/





































































































































































































Автор: Бамберг П. Стернберг Ш.
Теги: физика математика математическая физика переводная литература издательство москва
ISBN: 5-7036-0109-6
Год: 2006




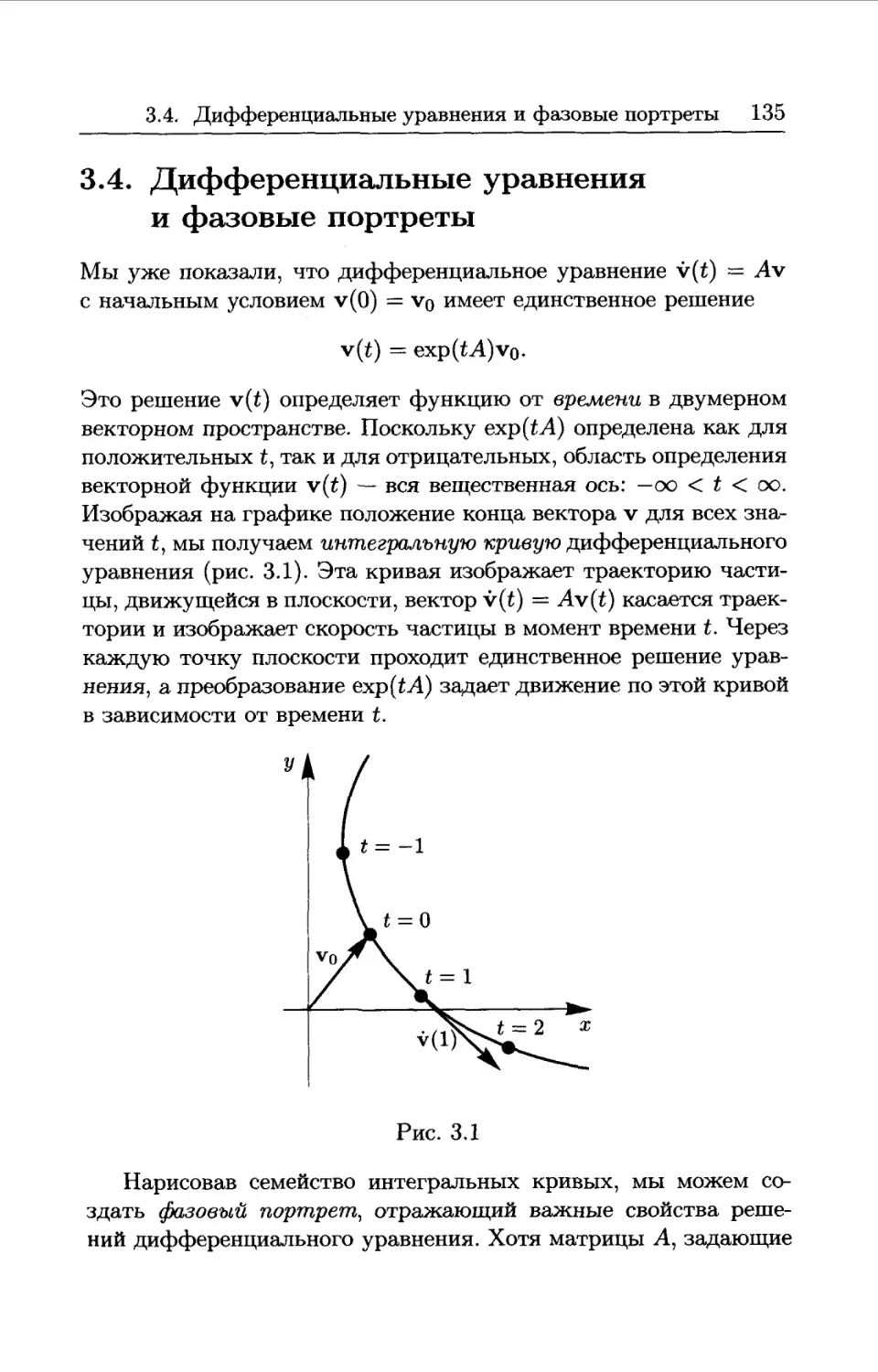
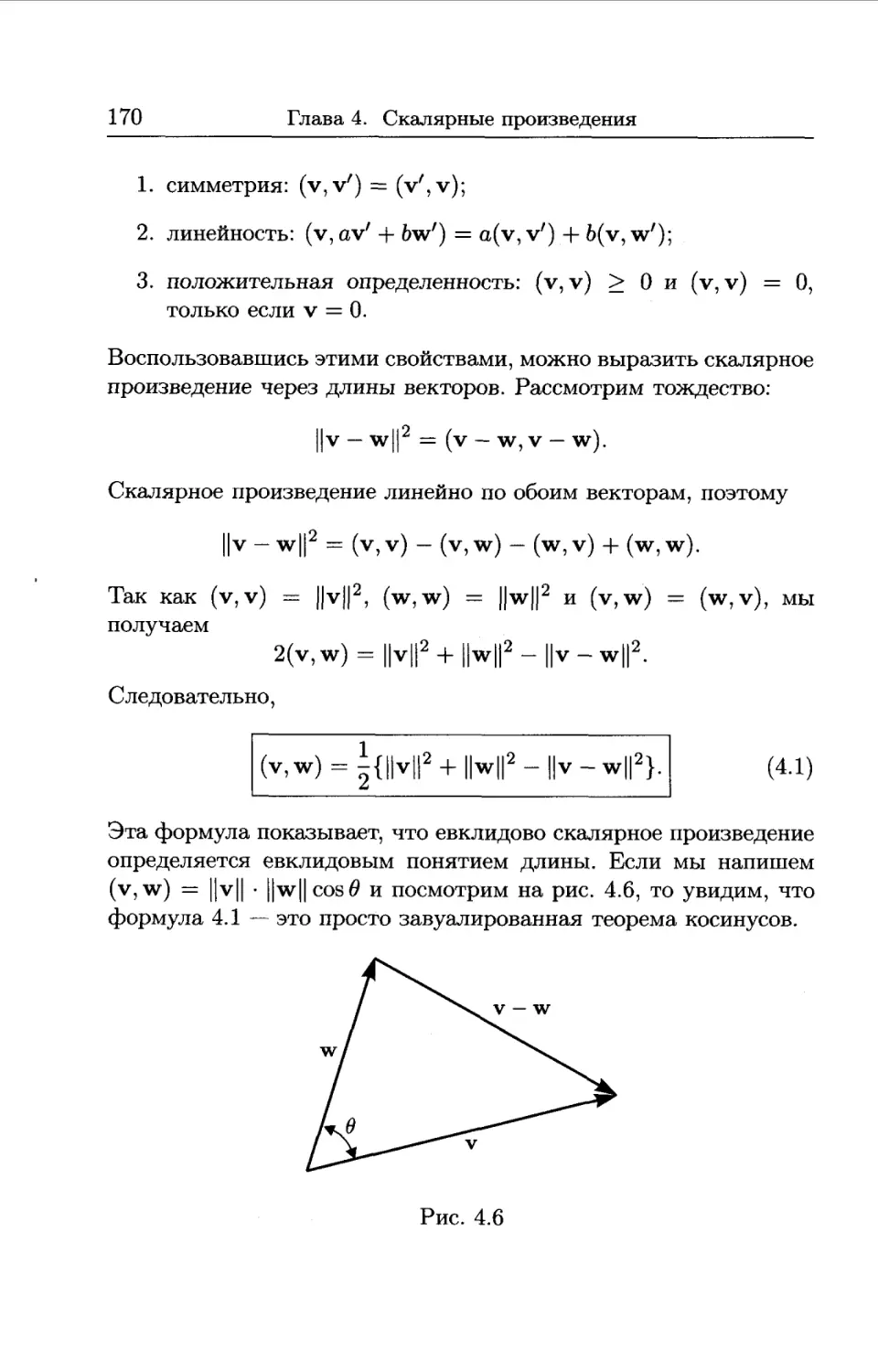
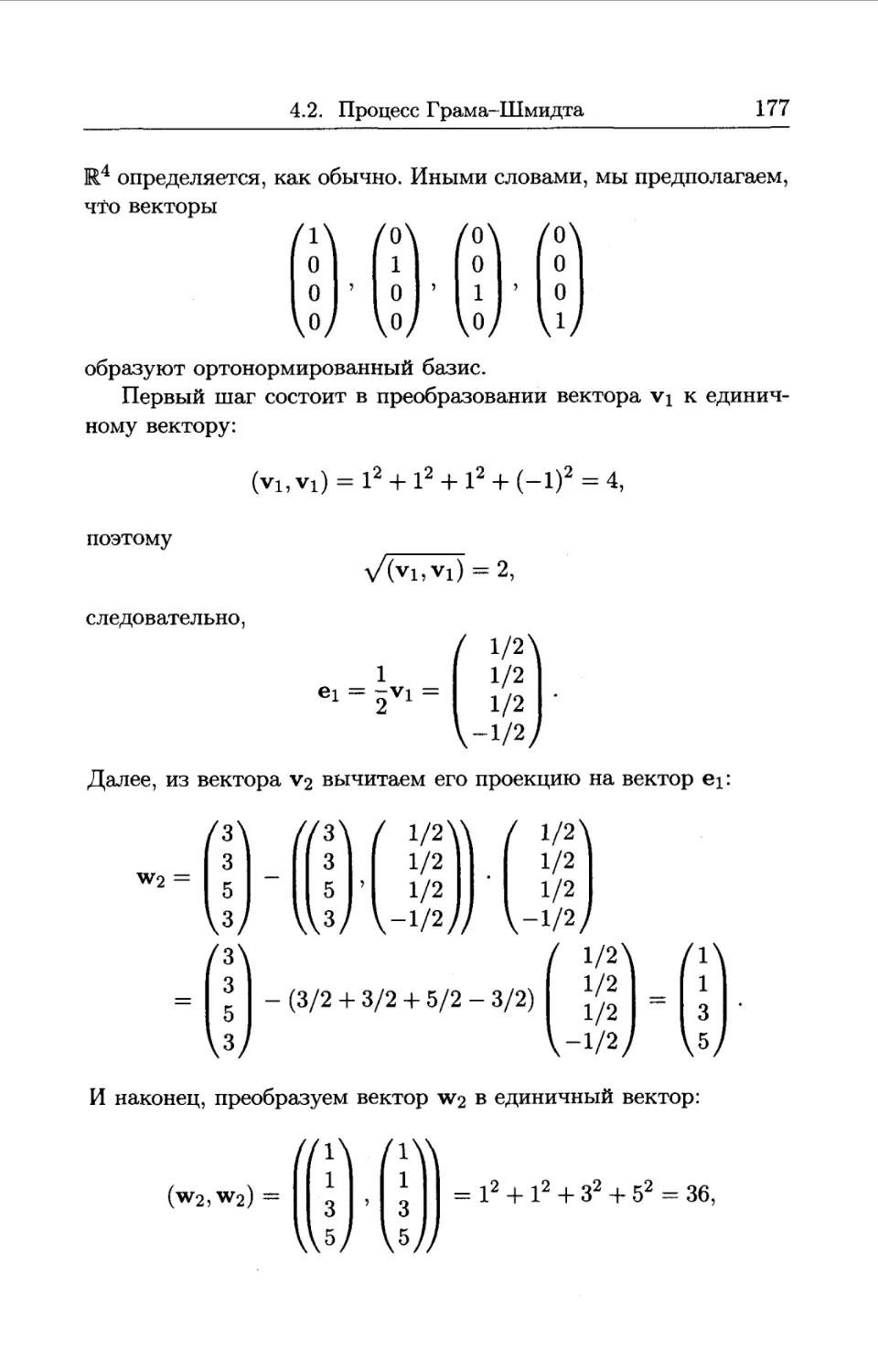
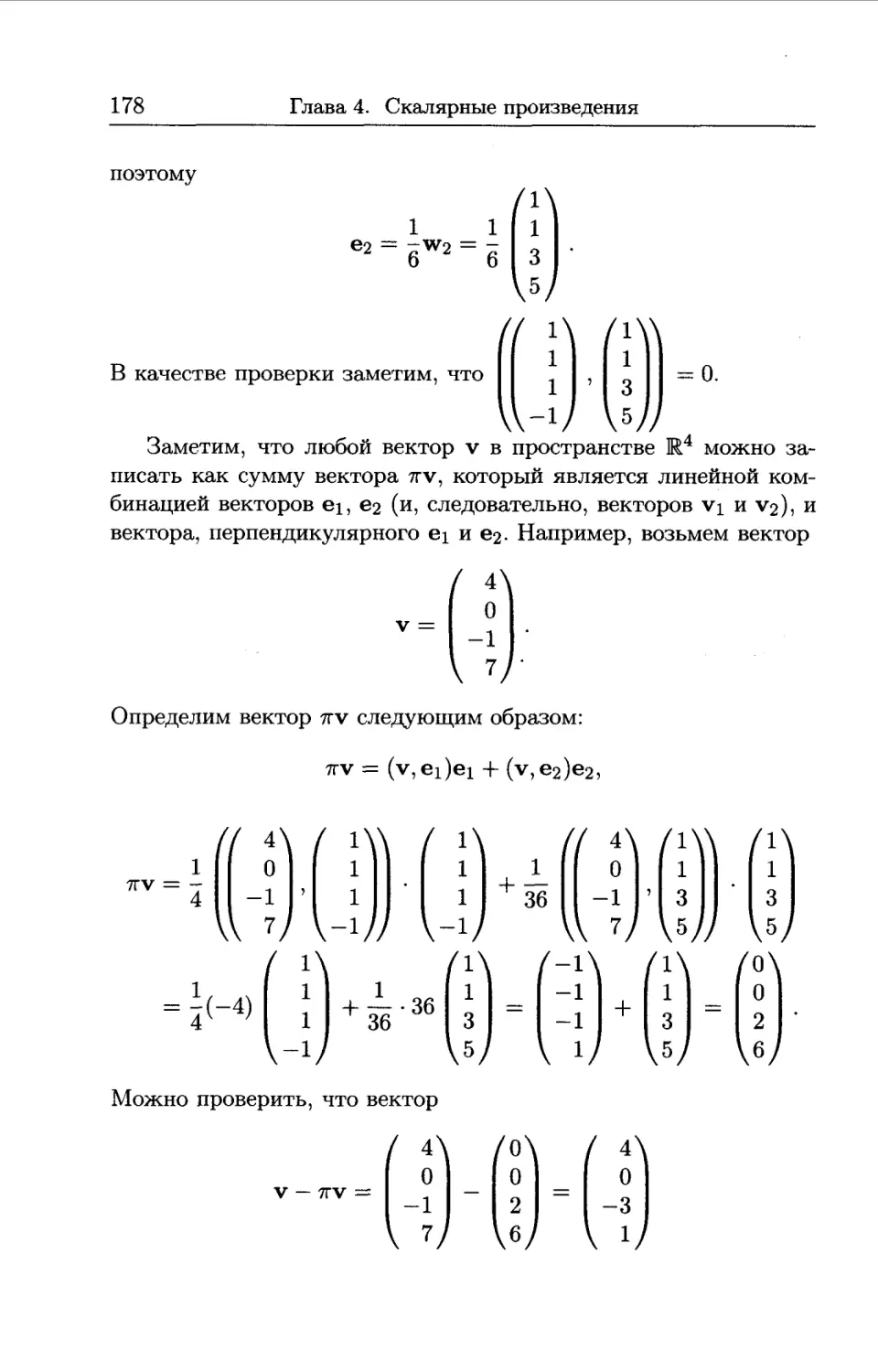
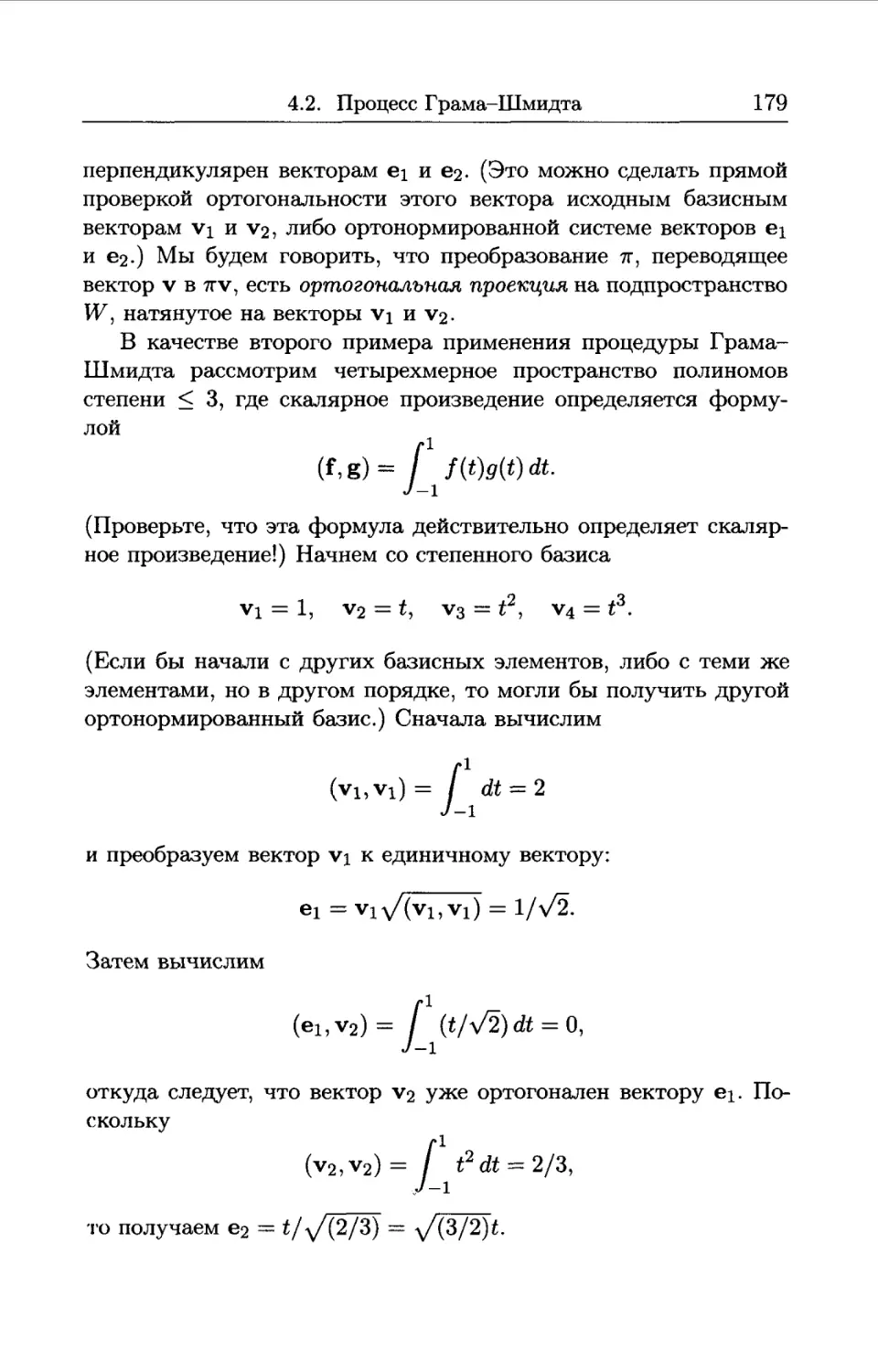
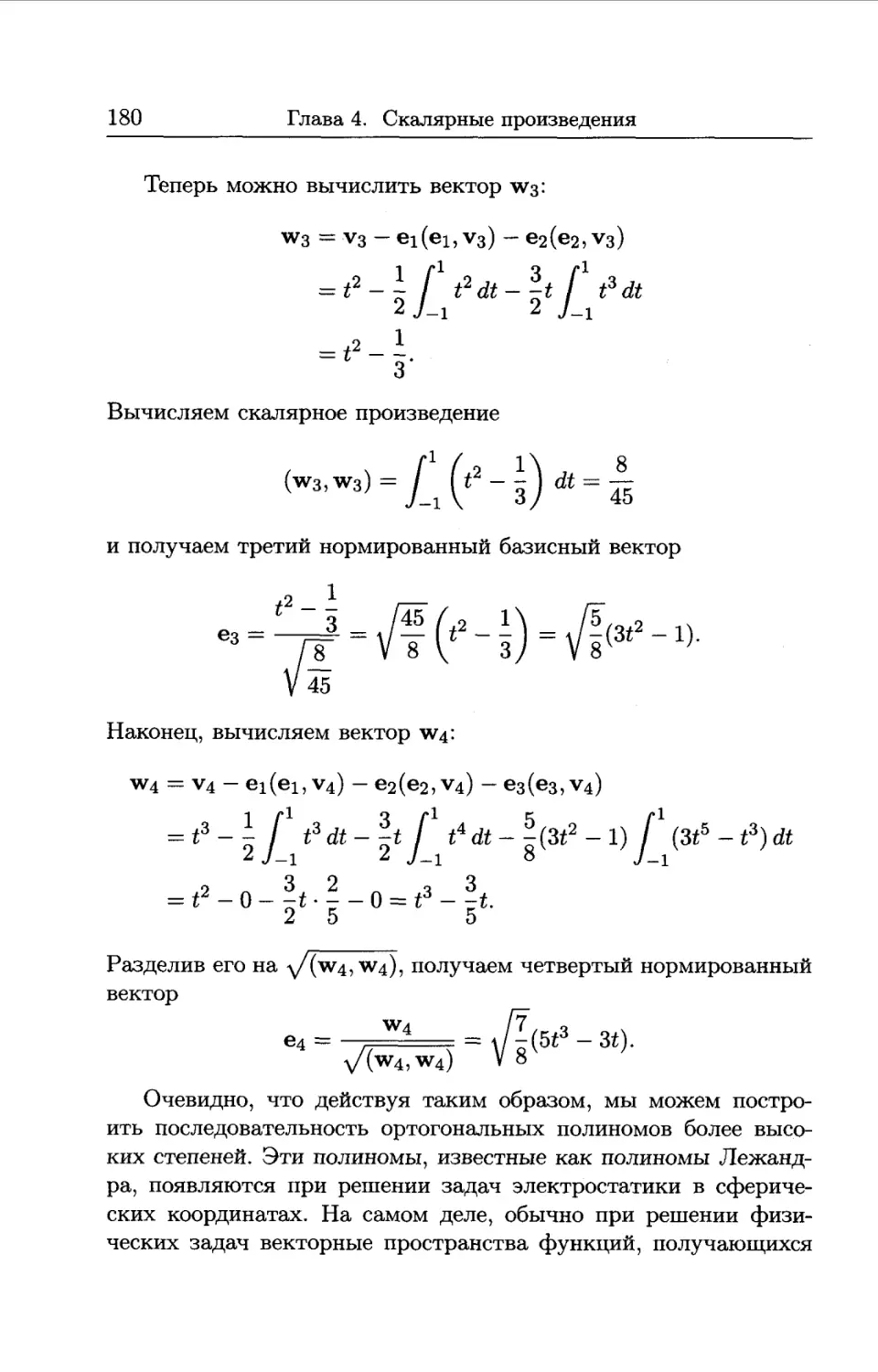
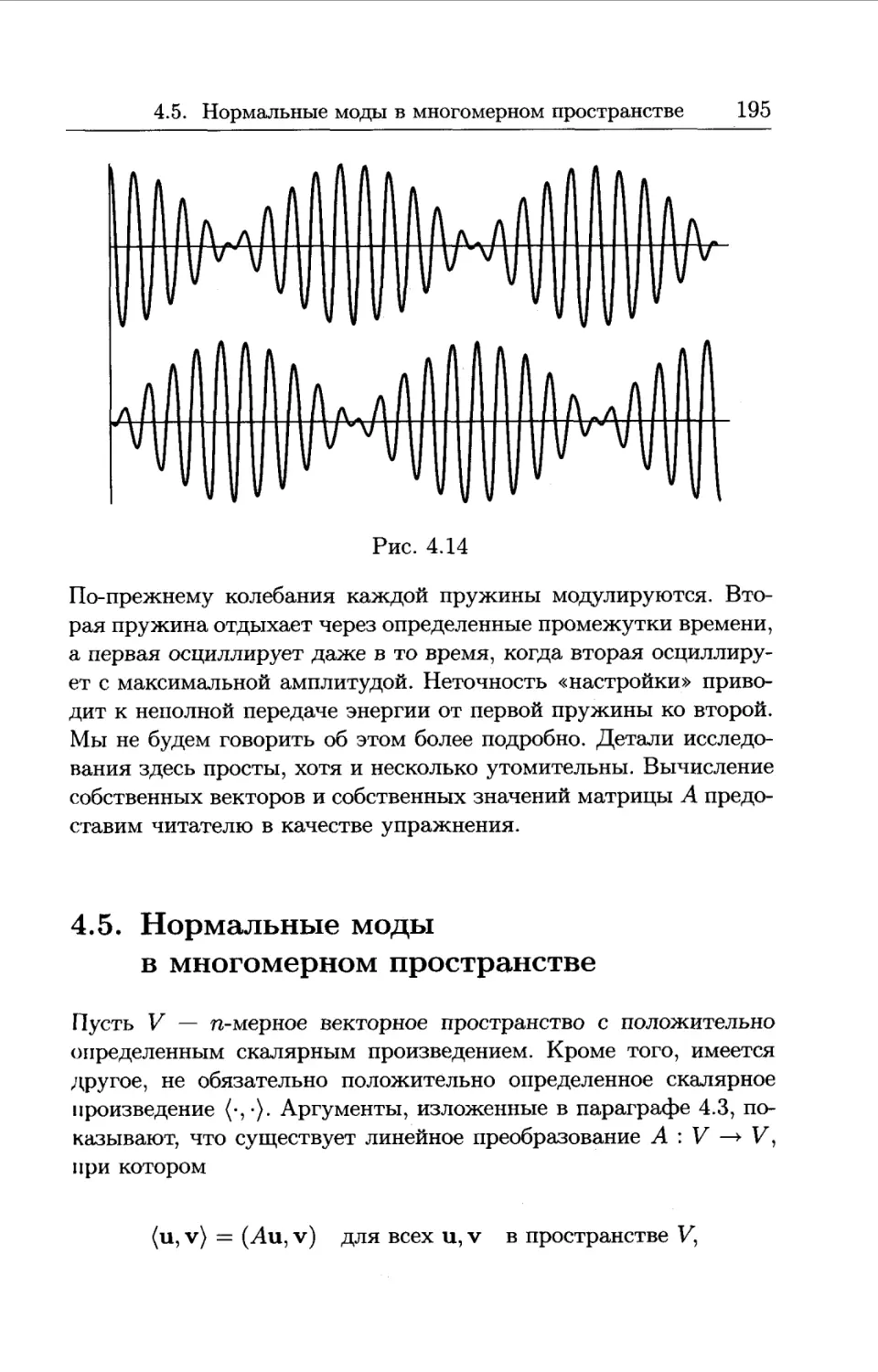
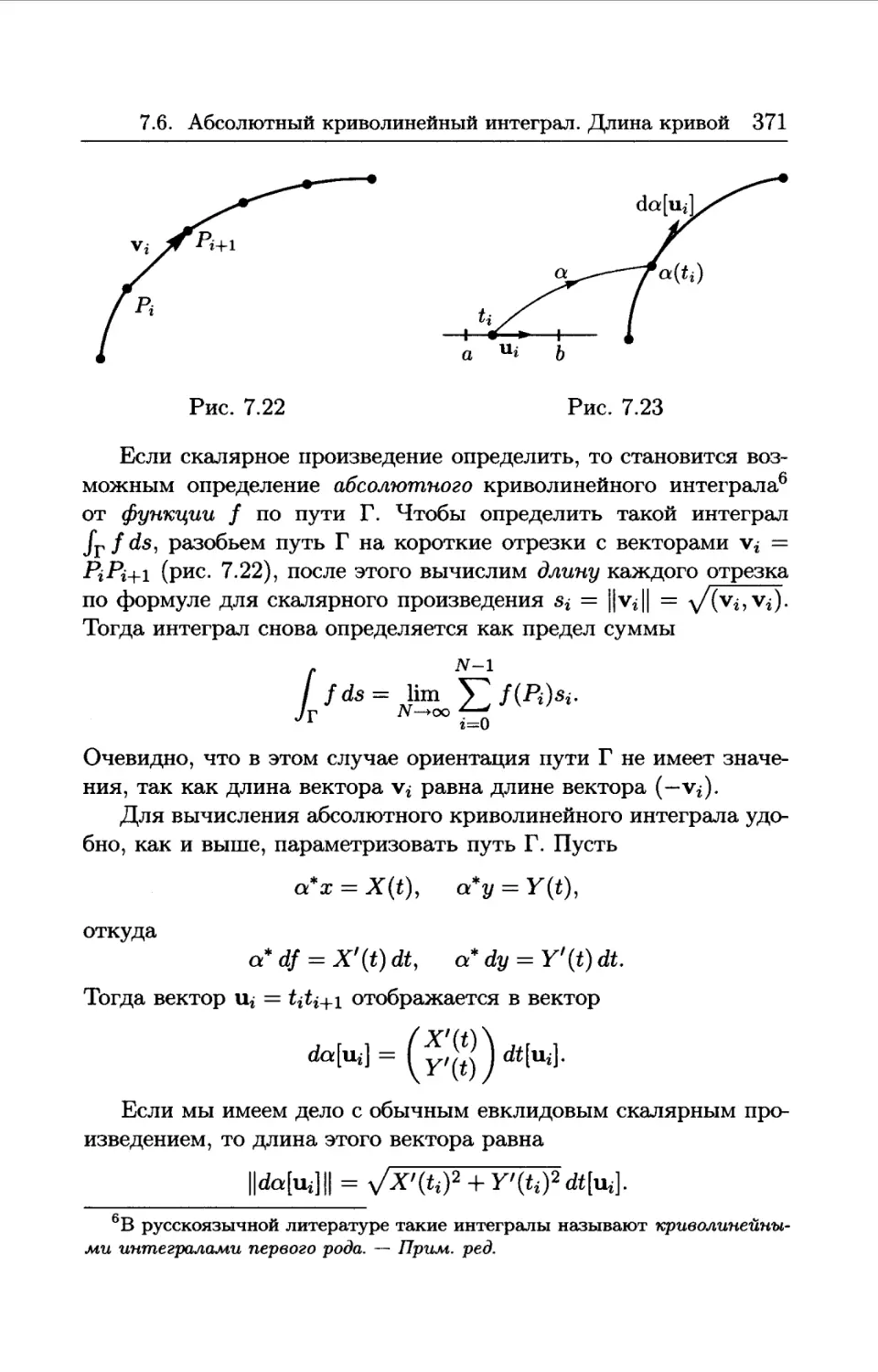
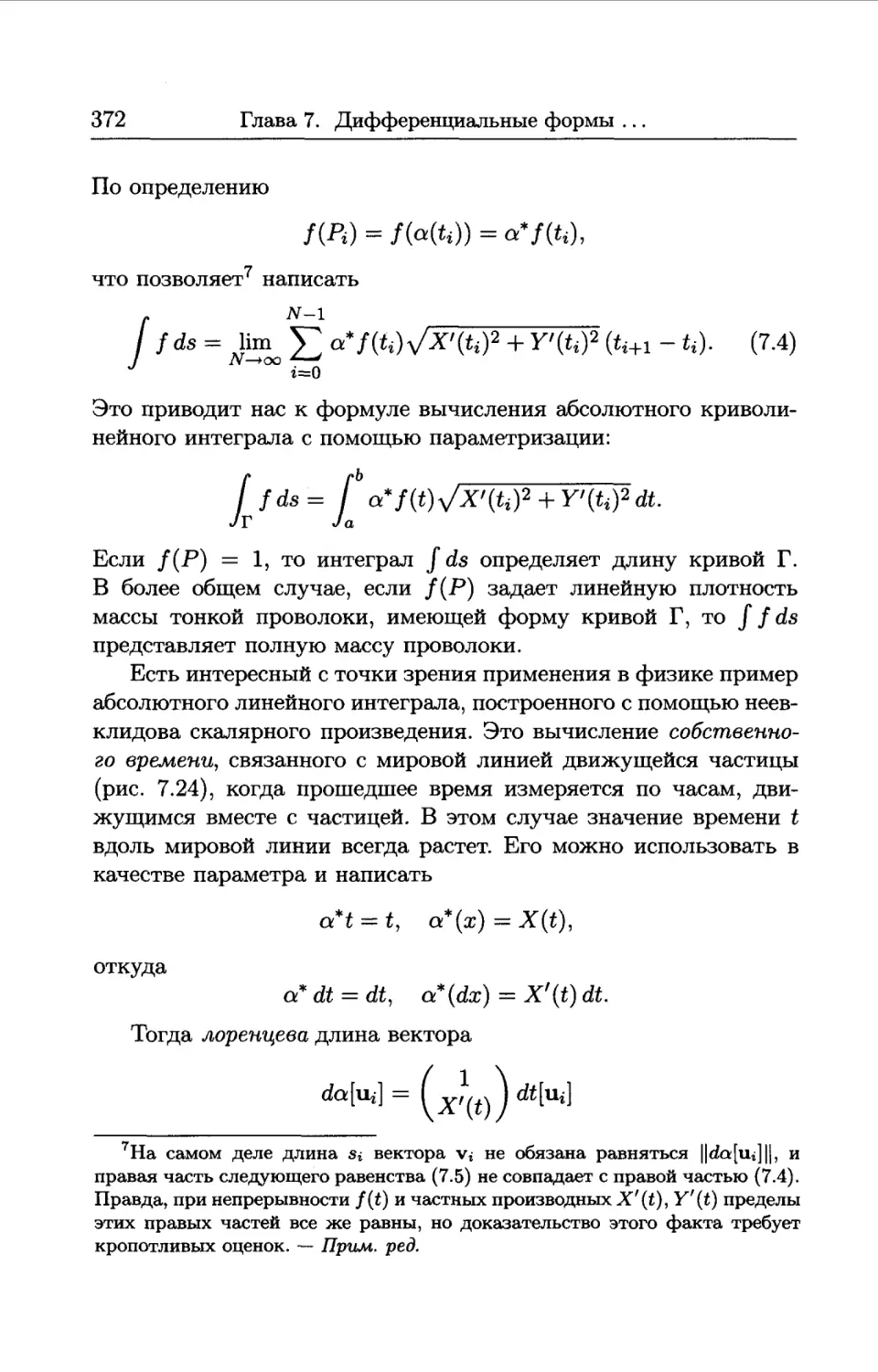
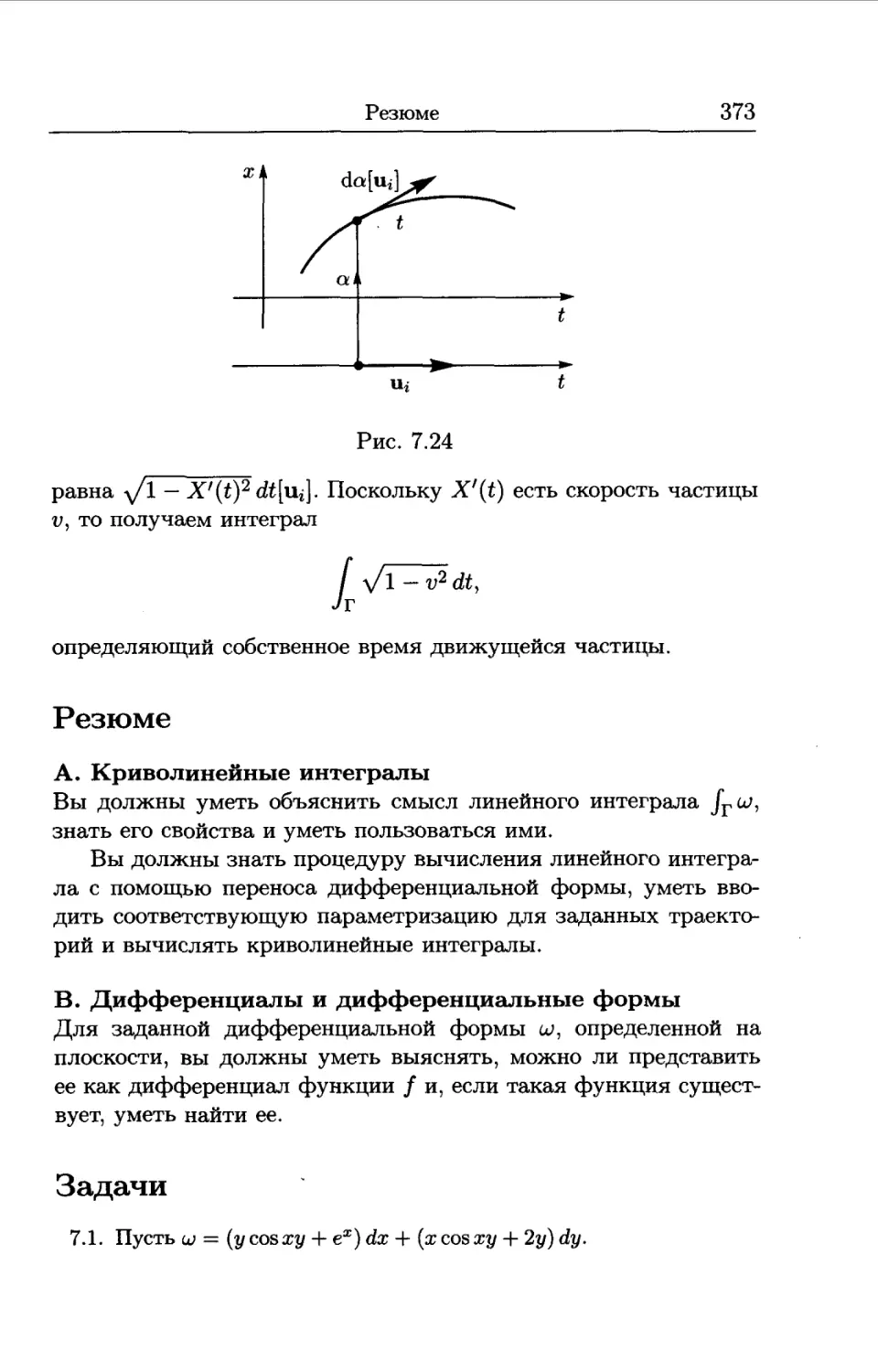
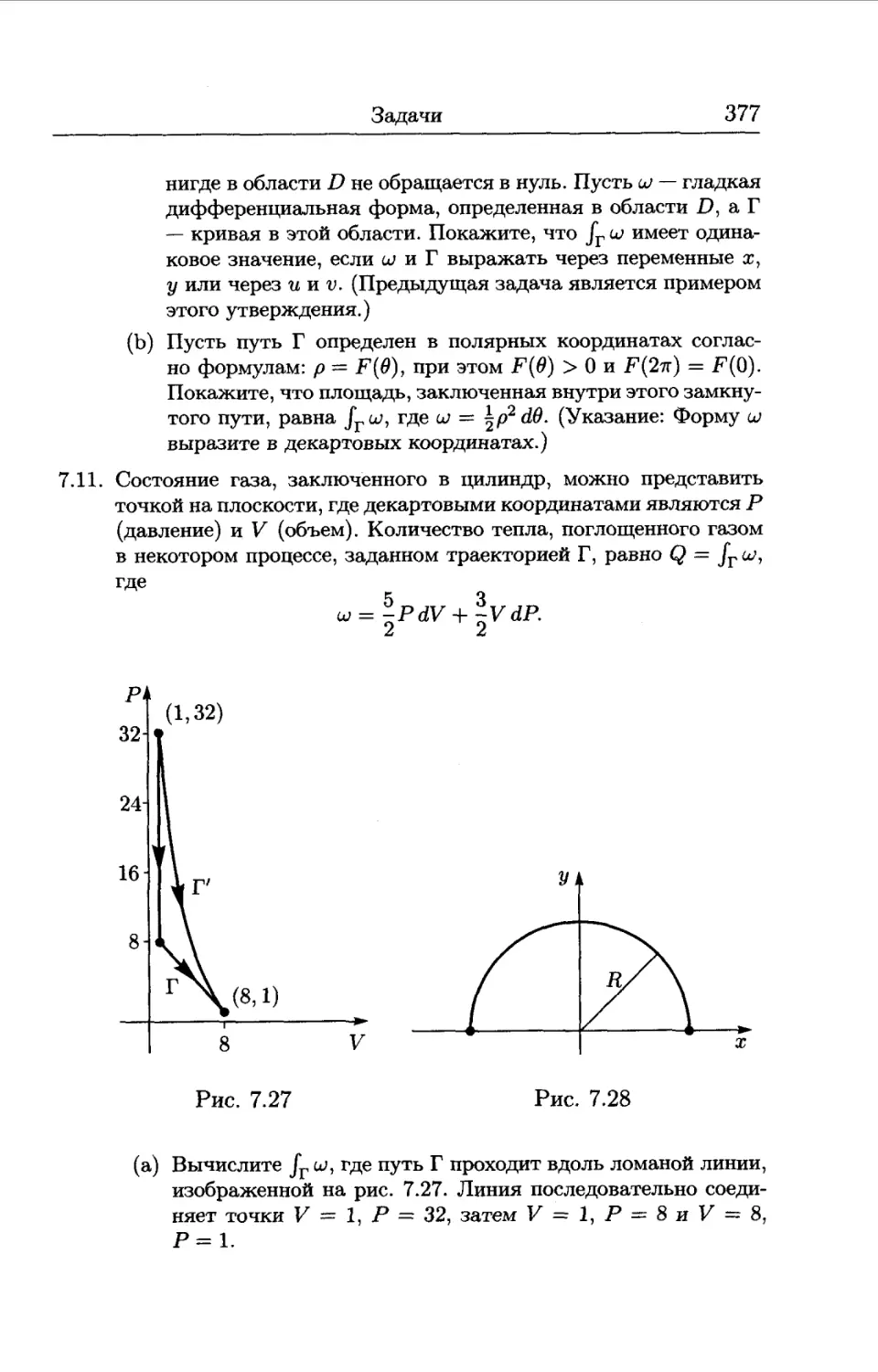
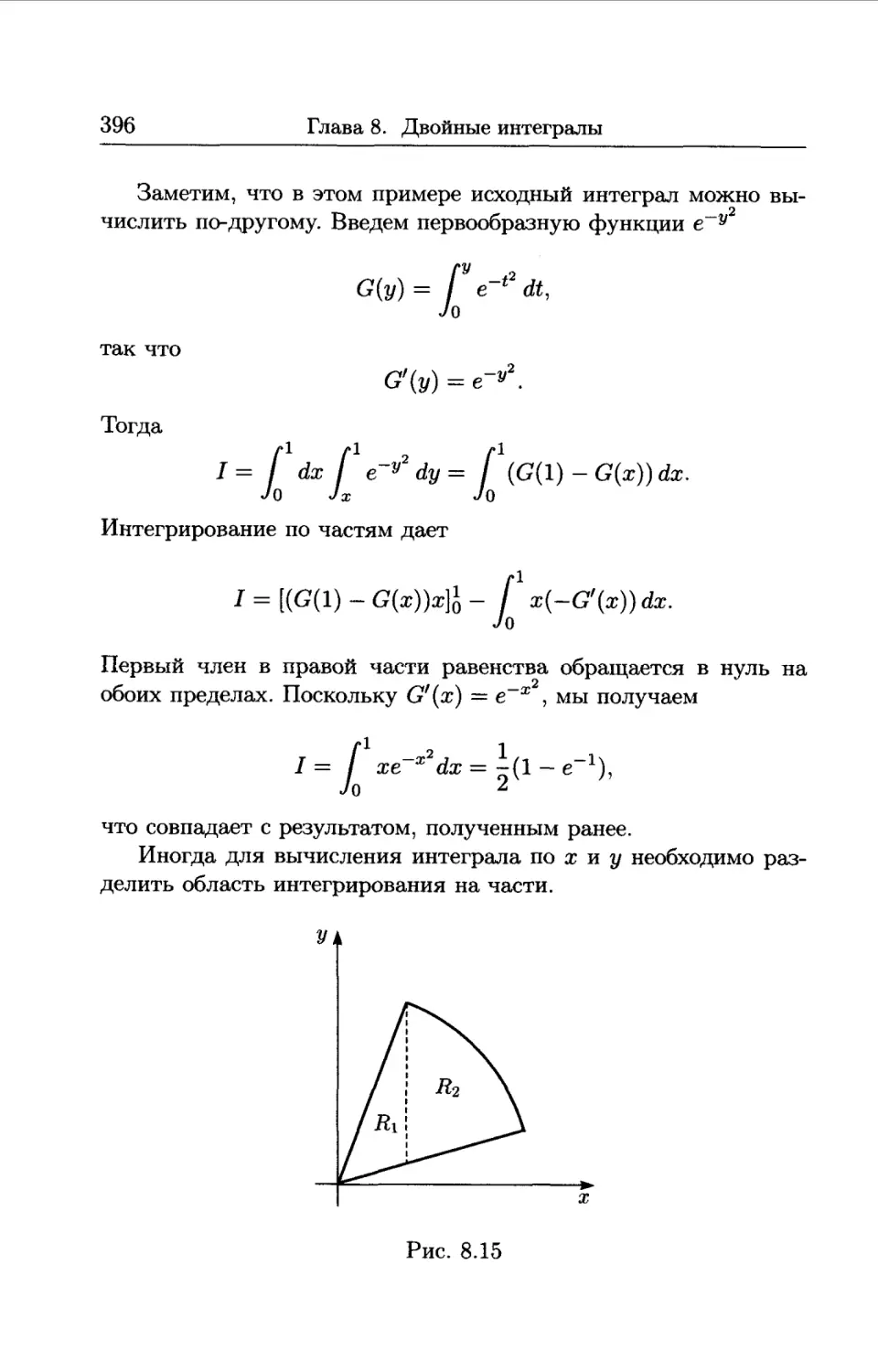
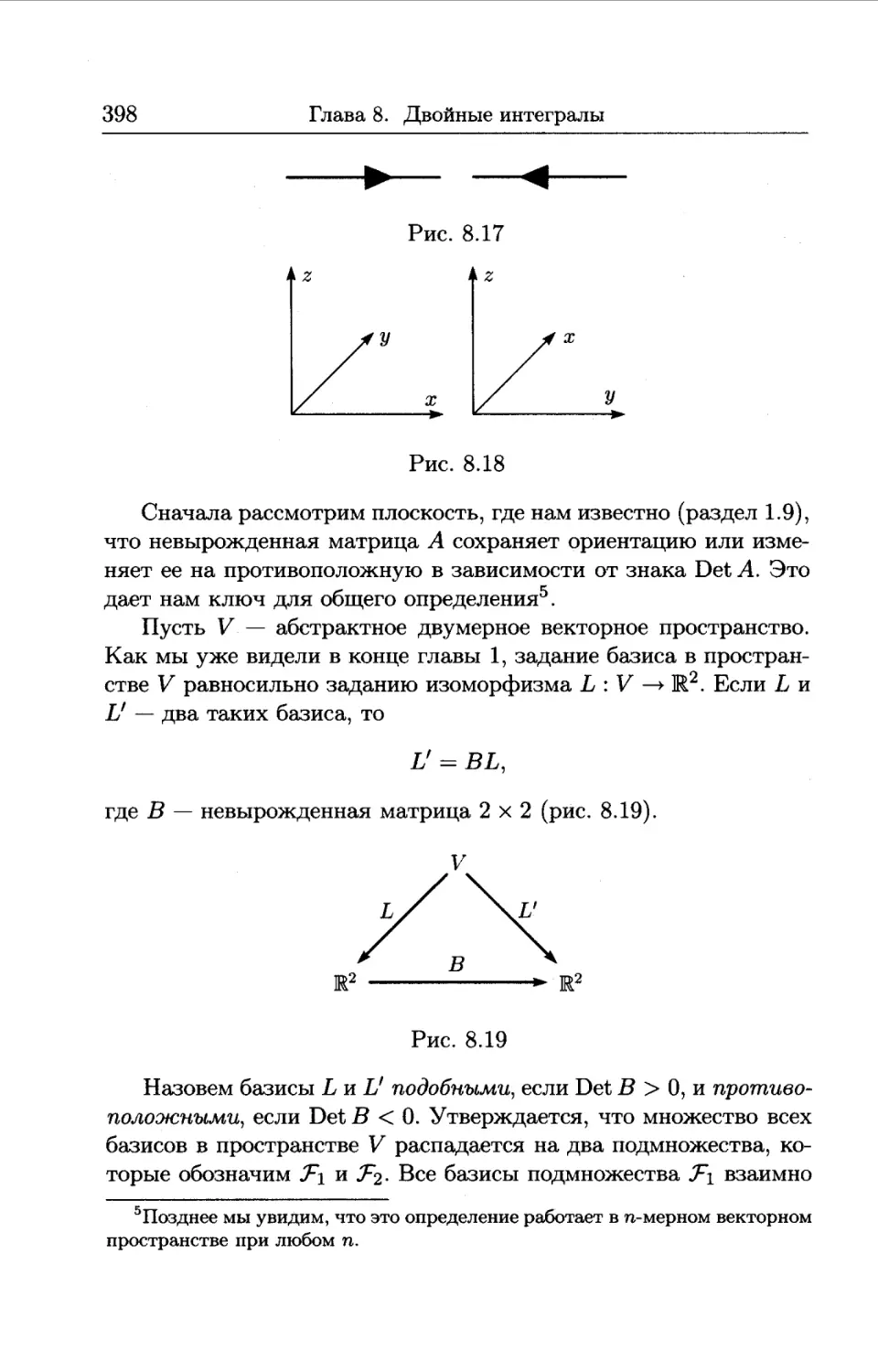
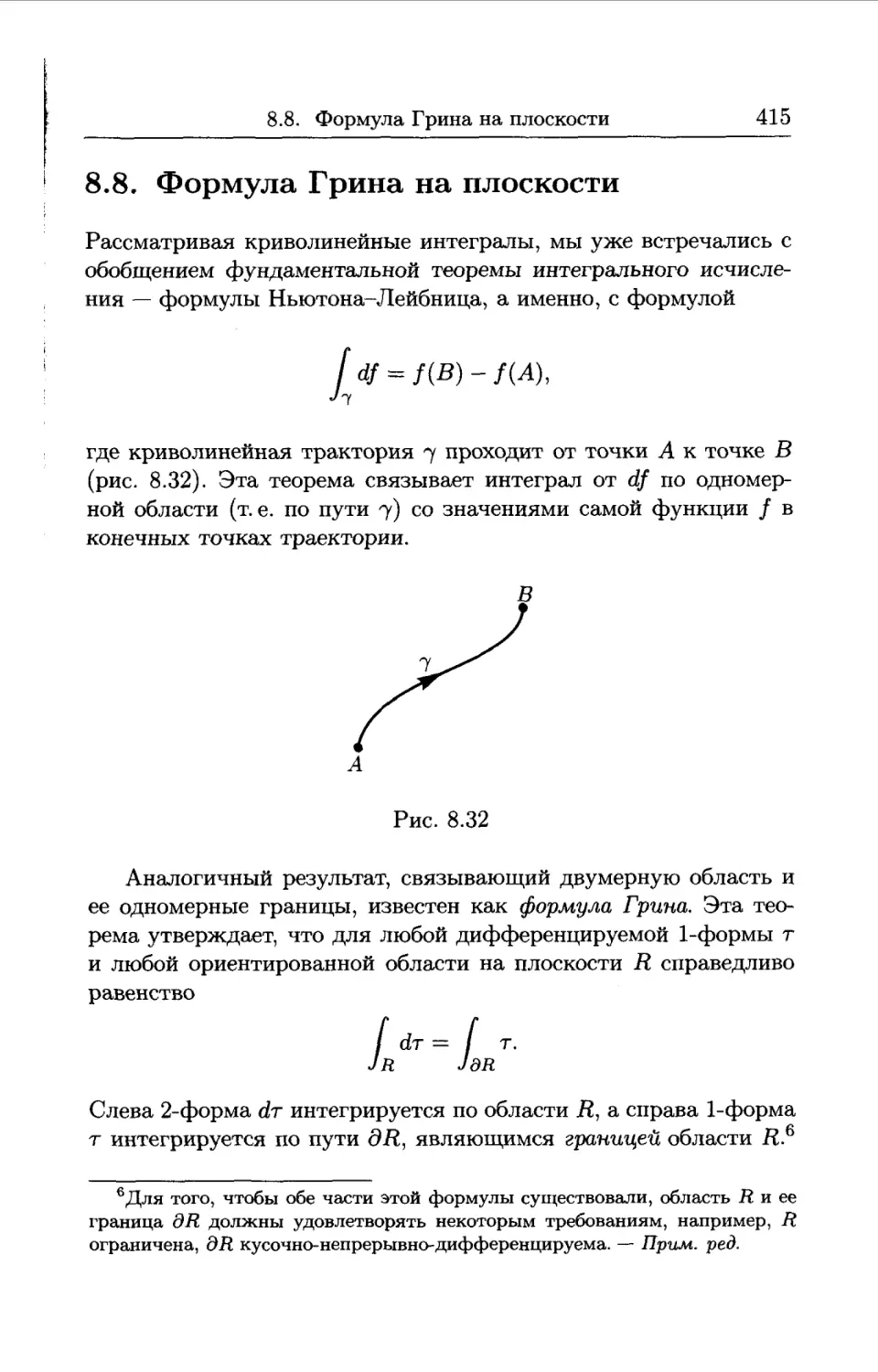
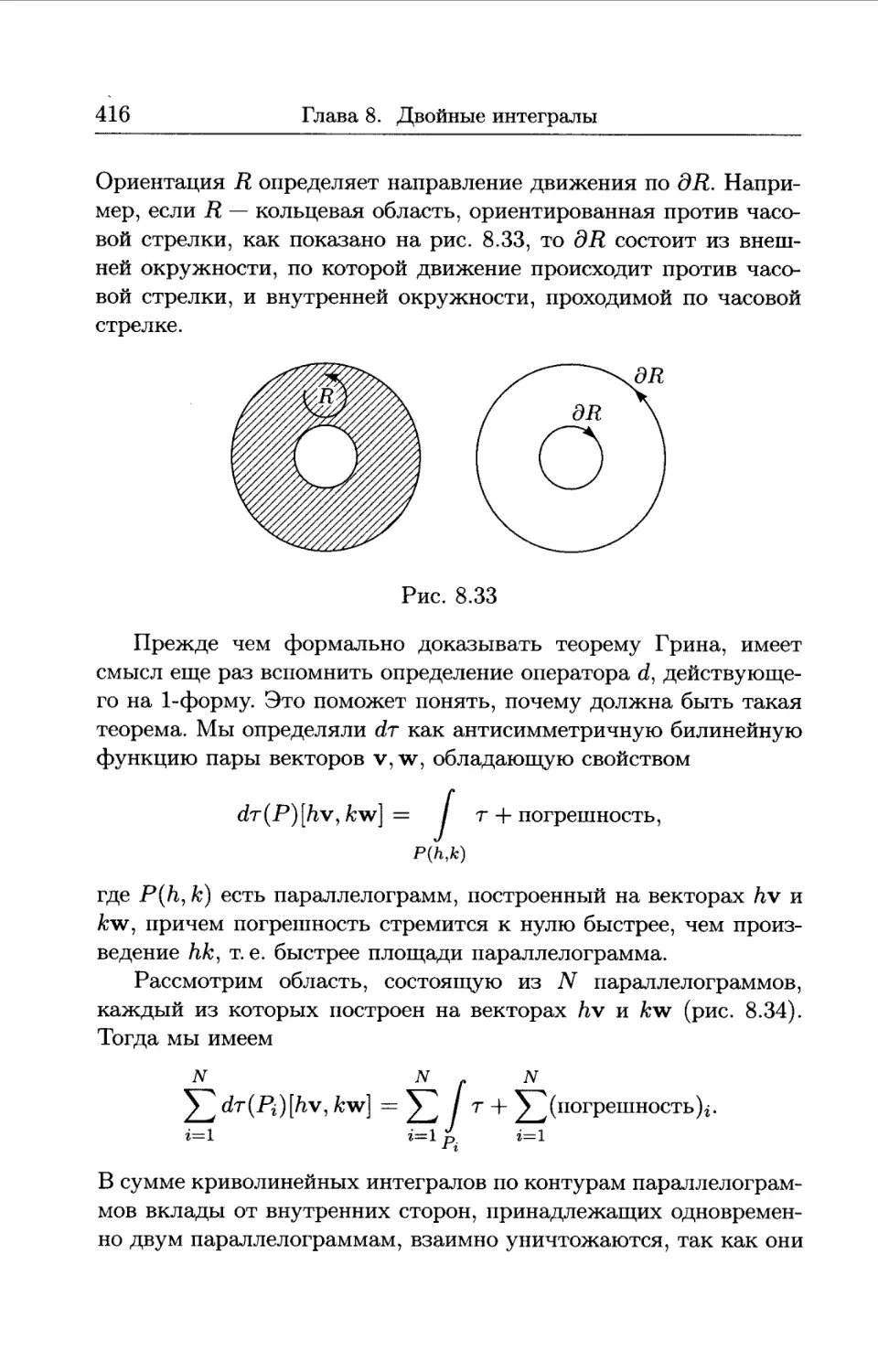
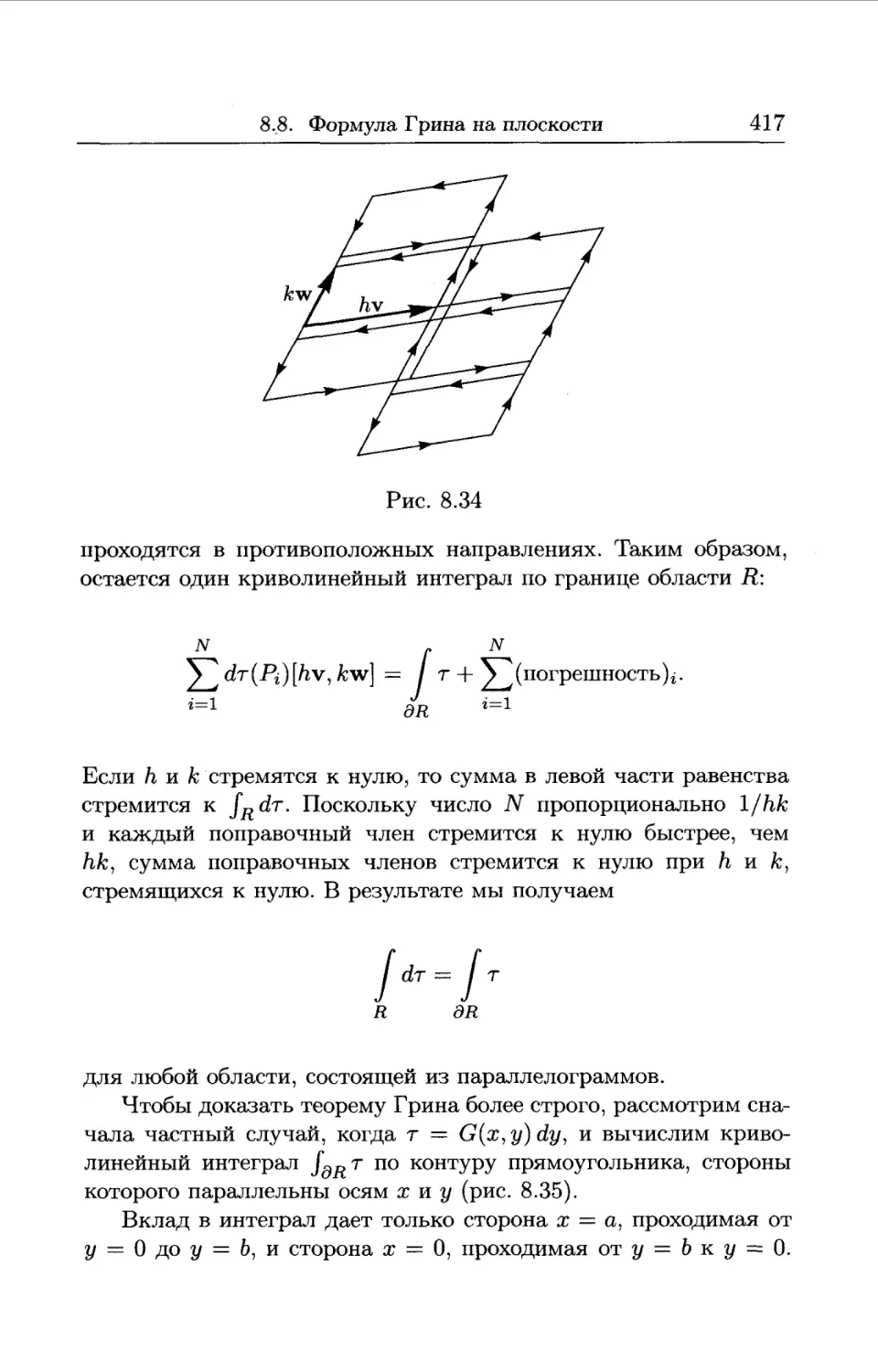
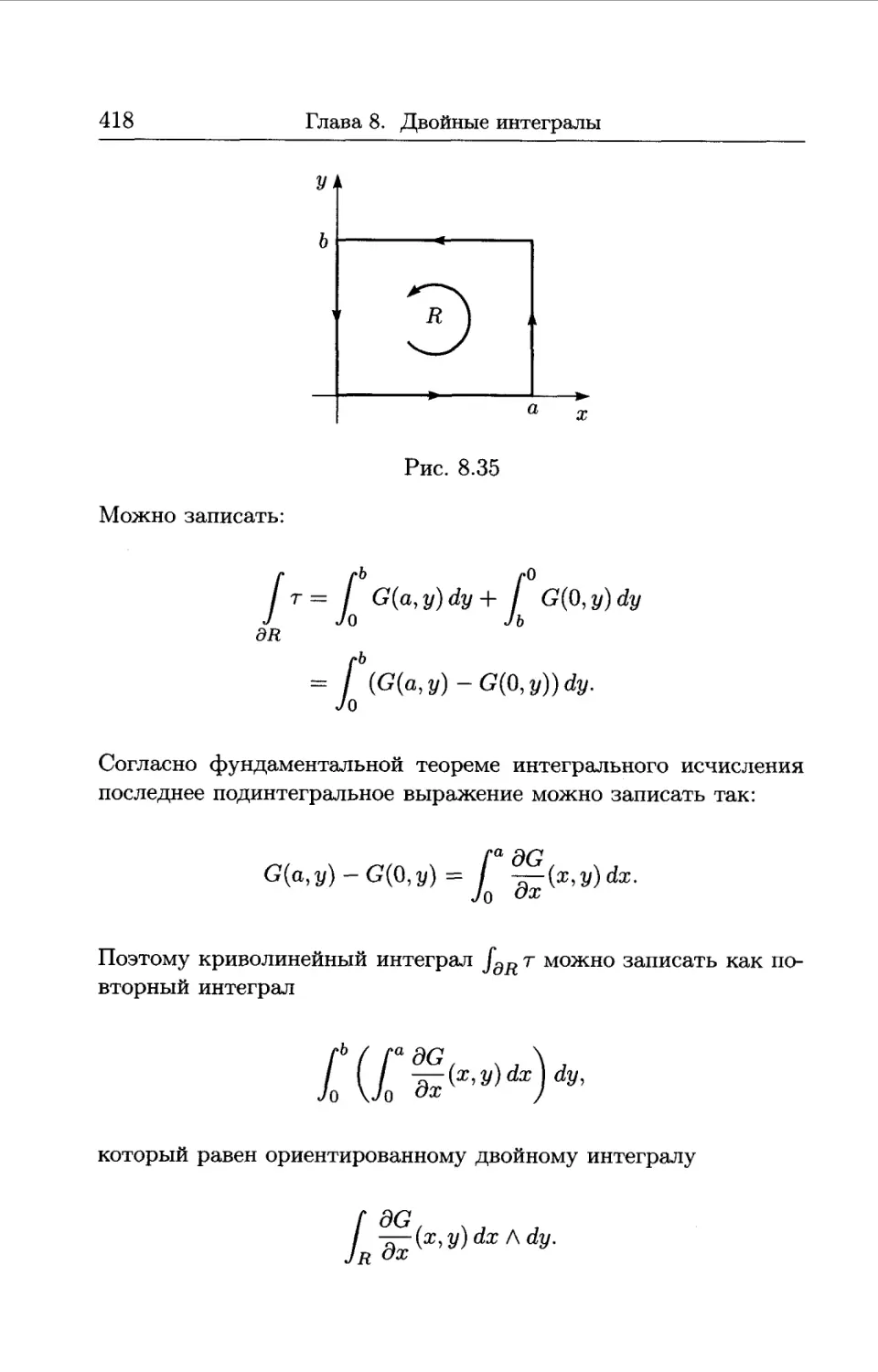
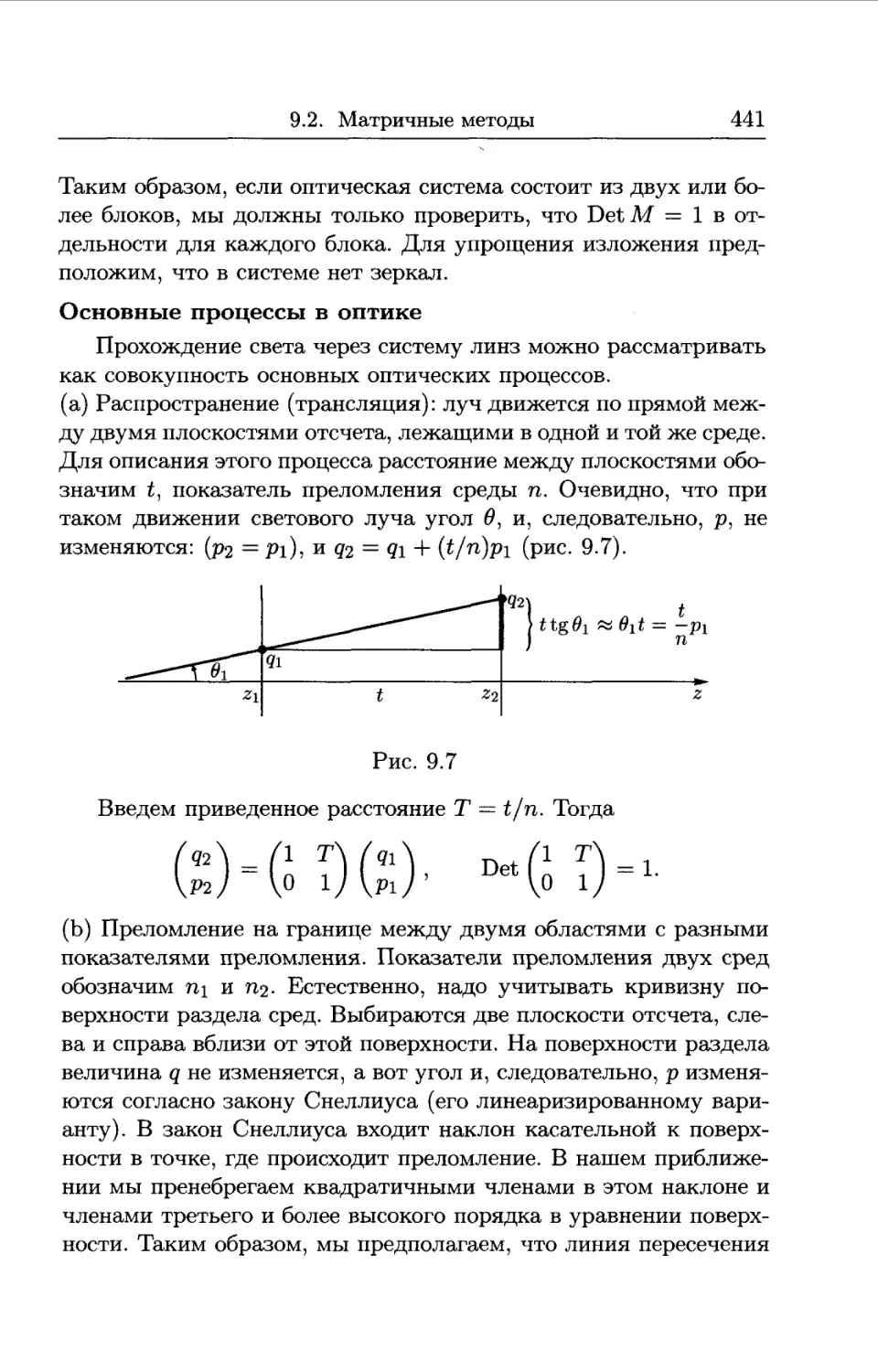
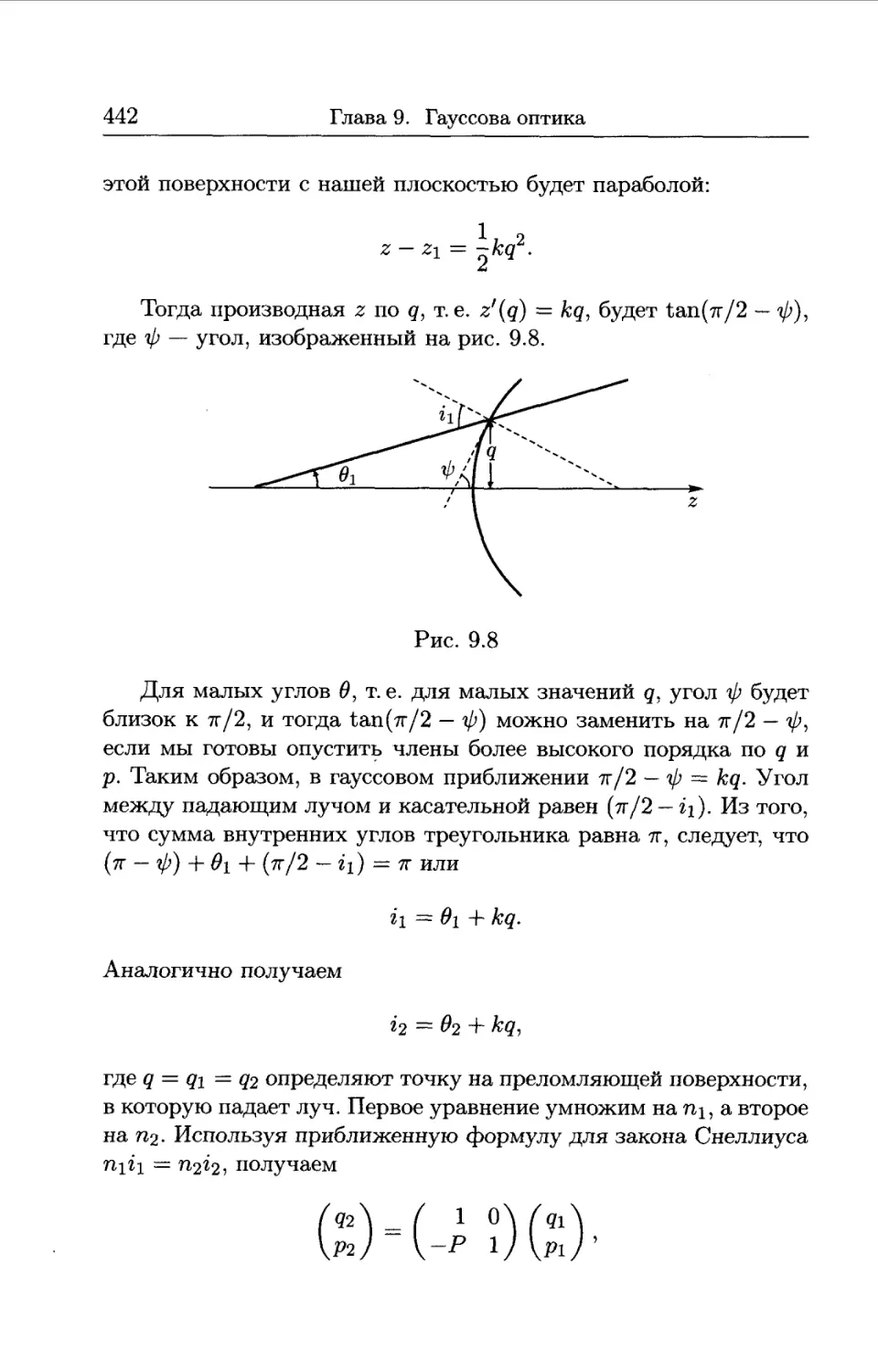
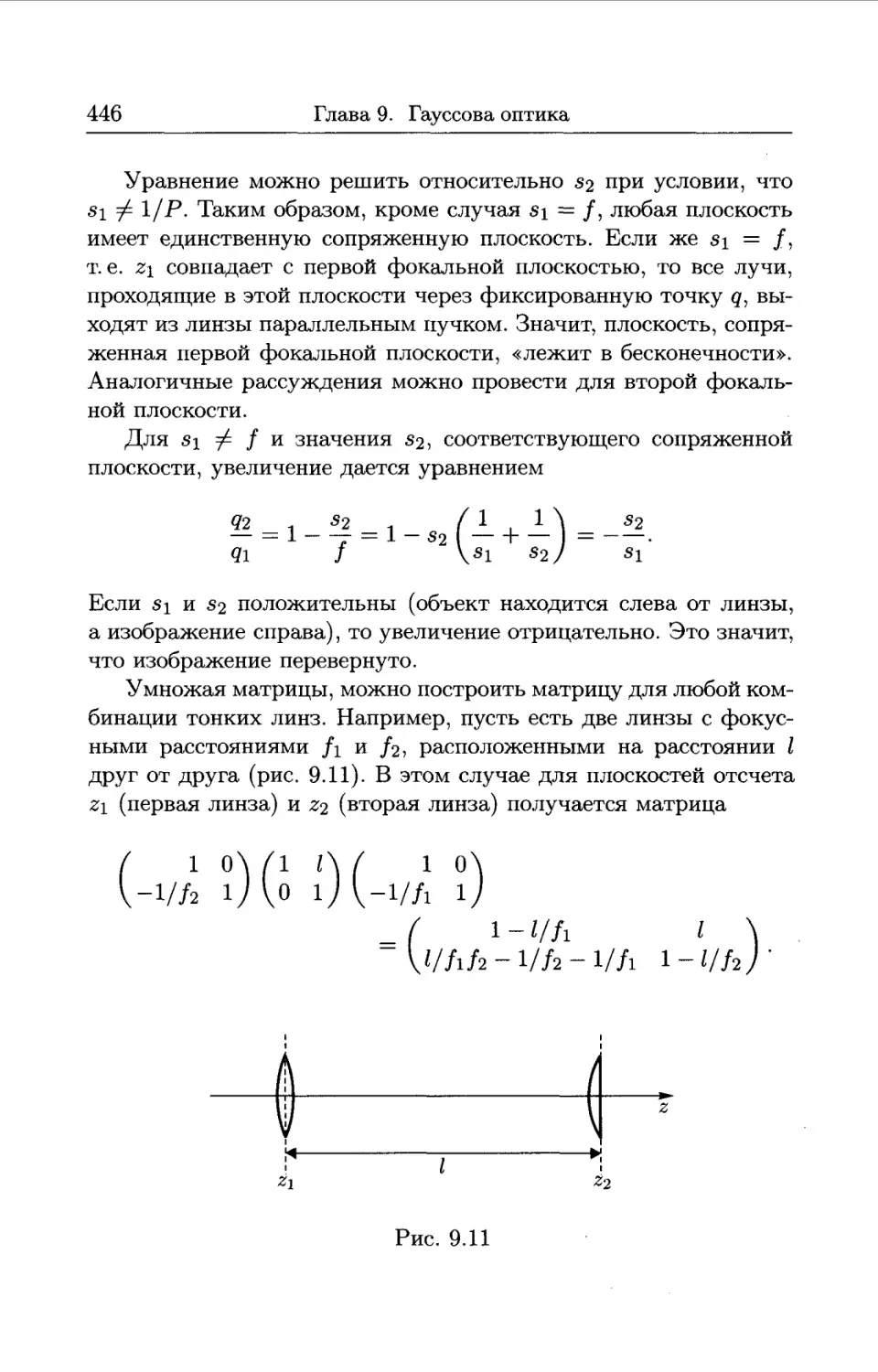
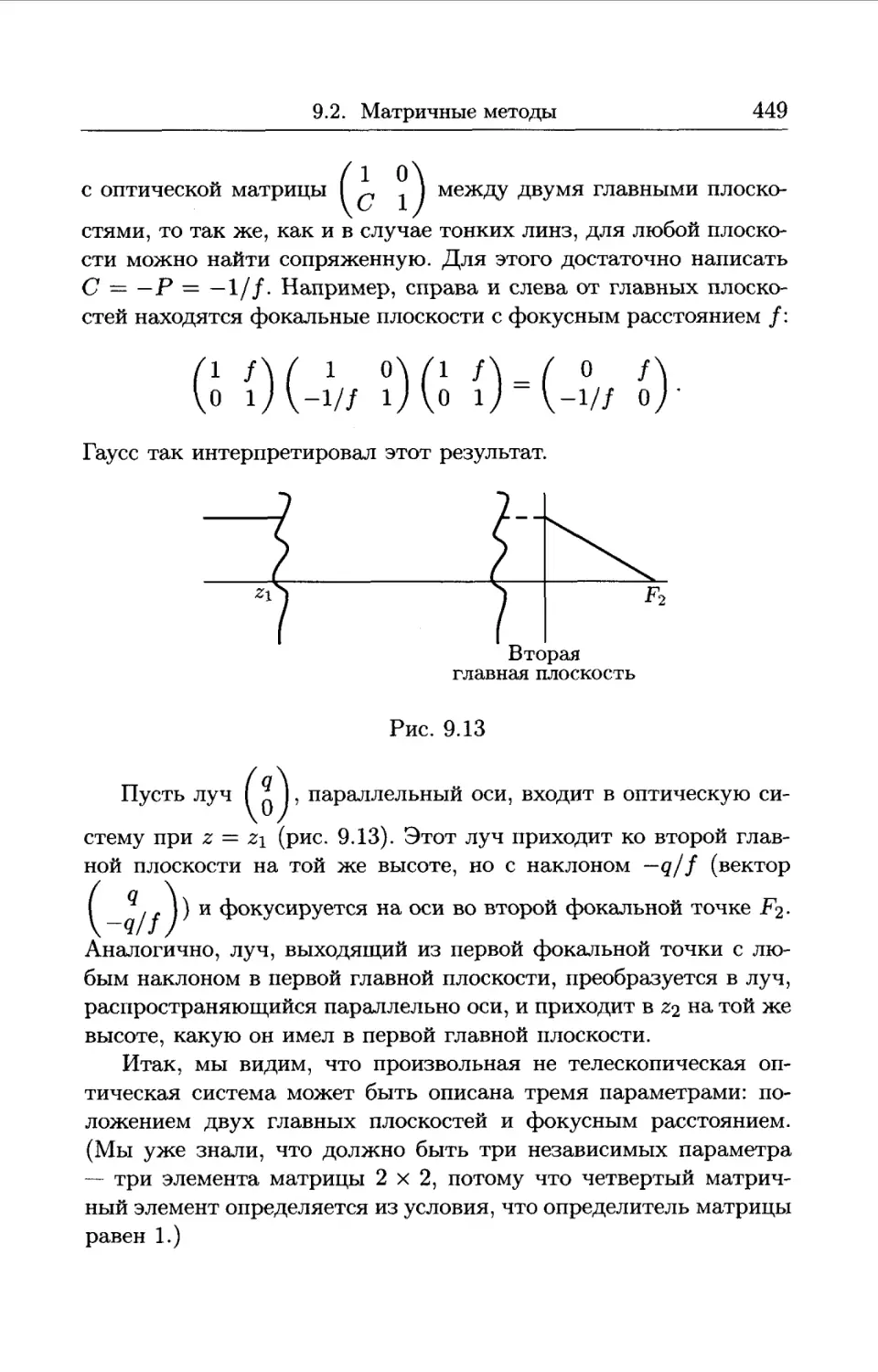
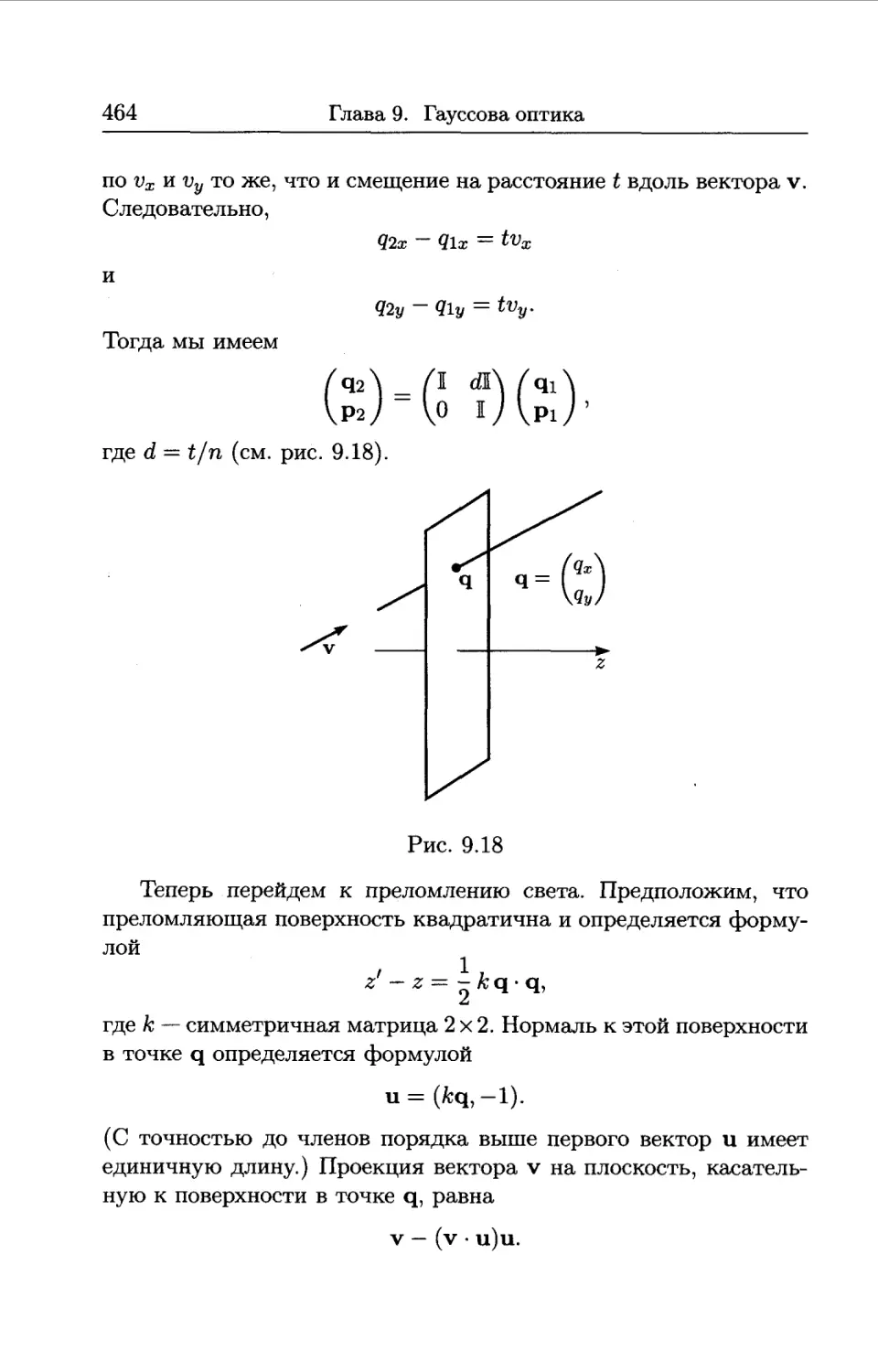
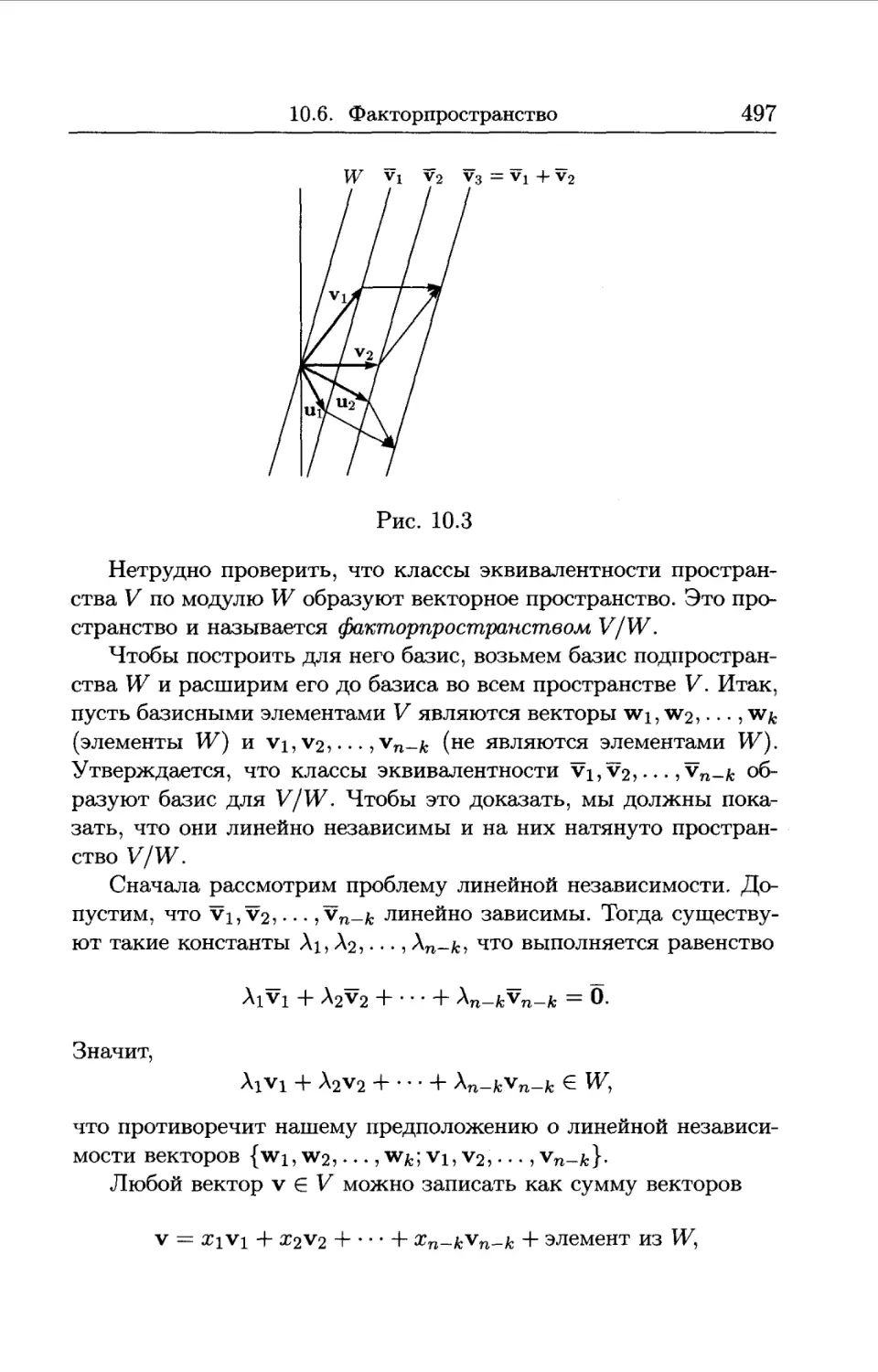
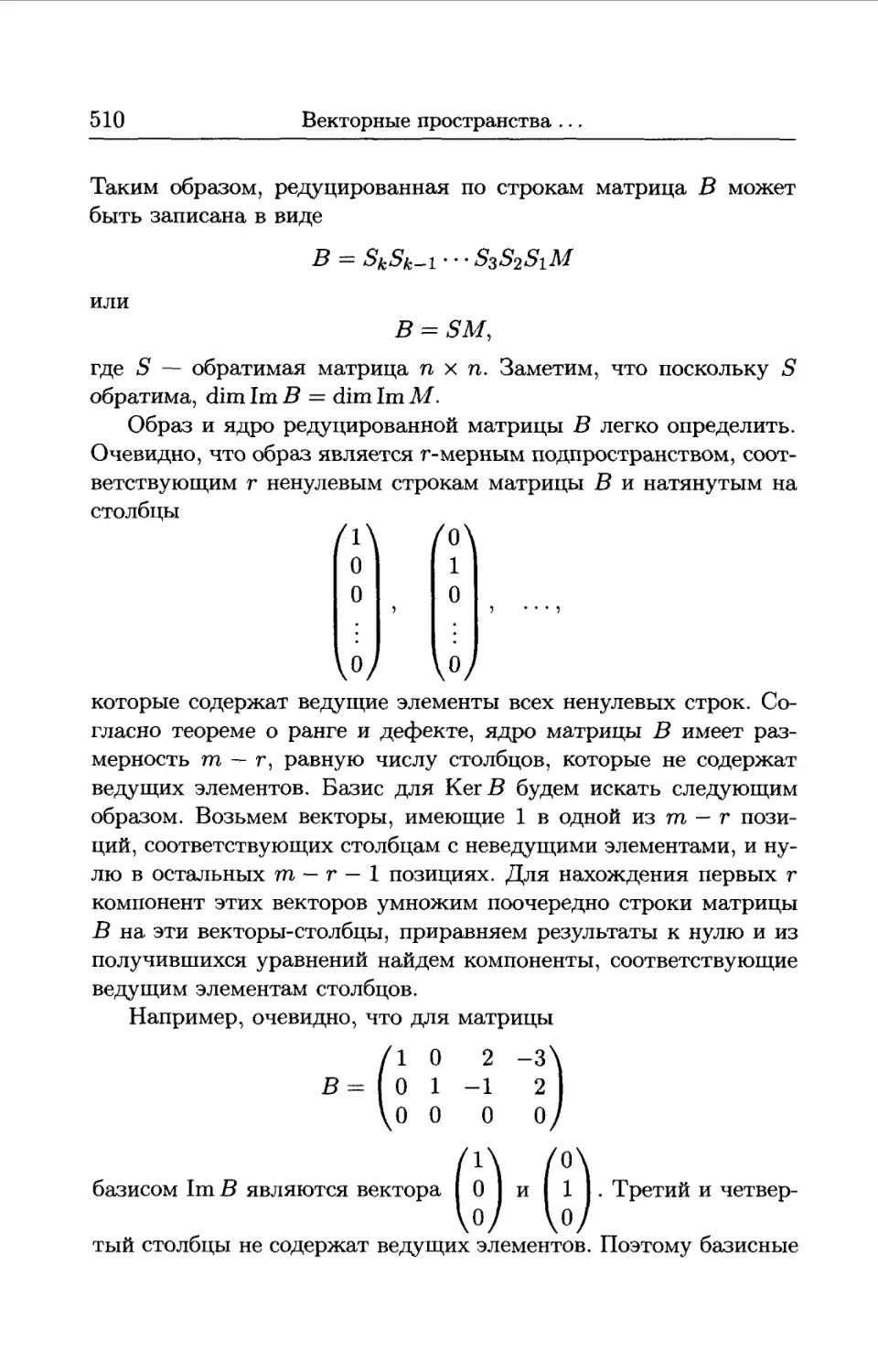
Текст
Ш.ГОМО
V.
Том ’
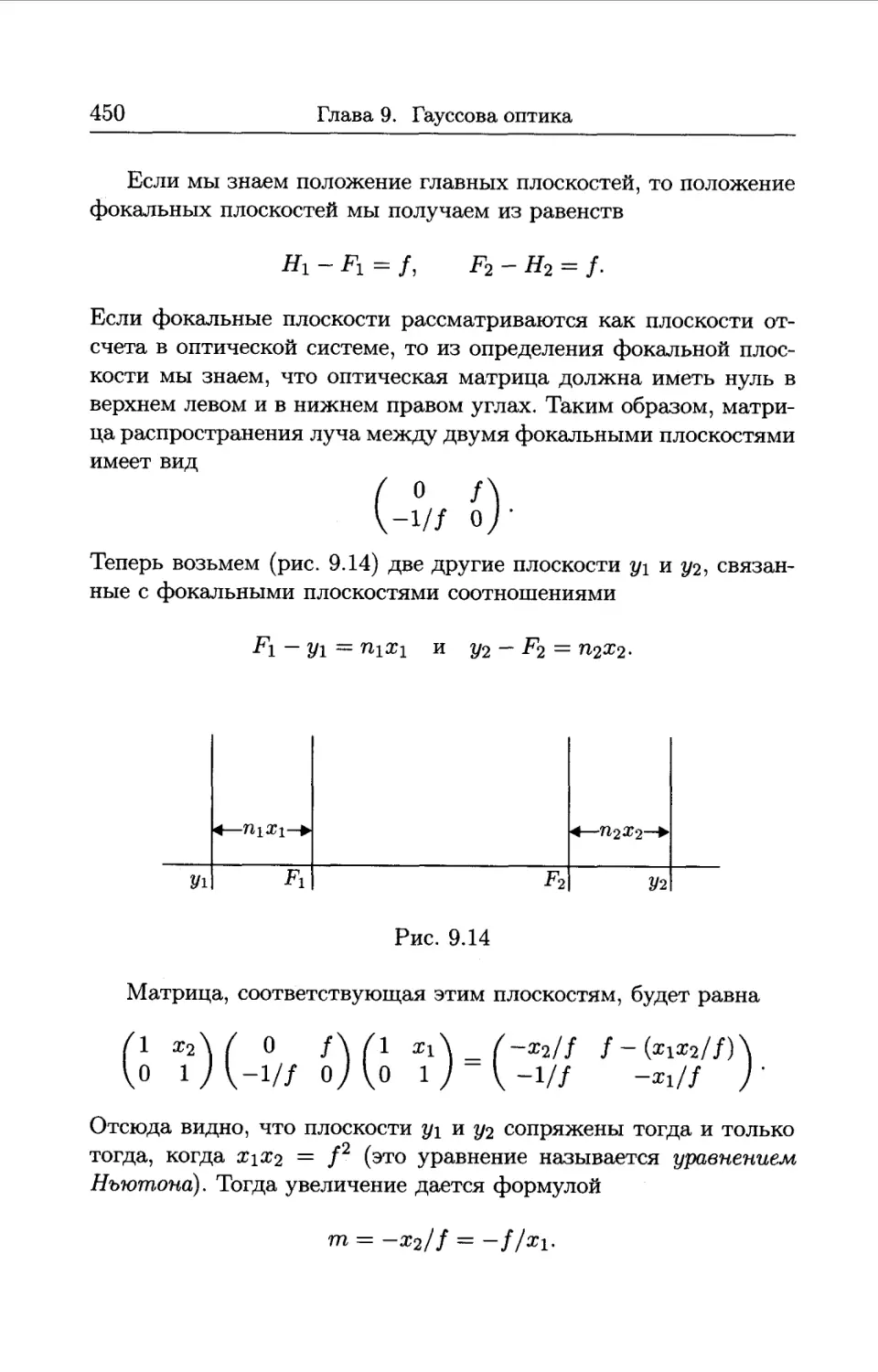
Предлагаемый курс лекций
известных профессоров
Г арвардского университета
П. Бамберга и Ш. Стернберга
пользуется большой попу-
лярностью среди физиков и
инженеров, считающих для
себя необходимым освоить
основные элементы
современной математики.
Помимо традиционных
вопросов этот курс содержит
изложение основ топологии и
геометрии, топологический
смысл уравнений Максвелла,
комплексный анализ, асимп-
тотический метод Лапласа и
начала термодинамики.
Объединение всех этих
разделов математики и
физики а одной монографии,
несомненно, полезно для
студентов и аспирантов
российских университетов
и позволит им быстро
включиться в проходящие
во всём мире исследования
в теоретической и мате-
матической физике.
Я. Г. Синай и
на ступенях МГУ 1
(фото.
Я. Г. Синай
академик РАН
В. И. Арнольд
сентябре 1963 года
Moser)
История преподавания
математического анализа,
начиная с его изобретения
Ньютоном, изобиловала крутыми
поворотами. К середине XX века
традиционные изложения стали
отличать полное исключение
всех геометрических понятий и
представлений, с одной стороны,
и полный отрыв от физики и всех
приложений, с другой.
Предлагаемая книга знаменует
возвращение преподавания
математики к естественнонауч-
ному подходу, для которого
характерны явная геометрич-
ность и прямое представление
математики как части физики,
непосредственно пригодной для
многочисленных приложений
как в естествознании, так и
в инженерном деле.
Это возвращение математики
в русло естественных наук
происходит сейчас и на уровне
новых научных исследований, а
его проявление в преподавании
давно стало абсолютно
необходимым.
В. И. Арнольд
академик РАН
Пол БАМБЕРГ
Шломо СТЕРНБЕРГ
КУРС МАТЕМАТИКИ
ДЛЯ
СТУДЕНТОВ-ФИЗИКОВ
Том I
Главы 1-11
ПЕРЕВОД С АНГЛИЙСКОГО
к. ф.-м. н., доц. Л. П. Котовой (МФТИ)
ПОД РЕДАКЦИЕЙ
к. ф.-м. н., доц. Е. В. Майкова (МГУ)
ф
МОСКВА
2006
УДК 51
Издание осуществлено при поддержке
Центрального аэрогидродинамического
института имени Н. Е. Жуковского,
директор В. Г. Дмитриев
и
Фонда «КНИГА-НАУКА-КУЛЬТУРА»,
директор В. Б. Филиппов
Бамберг П., Стернберг Ш.
Курс математики для студентов-физиков. Том I, главы 1-11.
Перев. с англ. Л. П. Котовой под ред. Е. В. Майкова.
- М.: ФАЗИС, 2006. 592c.(i-xviii, 1-574)
ISBN 5-7036-0109-6
Paul Bamberg & Shlomo Sternberg
A Course in Mathematics for Students of Physics
© Cambridge University Press 1988 (Vol. 1)
Издательство ФАЗИС
123557 Москва, Пресненский вал, 42-44
e-mail: publisher@phasis.ru /ittp://www.phasis.ru
Типография «Наука» Академиздатцентра РАН
121099 Москва Г-99, Шубинский пер., 6
Заказ №3638
ISBN 5-7036-0109-6
© ФАЗИС, 2006
Оглавление тома I
Предисловие................................................. VII
От издателя русского перевода...............................XVII
Глава 1. Линейные преобразования плоскости.................... 1
1.1. Аффинные плоскости и векторные пространства.............. 1
1.2. Векторные пространства и их аффинные пространства....... 10
1.3. Функции и аффинные функции.............................. 18
1.4. Евклидовы и аффинные преобразования..................... 23
1.5. Линейные преобразования................................. 25
1.6. Матрица линейного преобразования........................ 29
1.7. Умножение матриц........................................ 31
1.8. Алгебра матриц.......................................... 34
1.9. Площади и определители.................................. 37
1.10. Обратные матрицы....................................... 45
1.11. Сингулярные матрицы.................................... 50
1.12. Двумерные векторные пространства....................... 55
Добавление: фундаментальная теорема аффинной геометрии....... 60
Резюме....................................................... 64
Задачи....................................................... 64
Глава 2. Собственные векторы и собственные значения.......... 77
2.1. Конформные линейные преобразования...................... 77
2.2. Собственные векторы и собственные значения.............. 82
2.3. Процессы Маркова........................................ 93
Резюме...................................................... 101
Задачи...................................................... 102
Глава 3. Линейные дифференциальные уравнения на плоскости... 115
3.1. Функции матриц......................................... 115
3.2. Экспонента от матрицы.................................. 119
3.3. Вычисление экспоненты от матрицы....................... 127
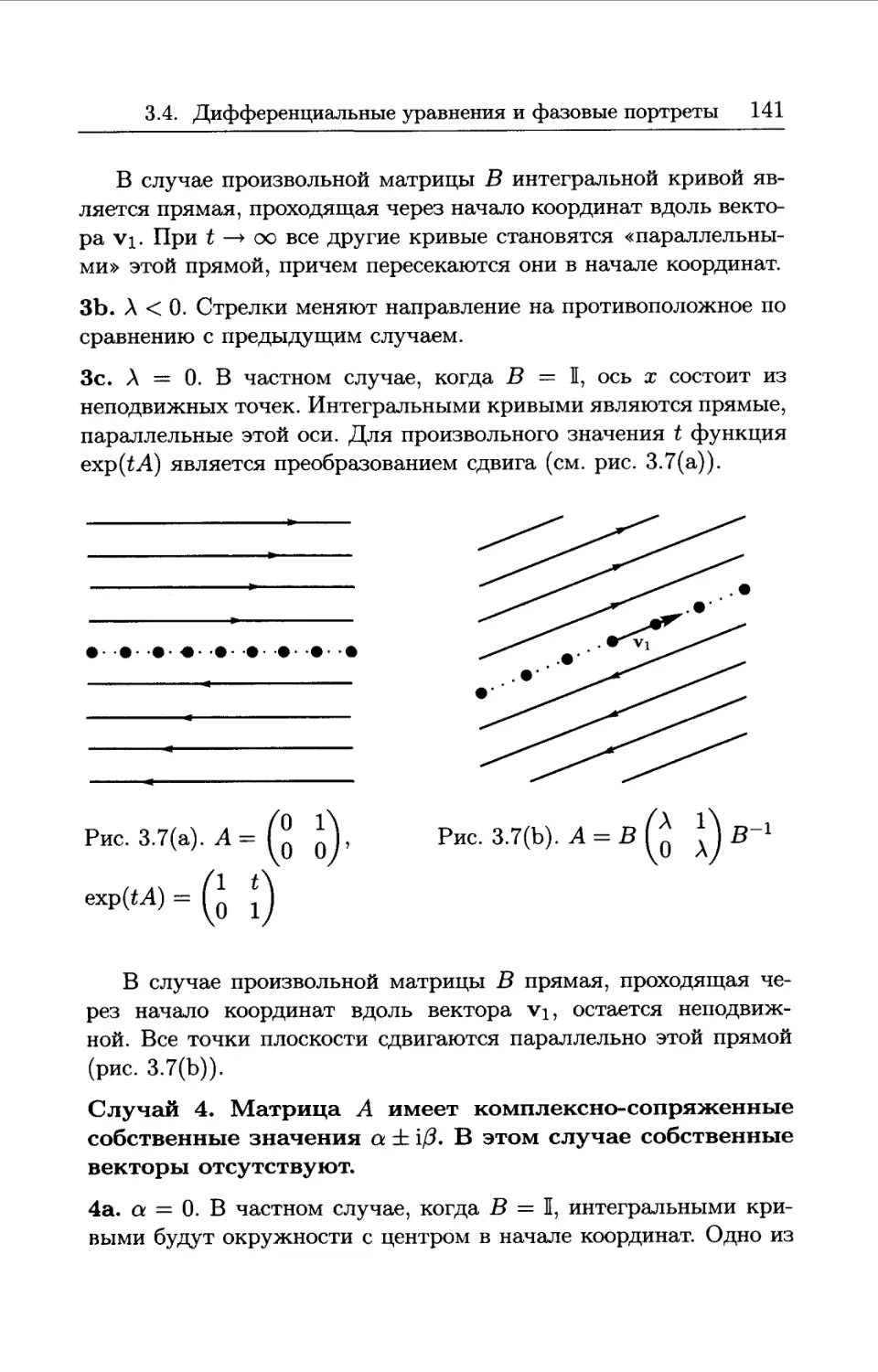
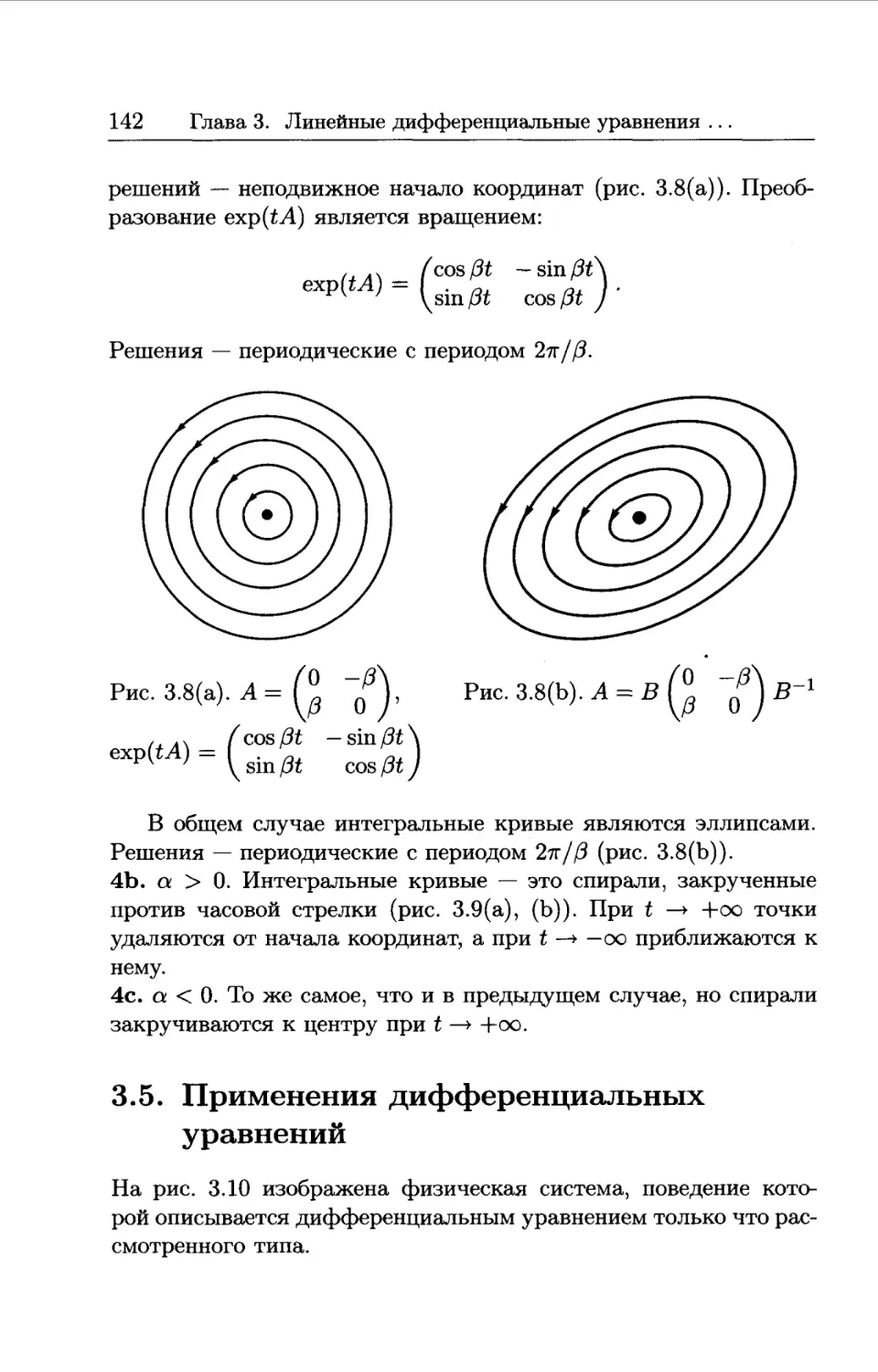
3.4. Дифференциальные уравнения и фазовые портреты.......... 135
3.5. Применения дифференциальных уравнений.................. 142
IV
Оглавление тома I
Резюме..................................................... 155
Задачи..................................................... 156
Глава 4. Скалярные произведения............................ 165
4.1. Скалярные произведения в евклидовом пространстве...... 165
4.2. Процесс Грама Шмидта.................................. 171
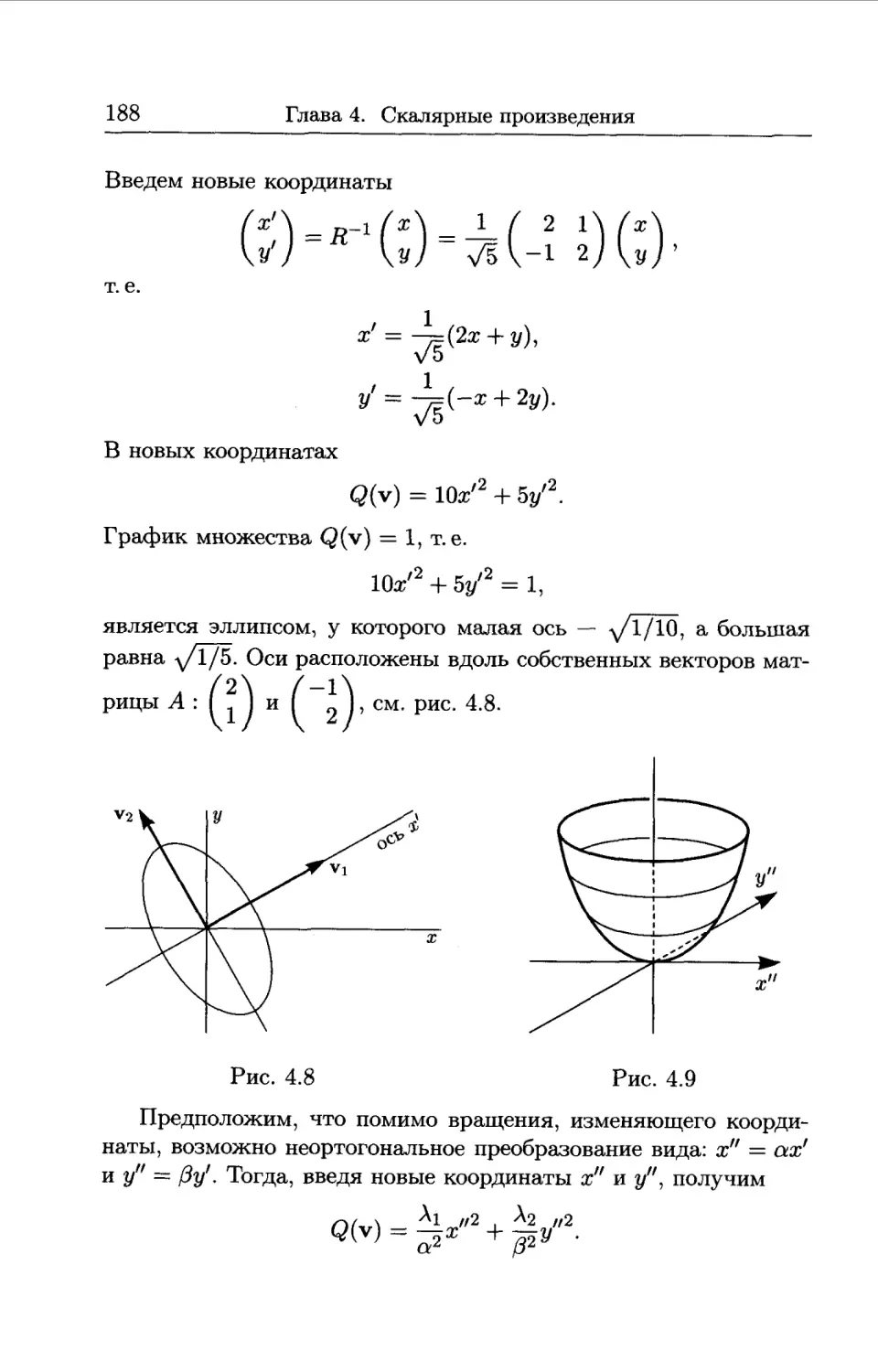
4.3. Квадратичные формы и симметричные матрицы............. 181
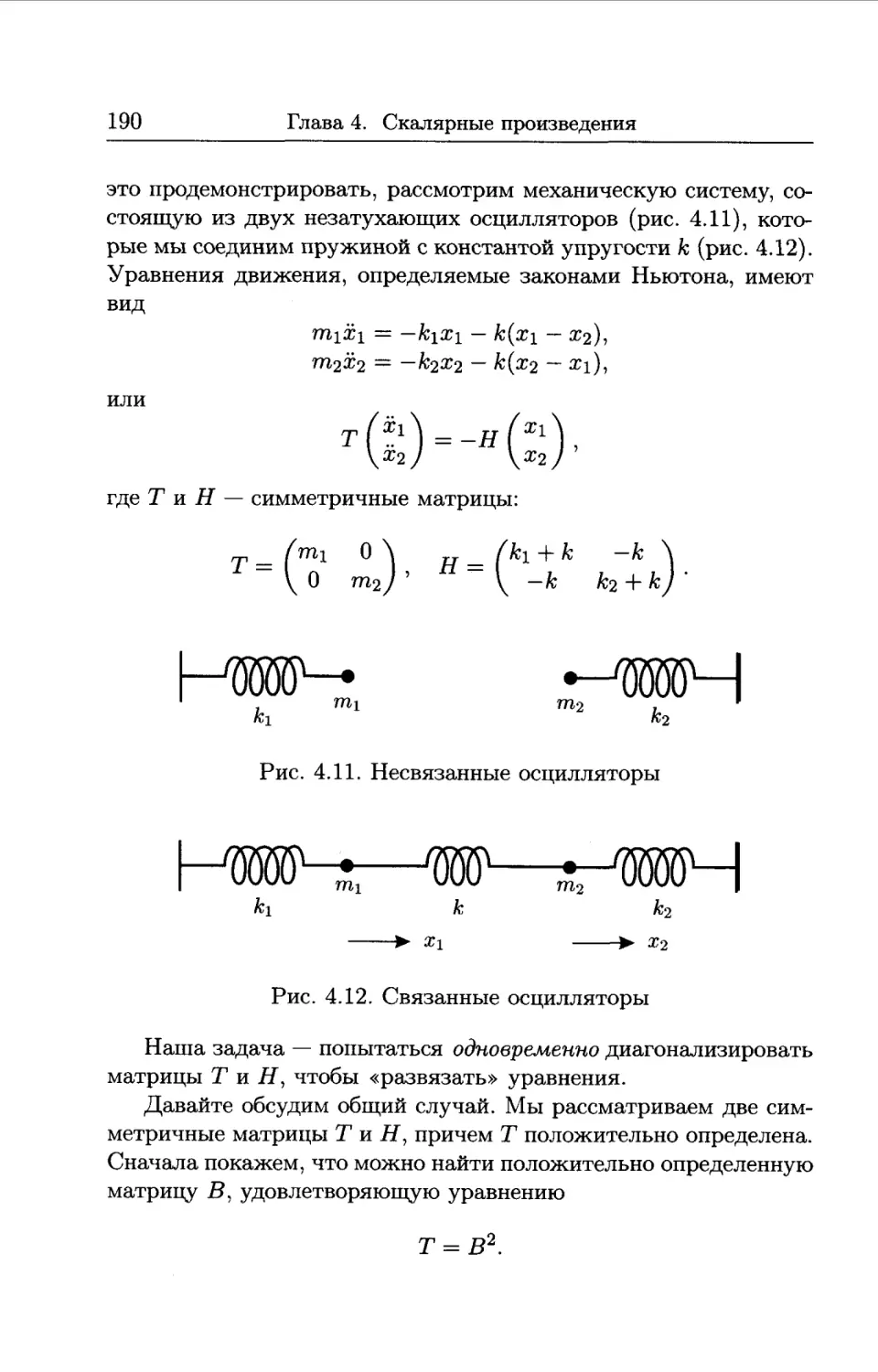
4.4. Нормальные колебания.................................. 189
4.5. Нормальные моды в многомерном пространстве............ 195
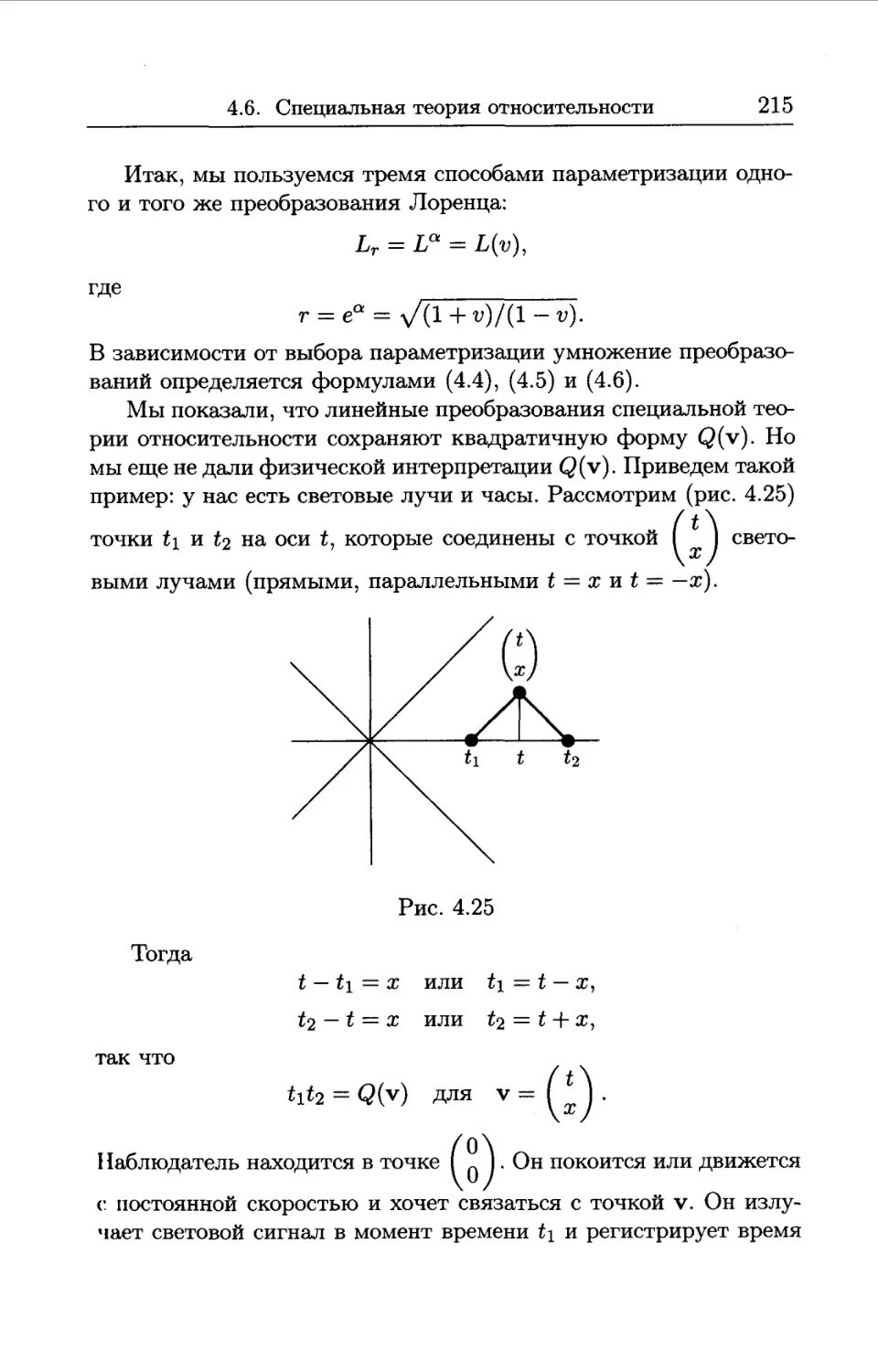
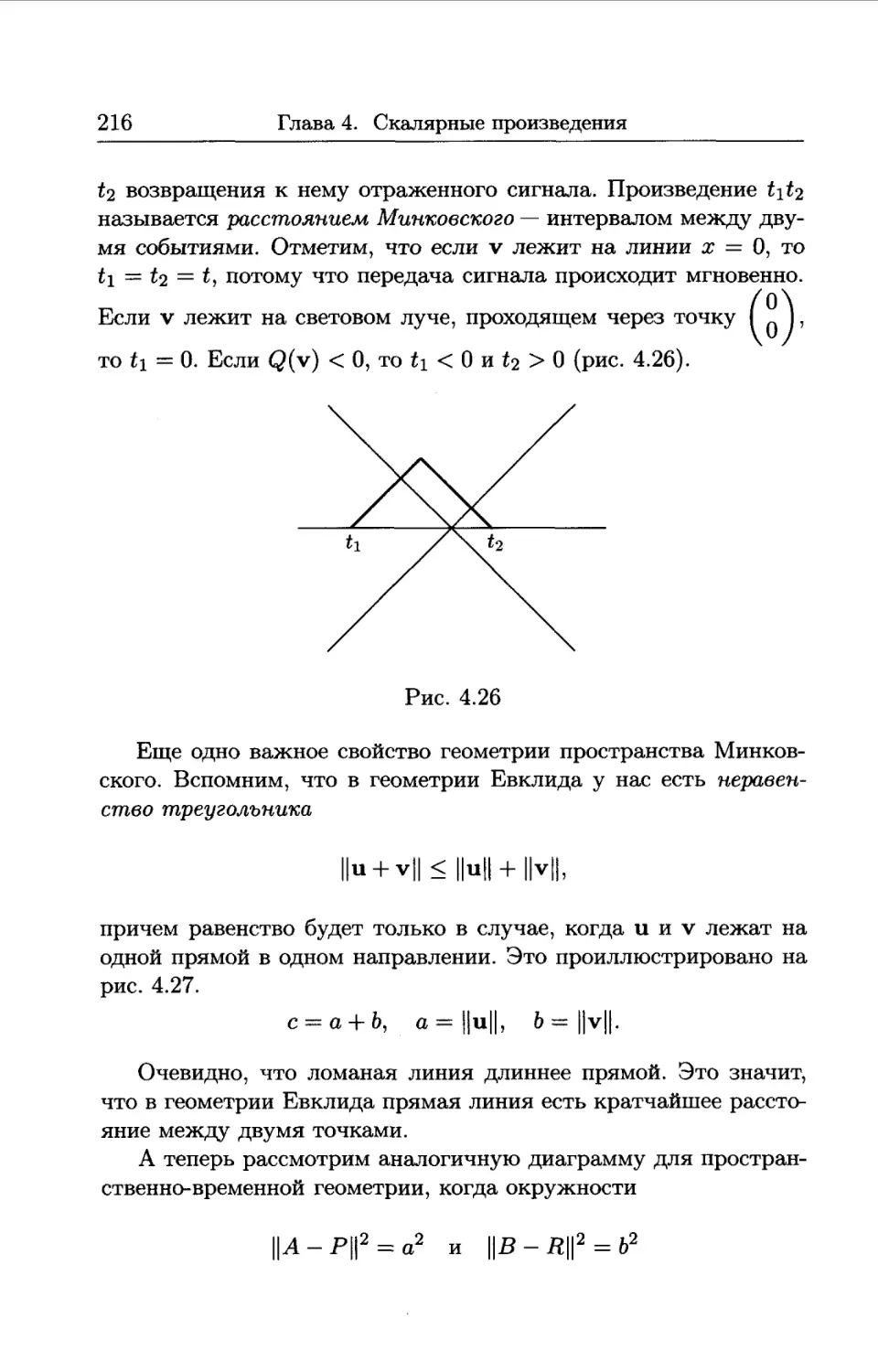
4.6. Специальная теория относительности.................... 205
4.7. Группа Пуанкаре и группа Галилея...................... 218
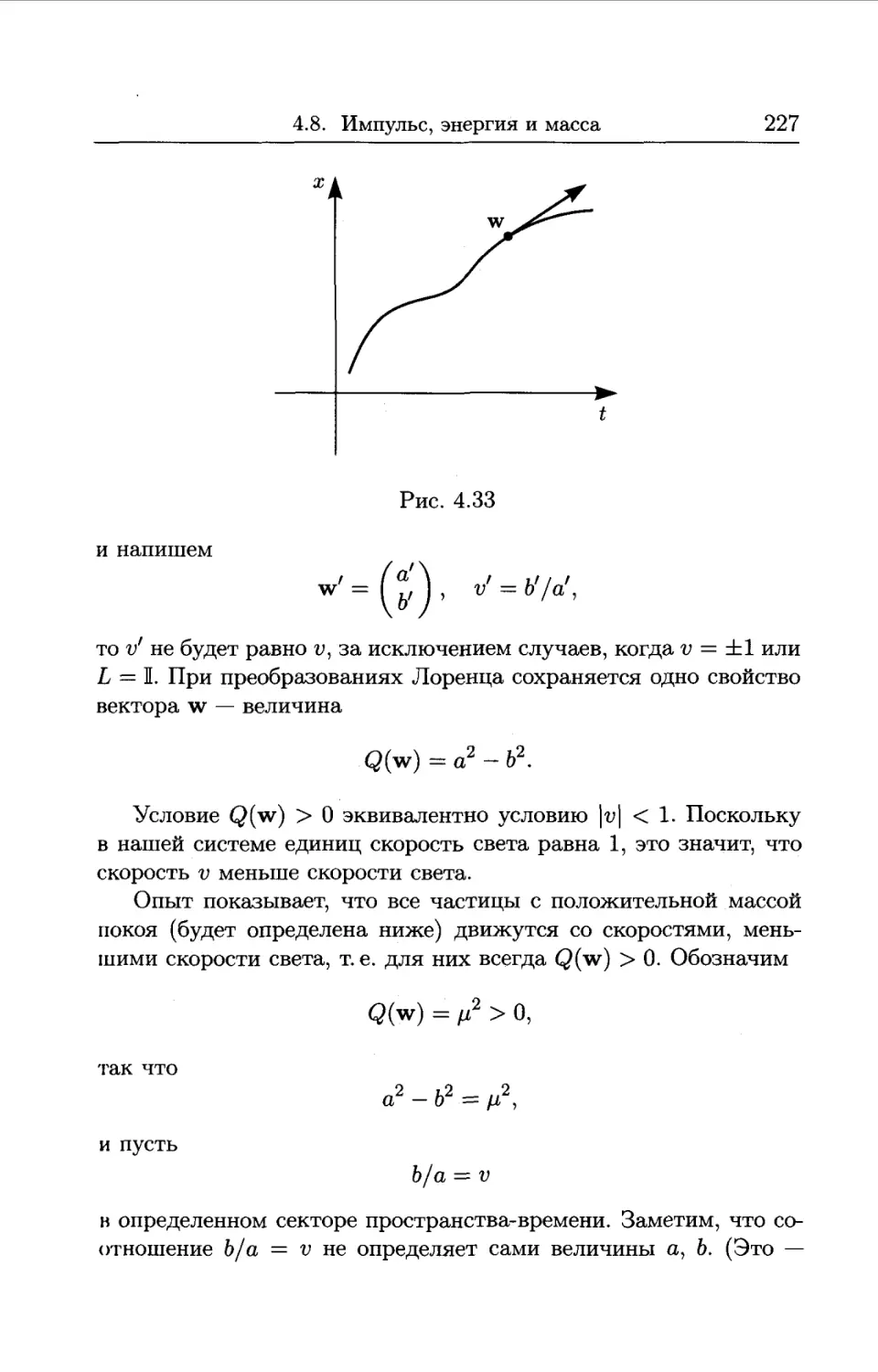
4.8. Импульс, энергия и масса.............................. 222
4.9. Антисимметричные формы................................ 230
Резюме..................................................... 232
Задачи..................................................... 233
Глава 5. Дифференциальное исчисление на плоскости.......... 243
Введение................................................... 243
5.1. «О» большие и «о» малые............................... 247
5.2. Дифференциальное исчисление........................... 254
5.3. Примеры на цепное правило............................. 262
5.4. Частные производные и дифференциальные формы.......... 274
5.5. Производные по направлению ........................... 285
5.6. Операция переноса..................................... 291
Резюме..................................................... 299
Задачи..................................................... 299
Глава 6. Теоремы многомерного дифференциального исчисления.. 305
6.1. Теорема о среднем значении............................ 305
6.2. Производные высших порядков и формула Тейлора......... 310
6.3. Максимум и минимум.................................... 314
6.4. Теорема об обратной функции........................... 321
6.5. Поведение функции вблизи критической точки............ 336
Резюме..................................................... 339
Задачи..................................................... 339
Глава 7. Дифференциальные формы и криволинейные интегралы... 347
Введение................................................... 347
7.1. Ориентированные траектории............................ 351
7.2. Криволинейные интегралы............................... 355
7.3. Точные дифференциальные формы......................... 362
7.4. Замкнутые дифференциальные формы...................... 366
7.5. Перенос дифференциальной формы и интегрирование....... 368
7.6. Абсолютный криволинейный интеграл. Длина кривой....... 370
Резюме..................................................... 373
Задачи..................................................... 373
Глава 8. Двойные интегралы................................. 379
8.1. Внешняя производная................................... 379
Оглавление тома I
V
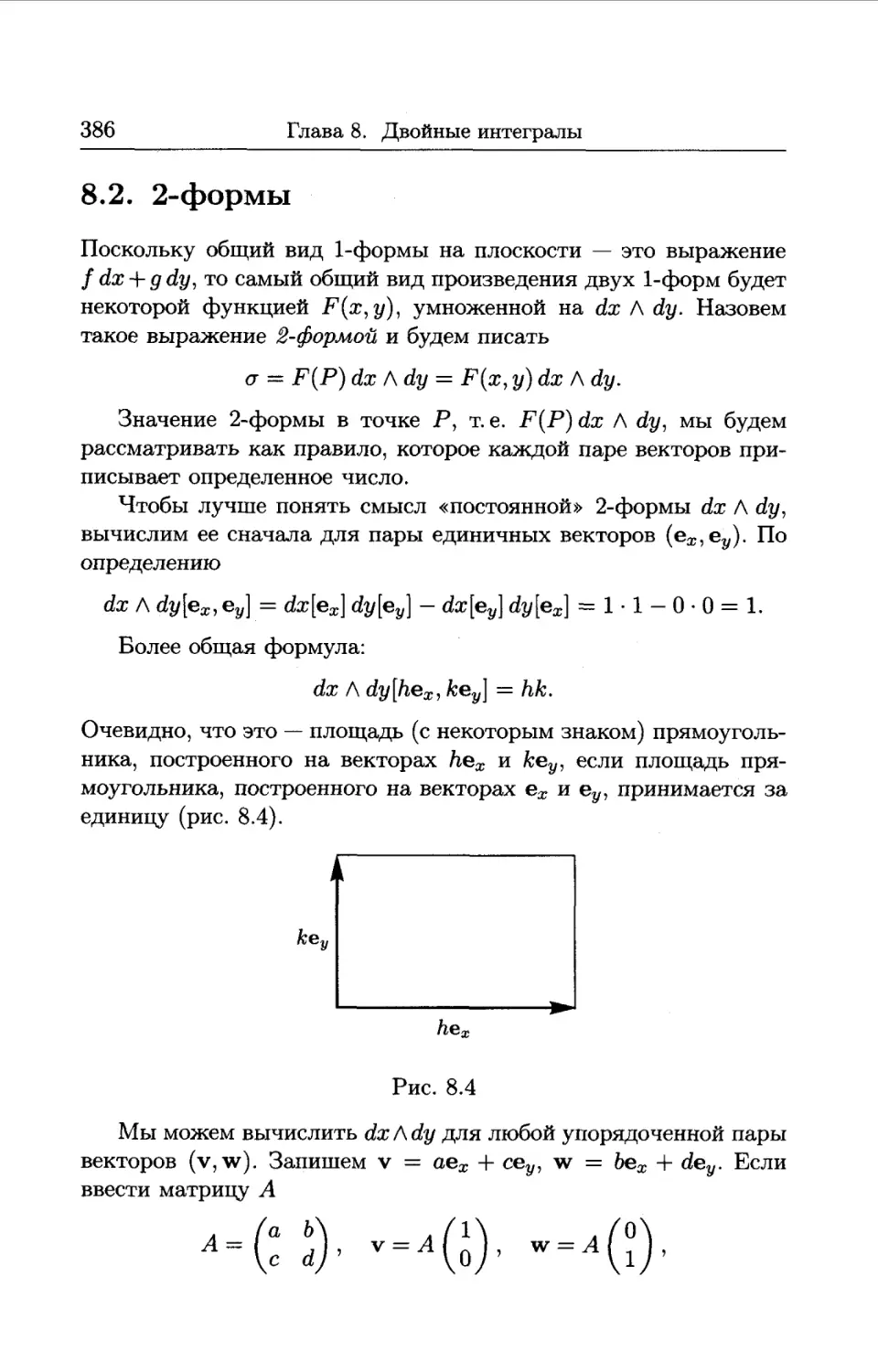
8.2. 2-формы................................................. 386
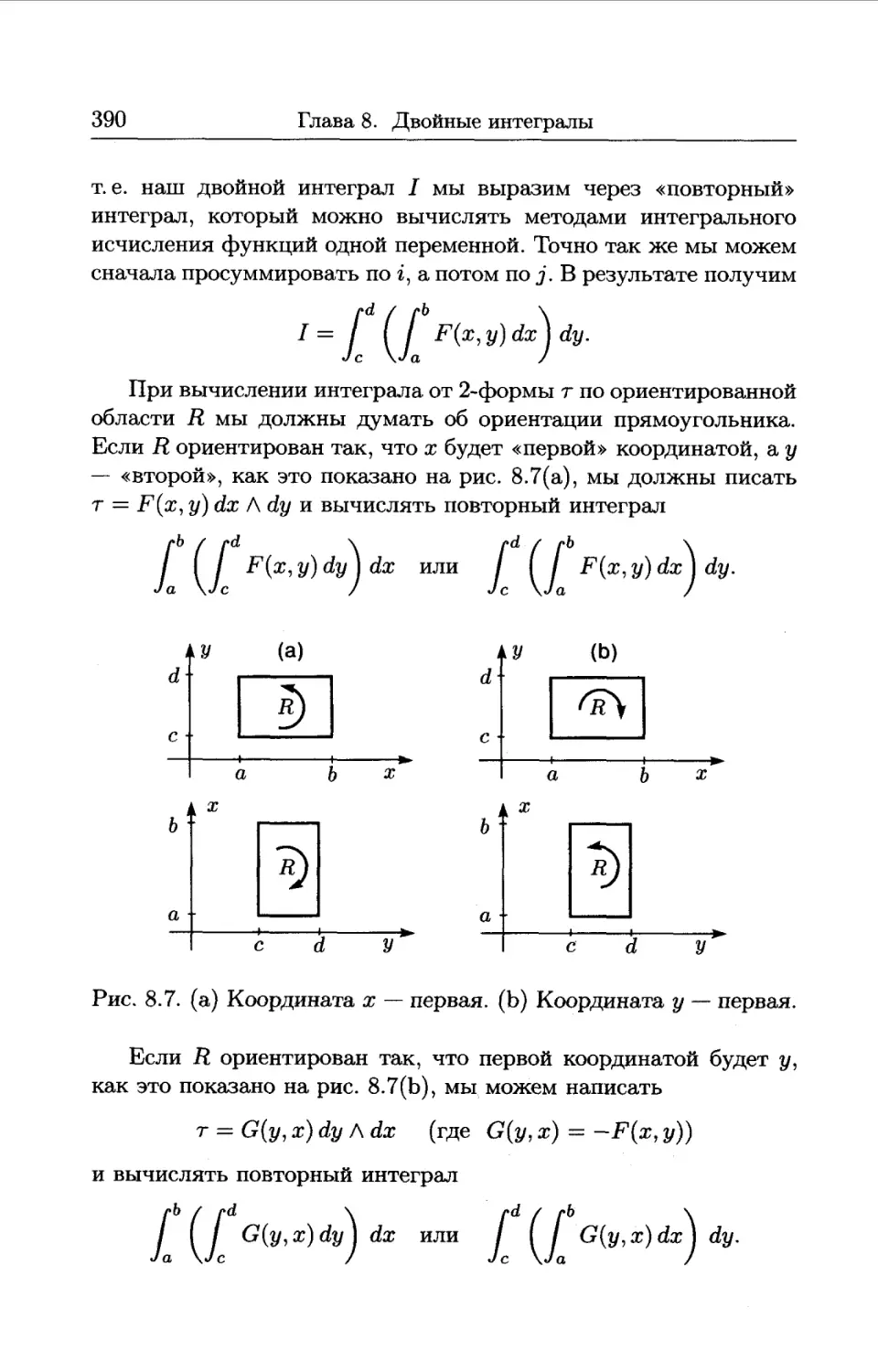
8.3. Интегрирование 2-форм................................... 388
8.4. Ориентация.............................................. 397
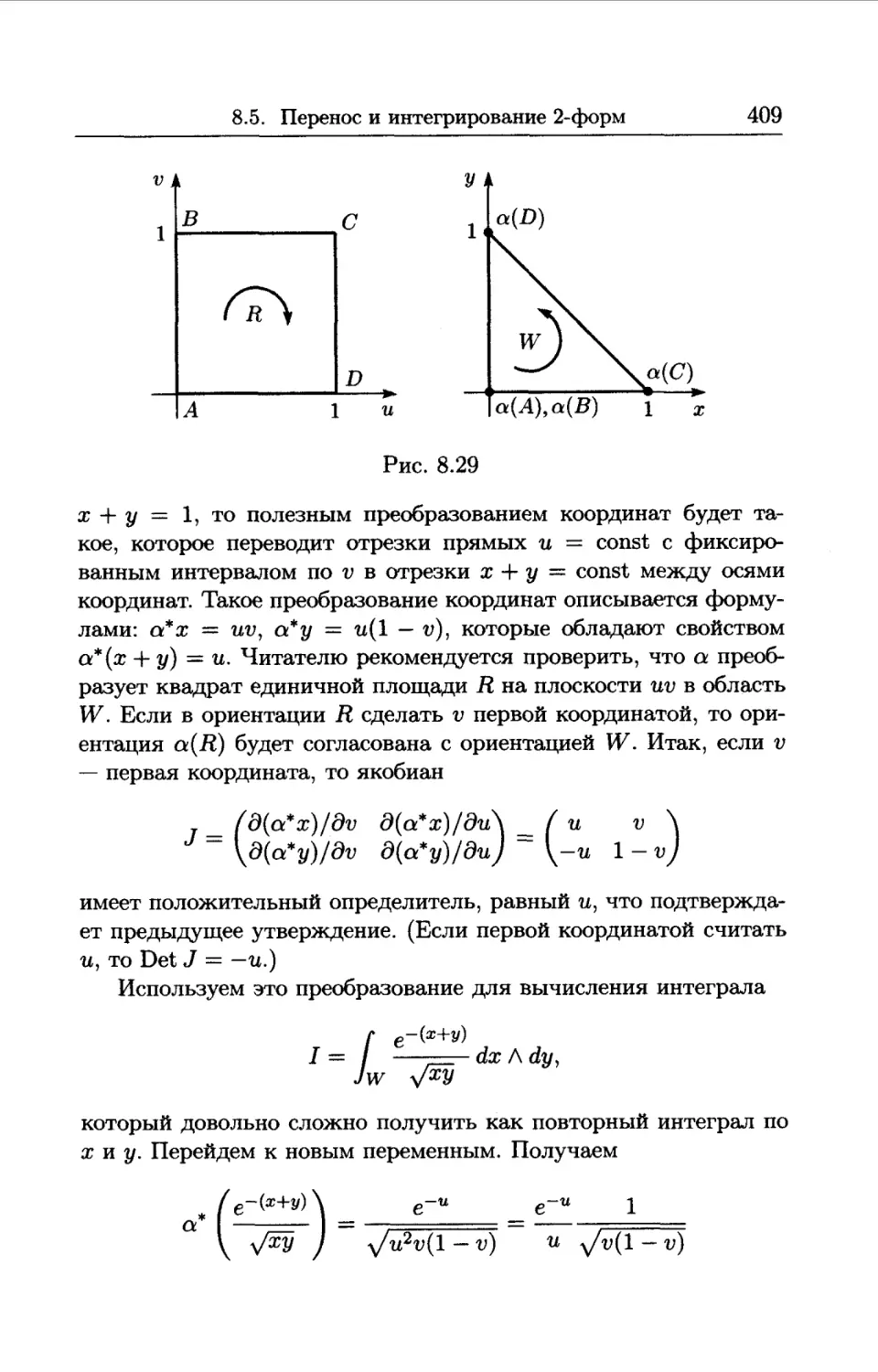
8.5. Перенос и интегрирование 2-форм......................... 401
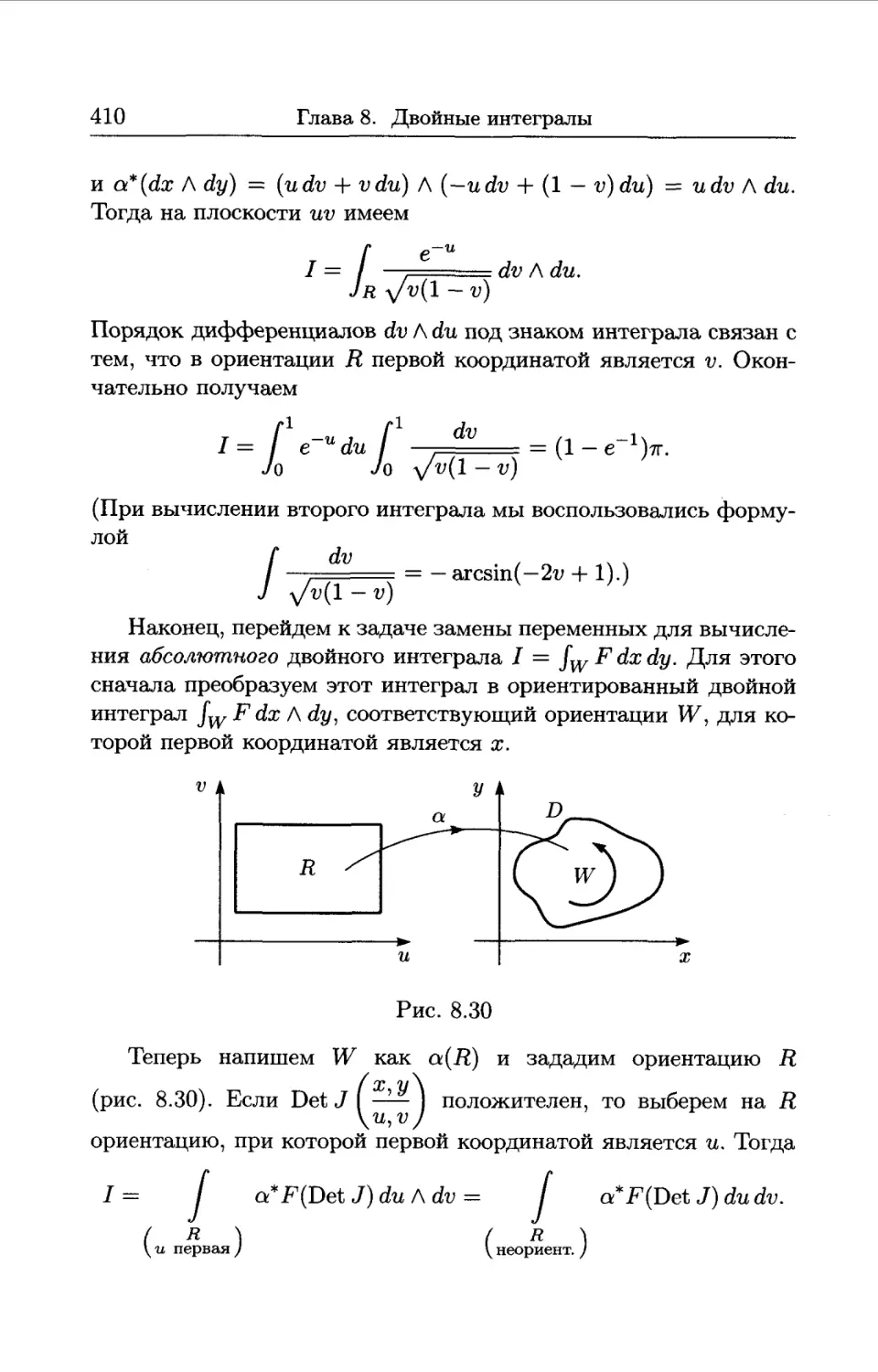
8.6. 2-формы в трехмерном пространстве....................... 411
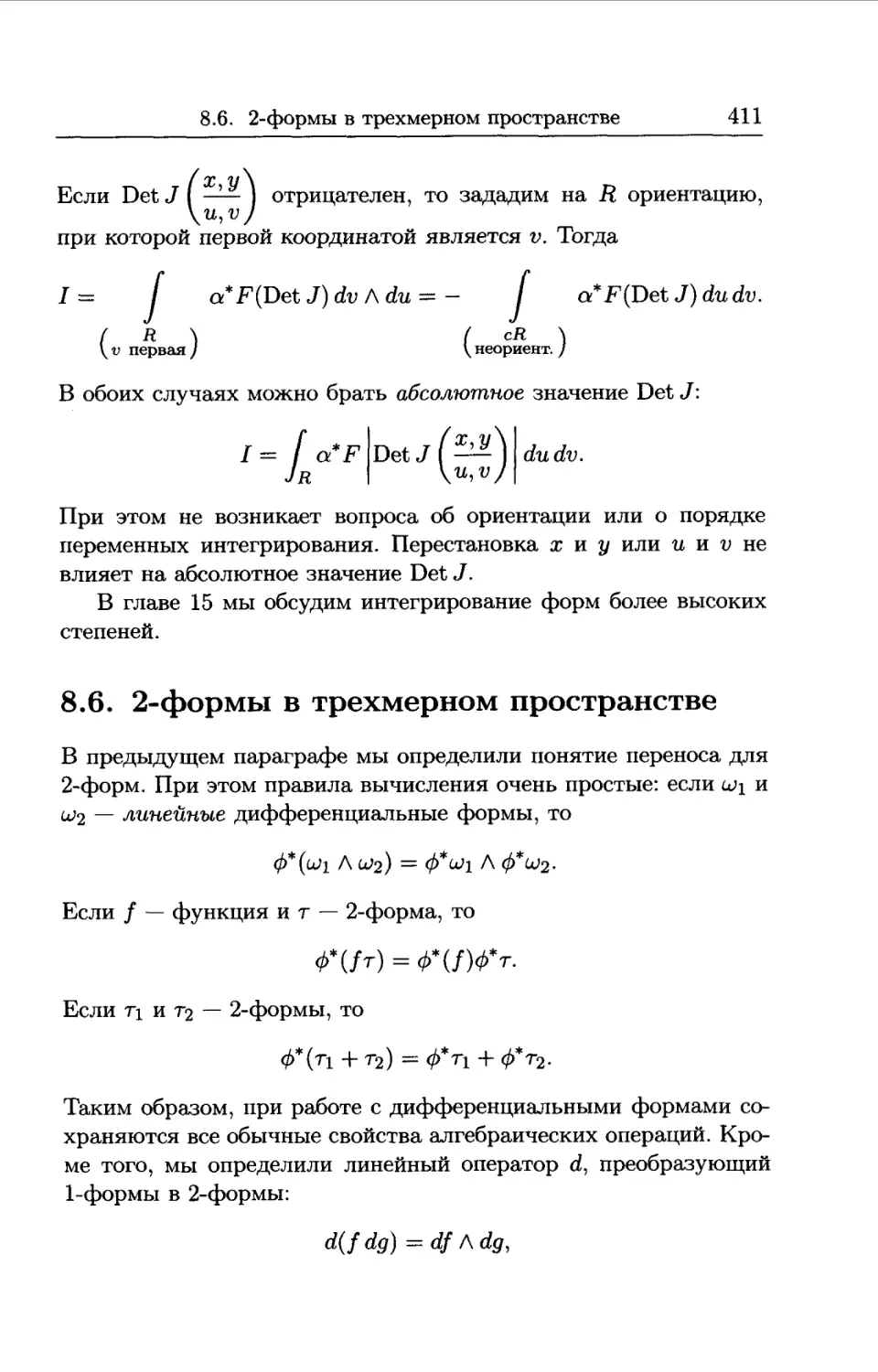
8.7. Различие между 2-формами и плотностями.................. 413
8.8. Формула Грина на плоскости.............................. 415
Резюме....................................................... 425
Задачи....................................................... 426
Глава 9. Гауссова оптика..................................... 433
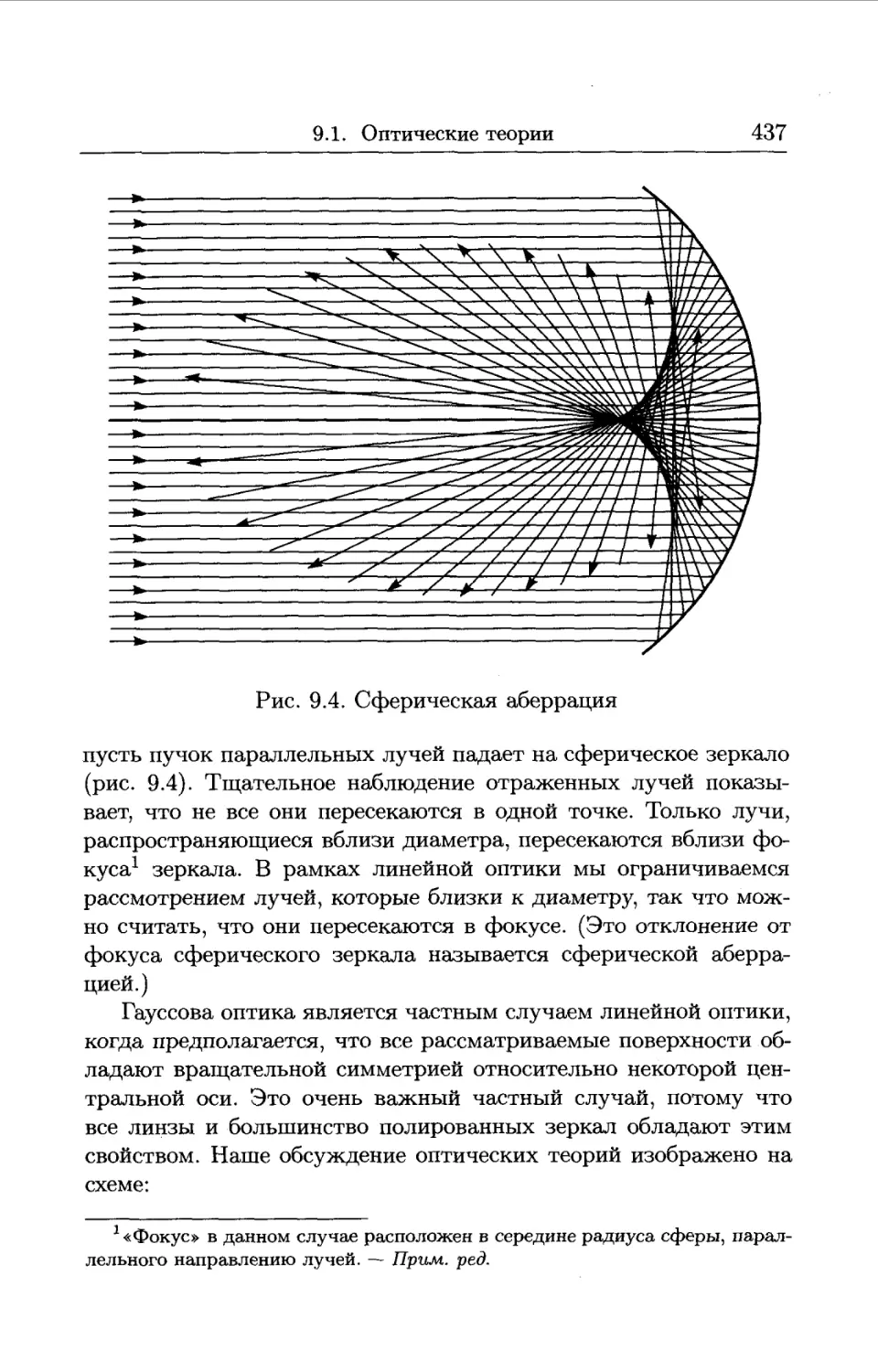
9.1. Оптические теории....................................... 433
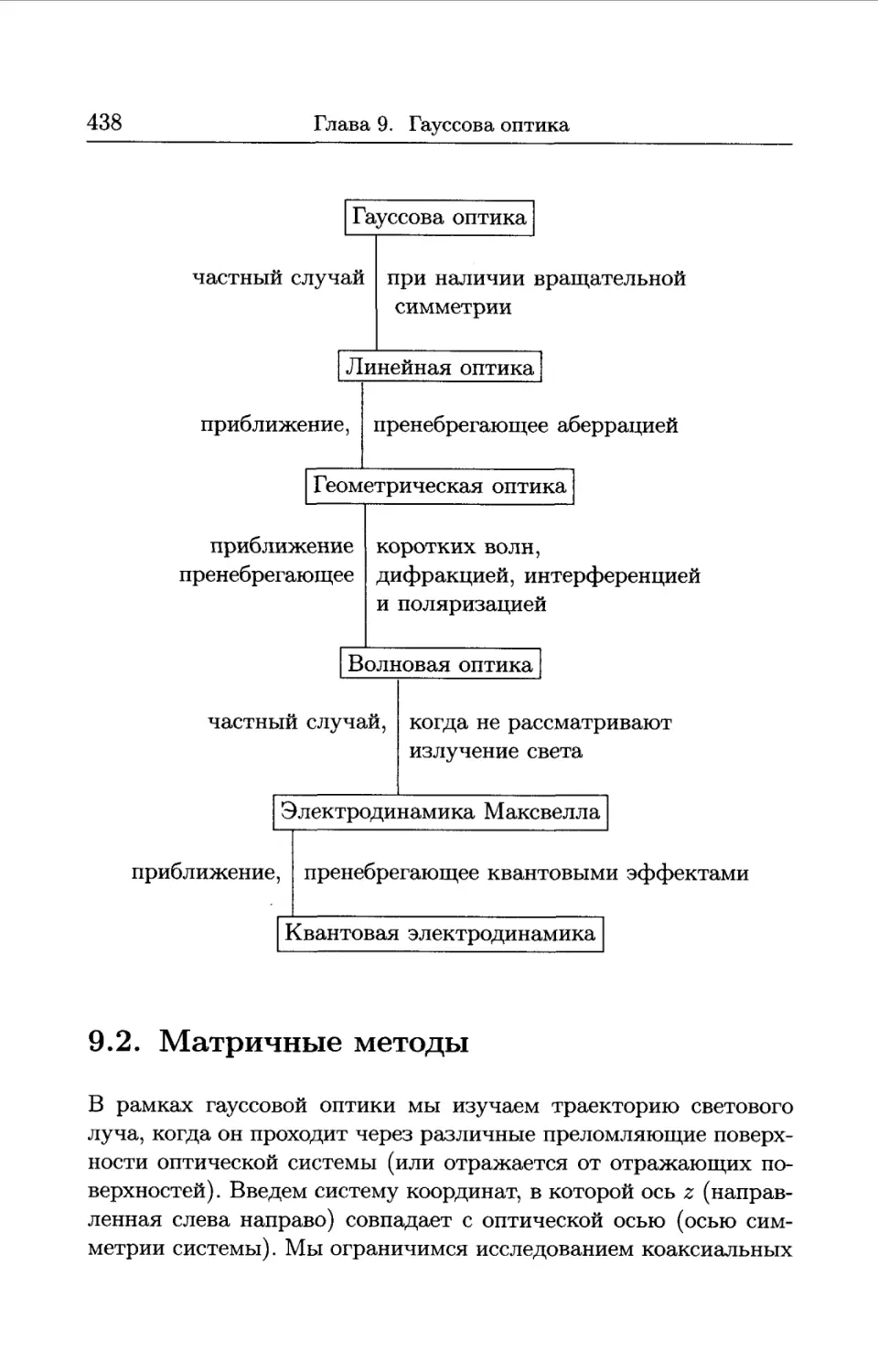
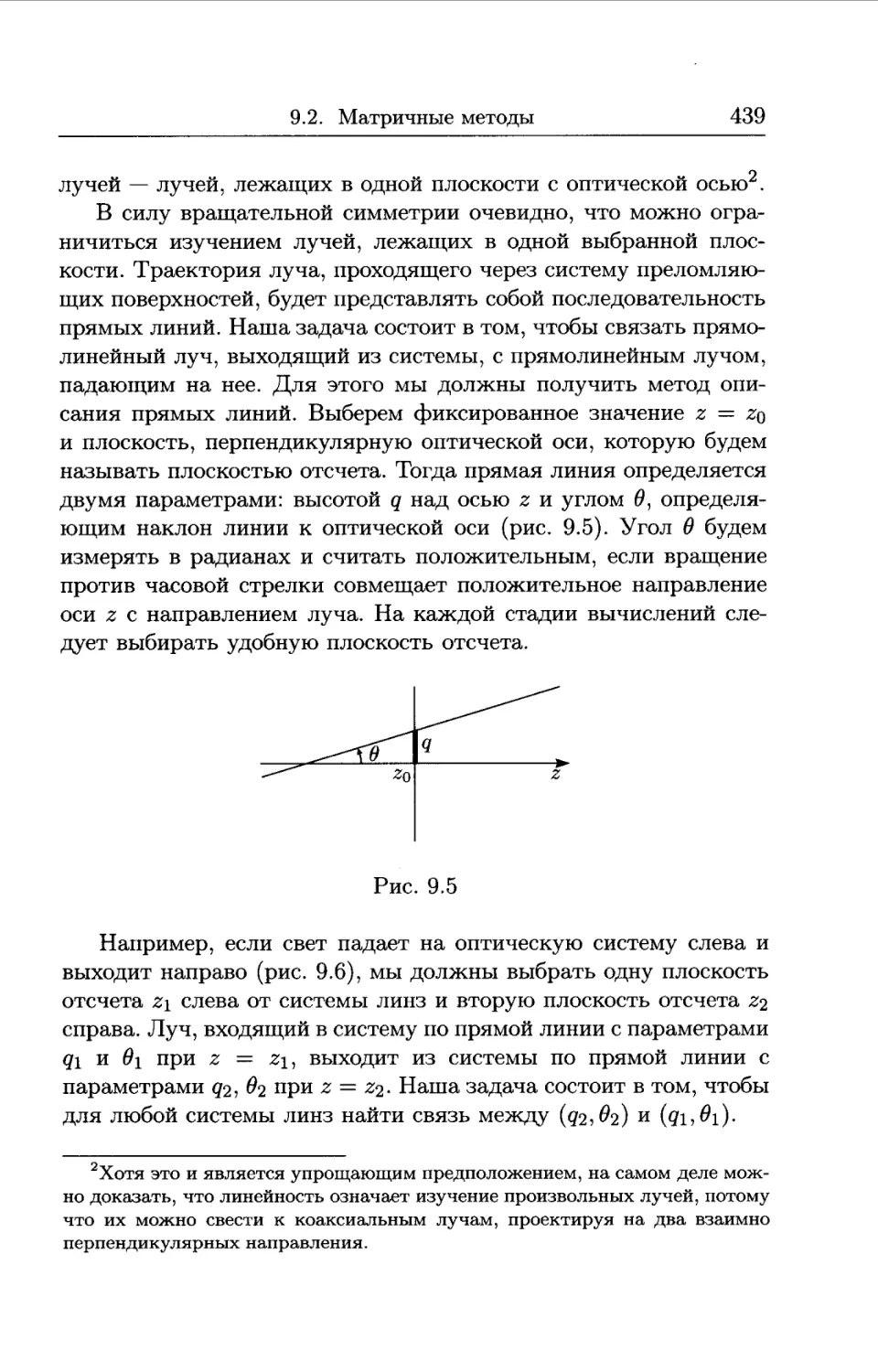
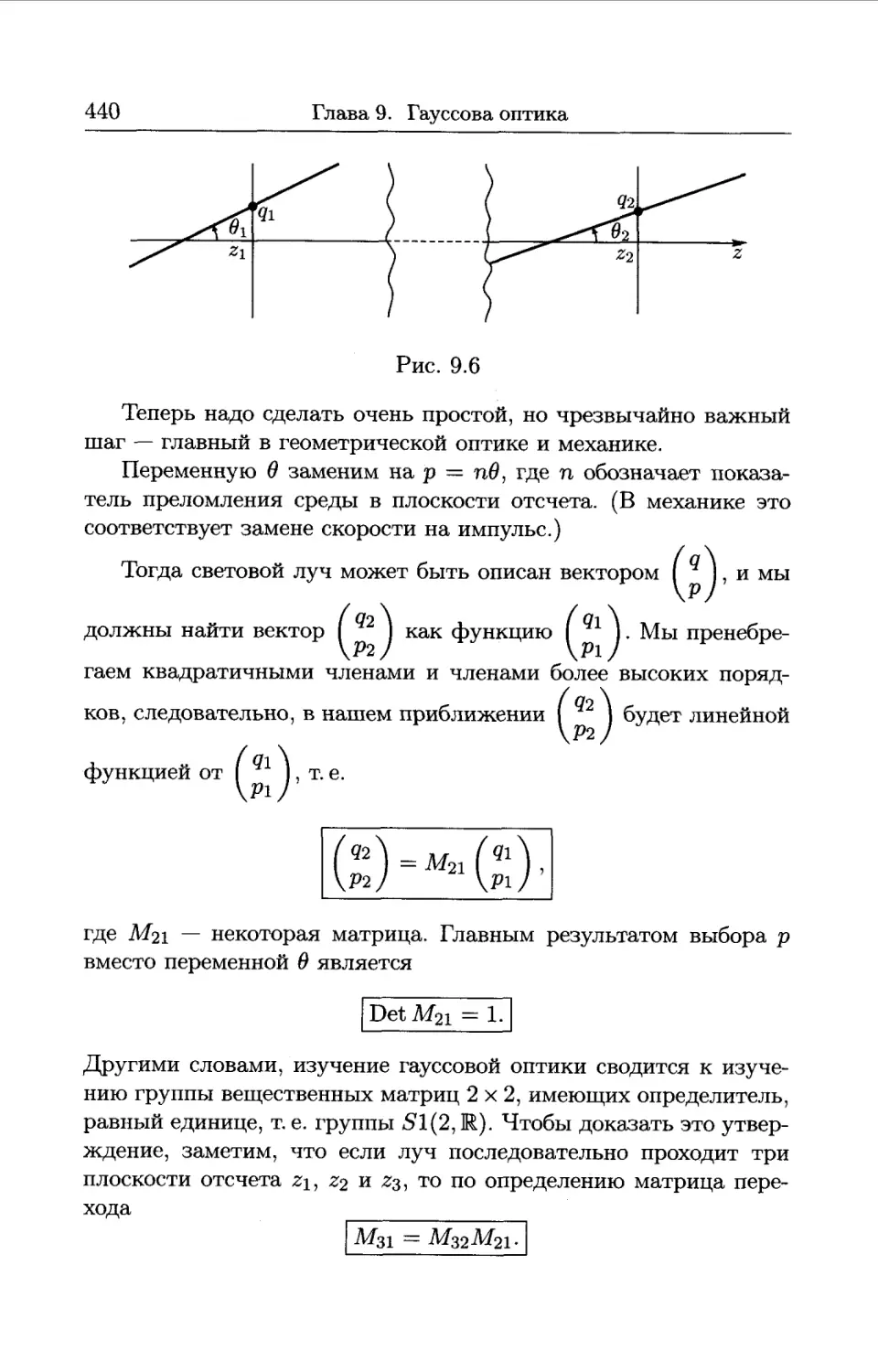
9.2. Матричные методы....................................... 438
9.3. Метод Гамильтона в гауссовой оптике..................... 451
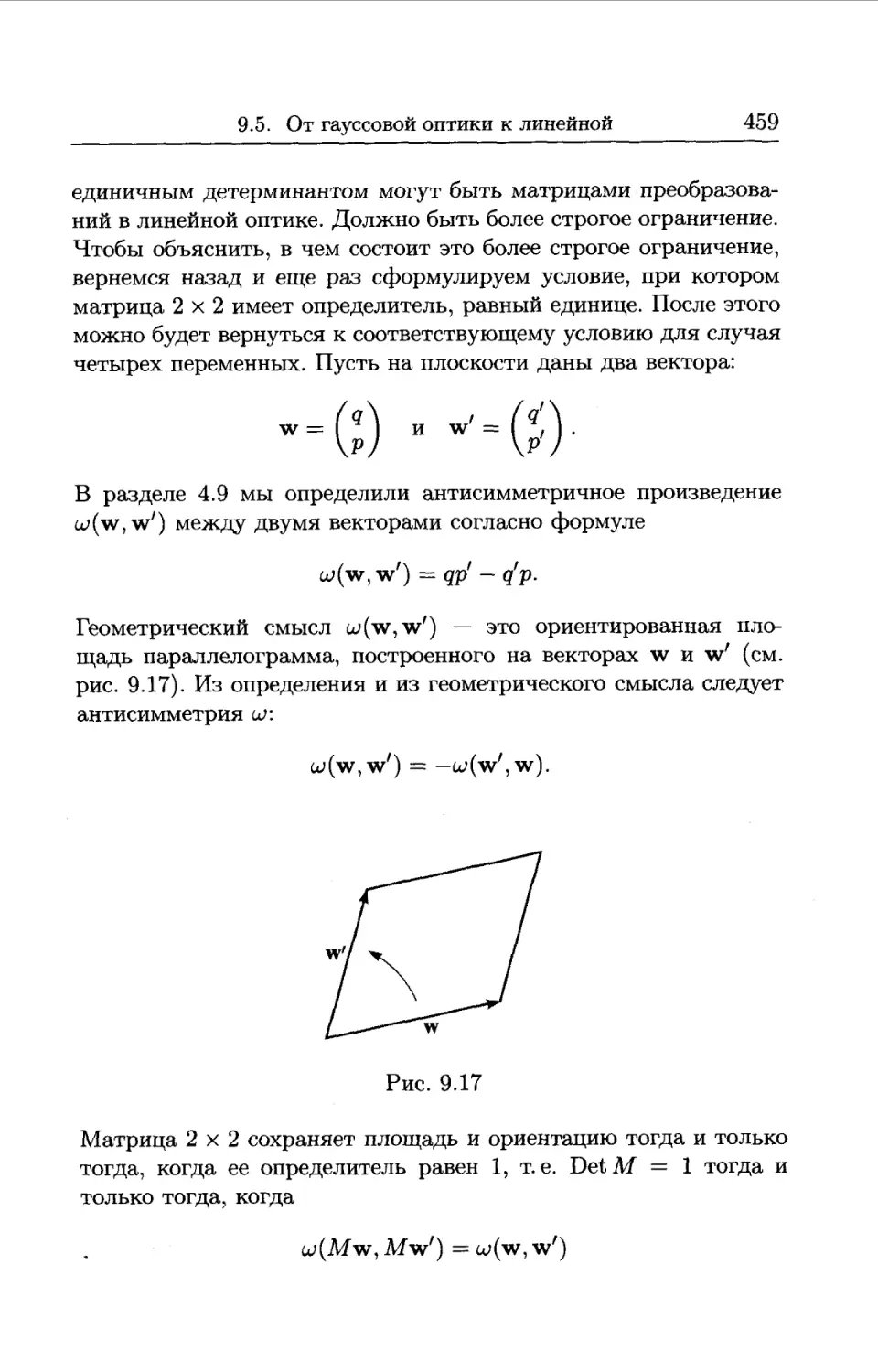
9.4. Принцип Ферма........................................... 455
9.5. От гауссовой оптики к линейной.......................... 458
Резюме....................................................... 468
Задачи....................................................... 468
Глава 10. Векторные пространства и линейные преобразования... 475
Введение..................................................... 475
10.1. Свойства векторных пространств......................... 476
10.2. Дуальное пространство.................................. 479
10.3. Подпространства........................................ 480
10.4. Размерность и базис.................................... 482
10.5. Дуальный базис......................................... 491
10.6. Факторпространство..................................... 493
10.7. Линейные отображения................................... 502
10.8. Редукция по строкам.................................... 506
10.9. Локальная структура дифференцируемого отображения...... 517
10.10. Сопряженное отображение............................... 526
Резюме....................................................... 531
Задачи....................................................... 532
Глава 11. Определители....................................... 547
Введение..................................................... 547
11.1. Аксиомы для определителей.............................. 549
11.2. Закон умножения и другие следствия аксиом.............. 557
11.3. Существование определителя............................. 560
Резюме....................................................... 562
Задачи....................................................... 562
Рекомендуемая литература..................................... 565
Предметный указатель......................................... 569
Предисловие
В этой книге излагается курс математики, который мы пре-
подавали в Гарварде в течение восьми лет. Курс предназначен
для студентов, интересующихся физикой и имеющих хорошую
подготовку по математическому анализу функций одной пере-
менной. Полезно некоторое знакомство с линейной алгеброй, но
это не обязательно. Большинство наших студентов одновремен-
но с этим курсом изучают сложные курсы по физике, так что
они могут соединить излагаемые здесь сведения со своими фи-
зическими знаниями. Такое совмещение полезно, но не обяза-
тельно. Основное содержание нашега курса — теория и физиче-
ские приложения линейной алгебры и математического анализа
функций нескольких переменных, включая внешнее исчисление.
Наш педагогический метод — изложение по «спирали», т. е. мы
рассматриваем одну и ту же тему несколько раз, возвращаясь к
ней на все более высоком уровне, одновременно расширяя облас-
ти ее применения. Такое построение мы предпочитаем «прямо-
линейному» строгому логическому порядку. Надеемся, что при
этом мы избежим логических ошибок типа «порочного круга»,
но часто будем начинать с простого случая того или иного по-
нятия, а затем возвращаться к нему для обобщений, делая это
только после ознакомления с родственными понятиями и, как
следствие, приобретения более широкого взгляда на предмет.
Такой подход требует от студентов определенного доверия и тер-
пения. Но мы надеемся, что, в конце концов, они будут возна-
граждены более глубоким интуитивным пониманием предмета
в целом.
VIII
Предисловие
Теперь расскажем о содержании книги более детально. Цель
первых четырех глав — познакомить читателя с алгеброй и ана-
лизом квадратных матриц. Таким образом, изучив эти главы,
студент должен научиться думать о матрицах как о самостоя-
тельных объектах, а не просто как о наборе чисел, выстроенных
по квадрату. В этих главах мы рассматриваем почти исключи-
тельно матрицы 2x2, когда самые сложные вычисления сводятся
к решению квадратных уравнений. Но каждый раз мы формули-
руем результаты, имея в виду матрицы более высокого порядка.
Глава 1 начинается с объяснения связи закона умножения
матриц 2 х 2 и геометрии прямых линий на плоскости. Далее
излагается алгебра матриц 2x2, обсуждается детерминант и его
отношение к плоскости и ориентации. Мы вводим определение
абстрактного векторного пространства в общем случае, объясня-
ем понятие базиса и замены базиса в одномерном и двумерном
векторном пространстве.
В главе 2 мы обсуждаем конформную линейную геометрию
на плоскости, т.е. геометрию линий и углов и их связь с опре-
деленного вида матрицами 2x2. Кроме того, вводятся понятия
собственных значений и собственных векторов, столь важные в
квантовой механике. Мы пользуемся этими понятиями, чтобы по-
строить алгоритм вычисления степеней матрицы. В качестве при-
мера, где это применяется, обсуждаются основные свойства цепей
Маркова.
Основная задача главы 3 -- показать, что система однород-
ных линейных дифференциальных уравнений с постоянными ко-
эффициентами может быть записана в виде du/dt — Au, где А
— матрица, а и — вектор, и что решение этой системы имеет вид
ел*ио, где ио задается начальными условиями. При этом, конеч-
но, требуется объяснить, что означает экспонента, в показателе
которой стоит матрица. Кроме того, описывается качественное
поведение решений в неоднородном случае, в том числе обсуж-
дается явление резонанса.
Глава 4 посвящена изучению скалярных произведений и квад-
ратичных форм. В ней имеется много физических приложений, в
том числе обсуждение нормальных форм и детальное изложение
специальной теории относительности.
Предисловие
IX
В главах 5 и 6 изложены основные положения дифференци-
ального исчисления.
В главе 5 определяется дифференциал отображения одно-
го векторного пространства на другое, обсуждаются его основ-
ные свойства, в частности, правило дифференцирования компо-
зиции. В качестве физических приложений рассматриваются за-
дача Кеплера и приближение Борна. Мы даем определения част-
ной производной и производной по направлению, определяем ли-
нейные дифференциальные формы.
В главе 6 продолжается изложение дифференциального ис-
числения. Мы представляем в векторной форме теорему о сред-
нем значении, формулу Тейлора и теорему об обратном отобра-
жении. Обсуждаем поведение критических точек и множители
Лагранжа.
Главы 7 и 8 знакомят читателя с интегральным исчислением.
Глава 7 посвящена изучению линейных дифференциальных
форм и их интегралов. Особое внимание уделено замене перемен-
ных. Кроме того, обсуждаются и другие одномерные интегралы,
например, длина дуги.
Глава 8 посвящена изучению внешних форм второй степени
и соответствующих им двумерных интегралов. Вводится понятие
внешней производной и подчеркивается инвариантность относи-
тельно замены переменных. Доказывается двумерный вариант
теоремы Стокса, т. е. теорема Грина. Рассматриваются поверх-
ностные интегралы в трехмерном пространстве.
В главе 9 результаты первых восьми глав используются при
построении физической теории — оптики. Вся глава посвящена
приложениям, и ее можно опустить без ущерба для понимания
последующего материала.
В главе 10 мы возвращаемся назад и доказываем основные
свойства конечномерных векторных пространств и их линейных
преобразований. Обычно это непосредственное обобщение резуль-
татов, полученных в первых четырех главах в двумерном случае.
Но при этом дан новый алгоритм редукции матрицы по строкам.
Вводятся два новых понятия — дуальное пространство и фак-
торпространство (в начале курса их было трудно определить).
В дальнейшем эти понятия окажутся чрезвычайно важными.
X
Предисловие
Глава 11 посвящена свойствам детерминантов матриц п х п.
Тема рассмотрена аксиоматически, показаны основные вычисли-
тельные алгоритмы.
Главы 12-14 знакомят читателя с математикой формы, т. е. с
алгебраической топологией.
В главе 12 мы начинаем изучение электрических цепей. При
этом рассматриваются два аспекта. Во-первых, изучаются «про-
вода» цепи, т. е. как соединяются между собой различные ветви.
На математическом языке это называется топологией одномер-
ных комплексов. Во-вторых, мы изучаем реакцию цепи в целом,
если нам известно поведение отдельных ветвей, в частности из-
менение мощности и энергии. Мы приводим несколько примеров
цепей, интересных с физической точки зрения.
В главе 13 мы продолжаем изучение цепей. Исследуем крае-
вые задачи, связанные с емкостными цепями, и применяем изло-
женные методы для решения ряда классических задач электро-
статики, включающих проводники.
В главе 14 мы кратко показываем, как результаты, получен-
ные в главах 12 и 13 в одномерном случае, обобщаются на случай
большего числа измерений.
Главы 15-18 посвящены разработке внешнего дифференци-
ального исчисления, рассматриваемого как непрерывная версия
дискретной теории комплексов.
В главе 15 излагаются основные сведения о внешнем исчис-
лении: внешняя алгебра, fc-формы, замена переменных, внешняя
производная и теорема Стокса.
Глава 16 посвящена электростатике. Мы рассматриваем ди-
электрические свойства вакуума как непрерывный аналог емко-
сти цепи, причем эти диэлектрические свойства определяют ев-
клидову геометрию в трехмерном случае. Излагаем основные по-
ложения теории потенциалов.
В главе 17 мы продолжаем изучение внешнего дифференци-
ального исчисления. Основные темы: векторные поля и потоки,
внутренние произведения и производные Ли. Полученные резуль-
таты применены для решения задач магнитостатики.
Глава 18 заканчивает изучение внешнего исчисления углуб-
ленным обсуждением общего случая звездного оператора.
Предисловие
XI
Главу 19 можно считать кульминацией всего курса. В ней ре-
зультаты, полученные в предыдущих главах, применяются для
исследования уравнений Максвелла и связанных с ними волно-
вых уравнений.
Главы 20 и 21 никак не связаны с главами 9-19, и их можно
читать независимо. Обычно они не включаются в наш годовой
курс. А вот главы 1-9, 20 и 21 могут составить самостоятельный
краткий курс математики.
Материал главы 20 представляет собой относительно стан-
дартное изложение теории функций комплексного переменного,
которое вполне доступно для студентов, подготовленных к чте-
нию этой книги.
В главе 21 обсуждаются простейшие аспекты асимптотик.
В главе 22 показано, как, следуя идеям Бора и Каратеодори,
внешнее исчисление можно использовать в классической термо-
динамике.
Большинство математиков и все физики, результаты которых
представлены в этой книге, работали в первом десятилетии два-
дцатого века. Это значит, что изложенному материалу уже по
крайней мере 90 лет. И, тем не менее, он еще не вошел в наши
элементарные курсы математики, хотя большая его часть (за ис-
ключением, может быть, теории цепей) должна изучаться совре-
менными физиками, что они и делают на определенном этапе сво-
ей карьеры. Причины этого, в значительной мере, исторические.
У. Гамильтону (1805-1865) было очевидно, что вещественных и
комплексных чисел недостаточно для глубого изучения геомет-
рического анализа, что в декартовой геометрии дву- и трехмер-
ного пространства возникает желание рассматривать числа па-
рами и тройками, как самостоятельные объекты с собственны-
ми алгебраическими свойствами. Для этого он разработал ал-
гебру кватернионов, которая была очень популярна в Англии в
середине девятнадцатого века. Однако, теория имела ряд изъ-
янов: кватернионы более естественны в пространстве четырех,
а не трех измерений. Геометрия трех измерений возникала как
часть более общей конструкции, а не как самостоятельная теория.
Кроме того, кватернионы имели слишком сложную алгебраиче-
скую структуру. Например, очень громоздкой была связь между
XII
Предисловие
умножением кватернионов и геометрическими построениями в
трехмерном пространстве. (Конечно, первый недостаток сегодня
считался бы не очень серьезным, но вместо него возникло бы
другое возражение: теория ограничена четырьмя измерениями.)
В конце концов, векторная алгебра в трехмерном пространстве
с ее скалярным и векторным произведениями была очищена от
теории кватернионов. Ее объединили с необходимыми дифферен-
циальными операциями, в результате чего появился векторный
анализ, окончательно разработанный Дж. Гиббсом (1839-1903) и
обнародованный им в своей знаменитой книге «Элементы вектор-
ного анализа», оказавшей сильное влияние на дальнейшее разви-
тие науки.
Итак, векторный анализ с его операциями grad, div, curl и т. д.
стал стандартным языком изложения геометрических законов
физики. Однако, несмотря на то, что векторный анализ прекрас-
но описывает геометрию трехмерного пространства, он тоже име-
ет ряд существенных недостатков. Первый — и наименее серьез-
ный — состоит в том, что в нем не просматривается очень важное
единство: например, не ясно, что фундаментальная теорема ис-
числения одна — сейчас ее называют общей теоремой Стокса, а
теоремы Грина, Гаусса и классическая теорема Стокса являются
ее частными случаями. В рамках векторного анализа мы не мо-
жем это увидеть. Более серьезный недостаток состоит в том, что
фундаментальные операторы (например, grad, div) предполага-
ют евклидову структуру пространства, т. е. подразумевают трех-
мерное пространство и ориентацию (например, curl). Это значит,
что теория работает только в трехмерном ориентированном ев-
клидовом пространстве. При этом возникает еще одна пробле-
ма — при произвольном изменении координат операторы ведут
себя неприятно, их выражения в неортогональных координатах
очень громоздкие. Уже А. Пуанкаре (1854-1912) в своих фун-
даментальных научных и философских работах, предшествовав-
ших теории относительности, подчеркивал необходимость делать
различие между «топологическими» законами геометрии и физи-
ки, т. е. законами, которые зависят только от дифференциальной
структуры пространства и поэтому инвариантны относительно
гладких преобразований, и законами, зависящими от геометри-
Предисловие
XIII
ческой структуры, например, от понятия расстояния. Теория от-
носительности оказала огромное влияние на развитие математи-
ки главным образом потому, что она поощряла изучение теории
многомерных пространств, которая уже существовала в матема-
тической литературе, но не считалась важной для изучения гео-
метрии. Кроме того, необходимо было исследовать произвольные
изменения координат. Векторный анализ не мог решить эти две
задачи и поэтому позднее его дополнили тензорным анализом.
Но и тензорный анализ с его обилием индексов тоже имеет много
серьезных недостатков. Главный изъян состоит в том, что неве-
роятно трудно сказать, какие операции имеют общее геометриче-
ское значение, а какие связаны только с данной системой коорди-
нат. Таким образом, тензорный анализ очень хорош для вычис-
лений, но трудно сказать, что именно вычисляется. Вся работа,
начатая еще Гамильтоном и направленная на создание матема-
тического аппарата, в котором объекты имеют геометрический
смысл, оказалась напрасной. Для того, чтобы заставить теорию
работать, необходимо было ввести аффинную связь — доволь-
но изощренную геометрическую конструкцию. Но даже с такой
конструкцией геометрическое значение операций не стало про-
зрачным. По существу интуитивно ясный векторный анализ так
и не был вытеснен тензорным анализом из программ начального
университетского обучения.
Математики в основном уже согласились, а физики постепен-
но привыкают к тому, что самым удобным аппаратом для гео-
метрического анализа является внешнее дифференциальное ис-
числение Грассмана и Картана. Его преимущество состоит в том,
что наряду с простыми и четкими правилами вычисления все
объекты имеют прозрачный геометрический смысл. Внешнее ис-
числение работает при любом числе измерений, хорошо себя ве-
дет при отображениях и изменениях системы координат, облада-
ет существенным единством основных теорем и четко различает
«топологические» и «метрические» свойства. В рамках внешне-
го анализа геометрические законы физики принимают простую и
элегантную форму. Чтобы это продемонстрировать, полезно при-
вести таблицу, взятую из книги «Курс математической физики»,
написанную Тиррингом.
XIV
Предисловие
Таблица 1. История записи уравнений Максвелла.
Константы с? //о, и бо положены равными 1.
Однородное уравнение Неоднородное уравнение
Самая ранняя форма
11 -oq-ctT-cq 4g 1 1 1 и и и §1^1 ww и и и + s’- + + + |Г
Конец XIX века
V-B-0 V x E = -B V • Е = р V х В = j + Ё
Начало XX века
*F^,Q = 0 F^“,a = J0
Середина XX века
dF = 0 5F = J
В 1844 году Г. Грассман (1809-1877) опубликовал книгу «Aus-
dehnungslehre». Математическое сообщество не оценило эту ра-
боту и ведущие немецкие математики того времени проигно-
рировали ее. Фактически, Грассман так никогда и не получил
место в университете; всю свою жизнь он преподавал матема-
тику в школе. Однако, похоже, что он прожил счастливую и
плодотворную жизнь. У Грассмана была большая семья и он
считался признанным экспертом по санскритской литературе.
В конце жизни он попробовал еще раз выпустить новое изда-
ние «Ausdehnungslehre», но оно также не имело успеха. Толь-
Предисловие
XV
ко немногие из математиков того времени оценили его работу.
Среди них был К. Мебиус (1825-1908). Тем не менее, в книге
«Ausdehnungslehre» впервые появились ключевые в современной
математике понятия и большинство алгебраических структур,
используемых в этой книге. В ней были определены: векторное
пространство, внешняя алгебра, внешнее и внутреннее произве-
дение, теорема Стокса в обобщенной форме.
В настоящее время общепризнано, что Э.Картан (1869-1951)
является крупнейшим специалистом по геометрии в XX веке. Его
ранние работы, относящиеся к группам Ли и дифференциальным
уравнениям в частных производных, имеющие огромное значение
для современной математики, тоже сначала не были поняты. Но
в 1920 году они стали известны широкому кругу ученых. К это-
му времени теория групп Ли начала играть ключевую роль в
математике и физике, и Г. Вейль заново представил их в своих
статьях. В настоящее время работы Картана по основным уз-
лам и связям (известные под общим названием «калибровочные
теории») являются основой теории элементарных частиц. В 1922
году Картан опубликовал книгу «Лекции по интегральным инва-
риантам», где показал, что изобретенное им внешнее дифферен-
циальное исчисление является гибким инструментом не только
для геометрии, но и для вариационного исчисления с широким
кругом физических приложений. Как уже было сказано, призна-
ние пришло не сразу, но сегодня и физики, и математики счита-
ют, что внешнее исчисление позволяет наилучшим образом фор-
мулировать геометрические законы физики. И нам кажется, что
пришла пора заменить им векторное исчисление в программах
начального университетского обучения.
Необходимо пояснить, почему в книге так много внимания
уделено теории электрических цепей, хотя обычно эта тема не
входит в учебные программы по математике. Прежде всего, это
оправдано с педагогической точки зрения. Данная тема все-
гда нравится студентам. Она позволяет на очень приземленном
уровне ввести понятия дуального пространства и факторпро-
странства. Иначе эти понятия кажутся студентам слишком аб-
страктными и поэтому трудно воспринимаются ими. Кроме того,
в дискретном, алгебраическом подходе к теории цепей теорема
XVI
Предисловие
Стокса появляется, по существу, как естественное определение,
что позволяет понять роль оператора d и теоремы Стокса при
формулировке внешнего исчисления. Конечно, есть более глу-
бокие, философские причины, почему мы приняли решение по-
дробно рассказать о теории цепей. Уже почти сто лет, как люди
думают, что силы, удерживающие макроскопические тела, име-
ют электрическую природу. Таким образом, понятие твердого
тела и отсюда евклидова геометрия вытекают из электростати-
ки (конечно, в нерелятивистском приближении, когда понятия
твердого тела и геометрия Евклида имеют смысл). Физические
исследования как предельно малых объектов (элементарных ча-
стиц) , так и предельно больших (космология) заново ставят фун-
даментальные вопросы о геометрии пространства и времени. Мы
полагаем, что разумно уже в самом начале изучения математики
дать студентам представления о связи геометрии и физики. Без
сомнения, сторонники компьютеров и ряда современных теорий
в физике зададут вопросы о дискретности, противопоставляе-
мой непрерывному характеру пространства и времени (пробле-
ма, поднятая Риманом в его диссертации об основах геометрии).
Надеемся, что наше обсуждение может быть полезно тем, кто в
будущем станет решать эту проблему.
Наш курс математики читается в течение одного года, и по-
этому мы вынуждены были опустить некоторые важные темы.
Мы не обсуждаем бесконечномерные векторные пространства,
в частности, гильбертовы пространства; не даем определения и
не изучаем абстрактные дифференцируемые многообразия и их
свойства. Наш опыт показал, что эти темы слишком сложны для
студентов, и усилия, которые необходимо затратить на их объ-
яснение, лучше использовать по-другому. Конечно, в книге есть
места, где нам приходится компенсировать отсутствие этих по-
нятий. Однако, более серьезно то, что в книге нет подробного
обсуждения гармонического анализа Фурье, классической меха-
ники и теории вероятностей. Мы только слегка касаемся этих
тем, не давая подробного изложения. Нас может извинить только
то, что каждая из этих тем потребовала бы семестрового курса,
а их подробное изложение на современном уровне легко найти.
В конце книги приводится список рекомендуемой литературы.
От издателя русского перевода
XVII
Нам приятно поблагодарить профессора Даниэла Гороффа,
тщательно прочитавшего рукопись, за многочисленные исправ-
ления и полезные предложения. Мы искренне благодарим Джин
Моррис за отличное качество набора, за то, что она внимательно
сопровождала производство книги на протяжении восьми лет —
с самого начала проекта до его завершения.
От издателя русского перевода
Еще восемь лет потребовалось для выхода в свет русского
варианта этой книги, выполненного типографским способом. На
пути русского издания оказалось много препятствий. Невыпол-
нение Российским фондом фундаментальных исследований своих
уставных обязанностей по финансированию издания выигравших
конкурс произведений (проект № 98-01-14152), последствия пре-
ступного дефолта августа 1998 года, — эти и другие финансовые
трудности были преодолены благодаря энтузиазму тех, кто рабо-
тал над русским переводом двухтомника.
Однако не только финансовые проблемы снижали скорость
подготовки русского издания. Оказалось, что английский ориги-
нал содержит изрядное количество неточностей и ошибок. По-
этому необходимо особо отметить труд переводчика и редакто-
ров, которые провели тщательную работу по адаптации данного
курса к практике российского образовательного процесса. Часть
ошибок была найдена Л. П. Котовой уже при переводе. Многие
неточности и ошибки устранены Е. В. Майковым при его скру-
пулезном редактировании первого тома. Некоторые исправления
в первый том внес и редактор второго тома А.Н.Якивчик; его
же трудами в списке рекомендуемой литературы указаны теперь
точные библиографические данные последних изданий.
XVIII
От издателя русского перевода
Тем не менее, не исключено, что наш уважаемый Читатель
заметит в книге отдельные опечатки, неточности, ошибки. И хо-
тя кое-кто считает, что не следует устранять опечатки, чтобы
не лишать читателя удовольствия находить ошибки*, мы все же
постоянно ведем работу по уточнению текста книги и будем при-
знательны читателям за соответствующие замечания (наш адрес:
publisher@phasis.ru).
Москва, май 2006
См., например: «Задачи Арнольда» (М.: ФАЗИС, 2000, с. X).
Глава 1
Линейные преобразования
плоскости
В главе 1 мы рассказываем о связи закона умножения
матриц 2 х 2 с геометрией прямых на плоскости. Изла-
гаем алгебру матриц 2x2, изучаем определитель и его
связь с площадью и ориентацией. Вводим понятие аб-
страктного векторного пространства в общем случае,
объясняем понятия базиса и замены базиса в случае
одномерного и двумерного векторного пространства.
1.1. Аффинные плоскости
и векторные пространства
Евклидова плоскость, знакомая из школьной планиметрии, воз-
никла на раннем этапе развития математики. Физические экспе-
рименты на столе или школьной доске легко демонстрируют ее
свойства. Благодаря использованию линейки и транспортира мы
привыкаем считать «длину» и «угол» такими же фундаменталь-
ными понятиями, как «точка» и «прямая». Занимаясь чистой ма-
тематикой или ее приложениями к физике и другим дисципли-
нам, мы часто рассматриваем плоскости, для которых прямые
определены, но нет общего определения длины, или когда обыч-
ное евклидово определение длины не работает. Такая плоскость
может быть изображена на листе бумаги, но физическое расстоя-
ние между двумя точками, измеренное линейкой, или угол между
2
Глава 1. Линейные преобразования плоскости
двумя прямыми, измеренный транспортиром, может не иметь ни-
какого смысла.
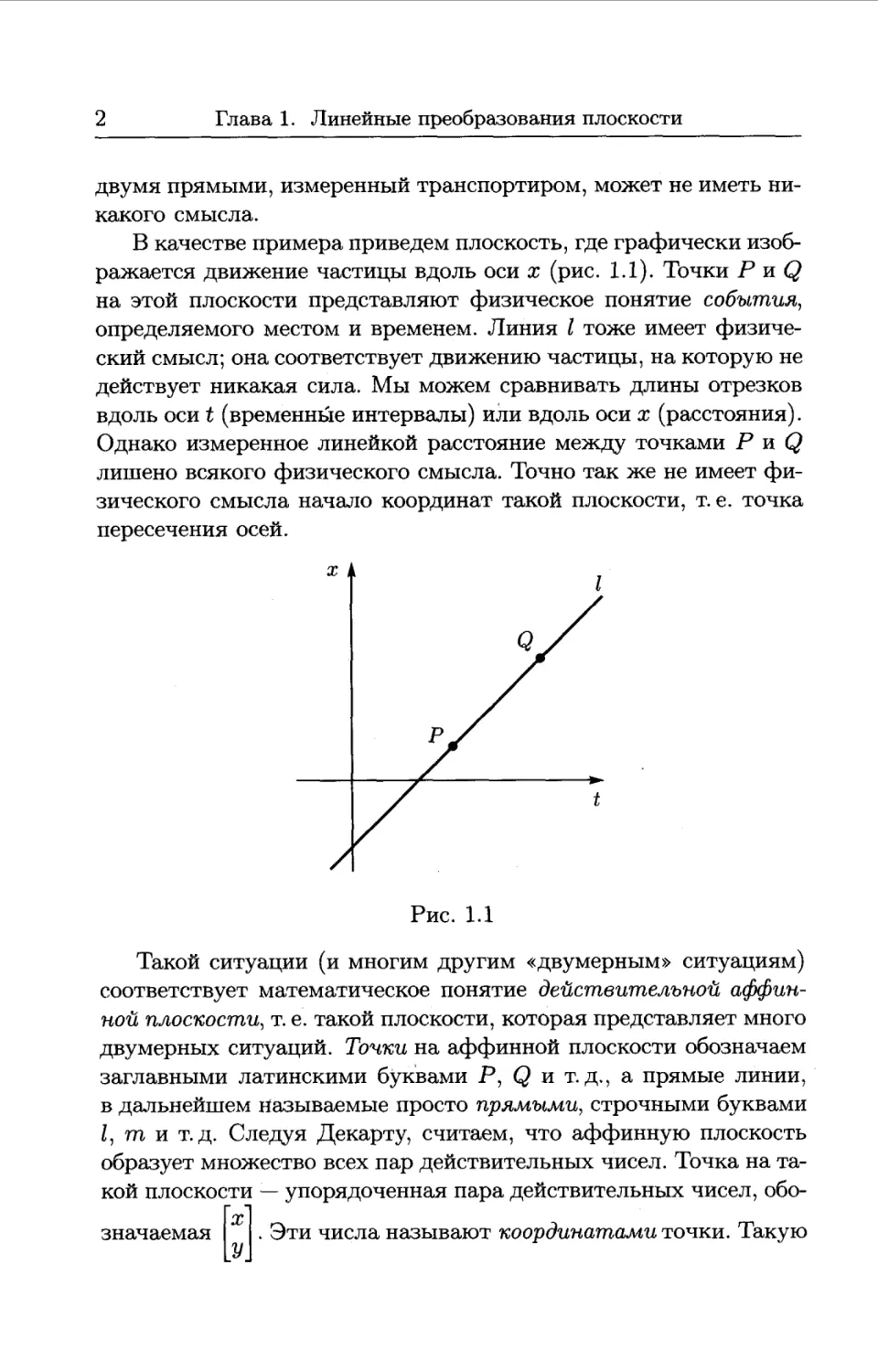
В качестве примера приведем плоскость, где графически изоб-
ражается движение частицы вдоль оси х (рис. 1.1). Точки Р и Q
на этой плоскости представляют физическое понятие события,
определяемого местом и временем. Линия I тоже имеет физиче-
ский смысл; она соответствует движению частицы, на которую не
действует никакая сила. Мы можем сравнивать длины отрезков
вдоль оси t (временные интервалы) или вдоль оси х (расстояния).
Однако измеренное линейкой расстояние между точками Р и Q
лишено всякого физического смысла. Точно так же не имеет фи-
зического смысла начало координат такой плоскости, т. е. точка
Такой ситуации (и многим другим «двумерным» ситуациям)
соответствует математическое понятие действительной аффин-
ной плоскости, т. е. такой плоскости, которая представляет много
двумерных ситуаций. Точки на аффинной плоскости обозначаем
заглавными латинскими буквами Р, Q и т. д., а прямые линии,
в дальнейшем Называемые просто прямыми, строчными буквами
Z, т и т. д. Следуя Декарту, считаем, что аффинную плоскость
образует множество всех пар действительных чисел. Точка на та-
кой плоскости — упорядоченная пара действительных чисел, обо-
. Эти числа называют координатами точки. Такую
х
значаемая
У
1.1. Аффинные плоскости и векторные пространства
3
плоскость назовем ЛК2 (рис. 1.2). Здесь А говорит нам, что плос-
кость аффинная, и мы не выделяем на ней начала координат.
Буква R соответствует множеству действительных чисел, а верх-
ний индекс два указывает, что мы рассматриваем пары действи-
тельных чисел. (Как обычно, изображая плоскость на бумаге, мы
откладываем х по горизонтальной оси, а у определенного вида —
вертикально вверх вдоль перпендикулярной оси. Однако, в на-
стоящий момент понятия «перпендикулярности» или величины
угла не определены. С одинаковым успехом можно откладывать
х и у вдоль любых1 осей.) Прямая — это определенного вида
множество точек. Мы предполагаем, что в результате изучения
геометрии читатель знаком с прямыми и, в частности, знает, как
описываются прямые в аналитической геометрии.
Прямые на аффинной плоскости AR2 могут описываться по-
разному. Например, уравнением, которому удовлетворяют все
точки, лежащие на прямой,
х
У.
ах + by = с
Формулу следует читать так: «I — это множество точек ,
У _
координаты которых удовлетворяют уравнению ах + by = с».
Предполагается при этом, что а и b одновременно не равняются
нулю.
Такой способ описания прямой не очень удобен, потому что
параметры прямой а, Ь, с не определяются прямой однозначно.
хНе параллельных друг другу. — Прим. ред.
4
Глава 1. Линейные преобразования плоскости
Например, формулы
х
У
ах + by = с
и
Зах 4- ЗЬу = Зс
определяют одну и ту же прямую. Вообще параметры га, rd, гс
при г / 0 описывают ту же прямую, что и а, &, с.
Второй способ задания прямой состоит в том, что на плоско-
сти ЛК2 выбираются две различные точки Fq =
и через них проводят прямую. Тогда точки, лежащие на такой
прямой, определяются формулой
х° р = Х1
Уо ’ 1 У1
г! = рг0 + t&i “ *о)
У] " + ~Уо\
где параметр t — любое действительное число. Это описание пря-
мой еще более громоздко, чем предыдущее: мы можем заменить
выбранные точки Fq и любой другой парой точек, принадле-
жащих этой прямой.
Есть более удобный способ описания прямой («динамиче-
ский» в отличие от «статического» описания). Мы задаем точку
на прямой и «направляющий вектор прямой». Таким образом,
набор точек, определяемых по формуле
х° +t(u) teR ,
|yoj \vj J
где w * g — заданный вектор, и есть прямая. (Представим
себе частицу, движущуюся вдоль этой траектории с вектором
(и\ г '
скорости 1^1, находившуюся в точке
времени). Здесь для описания прямой мы используем четыре па-
раметра. При этом можно умножить на не равный нулю
скаляр и получить ту же прямую (это будет движение с другой
скоростью) или можем сдвинуть начальную точку
прямой. В этом случае мы имеем два избыточных параметра.
Xq
в нулевой момент
Го
УО
вдоль
1.1. Аффинные плоскости и векторные пространства
5
Конечно, эта формула переходит в формулу, полученную вто-
рым способом,
и — Xi — то,
V = У1 - У1-
Ну, а теперь опишем четвертый, привычный способ задания пря-
мой. В нем нет избыточных параметров, его неудобство состоит
в отсутствии единообразия записи для различных прямых. Если
а и b ~ любые действительные числа, то набор точек
1 =
у ~ ах+ Ь
задает прямую, пересекающую ось у в точке
О'
b
и имеющую «уг-
ловой» коэффициент а, т. е. для всех точек прямой увеличение х
на единицу влечет за собой увеличение у на величину а. Пря-
мая задается простым уравнением, параметры а и Ъ определяют
геометрические свойства прямой. Но не все прямые могут быть
заданы таким образом. Необходимо добавить прямые, параллель-
ные оси у\
1 =
х = d> .
Следуя строгой логике, мы должны принять один из этих
четырех способов описания за определение прямой. Например,
следует сказать: по определению, прямая I ~ это набор точек
на плоскости AR2,
1 =
ах + by = с
где три параметра а, Ъ и с — действительные числа, причем а
и Ь одновременно не равны нулю. Теперь нам следовало бы до-
казать, что этот же набор точек может быть получен и в трех
других способах описания. Но здесь мы не станем углубляться в
логические тонкости, которые можно реализовать в рамках эле-
ментарной аналитической геометрии.
6
Глава 1. Линейные преобразования плоскости
Важно помнить, что в аффинной плоскости не выделено на-
чало координат, и бессмысленно складывать точки на такой плос-
кости. Точка
О
О
не имеет особого значения, и мы устоим перед
'2] [3
и
, суммируя их координа-
1
6
соблазном складывать точки
ты. Однако, существует близкое понятие двумерного векторного
пространства, где операция сложения определена. Мы построим
векторное пространство из аффинной плоскости, вводя для лю-
бой пары ее точек вектор смещения PQ, такой, что «хвост» векто-
ра находится в точке Р, а его «голова» — в точке Q (рис. 1.3). Та-
кие векторы будем обозначать жирными строчными латинскими
буквами v, w и т. д. Вектор v определяется парой действитель-
ных чисел, например, v = • (Заметим, что для векторов мы
используем круглые скобки ( ), а для точек — квадратные [ ]).
Рис. 1.3 Рис. 1.4
Например, вектор v =
которое переводит точку
следует понимать как смещение,
в точку
точку
-3
2
в точку
6
5
’2'
4
, и вообще, произвольную точку Р =
х ~ х + 5
в точку Q — . о
у J у+ 2
Таким образом, вектор v определяет некое преобразование аф-
финной плоскости, а именно, жесткую трансляцию всей плоско-
сти. Если Р — любая точка аффинной плоскости, то смещенную
1Д. Аффинные плоскости и векторные пространства
7
точку Q обозначаем Р “+” v: знак “+” обозначает действие век-
тора на точки. Таким образом, вектор v переводит точку Р в
х + а
У + Ъ '
X
У
, то Р “
точку Q — Р “+” V. В координатной форме это выглядит так:
если Р =
Мы ставим кавычки вокруг знака “+”, потому что в этом слу-
чае операция производится над объектами различной природы,
над точками и векторами, и поэтому отличается от обычной про-
цедуры сложения. Далее, для любой пары точек Р и Q определим
единственный вектор v = Q ” Р такой, что
р “+” v = Q.
Вокруг знака минус мы тоже ставим кавычки, потому что здесь
тоже участвуют объекты разного рода ~ из пары точек получает-
ся вектор. Нарисовав несколько примеров на бумаге в клеточку,
вы можете самостоятельно убедиться, что две пары точек Р, Q и
Я, S определяют один и тот же вектор (т. е. Q ” Р — S ” R)
тогда и только тогда, когда векторы PQ и RS являются противо-
положными сторонами параллелограмма (рис. 1.4). Поэтому час-
то говорят, что вектор определяется величиной и направлением.
Но здесь мы не будем вводить понятия величины и направления
вектора, потому что они не являются инвариантными.
По определению, суммой двух векторов и =
является вектор
Ч:)
и v
а + с
b + d
и + V =
Заметим, что
Р “+” (и + v) = (Р “+” и) “+” V, (1.1)
так как, если и =
иР =
, то и левая, и пра-
вая части равенства (1.1) определяют точку
а + с + х
b + d + y
. Форму-
ла (1.1) означает, что смещение, соответствующее u + V, может
быть получено последовательным применением операций смеще-
ния и и V. При этом заметим, что u + v = v + и. Мы можем
10
Глава 1. Линейные преобразования плоскости
в обозначениях между R2 и AR2. Дело в том, что в пространстве
R2 точка имеет особое значение (нейтральный элемент), и
имеет смысл сложение двух векторов. В пространстве AR2 ничего
этого нет.
1.2. Векторные пространства
и их аффинные пространства
Легко проверить, что операция сложения векторов в пространст-
ве R2 и операция умножения векторов на действительные числа
удовлетворяют следующим аксиомам.
Сложение векторов
Ассоциативность сложения: (u + v) + w = и + (v + w).
Коммутативность сложения: и + v = v + и.
Существование нулевого элемента: существует такой вектор О,
что 0 + v — v для всех векторов v.
Существование противоположного элемента: для любого век-
тора v существует —v такой, что v + (—v) — 0.
Умножение векторов на действительные числа
Свойство числа 1: lv = v для любого v.
Ассоциативность и дистрибутивность умножения на число:
для любых действительных чисел г и s и любых векторов и и v
(rs)v = r(sv),
(г + s)v — TV + SV,
r(u + v) = ru + TV,
Эти аксиомы известны как аксиомы векторного простран-
ства. По определению, векторное пространство — это такое мно-
жество V объектов, называемых векторами u, v и т. д., в котором
введены операция сложения, означающая, что каждой паре век-
торов и и v соответствует третий вектор u + v, и операция умно-
жения такая, что каждому действительному числу t и каждому
вектору v соответствует вектор iv. При этом должны выполнять-
ся вышеперечисленные аксиомы.
1.2. Векторные пространства и их аффинные пространства 11
Итак, мы показали, что R2 является векторным простран-
ством. В качестве второго примера рассмотрим пространство R3,
в котором вектор является триплетом, состоящим из действи-
тельных чисел:
Са\
b I .
с/
Сложение векторов производится сложением компонент, как и в
пространстве R2:
(а1\ / /(Z1 + &2\
bl I и V2 — I &2 I , ТО V1 + V2 = I bl + &2 I •
Q/ \с2/ \С1 + с2 /
Пространство R3 — это знакомое нам трехмерное простран-
ство векторов. Понятие размерности пространства мы обсудим
позднее.
Все действительные числа тоже можно рассматривать как
векторное пространство R' = R1, в котором процедурами сложе-
ния и умножения являются обычные операции сложения и умно-
жения чисел. Когда мы определим понятие размерности про-
странства, станет ясно, что R1 — это пример одномерного век-
торного пространства.
В качестве другого примера векторного пространства рас-
смотрим множество всех полиномов. Мы умеем складывать по-
линомы, просто складывая коэффициенты при одинаковых сте-
пенях х, например:
(1 + Зх + 7х2) + (2 - х2 + х4 - х6) = 3 + Зх + 6х2 + х4 - х\
Мы умеем умножать полиномы на действительное число:
7(1 + За? + За?2) = 7 + 21® + 21аА
Легко проверить, что в этом случае все аксиомы векторного про-
странства тоже выполняются. Далее, можно рассматривать про-
странство полиномов не выше заданной степени. Например, наи-
более общий вид полинома не выше второй степени таков:
Р = ах2 +Ьх + с.
12
Глава 1. Линейные преобразования плоскости
Сумма двух полиномов
Pi — аух2 + bix + ci и P2 — a2x2 + b2x + c2
равна
Pi + P2 - («1 + «2)^ + (bi + b2)x + (ci + c2).
Например, если
Pi = 3x2 + 2x + 1, P2 = 7x2 - Юж + 2,
TO
Pi + P2 = Юж2 - 8x + 3.
Множество всех полиномов степени не выше двух также яв-
ляется векторным пространством. Заметим, что оно похоже на
R3, в том смысле, что предыдущие равенства можно записать в
виде
7
-10
2
10
-8
3
В дальнейшем мы еще вернемся к этому вопросу.
Предположим, что задано векторное пространство V; напри-
мер, это может быть R1, R2 или R3. Аффинным пространством,
ассоциированным с V, мы называем множество А, состоящее из
точек Р, Q, и т. д., при этом операция “+” означает, что каждой
точке Р Е А и каждому вектору v Е V в аффинном пространстве
А соответствует другая точка, обозначаемая Р “+” v. При этом
должны выполняться следующие аксиомы.
Ассоциативность: (Р “+” и) “+” v = Р “+” (и + v) для Р Е А
и и, v Е V.
«Нуль» действует как тождественное отображение:
Р О = Р для любой точки Р Е А.
Транзитивность: для заданных Р и Q Е А существует v Е V
такой, что Р “+” v = Q.
Точность: если для любой точки Р выполняется Р “+” и =
Р “+” V, то и = V.
Комбинируя две последних аксиомы, можно сказать, что для
любых заданных точек Р и Q существует единственный вектор
1.2. Векторные пространства и их аффинные пространства 13
v такой, что Р “+” v = Q. Иногда это удобно записывать как
v = Q“—” Р.
Концепция векторного пространства и ассоциированного с
ним аффинного пространства привлекает внимание физиков на
протяжении трех столетий. Началось это еще с ньютоновской ме-
ханики, затем продолжалось в специальной теории относительно-
сти и в квантовой механике. Цель этой главы — исследуя на ин-
туитивном уровне простой случай двумерного2 векторного про-
странства R2, продемонстрировать ключевые идеи, необходимые
для изучения таких структур. Начнем, однако, с одномерного
случая, концепция которого настолько очевидна, что подробное
обсуждение может показаться слишком педантичным. Однако
стоит постараться.
Векторное пространство V называется одномерным, если оно
удовлетворяет следующим двум условиям: (i) в нем существует
вектор v О; и (ii) если v О, то любой вектор u € V может
быть записан как u = rv, где г — некоторое действительное
число. Заметим, что число г единственное: если riv — r2V, то
обязательно ri — Г2. Действительно, равенство riv — r2V можно
переписать в виде
(п - ^)v — 0.
Если Г1 — Г2 0 0, тогда, вводя обозначение s = (п — Г2)-1, имеем
0 = s[(n - r2)v] = (s(ri - r2))v = lv = v,
т. е. v — 0, что противоречит начальному предположению v 0.
(Проверьте самостоятельно, какую из аксиом векторного про-
странства мы использовали на каждом этапе рассуждений.)
Итак, если выбрать в одномерном пространстве вектор v 0,
то для каждого вектора и можно указать вещественное число г,
и —> г такое, что u = rv.
Если ui = riv и U2 = r%v, то ui + U2 — (ri + r2)v. Таким об-
разом, вектору Ui + U2 соответствует число п + 7*2- Аналогично,
2Мы дадим строгое определение термина «двумерный» в разделе 1.12,
термина «одномерный» на следующей странице, а общее понятие размерно-
сти векторного пространства — в главе 10. — Прим. ред.
14
Глава 1. Линейные преобразования плоскости
если u = rv и t — любое действительное число, то £u = (tr)v, т. е.
вектору tu соответствует число tr. Итак, каждый вектор соот-
ветствует вещественному числу, и векторные операции соответ-
ствуют операциям в пространстве R1. В этом случае мы гово-
рим, что имеется изоморфизм одномерного векторного простран-
ства V с пространством R1. Такое сопоставление пространства V
пространству R1 зависит от выбора вектора v. Выбор вектора v
называется выбором базиса V, а число г, связанное с и соотно-
шением u — rv, называется координатой вектора и относительно
базиса v. Предположим, что мы выбрали другой базис v'. Здесь
v' = uv, где а — действительное число, не равное нулю. Если
и = rv, то
u — (ra“1)av,
поэтому
и = r'v7, г1 = а~1г.
Таким образом, изменение базиса посредством замены v на av
вызывает замену координаты любого вектора г на а-1г. Выбор
базиса в одномерном пространстве очень похож на выбор сис-
темы единиц для физической величины. Если один килограмм
(единицу массы) мы заменим на новую единицу массы — один
грамм, то вес тела, равный 1.3 кг, станет равным 1300 г. Отличие
состоит в том, что для многих обычных физических величин из-
мерение объектов производится с помощью положительных (или
нулевых) значений. Бессмысленно говорить, что тело имеет от-
рицательный объем, массу и т. д. Есть исключение только в тео-
рии электричества, где электрический заряд может быть поло-
жительным и отрицательным. Например, мы можем представить
себе ситуацию, когда в качестве единицы измерения выбран за-
ряд электрона. В таком базисе электрон будет иметь заряд +1, а
не -1.602191 х 10 19 Кл, где кулон (Кл) — стандартная единица,
т. е. базис, принятый международным соглашением.
Пусть А — аффинное пространство, ассоциированное с одно-
мерным векторным пространством V. Если мы выберем точку
О в А, то каждая точка Р определяет вектор u = Р О. Ес-
ли в пространстве V выберем базис v, то каждой точке Р будет
соответствовать число т(Р),
Р = О “+” z(P)v.
1.2. Векторные пространства и их аффинные пространства 15
Значение х(Р) назовем координатой точки Р. Теперь у нас есть
две возможности: можно взять точку О в качестве начала коор-
динат, и тогда считать другие точки векторами; либо выбрать
базис в пространстве V, и тогда отождествить векторы с числа-
ми. Если мы заменим базис v на av, то х перейдет в xf согласно
формуле
х'(Р) = а~1х(Р).
Если, кроме того, мы заменим начало О на О', где О1 ~ О “+” w,
то получим
р О' - (Р О) - w.
Если w = 6v, то это равносильно замене xf на х" по формуле
х"(Р) = бГ^Р) - Ь.
Сравним вышеприведенные рассуждения с концепцией абсо-
лютного времени, введенной Ньютоном. Ньютон писал:
Абсолютное, истинное, математическое время или дли-
тельность течет равномерно в соответствии со сво-
ей внутренней природой, независимо от каких-либо
внешних условий. Относительное, кажущееся, обыч-
ное время есть некоторая мера длительности, изме-
ренная посредством движения (например, движения
стрелки часов). Оно обычно используется вместо ис-
тинного времени.
В нашей терминологии мысль Ньютона можно изложить так:
есть понятие абсолютного времени, и множество всех абсолют-
ных времен обладает структурой одномерного аффинного про-
странства. Идея гладкого и равномерного течения времени дела-
ет математически точным утверждение, что для множества аб-
солютных времен в одномерном векторном пространстве V су-
ществует операция Именно эта постулированная операция
позволяет нам сравнивать различные интервалы времени. Нью-
тон различает истинное и обычное время. В нашей дискуссии это
соответствует степени произвольности при определении коорди-
нат на аффинной прямой.
16
Глава 1. Линейные преобразования плоскости
Давайте сделаем небольшую паузу и еще раз обдумаем этот
абстрактный постулат Ньютона, который является краеуголь-
ным камнем в физике двух последних столетий. Каждый из нас
имеет собственное психологическое восприятие времени. Наше
психологическое время во многих отношениях отличается от аб-
солютного времени Ньютона. Основное отличие в том, что для
нас время имеет определенное направление. Будущее в какой-
то степени неизвестно и подвержено нашим желаниям и наше-
му вмешательству. Во многих европейских языках, например, бу-
дущее время указывается словами, выражающими желание или
необходимость (по-английски I will go — я хочу идти или по-
французски j’irai — я должен идти). А вот прошлое в какой-то
степени мы знаем и помним. Однако законы Ньютона не зависят
от изменения направления времени. Если бы мы прокрутили ки-
нофильм ньютоновской планетарной системы (во всех отношени-
ях реальной) в обратном направлении, то не обнаружили бы про-
тиворечий с законами Ньютона. Второе существенное отличие в
том, что психологическое время не течет гладко и равномерно, по
крайней мере так, как это происходит с ньютоновским абсолют-
ным временем. У нас есть определенные физические функции,
повторяющиеся периодически, которые побуждают нас ввести
понятие временного интервала: через определенный промежуток
времени после еды мы опять хотим есть. Но величина такого про-
межутка сильно меняется, она определяется уровнем сахара в
крови, который, в свою очередь, зависит от того, что мы съе-
ли, что делали, от нашего психологического состояния в целом
и т. д. Кроме того, сильно меняется психологическое восприятие
временных интервалов. Время летит быстро, когда нам интерес-
но, и мы увлечены тем, что делаем, и наоборот, оно тянется очень
медленно, если нам скучно. И тем не менее, оказывается, что наш
внутренний ритм как-то коррелирует с периодичностью мира во-
круг нас. Из самых древних источников мы знаем, что измерение
внешнего времени для ведения календаря или для научных це-
лей всегда основывалось на вращении небесных тел. В качестве
стандарта временного интервала суток обычно использовали ви-
димое вращение Солнца, т. е. интервалы между последовательны-
ми прохождениями Солнцем зенита. Египтяне разделили сутки
1.2. Векторные пространства и их аффинные пространства 17
на 24 равных промежутка (24 часа), а греки делили периоды от
восхода до заката солнца на двенадцать одинаковых часов, ана-
логично делили ночные периоды. Эти временные интервалы от-
мечались с помощью разных приборов, например, с помощью во-
дяных часов, а днем с помощью солнечных часов. Те, кто принял
греческую систему, должны были оборудовать водяные часы спе-
циальным компенсирующим приспособлением, чтобы модифици-
ровать временные интервалы в соответствии со временем года.
(Длительность календарного, или солнечного, дня в течение года
непостоянна из-за неравномерности движения Солнца на небес-
ной сфере. Простейшая, относительно точная мера времени —
это звездный день. Он определяется по вращению Земли вокруг
своей оси и измеряется наблюдением за какой-то фиксированной
звездой: период между двумя последовательными прохождени-
ями фиксированной звезды определенного меридиана называют
звездным днем. Календарный день в среднем на четыре минуты
длиннее звездного дня.)
Самые первые часы, по-видимому, появились в Европе в три-
надцатом веке, но они были очень неточными. Первый крупный
шаг в деле усовершенствования часов был сделан в XVII веке,
когда Галилей обнаружил, что период колебаний маятника (из-
меренный, например, по нормальному сердечному пульсу) посто-
янен. Но Галилей, похоже, мало использовал это открытие на
практике и только изобрел небольшой прибор для врачей, что-
бы измерять пульс у пациентов. Однако говорят, что его сын
использовал маятник для создания часов. Во всяком случае, с
этого времени усовершенствование механических часов происхо-
дило стремительно. Таким образом, во времена Ньютона уже су-
ществовал метод, согласно которому, в принципе, можно было
делить время на произвольно малые равные интервалы. Следу-
ет отметить, что направление движения стрелок механических
часов совершенно условно, и оно легко обратимо. Простой заме-
ной зубчатой передачи мы можем заставить стрелки вращаться в
противоположном направлении. Интересно пофантазировать на
тему: как развитие механических часов связано с ньютоновской
концепцией времени?
18
Глава 1. Линейные преобразования плоскости
1.3. Функции и аффинные функции
В нескольких следующих параграфах мы будем рассматривать
те отображения AR2 на себя, при которых прямые линии преоб-
разуются в прямые линии. Начнем с общего обсуждения понятий
«отображения» или «функции».
Пусть W и X — некоторые множества. Правило f : W —*
X. согласно которому элементу w множества W соответствует
элемент f(w) G X, называется функцией (или отображением^
картой, оператором)) переводящей множество W в множество
X. Множество W называется областью определения f. Если А —
подмножество W, то f(A) обозначает подмножество X, состоящее
из элементов /(w), где w 6 А:
f(A) = {/(w) | w € A}.
Множество f(W) называется образом f, оно является подмноже-
ством X.
Например, допустим, что f ~ это отображение R2 на себя,
определяемое равенством f(P) — Р “+” v, где v — фиксирован-
ный вектор. Тогда /(А) получается из А переносом А на вектор
V. Если А = I — {Р + £и} — прямая, то f(l) = {Р + v 4- tuj ~
другая прямая (рис. 1.7).
Рис. 1.7
Это очень общее и мощное определение функции. Уточним,
что считать результатом действия функции. Например, невоз-
можно иметь функцию / : R —> R, обладающую свойствами:
1.3. Функции и аффинные функции
19
/(1) = 2 и /(1) — 3, но все будет в порядке, если для функции
f : R —> R2 мы будем иметь /(1) = 0^.
Следует знать стандартную терминологию, касающуюся об-
ласти определения и образа функции /.
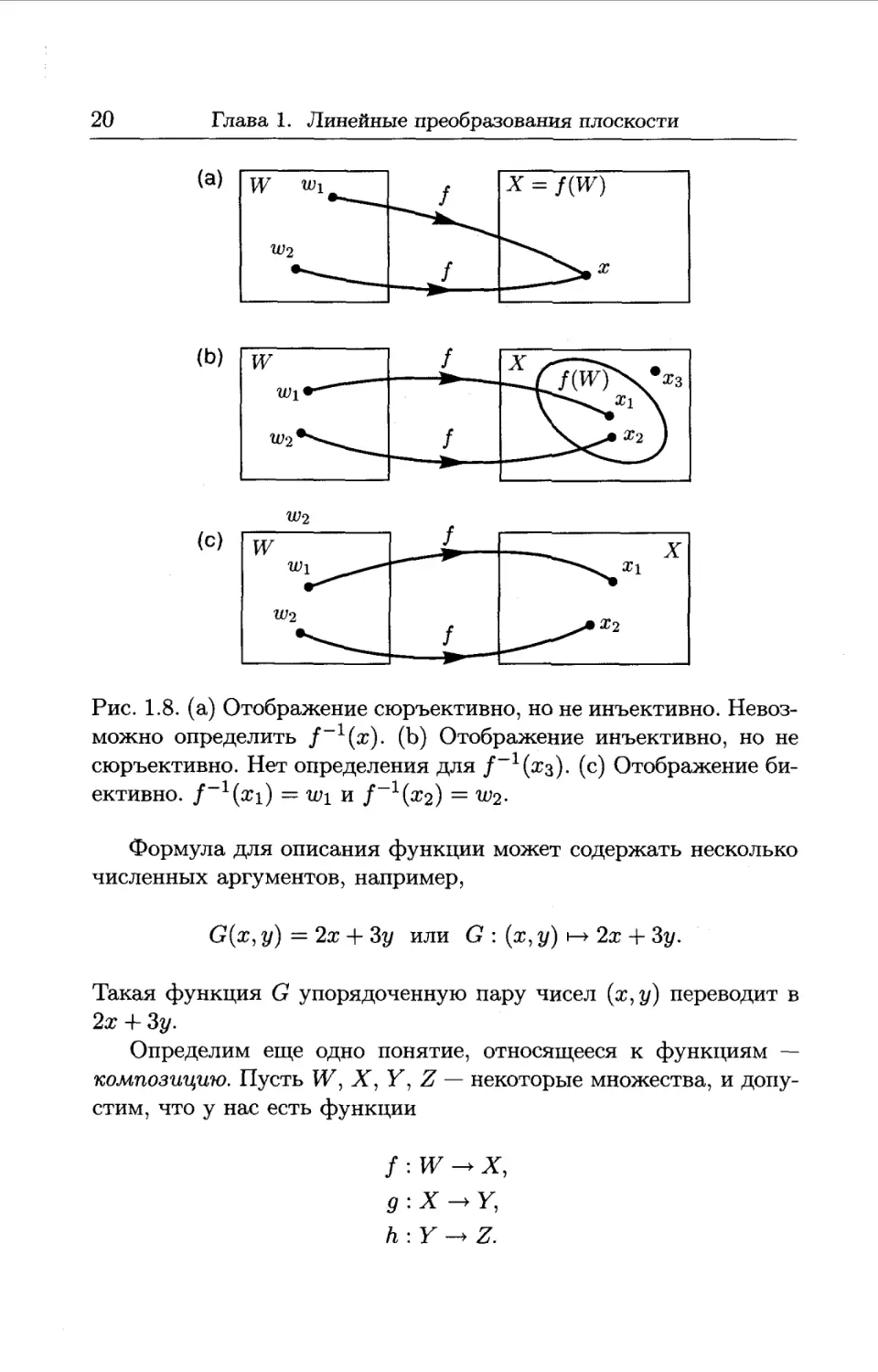
1. Если два различных элемента wi, 6 W всегда отоб-
ражаются в различные точки Xi, Х2 € X, то / называ-
ют инъективным отображением. Другими словами, f
инъективно, если из равенства /(wi) = /(^2) следует,
ЧТО Wi — W2.
2. Если образ f(W) составляет все множество X, то f
называется сюръективным (иногда говорят, что / яв-
ляется отображением на X). Другими словами, если
уравнение /(w) = х имеет по крайней мере одно реше-
ние для каждого х 6 X, то f сюръективно.
3. Если отображение f и инъективно, и сюръективно, то
оно называется биективным. Другими словами, / на-
зывается биективным, если уравнение f(w) — х имеет
единственное решение w для каждого элемента х 6 X.
В этом случае существует обратная функция У"1 :
X —* W, которая отображает каждый элемент х G X в
единственный w, для которого = х.
Эти свойства отображений проиллюстрированы на рис. 1.8.
Во многих случаях мы можем описать функции с помощью
формул. Существует два способа записи соответствующих фор-
мул. Например, операцию возведения в квадрат F : R —> R мы
можем записывать как F(x) = х2 или
F : х х2.
При любой форме записи х — немой символ. Та же функция
может записываться как
F(t) - t2
или
F : а н-> а2.
20
Глава 1. Линейные преобразования плоскости
Рис. 1.8. (а) Отображение сюръективно, но не инъективно. Невоз-
можно определить (Ь) Отображение инъективно, но не
сюръективно. Нет определения для У-1(хз). (с) Отображение би-
ективно. — W1 и /-1(х2) = W2-
Формула для описания функции может содержать несколько
численных аргументов, например,
G(x, у) — 2х + Зу или G : (х, у) 2х + Зу.
Такая функция G упорядоченную пару чисел (я, у) переводит в
2х 4- Зу.
Определим еще одно понятие, относящееся к функциям —
композицию. Пусть W, X, Y, Z — некоторые множества, и допу-
стим, что у нас есть функции
f : W X,
У : X У,
h : У Z.
1.3. Функции и аффинные функции
21
Рассмотрим функцию, которая берет w е W, действует на этот
элемент посредством f, в результате чего получается элемент
/(w) множества X; затем на этот элемент /(w) действует про-
изводя элемент множества Y. Такую функцию обозначим д о f
и назовем ее композицией д с /. Короче: (д о /)(w) — p(/(w)).
Заметим, что композиция
hogof:W~+Z
(сначала действует /, потом д, потом h) совпадает с отображе-
ниями h о (<? о /) и (Ji о д) о f. Таким образом, для композиций
выполняется такой же «ассоциативный закон», как и для умно-
жения действительных чисел.
Теперь рассмотрим функции, определенные на аффинных
прямых, плоскостях и векторных пространствах. Начнем с одно-
мерных примеров, которые, конечно, очень важны, но при этом
достаточно просты для изучения.
Пусть А — аффинная прямая, изображенная на рис. 1.9. Мы
можем выбрать некоторое начало и направление и приписать
координату каждой точке на этой прямой.
Р R Q
Рис. 1.9
На математическом языке это значит, что мы выбрали начало
координат О на прямой А и базис v в пространстве У, как это
сделано в предыдущем параграфе. Таким образом, мы построили
аффинную координатную функцию
х : А —> R.
Конечно, на прямой существует много возможных аффинных ко-
ординатных функций, которые можно построить в зависимости
от выбора начала координат и единицы измерения. Мы называем
х координатной функцией, потому что она обратима: зная х(Р),
можно восстановить Р. Заметим, что х сохраняет «интерполяци-
онное свойство» действительной аффинной прямой: если
Р = (1 -t)P + tQ,
22
Глава 1. Линейные преобразования плоскости
то
x(R) = (1 — t)x(P) + tx(Q).
В частности, если R — средняя точка отрезка PQ, то
x(R} =
Вы, вероятно, никогда раньше не думали об х как о функции.
Вы не можете написать для нее формулу. Однако без этой функ-
ции невозможно изучать физику, потому что именно она позво-
ляет вам записывать другие функции на прямой в виде формул.
Например, сила, действующая на частицу, которая находится на
прямой, является функцией положения частицы
f : А R;
причем вы не можете написать формулу для /, но можете ввести
аффинную координату
х : А —> R.
и функцию F : R —> К, после чего написать
/(P) = F(®(P)) = (Fox)(P).
Именно такая композиция, например, формула «сила = sinx», и
применяется для представления функции на прямой.
Время — это тоже аффинная прямая, точками которой явля-
ются «мгновения». Аффинная координатная функция t : А —> R
приписывает каждому мгновению число. Чтобы узнать i, мы
смотрим на часы. Часы, отсчитывающие время с разной скоро-
стью, дают различные функции t, но любые «хорошие» часы про-
изводят аффинную функцию. В то же время плохие часы, напри-
мер, часы, у которых длина маятника меняется с температурой,
произведут неаффинную функцию.
Движение частицы по прямой линии определяет зависимость
одной действительной аффинной прямой At (время) от другой
действительной аффинной прямой Ах (пространство). Такая
функция f : At —> Ах каждому моменту времени Е ставит в
соответствие точку Р на прямой, так что Р — f(E). Мы не мо-
жем записать формулу для /, потому что Е и Р не являются
1.4. Евклидовы и аффинные преобразования
23
числами. Поэтому, если мы хотим иметь формулу для описания
движения частицы, то должны ввести аффинные координатные
функции t и х. После этого можно написать
х(Р) = F(t(E)),
где F : R —> R может быть представлена формулой типа, напри-
мер, F(a) = хо + гоа + jaa2.
1.4. Евклидовы и аффинные
преобразования
Отображение / : R2 -» R2 называется евклидовым преобразова-
нием, если оно сохраняет расстояние. Это значит, что расстояние
Г “1 гл
между двумя любыми точками Pi —
расстоянию между /(Pi) и /(Р2)- Если мы выразим f через две
#1
У1_
.2/2
равняется
функции : R2 —> R и : R2 R так, что
и Рг =
я] = [</>(£,. у)
У] У)\ ’
то из условия сохранения расстояния получим равенство
[^2,У2)“^1^1)]2 + [^(^2,?/2)“^(^1,?/1)]2 = (^2“^1)2 + (?/2-2/1)2?
которое должно выполняться для всех значений xi, yi, у%.
Можно считать, что евклидова геометрия изучает свойства
тех подмножеств плоскости, которые инвариантны при любом
евклидовом преобразовании. Например, если А — окружность
и f — евклидово преобразование, то /(А) — тоже окружность.
Если I — прямая, то /(/) ~ тоже прямая. Из определения ясно,
что если fug — евклидовы преобразования, то композиция go f
тоже будет евклидовым преобразованием.
Отображение f : R2 —> R2 называется аффинным преобразо-
ванием, если оно переводит прямые в прямые. Таким образом,
для любой прямой I образ /(/) — тоже прямая. Например, пусть
преобразование f задается как
х _ 2х + у + 1
_у\ ~ L У - х + 5
24
Глава 1. Линейные преобразования плоскости
Самое общее выражение для прямой на плоскости записывается
уравнением
ах + by + с = 0.
Это значит, что
X
У.
ах + by + с =
Поэтому
w
z
/ю =
w = 2х + у + 1, z = у — х + 5 и ах + by + с = 0 > .
Мы можем решить уравнения
w — 2х 4- У + 1,
z — у “ х + 5
для х и у у выразив их через w и z:
я = i(w - 1) - |(z - 5),
О о
У = - 1) + |(г - 5).
О о
Тогда условие
ах + by + с = 0
можно переписать в виде
а
о о
5) +b |(w - 1) + |(z - 5)
О о
+ с = 0,
или иначе:
|(a + b)w +
О
1 \ 4 11
-a\z + c+ -а — — Ь = 0.
О J о о
Другими словами,
/(А) = { И
ew + gz h —
1.5. Линейные преобразования
25
где
1, 2, 1 t 4 11
е = -(а + Ь), д=-Ь--а, и h = с + -а - —Ь.
О о о о о
Мы видим, что в результате отображения f получилась снова
прямая.
Заметим, что / из этого примера не является евклидовым
преобразованием. Аффинная геометрия изучает те свойства под-
множеств плоскости, которые инвариантны при всех взаимно-
однозначных аффинных преобразованиях. Таким образом, ес-
ли А — окружность, то /(А) не обязана быть окружностью (позд-
нее мы увидим, что это всегда эллипс).
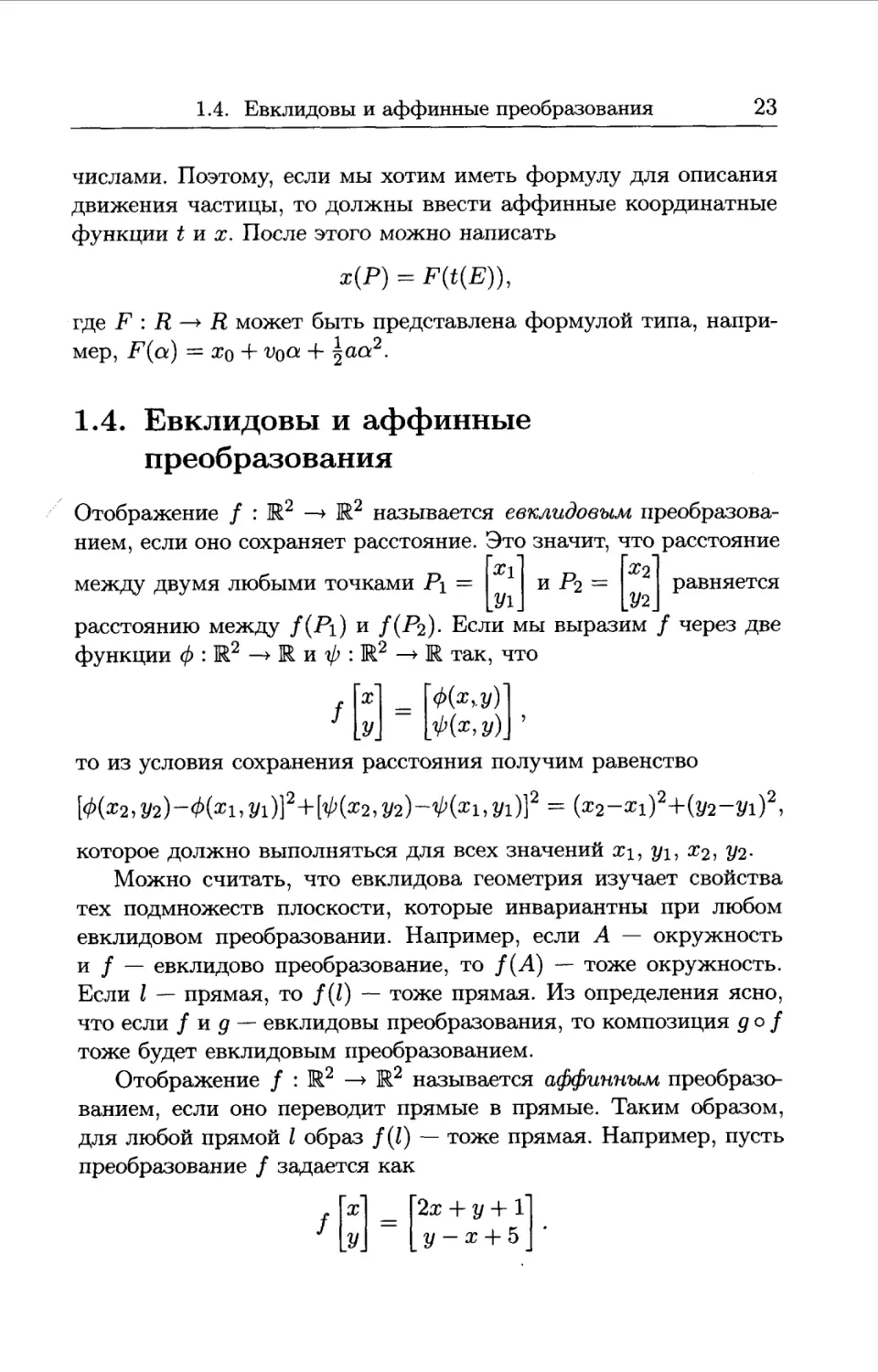
Предположим, что f и есть такое аффинное преобразование.
Тогда, по определению, f преобразует прямые в прямые и по-
скольку различные точки переходят в различные точки, то па-
раллельные прямые переходят в параллельные прямые. Поэтому
преобразование / переводит параллелограммы в параллелограм-
мы. Таким образом, в аффинной геометрии существует понятие
параллелограмма рис. 1.10, но нет понятий прямоугольника и
квадрата — рис. 1.11.
Рис. 1.10
Рис. 1.11
1.5. Линейные преобразования
Простейшим случаем аффинных (и евклидовых) преобразований
являются трансляции
х
У
х + а
у + Ь
С помощью трансляций любую точку пространства можно пе-
реместить в любую другую. Прежде чем переходить к дальней-
шему, давайте ограничимся аффинными преобразованиями, при
26
Глава 1. Линейные преобразования плоскости
О
О
О'
о
о
О
которых одна точка, скажем
Производя трансляцию, мы сможем из этой точки перейти в лю-
бую другую.
Пусть f — взаимнооднозначное аффинное преобразование,
при котором начальная точка О ~
, неподвижна, т. е.
о
о
неподвижна. Теперь лю-
бую точку Р =
жения v
можно задавать с помощью вектора поло-
х
У.
, так что Р = О “+” V. В дальнейшем мы будем
опускать обозначение [ ], тем самым не будем различать AR2 и R2.
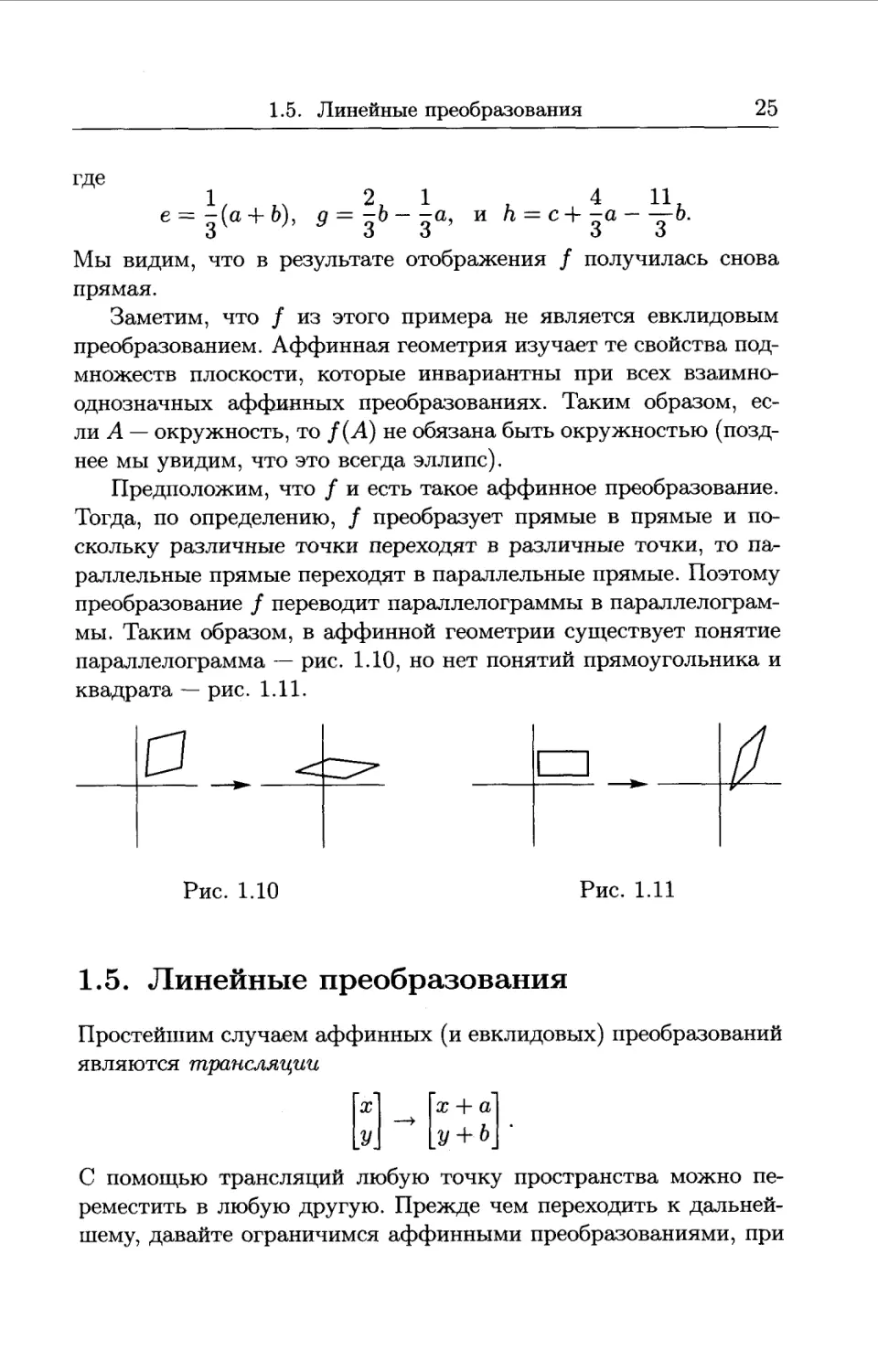
Из того, что / преобразует параллелограмм в параллелограмм,
немедленно следует, что если вектор положения точки Q есть
v + w, то вектор положения f(Q) будет /(v) + /(w). Поэтому
/(v + w) = f(v) + /(w) при v^w. (1.2)
Рис. 1.13
1.5. Линейные преобразования
27
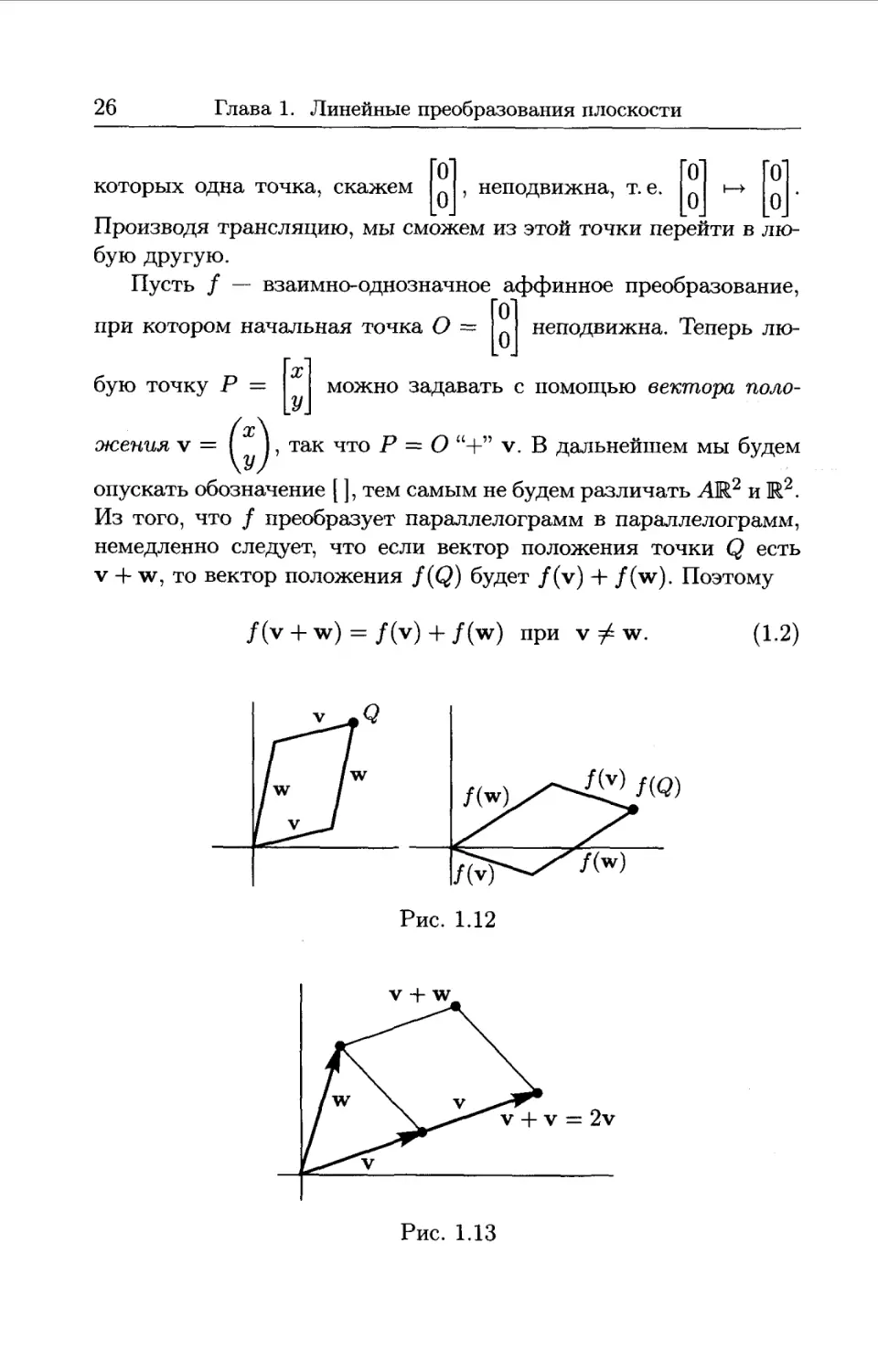
Теперь можно показать, что преобразование f сохраняет от-
ношение длин отрезков на любой прямой. Если параллелограмм
натянут на векторы w, v, v + w и 2v, то из рис. 1.12, 1.13 видно,
что
I f(2v) = 2/(v),
и уравнение (1.2) выполняется при v — w. Повторяя те же аргу-
менты, получаем
f(nv) = n/(v)
для любого целого числа п > 0. Проводя такое же рассуждение
для вектора (l/m)v, в результате получим
/(av) = a/(v)
для любого рационального числа а > 0.
Из рассмотрения параллелограмма с вершинами О, w, —v+w,
—v видим, что
/(-v) = -/(v),
поэтому
/(av) = a/(v)
для любого рационального числа а, положительного и отрица-
тельного, и для всех v.
Если мы предположим, что f — непрерывное преобразование,
то получим, что
/(av) = a/(v)
для всех вещественных чисел а. Но оказывается, такое предполо-
жение излишне. Действительно, из свойств системы веществен-
ных чисел и из того, что / преобразует прямую на плоскости в
другую прямую, следует, что f — непрерывное преобразование.
Это значит, что равенство f(av) ~ a/(v) справедливо для всех
вещественных чисел а и всех векторов v. Доказательство этого
утверждения несколько искусственно, мы приведем его в добав-
лении в конце этой главы. А сейчас ограничимся только теми аф-
финными преобразованиями, для которых условие /(av) = a/(v)
выполняется при всех вещественных числах а, хотя, как уже было
28
Глава 1. Линейные преобразования плоскости
сказано, здесь нет никакого ограничения. Для таких преобразо-
ваний f имеем тождество
/(av + 6w) = af(v) + 6/(w), (1.3)
справедливое для любых вещественных чисел а, b и для любых
векторов v, w в пространстве R2.
Отображение f : R2 —► R2, удовлетворяющее условию (1.3),
называется линейным преобразованием плоскости. Таким обра-
зом, изучение аффинных преобразований R2, при которых фик-
сировано начало координат, мы свели к изучению линейных пре-
образований векторного пространства R2.
По определению, любое отображение R2 —► R2, удовлетворяю-
щее условию (1.3), линейно. Но не каждое линейное преобразова-
ние является взаимно-однозначным. Например, преобразование,
которое отображает каждый вектор пространства R2 в нулевой
вектор:
z© = (°) длявсех ©
линейно, но не взаимно-однозначно.
Если f — линейное преобразование, то
/(v + tw) = /(v) + t/(w).
Если /, кроме того, взаимно-однозначно, то из условия w ф
О следует, что /(w) 0. Таким образом, / преобразует пря-
мую {v + tw I t E R} в прямую {/(v) + i/(w) | t E R}, t. e.
f всегда прямые преобразует в прямые. Следовательно, любое
взаимно-однозначное линейное преобразование является аффин-
ным преобразованием. Взаимно-однозначное линейное преобра-
зование называется регулярным или несингулярным. Линейное
преобразование, не являющееся взаимно-однозначным, называет-
ся сингулярным. Мы уже видели, что любое регулярное линейное
преобразование является аффинным. Покажем, что сингулярные
преобразования переводят всю плоскость в прямую или в началь-
ную точку.
Очевидно, что если f и g — линейные преобразования (ре-
гулярные или нет), то g о / — тоже линейное преобразование.
1.6. Матрица линейного преобразования
29
Действительно, поскольку f линейно, то (д о f)(av + bw) =
^(a/(v) + b/(w)), и поскбльку д линейно, это выражение рав-
но ад о /(v) + bg о f (w), из чего следует линейность д о f.
Итак, по определению, преобразование f линейно, если усло-
вие (1.3) выполняется для всех пар векторов v и w и для всех
вещественных чисел а и Ь. Аффинное преобразование — это
взаимно-однозначное отображение пространства R2 в себя, пе-
реводящее прямые в прямые. Любое аффинное преобразование
может быть записано как регулярное линейное преобразование с
последующей трансляцией, т. е. для любого аффинного преобра-
зования f выполняется
/(w) = Z(w) + V,
где I — регулярное линейное преобразование. Верно и обратное
утверждение: если преобразование f имеет такой вид, то оно
аффинно.
1.6. Матрица линейного преобразования
Пусть f : Ж2 —> Ж2 — линейное преобразование. На плоскости
( х\
каждый вектор I можно записать в виде
так что
'CH(oWC)-
Последняя формула показывает, что преобразование f полно-
стью определяется тем, во что оно переводит базисные векторы
(о) " (1)' Предположим, что / Q) = Q и f Q = Q).
Тогда f полностью определяется четырьмя числами a, b, end
30
Глава 1* Линейные преобразования плоскости
Запишем эти числа в форме квадратной матрицы
где первый столбец есть образ вектора
вектора
. Тогда образ любой точки
, а второй — образ
задается формулой
ах +
сх + dyj ’
(1.4)
причем соотношение (1.4) рассматривается как определение умно-
жения матриц. Оно показывает, как вектор
, чтобы получить другой вектор.
(а b
матрицу | d
му правилу для получения каждой компоненты
умножать на
Согласно это-
вектора надо
«умножить строку на столбец». Подробнее, верхняя компонента
ах+by вектора справа в (1.4) получена умножением верхней стро-
ки матрицы (а, Ь) на столбец , аналогично получена нижняя
компонента.
Например, пусть Re есть поворот на плоскости против часовой
стрелки на угол 0. Тогда (рис. 1.14)
Рис. 1.14
1.7. Умножение матриц
31
а поворот Rq имеет матрицу
COS#
sin#
— sin#
cos#
Образ любой точки
X \
) имеет вид
У/
cos#
sin#
— sin #\ (х\ __ (х cos # — у sin #
cos# )\у) Lesin# + у cos#
Формула (1.4) показывает соответствие между линейными преоб-
разованиями и матрицами, т. е. матрицы 2x2 можно отождест-
вить с линейными преобразованиями пространства R2.
1.7. Умножение матриц
Допустим, что F — линейное преобразование, которому соответ-
ствует матрица
, а линейному преобразованию G соответ-
ствует матрица
тоже линейно и
J. Мы знаем, что преобразование F о G
ему соответствует матрица, в которой первый
столбец равен
а второй столбец равен
af + Ь/Л
cf + dhj ’
Мы определим умножение матриц так, чтобы их произведение со-
ответствовало композиции линейных преобразований: (MatF) х
(Mat G) = Mat F о G, Итак, правило умножения матриц таково:
а (е f
с dj \а h
ае + Ьд
се + dg
af +
cf + dhj *
32
Глава 1. Линейные преобразования плоскости
Каждый элемент матрицы-произведения получается умножени-
ем той или иной строки первой матрицы на некоторый столбец
второй.
Например, если Ro есть поворот против часовой стрелки на
угол а Яф есть аналогичный поворот на угол ф, то Ro • Яф —
Re+ф и
cos 0 — sin (А /cos ф
sin# cos# J \зтф
— sin0
СОвф
cos в cos ф — sin в sin ф — cos в sin ф — sin 0 cos ф
sin 0 cos ф + cos 0 sin ф cos 0 cos ф — sin 0 sin ф
Сравнение этого выражения с матрицей Яо+ф
cos(0 + ф) — sin(0 + ф)
sin(0 + ф) cos(0 + ф)
дает стандартные тригонометрические формулы для cos(# + ф) и
sin(0 + ф). Таким образом, уже нет необходимости помнить фор-
мулы для синуса и косинуса суммы углов. Вы можете получить
их из более общего правила умножения матриц.
Заметим, что, вообще говоря, умножение матриц не коммута-
тивно. Например,
1 2\ /4 0\ = /4 10\
О 3) ^0 5/ \0 15/ ’
а произведение этих же матриц в обратном порядке дает другой
результат:
4 0\ /1 2\ _ /4 8 \
0 5/ \0 3) " \0 15/
(Два поворота в пространстве R2 коммутируют между собой,
потому что не важно, на какой угол мы поворачиваем сначала.
Но в общем случае коммутативности нет.)
В качестве другого примера умножения матриц докажем
утверждение о разложении матрицы в произведение трех мат-
риц. Позже это утверждение нам пригодится. Мы докажем, что
177Т Умножение матриц
33
. (а Ь\ , п
любая матрица I Д при а 0 может
тройное произведение в виде
быть записана как
а Ь\ _ /1 0\ /г 0\ /1 аЛ
с d) ~ \у 1) s) ^0 1J ’
Чтобы это доказать, мы просто предложим способ вычисления
констант ?/, г, s, х. Сначала умножим две матрицы, стоящие
в (1.5) справа. Получаем:
г 0\ /1 _ /г гх
0 sj \0 1/ \0 s
Мы хотим, чтобы выполнялось равенство
гх
гху + s
Приравняем соответствующие элементы матриц справа и слева.
Сначала получаем а = г, и по нашему предположению а 0,
г / 0. Далее, имеем b — гх и, следовательно, х = Ь/г = Ь/а
(напомним, что а / 0). Аналогично, с = гу, поэтому у — с/г =
с/а. И наконец, d = гху + s, и, следовательно,
s = d — гху — d — r(b/r)(c/r) = d — (be)/а.
Аналогичное разложение матрицы, важное при изучении систем
линз, имеет вид
а b\ = f1 у\ (° Л А
cd) \о 1/ \е о; \о 1J
Это разложение, возможное для любой матрицы при с ф 0, до-
казывается столь же просто: достаточно выполнить умножение в
правой части формулы и приравнять соответствующие элементы
в обеих частях равенства.
34
Глава 1. Линейные преобразования плоскости
1.8. Алгебра матриц
Пусть F и G — линейные преобразования в пространстве R2.
Определим их сумму равенством:
(F + G)(v) = F(v) + G(v).
Заметим, что
(F + G)(av + 6w) = F(av + 6w) + G(av + 6w)
= aF(v) + 6F(w) + aG(v) + 6G(w)
- a(F(v) + G(v)) + b(F(v) + G(v))
= a(F + G)(v) + &(F + G)(w).
Таким образом, сумма преобразований F+G есть тоже линейное
преобразование. Очевидно, что такая операция сложения облада-
ет свойствами ассоциативности, коммутативности, нулевое пре-
образование имеет вид O(v) = 0 для всех v, условие (—F)(v) =
—F(v) определяет противоположное к F преобразование (—F),
т. е. (—F) + F = О, где О обозначает нулевое линейное преобра-
зование.
Если Н — третье линейное преобразование, то композиция,
представляющая произведение матриц, обладает свойством:
Н о (F + G)(v) = H[(F + G)(v)]
- H[F(v) + G(v)]
= H[F(y)] + H[G(y)]
= (HoF)(v) + (HoG)(v),
справедливым для всех v. Это можно записать кратко
Ho(F + G)^HoF + HoG.
Аналогично,
(F + G)oH-FoH + GoH.
Это значит, что умножение матриц дистрибутивно по отношению
к введенной операции сложения.
1.8. Алгебра матриц
35
Из определения суммы линейных преобразований непосред-
ственно следует, что если имеются матрицы F и G:
Mat<F’=(“ d) и Mat(G)=0 0,
то для матрицы преобразования F + G имеем
Mat(F + (?) = (“ * * d t {) = Mat(F) +
Другими словами, при сложении матриц мы складываем их сот-
ветствующие элементы. Матрицу можно умножать на число: на-
_ fa b\ f2a 2b\ о
пример, 2 , = „ о . Заметим, что
\с a J \2с 2d)
(а Ъ\ _ (2а 2Ь\ _ (2 0\ (а Ь\
d) ~ у 2с 2d) \0 2у ус d) *
Итак, мы определили сложение и умножение матриц 2x2;
правила сложения и умножения матриц точно такие же, как боль-
шинство известных правил сложения и умножения чисел. Таким
образом,
о сложение ассоциативно, коммутативно, существуют нулевое
и противоположное преобразования;
о умножение матриц ассоциативно, дистрибутивно по отно-
/1 о\ з
шению к сложению, существует единичная матрица Ь I.
Однако, у матриц есть два существенных свойства, отличающие
их от чисел.
1. Умножение матриц не коммутативно.
2. Произведение двух ненулевых матриц может равнять-
ся нулю, так что закон сокращения при умножении
матриц работает не всегда:
/О 1\ /0 1\ = /о 0\
\о о/ До о) ~ Vo о/'
3 Имеется в виду, что умножение любой матрицы М на матрицу ()
(и слева, и справа) дает М. — Прим. ред.
36
Глава 1. Линейные преобразования плоскости
И тем не менее, во многих отношениях с линейными преобразо-
ваниями можно работать так же, как и с числами.
Теперь рассмотрим линейные преобразования не в R2, а в век-
торном пространстве R3. Векторы пространства R3 описываются
/х\ /1\ /0\
столбцами I у I. Существуют три базисных вектора I О I, 111
W \°/ \°/
/0\
и I О I. Наиболее общее линейное преобразование в пространстве
V/
R3 описывается матрицей 3x3:
«11 «12 «13
«21 «22 «23
«31 «32 «33
где первый столбец является образом первого базисного вектора
/1\
I О I и т. д. Формула умножения таких матриц имеет вид
\0/
«11 «12 «1з\ All Ь12 Ь13
«21 «22 «23 I х I &21 &22 ^23
«31 «32 «33 / \&31 Ь32 &33
«11 «12 «13
«21 «22 «23
«31 «32 «33
где для любых г, J, принимающих значения 1, 2, 3, элемент ре-
зультирующей матрицы равен
«ij — «il^lj + «i2^2J “Ь «i3^3J *
Таким образом, как и в R2, для получения любого элемента про-
изведения надо строку первой матрицы умножать на столбец вто-
рой. Например, пусть i = 2 и j = 3. Тогда написанная выше
формула условно изображена на рис. 1.15.
При сложении матриц 3x3 матричный элемент результиру-
ющей матрицы равен сумме соответствующих матричных эле-
ментов. При этом сохраняются все свойства, которыми обладают
матрицы 2x2: ассоциативность и коммутативность для сложе-
ния; ассоциативность и дистрибутивность по отношению к сло-
жению — для умножения.
1.9. Площади и определители
37
#21 #22 #23
I I
&13
&23
&33
#23
Рис. 1.15
Аналогично, мы можем рассматривать матрицы 4 х 4, 5 х 5 и
вообще матрицы п х п.
Можно умножить вектор в пространстве R3 на матрицу 3x3:
а b с\ /х
d е f I I у
д h i I \z
ax + by + cz
dx + ey + fz
gx + hy + iz
в общем случае можно умножить вектор в пространстве Rn на
матрицу п х п.
1.9. Площади и определители
Опять вернемся к плоскости. Пусть f — несингулярное линейное
преобразование плоскости. Поскольку /(v + tw) — /(v) + £/(w),
преобразование f прямые переводит в прямые, следовательно,
f является аффинным преобразованием и квадраты переводит в
параллелограммы. Далее, пусть Dv — единичный квадрат, левый
нижний угол которого находится в v (рис. 1.16):
— {v + w | w е По} .
О < s < 1, О < t < 1
В результате преобразования f получается образ квадра-
та Dv, обозначаемый /(Dv)? который может быть получен
38
Глава 1. Линейные преобразования плоскости
трансляцией образа /(По) квадрата □(>:
/(□v) = {/(v) + /(w) I w € Do}
= {/(v) + u|u6/(D0)}.
Это значит, что /(Dv) имеет ту же самую площадь, что и /(По).
Очевидно, что то же самое справедливо не только для единично-
го квадрата, но и для квадрата любого размера. С другой сторо-
ны, можно разделить единичный квадрат на четыре конгруэнт-
ных квадрата (рис. 1.17). Соответствующие образы тоже будут
конгруэнтны и сложенные вместе образуют образ Со, т. е. образ
каждого из них имеет площадь, равную | х (/(По)) (рис. 1.18).
Продолжив деление квадратов дальше, можно сделать вывод,
что для квадрата □, длина стороны которого l/2fc, отношение
площадь /(□)
площадь □
1.9. Площади и определители
39
есть число, не зависящее от □ (или от величины 2fe). Обозначим
это число Аг(/), т. е.
площадь
площадь □
Пусть D — некоторое «хорошее» подмножество на плоско-
сти (рис. 1.19), т. е. подмножество, которое можно с любой степе-
нью точности аппроксимировать объединением описанных выше
квадратиков (рис. 1.20). (Строго говоря, следовало бы аппрокси-
мировать D изнутри и снаружи. Если мы можем покрыть гра-
ницу множества D конечным объединением квадратиков сколь
угодно малой суммарной площади, то общую площадь их обра-
зов тоже можно сделать сколь угодно малой. Именно такие ап-
проксимации нам необходимы, и именно их возможность подра-
зумевается нашим термином «хорошее» множество4). Для таких
множеств также будет выполняться5 равенство
площадь/(D)
площадь D
Итак, Аг(/) есть коэффициент, показывающий, как изменя-
ется площадь в результате преобразования /. Если / и д — два
4 Здесь авторы фактически предполагают знакомство читателя с поняти-
ем площади для довольно широкого класса подмножеств плоскости, назы-
ваемых «измеримыми по Жордану», или «квадрируемыми». Именно такие
множества авторы называют «хорошими». Читатель должен также знать по-
нятие «границы множества» и ее простейшие свойства. — Прим. ред.
5При очевидном условии, что (площадь D) / 0. —- Прим. ред.
40
Глава 1. Линейные преобразования плоскости
несингулярных линейных преобразования, то
площадь (/ о <?)(□) _ площадь f о </(□) площадь #(□)
площадь □ площадь р(П) площадь □
и, следовательно,
Аг(/о5) = (Аг(/)) х (Аг(р)).
Теперь вычислим коэффициенты Аг(/) для нескольких ли-
нейных преобразований специального вида, а затем используем
полученные результаты, чтобы получить этот коэффициент в об-
щем случае. Заметим, что Аг(/) = площадь [/(По)] = площади
образа единичного квадрата в результате действия преобразова-
ния /.6
Случай 1а. Преобразование f задается матрицей
о
з
г > 0, з > 0.
Рис. 1.21(a)
Случай 1b. Преобразование f задается матрицей
/г (А
\0 sj ’
г < 0, з > 0.
Тогда (рис. 1.21(b)) Аг(/) = |гз|.
6Если принять, что площадь единичного квадрата По равна единице. —
Прим. ред.
1.9. Площади и определители
41
Рис. 1.21(b)
Из рассмотрения этих двух случаев видно, что Ar(/) = |rs|
для любой диагональной матрицы F.
f у. \
Случай 2а. Преобразование f задается матрицей F = I п 1 I.
Рис. 1.22(a)
Заштрихованный треугольник (см. рис. 1.22(a)) с вершинами
), I I, I I можно получить из заштрихованного тре-
раллелограмма имеет ту же площадь, что и сам единичный па-
раллелограмм. Это значит, что при таком преобразовании сдвига
площадь не изменяется и коэффициент Ar(/) = 1.
Случай 2Ь. Преобразование f задается матрицей F = |
42
Глава 1. Линейные преобразования плоскости
И в этом случае два заштрихованных треугольника имеют
одинаковую площадь, т. е. коэффициент Ar(/) = 1.
Теперь поговорим о связи между свойствами линейного пре-
образования и определителем его матрицы.
Определителем матрицы F = \ ,) называется число
\ С nJ
Det F = ad — be. (1.6)
Докажем важную формулу:
Ar(/) = |DetF|, (1.7)
где F обозначает матрицу преобразования /. Чтобы доказать эту
формулу, воспользуемся важным свойством определителей:
Det(F о G) = (Det F) х (Det G).
/ е f \
Оно проверяется простым умножением: если G = , ), то
\5 и/
Det(F о G) = Det (ае
v ' \ce + dg cf + dhj
= (ае + bg)(cf + dh) - (af + bh)(ce + dg)
= (ad — be) (eh — fg) = (Det F) x (Det G).
Принимая во внимание два правила,
Ai(f о g) = (Ar(f) x Ar(g)) и Det(F о G) — (Det F) x (Det G),
1.9. Площади и определители
43
получаем, что формула
Ar(/) = |DetF|
верна для любого преобразования, которое можно записать как
композицию преобразований, для которых уже проверена ее
справедливость. В разделе 1.7 мы доказали, что если а О,
можно записать (см. (1.5)):
а _ /1 (Л /г (А /1 аЛ
с dj ~\у 1/\0 s) ^0 1у
Таким образом, формула доказана для всех а ф 0. Если а = 0,
мы можем действовать двумя способами:
1. Непосредственной проверкой: Ar ^J=|bc| =
Доказательства предоставляем читателю7.
2. Воспользоваться непрерывностью8: заметим, что и Аг(/) и
Det F — непрерывные функции коэффициентов матрицы F
(т. е. если мы мало изменяем эти коэффициенты, то значе-
ния Аг(/) и DetF тоже изменяются мало.) Если матрица
/0
I с . j I несингулярна, то для достаточно малых е матрица
Q d) тоже несингулярна. Далее, поскольку мы знаем, что
равенство
> (е Ь\ ТЛ х (е Ь\
Аг I , = Det I ,
\с dj \с a J
выполняется для всех е, близких к нулю, то оно верно при
е = 0.
7 Легкое доказательство: если с ~ 0, то преобразование сингулярно, если
, п Д) (A f0 b\ fl d/c\ „ л
же с Ф 0, то | , — I „ х ( п — Прим. ред.
\с dj \с 0 J \0 1 j
8Следующее рассуждение использует не определенные ранее понятия
непрерывной зависимости от параметра нескольких объектов: преобразова-
ния, его матрицы и функций от них. — Прим. ред.
44
Глава 1. Линейные преобразования плоскости
Перейдем к выяснению геометрического смысла знака Det F, ес-
ли DetF 0. (Смысл модуля этого определителя мы уже об-
судили.) Смысл знака DetF лучше всего показать на приме-
ре (рис. 1.23). Преобразование
кости относительно оси х.
О \
— 1 I — это отражение плос-
Результатом отражения является изменение направления вра-
щения против часовой стрелки на вращение по часовой стрел-
ке. Таким образом, тот факт, что определитель отрицателен,
означает изменение ориентации плоскости на противоположное,
см. рис. 1.23.
В качестве иллюстрации давайте рассмотрим евклидово ли-
нейное преобразование плоскости, обозначаемое F. Поскольку
вектор F имеет единичную длину, то для некоторого угла
в можно написать
F
Так как F I I тоже имеет единичную длину, и он перпендику-
/cos
лярен вектору ( I ? У нас есть Две возможности:
F
или F
1.10. Обратные матрицы
45
В первом случае мы имеем дело с поворотом на угол
COS#
sin#
— sin#
cos#
и DetF — 1.
(cos# sin#\
sin # cos # J ’ 'Д'ЛЯ ко-
торого DetF == — 1, является отражением относительно вектора
. Действительно, из тригонометрических формул сле-
дует, что
cos#/2\
sin #/2у
cos#
sin#
sin# \ /cos#/2\ _ /cos#/2\
— cos #j у sin #/2) ^sin #/2J ’
Поэтому вектор после преобразования F остается на
месте и прямая, проведенная из начала вдоль этого вектора, отоб-
ражается сама в себя. Далее FoF = , т. е. преобразование
F действительно является отражением.
1.10. Обратные матрицы
Пусть F — — любая матрица порядка 2x2.
Матрица G называется обратной к F, если GF — FG =
/1 (А
\0 V
Если Det F = 0, то матрица F не имеет обратной, поскольку
(Det F) • (Det G) — Det Q = 1 / 0. Если же Det F 7^ 0,
то мы найдем обратную к F матрицу G с помощью следующего
построения.
Определим матрицу Fa согласно формуле
р<а _ । & Ь
\ —С
а
46
Глава 1. Линейные преобразования плоскости
Непосредственное умножение показывает, что
FaF = FF
Det F
О
DeOtP)=DetFU 1
а
Поэтому ясно, что в качестве матрицы, обратной к F, можно
взять
G = (DetF)-1F“.
Таким образом, мы доказали теорему: матрица F имеет обрат-
ную тогда и только тогда, когда DetF 0. В этом случае для
обратной матрицы F-1 справедлива формула
i f d(DetF)-1 —b(DetF)-1 \
\ —c(DetF)-1 a(DetF)-1 J { ’
Нам следует понять геометрический смысл F”1; эта матрица
«уничтожает» действие матрицы F. Если сначала мы произведем
операцию F, а потом F-1, то вернемся в исходное состояние9, по-
rpr-i—i А1 0\
скольку rFx=lg i I ~ соответствует тождественному отоб-
ражению.
Заметим, что если F сингулярна, то она не имеет обратной
матрицы, потому что для любой матрицы F, имеющей обратную,
из Fv — Fw следует F-1Fv = F-1Fw, т. е. v = w.
Тот факт, что условие условия Det F = 0 соответствует син-
гулярности F, можно интерпретировать в терминах площадей.
Действительно, пусть параллелограмм имеет одну вершину в на-
Аа\ Ab\ „
чале и стороны, параллельные векторам | I и I I. Параллело-
грамм имеет площадь, не равную нулю, если эти вектора не ле-
жат на одной прямой, проходящей через начало. Это значит, что
Det 0, потому что Det
a b
c d
равен площади этого
параллелограмма. В этом случае существует обратная матрица,
и мы можем написать
где F"1 = К J .
\9 /
93десь и иногда далее авторы не делают различия между линейным пре-
образованием и его матрицей. — Прим, ред.
1.10. Обратные матрицы
47
То же самое можно написать по-другому:
и
. А это значит, что любой вектор на
плоскости может быть представлен как линейная комбинация
М Г А
векторов I 1 и I J, гДе е, j, д и h — просто числа.
Вспомним (см. параграф 1.1), что вектора и и v называются
линейно зависимыми, если существуют вещественные
s, не равные нулю, такие, что
числа г и
ru + sv — 0.
Если векторы u, v не являются линейно зависимыми,
зывают линейно независимыми.
Пусть и = и v — 0^. Вектора и и v линейно
мы тогда и только тогда, когда матрица
то их на-
независи-
несингулярна. Действительно, матрица М переводит единичные
/а ЛЛ .
вектора 1^1 и L I buhv соответственно. Таким образом, и
и v будут лежать на одной прямой (а это и означает их линейную
зависимость) тогда и только тогда, когда матрица М преобразу-
ет единичный квадрат в вырожденный параллелограмм нулевой
площади, т. е. при условии, что Det М = 0.
Предположим, что и и v линейно независимы, и мы имеем
матрицу М, определенную выше. Пусть w есть любой вектор на
плоскости R2. Поскольку М несингулярна, то мы можем постро-
ить обратную матрицу М~х и взять вектор Af-1w. Этот вектор
определен на плоскости R2 и, следовательно, можно написать
М 1w
Умножаем обе части этого уравнения на М и получаем
ММ — w = аМ
= аи 4- bv.
48
Глава 1. Линейные преобразования плоскости
Таким образом, если и и v линейно независимы, то любой век-
тор на плоскости может быть записан как линейная комбинация
этих векторов. Обратно, допустим, что любой вектор на плоско-
сти можно записать в виде линейной комбинации векторов и и v.
Очевидно, что и и v не могут лежать на одной прямой, проходя-
щей через начало, так как это означало бы, что любой вектор на
плоскости лежит на той же прямой. Таким образом,
векторы и и v линейно независимы тогда и только
тогда, когда любой вектор на плоскости может быть
представлен как линейная комбинация и и v.
Допустим, что F — матрица, а щ и U2 - два линейно независи-
мых вектора. Параллелограмм, построенный на векторах щ и 112,
имеет ненулевую площадь, следовательно, F(ui) и F(u2) будут
линейно независимы тогда и только тогда, когда DetF 0 0.
Подытожим сказанное.
Все утверждения, приведенные ниже, эквивалентны.
1. Матрица F =
Ь\
d)
имеет обратную.
2. DetF /0.
3.
Векторы
не лежат на одной прямой, проходящей
через начало координат.
4.
Любой вектор на плоскости можно записать в виде линей-
ной комбинации
5. Для некоторой пары векторов ui, 112 соответствующие век-
тора F(ui) и F(u2) линейно независимы.
6. Для любой пары линейно независимых векторов vi, V2 век-
тора F(vi) и F(v2) линейно независимы.
7. F несингулярная матрица.
Давайте используем эти результаты для иллюстрации ряда
положений из аффинной геометрии. Для начала отметим, что в
1.10. Обратные матрицы
49
рамках аффинной геометрии не имеет смысла не только длина
отрезка, но и относительные длины двух отрезков, не лежащих
на одной прямой. Действительно, если и и v — два линейно неза-
висимых вектора, то существует единственное линейное преобра-
зование /, которое выполняет операции: u i—> ги и v i—> sv, где
г и s — любые числа, не равные нулю. Таким образом, подбирая
s/r, мы можем сделать любым отношение длин /(и) и /(v).
С другой стороны, отношение длин отрезков, лежащих на од-
ной прямой, в аффинной геометрии имеет смысл. Действительно,
раз трансляции сохраняют длину, мы можем предположить, что
прямая I и ее образ /(Z) проходят через начало. Так как вращения
тоже сохраняют длину, то мы можем сделать поворот и считать,
что /(Z) = I. Но тогда, если 0 u е Z, образ /(и) тоже лежит на
прямой Z, поэтому /(и) — си, где с — постоянный коэффициент.
Следовательно, /(v) = cv для любого вектора v С !. Это зна-
чит, что / изменяет длины всех отрезков на прямой I одинаково,
умножая их на |с|.
Следует также отметить, что для заданных треугольников
Д1 и Д2 существует аффинное преобразование /, для которо-
го /(Д1) = А2. На самом деле, с помощью трансляций одну из
вершин треугольника Дх можно поместить в начало. Пусть кон-
цы векторов Ui и vi находятся в двух других вершинах. Вектора
Ui и vi линейно независимы, поэтому вершины треугольника О,
Ui, vi не лежат на одной прямой. Аналогично можно считать,
что вершинами треугольника Д2 являются точки О, U2, V2. Но
тогда существует единственное линейное преобразование /, для
которого /(щ) = U2 и /(vi) = V2. Теперь мы можем сформулиро-
вать теорему: для любого треугольника три прямые, соединяю-
щие вершины со средними точками противоположных сторон,
пересекаются в одной точке.
Понятие средней точки в рамках аффинной геометрии су-
ществует, поэтому утверждение, что эти три прямые пересека-
ются в одной (общей) точке, имеет смысл. Чтобы доказать эту
теорему, достаточно рассмотреть один треугольник, потому что
мы можем найти аффинное преобразование, переводящее один
треугольник в другой. Поэтому, если теорема справедлива для
одного треугольника, то она будет справедливой и для любого
50
Глава 1. Линейные преобразования плоскости
другого. Теорема очевидна для равносторонних треугольников.
Поэтому можно считать, что она доказана и в общем случае.
1.11. Сингулярные матрицы
Давайте разберемся, что происходит, когда DetF = 0. В этом
случае возможны два варианта:
„ _ (0 0\ г. / <° 0\
F \о оу или F До о/
Если F — нулевая матрица, то каждый вектор она отображает
в О, вся плоскость стягивается в начальную точку. В другом
случае, когда F — не нулевая матрица, но Det F = 0, справедливы
следующие утверждения.
1. Существует такая прямая Z, что F(u) € I для каждого век-
тора и на плоскости R2. Более того, каждый вектор v 6 I
является образом некоторого uER2, т.е. v = F(u). Други-
ми словами, матрица F стягивает плоскость в прямую I,
2. Существует такая прямая fc, что F(w) = 0 тогда и только
тогда, когда w е к. Другими словами, матрица F стягивает
прямую к в начальную точку и не переводит в 0 ни одного
вектора, не принадлежащего прямой к.
Докажем утверждение 1. Пусть
- - ©-О
образуют два столбца матрицы F — .
Поскольку F — ненулевая матрица, ci и С2 не могут одно-
временно быть равными 0. С другой стороны, если ci и С2 не
лежат на одной прямой, то из утверждений 2 и 3 предыдущего
параграфа следует, что DetF 0, что противоречит исходному
предположению. Таким образом, ci и С2 лежат на одной прямой.
1.11. Сингулярные матрицы
51
Обозначим ее I. Любой вектор u Е R2 можно представить в виде
и
поэтому F(u) = £С1 + ус2 лежит на той же прямой I.
Если ci ф 0, то любой вектор v G I равен v — tci, где х —
некоторое число. Следовательно, v — ЛК))- Если же с2 Ф О,
. Таким образом, мы доказали
то v = yc2 и вектор v = F
утверждение 1.
Теперь докажем утверждение 2. Пусть bi и b2 — первый и
второй столбцы матрицы F°\ т. е.
bi-
d
—с
ll ь2 =
—b
a
Поскольку Det Fa = Det F = 0 и из (7) мы знаем, что bi и Ь2
линейно зависимы. Кроме того, они не могут быть одновременно
равны О, т. к. мы предположили, что исходная матрица F / 0.
Значит, эти вектора порождают прямую, которую мы обозначим
к. Простое вычисление показывает, что Fbi = Fb2 — 0. Сле-
довательно, каждый вектор w € к удовлетворяет соотношению
Fw = 0.
Обратно, пусть вектор w = удовлетворяет условию
Fw — 0, и пусть хотя бы одно из чисел а, b не равно нулю. Тогда
координаты вектора w удовлетворяют уравнению ах + by = О,
которое, очевидно, задает прямую к. Если же а = b = 0, то хотя
бы одно из чисел с, d не равно нулю, и выполняется равенство
сх + dy = 0, что снова является уравнением прямой к. В обоих
случаях мы получили w Е fc, что и доказывает утверждение 2.
Обозначим Im(F) подмножество R2, состоящее из всех эле-
ментов вида F(u). Запишем это символически:
Im(F) — {v | v = F(u) для некоторого u}.
Читается обозначение Im(F) так: «образ отображения F».
52
Глава 1. Линейные преобразования плоскости
Аналогично определяем «ядро отображения F», обозначая
его символом Ker(F). Так мы будем обозначать множество век-
торов, которые преобразование F переводит в 0. Запишем это
формулой:
Ker(F) = {w | /(w) = 0}.
Такм образом, в зависимости от коэффициентов матрицы F су-
ществует три возможности.
1. Det F ф 0. Тогда Im(F) = R2 и Ker(F) = {О}.
2. DetF = 0, но F - ненулевая матрица. Тогда Im(F) = I
есть прямая и Ker(F) = к тоже прямая. Другими словами,
Im(F) и Ker(F) образуют одномерные векторные простран-
ства (рис. 1.24).
3. F — нулевая матрица. Тогда Im(F) = {0} и Ker(F) = R2.
Если рассматривать {0} как векторное пространство нулевой
размерности, то можно написать общее выражение
размерность Im(F) + размерность Ker(F) — 2.
Специальные случаи сингулярных преобразований. Сей-
час мы изучим несколько частных случаев сингулярных линей-
ных преобразований.
Рис. 1.24
1. Проекции. Будем называть преобразование р проекцией, если
оно обладает свойством:
если v есть вектор из образа р, то p(v) = v.
1.11. Сингулярные матрицы
53
Для произвольного сингулярного преобразования f : R2 —> R2
можно было бы лишь сказать, что при v Е Im(/) вектор /(v)
лежит на той же прямой, что и v, т. е. /(v) = a?v для некоторого
числа а. Если w — произвольный вектор, то v — p(w) принадле-
жит образу р и
(р О p)(w) = p(v) = V = p(w).
Отсюда следует, что pop — р, и поэтому матрица Р, представля-
ющая проекцию, удовлетворяет условию Р2 = Р. Таким образом,
(a b\ /a b\ _ (с? + bc ab + bd\ _ fa b\
с dj ус d) \ac + cd bc + d2J ус dj *
Поэтому ab + bd — b, и для b ф 0 получаем а + d = 1. Далее,
ас + cd = су для с 7^ 0 снова получаем а + d = 1. В случае, когда
b = 0 и с = 0, мы имеем а2 = a, d2 = d и Det Р = ad — 0, т. е.
либо а = 1, d = 0 либо а ~ 0, d = 1, либо Р = 0. Поэтому, кроме
случая Р = 0, след Р, обозначаемый ТгР = а + d, должен быть
равен 1.
Итак, ненулевая (сингулярная) проекция р удовлетворяет
условию р о р = р; матрица Р удовлетворяет условию Р2 = Р
и имеет нулевой определитель (ad — be — 0) и единичный след
(а + d — 1).
Обратно, предположим, что ad — be — 0 и а + d — 1. Тогда
ab~\-bd = (a+d)6 — b и ac+cd = с, кроме того, a2+bc = a2+ad = а и
bc+d2 = d. Таким образом, Р2 = Р и р есть проекция на прямую.
В общем случае будем называть оператор р проекцией, если
р о р — р. Тогда у нас есть три возможности.
1. Р несингулярна. В этом случае обе части уравнения Р2 — Р
можно умножить на Р-1 и получить
В этом случае ТгР = 2 = dim(Im(P)), где dim обозначает
размерность.
2. Р сингулярна, но не равна нулю. Мы уже рассмотрели этот
случай раньше. Здесь Р отображает R2 на прямую и Tr Р —
1 = dim(Im(P)).
54
Глава 1. Линейные преобразования плоскости
3. Р = ( о q ) • поэтому Р стягивает всю плоскость в началь-
ную точку и ТгР = 0 = dim(Im(P)).
Во всех трех случаях выполняется равенство TrP — dim(Im(P)).
2. Нильпотенты. Для произвольной сингулярной матрицы
определены две прямые Im(F) и Ker(F). Рассмотрим частный
случай, а именно, преобразование п, для которого прямые его
образа и его ядра совпадают. Действуя преобразованием п на
произвольный вектор w, получаем вектор v — n(w), который
принадлежит одновременно образу и ядру преобразования п.
Отсюда следует, что n(v) — по n(w) = 0. Таким образом, пре-
образование поп стягивает всю плоскость в начальную точку
и матрица У, определяющая п. удовлетворяет условию N2 = 0.
Поэтому
/а /а Ь\ __ /а2 + be ab + bd\ _ /0 0\
ус dj ус dj \ac + cd bc + d2J у0 Оу
В частности ab + bd — 0 и ас + cd = 0, поэтому если 6^0 или
с / 0, то а + d — 0. Если b — с — 0, то а2 = d2 — 0 и N = .
В любом случае матрица N имеет нулевой след. И обратно, если
Тг7\Г = а + й = 0и Det TV = ad — be = 0, то N2 = 0.
Будем называть матрицу нильпотентом, если Nk = 0 для
некоторого к. У такой матрицы необходимо Det У = 0, т. к.
Det(7V)fc — (Det 7V)fe. Итак, ad — be = 0 и, следовательно,
/ a b\2_/\a + d)a (a + d)b\
ус dj y(a + d)c (a + d)dy
Тогда
Nk _ I (a + d)k~la (a +
у (a + d)fc-1c (a + d)k~1dJ ’
Эта матрица становится нулевой, если а + d = 0. Но в этом
случае уже N2 — 0. Таким образом, на плоскости матрица N
является нильпотентом тогда и только тогда, когда выполняется
условие N2 = 0, а оно выполняется тогда и только тогда, когда
Det N = 0 и Tr 7V — 0.
1.12. Двумерные векторные пространства
55
1.12. Двумерные векторные пространства
Векторное пространство V называется двумерным, если в V мы
можем найти такие два вектора щ и U2, что каждый v е V можно
единственным способом представить в виде
v — (Z1U1 + а2и2.
«Единственность» означает, что если
v = aiUi + a2u2 и v — biUi + b2u2,
то необходимо выполняются равенства
«1 — £>i и а2 = £>2*
Упорядоченная пара векторов и2, обладающая описанным
свойством, называется базисом векторного пространства V. Вы-
бор базиса определяет отображение L — LU1}U2 векторного про-
странства V на плоскость R2
V -Д R2
такое, что если
v = aiUi + a2u2, то L(v) = '
Предполагаемая единственность гарантирует, что отображение L
однозначно определено, компоненты и а2 полностью опреде-
ляются вектором v. Отображение L сюръективно: при любых
(^11 i Т ( А II
для v — aiUi + a2u2 равенство L(y) =
а2 J \а2 J
удовлетворяется очевидным образом10.
Отметим некоторые свойства отображения L.
Если v = aiUi + <z2u2 и w = biui + Ь2и2, то
V + u = aiUi + a2u2 + 61U1 + b2u2 = (ai + bi)ui + (a2 + fe2)u2,
10Следовало бы еще отметить инъективность отображения L. — Прим. ред.
56
Глава 1. Линейные преобразования плоскости
и, следовательно,
L(y + w) = L(v) + L(w).
Аналогично,
L(rv) — rL(y)
для любого вещественного числа г и любого вектора v в прост-
ранстве V.
Имея в виду все эти свойства, мы говорим, что L — изоморф-
ное11 отображение (или изоморфизм) пространства V на R2. Это
позволяет нам все свойства и операции векторного пространства
V отождествить с соответствующими свойствами и операциями
в R2 - так же, как в одномерном случае свойства векторного
пространства мы перенесли на R1. Конечно, как и в одномерном
случае, изоморфизм L зависит от выбора базиса. Таким образом,
выбор базиса {ui,U2} есть двумерный аналог «выбора единиц
измерения». Нас будут интересовать только те свойства, которые
не зависят от выбора базиса и имеют истинно геометрическую
природу.
Давайте коротко изучим, как изменяется L при замене бази-
са. Сначала рассмотрим, как, зная L, можно восстановить базис
{ui,U2}. Действительно,
- u2
Таким образом, задание базиса равнозначно заданию изоморфиз-
ма, L : V —> R2. Выбрав L, мы можем из этих уравнений получить
базисные вектора щ и U2. Поскольку любой вектор в R2 может
быть однозначно записан в виде линейной комбинации векторов
ЛА т , ,
О И L и ПОСКОЛЬКУ L “ изоморфное отображение, то каж-
дый вектор в V может быть однозначно записан в виде линейной
11В математике термин «изоморфизм» означает взаимно однозначное (би-
ективное) отображение, сохраняющее все относящиеся к делу структуры.
Для векторных пространств V и W мы говорим, что отображение L про-
странства V на W является изоморфизмом, если оно линейно, инъективно и
сюръективно (т. е. биективно).
1.12. Двумерные векторные пространства
57
комбинации векторов щ, U2. Таким образом, изоморфизм, свя-
занный с {111,112}, очевидно, есть L.
Линейным преобразованием F : V —> V называется отображе-
ние, удовлетворяющее знакомому тождеству
F(au + 6v) — aF(u) + 6F(v).
Выбрав базис в пространстве V, определяющий отображение L :
V -> R2, мы можем определить линейное преобразование про-
странства R2 следующим образом:
LFLT1.
Здесь L-1 : R2 У, F :V -> V и L : V —> R2. Эту ситуацию
лучше всего видеть на диаграмме:
F
v—^v
L~l L
R2---->R2
Преобразование LFL~X : R2 —> R2, соответствующее нижней ли-
нии, получается после трех последовательных преобразований:
вверх по левой линии диаграммы, вправо по верхней линии и
вниз по правой. Линейное преобразование R2 —> R2 задается мат-
рицей. Таким образом, выбрав базис L, мы определяем соответ-
ствующую матрицу преобразования F
Matb(F) = Mat(LF£-1)
для любого линейного оператора F : V —► V. Если G : V —> V —
другое линейное преобразование, то
LGFLT1 = LGL-'LFL-1,
поэтому
MatL(G о F) = MatL(G)MatL(F).
Другими словами, композиции линейных преобразований со-
ответствует умножение их матриц. Аналогичный вывод можно
58
Глава 1. Линейные преобразования плоскости
сделать для сложения линейных преобразований. Таким обра-
зом, алгебра линейных преобразований двумерного векторного
пространства преобразуется в алгебру матриц 2x2.
Пространство R2 является векторным пространством. Оно
Если f : R2 —> R2 — линейное преобразование, то, пользуясь
языком предыдущих параграфов, соответствующая естественно-
му базису матрица — это F. Отображение £ : R2 —► R2, соответ-
ствующее этому базису — просто тождественное отображение I.
Таким образом, связь между f и F следует записать в виде
F = Mat/(/).
Следуя строгой логике, нам следовало бы с самого начала исполь-
зовать обозначение Matj(/) вместо F, но это было бы слишком
громоздко. С настоящего момента, владея понятием линейного
преобразования произвольного векторного пространства, мы не
будем делать различие между большими и малыми буквами в
скобках.
Привязка Matr(F) к F зависит от выбора базиса. Давайте
посмотрим, что произойдет, если базис изменить. Предположим,
что у нас есть два базиса. Это значит, что нам заданы два изо-
морфизма: L : V R2 и 7W : V —> R2. Рассмотрим матрицу
В — MLT1 : R2 —> R2, обладающую свойством
М = BL.
Эту ситуацию легко видеть на диаграмме:
V
L / \ М
R2
R2
Матрица В называется «матрицей замены базиса» (устанав-
ливает связь между базисами L и М). Это двумерный аналог
множителя 1000, на который мы должны умножать численные
значения масс при переходе от килограммов к граммам в новой
1.12. Двумерные векторные пространства
59
системе единиц. Итак, повторяем: L(v) и M(v) — это две точки
в R2, соответствующие одной и той же точке v в пространстве V
для двух различных базисов L и М. Эти две точки в R2 связаны
между собой матрицей замены базиса:
M(v) = BL(v).
Матрица В задает изоморфизм R2 —> R2 (это композиция
двух изморфизмов), т. е. она не сингулярна. (Ясно, что если мы
имеем изоморфизм L и дана любая несингулярная матрица В,
то можно определить М = BL, при этом матрица М — это
изоморфизм V —> R2. Итак, коль скоро мы выбрали базис, т. е.
имеем отображение L : V —-> R2, то множество других базисов
в пространстве V параметризуется множеством всех обратимых
матриц 2x2, обозначенных у нас В.)
Пусть F : V V — некоторое линейное преобразование.
Тогда MatL(F) - LFL”1 и MatM(F) - MFM~^
Следующая выкладка приводит к важной формуле:
MFM-1 = (BL)F(BL)"1 - BLFL^B”1 = B(LFL-'1)B-1,
поэтому
MatM(F) - BMatr(F)B~1.
Эта формула показывает, как две матрицы одного и того же
преобразования связаны в разных базисах между собой, если мы
знаем матрицу замены базиса В.
Для заданного линейного преобразования F : V —> V мож-
но выбрать такой базис В, что Matf,(F) имеет наиболее удоб-
ную форму. Например, допустим, что F : V —> V стягивает все
пространство V в прямую и эту прямую преобразует в точку О.
Другими словами, пусть ImF = KerF. Возьмем вектор U2, не
принадлежащий KerF; обозначим ui = F(u2), так что ui / О,
a F(U1) - 0. Вектора щ и U2 выберем в качестве базиса. Тогда
LFL-1 Q) = LF(U1) = L(0) = (°) и LFL~l Q = LF(u2) =
£(ui) = (q^- При таком выборе базиса матрица преобразования
60
Глава 1. Линейные преобразования плоскости
F имеет следующий вид:
Matb(F) = ( 0
1\
0/ '
(1-9)
В ходе этих рассуждений ничто не мешает нам рассмотреть
случай, когда векторное пространство V есть R2. Используя стан-
дартный базис, мы задали линейное преобразование в виде мат-
рицы. Другими словами, когда в параграфах 1.5 и 1.6 мы писали
F, на самом деле следовало писать Mat/(F). Например, пусть
N — ненулевая нильпотентная матрица. Тогда N = Mat/(F), где
F — линейное преобразование R2 с KerF — ImF. (Это значит,
что N есть матрица линейного преобразования F в стандартном
базисе.) Предыдущие рассуждения позволяют нам найти другой
базис L, для которого выполняется (1.9). Формула замены базиса
(переходим от базиса L к базису I) дает нам
^ = в(о (1.10)
Итак, мы доказали следующее: задав любую ненулевую нильпо-
тентную матрицу 7V, можно найти такую обратимую матрицу В,
что выполняется (1.10). В следующей главе мы еще к этому вер-
немся (в частности, рассмотрим, как получить В).
Важные физические приложения результатов этой главы из-
ложены в главе 9. В ней мы покажем, как гауссова оптика сво-
дится к изучению матриц 2x2. Однако, большую часть главы 9
можно читать, только зная материал главы 1.
Добавление: фундаментальная теорема
аффинной геометрии
Мы хотим доказать следующее:
Пусть f — аффинное преобразование R2, удовлетво-
ряющее условию / = 1огда j линейно.
Для доказательства этой теоремы сделаем ряд упрощений. За-
метим, что если д — обратимое линейное преобразование, то д о f
Добавление: фундаментальная теорема аффинной геометрии 61
линейно тогда и только тогда, когда f линейно. Пусть вектора
f и f не лежат на одной прямой, проходящей через на-
чало координат, т. е. они линейно независимы, и, следовательно,
мы можем построить линейное преобразование д, обеспечиваю-
щее равенства д о f (^ = (^ и д о / ((^) = (^. Таким
образом, с учетом замены f на д о f нам достаточно доказать
следующее:
Пусть f — аффинное преобразование, удовлетворя-
ющее условиям f
и
. Тогда f — тождественное преобра-
зование.
Доказательство. Из параграфа 1.5 мы знаем, что /
о существу, мы доказали,
™f о = для любых рациональных чисел г и $.)
Таким образом, / переводит оси х, у и прямую х ~ т/, прохо-
дящую через точки L I и L I, в самих себя.
Итак, для любого вещественного числа а
где ф — некоторая функция. (Мы хотим доказать, что ф(а) =
Of 0 \
— I I для некоторой
функции ф. Поскольку
мы имеем
62
Глава 1. Линейные преобразования плоскости
Мы утверждаем, что ф и ф — одна и та же функция. Действи-
тельно, возьмем прямую х — а (рис. 1.25). Она параллельна оси
у и, следовательно, ее образ при преобразовании f должен быть
параллелен оси у, т. е. образ должен быть х — ф(а). Прямая х = а
пересекает прямую х — у в точке , а прямая х ~ ф(а) пере-
секает прямую х — у в точке . Следовательно,
т. е. ф(а) — ф(а) для всех а.
Мы знаем, что
т. е.
ф(а + Ь) = ф(а) + ф(Ь).
Воспользуемся аргументами из параграфа 1.2 и докажем уди-
вительное равенство
ф(аЬ) = ф(а)ф(Ь).
Действительно, давайте посмотрим на рис. 1.26. Прямая, со-
щей точки
единяющая точки
и
, параллельна прямой, соединяю-
Таким образом, значение ab может быть
Добавление: фундаментальная теорема аффинной геометрии 63
получено графически с помощью параллельных и пересекающих-
ся прямых. Поэтому, рисуя аналогичную диаграмму для
( ФФ)\
и I q h мы получим
(0(аЬ)\ _ г (аЬ\ _ /0(а)0(Ь)\
°/\°/\ 0 /
откуда следует, что
ф(аЬ) — ф(а)ф(Ь).
Вещественное число х положительно тогда и только тогда, когда
х — j/2 при некотором положительном у. Поэтому ф(х) = ф(у2) ~
ф(у)2, и из неравенства х > 0 следует, что 0(х) > 0. Итак, из
а — b > 0 вытекает, что ф(а) — ф(Ь) > 0. И если г < а < 5, то
0(г) < 0(a) < 0(s). Для любого вещественного числа а мы можем
найти рациональные числа г и s, удовлетворяющие условию г <
а < s, сделав величину $ — г сколь угодно малой. Однако, для
рациональных чисел 0(т) = г и 0($) = $. Отсюда
г < 0(a) < s.
Следовательно, |a — 0(a) | < s — г. Поскольку число s — т может
быть выбрано сколь угодно малым, то для всех вещественных
чисел выполняется 0(a) = а. Этим заканчивается наше доказа-
тельство.
64
Глава 1. Линейные преобразования плоскости
Резюме
А. Преобразования плоскости
Прочитав эту главу, вы должны усвоить определения аффинного
преобразования, линейного преобразования и евклидова преобра-
зования.
Вы должны уметь определять геометрические свойства, ко-
торые сохраняются при аффинных преобразованиях, и свойства,
которые сохраняются при евклидовых преобразованиях.
В. Алгебра матриц
Вы должны уметь складывать и умножать квадратные матри-
цы одинакового ранга, вычислять определители матриц 2 х 2 и
писать обратную матрицу для обратимой матрицы 2x2.
С. Матрицы и линейные преобразования
Имея достаточную информацию о линейном преобразовании
плоскости, вы должны уметь писать матрицу 2x2, определя-
ющую это преобразование.
Вы должны понимать связь между умножением матриц и
композицией линейных преобразований и уметь пользоваться
этой связью.
Вы должны уметь определять матрицы 2x2, которые пред-
ставляют частные случаи преобразований (преобразования вра-
щения, отражения, проекции, нильпотентные преобразования).
Задачи
1.1. Ниже приводятся несколько теорем евклидовой геометрии плос-
кости. Разберитесь, какие из них справедливы для аффинной гео-
метрии плоскости.
(а) Все медианы треугольника пересекаются в одной точке и
делятся этой точкой в отношении 2 : 1 (считая от вершины
угла).
(Ь) Длины биссектрис равнобедренного треугольника равны.
(с) Диагонали ромба взаимно перпендикулярны.
(d) Диагонали параллелограмма в точке пересечения делятся
пополам.
Задачи
65
(е) Пусть PQR и P^R' — два таких треугольника, что парал-
лельны следующие три пары прямых: PQ и P'Q', QR и QfRf,
PR и PfR(. Тогда три прямые РР1, QQf и RR' либо парал-
лельны друг другу, либо пересекаются в одной точке.
1.2. (а) Пусть Ai и А2 “ аффинные прямые, х — аффинная коор-
дината на Ai, а у — аффинная координата на А2. Далее,
пусть f : Ai —> А2 — аффинное отображение, а соответству-
ющая ему функция F : R —> R такова, что если Q = f(P), то
y(Q) = Fox(P). Покажите, что наиболее общий вид функции
F есть F(a) = ra + s.
(b) Пусть xf = ах + 6, yf = су + d, где F и у' новые аф-
финные координаты на Ai и Аз соответственно, и пусть
y(Q) = F о х(Р), где F(a) = та + s. Получите формулу для
такой функции чтобы y'(Q) = F' о х'(Р).
1.3. Функцию и : R2 —> R назовем аффинной, если она аффинна
для каждой прямой в плоскости и для любого параллелограмма,
изображенного на рис. 1.27, выполняется равенство u(P)+u(R) —
u(Q) + u(S). Пусть и : R2 R — аффинная функция и известны
(а) Получить формулу для и .
(Ь) Нарисовать R2 и показать прямые и = const.
1.4. Для линейного преобразования, представленного каждой из мат-
риц, следующих ниже, получить образ прямоугольника ABDE,
изображенного на рис. 1.28. Вычислить определители преобразо-
ваний и проверить, что они правильно предсказывают площади
и ориентации образов прямоугольника.
(а) Вращение R^/2 =
-1
О
66
Глава 1. Линейные преобразования плоскости
(Ь)
(d)
Рис. 1.28
Вращение * J J.
„ п 0 \
«JZI сказке ние^ Z/2 — ( q 1 *
гг , п г - f5/4 3/А
Преобразование Лоренца Х/2 — I 3/4 5/4у*
(f)
(g)
(h)
г с (1 Ц
Сдвиг 5i = I Q j I.
п Q1 - ( V2 V2\
Сдвиг Sy — ^-4/2 3/2уФ
Л о \
Отражение Azq = I q jl •
лл Ао
Отражение = \ 1
1\
0Г
Проекция Ftt/4 =
(j)
(k)
тт гг АГ /0 1\
Нильпотентное преобразование jVq = I q q I
тт at f—1/2 l/2\
Нильпотентное преобразование jVjt/4 = I _j/2 1/2/
1.5. Алгебраически вычислите произведения матриц, определенных
в предыдущем упражнении, и дайте геометрическую интерпре-
тацию полученных преобразований:
(а) ^7г/4^7г/2у
(b) S?,
Задачи
67
(с) Я^/2^0,
(d) ^2/4>
(е) ^/4.
1.6. Для каждой из следующих матриц вычислите обратную матрицу
и дайте геометрическую интерпретацию полученного результата:
w “*74 — 72 I 1 1
АЛ Т _(5/* 3/4\
(Ь) L2 - ^3/4 5/4J,
и Н D’
(d) — I 1 gJ .
1.7. Для каждой из следующих матриц, имеющих нулевой определи-
тель, найдите образ (Im) и ядро (Кег):
(а) _ /1/2 1/2А эт/4 — \1/2 1/2^’
(Ь) x'f-1/2 V2\ ir/4-\<-1/2 V2/’
(с) А-Г 1 А~ 1 -1 -2 )'
1.8. В параграфе 1.7 доказано разложение матрицы в произведение
трех множителей. Представьте матрицу
2
6
4\
8/
в виде
1 0\ /г 0\ (1 х\
у 1Дб зДо 1/
1.9.
тт f а Ь
Найдите процедуру, представляющую любую матрицу (
при с 0 в виде произведения
68
Глава 1. Линейные преобразования плоскости
С помощью этой процедуры разложите матрицу
произведение трех множителей.
— 12
—4
1.10. Докажите, что Аг &
d)
(а) путем прямой проверки (найдите образ квадрата);
(Ь) используя разложение из предыдущего упражнения, которое
справедливо даже при а = 0.
1.11. Постройте матрицы 2x2, которые представляют следующие пре-
образования плоскости:
(а) преобразование Р, удовлетворяющее условию Р2 = Р, кото-
рое всю плоскость отображает на прямую у = 2х, а прямую
у = —2х отображает в начало координат;
(Ь) преобразование сдвига S, которое каждую точку прямой у =
2х отображает в себя, ось у отображает в прямую у = — х и
удовлетворяет условию (S — I)2 = 0;
гай /А (2\ ( 1\ /1/2\
(с) преобразование, переводящее [ ) в I 4 b а ( „2 / в 1—1/’
(d) нильпотентное преобразование N, удовлетворяющее усло-
вию N2 = 0, для которого прямая у = Зт является одновре-
менно образом и ядром.
1.12. Упражнение на умножение матриц 3x3. Возьмите две матрицы
/0 1 0
U= (0 0 1
\0 0 0
(0 0 0\
1 0 0
0 1 0/
и вычислите UL, LU, U3.
1.13. Известно, что определитель матрицы 3x3 равен:
(аы
a2i
«31
«12 «13
«22 агз
«32 «33
«22
«32
— ai2Det (^21
«23
«33
-I- ai3Det
«21
«31
«22
«32
= «11«22«33 “ «11«23«32 — «12«21«33
4" «12«23«31 + «13«21«32 ~ «13«22«3b
Задачи
69
Докажите, что
Det(F о G) = Det F х Det G.
1.14. Покажите, что если матрица
(«11
«21
«31
«12 «13
«22 «23
«32 «33
удовлетворяет условиям аи 0 и «ц«22 ~«12«21 / 0, то ее можно
записать в виде произведения трех матриц
(1 0 0\ /е 0 0\ /1 Т12 а?1з\
У21 1 0 О f О I I 0 1 т2з .
2/31 Уж 1/ \0 0 gj \0 0 1 /
1.15. В пространстве R3 мы можем определить VolF для любого
несингулярного линейного преобразования F так же, как мы
определяли Аг на плоскости. Таким образом,
VolF = °бъеМ
объем D
для любой области D. Кроме того,
Vol(FoG) = VolFx VolG
и VolF = объем F(D), где □ — единичный куб. Докажите, что
VolF= |DetF|.
1.16. Рассмотрите аффинное преобразование, которое не оставляет на-
чало координат на месте:
где А — аффинное преобразование, оставляющее начало коорди-
нат на месте. Покажите, что такое преобразование может быть
представлено матрицей 3x3:
А
а
b
1
70
Глава 1. Линейные преобразования плоскости
где А — матрица 2x2, при условии, что вектор на плоскости
(х\
у I. Дока-
1/
жите следующие утверждения.
(а)
(Ь)
(с)
Такая матрица 3x3 имеет определитель, равный Det А.
Когда такая матрица 3x3 действует на вектор
компонента результирующего вектора равна 1.
1
Матрицы Т(а, 0
0
0 1 b I, представляющие чистые
0 V
трансляции, удовлетворяют закону
0
Г(а, 0T(c, d) = Т(а + с, b + d).
Это упражнение может быть интерпретировано геометриче-
ски. Рассмотрим аффинную плоскость как плоскость z — 1 в
пространстве R3. Группу аффинных преобразований этой плос-
кости отождествим с группой линейных преобразований в прост-
/х\
ранстве R3. Точку I у ] на плоскости z — 1 отождествим с пря-
V/
мой, соединяющей эту точку с началом координат. Любая точ-
ка на плоскости определяет единственную такую прямую. Если
прямая, проведенная из начальной точки, пересекает плоскость
z = 1, то она пересекает ее в единственной точке (рис. 1.29).
Таким образом, мы можем говорить, что каждой точке на нашей
аффинной плоскости соответствует прямая в пространстве R3,
выходящая из начальной точки и пересекающая плоскость z = 1.
Такая геометрическая интерпретация позволяет нам подойти к
определению понятия перспективы: две плоские фигуры в про-
странстве R3 (не содержащие начало) перспективно совпадают,
если они определяют одно и то же семейство прямых, выходя-
щих из начала координат (рис. 1.30).
Это позволяет нам рассмотреть новую геометрию, в которой
«точки» — это прямые в пространстве R3, проходящие через на-
чало; мы не требуем, чтобы прямая пересекала плоскость z — 1.
Задачи
71
Новые «точки», которые мы добавили, соответствуют тем пря-
мым в пространстве R3, которые лежат в плоскости z — 0 и
(а\ /0\
b I I 0 j — точка
°/ \°/
пространства R3, лежащая в плоскости z — 0. Буквой Р обо-
значим прямую, проходящую через начальную точку и точку
/ а\
I b I, т. е. Р — это одна из наших «новых» точек. Таким образом,
\0/
►. С точки зрения пространства R3, где Р явля-
ется прямой, мы можем аппроксимировать Р семейством прямых
Р€, проходящих через начальную точку (рис. 1.31) и задаваемых
формулой
Ы j > .
В некотором смысле Ре —► Р при е —> 0. Но Ре пересекает плос-
(а/е
Ь/е
1
Точки прямых Р6, принадлежащие аффинной плоскости, стре-
мятся к бесконечности при е 0 в определенном направлении,
72
Глава 1. Линейные преобразования плоскости
«точка» Р — это точка, лежащая на бесконечности в аффинной
плоскости. Понятие о таких бесконечно удаленных точках было
впервые введено в пятнадцатом и шестнадцатом веках художни-
ками и геометрами, изучавшими перспективу.
Итак, мы определили новое пространство Р2, называемое про-
ективной плоскостью, «Точка» в пространстве Р2 — это прямая,
проведенная из начальной точки в пространстве R3. Давайте те-
перь посмотрим, как определить «прямую» в Р2. С точки зре-
ния пространства R3 «прямая» на аффинной плоскости z = 1
состоит из прямых, проходящих через начало координат и пере-
секающих плоскость г = 1 во всевозможных точках некоторой
прямой (рис. 1.32).
Рис. 1.32
Задачи
73
Такое семейство прямых образует плоскость в пространст-
ве R3. Другими словами, с точки зрения пространства R3, пря-
мая на аффинной плоскости есть линия пересечения плоскости в
пространстве R3, проходящей через начальную точку, и плоско-
сти z = 1. Теперь ясно, что делать дальше. Мы опускаем усло-
вие пересечения плоскостей и определяем «прямую» на Р2 как
плоскость в пространстве R3, проходящую через начальную точ-
ку. Существует только одна плоскость в пространстве R3, про-
ходящая через начало и не пересекающая плоскость z = 1. Это
плоскость z = 0. Нам осталось добавить к множеству прямых
на аффинной плоскости «бесконечно удаленную прямую». Точка
Р принадлежит «прямой» Z, если прямая, проведенная из нача-
ла, лежит в плоскости, проходящей через это начало. Две раз-
ные «точки» Р и Q (т. е. две разные прямые, проведенные через
начало) определяют единственную плоскость, проходящую через
начало, т. е. две различные «точки» определяют единственную
«прямую». Две различные плоскости, проходящие через начало
в пространстве R3, пересекаются по прямой, проходящей через
начало. Таким образом, две разные «прямые» на плоскости Р2
всегда пересекаются в «точке». (Заметим, что здесь проявляется
различие с аффинной геометрией, где две прямые могут быть па-
раллельны. Две параллельные прямые, принадлежащие аффин-
ной плоскости, пересекаются «на бесконечности» в проективной
плоскости.)
Выводы: любая «точка» на плоскости Р2 — это прямая, прохо-
дящая через начало в пространстве R3; любая «прямая» на плос-
кости Р2 — это плоскость, проходящая через начало в простран-
стве R3; две различные «прямые» пересекаются в единственной
«точке».
Любая обратимая матрица 3x3, действуя в пространстве
R3, переводит прямые, проходящие через начало, в прямые, то-
же проходящие через начало; переводит плоскости, содержащие
начало, в плоскости, тоже содержащие начало.
1.17. (а) Покажите, что любая обратимая матрица 3x3 определя-
ет взаимно-однозначное преобразование проективной плос-
кости Р2, переводящее «прямые» в «прямые».
74
Глава 1. Линейные преобразования плоскости
(Ь) Покажите, что две обратимые матрицы А и В третьего по-
рядка определяют одно и то же преобразование плоскости
Р2 тогда и только тогда, когда А = сВ для вещественного
числа с, не равного нулю.
1.18. Три вектора u, v и w в пространстве R3 называются линейно
независимыми, если уравнение
au + 6v + cw — О
не может выполняться, если только не все числа а, 6, с равны
нулю. Покажите, что если u, v и w линейно независимы, то су-
ществует единственная обратимая матрица А третьего порядка,
для которой
/1
Ли = I О
\0
Л v = I 1
\0
A w = I О
\1
(Обобщение этой теоремы для любого конечномерного векторно-
го пространства будет доказано позже.)
1.19. (а) Пусть Ру, Р2, Р3 — различные «точки» на плоскости Р2, опре-
деляемые прямыми, проходящими через начальную точку, и
/А (°\
I О I, 111 и I О I соответственно. Пусть Qi, Q2,
\°/ \°/ V/
Q$ — три любые другие различные «точки» Р2. Покажите,
что существует обратимая матрица 3x3, которая преобра-
зует точку Qi в Pi, Q2 в Р2 и Q3 в Р3.
(Ь) Пусть Qi, Q2, <2з, Q4 — «точки» на плоскости Р2, из которых
никакие три не лежат на одной прямой. Пусть Pi, R2, Р3,
Р4 Другой набор четырех «точек», из которых никакие три
не лежат на одной прямой. Покажите, что существует такая
матрица 3x3, которая преобразует Qi в Pi, Q2 в Р2, Q3 в
Рз и ф4 в Р4.
(с) Докажите фундаментальную теорему проективной геомет-
рии: любое взаимно-однозначное преобразование плоскости
Р2, переводящее «прямые» в «прямые», осуществляется мат-
рицей 3x3. (Подсказка: сведите все к фундаментальной тео-
реме аффинной геометрии, доказанной в приложении к этой
главе.)
Задачи
75
1.20. В качестве иллюстрации применения упражнения 1.19(b) дока-
жите теорему Фано (рис. 1.33). Пусть А, В, С, D — четыре точки,
из которых никакие три не лежат на одной прямой, и пусть Р —
точка пересечения прямых АВ и CD, Q — точка пересечения
АС и BD, R — точка пересечения AD и ВС. Тогда Р, Q и R не
лежат на одной прямой. (Подсказка: рассмотрите частный слу-
чай, например, пусть А, В, С — три вершины равностороннего
треугольника, a D — его центр.)
Рис. 1.33
Глава 2
Собственные векторы
и собственные значения
Во второй главе мы обсудим конформную линейную
геометрию на плоскости, т. е. геометрию прямых, уг-
лов и их связь с матрицами 2x2 определенного вида.
Обсудим очень важные для квантовой механики поня-
тия собственных векторов и собственных значений1.
С помощью этих понятий получим алгоритм вычис-
ления степеней матрицы. В качестве приложения изу-
чим основные свойства цепей Маркова.
2.1. Конформные линейные преобразования
Мы рассмотрим такие линейные преобразования / пространства
R2, которые
(1) сохраняют угол,
(2) сохраняют ориентацию, т. е. Det F > О,
где F — матрица, представляющая /. Заметим, что если f и д —
два таких преобразования, то их композиция д о f обладает теми
же свойствами.
1 Конечно, эти понятия не менее важны в самых различных разделах
математики и ее приложениях. — Прим. ред.
78
Глава 2. Собственные векторы и собственные значения
в
Допустим, что f сохраняет угол и ориентацию (рис. 2.1). Мы
можем найти такой поворот г_^, что о / переводит
точку на положительной оси х. Но раз преобразование о f
сохраняет углы и Det(r_0 о /) > 0, то т_е о f находится
на положительной оси у.
Таким образом, матрица, представляющая имеет вид:
'’='4 „)
где г > 0, $ > 0. Так как г_0 о f сохраняет углы, прямая, иду-
щая вдоль вектора | J ), переходит в себя. Если мы говорим, что
уО лежИТ на пРям°й, заданной вектором это зна-
чит, что г = s. Следовательно,
- (г 0\
Г )•
Поэтому матрица, представляющая /, имеет вид
cos# — sin0\ _/гcos# —rsin0\_/a — b
sin 0 cos 0 I ~ \ г sin 0 г cos 0 1 \b а
F =
где а = rcos0, b = rsin0. Ясно, что любая такая матрица удов-
летворяет условию Det F ~ а2 + Ь2 = г2 > 0.
2.1. Конформные линейные преобразования
79
Обратное утверждение: любая ненулевая матрица I 1
сохраняет угол и ориентацию, потому что взяв
a2 + b2^O,
у b а/ 7
можно положить г2 = а2 + Ь2 и потом найти такой угол 0, при
котором
cos# = ar-1, sin# — Ьг-1,
поскольку а < г и sin2 #+cos2 0 — (a2+b2)/r2 = 1. Следовательно,
матрица принимает вид
(а / г cos# —rsin#\
b a J yr sin # r cos 0 J *
Итак, в общем случае матрица
(а —Ь\ 2 । l2 / п
, I , где от + b О,
к о а I
сохраняет угол и ориентацию, причем
Det (°, — а2 _|_ ь2.
у b a J
Очевидно, что произведение двух таких матриц дает матрицу
такого же вида. Кроме того, заметим, что
/а —Ь\ (а! — __ /аа' — bbf —(ba! + аУ)А
у b a J ybf a! J ybaf + ab' аа! — bbf J
_ ( а! — b/4\ ( cl —b\
~ у У а) ’
т. е. в этом случае произведение матриц коммутативно. Более то-
го, при ненулевых значениях а и Ь существует обратная матрица
(т. к. определитель матрицы равен а2 + 62). Наконец, если мы сло-
жим две матрицы
/а —Ь\ (о! —Ь'\ _ (а + а! — (Ь + У) \
y# a) ybf af) ~ yb + У а + а() ’
80
Глава 2. Собственные векторы и собственные значения
. (а -Ь\ г,
то сумма будет опять матрицей типа ( I. Это замечатель-
ное свойство не следует прямо из определения. Матрицу типа
а bj будем называть конформной. (При этом мы допуска-
\Ь
ем возможность, что а = b = 0. Таким образом, ненулевыми
конформными матрицами называются такие матрицы, которые
сохраняют угол и ориентацию.)
Итак, мы доказали, что множество всех конформных мат-
риц замкнуто относительно операций сложения и умножения.
Для таких матриц умножение является коммутативной операци-
ей. Каждая ненулевая конформная матрица имеет обратную. Это
значит, что поведение конформных матриц во многом похоже на
поведение чисел.
Любую конформную матрицу можно записать в виде
1 а £> СУ- 11 Р О I-1 О + о- 1 О и-1
О <0 Заметим, что 1 -1\ 0 1 есть поворот на девяносто градусов и что
/0 \ 1 -1\2 _ /-1 о \ _ /1 о\ 0 / ~ \ 0 -1 / ~ \0 1/ ‘
Введем обозначения:
и
I для
1
° 1)
i для
0 -1\
1 oj *
Тогда
а
b
] — al + Ы,
а /
где
i2 = -I.
2.1. Конформные линейные преобразования
81
Другими словами, множество конформных матриц можно отож-
дествлять с множеством комплексных чисел.
Обычное представление комплексного числа в виде точки
на плоскости есть просто отождествление комплексного числа
с образом точки 1^1 при преобразовании, задаваемом матри-
цей Для конформных матриц точка определяет
(а —b\
h I ’
и Cl j
Легко вычислить n-ю степень конформной матрицы. Действи-
тельно, если мы запишем
— sin#
cos#
I т
то, учитывая, что I
получим
коммутирует со всеми матрицами 2x2,
cos#
sin#
cos пв
sin п0
— sin n#
cos пО
Итак,
г cos # —г sin # \ п _ / rn cos nd —rn sin n#
г sin # г cos #/ \rn sin nO rn cos n8
На языке комплексных чисел это значит, что если
z = r(cos# + isin#),
то
zn = rn (cos nO + i sin n#);
это равенство известно как теорема Муавра.
Другой способ вычисления матрицы Ап состоит в применении
биномиальной формулы. Учитывая, что
а 0\ _ (1 0\
О а) ~ а \0 1J
О /О -1\
ь о J ~ V о ) ’
и
82
Глава 2. Собственные векторы и собственные значения
вычисляем
В следующем параграфе мы покажем процедуру вычисления сте-
пеней произвольной матрицы 2x2 (не обязательно конформной).
Для этого потребуется понятие собственных значений, играющее
ключевую роль в квантовой механике.
2.2. Собственные векторы
и собственные значения
Пусть F - линейное преобразование. Зададим вопрос: может ли
оно перевести прямую, проходящую через начальную точку, в
себя? (Ни один нетривиальный поворот не обладает таким свой-
ством, а вот любое ненулевое сингулярное преобразование пере-
водит свой образ в себя.)
Если v — ненулевой вектор, лежащий на такой прямой, то
должно выполняться равенство
F(v) = Av,
где Л — вещественное число. Если это уравнение выполняется
для некоторого v 0, то А называется собственным значением
преобразования /, соответствующим собственному вектору v.
Последнее уравнение можно переписать в виде
2.2. Собственные векторы и собственные значения
83
Так как вектор v не равен нулю, мы получаем равенство
представляющее собой уравнение относительно Л.
Если F — (а
\с
то F — Л
b
d~Xj ’
и предыдущее уравнение можно записать так:
Det (а Х
\ с
ъ \
d-Xj
— (a—X)(d—X)~bc — A2—(a+d)A+(ad~bc) — О,
или
А2 — (ТгР)А + Det Р — 0.
Полином
Р(Х) - X2 - (а + d)X + (ad ~ be)
называется
характеристическим полиномом матрицы
а Ь\
, , а
с d)
уравнение
Р(А) = 0
характеристическим уравнением. Это уравнение бу-
называется
дет иметь вещественные корни
А = | [(а + d) ± У{(а +^)2 - 4(ad - Ьс)}]
= ^[(а + «0 ± \Z{(a-d)2 + 4Ьс}]
тогда и только тогда, когда
(а — d)2 + 4bc > 0.
В этом случае мы можем проверить, что
(а - A b \ (d - А\
\ с d-XJ\ -с ) U
84
Глава 2. Собственные векторы и собственные значения
и
а — А
с
b ] I b
d-XJ А)
-0.
Поэтому, если
d-A\ ( Ь \
I или I (а_ д) I не равны нулю, то они
являются собственными векторами; они лежат на одной прямой,
поскольку
Det
d- А
~с
. (а - А
= - Det
\ с
d-XJ
= 0.
Если же они оба равны нулю, то а = А, Ь = с — 0 и d = А, поэтому
а
с
Ь\
dj
F = Al,
и каждый (ненулевой) вектор на плоскости является собственным
вектором.
Рассмотрим возможные варианты собственных значений ли-
нейных преобразований.
Случай 1. Характеристическое уравнение имеет различ-
ные вещественные корни. В случае, когда (а — d)2 + 4bc > 0,
существуют два различных вещественных собственных значения
Ai и А2. Тогда F ф AI и, следовательно, есть только две пря-
мые, проходящие через начало координат и не меняющиеся при
таком преобразовании, каждая из которых задается собственным
(xl\ fx2\
вектором vi — ( 1 или V2 = I I. Мы можем записать
/ \?/2 ]
Возьмем матрицу
а
с
^2^
У2/
Х1
У1
2.2. Собственные векторы и собственные значения
85
ГА I I х2\
Она несингулярна, потому что векторы I I и I 1 принадле-
\2/1 / \2/2 у
жат разным прямым. Тогда уравнение для собственных векторов
можно записать в виде
FB = ВЛ,
Л Ml 0\
где Л — х , или, окончательно,
\U Л2 j
F = В АВ-1, Л = о\
\ 0 А2/
Обратное утверждение: если F = В АВ 1 при Л = \ Р ), то
\0 А2/
F [в G)] = ВЛВ ’в (о) = ВА (о) = (о) = Л,В (о) ’
так что первый столбец матрицы В является собственным век-
тором преобразования F, соответствующим собственному значе-
нию Л1, и второй столбец — собственный вектор для собственного
значения Л2.
Случай 2. Характеристическое уравнение имеет кратный
вещественный корень. В случае, когда (а — d)2 + 4Ьс = 0 и
полином Р(Х) — 0 имеет два одинаковых корня А, ситуация
немного сложнее. Рассмотрим две матрицы
/О 0\ /0 1\
\о о) и \0 О/
Для этих матриц характеристический полином Р(Х) = име-
ет два равных корня А = 0. Каждый ненулевой вектор на плос-
кости является собственным вектором первой матрицы, и толь-
ко векторы будут собственными векторами второй. Заме-
тим, однако, что обе матрицы удовлетворяют уравнению F2 — 0,
которое можно записать как P(F) — 0, т. е. мы заменяем F
86 Глава 2. Собственные векторы и собственные значения
(как будто это число) на его характеристический полином и полу-
чаем ноль. В общем случае это утверждение называется теоремой
Гамильтона-Кэли.
Если Р(Х) — характеристический полином матрицы F, то
P(F) = О,
т. е.
6\2
d )
а
с
(а + (с d) + ~ Ьс>> (о 1) = °’
В случае матриц 2x2 эта теорема проверяется вычислением.
Действительно,
(a + d)(c d)
а? + be
са + cd
а2 + ad
са + cd
ab + &d\
cb + d2 J ’
ab + bd
ad + d2
и
1
0 V
(ad — be)
ad — be
0
° I
ad —be) '
поэтому
(\ 2 / \ / \
о 6 \ / j\ (a r \ I 1 6 । л
c d) -(“+o(kC ij=o-
Если полином P(X) имеет кратный корень, то
Р(Х) = (Х-А)2,
следовательно,
При этом существуют две возможности
— О, тогда F = I ф
° \
А/ ’
2.2. Собственные векторы и собственные значения
87
или
/0.
— собственный вектор преобразования F, а нену-
левой вектор
вектор
не является собственным вектором F, Тогда
1
0
F —А
2
будет собственным вектором F, потому что
и он должен быть пропорционален вектору
на соответствующую ненулевую константу, можно
получить
/ Xi \
И в этом случае матрица В = I I
дущее уравнение можно записать в виде
или F = B[*
\ U Л /
несингулярна, а преды-
Обратное утверждение: любая матрица вида
F = B(o 1
обладает свойством
= 0, но при этом
F — X
/0,
что можно легко проверить.
88
Глава 2. Собственные векторы и собственные значения
Случай 3. Комплексные корни. Иногда нам приходится рабо-
тать с преобразованиями, не имеющими вещественных собствен-
ных значений и собственных векторов. Наиболее очевидные при-
меры таких преобразований: повороты на угол, не кратный тг;
конформное преобразование, которое состоит из поворота плос-
кости и последующего однородного «растяжения».
Давайте посмотрим, что получится, если мы попытаемся най-
ти собственные значения и собственные векторы конформной
9
матрицы*
с=(х "И.
х )
Характеристическое уравнение этой матрицы имеет вид
{х - Л)2 + у2 = 0.
Далее получаем
(Л - х)2 = -у2,
Л — х — ztiy
и
А = х ± iy.
В параграфе 2.1 мы отметили, что конформная матрица
( х -у \ -
| % \ может быть применена для представления комплекс-
ного числа х + iy. Сейчас мы видим, что это комплексное число
является собственным значением матрицы. Более того, для лю-
бой пары комплексно сопряженных чисел x+iy, x — iy существует
вещественная конформная матрица, для которой эти числа яв-
ляются собственными значениями. Конечно, мы не можем дать
геометрическую интерпретацию комплексных собственных зна-
чений, потому что соответствующие собственные векторы имеют
комплексные компоненты и не могут рассматриваться как векто-
ры на вещественной плоскости.
2В дальнейшем предполагается, что у 0 0. — Прим. ред. /
2.2. Собственные векторы и собственные значения
89
Покажем, что любая матрица F с собственными значениями
х ± iy может быть записана в форме
F = BCB~\ С- у ).
я /
Доказательство. Рассмотрим матрицу G = F — rf. Согласно
теореме Гамильтона-Кэли, имеем
(F - а?!)2 + у2Н = 0.
Таким образом,
G2 = -у21
Возьмем произвольный вектор vi 0 и определим новый вектор
V2 по формуле
v2 = 2/-1Gvi.
Тогда
Gv2 = y~1G2v1 = -yvi,
а по определению вектора v2
Gvi = yv2.
Пусть В — матрица co столбцами vi и v2. Тогда Vi = В I _ ) и
V2-B , И, следовательно,
gbG)=sb(i) - gb(0=-bbG)’
поэтому GB = В q . Умножая эти соотношения на В-1,
У Ф I В-1. Итак, матрицу F можно
записать в виде
В = Я + В(° ) В-1 = В(яг1)В-1 + В ( ° У (В-1
\у 0 J \У 0 J
= bLi+(° “^Ib-1,
90
Глава 2. Собственные векторы и собственные значения
а так как B(xl) = (х!)В, то
F = B ( Х у ) В"1,
х )
что и требовалось доказать.
Например, для простоты выберем vi = В , хотя можно
было бы сделать и другой выбор. Тогда
V2 = у 1Gv1 =у XG
т. к. Gvi — yv2. Это значит, что Vi (первый столбец матрицы В)
равен , а второй столбец этой матрицы V2 — это первый
столбец матрицы G, деленный на у.
Подведем итог: если F — (а \
ус а
ния, равные х ± iy, причем у / 0, то F ~ ВСВ-1, где
имеет собственные значе-
В =
и
х —у \
У % J
А матрица G — F — х! удовлетворяет уравнению G2 — —у21.
u к (7 “1(Л
В качестве примера рассмотрим матрицу F = I 9 1, име-
ющую TrF = 6 и DetF = 13. Характеристическое уравнение
А2 — 6А + 13 = 0 имеет корни
6±^/(36-52)
Л — “7----- — О HZ Z1.
Таким образом, х = 3, у = 2. Матрица
/4 —юА
G = F —31 = ,
как и ожидалось, удовлетворяет уравнению G2 = —41. Чтобы
получить второй столбец матрицы В, нам следует первый столбец
G разделить на у:
2.2. Собственные векторы и собственные значения
91
Следовательно, В =
1
О 1/
и
F = ВСВ-1
1 2\ /3 —2 \ /1 —2 \
О 1J у 2 3/^0 1 J '
Степени матриц. Предположим, что нам задана матрица F, и
мы хотим вычислить Fn для разных значений п (или для очень
больших п). В следующем параграфе мы дадим пример, когда
возникает такая проблема.
Случай 1. Различные вещественные корни. Если
0\
А2Г
тогда очевидно, что
0\
Это значит, что вычисление степеней диагональной матрицы сво-
дится к вычислению степеней вещественных чисел. Если
F = ВХВ-1,
то
F2 = ВХВ^ВХВ-1 - ВЛ?В~1
и тогда по индукции
Fn = ВХпВ-1.
Случай 2. Равные вещественные корни. Рассмотрим мат-
рицу
А 1\
° А)
А 0\ /0 1\
о а; + ^о од
92
Глава 2. Собственные векторы и собственные значения
Матрица
мы имеем
А 0\
О х)
коммутирует со всеми матрицами 2x2. Далее
поэтому можно воспользоваться формулой бинома:
т. к. все остальные члены в биномиальном разложении равны
нулю. Следовательно,
Поэтому если
то
пХп 1
Хп
Fn = В
В"1
Случай 3. Комплексные корни. Пусть, наконец,
F = ВСВ~\
(х —V \ _
где С — I I — конформная матрица. Тогда
у У X J
Fn = ВСпВ~\
где Сп вычисляется одним из двух методов, изложенных в конце
параграфа 2.1.
Итак, вычислив собственные значения матрицы F и найдя
матрицу В замены базиса, мы получаем простой метод вычис-
ления степеней матрицы F, который применим во всех случаях
2.3. Процессы Маркова
93
(разные вещественные собственные значения, два одинаковых ве-
щественных или два комплексно-сопряженных собственных зна-
чения).
На самом деле для двух последних случаев у нас нет необхо-
димости вычислять В: если собственные значения вещественны и
равны, то матрица N = (F — AI) удовлетворяет условию 7V2 = О,
следовательно, используя формулу бинома, получаем
Fn = (AI + 7V)n = A”I + nXn~1N.
Для комплексно-сопряженных собственных значений х ± iy
имеем равенство
F — хЕ — уН, где Н2 = —I.
Следовательно,
Fn = (Я + уН)п = жп1 + пхп~1уН + (2) хП~2У2Н2 + • • •
- (rn- Q хп~2у2 + ••)/+ ((1) хп^у— (”) хп~3у3+- • •) Н.
2.3. Процессы Маркова
В этом параграфе мы покажем, как умножение матриц применя-
ется в вероятностных задачах. При этом мы не собираемся пи-
сать подробное введение в теорию вероятностей. Мы просто при-
ведем основные положения этой теории. Каждому «событию» А,
В и т. д. ставится в соответствие «вероятность события» — веще-
ственное число р(А), р(В) и т.д., так что выполнены некоторые
условия:
О <р(А) < 1, 0 <р(В) <1, ...
в соответствии с определенными правилами:
• вероятность достоверного события равна 1;
• вероятность невозможного события равна 0;
94
Глава 2. Собственные векторы и собственные значения
• если событие А может произойти к взаимно исключающими
способами А]_,..., А&, что мы записываем как
А = Ai U • • • U Afa Ai A Aj — 0, при i /= j,
то
р(А) = p(Ai) + • • • + p(Afc).
В частности, если Ас обозначает «дополнительное событие»,
означающее, что событие А не произойдет, то A U Ас достоверно
(событие А либо произойдет, либо нет), и А А Ас — 0, поэтому
р(А) + р(Ас) = 1. Кроме того, применяется понятие «условной
вероятности»:
р(В\А) — условная вероятность события В при заданном А.
Таким образом, если событие А значит, что «сегодня идет дождь»,
а событие В значит, что «завтра будет ясно», то р(В|А) есть ве-
роятность того, что завтра будет ясно, если известно, что сегодня
идет дождь. Тогда у нас есть правило
р(ААВ) =р(В|А)р(А),
т. е. вероятность двух событий А и В равна произведению услов-
ной вероятности события В при заданном А на вероятность со-
бытия А.
В частности, если Ai,..., А^ — взаимно исключающие друг
друга события, Аг А А^ — 0, и событие В может произойти только
при условии, что произойдет одно из событий Ai, то:
В = (В П AJ U • • • U (В A Afc),
тогда
р(В) = р (В A Ai) Н---1- р (В A Afc),
следовательно,
р(В) = р(В|А1)р(А1) + • • • + p(B|Afe)p(Afc).
2.3. Процессы Маркова
95
Теперь рассмотрим систему, которая может находиться в од-
ном из двух состояний. Например, прибор выключен или вклю-
чен; или игра в бадминтон: состояние 1 означает ситуацию, когда
подает первый игрок, а в состоянии 2 подает второй игрок. При
этом один «шаг» соответствует переходу подачи от одного игрока
к другому. Таким образом, во время игры в бадминтон система
может находиться в одном состоянии (игрок получил очко и про-
должает подавать), потом происходит переход из одного состоя-
ния в другое (игрок проиграл очко, и подача переходит к против-
нику). Итак, пусть подает первый игрок, с вероятностью 0.8 он
может выиграть очко, а с вероятностью 0.2 может его проиграть.
Когда подает второй игрок, то он выигрывает очко с вероятно-
стью 0.7, а проигрывает с вероятностью 0.3. В реальной игре для
каждого игрока вероятность выиграть очко зависит от множест-
ва факторов (от его желания победить, от степени его усталости,
деморализации и т. д.). Мы же сделаем радикальное упрощаю-
щее предположение: развитие игры зависит только от того, кто в
данный момент подает, и ни от чего другого. Все перечисленные
выше вероятности можно организовать в матрицу
/0.8 0.3\
у0.2 0.7) *
Таким образом, 0.8 есть условная вероятность системе находить-
ся в состоянии 1 после шага, если до выполнения шага она находи-
лась также в состоянии 1; 0.2 есть условная вероятность системе
находиться в состоянии 2 после шага, если до него она была в
состоянии 1.
Вообще, в случае дискретного времени и стационарной систе-
мы с двумя состояниями процесс Маркова — это процесс, когда
состояния могут изменяться в дискретные моменты времени, а
вероятность перехода из одного состояния в другое зависит толь-
ко от состояния самой системы и не зависит от прошлой истории
системы и от времени перехода между состояниями. Таким обра-
зом, все определяется только четырьмя «вероятностями перехо-
да», которые могут быть организованы в матрицу
96 Глава 2. Собственные векторы и собственные значения
где
а = вероятность перехода
Ь — вероятность перехода
с = вероятность перехода
d — вероятность перехода
из состояния 1 в состояние 1;
из состояния 2 в состояние 1;
из состояния 1 в состояние 2;
из состояния 2 в состояние 2.
Предположим, что мы не знаем, в каком состоянии находится
система в данный момент времени. Знаем только, что с веро-
ятностью р система находится в состоянии 1 и с вероятностью
q — 1 — р в состоянии 2. Такое распределение вероятностей мо-
жет быть представлено вектором v = . После одного шага,
согласно закону для условной вероятности, мы получаем
вероятность быть
в состоянии 1
после одного шага
вероятность пере-
► хода из состояния 1 х быть в
в состояние 1
вероятность
состоянии 1
(вероятность пере- I
хода из состояния 2 > х
в состояние 1 I
вероятность
быть в
состоянии 2
> ~ ар + bq.
Аналогично, вероятность находиться в состоянии 2 после выпол-
нения одного шага равна
cp + dq.
Другими словами, новый вектор вероятности равен
Давайте проиллюстрируем это на примере игры в бадминтон.
Предположим, мы знаем, что первый игрок начинает игру. Век-
тор Vq =
является вектором вероятности в начале игры.
После первой подачи вектор вероятности становится
2.3. Процессы Маркова
97
После второй подачи он равен
V2 = Avi —
/0.8 0.3\ /0.8\ /0.7\ 2
\0.2 0.7J \0.2J \0.3) А V°
После третьей подачи
V3 = Av2 =
/0.8 0.3\ /0.7\ _ /0.65\ з
у0.2 0.7) \0.3) ~ \0.35) ~ А V°
и так далее. В результате п шагов появляется матрица Ап.
Интуиция позволяет сделать вывод, что после большого числа
шагов вектор вероятности практически не будет зависеть от на-
чального состояния, т. е. вероятность того, что первый игрок по-
дает, чтобы выиграть пятнадцатое очко, вряд ли сильно зависит
от того, кто подавал в первый раз. Эта гипотеза подтверждается
вычислением. Действительно,
Теперь можно предположить, что
В общем случае легко показать, что если Ь и с одновременно
не равны 0 или 1, то lim^oo Ап существует. Надо только найти
собственные значения и собственные векторы матрицы А. Учи-
тывая, что а + с=1, 6 + d=l, можно написать
Ь А
1-6/ *
98 Глава 2. Собственные векторы и собственные значения
Так как Тг А = 2 — (Ь + с) и Det А = l~b — c + bc~bc = 1 — (6 + с),
характеристическое уравнение имеет вид
А2 — [2 — (6 + с)]А 4-1 — (6 +с) = О,
ИЛИ
(А — 1)(А — (1 — Ь — с)) = 0.
Из этого уравнения получаем собственные значения Ai = 1, А2 =
1 — (Ь + с). Заметим, что IA2I < 1, где равенство выполняется
только если b = с = 0 или b = с = 1.
Собственные векторы легко получаются из рассмотрения мат-
рицы
А - Ail = (1 С
\ с
b
1-6/
1 0\ _ /— с Ь\
О 1/ \ С -Ь)
Ядро этой сингулярной матрицы пропорционально собственному
вектору, соответствующему Ai = 1. Нормируем этот вектор так,
чтобы его компоненты в сумме давали 1. В результате получаем
V1 = 6^
Образ А — Ail пропорционален собственному вектору, соответ-
ствующему Аз, который удобно выбрать в виде V2 — .
Операция А может быть наглядно представлена через эти
собственные значения и собственные векторы. Проведем отрезок
прямой, соединяющий точки и Тогда конец вектора
vi лежит на нем. Любой вектор, конец которого лежит на этом
отрезке, может быть записан в виде v = vi+c*f Y Учитывая,
что Avi ~ vi и А
Av = Vi + qA2 ( J
2.3. Процессы Маркова
99
Рис. 2.2
или для произвольной степени п
Anv = vi + а(Л2)п
Из того, что |Л2| < 1, очевидно, следует, что, независимо от
того, каким был начальный вектор v, limA"v = vi.
Выразим матрицу А явным образом через диагональную. Для
этого запишем А = ВАВ^1, где
R = ( Ь/{Ь + с)
\ с/(Ь + с)
"Ч В-1- 1
1Г ° ~\-с/(Ь + с)
1 \
b/(b + c)J ’
Тогда
Ап = ВАпВ~х.
Учитывая, что
V ЛП /1 0\
11т Л = ( О П ) ’
п—+оо \ и V /
получим
lim Ап — f + с)
-^с/(Ь + с)
Ь/(Ъ + с)
с/ (Ь + с)
-i\A 0W 1 1 \
1J \0 0/ у—с/(6 + с) Ь/(Ь + с)/
-1\ (1 1\ = 1 (Ь Ь\
1 / \0 0/ {)4-с\с с) '
100 Глава 2. Собственные векторы и собственные значения
Таким образом, если v — ( ) при р + q = 1, то
lim Ап +
п^о У \с/(Н<
Итак, если А — стохастическая матрица 2х2, т. е. А = \ а \\
у с (л J
с условием а > 0, b > 0, с > 0, d > 0, а + с ~ 1, b + d = 1, то ее
собственные значения равны 1 и 1 — (Ь + с), а соответствующие
л fb/(b + c)\
собственные векторы задаются столбцами I ; и л |
уС/(О + С) J у 1 J
соответственно. Если все входящие в матрицу параметры строго
положительны, то повторное действие А заставляет систему стре-
/Ь/(Ь + с)\
миться к предельному состоянию I + с)/ Переход от состоя-
ния в данный момент к этому предельному состоянию осуществ-
ляется умножением на А2 при каждом шаге. Вернемся к игре в
п л А0-8 0.3\ х
бадминтон. В этом случае матрица А = I 7 I, Л2 = 0.5 и
\ м.л U./ j
/о.б\ ъ
предельное состояние I j. Это значит, что после розыгрыша
большого числа очков первый игрок имел 60% подач.
тт л (° Л
Пусть теперь матрица А = I д) “ стохастическая и не
удовлетворяет условиям строгой положительности. Очевидно,
что
f I, если п — четное число,
( А, если п — нечетное число.
Смысл матрицы А очевиден. Она представляет безусловный пе-
реход в другое состояние. В этом случае нет предела Ап при
п —► ос. (Однако, в некотором «усредненном» смысле мы ожи-
даем, что система проводит в каждом состоянии половину вре-
мени.)
Несложно сделать обобщение на случай процессов Маркова
для систем с большим числом состояний. Процессы с тремя со-
стояниями описываются матрицами 3 х 3 и т. д. Параметры каж-
дого столбца должны быть неотрицательными и в сумме дают 1.
Резюме
101
Такова, например, стохастическая матрица 3x3
/0.5 0 0.1\
А = I 0.3 0.6 0 .
\0.2 0.4 0.9/
С некоторыми поправками сохраняются важные свойства матриц
2x2. Например, матрица
/0.5 0.3 0 0\
0.5 0.7 0 0
0 0 0 1
\0 0 10/
представляет систему, в которой невозможны переходы из пер-
вых двух состояний в два последние и наоборот. Вектор вероят-
ности, ограниченный первыми двумя состояниями, имеет предел.
Вектор, ограниченный двумя последними состояниями (т. е. пер-
вые две компонеты равны 0) предела при п —> ос не имеет, и
его величина зависит от четности п. Нетрудно понять, как все
это будет звучать на языке матричных элементов матрицы А, За
исключением этих случаев n-мерная матрица дает то же самое,
что и двумерная. Матрица имеет собственное значение, равное
1, соответствующий собственный вектор определяет предельное
состояние. Все другие собственные значения меньше единицы, и
Нши-юо Ап является сингулярной матрицей, преобразующей лю-
бой вектор вероятности в собственный вектор, соответствующий
А ~ 1.
Резюме
А. Конформные матрицы
Вы познакомились в этой главе с определением конформной мат-
рицы и с геометрической интерпретацией преобразования, кото-
рое она представляет.
Вы должны уметь установить и применять изоморфизм меж-
лу конформными матрицами и комплексными числами.
102 Глава 2. Собственные векторы и собственные значения
В. Собственные значения и собственные векторы
Вы должны уметь писать характеристическое уравнение матри-
цы 2 х 2 и использовать его для определения собственных зна-
чений матрицы; уметь получать собственные векторы, соответ-
ствующие вещественным собственным значениям матрицы 2x2,
уметь описывать действие матрицы на языке собственных значе-
ний и собственных векторов.
С. Подобие матриц
Для данной матрицы А (2 х 2) вы должны уметь построить такую
матрицу В, что А = ВСВ~\ где С диагональна, если А имеет
разные вещественные собственные значения; С конформна, если
А имеет комплексно-сопряженные собственные значения и С =
(х 1\ , А
I л . ), если А имеет два равных собственных значения, но при
этом А / ЛИ. В каждом случае вы должны дать геометрическую
интерпретацию столбцов матрицы В.
D. Процессы Маркова
Вы должны уметь написать матрицу п х п, представляющую
процесс Маркова для п состояний.
Для матрицы А (2 х 2), представляющей процесс Маркова, вы
должны уметь связывать собственные значения и собственные
векторы с поведением вероятностей двух состояний.
Задачи
2.1. Рассмотрим две конформные матрицы
F1 = f3 и F2=( 4
1 \4 3/ 2 ^-3 4/'
(а) Напишите комплексные числа z\ и соответствующие этим
матрицам.
(Ь) Выразите матрицы и F% в виде произведения числа на
единичную матрицу и на матрицу поворота. Используя тож-
дество е10 = cos 3 + i sin 3, запишите z\ и в полярных коор-
динатах z — ге1в.
Задачи
103
(с) Вычислите Ff1, потом вычислите zf \ домножая числитель
и знаменатель на сопряженное число а — bi. Сравните полу-
ченные результаты.
(d) Вычислите F1F2 и F2F1. Потом вычислите Z1Z2 и сравните
результаты.
2.2. Проверьте теорему Муавра на примере двух конформных матриц
Fi и F2 из первого упражнения, т. е. вычислите Ff и F^.
О / \ т-r D f °*8
2.3. (а) Покажите, что матрица R = ( § 0 8/ пРеДставляет по"
ворот против часовой стрелки приблизительно на 37°. Вы-
числите R~l.
(\ 2\
(Ь) Матрица S = ( I представляет сдвиг вдоль оси х. Вы-
числите S'-1 и дайте геометрическую интерпретацию резуль-
тата.
(с) Вычислите А = RSR~r и дайте геометрическую интер-
претацию результата. То же самое сделайте для А”1, В =
RS~1R~1 и В"1.
/_у
2.4. Матрицу F = I Q о ) приведите к диагональному виду со-
гласно процедуре:
(а) напишите характеристический полином Р(А), приравняйте
его к нулю и найдите собственные значения матрицы F.
(Ответ: Ai = 2, А2 = — 1.)
(b) Проверьте, что в соответствии с теоремой Гамильтона-Кэли
P(F) = 0.
(с) Для каждого собственного значения получите собственные
векторы. Пусть для каждого собственного вектора у = 1.
(d) Постройте матрицы В и В-1 так, чтобы F = ВДВ-1.
w * г <5/4 3/4\
2.5. Матрицу лоренцева преобразования L2 = I 3/4 5/4/ пРивеДите
к диагональному виду, записав ее как = ВДВ-1, где В есть
матрица вращения, а А диагональна. Дайте геометрическую ин-
терпретацию результата.
2.6. Получите такую обратимую матрицу В и такую диагональную
матрицу £>, чтобы выполнялось равенство
в( 4 В"1 = D.
104 Глава 2. Собственные векторы и собственные значения
1 9\
2.7. Матрица F — I ₽ I имеет равные собственные значения.
Приведите ее к диагональному виду, следуя процедуре:
(а) напишите характеристический полином Р(Л) и найдите соб-
ственные значения;
(Ь) получите собственный вектор матрицы F в форме ’
(с) постройте матрицу G = F — AI. Покажите, что из теоремы
Гамильтона-Кэли следует уравнение G2 = 0. Получите ядро
и образ матрицы G;
/ 1 \ (*, z~y (*Г1 । тт м
(а) получите вектор I > такой, что G I ~ \ 1 J * ПОСТРО®_
те матрицы В и В-1 так, чтобы выполнялось равенство
f=s(o i)®'1-
2.8. Диагонализуйте матрицу
/ 3/5 1/5 \
у—4/5 7/5/’
имеющую равные собственные значения. Получите образ и яд-
ро матрицы G = F — ЛЛ, дайте геометрическую интерпретацию
преобразования F.
2.9. Пусть А есть матрица с собственными значениями > Аг > 0.
(а) Диагонализуя матрицу Л, опишите процедуру вычисле-
ния матрицы Gn = A^nAn. Покажите, что матрица F =
Пшп^оо Gn сингулярна.
/ 3 —2\
(Ь) Проделайте эту процедуру для матрицы А — ( 0 / ’ ВЫ
числяя явно матрицы Gn и F. Найдите собственные значения
и собственные векторы матрицы А, ядро и образ преобразо-
вания F и свяжите их с собственными векторами матрицы А,
2.10. Для любой матрицы А след (Тг А) определяется как сумма мат-
ричных элементов, стоящих на главной диагонали. Таким обра-
зом, если А = (а j |, то Тг А — а + d.
’ ус dj’
(а) Докажите, что для двух матриц А и В (2 х 2) Тг (АВ) =
Тг (ВА), даже если А и В не коммутируют друг с другом.
Задачи
105
(b) Докажите, что Тг А равен сумме собственных значений мат-
рицы А. Докажите, что если А = BBS"1, то Тг А = ТгВ.
(с) Используя результат пункта (а), докажите, что
Тг (АВС) = Тг (ВС А) = Тг (С АВ).
—1\
Матрицу F = I г 1 , имеющую комплексно-сопряженные соб-
ственные значения, запишите в форме F — ВСВ1^ следуя про-
цедуре, описанной ниже.
(а) Найдите собственные значения матрицы F.
(Ь) Постройте конформную матрицу С, имеющую те же соб-
ственные значения, что и F.
f 1
(с) Постройте матрицу В в виде ( .
2.12. Пусть А = J. g j. Постройте такую конформную матрицу С
и такую матрицу сдвига В, чтобы А = SCS~l.
2.13. Пусть F = 0 — матрица с различными вещественными
собственными значениями Ai и Аг, и пусть
# = + ^2), У = ~(Ai - А2).
& L
(а) Покажите, что Н = F — жН удовлетворяет уравнению
Н2 = у21.
(Ь)
(с)
(d)
( X У
Покажите, что матрица 5 = |
у У
ные значения, что и F.
имеет те же собствен-
Постройте матрицу В, у которой первый столбец ( п ). При
этом должны выполняться условия Н =
В 1 и
х у
У х
F = B
В'1.
Постройте такую матрицу Я, чтобы выполнялось равенство
Х
ух) \ 0
о А
А2 )
R~\
106 Глава 2. Собственные векторы и собственные значения
Докажите, что BR 0^ и BR являются собственными
векторами матрицы F.
2.14. Пусть F есть матрица 2 х 2 с различными вещественными соб-
ственными значениями Ai и А2. Определим
= F-A2Z F-X.I
Ai — Аз ’ А2 — Ai
Докажите следующие свойства Р± и Р2:
(a) Pi и Р2 являются проекциями: Pj2 = Pi, Р^ = Р2;
(Ь) Р1Р2 = Р2Р1-0;
(с) P-AiPi + A2P2;
(d) Рп = А?Р1 + А£Р2.
(е) Вычислите Pi и Р2 для случая F = —2 ) * воспользо-
вавшись этим результатом, вычислите Р7.
2.15. Пусть F — матрица 2x2, характеристическое уравнение которой
имеет корни А = х ± iy. Можно переписать это в полярных коор-
динатах х ± 1у = ге±1(?, где г = \/(х2 + у2) и = cos# ± isin0.
Если F — конформная матрица, то она поворачивает плоскость
на угол 0 и однородно растягивает ее с коэффициентом г. В этой
задаче нет необходимости требовать конформность матрицы F.
(а) Покажите, что матрица Fn пропорциональна единичной
матрице для целых чисел п тогда и только тогда, когда
пО = ттг для целого числа т. В этом случае
Рп = (-1)™гп1.
(Подсказка: F = ВСВ~\ где С — конформная матрица.)
/ з
(Ъ) Запишите матрицу F = I _])в виДе ВС В"1. Найди-
те наименьшее число п, для которого Fn пропорциональна
единичной матрице. Проверьте ответ прямым вычислением.
(с) Покажите, что этот ответ соответствует теореме Гамильто-
на-Кэли.
/ —2 —15\
(d) Получите «квадратный корень» матрицы G = ( „ ],
\ KJ У
т. е. найдите такую матрицу А, чтобы выполнялось условие
Задачи
107
А2 = G. Напоминаем формулы:
9 0 1/. .9 0 1/.
cos2 ~ = -(1 + COS0), sin - = -(1 — COS0).
z z z z
2.16. Композитор-модернист Але А. Тори3 создает музыкальные про-
изведения из двух нот, следуя теории процессов Маркова.
1. Если (п — 1)-я нота есть Фа, тогда вероятность рп того, что п-я
' нота тоже Фа, будет равна 3/4, а вероятность qn того, что п-я
нота Соль, равна 1/4.
2. Если (п — 1)-я нота есть Соль, то вероятность рп того, что п-я
нота Фа, равна 1/2, а вероятность qn того, что п-я нота Соль,
тоже равна 1/2.
(а) Постройте матрицу А (2x2), которая преобразует вероятно-
(Рп-Л
сти в вероятности
(Ь) Допустим, что первая нота есть Фа. С помощью матрицы
А найдите, чему равна вероятность третьей ноте тоже быть
Фа.
(с) Получите собственные значения и соответствующие соб-
ственные векторы матрицы А.
(d) Допустим, что первая нота есть Фа. Это значит, что
Покажите на диаграмме последовательность векторов
и получите предел этой последовательности, интерпретируя
его через собственные значения матрицы А.
2.17. Один студент, успешно изучавший теорию вероятностей и увле-
кавшийся футболом, придумал игру со следующими правилами.
1. Если в (п — 1)-й раз некоторый игрок дал пас другому игроку, то
в n-й раз он делает пас с вероятностью рп = 1/6 и ведет мяч сам
с вероятностью qn = 5/6.
3Непереводимая игра слов: aleatory — случайный. — Прим. ред.
108 Глава 2. Собственные векторы и собственные значения
2. Если в (п — 1)-й раз игрок повел мяч сам, то вероятность паса на
n-м ходу равна рп = 2/3, а вероятность самостоятельного прохода
равна qn = 1/3.
(а) Постройте матрицу А, которая преобразует вероятности
/ Рп~(Рп\
( в вероятности ( ).
\Qn—1J \Чп/
(Ь) Для матрицы А найдите собственные значения и соответ-
ствующие им собственные векторы. Покажите на диаграмме,
как А действует на собственные векторы.
(с) Никто не знает, что капитан сделает, получив мяч в первый
раз. Однако, видеозапись игры показала, что при втором
ходе в половине случаев он отдавал пас, а в другой половине
случаев вел мяч сам. Каковы вероятности ддя первого
хода?
2.18. Профессор Константин Байес много лет читает курс «Стохасти-
ческие методы в классической археологии». Всем известно, что
Байес подбирает экзаменационные вопросы, вытаскивая разно-
цветные шарики из древнегреческих урн, стоящих в его кабине-
те, но содержание урн он держит в секрете. Однако, анализируя
вопросы Байеса, заданные им на выпускных экзаменах в течение
многих лет, а все они хранятся в библиотеке Ламонта, студенты
выяснили следующее:
1. Если на выпускном экзамене в (N — 1)-м году профессор спраши-
вал о статуях, то на выпускном экзамене TV-го года вероятность
получить вопрос о статуях равнялась 1/2, и вероятность полу-
чить вопрос о керамике тоже равнялась 1/2;
2. Если на выпускном экзамене в (7V — 1)-м году профессор задавал
вопрос о керамике, то в TV-м году вопрос о статуях на выпускном
экзамене можно было получить с вероятностью 1/4, а вопрос о
керамике — с вероятностью 3/4.
(а) Напишите матрицу Af, преобразующую распределение веро-
ятностей вопросов о статуях и о керамике в Рас"
пределение вероятностей вопросов на выпускных экзаменах
(Pn\
следующего года ( I.
/
(Ь) Найдите собственные значения и собственные векторы мат-
рицы М и запишите ее в форме 5£>5-1, где D — диагональ-
ная матрица.
Задачи
109
(с) Заходя регулярно в кабинет Байеса, студенты, наконец, по-
няли метод профессора. У Байеса было две урны, но он поль-
зовался ими дважды: один раз для себя, предварительно,
а потом еще раз для окончательного экзаменационного во-
проса, так что матрица М представляет собой два шага мар-
ковского процесса. Диагонализуя матрицу М, найдите две
возможные матрицы N для одного шага процесса.
2.19. Джон и Илья играют в мяч, который может быть либо в лунке
И, либо в лунке Y. Джон предпочитает мяч в лунке Н, а Илья —
в лунке Y. Джон получает ход. Если мяч лежит в Н, он не
делает ничего. Но если мяч оказывается в У, то он пытается
перекатить его в Н. Это не так просто. Вероятность того, что
Джону удается перекатить мяч, равна 2/3, но с вероятностью
1/3 мяч скатывается обратно в лунку У. Когда Илья получает
ход, он ничего не делает, если мяч лежит в лунке У, и пытается
перекатить, если мяч находится в Н. Илья играет хуже Джона,
и вероятность удачи равна только 1/2.
(а) Мяч лежит в лунке У и играет Джон. Чему равна вероят-
ность мячу быть в лунке Н после второго хода Джона?
(Ь) Джон играл п раз, а Илья (п—1) раз. Чему равна вероятность
того, что после n-го хода Джона мяч окажется в Н1
(с) Допустим, что игра продолжается «очень долго». Вы смот-
рите на игру после хода Ильи. Чему равна вероятность уви-
деть мяч в лунке И? Сколько надо сделать ходов, если мы
хотим быть уверенными в этой величине вероятности с точ-
ностью до 0.001?
2.20. Банк разработал правила, согласно которым очередь в окно не
должна быть длиннее двух человек. Если появляется третий кли-
ент, то все трое сопровождаются в кабинет менеджера и обслужи-
ваются по высшему разряду. Перед окном нет никакой очереди.
Более того, вооруженный охранник на входе в банк не пропуска-
ет более одного клиента в минуту (именно столько времени тре-
буется для тщательной проверки клиента). В результате длина
очереди в окно определяется процессом Маркова, описывающим,
что происходит в течение одной минуты.
1. Если нет очереди, то с вероятностью 1/2 клиент появится в те-
чение одной минуты и с вероятностью 1/2 не появится.
2. Перед окном стоит один человек. С вероятностью 1/6 этого кли-
ента обслужат, и он уйдет; с вероятностью 1/3 появится второй
клиент и с вероятностью 1/2 ничего не изменится.
110 Глава 2. Собственные векторы и собственные значения
3. Перед окном в очереди два человека. С вероятностью 1/6 одно-
го клиента обслужат, и он уйдет; с вероятностью 1/6 появится
третий клиент, и все трое уйдут в кабинет менеджера, и с веро-
ятностью 2/3 ничего не изменится.
(а) Постройте матрицу М, преобразующую распределение веро-
(Р1\
ятностей I р2 I в момент t в распределение вероятностей в
\Рз/
момент (t +1).
(b) Когда банк открывается в 9 часов утра, pi = 1. Каково
/рЛ
распределение вероятностей I р2 I через три минуты?
\Рз/
(с) Получите собственные значения и собственные векторы мат-
рицы М.
/рЛ
(d) Какое будет распределение вероятностей I Р2 I после многих
\Рз/
часов работы банка? Оцените, через какое время вероятно-
сти pi, Р2 и рз будут совпадать с предельными значениями с
точностью до 0.001.
(е) Сколько, в среднем, посетителей обслуживается в течение
одной минуты? Сколько клиентов приглашаются в кабинет
менеджера?
Модель Эренфеста. Предположим, что у нас есть два ящи-
ка и N шаров. Пусть г шаров лежат в первом ящике и N — i
во втором. Состояние системы определяется целым числом г, т. е.
система имеет п + 1 состояние: i — 0, i = 1, ..., i = TV. В каждый
временной интервал из одного ящика вынимают шар (с вероят-
ностью 1/TV) и перекладывают его в другой. Таким образом, i
принимает значения i — 1 или i + 1, в зависимости от того, бе-
рут шар из первого ящика или кладут в него. Вероятности таких
переходов равны iN~* и (N — z)7V-1 соответственно. Итак,
= iN~\
Pi+i,i = (N —
Pj i — 0, j i i 1.
Задачи
111
Например, если N = 4, то матрица 5x5 равна
/0 1 1/4 0 0 1/2 0 0 0\ 0
Р = 0 3/4 0 3/4 0
О о, 0 0 1/2 0 0 1/4 1 о)
Заметим, что Р преобразует состояние с четным i в состояние с
нечетным i и наоборот. А преобразование Р2 переводит четные
состояния в четные и нечетные состояния в нечетные, так как
матрица Р2 имеет вид
Pi-2,i = i(i - 1)N~2,
Pi,i = [i(N - i + 1) + (N - i)(i + 1)]№2,
Pi+2,i = (N — i)(N -t-l)AT2,
Pj,i = 0, j ±2, i.
В случае, когда N = 4, соответствующая матрица равна
/1/4 0 0 5/8 1/8 0 0 3/8 0 0
Р2 = 3/4 0 3/4 0 3/4
0 3/8 0 5/8 0
\0 0 1/8 0 1/4J
Так как Р2 осуществляет переходы только между состояниями с
одинаковой четностью, можно рассматривать отдельно состояния
с четными значениями i = 0,2,4,... и с нечетными i — 1,3,5,...
Это значит, что из выписанной матрицы можно выделить четно-
четные позиции и нечетно-нечетные в две отдельные матрицы
/1/4 1/8
Q - I 3/4 3/4
\ 0 1/8
0 \
1/4 I и R
/5/8 3/8\
\3/8 5/8) ’
(1\
6 I является собственным
1/
вектором, соответствующим собственному значению 1; для
112 Глава 2. Собственные векторы и собственные значения
матрицы R покажите, что является собственным векто-
ром, соответствующим собственному значению 1.
(Ь) Повторите предыдущее упражнение для случая N = 5. По-
кажите, что «четный» собственный вектор для собственного
/1\
значения 1 пропорционален I 10 I и «нечетный» собствен-
\5 /
/5\
ный вектор пропорционален | 10 I.
V/
(с) Докажите в общем случае, что «четные» и «нечетные» соб-
ственные векторы для собственного значения 1 пропорцио-
нальны вектору, где элементы столбца суть четные и нечет-
ные биномиальные коэффициенты соответственно с четными
и нечетными номерами. Другими словами, докажите, что
собственные векторы
нечетные
собственные векторы.
2.22. Числа Фибоначчи.
Числовая последовательность 0,1,1,2,3,5,8,13... называется
последовательностью Фибоначчи. Эти числа появляются при
изучении многих интересных физических и математических за-
дач, от роста растений до механики небесных тел (см. например
книгу D’Arcy Thompson On Growth and Form). Рекуррентная
формула для этой последовательности имеет вид
^п+2 — *^n+l "Ь ^0 — *^1 — 1*
(а) Вычислите отношение хп+\/хп для п от 1 до 8. Имеет ли эта
последовательность предел?
(Ь) Найдите такую матрицу А, чтобы выполнялось равенство
*£п-Ь2 А _ Al
+1J V
Задачи
113
л I *^n+2 i (*^1 i
С помощью матрицы А выразите I ) через I I.
J \S0 J
(с) Получите явное выражение для хп через #1 и хо- (Подсказка:
приведите матрицу А к диагональному виду.)
(d) Покажите, что существует предел lim xn^i/xn и вычислите
п—>оо
его.
(е) Используя величину этого предела, что можно сказать о бес-
конечной дроби
1 +
(f) Существуют ли такие хо и a?i, что lim xn^i/xn отличается
п—>оо
от значения, полученного в упражнении (d)?
Глава 3
Линейные дифференциальные
уравнения на плоскости
Основная цель этой главы — объяснить, что система
однородных дифференциальных уравнений с постоян-
ными коэффициентами может быть записана в форме
du/dt = Au, где А ~ матрица и и — вектор, и что ре-
шение этого уравнения имеет вид е и0, где uq опре-
деляется начальными условиями. При этом, конечно,
надо объяснить, что такое экспонента, показателем ко-
торой является матрица. Кроме того, обсуждается ка-
чественное поведение решений в неоднородном случае,
в том числе явление резонанса.
3.1. Функции матриц
Обсуждая теорему Гамильтона-Кэли, мы уже встречались с мат-
ричным полиномом. В общем случае, пусть Q(X) — любой поли-
ном. Если
Q(X) = апХп + a„-iXn-1 + • • • + + а0,
то можно определить матрицу Q(F) как
Q(F) — &nFn + ct,n—iFn 1 + • • • + a±F + czq.
Мы можем перемножить два полинома и получить третий поли-
ном: (QiQ2)(X) = ФгРОФгРО- Аналогично, для матриц
(Q1Q2)(F) = Qi(F)Q2(F).
116 Глава 3. Линейные дифференциальные уравнения ...
Здесь не возникает проблемы из-за некоммутативности матрич-
ного умножения, так как степени фиксированной матрицы всегда
коммутируют друг с другом в соответствии с ассоциативным за-
коном:
pkpi _ pk+l _ pl ph.
Аналогично,
(Q1+Q2)(F) = Q1(F) + Q2(F).
Короче говоря, при вычислении матричного полинома действуют
обычные законы алгебры.
Мы хотим перейти к изучению функций от матриц более об-
щего вида. С этой целью сделаем небольшое отклонение и пого-
ворим о степенных рядах.
Выражение вида
Я(Х) = ар + + CI2A2 + • • • + апХп + • • * ,
где коэффициенты = 0,1,... — вещественные числа, а X
некий символ, называется формальным степенным рядом. Сло-
жение степенных рядов производится по правилу
(ао + + аъХ2 + •••) + (Ьо 4- Ь\Х + Ъ^Х2 + * * •)
= (ао 4- &о) “Г (а1 + 61)-^ 4* (о>2 + 62)X2 4- • * • ,
т. е. мы складываем коэффициенты при одинаковых степенях
X. Для умножения степенных рядов воспользуемся правилом
ХкХ1 = Хк+1. Тогда, собирая члены с одинаковыми степенями
X, получаем
(по + а±Х + а^Х2 + • • • )(Ьо 4" Ъ^Х 4- Ъ%Х2 4- • • •)
= ао&о 4- (aibo 4- aobi)A 4- (^Ьо 4- aii>i 4- ^0^2) А2 4- • • • .
Таким образом, например,
(1 + X + X2 + • • • )(1 + X + X2 + • • •) = 1 + 2Х + ЗА2 + • • .
Легко проверить, что обычные свойства сложения и умножения
полиномов сохраняются и для степенных рядов.
3.1. Функции матриц
117
Пусть t — любое вещественное число. По определению, фор-
мальный степенной ряд для exp (tX) имеет вид
exp (tX) = 1 + tX + ^t1 2X2 + ^t3X3 + ^t4X4 + • • • . (3.1)
Тогда
exp (sX) exp (tX) = (1+sX+ ^s2X2 + • •) (1+tX+^t2X2 + • •
= 1 + (s + t)X + — (s2 + 1st + t2)X2 4- • • • ,
где коэффициент при Xn определяется формулой
1 (sn + nsn~4 + n^-^sn~2t2 + • • • + tnY
n! \ 2 J
которая, по формуле бинома Ньютона, равна просто (1/n!)(s+t)n.
Так как по определению
1 + (s + t)X + — (s +t)2 X2 + Б7 (5 + t)^X3 + • • • = exp (s + t)X^
Zl o.
то можно сделать вывод, что равенство
exp (sX) exp (tX) = exp (s +1) X (3.2)
выполняется тождественно для формальных степенных рядов.
В отличие от полиномов, мы в общем случае не можем вычис-
лить R(X) для какого-нибудь числа г или матрицы F. Действи-
тельно, если в формальный степенной ряд
R(X) = ао + <21X + а%Х2 + • * •
вместо символа X подставить вещественное число г, то получится
бесконечная сумма
Go + + Й2Г2 + • • • ,
которая в таком виде не имеет смысла. Один способ придать
такой сумме смысл сводится к обрезанию бесконечного ряда на
118 Глава 3. Линейные дифференциальные уравнения ...
каком-то слагаемом. Может оказаться, что такая конечная сумма
не будет сильно зависеть от места обрыва ряда, если мы оставим
достаточное количество слагаемых. Величину, полученную как
«предельное значение» конечной суммы, обозначим /?(г). Объяс-
ним эту процедуру более аккуратно. Пусть из бесконечной суммы
мы оставили М слагаемых. Обозначим RM (г) соответствующую
конечную сумму:
Ям(г) — ао + «I’" + Н-------h
Мы будем говорить, что степенной ряд R(X) сходится для данно-
го числа г, если при сколь угодно малом положительном е можно
найти достаточно большое число Мсь такое, что для любых целых
А/ и 7V, больших Мо, выполняется неравенство
\RM(r)-RN(r)\<£.
Другими словами, если мы учтем достаточно большое число сла-
гаемых, то все значения RM(f) будут отличаться на малое зна-
чение е. Чем больше членов мы учитываем, тем ближе конечная
сумма RM(r) к предельному значению, обозначаемому Я(г)1.
Точно такое же определение можно ввести для матриц. Для
любой матрицы F конечная сумма
FM(F) = а0 + aiF + + aMFM
имеет смысл. Разность RM (F) — RN(F) — тоже матрица. Тогда
условие
|7?M(F) - 2?n(F)| < £
означает, что все матричные элементы матрицы RM(F) — RN(F)
по модулю меньше е. Итак, мы говорим, что /?(Х) сходится для
1 Авторы проявляют здесь некоторую непоследовательность. Предполо-
жив в начале книги, что читатели владеют одномерным математическим
анализом, было бы естественно считать, что они знают понятие предела чис-
ловой последовательности. Тогда сумму R(r) ряда можно определить как
lim RM(r), если, конечно, этот предел существует. Рассуждения авторов
Af—юо
здесь нечетким образом используют «критерий Коши» (теорему о равно-
сильности сходимости последовательности и ее фундаментальности). Кстати,
предел последовательности чисел (и матриц!) уже использовался авторами
в главе 2. — Прим, ред.
3.2. Экспонента от матрицы
119
матрицы F, если при любом £ > О существует такое значение
Мо, что условие \RM(F) — RN(F)| < £ выполняется для всех М
и N, больших Mq. В этом случае каждый матричный элемент
RM(F) стремится к предельному значению2. Таким образом, мы
получаем матрицу предельных значений матричных элементов,
которую обозначаем R(F').
Очевидно, что если /?2(Х) и 7?з(Х) — формальные
степенные ряды, для которых справедливо равенство
R1(X)R2(X) = Яз(Х),
и, если все три степенных ряда сходятся для матрицы F, то
R1(F)R2(F) = R3(F).3
Аналогично для сложения: если Ri(X) + i?2(A) = 7?з(Х), и все
ряды4 сходятся для матрицы F, то 7?i(F) + /?2(F) = Rs(F).
3.2. Экспонента от матрицы
Мы уже ввели формулой (3.1) формальный степенной ряд для
экспоненциальной функции и показали, что для нее выполняется
равенство (3.2). Сейчас докажем, что степенной ряд для exp (tX)
будет сходиться в случае, когда символ X заменяется матрицей
2x2, обозначаемой буквой А. В качестве первого шага проведем
доказательство того, что ряд сходится абсолютно5, если вместо
X подставить произвольное вещественное число к. Рассмотрим
степенной ряд
expy = 1 + у + ^у2 + + • • • , (3.3)
2 Это следует из упомянутого в предыдущем примечании критерия
Коши. — Прим. ред.
3Вряд ли стоит называть очевидным утверждение, являющееся следстви-
ем одной тонкой теоремы Абеля. — Прим. ред.
4Здесь достаточно предположить сходимость первых двух рядов. — Прим,
ред.
5Говорят, что ряд сходится абсолютно, если сходится другой ряд, состав-
ленный из модулей слагаемых первого ряда. В этом случае первый ряд тоже
сходится. — Прим. ред.
120 Глава 3. Линейные дифференциальные уравнения ...
где у = \tk\. При положительных значениях у все слагаемые этого
ряда положительны. Если мы покажем, что ряд (3.3) сходится,
будет доказана абсолютная сходимость ряда для exptfc.
Для доказательства сходимости ряда (3.3) покажем, что фраг-
мент гт,п, получающийся при суммировании членов с номерами
от т до (т + п), может быть сколь угодно малым, если выбрано
достаточное большое значение т. Это легко сделать, сравнивая
фрагмент
г = _ _|___?/m+1 -I______-______7/п+2 j_
771,71 ml m!(m + l) m!(m + l)(m + 2)
+---------------vm+n
ml (m + 1) • • • (m + n)
с геометрической прогрессией
111 1
Sm,n = —,ym + -7-ym+1 + -r^ym+2 + + -r~^ym+n-
ml ml m ml mz ml mn
Очевидно, что rm,n < зт,п для всех т. Сумму sm^n геометриче-
ской прогрессии можно вычислить явно:
где
Ут 1
Sm ml 1 — yfm
Итак, мы доказали, что
Гт,п <
Предположим, что мы выбрали т > 2у, В этом случае
-J—<-J—= 2.
1 — у/т 1-1/2
Тогда sm < 2ут/т\. Каждый раз, увеличивая т на единицу,
мы умножаем sm на множитель, меньший 1/2. Очевидно, что
3.2. Экспонента от матрицы
121
выбрав достаточно большое значение т, можно сделать величину
sm сколь угодно малой. А так как rm,n < sm, то и значение гт,п
может быть сделано сколь угодно малым. А это означает, что ряд
1 1
exptk = 1 + tk + — (tfc)2 + «л (^)3 + ’' *
сходится абсолютно. Между прочим, хорошо известное доказа-
тельство абсолютной сходимости степенного ряда
а0 + aiy + а2у2 + «зУ3 + • • •
с учетом оценки предела
Um
7П->ОО а^пУ^1
основывается на тех же аргументах, которые мы только что ис-
пользовали6 .
Перейдем теперь к матричному случаю. Возьмем матрицу
А = , в которой каждый элемент по модулю меньше, чем
к/2. Матричные элементы матрицы А2 = Q 0 состоят
из двух слагаемых, причем эти слагаемые по модулю меньше,
чем (&/2)2 = fc2/4. Таким образом, матричные элементы А2 по
модулю меньше, чем к2/2. Легко показать, что все матричные
элементы А3 по модулю меньше, чем fc3/2, и далее, по индукции,
элементы матрицы Ат по модулю меньше, чем кт/2. Теперь,
если мы будем суммировать ряд
/2 +3
exp(tA) = 1 + tA + —А2 + —А3 + • • • ,
£t\ О.
то все слагаемые в четырех матричных элементах получающейся
матрицы меньше, чем соответствующие слагаемые ряда
к t2 к2 t3 к3
2 + 2! Т + 3! Т
6 В русскоязычной литературе последний прием составляет содержание
признака Даламбера. — Прим. ред.
122 Глава 3. Линейные дифференциальные уравнения . *.
Из этого следует, что для любого вещественного числа t и лю-
бой матрицы А (2 х 2) ряд exp (tA) сходится. Используя те же
аргументы, заменив только к/2 на к/п, можно показать, что экс-
поненциальный ряд сходится и в случае, когда матрица А имеет
размер п х п.
Итак, для экспоненциальной функции от матрицы мы полу-
чили фундаментальное тождество
exp (s + t)A — exp (sA) exp (tA).
Вы можете спросить: а как обстоит дело с тождеством
?
ехр (А + В) = (ехр А)(ехр В),
где А и В — произвольные матрицы? Чтобы понять, что проис-
ходит в этом случае, разложим в ряд обе части этого равенства:
ехр(А + В) =Л + А + В + |(А + В)2 + ---
= I + А + В + ^(А2 + АВ + В А + В2) + • • •
и
(ехр А)(ехр В) = (л + А + ^А2 Н-) (л + В + |в2
= Л + А + В + ( |а2 + АВ + |в2 ) +
где многоточия обозначают слагаемые более высоких степеней по
А и В. Если мы сравним слагаемые второй степени в этих двух
выражениях, то увидим, что они равны только при условии
|(АВ + В А) = АВ,
т. е. если
АВ = ВА.
Итак, если матрицы А и В не коммутируют, то нет оснований
ожидать, что выполняется тождество
ехр (А + В) = (ехр А) (ехр В),
3.2. Экспонента от матрицы
123
и на самом деле оно не всегда верно. Рассмотрим конкретный
пример. Возьмем матрицу
°
.° °/ ’
А =
В этом случае А2 = 0 и, следовательно, все слагаемые более
высоких степеней в разложении ехр А равны нулю. Получаем
простую формулу:
ехр А = 5 + А =
1
1
R D (° 0
Возьмем теперь другую матрицу В = К
В2 = 0. Тогда
, для которой тоже
ехрВ = 14-В = К О j .
А теперь перемножим две получившиеся матрицы:
(ехр А) (ехр В) —
/0 1\
V °/
С другой стороны, А 4- В =
и, соответственно, (А 4- В)2 =
. Отсюда получаем, что
ехр(А4-В) =1 +(А + В) 4-^14-jj(A +В) 4-^1 +•••
= (* 1 + ^! + i! + ”)I+(1 + ^ + ^ + ’’’)(A + B)'
Множители в скобках можно упростить7
, 1 1 1/ -1ч
1 + 2!+4!+’”~2(е + е )
7 Это делается с использованием тождеств
1 + Т!+5!+^+-=еХр1 = е’
1~Il+^“^+” = eXpF1) = e~1-
124 Глава 3. Линейные дифференциальные уравнения ...
exp(A + В) = i
A
, 111 1, _1Ч
1+3! + 5! + 7!+'"~ 2(е"е
Окончательно, получаем, что
е-е-1 е + е-1)^ (ехрЛ)(ехрВ)’
Справедливость формулы
exp(s + t)A = ехр($А)ехр(М)
связана с тем, что матрицы $А и tA коммутируют.
Показав, что ехр(М) определяется степенным рядом, мы те-
перь обобщим на матричный случай хорошо известную формулу
[exp(tfc)] = fcexp(tfc). (3.4)
at
Определим производную функции ехр(М) по вещественной пе-
ременной t следующим образом
-^-[ехр(М)] = lim i[exp((t + ft) А) - exp(fA)].
a t h—>0 ft
Предел в правой части равенства означает матрицу, элементы
которой являются пределами соответствующих элементов зави-
сящей от t матрицы, стоящей под знаком lim. Поскольку
h-*G
exp((t + ft)A) — exp(ftA) exp(tA),
получаем
-^-[exp(tA)] = lim ^-(exp(hA) — H]exp(tA).
d t h^O ft
В то же время
. h2A2 h3A3
exp(hA) - I = hA + —%- + -gp-
следовательно,
1. .. .. . AA2 h2A3
—(ехр(ЛА) -1) = A + — + -до-
3.2. Экспонента от матрицы
125
lim i[exp(/iA) — I] = А.8
h—>0 h
-^-[exp(M)] = Aexp(tA).
at
Эта формула похожа на (3.4), но справа подразумевается мат-
ричное умножение.
Выберем на плоскости фиксированный вектор vo = и
определим зависящий от времени вектор v(i) формулой
v(t) = exp(M)vo, где А = (а & ) .
\ с а ]
Определим производную по времени v(£) вектора v(£):
v(t) = lim |[v(t + h) - v(t)].
h-+0 ri
Если v(t) = то производная этого вектора по времени,
y^J- Так как
vq — постоянный вектор, то
v(i) = lim ^-[exp((t + h)A) - exp(tA)]vo,
h—>0 fl
т. e.
v(t) = -77eXP(fA)vo.
at
Отсюда
v(t) = Aexp(M)vo = Av(t).
Итак, мы показали, что v(i) удовлетворяет дифференциальному
уравнению
v(t) = Av(t), v(0) = v0.
8 Здесь следовало сослаться на теорему о почленном переходе к пределу,
которая требует проверки некоторых условий, например, равномерной схо-
димости ряда (это понятие авторы даже не упоминают). — Прим. ред.
126 Глава 3. Линейные дифференциальные уравнения ...
Записав, как и выше, v(t) = ( ж(*)\ \y(t) /’ полУчаем
= /а /x(i)\ \с
т. е.
i(t) = ax(t) + by(t),
y(t) = cx(t) + dy(t).
Итак, формула
= ехр(М) (Жо>)
\yoj
дает решение системы линейных дифференциальных уравнений
первого порядка, написанной выше.
Легко доказать, что любое решение дифференциального урав-
нения v(t) = Av(i) имеет вид v(i) = exp(M)vo* Для доказатель-
ства возьмем вектор w(t) = ехр(—tA)v(t). Тогда9
w(t) = -^-(ехр(—M))v(t) + exp(—M)v(t).
at
В то же время
~^-ехр(—М) = —Аехр(—tA)
at
и, кроме того,
v(£) = Av(i).
Следовательно,
w(i) = — Лехр(—M)v(£) + ехр(—tA)Av(t) — О,
так как матрицы А и ехр(—tA) коммутируют. Из этого следует,
что w — постоянный вектор (обозначенный Vo), и мы получаем
vo — ехр(—tA)v(t)
9 Следующая далее выкладка использует упоминавшуюся ранее формулу
дифференцирования переменного вектора w(t), заданного как образ другого
переменного вектора v(i) при преобразовании, также зависящем от t. —
Прим. ред.
3,3. Вычисление экспоненты от матрицы
127
или
v(t) = exp(M)v0.
Итак, мы показали, что последняя формула с экспонентой
ехр(М) определяет общее решение системы дифференциальных
уравнений с постоянными коэффициентами. Поэтому важно об-
судить различные методы вычисления ехр(М).
3.3. Вычисление экспоненты от матрицы
Предположим, что матрицы F и G связаны между собой соотно-
шением
F = BGB'1.
Тогда при любом к
Fk = BG^B"1
и из разложения ехр(М) в степенной ряд следует, что
exp(tF) — Bexp(tG)B-1.
Случай 1. Матрица F имеет разные вещественные соб-
ственные значения. Мы уже научились приводить матрицу
2 х 2 к диагональному виду. Допустим, что матрица F имеет раз-
ные вещественные собственные значения Ai и Л2. Тогда можно
записать, что при некоторой матрице В
F-B (о
о А
Аг/
В-1.
Очевидно, что
/Ai О V /А” О А
^0 А2/ V0 Л2/
и из разложения экспоненциальной функции в степенной ряд
следует, что
/Ait 0 А /еЛ1‘ 0 А
ехр 0 X2t) ~ V 0 еА27 '
Тогда
(pAit 0 \ 1
о Л') в
128 Глава 3. Линейные дифференциальные уравнения ...
Приведем конкретный пример. Характеристический полином
матрицы F = ( ) имеет вид А2 — 2А — 3 = 0, откуда
\ —/
получаем собственные значения Ai = 3, А2 — — 1. Рассматривая
/ 4 4\ / 1\
(F — 31) = ( о о , найдем собственные векторы vi = ( )
\ —о —о / \ —1 /
(ядро матрицы F — 31) и V2 —
Таким образом, можно взять
в =
—1
2 1
1 1
и записать матрицу F в виде
.ос ;)•
Отсюда следует, что
ехРт=(_11
Перемножив эти матрицы, получаем
( 2e3t - e~1 e3t “ е~г А
ехР( ) — \^_2e3t + 2e-t — e3t + 2е“* J '
Выбрав вектор vq, определяющий начальные условия, т.е. зна-
чение v в момент t = 0, мы можем написать частное решение
уравнения v(i) = Fv(t). Пусть, например, Vo = Тогда
vW = exp((F) (}) = (_33еХХ‘.) •
Дифференцирование этого вектора дает
. z х _ ( 9e3t + 2е_< \
V у—9e3t — 4е”*у *
3.3. Вычисление экспоненты от матрицы
129
Прямым вычислением легко проверяется равенство
J’v(t) =
7 4\ ( Зе3* - 2е~* \
-8 -5 ) у—Зе3* + 4е-*/
9е3* + 2е~* \
—9e3t — 4e-ty ’
т. е. справедливость уравнения v — Fv.
Случай 2. Одинаковые собственные значения. Метод, опи-
санный выше, работает, когда F имеет разные собственные зна-
чения. Допустим теперь, что F имеет два одинаковых собствен-
ных значения А. Тогда либо F —
/pAt л \ / \
exp(tF) - n v ), либо F = B .
7 \ 0 елЧ \ О
0\
х I, когда можно писать
1
А
В”1.
Пусть в показателе экспоненты стоит матрица
чала преобразуем ее к виду
О _ I f О А
о xt) +\о 0/
Если матрицы С и D коммутируют, то, как мы знаем,
ехр((7 + D) = (ехрС)(ехрВ).
Поскольку AI коммутирует с любой матрицей, мы имеем
(Xt
ехр^о
Д) = exp(Atl) ехр
А
°/ ’
„ /О А2 /0 0\
В то же время I 1 ~ ( q дЬ поэтому
соответствующей экспоненты сводится к
степенной ряд для
130 Глава 3. Линейные дифференциальные уравнения ...
Итак, мы получили, что
/ \ 1 \ (pAt y-pAt\
если F = В I Q д J В-1, то exp(tF) = В ( ^xt j В"1.
В качестве примера рассмотрим систему уравнений
х = х + у,
У = -х + Зу.
А/Г г. ( 1 П
Матрица F = I о ) имеет характеристическое уравнение
\ о /
А2 - 4А + 4 = 0, имеющее два равных корня А — 2. Рассматривая
(F — 21) = ( J J!], получаем собственный вектор vi =
и
вектор V2 = ( - ), для которого (F — 21)V2 = vi. Отсюда
0(-5 ?)
f2t t A (e2i te2t\
Поскольку exp ( 2i / ~ \ 0 e2t / ’ MbI имеем
А °А te2t\ ( 1
ехр(*Л=^ е2<Д_1 J
или
/.рч /(1 — t)e2t te2t \
exp(iF) = _te2l (1 + ()е^.
Если, например, мы хотим найти решение нашей системы диффе-
ренциальных уравнений с начальными условиями xq = 2, у$ = 1,
то следует построить вектор
/+pxf2\ (2e2t-te2t\
«P(<F) (J = (^ _ (e2. )
Легко проверить, что
х = 4е2< - e2t - 2te2t = х + у,
у — 2e2t — e2t — 2te2t = —х + Зу.
3.3. Вычисление экспоненты от матрицы
131
На самом деле в случае равных собственных значений А необя-
зательно записывать матрицу F в виде F — В ( ] В4. Со-
ки л /
гласно теореме Гамильтона-Кэли (F — А1)2=0, поэтому матрица
G = F — AI является нильпотентом. Поскольку AI и G коммути-
руют, из равенства F = G + AI следует:
exp(tF) = exp(Atl) exp(iG).
Но exp(tG) легко вычисляется разложением в степенной ряд:
exp(tG) = I + tG,
поскольку (tG)2 и все последующие слагаемые ряда равны нулю.
Следовательно,
exp(tF) =
А*) (I + tG).
В предыдущем примере, где F =
1\
I, получаем
1
1
G = F - 21 =
-1
-1
/е2‘
exp(tF)=( 0
0\ Г/1 О A f-t t\
e2t) |\0 + t)
(1—t)e2t
—te2t
te2t \
(l+t)e2ty’
и
что и следовало ожидать.
Случай 3. Комплексно-сопряженные собственные значе-
ния. Ранее мы доказали, что если матрица F имеет комплексно-
сопряженные собственные значения а ± i/З, то ее можно предста-
вить в форме F — ВСВ"1, где С = — конформная
матрица. Перед нами стоит задача получить экспоненту, в пока-
зателе которой стоит С.
Заметим, что конформная матрица С может быть записана в
виде С = al + /3 J, где J = ( Y Матрица J удовлетворяет
132 Глава 3. Линейные дифференциальные уравнения ...
уравнению J2 = —К и соответствует комплексному числу i. Так
как al и (3 J коммутируют, мы имеем равенство
exp(t<7) — exp(tal) exp(t/3J),
где
feat 0 \
exp(tal) = ( 0 gQt I .
Чтобы вычислить exp(t/3J), воспользуемся разложением в сте-
пенной ряд:
exp(t/3J) = I + t/3J + 1(W)2 + 1(Ш)3 + zStf3J^ + ’'' •
X! О*
Поскольку J2 = —I, J3 — — J, J4 — I, J5 = J и т. д., получаем
exp(i/3J) = I + W7 - l(t/3)2I - i(W)3 J + 1 (t/i)4! + ••
Воспользуемся тем, что коэффициент при матрице I в послед-
нем выражении — степенной ряд для cos /?t, а коэффициент при
матрице J — степенной ряд для sin (3t. Следовательно, можно за-
писать
/Э4ТГ • /Эх т /cos/3t -sin/3A
exp(tpj) = cos pt I + sin pt J ~ I .
\ sin pt cos pt J
Полученная матрица является матрицей вращения, зависящей от
времени. Отождествляя матрицу J с комплексным числом i, мы
можем получить известную формулу
= cos /3t + i sin /3t.
Итак, если С = ( |, то
у р a J
feat 0 \ / cos/?t -sin/3t\
exp(if)=^0 e<,.J^sin/3t COS^J.
3.3. Вычисление экспоненты от матрицы
133
И если F = ВС В \ то exp(iF) можно вычислить по формуле
exp(tF) = Вехр(«7)В \
о /3 -10\ v
В качестве примера возьмем матрицу I _ 1. Характери-
\ /
стическое уравнение этой матрицы А2 + 2Л + 5 = 0 имеет кор-
( — 1 —2\
9 1 ) “
J* J
конформная матрица. Как описано в параграфе 2.2, в качестве
первого столбца матрицы В можно взять тогда второй
столбец В равняется первому столбцу F — al, деленному на (3,
1 /3 _|_ 2\ /2\ /1 2\
т.е. столбцу - I 2 ) = Следовательно, В — I I и
. Воспользовавшись изложен-
ной выше процедурой, вычислим exp(tC):
(е 1 0 \ / cos2t — sin 22 \
exp(iC)=^0 е-(Дв1п2( cos2fJ.
Из равенства exp(tF) — Q exp(tC) перемножая
матрицы, получаем
/. рч ((cos 2t + 2sin2t) -5e~f sin2t \
exp( ) — sin 2t e-t (cos 2t — 2 sin 2i)y *
Можете самостоятельно проверить, что
~exp(tF) = Fexp(tF).
dt
И в этом случае нет необходимости явно выписывать разло-
жение на множители F — ВСВ~1. Пусть F имеет собственные
значения a±i/3, так что характеристическое уравнение имеет вид
(Л - а)2 + /З2 = 0.
Согласно теореме Гамильтона-Кэли
(F - al)2 + /321 = 0,
134 Глава 3. Линейные дифференциальные уравнения ...
поэтому матрица G = F — al, след которой равен нулю, удовлет-
воряет уравнению G2 = — /321. Из равенства F = al+G получаем,
что
exp(tF) = exp(atl) exp(tG).
Экспоненту, в показателе которой стоит tG, запишем в виде ряда
exp(tG) — I + tG + —I- ——h ———I---------.
Используя уравнение G2 = —/32И, получаем
exp(tG)=I + fG-^pI-^ + ^I + ..-.
Коэффициент при матрице I — это степенной ряд для cos (It, а
коэффициент при матрице G равен
_ /32t3 I34t5 /33t3 /35t5
3! + 5! 3! + 5!
_ sin
Следовательно,
exp(£G) — cos (It I + [(sin/?£)//?] G,
и
/ eat 0 \
exp(iF) = ( 0 eCttj exp{tG).
n „ /3 -10\ „ .
Возвращаясь к матрице F — I о I, для которой a — — 1,
/4 —10\
/3 = 2, построим матрицу G^F + I^^ 1, имеющую след,
равный нулю и удовлетворяющую уравнению G2 = —41. Тогда
/cos2t ° \ 1 /4 —10\
exp(tG)=(, О с<в21/) + 2И"2112 _4)-
z _ /cos 2t + 2 sin 2t —5 sin 2t \
exp(tG) - I sin 2t cos 2t - 2 sin 2t) '
(e 0 \
0 t I, полу-
чим ранее вычисленную exp(^F), но затратив гораздо меньше
усилий.
3.4. Дифференциальные уравнения и фазовые портреты 135
3.4. Дифференциальные уравнения
и фазовые портреты
Мы уже показали, что дифференциальное уравнение v(t) — Av
с начальным условием v(0) — Vq имеет единственное решение
v(t) = exp(M)vo.
Это решение v(t) определяет функцию от времени в двумерном
векторном пространстве. Поскольку ехр(М) определена как для
положительных t, так и для отрицательных, область определения
векторной функции v(t) — вся вещественная ось: — оо < t < оо.
Изображая на графике положение конца вектора v для всех зна-
чений t, мы получаем интегральную кривую дифференциального
уравнения (рис. 3.1). Эта кривая изображает траекторию части-
цы, движущейся в плоскости, вектор v(t) = Av(t) касается траек-
тории и изображает скорость частицы в момент времени t. Через
каждую точку плоскости проходит единственное решение урав-
нения, а преобразование ехр(М) задает движение по этой кривой
в зависимости от времени t.
Нарисовав семейство интегральных кривых, мы можем со-
здать фазовый портрет, отражающий важные свойства реше-
ний дифференциального уравнения. Хотя матрицы А, задающие
136 Глава 3. Линейные дифференциальные уравнения ...
дифференциальное уравнение v(t) — Av, могут быть самыми
разными, но они порождают ограниченное число различных ти-
пов фазовых портретов. Скажем конкретнее: если матрицы А
и F — сопряженные, т. е. А = BFB~\ то интегральные кри-
вые уравнения v(t) = Av получаются из решений уравнения
w(i) = Fw линейным преобразованием v(i) = Bw(t). Доказа-
тельство очень простое: матрица В не зависит от времени, поэто-
му v(t) = Bw(t). Следовательно, если w(i) — Fw, то
v = Bw — BFw = BFB~xv — Av.
Таким образом, если А и F — сопряженные матрицы, то фазо-
вые портреты для уравнения v(i) = Av, по существу, совпадают
с фазовыми портретами w(£) = Fw. Поэтому можно (с точно-
стью до линейного преобразования) определить фазовые портре-
ты, рассматривая различные возможные собственные значения
матрицы А.
Сначала отметим, что если Vq ~ собственный вектор А, соот-
ветствующий собственному значению А, то
v(t) = exp(iA)vo —
1 + tA + — (£А)2 Н----
VO
1 +1\ + —(tA)2 "I—
v0 = eAtv0.
В этом случае интегральная кривая представляет собой прямую,
проходящую через начало координат по направлению вектора vq.
Если А положительно, то с ростом t конец вектора v(t) экспонен-
циально удаляется от начала координат. Если же А отрицательно,
то частица, движущаяся по закону v(t), при t +ос экспоненци-
ально приближается к началу координат. Наконец, когда А = О,
v(t) = vo для всех t. Поэтому все точки на прямой, проходящей
через начало координат и vq, остаются неподвижными.
Теперь мы можем перечислить все возможные случаи.
Случай 1. Матрица А пропорциональна единичной мат-
рице.
1 л Л тт
la. А = I Q q I, ехр(сА) = I I. Поэтому все точки непо-
движны.
3.4. Дифференциальные уравнения и фазовые портреты 137
Л М /+л\ /еМ 0\ TZ
lb. А = I Q I, ехр(М) = I g е/х 1 • Каждый вектор является
собственным, поэтому все интегральные кривые — это прямые
линии, проходящие через начало координат. Если А > 0, то при
t —> +оо каждая точка плоскости экспоненциально удаляется от
начала координат (рис. 3.2(a)); если А < 0, то точки движутся в
обратном направлении, к началу координат (рис. 3.2(b)).
Случай 2. Матрица А имеет разные вещественные соб-
ственные значения Ai и А2. Тогда
А = В
0\
А27
В-1.
2а. Ai и А2 положительны и Ai > А2. В частном случае, если
В — I, интегральные кривые изображены на рис. 3.3(a). Оси х и
у являются интегральными кривыми. Далее, поскольку решения
задаются формулами
/еЛ1*Я(Л
\2// ~ \eX2tyo)
и Ai — Л2 > 0, отношение х/у = eUi-*2)t растет при t —> +оо, а
при t —► — 00 кривые входят в начало координат, касаясь оси у.
В случае произвольной матрицы В пусть vi и V2 - собствен-
ные векторы матрицы А. Прямые, идущие вдоль векторов и
V2, являются интегральными кривыми. Поскольку Ai > А2, дру-
гие интегральные кривые становятся почти параллельными vi
138 Глава 3. Линейные дифференциальные уравнения ...
при t ~* +оо и касаются V2 при t —> — сю, как это показано на
рис. 3.3(b).
2b. Ai и Л2 отрицательны и |Ai| < |Аг|. Этот случай похож на
случай 2а, но все стрелки направлены в противоположную сто-
рону. При t —► +00 все интегральные кривые движутся к началу
координат.
2с. Ai положительно, а А2 отрицательно. В частном случае, когда
В = I, оси х и у опять являются интегральными кривыми. С
ростом t значение |х| растет, а значение |у| убывает.
Другие интегральные кривые стремятся к оси х при t —> +00
и к оси у при t —> —сю, как это показано на рис. 3.4(a).
В случае произвольной матрицы В пусть вектор vi соответ-
ствует собственному значению Ai > 0, а вектор V2 — собствен-
ному значению А2 < 0. Точки, расположенные на прямой, про-
ходящей через vi, удаляются от начала координат, а точки на
прямой, порожденной вектором V2, движутся к началу коорди-
нат. Кривые решений стремятся к прямой, проходящей через vi,
при t —> 00, и к прямой, проходящей через V2, при t —> —00, как
это изображено на рис. 3.4(b).
2d. Ai положительно, А2 равно нулю. В частном случае, когда
В — I, координата у на каждом решении не зависит от времени.
Точки оси у неподвижны. Интегральными кривыми являются
3.4. Дифференциальные уравнения и фазовые портреты 139
Рис. 3.4(b). А = В (
Рис. 3.4(a). А = ( п1
еЛ1*<Го\
еА2*у0 /
прямые, параллельные оси х. При t —> +оо точки удаляются от
оси у, а при t —* — ос приближаются к ней (рис. 3.5(a)).
Рис. 3.5(a). А = ( Q1 °
/ _ / еЛ1*#(Л
\У) ~ \ Уо )
В случае произвольной матрицы В, пусть вектор Vi соот-
ветствует собственному значению Ai > 0, a V2 — собственному
значению А2 = 0. Прямые, проходящие через начало координат
140 Глава 3. Линейные дифференциальные уравнения ...
вдоль вектора V2, состоят из неподвижных точек. Интегральны-
ми кривыми являются прямые, параллельные вектору vi. Точки
удаляются от прямой, проходящей через V2, при t оо и при-
ближаются к ней при t —> —оо (рис 3.5(b)).
2е. Ai отрицательно, А2 равно нулю. Все стрелки имеют направ-
ление, противоположное предыдущему случаю. При t —> +00
вся плоскость проектируется на прямую, проходящую через век-
тор V2*
Случай 3. Собственные значения матрицы А равны, но
А
0
А АН. При этом А = В
? JB-1, ехр(М) = ВеЛ1Г * ИВ"1.
А / \ U 1 /
В этом случае преобразование А имеет только один собственный
вектор vi.
За. А > 0. Если В — I, то собственный вектор vi лежит на
оси х. Ось х является интегральной кривой. На любом решении
при t —> +00 |х| становится много больше \у\; соответственно
интегральные кривые, задаваемые формулой
fяЛ xt (хъ + tyo\
\у) \ У0 /’
становятся «почти параллельными» оси х (рис. 3.6(a)). При t —>
—00 знак х противоположен знаку у. Все кривые пересекают ось
у при t = ~х$/у$.
3.4. Дифференциальные уравнения и фазовые портреты 141
В случае произвольной матрицы В интегральной кривой яв-
ляется прямая, проходящая через начало координат вдоль векто-
ра Vi. При t —> оо все другие кривые становятся «параллельны-
ми» этой прямой, причем пересекаются они в начале координат.
ЗЬ. А < 0. Стрелки меняют направление на противоположное по
сравнению с предыдущим случаем.
Зс. А = 0. В частном случае, когда В — I, ось х состоит из
неподвижных точек. Интегральными кривыми являются прямые,
параллельные этой оси. Для произвольного значения t функция
ехр(М) является преобразованием сдвига (см. рис. 3.7(a)).
Рис. 3.7(a). А= (°
В случае произвольной матрицы В прямая, проходящая че-
рез начало координат вдоль вектора vi, остается неподвиж-
ной. Все точки плоскости сдвигаются параллельно этой прямой
(рис. 3.7(b)).
Случай 4. Матрица А имеет комплексно-сопряженные
собственные значения а ± i/З. В этом случае собственные
векторы отсутствуют.
4а. а = 0. В частном случае, когда В — I, интегральными кри-
выми будут окружности с центром в начале координат. Одно из
142 Глава 3. Линейные дифференциальные уравнения ...
решений — неподвижное начало координат (рис. 3.8(a)). Преоб-
разование ехр(М) является вращением:
ехр(М) =
cos /3t
sin Д
— sin pt
COS pt
Решения — периодические с периодом 2тг//3.
В общем случае интегральные кривые являются эллипсами.
Решения — периодические с периодом 2%/Р (рис. 3.8(b)).
4Ь. а > 0. Интегральные кривые — это спирали, закрученные
против часовой стрелки (рис. 3.9(a), (Ь)). При t —> +оо точки
удаляются от начала координат, а при t —> — ос приближаются к
нему.
4с. а < 0. То же самое, что и в предыдущем случае, но спирали
закручиваются к центру при t —> +оо.
3.5. Применения дифференциальных
уравнений
На рис. 3.10 изображена физическая система, поведение кото-
рой описывается дифференциальным уравнением только что рас-
смотренного типа.
3.5. Применения дифференциальных уравнений
143
Рис. 3.9(a). А =
cos /3t — sin (3t
sin (3t cos /3t
Рис. 3.10
144 Глава 3. Линейные дифференциальные уравнения ...
Масса М движется под действием пружины, создающей силу
—кх, пропорциональную смещению х; линейный буфер создает
силу —zu, пропорциональную скорости и, с которой движется
эта масса. Второй закон Ньютона говорит, что Мй — — кх — zu,
где скорость определена как х = и. Состояние системы полно-
стью описывается вектором w = yuJ> компонентами которого
являются положение и скорость массы М. Поскольку
х = и,
к z
и " “77х “ 77и>
м м
можно написать дифференциальное уравнение
w = Aw,
где
9 к z
ш° = м' = М'
Движение системы определяется собственными значениями
матрицы А. Характеристическое уравнение матрицы имеет вид
Л2 + Г А + c<?q = О,
решая которое, получаем следующие собственные значения:
-Г±/Г2-4^
А 2
Таким образом, существуют четыре возможности.
1. Если Г — 0 (отсутствует трение), то Л = ±io>o- Такая систе-
ма движется, не затухая, совершая колебания около положения
равновесия (осциллятор без затухания). Фазовый портрет соот-
ветствует случаю 4а из предыдущего параграфа. Кривыми реше-
ния являются эллипсы в плоскости хи (рис. 3.11(a)). Уравнение
для каждого из эллипсов имеет вид ^кх2 + ^Ми2 = const, что
означает сохранение энергии. Период движения равен 2тг/соо.
3.5. Применения дифференциальных уравнений
145
Рис. 3.11(a)
2. Если Г > 0 и при этом Г2 — < 0, то собственные
значения равны
Г
2
Такая система называется осциллятором с затухающими коле-
баниями, Фазовый портрет соответствует случаю 4с. Интеграль-
ными кривыми являются спирали, закручивающиеся к началу
координат (рис. 3.11(b)).
3. Если Г2 = 4oJq, то характеристическое уравнение имеет
два одинаковых корня Л = —Г/2. Такую систему называют ос-
циллятором с критическим затуханием, его фазовый портрет
соответствует случаю ЗЬ (рис. 3.11(c)).
Запишем явно матрицу
А- АН =
Г/2 1 \
-Г2/4 —Г/2/
Отсюда видно, что Wi =
— один из собственных векто-
ров матрицы А. Это значит, что если
ио/ “ у—(Г/2)х0
146 Глава 3. Линейные дифференциальные уравнения ...
то в процессе движения отношение координат х и и остается
постоянным.
4. Если Г2 > 4Ц), то характеристическое уравнение имеет
отрицательные вещественные корни
А = —Г/2 ± ^/г2/4 — Wq.
Такое поведение системы называется апериодическим затухани-
ем] его фазовый портрет соответствует случаю 2Ь (рис. 3.11(d)).
Чтобы лучше понять эти четыре типа движения, давайте для
каждого из этих случаев найдем и нарисуем зависимость коор-
динаты х от времени t.
Случай 1* Осциллятор без затухания. Мы имеем:
° Л _ /Ч1/2 ° \ ( ° R2 о А
-^0 0/ ( О wj/2) о ) о w01/2у ’
следовательно,
/0
ехр 0
/ -1/2
= |
\ 0
1/2
cos a>ot
— sinwot
sin wot
cos Wot
/ 1/2
| W
\ 0
-1/2
w0
о
0
3.5. Применения дифференциальных уравнений
147
Отсюда зависимость х от t имеет вид
х = т cos (VQt + п sincuo^,
где шип определяются из начальных условий. Введем параметр
р, удовлетворяющий равенству
т2 + п2 = р2
и определим ф из соотношений
т = р sin </>, п — рсоъф.
Тогда можно написать
x(t) = pcos(cuoi + 0).
Такая кривая представляет собой синусоиду с частотой Фаза
ф и амплитуда р зависят от начальных условий (рис. 3.12).
W
Рис. 3.12
Случай 2. Осциллятор с затухающими колебаниями. Нам
известно, что в этом случае
„/e-rt cosu>it —e-rtsina?it\
exp(tA) = В _г* . \ _rt . В \
v ye sinc^ii е llcosuitJ
где
о?1 = ^40^ - Г2.
Таким образом, зависимость х от t имеет вид
x(t) = pe~rt cos(ivit + </>),
148 Глава 3. Линейные дифференциальные уравнения ...
где р и ф зависят от начальных условий. Графиком этой за-
висимости является экспоненциально затухающая синусоида
(рис. 3.13).
Случаи 3 и 4. Здесь у графика x(t) не существует синусоидаль-
ной составляющей в траектории, координата х экспоненциально
затухает со временем t и может пересекать линию х = 0 не боль-
ше одного раза (рис. 3.14 и 3.15).
Вынужденные колебания. Очень часто дифференциальные
уравнения, возникающие при решении физических задач, явля-
3.5. Применения дифференциальных уравнений
149
ются неоднородными уравнениями типа
v - Лv = b(i),
где b(i) не равняется тождественно нулю. Чтобы понять, как
появляется член b(t), рассмотрим управляемый осциллятор: на
массу М помимо пружины и буфера действует внешняя вынуж-
дающая сила F(t) (рис. 3.16).
Рис. 3.16
Тогда уравнения х = и и тй = —кх — Zu + F(t) можно
записать в форме
(_ ( ° 1 \ М = ( 0
Vi/ \-к/М -Z/m)\u)
Чтобы получить решение неоднородного уравнения v—Av = b(£),
обобщим метод, называемый вариацией постоянных. Этот ме-
тод хорошо известен для решения линейных дифференциаль-
ных уравнений от одной переменной. В случае одной неизвестной
функции для решения уравнения
х — кх — b(t)
пользуются тем, что функция ekt является решением однородного
уравнения х — кх = 0. Тогда решение неоднородного уравнения
можно искать в виде x(t) = ektu(t). Подставляя это выражение в
неоднородное уравнение х — кх = b(t), получаем
kektu(t) + ektu(t) - kektu(t) = b(t),
откуда
u(t) = e~ktb(t).
150 Глава 3. Линейные дифференциальные уравнения ...
Интегрируя это равенство по времени, получаем в качестве одно-
го из решений
t t
= / e~ksb(s)dS) x(t) = ektu(t) = ekt J e~ksb(s)ds
о о
или
t
z(i) = у efe(t-s)b(s) ds.
0
Это решение получено для начального условия х(0) = 0. Чтобы
получить решение для произвольного начального условия хо, мы
просто добавляем соответствующее решение однородного уравне-
ния ektXQ. Тогда решение уравнения х — кх ~ b(t) с начальным
условием х(0) = xq можно записать в виде
t
x(t) = / ek^~s^b(s) ds + ektxo.
о
Этот метод можно применить и для решения векторного урав-
нения V—Av = b(i). Действительно, функция exp(M)vo является
решением однородного уравнения v — Av = 0. Мы можем заме-
нить постоянный вектор vo на функцию w(t) и искать решение
неоднородного уравнения в виде v(^) = exp(tA)w(£). Подстановка
этой функции дает
Aexp(M)w(i) + exp(M)w(i) — A exp(M)w(t) = b(i).
Отсюда следует, что
w(t) ~ exp(-M)b(t).
Интегрируя по времени, получаем, как одно из решений,
t
w(t) = / exp(-sA)b(s)ds.
о
3.5. Применения дифференциальных уравнений
151
Итак,
v(i) ~ exp(tA)w(t),
t
v(i) = / exp[(f — s)^]b(s)ds.
о
Очевидно, это решение удовлетворяет условию v(0) = . Что-
бы получить решение с произвольными начальными условиями,
добавим общее решение однородного уравнения. Тогда получаем
векторную функцию
t
v(t) ~ Jехр[(/ - s)A]b(s) ds + exp(M)vo,
о
которая удовлетворяет условию v(0) = vq.
В учебниках по физике при обсуждении осциллятора с вы-
нуждающей силой обычно рассматривают в качестве функции
Ь(£) синусоиду с постоянной частотой Например,
, , ч _ /sincotf + coscuA
' ' у 3coso>£ у ’
Тогда b(t) удовлетворяет уравнению b = -~cu2b. В этом случае
мы можем в общем решении, полученном выше, провести инте-
грирование по частям. Применим тот же трюк, который исполь-
зуют для вычисления неопределенного интеграла f e~kssinsds:
проинтегрируем два раза по частям и получим уравнение для
неизвестного интеграла. Пусть
t
v — J exp[(i — s)A]b(s) ds.
о
Интегрируем один раз по частям и, предполагая, что А — несин-
гулярная матрица, получаем
t
v= [—exp[(t — s)A]A-1b(s)]<0 + exp[(t — s)A]A-1b(s) ds.
о
152 Глава 3. Линейные дифференциальные уравнения ...
Еще раз интегрируем по частям:
v = [— exp[(i — з)Л]Л”хЬ(з)]р — jexp(£ — з)Л-2Ь(з)^
t
+ У ехр[(£ — з) Л]Л“2Ь(з) ds.
о
Заменив b на —cu2b, видим, что последний член равен — A“2oj2v.
Итак,
v + A”2cu2v = — |exp[(t — з)Л] p“xb(s) + A“2b(s)j
или
(А2 + cu2/)v = — |ехр[(£ - з) Л] [b(s) + ЛЬ(з)^| °.
Кроме случая, когда Л имеет собственные значения ±iu> (тогда
матрица (Л2 + о/21) сингулярна), обе части последнего равенства
умножаем на (Л2+и2Н)-1 и получаем решение уравнения в явном
виде
v = —(Л2 +o;2I)“1 + ЛЬ(£) — ехр(/Л) ^b(O) + Ab(O)^j .
Член, содержащий ехр(М), обеспечивает выполнение начального
условия v(0) = 0. Если Г > 0, то умножение на ехр(М) приводит
к тому, что любой вектор стремится к нулю при t —► +оо. Таким
образом, при больших значениях t этот член можно опустить и
мы получаем установившееся решение:
v = -(Л2 + сЛ)-1 p(t) + Ab(t)J .
Чтобы проверить этот результат, заметим, что
v = —(Л2 + or2!)-1 p(t) + Ab(t)j
и
Av = -(А2 + ш2!)-1 [Ab(t) + A2b(t)] .
3.5. Применения дифференциальных уравнений
153
Тогда
v — Av = —(А2 + о?2!)-1 [w2b(t) + A2b(t)] = b(t).
Эта проверка показывает, что результат правильный, даже если
матрица А сингулярна!
Например, мы хотим найти решение для
/х\ /—1 —2\ (х\ _ /sin3t\
\ 2 -1) \у) ~ \cos3t/ '
Здесь
b(t)=f5i““
\cos3t
и b(t) = —32b(t), т.е. ш = 3. Тогда
1 /3
26 \2
1 /3
26 \2
—2\
3 )
cos 3t — sin 3t
— cos 3t — sin 3t
3 cos 3t
—3 sin 3t
— sin 3t — 2 cos 3t
2 sin 3t — cos 3t
1 / sin 3t — 5 cos 3t \
26 \ 5 sin 3t + cos 3t) ‘
и
Это есть установившееся решение исходного дифференциального
уравнения. Заметим, что компоненты вектора v(£) — опять сину-
соидальные функции от t с той же частотой, что и вынуждающий
член. Однако, амплитуды компонент v и соответствующие фазы
(положение гребней и впадин волны) изменились.
Рассмотрим установившееся решение для физической систе-
мы, описанной в начале параграфа, с синусоидальной вынужда-
ющей силой. Пусть
л ( ° 1 \ м ( 0 \
А — ( о т-J , b(t) = I . . .
у—cuq —Г/ х ' \smwtj
154 Глава 3. Линейные дифференциальные уравнения ...
Тогда
2 _ f-^О -Г
А Г2-си2
Далее,
Л 2 4- - (^2 ~ ~Г
A+uU-^r^2 r2W-u#
и
Det (Л2 +о>21) = (о;2—Wg)2-l-r2(a>2—а>о)+Г2а;о = (ш2 — о>о)2+Г2оА
Поэтому
(Л2 4- Ш2!)-1 =________-_______/Г2 + ш2 - Г \
(Л + Ш I) (^2 _ ^2)2 + г2^2 _г^2 ш2 _ ,
и мы получаем формулу для установившегося поведения системы
1
-(л2++ль<‘«=
х/Г2+а?-а>0 Г \ / / 0 \ / sincu£
у “Гсид cu2 — сиду у yiu cos art] у—Tsina^
Таким образом, закон движения определяется формулой
= ~ (cu2 — си^)2 + Г2си2 C°SW< + ~ Sin^
= psm(ut + </>),
где
Р= - , ф = аГС8Ш(-Гй>/р) = aTCCOs(wJ) - Ш2)/р.
у (о;2 — о?о)2 + Г2о>2
Заметим, что если Г мало, то для значения си, близкого к сио, в
амплитуде появляется большой множитель. Это явление называ-
ется резонансом (рис. 3.17).
Обратите также внимание, как изменяется фазовый сдвиг ф от
нуля при малых значениях си2 до —тг/2 для ш2 = loq. Для больших
значений си2 фазовый сдвиг равен arccos(—1) = —тг (рис. 3.18).
Резюме
155
Рис. 3.17. Резонансная кривая
Рис. 3.18. Фазовый сдвиг
Резюме
А. Экспонента от матрицы
Изучив эту главу, вы должны научиться выражать экспоненци-
альную функцию exptX в виде формального степенного ряда,
уметь вычислить эту функцию в тех случаях, когда степени мат-
рицы X имеют простую форму.
Вы должны уметь объяснить смысл производной (d/dt)etx и
показать, что она равна Xetx.
В. Линейные дифференциальные уравнения
Вы должны уметь показать, что все решения уравнения v = Av
At
имеют вид v = e vo-
Вы должны уметь вычислять eAt для любой матрицы А (2 х 2)
и решать уравнение v = Av с заданными начальными условиями.
Вычислив собственные значения матрицы А (2x2), вы долж-
ны уметь рисовать фазовый портрет, представляющий инте-
гральные кривые для уравнения v = Av.
С. Неоднородные уравнения и гармонический осциллятор
Вы должны уметь преобразовывать дифференциальное уравне-
ние второго порядка, описывающее осциллятор, к виду v — Av =
b, где А — матрица 2 х 2 и b - вектор, зависящий от времени.
Вы должны уметь решать это уравнение и связывать решение
с поведением осциллятора при наличии затухания и резонанса.
156 Глава 3. Линейные дифференциальные уравнения ...
Задачи
3.1.
(Ь)
3.2.
Докажите, что F2 = F/2 м. F
3.3.
(Ь)
Вычислите матрицу, обратную
-1
, записав ее в
, и воспользо-
. Обратите
(Ь)
справедливо условие
= exp(tXw/4) и
удовлетворяет условию Р2у4 =
3.4.
Напишите разложение в степенной ряд для (1 — X) 1 и для
(1-Х)-2.
Перемножьте два полученных ряда и сравните результат с
разложением в степенной ряд (1 — X)-3.
п „ /1/4 1/4\
Пусть Р=^4
F/2n~xt Используя этот результат, получите разложение в
ряд матрицы (I—F)-1. Получите обратную матрицу прямым
вычислением и сравните результаты.
3/2 1/2'
1/2 3/2
виде (1 + Р)”1, где Р — проекция 1/2
вавшись разложением в ряд матрицы (НХ)-1
внимание на то, что ряд расходится, несмотря на существо-
вание обратной матрицы.
„ лг /—1/2 1/2
Для матрицы Л/г/д = I _х/2 1/2
Х^/4 = 0. Используя это, вычислите F(t)
проверьте, что F'(t) ~ Nnf4F(t).
„ ТУ (УЪ 1/2'
Матрица Р^ = I
Pjr/4* Вычислите G(t) = ехр^Р^), воспользовавшись этим
свойством, и проверьте, что G^4 = PK/4G(i).
Пусть матрица Р удовлетворяет уравнению Р2 = ЗР.
(а) Какие собственные значения имеет Р? Приведите свои аргу-
менты.
(Ь) Используя разложение экспоненты в степенной ряд, покажи-
те, что ехр(/Р) может быть записана в виде
exp(tP) = К + g(t)P.
Найдите явное выражение для функции g(t).
3.5. Допустим, что В есть матрица 2 х 2 с одинаковыми собственными
значениями А.
(а) Покажите, что матрица N = В — AI является нильпотентом,
т. е. N2 = 0.
Задачи
157
(b) Записав В = N + АЕ и воспользовавшись разложением экс-
поненты в степенной ряд, покажите, что
exp(tB) = (I + tN) exp(tAE).
3.6. Воспользовавшись результатом задачи 3.5, решите систему урав-
нений
X = x(t) - y(t),
у = x(t) + 3y(t)
/ Т(Л
с произвольными начальными условиями I I.
3.7. Вычислите -ехр(Ы) для следующих матриц и проверьте, что
(d/dt) ехр(М) = Лехр(М):
, . л __ /~4
(а) А " \^-2 Зу
/—1 д\
(b) А = I J. 1. (Подсказка: А = 2I + N, где N — нильпотент-
ная матрица.)
/а л __ "Л
(с) А~ (5
3.8. Пусть А — матрица 2x2, имеющая два разных вещественных
собственных значения Ai и Аг, соответствующие собственным
векторам vi и V2.
(а) Покажите, что матрица Pi — (Л — АгЕ)/(А1 — Аг) задает
проекцию на прямую, задаваемую собственным вектором vi:
Pf == Pi, образ Pi есть Avi, а ядро Pi есть Av2.
(b) Покажите, что матрица Р2 = (А — А1Е)/(Аг — Ai) задает
проекцию на прямую, задаваемую v2. Покажите, что
Р1Р2 — Р2Р1 = 0? Pi + Р2 = I? AiPi + А2Р2 — А.
(с) Используя разложение экспоненты в степенной ряд, покажи-
те, что
exp(tAiPi + tA2P2) = eAltPi + eA2tP2.
(d) Воспользовавшись этим результатом, решите систему урав-
нений
x(t) = -4s(t) + 5y(t),
y(t) = -2x(t) -I- 3y(i)
158 Глава 3. Линейные дифференциальные уравнения ...
с произвольным начальным условием (
3.9. Пусть А — матрица 2 х 2, у которой след равен нулю и опреде-
литель равен 1.
(а) Напишите характеристическое уравнение матрицы А. Что
можно сказать о матрице А2 в этом случае?
(Ь) Используя разложение ехр(М) в степенной ряд, получите
формулу
ехр(М) = F(t)I + G(t)A,
где матрицы F(t) и G(t) содержат тригонометрические функ-
ции от t.
(с) Кривой решения уравнения v = Av с начальным условием
v = vo является эллипс, изображенный на рис. 3.19. Дока-
жите, что все хорды, соединяющие exp(M)vo с ехр(—M)v0
параллельны Avq , и что средняя точка каждой хорды лежит
на диаметре эллипса, на котором лежит вектор vq.
3.10. Допустим, что матрица G имеет след, равный нулю и определи-
тель, равный — /З2.
(а) Чему равняется G2 (примените теорему Гамильтона-Кэли)?
(Ь) Используя разложение экспоненты в степенной ряд, покажи-
те, что матрица exp G+exp(—G) пропорциональна единичной
Задачи
159
матрице. Найдите такую функцию /, чтобы выполнялось ра-
венство
exp(G) + exp(-G) = /(/3)L
(с) Умножив это тождество на expG и применив теорему Га-
мильтона-Кэли, покажите, что Det (ехр (G)) = 1, и получите
выражение для следа матрицы ехр G.
(d) Пусть F = AI + G. Используя результаты, полученные выше,
покажите, что Det(expF) = exp(TrF).
3.11. Для каждой системы дифференциальных уравнений, представ-
ленных ниже, найдите, какой из фазовых портретов, полученных
в параграфе 3.4 (случаи 1(а)-4(с)), наилучшим образом описыва-
ет поведение общего решения. Решите эти системы для началь-
(т0\ /3\
ного условия I \ — I j 1 при t = 0.
(а) х = -4у,
у - х - 4у;
(Ь) х х — 2у,
у = —2т + Аух — 4у;
(с) х = 4т — 5г/,
у = 4т — 4у;
(d) х = 2т 4- г/,
У ~ -х + 4г/;
(е) х = т — 5г/,
У = 2т - 5г/;
(f) х = —2т + 4г/,
г/ = -т + 2г/.
3.12. Решите системы уравнений, приведенные ниже, с начальными
( xq \ / 2 \ -г-ч „
условиями I 1 ( 1 Ь В каждом случае определите, какой
фазовый портрет наилучшим образом представляет общее реше-
ние системы.
(а) х = Зу,
у = х- 2у;
(Ь) х = -х + у,
у = -5х + Зу;
(с) х = Зх + у,
у = -х + у;
160 Глава 3. Линейные дифференциальные уравнения ...
(d) х ~ ~Ьх + 4г/,
у = -8х 4- 7г/;
(е) х = — 4х — 2г/,
у = 5х + 2у;
(f) х = х 4- 2г/,
У = 2х - 4г/.
3.13. Обобщив на случай матрицы 3x3 то, что вам известно о вы-
числении и применении экспоненты, в показателе которой стоит
матрица 2x2, решите систему дифференциальных уравнений
£ = г/,
У = z.
z = —6т — 11г/ — 6z
/х\ / 1 \
с начальными условиями I у I = I 2 ) при t = 0. (Примечание:
V/ \ “1 /
возникнет проблема вычисления обратной матрицы 3x3. Это
можно сделать «в лоб», если рассмотреть задачу решения трех
систем линейных уравнений.)
3.14. Обобщив известную технику, решите систему уравнений
х — х 4- у — z,
у = ~~х 4- 5у 4- z,
z = ~2х + 2г/ 4- 4z
/х\ /1\
с начальными условиями I у I = I 1 I при t = 0.
угу \1у
3.15. Введя величину v — х, преобразуйте дифференциальное уравне-
ние второго порядка
х 4- 4х 4- 5х = 0
в систему уравнений первого порядка. Решите эту систему для
„ f Xq
произвольных начальных условии I
3.16. (а) Дифференциальное уравнение для гармонического осцилля-
тора с критическим затуханием (единицы выбраны так, что
и>2 = 1) имеет вид
х 4- 2х 4- х = 0.
Задачи
161
Решите это уравнение матричным методом, вводя v ~ х в ка-
честве новой переменной. Запишите решение для начальных
0( х$\ (х\ / 0 \ Л х
= IqI и = I v I, нарисуйте фазовые
портреты этих и других решений. Покажите, что каждое из
равенств х — 0 или v = 0 может выполняться не больше, чем
в одной точке.
(Ь) Есть другой способ решения этого уравнения. Сначала ищут-
ся решения уравнения х+2я+(1 — s2)x = 0 при г > 0, что при-
водит к матрице с разными вещественными собственными
значениями, а затем рассматривается предельный переход
г —> 0. (Физически это соответствует использованию слегка
ослабленной пружины.) Выполните всю процедуру для на-
чальных условий и * Покажите, что произойдет с
фазовыми портретами при €—►().
(с) Еще один способ решения того же уравнения. Сначала реша-
ется уравнение ^+2±Н-(Ц-£2)ж — 0, что приводит к матрице с
комплексно-сопряженными собственными значениями, после
этого е —> 0. Проделайте вычисления для начальных условий
( (0 \ 1
\ 0 / И \ г>о / наРисУите Ф330131*16 портреты решении и по-
кажите, что происходит с фазовыми портретами при е —> 0.
3.17. Рассмотрим функцию costa.
(а) Разложите функцию в формальный степенной ряд и пока-
жите, что
d2 ( . 2
— (costa) = —х costa
аг2
и
d , ч
— (costa) = 0 при t = 0.
dt
(b) Пусть
—В J, где матрица В имеет квадратный
корень А (т. е. А2 = В). Покажите, что cos(M) есть
решение дифференциального уравнения второго порядка
= A2v(t)
162 Глава 3. Линейные дифференциальные уравнения ...
с начальными условиями v(0) — г>о и dv/dt(fi) — О.10
(с)
Пусть В = 5/2 у Зайдите такую матрицу А, ко-
торая имеет положительные собственные значения и удов-
летворяет уравнению А2 = В. (Указание: диагонализуйте
матрицу В.)
(d) Для построенной таким образом матрицы А вычислите
cos(M). (Указание: Матрица А уже приведена к диагональ-
ному виду. Воспользуйтесь той же процедурой, что и для
вычисления ехр(Ы).)
(е) Используйте полученные выше результаты для решения сис-
темы уравнений
5 3
Х = ~2Х+2У’
.. 3 5
У=2Х~2У
с начальными условиями
гг(О) = у(0) = 0, т(0) = х0, у(0) = у0.
3.18. Рассмотрим систему дифференциальных уравнений
X = 4(3х — у
у = 9х -Ь /3,
где (3 — вещественный параметр.
(а) Решите систему с произвольными начальными условиями
при /3 — 0.
(Ь) Найдите два критических значения параметра {3\ < 0 и
/З2 > 0, при которых меняется характер решения. Обсуди-
те случаи /3 = /31 и /3 = /З2-
(с) Нарисуйте фазовые портреты, которые качественно описы-
вают природу решений для /3 < /31, /31 < /3 < /З2 и /3 > /Зг-
/ —9 1 \
3.19. Пусть А — ( . ).
10Авторы имеют в виду, что матрица cos(tA) должна быть получена как
сумма формального степенного ряда для cos tx, где вместо числа х подставле-
на матрица А. Разумеется, необходимо убедиться в сходимости полученного
ряда. (Можно доказать, что он сходится для всех t при любой матрице А.)
См. также указания авторов к задаче 3.17 (d). — Прим. ред.
Задачи
163
(а) Найдите такие матрицы D и В, чтобы выполнялось соотно-
шение А = BDB~r (D — диагональна).
(Ь) Постройте решение дифференциального уравнения v = Av
у (J. А
для произвольных начальных условий vo = I \ при t = 0.
(с) Нарисуйте фазовый портрет решения уравнения v = ^4v.
Получите образ и ядро матрицы
F = lim exp(AZ),
t—>оо
объясните их значения в связи с фазовыми портретами.
(d) Выбрав пробное решение в виде v = exp(?U)w, получите
решение дифференциального уравнения v — 4v = 0^.
3.20. (а) Введя и = х в качестве новой переменной, преобразуйте
х + 2х — Зх = 3 sin 2t + 2 cos 2t
к уравнению вида
©~а(:)=ь<‘)-
(Ь) Решите это уравнение с начальными условиями я(0) = 0,
и(0) — 0, воспользовавшись результатами, полученными в
параграфе 3.4.
3.21. Когда к незатухающему осциллятору приложена вынуждающая
сила, частота которой равна собственной частоте осциллятора,
обычные методы решения не работают. В этом случае они не
дают установившегося решения. Однако, мы получили формулу
t
v(t) = / exp[(i — s)A]b(s)ds,
о
которая прекрасно работает. С помощью этой формулы получите
решение уравнения
для начальных условий гг(О) = 0, w(0) — 0.
Глава 4
Скалярные произведения
Глава 4 посвящена изучению скалярных произведений
и квадратичных форм. В ней много физических при-
ложений, в том числе обсуждение нормальных мод и
подробное изложение специальной теории относитель-
ности.
4.1. Скалярные произведения
в евклидовом пространстве
Как вы помните, на аффинной плоскости мы располагаем очень
ограниченным понятием длины: мы можем сравнивать длины
отрезков на параллельных прямых, но для прямых, которые не
параллельны, это сделать нельзя. Например, можно говорить,
что на рис. 4.1 длина отрезка QR (или QlRf) в два раза больше
длины отрезка PQ, но мы не имеем права сравнивать длины
отрезков PQf и PQ.
Евклидова плоскость — это аффинная плоскость, где опреде-
лена функция расстояния, которая каждой паре точек приписы-
вает неотрицательное вещественное число D(P, Q), называемое
расстоянием между этими точками. Эта функция расстояния
совместима с ограниченным понятием длины в аффинной гео-
метрии, например, на рис. 4.1 D(Qf,Rf) ~ 2D(P,Q). Кроме то-
го, она позволяет сравнивать длины непараллельных отрезков,
таких как PQ и PQf. На евклидовой плоскости R2 расстояние
166
Глава 4. Скалярные произведения
между двумя точками определяется хорошо известной формулой
Z)(P, Q) = У(xq - жр)2 + (yQ - ур)2.
Евклидовым преобразованием f : R2 —► R2 называется аффинное
преобразование, сохраняющее функцию расстояния, т. е. удовле-
творяющее условию Z)(/(P),/(Q)) — Z>(P, Q).
Обратим внимание на векторное пространство смещений на
евклидовой плоскости. Мы видим, что функция расстояния поз-
воляет определить длину каждого вектора. Действительно, дли-
на вектора — это просто расстояние от его «головы» до «хво-
ста». Длину вектора v будем обозначать ||v||. Очевидно, что если
v = то llvll = Vх*2 + У2 (рис- 4.2).
Вообще говоря, линейные преобразования векторного про-
странства R2 не сохраняют длины векторов. Линейные преобра-
зования, сохраняющие длину, называются ортогональными пре-
образованиями. Это могут быть вращения вокруг начала коор-
динат или отражения относительно прямых, проходящих через
начало координат.
Поскольку евклидово преобразование плоскости сохраняет
длины, то оно каждый треугольник переводит в конгруэнтный
треугольник (рис. 4.3) и, следовательно, сохраняет не только
длины, но и углы. В частности, в евклидовой геометрии при-
обретает смысл понятие «перпендикулярности» (это понятие не
определено в аффинной геометрии). Мы будем говорить, что два
вектора v и w перпендикулярны или ортогональны друг другу,
4.1. Скалярные произведения в евклидовом пространстве 167
Рис. 4.3
если для треугольника, который они определяют, справедлива
теорема Пифагора, т. е. ||v||2 + ||w||2 = ||v — w||2 (рис. 4.4).
Теперь, имея понятия длины и угла в евклидовом пространст-
ве, мы можем определить скалярное произведение двух векторов.
ТТ ( Х\ / ( Х'\ ТЛ
11усть даны два вектора, v = | I и v — I , I. Их скалярное
произведение, обозначаемое (v, v'), определяется равенством
(v,v') = ||v|| • ||v'||cos0,
где 0 — угол между этими векторами.
168
Глава 4. Скалярные произведения
Геометрически это можно истолковать так (рис. 4.5): мы бе-
рем проекцию вектора v' на прямую, на которой расположен век-
тор v. Затем мы умножаем полученную проекцию на длину век-
тора v. Берем это произведение со знаком плюс, если направление
спроектированного вектора совпадает с направлением вектора v,
и со знаком минус, если проекция имеет противоположное на-
правление. Поскольку скалярное произведение определено в тер-
минах евклидовой геометрии плоскости, то любое линейное пре-
образование, сохраняющее длину, должно сохранять и скалярное
произведение, т. е. линейное преобразование, сохраняющее длину
векторов и угол между ними, сохраняет скалярное произведе-
ние этих векторов. Другими словами, если есть ортогональное
преобразование ЛГ, то (Mv,Mv') = (v,vx) для любой пары век-
торов Vх и v. Ниже мы приведем алгебраическое доказательство
этого утверждения. Обратно, поскольку (v,v) = ||v||2, то любое
преобразование Л/, сохраняющее скалярное произведение любых
векторов v' и v, является ортогональным.
Допустим, что мы зафиксировали вектор v. Рассмотрим
(v,v') как функцию вектора Vх. Мы утверждаем, что (v,vx) яв-
ляется линейной функцией от Vх, т. е. (v,avx + bwx) = a(v,vx) +
fe(v,wx) для любых чисел а и b и для любых векторов vf и wx.
Самый простой способ доказать это состоит в следующем. Сна-
„ (с\
чала рассмотрим частный случаи, когда вектор v = I I лежит
на оси х. Тогда для вектора Vх — скалярное произведение
(v, vx) — сх1. Очевидно, что это выражение зависит линейно от
Vх, что доказывает наше утверждение в частном случае. Теперь
пусть у нас вектор v произволен. Можно найти преобразова-
ние вращения Af, совмещающее вектор v с осью х. При этом
(v,vx) — линейно зависит от W и Mv1 линейно
зависит от Vх, что и требовалось доказать. Сделаем это доказа-
тельство более подробно.
(v, avx + few') (Mv,M(av' + few')) = (Mv, aMvf + feMw')
= a(Mv, Mv')+ b(Mv, Mw') = a(v,v') + b(v,w'),
где (a) следует из ортогональности Af, (fe) — из линейности М,
4.1. Скалярные произведения в евклидовом пространстве 169
(с) — доказано в частном случае, что Mv лежит на оси х, (d)
также следует из ортогональности М. Так как скалярное произ-
ведение (v,v') симметрично по v и v', то (v,v') будет линейной
функцией v при фиксированном v'. Это позволяет нам получить
формулу для скалярного произведения. Пусть мы имеем два век-
тора:
Базисные вектора
ортогональны друг другу и имеют
длину, равную единице. Тогда
= хх + yyf.
Обоснования: (а) следует из линейности по v, (b) следует из ли-
нейности по v', (с) — использованы соотношения
Таким образом, мы получили удобную формулу для скалярного
произведения двух векторов, лежащих в одной плоскости:
(v, v') = xxf + yyf.
Перечислим важные свойства скалярного произведения в евкли-
довом пространстве:
170
Глава 4. Скалярные произведения
1. симметрия: (v,v') ~ (v',v);
2. линейность: (v, av' + bw') = a(v, v') + b(v, w');
3. положительная определенность: (v, v) > 0 и (v, v) = 0,
только если v = 0.
Воспользовавшись этими свойствами, можно выразить скалярное
произведение через длины векторов. Рассмотрим тождество:
||v — w||2 — (v — w, v — w).
Скалярное произведение линейно по обоим векторам, поэтому
|| v — w||2 = (v, v) — (v, w) — (w, v) + (w, w).
Так как (v, v) = (w,w) — ||w||2 и (v,w) — (w,v), мы
получаем
2(v, w) = ||v||2 + ||w||2 - ||v - w||2.
Следовательно,
(V, W) = |{IIv||2 + IIw||2 - ||v - w||2}. (4.1)
Эта формула показывает, что евклидово скалярное произведение
определяется евклидовым понятием длины. Если мы напишем
(v, w) — ||v|| • ||w||cos0 и посмотрим на рис. 4.6, то увидим, что
формула 4.1 это просто завуалированная теорема косинусов.
Рис. 4.6
4.2. Процесс Грама-Шмидта
171
4.2. Процесс Грама-Шмидта
Пусть V -- абстрактное двумерное векторное пространство. До-
пустим, что в нем дано положительно определенное скалярное
произведение (•, -)у. Другими словами, допустим, что у нас есть
функция, которая каждой паре векторов Vi, V2 из V приписы-
вает вещественное число (vi,V2)v, удовлетворяющее условиям
симметричности, билинейности и положительной определенно-
сти. Тогда мы утверждаем, что существует линейный изомор-
физм1 L : V —> R2 такой, что
(vi,v2)v = (Lvi,Lv2).
Другими словами, выбрав правильный базис, можно сделать так,
чтобы скалярное произведение (у)ув пространстве V выглядело
так же, как евклидово скалярное произведение (•, •) в простран-
стве R2. Для доказательства этого утверждения выберем в про-
странстве V ненулевой вектор w. Так как ||w||^ — (w,w)y > О,
длина вектора
_ w
ei ~ l|w||v
равна единице, т. е.
Ilei||2 = (ei,e2)v = |i-Tii2-(w,w)y = 1.
II wll v
Теперь пусть и — вектор в пространстве У, линейно независи-
мый от ер Так как это пространство двумерно, то такой вектор
существует. Пусть
u2 = u - (u,ei)yei.
Вектор и2 перпендикулярен ei, т. е. (u2, ei)y = 0. Действительно,
(u2,ei)y = (и - (и,ei)yei,ei)y
= (u,ei)v - (u,ei)y(ei,ei)y
= (u,ei)y - (u,ei)y = 0,
1 Напоминаем, что в параграфе 1.12 мы определили понятие изоморфиз-
ма: L — линейное, взаимно-однозначное, сюръективное преобразование, и,
следовательно, имеющее обратное линейное преобразование.
172
Глава 4. Скалярные произведения
так как (ei,ei)y = 1. Кроме того, U2 0, так как в противном
случае вектора ei и и были бы линейно зависимы. Определим
вектор
1
©2 "п ц U2 •
llu2||v
Тогда (e2,ei)y = (l/||u2||v)(u2,ei)y = 0 и ЦегП = 1. Выберем эти
векторы ej, е2 в качестве базиса в пространстве V, Тогда любой
вектор в этом пространстве можно представить в форме
v = xei + уе2.
Заметим, что х = (v,ei), так как (e2,ei) = 0 и (ei,ei) — 1.
Аналогично, у — (v,©2).
Пусть
Vi = Xiei +У1е2,
V2 = z2ei + 2/2^2-
Возьмем отображение L : V —> R2 в нашем базисе
т ( х1\ г (х%\
Lvi = J и LV2 “I | .
\У1/ \y^J
Тогда
(vi,v2)y = (^161 + 2/1^2, x2ei + y2e2)v = xix2 +2/11/2 = (Lvi,Lv2),
т.к. (ei,e2)y = (e2,ei)y = 0 и (ei,ei)y = (е2,е2)у — 1. Наше
утверждение доказано.
Определим евклидово скалярное произведение в пространстве
R3 формулой
(/ Х1 \ / х2 \\
I 2/1 I , I У2 ) I = Х1Х2 + 2/12/2 + ^2-
VI / \ ^2 //
(х\
у I, то ||v||2 ~ (v, v) явля-
z /
ется квадратом евклидовой длины вектора v. Приведенные выше
4.2. Процесс Грама-Шмидта
173
соображения показывают, что, воспользовавшись формулой 4.1,
по длине вектора можно восстановить скалярное произведение:
(v, W) = | (||v||2 + ||w||2 - ||v - w||2).
Таким образом, вращения в трехмерном пространстве сохраняют
скалярное произведение. В частности, если нам даны два вектора
v и w, то можно повернуть плоскость, в которой они расположе-
ны, так, чтобы она совпала с плоскостью z ~ 0. Для векторов в
такой плоскости скалярное произведение сводится к скалярному
произведению в пространстве R2. А для таких векторов мы уже
получили, что
(v,w) = ||v|| • ||w|| COS0,
и, следовательно, это справедливо для любой пары векторов (по-
скольку обе части равенства инвариантны относительно враще-
ний).
Векторное пространство V называется трехмерным, если лю-
бые четыре вектора линейно зависимы, но существуют три линей-
но независимых. Это значит, что для любых четырех векторов vi,
v2, V3, V4 можно найти четыре числа ai,a2, «3,(24, не все равные
нулю, при которых выполняется равенство
«ivi + a2v2 + (23V3 + CI4V4 = 0,
и при этом существуют три вектора u, v, w такие, что равенство
au + 6v + cw — 0
выполняется только при условии а — b — с = 0.
Допустим, что в пространстве V есть положительно опреде-
ленное скалярное произведение (•, *)у. Повторим построение, при-
веденное выше для двумерного случая. Выберем ненулевой век-
гор. Обозначим его ei. Выберем другой вектор и, линейно неза-
висимый с вектором ei. Положим
u2 = u - (u,ei)yei,
1
е2 = й—п-и2-
||u2||v
174
Глава 4. Скалярные произведения
Векторы ei и е2 удовлетворяют условиям
11^1 ||v — ||е2|| v = 1, (ei,e2)y = 0.
Множество векторов вида xei + т/е2 изоморфно R2 и, следова-
тельно, образует двумерное векторное пространство. Оно не за-
полняет все пространство V, так как в этом множестве мы не
можем найти три линейно независимых вектора. Таким образом,
в пространстве V существует вектор w, который нельзя записать
в форме xei + г/е2. Значит, вектор
w3 = w — (w,ei)vei — (w,e2)ye2
не равен нулю. Определим вектор
1
ез = и---iT“W3‘
Hw3||v
Тогда
||ei||y = ||е2||у = ||е3||у = 1,
(ei,e2)v = (ei,e3)v = (e2,e3)y = 0.
Если v — произвольный вектор в пространстве V, то мы утвер-
ждаем, что
V - (v,ei)yei - (v,e2)ve2 - (v,e3)ve3 = 0.
Действительно, воспользовавшись теми же соображениями, что
и раньше, положим
v4 = v - (v,ei)ei - (v,е2)е2 - (v,e3)e3.
Тогда
(v4,ei)v = (v4,e2)y = (v4,e3)y = 0.
Если предположить, что V4 0, то можно доказать, что векторы
©i, е2, ез, V4 линейно независимы. В самом деле, пусть выполнено
равенство
aiei + а2е2 + а3ез + (Z4V4 — 0.
Домножим обе его части на ei, е2 и ез. В результате получим,
что ai ~ 0, а2 — 0, а3 = 0. Следовательно, если V4 О, то
4.2. Процесс Грама-Шмидта
175
«4 = 0. Но это противоречит исходному предположению, что
пространство V трехмерное.
Итак, любой вектор в пространстве V может быть записан в
форме
v = хех + уе2 + ге3, где х = (v,ei), у = (v,e2), z = (v,e3).
Точно также, как и в двумерном случае, определим отображение
L : V —> R3 равенством
(х \
у I , если v = xei + уе2 + ге3.
z /
Это отображение является линейным, взаимно-однозначным ото-
бражением V на пространство R3 и
(u,v)v = (£и,Лу)^з.
Аналогичное утверждение можно доказать и для случаев че-
тырех, пяти, ..., п измерений.
В пространстве Rn определим евклидово скалярное произве-
дение
(( xi\ f \\
= xiWi 4----ь Xnwn
\\хп / \W //
Векторное пространство V называется n-мерным, если сущест-
вует п линейно независимых векторов, при этом любой набор
из п + 1 векторов является линейно зависимым. Общую теорию
n-мерных векторных пространств мы будем изучать в главе 10.
Если V — n-мерное пространство, имеющее положительно опре-
деленное скалярное произведение, то в нем можно найти ортого-
нальный базис ei,..., еп, т. е. можно найти п векторов ei,..., еп,
обладающих свойствами
11е1|| v = ||в2 IIV = • • • = ||en|| V = 1
и
(ei,ej)v = 0, i^j.
176
Глава 4. Скалярные произведения
Любой вектор v в пространстве V может быть записан в форме
v = Ziei 4----1- хпеп, Xi = (v, ej.
Соответственно определяется отображение L : V —» Rn
(xi У
= •
/
Тогда
(v,w)y — (Lv, Lw).
Итак, если у нас есть п независимых векторов vi,... vn, то векто-
ры ег можно последовательно получить с помощью следующего
алгоритма:
U2 = v2 - (v2,ei)ei,
1
©2 т;
l|u2||
u3 = v3 - (v3,ei)ei - (v3,e2)e2,
1
ез = ii—„из,
l|u3||
и так далее. Этот алгоритм называется ортонормировочной про-
цедурой Грама-Шмидта.
Покажем начало процедуры Грама-Шмидта в применении к
векторам vi, V2, V3, V4 пространства R4, где
/ 1\ /з\
1 3
vi= 1 , v2= 5 .
\-1/ \3/
(Мы сделаем только два первых шага, поэтому векторы V3, V4
нам не потребуются.) Скалярное произведение в пространстве
4.2. Процесс Грама-Шмидта
177
R4 определяется, как обычно. Иными словами, мы предполагаем,
что векторы
/0\
1
о
W
/°\
О
1
\°/
/0\
01
0
V/
образуют ортонормированный базис.
Первый шаг состоит в преобразовании вектора vi к единич-
ному вектору:
(vi,vi) = I2 + I2 + I2 + (-1)2 = 4,
поэтому
следовательно,
/ 1/2 \
1/2
1/2
\-1/2/
Далее, из вектора V2 вычитаем его проекцию на вектор ei:
/3\
I 3
W2= 5
W
/3\
3
5
\3/
1/2
1/2
-1/2/
/А
1
3
W
И наконец, преобразуем вектор W2 в единичный вектор:
(w2,W2) =
/А
1
3
W
1
3
\5//
= I2 + I2 + З2 + 52 = 36,
\/(vi,vi) = 2,
178
Глава 4. Скалярные произведения
поэтому
\5/
в
качестве проверки заметим, что
Заметим, что любой вектор v в пространстве R4 можно за-
писать как сумму вектора ttv, который является линейной ком-
бинацией векторов ei, в2 (и, следовательно, векторов vi и V2), и
вектора, перпендикулярного ei и е2- Например, возьмем вектор
Определим вектор irv следующим образом:
1
7FV = -7
4
я-v = (v,ei)ei + (v,e2)e2,
w
/°\
о
2
W
Можно проверить, что вектор
/ 4\ /0\ / 4\
О _ О о
— 1 2 ~ —3
\ 7/ W \ М
4.2. Процесс Грама-Шмидта
179
перпендикулярен векторам ei и е2. (Это можно сделать прямой
проверкой ортогональности этого вектора исходным базисным
векторам vi и V2, либо ортонормированной системе векторов ei
и е2.) Мы будем говорить, что преобразование тг, переводящее
вектор v в 7TV, есть ортогональная проекция на подпространство
W, натянутое на векторы Vi и V2.
В качестве второго примера применения процедуры Грама-
Шмидта рассмотрим четырехмерное пространство полиномов
степени < 3, где скалярное произведение определяется форму-
лой
(f, g) = j х /(i)fl'(O dt.
(Проверьте, что эта формула действительно определяет скаляр-
ное произведение!) Начнем со степенного базиса
V1 = 1, V2 = V3 — t2, V4 = t3.
(Если бы начали с других базисных элементов, либо с теми же
элементами, но в другом порядке, то могли бы получить другой
ортонормированный базис.) Сначала вычислим
(vi,vi) = j ^dt = 2
и преобразуем вектор vj к единичному вектору:
ei = vlx/(v!,vi) = 1/V2.
Затем вычислим
/•1
(ei,V2)= / (t/Vtydt = O,
J-i
откуда следует, что вектор V2 уже ортогонален вектору ei. По-
скольку
(v2, v2) = У t2 dt = 2/3,
'го получаем в2 ~ t/^/(2/3) = ^/(3/2)L
180
Глава 4. Скалярные произведения
Теперь можно вычислить вектор W3:
W3 = v3 - ei(ei, v3) - е2(е2, v3)
Вычисляем скалярное произведение
и получаем третий нормированный базисный вектор
Наконец, вычисляем вектор W4:
w4 = v4 - ei(ei, v4) - е2(е2, v4) - е3(е3, v4)
= t3-W t3dt-^t [ t4 dt — |(3t2 -1) [ (3t5-t3)dt
2 J-i 2 J-i 8 J-i
, 3 2 о 3
= t2 - 0 - -t • - - 0 = t3 - -t.
2 5 a
Разделив его на ^/(w4, W4), получаем четвертый нормированный
вектор
=4 = = 1/I'5'3 - 3‘>-
V(w4,w4) V 8
Очевидно, что действуя таким образом, мы можем постро-
ить последовательность ортогональных полиномов более высо-
ких степеней. Эти полиномы, известные как полиномы Лежанд-
ра, появляются при решении задач электростатики в сфериче-
ских координатах. На самом деле, обычно при решении физи-
ческих задач векторные пространства функций, получающихся
4.3. Квадратичные формы и симметричные матрицы 181
при решении дифференциальных уравнений, имеют ортогональ-
ный базис, возникающий естественным образом из физических
соображений. Поэтому на практике не так уж часто приходится
прибегать к громоздкой процедуре Грама-Шмидта.
4.3. Квадратичные формы и симметричные
матрицы
В параграфах 4.1 и 4.2 мы изучали евклидовы скалярные произ-
ведения, обладающие тремя свойствами: они билинейны, симмет-
ричны и положительно определены. Сейчас мы займемся изуче-
нием «скалярных проиизведений» более общего вида, когда поло-
жительная определенность не обязательна. Эти скалярные про-
изведения играют центральную роль в теории относительности.
Возвращаемся в пространство Ж2. Допустим, что в этом про-
странстве нам дано скалярное произведение (•,•), которое не обя-
зательно будет положительно определенным. При этом мы пола-
гаем, что оно
билинейно: (v, au + bw) = a(v, u) + b(v, w)
и симметрично: (u, v) = (v,u)
для всех векторов u, v, w и всех вещественных чисел а и Ь.
Интересно сравнить скалярное произведение (•,•) с евклидовым
скалярным произведением (•,•). Начнем с элементарной леммы.
Пусть I : R2 —> R есть линейное отображение. Тогда сущест-
вует единственный вектор w, для которого
i(v) = (v,w) для всех v из R2.
Действительно, I определяется матрицей 1x2: (а Ь), т. е.
1 z- (х\ —О
= ах 4- by для любого v — 6 К .
У/ \У/
Выберем вектор
182
Глава 4. Скалярные произведения
Тогда
(v,w) = II I , Н II =ах + Ъу,
что мы и хотели доказать. Очевидно, что w — единственный
вектор в пространстве К.2, обладающий таким свойством. Теперь
рассмотрим (u,v) как функцию v при фиксированном векторе
и. Это скалярное произведение линейно по v, следовательно, су-
ществует такой вектор w, для которого
(u, v) = (v, w) для всех v Е V.
Вектор w зависит от и, поэтому в этом уравнении следует писать
w(u). Итак, w(u) — это такой вектор, для которого евклидово
скалярное произведение с любым вектором v равно (u, v). Пусть
Ui и U2 — два вектора, а им соответствуют w(ui) и w(u2). Тогда
(aui + i*u2, v) (v, aui + bu2)
= a(v, ui) + b(v,u2)
= a(ui, v) + 6(u2, v)
= a(v, w(ui)) + fe(v, w(u2))
= (v, aw(ui) + 6w(u2)),
где (a) — следствие симметрии, (Ь) — следствие билинейности,
(с) — следствие симметрии. Таким образом,
w(aui + 6112) = aw(ui) + bw(u2)<
Другими словами, w линейно зависит от и. Но тогда можно напи-
сать w(u) = Au, где А — линейное преобразование. Вводя преж-
ние обозначения w(u) = Au, получаем:
(u, у) = (у, Ли)
для всех и и v в пространстве R2. До этого момента мы нспользо-
вали только билинейность (u, v), т. е. линейность по и при фикси-
рованном v и линейность по v при фиксированном и. (Здесь, по
4.3. Квадратичные формы и симметричные матрицы 183
существу, использована также симметрия (•,•).) Симметрия (•,•)
позволяет записать
(u,v) = (v,u),
следовательно,
(v, Au) = (u, Av).
Однако, (u, v) = (v,u), поэтому
(v, Au) = (Av, u)
для всех векторов u и v в пространстве V. Посмотрим, что из
этого можно получить для матрицы А.
Для любой матрицы В выражение (Bv, и) линейно в отдель-
ности по и и по v. Воспользовавшись предыдущими аргументами,
можно показать, что существует единственное линейное преобра-
зование (обозначим его Вт), которое удовлетворяет условию
(Bv, u) = (v, Вти)
для всех векторов и и v в пространстве V, Это преобразование
называется транспонированным по отношению к В. Вычислим
В7, приняв обозначения
Тогда
(Bv, u) = (ex + fy)x' + (дх + hy)y'
= ехх' + fyx' 4- дху' + hyy'
= х(ех' + ду') + y(fx' + hy'),
следовательно,
ex’ + ду'
fx' + hy1
или
Другими словами, транспонированная матрица ВТ получается
отражением матрицы В относительно главной диагонали.
184
Глава 4. Скалярные произведения
Отсюда для матрицы А, определяющей наше «скалярное про-
изведение», следует, что
А = Ат,
т. е. матрица А симметрична. Значит, А может быть записана в
виде
Если мы обозначим
<?(v) = (v,v),
тогда, как и в параграфе 4.1, можем получить тождество
(и, V) = |(<2(и) + Q(v) - Q(u - v)),
Q(v) = (Av, v) = ат2 + 2bxy + cy2.
Такая функция Q называется квадратичной формой. Таким
образом, предыдущие формулы показывают, что квадратичная
форма Q определяет (•,•), и обратно, каждое скалярное произве-
дение определяет квадратичную форму.
Коэффициенты а, 26, с в квадратичном полиноме Q(v) опре-
деляют матрицу А. Другими словами, Q определяет А и, следо-
вательно, (•,•).
Характеристический полином для матрицы А имеет вид
х2 - (а + с)х + ас - 62,
при этом выполнено условие
(а + с)2 — 4(ас - 62) = (а - с)2 + 4Ь2 > 0.
Выражение (а — с)2 + 4Ь2 называется дискриминантом квадра-
тичной формы Q. Дискриминант равен нулю в том и только том
случае, если а = с и b = 0. Тогда
л (а ° А тт
А — л ) = а!
\ 0 а)
4.3. Квадратичные формы и симметричные матрицы
185
и
(u, v) — а(и, v).
В этом случае (♦, •) пропорционально (•,).
Предположим, что А имеет различные собственные значения
Ai Ф А2, соответствующие собственным векторам vi и V2. Дока-
жем, что вектор Vi перпендикулярен вектору V2, т. е. (vi, V2) = 0.
Это очень просто: (Avi,V2) = (vi,Av2), т.к. А симметрич-
на; (AiVi,V2) = (vi,A2V2), т.к. vj, V2 — собственные векторы;
Ai(vi,V2) = A2(vi,v2), т. к. скалярное произведение линейно;
(vi, V2) = о, потому ЧТО А1 7^ А2-
Докажем обратное утверждение: пусть собственный вектор
vi матрицы А соответствует собственному значению Ai. Пусть
вектор V2 не равен нулю и перпендикулярен Vi, т.е. (vi,V2) = 0.
Тогда
(vi, AV2) = (Avi, v2) = Ai(vx, V2) — 0,
следовательно, Av2 перпендикулярен Vi. Но существует только
одна прямая, перпендикулярная вектору vi, и вектор V2 0 ле-
жит на ней. Это значит, что AV2 пропорционален V2, т. е. Av2 ~
A2V2 для некоторого собственного значения А2.
Итак, мы доказали, что любая симметричная матрица А име-
ет два ортогональных собственных вектора vi и V2. Умножив
векторы vi и v2 на соответствующие скаляры, можно сделать их
гр (хЛ
длину равной единице. Тогда матрица I 1, где vi = I I
\ 2/1 2/2 / \ 2/1 /
( Х2\
и V2 = | , является матрицей вращения.
V 2/2/
Таким образом, можно записать А = R [ 1 х ) R \ где
у 0 А2у
R — матрица вращения. Для ортогональной матрицы М выпол-
няются соотношения (Tlfv, Mv) = (v, MTMv) = (v,v) для всех
векторов v. Отсюда следует, что МТ — М~\ и мы можем напи-
сать равносильное равенство:
А R (о
о А
Аг/
RT.
Предположим, что мы выбрали собственные векторы так, что
Ai > Аг- Тогда собственный вектор vi, уже преобразованный к
186
Глава 4. Скалярные произведения
единичной длине, отличается от всех других векторов единичной
длины v тем, что Q(v) принимает максимальное значение. Век-
тору V2, тоже имеющему единичную длину, соответствует мини-
мальное значение Q(v), т. е.
Q(vi) > Q(v) > Q(v2)
для любого вектора v единичной длины ((v, v) = 1). Чтобы до-
казать это утверждение, запишем v = vi cos0 + V2sin0 (рис. 4.7).
Векторы Vi и V2 ортогональны и имеют единичную длину, сле-
довательно,
(v,v) = (vi,vi)cos20+ (V2,V2)sin20 = 1.
Рис. 4.7
Тогда
Q(v) = (Av,v)
= (Avi cos 0 + Av2 sin 0, vi cos 0 + v2 sin 0)
= (Ai Vi cos 0 + A2v2 sin 0, vi cos 0 + v2 sin 0)
= Ai(v1,vi)cos20 + A2(v2,v2)sin20 (т.к. (vi,v2) = 0)
= Ai cos2 0 + A2 sin2 0
— Ai — (Ai — A2) sin2 0.
Очевидно, что Q(v) имеет максимум при sin2# = 0, т. е когда
v = ±vi, и принимает минимальное значение при sin2# = 1, т.е.
когда v = ±v2.
4.3. Квадратичные формы и симметричные матрицы 187
Теперь понятно, как нарисовать линию Q(v) = (Av,v) —
const. С помощью матрицы вращения R приведем А к диаго-
нальному виду:
Л==ДГп1
' У и Л2 J
Тогда
<?М = (я( о1 л2)л-1у’у)-
Матрица R ортогональна, поэтому RT = Я”1, и мы получаем
Q,y,-((o л')й 1у Я’v)-
Если записать | Х. | = R-1 ( Х ) = R~lv, то
\У / \У/
qw=(& ::W))=AiZ+w2-
Если оба собственные значения Ai и А2 положительны, то ли-
ния Q(v) = fc — это эллипс при к > 0, начало координат при
к = 0 и пустое множество при к < 0. Если Ai и А2 отрицатель-
ны, то линия будет эллипсом при к < 0. Если Ai и А2 имеют
противоположные знаки, то линия Q(v) = к будет гиперболой,
вырождающейся в две прямых при к = 0. Вершины эллипса или
гиперболы, в которых расстояние от точки на кривой до начала
координат имеет локальный экстремум, лежат на прямых, зада-
ваемых собственными векторами матрицы А.
(9 2\
9 I. Тогда
Z о /
Q(v) = 9х2 + 4ху + бу2.
Собственные значения матрицы А таковы: Ai — 10, А2 = 5. Соот-
ветствующие им собственные векторы:
. Мы можем
написать А = R
10 0\
0 б)
R 1, где матрица вращения R равна
R= 4= (1
у/5 V
-1
2
188
Глава 4. Скалярные произведения
Введем новые координаты
f х(х\ _ 1 / 2 1\ ( х\
\у') w 2;
т. е.
х' = -±=(2х + у),
V 5
у'=-у=(-х + 2у).
V о
В новых координатах
Q(v) = 10а/2 + 5у'2.
График множества Q(v) = 1, т. е.
10а/2 + 5у'2 = 1,
является эллипсом, у которого малая ось — -^1/10, а большая
равна ^/1/5. Оси расположены вдоль собственных векторов мат-
рицы А : f j j и Г 1 \ см' рис. 4.8.
Предположим, что помимо вращения, изменяющего коорди-
наты, возможно неортогональное преобразование вида: хп = ах'
и у" ~ /Зу'. Тогда, введя новые координаты х" и у", получим
<?м = >'2 + >''2.
4.4. Нормальные колебания
189
Если Ai ф 0, то можно выбрать с? = |Ai|. Тогда Ai/o2 = ±1.
Аналогичную процедуру проделаем и для Аг- Мы приходим к
следующему результату.
Пусть Q — любая квадратичная форма в пространстве R2.
Мы можем найти такие координаты хп и у", для которых Q
определяется одной из следующих формул:
Q(v) =
х"2 + у"2,
х"2,
о,
-ж"2
х"2 - у"2
-х"2-^'2.
Если обе координаты входят в формулу со знаком плюс, то Q(v)
имеет минимум при v = 0 (рис. 4.9). Если они входят со знаком
минус, то Q(v) имеет в этой точке максимум. Если одна коорди-
ната входит со знаком плюс, а другая со знаком минус, то Q(v)
не имеет ни максимума, ни минимума, а седловую точку в начале
координат, как это показано на рис. 4.10.
4.4. Нормальные колебания
Теория связанных осцилляторов является одним из самых важ-
ных приложений результатов предыдущего параграфа. Чтобы
190
Глава 4. Скалярные произведения
это продемонстрировать, рассмотрим механическую систему, со-
стоящую из двух незатухающих осцилляторов (рис. 4.11), кото-
рые мы соединим пружиной с константой упругости к (рис. 4.12).
Уравнения движения, определяемые законами Ньютона, имеют
вид
m^xi — —к\Х\ — k(xi — Х2),
ТП2Х2 = — к2Х2 - к(х2 - Х1),
или
где Т и Н — симметричные матрицы:
Н =
-к \
к2 + kJ *
\ 0
Рис. 4.11. Несвязанные осцилляторы
mi
m2
> Х2
> Xi
Рис. 4.12. Связанные осцилляторы
Наша задача — попытаться одновременно диагонализировать
матрицы Т и Н, чтобы «развязать» уравнения.
Давайте обсудим общий случай. Мы рассматриваем две сим-
метричные матрицы Т и 7/, причем Т положительно определена.
Сначала покажем, что можно найти положительно определенную
матрицу В, удовлетворяющую уравнению
т = в2.
4.4. Нормальные колебания
191
Действительно, если Т диагональна, как в нашем примере, то
можно взять
/ 1/2
в= (Ш1
\ о
0
1/2 I •
m2 J
С другой стороны, можно найти
такую матрицу вращения В#,
что
Т = Re^Rf)T, где А — диагональная матрица.
Пусть А — С2, где С положительно определена. Тогда матрица
В — RqCRJ симметрична, положительно определена и удовлет-
воряет условию В2 = Т.
Теперь определим
w = Bv,
откуда
v = В xw.
Тогда v — В xw, и наше уравнение Tv ~ — Bv принимает вид
TB“xw - —BB“xw,
или
Bw = -HB-Xw,
так как Т = В2. Теперь получаем
w — —Aw, где А — B~iHB~1.
Заметим, что А — тоже симметричная матрица. Таким образом,
мы свели задачу к случаю, когда Т = I. (Проницательный чита-
тель, должно быть, заметил, что с геометрической точки зрения
мы просто перешли в систему координат, в которой квадратичная
функция, связанная с Т, приведена к нормальному виду х2 + з/2.)
Чтобы решить уравнение w = —Aw, найдем собственные зна-
чения и собственные векторы матрицы А. Предположим, что
Vi — собственный вектор матрицы А с положительным собствен-
ным значением си2. Тогда очевидно, что функция
w(t) = pcos(iui£ + a)vi
192
Глава 4. Скалярные произведения
является решением при произвольной амплитуде р и фазе а. Ана-
логично, второй собственный вектор и собственное значение да-
дут pcos(o/2^ + oi). Эти решения называются нормальными коле-
баниями осциллирующей системы.
Запишем матрицу А в виде
А = RDR-1
где D — диагональная матрица. Тогда, определив вектор и ра-
венством
w = 7?и,
получаем уравнение
w = 7?u = —RDR 1/?и,
или
u = —Du.
Так как матрица D диагональна, для каждой компоненты век-
тора и получается независимое дифференциальное уравнение.
Предположим, что оба собственных значения матрицы А поло-
жительны. Пусть они равны и ivj. Тогда общее решение урав-
нения
имеет вид
й = -Du
Если собственные векторы матрицы А равны
то общее решение уравнения w = —Aw можно записать в форме
w(t) — Pl cos(cuit + Ol)vi + р2 cos(u>2* + ^2^2’
Таким образом, общее решение является «суперпозицией» нор-
мальных колебаний.
4.4. Нормальные колебания
193
В качестве примера рассмотрим две одинаковые связанные
между собой пружины, т. е. предположим, что ту = m2 — т,
= &2- В отсутствие связи каждая пружина описывается урав-
нением
х = —cuq2 = fci/mi ~ к2/тп2>
При наличии связи получаем систему уравнений
Ху — —(o,Q + s)£Ei + SX2, Х2 ~ 5X1 — (o>q + $)Х2, 5 — к/m
или
-Av, A=(“o + s
\ “5
— S
+ S
Из соображений симметрии получаем, что собственные векторы
матрицы А равны
для собственного значения cJq
и
/ 1\ 9
I jl для собственного значения + 2s.
Эти векторы задают два вида нормальных колебаний нашей сис-
темы. В первом случае шарики движутся в одну сторону, а во
втором — в противоположных направлениях (рис. 4.13).
Рис. 4.13
(wq + 2s)1/2 ~ о>о + $/а;о, если s/cuo мало.
Общее решение нашей системы дифференциальных уравне-
ний имеет вид
Х1 = ру cos(o?o^ + »1) + Р2 cos(o/t + С12),
#2 = Pl COs(a>o£ + «1) — Р2 COS(o/t + 6*2).
194
Глава 4. Скалярные произведения
Изучим частное решение нашей системы, когда мы натянули од-
ну пружину и отпустили ее в t = 0. Иными словами, зададим
начальные условия
Ж1(0) = С, ±1(0)- 0,
х2(0) — 0, ±2(0) = 0.
Из общего решения для данных начальных условий получаем
р± = р2 — С/2 и ai = oi2 = 0. Таким образом, частное решение
имеет вид
а?1 =
Х2 =
^C(cosa>o^ + coso/t),
&
“C(cosa;o£ — coso/t).
£
Вспомним, что cos о = ^(ега + е га). Отсюда можно получить
известные формулы:
cos а + cos (3 = 2 cos
cos а — cos /3 — —2 sin
Подставив a = u?ot и (3 = u/t, получаем наше частное решение в
форме
Х\ = С COs(u/ — OJo)t coscuot,
Х2 = —Csin(o/ — cuo)^sina;o^*
В случае слабой связи, т. е. при малой константе $, величина
— о?о мала. На рис. 4.14 изображены графики движения обеих
пружин как функции от времени. Колебания каждой пружины
(с собственной частотой сио) модулируются. Биения определяются
модулирующими множителями cos(c/ — cjq)/ sin(a/ — o>o)t- Энер-
гия переходит от одной пружины к другой. Когда одна пружина
колеблется с максимальной амплитудой, вторая отдыхает, и на-
оборот. Это явление называется резонансом.
Если пружины не одинаковы, но отличие невелико («неточ-
ная настройка»), то поведение системы будет почти таким же.
4.5. Нормальные моды в многомерном пространстве
195
* * v * V
Рис. 4.14
По-прежнему колебания каждой пружины модулируются. Вто-
рая пружина отдыхает через определенные промежутки времени,
а первая осциллирует даже в то время, когда вторая осциллиру-
ет с максимальной амплитудой. Неточность «настройки» приво-
дит к неполной передаче энергии от первой пружины ко второй.
Мы не будем говорить об этом более подробно. Детали исследо-
вания здесь просты, хотя и несколько утомительны. Вычисление
собственных векторов и собственных значений матрицы А предо-
ставим читателю в качестве упражнения.
4.5. Нормальные моды
в многомерном пространстве
Пусть V — n-мерное векторное пространство с положительно
определенным скалярным произведением. Кроме того, имеется
другое, не обязательно положительно определенное скалярное
произведение (•,•). Аргументы, изложенные в параграфе 4.3, по-
казывают, что существует линейное преобразование А : V —> У,
при котором
(u, v) = (Au, v) для всех и, v в пространстве У,
196
Глава 4. Скалярные произведения
где А симметрично, т. е.
(Au, v) ~ (u, Av).
Действительно, из параграфа 4.2 мы знаем, как найти изомор-
физм V пространства Rn, чтобы (•,•) преобразовалось в евкли-
дово скалярное произведение. Тогда без изменения можно вос-
пользоваться аргументами параграфа 4.3 и показать, что А —
симметричная матрица.
С помощью аргументов параграфа 4.3 можно показать, что
матрица А имеет п взаимно перпендикулярных собственных век-
торов. Действительно, рассмотрим квадратичную форму
Q(v) = (v, v) = (Av,v)
на единичной сфере
{v|||v|| = l}.
Эта функция непрерывна и ограничена. Если для всех матрич-
ных элементов AZJ выполняется неравенство |А^| < Л/, где М —
некоторое число, то для
мы имеем ||v||2 = = 1, следовательно, < 1 при всех
значениях i и
(Av, v) = ^AjjXjXj.
Откуда следует
|(Av,v)| < < пМ.
Пусть v определяет точку на поверхности единичной сферы,
где Q(v) принимает максимальное значение. (В этом месте мы
реально используем свойства системы вещественных чисел, ко-
торые гарантируют, что на самом деле существует точка на сфе-
ре, где Q принимает максимальное значение.) Утверждается, что
4.5. Нормальные моды в многомерном пространстве
197
v является собственным вектором матрицы А. Действительно,
определим вектор w формулой
w = Av — (Av, v)v.
Покажем, что если в точке v квадратичная форма Q принимает
максимальное значение, то w = 0, Так как (v,v) = 1, то вектор
w перпендикулярен вектору v, т. е.
(w, v) = О,
и, следовательно,
(Av,w) = ||w||2.
Тогда для любого вещественного числа s
||v + sw||2 = (v + sw, v + sw) = ||v||2 + s2|| w||2 = 1 + s2||w||2
и
(A(v + sw), v + sw) = (Av, v) + s(Aw, v) + s(Av, w) + s2(Aw, w).
Однако, (Av,w) = (w, Av), следовательно,
(A(v + sw), v + sw) = (Av, v) + 2s(Av, w) + s2(Aw, w)
= (Av, v) + 2s || w ||2 + s2(Aw, w).
Домножим вектор v + sw на число, чтобы получить вектор еди-
ничной длины:
1
U = 71------17 (v + sw)-
l|v + sw||v
Возьмем функцию
= (Au, u) = ||v+\w||2 (A(v + sw), v + sw
= 1 + S21|w||2 ((AV’ V) + 2s||w|12 + w)).
Это выражение представляет дифференцируемую функцию пе-
ременной s. По нашему предположению она имеет максимум в
198
Глава 4. Скалярные произведения
точке s = 0, поэтому первая производная /'(О) при s = 0 должна
обращаться в нуль: /'(0) = 2||w||2. Отсюда следует, что w = 0.
Таким образом, мы доказали, что
Av — (Av, v)v.
Другими словами, v является собственным вектором А для соб-
ственного значения (Av, v). Обозначим этот вектор vi, а соответ-
ствующее ему собственное значение (Avi,vi) = Ai.
Теперь рассмотрим пространство всех векторов z в V, кото-
рые перпендикулярны вектору vi (рис. 4.15), т. е. для всех векто-
ров z должно выполняться условие
(z,vi) = 0.
Для таких z мы имеем
(Az,vi) = (z,Avi) = Ai(z,vi) = 0, Ai = (Avi,vi).
Рассмотрим множество всех z единичной длины, т. е. таких z, для
которых справедливы равенства
||z|| = l, (z,V!) = 0.
Пусть v2 определяет точку, где Q принимает максимальное
значение. Запишем
Av2 = (Av2,v2)v2 + w2.
4.5. Нормальные моды в многомерном пространстве
199
Из того, что (v2,vx) = 0 и (Av2,Vi) = 0, получаем (w2,vi) = 0.
Как и раньше, мы делаем вывод, что (w2, v2) = 0. Тогда
I|V2+1SW2||2(A(V2 + SW2>’(V2 + SW2))
= f+g2+ V2) + 2sI|w2||2 + S2(Aw2, W2))
имеет максимум при s - 0 и, следовательно, W2 = 0, а вектор V2
является собственным вектором матрицы А.
Мы можем продолжить наши рассуждения: рассмотрим век-
торы z, удовлетворяющие условию (z,vi) = (z, V2) — 0 и ||z|| = 1,
и так далее. Каждый раз мы будем находить новый собствен-
ный вектор матрицы А, перпендикулярный ко всем предыдущим.
Когда этот процесс закончится? Когда мы выберем все ненулевые
векторы, перпендикулярные Это произойдет только
при условии к = п. Действительно, к не может быть больше п, так
как тогда векторы vi,..., vn+i будут взаимно перпендикулярны
и, следовательно, линейно независимы. Но это противоречит ис-
ходному предположению, что в пространстве V нет п + 1 линейно
независимых векторов (мы предположили, что пространство V
n-мерно). С другой стороны, если к < п, то уравнения
(vi,w) = 0,
(vfc,w) =0
в пространстве Rn образуют систему к однородных линейных
уравнений с п неизвестными. Такие системы всегда имеют ре-
шение. В общем случае мы докажем это в главе 10. Здесь мы
докажем существование вектора w 0. Если п-компонентный
вектор Vfc не равен нулю, т. е.
Xi \
: , где хп ± 0,
Vn/
то последнее уравнение системы имеет вид
XiWt Н----1- xnwn = 0.
200
Глава 4. Скалярные произведения
Из этого уравнения вектор wn выразим через wi,..., wn-i:
1 /
wn =-----(XxWi + • • • + Xn_iWn_i).
Подстановка этого вектора в предыдущее уравнение дает систе-
му к — 1 уравнений с п — 1 неизвестными. Процедура может быть
продолжена. Если n-я компонента любого из векторов vi,...,
не равна нулю, мы можем проделать то же самое — взять вектор
Vj с ненулевой n-й компонентой и получить wn. Если n-я компо-
нента всех векторов vi,..., vn равна нулю, то решением является
вектор
(0\
: I
1 /
(все первые п — 1 компонент обращаются в 0).
Таким образом, продолжая этот алгоритм, мы получим п по-
парно ортогональных собственных векторов.
Нормальные колебания как волны
Поработаем с интересным примером в пространстве п измере-
ний. Представим себе последовательность равных точечных масс,
где каждая соединена с ближайшими соседками пружинками,
причем все пружинки одинаковые. Тогда сила, действующая на
г-ю точечную массу, равна
-k(xi ~ + k(xi - Xi-i).
Запишем уравнения Ньютона
mxi = -k(2xi - x^i - xi+i).
Предположим, что первая и последняя точки также соединены
пружинкой. Система изображена на рис. 4.16.
Введем частоту а)2 = к/т и перепишем уравнения движения
в форме
х = —(V2Ax,
4.5. Нормальные моды в многомерном пространстве
201
где
Наша задача — найти собственные значения и собственные векто-
ры матрицы А. Прежде чем рассматривать общий случай, начнем
с рассмотрения случая п = 3. Из равенства
2 -1 -1\ /1 \ /0\
-1 2 —1 J I 1 J = I 0 J
-1 -1 2/ \1/ \0/
/ i \
следует, что ( 1 I — собственный вектор этой матрицы, соответ-
V /
ствующий собственному значению 0. Мы знаем, что другие соб-
/1\
етвенные векторы должны быть ортогональны I 1 1. Попробуем
\ 1 /
202
Глава 4. Скалярные произведения
/ 1\
вектор [—11. Тогда
\ 0/
/ 1\ / 0\
Значит, вектор I — 1 I и, аналогично, третий вектор I 1 1 яв-
\ °/ У”1/
ляются собственными векторами с собственным значенем 3. Та-
ким образом, собственные значения равны 0 и 3, причем значение
3 реализуется дважды.
Перейдем к случаю п — 4:
/2—1 0 -1\
л= -1 2—1 0
0—12—1’
\-1 0 -1 2/
Тогда
/л М
А 1 _ 0
1 “ 0 ’
V/ \о/
как и раньше. Кроме того,
Остающиеся собственные векторы должны быть ортогональны
этим двум. Попробуем вектор
/ 1\
0
-1
4.5. Нормальные моды в многомерном пространстве 203
Получаем
/ 2 -1 0 -1\ / i\ / 1
-1 2 -1 0 1 0 0
0 -1 2 -1 1 -1 м II -1
к-1 0 -1 2 / к о/ О
Находим последний собственный вектор
/ 2 -1
-1 2
0 -1
\-1 0
0
-1
2
-1
-1\
0
-1
2/
/ о\
1
0
\-1/
(о
-1
Итак, мы получили четыре собственных значения: 0, 4 и два раза
появилось собственное значение 2.
Чтобы рассмотреть n-мерный случай, заметим, что наша си-
стема инвариантна относительно поворота, когда первая точка
становится на место n-й, вторая на место первой, и т. д. Такой
поворот осуществляется матрицей
Легко проверить, что SA = AS. Найдем собственные векторы
матрицы S. Если Sw = Aw, то SAw = ASw = A(Aw) = A Aw.
Поэтому, если w является собственным вектором матрицы S для
собственного значения А, то Aw — тоже собственный вектор с
тем же собственным значением. Ниже мы получим п различных
собственных значений матрицы S. Тогда если Sw = Aw, то век-
тор Aw должен быть пропорционален w, т. е. быть собственным
вектором матрицы А.
Окажется, что «собственные значения» матрицы S и коорди-
наты «собственных векторов» будут комплексными числами. Ве-
щественные и мнимые части этих векторов будут собственными
векторами матрицы А. Приведем это доказательство.
204
Глава 4. Скалярные произведения
Пусть т = е27Г1/п, откуда тп — 1. Тогда
и так далее. Все собственные значения 1, т, т2, , т12"1 раз-
личны. Таким образом, каждый собственный вектор матрицы S
должен быть собственным вектором матрицы А, Обозначим эти
«собственные векторы» ei,... ,еп. Мы знаем, что
— ^к&к
для некоторых которые нам предстоит вычислить. Вторая
координата вектора Ае^ равна
(-1 2
-10 ... 0)
\ ’ /
= -1 + 2тк - т2к = (-т^к + 2 - тк)тк = 2(1 - cos(27rfc/п))тк.
Отсюда следует, что к-е собственное значение равно
Ад, = 2(1 — cos(27rA:/n)).
4.6. Специальная теория относительности
205
Мы получаем одинаковые собственные значения для к и п — к.
Тогда, складывая и вычитая собственные векторы для к и п — к,
мы можем получить вещественные собственные векторы. Итак,
векторы
/ 1 \
cos(27rfc/n)
cos(47rfc/n)
cos(67rfc/n)
\ /
0 \
sm(27rA:/n)
sin(47rfc/n)
sin(67rfc/n)
являются собственными векторами для собственного значения
2(1 + cos(27rfc/n)).
Если п = 2т — четное число, то второй столбец равен нулю при
к = т. Во всех остальных случаях собственные векторы не равны
нулю. Таким образом, каждую нормальную моду системы можно
рассматривать как волну сжатия (синус или косинус).
4.6. Специальная теория относительности
В этом параграфе мы подробно рассмотрим геометрию двумер-
ного векторного пространства с квадратичной формой Q(v) —
(v, v), которая может принимать как положительные, так и отри-
цательные значения. Как мы уже знаем, это пространство можно
идентифицировать с R2, а квадратичную форму Q определить
соотношением
qP \=t2-x2.
\х J
Мы увидим, что геометрия этого пространства (рис. 4.17)
обеспечивает хорошую модель для понимания специальной тео-
рии относительности. Слово модель мы применяем в следующем
смысле. Наше обычное пространство трехмерно. Поэтому, ес-
ли добавить время в качестве дополнительного измерения, мы
получим четырехмерное пространство-время. В нашей моде-
ли мы будем считать пространство одномерным, поэтому наше
пространство-время вместо четырехмерного будет двумерным.
206
Глава 4. Скалярные произведения
В этом случае мы сможем нарисовать все геометрические кон-
струкции. На самом деле, большая часть того, что будет сказано,
работает в обычном четырехмерном мире, с некоторой модифи-
кацией нашей двумерной модели.
Первый постулат специальной теории относительности под-
тверждает закон Ньютона: частицы, на которые не действуют
никакие силы, движутся вдоль прямых линий. Таким образом,
геометрия нашего пространства-времени среди всех возможных
кривых выделяет прямые линии. Наше пространство-время яв-
ляется аффинной плоскостью с некоторыми дополнительными
геометрическими структурами.
Второй постулат — конечная абсолютная константа. Таким
образом, в каждой точке пространства-времени существуют две
определенные линии, изображающие распространение света вле-
во или вправо. Пространственная и временная инвариантность
скорости света означает, что при смещении точки Р в точку Q
два световых луча, проходящие через точку F, преобразуются в
два световых луча, проходящих через точку Q (рис. 4.18).
Мы будем исследовать такие аффинные преобразования, ко-
торые световые лучи переводят в световые лучи. Трансляции по-
падают в это категорию. Поэтому задача сводится к изучению ли-
нейных преобразований, которые сохраняют световые лучи, про-
ходящие через начало координат. Итак, у нас есть две прямые
х — ±ct. Требуется найти такие линейные преобразования, кото-
рые сохраняют эти прямые. Для дальнейших вычислений удобно
ввести естественные единицы длины и времени, для которых
4.6. Специальная теория относительности
207
скорость света равна единице. Например, мы могли бы измерять
t в годах, а х в световых годах. Или если мы выберем наносекун-
ду (10“9 секунд) в качестве единицы времени, то соответствую-
щая единица длины, с великолепной точностью, будет один фут.
Поэтому в качестве естественных единиц t можно измерять в на-
носекундах, а х в футах.
Итак, мы будем изучать такие линейные преобразования, ко-
торые сохраняют изображенную на рис. 4.19 фигуру, определяе-
мую линиями х = t и х = —t.
Получив эти линейные преобразования, мы определим все
преобразования пространства-времени, которые сохраняют пря-
мые линии и скорость света.
На самом деле, мы хотели бы, по крайней мере временно,
исключить из рассмотрения определенные типы преобразований.
208
Глава 4. Скалярные произведения
Например, преобразования отражения
Рис. 4.20
Рис. 4.21
и преобразование инверсии (рис. 4.22).
Рис. 4.22
Эти преобразования все прямые х — ±t переводят в х = ±£,
при этом возможна перестановка линий. На рисунках показано,
как эти преобразования переставляют четыре области на плоско-
сти. Поэтому, умножая на одно из них, можно сделать так, чтобы
необходимые нам преобразования сохраняли бы каждую из этих
четырех областей. Таким образом, мы будем искать преобразо-
вания F, которые сохраняют прямые х = i, х = — t и переднюю
область (область абсолютного будущего): t2 > х2, t > 0.
Чтобы получить такие преобразования, перейдем к новым ко-
ординатам, для которых эти прямые становятся осями координат
(рис. 4.23):
4.6. Специальная теория относительности
209
Таким образом, R rFR должно сохранять координатные оси
и положительный квадрант, и преобразование R~lFR является
диагональной матрицей
R-lFR =
а 0\
0 dj ’
а > 0, d > 0.
Введем обозначения: ad = s2 и a/d = г2 выбрав s > 0, г > 0.
Тогда
R-1FR =
Значит, мы доказали, что
F = SLr,
где
s = °)
у 0 s J
является преобразованием смены масштаба и
1г = н(Г„ ° Лв-1 = ИГ+Г111 r7r:;y (4.2)
у 0 г 1J 2 — г 1 г + г 1J v 7
Преобразование Lr называется собственным преобразованием
Лоренца с параметром г. Мы утверждаем, что для любой пары
векторов vi, V2 _______________________
(£гУ1,Тгу2) = (vi,v2). (4.3)
Действительно, по аналогии с формулой (4.1) для скалярного
произведения (•,•), достаточно доказать, что
Q(v) = Q(Lrv).
210
Глава 4. Скалярные произведения
В нашем случае
Q(v) — t2 - х2 = — 4pq
I г
и, если v = Lrv =1 , I, то
\х /
(j) = (Д) И = ~4P'q' = ~4РЯ =
что и требовалось доказать2.
Результат преобразования масштаба S состоит в том, все дли-
ны и время умножаются на множитель $. Существование атом-
ных часов вместе с определенными спектральными линиями по-
казывает, что природные явления не инвариантны относительно
преобразования S при s 7^ 1.
Линейное преобразование Л, которое сохраняет квадратич-
ную форму Q в том смысле, что
Q(Av) = Q(v) для всех v в пространстве V,
называется преобразованием Лоренца. Такое преобразование А
должно переводить световой конус (называемый также нулевым
конусом)
{V | Q(v) = 0}
2Инвариантность Q(v) при преобразовании Лоренца проиллюстрирована
на рис. 4.24. — Прим. ред.
4.6. Специальная теория относительности
211
в себя, т. е. множество {х = ±i} должно сохраняться. Если, кроме
того, А преобразует область абсолютного будущего в себя же, то
оно является собственным преобразованием Лоренца А = Lr для
некоторого числа г.
Производя ряд преобразований Лоренца, собственные преоб-
разования Лоренца могут быть непрерывно сведены к тожде-
ственному. В этом состоит их отличие от других преобразований
Лоренца. Действительно, пусть A(t) есть семейство преобразо-
ваний Лоренца, удовлетворяющее условиям Л(0) = I, Л(1) =
Л. Пусть v указывет точку в области абсолютного будуще-
го. Тогда Л(£)у не может пересекать световой конус, потому
что <2(Л(£)у) = Q(v) > 0. Для любого преобразования Лорен-
ца Ое1Л = ±1, т.к. Л, умножаемое на матрицу вида
(±1 к к тт
или I ±1)’ есть собственное преобразование Лоренца и
Det£ = 1 для собственного преобразования Лоренца L. Таким
образом, поскольку Det A(t) непрерывно изменяется со временем
t и Det Л(0) = 1, мы должны иметь Det A(t) = 1, следовательно,
Det Л = 1. Но если Л может быть непрерывным образом сведено
к тождественному преобразованию, значит, Л является собствен-
ным преобразованием Лоренца. С другой стороны, если Л — £г,
то положим Л(£) = Ltr7 так что Л(0) — I и Л(1) = Л.3
3 Собственные преобразования среди всех преобразований Лоренца можно
охарактеризовать возможностью перевести их в тождественное отображение
непрерывным изменением в классе всех преобразований Лоренца. Точнее,
для того, чтобы А было собственным преобразованием Лоренца, необходимо
и достаточно существование семейства А(т) преобразований Лоренца, непре-
рывно зависящего от т при 0 < т < 1, такого, что А(0) = I, А(1) — А.
Докажем это. Необходимость доказывается совсем просто: если А = Lr,
то в качестве Л (г) можно взять А(т) = Докажем достаточность.
Пусть v — произвольная точка из передней области. Поскольку при всех т
Q(A(t)v) — Q(v) > 0, то точка A(r)v не может пересечь световой конус,
т. е. и при т — 1 находится внутри передней области. Далее, детерминант
любого преобразования Лоренца равен 4-1 или —1, поскольку такое преоб-
разование может быть получено из собственного домножением на матрицу
ПОСКОЛЬКУ Det А(0) = 1, то из соображений непрерывности
Det Д(т) — 1, откуда Det А = 1. Из этих фактов следует, что А — собственное
преобразование Лоренца. — Прим. ред.
212
Глава 4. Скалярные произведения
Произведение двух собственных преобразований Лоренца то-
же является собственным преобразованием Лоренца. Действи-
тельно, если
Lr = 7?f^ и Lrl=R(r' ^Лвг1,
\ 0 г 1 I \ 0 г )
то
£^ = л(о
так что
(4-4)
Удобно обозначить г = еа и положить
La = Zea
Тогда
(4-5)
Если ввести в рассмотрение гиперболические функции cosh а =
+ е а), sinh а =
£
— е а), то можно написать
cosh о
sinh о
sinha
cosh а
Теперь по своей записи преобразование Лоренца La очень похоже
на преобразование вращения R$:
cosh a sinh а \ __ / cos 0 — sin 0
sinh a cosh a J 1 у sin 0 cos О
Похожие формулы получаются для произведений преобразова-
ний:
La =
Lai . _ £ai+a2, в то ВремЯ как Rqx • R$2 = R#^#^
При изменении параметра а точка Lav движется вдоль гипер-
болы, за исключением пограничного случая, когда v лежит на
4.6. Специальная теория относительности
213
световом конусе. В этом случае точка Lav движется к вершине
светового конуса или от нее (кроме v = О, когда £av = 0 для всех
а). Именно поэтому функции sinh, cosh называются гиперболиче-
ским синусом и гиперболическим косинусом. Если изменяется па-
раметр то точка Rqv движется по окружности, кроме случая
v = 0, когда она остается неподвижной. Поэтому функции cos,
sin называются круговыми.
Евклидово движение плоскости — это преобразование вида
, где R — ортогональное преобразование]
другими словами, евклидово преобразование состоит из транс-
ляции и ортогонального преобразования. Евклидова геометрия
изучает свойства подмножеств плоскости, которые инвариантны
при всех евклидовых преобразованиях. Преобразование Пуанкаре
на плоскости есть преобразование вида —> L
где L — преобразование Лоренца. Геометрия специальной теории
относительности изучает свойства, инвариантные относительно
всех преобразований Пуанкаре. Свойство прямой I быть парал-
лельной оси у не является евклидовым свойством прямой I. Дей-
ствительно, если I параллельна оси y^wRl не будет параллельна
у для всех вращений R, кроме поворотов на 0° и 180°. Аналогич-
но, свойство прямой быть параллельной оси х не является свой-
ством, которое определяет специальная теория относительности.
Если I параллельна х, то Ы не будет параллельной оси х для
всех преобразований £, кроме тождественного. Это утверждение
обычно формулируется так: «в рамках специальной теории отно-
сительности понятие одновременности не имеет смысла».
Точно так же не имеет смысла утверждение, что «частица по-
коится». Нам хотелось бы сказать, что линия х = 0 (ось t) пред-
ставляют частицу, покоящуюся в начале координат. Но преобра-
зование Лоренца Lr переводит эту линию в другую, проходящую
через начало координат, и
1/г + г
\0у 2 \г — г"1 у *
214
Глава 4. Скалярные произведения
Таким образом, преобразование Lr переводит ось t в прямую
г — г"1 г2 — 1
X vt, где У = —;------г = -к—
г + г-1 г2 + 1
Результат похож на траекторию частицы, движущейся с посто-
янной скоростью v. Мы можем решить уравнение
V = (г2 - 1)/(г2 + 1),
выразив г через v.
г — ^(1 + ^)/(1
что легко проверяется. При желании мы можем использовать у
в качестве параметра для описания L: определим
L(y) — Lr —
где
г = ^/(1 + v)/(l - v) = еа,
г — г"1 еа — е~а sinha _
у —---------- =--------= —-— = tanner
г + г-1 еа + е~а cosh а
Заметим, что
L(y)L(y') = Lrr>, г — х/(1 + г9/(1 “ г' = л/(1 + г/)/(1 - v').
При этом произведение rrf можно записать в виде
1+^
1 4- уу'
1 _ v + v'
1 + VVf,
1/2
так что
(4-6)
Эта формула представляет закон сложения скоростей в специ-
альной теории относительности.
4.6. Специальная теория относительности
215
Итак, мы пользуемся тремя способами параметризации одно-
го и того же преобразования Лоренца:
Lr = La = Цу\
где
г = еа — >/(1 + v)/(l - v).
В зависимости от выбора параметризации умножение преобразо-
ваний определяется формулами (4.4), (4.5) и (4.6).
Мы показали, что линейные преобразования специальной тео-
рии относительности сохраняют квадратичную форму Q(v). Но
мы еще не дали физической интерпретации Q(v). Приведем такой
пример: у нас есть световые лучи и часы. Рассмотрим (рис. 4.25)
(t\
точки ti и t2 на оси которые соединены с точкой I I свето-
выми лучами (прямыми, параллельными t — х и t — —х).
Тогда
t — = X ИЛИ fl — t — X,
t2 — i — x ИЛИ t2 = t + X,
так что
tit2 = Q(v)
Для
Наблюдатель находится в точке J • Он покоится или движется
с постоянной скоростью и хочет связаться с точкой v. Он излу-
чает световой сигнал в момент времени t± и регистрирует время
216
Глава 4. Скалярные произведения
^2 возвращения к нему отраженного сигнала. Произведение
называется расстоянием Минковского — интервалом между дву-
мя событиями. Отметим, что если v лежит на линии х = 0, то
<1 = <2 = потому что передача сигнала происходит мгновенно.
Если v лежит на световом луче, проходящем через точку
то t\ = 0. Если Q(v) < 0, то ti < 0 и ^2 > 0 (рис. 4.26).
Еще одно важное свойство геометрии пространства Минков-
ского. Вспомним, что в геометрии Евклида у нас есть неравен-
ство треугольника
||u + v|| < ||u|| + ||v||,
причем равенство будет только в случае, когда и и v лежат на
одной прямой в одном направлении. Это проиллюстрировано на
рис. 4.27.
с ~ а + fe, а — ||u||, b = ||v||.
Очевидно, что ломаная линия длиннее прямой. Это значит,
что в геометрии Евклида прямая линия есть кратчайшее рассто-
яние между двумя точками.
А теперь рассмотрим аналогичную диаграмму для простран-
ственно-временной геометрии, когда окружности
||А — Р||2 = а2 и ||В - Я||2 = Ь2
4.6. Специальная теория относительности
217
заменяются гиперболами Q(A — Р) = а2 и Q(B — R) = b2
(рис. 4.28). Но в этом случае для любых отрезков I и т, об-
разующих ломаную линию между точками Р и R, мы имеем
Q(Z) < а2 и Q(m) < i>2.
Здесь Q(Z) равняется квадрату временного отрезка, который
показывают часы, движущиеся с постоянной скоростью вдоль
линии I, Итак, в этом случае мы имеем обратное неравенство
треугольника.
Время, измеренное по часам, движущимся с постоянной ско-
ростью из точки Р в точку R будет больше, чем время, измерен-
ное по часам, движущимся вдоль любой ломаной линии, соеди-
нящей точки Р и R.
Это явление называют эффектом близнецов: близнец, двига-
ющийся вдоль ломаной линии, (если он выживет на ухабах) бу-
дет моложе другого близнеца, который двигается с постоянной
218
Глава 4. Скалярные произведения
скоростью из точки Р в точку R. Этот эффект называют так-
же парадоксом близнецов. Конечно, здесь нет никакого парадок-
са, мы имеем просто очевидное следствие обратного неравенства
треугольника.
4.7. Группа Пуанкаре и группа Галилея
До сих пор мы описывали преобразования геометрии Евклида и
специальной теории относительности в терминах естественных
единиц. Точки в пространстве-времени называют событиями.
Они отмечают, где и когда что-то произошло. Если мы зареги-
стрируем все события, случившиеся с одним человеком (скажем,
за 70 лет) в секундах и возьмем несколько сотен или тысяч мет-
4
ров, тоже измеренных в секундах , то мы получим множество
событий, протяженность которого вдоль временной оси пример-
но в 1018 раз больше, чем в направлении пространственных осей
(рис. 4.29)4 5.
V
Рис. 4.29
4Авторы имеют в виду световую секунду, т. е. расстояние, проходимое
светом за 1 секунду. — Прим. ред.
5Расчет авторов ошибочный: 70 лет/1000 метров « 2 • 1014. — Прим. ред.
4.7. Группа Пуанкаре и группа Галилея
219
Получив такую вытянутую вдоль временной оси область, воз-
никает желание измерять расстояния в более мелких единицах
(например в метрах), чем те единицы (секунды), которые мы
применили для измерения времени. Конечно, если единица из-
мерения будет меньше, то значение измеряемой велинины станет
больше. Поэтому в «обычной» системе единиц пространственные
расстояния будут сильно увеличены по сравнению с временными
интервалами. Конкретно это значит, что мы будем рассматривать
новые переменные Т и X, связанные с естественными единицами
t и х соотношениями Т = t и X ~ сх, т. е.
Т\ = А 0\ А\
х) ~ ^0 с) \х) ’
где с — большое число. Световой конус |х| = |t| в новой системе
единиц преобразуется в с~1 |Х| = \Т\ или |Х| = с|Т|.
Мы будем говорить, что «в обычных единицах скорость света
равна с». Аналогично, гипербола t2 — х2 = к преобразуется в кри-
вую Т2 — с2Х2 = к (рис. 4.30). «Времениподобные гиперболы»,
соответствующие к > 0, становятся менее кривыми, при малых
значениях X они становятся почти вертикальными прямыми ли-
ниями.
Выразим преобразования Лоренца через обычные единицы.
/Т\
Для этого проделаем следующее: возьмем точку I %. I и найдем
точку
А\ _ А 0 у Т\
^0 c^JyXj'
Подействуем на нее преобразованием Лоренца L и получим
1 0\(Т\
0 с-1) \Х ) *
через обычные единицы, умножив
его на матрицу
Выразим этот новый вектор
1 °А п
Ф I. В результате получим:
1 0\ г/1 о \ (т\
о с/ До с / Д J ’
220
Глава 4. Скалярные произведения
Итак, в терминах обычных единиц преобразование Лоренца пе-
реводит вектор
/
в М
(Т\
/
, где матрица М равна
М =
1 °А г Л
0 <7 ^0
0 А
с-1у *
Пусть L = La. Перемножив матрицы, получаем
М _ / cosh а с 1 sinh а
\ с sinh a cosh а
Эта формула справедлива для любого значения а. Вернемся к
преобразованию Лоренца L, для которого параметр а мал. Вве-
дем tanha — sinh а/ cosh а = v/c, где, по нашему предположе-
нию, с — большая скорость, a v — обычная скорость, так что
а — очень маленький параметр. Тогда
cosh а
ctanhce cosh а
с 1 tanh a cosh а
cosh а
или
М = cosh а
v/c2\
1 /
4.7. Группа Пуанкаре и группа Галилея
221
где
cosh а = -----—=——тт- = (1 - v2/c2)-1/2.
(1 - tanh2 a)V2 v 7 ’
Разложение в ряд по малому параметру и2/с2 дает
cosh о = 1 + ^г>2/с2 Н--.
Подставив это разложение в формулу для М, получаем
м = fl + ^v2/c2 + • • Л (1
\ 2 J \v 1 J
или
М -
+ Е,
где элементы матрицы Е имеют порядок величины с 2. Матрица
, _ Л 0\
v V
называется преобразованием скорости, соответствующим значе-
нию скорости, равному v. Это преобразование сохраняет пря-
( Т\ ( Т \
мые Т = const, т. к. Gv I v ) = I v ml- Таким образом, мы
у -А / у А. + vl J
видим, что преобразования скорости можно рассматривать как
«предельный случай» преобразований Лоренца при малом зна-
чении а. Иными словами, предполагая обычную скорость малой
по сравнению со скоростью света, мы получаем, что временипо-
добные гиперболы превращаются в вертикальные прямые линии,
а преобразования Лоренца становятся преобразованиями скоро-
сти.
Множество преобразований скорости образует группу, эле-
менты которой обладают свойством GV1GV2 — GV1^V2, что можно
легко проверить. Для этой группы сохраняется понятие одновре-
менности.
(Т\
/
называются
Преобразования типа
преобразованиями Галилея. Итак, преобразования Галилея — это
222
Глава 4. Скалярные произведения
композиции трансляций и преобразований скорости. Механика
Ньютона основана на принципе относительности Галилея; ее ос-
новные понятия инвариантны относительно преобразований Га-
лилея. Гениальность открытий Лоренца, Пуанкаре и Эйнштейна
состояла в том, что они поняли приближенный характер поня-
тия одновременности: это понятие справедливо только на малых
расстояниях и для малых скоростей. А преобразование скорости
„ (1 0\ .
Gv = I 1 ) следует рассматривать как аппроксимацию преоб-
разований Лоренца (в обычной системе единиц):
1/y/l
v/^/1 ” v2/c2
VI(? д/Г — V2/c2 \
I/a/1 - v2/c2 / ’
4.8. Импульс, энергия и масса
Переход от группы Галилея к группе Пуанкаре потребовал пе-
реопределения базисных понятий механики. Основные контуры
такой теории Пуанкаре изложил в обращении к Всемирной Вы-
ставке, проходившей в 1904 году в Сент-Луисе. После этого он и
работавший независимо А. Эйнштейн опубликовали в 1905 году
серию фундаментальных работ. Опишем некоторые идеи из этих
работ.
В классической механике существуют два фундаментальных
закона, используемых при изучении движения частиц, — закон
сохранения импульса и закон сохранения энергии. Например, мы
изучаем столкновение двух частиц А и В. Импульс частицы А
до столкновения обозначим рл, а после столкновения р^, анало-
гично для частицы В. Закон сохранения импульса говорит, что
Ра + Рв = Рд + р'в-
Столкновение называется упругим, если полная кинетическая
энергия сохраняется. Пример неупругого столкновения: в резуль-
тате столкновения двух частиц получается одна. Обратная ситу-
ация: пусть в начальный момент две покоящиеся частицы были
4.8. Импульс, энергия и масса
223
связаны, потом произошел взрыв, в результате которого две ча-
стицы разлетаются. Это можно рассматривать как процесс, «об-
ратный» столкновению. Если бы мы записали его на пленку и
прокрутили в обратном направлении, то увидели бы столкнове-
ние двух частиц, в результате которого получается одна частица.
Полная кинетическая энергия не сохраняется — до взрыва она
была равна нулю, а стала больше нуля. Энергия, освободившаяся
при взрыве, преобразовалась в кинетическую энергию. В обрат-
ном процессе мы полагаем, что когда из двух частиц получается
одна, кинетическая энергия преобразуется либо в потенциальную
энергию, либо в тепло. Для неупругих столкновений выполняется
закон сохранения импульса. А для упругих столкновений, когда
нет преобразования кинетической энергии в другие формы энер-
гии, полная кинетическая энергия тоже сохраняется:
Еа + Ев = EfA + Ев,
где Еа - кинетическая энергия частицы А до столкновения,
Е'А — кинетическая энергия той же частицы после столкновения
и т.д.
Оказывается, что в специальной теории относительности за-
коны сохранения энергии и импульса выполняются, как и в меха-
нике Ньютона. Что необходимо изменить в определениях энергии
и импульса?
Импульс частицы в механике Ньютона равен
р = mv,
где v — скорость движущейся частицы и т ~~ ее масса. Ско-
рость (и, следовательно, импульс) является вектором в трехмер-
ном пространстве. В нашей модели мы будем рассматривать его
как одномерный. (Другими словами, мы ограничимся рассмотре-
нием частиц, движущихся вдоль одной прямой. Массу можно, в
принципе, измерить, проделав следующие эксперименты.
Рис. 4.31
224
Глава 4. Скалярные произведения
Допустим, у нас есть несколько объектов — например, шари-
ки, сделанные из разных материалов* Пусть два удерживаются
вместе и покоятся. Далее происходит взрыв или отпускается пру-
жина, и шарики разлетаются в разные стороны. Один полетит
вправо, другой влево (рис. 4.31). Если шарики сделаны из одного
материала и имеют одинаковый размер, то их движение должно
быть симметричным. Например, если на равных расстояниях от
точки, где покоились шарики, поместить две отражающие стен-
ки, следует ожидать, что после отражения шарики столкнутся в
той же точке. Этот эксперимент можно проделать и убедиться,
что все будет происходить именно так. А теперь возьмем шари-
ки, сделанные из одного материала, но имеющие разные размеры.
Пусть правый шарик будет больше. Мы можем убедиться, что по-
сле отражения шарики столкнутся правее центра, т. е. меньший
шарик пройдет большее расстояние. Тот же эксперимент мож-
но проделать с шариками, сделанными из разных материалов.
Например, пусть шарики имеют одинаковый размер, но правый
сделан из свинца, а левый из алюминия. В этом случае столкно-
вение произойдет справа от центра. Однако, если свинцовый ша-
рик будет очень маленький, а алюминиевый того же размера, то
столкновение произойдет левее центра. Если у нас много свинцо-
вых шариков разных размеров, то среди них можно найти такой,
который будет точно соответствовать алюминиевому шарику (в
том смысле, что столкновение будет происходить в центре).
А теперь давайте сравнивать свинцовые шарики с медными.
Допустим, мы нашли свинцовый шарик, соответствующий алю-
миниевому, и медный шарик, соответствующий свинцовому. Те-
перь мы можем сравнить алюминиевый шарик с медным. Экс-
перимент покажет, что они соответствуют друг другу. И это не
логический вывод, а закон природы®. Теперь мы можем опреде-
лить понятие массы: два объекта имеют одинаковую массу, если
в нашем эксперименте они соответствуют друг другу. Закон при-
роды, который мы обсуждаем, позволяет корректно определить
понятие массы. Если А и В имеют одинаковую массу, а масса В
6Повернем наш прибор на 180°, т. е. поменяем местами правую и левую
стороны. Этот поворот не отразится на свойствах шариков соответствовать
друг другу. И это тоже закон природы.
4.8. Импульс, энергия и масса
225
равна массе С, то А и С имеют одинаковые массы. В эксперимен-
те можно проверить закон природы: если шарик соответствует
шарику Bi и шарик А% соответствует то, экспериментируя с
парами шариков: Ai и А 2 против В\ и В2, можно убедиться, что
Ai и А2 соответствуют Bi и В% (рис. 4.32).
Рис. 4.32
Экспериментально можно также убедиться, что масса шарика
пропорциональна его объему: если свинцовый шарик с радиусом
гд соответствует медному шарику с радиусом г#, то свинцовый
шарик с радиусом Згд будет соответствовать 27 медным шарикам
с радиусом г#.
Это позволяет нам ввести единицу массы: выберем один объ-
ект, скажем свинцовый шарик объемом 1см3. Тогда мы можем
сравнивать с ним другие объекты, масса которых будет кратна т
(массе выбранного свинцового шарика). Таким образом, мы полу-
чим численное значение любой массы. Первоначально в метриче-
ской системе единиц за единицу массы — 1 грамм — была взята
масса 1 кубического сантиметра воды при 4°С. Поскольку нам
сложно проводить эксперименты по столкновениям с водой при
4°С, мы могли бы определить 1 грамм как массу медного шарика
объемом 0.11... см3. Интересно отметить, что во всех описанных
экспериментах не было потребности в каких-либо инструментах
измерения времени.
Вернемся к закону сохранения импульса. В механике Ньюто-
на, если мы определим импульс частицы
р = mv,
то полный импульс сохраняется. (Нетрудно показать, что такая
(|юрмулировка закона сохранения импульса является следствием
нашего определения массы и предположения, что законы приро-
ды инвариантны относительно группы преобразований Галилея.
226
Глава 4. Скалярные произведения
См. Лекции по физике Фейнмана, главу 10, где дается четкое из-
ложение этого утверждения.) В специальной теории относитель-
ности такое определение импульса не имеет смысла, потому что
не имеет смысла скорость! Ведь по определению скорость равна
dx
при этом предполагается, что мы выбрали координатные оси х
и t и решили параметризовать движение частицы временем t.
Именно поэтому мы записываем траекторию частицы с помо-
щью функции x(t). Если мы сделаем преобразование Лоренца,
то получим новые координатные оси t', х' и, следовательно, но-
вую скорость vf. Поставим задачу немного по-другому. Допустим,
что траектория частицы описывается третьим нейтральным па-
раметром s. Например, в роли s могут быть показания неких
внутренних часов, которые частица несет вместе с собой. Тог-
да траектория частицы на пространственно-временной плоскости
дается вектором
В некоторый момент sq мы можем вычислить касательную к этой
кривой (рис. 4.33)
Тогда в системе координат t,x скорость v = dx/dt равна
v ~ Ъ/а.
Очевидно, что для вектора
отношение v — b/а не имеет физического смысла. Если мы заме-
ним w на
w' = Lw
4.8. Импульс, энергия и масса
227
и напишем
то vf не будет равно v, за исключением случаев, когда v = ±1 или
L = I. При преобразованиях Лоренца сохраняется одно свойство
вектора w — величина
Q(w) = а2 — Ь2.
Условие Q(w) > 0 эквивалентно условию |г?| < 1. Поскольку
в нашей системе единиц скорость света равна 1, это значит, что
скорость v меньше скорости света.
Опыт показывает, что все частицы с положительной массой
покоя (будет определена ниже) движутся со скоростями, мень-
шими скорости света, т. е. для них всегда Q(w) > 0. Обозначим
Q(w) = /? > 0,
так что
а2 — 62 = д2,
и пусть
Ь/а = v
в определенном секторе пространства-времени. Заметим, что со-
отношение Ь/а = v не определяет сами величины а, Ъ. (Это —
228
Глава 4. Скалярные произведения
отражение того факта, что мы не конкретизировали наш мисти-
ческий параметр s для кривой u(s).) Теперь можно решить два
уравнения а2 — b2 = /х2, b/a = v и получить
М , №
х/1 — v2 л/1 — г>2
для данного сектора пространства-времени. Для малых значений
v можно воспользоваться разложением в ряд Тейлора
1 . 1 2
+2V
так что
1 2
а = /х + Н------,
£
г 1 3
о = fiv + -p,v° Ч-.
Отметим, что разложение величины b очень похоже на р =
тг», если мы идентифицируем ц с т и отбросим члены более
высокого порядка по и. Точно так же второй член в разложе-
нии а похож на выражение для кинетической энергии в механике
Ньютона. Итак, мы подошли к возможности переопределить по-
нятия энергии и импульса. Каждому объекту соответствует опре-
деленное значение величины /х. Во избежание путаницы обозна-
чим эту величину то и назовем ее массой покоя данного объек-
та. Если оказывается, что объект покоится в некотором секторе
пространства-времени, то масса покоя совпадает (с точностью до
выбранной системы единиц) с массой покоя, определенной выше
экспериментально. Допустим, что то > 0 (мы это все время под-
разумевали). Тогда для движущегося объекта вводится вектор
энергии-импульса (4-импульс)
такой, что
Q(w) = Е2 - р2 = то
4.8. Импульс, энергия и масса
229
и w есть произведение u — du/ds на скалярный множитель,
где u(s) — траектория объекта, движущегося в пространстве-
времени.
В данном секторе пространства-времени, где траектория объ-
екта задается формулой
соответственно
u(s) =
dx __ i(s)
dt i(s) ’
мы получаем
n _ m°v p __ mo
\/l — v’2’ i/l — v2
В частности, если объект покоится, так что v — 0, то
р — О, Е — то
в данной системе координат.
Закон сохранения энергии-импульса в новой формулировке
выглядит как закон сохранения для векторов в пространстве-
времени при любом столкновении:
+ А ДвА
РА у \ РВ J
е'а\ + (е'в\
Ра) + \Рв7
Эти уравнения записаны в естественной системе единиц, ког-
да скорость света равна 1, a v — число. Поэтому выражение
\/1 — v2 имеет смысл. Если же мы будем работать с «психоло-
гическими единицами», то v не будет числом, а будет скоростью,
выраженной, например, в см/сек. Тогда выражение д/1 — г>2 уже
нс имеет смысла. В этом случае \/1 — г?2 следует заменить на
— 7?2/с2. Соответственно изменяется выражение для р\
_ тру
у/1 — V2/c2
230
Глава 4. Скалярные произведения
При малых значения v мы получим ньютоновское выражение для
импульса. Аналогично изменяется формула для энергии Е:
TTIqC2
у/1 — v2/с2
Для покоящейся частицы мы получаем известную формулу Эйн-
штейна
Е = т$с2.
4.9. Антисимметричные формы
В предыдущих параграфах мы рассмотрели два типа скалярных
произведений на плоскости. Первое — евклидово скалярное про-
изведение, определяемое формулой
(w, wz) = хх + yyf, где w = ( X j и
второе — лоренцево скалярное произведение
Оба типа скалярных произведений билинейны, т. е. если один век-
тор зафиксировать, то произведение будет линейной функцией от
другого вектора:
(awi +bw2,w/) — a(wi,w') + b(w2,w/).
Оба скалярных произведения симметричны:
(w,w') — (w',w) и (v,v') — (v',v).
Введем третий тип произведения между двумя векторами на
плоскости, который будет по-прежнему билинейным, но вмес-
то симметричности обладает свойством антисимметрии. Именно,
определим следующую функцию от двух векторов:
4.9. Антисимметричные формы
231
Здесь выполняется тождество
w(v,v') = -w(v',v),
которое мы и называем антисимметричностью.
Рис. 4.34
Геометрический смысл cu(v, v') понятен: это ориентирован-
ная площадь параллелограмма, построенного на векторах v и v'
(рис. 4.30). Очевидно, что функция o>(v, Vх) билинейна. Величина
и называется симплектическим скалярным произведением.
Линейное преобразование А называется симплектическим,
если оно сохраняет симплектическое скалярное произведение и).
Таким образом, А симплектично тогда и только тогда, когда для
любых v, v'
qj(Av,Av') —w(v,vf).
Матрица, столбцы которой Av и Av', получается умножением
( /\
р pfY Отсюда
aAAv, Avl\ ~ Det А ($
Vр р
— Det A Det S ) = Det Aat(y, v').
\Р Р J
Следовательно, преобразование А является симплектическим
тогда и только тогда, когда Det А = 1. Очевидно, что любая
симплектическая матрица имеет обратную, которая также сим-
плектична, и произведение двух симплектических матриц то-
же всегда симплектично. Это означает, что совокупность всех
232
Глава 4. Скалярные произведения
симплектических матриц образует группу, называемую (двумер-
ной) симплектической группой. Симплектическая группа играет
очень важную роль в оптике, мы увидим это в главе 9.
Резюме
А. Евклидово скалярное произведение
Изучив эту главу, вы должны усвоить понятие евклидова скаляр-
ного произведения и научиться пользоваться его свойствами.
Вы должны уметь транспонировать матрицу и применять
операцию транспонирования в связи со скалярным произведени-
ем и евклидовыми преобразованиями.
Вы должны знать, как в векторном пространстве двух и бо-
лее измерений с евклидовым скалярным произведением приме-
нить процесс Грама-Шмидта для построения ортонормирован-
ного базиса и для получения ортогональной проекции вектора на
подпространство.
В. Квадратичные формы
Вы должны уметь выразить квадратичную форму Q(v) через
симметричную матрицу А и связать максимальные и минималь-
ные значения Q с собственными векторами и собственными зна-
чениями А.
Если на плоскости задана квадратичная форма Q, то вы
должны уметь ввести такие координаты xf и у\ в которых она
имеет вид
Q = Aiz'2 + А2у'2,
и воспользоваться этими координатами для построения графика
Q = const.
С. Связанные колебания
Вы должны уметь свести задачу о двух связанных осцилляторах
к уравнению w = —Aw и выразить нормальные колебания через
собственные векторы и собственные значения А.
D. Лоренцево скалярное произведение
Вы должны уметь вычислять лоренцево скалярное произведение
Задачи
233
двух векторов, определять преобразования Лоренца, которые со-
храняют это скалярное произведение. Применять эти понятия в
специальной теории относительности.
Задачи
4.1. (а) Используя три свойства скалярного произведения (симмет-
ричность, линейность, положительная определенность), до-
кажите неравенство Коши-Шварца
(v,w) < у/(v, v)(w, w)
для любой пары векторов v и w. (Указание: рассмотрите
скалярное произведение (v — aw, v — aw). Этот квадратич-
ный полином по а не может иметь вещественных корней,
кроме случая v — aw.)
(b) Докажите неравенство треугольника
||v + w|| < ||v|| + ||w||,
где ||v||2 = (v, v). (Указание: возведите неравенство в квад-
рат и примените неравенство Коши-Шварца из пункта (а).)
4.2. (а) На плоскости заданы два вектора v и v'. Покажите, что
поворот Re на угол О, для которого
COS0 =
(у. у')
\/(v,v)(v',v')’
сделает вектор v пропорциональным вектору v'. Найдите
/2\ ( 4>
угол между векторами I 1 | и I „ ).
(Ь) В двумерном пространстве-времени заданы два вектора v и
v'. Оба вектора либо пространственноподобны, либо време-
ниподобны вперед или времениподобны назад. Покажите,
что собственное преобразование Лоренца La, для которого
cosh а —
{у. у'}
Ду.уЦу'.у'}’
переводит вектор v в вектор, пропорциональный вектору v'.
234
Глава 4. Скалярные произведения
Воспользуйтесь этим результатом и найдите преобразова-
гг
ние Лоренца, переводящее вектор ( 4 I в вектор, пропорци-
ональный вектору I „ ).
\ о /
Какая проблема возникнет, если вектор v — пространствен-
ноподобный, а вектор v' - времениподобный? Если вектор
v — времениподобный вперед, a v' — времениподобный на-
зад? Если векторы v и v' находятся на световом конусе?
4.3. Чтобы научиться вычислять лоренцевы скалярные произведе-
ния, поработайте с векторами в двумерном пространстве-време-
ни. (Первая координата соответствует времени i, а вторая оси х.)
(а) Вычислите лоренцево скалярное произведение каждого век-
тора на самого себя {v, v}. В системе координат х. t изобра-
зите каждый вектор и разберитесь, к какому типу он отно-
сится: пространственноподобный, времениподобный вперед
или назад, лежит на световом конусе вперед или назад.
(Ь) Вычислите лоренцевы скалярные произведения {v2,v3},
{v5,v6} и {v3,v6}.
(с) Найдите векторы wi,..., we, в которые переходят векторы
vi,..., vg под действием преобразования Лоренца
/5/4 3/4\
^3/4 5/4/
Изобразите полученные векторы в системе координат х, t.
(d) Вычислите скалярные произведения {w2,W2}, {wg,wg},
{w2, w3}, {ws, wg} и {w3, wg}. Они должны совпадать с со-
ответствующими скалярными произведениями векторов v.
4.4. Пусть матрица S симметрична и имеет положительные собствен-
ные значения. Введем новое скалярное произведение [v,w]s,
определяемое уравнением [v,w]s = (Sv, w).
(а) Покажите, что это скалярное произведение симметрично,
билинейно и положительно определено.
Задачи
235
(b) Покажите, что матрица С сохраняет это скалярное произве-
дение (т. е. [Cv, Cw]s — [v, w]s) тогда и только тогда, когда
CTSC = S\
(с) Опишите процедуру построения матрицы В, обладающей
следующим свойством: если v' = B-1v, w' = B”1w, то
[v,w]s — (v',wz). Объясните как, имея одну матрицу В,
обладающую этим свойством, можно построить много дру-
гих.
/37 0.9\
4.5. Пусть в предыдущем упражнении S = ( п*о 1 \ .
\ и.У 1.0J
(а) Получите вектор v, ортогональный вектору w =
для скалярного произведения, определенного матрицей S
так, что [v, w]s = 0.
(b) Постройте матрицу В, обладающую свойствами, описанны-
ми в задаче 4.4(c). Проверьте, что для векторов v и w из
пункта (а) выполняется равенство (B-1v, B-1w) = 0.
(с) Постройте матрицу ортогонального проектирования В,
удовлетворяющую уравнению Р2 = В, чей образ состоит
( 1\ ы
из векторов, пропорциональных вектору w = ( I. Про-
верьте, что для всех векторов v выполняется равенство
[w,Bv]s = [w, v]s.
(d) Постройте матрицу С, которая сохраняет скалярное произ-
ведение, определяемое матрицей S, и удовлетворяет уравне-
нию С2 = —I. (Указание: матрица R — удовлет-
воряет уравнению В2 = — Е и сохраняет обычное скалярное
произведение.
4.6. Для квадратичной формы
Q(v) = 8т2 + 12x7/ + 17т/2
проделайте следующие операции.
(а) Запишите Q в виде (Av, v), где А — симметричная матрица.
(Ь) Найдите собственные значения матрицы А.
(с) Представьте матрицу А в форме
A = Ro(X1 >°)лЛ
\ Л2 /
236
Глава 4. Скалярные произведения
(d) Найдите такие координаты х' и у', для которых квадратич-
ная форма Q принимает вид
Q(v) = 20а/2+ 5у'2.
(е) Нарисуйте линию Q(v) = 20. Отметьте на ней координат-
ные оси хуу и х1, у1.
9 2\
2 6Л
4.7. (а) Найдите собственные значения Ai и А2 матрицы S —
определите собственные векторы Vi и V2, соответствующие
этим собственным значениям.
(Ь) Постройте такую матрицу вращения R, чтобы выполнялось
равенство S ~ RAR~\ где Л — диагональная матрица.
Проверьте, что R на самом деле осуществляет поворот!
(с) Найдите новые координаты у*, являющиеся линейными
функциями х и у, для которых
9а;2 + Ьху + 6т/2 = Aix'2 + Л2г/'2.
4.8. (а) Найдите собственные значения и собственные векторы мат-
рицы
л _ Ло б\
^6 ю/
(Ь) Постройте матрицу вращения R и диагональную матрицу
Л, для которых выполняется соотношение А = RAR-1.
(с) Нарисуйте график уравнения Юж2 + 12хг/ + Ют/2 — 24.
4.9. (а) Найдите такие координаты х{, у?, чтобы квадратичная
форма
Q(v) = —х2 + Ъху + 7у2
приняла вид
Q(v) = Л1Ж'2 + W2.
Нарисуйте линию <?(v) — 40.
(b) Пусть х и у лежат на окружности единичного радиуса, так
что х — cos#, у = sin0. Найдите значения углов 0, при
которых Q принимает максимальное и минимальное значе-
ние. Вычислите эти значения. Какова связь между этими
результатами и результатами, полученными в предыдущем
пункте?
Задачи
237
4.10. Предположим, что М и К — симметричные матрицы 2x2.
(а) Приведите пример, показывающий, что М 1К не обяза-
тельно симметрична.
(Ь) Опишите, как построить такую симметричную матрицу В,
чтобы выполнялось равенство В2 = Л/”1. Покажите, что
матрица S = ВКВ симметрична, и, следовательно, ее мож-
но записать в форме S = ВЛЛ"1, где R — матрица враще-
л Mi 0 \
ния, а Л = л х .
у U A2J
(с) Покажите, что если А = BR, то М~ГК = АЛА”1. Это
доказывает, что М~ХК имеет вещественные собственные
значения.
(d) Найдите новые координаты xf и у1 из условия I , 1 —
А”1 ( Х ). Покажите, что если v = ( Х ), то
\У J \У)
(Mv, v) = Z + р'2, a (Kv, v) ~ X±xf2 + A2Z//2•
(Указание: В — симметричная матрица, поэтому (Bv, w) =
(v, Bw). R — ортогональная матрица, следовательно,
(Bv,w) — (v,B-1w).)
4.11. (a)
(b)
Покажите, что если A = J, to exp(tA) является пре-
образованием Лоренца.
В релятивистской механике полная энергия Е и импульс р
частицы, имеющей массу т и движущейся вдоль прямой,
образуют вектор v = , при этом (v, v) = Е2 — р2 = т2.
Если частица движется так, что ее ускорение всегда равно а
с точки зрения наблюдателя, который видит частицу поко-
ящейся в данный момент времени, то Е и р связаны между
собой уравнениями
dE dp _
—- = op, — ~ су.Е,
dr dr
где г — время, измеренное по часам, движущимися вместе
с частицей. Решите эту систему уравнений с начальными
(Ео\ о
условиями I р ) ПРИ т = 0 и получите вектор I \ .
238
Глава 4. Скалярные произведения
4.12. Допустим, что расстояния вдоль двух взаимно перпендикуляр-
ных осей на плоскости измеряются в единицах, которые отлича-
ются большим множителем с. Например, у нас есть сверхскорост-
ная прямая дорога. Ее проекция на ось х равна 1000 километрам,
а проекция на ось у только 1000 сантиметрам. Мы можем ввести
новые координаты X = х и Y = су, где с — 105. Теперь X из-
меряется в километрах, а У в сантиметрах. Постройте матрицу
поворота на угол 0 в системе координат X, У. Покажите, что для
прямых, чей наклон X/Y порядка единицы, матрица вращения
превращается в матрицу сдвига в пределе с сю. Объясните это
явление геометрически, рассмотрев, что происходит с окружно-
стями х2 + у2 = к. (Замечание: выполнив это упражнение, еще
раз прочитайте в параграфе 4.3 обсуждение предела с —► оо для
преобразований Лоренца.)
4.13. Вычислите симплектическое скалярное произведение cu(vi,V2)
для векторов
Проверьте непосредственно, что это скалярное произведение со-
храняется при действии на него симплектической матрицы
4.14. Рассмотрите конструкцию, состоящую из масс и пружин, изоб-
раженную на рис. 4.35.
Рис. 4.35
Хъ
(а) Покажите, что если х± и я2 задают смещения масс впра-
во от положения равновесия, то уравнение движения этой
системы имеет вид
Т
Задачи
239
где
/4 0\
\° V
и
(Ь) Пусть В — диагональная матрица с положительными мат-
ричными элементами, удовлетворяющая уравнению В2 =
Т. Постройте матрицу А = В~ХНВ~Х. Найдите ее собствен-
ные значения и собственные векторы, используйте их для
нахождения общего решения уравнения w = —Aw.
(с) Опишите нормальные колебания системы, определив их ча-
стоту через cuq = (К/М) и отношение х^ху.
4.15. Рассмотрите систему масс и пружин, изображенную на рис. 4.36.
Пусть х± и Х2 обозначают смещение масс вправо от положения
равновесия.
Рис. 4.36
(а) Определите частоты нормальных колебаний и Для
каждого колебания получите отношение х^/х^.
(Ь) Пусть в начальный момент смещения масс равны xi = А,
#2 — 0, и они покоятся. Потом их отпускают. Найти выра-
жения и X2(i), определяющие дальнейшее движение
системы.
I Е\
4.16. Частица с 4-импульсом I ) подвергается действию преобразо-
вания Лоренца L с матрицей
1 fr + г 1
2 \г — г-1
Покажите, что при этом сумма энергии и импульса умножает-
ся на г, а их разность делится на г. Объясните этот результат в
терминах собственных значений и собственных векторов преоб-
разования L.
240
Глава 4. Скалярные произведения
4.17. Масса частицы равна 15 (в произвольных единицах), а ее ско-
рость равна и = 12/13 (с = 1). Эта частица сталкивается с по-
коящейся частицей, масса которой равна 6, и они образуют одну
частицу.
(Е \
] всех трех частиц, участвующих
в реакции. Определите массу и скорость образовавшейся
частицы.
, со-
(Ь) Возьмите преобразование Лоренца L =
4
ответствующее скорости -с. Определите 4-импульсы каж-
5
(Е( \
f I в системе координат, движущейся со
7^ /
4
скоростью -с.
5
4.18.
( Ei \
Допустим, что две частицы имеют 4-импульсы Wi = I I и
у Pi /
( ^2 \
Wo = соответственно, где
\ Р2 )
ml = El-pt m22 = El-pl
(а) Напишите лоренцево скалярное произведение этих векто-
ров {wi,W2} = mim2cosha. Покажите, что v = tanho =
cosh2 о — 1 / cosh о представляет скорость одной из частиц
в системе покоя другой частицы.
(Ь) Определите скорость v для двух случаев:
w2 —
4.19. В системе единиц, где с не равняется 1, матрица преобразования
Лоренца, действующая на 4-импульс ( , равна
(cosh а
с sinh a
(1/с) sinh о
cosh а
Задачи
241
( Е\
(а) Покажите, что на 4-импульс ( ) действует матрица,
транспонированная этой.
(Ь) Покажите, что та же матрица L действует на 4-импульс,
если мы представим его в виде строки, т. е.
(Е'.р') = (E,p)L.
4.20. В системе единиц, где с = 1, энергия фотона равна его импульсу,
т. е. 4-импульс фотона равен Е или Е । в зависимости
от направления его движения.
(а) Допустим, что покоящаяся частица с массой 2т распадает-
ся на частицу с массой т и фотон. Используя закон сохра-
нения 4-импульса, получите скорость частицы с массой т и
энергию фотона.
(Ь) Используйте преобразование Лоренца для описания этого
распада в системе координат, где частица с массой 2т дви-
жется со скоростью
5*
4.21.
Фотон имеет энергию £?7; соответственно, в системе координат,
где с ~ 1, 4-импульс фотона равен
Фотон сталкивается с
неподвижной частицей (масса mi), и образуется одна частица с
массой m2. Покажите, что
_ т\-т\
7 2т\
4.22. Используя скалярное произведение (f,g) = Jo°° /(£)<?(£) dt, по-
стройте ортонормированный базис для пространства функций,
удовлетворяющих дифференциальному уравнению
4.23. Постройте ортонормированный базис для подпространства R4,
определяемого векторами
(2
2
1
0
(0\
4 I
1 I
2/
х + 3£ + 2х = 0.
242
Глава 4. Скалярные произведения
4.24. В пространстве R2 определите скалярное произведение согласно
формуле (vi, V2) = 4x1^2 + У\У2- Постройте матрицу Р (2 х 2),
которая осуществляет ортогональную проекцию любого вектора
v (по отношению к скалярному произведению, определенному
а тт
выше) на прямую, порожденную вектором ( । • Покажите, что
(I — P)v ортогональна Fv-
Глава 5
Дифференциальное исчисление
на плоскости
В главах 5 и 6 излагаются основы дифференциально-
го исчисления. В главе 5 мы определим дифференци-
ал отображения одного векторного пространства на
другое, обсудим его основные свойства, в частности,
цепное правило. Дадим примеры физических прило-
жений, в частности, движение Кеплера и приближе-
ние Борна. Дадим определение частной производной,
производной по направлению и линейных дифферен-
циальных форм.
Введение
Наша первая задача — разработать дифференциальное исчисле-
ние для четырех типов отображений:
(i) R1 —> R2,
(ii) R2—>RX,
(iii) R1 —> R1,
(iv) R2 —> R2.
Отображения первого типа R1 —> R2 можно изобразить, как
кривые на плоскости (рис. 5.1), функции R2 —> R1 — как поверх-
ности в трехмерном пространстве (рис. 5.2). Функции R1 —> R1
знакомы читателю с первого года изучения математического ана-
лиза. В главе 1 рассмотрены линейные отображения R2 —> R2.
244 Глава 5. Дифференциальное исчисление на плоскости
Рис. 5.1. Функция из R1 в R2
Сейчас мы хотим расширить изучение и включить в рас-
смотрение нелинейные отображения одной плоскости в другую
(рис. 5.3). Чтобы не рассматривать каждый случай отдельно, вве-
дем некоторые единообразные обозначения. В дальнейшем буквы
V, W, Z и т. д. будут обозначать либо R1, либо R2. Поэтому, когда
мы пишем
/: W
(читайте «/ отображает V в И7», или, другими словами, «/ есть
отображение из V в ТУ»), то это значит, что рассматривается
любой из четырех случаев: V — это R1 или R2, и W — это R1
или R2.
На самом деле наши обозначения и доказательства будут та-
ковы, что позволят множествам V, W и т. д. быть пространствами
Rn, т. е. они могут быть любыми конечномерными вещественны-
ми векторными пространствами или аффинными пространства-
ми (эти пространства мы будем изучать в главе 10). В этой главе
Введение
245
мы проделаем некоторые общие вычисления, даже не имея в рас-
поряжении всех формальных определений.
Сначала отметим факт, вероятно, уже известный читателю,
который следует из простого обобщения нашего обсуждения в
главе 1: линейное отображение пространства Rp в R9 определя-
ется матрицей, имеющей q строк и р столбцов. Итак, матрица
/5 2
А= I 4 1
\3 О
1 0 1\
-10 3 1
1 1 О/
задает линейное отображение R5 в R3:
А
0
0
О
\°/
И т.д.
Если
/1 5 9\
2 4 6
3 7 11
\4 8 12/
т. е. В отображает R3 R4, то В А отображает R5 —> R4 и, еле-
довательно, является матрицей, имеющей четыре строки и пять
столбцов, причем матричные элементы вычисляются по обычным
правилам умножения матриц.
ВА~
В нашем примере
х = (2)(1) + (6)(-1) + (10)(1).
В частности, линейное отображение Rp —> R1 — R (обычно на-
зываемое линейной функцией) определяется матрицей, у которой
246 Глава 5. Дифференциальное исчисление на плоскости
одна строка и р столбцов. Такую матрицу называют вектором-
строкой. Итак, I — (1,2,3,4) является линейным отображением
R4 —> R, так что
/0\
1
О
\°/
и т.д.
Результат действия этого отображения на произвольный вектор
задается формулой
~ х + 2у + 3z + 4w.
Еще пример: пусть вектор-строка I = (a,i>, с, d) действует на
вектор-столбец
v= Р .
I z
\w >
Согласно обычным правилам умножения матриц, мы получаем
один матричный элемент
I(v) = ах + by + cz + dw.
Если А : Rp —> R*7 и I : R^ —> R, то I о А : Rp —► R определяется
матричным умножением: матрица 1 х q умножается на матрицу
q х р. Например, если q — 3, р — 5, I = (1,2,3),
то
/52 1 0 1\
А= 4 1 -1 0 3 ,
\3 0 110/
(52 1 0 1\
4 1-10 3 I = (22,4,2,3,7).
30 110/
5.1. «О» большие и «о» малые
247
Еще небольшое напоминание об обозначениях из парагра-
фа 4.1. В пространстве мы имеем евклидово скалярное произ-
ведение (•,•) и соответствующую норму || • || > 0, определяемую
формулой
IMI2 = (v,v) = a?? + ^ + ---+^
для
Неравенство треугольника утверждает, что при любых и и v
l|u + v|| < ||u|| + ||v||.
5.1. «О» большие и «о» малые
В одномерном дифференциальном исчислении говорится, что
функция /, зависящая от одной переменной, имеет производную
А в точке х, если f определена в некоторой окрестности точки х
и разностное отношение
f (ж + у) - f (ж)
V ’
определенное для всех достаточно малых v ± 0, имеет предел А
при v —> 0. Мы хотели бы обобщить это определение на отоб-
ражения f : V W. Первое препятствие состоит в том, что
деление на вектор не имеет смысла, и мы не можем использовать
понятие разностного отношения. Поэтому в многомерном случае
обойдемся без дробей:
/(x + v)-/(х) = Av + 0(v). (5.1)
По определению, А будет производной f в точке ж, если поправоч-
ный член 0(v) стремится к нулю «быстрее, чем V». Утверждению
в кавычках можно придать точный смысл, потребовав, чтобы
lim 0 при llvll “* 0* (5.2)
248 Глава 5. Дифференциальное исчисление на плоскости
Подробнее: для любого значения е > 0 существует такая величи-
на 3 > 0, что
№(v)||<e||v|| (5.3)
для всех v, удовлетворяющих условию ||v|| < 3.
В формулах (5.2) и (5.3) выражение ||v|| обозначает длину
вектора v в пространстве V, что следует отразить в обозначе-
нии, записав ||v||у. Аналогично, ||</>(v)|| обозначает длину вектора
ф(у) в пространстве ГИ, что следует обозначить ||0(v) ||цл. Тогда
неравенство (5.3) приобретет вид
ll<Xv)||w < e||v||v-
Нижние индексы делают обозначения слишком громоздкими, по-
этому мы не будем их использовать, а будем писать, как в фор-
мулах (5.2) и (5.3).
Например, пусть f и, следовательно, ф — отображения R2 на
пространство R1. Наиболее общее выражение для вектора v в
пространстве R2 имеет вид v = ( |. Для типографского упро-
\ У }
щения запишем <^(v) как ф(хуу). Тогда ||v|| = (х2 + у2)1/2 и
||0(v)|| = |<Хх,У)\- В этом случае условие (5.3) можно прочитать
следующим образом:
Для любого заданного значения е > 0 существует та-
кая величина 3 > 0, что неравенство
\ф(х, у)| < е(х2 + у2)1/2
выполняется для всех х и у, удовлетворяющих усло-
вию
(х2 + № < S.
Функцию ф : V —> W, определенную в малой окрестности во-
круг начала координат, удовлетворяющую условию (5.3), назы-
вают «“о” малое от V». Символически мы говорим «ф есть o(v)»
или, несколько злоупотребляя обозначениями, пишем ф = o(v).
Теперь условие того, что А является производной функции / в
точке х, можно записать в виде
/(х + v) - /(х) = Av + 0(v),
5.1. «О» большие и «о» малые
249
где 0(v) есть o(v), или </>(v) = o(v), или более кратко:
/(х + v) - /(х) — Av + o(v). (5.4)
С точки зрения логики этот вариант записи слегка хромает, но
из соображений удобства мы будем его часто использовать. Член
o(v) в формуле (5.4) на самом деле обозначает «некоторую функ-
цию </>(v), являющуюся o(v)». Очень часто остаточный член ф
нас не будет интересовать, нам достаточно будет знать, что он
удовлетворяет условию (5.3). Именно поэтому удобно не вводить
отдельный символ для каждой подобной функции ф.
Чтобы прочувствовать понятие o(v), давайте докажем лемму:
Предположим, что ф :V —> W — линейное преобразование и что
ф(у) — o(v). Тогда
ф = 0. (5.5)
Доказательство. Ввиду линейности ф для любого вещественного
числа г справедливо равенство </>(rv) — гф(у). Для любого е > О
выберем такое 5, чтобы выполнялось неравенство ||0(v)|| < е||v||,
когда ||v|| < 6. Теперь для произвольного вектора w 0 выберем
г = ||w||/<5 и запишем
w = rwz.
Тогда ||w'|| = S, следовательно,
||<Xw)|| = r||0(w')|| < re||w'|| = srS = s||w||.
Итак, для каждого w 0
||0(w)|| < £||w||
(очевидно, что ввиду линейности ф это справедливо и для w = 0).
Но это неравенство должно выполняться для всех е. Следова-
тельно, ф = 0.
Из леммы следует, что если справедливо равенство (5.4), то
производная А, стоящая в нем, определена однозначно. Действи-
тельно, предположим, что
/(х + v) - У(х) = Av + ф(у)
250 Глава 5, Дифференциальное исчисление на плоскости
и
/(х + v) - У(х) = A'v + <£'(v),
где и ф и ф( являются o(v). Тогда
{А! - A)v = </>(v) - </>'(v).
Но мы утверждаем, что сумма или разность двух функций, каж-
дая из которых есть o(v), тоже является функцией o(v). Дей-
ствительно, для любого е > 0 можно найти такие 51 > 0 и > 0,
чтобы выполнялись неравенства
1
||</>(v)H < -£||v|| для ||v|| < <51
и
ll^(v)ll < ДЛЯ ||v(| < 62.
£
Теперь, выбрав равное наименьшему из двух чисел <$i и ^2, из
неравенства треугольника мы получаем при ||v|| <6
n«v) ±#ми < mu + iirni < eiivi|.
Мы получили, что линейное преобразование А1 — А есть o(v)
и, следовательно, является тождественно нулевым, т. е. А = А'.
Повторим, что отображение f, удовлетворяющее условию
(5.4) для некоторого (единственного) А называется дифферен-
цируемым в точке х. В этом случае линейное преобразование А
называется дифференциалом f в точке х и обозначается d/x. По-
вторяем еще раз: дифференциал f в точке х есть единственное
линейное отображение V на W, которое аппроксимирует истин-
ное изменение отображения f в точке х для малых v, что может
быть записано как
У(х + v) - /(х) = dfx[v] + o(v).
Для того, чтобы доказать основные теоремы дифференциаль-
ного исчисления, нам необходимо собрать сведения о функциях,
которые попадают в категорию o(v). Для этого удобно ввести
следующие обозначения.
5.1. «О» большие и «о» малые
251
Подпространство S пространства V называется окрестно-
стью нуля, если оно содержит некоторый шарик с центром в
начале координат, т. е. если для некоторого 6 > 0 оно содержит
множество всех V, удовлетворяющих условию ||v|| < S. Очевидно,
что пересечение двух окрестностей тоже является окрестностью
(просто возьмем меньший из двух шариков, он находится в пе-
ресечении). Точно так же можно говорить об окрестности любой
точки х. Это будет множество, которое содержит некоторый ша-
рик вокруг точки х, т. е. содержит множество {у | ||у — х|| < J}.
Если А — обратимое линейное преобразование из V в W (V и
W имеют одинаковую размерность), тогда можно найти констан-
ты fci и &2 > 0, для которых выполняются неравенства
||Av|| < &i||v|| и ||A-1w|| < fc2||w||,
или, положив w = Av, неравенство
*2 "IMI < IHvlh
Таким образом, образ шарика с радиусом г содержится в шарике
с радиусом feiT, внутри которого содержится шарик с радиусом
(рис. 5.4). В частности, А преобразует окрестности в окрест-
ности, этим же свойством обладает А”1.
Давайте рассмотрим общий случай, когда размерности V и
W не совпадают. Введем обозначение o(V, 1У) для пространства
252 Глава 5. Дифференциальное исчисление на плоскости
функций, попадающих в категорию o(v), т. е. функция ф принад-
лежит о(У, ТУ), если ф = o(v). Более подробно: ф € о(У, ТУ), если
ф определена в некоторой окрестности вокруг начала координат
и удовлетворяет условию (5.3).
Функция ф принадлежит категории <?(v) (следует читать «ф
есть “О” большое от V»), если она определена в некоторой окрест-
ности 0 и существует такая постоянная к > 0, для которой нера-
венство
|Hv)|| < fc||v||
справедливо для любого v в этой окрестности. Например, линей-
ное отображение автоматически является (?(v). Очевидно, что
любая функция, попадающая в категорию o(v), заведомо являет-
ся O(v). Пусть О(У, ТУ) обозначает пространство всех функций,
попадающих в категорию O(v), и пусть /(У, ТУ) обозначает про-
странство функций, определенных вблизи 0 и стремящихся к О
при v —> 0. Иначе говоря,
X € /(У, ТУ), если х определена в некоторой окрестно-
сти вокруг начала координат и для каждого значения
в > 0 существует такое значение 6 > 0, что
||x(v)|| < £, когда ||v|| < 6.
Очевидно, что
о(У, ТУ) С О(У, ТУ) С /(У, ТУ).
Если, например, мы возьмем V — ТУ = R1 и определим ф(х) = х2,
ф(х) — X И х(х) — |х|г/2, то
<£ео(У,ТУ),
^еО(У,ТУ), но т/>£о(У,ТУ)
и
у€/(У,ТУ), но у£О(У,ТУ).
Следовательно, выписанные выше включения — строгие.
Выше мы доказали, что сумма двух функций, являющихся
о(У, ТУ), по-прежнему попадает в категорию о(У, ТУ). Аналогично
5.1. «О» большие и «о» малые
253
доказывается, что сумма двух функций, являющихся O(V,W),
также есть О(У, Ж). То же — для /(У, IV).
Рассмотрим поведение этих пространств при композиции.
Пусть X обозначает третье пространство. Докажем следующие
утверждения.
Если € O(V,TV) и ^2 € О(1У,Х), то ^20^1 € O(V,X). (5.6)
Если ^eO(V,IV) и ^2eo(IV,X), то ф2офг е o(V,X). (5.7)
Если е o(V,lV) и е 0(1У,Х), то VW1 е o(V,X). (5.8)
Доказательство. Если ||Vl(v)|| < fci||v|| Лля llvll < 51 и
||'02(w)|| < fc2||w|| для ||w|| < 52, то композиция ^2 ° будет
определена для ||v|| < где 6 есть меньший из двух параметров
51 и 52/fci. Для таких v мы имеем
11^2 ° ^i(v)|| = ||^2(^i(v))|| < M^l(v)ll < k2ki||v||,
что доказывает (5.6). Если ^2 £ o(lV, X), мы можем сделать fc2
сколь угодно малым, выбирая 52 (и, следовательно, 5) малым.
Это доказывает утверждение (5.7). Если ф\ 6 o(V, IV), то мы
можем сделать сколь угодно малым значение fci, выбирая 51 (и,
следовательно, 5) достаточно малым, что доказывает (5.8).
Если ф — отображение из V в И7 и : V —> R функция с ве-
щественными значениями, то произведение <?(v)</>(v) имеет смысл
только для тех v, которые лежат в пересечении областей опреде-
ления ф и д. Так получается функция дф, которая отображает V
на W.
Если ^€0(У,1У) и 5e/(V,R), то дф € o(V,IV). (5.9)
Доказательство. Мы знаем, что существует такое значение
к, для которого ||<0(v)|| < fc||v|| в некоторой окрестности вокруг
начала координат. Задав произвольное значение г > 0, выберем
5 настолько малым, чтобы ||<7(v) || < е/к ддя всех v при условии
||v|| < 6. Тогда для таких v
||5(v)^(v)|| < (£/fc)||^(v)|| < £||v||,
254 Глава 5. Дифференциальное исчисление на плоскости
что и доказывает утверждение (5.9). Аналогично доказываются
следующие утверждения.
Если гр е /(У, ТУ) и д G О(У,R), то дгр 6 о(У, ТУ). (5.10)
Если гр е о(У, ТУ) и д — ограниченная функция из У —> R, то
g^eo(V,W\ (5.11)
Если отображение гр из V в W. определенное в некоторой окрест-
ности вокруг начала координат, ограничено и д е o(V, R), то
дгр Е o(V,W). (5.12)
(Когда мы говорим, что отображение гр : V —> W ограничено^ это
значит, что существует некоторое положительное вещественное
число к, такое, что ||'0(v)||w < к для всех v из У.)
Итак, мы собрали все необходимые леммы, чтобы приступить
к изучению дифференциального исчисления.
5.2. Дифференциальное исчисление
Пусть f : У —> W определена в некоторой окрестности точки
х Е У. Определение функции \?х/ дается формулой
Vx/(h) = /(x + h) - /(х).
Она определена для всех значений h в некоторой окрестности
О и показывает изменение / относительно ее значения в точке
х. Функция f непрерывна в точке х, если Vx/ £ ^(^,ТУ). (Это
значит, что \7x/(h) стремится к 0 при h —> 0, так что /(x + h) —>
/(х).) Напоминаем, что функция / дифференцируема в точке х,
если существует линейное преобразование dfK : У —> W такое,
что
Vx/(h) = d/x[h]+O(h).
Это уравнение единственным образом определяет линейное пре-
образование d/x, называемое дифференциалом / в точке х. Лю-
бая линейная функция относится к категории О (У, ТУ); сумма
5.2. Дифференциальное исчисление
255
функции типа O(V, Ж) и функции типа o(V, Ж) тоже относится
к O(V,W). Отсюда можно сделать вывод:
если f дифференцируема в точке х, то \/х / € O(V, Ж). (5.13)
(В частности, из того, что O(V, W) С Z(K W), следует, что если
функция f дифференцируема в х, тогда она обязательно непре-
рывна в точке х.)
Если f — линейная функция, т. е. /(х) — Ах, то Vx/[h] —
А(х + h) — Ах = Ah. Следовательно, линейная функция /(х) —
Ах дифференцируема во всех точках. Ее дифференциал дается
формулой dfx — А и не зависит от х.
Если f — постоянная функция, то Vx/ = 0 и формула (5.4)
справедлива при А — 0. Следовательно, постоянная функция
дифференцируема везде, и ее производная тождественно равна
нулю.
Теперь мы можем сформулировать и доказать .правило вы-
числения дифференциала суммы двух функций.
Если f и д — две функции из V на W, и обе функции диффе-
ренцируемы в точке х, то дифференциал суммы равен
d(J + р)х = dfx + (5.14)
Доказательство. Очевидно, что Vx(/ + <?) = \7х/ + Vx5- Из
того, что
Vx/ = <x + 0i и Vx5 = dgx + </>2,
где и — функции типа o(V, Ж), следует, что
Vx(/ + д) ~ dfx + dgx + Ф1 +
Так как (01 + фъ) 6 o(V, Ж), формула (5.14) доказана.
Если мы умножим функцию д, значения которой принадле-
жат R, на функцию /, значения которой принадлежат Ж, то по-
лучим функцию, значения которой принадлежат Ж. Сформули-
руем правило вычисления производной произведения функций.
Предположим, что / : V —> Ж и g : V —> R дифференцируемы в
точке х. Тогда произведение gf тоже дифференцируемо в точке
х и
= p(x)d/x[h] + (d<?x[h])/(x).
256 Глава 5. Дифференциальное исчисление на плоскости
Доказательство.
Vx(s/)[h] = f?(x + h)/(x + h) - g(x)/(x)
= 9(х + h)(/(x + h) - /(х)) + (р(х + h) - р(х))/(х)
= S(x)(/(x + h) - /(x)) + (p(x + h) - я(х))/(х)
+ (s(x + h) - ^(x))(/(x + h) - /(x))
= S(x) Vx /[h] + (Vx5[h])/(x) + (Vx5[h])(Vx/[h])
= 5(x)(d/x[h]+o(h)) + (dpx[h])+o(h))/(x)+O(h)o(h),
так как f и g дифференцируемы в точке х и, следовательно, оба
дифференциала Vx/ и Vx# суть o(h) из (5.13). Из (5.9) следует,
что произведение двух функций типа o(h) есть функция типа
o(h). Обе функции f и д ограничены вблизи х, т. е. д(х. + h) —#(х)
и /(х + h) — /(х) стремятся к нулю. Произведение ограниченной
функции и функции типа o(h) есть тоже функция типа o(h).
Используя это в последнем равенстве, получаем
Vx(5/)[h] = f?(x)d/x[h] + (dgx[h])/(x) + o(h),
что и требовалось доказать.
А теперь сформулируем очень важную теорему.
Цепное правило. Предположим, что f : V —> W дифференци-
руема в точке х 6 V и > X дифференцируема в точке
У = /(х) € W. Тогда д о f : V —> X дифференцируема в точке х
и ее дифференциал определяется формулой:
d(g°f)x = (dg^) (dj*).
(5.15)
(В правой части этого выражения стоит композиция двух линей-
ных преобразований: dgj^ : W X и dfx : V —» W. В левой
части стоит композиция д и /.)
Доказательство.
Vx(5 ° f)[h] = sr(/(x + h)) - 5(/(x))
= 5(/(x) + Vx/[h]) - 5(/(x))
= V/(x)S[Vx/[h]]
= d0/(x)[#x[h]] + dff/(x)[o[h]] + (</> о V>)(h),
5.2. Дифференциальное исчисление
257
где ф Е o(V,X) (происходит от остаточного члена в V/(x)3)> а
ф — \7xf O(V,W), что следует из (5.13). Согласно (5.8), эта
композиция относится к категории o(V, X). Кроме того, dg^)
линейна и, следовательно, относится к категории O(W, X). Та-
ким образом, второе слагаемое есть композиция элемента типа
O(W, X) и элемента типа o(V, W). Согласно (5.7) эта композиция
имеет тип o(V, W). Поэтому
Vxte ° /) [h] = (dgfM О d/x)[h] + o(h),
что и требовалось доказать.
Примеры
Приведем несколько примеров на вычисление дифференциа-
лов и на цепное правило. Для функций а : R1 —> R1 дифферен-
циал dax^ вычисленный для h Е R, определяется умножением на
производную af(x), т. е.
с/ат[Л] — a'(x)h.
Это выражение является определением производной а\х). На-
пример, пусть а : К1 -> К1 и /3 : R1 -> К1 имеют вид
а(у) = У2, 0(х) = 5rr3 + 1,
так что
а о /3(х) — (5а;3 + I)2.
Тогда
day соответствует умножению на 21/,
d(3x соответствует умножению на 15а;2,
d(a о /3)х соответствует умножению на 2 (5а;3 + 1) (15а;2).
В соответствии с цепным правилом da^x^ о d/3x — d(a о (3)х.
Поэтому мы имеем:
соответствует умножению на 2 (5а;3 + 1),
о df3x соответствует умножению на 15а;2, а потом
на 2(5а;3 + 1), или
о df3x соответствует умножению на 2(5а;3 + 1)(15а;2).
258 Глава 5. Дифференциальное исчисление на плоскости
Очевидно, что эти обозначения довольно громоздкие. Обозна-
чения Лейбница для функций одной переменной лучше.
Если а ~ функция от у, то ее производная записывается как
> da ,
а — — или аа = а dy.
dy
Последнее равенство показывает, что для каждого значения у
day(h) — a'(y)h.
Другими словами, dy является фиктивным символом, вместо ко-
торого мы подставляем значение h. Тогда
d(y2) = 2у dy, d(5a;3 + 1) = 15х2 dx.
Согласно цепному правилу, подставляем
у — (5х3 + 1) и dy = 15х2 dx
в формулу для d(y2) и получаем выражение для d[(5rr3 + I)2]. В
обозначениях Лейбница цепное правило становится механической
подстановкой.
Мы, тем не менее, продолжим вычисление других приме-
ров в наших, более громоздких обозначениях, надеясь прояснить
смысл выполняемых операций.
Пусть f : R1 —> R2 и д : R2 —> R1 определены формулами
-7 ч (х2 + 1\ ((х\\ 2
/(х) — п 1 > <7 —х У*
J v 7 \2х -1J \\УJJ
Чтобы вычислить dfx, заметим, что
\7xf[s] = f(x + s) - /(ж)
_ / 2X8 \ / S2 \
— у 2s ) + \ 0 )
(2аЛ 1 (\
= S I 2 ) + °(5)-
/ \
Таким образом, djx представляется матрицей dfx — ( 9 ) •
5.2. Дифференциальное исчисление
259
Аналогично,
v(?)9 [(0
= (ж + s)2(y +1) - х2у
= x2t + 2sxy + 2sxt + s2y + s2t
поэтому матрица для dg^ x имеет вид
dg^ = (2жу,ж2).
Композиция g о f : R1 —> R1 дается формулой
g о f (ж) = (ж2 + 1)2(2ж - 1),
так что
d(g о /}х = 2(ж2 + 1)(2ж)(2ж - 1) + 2(ж2 + I)2.
Согласно цепному правилу, это выражение должно быть рав-
но матричному произведению dgj(xj о dfx, Действительно,
dgfix} ° dfx = (2(ж2 + 1)(2ж - 1), (ж2 + I)2) (
= 2(ж2 + 1)(2ж - 1)(2ж) + 2(ж2 + I)2,
а это равняется d(g о /)ж.
Мы можем также построить композицию этих функций в дру-
гом порядке, f о д : R2 —► R2, определяемую формулой
(ж2у)2 + 1
2(ж2у) - 1
Подробно вычислим d(f о д)^ху.
ГТ (f \ ((S\\ - ((Х + + *)2 + Л /Т4У2 + 1
(ч2(ж4-в)2(у + <) - 1J \^2y-l
260 Глава 5. Дифференциальное исчисление на плоскости
/ (х4 + 4x3s + 6x2s2 + 4xs3 + s4)(t/2 + 2yt + t2) — x4?/2\
\ 2(ж2 + 2xs + s2)(y +1) — 2x2y J
/2x4yt + 4x3y2s\
у 2x2t + 4xys J
। fxH2 + 4z3s(2yt + i2) + (6x2s2 + 4xs3 + s4)(?/ +1)2
у 4xst + s2y + s2t
/4z3y2 2x4y\ fs\ ((s\\
4txy 2x2 J \ t) ° ))
Следовательно,
,/ /. x (4x3y2
* ° »’(?) - (. ixy
2x4y
2x2
Согласно цепному правилу, это должно быть равно dfg^x^ о
dg^xy определяемому формулой
(2д72/у *\ п
2 )(2ху,х)
_ / 4z3y2 2х4?/\
I 4#?/ 2х2 J ‘
Как и следовало ожидать, мы получили ту же матрицу.
Еще один пример на цепное правило. Пусть F : R2 —> R2 и
G : R2 —> R2 заданы формулой
х2 + у
ху
Зху2\
х2 J ’
Вычислим дифференциалы отображений F и G в отдельности.
Для отображения F имеем
V7 т = ((X + S)2 + (y + OA _ fx2+y\
\ (s + s)(3/ + t) J \ xy J
_ / 2xs + t \ / s2 \
I xt + sy ) \st J
5.2. Дифференциальное исчисление
261
откуда
Аналогично, для отображения G имеем
(3(т + s)(y + i)2\ ( Зху2\
у (х + s)2 у у х2 J
/ 3s?/2 + Зху (2f) \ / 3xt2 + 3s(2yt +t2) \
\ 2xs / \ $2 )
(Зу2 6ху\ (з\ ((s\\
2х 0 ) \t) + \V)) ’
откуда
Композиция F о G : R2 —* R2 задается формулой
9z2y4 + х2
Зх3у2
f (Зху2)2 + х2
у Зху2х2
Найдем дифференциал композиции F о G.
_ / 9(ж + s)2(y + t)4 + (х + s)2\ / 9ж2у4 + х2\
~~ \ 3(z + s)3(y 4-1)2 J у Зх3у2 J
_ / 9(2zs)y4 + 9x2(4y3t) + 2®s\
3(3x2 s)y2 + Зх3 (2yt) J
/ 9a;2(6y2£2 + 4yt3 + 4£) + 18xs[(y + I)4 — y4] + 9s2 (y + t)4
у 3x3t2 + 3(3xs2 + s3)(y +1)2 + 9x2s(2yt + t2)
_ f 18xy4 + 2x 36x2y3\ f s\ /7 s\\
у 9x2y2 6ж3у J V/ ° \\i//
Отсюда
(18xy4 + 2x 36x2y3\
d<FoG\xy) = [ 9x2y2 6x3y )
262 Глава 5. Дифференциальное исчисление на плоскости
Согласно цепному правилу, это должно быть равно dFG^x^ о
dG/хх. Проверяем:
оИГ _/2(За?г/2) 1 W3y2 6ху\
_ / 18ху4 + 2х З6х2у3\
уЗх2у2 + 6х2у2 6х3у у
= d(FoG\xY
В следующих параграфах мы займемся некоторыми важны-
ми следствиями цепного правила. Но сначала рассмотрим еще
несколько более «абстрактных» примеров на применение цепно-
го правила и введем несколько обозначений.
5.3. Примеры на цепное правило
Рассмотрим отображение умножения д : R2 —> R1, заданное фор-
мулой
5 ((у)) = ху-
Если v = | и h = | L то
\yj \SJ
д(у + h) = (х + r)(y + s) = ху + xs + yr + rs
= s(v) + xs + yr + o(h).
Откуда
dgv(h) = xs + yr,
а соответствующая матрица (с одной строкой и двумя столбцами)
равна
(у, х).
Пусть задано отображение f : R1 —> R2. Его можно изобразить
как кривую на плоскости или, что проще, представить как две
вещественных функции от одной вещественной переменной, т. е.
f(t) = ( х^\
Я) \y(t))
5.3. Примеры на цепное правило
263
Тогда
~1— м — (x(t + h)\ _ /x(t) + x'(t)h + o(h)\
Л + > ~ \y(t + h)J~ <y(t) + y'(t)h + o(/i) J ’
следовательно,
или
f'(t} —
Умножение матрицы
dgf(t) = (y(i),^(0) на dft = /'(t) =
d(g ° f)t = (do = x'(t)y(f) + r(t)y'(t).
Но (g о /)(£) — x(i)y(t). Таким образом, в этом случае цепное
правило можно истолковать как применение формулы Лейбница
для производной от произведения двух функций.
Прежде чем двигаться дальше, удобно ввести некоторые но-
вые обозначения. Вместо того, чтобы писать
d^v(h) = yr + xs, где v=(M, h = ( Г ) , g (( ^ )) = xy,
\У / \b / \\ у ))
удобно всю информацию заключить в формулу
= ydx + xdy.
В этом уравнении символ dx в правой части следует понимать как
линейное отображение R2 —> JR1: отображение, приписывающее
каждому вектору его первую координату. Итак,
dz(h) = г, если h —
и аналогично
dy(h) 5.
264 Глава 5. Дифференциальное исчисление на плоскости
В выражении у dx символ у — это функция вектора v, приписыва-
ющая вектору v = ( Х 1 его вторую координату. Следовательно,
у У /
члены типа ydx зависят от переменных двух типов, от перемен-
ной v, говорящей нам, где вычисляется производная, и от пере-
менной h, являющейся мерой небольшого отклонения. Стоящее
в левой части формулы выражение d{xy) есть краткая запись
где функция д определяется условием <?(v) = ху для векто-
(х \
1. Используя цепное правило по аналогии с первым
примером, мы говорим:
Рассмотрим х как функцию1 в пространстве R2, ко-
торая каждому вектору приписывает его первую ко-
ординату. Тогда, по определению нашего отображения
/, можно написать (хо f)(t) = x(t). Согласно цепному
правилу, d((rr о f)t — xf(t)dt, функция x'(t) вычисля-
ется в той точке t, где требуется найти дифференци-
ал, dt определяет малое приращение. Следовательно,
когда мы рассматриваем х как функцию t, заданную
отображением /, мы производим «замену» dx — х' dt,
где х' зависит от t. Аналогично, если мы рассматрива-
ем у как функцию от t, задаваемую отображением /,
цепное правило приписывает нам сделать подстановку
dy = y'dt.
Тогда можно написать
d{g ° f) ~ Ух' dt 4- ху' dt,
где справа величины x,y,xf и yf следует заменить явными функ-
циями от t.
Например, положим x(t) — t + sint, y(t) = e2t. Тогда
dg — d(xy) — ydx + xdy,
df = d
t + sin t
e2t
1 + cos t
2e2t
1 Вероятно, полезно еще раз прочитать то место в параграфе 1.3, где
подробно обсуждается, как координату х можно рассматривать в качестве
функции.
5.3. Примеры на цепное правило
265
и
d(g ° /) ~ d((t + sint)(e2t)) = (e2t(l + cosi) + 2e2t(t + sint)) dt.
Давайте изобразим цепное правило на диаграмме (рис. 5.5).
Нам даны два дифференцируемых отображения f : V —* W и
д : W —» Z, из которых можно составить композицию д о f : V —>
Z. На некоторую точку v в пространстве V действуем отобра-
жением f и получаем /(v), потом действуем отображением д и
получаем <?(/(v)). При вычислении дифференциала d(g о /)v(h)
мы можем двигаться последовательно, сначала подействовав ли-
нейным отображением dfv на вектор h и затем подействовав ли-
нейным отображением dgf(y) на полученный образ.
Рис. 5.5
А теперь давайте выполним более сложные вычисления с цеп-
ным правилом. Рассмотрим векторные пространства У, W и т. д.
большого числа измерений. Конечно, формально говоря, нам бы
следовало отложить эти вычисления, пока не изучен соответству-
ющий раздел линейной алгебры. Но мы, тем не менее, рекомен-
дуем разобрать их сейчас. Начнем с вычисления производной от
произведения двух матриц. Пусть V есть векторное простран-
ство, образованное парами матриц п х п. Вектор в таком прост-
ранстве имеет вид
В J
266 Глава 5. Дифференциальное исчисление на плоскости
где А и В — матрицы размера п х п. Векторы в этом пространстве
складываются и умножаются на скаляр покомпонентно.
Если v =
то
Очевидно, что пространство V имеет размерность 2п2.
Пусть W обозначает другое векторное пространство матриц
размером п х п. Определим отображение д : V —> W формулой
9
V (А
Если v = | о
\
и h =
, то
ff(v + h) - p(v) — (А + Х)(В + У) - АВ
- ХВ + AY + XY = ХВ + AY + o(h).
Следовательно,
d^v(h) = ХВ + AY. (5.16)
В процессе вычислений будем для удобства пользоваться обозна-
чениями, где опущены индекс v и аргумент h. Тогда уравнение
(5.16) имеет вид
d(AB) - (dA)B + A(dB). (5.17)
В этих обозначениях величина АВ в левой части уравнения —
это удобное обозначение функции д. Величина dA справа есть
ж (А\
производная функции, которая вектору D ставит в соответ-
\ В /
ствие матрицу А. Эта производная, вычисленная в точке ( Ь
\ В /
для вектора
дает значение X. Таким образом, dA — линей-
ставит в соот-
ное отображение, которое каждому вектору
ветствие величину X. Поэтому, например, (dA)B есть линейное
5.3. Примеры на цепное правило
267
отображение, которое вектору ( у ) ставит в соответствие зна-
чение ХВ. В этом смысле уравнение (5.17) есть краткая запись
уравнения (5.16).
Далее, пусть f обозначает отображение из W в V согласно
формуле
ДА) = .
Так как / — линейное отображение, то его производная не зави-
сит от А, является линейным отображением, и вычисление дает
dfA(X) = (*) .
В дифференциальных обозначениях это следует записать так:
/А\ _ (dA\
d\AJ “ \dAJ ’
где опять dA — линейное отображение, которое любому элементу
X ставит в соответствие значение X.
А теперь рассмотрим отображение h : W —> РИ, определяемое
формулой
Л(А) = А2.
Очевидно, что h(A) = g(f(A)) или h = д о f. Действие цепного
правила в этом случае изображено на рис. 5.6.
Рис. 5.6
Это значит, что
(Z\
z \ = ZA+AZ.
268 Глава 5. Дифференциальное исчисление на плоскости
Мы могли бы записать эту выкладку в «дифференциальных»
обозначениях, а именно, в уравнении (5.17) сделаем «замены»:
А = А и В = А. В результате получаем
d(A2) = (dA)A + A(dA).
(Отметим еще раз: вследствие некоммутативной природы мат-
ричного умножения эта формула дает правильное обобщение
формулы d(x2) = 2xdx. Формула d(A2) — 2AdA неверна!)
Разложение Борна
Рассмотрим отображение (inv), которое каждой обратимой
матрице ставит в соответствие ее обратную, т. е.
(inv)(A) — А-1.
Отображение (inv) определено только на подмножестве W, со-
стоящем из всех обратимых матриц. Предполагая, что (inv) диф-
ференцируемо в области определения, покажем, как вычислять
производную (inv), используя цепное правило. Пусть отображе-
ние f задано формулой
или, символически,
f = ( (id) А
J у (inv) ) '
Напоминаем, что отображение д, как и выше, определено форму-
лой
Тогда (gof)(A) = АА-1 — I, где I - единичная матрица. Другими
словами, композиция gof постоянна и, следовательно, d(gof) ~ 0.
Согласно цепному правилу,
dA(id)(X) \ / X
dA(inv)(X) J \d(inv)A(X)
Воспользуемся цепным правилом еще раз:
о = (df(A)g](dAf(X)) = ХА-1 + A(dA(inv)(X)).
5.3. Примеры на цепное правило
269
Умножая это уравнение слева на А 1 и решая его относительно
d^(mv)(X), получаем
dA(mv)(X) = -А^ХА-1.
В дифференциальных обозначениях эта процедура записывается
следующим образом. Так как АА^1 = Н, мы имеем (/(АА”1) = 0.
Заменяя А и А-1 на А и В в формуле d(AB) — (dA)B + A(dB),
получаем
0 - (/(АА”1) - ((/А)А-1 + Ad(A-1).
Решая это уравнение относительно (/(А”1), получаем формулу
d(A-1) = -A-1(dA)A-1.
(5.18)
(Соотношение (5.18) дает правильное обобщение формулы диф-
ференциала d(l/x) = —(l/x2)dx на случай матриц.) Дадим
немного другое объяснение формуле (5.18). Предположим, что
А — обратимая матрица, т. е. Det А ф 0. Тогда, если X является
матрицей, элементы которой достаточно малы и Det(A + X) ф 0,
то матрица А + Х тоже обратима. В этом случае можно написать
А + Х = (1 + ХА-1)А.
Если X достаточно мала, то матрица ХА”1 тоже будет малой и
ряд
(I + ХА”1)”1 - I - (ХА”1) + (ХА”1)2 - (ХА”1)3 + • • •
будет сходиться. Тогда мы получим
(А + X)”1 - [(I + ХА”1)А]”1 = А-1(1 + ХА”1)”1
- А”1^ - (ХА”1) + (ХА”1)2---)
или
(А + X)-1 = А'1 - А~1ХА~1 + А^ХА^ХА-1
- А~1ХА~1ХА~1ХА~1 + • • • .
270 Глава 5. Дифференциальное исчисление на плоскости
В физической литературе этот ряд называется борновским раз-
ложением по имени известного физика-теоретика Макса Борна.
Формула (5.18) получается из разложения Борна, если опустить
все члены более высокого порядка малости, чем X, В физической
литературе формула (5.18) известна как первое борновское при-
ближение, играющее чрезвычайно важную роль в теории рассея-
ния. Как мы уже показали, нам не надо знать все борновское раз-
ложение для получения первого борновского приближения. Его
можно получить непосредственно из цепного правила.
С другой стороны, разложение Борна означает, что
(А + X)-1 - А-1 = —А~1ХА~1 + о(Х).
Это доказывает, что функция (inv) дифференцируема. Именно
это нам пришлось предположить, когда мы применяли цепное
правило.
Пусть В — постоянная матрица. Рассмотрим отображение
/(А) = АВА-1. Тогда
(/(АВА”1) = (dA)BA”1 + АВ((/А-1)
= (dA)BA”1 - ABA-^dAjA-1.
Это можно записать по-другому:
dA/(X) = ХВА-1 - АВ А-1 ХА-1.
Предположим, что t —> A(t) есть некоторая дифференцируемая
кривая в пространстве матриц. Пусть
(7(t) = A(t)BA(t)-x,
где В — постоянная матрица. Кроме того, предполагаем, что А(/)
обратима для всех t. Применяя цепное правило и предыдущие
формулы, получаем
С"(/) = А'(/)ВА(/)-1 - А(/)ВА(/)А'(/)А(/)”1.
Допустим, что А(0) = I и А'(0) = X. Тогда, полагая t = 0 в
предыдущей формуле, имеем
С"(0) = хв- вх.
5.3. Примеры на цепное правило
271
Это весьма важная формула в математике и физике. Правая
часть называется коммутатором матриц X и В и обозначается
[Х,В], т.е.
[Х.В] = ХВ-ВХ.
В качестве примера возьмем A(t) = exptX. Тогда
A(t) = I + tX + |t2X2 + • • • .
£
Очевидно, что А(0) — I и А'(0) = X, поэтому можно воспользо-
ваться полученной формулой. Итак, мы имеем
А(£)-1 = (ехр^Х)-1 — ехр(—tX) = I — tX + ^t2X2 Ч-,
поэтому
= (Я + tX + |i2JV2 + • • • )B(I - tX + |t2X2 + • • •)
= В + t(XB - BX) + |t2(X2B - 2XBX + BX2) + • • • .
Собрав вместе члены порядка два и выше по £, получаем
A(i)BA(t)-1 = В + t[X, В] + o(t).
Движение Кеплера
Мы уже видели, что цепное правило влечет правило Лейбница
для производной произведения, причем это верно и для произве-
дения матриц, когда операция умножения не обладает свойством
коммутативности. Давайте используем ту же аргументацию для
векторного произведения в пространстве В3. (Сейчас мы напом-
ним это определение.) В качестве следствия мы получим второй
закон Кеплера, описывающий движение планет.
В трехмерном пространстве векторное произведение опреде-
лено следующим образом:
(х\ / р\ / yr — zq\
у I и w = I q ] , то v х w — I гр — xr | .
г / \г / \хд — УР/
272 Глава 5. Дифференциальное исчисление на плоскости
Из этого определения вытекают свойства векторного произведе-
ния:
(vi +V2) X W — V1 X w +V2 X W, V X (wi +W2) = v X Wi+v X W2,
(av) x w = v x (aw) — a(v x w) и v x v — 0.
Из первых трех уравнений следует, что знак «х» действует как
знак умножения. Можно доказать, что
d(y xw) = dvxw + vx dw.
В частности, если v(£) и w(t) — кривые в пространстве 1R3, и если
мы положим
u(t) = v(t) х w(t),
то
u'(t) — v'(t) x w(i) + v(t) x w'(£).
Допустим, что r(t) обозначает положение частицы в момент
времени i, и пусть p(t) обозначает импульс этой частицы в мо-
мент t. Тогда вектор
д(«) = р(<) X r(t)
называется угловым моментом частицы относительно начала ко-
ординат (в момент времени t). Предположим, что частица имеет
массу т, и на нее действует сила F(i) — c(t)r(£), направленная
вдоль вектора, идущего от начала координат к частице. Посколь-
ку r(£), р(£) и F(£) связаны формулами
r'(t) = (l/m)p(t) и p'(t) = F(t) = c(t)r(t),
TO
д'(£) = p'(i) X r + p(t) x r'(i)
— c(t)r(Z) x r(i) + (l/m)p(t) x p(t) = 0.
Другими словами, вектор /z должен быть постоянным. Этот за-
кон называется законом сохранения углового момента. Для про-
стоты предположим, что fi ф 0. Из определения векторного про-
изведения легко показать, что для любых векторов v и w выпол-
няется соотношение (v х w) • w — 0. Так как д = p(t) х r(t), мы
5.3. Примеры на цепное правило
273
получаем, что • г(£) = 0 для всех значений t. Другими словами,
частица всегда двигается в фиксированной плоскости, которая
перпендикулярна вектору дл. В пространстве IR3 повернем систе-
му координат так, чтобы /х был направлен вдоль оси г, тогда
частица будет двигаться в плоскости ху. Итак,
/ x'(t)\
r(t) = I 2/(0 , тогда p(t)= I y'(t)
\ 0 / \ 0 /
/ ° \
и /х = т I О I .
- x(t)y'(O/
Таким образом, условие сохранения /х значит, что выражение
я'(£)у(£) — x(t)yf(t) постоянно. Чтобы понять смысл этого усло-
вия, нарисуем траекторию частицы в плоскости ху (рис. 5.7).
С точностью до членов о(Л) область, ограниченная траекторией
/x(t) \ (x(t + h) \
( и вектором { \ ; 1, совпадает с площадью треуголь-
\У(*) / \y(t + h) J
(x(t)\ f x(t + h)\
ника, построенного на векторах I I и I I, т. е. с этой
точностью мы можем пренебречь площадью, заштрихованной на
рис. 5.7.
С точностью до знака площадь треугольника равна
|(x(t + h)y(t) - x(t)y(t + /i)).
274 Глава 5. Дифференциальное исчисление на плоскости
Но
x(t + h) = x(t) + hxf(t) + o(h) и y(t + h) — y(t) + hyf(t) +
Тогда площадь треугольника равна
|(x'(t)y(t) - x(t)y'(ty)h + o(/i).
Это значит, что скорость изменения площади, описываемой
радиусом-вектором движущейся частицы, постоянна. Так форму-
лируется второй закон Кеплера. Используя цепное правило, мы
видим, что второй закон Кеплера и то, что частица движется в
фиксированной плоскости, является результатом действия силы,
направленной вдоль ее радиуса-вектора. Тот факт, что движение
планет происходит в фиксированных плоскостях и за равные про-
межутки времени их радиусы-векторы описывают равные площа-
ди, определяется тем, что действующая на них сила направлена
к Солнцу. Изложенный вывод второго закона Кеплера принадле-
жит Ньютону.
5.4. Частные производные
и дифференциальные формы
В этом параграфе мы введем понятия и обозначения, удобные для
применения цепного правила. Рассмотрим дифференцируемую
функцию / : Rfc —> R. Например, пусть к = 3 и
Тогда dfv есть линейное отображение R3 R. Следовательно, dfv
можно рассматривать как вектор-строку. Утверждается, что для
у 1 вектор-строка определяется формулой
z /
d/v = (2z?/3z4, 3rr2?/2z4, 4rr2i/323).
5.4. Частные производные и дифференциальные формы 275
Чтобы убедиться в этом, вычислим его проекции на каждый из
/1\ /о\ /о\
векторов |0 ,1|и|0|. Например,
\о/ \о) \1/
/ /1\ \ / s\
f I v + s I 0 j j - /(v) = dfv | 0 | + o(s)
\ \0// \0/
/i\
= sdfv j 0 j + o(s).
\° /
Это следует из определения dfv и из того факта, что дифферен-
циал d/v[h] линеен по h. Тогда
и предел этого выражения при s —> 0 является производной f по
переменной х при фиксированных у и z. Он называется частной
производной f по х и обозначается df /дх. Если
= x2y3z4,
то элементарное вычисление дает
дх
= 2xyizi.
Таким образом,
5/
дх
276 Глава 5. Дифференциальное исчисление на плоскости
И II df
Аналогично, dfv II 1 11 = тг- и dj\
\\oJJ дУ
функции / мы получаем формулу
7о\\
Р
\1 //
а/
dz
Итак, для
df,
df_
' ду
Непосредственная проверка для / = x2y3z4 дает тот же резуль-
тат. Есть более удобный способ организации этой информации.
Напоминаем, что мы уже имели обозначение dx для линейной
функции, приписывающей каждому вектору его первую компо-
ненту, т. е. dx задается матрицей
(1, о, 0)
и, аналогично, для dy и dz — матрицы
(0, 1, 0) и (0, 0, 1).
Теперь можно записать равенство
= (v)(l, 0, 0) + g(v)(0, 1, 0) + g(v)(0, 0, 1)
в форме
«Льлъль.
дх ду dz
Таким образом,
d(x2^/3z4) = 2ги/3г4 dx + Зх2у2г4 dy + 4x2g/3^3 dz.
Справа стоит сумма трех членов, являющихся функциями, умно-
женными на dx, dy и dz. Такая сумма называется линейной диф-
ференциальной формой. Смысл этой формы в том, что она опре-
деляет правило, по которому каждой точке пространства R3 при-
писывается вектор-строка.
5.4. Частные производные и дифференциальные формы 277
Это формула естественна в том смысле, что если взять функ-
цию
У 11 = X,
\z / /
то
^=0
дх ' ду~ ’ dz ~ ’
и тогда мы получаем
df = dx.
С этими обозначениями цепное правило сводится к формаль-
ным подстановкам. Покажем, что мы имеем в виду. Рассмотрим
отображение ф : R2 —> R2, определяемое формулой
л (( ( rcos0\
\\0// \rsin^/
Пусть / : R2 —> R есть некая функция, скажем,
/ = ^ + У2^
\\ у ) /
Тогда
У ° ф = г3 cos 0.
Отображение Лф^г^ будет матрицей размера 2x2, скажем,
(а Ь\
d^ = {c dj'
Чтобы найти верхнюю строку этой матрицы, мы должны умно-
жить ее слева на вектор (1, 0). Тогда
а, о) (: *)=(», ц.
В нашем случае (1, 0) есть dx. Согласно цепному правилу,
da4(5)) = d(xod(l>\rey
278 Глава 5. Дифференциальное исчисление на плоскости
Но х о ф ^0^ ~ rcos#, следовательно, мы получаем вектор-
строку
d(x ° ф)(т = cos 0 dr — г sinд d0
= (cos#, —г sin#).
Итак, а — cos#, b = —гsin#. Аналогично
= d(y ° </>)(£) — sin# dr + r cos#d# = (sin#, r cos#).
Откуда следует, что Зф^г^ задается матрицей
/ cos# —гsin# \
у sin # г cos # J '
Тогда
df — (Зя2 + у2) dx + (2яу) dy
и
d(f ° Ф) — 3r2 cos # dr — г3 4 * * sin # d#.
В принципе, согласно цепному правилу, можно перемножить мат-
рицы и получить матрицу для дифференциала d(/ о ф):
2 2д , 2 • 2/1 л2 • л f COS# ~rsin# \
(3r2 cos2 в + r sin2 #, 2r2 sm#cos#) . Л n 1
4 7 у sm# rcos# J
— (Sr2 cos #, —r3sin#).
Конечно, это правильно. Однако, можно сделать иначе - - подста-
вить
х ~ г cos #, dx — cos # dr — г sin # d#,
у = r sin #, dy — sin # dr + r cos # d#
в выражение
df — (Sx2 + y2) dx + (2яу) dy,
после этого все перемножить, собрать вместе коэффициенты и
получить то же самое выражение для d(f о ф).
5.4. Частные производные и дифференциальные формы 279
Другими словами, можно считать, что отображение ф пре-
вращает х в функцию т и в, т. е. х надо заменить на функцию
х о ф = г cos 0 и вычислить ее дифференциал.
Чтобы проделать эти вычисления, полезно вспомнить, что
d(gti) = gdh + hdg.
Например, в пространстве R2
, дд . дд .
dg^^dx + ^- dy,
ох ду
откуда
. , .дд , .дд .
hdg ~ h-^- dx + h-~- dy.
дх ду
Тогда
d[(gh) о ф\ = (д о 0) d(h оф) + (ho ф) d(g о ф).
Таким образом, в нашем примере
F f = х3 + у2х = (х2 + у2)х = gh (Х\ ,
\У/ \У/
где д — х2 + у2 и h — х. Тогда f о ф _ г2 • г cos 0 и, следовательно,
d(f о ф) — (г cos 0)2r dr + г2 (cos 0 dr — г sin 0 d0)
= 3r2 cos 0 dr — r3 sin 0 d0.
Эта процедура легко обобщается: пусть у±,..., yi обозначают
координатные функции в пространстве где точка задается
столбцом
(У1
У1 /
Пусть / : R* —> R есть дифференцируемая функция. Тогда
df . ^df
af = dy\ Ч------F — dyi.
280 Глава 5. Дифференциальное исчисление на плоскости
Предположим, что Xi,..., обозначают координаты в простран-
стве Пусть ф : — дифференцируемое отображение.
Определим ф± = о ф2 = т/2 ° Ф и так далее. Тогда
/ </>i(v) \ / X! >
<£(v) — I : , где v = I :
\ <MV) / \ Хк /
Далее можно написать
аф1 — — «^1 + • • • + —— axk,
ох\ дхк
,, дф1 дф1
аф1 = -тг- dxi Н---+ dxk,
OXi ОХк
и линейное отображение (1фч задается матрицей
/ дф1
дху
дфг
\ дхх
или в более простой форме
(1ф =
/ дфу
дх\
дф1
\ дх\
дф1 \
дхк
дф1
дхк /
Согласно цепному правилу,
d(f °Ф) = ° фЛф\ Ч------h —~ о ф(1ф[,
дуг dyi
Z7A Л -L й
где использованы выражения axpt — —— ах\ + • • • + —— ахь*
oxi дхк
5.4. Частные производные и дифференциальные формы 281
Закончим этот параграф доказательством двух теорем.
Чтобы определить частную производную, мы использовали
дифференцируемость f в точке р. Можно показать, что сущест-
вование частных производных по х и по у еще не означает диффе-
ренцируемость f в р. Достаточные условия дифференцируемости
f в точке р дает следующая теорема.
Теорема: Пусть / : R2 —> R1 имеет непрерывные частные
л df df
производные — и — в точке р. Тогда f дифференцируема в
дх ду
точке р.
Доказательство. Если / дифференцируема в р, то линейное
отображение d/p должно иметь вид
Итак, если существуют —
дх р
точке р тогда и только тогда,
df
и ду
когда
, то / дифференцируема в
р
Запишем приращение функции f в виде
V₽ = + s'yP + t^~
= f(xp + 3, Ур + t) - /(жр, Ур +t) + f(xp, Ур + t)- /(жр, Ур).
По теореме Лагранжа о среднем значении из одномерного
дифференциального исчисления можно записать:
d f
f(Xp + s, Ур + t) - /(жр, Ур + t) = s^-
дх ( хо \
\Ур+Ч
f(xp, Ур + t) - /(хр> Ур) = t^
282 Глава 5. Дифференциальное исчисление на плоскости
для некоторых xq и уо, удовлетворяющих условиям хр < xq <
Жр + s и ур < ?/о < Ур + Тогда
так что
z/ Up+v Uo)
стремится к нулю, то ввиду непрерывности функций
Если
df /дх и df /ду коэффициенты при s и t тоже стремятся к нулю,
т. е. относятся к категории /(R^R1). Поскольку обе функции s
и t являются ©(R^R1), то все выражение есть ^(R^R1), что и
требовалось доказать.
Теорема: Пусть / : R2 —> R1 дифференцируема в точке р и име-
д (df\ д (df\
ет непрерывные смешанные производные — — и — —-
ду у дх J дх уду/
в точке р. Тогда
д
ду
д (df\
дх уду/
р
Интуитивная идея, лежащая в основе доказательства этой
У )1
f х + s\ I х \ ( х + s\ ~
, , и 1. Они расположены на плоскости
у у J yy + t) yy + tJ
так:
х + s
y + t
x + s
У
5.4. Частные производные и дифференциальные формы 283
Рассмотрим выражение, составленное из значений функции / в
этих точках:
Его можно сгруппировать двумя способами: либо
либо
J\\y + t)J J\xu + tJJ V \\ У // \\УJJJ v ?
Очевидно, что они равны. Выражение (5.20) равно
((о))
Учтем, что
V(A)Z(w/ =sto
+ o(s)
(yX+t)
и
v(;)/((o)) = s^L+°(s)-
\y)
Если бы мы могли «пренебречь» поправочными членами о($), то
мы бы имели
(df\ fo\ л э (df\
= S V(I I ( + ) = st^~ ( I + so(t).
\y) \dxJ \ t J dy \ox)
Если те же операции проделать с выражением (5.19), то получим
+ to(s).
284 Глава 5. Дифференциальное исчисление на плоскости
Разделив полученные ответы на st, получаем (без учета послед-
них, «малых» слагаемых)
д_д£
дх ду ду дх
Чтобы приведенное рассуждение стало строгим, нам необхо-
димо внимательно исследовать поправочные члены. Мы можем
сделать это с помощью теоремы о среднем значении из диффе-
ренциального исчисления функций одной переменной. Положим
/ \ р ff X S л /f X
Функция g дифференцируема по у и выражение (5.20) равно
д(у +1) - g(y).
Согласно теореме о среднем значении
у(у + t) - s(y) = ty'ty),
где у — некоторая точка между у и у +1. Далее,
у (у) = Inn |(д(у + е) - у(у))
_ д_ р ((х + s\\___f ^\\
ду? \Х У JJ ду \\У// *
По предположению теоремы функция df /ду дифференцируема.
Еще раз воспользуемся теоремой о среднем значении
Таким образом, выражение (5.20) равно
5.5. Производные по направлению
285
д ( д f\
По условию теоремы функция —- ( — ) непрерывна. Поэтому
дх \ду J
для любого е > 0 можно найти такое 8 > 0, что
д д f( х \\
дхду \\У//
— — f ((
дхду \\У))
< е, если |s| + |t| < 8.
Таким образом, (5.20) преобразуется к
где |г11 < £, если |.s| + |t| < 6. Аналогично получаем, что (5.19)
равняется
S \ду \\У// / '
Будем считать, что |st| > 0. Разделив полученные результаты на
st, получаем неравенство
дх ду
д_д£
ду дх
< Гз»
где
|гз| < |п| + |т2| < 2£, если |s| + |t| < 6.
Левая часть неравенства есть просто разность между двумя чис-
лами, она не зависит от 8, следовательно, гз может быть сделано
сколь угодно малым и, мы получаем равенство смешанных про-
изводных, т. е.
дх ду ду дх ’
5.5. Производные по направлению
Пусть I — интервал в пространстве R1, содержащий 0. Возьмем
7 : I —► V, дифференцируемую в 0. (Как обычно, в качестве
V можно взять любое векторное пространство, для наглядности
286 Глава 5. Дифференциальное исчисление на плоскости
представляйте себе случай V = R2.) Предположим, что у(0) — х,
и пусть 7'(0) обозначает вектор Й7о(1), т. е.
7'(0) = с?7о(1) = lim[(l/i)(7(f) - 7(0))].
t >и
Вектор 7' (0) называется касательным вектором к кривой 7 в
точке t = 0. Если 71 — вторая кривая, для которой выполняются
условия 71(0) = 7(0) и 71(0) = 7/(0) (рис. 5.8) то мы будем
говорить, что 7 и 71 касаются при t = 0, или что они согласуются
в нуле с точностью первого порядка.
Рис. 5.8
Если 7 касается 71 в нуле, и 71 касается 72 в нуле, то очевид-
но, что 7 касается 72 в нуле. Другими словами, мы определили
отношение эквивалентности для дифференцируемых кривых: две
кривые эквивалентны, если они согласуются в нуле с точностью
первого порядка. Если 7'(0) = v, то пара {х, v} определяет класс
эквивалентности. Мы представляем этот класс эквивалентности
как вектор v с началом в точке х, и называем этот вектор ка-
сательным вектором в точке х. Любые х и v определяют неко-
торый класс эквивалентности, потому что всегда можно взять
прямую линию
7(t) = х + tv,
для которой выполняются условия 7(0) — х и у'(0) = v. Иногда
мы будем пользоваться греческой буквой, например, £, для обо-
значения касательного вектора в точке х, т. е. £ обозначает пару
х и V.
5.5. Производные по направлению
287
Предположим, что V = R2, тогда кривая 7 задается двумя
функциями х о 7 и у о 7, обычно обозначаемыми и у (2).
Например,
x(f) = tsint + 1
У(0 = е*
определяют кривую
t sin t + 1
ef
с начальными условиями
Заметим, что
d(x 07) = d(t sin t 4-1) = (sin t 4- t cos t) dt
d(y 07) = d(e*) = e* dt.
Поэтому функция
,/jt4 /sinf4-tcosf
7 (t) = ( et
может быть восстановлена по коэффициентам при dt в d(x о 7) и
Пусть функция f : V —> R определена в некоторой окрестно-
сти точки р. Для каждой кривой 7, удовлетворяющей условию
7(0) = р, функция /07 определена вблизи 0 в пространстве R.
Если f — дифференцируемая функция в р и 7 дифференцируема
в нуле, то, согласно цепному правилу, /07 будет (вещественной)
функцией, дифференцируемой в нуле, и ее производная опреде-
ляется формулой
(/o7)Z(0) = d/p(Y(0)).
Используя обозначения, принятые для дифференциальных
форм в пространстве R2, в выражении для df заменим ^(3707) на
288 Глава 5. Дифференциальное исчисление на плоскости
dx и d(7 о 7) на dy. Например, если взять
/ (у} =Х2+У2,
df = 2xdx + 2у dyy
d(f 0 7) — 2(tsint + l)(sint + £ cost) dt + 2e* • el dt
= 2(tsint + l)(sint + t cos t)dt + 2e2t dt.
Коэффициент при dt равен (/ о 7)'(t). Полагая t — 0, получаем
(/о7)'(0).
Заметим, что (/ о 7)'(0) зависит от р и 7х(0), но при этом
не требуется другая информация о кривой 7, т. е. эта величина
зависит только от касательного вектора £. Обозначим эту вели-
чину D^f и будем называть ее производной по направлению £ от
функции /. Итак,
D^f = dfp(v), < = {p,v}.
Например, если v = ^j), то D$f = ^-(р). Пусть /1 и /2 —
две функции, дифференцируемые в точке х, и пусть f = Д + Д.
Кривая 7 проходит через точку х, причем ее касательный вектор
в р есть Из курса дифференциального исчисления функций
одной переменной мы знаем, что
(/о7У(0) = (Ло7)'(0) + (/2о7)'(0).
Следовательно,
+ /2) — + ^Д.
Аналогично, если мы возьмем h ~ ДД, то элементарные вычис-
ления дают
(Л О 7)'(0) = (/1 О 7)'(0)(/2 о 7)(о) + (/1 О 7)(0)(/2 ° 7)'(0)
= (А ° 7)'(0)/2(х) + /1(х)(/2 ° 7)'(0),
так как (/i о7)(0) = /1(7(0)) = /1(х) и то же самое для /2. Таким
образом, мы можем записать
P€(/i/2) = (Z)c/i)/2 + /1(^/2).
5.5. Производные по направлению
289
Еще один пример на вычисление производной по направлению.
Пусть 7 : R —> R2, где
(<4 2Л2)’ у О)=+j3-
Тогда df^x} и £ = {7(0), У(0)} определяются формулами
с?/(Х) = (2а?г/,х2+ Зу2), £={( 2) ’Q)}'
Отсюда
D^(f) = df^ (Q)) =(-4,13) Q) =-4 + 26 = 22.
Покажем, что это равно (/ О7')(0). Для этого заметим, что
/ о 7(i) = (i - l)2(t2 + 2t + 2) + (t2 + 2t + 2)3,
(/ 0 7)'W = 2(t - l)(t2 + 2t + 2) + (t - l)2(2t + 2)
+ 3(i2 + 2t + 2)2(2t + 2).
Следовательно,
(/ О 7)'(0) = 2(—1)(2) + (—1)2(2) + 3(2)2(2) = 22.
Вычислим производную по направлению от произведения
двух функций. Пусть д : R2 —> R, где д (( Х j j = х2 — у2. Тогда
отображение произведения fg : R2 —> R имеет вид
« ff X \\ е ii 11 /2 i 3 \ / 2 2 \
/5 (( 7/ )) = (( V )) 9 (( V )) = У + У ^Х ~ У >-
\\ ^ // \\ // \\ Zz
Дифференциалы dg и d(fg) равны
dg^ = (2x, -2y)
= (2<и/(ж2 - у2) + (x2y + у3)(2ж), (x2 + Зу2)(х2 - у2)
+ (x2y+ y3)(-2y)).
290 Глава 5. Дифференциальное исчисление на плоскости
Тогда мы имеем
D^fg) = <<?)(-!) (Q))
= (—4(—3) + 10(—2), 13(-3) + 10(—4)) ( J
- -8 - 158 = -166.
Согласно правилу дифференцирования произведения, производ-
ная должна быть равна
D^fg) = D^f)g (j*) + f ("2) D^'
где
д (= (-1)2 - 22 = -3, f (= (—i)22 + 23 = 10
D^g) = dg^ (Q)) = (-2, -4) Q) = -10.
Следовательно,
D^fg) = 22(—3) + 10(-10) - -166,
что совпадает с ранее полученным результатом. Множество каса-
тельных векторов в точке х удобно рассматривать как векторное
пространство, называемое касательным пространством в точке х
и обозначаемое TV*. Тогда если £ = {х, v} и Т] = {х, w} — два ка-
сательных вектора в точке х, то их сумма равна ~ {х, v-|-w}.
Кроме того, если £ — {х, v} и а — произвольное вещественное
число, то — {х, av}. Таким образом, пространство TV* похо-
же на пространство V, за исключением того, что все выражения
имеют немой индекс х. Сейчас читателю эти обозначения могут
показаться слишком громоздкими, но позднее станет ясно, на-
сколько они удобны.
Если £ = {х, v} И 7) = {х, w}, то
Di+rjf = d/x[v + w] = d/xx[v] + d/x[w] = D$f + D^f,
5.6. Операция переноса
291
следовательно,
Аналогично,
D$+r}f =
Da^f = aD^f.
5.6. Операция переноса
Пусть ф : V —> W, где </>(х) = у — дифференцируемая функция.
Если f : W —> R определена в окрестности у, то функция / о ф
определена в окрестности х. Чтобы подчеркнуть точку зрения,
которая будет центральной в этой книге, обозначим эту функцию
ф* f и назовем ее переносом2 функции f с помощью ф. Таким
образом,
ФЧ = /°Ф,
ОМ = /(^(х)).
Будем считать функцию ф фиксированной, а / переменной, так
что ф* переводит все функции на пространстве W в функции на
пространстве V (назад). Заметим, что
Ф*(/1 + /2)-^Л+^/2
И
ФЧШ = М*А)М*Л),
следовательно, ф* сохраняет все алгебраические операции.
Если, например, ф : R2 —> R2 — отображение, задающее пере-
ход от полярных координат к декартовым согласно формуле
, (( г\\ ( ГСО80\
\\0// ~ \rsin0y ’
2 В английском оригинале эта операция имеет выразительное название
pullback, что в буквальном переводе означает отступление, отход назад.
Русский термин перенос несколько менее информативен, так как в нем нет
указания на то, что область определения функции f под действием переноса
перемещается в направлении, противоположном перемещению точек при
отображении ф, — Прим. ред.
292 Глава 5. Дифференциальное исчисление на плоскости
то можно написать
ф*х = г cos ф*у = rsin0.
Здесь нам хотелось бы остановиться и объяснить смысл этих
уравнений. У нас есть две плоскости: г0 и ху (рис. 5.9). Пусть
отображение ф каждой точке плоскости гд ставит в соответствие
точку на плоскости ху. Мы рассматриваем х как функцию на
плоскости ху: каждой точке плоскости эта функция ставит в
соответствие координату х.
Тогда ф*х становится функцией на плоскости г0, т. е.
ф*х = rcos0, и, аналогично, ф*у = rsin0.
Теперь мы хотим определить перенос с помощью ф для диф-
ференциальных форм. Начнем с определения переноса для ба-
зисных форм dx и dy. По определению,
ф+dx = d(</>*x)= cos в dr — г sin 0 d0,
ф*dy = d($*y) = sin О dr + г cos Odd.
Тогда для любой линейной дифференциальной формы типа
х2 dx + у2 dy
можно определить
ф*(х2 dx + у2 dy) = ф*(х2) • ф* dx + ф*(у2)ф* dy
= (г2 cos2 0)(cos в dr - г sin в d0) + (г2 sin2 0)(sin О dr + г cos 0 dO)
= r2 (cos3 0 + sin3 0) dr + r3(sin2 0 cos 0 — cos2 0 sin 0) d0.
5.6. Операция переноса
293
Другими словами, для дифференциальной формы
adx + bdy.
где а и b — функции, определяем
(j)*(adx + bdy) = ф* (а)ф* (dx) + ф*(Ь)ф*(^1у),
где потом следует собрать вместе коэффициенты при dr и d0.
Заметим, что если f — произвольная функция на плоскости ху,
то
„ df я df л
df = —dx + — dy.
дх ду
Откуда, воспользовавшись цепным правилом, получаем
Ф df = ф 1 — ]ф dx + ф — ф dy
удх J уду J
о ф\ d(x о ф) + О фХ d(y о ф)
дх / \ду /
= d(J о 0)
Итак,
Эта формула справедлива в общем случае для дифференцируе-
мых отображений Rfc Rz.
В качестве примера рассмотрим отображение ф : R2 —> R3,
заданное формулой
Тогда если х, у, z обозначают координаты в пространстве R3, то
ф*х = г2, отсюда ф* dx = 2r dr,
ф*у = sr, отсюда ф* dy = s dr + г ds,
ф*г = s2, отсюда ф* dz = 2s ds.
294 Глава 5. Дифференциальное исчисление на плоскости
Для любой функции f в пространстве R3 справедлива фор-
мула
df^/dl + ^dy + ^dz
дх ду dz
и мы можем вычислить двумя способами: вычислять
d&*f)
или
- (df\ fdf\ (0f\ ±if J
ф {df) = ф I — ]ф dx + ф ( — ) ф dy + ф — ]ф dz.
\дх / \оу J \oz J
Например, пусть
Тогда
df — —z dx + 2у dy — х dz.
Подстановка дает
^*/ = 0
и
(f>*df = d^*f) = Q.
Если вычислять $*df непосредственно, получаем
ф* df — —s2 • 2r dr + 2sr (s dr + r ds) — г2 • 2s ds
= [—s2 • 2r + 2s2r] dr + [—r2 • 2s + 2r2s] ds = 0.
Теперь понятно, как поступать в общем случае. Если xi,..., Xk
— координаты в пространстве и — координаты в
пространстве Rz, то дифференцируемое отображение ф : Rz
определяется формулой
<^(v)
5.6. Операция переноса
295
Тогда
д(1) дф
Ф*У1 = Ф1, Ф* dyi = dfa = dxi ч--------------+ dxk,
ОХ\ ОХк
Ф*У1 = Фь Ф*йУ1 = Лф1,
Операция ф* переносит функции на пространстве R* в функ-
ции на пространстве R*, соответственно она переводит линейные
дифференциальные формы из пространства Rz в линейные диф-
ференциальные формы пространства Rfe. При этом перенос ф*
сохраняет все алгебраические операции: сложение и умножение
двух функций, сложение двух форм, умножение функции на фор-
му. Более того, согласно цепному правилу,
ф*<1/ = (1(ф*/)
для любой функции f в пространстве R*.
Предположим, что мы имеем ф :V —> W иф: W —> Z. Можно
сделать композицию двух отображений и получить
ф о ф : V -> Z.
Если д — произвольная функция на пространстве Z, то можно
образовать
Ф*д = д°Ф>
т. е. функцию на пространстве и тогда
Ф*(Ф*д) = (<? ° Ф) °Ф
является функцией на пространстве V. Согласно ассоциативному
закону, для композиции имеем
{доф) оф = до {фо ф\
Следовательно,
{Ф о ф)*д = ф*{ф*д),
так что
(Ф О ФУ = ф* оф*.
296 Глаза 5. Дифференциальное исчисление на плоскости
Обратите внимание на обратный порядок функций!
Допустим, что V — Rfc, W — и Z ~ Rm. В каждом из про-
странств определены координаты х1,..., хк\ у\ .. . ,у1; г1,..., zm
соответственно. Тогда если
а; ~ ai dzx Ч----F ат dzm
дифференциальная форма в пространстве Rm, то ф*ш будет диф-
ференциальной формой в пространстве а - дифферен-
циальной формой в пространстве Из цепного правила следует,
что
ф*г df = ф*ш*п) = <т*п=о фу/].
Операции ф* и сохраняют все алгебраические действия, то же
самое можно сказать и про (ф о 0)*,
ф*ф*^Г) = (фофу^Г).
Наиболее общий вид дифференциальной формы представляется
суммой членов типа gdf, т. е.
а\ dz1 Ч--1- amdzm.
следовательно, уравнение
(ф о ФУ(сФ) =
(5.21)
справедливо для всех линейных дифференциальных форм.
Пусть 7 : R —> V — кривая, проходящая через точку х, т. е.
7(0) = х, а кривая фо у проходит через точку у. Если 7 — диф-
ференцируемая функция в нуле, то ^>07 тоже дифференцируема
в нуле и, согласно цепному правилу,
(Ф ° 7)'(0) = <1фх('/(0)).
Правая часть этого уравнения зависит только от касательного
вектора £, относящегося к кривой 7. Поэтому dфx отображает
касательные векторы в точке х в касательные векторы в точке
<1фх : TVX TW^,
5.6. Операция переноса
297
где мы определили
#х€ = {<Xx),#x(v)}, если £ = {x,v}.
Дифференциал с1фх можно истолковать как преобразование ин-
финитезимальных кривых, проходящих через точку х, в инфи-
нитезимальные кривые, проходящие через 0(х).
Пусть теперь функция f : W —► R дифференцируема в <£(х).
По ассоциативному закону для композиции имеем:
(</>*/) 07 = / 0^07 = / о(</ю7).
Дифференцируя это уравнение при t — 0, получаем
W/) - D^f.
(5.22)
Это значит, что мы можем перенести функцию f назад с помо-
щью ф и потом вычислить производную по направлению £, или
мы можем пройти вперед с помощью <1ф^ и потом взять производ-
ную по направлению от f по В обоих случаях мы получим
один и тот же ответ.
Положив £ — {х, v}, полученное равенство можно переписать
в виде
£>{x,v}(4> /) = ^d</)x(x),d(/>x[v] (/),
или, равносильно,
d(f о <A)x[v] = й/ф(ху[(1фх\у]].
Последнее равенство означает, что
d(J о ф)х = d/ф^) о dфx,
а это не что иное, как частный случай цепного правила.
В качестве примера на применение этого равенства возьмем
/:1У~>Киф:У—+ W, определяемые формулами
/
= х2у,
г cos#
г sin#
298 Глава 5. Дифференциальное исчисление на плоскости
Тогда
df(Xj = (2ху, ж2),
cos# — rsin0\
sin в г cos 0 / ’
и мы получаем, что
= (2(r cos0)(rsin0), (rcos0)2) fC?S« rsin^A
v v 7V 7 v 7 7 \sin0 rcos0J \ve J
/П 2 Л • л 2 2 ЛЛ f Vr cos в — t^rsintfA
= (2r2cos0sm0, rzcosz0) . Л . Л
v 7 у vr sin в + TVq cos 0 J
= 2r2 cos в sin 0 (t>r cos в — rve sin 0) + r2 cos2 0(yr sin 0 + rv$ cos 0)
= 3r2 cos2 0 sin 0 vr + r3(—2 cos 0 sin2 0 + cos3 0)vq.
Теперь надо показать, что последнее выражение равно
Для этого заметим, что
</»*/ ((#)) = f ((rsinf )) = (rcos^)2f sin= r3cos20sin0.
Следовательно,
^(^*/)(^) — (Зг2 cos2 0sin#, r3(2cos0(“sin0)sin0 + cos3 0)).
Отсюда, наконец, получаем:
O{(S),V}W/) = W)(5) ((*)) =
— 3r2 cos2 0 sin 0 vr + r3(—2 cos 0 sin2 0 + cos3 0)v^.
Резюме
299
Резюме
А. Дифференциалы и частные производные
Вы должны уметь давать определение дифференциала df функ-
ции / в терминах «о» и «О».
Вы должны знать и уметь применять правила дифференци-
рования суммы, произведения и композиции функций.
Вы должны уметь выражать дифференциал функции через
частные производные и уметь строить матрицу, представляющую
дифференциал функции / : R2 —> R2.
В. Преобразования координат
Для заданного преобразования, которое вводит новые координа-
ты на плоскости, надо уметь пользоваться цепным правилом для
выражения дифференциалов и частных производных в этих но-
вых координатах.
С. Применения дифференциалов
Вы должны знать, как получить уравнение прямой или плоско-
сти, касательной к графику функции в выбранной точке.
Вы должны уметь пользоваться цепным правилом для реше-
ния задач с участием функций от нескольких переменных.
Задачи
5.1. Покажите, что если f : V —> W дифференцируема в точке о и
Т : W —> Z линейна, то композиция Т о f дифференцируема в
точке а и
d(T о f)a — Т о dfa.
5.2. Пусть F : V —► R дифференцируема в а и функция f : R —► R
имеет производную в а = F(pt). Докажите, что f о F дифферен-
цируема в точке а и
d(f о F)a = ff(d)dFa,
5.3. Пусть F : V —>WnG:W-~^V — непрерывные отображения,
причем G о F(v) = v и F о G(w) = w для всех v в пространстве
300 Глава 5. Дифференциальное исчисление на плоскости
V и для всех w в пространстве W. Допустим, что F дифферен-
цируема в точке a, a G дифференцируема в точке /3 = F(a).
Докажите, что
dG0 = (dfk)-1.
5.4. Пусть функция / : V —> R дифференцируема в точке а. Пока-
жите, что д = fn дифференцируема в точке а и что
dga = nf^1 dfa.
/ et \
5.5. Пусть 7 : R —► R2 обозначает кривую 'y(t) = I I. Пусть
F : R2 —> R2 — отображение, где
(а) Вычислите вектор, касательный к кривой 7 при t = 0 и
t = тг/2.
(Ь) Найдите производную по направлению отображения F для
каждого из полученных касательных векторов.
5.6. Пусть / : R2 —> R2 и # : R2 —> R2 определены формулами
у (( х II — ( х У । (( х и — I cosxy 1
j )) ~ \У3 / ’ 9 \\^// ~ \sinx?/J '
Проверьте цепное правило для отображения д о f : R2 —> R2.
5.7. Пусть д : V W - отображение, где д А : R —> V — прямая линия / /1 \ (а) Найдите касательный вектор в точке 9° А. (Ь) Производную по направлению D/ з А /1 k-U’h мя способами. / х2еу \ “ , и у JJ \ cosxy 1 1 —1 1 для кривой ) (д) вычислите дву-
Задачи
301
5.8. Пусть ф : V —> W — отображение, задаваемое формулой ф :
а ФУНКЧИЯ / : —► R определена формулой
/:(]!—> х3у4. Проверьте, что
Щ(ф*П = D^f
для всех касательных векторов £ = (a, v).
5.9. Определим отображения F : R2 —> R2, G : R2 —> R2, / : R1 —> R2
и д : R2 —> R1 равенствами
/t2 + l + cost\ х\\ /3\
№=[ 3t + 2 )' 9\у))=^уУ
Проверьте, что:
(a) d(FoG)^ =dFG((xy} °dG^
(b) d(GoF)^ =dGF^x^ odF^xj
(c) d(g о f){t} = dgf(t} о dF(t)
(d) d{fog){Xy}=dfg^x}}odg{xy}.
5.10. Пусть функция f : R2 —> R дифференцируема в некоторой
(^0 A £ if ^0 \\ /
I и удовлетворяет условию j П ) I 0.
Покажите, что в некоторой окрестности отображение
(0 )) = 1 / (( )) дифференцируемо и что
d9(Xy°0) = -df(y°0)/ (7Со))) '
5.11. Функция f определена на плоскости через аффинные координа-
ты х и у следующим образом:
/(р) = Vl^(P)y(P)l-
302 Глава 5. Дифференциальное исчисление на плоскости
(а) Непрерывна функция f в начале координат РДх = 0, у = 0)
или нет? Дайте точный ответ через определение непрерыв-
ности.
(Ь) Дифференцируема ли функция f в начале координат? Дайте
точный ответ через определение дифференцируемости.
5.12. Так называемые параболические координаты на плоскости выра-
жаются через декартовы координаты х и у согласно формуле
(а) Выразите через используя матрицы 2x2, по-
том обратите эти матрицы и выразите через .
(Ь) Получите обратное преобразование координат, выразив
через . Выразите дифференциал через
f du\
ydv J
(с) Покажите, что кривые и = const и v = const являются па-
раболами, перпендикулярными друг другу в точке пересе-
чения. Нарисуйте семейства этих кривых.
(d) Рассмотрите функцию /, определенную на плоскости фор-
мулой f(p) = 1/(п(р) + v(p)). Выразите c?q/, где q — точка
с координатами и = 4 и v = 16, сначала через du и dv, а
потом через dx и dy.
(е) Предположим, что траектория движущейся частицы опре-
делена формулами: ос : Ж —> R2, где
t2 + А
t3 ;•
Вычислите производные от х о ос, у о ос, и о ос и v о ос при
t = 2.
5.13. Пусть координаты на плоскости и и и связаны с декартовыми
координатами х и у уравнениями
Задачи
303
(а) Вычислите производную (матрицу Якоби) этого преобразо-
„ . z (dx\ ( du\
вания в точке и = 2, v — 1 (т. е. выразите ( I через 1^1
в этой точке).
(Ь) Рассмотрите функцию f(u,v) — u2v3. В координатах х и
у получите уравнение касательной к кривой = 4 в
точке и = 2, г — 1 (т. е. т = 4, у = 3). (Не пытайтесь искать и
и v как функции хну' просто используйте цепное правило.)
(с) Предположим, что частица движется вдоль траектории
В момент времени t = 2 частица проходит через точку
( и\ f 2\ „
(I = I I. С какой скоростью изменяются координаты
и и v, т. е. чему равны du/dt и dv/dt в этот момент?
5.14. Пусть А обозначает аффинную плоскость. Точка Ро лежит на
этой плоскости. Постройте функцию f : А —> R, для которой
/(Ро) = 0, такую, что для произвольных аффинных координат
s(P), t(P) частные производные (df/ds)t и (df /dt)s определены
и равны нулю в точке Ро, но при этом f не дифференцируема
в Ро. (Указание: если заменить термины «дифференцируема»
на термин «непрерывна» и «частная производная» на «предел
функции от одной переменной», то ответ был бы
0
f(P) = < х2У
т4 + у2
в точке Ро,
в других точках,
где т(Р0) и г/(Р0) равны нулю.)
5.15. Для некоторого кратера высота над уровнем моря определяется
формулой
z(t,t/) = \/х2 + 4у2 (т, у, z измерены в километрах).
Температура по Фаренгейту находится из уравнения
Т(т, у) = 100 + 2х — ^х2у2.
(а) Выразите dz и dT через dx и dy в точке х = 3, у = 2.
304 Глава 5. Дифференциальное исчисление на плоскости
(Ь) Получите уравнение касательной плоскости к кратеру в
точке х = 3, у = 2.
(с) Вдоль какого направления температура изменяется быстрее
всего в точке х — 3, у = 2? Если двигаться вдоль этого
направления, то с какой скоростью изменяется температура
в зависимости от высоты над уровнем моря (с точностью до
градуса на километр)?
Глава 6
Теоремы многомерного
дифференциального
исчисления
В этой главе мы продолжаем изучение дифференци-
ального исчисления. Приводим векторные варианты
теоремы о среднем значении, формулы Тейлора и тео-
ремы существования обратной функции. Обсуждаем
поведение в окрестности критической точки и множи-
тели Лагранжа. Эту главу можно прочитать быстро,
не очень вникая в детали доказательств, но упражне-
ния надо проделать.
6.1. Теорема о среднем значении
Это одна из немногих теорем, которые для функций нескольких
переменных мы не сможем доказать с такой же степенью строго-
сти, как это делается для функций, зависящих только от одной
переменной. Сначала вспомним формулировку теоремы для слу-
чая одной переменной. Утверждается, что если f — непрерывно
дифференцируемая функция на некотором отрезке [а, Ь], то су-
ществует точка г, лежащая внутри этого отрезка, такая, что
/(6)-/(a) = /'(z)(6-a). (6.1)
Значение z в общем случае трудно определить явно, поэтому
обычно теорема о среднем значении используется в несколько
306 Глава 6. Теоремы ... дифференциального исчисления
ином виде, как неравенство:
Если f(x) < т для всех ж € [а, Ь], то f(b) — f(a) < m(b ~ а).
(6-2)
Так как /'(z) < т, то это неравенство немедленно следует из
теоремы о среднем значении, сформулированной выше. В то же
время его легко доказать непосредственно с помощью фундамен-
тальной теоремы интегрального исчисления. Действительно,
pb rb
/(Ь) - f(a) — / ff(s)ds< / mds<m(b — a). (6.3)
Ja J a
Чтобы обобщить теорему на случай большего числа измерений,
удобно немного переписать аргумент функции в (6.3):
/(b)-/(a)= [ ^-f(a + t(b-a))dt= [ f'(a + t(b- a))(b-a)dt
Jo at Jo
< (b — a) f f’(a + t(b — a)) dt < m(b — a). (6.4)
Jo
(Заметим, что второе равенство следует из цепного правила.)
Преимущество записей (6.2) или (6.4) по сравнению с (6.1) со-
стоит в том, что их можно сразу же распространить на случай,
когда f является отображением изКв1\ Предположим, что f
- - именно такое отображение:
/Л(0
/(<) = :
Ufc(t)
Тогда /'(£) = lim/l_^o(l/^)(/(i + h) - f(t)) = d/t[l]. Здесь мы рас-
сматриваем 1 как вектор в пространстве R1, если использовать
ранее введенное обозначение. Очевидно, что вектор fr(t) опреде-
ляется формулой
/Ж*)
f'(t) = ;
6.1. Теорема о среднем значении
307
Для этого вектора можно написать равенство, аналогичное (6.4),
т. е.
f(b)—f(a) = [ ^-f(a+t(b-d))dt=( [ f'(a + t(b - а\) dt\(b-a).
Jo at \Jo /
(6-5)
Под интегралом от векторной функции д мы подразумеваем век-
тор, компонентами которого будут интегралы от его компонент:
если д =
( 91\
; I , то / g(t) dt = I
\9к J \fgk(t)dt
Конечно, у нас есть определение интеграла в виде предела ап-
проксимирующей суммы:
/•1 72
/ g(t) dt = lim (1/n) s(Vn)-
/Pi n—»oo *
2=1
Поскольку каждая компонента этой аппроксимирующей суммы
векторов есть аппроксимирующая сумма для интеграла от со-
ответствующей компоненты функции, то оба определения инте-
грала для векторной функции от одной переменной совпадают.
Для векторов существует неравенство ||vi + V2II < ||vi|| + ||v2||.
Аналогичное неравенство можно написать для аппроксимирую-
щей суммы и, переходя к пределу, мы получаем неравенство для
интеграла
[ g(t)dt < [ ||5(2)|| dt.
Положим 5 = f' и подставим в (6.5). Тогда
11/(5) ~ У(а)|| < т(Ь — а), если ||/,(t)|| < тп для всех t G [а, Ь].
(6-6)
Именно здесь можно увидеть трудность, возникающую при по-
пытке обобщить (6.1) на функцию, определенную в пространстве
Мы можем применить (6.1) к каждой компоненте fj функции
/. Для каждой компоненты мы получим
/#) - Л(«) = />(^)(Ь - а).
308 Глава 6. Теоремы ... дифференциального исчисления
Однако значения Zj могут быть разными для разных J. Вооб-
ще говоря, не существует такой точки г, которая подошла бы
для всех компонент fj. Поэтому аналогия с (6.1) в многомерном
случае не проходит. Что касается формулы (6.5), она остается
верной.
Давайте обобщим утверждение (6.6) на случай, когда / есть
отображение V —► W, при этом V — не обязательно одномерное
пространство. Мы уже знаем, что обобщением /'(я) является dfx.
Пусть dfx — линейное преобразование. Нам необходимо понять,
что значит ||А||, если А — линейное преобразование из V в W. По
определению,
||А|| = max ||Au||
||u||=l
или, что то же самое,
||А|| = max 11^1.
v/0 ||V||
Тогда ||Av|| < ||A|| • ||v|| для всех v и ||A|| будет наименьшим
числом, обладающим этим свойством1, т. е. если
||Av|| < fc||v|| для всех v, то ||А|| < к.
Если Ai и А2 — два линейных преобразования из V и ТУ, то
11(А+Л)у|| = ИЛу+ЛуИ < МгуН+НЛуН < (||Л1||+А2||).||у||,
откуда
||^ + A2||<||A|| + ||A2||. (6.7)
Пусть [а, Ь] обозначает отрезок прямой, соединяющей любые точ-
ки а и b в пространстве V (рис. 6.1). Это значит, что отрезок [а, Ь]
состоит из всех точек вида а+ДЬ —а) для 0 < t < 1 (естественное
обобщение одномерных обозначений). Мы хотим доказать следу-
ющее. Предположим, что f : V —> W дифференцируема во всех
точках [а, Ь], и дифференциал функции dfx является непрерыв-
ной функцией от х на этом отрезке. Далее, предположим, что
||d/x|| < т для всех х € [а, Ь].
1 Число ||А|| называют нормой линейного преобразования А : V —> W. —
Прим. ред.
6.1. Теорема о среднем значении
309
Тогда
|И(Ь)-/(а)[| < т||Ъ-а||. (6.8)
Доказательство. Пусть h : [0,1] —> [а, Ь] — отображение, задан-
ное формулой
h(t) — а + t(b — а).
Обозначим F = f о h, так что F(t) = /(а + t(b — а)). Тогда F —
дифференцируемое отображение [0,1] —» W и, согласно цепному
правилу,
dFt = dfh(t) о dht.
Далее, dht[l] = b — а, значит,
F\t) = dFt[l] = dfhW[b-a\.
Отсюда
/(b) - /(a) = F(l) - F(0) = f F'(t) dt = f dfh(t)[b - a] dt.
Jo Jo
Следовательно,
/(b) —/(a) = A(b — a), (6.9)
где A — линейное преобразование
A= ['df^dt. (6.10)
Jo
В формуле (6.10) мы интегрируем функцию, которая каждому
значению t приписывает линейное преобразование df^. Мы мо-
жем толковать эти интегралы точно так же, как мы толкова-
ли векторные интегралы. Например, так как в пространствах
V и W имеются стандартные базисы, то каждое линейное пре-
образование можно определять матрицей. Интеграл от матрич-
ной функции д, где g(t) = (^j(t)), задается матрицей, у которой
310 Глава 6. Теоремы . . * дифференциального исчисления
ij-й матричный элемент есть интеграл от численной функции gij.
Или, как и раньше, интеграл можно рассматривать как предел
от аппроксимирующих сумм. Тогда из (6.7) следует, что
g(t) dt
< I ИМ
В частности, выполнив такую оценку (6.10) и предположив, что
||d/x|| < тп для всех х е [а,Ь], можно сделать вывод:
||А|| < т,
и с учетом свойств нормы ||А|| из равенства (6.9) получаем спра-
ведливость оценки (6.8).
6.2. Производные высших порядков
и формула Тейлора
Пусть f : R2 —> R — дифференцируемая функция. Если частные
производные df /дх и df /dy непрерывно дифференцируемы, то
можно образовать конструкции
д (df\ дх \дх) . d2f , обозначается , дх2
д_ (df\ ду \ду) д (д£\ дх \ду ) ’ . d2f , обозначается 7—5-, ду2 . d2f обозначается _ —. дхду
Мы уже знаем, что
а2/ = д д/
дхду ду дх
Аналогично можно определить частные производные более высо-
ких порядков, если они существуют, и получить соответствующие
равенства для смешанных производных. Например,
д (д_ (df\\ =±(д_ (0f\\
дх \ду )) ду \дх ) ) дх )J
6.2. Производные высших порядков и формула Тейлора 311
и так далее. Значение производных второго и более высоких по-
рядков связано с формулой Тейлора, которую мы сейчас получим
и докажем.
Для упрощения обозначений пока сформулируем ее для на-
чала координат. Предположим, что f имеет непрерывные про-
изводные первого и второго порядков в окрестности
удобства мы будем писать f(xyy) вместо f
Z*1 d
f(x,y) = /(0,0) + h —f(tx,ty)dt
f1 (df df \
= /(0,0)+/ I -^-(tx,ty)x + -^-(tx,ty)y I dt.
Jo \ dx dy J
Пусть
/1(®,у)= [ ^-(tx,ty)dt и /2(а?,у) = [ ~-(tx,ty}dt.
Jo dx Jo dy
f(x,y) = /(0,0) +ж/1(ж,у) + yf2(x,y),
где /i и /2 ~ дифференцируемые2 функции, или, более компакт-
/ = /(0,0) +xfi + yf2.
Отметим, что
Л(0,0) = ^(0,0) И /2(0,0) = ^(0,0).
Те же самые соображения применим для /1 и /2-
/10,2/) = /1(0,0) + ®/ц(яг,у) + yfi2(x,y),
где
fu(x,У) = [ ^(tx,ty)dt и /12(ж,у)= [ ^(tx,ty)dt.
Jo dx Jo dy
Разумеется, это требует доказательства. — Пргьм. ред.
312 Глава 6. Теоремы ... дифференциального исчисления
Аналогично
h {х, у) = /2(0,0) + xf21(x,y) + yf22(x,y).
Итак,
/ = /(0,0) + ж/i (0,0) + у/2(о, 0) +х2/11 + жу(/12 + /21).
Если / имеет непрерывные3 производные вплоть до третьего по-
рядка, мы можем повторить процедуру еще раз и получить:
/ - /(0,0) + x/i(0,0) + у/2(0,0) + ж2/ц(0,0)
+ яу(/12(0,0) + /21(0,0)) + у2/22(0,0)
+ ^3/111 + Ж2у(/112 + /121 + /211)
+ ^У2(/122 + /212 + /221) + У3/222,
где все функции /ш, /112» и т. д. непрерывны. Вычислив вторые
производные от обеих частей этого уравнения, получаем
2/11(0,0) = g(0,0),
/12(0,0) + /21(0,0) =
df2
2/22(0,0) =-У °, °).
ду2
Итак, мы доказали, что
/(*.») = /(0,0) + ^(0,0) + фо) + ^2g(o,o)
+ ^^-(0,0) + 5У2Й(°.0) + о( (*) 3\ (6.11)
дхду 2 ду2 \ \у J J
3Авторы опускают здесь доказательство непрерывности, так же, как
ниже в формуле (6.11) опускают оценку остатка, записанного сразу как
6.2. Производные высших порядков и формула Тейлора 313
Очевидно, что если f имеет непрерывные производные более вы-
соких порядков, то эту процедуру можно продолжать и дальше.
Понятно также, что подобные соображения применимы не толь-
ко в R2, но и в произвольном пространстве R*\ Наконец, начало
/о\ а (х\
координат I q у можно заменить любым вектором и и I I за-
менить на u + v. В результате придем к следующей теореме:
Пусть функция f : Rfe —* R имеет непрерывные частные
производные вплоть до порядка п + 1. Тогда существует такой
полином Рп, зависящий от координат вектора v, что
/(u + v) = Pn(v) + O(||v|r1).
Коэффициенты Pn(v) определяются путем последовательного
дифференцирования по v этого тождества и последующей под-
становки v = О.4
Если f : R2 —> R1, то матрица, составленная из частных
производных второго порядка,
/ 92 f
н (f\ _ дх2 дхдУ р
₽
Хдхду^ ду2^ /
называется матрицей Гессе, а соответствующая квадратичная
форма называется гессианом и обозначается d2/p. Если функция
f и точка р зафиксированы, матрицу Hp(f) будем обозначать
просто Н. Итак, формулу (6.11) можно переписать в форме
/(Р + v) = /(р) + dfp(v) + i</2fp(v) + o(||v II2), (6.12)
где
d2fp = vTHv = (vi, v2)H . (6.13)
4Можно доказать, что в условиях этой теоремы все частные производные
от остатка О (||v||n+1) до порядка п включительно при v = 0 равны нулю. —
Прим. ред.
314 Глава 6. Теоремы ... дифференциального исчисления
Гессиан d2/p является квадратичной формой, и поэтому к нему
применим анализ, изложенный в главе 4. Например, если f(P) =
[т(Р)]2у(Р), то в точке х — 2, у — 3 частные производные равны
df df 9
1+- = 2ху = 12, = х2 = 4,
дх ду
дх2 У ' дхду ’ ду2
Следовательно, дифференциал df в точке
числами (12,4), а гессиан — матрицей
определяется
6.3. Максимум и минимум
Гессиан особенно полезен при анализе поведения функции в
окрестности критической точки, т. е. точки, где df равен нулю.
Если ро — ““ кРитическая точка, то
/(Ро + V) = /(ро) + ^2/p(v).5
Если квадратичная форма d2fp положительно определена
(в этом случае Н имеет два положительных собственных значе-
ния), то из формулы Тейлора следует, что /(ро + v) > /(ро) для
достаточно малых v Ои функция f имеет минимум в точке ро-
Если d2/p отрицательно определена (Н имеет два отрицатель-
ных собственных значения), то /(ро + v) < /(ро) и f достигает
максимума в ро- Наконец, если собственные значения Н имеют
так что напи-
У
5 Авторы опустили в этой формуле остаток О
санное равенство — приближенное, а не точное. Поэтому, хотя сформулиро-
ванные в следующем абзаце утверждения верны, приведенные рассуждения
следует считать лишь наводящими соображениями, а не строгим выводом
достаточных условий максимума, минимума и седловой точки. — Прим. ред.
6.3. Максимум и минимум
315
разные знаки, то d2/(v) может иметь и положительные, и отри-
цательные значения. В этом случае точка ро является седловой
точкой функции /. Если одно или два собственных значения Н
равны нулю, т. е. гессиан — сингулярный, то чтобы установить,
будет ли функция f иметь максимум или минимум в точке ро,
мы должны исследовать производные более высокого порядка.
Рассмотрим пример использования гессиана. Мы должны
найти и классифицировать критические точки функции
f = Зх2 + 2у3 — бху.
Вычислим частные производные по х и по у и приравняем их к
нулю.
= 6т - бу = О,
= /2(ж>У} = бу2 - 6ж = о,
т. е. х = у,
т. е. х — у2.
Следовательно, функция f имеет критические точки: х — 0, у ~ О
и х — 1, у = 1. Чтобы построить гессиан, вычислим частные
производные второго порядка:
d2f d2f d2f
= 6’ ^4- = "6’ W
дх^ дхду ду£
Следовательно, в точке х = 0, у — 0 матрица гессиана равна
Н =
6
-6
-6
О
Определитель этого гессиана отрицательный, следовательно, его
собственные значения имеют противоположные знаки, и функ-
ция /(х, у) имеет в начале координат седловую точку. Чтобы про-
верить это, заметим, что f имеет положительные значения при
у — 0 и малых х. А при х — у функция имеет отрицательные
значения в окрестности начала координат.
В точке х = 1, у = 1 матрица гессиана равна
6
-6
-6
12
316 Глава 6. Теоремы ... дифференциального исчисления
Определитель этого гессиана положителен, поэтому собственные
значения имеют одинаковый знак. Так как след определителя
положителен, то собственные значения гессиана положительны.
Следовательно, в точке х — 1, у = 1 функция имеет локальный
минимум.
На аффинной плоскости дифференциал второго порядка d2/
обладает одним свойством, которое не зависит от выбора систе-
мы координат, а именно, число положительных, отрицательных
и нулевых собственных значений гессиана. На евклидовой плос-
кости функция / обладает еще одним свойством, не зависящим
от выбора системы координат. Чтобы получить его, сравним зна-
чение функции, усредненное по малой окружности вокруг точки
Ро, со значением функции в точке ро (рис. 6.2).
Рис. 6.2
Из формулы (6.12) следует, что
/(ро + V) = /(ро) + d/[v] + \d2f (v) + остаток.
Поскольку df[~v] — —d/[v], среднее значение d/[v] для лю-
бой окружности с центром в точке ро равно нулю. Чтобы усред-
1 Л г/ \ / COS 0
нить -cr/(v), ПОЛОЖИМ V = , . Л
2 v 7 \/isin0
лой (6.13):
. Воспользуемся форму-
^d2/(v) — (h cos 0, h sin 0)
52//5ж2
d2f/дхду
d2f/дхду
d2f/dy2
— \h2 cos2 0 + 2-^-^-cos 0 sin 0 + ^-^sin20
2 дх2 дхду dy2
6.3. Максимум и минимум
317
Средние значения cos2 0 и sin2 0 на отрезке [0,2тг] равны сред-
нее значение cos 0 sin 0 равно нулю. Поэтому
= -h2
£ “Z
дх2 ду2
Следовательно,
1 / д2, f д2 f\
(/(Ро + v)) = /(р0) + ~h2 ) + остаток.
Величина d2f/dx2 + d2f/dy2, определяющая «в среднем» пове-
дение функции f при движении от точки ро, называется лапла-
сианом /. Для любой системы координат, полученной вращени-
ем системы х, т/, лапласиан имеет одинаковое значение. Поэтому
уравнение
а2/ ,
дх2 ду2
называемое уравнением Лапласа, описывает свойство функции
на евклидовой плоскости, не зависящее от выбора системы ко-
ординат. Не удивительно, что такое уравнение часто описывает
функции, имеющие физический смысл: электрический потенци-
ал, температура и т. д.
Прежде чем закончить исследование вопроса о максимуме и
минимуме функции на плоскости, рассмотрим проблему услов-
ного экстремума: найти максимум и минимум функции /(р) на
кривой, заданной уравнением уравнением g(p) — const. 6
Необходимое условие того, что функция достигает условно-
го экстремума в точке ро, имеет вид: d/Po(v) = 0 для любого
вектора v, касательного к кривой <?(р) = const (рис. 6.3). Но та-
кой вектор удовлетворяет уравнению dg(y) = 0. Следовательно,
в точке ро, где достигается максимум или минимум исследуемой
функции, значение dfpo должно быть пропорционально dgpo, т. е.
df = Xdg. Таким образом, проблема условного экстремума приве-
ла нас к методу, известному как метод множителей Лагранжа.
6В дальнейшем используется, что /, д дифференцируемы, а также усло-
вие, что dgPo не равен тождественно нулю. — Прим. ред.
318 Глава 6. Теоремы ... дифференциального исчисления
Рис. 6.3
Рассмотрим функцию f — Хд, где X — неопределенный скалярный
коэффициент, называемый множителем Лагранжа. Если в точ-
ке ро достигается максимум или минимум, то в этой точке при
некотором X должно выполняться равенство d(f — Xg) = 0. Кроме
уравнения д — const, это дает еще два, из которых определяют-
ся неизвестные значения х, у и X. Чтобы выяснить, какой экс-
тремум (максимум или минимум) мы получили (или никакого),
сначала найдем вектор v, для которого dg(v) — 0. Этот вектор
будет касательным к кривым f — const и д — const в критической
точке ро- Затем рассмотрим функцию h — f — Xg, у которой, по
построению, точка ро будет критической на плоскости. Найдем
наилучшее квадратичное приближение к h в окрестности этой
критической точки и вычислим его для нашего вектора v. Если
величина ~d27i(v) положительна, то Л(р) > Л(ро) во всех точках
кривой вблизи ро- Действительно, зададим кривую g = 0 пара-
метрически: р — p(t), т. е. мы возьмем функцию р : R —> R2, для
которой
5(p(t)) = 0, р(0) = ро, р'(0) = v.
(Это всегда можно сделать, как следует из теоремы о неявной
функции, которую мы докажем в следующем параграфе.) Тогда
hop = f op, так как д о р = 0.
Далее,
(Лор)'(О) = d/ipo(v) = 0,
(/ °Р)" = (h ор)"(0) = d2hpo(v).
6.3. Максимум и минимум
319
Если (А о р)"(0) > 0, то f имеет минимум в точке ро на линии
д = 0. Аналогично, f имеет максимум на линии д = 0, если
d2/i(v) < 0.
Например, мы хотим найти экстремум квадратичной формы
Q(x, у) = &с2 - 12жу + 17у2
на окружности <7(ж, у) = х2 + у2 = 1. Положив дифференциал
Q — XG равным нулю, получаем
16т — 12у — 2А« = 0,
— 12т + 34у - 2Лу = 0.
Исключив из этих уравнений А, получаем
16 - 12(у/т) = —12(т/у) + 34
или
Отсюда
&/у) - (у/ж) = 3/2.
2 3 9 „
я - - У = о,
£
и, следовательно,
(ж — 2у) (я+^у) =0.
Таким образом, квадратичная форма Q может принимать экс-
тремальные значения в точках
х ~ с окружностью х2 + у2
&
пересечения прямых х — 2у и
= 1 (рис. 6.4), т. е. в точках
Р1 = ±
2/г/5\
i/VsJ
И
Р2 = ±
Исследуем теперь, имеются ли экстремумы в этих точках, и
какие именно. Вычислим дифференциалы
dQ = (16# - 12у) dx + (-12# + 34у) dy,
dG = 2xdx + 2у dy.
320 Глава 6. Теоремы ... дифференциального исчисления
Рис. 6.4
В точке pi, где х = 2?/, получаем
dQ = Ют dx + 5т dy, dG = 2xdx + х dy.
Как мы и ожидали, dQ пропорционален dG с множителем А = 5.
Вектор v, для которого dQ(y) — dG(y) = 0, равен ( . В этом
\ " /
случае гессиан квадратичной формы Q — 5G равен
Н =
-б\
12 ) •
(3
—о
-6
12
= 75 и приходим к выводу,
что Q имеет минимум на окружности в точке рр
В другой критической точке р2, где у — —2т, получаем
dQ — 40т dx — 80т dy, dG = 2xdx — 4т dy,
следовательно, А = 20. Вектор, для которого dQ(v) — dG(y) =
(2\
1 1. Вычислив гессиан функции Q — 20G для этого
вектора, получаем
р.п (“21 :з)(0=(2Л)(-“)=“76’
значит, Q имеет локальный максимум на окружности х2 + у2, = 1
в точке р2-
6.4. Теорема об обратной функции
321
6.4. Теорема об обратной функции
Пусть U и V — векторные пространства одинаковой размерности
и пусть / : U V — дифференцируемое отображение с условием
/(ро) = Чо- Мы хотели бы знать, при каких условиях существует
такое отображение д : V —> 17, что д о f — (id), Прежде чем дать
формулировку соответствующей теоремы, исследуем сначала ряд
необходимых ограничений этой проблемы.
Если мы ожидаем, что отображение д тоже должно быть диф-
ференцируемым, то согласно цепному правилу
dgf(p) ° dfp = (id).
Тогда линейное отображение d/p должно быть обратимым. Если
это так, то справедлива формула
^/(р) ~
Обсудим случай, когда df не является обратимым отображе-
нием: U — V — R1 и /(я) = х2 (рис. 6.5). В начале координат
dfo = 0, и возникает проблема с д(у) = ^/у вблизи у = 0. По суще-
ству, возникают три разных проблемы. Прежде всего, y/у не опре-
делен (в области вещественных чисел) для у < 0. Более точно, не
существует точки у < 0, являющейся образом f. Во-вторых, ко-
рень квадратный из у определен неоднозначно: для данного у > 0
322 Глава 6. Теоремы ... дифференциального исчисления
о
существует два значения т, удовлетворяющих уравнению = у.
И последнее: производная y/у неограниченно растет при у —> 0.
Чтобы обойти вторую из перечисленных трудностей, проделаем
следующую процедуру.
Рис. 6.6
Предположим, что мы взяли некоторое значение то ± 0, для
которого Xq = уо- Для определенности, пусть xq > 0. Тогда в
достаточно малой окрестности точки уо (настолько малой, чтобы
не включать у = 0) существует единственная обратная функция:
квадратный корень, удовлетворяющая конкретному требованию:
значения функции должны быть достаточно близки к xq. (В этом
случае слова «достаточно близки» значат, что функция не может
быть отрицательной. Если мы выбрали положительное значение
корня, то функция определена однозначно (рис.6.6).)
Мы можем не только утверждать существование квадратно-
го корня, но и дать алгоритм его вычисления с любой наперед
заданной точностью. Здесь приводится один из возможных ал-
горитмов — метод Ньютона, который формулируется в общем
случае.
Допустим, что у нас есть отображение f : U -+ V с условием
/(Ро) — qo- Пусть задано некоторое значение q вблизи qo, и мы
хотим найти такое р вблизи ро, что /(р) = q. Найти р — это то
же самое, что найти р — Ро- Итак, мы хотели бы иметь равенство
Яро + р - ро) = q-
6.4. Теорема об обратной функции
323
Однако,
/(ро + Р - Ро) = /(Ро) + dfP0(p - Ро) + о(р - Ро)
= qo + #ро(Р - Ро) + о(р - Ро)-
Если опустить член о(р — ро), то получится приближенное урав-
нение
q-q0 = d/Po(p-po),
или, так как dfy0 имеет обратное отображение,
p = po + d/po1(q-qO).
Это значит, что мы получили
pi = po + d/po1(q-qo)
в качестве приближенного решения. Теперь определим
qi = /(pi)
и начнем все сначала. На следующем шаге получим
Р2 = Pi + d/p^q - qi),
и так далее7. В этом и состоит метод Ньютона.
Вернемся к рассмотренному выше примеру. Пусть U = V —
R1 и f(p) = р2. Тогда dfp есть умножение на 2р и, следовательно,
d/p"1(w) = w/2p. В этом случае
1 /
Pi^Po + ^—(Q-Qo).
2ро
Например, если взять р$ = 3, то qq — 9 и q = 10. Тогда
Р1 = з + 1(10 - 9) = 3.1666..., 91 = Pi = 10.02777...
6
7При выполнении некоторых условий последовательность pi,p2, • • •, вы-
числяемая по формуле Рг+i = рг + б?/р/(ч “ Чг), имеет предел р, который
является решением уравнения /(р) = q. Авторы говорят об этом ниже, в
пункте «Сходимость метода Ньютона». — Прим. ред.
324 Глава 6. Теоремы ... дифференциального исчисления
(Заметим, что pi дает значительно лучшее приближение для л/10,
чем ро = 3.)
Следующее приближение:
Р2 = 3.16+ —^(10- 10.027)
2 X 3.1b
= 3.1622816...
При этом
q2 = ?2 = Ю.000024,
а число р2 дает ответ с точностью до четырех десятичных знаков
(vT0 = 3.1622776...).
Рассмотрим еще пример. Пусть U = V = R2 и отображение f
дается формулой
х3 - у3
2ху
Тогда df х
есть линейное преобразование, матрица которого рав-
на
Зж2
-Зу2
2х
Пусть ро =
. Тогда
qo =
8-1 \
2-2-1/
7\
4 J ’
0
jf /12 ~3\ ,,, __ 1 /43
“Jpo - ( 2 4/’ Wpo' “ 54 \ - 2 12
(7.5\
' ) и будем решать уравнение /(р) = q по
0.0 J
методу Ньютона. Тогда
Р1=Ро + «ро) Чч-Чо)
= /2\ 1 / 4 3\/ 0.5 \ /2.026 \
\1/ + 54 \-2 12J у—0.2) ~ у0.937) '
6.4. Теорема об обратной функции
325
n А 7.493 \ .
В результате получаем qi = I I, что уже достаточно близко
/2.026643.. А о
к точному решению: р = ( 937510 / ^аметим’ что каждый
последующий шаг этого алгоритма означает вычисление значе-
ний преобразования (d/pj-1 в различных точках рг.
Ниже мы сформулируем математическую теорему, согласно
которой при некоторых предположениях относительно f метод
Ньютона дает последовательность точек рг, которая сходится к
решению р, когда /(р) — q при условии, что q достаточно близко
к qo-
Существует другой алгоритм вычисления квадратного корня,
называемый методом Пикара. Однако сходится он гораздо мед-
леннее метода Ньютона. Согласно методу Пикара, полагаем
L =
и тогда
Р1 = Ро + L(q - qo), qi = /(pi),
P2 =P1 + L(q-qi), q2 = /(P2), и так далее.
Например, для / : R -» R с f{p) = р2, q — 10 и ро = 3 мы
имеем
pi = 3.16, gi = 10.027,
как и в методе Ньютона. Однако
р2 = 3.16 + |(—0.027) = 3.162036,
Q2 — 9.9984817 и так далее.
Преимущество метода Пикара в том, что L вычисляется один раз.
Сравнительно легко доказать сходимость методов Пикара и
Ньютона при небольших ограничениях на /. Получение хорошей
оценки скорости сходимости метода Ньютона потребует, как мы
увидим, более сильных ограничениях на /.
Доказательства сходимости. Здесь мы сформулируем предпо-
ложения относительно функции /, которые нам необходимы для
326 Глава 6. Теоремы ... дифференциального исчисления
доказательства сходимости обоих методов. Напоминаем, что мы
называем функцию / дифференцируемой в точке р, если
Яр1) = Яр) + #Р(рх - р) + Яр1 - р)-
Это значит, что для любого данного s можно найти такое 5, что
НЖр1) - Др) - #р(РХ - Р-)II < е1|р1 - р|| (6.14)
при условии, что Нр1 — р|| < 5. Величина 5, стоящая в этом
неравенстве, может зависеть от точки р. Предположим, что f
равномерно дифференцируема в том смысле, что для любого е
можно найти такое <5, что (6.14) выполняется для всех точек р и
р1, принадлежащих небольшому шарику с центром в ро. Итак,
мы предполагаем, что существует такое а > 0, что для данного е
можно найти такое <У, чтобы неравенство (6.14) выполнялось при
условии:
Нр1 - р|| < <5, Пр - poll < Up1 - poll < а.
Предположим также, что df~r равномерно ограничена, т. е. что
существует некоторая постоянная К, для которой
||d/p1||<K для всех ||р - р0|| < а. (6.15)
Кроме того, будем считать, что и сама функция <У/р равномерно
ограничена, т. е. что
IKpll < м для всех ||р - Poll < а.
Наконец, для метода Пикара предположим, что d/p непрерывна
в том смысле, что для любого е > 0 существует такое 5, что
ИР-<р1||<|е,
если ||р- р1!! <5, ||р- ро|| <а, Цр1 - Poll < а, (6.16)
и нам потребуется только существование (d/po)’1-
Сходимость метода Ньютона. Рассмотрим метод Ньютона.
Переход от точки рг к точке pj+i определяется формулой
Рг+1 = Pi + (d/Pi)-1(q-/(Pi)). (6.17)
6.4. Теорема об обратной функции
327
Дифференцируемость f(p) в точке рг-1 означает, что
/(Рг) = /(Рг-1 + Рг - Рг-1)
= /(Рг-1) + dfpi_± (р» - Pi-1) + О(р, - Pi-1) (6.18)
Равенство (6.17) можно переписать в виде
dfPi(pt+l - Рг) = q - /(Рг),
откуда заменой i на (г — 1) мгновенно получается, что сумма
первых двух слагаемых в правой части (6.18) равна q, поэтому
из (6.18) следует, что
f (.Рг) - q = <?(Pi - Рг-1)-
Это значит, что для любого е > 0 можно подобрать 6 > 0 так,
чтобы при ||рг — Pi-i || < 5 выполнялось неравенство
||/(Рг) -q|| < е||р< — Рг-1||.
С учетом равенства (6.17) и оценки (6.15) из только что написан-
ной формулы можно получить следующую оценку:
||Рг+1 “Pill < Ке||Рг — Рг—1||- (6.19)
В дальнейшем будем считать, что число е взято таким, что
Перейдем к оценке скорости сходимости метода Ньютона.
Прежде всего,
pi = ро + d/po1 (q - qo), qo = /(ро)•
Поэтому, если ||q — Qoll < d/K, то ||р — Poll < d. Если 5 < a/2,
точка pi будет удовлетворять неравенству
IIPi - Poll <
Поскольку px лежит внутри области определения /, то можно
воспользоваться алгоритмом (6.17) и получить р2- Из неравен-
ства (6.19) следует, что
||Р2-Р1||<|«<^По),
328 Глава 6. Теоремы ... дифференциального исчисления
следовательно,
||Р2 - Poll < ||Р2 - Pill + IIpi - Poll < (I + 1) Ja < а.
Итак, точка р2 опять лежит внутри шарика радиуса а и опять
можно воспользоваться алгоритмом (6.17). Получаем
НРЗ -Р2|| < |||Р2 - Pill < 2s,
Z ч
и, следовательно,
.. Л 1 Л 1
I1P3 - Poll < I -7 + X + 1 ) 7ia <
\ Ч Z J Zt
и так далее. По индукции можно доказать, что при всех i
||Pi - P*-i || < 6/2^
и
П Н fl 1 хП 1 х
||р* - Poll < ( 2? + 2^1 + ' ' + 1 ) 2й - 2 ’ 2а - а'
Последовательность точек pi сходится8 к некоторой точке р, т. к.
llPi+fc - Pill < + + 2 J 5 - 2^S 0
при i —> оо.
Наконец,
llq - f (Pi)ll = nPi(Pi+i - Pi)II < м||pi+i - Pill -> o,
т.е. limi —>oo /(Pi) = q- Так как функция f непрерывна, то
/(р) = q-
Единственность решения. Рассмотрим проблему единствен-
ности решения уравнения J(p) = q. Заметим, что величина К
83десь авторы используют классическое необходимое и достаточное усло-
вие сходимости, известное как «критерий Коши». — Прим. ред.
6.4. Теорема об обратной функции
329
определяется функцией /. При желании мы можем выбрать еще
меньшее значение а, не изменяя при этом К, Сделать это можно
за счет выбора 6 и, следовательно, меньшего значения 6/К. В
частности, предположим, что а выбрано настолько малым, что
(6.14) выполняется для любой пары точек р и р1, и при этом
еК < 1. Тогда для любой пары точек имеем
Пр - р1 II = II(<#р)-1(^/р(р - р1))II < -М#Р(р - р1)!!-
Если /(р) = /(р1), то неравенство (6.14) значит, что
ИР(рх -р) < eIIp1 -р||,
и тогда, комбинируя эти два неравенства, получаем
Пр-Р1!! < еКПр-р1», гК < 1.
Это неравенство справедливо только в случае ||р — р11| = 0, т. е.
р — р1. Таким образом, для ||р —Poll < а может быть только одно
уравнения решение /(р) = q.
Сходимость метода Пикара. Рассмотрим метод Пикара. Пусть
L = (^/ро)-1- Тогда
pi+i = + L(q - /(pi))
= Pi + T(q - /(pi-i) + dfp^Pi - pj-i) + o(pi - Pi-i)),
как и раньше. Теперь
q - /(Pi-1) + <#po(Pi - Pi—1) = °,
следовательно,
llq - /(Pi-1) + - Pi-i)|| = II(dfPi_1 - d/p0)(Pi - Pi-i)||
< |||Pi -Pi-i II
при условии, что выбранное значение а достаточно мало. Кроме
того, мы можем выбрать 6 настолько малым, чтобы в неравенстве
(6.14) можно было е заменить на -е. Тогда
&
||Pi+i - Pill < k QellPi - Pi-ill + ^£l|Pi - Pi-ill
< ЛеПр» -pi_i||,
330 Глава 6. Теоремы ... дифференциального исчисления
так что неравенство (6.19), где сделана замена К — ||L||, вы-
полняется, как и раньше. На самом деле можно воспользоваться
теоремой о среднем значении, чтобы изменить обоснование ме-
тода Пикара, и таким образом избежать необязательного пред-
положения о равномерной дифференцируемости. Действительно,
рассмотрим отображение
h(p) = р + Цч-/(р)),
где L = (dfро)-1. Непрерывность дифференциала dfp позволяет
выбрать значение а настолько малым, чтобы выполнялось нера-
венство
||dM = ll/-WI<l
Тогда, воспользовавшись теоремой о среднем значении, получаем
||Рг+1 - Pill = ll^(Pi) - MPi-l)ll < ^llPi - Pi-1 II,
и дальше можно рассуждать, как и раньше.
Теперь обсудим, почему на самом деле метод Ньютона сходит-
ся гораздо быстрее, чем это видно из доказанных выше оценок.
Предположим, что f имеет две непрерывные производные. Тогда
из формулы Тейлора следует, что
I/(Р1) - f (р) - df Р(рх - р)| < сНр1 - р||2,
где постоянная с определяется максимумом \d2f |. Это неравен-
ство значительно сильнее, чем (6.14). Возвращаясь назад к дока-
зательству (6.17) и использовав это неравенство, получаем
llpi+l - Pill < #llpi - Pi-1 II2-
Если, например, мы начали со столь малого значения ||pi — Ро II ?
что K(|pi — Poll1/2 < 1 (и dpi — poll < 1), то из последнего
неравенства следует
llPi+i - Pill < -MPi - Pi-iII1/2 • IIpi - Pi-i||3/2-
Тогда
I|pi+1 - Pill < IIpi - Po||(3/2)n,
6.4. Теорема об обратной функции
331
т. е. мы получаем экспоненциальную скорость убывания вместо
геометрической прогрессии ||p^_i — РгЦ < (zK)n |[pi “Poll? полу-
чающейся в методе Пикара.
Итак, резюмируем, что мы выяснили. Мы показали, что при
соответствующих условиях вокруг точки qo = /(ро) существует
шарик В, а вокруг точки ро шарик С, такие, что для каждой
точки q Е В существует единственная точка р Е С, для которой
/(р) — Ч (рис. 6.7). Другими словами, мы определили такое
отображение д : В С, что fog — (id) и д о f = (id),9
Дифференцируемость решения. Докажем, что функция д
дифференцируема. Заметим, что из единственности д вытекает
ее непрерывность. Итак, предположим, что д(ц) — р. Нарисуем
шарик с центром в точке р. А теперь воспользуемся результа-
тами, уже полученными для точек р и q. Это значит, что су-
ществуют шарик с центром в точке q, и функция, обратная к /,
отображающая его в шарик с центром в точке р.
Рис. 6.7
Однако, в силу единственности, эта обратная функция долж-
на совпадать с д. Следовательно, д отображает небольшой шарик
с центром q в небольшой шарик с центром р, т. е. она непрерывна.
Тогда
V = /(0(q+v))-/te(q)) = d/P(ff(q+v)-ff(q))+<>(ff(q+v)-g(q)).
Применим отображение (с//р)-1 к обеим частям этого равенства.
9Последнее предложение, означающее биективность отображения р, тре-
бует уточнения: для биективности д следует его рассматривать как отобра-
жение д : В —> Ci, где Сх = д(В) — образ шарика В при отображении д,
который содержится в С, но не обязательно заполняет все С. — Прим. ред.
332 Глава 6. Теоремы ... дифференциального исчисления
В результате получим
Wfp)-1(v) = g(q + v) - g(q) + o(g(q + v) - g(q)).
В силу непрерывности функции д мы можем выбрать v настолько
малым, что ||o(g(q+v) - g(q))|| будет меньше -||g(q+v) - g(q)||.
Из написанного выше равенства следует, что
Il(rf/P)“1(v)|| + ||o(g(q + v) - p(q))|| > ||<j(q + v) - g(q)||,
откуда
||#(q + v) — <?(q)|| < 2||(d/p)~1(v)||,
t. e. <?(q + v) — #(q) — O(v). Но тогда
o(g(q + v) - g(q)) = o(O(v)) = o(v).
Следовательно, мы получили, что
g(q + v) - g(p) = (<p)-1(v) + o(v),
т. e. функция g дифференцируема в точке q, и ее производная
равна
^5/(р) = (4/р)
Тем самым мы доказали следующую теорему10.
Теорема об обратной функции. Пусть f : U V непре-
рывно дифференцируемая функция, где ~ qo, и отображе-
ние df р0 обратимо. Тогда вокруг точек qo и ро существуют та-
кие шарики В и С, что имеется единственное отображение
g : В —> С, для которого f о g = (id). Это отображение непре-
рывно дифференцируемо и
ddffo) = (^/р)
Теорема о неявной функции. Давайте рассмотрим некоторые
следствия теоремы существования обратной функции. Предполо-
жим, что G : R2 R1, G(xo, уо) = 0 и
dG , „
Т О В точке (хо, Уо).
оу
10В связи с формулировкой этой теоремы см. сноску 9. -- Прим. ред.
6.4. Теорема об обратной функции
333
Речь будет идти о том, чтобы решить (хотя бы локально) урав-
нение д(х, у) = 0 относительно у.
Определим отображение / : R2 —> R2 формулой
х
G(x,y)
Тогда
/ 1 0 \
df = ас ас
\ дх ду /
является матрицей, несингулярной в точке ^°у* Согласно тео-
реме существования обратной функции, можно найти отображе-
ние р, для которого fog — (id). Тогда можно написать
F(u, v) \
Н(щи) J
и уравнение f о g = (id) преобразуется к виду
F(u,v) — щ
G(F(u,v)y H(u,v)) — v.
Подставив первое уравнение во второе, получим
G(u, Н(щ v)) — v,
а выбрав v = 0 и обозначив h(u) = Н(и, 0), имеем
в(иЛН) -о.
Функция h(u) дифференцируема и является единственным
решением этого уравнения. Единственность и дифференцируе-
мость функции h составляет содержание теоремы существова-
ния неявной функции. Таким образом, теорема существования
неявной функции от одной переменной есть следствие теоремы
существования обратной функции, зависящей от двух перемен-
ных. Сформулируем эту теорему еще раз.
334 Глава 6. Теоремы ... дифференциального исчисления
Теорема о неявной функции. Пусть G — дифференцируемая
функция, для которой G(xo,yo) = 0 и (dG/dy)(xq, уо) Ф 0- Тогда
существует единственная функция h(x), определенная вблизи
х = жо; удовлетворяющая условиям: Л(хо) = Уо и G(x, h(x\) = 0.
Функция h дифференцируема и Л'(х) = — (dG/dx)/(dG/dy).
Предыдущую аргументацию можно сформулировать по-дру-
гому. Простейшее отображение из R2 —> R1 (за исключением по-
стоянного отображения), которое можно придумать, есть проек-
ция на одну из осей:
тг : R2 —> R1 тг ff = и.
\\v //
Пусть G : R2 —> R1 — любое непрерывно дифференцируемое
отображение и предположим, что dGPo сюръективно (что в на-
шем случае одномерной области значений означает dGPQ 0).
Утверждается, что существуют локальные замены координат,
т. е. отображения g : R2 —> R2, которые локально определены
и имеют дифференцируемые обратные отображения, так что
G о g = тг.
Действительно, поскольку dGPo Ф 0, мы можем сначала линейной
заменой добиться, чтобы dG/dy 0. Тогда вышеприведенные
соображения позволяют построить отображение д, для которого
Gog — тг. Таким образом, если допускаются произвольные замены
координат, то самое общее непрерывно дифференцируемое отоб-
ражение, у которого dGp сюрьективно, есть проекция на одну из
осей. На рис. 6.8 вы видите пример функции G(x, у) = (x2+y2)1/Z2
(изображены линии д(х,у) ~ const), которая после перехода к
полярным координатам имеет вид Gog(0,r) — г, т. е. задает про-
екцию точки (0, г) на ось г.
Теперь поговорим об отображениях из R1 в R2. Простейшее
нетривиальное отображение такого вида — это отображение г,
которое вставляет пространство R1 в R2 как ось х\
г(ж)=(о).
Мы утверждаем, что если G : R1 —> R2 — любое непрерывно диф-
ференцируемое отображение с условием dGPo 0, то локально
6.4. Теорема об обратной функции
335
У
Рис. 6.8
можно найти замену координат, т. е. непрерывно дифференциру-
емое отображение f, имеющее дифференцируемое обратное, так
что (см. рис. 6.9)
foG = i.
Действительно, сначала можно выполнить линейное преобра-
зование переменных на плоскости так, чтобы в новой состоме
координат отображение G имело вид
Теперь определим F : R2 —> R2 формулой
F
Gi(u)
Gz(u) + v
336 Глава 6. Теоремы ... дифференциального исчисления
Тогда
dFG(po) =
и, следовательно, F имеет (локально) непрерывно дифференци-
руемое обратное отображение. Из определения F и i следует, что
Поэтому, взяв f — F \ получаем
i = f о G.
Итак, изменяя систему координат, можно локально «выпрямить
любую кривую».
6.5. Поведение функции вблизи
критической точки
Предположим, что / : R2 —> R имеет критическую точку в ро,
т. е. d/Po = 0. Будем считать, что мы уже сделали преобразование
координат так, что теперь ро = 0 в R2. Допустим, что с!2/о невы-
рождена, т. е. Det(d2/o) 0. Другими словами, предположим,
что симметричная матричная функция
/ а2/ а2/ \
дх2 dxidx2
d2f d2f
дх1дх2 а«2 )
невырождена в 0. Из результатов параграфа 4.2 мы знаем, что
можно найти такое линейное преобразование координат L, что
LH(0)LT может быть принять одну из трех форм:
LH(0)LT = *
/1 0\
\° У '
(-1 0\
\ 0 V ’
(-1 0 \
\° -1/’
6.5. Поведение функции вблизи критической точки
337
Допустим, что мы уже сделали линейное преобразование коорди-
нат, и d2fo уже записывается в виде одной из этих стандартных
форм. Из доказательства разложения Тейлора мы знаем, что
f(x, у) = /(О) + Ьц(ж, у)х2 + 2612(ж, у)ху + Ь22(х, у)у2
£)(;)
= f(O) + (x,y)B(XY
\ & /
где bij — непрерывные функции х и у, а матричная функция В,
вычисленная в начале координат, равна d?fo, т. е.
В(0) = Я(0)
или
= Й(°). МО) = Й;(О). W®) = S(O).
ох* охоу оу*
Матрица В симметрична. Применим процедуру Грама- Шмидта
к В(х) и В(х) Из непрерывности В ясно, что произ-
ведения
(l,0)B(x)(j), (l,0)B(x)(j), (0,l)B(x)(j)
непрерывно зависят от х. Следовательно, для х, достаточно близ-
ких к нулю, можно найти такую обратимую матрицу Q(x) (за-
данную процедурой Грама-Шмидта), что
В(х) = Q(x)TB(0)Q(x).
Алгоритм Грама-Шмидта обеспечивает дифференцируемость
функции (?(х). Таким образом,
/(х) = /(О) + xTQ(x)TH(0)Q(x)x,
или
/(х) = /(0) + утЯ(0)у,
338 Глава 6. Теоремы ... дифференциального исчисления
где
у = Q(x)x.
Отображение х м у, заданное этой формулой, обратимо согласно
теореме об обратной функции! Более подробно: пусть ф : К2 —> R2
определена формулой
0(х) = Q(x)x.
Тогда, дифференцируя произведение, получаем
d^o(x) = (dQo(x))O + Q(O)x
или
dфQ = (id).
Таким образом, теорема существования обратной функции гаран-
тирует, что ф имеет дифференцируемую обратную
X = V’(y)-
Но тогда (^*/)(у) = /(х)> поэтому
V’V(y) = /(0) + утЯ(0)у.
Другими словами, функция ^*(/ — /(0,0)) — квадратичная фор-
ма! Итак, мы доказали, что вблизи любой невырожденной кри-
тической точки можно ввести такие координаты 3/1, у2. что
/(ух, У2) = /(о) + Q(yi, у2),
где
С(У1,У2) = ±(У1 4-!/г) или Р(У1,У2) =-У1+У2-
Что выбрать из этих трех вариантов, определяется нормальной
формой (числом отрицательных собственных значений) второго
дифференциала d2/0-
Это доказательство имеет общий характер, оно применимо
для любой размерности. Итак, если О - невырожденная крити-
ческая точка /, то можно найти такие координаты, в которых
/(у) = /(0) + С(у),
Резюме
339
где
Q(y) = ±У1 ± у1 + •
Число знаков минус в этой формуле (называемое индексом Q),
равно числу отрицательных собственных значений матрицы d2/o-
Этот результат известен как лемма Морса. Мы воспользуемся
этой леммой при изучении асимптотических интегралов в гла-
ве 21.
Резюме
А. Производные высших порядков
Вы должны уметь писать разложение Тейлора для функции,
определенной на плоскости, через частные производные перво-
го и второго порядка.
Вы должны уметь применять цепное правило, чтобы выра-
зить частные производные второго порядка или уравнения в
частных производных второго порядка через новые координаты.
В. Критические точки
Надо уметь находить критические точки функции, определенной
на плоскости, и классифицировать их, т. е. определять максимум,
минимум и седловую точки.
Надо уметь пользоваться методом множителей Лагранжа для
нахождения условных критических значений функции несколь-
ких переменных.
С. Обратные функции
Вы должны знать формулировку теоремы существования обрат-
ной функции и уметь пользоваться ей.
Вы должны уметь применять метод Ньютона для нахождения
приближенного решения уравнения /(р) = q, где / : R2 —> R2.
Задачи
6.1. Пусть F(x, у) =
О
х3у
х2 + у2
для х — у = 0;
в других точках.
340 Глава 6. Теоремы ... дифференциального исчисления
(а) Вычислите dF/dx и dF/dy. Непрерывны ли они в (0,0)?
(Ь) Вычислите d2F/dxdy и d2F/dydx. Непрерывны они в (0,0)
или нет? (Замечание: если эти производные не непрерывны
в (0,0), то их нельзя вычислить, получая общую формулу и
устремляя х и у к нулю!)
(с) Покажите, что d2F/dxdy(Q,ff) =/ d2F/dydx(fy 0).
(d) Придумайте гладкую кривую, которая проходит через нача-
ло координат и определяется формулами х = X(t), у — Y(t)
с условием Х(0) = У(0) = 0 так, чтобы функция
G(t) = F(X(t),Y(t))
была не дифференцируема в начале координат.
6.2. Найдите и проклассифицируйте все критические точки функции
F : R2 — R, определенной формулой
F(x, у) = х3 + у3 ~ Зху.
6.3. Пусть F(x,y) — х2у — Зху + ~х2 + у2.
(а) Найдите уравнение плоскости, касательной к функции z =
F(x, у) в точке х = 2, у = 2, z = 2.
(b) Функция F(x, у) имеет три критические точки, две из ко-
торых лежат на прямой х = у. Найдите эти критические
точки и выясните, где будет максимум, минимум или сед-
ловая точка.
6.4. Функция F в пространстве R2 определена формулой
F(x, у) ~ х2 — 4ху + у2 — ба:”1.
(а) Получите уравнение плоскости, касательной к z = F(x, у) в
точке х = —1, у — —2.
(Ь) Найдите критические точки этой функции и выясните их
природу.
6.5. Найдите и проклассифицируйте все критические точки функ-
ции F(x,y) = у2 + (х2 — 3x)logi/, определенной в верхней полу-
плоскости у > 0.
6.6. Покажите, что функция F(x, у) = у(е4х — 1) + 9х2 + бу2 имеет
критическую точку в начале координат и определите природу
этой точки. Опишите линии уровня F(t, у) в окрестности начала
координат. Нарисуйте пару типичных кривых. Опишите линии
уровня F(x,y) в окрестности точки х = 0, у = 1 и нарисуйте
типичные кривые.
Задачи
341
6.7. Найдите критические точки функции
F(x, у) = 5х3 — Зяг2т/ + бху2 — 4у3 — 27а; 4- 27у
и определите их природу. (Критические точки имеют целые ко-
ординаты.)
6.8. (а) Найдите критические точки функции F(x,y) — ху2е~^х+у\
(Ь) Определите природу тех критических точек, которые не на-
ходятся в начале координат. Нарисуйте как можно точнее
несколько кривых уровня вблизи каждой точки.
(с) Если критическая точка совпадает с началом координат, то
в ней гессиан равен нулю. Выясните природу критической
точки в начале координат и нарисуйте несколько кривых
уровня в его окрестности.
6.9. Пусть х и у — обычные аффинные координатные функции на
плоскости. Определим другую пару координатных функций в
правой полуплоскости (х > 0):
и~ х2 — у2, v = 2ху.
(а) Выразите du и dv через dx и dy. Напишите матрицу, вы-
( du \ ( dx \ г-.
ражающую I \ через I \ в точке Р с координатами
х = 2, у — 1, и = 3, v = 4.
(Ь) Найдите приближенные значения координат х и у для такой
точки Q, что u(Q) = 3.5, v(Q) = 4.
(с) Пусть ф обозначает электрический потенциал на плоскости.
Для выбранной точки Р(х = 2, у = 1, и = 3, v = 4),
где (дф/ди) = 2 и дф/dv = -1, вычислите дф/дх и дф/ду.
Найдите направление, по которому функция ф изменяется
быстрее всего.
(d) В той же точке выразите д2ф/дудх через частные произ-
водные ф по и и v. Конечно, ответ может включать явный
вид функций ОТ X И у.
6.10. Предположим, что координаты и и v выражаются через х и у
согласно формуле
и\ _ f cos а — sincA f х
v J \ sin a cos a J I у
342 Глава 6. Теоремы ... дифференциального исчисления
Пусть f — дважды дифференцируемая функция на плоскости.
Покажите, что
ди2 dv2 дх2 ду2
6.11. Полярные координаты г, 0 связаны с декартовыми координатами
соотношением
(х\ _ (rcos#\
у у ) ~ у г sin 0 J '
Предположим, что функция f : R2 —* R удовлетворяет уравне-
нию Лапласа:
Щ + Щ=о
ах2 аУг
Выразите это уравнение через производные f по г и 0.
6.12. Пусть f : R2 —► R ~ дважды дифференцируемая функция и
пусть ~ Выразите d2f/d02 через частные про-
изводные f по х и у.
6.13. Пусть f ; R2 —> R — дважды дифференцируемая функция.
Пусть, далее, х 0 и
(г \ — ( дА2 + У2 А
/ \агс1ап(?//т) J ’
Выразите d2f/dx2 через частные производные f по г и 0.
6.14. Дано, что df /дх = f + df /ду. Покажите, что
д2Цдх2 _ Q2f/dy2 = f 2(df/dy).
6.15. Воспользуемся полярными координатами, данными в упражне-
нии 6.11.
(а) Пусть функция f определена на плоскости. Допустим, что
в точке с координатами х — 3, у = 4 частные производные
равны df /дх = 2 и df /ду = 1. Вычислите df /дг и df /d0 в
этой точке.
(Ь) Предположим, что / удовлетворяет уравнению в частных
производных
дг2 г дг г2 д02
Преобразуйте его в уравнение, содержащее только частные
производные f по х и у.
Задачи
343
6.16. Предположим, что на плоскости определена функция /, удовле-
творяющая уравнению Лапласа d2 f / dx2 + d2 f / dy2 — 0. Преобра-
зуйте это уравнение к координатам, приведенным в упражнении
5.13. В него могут войти d2f/du\ d2f/dv2^ d2f/dudv, df /du,
df /dv, и и v, но не должны входить т, у и частные производные
по х и у.
6.17. Пусть есть отображение ф : R2 —> R2:
, // х \\ __ / ех + еу \
\\2/)) ~ \ех ~~еу )'
Покажите, что для ф в окрестности любой точки можно получить
обратную функцию. Вычислите якобиан обратного отображения.
6.18. В пространстве R3 рассмотрите поверхность z = F(x,у), где
F(x, у) = х2 — 2ху + 2у2 + Зх + 4у.
(а) Получите наилучшее аффинное приближение к F в окрест-
(х\ /1\
= 1 I •
у J К1/
(Ь) Напишите уравнение плоскости, касательной к поверхности
/1\
в точке I । I •
(с) Получите уравнение линии, перпендикулярной к поверхно-
сти в этой же точке.
(d) Уравнение F(x, у) = 8 определяет функцию у = д(х). Вы-
числите д'(1).
6.19. В статистической механике существует важная проблема. Рас-
смотрим физическую систему, которая может иметь энергии +F,
0 и —Е. Пусть х обозначает вероятность системе иметь энергию
+Е и пусть у обозначает вероятность системе иметь энергию — Е.
Тогда вероятность системе иметь нулевую энергию равна 1—х—у.
Получите максимум энтропии S, если она определена соотноше-
нием
S(x,y) = -a? log ж - у logy - (1 - X - у) log(l - х - у)
при условии, что средняя энергия равна Fq, т. е.
F(x,i/) = хЕ - уЕ = Ео.
Решите эту задачу, введя множитель Лагранжа (3. Покажите, что
вероятность х пропорциональна е~$Е, а вероятность у пропорци-
ональна е@Е. Найдите коэффициенты пропорциональности.
344 Глава 6. Теоремы ... дифференциального исчисления
6.20. Рассмотрите функцию а : R2 —> R2, определенную формулой
а(Р) = F
ху3/2
х^2-у2
(а) Вычислите матрицу якобиана 2x2, которая представля-
ет линейную часть наилучшего аффинного приближения к
/ х \ ( 4 А
функции а вблизи точки I I = ( ]) • Вычислите прибли-
//4.2\\
женное значение F 11 11, воспользовавшись этой матри-
цей.
(b) С помощью той же матрицы получите приближенное реше-
ri (( 4.2 \\
ние уравнения F LI Ij = 11 5 g )) *
6.21. Пусть f(x,y) — у/х2у4 4- 9т2.
(а) Получите наилучшее аффинное приближение к этой функ-
ции вблизи точки х = 1, у = 2.
(Ь) Возьмем точку х = 1, у = 2. По какому направлению ско-
рость изменения функции /(т, у) максимальна?
(с) Решением системы уравнений
/(х,у) = 5,
х + у = 3
является точка х = 1, у = 2. Получите приближенное реше-
ние уравнения
f(x,y) = 5.34,
х + у = 3.05,
используя наилучшее аффинное приближение, полученное
в первом пункте.
6.22. Функции s и t определены через аффинные координаты функций
х и у в области х > 0, у > 0 следующими формулами:
s = ху, t = log?/ — log х.
(а) Выразите дифференциалы ds и dt через dx и dy в точке
х = 1, у = 2.
Задачи
345
(b) В точке х = 1, у = 2 значения функций s и t равны s = 2,
t = log 2 « 0.693. Используйте матрицу Якоби в этой точке
и получите приближенные значения координат х и у для
точки, где s = 2.02 и t = 0.723.
(с) Пусть f — дважды дифференцируемая функция, опреде-
ленная на плоскости. Выразите df /дх, df /ду и д2 f /дудх
через х, у и частные производные f по s и t.
Глава 7
Дифференциальные формы
и криволинейные интегралы
Главы 7 и 8 являются введением к изучению мно-
гомерного интегрального исчисления. Глава 7 посвя-
щена линейным дифференциальным формам и со-
ответствующим криволинейным интегралам. Особое
внимание уделено замене переменных в криволиней-
ных интегралах. Обсуждаются некоторые другие од-
номерные интегралы, в частности, вычисление длины
кривой.
Введение
В этой главе мы выясним геометрический смысл линейных диф-
ференциальных форм, в частности, объектов, которые предстоит
интегрировать по ориентированным траекториям, в результате
чего получаются числа. Начнем с примеров. Рассмотрим форму
w = ±(xdy -ydx).
По определению, эта форма задает правило, которое каждой
точке ставит в соответствие вектор-строку |(—у, т). Да-
лее, вектор-строка понимается как линейная функция векторов
нашего пространства. В рассматриваемом случае вектор-строка
348
Глава 7. Дифференциальные формы ...
|х) ставит в соответствие вектору h = число
w(£)[hl =
которое равно ориентированной площади треугольника с верши-
Рис. 7.1
/ x(t} \
Предположим (рис. 7.2), что у нас есть кривая a(t) = I 1.
Выберем на этой кривой точки рг и пусть hz — p^+i — рг. Тог-
да сумма ^2 ^Рг [hi] даст нам полную ориентированную площадь
изображенных на рис. 7.2 треугольников.
В пределе ломаная линия, соединяющая точки рг. аппрокси-
мирует кривую. Мы ожидаем, что эта сумма будет стремиться
к пределу — ориентированной площади, заметенной радиусом-
вектором, движущимся вдоль нашей кривой. Мы уже встреча-
лись с этим понятием, когда изучали второй закон Кеплера.
Второй пример. В нем появляется понятие силового поля. Си-
ловое поле
w = F dx 4- Gdy + Н dz
в каждой точке трехмерного пространства определяет линейную
функцию с матрицей
(F, G, Я).
Введение
349
Эта линейная функция задает элемент работы инфинитезималь-
ного движения, т. е. любому вектору смещения v в точке р ставит
в соответствие
(F, G, Н) I vy ] = Fvx + Gvy + Hvz.
\vz/
Мы ожидаем, что эта величина может быть проинтегрирована
вдоль любой траектории Г, в результате чего получается /Гсо
— работа, совершенная при движении вдоль траектории Г. Заме-
тим, что хотелось бы уметь получать работу при движении вдоль
всех траекторий. Представим себе двумерное пространство, где
действует силовое поле
со — F dx + G dy.
Рис. 7.3
Например, на рис. 7.3 изображено влияние гравитации при
движении по поверхности z = f(x, у). В этом случае силовое поле
350
Глава 7. Дифференциальные формы ...
пропорционально
= df = — dx + — dy.
дх ду
Допустим, что у нас есть идеально обратимый электрический ав-
томобиль. (Идеально обратимый означает, что вся энергия тор-
можения возвращается в аккумуляторную батарею, при этом не
учитывается ни сопротивление воздуха, ни любое другое сопро-
тивление.) Будем измерять, сколько энергии поступает в батарею
и сколько расходуется. Разницу между начальным и конечным
показаниями батареи обозначим Bp — Bj. Кроме того, введем ки-
нетическую энергию автомобиля в начале и в конце пути — КЕ{
и К Ер. Из закона сохранения энергии следует, что
К Ер — КЕ/ + Вр — В/ ~ I и,
что равно работе, выполненной при движении. (В этом рассужде-
нии мы предполагаем, что силы не зависят от скорости, т. е. мы
рассматриваем такое силовое поле, для которого силы зависят
только от пространственных координат.)
Отметим некоторое отличие от использования понятия силы в
законах Ньютона. Если мы пустили камень катиться по поверхно-
сти, то законы Ньютона предсказывают, как он будет двигаться
дальше: движение камня определяется уравнениями
— — F, р — mv — импульс, v — скорость.
Рис. 7.4
В нашем обсуждении мы интересуемся величиной энергии, ис-
пользованной при движении вдоль данной кривой. Силовое поле
и приписывает энергии траекториям Г. Если и — df, то полная
7.1. Ориентированные траектории
351
работа, совершенная при движении вдоль траектории, есть раз-
ность потенциалов
/(<?)-m
где Р и Q — начальная и конечная точки нашего пути (рис. 7.4).
Ну а теперь, имея в виду все эти соображения, перейдем на
математический язык.
7.1. Ориентированные траектории
Ориентированной траекторией на плоскости (или в простран-
стве Rfe) мы будем называть кривую, на которой выбрано опре-
деленное направление движения. Траектория вида Г1 (рис. 7.5),
начальная и конечная точки которой не совпадают, имеет опреде-
ленное начало (точка Ра) и определенный конец (точка Рь). Пере-
становка начальной и конечной точек изменяет ориентацию кри-
вой на противоположную. Замкнутая кривая вида Г2 (рис. 7.6)
не имеет определенных начальной и конечной точек. Любая точ-
ка Р может быть началом траектории и одновременно ее концом.
Для таких замкнутых траекторий, тем не менее, можно задать
направление движения, т. е. ориентацию. Тогда для любого фраг-
мента такой траектории определится его начало и конец.
Рис. 7.5 Рис. 7.6
Физически это можно истолковать так: мы имеем траекторию
движения частицы, причем известно, через какие точки проходит
частица и в каком порядке, но скорость ее движения мы не знаем.
Вполне возможно, что какие-то отрезки пути проходятся два или
более раз. Например, частица может пройти два раза по окруж-
ности единичного радиуса против часовой стрелки, или (рис. 7.7)
352
Глава 7. Дифференциальные формы ...
пройти от точки Ра до точки Q, обратно до точки R и только
потом к точке Р&. Такие траектории, может быть, трудно изоб-
ражать кривыми с соответствующими стрелками, но они имеют
физический смысл и, как мы скоро увидим, их легко описывать
на языке функций.
Здесь мы ограничимся рассмотрением только кусочно-диффе-
ренцируемых траекторий — непрерывных кривых, для которых
существуют касательные во всех точках, за исключением их ко-
нечного числа (рис. 7.8). Такая траектория может быть описана
как образ отрезка вещественной прямой при непрерывном отоб-
ражении
а : R -> R2,
которое дифференцируемо везде, кроме конечного числа точек.
Функция о называется параметризацией траектории (рис. 7.9).
Физически можно считать, что функция а определяет поло-
жение частицы в каждый момент времени. Мы можем задавать
а, определяя перенос а* координатных функций, т. е. записы-
вать формулы, которые дают численные значения координат х
и у в зависимости от времени. Например, если частица движется
„ О (R\ /0\
вдоль круговой дуги с радиусом R из точки I ] в точку D )
\ U J \ /г J
(рис. 7.10), то ее траекторию можно представить в форме
( R cos t
у R sm t
0 < 2t < тг,
или
a*x — Я cost, = .Rsint.
Каждая траектория может быть параметризована по-разному,
7.1. Ориентированные траектории
353
причем каждый способ физически будет соответствовать прохож-
дению траектории с различными скоростями в разные промежут-
ки времени. Например, отрезок гиперболы у2 — х2 — 1 от точки
(О j до точки ( ) (рис. 7.11) может быть параметризован
Л / \ у & /
следующими способами:
= t, а*у = \/t2 — 1, 0 < t < 1,
а*х — sinhtf, а*у — coshi 0 < t < arcsinh 1,
а*х = tan£, а*у = sect 0 < < %.
Траектории, на которых отдельные участки кривой проходят-
ся более одного раза, удобно записывать в параметрической фор-
ме. Например, параметризация
а*х — cost, а*у — sint, 0 < t < 4тг
описывает путь, проходимый частицей вдоль окружности еди-
ничного радиуса против часовой стрелки два раза, а параметри-
зация
а*х = sin21, а*у = sin21, 0 < t < Зтг/2
/0\
описывает движение по отрезку прямой от точки ( g I вперед к
точке I j I, обратно к I I и потом еще раз вперед к точке I j ) •
354
Глава 7. Дифференциальные формы ...
Рис. 7.13
В практических вычислениях каждый дифференцируемый
отрезок пути параметризуется отдельно. Например, на рис. 7.12
изображен путь, который можно параметризовать в виде: сначала
а*х — i, а*у — ty 0 < t < 1,
а потом
а*х = x/2cos(tt/4 — t), а*у ~ \/2sin(7r/4 — t), 0 < t < тг/4.
Кусочно-дифференцируемый путь можно аппроксимировать
последовательностью векторов, уложенных вдоль него (рис. 7.13).
Разобьем кривую на отдельные участки, расставив на ней по ходу
движения точки Pq, Pi, Р2, ..., Ру, где Ро — начало пути, а Ру
— его конец. При этом необходимо включить в это подразбиение
7.2. Криволинейные интегралы
355
все точки, где кривая не имеет касательной. Затем можно ввести
векторы смещения
vo = PqPi, vi = Р1Р2, vyy-i = P/y-iP/y.
Выбрав точки Pi достаточно близко, мы можем аппроксими-
ровать любую кусочно-гладкую траекторию с помощью ломаной
линии, заданной последовательностью векторов с любой наперед
заданной точностью. Следует заметить, что есть пути, которые
нельзя хорошо аппроксимировать таким способом, но они не мо-
гут быть параметризованы дифференцируемыми функциями, и
мы не будем их рассматривать.
7.2. Криволинейные интегралы
Теперь опишем естественный способ, когда заданная дифферен-
циальная форма приписывает траектории некоторое веществен-
ное число. Пусть отрезок пути характеризуется точкой Pi с со-
ответствующим вектором vz. Дифференциальная форма си при-
писывает этому отрезку вещественное число cu(P$)[vj]. Вычислим
сумму этих чисел по всем отрезкам пути:
N-1
In = 5Z и’(рг)М-
г=0
Эта сумма очень похожа на римановскую сумму для обычного
интеграла. Пусть число точек Pi растет так, что все вектора vz
стремятся к нулю1 2. Вычислим предел суммы /у в этом случае.
Если такой предел существует и не зависит от выбора последова-
v 2
тельности точек, то он называется криволинейным интегралом*
1 Точнее говоря, следует потребовать, чтобы стремилось к нулю число,
равное maxi||vi||. — Прим. ред.
2 В русскоязычной литературе такие интегралы иначе называют криволи-
нейными интегралами второго рода. Конструкция «абсолютного» интеграла
по кривой, рассматриваемая авторами в конце этой главы, в русскоязычной
литературе называют криволинейными интегралами первого рода. — Прим.
ред.
356
Глава 7. Дифференциальные формы ...
от дифференциальной формы си по пути Г. Его обозначают Jrtu,
т. е.
r N—1
/ ш = lim y2w(pi)[vi]-
7г
Мы докажем скоро, что для кусочно-дифференцируемых путей
написанный предел существует и не зависит от выбора точек де-
ления пути. Дадим формулу для Jrcu, используя операцию пере-
носа дифференциальной формы.
Из определения суммы дифференциальных форм и произве-
дения дифференциальной формы на вещественное число следуют
три очевидных свойства криволинейных интегралов Jrcu.
(1) Интеграл линеен по си, т. е. если cu = cui + CU2, то Jrcu =
Jr ^1 + Jr ^2- Если cu = Леи', TO Jr си = Л Jr си'.
(2) Если Г состоит из двух участков Г1 и Г2, то
[ [ CU.
Jr иг2
Это значит, что всегда можно разделить кусочно-дифференци-
руемую траекторию на дифференцируемые фрагменты, как это
показано на рис. 7.14, и свести интегрирование по всей кривой к
вычислению интегралов по этим фрагментам.
(3) Если Г отличается от Г' только ориентацией, то
7.2. Криволинейные интегралы
357
Это следует из того, что, изменяя ориентацию Г, мы меняем
направление всех векторов v», а поскольку а) — линейная форма,
то
= -w(Pi)[Vi].
Перейдем к задаче нахождения численного значения криво-
линейного интеграла. Наша цель состоит в том, чтобы свести эту
задачу к вычислению обычного интеграла по параметру, введен-
ному вдоль пути интегрирования. Параметризация а : R —> R2
отображает отрезок вещественной прямой [а, Ь] в траекторию Г.
Предположим, что точка а (нижняя граница интервала [а, £>])
отображается в начальную точку пути Ра, а верхняя граница b
— в конечную точку пути Р^. Рассматривая отдельно гладкие
участки нашего пути, будем считать, что а задается дифферен-
цируемыми функциями
a*x = X(t), a*y = Y(t\
для которых, согласно цепному правилу,
a* dx = X'(f) dt, а* dy = У'(4) dt.
Пусть разбиение пути соответствует следующему разбиению
отрезка:
& — t$ <С tji — 6,
так что
Р — a(t) = (
Возьмем дифференциальную форму
си = gdx + hdy.
Тогда криволинейный интеграл может быть аппроксимирован
358
Глава 7. Дифференциальные формы ...
суммой
У2^(Рг)[а(4г+1) -a(ti)]
i
= dx[a(ti+i) - a(ti)] + h(Pi) dy[a(ti+1) -
= - X&)] + hHti»[Y(ti+i) - Yfa)]}.
(7-1)
Вспомним, что — f dt, где
/(t) = 5(a(t))X'(t) + h(a(t))y'(t).
Покажем, что (при соответствующих предположениях относи-
тельно a, f и д) приближенное выражение (7.1) стремится к
ь
f dt, (7.2)
когда длина отрезков разбиения пути стремится к нулю. Итак, мы
хотим сравнить (7.1) и (7.2) для данного разбиения и показать,
что их разность стремится к нулю, когда тахД^+х—стремится
к нулю. Можно написать
X(ti+1) - X(ti) = j^l+1 X'(s) ds
V(ti+1) - Y(ti) = [^Y'^ds.
Jti
Тогда сумма (7.1) имеет вид
g(a(ti)} [ Xf(s) ds + /* Y'(s)ds
Jti Jti
a (7.2) можно написать в виде
/ /(s)ds
= 5(a(s)H'(s)ds + У h(a(s))Y\s) ds
7.2. Криволинейные интегралы
359
Разница между этими выражениями в том, что для (7.1) мы име-
ем или стоящими перед знаком интеграла в каж-
дом слагаемом, а в (7.2) функции #(а(з)) и /i(a(s)) стоят под зна-
ком интеграла. Интуитивно ясно, что для непрерывных функ-
ций д и h и гладком отображении а эта разница пренебрежимо
мала при достаточно мелком разбиении. Сделаем ряд предполо-
жений, чтобы получить точную оценку разницы между (7.1) и
(7.2). (Можно было бы сделать и более слабые предположения,
но тогда потребовалось бы более сложное доказательство.)
(i) Предположим, что д и h равномерно3 непрерывны, т. е.
что для любого 6 > 0 существует такое т] > 0, что из неравенства
||Р - QII < 7? следует \д(Р) - 0(Q)| < е и |/г(Р) - h(Q)\ < е. Это —
предположение относительно си. По теореме Лагранжа о среднем
значении оно будет выполняться (при gN ~ s), если производные
dg и dh удовлетворяют неравенствам ||dg|| < N и ||d/i|| < TV во
всех точках.
(ii) Допустим, что существует такая постоянная М, что
|X'(t)| <м и |y'(t)| <м
для всех значений t. Это — предположение относительно пути а.
По теореме о среднем значении можно найти такое <5 > 0, что
для любых tf и tn из условия
\tf - t"\ < 8
вытекает неравенство
|а(О-а(<")|<тл
Разделим весь путь на отрезки так, чтобы для всех i выполнялось
неравенство < 6 . Согласно предположению (i), мы будем
иметь
|g(a(s)) - ff(a(ti))| < £ для U < s < ti+i.
Аналогичную оценку можно получить для h. Тогда
fti+1 rti+l
5(а(М) / X'ifydt- / g(a{s)')X'{s)ds
Jti Jti
3Известно, что непрерывная на компакте функция всегда равномерно
непрерывна. — Прим. ред.
360
Глава 7. Дифференциальные формы ...
Jti
< £г|-
Просуммировав эти неравенства по всем отрезкам (с учетом ана-
логичной оценки для членов с /г), можно увидеть, что разность
между (7.1) и (7.2) не больше, чем
57 £^ki+i - tiI + еЛф*+1 - t*| = 2еМ|Ь — а|.
i
Выбирая длину разбиения с достаточно малым 5, можно полу-
чить эту оценку со сколь угодно малой величиной е. Тем самым
доказано равенство нашего криволинейного интеграла и опреде-
ленного интеграла (7.2).
Поскольку f dt = можно написать
rb гЪ
I f dt = I а*ш,
Ja J л
где правая часть равенства равна левой по определению. В ре-
зультате получаем:
[ fb *
I w = I aw.
Jr Ja
В этом равенстве левая часть имеет очевидный интуитивный
смысл, а правая удобна для вычисления.
Пример. В качестве применения этого результата вычислим ин-
теграл I от
w — ху dx + х2 dy
(Ь\ /1\
вдоль двух различных путей, соединяющих точку I j) с ( q I •
Первый путь Гх идет вдоль параболы у = 1—х2, а путь Г2 — вдоль
прямолинейного отрезка, соединяющего эти точки (см. рис. 7.16).
Для параметризации Г1 введем функцию
а : t ь-> ( 1 Ь 0 < t < 1,
у 1 - г J ’ ~ ’
7.2. Криволинейные интегралы
361
т. е.
= t, а*у = 1 — i2,
откуда следует, что
a* dx = dt, а* dy = — 2t dt.
Направление движения, задающего ориентацию на кривой, соот-
ветствует увеличению параметра t: начало кривой — это точка
а(0) =
, а ее конец — точка а(1) =
Тогда
а* ш = t(l -t2) dt + t2(—2t dt) = (t- 3t3) dt
и интеграл от cu по этой кривой равен
(t - 3t3) dt =
1
4
Для параметризации кривой Гг введем функцию
0 : t н-»
t
1 -t
т. е.
(3*х = t, /3*у = 1- t.
362
Глава 7. Дифференциальные формы ...
Следовательно,
/3* dx = dt, /3* dy = -dt
и
/3*cu = t(l — t) dt + t2(—dt) = (i — 2i2) dt.
Тогда для этого пути получаем
(t - 2t2) dt
1
6'
7.3. Точные дифференциальные формы
В предыдущем примере величина криволинейного интеграла за-
висит от формы пути, по которому он вычисляется, при фикси-
рованном положении начальной и конечной точки. В общем слу-
чае это правильно, но есть один важный частный случай диффе-
ренциальных форм, для которых величина криволинейного ин-
теграла полностью определяется начальной и конечной точками
кривой Г. Допустим, что дифференциальная форма си имеет вид
си = df. В этом случае
[df= fa*(df) = [Ь d(a* f).
vT' J a J a
Согласно фундаментальной теореме интегрального исчисления
(формула Ньютона-Лейбница)
J а
Однако, a*f(b) — /(а(Ь)) = /(А), где Рь — конечная точка пути
Г, и аналогично а*/(а) — f(Pa). Отсюда следует вывод, что если
начало и конец пути Г, т. е. точки Ра и Рь, фиксированы, то
интеграл
Jr<tf = f(Pb)-f(Pa)
определяется этими точками и не зависит от выбора пути Г.
7.3. Точные дифференциальные формы
363
Итак, этот результат в комбинации с предыдущими вычисле-
ниями показывает, что не любая дифференциальная форма име-
ет вид со = df. Действительно, легко написать необходимое для
этого условие: допустим, что
со = G dx + Н dy — df — dx + ^~ dy.
дх ду
Поскольку смешанные производные равны4, т. е. d2f/dxdy —
d2f/dydx1 мы имеем
dG _ дН
ду дх
В вышеприведенном примере G = ху и Н = х2, поэтому
dG , дН п
— х Ф — 2х.
ду дх
Дифференциальная форма си, которую можно представить в виде
со — df^ называется точной.
Сейчас мы докажем, что локально условие
dG _ дН
ду дх
достаточно, чтобы дифференциальная форма со — Gdx + Н dy
имела вид со = df для некоторой функции /, определенной с
точностью до константы.
Сначала зафиксируем точку Ра, и пусть f(Pa) — 0- Теперь
определим функцию f по формуле f(P) — fr со, где Г — специ-
ально выбранная траектория, соединяющая точки Ра и Р. Ко-
нечно, к f можно добавить любую константу без изменения ее
дифференциала df. Выбор точки Ра определяет эту константу.
Давайте проделаем эту процедуру в декартовых координатах.
Допустим, что
со = G(x, y)dx + Н(т, у) dy.
4При дополнительном условии непрерывности этих производных. —
Прим. ред.
364
Глава 7. Дифференциальные формы ...
Для простоты пусть Ра совпадает с началом координат. Следо-
вательно, / (( 2 )) — 0. В качестве Г выберем путь, соединяю-
f х \
щий начало координат и точку I 1 прямолинейным отрезком
\ У J
(рис. 7.17), который легко параметризовать:
Рис. 7.17
Поскольку буквы х и у обозначают у нас координаты конечной
точки пути Г, то для обозначения переменных интегрирования
используем буквы х и у. Таким образом,
а*х = xt, а*у — yty
a* dx = х dt, a* dy = у dt
и
= G(xt, yt)x dt + H(xt, yf)y dt.
Тогда
/(P) =
и, следовательно, формула
/(ж,у) = [ [xG(xt,yt) + yH(xt,yf)]dt (7.3)
Jo
7.3. Точные дифференциальные формы
365
позволяет построить функцию / по дифференциальной форме о;.
Заметим, что это можно сделать только при условии, что функ-
ции G и Н определены на всем пути Г.
До сих пор мы не делали никаких предположений относи-
тельно формы си, кроме того, что она должна быть определена
вдоль траектории интегрирования. Поэтому, вообще говоря, мы
не ожидаем, что df = си. Поэтому сейчас мы должны сделать ряд
предположений. Давайте вычислим df /дх. В определении функ-
ции f продифференцируем по х под знаком интеграла5:
= [ G(xt,yt)dt + [ (xt^-(xt,yr) + ty^-(xt,yt/\ dt.
ox Jq Jo \ ox ox /
Теперь воспользуемся тождеством
d dG dH
—{tG{xt,yty) = G(xt,yt) + tx—(xt,yf) +ty—(xt,yt).
at ox oy
Из него следует:
Г1 d
G(x, у) = [tG(xt, yi)]o = / — (tG(xt,yt))dt
Jo at
Подставив это выражение в df /дх, получим
^ = G(®,y)+ [ ty
дх Jo
(/^(xt,yt)-^(xt,yt/)dt.
Предположим, что вдоль всего пути
dG _ дН
ду дх
Г\ А
Тогда — — G. Аналогично — = Н. Поэтому со = df, т. е.
дх ду
дифференциальная форма со является точной.
5 Для этого достаточна непрерывная дифференцируемость подинтеграль-
ной функции. — Прим. ред.
366
Глава 7. Дифференциальные формы ...
Рассмотрим пример восстановления функции по ее диффе-
ренциалу в явном виде. Пусть
си = 2ху3 dx + Зх2у2 dy.
Поскольку а) определена везде и
~^ху3) = вху2 = ^(3xV),
то (X = df. А теперь вычислим /:
f(x,y)= [ [xG(xt,yf) +yH(xt,yf)]dt,
Jo
f(x, y)= [ (2z2y3 + 3x2y3)^4 dt = x2y3.
Jo
Действительно,
d(x2y3) = 2xy3 dx + 3x2y2 dy.
7.4. Замкнутые дифференциальные формы
В предыдущем параграфе мы показали, что если ш определена
в области /?, имеющей форму звезды, все точки которой мож-
но соединить с некоторой точкой О, лежащей внутри 7?, от-
резками прямых, также лежащими в R (рис. 7.18), то условие
dG/ду = дН/дх достаточно для того, чтобы форма си была точ-
ной. Если области определения G и Н не удовлетворяют условию
звездности, то такой вывод может оказаться неверным.
Например,
У х
W =---dx + ---2 dy
х* + у2 xz + yz
удовлетворяет условию dG/ду = дН/дх, но си не определена в
точке х = 0, у = 0. В этом случае в плоскости с «проколотой
7.4. Замкнутые дифференциальные формы
367
точкой» не существует функции /, для которой ш ~df.
Действительно, если си — точная форма, то интеграл от нее по
замкнутому пути должен быть равен нулю. Но легко показать,
что интеграл от нашей формы по окружности Г единичного ра-
диуса с центром в начале координат не равен нулю. Возьмем
а*х — cosi, а* у = sint,
a*dx — — sin t dt, a* dy — cos t dt,
так что
— sin2 tdt + cos2 tdt = dt.
Тогда
[ cu = [2* dt^ 27Г.
Jr Jo
Дифференциальная форма ш — Gdx + H dy, определенная
в некоторой области пространства R2, называется замкнутой,
если dG/ду — дН/дх. Если область имеет форму звезды, то мы
доказали, что замкнутая форма является точной. В общем случае
это не так.
В последующих главах мы вернемся к рассмотрению этих
идей, имеющих важнейшее значение для теории электромагнит-
ного поля.
368
Глава 7. Дифференциальные формы ...
7.5. Перенос дифференциальной формы
и интегрирование
Поскольку определение линейного интеграла а? не зависит от
выбора параметра вдоль пути Г, очевидно, что численное значе-
ние интеграла не зависит от параметризации. Полезно продемон-
стрировать эту независимость в явном виде. Предположим, что
путь Г параметризован двумя способами: с помощью переменных
8 И t.
Рис. 7.19
Тогда существует взаимно-однозначное отображение а отрез-
ка s-прямой на отрезок i-прямой, как это показано на рис. 7.19.
Следовательно, параметризацию пути Г можно записать в виде
Р = /?(£) и Р — (3(а(зУ) = (3 о а($).
Используя параметр 8, цепное правило и формулу для замены
переменных в обычных определенных интегралах, вычислим
/* pb rb
Ш= (/?oa)*w= / а*(/ГЪ)= / /3*ш.
Jr J a J a Ja(a)
Это в точности совпадает с тем, что мы получили бы, вычис-
ляя интеграл с помощью параметра t. С вычислительной точки
зрения это значит, что использование разных параметризаций эк-
вивалентно замене переменных в интеграле.
Криволинейный интеграл, заданный в одной плоскости, мож-
но преобразовать в равный ему интеграл в другой плоскости,
как это показано на рис. 7.20. Символ /3 обозначает взаимно-
однозначное отображение пути Г на плоскости А в путь /?(Г) на
7.5. Перенос дифференциальной формы и интегрирование 369
плоскости В. Выбрав дифференциальную форму w на плоскости
В, мы определяем ее перенос согласно формуле
/3%(P)[v]=W(^(P))[d/3P[v]].
[ ш = [
J/3(T) Jr
Действительно, по определению криволинейного интеграла
дг-1
= lim ^2 ^*^(Pi)[v]
i=0
N-l
= lim ^P^d^i]].
i=0
Заметим, что при N —> oo векторы d/3[vj] располагаются вдоль
пути /3(Г) все более близко. Следовательно, последняя сумма в
пределе 7V —> ос становится интегралом Действительно,
если мы параметризуем Г с помощью отображения аг, то согласно
цепному правилу получим
Однако, (Зоа есть параметризация пути /3(Г), поэтому последний
интеграл равен что и требовалось доказать.
370
Глава 7. Дифференциальные формы ...
Пример. Смысл последнего результата состоит в том, что для
вычисления интеграла можно вводить любую удобную систему
координат. Например, если мы хотим вычислить интеграл от си =
, я ЛА
хау — у ах по полуокружности единичного радиуса от точки I q I
до точки на плоскости ху (рис. 7.21), эту полуокружность
можно заменить на направленный отрезок Г в полярной системе
координат с помощью отображения (3 : [ [ Г C?S f . Тогда
/3*ш — (г cos в) d(r sin 0) — (г sin 0) d(r cos 0) = r2 d0.
Рис. 7.21
Для отрезка Г значение г = 1 и поэтому
[ = Г d0 = ir.
Jr Jo
Ясно, что вычисление си с помощью параметризации t —*
(cos А
sin£ / ,п,ает то же самое значение интеграла.
7.6. Абсолютный криволинейный интеграл.
Длина кривой
До сих пор мы рассматривали направленные криволинейные ин-
тегралы, вычисляемые вдоль ориентированных путей на плоско-
сти, где скалярное произведение может быть не определено.
7.6. Абсолютный криволинейный интеграл. Длина кривой 371
Если скалярное произведение определить, то становится воз-
можным определение абсолютного криволинейного интеграла6
от функции f по пути Г. Чтобы определить такой интеграл
frfds, разобьем путь Г на короткие отрезки с векторами v2 —
PiPi+i (рис. 7.22), после этого вычислим длину каждого отрезка
по формуле для скалярного произведения Si = ||vj| = x/(v^, vj.
Тогда интеграл снова определяется как предел суммы
Г N—1
fds= lim 22
Jr ЛГ-оо
Очевидно, что в этом случае ориентация пути Г не имеет значе-
ния, так как длина вектора равна длине вектора (“VJ.
Для вычисления абсолютного криволинейного интеграла удо-
бно, как и выше, параметризовать путь Г. Пусть
= X(t), о*?/ = y(t),
откуда
a* df = X'(t) dt, a* dy = Y'(t) dt.
Тогда вектор иг = titi+i отображается в вектор
= I 1 dt[Ui].
Если мы имеем дело с обычным евклидовым скалярным про-
изведением, то длина этого вектора равна
||da[ui]|| = \/X'(ti)2 + y'(tj)2 dt[ui].
6 В русскоязычной литературе такие интегралы называют криволинейны-
ми интегралами первого рода. — Прим. ред.
372
Глава 7. Дифференциальные формы ...
По определению
7
что позволяет написать
fds = lim V а*Ж)\/*'(й)2 + ПМ2 (**+1 - **)• (7-4)
/ N—>oc
J i=0
Это приводит нас к формуле вычисления абсолютного криволи-
нейного интеграла с помощью параметризации:
[ f ds = [Ь a* f(t)yx'fo)2 + Y'(ti)2 dt.
Jr Ja
Если f(P) = 1, то интеграл f ds определяет длину кривой Г.
В более общем случае, если f(P) задает линейную плотность
массы тонкой проволоки, имеющей форму кривой Г, то f f ds
представляет полную массу проволоки.
Есть интересный с точки зрения применения в физике пример
абсолютного линейного интеграла, построенного с помощью неев-
клидова скалярного произведения. Это вычисление собственно-
го времени, связанного с мировой линией движущейся частицы
(рис. 7.24), когда прошедшее время измеряется по часам, дви-
жущимся вместе с частицей. В этом случае значение времени t
вдоль мировой линии всегда растет. Его можно использовать в
качестве параметра и написать
a*t = t, а*(х) = X(t),
откуда
a* dt = dt, a*(dx) = X\t) dt.
Тогда лоренцево длина вектора
7На самом деле длина Si вектора vT не обязана равняться ||da[ui] ||, и
правая часть следующего равенства (7.5) не совпадает с правой частью (7.4).
Правда, при непрерывности f(t) и частных производных Xf(t), Yf(t) пределы
этих правых частей все же равны, но доказательство этого факта требует
кропотливых оценок. — Прим. ред.
Резюме
373
равна а/1 — Xz(i)2 dt[ui]. Поскольку X'(t) есть скорость частицы
v, то получаем интеграл
г
v2 dt,
определяющий собственное время движущейся частицы.
Резюме
А. Криволинейные интегралы
Вы должны уметь объяснить смысл линейного интеграла /гси,
знать его свойства и уметь пользоваться ими.
Вы должны знать процедуру вычисления линейного интегра-
ла с помощью переноса дифференциальной формы, уметь вво-
дить соответствующую параметризацию для заданных траекто-
рий и вычислять криволинейные интегралы.
В. Дифференциалы и дифференциальные формы
Для заданной дифференциальной формы си, определенной на
плоскости, вы должны уметь выяснять, можно ли представить
ее как дифференциал функции f и, если такая функция сущест-
вует, уметь найти ее.
Задачи
7.1. Пусть си = (у cosxy + ех) dx + (х cos ху + 2у) dy.
374
Глава 7. Дифференциальные формы ...
(а) Вычислите Jrcu вдоль участка параболы у = х2 от точки
/0\ тл л
I 0 / Л0 \ 1 / ’ Используйте параметризацию <р, задаваемую
переносом
f Ф*х\ __ ( £ \
\Ф*У ) ~~ V2/ '
(Ь) Вычислите Jr и, если Г — прямая линия, соединяющая на-
чало координат с точкой . Вычислите тот же интеграл,
если путь Г состоит из отрезка 0 < х < а вдоль оси х и от-
резка х = о, 0 < у < /3.
(с) Найдите такую функцию f(x,y), чтобы выполнялось усло-
вие cu = df.
7.2. Пусть снова ш = (г/cos ху + ех) dx + (х cos ху -|- 2у) dy.
(а) Вычислите /г си вдоль участка параболы Г, определенного
формулами
У
t
t2
(b) Найдите такую функцию f(x,y), чтобы cu = df.
7.3. Пусть си == ydx — хdy.
(а) Вычислите Jr си вдоль полуокружности Г от точки J
до точки ( g j • Путь Г определен формулами
— cosi
sint
(b) Покажите явно, что выбрав другую кривую, соединяющую
/-1\ /1\
те же точки I Q / и I q ) ? можно получить другое значе-
ние интеграла от той же формы.
7.4. Пусть си = (15х2у2 — Зу) dx + (10х3у — Зх) dy. Вычислите /г си, где
Г — путь от (—1,0) до (1,0) вдоль полуокружности х2 + у2 = 1,
У > 0.
Задачи
375
7.5. (а) Вычислите /г о;, где о; = dx + 2х dy, Г — участок параболы
х = 1 — у2 между у — — 1 и у = +1, как это показано на
рис. 7.25.
(Ь) Найдите такие константу а и функцию f, для которых вы-
полняется равенство еауш = df.
7.6. (а) Пусть о; = (х2 — 2xy)dx 4- (у2 — 2xy)dy. Вычислите /го/,
где путь Г проходит вдоль участка параболы у = х2 между
точками (-1,1) и (1,1).
(Ь) Пусть а = 30х22/5 dx + 40гг3з/4 dy. Найдите целое число п
и функцию /, для которых выполняется равенство df =
(ху)па.
7.7. Пусть си == 1 Оу2 dx 4- bxy dy.
(а) Вычислите frw, где путь Г проходит по дуге единичного
МА МА /лг
радиуса между точками ( q 1 и ( । I • (Указание: введите
параметр 0 — см. рис. 7.26.)
(Ь) Найдите такое целое число п и функцию f, чтобы выпол-
нялось равенство хпа> = df.
7.8. (а) Покажите, что дифференциальная форма
и = Зху dx + 2х dy
не является дифференциалом никакой функции /.
376
Глава 7. Дифференциальные формы ...
(Ь) Найдите уравнение семейства кривых, зависящих от одного
параметра и обладающих свойством cu(v) = 0 для любо-
го вектора v, касательного к какой-либо из этих кривых.
(Указание: если у = F(t) и v =
то вы можете
написать дифференциальное уравнение для F(t).)
(с) Найдите функции f(x,y) и д(х, у), для которых выполня-
ется равенство df = док (Указание: функция f должна
быть постоянной вдоль кривых, полученных в предыдущем
упражнении.)
7.9. (а) Нарисуйте полуэллипс, заданный уравнением в полярных
координатах
9
5 — 4 cos 0
для 0 < 0 < 7Г.
Вспомнив, что х = rcos0 и у = rsin0, покажите, что этот
полуэллипс есть участок кривой
(х - 4)2 у2
25 9
(Ь) Дифференциальную форму
ху dy — у2 dx
. —
х2 4- у2
выразите в полярных координатах через г, 0, dr и dO.
(с) Вычислите fr cu, где путь Г — полуэллипс из первого пункта
этого упражнения. Воспользуйтесь полярными координата-
ми, где 0 — удобный параметр.
(d) Вычислите /г си в координатах х и у. Удобную параметри-
зацию определяет отображение
4 + 5 cos t \
3cost J ’
О < t < тг.
7.10, (а) Предположим, что и и v — криволинейные координаты в
области D на плоскости. Соответствующий якобиан
Det
dufdx
dv/dx
du/dy\
dv/dyJ
Задачи
377
нигде в области D не обращается в нуль. Пусть ы — гладкая
дифференциальная форма, определенная в области Р, а Г
— кривая в этой области. Покажите, что Jr си имеет одина-
ковое значение, если си и Г выражать через переменные х,
у или через и и v. (Предыдущая задача является примером
этого утверждения.)
(Ь) Пусть путь Г определен в полярных координатах соглас-
но формулам: р == F(0), при этом F(0) > 0 и F(2tt) = F(0).
Покажите, что площадь, заключенная внутри этого замкну-
того пути, равна /гси, где cu = (Указание: Форму си
выразите в декартовых координатах.)
7.11. Состояние газа, заключенного в цилиндр, можно представить
точкой на плоскости, где декартовыми координатами являются Р
(давление) и V (объем). Количество тепла, поглощенного газом
в некотором процессе, заданном траекторией Г, равно Q = Jr си,
где
u = ^PdV + ~VdP.
2 2
(а) Вычислите /г си, где путь Г проходит вдоль ломаной линии,
изображенной на рис. 7.27. Линия последовательно соеди-
няет точки V = 1, Р = 32, затем V = 1, Р — 8 и V = 8,
Р= 1.
378
Глава 7. Дифференциальные формы ...
(Ь) Вычислите интеграл Jr, cu вдоль пути Г', проходящем вдоль
кривой PV5/3 = 32 от точки V — 1, Р = 32 к точке V — 8,
Р-1.
(с) Найдите такую функцию S, чтобы выполнялось равенство
dS - ш/PV.
7.12. (а) Имеется однородная проволока с массой ЛГ, согнутая в по-
луокружность с радиусом R, как это показано на рис. 7.28.
Найдите у-ю координату центра масс этой проволоки и вы-
числите ее момент инерции относительно оси х.
(Ь) Решите ту же задачу в случае, когда линейная плотность
проволоки пропорциональна у, но ее полная масса по-
прежнему равна М.
7.13. Запишите в форме интеграла длину кривой у — (х — 2)3, соеди-
( О
няющей точки I И и I Л на евклидовой плоскости.
7.14. Рассмотрите дифференциальную форму
си = 5у dx + Зх dy.
(а) Найдите такие целые числа тип, для которых выполня-
ется равенство d(xmynaj) — 0.
(b) Для этих целых чисел найдите такую функцию /, чтобы
выполнялось равенство df = хтупси.
(с) Отобразим плоскость uv на плоскость ху так, чтобы
/аА / а2 4- \
^/32 + 2<J-
Перенесите форму си на плоскость uv.
(d) Вычислите J cu вдоль путей Г1 и Гэ, соединяющих точки
/0\ /1\ г
\ 0 / И \ 1 / Г1 состоит из ДВУХ прямых отрезков и
/1\ г
проходит через точку I I, а путь Г2 проходит по двум
/(А
прямым отрезкам через точку ( । I •
(е) Вычислите абсолютный криволинейный интеграл /Г1 ||cu|| ds.
(В ответе один член можно оставить в виде обычного опре-
деленного интеграла.)
Глава 8
Двойные интегралы
Глава 8 продолжает изучение интегрального исчис-
ления. Она посвящена внешним 2-формам и двумер-
ным интегралам, которые им соответствуют. Вводит-
ся определение внешней производной и отмечается ее
инвариантность относительно переноса. Доказывает-
ся двумерный вариант теоремы Стокса, известный как
теорема Грина. Исследуются поверхностные интегра-
лы в трехмерном пространстве.
8.1. Внешняя производная
Мы уже знаем, что дифференциал функции f дает наилучшее
линейное приближение к приращению значения функции при пе-
ремещении ее аргумента от точки Р к точке Р + v. Это можно
записать в форме
d/(P)[v]=/(P + v)-/(P)+O(v),
где при v —> О поправочный член o(v) стремится к нулю быст-
рее, чем длина вектора v. Можно представлять себе, что df яв-
ляется линейной функцией, значение которой на конце вектора
v определяется значениями самой функции f на концах отрез-
ка, заданного вектором v «в пределе», когда v становится очень
малым.
Воспользовавшись аналогичным подходом, можно из 1-формы
т построить 2-форму dr, которая будет называться внешней про-
изводной от т. Эта 2-форма в каждой точке Р будет билинейной
380
Глава 8. Двойные интегралы
функцией двух векторов v и w. Именно, выбрав точку Р, упоря-
доченную пару векторов v и w и 1-форму, мы можем получить
число, проинтегрировав т по параллелограмму, построенному на
векторах v и w, двигаясь сначала «вперед» от Р вдоль перво-
го вектора v, а в конце пути «назад» вдоль второго вектора w
(рис. 8.1).
Рис. 8.1
Рис. 8.2
Если векторы v и w достаточно малы и поведение формы т
в окрестности точки Р достаточно хорошее, то можно ожидать,
что значение этого интеграла будет приблизительно билинейно,
т. е. оно будет зависеть приблизительно линейно от v (при фик-
сированном векторе w) и линейно от w (при фиксированном v).
Обозначим P(/i,fc) параллелограмм, заданный векторами hv и
few (рис. 8.2). Хотелось бы определить dr(P) формулой
I т = hfcdr(P)[v, w] + остаток, (8.1)
Jp(h,k)
где (мы надеемся) остаточный член стремится к нулю быстрее,
чем h при h —> 0 (значение к фиксировано) и быстрее, чем к при
к —> 0 (значение h фиксировано)1.
Если 2-форма dr(P) существует, то она единственна. Доказа-
тельство практически совпадает с доказательством утверждения,
что дифференциал функции единственен. Предположим, что
1Обычно требуется более сильное условие: дробь остаток/Л/с должна стре-
миться к нулю при одновременном стремлении к нулю обоих чисел h, к (см.
раздел 8.8). - - Прим. ред.
8.1. Внешняя производная
381
уравнение (8.1) справедливо для двух разных билинейных функ-
ций dr и dr. Пусть а обозначает их разность. Тогда мы имеем
О = Л&сг[у, w] + остаток.
Разделим это равенство на hk и устремим h к нулю. Тогда полу-
чаем
О = cr[v,w] + ~ Пш(остаток//1).
Но остаток стремится к нулю быстрее /г, следовательно,
a[v, w] = 0. Это значит, что dr не может отличаться от dr.
А теперь займемся проблемой вычисления dr(P) и доказа-
тельством существования 2-формы. Для простоты сначала пред-
положим, что т имеет вид f dx, где f — дважды дифференциру-
емая функция в окрестности точки Р. В этом выражении dx яв-
ляется формой, которая каждому касательному вектору припи-
сывает его х-ю компоненту. В частности, dx[/iv] = h cfcc[v] — hvx,
если v = I Vx |. Вклад в интеграл, получаемый при движении
\vy /
(рис. 8.3) вдоль одной стороны параллелограмма, скажем, от точ-
ки Р к точке Р + /rv, получаемый с помощью параметризации
£ —> Р + thv, равен
[ /(Р + thv)xf(t) dt = [ f(P + thv) dx[/rv] dt
0 Jo
— 7zdx[v] j /(P 4- thv) dt.
Jo
Рис. 8.3
382
Глава 8. Двойные интегралы
Вклад противоположной стороны от точки Р + hv + kw к
точке Р + few получается аналогично. Он равен
—h dx[v] [ /(Р + thv + few) dt.
Jo
Складывая оба члена, мы получаем
—/i<±r[v] [ [/(Р + thv + few) — /(Р + thv)] dt.
Jo
Поскольку мы предположили, что f — дважды дифференцируе-
мая функция, то можно воспользоваться формулой Тейлора
/(Р + thv + few) - /(Р + few) = ^/(p+thv)[fcw] + O(fc2)
и записать суммарный вклад от двух сторон в виде
-/idx[v] [ df^p+thv')[kw]dt + O(hk2').
J о
Вычисление интеграла вдоль других двух сторон дает выра-
жение
4-/cdac[w] j df(p+tkw)[hv]dt + O(kh2').
J о
Собирая вместе все члены, получаем
[ т = —hk ( df(p+thv)\w] dt • dx[v]
JP(h,fc) JO
+ hk f d/(p+tfcw) M dt dx[w] + O(kh2) -I- O(hk2).
Jo
Здесь ^/(p+thv) является вектором-строкой
№(P + thv),^(P + thv)\.
\ox oy J
Согласно нашему предположению о функции /, ее частные про-
изводные дифференцируемы. Следовательно, по теореме о сред-
нем значении
^(Р + ^) = ^(Р)+О(Л),
8.1. Внешняя производная
383
откуда
rf/(P+tftv)[w] = d/p[w] + O(/i).
Интегрирование этого выражения дает
[ df(P+thv) [w] dt = dfo [w] + O(h).
*/ 0
Подставим это в наш интеграл по контуру параллелограмма и
получим
[ т = hk(dfp[v] dx[w] — d/p[w] dx[v]) + O(h2k) + O(hk2).
Jp(h,fc)
Таким образом, мы можем получить выражение (8.1), если поло-
жим
drp[v, w] = d/p[v] dx[w] — d/p[w] dx[v].
Из этого выражения видно, что dr является антисимметричной
функцией своих аргументов, т. е. dr[w,v] = — dr[v, w],
2-форма dr может быть записана короче, если ввести поня-
тие внешнего произведения двух 1-форм. По определению, это
внешнее произведение равно
(ст Л A)[v, w] — a[v]A[w] — a[w]A[v],
где а и А являются 1-формами, a v и w — векторами. Тогда
можно написать
d7p[v,w] = (d/p Adrr)[v,w],
или еще короче
dr = df Л dx.
Из определения внешнего произведения ясно, что
А Л а = —а Л А,
т. е. оно антисимметрично. В частности, су Л а — —а Л а ~ 0, т. е.
произведение 1-формы на себя равно нулю.
Кроме того, очевидно, что
(сг + о>) Л А — (о Л А) + (и Л А),
384
Глава 8. Двойные интегралы
т. е. внешнее произведение дистрибутивно по отношению к опе-
рации сложения.
Теперь рассмотрим 1-форму общего вида: / dx + д dy. Те же
самые соображения, примененные к gdy, дают
d(g dy) = dg Л dy.
Поскольку интеграл от а; линеен по мы получаем
d(J dx + д dy) = df Л dx + dg Л dy.
Это выражение можно доказать непосредственно, исходя из опре-
деления d. Теперь выразим df и dg через dx и dy:
df . df _ , dg . dg .
df = ^-dx + ^-dy; dg = -~~dx+~- dy.
dx dy dx dy
Поскольку dx Л dx = 0 и dy Л dy ~ 0, мы имеем
_ df . . dg . .
dr ~ — dy Adx + — dx A dy.
dy dx
И наконец, поскольку dy Adx — —dx Л dy, получаем
f dg df\
dr = ------— eta A dy.
\dx dy J
В качестве примера возьмем 1-форму
т = х2у2 dx + х3у dy.
Тогда
dr = d(x2y2) Adx + d(x3y) Л dy
= (2xy2 dx + 2x2y dy) Adx + (3x2y dx + x3 dy) A dy
= 2x2y dy Adx + 3x2?/ dx A dy = x2y dx A dy.
В частном случае, когда 1-форма т точная, т. е. т = d</>, мы
получаем, что dr = 0. Это видно из определения dr: поскольку
dr[v,w] является наилучшим линейным приближением к инте-
гралу по контуру параллелограмма f т, и поскольку интеграл
8.1. Внешняя производная
385
от полного дифференциала по замкнутому контуру равен ну-
лю, то (1(с1ф) = 0. Этот результат можно установить и прямым
вычислением:
дФ дФ j
т = аф = — dx + — dy,
дх ду
д^ ф д2 ф
dr = - dy Л dx + - n dx Л dy = 0,
дудх дхду
потому что смешанные частные производные второго порядка
равны. Заметим, что попутно мы получили короткий вариант
определения замкнутой формы: форма т является замкнутой тог-
да и только тогда, когда
dr — 0.
Итак, мы показали, что если f дифференцируема их — ко-
ординатная функция, то d(f dx) = df Л dx. Используем этот ре-
зультат для доказательства более общей формулы
d(fr) = df Л т + f dr,
где f — дифференцируемая функция, ат — дифференцируемая
1-форма. Записав т = gdx + hdy, мы получим /т = (fg)dx +
(fh) dy и, следовательно,
d(fr) = d(fg) Л dx + d(fh) Л dy.
Поэтому
d(/r) = gdf f\dx + f dg /\dx + hdf A dy + f dh /\dy
и мы видим, что
d(fr) — df Л (gdx + hdy) + f(dg f\dx + dh /\ dy),
t. e.
d(fr) = df /\т + f dr.
386 Глава 8. Двойные интегралы
8.2. 2-формы
Поскольку общий вид 1-формы на плоскости — это выражение
f dx + g dy. то самый общий вид произведения двух 1-форм будет
некоторой функцией F(x.y). умноженной на dx Л dy. Назовем
такое выражение 2-формой и будем писать
ст — F(P) dx /\dy = F(x. у) dx A dy.
Значение 2-формы в точке Р. т. е. F(P)dx Л dy. мы будем
рассматривать как правило, которое каждой паре векторов при-
писывает определенное число.
Чтобы лучше понять смысл «постоянной» 2-формы dx Л dy.
вычислим ее сначала для пары единичных векторов (ех.еу). По
определению
dx Л dy[ex. еу] = dx[ex] dy [e^] — dx [ey] dy[ex] = 11 — 0-0 = 1.
Более общая формула:
dx Л dy[hex. кеу] = hk.
Очевидно, что это — площадь (с некоторым знаком) прямоуголь-
ника, построенного на векторах hex и кеу. если площадь пря-
моугольника, построенного на векторах ех и еу. принимается за
единицу (рис. 8.4).
j i
кеу
h&x
Рис. 8.4
Мы можем вычислить dx/\dy для любой упорядоченной пары
векторов (v,w). Запишем v = аех + сеу, w = bex + dey. Если
ввести матрицу А
w = А
8.2. 2-формы
387
то
dx Л dy[v, w] = d#[v] dy[w] — dx[w] dy[v]
= ad — be — Det A.
В общем случае 2-форма а является функцией трех перемен-
ных: Р, v и w. Для фиксированной точки Р она билинейна и ан-
тисимметрична относительно векторов v и w. Если а = F dx/\dy,
то
ct(P)(v5 w) = F(P) Det Д
где v, w и А определены выше. Итак, каждому параллелограмму
с вершиной в точке Р 2-форма сг(Р) приписывает площадь с
определенным знаком — ориентированную площадь.
ckr Л <1у[еж,еу] = +1
dzAdy [e^ej = -1
Рис. 8.5
Очень важно помнить, что величина dx Л dy для данного па-
раллелограмма зависит от его ориентации, которая определяется
порядком векторов, задающих его. Для ориентированного пря-
моугольника, соответствующего векторам [ex,ej, dx /\dy = 1, а
dy /\dx = —1. Для того же прямоугольника, но с противополож-
ной ориентацией, соответствующей порядку [еу,ех], dx Ady = —1
и dy Л dx = +1 (см. рис. 8.5). В общем случае, чтобы получить
2-форму т для параллелограмма, построенного на векторах v и
w, надо задать его ориентацию, т. е. выбрать, какой вектор будет
«первым», а после этого вычислять либо t[v,w], либо t[w, v].
388
Глава 8. Двойные интегралы
8.3. Интегрирование 2-форм
Итак, 2-форма т приписывает число каждому малому ориен-
тированному параллелограмму (паре векторов), точно так же,
как 1-форма приписывает число каждому малому направлен-
ному отрезку линии (вектору). Поэтому мы можем интегриро-
вать 2-формы по области R подобно тому, как мы интегрировали
1-формы по путям.
У
Рис. 8.6
Приступим к построению такого интеграла. Возьмем прямо-
угольник Д, ориентированный так, как показано на рис. 8.6, раз-
биваем его на NxNy маленьких прямоугольников и составляем
римановы суммы
SNxNy = 52
г=0 j—0
b — a d — c
~Wey.
Если
a — F(x, y) dx A dy,
TO
b — a
d — c
s«.4, N
Nx-lNy-l
52 52 J/j)>
г=0 j=0
где
Z 7
^ = a+—(6-a), У3=с+—(d-c).
ж 1 у
8.3. Интегрирование 2-форм
389
Теперь определим интеграл от 2-формы т по ориентированной
области R согласно формуле
lim Snxn ,
Nx->oo
Ny^oo
при условии, что предел не зависит от характера измельчения
разбиения2.
Двойной интеграл от F(x, у) dx Л dy по области R можно вы-
числять как «повторный» интеграл. Чтобы вычислить выраже-
ние
г Л . №-1^-1
I = lim —— • ——
М^оо у г=° 7=0
сначала просуммируем по j для каждого фиксированного значе-
ния i и прежде, чем суммировать по г, устремим Ny оо. По
определению обычного риманова интеграла от функции одной
переменной
j _ у rd
lira —— F(xi,yj) = / F(xi,y)dy.
Ny Jc
Следовательно,
h — n Ny 3 rd
/=vlim ~W~ 52 / F{Xi,y}dy.
Nx^<x> Nx Jc
Рассматривая предел этой римановой суммы как интеграл,
мы можем написать
I = j (J F(x,y)dyj dx,
2Авторы не останавливаются на вопросе о том, для каких функций F(x, у)
написанный предел существует. На самом деле для этого достаточно, чтобы
F(x,y) была непрерывной на прямоугольнике R. То же самое относится к
рассматриваемому ниже вопросу о сведении двойного интеграла к повторно-
му. — Прим, ред.
390
Глава 8. Двойные интегралы
т. е. наш двойной интеграл I мы выразим через «повторный»
интеграл, который можно вычислять методами интегрального
исчисления функций одной переменной. Точно так же мы можем
сначала просуммировать по г, а потом по j, В результате получим
rd / rb \
При вычислении интеграла от 2-формы т по ориентированной
области R мы должны думать об ориентации прямоугольника.
Если R ориентирован так, что х будет «первой» координатой, а у
— «второй», как это показано на рис. 8.7(a), мы должны писать
т = F(x, у) dx Л dy и вычислять повторный интеграл
или
Рис. 8.7. (а) Координата х — первая. (Ь) Координата у — первая.
Если R ориентирован так, что первой координатой будет $/,
как это показано на рис. 8.7(b), мы можем написать
т = G(y, х) dy Л dx (где G(y, х) = -F(x, у))
и вычислять повторный интеграл
rb / rd \ rd / rb
I ( / G(y, x) dy I dx или / ( /
8.3. Интегрирование 2-форм
391
Изменение ориентации прямоугольника R приводит к изменению
знака интеграла.
В случае криволинейных интегралов понятие ориентации (и
почему изменяется знак при изменении ориентации) интуитив-
но ясно. (Например, для случая силового поля криволинейный
интеграл дает работу, выполняемую при движении вдоль пути.
Прибор регистрирует разность энергий Ев — Еа- При изменении
направления движения прибор будет показывать изменение энер-
гии Еа — Ев-) Важно иметь аналогичный интуитивный пример
для наших двумерных интегралов. Вот такой пример. Ориента-
ция плоскости изменяется в зависимости от того, смотрим мы на
нее сверху или снизу. Предположим, что в трехмерном простран-
стве есть плоскость ху при z = 0. Мы смотрим на эту плоскость
сверху и видим вращение по часовой стрелке. Но если смотреть на
эту же плоскость снизу, то то же самое вращение мы будем видеть
как вращение против часовой стрелки (рис. 8.8). Можно сказать,
что выбор ориентации плоскости в трехмерном пространстве тес-
но связан с выбором «стороны» этой плоскости. Допустим, что
через поверхность течет какое-то вещество. Например, поверх-
ность — это клеточная мембрана, и нам интересно знать, какое
количество ионов проходят через нее.
Конечно, используя слово «через», мы должны сделать вы-
бор: переход в каком направлении мы считаем со знаком «+», а
в каком — со знаком «—». Итак, для измерения полного потока
через поверхность мы должны задать ее ориентацию. Изменение
ориентации приводит к изменению знака потока и, соответствен-
но, знака нашего интеграла.
Абсолютные двойные интегралы. Часто необходимо вычис-
лять абсолютный двойной интеграл, который вычисляется по
392
Глава 8. Двойные интегралы
области, не имеющей ориентации3. Если, например, а обозначает
плотность плоской пластины (массу на единицу площади), име-
ющей форму прямоугольника R, то масса всей пластины опреде-
ляется двойным интегралом
f adA.
Jr
Очевидно, что М должна быть положительным числом, и ори-
ентация прямоугольника R не имеет значения (рис. 8.9). В этом
интеграле dA можно считать функцией, которая любому мало-
му параллелограмму приписывает его обычную геометрическую
площадь, т. е. абсолютное значение его ориентированной площа-
ди. В качестве координат выберем х и у. Тогда dA = dxdy или
dA = dydx, порядок координат не важен.
И
_|---------►
b х
а
Рис. 8.9
Абсолютный интеграл fRF(x,y)dxdy вычисляется как по-
вторный интеграл
У (У F(x,y)dy^ dx,
или как 4 ь
/ ( F(x, у) dx j dy.
J с \ J а /
Важно отметить, что существуют два разных типа геометри-
ческих объектов: выражения типа a dA, которые можно называть
3В русскоязычной литературе такие интегралы называют интегралами
первого рода. Интегралы, рассматривавшиеся выше, в русскоязычной лите-
ратуре называют интегралами второго рода. — Прим. ред.
8.3. Интегрирование 2-форм
393
плотностями, при этом интегрирование по области R не зависит
от ее ориентации; и 2-формы г — F dx /\dy, интеграл от которых
зависит от ориентации. У них совершенно различный физический
смысл. Позднее мы увидим, что они по-разному ведут себя при
замене переменных или переносе.
Двойные интегралы по произвольной области как по-
вторные интегралы. Двойные интегралы можно вычислять
как повторные для любой области, ограниченной прямыми х =
const и графиками функций, которые не пересекаются. Напри-
мер, на рис. 8.10 изображена область, ограниченная слева пря-
мой х — а, справа прямой х = Ь, сверху линией у = ф(х) и снизу
линией у =
В этом случае справедлива формула4:
г fb / гф(х) \
/ F(x,y)dxdy — / I / F(x,y) j dydx.
Jr Ja \Ji/>(x) J
В качестве примера вычислим интеграл I = fR 2ху dx dy по чет-
верти круга, ограниченной прямыми х — 0, х = а, у = 0 и дугой
4 Отсутствующее у авторов определение левой части этой формулы мож-
но дать так: дополним область R до координатного прямоугольника R и
доопределим функцию F(x,y) нулем вне R, получим функцию F на R. Тог-
да можно свести дело к предыдущему понятию, определив fRFdxdy как
Fdxdy. Для следующего ниже равенства достаточны непрерывность и
ограниченность на R функции F и непрерывность ф(х) и ф(х). — Прим, ред.
394
Глава 8. Двойные интегралы
Рис. 8.11
у — у/а2 — х2 (рис. 8.11). Интегрируя сначала по у, а потом по х,
получаем
ра / г у/ (а2—sc2) \
I — / I / ^xydy I dx
Jo \Jo )
[aг 2iу/(a2—sc2) , fa / 2 2\ j 1 3
= / [ХУ ]o dx — x(ar - x2) dx = -ar.
Jo Jo 4
Иногда двойной интеграл легче вычислять, если изменить по-
рядок интегрирования и сначала выполнить интегрирование по
х. Например, интеграл I = fsF(x,y)dxdy по области S, изобра-
женной на рис. 8.12 (который совсем не просто получить, если
сначала проинтегрировать по у), может быть вычислен так:.
rd / \
I — / I / F(x, у) dx j dy.
J с \Ja(y) J
Даже для областей, не имеющих форму прямоугольника,
двойной интеграл часто можно вычислять как повторный ин-
теграл при обоих порядках интегрирования. Предположим, на-
пример, что нам надо вычислить I = fRydxdy по области Я,
заключенной между параболой у = х2 и прямой у = х (рис. 8.13).
Сначала проинтегрируем по у, а потом по х:
8.3. Интегрирование 2-форм
395
Рис. 8.13
Рис. 8.14
Эту же область можно заключить между прямой х = у и пара-
болой х = у/у, тогда сначала интегрируем по х, затем по у:
1 = L (/ d^ydy = /0^y-y)ydy = fQ^-y^dy = ^
Иногда, чтобы изменить порядок интегрирования, имеет
смысл рассматривать повторный интеграл как двойной. Напри-
мер, интеграл
I — j е~у2 dy^ dx
довольно сложно вычислять в таком виде. Однако, его можно
записать как двойной интеграл
I — f е~у2 dx dy,
Jr
где область R заключена между прямыми х ~ О, у ~ 1 и у — х
(рис. 8.14).
В этом двойном интеграле проще сначала проинтегрировать
по х, а потом по у.
1 =
Тогда
I = [ Уе~у2 dy= [ du = ^(1 - е-1).
Jo Jo 1 1
396
Глава 8. Двойные интегралы
Заметим, что в этом примере исходный интеграл можно вы-
числить по-другому. Введем первообразную функции е~у
G(y) = [ е~*2 dt,
Jo
так что
G'(y) = е~У2.
Тогда
1= [ dx f е~у2 dy= [ (G(l) - (ЭД) dx.
Jo Jx Jo
Интегрирование по частям дает
I = [(G(l) - G(x))x]J - C x{-GJ(x))dx.
Jo
Первый член в правой части равенства обращается в нуль на
обоих пределах. Поскольку G'(x) = е~х , мы получаем
Г1 2 1
1=1 хе~х dx = -(1 — е-1),
Jo 2
что совпадает с результатом, полученным ранее.
Иногда для вычисления интеграла по х и у необходимо раз-
делить область интегрирования на части.
Рис. 8.15
8.4. Ориентация
397
Например, чтобы вычислить f F(x^y)dxdy по сектору 7?,
изображенному на рис. 8.15, разделим его на области и Т?2-
Тогда можно написать
/ F(x,y)dxdy = / F(x,y)dxdy + / F(x,y)dxdy
Jr J Ri J R2
и каждый интеграл свести к повторному. Существует более есте-
ственный способ вычисления этого интеграла — ввести полярные
координаты. Важную проблему замены переменных мы обсудим
в разделе 8.5.
8.4. Ориентация
Мы уже знаем, что знак криволинейного интеграла зависит от
ориентации пути, а знак интеграла от 2-формы зависит от ори-
ентации плоскости. Надеемся, что у читателя появилось интуи-
тивное ощущение того, что означает ориентация. В то же вре-
мя мы понимаем, что необходимо дать точное математическое
определение, что и будет сделано в этом разделе. Прежде чем
углубиться в абстрактные математические определения, давайте
рассмотрим пример. Интуитивно ясно, что на плоскости имеются
две возможные ориентации (рис. 8.16).
Рис. 8.16
Мы не можем дать внутренние характеристики этих ориен-
таций, но точно знаем, что они разные и что их только две. То
же самое можно сказать о прямой (рис. 8.17) или о трехмерном
пространстве, где существуют правая и левая системы координат
(рис. 8.18).
398
Глава 8. Двойные интегралы
Рис. 8.18
Сначала рассмотрим плоскость, где нам известно (раздел 1.9),
что невырожденная матрица А сохраняет ориентацию или изме-
няет ее на противоположную в зависимости от знака Det А. Это
дает нам ключ для общего определения5.
Пусть V — абстрактное двумерное векторное пространство.
Как мы уже видели в конце главы 1, задание базиса в простран-
стве V равносильно заданию изоморфизма L : V —> R2. Если L и
Lf — два таких базиса, то
Lf = BL,
где В — невырожденная матрица 2x2 (рис. 8.19).
Назовем базисы L и Lf подобными, если Det В > 0, и противо-
положными, если Det В < 0. Утверждается, что множество всех
базисов в пространстве V распадается на два подмножества, ко-
торые обозначим 7ч и Все базисы подмножества 7ч взаимно
5Позднее мы увидим, что это определение работает в n-мерном векторном
пространстве при любом п.
8.4. Ориентация
399
подобны, так же, как и все базисы подмножества Каждый ба-
зис из Ji противоположен каждому базису из Действительно,
выберем базис L\. Пусть подмножество Ji содержит базисы вида
B£i, Det В > О,
а подмножество J2 — базисы вида
BLi, DetB<0.
Любой базис принадлежит одному из этих подмножеств. Если
два базиса L и Lf принадлежат Ji, то
L - BLi, L' = BfLi, Det В > 0, Det Bf > О,
следовательно,
L' = B'B^L и Det В'В”1 = Det B'(Det В)"1 > О,
а это значит, что L и L' подобны. Если в этих выражениях
Det В < 0 и Det В' < 0, то базисы L и Lf подобны. В случае, когда
один определитель положителен, а другой отрицателен, базисы L
и Lf противоположны. Итак, если J обозначает множество всех
базисов в пространстве V, то мы имеем
J = Ji U J2, Ji П J2 — 0.
Выбор ориентации в пространстве V означает выбор одного
из этих подмножеств. Другими словами, по определению ориен-
тация в пространстве V — это такое подмножество базисов V,
что любые два базиса из подмножества подобны, и любой базис,
подобный базису из подмножества, тоже принадлежит этому под-
множеству. Отметим, что выбор базиса L в пространстве V опре-
деляет ориентацию пространства, т. е. множество всех базисов,
подобных L. Итак, пусть мы выбрали ориентацию пространства
V. Тогда базис L называется хорошим или положительным, ес-
ли он принадлежит выбранному подмножеству базисов, и плохим
или отрицательным, если нет. Таким образом, раз мы выбрали
ориентацию, то любой базис становится либо хорошим, либо пло-
хим. (Конечно, другой выбор ориентации изменяет эту класси-
фикацию на противоположную.)
400
Глава 8. Двойные интегралы
V----—
М
Ж2
Рис. 8.20
V —-—
L М
R2-----► R2
С
Рис. 8.21
Пусть W — другое векторное пространство и пусть А : V
W — линейный изоморфизм, т. е. существует обратное линейное
отображение А-1 : W —> V (см. рис. 8.20). Предположим, что мы
выбрали ориентацию Оу в пространстве V и ориентацию Ow в
пространстве W. Пусть М Е Ow — хороший базис в пространст-
ве W. Тогда М : W R2, следовательно, М о А — изоморфизм,
т. е. задает базис в пространстве V. Итак, существуют две воз-
можности — базис М о А либо хороший, либо плохой. Давайте
посмотрим на эту альтернативу по-другому. Пусть L — хороший
базис в пространстве У. Обозначим
С = MatL>M(A) = MAL~l
Матрица С = MAL~l — это матрица перехода от базиса МА
к базису L (рис. 8.21); другими словами,
МА = CL.
Итак, базис МА будет хорошим тогда и только тогда, когда
Det С > 0. Если базис L заменить на Lf = B^L (DetBi > 0) и
М заменить на Mf = В2М (Det В2 > 0), то
С = M'AlT1 = B2MAL~1B^1 = В2СВ^.
Тогда
Det С' = Det В2 Det С Det Bf1
имеет тот же знак, что и Det О'. Таким образом, знак Det С не
зависит от частного выбора L Е Оу и М Е Оуу>
Если Det С > 0, мы будем говорить, что отображение А со-
храняет ориентацию (или положительно). Если же Det С < 0,
8.5. Перенос и интегрирование 2-форм
401
мы говорим, что А изменяет ориентацию (или отрицательно).
А А'
Предположим, что V —> W и W —► Z — два линейных изомор-
физма, и мы выбрали ориентацию во всех трех пространствах.
Тогда легко проверить, что
о если А и А' сохраняют ориентацию, то А'о А тоже сохраняет
ориентацию;
о если оба изоморфизма А и А' меняют ориентацию, то А'о А
ее сохраняет;
о если один изоморфизм сохраняет ориентацию, а другой из-
меняет, то А' о А изменяет ориентацию.
Пусть ф : V —► W — дифференцируемое отображение. Тогда
в каждой точке р Е V дифференциал (1фр : V —► W — линейное
отображение. Мы говорим, что ф сохраняет ориентацию, если в
каждой точке дифференциал (1фр является линейным отображе-
нием, сохраняющим ориентацию. (В частности, мы предполагаем,
что (1фр — линейный изоморфизм для каждой точки р.)
До сих пор мы предполагали, что пространство V — двумер-
ное. Но это не имеет значения. Например, если V — трехмерное
пространство, то все определения работают. Просто надо знать,
что матрица 3x3 обратима тогда и только тогда, когда ее опре-
делитель не равен нулю, что любые три линейно независимые
вектора в трехмерном пространстве V образуют базис, т. е. опре-
деляют изоморфизм с R3. Тогда все рассуждения, приведенные в
конце главы 1, применимы и здесь. Такая же ситуация в п-мерном
пространстве — требуется определение размерности п и опреде-
лителя матрицы п х п. Эти вопросы мы будем обсуждать в гла-
вах 10 и 11. (В пространстве одного измерения базисом является
ненулевой вектор, матрица 1x1- это просто число а, которое
рассматривается как определитель этой матрицы.)
8.5. Перенос и интегрирование 2-форм
Чтобы упростить вычисление двойного интеграла, часто вводят-
ся новые, более удобные координаты. Например, область W,
402
Глава 8. Двойные интегралы
изображенная в координатах х,у на рис. 8.22, становится пря-
моугольником R в системе координат г, 0. Переход от одной сис-
темы координат к другой осуществляется в этом случае с помо-
щью известного преобразования о, которое дается формулами
= г cos# и а*у = г sin#.
Рис. 8.22
Мы можем использовать это преобразование и свести двой-
ной интеграл по ориентированной области jw к интегралу от
2-формы в плоскости г, 0. Определим перенос 2-формы а*т так,
что если W = а(71), то
Для определения переноса 2-формы мы расширим определе-
ние переноса от 1-формы очевидным образом. Для 1-формы А мы
определяли перенос а* А согласно формуле
a*A(p)[v] = A(a(p))[da[v]].
А теперь определим перенос 2-формы, применяя da к обоим
векторам аргумента т (рис. 8.23). Таким образом, по определению
a*T(p)[v,w] = r(a(p))[da[v],da[w]].
Это определение гарантирует, что, как будет доказано, фор-
мула fRa*r ~ т спРавеДлива для любой прямоугольной об-
ласти /?, при условии, конечно, что а дифференцируемо, сохраня-
ет ориентацию и оба интеграла существуют. Для доказательства
8.5. Перенос и интегрирование 2-форм
403
Рис. 8.24
мы будем аппроксимировать интеграл fRa*r римановой суммой
по большому числу малых прямоугольников (рис. 8.24).
Вклад в эту сумму прямоугольника с вершиной в точке р ра-
вен a*r(p)[/iv, few]. По нашему определению переноса 2-формы
это равно r(a(p))[da[ftv],da[fcw]], т. е. значению формы т на па-
раллелограмме, который является наилучшим линейным прибли-
жением к образу прямоугольника, построенного на векторах hv
и A;w при преобразовании а.
Конечно, образ прямоугольника при преобразовании а не яв-
ляется точным параллелограммом (рис. 8.25) и величина
T(a(p))[da(/zv), da(kw)]
не будет точно равна интегралу от т по образу прямоугольника.
Таким образом, у нас возникнут погрешности двух типов: мы
заменяем образ прямоугольника на параллелограмм (обозначим
его Р), так что
0) /«(прямоуг.) заменяем на fp,
И
(ii) fp заменяем на r(a(p))[da(hv), da(fcw)].
404
Глава 8. Двойные интегралы
Рис. 8.25
Если т непрерывна, то погрешность типа (ii) будет o(hk). Если
т имеет равномерно ограниченные первые производные во всей
области, ограниченные, скажем, числом к, то
|r(q) - т(а(р))| < n(h2 + fc2)1/2 для любого q в Р.
Тогда погрешность типа (ii) будет не больше, чем
k(/i2 + fc2)1/2^.
Погрешность типа (i) можно оценить, исходя из формулы Тейло-
ра, заменив, например, искривленный образ каждой стороны на
аппроксимирующую прямую линию. Предполагая, что первая и
вторая производные а ограничены в области Л, можно получить,
что погрешность оценивается сверху суммой слагаемых вида h2k
и hk2, умноженных на некоторую константу. Отсюда можно по-
лучить оценку
a*(r(pi))[hv,/iw] = I т + погрешность,
Уа(прямоуг.)
где
(погрешность! < C^h2 + А:2)1/2 х (площадь К),
Суммируя по всем прямоугольникам, получаем
a*(r(pj)[/iv,/zw] = I т + погрешность,
Л(Я)
где
(погрешность] < C(h2 + fc2)1/2 х (площадь R).
8.5. Перенос и интегрирование 2-форм
405
Если мы будем неограниченно измельчать разбиение, то сумма
слева стремится к а погрешность справа стремится к ну-
лю. Отсюда следует, что
Более аккуратное доказательство этого важного результата,
не требующее таких строгих ограничений на а и г, справедливое
для всех п, читатель может найти в книге Loomis and Sternberg,
Advanced Calculus, раздел 8.11. Мы вообще рекомендуем для изу-
чения теории интегрирования главу 8 этой книги (ее можно чи-
тать независимо от других).
Теперь необходимо разработать процедуру вычисления пере-
носа от 2-форм. Поскольку любая 2-форма на плоскости выра-
жается в виде произведения двух 1-форм, сначала вычисляем
а* (Л Л <т), где Айа обозначают 1-формы. По определению
а*(А Л a)[v, w] = (А Л a)[da[v],da[w]]
= A[da[v]]a[da[w]] - A[da[w]]cr[da[v]].
С другой стороны,
(a* A Aa*a)[v, w] = a*A[v]a*a[w] - a*A[w]a*a[v].
Согласно определению переноса для 1-формы, a*A[v] = A[da[v]].
Отсюда следует, что
а*(А Л а) = а*А Л а*сг,
т. е. операция переноса коммутирует с внешним произведением.
Поскольку самый общий вид 2-формы на плоскости ху — это
т = F dx /\dy,
мы немедленно получаем, что
а*т = (oi*jF) d(a*x) Л d(a*y).
406
Глава 8. Двойные интегралы
Если, например, а*х = rcos0, а*у = rsin0, то
d(a*x) Л d(a*y) = (cos 0 dr — г sin 0 d0) Л (sin 0 dr + r cos 0 d0)
— rdr Л d0.
Итак, мы установили, что формула перехода от декартовых
координат к полярным имеет вид
I (a*F)(r,0)r dr Л d0 — [ F(x,y)dx/\ dy.
JR Ja(R)
2-форма r dr /\d0 каждому маленькому параллелограмму на плос-
кости г, 0 ставит в соответствие не его ориентированную площадь
(что делает dr Л d0), а ориентированную площадь его образа в
плоскости ху, получившегося в результате преобразования а.
Теперь мы можем получить формулу замены переменных для
ориентированных двойных интегралов в общем случае. Пусть
R — ориентированная область в плоскости uv, которую диффе-
ренцируемое преобразование а переводит в ориентированную об-
ласть a(R) на плоскости ху (рис. 8.26).
Рис. 8.26
Преобразование а задается с помощью переноса для коорди-
натных функций х и у:
а*х = X(u,v), а*у = Y(u,v).
Тогда
. 5(а*х) J д(а*х) J дХ J дХ
d(a х) = —-—- du Ч-----—- dv = du + -7— dv.
ди dv ди dv
„ * А 3(а*у) Э(а*у) dY dY
d(a у) = —-—- du Ч---—- dv = —du + — dv.
ди dv ди dv
8.5. Перенос и интегрирование 2-форм
407
2-форма т на плоскости ху записывается в виде т — F{x, у) dx Л
dy. Перенос этой 2-формы равен
а*т = a*Fd(a*x) Л d{a*y)
= a*F
д{а*х) д{а*у)
ди dv
<Э(а*х) д(а*у)
dv ди
du Л dv,
или
а*т = F(X(u, v),y(w, v))
~дХ dY
ди dv
дХ dY
dv ди
du Л dv.
Множитель в квадратных скобках является детерминантом мат-
рицы Якоби {якобиана) J, который выражает da в выбранных
координатах,
_ (д{а*х)/ди d{a*x)/dv\ _ fdX/du dX/dv\
\д{а*у)/ди d{a*y)/dvj \дУ/ди dY/dvj
Следовательно, мы можем написать
I F dx Ady = I a*F Det J du A dv.
Jot(R') JR
Это равенство совершенно естественно. Поскольку Det J являет-
ся множителем, «преобразующим площадь» для линейного пре-
образования do, то Det J du Adv каждой малой области на плос-
кости ставит в соответствие ориентированную площадь его
образа в плоскости ху. Если порядок и и v определяется ориента-
цией /?, а порядок х и у — ориентацией си(Д), причем а сохраняет
ориентацию, то якобиан J будет иметь положительный определи-
тель. Изменение порядка и и v (или порядка хну) соответствует
изменению ориентации на плоскости uv (на плоскости ху). При
этом столбцы или строки J меняются местами, что вызывает из-
менение знака Det J.
В качестве примера рассмотрим вычисление площади ориен-
тированной области IV, ограниченной осью х, прямой у = тх,
гиперболой х2 — у2, — 1 и гиперболой х2 — у2 = 4 (рис. 8.27, 8.28).
Чтобы это сделать, напишем W = a(R), где а*х — wcoshv и
408
Глава 8. Двойные интегралы
а*у = u sinh v. Отображение а переводит ориентированный пря-
моугольник R, заданный неравенствами
1 < и < 2, 0 < v < arctanhm,
в область W. Например, вертикальный отрезок прямой и = 2
отображается в кусок гиперболы х2 — у2 = 4.
Рис. 8.27
Рис. 8.28
Поскольку в ориентации области W первой координатой яв-
ляется х, ее площадь А = fw dx Л dy. Выполнив перенос, по-
лучаем А = fRa*(dx Л dy) = J^Det J du A dv. Здесь a*(dx Л
dy) = d(u cosh v) A d(u sinh v) = (cosh v du + sinh v dv) A (sinh v du +
и cosh v dv) = и cosh2 v du A dv + и sinh2 v dv A du = и du A dv, сле-
довательно,
r /*tanh 1 m 3
A~ I и du /\dv= I и du I dv = - tanh”1 m.
Jr Ji Jo 2
С другой стороны, мы можем вычислить
Det J = Det
cosh v
sinhv
'usinhv
и cosh v
= и
и получить тот же самый интеграл А = fRudu Л dv.
Мы видим, что секрет полезности преобразования коорди-
нат состоит в том, что границы области W становятся образа-
ми сторон прямоугольника на плоскости uv. Если, например, W
— треугольник, заключенный между осями координат и прямой
8.5. Перенос и интегрирование 2-форм
409
х + у = 1, то полезным преобразованием координат будет та-
кое, которое переводит отрезки прямых и = const с фиксиро-
ванным интервалом по v в отрезки х + у — const между осями
координат. Такое преобразование координат описывается форму-
лами: а*х = uv, а*у = — v), которые обладают свойством
а*(х + у) = и. Читателю рекомендуется проверить, что а преоб-
разует квадрат единичной площади R на плоскости ии в область
W. Если в ориентации R сделать v первой координатой, то ори-
ентация а(7?) будет согласована с ориентацией W. Итак, если v
— первая координата, то якобиан
/ d(a*x)/dv
\d(a*y)/dv
д(а*х)/ди\ ( и v
д(а*у)/ди) ~~ \—и 1 — v
имеет положительный определитель, равный и, что подтвержда-
ет предыдущее утверждение. (Если первой координатой считать
и, то Det J = —и.)
Используем это преобразование для вычисления интеграла
Г е~(х+у)
1=1 ——— dx Л dy,
Jw y/ху
который довольно сложно получить как повторный интеграл по
х и у. Перейдем к новым переменным. Получаем
е~и _ е~и
y/u2v(l W
1
y/v(l - V)
410
Глава 8. Двойные интегралы
и a*(dx Л dy) = (udv + vdu) Л (—udv + (1 — v) du) = и dv A du.
Тогда на плоскости uv имеем
г e~u
1=1 7---- — dv Л du.
Jr v^(1 - v)
Порядок дифференциалов dv A du под знаком интеграла связан с
тем, что в ориентации R первой координатой является v. Окон-
чательно получаем
1= С е~и du Л -=£= = (1 - е-1)тг.
Jo Jo vMl - vj
(При вычислении второго интеграла мы воспользовались форму-
лой
/dv . , „ .
. = = — arcsin(—2v -I-1).)
>/v(l - v)
Наконец, перейдем к задаче замены переменных для вычисле-
ния абсолютного двойного интеграла I = fw F dxdy. Для этого
сначала преобразуем этот интеграл в ориентированный двойной
интеграл fw F dx Л dy, соответствующий ориентации W, для ко-
торой первой координатой является х.
Теперь напишем W как a(R) и зададим ориентацию R
(рис. 8.30). Если Det J | ) положителен, то выберем на R
у u, v J
ориентацию, при которой первой координатой является и. Тогда
o*F(Det J)du /\dv — J a*F(Det J) du dv.
( R )
\ неориент. J
8.6. 2-формы в трехмерном пространстве
411
Если Det J ( ) отрицателен, то зададим на R ориентацию,
\u, v /
при которой первой координатой является v. Тогда
У a*F(Det J) dv Л du — — a*F(Det J) dudv.
R \ ( cR \
первая J \ неориент. /
В обоих случаях можно брать абсолютное значение Det J:
(х.и\
—
U, V/
dudv.
При этом не возникает вопроса об ориентации или о порядке
переменных интегрирования. Перестановка х и у или и и v не
влияет на абсолютное значение Det J.
В главе 15 мы обсудим интегрирование форм более высоких
степеней.
8.6. 2-формы в трехмерном пространстве
В предыдущем параграфе мы определили понятие переноса для
2-форм. При этом правила вычисления очень простые: если lji и
си2 — линейные дифференциальные формы, то
Л а>2) = Ф*^1 Л ф*а>2.
Если f — функция иг — 2-форма, то
ФЧМ = Ф\Г)Ф*т.
Если Т1 И Т2 — 2-формы, то
0*(Т1 4- Т2) = Ф*Т\ + </>*Т2.
Таким образом, при работе с дифференциальными формами со-
храняются все обычные свойства алгебраических операций. Кро-
ме того, мы определили линейный оператор d, преобразующий
1-формы в 2-формы:
d(f dg) = df Л dg,
412
Глава 8. Двойные интегралы
или в более общем виде:
d(fcu) = df Л uj + f du,
удовлетворяющий условию
4- CJ2) = d^i + <^2-
Перенос ф* коммутирует с оператором d в том смысле, что
</>*(<#) = dф*f, где f ~ функция
и
ф*(1и ~ dф*u, где и — 1-форма.
2-формой в трехмерном пространстве (в декартовых коорди-
натах х, у, г) мы по определению будем называть выражение
вида
a dx Л dy + b dx Л dz 4- с dy Л dz,
где а, b и с — функции. Если дана 1-форма
и = Adx 4- Bdy + Cdz,
то правила для внешней производной d и для внешнего умноже-
ния дают
dw = dA Л dx 4- dB Л dy + dC Л dz
dA J дА dA \ J
— dx 4- — dy + — dz] Adx
dx dy dz J
(dB J dB J OB \
+ \-z~dx + —dy + —-dz] Ady
\ dx dy dz J
(dC dC dC , \ .
+ — dx 4- —- dy 4- -тг- dz ] Adz
\ dx dy dz j
dB 0A\ (dC dA\, .
dx dy J \ dx dz J
(dC dB\ л
+ я----— I dy Л dz.
\dy dz J
Если ф : R2 —> R3 и т — 2-форма в пространстве R3, то ф*т будет
2-формой в пространстве R2.
8.7. Различие между 2-формами и плотностями
413
Если R — некоторая область в R2 и мы выбрали в ней ориен-
тацию, то можно написать который рассматривается как
интеграл от т по ориентированной поверхности а(Д).
8.7. Различие между
2-формами и плотностями
Вернемся в двумерное пространство. Мы помним, что перенос
а*т определен для любой 2-формы т. Другими словами, если а
отображает плоскость uv в плоскость ху, то
a*(Jdx /\dy) = (а*/) • (Det J)du Adv, (8.2)
где якобиан перехода J определяется матрицей
dai/du
даъ/ди daz/dv J ’
а —
Эта формула верна для любого дифференцируемого отобра-
жения а. Кроме того, мы доказали, что если а — взаимно-
однозначное отображение, сохраняющее ориентацию, то
(8.3)
Это верно для интегралов от 2-форм, когда ориентация имеет
значение. Предположим, однако, что мы хотим вычислить абсо-
лютный интеграл. Тогда выбор ориентации не имеет значения,
но формула для замены переменных или перенос для выражения
414
Глава 8. Двойные интегралы
f dA или fdxdy не будет совпадать с (8.2). Давайте вернемся
назад, к доказательству формулы замены переменных. Тогда ин-
теграл /л(прямоуг ) мы заменяли на
r(P)[cfa(7iv), da(fcw)]
= f(P) х ориентированную площадь прямоугольника.
Очевидно, что в случае вычисления абсолютного интеграла мы
должны заменить ориентированную площадь на абсолютное зна-
чение этой площади. Таким образом, в формуле (8.2) надо напи-
сать
a* (fdxdy) = а*/ • | Det J\ dudv. (8.4)
Читателю предлагается проверить в качестве поучительного
упражнения, что если а — взаимно-однозначное отображение,
то
/ a* (fdxdy) — / fdxdy
Jr Ja(R)
независимо от ориентации.
Итак, 2-формы г = f dx A dy и плотности f dx dy являются
совершенно разными объектами — при замене переменных они
преобразуются по-разному. Например, плотность может быть по-
ложительной и отрицательной (плотность электрического заря-
да): если f > 0, то при замене переменных fdxdy становится
а*(У)| Det J\ dudv и а* f • | Det J\ по-прежнему положительна (ес-
ли Det J ф 0, что выполняется при дифференцируемости а-1).
Однако, не имеет смысла задавать вопрос о знаке 2-формы т, по-
тому что Det J, входящий в (8.2), может быть и положительным,
и отрицательным. Плотности и 2-формы совпадают, только если
мы выбрали ориентацию и делаем замену переменных, сохраня-
ющую эту ориентацию (для них Det J > 0).
8.8. Формула Грина на плоскости
415
8.8. Формула Грина на плоскости
Рассматривая криволинейные интегралы, мы уже встречались с
обобщением фундаментальной теоремы интегрального исчисле-
ния — формулы Ньютона-Лейбница, а именно, с формулой
где криволинейная трактория 7 проходит от точки А к точке В
(рис. 8.32). Эта теорема связывает интеграл от df по одномер-
ной области (т. е. по пути 7) со значениями самой функции / в
конечных точках траектории.
Рис. 8.32
Аналогичный результат, связывающий двумерную область и
ее одномерные границы, известен как формула Грина. Эта тео-
рема утверждает, что для любой дифференцируемой 1-формы т
и любой ориентированной области на плоскости R справедливо
равенство
[ dr = [ т.
Jr JdR
Слева 2-форма dr интегрируется по области /?, а справа 1-форма
т интегрируется по пути dR, являющимся границей области 7?.6
6Для того, чтобы обе части этой формулы существовали, область R и ее
граница dR должны удовлетворять некоторым требованиям, например, R
ограничена, dR кусочно-непрерывно-дифференцируема. — Прим. ред.
416
Глава 8. Двойные интегралы
Ориентация R определяет направление движения по dR. Напри-
мер, если R — кольцевая область, ориентированная против часо-
вой стрелки, как показано на рис. 8.33, то dR состоит из внеш-
ней окружности, по которой движение происходит против часо-
вой стрелки, и внутренней окружности, проходимой по часовой
стрелке.
Рис. 8.33
Прежде чем формально доказывать теорему Грина, имеет
смысл еще раз вспомнить определение оператора с/, действующе-
го на 1-форму. Это поможет понять, почему должна быть такая
теорема. Мы определяли dr как антисимметричную билинейную
функцию пары векторов v,w, обладающую свойством
dr(F)[hv, fcw] = j* г + погрешность,
P(h,k)
где P(h, к) есть параллелограмм, построенный на векторах hv и
hw, причем погрешность стремится к нулю быстрее, чем произ-
ведение hk, т. е. быстрее площади параллелограмма.
Рассмотрим область, состоящую из N параллелограммов,
каждый из которых построен на векторах hv и hw (рис. 8.34).
Тогда мы имеем
N N f N
'^dr(Pi)[hv,kw] = J т + £ (погрешность),.
г=1 г—1 р i=l
В сумме криволинейных интегралов по контурам параллелограм-
мов вклады от внутренних сторон, принадлежащих одновремен-
но двум параллелограммам, взаимно уничтожаются, так как они
8.8. Формула Грина на плоскости
417
Рис. 8.34
проходятся в противоположных направлениях. Таким образом,
остается один криволинейный интеграл по границе области R:
N г N
dr(Pi)[hv, kw] = I т + (погрешность)^.
г=1 JR i=l
Если h и А; стремятся к нулю, то сумма в левой части равенства
стремится к fRdrt Поскольку число N пропорционально 1/hk
и каждый поправочный член стремится к нулю быстрее, чем
hk, сумма поправочных членов стремится к нулю при h и fc,
стремящихся к нулю. В результате мы получаем
R dR
для любой области, состоящей из параллелограммов.
Чтобы доказать теорему Грина более строго, рассмотрим сна-
чала частный случай, когда т — G{x^y)dy^ и вычислим криво-
линейный интеграл по контуру прямоугольника, стороны
которого параллельны осям х и у (рис. 8.35).
Вклад в интеграл дает только сторона х = а, проходимая от
у = 0 до у = Ь, и сторона х — 0, проходимая от у = b к у — 0.
418
Глава 8. Двойные интегралы
Можно записать:
/гЬ /*0
т= G(a,y)dy + / G(O,y)dy
Jo Jb
dR
G(O,y))dy.
Согласно фундаментальной теореме интегрального исчисления
последнее подинтегральное выражение можно записать так:
Поэтому криволинейный интеграл т можно записать как по-
вторный интеграл
[b(r^x,y)dX}
Jo \Jo )
dy,
который равен ориентированному двойному интегралу
R
8.8. Формула Грина на плоскости
419
Аналогичные соображения для 1-формы F(x,y)dx дают
/ра / ph Qpi \
F(x,y)dx = J (J —(x,y)\dxAdy
dR оо
ra f dF
= — I (F(x,b) — F(x,0)) dx = — / -7— dxAdy.
Jo J ОУ
R
Сложив это с предыдущим результатом, получаем
//* dG 9F
F(x,y)dx+ G(x,y)dy = J -(x,y)dx-—(x,y)dxAdy.
dR R
Поскольку для дифференциальной 1-формы
т = F(x, у) dx + G(x, у) dy
внешняя производная равна
dr — - —(z, у) dx f\dy+ — (х,у) dx Л dy,
ду дх
то последнее равенство с интегралами означает справедливость
формулы Грина для координатного прямоугольника R:
ldT=lT-
R 9R
А теперь докажем теорему Грина в более общем случае, ког-
да область на плоскости является образом прямоугольника при
гладком биективном отображении а. Стратегия уже знакома: мы
перенесем интегралы т и dr на плоскость st, где рас-
сматриваемая область интегрирования является прямоугольни-
ком (рис. 8.36).
Мы будем пользоваться условием, что образом границы об-
ласти R является граница а(Я). Следовательно,
420
Глава 8. Двойные интегралы
Однако, для прямоугольной области R мы уже доказали, что
J а*т = J d{a*r}.
dR R
Более того, согласно определению переноса, мы имеем
dr = J a*(dr).
a(R) R
Следовательно, для доказательства равенства т = fa(K) dr
достаточно показать, что
a*(dr) = d(a*r).
Это легко сделать прямым вычислением. Пусть т = f dx +
gdy. Используя равенства a*(dx) = d(a*x), ot*(dy) — d(a*y), по-
лучаем, что а*т = (a*f) d(a*x)+(a*g) d(a*y). Далее, из формулы
d(/ dh) = df f\dh имеем
d(a*r) = d(a* f) Л d(a*x) + d(a*g) A d(a*y).
С другой стороны, мы знаем, что
dr = df /\dx + dg A dy.
Правило а*(сг Aw) = а*о Л а*ш дает нам
a*dr = a*(df) A a*(dx) + a*(dg) A a*(dy),
8.8. Формула Грина на плоскости
421
следовательно,
a* dr = d(a*f) Л d(a*x) + d(a*д') Л d(a*y).
Из сравнения этого выражения с (8.2) получаем то, что нам тре-
бовалось:
d(a*r) — a* (dr).
Таким образом, мы имеем
/* т = [ а*т = f d(a*r) = f a* (dr) = f dr,
Ja(dR) JdR JR JR Ja(R)
т. e. формула Грина доказана для любой области, которая явля-
ется образом прямоугольника.
Добавим еще доказательство этой формулы для случая, ког-
да область является многоугольником. На плоскости любой мно-
гоугольник можно разложить на треугольники. Действительно,
любой многоугольник разбивается на выпуклые многоугольни-
ки (рис. 8.37). А любой выпуклый многоугольник разлагается на
треугольники, если взять точку внутри него и соединить эту точ-
ку со всеми вершинами (рис. 8.38).
Рис. 8.38
Рис. 8.37
Если бы мы знали формулу Грина для треугольников, то она
была бы нам известна для всех многоугольников, так как ин-
тегралы, вычисленные по внутренним границам треугольников,
взаимно уничтожаются (рис. 8.39).
Итак, мы должны доказать теорему для треугольников. Аф-
финное преобразование переводит любой треугольник в тре-
угольник. Следовательно, инвариантность интегралов при глад-
ком (в частности, аффинном) преобразовании означает, что тео-
рему достаточно доказать для какого-либо одного треугольника.
422
Глава 8. Двойные интегралы
Рис. 8.39
Рис. 8.40
Итак, на плоскости ху рассмотрим треугольник (рис. 8.40)
То = {0 < х < у < 1}.
Мы можем рассмотреть четырехугольник
Т£{0 < X < у, £ <у < 1},
где 0 < е < 1. Очевидно, что если мы докажем теорему Грина для
она будет верна в предельном случае для треугольника То,
поскольку криволинейные интегралы и интегралы по площади
внутри малой области при е —► 0 стремятся к нулю. Область Те
для е > 0 есть образ прямоугольника {0 < u < 1, е < < 1} на
плоскости uv. полученный в результате отображения
х = uv
y^=v.
Это отображение имеет гладкое обратное
и — х/у,
v = y,
если у > е > 0. Следовательно, мы свели теорему к случаю,
который уже доказан, т. е. к образу прямоугольника (рис. 8.41).
В качестве иллюстрации применения формулы Грина рас-
смотрим интеграл от 1-формы
т = х2 dy
по замкнутому пути 3R (рис. 8.42), образованному отрезком пря-
мой от точки
к точке
, параболой у = 1 — х2
от точки
к точке
и отрезком от точки
к точке
&
8.8. Формула Грина на плоскости
423
v |
Прямолинейные отрезки, как нетрудно проверить, не дают
вклада в интеграл. Параметризуя параболу
(3*х = 1 - t, 0*у = 1 - (1 - t)2 = 2t - t2, 0 < t < 1,
получаем
(3*т = (1 -t)2(2 - 2t) dt = 2(1 - t)3 dt,
И
f fl 1
I г — / 2(1 — t)3 dt =
JdR JO 2
По формуле Грина интеграл от dr = 2xdx Л dy по области R дол-
жен давать то же самое. Вычисляем этот интеграл как повторный
и получаем
fl fl~X2 fl J
/ 2xdx / dy = I 2(1 — x2)xdx =
Jo Jo Jo 2
424
Глава 8. Двойные интегралы
что и следовало ожидать.
Формулу Грина можно использовать для вычисления площа-
дей через криволинейные интегралы. Например, если т — xdy,
то dr — dx Л dy и
/ т — dx /\dy = площади /?,
JdR Jr
предполагая, что R ориентирована против часовой стрелки. Ко-
нечно, любая 1-форма т' — xdy + d/, где / — произвольная диф-
ференцируемая функция, обладает этим свойством, так как
drf = d(x dy) 4- d(df) = dx /\dy — dr.
Например, выберем f = — \xy. Тогда получаем
rf = xdy - ^xdy - ^ydx = ^(xdy -ydx).
Вводя полярные координаты согласно формулам7 *
а*х = г cos#, а*у = г sin#,
мы можем получить
a*rf = ^r2d#,
откуда следует хорошо известная формула
г2тг -1
г2"9
для площади, ограниченной замкнутой кривой, заданной в по-
лярных координатах.
7 В практических вычислениях символ а* часто опускают и пишут просто
х — г cos в, у — г sin 0.
Резюме
425
В заключение выпишем основные формулы этой главы:
X Ла — —а Л А,
(о>1 + о>2) Л а = ui Л а + Ш2 Л а,
d(fw) = df Лш + f div,
а*(А Л а) = а*X Л а*а,
а* (ту + т2) = a*Ti + а*тг,
a* dr = da* г,
а*т = т для а, сохраняющего ориентацию,
JR J a(R')
/ т — I dr.
JdR JR
Резюме
А. 2-формы
Для заданной на плоскости дифференциальной 1-формы т надо
уметь давать определение ее внешней производной dr и вычис-
лять dr в координатах х, у.
Вы должны знать определение и уметь вычислять интеграл
от 2-формы по ориентированному прямоугольнику на плоскости.
В. Двойные интегралы
Вы должны уметь вычислять двойные интегралы по заданным
на плоскости областям, сводя их к повторным интегралам с со-
ответствующими пределами интегрирования; уметь изменять по-
рядок интегрирования в повторном интеграле, преобразуя его к
двойному интегралу.
Выбрав преобразование одной области на плоскости в другую,
надо уметь вычислять интегралы по второй области с помощью
переноса. Надо уметь находить такое преобразование, в резуль-
тате которого упрощается вычисление двойного интеграла.
С. Формула Грина
Надо знать формулу Грина на плоскости и уметь применять ее.
426
Глава 8. Двойные интегралы
Задачи
8.1. В трех случаях, перечисленных ниже, и и v являются функци-
ями на плоскости, а х и у ~ аффинные координаты. Вырази-
те dx Л dy через du Л dv. Нарисуйте графики типичных кривых
и = const и v = const в первой четверти плоскости {х,у > 0) и
попробуйте дать геометрическую интерпретацию соотношениям
между dx Ady и du Л dv на примере параллелограмма, стороны
которого касательны к кривым и = const и v = const.
(а) х = и cos v, у = и sin v.
(b) х — и cosh у = и sinh v.
(с) х — и2 — г2, у = 2uv.
8.2. Вычислите интеграл Jjs х2у2 dx dy, где область S расположена в
первой четверти и находится между гиперболами ху = 1, ху = 2
и прямыми линиями у = х, у = 4х.
8.3. (а) Изменяя порядок интегрирования, покажите, что
^т(а~ х
а
x)em^~^f{x) dx,
где а и т — постоянные и а > 0.
(Ь) Покажите, что
f(t)dt
)1 Гх
dv = - I (х — t)2 f(t)dt.
2 Jo
Если делать это последовательно в два шага, то вам не
придется рассматривать тройной интеграл!!
8.4. Вычислите повторный интеграл
sin 1гх
dx ) dy,
представив его как двойной по соответствующей области W. По-
сле этого вычислите интеграл как повторный, изменив порядок
интегрирования. Нарисуйте график области W.
8.5. Рассмотрите отображение, определенное формулами
9
X — u~h V, у = и — и .
Задачи
427
(b)
(d)
Вычислите якобиан этого отображения в переменных и и v.
Треугольник Т лежит на плоскости uv и имеет вершины в
точках: (0,0), (2,0), (0,2). Нарисуйте образ этого треуголь-
ника S на плоскости ху.
Вычислите площадь S как двойной интеграл по области S
и как двойной интеграл по области Т.
Вычислите интеграл
I)2'
Пусть S обозначает единичный квадрат на плоскости uv
(рис. 8.43). Опишите и нарисуйте образ S при отображении
uv \
v(2 — и2) у ’
На рисунке покажите ф(А), ф(В') и ф(С).
У f
2-
1"
-1
1 х
Рис. 8.43
(Ь) Вычислите интеграл ff ydxdyno этой области на плоскости
(с) Вычислите этот же интеграл, интегрируя соответствующую
функцию по квадрату S на плоскости uv.
(а) Вычислите интеграл
w
для треугольной области И7, изображенной на рис. 8.44.
428
Глава 8. Двойные интегралы
(Ь) Вычислите этот же интеграл в переменных и и v, опреде-
ленных формулами х = 2иг, у — и — uv.
8.8. Вычислите интеграл
/о (J* ^х2 +у2 dy^dx
сначала как повторный интеграл по у и х, а потом в полярных
координатах.
8.9. (а) Вычислите повторный интеграл
(Ь) Интерпретируйте этот интеграл как двойной по соответ-
ствующей области на плоскости uv. Нарисуйте эту область,
выписав в явном виде ограничивающие кривые. (Не беспо-
койтесь здесь и в дальнейшем, что область не ограничена8.)
(с) Полученный двойной интеграл еще раз перепишите как по-
вторный с другим порядком интегрирования и вычислите
его.
(d) Выполните в двойном интеграле замену переменных и —
х2т/-3 и v = х~ху2. Получите новый двойной интеграл на
плоскости ху. Нарисуйте область интегрирования для этого
нового интеграла.
(е) Преобразуйте полученный двойной интеграл в повторный и
вычислите его.
83десь появляется несобственный двойной интеграл. Определение этого
понятия и изучение свойств несобственных интегралов составляет самостоя-
тельный раздел математического анализа. — Прим. ред.
Задачи
429
8.10.
8.11.
(f) Покажите, что х и у являются дифференцируемыми функ-
циями в первой четверти плоскости uv.
(а) Вычислите интеграл
!LviA'
где Q — первая четверть круга единичного радиуса. Этот
интеграл преобразуйте в повторный по переменным х и у.
(Л обозначает обычную площадь на плоскости ху.)
(Ь) Введите полярные координаты г и 0 обычным способом и
преобразуйте данный интеграл в интеграл по соответству-
ющей области на плоскости г0. Дайте описание этой облас-
ти. (Под плоскостью т0 подразумевается новое простран-
ство R2, где декартовыми координатами являются г и 0.)
(с) Преобразуйте полученный интеграл в повторный в перемен-
ных г, 0 и вычислите его еще раз.
(а) Вычислите интеграл I = fw 2ydx Л dy как сумму двух по-
вторных интегралов на плоскости ху. Область W (рис. 8.45)
ограничена прямыми у = х/2^ у = 2х к гиперболами ху = 2,
ху = 8.
Рис. 8.45
(Ь) На плоскости uv найдите такой прямоугольник чтобы W
была образом R после преобразования о, заданного форму-
лами: а*х = 2uv, а*у = u/v.
(с) Вычислите о* (2у dx Л dy).
(d) Вычислите интеграл I как интеграл по области R.
430
Глава 8. Двойные интегралы
8.12. (а) Вычислите криволинейный интеграл /[(2?/2+Зя) dx+2xydy]
по кривой 7, изображенной на рис. 8.46, которая состоит из
прямолинейных отрезков 0 < ж < 2, 0 < ?/ < 2 и дуги
окружности х2 + у2 — 4 при х > 0 и у > 0.
(Ь) Постройте такой двойной интеграл по области, ограничен-
ной кривой 7, чтобы он был равен криволинейному интегра-
лу, вычисленному в предыдущем пункте. Вычислите этот
двойной интеграл, преобразуя его к полярным координа-
там.
(с) Найдите функцию /(ж), обладающую свойством
f(x)[(2y2 -I- Зх) dx + 2ху dy] — 0,
когда интеграл вычисляется по любой замкнутой кривой на
плоскости.
8.13. Один из способов замены переменных в ориентированном инте-
грале I = f dx Л dy, где W = ф(5), состоит в том, чтобы
воспользоваться формулой Грина и преобразовать интеграл I в
криволинейный интеграл по замкнутому пути dW, Затем преоб-
разовать результат в криволинейный интеграл на плоскости uv,
еще раз применить формулу Грина и выразить I как двойной
интеграл на плоскости uv. Воспользовавшись этим подходом, по-
лучите формулу замены переменных для двойного интеграла.
8.14. Пусть и и v будут функциями на плоскости, у которых первые
и вторые производные по х и у непрерывны. Пусть S — связная
Задачи
431
область на плоскости, границу которой обозначим dS. Покажите,
что
_ / dv ди\ .
dx + и-----V— dy
\ ду ду J
d2v \
Vдхду)
dx dy.
5. (а) Тонкая пластина S (рис. 8.47) имеет постоянную плотность
а (здесь а — масса на единицу площади). Момент инерции
пластины относительно оси х равен
1х = & / У2 dxdy.
Js
Покажите, что Ix = a fds ху2 dy, где dS — граница пласти-
ны, проходимая против часовой стрелки.
(Ь) Момент инерции пластины относительно оси у равен
1у = а х2 dx dy.
Найдите две дифференциальные формы и) и т, для которых
справедливо равенство
1У^ а и = т.
JdS JdS
(с) Момент инерции пластины относительно оси z равен
= & / (х2 4- у2) dx dy = Ix+ ly.
Js
432
Глава 8. Двойные интегралы
Найдите такую дифференциальную форму О, для которой
выполняется равенство Iz ~ a Q. Форму Q запишите в
полярных координатах г и 0.
Глава 9
Гауссова оптика
В главе 9 дан пример использования результатов пер-
вых восьми глав в физической теории — оптике. Она
состоит целиком из приложений, и ее пропуск при чте-
нии никак не отразится на понимании последующего
материала.
9.1. Оптические теории
В истории физики часто случается, что старая теория вытесня-
ется новой, но при этом старая остается справедливой, становясь
либо приближением к новой, которое пригодно при определен-
ных ограничениях, либо частным случаем новой теории. Так,
ньютоновская механика может рассматриваться как приближе-
ние к релятивистской механике, справедливое при скоростях, ма-
лых по сравнению со скоростью света. Аналогично, ньютоновская
механика может рассматриваться как приближение к квантовой
механике, когда изучаемые объекты достаточно велики. Законы
Кеплера, описывающие движение планет, являются частным слу-
чаем законов Ньютона, когда сила взаимодействия между телами
обратно пропорциональна квадрату расстояния между ними. За-
коны Кеплера можно также считать приближением к уравнени-
ям движения Ньютона, когда мы пренебрегаем влиянием одной
планеты на движение других.
436
Глава 9. Гауссова оптика
распространения луча. Это явление называется поляризацией
света, и его можно наблюдать, например, используя специальные
поляроидные фильтры.
Геометрическая оптика является приближением к волновой
оптике, в котором пренебрегают волновой природой света. Это
можно делать, когда размеры апертур велики по сравнению
с длиной волны света и когда мы не интересуемся тем, что про-
исходит в фокусах и в окрестности тени.
Линейная оптика является приближением к геометрической
оптике, когда исследуются малые углы. В рамках линейной оп-
тики делаются приближения: sin# = #, tan# = •#, cos# = 1 и т. д.,
т. е. отбрасываются все выражения, квадратичные (и более вы-
соких порядков) по углам. Например, в геометрической оптике
справедлив закон Снеллиуса, согласно которому, если свет про-
ходит область с коэффициентом преломления п (относительно
вакуума) и попадает в область с коэффициентом преломления
п!, то nsinz = n'sini', где г и г' — углы, которые составляет
направление распространения луча с нормалью к поверхности,
разделяющей эти области (рис. 9.3). В линейной оптике этот за-
кон упрощается: ni = nW, потому что углы гиг' малы. (Этот
приближенный закон был известен еще Птолемею.)
Различие между геометрической оптикой и ее линейным при-
ближением называется (геометрической) аберрацией. Например,
9.1. Оптические теории
437
Рис. 9.4. Сферическая аберрация
пусть пучок параллельных лучей падает на сферическое зеркало
(рис. 9.4). Тщательное наблюдение отраженных лучей показы-
вает, что не все они пересекаются в одной точке. Только лучи,
распространяющиеся вблизи диаметра, пересекаются вблизи фо-
куса1 зеркала. В рамках линейной оптики мы ограничиваемся
рассмотрением лучей, которые близки к диаметру, так что мож-
но считать, что они пересекаются в фокусе. (Это отклонение от
фокуса сферического зеркала называется сферической аберра-
цией.)
Гауссова оптика является частным случаем линейной оптики,
когда предполагается, что все рассматриваемые поверхности об-
ладают вращательной симметрией относительно некоторой цен-
тральной оси. Это очень важный частный случай, потому что
все линзы и большинство полированных зеркал обладают этим
свойством. Наше обсуждение оптических теорий изображено на
схеме:
1 с Фокус» в данном случае расположен в середине радиуса сферы, парал-
лельного направлению лучей. — Прим. ред.
438
Глава 9. Гауссова оптика
9.2. Матричные методы
В рамках гауссовой оптики мы изучаем траекторию светового
луча, когда он проходит через различные преломляющие поверх-
ности оптической системы (или отражается от отражающих по-
верхностей). Введем систему координат, в которой ось z (направ-
ленная слева направо) совпадает с оптической осью (осью сим-
метрии системы). Мы ограничимся исследованием коаксиальных
9.2. Матричные методы
439
лучей — лучей, лежащих в одной плоскости с оптической осью2.
В силу вращательной симметрии очевидно, что можно огра-
ничиться изучением лучей, лежащих в одной выбранной плос-
кости. Траектория луча, проходящего через систему преломляю-
щих поверхностей, будет представлять собой последовательность
прямых линий. Наша задача состоит в том, чтобы связать прямо-
линейный луч, выходящий из системы, с прямолинейным лучом,
падающим на нее. Для этого мы должны получить метод опи-
сания прямых линий. Выберем фиксированное значение z — zq
и плоскость, перпендикулярную оптической оси, которую будем
называть плоскостью отсчета. Тогда прямая линия определяется
двумя параметрами: высотой q над осью z и углом 0, определя-
ющим наклон линии к оптической оси (рис. 9.5). Угол 0 будем
измерять в радианах и считать положительным, если вращение
против часовой стрелки совмещает положительное направление
оси z с направлением луча. На каждой стадии вычислений сле-
дует выбирать удобную плоскость отсчета.
Например, если свет падает на оптическую систему слева и
выходит направо (рис. 9.6), мы должны выбрать одну плоскость
отсчета z± слева от системы линз и вторую плоскость отсчета z%
справа. Луч, входящий в систему по прямой линии с параметрами
qi и 01 при z — Zi, выходит из системы по прямой линии с
параметрами q^ 02 при z = Z2> Наша задача состоит в том, чтобы
для любой системы линз найти связь между (q2?#2) и (gi,^i).
2Хотя это и является упрощающим предположением, на самом деле мож-
но доказать, что линейность означает изучение произвольных лучей, потому
что их можно свести к коаксиальным лучам, проектируя на два взаимно
перпендикулярных направления.
440
Глава 9. Гауссова оптика
Теперь надо сделать очень простой, но чрезвычайно важный
шаг — главный в геометрической оптике и механике.
Переменную 0 заменим на р — п0, где п обозначает показа-
тель преломления среды в плоскости отсчета. (В механике это
соответствует замене скорости на импульс.)
Тогда световой луч может быть описан вектором , и мы
должны найти вектор ^2 как функцию . Мы пренебре-
гаем квадратичными членами и членами более высоких поряд-
ков, следовательно, в нашем приближении будет линейной
функцией от , т. е.
где М21 — некоторая матрица. Главным результатом выбора р
вместо переменной 0 является
DetM2i — 1.
Другими словами, изучение гауссовой оптики сводится к изуче-
нию группы вещественных матриц 2x2, имеющих определитель,
равный единице, т. е. группы 51(2, R). Чтобы доказать это утвер-
ждение, заметим, что если луч последовательно проходит три
плоскости отсчета zi, Z2 и 23, то по определению матрица пере-
хода
М31 = 7И32М21.
9.2. Матричные методы
441
Таким образом, если оптическая система состоит из двух или бо-
лее блоков, мы должны только проверить, что Det М = 1 в от-
дельности для каждого блока. Для упрощения изложения пред-
положим, что в системе нет зеркал.
Основные процессы в оптике
Прохождение света через систему линз можно рассматривать
как совокупность основных оптических процессов.
(а) Распространение (трансляция): луч движется по прямой меж-
ду двумя плоскостями отсчета, лежащими в одной и той же среде.
Для описания этого процесса расстояние между плоскостями обо-
значим /, показатель преломления среды п. Очевидно, что при
таком движении светового луча угол 0, и, следовательно, р, не
изменяются: (р2 = Pi), и #2 — Qi + (£/п)Р1 (рис. 9.7).
(Ь) Преломление на границе между двумя областями с разными
показателями преломления. Показатели преломления двух сред
обозначим П1 и П2- Естественно, надо учитывать кривизну по-
верхности раздела сред. Выбираются две плоскости отсчета, сле-
ва и справа вблизи от этой поверхности. На поверхности раздела
величина q не изменяется, а вот угол и, следовательно, р изменя-
ются согласно закону Снеллиуса (его линеаризированному вари-
анту). В закон Снеллиуса входит наклон касательной к поверх-
ности в точке, где происходит преломление. В нашем приближе-
нии мы пренебрегаем квадратичными членами в этом наклоне и
членами третьего и более высокого порядка в уравнении поверх-
ности. Таким образом, мы предполагаем, что линия пересечения
442
Глава 9. Гауссова оптика
этой поверхности с нашей плоскостью будет параболой:
1, 2
- - = ~kq.
Тогда производная z по q, т. е. z'(q) = kq, будет tan(7r/2 — ^),
где —- угол, изображенный на рис. 9.8.
Для малых углов 0, т. е. для малых значений q, угол будет
близок к 7г/2, и тогда tan(7r/2 — *ф) можно заменить на тг/2 —
если мы готовы опустить члены более высокого порядка по q и
р. Таким образом, в гауссовом приближении тг/2 — Угол
между падающим лучом и касательной равен (тг/2 — ii). Из того,
что сумма внутренних углов треугольника равна тг, следует, что
(тг — *ф) + 01 + (тг/2 — 21) — ТГ или
h — 01 + kq.
Аналогично получаем
12 ~ #2 + kq,
где q = qi — q2 определяют точку на преломляющей поверхности,
в которую падает луч. Первое уравнение умножим на ni, а второе
на Tty. Используя приближенную формулу для закона Снеллиуса
niii — ^2^2, получаем
(<72 Л = ( 1 0\ f Q1A
\Р2 J \~Р 1/ \Р1) ’
9.2. Матричные методы
443
константа Р — (п2 — пх) • к называется оптической силой прелом-
ляющей поверхности.
Сопряженные плоскости
Итак, движение луча в любой гауссовой оптической системе
между двумя плоскостями отсчета соответствует матрице
М=(^ п)> где AD — ВС = 1.
и J
Теперь можно составить словарь, переводящий свойства матрицы
в оптические свойства.
Например, две плоскости zx и называются сопряженны-
ми, если для любого значения qx все лучи, выходящие из Qi, Zx,
сходятся в точку q2, ^2. Это значит, что значение q% не должно
зависеть от рх, т. е. что
В-0.
Тонкие линзы
о ( 1
Заметим, что произведение двух матриц вида I р I име-
ет тот же вид, т. е.
( 1 0\ ( 1 0\ / 1 О А
1Д-р2 V“^-(Pi + p2) 1/
Это позволяет написать уравнение для так называемых тонких
линз, состоящих из преломляющих поверхностей с пренебрежи-
мо малым расстоянием между ними (рис. 9.9)3. В этом случае
плоскости отсчета zx и z^ удобно брать совпадающими с плоско-
стью линз. При этом с плоскостью zx связывают лучи, падающие
слева, а с плоскостью z^ — лучи, выходящие из линз и распро-
страняющиеся направо.
3На рис. 9.9 преломляющие поверхности изображены не параболами, как
делалось выше, а дугами окружностей. Можно доказать, что уравнение
окружности радиуса R с центром на оси z справа от точки zi, в которой эта
( 2\ Я2
окружность пересекает ось z, с точностью до o(q ) имеет вид z —
2R
Поэтому константа к из предыдущего построения в этом случае равна 1/R.
Заметим, что число к = 1/R называют кривизной окружности радиуса R. - •
Прим. ред.
444
Глава 9. Гауссова оптика
Рис. 9.9
Матрица для левой преломляющей поверхности равна
1
П2 “
Ri
Соответственно, матрица для правой преломляющей поверхности
равна
1
ГЦ — П2
о
1
(Заметим, что на рис. 9.9 значение Ri отрицательно.) Перемно-
жив эти матрицы, мы получаем матрицу для тонкой линзы
1 0\ 1 . . ( 1 1
-i/г J' гда 7 = ("2~П1)(а~ъ
Число f называется фокусным расстоянием линзы. Мы будем
предполагать, что линзы находятся в вакууме, так что — 1 и
П2 > 1. Если Ri положительно, а Т?2 отрицательно (двояковыпук-
лая линза), то фокусное расстояние / положительно, поскольку
П2 — ni > 0.
Рис. 9.10
9.2. Матричные методы
445
Вычислим матрицу для тонкой линзы, задающую движение
луча между плоскостью отсчета Fi, расположенной слева на рас-
стоянии f от линзы, и плоскостью отсчета F2, расположенной
справа на расстоянии f от нее (рис. 9.10):
(1 f\( 1 0\ /1 А = f о А
\о 1Д-1// 1До 1J у-1/f о/
Плоскость Fi называется первой фокальной плоскостью. Если
луч, падающий на линзу, проходит через эту плоскость в точке
gi = 0 под углом , то выходящий луч имеет параметры
(ЯгА = ( о А / 0 \ = / fpA
\Р2 / \-1// 0/ \Р1/ \ 0 /’
т. е. выходящий луч параллелен оси z. Обратное утверждение:
если падающий луч параллелен оси г, то выходящий луч имеет
параметры
А<7г\ ( о А (qA = f 0 \
\P2j \~l/f OJ\OJ
т. e. пересекает ось z во второй фокальной плоскости. В общем
случае, можно видеть, что Р2 не зависит от pi, следовательно, лу-
чи, проходящие через фиксированную точку в первой фокальной
плоскости, выходят из линзы параллельным пучком под одним и
тем же углом к оси z. Далее, q% не зависит от qi, т. е. все парал-
лельные друг другу до линзы лучи проходят через одну точку во
второй фокальной плоскости.
Рассмотрим простой пример использования матричного мето-
да фокусировки. Пусть плоскость отсчета z\ находится слева от
тонкой линзы на расстоянии $1, а плоскость отсчета z^ находится
справа от линзы на расстоянии S2- Матрица, задающая движение
луча между этими плоскостями, такова:
fl 32\ ( 1 0\ ( 1 Sl\/1-S2// S2 + S1 - SiS2/f\
\0 1Д-1// 1/ \o 1J -1// 1-S1// /
Плоскости будут сопряженными, если верхний правый матрич-
ный элемент равен нулю. Мы получаем хорошо известное урав-
нение тонкой линзы l/$i 4-1/$2 = 1//- Запишем его в виде
si + s2 - Fsis2 0, где P = l/f.
446
Глава 9. Гауссова оптика
Уравнение можно решить относительно $2 ПРИ условии, что
si ф l/Р- Таким образом, кроме случая $i — /, любая плоскость
имеет единственную сопряженную плоскость. Если же $1 = /,
т. е. zi совпадает с первой фокальной плоскостью, то все лучи,
проходящие в этой плоскости через фиксированную точку Q, вы-
ходят из линзы параллельным пучком. Значит, плоскость, сопря-
женная первой фокальной плоскости, «лежит в бесконечности».
Аналогичные рассуждения можно провести для второй фокаль-
ной плоскости.
Для si ф f и значения $2> соответствующего сопряженной
плоскости, увеличение дается уравнением
72
Q1
1 52 1
= 1--7^=1- 52
52
51*
Если $i и $2 положительны (объект находится слева от линзы,
а изображение справа), то увеличение отрицательно. Это значит,
что изображение перевернуто.
Умножая матрицы, можно построить матрицу для любой ком-
бинации тонких линз. Например, пусть есть две линзы с фокус-
ными расстояниями Д и /2, расположенными на расстоянии I
друг от друга (рис. 9.11). В этом случае для плоскостей отсчета
z\ (первая линза) и z^ (вторая линза) получается матрица
1
-1//2
(А
1 J
(А
1)
l/flh ~ 1//2 - 1//1
I
1 - Z//2 J
Рис. 9.11
9.2. Матричные методы
447
Телескоп
Очень интересная ситуация возникает с парой линз, когда
I = /1 + Д. В этом случае матрица имеет вид
А В\
О d)'
т. е. С = 0. Это значит, что р2 — Dpi, т. е. направление выходя-
щего луча зависит только от направления падающего луча. Это
условие выполняется в конструкции, которая называется аст-
рономическим телескопом. Он состоит из линзы (объектива) с
большим положительным фокусным расстоянием Д и окуляра с
малым положительным фокусным расстоянием Д, расположен-
ных на расстоянии Д + Д друг от друга (рис. 9.12). Такой теле-
скоп преобразует параллельные лучи, идущие от далекой звезды,
в параллельные лучи, попадающие в глаз наблюдателя.
Рис. 9.12
Угловое увеличение телескопа равно отношению наклона вы-
ходящего луча к наклону падающего луча, что равняется
D = 1_ 1 =1-Л + й= Л
д д д
Это увеличение отрицательно (образ перевернут), и его величина
равна отношению фокусного расстояния объектива к фокусному
расстоянию окуляра.
448
Глава 9. Гауссова оптика
Общий случай
Здесь мы хотим показать, что любая матрица М =
с Det М = 1 описывает некоторую оптическую систему.
Пусть сначала С ± 0. В этом случае матрицу М можно пред-
ставить в виде произведения трех оптических матриц:
Непосредственной проверкой можно убедиться, что это равенство
1 — А 1-D
выполняется при s ~ , t = ———, и только при этих s, t.
О О
Если С = 0 (при этом А / 0), то, домножив матрицу М слева
на 0^ (берем Р 0), получим матрицу
Mr ?
А В \
РА PB + DJ’
у которой левый нижний элемент - - не нуль, поэтому Mf — оп-
тическая матрица, а поскольку М = р М\ то М — тоже
оптическая матрица.
Гауссово разложение
Из формулы (9.1) вытекает, что для любой матрицы М —
(А В\
„ _ ) с Det М — 1 и С ф 0 существуют и единственны числа
(_У U )
s, t такие, что
Таким образом, для любой не телескопической оптической сис-
темы существуют такие две плоскости, что матрица, описываю-
/1 0\ о
щая движение луча между ними, имеет вид ~ 1 I. Эти плос-
\С 1 )
кости сопряжены между собой, и соответствующее увеличение
равно 1. Гаусс назвал их главными плоскостями. Если начать
9.2. Матричные методы
449
0\
между двумя главными плоско-
( 1
с оптической матрицы I 1
\ С 1
стями, то так же, как и в случае тонких линз, для любой плоско-
сти можно найти сопряженную. Для этого достаточно написать
С ~ —Р = —^lf- Например, справа и слева от главных плоско-
стей находятся фокальные плоскости с фокусным расстоянием /:
1 О
-V/ 1
Гаусс так интерпретировал этот результат.
Рис. 9.13
Вторая
главная плоскость
Пусть луч параллельный оси, входит в оптическую си-
стему при z — z\ (рис. 9.13). Этот луч приходит ко второй глав-
ной плоскости на той же высоте, но с наклоном —q/f (вектор
и фокусируется на оси во второй фокальной точке F2-
Аналогично, луч, выходящий из первой фокальной точки с лю-
бым наклоном в первой главной плоскости, преобразуется в луч,
распространяющийся параллельно оси, и приходит в z^ на той же
высоте, какую он имел в первой главной плоскости.
Итак, мы видим, что произвольная не телескопическая оп-
тическая система может быть описана тремя параметрами: по-
ложением двух главных плоскостей и фокусным расстоянием.
(Мы уже знали, что должно быть три независимых параметра
-- три элемента матрицы 2x2, потому что четвертый матрич-
ный элемент определяется из условия, что определитель матрицы
равен 1.)
450
Глава 9. Гауссова оптика
Если мы знаем положение главных плоскостей, то положение
фокальных плоскостей мы получаем из равенств
Ях - Г1 = /, F2 - Н2 = /.
Если фокальные плоскости рассматриваются как плоскости от-
счета в оптической системе, то из определения фокальной плос-
кости мы знаем, что оптическая матрица должна иметь нуль в
верхнем левом и в нижнем правом углах. Таким образом, матри-
ца распространения луча между двумя фокальными плоскостями
имеет вид
0 Л
-1// о/
Теперь возьмем (рис. 9.14) две другие плоскости у\ и у2, связан-
ные с фокальными плоскостями соотношениями
F1 - У1 = П1Х1 и у2 “ F2 = п2х2.
п2х2—► * 1
Ei
У2
Рис. 9.14
Матрица, соответствующая этим плоскостям, будет равна
1 ( 0 /\ /1 xA_(-x2/f f-(xix2/f)\
0 1Д-1// 0ДО 1J \-l/f -X1/f )
Отсюда видно, что плоскости у\ и у2 сопряжены тогда и только
тогда, когда Х]Х2 = f2 (это уравнение называется уравнением
Ньютона), Тогда увеличение дается формулой
т = -х2// = -/Ai-
9.3. Метод Гамильтона в гауссовой оптике
451
Например, пусть у2 находится справа от F2, так что Х2 поло-
жительно. Тогда, если фокусное расстояние f положительно, то
увеличение т отрицательно, т. е. изображение оказывается пере-
вернутым.
Давайте перечислим полученные результаты. Пусть Sl(2, R)
обозначает группу матриц 2 х 2 с определителем, равным 1.
В этом разделе мы показали изоморфизм между Sl(2,R) и си-
стемами гауссовой оптики. Каждая матрица соответствует оп-
тической системе. Умножение матриц соответствует композиции
оптических систем.
А теперь перейдем к изложению идей Гамильтона в самой
простой форме.
9.3. Метод Гамильтона в гауссовой оптике
Предположим, что в нашей оптической системе z\ и — не
сопряженные плоскости. Это значит, что элемент В в оптической
матрице не равен нулю. Тогда из уравнений
Q2 = Aqi + Врг,
Р2 = Cq-i + Dpi
мы можем выразить р\ и р2 через q\ и 52:
Pi = (1/В)(§2 - Agi),
Р2 = (l/B)(Dq2 - Qi),
где мы воспользовались условием AD — ВС — 1. Этот результат
можно интерпретировать геометрически. Выбираем точку qi на
плоскости z\ и точку Q2 на плоскости Z2- Существует единствен-
ный луч, соединяющий эти точки. (Для сопряженных плоскостей
это не так. Если q2 — изображение точки 51, то имеется бесконеч-
ное число лучей, соединяющих точки q± и 52, т. е. все лучи, вы-
ходящие из точки Qi, попадают в точку 52. Если 52 не является
изображением точки 51, то лучей, соединяющих точки 51 и 52, не
существует.) Пусть функция W = W(51,52) имеет вид
ИШ) = (1/2В)(А92 + Dq% - 2q192) + К,
452
Глава 9. Гауссова оптика
где К — постоянная. Тогда р\ и р2 выражаются в форме
Pi = -(dW/dqi) и р2 ~ (dW/dq2Y
Гамильтон назвал эту функцию точечной характеристикой сис-
темы. В современной физической литературе иногда ее называ-
ют эйконалом. Предположим, что мы выбрали плоскости zi, Z2
и Z3, причем ни одна пара плоскостей не является сопряженной.
Пусть < z<2 < Z3 и Z2 не совпадает с преломляющей поверхно-
стью. Обозначим Ж21 точечную характеристику системы z\ — Z2,
а ГИ32 — системы Z2 — z%. Утверждается, что точечная характери-
стика системы z± — Z3 (с точностью до произвольной аддитивной
постоянной) дается формулой
^31(<71Лз) ~ ^21(^1Л2) + 1^32(92><7з),
причем луч, распространяющийся из точки q\ в точку ^3, прохо-
дит через точку q2 = <?2(<7ь<7з) на плоскости Z2-
Чтобы убедиться в справедливости этой формулы, заметим,
что раз плоскость Z2 не совпадает с преломляющей поверхностью,
то она не изменяет направление луча. Тогда
Р2 = (dW21/dq2)(qi,q2) = ~(dW32/dq2>)(q2,q3')-
А теперь применим цепное правило и получим, что
SW31/3Q1 = -pi и dW31/dqs =Рз-
Итак, функция W определена с точностью до аддитивной по-
стоянной. Гамильтон показал, что при соответствующем выборе
этой постоянной можно сделать так, что W(qi, ^2) будет оптиче-
ской длиной луча, соединяющего точки q± и q2.
Понятие оптической длины определяется следующим обра-
зом. Для отрезка пути I в среде с постоянным коэффициентом
преломления п оптическая длина пути равна nl. Пусть путь 7
является ломаной линией, где каждый отрезок Ц лежит в среде с
постоянным коэффициентом преломления щ. Тогда оптическая
длина пути 7 равна
М?) =
9.3. Метод Гамильтона в гауссовой оптике
453
Докажем теорему Гамильтона в рамках гауссовой оптики.
В этом приближении в производных функции W сохраняются
только члены, линейные по р и q. Таким образом, для вычис-
ления оптической длины в функции W мы должны учитывать
члены не выше квадратичных. Итак, световой луч, падающий на
плоскость zi, определяется параметрами а ЛУЧ, ВЫХОДЯ"
(Q2 \
. Тогда оптическая
P2.J
длина пути
М?) = Lo + |(р292 - Pl 91),
где Lo обозначает оптическую длину вдоль оси системы между
плоскостями 2:1 и ^2 (pi = Qi = 0 = Р2 = ^2)- Если мы докажем эту
формулу, то предположив, что z± и не являются сопряженными
плоскостями, значения pi и р2 можно выразить через qi и q%, т. е.
подстановка pi = (1/B)(g2 - Л/1) и р2 — (1/В)(£>^2 ~ Q1) в £(?)
даст выражение для W, если принять К = Lo.
Прежде чем доказывать формулу для £(7), заметим, что она
правильно себя ведет для случая комбинированной системы: если
мы взяли zi, z^ и гз, то очевидно, что длина вдоль оси склады-
вается:
о(Р292 - Р191) + ~(рз9з -Р29г) = ~ (Рз9з - Р191)-
Следовательно, мы должны доказать формулу в двух фундамен-
тальных случаях.
(1) Если коэффициент преломления п постоянен, d — проек-
ция луча на ось г, то в этом случае
£(7) = n(d2 + (g2 - Q1)2)1/2
1”/ х2
= nd + 3^(92-91)
, 1 Гп/ \
= nd + - - 91)] (92 - 91)
= nd+-p(92-9i),
где Р2 = Pi = Р = 3(92 - 91)-
а
454
Глава 9. Гауссова оптика
(2) Пусть теперь коэффициент преломления слева от пре-
ломляющей поверхности z1 — z — -kq2 равен ni, а справа П2
(рис. 9.15).
Рис. 9.15
Предположим, что слева от преломляющей поверхности вы-
брана точка ^з, а справа гд. Если бы п\ равнялось П2, то оптиче-
ская длина между этими точками была бы равна ni/з + П2(1 + Ц),
где /3 — длина отрезка слева от выбранной плоскости, а I + /4
— длина отрезка справа, причем I4 — отрезок справа от прелом-
ляющей поверхности. (Мы нарисовали картину для к > 0, но то
же самое справедливо и для к < 0.) Если 722 7^ ni, то 722/4 будет
другим, но его можно вычислить по формуле случая (1) между
точками z и z±. Кроме того, влияние преломляющей поверхности
приведет к замене TI2I на n^l в выражении для длины пути, и
вклад преломляющей поверхности будет равен
(ni - п2)1.
Итак,
I — (zff — г) cosec #i,
где z" находится из системы уравнений
z" - z =
q" = (tanfliX-z" — z) + q.
9.4. Принцип Ферма
455
+ z и cosec заменить на 1.
£
Очевидно, что с точностью до членов более высокого порядка
мы можем взять zn — zf =
Следовательно,
(ni - n2)/ = ^fc(ni - n2)q2 =
= J[fc(ni -n2)q]q
1/
= p(P2-Pl)Q,
поскольку на преломляющей поверхности Q2 ~ <71 — Q и Р2 =
Pl — Pq, где Р = k(ri2 — п-i). Итак, наша формула доказана.
9.4. Принцип Ферма
Рассмотрим преломляющую поверхность с оптической силой Р —
(п2 — ni)fc, расположенную в некотором z. Здесь Р может обра-
щаться в нуль. Пусть плоскость z\ находится слева, а плоскость
Z2 справа от z (рис. 9.16). Предположим, что коэффициенты пре-
ломления среды на участках от z\ до z и от z до z^ постоянны.
Пусть gi — точка на плоскости zi, <?2 “ точка на плоскости z^ и
q — точка на плоскости г. Рассмотрим траекторию, состоящую
из трех участков: луч от точки q± движется к точке q, второй
Рис. 9.16
456
Глава 9. Гауссова оптика
Pi = ?-(g-gi) и Р2
участок — через преломляющую поверхность в точке q, и потом
опять световой луч от q до точки q^-
Поскольку q выбрана произвольно, то, вообще говоря, эта тра-
ектория не будет оптическим путем. Однако оптическая длина
этой траектории
nUl + nl + 722^2
в гауссовом приближении состоит из трех членов:
L(qi,q,qz) = Lo + |(pi(g - 91) + Рг(?2 - g) - Pg2),
как было показано в предыдущем разделе. В этом выражении
п2
Следовательно, мы можем написать
2 П2 /
Предположим, что мы фиксировали точки qi и q2. Найдем по-
ложение точки q, когда L достигает экстремума. Другими слова-
ми, мы хотим решить уравнение dL/dq = 0 для фиксированных
значений qi и q2. Вычисляя производную по q от L и учитывая,
что dp\/dq — ni/di и dp^/dq — —722/^2, получаем уравнение
Pi - Р2 - Pq - 0.
Откуда имеем
= Pq + Pi-
Но это в точности то же самое соотношение между р± и Р2? кото-
рое определяется из матрицы преломления в точке z.
Итак, мы доказали следующий факт. Фиксируем точки qi и q2.
Рассмотрим траектории, соединяющие точки qi и q2, состоящие
из двух отрезков: от точки qi до qf и от qf до Q2- Из всех возмож-
ных траекторий световой луч распространяется вдоль той, где L
достигает экстремума, т. е. выполняется условие
9.4. Принцип Ферма
457
Это и есть знаменитый принцип наименьшего времени Ферма
(в гауссовом приближении). Давайте подставим
Pi = - <71) и Р2 = 7^(92-q)
ai «2
в формулу для L. Получим еще одно выражение для L:
L = nidi + n2d2 + | у"(9 - 9i)2 + ¥(«2 - 9)2 ~ Pq2
2 [Cti (12
Коэффициент при q2 равен n^/di + ri2/d2 — P- Таким образом,
оптический путь минимален при условии
21 + 22
di d2
и максимален при условии
21 . ^2
di d2
Если Р > 0, то мы получаем минимум при малых значениях
di и и максимум при больших значениях di и ^2- Ситуация
становится неопределенной, когда
21 .22
rfi </2
т. е. мы не можем найти решение для qf. Это условие означает,
что соответствующие плоскости являются сопряженными. Итак,
мы получаем минимум, если плоскость, сопряженная к zi, не ле-
жит между z\ и z2, и максимум в противном случае. Тот факт,
что L достигает минимума только до первой сопряженной точ-
ки, справедлив и для произвольной оптической системы, где он
известен как теорема коэффициентов Морзе.
Рассмотрим интуитивно ясный пример этого явления. Пусть
свет отражается от вогнутого сферического зеркала. Возьмем
точку Q на оси z внутри сферы. Луч распространяется вдоль
диаметра сферы и, отражаясь, попадает в точку Q. Очевидно,
что расстояние от зеркала до точки Q будет локальным мини-
мумом, если точка Q расположена между зеркалом и центром, в
противном случае это расстояние будет локальным максимумом.
458
Глава 9. Гауссова оптика
9.5. От гауссовой оптики к линейной
Что произойдет, если мы не будем предполагать наличие враща-
тельной симметрии оптической системы, но по-прежнему будем
учитывать только члены первого порядка по углам и расстояни-
ям? Прежде всего для описания луча нам необходимо иметь че-
тыре переменных: qx и qy - координаты точки, в которой луч
пересекает плоскость, перпендикулярную оси г; два угла 0х и
0у, определяющие направление луча. Направление в трехмерном
пространстве задается единичным вектором v — (ух, vyy vz). Ес-
ли направление этого вектора близко к положительному направ-
лению оси г, то можно считать, что он имеет вид v = (0Х, 0у, vz),
где vz = 1 — -(0Х + Оу) = 1, при условии, что углы вх и ву малы.
Угловые переменные 0 заменим на р, определяемые формулами
рх = п9х и ру = п9у. (Если среда анизотропна, например, для
некоторых кристаллов, то соотношение между 0 и р становится
более сложным. Но здесь мы не будем рассматривать такие сре-
ды.) Конечно, все происходит в некоторой фиксированной плос-
кости, перпендикулярной оси z. Если мы будем рассматривать
две плоскости z\ и ^2, то лучу будут соответствовать два вектора
для каждой плоскости соответственно:
U1
/ <1x1 \
Рх1
\ Pyl /
Наша задача — найти соотношение между ui и U2- Поскольку
мы пренебрегаем членами порядка выше первого, можно напи-
сать
U2 = Mill,
где М — матрица размера 4x4.
Наша задача — установить, какие матрицы 4x4 возника-
ют в линейной оптике. Первая очевидная мысль, что это матри-
цы, удовлетворяющие условию DetM = 1. Однако это не так.
Безусловно, верно, что все оптические матрицы должны иметь
единичный детерминант, но не верно, что все матрицы 4 х 4 с
9.5. От гауссовой оптики к линейной
459
единичным детерминантом могут быть матрицами преобразова-
ний в линейной оптике. Должно быть более строгое ограничение.
Чтобы объяснить, в чем состоит это более строгое ограничение,
вернемся назад и еще раз сформулируем условие, при котором
матрица 2x2 имеет определитель, равный единице. После этого
можно будет вернуться к соответствующему условию для случая
четырех переменных. Пусть на плоскости даны два вектора:
W = ( и w' = (.
\р) \р J
В разделе 4.9 мы определили антисимметричное произведение
cu(w,w') между двумя векторами согласно формуле
tu(w, w') = qpf — q'p.
Геометрический смысл cu(w,w') — это ориентированная пло-
щадь параллелограмма, построенного на векторах w и w' (см.
рис. 9.17). Из определения и из геометрического смысла следует
антисимметрия си:
cu(w,w') — —cu(w',w).
Матрица 2x2 сохраняет площадь и ориентацию тогда и только
тогда, когда ее определитель равен 1, т. е. Det М = 1 тогда и
только тогда, когда
cu(Afw, Mw') — lu(w, wz)
460
Глава 9. Гауссова оптика
для всех w и wz. А сейчас предположим, что в четырехмерном
пространстве есть два вектора
/ Qx \
Qy
Рх
\Ру /
Введем по определению
w(u, u') = qxp'x - q'xpx + qyp'y - q'ypy.
Произведение о; по-прежнему остается антисимметричным:
и>(и',и) = —cu(u, и'),
но геометрический смысл его не очень понятен.
Оказывается, что матрица М (4 х 4) может быть матрицей
преобразования в линейной оптике только при выполнении усло-
вия
cu(Mu, Mu') — cu(u, u')
для всех векторов и и и'. Матрицы такого типа называются в фи-
зической литературе линейными каноническими преобразования-
ми, а в математической литературе они называются линейными
симплектпическими преобразованиями. Эти матрицы (и их обоб-
щения на случай большего числа измерений) играют важнейшую
роль в теоретической механике и геометрии.
Сначала сформулируем ряд основных сведений относительно
линейных симплектических преобразований в пространстве че-
тырех переменных. Тогда мы сможем увидеть, что наши рассуж-
дения, показывающие, что гауссова оптика эквивалентна груп-
пе 51(2, R), могут быть использованы для демонстрации эквива-
лентности линейной оптики группе 5р(4, R) — группе линейных
симплектических преобразований в пространстве четырех изме-
рений.
В общем случае пусть V обозначает векторное (вещественное
конечномерное) пространство. Билинейная форма Q в простран-
стве V — это любая функция Q : V х V —> R, линейная по каждой
переменной при условии, что другая фиксирована, т. е. Q(u, v) —
9.5. От гауссовой оптики к линейной
461
линейная функция v при фиксированном и и линейная функция
и при фиксированном v. Мы говорим, что Q антисимметрична,
если Q(u,v) — —Q(v,u) для всех и и v в пространстве V. Мы
говорим, что П невырождена, если при любом фиксированном
и линейная функция Q(u, •) не тождественный нуль (если только
сам вектор и не равен нулю). Антисимметричная невырожденная
билинейная форма в пространстве V называется симплектиче-
ской формой. Векторное пространство, снабженное данной сим-
плектической формой, называется симплектическим векторным
пространством, говорят, что оно имеет симплектическую струк-
туру. Пусть V — симплектическое векторное пространство с сим-
плектической формой Q и пусть А -- линейное преобразование
пространства V в себя; тогда мы говорим, что А — симплекти-
ческое преобразование, если Q(Au, Av) = Q(u,v) для всех и и
v в пространстве V. Существует теорема (Guillemin, Sternberg,
Symplectic Techniques in Physics, Chapter II), утверждающая, что
каждое симплектическое векторное пространство должно быть
пространством четного числа измерений, и что каждое симплек-
тическое линейное преобразование должно иметь детерминант,
равный единице, а значит, быть обратимым. Очевидно, что преоб-
разование, обратное к симплектическому преобразованию, долж-
но быть симплектическим, и что произведение любых двух сим-
плектических преобразований тоже должно быть симплектиче-
ским. Множество всех симплектических линейных преобразова-
ний называется симплектической группой в пространстве V и
обозначается Sp(V).
Предположим, что V ~ + Rn. Это — пространство, в кото-
ром вектор можно записать в виде
Симплектическая форма Q определяется формулой
Q(u, и') = р • qz — р7 • q,
где символ • обозначает обычное скалярное произведение в прост-
ранстве Rn. Если использовать запись скалярного произведения
462
Глава 9. Гауссова оптика
и • и' — q • q' + р • р', то форму можно переписать по-другому
Q(u, и') = и' • Ju,
где J — матрица 2п х 2п вида ( , а I — единичная матрица
п х п. Повторим: линейное преобразование Т в пространстве V
симплектично тогда и только тогда, когда для всех и и и' выпол-
няется равенство
Q(Tu,Tu') — Q(u,uz).
Это можно переписать в виде
Т* JTu u' = Ju • и',
где Т* обозначает транспонированную матрицу (т. е. матрицу, со-
пряженную к Т по отношению к скалярному произведению в про-
странстве V). Поскольку это равенство выполняется для всех и
и и', мы получаем
Т* JT = J.
Отображение Т можно записать в виде
\р/
Aq + Вр \
Cq + DpJ ’
где А, В, С и D — матрицы п х п, т. е.
/А В\
V7 D)'
Тогда
rpt __
с*\
D*) ’
где А* обозначает матрицу, транспонированную к А, и т. д. Усло-
вие Т1.]Т = J переходит с совокупность условий: AtC = С1 А,
BtD — В*В, и А* В — С* В = I. Заметим, что матрица Г-1, кото-
рая также симплектична, имеет вид
т-1 =
D1
-С*
-В‘\
А* ) ’
9.5. От гауссовой оптики к линейной
463
причем выполняются условия:
DC* = CD* и В A* = АВ*.
А теперь вернемся к проблеме доказательства того, что груп-
па линейных симплектических преобразований (в пространстве
четырех измерений) совпадает с множеством всех преобразова-
ний в линейной оптике. Как и в случае гауссовой оптики, дока-
зательство распадается на две части. Первая, физическая часть
доказательства показывает, что (в линейном приближении) мат-
( л Е> Dt
рица I р д I, где Р — Р — симметричная матрица, соответ-
ствует преломлению на поверхности раздела между двумя обла-
стями с постоянным коэффициентом преломления (для каждой
поверхности появляется своя матрица Р), и что матрица I д I
соответствует движению в среде с постоянным коэффициентом
преломления, где d -- оптическая длина вдоль оси. Вторая часть
доказательства (математическая) позволяет доказать, что любая
симплектическая матрица может быть записана как произведе-
ние матриц этого вида.
Здесь мы не будем заниматься математическим доказатель-
ством, которое является довольно хитроумным обобщением до-
казательства, приведенного в разделе 9.2. Читатель может найти
его в книге Guillemin, Sternberg, Symplectic Techniques in Physics,
стр. 27-30. Давайте рассмотрим физическую часть этой задачи.
Напомним, что мы определяем падающий луч заданием его на-
правления v = (vx,vy,vz), ||v|| = + Vy + — 1, и точкой, где
луч пересекает плоскость, параллельную плоскости ху и находя-
щуюся в точке z на оптической оси. Тогда
Vz = (1 - v2x - ^2)1/2 = 1 - |(v2 + г?2) + • • • = 1.
Мы предполагаем vx и малыми и поэтому пренебрегаем квад-
ратичными членами. Пусть
Рх = nvx, ру = nvy,
где п — коэффициент преломления. Смещение на расстояние t
вдоль оптической оси —- это с точностью до квадратичных членов
464
Глава 9. Гауссова оптика
по vx и vy то же, что и смещение на расстояние t вдоль вектора v.
Следовательно,
$2х Qlx ~ №х
и
Тогда мы имеем
где d — t/n (см. рис. 9.18).
Рис. 9.18
Теперь перейдем к преломлению света. Предположим, что
преломляющая поверхность квадратична и определяется форму-
лой
, 1 ь
Z ~Z = 2 A:q4’
где к — симметричная матрица 2x2. Нормаль к этой поверхности
в точке q определяется формулой
u = (fcq, —1).
(С точностью до членов порядка выше первого вектор и имеет
единичную длину.) Проекция вектора v на плоскость, касатель-
ную к поверхности в точке q, равна
v — (v • u)u.
9.5. От гауссовой оптики к линейной
465
Запишем v = (vx,vy, 1) = (и, 1), тогда v u = fcq - р - 1 и
v — (v • u)u = (р, 1) — (fcq • i/ — 1)(fcq, —1).
Откуда, пренебрегая квадратичным членом fcq -1/, получаем для
проекции выражение
(м + fcq, 0).
Закон Снеллиуса говорит, что ni(vi — (vi-u)u) = n2(v2~(v2-u)u).
В линейном приближении и с учетом того, что pi = тн/i и р2 ~
получаем
Pi - ^i&q = Р2 - пъкц
или
р2 = pi - Pq,
где
Р = —(ni — П2)к.
ы /10
Итак, мы получили матрицу преломления I р д
. Таким об-
разом, мы показали, что группа преобразований линейной оптики
совпадает с группой Sp(4,R).
Есть еще один заслуживающий внимания момент в гауссовой
оптике. Предположим, что оптическая система обладает враща-
тельной симметрией. Тогда на каждой преломляющей поверхно-
сти матрица оптической силы Р имеет вид Р = ml, где т —
скалярный коэффициент и I — единичная матрица 2x2. Оче-
/I
видно, что произведение таких матриц на матрицу вида I I
. Заметим, что когда такая
матрица действует на вектор
/а! №
может быть записано в виде т m
I cl а!
0.x
Чу
Рх
\Ру)
466
Глава 9. Гауссова оптика
(а Ь\
то получится то же самое, когда матрица I J действует от-
дельно на у и у’ ^так’ когДа мы изучали гауссову оп-
тику, то не обязательно было ограничиваться изучением коакси-
альных лучей. Можно было рассматривать произвольные лучи,
разложив их на х~ и ^/-компоненты. Это является следствием при-
нятого линейного приближения.
Основная формула для оптической длины
L = Lo + -(р2 q2 - pi Qi)
(где теперь р и q - векторы) доказывается так же, как и в гаус-
совом случае, проверяя, что происходит с базисными компонен-
тами. Нет смысла повторять это еще раз.
Две плоскости называются несопряженными, если оптическая
матрица В, связывающая их, несингулярна. Тогда можно решить
уравнения
42 = Aqi + Bpi
И
Р2 = Cqi + Z>pi
относительно Pi и р2, которые оказываются равны
Pi = - B-1Aqi + B-1q2
Р2 = (С - ПВ“1А)Ч1 + ВВ-1Ч2.
Теперь можно написать
L = Lo + W(qi,q2),
где
VK(qi, q2) = | [BB-1q2 • q2 + B-1Aqi • qi - (2В‘)-141 • 4г] •
(При выводе этой формулы мы использовали тождество
-(В*)'1 = С - DB^A,
9.5. От гауссовой оптики к линейной
467
которое следует из несингулярности В и условия AlD — BlC = I.)
Прямое вычисление (с использованием этого тождества) дает (в
очевидном смысле)
дь дЬ
= Р2 и — = -Р1.
3q2 dqi
Таким образом, знание L дает возможность выразить pi и р2
через qi и q2.
Мы можем теперь коротко описать переход к (нелинейной)
геометрической оптике. Сформулируем условие симплектично-
сти матрицы А немного по-другому. В пространстве R4 рассмот-
рим 2-форму
со — dqx Л dpx + dqy Л dpy.
Линейное отображение А : R4 —* R4 симплектично тогда и только
тогда, когда
А* со = со.
Другими словами, перенос формы со в результате действия А дает
снова од. Поэтому дадим следующее определение: дифференциру-
емое отображение ф называется симплектическим, если
ф*оо = си.
Мы не требуем здесь, чтобы ф было линейно. (В старой литера-
туре симплектические отображения назывались каноническими
преобразованиями.) Гамильтон показал, что отображения в гео-
метрической оптике (от входа до выхода) являются в точности
симплектическими отображениями. Кроме того, он показал, что
в предположении неконгруэнтности симплектическое отображе-
ние определяется характеристической функцией £, где Z(qi,q2)
есть оптическая длина пути, соединяющего точки qi и q2. (Ко-
нечно, в этом случае формула для L будет гораздо сложнее.)
Примерно через десять лет после написания фундаменталь-
ных работ по оптике Гамильтон сделал потрясающее наблюдение:
тот же самый формализм применим и в механике точечных ча-
стиц. Пусть gi,..., qn — обобщенные координаты системы частиц,
a pi,... ,рп ~~ их обобщенные импульсы. Вместо оптической оси z
468
Глава 9. Гауссова оптика
рассматривается время. Тогда преобразование от начальных ко-
ординат и импульсов к конечным всегда будет симплектическим.
В XIX веке это открытие привело к громадному прогрессу в тео-
ретической механике. А почти столетием позже, в 1920 году, ана-
логия между оптикой и механикой, обнаруженная Гамильтоном,
сыграла ключевую роль в развитии квантовой механики.
Резюме
А. Матричная формулировка гауссовой оптики
Вы должны уметь использовать двухкомпонентный вектор для
описания луча, проходящего через плоскость отсчета.
Вы должны уметь получать и использовать матрицы 2x2
для описания эффектов распространения, преломления света и
тонкой линзы.
В. Система линз
Вы должны уметь вычислять матрицу для системы преломляю-
щих поверхностей или системы тонких линз между двумя плос-
костями отсчета.
Для данной системы линз надо уметь находить главные и фо-
кальные плоскости. Надо уметь пользоваться ими для нахожде-
ния изображения объекта.
С. Гамильтонова оптика
Для гауссовой оптической системы надо уметь находить точеч-
ные характеристики Гамильтона между плоскостями отсчета и
использовать их для определения траектории луча, соединяюще-
го две точки в двух плоскостях.
Задачи
9.1. На рис. 9.19 изображены фокальные и главные плоскости для
тонкой линзы. Лучи, падающие слева параллельно оси системы,
преломляются и проходят через фокус в плоскости Г2. Лучи, вы-
ходящие из фокуса в плоскости Fi, преломляются и выходят па-
раллельными оси. Главные плоскости Hi и Н2 связаны с фокаль-
ными плоскостями Fi и Г2 соответственно.
Задачи
469
(а) С помощью луча J?i, изображенного на рисунке, определя-
ется положение в плоскости z. Нарисуйте ход луча и еще
двух других лучей.
(Ь) Вычислите координаты изображения из предыдущего пунк-
та с помощью уравнения Ньютона относительно любой из
плоскостей, изображенных на рис. 9.19.
(с) Постройте матрицу оптической системы между плоскостя-
ми и Z2. С помощью этой матрицы определите положение
и наклон луча 7?i, выходящего из линзы в плоскости .
F\ Н2 Z2 Fq,
Ri
1 см
Рис. 9.19
9.2. На рис. 9.20 изображена толстая линза, сделанная из стекла с
показателем преломления п = 3/2. Постройте матрицу распро-
странения луча между плоскостями отсчета z\ и 22. Определите
положение фокальных плоскостей F± и F2, главных плоскостей
Н\ и Т?2 и покажите их на рисунке. Нарисуйте ход лучей и опре-
делите положение изображения объекта, находящегося слева от
zi на расстоянии 1 см. Используя уравнение Ньютона, проверьте
полученные результаты.
Рис. 9.20
470
Глава 9. Гауссова оптика
9.3. Предположим, что ход лучей считается фундаментальной харак-
теристикой свойств тонкой линзы, т. е. предположим, что пере-
сечение луча, проходящего через центр линзы, с лучом, парал-
лельным оси слева от линзы и проходящим через ее фокус справа,
определяет пересечение всех лучей от выбранного объекта.
(а) Используя это допущение, получите уравнение тонкой лин-
зы. Рассмотрите только тот случай, когда р, q и f положи-
тельны.
(Ь) Используя это допущение, докажите, что тонкая линза мо-
жет быть описана матрицей 2 х 2 и получите вид этой мат-
рицы.
9.4. Шарик радиуса 6 см (рис. 9.21) сделан из стекла с показателем
преломления п = 3/2. Для лучей, проходящих вблизи диаметра,
этот шар ведет себя как линейная толстая линза (толстая линза —
это цилиндрическая сердцевина, осью которой является диаметр
шара). Постройте матрицы для этой линзы между плоскостями
отсчета z\ и Z2, между фокальными и главными плоскостями.
Покажите эти плоскости на рисунке.
f = 12 см f = 8 см
◄-----4 см-------►
Z1 Z2
Рис. 9.22
9.5. (а) Для системы из двух собирающих линз, изображенной на
рис. 9.22, постройте матрицу для движения луча между
ПЛОСКОСТЯМИ 21 И 22.
(Ь) Найдите положение фокальных плоскостей zfx nzf2, исполь-
зуя уравнение тонкой линзы и матрицу этой оптической сис-
темы. Постройте матрицу между двумя фокальными плос-
костями.
Задачи
471
(с) Найдите положение главных плоскостей Hi и и построй-
те соответствующую матрицу. Это легко сделать, учтя тот
факт, что фокусное расстояние / = 6 см и каждая глав-
ная плоскость находится на расстоянии 6 см от соответству-
ющей фокальной плоскости. Обратите внимание, что обе
главные плоскости лежат между линзами, и в этом случае
Hi находится справа от Jf2.
(d) На рисунке покажите положение фокальных и главных
плоскостей этой системы.
(е) Пусть плоскость z$ находится на расстоянии 12 см слева
от zi. Четырьмя способами найдите плоскость, сопряжен-
ную этой: (1) перемножая матрицы, (2) дважды используя
уравнение тонкой линзы, (3) используя уравнение Ньютона
#1#2 — /2 и (4) рисуя ход лучей.
9.6. Оптическая система состоит из двух тонких линз с фокусными
расстояниями /1 и /2, расположенными на расстоянии t друг от
друга (рис. 9.23). Первая фокальная плоскость находится слева
от первой линзы на расстоянии Zi; вторая фокальная плоскость
находится справа от второй линзы на расстоянии Z2. Докажите,
что фокусное расстояние f этой системы удовлетворяет уравне-
нию f2 —tf — I1I2 = 0. Имея в виду, что все параметры Zi, Z2, f, /1
и /2 могут иметь любой знак, определите, какой из корней этого
квадратного уравнения имеет физический смысл.
Рис. 9.23
9.7. Придумайте систему тонких линз, оптическая матрица которой
Л /хг
имеет вид I д L (Указание: система состоит из нескольких
линз. Можно начать с построения системы, матрица которой
удовлетворяет уравнению М2 = I.)
472
Глава 9. Гауссова оптика
9.8. На рис. 9.24 изображена оптическая система. В плоскости zj па-
дающий луч имеет координаты 2 ‘ Найдите коорди-
наты луча, выходящего из плоскости z2-
Рис. 9.24
^2
|Л| = 6 см |7?| = 9 см
Рис. 9.25
9.9. На рис. 9.25 изображена толстая линза, сделанная из стекла с
показателем преломления п = 3/2.
(а) Постройте матрицу, соответствующую движению луча меж-
ду ПЛОСКОСТЯМИ Z\ И Z2-
(Ь) Выясните, какой падающий луч выходит из системы
(q2\ (1/2\
в плоскости z2 с координатами I у ~ ( 1/6 / ‘
9.10. На рис. 9.26 изображена собирающая линза с фокусным рассто-
янием f = 10 см. Она сделана из стекла с показателем прелом-
ления п = 1.4. Выпуклые поверхности линзы имеют одинаковый
радиус кривизны R.
(а) Вычислите радиус кривизны 7?, найдите зависимость тол-
щины линзы b от расстояния q от оси. (Указание: 6(2) — 0.)
Задачи
473
(b) Луч проходит через точку А, потом по линии ACF. Пока-
жите, что время движения вдоль этой траектории мини-
мально по сравнению с любой траекторией, которая прохо-
дит через линзу с другими значениями q.
(с) Покажите, что время движения луча вдоль траектории
АС В максимально по сравнению со временем движения
по любой траектории, связывающей точки А и В.
(d) Напишите функцию ТУ («уд, qp) для плоскостей А и F. Пока-
жите, что уравнения Гамильтона дают правильный наклон
луча, заданного параметрами qA = 1 и qp = 0. Сделайте
то же самое для плоскостей А и В. Используйте функцию
W(Qa,Qb) для определения траектории луча, проходящего
через А и В.
9.11. Пусть vi = и vi = -1 J °^означают Два луча, входящие
в произвольную гауссову оптическую систему. Симплектическое
скалярное произведение этих векторов определяется формулой
^(vi,vi) = qiPi — qiPi*
(а) Покажите, что это скалярное произведение сохраняется
при прохождении оптической системы, т.е. что cu(v2,V2) =
(b) Покажите, что o>(vi, vi) — 0, если vi и Vj обозначают лучи,
пересекающиеся на оптической оси.
474
Глава 9. Гауссова оптика
(с) Допустим, что два луча проходят через одну точку в
плоскости отсчета Z\ с углом ф\ между ними. Если эти лучи
пересекаются в сопряженной плоскости с углом ф% между
ними, то чему равно расстояние от оси (Пусть п — 1 в
плоскостях Z1 и ^2.)
Глава 10
Векторные пространства
и линейные преобразования
В главе 10 мы возвращаемся назад и доказываем ос-
новные свойства конечномерных пространств и их
линейных преобразований. Здесь, главным образом,
обобщаются результаты, полученные в первых четы-
рех главах для двумерного пространства. Излагается
новый алгоритм — редукция по строкам. Вводятся
два новых понятия: понятие сопряженного простран-
ства и факторпространства. (Их было сложно ввести
раньше.) Эти понятия будут играть решающую роль
в дальнейшем1.
Введение
Мы уже довольно подробно изучили двумерное пространство. Но
при этом рассматривались только две конкретные модели. Век-
торное пространство V было либо множеством перемещений в
аффинной плоскости, либо это было пространство R2 — множест-
во упорядоченных пар вещественных чисел. Вводя координаты,
гВ параграфе 10.9 авторы выходят за пределы линейной алгебры и дока-
зывают важную теорему о локальной структуре дифференцируемого отоб-
ражения. — Прим. ред.
476
Векторные пространства ...
мы могли отождествить любое двумерное пространство с про-
странством R2, в котором линейное преобразование представля-
лось матрицей 2x2.
Сейчас мы начнем изучение произвольного векторного про-
странства в абстрактном виде с аксиоматической точки зрения.
Преимущество такого подхода состоит в том, что мы сможем рас-
сматривать векторные пространства, которые не определяются
ни через геометрические понятия, ни как множество наборов из
п вещественных чисел. Окажется, что такое векторное простран-
ство, содержащее только конечное число линейно независимых
элементов, может быть отождествлено с пространством Rn для
некоторого целого числа п, так что в конечном счете мы вернемся
к изучению пространства Rn и использованию матриц для опи-
сания линейных преобразований. В последующем надо все время
иметь в виду известную двумерную геометрическую модель век-
торного пространства, чтобы напоминать себе, что последующие
аксиомы и определения вполне разумны. Однако, мы специально
будем давать примеры векторных пространств без геометриче-
ского содержания. Такие векторные пространства являются ча-
стью естественного математического языка в различных обла-
стях физики, особенно в электромагнитной теории и квантовой
механике.
10.1. Свойства векторных пространств
Начнем с повторения основных определений.
Векторное пространство У, иногда называемое линейным про-
странством, состоит из элементов — векторов, для которых спра-
ведливы ряд аксиом. Эти пространства будем обозначать заглав-
ными буквами, напрмер, V, ТУ*, Ci, а их элементы — строчными
буквами жирным шрифтом, например, v, W2, b1.
В векторном пространстве V вводится правило, согласно ко-
торому любым двум элементам vi и V2 ставится в соответствие
третий элемент v, называемый их суммой и обозначаемый V1+V2.
Эта операция удовлетворяет тем же аксиомам, что и сложение
вещественных чисел:
10.1. Свойства векторных пространств
477
Коммутативный закон:
Vl + V2 = V2 + V1. (10.1)
Ассоциативный закон:
(vi + v2) + v3 = Vl + (v2 + v3). (10.2)
Существование нуля: существует такой элемент 0, что
v + 0 = v для всех v. (10.3)
Существование противоположного: для любого v существу-
ет такой элемент —v, что
-v + v = О. (Ю.4)
В некоторых случаях сложение определяется прямо через сло-
жение вещественных чисел, поэтому сразу бывает ясно, что эти
аксиомы выполняются. Например, в пространстве R2 мы опреде-
ляем
ai \ । / bi \ _ / ai + bi
а2 J \ &2 J \ а2 + ^2
Аналогично, можно рассматривать двумерное векторное про-
странство всех функций, определенных на двухточечном мно-
жестве {А, В}, где сложение определяется отдельно для каждой
точки, т. е. h — f -h g — функция, обладающая свойствами
h(A) = f(A)+g(A),
h(B) = f(2?) + g(B).
В качестве еще одного примера рассмотрим пространство всех
непрерывных функций на отрезке [0,1], где также сложение опре-
деляется отдельно для каждой точки. Если f и g — элементы
этого пространства, то их суммой будет функция h, задаваемая
формулой h(x) = f(z)+ g(z). В этом случае важно отметить, что
для любых f и g сумма h будет также непрерывной функцией и
поэтому принадлежит векторному пространству.
Ясно, что во всех этих примерах нулевой элемент и проти-
воположный элемент существуют и единственны. Это верно для
478
Векторные пространства ...
любого векторного пространства, что легко доказывается, исходя
из приведенных аксиом. Читателю предоставляется возможность
сделать это самостоятельно.
В векторном пространстве должна быть определена еще одна
операция: умножение вектора на скаляр. В этой главе мы все-
гда будем считать, что скаляр — вещественное число. Поэтому
векторное пространство будет вещественным векторным про-
странством, Позднее рассмотрим комплексные векторные про-
странства, в которых элементы могут умножаться на комплекс-
ные числа. И в этом случае должны быть справедливы аксиомы
обычного умножения, а именно: если ci и С2 - скаляры, a Vi и
V2 — векторы, то справедливы
Ассоциативный закон:
ci(c2v) = (cic2)v.
Дистрибутивные законы:
(ci + C2)v = C1V + c2v,
c(vi + V2) = CV1 + cv2.
(10.5)
(10.6)
Умножение на 1 дает тождество:
lv = v для всех v.
(Ю.7)
Поскольку аксиомы сложения и умножения на скаляр в век-
торном пространстве точно такие же, как и в арифметике, то
в векторной алгебре сохраняются все арифметические свойства.
Они легко доказываются, исходя из аксиом. Ниже приводится пе-
речень этих свойств. Подумайте и постарайтесь доказать их, так
как в определениях они не содержатся.
(а) 0 • v = 0.
(Ь) с-0 = 0.
(с) (—с) • v = —(с • v) = с • (—v).
(d) v + v — 2v, v + v + v — 3v, и т. д.
(е) Если а • v — О, то либо а = 0, либо v — 0.
10.2. Дуальное пространство
479
10.2. Дуальное пространство
Для выбранного векторного пространства V можно рассмотреть
множество всех линейных функций из V в R. Сейчас мы покажем,
что они образуют векторное пространство, называемое дуальным
пространством, сопряженным к пространству V, и обозначае-
мое V*. Элементы этого пространства будем обозначать грече-
скими буквами жирным шрифтом и договоримся писать у них
индексы сверху, в отличие от элементов пространства V. Таким
образом, Vi,V2,... — элементы пространства V, а а1,»2,... —
элементы пространства V*. Действие элемента из V* на элемент
из V будем обозначать a[v].
Сумму двух элементов пространства V* определим как для
функций, т. е. для любого v 6 V положим (а1 + a2)[v] = ax[v] +
a2[v]. Поскольку сумма линейных функций — тоже линейная
функция, а1 + а2 является элементом пространства V*. Легко
видеть, что все аксиомы сложения (10-1)—(10.4) выполняются;
нулевым элементом V* будет нулевая функция, которая, конечно,
линейна. Аналогично определяется умножение на скаляр:
(ca)[v] = c(a[v]).
Очевидно, что са ~ линейная функция, и что для введенной
таким образом операции умножения на скаляр выполняются все
аксиомы умножения.
Приведем несколько очень разных примеров определения эле-
ментов дуального пространства.
1. Пусть V — двумерное пространство R2. Элементы это-
(х \
]. Тогда можно считать,
что элементами пространства V* будут вектор-строки. Напри-
мер, а = (а, Ь), причем a[v] = (а, Ь) = ах + by.
2. Пусть V — пространство всех функций множества, состо-
ящего из двух элементов {А, В}. Тогда правило otA : V —> R
приписывает каждому элементу f Е V его значение на элемен-
те А, т.е. ал[Г] = f(A) будет элементом множества V*. В этом
случае общий вид элемента из V* можно записать в форме
a[f] = af (А) + bf (В)
480
Векторные пространства ...
для произвольных а и Ь. В этом примере интересно то, что мы
идентифицировали А с и В с ав. Выражение аА+ЬВ бессмыс-
ленно, а выражение actA + bctB определяет элемент пространства
V*. Таким образом, мы получили процедуру, связывающую век-
торное пространство с любым конечным множеством так, чтобы
все элементы множества стали векторами. Для этого надо взять
дуальное пространство к пространству функций на этом множе-
стве. Такая конструкция оказывается очень полезной в теории
электрических цепей.
3. Пусть V — пространство дифференцируемых функций f (t)
на отрезке [0,1]. Тогда все выписанные ниже отображения будут
элементами пространства V*:
a: f^f(O),
/3: f^f'(O),
7 : fi-*/ f(i) dt,
Jo
6: [ tf(t)dt,
Jo
10.3. Подпространства
Часто векторное пространство W является частью большего век-
торного пространства V, причем процедуры сложения и умноже-
ния на скаляр определены в них одинаково. Поскольку известно,
что V удовлетворяет всем аксиомам векторного пространства, то
нет необходимости проверять их для W. Чтобы показать, что под-
пространство W является векторным пространством, достаточно
доказать, что W замкнуто по отношению к операциям сложения
и умножения, т. е. что сумма двух любых элементов wi, W2 Е W,
равная Wi + W2, является элементом W, и для произвольного ве-
щественного числа с и любого w G W элемент cw принадлежит
W. В частности, нулевой вектор должен быть элементом W.
На практике подпространство обычно определяется одним из
10.3. Подпространства
481
двух методов: конкретизируется некоторое множество элементов
из V, либо множество элементов из V*.
Метод 1. Пусть wi,W2,...,Wfc — векторы в пространстве V.
Тогда множество W всех линейных комбинаций вида
к
w = У2 CiWi
г=1
образует подпространство пространства V. (Конечно, это может
быть и все пространство V.)
Метод 2. Пусть а1, а2,..., -- элементы V*. Тогда множество
W элементов v 6 V, удовлетворяющих условиям
аг[у] = 0,
a2[v] = 0,
afc[v] = 0,
образует подпространство пространства V. Это доказывается
очень просто. Пусть wi и W2 — два вектора из множества W.
Тогда вследствие линейности функций а1, а2,... мы получаем
ct2[wi + W2] = a2[wi] + az[w2] — 0, i — 1,2,..., к,
так что Wi + W2 6 W. Точно так же, если w G W, то
c/[cw] — с<У [w] — 0,
следовательно, cw 6 W. Таким образом, мы показали, что мно-
жество W замкнуто по отношению к операциям сложения и умно-
жения на скаляр, т. е. является подпространством. (Конечно, это
может быть {0} — нулевое подпространство, состоящее из един-
ственного элемента — нулевого вектора.)
Хорошо известный пример применения этих двух методов да-
ет построение плоскости, проходящей через начало координат в
пространстве R3. Согласно методу 1, плоскость задается двумя
482
Векторные пространства ...
векторами, например,
или
Согласно методу 2, плоскость описывается линейным уравнени-
ем, например,
2х — 2у + z = О,
которое соответствует a[w] — 0, где
а - (2,-2,1)
Рассмотрим еще один пример: пространство V образовано
множеством полиномов, степень которых < 2. Элемент этого мно-
жества имеет вид
f(t) — а + Ы + ct2.
Согласно методу 1, в качестве одномерного подпространства W
можно рассматривать пространство всех полиномов, имеющих
вид умноженной на любую константу функции 1 — t2. Соглас-
но методу 2, это же подпространство можно определить двумя
условиями
/(1) = 0 и Л-1) = о,
или, более замаскированно, условиями
/'(0)=0 и [^f(t)dt = Q.
Jo
10.4. Размерность и базис
Чтобы двигаться дальше в изучении векторных пространств, нам
необходимы понятия линейной зависимости и линейной неза-
висимости набора векторов. Говорят, что множество векторов
10.4. Размерность и базис
483
{vi, V2,..., Vfc} линейно зависимо, если существуют такие веще-
ственные числа Л1, Л2,. • •, А&, не все равные нулю, что
Avi + A2V2 + • * • + AfcVfc = 0.
Если это равенство выполняется только для Ai = А2 — •••— А^ =
0, то такое множество векторов линейно независимо.
Приведем несколько примеров, иллюстрирующих эти важные
понятия.
1. Пусть V — пространство R3. Рассмотрим
Векторы, образующие набор {vi,v2,V3}, линейно зависимы, по-
тому что
2vi + v2 - V3 =
С другой стороны, набор векторов {vi,V2} линейно независим,
потому что
/1\ /0\ / Ai \
Ai | 1 ] + А2 | 2 | = | Ai + 2А2 I .
\0/ \1/ \ а2 /
Очевидно, что результирующий вектор равен нулю, только если
Ai ~ 0 и А2 — 0.
2. Пусть V — пространство функций на отрезке [0,2тг]. Рас-
смотрим
vi = cos2t, V2 — sin2t, V3 — cos 2t.
Этот набор линейно зависимый, потому что vi — V2 — V3 — 0.
3. Пусть V — пространство функций на множестве {Л, В}.
Рассмотрим
fi: Л(А) = 1, Л(В) = 2,
f2: /2(А) = 2, /2(В) = —3,
f3: /3(А) =-3, /з(В) = 1.
484
Векторные пространства ...
Функции этого набора линейно зависимы, потому что fi +£2+£3 —
О (т. е. мы получили нулевую функцию).
4. Пусть V — пространство полиномов степени < 2. Рассмот-
рим следующие элементы пространства У*:
а : f —> if(i)tft,
/3: f^f'(O).
Написав f(t) = А + Bt + Ci2, мы получим
/*2 -j /?
<x[f] = / (At + Bt2 + Ct3) dt = -^B
J—2 3
И
/3[f] = B.
(16 \
a —— (3 ) [f] = 0, и набор векторов {a,/3} ли-
O /
нейно зависим.
Из приведенных примеров, вероятно, стало понятным, что
существуют ситуации, когда не очевидно, является ли некоторый
набор векторов линейно зависимым или нет. Поэтому мы должны
разработать процедуру исследования этого вопроса.
Мы говорим, что пространство V натянуто на множество
векторов {vi, V2,..., vfc}, если V состоит из векторов, которые
можно записать как линейную комбинацию (Набор
векторов {vi, V2,..., Vfc} может быть линейно зависимым, но тог-
да коэффициенты определены неоднозначно.) Рас-
смотрим следующие примеры.
1. Пусть V — пространство R3. Очевидно, что набор векторов
'/1\ /0\ ZoV
< I 0 , 1 , I ° >
< \°/ \0/ \1/ ;
/М1
порождает пространство R3, потому что любой элемент I
\Мз
10.4. Размерность и базис
485
этого пространства может быть записан в виде
(Д1\ /1\ / 0\ / 0
М2 I = Mi I 0 I + М2 I 1 I + Мз I о
Мз/ \0/ \0/ \1
Менее очевидно, что набор векторов
тоже порождает пространство R3, а вот набор
'/1\ /0V
< 1,1 '
1\о/ V/J
пространство R3 не порождает.
2. Пусть V — пространство функций f(t) на интервале [0, оо),
удовлетворяющих дифференциальному уравнению
f" + 3f' + 2f - 0.
Векторы е“* и e~2t порождают пространство V, потому что общее
решение уравнения имеет вид
= Ае~г + Be~2t.
3. Пусть V — пространство функций вида f(t) = А + Bi3.
Тогда векторы
a: f —>f(0),
порождают дуальное пространство У*. В самом деле,
a[f] - Л,
Г1 2
0[f] = / (At + Bt4) dt = -В.
J-i 5
486
Векторные пространства ...
Однако любой элемент 7 6 V* должен иметь вид ^[f] — а А + ЬВ.
5
где а и b — некоторые постоянные. Таким образом, 7 ~ аа +
а и /3 определяют пространство V*.
Пусть vi, V2,..., vn — конечный линейно независимый набор
векторов, порождающих векторное пространство V. Число век-
торов п называется размерностью пространства V, Чтобы уста-
новить, что размерность определяется однозначно, т. е. что все
такие наборы для данного пространства содержат одинаковое ко-
личество элементов, мы должны доказать следующую теорему.
Теорема. Пусть набор векторов vi,V2,...,Vfc порождает
векторное пространство V. Тогда любой набор k + 1 векторов
в этом пространстве V линейно зависим.
Теорему будем доказывать по индукции: сначала проверим
ее для k = 1, потом покажем, что если теорема верна для про-
странства, натянутого на к — 1 вектор, то она справедлива и для
пространства, натянутого на к векторов.
Итак, пусть к = 1. Теорема в этом случае утверждает, что
если V натянуто на один вектор v, то любые два вектора в этом
пространстве V линейно зависимы. Действительно, рассмотрим
два таких вектора wi и W2. Так как v порождает пространство V,
то существуют такие вещественные числа и /12, что wi = M1V
и W2 = №v. Тогда очевидно, что
W - /iiw2 = M2M1V - /11M2V = О,
откуда следут линейная зависимость векторов wi и W2.2
Теперь предположим, что теорема верна для любого набо-
ра к векторов в пространстве, натянутом на к — 1 вектор. Рас-
смотрим набор к + 1 векторов {wi,..., W£+i} в пространстве,
определенном векторами Vi,...,Vfc. Мы можем написать wi =
aiivi + CZ12V2 + • • • + «ifcVfc, потому что векторы {уД порожда-
ют пространство V. Если Wi = О, то rwi = 0, где г 0, дает
нетривиальную связь между векторами w$, и тогда все доказа-
но. Поэтому предположим, что wi 0. В этом случае можно
Определение линейной зависимости векторов {wi, W2} требует, чтобы по
крайней мере одно из чисел /zi, не равнялось нулю. На случае Д1 = д2 — О
авторы не останавливаются. Можно порекомендовать читателю рассмотреть
его в качестве самостоятельного (очень простого) упражнения. — Прим. ред.
10.4. Размерность и базис
487
упорядочить векторы vi, v2,..., Vfc так, что ац / 0. Тогда
1 «12 .
—W1 = V1 4--v2 4--h —Vfc.
ап ап «и
Далее, пусть
w2 = a2ivi + a22v2 4---------------h «2fcVfc.
Можно написать равенство
«21 ( «21«12 \ , I «21«lfc \
w2--------w 1 — I а22--------------) v2 4- • • • 4- I -------------) vfc-
«11 X «11 / \ «11 /
Аналогично, можно выразить W3-----wi и т. д. через к — 1 вектор
«и
из набора v2,..., v^. Но мы предположили, что теорема верна для
к — 1 векторов. Следовательно, набор к векторов
«21 «31
w2--------Wi, W3---------W1, ... , Wfc+1 -
«11 «11
«(fc+l)l
«11
линейно зависим. Это значит, что существуют такие константы
А2,..., Afc+i, не все равные нулю, что
\ / «21 \ \ / «31
А2 I w2------wi I + А3 I w3--------- wi
X «11 / \ «11
+ Afc+i (Wfc+i
= 0.
Отсюда вытекает, что набор векторов {wi, w2,..., w^+i} линейно
зависим, что и требовалось доказать.
Теперь мы можем легко показать, что размерность векторно-
го пространства определена однозначно. Предположим, что у нас
есть набор линейно независимых векторов {vi,..., v&}, на кото-
рый натянуто пространство V. Кроме того, есть еще один набор
{wi,...,wn}, на который тоже натянуто это пространство. Из
только что доказанной теоремы следует, что п < к. В противном
случае векторы {wi,..., wn} будут линейно зависимы. С другой
стороны, по той же теореме, к < п. Иначе векторы {vi,..., v&}
488
Векторные пространства ...
будут линейно зависимы. Следовательно, к = п, и любой конеч-
ный набор линейно независимых векторов, определяющих про-
странство V, содержит одинаковое число элементов. Это число и
называется размерностью пространства V.
На самом деле в векторном пространстве V, имеющем раз-
мерность п, любой набор п линейно независимых векторов по-
рождает это пространство. Действительно, пусть {vi,..., vn} —
набор линейно независимых векторов в пространстве У, и пусть
w — произвольный вектор, не равный нулю. Множество векторов
{w, vi,..., vn}, состоящее их п + 1 элементов, должно быть ли-
нейно зависимым. Следовательно, существуют такие постоянные
Ло, Ai,.. •, Лп, что
Aow + Aivi +----F Anvn = О.
В этом выражении константа Ао не может быть равна нулю,
так как иначе векторы {vi,..., vn} будут линейно зависимы, что
противоречит начальному предположению. Поэтому можно на-
писать
w = (A1V1 + • • • + Anvn).
Ло
Таким образом, произвольный ненулевой вектор w выражен как
линейная комбинация векторов {vi,..., vn}, порождающих про-
странство.
Линейно независимый набор векторов {vi,..., vn}, порожда-
ющий векторное пространство V, записанный в определенном по-
рядке, называется базисом пространства У. Таким образом, на-
боры {vi, v2, V3,..., vn} и {v2, vi, V3, <.., vn} являются разными
базисами.
Рассмотрим векторы wi,...,Wfc (к < п) в n-мерном вектор-
ном пространстве У. Мы всегда можем найти вектор Wfc+i, кото-
рый не принадлежит подпространству {wi,..., w^}. Продолжая
этот процесс п — к раз, мы получим базис в пространстве У, ко-
торый включает векторы В частности, для данного
векторного пространства У с размерностью п, содержащего под-
пространство W с размерностью к, мы всегда можем построить
такой базис для У, что его первые к векторов будут базисом
подпространства W. Эта процедура называется расширением ба-
зиса подпространства ТУ до базиса пространства У.
10.4. Размерность и базис
489
Пусть в пространстве V выбран базис {ei,..., еп}. Тогда лю-
бой элемент этого пространства может быть единственным об-
разом записан как линейная комбинация базисных векторов:
v = rciei + z2e2 Ч---------Ь хпеп
Числа Xi,..., хп называются компонентами вектора v в данном
базисе. Чтобы показать единственность такого разложения, до-
пустим, что v может быть записан по-другому:
v = У1ег + у2е2 Ч----Н упеп-
Вычтем из первого равенства второе и получим
О = (xi - yi)ei + (ж2 - у2)е2 Н---Н (жп - уп)еп.
Поскольку базисные векторы линейно независимы, то
- У1 = Х2 - У2 = • = Хп - уп = 0,
что и доказывает единственность компонент вектора v.
Из сказанного видно, что с помощью базиса в пространстве V
можно определить изоморфизм L пространства V с Rn, положив
и т. д.
Обратно, если L такой изоморфизм, то набор векторов
И Т.д.
является базисом пространства V. Таким образом, мы можем
отождествить базис {vi,..., vn} с соответствующим изоморфиз-
мом L точно так же, как мы делали в главе 1 в двумерном случае.
490
Векторные пространства ...
Пусть L : V —> Rn и L' : V —> Rn — два базиса в одном
n-мерном пространстве V.
V
Rn-----------^Rn
О
Тогда В ~ Lf о Z-1 — линейный изоморфизм Rn —> Rn, т. е.
обратимая матрица п х п. Эта матрица называется матрицей
замены базиса.
Пусть V — векторное пространство размерности к, a W -
векторное пространство размерности /, и пусть Т : V —> W —
линейное преобразование. Предположим, что мы выбрали базисы
в пространствах V и W. Тогда у нас есть изоморфизмы L : V —>
Rfc и М : W R1, и мы можем определить отображение
MTL-1 : R* Rz.
Выражение MTL~X можно рассматривать как матрицу, у кото-
рой I строк и к столбцов. Мы называем MTL"1 матрицей отобра-
жения Т относительно базисов L и М и обозначаем ее Ма1дд/(Т),
т. е.
MatL,M(T) = MTL-1.
Эта ситуация может быть изображена на диаграмме
т
V----------W
L М
тгрА; ----->- тгт)/
К MatLiMCO К
Если мы выберем другие базисы: Lf ~ PL в пространстве V
и Mf = QM в пространстве W, то
L'~r = L~1P~1, так что M'TL'-1 = QMTL^P'1,
ИЛИ
Matj/’M'C^) ~ Q(Mat£)Af(T))P“1,
т. е. получена формула для замены базисов, из которой видно, как
матричное представление линейного преобразования изменяется
при такой замене.
10.5. Дуальный базис
491
10.5. Дуальный базис
Построив базис векторного пространства V, мы можем присту-
пить к построению дуального базиса для дуального пространства
У*. Пусть {ei,е2,...,еп} — базис в пространстве V, Тогда любой
вектор v Е V может быть записан единственным образом
v = xiei + х2е2 Ч--Ь хпеп.
Пусть а — элемент дуального пространства У*. Поскольку а —
линейная функция в пространстве V, мы имеем
Ot[v] = Xi«[ei] + ж2а[е2] Ч-h тпа[еп].
Это значит, что а полностью определяется своими значениями
на базисных векторах {ei,e2,... ,еп}. Введем в пространстве У*
систему векторов е1,..., €п, задаваемых равенствами
Чтобы доказать линейную независимость этой системы, рассмот-
рим ^2 Применив эту линейную функцию к ej, получаем
п
52Лгег[е,] = Aj.
г=1
Таким образом, если J2 ^гег является нулевым элементом в У*, то
Xj — 0 для всех j. Это доказывает, что набор векторов {е1,..., еп}
линейно независим.
Для любого элемента а Е У* можно написать
а = «[е^е1 + ск[е2]е2 Ч----Н а[еп]еп.
Очевидно, что обе части этого равенства имеют одинаковое значе-
ние для любого базисного вектора е7, т. е. являются одним и тем
же элементом дуального пространства У*. Это доказывает, что
пространство У* натянуто на векторы е1,..., еп, которые, кроме
того, линейно независимы. Из этого следует, что пространство У*
492
Векторные пространства ...
имеет ту же размерность п, и набор векторов {е1,... , е71} явля-
ется базисом в пространстве V*.
Этот базис можно использовать, чтобы идентифицировать V*
с пространством Rn*. Если мы разложим элемент at Е V* по
дуальному базису
— Aie* + А2€^ + • * • + Ап€П,
то обнаружим, что удобно рассматривать элементы Rn* как
векторы-строки. Тогда ct отождествляется с вектором-строкой
(Ai, Аз,..., Хп). Преимущество такого обозначения в том, что дей-
ствие а на v описывается обычными правилами умножения мат-
риц
a[v] = (А1,Л2,...,Ап)
— А1Ж1 + А2Ж2 + ’ • • + Ап®тг.
Важно не забывать, что эта техника применима только в случае,
когда базис, определяющий соответствие между V* и Rn*, явля-
ется дуальным к базису, определяющему соответствие между V
и Rn.
Предположим, что у нас есть n-мерное пространство V и
fc-мерное подпространство W. В пространстве V мы можем вы-
брать такой базис, что его первые k векторов образуют базис
подпространства W:
После этого построим дуальный базис
{a1,..., afc;afe+1,
так что
1, » =
О, i / j-
a’[vj] = <
Подпространство в V* размерности n — fc, натянутое на век-
торы , an}, называется аннулирующим пространством
10.6. Факторпространство
493
для W и обозначается W1. Если а е W1- и w е W, то a[w] = 0,
т. е. WL «аннулирует» подпространство W. Отсюда и происхож-
дение этого термина. То, что мы раньше называли методом 2
для описания подпространства, по существу, было описанием ан-
нулирущего пространства. Например, вектор (а, 6, с) определяет
одномерное подпространство ТУ1* дуального пространства R3*.
Подпространство W пространства R3, аннулированное ТУ1, бу-
дет двумерным: это плоскость ах + by + cz — 0. Если мы выберем
два независимых элемента дуального пространства R3*, напри-
мер, (ai,6i,ci) и («2,^2?Ог), тогда подпространство R3, аннули-
рованное ими, будет одномерным: это будет прямая, задаваемая
системой уравнений
aix + bi2/ + ciz = 0,
«2^ + £>2У + c2z — 0.
Заметим, что аннулирующее пространство ТУ1 подпространства
ТУ С V не зависит от конкретного выбора базиса пространства V.
Мы вводили базис только для того, чтобы было удобно вычислить
размерность ТУ3-.
Пока нам недостает систематической процедуры вычисления
размерности подпространства, натянутого на определенные эле-
менты векторного пространства, или размерности подпростран-
ства, аннулированного конкретными элементами дуального век-
торного пространства. Эту процедуру, которая называется редук-
цией по строкам, мы опишем позднее.
10.6. Факторпространство
Продолжим рассмотрение n-мерного векторного пространства У,
содержащего подпространство W с размерностью к.
Кажется естественным, что должно существовать подпро-
странство с размерностью п — к, которое в некотором смысле
будет «разницей» между V и W. Такое подпространство назы-
вается факторпространством и обозначается V/W. Однако, его
элементы не будут элементами пространства V. Они являются
множествами элементов пространства V и называются классами
эквивалентности. Прежде чем дать определение этих классов,
494
Векторные пространства ...
нам следует сначала увидеть, почему что-то более простое не
будет достаточным.
В качестве конкретного примера пространства V с подпро-
странством W рассмотрим плоскость R2 и прямую W на этой
плоскости, как это изображено на рис. 10.1. «Разностью» между
V и W могло бы быть множество элементов V, не входящих в
ТУ. Но ведь они порождают всю плоскость. На рис. 10.1 видно,
что векторы vi и V2, не лежащие на прямой ТУ, порождают всю
плоскость.
Рис. 10.1
Можно попробовать поступить по-другому — взять к базис-
ных векторов подпространства ТУ и расширить это множество до
базиса пространства У. Тогда у нас добавится п — к базисных
векторов, не входящих в ТУ. Возникает подпространство нужной
размерности, но оно зависит от выбора базисных векторов и по-
этому «плохо» определено. Например, на рис. 10.1 мы взяли w в
качестве первого базисного вектора. После этого в качестве вто-
рого базисного вектора можно брать vi, V2 или V3. При этом мы
каждый раз будем получать новое пространство. Если бы в про-
странстве V было определено скалярное произведение, то можно
было бы выбрать подпространство, ортогональное к W. Но у нас
нет скалярного произведения, поэтому и нет возможности опреде-
лить процедуру предпочтительного получения второго базисного
элемента.
10.6. Факторпространство
495
Работающая конструкция дает определение классов эквива-
лентности (по модулю W) как множеств, каждое из которых
состоит из векторов в пространстве V, разность между которыми
лежит в W. Класс эквивалентности вектора v будем обозначать
черточкой над вектором. Таким образом, v обозначает множест-
во векторов вида v + w, где v — заданный элемент множества V,
aw — произвольный элемент W.
Например, на рис. 10.2 видно, что 0 (класс эквивалентности
нулевого вектора) есть подпространство W. т. е. прямая, прохо-
дящая через начало координат. Векторы vi и V2, отличающиеся
на элемент подпространства W. принадлежат одному и тому же
классу эквивалентности, который можно обозначать Vx или V2.
Этот класс эквивалентности является прямой, не проходящей че-
рез начало координат. Класс эквивалентности V3 будет другой
прямой, которая тоже не проходит через начало координат. В
этом случае классы эквивалентности составляют семейство пря-
мых, параллельных W. В более общем случае мы можем считать
подпространство W fc-мерной гиперплоскостью3, проходящей че-
рез начало координат n-мерного пространства V. Тогда классами
эквивалентности по модулю W будет семейство гиперплоскостей,
параллельных ей.
3В русскоязычной математической литературе термин «гиперплоскость»
обычно относят только к случаю k = п — 1. — Прим. ред.
496
Векторные пространства ...
Чтобы ввести операцию сложения классов эквивалентности,
сначала рассмотрим арифметику целых чисел по модулю 4, с
которой читатель, возможно, уже знаком. В этом случае есть
четыре класса эквивалентности:
О —{0,4,-4, 8,-8,...} = {4п},
1 = {1,5, - 3, 9,-7,...} = {4п + 1},
2 = {2,6, —2,10, -6,... } = {4п + 2},
3 = {3,7, -1,11, -5,... } = {4п + 3}.
Чтобы сложить два класса эквивалентности, выбираем любое це-
лое число из каждого класса, складываем их и получаем класс
эквивалентности суммы. Например, чтобы сложить 2 и 3, выби-
раем число 6 из 2 и число 3 из 3. Складываем эти числа 6+3 = 9 и
видим, что сумма принадлежит классу эквивалентности 1. Таким
образом, 2 + 3 = 1. Любой другой выбор, скажем, —2+(—1) = — 3,
дает тот же результат. Значит, процедура сложения классов эк-
вивалентности определена корректно.
Сложение классов эквивалентности векторов по модулю под-
пространствами определяется аналогично. По определению, vi +
V2 = (vi + V2), т. е. складываем любые два вектора из классов Vi
и V2 и находим класс, к которому принадлежит сумма. Допу-
стим, что мы взяли Vi + wi из класса vi и V2 + W2 из класса
V2, где wi и W2 — произвольные элементы подпространства W,
Тогда сумма vi + V2 есть класс эквивалентности, содержащий
(vi + V2) + (wi + W2), т. е. класс (vi + V2) не зависит от выбора
W1 И W2-
Процедура сложения изображена геометрически на рис. 10.3.
Сумма vi + V2 ~ V3 независимо от того, какую пару векторов
— vi и V2 или Ui и U2 — мы брали в качестве представителей
классов vT и V2-
Аналогично определим операцию умножения класса эквива-
лентности на скаляр: cvi — (cvi), т. е. умножая произвольный
элемент из класса vi на с, мы получаем класс эквивалентности
произведения. Результат единственный, потому что W является
подпространством.
10.6. Факторпространство
497
И7 Vi V2 v3 = Vi + v2
Нетрудно проверить, что классы эквивалентности простран-
ства V по модулю W образуют векторное пространство. Это про-
странство и называется факторпространством V/W.
Чтобы построить для него базис, возьмем базис подпростран-
ства W и расширим его до базиса во всем пространстве V. Итак,
пусть базисными элементами V являются векторы wi, W2,...,
(элементы Ж) и vi, V2,..., vn-k (не являются элементами ТУ).
Утверждается, что классы эквивалентности Vi, V2,...,"vn-k об-
разуют базис для V/W. Чтобы это доказать, мы должны пока-
зать, что они линейно независимы и на них натянуто простран-
ство V/W.
Сначала рассмотрим проблему линейной независимости. До-
пустим, что vi, v2,... ? vn_£ линейно зависимы. Тогда существу-
ют такие константы Ах, Аг,..., Ап_&, что выполняется равенство
AiVi + A2V2 + • • • + Xn-k'Vn-k — 0.
Значит,
A1V1 + A2V2 + * • + An_fcVn_fc € ТУ,
что противоречит нашему предположению о линейной независи-
мости векторов {wi, W2, •.. ? vi, V2,..., vn_fc}.
Любой вектор v е V можно записать как сумму векторов
v = xivi + T2V2 Н--+ хп-кУп-к + элемент из ТУ,
498
Векторные пространства ...
откуда следует, что
V = X1V! + x2v2 + • • • + xn__fcvn_fc.
Это доказывает, что классы эквивалентности vi, v2,... ,vn-k по-
рождают пространство V/W. Таким образом, vi, v2,..., vn_^ об-
разуют базис V/W и
dim (V/W) - dim V - dim W.
(Здесь и в дальнейшем dim обозначает размерность простран-
ства.)
А теперь приведем несколько примеров факторпространств.
Пример 1. Пусть пространство V — это R3, а одномерное под-
/1\ /1\ /о\
пространство W натянуто на вектор I 1 I. Векторы I 1 j, I 1 1
\°/ \°/ \°/
/о\ 7о~\
и I О I порождают пространство R3. Поэтому векторы I 1 1
1
o'
и I О I могут быть базисными векторами факторпространства
\1 /
V/W. Например,
з\ IЧ /°\ /°
1=31-21+0
1/ \0/ \0/ \1
Следовательно,
3\ /0\ /0
1 I = —2 I 1 + 0
1/ \0/ \1
Класс эквивалентности любого вектора в пространстве R3 можно
выразить как линейную комбинацию векторов I 1 I и I 0
10.6. Факторпространство
499
/1\ /о\
Заметим, между прочим, что векторы I 0 | и I 1 ] не мо-
\°/ \°/
гут быть базисом V/W. Сумма этих векторов является элемен-
том ТУ, поэтому они не будут линейно независимыми элементами
факторпространства V/W:
1\ /0\ /1\
° + 1 = 1L
о/ \0/ \0/
поэтому
1\ /0\
0 + 1=0.
°/ \°/
Пример 2. Пусть V — пространство полиномов f (t) степени < 2,
и пусть двумерное подпространство W образовано полиномами,
удовлетворяющими условию f(l) = 0. Базисными полиномами
W будут fi = 1 — t и f2 = 1 ~ t2. Базисом факторпространства
V/W будет класс эквивалентности 1. В этом случае общий вид
элемента пространства V — это
f (t) = А + Bt + Ct2,
или, что то же самое,
f(t) = А + В + С - В(1 - t) - С(1 - t2).
Это означает, что
f(t)=:(A + B + C)l.
Если элементами факторпространства V/W считать плоскости,
то подпространство W — это плоскость f (1) = 0, и класс эквива-
лентности любой функции f(t) определяется значением f(l).
А теперь воспользуемся понятиями дуального пространства и
факторпространства и получим очень важный результат. Рань-
ше мы обнаружили, что если W является подпространством V,
то аннулирующее пространство W1- является подпространством
дуального пространства У*. Предположим, что а — элемент 1+^,
и рассмотрим его действие на класс эквивалентности v. Посколь-
ку a[w] =0 для всех w е W и а линейно, то
a[v + w] = a[v].
500
Векторные пространства ...
Это значит, что а имеет одинаковое значение для любого эле-
мента класса эквивалентности и поэтому может рассматриваться
как линейная функция в пространстве классов эквивалентности.
И обратное утверждение: любая линейная функция в V/W мо-
жет считаться линейной функцией в пространстве V. Определим
/3[v] формулой
= ВД.
Тогда /3[w] = /3[0] — 0. Следовательно, (3 является элементом
ТУ-Ч Поэтому W1- может быть отождествлено с дуальным
пространством факторпространства V/W. Вспомним, что
и V/W имеют одинаковую размерность: dim У — dim ИЛ
Аналогично можно рассмотреть факторпространство У*/ИЛ±,
элементами которого являются классы эквивалентности /3, эле-
менты которых, в свою очередь, отличаются на элементы И/±,
т. е.
& = {/3 + а : a G
Определим действие (3 на вектор w € W согласно формуле
/3[w] = /3[w]. Это вполне законно, потому что для любого a G W"1-
мы имеем (/3 + a)[w] = /3[w]. Если /3[w] = О для всех w G W, то
/3[w] = О для всех w G W. А это значит, что (3 G 1УХ или /3 = 0.
Следовательно, /3 полностью определено линейной функцией, за-
данной в подпространстве W.
Обратное утверждение: каждый элемент 7 Е W* имеет вид
7 = /3 для некоторого /3 Е V*. Действительно, выберем ба-
зис wi,..., Wfc в подпространстве W и расширим его до базиса
wi, • • •, Wfc, vi,..., vn_fc пространства V.
Пусть /3 — произвольная линейная функция, удовлетворяю-
щая условию /3[w$] = 7[wi] для всех и пусть /3 принимает лю-
бые значения для всех v?. Тогда /3 = 7. Поэтому мы можем
пространство этих классов эквивалентности, т. е. фактор-
пространство V*/W~L, отождествить с дуальным простран-
ством W*.
Этот результат можно изобразить на следующей схеме:
<- V* W\
w^v ->v/w.
10.6. Факторпространство
501
Здесь пространства, дуальные друг другу, расположены одно над
другим: V и V* (размерность n), W и (размерность &),
V/W и (размерность п — к).
На этой теореме основывается много результатов линейной
алгебры и ее применений в теории электрических цепей, что,
безусловно, заслуживает более тщательного рассмотрения.
Приведем один пример. Пусть пространство V образовано по-
линомами f(i) степени < 2, а двумерное подпространство W —
четными полиномами. Тогда факторпространство VfW будет
одномерным, базисный элемент, обозначаемый ho, — это класс
эквивалентности функции f(t) = t. Таким образом, если f(t) =
A + Bt + Ct2, то f = Bh0.
В этом случае аннулирующее пространство W1 тоже одно-
мерно. Базисный элемент может быть выбран в виде линейного
оператора
a: f н-> У tf(t)dt.
Поскольку
Г t(A + Bt + Ct2)dt = |в,
J-1 з
то а на самом деле аннулирует любой четный полином и при-
писывает значение 2/3 полиному f(i) = t, который определяет
базисный элемент ho факторпространства V/W. Таким образом,
За/2 — это базисный элемент, дуальный к ho.
Мы можем расширить а до полного базиса V*, добавив ба-
зисные элементы
ft:
действие которых состоит в выборе коэффициентов А и С соот-
ветственно, т. е.
/^[А + Bt + Ct2] = А,
/32[А + Bt + Ct2] = С.
502
Векторные пространства ...
Классы эквивалентности /32 и /32, образующие базис V*/W\ так-
же образуют базис W*, поскольку они являются дуальными ба-
зисными элементами для базисных элементов 1 и t2 подпростран-
ства четных полиномов пространства W.
10.7. Линейные отображения
Рассмотрим линейное преобразование
А : V W,
где V — векторное пространство размерности n, a W — простран-
ство размерности к. Как мы уже знаем, линейность отображения
А означает, что A(civi + C2V2) = CiAvi + C2AV2.
С линейным отображением А : V W связаны два подпро-
странства: ядро А и образ А.
Ядро А, в дальнейшем обозначаемое Кег А, — это по опреде-
лению множество всех таких векторов v Е V, что Av = О. Прове-
рим, что Кет А является подпространством пространства V. За-
метим, что если Vi и V2 принадлежат ядру А, то A(ciVi + C2V2) =
ciAvi + C2AV2 = 0, откуда следует, что civj 4- C2V2 € Ker А. Это
и значит, что ядро А является подпространством.
Образ А, в дальнейшем обозначаемый 1mA, — это множество
всех векторов w Е W, которые имеют вид Av для каких-либо
v € V. Если wi и W2 — два вектора из множества Im А, то
wi — Avi и W2 = Av2 для некоторых vi,V2 € V. Поскольку
отображение А линейно, мы имеем
A(civi + C2V2) = ciAvi + C2AV2 = ciWi + C2W2,
откуда видно, что элемент C1W1 + C2W2 является элементом мно-
жества 1mA. Это доказывает, что А является подпространством
пространства W.
Размерности пространств Кег А и 1mA, как мы сейчас дока-
жем, связаны соотношением
dim(Im А) + dim(Ker А) — dimV.
(10.8)
10.7. Линейные отображения
503
Размерность образа А называется рангом отображения А, а
размерность ядра А — дефектом отображения А. Соотношение
(10.8) называется теоремой о ранге и дефекте. Читатель уже зна-
ком с этой теоремой в частном случае преобразований плоскости
в себя. Вспомним, что в этом случае было три возможности для
А : R2 —> R2:
1. Образом преобразования А является вся плоскость и отсут-
ствует ненулевой вектор, который преобразуется в нулевой
(ранг равен 2, дефект равен 0);
2. А преобразует плоскость в прямую, а прямую — в начало
координат (ранг равен 1, дефект равен 1);
3. А переводит всю плоскость в начало координат (ранг равен
0, дефект равен 2).
Чтобы доказать эту теорему в общем случае в пространстве V,
выберем удобный базис. Допустим, что dim V = п и dim(Ker А) =
к. Выберем базис щ, U2,..., для Кег А и расширим его до бази-
са всего пространства V, выбрав г = п — к векторов vi, V2,..., vr.
Для удобства упорядочим этот базис в виде:
{vi,v2,...,vr;ui,U2,...,ufc},
где первые г векторов не принадлежат подпространству Кег А.
Теперь надо показать, что г векторов вида {Avi, Av2,..., Avr}
являются базисом 1mA.
Сначала покажем, что векторы {Avi, Av2,..., Avr} линейно
независимы. Предположим противное:
^2 = 0.
i=l
Преобразование А линейно, что означает
504
Векторные пространства ...
Отсюда сразу же следует, что X2vz Е Кег А. Однако, векто-
ры {vj} вместе с векторами {и*} образуют базис V. Поэтому из
равенства
г
XiVi = и, где u Е Кег А,
г=1
следует, что все А* равны нулю, и вектора {Avi, Av2,..., Avr}
линейно независимы.
Теперь надо показать, что вектора {Avi, Av2,..., Avr} по-
рождают Im Л. Для этого рассмотрим произвольный вектор w €
1mA. Существует такой вектор v е V, для которого w = Av.
Тогда мы можем написать
г к
v = 52aiVi +
г=1 j~l
Однако, все базисные вектора и? принадлежат множеству Кег А,
значит,
(г к \ г
52 °iVi+52 ьзиз j= 52
г=1 _7=1 I г=1
т. е. любой вектор w можем быть записан в виде линейной ком-
бинации векторов {Avi, Av2, ..., Avr}.
Отсюда мы делаем вывод, что г векторов {Avi, Av2,..., Avr}
образуют базис 1mA. Кроме того, dim(ImA) — г — п — к, где
dim V = п и dim(Ker А) — к. Таким образом, dim(Im А) — dim V —
dim(Ker А), что равносильно формуле (10.8).
Теорема о ранге и дефекте доказывает еще один факт об ан-
нуляторе подпространства, о котором читатель, возможно, уже
догадался. Предположим, что {а1, а2,..., ап} — элементы про-
странства V*. Определим линейное преобразование
А : V Rn
формулой
\«”М/
10.7. Линейные отображения
505
На векторы {а1, а2,..., ап} натянуто подпространство U1- С
V*, которое аннулирует подпространство Кег Л. Доказанная на-
ми теорема говорит, что dim(ImA) = dimV — dim(KerA). Но в
параграфе 10.4 мы показали, что
dim((/“L) = dim V — dim(Ker Л),
откуда следует, что
dim(Im А) = dim {7х.
На языке матриц каждый элемент является строкой матри-
цы и dim U1- есть размерность подпространства V*, натянутого
на строки матрицы. В тоже время dim(ImA) есть размерность
подпространства W, натянутого на столбцы матрицы. Обе эти
размерности равны (обозначим их г), и число г называется ран-
гом матрицы.
Представление строк матрицы как элементов дуального про-
странства V* особенно полезно для решения системы линейных
уравнений. Например, система уравнений
х + у + z = 0,
х + 2у + Зг = 0,
2х + Зу + 4г = 0
может быть записана в форме Av — 0, где
/1 1 1\ /х\
А = I 1 2 3 , V— у .
\2 3 4/ \z)
Здесь в строках матрицы А записаны коэффициенты каждого
уравнения. Поскольку третье уравнение является суммой первых
двух, то три строки определяют только двумерное подпростран-
ство пространства V*, ранг матрицы А равен 2, и ее дефект (раз-
мерность ядра) равен 3 — 2 = 1. Поэтому Кег А — одномерное
подпространство, и существует одномерное подпространство ре-
шений уравнения Av = 0.
506
Векторные пространства ...
10.8. Редукция по строкам
Рассмотрим линейное отображение
Т : V W,
где V — векторное пространство размерности m, a W — про-
странство размерности п. Отображение Т имеет ранг г. Мы уже
видели, что при выборе базисов для V и W отображение Т пред-
ставляется в виде матрицы. В качестве базиса пространства V
выберем векторы
{vi,v2,...,vr;vr+i,...,vm},
где последние m — г векторов являются базисом Кег Т. Тогда
Tvr+i = Tvr+2 = • • = Tvm = 0.
Следовательно, векторы Tvi, Tv2,...,Tvr являются базисом
Im Г. Теперь выберем векторы
Wi = Tvi, w2 = Tv2, wr — Tvr
в качестве базиса Im T и расширим этот этот набор до базиса
всего пространства ИЛ В этих базисах матричное представление
преобразования Т имеет очень простой вид:
(о о)} пстрок (Ю-9)
тп столбцов
В левом верхнем углу по диагонали этой матрицы стоят г единиц,
а все остальные матричные элементы равны нулю.
Увы, обычно отображение Т описывается матрицей А, кото-
рая представляет его в других, менее удобных базисах. Важная
задача — найти такую замену базисов для пространств V и W. ко-
торое преобразует матрицу А, заданную в произвольном базисе,
к 1г. Наиболее эффективно эта задача решается с помощью ре-
дукции по строкам, что, по существу, является систематической
процедурой решения линейных уравнений методом исключения
10.8. Редукция по строкам
507
неизвестных4. Сначала мы покажем процедуру на конкретном
примере, а потом объясним, почему таким образом решается за-
дача в общем случае.
Предположим, что нам дана матрица
(0 4 -4 8\
2 4 0 2 .
30 6—9/
Назовем индексом любой строки матрицы М, где не все элементы
равны нулю, положение первого ненулевого элемента, называе-
мого ведущим элементом этой строки. Для первой строки нашей
матрицы М индекс равен 2, а ведущий элемент равен 4. Для тре-
тьей строки индекс равен 1, а ведущий элемент равен 3.
В качестве первого шага определим строку с минимальным
индексом, переместив ее вверх матрицы, переставляя строки, и
разделив ее на ведущий элемент. Для данной матрицы М мы
переставляем первую и вторую строки:
2 4 0 2\
0 4 -4 8 |
30 6—9/
и делим верхнюю строку на ее ведущий элемент:
1 2 0 1\
0 4 -4 8 .
30 6-9/
В качестве второго шага мы должны «очистить» столбец под
ведущим элементом верхней строки. Для этого первая строка
умножается на соответствующий коэффициент и вычитается по-
следовательно из нижних строк. В нашем случае мы умножаем
первую строку на 3 и вычитаем из третьей строки:
1 2 0 1
0 4 —4 8
0 -6 6 —12
4 Другое название этой процедуры, принятое в русскоязычной литературе,
— метод Гаусса. — Прим. ред.
508
Векторные пространства ...
Теперь у матрицы есть ведущий элемент 1 в верхней строке,
а все другие строки имеет более высокий индекс. Далее, пере-
двигаем строку со следующим по величине индексом на вторую
позицию и делим ее на ведущий элемент. В нашем примере вто-
рая строка уже имеет следующий по величине индекс, поэтому
нам остается разделить ее на ведуший элемент 4. В результате
получаем
/120 1\
0 1-1 2 I .
\0 -6 6 —12/
Теперь надо очистить столбец, соответствующий ведущему эле-
менту второй строки, умножая вторую строку на соответствую-
щий коэффициент и вычитая ее из других строк. В нашем случае
мы умножаем вторую строку на 2 и вычитаем ее из первой стро-
ки, потом умножаем вторую строку —би вычитаем ее из третьей
строки. Получаем матрицу
1 0 2 -3\
0 1-1 2 I .
0 0 0 0/
(10.10)
Теперь первый и второй столбцы содержат по единственному
ненулевому элементу, равному 1, которые являются ведущими
элементами соответствующих строк.
В общем случае мы снова переставляли бы строку со следу-
ющим по величине индексом на третью позицию и делили бы ее
на ведущий элемент. Далее умножали бы третью строку на соот-
ветствующие коэффициенты и вычитали бы из остальных строк,
чтобы очистить третий столбец. И так далее. В нашем случае
больше нет ненулевых строк, и мы получили матрицу в редуци-
рованной форме. Перечислим свойства редуцированной матри-
цы, которые можно увидеть из (10.10).
(а) Все нулевые строки, если они есть, находятся внизу.
(Ь) Ненулевые строки расположены в порядке возрастания ин-
дексов.
10.8. Редукция по строкам
509
(с) Все элементы столбца, содержащего ведущий элемент (он
равен 1) ненулевой строки, равны нулю, (кроме, естествен-
но, этого ведущего элемента).
Каждая операция в процедуре редукции по строкам может
быть получена умножением слева на обратимую матрицу п х п.
Например, умножение нашей матрицы слева на матрицу
(О 1 0\
10 0
0 0 1/
приводит к перестановке первой и второй строк:
/0 1 0\ /0 4 —4 8\ /2 4 0 2\
(100124 0 2 = 04 -4 8).
\0 0 1/ \3 0 6—9/ \3 0 6—9/
Умножение слева на матрицу
/1/2 0 0\
S2 = 0 10
\ 0 0 1/
соответствует делению первой строки на 2:
/1/2 0 0\ /2 4 0 2\ /12 0 1\
010 04 -4 8 1 = ( 0 4 —4 8 1.
\ 0 0 1/ \3 0 6 -9/ \3 0 6 -9/
Умножение слева на матрицу
/ i ° 0\
S3 = 0 10
\-3 0 1/
соответствует трехкратному вычитанию первой строки из тре-
тьей:
/ 1 0 0\ /1 2 0 1\ /1 2 0 1\
010104 -4 8 I = 0 4 -4 8 1.
\-3 0 1/ \3 0 6—9/ \0 -6 6-12/
510
Векторные пространства ...
Таким образом, редуцированная по строкам матрица В может
быть записана в виде
или
В = SM,
где S — обратимая матрица п х п. Заметим, что поскольку S
обратима, dim Im В = dim Im М.
Образ и ядро редуцированной матрицы В легко определить.
Очевидно, что образ является г-мерным подпространством, соот-
ветствующим г ненулевым строкам матрицы В и натянутым на
столбцы
которые содержат ведущие элементы всех ненулевых строк. Со-
гласно теореме о ранге и дефекте, ядро матрицы В имеет раз-
мерность т — г, равную числу столбцов, которые не содержат
ведущих элементов. Базис для Кег В будем искать следующим
образом. Возьмем векторы, имеющие 1 в одной из т — г пози-
ций, соответствующих столбцам с неведущими элементами, и ну-
лю в остальных т — г — 1 позициях. Для нахождения первых г
компонент этих векторов умножим поочередно строки матрицы
В на эти векторы-столбцы, приравняем результаты к нулю и из
получившихся уравнений найдем компоненты, соответствующие
ведущим элементам столбцов.
Например, очевидно, что для матрицы
/10 2 -3\
В- | 0 1 -1 2 I
\0 0 0 0/
/1\ /0\
базисом Im В являются вектора I 0 | и I 1 I. Третий и четвер-
\°/ \°/
тый столбцы не содержат ведущих элементов. Поэтому базисные
10.8. Редукция по строкам
511
вектора Кег В ищем в форме
ui =
У2
о
У1/
Положив Вщ = О, получаем
х\ + 2 = 0, Х2 — 1 = 0.
Следовательно,
Положив Виз = 0, получаем
У1 - 3 = 0, У2 + 2 = 0
и
Конечно, нам интересно знать ядро и образ первоначальной
матрицы М, а не редуцированной по сторокам матрицы В. Од-
нако, В — SM, где S — обратимая матрица. Тогда
М = S~lB.
Из двух последних равенств видно, что любой вектор из ядра
отображения В принадлежит ядру М. Поэтому получив ядро В,
тем самым, мы получаем ядро М. Чтобы найти образ М, надо
обратить S и подействовать матрицей S'-1 на образ В. Итак, мы
имеем В = SM. Кег В = КегМ и dim Im В = dim Im М.
Предположим, что нам надо решить уравнение
Mv = w.
512
Векторные пространства ...
Проделаем процедуру редукции по строкам с обеими частями
этого уравнения:
SMv = Sw или Bv — u,
где В — редуцированная по строкам матрица, a u = Sw. Это
уравнение имеет вид
1 0 2 -3\
0 1-1 2
0 0 0 0/
(
\XJ
Оно может быть исследовано и решено следующим образом.
1. Если хотя бы одна компонента вектора и, соответствующая
нулевой строке В, отлична от нуля, то уравнение не имеет
решения.
2. Если все компоненты вектора и, соответствующие нулевым
строкам В, равны нулю, то
vq =
U2
о
\0/
является частным решением уравнения.
3. Общее решение уравнения имеет вид vq + v, где v G Ker M.
Решая конкретную задачу, прежде чем проводить редукцию
по строкам, удобно объединить матрицу М и вектор w в одну
таблицу так, чтобы проводить редукцию одновременно. Приве-
дем пример. Нам надо решить уравнение
Mv — w,
где
/2 4 2 2\ / 0\
М- 1 3 201 и w= -1 .
\3 1 —2 8/ у 5/
10.8. Редукция по строкам
513
Объединяем М и w в таблицу
24 22 0\
1 3 2 0 —11
31-28 5/
и проводим редукцию, получая последовательно
12 11 0\
1 3 2 0 —1 ),
3 1 -2 8 5/
12 1
0 1 1
0 -5 -5
<1 0 -1
0 1 1
<0 0 0
Так мы получаем частное решение нашего уравнения
-1
0
Чтобы найти общее решение, мы должны построить базис
ядра М. Один базисный вектор имеет 1 на третьей позиции и 0 на
„ -1
четвертой, он равен I
\ о/
. Другой имеет 0 на третьей позиции
1
0
и 1 на четвертой, он равен
. Поэтому решением уравнения
Mv = w будет
-1
0
\ 0/
Л1 ;
V 0/
/—3\
X I 1
+ Л2 о
514
Векторные пространства ...
где Ai и Аз — произвольные вещественные числа.
Отметим характерную форму решения относительно столб-
цов редуцированной матрицы, которые не содержат ведущих эле-
ментов строк (в нашем случае это третий и четвертый столбцы).
Частное решение уравнения имеет нули на третьей и четвертой
позициях. А вот базисные вектора ядра М имеют ненулевой эле-
мент (единицу) ровно на одной из этих позиций. Общее решение
уравнения можно записать многими способами, но этот вид —
самый простой.
Для несингулярной квадратной матрицы А эта техника дает
эффективный метод получения обратной матрицы. Преобразова-
ние S, которое редуцирует по строкам матрицу А к единичной, и
есть А-1. Поэтому обратная матрица может быть получена, если
каждый отдельный шаг процедуры редукции применять к матри-
це, которая получается добавлением к матрице А справа единич-
ной матрицы. Допустим, что А = единичную матрицу объединим в /1 2 1 12 3 3 \-1 -1 0 Первую строку умножим на —2 и бавляем первую строку к третьей /1 2 1 0-11- \0 1 1 Умножим вторую строку на —1: /12 11 0 1-12 \0 1 11 / 1 2 1\ 1 2 3 3]. Эту матрицу и \-1 -1 0/ одну таблицу 1 0 0\ 0 1 0 1 . 0 0 1/ сложим со второй, потом при- 1 0 0\ -2 1 0 . 10 1/ 0 0\ -10 . 0 1 /
10.8. Редукция по строкам
515
Вторую строку умножим на —2 и прибавим к первой, потом вы-
чтем вторую строку из третьей:
/1 0 3 -3 2 0\
0 1- 1 2—101
\0 0 2 -1 11/
Разделим третью строку на 2:
/10 3 -3 2 0
10 1—1 2-1 0
\0 0 1 1/2 1/2 1/2
Третью строку умножим на
—3 и сложим с первой, потом приба-
вим третью строку ко второй:
10 0 0 1 0 0 0 1 -3/2 1/2 -3/2 3/2 -1/2 1/2 -1/2 1/2 1/2
Отсюда следует, что матрица А 1 равна:
1
2
1
-1 1 .
1 1 /
Вернемся теперь к случаю прямоугольной матрицы. Вместо
того, чтобы выполнять редукцию по строкам, мы можем выпол-
нить редукцию по столбцам. Процедура точно такая же, только
слово «строка» надо заменить на «столбец». В результате полу-
чим матрицу
С — МТ,
где Т — обратимая квадратная матрица, а С - матрица, реду-
цированная по столбцам. Отметим свойства матрицы, редуциро-
ванной по столбцам.
(а') Все нулевые столбцы матрицы С, если они есть, располо-
жены справа.
(Ь') Ненулевые столбцы матрицы С расположены в порядке воз-
растания индекса. (Индекс ненулевого столбца равен номе-
ру первого ненулевого элемента.)
516
Векторные пространства ...
(с') Каждая строка, содержащая ведущий элемент ненулевого
столбца, имеет ведущий элемент, равный 1, а все остальные
элементы строки равны нулю.
Отметим, что
Im С = Im Л/,
и г ненулевых столбцов матрицы С будут линейно независимы.
Следовательно, они образуют базис ImM. Таким образом, под-
ведем итоги.
Чтобы найти базис ImM, применяется редукция по
столбцам. Базисом являются ненулевые столбцы по-
лучившейся матрицы С.
Чтобы найти базис Кег Л/, применяется редукция по
строкам. Получившиеся строки редуцированной мат-
рицы В — SM дают систему г уравнений для Кег В,
с помощью которых затем и находится ядро М и его
базис.
Мы можем также проделать редукцию и по строкам, и по
столбцам. Например, допустим, что надо сделать редукцию по
столбцам с матрицей, редуцированной по строкам:
/10 2 3\
В — I 0 1 -1 2 .
\0 0 0 0/
Первый столбец умножим на 2 и вычтем из третьего, потом пер-
вый столбец умножим на 3 и вычтем из четвертого. В результате
получим
1 0 0 0\
0 1-12 1.
0 0 0 0/
Теперь второй столбец сложим с третьим, потом второй столбец
умножим на 2 и прибавим к четвертому. Получаем матрицу
1 0 0 0\
0 10 0.
0 0 0 0/
10.9. Локальная структура дифференцируемого отображения 517
В общем случае, проводя редукцию по столбцам с матрицей В,
редуцированной по строкам, мы делаем так, чтобы ведущими
столбцами стали первые г столбцов. (В нашем примере этого не
надо было делать.) Затем, умножая первые г столбцов на соот-
ветствующие коэффициенты и вычитая их из остающихся т — г
столбцов, мы получаем матрицу, у которой на главной диагонали
стоят г единиц, а остальные элементы равны нулю, т. е. матрицу
вида (10.9). Итак, мы описали эффективный метод получения
таких матриц 5 и Т, что матрица SMT имеет вид (10.9).
10.9. Локальная структура
дифференцируемого отображения
Если собрать вместе результаты предыдущего параграфа с ре-
зультатами параграфа 6.3, то можно получить очень важную ин-
формацию о структуре дифференцируемых отображений. Пусть
V и W — векторные пространства размерности тип соответ-
ственно, и пусть О — некоторая (открытая) область в пространст-
ве V. Далее, предположим, что / : О —> W — дифференцируемое
отображение. В каждой точке р G О мы можем вычислить диф-
ференциал d/p. Этот дифференциал является линейным отобра-
жением V на W, и поэтому мы можем вычислить его ранг. Ко-
нечно, этот ранг может зависеть от точки р. Сейчас мы докажем
следующую теорему.
Теорема о постоянном ранге. Предположим, что сущест-
вует такое постоянное целое число г, что ранг dfp равен г для
всех р е О. Тогда для любого х е О существует такое взаимно-
однозначное дифференцируемое отображение ф> преобразующее
окрестность х в некоторую окрестность в такое, что ф
имеет обратное дифференцируемое. Кроме того, можно найти
такое взаимно-однозначное дифференцируемое отображение ф,
преобразующее окрестность f(x) в пространстве W в некото-
рую окрестность в Rn, причем оно также имеет обратное диф-
ференцируемое. При этом композиционное отображение
ф о f о ф-1 : Rm Rn
является линейным отображением с матрицей вида (10.9).
518
Векторные пространства ...
Короче говоря, эта теорема утверждает, что для дифферен-
цируемых отображений постоянного ранга выполняется основная
теорема о редукции по строкам: мы можем «сделать такие замены
переменных», т. е. найти такие отображения ф и что выполня-
ется равенство
('фо/о'ф х)
Доказательство. Сделав трансляцию в пространстве V, мы
можем считать, что х = 0. Сделав еще одну трансляцию в прост-
ранстве W, можно предположить, что /(х) = 0. Иными словами,
чтобы упростить обозначения, можно считать, что /(0) — 0, и
мы интересуемся отображениями f в окрестности 0. Проделав
редукцию по строкам, мы можем привести линейное отображе-
ние d/o к виду (10.9), т. е. мы можем найти обратимые линейные
отображения R : W —+ Rm и S : V —► Rn, для которых
d(RfS~1)Q = RdfQS~l
имеет вид (10.9). Тогда можно рассмотреть отображение
где матрица
г=1,...,г
10.9. Локальная структура дифференцируемого отображения 519
есть единичная матрица в 0. Следовательно, она обратима в неко-
торой окрестности точки 0. Рассмотрим отображение д, опреде-
ленное вблизи 0 в пространстве формулой
/ я \
fr
^г+1
\ у
Здесь первые г компонент отображения д — это введенные выше
функции Д,..., /г, а остальные т — г компонент равны соответ-
ствующим координатам. Заметим, что матрица
строк
т — г
строк
т — г
столбцов столбцов
обратима в 0 и, следовательно, обратима в окрестности 0.
А теперь применим теорему об обратной функции из пара-
графа 6.3 к отображению д. Еще раз рассмотрев то доказатель-
ство, мы видим, что оно работает для произвольных конечно-
мерных пространств. (Заметим также, что сохраняется и доказа-
тельство теоремы о неявной функции, если х и у рассматривать
как векторные переменные, а условие неравенства нулю произ-
водной дд/ду (вместо нее теперь матрица) становится требова-
нием обратимости матрицы.)
Вернемся к нашей задаче. Мы можем найти обратное преоб-
разование для д. Пусть
h = (RfS~1)og-1.
520
Векторные пространства ...
Тогда
Следовательно,
и
( У1
Ут
5г+1(у)
\ 9п(у) /
при некоторых функциях gr+i,.. ,дп, определенных в простран-
стве Rm в окрестности 0. Воспользуемся цепным правилом и по-
лучим
dh4 = d^RfpS-1) о dg~\ где q = g(5p).
Отсюда получаем, что в некоторой окрестности О ранг dhq тож-
дественно равен г. Рассмотрев матрицу
п — г
г
строк
п — г
строк
столбцов столбцов
10.9. Локальная структура дифференцируемого отображения 521
мы видим, что это может случиться, только если все частные
производные, появляющиеся в правом нижнем углу, тождествен-
но обращаются в нуль. Это значит, что последние п — г компонент
отображения h зависят только от первых г координат у, т. е.
5г+1 =5г+1(У1,---,Уг,0,...,0), ит.д.
Введем преобразование Н в пространстве Rn согласно формуле
^Т
., zr,0,... ,0)
%п Qni.zi't..., 0,..., 0)
Это гладкое отображение, определенное в окрестности z = 0
в Rn. Очевидно, что оно обратимо — обратное преобразование
определяется формулой
/ W1 \
Тогда
wr
Wr+1 4-Pr+i(wi,... ,wr,0,... ,0)
\wn4-pra(wi,...,wr,0,...,0) /
/У1\
Уг
о
\° /
Подставив определение h = (RfS l) ° д 1 в Н о h, получаем
Hoh = (HR)ofo(S-lg-1).
522
Векторные пространства ...
Определяя
и
Ф = 9 ° S,
видим, что ф о f о ф 1 имеет требуемую теоремой форму
что и требовалось доказать.
Наиболее важное применение этой теоремы относится к слу-
чаю г = п (напомним, что п — это размерность пространства ТУ).
Если дифференциал dfp непрерывен в некоторой точке р и име-
ет ранг п, то утверждается, что он имеет ранг п во всех точках,
достаточно близких к р. Действительно, с помощью редукции по
строкам мы можем найти такие R и S, что Rdf^S^1 имеет вид
(10.9) с г = п. Если q достаточно близко к р, то верхний ле-
вый блок матрицы RdfpS^1 будет близок к единичной матрице.
Следовательно, размерность образа df4 не меньше п. Поскольку
размерность этого образа не может быть больше dim IV — п, мы
делаем вывод, что ранг дифференциала df4 тождественно равен
п для всех q в некоторой окрестности р. Из теоремы о постоянном
ранге мы делаем следующий вывод.
Теорема о множестве решений. Предположим, что f :
О —> W — непрерывно дифференцируемое отображение и что
dfp сюръективно в точке р? т. е. что ранг dfp равен dimly. Тог-
да мы можем найти дифференцируемые отображения: ф, отоб-
ражающее окрестность р в и ф, отображающее окрест-
ность f (р) в Rn, так что оба отображения имеют непрерывно-
дифференцируемые обратные, причем ф(р) = О в R™, ^(/(q)) =
10.9. Локальная структура дифференцируемого отображения 523
0 в Rn и локально выполняется равенство
/х1 \
В частности, точка х является решением уравнения
/(х) = /(р) (х вблизи р)
тогда и только тогда, когда
\\ У- //
причем все ут+\,ут+2, • • • ,Уп лежат в окрестности О.
Введем несколько терминов, чтобы сделать теорему о мно-
жестве решений более краткой. Пусть Нт.~п обозначает подпро-
странство Rm, определенное условиями
#1 = 0, ..., хп — 0.
(Здесь предполагается, что п должно быть < т.) Подмножество
М m-мерного векторного пространства V называется подмного-
образием коразмерности и, если оно обладает следующим свой-
ством: около каждой точки х е М мы можем найти окрест-
ность О в пространстве V и дифференцируемое отображение
</> : О —> Rm с 0(х) ~ 0, так что ф взаимно-однозначным об-
разом отображает О в окрестность U вблизи О, при этом ф~х
дифференцируемо и
ф(М по^ип нт_п
524
Векторные пространства ...
Ф(х,у) =
Рис. 10.4
Другими словами, это условие на М означает, что вблизи каж-
дой точки х € М мы можем найти такую гладкую деформацию
всей окрестности, задаваемую отображением ф, что М «уплоща-
ется» и становится куском гиперплоскости. Например, окруж-
ность х2 + у2 = 1 является подмногообразием коразмерности 1 в
пространстве R2, потому что мы можем ввести отображение
г2 — 1
arctan(y/x)
во всех ее точках с х =4 0 (с последующим сдвигом в вертикальном
направлении к началу координат образа). В точках, где х = 0,
мы можем пользоваться функцией arctan (х/у). А вот периметр
квадрата не является подмногообразием, потому что не сущест-
вует гладкого способа выпрямить углы.
Пусть f : О W — непрерывно-дифференцируемое отобра-
жение. Точка р Е О называется регулярной точкой отображения
/, если dfp сюръективно, т. е. если ранг dfp равен dim ИЛ Точка,
которая не является регулярной, называется критической точкой.
Если W = R, то р будет критической точкой при условии d/p = 0.
Это согласуется с нашими предыдущими обозначениями.
Точка q Е W называется регулярным значением, если все
точки р в /~1(q) являются регулярными точками. Теперь дадим
еще одну формулировку нашей теоремы.
Если q — регулярное значение /, то /-1(q) — подмно-
гообразие.
Приведем несколько примеров.
10.9. Локальная структура дифференцируемого отображения 525
(а) Пусть n = 1 и / : Rw —> R1 = R определено формулой
= xj + • • • + х^.
Тогда dfp Ф 0, если р / 0. Таким образом, любое ненулевое
значение / будет регулярным значением. Для с > 0, есть
сфера радиуса у/с. Значит, сферы являются подмногообразиями.
(Ь) Пусть М(к) обозначает векторное пространство всех мат-
риц к х fc, тогда т = dimV — к2. Пусть W = S(R) обозначает
векторное пространство всех симметричных матниц к х к, т. е.
матриц В, удовлетворяющих условию Dl = D. Тогда
п = dim W ~ ^к(к + 1).
Рассмотрим отображение f : V —> VP, где /(А) = АА*. Легко
проверить, что d/д (В) — ВАТ + АВ*. Мы утверждаем, что еди-
ничная матрица I является регулярным значением отображения
/. Для доказательства этого утверждения следует проверить, что
d/д сюръективно, если АА* = I. Другими словами, при каждом
А уравнение
В А* + АВ* = С
относительно В должно иметь решение для любой симметричной
матрицы С. Действительно, пусть В ~ СА/2. Тогда
В A1 + ABl = \ САА* + 1 АА*С*
= - С + - С*, т. к. АА* = А4А = I
2 2
= С, т.к. С = С4.
Итак, множество всех ортогональных матриц, т. е. матриц,
удовлетворяющих условию АА* = Л, является подмногообразием
пространства всех матриц.
526
Векторные пространства ...
10.10. Сопряженное отображение
Изучая отображения одной аффинной плоскости в другую, мы
пользовались понятием переноса функции (pullback). Вспомним,
что при отображении ф аффинной плоскости А в другую аф-
финную плоскость В естественным образом возникало линейное
отображение функций, определенных на плоскости В, в функ-
ции, определенные на плоскости А. Эта ситуация изображена на
рис. 10.5. Перенос определенной на плоскости В функции /, обо-
значаемый ф*/, является функцией на плоскости А, определяе-
мой соотношением
(ОС*’) = /(Ж))-
Понятие переноса может быть расширено на случай отображений
одного векторного пространства V в другое векторное простран-
ство W. Нам особенно интересен перенос линейных функций в
пространстве W (т.е. элементов дуального пространства ТУ*),
возникающий как следствие линейного отображения А простран-
ства V в W. В этом случае перенесенное отображение из ТУ* в
V* называется отображением, сопряженным к А. Мы будем обо-
значать его Л*. Его действие на элемент /3 G W* определяется
формулой
(Л*/3)М = 0[Ау].
Доказательство того, что таким образом определенное отоб-
ражение А* линейно по /3, точно такое же, как доказательство
10.10. Сопряженное отображение
527
того, что вообще перенос — линейное отображение. Если элемен-
ты (З1 и /З2 являются элементами W*, то
(А^/З1 + с2/32)) [v] = (с,#1 + с2/32) [Av]
= ci/J^Av] + c2/32[Av]
= ciA*/31[v]+c2A*02[v].
Отсюда получаем равенство
A'tafl1 + с2/32) = С1А*^ + с2А*02,
которое и означает линейность А*. Отметим, что из линейности А
и /3 следует линейность функции А*/3 по v, т. е. что действительно
А*(3 находится в пространстве V*.
Важно отметить, что сопряженное отображение А* действует
«в направлении, противоположном» А. Это значит, что если А
преобразует вектор v € V в вектор Av G W, то сопряженное
отображение А* преобразует вектор (3 G W* в вектор А*/3 е V*.
На схеме это выглядит так:
у* X W*,
V ^w.
Рассмотрим пример сопряженного отображения: пусть V —
трехмерное пространство четных полиномов степени < 4 и пусть
W — двумерное пространство нечетных полиномов степени < 3.
Тогда операция дифференцирования определяет линейное отоб-
ражение D из V в W:
D: f^f'.
Пусть элемент пространства W* таков:
/3: gwg(l).
Например, /3(t + 2£3) = 1 + 2 = 3. Чтобы вычислить D*fi, вое-
пользуемся определением
528
Векторные пространства ...
В нашем случае Df = f' и /3[£>f] = f'(l). Отсюда следует, что D*0
— линейная функция в пространстве V (элемент пространства
V*):
Р*/3: f^f'(l).
Возьмем другой элемент пространства РИ*:
а : g [ g(t) dt.
Jo
Тогда
D*a[f] = a[Df] = [ f'(t) dt = f(l) - f(0),
Jo
t. e. D*ot — линейная функция
T>*a: f^f(l)-f(O).
Если ввести базисы в пространствах V, W, V* и W*, то
описание сопряженного отображения становится особенно про-
стым. Предположим, что V — m-мерное пространство с бази-
сом {vi, V2,..., vm}. Введем дуальный базис {а1, а2,..., в
дуальном пространстве V*. Аналогично, пусть {wi,W2,...,wn}
и {/З1, /З2 ... ,/Зп} будут базисами пространств W и IV* соответ-
ственно. Если А — линейное отображение из У в W, то
п
Avi =
3=1
где величины {сил,а2г,... образуют г-й столбец матрицы,
задающей отображение А. Вычислим, как А* действует на базис-
ный элемент пространства И7*:
Поскольку базис {/З1, /З2 ..., /Зп} дуален базису {wi, W2,..., wn},
мы имеем
10.10. Сопряженное отображение
529
т. е.
(A*/3fc)[Vi] = aki.
Итак, мы можем выразить А*0к через базисные вектора
{л1, а2,..., ат} в пространстве V*:
= f>fcZaz.
Величины {а*;/} = {«ki,«fc2> < • • , «fcm} образуют fc-й столбец мат-
рицы, задающей отображение А*, но одновременно они являют-
ся fc-й строкой матрицы, задающей А. Это значит, что матрица
отображения А* является транспонированной матрицей отобра-
жения А. Например, если V — трехмерное пространство, W ~
двумерное и А : V —> W представляется матрицей
А = (а11 а12 а13>1
\«21 «22 «23/ ’
то сопряженное отображение А* : W* —> У* задается матрицей
А*
«11
«12
«13
«21
«22
«23
Вспомним, что элементы дуального пространства могут быть
записаны в виде векторов-строк. В нашем примере элемент
пространства W* можно записать в виде двухкомпонентного
вектора-строки:
/з = (А1,Л2),
а элемент пространства V — как трехкомпонентный вектор-
столбец:
(нА
V2 I .
гз /
Тогда (A*/3)[v] = /3[Av] можно записать как произведение
(Ai, А2)
Оц
«21
012
022
О1з\ I
023/ \ ,,
\ Гз
530
Векторные пространства ...
Естественное истолкование этого произведения: матрица А, дей-
ствуя сначала на столбец, расположенный от нее справа, дает Av,
на который уже действует /3. С другой стороны, можно думать,
что матрица сначала действует на вектор-строку, стоящую слева:
(Ai, Л2) Г^11 ^12 = (м1,^2,Мз),
\«21 «22 «23 /
где (/zi,//2,Мз) представляет вектор (А*/3) Е V*, который потом
действует на v Е V. Таким образом, если мы изменим обычные
правила умножения матриц и позволим матрице сначала действо-
вать налево на вектор-строку, то одна и та же матрица будет
представлять А и А*. Если же мы хотим записывать А* тради-
ционно, т. е. в виде матрицы, действующей на столбец справа, то
мы должны писать
И мы видим, что матрица, представляющая А*, будет транспо-
нированной матрицей А.
Исследуем теперь ядро и образ сопряженного отображения
А*. Если (3 Е РИ* и принадлежит ядру А*, то A*/3[v] = 0 для всех
v Е V, т. е. /3[Av] = О. Это значит, что /3 аннулирует все вектора
вида Av. Отсюда можно сделать вывод, что ядро А* аннулирует
образ А.
Предположим, что а Е V* и принадлежит образу А*, т. е.
а = А*(3 для некоторых /3 Е W*.
Предположим, что v есть элемент Кег А. Тогда
a[v] — A*/3[v] = /3[Av] = О.
Отсюда следует, что образ А* аннулирует ядро А.
Объединив эти результаты с общими результатами для ду-
альных пространств и факторпространств, доказанными в конце
параграфа 10.5, мы можем построить две схемы, изображающие
Резюме
531
общую картину векторных пространств и линейных преобразо-
ваний. Итак, для подпространств V и V* мы имеем
У*/1т А* У* «—1тА*,
КегА—>У ->У/КегА.
Эта схема отражает тот факт, что факторпространство У*/1т А
может быть идентифицировано с сопряженным к Кег А, а образ
А* сопряжен с У/КегА.
Для подпространств W и W* мы получаем схемы:
Ж*/КегА* «— Ж* «— Кег А*,
1mA—> Ж —> Ж/ImA.
Здесь Ж*/Кег А* может быть идентифицировано с дуальным
Im А, а Кег А* дуально к Ж/Im А. Многочисленные примеры этих
соотношений будут нами рассмотрены при изучении теории элек-
трических цепей.
Резюме
А. Векторные пространства
Вы должны знать аксиомы векторных пространств и уметь при-
менять их.
Для данного базиса векторного пространства надо уметь на-
ходить дуальный базис для дуального пространства.
Для данного подпространства U векторного пространства V
надо уметь строить базисы для аннулирующего пространства (7х
и факторпространства V/U и использовать их.
В. Линейные преобразования
Вы должны уметь писать матрицу, представляющую линейное
преобразование А : V —► W в заданных базисах.
Вы должны знать формулировку теоремы о ранге и дефекте,
уметь доказывать и применять ее.
Для данной матрицы линейного преобразования А надо уметь
пользоваться редукцией по строкам для определения базисов для
Кег А и 1mA и получать общее решение уравнения Av = w.
532
Векторные пространства ...
Вы должны знать определение сопряженного отображения А*
для линейного преобразования А, Надо знать формулы, доказы-
вать и применять соотношения между ядром и образом А, между
ядром и образом А*.
Задачи
10.1. Рассмотрите пятимерное векторное пространство V полиномов
f(t) степени < 4. Выясните, будет ли подпространством мно-
жество в каждом из перечисленных ниже примеров. Если нет,
то объясните, почему. Если да, то найдите базис.
(а) Полиномы удовлетворяют условию f(t) =
(b) Полиномы удовлетворяют условию /(0) = 1.
(с) Полиномы удовлетворяют условию /(1) = /(—1).
(d) Полиномы удовлетворяют условию dt ~ 0.
10.2. (а) Найдите базис для подпространства R3, определенного
условием a[v] =0, где
а = (2,-3,1).
(Ь) Найдите базис для подпространства R3, определенного
условиями a[v] = 0 и /3[v] =0, где
а = (2,-3,1) и /3 = (2,1,-1).
(с) Найдите базис аннулирующего пространства для подпро-
странства W С R3, натянутого на вектора
(2\ / 2\
-3 и 1 .
1/ \-1/
10.3. (а) Покажите, что множество функций /(t), удовлетворяющих
уравнению /" + 5/' + 6/ = 0, является векторным простран-
ством V.
(Ь) Возьмем три элемента пространства V*, дуального к этому
пространству:
а1:
а2: /-/'(0),
/ + ОО
а3 : f •-» / e‘/(t) dt.
Jo
Задачи
533
Найдите соотношение между а1, а2 и а3, показывающее,
что они линейно зависимы.
(с) В качестве базиса пространства V выберем вектора
vi = e~2t 4- e~3t,
v2 = 2e~2t - e”3t.
Выразите дуальные базисные элементы /З1 и /З2 через а1 и
а2, определенные в предыдущем пункте.
10.4. (а) Покажите, что если S и Т — подпространства векторного
пространства V, то их пересечение S П Т (множество эле-
ментов, общих для S и Т) является подпространством V.
(Ь) Покажите, что S + T (множество векторов, являющихся ли-
нейными комбинациями векторов из S и Т) будет подпро-
странством V.
(с) Покажите, что dim(S 4- Т) = dim(S) 4- dim(T) — dim(S П Г).
(Указание: начните с базиса 5ПТ и расширьте его до базиса
S + T.)
(1
о
, а Т соответственно на векторы
стройте базисы для S П Г, S 4- Т и для пространства, анну-
лирующего S 4- Т.
/ 1
10.5. Пусть W — подпространство R3, натянутое на вектор | 2
\4
/1\ /1\
(а) Покажите, что ei = I 1 | и е2 = ( 1 I образуют базис
\°/ X1/
/ Г\ /oV
факторпространства . Выразите вектора I 0 ], | 1 |
\°/ \°/
534
Векторные пространства ...
Г I
и О в виде линейных комбинаций этих базисных векто-
X1/
ров.
(Ь) Покажите, что а = (2,—1,0) и /3 = (4,0,—1), будучи эле-
ментами дуального пространства к Ж3, являются базисом
аннулирующего пространства И/Г±. Для Wx постройте ба-
зис {е\б2} через элементы а и /3, который будет дуален
базису {ei,e2} факторпространства R3/Vk\
10.6. (а) Пусть W — подпространство векторного пространства V.
Пусть U — подпространство W. Докажите, что W/U явля-
v/rr V/U
ется подпространством V/U и что ' естественно совпа-
W/U
дает с V/W.
(Ь) Пусть векторное пространство V есть R3, W — плоскость
# + ?/ + г==0, а[7—- прямая линия, определенная вектором
/ 1\
1—21. Получите явный вид базисов для этих пространств.
\ 1/
(с) Разберитесь, что происходит в дуальном пространстве, т. е.
постройте подпространства V*, которые будут дуальными
или аннулирующими пространствами для всех пространств,
перечисленных в пункте (а). Сначала сделайте это в общем
виде, а потом для частного случая, описанного в пункте (Ь).
10.7. Рассмотрите пространство V, образованное функциями вида
f(t) = At + В/t, заданными на отрезке [1,2]. Пусть базисные
вектора имеют вид vi = t и V2 = 1/t. Два элемента дуального
пространства V* равны
/З1 : f(t)^ /(1),
/З2 : /(t) /(2).
Выразите базисные элементы {а1, а2}, дуальные к {v17V2}, в
виде линейной комбинации /З1 и /З2.
Прежде чем выполнять упражнения 10.8-10.12, перечитайте па-
раграф 4.2 о процессе Грама-Шмидта.
10.8. (а) Найдите размерность пространства тригонометрических
полиномов, натянутого на
{1, sin2я, cos2х, sin4х, sin2хcos2cos4#}.
Задачи
535
(b) Пусть скалярное произведение в этом пространстве равно
(/, д) = - [ dx.
тг Jo
С учетом этого определения постройте ортонормированный
базис.
10.9. (а) Рассмотрите векторное пространство нечетных полиномов
степени < 3 с базисом {f, t3} и скалярным произведением
Jo f (1)9(1) dt. Постройте ортогональный базис (его не надо
нормировать).
(Ь) Для линейного оператора f : V —► У, определенного фор-
мулой f(p(t)) = tpf(t), постройте матрицу А, которая пред-
ставляет / в базисе {/, t3}, и матрицу А, которая представ-
ляет f в ортогональном базисе, построенном в предыдущем
пункте.
(с) Три элемента дуального к V пространства V* можно задать
в виде: аг[р] = р(1), a2jp] = р'(0) и «3[р] = jQtp(t)dt.
Получите соотношение между а1, а2 и а3, показывающее
в явном виде, что они линейно зависимы.
10.10. Пусть V — двумерное векторное пространство функций, явля-
ющихся линейными комбинациями Д = 1 и/2 = cos2t. Опре-
делим скалярное произведение в этом пространстве (f,g) =
Jo/2 dt-
(а) Постройте ортонормированный базис для пространства V.
2 Г/2 1 2 Г/2 3
(Замечание: — / cos2 tdt — ~ / cos4tdt = -.)
яг Jo 2 тг Jq 8
(b) Три элемента дуального пространства У* равны:
ртг/2
tt1 ' / о:2:/—> / f(t)costdt,
Jo
rn/2
а3 : f / f(t) sin tdt.
Jo
Покажите в явном виде, что они линейно зависимы.
10.11. Рассмотрите трехмерное пространство У, элементами которого
будут полиномы степени < 2, умноженные на e~2t. Базисом этого
пространства будут три вектора:
Vi = е-2\ v2 = te~2i, V3 = t2e“2<.
536
Векторные пространства ...
(а) В этом базисе напишите матрицу Z), представляющую опе-
рацию дифференцирования, т. е.
Df(t) = /'(t).
(Ь) Постройте матрицу О2 4- 4D + 41. (В этой матрице будет
много нулей!)
(с) Общее решение уравнения х + 4т 4- 4т — e-2t лежит в век-
торном пространстве V. Получите его с помощью матрицы,
построенной в пункте (Ь).
10.12. Векторное пространство решений уравнения
х 4- 3± 4- 2т = 0
обозначим через V. Определим скалярное произведение в этом
пространстве равенством
Jr+oo
' f(t)g(t)di.
О
(Учтите, что /0+°° e~xtdt — 1/А.)
(а) Пусть fi = e~2t — первый базисный вектор пространства V.
Постройте второй вектор Гг, ортогональный к fi.
(b) В базисе {fi,постройте матрицу D, которая представ-
ляет операцию дифференцирования по t. Проверьте, что
D2 4- 37? + 21 — 0. Пусть три элемента дуального простран-
ства V* имеют вид
«i[f] = f(O),
a2[f]=f'(0),
/•4-оо
«зИ = / f(t)dt.
JO
(с) Объясните из общих соображений, почему существуют чис-
ла Ai, Аг, Аз (не все равные нулю), для которых выполня-
ется соотношение
AiOti + А2СК2 4" A3Q3 = О.
Получите Ai, Аг и A3.
Задачи
537
(d) С помощью cti и ct2 постройте базис {/315/32} для V*, кото-
рый будет дуальным к базису {fi, ^2}, полученному в пунк-
те (а).
3. Пусть V — четырехмерное векторное пространство полиномов
степени < 3 с базисными элементами l,t, t2,t3. Пусть D — диф-
ференциальный оператор, действующий в этом пространстве:
Df(t) = f'(t) и пусть Та — оператор трансляции: Taf(t) = f(t+a).
(а) В этом базисе постройте матрицы D и Та и покажите, что
Та = К + Da + |и2а2 + ^D3a3.
(Ь) Докажите, что если V — пространство полиномов степени
< п, то Та — exp(Da). (Указание: вспомните формулу Тей-
лора, и тогда не придется строить матрицы.)
4. Пусть V — пространство 1-форм на плоскости, для которых ко-
эффициенты при dx и dy — квадратичные функции. Базисом та-
кого пространства V будут х2 dx, ху dx, у2 dx, х2 dy, ху dy, у2 dy.
Любая кривая Г, лежащая на плоскости, определяет элемент аг
дуального пространства V* согласно формуле
ar[w] — J а).
(а) Найдите нетривиальную кривую Г, для которой аг будет
нулевым элементом V*.
(Ь) Получите базис для подпространства V, которое аннулиру-
ется элементом аг, где Г — любая замкнутая кривая.
(с) Пусть Гх, Г2 и Г3 — три произвольные замкнутые кривые
на плоскости. Докажите, что а^, аг2 и аг3 линейно за-
висимы. (Указание: воспользуйтесь теоремой Грина, чтобы
преобразовать криволинейные интегралы к двойным.)
(d) Найдите такие кривые Г1, Г2,. •., Ге (это могут быть отрез-
ки прямых линий), чтобы СКГ1, О£г2э • • •) аг6 были базисом
для V*, дуальным к базису, данному в условии задачи. На-
пример,
I х2 dx = 1, остальные / x2dx = 0 (J = 2,3,4,5,6);
</Г1 JVj
/ xydx = 1, остальные I xydx — Q (j = 1,3,4,5,6).
Уг2 Jvj
538
Векторные пространства ...
10.15. Рассмотрите линейное преобразование f из пространства R4 в
пространство R3, матрица которого имеет вид:
/1 2 0 1\
10 2 -3 .
\0 1 —1 2/
(а) Получите базис для ядра f и найдите общее решение урав-
нения
(1\
3 .
-1}
(Ь) Пусть N обозначает ядро /; пусть G ~ факторпростран-
ство R4/7V. Постройте базис для G и объясните, почему по-
лученные базисные вектора будут линейно независимыми
элементами G,
10.16. Рассмотрите линейное преобразование f из R4 в R3, с матрицей
(24 2 2\
1 3 2 0.
31—28/
(а) Получите базис ядра f и найдите общее решение уравнения
/ 0\
/(v) = 1—11
\ 5/
(Ь) Напишите базис образа /.
(с) Два элемента факторпространства Н имеют вид:
/0\ /0\
hx = I 1 I и Ьг = I 0 I.
\°/ \1/
Покажите в явной форме, что hi и Ьг линейно зависимы.
(Указание: вернитесь к первому пункту этого упражнения.)
10.17. Линейное преобразование f : R4 —» R4 представляется матрицей
(10-1 1\
02 4—81
2 1-4 6
11-3 5/
Задачи
539
(а) С помощью редукции по строкам получите ранг матрицы А
и найдите базис ядра этой матрицы. Обозначьте этот базис:
vi,..., Vfc, где к = dimКегЛ.
(Ь) Найдите решения wi,..., W& уравнений Aw* = v$.
(с) Будут ли вектора wi,..., w^, Vi,..., базисом простран-
ства R4? Что означает ответ на этот вопрос для преобразо-
вания /?
(d) Найдите базис Im А и выразите этот базис через вектора w<
и Vi. Как этот результат связан с результатами предыдуще-
го пункта?
10.18. Нам дана матрица 4x4:
(242 2\
1 2 0 2 |
3 6 5 1
0 0 3 -3/
(а) С помощью редукции по строкам получите базис ядра А и
базис образа А. Найдите общее решение уравнения
(Ь) Получите базисные вектора щ и иг для факторпростран-
(4\
3 I
I выразите через полу-
-3/
ченные щ и иг.
10.19. Пусть W — векторное подпространство в R4, натянутое на век-
тора
Скалярное произведение в R4 — обычное евклидово,
(а) Постройте ортонормированный базис для W.
540
Векторные пространства ...
(4\
_0 j в виде суммы вектора из
7/
пространства W и вектора, ортогонального к W.
(с) Пусть f : R4 —> R3 определено формулой
/(v) =
(wi,v)
(w2,v)
(w3,v)
Запишите матрицу, представляющую преобразование f.
С помощью редукции по строкам получите общее решение
уравнения
/ 4\
/(v) = 6 .
\—2/
10.20. С помощью редукции по строкам получите базис подпростран-
ства U е R5, аннулирующее пространство которого UY натянуто
на вектор-строки
а1 = (1,2,0,-1,2),
а2 - (2,4,3,4,4),
а3 = (0,0,1,2,1).
а4 = (3,6,5,7,8).
Получите общее решение для системы линейных уравнений
q1[v] = 5, a2[v] = 16, a3[v] == 3, a4[v] = 27.
10.21. С помощью редукции по строкам получите матрицу, обратную к
/ 1 —2 1\
А = 1-2 5 —4 .
\ 1 —4 6 /
10.22. Пусть V — пространство функций f на R2, обладающих свой-
ством f(XxyXy) = X3f(x,y). Базисные вектора пространства V
имеют вид
{vi = х3, v2 = x2y, Уз^ху2, v4 = s/3}.
Задачи
541
Пусть W — пространство 1-форм на плоскости, являющихся
квадратичными функциями х и у. Базис этого пространства име-
ет вид
wi = х2 dx, w2 = ху dx, W3 = у2 dx,
w4 = х2 dy, w5 = xy dy, w6 = y2 dy.
Оператор d является линейным преобразованием из V в W.
(а) Напишите матрицу, представляющую оператор d в задан-
ных базисах.
(Ь) Получите базис для образа d и для факторпространства
G = W7(Imd).
Рис. 10.6
(с) Два элемента дуального пространства W* обозначаются а1
и а2. Причем а1 приписывает любому элементу е W
значение интеграла fal си, где о1 является квадратом еди-
ничной площади 0 < х < 1, 0 < у < 1, проходимым против
часовой стрелки, а для элемента а2 берется другой квадрат
0 < rr < 1, — 1 < г/ < 0 (рис. 10.6). Получите векторы-строки,
представляющие а1 и а2. Найдите линейные комбинации
а1 и а2, образующие дуальный базис для базиса простран-
ства G.
(d) Пусть U обозначает пространство 2-форм на плоскости, ко-
торые зависят линейно от хиу. Базисом этого пространства
являются вектора
{ui = хdx Л dy, u2 — ydx A dy}.
542
Векторные пространства ...
Постройте матрицу, представляющую оператор d из W в 17.
Что является ядром этого оператора?
10.23. Пусть А — линейное преобразование из V в W; и пусть А*-—
сопряженное преобразование из W* в V*. Предположим, что
мы имеем произвольные (не обязательно дуальные) базисы для
V и V*: базис {vi, V2,..., vm} для пространства V и базис
{а1, а2,... ,ат} для пространства V*, где al[vj] = Sij. Чис-
ла Sij образуют т х т матрицу S. Аналогично у нас есть базисы
{wi, W2,... ,wn} и {/З1,/З2,... ,/Зп} для W и И7* соответственно,
где /Зк [wi] = Тьь Числа Ты образуют п х п матрицу Т. (Если бы
мы выбрали дуальные базисы, то Т и S были бы единичными
матрицами.)
Если А — матрица отображения в базисах {vj} и {w^}, то какова
будет А* — матрица сопряженного отображения в базисах {/Зг}
и {аг}? Ответ выразить через транспонированную матрицу А4 и
матрицы S и Т.
10.24. Для векторного пространства V, где определено скалярное про-
изведение (vi, V2), сопряженное преобразование А* для линейно-
го преобразования А : V —► V тоже будет линейным преобразо-
ванием А* : V V, определяемым формулой
(A*vx,v2) = (vi, Av2).
(а) Покажите, что это определение следует из определения А*,
как преобразования из V* в V*, с учетом обычной иденти-
фикации V* с V, которая следует из скалярного произведе-
НИЯ .
(Ь) Покажите, что в ортонормированием базисе {ei, ег, •.., еп}
матрица, представляющая А*, будет транспонированной к
матрице А.
(с) Пусть тг обозначает линейную операцию ортогонального
проектирования из V на подпространство И5 * 7, т. е. для лю-
бого v € V вектор 7FV принадлежит подпространству W и
вектор v — 7FV ортогонален вектору ttv. (Операция тг есть
преобразование из V в V, причем 1ттг = W.) Покажите,
что тг* = 7Г.
5Напомним, что упомянутая идентификация означает, что каждому век-
тору u € V ставится в соответствие линейная функция а 6 V*, действующая
по формуле a(v) = (u, v). — Прим. ред.
Задачи
543
(d) Пусть V — пространство полиномов степени < 2, где опре-
делено скалярное произведение (f,g) = Jq f(t)g(t) dt. Выбе-
рем базис vi = 1, V2 = t, V3 ~ t2. (Этот базис не ортонорми-
рован.) Пусть А — линейное преобразование, определенное
формулой
В этом базисе постройте матрицу, представляющую Л*.
10.25. Рассмотрите линейное преобразование из четырехмерного век-
торного пространства V в трехмерное векторное пространство
ТУ, которое представляется матрицей
(1 1 0 3\
2 1 2 2 .
2 3 —2 10/
(а) Пусть М обозначает образ А. Покажите, что вектора mi =
(1 \ /1\
2 I и m2 = j 1 I образуют базис подпространства М.
2/ \3/
(Ь) Пусть Н = W/М. Покажите, что базис этого факторпро-
/ 1\
странства состоит из одного вектора hi = I 0 I, кото-
\° /
рый является классом эквивалентности, содержащим все
вектора
+ т, где т — элемент М. Покажите, что
Г\ 1
| 1 I = — -hi, т. е. найдите такой элемент m из простран-
но/ 4
ства М, чтобы выполнялось равенство
0\
1
0/
1
4
1\
0 j + ш.
0 /
/ ° \
Выразите I 0 I через hi.
\ 1 /
544
Векторные пространства ...
(с) Пусть У обозначает ядро А, Один элемент из N равен ni =
I q . Найдите второй вектор пг, так чтобы щ ип2 были
\ 1/
базисом пространства N,
Указание: Сначала проведите редукцию по строкам для
ЛД
А I Я
матрицы А, а потом ищите вектор вида I
\0>
(d) Пусть G обозначает факторпространство V/N. Базисные
Ж
о I
вектора этого пространства имеют вид: gi = и g2 =
<0/
(0\ /ОХ /0
1 тт | 0 | о [ 0
0 . Покажите, что I I = 2gi — 2g2, и выразите I
0/ \0/ \1
через gt и g2.
(е) Получите несингулярную 2x2 матрицу С, которая пред-
ставляет А как преобразование от G (с базисом gi, g2) к М
(с базисом mi, m2).
/2\
(f) Вектор I 1 ] выразите через mi и m2. (Указание: сделай-
V /
те те же операции, которые выполняются при редукции по
строкам.) После этого примените С'~1, т. е. решите уравне-
/2\
ние Av = 111, записав ответ в виде v = agi + 6g2 =
\7 /
q I + п, где п — произвольный элемент из 7V.
ко/
10.26. Пусть /* обозначает сопряженное отображение для f в предыду-
щей задаче. Отображение /* является отображением дуального
пространства W* в дуальное пространство V* и задается фор-
мулой ~ где /3 и v - произвольные элементы из
W* и V. Если взять базисы, дуальные к исходным базисам в
Задачи
545
пространствах V и W, то f* представляется матрицей, транспо-
нированной к А:
(1 2 2\
11 3 |
I
О 2 -2 Г
3 2 10/
(а) Покажите, что образ /* сопряжен с пространством G. Пусть
gi и ё2 ” элементы V*, дуальные к д± и д%. Каждый столбец
в матрице А1 выразите через g* и g^.
(b) Покажите, что ядро /* сопряжено с пространством Н.
Пусть элемент 7' дуален hi, т. е. 7'(hi) = 1. Пусть /З1 —
элемент JF, выбирающий первую компоненту вектора, т. е.
(а\
b ] = а. Выразите /З1 через у'. Сделайте то же самое
с у
для /З2 и /З3, которые выбирают вторую и третью компо-
ненты вектора соответственно.
(с) Найдите такие вектора а1 и а2 в пространстве W*, что
/*а1 = /З1, f*ct2 = (З2. Покажите, что а1, а2 и yf образуют
базис для W*.
Глава 11
Определители
Глава 11 посвящена доказательствам основных свойств
определителей матриц п х п. Сначала приводятся ак-
сиомы для определителей, потом даются методы их
вычисления.
Введение
В этой главе мы обсудим свойства определителей матриц размера
п х п. Пусть А — матрица п х п. Столбцы этой матрицы будем
обозначать Ai,..., Ап. Для единичной матрицы 1 размера п х п
столбцы имеют вид:
Тогда для произвольной матрицы А
Ai = А1±, • • •, Ап — AZn,
другими словами, Ai является образом 4, т. е. г-го вектора стан-
дартного базиса в Жп при отображении А.
Мы хотели бы определить Det А как ориентированный объ-
ем параллелепипеда, построенного на векторах Ai,...,An. На-
ши знания, полученные в главах 1 и 4, позволяют говорить, что
548
Глава 11. Определители
этот ориентированный объем будет полилинейным, т. е. линей-
ным по Ai при фиксированных А2,..., Ап, линейным по А2 при
фиксированных Ai, A3,..., Ап, и так далее. Вследствие наличия
ориентации мы ожидаем, что Det А антисимметричен по столб-
цам, т. е. перестановка любых двух столбцов матрицы изменяет
знак определителя. Мы должны дать определение определителя
и доказать, что он обладает требуемыми свойствами. Материал
излагается классически, начиная с основных аксиом для опре-
делителей. Мы выпишем основные свойства, которыми должны
обладать определители, и покажем, что эти свойства задают его
однозначно. Другими словами, покажем, что существует не более,
чем одна функция от элементов матрицы с требуемыми свойства-
ми. Затем получим правила вычисления определителей и пока-
жем, что функция, удовлетворяющая аксиомам, существует. По-
том дадим другие определения определителей и убедимся, что
все определения дают одну и ту же функцию.
В последующем мы будем рассматривать функцию от мат-
риц. Если эта функция вычисляется для конкретной матрицы А,
то пишем £>(А) или D(Ai,..., Ап), чтобы подчеркнуть, что это
функция от п векторов Ai,..., Ап. Если все столбцы, кроме /с-го,
фиксированы, то мы получим функцию одного столбца, которую
будем обозначать Например, будем писать
D2
(( 1 Х
для D | -2 у
\\ 3 z
(Строго говоря, в обозначении мы должны отразить постоян-
/ 1\ / 7\
ные векторы Ai = I — 2 I и A3 — I 9 I и писать
\ з/ \—17
но это обозначение слишком громоздко.)
11.1. Аксиомы для определителей
549
11.1. Аксиомы для определителей
Функция матриц D называется определителем, если она удовлет-
воряет следующим условиям.
о Каждая функция Dk линейна:
Dk(Ak + Ак) — Dk(Ak) + Ек(Ак),
Dk(cAk) = cDk(Ak).
Другими словами, D линейна по каждому столбцу, когда
другие столбцы фиксированы.
о Если два соседних столбца матрицы А равны, то
D(A) = 0.
(11.2)
Наконец,
O(D = 1.
(П.З)
Предположим, что функция 7), удовлетворяющая свойствам
(11.1) и (11.2), существует. Что из этого следует?
Если один столбец умножить на какое-то число и приба-
вить его к соседнему, то значение функции D не изменится.
Доказательство. Прибавим к (к + 1)-му столбцу к-й, умно-
женный на с. Получим
D(Ai,..., Ак,сАк + Ак+1,Ак+2,...,Лп)
= Z>(Ai,..., Ак,Ак+1, Ак+2 • • - Мп)
+ cD^Ai,..., Ак, Ак, 1
= D(A1,^,An). (11.4)
Здесь использовались условия (11.1) и (11.2). Например,
//1 4 7\\ //14 — 41 7\\ //1 0 7\\
7) 2 5 8 =7) 2 5 -4-2 8 =7) 2 -3 8 .
\\3 6 9// \\3 6-4-3 9// \\3 -6 9//
Чтобы получить еще одно свойство определителя, прибавим &-й
столбец к (к + 1)-му, получившийся (к + 1)-й столбец вычтем из
550
Глава 11. Определители
к-т столбца, потом еще раз прибавим полученный fc-й столбец к
(к + 1)-му. В результате получим:
= 7)(А,..., Ajfc-i, Ak, Ak + А+ь A+2,..., An)
— D(Ai,..., Afc-i, Ak ~ (Ak + A+i), Ak + А+ь•.., An)
— D(Ai,..., A-i, — A+i, Ak + А+ь A+2? • * • Mn)
D(Ai,..., Ak—i, Ak + -A^i • • • ? Ai)
— D(Ai,..., Ak-i, ~A+i? Ak, Ak+2, •, A)
~ ^(A?..., Ak—±, Ak+i, Ak, Ak+2) * • • > Ai)* (4’5)
Таким образом, перестановка двух соседних столбцов изменяет
знак определителя D(А). Отсюда немедленно следует, что
если два столбца матрицы А равны, то D(A) = 0. (П-6)
Действительно, если у матрицы есть два одинаковых столб-
ца, то мы можем переставлять соседние столбцы до тех пор, пока
наши столбцы не станут рядом. После этого остается воспользо-
ваться свойствами (11.2) и (11.5). Ссылки на свойства (11.1) и
(11.6) приводят нас к еще одному следствию.
Если умножить один столбец на число
и прибавить его к другому столбцу, (11.7)
то величина D(A) не изменяется.
Продолжим наш пример вычисления определителя. Мы по-
лучили:
//1 4 7\\ //1 0 7\\
Z) 11 2 5 8 =£> 2 -3 8 ) 1
\\3 6 9// \\3 -6 9//
Теперь 1-й столбец умножим на 7 и вычтем из 3-го, а затем 2-й
столбец умножим на 2 и вычтем из 3-го:
//1 0 0\\ //1 0 0\\
D I 2 -3 —6 I) = 11 2 -3 О I — О
\\3 -6 —12// \\3 -6 О//
по свойству (11.1).
11.1. Аксиомы для определителей
551
Сделаем еще один пример.
//2 1 4\\
D 3 2 1
\\4 2 —1//
2-й столбец умножим на 2
и вычтем из 1-го
//0 1 4\\
= D -1 2 II
\\ 0 2 -1//
// 0 1 4\\
= D -1 О 1
\\ 0 2 —1/7
//0 1 4\\
= D [I -1 О Oil
\\ 0 2 —1/7
// 0 1 0\\
= D -1 О О 11
\Х 0 2 -9//
(/ ° 1 0\\
-1 о oil
\ 0 2 1//
// 0 1 0\\
= -9D -1 О 0 1
\\ о о 177
/71 о 0\\
= 9£> ([ О -1 О])
\\0 0 177
/71 0 0\\
= -9D 11 О 1 0 .
\\0 0 177
1-й столбец умножим на 2
и сложим со 2-м
1-й столбец прибавим к 3-му
2-й столбец умножим на 4
и вычтем из 3-го
воспользуемся аксиомой (11.1)
З-й столбец умножим на 2
и вычтем из 2-го
меняем местами 1-й и 2-й столбцы
воспользуемся аксиомой (111)
Если теперь использовать аксиому (11.3), то получаем
//2 1
D 3 2
\\4 2
= -9.
552
Глава 11. Определители
Заметим также, что из (11.7) следует (доказывается как в (11.5)),
что
перестановка двух любых столбцов изменяет знак D(A).
(И-8)
Можно также получить, что
если столбцы А линейно зависимы, то D(A) — 0. (11.9)
Действительно, если AMi Н----h ХпАп ~ 0 и некоторое значение
Ai ф 0, то можно разделить это соотношение на Аг и получить
А{ с^А} • • • СпАп ~ 0, Ci — 0.
Поэтому вычитание CiAi и т. д. из i-ro столбца не изменяет D(A)
(следствие (11.7)) и приводит к матрице с нулевым г-м столбцом.
Тогда вследствие (11.1) D(A) — 0.В частности, мы знаем, что
любые п векторов вида
//0\\
«2
\Vn//
(с нулем в первой строке) линейно зависимы. Поэтому
если все элементы верхней строки матрицы А
равны нулю, то D(A) — 0.
Предположим, что хотя бы один элемент в верхней строке
матрицы А не равен нулю. Переставляя столбцы, если это надо,
всегда можно сделать так, что первый столбец имеет ненулевой
элемент в верхней строке. Следовательно,
D(A) = ±D(B), где Ьп/0.
Но тогда
D{B) = bnD(B'),
где для матрицы Bf первый столбец В[ — (1/Ьц)В1.
11.1. Аксиомы для определителей
553
Умножая первый столбец на соответствующий коэффициент
и вычитая из остальных столбцов, можно сделать так, чтобы все
остальные элементы в первой строке были равны нулю, т. е.
D(.B') = Z>(B"),
где
Рассмотрим D(B") как функцию матрицы С. Очевидно, что ак-
сиомы (11.1) и (11.2) удовлетворяются. Кроме этого, если бы С
была единичной матрицей (п — 1) х (n — 1), мы могли бы, не изме-
няя значения D(B"), сделать все элементы первого столбца btji,
Ьз\ и т. д. равными нулю (умножая остальные столбцы на соот-
ветствующие множители и вычитая из первого). Например,
//1 о
2 1
з о
\\4 0
о
о
1
о
о
1
о
о
о
1
о
о
о
1
о
о
2-й столбец умножаем на 2
и вычитаем из 1-го
0 °\\
О О
1 О
О 1//
0 °\\
° ° II
1 0 II
0 1//
0 °\\
О О I
1 0 I
О 1//
3-й столбец умножаем на 3
и вычитаем из 1-го
4-й столбец умножаем на 4
и вычитаем из 1-го
554
Глава 11. Определители
Другими словами, функция
о ... 0\\
с
))
как функция от С удовлетворяет всем аксиомам для определите-
ля матриц (п — 1) х (п — 1). Следовательно,
D(B") = D(C),
где справа стоит .D-функция (если она существует) для матриц
(п — 1) х (п — 1).
Еще раз повторив предыдущие рассуждения, мы приходим к
выводу, что или D(C) = 0 (если все элементы в первой строке
равны нулю) или D(C) можно выразить как D-функцию матриц
(п — 2) х (п — 2). И так можно спускаться, пока не дойдем до
матриц 1x1, для которых из аксиом (11.1) и (11.3) следует, что
D(a) = o(D(l)) = а.
Таким образом, мы доказали, что D-функция, если она су-
ществует, единственна, и получили правило для ее вычисления.
Например, пусть
/ 0 3 -1 4\
2 4 15
-4 7 2 8
\ 2 9 3 2/
Можно показать, что D(A) = —D(B), где
(-1 3 0 4\
14 2 5
2 7-48
3 9 2 2/
11.1. Аксиомы для определителей
555
а дальше получаем, что D(B) = где
/10 о 0\
„ -1 7 2 9 I
—2 13 —4 16 Г
\-3 18 2 14/
Далее, Г>(В") = Р(С), где
( 7 2 9\
13 —4 16 .
18 2 14/
Наконец,
// 7 1 9\\
£>(С) = 2D I 13 —2 16 11
\\18 1 14//
// 1 0 9\\
= -2D (( —2 27 16 I
\\ 1 11 14//
// 1 0 0\\
= -2D -2 27 34 j j
\\ 1 11 5 //
= —2 • 27D
= -2 • 27(5 - 34 • 11/27) = 478.
В следующем параграфе мы дадим другое доказательство
единственности D(A) и другой рецепт его вычисления. Но нам
еще надо показать, что D(A), удовлетворяющий условиям (11.1),
(11.2) и (11.3), существует.
Из приведенного способа вычисления определителя А можно
получить важное следствие. Предположим, что матрица А имеет
556
Глава 11. Определители
вид
. (L М\
А (о NJ ’
где L есть матрица к х к, N - матрица (п — к) х (п — к) и М —
матрица, у которой к строк и (n — fc) столбцов. Другими слова-
ми, предположим, что первые к столбцов матрицы А имеют нули
в последних п — к позициях. В этом случае первые к столбцов
матрицы А линейно зависимы или линейно независимы тогда и
только тогда, когда столбцы матрицы L линейно зависимы или
линейно независимы, т. е. последние п— к нулевых элементов не
влияют на линейную зависимость или независимость этих столб-
цов. Если эти столбцы линейно зависимы, то
D(A) - 0 и D(L) = 0.
Если же они линейно независимы, то применяя вышеизложенный
метод, можно использовать первые к столбцов и заменить матри-
цу М нулевой матрицей, не изменяя при этом элементы матрицы
N. В этом случае
D (о ^)=D(L)W). (H-П)
Эта формула является обобщением на пространство п измере-
ний формулы вычисления площади параллелограмма (рис. 11.1).
В двумерном случае мы получаем
п ((х и\\
и I — XV.
\\0 v JJ
Это ориентированная площадь параллелограмма, построенного
на векторах и пРичем она равна ориентированной
площади параллелограмма, построенного на векторах и
/0\
В трехмерном случае
(/ X U р\\ ZZ чч
у V <? =D[(X J W)),
\0 0 г// 77
11.2. Закон умножения и другие следствия аксиом 557
Рис. 11.1
а интерпретация та же самая (рис. 11.2).
11.2. Закон умножения
и другие следствия аксиом
Рассмотрим еще некоторые следствия из свойства (11.8) о пере-
становке двух столбцов определителя. Пусть (гл,~ про-
извольная перестановка чисел (1,...,п). Возьмем определитель
матрицы с переставленными столбцами
2? ( (А^ 1 * - * ? А^ 7 ••• 7 А^ ) ) ,
и будем попарно переставлять их до тех пор, пока не вернемся к
исходному порядку. На каждом шаге будем применять свойство
(11.8) и придем к выводу, что
D((AU1,..., Дп)) = ±О((Д,..., Ап)), (11.12)
где знак + или — не зависит от конкретных значений матрич-
ных элементов матрицы А. Если (11.12) применить к единичной
матрице, то получим
.. ,IVn)) = ±1
и, следовательно,
Р((А^,..., Д,„)) = £>((1П,...,IVn))D(A). (11.13)
558
Глава 11. Определители
Пусть В = (bij) — другая матрица п х п и пусть
С-АВ.
Столбцы матрицы С равны
Ск — + ЬъкАъ + • • • + ЬпкАп.
Для вычисления В (С) мы можем сначала применить (11.1) к пер-
вому столбцу С и получить сумму некоторых слагаемых; потом
можно проделать то же самое со вторым столбцом, и так далее.
Например, в трехмерном случае
Ci — biMi + 612А2 + 613А3,
С2 = £>12 Ai + £>22 А2 + £>32 A3,
С3 = Ь1зА1 + £>23 А2 + ЬззАз
Тогда
В(С1,С2,С3)
= £>цВ(А1, С2, С3) + £>2iD(A2, С2, С3) + Ь31В(Аз, С2, С3)
= Ьц{Ь12В(А1, Ai,C3) + b22P(Ai, А2,Сз) + £>32B(Ai, А3,С3)}
+ £>2i{£>i2B(A2, Ai, С3) + £>22В(А2, А2, С3) + £>32В(А2, А3, С3)}
+ £>3i{£>i2B(A3, Ai, Сз) + Ь22В(А3, А2, Сз) + £>32В(А3, А3, Сз)}.
Прежде чем двигаться дальше, можно исключить слагаемые с по-
вторяющимися столбцами. Очевидно, что останутся только выра-
жения типа В((АР1, А^, А^)), а они в силу (11.12) равны ±В(А).
Таким образом, в общем случае мы видим, что
D(C-) = D(A) ±^1^2 • ЬипП, (11.14)
где берется сумма по всем перестановкам и знак ± соответствует
(11.12).
Предположим, что А — L Из (11.14) следует, что С — В и
= 52 ibpii... ЪупП. (11.15)
Таким образом, мы получили явный вид В(В), что еще раз дока-
зывает единственность определителя, если он существует. Если
11.2. Закон умножения и другие следствия аксиом
559
(11.15) подставить в (11.14), то получается важный закон умно-
жения определителей:
D(AB) = D(A)D(B). (11.16)
Каждый член в (11.15) содержит только один элемент из каж-
дой строки матрицы В. Поэтому
D(B) — линейная функция каждой строки
при фиксированных других строках.
Выведем еще одно свойство определителя, связанное с его
строками. Пусть для некоторого значения 1 < i < п матрица
А имеет вид
А^ — k А 1,
Ai = li + /г+1?
Д+1 = о.
Например, для п = 3 и i = 2 у нас была бы матрица
/1 0 0\
j 0 1 о .
\° 1 °/
Заметим, что в матрице АВ все строки, кроме (г+1)-й, совпадают
со строками матрицы В, а (г + 1)-я строка заменена на г-ю. В
нашем примере мы получили бы
/1 0 0\ /1 5 9\
0101268
\0 1 0/ \3 7 4/
1 5 9\
2 6 8 I .
2 6 8/
Кроме того, В (А) = 0, потому что один столбец этой матрицы
нулевой. С помощью подобного построения можно прийти к вы-
воду, что
если В имеет две одинаковых соседних строки, то D(B) ~ 0.
(И.2')
560
Глава 11. Определители
Это значит, что £>(В*) удовлетворяет аксиомам (11.1) и (11.2), по-
тому что замена В на транспонированную матрицу В1 приводит к
перестановке роли строк и столбцов. Поскольку D(I*) = £>(1) — 1,
то функция В (В*) удовлетворяет аксиомам (11.1)—(11.3) и вслед-
ствие единственности определителя должна совпадать с D(B).
Другими словами,
В(В^ -В(В). (11.17)
11.3. Существование определителя
Теперь, наконец, мы должны доказать существование определи-
теля, т. е. построить функцию матриц п х п, которая удовлетво-
ряет (11.1), (11.2) и (11.3)1.
Для п = 1 положим по определению D ((a)) = а.
Для п = 2 определим D = ad — be. Легко про-
верить, что аксиомы (11.1)—(11.3) в этих случаях выполняют-
ся. Предположим, что существуют определители матриц размера
(п — 1) х (п — 1). Пусть А = (аж) — матрица п х п. Возьмем некото-
рый матричный элемент а^ из г-й строки и fc-ro столбца. Вычерк-
нем из матрицы А г-ю строку и fc-й столбец. Теперь рассмотрим
определитель для получившейся матрицы (п — 1) х (п — 1). Этот
определитель, умноженный на (—1)г+\ называется алгебраиче-
ским дополнением элемента а^ и обозначается Знак (—1)г+А:
распределен в шахматном порядке, а именно:
1На самом деле существование такой функции стало очевидным ранее,
когда была получена формула (11.15) — явное выражение D(B) через эле-
менты матрицы В. В этом параграфе приводится несколько других важных
понятий и формул: алгебраические дополнения и вычисление определите-
лей с их помощью, присоединенная матрица, способ нахождения обратной
матрицы. — Прим. ред.
11.3. Существование определителя
561
Пусть i — некоторое фиксированное число от 1 до п. Рассмот-
рим следующую функцию D от матрицы А:
D — ацАц + cti2Ai2 + • - • + сцпА{П. (11.18)
Ее структура — сумма произведений всех элементов г-й строки
на их алгебраические дополнения.
Рассмотрим зависимость D от заданного столбца, скажем, от
Ah. Для у к Аш зависит линейно от А&, а не зависит
от него; для у — к Ац^ не зависит от А&, но является эле-
ментом этого столбца, т. е. это слагаемое также линейно зависит
от столбца А&. Таким образом, аксиома (11.1) выполняется. Да-
лее, предположим, что два соседних столбца А^ и А^+1 равны.
Для у ф к, к + 1 мы имеем два одинаковых столбца в А^, т. е.
AiU — 0. При вычислении А^ и А^+1 используются одинаковые
определители, но с противоположными знаками. Следовательно,
А^ “ — A^fc+i, a dik — <к,к+1- Таким образом, D = 0 и выполняет-
ся аксиома (11.2). В частном случае Ау = 1и (у = 1, 2,..., п) мы
имеем а™ — 0 для у ф i и an = 1, Ац = 1. Следовательно, D — 1,
что означает выполнение аксиомы (11.3). Таким образом, мы до-
казали существование определителя матрицы п х п и выполнение
формулы (11.18), так называемое разложение определителя по
элементам г-й строки. Формулу (11.18) можно обобщить. В опре-
делителе заменим г-ю строку на j-ю и разложим определитель
по этой новой строке. Для г / j определитель равен нулю, а для
г — j он равен D, т. е.
f D’
t 0,
ajiAn + dj2Ai2 + • • • + ajnAin
j ~
j /i-
(11.19)
Если мы поменяем ролями строки и столбцы, то получим
aihAifc + аъьАък + • • • + anhAnk —
D,
0,
(11.20)
h~ к,
h 7^ к.
Составим из алгебраических дополнений элементов aij матри-
цы А матрицу В = (Aji). (Обратим внимание, что алгебраическое
дополнение элемента стоящего на пересечении г-й строки и
j-ro столбца, находится на пересечении j-й строки и г-го столбца.)
562
Глава 11. Определители
Матрица В называется присоединенной матрицей к матрице А.
Из уравнения (11.20) следует, что
АВ - В А - D(A)I.
Мы уже доказали, что если А сингулярна (столбцы А линейно
зависимы), то D(A) = 0. Если же D(A) ф 0, то предыдущее
уравнение дает формулу для А-1. Таким образом, мы доказали,
что
матрица А обратима
тогда и только тогда, когда D(A) 0.
Если D(A) ф 0, то А-1 = - - В,
v z D(A)
где В — матрица, присоединенная к матрице А.
(Для п — 2 это правило совпадает с методом, изложенным
в главе 1.) При п > 2 это правило не очень удобно, лучше ис-
пользовать алгоритм, изложенный в главе 10. И тем не менее, эта
формула важна с теоретической точки зрения. Например, она по-
казывает, что все элементы матрицы А"1 являются частным от
деления полинома от матричных элементов А на определитель.
Резюме
А. Определители
Вы должны знать аксиомы для определителей и пользоваться
этими аксиомами для вычисления определителей.
Вы должны уметь вычислять определители с помощью алгеб-
раических дополнений.
Вы должны знать и уметь применять метод вычисления об-
ратной матрицы для несингулярной квадратной матрицы.
Задачи
Напишите несколько матриц размера ЗхЗи4х4и вычислите
для них определители. Вы увидите, что уже для случая 4x4
Задачи
563
выражения (11.15) и (11.18) становятся очень громоздкими (при
вычислении по формуле (11.15) приходится выполнить 3-4! умно-
жений и 4! — 1 сложений). А вот метод, описанный в параграфе
11.1, вполне приемлем. Ниже даются определители, для которых
надо проверить ответы.
(а) Det /1 5 6 v 2 > 8 i 9 10 3 11 13 14 4\
12 15 16 = -2.
(Ь) <0 2 2 2\
Det 3 1 3 3 2 4 2 2 : 12.
^3 3 3 5/
(с) /1 i 1 A
Det 2 3 2 2 3 3 3 3 = 1.
\2 2 2 V
(d)
<1 1 1 1\
Det 2 4 3 9 5 25 6 36 = 72.
27 : 125 216/
11.1. Обобщая пример (Ь), покажите, что
Г1 а а а
b Г2 а а
b b гз а
b b b г$
bf{a) - af(b)
b — а
если а ф Ь,
где /(т) = (тт ~ х)(т2 - т)(гз - х)(т4 - х).
564
Глава 11. Определители
Указание: рассмотрите определитель матрицы, выписанной ни-
же, его значение обозначим F(x):
/И - х
b — х
Ь — х
\ b — х
а — х
г2 - х
Ь — х
Ъ — х
а — х
а — х
гз~х
b — х
а — х
а — х
а — х
т^ — х
F(x) линейно зависит от ж, потому что мы можем вычесть первую
строку из остальных, исключив х из всех строк, кроме первой.
Следовательно,
F(x) = А + Вх,
где А и В — некоторые постоянные. При этом F(a) = /(а)
и F(b) = /(b). Наш исходный определитель, очевидно, равен
F(0) = А. Чему он будет равен при а — Ь?
11.2. Обобщая пример (с), покажите, что
(1 1 1 1\
Х а к к1“(а — Х)(Ь ~ у)(с ~ z)-
х у b b I к А 7
х у Z С/
11.3. Обобщая пример (d), покажите, что
/ 1
X
х2
\х3
1
У
у2
у3
1
Z
Z2
г3
1\
w
W2
W3 /
= (у — x)(z — x)(w — x)(z — y)(w — y)(w — z).
Выпишите и докажите соответствующую формулу, если число 4
заменить на п.
11.4. Покажите, что
Когда будет равенство?
Указание: воспользуйтесь интерпретацией | Det | как объема.
11.5. Покажите, что если О — ортогональная матрица (т. е. О О1 = I),
то Det О = ±1.
11.6. Матрица R будет матрицей вращения, если RR1 =1и DetF —
+1. Покажите, что вращение в пространстве нечетного числа
измерений всегда сохраняет неподвижным по крайней мере один
ненулевой вектор, т. е. число 1 является собственным значением
матрицы R. Указание: рассмотрите определитель Det(7? — I).
Рекомендуемая литература
В конце тома мы даем короткий перечень книг, не являющий-
ся, конечно, библиографией. Это скорее дополнительная литера-
тура, полезная студентам, изучающим наш курс. Книгу LOOMIS
AND STERNBERG можно считать параллельным учебником, хотя
изложение материала более формально и абстрактно, с акцентом
на математические доказательства. Содержание, по существу, та-
кое же, как и в нашей книге, но гораздо больше внимания уде-
ляется формальным определениям, строгой аргументации и ма-
тематической изощренности. Во втором томе мы несколько раз
будем отсылать читателя к этой книге за детальным доказатель-
ством некоторых ключевых теорем.
В данной книге одним из главных разделов математики яв-
ляется линейная алгебра. Поэтому мы рекомендуем классичес-
кий учебник Halmos, где имеется уклон к расширению конечно-
мерной теории в направлении гильбертова пространства. Книга
Lang обсуждает этот предмет с точки зрения абстрактной ал-
гебры, в то время как в книге Strang акцент делается на вы-
числительной технике и приложениях, которые мы здесь почти
не рассматриваем. Чтобы получить полное представление о ли-
нейной алгебре, правильная стратегия — прочитать все три эти
книги.
В главе 1 мы обсуждаем геометрию прямых. Далее, естествен-
ный шаг — проективная геометрия. Мы немного говорим о ней в
добавлении к главе 1 и в задачах 1.16-1.20. В книге Hartshorne
дается введение в проективную геометрию.
566
Рекомендуемая литература
В конце главы 2 мы только слегка касаемся теории вероят-
ностей. Этот важный раздел не получил серьезного обсуждения,
что является одним из главных наших пробелов. Хорошее введе-
ние в теорию вероятностей без математических сложностей чи-
татель может найти в трех томах Hoel, PORT AND STONE. Тео-
рия вероятнотей легко приводит к довольно изощренной мате-
матической «кухне», например, к теории меры и тонким вопро-
сам Фурье-анализа. Достоинством этих книг является изложение
важных идей без глубокого погружения в трудную математику.
Книга Moran уже сложнее для чтения, но на нее стоит потра-
тить усилия. В книге Kemeny and Snell обсуждаются конеч-
ные цепи Маркова, и ее следует читать как продолжение главы 2.
Книга Doyle and Snell дает краткое введение и в теорию цепей
Маркова, и в теорию сетей, которые мы будем изучать во втором
томе.
В главе 3 мы даем начальные сведения о дифференциальных
уравнениях. Учебник Hirsch and Smale здесь будет вполне ес-
тественным, так как наши точки зрения довольно близки. Кни-
га Braun излагает материал более стандартно. (Экспонента от
матрицы появляется там только на с. 321!) Однако, ее следует
прочитать, поскольку в ней есть много полезных деталей и при-
ложений. Книга Simmons довольно традиционная, но в ней много
интересной исторической информации. Две классические книги
Арнольда очень приятно читать. Во взаимодействии геометрии
и анализа видна уверенная рука крупного специалиста в этом
вопросе.
В главе 4 два параграфа посвящены теории относительности.
На эту тему мы рекомендуем три книги. Во-первых, большая и
сложная, богатая идеями книга Misner, Thorne and Wheeler.
Во-вторых, короткая, захватывающая, с минимумом математи-
ки книга Taylor and Wheeler. И, наконец, книга Spacetime,
Geometry, Cosmology, написанная Burke, обсуждает математи-
ческие идеи, которые мы пытаемся объяснить в нашей книге, и
дает прекрасное изложение физики относительности.
Другая книга Burke вместе с книгами Flanders и Spivak
могут быть рекомендованы как параллельное и дополнительное
чтение.
Рекомендуемая литература
567
В главе 6 и потом еще раз в параграфе 10.9 мы касаемся во-
просов, относящихся к курсу дифференциальной топологии. Кни-
га Guillemin and Pollack написана как лекционный курс, в ко-
тором, помимо формального изложения теории, автор использу-
ет интуитивный подход и много рисунков. А вот книга Brocker
AND Lander совсем другая. В ней минимум обсуждений, а глав-
ным образом точные формулировки теорем и доказательств. И,
конечно, ее непросто читать. Эти книги посвящены несколько
различным проблемам, и поэтому мы рекомендуем изучить обе.
АРНОЛЬД В. И. Обыкновенные дифференциальные уравнения. — М.:
Наука, 1984 (3-е изд.).
Арнольд В. И. Дополнительные главы теории обыкновенных диффе-
ренциальных уравнений. — М.: Наука, 1978.
Braun М. Differential Equations and their Applications. An Introduction
to Applied Mathematics. — New York: Springer-Verlag, 1993 (4th ed.).
BrOcker Th. and Lander L. Differentiable Germs and Catastrophes. —
Cambridge, UK: Cambridge University Press, 1975. (London Mathematical
Sociaty Lecture Note Series, 17.)
Burke W.L. Spacetime, Geometry, Cosmology. A Series of Books in
Astronomy. — Mill Valley, CA: University Science Books, 1980.
Burke W.L. Applied Differential Geometry. — Cambridge, UK: Cam-
bridge University Press, 1985.
Doyle P.G. and Snell J.L. Random Walks and Electric Networks.
— Washington, DC: Mathematical Association of America, 1985. (Cams
Mathematical Monographs, 22.)
Feynman R. P., Leighton R. B. and Sands M. The Feynman Lectures
on Physics. Vol. 1-3. — Reading, MA: Addison-Wesley, 1963-1965.
Русский перевод: Фейнман P. IL, Лейтон P. Б. и Сэндс М. Фейн-
мановские лекции по физике. Вып. 1-9. — М.: Мир, 1965-1967.
Flanders Н. Differential Forms with Applications to the Physical Sci-
ences. — New York: Dover, 1989 (2nd ed.). (Dover Books on Advanced
Mathematics.)
Guillemin V. W. and Pollack A. Differential Topology. — Englewood
Cliffs, NJ: Prentice-Hall, 1974.
Guillemin V. W. and Sternberg S. Symplectic Techniques in Physics.
— Cambridge, UK: Cambridge University Press, 1984 (2nd ed.).
568
Рекомендуемая литература
Halmos Р. F. Finite-Dimensional Vector Spaces. — New York: Springer-
Verlag, 1974 (reprint of the 1958 2nd edition). (Undergraduate Texts in
Mathematics.)
Русский перевод: ХАЛМОШ П. Конечномерные векторные простран-
ства. — М.: Физматгиз, 1963; Ижевск: РХД, 2002.
Hartshorne R. Foundations of Projective Geometry. Lecture Notes, Har-
vard University, 1966/67. — New York: W. A. Benjamin, 1967.
Hirsch M. W. and SmaleS. Differential Equations, Dynamical Systems
and Linear Algebra. — New York: Academic Press, 1974. (Pure and Applied
Mathematics, 60.)
Hoel P.G., Port S.C. and Stone C. J. Introduction to Probability;
Introduction to Statistical Theory; Introduction to Stochastic Processes. —
Boston, MA: Houghton Mifflin, 1971; 1971; 1972. (The Houghton Mifflin
Series in Statistics.)
Кemeny J. G. AND Snell J. L. Finite Markov Chains. — New York:
Springer-Verlag, 1976 (reprint of the 1960 original). (Undergraduate Texts
in Mathematics.)
Lang S. Linear Algebra. — New York: Springer-Verlag, 1987 (3rd ed.).
(Undergraduate Texts in Mathematics.)
Loomis L.H. and Sternberg S. Advanced Calculus. — Boston, MA:
Jones and Bartlett, 1990 (revised ed.).
Misner C. W., Thorne K. S. and Wheeler J. A. Gravitation. — San
Francisco, CA: W.H. Freeman, 1973.
Русский перевод: Мизнер Ч., Торн К. И УИЛЕР Дж. Гравитация.
Т. 1-3. - М.: Мир, 1977.
MORAN Р. А. Р. An Introduction to Probability Theory. — Oxford: Claren-
don Press, 1968; corrected reprint 1984.
Simmons G.F. Differential Equations with Applications and Historical
Notes. — New York: McGraw-Hill, 1972. (International Series in Pure and
Applied Mathematics.)
Spivak M. Calculus on Manifolds. A Modern Approach to Classical The-
orems of Advanced Calculus. — New York: W. A. Benjamin, 1965.
Strang G. Linear Algebra and its Applications. — New York: Academic
Press, 1980 (2nd ed.).
Русский перевод: Стрэнг Г. Линейная алгебра и ее применения. — М.:
Мир, 1980.
Taylor Е. F. and Wheeler J. A. Spacetime Physics. — New York:
W.H.Freeman, 1992 (2nd ed.).
Предметный указатель
1-форма, см. дифференциальная
форма линейная
2-форма, 386, 412
4-импульс, 228
—, закон сохранения, 229
А
аберрация, 436
— сферическая, 437
абсолютная константа, см.
скорость света
алгебра матриц (и линейных
преобразований), 34
алгебраическое дополнение
элемента матрицы, 560
аннулятор (аннулирующее
пространство), 492
аффинная плоскость, 2
аффинное преобразование, 23
аффинное пространство
(ассоциированное с векторным
пространством), 12
Б
базис, 14, 55, 488
— дуальный, 491
— ортонормированный, 177
базисы
— подобные, 398
— противоположные, 398
биения,194
билинейная функция, 379
близнецов парадокс, 217
борновское разложение, 270
В
вариация постоянных, 149
ведущий элемент строки матрицы,
507
вектор
— касательный, 286
— энергии-импульса, см. 4-импульс
векторное пространство, 6, 10, 476
—, базис, 488
— двумерное, 55
— дуальное, 479
— касательное, 290
—, натянутое на множество
векторов, 484
— одномерное, 13
-, подпространство, 480
—, размерность, 486
— симплектическое, 461
внешнее произведение (1-форм),
383
внешняя производная (от
1-формы), 379
время
— истинное (по Ньютону), 15
— собственное, 372
вынужденные колебания, 148
—, резонанс, 154
вырожденная матрица, см.
линейное преобразование
сингулярное
570
Предметный указатель
Г
Галилея преобразование, 221
Гамильтона теорема, 452
Гамильтона уравнения, 452
Гамильтона-Кэли теорема, 86
гауссово разложение, 448
гессиан, 313
гиперболические синус и косинус,
213
главные плоскости, 448
Грама-Шмидта процесс, 176
граница области, 415
Грина формула, 415
д
движение евклидово, 213
детерминант, см. определитель
дефект линейного преобразования,
503
дискриминант квадратичной
формы, 184
дифракция, 434
дифференциал, 250, 254
дифференциальная форма
— замкнутая, 367, 385
— линейная (1-форма), 277
— степени 2 (2-форма), 386, 412
— точная, 363
дифференциальное уравнение
—, интегральная кривая, 135
— Лапласа, 317
— линейное неоднородное, 148
----, установившееся решение, 152
— линейное однородное, 125
----, начальные условия, 128
----, общее решение, 127
—, фазовый портрет, 135
дифференцируемое отображение,
250
—, регулярная точка, 524
—, сохраняющее ориентацию, 401
длина
— вектора, 166, 371
----лоренцева, 372
— кривой, 372
— оптическая, 452
дуальное пространство, 479
дуальный базис, 491
Е
евклидова плоскость, 165
евклидово преобразование, 23, 166
единичная матрица, 35
3
закон
— Кеплера второй, 274
— сложения скоростей, 214
— Снеллиуса, 436
----линеаризованный, 442
— сохранения
----4-импульса, 229
----углового момента, 273
— умножения определителей, 559
затухание
— апериодическое, 146
— критическое, 145
И
изоморфизм векторных
пространств, 14, 56
индекс строки матрицы, 507
интеграл
— двойной
----абсолютный (первого рода),
391
----от 2-формы (второго рода),
389
— криволинейный
----абсолютный (первого рода),
371
----от 1-формы (второго рода),
355
— несобственный, 428
интерференция, 435
К
каноническое преобразование, см.
симплектическое отображение
касательное пространство, 290
Предметный указатель
571
касательный вектор, 286
квадратичная форма, 184
квадратичная функция, 191
Кеплера закон второй, 274
коаксиальный луч, 438
коммутатор пары матриц, 271
композиция отображений, 20
конформная матрица, 80
Коши-Шварца неравенство, 233
коэффициент (показатель)
преломления, 436
кривизна, 441, 443
Л
Лагранжа множитель, 318
Лапласа уравнение, 317
лапласиан, 317
Лежандра полиномы, 180
Лейбница формула (производная
произведения функций), 263
лемма Морса, 339
линейная зависимость векторов, 9,
47, 483
линейное преобразование, 28, 57
—, изменяющее ориентацию, 401
— конформное, 77
— Лоренца, 210
----собственное, 209
—, матрица, 29
—, норма, 308
— ортогональное, 166
— регулярное (несингулярное), 28
— симплектическое, 231, 460
— сингулярное, 28
— скорости, 221
— сопряженное, 526
—, сохраняющее ориентацию, 400
— транспонированное, 183
линза
— тонкая, 443
—, фокальные плоскости, 445
—, фокусное расстояние, 444
Лоренца преобразование, 210
— собственное, 209
М
Маркова процесс, 93
—, матрица вероятностей перехода,
95
масса покоя, 228
матрица
—, ведущий элемент строки, 507
— вероятностей перехода (в
процессе Маркова), 95
— вращения, 564
— Гессе, 313
— единичная, 35
— замены базиса, 58, 490
—, индекс строки, 507
— конформная, 80
— линейного преобразования, 29
----, зависимость от базиса, 29
— обратная, 45
—, определитель, 549
— оптическая
----гауссово разложение, 448
----общего вида, 448
----преломления, 442
----распространения, 441
— ортогональная, см. линейное
преобразование ортогональное
— присоединенная, 562
—, редукция по строкам, 506
— симплектическая, см. линейное
преобразование
симплектическое
— сингулярная (вырожденная), см.
линейное преобразование
сингулярное
— транспонированная, 183
—, функция от, 115
— Якоби, 303, 407
метод
— вариации постоянных, 149
— Гаусса, см. редукция по строкам
— множителей Лагранжа, 317
— Ньютона, 323
— Пикара, 325
Минковского расстояние, 216
Морса лемма, 339
Муавра теорема, 81
572
Предметный указатель
Н
неравенство
— Коши-Шварца, 233
— треугольника, 216
----обратное, 217
нильпотент, 54
норма линейного преобразования,
308
нормальные колебания, 192
нулевой вектор, 9
нулевой конус, см, световой конус
Ньютона метод, 323
Ньютона уравнение (оптическое),
450
Ньютона-Лейбница формула, 362,
415
О
область абсолютного будущего, 208
образ линейного преобразования,
51, 502
образ отображения, 18
обратная матрица, 45
обратное отображение, 19
определитель (детерминант), 42,
549
оптика
— волновая (теория Френеля), 434
— гауссова, 437
— геометрическая, 436
— линейная, 436
оптическая ось, 438
оптическая сила, 443
ориентация
— векторного пространства, 399
— области (на плоскости), 389, 416
— параллелограмма, 387
— поверхности (в пространстве),
391
— траектории, 351
ориентированная площадь
(параллелограмма), 387
ориентированный объем (п-мерного
параллелепипеда), 547
ортогональная проекция, 179, 235
ортогональное преобразование, 166
ортогональность векторов, 166
ортонормированный базис, 177
ортонормировочная процедура, см.
Грама-Шмидта процесс
осциллятор
— без затухания, 144
— с затуханием, 145
отображение, также функция,
оператор, преобразование, 18
— аффинное, см. аффинное
преобразование
— биективное, 19
— дифференцируемое, 250
----, регулярная точка, 524
----, сохраняющее ориентацию, 401
— евклидово, см. евклидово
преобразование
— инъективное, 19
— линейное, см. линейное
преобразование
— обратное, 19
— ограниченное, 250
— симплектическое, 467
— сюръективное, 19
И
параметризация траектории, 352
перенос (pullback)
— 2-формы, 402
— функции, 291
перпендикулярность, см.
ортогональность векторов
Пикара метод, 325
плоскость
— аффинная, 2
— проективная, 72
плотность (распределение по
площади), 393
подмногообразие векторного
пространства, 523
подпространство векторного
пространства, 480
показатель преломления, 438
поляризация света, 436
полярные координаты, 291, 370
приближение Борна (первое), 270
Предметный указатель
573
принцип Ферма (наименьшего
времени), 457
присоединенная матрица, 562
проективная плоскость, 72
проекция, 52
— ортогональная, 179, 235
произведение матриц, 31
производная
— внешняя (от 1-формы), 379
— многомерная (отображения
векторных пространств), см.
также дифференциал, 247
— по направлению, 288
— произведения функций, см.
Лейбница формула
— смешанная (вторая), 282
— частная, 275
пространство-время, 205
противоположный вектор, 10
процесс
— Грама-Шмидта, 176
— Маркова, 93
— —, матрица вероятностей
перехода, 95
Пуанкаре преобразование, 213
Р
работа силового поля, 349
равномерная дифференцируемость,
326
разложение
— борновское, 270
— гауссово, 448
размерность векторного
пространства, 486
ранг линейного преобразования,
503
расстояние Минковского, 216
регулярная точка
(дифференцируемого
отображения), 524
редукция по строкам, 506
резонанс, 154, 194
ряд степенной, 116
— сходящийся, 118
— — абсолютно, 119
С
световой конус, 210
силовое поле, 348
—, работа, 349
симплектическая группа, 232, 461
симплектическая форма, 461
симплектическое векторное
пространство, 461
симплектическое отображение, 467
сингулярная (вырожденная)
матрица, см. линейное
преобразование сингулярное
скалярное произведение, 167
— евклидово, 175
—, свойства, 169
— симплектическое, 231
скорости преобразование, 221
скорость света, 206
сложения скоростей закон, 214
смещение, см. трансляция
аффинная
Снеллиуса закон, 436
— линеаризованный, 442
собственное время, 372
собственное значение, 82
собственный вектор, 82
сопряженное отображение, 526
сопряженные плоскости, 443
специальная теория
относительности, 206
Т
Тейлора формула (многомерная),
311
телескоп астрономический, 447
теорема
— Гамильтона, 452
— Гамильтона-Кэли, 86
— Грина, см. Грина формула
— коэффициентов Морзе, 457
— Муавра, 81
— о неявной функции, 334
— о постоянном ранге, 517
— о ранге и дефекте, 503
— о среднем значении, 305
574
Предметный указатель
--многомерная (неравенство),
309
— об обратной функции, 332
тонкая линза, 443
точечная характеристика
(оптической системы), 452
траектория
— кусочно-дифференцируемая, 352
— ориентированная, 351
—, параметризация, 352
трансляция аффинная, 6, 25
транспонирование, 183
У
увеличение
— линзы,446
— телескопа угловое, 447
угловой момент, 272
— , закон сохранения, 272
угол между векторами, 167
умножение матриц, 31
уравнение
— дифференциальное, см.
дифференциальное уравнение
— Лапласа, 317
— Ньютона (оптическое), 450
— характеристическое, 83
уравнения Гамильтона, 452
условный экстремум, 317
Ф
факторпространство, 497
Ферма принцип (наименьшего
времени), 457
фокальные плоскости, 445
фокусное расстояние, 444
формула
— Грина, 415
— Лейбница (производная
произведения функций), 263
— Ньютона-Лейбница, 362, 415
— Тейлора (многомерная), 311
функция
— билинейная, 379
— квадратичная, 191
— от матрицы, 115
X
характеристический полином, 83
характеристическое уравнение, 83
ц
цепное правило, 256
Ч
частная производная, 275
Э
эйконал, см. точечная
характеристика
энтропия, 343
Я
ядро линейного преобразования,
52, 502
якобиан, см. матрица Якоби