/


























































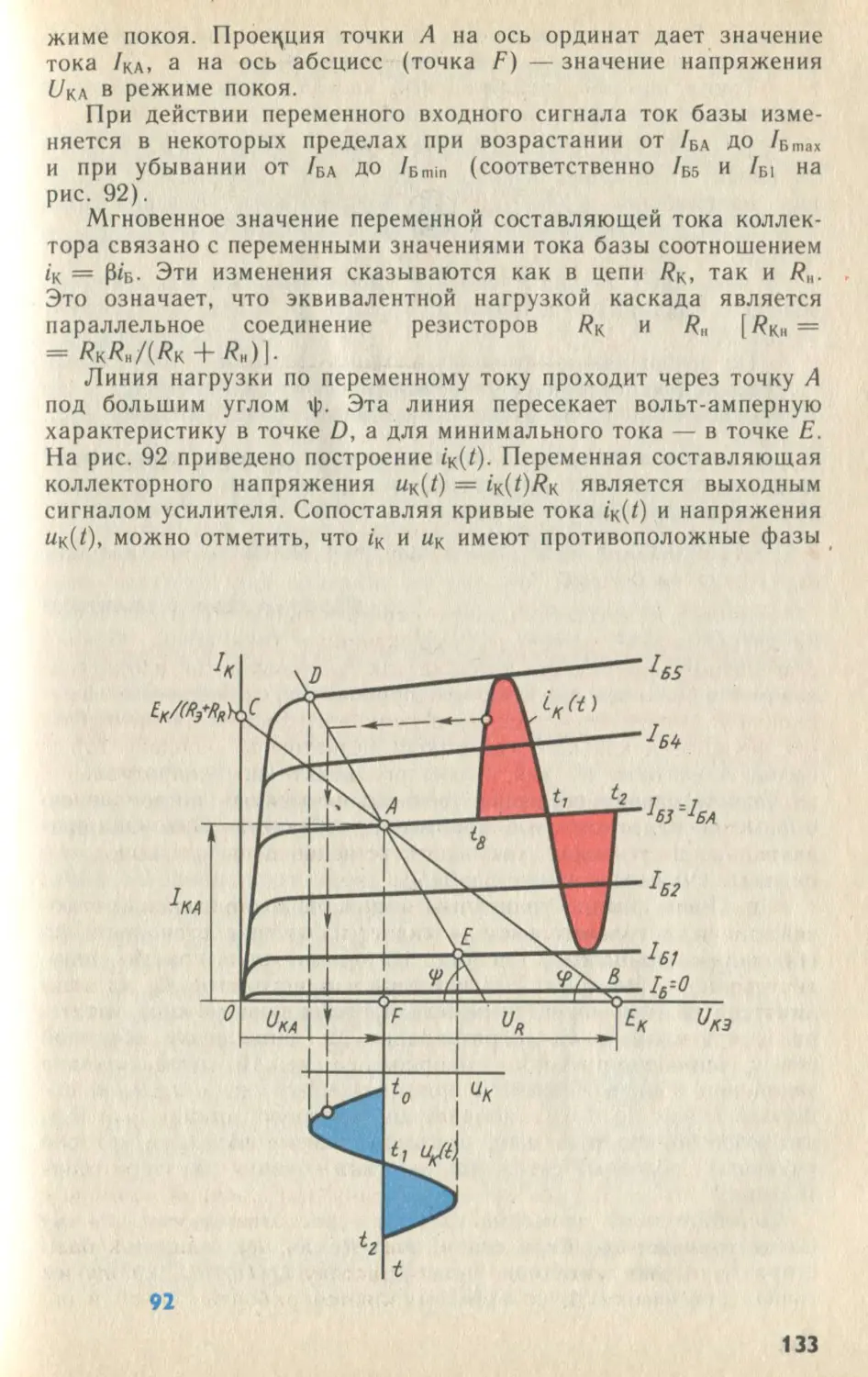


















































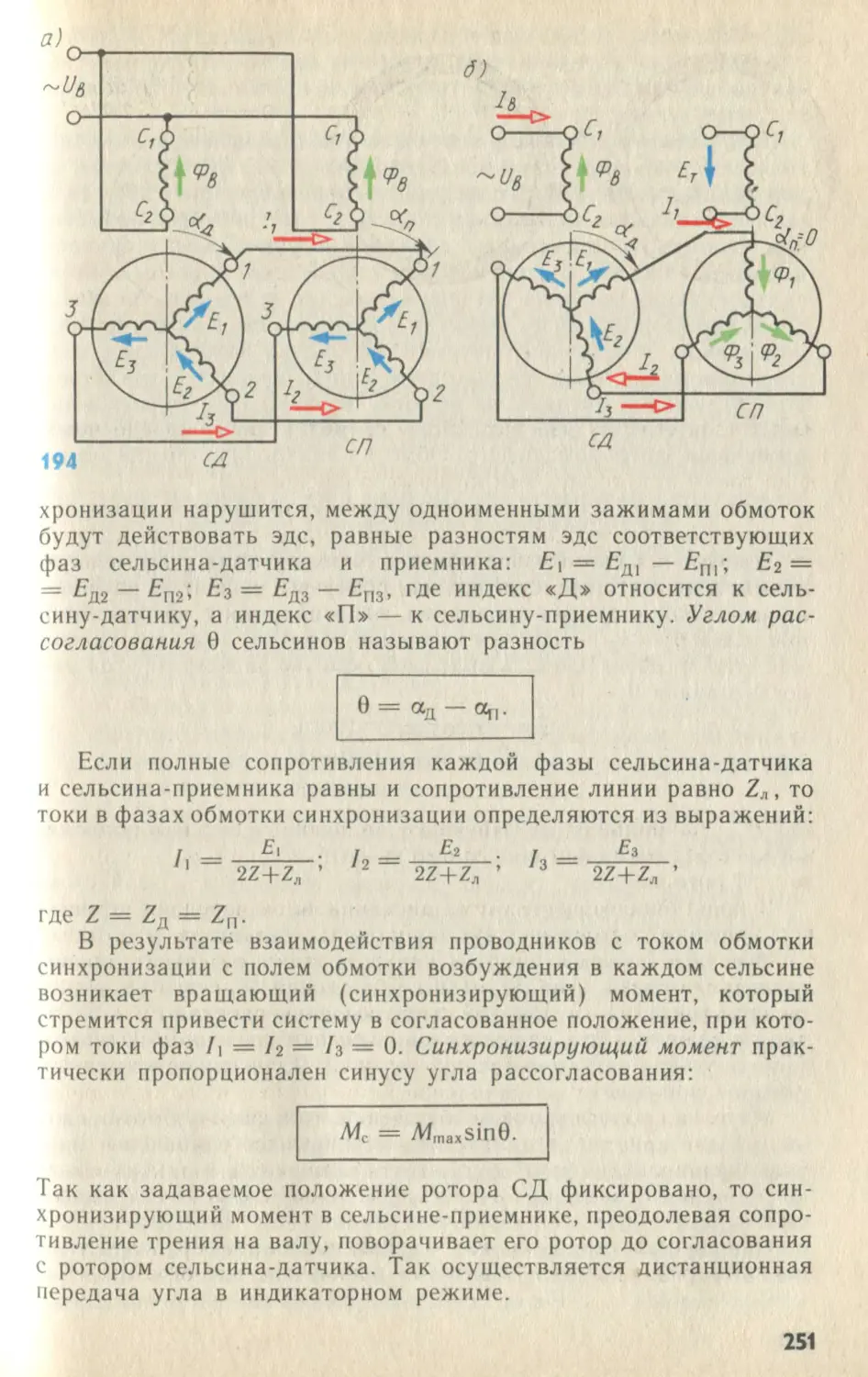

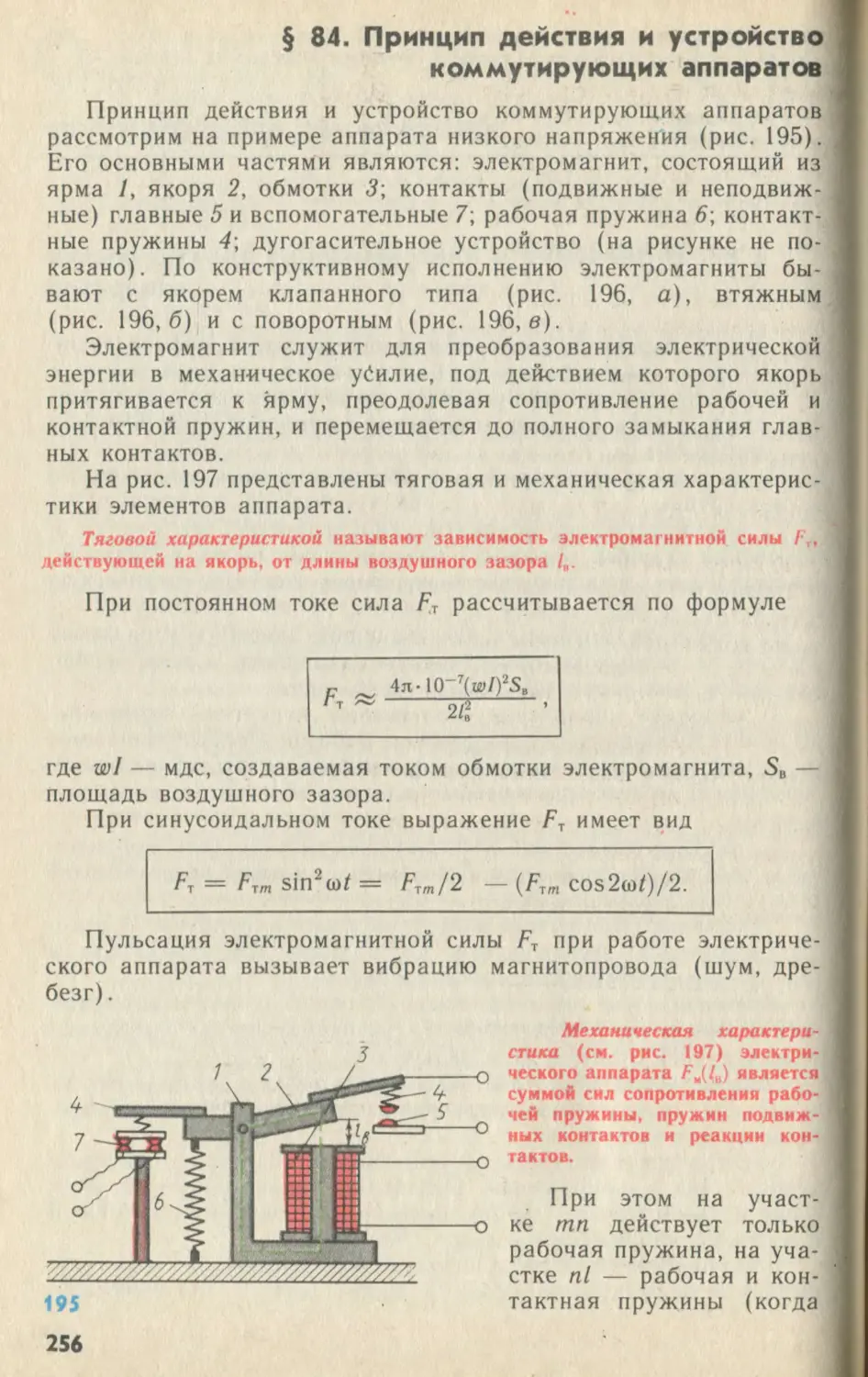



















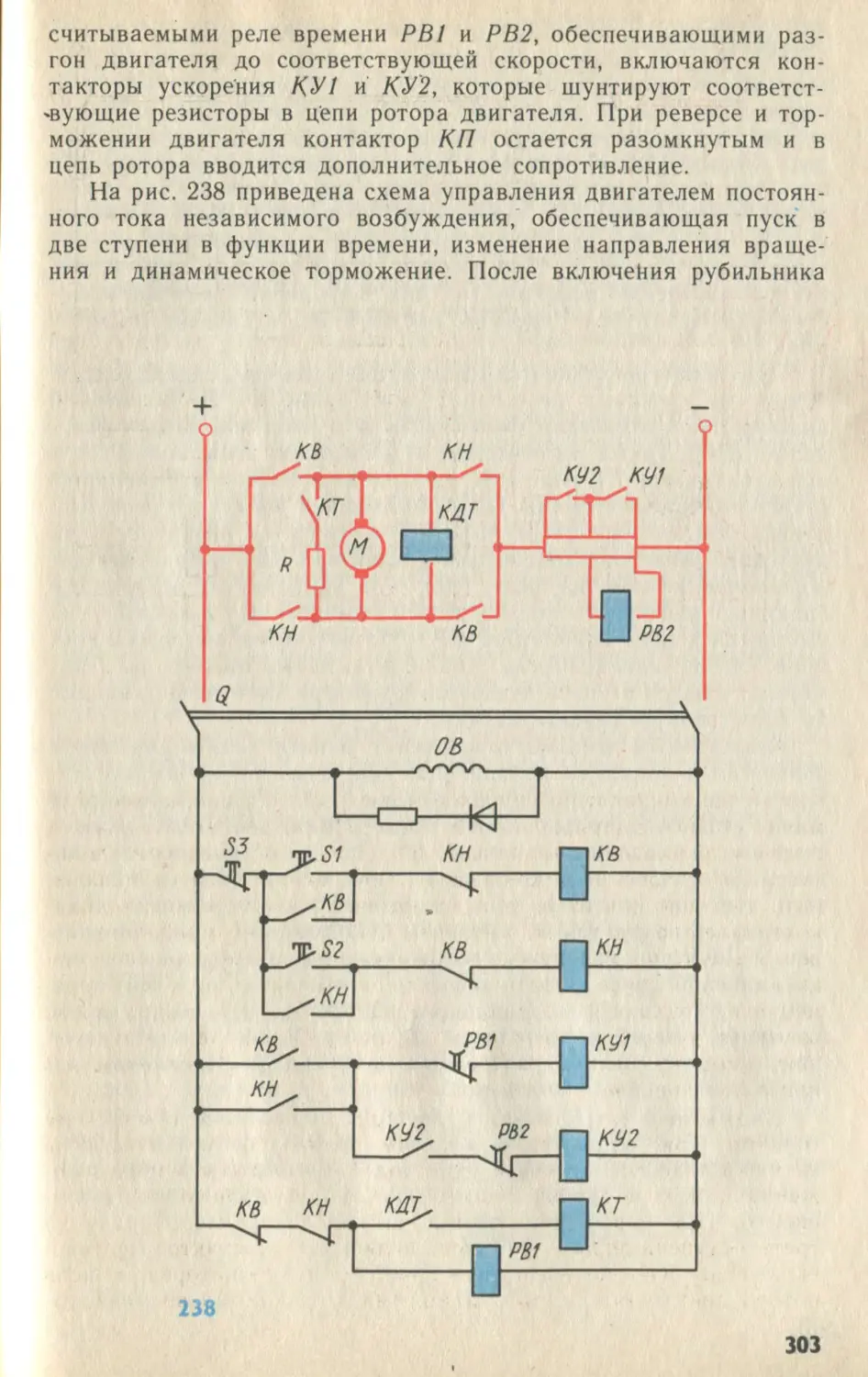















Текст
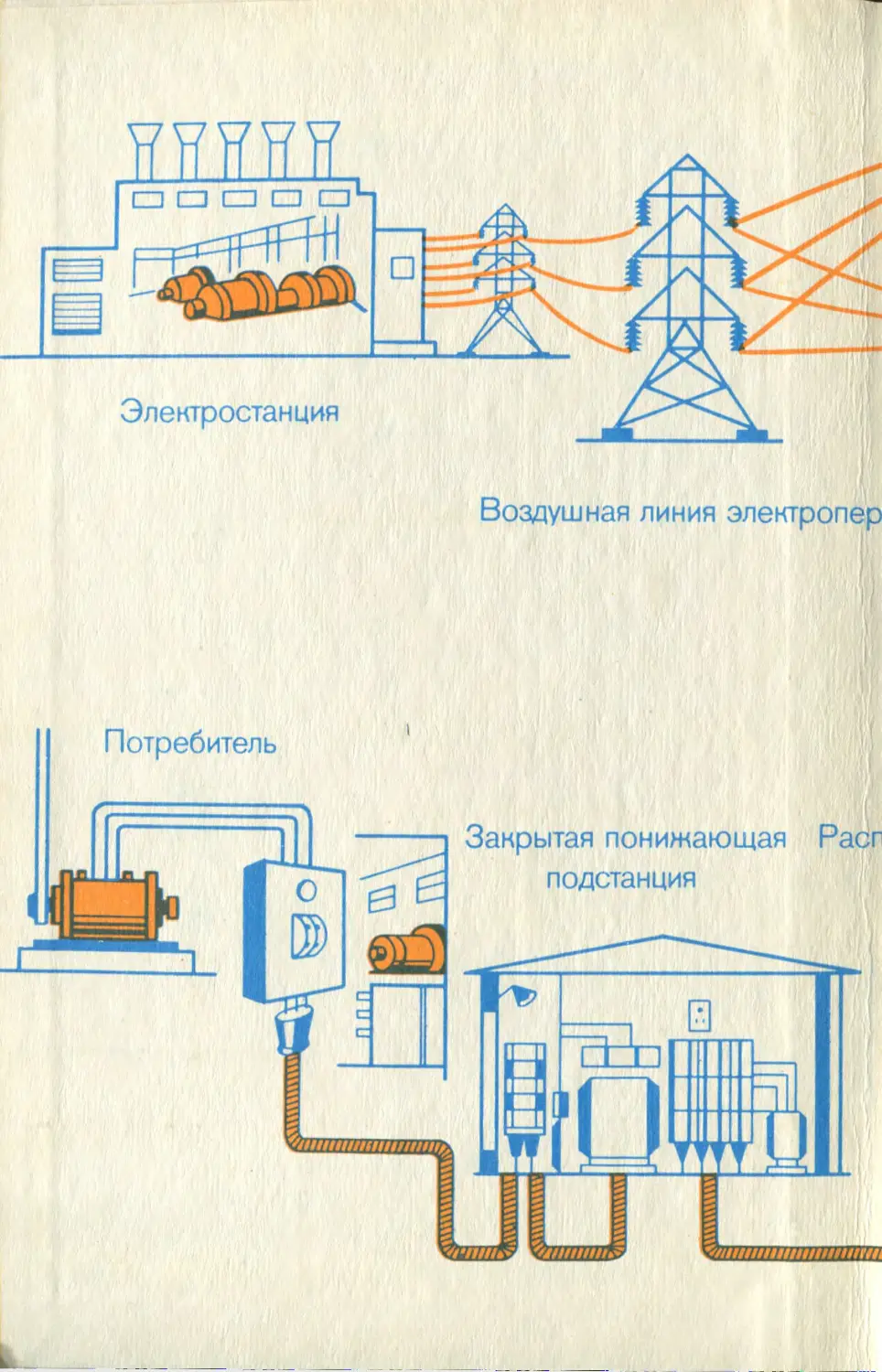
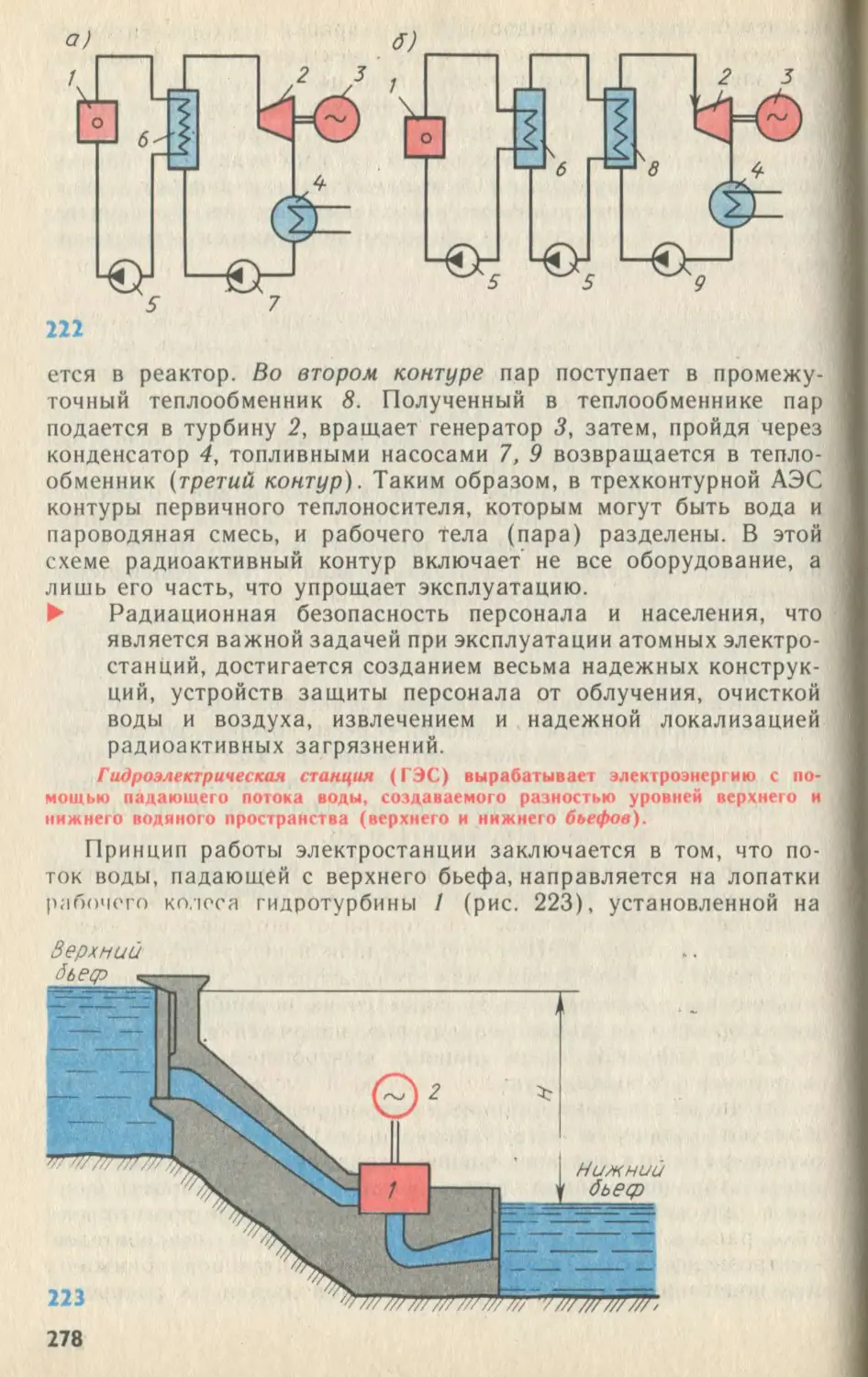
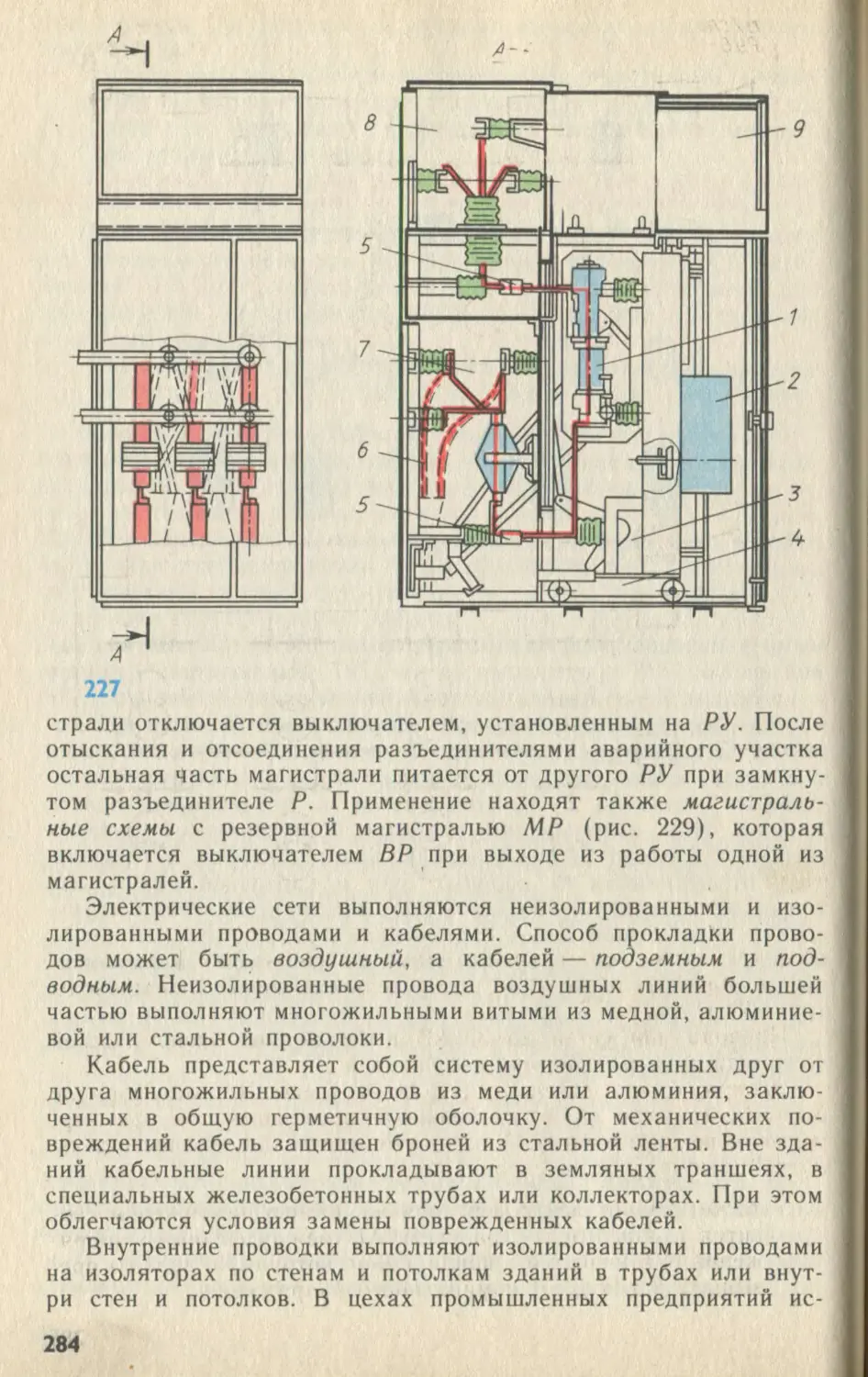
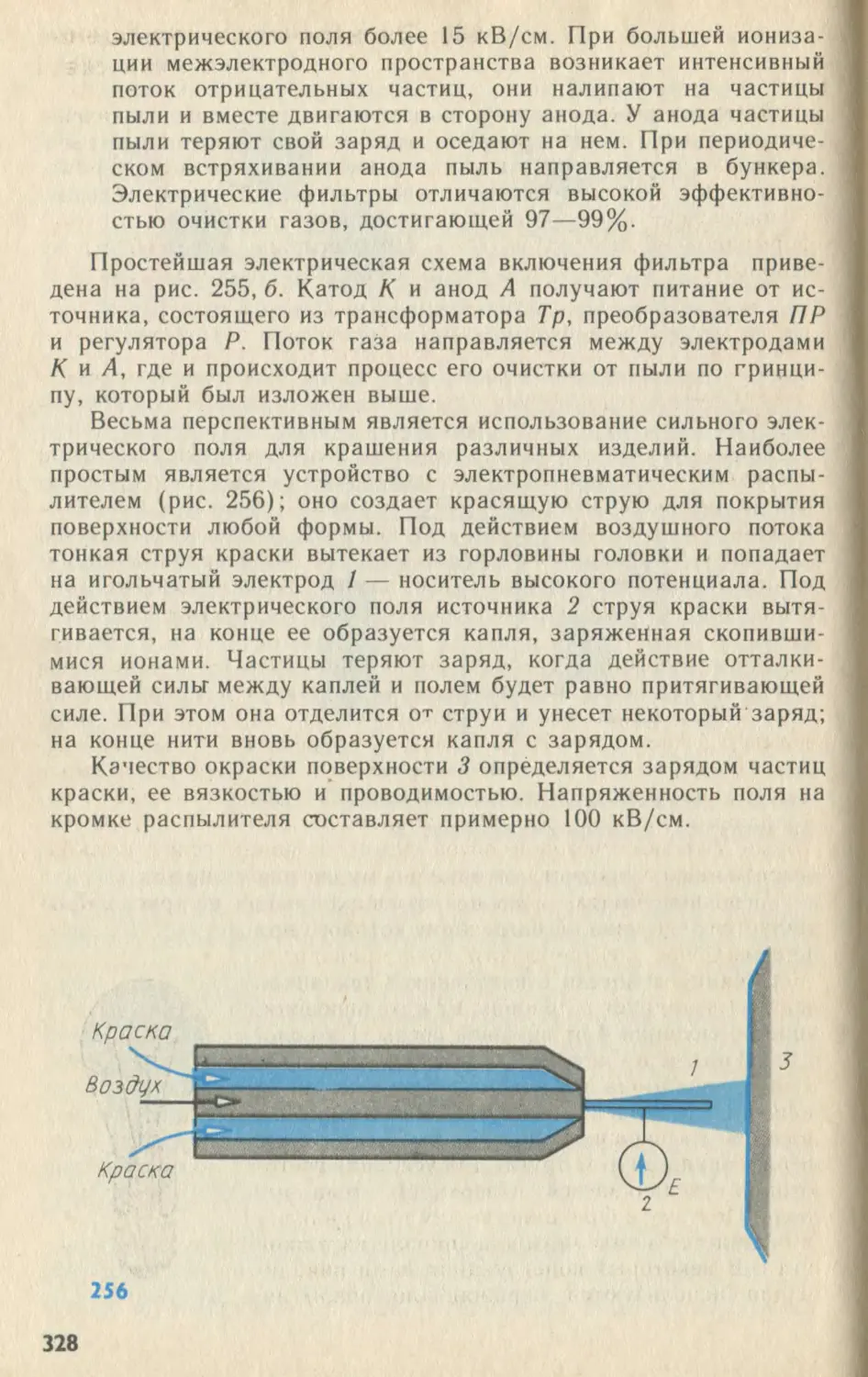
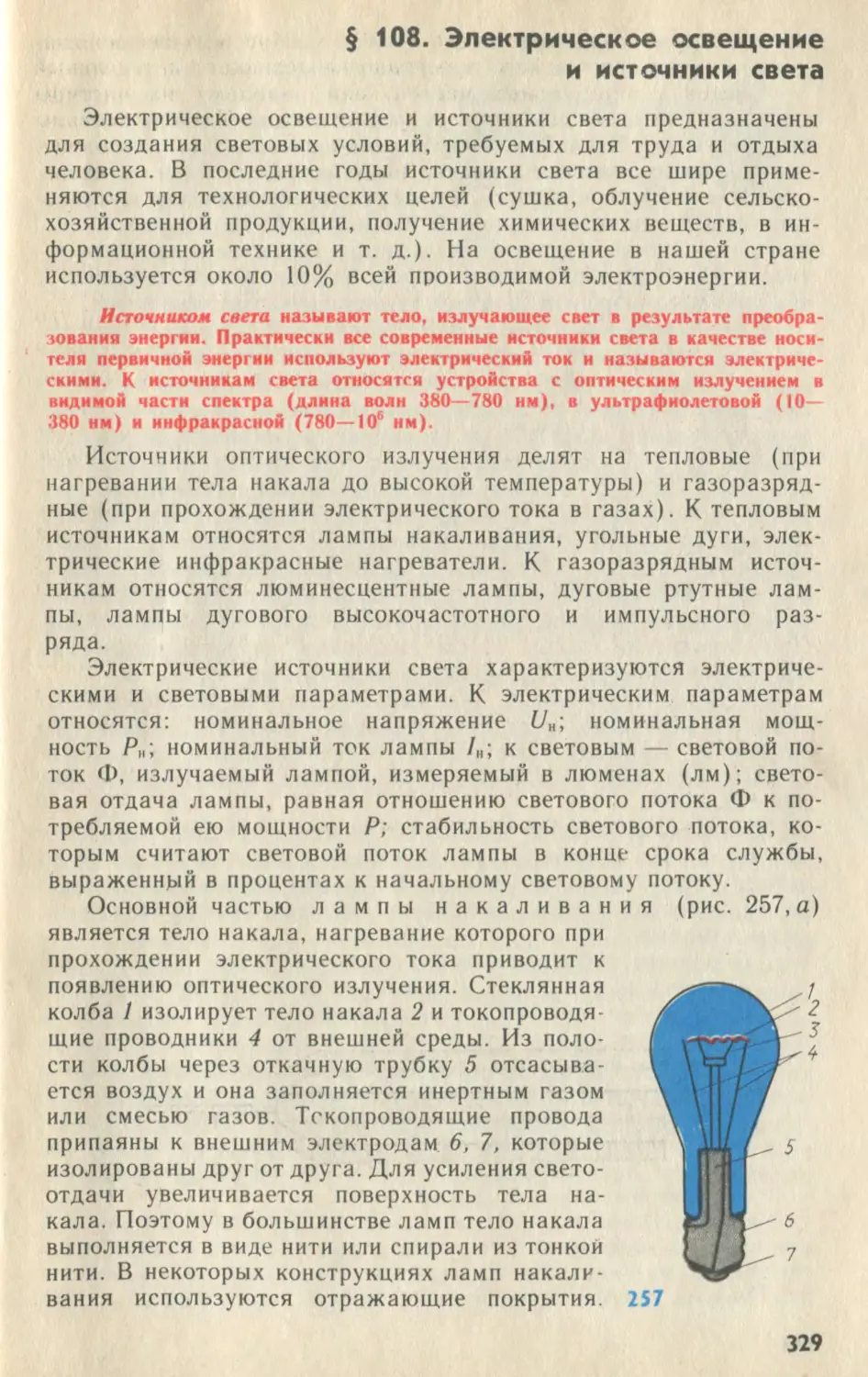
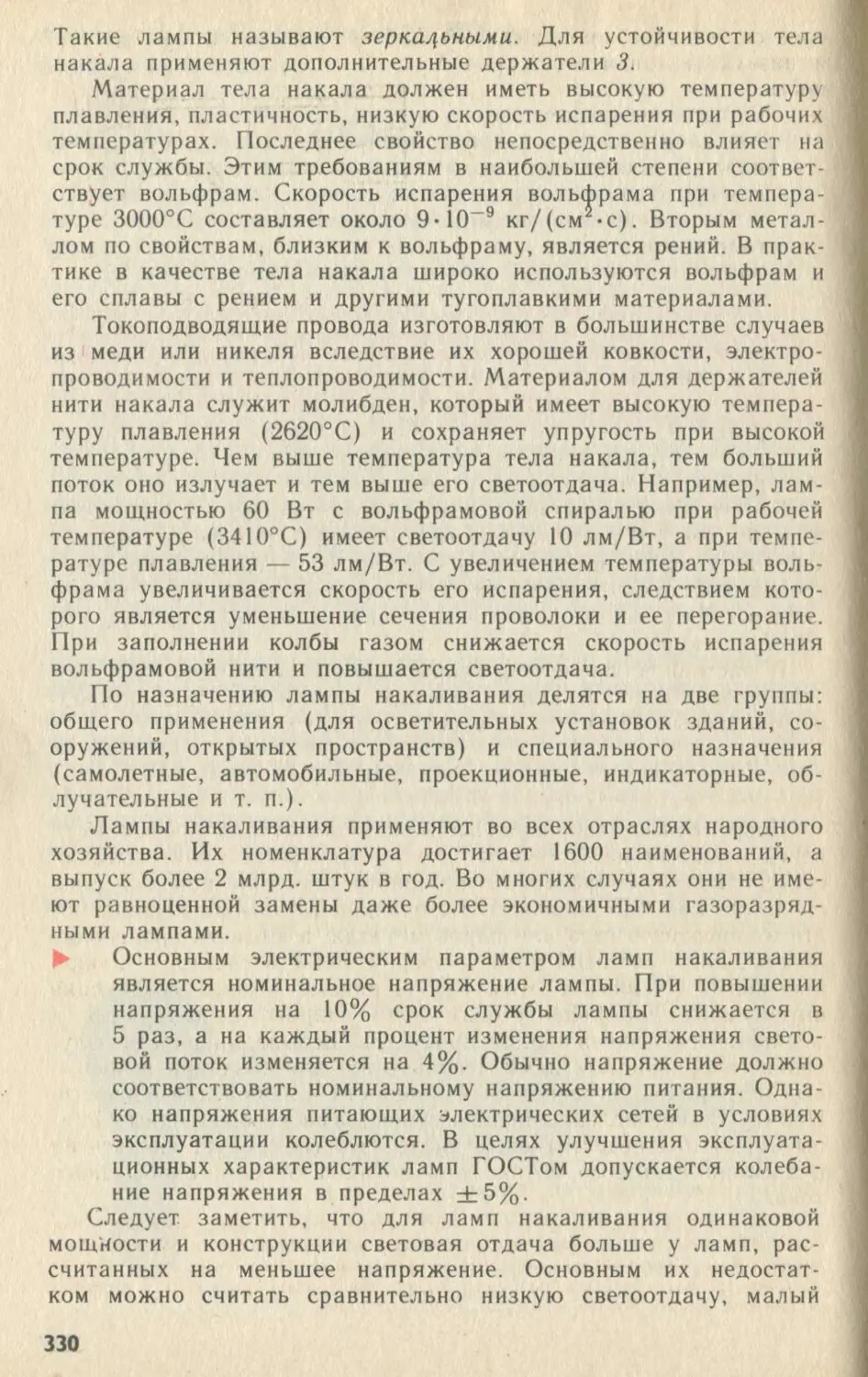
Воздушная линия электропер
Потребитель
Закрытая понижающая
подстанция
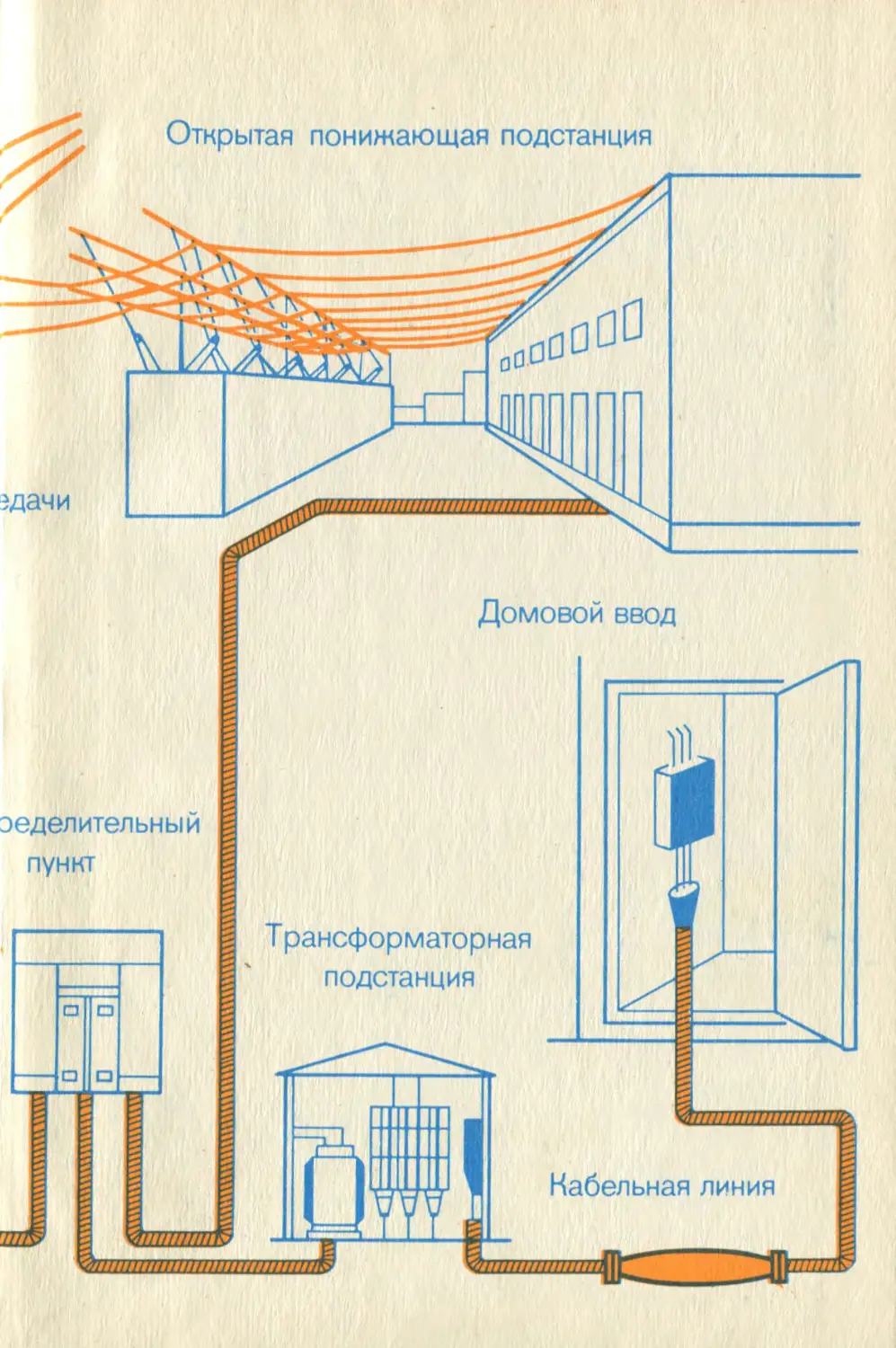
Открытая понижающая подстанция
ЭЛЕСТРО-
ТЕХНИССА
ПОД РЕДАКЦИЕЙ ПРОФ. А. Я. ШИХИНА
ИЗДАНИЕ ВТОРОЕ, СТЕРЕОТИПНОЕ
Допущено Государственным комитетом СССР
по народному образованию в качестве учебника
для профессионально-техническим училищ
Москва
«Высшая школа» 1991
ББК 31.2
Э 45
УДК 621.3
Рецензенты: инж. П. М. Иванов (Московский радиотехнический тех-
никум); инж. Е. В. Шапкин (Всесоюзный заочный индустриально-педагоги-
ческий техникум).
А. Я. Шихин, Н. М. Белоусова, Ю. X. Пухляков, В. Г. Сергеев,
М. М. Соколов, А. Н. Старостин
Электротехника: Учеб, для ПТУ/А. Я- Шихин, Н. М. Бе-
Э45 лоусова, Ю. X. Пухляков, и др.; Под ред. А. Я. Шихина.
М.: Высш, шк., 1991. — 336 с.: ил.
ISBN 5-06-002082-7
В книге в соответствии с новой программой изложены вопросы, связанные
с изучением и расчетом электрических н магнитных цепей. Описаны электроизме-
рительные приборы и электротехнические измерения, электронные приборы и
устройства, конструкции электрических аппаратов и машин. Даны способы произ-
водства, распределения и потребления электрической энергии, преобразования ее
в другие виды энергии.
2202010000(4307000000)— 006
052(01)—91
33-91
ББК 31.2
6П2.1
Учебное издание
| Шихин Анатолий Яковлевич!, Белоусова Нииель Михайловна,
Пухляков Юрий Харлампиевич, Сергеев Виктор Георгиевич,
Соколов Михаил Михайлович, Старостин Алексей Николаевич
Электротехника
Заведующий редакцией В. И. Трефилов. Редактор А. Ш. Долгова. Мл. редактор И. Л. Жу-
ховицкая. Художественный редактор В. Г. Пасичинк. Технический редактор Т Д. Гарина.
Художник С. Ю. Вернченко. Корректор Г А. Чечеткина
ИБ №-9143
Изд. № ЭГ—282. Подп. в печать 12.07.90. Формат 60Х90’/16- Бум. книж.-журн. Гарнитура
литературная. Печать офсетная. Объем 21 усл. печ. л. 4-0,25 усл. печ. л. форз. 84,5 усл.
кр -отт. 20,92 уч.^изд. л. + 0,33 уч.-изд. л. форз. Тираж 200 000 экз. Зак. № 85. Цена 2 руб.
Издательство «Высшая школа». 101430, Москва, ГСП-4, Неглннная ул., д. 29/14
Ярославский полиграфкомбннат Госкомпечати СССР 150049, Ярославль, ул. Сво-
боды, 97
ISBN 5-06-002082-7
© Издательство «Высшая школа», 1991
ПРЕДИСЛОВИЕ
Настоящая книга написана в соответствии с новой
программой по предмету «Электротехника» для уча-
щихся профессионально-технических училищ. При созда-
нии книги ставилась цель удовлетворить запросы раз-
личных электроэнергетических и электротехнических
специальностей. Поэтому в зависимости от специаль-
ности преподаватель может материал частично не рас-
сматривать.
Основное внимание авторы стремились уделять на-
ряду с методическими аспектами при изложении ма-
териала более близкой связи с практикой исполь-
зования электрических и магнитных явлений в тех-
нике.
Материал учебника разбит на три раздела.
1. Электрические и магнитные цепи. 2. Электротехни-
ческие устройства. 3. Производство, распределение и
использование электрической энергии.
В начале раздела кратко описываются физические
законы и явления, относящиеся к данному вопросу.
Затем изложение строится так: от простого идеализи-
рованного представления к реальным электротехниче-
ским устройствам и системам и их использованию в
производстве.
Материал первого раздела подбирался как теоре-
тическая база двух последующих разделов, посвящен-
ных конкретным электротехническим устройствам и
системам производства, распределению и использо-
ванию электрической энергии, а также электрическим
средствам контроля, информации и управления.
Весь материал книги базируется на современных
достижениях отечественной электроэнергетики и элект-
ротехники, подчеркивается их ведущая роль в комму-
нистическом строительстве.
В книге использованы различные выделения, кото-
рые, на наш взгляд, помогут преподавателям лучше
структурировать подачу материала, а учащимся об-
легчить его усвоение. Наиболее важные мысли обозна-
чены значком► Выделены определения, а также по-
ложения, обязательные для запоминания. При прове-
дении итоговых занятий целесообразно ориентировать-
ся на рубрику «Самое важное». Предлагаемые темы
рефератов рекомендуется использовать как на уроках
для развития познавательной деятельности учащихся
так и для внеклассной работы.
Авторы
ВВЕДЕНИЕ
Электрическая энергия — самый распространенный вид энер-
гии, которым пользуется человечество в наше время. Она широко
используется в промышленности, сельском хозяйстве, на тран-
спорте, в быту. Без ее применения невозможна была бы совре-
менная служба связи, у нас не было бы кино и телевидения,
кроме того, она играет важную роль в благоустройстве наших
сел и городов.
Успехи электротехники как науки, изучающей методы и сред-
ства использования электрических и магнитных явлений в техни-
ке, позволили разработать и затем использовать различные
методы преобразования неэлектрических величин в электрические
и создать электрические приборы для контроля, управления и
автоматического регулирования любых производственных про-
цессов даже таких, полный цикл которых длится доли секунды.
Без электротехнических устройств и приборов в современных
условиях невозможно получать и передавать сигналы или ин-
формацию, регулировать температуру, давление, концентрацию,
плотность газовых и жидких сред, вибрацию и т. д.
Благодаря исследованиям в области электротехники созданы
и широко используются быстродействующие вычислительные
машины, электроизмерительные приборы, системы управления
техническими и другими объектами.
Следовательно, без знания электротехники нельзя быть хоро-
шим специалистом, в какой бы области человек не работал.
В. И. Ленин на Ill съезде комсомола в 1920 г сказал:
«Вы прекрасно понимаете, что к электрификации неграмотные
люди не подойдут, и мало тут одной простой грамотности. Здесь
недостаточно понимать, что такое электричество: надо знать, как
технически приложить его и к промышленности, и к земледелию,
и к отдельным отраслям промышленности и земледелия. Надо
научиться этому самим, надо научить этому все подрастающее
трудящееся поколение»*
Электротехника как наука возникла с появлением источника
непрерывного электрического тока, годного для практических
целей. Родоначальником мировой электротехники следует считать
русского ученого В. В. Петрова, который в 1802 г., исследуя
гальванические элементы при подключении к зажимам батареи
углей, обнаружил в воздушном промежутке между ними яркое
пламя белого цвета. Концы углей нагревались настолько, что
начинали плавиться. Таким образом, В. В. Петров первым в мире
открыл явление (позднее названное «вольтовой дугой») превра-
* Л е и н н В. И. Поли. собр. соч. Т. 41. С. 307.
4
щения электрического тока в теплоту и свет, а, точнее говоря,
преобразования электрической энергии в другие виды энергии,
которые уже непосредственно могут быть использованы для
практических целей.
Следует отметить, что большинство наиболее важных изобре-
тений и открытий в области электротехники сделано русскими
учеными и инженерами. Академик Э. X. Ленц, обобщив открытия
Эрстеда и Фарадея, установил в 1833 г. закон о направлении
индуцированного тока, а позднее (1838—1844 гг.) теоретически
обосновал и практически доказал принцип обратимости электри-
ческих машин.
Русский изобретатель П. Л. Шиллинг осуществил (1832 г.)
первую в мире телеграфную связь с помощью изобретенного им
электромагнитного телеграфа. Это было первым практическим
применением электричества в области техники электросвязи.
Русский академик Б. С. Якоби изобрел и построил первый
электродвигатель, а затем (1838 г.) электропривод судна на Не-
ве — «Электроход Якоби».
В последующие годы (1840—1870 г.) творческая деятельность
ученых мира была направлена на создание экономичного и
надежного электрического генератора. Основная часть выраба-
тываемой в то время электрической энергии использовалась на
освещение. Этому в значительной мере способствовало изобре-
тение (1875 г.) русским инженером П. Н. Яблочковым синхронного
генератора и дуговой лампы (электрической свечи Яблочкова).
Его свечи получили широкое распространение в ряде стран Евро-
пы и стали известны там под названием «русского света».
Рост городов и развитие промышленности способствовали
существенному расширению использования электрической энер-
гии. Началось строительство электрических станций. Появилась
необходимость передачи электроэнергии на дальние расстояния.
Однако на электростанциях того времени были установлены
генераторы постоянного тока. Передавать же электроэнергию на
дальние расстояния постоянным током из-за больших потерь в
проводах линии было экономически невыгодно.
Последнее десятилетие XIX в. ознаменовалось новым перио-
дом в технике использования электрической энергии в промыш-
ленном производстве. Возникла новая область техники — элект-
роэнергетика, — родоначальником которой явился выдающийся
русский электротехник М. О. Доливо-Добровольский, разрабо-
тавший в 1888—1890 гг. трехфазную систему токов и построив-
ший первый в мире трехфазиый генератор переменного тока.
Созданный им асинхронный короткозамкнутый электродвигатель
переменного тока является и поныне основным типом электро-
двигателя. В тот же период времени М. О. Доливо-Доброволь-
ский создал трехфазный трансформатор, а также трехфазную
систему передачи и распределения электрической энергии. Эта
система до сих пор действует во всем мире.
Славные традиции русских электротехников XIX в. продолжи-
5
ли ученые и инженеры нашей страны. Сейчас Советский Союз
является мощной индустриальной державой, во многих областях
электроэнергетики и электропромышленности СССР занимает ве-
дущее место в мире. По производству электроэнергии СССР
превосходит все страны Европейского экономического сообщест-
ва, а по темпам роста производства электроэнергии превосходит
США. В нашей стране действует Единая Энергосистема (ЕЭС)
СССР, позволяющая рационально загружать генераторы элект-
ростанций страны и бесперебойно снабжать все энергопотребля-
ющие предприятия.
В настоящее время создаются разнообразные устройства с
электронными, полупроводниковыми и электромагнитными эле-
ментами, автоматические промышленные роботы и манипулято-
ры. С их помощью совершенствуются технологические процессы,
системы управления, контроля и информации.
Без использования электротехники немыслимы были бы успе-
хи в медицине, биологии, экологии и в других отраслях науки.
РАЗДЕЛ
ЭЛЕКТРИЧЕСКИЕ И МАГНИТНЫЕ ЦЕПИ
ОСНОВНЫЕ ПОНЯТИЯ ОБ ЭЛЕКТРИЧЕСКИХ
И МАГНИТНЫХ ЦЕПЯХ
§ 1. Определение электрической
и магнитной цепей
Система производства, передачи и преобразования электри-
ческой энергии в другие виды энергии состоит из ряда электро-
технических устройств — генераторов, трансформаторов, аппара-
тов управления и защиты, линий электропередачи и приемников
электрической энергии.
Комплекс электротехнических устройств, предназначенный для производства,
передачи и использования электрической энергии, называется электрической
системой.
Электрическая система в целом и составляющие ее электро-
технические устройства представляют собой совокупность элект-
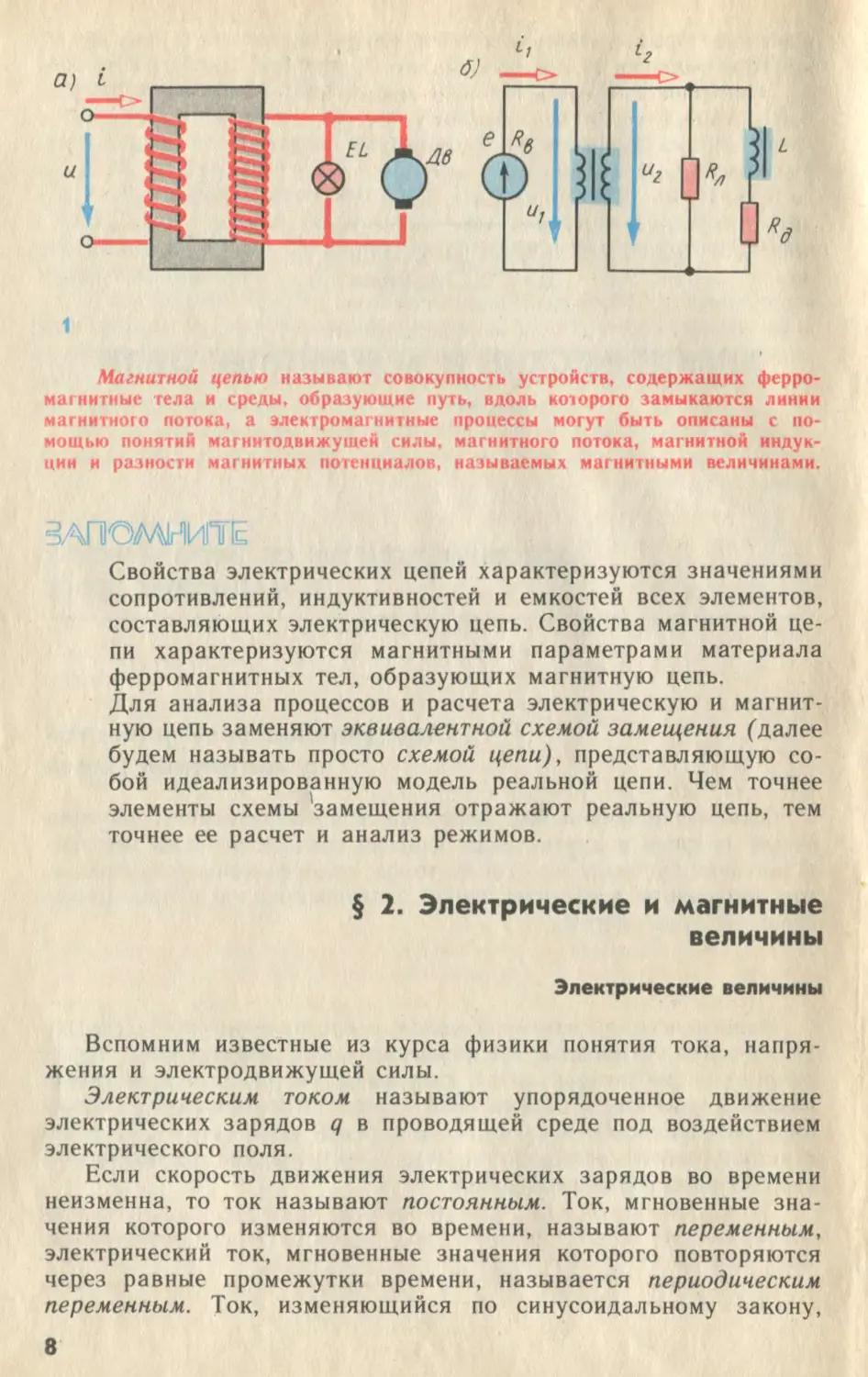
рических и магнитных цепей. Например, на рис. 1,а приемники:
лампа и двигатель подключены через трансформатор к источ-
нику электрической энергии. Схема такой цепи (рис. 1,6) пред-
ставляет собой совокупность двух электрических (первичной и
вторичной) и магнитной цепей.
Электрической цепью называют совокупность электротехнических устройств,
образующих путь для электрического тока, электромагнитные процессы в ко-
торой могут быть описаны с помощью электрических величин — электродви-
жущей силы, тока и напряжения.
7
1
Магнитной цепью называют совокупность устройств, содержащих ферро-
магнитные тела и среды, образующие путь, вдоль которого замыкаются линии
магнитного потока, а электромагнитные процессы могут быть описаны с по-
мощью понятий магнитодвижущей силы, магнитного потока, магнитной индук-
ции и разности магнитных потенциалов, называемых магнитными величинами.
ЗАПОМНИТЕ
Свойства электрических цепей характеризуются значениями
сопротивлений, индуктивностей и емкостей всех элементов,
составляющих электрическую цепь. Свойства магнитной це-
пи характеризуются магнитными параметрами материала
ферромагнитных тел, образующих магнитную цепь.
Для анализа процессов и расчета электрическую и магнит-
ную цепь заменяют эквивалентной схемой замещения (далее
будем называть просто схемой цепи), представляющую со-
бой идеализированную модель реальной цепи. Чем точнее
элементы схемы 'замещения отражают реальную цепь, тем
точнее ее расчет и анализ режимов.
§ 2. Электрические и магнитные
величины
Электрические величины
Вспомним известные из курса физики понятия тока, напря-
жения и электродвижущей силы.
Электрическим током называют упорядоченное движение
электрических зарядов q в проводящей среде под воздействием
электрического поля.
Если скорость движения электрических зарядов во времени
неизменна, то ток называют постоянным. Ток, мгновенные зна-
чения которого изменяются во времени, называют переменным,
электрический ток, мгновенные значения которого повторяются
через равные промежутки времени, называется периодическим
переменным. Ток, изменяющийся по синусоидальному закону,
8
называют синусоидальным. Ток выра-
жают в амперах (А) и обозначают I, i*.
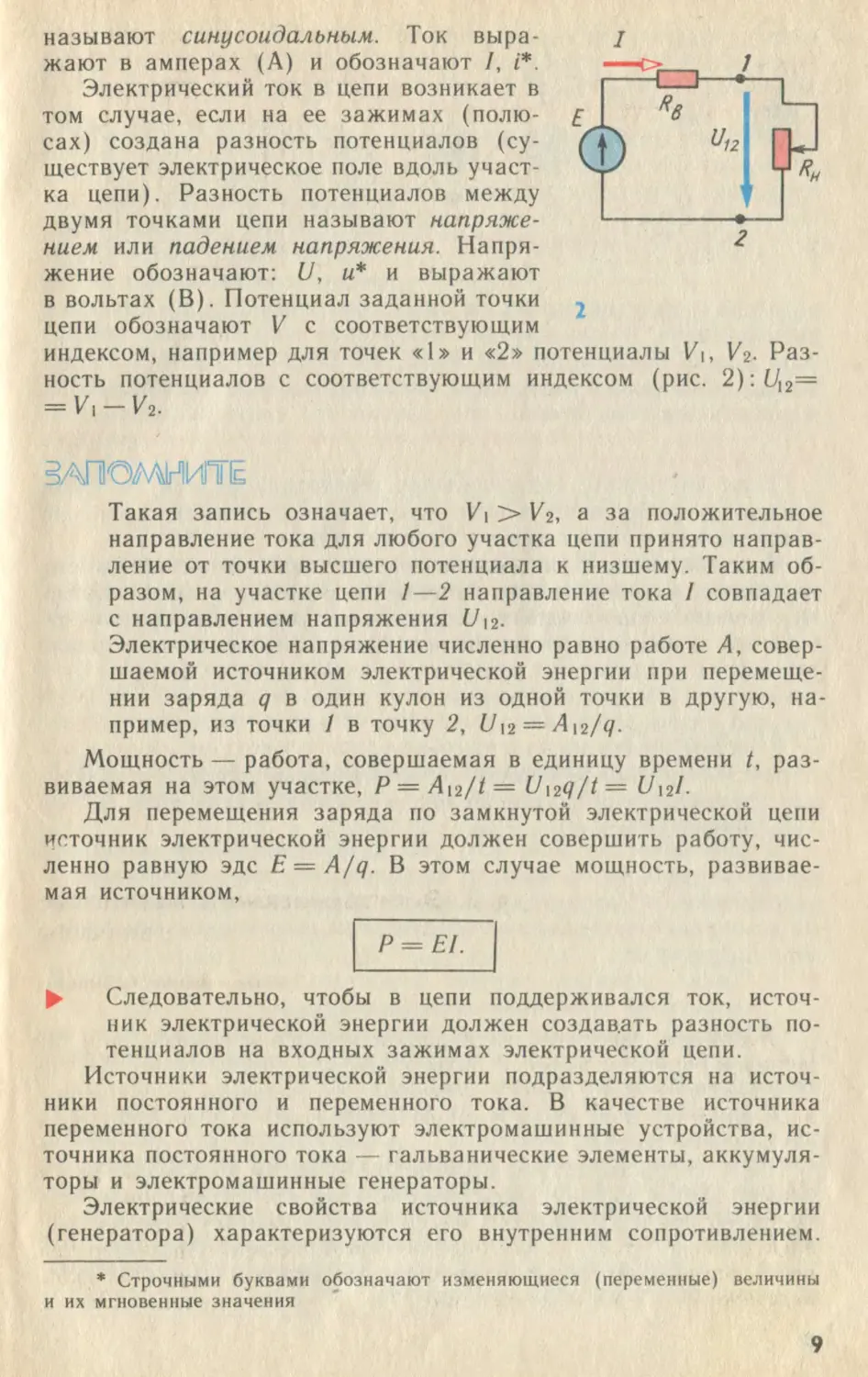
Электрический ток в цепи возникает в
том случае, если на ее зажимах (полю-
сах) создана разность потенциалов (су-
ществует электрическое поле вдоль участ-
ка цепи). Разность потенциалов между
двумя точками цепи называют напряже-
нием или падением напряжения. Напря-
жение обозначают: U, и* и выражают
в вольтах (В). Потенциал заданной точки
цепи обозначают V с соответствующим
индексом, например для точек «1» и «2» потенциалы V), V2. Раз-
ность потенциалов с соответствующим индексом (рис. 2): С712=
= Vl-V2.
ВАПОМНИПГЕ
Такая запись означает, что Vi>V2, а за положительное
направление тока для любого участка цепи принято направ-
ление от точки высшего потенциала к низшему. Таким об-
разом, на участке цепи 1—2 направление тока / совпадает
с направлением напряжения U\2.
Электрическое напряжение численно равно работе А, совер-
шаемой источником электрической энергии при перемеще-
нии заряда q в один кулон из одной точки в другую, на-
пример, из точки / в точку 2, U\2 = A\2/q.
Мощность — работа, совершаемая в единицу времени t, раз-
виваемая на этом участке, Р = A\2/t = U\2q/t = U\2I.
Для перемещения заряда по замкнутой электрической цепи
источник электрической энергии должен совершить работу, чис-
ленно равную эдс E — A/q. В этом случае мощность, развивае-
мая источником,
Р = Е1.
► Следовательно, чтобы в цепи поддерживался ток, источ-
ник электрической энергии должен создав.ать разность по-
тенциалов на входных зажимах электрической цепи.
Источники электрической энергии подразделяются на источ-
ники постоянного и переменного тока. В качестве источника
переменного тока используют электромашинные устройства, ис-
точника постоянного тока — гальванические элементы, аккумуля-
торы и электромашинные генераторы.
Электрические свойства источника электрической энергии
(генератора) характеризуются его внутренним сопротивлением.
* Строчными буквами обозначают изменяющиеся (переменные) величины
и их мгновенные значения
9
о о
6 6
3
нератора может
внешней цепи. В
оказаться
Под внутренним сопротивлени-
ем генератора понимают сопротив-
ление электрическому току всех
элементов внутри генератора.
Учет внутреннего сопро-
тивления генератора необхо-
дим при анализе и расчете
режимов электрической це-
пи. Вместе с тем при расчете
электрических цепей внут-
реннее сопротивление RB ге-
во много раз меньше сопротивления
этих случаях внутреннее сопротивление генера-
тора можно принять равным нулю, что позволит считать напря-
жение на зажимах генератора не зависящим от тока нагрузки
и равным эдс генератора.
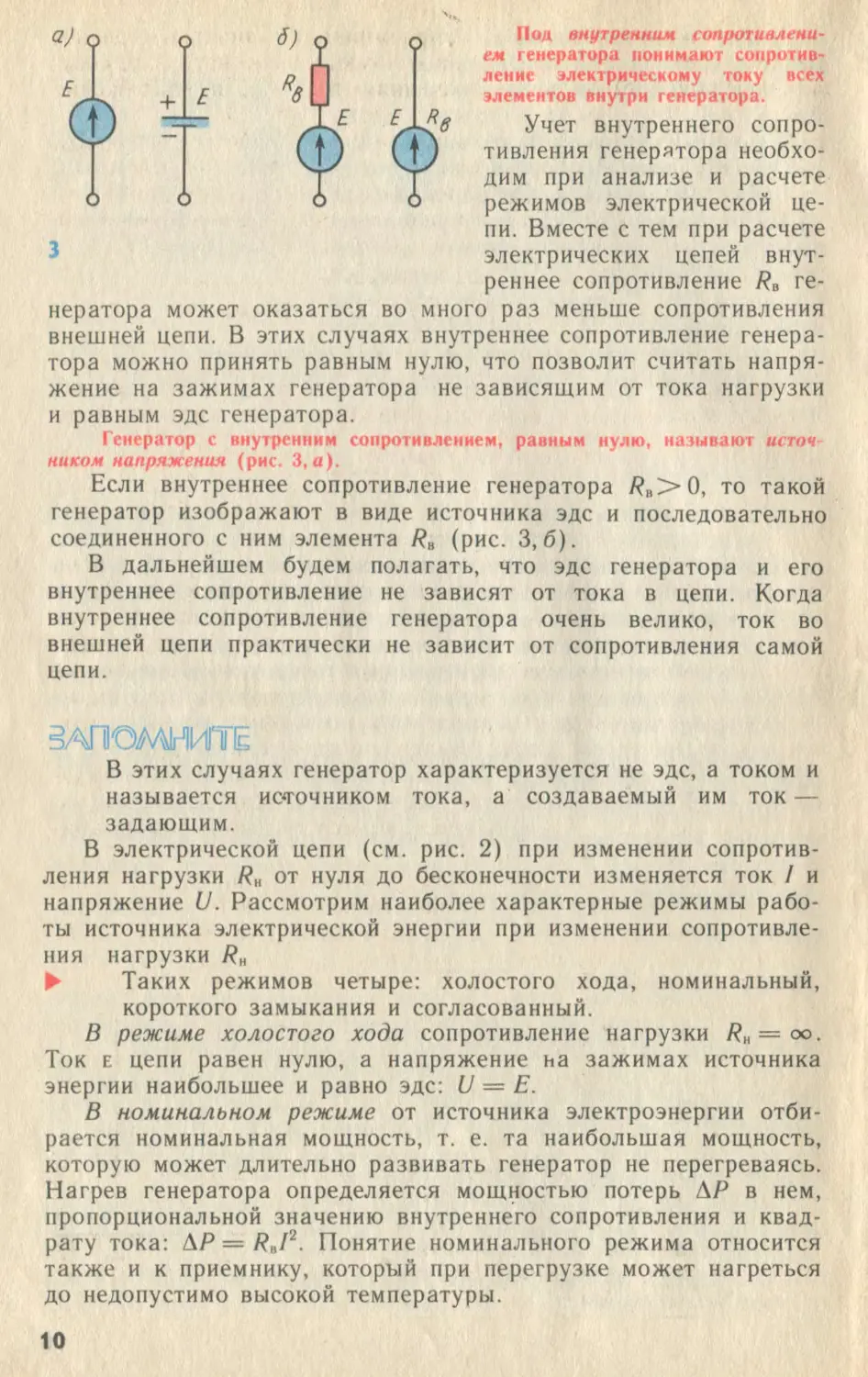
Генератор с внутренним сопротивлением, равным нулю, называют источ-
ником напряжения (рис. 3, а).
Если внутреннее сопротивление генератора Рв>0, то такой
генератор изображают в виде источника эдс и последовательно
соединенного с ним элемента RB (рис. 3,6).
В дальнейшем будем полагать, что эдс генератора и его
внутреннее сопротивление не зависят от тока в цепи. Когда
внутреннее сопротивление генератора очень велико, ток во
внешней цепи практически не зависит от сопротивления самой
цепи.
ЗАПОМНИТЕ
В этих случаях генератор характеризуется не эдс, а током и
называется источником тока, а создаваемый им ток —
задающим.
В электрической цепи (см. рис. 2) при изменении сопротив-
ления нагрузки R„ от нуля до бесконечности изменяется ток / и
напряжение U. Рассмотрим наиболее характерные режимы рабо-
ты источника электрической энергии при изменении сопротивле-
ния нагрузки R„
► Таких режимов четыре: холостого хода, номинальный,
короткого замыкания и согласованный.
В режиме холостого хода сопротивление нагрузки Р„ = оо.
Ток е цепи равен нулю, а напряжение на зажимах источника
энергии наибольшее и равно эдс: U = Е.
В номинальном режиме от источника электроэнергии отби-
рается номинальная мощность, т. е. та наибольшая мощность,
которую может длительно развивать генератор не перегреваясь.
Нагрев генератора определяется мощностью потерь ДР в нем,
пропорциональной значению внутреннего сопротивления и квад-
рату тока: ДР = Рв/2. Понятие номинального режима относится
также и к приемнику, который при перегрузке может нагреться
до недопустимо высокой температуры.
10
Для каждого источника и приемника номинальный режим
предполагает вполне определенную номинальную нагрузку, соот-
ветствующую номинальным значениям тока /ном и напряжения
> Важным показателем рациональной работы источника
электрической энергии является коэффициент полезного
действия (кпд) г). Он определяется отношением мощности
в нагрузке (Д? = /?„/2) к полной мощности, вырабатываемой
(генерируемой) источником электроэнергии (Р\ = Е1):
11== Р2/Д1 = (Р1-ДР)/Р1= 1 — ДР/Р,.
Выражение для коэффициента полезного действия может
быть записано через параметры цепи. Оно будет иметь следую-
щий вид:
П = R„I2/(RJ2 + /?в/2) = /?„/(/?„ + Я»)
В режиме короткого замыкания, когда RH — 0, ток в цепи
будет ограничен только внутренним сопротивлением источника
электроэнергии R = E/RB, Р\ = Е1К и Р? — 0. В этом случае
т) = Рг/Р\ — 0. Для источника с малым внутренним сопротивле-
нием (аккумуляторы, электромашинные генераторы) режим ко-
роткого замыкания опасен — это аварийный режим. Для гальва-
нических элементов режим короткого замыкания менее опасен,
так как их внутреннее сопротивление относительно велико.
При согласованном режиме в приемнике (нагрузке) выде-
ляется наибольшая мощность. Такой режим используется в из-
мерительных цепях, в устройства; вычислительной, информаци-
онной техники, средств связи.
Например, при согласованном режиме в цепи рис. 2 мощ-
ность в приемнике Pi равна мощности источника Р\ = EI за вы-
четом внутренних потерь в самом источнике, т. е. Р2= Е1— RJ2.
Коэффициент полезного действия г] = 1 — /?а/2/(£/) = Г—
- ///к-
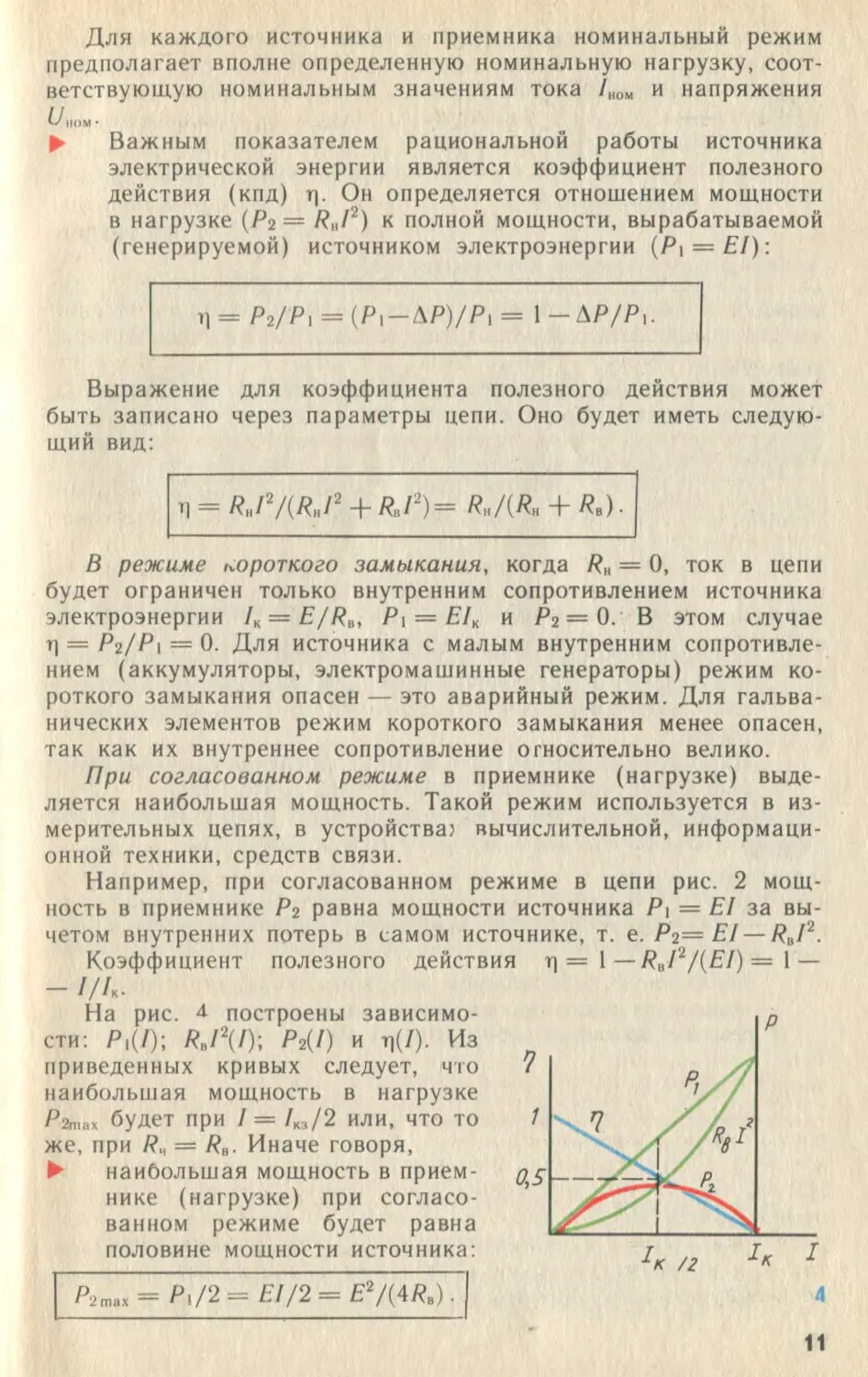
На рис. Л построены зависимо-
сти: Р^/); RJ\I)-, Р2(Г) и т|(7). Из
приведенных кривых следует, что
наибольшая мощность в нагрузке
/’гшах будет при / = /кз/2 или, что то
же, при /?„ = RB. Иначе говоря,
► наибольшая мощность в прием-
нике (нагрузке) при согласо-
ванном режиме будет равна
половине мощности источника:
P2max - Pi/2 = El/2 = E2/(4Ra).
11
В этом случае коэффициент полезного действия т| = 0,5.
При передаче больших мощностей работа в согласованном
режиме, как правило, недопустима. В цепях большой мощности
непременным условием является R„ R„, т. е. обеспечение воз-
можно большего г].
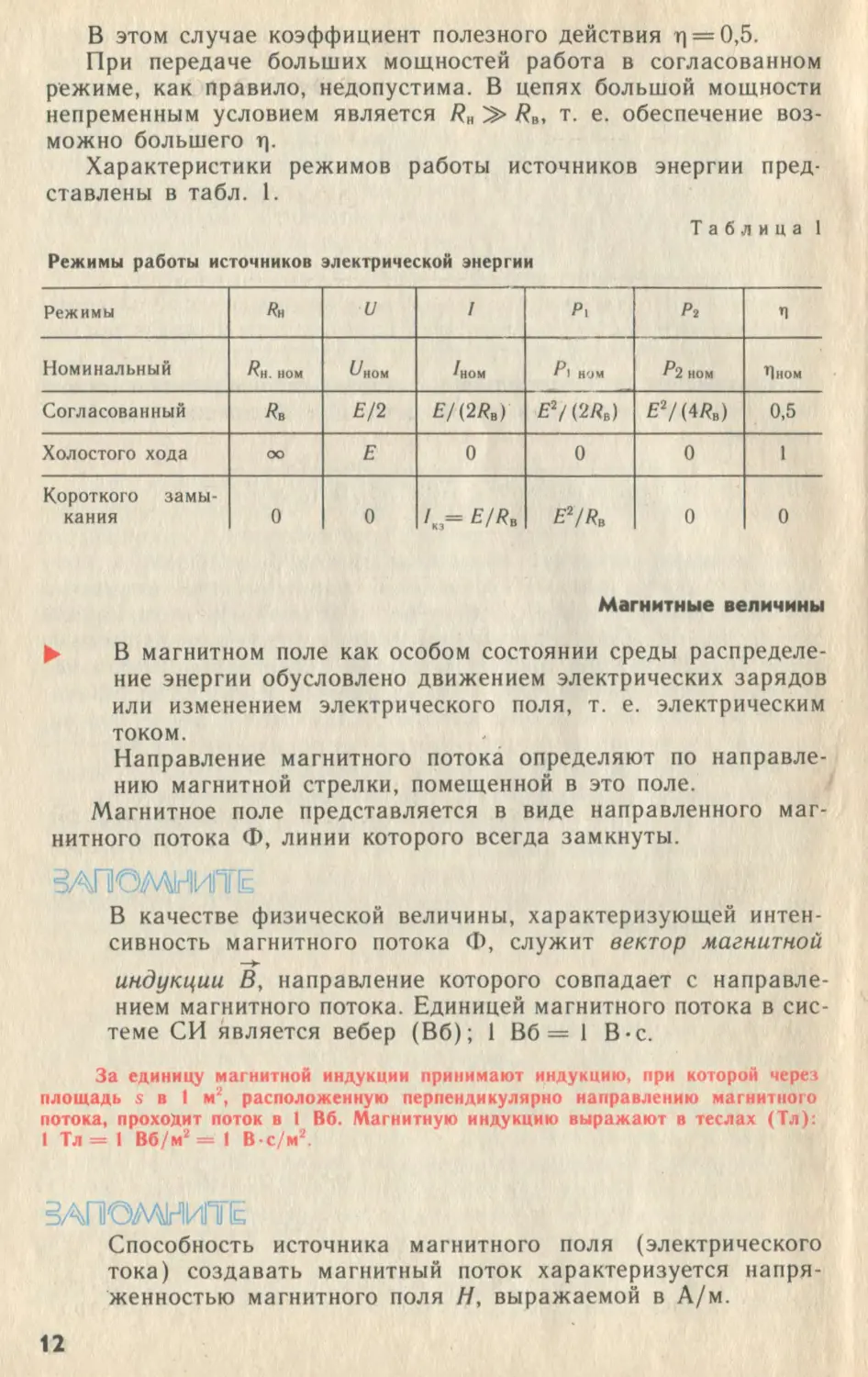
Характеристики режимов работы источников энергии пред-
ставлены в табл. 1.
Таблица 1
Режимы работы источников электрической энергии
Режимы Rh и / Л Рг п
Номинальный Rh. ном ^ном 'ном ном Pi ном Л ном
Согласованный Е/2 Я/(2/?в) Ег! (2ЯВ) £2/(4Яв) 0,5
Холостого хода оо Е 0 0 0 1
Короткого замы- кания 0 0 /„= £//?в £2//?в 0 0
Магнитные величины
► В магнитном поле как особом состоянии среды распределе-
ние энергии обусловлено движением электрических зарядов
или изменением электрического поля, т. е. электрическим
током.
Направление магнитного потока определяют по направле-
нию магнитной стрелки, помещенной в это поле.
Магнитное поле представляется в виде направленного маг-
нитного потока Ф, линии которого всегда замкнуты.
ЗАПОМНИТЕ
В качестве физической величины, характеризующей интен-
сивность магнитного потока Ф, служит вектор магнитной
—►
индукции В, направление которого совпадает с направле-
нием магнитного потока. Единицей магнитного потока в сис-
теме СИ является вебер (Вб); 1 Вб = 1 В-с.
За единицу магнитной индукции принимают индукцию, при которой через
площадь s в 1 м2, расположенную перпендикулярно направлению магнитного
потока, проходит поток в 1 Вб. Магнитную индукцию выражают в теслах (Тл):
I Тл = 1 Вб/м2 = 1 В-с/м2.
ЗАПОМНИТЕ
Способность источника магнитного поля (электрического
тока) создавать магнитный поток характеризуется напря-
женностью магнитного поля И, выражаемой в А/м.
12
а)
I
В воздухе направление векторов магнитной индукции В и
напряженности магнитного поля Н совпадают и связаны соот-
ношением H — B/\io, где цо=4л-1О-7 Гн/м — магнитная посто-
янная.
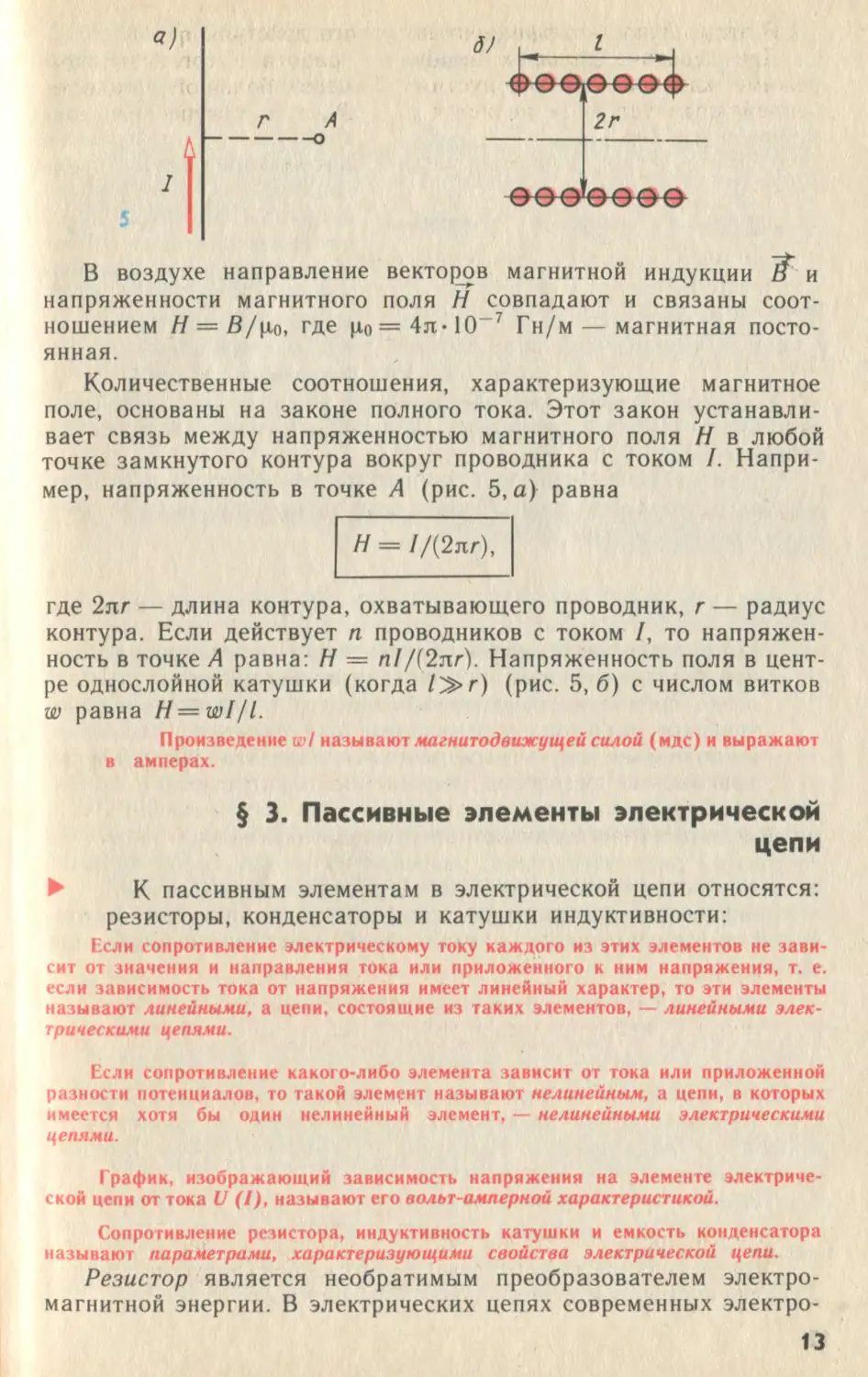
Количественные соотношения, характеризующие магнитное
поле, основаны на законе полного тока. Этот закон устанавли-
вает связь между напряженностью магнитного поля Н в любой
точке замкнутого контура вокруг проводника с током /. Напри-
мер, напряженность в точке А (рис. 5, а) равна
Н = //(2лг),
где 2лг — длина контура, охватывающего проводник, г — радиус
контура. Если действует п проводников с током /, то напряжен-
ность в точке А равна: И — п//(2лг). Напряженность поля в цент-
ре однослойной катушки (когда 1^>г) (рис. 5,6) с числом витков
w равна H=wl/I.
Произведение wl называют магнитодвижущей силой (мдс) и выражают
в амперах.
§ 3. Пассивные элементы электрической
цепи
► К пассивным элементам в электрической цепи относятся:
резисторы, конденсаторы и катушки индуктивности:
Если сопротивление электрическому току каждого из этих элементов не зави-
сит от значения и направления тока или приложенного к ним напряжения, т. е.
если зависимость тока от напряжения имеет линейный характер, то эти элементы
называют линейными, а цепи, состоящие из таких элементов, — линейными элек-
трическими цепями.
Если сопротивление какого-либо элемента зависит от тока или приложенной
разности потенциалов, то такой элемент называют нелинейным, а цепи, в которых
имеется хотя бы один нелинейный элемент, — нелинейными электрическими
цепями.
График, изображающий зависимость напряжения на элементе электриче-
ской цепи от тока V (1), называют его вольт-амперной характеристикой.
Сопротивление резистора, индуктивность катушки и емкость конденсатора
называют параметрами, характеризующими свойства электрической цепи.
Резистор является необратимым преобразователем электро-
магнитной энергии. В электрических цепях современных электро-
13
технических устройств ис-
пользуют резисторы про-
волочные и непроволоч-
ные. В проволочных ре-
зисторах токопроводящим
материалом служит ме-
таллическая проволока из
сплавов с высоким удель-
ным электрическим сопро-
тивлением, а в непрово-
лочном — слой или стер-
жень из материала с вы-
соким удельным сопро-
тивлением.
Условные графические изображения резисторов с линейным
(постоянным и регулируемым) и нелинейным сопротивлением по-
казаны на рис. 6, а.
Сопротивление резисторов зависит от температуры и от про-
ходящего через него тока. Однако для упрощения анализа этой
зависимостью можно пренебречь.
ЗАПОМНИТЕ
Сопротивление резистора является его параметром только
при постоянном токе. В цепях переменного тока сопротив--
ление проволочного резистора зависит от частоты. Сопро-
тивление резистора переменному току называют активным,
постоянному току — электрическим. При этом активное со-
противление резистора больше его электрического сопро-
тивления.
Конденсатор накапливает энергию электрического поля. Он
состоит из двух электродов, разделенных между собой диэлект-
риком; его основной характеристикой является емкость С.
Графическое изображение конденсатора с линейной (посто-
янной и регулируемой) и нелинейной емкостью показано на
рис. 6, б.
Емкостью С конденсатора называют отношение электрического заряда к
разности потенциалов между его электродами: C=q/U. Емкость выражают в
фарадах (Ф). На практике чаще применяют доли: микро- и пикофарады: 1 Ф =
= 106 мкф = 10'2 пФ.
При изменении напряжения на зажимах генератора изменя-
ется напряжение на электродах конденсатора, а также ток в
проводах, соединяющих генератор с конденсатором. Энергия
электрического поля конденсатора 1Г, = С£/2/2.
Катушка индуктивности накапливает энергию магнитного по-
ля. Ток в витках катушки создает магнитный поток, пронизы-
вающий эти витки.
Произведение числа витков w на значение магнитного потока <1> называют
потокосцеплением катушки: Чг =
14
В линейной катушке индуктивности потокосцепление пропорцио-
нально току.
Коэффициент пропорциональности L = Чг// называют индуктивностью.
Единица индуктивности — генри (Гн). На практике применяют доли; милли- и
микрогенри: 1 мГн = 10“3 Гн; I мкГн= 10 ь Гн.
Графическое изображение катушки индуктивности с линейной
(постоянной и переменной) и нелинейной индуктивностью пред-
ставлены на рис. 6, в.
ВАЛОМНИГТЕ
Энергия магнитного поля катушки индуктивности (Дж)
определяется работой, совершаемой электрическим .током в
процессе создания магнитного поля:
W'm = U2/2.
§ 4. Электрическая цепь. Уравнения электрического
состояния цепи
► Устройствами, образующими электрическую цепь, являют-
ся: источники (генераторы) электромагнитной энергии или
электрических сигналов, приемники (потребители) электро-
магнитной энергии и устройства передачи и преобразования
энергии (провода, трансформаторы и др.).
Каждый генератор и приемник имеют два зажима (полюса), выходные \
для генератора и входные для приемника, с помощью которых через систему
передачи осуществляется связь между ними. Их называют двухполюсниками.
В общем случае источники и приемники могут объединять
несколько двухполюсников, соединенных последовательно или па-
раллельно.
► Двухполюсник называют активным, если он содержит ис-
точник эдс; при отсутствии источника эдс двухполюсник
будет пассивным.
Устройство для передачи энергии от источника к приемнику имеет четыре
зажима (полюса); через входные энергия поступает от источника, а к выход-
ным подключают приемник. Такое промежуточное устройство называется четы-
рехполюсником.
Условные обозначения пассивного П и активного А двухпо-
люсников приведены на рис. 7, а, четырехполюсника — на
рис. 7, б.
► Соединение элементов электрической цепи может быть по-
следовательным, параллельным и смешанным.
Участок электрической цепи, по которому проходит ток одного и того же
значения и направления, называется ветвью.
Место соединения трех и более ветвей называют узлом.
Узел электрической цепи на схеме отмечается жирной точ-
кой. Если на схеме место скрещивания ветвей точкой не отмече-
15
а) д)
1
но, это означает, что
электрического соеди-
нения между ними в
месте их пересечения
нет.
Замкнутую электрическую
цепь, образуемую одной или
несколькими ветвями, назы-
вают контуром.
ЗАПОМНИТЕ
Контур, внутри которого не лежат другие ветви, связываю-
щие между собой его узлы, называют простым (или ячей-
кой).
Например, в схеме рис. 8 содержится шесть ветвей, четыре
узла и три простых контура.
Анализ электрической цепи может быть произведен или экс-
периментально, или решением уравнений ее электрического со-
стояния.
► Основными физическими законами, позволяющими описать
любые режимы электрической цепи, являются законы Ома,
сохранения заряда и сохранения энергии, на основе кото-
рых составляются уравнения электрического состояния вет-
ви, узла и контура.
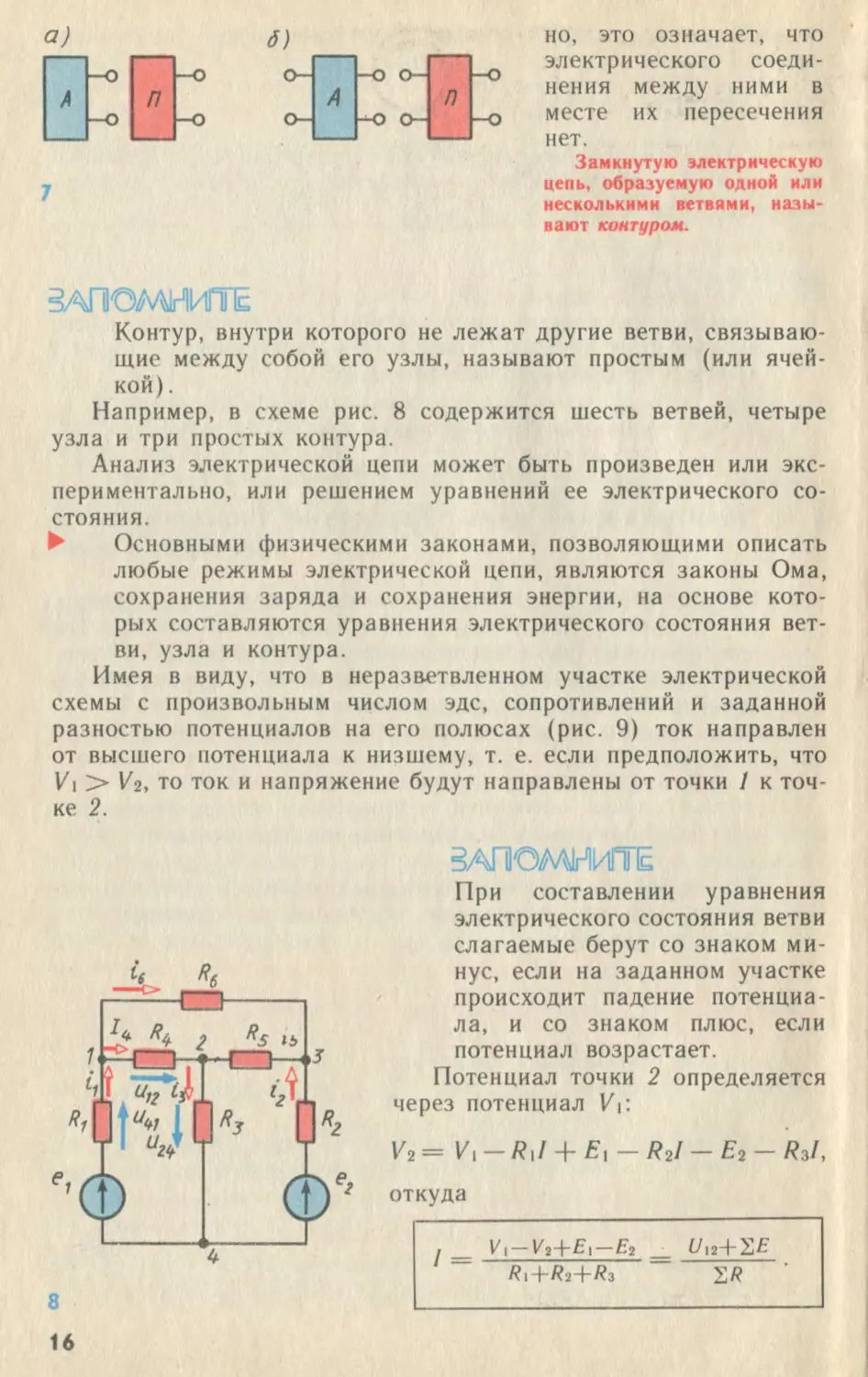
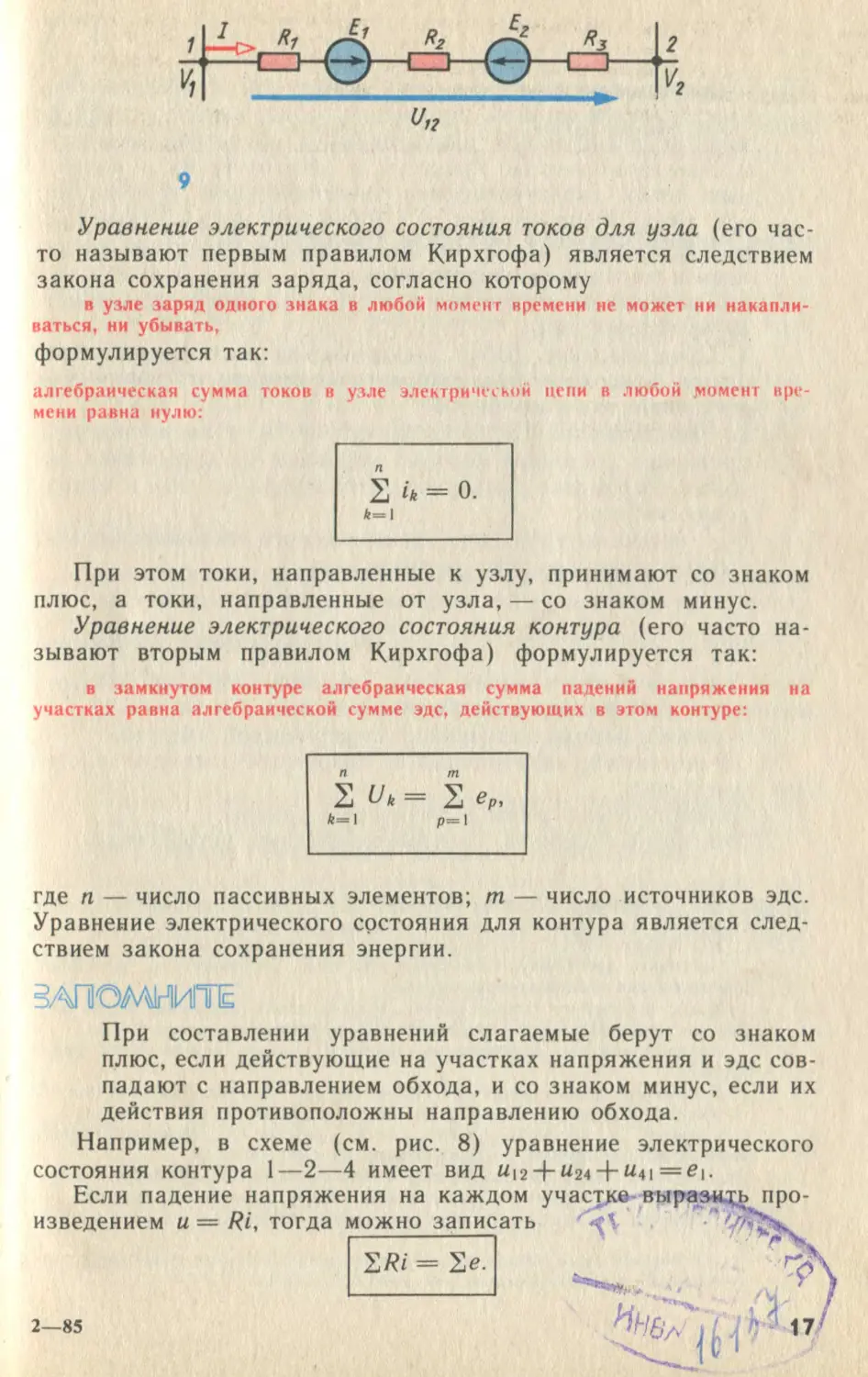
Имея в виду, что в неразветвленном участке электрической
схемы с произвольным числом эдс, сопротивлений и заданной
разностью потенциалов на его полюсах (рис. 9) ток направлен
от высшего потенциала к низшему, т. е. если предположить, что
Ki > Кг, то ток и напряжение будут направлены от точки / к точ-
ке 2.
ЗАПОМНИТЕ
При составлении уравнения
электрического состояния ветви
слагаемые берут со знаком ми-
нус, если на заданном участке
происходит падение потенциа-
ла, и со знаком плюс, если
потенциал возрастает.
Потенциал точки 2 определяется
через потенциал V}:
К2 = Ki - /?|/ + Е, - /?2/ - Е2 - R3I,
откуда
К। — Иг4~£। —£г Ui2~|-2LE
/?1+/?2+£з £/?
8
16
Уравнение электрического состояния токов для узла (его час-
то называют первым правилом Кирхгофа) является следствием
закона сохранения заряда, согласно которому
в узле заряд одного знака в любой момент времени не может ни накапли-
ваться, ни убывать,
формулируется так:
алгебраическая сумма токов в узле электрической цепи в любой момент вре-
мени равна нулю:
S ik = о.
4=1
При этом токи, направленные к узлу, принимают со знаком
плюс, а токи, направленные от узла, — со знаком минус.
Уравнение электрического состояния контура (его часто на-
зывают вторым правилом Кирхгофа) формулируется так:
в замкнутом контуре алгебраическая сумма падений напряжения на
участках равна алгебраической сумме эдс, действующих в этом контуре:
2 Uk = S ер,
k=\ p=i
где п — число пассивных элементов; m — число источников эдс.
Уравнение электрического состояния для контура является след-
ствием закона сохранения энергии.
ЗАПОМНИТЕ
При составлении уравнений слагаемые берут со знаком
плюс, если действующие на участках напряжения и эдс сов-
падают с направлением обхода, и со знаком минус, если их
действия противоположны направлению обхода.
Например, в схеме (см. рис. 8) уравнение электрического
состояния контура 1—2—4 имеет вид «i2 + w24 + «4i = ^i.
Если падение напряжения на каждом участке вырази
изведением и = Ri, тогда можно записать
про-
ZRi = Se.
2—85
САМОЕ ВАЖНОЕ
1. Любая электрическая цепь может быть представлена
электрической схемой замещения, содержащей источники
энергии, резистивный, индуктивный и емкостной элементы.
2. Электромагнитные процессы в электрических и магнит-
ных цепях характеризуются электрическими величинами:
эдс, током, напряжением, а в магнитной цепи — магнитны-
ми величинами: мдс, магнитным потоком, магнитной индук-
цией и магнитным напряжением.
3. Свойства электрических и магнитных цепей определяют-
ся их параметрами.
4. Представление любой электрической цепи схемой заме-
щения позволяет анализировать состояние и режим как
всей цепи, так и ее частей.
5. Электрическая схема содержит ветви, узлы и контуры,
уравнения состояния которых основаны на физических за-
конах сохранения электрического заряда в узле и сохра-
нения энергии.
6. С помощью уравнения электрического состояния рассчи-
тывают и анализируют режимы цепи.
Темы докладов и рефератов
1. Электрические величины как средства описания электро-
магнитных процессов в электрических цепях.
2. Режимы работы источников электрической энергии.
3. Резистивный, индуктивный и емкостный элементы в схе-
мах замещения.
4. Электрические схемы и физические законы.
5. Магнитные цепи в электротехнических устройствах.
Что называется электрической системой и какие устройства ее со-
ставляют? Что называется электрической и магнитной цепью?
Как изображается электрическая цепь? Магнитная цепь?
Составьте простейшую электрическую цепь, состоящую из источника
и потребителя электрической энергии.
Какое внутреннее сопротивление должен иметь источник, чтобы кпд
был не менее 91%, если сопротивление нагрузки составляет 2 кОм?
Какие магнитные величины вы знаете и в каких единицах их выра-
жают?
Каково назначение резистора? Конденсатора? Катушки индуктивности?
Укажите на рис. 8 ветви, узлы, контуры. Занесите их в тетрадь.
Сравните и проанализируйте, в чем сходство и различие между
электрическими цепями, изображенными на рис. 1,6 и 8.
Докажите, что уравнение электрического состояния для любого конту-
ра схемы рис. 8 является следствием закона сохранения энергии.
Назовите элементы электрических цепей, изображенных на рис. 9, а,
11. а.
Объясните виды электрических соединений элементов схем электриче-
ских цепей, изображенных на рис. 5, а, 6, а, 7, 10.
ЭЛЕКТРИЧЕСКИЕ ЦЕПИ
ПОСТОЯННОГО ТОКА
§ 5. Расчет простой электрической цепи
Изложение методов расчета и анализа электрических цепей
начнем с линейных цепей постоянного тока как наиболее про-
стых.
Рассматриваемые здесь методы расчета и анализа электри-
ческих цепей постоянного тока пригодны и для цепей пере-
менного тока, а также для цепей с нелинейными элемен-
тами.
ЗАПОМНИТЕ
В электрической цепи постоянного тока токи и напряжения
постоянны, поэтому изменения этих величин во времени
равны нулю: ^- = 0 и -^-= 0, а следовательно, и напряже-
ние на индуктивности UL, и ток через емкость 1С, зависящие
от изменения этих величин, также равны нулю:
i/£ = Z.-^-=0; /с = С-^=0.
Отсюда следует, что в индуктивности сопротивление по-
стоянному току равно нулю, т. е. UL = 0, а емкость, наобо-
рот, является бесконечно большим сопротивлением.
Поэтому в цепи с источниками постоянного тока можно ис-
ключить все индуктивности, закоротив их, а все ветви, содержа-
щие конденсаторы, — разомкнуть. В этом случае уравнение элек-
трического состояния контура приобретает вид:
2/?/=S£.
ЗАПОМНИТЕ
В уравнении положительные знаки принимаются для тех
токов и эдс, направления которых совпадают с произволь-
но выбранным направлением обхода рассматриваемого
контура.
Простыми электрическими цепями иазыканн цепи с одним источником энергии.
2*
19
При этом в качестве приемников могут быть несколько резисто-
ров, включенных последовательно и параллельно. Если известны
эдс генератора, его внутреннее сопротивление и сопротивление
резисторов, то токи во всех ветвях можно найти, используя метод
преобразования (свертывания) или метод пропорциональных ве-
личин (подобия).
> Метод преобразования
Этот* метод состоит в замене групп последовательно и парал-
лельно соединенных резисторов эквивалентным /?,. Затем по урав-
нению состояния простого контура находят ток в неразветвленной
части цепи. Посредством обратного преобразования находят токи
во всех ветвях заданной цепи.
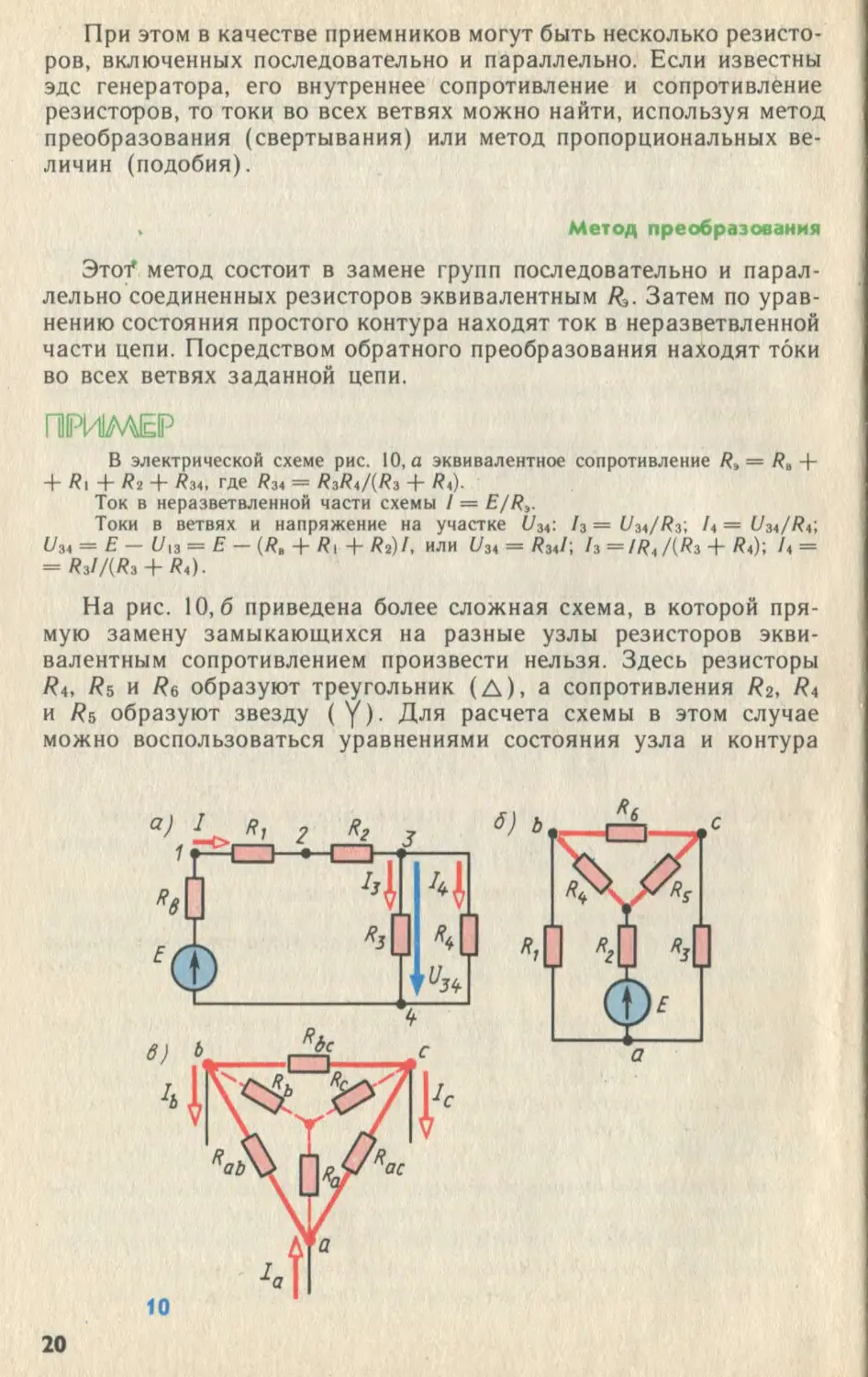
ПРИМЕР
В электрической схеме рис. 10, а эквивалентное сопротивление /?, = /?в -|-
+ R । -Т Rг 4- ^34, где Rsa — RsRa/(Rs + Ra)-
Ток в неразветвленной части схемы I—E/R3.
Токи в ветвях и напряжение на участке 1/34: /3 = 1/34//?3; /4 = С/34//?4;
Usa — E — U is = Е — (R, + /?| + /?а) /, или U за = /?34/; /3 — / Rt /(Rs 4- Ra)', I а =
= RslARs + R,).
На рис. 10,6 приведена более сложная схема, в которой пря-
мую замену замыкающихся на разные узлы резисторов экви-
валентным сопротивлением произвести нельзя. Здесь резисторы
Ra, Rs и R6 образуют треугольник (А), а сопротивления R2, Ra
и Rs образуют звезду ( у ) • Для расчета схемы в этом случае
можно воспользоваться уравнениями состояния узла и контура
20
или преобразовать треугольник в звезду (рис. 10, в). Тогда схе-
ма значительно упростится.
Формулы преобразования треугольника в звезду имеют вид
n RabRac . П _ RabRbc . D ___________________RcaRbc___
(Rab + Rac + Rbc) ’ (Rab + Rae + Rbc) ’ (Rab + Rae + Rbe)
ЗАПОМНИТЕ
Сопротивление луча эквивалентной звезды равно произве-
дению сопротивления сторон треугольника, прилегающих к
лучу, деленному на сумму сопротивлений всех сторон треу-
гольника. •
Для замены звезды эквивалентным треугольником пользуются
следующими формулами:
Rab = Ra + Rb + ; Rbc = Rb + Rc + ;
1\C Ra
Rac = Ra + Rc + .
ЗАПОМНИТЕ
Здесь сопротивление стороны треугольника равно сумме
сопротивлений двух лучей звезды, опирающихся на это со-
противление, плюс произведение сопротивлений указанных
лучей, деленное на сопротивление третьего луча звезды.
Возвращаясь к схеме рис. 10,6, после преобразования тре-
угольника RtRsRs в звезду, получим двухконтурную схему:
Ra — RiRs/tRi 4" Rs + Rs)', Rb = RtRs/^Rt 4* Rs 4- Rs)',
Rc — RsRs/(Rt 4- Rs 4* Rs)-
Метод пропорциональных величин
(подобия)
Сущность метода состоит в том, что в электрической схеме
задаются произвольным значением тока в одной из ветвей и за-
тем после определения токов в других ветвях находят эдс Е'.
Сравнивают полученное значение Е' с заданной эдс Е, находят
коэффициент пропорциональности К = Е/Е'. Для нахождения
действительных токов в ветвях схемы полученные значения токов
умножают на коэффициент К.
П1РИЛАЕР ® схеме рис. 10 примем /1=1 А. Тогда
/з — RJi/Rs', I' — 1з + /1; Е' — (Ri + Лг + Ru)l’ + RJI-
Токи в ветвях / = КГ\ /з = Л7з; Е — КЕ-
21
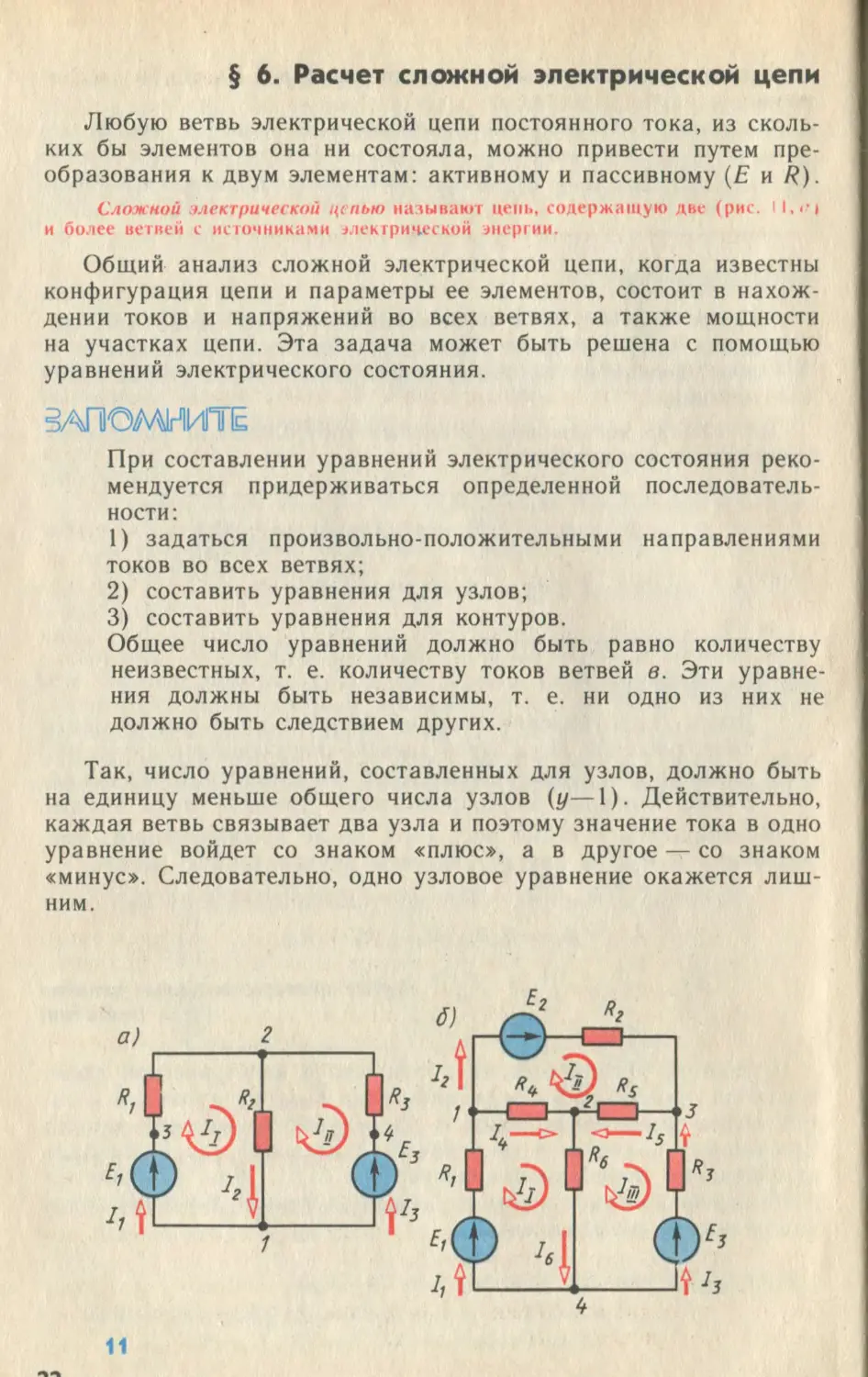
§ 6. Расчет сложной электрической цепи
Любую ветвь электрической цепи постоянного тока, из сколь-
ких бы элементов она ни состояла, можно привести путем пре-
образования к двум элементам: активному и пассивному (Ей/?).
Сложной электрической цепью называют цепь, содержащую две (рис. 11. «•»
и более ветвей с источниками электрической энергии.
Общий анализ сложной электрической цепи, когда известны
конфигурация цепи и параметры ее элементов, состоит в нахож-
дении токов и напряжений во всех ветвях, а также мощности
на участках цепи. Эта задача может быть решена с помощью
уравнений электрического состояния.
ЗАПОМНИТЕ
При составлении уравнений электрического состояния реко-
мендуется придерживаться определенной последователь-
ности:
1) задаться произвольно-положительными направлениями
токов во всех ветвях;
2) составить уравнения для узлов;
3) составить уравнения для контуров.
Общее число уравнений должно быть равно количеству
неизвестных, т. е. количеству токов ветвей в. Эти уравне-
ния должны быть независимы, т. е. ни одно из них не
должно быть следствием других.
Так, число уравнений, составленных для узлов, должно быть
на единицу меньше общего числа узлов (у—1). Действительно,
каждая ветвь связывает два узла и поэтому значение тока в одно
уравнение войдет со знаком «плюс», а в другое — со знаком
«минус». Следовательно, одно узловое уравнение окажется лиш-
ним.
11
Количество контурных. уравнений k определяется из выра-
жения
k = в —({/—1).
При выборе контуров для составления уравнений следует ис-
ходить из того же принципа независимости уравнений. Контуры
необходимо выбирать так, чтобы в систему составляемых урав-
нений вошли все ветви схемы, а в каждый из контуров — наи-
меньшее число ветвей.
Для трехконтурной схемы рис. 11,6 можно составить три
уравнения простых контуров (ячеек) — здесь они независимые.
При этом контуры будут содержать наименьшее число ветвей.
Таким образом, для анализа схемы рис. 11,6 необходимо иметь
систему из шести уравнений: трех узловых и трех контурных
(в = 6; у—1=3; /г = 3).
Наряду с токами и напряжениями характеристикой электри-
ческой цепи является также энергетическое состояние: баланс
мощностей, выделяемых источниками энергии и потребляемых
приемниками.
Из закона сохранения энергии для любой электрической цепи
алгебраическая сумма мощностей источников эдс равна сумме
мощностей, потребляемых в приемниках (резисторах):
т п
S Eklk = S RkIl
Л= 1 k=1
ЗАПОМНИТЕ
Если направления эдс*и тока, действующих в ветви, совпа-
дают, то мощность такого источника эдс будет в уравнении
со знаком плюс — источник отдает энергию в цепь (работа-
ет в режиме генератора). Если направление действия эдс
не совпадает с направлением тока в ветви, то источник эдс
потребляет энергию и в уравнении будет знак «минус».
§ 7. Рационализированные методы общего расчета
электрических цепей
Решение системы уравнений электрического состояния узлов
и контуров, если количество ветвей в электрической цепи более
трех, создает известные трудности.
Упростить расчет сложных электрических цепей возможно
двумя методами: наложения (суперпозиции) и с помощью вспо-
могательных неизвестных.
23
Метод наложения состоит в предварительных преобразова-
ниях, позволяющих сложную цепь представить несколькими про-
стыми цепями.
Метод вспомогательных неизвестных — контурных токов или
узловых потенциалов, заключается во введении этих неизвестных
в расчеты, число которых существенно меньше числа ветвей в
цепи.
Метод наложения
► Метод наложения используется для линейной системы.
Принцип наложения заключается в том, что если линейная
цепь подвергается воздействию нескольких источников эдс
одновременно, то реакция (ток) цепи на эти источники
равна алгебраической сумме реакций (токов) на каждое
воздействие отдельно.
Для определения токов методом наложения рассмотрим
электрическую схему рис. 11, а. Предположим, что в цепи дей-
ствует только эдс Е\. Действие эдс в другой ветви Е2 прирав-
нивается нулю. При этом все сопротивления, включая и внут-
ренние сопротивления источников, остаются неизменными. Опре-
деление составляющих токов /(; Г2\ 1з производится от эдс Е\.
Повторяют расчет, считая действующей эдс Е2 (при Ei = 0)
и определяют соответствующие составляющие токов. Алгебраи-
ческое суммирование дает значение действительных токов в вет-
вях: /, = /( + Д', Д = Д + Д', Д = Д + Д'.
Сложные электрические цепи методом наложения рассчиты-
вают редко, так как ошибки при определении действительного
тока по составляющим суммируются, что может привести к зна-
чительным погрешностям. Кроме того, метод наложения непри-
меним к расчету мощностей, так как значения их пропорцио-
нальны квадрату токов.
Метод контурных токов
► В методе контурных токов в качестве промежуточных пере-
менных выбирают токи, замыкающиеся в каждом контуре
и называемые контурными (рис. И). В этом случае число
уравнений уменьшается до числа независимых контуров
(ячеек), т. е. до k = в — (у — 1). Очевидно, этот метод будет
выгоден, когда k (у— 1).
Покажем, что контурные токи для любой линейной электри-
ческой цепи удовлетворяют уравнениям электрического состоя-
ния.
На рис. И,а представлена двухконтурная схема. Выразим
ток во второй ветви как сумму токов в первой и третьей ветвях:
Д=Л+Д. В качестве контурных токов можно принять токи
// = !\ и 1ц = —Д. Составим контурные уравнения для двух кон-
турных токов // и 1ц'.
24
(R\ -J- R2)11 — Rzhi = Ei',
~ Rih 4" (R3 + Rz)hi = —E3.
Ток 12 определяется как разность /2=Л —
В схеме рис. 11,6 три простых контура и, следовательно, мож-
но составить три контурных уравнения:
(Ri -j- /?4 -|- Rb) h — Rthi — Rbhn = Ег,
— RJi 4“ R2 + R4 4~ Rs)hi — Rshii — E2;
~ Rbh — Rahi 4- (R3 4- R& 4- Re)///z = —E3.
Решая полученную систему уравнений, находим контурные
токи //, Л/ и /,//. Действительные токи в ветвях определяются
из выражений
Л h> h ~ hi’ h — hn< h — h hi’ Is — hi hii’
lb = h hir
ЗАПОМНИТЕ
При расчете электрических цепей методом контурных токов,
следует руководствоваться следующими правилами:
1. Число контурных токов, замыкающихся через каждую из
ветвей, должно быть по возможности минимальным, т. е.
следует выбирать только простые контуры;
2. Положительные направления контурных токов можно
выбирать произвольно, лучше (удобнее) по часовой стрелке.
Метод узлового напряжения
► Если разветвленная цепь имеет только два узла или путем
несложных преобразований может быть приведена к двум
узлам, то анализ таких цепей ведут методом двух узлов,
который называют методом узлового напряжения.
Для получения расчетного уравнения схемы рис. 11, а зада-
димся направлением токов в ветвях.
Согласно узловому уравению электрического состояния, сум-
ма токов в ветвях, сходящихся в узле 2, должна быть равна
нулю: 1\ — /2 4~ 1з = 0.
Пользуясь уравнением электрического состояния ветви элек-
трической цепи и положив V\ = 0, найдем разность потенциалов
V2 — V) для первой ветви, равную напряжению U2\ — Е\ — R\l\.
Решая уравнение относительно тока 1\, получим
/, = (£1-G2I)/R1 = (£1-G2I)GI,
где Gi = 1/Ri — проводимость первой ветви.
По аналогии найдем выражения для токов в других ветвях.
Если эдс в какой-либо ветви направлена в сторону понижения
25
потенциала, то в уравнении для тока этой ветви эдс запишется со
знаком «минус». Ток /2 = U21G2.
Подставив записанные выражения для токов в ветвях в узло-
вое уравнение для узла II, получим
(£> — Uii)G । + (£3 — £г|)Сз — U 2\G 2 = 0.
Решая уравнение относительно I72i, имеем
t/2, = (EtGt + E3G3)/(Gt 4- G2 + G3).
Подставляя полученное напряжение t/2i в выражение для
токов, определяют токи в ветвях. Если между узлами включено п
ветвей, в том числе т активных (содержащих источники эдс),
то расчетное уравнение можно записать в общем виде:
т 2 £»G*
G2i = - к 1 S 6* fc=l
ЗАПОМНИТЕ
Произведение EG имеет знак «плюс», если эдс направлена
к узлу 2, и знак «минус» — к узлу /.
§ 8. Методы анализа режимов отдельной ветви
или части электрической цепи
В практике возникает необходимость исследовать режимы от-
дельных участков или ветвей схемы при изменении их параметров
или параметров на других участках (ветвях) схемы, выбрать
оптимальные режимы их работы, например при максимальной
мощности, заданном коэффициенте полезного действия, получе-
нии линейности и стабильности характеристики при изменении
режимов источника питания и др.
> Воздействие сложной активной электрической цепи (актив-
ного двухполюсника) на исследуемую ветвь можно заме-
нить воздействием последовательно соединенных эдс £э и
его внутреннего сопротивления RB.
Докажем возможность такой замены, выделив ветвь с сопро-
тивлением R (рис. 12, а).
Включим в исследуемую ветвь последовательно и встречно
две одинаковые эдс £х и £(, равные напряжению холостого хода
Ux- при разрыве ветви с R. В этом случае ток в этой ветви /
остается неизменным (рис. 12, б). Если теперь использовать
26
принцип наложения, рассматривая две схемы (рис. 12, в), то ток
ветви cd будет определяться только правой схемой, характери-
зуемой эдс холостого хода Ех, направление которой совпадает
с направлением тока в исходной схеме, и внутренним (входным)
сопротивлением Re двухполюсника. Таким образом, ток ветви
cd равен действительному току:
/ = Ех/(/?„ + /?) = UJ(RB + R).
В частности, при R = 0 (короткое замыкание ветви)
/?в = t/x//K и / = /к = Ux/Rb.
Если рассматриваемая ветвь содержит источник эдс Е , то ток
в ней
/ = (Г/х± £)/(/?. + /?),
где эдс Е берется с плюсом, когда
напряжение LR и эдс Е действуют
в одном направлении, и с минусом,
когда эдс Е направлена навстречу
(7Х. Этот метод анализа называют
методом эквивалентного источ-
ника.
Метод используется и в тех
случаях, когда необходимо проа-
нализировать режим одной ветви
разветвленной электрической цепи
при изменении параметров в дру-
гой ветви. Характерным примером
такой цепи является схема мосто-
вого преобразователя (схема мо- 13
ста), представленная на рис. 13. Ветви, соединяющие соседние
узлы а и с, с и b, b и d, d и а, называют плечами моста. Они со-
держат резистивные элементы. Ветвь ab является диагональю
питания моста. В эту ветвь включен источник Е. Ветвь
27
cd содержит измерительный прибор. Эту ветвь моста называют
измерительной диагональю.
Мост можно привести в состояние равновесия, которое насту-
пает при равенстве падений напряжений на плечах ас и ad, т. е.
при Rih = и R2I2 = R3I3 или, что то же, Va — Vc= Va — Vj.
В момент равновесия потенциалы узлов с и d равны (Vf = Vd)
и ток /5 в диагонали cd равен нулю (стрелка измерительного
прибора установится на нулевой отметке). В этом случае /1 = /2
и /3 = /4. Условие равновесия моста:
R\/Rt = R4/R3, или
R1R3 = RvRt-
Равновесие моста будет нарушено, если в каком-либо плече
моста изменится сопротивление. Тогда изменятся токи в ветвях,
изменятся потенциалы узлов с и d(Vc=£Vd). В диагонали cd
появится ток, и стрелка прибора отклонится от нулевого положе-
ния. Такой мост называется неуравновешенным.
ИРИААЕР Рассмотрим, как определяется ток в ветви с измерительным при-
бором, сопротивление которого равно R„, при изменении сопротивления Rt. Решение
задачи проводится методом эквивалентного источника, согласно которому ток h
определяется по формуле /5 = Ucd/(RB + Rn), где Ucd — напряжение между точка-
ми с и d при R„ = 00 (разрыв цепи измерительного прибора); RB — внутреннее со-
противление моста относительно зажимов cd.
Для определения зависимости /s(/?i) необходимо подсчитать RB и Ucd:
RB = [Яз/ЬДЯз + Rd + R,Ri/(Rt + Л2)];
Ucd = [ERi/(Rt + R2) - ER3/(R3 + Rd] =
= E[Ri/(R\ + R2) - R3/(R3 4- Rd].
Задаваясь значениями Rt, определяют значения Ucd и RB. По полученным
значениям Ucd и RB находят значения 13 и строят зависимость /s(/?i).
§ 9. Нелинейные электрические цепи
при постоянных токе и напряжении
Нелинейной электрической цепью называют электрическую цепь, электри-
ческое сопротивление участков которой зависит от значений или от направлений
токов и напряжений. Как было показано, нелинейные элементы этих цепей
имеют нелинейную вольт-амперную характеристику.
ЗАПОМНИТЕ
Нелинейные элементы электрических цепей по типу их
вольт-амперных характеристик можно подразделить на
симметричные (рис. 14, а) и несимметричные (рис. 14,6).
Симметричные элементы имеют вольт-амперные характерис-
тики, не зависящие от направления тока или напряжения.
При расчете нелинейных цепей вводят понятие статического
и дифференциального сопротивлений нелинейного элемента.
28
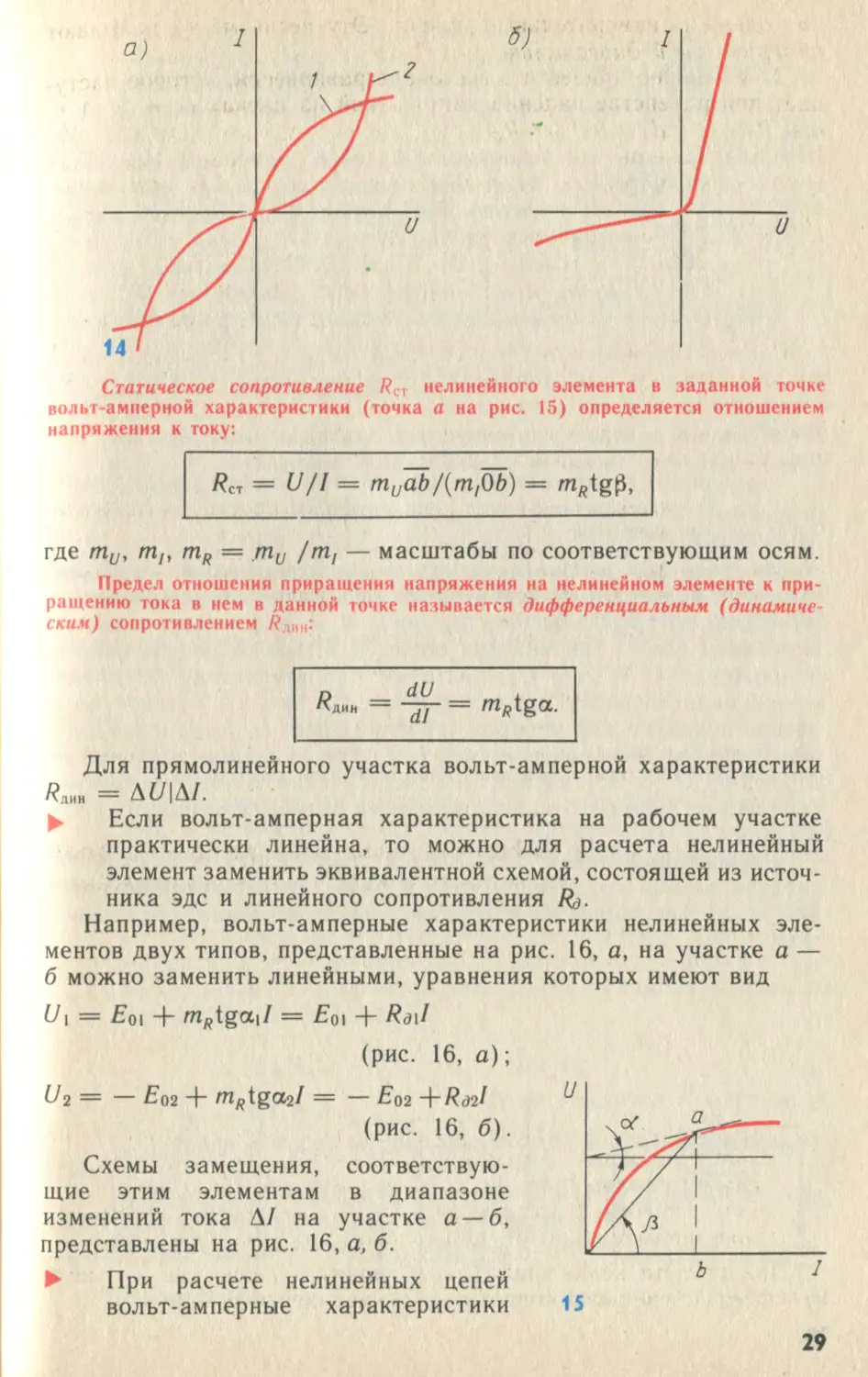
Статическое сопротивление /?ст нелинейного элемента в заданной точке
вольт-амперной характеристики (точка а на рис. 15) определяется отношением
напряжения к току:
R„ — VII— тиаЬ /(nt/Ob) = m^tgp,
где ти, Ш/, mR — ти /гщ — масштабы по соответствующим осям.
Предел отношения приращения напряжения на нелинейном элементе к при-
ращению тока в нем в данной точке называется дифференциальным (динамиче-
ским) сопротивлением /?дин:
— ,, — /Tlfltga.
Для прямолинейного участка вольт-амперной характеристики
/?дин = А£7|Д/.
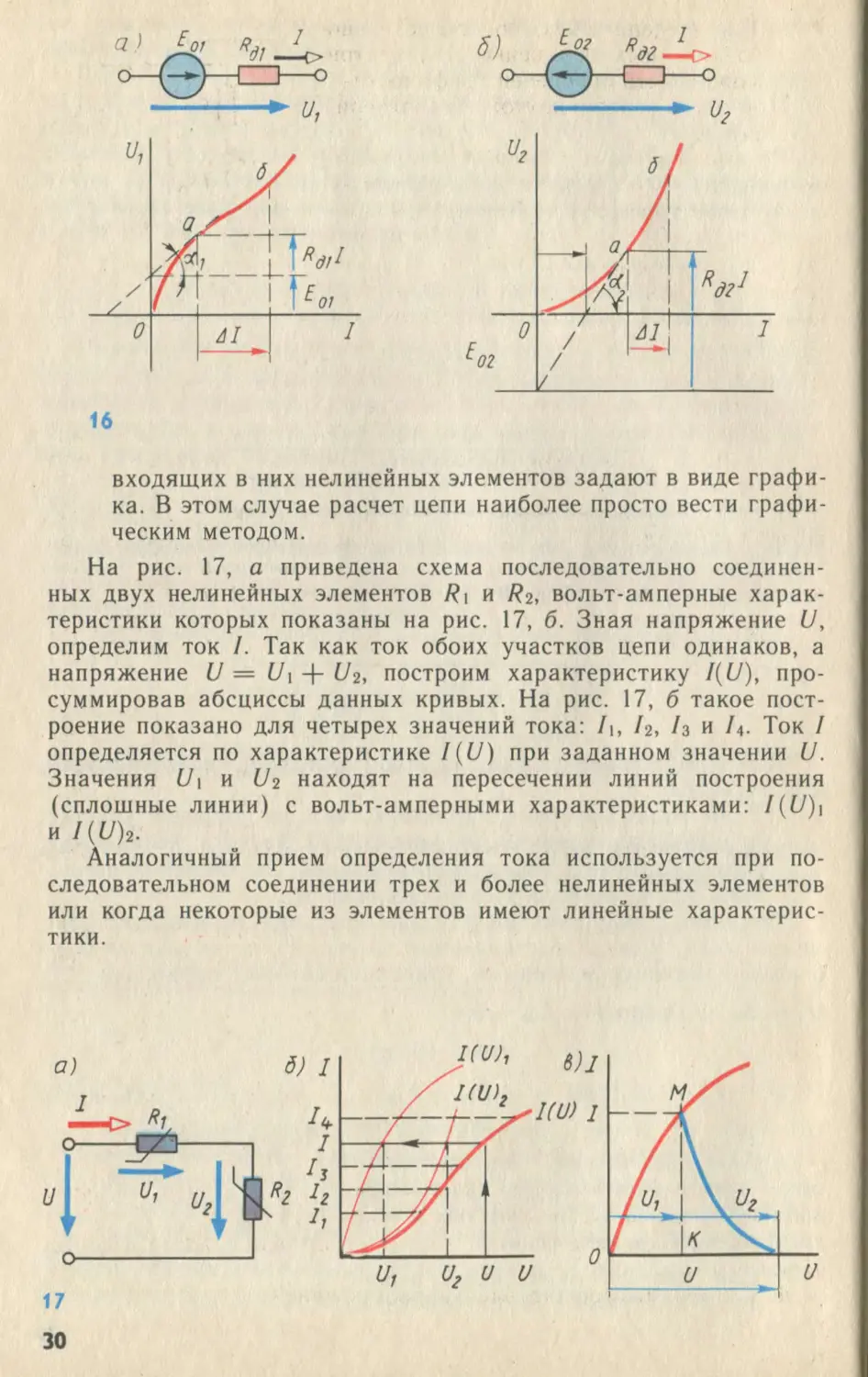
> Если вольт-амперная характеристика на рабочем участке
практически линейна, то можно для расчета нелинейный
элемент заменить эквивалентной схемой, состоящей из источ-
ника эдс и линейного сопротивления fa.
Например, вольт-амперные характеристики нелинейных эле-
ментов двух типов, представленные на рис. 16, а, на участке а —
б можно заменить линейными, уравнения которых имеют вид
Ui = £01 + m^tgai/ = £01 4- Rail
(рис. 16, a);
U2 = — £о2 + mRiga.2l = — Е02 -}~RdtI
(рис. 16, б).
Схемы замещения, соответствую-
щие этим элементам в диапазоне
изменений тока А/ на участке а —б,
представлены на рис. 16, а, б.
► При расчете нелинейных цепей
вольт-амперные характеристики
15
29
входящих в них нелинейных элементов задают в виде графи-
ка. В этом случае расчет цепи наиболее просто вести графи-
ческим методом.
На рис. 17, а приведена схема последовательно соединен-
ных двух нелинейных элементов R\ и /?2, вольт-амперные харак-
теристики которых показаны на рис. 17, б. Зная напряжение U,
определим ток /. Так как ток обоих участков цепи одинаков, а
напряжение U = U\ + 1/2, построим характеристику /((У), про-
суммировав абсциссы данных кривых. На рис. 17, б такое пост-
роение показано для четырех значений тока: Л, /2, /з и /4. Ток /
определяется по характеристике I(U) при заданном значении U.
Значения U\ и (72 находят на пересечении линий построения
(сплошные линии) с вольт-амперными характеристиками: /(£7)1
и /(t/)2.
Аналогичный прием определения тока используется при по-
следовательном соединении трех и более нелинейных элементов
или когда некоторые из элементов имеют линейные характерис-
тики.
17
30
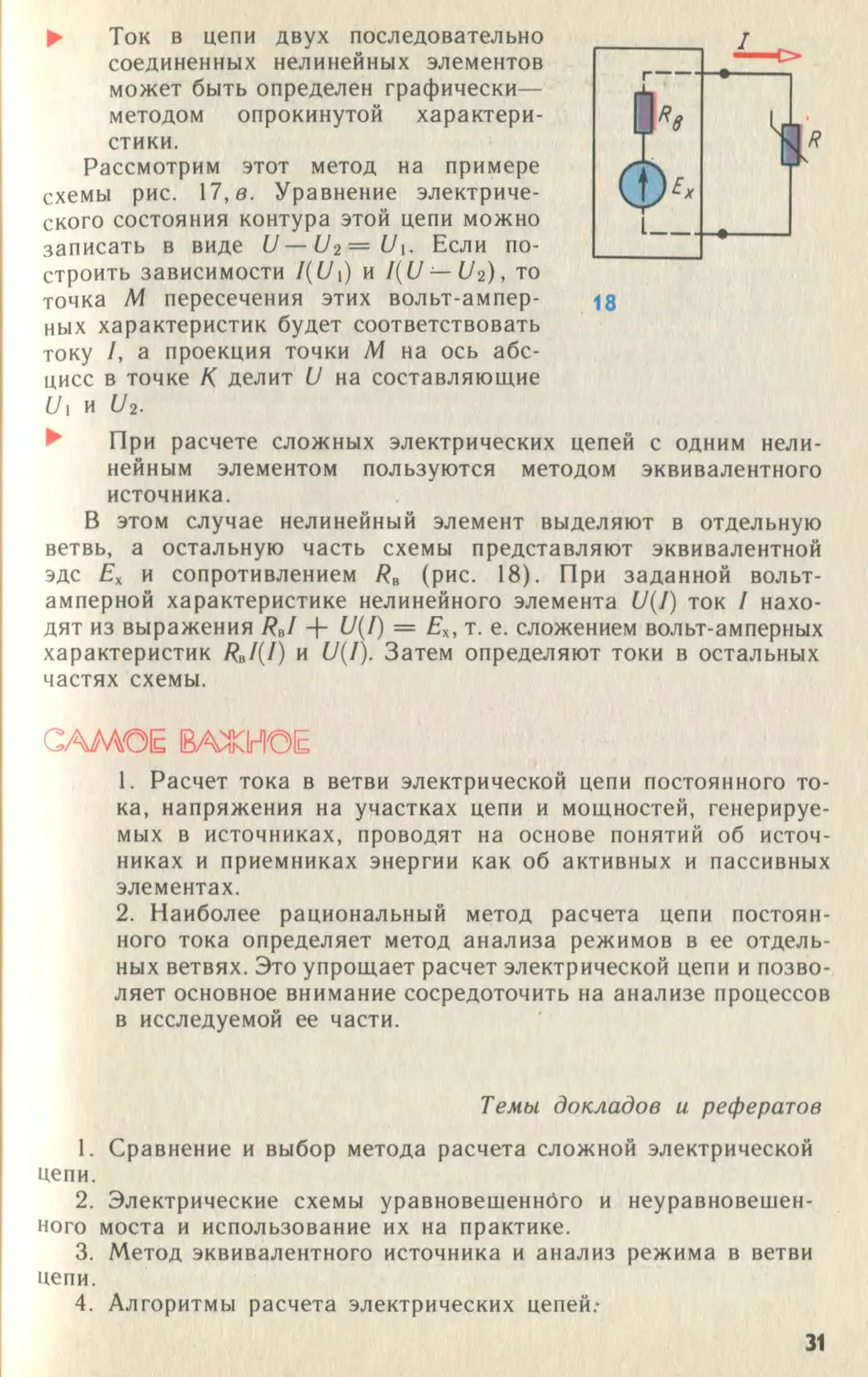
► Ток в цепи двух последовательно
соединенных нелинейных элементов
может быть определен графически—
методом опрокинутой характери-
стики.
Рассмотрим этот метод на примере
схемы рис. 17, в. Уравнение электриче-
ского состояния контура этой цепи можно
записать в виде U —1)1= U\. Если по-
строить зависимости /(t/|) и I(U — U2), то
точка М пересечения этих вольт-ампер-
ных характеристик будет соответствовать
току /, а проекция точки М на ось абс-
цисс в точке К делит U на составляющие
(71 и U2-
При расчете сложных электрических цепей с одним нели-
нейным элементом пользуются методом эквивалентного
источника.
В этом случае нелинейный элемент выделяют в отдельную
ветвь, а остальную часть схемы представляют эквивалентной
эдс Ек и сопротивлением RB (рис. 18). При заданной вольт-
амперной характеристике нелинейного элемента (/(/) ток / нахо-
дят из выражения /?0/ + (/(/) = £х, т. е. сложением вольт-амперных
характеристик /?„/(/) и [/(/). Затем определяют токи в остальных
частях схемы.
САМОЕ [ВАЖНОЕ
1. Расчет тока в ветви электрической цепи постоянного то-
ка, напряжения на участках цепи и мощностей, генерируе-
мых в источниках, проводят на основе понятий об источ-
никах и приемниках энергии как об активных и пассивных
элементах.
2. Наиболее рациональный метод расчета цепи постоян-
ного тока определяет метод анализа режимов в ее отдель-
ных ветвях. Это упрощает расчет электрической цепи и позво-
ляет основное внимание сосредоточить на анализе процессов
в исследуемой ее части.
Темы докладов и рефератов
1. Сравнение и выбор метода расчета сложной электрической
цепи.
2. Электрические схемы уравновешенного и неуравновешен-
ного моста и использование их на практике.
3. Метод эквивалентного источника и анализ режима в ветви
цепи.
4. Алгоритмы расчета электрических цепей,-
31
I . Определить токи в электрической цепи, изображенной на рис. 10, если
R, = R2 = 5 Ом; Яз = /?4 = Ю Ом; Яв = 1 Ом, £ = 120 В.
2 В каком случае при расчете электрических цепей используют преобра-
зование треугольника в звезду и звезды в треугольник? Запишите формулы
определения сопротивления при преобразованиях.
: Как определить минимальное количество контурных уравнений элек-
трического состояния и как выбрать контуры при расчете сложной элек-
трической цепи?
На рис. 14, а изображены вольт-амперные характеристики двух нели-
нейных элементов: бареттера (/), стабилитрона (2). Какой из них можно
использовать: а) для стабилизации напряжения; б) для стабилизации
тока?
Почему для расчета разветвленных нелинейных электрических цепей
нельзя применить метод наложения?
В каких случаях целесообразно применять метод двух узлов?
7. Какие преимущества имеет метод контурных токов?
- Каково условие равновесия мостовой схемы электрической цепи?
Как по вольт-амперным характеристикам нелинейных элементов опреде-
лить напряжение U, если задан ток /?
10. Проанализируйте графики рис. 16, а и б.
МАГНИТНЫЕ ЦЕПИ
§ 10. Классификация магнитных цепей. Элементы
магнитной цепи
Магнитная система является одним из основных элементов
электрических машин и ряда электротехнических устройств.
В магнитную систему входят источники магнитного поля (обмот-
ка с током, возбуждающая магнитное поле, постоянный магнит)
и система магнитопроводов из ферромагнитного материала, по
которым замыкается магнитный поток.
► При анализе магнитных цепей магнитную систему электро-
технического устройства представляют, как и в электриче-
ских цепях, эквивалентной схемой. Магнитные цепи бывают
неразветвленные (рис. 19, а, б) и разветвленные (рис. 19, в),
однородные и неоднородные, симметричные и несиммет-
ричные.
Неразветвленной магнитной цепью называют цепь, через элементы которой
замыкается один и тот же магнитный поток. В разветвленной магнитной цепи
содержатся ветви, в каждой из которых замыкаются свои магнитные потоки.
В однородной магнитной цепи, образованной замкнутым магнитопроводом, маг-
нитный поток находится в однородной среде. Неоднородной называют магнит-
ную цепь, состоящую из участков, имеющих разные сечения, воздушные зазоры,
ферромагнитные тела с различными магнитными свойствами.
Из физики известна способность вещества под воздействием
напряженности внешнего магнитного поля И создавать собствен-
ное поле, называемое намагниченностью М, которая характери-
зуется магнитной восприимчивостью х.-.М — уН. При этом маг-
нитная индукция в веществе
В = р.0(Н + М) — ЦгЦо// = VaH,
где ц, = 1 + х- — относительная и абсолютная магнитные
проницаемости, соответственно.
Вещества, имеющие высокое значение магнитной восприимчивости, назы-
вают ферромагнитными, или магнитными.
К ним относятся железо (Fe), кобальт (Со), никель (Ni),
редкоземельные элементы: гадолиний (Gd), диспрозий (Dy) и
др., а также сплавы на базе этих элементов.
► Зависимость магнитной индукции в веществе (материале)
от напряженности внешнего магнитного поля В(Н) носит
нелинейный характер: по мере увеличения Н индукция В
3-85 33
19
сначала возрастает резко, а затем, приближаясь к области
насыщения, процесс намагничивания материала замедляет-
ся и прекращается, когда резервы ферромагнетика оказы-
ваются исчерпанными.
Если элемент магнитной цепи, например цилиндр из ферро-
магнитного материала, поместить в однородное магнитное поле,
он намагнитится. Если после намагничивания до состояния насы-
щения внешнее поле убрать (уменьшить до нуля), то цилиндр
явится источником магнитного поля за счет намагниченности
материала — остаточной намагниченности. Чтобы разрушить эту
остаточную намагниченность, нужно создать внешнее поле, на-
правленное противоположно полю, создаваемому цилиндром,
для преодоления задерживающей, так называемой коэрцитивной
силы Нс, которая стремится сохранить созданную микротоками
намагниченность.
ВАПОМНИППё
В зависимости от значения коэрцитивной силы Нс все маг-
нитные материалы принято делить на магнитомягкие и маг-
нитотвердые.
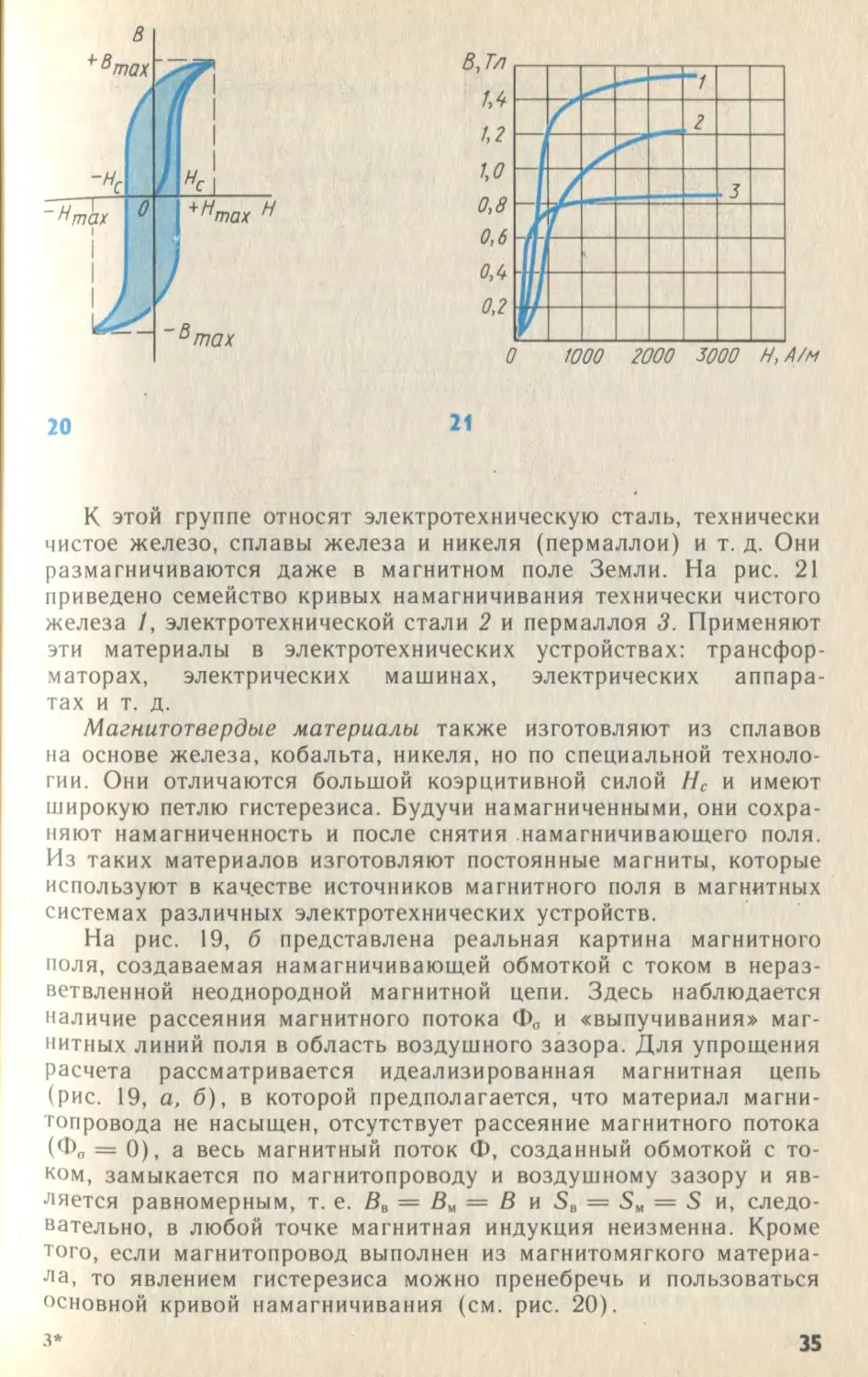
Магнитомягкие материалы имеют малую коэрцитивную силу
(круто поднимающаяся основная кривая намагничивания и отно-
сительно малая площадь петли гистерезиса) (рис. 20).
34
20
К этой группе относят электротехническую сталь, технически
чистое железо, сплавы железа и никеля (пермаллои) и т. д. Они
размагничиваются даже в магнитном поле Земли. На рис. 21
приведено семейство кривых намагничивания технически чистого
железа 1, электротехнической стали 2 и пермаллоя 3. Применяют
эти материалы в электротехнических устройствах: трансфор-
маторах, электрических машинах, электрических аппара-
тах и т. д.
Магнитотвердые материалы также изготовляют из сплавов
на основе железа, кобальта, никеля, но по специальной техноло-
гии. Они отличаются большой коэрцитивной силой Нс и имеют
широкую петлю гистерезиса. Будучи намагниченными, они сохра-
няют намагниченность и после снятия намагничивающего поля.
Из таких материалов изготовляют постоянные магниты, которые
используют в качестве источников магнитного поля в магнитных
системах различных электротехнических устройств.
На рис. 19, б представлена реальная картина магнитного
поля, создаваемая намагничивающей обмоткой с током в нераз-
ветвленной неоднородной магнитной цепи. Здесь наблюдается
наличие рассеяния магнитного потока Фо и «выпучивания» маг-
нитных линий поля в область воздушного зазора. Для упрощения
расчета рассматривается идеализированная магнитная цепь
(рис. 19, а, б), в которой предполагается, что материал магни-
топровода не насыщен, отсутствует рассеяние магнитного потока
(Фа = 0), а весь магнитный поток Ф, созданный обмоткой с то-
ком, замыкается по магнитопроводу и воздушному зазору и яв-
ляется равномерным, т. е. йв = Вы = В и SB = SM — S и, следо-
вательно, в любой точке магнитная индукция неизменна. Кроме
того, если магнитопровод выполнен из магнитомягкого материа-
ла, то явлением гистерезиса можно пренебречь и пользоваться
основной кривой намагничивания (см. рис. 20).
з*
35
§ 11. Расчет магнитной цепи
Аналогия между магнитной и электрической
цепями
► Расчет магнитных цепей производится на основе закона
полного тока с помощью уравнений магнитного состояния.
Как и в электрических цепях, здесь используют уравнения
магнитного состояния:
узловое — алгебраическая сумма магнитных потоков, сходящихся в любом
узле (поток через замкнутую поверхность), всегда равна нулю:
£Ф = 0;
контурное — алгебраическая сумма падений магнитных напряжений в лю-
бом замкнутом контуре магнитной цепи равна алгебраической сумме магнито-
движущих сил в контуре:
Падение магнитного напряжения на заданном участке маг-
нитной цепи определяют как произведение напряженности маг-
нитного поля на длину участка цепи (или магнитного сопротивле-
ния участка на магнитный поток) и выражают в амперах:
— HI = Ф//(рЛцо5) = /?ИФ,
где /?ц =//(цгцо5)
магнитное сопротивление участка. Для
воздушного зазора цг = 1 и = //(ц05).
► Зависимость магнитного потока Ф от магнитодвижущей си-
лы wl и магнитных сопротивлений участков магнитной
цепи получают из уравнения магнитного состояния ветви
магнитной цепи и записывают в виде фор-
мулы
ф= 2>//2Х.
Полученная формула по своей структуре напоминает урав-
нение состояния ветви электрической цепи.
ЗАПОМНИТЕ
Между вебер-амперными характеристиками Ф(/) в магнит-
ных цепях и вольт-амперными (/(/) в электрических цепях
существует полная аналогия.
Для магнитной цепи можно изобразить аналоговую, т. е. ана-
логичную режиму нагрузки электрической цепи, схему замеще-
36
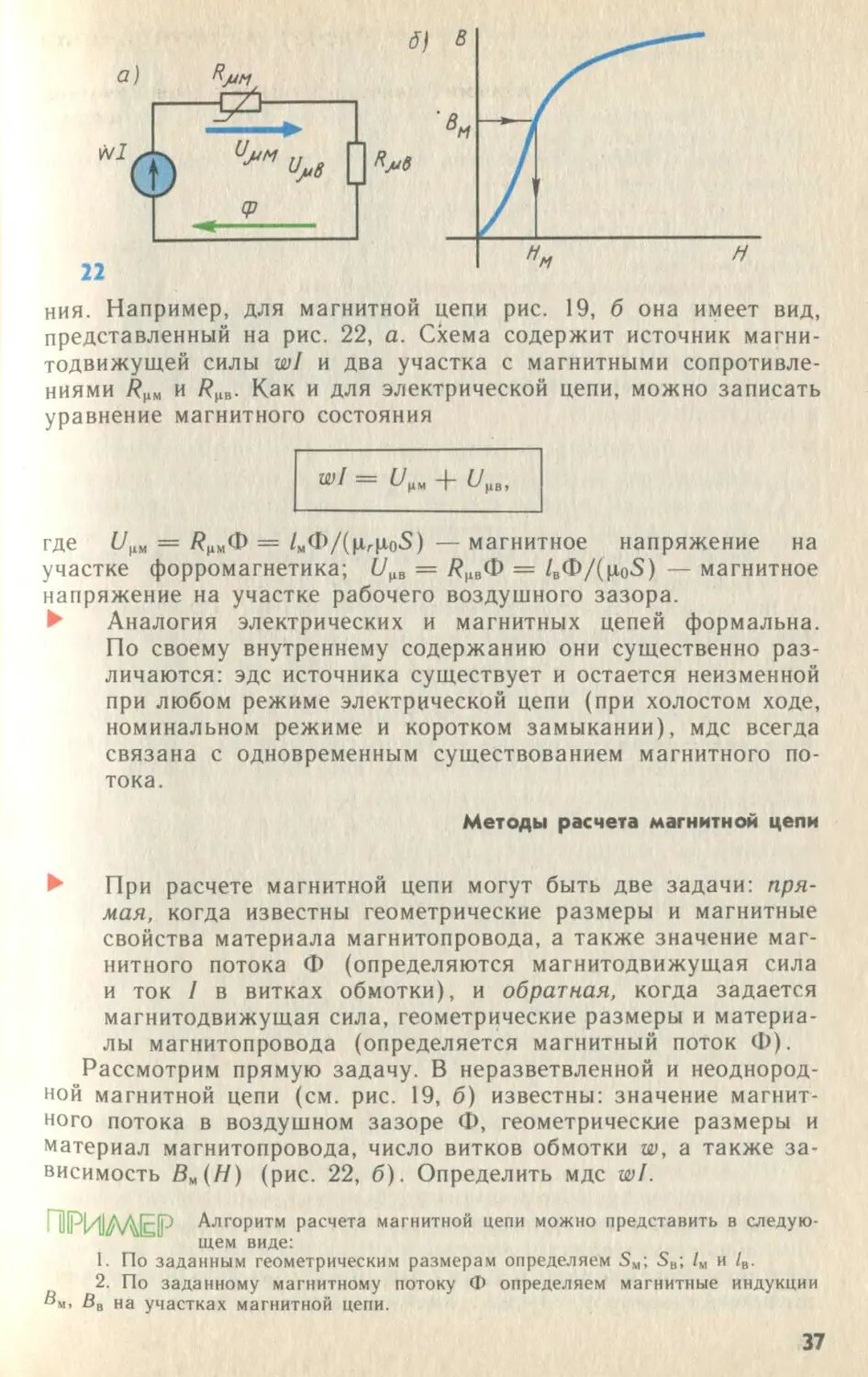
ния. Например, для магнитной цепи рис. 19, б она имеет вид,
представленный на рис. 22, а. Схема содержит источник магни-
тодвижущей силы wl и два участка с магнитными сопротивле-
ниями и /?цв. Как и для электрической цепи, можно записать
уравнение магнитного состояния
--- Уцм ^\<в,
где £/|1М = /?(1МФ = /мФ/(цгцо5) — магнитное напряжение на
участке форромагнетика; йцв = /?|1ВФ = /вФ/(цоЗ) — магнитное
напряжение на участке рабочего воздушного зазора.
► Аналогия электрических и магнитных цепей формальна.
По своему внутреннему содержанию они существенно раз-
личаются: эдс источника существует и остается неизменной
при любом режиме электрической цепи (при холостом ходе,
номинальном режиме и коротком замыкании), мдс всегда
связана с одновременным существованием магнитного по-
тока.
Методы расчета магнитной цепи
► При расчете магнитной цепи могут быть две задачи: пря-
мая, когда известны геометрические размеры и магнитные
свойства материала магнитопровода, а также значение маг-
нитного потока Ф (определяются магнитодвижущая сила
и ток / в витках обмотки), и обратная, когда задается
магнитодвижущая сила, геометрические размеры и материа-
лы магнитопровода (определяется магнитный поток Ф).
Рассмотрим прямую задачу. В неразветвленной и неоднород-
ной магнитной цепи (см. рис. 19, б) известны: значение магнит-
ного потока в воздушном зазоре Ф, геометрические размеры и
материал магнитопровода, число витков обмотки w, а также за-
висимость ВМ(Н) (рис. 22, б). Определить мдс ю/.
111РИ1М1ЕР Алгоритм расчета магнитной цепи можно представить в следую-
“ щем виде:
1. По заданным геометрическим размерам определяем SM; SB; /м и /„.
2. По заданному магнитному потоку Ф определяем магнитные индукции
®м, Вв на участках магнитной цепи.
37
Цепь одноконтурная, следовательно, магнитный поток Ф во всех участках
цепи будет неизменным. Полагая SB = SM, получим
В„=ВИ=Ф/5М.
3. По вычисленным В„ и кривой намагничивания В(Н) для заданного ма-
териала магнитопровода находим Н„ (рис. 22,6).
4. Обходя контур в направлении магнитного потока, запишем уравнение
магнитного состояния
ну/ = НМ1К + Нв1„,
здесь Нв = Вв/ро = Вв/(4л-10~7) = 8- 105Вв — напряженность магнитного поля
в воздушном зазоре.
Таким образом, расчетное уравнение примет вид
wl = Нм1„ + 8- 105Вв/в.
В обратной задаче расчета магнитной цепи задается мдс wl
и требуется определить магнитный поток Ф на участке цепи (или
в воздушном зазоре).
► Из-за нелинейности зависимость Ф (wl) необходимо пред-
варительно рассчитать и построить, а затем для заданного
значения wl определить Фв. Для построения зависимости
Ф(ш/) задают 5—7 значений магнитного потока, по алго-
ритму «прямой задачи» рассчитывают соответствующие
значения мдс и строят зависимости Ф(ш/).
Во многих электротехнических устройствах (электрических
машинах, трансформаторах и др.) используют симметричные
магнитные системы (см. рис. 19, в). В цепи такой системы маг-
нитный поток Ф1 равен потоку Ф2. В среднем сердечнике магни-
топровода оба потока Ф| и Ф2 складываются, но и сечение сердеч-
ника вдвое больше сечения крайних сердечников. При расчете
такую цепь можно представить как две самостоятельные, если
мысленно разделить магнитопровод по вертикальной оси ab.
Магнитные потоки Ф] и Ф2 при таком делении останутся неиз-
менными по направлению. Иными словами, схему замещения
магнитной цепи такой магнитной системы можно представить
двумя независимыми неразветвленными магнитными цепями,
в которых действуют одинаковые мдс, и рассчитывать одну из
двух составляющих. При решении прямой задачи, когда задан
магнитный поток Ф в любом стержне, полученное значение мдс
равно значению полной мдс. При решении обратной задачи
значение магнитного потока в среднем стержне Ф определяют на
основании уравнения состояния узла.
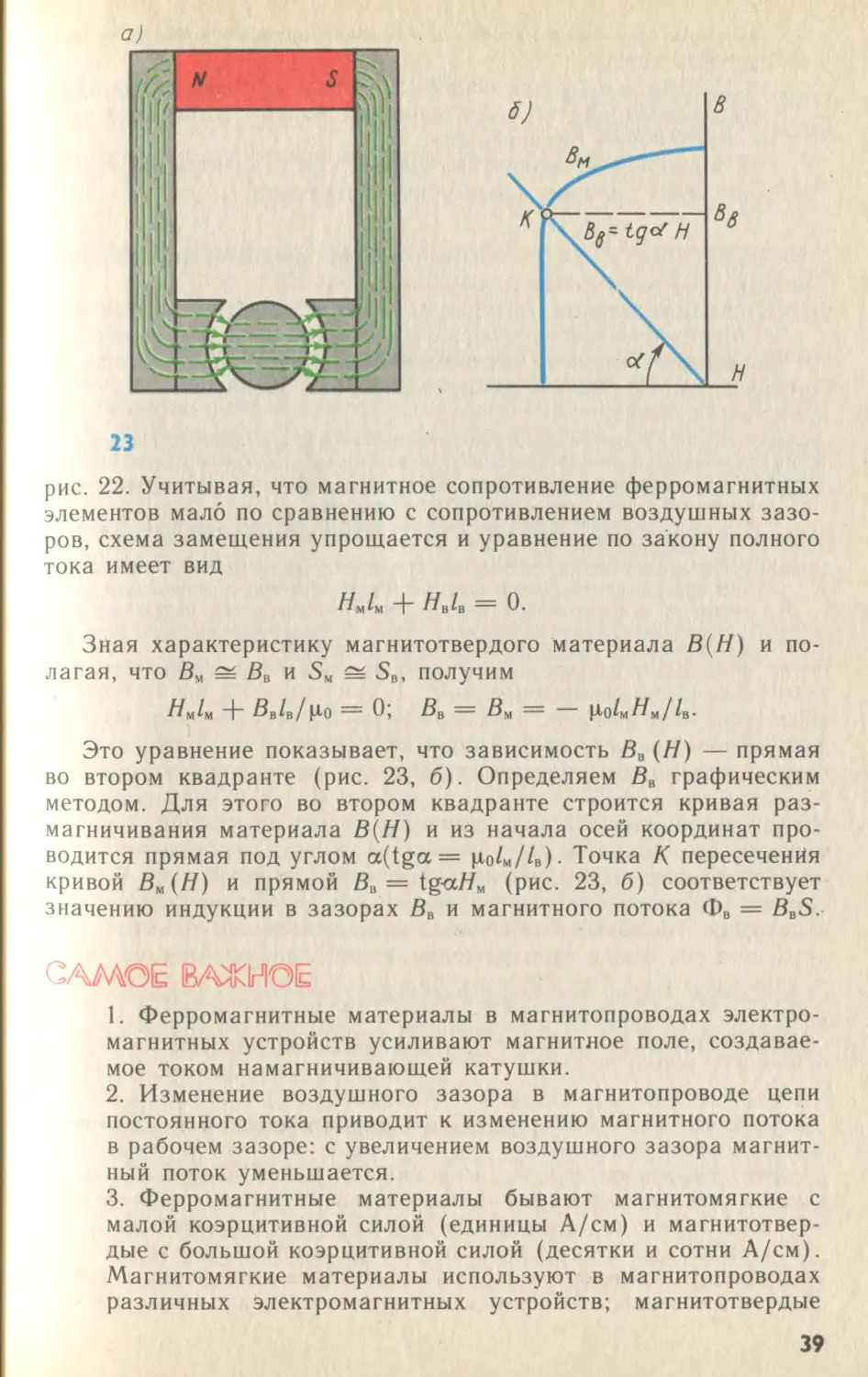
Магнитная цепь с постоянными магнитами
В магнитных системах с постоянными магнитами поле в воз-
душном зазоре создается под воздействием энергии постоянного
магнита. В качестве примера на рис. 23, а представлена магнит-
ная цепь магнитоэлектрического прибора, состоящая из постоян-
ного магнита, элементов из магнитомягкого материала и двух
воздушных зазоров. Схема замещения этой цепи показана на
38
23
рис. 22. Учитывая, что магнитное сопротивление ферромагнитных
элементов мало по сравнению с сопротивлением воздушных зазо-
ров, схема замещения упрощается и уравнение по закону полного
тока имеет вид
BJK + Яв/В = 0.
Зная характеристику магнитотвердого материала В(В) и по-
лагая, что Вм = Вв и SM = SB, получим
ВМ1К И- Вв1в/р,о = 0, Вв = Вм = ро^м Вм / /в.
Это уравнение показывает, что зависимость Вв (И) — прямая
во втором квадранте (рис. 23, б). Определяем Вв графическим
методом. Для этого во втором квадранте строится кривая раз-
магничивания материала В(В) и из начала осей координат про-
водится прямая под углом a(tga = р,0/м//в) • Точка К пересеченйя
кривой Вм(/7) и прямой Вв = tga//M (рис. 23, б) соответствует
значению индукции в зазорах В„ и магнитного потока Фв = B„S.
САМОЕ ВАЖНОЕ
1. Ферромагнитные материалы в магнитопроводах электро-
магнитных устройств усиливают магнитное поле, создавае-
мое током намагничивающей катушки.
2. Изменение воздушного зазора в магнитопроводе цепи
постоянного тока приводит к изменению магнитного потока
в рабочем зазоре: с увеличением воздушного зазора магнит-
ный поток уменьшается.
3. Ферромагнитные материалы бывают магнитомягкие с
малой коэрцитивной силой (единицы А/см) и магнитотвер-
дые с большой коэрцитивной силой (десятки и сотни А/см).
Магнитомягкие материалы используют в магнитопроводах
различных электромагнитных устройств; магнитотвердые
39
материалы — для изготовления постоянных магнитов и маг-
нитных систем.
4. Расчет магнитных цепей с ферромагнитными элементами
аналогичен расчету электрических цепей постоянного тока
с нелинейным элементами.
5. При расчете магнитных цепей, как и электрических, ис-
пользуют узловые и контурные уравнения.
Темы докладов и рефератов
1. Магнитотвердые материалы и их применение в технике.
2. Магнитомягкие материалы и их применение в технике.
3. Алгоритм расчета магнитной цепи как один из этапов ре-
шения задач на ЭВМ. Прямая и обратная задачи.
I. Почему сердечник электромагнита делают из магнитомягкого железа?
2. Какие существуют способы усиления магнитных полей?
3. Напишите уравнения для разветвленной магнитной цепи, аналогичные
уравнениям состояния для электрической цепи.
4. В чем различие между уравнением участка (ветви) электрической цепи
и его аналогом для магнитной цепи?
5. Как определить магнитное сопротивление участка магнитной цепи?
6. В однородной кольцевой катушке с ферромагнитным сердечником число
витков w при постоянном токе /, длина средней линии магнитного поля
в сердечнике I, длина воздушного зазора /в. Напряженность поля Н = Нср.
Как запишется уравнение магнитного состояния?
7. Составьте алгоритм расчета неразветвленной и неоднородной магнитной
цепи, изображенной на рис. 19, б.
ЭЛЕКТРИЧЕСКИЕ ЦЕПИ
ПЕРЕМЕННОГО ТОКА
§ 12. Параметры переменного тока и напряжения.
Классификация электрических цепей
переменного тока
В настоящее время переменный ток находит широкое приме-
нение в технике, так как он легко трансформируется и передается
на большие расстояния при высоком напряжении и малых поте-
рях. Экономический эффект при этом огромен. Кроме того, элек-
трические машины и другие электротехнические устройства, пред-
назначенные для работы в цепях переменного тока, относительно
просты и достаточно надежны в эксплуатации.
Переменный ток применяют в различных областях электротех-
ники (электропривод, электротермия, электросвязь, радиотехника
и т. д.).
Электрический ток, изменяющийся с течением времени, называют перемен-
ным. Если его мгновенные значения и направления через равные промежутки
времени (периодически) повторяются, то его называют периодически изменя-
ющимся.
Электрические цепи периодического переменного тока клас-
сифицируют в зависимости от формы кривой тока и его частоты,
характера параметров, сложности электрических схем замеще-
ния, назначения.
► Из большого числа различных видов электрических цепей
переменного тока можно выделить следующие: однофазные
и многофазные; линейные и нелинейные; с сосредоточенны-
ми и распределенными параметрами; с взаимоиндуктивнос-
тями и без взаимоиндуктивностей; простые и сложные (к
сложным можно отнести многофазные цепи).
Удобнее начинать изучение электрических цепей переменного
тока с наиболее простых — однофазных линейных электрических
цепей в устновившемся режиме и без учета взаимоиндуктивнос-
тей при синусоидальных токах.
Синусоидальный переменный ток получил наиболее широкое
применение в электроэнергетике. Генераторы всех электростан-
ций мира генерируют электрический ток синусоидальной формы.
Изменение тока по синусоидальному закону происходит плавно,
без скачков и резких перепадов, что благоприятно сказывается
на работе электрических машин и аппаратов.
Однофазной электрической цепью синусоидального тока называют цепь,
содержащую один или несколько источников электрической энергии переменного
тока, имеющих одинаковые частоту и начальную фазу.
41
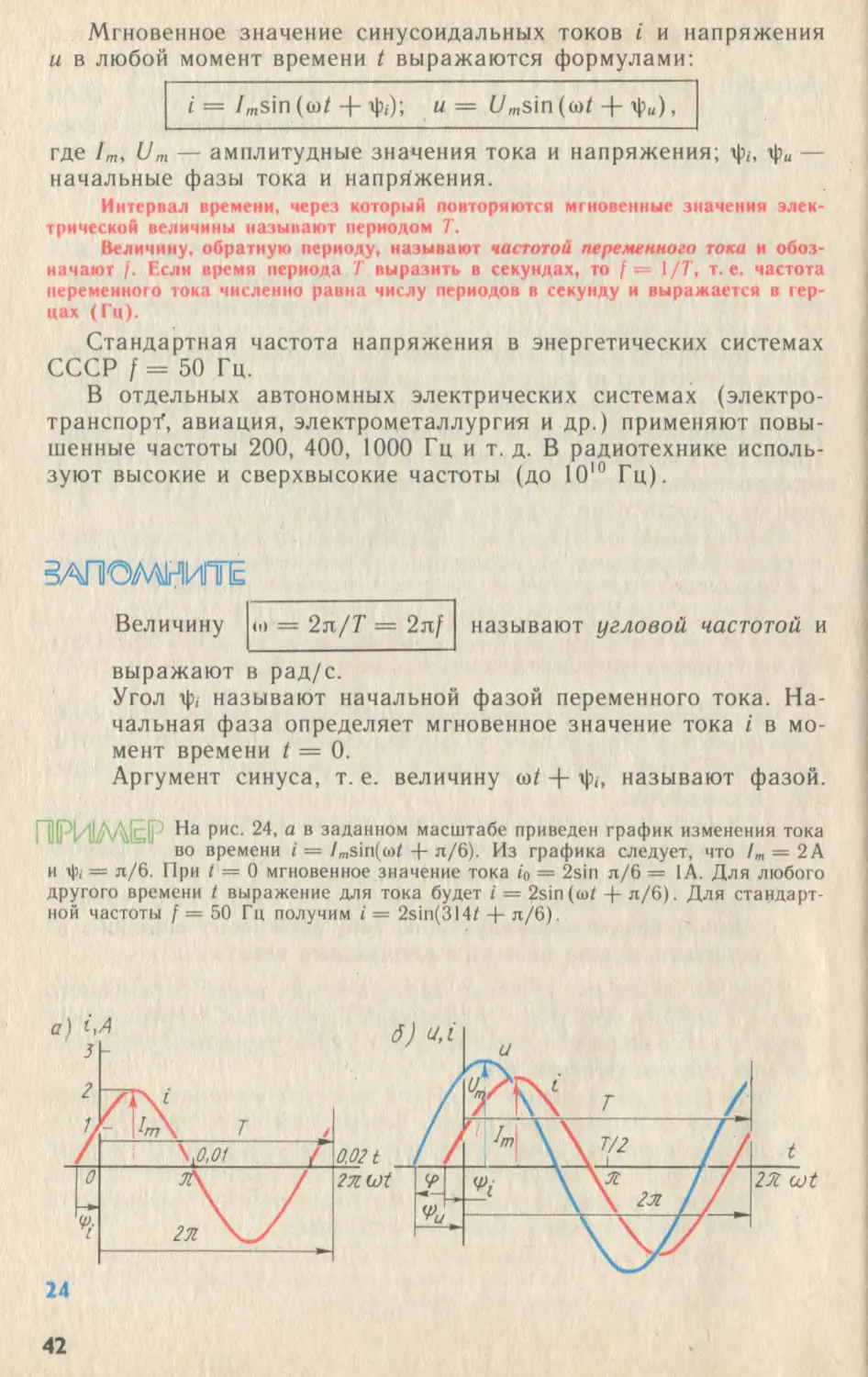
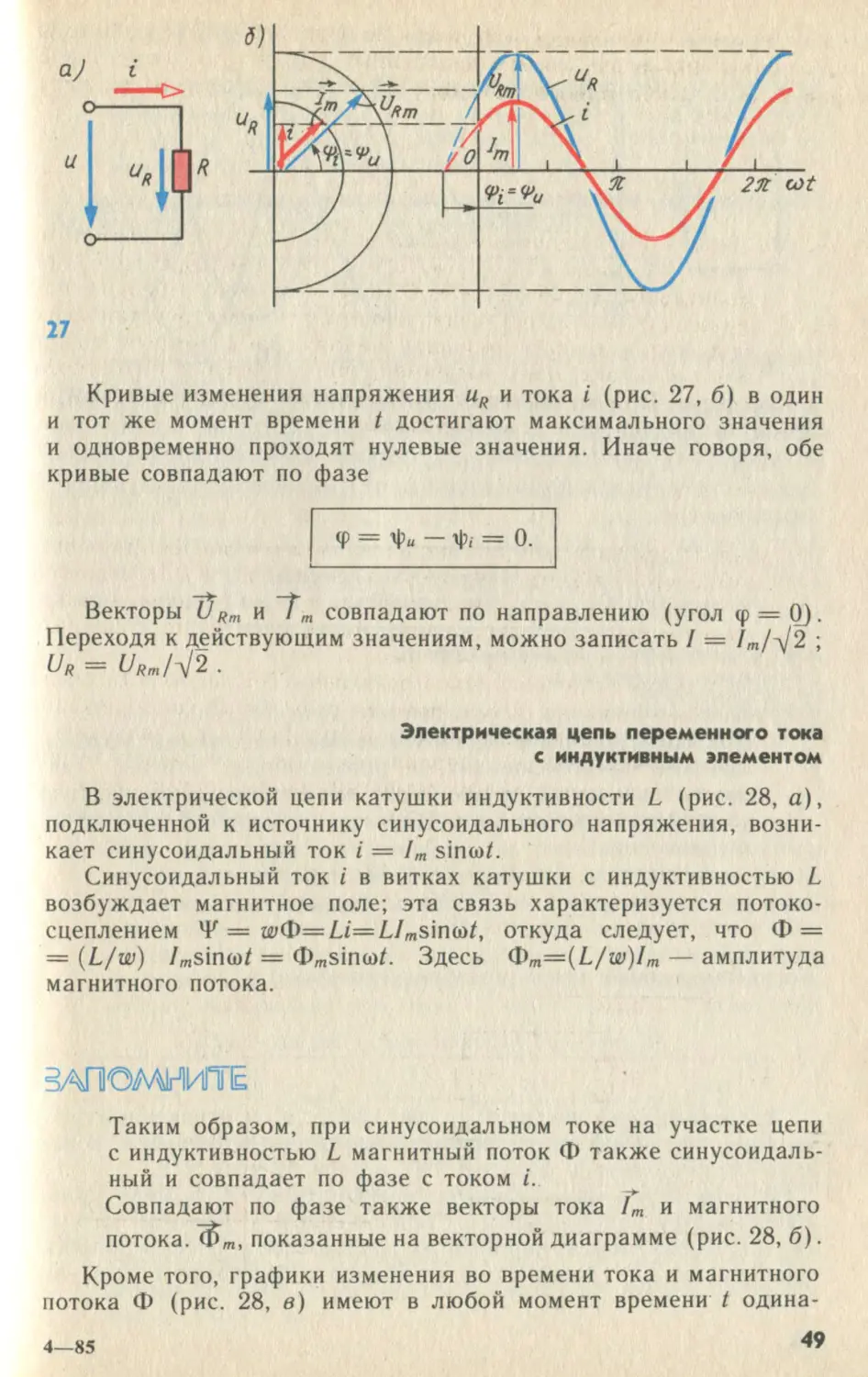
Мгновенное значение синусоидальных токов i и напряжения
и в любой момент времени t выражаются формулами:
i = Z,„sin (<ot + ф,); и = (У,„sin (оД 4- фи) ,
где lm, Uт — амплитудные значения тока и напряжения; ф,-, ф„ —
начальные фазы тока и напряжения.
Интервал времени, через который повторяются мгновенные значения элек-
трической величины называют периолом Т.
Величину, обратную периоду, называют частотой переменного тока и обоз-
начают f. Если время периода Т выразить в секундах, то f = 1 /Г, т. е. частота
переменного тока численно равна числу периодов в секунду и выражается в гер-
цах (Гц).
Стандартная частота напряжения в энергетических системах
СССР f = 50 Гц.
В отдельных автономных электрических системах (электро-
транспорт’, авиация, электрометаллургия и др.) применяют повы-
шенные частоты 200, 400, 1000 Гц и т. д. В радиотехнике исполь-
зуют высокие и сверхвысокие частоты (до Ю10 Гц).
ЗАПО/ЧНИТЕ
Величину <<> — 2л/7’ = 2n.f называют угловой частотой и
выражают в рад/с.
Угол ф, называют начальной фазой переменного тока. На-
чальная фаза определяет мгновенное значение тока i в мо-
мент времени t = 0.
Аргумент синуса, т. е. величину wt -ф ф„ называют фазой.
ТРИААЕ' На рис. 24, а в заданном масштабе приведен график изменения тока
во времени < =/rasin(o>/+ л/6). Из графика следует, что /т=2А
и ф, = л/6. При I — 0 мгновенное значение тока io = 2sin л/6 = 1А. Для любого
другого времени t выражение для тока будет i — 2sin(o>/ + л/6). Для стандарт-
ной частоты f = 50 Гц получим i — 2sin(314Z + л/6).
42
§13. Формы представления электрических
величин
Графическое изображение электрических
величин
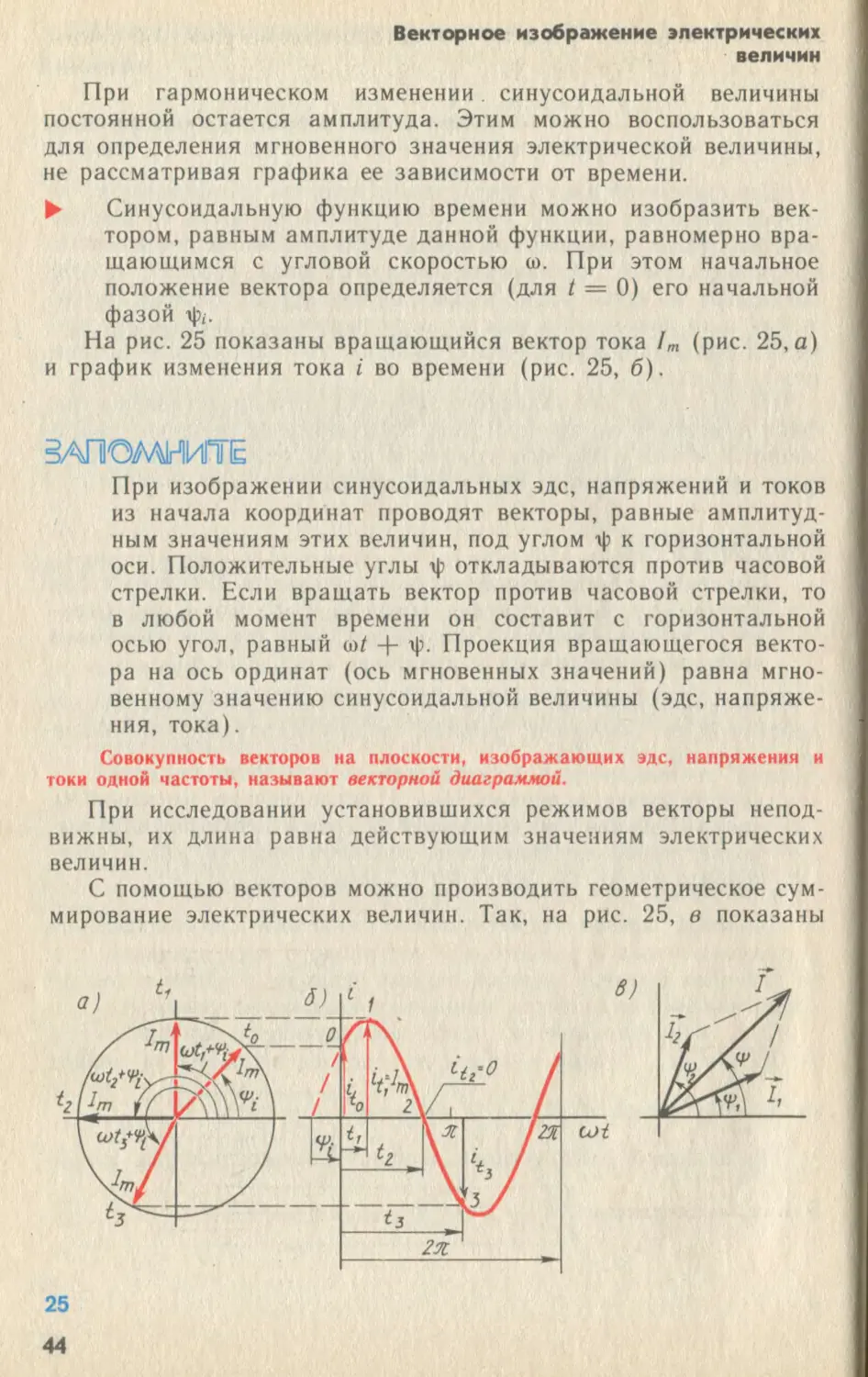
Для сравнения двух электрических величин, изменяющихся по
синусоидальному закону, необходимо знать разность их началь-
ных фаз. Если, например, на каком-либо участке цепи ток i и на-
пряжение и имеют одинаковые начальные фазы, говорят, что они
совпадают по фазе. Если график изменения во времени напря-
жения и на каком-либо участке цепи пересекает координату вре-
мени t раньше графика тока i, говорят, что напряжение по вре-
мени опережает ток.
На рис. 24, б для заданного элемента цепи представлены гра-
фики изменения во времени двух электрических величин: напря-
жения и и тока z. Из этих графиков видно, что они сдвинуты по
фазе друг относительно друга на угол <р.
ЗАПОМНИТЕ
Значение угла <р определяется как разность начальных фаз
Ф = фи — ф<- В тех случаях, когда фи < ф„ угол ф записыва-
ют со знаком «минус» и это означает, что ток при изменении
во времени опережает напряжение и на угол ф.
Изменяющийся во времени ток i принято характеризовать его
действующим значением, равным среднеквадратическому значе-
нию переменного тока I.
► Действующее значение тока / эквивалентно переменному
току i. Так, ток / на участке R за время одного периода вы-
деляет такое же количество тепловой энергии как и пере-
менный ток I, т. е. /?/2=/?(«2)сР, откуда
Тепловой эффект действующего значения синусоидального
переменного тока и равного ему постоянного тока одинаков, т. е.
за интервал времени, равный одному периоду, в одном и том же
сопротивлении выделяется одинаковое количество теплоты.
Для синусоидального тока действующее значение / =
= д/(/т81п2ы/)ср . Имея в виду, что среднее значение за период
siri2w/ = (1 — cos2w/)/2 = 1 /2, получим
По аналогии действующее значение синусоидальных напря-
жения и эдс равны: U = Um/->j2 ; Е = Ет/^2 .
I = 1т/^2
43
Векторное изображение электрических
величин
При гармоническом изменении. синусоидальной величины
постоянной остается амплитуда. Этим можно воспользоваться
для определения мгновенного значения электрической величины,
не рассматривая графика ее зависимости от времени.
► Синусоидальную функцию времени можно изобразить век-
тором, равным амплитуде данной функции, равномерно вра-
щающимся с угловой скоростью со. При этом начальное
положение вектора определяется (для t = 0) его начальной
фазой ф,.
На рис. 25 показаны вращающийся вектор тока 1т (рис. 25, а)
и график изменения тока i во времени (рис. 25, б).
ЗАПОМНИТЕ
При изображении синусоидальных эдс, напряжений и токов
из начала координат проводят векторы, равные амплитуд-
ным значениям этих величин, под углом ф к горизонтальной
оси. Положительные углы ф откладываются против часовой
стрелки. Если вращать вектор против часовой стрелки, то
в любой момент времени он составит с горизонтальной
осью угол, равный <в/ ф- ф. Проекция вращающегося векто-
ра на ось ординат (ось мгновенных значений) равна мгно-
венному значению синусоидальной величины (эдс, напряже-
ния, тока).
Совокупность векторов на плоскости, изображающих эдс, напряжения и
токи одной частоты, называют векторной диаграммой.
При исследовании установившихся режимов векторы непод-
вижны, их длина равна действующим значениям электрических
величин.
С помощью векторов можно производить геометрическое сум-
мирование электрических величин. Так, на рис. 25, в показаны
44
векторы токов Г| h Tj, а также вектор их геометрической суммы
~Г =.~Г\ Углы -ф], 1|>2 и ф обозначают начальные фазы то-
ков.
Векторные диаграммы широко используют при анализе элек-
трических цепей переменного тока.
Представление синусоидально изменяющихся
электрических величин комплексными числами
> Синусоидально изменяющуюся электрическую величину
можно представить комплексным числом и изобразить в ви-
де вектора на комплексной плоскости с прямоугольной сис-
темой координат (рис. 26, а).
ЗАПОМНИТЕ
Комплексное число состоит из действительной (веществен-
ной) и мнимой частей. По оси ординат откладывают дей-
ствительную часть комплексного числа, а ось обозначают
+ 1 и —1; по оси абсцисс — мнимую часть комплексного
числа, а ось обозначают -|- / и — /.
На комплексной плоскости синусоидальная величина может
изображаться в виде модуля и аргумента или в виде двух
составляющих вектора, направляемых по действительной
и мнимой осям. Например, синусоидальный ток i =
= /,„sin(co/ + ф,) представляют вектором 1,п, модулем кото-
рого является значение амплитуды тока Im, а аргументом —
начальная фаза ф,-, которую можно выражать в радианах
или в градусах (рис. 26, а). Составляющими вектора 1п
по действительной оси будет Гт, а по мнимой 1„, т. е.
45
Im — I'm + jl'm — I«СОЭф, -ф /7msim|)(.
Вектор i,„ называют комплексной амплитудой тока.
Обычно при расчетах пользуются действующими значениями. Комплекс
действующего значения электрической величины получают путем деления комп-
лексной амплитуды на д/2 :
/ = /т/д/2 ; О = Йт/ф2 ; Ё = Ёт/^2 .
ЗАПОМНИТЕ
Комплексы действующих значений кратко называют комп-
лексом величины, например комплекс тока, комплекс напря-
жения и т. д.
ПРИААЕР Запишем выражение для мгновенного значения тока, если комплекс-
ный ток / = (4 + /3) А. частота тока / = 50 Гц, <о= 2я[ — 2 • 3,14 50 =
= 314 рад/с.
В этом случае амплитуда тока Л„, аргумент ф. Амплитудное значение тока
= д/2 / = д/2 -V(47 + З7) = 7,05 А. Аргумент ф определяем через tgvp, = 3/4
(рис. 26, а). По тригонометрической таблице находим ф = 37°. В результате
мгновенное значение тока запишем в виде i = 7,05-sin (314г -ф 37°), А.
Если надо сложить или вычесть синусоидальные величины
одинаковой частоты, применяют два способа: графический и ана-
литический. Например, найдем аналитическим способом сумму
двух эдс:
ei= E|msin(co( + ф|) и е2 = E2msin(w/4-Фг).
Решение задачи сводится к нахождению амплитуды и ар-
гумента ф суммарной эдс е = е\ -ф е2. Эта сумма соответствует
сумме проекций на действительную и мнимую оси комплексной
плоскости (рис. 26, б):
£lm = Е'\т 4* jE"m, ^2т — E'im 4~ jE'im', Ёт = Е'\т -ф £2т -ф
+ j(E"m 4“ E'inx) = Е'т 4“ jE'm-
Проекции Е'т и Е'т, найденные в результате суммирования
соответствующих проекций векторов Ё\т и £2т, будут действи-
тельной и мнимой составляющими комплексной амплитуды
Ёт. Модуль результирующей эдс
Ет = V(£m)2 4- (£й)2 -
Аргумент ф определяется из выражения 1§ф = Е'т/Е'т.
ЗАПОМНИТЕ
При построении векторных диаграмм точно фиксируют
угол сдвига между векторами, а положение их относитель-
но осей комплексной плоскости может быть произвольным,
46
поэтому оси можно не изображать. При этом для удобства
анализа и построения векторных диаграмм начальный фа-
зовый угол одной из электрических величин (чаще напря-
жение источника электрической энергии) принимают рав-
ным нулю.
При анализе электрических цепей переменного тока прихо-
дится иметь дело с умножением и делением электрических ве-
личин. В этом случае удобно пользоваться комплексами этих
величин, записанными в показательной форме:
/ = /е'1*"; О =
где ei'f — оператор поворота единичного вектора относительно
оси действительных величин. Например, произведение 01 и част-
ное 0/1 имеют такой вид:
01 = Ole^+'M; 0/1 = (U/1)^--^.
Для единичного вектора тока (/= 1А) и значений = 0;
л/2; —л/2; л имеем:
/е>° = 1; /е'"/2 = + /; /e~M = - /; /е“" = — 1.
► Отсюда следует, что умножение на / означает поворот векто-
ра на угол +90 ° (в сторону, противоположную направле-
нию движения стрелки часов). При умножении на /2 =
= /•/ вектор поворачивается на +180° и занимает направ-
ление, обратное исходному положению. Умножение на —/
означает поворот вектора на угол —90° (по часовой
стрелке).
§14. Однофазные синусоидальные электрические
цепи
Параметры синусоидальной электрической цепи
Как известно, переменный ток во всех участках электрической
цепи с резистором R, индуктивной катушкой L и конденсатором С
может существовать длительно и как ток проводимости, и как ток
смещения.
ЗАПОМНИТЕ
Сопротивление резистора из-за явлений вытеснения тока к
поверхности проводника несколько возрастает и тем боль-
ше, чем больше частота тока в резисторе. При переменном
напряжении на зажимах конденсатора в диэлектрике,
заключенном между его электродами, электрическая энергия
преобразуется в энергию электрического поля и запасается.
47
Нельзя себе представить ток без магнитного поля так же,
как и магнитное поле без тока. Это в равной степени отно-
сится как к постоянному, так и переменному токам. При
переменном токе переменным будет и магнитный поток,
следовательно, в каждом элементе электрической цепи
будет наводиться эдс самоиндукции, будет накапливаться
энергия и, наконец, преобразование электрической энергии
в тепловую, как необратимый процесс, происходит непре-
рывно во всех элементах электрической цепи. При этом не
только резисторы, но и катушки индуктивности, а также
конденсаторы обладают электрическим сопротивлением
и при наличии тока в них происходит выделение теплоты.
► Таким образом, все элементы электрической цепи обладают
одновременно: индуктивностью L, емкостью С и электриче-
ским сопротивлением R.
В реальной цепи на одном каком-либо участке, например
в конденсаторе, преобладает электрическое поле; в катушках
индуктивности преобладает магнитное поле. Поэтому, отвлекаясь-
от действительной картины сложных физических явлений, будем
считать, что, например, резистор в цепи переменного тока обла-
дает активным сопротивлением и для него пренебрежимо
малы L и С. В дальнейшем параметр резистивного элемента R
в цепи будем характеризовать как активное сопротивление пере-
менному току, а его значение определять степенью выделения
энергии — тепловой, механический и т. д.
В двух других элементах (L и С) энергия магнитного и элек-
трического полей периодически с частотой тока изменяется. Это,,
как известно из физики, связано с возникновением электродви-
жущих сил eL и ес, направленных против приложенного к этим
элементам напряжения. Поэтому элементы L и С в электрической
цепи переменного тока называют реактивными, а их способность
противодействовать переменному току, называют реактивным
сопротивлением элементов. Для элемента L это сопротивление
называют индуктивным и обозначают XL, для элемента С —
емкостным сопротивлением и обозначают Хс
Электрическая цепь переменного тока
с резистивным элементом
В электрической цепи с резистивным элементом R (рис. 27, а)
ток изменяется по синусоидальному закону с начальной фазой
ф,, т. е. i = /msin (<в/ -ф ф,). Напряжение на зажимах резистора
ик = Ri — Rlmsin (ut -ф ф,) = URmsin (<о/ -ф фи),
где URm = Rlm — амплитудное значение напряжения на зажимах
резистора, фи = ф, — начальные фазы напряжения и тока.
48
Кривые изменения напряжения uR и тока i (рис. 27, б) в один
и тот же момент времени t достигают максимального значения
и одновременно проходят нулевые значения. Иначе говоря, обе
кривые совпадают по фазе
<р = фи — ф,= 0.
Векторы U Rn и / т совпадают по направлению (угол <р = 0).
Переходя к действующим значениям, можно записать / — lmN2 ;
UR = i/«ra/V2 .
Электрическая цепь переменного тока
с индуктивным элементом
В электрической цепи катушки индуктивности L (рис. 28, а),
подключенной к источнику синусоидального напряжения, возни-
кает синусоидальный ток i = lm sinw/.
Синусоидальный ток I в витках катушки с индуктивностью L
возбуждает магнитное поле; эта связь характеризуется потоко-
сцеплением Т = wO=Lz=L/msino)Z, откуда следует, что Ф =
= (L/tez) /msino)/ = OmSincoZ. Здесь Фт=(1/и»)/ш — амплитуда
магнитного потока.
ЗАПОМНИТЕ
Таким образом, при синусоидальном токе на участке цепи
с индуктивностью L магнитный поток Ф также синусоидаль-
ный и совпадает по фазе с током I.
Совпадают по фазе также векторы тока 1т и магнитного
потока. показанные на векторной диаграмме (рис. 28, б).
Кроме того, графики изменения во времени тока и магнитного
потока Ф (рис. 28, в) имеют в любой момент времени t одина-
4—85
49
ковые фазы. В свою очередь, возбуждаемый током i магнитный
поток Ф индуцирует в витках этой же катушки электродви-
жущую силу самоиндукции е^, которая изменяется пропорцио-
нально скорости изменения тока в цепи и зависит от индуктивности
катушки, т. е.
_ ____ ___ г di______ . Imd(sinu>t)
L dt L dt
ЗАПОМНИТЕ
При расчетах цепей переменного тока используют матема-
тические преобразования и равнозначные замены. Так,
вместо синусоиды можно взять косинусоиду, умноженную
на угловую частоту со, и записать, не нарушая равенства,
в уравнении
(ocOSCOT
dt
Тогда выражение для eL преобразуется так:
eL = — <oL/mcoswZ = £,tmsin(coZ — л/2).
Таким образом, вектор Tz Lm (рис. 28, б, в) и мгновенные зна-
чения eL, представленные графиком изменения во времени, пока-
заны отстающими по фазе от тока в цепи на угол л/2.
В цепи переменного тока эдс самоиндукции eL должна урав-
новешиваться напряжением uL, приложенным к зажимам катуш-
ки, и в любой момент времени их мгновенные значения должны
быть равны по абсолютному значению и противоположны по
знаку, т. е. uL = — eL.
50
^АПОМНИПГЕ
Из векторной диаграммы и графиков изменения во времени
мгновенных значений uL и следует, что эдс самоиндукции
eL всегда находится в противофазе с приложенным на
зажимы катушки напряжением uL.
На основании сказанного запишем выражение для напряже-
ния на зажимах катушки с индуктивностью:
uL = — eL = <i>L/msin(wZ + л/2),
т. е. на участке цепи с индуктивностью L напряжение опережает
ток на четверть периода (<р = л/2).
Если индуктивность L выразить в Ом-с, а угловую частоту
со — в 1/с, то размерность индуктивного сопротивления XL бу-
дет Ом. Индуктивное сопротивление участка цепи зависит от
частоты переменного тока и значения индуктивности XL — 2nfL.
Например, если L = 0,1 Гн, то при f'= 50 Гц индуктивное сопро-
тивление катушки X'L — 2л-50-0,1 = 31,4 Ом. При частоте тока
f" = 400 Гц индуктивное сопротивление катушки X" = 0,1 -2л X
X 400 = 251,2 Ом, т. е. возрастет в f"/f' = 400/50 = 8 раз.
Электрическая цепь переменного тока
с емкостным элементом
В электрической цепи конденсатор С подключен к источнику
синусоидального напряжения и= t/msin<i)/ (рис. 29, а).
ЗАПОМНИТЕ
При изменении напряжения на зажимах конденсатора
между его обкладками возбуждается электрическое поле,
которое изменяется во времени, как и напряжение, по сину-
соидальному закону. Под воздействием сил поля ток в цепи
изменяется пропорционально скорости изменения зарядов
на пластинах конденсатора (i — dq/dt). Учитывая, что q =
= Сис, выражение для тока I через емкость примет вид
i=cdu^= Сшист ^П0)<) = ^CUcmsin(w/ + л/2).
dt dt
Таким образом, мгновенное значение тока в цепи на участке
с емкостью, изменяясь во времени, опережает напряжение
на четверть периода, т. е. фазовый угол между током I и
напряжением ис составляет <р = л/2. На векторной диаг-
рамме (рис. 29, б) вектор тока опережает вектор напряже-
ния на угол л/2.
51
4*
29
ния будет Г-----------!------ = —
? [ А.(с/В).(1/с) А
Запишем выражение для
действующего значения тока
через емкость
/ = u>CUc, или / = Uc/Xc,
где Хс= 1 /(<оС) — емкостное
сопротивление, характери-
зующее процесс накопления
энергии в электрическом по-
ле конденсатора. Размер-
ность емкостного сопротивле-
Ом] .
§15. Последовательное, параллельное и смешанное
соединение приемников переменного тока.
Векторные диаграммы
В электрической цепи (рис. 30, а) элементы R, L и С соеди-
нены последовательно и подключены к источнику синусоидаль-
ного напряжения. Ток в такой цепи будет изменяться также по
синусоидальному закону.
Уравнение электрического состояния цепи для мгновенных
значений напряжений имеет вид и = uR + uL -f- ис. Если выра-
зить uR, uL и ис через ток и параметры элементов R, L и С,
получим
и = Rlmsinut + wL/msin(n)Z + л/2) + (1/<оС)/т sin (<о/ — л/2).
Уравнение электрического состояния может быть записано
так же, как сумма векторов напряжений, т. е. вектор напря-
жения на входе цепи будет равен сумме^векторов напряжений
на элементах R, L и С (рис. 30, a): U = UR -(- UL Uc.
► Сравнивая правые части уравнений электрического состоя-
ния, записанные для мгновенных значений и в виде векто-
ров, можно видеть, что напряжение uR на элементе R сов-
падает по фазе с током, напряжение uL на элементе L
опережает ток на угол л/2 и напряжение ис на элементе С
отстает от тока на угол л/2. Поэтому уравнение в виде
суммы векторов можно представить как геометрическую
сумму векторов на векторной диаграмме.
Построение векторной диаграммы можно начать с вектора
тока /, так как при последовательном соединении R, L и С он
является общим для всех элементов цепи. Направим вектор тока
по горизонтальной оси (рис. 30,6), векторы напряжений на
участках строим при условии обхода контура против направле-
ния тока. Стрелки векторов напряжений направляются в сторо-
52
ну возрастающего потенциала. Потенциал точки о приравняем
к нулю (Vo = 0), вектор Ur совпадает с вектором тока и направ-
лен от точки о к точке с. Напряжение на элементе L опережает
ток на угол л/2, поэтому вектор lTL строим из точки с к точке b
под углом л/2 к вектору тока. Напряжение надлементе С отстает
от тока на угол л/2, следовательно, вектор Uc необходимо на-
править в сторону отставания, т. е. на диаграмме идточки b вниз
до точки a (UC<UL). Соединив конец вектора Up с началом
координат, пцлучидо вектор надряжеция источника Uao-
Векторы Uao, UR и Uас = UL — Uc образуют прямоугольный
треугольник напряжений, из которого получим
Uao = + Uас = ~ Uc)*.
Поделив напряжение на ток, получим выражения для полно-
го сопротивления:
Z = \/R2 4- [<oL - 1/(<1>С)]2 = R2 + X2 ,
где X = XL — Хс — реактивное сопротивление электрической
цепи.
На векторной диаграмме этому выражению соответствует
треугольник сопротивлений опгп. Индуктивное и емкостное со-
противления характеризуют свойства цепи, обусловленные ее
реакцией на изменение тока и напряжения, поэтому их назы-
вают реактивными.
Из треугольника сопротивлений можно определить угол сдви-
га фаз ф между током и напряжением по формулам: cos ф =
= R/Z, или tg ф = X/R. Зная cos ф или tg ф, по тригонометри-
ческим таблицам определяют угол ф.
ЗАПОМНИТЕ
В электротехнике условились угол ф обозначать стрелкой,
направленной от вектора тока к вектору напряжения.
53
Знак угла <р в выражении для мгновенного значения тока i
определяется характером нагрузки: при индуктивном ха-
рактере нагрузки (XL > Хс) ток отстает от напряжения
на угол <р и в выражении для мгновенного значения
тока угол <р записывают со знаком минус, т. е. i —
= /msin(w/ — ф); при емкостном характере нагрузки (Хс >
> XL) ток опережает напряжение и угол ф в выражении
мгновенного значения тока записывают со знаком плюс,
т. е. i = /msin(co/ + ф).
;i ; . Л.11 в схеме электрической цепи (рис. 30, а) напряжения на элемен-
тах равны: UR = 40 В; UL = 30 В; Uc = 60 В. Определить напряжение на
входе цепи Uao (напряжение источника) и напряжения на участках Uac и дьо.,
Векторная диаграмма построена на рис. 30, б.
Рассмотрим электрическую цепь, состоящую из двух приемни-
ков, подключенных параллельно к зажимам источника синусои-
дального напряжения и = L/msin со/ (рис. 31, а). В первом прием-
нике включены последовательно элементы R\ и L, во втором со-
ответственно /?2 и С. Оба приемника находятся под действием
одного общего напряжения.
Выражение для мгновенных значений токов в первой и вто-
рой ветвях заданной цепи имеют соответственно индуктивный
и емкостный характер:
ii = /imSin (со/ — ф1); /2 = /2msin (со/ + ф2).
Действующее значение тока / и косинус угла ф определяем
из следующих выражений:
для первой ветви
Л = U/^R'2 + X?; cos ф, = + XI ;
для второй ветви
/2 = U/^JrI + X2-, СОЭФ2 = Я2/7Rl + Х2с-
Зная токи в ветвях, нельзя определить значение тока / в не-
разветвленной части цепи простым сложением токов 1\ и /2, так
как при этом необходимо учитывать их фазовые углы ф, и ф2.
Поэтому ток I определяют как геометрическую сумму токов в
ветвях, т. е. / = /1-|-/ 2- На рис. 31,6 изображена векторная
диаграмма, где произведено такое суммирование (принято Л>/2
И ф2>ф|).
Значения токов в ветвях и в неразветвленной части цепи мож-
но определить и аналитически. Для этого вводят понятия актив-
ной и реактивной составляющих тока для ветви при последова-
тельном соединении активных и реактивных элементов. Так, для
первой ветви с элементами R и L
1 I = / 1а + / lp-
54
В этом случае ветвь с током Л (его активной и реактивной
составляющими) будет соответствовать двум параллельным вет-
вям (рис. 31, в) с проводимостями g\ и bL. В одной ветви схемы
замещения будет активная составляющая тока Ла.== /jcostpi,
по фазе совпадающая с напряжением; в другой — реактивная
составляющая тока Др = Zisin <pi, которая по фазе отстает от
напряжения на угол л/2.
> Ветвь с активной составляющей тока характеризуется ак-
тивной проводимостью g\, выражение для которой можно
получить исходя из формулы для активной составляющей
тока /1а, т. е.
/1а = /, cos= (U/Z^Rt/Zt) = URi/Z^ = glU,
где g\ = R\/Z\ — активная проводимость первой ветви.
ЗАПОМНИТЕ
Активная проводимость g = R\IZ2 выражается в сименсах:
1 /[ Ом] = [ См].
Активная проводимость ветви g\ не является величиной,
обратной активному сопротивлению /?,, так как в выраже-
ние полного сопротивления ветви Z? = /?? + (о>£)2 входит
реактивная составляющая <»/..
► Ветвь с реактивной составляющей тока характеризуется
реактивной проводимостью bi.. Выражение реактивной про-
водимости можно получить из формулы для /1Р, т. е.
/|Р = /isincpi = UmL/Z'x = b-.JU,
где bL = <oL/[ R2i + (co/,)2]
реактивная проводимость
первой ветви, См.
55
ЗАПОМНИТЕ
Реактивная проводимость bL не является величиной, обрат-
ной реактивному сопротивлению, так как при ее определе-
нии учитывается и активное сопротивление ветви.
Полная проводимость первой ветви:
h = л/Я| +
Ток в первой ветви (см. рис. 31, а) определяется по формуле
/. = Y\U.
Активная составляющая тока Ua совпадает по фазе с напряже-
нием U. Значение /2а определим по формуле
/2а = /2 cos <р2 = g2U = и £У + Р/(ШС)|2 .
Реактивная составляющая тока /2р определяется по формуле
/2р - /2 Sin ф2 = bcU = и-
Активная составляющая тока /а в неразветвленной части цепи
равна сумме />а и /2а (обе составляющие совпадают по фазе с
напряжением):
Л = /|а + /2а = (gl + gi)U = gU
Реактивная составляющая тока первой ветви l\v отстает по
фазе от напряжения на угол л/2, а реактивная составляющая
тока второй ветви /2р опережает напряжение на л/2.
> Таким образом, реактивная составляющая тока /р в нераз-
ветвленной части цепи равна разности реактивных состав-
ляющих токов /|Р и /2р. Реактивная проводимость для ветви
с индуктивностью bL записывается со знаком плюс, а для
ветви с емкостью Ьс — со знаком минус.
/Р = ЛР — hp — (bL — bc)U — bU.
Выражение полного тока в неразветвленной части цепи имеет
вид
/ = -V7F+7P2 = Vte2 + ьг)и = yu.
При смешанном соединении ветвей расчет токов в ветвях
производится методом эквивалентных преобразований с
использованием проводимостей. Эквивалентное сопротивле-
ние приемника определяется через проводимости ветвей
и полную проводимость разветвления.
56
§16. Анализ и расчет простых электрических цепей
переменного тока с помощью
комплексных чисел
Анализ режимов в электрических цепях существенно упрос-
тится и станет более наглядным, если воспользоваться
комплексными числами, а векторные диаграммы напряже-
ний и токов строить на комплексной плоскости. Уравнения
электрического состояния для цепи переменного тока в ком-
плексной форме сходны с уравнениями электрического сос-
тояния для цепей постоянного тока. Благодаря этому
анализ и расчет электрических цепей синусоидального тока
с помощью комплексных чисел получил в практике широкое
применение.
Сущность метода состоит в том, что в уравнениях электриче-
ского состояния мгновенные значения тока и напряжения на всех
участках заменяют комплексными. Так, мгновенные значения то-
ка i и напряжения и заменяют комплексом тока 7 и напряже-
ния U. Мгновенное значение напряжения uR = Ri на резистив-
ном участке с сопротивлением R заменяют комплексом UR — R1,
по фазе совпадающим с током 7. Мгновенное значение напряже-
ния uL = шЫ на участке с индуктивностью L заменяют комплек-
сом jwLl. Оператор Д здесь как множитель, указывает на то, что
вектор напряжения UL повернут на угол + л/2 по отношению к
вектору тока 7. Следовательно, если на комплексной плоскости
вектор напряжения ОL направлен по оси действительных значе-
ний (оси -f-1), то вектор тока 7 направлен по мнимой оси — /.
При этом, если вектор UL занимает любое другое положение на
комплексной плоскости, вектор тока 7 будет занимать по отноше-
нию к вектору UL положение, определяемое углом —л/2.
Значение напряжения ис = г/(<оС) на емкостном элементе С
заменяют комплексом —jl/(wC). Умножение на —/ указывает
на то, что напряжение на емкости по фазе отстает от тока на
угол л/2.
ЗАПОМНИТЕ
Уравнения электрического состояния в комплексной форме
имеют вид: для ветви 7 = (7/Z; для узла ^7 = 0, для кон-
тура XZl = SE.
Контурное уравнение электрического состояния цепи при
последовательном соединении элементов R, L и С, записанное
в комплексной форме, имеет вид U = Rl + jmLI — /7/(ыС) =
= (А? + jXL — jXc)I = Z7, откуда можно найти комплекс тока
57
i = 0/z = 0/[r + j(xL - xc)] = 0/(R + /X),
где Z — комплексное сопротивление цепи.
Чтобы освободиться от мнимых составляющих комплексного
числа в знаменателе, умножим и разделим правую часть урав-
нения на сопряженный комплекс сопротивления:
1 = [ U/(R + jX)][R - jX)/(R - jX)] = U(R - jX)/(R2 + X2).
► В общем случае комплекс полного сопротивления Z в пока-
зательной форме состоит из модуля комплекса Z = д//?2~|-Х2
и аргумента <р, который определяется разностью углов на-
чальных фаз напряжения (фи) и тока (ф<), Z = Ze'4’.
При параллельном соединении приемников (рис. 32) они на-
ходятся под общим напряжением и — Umsmat.
В комплексной форме выражение для тока в неразветвленной
части цепи согласно уравнению электрического состояния для
узла 1 (или узла 2) имеет вид
или
/ = YU.
Под комплексной проводимостью понимают отношение комплекса тока
к комплексу напряжения, или величину, обратную комплексу сопротивления
y=i/z.
Для нагрузки индуктивного характера, когда Х£>ХС,
Y = l/(Zellf) = Ye~i4 = g - jb;
для нагрузки емкостного харак-
тера, когда XC>XL,
Z = 8 + jb.
Пользуясь комплексными чис-
лами, анализ режимов в элект-
рических цепях при смешанном
58
соединении элементов можно производить рассмотренными ра-
нее методами, например методом эквивалентных преобразований
или методом пропорциональных величин.
§ 17. Активная, реактивная и полная мощность
переменного тока. Коэффициент мощности
Мощность в цепи переменного тока является также пере-
менной величиной и на любом заданном участке цепи в лю-
бой момент времени t определяется как произведение мгно-
венных значений напряжения и тока.
Так, в цепи с активным сопротивлением мгновенное значе-
ние мощности р — ui. Принимая и — Um sin at и i = Im sin at,
получим
p = Umlm sin2wZ = (1 - cos2<b/) = Ul —UI cos2oj/,
где UI = Umlm 12.
Следовательно, активная мощность имеет постоянную состав-
ляющую UI и переменную UIcos2o>Z, изменяющуюся с двойной
частотой. Ее среднее значение равно P=U1. График P(at)
представлен на рис. 33, а.
В цепи с реактивным сопротивлением, например индуктивным,
мгновенное значение мощности равно q = ui. Эту мощность на-
зывают реактивной. Принимая и= Umsmat и i = /msin(w/ — л/2) =
= — lm cos at, имеем q = Umlm sin at cos at = sin2co/ =
= UI sin2w/.
Полученное выражение показывает, что реактивная мощность
содержит только переменную составляющую, изменяющуюся с
двойной частотой (рис. 33,6); ее среднее значение равно нулю.
59
ЗАПОМНИТЕ
Если ток и напряжение синусоидальны и цепь содержит эле-
менты R и L или R и С, то в таких цепях кроме необратимого
преобразования энергии в активном элементе R происходит
изменение энергии магнитного и электрического полей в ре-
активных элементах L и С. В этом случае полная мощность
равна сумме активной и реактивной мощностей:
s = ui = р + q.
Для примера рассмотрим цепь с элементами R и L (рис. 34, а).
Графики изменения мгновенных значений тока и напряжения во
времени показаны на рис. 34, б. Выражение для значения полной
мощности имеет вид s = ui = UmIm sin (at sin(co/ — <p).
После подстановки sin(w/— <p) = sin co/ cos <p — cosco/sin ф и за-
мены амплитудных значений напряжения и тока их действующими
значениями получим
$ = t//cos<p — (7/cos <р cos 2ш/ — t//sn^sin2co/.
Значение полной мощности можно рассматривать в виде суммы
двух составляющих s = р + q, где р — U1 соэф — U1 совф cos2co/
и <7= — UI sin<psin2oj/ — мгновенные значения активной и реак-
тивной мощностей на участках R и L. Графики р, q, s в зависи-
мости от со/ представлены на рис. 34, в.
Действующее значение активной мощности выражается в ват-
тах
Р = UI cos ф.
Реактивная мощность q— Qmsin2co/ изменяется с двойной
частотой и ее действующее значение
Q = UI sin ф.
Реактивную мощность выражают в вольт-амперах реактивных
(вар). В общем случае в цепи при последовательном соединении
элементов R, L и С реактивная мощность характеризует энергию,
направляемую источником в цепь на создание электрических и
магнитных полей в приемниках.
► Предельная мощность, которую может развивать электро-
машинный генератор, определяется номинальным (наи-
большим по условиям нагрева) током в проводниках его
обмоток и номинальным напряжением на выходных зажи-
мах генератора. Поэтому наибольшая, или полная, мощ-
60
ность генератора — это произведение действующих значе-
ний напряжения и тока: S = U1. Размерности Р и S
одинаковы, однако в практике условились полную мощ-
ность S выражать в вольт-амперах (В-А).
Активная, реактивная и полная мощности, выраженные че-
рез параметры электрической цепи, имеют такой вид:
Р — Rr; Q = ХГ~ и S = Z/2 и так же, как сопротивления R,
X, Z, образуют треугольник мощностей (рис. 34, г).
Из треугольника мощностей можно записать выражение для
полной мощности
S = VA2 + Q2.
61
Для цепи с элементами R, L и С реактивная мощность записы-
вается как алгебраическая сумма реактивных мощностей
Q — Ql Qc-
ЗАПОМНИТЕ
Реактивная мощность в треугольнике мощностей является
положительной (QL), когда ток в цепи отстает от напряже-
ния, и отрицательной (Qc), когда ток опережает напряже-
ние.
Связь полной и реактивной мощностей выражается формулой
Р = S costp = UI cos<p,
откуда
cos <p = P/{U1).
Отношение активной мощности Р к полной 5 называют козффициентом
мощности costp. Он показывает, какую долю всей вырабатываемой источником
мощности составляет активная мощность.
Очевидно, что чем больше costp, тем экономичней работает
энергосистема, так как при одних и тех же значениях тока / и
напряжения U источника можно получить большую активную
мощность. Или при определенных значениях напряжения и мощ-
ности источника можно передавать активную энергию меньшим
током, что снижает потери в линии электропередачи.
Одним из способов повышения costp является включение па-
раллельно нагрузке R, L батареи конденсаторов С (рис. 35, а).
Векторная диаграмма представлена на рис. 35, б, из которой
видно, что при включении конденсатора cos<p2>cos<pi и /л</.
35
62
§18. Резонанс напряжений и токов в электрических
цепях переменного тока
Резонансом называется такой режим в электрической цепи, содержащей
катушки индуктивности и конденсаторы, при котором ее входное реактивное
сопротивление при последовательном соединении элементов (или ее входная
реактивная проводимость при параллельном соединении ветвей с элементами L
и С) равно нулю. При резонансе ток и напряжение на входе цепи совпадают
по фазе.
Различают два вида резонансных состояний: резонанс напря-
жений и резонанс токов.
Резонанс напряжений
Резонанс напряжений может быть в цепи при последователь-
ном соединении элементов R, L и С (рис. 36, а). Резонанс насту-
пает при равенстве реактивных сопротивлений, т. е. когда
— ^С-
Имея в виду, что сопротивления XL и Хс такой цепи зависят
от угловой частоты со, при заданных параметрах L и С измене-
нием частоты <о можно получить равенство реактивных сопротив-
лений: uL = 1/(<оС). В этом случае полное реактивное сопротив-
ление цепи станет равным нулю: X — a>oL — 1/(а>оС) = 0.
Отсюда получим резонансную угловую частоту
соо = 1 /V LC
При резонансе XL — Хс = 0, полное сопротивление цепи будет
наименьшим Z = R. Ток в цепи по фазе совпадает с напряжением
на входе (<р= 0), а его значение максимально:
/рез = U/R.
Векторная диаграмма, построенная при резонансе напряжений,
представлена на рис. 36, б.
36
63
Режим резонанса может быть получен изменением частоты
напряжения источника при неизменных параметрах элементов L
и С или изменением параметров L и С (либо одного из них)
при w = const.
ЗАПОМНИТЕ
В связи с явлением резонанса напряжений следует иметь в
виду, что когда соТ = 1/(®С)^> /?, напряжения UL и Uc на
реактивных элементах L и С могут быть много больше на-
пряжения на входе цепи. Поэтому в электроустановках
большой мощности резонанс напряжений, который может
наступить внезапно, например, при изменении емкостного
сопротивления, приводит к опасным перенапряжениям и
рассматривается как аварийный.
Резонанс токов
В электрической цепи при параллельном соединении двух вет-
вей, когда в одной ветви включены элементы Ri и L, а в другой
Rz и С (рис. 37, а), может установиться режим резонанса токов,
при котором ток в неразветвленной части цепи будет совпадать
по фазе с напряжением (<р= 0, рис. 37, б).
> В режиме резонанса токов реактивные проводимости обеих
ветвей равны (bL = bc), поэтому реактивные составляющие
токов в параллельных ветвях будут равны по значению и
противоположны по направлению. Ток в неразветвленной
части цепи будет только активный, равный сумме активных
составляющих токов в ветвях
I = Ла + Ла == (gl + g'i) и
64
Из условия резонанса bL — be через параметры цепи и часто-
ту получим
_ 1 -д/L/C-tf
° LC' L/C - RI
Отсюда следует, что состояние резонанса токов в цепи мож-
но получить либо изменением частоты источника <о, либо
изменением параметров L, С, R\ и
§19. Анализ электрических цепей с переменными
элементами с помощью круговых диаграмм
► При анализе режимов в электрических цепях часто пред-
ставляется необходимым определять зависимость изменения
одной какой-либо электрической величины от изменения
одного или нескольких параметров цепи. Такой анализ ре-
жима цепи можно проводить графически построением кру-
говых диаграмм.
Круговая диаграмма — это геометрическое место концов векторов тока или
напряжения при изменении по модулю какого-либо параметра исследуемой цепи
при условии сохранения неизменными всех других параметров, а также часто-
ты и входного напряжения.
Рассмотрим круговые диаграммы токов на примере простей-
ших электрических цепей. На рис. 38, а, б представлены цепи
при последовательном соединении элементов R, L и R, С. Выяс-
ним с помшцью круговой диаграммы (рис. 38, в) характер изме-
нения тока / при изменении сопротивления элементов Xl и Хс.
При заданном значении напряжения питания U векторы на-
пряжения Or = R1 и 0х — ±jXI на комплексной плоскости при
изменении сопротивления R или X всегда располагаются под
углом л/2. Поэтому конец вектора напряжения Or (или потен-
циал точки Ь) при изменении любого из указанных параметров
будет описывать окружность, образуя так называемый годограф
напряжения. Диаметр окружности равен длине вектора 0. При
этом, если Х = Xl (индуктивность), то годограф образует правую
полуокружность, а если X = Хс — левую.
Вектор тока / совпадает по направлению с вектором Or =
— R1. Поэтому при R = const и переменном X конец вектора
тока 1 будет также описывать соответствующие полуокружности.
Здесь диаметр окружности равен току короткого замыкания
/к. Ток /к подсчитывается при X = 0. Он будет активным:
/к = 0/R.
Проследим за изменением вектора тока / при изменении со-
противления R и неизменном значении сопротивления реактив-
ного элемента, например индуктивности (рис. 39, а).'
При R = 0, что соответствует режиму короткого замыкания
5—85 65
участка be, в цепи остается только реактивный элемент L с
сопротивлением XL, поэтому ток /к будет индуктивным и его зна-
чение определится по формуле
/к = O/(JXL) = — jU/XL.
Вектор тока /к по фазе будет отставать от напряжения 0
на угол л/2 и по направлению совпадать с осью—/ (рис. 39, б).
В выбранном масштабе отложим вектор тока /к и на нем, как
на диаметре, построим полуокружность. Далее для каждого
задаваемого значения R будем находить комплекс тока /. Для
этого в масштабе сопротивления по оси —/ отложим катет
X/. (отрезок СМ). Из точки М параллельно вектору 0 проведем
линию переменного параметра R. Чтобы определить ток, нужно
39
отложить заданное значение R по линии параметра R в масштабе
сопротивления гпп (отрезок ММ), прямая CN и будет направле-
нием вектора тока /, а точка А — место пересечения с окруж-
ностью прямой CN — определит значение тока 1. Фазовый угол
Ф определяется через tg ф из соотношения tg ф = XL/R =
= CN/M~N.
§ 20. Электрические цепи с индуктивно-связанными
элементами
Индуктивно связанными элементами электрической цепи переменного тока
называют индуктивные катушки, в которых кроме эдс самоиндукции создается
эдс от действия переменного магнитного поля других индуктивных катушек с
током. Такая эдс называется эдс взаимной индукции.
На рис. 40, а показаны магнитные потоки, создаваемые током
одной из катушек. Часть магнитного потока Ф2| пронизывает
витки второй катушки, а часть, называемая потоком рассеяния
Ф„, замыкается вне ее витков. Аналогичная картина будет, если
действует только ток второй катушки (рис. 40, б).
Взаимная индуктивность М характеризует свойство созда-
вать током одной катушки эдс взаимной индукции в другой ка-
тушке посредством частичного потокосцепления Ч'гь Так, взаим-
ная индуктивность между первой катушкой с током и второй
М21 = Аналогично между второй и первой катушками
Л4|2 = ’РД/Д При этом принимается A4i2 = A42i = Л4.
> Чтобы знать, как направлены друг относительно друга маг-
нитные потоки самоиндукции и взаимной индукции, исполь-
зуют разметку зажимов индуктивно связанных элементов
цепи. Два зажима, принадлежащие двум разным индуктив-
но связанным элементам цепи, называют одноименными на
основании следующего правила: при одинаковом направ-
лении токов относительно одноименных зажимов магнитные
5*
67
41
потоки самоиндукции и взаимной индукции в каждой ка-
тушке суммируются.
Для обозначения одноименных зажимов обычно пользуются
символом «звездочка» (4) или «точка» (•). Разметим зажимы
катушек на рис. 41, а. Если ток 1\ имеет направление от зажима а
к зажиму Ь, а ток ii — от зажима с к зажиму d, то магнитные
потоки самоиндукции Фп и Ф22 и взаимной индукции Ф12 и Ф21
суммируются. Следовательно, зажим а одноименен с зажимом с,
а зажим b — с зажимом d. Для катушек (рис. 41, б) одноимен-
ными являются зажимы ai и d\, а также Ь\ и с1( так как в этом
случае намотка витков второй катушки имеет другое направ-
ление.
Возможны два способа последовательного включения двух
индуктивно связанных элементов цепи: согласное (рис. 42,а) и
встречное (рис. 42, б). При согласном включении токи в обоих
элементах цепи в любой момент времени имеют одинаковое
направление относительно одноименных зажимов, а поэтому маг-
нитные потоки самоиндукции Фп и Ф22 и взаимной индукции
Ф12 и Ф2|, сцепленные с каждым элементом, складываются. При
встречном включении токи в обоих элементах цепи в любой мо-
мент времени имеют противоположные направления относительно
одноименных зажимов и поэтому магнитные потоки самоиндук-
ции и взаимной индукции, сцепленные с каждым элементом,
различны по направлению.
Индуктивность цепи, состоящей из двух индуктивно связан-
ных элементов:
L = W/i = (V, + Т2)/«,
где 4*1 и Тг — потокосцепления первого и второго элементов
цепи.
При согласном включении элементов
= Ld 4- Mi; ¥2 = L2i + Mi и
L = (4, + T2)/i = L, 4 L2 4 2M.
При встречном включении элементов
L = L\ 4 Li — 2M.
68
В общем случае
L — L\ 4~ £2 ± 2Л4.
Знак «+» относится
к согласному включе-
нию, а знак «—» — к
встречному. Если L\ =
= Li—M, то при со-
гласном включении эле-
ментов £=4£2 = 4£| —
индуктивность цепи в
четыре раза больше
индуктивности одного
элемента. При встреч-
ном включении £ = 0,
так как магнитные по-
ля обоих элементов
взаимно нейтрализуют
друг друга.
Рассмотрим связь между током в цепи i и напряжениями
«1 и U2 на ее элементах. Напряжения и\ и м2 имеют три состав-
ляющих: U\ — R\i + UlL + UIM; «2 = Ril + «2Г + «2М-
В комплексной форме эти соотношения имеют следующий
ВИД: = Ril + jaLtl ± /<оМ/;
U 2 = R2I 4" /С1)£2/ -+- ]ыМ1,
где шМ = Хм — сопротивление взаимной индукции, Ом (знак
плюс при согласном включении и знак минус — при встречном).
Напряжения UiM и £72м, обусловленные взаимной индукцией,
равны друг другу и сдвинуты относительно тока по фазе на
±л/2.
§ 21. Электрические цепи с периодическими
несинусоидальными токами и напряжениями
На практике в большинстве случаев кривые эдс и токов от-
личны от синусоиды. Несинусоидальными являются эдс, созда-
ваемые генераторами периодических импульсов — пилообразных,
ступенчатых, прямоугольных и др. В электрических цепях, со-
держащих нелинейные сопротивления, индуктивности или ем-
кости, даже при синусоидальных эдс, возникают несинусоидаль-
ные токи и напряжения. Расчет таких электрических цепей
можно упростить, воспользовавшись методами расчета при сину-
соидальных эдс. При расчете периодических несинусоидальных
функций пользуются разложением их в тригонометрический ряд:
у(и>С) = Ло + Alm sin((o/ 4- ф|) + 42msin(2w/ 4- ф2) 4-
оо
= 4о 4- 2 4*msin(&<oZ 4- Ф<4,
1
м
где Ao — постоянная составляющая; Almsin(a>/ -ф Ф1) — основная
гармоника; Akmsin(ku>t + ф*)— высшие гармоники (£>1);
о» = 2л/ = 2л/Т — основная частота; Т — период несинусоидаль-
ной периодической кривой.
► Если функция задается графиком, то она может быть
представлена конечным рядом.
Существует много способов графического решения, в том
числе использование специальных шаблонов, гармонических ана-
лизаторов и синтезаторов и др.
Разложение несинусоидальной периодической функции на ряд
гармонических сводится к определению амплитуд и начальных
фаз каждой гармоники.
ЗАПОМНИТЕ
Периодически изменяющаяся несинусоидальная функция
характеризуется тремя значениями: максимальным атах,
среднеквадратическим (или действующим) и средним. Для
каждой гармоники эти значения определяются так же, как
и при рассмотрении электрических цепей синусоидального
тока.
Действующее значение несинусоидальной величины зависит
только от действующего значения ее гармоник и не зависит от
их фаз. Амплитуды гармонических составляющих ряда умень-
шаются с увеличением номера гармоники. Поэтому часто при
анализе электрических цепей несинусоидального тока ограничи-
ваются первыми членами ряда.
Среднее значение синусоидальной функции за период равно
постоянной составляющей, так как суммарная площадь, ограни-
ченная кривой, за период любой гармонической составляющей
равна нулю. Например, среднее значение функции рис. 43, а
равно 0, а рис. 43, б равно атах/2. Действующее значение не-
синусоидальных электрических величин равно корню квадрат-
ному из суммы квадратов действующих значений составляющих
гармоник и постоянной составляющей
А = ~^Ао + Д?)+ А^ф ... .
Сравнивать несинусоидальные величины удобно по коэффи-
циентам; формы /гф, амплитуды ka и искажения k„.
кф — А/Аср; — Ат/A; kH — АДА,
где Am, Acp и A — соответственно амплитудное, среднее и дей-
ствующее значения; А\—действующее значение основной гар-
моники.
► Расчет электрической цепи с несинусоидальными эдс и
токами, проводят методом наложения, при котором счи-
70
тается, что линейная электрическая цепь для каждой гар-
монической составляющей эдс независима. Метод наложе-
ния состоит из трех этапов: 1) разложения действующей в
цепи эдс на гармонические составляющие; 2) расчета токов
и напряжений в цепи для каждой из гармонических состав-
ляющих эдс; 3) суммирования решений, полученных для
каждой составляющей.
Например, если в цепи эдс е = Ео + E(i)msin<o/ + Е(2)т X
Xsin2co/, то она аналогична действию трех последовательно
соединенных эдс Ео, Е(ц и Е<2). Мгновенное значение тока цепи
будет равно сумме составляющих токов отдельных гармоник
' = /о + i(l) + *(2)-
► При расчете электрической цепи следует учитывать, что
емкостное сопротивление с увеличением порядка гармоники
уменьшается в k раз: Хс = 1/(/гыС) = Xc\/k, а индуктивное
сопротивление в k раз увеличивается: Xl — ka>L = kXb\.
Активное сопротивление с ростом частоты за счет поверхност-
ного эффекта возрастает, но при невысоких частотах можно счи-
тать его практически неизменным, равным сопротивлению по-
стоянному току. Поэтому ток в электрической цепи, содержа-
щей L, по форме более близок к синусоиде, чем в цепи с С, где
кривая тока более искажена. В последнем случае постоянная
составляющая тока отсутствует, так как сопротивление емкости
постоянному току равно бесконечности.
Если цепь состоит из элементов Е, L и С, то полное сопро-
тивление цепи для любой гармоники
Z. = R + - Д^).
Значение тока определяется по формуле
I. U km
m ~ у/?2 + [/га)/.- l/(*o)C)|‘J ’
Зная действующее значение токов каждой гармоники, можно
определить активную мощность электрической цепи. Полагая
71
неизменным активное сопротивление (область невысоких частот),
имеем
оо
Р— Е /\ = £о/о + £|/|COS<pi 4-Еа/гСОЭфг + ... •
k = о
ЗАПОМНИТЕ
Резонансные явления при несинусоидальных эдс и тока
возможны не только на первой гармонике, но и на высших
гармониках. Режим, при котором ток и напряжения fe-й гар-
моники на входе электрической цепи совпадают по фазе,
называют резонансом токов и напряжений k-н гармоники.
§ 22. Электрические фильтры
Электрическими фильтрами называют четырехполюсники, содержащие
реактивные элементы, которые либо задерживают, либо пропускают к приемнику
токи одного или нескольких заданных диапазонов частот. Электрические фильтры
широко применяют в радиотехнике, связи,электроэнергетике и т. д.
> В основе принципа действия фильтра лежит зависимость
его эквивалентного сопротивления Z3 от частоты. Комбини-
руя схемы соединения индуктивности и емкости, можно
получить фильтры, различные по своему действию. На-
ибольшее распространение получили фильтры следующих
типов: низкочастотные, высокочастотные, полосовые и за-
градительные.
Низкочастотные фильтры пропускают токи в диапазоне угло-
вых частот 0 — гоо- Их выполняют по Т-образной схеме. Схема и
зависимость входного сопротивления от угловой частоты низко-
частотного фильтра представлены на рис. 44, а.
Низкочастотные фильтры широко применяют в качестве сгла-
живающих выпрямительных устройств.
Высокочастотные фильтры также выполняются по Т-образной
схеме. Схема и зависимость Z9 (со) представлены на рис. 44, б.
Полосовые фильтры пропускают токи в заданном диапазоне
угловых частот, например (Oi — ы?. У полосового фильтра индук-
тивность и емкость L\ и С, соединяются последовательно, a L2 и
Сг — параллельно. Схема и зависимость эквивалентного сопро-
тивления фильтра от угловой частоты представлены на рис. 44, в.
Заградительные фильтры имеют полосу пропускания тока от О
до <х>1 и от «г до оо. Схема и зависимость Z3 от угловой частоты
представлены на рис. 44, г.
В маломощных электрических цепях (в радиоэлектронике,
связи) полосовые и заградительные фильтры часто выполняют
на основе резисторов и конденсаторов.
72
73
Низкочастотный RC-фильтр используется для сглаживания
пульсаций тока в маломощных выпрямительных схемах. Его
схема и частотная характеристика представлены на рис. 44, д.
В приведенной схеме /?С-фильтра включение активного сопро-
тивления необходимо для ограничения тока при подключении
схемы к источнику питания. При отсутствии R в момент включе-
ния сопротивление Хс очень мало и источник оказывается в ре-
жиме короткого замыкания. Введение R хотя и увеличивает по-
тери мощности, но обеспечивает защиту источника от короткого
замыкания.
§ 23. Переходные процессы в электрических
цепях
В элёктрических цепях происходят непрерывные (плавные
или скачкообразные) изменения параметров и различных
воздействий, коммутационные изменения (включение, от-
ключение, короткое замыкание отдельных участков и т. д.).
В результате таких изменений в цепи возникают переходные
процессы, которые продолжаются в течение некоторого
времени (теоретически бесконечно большого).
Электрическое и энергетическое состояние резистивного, ин-
дуктивного и емкостного элементов электрической цепи в пере-
ходном процессе описываются уравнениями uR= Ri; U\ = —eL —
, di n duc
= L —; i = L соответственно мощность на этих элементах
at at
равна:
pR = Ri2; pL = uLi = Li £; pc = uci = Cuc
Из приведенных выражений следует, что напряжение на ре-
зистивном элементе ик пропорционально току и повторяет харак-
тер изменения тока; напряжение на индуктивности tiL пропор-
ционально скорости изменения тока, а ток i в цепи с емкостью
пропорционален скорости изменения напряжения на ней. Так как
параметры емкостного и индуктивного элементов ограничены, а
реальные источники электрической энергии имеют конечную мощ-
ность, то, как это видно из приведенных выражений, ток в ин-
дуктивности и напряжение на емкости в момент коммутации
изменяться скачком не могут.
ЗАПОМНИТЕ
Поэтому при анализе переходных процессов в электриче-
ских цепях руководствуются следующим:
1. В любой ветви с индуктивностью ток и магнитный
поток в момент коммутации сохраняют те значения, которые
они имели непосредственно перед коммутацией, а затем
начинают изменяться от этих значений.
74
2. В любой ветви, содержащей емкость, напряжение и
электрический заряд сохраняют в момент коммутации те
значения, которые они имели непосредственно перед комму-
тацией, и в дальнейшем изменяются, начиная от этих зна-
чений.
Рассмотрим переходные процессы в линейных электрических
цепях, полагая, что коммутация происходит мгновенно — элек-
трическая дуга отсутствует или длительность ее существования
по сравнению с продолжительностью переходного процесса очень
мала. Кроме того, будем считать момент коммутации за начало
переходного процесса и принимать, что в момент t = 0, точнее
t = 0-н коммутация уже произошла.
► Расчет токов и напряжений на участках и элементах
электрической цепи в переходном процессе производят по
уравнениям электрического состояния.
Эти уравнения составляют для мгновенных значений токов и
напряжений. Для линейной электрической цепи с постоянными
параметрами R, L и С в общем случае уравнения представляются
с постоянными коэффициентами. Решение этих уравнений опреде-
ляет закон изменения тока или напряжения в переходном про-
цессе.
Рассмотрим переходный процесс при подключении последо-
вательно соединенных элементов R, L к источнику постоянного
напряжения (рис. 45, а).
Контурное уравнение электрического состояния для любого
момента времени имеет такой вид:
ul + Up — U, или L — -{- Ri: = U,
где i — ток переходного процесса, который будем называть пере-
ходным током или просто током.
Переходный ток можно представить как сумму двух состав-
ляющих (рис. 45, б): принужденного тока г„р, который устанав-
ливается после окончания переходного процесса, и свободного
/св, действующего во время переходного процесса, вызванного
запасенной энергией магнитного поля в катушке индуктивности:
Уравнение электрического состояния принужденного режима
имеет вид
* Ri„v = U.
Уравнение электрического состояния для свободного режима
получим вычитанием из уравнения переходного процесса уравне-
ния принужденного режима:
L^-+ RiCB = 0.
75
45
Решением этого уравнения, как известно из математики, будет
г'св = Л е_//т, где А — постоянная, т = L/R — постоянная време-
ни. Постоянная А определяется из начальных условий (при
/ = 0), когда i(0) = i,ip(0)+zCB (0).
Для ветви, содержащей индуктивность, в момент коммутации
переходный ток равен току до коммутации, т. е. z(0) — 0. Из
уравнения принужденного режима получим: inp (0) = i„p — U/R,
для свободного режима — (0) = А и, следовательно, А —
= -U/R.
Ток в переходном процессе
i = top + = U/R - ± (1 - е-'/т).
А А
Напряжение на индуктивности при переходном процессе.
uL = L^-= Ue~‘'\
at
При включении на постоянное напряжение элементов /?, С
(рис. 46, а) напряжение на емкости не может изменяться скач-
ком, так как при duc/dt = оо необходима бесконечно большая
мощность источника.
Уравнение электрического состояния цепи R, С имеет
вид
Ri + ис = U, или RC + ис= U.
at
В установившемся режиме ucпр = U, а ток inp = 0.
В начальный момент переходного процесса ток в цепи изме-
нится скачком до значения i = U/R. Напряжение на емкости
в переходном процессе запишется в виде ис = £7(1 —е“г/т), где
т = RC — постоянная времени. Переходный ток в цепи i =
г* ____ U
- C~dT~~Re
76
ЗАПОМНИТЕ
Скорость установления принужденного режима и характер
переходного процесса зависят от параметров электрической
цепи и характеризуются постоянной времени т, которая для
последовательного соединения цепи R, L равна | т =
а цепи R, С — т = Очевидно, что чем больше L или
С, тем медленнее идет переходный процесс. Практически
переходный процесс завершается через 3—5 т.
Графики переходного процесса i(f), uc(f) строят следующим
образом. По оси ординат откладывают переменную величину
(i, и), а по оси абсцисс — время. Значения тока i в индуктив-
ности и напряжения ис на емкости лучше определять через ин-
тервалы времени, кратные т. Значения е_'/т в этом случае равны:
t 0 т 2т Зт 4т 5т
1 0,37 0,13 0,1 0,02 0,01
Графики переходных токов и напряжений для схем рис. 45, а
и 46, а представлены соответственно на рис. 45, б и 46, б.
► Переходный процесс при включении элементов R, L на си-
нусоидальное напряжение часто встречается на практике,
например при включении трансформатора, электрического
аппарата, электрической машины переменного тока.
Уравнение электрического состояния переходного процесса
имеет вид
L^ + Ri=u-
Если предположить, что включение цепи R, L произошло в
момент, когда #= 0, т. е. и = Um sin (ы/ -j- фц), то ток принуж-
денного режима j„p = lm sin (<о/ -ф- фи — <р),
где Im = U/ [/?2 -ф- (wL)2]; <р = arctg (<oL//?).
77
Свободный ток определяется из уравнения L + /?4В = О,
решением которого является zCB = Л е~'/т, где т = L/R.
Ток переходного режима в цепи
i = «пр + = 1т sin (ю/ + фи — <р) + Ле <Л.
Постоянная А определяется из условия i(0) = /пр(0) -|- 4в(0),
т. е. О = /т sin (ф« — <p) + Л, откуда
А — —lm sin (фв — ф) и i = In sin (<о/ + фи — ф) —
— Im sin (фи — ф) е_//т.
Кривая изменения тока! <(/) приведена на рис. 47.
Начальное значение переходного тока зависит от начальной
фазы (момента включения) напряжения источника фи. Если
фи = ф, то из выражения для переходного тока видно, что сво-
бодный ток в момент / = 0 равен нулю и переходный процесс
отсутствует — сразу после включения в цепи устанавливается
принужденный режим i = i„v = Im sin юЛ При ф„ — ф — л/2
в момент t = 0 свободный ток максимален, и если постоянная
времени т значительно больше периода, то максимальное значе-
ние переходного тока может превышать амплитудное значение
установившегося режима 1т, но не более чем в два раза /тах
< 2/т.
САМОЕ ВАЖНОЕ
1. Наиболее широкое применение в электроэнергетике полу-
чил синусоидальный ток.
2. На практике оперируют действующими значениями элек-
трических величин. Они в -\/2 меньше амплитудных зна-
чений.
3. Синусоидальные электрические величины изобража-
ют в виде векторов; они
могут быть представлены
комплексными числами.
4. Элементы электрической
цепи переменного тока об-
ладают одновременно индук-
тивностью, емкостью и ак-
тивным сопротивленим.
5. На участке электрической
цепи переменного тока с
активным сопротивлением R
ток и напряжение совпадают
по фазе; с емкостным эле-
78
ментом С напряжение «отстает» от ток^ на ф=л/2; с ин-
дуктивным элементом L напряжение «опережает» ток на
<р—л./2. Поэтому напряжение на входе цепи с R, L, С есть
векторная сумма напряжений на участках цепи.
6. Полная мощность генератора определяется произведе-
нием действующих значений тока и напряжения S — UI
и выражается в вольт-амперах. Отношение активной мощ-
ности Р к полной S называют коэффициентом мощности
cos <р. Чем больше cos ф, тем экономичнее работает энерго-
система.
7. Если в электрической цепи переменного тока есть катуш-
ки индуктивности и конденсаторы, то в ней при опреде-
ленных соотношениях могут возникнуть резонанс напряже-
ний или токов.
8. Расчет токов и напряжений на участках и элементах
электрической цепи при переходном процессе проводят по
уравнениям электрического состояния для мгновенных зна-
чений этих величин.
Темы докладов и рефератов
1. Применение переменного тока в твоей профессии.
2. Классификация электрических цепей переменного тока.
3. Векторные диаграммы.
4. Комплексные числа и круговые диаграммы при анализе и
расчете простых электрических цепей переменного тока.
5. Применение электрических фильтров в твоей профессии.
График какого тока показан на рис. 41?
Определите угловую частоту, если период равен 0,02 с.
Как связаны мгновенные значения тока в линейном резисторе и напря-
жения на нем?
Запишите выражение для фазового сдвига <р по графикам рис. 24, б.
Сравните действие переменного тока и постоянного тока, числовое зна-
чение которого равно действующему значению переменного тока.
Составьте возможные электрические схемы и векторные диаграммы
при <р = 0; <р > 0; <р < 0.
Постройте векторные диаграммы для электрической цепи, изображен-
ной на рис. 32 и 42.
Почему в расчете цепей при постоянном токе учитывается только их
активное сопротивление, а при переменном токе — также их индуктив-
ность и емкость?
Как изменяются ток, напряжение и электрическая мощность в цепи
переменного тока с активным сопротивлением? с индуктивностью? с ем-
костью?
В чем сходство и различие явлений резонанса токов и резонанса
напряжений?
Какие способы используют для повышения коэффициента мощности
cos<p?
Какие типы фильтров применяют для сглаживания пульсаций? в из-
бирательных цепях?
Назовите основные положения и допущения при анализе переходных
процессов.
Постройте алгоритм расчета переходного процесса в простой электри-
ческой цепи?
Поясните влияние постоянной времени на характер изменения тока и
напряжения при переходном процессе.
МНОГОФАЗНЫЕ ЭЛЕКТРИЧЕСКИЕ
СИСТЕМЫ
§ 24. Общие понятия и определения
Многофазной системой называют совокупность двух и более электрических
цепей, источники электрической энергии (эдс) которых имеют одинаковую
частоту, сдвинуты по фазе друг относительно друга и генерируются одним
генератором.
Каждая из цепей многофазной системы называется фазой —
это новый смысл термина «фаза». Применяются следующие
обозначения фазы (рис. 48, б): А или а — начало, X или х —
конец фазы (прописные буквы относятся к источнику, а строч-
ные— к нагрузке). Всю фазу называют фазой А, следующие —
фаза В, фаза С и т. д. Многофазный генератор обозначают, как
показано на рис. 48,а.
За начало фазы принимают зажим, через который ток посту-
пает во внешнюю цепь при положительном его значении. В за-
висимости от числа фаз, составляющих многофазную систему,
она называется двухфазной, трехфазной, четырехфазной и т. д.
Концы фаз источника можно соединить друг с другом, тогда
во внешней цепи будет действовать суммарная эдс — такая си-
стема называется связанной. Так, если объединить концы двух
фаз с эдс Ел и Ев, то эдс, действующая между точками А и В,
равна геометрической разности ЁАВ — ЁА — Ёв.
► Наибольшее распространение получила трехфазная электри-
ческая система как наиболее простая и экономичная для
передачи и использования электрической энергии перемен-
ного тока.
Трехфазная система эдс называется симметричной, если эти эдс синусои-
дальны, их частота и амплитуда одинаковы и эдс каждой фазы смещены относи-
тельно друг друга на угол ф = 2л/3.
В аналитической форме мгновенные и действующие значения
наводимых в фазах эдс записывают в следующем виде:
ед е= Етд sin ц>(; ЁА = Е;
ев = ЕтВ sin (<о/ - 2л/3); Ёв = Ееч2п/3;
ес = ЕпС sin (<о/ - 4л/3); Ёс = Ее~/4п/3 = Ее+'2л/3.
Графическое и векторное их изображения представлены на
рис. 49.
В симметричной многофазной системе сумма мгновенных
80
значений фазовых эдс в любой
момент времени равна нулю:
еА + ев + ес = 0 (рис. 49, а).
То же для действующих значе
ний векторов £л4-£д + £с =()
(рис. 49, б).
На векторной диаграмме
(рис. 49, б) фаза В отстает от
фазы А, а фаза С — от В\ та-
кое чередование фаз АВС на
зывают прямой последователь-
ностью, а чередование фаз
АСВ — обратной. Последовательность фаз определяют специ-
альным прибором — фазоуказателем.
48
§ 25. Схемы соединения обмоток трехфазного
генератора
Фазы обмотки трехфазного генератора могут быть соединены
в звезду Y (рис. 50, а) или в треугольник А (рис. 50, б).
При соединении в звезду концы фаз объединяются в одну
точку N (рис. 50, а), которая называется нулевой, или нейт-
ральной. Нагрузку можно подключить к зажимам: N — А;
N - В; N - С или А — В; В — С; С — А.
► Различают фазные Ел, Ев и Ес и линейные Елв, Евс и ЕСА
эдс, которые связаны между собой выражениями:
Ёдв = ЁА — Ёв\
Ёвс = Ёв — Ёс',
Ёса — Ёс — Ёл.
81
/I
В симметричной системе система линейных эдс симметрична:
Ёдв -ф Ёвс + ЁСа = 0- При этом соотношение между фазными и
линейными эдс имеют вид:
Ел = V3 Еф.
ЗАПОМНИТЕ
При соединении фаз источника в треугольник нагрузку
подключают к его вершинам (рис. 50, б). При этом линей-
ные и фазные эдс и напряжения оказываются равными:
Еф = Ел-, l/ф = Un. Такое соединение возможно лишь при
симметричном источнике. В этом случае фазы образуют
замкнутый контур, ток в котором отсутствует.
Практически невозможно выполнить все обмотки одинаковы-
ми, т. е. система эдс всегда несимметрична. В ней появляется
уравнительный ток, что нежелательно. Поэтому обмотки генера-
тора (за редким исключением) соединяют звездой.
ЗАПОМНИТЕ
Приемники электрической энергии могут быть соединены в
треугольник и в звезду. Обычно задается значение линей-
ного напряжения источника. Стандартом предусмотрена
шкала линейных напряжений: 127, 220, 380, 500, 660 В
и т. д.,
ПРИЛАЕРзадано 0а = 380 В. Записать фазные и линейные напряжения в
комплексной форме.
В соответствии с векторной диаграммой рис. 50, в имеем:
(JA = 1/ф = 220 В, Ов = бле“'2л/3 = (—110 — /190) В, (Jc = 220е-/4“/3 = (—110
+ /190) В, 0АВ = бА - (JB = (330 + /190) В, йвс = 0в- С/с = (-/380) В;
йСА = 0с~ йА = (-330 + /190) В.
§ 26. Соединение фаз нагрузки в звезду
и треугольник
Соединение фаз нагрузки в звезду
Если объединить концы фаз генератора и концы фаз нагрузки
в общую точку, то получим трехфазную четырехпроводную
систему (рис. 51, а).
Провода, соединяющие генератор с нагрузкой, называются линейными. Про-
вод, соединяющий нейтральные точки источника и нагрузки, называется ней-
тральным.
В отдельных случаях, когда сопротивление проводов Z„ и
внутреннее сопротивление источника малы и ими можно пре-
небречь,
ЁА = (JA- Ёв = 0в- Ёс = О,..
В каждом линейном проводе проходит свой линейный ток.
Например, в проводе А ток 1А (он же и ток фазы источника).
► Нагрузка в трехфазной цепи может быть:
неоднородной и неравномерной, если сопротивления фаз на-
грузки различны по характеру (аргументу) и значению
(МОДУЛЮ) ’, Za =/= Zb Zc, фа фЬ фс!
равномерной, если сопротивления фаз равны по модулю, но
отличаются по характеру: Za = Zb = Zc\ ф0 #= <pft =/= фс;
однородной, если сопротивления фаз нагрузки одинаковые
по характеру (аргументу), но отличаются по значению (мо-
дулю) : Za Zb Zc, фа == фб == фс>
51
83
6*
симметричной, если сопротивления фаз одинаковы по зна-
чению и модулю: Za= Zb= Zc.
При симметричной нагрузке напряжение UnN, называемое
напряжением смещения потенциала нейтрали нагрузки Vn отно-
сительно нейтрали генератора Уы, равно нулю (UnN = О,
/д, = 0), так как Ёд + Ёв + Ёс = 0. При несимметричной нагруз-
ке и малом сопротивлении нейтрального провода (ZN = 0) раз-
ность потенциалов между нейтральными точками генератора и
нагрузки близка к нулю (0„n ~ 0) и токи в фазах определяют-
ся фазными напряжениями 0А, 0в и 0с. При этом ток в нейт-
ральном проводе lN = 1А + 4 + 1с,-
В общем случае, когда Za ф Zb =Н= Zc, ZN 0, токи фаз опре-
деляют по методу узлового напряжения. При этом полагают, что
полные сопротивления, ветвей фаз А, В и С соответственно
равны: ZA _ 4- 2Л; Zj — Zb 2Л; Zc = Zc Z„.
Формула для определения 0 nN имеет вид
г, 0 Л + <\Yb + OcY-c
nN Ел + Y_H + Yc + У,
где Уд, Уд, Ус, Уд, — проводимости соответственно фаз А, В, С
и нейтрали.
Трехфазная трехпроводная система представлена на рис. 51, б.
В этом случае сопротивление ZN = оо, YN = 0.
Напряжение смещения нейтрали нагрузки определяют по фор-
муле
... OaY_a +0^ +OcY_c
U И А/ = -------—--—---- •
Векторная диаграмма для общего случая (UnN =/= 0) представ-
лена на рис. 51, в. Токи в линейных проводах
Л = (^А — (1пы)1'2а\ Ib = пы) / Zb‘,
1С = (0с- UnN)/Zc.
При этом имеет место равенство 1А + Л; + 1с = 0.
Рассмотрим аварийные ситуации в трехпроводной системе.
При обрыве одной из фаз нагрузки, например фазы а, образу-
ется однофазная цепь (ZA = °°), в которой сопротивления фаз b
и с нагрузки включены последовательно, а токи в линейных про-
водах В и С 1В = — 1с — Ubc/(Z-b И- Zc).
Напряжения фаз нагрузки становятся равными: 0ь =
/7 .
ВГ Z_b + Zc ’
Ос = ивс
Zc
Zj + Zc
84
Эту же электрическую цепь можно считать трехфазной и вести
расчет, пользуясь формулой смещения нейтрали, принимая Ул = 0:
йвУд + 0cY_c
UnN = Ув + •
Если Ув = Ус, то 0nN — (0в + йсУЪ-
При коротком замыкании фазы нагрузки, например фазы a, ZA = 0,
Ya = оо. Напряжение смещения нейтрали
Ол + + {>с(Ус/Ь)
UnN 1 ч- Ув/Ул + Ус/Ул А'
Следовательно, потенциал нейтрали нагрузки переместился
в точку а, а фазы нагрузки b и с находятся под соответствующими
линейными напряжениями
Соединение фаз нагрузки в треугольник
При соединении фаз нагрузки в треугольник (рис. 52, а) объе-
диняют зажимы х — Ь, у — с, z — а. Здесь Ц, 1В, 1С — линейные,
lab, he, lea — фазные токи нагрузки; 0АВ, Uвс, Оса — линейные
напряжения источника, 0аь, the, 0са — напряжения фаз нагрузки.
Если сопротивления линейных проводов не учитывать, то баь —
— 0ав, the = 0вс и иса = Оса, а токи в линейных проводах
А — lab lea', 1В — 1 be lab", ‘С — 1 са
ГДе lab — OAB/Zab', hc = 0Вс/Zbc', lea — Oca/Zcu-
Если же сопротивления линейных проводов необходимо учиты-
вать, то для расчета цепи следует преобразовать треугольник
сопротивления нагрузки в звезду, определить токи в линейных про-
водах с учетом формулы для 0nN и затем найти напряжения и токи
фаз нагрузки.
При симметричной нагрузке векторы линейных напряжений и
токов образуют равносторонний треугольник и связь между
52
85
линейными и фазными токами определяется соотношением:
/л = з/З /ф.
Рассмотрим аварийные ситуации при соединении нагрузки в
треугольник.
При обрыве фазы нагрузки, например фазы ab, Zab=°°, Таь —
— 0. Для упрощения примем, что Zj>c — Zca = R. Тогда токи в ли-
нейных Проводах 1А = — Tea', 1в = ibc', Тс — Tea — Нс- ПрИ ЭТОМ
сохраняется условие:
Та + 1в + 1с — 0.
Независимо от режима фазы ab напряжение на фазах нагрузки
Zbc и Zca остается неизменным.
При обрыве линейного провода, например провода А, схема
преобразуется в однофазную. Если положить,, что Zab = Zbc—
= Zca = R,TO ИЗ схемы рис. 52, б следует lab — Tea', Тв ~ Tab — Tbc',
Тс '!= Тbe Tea*
Напряжения на фазах нагрузки ab и са уменьшаются в два
раза.
На практике в трехфазную цепь наиболее часто включают не-
сколько приемников, которые могут быть соединены как в звезду,
так и в треугольник. При расчетах схем со смешанным соедине-
нием нагрузки сопротивление каждой фазы определяют, преобра-
зуя треугольники сопротивления в звезду и обратно.
ЗАПОМНИТЕ.
Последовательность преобразования схемы рис. 53 сле-
дующая:
звезду Yi преобразуют в треугольник Д,;
сопротивления треугольников Д, и Д2 объединяют в эк-
вивалентный треугольник Д12;
ЯА
эквивалентный треугольник Д)2 преобразуют в эквива-
лентную звезду Y12;
сопротивление эквивалентной звезды Y )2 складывают с
сопротивлениями соответствующих линейных проводов Y,2 +
+
определяют смещение нейтрали эквивалентной нагрузки
и рассчитывают линейные токи;
определяют напряжения и токи в нагрузках.
§ 27. Мощность трехфазной электрической
цепи
Мгновенное значение полной мощности в трехфазной системе
равно сумме мощностей фаз:
S = UА 1а + Wfitfl + Ucic
Как известно, в однофазной системе мгновенное значение ак-
тивной мощности определяют по формуле p=Wcosip—f7/cos2<oZ,
из которой следует, что мощность пульсирует во времени. Такие
системы называют неуравновешенными. К неуравновешенным си-
стемам относят и трехфазные системы с несимметричной на-
грузкой.
Уравновешенной называют такую систему, мощность которой постоянна и не
зависит от времени.
Таким свойством обладает трехфазная система с симметричной
нагрузкой. Действительно, мгновенное значение активной мощно-
сти трехфазной симметричной системы р = Ра+Рв+Рс — 3(7ф/фсоз1р
равно среднему значению за период
Р = ЗУФ/Ф cosip.
На практике принято выражать мощность через линейные зна-
чения тока и напряжения
Р = -\/3 UI cosip.
Соответственно реактивная мощность
Q = -\/3 Ul sin<р.
Полная мощность
S = ^Р2 + Q2 = 3(/ф/ф = д/З UI.
87
Если известны мощность Р, напряжение U и ток 1 при симмет-
ричной нагрузке, то коэффициент мощности cos <р определяют по
формуле
cos = Р/(-\/3 UI).
САМОЕ ВАЖНОЕ
1. Наибольшее распространение получила трехфазная элект-
рическая система как наиболее простая и экономичная.
2. Фазы обмоток трехфазных генератора и приемника могут
быть соединены в звезду или треугольник; при этом нагруз-
ка питается по четырехпроводной или трехпроводной системе.
3. Трехфазные цепи рассчитывают методом узлового напря-
жения.
Темы докладов и рефератов
1. Графические и векторные изображения напряжений, токов
и эдс в трехфазной симметричной системе.
2. Соединение обмоток трехфазного генератора (линейные и
фазные эдс, токи, мощность).
3. Соединение приемников электрической энергии (векторная
диаграмма токов и напряжений).
4. Алгоритм расчета трехфазной цепи.
3.
4.
5.
В трехфазной симметричной системе токов и напряжений определить
зависимости между линейными и фазными токами и напряжениями при
соединении звездой, треугольником.
Как изменяются линейные и фазные токи симметричной системы без
нейтрали, соединенной звездой, при: а) обрыве линейного провода;
б) обрыве фазы; в) коротком замыкании фазы?
Как изменятся токи в фазах симметричной нагрузки, соединенной в
треугольник, при обрыве линейного провода 4?
Для чего применяют нейтральный провод в трехфазных сетях?
Фазы симметричной нагрузки (Ri = /?2 = /?з) соединены в треугольник
и включены в трехфазную сеть. Как изменятся линейные токи, если
фазы нагрузки соединить в звезду?
НЕЛИНЕЙНЫЕ ЭЛЕКТРИЧЕСКИЕ ЦЕПИ
ПЕРЕМЕННОГО ТОКА
§ 28. Электрические цепи с нелинейным
резистивным элементом
Электрические цепи переменного тока, содержащие нелиней-
ные элементы (резисторы, конденсаторы и катушки индуктивно-
сти) при синусоидальных эдс, называются нелинейными.
Такие электрические цепи широко применяют для решения
практических задач. Используя нелинейные элементы, можно
стабилизировать ток и напряжение, мощность, получить опреде-
ленную форму напряжения (треугольник, трапеция и др.).
Нелинейное резистивное сопротивление с резко выраженной
несимметрией вольт-амперной характеристики работает как вен-
тиль, т. е. имеет одностороннюю проводимость.
Вентильными свойствами обладает ряд приборов: германие-
вые и кремниевые диоды, электронные и газоразрядные элект-
ронные лампы.
Рассмотрим электрическую цепь, содержащую последова-
тельно соединенные источник синусоидального напряжения (и =
54
89
= Um sin w/), вентиль (например, диод), с несимметричной вольт-
амперной характеристикой и линейную нагрузку R (рис. 54, а).
Для этой цепи уравнение электрического состояния имеет вид
и= ив-\- Ri.
Зная зависимость i (и) нелинейного элемента и параметр R,
строят кривую i (/) по известным правилам (рис. 54,6). Как вид-
но из построения, кривая i (/) состоит из чередующихся положи-
тельных и отрицательных полуволн. При этом амплитуда поло-
жительных полуволн во много раз больше отрицательных. Та-
ким образом получают эффект выпрямления переменного тока.
При значительных амплитудах питающего напряжения с до-
пустимой для практики точностью можно пользоваться идеаль-
ной характеристикой диода и рассчитывать цепь аналитическими
методами, используя кусочно-линейную аппроксимацию, т. е. при-
нимая при положительной полярности напряжения сопротивле-
ние диода равным нулю (Rnp = 0), а при отрицательной — бес-
конечности (/?овр = сю).
Рассмотрим однополупериодное выпрямление синусоидально-
го тока (рис. 54, а). Вследствие односторонней электрической
проводимости диода ток в цепи протекает только в течение поло-
жительного полупериода (рис. 54, в). В нагрузочном сопротив-
лении создается однополярное пульсирующее напряжение ко-
торое называют выпрямленным. Такую схему выпрямления назы-
вают однополупериодной. Среднее значение напряжения
Т'о = U т/л.
Для получения трапецеидального напряжения используют
схемы с диодным стабилитроном (рис. 55, а). Она представляет
собой четырехполюсник, включающий балластное сопротивление
и двусторонний стабилитрон, имеющий симметричную вольт-
амперную характеристику (рис. 55,6). При любой полярности
входного напряжения uBX = Um sinto/, пока uBX £7 о сопротивле-
ние стабилитрона велико ig = 0, иВЬ1Х — иех. При «вх > Uo сопро-
тивление стабилитрона близко к нулю и мвх практически не из-
меняется (рис. 55, в).
90
§ 29. Электрические цепи с нелинейной
индуктивностью. Дроссели. Магнитные усилители
В качестве нелинейной индуктивности используют катушку
индуктивности с ферромагнитным сердечником (рис. 56, а). Если
цепь питается от источника синусоидального напряжения и =
= Um sin ы/, и если считать активное сопротивление и индуктив-
ность рассеяния катушки незначительными, то все приложенное
напряжение уравновешивается эдс самоиндукции eL, наводимой
переменным потоком Ф в сердечнике: «= — eL=w—^~, где
W — число витков обмотки.
ЗАПОМНИТЕ
При синусоидальном напряжении магнитный поток Ф и
эдс также синусоидальны, но магнитный поток отстает
по фазе от напряжения на л/2, а эдс самоиндукции в ка-
тушке eL отстает на л/2 от потока Ф:
dO . г-> • 1
eL = — w = — (ОДОФ™ sin (Dt = — Ет sino)/,
где Ет = ышФт-
Действующее значение эдс в катушке
Е = = М- w<bm = 4,44/даФ,„.
т/2 V2 л/2
Векторная диаграмма индуктивной катушки с ферромагнит-
ным сердечником представлена на рис. 56, б.
Ферромагнитный сердечник обычно выполняют из магнито-
мягкого материала, магнитная характеристика которого — дина-
мическая петля магнитного гистерезиса (рис. 56, в, кривая 2) —
отличается от статической (кривая /) вследствие проявления
инерционного действия вихревых токов. На рис. 57, а приведено
56
91
построение графика зависимости и (?). Как видно из построения
при и= Ums'rn<ot, кривая тока i (/) несинусоидальна и не совпа-
дает по фазе с напряжением (при i — 0; и =# 0).
Реальную кривую тока можно заменить эквивалентной сину-
соидой 4 (?) (рис. 57, б). Угол 6 называют углом потерь на
перемагничивание сердечника. Такая замена позволяет использо-
вать известные методы анализа и расчета синусоидальных
электрических цепей.
Электрическая схема цепи катушки и векторная диаграмма с
учетом потока рассеяния (Фа>0), потерь в обмотке (RK > 0)
и потерь на перемагничивание сердечника (R,, > 0) представле-
ны на рис. 58, а, б соответственно. Уравнение электрического
состояния цепи имеет вид 0 = RK / + jX„ 1 4- /Хи/ + Rn/.
Катушку индуктивности с ферромагнитным сердечником, имеющим воздуш-
ный зазор, называют дросселем. Дроссель используется на практике как индук-
тивное сопротивление в электрических цепях и фильтрах.
Согласно закону полного тока для магнитной цепи дросселя,
имеем &у/=/7в/в4-//ст/ст, где Нв, Нст— напряженность магнитного
поля соответственно в воздушном зазоре и сердечнике; /в, 4т—
длина воздушного зазора и сердечника.
Подставляя значения Нв = В в/цо = Ф/ (М-o-S) и Н„ = Дт/(ц,цо)
и полагая, что RK, Х„ и Rp — 0, получим
92
58
Индуктивность дросселя определяется по формуле
'I' Ф W1
— = W — = ------------------------
I 1 Rfie + Rite
Так как /?цс, то в определенном диапазоне изменения
/в можно считать, что L = цойу2/в/5. С изменением /„ изменяется L
и ток в цепи /, т. е. посредством регулирования воздушного зазо-
ра в дросселе можно регулировать ток в электрической цепи пе-
ременного тока.
> Индуктивное сопротивление, создаваемое катушкой с зам-
кнутым ферромагнитным сердечником, можно изменять под-
магничиванием сердечника с помощью дополнительной об-
мотки, подключаемой к регулируемому источнику постоян-
ного напряжения (рис. 59, а). Такое устройство называют
дросселем с подмагничиванием.
Если пренебречь потоками рассеяния и потерями в сердечнике,
то для цепи переменного тока дросселя с подмагничиванием урав-
нение электрического состояния для мгновенных значений имеет
вид
и = R,+ едр = Ri w ,
откуда
где едр — эдс самоиндукции, создаваемая изменением магнитного
потока в сердечнике на АФ; R = RK 4- R„ — суммарное сопротив-
ление катушки и нагрузки; w — число витков обмотки перемен-
ного тока.
93
При одновременном действии переменного и постоянного то-
ков результирующая магнитодвижущая сила F = F= + F~ и со-
ответственно поток в сердечнике Ф= Ф= + Ф~.
Из построения кривой тока на рис. 59, б видно, что при Ф, —
= 0 ток i — I' мал. При Ф= > 0 ток i = i" значительно увеличи-
вается.
ЗАПОМНИТЕ
Изменяя подмагничивающий постоянный ток, можно ре-
гулировать в широком диапазоне ток Это свойство ис-
пользуется в магнитных усилителях.
Магнитным усилителем называют устройство, служащее для регулирова-
ния тока в цепи нагрузки посредством подмагничивания ферромагнитных сердеч-
ников постоянной мдс.
Основными элементами магнитного усилителя являются два
замкнутых одинаковых магнитных сердечника с несколькими об-
мотками (рис. 60). Как правило, в магнитных усилителях ис-
пользуют ленточные (кольцевые или прямоугольные) сердечники
из магнитомягкого материала с прямоугольной петлей гистере-
зиса. Каждый сердечник работает в условиях одновременного
намагничивания переменным и постоянным магнитными полями.
Для создания этих полей на каждом из сердечников располо-
жены обмотка переменного тока — рабочая обмотка с числом
витков аур — и несколько обмоток постоянного тока. Обмотки
постоянного тока называют по их назначению: управления с чис-
лом витков wy, смещения wCM и обратной связи w0Q.
94
Для устранения влияния наведенной переменной эдс основ-
ной частоты в обмотках постоянного тока обмотки включают
встречно-последовательно или встречно-параллельно при соглас-
ном включении обмоток постоянного тока. Обычно обмотка уп-
равления наматывается на оба сердечника (рис. 60, а). В этом
случае рабочие обмотки включают последовательно-согласно или
параллельно-согласно. Рабочие обмотки и сопротивление нагруз-
ки R„ образуют последовательную рабочую цепь, присоединен-
ную к источнику переменного тока.
Для упрощения анализа работы магнитного усилителя при-
мем петлю гистерезиса материала сердечников прямоугольной
с малой коэрцитивной силой, т. е. будем рассматривать идеаль-
ную основную кривую намагничивания (рис. 60,6). Вначале
примем R = 0 и La = 0. При мдс управления Fy — 0 (/у = 0) на-
пряжение, приложенное к рабочей цепи магнитного усилителя,
уравновешивается эдс самоиндукции в\ и е^, наведенными по-
токами в сердечниках / и //:
/ , , о ДФ
Ц= -(£, + ₽„)= 2аур^—.
95
При некотором значении тока управления /у > 0(Fy > 0) в
первый полупериод напряжения питания магнитное состояние
сердечника / изменяется под действием мдс Лр/ в пределах
точек 1—2—3—2—1, а сердечника II — Г—1—2—1—1’.
В этом интервале времени АФ/> О, а АФ//= 0 (действие Fvn).
Тогда эдс бц=0. Изменение индукции в первом сердечнике
(АФ/ > 0) создает эдс е, в рабочей обмотке, которая уравнове-
шивает приложенное напряжение. Во второй полупериод карти-
на изменяется — напряжение сети уравновешивается эдс само-
индукции, создаваемой в рабочей обмотке второго сердечника.
Из рассмотренного графика следует, что для изменения ин-
дукции в сердечниках при Fy = 0 необходимо, чтобы ток рабочей
обмотки /р изменялся во времени по прямоугольному закону и его
среднее значение за полупериод выражалось как
/р = Wyly/wv
Зависимость /р(/у) называется характеристикой управления магнитного уси-
лителя.
При /?>0 пропорциональность между токами сохраняется
только до определенного их значения, так как приложенное
переменное напряжение при токе управления, большем предель-
ного, уравновешивается эдс самоиндукции сердечников и паде-
нием напряжения на активном сопротивлении и индуктивности
рассеяния. Характеристика управления магнитного усилителя
для двух значений R представлена на рис. 60, в.
Подмагнитить магнитный усилитель можно выпрямленным
током нагрузки. Такое подмагничивание называется положитель-
ной обратной связью (внешней и внутренней).
При внешней обратной связи (рис. 61, а) подмагничивание
осуществляется двумя обмотками постоянного тока: управления
wy и обратной связи w0Q. Последняя питается выпрямленным
током рабочей цепи (или его частью). При 1ж = 1р имеем wplf =
= Wyly + wocIp. В этом случае уравнение характеристики управ-
ления магнитного усилителя имеет вид
/ = —— /
р ®Р(1-М у’
где /гос = woc/wp — коэффициент обратной связи.
ВАПЮМНИП1
Из последнего выражения следует, что в магнитном усили-
теле с положительной обратной связью в отличие от маг-
нитного усилителя без обратной связи для получения одно-
го и того же значения /р необходима меньшая мдс управ-
96
61
ления (мощность управления). При этом минимум тока
/рппп сместится во второй квадрант (рис. 61,6).
Недостатком магнитных усилителей с внешней обратной свя-
зью является увеличение сопротивления рабочей цепи, что при-
водит к уменьшению максимального тока нагрузки и, следова-
тельно, к уменьшению его выходной мощности.
Магнитные усилители с внутренней обратной связью свобод-
ны от этого недостатка и, кроме того, роль специальной обмотки
обратной связи выполняют рабочие обмотки, осуществляя само-
подмагничивание сердечника постоянной мдс.
На рис. 62, а изображена схема магнитного усилителя с внут-
ренней обратной связью и активной нагрузкой на постоянном
токе. Для упрощения анализа будем считать, что диоды Д1 и Д2
и сердечники имеют идеальные характеристики. Это позволяет
рассматривать работу магнитного усилителя (процесс намагни-
чивания и размагничивания) для каждого сердечника отдельно.
Процессы перемагничивания первого и второго сердечников будут
аналогичны, но смещены во времени на полупериод питающего
напряжения.
При отсутствии тока управления магнитные состояния сердеч-
ников в интервале соответствующих полупериодов (диоды Д1
или Д2 открыты) изменяются от точки 1 до точки 2 (см.
рис. 60,6). В этом случае АФ = 0, ток /р имеет максимальное
значение и определяется по формуле
При увеличении тока управления в отрицательном направ-
лении до < Нс1су индукция не изменяется (ДФ = 0), так как
внешнее поле меньше коэрцитивной силы Нс. С момента, когда
7—85
97
62
Wyly > Hcl„, начнет изменяться магнитный поток в сердечнике
(АФ>0). Перемагничивание его происходит по частным циклам.
При определенном отрицательном значении /у магнитный поток
будет изменяться от -|-Фт до —Фт, ток в рабочей цепи /р будет
минимальным. Дальнейшее увеличение тока управления приведет
к увеличению тока в рабочей обмотке, но уже без самоподмагни-
чивания (рис. 62, б).
САМОЕ ВАЖНОЕ
1. Электрические цепи переменного тока, содержащие не-
линейные элементы (резисторы, конденсаторы, катушки ин-
дуктивности), рассчитывают на основании вольт-амперных
характеристик нелинейных элементов.
2. Любое нелинейное резистивное сопротивление, обладаю-
щее односторонней проводимостью, работает как вентиль.
3. Индуктивное сопротивление катушки с ферромагнитным
сердечником можно изменять, регулируя воздушный зазор
(дроссель) или подмагничивая сердечник постоянным то-
ком (дроссель с подмагничиванием и магнитный усили-
тель) .
Темы докладов и рефератов
1. Применение нелинейных элементов в твоей профессии.
2. Однополупериодное выпрямление переменного тока.
3. Дроссель в электрических цепях и фильтрах.
4. Магнитные усилители.
98
I Постройте график выпрямления переменного тока электрической схе-
мой, изображенной на рис. 56, а.
' Сравните динамическую и статическую характеристики ферромагнит-
ного сердечника на рис. 58,в (по коэрцитивной силе).
Что называется дросселем?
I От каких параметров зависит индуктивность дросселя? Какой физиче-
ский смысл понятия «индуктивность»?
Что называют магнитным усилителем?
Объясните назначение обмоток в магнитном усилителе.
7. Изобразите, какой вид имеет характеристика магнитного усилителя
/р (/у) при внешней положительной обратной связи, если без обратной
связи его характеристика имеет вид, изображенный на рис. 60, в.
РАВАЕЛ
ЭЛЕКТРОТЕХНИЧЕСКИЕ УСТРОЙСТВА
ОБЩИЕ ПОНЯТИЯ
ОБ ЭЛЕКТРОТЕХНИЧЕСКИХ УСТРОЙСТВАХ
§ 30. Преобразование электрической энергии
в другие виды энергии
Преобразование электрической энергии в другие виды энер-
гии, в основном используемые в производстве и быту, осуществля-
ется электротехническими устройствами, принцип действия кото-
рых основан на способности электрического тока при прохождении
через резистивные и реактивные элементы, через воздух и газы
при определенных условиях, преобразовываться в тепловую, све-
товую, звуковую и другие виды энергии, а также в электромаг-
нитную энергию (создавать магнитное и электрическое поля).
► Эффективная работа электротехнических устройств — пре-
образователей энергии — обеспечивается при определенных
параметрах электрического напряжения и тока (значение,
форма и частота) и управлении ими. Для этого используют
специальные преобразователи электрической энергии:
трансформаторы, преобразователи частоты, выпрямитель-
ные устройства, инверторы, регуляторы напряжения и тока,
электрические аппараты и др.
Преобразование электрической энергии в тепловую основа-
но на следующих физических явлениях: прохождении тока
100
через сопротивления, электрической дуге, индукционном на-
греве и др.
В устройствах с нагревательным сопротивлением основным
элементом является металлический проводник с повышенным
электрическим сопротивлением и высокой температурой плавле-
ния. Выделяемая в этом элементе электрическая энергия U7, =
= /?э/2/ преобразуется в теплоту, в результате чего элемент
нагревается, а теплота IV'т передается в окружающую среду.
В установившемся режиме W, = IFT, откуда
RJ2t = OrSOp,
где 0Р = 0Э—0ср — разность температур элемента и окружающей
среды: аг — коэффициент теплоотдачи с поверхности элемента,
S — площадь поверхности нагревательного элемента.
К устройствам с нагревательным элементом относят электро-
плиты, нагревательные печи, электрокипятильники и др. Чем
выше допустимый нагрев элемента 0Э, тем эффективнее работа
нагревательного устройства.
Наиболее интенсивное преобразование электрической энергии
в тепловую происходит при возникновении электрической дуги.
Как известно из физики, при разведении первоначально сопри-
касающихся металлических или угольных электродов, подклю-
ченных к источнику напряжения, между ними возникает электри-
ческий разряд, называемый электрической дугой. Сила тока в
дуге может достигать огромных значений (тысячи и десятки ты-
сяч ампер) при напряжении в несколько десятков вольт. При
возникновении электрической дуги происходит термоэлектронная
эмиссия с раскаленной поверхности катода и термическая иони-
зация молекул, обусловленная высокой температурой газа. Прак-
тически все межэлектродное пространство заполнено высокотем-
пературной плазмой, служащей проводником, по которому быст-
ро перемещаются электроны от катода к аноду. Температура
плазмы может достигать 10 000 К.
Электрическая дуга применяется для сварки металлических
деталей и в электропечах для плавки качественных сталей и
различных тугоплавких материалов.
Наряду с широким использованием электрической дуги в
производстве, в ряде аппаратов она является нежелательной,
например в коммутационных электрических аппаратах или в ли-
ниях электропередач — здесь электрический разряд между про-
водами, проводами и опорами, называемый коронным, приводит
к увеличению электрических потерь.
В практике широко используется индукционный нагрев. Его
применяют для поверхностной закалки сталей, нагрева, отжига и
плавления металлов. Как известно, если поместить деталь в пе-
ременное магнитное поле, то в нем индуцируются (наводятся)
токи, называемые вихревыми. Эти токи зависят от формы детали,
101
типа металла, от направления и скорости изменения магнитного
поля. Вихревые токи из-за малого сопротивления металла могут
быть очень большими и вызывать его значительное нагревание.
Глубина проникновения вихревых токов (магнитного поля)
зависит от скорости (частоты) изменения магнитного поля, так
как они создают собственное магнитное поле, которое направле-
но навстречу внешнему магнитному полю, вызвавшему их появ-
ление.
ЗАПОМНИТЕ 1
Чем больше частота изменения внешнего поля, тем силь-
нее противодействие поля вихревых токов и меньше глу-
бина проникновения их внутрь тела.
Глубина проникновения вихревых токов может быть опре-
делена по формуле
(О На? V л/фаТ
где у, ца — электропроводимость и магнитная проницаемость
материала.
Способность вихревых токов создавать собственное поле, про-
тиводействующее внешнему полю, используется в технике маг-
нитных экранов. Во многих случаях вихревые токи бывают
нежелательными, так как вызывают дополнительные потери и на-
гревание магнитопроводов электротехнических устройств (элект-
рические аппараты, электрические машины, трансформато-
ры и др.).
► Для уменьшения действия вихревых токов в этих устройст-
вах их магнитопроводы набирают из тонких пластин, изо-
лированных одна от другой.
ЗАПОМНИТЕ
Преобразование электрической энергии в световую основано
на нагревании проводника до высокой температуры (темпе-
ратурные источники света) и на оптическом излучении при
дуговом разряде в газах, вызывающем люминесцентный
эффект при движении заряженных частиц в газонапол-
ненном пространстве (люминесцентные источники света).
Электрическая энергия в механическую преобразуется в
электрических машинах и аппаратах, электроизмерительных
приборах.
Их принцип работы основан на физическом законе электро-
магнитных сил, из которого следует, что
102
если проводник с током поместить в магнитное поле,
то на проводник действует электромагнитная си-
ла (рис. 63), значение которой определяется
как /;,м = ВИ. где В — магнитная индукция,
В-с/м2; / — ток, А; I — длина проводника, м.
► Направление действия этой силы
определяется по правилу левой руки.
При равномерном движении проводника
со скоростью v электромагнитная сила F3lt
должна уравновешиваться механической
силой. Е,м = Емсх — это уравнение механи-
ческого состояния равномерно движуще-
63
гося проводника с током. Если левую и правую части уравнения
умножить на скорость и, то получим уравнение преобразования
электрической мощности (энергии) в механическую, которое име-
ет вид
F3MV = ЕмехЦ,
ИЛИ
Рэм — Р мех
§ 31. Электротехнические устройства контроля
и регулирования
В системах контроля и регулирования различных технологи-
ческих процессов основное значение придается получению досто-
верной информации, ее преобразованию, передаче, обработке и
воздействию на управляемый объект. Обычно информация пред-
ставляется в виде электрического сигнала.
В общем случае электрическим сигналом называется сигнал, функционально
связанный с какой-либо физической величиной и несущий информацию о ее зна-
чении.
Из-за многообразия информационных систем требуются раз-
личные по значению и форме электрические сигналы: эта задача
в технике решается путем их преобразования.
В зависимости от рода электрического сигнала (постоянный
или переменный ток), вида его (напряжение, ток), формы пред-
ставления (аналоговая, дискретная) функции преобразования
различают: масштабные преобразователи (делители напряжения
и тока, трансформаторы, усилители); преобразователи перемен-
ного сигнала в постоянный (термопреобразователи, выпрями-
тельные устройства); аналого-цифровые и цифроаналоговые пре-
образователи; электромеханические преобразователи.
103
4ИЛЛё
эразователи электрических сигналов характеризуются
ией преобразования — зависимостью выходной вели-
от входной хвых = /(хвх), ее стабильностью и линей-
о, погрешностями преобразования.
(ейной функции преобразования связь выходного сиг-
1ным представляется постоянным коэффициентом пре-
я (коэффициент усиления для усилителя, коэффици-
я для делителя, коэффициент трансформации для
(торов и т. д.).
1ления сигналов постоянного и переменного тока ис-
азличного рода усилители. В зависимости от прин-
ния электрического сигнала они бывают магнитные,
инные и электронные.
усиливаемого сигнала они подразделяются на усили-
нного, переменного тока и избирательные.
зитием цифровой вычислительной техники появилась
>димоеть преобразования непрерывного сигнала в дис-
1й и наоборот. Эти функции выполняют соответствен-
злого-цифровые (АЦП) и цифроаналоговые (ЦАП)
шзователи. Основу процесса преобразования состав-
эперации квантования (разделения на «порции») по
1и и уровню непрерывного входного сигнала.
ание по времени сводится к представлению непре-
'нала хЦ), поданного на вход преобразователя, его
и значениями х(^|), х(/2),...,х(/л) в определенные мо-
гни (рис. 64, а).
1ние по уровню связано с представлением мгновен-
1й входного непрерывного сигнала конечным числом
й, отстоящих друг от друга на заданный интервал
б).
ЗАПОМНИТЕ
Квантованные значения непрерывной величины можно пре-
образовывать в коды, удобные для дальнейшего исполь-
зования (ввод в ЭВМ, преобразование в цифровую инфор-
мацию и т. д.).
Операция преобразования кодовой комбинации входного сиг-
нала в фиксированный уровень выходного сигнала осуществля-
ется цифроаналоговыми преобразователями.
§ 32. Режимы работы и энергетическая диаграмма
электротехнических устройств. Роль электрической
изоляции
Обычно электротехнические устройства предназначаются для
номинального продолжительного режима работы, при котором их
можно эксплуатировать с превышением (в допустимых преде-
лах) температуры их отдельных частей относительно темпера-
туры окружающей среды.
► Для устройств, работающих в режимах нагрузка — холос-
той ход или пуск — нагрузка — останов, применяют номи-
нальные режимы — кратковременный (импульсный) и пов-
торно-кратковременный.
Преобразование электрической энергии в другие виды энер-
гии и обратно, регулирование и управление электрической энер-
гией различными электротехническими устройствами сопряжено с
потерями мощности внутри них, так как энергия затрачивается
на нагрев обмоток, изоляции, контактов, токопроводов, электри-
ческой дуги, на перемагничивание магнитопровода, трение во
вращающихся и трущихся частях и т. д.
ЗАПОМНИТЕ
Процесс преобразования энергии можно сформулировать
следующим образом: вся потребляемая электротехнически-
ми устройствами мощность Р, преобразуется в полезную
мощность Р2 и частично расходуется на покрытие потерь
мощности внутри устройства:
Pi = Р2 + ЬРЪ
Эффективность преобразования энергии электротехническим устройством ха-
рактеризуется коэффициентом полезного действия (кпд), который равен отноше-
нию полезной мощности ко всей подводимой мощности:
Т) = Pi/Pt = (Р, + APZ)/P, = 1 - (АР^/Р,).
105
ЗАПОМНИТЕ
Чем меньше потери мощности, тем выше кпд устройства,
тем большую мощность оно может преобразовывать при
тех же габаритах.
Предельно допустимая мощность преобразования ограничи-
вается температурой нагрева основных частей электротехниче-
ского устройства, и в первую очередь изоляции токопроводящих
частей. Изоляцию следует считать одним из главных элементов
электротехнических устройств. Она в основном определяет их
надежность в работе. Нагревостойкость изоляции позволяет уве-
личить допустимые температуры, а следовательно, и нагрузки
активных материалов (проводников, магнитопроводов и др.).
Допустимые значения температуры рассчитывают на срок
службы изоляционных материалов 20—25 лет. При увеличении
температуры сверх допустимой происходит «старение» изоляции
(она делается хрупкой и механически непрочной) и срок службы
ее значительно сокращается.
Изоляционные материалы подразделяют на неорганические
(керамика, стекло, слюда, кварц, асбест) и органические (смолы,
лаки, нефтяные масла, компаунды, элегаз и др.). На основе
этих материалов изготовляют миканиты, микаленты, микафолит
и др.
ЗАПОМНИТЕ
Все электроизоляционные материалы (твердые, жидкие,
газообразные) отличаются большим удельным электриче-
ским сопротивлением: pv* = 108-? Ю20 Ом-м.
Электрическая прочность изоляционного материала оцени-
вается наименьшим значением напряженности электриче-
ского поля, при котором происходит так называемый «про-
бой». Пробой изоляции возникает в результате теплового
или электрического процесса.
При тепловом пробое изоляционных материалов образуются
тепловые тонкие каналы, в которых снижается электрическое
сопротивление и в дальнейшем может возникнуть электрическая
дуга.
При электрическом пробое под действием сильного электри-
ческого поля нарушается структура диэлектрика.
Интенсивное охлаждение изоляционного материала сущест-
венно повышает его электрическую прочность. С этой целью
используют принудительную вентиляцию и увеличивают охлаж-
дающую поверхность. В результате этого значительно снижается
перегрев активных материалов и изоляции и, следовательно,
увеличивается энергоемкость электротехнического устройства.
106
САМОЕ ВАЖНОЕ
1. Электротехнические устройства служат для преобразо-
вания электрической энергии в другие виды энергии и на-
оборот.
2. К электротехническим устройствам относят делители на-
пряжения и тока, трансформаторы, усилители, термопреоб-
разователи, выпрямительные устройства, аналого-цифровые
и цифроаналоговые преобразователи и др.
3. Потребляемая электротехническими устройствами мощ-
ность Pi преобразуется в полезную А и расходуется на
покрытие потерь мощности АР в устройстве. Кпд электро-
технического устройства T] = Pz/Pi.
Темы докладов и рефератов
1. Электротехнические устройства, используемые в быту и на
производстве (по профилю профессии).
2. Электрическая изоляция в электротехнических устройст-
вах.
1 Какие виды энергии используют в производстве и быту?
( J] 2 На каких явлениях основано преобразование электрической энергии
''Дх в тепловую? в световую?
Назовите основные законы и явления, на которых базируется принцип
действия электротехнических устройств, преобразующих электрическую
энергию.
Что называют «электрическим сигналом» и каковы функции преобра-
зования сигнала?
Приведите примеры применения магнитных, электромашинных и
электронных усилителей в своей профессии.
Какие функции выполняют аналого-цифровые и цифроаналоговые пре-
образователи?
Составьте уравнение процесса преобразования энергии по энергетиче-
ской диаграмме, изображенной на‘ рис. 178. Напишите формулу кпд
электротехнического устройства.
Почему изоляцию токопроводящих частей считают одним из основных
элементов электротехнических устройств?
ЭЛЕКТРОННЫЕ ПРИБОРЫ
И УСТРОЙСТВА
§ 33. Назначение и классификация электронных
приборов
Электронными называются устройства, в которых преобразование электри-
ческой энергии и сигналов реализуется с помощью электронных активных эле-
ментов (электронных приборов).
Наиболее простым видом преобразования является выпрямле-
ние переменного тока, более сложными — инвертирование по-
стоянного тока в переменный, усиление, генерирование и преоб-
разование сигналов различной формы.
Электрическая схема устройства включает в себя кроме ак-
тивных элементов (электронных приборов) пассивные компонен-
ты: резисторы, конденсаторы и катушки индуктивности. Резис-
торы обеспечивают требуемый режим активных элементов. Кон-
денсаторы служат для связи отдельных цепей и узлов по пере-
менному току, обеспечивая в то же время их разделение по по-
стоянному току. Катушки индуктивности используются для соз-
дания колебательных контуров, дросселей, различных фильтров
и т. д.
ЗАПОМНИТЕ
Все активные элементы (электронные приборы) можно раз-
делить на две группы: электровакуумные и полупроводни-
ковые.
► В электровакуумных приборах перенос электрических заря-
дов осуществляется в вакууме или газе, заполняющем
прибор. Носителями электрического заряда являются элект-
роны, источником которых служит катод.
В большинстве электровакуумных приборов применяются
термоэлектронные катоды, которые генерируют (эмиттируют)
электроны под действием теплоты. Все электровакуумные прибо-
ры кроме катода имеют анод, выполняющий роль коллектора
(«собирателя») электронов. В зависимости от назначения при-
бора между анодом и катодом вводятся управляющие электроды:
сетки и экраны, регулирующие интенсивность и скорость элект-
ронов.
108
ЗАПОМНИТЕ
В зависимости от характера процесса переноса заряда все
электровакуумные приборы разделяют на две группы: элек-
тронные и газоразрядные.
К электронным относятся: электронные лампы, электронно-
лучевые трубки, вакуумные фотоэлементы и фотоэлектронные
умножители. В этих приборах процесс переноса носителей за-
ряда от катода к аноду происходит в вакууме и осуществляется
исключительно катодными электронами.
К газоразрядным приборам относятся газотроны, тиратроны,
ртутные выпрямители. В этих приборах физические процессы
протекают в среде инертного газа или паров ртути и в процессе
переноса электрических зарядов кроме катодных электронов
участвуют электроны и положительные ионы, возникшие вслед-
ствие ионизации газа.
► В полупроводниковых приборах перенос электрических за-
рядов происходит в твердом теле (полупроводнике).
К ним относятся диоды, транзисторы, тиристоры, фоторезисторы,
фотодиоды, фототранзисторы и светодиоды.
ЗАПОМНИТЕ
Полупроводниковые приборы подразделяются на биполяр-
ные и униполярные.
В биполярных полупроводниковых приборах в переносе элект-
рического заряда в рабочем промежутке участвуют основные и
неосновные носители заряда. Применительно к полупроводнику
с проводимостью p-типа основными носителями заряда являются
положительно заряженные частицы — дырки (обозначают р), а
неосновными — отрицательно заряженные электроны (обозна-
чают п). Соответственно для полупроводника с проводимостью
п-тияа основными носителями являются отрицательно заря-
женные электроны, а неосновными — положительно заряженные
дырки.
В униполярных приборах перенос электрических зарядов осу-
ществляется основными носителями полупроводника проводя-
щего слоя.
ЗАПОМНИТЕ
По способу управления потоком электрических зарядов
(электрическим током) все рассмотренные активные элемен-
ты можно разбить на две группы: полевые и токовые.
В полевых приборах управление осуществляется электриче-
ским полем. К ним относятся все электровакуумные и униполяр-
ные полупроводниковые приборы.
В токовых приборах управление осуществляется электриче-
ским током. К токовым приборам относятся биполярные тран-
зисторы.
109
§ 34. Электронно-лучевые приборы
Электронно-лучевыми называются электровакуумные приборы, в которых ис-
пользуется поток электронов, сконцентрированный в форме луча или пучка лучей.
В соответствии с их назначением электронно-лучевые приборы
можно подразделить на следующие группы: электронно-графи-
ческие, передающие телевизионные трубки, запоминающие труб-
ки и электронно-лучевые переключатели.
Электронно-графические приборы предназначены для получе-
ния оптического изображения на экране под действием электро-
нов. К ним относятся осциллографические, радиолокационные
и приемные телевизионные трубки.
Осциллографическая трубка (рис. 65) представляет собой
однолучевой или многолучевой прибор, предназначенный для
наблюдения или регистрации изменений во времени быстропро-
текающих процессов, а также для генерации на экране требуе-
мых изображений.
В электронно-графических приборах широко применяется
электростатическое управление электронным потоком.
В торце узкой части стеклянного баллона расположен катод
1 в виде небольшого цилиндра. Внутри катода помещена спи-
раль для подогрева. Дно цилиндра с внешней стороны покрыто
оксидным слоем. Вблизи катода располагается полый цилиндр,
называемый управляющим электродом или модулятором 2; он
служит для изменения плотности тока электронного луча.
По оси трубки располагаются еще два цилиндра — первый 3
и второй 4 аноды. Первый анод, находясь под положительным
потенциалом в несколько сотен вольт, ускоряет движущийся от
катода поток электронов. Ко второму аноду подводится напря-
жение, достигающее в некоторых электронно-лучевых приборах
десятков киловольт. В результате этого электронный поток из
второго анода выходит с достаточно высокой скоростью. Кроме
ускорения электронов аноды фокусируют электронный поток в уз-
кий луч, сходящийся у поверхности экрана.
Вся система электродов крепится на траверсах и образует
единое устройство, называемое электронным прожектором. Вый-
дя из электронного прожектора, электронный луч попадает в от-
клоняющую систему 5, служащую для управления положением
луча в пространстве. Отклоняющая система состоит из двух пар
пластин, расположенных попарно в вертикальной и горизонталь-
ной плоскостях. Пластины, расположенные ближе к прожектору,
называются измерительными (пластины вертикального отклоне-
ния). Трубку в аппаратуре устанавливают таким образом, чтобы
измерительные пластины давали вертикальное отклонение пятна.
Под действием напряжения, поступающего на эти пластины, луч
на экране прочерчивает вертикальную прямую линию. Длина
этой линии характеризует размах исследуемого колебания (для
синусоидального процесса равна двум амплитудам 2Дтах).
110
65
Для наблюдения (регистрации) этого колебания на экране пятно
должно двигаться с постоянной скоростью в горизонтальном на-
правлении. Это достигается с помощью пластин горизонтального
отклонения. Свечение экрана обеспечивается люминофорным
покрытием 7 под действием бомбардирующих его электронов.
При бомбардировке экрана с его поверхности вылетают элект-
роны, которые увлекаются полем проводящего покрытия — аква-
дага 6, находящегося под положительным потенциалом зазем-
ленного второго анода.
Проследим образование изображения на экране осциллогра-
фической трубки. Пусть на пластины горизонтального отклонения
подается линейно изменяющееся напряжение (рис. 66). Когда
напряжение на этих пластинах имеет максимальное отри-
цательное значение /о, пятно находится в левом краю экрана.
По мере увеличения напряжения (интервал 7’1) пятно с постоян-
ной скоростью перемещается вдоль горизонтальной оси слева
направо и при наличии на измерительных пластинах исследуе-
мого сигнала луч описывает кривую, подобную ему. Когда
пятно достигает противоположного края экрана^ развертываю-
щее напряжение (напряжение развертки) быстро уменьшается
(интервал Га) и пятно возвращается в исходное положение.
111
ЗАПОМНИТЕ
Осциллограммы на экране получаются неподвижными
только тогда, когда период напряжения развертки равен
или кратен периоду исследуемого колебания.
Яркость свечения регулируется с помощью потенциометра /?1,
изменяющего напряжение между модулятором и катодом, фо-
кусировка обеспечивается потенциометром R2 (см. рис. 65), из-
меняющим потенциал на первом аноде.
§ 35. Полупроводниковые диоды
Полупроводниковый диод (рис. 67, а), представляет собой двухслойную
структуру, которая образуется в одном кристалле. Один слой имеет электропро-
водность n-типа, а другой р-типа.
Эти слои разделены слоем с собственной электропроводно-
стью; в нем сосредоточен пространственный заряд, положитель-
но заряженных ионов донорной примеси со стороны полупровод-
ника n-типа, и отрицательно заряженных ионов акцепторной
примеси — со стороны полупроводника p-типа. Этот слой назы-
вается запирающим, так как его электрическое поле препятст-
вует движению основных носителей полупроводников и способ-
ствует движению неосновных носителей. В целом эта структура
называется п-р-переходом или электронно-дырочным переходом.
ЗАПОМНИТЕ
Основным свойством электронно-дырочного перехода явля-
ется его односторонняя электропроводимость. Направление,
при котором ослабляется действие запирающего слоя (по»
ложительный полюс источника напряжения подсоединен к
p-области, а отрицательный — к n-области), называется
прямым или направлением пропускания тока, а направле-
ние, при котором усиливается действие запирающего слоя
(отрицательный полюс источника напряжения подсоеди-
67
112
нен к p-области, а положительный — к n-области), назы-
вается обратным или направлением запирания.
► При прямом смещении р-п-перехода его электрическая про-
водимость возрастает и через переход проходит ток, сильно
зависящий от приложенного напряжения.
При обратном смещении р-п-перехода электрическая прово-
димость перехода уменьшается и через переход проходит
лишь незначительный ток, который слабо зависит от прило-
женного напряжения.
Электронно-дырочный переход, обладающий односторонней
проводимостью, получил название выпрямляющего контакта.
Кроме него в диоде имеются еще два невыпрямляющих кон-
такта, с помощью которых области полупроводников р и п
(рис. 67, а) соединяются с внешними выводами. Прямой ток дио-
да направлен от анода А (слой p-типа) к катоду К (слой п-типа)
по «стрелке».
^ПЮМНИПГЕ
В зависимости от выпрямляющего контакта диоды подраз-
деляют на плоскостные (рис. 67,6) и точечно-контактные
(рис. 67, в)
Обозначение полупроводникового диода на электрических
схемах показано на рис. 67, г.
Вольт-амперная характеристика диода I(U) приведена на
(рис. 68). Кривая прямого тока расположена в I квадранте, об-
ратного — в III квадранте. Из графика видно, что прямой ток
достаточно сильно зависит от напряжения. При увеличении на-
пряжения ток может превысить допустимое максимальное зна-
чение /тах и тогда произойдет перегрев р-п-перехода — прибор
выйдет из строя. Для германиевых диодов напряжения U, при
которых ток достигает 0,1 находятся в пределах 0,2—0,4 В,
для кремниевых — 0,5—0,8
При напряжениях,
больших по абсолютно-
му значению t/06pmax, об-
ратный ток диода резко
возрастает, может стать
соизмеримым с прямым
током и Тогда происходит
локальный перегрев, при-
водящий к разрушению
диода.
На основе электронно-
дырочного перехода соз-
даны кремниевые стаби-
литроны и варикапы.
В.
8—85
113
69
Особенность вольт-амперной харак-
теристики стабилитрона — резкое
увеличение обратного тока при срав-
нительно малых изменениях обрат-
ного напряжения в области, близкой
к напряжению пробоя (U06V>
>t/06pmax) — используется При СОЗ-
дании стабилизаторов напряжения.
Основными параметрами стабили-
тронов являются: напряжение ста-
билизации (7СТ и дифференциальное
(динамическое) сопротивление в ра-
бочей точке /?дин = Чем меньше /?дин, тем выше каче-
ство стабилизации.
На рис. 69, а, б показана простейшая схема включения стаби-
литрона для стабилизации постоянного напряжения и его услов-
ное обозначение. При увеличении входного напряжения t/BX воз-
растает ток в цепи R1 — VD. Напряжение на нагрузке UH, равное
напряжению стабилизации, практически не изменяется, а все из-
быточное напряжение падает на резисторе /?1. Вольт-амперные
характеристики некоторых промышленных типов стабилитронов
показаны на рис. 70 (/— КС133А, 2 — КС156А, 3 — КС182Ж,
4 — КС212Ж).
Варикапом называют полупроводниковый диод с обратно смещенным р-п-пе-
реходом, применяемый в качестве конденсатора для электрической настройки
частотно-избирательных цепей.
С увеличением обратного напряжения на варикапе емкость
его перехода уменьшается. Условное обозначение варикапа по-
казано на рис. 71, а. Зависимость его емкости от напряжения
С((/) называется вольт-фарадной характеристикой варикапа
(рис. 71,6). Номинальная емкость варикапа определяется при
номинальном обратном напряжении.
>8 д 4
70
114
Максимальная емкость варикапа в зависимости от его типа
составляет 5—300 пФ. Отношение минимальной и макси-
мальной емкостей для данного типа прибора около 1:5.
§ 36. Биполярные транзисторы
Биполярным транзистором называется полупроводниковый прибор с двумя
p-zi-переходами. Он имеет трехслойную структуру п-р-п (рис. 72, а) или р-п-р-
типа (рис. 72, б).
Средняя область между двумя р-и-переходами называется
базой. Толщина ее делается достаточно малой. Соседние области
называются эмиттером и коллектором. Соответственно р-п-пере-
ход эмиттер — база называется эмиттерным, а переход база —
коллектор — коллекторным. Биполярные транзисторы, выпускае-
мые промышленностью,, выполнены на основании кремния и гер-
мания. Наибольшее применение в современной аппаратуре полу-
чили кремниевые транзисторы.
► Различают следующие режимы транзистора: режим отсечки
токов (режим закрытого транзистора), когда оба перехода
смещены в обратном направлении (закрыты), токи в тран-
зисторе малы; режим насыщения (режим открытого тран-
зистора), когда оба перехода смещены в прямом направле-
нии, токи в транзисторах максимальны и не зависят от его
параметров: активный режим, когда эмиттерный переход
смещен в прямом направлении, коллекторный — в обрат-
ном.
В режимах отсечки и насыщения управление в транзисторе
отсутствует. Напряжения между электродами (режим отсечки)
и токи открытого транзистора (режим насыщения) определяются
параметрами компонентов внешних цепей. В активном режиме
эмиттерный ток р-п-перехода управляет током коллектора. Ак-
тивный режим называется усилительным. Схема включения и на-
правления токов п-р-п-транзистора, работающего в активном
режиме, приведена на рис. 73, а.
Функцией эмиттерного перехо-
да является инжекция («впрыс-
кивание») неосновных носителей
заряда в область базы. Для этого
область эмиттера (p-типа для
структуры р-п-р и n-типа для
структуры п-р-п) делается более
низкоомной, чем область базы.
Часть инжектированных эмиттер-
ным переходом носителей заряда
рекомбинирует с основными носи-
телями базы и не доходит до кол-
лекторного перехода. Эта часть
невелика и составляет примерно
несколько процентов — десятые—
8*
115
сотые доли процента инжектиро-
ванных зарядов. Таким образом,
ток из цепи эмиттера передается
в цепь коллектора с коэффициен-
том а=/к//э Коэффициент а на-
зывается коэффициентом переда-
чи тока эмиттера в коллектор. В
современных транзисторах а =
= 0,95-4-0,99 и более (но всегда
а< 1).
На ток /к, переданный из цепи
эмиттера в цепь коллектора, на-
кладывается обратный (тепло-
вой) ток /ко коллекторного пере-
хода. Таким образом, формулу
для коллекторного тока можно
записать в виде
/к — а/ э-|- / Ко.
Была рассмотрена работа би-
полярного транзистора в актив-
ном режиме. Внешние напряже-
ния прикладывались между эмиттером и базой и между коллек-
тором и базой. При этом потенциал базы оставался неизменным.
Такой режим соответствует включению транзистора по схеме с
общей базой (ОБ) (рис. 73, а). Управляющим током в этой схеме
является ток эмиттера, управляемым — ток коллектора.
Кроме схемы ОБ получили широкое применение схемы
включения транзистора с общим эмиттером ОЭ (рис. 74,а) и
общим коллектором ОК (рис. 74,6). Вольт-амперными для
любой из схем включения являются входные и выходные
характеристики.
Рассмотрим вольт-амперные характеристики п-р-и-транзисто-
ров как наиболее широко применяемых (для р-п-р-транзисторов
необходимо изменить знаки напряжений и токов на противопо-
ложные). Входные характеристики для схемы с общей базой
(см. рис. 73,6) представляют собой зависимости /э = /(£/эб)
при £/КБ = const, а выходные (см. рис. 73, а) —зависимости
/к = /(47КБ) при /э = const. Для нормального активного режима
выходные характеристики представляют собой семейство парал-
лельных прямых.
В схеме с общим эмиттером управляющим током является
ток базы. Поэтому входной характеристикой будет зависимость
/Б =/(t/вэ) при фиксированном напряжении между коллектором
и эмиттером (Дэ (рис. 74, в), а выходной — зависимость /к =
= f(t7K3) при фиксированном значении тока базы (рис. 74,г).
В активном режиме идеализированные выходные характерис-
116
тики представляют собой
параллельные прямые,
описываемые уравнением
/к — + (1 + Р) ^Ко,
где р = а/(1—а) — коэф-
фициент передачи тока
базы в коллектор.
Значение коэффициен-
та р много больше едини-
цы. Обычно 0 = 204-200,
а для некоторых типов
транзисторов достигает
1000 и более. Реальные
характеристики имеют на-
клон. Ток /к возрастает с
увеличением (7КЭ. Для
оценки реальной зависи-
мости IK = f(L/K3) в ак-
тивном режиме вводится
параметр — дифференци-
альное сопротивление кол-
лектора в схеме с ОЭ
г* — ' тЛ2-- В схеме с общим коллектором управляющим током
д/к
является ток базы, а управляемым — ток эмиттера. Вольт-ампер-
ные характеристики транзистора в этой схеме практически та-
кие же, как и в схеме с ОЭ, поскольку ток коллектора практи-
чески равен току эмиттера.
Выпускаемые промышленностью биполярные транзисторы
классифицируют в основном по максимальной мощности,
рассеиваемой на коллекторном переходе РКтах, максималь-
ному напряжению между коллектором и эмиттером f/кэтах
и максимальному току коллектора /Ктах-
§ 37. Тиристоры
Многослойные структуры с тремя р-л-переходамн называют тиристорами.
Тиристоры с двумя выводами (двухэлектродные) называются динисторами. а с
тремя (трехэлектродные) — тринисторами.
> Основным свойством такой четырехслойной структуры яв-
ляется способность находиться в двух состояниях устойчи-
вого равновесия: максимально открытом (с большой про-
водимостью) и максимально закрытом (с малой проводи-
мостью) .
По этой причине тиристоры относят к классу переключающих
полупроводниковых приборов, главным применением которых
117
является бесконтактная комму-
тация электрических цепей.
При прямом включении ди-
нистора (рис. 75,а) источник
питания Еп смещает р-п-пере-
ходы П\ и П3 в прямом на-
правлении, а /7г — в обратном,
динистор находится в закры-
том состоянии и все приложен-
ное к нему напряжение падает
на переходе /7г. Ток прибора
определяется током утечки /ут,
значение которого находится в
пределах от сотых долей мик-
роампера до нескольких микро-
ампер (участок ОД). Диффе-
ренциальное сопротивление ди-
„ At;
нистора /<дИн = на участке
ОА положительно и достаточ-
но велико. Его значение мо-
жет достигать нескольких со-
75
тен мегаом. Условное обозначение динистора показано на
рис. 75, б.
Когда напряжение достигает напряжения переключения
Опер (Опер близко к напряжению пробоя р-п-перехода П2), ток
динистора резко возрастает, а напряжение на переходе П2 па-
дает. Прибор находится в открытом состоянии, рабочая точка
динистора перемещается на участок БВ. Дифференциальное со-
противление динистора на участке БВ положительно и достаточ-
но мало, значение его лежит в пределах от 0,001 Ом до несколь-
ких ом. Чтобы выключить динистор, необходимо, чтобы ток /Пр
был меньше тока удержания /уд (рис. 75, в).
Если к динистору приложено обратное напряжение, то пере-
ход П2 открыт, а переходы П1 и ПЗ закрыты. В этом состоянии
ток прибора определяется обратным током утечки /ут обр, если
приложенное напряжение не превышает 770бртах, зависящего
главным образом от свойств переходов П1 и ПЗ (участок ОГ,
рис. 75, в).
Из вольт-амперной характеристики динистора видно, что за-
висимость /((/) имеет участок с отрицательным наклоном (учас-
ток АБ). Дифференциальное сопротивление динистора на этом
участке отрицательно. При приближении режима работы динис-
тора к участку АБ происходит переключение его из одного со-
стояния в другое. Динисторы относятся к неуправляемым ком-
мутирующим элементам.
Тринисторы относятся к разряду управляемых коммути-
рующих элементов. Четырехслойная структура их имеет три вы-
118
вода: два от крайних областей (ано-
да Л и катода К, как в динисторе) и
третий — управляющий вывод У — от
одной из средних (базовых) областей
(рис. 76, а). Ток перехода ПЗ управ-
ляется внешним управляющим сигна-
лом /упр. Условное обозначение трини-
стора показано на рис. 76, б.
Вольт-амперные характеристики да-
ны для трех значений управляющих
токов (рис. 76, в). При управляющем
токе, равном току спрямления /спр, про-
падает участок с отрицательным на-
клоном, т. е. происходит как бы спрям-
ление вольт-амперной характеристики.
Тринистор становится токопроводя-
щим.
§ 38. Полевые (униполярные)
транзисторы
Полевым транзистором называется полу-
проводниковый прибор, являющийся резисто-
ром, сопротивление которого изменяется под
действием поперечного электрического поля, создаваемого прилегающим к про-
водящему объему полупроводника управляющим электродом (затвором).
► В отличие от биполярных транзисторов, в которых физиче-
ские процессы переноса зарядов обусловлены как основны-
ми, так и неосновными носителями, в полевом транзисторе
управляемый ток обусловлен движением основных для дан-
ного типа полупроводника носителей заряда. Именно этим
явлением объясняется второе название транзистора — уни-
полярный .
Применяют два вида полевых транзисторов: с управляющим
р-п-переходом и с изолированным затвором. Упрощенная струк-
тура полевого транзистора с управляющим р-п-переходом и ка-
налом п-типа, а также схема его включения в электрическую
цепь показаны на рис. 77, а, его условное обозначение — на
рис. 77, б.
Область канала, от которой начинается движение носителей, называется исто-
ком И, а область, к которой движутся основные носители, — стоком С. Управ-
ляющая область в приборе (охватывающая канал) называется затвором 3.
В рассматриваемом случае затвором является полупроводни-
ковая область p-типа, охватывающая канал сверху и снизу. В ра-
бочем режиме р-и-переход смещен в обратном направлении. Это
смещение обеспечивается управляющим напряжением (7ЗИ. По-
лярность напряжения Пси выбирается такой, чтобы основные но-
119
сители тока перемещались в ка-
нале в направлении от истока к
стоку.
ЗАПОМНИТЕ
Принцип управления током
стока заключается в том,
что, изменяя значение уп-
равляющего напряжения
Уз и (другими словами, из-
меняя обратное напряжение
на р-и-переходе), можно ре-
гулировать поперечное се-
чение проводящего канала
и, следовательно, его прово-
димость.
При увеличении обратного на-
пряжения на р-п-переходе попе-
речное сечение проводящего ка-
нала уменьшается, что приводит
к уменьшению тока стока /о При
некотором напряжении происхо-
дит полное перекрытие канала и
ток стока становится равным ну-
лю. Напряжение, при котором
канал перекрывается, называется
напряжением отсечки UOTC (на
рис. 77, в Umc = — 2,0 В).
Вольт-амперными характерис-
тиками полевого транзистора с управляющим р-п-переходом яв-
ляются: проходная (стоко-затворная) (рис. 77, в) /с = /(^зи),
снятая при фиксированном напряжении UCw, и выходные 1С =
— [(Ucm), снятые при фиксированных значениях напряжения
Узи (рис. 77, г). Изменяя управляющее напряжение в пределах
Уотс < Узи < 0, можно в широких пределах изменять ток в цепи
стока /с,
Выходные характеристики транзистора имеют ярко выражен-
ные крутой и пологий участки. Усилительному режиму транзи-
стора соответствует пологий участок.
> Основными параметрами транзистора в режиме усиления
являются:
дифференциальная крутизна стоко-затворной характери-
стики
S = I
ЛУЗИ 't/си» const ’
120
дифференциальное выходное сопротивление И
3 С
и I
/си — Л(/с/АА>
Параметр S можно определить по стоко-
затворным характеристикам, а гси — по вы-
ходным. В зависимости от разновидности
транзисторов крутизна стока-затворной ха-
рактеристики лежит в пределах 5—
П
78
12,5 мА/В.
ЗАПОМНИТЕ
Полевые транзисторы с изолированным затвором (рис. 78, а)
имеют структуру металл (М) — диэлектрик (Д) — полупро-
водник (П) (сокращенно МДП).
На подложке p-типа создаются области n-типа, к которым
подводятся внешние электроды истока И и стока С. Между
металлическим затвором 3 и подложкой находится диэлектрик Д,
чаще всего это диоксид кремния SiO2. По этой причине МДП-
структуры часто называют МОП-структурами (металл — оксид —
полупроводник). Проводящий слой канала n-типа образуется в
поверхностном слое подложки под диэлектриком. Этот канал мо-
жет быть встроенным (результат технологического процесса) и
индуцированным, возникающим под действием электрического
поля, создаваемого положительным напряжением, приложенным
между затвором и истоком. Это электрическое поле отталкивает
носители положительного заряда р в глубь подложки и притяги-
вает электроны п к ее поверхности.
Проводящий канал возникает только при некотором напря-
жении, называемом пороговым [7пор. Значение Unof> может быть
как положительным (для транзистора с индуцированным кана-
лом п-типа), так и отрицательным (для транзистора с индуци-
рованным каналом p-типа). Условные обозначения МДП-тран-
зисторов с встроенным каналом n-типа приведено на рис. 79, а,
р-типа — на рис. 79, в, с индуцированным каналом n-типа на
рис. 79, б и р-типа — на рис. 79, г. Там же показаны полярности
управляющего иЗИ и питающего (7Си напряжений.
Управляющее на-
пряжение транзисторов
с встроенным каналом
может быть как поло-
жительным, так И отри-
цательным. Это обу-
словлено тем, что в
этих транзисторах про-
водящий канал сущест-
вует уже при (7ЗИ = 0.
а) д) в) г)
121
80
^ЗИ7 7 ^ЗИ6
иЗИ6>1^ЗИ5
иЗИ5 ’ иЗИ4
Узиь 7 Узиз
Узиз >^ЗИ2
Узиг > Узиг
"ЗИ1 * Vпор
Uсн
81
На рис. 80 приведены стоко-затворные характеристики для
МДП-транзисторов с индуцированным (кривая /) и встроенным
(кривая 2) каналами n-типа. Выходные характеристики МДП-
транзистора (рис. 81) имеют два ярко выраженных участка:
крутой и пологий.
На крутом участке вольт-амперной характеристики ток стока
сильно зависит от приложенного напряжения [?си- На пологом
ток стока /с достигает как бы насыщения и не зависит от (Уси,
а определяется управляющим напряжением Um. В пологой об-
ласти характеристики транзистор имеет лучшие усилительные
параметры: крутизну S и дифференциальное сопротивление гСи-
ЗАПОМНИТЕ
Отличительной особенностью МДП-транзисторов является
большое входное сопротивление (У?вх > 109 Ом), что позво-
ляет управлять мощными цепями с помощью маломощных
источников сигнала.
§ 39. Фотоэлементы. Оптроны
К фотоэлементам относятся фоторезистор, фотодиод, фото-
транзистор, светодиод.
Полупроводниковый прибор, сопротивление которого зависит от освещенно-
сти, называется фоторезистором.
Такие приборы обычно выполняют на основе сульфида или
селенида кадмия. При увеличении освещенности сопротивление
фоторезистора уменьшается.
► Принцип действия фотодиода (рис. 82) основан на воз-
растании обратного тока р-п-перехода при его освещении.
Фотодиод применяется без дополнительного источника пита-
ния, поскольку сам является генератором тока, причем сила тока
пропорциональна освещенности.
122
82
Фотодиоды с большой площадью р-п-перехода, предназначенные специально
для получения электрической энергии из световой, называют солнечными ба-
тареями.
► В фототранзисторе р-п-переход коллектор — база представ-
ляет собой фотодиод.
На рис. 83, а представлена структура фототранзистора, на
рис. 83, б — его условное обозначение.
Светодиоды изготовляют на основе арсенида-фосфида галия.
Они излучают свет при прохождении через них прямого тока.
Яркость свечения пропорциональна прямому току. При токе в не-
сколько миллиампер светодиод уже отчетливо светится, поэтому
его удобно применять в качестве элементов индикации в полупро-
водниковых схемах.
Если в одном корпусе совместить светодиод и фоточувствительный элемент,
например фототранзистор, то входной ток можно преобразовать в выходной с
полным гальваническим разделением цепей. Такие оптоэлектрические элемен-
ты называют оптронами.
Коэффициент передачи тока оптрона от 0,1 до нескольких
тысяч.
§ 40. Выпрямительные устройства
Выпрямительные устройства преобразуют переменное напряжение питающей
сети в постоянное напряжение на нагрузке.
Они применяются в качестве источников вторичного электро-
питания (рис. 84).
Переменное напряжение питающей сети, например 220 В,
с помощью силового трансформатора понижается до необходимо-
го значения и затем выпрямляется с помощью выпрямителя.
В результате на выходе выпрямителя образуется напряжение
неизменного направления, которое является пульсирующим
84
123
(т. е. меняется во времени по значению) и поэтому непригодно
для питания большинства электронных устройств.
Для уменьшения пульсаций выпрямленного напряжения на
выходе выпрямителя включают сглаживающий фильтр, а в неко-
торых случаях дополнительно вводят стабилизатор постоянного
напряжения.
Выпрямительные схемы можно подразделить на однополупе-
риодные и двухполупериодные, а также на однофазные, много-
фазные и с умножением напряжения.
Однофазная мостовая схема выпрямителя
Однофазную двухполупериодную схему можно построить с
помощью выпрямительного моста, состоящего из четырех полу-
проводниковых диодов (рис. 85, а). К диагонали ab выпрями-
тельного моста приложено напряжение питающего источника
(например, от вторичной обмотки трансформатора), а в диаго-
наль cd включена нагрузка /?„. В положительный полупериод
питающего напряжения «2 потенциал точки а положителен,
а точки b — отрицателен. Диоды VD1 и VD2 включены в прямом
направлении, a VD3, VD4 — в обратном. Ток от положительного
зажима вторичной обмотки трансформатора направлен через
диод VD1 к точке с, далее через нагрузку R„ — к точке d и через
открытый диод VD2 — к отрицательному зажиму вторичной об-
мотки трансформатора. В отрицательный полупериод (поляр-
ность напряжения и2 указана в скобках) диоды VD3, VD4 про-
водят ток, a VD1, VD2 закрыты. Ток от положительного зажима
вторичной обмотки направлен через открытый диод VD3 к точ-
ке с, затем через нагрузку — к точке d и далее через открытый
124
диод VD4 — к отрицательному зажиму вторичной обмотки тран-
сформатора. Таким образом, ток в нагрузке имеет всегда одно
и то же направление от с к d. Во вторичной обмотке трансформа-
тора ток меняет направление каждый полупериод и, следователь-
но, постоянная составляющая тока в обмотке отсутствует.
Значения выпрямленного напряжения Uo и тока /о в мосто^
вой схеме определяются соотношениями:
Uo = 2U2m/n = 2д/2 U2/n = 0,9Z72;
/о = Uo/RH = 2O2m/(n/?„) = 2/2m/n,
где U2m и U2 — амплитудное и действующее значения напря-
жения.
Графики изменения тока и напряжения в нагрузке пока-
заны на рис. 85, б. Из рисунка видно, что напряжение и ток
имеют одно направление.
Трехфазная мостовая схема выпрямителя
Схема выпрямителя (рис. 86, а) содержит трехфазный транс-
форматор, первичная и вторичная обмотки которого соединены
в звезду, шесть диодов VD1, VD3, VD5 и VD2, VD4, VD6 и
нагрузку /?н.
ЗАПОМНИТЕ
Вторичные обмотки могут быть соединены и в треугольник.
При этом с помощью того же силового трансформатора
можно получить выпрямленное напряжение, отличающееся
в /3 раз.
Диоды в схеме выпрямителя (рис. 86, а) образуют как бы
две группы: верхнюю — нечетную с общим анодом и нижнюю —
четную с общим катодом. Они работают попарно и поочередно.
В любой момент времени проводят два диода (рис. 86,6): один
из нижней (четной) группы, напряжение на аноде которого
имеет наибольшее положительное значение, и один из верхней
(нечетной) группы, напряжение на катоде которого имеет наи-
большее отрицательное значение. Каждый диод проводит одну
треть (2л/3) периода. Четные и нечетные диоды работают со
сдвигом по фазе на одну шестую (л/3) периода и, следователь-
но, переключение происходит каждую шестую часть периода.
При работе выпрямителя на активную нагрузку выпрямленное
напряжение Uo = 2,34У2ф, где и2ф — фазное напряжение вторич-
ной обмотки трансформатора; частота пульсации fn = 6f\ (при
частоте сети [\ = 50 Гц fn = 300 Гц).
125
a>t
86
cot
Из рассмотрения схем выпрямителей видно, что с увеличе-
нием числа фаз повышается выпрямленное напряжение,
уменьшается коэффициент пульсации на выходе выпрямите-
ля и возрастает частота пульсации.
Сглаживающие фильтры
Анализ выпрямительных устройств, описанных ранее, пока-
зывает, что выпрямители позволяют получать на выходе постоян-
ное пульсирующее напряжение с частотой, пропорциональной
числу фаз выпрямления. Для питания устройств эти пульсации
должны быть снижены до минимального уровня, при котором
они не оказывают существенного влияния на работу электротех-
нических устройств.
С этой целью используют сглаживающие фильтры, • которые пропускают на
выход только постоянную составляющую выпрямленного напряжения и макси-
мально ослабляют его переменные составляющие.
Обычно амплитуда переменной составляющей основной часто-
ты пульсаций (основной гармоники) наибольшая, поэтому сгла-
живающее действие фильтра оценивается по степени ослабления
именно этой гармоники.
Сглаживающие фильтры относятся к группе фильтров низких
частот (см. гл. 4). Качество сглаживания фильтра оценивается
коэффициентом сглаживания
kQ = ^|/<?2 = (^тп|/^тп2)(^02/^01),
где q\ и qz — соответственно коэффициенты пульсации на входе
и выходе фильтра; U та\ и Uтп2—амплитуды пульсаций; t7oi и
U02 — средние выпрямленные напряжения на входе и выходе.
126
► В простейшем случае сглаживающий фильтр может содер-
жать только один элемент — либо дроссель с большой ин-
дуктивностью, включаемый последовательно на выходе
выпрямителя, либо конденсатор с большой емкостью, вклю-
чаемый параллельно нагрузке.
С целью увеличения коэффициента сглаживания применяют
различные виды фильтров: Г-образные и П-образные, а также
фильтры, в которых используются резонансные явления.
§ 41. Стабилизаторы постоянного напряжения
Стабилизатором напряжения называется устройство, поддерживающее на-
пряжения на нагрузке с заданной точностью при изменении сопротивления на-
грузки и напряжения сети в определенных пределах.
Основным показателем, характеризующим качество работы
стабилизатора, является коэффициент стабилизации напряже-
ния, который равен отношению относительного изменения напря-
жения на входе к относительному изменению напряжения на
выходе:
______ -У'вх/^вх. ном
KcTt/ MJ /и '
17 вых/ и вых. ном
ГДе А/7Вх == t/axmax t/axmin» А/7ВЫХ, === Uвыхтах /Лыхпйп, ЗДССЬ
t/вх ном> t/вых.ном — номинальные напряжения на входе и выходе
стабилизатора; t/Bxmax, t/Bxmin — максимальное и минимальное
входные напряжения; t/Bblxmax, (7BUXmin — максимальное и мини-
мальное выходное напряжение (на нагрузке).
ЗАПОМНИТЕ
Существует два вида стабилизаторов: параметрический и
компенсационный. В параметрических стабилизаторах ос-
новным стабилизирующим звеном является нелинейный
элемент —- стабилитрон. В компенсационных — стабилиза-
ция достигается путем введения отрицательной обратной
связи с выхода стабилизатора на вход регулирующего
элемента, в качестве которого, как правило, используется
мощный транзистор.
Простейшим параметрическим стабилизатором напряжения
является прибор с кремниевым стабилитроном (рис. 87, а),
вольт-амперная характеристика которого представлена на
рис. 87, б.
Если выбрать рабочую точку A (UmM, /,,ом) примерно в сере-
дине рабочего участка (/сттж 4-Лттах) характеристики, то напря-
жение на стабилитроне £/вых будет оставаться почти неизменным
при изменении тока стабилитрона в пределах А/ст = Аттах— Лом-
127
ид zx
Iст min ^ном hrmax hr
Коэффициент стабилизации параметрического стабилизатора
напряжения обычно невелик и составляет 20—50. Достоинством
рассмотренного стабилизатора является его простота, а недостат-
ком — низкий кпд и ограничение по току нагрузки.
§ 42. Преобразователи постоянного тока
в переменный (инверторы)
Преобразование постоянного тока в переменный называется инвертирова-
нием, а устройство, выполняющее такую функцию, — инвертором.
Инвертор, передающий энергию от источника постоянного тока потребителю,
в цепи которого не содержится источников энергии переменного тока, назы-
вается автономным, или независимым.
Инвертор, отдающий энергию в сеть переменного тока, называется зависимым,
или ведомым сетью.
В автономном инверторе частота выходного переменного на-
пряжения определяется частотой переменного напряжения в це-
пи управления, а в инверторе, ведомым сетью, значение и часто-
та переменного напряжения задаются сетью переменного тока.
Автономные инверторы
► Функциональная схема автономного инвертора содержит
трансформатор, переключающие приборы, цепи управления
режимом переключения, а также вспомогательные устрой-
ства.
В качестве переключающих в инверторах применяют приборы
с управляющими электродами: тиристоры (тринисторы), транзи-
сторы и др.
Принципиальная электрическая схема инвертора на тиристо-
рах и диаграммы токов и напряжений, иллюстрирующие его ра-
боту, показаны на рис. 88. Импульсы на управляющие электроды
тиристоров подаются поочередно по цепи управления. Между
анодом и катодом тиристоров VSI и VS2 приложено постоянное
(прямое) напряжение Ео. При отсутствии управляющих импуль-
сов тиристоры закрыты.
128
Пусть в момент времени
t — to на управляющий элек-
трод VS1 подается положи-
тельное (отпирающее) на-
пряжение. Под действием
этого напряжения тиристор
VS1 открывается, а тиристор
VS2 продолжает оставаться
закрытым. Ток от источника
постоянного напряжения за-
мыкается через левую поло-
вину обмотки W2 и открытый
тиристор VS1. Одновремен-
но через правую половину
обмотки W2 проходит ток
заряда конденсатора 1С. Об-
щий ток источника Io = ia\-\-ic (считаем индуктивность дрос-
селя бесконечно большой). В обмотках трансформатора W2
наводятся эдс одного направления, поэтому напряжение на кон-
денсаторе Uс=2в2- Когда в момент времени t=t\ на управляю-
щий электрод тиристора VS2 подается положительное напряже-
ние, то он открывается. Конденсатор С разряжается, и его
ток замыкается сразу через два тиристора VS1 и KS2, при-
чем в тиристоре VS2 разрядный ток конденсатора совпада-
ет по направлению с током 1а2, а в VS1 он направлен противо-
положно току iai. Когда разрядный ток конденсатора станет
равным прямому току ia2, общий ток в тиристоре VS1 умень-
шится до нуля и VS1 при отсутствии отпирающего сигнала на
управляющем электроде закроется, a VS2 продолжает оставать-
ся открытым. Направление токов в обмотках w2 и в конденса-
торе изменилось на противоположное. Конденсатор перезаря-
жается, и напряжение меняет полярность (на рис. 88 полярность
указана в скобках). При последующем открывании тиристора
VS1 конденсатор С
обеспечивает коммута-
цию тока из цепи VS2
в цепь VS1. Зависи-
мости ic(0 и ис(/) пока-
заны на рис. 89, а, б.
► Изменение тока в
обмотках транс-
форматора проис-
ходит с частотой
следования поло-
жительных им-
пульсов, подавае-
мых на управляю-
щие электроды ти-
ристоров.
89
9—85
129
Инверторы, ведомые сетью
► Процесс инвертирования можно рассматривать как явление,
обратное выпрямлению.
Как известно, в двухполупериодном выпрямителе с выводом
нулевой точки вторичной обмотки трансформатора положитель-
ным полюсом выходного постоянного напряжения является об-
щая точка катодов диодов, а отрицательным — средняя точка
вторичной обмотки трансформатора. Нагрузка подсоединяется
между положительным и отрицательным полюсом, и ток в на-
грузке направлен от положительного полюса к отрицательному,
а ток во вторичных обмотках трансформатора проходит в период
действия положительной полуволны переменной эдс в фазах вто-
ричной обмотки трансформатора. Такое направление эдс и тока
соответствует передаче этими обмотками энергии в нагрузку,
включенную в цепь постоянного тока. В первичной обмотке
трансформатора ток и эдс направлены навстречу друг другу, что
означает потребление этой обмоткой энергии из сети переменного
тока.
► При инвертировании в сетевой обмотке ток и эдс должны
иметь одинаковое направление, что будет означать переда-
чу энергии в сеть переменного тока.
Для выполнения этого условия вентили должны пропускать
ток преимущественно при отрицательной переменной эдс во вто-
ричной обмотке трансформатора. Эта обмотка, которая в схеме
выпрямителя являлась вторичной, в схеме инвертора в связи с
изменением направления потока энергии становится первичной.
Такое направление тока через диоды обеспечивается присоеди-
нением положительного полюса источника постоянного напря-
^220В
130
жения Ео к нулевой точке трансформатора и отрицательного
полюса к общей точке катодов. Инвертор (рис. 90) выполнен на
тиристорах VS1 и VS2, на управляющие электроды которых
поочередно подается отпирающее напряжение. Время действия
отпирающего напряжения совпадает с отрицательной частью
волны переменной эдс в соответствующей обмотке. Частота ин-
вертированного напряжения совпадает с частотой сети.
§ 43. Электронные усилители
Схема и принцип действия электронных
усилителей
Усилителем называется устройство, предназначенное для повышения мощно-
сти входного сигнала. В линейном усилителе входной сигнал усиливается без
искажения его формы.
► Повышение мощности сигнала на выходе усилители дости-
гается преобразованием энергии источника питания посто-
янного тока в энергию переменного сигнала.
Такое преобразование энергии осуществляется с помощью
активных компонентов — транзисторов или электронных ламп.
Соответственно усилители подразделяют на полупроводниковые
и ламповые. В настоящее время применяют в основном полупро-
водниковые усилители в интегральном исполнении.
В общем случае электронные усилители являются многокас-
кадными устройствами. Отдельные каскады связаны между собой
цепями, по которым передается переменный (усиливаемый) сиг-
нал и не пропускается постоянный сигнал. Каскады выполняют
по схеме с общим эмиттером (см. рис. 74, а) и с общим истоком,
с общим коллектором (см. рис. 74,6) и с общим стоком, с общей
базой (см. рис. 73, а) и с общим затвором.
Каскады с общим эмиттером и общим истоком называются усилительными
каскадами, с общим коллектором и общим стоком — повторителями напряже-
ния, с общей базой и общим затвором — повторителями тока.
ЗАПОМНИТЕ
Схема любого каскада состоит из источника питания,
транзистора и цепей смещения, обеспечивающих режим
транзистора по постоянному току (режим покоя).
Принципиальная электрическая схема усилительного каскада
на биполярном транзисторе приведена на рис. 91. В этой схеме
транзистор включен в цепь источника питания последовательно
с резисторами /?к и /?э. Режим покоя усилителя задается входным
9*
131
делителем R\ — Ri совместно с резисторами /?к и Ry Кроме того,
резисторы R\, R2, R3 стабилизируют коллекторный ток покоя при
изменении окружающих условий.
► Стабилизация будет тем лучше, чем меньше сопротивления
Ri и Ri и чем больше R3.
Резистор R3 создает сильную отрицательную обратную связь,
препятствующую изменению коллекторного тока покоя. Однако
стабилизирующее действие R3 на ток /к проявляется и при уси-
лении переменного сигнала, что приводит к снижению коэффи-
циента усиления. В усилителях переменного тока это нежелатель-
ное явление исключают, шунтируя резистор R3 конденсатором
большой емкости С3 так, чтобы его реактивное сопротивление
на частоте переменного сигнала было ничтожным по сравнению
с R3. Конденсаторы Ci и Сг являются разделительными. Они раз-
деляют по постоянному току соответственно цепь источника сиг-
нала (С|) и выход усилителя (Сг).
Принцип усиления переменного сигнала и определение рабо-
чей точки в усилительном каскаде иллюстрируется рис. 92.
На рисунке приведено семейство выходных характеристик тран-
зистора /к = f(UK3, 1Ъ). В отсутствие входного сигнала устанав-
ливается режим покоя. В первом приближении можно считать,
что постоянный ток коллектора примерно равен току эмиттера.
Это позволяет определить напряжение между коллектором и
эмиттером UK3 в режиме покоя, как «(/Кэ = Ек — /к(Лк + Лэ)-
Функция UK3 = f(/K) описывает нагрузочную прямую каскада
для постоянного тока. Она проходит через точку С, в которой
UK3 = 0 и /к = Ek/(Rk + Лэ), а также точку В, в которой
/к = 0 и t/K3 = £к- Точки пересечения нагрузочной прямой с
характеристиками семейства /к(Екэ, /в) соответствуют режиму
покоя транзистора. Если с помощью Rt, Ri, R3 задан ток базы
/ба, то, построив выходную характеристику /к (^кэ) Дба, получим
точку пересечения А, которая и является рабочей точкой в ре-
132
жиме покоя. Проекция точки А на ось ординат дает значение
тока /Ка, а на ось абсцисс (точка F) — значение напряжения
67ка в режиме покоя.
При действии переменного входного сигнала ток базы изме-
няется в некоторых пределах при возрастании от /БА до /Бтах
и при убывании от /БА до /Бт<п (соответственно /Б5 и /Б1 на
рис. 92).
Мгновенное значение переменной составляющей тока коллек-
тора связано с переменными значениями тока базы соотношением
iK = pjg. Эти изменения сказываются как в цепи /?к. так и /?„.
Это означает, что эквивалентной нагрузкой каскада является
параллельное соединение резисторов /?к и /?„ [ /?Кн =
— + Ян)]-
Линия нагрузки по переменному току проходит через точку А
под большим углом др. Эта линия пересекает вольт-амперную
характеристику в точке D, а для минимального тока — в точке Е.
На рис. 92 приведено построение tK(/). Переменная составляющая
коллекторного напряжения цк(С = <’к(0Як является выходным
сигналом усилителя. Сопоставляя кривые тока iK(/) и напряжения
ик(/)> можно отметить, что гк и «к имеют противоположные фазы
92
133
(знаки). В то же время нетрудно установить, что сигнал /к(0
совпадает по фазе с входным сигналом uBX(f).
► Таким образом, усилительный каскад с общим эмиттером
инвертирует фазу входного сигнала.
Для характеристики усилителя в динамическом режиме рабо-
ты вводят следующие основные параметры: коэффициент усиле-
ния напряжения Ku = UBM/UBX, коэффициент усиления тока
Ki — *ВЫх/4х и коэффициент усиления мощности Кр — Рвм/Рвх =
=
В некоторых случаях усиление удобно выражать в логариф-
мических единицах — децибелах: Ки /(дБ) = 201g^/; Кр(дБ) =
= lOlgKp.
► По отношению к источнику входных сигналов усилительный
каскад характеризуется входным сопротивлением /?вх, а по
отношению к нагрузке — выходным сопротивлением /?ВЬ1Х.
В рассматриваемой схеме входное сопротивление переменному
сигналу определяется сопротивлением резисторов R\, R2, соеди-
ненных параллельно с входным сопротивлением транзистора,
а выходное /?вых — сопротивлением резистора /?к.
Обратные связи в усилителях
Обратной связью называется передача части энергии выходного сигнала на
вход усилителя. Если сигнал обратной связи действует согласно с входным
сигналом, в результате чего коэффициент усиления возрастает, то такая связь
называется положительной. Если же сигнал обратной связи противодействует
входному сигналу и коэффициент усиления уменьшается, то связь называется
отрицательной.
Отрицательная обратная связь благоприятно влияет на ос-
новные эксплуатационные параметры усилителя. Она улучшает
стабильность усиления, уменьшает искажения формы выходного
сигнала, снижает влияние разброса параметров элементов схемы
и т. д. Очень распространенным видом отрицательной обратной
связи в усилительном каскаде является местная отрицательная
обратная связь по току (см. рис. 91). Чтобы ввести такую связь,
достаточно в схеме рис. 91 исключить конденсатор С3 из цепи
эмиттера. В этом случае переменная составляющая тока эмитте-
ра 1Э — »к создает на сопротивлении R3 напряжение обратной
связи, пропорциональное выходному току. По этой причине
такой вид обратной связи получил название отрицательной об-
ратной связи по току. Напряжение обратной связи и3 = /?э*э
вводится во входную цепь усилителя таким образом, что оно
уменьшает полезный сигнал на зажимах «база — эмиттер» тран-
зистора.
Действительно, согласно схеме на рис. 91, иБЭ = UBX— и3.
Следовательно, обратная связь, получаемая при введении рези-
стора R3 в цепь эмиттера, является отрицательной, так как ее
сигнал противодействует входному сигналу.
134
Разделив обе части соотношения на ц,ых, получим
ЦБэ/Шых == (^вх/^вых) (^э/Пвых)-
Введем обозначения: цвых/«бэ = Ки — коэффициент усиления
напряжения усилителя без обратной связи; ивых/мвх = Куос —
коэффициент усиления напряжения при наличии обратной связи;
иэ/«вых = у — коэффициент обратной связи.
С учетом принятых обозначений из последнего уравнения
имеем
Кцос= W(1 + уКи).
ЗАПОМНИТЕ
Отрицательная обратная связь увеличивает входное сопро-
тивление каскада в (1 + уКи) раз. Выходное сопротивление
каскада определяется в основном /?к и поэтому остается
практически неизменным.
Применяют способ введения отрицательной обратной связи
в усилительный каскад с общим коллектором, когда нагрузку
включают через разделительный конденсатор большой емкости в
цепь эмиттера, как показано на рис. 93. При таком включении
нагрузки напряжение обратной связи оказывается равным вы-
ходному напряжению «вых, поэтому такая связь называется
стопроцентной отрицательной обратной связью по напряжению.
Коэффициент усиления напряжения в каскаде не превышает
единицы:
КУос= Ки/(1 + Ку)<1.
Напряжение на выходе усилителя как бы повторяет форму
входного сигнала, отсюда рассматриваемый каскад получил еще
одно название эмиттерного повторителя.
ЗАПОМНИТЕ
Эмиттерный повторитель
имеет высокое входное и
низкое выходное сопро-
тивления, поэтому дей-
ствует как трансформатор
сопротивлений и широко
применяется для согласо-
вания усилительных кас-
кадов с низкоомной на-
грузкой.
Многокаскадные усилители пред-
ставляют собой последовательное со-
единение однотипных усилительных
каскадов.
Наиболее просты усилители
с емкостной связью (рис. 94)
135
94
В них сигнал с коллектора предыдущего каскада передается на
базу последующего через разделительный конденсатор, чем
достигается независимость режимов покоя отдельных усилитель-
ных каскадов. C„i и Сл2 являются паразитными входными емко-
стями. В зависимости от параметров разделительных цепей эти
усилители способны усиливать сигналы в широком диапазоне
частот, при относительном постоянстве коэффициента усиления
напряжения в пределах полосы пропускания.
П олоса_пропу скания усилителя обычно определяется по уров-
ню Луо/д/2 = О,7О7К{;о, где Кио—коэффициент усиления в об-
ласти средних частот.
Помимо конденсаторов в цепях связи между отдельными уси-
лительными каскадами, выполненными на дискретных компонен-
тах, используют трансформаторы. Трансформатор обеспечивает
хорошую гальваническую развязку, согласование низкоомного
сопротивления нагрузки с высоким выходным сопротивлением
усилителя, а также низкого входного сопротивления каскада с
высоким внутренним сопротивлением источника сигнала.
Как известно, при согласованном режиме работы можно пере-
давать максимальную мощность от источника в приемник. Поэто-
му трансформаторная связь используется в основном в усилите-
лях мощности.
В усилителях в интегральном исполнении применяют непосредственную связь
между каскадами. Такие усилители могут усиливать сколь угодно медленно
изменяющиеся сигналы и даже сигналы постоянного тока и поэтому получили
название усилителей постоянного тока.
Современные усилители постоянного тока усиливают сигна-
лы в очень широком спектре частот и относятся к разряду широ-
кополосных усилителей. Типичная зависимость коэффициента
усиления от частоты в усилителе с непосредственной связью по-
казана на рис. 95. Как видно из графика, верхняя граничная
частота полосы пропускания fB определяется частотой, на которой
коэффициент усиления вследствие шунтирующего действия пара-
136
95
зитных емкостей транзисторов и нагрузки уменьшается в д/2
раз. Недостатком усилителей с непосредственными связями яв-
ляется изменение выходного напряжения режима покоя (дрейф
нуля) вследствие нестабильности напряжения питания, темпера-
туры и других факторов. Эффективным способом уменьшения
дрейфа нуля в таких усилителях является применение дифферен-
циальных усилительных каскадов.
Дифференциальный усилительный каскад представляет собой симметричную
двухтранзисторную схему с объединенными эмиттерами, имеющую два входа
и предназначенную для усиления только разности двух входных сигналов
(рис. 96).
Выходной сигнал можно снимать либо с коллектора одного из
транзисторов ({/ВЫХ|, {Лыхг). либо в виде разности напряжений
между коллекторами обоих транзисторов t/BUXi — (7вых2.
При симметричном выходе (между коллекторами) схема поз-
воляет в значительной степени уменьшить дрейф нуля выход-
ного сигнала. Действительно, если резисторы и транзисторы в
обоих плечах будут абсолютно одинаковы, то токи в каждом
плече схемы будут равны (при t/BX = 0): iK) = iK2 = /э/2. Уровни
напряжения на каждом выходе будут одинаковы: мвых| = L/Ki —
= Ек — а/эЛк/2; wBux2 = ^кг = £к — а/э/?к/2.
96
137
► Дифференциальные усилители применяются в измеритель-
ных схемах, а также в качестве основного звена в опера-
ционных усилителях.
§ 44. Операционные усилители
Операционный усилитель, как и любой другой усилитель,
предназначен для усиления мощности входного сигнала. Назва-
ние «операционный» он получил от аналогов на дискретных ком-
понентах, выполнявших различные математические операции
(суммирование, вычитание, логарифмирование и др.) в основном
в аналоговых ЭВМ.
В настоящее время операционным называют усилитель, выполненный в виде
интегральной микросхемы.
ЗАПОМНИТЕ
Идеальным операционным усилителем будем называть уси-
литель постоянного тока с дифференциальным входом и
одним выходом (рис. 97), имеющий бесконечно большой
коэффициент усиления напряжения (на схеме обозначено
«>оо»), бесконечно большое входное сопротивление и нуле-
вое выходное сопротивление, т. е. Ku = Rex = оо,
Квых = 0.
► Интегральные операционные усилители являются универ-
сальными, выполняющими не только математические опера-
ции, но и генерирующими, усиливающими и преобразую-
щими сигналы.
Результирующие характеристики устройства определяются
только параметрами компонентов цепи внешней обратной связи.
В операционном усилителе в качестве входного использует-
ся дифференциальный усилительный каскад, применение кото-
рого повышает стабильность выходного потенциала усилителя,
а также расширяет его возможности благодаря наличию двух
входов.
► В зависимости от того, находится ли входной сигнал в про-
выходным, различают инвертирую-
инверсии «О» на рис. 97) и неин-
вертирующий (Вх2) входы.
Для питания операционного
усилителя обычно используют два
разнополярных источника -f-fni
и —Е„2, позволяющие получить
выходной потенциал, равный в со-
стоянии покоя нулю.
В операционном усилителе
внешние цепи обратной связи мо-
гут быть подключены к различ-
ным точкам микросхемы, в ре-
тивофазе или в фазе с
щий (обозначен знаком
138
зультате этого можно собирать самые разнообразные устройства
на базе одного и того же усилителя.
^АПЮМНИПГЕ
Так как операционные усилители выполняют на базе диффе-
ренциальных усилительных каскадов, то они характеризуют-
ся теми же параметрами, что и дифференциальные уси-
лители.
Одним из основных параметров операционного усилителя
является дифференциальный коэффициент усиления напряжения
Ки- Как правило, он очень высок и достигает нескольких миллио-
нов. Операционные усилители обладают весьма высоким вход-
ным сопротивлением (нескольких сотен килоом) и низким вы-
ходным сопротивлением (/?8ЫХ составляет от десятков до со-
тен ом).
Для построения линейных усилителей применяют операцион-
ные усилители с отрицательной обратной связью. В зависимости
от того, на какой из входов подается напряжение входного
сигнала, различают неинвертирующий и инвертирующий усили-
тели.
В неинвертирующем усилителе (рис. 98, а) фазы сигналов на
входе и выходе одинаковы. Входное напряжение подается на
98
139
неинвертирующий вход, а с выхода усилителя через резистивный
делитель R1— R2 на инвертирующий вход подается напряжение
отрицательной обратной связи. Обычно выполняется условие
Ri » /?ВЫх и Ri < RBX.
Коэффициент усиления операционного усилителя с отрица-
тельной обратной связью
K.U = КуБс/(1 + ?ЛуБс) = 1/( V' — + у) — (Л1 4- Ri)/R\,
где у = R\/{R\ + /?2), Ку, Киве —- коэффициенты усиления усили-
теля с обратной связью и без нее.
► Таким образом, усиление усилителя, охваченного отрица-
тельной обратной связью, зависит только от соотношения
сопротивлений внешних резисторов и не зависит от коэффи-
циента усиления самого операционного усилителя. Поэтому
коэффициент усиления такого усилителя очень стабилен.
Выбирая соответствующим образом значения сопротивле-
ний R\ и /?2, можно обеспечить необходимый коэффициент
усиления.
При построении инвертирующего усилителя (рис. 98, б) вход-
ной сигнал и сигнал обратной связи подаются одновременно на
инвертирующий вход, а другой вход обычно заземлен. Если пре-
небречь входным током операционного усилителя, то входной
ток Л и ток обратной связи 12 в указанном усилителе долж-
ны быть равны, т. е. = Так как коэффициент усиления
интегрального операционного усилителя очень велик, то диффе-
ренциальный сигнал на его входе ивх.д очень мал. Действительно,
при Кубс-*°° «вл д = «вых/Кубс0. Поэтому можем считать,
что «вх = Rtii, «вых = —Riii- Знак минус показывает, что фаза
сигнала на выходе противоположна фазе входного сигнала, т. е.
усилитель является инвертирующим. Учитывая условие равен-
ства токов, находим
Ки == ^вых/^вх = Ri/R\-
Полученные выводы позволяют построить схему усилителя,
осуществляющего суммирование входных напряжений. Для этого
несколько входных сигналов (например, три) через одинаковые
резисторы RI одновременно подаются на инвертирующий вход
усилителя, как показано на рис. 98,в.
Полагая, что входной ток операционного усилителя близок
• нулю, составим уравнение токов для узла
i'i + i'{ + Й" = -i2.
Выразим отдельные слагаемые входных токов через значения
входных напряжений
Й == Ивх1//?|, й = Ubx2/R\i Й = 12bx^/R\,
Учитывая выражение для тока обратной связи i2 = uBm/Ri,
составим уравнение для напряжений:
140
WbxI /R I “4“ URX2 / R\ “E ^вхз/R\ — ИВых//?2-
Отсюда можно найти выходное напряжение
^вых = ^2(wBx| "I- UBx2 “Ь ^bx3)/R| = {^R'l^U^i^ / R\-
Таким образом, значение выходного напряжения пропорцио-
нально сумме входных напряжений.
Операционный усилитель, включенный в цепь с тремя входами, выполняет ал-
гебраическую операцию сложения напряжения и поэтому называется сумма-
тором.
§ 45. Электронные генераторы
Генераторами называют автоколебательные (самовозбуждающиеся) системы,
в которых энергия источника питания (постоянного тока) преобразуется в энер-
гию переменного сигнала нужной формы.
В усилителе с положительной обратной связью сигнал обрат-
ной связи «помогает» входному сигналу, поэтому существенно
возрастает коэффициент усиления напряжения.
> Если абсолютное значение (модуль) произведения коэффи-
циента усиления напряжения усилителя без обратной свя-
зи Ки на коэффициент передачи напряжения в цепи обрат-
ной связи Уу станет больше единицы, то усилитель с обрат-
ной связью самовозбуждается: |/<ууу|> 1.
Если это условие выполняется на одной частоте, то усили-
тель становится генератором синусоидальных (гармониче-
ских) колебаний или близких к ним. Если же оно справед-
ливо для широкого диапазона частот, то генерируются коле-
бания сложной формы, часто близкие к прямоугольным.
В генераторе синусоидального напряжения усилитель с коэф-
фициентом усиления Ки охвачен положительной обратной связью
с коэффициентом передачи уу. На рис. 99, а цепь обратной связи
показана четырехполюсником, включенным между выходом и
входом усилителя. Выходной сигнал «ВыХ через цепь обратной
связи передается на вход в виде напряжения обратной связи t/oc.
Усилитель выполняется либо на транзисторах, либо на электрон-
ных лампах. Наибольшее применение в современной электрон-
ной аппаратуре получили транзисторные генераторы.
В цепи обратной связи применяют пассивные элементы в со-
четании L—С, R — L — С, R — С. В зависимости от этого разли-
чают LC-, RLC- и RC-генераторы. На рис. 99, б показана схема
транзисторного генератора с LC-обратной связью. Сигнал об-
ратной связи с коллектора через индуктивно связанные катуш-
ки L — L1 и через разделительный конденсатор СР| поступает на
базу транзистора. На резонансной частоте (ы = <оо) контура в
цепи коллектора выполняется условие |/<ууу|> 1 и в генераторе
возникают гармонически изменяющиеся токи и напряжения, или,
по-другому, возбуждается автоколебательный процесс.
141
Применение колебательных LC контуров целесообразно на вы-
соких частотах (от 200 кГц до 200 МГц и выше). Однако на низких
частотах (до 200 кГц) габаритные размеры и стоимость колеба-
тельных контуров очень большие, поэтому при таких частотах
применяют генераторы с /?С-обратной связью, в которых на опре-
деленной частоте соо также обеспечивается выполнение условия
генерации |Ko?t/|>l.
В схеме /?С-генератора с нулевым сдвигом фазы (рис. 99, в)
усилитель выполнен на двух транзисторах VT1 и VT2. На основе
транзистора VT1 создан эмиттерный повторитель, а на основе
транзистора VT2 — усилительный каскад с, общей базой. Потен-
циал базы транзистора VT2 задается делителем /?б2 — Rfo и под-
держивается постоянным с помощью конденсатора См- Каскад
с общей базой не инвертирует фазы входного сигнала.
► В практических схемах такого типа обычно Ri = R2 = R,
С। = С2 = С и для этих значений ы0 = 1/(/?С), уУБ = 1/3,
а коэффициент усиления Ки должен быть больше 3.
§ 46. Мультивибраторы (генераторы прямоугольных
импульсов)
В рассмотренных генераторах синусоидального напряжения
транзисторы работают в усилительном режиме. В отличие от них
в генераторах импульсов транзисторы работают в ключевом
режиме.
142
Ключевым режимом называется такой режим, при котором транзистор нахо-
дится попеременно то в открытом, то в закрытом состоянии.
► В открытом состоянии активный элемент пропускает мак-
симальный ток и имеет на выходе минимальное напряжение,
определяемое его остаточным напряжением. В закрытом
состоянии ток активного элемента минимален, а выходное
напряжение максимально и близко к напряжению источ-
ника питания. Такой элемент называют ключом.
На рис. 100 показаны схемы наиболее широко применяемых
ключей на биполярном (рис. 100, а) и МДП-транзисторах,
(рис. 100, б), включенных соответственно по схеме с общим эмит-
тером ОЭ и общим истоком ОИ и даны их выходные характе-
ристики, а также построена нагрузочная прямая. Точки 0 и 1
соответствуют состояниям открытого и закрытого транзистора.
Как видно из рисунков, в открытом состоянии рабочая точка О
располагается на крутом участке выходных характеристик. Для
этого участка характерны малые падения напряжения на тран-
зисторе Uк0, Uсо и максимальный ток /кн, /см-
В открытом состоянии биполярный транзистор, как правило,
работает в режиме насыщения и его внутреннее сопротивление
мало. Крутой участок характеристик МДП-транзисторов соот-
ветствует большой проводимости канала и, следовательно, также
малому внутреннему сопротивлению транзистора.
В закрытом состоянии рабочая точка 1 (рис. 100, в, г) распо-
143
лагается близко к оси абсцисс. Токи транзисторов малы, а напря-
жение близко к напряжению источника питания.
При переключении транзисторов, например, из закрытого
состояния в открытое рабочая точка перемещается из положе-
ния 1 в положение О.
Мультивибраторы — это импульсные генераторы с положительной обратной
связью, в которых усилительные элементы (транзисторы, операционные усили-
тели) работают в ключевом режиме.
► Мультивибраторы не имеют ни одного состояния устойчи-
вого равновесия, поэтому относятся к классу автоколеба-
тельных генераторов и выполняются на дискретных транзи-
сторах, интегральных логических элементах и на операцион-
ных усилителях.
На рис. 101, а приведена схема мультивибратора на опера-
ционном усилителе. С помощью делителя напряжения /?2—R\
осуществляется положительная обратная связь с выхода ОУ
на неинвертирующий вход (Вх2), а /?С-контур в цепи инверти-
рующего входа является времязадающим элементом. Операцион-
ный усилитель работает в ключевом режиме и выполняет роль
схемы сравнения.
На рис. 101,6 показана передаточная характеристика ОУ —
зависимость выходного напряжения «вых от напряжения между
входами ивх (разности «вх)— ивх2). Напряжение на входах uBXi
144
и «вх2 сравниваются между собой и, когда ивх] — мвх2, т. е. ивх = О,
происходит переключение операционного усилителя в состояние,
характеризуемое либо высоким выходным напряжением
(состояние положительного насыщения), либо низким выходным
напряжением U~ (состояние отрицательного насыщения). В со-
стоянии положительного насыщения на неинвертирующем входе
устанавливается напряжение, равное у£/+[где у = Ri/(Rt Ч-/?2)],
а в состоянии отрицательного насыщения — напряжение, рав-
ное yU((. Эти значения можно считать пороговыми Ump\ = yU£
и (7пор2 = yU„. Значения напряжений Ut и U„ либо равны, либо
близки друг к другу.
Временные диаграммы выходного напряжения ц8ЫХ и напря-
жения на конденсаторе ис, иллюстрирующие принцип функциони-
рования мультивибратора, показаны на рис. 101, в. В момент вре-
мени t = 0 напряжение на конденсаторе сравнивается с пороговым
напряжением 67ПОР2 — уИй и происходит быстрое переключение
операционного усилителя из состояния отрицательного насыщения
в состояние положительного насыщения, а выходное напряжение
скачком изменяется от Ий до U£. При этом напряжение ивх2 уста-
навливается равным и„ор\ — yUf и конденсатор начнет заряжать-
ся с постоянной времени т = RC. В момент времени t = h напря-
жение ис становится равным Unop\ и операционный усилитель
скачком переключается от Ut до U„. При этом напряжение на
выходе устанавливается равным L/й, а на неинвертирующем входе
t/nop2 = yU„. После этого конденсатор начнет разряжаться с
постоянной времени т = RC. В момент времени t — t2 напряже-
ние Uc равно (/ПОр2 и происходит переключение операционного уси-
лителя.
Период колебания выходного напряжения Т = + /Г- При
одинаковых значениях Uf и U„ мультивибратор счита-
ется симметричным.
Через параметры элементов схемы период колебания опреде-
ляется по формуле Т = 2RC ln( 1 + 2R\/R2).
§ 47. Цифровые интегральные микросхемы
Интегральная микросхема (ИМС) представляет собой совокупность несколь-
ких взаимосвязанных транзисторов, диодов, конденсаторов, резисторов и т. п.,
она изготовлена в едином технологическом цикле (т. е. одновременно), на одной и
тон же несущей конструкции — подложке — выполняет определенную функцию
преобразования электрических сигналов.
ЗАПОМНИТЕ
Компоненты, которые входят в состав ИМС и тем самым не
могут быть выделены из нее в качестве самостоятельных изде-
лий, называются элементами ИМС или интегральными эле-
ментами. В отличие от них конструктивно обособленные при-
боры и детали называются дискретными компонентами, а
10—85
145
узлы и блоки, построенные на их основе, — дискретными схе-
мами.
Высокая надежность и качество в сочетании с малыми разме-
рами, массой и низкой стоимостью интегральных микросхем обес-
печили их широкое применение во многих отраслях народного
хозяйства.
► Основу современной микроэлектроники составляют полупро-
водниковые интегральные микросхемы. В настоящее время
различают два класса полупроводниковых интегральных
микросхем: биполярные и МДП.
Основным элементом биполярных ИМС является п-р-п-тран-
зистор: на его изготовление ориентируется весь технологический
цикл. Остальные элементы изготовляют одновременно с этим тран-
зистором без дополнительных технологических операций. Напри-
мер, резисторы изготовляют с базовым слоем п-р-п-транзисто-
ра, поэтому они имеют ту же глубину, что и базовый слой. В ка-
честве конденсаторов используют обратно смещенные р-п-переходы,
в которых n-слой соответствует коллекторному слою п-/)-п-тран-
зистора, а слой р — базовому слою. Размеры кристаллов совре-
менных полупроводниковых ИМС составляют от 1,5X1,5 до
6X6 мм. Чем больше площадь кристалла, тем более сложную, бо-
лее многоэлементную интегральную микросхему можно на нем
разместить.
Основным элементом МДП интегральной микросхемы являет-
ся МДП-транзистор с индуцированным каналом. Роль резистора
выполняют транзисторы, включенные по схеме двухполюсника, а в
качестве конденсаторов используются МДП-структуры, в которых
слой диэлектрика получают одновременно с подзатворным слоем
транзистора, а полупроводниковую обкладку — одновременно со
слоями истока и стока.
Особенностью полупроводниковых ИМС является отсутствие
среди их элементов катушек индуктивности. Это объясняется тем,
что до сих пор не удалось использовать в твердом теле какое-либо
физическое явление, эквивалентное электромагнитной индукции.
ЗАПОМНИТЕ
Функциональную сложность интегральной микросхемы при-
нято характеризовать степенью интеграции, которая опреде-
ляется числом содержащихся в ней элементов, или коэффи-
циентом К = IgM, который округляется до ближайшего це-
лого числа; N — число элементов, входящих в интегральную
микросхему.
► Интегральные микросхемы, содержащие в своем составе
от 101 до 1000 элементов, называют ИМС третьей степени
интеграции; от 1001 до 10000 — четвертой и от 10001 до
100000 — пятой степени интеграции. Интегральную микро-
схему называют простой, если /(<11 (Д'<2 10); средней,
146
если 1 <А<2, большой (БИС), если 2<Л^З и сверхболь-
шой (СБИС), если /(>3 (А>103).
ЗАПОМНИТЕ
Кроме степени интеграции, для характеристики интегральной
схемы используют показатель плотности упаковки — коли-
чество элементов (чаще всего транзисторов), на единицу
площади. Этот показатель главным образом характеризует
уровень технологии. В настоящее время он составляет
5004-1000 элементов/мм2.
§ 48. Логические элементы
Логическими элементами называют электронные устройства, выполняющие
простейшие логические операции.
► Логические функции и логические операции над ними со-
ставляют предмет алгебры логики, или булевой алгебры.
В основе алгебры логики лежат логические величины, кото-
рые обозначают латинскими буквами А, В, С, D и т. д. Ло-
гическая величина характеризует два взаимоисключающих
понятия: есть и нет, черное и нечерное, включено и выклю-
чено и т. п. Если одно из значений логической величины
обозначено через А, то второе обозначают через А
(т. е. «не А»).
Для операций с логическими величинами удобно применять
двоичный код, полагая А= 1, А = 0 или, наоборот, А = 0,
А=1. В двоичной системе исчисления одна и та же схема может
выполнять как логические, так и арифметические операции. Если
понятие «не А» обозначить особой буквой, например, В, то связь
между В и А будет иметь вид: В = А.
Это простейшая логическая функция, которую называют отри-
цанием, инверсией или функцией НЕ. Схему, обеспечивающую
такую функцию, называют инвертором или схемой НЕ. Услов-
ное обозначение схемы НЕ показано на рис. 102, а. Функция
инверсии характеризуется кружком на выходной стороне прямо-
угольника. Функция отрицания является функцией одной пере-
менной. Приведем примеры логических функций двух пере-
менных.
'ill I- liAAl' Логическое сложение, или функция ИЛИ, С = А + В. Эта функция
определяется следующим образом: С = 1, если А = 1 или В — 1, или и А = 1 и
В = 1. Обозначение схемы ИЛИ показано на рис. 101, б.
Логическое умножение, или функция И: С — A-В. Эта функция определяет-
ся следующим образом: С — 1, только если одновременно и А = 1, и В = 1.
Обозначение схемы И показано на рис. 102, а
Сочетание функции ИЛИ с инверсией выражается комбинацией ИЛИ — НЕ
(рис. 102, г): С = А Ц-В. Аналогично сочетание И с инверсией выражается
комбинацией И — НЕ: С = АВ.
10*
147
Функции ИЛИ — НЕ и И — НЕ — самые распространенные,
так как на их основе можно реализовать любую другую логи-
ческую функцию. Количество переменных, а значит, и количест-
во входов у соответствующих схем может быть равно трем, че-
тырем и более.
► В логических элементах логические нули и единицы обычно
представлены различными значениями напряжения: напря-
жением (или уровнем нуля) U° и напряжением (или уров-
нем единицы) U'. Если уровень единицы больше уровня ну-
ля, то говорят, что схема работает в положительной логике,
в противном случае ([/’ < U°) она работает в отрицатель-
ной логике. Никакой принципиальной разницы между поло-
жительной и отрицательной логиками нет. Более того, одна
и та же схема может работать и в одной, и в другой логике.
Разность уровней единицы и нуля называют логическим перепадом: U,=
= U'—U*.
Естественно, логический перепад должен быть достаточно
большим, чтобы единицы и нули четко отличались друг от друга
и чтобы случайные помехи не «превращали» один уровень в
другой.
Инверторы могут быть выполнены на основе транзисторных
ключей с общим эмиттером (рис. 103, а) и с общим истоком
(рис. 103,6). В зависимости от входного сигнала транзистор
может находиться либо в открытом состоянии (выходное напря-
жение Uo мало, а ток максимален), либо в закрытом состоянии
(выходное напряжение велико 1)3, а ток минимален). Напряже-
ние Uo соответствует уровню логического нуля U0, оно появля-
ется на выходе, когда на входе действует отпирающий сигнал
(уровень логической единицы L/'). Напряжение U3 соответству-
103
148
ет уровню логической единицы U', оно устанавливается на вы-
ходе, когда на входе действует запирающий сигнал (уровень
логического нуля).
В схемах на полевых транзисторах роль нагрузочного рези-
стора Rc часто выполняет дополнительный транзистор (транзи-
стор VT2 в схеме инвертора рис. 103, в).
Схемы ИЛИ и И могут быть выполнены на резисторах (ре-
зисторная логика), на диодах (диодная логика), на транзисто-
рах (транзисторная логика). Чаще всего эти схемы применяются
в сочетании с инвертором, и тогда они реализуют функции
ИЛИ — НЕ, И — НЕ. Наиболее широкое применение получила
схема И — НЕ типа ТТЛ-транзистор транзисторного логического
элемента (рис. 104). Логическую функцию И выполняет много-
эмиттерный транзистор VTI, а инверсию осуществляет сложный
инвертор на транзисторах VT2, VT3, VT4. Каждый эмиттерный
переход трехэмиттерного транзистора эквивалентен входному
диоду, а коллекторный переход этого транзистора выполняет роль
диода смещения. Транзисторы VT2, VT3 включены таким обра-
зом, что отпирание их происходит одновременно. Диод VD слу-
жит для запирания транзистора VT4, когда открыты транзисто-
ры VT2, VT3.
Схема функционирует следующим образом. Когда на один
или несколько входов подается низкий уровень напряжения
(сигнал логического нуля), то транзистор VT1 открыт и насыщен.
На коллекторе VT1 в этом режиме устанавливается низкий по-
тенциал и транзисторы VT2 и VT3 закрыты. Транзистор VT4
открыт базовым током, проходящим через RK2 в базу транзи-
стора VT4, диод VD и нагрузку. Транзистор VT4 включен по
схеме с общим коллектором (резистор служит для ограниче-
ния тока коллектора). Когда одновременно на все входы
(Д, В и С) подается высокий потенциал (уровень логической
единицы), транзистор VT1 закрывается, потенциал коллектора
VT1 повышается, что приводит к отпиранию транзисторов
VT2 и VT3. Напряжение на выходе устанавливается низким,
104
149
равным остаточному напряжению между коллектором и эмитте-
ром транзистора VT3. Транзистор VT4 при этом запирается.
Таким образом, выходная величина Р соответствует функции
Р = АВС.
► В логических схемах выходная величина определяется толь-
ко входными сигналами на данный момент времени и не за-
висит от предыстории во входных цепях. Поэтому можно
сказать, что логические схемы не обладают свойством запо-
минать предыдущие состояния.
Однако, комбинируя логические схемы ИЛИ — НЕ или
И — НЕ, можно создать устройства, обладающие памятью. Та-
кими устройствами являются двухстабильные ячейки — триггеры.
Триггерами называют электронные устройства, обладающие двумя состоя-
ниями устойчивого равновесия и способные скачкообразно переключаться из
одного состояния в другое каждый раз, когда входной (управляющий) сигнал
превосходит определенный уровень, называемый порогом срабатывания.
Триггеры можно разбить на два класса: симметричные и
несимметричные. Симметричные триггеры применяются в качест-
ве элементов памяти и делителей частоты на два. На их основе
строятся регистры сдвига и счетчики в цифровых ЭВМ. Несим-
метричные триггеры как пороговые устройства применяются в
преобразователях непрерывных сигналов в дискретный (цифро-
вой) код, в различителях амплитуды сигнала и в качестве раз-
рядного устройства в генераторах импульсов.
Симметричные триггеры сравнительно просто компонуются
из двух логических схем ИЛИ — НЕ или И — НЕ, которые
соединяются определенным образом: выход одной логической
схемы соединяется со входом другой, а выход другой — с вхо-
дом первой. Другими словами, логические схемы соединяются
между собой перекрестными связями.
На рис. 105, а показана логическая структура симметричного
триггера, выполненного на двух одинаковых транзисторных
схемах ИЛИ — НЕ на два входа. На схеме выход Ci соединен
с входом Л2, а выход С2 — с входом At (перекрестно). Остав-
шиеся два входа Bt и В2 служат для управления работой триг-
гера. Принципиальная электрическая схема триггера показана
на рис. 105,6. Собственно триггер как двухстабильная ячейка
выполнен на транзисторах VT1 и ЁТЗ, т. е. на этих транзисторах
создана схема с положительной обратной связью: выход (кол-
лектор) транзистора VT1 соединен с входом (базой) транзисто-
ра VT3, а выход транзистора VT3 — с входом транзистора VT1.
Схема триггера симметрична по своей конфигурации. Триггер
имеет два состояния устойчивого равновесия, в которых он мо-
жет находиться неограниченно долго. Этими состояниями явля-
ются:' 1) VT1 — закрыт, VT3 — открыт; 2) VT1 — открыт, VT3 —
закрыт. Таким образом, симметричному триггеру свойственна
электрическая (в смысле режимная) асимметрия.
Симметричный триггер наиболее часто применяют в качестве
элемента памяти. В этом триггере выходной потенциал может
150
105
принимать два существенно различных друг от друга значения,
каждое из которых соответствует логической единице и логиче-
скому нулю. Установленное в триггере состояние (или, по-дру-
гому, записанная информация) сохраняется до тех пор, пока под
действием входного сигнала не произойдет его переключения.
Триггер переключается из одного состояния в другое с помощью
вспомогательных (управляющих) транзисторов VT2 и VT4.
Управляющими входами являются входы В\ (S — вход) и
В2 (R — вход). Такое управление работой триггера называется
раздельным.
§ 49. Большие интегральные микросхемы
и микропроцессоры
Большие интегральные микросхемы (БИС)
Большой интегральной микросхемой называется многомерное полупроводни-
ковое изделие, содержащее большое число однородных ячеек, соединенных в
сложную функциональную схему со степенью интеграции 2 < К < 3.
Выпускаемые в настоящее время БИС содержат уже до
10 тыс. и более логических элементов.
► Все БИС можно разбить на три класса: 1) функциональ-
ные блоки типа счетчиков, регистров, стековых накопителей,
арифметико-логических устройств (АЛУ); 2) запоминаю-
щие устройства (ЗУ); 3) микропроцессоры.
Первые БИС были выполнены на основе МДП-структур.
В настоящее время в элементную базу БИС входят также бипо-
лярные структуры.
Мы рассмотрим более подробно микропроцессоры — устрой-
ства, получившие самое широкое применение в различных от-
раслях промышленности.
151
Микропроцессоры
Микропроцессором называется цифровая интегральная схема (одна или не-
сколько) высокой степени интеграции, являющаяся функционально закончен-
ным изделием, в состав которой входят как минимум основные узлы процессора:
арифметическое и логическое устройство, дешифратор команд и устройство уп-
равления.
Микропроцессор служит для логической обработки, хранения
и преобразования данных. В настоящее время для разработки
систем управления сложными устройствами — станками, лета-
тельными аппаратами, автомобилями, измерительными прибора-
ми J- нет необходимости выбирать дискретный транзистор и ин-
тегральную схему малой степени интеграции, а можно сразу
применить универсальное по своим возможностям полупроводни-
ковое устройство управления — микропроцессор.
В та^ называемый микропроцессорный комплект могут вхо-
дить до сотни микросхем (оперативная и постоянная память,
устройства прерывания, прямого доступа к памяти; контроллеры
клавиатуры электронно-лучевой трубки; программируемые тай-
меры ит. п.).
Отечественная промышленность выпускает значительное ко-
личество микропроцессорных комплектов. Например, микропро-
цессорный комплект серии К580 выполнен по технологии «-ка-
нальных МОП-транзисторов, включает три процессорных и де-
сять вспомогательных интегральных схем. Его параметры сле-
дующие: время выполнения команды — 2 мкс; число команд —
78; максимальная емкость адресуемой памяти — 64К; потребляе-
мая мощность — не более 1,5 Вт. Микропроцессорный комплект
серии К583 выполнен по технологии дополняющих МОП-струк-
тур (КПОМ), включает три процессорных и восемь вспомога-
тельных микросхем. Характеризуется следующими параметрами:
время выполнения команды — не более 0,75 мкс; разрядность —
16; потребляемая мощность — не более 1 мВт.
САМОЕ ВАЖНОЕ
1. Электронные приборы — активные элементы электронных
устройств.
2. Выпрямители, стабилизаторы, преобразователи, усилите-
ли, генераторы синусоидальных и импульсных напряже-
ний рассчитывают на основе рабочих характеристик и
параметров электронных приборов.
Темы докладов и рефератов
1. Электровакуумные приборы в твоей профессии.
2. Ионные (газоразрядные) приборы в твоей профессии.
3. Полупроводниковые диоды и их применение в выпрями-
тельных устройствах.
152
4. Операционные усилители.
5. Выпрямительные устройства в электроэнергетике.
6. Электронные генераторы.
7. Интегральные микросхемы и микропроцессоры.
Как устроена осциллографическая электронно-лучевая трубка с электро-
статическим управлением?
Объясните принцип действия полупроводникового диода.
Как выглядит вольт-амперная характеристика диода?
Какими параметрами характеризуются кремниевые стабилитроны?
Изобразите простейшую схему стабилизации постоянного напряжения.
Как устроен биполярный транзистор?
Какие режимы работы различают у транзисторов?
Изобразите вольт-амперные характеристики транзистора в схеме с об-
щей базой.
Как изображаются входные и выходные характеристики транзисто-
ра в схеме с общим эмиттером?
Укажите основные разновидности полевых транзисторов.
Объясните принцип действия полевого транзистора с управляющим
р-п-переходом.
Какими параметрами характеризуются полевые транзисторы?
Как устроен МДП-транзистор?
Объясните принцип действия тиристирного инвертора постоянного тока.
Что такое инверторы, ведомые сетью?
Объясните назначение всех компонентов в схемах усилительных кас-
кадов с общим эмиттером и общим коллектором.
Какие виды межкаскадной связи могут быть использованы в электрон-
ных усилителях и каковы их характерные особенности?
Какими основными параметрами характеризуется операционный уси-
литель?
С какой целью используется отрицательная обратная связь в опера-
ционных усилителях?
Чем отличаются схемы инвертирующего и неинвертирующего усили-
теля, выполненные на базе ОУ?
Что такое ключевой режим работы транзисторов?
Объясните принцип действия мультивибратора на ОУ.
Перечислите основные логические функции.
Что такое триггер?
ЭЛЕКТРОИЗМЕРИТЕЛЬНЫЕ ПРИБОРЫ
§ 50. Виды и методы электрических измерений.
Классификация погрешностей
Измерением называется познавательный процесс сравнения измеряемой фи-
зической величины с некоторым значением той же величины, принятым за еди-
ницу. Физические величины измеряют техническими средствами — средствами
измерения.
В зависимости от способа получения результатов измерения
делят на два вида: прямые и косвенные.
Прямыми называют измерения, при которых искомое значение физической
величины определяют непосредственно по показанию прибора.
К ним относят измерение тока амперметром, электроэнергии
счетчиком, напряжения вольтметром и др.
Косвенными называют измерения, при которых искомое значение измеряе-
мой величины находят на основании известной зависимости между этой' величи-
ной и величинами, полученными в результате прямых измерений.
Примером может служить определение электрического сопро-
тивления R по показаниям вольтметра Uy и амперметра /д:
R = UV/1A.
В зависимости от способов и средств измерений различают
методы непосредственной оценки и методы сравнения.
Метод непосредственной оценки состоит в том, что значение измеряемой
величины определяют непосредственно по отсчетному устройству измерительного
прибора (значение тока — по амперметру, значение напряжения — по вольтмет-
ру и др.).
Этот метод оценки прост, но отличается сравнительно невы-
сокой точностью.
Метод сравнения заключается в том, что измеряемая величина сравнивается
с величиной, воспроизводимой мерой.
Этот метод обеспечивает большую точность измерения по
сравнению с методом непосредственной оценки, но процесс из-
мерения усложняется. Метод сравнения имеет несколько разно-
видностей: нулевой, дифференциальной и замещения.
При нулевом методе результирующий эффект воздействия
сравниваемых величин на измерительный прибор доводят до ну-
ля (измерение электрического сопротивления с помощью урав-
новешенного моста).
При дифференциальном методе на измерительный прибор
воздействует разность измеряемой величины и величины, вос-
154
производимой мерой (измерение электрического сопротивления с
помощью неуравновешенного моста).
При методе замещения измеряемую величину замещают из-
вестной величиной, воспроизводимой мерой. При этом путем
изменения известной величины добиваются такого же показа-
ния прибора, которое было при действии измеряемой величины;
► В связи с тем, что абсолютно точных приборов нет, каждое
средство измерения характеризуется погрешностью.
По способу выражения погрешности средств измерения делят-
ся на абсолютные, относительные и приведенные.
Абсолютная погрешность \ — это разность между показанием прибора А
и действительным значением измеряемой величины Ад:
А = А - А,.
Относительная погрешность 6 представляет собой отношение абсолютной
погрешности Л к истинному значению измеряемой величины А. Обычно относи-
тельная погрешность выражается в процентах:
«= 100%.
Приведенная погрешность у представляет собой отношение абсолютной
погрешности Л к нормирующему значению Ад, измеряемой величины
y = ±4-100%:
Нормирующее значение обычно принимают равным верхнему
пределу измерения для данного Прибора.
По характеру проявления погрешности делят на системати-
ческие и случайные.
Систематическая погрешность — это погрешность, остающаяся постоянной
или изменяющаяся по определенному закону. Ее значение всегда можно учесть
путем введения соответствующих поправок.
Случайная погрешность — это погрешность, изменяющаяся по случайному
закону. Случайные погрешности нельзя исключить опытным путем, значение их
можно уменьшить проведением многократных измерений.
В зависимости от условий эксплуатации различают основную
и дополнительную погрешности средств измерения.
Основная погрешность — это погрешность средств измерения, находящихся
в нормальных условиях эксплуатации (температура внешней среды, влажность,
атмосферное давление, напряжение и частота питания, внешние электрические
и магнитные поля и др.).
Дополнительная погрешность — это погрешность средств измерения, возни-
кающая при отклонении указанных условий от нормального значения.
► Уровень точности средств измерения характеризуется клас-
сом точности. Для электроизмерительных приборов уста-
новлены следующие классы точности: 0,05; 0,1; 0,2; 0,5; 1,0;
1,5; 2,5 и 4.
Цифры указывают основную приведенную погрешность у в про-
центах. Основные абсолютная А и относительная 6 погреш-
ности могут быть представлены в этом случае в виде
155
§ 51. Средства измерения электрических
величин
Средствами измерения электрических величин называют технические устрой-
ства, используемые при измерениях и имеющие заданные метрологические ха-
рактеристики.
В общем случае к средствам измерений относятся: меры,
измерительные преобразователи, измерительные приборы и уста-
новки.
Мера предназначена для воспроизведения физической величины заданного
значения.
К основным мерам электрических величин относятся меры:
эдс, электрического сопротивления, индуктивности, электрической
емкости и др. Меры высшего класса называются образцовыми.
Они служат для проверки и градуировки рабочих мер и изме-
рительных приборов.
Измерительные преобразователи предназначены для выработки электриче-
ского сигйала в форме, удобной для передачи, дальнейшего преобразова-
ния, обработки и хранения, но не поддающейся непосредственному восприя-
тию.
Различают преобразователи электрических величин в электри-
ческие — шунты, добавочные сопротивления, делители напряже-
ния и т. д., а также преобразователи неэлектрических величин
в электрические—первичные преобразователи (см. § 61).
Измерительные приборы предназначены для выработки сигналов в форме,
доступной для непосредственного наблюдения
К ним относятся, например, амперметр, вольтметр, ваттметр
и др.
Электроизмерительная установка представляет собой совокупность мер,
измерительных преобразователей и приборов, расположенных в одном месте и
предназначенных для выработки сигналов в форме, удобной для непосредст-
венного наблюдения.
Все средства измерений, и в частности электроизмерительные
приборы, можно классифицировать по следующим признакам:
виду получаемой информации, методу измерения, способу пред-
ставления и регистрации информации.
► По виду получаемой информации электроизмерительные
приборы делятся на приборы для измерения электрических
(ток, напряжение, мощность и др.) и неэлектрических (тем-
пература, давление, влажность и др.) величин; по методу
измерения — на приборы непосредственной оценки (ампер-
метр, вольтметр и др.) и приборы сравнения (измеритель-
ные мосты и компенсаторы); по способу представления из-
меряемой информации — на аналоговые и дискретные
(цифровые). Аналоговые электроизмерительные приборы,
в свою очередь, могут быть электромеханическими и элек-
тронными.
156
ЗАПОМНИТЕ
Основными характеристиками электроизмерительных при-
боров являются: погрешность, вариация показаний, чув-
ствительность, потребляемая мощность, время установления
показаний и надежность.
Вариация показаний прибора — наибольшая разность показаний прибора
при одном и том же значении измеряемой величины,
Она определяется при плавном подходе стрелки к выбранной
отметке шкалы при движении стрелки один раз от начальной,
а второй раз от конечной отметки. Причиной вариации является
в основном трение в опорах подвижной части прибора.
Чувствительность S прибора — отношение приращения перемещения ука-
зателя Да к приращению измеряемой величины Ах:
Если чувствительность постоянна (шкала равномерная), то ее
можно определить как S = а/х.
Величина, обратная чувствительности (С = 1 /S), называется ценой де-
ления (постоянной) прибора. Она равна числу единиц измеряемой величины,
приходящихся на одно деление шкалы.
Например, при S = 10 дел/В постоянная С — 0,1 В/дел.
Потребляемая мощность — мощность, которую потребляет прибор при
включении его в цепь.
В результате этого меняется режим работы цепи, что в ко-
нечном счете приводит к увеличению погрешности измерения.
Поэтому малое потребление мощности является достоинством
прибора.
Время установления показаний — промежуток времени с момента включе-
ния измеряемой величины до момента, когда указатель займет положение, отли-
чающееся от установившегося значения не более чем на 1,5%.
Время установления показаний для большинства аналоговых
измерительных приборов не превышает 4 с.
Надежность — способность электроизмерительных приборов сохранять за-
данные характеристики при определенных условиях работы в течение заданного
времени. Количественной мерой надежности является среднее время безотказ-
ной или исправной работы прибора.
§ 52. Общие сведения об электромеханических
измерительных приборах
Электромеханические приборы составляют большую группу
электроизмерительных приборов. Их основными частями являют-
ся электроизмерительная цепь и измерительный механизм. Изме-
рительная цепь служит для преобразования измеряемой величи-
ны х в некоторую промежуточную электрическую величину у,
функционально связанную с величиной х, т. е. у — f(x). Электри-
157
ческая величина у, например ток или напряжение, непосредст-
венно воздействует на измерительный механизм; ее называют
входной величиной. Входные величины создают механические
силы, действующие на подвижную часть измерительного меха-
низма и вызывающие перемещение ее (чаще всего угловое).
Поэтому измерительный механизм рассматривают как преобразо-
ватель электрической величины в механическое перемещение и
называют электромеханическим преобразователем.
► Общими элементами электромеханических измерительных
приборов являются отсчетное устройство, подвижная часть
измерительного механизма, устройства для создания вра-
щающего, противодействующего и успокаивающего мо-
ментов.
Вращающий момент Мвр, действующий на подвижную часть,
является функцией измеряемой величины х (тока или напряже-
нйя) Л4вр = fix').
Подвижная часть измерительного механизма под действи-
ем Мвр поворачивается, до тех пор, пока он не уравновесится
противодействующим моментом Мпр, создаваемым с помощью
растяжек или спиральных пружин при их закручивании и на-
правленным навстречу Л4вр. Значение противодействующего мо-
мента пропорционально углу поворота подвижной части а: Л4пр —
=/га, где k — удельный противодействующий момент растяжки
или пружины.
Установившееся отклонение подвижной части и укрепленного
на ней указателя характеризуется равенством
Мвр — Мпр.
Крепят подвижную часть в измерительном механизме с помощью
опорного устройства, включающего, как правило, керны и под-
пятники.
На рис. 106 представлено устройство подвижной части изме-
рительного механизма, в
котором противодейству-
ющий момент создается
спиральными пружинами
5 и 6, выполненными из
оловянно-цинковой бронзы.
Пружина 6 одним концом
крепится к оси 2, а дру-
гим — к поводку 4 кор-
ректора. Корректор слу-
жит для установки на
нуль стрелки невключен-
ного прибора. Он состоит
8 из винта 9 с эксцентрично
106 расположенным пальцем
158
8, вилки 7 с поводком 4. Для уравновешивания подвижной ча-
сти служат грузики — противовесы 10. Ось 2 заканчивается
кернами, опирающимися на подпятники 1. Жестко с осью закреп-
лена стрелка 3.
В приборах со спиральными противодействующими пружи-
нами чаще для создания момента успокоения применяют воздуш-
ные успокоители (см. рис. 110). Они представляют собой закры-
тую камеру /, в которой помещается легкое алюминиевое кры-
ло 2, жестко связанное с подвижной частью измерительного
механизма. При перемещении воздуха из одной части камеры
в другую через зазор (между камерой и крылом) тормозится
движение крыла, создавая момент успокоения.
► Отсчетное устройство обязательно имеет шкалу и указатель.
На шкалу нанесены отметки в виде коротких черточек,
соответствующих определенным значениям измеряемой ве-
личины. Интервал между соседними отметками шкалы на-
зывают делением.
ЗАПОМНИТЕ
Шкалы могут быть равномерными (деления постоянной
длины) и неравномерными (деления непостоянной длины).
Наименьшее значение, указанное на шкале, называется
начальным, наибольшее — конечным. Область между на-
чальным и конечным значениями называют диапазоном по-
казаний прибора.
Значение измеряемой величины отсчитывается с помощью ука-
зателя. Как правило, указатели выполняют в виде стрелок, чаще
всего клиновидных или ножевидных, жестко скрепленных с
подвижной частью измерительного механизма.
► В зависимости от физических явлений, положенных в осно-
ву создания вращающего момента, различают магнито-
электрические, электромагнитные, электродинамические, ин-
дукционные и электростати-
ческие измерительные меха-
низмы, или преобразователи.
Аналогичное название в за-
висимости от вида исполь-
зуемого преобразователя
имеют электромеханические
измерительные приборы.
Принцип действия прибора,
возможность его работы в тех
или иных условиях, возможные
предельные погрешности прибора
могут быть установлены по услов-
ным обозначениям, нанесенным
на циферблат прибора. Так,
электроизмерительному прибору,
159
шкала которого изображена на рис. 107, можно дать следующую
техническую характеристику: вольтметр (V) для измерения пе-
ременного напряжения (~) в пределах от 0 до 150 В, электро-
магнитной системы ) вертикального положения ( । ) клас-
са точности 1,0. Изоляция прибора испытана на напряжение
2 кВ ( ), год выпуска 1975, заводской номер 3275, эксплуата-
ционная группа Б ( ).
§ 53. Магнитоэлектрические механизмы
и приборы
Магнитоэлектрический механизм (рис. 108) состоит из по-
стоянного магнита 2, магнитопровода /, полюсных наконечни-
ков 4 и цилиндрического сердечника 5. В рабочем зазоре между
сердечником и полюсными наконечниками образуется равномер-
ное радиальное магнитное поле с индукцией В. Подвижная ка-
тушка 6, выполненная из тонкого изолированного провода, по-
мещена в рабочем зазоре и укреплена на осях. Концы обмотки
электрически соединены со спиральными пружинами 3, по кото-
рым измеряемый ток / поступает в катушку. При наличии тока
на активную длину / витка обмотки действует сила F, равная,
согласно закону Ампера,
F = BlwF
где w — число витков обмотки.
Под действием пары таких сил, действующих на обе активные
стороны катушки, создается вращающий момент
Л4вр = 2F -|-= Blbwl = Bswl = Фш/= Аро/,
где Ь и s — соответственно ширина и площадь катушки (s = W);
Ф — магнитный поток; ip0— постоянная прибора, равная потоко-
сцеплению катушки.
Из последнего выражения видно, что вращающий момент
прямо пропорционален току. С учетом выражения Мвр= Afnp угол
поворота а также пропорционален току /
а = S,/,
где Si=^0/k — чувстви-
тельность измерительного
механизма по току — вели-
чина постоянная.
Магнитоэлектрические
приборы, в которых исполь-
зуются магнитоэлектрические
измерительные механизмы,
применяют для измерения
160
постоянных токов (амперметры), напряжений (вольтметры), со-
противлений (омметры) и т. д.
Магнитоэлектрические амперметры и вольтметры имеют вы-
сокую точность, равномерную шкалу, обладают малым потреб-
лением энергии от объекта измерения.
К недостаткам этих приборов относятся: непригодность к ра-
боте в цепях переменного тока, чувствительность к перегрузкам
и зависимость показаний от окружающей температуры.
Магнитоэлектрические приборы имеют высокую чувствитель-
ность и потому широко используются в качестве нулевых инди-
каторов при измерениях в мостовых и компенсационных цепях
постоянного тока. Их применяют также в качестве лаборатор-
ных и щитовых приборов на электростанциях и других энергети-
ческих предприятиях.
Магнитоэлектрические приборы в сочетании с различными
преобразователями переменного тока в постоянный служат для
измерения в цепях переменного тока. К таким приборам отно-
сятся выпрямительные и термоэлектрические приборы.
§ 54. Электромагнитные механизмы
и приборы
Электромагнитный механизм (рис. 109) состоит из неподвиж-
ной катушки 1 и укрепленной на оси 4 подвижной пластинки 2
из магнитомягкого материала. Когда через катушку проходит
ток /, создается магнитное поле, которое намагничивает ферро-
магнитную пластинку и она втягивается внутрь катушки. Возни-
кающий при этом вращающий момент пропорционален квадрату
тока М„р = с/2. Противодействующий момент Л4пр — ka создается
спиральной пружиной 3. С учетом равенства М„р = Мпр
а = с\Г2,
где с и Ci — постоянные коэффициенты. Час-
то квадратичную шкалу выравнивают, под-
бирая соответствующую форму ферромаг-
нитной пластинки.
Электромагнитные приборы, построен-
ные на базе электромагнитных измеритель-
ных механизмов, применяют для измерения
в цепях постоянного и переменного тока в
качестве амперметров, вольтметров и фазо-
метров. Они являются одними из самых ра-
спространенных щитовых приборов для из-
мерений в цепях переменного тока (просты
по устройству; не имея токоподвижных час-
J 4 Э
109
11—85
161
тей, сравнительно хорошо переносят перегрузки). Недостатками
этих приборов являются: невысокая точность, большое собствен-
ное потребление мощности (до 10 Вт), ограниченный частотный
диапазон, чувствительность к внешним магнитным полям.
Щитовые амперметры выпускают классов 1,0; 1,5; 2,5 на токи
прямого включения до 300 А и до 15 кА с наружными трансформа-
торами тока.
Щитовые вольтметры тех же классов точности выпускают на
напряжении до 600 В с прямым включением и до 750 кВ с транс-
форматорами напряжения.
§ 55. Электродинамические механизмы
и приборы
Электродинамический механизм (рис. 110) состоит из непо-
движной 4 и подвижной 3 катушек, поршня 2 и камеры 1. Подвиж-
ная катушка может поворачиваться вокруг оси внутри двух
секций неподвижной катушки. При наличии в катушках токов 1\
и /г возникают электромагнитные силы взаимодействия, стремя-
щиеся повернуть катушку 4 соосно с катушкой 4. В результате воз-
никает вращающий момент
Л4вр —
При синусоидальных токах i। = 1im sin wt и i2= /2 sin (wt — ф)
вращающий момент электродинамического измерительного ме-
ханизма пропорционален произведению действующих значений
токов в катушках и косинусу угла сдвига фаз между ними. Угол
отклонения подвижной части измерительного механизма выража-
ется формулой
а = k\l 1/2 соэф.
Электродинамические приборы, в
которых используются вышеописанные
механизмы, применяют в цепях по-
стоянного и переменного тока для из-
мерения тока, напряжения и мощно-
сти. Они отличаются высокой точ-
ностью (класс точности: 0,1; 0,2 и 0,5),
независимостью показаний от формы
кривой тока и напряжения.
К недостаткам этих приборов сле-
дует отнести сравнительно низкую чув-
ствительность, большое собственное
потребление мощности (0,54-15 Вт),
влияние внешних магнитных полей и
ограниченный частотный диапазон.
162
§ 56. Индукционные
механизмы и приборы
Индукционный механизм (рис.
111) состоит из двух неподвижных
магнитопроводов 1 и 2 с обмотками
и подвижного алюминиевого диска
4, укрепленного на оси. Магнитные
потоки Ф| и Ф2, создаваемые сину-
соидальными токами /| и 1ч и про-
низывающие диск, смещены в про-
странстве. При этих условиях в дис-
ке образуется бегущее магнитное
111
поле, под влиянием которого диск приходит во вращение. Маг-
нит 3 служит для создания тормозного момента. Среднее значе-
ние вращающего момента
Мвр — few/1/2 sin ф.
Измерительные приборы на базе индукционных механизмов ис-
пользуют главным образом в качестве однофазных и трехфазных
счетчиков энергии переменного тока. Счетчики имеют классы точ-
ности: 1,0; 2,0 и 2,5. Промышленность выпускает однофазные
счетчики электроэнергии на токи 5 и 10 А и напряжения 127 и
220 В; трехфазные счетчики на токи до 50 А и напряжения 127, 220
и 380 В для непосредственного включения и до 2000 А и 35 кВ для
включения через измерительные трансформаторы.
§ 57. Электростатические механизмы
и приборы
Электростатический механизм (рис. 112) состоит из двух
(и более) металлических изолированных пластин, выполняющих
роль электродов. На неподвижные пластины 1 подается потенциал
одного знака, а на подвижные пластины 2 — потенциал другого
знака. Подвижная пластина вместе с указателем укреплена на
оси и под действием сил электрического поля между пластинами
поворачивается. При постоянном напряжении U между пластина-
ми вращающий момент пропорционален зарядам (q — CU) на
этих пластинах, где С — емкость между подвижными и неподвиж-
ными пластинами:
Мвр = kq2 = kC2U2.
При синусоидальном напряжении u=(/msino>/ подвижная
часть механизма реагирует на среднее значение момента, равно-
го Л4Вр.Ср. = k\U2, где U— действующее значение напряжения.
Электростатические приборы, в которых используется электро-
статический механизм, применяют исключительно в качестве
вольтметров постоянного и переменного тока. Из последнего вы-
и*
163
ражеиия следует, что угол отклоне-
ния указателя электростатического
прибора пропорционален квадрату
напряжения, т. е. шкала является
квадратичной. Часто подбором фор-
мы электродов (пластин) получают
практически равномерную шкалу (в
пределах 10 4- 100% UN).
Электростатические вольтметры
отличаются малым собственным по-
треблением энергии, широким ча-
стотным диапазоном (до 10 МГц),
нечувствительностью к внешним маг-
нитным полям и колебаниям температуры; их показания не за-
висят от формы кривой измеряемого напряжения.
К недостаткам этих приборов следует отнести сравнительно
низкую чувствительность — без предварительных усилителей
сигналов их нижний предел измерения составляет 10 В.
Эти приборы изолированы от внешних магнитных полей
электростатическими экранами.
§ 58. Электронные аналоговые приборы
Электронные аналоговые приборы представляют собой сочетание различных
электронных преобразователей и магнитоэлектрического прибора и служат для
измерения различных электрических величин (напряжения, частоты, фазы и др.).
В отличие от электромеханических приборов они обладают
большим входным сопротивлением (малым потреблением энергии
от объекта измерения) и высокой чувствительностью.
Электронный вольтметр включает в себя устройство в виде
высокоомного резистивного делителя напряжения, усилитель на-
пряжения, магнитоэлектрический измерительный прибор. Вход-
ное устройство обеспечивает высокое входное сопротивление
вольтметра и изменение пределов измерения. Усилитель служит
для увеличения чувствительности прибора. Он должен обеспечи-
вать высокую линейность и стабильность амплитудной харак-
теристики. Если вольтметр предназначен для измерения пере-
менного напряжения, то в схеме должен быть предусмотрен
преобразователь переменного напряжения в постоянное.
Современные электронные вольтметры имеют входное сопро-
тивление на уровне единиц и десятков мегаом, диапазон изме-
рений от единиц милливольт до сотен вольт, погрешность изме-
рения на уровне 14-6%.
На рис. 113,а,б приведена структурная схема электронного
(конденсаторного) частотомера и временные диаграммы его ра-
боты. Формирующее устройство ФУ преобразует входное напря-
жение U/x неизвестной частоты [х в прямоугольные импульсы
164
т* t
113
иф постоянной амплитуды, следующие с той же частотой. Пока
импульс существует, конденсатор С заряжается через диод VD\,
при отсутствии импульса — конденсатор С разряжается через
диод VD2 и магнитоэлектрический измерительный механизм ИМ.
Среднее значение разрядного тока /ср, протекающего через ИМ
за период, пропорционально количеству электричества q—CU^,
т. е.
— qfx — Utyfxt
где t/ф — напряжение, до которого заряжается конденсатор.
Если С и постоянны, то ток, протекающий через магнито-
электрический прибор, линейно связан с измеряемой частотой и
шкалу его можно проградуировать непосредственно в единицах
измерения частоты fx.
Промышленностью выпускается конденсаторный частотомер
43-7, имеющий диапазон измеряемых частот для синусоидаль-
ных сигналов 10 Гц—500 кГц, для прямоугольных импульсов
10 Гц — 20 кГц. Основная погрешность измерения составляет
±2%.
Структурная схема электронного фазометра приведена на
рис. 114, а. Исследуемые напряжения и\ и ы2 поступают на два
идентичных измерительных канала, которые включают форми-
рующие устройства ФУ и ограничители Ог, не пропускающие
сигналы отрицательной полярности. На выходе ФУ получаются
остроконечные импульсы иф, фронты которых соответствуют мо-
ментам переходов через нуль напряжений и\ и и2. Интервал
т между импульсами /—2, 3—4, 5—6 и т. д. пропорционален
сдвигу фаз <р между и\ и ц2. Если интервал т отнести к длитель-
ности периода Т исследуемых напряжений, как это видно из
рис. 114,6, получим ф = -у- • 360°.
Положительные импульсы, получаемые на выходе ограничи-
телей Ог, управляют работой триггера Тг. Выходные импульсы
напряжения последнего имеют постоянную амплитуду UTp и раз-
личную в зависимости от ф длительность т. В качестве выход-
ного прибора используется магнитоэлектрический измерительный
165
114
механизм ИМ, реагирующий на среднее значение поступающего
т U
сигнала, т. е. /ср = где R„3 — сопротивление измеритель-
* Айз
ной цепи ИМ.
Окончательно имеем
_ 360/?и| ,
Ф— и 'ср,
иТр
т. е. шкала измерительного прибора может быть отградуирована
в градусах сдвига фаз между щ и и2.
По описанной схеме выполняют фазометры типа Ф2-1. По-
грешность измерения сдвига фаз составляет 1,5—3%.
§ 59. Цифровые измерительные приборы
Принцип действия цифровых измерительных приборов основан на преобразо-
вании измеряемого непрерывного сигнала в электрический код, отображаемый
в цифровой форме.
В общем случае цифровой прибор содержит входное устройст-
во, аналого-цифровой преобразователь и цифровое отсчетное
устройство. Входное устройство предназначено для обеспечения
большого входного сопротивления, изменения пределов измере-
ния и определения полярности входного сигнала.
166
Аналого-цифровой преобразователь преобразует аналоговую
величину в дискретный сигнал в виде электрического кода, про-
порционального измеряемой величине. Результат измерения ре-
гистрируется на табло цифрового отсчетного устройства.
Достоинствами цифровых приборов являются: малые погреш-
ности измерения (0,1-4-0,001%) в широком диапазоне измеряе-
мых сигналов; высокое быстродействие (до 500 измерений/с);
выдача результатов измерений в цифровом виде; возможность
документальной регистрации измерительной информации с по-
мощью цифропечатающих устройств и ввода ее в ЭВМ для по-
следующей обработки.
К недостаткам следует отнести: сложность схем и конструк-
ции, высокую стоимость, меньшую (по сравнению с аналоговыми
приборами) надежность. Эти недостатки можно считать времен-
ными, поскольку в настоящее время они быстро устраняются
в связи с развитием микроэлектронной элементной базы.
Большую группу среди цифровых приборов составляют циф-
ровые вольтметры. На рис. 115,а приведена структурная схема
цифрового вольтметра с время-импульсным преобразованием.
Измеряемое напряжение Ux преобразуется в интервал времени
АГ, длительность которого определяется числом заполняющих
импульсов генератора образцовой частоты ГОЧ. Вольтметр име-
ет входное устройство ВУ, обеспечивающее высокое входное со-
противление прибора; управляющее устройство УУ, служащее
для запуска генератора линейно изменяющегося напряжения
ГЛИН и обнуление счетчика Сч; сравнивающие устройства СУ\
и СУ%, вырабатывающие сигналы при равенстве Ux и линейно
падающего напряжения (7Г, а также при £7Х = 0; ключ К, про-
пускающий импульсы частоты fr04 = 1/Ггоч за время АГ с ГОЧ
на счетчик импульсов Сч; цифровое отсчетное устройство ЦОУ,
фиксирующее результат измерения. Работа цифрового вольтмет-
ра поясняется временными диаграммами, представленными на
рис. 115,6. Из рис. 115,6 видно, что АГ = А Ггоч = A/fr04, где
N — число импульсов, прошедших в счетчик за время АГ, a Ux =
115
167
= A7tgp. Множитель tg 0 численно равен скорости изменения
линейного падающего напряжения. Подставляя АТ и в выраже-
ние для 1/х, получим
Ux = tg р = KN, или N = -L-Ux.
I ГОЧ Л
Таким образом, показания цифрового отсчетного устройства,
фиксирующего количество импульсов в счетчике, будут пропор-
циональны значению измеряемого напряжения Ux.
► Следует отметить, что основные метрологические характе-
ристики цифровых приборов определяются преобразованием
непрерывной измеряемой величины в код, так как дальней-
шая передача и преобразование кода практически не вносит
погрешности.
Структурная схема цифрового частотомера и временные диа-
граммы, поясняющие его работу, представлены на рис. 116,а,б.
Входное устройство ВУ предназначено для согласования вход-
ного сопротивления частотомера с источником сигнала измеряе-
мой частоты fx и ’для усиления или ослабления напряжения
до значения, необходимого для нормальной работы формирую-
щего устройства ФУ. Последнее преобразует синусоидальные
сигналы измеряемой’ и образцовой частоты в короткие прямо-
угольные импульсы «фУ, возникающие в моменты перехода си-
нусоиды через нуль. Временной селектор ВС, представляющий
собой электронный ключ, пропускает импульсы, соответствующие
частоте напряжения от генератора с кварцевой стабилизаци-
ей Гы на электронный счетчик Сч в течение времени, равного
периоду Тх напряжения Uх измеряемой частоты Сигнал Uyy,
управляющий временным селектором, формируется устройством
управления УУ. Оно же сбрасывает счетчик Сч в нулевое по-
ложение по окончанию времени счета импульсов Тх. Если за
время Тх подсчитано N импульсов образцовой частоты /кв, то
среднее значение измеряемой частоты определится как
Л = 1/Л = Лв/Л/.
168
фазометра показана на
формирующих устройств
В цифровых фазометрах
измерение сдвига фаз между
напряжениями и\ и и2 сводит-
ся к измерению интервала вре-
мени т между двумя однопо-
лярными импульсами, форми-
руемыми ФУ в моменты пере-
хода через нуль исследуемых
напряжений в течение одного
периода. Упрощенная схема такого
рис. 117. Функциональное назначение
ФУ и ограничителей Ог такое же, как и в схеме электронного
фазометра. Ключ К открывается на время т, пропорциональное
измеряемому сдвигу фаз. Число импульсов генератора опорной
частоты ГОЧ, подсчитанное счетчиком Сч, равно N — т/Та, где
То — 1//о— период следования опорных импульсов.
Принимая во внимание, что <р =-у-• 360°, окончательно по-
лучим
<р= 2nfTaN = 2л
§ 60. Измерение тока и напряжения
Измерение постоянного и переменного
тока
ЗАПОМНИТЕ
Для измерения тока / в каком-либо элементе электрической
цепи последовательно с ним включают измеритель тока —
амперметр.
При измерении малых постоянных токов (менее 10-3 А) ис-
пользуют прямые и косвенные методы измерения. В первом слу-
чае ток измеряют приборами непосредственной оценки, например
магнитоэлектрическими микроамперметрами. Для увеличения
чувствительности применяют усилители постоянного тока.
Более точным, но в то же время более сложным способом
является косвенное измерение тока, при котором в измеритель-
ную цепь включают резистор с известным сопротивлением /?0
и на нем измеряют падение напряжения Uo компенсационным
методом. Искомый ток находят по формуле 1 — Uo/Ro-
Устройства, реализующие компенсационный метод измерения, называют ком-
пенсаторами.
На рис. 118 показана принципиальная схема измерения на-
пряжения Ux компенсационным методом. В верхнем контуре
под действием эдс вспомогательного источника питания Евсп соз-
дается рабочий ток /р. Его значение регулируется резистором
169
118
/?рег и устанавливается с исполь-
зованием нормального элемента
£„э, эдс которого известна с высо-
кой точностью. Регулировкой соп-
ротивления резистора Rper доби-
ваются отсутствия тока в нуль-
индикаторе НИ (переключатель
П в положении /). В этом случае
справедливо равенство
^pRi\' £„„
где RN — сопротивление образ-
цового резистора.
Поскольку эдс нормального
элемента и значение сопротивле-
ния Rn известны с высокой точностью, то и значение /р= EH3/RN
получают также с высокой точностью. При положении 2 пере-
ключателя П измеряемое напряжение Ux сравнивается с ком-
пенсирующим напряжением £к, создаваемым током /р на ком-
пенсирующем резисторе /?«. При отсутствии тока в НИ напряже-
ние Ux уравновешено напряжением UK, т. е.
Ux= UK = IVR' = Е„3-^-.
Из данного выражения видно, что точность измерения Ux
определяется точностью сравнения его с UK, т. е. чувствитель-
ностью НИ и неизменностью рабочего тока /р, т. е. стабильностью
£всп. В свою очередь, точность UK зависит от точности, изготовле-
ния резистора RK.
Выпускаемые промышленностью компенсаторы имеют следую-
щие классы точности: 0,0005, 0,001; 0,002; 0,005; 0,01; 0,02; 0,05;
0,1; 0,2; 0,5. Максимальное напряжение, измеряемое компенсато-
ром непосредственно, составляет 2,12111 В.
' Постоянные токи порядка 10~3—102 А измеряют, как пра-
вило, приборами непосредствен-
ной оценки — миллиампермет-
рами и амперметрами магнито-
электрической, электромагнит-
ной и электродинамической си-
стем, а также электронными
аналоговыми и цифровыми при-
борами.
Для измерения больших по-
стоянных токов (свыше 100 А)
обычно применяют амперметры
магнитоэлектрической системы
с использованием шунтов, под-
ключаемых параллельно изме-
рительному механизму ИМ
(рис. 119,а).
Сопротивление шунта подбирается из соотношения Rm —
= R№/(n—1), где /?„ — сопротивление обмотки измерительного
механизма; п — 1/1и— коэффициент шунтирования, /—измеряе-
мый ток; /й — допустимый ток ИМ.
ЗАПОМНИТЕ
При измерении переменных токов важно, какое значение
тока измеряется: действующее, амплитудное или среднее.
Эта необходимость вызвана тем, что все приборы градуи-
руются в действующих значениях синусоидального тока, а
реагируют подвижные части некоторых измерительных ме-
ханизмов на среднее значение измеряемой величины.
► Переменные токи до 100 мкА измеряют обычно цифровыми
микроамперметрами. Токи выше 100 мкА измеряют выпря-
мительными микроамперметрами. Для измерения перемен-
ных токов в диапазоне 10 мА—100 А используют электро-
магнитные, электродинамические и выпрямительные прибо-
ры, работающие в частотном диапазоне до десятков кило-
герц, и термоэлектрические приборы в диапазоне частот до
сотен мегагерц. Большие переменные токи измеряют теми
же приборами, но с использованием измерительных транс-
форматоров тока.
Измеряют переменные токи и косвенным способом. 45 этом
случае последовательно в измерительную цепь включают образ-
цовый резистор и измеряют падение напряжения на нем.
ЗАПОМНИТЕ
При измерении тока включение в измеряемую цепь ампер-
метра с внутренним сопротивлением RA или образцового
резистора изменяет режим работы цепи. Вследствие этого
появляется методическая погрешность измерения тока
6,= -1/(1 +/?вхА//?л),
где RM А—входное относительно зажимов амперметра
сопротивление цепи. Чем меньше сопротивление обмотки
амперметра, тем меньше методическая погрешность изме-
рения.
Измерение постоянного и переменного
ЗАПОМНИТЕ напряжения
► При измерении эдс и напряжения на каком-либо участке
электрической цепи измеритель напряжения включают па-
раллельно этому участку.
При измерениях постоянных напряжений в диапазоне
1 —1000 мкВ используют цифровые микровольтметры и ком-
пенсаторы постоянного тока. Значения напряжений от де-
сятков милливольт до сотен вольт измеряют приборами маг-
нитоэлектрической, электромагнитной, электродинамической
171
систем, электронными аналоговыми и цифровыми вольт-
метрами с использованием делителей напряжения и доба-
вочных резисторов.
Схема включения вольтметра с добавочными резисторами
/?д приведена на рис. 119,6. Сопротивление их определяется из
условия /?Д|,2 = — 1). 'Де Rv — внутреннее сопротивление
вольтметра; mi,2 = Ut.i/Umv — масштабный коэффициент.
► Для измерения постоянных напряжений до нескольких
киловольт применяют в основном электростатические вольт-
метры, реже приборы других систем с делителями напря-
жения.
Малые переменные напряжения (до единиц вольт) изме-
ряют с помощью приборов выпрямительной системы, ана-
логовыми и цифровыми электронными вольтметрами.
Для измерения переменных напряжений от единиц до сотен
вольт в диапазоне частот до десятков килогерц используют
приборы электромагнитной, электродинамической и выпря-
мительной систем. В диапазоне частот до десятков мега-
герц напряжение измеряют приборами электростатической
и термоэлектрической систем, цифровыми вольтметрами.
Большие значения переменных напряжений (свыше кило-
вольта) измеряют теми же приборами, но с применением изме-
рительных трансформаторов напряжения. Последние кроме пре-
образования переменного напряжения обеспечивают изоляцию
вторичной цепи от первичной, находящейся под высоким напря-
жением.
ЗАПОМНИТЕ
При подключении вольтметра с внутренним сопротивлением
Rv к участку электрической цепи изменяется ее режим ра-
боты. В этом случае возникает методическая погрешность
измерения напряжения
би= -1/(1 +Rv/R^v),
где /?вху — входное относительно зажимов вольтметра со-
противление цепи.
Чем больше внутреннее сопротивление вольтметра, тем
меньше погрешность измерения.
§ 61. Измерение электрической мощности
и энергии
Мощность в электрических цепях измеряют прямым и косвен-
ным способами. При прямом измерении используют ваттметры,
при косвенном — амперметры и вольтметры.
Измерение мощности в цепях постоянного
тока
В цепях постоянного тока для измерения мощности ватт-
метр применяют относительно редко, в основном используют ме-
тод амперметра — вольтметра (рис. 120). Определив ампермет-
ром значение тока / и вольтметром напряжение U, вычисляют
мощность по формуле Р = UI.
Для уменьшения погрешности из-за влияния внутренних со-
противлений приборов схему рис. 120, а следует использовать при
малом сопротивлении R, а схему рис. 120,6 — при большом со-
противлении R нагрузки.
Измерение мощности в однофазных цепях
переменного тока
Полную мощность S приемника измеряют, как правило, ме-
тодом амперметра-вольтметра: S=UI, где U и / — действую-
щие значения напряжения и тока.
Активную P=Ulcos(f и реактивную Q=t//sin<p мощности
приемников измеряют с помощью ваттметров.
Измерение активной мощности ваттметром в однофазных це-
пях производят по схеме рис. 121, а. Токовую обмотку включают
в цепь последовательно с приемником R„ (т. е. в цепь тока /),
а обмотку напряжения — параллельно приемнику R„ на напря-
жение U.
Реактивную мощность в однофазных цепях измеряют только
в лабораториях при проведении каких-либо исследований вклю-
чением обычных ваттметров по специальным схемам.
173
Измерение мощности в трехфазных цепях
Полная мощность приемника при симметричной нагрузке
может быть измерена методом амперметра—вольтметра и вычис-
лена по формуле
S= V3 UI,
где U и / — действующие значения линейных напряжения и тока.
Полная мощность приемника при несимметричной нагрузке
определяется как |S| = IS, + S2 + S3I, где Si, S2 и S3 — полные
мощности фаз приемника.
При измерении активной мощности в трехфазной четырех-
проводной цепи включают три ваттметра (рис. 121,6). Активная
мощность приемника определяется суммой их показаний:
Р= Pi + Р2 + Р3.
Широко распространено измерение активной мощности в
трехфазных цепях методом двух ваттметров. Этот метод исполь-
зуют только для трехпроводной цепи. На рис. 121,в показана
одна из возможных схем включения ваттметров W\ и №2. Сумма
показаний ваттметров выражается как
174
UabIa cos(UabIa) + f^cB^cC0s(t7cB^c) — P — + c%2
и представляет собой активную мощность трехфазного при-
емника.
При симметричной нагрузке эта сумма представляется в виде
Р — -\/3 UI costp,
где U и / — действующие значения линейных напряжения и тока;
ср — сдвиг фаз между фазными напряжением U$ и током /ф.
Реактивную мощность измеряют по показаниям ваттметров,
включенных по схемам рис. 121, в. В этом случае реактивная
мощность пропорциональна алгебраической разности показаний
прибора:
U1 соз(ф + 30°) — UI соэ(ф — 30°) = UI эщф = Q/y/З .
ЗАПОМНИТЕ
Реактивная мощность трехфазного приемника равна раз-
ности показаний ваттметров, умноженной на -\/3 :
Q == "V3 (ot|^I оц^).
При несимметричной нагрузке реактивную мощность измеря-
ют методом двух или трех ваттметров, включенных по специаль-
ным схемам.
Измерение активной и реактивной энергии
Активную энергию в цепях однофазного переменного тока из-
меряют индукционными счетчиками, включаемыми в цепь по тем
же схемам, что и ваттметры. Активная энергия выражается в
ватт-секундах или киловатт-часах. Для измерения активной
энергии в системах энергоснабжения широко применяют двух-
и трехэлементные счетчики.
ЗАПОМНИТЕ
В однофазных цепях учет реактивной энергии в нашей
стране не производится.
В трехфазных цепях реактивная энергия учитывается с по-
мощью трехфазных трехэлементных счетчиков.
Счетчики активной энергии имеют обозначения СА, счетчики
реактивной энергии — СР.
§ 62. Измерение частоты и сдвига фаз
Измерение частоты
Измерение частоты является одной из важнейших задач изме-
рительной техники. Для этой цели используют методы непосред-
ственной оценки й сравнения.
175
► В области низких частот (до 2 кГц) для измерения частоты
применяют электромеханические частотомеры: электромаг-
нитные типа Э393 и электродинамические типа Д506.
Для измерения высоких частот используют электронные
аналоговые и цифровые частотомеры (см. § 54).
Частоту нередко измеряют осциллографом по фигурам Лисса-
жу. Для этого на один из входов осциллографа (например, вход У)
подается напряжение измеряемой частоты Д, на другой — напря-
жение известной частоты Д. Электронный луч под действием двух
взаимно перпендикулярных и меняющихся по гармоническому за-
кону соответственно с частотами Д и Д напряжений вычерчивает
на экране некоторую сложную кривую. Если отношение частот вы-
ражается целым числом, то кривая (фигура Лиссажу) неподвиж-
на (рис. 122, а). Для определения отношения частот необходимо
подсчитать число точек пересечения вертикальной Ny и горизон-
тальной Nx прямыми наблюдаемой фигуры.
ПРИМЕР
Для фигуры, изображенной на рис. 122, a, = 2, N, = 6 и поэтому
Л=(о-^- = 4/о = 3/„.
Зная частоту f0 образцового генератора, можно определить неизвестную частоту fx.
Погрешность измерения f„ определяется стабильностью f0.
Измерение сдвига фаз
► Сдвиг фаз между двумя напряжениями определяется мето-
дами непосредственной оценки и сравнения при исследовании
различного рода четырехполюсников (трансформаторов,
фильтров, усилителей и др.) в заданном диапазоне частот,
а также зависимости сдвига фаз от частоты. Сдвиг фаз вы-
ражается в радианах или градусах.
Наиболее распространены для измерения сдвига фаз элек-
тродинамический (на низких частотах), электронный, цифро-
вой фазометры и осциллограф (на высоких частотах).
Отечественной промышленностью выпускаются электродина-
мические фазометры типа Д5/8, приведенная погрешность которых
находится на уровне ±0,5%. Принцип работы электронных ана-
логовых и цифровых фазометров рассмотрен в § 55.
Способ оценки сдвига фаз между двумя напряжениями с по-
мощью электронно-лучевого осциллографа методом эллипса ил-
люстрируется рис. 122,6. Одно из исследуемых напряжений
U] == (7|msin<o/ подают на вход вертикального, а другое «2 =
= Uim sin(<i>/ —;ф) — на вход горизонтального канала электронно-
лучевого осциллографа. На экране появится фигура — эллипс
(рис. 122,6). Центр эллипса совмещают с началом координат.
Находят точки пересечения эллипса с осями и определяют
176
максимальную абсциссу (ординату). При t - 0 и t = 2л/о> напря-
жение U[ = 0, а напряжение м2 = ±^2msin<p. Отрезок ab эллипса
пропорционален 2{72msin<p, а отрезок cd, соответствующий макси-
мальному отклонению луча по горизонтали, пропорционален 2i72m.
В этом случае
Ф = arcsin[a£>/(cd)].
Можно вычислить сдвиг по фазе и по отношению большой В
и малой А осей эллипса:
т-----------------
I ф = 2 arctgB/Л.
Погрешность измерения сдвига фаз осциллографом составля-
ет 54-10% и определяется неточностью отсчета длин отрезков,
деформацией эллипса из-за наличия высших гармоник в исследуе-
мых напряжениях, наличием собственного сдвига фаз в каналах
прибора.
§ 63. Измерение параметров электрических цепей
Сопротивления R, емкости С, индуктивности L измеряют мето-
дами прямого и косвенного измерений.
Измерение электрического сопротивления
постоянному току
► Электрические сопротивления электротехнических устройств
(катушек, резисторов и т. д.) постоянному току можно услов-
но разделить на малые (до 1 Ома), средние (от 1 до 105 Ом)
и большие (выше 105 Ом). Для измерения малых сопротивле-
ний применяют метод амперметра — вольтметра и мостовой.
Для измерения средних сопротивлений применяют методы
амперметра — вольтметра, непосредственной оценки (ом-
метры), мостовой (одинарные мосты) и компенсационный.
12—85
177
Для измерения больших сопротивлений используют метод
непосредственной оценки, реализуемой мегаомметрами.
Метод амперметра — вольтметра (см. рис. 120) является наибо-
лее простым для измерения малых и средних сопротивлений R.
Схему рис. 120, а рекомендуется применять при измерении ма-
лых сопротивлений, так как в этом случае ток /А « IR ввиду того,
что вольтметр обладает гораздо большим сопротивлением по срав-
нению с R и поэтому справедливо равенство lv <С IR. Схему
рис. 120,6 лучше применять при измерении средних сопротивле-
ний, так как в этом случае напряжение Uv « UR ввиду того, что
амперметр имеет внутреннее сопротивление гораздо меньше
сопротивления R.
Измеряемое сопротивление находят из соотношения
r=uv/ia.
Недостатком этого метода является наличие погрешности,
возникающей из-за внутренних сопротивлений измерительных
приборов. Погрешность не превысит 1%, если для схемы
рис. 120, а выбрать вольтметр с сопротивлением Rv > 100/?,
а для схемы рис. 120, б — амперметр с сопротивлением /?,, < 100/?.
Метод непосредственной оценки реализуется с помощью ом-
метра, схема которого приведена на рис. 123, а. Он состоит из
магнитоэлектрического измерительного механизма ИМ, шкала
которого проградуирована в омах, источника питания напряже-
нием U, добавочного резистора Rd. Прибор имеет выходные
зажимы АВ, к которым присоединяют измеряемое сопротивле-
ние /?х. Ток в цепи измерителя /= U/(RA -)-/?„ + /?х), где /?д,
/?и и /?х — сопротивления соответственно добавочного резистора,
измерителя и измеряемого объекта. Угол отклонения стрелки
прибора определяется выражением
а= S,/ = S,U
1
/?э + + /?х
где Sz — чувствительность измерителя по току.
178
запомните
При разомкнутых зажимах АВ (Rx — <х>) угол отклонения
<х= О, при закороченных зажимах АВ (Rx = 0) угол откло-
нения максимальный, поэтому шкала у омметра обратная —
нулевая отметка находится справа.
Омметры удобны в практике, но имеют большую погрешность
(класс точности 2,5) из-за неравномерности шкалы и нестабиль-
ности источника питания. Для устранения последней причины
погрешности в омметрах используют логометрические измери-
тельные механизмы. Приборы, построенные на базе логометри-
ческого механизма, называют мегаомметрами (рис. 123, б). В ка-
честве источника питания этих приборов используют небольшие
генераторы Г с напряжением 500 и 1 000 В, приводимые в дей-
ствие вручную. Они служат в основном для измерения больших
сопротивлений, например сопротивления изоляции. Для измере-
ния сопротивлений свыше 10® Ом используют электронные при-
боры, называемые тераомметрами.
Широко применяют для измерения сопротивлений мостовой
метод. Устройства, реализующие этот метод измерения, называ-
ются измерительными мостами.
Одинарный (четырехплечий) мост (рис. 124, а) содержит че-
тыре плеча и две диагонали. В одно плечо моста включают изме-
ряемое сопротивление Rx, а три остальных плеча образованы
резисторами с сопротивлениями Rz, R3 и /?4- В одну диагональ
моста (между зажимами а и Ь) включают источник питания
с эдс Ео, а в другую (зажимы сиг/) — нулевой индикатор НИ,
выполняющий функции указателя равновесия моста. Когда по-
тенциалы узлов end равны, ток в индикаторе /„„ = 0, мост
находится в состоянии равновесия (признаком равновесия моста
является нулевое отклонение указателя НИ). При этом справед-
ливы следующие соотношения: 1\ — /2; /з = Л; RJ\ = R3I3 и
R2I2 = Rih- Разделив почленно два последних уравнения друг
на друга и учтя равенство токов, получим
Rx/R2 = R3/R4, или RXR, — R2R3.
ЗАПОМНИТЕ
Произведения сопротивлений элементов, включенных в про-
тивоположные плечи уравновешенного моста, равны между
собой.
Из последнего выражения вычисляют искомое сопротивле-
ние Rx:
Rx= R2-TT--
Ki
12*
179
Плечо Ri называют плечом сравнения, а плечи R3 и /?4 — пле-
чами отношения.
► Одинарный мост служит для измерения только средних
сопротивлений. Малые и большие сопротивления им изме-
рять не рекомендуется. Нижний предел (единицы ом) изме-
рения мостом ограничен влиянием сопротивлений соеди-
нительных проводов и переходных контактов, которые
неизбежно оказываются включенными в плечо ас последова-
тельно с измеряемым объектом Rx. Верхний предел (Ю50м)
измерения мостом ограничен шунтирующим действием то-
ков утечки.
Для измерения сопротивления с повышенной точностью ис-
пользуют компенсационный метод. На рис. 124,6 приведена схе-
ма измерительной цепи, включающая компенсаторы постоянного
тока, переключатель на две позиции (П1 и П2), образцовый
резистор Ro, источник питания Е и объект с измеряемым сопро-
тивлением Rx. Измерив падение напряжения на Rx и Ro при
двух положениях переключателя, определяют URo=Ro1 и
URx=RJ. Искомое значение сопротивления Rx находят из вы-
ражения
Rx = Ro .
UR"
В процессе измерения необходимо обеспечить постоянство
тока /.
Измерение индуктивности и емкости
Индуктивность L и емкость С измеряют в основном косвен-
ным методом с помощью амперметра, вольтметра и ваттмет-
180
ра, для получения более точных результатов применяют
мостовой метод.
Метод амперметра — вольтметра — ваттметра (рис. 125, а)
является наиболее доступным при определении параметров пас-
сивных двухполюсников. Результаты измерений действующих
значений тока / и напряжения (У, мощности Р позволяют вычис-
лить полное сопротивление Zx = U/Р, активное сопротивление
R = Р/Г2 и реактивное сопротивление X — /Z2 — R2.
Если из-
меряемой величиной является индуктивность, то она определяет-
ся как Lx — Xl/m, если емкость, то как Сх — \/(мХс).
Для измерения индуктивности и емкости широко применя-
ется мостовой метод. На рис. 125,6 приведена схема моста, при-
меняемого для определения параметров индуктивной катуш-
ки (7?1 и L\). Комплексные сопротивления плеч моста
равны:
Z|= Ri + jwLi; Z2 = Z3 = /?з; Z<= i'r~ •
— — — — 1/Л4Т /«)Ьо
Подставив эти значения в общее уравнение равновесия моста
Z1Z4 — Z2Z3 и приравнивая мнимые и вещественные составляю-
125
181
щие, получим формулы для определения параметров R\ и Ь\ ка-
тушки:
/?i = R2R3/R4, = C0R2R3.
На рис. 125, в приведена схема моста для измерения емкости Сх
и сопротивления Rx конденсатора с малыми потерями. Подстав-
ляя в общее условие равновесия моста Z1Z4 = Z2Z3 конкретные
значения указанных на схемах параметров плеч, получим выра-
жения для Сх и Rx:
Сх = C0R4/R2', Rx = RiRz/Rt.
§ 64. Методы и средства измерения магнитных
величин
К магнитным величинам относятся магнитный поток Ф, маг-
нитная индукция В и напряженность магнитного поля Н.
► Методы измерения магнитных величин основаны на преоб-
разовании магнитных величин в электрические сигналы.
Наиболее распространены индукционный метод и метод на
основе гальваномагнитных эффектов.
Индукционный метод основан на возникновении эдс в витках
катушки при изменении сцепляющегося с ними магнитного по-
тока Ф (рис. 126, а).
где ф — потокосцепление, w — число витков катушки.
При однородном магнитном поле магнитный поток Ф связан
с магнитной индукцией В соотношением Ф = Bs, где s — пло-
щадь сечения катушки.
В воздушной среде магнитная
индукция В связана с напряжен-
ностью поля Н соотношением В —
= у,0Н, где цо = 4л-1О~7 Гн/м —
магнитная постоянная. Следо-
вательно, индукционный метод
позволяет определять магнитный
поток, магнитную индукцию и
напряженность магнитного поля:
В — Ф/S, И — В/у.о = Ф/(ро«).
182
Приборы для измерения магнитного потока называют веберметрами.
Простейшая схема веберметра, в основе работы которого ле-
жит индукционный метод, приведена на рис. 126,6. Основными
элементами веберметра являются индукционная катушка (И7К)
и интегрирующее устройство ИУ, в качестве которого широко
используют магнитоэлектрические гальванометры без противо-
действующего момента. При внесении или удалении индукцион-
ной катушки из магнитного поля отклонение подвижной части
магнитоэлектрического измерительного механизма пропорцио-
нально магнитному потоку, сцепленному с витками катушки:
где Сф — цена деления веберметра, шк — число витков измери-
тельной катушки.
Промышленностью выпускаются магнитоэлектрические вебер-
метры типа М199 и Ml 119 с ценой деления соответственно
5-10”6 и 10“4 Вб/дел. Основная погрешность их находится в
пределах ±1,5%.
Из гальваномагнитных эффектов в технике магнитных изме-
рений широкое применение нашел эффект Холла.
► Если через полупроводниковую пластину (рис. 127,а), по-
мещенную в магнитное поле с индукцией В, пропустить
ток /, то между точками х—х возникнет разность пбтен-
циалов Ех, называемая эдс Холла.
Связь ее с магнитной индукцией описывается выражением
Ех = S„B,
где S,, — чувствитель-
ность преобразователя
при номинальном токе
питания /.
Приборы для измерения
магнитной индукции В называ-
ют тесламетрами.
На рис. 127, б приведена
упрощенная схема тесла-
метра с преобразователем
Холла (ПХ). Преобразо-
ватель Холла питается
переменным током от ге-
нератора Г через транс-
форматор Тр. Эдс Холла
измеряют компенсацион-
ным методом. Компенси-
рующее напряжение UK,
183
снимаемое с резистора Rt, и эдс Холла £х подаются в противо-
фазе на сравнивающее устройство СУ. Перемещением движка
резистора R, шкала которого проградуирована в единицах из-
меряемой индукции, добиваются нулевого показания сравнива-
ющего устройства. Поскольку компенсационная цепь и преобра-
зователь Холла питаются от одного и того же генератора, исклю-
чается погрешность от нестабильности частоты и выходного
напряжения генератора.
По описанной схеме выполнен выпускаемый промышленно-
стью тесламетр типа Ш1-8, который предназначен для измерения
индукции постоянных магнитных полей в диапазоне 0,01 — 1,6 Тл.
Основная погрешность прибора не превышает ±2%.
§ 65. Понятия об измерении неэлектрических
величин электроизмерительными приборами
Чтобы измерить ту или иную неэлектрическую величину, ее
нужно предварительно преобразовать в электрический сигнал.
Такое преобразование осуществляется с помощью первичных
преобразователей. Упрощенная структурная схема измерительно-
го устройства включает первичный преобразователь, электри-
ческую измерительную цепь, выходное устройство. Измеряемая
неэлектрическая величина х поступает на вход первичного преоб-
разователя, в котором преобразуется в электрический сиг-
нал у(х). Этот сигнал преобразуется в измерительной цепи в дру-
гой электрический сигнал у и воспринимается выходным устрой-
ством. Шкала выходного устройства <х(х) градуируется непосред-
ственно в значениях неэлектрической величины х.
> По принципу действия первичные преобразователи делятся
на резистивные, электромагнитные, электростатические, теп-
ловые.
Резистивные преобразователи подразделяют на реостатные
дрис. 128) и тенвочувствительные. Их работа основана на изме-
нении электрического сопротивления в зависимости от переме-
щения движка 3 по электрическому проводнику 2 (реостатные),
намотанному на кольцо /, или от механической деформации про-
водника или полупроводника (тензочувствительные).
ЗАПОМНИТЕ
Резистивные преобразователи применяют для измерения пе-
ремещений, а также других величин, которые могут быть
преобразованы в линейное или угловое перемещения: дав-
ление, усилие, вращающие моменты, уровень жидкостей,
ускорения и др.
На рис. 128 через х обозначена входная неэлектрическая ве-
личина (угловое перемещение), у — выходная электрическая ве-
личина (сопротивление).
184
6
Электромагнитные преобразователи подразделяются на ин-
дуктивные, магнитоупругие и индукционные.
Индуктивные преобразователи представляют собой катушку
индуктивности 2 с магнитопроводом / (рис. 129), параметры ко-
торой изменяются под воздействием измеряемой величины х при
перемещении якоря 3 (зазор 6) в соответствии с формулой
г _ а>|Цоящ
где s — сечение магнитопровода; wi— число витков катушки;
ц, — эквивалентная магнитная проницаемость.
Магнитоупругие преобразователи представляют собой разно-
видность индуктивных преобразователей с замкнутым магнито-
проводом, а индукционные — катушку, в которой наводится эдс
при ее перемещении в постоянном магнитном поле.
ЗАПОМНИТЕ
Электромагнитные преобразователи применяют для измере-
ния скорости, линейного и углового перемещения и других
величин, предварительно преобразованных в перемещение.
Электростатические преобразователи подразделяются на ем-
костные и пьезоэлектрические. У емкостных преобразователей
изменяется емкость под действием измеряемой величины. Работа
пьезоэлектрических преобразователей основана на возникнове-
нии эдс в некоторых кристаллах под действием механических сил.
Конструктивное исполнение емкостных преобразователей показа-
но на рис. 130, а. Как известно, емкость С между двумя парал-
лельными проводящими пластинами (подвижной 1 и неподвиж-
ной 2) площадью $ определяется формулой
С — eoers/6,
где 6 — расстояние между пластинами; е0 — диэлектрическая
постоянная (8,85-10-12 Ф/м); ег — относительная диэлектриче-
ская проницаемость среды между пластинами.
185
ЗАПОМНИТЕ
2
_____ C(V>
130
Электростатические пре-
образователи исполь-
зуются при измерении
силы, давления, влаж-
ности сыпучих веществ,
перемещения и коли-
чества вещества.
Действие тепловых
преобразователей осно-
пропессах: нагрев, охлаждение, теплообмен и
вано rfa
др. Они
ские. В
ния проводника или полупроводника от температуры. Для изме-
теиловых
подразделяются на терморезистивные и термоэлектриче-
терморезисторах используются зависимость сопротивле-
рения их сопротивления применяют обычно мостовые схемы
(см. § 59).
Действие термоэлектрических преобразователей основано на
возникновении эдс при нагреве или охлаждении спая двух раз-
нородных проводников (термопары). Для измерения термо-эдс Е
применяют электроизмерительный прибор (милливольтметр).
На рис. 130,6 показана простейшая схема включения прибора
в цепь термопары t. Точка соединения концов термоэлектродов 1
называется рабочим концом термопары, точки 2 и 2'— свободны-
ми концами. При измерениях необходимо температуру свободных
концов поддерживать одинаковой и неизменной.
ЗАПОМНИТЕ
Тепловые первичные преобразователи применяют в основ-
ном для измерения температуры.
Существуют электрохимические, ионизационные, фотоэлектри-
ческие преобразователи и др. Они служат для измерения состава
и концентрации растворов и газов, прозрачности жидкостных и
газовых смесей, количества электричества, температуры и гео-
метрических параметров.
САМОЕ ВАЖНОЕ
1. Различные электрические и неэлектрические величины
измеряют электромеханическими, электронными и цифро-
выми приборами.
2. Токи, напряжения, частоты, сдвиг фаз, мощности, энер-
гию, параметры электрических цепей, а также магнитные
величины измеряют с различной степенью точности.
3. Точность измерения определяется правильным нахожде-
нием источников погрешностей и их значений.
186
Темы докладов и рефератов
1. Классификация погрешностей (на конкретных примерах).
2. Измерения и электроизмерительные приборы в твоей про-
фессии.
3. Особенности и тенденции развития электронных аналого-
вых и дискретных измерительных приборов.
4. Электронно-лучевые осцилографы.
5. Способы расширения пределов измерения электрических
величин и их реализация.
6. Приборы для измерения параметров магнитных мате-
риалов.
Что называется измерением?
В чем заключается косвенный метод измерения? Приведите примеры
косвенных измерений.
Объясните принцип действия прибора магнитоэлектрической системы.
В какой части шкалы прибора с равномерной шкалой относительная
погрешность измерения будет наибольшей?
Какой системы измерительные приборы меньше всего подвержены воз-
действию внешних магнитных полей?
Какой системы приборы могут быть использованы в качестве ваттмет-
ров?
Проанализируйте временную диаграмму работы электронного частото-
мера. Как влияет изменение входного напряжения на разрядный ток?
Проанализируйте временную диаграмму электронного фазометра. Как
определить сдвиг фаз между исследуемыми напряжениями?
Объясните по структурной схеме (см. рис. 115) принцип работы циф-
рового измерительного прибора.
Объясните принцип работы цифрового частотомера по его структурной
схеме (см. рис. 116) и покажите форму сигнала на выходе каждого
блока. Каково назначение формирующего устройства?
Каким образом по фигуре Лиссажу на экране осциллографа опреде-
лить неизвестную частоту (см. рис. 122)?
Какими способами измеряют сопротивление резисторов постоянному
току?
С какой целью применяют мостовой метод для измерения сопротив-
лений?
Как измерить сопротивление резистора компенсационным методом?
ТРАНСФОРМАТОРЫ
§ 66. Назначение, устройство и принцип действия
трансформатора
Трансформатором называют электротехническое устройство, служащее для
преобразования переменного тока одного напряжения в переменный ток другого
напряжения той же частоты.
Трансформаторы широко применяются в системах передачи
и распределения электрической энергии. В электроэнергетических
системах при передаче от электростанций к потребителям элек-
троэнергия неоднократно преобразуется: сначала повышается
напряжение в целях уменьшения потерь в линиях электропере-
дач, а затем снижается до значений, обеспечивающих эффек-
тивную и безопасную работу электротехнических устройств.
В производственных условиях такое преобразование напряжения
с помощью трансформаторов достигает пять — семь раз. Общая
мощность трансформаторов в семь-восемь раз превышает уста-
новленную мощность генераторов на электростанциях. Поэтому
повышенные технико-экономические характеристики трансформа-
торов (cosq>, кпд и др.) являются одной из важнейших проблем
энергоснабжения, надежности и качества работы потребителей
электрической энергии.
В настоящее время только в СССР общая мощность установ-
ленных трансформаторов достигает 2 млрд. кВт при суммарной
мощности генераторов электростанций более 300 млн. кВт.
Преобразование напряжения в трансформаторах осуществ-
ляется переменным магнитным потоком индуктивно-связанных
между собой двух обмоток. Обмотка, подключаемая к источнику
электрической энергии, называется первичной, другая обмотка,
на которую включена нагрузка — вторичной. Если через транс-
форматор необходимо осуществить питание двух и более нагру-
зок с разным напряжением, то выполняется соответствующее
число вторичных обмоток. Условное обозначение на схемах двух-
обмоточного и трехобмоточного трансформаторов представлено
на рис. 131.
Для усиления индуктивной (магнитной) связи между обмот-
ками их помещают на ферромагнитный сердечник, называемый
магнитопроводом.
По назначению трансформаторы делятся на силовые и спе-
циального назначения (измерительные, сварочные, пиктрансфор-
маторы, согласующие и др.).
188
131
Силовые трансформаторы бывают однофазные и трехфазные,
повышающие и понижающие. По способу охлаждения они де-
лятся на воздушные и масляные.
Основными частями трансформатора являются магнитопро-
вод и обмотки. Магнитопровод собирается из тонких изолиро-
ванных друг от друга листов электротехнической стали. Часть
магнитопровода, на которой располагаются обмотки, называют
стержнями. Части магнитопровода, замыкающие стержни, на-
зывают ярмом.
Однофазные трансформаторы в зависимости от формы магни-
топровода и расположения обмоток подразделяются на стержне-
вые и броневые (рис. 132, а и б). Сечение стержней у маломощ-
ных трансформаторов выполняется прямоугольным, у мощных
132
189
трансформаторов, для лучшего исполь-
зования стали,— в виде ступенчатой
фигуры, вписанной в окружность витков
обмотки.
При сборке магнитопровода транс-
форматора стремятся до минимума
свести воздушные зазоры, так как при
заданном значении магнитного потока
Ф намагничивающий ток /о будет тем
меньше, чем меньше магнитное сопро-
тивление магнитной цепи.
Обмотка трансформатора с большим чис-
133 лом витков называется обмоткой высшего напря-
жения (ВН), а обмотка с меньшим числом вит-
ков — обмоткой низшего напряжения (НН). Так, у повышающего трансформа-
тора обмотка низшего напряжения является первичной, а у понижающего первич-
ной является обмотка высшего напряжения.
ЗАПОМНИТЕ
С целью снижения потоков рассеяния Фа первичную и вто-
ричную обмотки трансформатора выполняют на одном
стержне. При этом первичная обмотка располагается ближе
к стержню. В стержневом трансформаторе обмотки ВН и
НН разделяются на две части и размещаются поровну на
обоих стержнях. В трансформаторе броневого типа обе
обмотки располагаются на среднем стержне.
Трехфазные трансформаторы выполняются трехстержневыми
(рис. 132, в). На каждом стержне трансформатора размещаются
обмотки ВН и НН одной фазы. Стержни соединяются между
собой ярмом.
Принцип работы трансформатора рассмотрим на примере
однофазного двухобмоточного трансформатора (рис. 133). Если
первичную обмотку с числом витков wi подключить к источнику
напряжения ui, то ток в обмотке Z, создаст в магнитопроводе
основной переменный магнитный поток Фо, который, пересекая
витки первичной и вторичной обмоток, создаст в них эдс et и е2.
Под действием е2 во вторичной обмотке, замкнутой на нагрузку
ZH, появится ток /г, направление которого совпадает с направле-
нием е2. Так как магнитодвижущие силы первичной wii\ и вто-
ричной w2i2 обмоток направлены встречно, то результирующая
мдс и поток в магнитопроводе будет определяться разностью
мдс ®i(i — w2i2 = itowi.
§ 67. Однофазный трансформатор. Режим холостого
хода и нагрузки
Электрическая схема однофазного трансформатора представ-
лена на рис. 134, а. Здесь Е\ и Е2— эдс, индуктируемые в пер-
вичной и вторичной обмотках потоком Фо; Х> и Х2 — индуктивные
сопротивления, характеризующие действие потоков рассеяния;
Ri и R2— активные сопротивления первичной и вторичной обмо-
ток; Z,f — сопротивление нагрузки.
В зависимости от значения сопротивления нагрузки разли-
чают три режима работы трансформатора: ZH = оо — режим
холостого хода; 0 < ZH < оо — режим нагрузки; ZH = 0 — режим
короткого замыкания.
В режиме холостого хода (х. х.) вторичнар обмотка транс-
форматора разомкнута, ток /2 = 0. Магнитный поток в магнито-
проводе создается током первичной обмотки, называемый током
холостого хода, 11о. Переменный магнитный поток Фо =
= Фот81пю/, сцепленный с витками обмоток, наводит в них эдс,
равные
ЦФо йФо
е, = —и е2 — —
Действующие значения этих эдс, так же как и в катушке с
ферромагнитным сердечником, равны Д = 4,44fu» |Фо™ и
Е2 = 4,44/и>2Фот-
Отношение
£i _
Е1 и>2
называют
коэффициентом трансформации.
Вследствие перемагничивания магнитопровода в нем возни-
кают потери мощности, которые называют потерями холостого
хода. Можно считать, что мощность Ро, потребляемая из сети
трансформатором в режиме х. х., идет в основном на покрытие
потерь в магнитопроводе, так как потери в обмотке R\I2o сравни-
тельно малы. Ток холостого хода /,0 содержит активную и реактив-
ную составляющие /10 = д//?оа + /?ор , где /,оа = Pa/U\.
Векторная диаграмма трансформатора в режиме холостого
хода аналогична векторной диаграмме катушки с ферромагнитным
сердечником (рис. 134,6).
Режим короткого замыкания (к. з.) для силового трансфор-
матора является аварийным. Однако некоторые специальные
трансформаторы рассчитываются для работы в режиме, близком
к короткому замыканию. Это сварочные трансформаторы, изме-
рительные трансформаторы тока и др.
При работе трансформатора в режиме нагрузки (Z,, =# 0) во
вторичной цепи под воздействием Ё2 появится ток 12. Основной
магнитный поток Фо создается совместным действием мдс первич-
191
134
ной и вторичной обмоток. Результирующая мдс Fp равна их геомет-
рической сумме (рис. 134, в)
/р — W\I t 4- W2h — wJio.
Кроме основного потока Фо обмотки трансформатора охваты-
ваются и потоками рассеяния Ф|О и Ф2о (рис. 134, а), которые
создают в обмотках эдс самоиндукции, характеризуемые соот-
ветствующими индуктивными сопротивлениями Xi. и Х2: £|О =
= --/Х1/| и Ё‘2а — -jXili.
С учетом активного сопротивления обмоток уравнения электри-
ческого состояния первичной и вторичной цепей имеют вид
+ (R। -|- /X।)71,
Ё2 = (/?2 4“ 4- Zvl2 ИЛИ О2 = Ё2 — ^2/2.
§ 68. Электрическая схема замещения
трансформатора
Для исследования режимов работы трансформатора, расчета
сетей целесообразно магнитную связь между первичным и вторич-
ным контурами заменить электрической связью. Соединение пере-
192
мычками ас и bd в схеме на рис. 134, а возможно, если йаь= Uc<i-
Этому требованию удовлетворяет условие Ё'2 =—Ё1 = Ё>~' ,
здесь Е2 называется приведенной эдс.
Эквивалентность энергетических соотношений в трансформато-
ре и его схема замещения не будут нарушены, если полная мощ-
ность S2=S2 (E2I2 — Ei/Q, активная Р2 — Р2 (I2R2 = R2l2} и
реактивная Q2 = Q2 (Х2/2 — X-i/22), а также мощность в нагрузке
S„ = (U2/2 — U2/2) останутся неизменными. Подставляя эти
равенства, имеем
i'2 = /2j~; Ri = R2n2; Х'2 = Х2п2; U'2 = U2n; Z'2 = Z2n2.
Эти параметры называются приведенными (к числу витков je»i).
Составленное ранее уравнение мдс будет иметь вид /1 =
= /ю + 1'2.
Полная система уравнений электрического и магнитного со-
стояния трансформатора с учетом приведения вторичной обмотки
к первичной по числу витков и U = —Е\ = Ё2 имеет такой вид:
Oi = О + ZJ\;
U = Z/212 Э" й2',
/| = /щ + 1'2.
135
13—85
193
Эти уравнения описывают электромагнитные процессы в двух-
коцтурной схеме, которая носит название эквивалентной схемы
замещения трансформатора. На рис. 135, а представлена Т-образ-
ная схема замещения трансформатора. В тех случаях, когда
Z|/i невелико по сравнению с Ui,полагают U\ ~ U, схема замеще-
ния упрощается (рис. 135, б). Такая схема называется Г-образной.
Здесь Хк = Xi 4- Rk = R\ 4" R?-
В режимах работы трансформатора, близких к короткому за-
мыканию, когда /ю<СЛ, из схемы рис. 135,6 исключается ветвь
R« — Хм (рис. 135,в).
Эквивалентные схемы замещения трансформатора используют-
ся для анализа и расчетов режимов его работы, поэтому их назы-
вают расчетными схемами замещения трансформатора.
§ 69. Определение паспортных параметров
и внешняя характеристика трансформатора
Основные параметры
В процессе преобразования напряжения в трансформаторе
возникают потери электрической энергии в обмотках и магнито-
проводе, которые преобразуются в теплоту. Чем больше ток на-
грузки и напряжение источника, тем сильнее нагреваются обмот-
ки и магнитопровод трансформатора. Чрезмерный перегрев об-
моток может вызвать старение и разрушение изоляции, межвитко-
вое короткое замыкание и выход из строя трансформатора. Поэто-
му для обеспечения продолжительной работы силового трансфор-
матора под нагрузкой заводом-изготовителем задаются парамет-
ры, называемые паспортными данными: полная мощность SH,
коэффициент трансформации п, напряжения Ui„ и U2„, напряже-
ние к. з. С/Кн, токи /|„, /2н и ток холостого хода 1\Ои, частота f„, режим
работы (продолжительный или кратковременный), потери в стали
магнитопровода \РО„ и в обмотках АРМН и др. В процессе длитель-
ной эксплуатации, особенно при токовых перегрузках, колебаниях
первичного напряжения и частоты, повышенной влажности и тем-
пературы окружающей среды свойства изоляции ухудшаются,
повышаются потери энергии. Поэтому необходимо периодически
проверять основные параметры трансформатора, к которым отно-
сятся UKH и /ю„, характеризующие потери энергии в обмотках, изо-
ляции и стали магнитопровода.
Для этой цели проводятся два опыта: опыт холостого хода
и опыт короткого замыкания. На основании этих опытов оп-
ределяются также параметры схем замещения.
Опыт холостого хода
Схема включения измерительных приборов при опыте холо-
стого хода представлена на рис. 136, а. В процессе опыта изме-
ряют: (7|, U2, /ю, Ро при изменении U\ от 0 до U\„. При U\ — U\n
194
определяются: потери в стали магнитопровода &Рои, коэффициент
трансформации n= U\/Uz, ток холостого хода ЦОи. Подсчиты-
ваются параметры [схемы замещения /?м, Хм и cos фон по фор-
мулам:
/?м = ДЯи//10н; ZM = (Лн/7юн; Хм = лМм2 - Rl;
COS фон = &Рон/(7|0н 7-Лн)-
При расчете предполагается, что потери в обмотке невелики,
так как /юн составляет 5—10% от /1Н.
Опыт короткого замыкания
При опыте короткого замыкания (рис. 136,6) вторичная об-
мотка трансформатора замкнута накоротко, а первичная обмот-
ка включается через регулирующее устройство на такое пони-
женное напряжение U\K при котором в обмотках трансформато-
ра протекают номинальные токи. Это напряжение называют
напряжением короткого замыкания. В опыте измеряются Л, /2,
Ui = UK и Рг при изменении тока 1\ от 0 до Ц„. При Л =/|Н
определяются потери короткого замыкания &РКН, напряжение ко-
роткого замыкания UK„. Подсчитывают параметры схемы замеще-
ния по формулам:
R* = ДРК„//?Н; ZK = Хк = ^Z2K-R2 ;
COS фк = Rv/ZK,
где RK = Ri -f- R2 и XK = Xi -f- X2 — активное и индуктивное
сопротивления короткого замыкания трансформатора.
При расчете предполагают, что при малом напряжении маг-
нитный поток и намагничивающий ток малы, т. е. /ю~0. Поэто-
му можно считать, что мдс первичной и вторичной обмоток
трансформатора равны
Wih = W2I2 или /| == /2 •
и, следовательно, ваттметр- измеряет потери мощности только в
обмотках.
13*
195
Напряжение короткого замыкания « его активная и реак-
тивная составляющие выражаются обычно в процентах:
£А% = ((/к/£Л„).1ОО.
По значению (7К можно рассчитать ток короткого замыкания
/|К при аварийном режиме
/1К = t/1H/ZK = /1н-(У1н/{/к„) = /|н.(100/(/к).
В переходном процессе ударный ток к. з. /уд будет больше
тока к. з. в установившемся режиме в /гул раза: /уд = «уд/|к,
где /Суд < 2.
Этот ток опасен для трансформатора из-за резкого возраста-
ния механического взаимодействия между проводами. Сила взаи-
модействия между проводами пропорциональна квадрату тока и
при к. з. возрастает в сотни раз. При коротком замыкании обмот-
ки сильно перегреваются. Поэтому при проектировании транс-
форматоры дополнительно рассчитывают на теплостойкость и ме-
ханическую прочность.
Очень опасны замыкания одного или нескольких витков, так
как ток в этих витках /вк во столько раз больше тока короткого
замыкания, во сколько раз больше число витков обмотки w\ чис-
ла короткозамкнутых витков w : /вк = /)к-{w\/w).
Внешняя характеристика трансформатора
Рабочие свойства трансформатора характеризуются зависи-
мостью напряжения на нагрузке U? и кпд ц от тока /2.
Зависимость 1/2(/2) при различном характере нагрузки (активной, реактив-
ной, емкостной) называется внешней характеристикой трансформатора.
Внешняя характеристика трансформатора ^(Л) и зависи-
мость г)(/г) могут быть получены опытным путем или рассчитаны
по эквивалентной схеме замещения. В последнем случае уравне-
ние электрического состояния, полученное из Г-образной схемы
замещения (см. рис. 135,6),
имеет вид
^2 — О1 —- (/?к Т- /Ак)/г-
Вид зависимости (/2 (/2) опре-
деляется характером нагрузки.
Так, при емкостном характере на-
грузки (cos<p<0) с ростом то-
ка /2 напряжение (Л возрастает,
-а при индуктивном характере
(cos<p>0) падает (рис. 137).
Коэффициент полезного дейст-
вия трансформатора q равен от-
196
ношению полезной активной мощ-
ности Рч ко всей активной мощ-
ности, поступающей из сети:
>1 = р2/р, = Р2/(Р2 + ДД. 4- АРМ),
где АРС — потери мощности в
стали магнитопровода; ЛРМ — по-
тери мощности в обмотках.
Полезная мощность трансфор-
матора при любом характере на-
грузки
Pi = U2I2 COS ф2 = 0S„ COS ф2,
где S,, — полная мощность трансформатора, В-А; р =/2//2„ —
коэффициент нагрузки.
Потери в стали АРС не зависят от нагрузки и равны потерям
холостого хода. Потери в обмотках АРМ пропорциональны квад-
рату тока Л Л, = RJl = RJ« ₽2 = АРмн ₽2.
После подстановки выражение для т] будет иметь вид
т] — (Р S„ cos фг)/(Р •$,, cos ф2 + АРс + АРМН Р2)-
Зависимости АРМ, АРС и г| от коэффициента нагрузки р пред-
ставлены на рис. 138. Зависимость л(Р) имеет максимум. По-
средством подбора параметров обмоток и магнитопровода для
силовых трансформаторов выбирают r]max при р = 0,54-0,7, так
как они обычно работают большее время с недогрузкой.
§ 70. Трехфазные трансформаторы
Для трехфазных трансформаторов эквивалентные схемы за-
мещения изображаются для одной фазы и имеют такой же вид,
как и для однофазного трансформатора. Параметры схемы за-
мещения определяются из опытов холостого хода и короткого
замыкания.
Конструктивно трехфазные трансформаторы выполняют стерж-
невыми (см. рис. 132). На каждом из трех стержней размещают
первичную и вторичную обмотки одной фазы. Результирующие
мдс каждой фазы смещены друг относительно друга на 120°,
сумма векторов магнитных потоков равна нулю (ФА -|- Фв +
4фс = 0). Фазы первичной и вторичной обмоток могут соеди-
няться в звезду (Y) . и треугольник (Д). Поэтому векторы ли-
нейных напряжений 0\ и U2 могут не совпадать по фазе. Сдвиг
по фазе указывается группой соединения обмоток. Так, напри-
мер, на схеме рис. 139, а показана группа соединения Y/ Y — 0,
еде 0 указывает на совпадение фазы А вторичной обмотки с фа-
197
зой А первичной. На рис. 139, б показана схема соединения
Y/A — 11, здесь 11 указывает, что вектор напряжения £/дв
первичной обмотки опережает по фазе 0аь вторичной обмот-
ки на 30° и совпадает с положением часовой стрелки на
цифре 11.
В системах весьма большой мощности трехфазные трансфор-
маторы выполняются с использованием трех однофазных тран-
сформаторов. Это вызвано тем, что трехфазный трансформатор
большой мощности имеет такие большие габариты и массу, что
его невозможно транспортировать даже специальными транс-
портными средствами (железнодорожным, морским, речным и
автотранспортом).
§ 71. Автотрансформаторы
Преобразование переменного напряжения может быть осуще-
ствлено с использованием автотрансформатора. Автотрансфор-
матор в конструктивном отношении подобен обычному трансфор-
матору: имеет замкнутый стальной магнитопровод, на котором
размещены две обмотки, выполненные из медного провода раз-
личного сечения. В отличие от трансформатора обмотки авто-
трансформатора электрически соединены.
► . У понижающего автотрансформатора обмотка вторичного
напряжения является частью обмотки первичного напря-
жения. У повышающего, наоборот, обмотка первичного на-
пряжения является частью обмотки вторичного напряже-
ния. Таким образом, в автотрансформаторе кроме магнит-
ной связи между первичной и вторичной обмотками имеет-
ся и электрическая связь.
Электрические схемы понижающего и повышающего авто-
трансформаторов представлены на рис. 140. Напряжение источ-
ника, приложенное к зажимам первичной обмотки АХ с числом
198
140
витков wx, уравновешивается в основном эдс Е,, создаваемой
переменным магнитным потоком в магнитопроводе. Вторичная
обмотка имеет число витков w2. В ней создается эдс Е2—
= Е1(да1/ш2). В режиме холостого хода (/2 = 0), пренебрегая
потоком рассеяния, сопротивлением обмоток и потерями в стали,
напряжения U\ и L72 будут равны:
~ Б, = 4,44fw|ФОт;
U2 ~ Е2 = 4,44/а/2Фот-
Коэффициент трансформации равен отношению первичного и
вторичного напряжений:
п = Ui/Ui = w\/w2.
При подключении к зажимам ах нагрузки Z,, ток в общей час-
ти обмотки ах /12 будет равен геометрической сумме токов пер-
вичной и вторичной цепей: Л2 = /|-|-/2.
Мощность, потребляемая автотрансформатором из сети без
учета потерь, будет равна мощности, выделяемой в нагрузке,
т. е. U j/,= U2/2, откуда следует 12Ц = U J И2= п.
При этом так же, как и в трансформаторе, основной маг-
нитный поток Фот. должен оставаться неизменным при неизмен-
ном напряжении 0\.
Если пренебречь током холостого хода, то можно считать,
что токи /1 и /2 сдвинуты по фазе на 180° и их геометрическая
сумма равна алгебраической, т. е.
/|2= /2_/, = /2.[(1 -(1/п)].
^АПЮМНИГТЕ
В повышающем автотрансформаторе (п<1) направление
тока /12 совпадает с направлением тока Л, а в понижающем
они направлены встречно (рис. 140, а, б). Значение же тока
199
/12 всегда меньше 1\ в понижающем и /2 в повышающем
автотрансформаторах. Поэтому сечение провода в общей
части обмотки выбирается меньшим.
Электромагнитные процессы в автотрансформаторе ничем не
отличаются от процессов в обычном трансформаторе. При ра-
боте автотрансформатора под нагрузкой в нем, как и в трансфор-
маторе, ток, потребляемый из сети, увеличивается до значения
/, =/ю(/2/ц)', где /2/п — составляющая тока, которая ком-
пенсирует размагничивающее действие тока нагрузки; /щ—
ток холостого хода. В результате магнитный поток почти не из-
меняется, поддерживая, как и в трансформаторе, постоянство Е\.
Преимуществом автотрансформатора перед трансформатором
является более простое устройство, меньший расход меди, более
высокий кпд, меньшие потери в обмотках и стали магнитопро-
вода. Это объясняется тем, что в автотрансформаторе энергия
из первичной сети во вторичную частично передается по электри-
ческой связи.
Однако автотрансформатор по сравнению с трансформатором
имеет весьма существенные недостатки; он имеет малое сопро-
тивление короткого замыкания, что обуславливает большой ток
короткого замыкания, а электрическая связь между обмотками
при высоком первичном напряжении опасна при прикосновении
человека к проводам в цепи нагрузки.
► Следует заметить, что преимущество автотрансформатора
тем сильнее, чем меньше коэффициент трансформации.
Поэтому автотрансформаторы применяются при небольших
коэффициентах трансформации (п = 1-?2).
Электромагнитные процессы в трехфазном автотрансформа-
торе такие же, как и в однофазном. Трехфазные автотрансфор-
маторы применяются в электроэнергетике для связи сетей сме-
шанных напряжений, например 110 и 220, 220 и 500 кВ и т. п.,
при пуске асинхронных трехфазных электродвигателей с целью
уменьшения пускового тока.
Автотрансформаторы низкого напряжения выполняются на
небольшую мощность (до 7,5 кВ-А). Они имеют, как правило,
обмотку с одним сечением провода и могут использоваться как
для повышения, так и понижения напряжения.
В лабораториях широко применяются автотрансформаторы
низкого напряжения малой мощности (ЛАТР), имеющие плав-
ную регулировку выходного напряжения. В этих автотрансфор-
маторах один зажим нагрузки выполнен в виде подвижного
(скользящего) контакта.
§ 72. Параллельная работа трансформаторов
Наличие нескольких трансформаторов на подстанции позво-
ляет обеспечить более экономичную и надежную работу системы
распределения энергии. При выходе из строя одного трансфор-
200
матора оставшиеся несут нагрузку потребителей. При снижении
нагрузки целесообразно некоторые трансформаторы отключать,
с тем чтобы оставшиеся работали в режиме, близком к номиналь-
ной нагрузке и максимальным кпд. При параллельном соедине-
нии одноименные зажимы трансформаторов присоединяются к
одному и тому же проводу сети.
ЗАПОМНИТЕ
Нагрузка между параллельно работающими трансформато-
рами должна распределяться пропорционально их номи^
нальным мощностям.
Условие совместимости параллельной работы двух трансфор-
маторов рассмотрим на примере однофазных трансформаторов
ТР1 и ТР2 по их схеме включения (рис. 141, а) и эквивалентной
схеме (рис. 141, б).
При Е/ =/= Еп, ZKt #= ZKn в цепи будет течь уравнительный ток
даже при отсутствии нагрузки (Z„ = оо). Действительно, исполь-
зуя метод двух узлов, имеем
// = (£/ — #н)/ZK/ и 1ц — (Ёп — (7,,)/ZK„.
При равенстве £7 = Ец имеем E/ln = Z^/Z^, но ZK/ =
= (i/K/t/H2)/(SH/-100); ZK// = {UKllU2H)/{SHll-100).
Следовательно, .
I 11 ___ PkII Sh/
1/11 ~ UKi ' S„n
При равенстве номинальных мощностей в трансформаторах
S,,/ = S„n их токи нагрузки будут обратно пропорциональны на-
пряжению короткого замыкания. Откуда следует, что
► для правильного распределения нагрузки между трансфор-
маторами Тр1 и Тр2 необходимо обеспечить: 1) одинаковый
201
коэффициент трансформации (отклонение допускается не
более ±0,5%); 2) равенство напряжений короткого замы-
кания (отклонение допускается не более ±10%); 3) одина-
ковые группы соединения обмоток.
§ 73. Трансформаторы специального назначения
К трансформаторам специального назначения относят транс-
форматоры, работающие в особых режимах (насыщенной или
ненасыщенной магнитной цепи, короткого замыкания или холос-
того хода и др.) и предназначенные, например, для расширения
пределов изменения приборов (измерительные трансформаторы
тока и напряжения), для преобразования формы кривой напря-
жения (пиктрансформаторы), для систем защиты (быстронасы-
щающиеся), для электрической изоляции от первичной цепи
(измерительные трансформаторы, изолирующие трансформаторы
и т. д.).
Измерительные трансформаторы, напряжения используются
для включения вольтметров, частотомеров, обмотки напряжения
ваттметров и счетчиков.
Измерительные трансформаторы тока предназначены для под-
ключения амперметров, реле, токовых обмоток ваттметров и счет-
чиков.
На рис. 142 показана схема включения измерительных при-
боров через измерительные трансформаторы в однофазную сеть.
Для безопасности прикосновения к приборам один зажим
вторичных обмоток трансформаторов заземляют. Измеряемое
напряжение U\ по показанию вольтметра будет U\ = nuU2, а
измеряемый ток 1\ — по показаниям амперметра: 1\ = пДг, где
пи и п/ — коэффициенты трансформации трансформаторов на-
пряжения и тока соответственно.
Вторичные обмотки имеют стандартные значения Д2 и 12:100 В
для трансформаторов напряжения и 5 и 1 А для трансформато-
ров тока. Поэтому диапазон измерения может быть расширен
путем регулирования коэффициентов трансформации, т. е. соот-
ношения числа витков.
Измерительный транс-
форматор напряжения ра-
ботает в режиме, близком
к холостому ходу. Очевид-
но точность измерения на-
пряжения будет тем выше,
чем меньше падение на-
пряжения на трансформа-
торе. Действительно, из схе-
мы замещения (см. рис. 135)
следует, что погрешность
с UTW’il W | В1 । лл г*
=-------------100 будет
202
тем меньше, чем меньше RK иХк, что достигается снижением чис-
ла витков при увеличении сечения стали магнитопровода.
В трансформаторах тока, наоборот, снижение погрешности
достигается путем снижения тока /ю, для чего используется лен-
точный магнитопровод кольцевой формы из материала с малыми
потерями (малое значение коэрцитивной силы //с) и работе в не-
насыщенной части кривой намагничивания.
Поскольку нормальным режимом работы трансформатора
тока является режим короткого замыкания, то для переключений
во вторичной цепи устанавливаются приспособления, замыкаю-
щие выходные зажимы вторичной обмотки.
Пиктрансформатор (рис. 143, а) применяется для преобразования напря-
жения синусоидальной формы в импульсное напряжение пикообразной формы.
Пиктрансформатор имеет магнитопровод, состоящий из трех стержней: стер-
жень / не насыщен; на нем помещена первичная обмотка; стержень 2 с распо-
ложенной на нем вторичной обмоткой насыщается за счет уменьшения площади
сечения стержня; стержень 3 является магнитным шунтом и отделен от сердеч-
ника воздушным зазором. Магнитный поток стержня / замыкается частично
через стержни 2 и 3 и равен сумме магнитных потоков этих стержней, т. е.
Ф| = <р2 + Фа
На рис. 143, б показаны магнитные характеристики трех стержней сердеч-
ника (Ф (га/)). Если приложенное напряжение Ui синусоидальное, то и магнит-
ный поток стержня / синусоидален (кривая Ф1 на рис. 143, в).
При слабых магнитных полях магнитное сопротивление стержня 2 значи-
большая часть
2 возрастает и
Таким образом,
тельно меньше магнитного сопротивления стержня 3, так что
магнитного потока Ф, замкнется через стержень 2.
В режиме насыщения магнитное сопротивление стержня
увеличение магнитного потока Фг прекращается.
~ » , ДФ?
Электродвижущая сила вторичной обмотки е? = —W2~^t~•
форма кривой эдс вторичной обмотки зависит от скорости изменения во времени
потока Фа, взятой с обратным знаком (кривая ег на рис. 143, а).
203
САМОЕ [ВАЖНОЕ
1. Переменный ток одного напряжения преобразуется в
переменный ток другого напряжения той же частоты
трансформаторами.
2. Существует три режима работы трансформатора: холос-
того хода, нагрузки и короткого замыкания.
3. Анализируют и рассчитывают режимы трансформатора
с помощью эквивалентных схем замещения.
4. Трехфазные трансформаторы эквивалентной схемой заме-
щения изображаются так же, как и однофазные.
5. Автотрансформатор в конструктивном отношении подобен
обычному трансформатору, но его обмотки электрически
соединены.
6. Для более экономичной и надежной работы системы
распределения энергии трансформаторы включают на па-
раллельную работу. Нагрузка между параллельно работаю-
щими трансформаторами распределяется пропорционально
их номинальным мощностям.
Темы докладов и рефератов
1. Назначение и принцип действия трансформатора.
2. Схема замещения трансформатора и ее назначение.
3. Сравнительные характеристики трансформаторов и авто-
трансформаторов.
4. Трансформаторы специального назначения (по профилю
профессии).
"'N Объясните назначение и принцип действия трансформатора.
)1 Для чего магнитопровод трансформатора выполняется из электротех-
,«-'нической стали, а не из обычной, и собирается из отдельных тонких,
• изолированных друг от друга листов?
Как располагают обмотки трансформатора на сердечнике магнито-
провода?
Что называется коэффициентом трансформации трансформатора и как
его определить?
С какой целью приводится электрическая схема замещения трансфор-
матора?
С какой целью проводятся опыты холостого хода и короткого замыкания
трансформатора?
Какие параметры трансформатора называют паспортными?
s Сравните векторные диаграммы Т- и Г-образной схем замещения
трансформатора и составьте по ним уравнения электрического состояния.
Как соединяются обмотки трехфазных трансформаторов?
1(| Каковы достоинства и недостатки автотрансформаторов по сравнению
с трансформаторами?
И С какой целью трансформаторы включают на параллельную работу?
12 Укажите области применения трансформаторов специального назна-
чения.
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
§ 74. Принцип действия и устройство электрических
машин
Электрические машины предназначены для преобразования механической
энергии в электрическую и обратно. В первом случае электрические машины
называют генераторами, во втором — двигателями.
Кроме того, ряд электрических машин специального назначе-
ния используют как преобразователи рода тока — переменного
в постоянный, частоты и числа фаз переменного тока, повыше-
ния напряжения постоянного тока и т. п. Такие машины называ-
ются электромашинными преобразователями.
► Принцип действия электрических машин основан на физи-
ческих законах электромагнитной индукции и электромаг-
нитных сил. Согласно этим законам, а также законам Ома
и Джоуля — Ленца, можно.получить основные соотношения
между величинами, характеризующими рабочий процесс в
электрических машинах.
Так, из закона электромагнитной индукции следует, что если
проводник перемещать перпендикулярно линиям магнитного
поля, то в нем будет наводиться эдс в направлении, указанном
на рис. 144, а, а ее значение определится формулой
е — Blv,
где В — магнитная индукция, В-с/м2; /, v — длина, м, и ско-
рость, м/с, перемещения проводника.
Под действием эдс в проводнике, замкнутом на резистор, воз-
никает ток в направлении, совпадающем с направлением эдс.
В результате взаимодействия проводника с током и магнитного
поля возникнет электромагнитная сила, которая определяется по
формуле F3M = ВН, а ее направление — по правилу «левой руки».
► При равномерном движении проводника вся механическая
мощность преобразуется в электрическую Рмсх = Рзл = ЕЕ
Это элементарный идеальный генератор.
Электрическая мощность, отдаваемая во внешнюю цепь с уче-
том сопротивления проводника R, будет отличаться на значение
потерь мощности в проводнике RI2:
Ul = El - RI2.
Сократив все члены на /, получим уравнение электрического
состояния цепи
U = E — R1.
205
144
Если проводник с током движется в магнитном поле
(рис. 144, б.), то электрическая мощность Рэл = U1', подведенная
к проводнику, преобразуется в механическую Рмех = F3uv = EI
и частично расходуется на покрытие потерь в проводнике
Ul = EI + /?/2.
Уравнение электрического состояния будет иметь вид
U = E+R1.
В этом случае проводник с током, взаимодействуя с магнит-
ным полем, передвигается в направлении действия F3M.
ЗАПОМНИТЕ
Приведенные соотношения показывают, что электрическая
машина обратима, т. е. может работать как генератор и как
двигатель. Это так называемый принцип обратимости элек-
трических машин, который был установлен Ленцем в 1838 г.
► Таким образом, наличие магнитного поля и проводников
с током является необходимым условием для работы любой
электрической машины как преобразователя энергии, а по-
стоянное взаимодействие между ними достигается враща-
тельным движением.
Увеличение электромагнитной силы создается усилением маг-
нитного поля за счет применения ферромагнитных материалов
в системе возбуждения и увеличением активной длины провод-
206
ников, т. е. увеличением числа активных проводников, образу-
ющих обмотку электрической машины, в которой они соединяют-
ся последовательно и параллельно.
Конструктивно электрическая машина состоит из двух основ-
ных частей: вращающейся — ротора и неподвижной — статора.
ЗАПОМНИТЕ
Преобразование энергии в электрических машинах возмож-
но лишь при наличии силового взаимодействия между маг-
нитными полями статора и ротора, т. е. поля статора и рото-
ра должны быть неподвижны друг относительно друга при
любой частоте вращения ротора.
В режиме генератора (рис. 145, а) электромагнитный момент
,М,м противодействует вращению. Он уравновешивается момен-
том Мдв первичного приводного двигателя (турбина, дизель
и т. п.).
В режиме двигателя (рис. 145, б) электромагнитный момент
Мэм действует по направлению вращения. При равномерном вра-
щении ему противодействует момент сопротивления Мс приводи-
мого в движение механического устройства (станок, вентилятор,
насос и т. п.).
ВАГЮМИИППЁ
Условие неподвижности магнитных полей ротора и статора
в электрической машине может быть реализовано:
1) если при неподвижном поле статора поле ротора вра-
щается с частотой, равной частоте вращения ротора, но
в противоположном вращению ротора направлении;
2) если поле ротора неподвижно относительно вращающего-
ся ротора, а поле статора вращается с частотой вращения ро-
тора в том же направлении;
3) если поля статора и ротора вращаются относительно ста-
тора и ротора, частота вращения ротора равна разности час-
тот вращения соответственно полей статора и ротора.
В первом случае непод-
вижность полей ротора и ста-
тора достигается изменением
направления тока в провод-
никах ротора с помощью спе-
циального щеточно-коллек-
торного механизма, во вто-
ром и третьем случаях —
созданием вращающегося
магнитного поля. В связи
145
207
с этим электрические машины
делятся на коллекторные и бес-
коллекторные.
Основное магнитное поле в
электрических машинах, назы-
ваемое полем возбуждения, мо-
жет быть создано с помощью
обмоток возбуждения, полу-
чающих питание от источника
постоянного или переменного
тока и постоянными магнитами,
а вращающееся магнитное по-
ле — с помощью многофазной
системы токов.
Рассмотрим действие ще-
точно-коллекторного механиз-
ма на примере модели маши-
ны, работающей в режиме ге-
нератора (рис. 146). В магнит-
ном поле полюсов N—S вращается цилиндр, на котором рас-
положен виток — два проводника, соединенные между собой —
с двумя активными сторонами (проводниками аа' и бб'). В верх-
нем и нижнем положении одного из проводников витка индуци-
руемая в нем эдс Е имеет разные направления. За период (один
оборот) среднее значение эдс равно нулю. Если проводники под-
ключены к двум пластинам, по которым скользят щетки А и Б, то
при переходе проводников от одного полюса к другому направ-
ление их эдс переключится от щётки А на щетку Б и полярность
эдс на щетках останется прежней. При этом электромагнитный
момент сохранит прежнее направление.
При работе машины в режиме двигателя с помощью щеточно-
коллекторного механизма изменяется направление тока в провод-
никах, когда они переходят из зоны северного в зону южного
полюса. Тем самым создается постоянное взаимодействие полей
статора и ротора, и, следовательно, непрерывное преобразование
электрической энергии в механическую. Переключение направле-
ния тока в проводниках посредством щеточно-коллекторного ме-
ханизма называется коммутацией.
Если проводники подключить к кольцам (см. рис. 146), то
при вращении витка в магнитном поле на щетках будет созда-
ваться переменная эдс. Несколько последовательно соединенных
витков образуют катушки, а несколько катушек — обмотку.
Обмотка, в которой индуцируется эдс при пересечении ее проводниками
магнитного поля, называется якорной.
Она может располагаться как в пазах статора, так и в пазах
ротора.
Ротор с якорной обмоткой называется якорем.
Он используется в основном в коллекторных электрических
машинах постоянного тока и низковольтных синхронных маши-
208
нах. Размещение проводников в
пазах позволяет надежно закре-
пить их, до минимума уменьшить воз-
душный зазор между статором и ро-
тором и создать значительный магнит-
ный поток при той же мдс. В высоко-
вольтных синхронных генераторах и
двигателях якорная обмотка распола-
гается в пазах статора, что дает воз-
можность обеспечить надежность ее
изоляции.
На рис. 147 показан ротор с одним
витком обмотки. Часть витка 2, нахо-
дящаяся вне активной зоны (зоны по-
147
люсов), называют лобовой. Дугу окружности, приходящуюся
на один полюс, называют полюсным делением т.
При вращении ротора 1 проводники пересекают линии маг-
нитного поля и в них наводится эдс, равная elip = Blv. При
постоянной скорости v, если распределение индукции В вдоль
воздушного зазора синусоидальное, то епр будет также синусо-
идальной: е„р= £„р т sin о>/, а амплитуда эдс витка
Ет = 2£npm — ZBrnlv.
Линейную скорость v можно представить в виде
лРпр
60р
= 2т/,
где D — диаметр ротора, м; п — частота вращения, об/мин;
р- число пар полюсов; /= рп/60 — частота наведенной в про-
водниках эдс, с-1, т — лО/(2р) — полюсное деление.
Учитывая выражение для v и подставляя через среднее значе-
ние индукции ЛСр ( Вт = — Вср) , ПОЛуЧИМ
Ет = 2л/Фт,
где Фл, = /тВср.
Действующее значение эдс в витке
£в =~ = -^/Фт = 4,44/Фт.
д/2 л/2
Среднее значение эдс в витке в предположении, что Ф = Вср/т
равно
Вер = ВСр/ц = -22-Ф.
Ov
Стороны катушки укладывают в пазы и обычно размещают
в два слоя. Одна сторона катушки располагается внизу одного
паза, а другая — вверху другого паза, находящегося на расстоя-
нии полюсного деления т. Такие обмотки называются двухслой-
ными.
209
14—85
Обмотки по способу соединения могут быть волновыми
(рис. 148, а) и петлевыми (рис. 148, б). Волновая двухслойная
обмотка применяется обычно в машинах постоянного и перемен-
ного тока мощностью более 50 кВт.
Для получения постоянной по направлению эдс и поля якоря
в генераторах и двигателях секции якорной обмотки соединяют
пайкой с пластинами коллектора.
Коллектор представляет собой цилиндр, состоящий из ряда изолированных
друг от друга и от корпуса миканитом медных пластин, по которым скользят
угольные или металлоугольные щетки. Число пластин равно числу секций
обмотки.
В машине постоянного тока (генераторе и двигателе) при
вращении якоря и жестко связанного с ним коллектора
между щетками всегда остается включенным почти постоян-
ное число проводников, одинаково расположенных по отно-
шению к полюсам N — S. Проводники, заключенные между
щетками, образуют параллельные ветви, и при вращении
якоря постоянно переходят из одной параллельной ветви
в другую. При этом в них изменяется направление эдс.
Если общее число витков, соединенных последовательно, од-
ной параллельной ветви равно N/(2а), то эдс на щетках
£ = 2£" = ^Гф =
где с£ = рЛ//(60а) —конструктивная постоянная обмотки; N —
число проводников; а — число параллельных ветвей.
В трехфазных синхронных и асинхронных машинах обмотка
якоря делится на три части — фазы, ось каждой из которых
сдвинута друг относительно друга на 120 электрических градусов
(один электрический градус в р раз меньше геометрического
градуса). Каждая фаза состоит из нескольких катушек, в кото-
рых наводимые эдс сдвинуты относительно друг друга по фазе.
Электродвижущая сила одной фазы якорной обмотки
Е = KosSE» = 4,44/ ковшФт,
210
где Е„ — эдс витка; ko6 — обмоточный коэффициент, учитыва-
ющий тип обмотки и отличие геометрической суммы эдс витков
от арифметической; w — число витков фазы.
Рассмотрим способы получения вращающегося магнитного
пол я.
Вращающимся магнитным полем многофазной системы токов называется
результирующее поле, создаваемое при определенных условиях двумя или более
обмотками с током, перемещающееся относительно этих обмоток.
Этими условиями являются: наличие пространственного сдви-
га между осями обмоток (0 > 0) и фазового сдвига между
токами в этих обмотках (ф > 0) (рис. 149, а, в).
Результирующий вектор индукции магнитного поля В двух
обмоток, подключенных к двухфазной системе напряжений, как
видно из рис. 149, б, в, г, д, для разных моментов времени to, t\,
ti вращается по часовой стрелке. Если значение результирующе-
го вектора магнитной индукции В не изменяется за один оборот,
то поле будет круговым, если изменяется — эллиптическим.
Для получения вращающегося кругового магнитного поля в
двухфазной системе с максимальным значением вектора
магнитной индукции Bt — Bm необходимо обеспечить равен-
ство мдс Ft = F? и 0 = ф = л/2.
Поэтому двигатели, предназначенные для работы от однофаз-
ной или двухфазной сети, изготовляются с двумя обмотками, оси
14*
211
которых сдвинуты в пространстве на угол 0 = л/2. Угловая ско-
рость Q и частота вращения п результирующего поля равны
и ___ 2лп . и_____ 60/
— р ~ 60 ’ р '
где W — угловая частота тока; р — число пар полюсов. Напри-
мер, для двухполюсной системы р — 1 и частоты f = 50 Гц п =
_ 60-50 _ 3QQQ об/мин. для трехфазной симметричной системы
токов при 0 = ф = 2л/3 поле будет круговым, а индукция ре-
з
зультирующего поля Bt = -^-Вт, т. е. в 1,5 раза больше индукции
результирующего поля при двухфазной системе. При этом для
возбуждения магнитного поля двухфазной и трехфазной систе-
мой токов необходимо три провода.
ЗАПОМНИТЕ
При однофазном источнике питания и наличии двух обмо-
ток на статоре вращающееся магнитное поле можно полу-
чить двумя способами: 1) включением в цепь одной из об-
моток элемента: R, L или С, что позволяет сдвинуть по фазе
ток этой обмотки относительно тока другой обмотки; 2) рас-
щеплением (экранированием) полюсов.
При первом способе получения вращающегося магнитного
поля (рис. 150) в качестве фазосдвигающего элемента исполь-
зуют конденсатор С и резистор /?, включаемые в цепь одной из
обмоток.
Экранирование осуществляется ох-
ватом части полюса короткозамкнутым
витком (рис. 151, а). При этом основ-
ную обмотку подключают к источнику
переменного тока. Ток этой обмотки
создает пульсирующий поток, который
можно разделить на две части Ф' и Ф"
(рис. 151,6). Ток /к в короткозамкну-
том витке создает поток Фк. Резуль-
тирующий магнитный поток Фэ под
экранированной частью полюса равен
Ф" + Фк- Как видно из векторной диа-
граммы (рис. 151, в), потоки в неэкра-
нированной Ф' и экранированной Фэ
частях сдвинуты по фазе на угол ф.
Наличие пространственного сдвига
212
между осями обмоток (0>О) и фазового сдвига между потоками
(ф>0) является достаточным условием для получения вращаю-
щегося магнитного поля.
Принцип работы бесколлекторных электрических машин пе-
ременного тока (асинхронных и синхронных) основан на исполь-
зовании вращающегося магнитного поля.
В синхронном электродвигателе при подключении к сети пере-
менного тока обмотка статора создает вращающееся магнитное
поле. На роторе размещается обмотка возбуждения, подключае-
мая к источнику постоянного тока (рис. 152, а). При неподвиж-
ном роторе из-за его инерции вращающееся магнитное поле
статора не успевает увлечь ротор за собой. В результате за один
оборот поля вращающий момент, действующий на ротор, изме-
няет направление на обратное, а его среднее значение за период
будет равно нулю Ротор остается неподвижным (немного колеб-
лется). Если ротор предварительно разогнать до частоты равной
частоте вращения поля статора, то поля ротора и статора будут
неподвижны друг относительно друга, а вращающий момент
будет иметь одно и то же направление, т. е. ротор будет вращать-
ся синхронно с полем статора.
На статоре асинхронного электродвигателя размещается
трех- или двухфазная обмотка, создающая вращающееся маг-
нитное поле (A/—S рис. 152,6), на роторе — короткозамкнутая
213
обмотка (проводники с торцов
замкнуты кольцом). Если маг-
нитное поле статора пересекает
проводники обмотки ротора, то
в них индуцируются эдс, на-
правление которых определяет-
ся по правилу правой руки.
Токи в проводниках, создавае-
мые этими эдс, смещены по
U2 фазе и образуют собственное
вращающееся магнитное поле
относительно ротора, но син-
хронно вращающееся с полем статора; взаимодействуя, поля
ротора и статора создают вращающий электромагнитный мо-
мент, действующий на ротор в направлении (определяется по
правилу правой руки), совпадающем с вращающимся магнит-
ным полем статора.
ЗАПОМНИТЕ
Если частота вращения ротора П2 меньше частоты враще-
ния п\ поля статора, то всегда будет возникать вращающий
момент. Если частоты вращения равны, то эдс и токи в
проводниках ротора будут отсутствовать — момент равен
нулю. Следовательно, чтобы существовал вращающий мо-
мент, необходимо проскальзывание ротора относительно
поля статора, т. е. «2<ni.
Конструкция электрической машины постоянного тока вклю-
чает (рис. 153): подшипниковые щиты /, подшипники 2, вентиля-
тор 3, якорь 4, коллектор 5, главный 6 и дополнительный 7
полюсы и щеткодержатель с траверсой 8. Условное обозначение
такой машины приведено на том же рисунке.
Конструкции и условные обозначения синхронной (станина
возбудителя 1, подшипник 2, щеткодержатель 3, обмотка 4 и сер-
214
г J,
дечник 5 статора, коллектор возбудителя 6, якорь 7, траверса 8,
обмотка ротора 9, вентилятор 10, крышка подшипника 11, под-
шипниковый щит 12, крышка 13, контактные кольца 14 и выводы
обмотки статора 15) и асинхронной (крышка 1, подшипниковые
щиты 2, подшипники 3 и их крышка 4, вентилятор 5, коротко-
замкнутый ротор 6, обмотка статора 7, коробка выводов 8, щет-
кодержатели 9, контактные кольца 10 и фазный ротор 11) машин
приведены соответственно на рис. 154 и 155.
§ 75. Генераторы постоянного и переменного тока
► В настоящее время одним из основных способов производ-
ства электрической энергии является преобразование меха-
нической энергии в электрическую, которое осуществляется
генераторами постоянного и переменного (в основном син-
хронными) тока.
Генераторы постоянного тока
При холостом ходе генератора постоянного тока поток Ф и
соответствующая ему эдс Е зависят только от тока возбуждения.
Поэтому зависимость Е(1„), называемая характеристикой холос-
того хода генератора, аналогична характеристике магнитной
цепи машины Ф(/в). Эту характеристику получают либо в ре-
зультате расчета магнитной цепи, либо из опыта холостого хода
генератора.
Характеристика холостого хода, снятая при плавном измене-
нии тока возбуждения от нуля до максимума и обратно, пред-
ставляет собой петлю гистерезиса. В расчетах пользуются сред-
215
7
155
ней кривой, изображенной на рис. 156 прерывистой линией. При
отсутствии тока возбуждения в якоре наводится эдс E0Ct из-за
остаточной намагниченности машины (2—3% от номинального
напряжения).
В режиме нагрузки обмотка якоря включена на внешнее со-
противление. Ток в проводниках обмотки имеет направление,
совпадающее с направлением эдс проводников. Ток обмотки
якоря создает собственное поле, которое воздействует на основ-
ное поле возбуждения машины (рис. 157, а, б). Это явление
называют реакцией якоря. Результирующее магнитное поле Фр
генератора постоянного тока в режиме нагрузок Фр = Фв-|-Фя
ослабляется под набегающими краями полюсов и усиливается
под сбегающими (рис. 157, в). При этом среднее значение маг-
нитного потока остается практически неизменным. Только при
216
больших значениях тока якоря
вследствие насыщения части по-
люсов поток Фр несколько умень-
шается. Такая реакция якоря на-
зывается поперечной.
Напряжение на зажимах (щет-
ках) генератора постоянного тока
при работе в режиме нагрузки
равно эдс якоря Е за вычетом
падения напряжения на сопротив-
лении обмотки якоря
156
U - E—RJ=R„E
где RH — сопротивление нагрузки; /?я — сопротивление обмотки
якоря; Е — эдс якоря.
Электрическая схема замещения генератора представлена
на рис. 158.
При работе на активную нагрузку генератор создает на валу
первичного двигателя тормозной электромагнитный момент, сред-
нее значение которого определяется как сумма электромагнитных
157
217
158
моментов, создаваемых взаимодействием поля
возбуждения с полем якоря. Так как в поле
одного полюса находится N/(2а) проводников
с током //(2а), af,M = ВсрЛя, то с учетом того,
что Всрт1я = Ф, D = 2рт/л, имеем
М = (£Лм)£>/2 = рАФ//(2ла) = смФ/,
где D — диаметр якоря; / — ток нагрузки;
см = рА/(2ла)— постоянная для данной ма-
шины.
Полная электромагнитная мощность
Лм = EI = UI—RJ2 = MQ,
где Q — угловая скорость вращения ротора.
Основной рабочей характеристикой генераторов является за-
висимость выходного напряжения от тока нагрузки U(l), назы-
ваемая внешней характеристикой, которую снимают при постоян-
ной частоте вращения ротора (якоря). Аналитически эти харак-
теристики описываются уравнением электрического состояния
цепи якоря. Характер этих зависимостей определяется способом
возбуждения основного поля.
ЗАПОМНИПГЕ
Различают независимое возбуждение (рис. 159, а) — пита-
ние обмотки возбуждения от независимого источника и
самовозбуждение — питание обмотки возбуждения от гене-
ратора.
Самовозбуждение в генераторах постоянного тока может
быть осуществлено при соединении обмоток возбуждения с
обмоткой якоря: параллельном (рис. 159,6), последователь-
ном (рис. 159, в) и смешанном — согласном или встречном
(рис. 159, г).
Вид внешних характеристик генератора постоянного тока
при различных способах возбуждения представлен на рис. 160.
В генераторах смешанного возбуждения на полюсах имеется
две катушки: одна намотана проводом меньшего сечения — для
параллельного подключения, другая намотана проводом боль-
шего сечения — для включения последовательно с нагрузкой и
обмоткой якоря.
Самовозбуждение генератора происходит при наличии трех
условий: 1) остаточного магнитного потока, создающе-
го Еост (рис. 161); 2) совпадения направления поля обмотки
возбуждения с направлением остаточного магнитного по-
218
159
тока; 3) сопротивления обмотки возбуждения (при парал-
лельном возбуждении) меньше критического, т. е. когда ток
возбуждения способен достигнуть значения, обеспечиваю-
щего на характеристике холостого хода заданное значе-
ние эдс
Последнее вытекает из равенства RBIB = E — RJB, которое
на рис. 161 соответствует точке А пересечения зависимостей
Е(1В) и /?в/в(/в). При увеличении сопротивления RB точка А будет
перемещаться по кривой Е вниз и когда RB достигнет критиче-
ского значения, т. е. RB = /?кр, генератор практически не самовоз-
будится.
Синхронные генераторы переменного тока
Синхронные генераторы как источники переменного тока
классифицируются по числу фаз, частоте, напряжению и по виду
приводного двигателя. Наибольшее распространение получили
трехфазные синхронные генераторы промышленной частоты
(50 Гц) на повышенное напряжение (до 12 кВ). Обмотка якоря
располагается на статоре, обмотка возбуждения — на роторе.
Частота fi эдс переменного тока зависит от частоты вращения
ротора «1 и числа пар полюсов р: f\ — рп\/60.
219
Роторы синхронных генераторов при многополюсной системе
возбуждения выполняются с явно выраженными полюсами, при
двухполюсной системе — с неявно выраженными полюсами.
На рис. 162 представлена электромагнитная схема трехфаз-
ного синхронного генератора.
> В синхронных генераторах стремятся получить синусоидаль-
ную форму выходного напряжения. Для этой цели в явно-
полюсных системах создают неравномерный воздушный за-
зор, а в неявнополюсных системах распределяют проводни-
ки обмотки возбуждения по пазам (рис. 163, а, б).
Для устранения третьей гармоники обмотку якоря соединяют
в звезду.
Действующее значение эдс фазы якорной обмотки синхрон-
ного генератора при синусоидальной форме эдс, индуцируемой
в проводниках, равно
Е — 4,44/,до/?обФо,
где w — число витков фазы якорной обмотки; ko6 — обмоточный
коэффициент.
Характеристика холостого хода синхронного генератора
До (А) имеет такой же вид, как и у генератора постоянного тока,
но здесь значительно меньше проявляется гистерезис магнитной
цепи. При включении обмотки якоря на внешнее сопротивление
(нагрузку) в проводниках обмотки появится ток. В синхронном
генераторе токи якоря (статора) создают магнитное поле Фа
(рис. 164), вращающееся относительно статора и неподвижное
относительно поля возбуждения основного потока (ротора) Фо.
Совпадение токов в проводниках по фазе с эдс будет только при
активной нагрузке, при индуктивной нагрузке ток отстает по
фазе от эдс на л/2, при емкостной — опережает ее на л/2
(рис. 164,а,б, в).
При индуктивной (рис.
164,6) и емкостной (рис.
164,в) нагрузке магнит-
ные линии поля ротора Фо
и статора Фа колли-'
неарны.
ЗАПОМНИТЕ
При этом реакция
якоря при индуктив-
ной нагрузке будет
размагничивающая,
т. е. результирующее
поле машины ослаб-
ляется, а при емкост-(
ной нагрузке — под-|
магничивающая —|
результирующее по-
ле усиливается.
Уравнение электрического состояния одной фазы синхронного
генератора с учетом поля рассеяния якоря Фа имеет вид
+ + = О
где Ёо— эдс холостого хода; Ёа, Ёа— эдс самоиндукции об-
мотки якоря соответственно основного поля якоря и поля рас-
сеяния.
Выражая Ёа и Ё„ через индуктивные сопротивления
Ёа = —jXj и Ёа = —jXj и полагая, что полное индуктивное
сопротивление синхронной машины Хсин = Ла + Х> и Лсин^^я,
получим упрощенное уравнение электрического состояния фазы
синхронного генератора
О = Ёд — jXcJ.
Этому уравнению соответствует электрическая схема заме-
щения, представленная на рис. 165, а. Векторная диаграмма при
индуктивно-активной нагрузке представлена на рис. 165, б.
164
221
основном незави
165
i^CUH
В синхронных генераторах используется в
симое возбуждение, а вид внешней характеристики определяется
характером нагрузки. На рис. 166, а представлена внешняя ха
рактеристика синхронного генератора при активной (кривая /),
активно-индуктивной (кривая 2) и активно-емкостной (кривая <?)
нагрузках.
Рост напряжения с увеличением тока при емкостной нагрузке
объясняется подмагничивающим действием реакции якоря, а
снижение при индуктивной нагрузке — размагничивающим дей
ствием реакции якоря.
В синхронном генераторе с реактивно-активной нагрузкой
при определении электромагнитного момента необходимо учиты
вать фазовый сдвиг тока относительно магнитного потока (или
напряжения):
М = спФ1 coscp.
Электромагнитную мощность синхронного генератора обычно
представляют через угол 6 (см. рис. 165,6).
Пренебрегая потерями в сопротивлении обмотки якоря и под
« , Usinfl
ставив из векторной диаграммы созф = ——т-, получим
СИН*
Q/Г „
Рзм Р = ЗЕо/соэф = -г—EosinO.
^син
222
Электромагнитный момент, выраженный через угол 0,
м =Т —г&
На рис. 166,6 представлены зависимости Рэм и М синхронно-
го генератора от 0 при разных токах возбуждения, называемые
угловой характеристикой.
Синхронные генераторы в качестве источников электроэнер-
гии переменного тока, как правило, включаются параллельно
в распределительную сеть. В мощных энергосистемах различны-
ми регуляторами поддерживаются строго постоянные частота и
напряжение. Поэтому отдельный генератор можно рассматри-
вать как работающий параллельно с источником эдс, замещаю-
щим всю остальную часть энергосистемы (рис. 167, а).
При параллельной работе генератора с системой большой
мощности его частота и напряжение, а также угловая ско-
рость должны оставаться неизменными при любых изме-
нениях нагрузки, тока возбуждения и момента первичного
двигателя.
223
Активную мощность, отдаваемую генератором в сеть,
можно регулировать только изменением момента первичного
двигателя, т. е. воздействием на устройства подачи топлива
или энергоносителя (воды, пара и т. п.).
Реактивную мощность, отдаваемую генератором в сеть,
регулируют изменением тока возбуждения.
При этом, если активная мощность генератора остается не-
изменной, то из выражения для Рэм следует, что при изменении
тока возбуждения остаются неизменными /costp и £0sin9
(рис. 167, б, в), т. е. соответственно активная составляющая тока
и проекция вектора Ео на ось мнимых величин.
На рис. 167, б представлены зависимости тока якоря / от тока
возбуждения /„ при разных мощностях генератора, называемые
U-образными характеристиками
На рис. 167, в представлены векторные диаграммы синхрон-
ного генератора, работающего на сеть большой мощности при
трех значениях тока возбуждения и Р — const, иллюстрирующие
характер зависимостей /(/в). Линия, соединяющая минималь-
ные значения токов, соответствует чисто активной нагрузке,
т. е. coscp = 1 (см. рис. 167,6).
При уменьшении тока возбуждения уменьшается амплитуда
момента М угловой характеристики М(0) (см. рис. 166). При
А4ЯВ — Мт наступает граница устойчивости. Дальнейшее умень-
шение /в приведет к выпадению генератора из синхронизма.
§ 76. Электромашинные усилители, преобразователи,
тахогенераторы
К числу специальных электрических машин, работающих в
режиме генератора, относятся: электромашинные усилители,
тахогенераторы, электромашинные преобразователи частоты, на-
пряжения и рода тока (постоянный в переменный и наоборот),
регуляторы фазы и напряжения и другие.
Из электромашинных преобразователей в настоящее время
наибольшее распространение получили преобразователи частоты
50 Гц в стандартные частоты 400, 800 Гц, используемые для
питания специального электропривода, вычислительных машин.
Преобразователь частоты — это двухмашинный агрегат, со-
стоящий из двигателя и синхронного генератора, выполненных
в одном корпусе.
Преобразователи рода тока, а также для получения более
высоких частот в настоящее время в основном заменены полу-
проводниковыми преобразователями. Регуляторы фазы и напря-
жения (однофазные и трехфазные) выполняются на базе асин-
хронных машин, у которых заторможен ротор.
Электромашинные усилители продольного и поперечного поля
используются как усилители мощности. Основными их преиму-j
ществами по сравнению с магнитными и электронными усили-
224
телями являются: возможность по-
лучения большой мощности, высо-
кий коэффициент усиления, сравни-
тельно малые габариты, а по срав-
нению с магнитными усилителями
более высокое быстродействие.
Электромашинный усилитель по-
перечного поля (ЭМУ) представляет
собой специальный двухполюсный
генератор постоянного тока, в кото-
ром поперечный поток якоря ис-
пользуется как главный поток воз-
буждения. Электрическая схема
электромашинного усилителя при-
ведена на рис. 168.
В отличие от обычных двухпо-
люсных машин постоянного тока
электромашинный усилитель имеет
четыре щетки: две поперечные (</1 —
<?2) и две продольные (dl—d2). Ось
168
продольных щеток распо-
ложена по оси полюсов; ось поперечных щеток перпендикулярна
оси полюсов. Поперечные щетки закорочены, а к продольным
подсоединяется нагрузка.
Магнитная система электромашинного усилителя неявнопо-
люсная: статор набирается из штампованных колец электро-
технической стали с пазами для обмоток. В пазах статора уло-
жена компенсационная обмотка КО, обмотка дополнительных
полюсов ДП и обмотки управления ОУ.
Компенсационная обмотка и обмотка дополнительных полю-
сов включены последовательно в цепь продольных щеток. К вы-
ходным зажимам этой цепи подключается нагрузка Ри (напри-
мер, исполнительный двигатель).
Принцип работы электромашинного усилителя состоит в сле-
дующем. Небольшой ток в обмотке управления вызывает отно-
сительно небольшой магнитный поток, направленный по оси по-
люсов. На поперечных щетках электромашинного усилителя при
вращении якоря наводится небольшая эдс, а при замыкании
накоротко цепи поперечных щеток создается сравнительно боль-
шой ток. Ток в короткозамкнутом якоре возбуждает достаточно
большой поперечный магнитный поток ось которого перпен-
дикулярна к оси главных полюсов.
Под действием сильного поперечного поля якоря (неподвиж-
ного в пространстве) в секциях его обмотки возбуждаются зна-
чительные эдс, в результате чего на продольных щетках возни-
кает напряжение U<t-
Отношение мощности, переданной нагрузке Р„ — 1!Да, к мощ-
ности управления Ру — UyIy называется коэффициентом усиле-
ния ky = Р№/Ру.
Коэффициент усиления при работе электромашинного усили-
15—85
225
теля на нагрузку вследствие размагничивающего действия про- I
дольной составляющей потока реакции якоря Фй будет очень j
мал. Во избежание этого электромашинные усилители снабжа- ;
ются компенсационной обмоткой КО, включенной последователь-
но с нагрузкой, для создания потока Ф„, компенсирующего про- 1
дольный поток реакции якоря Ф</. При изменении нагрузки |
(вплоть до номинальной) потоки Ф^ и Фк должны быть примерно
равны по абсолютной величине и направлены навстречу друг ;
другу. Плавная регулировка потока Фк (тока 7К) осуществля- ’
ется с помощью переменного резистора RK, шунтирующего ком-|
пенсационную обмотку.
Дополнительные полюсы служат для улучшения коммутации.
Коэффициент усиления по мощности электромашинного усили-1
теля может достигать 1000 и более.
Тахогенератор — это электрическая микромашина, служащая
в качестве измерительного преобразователя частоты вращения
в электрическое напряжение. Если ротор тахогенератора имеет 1
частоту вращения п, то эдс на выходе тахогенератора пропор-
циональна частоте вращения:
Е = k\n.
Вольтметр, измеряющий эдс, может быть отградуирован не-
посредственно в оборотах в минуту.
Эдс на выходе тахогенератора пропорциональна первой про-
изводной от угла поворота а по времени:
с l da
E=ki —
Приведенные выражения показывают способность тахогенера-
торов измерять ускорение и решать задачу дифференцирования.
Тахогенераторы применяют для контроля за частотой враще-
ния различных машин и механизмов; получения демпфирую-
щих и форсирующих сигналов в системах автоматического регу-
лирования; при вычислительных операциях в счетно-решающих
системах; для исследования процессов разбега двигателей раз-
личных типов, т. е. для снятия кривой зависимости частоты
вращения от времени: п = f(t).
Тахогенераторы могут быть постоянного и переменного
(асинхронные и синхронные) тока.
В зависимости от назначения требования к выходным харак-
теристикам U(n) тахогенераторов различны. Так, для тахогене-
раторов, предназначенных для работы в качестве элементов
обратной связи, не требуется высокая точность, но необходима
большая крутизна выходной характеристики.
Тахогенераторы, предназначенные для измерения частоты
вращения, должны иметь высокую точность и линейность выход-
ной характеристики.
226
Тахогенераторы постоянного тока конструктивно представля-
ют собой обычный генератор постоянного тока с независимым
электромагнитным возбуждением или с возбуждением от по-
стоянных магнитов.
Максимальная частота вращения тахогенераторов постоянно-
го тока составляет 1000—7000 об/мин; крутизна выходной ха-
рактеристики 10—100 мВ/об/мин; отклонение от линейности
при максимальной скорости 0,5—3%.
Асинхронные тахогенераторы (АТГ) выполняются в виде
асинхронной машины с полым ротором.
Главным техническим показателем работы асинхронного та-
хогенератора является линейность выходной характеристи-
ки U (п). Нелинейность выходной характеристики обусловлена
непостоянством потока возбуждения и сопротивления ротора
при изменении частоты вращения. Крутизна выходной характе-
ристики тахогенератора составляет 1 —10 мВ/об/мин.
По сравнению с тахогенераторами переменного тока тахоге-
нераторы постоянного тока имеют ряд существенных недостат-
ков: наличие скользящих контактов между коллектором и щет-
ками; коммутацию и связанные с ней явление искрения под щет-
ками; необходимость устройства фильтров для подавления
радиопомех; сложность конструкции; более высокую стоимость.
Однако применение тахогенераторов постоянного тока оправ-
дывается прежде всего их большой выходной мощностью. Суще-
ственным достоинством тахогенератора с постоянными магнита-
ми является отсутствие источника энергии для возбуждения.
Асинхронные тахогенераторы отличаются простотой конст-
рукции, а также возможностью применения промежуточных
трансформаторов, что позволяет получить любое выходное на-
пряжение и при необходимости даже несколько потенциально
несвязанных выходных напряжений. Частота выходного напря-
жения асинхронного тахогенератора постоянна и не зависит от
частоты вращения. Недостатком асинхронных тахогенераторов
является малая мощность выхода (до 2—3 Вт), поэтому они
часто работают с усилителями мощности.
§ 77. Основные понятия о работе электрических
двигателей
Электрическими двигателями называют электрические машины, служащие
для преобразования электрической энергии в механическую.
Это преобразование осуществляется обычно с целью привода
различных механизмов.
ЗАПОМНИТЕ
В зависимости от производственных функций этих меха-
низмов электрическим двигателям предъявляются опреде-
ленные требования: обеспечение пускового момента и воз-
15* 227
можность его регулирования; устойчивость работы в рабо-
чем режиме; возможность регулирования частоты враще-
ния; высокий кпд и costp; надежность в работе.
Электрические двигатели так же, как и генераторы, в за-
висимости от вида источника питания могут быть постоянного
и переменного тока (синхронные и асинхронные).
Основной рабочей характеристикой электрических двигателей является
механическая — зависимость частоты вращения п или угловой скорости Q от
вращающего момента.
Анализ пуска, устойчивость в работе электродвигателей про-
изводят по уравнению механического состояния
Мдв-Мт =
где Л1ДВ — вращающий момент электрического двигателя; М, —
< Цй
тормозной момент приводимого во вращение механизма; -----------
ускорение или замедление вращательного движения; J — мо-
мент инерции вращающихся (подвижных) частей электрического
двигателя и приводимого механизма.
Из уравнения механического состояния следует, что при
МДВ>МГ двигатель ускоряется (-^->0), при Л4ДВ<Л4Т замед-
ляется. При Мд„ = Му ротор двигателя или стоит, или враща-
ется с постоянной угловой скоростью, т. е. система двигатель—
механизм находится в равновесном состоянии.
Способность двигателя при кратковременных или длительных возмуще-
ниях (изменения М„ U, f и других параметров) обеспечивать новое равно-
весное состояние или возвращение системы в исходное состояние после снятия
возмущений называют устойчивостью в работе двигателя.
Рассмотрим способность системы двигатель—механизм со-
хранять устойчивое состояние на примере двигателя, имеющего
механическую характеристику
рис. 169, где п(Мг) — механиче-
ская характеристика приводимого
механизма.
В области а—б состоянию си-
стемы в точке А при Л4ДВ — Мт со-
ответствует частота вращения пА.
Если М(>Л1ДВ, что соответствует
смещению механической характе-
ристики п(М() (штриховая ли-
ния), то вращение ротора будет
замедляться. Это вызывает увели-
чение Мяв и система придет в но-
вое равновесное состояние в точ-
ке А', которому соответствует час-
тота вращения пА,.
п(Мдв), представленную на
169
228
Устойчивость работы системы в области а—б проявляется
и при других возмущениях (изменения напряжения и др.), при-
водящих в конечном итоге к такому смещению механических
характеристик п(Мя„) и п(Л1т), при котором сохраняется условие
устойчивости
dn _ dn
~dM^<~dM;-
В области б—в система не устойчива. Например, в точке рав-
новесного состояния В при возмущении со стороны нагрузки
(штриховая линия), когда М"> Млв, вращение ротора замед-
ляется, разность между Мт и Млв увеличивается и двигатель
остановится. Если механическая характеристика механизма при
возмущении становится Л4((п), то при МЛВ>МТ ротор разгоня-
ется и переходит в область устойчивой работы а—б и в точке А'
наступает равновесное состояние.
§ 78. Двигатели постоянного тока
Уравнение электрического состояния цепи якоря двига-
теля без учета падения напряжения на щетках имеет вид
U = E-\-RBI, которому соответствует расчетная электрическая
схема замещения, представленная на рис. 170, а.
Уравнение механической характеристики двигателя п (М) по-
лучим из уравнения электрического состояния, которое с учетом
Е = СепФ и М = смФ/ после преобразований примет вид
Е U R« .л
п = —.
СЕ® CE® CECM®
170
229
В уравнении механической характеристики неизменными па-
раметрами являются /?я, Се и см. Напряжение питания U, поток
возбуждения Ф могут изменяться произвольно или в целях
управления. В последнем случае в цепь якоря включают доба-
вочное сопротивление. Механическая характеристика, получен-
ная при номинальных значениях напряжения питания и отсут-
ствии добавочного сопротивления в цепи якоря, называется есте-
ственной.
Механические характеристики п(Л4) при отличных от номи-
нальных значений напряжения U„, потока возбуждения Ф и при
наличии добавочного сопротивления /?д в цепи якоря называют
искусственными характеристиками.
► Так же как и в генераторах, обмотки возбуждения двига-
теля могут иметь последовательное, параллельное и сме-
шанное согласное включение, а также независимое (от по-
стороннего источника тока или постоянного магнита).
На рис. 170,6 представлены естественные механические ха-
рактеристики двигателя при различных способах возбуждения
и постоянных напряжении питания и сопротивлении цепи об-
мотки возбуждения.
На рис. 171 представлены схема и механические характери-
стики (естественная и искусственные) двигателя последователь-
ного возбуждения. В схему введены добавочное и шунтирующее
сопротивления: /?д — для регулирования тока якоря и /?ш — для
регулирования тока возбуждения.
Искусственные механические характеристики двигателя па-
раллельного возбуждения при изменении U, Rn и /?„ представ-
лены на рис. 172.
Следует заметить, что при отсутствии нагрузки на валу
(М, -> 0) двигатель последовательного возбуждения идет в раз-
нос (ц->оо), так как Ф->-0. Поэтому двигатели последователь-
ного возбуждения всегда работают под нагрузкой.
230
В двигателях смешанного возбуждения используют согласное
включение последовательной и параллельной обмоток. Основной
обмоткой считается та, которая создает до 70% мдс. Механи-
ческие характеристики двигателя смешанного—согласного воз-
буждения занимают среднее положение. Для такого двигателя
не опасно снятие нагрузки, так как при / = 0 поток возбуждения
создается параллельной обмоткой.
В момент пуска эдс якоря равна нулю и все напряжение
будет на обмотке якоря. В этом случае ток якоря, называемый
пусковым (/пуск = в 10—30 раз превышает номинальное
значение и вызывает на валу двигателя большой пусковой мо-
мент. Наиболее простой способ ограничения пускового тока со-
стоит во включении в цепь якоря добавочного сопротивления /?д,
называемого пусковым.
По мере увеличения частоты вращения эдс якоря растет,
ток якоря уменьшается. Для поддержания необходимого ускоре-
ния пусковой реостат выводят ступенями. На рис. 173 показан
переход в процессе пуска двигателя от искусственных механиче-
ских характеристик двигателя параллельного возбуждения (кри-
вые /, 2 3, 4) к естественной (кривая 5) при заданной меха-
нической характеристике приводимого во вращение механиз-
ма п(/Ит).
При ступенчатом уменьшении
/?д до 0 в процессе пуска двига-
теля поддерживается МДВ>Л1Т и
двигатель разгоняется до устано-
вившегося режима (точка а).
Для изменения направления вра-
щения двигателя необходимо из-
менить полярность напряжения
питания якоря или обмотки воз-
буждения.
Частоту вращения двигателя
наиболее просто регулируют вве-
дением в цепь якоря добавочного
173
231
сопротивления, называемого регулировочным сопротивлением.
Действительно, если двигатель работал в точке а (рис. 173) при
n = /i|, то при введении первой ступени /?д установившийся ре-
жим двигателя будет соответствовать точке б при П2<М|- Если
пусковое сопротивление рассчитывается на кратковременный
режим работы, то регулировочное сопротивление должно выби-
раться из расчета длительной работы, т. е. большей мощности.
Использование пускорегулирующего сопротивления связано с по-
терей мощности в цепи якоря. Поэтому оно применяется только
для двигателей малой и средней мощности.
Регулирование частоты вращения двигателя изменением поля
возбуждения используется только в небольшом диапазоне, так
как даже при небольшом уменьшении потока возбуждения и, сле-
довательно, эдс якоря, ток резко возрастает: / = (Д — Е) //?я.
► Наиболее экономичным способом регулирования пускового
момента и частоты вращения является изменение напря-
жения питания.
Однако для реализации его необходим отдельный регулируе-
мый источник, в качестве которого может быть использован
генератор постоянного тока или управляемый выпрямитель,
питаемый от сети переменного тока. Такую систему называют
генератор—двигатель (Г—Д).
Основные преимущества двигателей постоянного тока состоят
в возможности достаточно просто осуществлять реверсирование
и регулирование в широком диапазоне пускового момента и
частоты вращения. Несмотря на пониженную надежность и
сложность в эксплуатации они достаточно широко применяются
в электроприводе. Так, двигатели параллельного возбуждения
служат для привода металлорежущих станков и других меха-
низмов.
Система Г—Д, состоящая из электромашинного усилителя и
двигателя независимого возбуждения, широко применяется в
устройствах автоматического управления. Система Г—Д с двига-
телями последовательного возбуждения, используемая в транс-
портных средствах, позволяет обеспечить оптимальный режим
работы первичного двигателя (дизели, турбины и т. д.)
§ 79. Синхронные электродвигатели
В синхронных двигателях, как отмечалось выше, вследствие
отсутствия пускового момента необходим предварительный раз-
гон до угловой скорости, близкой к синхронной (0,95Qi). Наи-
более распространен асинхронный запуск синхронного двигателя.
Для осуществления асинхронного запуска на полюсах двигателя
размещена короткозамкнутая обмотка. При пуске двигателя об-
мотка якоря подключается к трехфазной сети переменного тока.
Возникающее при этом вращающееся магнитное поле индуци-
рует в короткозамкнутой обмотке эдс и токи, в результате чего
232
174
создается электромагнитный момент, как у асинхронного дви-
гателя. При пуске синхронного двигателя его обмотка возбужде-
ния отключена от источника постоянного тока, но замыкается
на активное сопротивление с целью уменьшения напряжения,
возникающего на ее зажимах. При достижении частоты враще-
ния, близкой к синхронной, обмотка возбуждения подключается
к источнику постоянного тока и двигатель втягивается в синхрон-
ный режим работы.
Схема замещения синхронного двигателя, соответствующая
упрощенному уравнению электрического состояния фазы якорной
обмотки U = £о + /Хин/, и векторная диаграмма представлены
на рис. 174, а, б.
Подобно показанному ранее для синхронного генератора
мощность и электромагнитный момент синхронного двигателя,
представленные в функции угла 0, имеют вид
Р =^~ £osin0, М = = МтsinO,
Леин
зи
где максимальный момент Мт — ——Ео.
ь2лснн
Зависимость М(0) называется угловой характеристикой
(рис. 174, в). Областью устойчивой работы двигателя является
участок 0 = О-т-л/2, где выполняется условие -^->0.
ЗАПОМНИТЕ
С целью получения запаса устойчивости за расчетный но-
минальный момент синхронного двигателя принимают
Л4Н = 0,5Mm, которому соответствует 0 = 30°.
Важным преимуществом синхронного двигателя являет-
ся способность регулировать потребляемую из сети реактив-
ную мощность путем изменения тока возбуждения.
233
Зависимость тока якоря от тока возбуждения (рис. 175, а)
практически одинакова с U-образной характеристикой генера-
тора; отличием является наличие тока, потребляемого из сети
при отсутствии полезной мощности на валу.
Как видно из векторных диаграмм (рис. 175,6), построенных
для точек 1 и 2 U-образной характеристики, при перевозбужде-
нии двигателя ток якоря имеет емкостный характер, а при недо-
возбуждении — индуктивный.
Несмотря на наличие дополнительного источника постоянного
тока для возбуждения, синхронные двигатели часто использу-
ются в промышленности, так как они позволяют регулировать
cos ср потребителя.
§ 80. Асинхронные электродвигатели
Классификация. Асинхронные двигатели получили широкое
применение в качестве электропривода различных механизмов.
В настоящее время только в СССР ежегодно производится
несколько десятков миллионов штук (80% всех двигателей)
асинхронных двигателей по мощности от нескольких ватт до не-
скольких сот киловатт.
Асинхронные двигатели могут быть с вращающимся и бегу-
щим магнитным полем. Двигатели с бегущим магнитным полем
называют линейными. По способу возбуждения магнитного поля
асинхронные двигатели делятся на трехфазные, двухфазные и
однофазные, а по типу обмотки ротора — на двигатели с корот-
козамкнутой и фазной обмотками. Конструкции роторов с корот-
козамкнутой и фазной обмотками представлены на рис. 155, а, 6;
их называют короткозамкнутым и фазным ротором соответствен-
но. Обмотка фазного ротора соединяется в звезду и выводится
к контактным кольцам.
При подключении к сети токи обмотки статора и индуцируе-
мые токи обмотки ротора асинхронной машины возбуждают вра-
234
щающееся магнитное
поле. Часть поля, пере-
секающего проводники
обмоток статора и ро-
тора, называют основ-
ным магнитным полем.
Часть поля, замыкаю-
щегося вокруг провод-
ников либо обмотки
статора, либо обмотки
ротора, называют по-
лями рассеяния стато-
ра и ротора. На рис.
176 представлена упро-
щенная картина полей
176
рассеяния обмотки статора. Основное магнитное поле машины
создается совместным действием мдс статора и ротора £2 и
описывается уравнением магнитного состояния:
£i + £2 = Ло,
где F\o — результирующая мдс.
Скольжение. Как следует из принципа работы асинхронного
двигателя, магнитное поле статора и ротор имеют разную
частоту вращения, т. е. вращаются асинхронно. При этом мдс
ротора и статора должны оставаться неподвижными друг отно-
сительно друга, что является необходимым условием преобразо-
вания энергии. Откуда следует, что п, —n2 = ns, где м, — частота
вращения мдс статора; «2— частота вращения ротора; ns —
частота вращения ротора относительно поля статора.
При анализе работы асинхронного двигателя пользуются от-
носительной величиной, называемой скольжением:
П1 —п? ns
Л| П1
Обычно скольжение при номинальной мощности равно несколь-
ким процентам. Если ротор заторможен (п2 = 0), то ns — ni
и s = 1.
Основное вращающееся магнитное поле индуцирует в про-
водниках ротора и статора эдс. Эдс в обмотке статора име-
ет частоту напряжения сети, а ротора — частоту, равную
Электрическая схема замещения. Действующие значения эдс
в фазах обмоток статора и ротора равны
£i — 4,44fiAo6) w 1Ф;
£2s = 4,44/'2£)62®2(I>,
235
где feo6i и koM — обмоточные коэффициенты, учитывающие тип
обмотки и отличие геометрической суммы эдс проводников от
арифметической (Хгоб<21).
Поскольку частота эдс ротора зависит от скольжения, то при
вращающемся роторе E2s = sE2, где Е2 — действующее значе-'
ние эдс в фазе неподвижного ротора (при s= 1).
Потоки рассеяния характеризуются соответствующими индук-
тивными сопротивлениями:
%! = = W|L|O; X2s = sX2 = -^ = <o2L2o.
11 hs
Уравнение электрического состояния фазы обмотки статора
имеет вид
Ut = -^t+jXih+Rjb
Схема замещения фазы обмотки ротора представлена на
рис. 177, а, которой соответствует уравнение электрического со-
стояния
^2s = jXislis + Rihs-
Действующее значение тока в фазе ротора l2s и cosi|?2s равны
I2s = ; cosi|?2s — R‘‘ „ -.
д//?2 + X2s V /?4 + X2s
Зависимости X2s, E2s, cost|)2s и I2s от скольжения представ-
лены на рис. 177,6.
ЗАПОМНИТЕ
Уравнения электрического и магнитного состояния асин-
хронного двигателя аналогичны уравнениям трансформа-
тора. Отличием является то, что частота эдс и тока в ротор-
ной цепи отличается от частоты эдс и тока статорной цепи
и полезная мощность не электрическая, а механическая.
236
178
Поэтому для определения параметров электрической схемы
замещения и приведения вторичной (роторной) цепи к статорной
необходимо кроме приведения по частоте и числу витков пред-
ставить механическую мощность на валу двигателя в виде элек-
трической. Такое преобразование достигается, если в цепь ротора
включить дополнительный резистивный элемент, значение сопро-
тивления которого определяется из уравнения цепи ротора
при делении всех членов на $:
£'2 — jX2l2s +
где -у-=/?д + /?2 или /?л =-^—/?2=/?2-Ц^-. В этом случае
электрическая цепь ротора имеет индуктивное сопротивление Х2
и эдс £2, соответствующие заторможенному ротору.
Энергетическая диаграмма асинхронного двигателя представ-
лена на рис. 178.
Из диаграммы следует, что электромагнитная мощность
Рэм = Й1М, передаваемая от статора к ротору, больше меха-
нической мощности ротора Puex = Q2M на значение магнитных
и электрических потерь в роторе. В рабочем режиме электри-
ческие потери в роторе много больше магнитных (ХРэ2^> ХРи2),.
поэтому можно записать
АР,2 = Р,м - Рмех = М(й, - Й2>^
- |
или
ЛР,2 = sPiH.
МПОМНИПГЕ
Мощность электрических потерь в роторе асинхронного дви-
гателя пропорциональна скольжению. Полезная мощность
на валу двигателя Р2 меньше механической на величину
мощности механических потерь.
237
Коэффициент полезно-
го действия равен отноше-
нию ц = Pi/P\, где Р\ —)
мощность, потребляемая
из сети. Номинальный кпд
современных асинхронных
двигателей составляет
0,75—0,95.
Вращающий электро-
магнитный момент двига-
теля в соответствии с за-
коном электромагнитных
сил равен
М — CMO/2sC0Sl|)2s,
где 4>2s — фазовый сдвиг тока /2s относительно потока Ф.
Механическая характеристика M(s) асинхронного двигателя,
построенная с учетом зависимостей /2s(s) и cosi|)2s(s), представ-
лена на рис. 179.
У асинхронных двигателей обычно Мтях/М„уСк = (0,06 4- 1,5),
Мтах/МИ — (1,54-2). Механическая характеристика может быть
представлена электрическими параметрами схемы замещения.
Для уравнения эдс, индуцируемых в обмотках статора и ро-
тора, обмотку ротора заменяют фиктивной обмоткой, имеющей
такое же число фаз и витков, что и у обмотки статора. При этом
параметры фазы обмотки ротора будут равны: R'2 —р2п2;
Х'2 — Х2п2, где п = — коэффициент приведения.
Полная и упрощенная схемы замещения фазы асинхронного
двигателя приведены на рис. 180, а, б.
Из энергетической диаграммы и схемы замещения (рис. 180,6)
имеем
180
238
Скольжение, при котором асинхронный двигатель развивает максимальный
момент Af„1ам, называют критическим
Ri
S ~ *
₽ л/л?+(х,+х2у Xi+Xi
Если подставить полученное значение sKp в выражение для М,
то получим значение Мтах:
2Q1[/?i+Vfli+(Xi + X0’]
эАПОЛАНИ1ТЕ
Мтах не зависит от сопротивления обмотки ротора /?2, а
скольжение sKp зависит от значения /?2.
На рис. 181, а представлены механические характеристики
асинхронного двигателя п(М) при разных значениях сопротив-
ления ротора /?2, или при введении в цепь ротора добавочного
сопротивления /?д, из которых видно, что при определенном
значении активного сопротивления фазы ротора /?2-f-/?£ =
= Xi+%2 можно получить Мпуск = Л4тах.
В тех случаях, когда не требуется большой точности для при-
ближенного построения механической характеристики асинхрон-
ного двигателя, пользуются упрощенной формулой
s/sKf + sH?/s
Пуск и регулирование частоты вращения. При пуске асин-
хронного двигателя costp очень мал и пусковой ток в обмотке
статора может возрастать в 5—7 раз по сравнению с номинальным
током /„, а при частых пусках наблюдается сильный перегрев
и выход из строя двигателя.
► Ограничение пускового тока и регулирование пускового мо-
мента осуществляются двумя способами: изменением часто-
ты питающего напряжения и увеличением активного сопро-
тивления цепи обмотки ротора в период пуска двигателя.
Семейство механических характеристик асинхронного двига-
теля при частотном регулировании и приводимого во вращение
механизма п(Мг) представлены на рис. 181,6.
Ограничение пускового тока в двигателях с короткозамкну-
тым ротором осуществляется с помощью глубокопазной обмот-
ки или обмотки в виде двойной «беличьей клетки» (рис. 182, а, б).
Принцип действия двигателя с глубокопазным ротором состо-
ит в следующем.
239
При пуске, когда частота тока обмотки ротора равна частоте
тока обмотки статора, индуктивное сопротивление элементарных
проводников в глубине паза оказывается значительным и токи
в них практически не возникают. При этом ток вытесняется в
верхние слои стержней (рис. 182, а). Площадь активного сечения
стержней будет меньше их геометрической площади, что эквива-
лентно увеличению активного сопротивления фазы обмотки ро-
тора. Таким образом, начальный пусковой момент оказывается
увеличенным. По мере возрастания частоты вращения ротора
частота токов в его стержнях уменьшается, одновременно с этим
снижается и индуктивное сопротивление. При частоте вращения,
близкой к номинальной, частота тока в роторе мала, ток в этом
случае распределяется практически равномерно по всему сечению
стержня, и общее активное сопротивление стержней автомати-
чески уменьшается.
Несколько лучшие пусковые характеристики имеют асинхрон-
ные двигатели, роторная обмотка которых выполнена в виде
двойной «беличьей клетки».
► Регулирование частоты вращения ротора асинхронного дви-
гателя при заданном противодействующем моменте, как
это следует из выражения
Q2=Qi(1-s)=-^(1-s)=-^(1-s),
может быть осуществлено тремя способами: изменением
частоты питающего напряжения переключением числа
пар полюсов р и изменением скольжения $.
Первый способ регулирования частоты вращения является
наиболее перспективным, так как он обеспечивает глубокое,
плавное и экономичное регулирование частоты вращения. Однако
240
для его выполнения требуется
специальный источник пита-
ния, обеспечивающий U/f =
= const. В качестве такого ис-
точника используют синхрон-
ные генераторы с приводом от
двигателя постоянного тока. В
последнее время для частотно-
го регулирования разработаны
статические источники питания
на транзисторах и тиристорах.
Регулирование частоты вра-
щения асинхронного двигателя
осуществляется лишь ступенями
182
изменением числа пар полюсов
Регулирование частоты вращения изменением скольжения до-
стигается включением регулировочного резистора в цепь ротора.
Недостатком этого способа является увеличение электрических
потерь в цепи ротора, которые пропорциональны скольжению.
Однако этот способ позволяет осуществлять плавную регулиров-
ку, поэтому он получил наибольшее распространение.
Однофазный асинхронный двигатель. Однофазный асинхрон-
ный двигатель отличается от трехфазного тем, что его обмотка
статора подключается к однофазному источнику питания. Ротор
однофазного двигателя выполняется короткозамкнутым. В таких
двигателях, как правило, на статоре размещается .две обмотки,
оси которых смещены друг относительно друга на электрический
угол 90°. Одна из этих обмоток называется рабочей ОВ, а вто-
рая — вспомогательной или пусковой ПО (рис. 183, а). Часто обе
обмотки (фазы) выполняют функции рабочей и питаются токами,
смещенными друг относительно друга по фазе. Такие двигатели
по своему устройству являются двухфазными хотя и питаются
от однофазной сети.
При подключении одной фазы обмотки статора к сети создается
пульсирующий магнитный поток, индуцирующий в обмотке ротора
16—85
184
эдс и ток. Возникающие при этом
электромагнитные силы, дейст-
вующие в любой момент времени
на неподвижный ротор (его про-
водники), компенсируют друг
друга и, следовательно, не созда-
ется начального пускового момен-
та (рис. 183,6). При внешнем
воздействии (при малом сопро-
тивлении обмотки ротора) двига-
тель будет развивать вращаю-
щий момент в направлении воздей-
ствия.
Принцип работы однофазного двигателя можно объяснить,
используя известный из физики принцип разложения стоя-
чей волны на две, бегущие в разные стороны. При непод-
вижном роторе оба поля (прямое и обратное) создают оди-
наковые, направленные встречно, вращающие моменты.
Если ротор под действием внешней силы начал вращаться
в прямом направлении (по часовой стрелке), то скольжение
(прямое) s„p будет уменьшаться, Л4пр — возрастать, so6p (обрат-
ное) — увеличиваться, а Л4овр— уменьшаться (рис. 184, а).
Суммарный электромагнитный момент Л4Р = Л4пр — Л4о6р>0.
Механическая характеристика однофазного асинхронного
двигателя может быть построена как суммарная Mnp = <p(snp) и
М)6р = ф(«обр)- При этом, когда snp = 0, то so6p = 2.
Если сопротивление обмотки ротора велико и исходные харак-
теристики Л4пр(пг) и Л4обр(п2) имеют вид, представленный на
рис. 184,6, то ротор однофазного асинхронного двигателя при
получении внешнего воздействия вращаться не будет, так как
результирующий момент, действующий на ротор, направлен на-
встречу действующей внешней силе .
Линейные двигатели. Отдельные механизмы (лифты, насосы,
транспортные средства и т. д.) приводятся в возвратно-посту-
пательное движение линейными электрическими двигателями,
подвижная часть которых (ротор, бегун) непосредственно с ними
связана. Устройство и принцип действия их аналогичны асин-
хронному двигателю, у которого статор с трехфазной обмоткой
развернут в плоскости (плоский статор). Трехфазная обмотка
с током сездает магнитное поле, перемещающееся (бегущее)
относительно статора со скоростью у = 2т/), где т— расстояние
между полюсами, ft — частота тока. Под воздействием бегущего
поля статора возбуждаемые им вихревые токи ротора создают
электромагнитную силу Еэм в направлении, совпадающем с на-
правлением движения поля статора.
► В линейном двигателе может быть статор длиннее ротора
или наоборот. Возможна и другая конструкция двигателя,
когда короткозамкнутый ротор неподвижен, а движется
242
статор с обмоткой, возбуждающей бегущее поле. Направ-
ление движения изменяется путем переключения последова-
тельности фаз.
Недостатком линейного двигателя является искажение маг-
нитного поля в воздушном зазоре и у краев статора, вследствие
которых снижаются энергетические показатели (кпд, cosq>).
§ 81. Электрические двигатели малой мощности
(микродвигатели)
Электрическими двигателями малой мощности обычно называют двигатели
мощностью до 500 Вт, приспособленные для привода различных устройств быто-
вой техники, исполнительных органов систем автоматики, привода специальных
приборов, лентопротяжных механизмов, инструмента и т. д.
Кроме обычных двигателей постоянного и переменного тока
изготовляют электрические двигатели малой мощности при спе-
циальных источниках питания (аккумулятор, однофазная сеть
и др.) и необходимости получить заданные рабочие характерис-
тики (пуск, регулирование частоты вращения, надежность в ра-
боте, повышенное быстродействие и др.).
Во многих случаях возникает необходимость обеспечить уни-
версальность двигателей, т. е. способность их работы при разных
источниках питания, например при питании от трехфазной и од-
нофазной сети или от постоянного и однофазного переменного
тока.
Конструкция и рабочие характеристики асинхронных и син-
хронных микродвигателей, так же как и двигателей постоянного
тока, мало отличаются от обычных двигателей средней и боль-
шой мощности.
При питании от однофазного источника переменного напря-
жения по способу получения вращающегося магнитного поля
асинхронные и синхронные микродвигатели делятся на две груп-
пы: с фазодвигающим элементом и с экранированными полю-
сами.
Асинхронные микродвигатели. Такие двигатели могут быть
с массивным или полым ротором. Устройство асинхронного мик-
родвигателя с полым ротором представлено на рис. 185.
Статор машины, набранный из листов электротехнической
стали, состоит из наружной 1 и внутренней 3 частей. В пазы
наружного статора укладываются две обмотки 2, оси которых
сдвинуты друг относительно друга на угол 90°. На подшипни-
ках 5 вращается вал 6. В воздушном зазоре между внутренним
и наружным статором помещается полый ротор 4, жестко скреп-
ленный с валом. Полый ротор обычно выполняется из сплава
алюминия в виде стакана с толщиной стенок 0,3—0,8 мм и тол-
щиной дна 1—2 мм. Воздушный зазор между внутренним и на-
ружным статорами составляет 0,6—1,2 мм. Наличие повышенно-
го почти вдвое по сравнению с обычным асинхронным двигателем
16*
243
185
воздушного зазора вызывает увели-
чение тока холостого хода до /х =
= (0,8 4-0,9)/н.
Внутренний статор служит для
уменьшения магнитного сопротив-
ления. В двигателях с полым рото-
ром, мощностью менее 1 —1,5 Вт час-
то обмотки размещают на внутрен-
нем статоре. В этом случае умень-
шаются габариты и масса двигате-
ля.
Универсальные асинхронные дви-
гатели (УАД). Универсальные асин-
хронные двигатели специально рас-
считаны для работы как от трехфазной, так и от однофазной
сети переменного тока (рис. 186, а). На статоре такого двига-
186
244
теля размещена трехфазная обмотка с шестью выводами. Схемы
включения обмотки статора представлены на рис. 186, б.
Синхронные микродвигатели. В зависимости от конструкции
ротора синхронные двигатели делятся на двигатели с постоян-
ными магнитами (рис. 187, а), реактивные (рис. 187, б) и гисте-
резисные (рис. 187, в). Кроме указанных видов применяются
тихоходные двигатели с электромагнитной редукцией и шаговые.
Последние широко распространены в системах автоматического
управления.
Принцип работы реактивного синхронного микродвигателя
состоит в следующем. Ротор реактивного двигателя выполняется
с явно выраженными полюсами из манитомягкого материала.
При подключении реактивного синхронного микродвигателя к се-
ти токи обмотки статора образуют вращающееся магнитное поле,
которое, возбуждая в роторе вихревые токи, создает вращающий
момент М, слагающийся из электромагнитного Ма (аналогичного
моменту асинхронного двигателя) и реактивного Мр (обусловлен-
ного неравенством магнитных проводимостей машины по про-
дольной и поперечной осям) моментов. Вращающееся магнитное
поле представлено в виде двух вращающихся полюсов магнита
(рис. 188, а). Сначала ротор разгоняется до подсинхронной
частоты вращения под воздействием асинхронного момента, а за-
тем втягивается в синхронизм под воздействием синхронизиру-
ющего реактивного момента.
Механическая характеристика реактивного синхронного мик-
родвигателя представлена на рис. 188, б.
Ротор гистерезисного двигателя (рис. 189, а) представляет
собой цилиндр 1 из магнитотвердого материала, расположенный
на втулке 2. Принцип работы гистерезисного двигателя состоит
в следующем. Вращающееся магнитное поле, образуемое токами
обмотки статора, создает в роторе вихревые токи и намагничи-
вает цилиндр. В результате вращающий момент двигателя мож-
но представить как сумму двух моментов: гистерезисного М,,
обусловленного наличием остаточного магнетизма ротора,
и асинхронного момента Л4а, возникающего от взаимодействия
187
245
вращающегося момента поля статора с вихревыми токами рото-
ра. Механическая характеристика гистерезисного двигателя при-
ведена на рис. 189, б.
ЗАПОМНИТЕ
Гистерезисный момент М, будет тем больше, чем больше
площадь петли гистерезиса магнитотвердого материала ро-
тора
В режиме асинхронной частоты вращения (пуск двигателя)
электромагнитная мощность двигателя пропорциональна потерям
в роторе (аналогично асинхронному двигателю) и площади петли
магнитого гистерезиса материала.
В режиме синхронной частоты вращения Ма = 0 потери в ро-
торе будут только гистерезисные. Следовательно, гистерезисный
момент Мг, равный P3M/Q, будет тем больше, чем больше пло-
щадь петли гистерезиса В(Н) материала.
В реактивно-гистерезисном двигателе вращающий момент
равен сумме трех моментов: гистерезисного, реактивного и асин-
хронного Л1ДВ = Л4Г -|- Мр -Г Ма.
246
d) Q
189
Коллекторные микродвигатели обычно двухполюсные, в кон-
структивном отношении мало отличаются от двигателей средней
мощности.
В настоящее время широкое распространение получили уни-
версальные коллекторные двигатели, предназначенные для рабо-
ты как от сети постоянного, так и однофазного переменного тока.
Эти двигатели имеют только последовательную обмотку возбуж-
дения с дополнительными выводами (рис. 190, а).
При работе на переменном токе включается лишь часть об-
мотки возбуждения, что позволяет сблизить механические харак-
теристики двигателя при работе на постоянном и переменном
токе (рис. 190, б—прерывистая линия). Необходимость допол-
нительных выводов вызвана тем, что при работе на переменном
токе из-за влияния индуктивности обмоток якоря и возбуждения
магнитный поток ослабляется. Искрение под щетками, радиопо-
мехи, шум, потери мощности при работе на переменном токе
значительно больше, чем на постоянном вследствие ухудшенных
условий коммутации.
Преимущество коллекторного двигателя переменного тока по
сравнению с асинхронным и синхронным
в том, что он позволяет получить
практически любые частоты вра-
щения и путем простых средств
обеспечить широкое и экономич-
ное регулирование пускового мо-
мента и частоты вращения. На-
пример, при частоте источника
питания 50 Гц диапазон регули-
рования частоты вращения может
достигать 3000—20 000 об/мин.
Шаговые двигатели использу-
ются в исполнительных устройст-
вах системы дискретного (им-
пульсного) управления. Они ана-
логичны многофазным и многопо-
люсным синхронным двигателям.
Их ротор и статор выполняются
двигателями состоит
247
191
с явно выраженными полюсами. Принцип действия п-фазного
шагового двигателя с двухполюсным ротором (рис. 191) состоит
в следующем. Если питание обмоток статора осуществляется
поочередно (/, 2, 3, ...) однополярными импульсами, то ротор
будет иметь т устойчивых положений, которые совпадают с
осями полюсов статора.
При импульсном управлении любая обмотка возбуждения по
истечении интервала времени действия импульса обесточится.
Фиксация положения ротора в интервале между импульсами обес-
печивается либо реактивным моментом (ротор намагничен по-
стоянным магнитом), либо специальным электромеханическим
фиксирующим устройством.
§ 82. Информационные электрические
микромашины
Информационные электрические микромашины предназначены для выпол-
нения функций первичных преобразователей, передачи информации, вычислитель-ч
пых операций в схемах автоматики, телемеханики и вычислительной техники.
В качестве первичных преобразователей они служат для преоб-
разования различных механических величин (угла поворота, час-
тоты вращения, скорости перемещения, ускорения, момента и т. п.)
в электрические величины или обратного преобразования; в вычис-
лительной технике выполняют решение тригонометрических за-
дач, преобразование координат, дифференцирование, интегриро-
вание; в телемеханических системах обеспечивают работу систем
синхронной связи.
В настоящее время разработано и создано большое количество
различных типов специальных электрических микромашин, пред-
назначенных для выполнения указанных функций. В данном пара-
графе рассматриваются сельсины, используемые в системах син-
хронной связи и выполняющие функции первичных преобразова-
телей.
748
В общем случае системой синхронной связи называют совокупность устройств,
служащих для измерения и передачи на расстояние сигнала (непрерывно или
дискретно), являющегося функцией рассогласования положения двух или несколь-
ких механизмов.
Под рассогласованным положением понимается наличие раз-
ных углов поворота валов этих механизмов (или частот вращения)
от исходного положения или относительно друг друга. В основном
система синхронной связи состоит из управляющего устройства
(датчика Д), линии передачи и принимающего устройства (прием-
ника П). Датчик, получая внешнее воздействие, перемещается
(поворачивается), вырабатывая сигнал и передавая его приемни-
ку. На выходе приемника появляется сигнал в функции угла
рассогласования 0 (или частоты вращения). Если выходным сиг-
налом является вращающий момент М, то такая система называет-
ся индикаторной (рис. 192, а). Этот момент действует в направ-
лении устранения рассогласования.
В трансформаторной системе синхронной связи (рис. 192, б)
выходным сигналом является эдс Ет, а устранение рассогласова-
ния между датчиком и приемником осуществляется исполнитель-
ным двигателем ИД, управляющая обмотка которого питается
от приемника через усилитель мощности УМ.
В системах малой мощности в качестве датчика и приемника
используются специальные электрические машины (сельсины),
способные самосинхронизироваться.
Сельсины — это небольшие электрические машины переменного тока, пред-
назначенные для синхронной передачи на расстояние угловых перемещений валов
различных устройств, механически не связанных между собой.
По конструкции сельсины делятся на контактные и бесконтакт-
ные. Устройство контактных сельсинов подобно устройству син-
хронных или асинхронных машин. Контактные сельсины выпол-
няются в двух вариантах. В одном варианте обмотка возбужде-
ния / располагается на роторе, а трехфазная обмотка 2, называе-
мая обмотка синхронизации,—в пазах статора (рис. 193,а).
В другом варианте обмотка а)
возбуждения расположена &
на статоре, а трехфазная об-—
мотка — в пазах ротора
(рис. 193,а). Начала фаз
этой обмотки выведены к й)
трем контактным кольцам, по
которым скользят три щетки.
Пакеты статора и ротора
(3, 4 на рис. 193, а) набраны
из листов электротехниче-
ской стали. Контактные коль-
ца для уменьшения переход-
ного сопротивления скользя-
щих контактов выполняются 192
249
из сплавов серебра. На рис. 193, б схематически показано поло-
жение осей обмоток сельсина. Обмотка синхронизации представ-
лена тремя катушками, оси которых смещены на 120°.
При включении обмотки возбуждения сельсина на однофазное
напряжение ток создает пульсирующее магнитное поле, которое
индуцирует в каждой фазе обмотки синхронизации переменную
эдс. Действующее значение эдс каждой фазы зависит от располо-
жения осей этих фаз относительно оси потока возбуждения
(рис. 193, б):
£i = £созад;
Ei = £соз(ал — 120°);
Е3 = £соз(ад Д- 120°),
где £ — наибольшее действующее значение эдс фазы обмотки,
когда ее ось совпадает с осью потока возбуждения, ад — угол по-
ворота ротора.
В простейшем случае схема дистанционной передачи угловых
перемещений состоит из двух одинаковых сельсинов, у которых
одноименные зажимы обмоток синхронизации соединены прово-
дами линии связи, а на обмотки возбуждения подается напряже-
ние сети (рис. 194, а). В такой схеме сельсины работают в индика-
торном режиме. Один из сельсинов называют сельсином-датчиком
СД, а другой — сельсином-приемником СП. Если оси одноименных
обмоток синхронизации 1—3 сельсинов расположены одинаково
относительно осей обмоток возбуждения, то в фазах обмоток син-
хронизации приемника и датчика индуцируются одинаковые эдс,
уравновешивающие друг друга. Ток в обмотках и в линиях связи
равен нулю. Такое положение сельсинов называют согласо-
ванным.
При рассогласовании роторов сельсинов, например, вследствие
поворота ротора сельсина-датчика равновесие эдс обмоток син-
250
хронизации нарушится, между одноименными зажимами обмоток
будут действовать эдс, равные разностям эдс соответствующих
фаз сельсина-датчика и приемника: Е| = ЕД1 —£П1; £2 =
= £Д2 — £П2; £3 = £д3 — £пз. гДе индекс «Д» относится к сель-
сину-датчику, а индекс «П» — к сельсину-приемнику. Углом рас-
согласования 0 сельсинов называют разность
0 — ад Оц.
Если полные сопротивления каждой фазы сельсина-датчика
и сельсина-приемника равны и сопротивление линии равно Zn, то
токи в фазах обмотки синхронизации определяются из выражений:
г __ Е\ . у _____ Еч . у ______ Ез
2Z+Za ’ 2 ~ 2Z+Z„ ’ 3~ 2Z+Z„ ’
где Z = Za = Zn.
В результате взаимодействия проводников с током обмотки
синхронизации с полем обмотки возбуждения в каждом сельсине
возникает вращающий (синхронизирующий) момент, который
стремится привести систему в согласованное положение, при кото-
ром токи фаз /| = /2 = /3 = 0. Синхронизирующий момент прак-
тически пропорционален синусу угла рассогласования:
Мс — A1maxsin0.
Так как задаваемое положение ротора СД фиксировано, то син-
хронизирующий момент в сельсине-приемнике, преодолевая сопро-
тивление трения на валу, поворачивает его ротор до согласования
с ротором сельсина-датчика. Так осуществляется дистанционная
передача угла в индикаторном режиме.
251
> Сельсины, работающие в индикаторном режиме, использу-
ются для передачи угла поворота какого-либо органа или
механизма из труднодоступного или удаленного от наблюде-
ния пункта.
При работе в индикаторном режиме желательна максимальная
точность показаний сельсинов-приемников. Она определяется ви-
дом характеристики Мс(0), моментом сопротивления на валу сель-
сина-приемника и другими факторами. Если требуется повышен-
ная точность, то применяется трансформаторный режим синхрон-
ной связи (рис. 194, б), при котором одноименные зажимы обмоток
синхронизации сельсина-датчика и сельсина-приемника соединены
проводами линии связи. Обмотка возбуждения сельсина-датчика
подключена к источнику питания, а обмотка возбуждения сель-
сина-приемника является выходной и подключается к усилителю.
При включении питания на обмотку возбуждения сельсина-дат-
чика в обмотках синхронизации появятся токи, определяемые
действием эдс ЕЛ1, Еа2, Еаз:
Л =
22+гл ’
/2 = ЕЮ ;
2 2Z+Z. '
/3 = £дз. .
3 2Z+Z„
Каждый из этих токов создает в фазах обмотки сельсина-при-
емника мдс, которые, суммируясь, образуют пульсирующий маг-
нитный поток сельсина-приемника, направленный в общем случае
под углом 0 = ад — «п к оси выходной обмотки. Значение наводи-
мой этим потоком эдс Ет в выходной обмотке зависит от угла рас-
согласования 0:
Ет — ETmaxcos0,
где Еттах — наибольшее действующее значение эдс выходной об-
мотки сельсина-приемника, когда 0 = 0.
► Таким образом, сельсин-приемник выполняет в этой схеме
роль трансформатора, напряжение на однофазной обмотке
которого изменяется пропорционально косинусу угла 0.
Для практического использования трансформаторного режима
работы сельсинов удобнее, чтобы зависимость Ет = ф(0) была си-
нусоидальной, т. е. чтобы при согласовании сельсинов Ет = 0. Это
достигается тем, что ротор сельсина-приемника смещают относи-
тельно ротора сельсина-датчика на угол 90° и такое положение
роторов принимают за начальное.
С помощью сельсинов, работающих в трансформаторном режи-
ме, осуществляется дистанционное непрерывное управление элек-
троприводом. Для этого выходное напряжение однофазной обмот-
ки сельсина-приемника усиливается усилителем (электронным,
электромашинным или магнитным) и подается на двигатель, по-
ворачивающий (вращающий) управляемый объект, которым мо-
жет быть, например, платформа с укрепленной на ней направлен-
ной антенной и т. п. Ротор сельсина-приемника жестко связывают
252
механической передачей с поворачиваемым объектом. Поворот
вала двигателя объекта вслед за поворотом ротора сельсина-дат-
чика начинается уже при незначительном угле рассогласования
(5—10°). С помощью двигателя, поворачивается как объект, так
и ротор сельсина-приемника в таком направлении, чтобы рассогла-
сование сельсинов уменьшилось до нуля (0 = 0). При исчезнове-
нии рассогласования вся система, повернувшись на заданный угол,
останавливается.
САМОЕ ВАЖНОЕ
1. Принцип действия электрических машин основан на физи-
ческих законах электромагнитной индукции и электромаг-
нитного взаимодействия.
2. Электрическая машина обратима, т. е. может работать
как генератор и как двигатель. Преобразование энергии в
электрической машине возможно лишь при наличии силового
взаимодействия между магнитными полями статора и ротора;
поля статора и ротора должны быть неподвижны друг относи-
тельно друга при любой частоте вращения ротора.
3. Вращающееся магнитное поле в электрических машинах
переменного тока создается с помощью многофазной системы
токов.
4. В синхронных генераторах используется в основном неза-
висимое возбуждение; вид внешней характеристики опреде-
ляется характером нагрузки.
5. Относительное отставание ротора от вращающегося маг-
нитного поля статора называют скольжением. Мощность
электрических потерь в роторе асинхронного двигателя про-
порциональна скольжению.
6. Тахогенераторы, шаговые двигатели, электрические мик-
ромашины, электромашинные усилители широко используют-
ся в автоматических устройствах.
7. Сельсины — это небольшие электрические машины пере-
менного тока, предназначенные для синхронной передачи на
расстояние угловых перемещений валов различных устрой-
ств, механически не связанных между собой.
Темы докладов и рефератов
1. Асинхронный двигатель и трансформатор.
2. Электродвигатели малой мощности.
.3. Электромашинные усилители, преобразователи, тахогенера-
торы в твоей профессии.
4. Генераторы постоянного и переменного тока.
5. Электрические двигатели.
6. Способы регулирования пускового момента и частоты вра-
щения в электрических двигателях.
253
Какие существуют способы получения вращающегося магнитного
поля при однофазном источнике? Поясните условия образования вращаю-
щегося магнитного поля.
С какой целью в конденсаторный двигатель последовательно с одной
из обмоток включается: а) конденсатор, б) конденсатор и резистор?
Объясните принцип действия асинхронного двигателя, синхронного
двигателя.
Поясните устройство электрической машины постоянного тока; асинх-
ронной машины с короткозамкнутым ротором и фазным ротором; син-
хронной машины.
Изобразите условные графические обозначения электрических машин
постоянного и переменного тока.
Составьте уравнение электрического состояния цепи якоря генератора
постоянного тока.
Проанализируйте внешние характеристики генератора постоянного тока:
какая из схем возбуждения генератора обеспечивает наименьшее изменение
его выходного напряжения при изменении тока нагрузки?
Составьте уравнение электрического состояния одной фазы синхрон-
ного генератора.
От чего зависит частота напряжения синхронных генераторов?
Чем объясняется: а) возрастающая внешняя характеристика синхрон-
ного генератора при емкостном характере нагрузки; б) падающая — при.
индуктивном характере нагрузки?
Где применяют электромашинные усилители? преобразователи? тахоге-
нераторы? Какие из перечисленных машин используются в вашей про-
фессии?
Как сохраняется условие устойчивости в работе электродвигателей,
имеющих механические характеристики, представленные на рис. 174?
Запишите уравнение механической характеристики двигателя постоян-
ного тока. Какая схема возбуждения применяется для: а) подъемного крана;
б) транспортного средства (трамвая, электровоза и др.)?
Проведите аналогию между асинхронным двигателем и трансформа-
тором.
Как изменить направление вращения ротора асинхронного двигателя?
Что называют скольжением асинхронного двигателя?
Зачем при пуске асинхронных двигателей с фазным ротором в цепь
ротора вводится добавочное сопротивление /?rf? Постройте механические
характеристики для разных Rd.
Из энергетической диаграммы асинхронного двигателя запишите выра-
жение электромагнитной мощности Р,м, передаваемой от статора к ротору.
Поясните принцип работы ротора однофазного асинхронного двига-
теля с малым и повышенным сопротивлением обмотки ротора.
Перечислите типы электродвигателей малой мощности. Что понимают
под «универсальностью» двигателя?
Из какого материала выполняются роторы синхронного реактивного,
гистерезисного, реактивно-гистерезисного микроэлектродвигателей? На-
рисуйте петлю гистерезиса материала ротора для каждого типа синхрон-
ных электродвигаталей малой мощности и особенности их конструкции.
Каково назначение информационных электрических мйшин?
Объясните особенности применения сельсинов. Сравните по рисункам
в учебнике работу сельсинов в индикаторном и трансформаторном режимах.
В каком случае достигается более высокая точность?
ЭЛЕКТРИЧЕСКИЕ АППАРАТЫ И РЕЛЕ
§ 83. Назначение и классификация электрических
аппаратов
Распределение энергии между приемниками электрической
'энергии (двигателями, нагревательными, осветительными и
другими электротехническими устройствами) и электриче-
ская защита их осуществляются с помощью электрических
аппаратов.
По назначению электрические аппараты можно разделить на
четыре группы:
1) коммутирующие аппараты, производящие отключение и
включение главных (силовых) электрических цепей в системах,
генерирующих, передающих и распределяющих электрическую
энергию;
2) реле и регуляторы, осуществляющие защиту и управление
работой различных электротехнических устройств, а также реше-
ние логических задач (ДА, НЕТ, ИЛИ и др.);
3) аппараты управления (контакторы, пускатели, контролле-
ры, командоаппараты), управляющие работой электротехническо-
го устройства, например пуск, регулирование частоты вращения,
торможение, реверс электрических двигателей в системах электро-
привода;
4) датчики, создающие электрические сигналы (ток, напряже-
ние), соответствующие определенным параметрам протекающего
технологического процесса.
► Различают три группы коммутирующих аппаратов: 1) авто-
матические выключатели, 2) плавкие предохранители и
3) неавтоматические выключатели.
Автоматические выключатели выполняют ручное и автомати-
ческое включение и выключение, а неавтоматические выполняют
только ручное отключение и включение.
Плавкие предохранители выполняют только разовое отклю-
чение при недопустимых нарушениях режима работы электро-
технического устройства.
Электрические аппараты классифицируются по роду тока и зна-
чениям тока и напряжения. Различают сильноточные от 5А и
выше и слаботочные — до 5А, низкого напряжения — до 1000 В
и высокого напряжения — выше 1000 В.
Электрические аппараты подразделяются также по числу раз-
рываемых контактов-полюсов на одно-, двух- и трехполюсные.
25S
§ 84. Принцип действия и устройство
коммутирующих аппаратов
Принцип действия и устройство коммутирующих аппаратов
рассмотрим на примере аппарата низкого напряжения (рис. 195).
Его основными частями являются: электромагнит, состоящий из
ярма 1, якоря 2, обмотки 3; контакты (подвижные и неподвиж-
ные) главные 5 и вспомогательные 7; рабочая пружина 6; контакт-
ные пружины 4\ дугогасительное устройство (на рисунке не по-
казано). По конструктивному исполнению электромагниты бы-
вают с якорем клапанного типа (рис. 196, а), втяжным
(рис. 196, б) и с поворотным (рис. 196, в).
Электромагнит служит для преобразования электрической
энергии в механическое усилие, под действием которого якорь
притягивается к ярму, преодолевая сопротивление рабочей и
контактной пружин, и перемещается до полного замыкания глав-
ных контактов.
На рис. 197 представлены тяговая и механическая характерис-
тики элементов аппарата.
Тяговой характеристикой называют зависимость электромагнитной силы F,,
действующей на якорь, от длины воздушного зазора /„.
При постоянном токе сила F, рассчитывается по формуле
4л-10 7(wl)2St
2^
где wl — мдс, создаваемая током обмотки электромагнита, SB —
площадь воздушного зазора.
При синусоидальном токе выражение F-, имеет вид
Гт = Лт sin2<o/= Fjm/2 —(FTm cos2<o/)/2.
Пульсация электромагнитной силы FT при работе электриче-
ского аппарата вызывает вибрацию магнитопровода (шум, дре-
безг) .
3
195
256
Механическая характери-
стика (см. рис. 197) электри-
ческого аппарата F„(la) является
суммой сил сопротивления рабо-
чей пружины, пружин подвиж-
ных контактов и реакции кон-
тактов.
При этом на участ-
ке пгп действует только
рабочая пружина, на уча-
стке nl — рабочая и кон-
тактная пружины (когда
196
контакты соприкоснутся), и на участке Ik — к этим двум силам
добавляется сила реакции контактов.
Если в момент замыкания контактов при воздушном зазоре
/в.раб (точка пг на рис. 197) FT > F„, то якорь притягивается к ярму
и контакты замкнутся. Затем под действием тягового усилия
металлическая поверхность контактов деформируется, сила сжа-
тия контактов будет соответствовать точке k, когда FT = FM.
При этом между якорем и ярмом остается небольшой зазор /в0.
Этот зазор необходим для предотвращения залипания якоря из-за
влияния остаточного магнетизма при включении тока в обмотке.
Контактом называют зону перехода электрического тока из одной токоведущей
части в другую. Некоторые типы контактов показаны на рис. 198, а, б, в.
К рабочим контактам предъявляются требования высокой
надежности электрического соединения, долговечности, стойкости
к влиянию внешней среды. Основная особенность контактной
поверхности — ее шероховатость. В отдельных точках выступы
контактирующих участков соприкасаются. В этих точках под
действием давления разрушается поверхностная оксидная пленка
на металлической поверхности (рис. 199). В режиме длительного
протекания тока допустимая температура нагрева контактов в за-
висимости от их типа и материала находится в пределах 85— 120°С.
ЗАПОМНИТЕ
Увеличение силы контакт-
ного нажатия приводит к
росту количества контакти-
рующих точек (площади кон-
тактной поверхности), т. е.
уменьшению контактного со-
противления /?к, но тем боль-
шая требуется мощность тя-
говой системы.
На рис. 200 представлены за-
зисимости переходного сопротив-
ления контактов RK от силы на-
жатия FK для разных контактных
материалов (1 —латунь, 2 — медь,
3 - серебро).
17—85
198
При длительном токе в
100 А сила нажатия в 14—24
Н для
контактора с медными контактами соответствует их сопротив-
лению RK — 0,1 4- 0,01 Ом.
Наиболее тяжелый режим работы контактов — процесс раз-
мыкания. Это объясняется тем, что разрываемая цепь обладает ин-
дуктивностью, и при размыкании контактов ток в цепи измениться
скачкообразно не может. Но одновременно по мере снижения силы
сжатия растет переходное сопротивление контактов, что приводит
к увеличению их температуры. При дальнейшем расхождении
контактов между ними возникает газовый разряд — образуется
электрическая дуга. Если коммутируемый ток меньше допусти-
мого /</Доп> то при разрыве контактов проскакивает только искра.
При больших токах температура дуги достигает таких значений,
что контакты могут пригореть и даже расплавиться. В особенно
тяжелых условиях работают контакты в момент разрыва цепи
постоянного тока, в этом случае при расхождении контактов
между ними создается постоянная разность потенциалов, а для
поддержания горения дуги достаточно 10—20 В. При разрыве цепи
переменного тока условия гашения дуги облегчаются, так как при
переходе тока через нулевое значение восстанавливается электри-
ческая прочность межконтактного промежутка.
► Для повышения надежности работы контактов в сильно-
точных аппаратах применяются устройства дугогашения,
принцип действия которых различен.
Первый способ основан на искусственном увеличении длины
дуги посредством ее электромагнитного выдувания или втягива-
ния в деионизирующую металлическую решетку или щелевую ка-
меру (рис. 201). В аппаратах высокого напряжения применяют
также выдувание дуги сжатым воздухом.
Второй способ состоит в помеще-
нии контактов в масло, которое под
г- 1 1 действием высокой температуры дуго-
----*—Hyi--------- вого разряда разлагается и выделяе-
* Аг мые при этом газы способствуют уско-
----*—Д)рению гашения дуги. Этот способ при-
— —'л'—-------- — меняется в основном в аппаратах
высокого напряжения в цепях пере-
199 менного тока до 6—10 кВ. В аппара-
258
тах напряжением выше 35 кВ при-
меняют дополнительно дугогаситель-
ные газовые камеры.
§ 85. Аппараты
неавтоматического управления
К неавтоматическим аппара-
там (выключателям) относятся
рубильники, переключатели, па-
кетные выключатели, командо-
аппараты различного назначе-
ния, предназначенные для ручного (непосредственного или
дистанционного) замыкания и размыкания электрических
цепей постоянного и переменного тока. Они используются
в распределительных щитах и устройствах, служащих для
управления. В неавтоматических выключателях распреде-
лительных устройств, где включение производят редко, при-
меняются плоскостные (клиновые) контакты.
Пакетные выключатели и переключатели служат для пере-
ключения в цепях постоянного и переменного тока при номи-
нальных токах до 100 А в качестве пускателей электродвигателей
малой мощности, в различных автоматических схемах для включе-
ния нагрузки и т. д. Конструкции их предусматривают возмож-
ность получения различных соединений в электрических схемах.
фиксированно поса-
Выпускаемые отечественной промышленностью пакетные вы-
ключатели и переключатели типа ПК состоят из отдельных колец-
пакетов, выполненных из изолирующего материала. Внутри па-
кета помещается контактная система, состоящая из неподвижно-
го и подвижного контактов. Каждый пакет представляет собой
одну йару контактов — один полюс. Из таких пакетов можно
набрать любое число полюсов. Чаще используют одно-, двух-,
трехполюсные аппараты.
На рис. 202 представлен трехполюсный пакетный выключатель,
у которого пакеты разных полюсов набираются на скобе 4 со стяж-
ными шпильками 3. На валике с рукояткой 1
жены подвижные контакты 7, имеющие
профильное отверстие 5. Неподвижные
контакты 8 находятся между изоляцион-
ными дисками 6. Контактные нажатия
происходят под действием пружинящих
подвижных контактов. Дуга, возникаю-
щая при замыкании и размыкании кон-
тактов, гасится в закрытой крышкой 2
камере, образованной между пакетами
при наличии искрогасительных шайб. Вы-
ключатель снабжен механизмом мгновен-
П
I [
г~;
201
17*
259
202
ного переключения, который представ-
ляет собой заводную пружину, обес-
печивающую большую скорость размы-
кания контактов (не зависит от скоро-
сти вращения рукоятки). Стандартные
элементы переключателей дают воз-
можность создавать различные схемы
с числом переключения положений ру-
коятки не более четырех.
Пакетные выключатели и переклю-
чатели выпускаются на напряжение
250 В и постоянный и переменный токи
10, 25, 60 и 100 А и допускают 10 000—
20 000 переключений без нагрузки при
скорости не более 60 переключе-
ний/мин.
Выключатели и переключатели для
размыкания и замыкания электриче-
ских цепей постоянного и переменного
тока при небольших значениях тока
(до 10—15 А) широко применяют в
маломощных электрических цепях раз-
личного назначения. Они выполняются
одно- и двухполюсными, защищенными
и герметическими, для открытых и
закрытых установок. Корпус выключателей в защищенном ис-
полнении изготовляют из пластмассы, а в герметическом — из
металла.
По своей конструкции они делятся на поворотные, перекидные
и кнопочные. В выключателях кнопочного типа контакты снабже-
ны защелкой с пружиной, что позволяет фиксировать замыкание
контактов при нажатии на кнопку, а при повторном нажатии на
кнопку размыкать их. Для управления электротехническими уста-
новками чаще используют выключатели с двумя кнопками: од-
ной для включения, другой для выключения. Такие кнопочные
выключатели называют пускателями или командоаппаратами.
На рис. 203, а представлен командоаппарат типа КА-73А, вы-
пускаемый на номинальные токи до 15 А и предназначенный для
включения и отключения электродвигателей постоянного и пере-
менного тока малой мощности. Он управляется кнопками «Пуск»
и «Стоп». Командоаппараты выполняются трехполюсными и рас-
считаны на 20 включений и отключений в час.
При включении и отключении двигателей средней и большой
мощности кнопочный выключатель используется для размыкания
и замыкания цепей питания обмоток контакторов, коммутирую-
щих главную цепь. В этом случае кнопочный выключатель вы-
полняется одно- и двухполюсным. Основной частью кнопочного
выключателя является кнопочный элемент, разрез которого по-
казан на рис. 203, б.
260
§ 86. Предохранители
Предохранитель — электрический аппарат, осуществляющий автоматическое
отключение электрической цепи при перегрузке или коротком замыкании в уста*
новках низкого и высокого напряжения.
Предохранитель состоит из плавкого металлического элемен-
та — вставки в виде тонкой проволоки или пластины и корпуса с
контактным устройством.
^АПЮМНИПГЕ
Плавкая вставка допускает длительное протекание тока, но
при перегрузках и токах короткого замыкания (/ > /вст)
нагревается до температуры плавления металла и, расплав-
ляясь, разрывает электрическую цепь. После отключения це-
пи в предохранителе следует заменить плавкую вставку но-
вой и вручную включить его в электрическую цепь.
Плавкие вставки изготовляют из сплава свинца с оловом, с
медью и др. Медные вставки с целью устранения окисления лу-
дят. Они имеют малое сопротивление и выполняются с малым попе-
речным сечением. Большинство предохранителей снабжается дуго-
гасительными средствами внутри корпуса (фибра, кварцевый пе-
сок и др.). Ток, на который рассчитана плавкая вставка для
продолжительной работы, называют номинальным током плавкой
вставки /вст в отличие от номинального тока предохранителя /пр,
261
204
на значение которого рассчитаны то-
коведущие, контактные и дугогаси-
тельные части предохранителя.
Зависимость времени плавления плавкой '
вставки предохранителя от значения проте-|
кающего через нее тока называют защитной '
характеристикой t = f(l).
На рис. 204 представлены за-
щитные характеристики двух плав-
ких вставок / и 2 на различные но-
минальные токи. Один и тот же гок
перегрузки / расплавит эти вставки
в разное время: время плавления
вставки с меньшим номинальным током будет меньше Ui<72)-
Это позволяет обеспечить селективную защиту электрических
сетей.
По конструктивному устройству предохранители делятся на
трубчатые и пробочные ПР.
Трубчатые предохранители выполняются закрытыми с корпу-
сом из газогенерирующего материала — фибры, который при по-
вышении температуры создает в трубке большое давление за
счет ее разложения. Предохранитель типа ПР (рис. 205, а, б) со-
стоит из плавкой вставки 4, заключенной внутри фибровой труб-
ки 5 разборного типа. Трубка армирована концевыми латунными
кольцами 3 с резьбой, на которые навинчиваются латунные кол-
паки 2, замыкающие контакты 1. К контактам крепится плав-
кая вставка, изготовляемая на номинальные токи от 15 до
1000 А.
205
262
Пробочные предохранители (рис. 206, а, б) применяются в ос-
новном для защиты осветительных установок и электродвигателей
малой и средней мощности. Они отличаются от трубчатых пре-
дохранителей способом крепления плавкой вставки.
§ 87. Автоматические воздушные выключатели
(автоматы)
> Автоматические воздушные выключатели (автоматы) пред-
назначены для автоматического размыкания цепей постоян-
ного и переменного тока при нарушении нормального ре-
жима их работы (перегрузки, короткие замыкания, снижение
или исчезновение напряжения и т. п.). По сравнению с
предохранителями автоматы обеспечивают более высокую
точность установки на определенный ток отключения и мно-
гократность действия.
Автоматические выключатели классифицируются по выпол-
няемым функциям защиты на автоматы максимального и мини-
мального тока и автоматы минимального напряжения и обратной
мощности.
Принцип действия автомата рассмотрим
тического выключателя максимального тока
на примере автома-
(рис. 207). При по-
вышении допустимого значения
тока включенный последова-
тельно в цепь электромагнит 1,
преодолевая усилие пружи-
ны 3, притягивает якорь 2, при
этом защелка 5, поворачиваясь
относительно якоря по оси 4,
освобождает рычаг 6 и под
действием отключающей пру-
жины 7 контакты автомата 8
размыкаются. Автомат включа-
ется вручную.
В настоящее время созданы
207
263
и биметаллическая пластина
автоматы, имеющие время отклю-
чения 0,02—0,007с на токи ко-
роткого замыкания 3000—5000 А
Существуют разнообразные
конструкции автоматических воз-
душных выключателей на различ-
ные номинальные токи для рабо-
ты на переменном и постоянном
токе. Широкое распространение
получили малогабаритные авто-
маты, предназначенные в основ-
ном для защиты от коротких за-
мыканий и перегрузок приемни-
ков электроэнергии и проводов в
производственных и бытовых ус-
тановках на токи до 50А и на-
пряжение до 380 В.
Средством защиты в этих ав-
томатах является электромагнит-
ный или биметаллический эле-
мент, срабатывающий при нагре-
вании с некоторой выдержкой
Времени. Автоматы с электромаг-
нитом обладают большим быст-
родействием, что очень важно
при коротких замыканиях.
На рис. 208, а представлен
пробочный автомат на номиналь-
ный ток 6 А и напряжение до
250 В. Катушка электромагнита 1
2 включены в цепь нагрузки после-
довательно. При токах перегрузки биметаллический элемент на-
гревается и, деформируясь, непосредственно действует на меха-
низм свободного расцепления 5. При токах короткого замыкания
электромагнит 1 мгновенно втягивает
сердечник и тоже воздействует на
этот механизм 5. Отключение автомата
может быть произведено и вручную
нажатием на кнопку 4, а включение —
нажатием на кнопку 3. Механизм сво-
бодного расцепления выполнен в виде
защелки или ломающегося рычага.
Принципиальная электрическая схема
автомата представлена на рис. 208, б.
По этой же схеме выполнены автоматы
типа ЭАБ-4 на номинальные токи до
25 А и напряжение до 250 В.
Автоматический трехполюсный вы-
ключатель типа АП-25 (рис. 209) снаб-
09
264
жен дугогабительной катушкой, электромагнитным расцепите-
лем / и кнопкой ручного включения 2. Он рассчитан на отключение
токов короткого замыкания порядка 1500—2000 А.
§ 88. Электрические реле
Электрическое реле — автоматический аппарат, осуществляющий скачкооб-
разное изменение выходной величины под воздействием плавно изменяющейся
входной величины и решающий логические задачи ДА — НЕТ — ИЛИ.
Реле обычно состоит из трех функциональных органов:
чувствительного, воспринимающего входную величину и пре-
образующего ее в электрическую;
сравнения преобразованной величины с эталоном, который
при достижении заданного значения передает воздействие на ис-
полнительный орган;
исполнительного, который воздействует на управляемую
электрическую цепь.
По характеру воздействующей величины реле делятся на
электрические (реагирующие на электрический ток или напряже-
ние), тепловые (реагирующие на температуру), механические
(реагирующие на давление или перемещение), оптические (реа-
гирующие на силу света), акустические (реагирующие на силу
звука).
По принципу действия исполнительного органа реле делят на
контактные и бесконтактные. Контактные реле воздействуют на
управляемую электрическую цепь с помощью замыкания и раз-
мыкания контактов. Бесконтактные реле осуществляют управле-
ние путем резкого изменения значения параметра исполнитель-
ного органа, включенного в управляемую электрическую цепь
(изменение резистивного, индуктивного сопротивления).
По принципу действия исполнительного органа контактные
реле разделяются на электромагнитные, поляризованные, индук-
ционные. К бесконтактным реле относятся магнитные реле, полу-
проводниковые и др.
По характеру входных параметров реле могут реагировать на
максимальное или минимальное значение воздействующих вели-
чин, на разность величин, на значение и направление и т. п.
ЗАПОМНИТЕ
Основной характеристикой реле является характеристика
«вход — выход», устанавливающая зависимость момента
скачкообразного (релейного) изменения выходного пара-
метра у от входной величины х.
На рис. 210, а, б, в представлены зависимости у (х) для трех
типов реле: электромагнитного, бесконтактного (магнитного,
электронного) и реле с памятью. При изменении входной вели-
265
210
чины х от 0 до хср выходная величина у равна нулю (или ymin у
бесконтактных реле). При х — хср выходная величина у изме-
няется скачком до z/max- При уменьшении х величина у остается
неизменной и при х — хотп скачком уменьшится до нуля (или до
Утт У бесконтактных реле). Отношение хО1а/хср — к* называется
коэффициентом возврата.
В реле с памятью (рис. 210, в) для возврата его в исходное
состояние необходимо изменить направление входного пара-
метра х.
С помощью реле осуществляется управление в электриче-
ских цепях, мощность которых значительно превышает мощность
управления реле. Это свойство реле характеризуется коэффици-
ентом управления по мощности к, = Ру/Рср, где Ру—мощность
в управляемой цепи, Рср — мощность, которую необходимо под-
вести к реле для приведения в действие исполнительного органа.
Быстродействие реле характеризуется временем срабатыва-
ния /ср — это интервал времени с момента подачи управляющего
сигнала до полного срабатывания исполнительного органа (за-
мыкания или размыкания цепи).
В табл. 2 даны Ку, tcp некоторых типов реле.
Таблица 2
Тип реле Коэффициент управления ку Время срабаты- вания /ср, мс
Электромагнитные 5—100 1—200
Поляризованные 20—5000 1 — 15
Магнитные 104—107 ю~3— ю-2
Максимальное значение мощности Рср ограничивается в кон-
тактных реле дугой и нагревом при размыкании и замыкании
контактов. Для гашения дуги и уменьшения искрения контактов
используют шунтирование /?С-цепью, через которую ток проходит
266
только в переходном процессе (в мо-
мент замыкания и особенно при раз- (J/
мыкании контактов).
Основным требованием к реле
является надежность их работы. На-
дежность контактных реле в значи-
тельной степени зависит от работы
контактов, бесконтактных реле — от
работы электронных приборов.
Бесконтактные реле работают
более надежно, чем контактные. Но
контактные реле можно эксплуати- 1
ровать при значительных колеба-
ниях температуры (—80°C-----1-250°C), они не чувствительны к
радиационным воздействиям, обеспечивают полный разрыв уп-
равляемой электрической цепи.
► Электромагнитные реле по принципу действия аналогичны
контакторам. Подвижная часть реле — якорь — перемеща-
ется так же, как и в контакторах под действием сил, создавае-
мых магнитным полем, которое возбуждается током обмотки
реле.
В зависимости от применения электромагнитные реле разде-
ляются в основном на реле защиты и управления.
Реле защиты электротехнических устройств и сетей выпол-
няются для защиты от превышения тока и напряжения — макси-
мальное реле, а также от обрыва цепи или снижения напряжения
питания — минимальное реле. Они работают при небольшой
частоте включения и выключения и небольших токах главных
контактов (0,5—20А), но должны обеспечивать четкую и без-
отказную работу.
Максимальные реле тока типа РТ имеют настройку на вы-
бранные значения тока срабатывания. Зажимы рабочих кату-
шек 2, 4, 6, 8 реле тока включаются в силовую сеть, а размы-
кающие 5, 7 и замыкающие 1, 3 контакты — в цепь управления
(рис. 211).
способность или количество
В тех случаях, когда разрывная
контактов реле защиты недостаточ-
ны, применяются вспомогательные
(промежуточные) реле, обычно по-
стоянного тока. Промежуточное ре-
ле типа ЭП (рис. 212) выполняется
на базе электромагнитного механиз-
ма клапанного типа. При прохожде-
нии тока в обмотке 2 якорь 4 притя-
гивается к сердечнику 1 вместе с
подвижными контактами 3.
Реле типа ЭПВ отличается от
реле типа ЭП наличием устройства
для получения и регулирования вы-
212
267
213
держки времени с помощью
дополнительной короткоза-
мкнутой обмотки, которая
замедляет процесс нараста-
ния магнитного потока в
магнитопроводе.
Схема защиты с помо-
щью максимального и проме-
жуточного реле, действую-
щих на отключение сети,
представлена на рис. 213.
При превышении тока на-
грузки чувствительный ор-
ган — трансформатор то-
ка ТТ — через вторичную
обмотку включен на управ-
ляющую обмотку макси-
мального реле РТ, которое включает цепь управления промежу-
точного реле РП. Промежуточное реле в свою очередь включает
питание обмотки привода выключателя В.
Поляризованное реле (рис. 214) является разновидностью
электромагнитного. Оно реагирует не только на значение управ-
ляющего тока, но и на направление его. В поляризованных реле
магнитный поток создается как мдс обмотки, так и постоянным
магнитом, встроенным в магнитную систему реле.
Принцип работы поляризованного реле состоит в следующем.
При отсутствии тока в обмотке поляризующий магнитный потсГк
постоянного магнита при строго вертикальном положении якоря
создает взаимно уравновешивающие силы. При прохождении
тока через обмотку магнитный поток управления Фу в магнито-
проводе, складываясь с потоком постоянного магнита, уменьшает
результирующий магнитный поток в одной из половин маГнито-
провода и увеличивает его в другой. В результате электромагнит-
ные силы, действующие на якорь, не будут уравновешиваться,
и он переместится вправо или влево в зависимости от направ-
ления тока, проходящего через обмотку.
§ 89. Контроллеры,
магнитные пускатели
и электромагниты
Контроллер — электриче-
ский аппарат, с помощью кото-
рого изменяют схемы включения
в силовой цепи и цепи возбуж-
дения электрических машин.
Конструктивно он пред-
ставляет собой переклю-
чающее многоступенчатое
контактное устройство.
268
Привод контроллеров ручной, ножной
или электродвигательный. Переклю-
чающее контактное устройство состоит
из ряда неподвижных контактов, с ко-
торыми замыкаются или размыкаются
подвижные контакты при повороте
вала.
В зависимости от конструкции кон-
тактного устройства контроллеры раз-
деляются на барабанные и кулачко-
вые.
Барабанные контроллеры применя-
ют для управления двигателями по-
стоянного тока мощностью до 45 кВт
и переменного тока — до 75 кВт.
Кулачковые контроллеры применя-
ют для управления двигателями боль-
ших мощностей. Число контактных
элементов в зависимости от схемы
может достигать 15 и более. Устрой-
ство одного контактного элемента
кулачкового контроллера представ-
лено на рис. 215. На плате из изоля-
ционного материала 1 укреплен не-
подвижный контакт 9. Подвижный
контакт 8 закреплен шарнирно на
рычаге 2, который на противополож-
ном конце имеет ролик 3, перекаты-
в 9
269
вающийся по профильной (кулачковой) шайбе 5, помещенной
на вертикальном валу 4. При повороте вала 4 кулачковая шайба
переходит от профиля с радиусом г к профилю радиуса R, ры-
чаг 4 поворачивается на оси в точке а и, преодолевая сопротив-
ление пружин 6 и 7, замыкает контакты 8 и 9. Для гашения дуги
каждый контактный элемент имеет свою дугогасительнуй катуш-
ку и камеру.
Магнитные пускатели состоят из одного или двух контакто-
ров и тепловых реле, смонтированных на общей панели. Пус-
катели предназначены для дистанционного или автоматического
управления двигателями напряжением до 600 В. Тепловые реле
осуществляют защиту двигателя от перегрузок.
Магнитные пускатели выпускаются в различных исполне-'
ниях: реверсивные, нереверсивные, закрытые^ взрывобезопас- '
ные и т. д.
Электромагниты предназначены для преобразования магнит-
ной энергии в механическую. Они используются для управле-
ния различными механизмами: при подъеме тяжестей, в качест-
ве магнитных патронов в станках, перемещения плит и столов
на шлифовальных станках, для торможения движущихся меха-
низмов и т. д.
На рис. 216, а и б представлен грузоподъемный электромаг-
нит для подъема и опускания ферромагнитных тел. Он состоит
из катушки электромагнита 1, корпуса 2, кабеля 3. Управление
подъемными электромагнитами осуществляется командоконтрол-
лерами.
§ 90. Магнитоуправляемые контакты
Наиболее ненадежным элементом электромагнитного реле
являются контакты, которые подвергаются коррозии и разру-
шаются газовым разрядом, кроме того, они имеют большое вре-
мя срабатывания, обусловленное большой массой якоря и
сравнительно длительным процессом нарастания тока в об-
мотке.
► Указанные недостатки в значительной степени устранены
в так называемых магнитоуправляемых контактах. Они
впаяны в стеклянную колбу, заполненную азотом или инерт-
ным газом, т. е. изолированы от внешней среды (гермети-
зированы). Поэтому магнитоуправляемые контакты часто
называют герконами, т. е. герметизированными контактами.
По назначению они подразделяются на замыкающие, пе-
реключающие, многоконтактные и др.
Основными элементами герконов (рис. 217) являются пер-
маллоевые пластинки 1, концы которых покрыты золотом, се-
ребром или родием. Замыкающие герконы отличаются от обыч-
ных реле отсутствием якоря. Пермаллоевые пластинки выполня- ,
ют одновременно роль магнитопровода и контактных пружин, а
их концы 2 — контактов. На стеклянной колбе 3 размещена
270
обмотка управления 4. При протекании тока через обмотку воз-
никает магнитное поле, которое, замыкаясь через пермаллоевые
пластинки, создает электромагнитное усилие, притягивающее кон-
такты друг к другу. Если это усилие превосходит механиче-
скую силу упругости пластинок, контакты замыкаются (рис. 217, а).
В переключающем герконе (рис. 217, б) при подаче управ-
ляющего тока в левую обмотку средняя пластина замыкается с ле-
вой, а при протекании тока через правую обмотку средняя пла-
стина замыкается с правой. Геркон с одной обмоткой может
иметь несколько контактов (рис. 217, в).
Достоинством герконов является высокое быстродействие,
износоустойчивость, (до 109 срабатываний), малые габариты,
невысокая стоимость.
Их контакты не подвергаются коррозии (как обычные реле).
§ 91. Бесконтактные реле
► Бесконтактные реле, основанные на использовании нелиней-
ных управляемых сопротивлений, имеют по сравнению с
обычным реле ряд существенных преимуществ: повышенные
надежность и срок службы, более высокое быстродействие,
отсутствие дуги и искрообразования.
Рассмотрим наиболее распространенные разновидности бес-
контактных реле.
Электронные и полупроводниковые реле. По своему устройству
электронные и полупроводниковые реле аналогичны электронным
218
271
и полупроводниковым приборам. Они находятся в одном из двух
состояний: проводящем (открытом) и непроводящем (закрытом)
Электронное реле (рис. 218, а) имеет высокое входное,сопро-
тивление
обычных
(соизмеримое с сопротивлением
реле)
при
отсутствии
разомкнутых
управляющего
контактов
положительного
сигнала на сетке и отрицательного напряжения смещения, за-
крывающего электронную лампу. При подаче достаточно боль
шого положительного сеточного напряжения лампа открывается
и через нее проходит необходимый ток, определяемый нагруз
кой. При этом, однако, сопротивление лампы оказывается зна
чительным, что является недостатком электронных реле
Транзисторное реле (рис. 218,6) по принципу действия ана
логично электронному. Его достоинство — малое входное сопро
тивление в открытом состоянии, недостаток — сравнительно низ-
кое сопротивление в закрытом состоянии.
Весьма перспективно тиристорное реле (рис. 218, в). Его осо-
бенность заключается в том, что тиристор остается в открытом
состоянии и после снятия управляющего сигнала. Для закры-
тия тиристора требуется отключите анодное напряжение.
Электронное реле времени используется вместо механическо-
го реле времени с часовым механизмом. Выдержка времени в
этом реле создается цепью заряда конденсатора от источника
постоянного напряжения Е (рис. 219). Обмотка промежуточно-
го реле РП включена через электронную лампу (триод) к ис-
точнику постоянного тока. При замкнутом ключе К конденсатор
заряжен до напряжения, равного Е, при котором триод заперт.
При размыкании ключа происходит разряд конденсатора через
резистор R с постоянной времени т = RC. Напряжение на сетке
триода падает, а ток через него и обмотку реле увеличивается
В момент достижения тока / реле срабатываем.
Магнитные реле. Их действие основано на изменении маг-
нитной проницаемости ферромагнетиков при насыщении. Когда
сердечник не насыщен, индуктивное сопротивление обмотки
велико, а когда насыщен — мало. Такие реле выполняются на
магнитных усилителях с внешней положительной обратной
связью или с самонасыщением (см. гл. 6), работающих в релей-
ном режиме (Км ~ 1).
Бесконтактные реле имеют ряд недо
статков: сравнитёльно небольшую комму
тируемую мощность, меньшее, чем у кон
тактных реле, отношение сопротивлений в
разомкнутом и замкнутом состояниях.
Они
более чувствительны к перегрузкам, чем
обычные реле. Поэтому их применяют с
учетом конкретных технико-экономических
и эксплуатационных условий.
219
272
САМОЕ ВАЖНОЕ
1. Электрические аппараты служат для защиты, коммутации
и распределения энергии между ее приемниками.
2. Коммутирующие аппараты предназначены для отключения
и включения главных (силовых) электрических цепей в системах,
генерирующих, передающих и распределяющих электрическую
энергию.
3. Реле и регуляторы применяют для защиты и управления
работой различных электротехнических устройств, а также реше-
ния логических задач типа ДА, НЕТ, ИЛИ и др.
4. Аппараты управления (контакторы, пускатели, контролле-
ры) управляют работой электротехнических устройств.
5. Датчики создают электрические сигналы, соответствующие
определенным параметрам протекающего технологического про-
цесса.
6. Предохранитель — это электрический аппарат для автома-
тического отключения электрической цепи при перегрузке или
коротком замыкании.
7. В автоматических устройствах широко применяют бес-
контактные реле: электронные и полупроводниковые (транзис-
торные, тиристорные), магнитные. Они имеют более высокое
быстродействие и повышенную надежность.
Темы докладов и рефератов
1. Электрические аппараты и реле в твоей профессии.
2. Принцип действия и устройство коммутирующих аппара-
тов и способы гашения дуги.
3. Аппараты неавтоматического управления в твоей профес-
сии.
4. Аппараты защиты в твоей профессии.
Объясните назначение электрических аппаратов и реле.
Какие группы коммутационных аппаратов вы знаете?
Нарисуйте и объясните тяговую и механическую характеристики
коммутационных аппаратов и состояние аппарата в точках их пересе-
чения.
Какие требования предъявляются к рабочим контактам и почему?
Какие способы гашения электрической дуги вам известны? В чем их
достоинства и недостатки?
В чем сходство и различие аппаратов автоматического и неавто-
матического управления? Для чего служат предохранители?
Сравните защитные характеристики двух плавких вставок / и 2 на
различные номинальные токи (см. рис. 204).
Объясните принцип работы предохранителя пробочного типа (рис.
206) и автоматического выключателя (см. рис. 210).
Каково назначение трансформатора тока (ТТ) в схеме, изображен-
ной на рис. 213?
Объясните по рис. 214 принцип работы поляризованного реле.
Перечислите преимущества и недостатки электромагнитных и бескон-
тактных реле.
Объясните назначение и принцип действия контроллеров и магнит
ных пускателей.
В чем состоит основное преимущество герконов перед электромагнит-
ными реле?
18—85
273
РАЗДЕЛ
ПРОИЗВОДСТВО, РАСПРЕДЕЛЕНИЕ
И ПОТРЕБЛЕНИЕ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ
ЭЛЕКТРИЧЕСКИЕ СТАНЦИИ, СЕТИ
И ЭЛЕКТРОСНАБЖЕНИЕ
§ 92. Электроэнергетические системы
Совокупность электрических станций, подстанций и потребителей электро-
энергии, связанных между собой линиями электропередачи и электрическими
сетями при общем централизованном оперативном управлении, носит название
электроэнергетической системы.
Представление о системе производства, передачи и распре-
деления электрической энергии дает схема электроснабжения
потребителей (рис. 220). Электрическая энергия, вырабатывае-
мая на электрической станции ЭС генераторами Г, передается
при напряжении более высоком, чем генераторное, по линии
электропередачи высокого напряжения ЛЭП на подстанцию про-
мышленного предприятия. Для изменения напряжения в систе-
ме применяются трансформаторы Т. Со сборных шин подстанции
ПС электроэнергия распределяется по различным электроприем-
никам: электродвигателям М, источникам света Л, электротер-
мическим установкам, нагревательным приборам Е и т. д.
ЗАПОМНИТЕ
Производство электрической энергии и ее потребление —
процесс непрерывный и единый во времени. Электрическую
энергию нельзя накапливать в больших количествах, не
передавая ее потребителям. В каждый момент времени вы-
работка электрической энергии должна соответствовать по-
274
лэп
треблению. Отдельные электростанции не могут обеспечить
бесперебойную подачу электроэнергии. Поэтому по мере
развития энергетики электрические станции, которые объе-
диняют в системы, работают, параллельно на общую на-
грузку. Их соединяют между собой линиями электропе-
редачи.
Объединение электростанций в электроэнергетическую систе-
му имеет важное значение для согласования" работы станций
различных типов, особенно тепловых и гидростанций. Мощности
гидроагрегатов ГЭС в периоды паводков и в зимнее время раз-
личны. Весной основную нагрузку системы воспринимают гидро-
станции, на тепловых же станциях часть агрегатов останав-
ливается, что дает возможность экономить топливо и проводить
плановые ремонтные работы. В зимнее время роли тепловых и
гидростанций меняются. Таким образом облегчается возмож-
ность создания экономически выгодных режимов для разных
типов электростанций.
► Создание энергосистем повышает надежность энергоснаб-
жения и улучшает качество электроэнергии, обеспечивает
постоянство напряжения и частоты, поскольку колебания
нагрузки воспринимаются многими электрическими стан-
циями.
Электроэнергетические системы линиями высокого напря-
жения объединены в более крупные объединенные энергосистемы
(ОЭС). При параллельной работе нескольких энергосистем в
составе ОЭС указанные преимущества проявляются в еще боль-
шей степени.
18*
275
§ 93. Электрические станции
► В зависимости от вида используемых энергоресурсов и
особенностей основного технологического процесса преоб-
разования энергии электростанции подразделяют на тепло-
вые (ТЭС), атомные (АЭС), гидравлические (ГЭС).
В настоящее время большая часть электроэнергии выраба-
тывается на этих станциях, причем основу советской энергетики
составляют тепловые элекростанции.
На тепловых электростанциях преобразуется химическая энергия топлива
сначала в механическую, а затем в электрическую.
Топливом для такой электростанции могут служить уголь,
торф, газ, горючие сланцы, мазут. Тепловые электрические стан-
ции подразделяют на конденсационные (КЭС), предназначенные
для выработки только электрической энергии, и теплоэлектро-
централи (ТЭЦ), производящие кроме электрической тепловую
энергию в виде горячей воды и пара. Крупные КЭС районного
значения получили название государственных районных электро-
станций (ГРЭС).,
Простейшая принципиальная схема КЭС, работающей на
угле, представлена на рис. 221. Уголь подается в топливный
бункер /, а из него — в дробильную установку 2, где превраща-
ется в пыль. Угольная пыль поступает в топку парогенератора
(парового котла) 3, имеющего систему трубок, в которых цир-
кулирует химически очищенная вода, называемая питательной.
В котле вода нагревается, испаряется, а образовавшийся насы-
щенный пар доводится до температуры 400—650°С и под дав-
лением 3—24 МПа поступает по паропроводу в паровую турби-
ну 4. Параметры пара зависят от мощности агрегатов.
ЗАПОМНИТЕ
Тепловые конденсацион-
ные электростанции име-
ют невысокий кпд (30—
40%), так как большая
часть энергии теряется с
отходящими топочными
газами и охлаждающей
водой конденсатора.
Сооружать КЭС выгодно в
непосредственной близости от
мест добычи топлива. При этом
потребители электроэнергии
могут находиться на значи-
тельном расстоянии от стан-
ции.
Теплоэлектроцентраль отли-
чается от конденсационной
221
276
станции установленной на ней специальной теплофикационной
турбиной с отбором пара. На ТЭЦ одна часть пара полностью
используется в турбине для выработки электроэнергии в генера-
торе 5 и затем поступает в конденсатор 6, а другая, имеющая
большую температуру и давление (на рис. 221 штриховая ли-
ния), отбирается от промежуточной ступени турбины и исполь-
зуется для теплоснабжения. Конденсат насосом 7 через деаэра-
тор 8 и далее питательным насосом 9 подается в парогенератор.
Количество отбираемого пара зависит от потребности предприя-
тий в тепловой энергии.
ЗАПОМНИТЕ
Коэффициент полезного действия ТЭЦ достигает 60—70%.
Такие станции строят обычно вблизи потребителей — про-
мышленных предприятий или жилых массивов. Чаще всего они
работают на привозном топливе.
Рассмотренные тепловые электростанции по виду основного
теплового агрегата — паровой турбины — относятся к паротур-
бинным станциям. Значительно меньшее распространение полу-
чили тепловые станции с газотурбинными (ГТУ), парогазовы-
ми (ПГУ) и дизельными установками.
Первая в мире атомная электростанция (АЭС), преобразую-
щая энергию расщепления ядер атомов тяжелых элементов в
электрическую, была построена в 1954 г. в Советском Союзе —
Обнинская АЭС. Основным тепловым агрегатом АЭС, как и ТЭС,
является паротурбинная установка. Средой, преобразующей теп-
ловую энергию в механическую, также служит водяной пар.
Принципиальное отличие АЭС от ТЭС состоит в том, что тепло-
та, необходимая для выработки пара, получается не при сгора-
нии топлива, а при расщеплении ядер тяжелых элементов в
ядерных реакторах. Такими элементами являются природный
изотоп урана-235 или получаемый искусственным путем изотоп
урана-233 и плутония-239.
► Из 1 кг урана можно получить столько же теплоты, сколь-
ко при сжигании примерно 3000 т каменного угля.
За годы, прошедшие со времени пуска в эксплуатацию пер-
вой АЭС, было создано несколько конструкций ядерных реак-
торов, на основе которых началось широкое развитие атомной
энергетики в нашей стране.
Атомные электростанции классифицируют по типу реактора
и в зависимости от числа контуров, по которым теплота, вы-
деляющаяся в реакторе, может передаваться рабочему телу
(пару) паровой турбины. Тепловая схема АЭС может быть двух-
(рис. 222, а) и трехконтурной (рис. 222,6). В трехконтурной
схеме в первом контуре нагретый в реакторе 1 радиоактивный
теплоноситель поступает в парогенератор 6, где отдает теплоту
рабочему телу (пару) и циркуляционным насосом 5 возвраща-
277
Ill
ется в реактор. Во втором контуре пар поступает в промежу-
точный теплообменник 8. Полученный в теплообменнике пар
подается в турбину 2, вращает генератор 3, затем, пройдя через
конденсатор 4, топливными насосами 7, 9 возвращается в тепло-
обменник (третий контур). Таким образом, в трехконтурной АЭС
контуры первичного теплоносителя, которым могут быть вода и
пароводяная смесь, и рабочего Тела (пара) разделены. В этой
схеме радиоактивный контур включает не все оборудование, а
лишь его часть, что упрощает эксплуатацию.
► Радиационная безопасность персонала и населения, что
является важной задачей при эксплуатации атомных электро-
станций, достигается созданием весьма надежных конструк-
ций, устройств защиты персонала от облучения, очисткой
воды и воздуха, извлечением и надежной локализацией
радиоактивных загрязнений.
Гидроэлектрическая станция (ГЭС) вырабатывает электроэнергию с по-
мощью падающего потока воды, создаваемого разностью уровней верхнего и
нижнего водяного пространства (верхнего и нижнего бьефов).
Принцип работы электростанции заключается в том, что по-
ток воды, падающей с верхнего бьефа, направляется на лопатки
рабочего колеса гидротурбины / (рис. 223), установленной на
нижнем бьефе. Колесо гидротурбины / вращает ротор электриче-
ского генератора 2, вырабатывающего электроэнергию. Мощность
ГЭС зависит от расхода и напора И воды.
Разновидностью ГЭС является гидроаккумулирующие элект-
ростанции (ГАЭС), предназначенные для покрытия «пиковых»
нагрузок и заполнения «провалов» в графиках потребления
элекроэнергии. Работа ГАЭС заключается в смене двух раз-
дельных во времени режимов: накопления энергии и отдачи ее
потребителям. Такие станции оснащают обратимыми агрегатами,
которые могут работать в режиме как двигателя, так и генера-
тора.
► Способность гидротурбинного оборудования ГЭС к быстро-
му изменению мощности позволяет использовать их для
покрытия пиковой нагрузки и обеспечения равномерного
режима работы тепловых и атомных электростанций.
Любая электростанция должна вырабатывать электроэнергию
с возможно меньшими затратами. Для уменьшения стоимости
1 кВт установленной мощности на электростанциях одного и
того же типа и параметров стремятся увеличить единичную
мощность основных агрегатов и мощность электростанции в це-
лом. Таким образом, с концентрацией мощностей удешевляется
энергия и снижаются затраты на ее производство.
ЗАПОМНИТЕ
Электротехнические установки характеризуются номиналь-
ным напряжением, т. е. напряжением, которое соответству-
ет номинальной и экономичной работе электрооборудова-
ния. Существует шкала стандартных номинальных напря-
жений переменного тока: 220, 380, 660 В, 3, 6, 10, 20, 35,
НО, 150, 220, 330, 500, 750, 1150 кВ.
На рис. 224 приведена примерная схема распределения
электроэнергии, в которой объединены ГЭС, ТЭС и АЭС, на-
ходящиеся на значительном расстоянии от потребителей элект-
роэнергии, а также ТЭЦ, расположенная в центре промышлен-
ного района. Вырабатываемая генераторами электроэнергия
(обычно напряжением 10 кВ) подается на повышающие транс-
форматорные подстанции, на которых напряжение повышается
до 220 и 500 кВ, и по линиям электропередачи поступает
на районную понижающую подстанцию А, служащую для связи
между двумя станциями. Линии электропередачи Л1, Л2. ЛЗ, Л4
образуют кольцевую сеть напряжением НО кВ. Внутри этого
кольца расположены понижающие трансформаторные подстан-
ции с вторичным напряжением 10 кВ, питающие промышлен-
ные и сельскохозяйственные предприятия. В центре промышлен-
ного района расположена ТЭЦ, снабжающая потребителей
электроэнергией и теплотой. От главной питающей понижаю-
щей подстанции (ГПП) электроэнергия подается на распреде-
279
280
лительный пункт РП, а от него — на понижающие подстанции,
расположенные непосредственно возле потребителей. К электро-
приемникам электроэнергия передается при напряжении 660 В
или 380/220 В.
Наиболее распространенная схема соединения источников
электрической энергии (генераторов с потребителями) приведена
на рис. 225. Для бесперебойного электроснабжения потребите-
лей и удобства оперативных переключений в схеме предусмотре-
ны рабочая А и резервная Б системы шин, последняя позволяет
выводить основную рабочую систему шин 'при авариях из эксплу-
атации, проводить осмотр или ремонт без перерыва питания
потребителей. Для этой цели используют секционный выключа-
тель В1, шиносоединительные выключатели В2, выключатели В
и разъединители Р.
§ 94. Электрические сети. Подстанции.
Распределение электрической энергии
Часть электроэнергетической системы, предназначенная для передачи и
распределения энергии потребителям, называется электрической сетью.
В состав электрической сети входят линии электропередачи
различных напряжений, трансформаторные, распределительные
и преобразовательные подстанции.
На трансформаторных подстанциях (повышающих и пони-
жающих) устанавливают трансформаторы, служащие для из-
менения напряжения. Одновременно с трансформацией обычно
изменяется и количество линий. Например, подходят 1—2 ли-
281
нии высокого напряжения, а отходят несколько линии низкого
напряжения.
► Различают два типа трансформаторных подстанций: откры-
тые, в которых основное оборудование располагается на
открытых площадках, и закрытые, оборудование которых
размещено в помещениях.
Если на подстанции трансформация напряжения не производится, а изме-
няется только количество линий, то она называется распределительной.
Преобразовательные подстанции используют для выпрямле-
ния переменного тока или преобразования постоянного в пере-
менный. На всех подстанциях устанавливают аппараты для
переключения электрических цепей и различные контрольно-
измерительные приборы.
► Электрические сети подразделяют по напряжению на сети
низкого до 1 кВ и высокого — более 1 кВ напряжения.
Большинство промышленных предприятий питаются элект-
рической энергией от подстанций. На подстанциях устанавлива-
ется два и более трансформаторов, через которые энергия от
энергосистемы по линиям высокого напряжения (35, НО или
220 кВ) передается на секционированные рабочие (или резерв-
ные) шины при напряжении 6—10 кВ. Иногда связь подстанции
со станциями системы осуществляется кабельными линиями 6—
10 кВ без трансформации энергии. С шин подстанции электро-
энергия распределяется по промышленным предприятиям и дру-
гим потребителям.
► Для понижения напряжения на цеховых подстанциях ус-
танавливают понижающие трансформаторы, которые полу-
чают питание от шин распределительного устройства РУ и
отдают энергию со стороны низшего напряжения цеховым
потребителям.
В зависимости от значимости потребителей, их мощности и
внешней схемы электроснабжения существует несколько вариан-
тов питания трансформаторных подстанций.
На рис. 226 приведен пример радиальной схемы питания
четырех трансформаторных подстанций ТП1—ТП4. Электроэнер-
гия передается при такой схеме по радиальным линиям, которые
не имеют разветвлений от пункта питания до пункта потреб-
ления. Достоинством радиальных схем является простота эксплу-
атации, удобство устройства защиты и автоматизации. Недоста-
ток ее состоит в том, что при выходе из строя питающей линии
производственный объект лишается электроэнергии на время,
необходимое для определения места повреждения и производ-
ства восстановительных работ. Кроме того, на каждой из линий
устанавливают комплекты переключающей аппаратуры, что
увеличивает капитальные затраты. На рисунке обозначены вы-
ключатели В, ВН и разъединители Р.
На современных установках линии, отходящие от распреде-
лительного устройства, соединяются с ним чаще всего комплект-
282
РУ 6-10 к 8
226
ними распределительными устройствами (КРУ). Общий вид од-
ной ячейки КРУ представлен на рис. 227. Выключатель 1 вместе
с приводом 2 установлен на выкатной тележке 4. Ячейка КРУ
состоит из нескольких отсеков: сборных шин 8, выкатной те-
лежки 3, трансформаторов тока 7, отходящей кабельной линии
6 и измерительных приборов 9. Выключатель 1 с помощью штеп-
сельных разъемов 5 присоединяется к стационарной части
ячейки. При выкатывании тележки 4 подвижные контакты
разъемов выходят из гнезд неподвижных контактов и выключа-
тель отсоединяется от сборных шин и кабельной линии. Эту
операцию проводят при отключенном выключателе, что обеспечи-
вается соответствующими блокировками. Отверстия для штеп-
сельных разъемов при выкатывании тележки закрываются
металлическими шторами, которые предотвращают доступ к
частям ячейки, находящимся под напряжением. Более рацио-
нальным является применение магистральных схем питания
трансформаторных подстанций.
Магистральной линией (магистралью) называется линия, предназначенная
для передачи электроэнергии к нескольким пунктам распределения или элект-
роприемннкам, присоединенным к ней в нескольких местах по ее длине.
В тех случаях, когда промышленное предприятие получает
электроэнергию от двух различных источников питания, целе-
сообразно применять схему магистрали с двусторонним пита-
нием (рис. 228). Такая магистраль обычно разомкнута. При
аварии, например, на одном из головных участков часть маги-
283
227
страли отключается выключателем, установленным на РУ. После
отыскания и отсоединения разъединителями аварийного участка
остальная часть магистрали питается от другого РУ при замкну-
том разъединителе Р. Применение находят также магистраль-
ные схемы с резервной магистралью МР (рис. 229), которая
включается выключателем ВР при выходе из работы одной из
магистралей.
Электрические сети выполняются неизолированными и изо-
лированными проводами и кабелями. Способ прокладки прово-
дов может быть воздушный, а кабелей — подземным и под-
водным. Неизолированные провода воздушных линий большей
частью выполняют многожильными витыми из медной, алюминие-
вой или стальной проволоки.
Кабель представляет собой систему изолированных друг от
друга многожильных проводов из меди или алюминия, заклю-
ченных в общую герметичную оболочку. От механических по-
вреждений кабель защищен броней из стальной ленты. Вне зда-
ний кабельные линии прокладывают в земляных траншеях, в
специальных железобетонных трубах или коллекторах. При этом
облегчаются условия замены поврежденных кабелей.
Внутренние проводки выполняют изолированными проводами
на изоляторах по стенам и потолкам зданий в трубах или внут-
ри стен и потолков. В цехах промышленных предприятий ис-
284
п/ст1
РУ 6-10 к В
О/ст 2
РУ 6-10 кВ
228
РУ 6- 10 кВ
229
пользуют также шины, проложенные на изоляторах и помещен-
ные в магистральные / и распределительные 2 шинопроводы
(рис. 230).
Провода для сетей до 35 кВ выбирают по экономической
плотности тока и по потере напряжения.
Экономическое сечение проводов определяют по формуле
Зэк = /тах//эк, где /тах — наибольший длительный ток при нор-
мальном режиме работы, А; /эк — экономическая плотность тока,
А/мм2 (выбирается по справочнику).
► Расчет линий электропередачи на потерю напряжения сво-
дится к определению разности АС/ между фазными напря-
жениями в начале и в конце линии, которая не должна пре-
вышать 2,5—5% от номинального напряжения.
285
1
230
Потеря напряжения в двухпроводных линиях постоянного и
переменного тока напряжением до 1 кВ определяется по формуле
MJ = 2PZ/(£7hYS),
а потеря напряжения в линиях трехфазного тока напряжением
выше 1000 В по формуле
MJ = (Pl/U„)-( гл совфИ-Хл sinq>),
где Р — расчетная мощность, передаваемая по линии, Вт, П„ —
номинальное напряжение, В, / — длина участка линии, км, у —
удельная проводимость материала проводника 1/Ом-м, S — се-
чение провода, мм2; гл — активное сопротивление 1 км линии,
Ом/км, хл — реактивное сопротивление 1 км линии, Ом/км, ф —
угол сдвига фаз между током и напряжением, рад.
Механическую прочность рассчитывают только для воздуш-
ных линий. В правилах устройства электроустановок (ПУЭ)
определены наименьшие значения сечения проводов воздушных
линий, обеспечивающие достаточную их механическую прочность
в зависимости от условий эксплуатации.
Сечение проводников цеховых сетей: проводов, кабелей и
шин -— выбирают по нагреву токами нагрузки. Для этого опреде-
286
ляют расчетный ток нагрузки /р приемника и по нему выбирают
по соответствующим справочным данным провод с алюминиевы-
ми или медными жилами с различными видами изоляции так,
чтобы /Р^/Пр> где /р — расчетный ток проводника, /пр — длитель-
но допустимый ток нагрузки проводника.
► Силовые и осветительные сети цехов промышленных пред-
приятий должны быть защищены от перегрева токами при
перегрузке или коротком замыкании. Соотношение между
номинальными токами защитных аппаратов и длительно
допустимым током нагрузки проводника должно быть:
для номинального тока плавкой вставки предохранителя
В Сп ,
для номинального тока расцепителя автоматического вы-
ключателя с зависимой от тока характеристикой /а^1,5/пр.
Выбранные проводники цеховых сетей проверяют также по
потере напряжения и механической прочности. Минимальное
сечение проводников по механической прочности 1,0—2,5 мм2.
С развитием централизованных мощностей совершенствуется
техника передачи электроэнергии, повышается ее экономическая
эффективность. Постоянно растут параметры ЛЭП — их длина,
а также пропускная способность. Чтобы увеличить пропускную
способность ЛЭП, требуется повышать напряжение. В настоя-
щее время основными межсистемными связями ЕЭС страны яв-
ляются линии напряжением 500 и 750 кВ. Следующая ступень
повышения напряжения— 1150 кВ.
§ 95. Электроснабжение промышленных
предприятий
ЗАПОМНИТЕ
Потребление электроэнергии промышленными предприятия-
ми, транспортом, в быту, в сельскохозяйственном произ-
водстве изменяется как в течение суток, так и в течение
года. Режим потребления электроэнергии во времени харак-
теризуется графиком нагрузки. В зависимости от времени
различают графики суточные (зимние, летние) и годовые.
Характер суточных графиков нагрузки зависит от состава
потребителей (бытовая, промышленная, транспортная и др.).
График бытовой нагрузки имеет резко выраженный вечерний
максимум. Промышленная нагрузка изменяется в течение суток
в зависимости от сменности предприятий. В утренние часы, когда
начинают работу предприятия, включается освещение в кварти-
рах, приводится в движение, городской электрический транспорт,
потребление электроэнергии значительно возрастает, наступает
утренний максимум нагрузки-. Днем нагрузка несколько снижа-
ется, а вечером (в 18—20 ч местного времени) снова достигает
287
максимальных значений, так как в это время напряженно рабо-
тает электрический транспорт, многочисленные бытовые приборы,
включается освещение.
► Площадь графика выражает в определенном масштабе ко-
личество потребленной энергии.
На потребление электрической энергии оказывает влияние и
время года. Например, в зимнее время электроэнергии на осве-
щение и отопление расходуется больше. Создание Единой энер-
госистемы позволяет за счет 3—5-часовой разницы во времени
в восточных и западных районах страны снизить пики суммар-
ного суточного потребления.
> По степени обеспечения надежности электроснабжения и
бесперебойного питания все потребители электрической
энергии делят на три категории, определяющие число ис-
точников электроэнергии и схему электроснабжения.
К первой категории относятся потребители, перерыв электро-
снабжения которых может повлечь за собой опасность для жизни
людей, значительный ущерб народному хозяйству, повреждение
дорогостоящего основного оборудования, массовый брак продук-
ции, нарушение функционирования особо важных элементов ком-
мунального хозяйства. Они должны получать электроэнергию
не менее чем от двух независимых и взаимно резервирующих
источников питания.
Вторую категорию потребителей образуют электроприемники,
перерыв электроснабжения которых приводит к недоотпуску про-
дукции, массовым простоям рабочих, механизмов и промышлен-
ного транспорта, нарушению нормальной деятельности значитель-
ного количества городских и сельских жителей. Они могут обес-
печиваться электроэнергией от двух независимых источников.
При нарушении электроснабжения от одного из них допустимы
перерывы электроснабжения на время, необходимое для вклю-
чения резервного питания дежурным персоналом или выездной
оперативной бригадой.
Все остальные виды потребителей электроэнергии относят к
третьей группе. Электроснабжение этих потребителей допускает-
ся от одного источника.
► Нормальная работа любого потребителя электроэнергии
требует не только бесперебойного электроснабжения, но и
обеспечения определенного качества электрической энер-
гии, к показателям которого относят: отклонения напряже-
ния и частоты от заданных номинальных значений, коле-
бания напряжения и частоты, несинусоидальность формы
кривой напряжения, несимметрия трехфазной системы на-
пряжения.
Под отклонением частоты понимают разность между фактическим значе-
нием частоты и ее номинальным значением в интервале 10 мин.
Это отклонение не должно превышать ±0,1 Гц. Сверх такого
отклонения допускаются колебания частоты не более 0,2 Гц/с.
288
Средством поддержания частоты является включение в работу
дополнительных генераторов или разгрузка системы путем огра-
ничения или отключения потребителей третьей группы.
ЗАПОМНИТЕ
Допустимые отклонения напряжения для разных потреби-
телей различны. Так, например, для освещения они состав-
ляют —2,54-5%, для электродвигателей —5-? 4-10%; для
остальных протребителей — ±5% от номинального.
Для ограничения отклонений и колебаний напряжения пере-
ключают ступени напряжения силовых трансформаторов на под-
станциях, включают на параллельную работу или отключают
резервные трансформаторы, линии и генераторы электростанций.
Промышленные предприятия, как правило, получают электро-
энергию от подстанций районных энергосистем и имеют свои
внутренние электрические сети. Внутренние сети делятся на меж-
цеховые и внутрицеховые.
Небольшие предприятия получают питание от ближайших под-
станций энергосистем по одной или
имеют простейшие внутренние се-
ти. Более крупные предприятия
обычно питаются от одной или
двух крупных подстанций при на-
пряжении НО—220 кВ, а также
могут иметь собственную тепло-
вую электростанцию, дающую
электроэнергию и теплоту для
технологических нужд. Крупное
предприятие имеет по существу
свою небольшую местную энерго-
систему, связанную с районной
линиями электропередач.
► Схема электроснабжения
предприятия определяется
характером электрической
нагрузки, особенностями дан-
ного производства.
Электрическая нагрузка раз-
личных промышленных предприя-
тий может быть от нескольких де-
сятков до миллионов киловатт.
Принципиальная схема внутрице-
ховой подстанции приведена на
рис. 231.
Большинство приемников по-
требляет электрическую энергию
двум линиям — 6—10 кВ и
6-10к8
380/2208
19—85
289
переменного тока индуктивного характера. К ним прежде всего
относятся асинхронные двигатели и трансформаторы. Мощность
таких потребителей при заданных значениях тока и напряжения
зависит от коэффициента мощности cosip. Коэффициент мощно-
сти показывает, как используется номинальная мощность источ-
ника. Зависимость потерь мощности от коэффициента мощности
имеет вид
\P = RJ2 = /?лР2/(£/2 cosip).
При номинальном режиме потребители имеют довольно вы-
сокий cosip = 0,74-0,9, но при малой нагрузке коэффициент мощ-
ности мал. Наличие реактивной энергии в линиях и трансформа-
торах ведет к дополнительным потерям энергии и напряжения,
уменьшает пропускную способность линий электропередачи. По-
этому по возможности стараются приближать источник реактив-
ной энергии к местам ее потребления.
Источниками реактивной энергии являются так называемые
компенсирующие устройства: конденсаторные батареи и синхрон-
ные компенсаторы. На промышленных предприятиях для компен-
сации реактивной мощности чаще применяют конденсаторные
батареи.
Большое значение для промышленных предприятий в целях
повышения коэффициента мощности имеет применение синхрон-
ных двигателей, позволяющих посредством изменения тока воз-
буждения регулировать потребление реактивной энергии.
ЗАПОМНИТЕ
Помимо применения компенсирующих устройств коэффи-
циент мощности промышленных предприятий необходимо
улучшать путем рационального использования установлен-
ных мощностей, ограничения режимов холостого хода дви-
гателей и трансформаторов, замены малозагруженных дви-
гателей двигателями меньшей мощности, упорядочения
энергетического режима оборудования.
Какими бы темпами не развивалась энергетика, важнейшей
ее задачей является экономия энергии. К мерам по экономии
энергетических ресурсов относятся прежде всего экономия энер-
гии в процессе производства, преобразования и передачи энер-
гии, более эффективное использование электрической и тепловой
энергии путем внедрения прогрессивных технологических процес-
сов, снижение металлоемкости продукции, улучшение организа-
ции производства, снижение потерь всех видов продукции, заме-
на дорогих и органических видов топлива более дешевыми и
доступными.
290
САМОЕ'ВАЖНОЕ
1. В зависимости от вида преобразуемой энергии (механи-
ческой, световой, химической и т. д.) электростанции под-
разделяют на тепловые, гидравлические, атомные, ветря-
ные, солнечные и т. д.
2. Производство и потребление электрической энергии —
единый процесс.
3. Крупные электростанции объединяют в энергосистемы,
что повышает надежность, обеспечивает бесперебойность
энергоснабжения потребителей, а также улучшает исполь-
зование их мощности.
5. Экономия электроэнергии — одна из основных задач
электроэнергетики.
Темы докладов и рефератов
1. Производство электрической энергии как единый во вре-
мени и непрерывный процесс ЕЭС СССР.
2. Сравнительные технико-экономические характеристики теп-
ловых, атомных и гидравлических электростанций.
3. Выбор сечения проводов для линий электропередач и це-
ховых сетей.
4. Электроснабжение промышленных предприятий.
5. Трансформаторные подстанции, КРУ и их назначение.
6. Пути экономии электроэнергии на производстве и в быту
(по профилю профессии).
7. Перспективы развития электроэнергетики к 2000 г.
9 Что понимают под электрификацией?
Что называют электроэнергетической системой?
Какие типы электростанций существуют?
С какой целью электростанции объединяют в электроэнергетическую
систему? Что представляет собой ЕЭС СССР?
Поясните принцип получения электроэнергии на конденсационной элек-
тростанции (КЭС) и ТЭЦ.
Поясните процесс ’получения электроэнергии на атомных электростан-
циях (АЭС) и каковы преимущества атомных электростанций перед теп-
ловыми?
В чем состоит принцип получения электроэнергии на гидроэлектро-
станции (ГЭС)?
Составьте схему передачи электроэнергии на расстояние.
Каково назначение трансформаторных подстанций? Какое оборудование
включает в себя трансформаторная подстанция?
10. Что называется коэффициентом мощности? Назовите способы его улуч-
шения.
Проанализируйте и сравните (по рисунку в учебнике) потребление
энергии различными потребителями в течение-суток. Какие вы знаете пути
экономии электроэнергии на производстве? в быту?
Что понимают в электроэнергетике под экономией энергии и теплоты?
Назовите пути уменьшения потерь электроэнергии на вашем рабочем
месте.
19*
ЭЛЕКТРОПРИВОД
§ 96. Основные понятия и определения.
Классификация электроприводов
Электроприводом называется электромеханическая система, преобразующая
электрическую энергию в механическую одного или нескольких рабочих меха-
низмов.
Электропривод включает в себя системы преобразования,
передачи и распределения энергии и управление этими про-
цессами и бывает групповой, индивидуальный и взаимосвя-
занный.
В групповом приводе один электродвигатель приводит в движение с по-
мощью разветвленной передачи группу механизмов или группу рабочих органов
одного механизма, например несколько станков или различные рабочие органы
одного станка.
В таком приводе кинематическая схема оказывается сложной
и громоздкой, а сам привод неэкономичным, поэтому в настоящее
время он находит лишь ограниченное применение.
Привод, в котором электродвигатель приводит в движение только один ра-
бочий орган, получил название индивидуального.
Индивидуальный электропривод существенно упрощает кине-
матическую схему механизма, повышает экономичность и позво-
ляет в ряде случаев встраивать электродвигатель непосредствен-
но в механизм, что уменьшает его металлоемкость. Примером
такого сочетания электродвигателя с рабочим органом может
служить различный электроинструмент: электродрель, электрото-
чило, электрошпиндель и др.
Взаимосвязанным называют привод, в котором рабочие органы одного ме-
ханизма приводятся в движение несколькими электродвигателями.
Взаимосвязанный электропривод может состоять из несколь-
ких индивидуальных электроприводов, участвующих в общем
технологическом процессе и установленных на одном производ-
ственном комплекте. Например, в металлорежущих станках уста-
навливают отдельные приводы главного движения заготовки ре-
жущего инструмента и приводы подач. Промышленные роботы
снабжаются несколькими отдельными приводами. Во взаимосвя-
занном приводе возможна работа нескольких электродвигателей
на один рабочий орган, что позволяет снизить усилия в рабочем
органе и передаче, распределить их в механизме более равномер-
но, избежать перекосов и т. д.
292
► Основная функция электропривода — приводить в движе-
ние рабочий механизм и изменять его режим работы в со-
ответствии с требованиями технологического процесса.
Для выполнения этой функции электропривода должно быть
выдержано определенное соответствие между механическими
свойствами электродвигателя и рабочего механизма. Рабочий
орган механизма реализует подведенную к нему механическую
энергию в полезную работу. Передача механической энергии от
вала двигателя к рабочему органу сопровождается потерями,
причиной возникновения которых является трение в подшипни-
ках, направляющих, зацеплен ях и т. д.
Для удобства выбора электродвигателя момент или усилие,
создаваемые рабочим органом, и потери в передачах приводят
к моменту на валу двигателя. Мощность на валу электродвига-
теля равна сумме мощности рабочего органа Рр.о и мощности
потерь в передаче АР: Р — P'v,0 -(- АР, где Р'р0 = Pv.0/i — мощность,
приведенная к валу двигателя, i — передаточное число редук-
тора.
С учетом кпд передачи т)пер мощность на валу двигателя и
момент определяются по выражениям
Р— Рр.о/'Ппер» М — Мр0/цпер.
От свойств электропривода зависят механические характе-
ристики рабочего механизма и электродвигателя. При этом
различают два режима работы электропривода: установив-
шийся (статический) и переходный (динамический). В пер-
вом режиме момент или усилие нагрузки не изменяется.
Во втором режиме момент или усилие нагрузки и двигателя
изменяются во времени. В переходных режимах двигатель
работает с ускорением или замедлением: разгоняется при
пуске, замедляется при торможении.
§ 97. Режимы работы и выбор электродвигателя
Несмотря на большое разнообразие рабочих механизмов их
механические характеристики практически могут быть объеди-
нены в три группы. Первая группа характеризуется тем, что
момент на валу электродвигателя остается постоянным при лю-
бой частоте вращения. К этой группе относятся подъемно-транс-
портные механизмы. Действительно, если кабина лифта запол-
нена пассажирами, то независимо от частоты вращения момент
сопротивления остается постоянным. Такая же картина наблю-
дается при подъеме груза краном.
Вторая большая группа характеризуется степенной зависимо-
стью момента от частоты вращения. Примером могут служить
вентиляторы, насосы, компрессоры центробежного типа и другие
механизмы. Так, момент на валу вентилятора может характе-
293
ризоваться квадратичной и большей степенью в зависимости от
егб конструктивных особенностей.
Третья группа характеризуется постоянством мощности на
валу: Р = const. Примером может служить токарный станок, где
обработка детали ведется от периферийной окружности к центру.
По мере продвижения резца момент сопротивления падает, а
частота вращения обычно увеличивается.
► Выбор электродвигателя определяется условиями работы и
требованиями производственного механизма. При этом наи-
более целесообразно выбирать электродвигатель более про-
стой, надежный в эксплуатации и имеющий наименьшую
массу, размеры и стоимость. Если требуется выбрать регу-
лируемый по скорости привод, то необходимо одновременно
выбирать электродвигатель и преобразователь.
В последнее время регулируемый привод выпускается комп-
лектно, т. е. электродвигатель поставляется совместно с преоб-
разователем.
► В любом случае выбирают следующие параметры электро-
двигателя: род тока, номинальное напряжение, мощность
и частоту вращения, способ регулирования, режим работы
и конструктивное исполнение.
Наиболее простыми по конструкции, надежными в эксплуата-
ции, имеющими наименьшую массу, размеры и стоимость, явля-
ются асинхронные двигатели с короткозамкнутым ротором. Уп-
равление ими обычно осуществляется непосредственно от трех-
фазной сети переменного тока без каких-либо сложных преоб-
разователей. Эти двигатели получили наиболее широкое приме-
нение во всех отраслях производства для механизмов, не тре-
бующих регулирования скорости, при небольшой частоте вклю-
чений.
Асинхронные двигатели с фазным ротором по конструкции
сложнее двигателей с короткозамкнутым ротором, имеют боль-
шую массу, размеры и стоимость, а также более сложное управ-
ление. Однако они позволяют простыми средствами — резисто-
рами в цепи ротора — регулировать частоту вращения, пусковой
ток и момент. Такие двигатели используются в режимах работы
с частыми пусками и остановками, например в подъемно-транс-
портных механизмах.
Синхронные двигатели, имеющие высокие энергетические по-
казатели, применяют для привода компрессоров, насосов, венти-
ляторов и преобразовательных установок, где не требуется регу-
лирование частоты вращения и крайне редки перерывы в работе.
Двигатели постоянного тока используются для привода меха-
низмов, работа которых сопровождается частыми пусками и
остановками; требуется глубокое регулирование частоты враще-
ния и высокое качество переходных процессов. Как правило,
применяются двигатели постоянного тока независимого возбуж-
дения с использованием преобразователей переменного тока в
регулируемый постоянный.
294
Двигатели постоянного тока последовательного возбуждения
служат для электропривода подъемно-транспортных механизмов,
так как имеют повышенные перегрузочный момент и механиче-
скую прочность.
ЗАПОМНИТЕ
Номинальную угловую скорость Йн электродвигателя выби-
рают в зависимости от известного передаточного числа ре-
дуктора ip и заданной угловой скорости йро рабочего меха-
низма, т. е. й„ = Qpoip.
Наивыгоднейшее значение номинальной угловой скорости
двигателя и передаточного числа редуктора для данного меха-
низма определяется путем сравнения нескольких технико-эконо-
мических показателей. Правильное определение этих параметров
особенно важно для приводов, работающих в режимах частых
пусков и торможений, поскольку это влияет на производитель-
ность механизма и потери энергии.
Важное значение для надежной работы электропривода имеет
выбор конструкции двигателя. Для большинства производствен-
ных механизмов используются двигатели с горизонтальным рас-
положением вала и лапами для его крепления к несущим кон-
струкциям, а также с фланцевым креплением. Более совершен-
ными являются встраиваемые двигатели, которые не имеют ста-
нины, подшипниковых щитов, а иногда и вала. Их монтируют
в корпусах самих рабочих механизмов. Линейные двигатели при-
меняются в механизмах с поступательным движением рабочего
органа.
По способу защиты от действия окружающей среды электро-
двигатели делятся на открытые, защищенные, в том числе капле-
защищенные и герметичные.
При выборе мощности двигателя исходят из того, что на-
грузка на его валу изменяется во времени.
► Для определения нагрузки в этих случаях строятся так
называемые нагрузочные диаграммы — зависимости разви-
ваемых двигателем момента и мощности от времени, т. е.
M(t) и P(t).
В случае завышения номинальной мощности двигателя сни-
жаются кпд и коэффициент мощности, что приводит к росту тока
в обмотках, а значит, и к перегреву двигателя и снижению срока
его службы.
Продолжительный режим работы (рис. 232) двигателя ха-
рактеризуется такой длительностью, при которой его температура
достигает своего установившегося значения туст. В таком режиме
работают, например, приводы вентиляторов, насосов, преобразо-
вательных установок.
В повторно-кратковременном режиме двигатель за время ра-
боты не успевает нагреться до установившейся температуры,
а за время паузы между включениями не успевает остыть до
295
232
температуры окружающей среды. Такой режим работы характе-
рен, например, для электроприводов подъемных кранов, лебедок,
лифтов, циклических конвейеров и т. п. Графики нагрузки, мощ-
ности потерь в двигателе и его температуры т при повторно-
кратковременном режиме работы приведены на рис. 233. На гра-
фиках /Р|, /Р2, <рз — время работы двигателя при первом, втором
и третьем включениях; /Оь 4>г, <оз— время пауз между включе-
ниями двигателя; Ти — время цикла, после которого график на-
грузки повторяется. Время цикла при повторно-кратковременном
режиме не должно превышать 10 мин. На это время рассчитыва-
ется тепловой режим двигателя при его конструировании.
При кратковременном режиме работы двигатель не успевает
в рабочий период нагреться до установившейся температуры,
а пауза столь длительна, что температура снижается до темпе-
ратуры окружающей среды. Такой режим работы характерен,
например, для приводов шлюзов, вспомогательных механизмов
электротермических установок, зажимов колонн металлорежущих
станков и др.
В продолжительном режиме двигатель работает либо с неиз-
менной нагрузкой (см. рис. 232, а), либо с изменяющейся во
времени нагрузкой (см. рис. 232,6).
► При постоянной нагрузке на валу номинальная мощность Р„
двигателя должна быть выбрана равной мощности Рс иа-
296
грузки. В этом
случае по катало-
гу выбирается дви-
гатель, удовлетво-
ряющий условию
Р«>РС-
Если при продолжи-
тельном режиме рабо-
ты нагрузка на валу
двигателя изменяется,
то для выбора мощно-
сти по нагреву исполь-
зуют методы средних
потерь за цикл или эк-
вивалентных величин:
тока, момента и мощ-
ности.
Метод средних по-
терь заключается в на-
хождении АРСр при за-
данном графике на-
грузки и сравнении их
с номинальными поте-
рями АРН, на которые
рассчитан двигатель
при длительной работе.
Метод является поверочным,
233
поскольку до выбора мощности
двигателя его номинальные потери неизвестны и поэтому при-
нимают ориентировочно мощность двигателя обычно на 10—30%
больше мощности за цикл.
На практике для определения мощности двигателя пользу-
ются нагрузочными диаграммами, представляющими собой зави-
симости момента или мощности от времени. Значение эквива-
лентной (среднеквадратичной) мощности двигателя определяют
по формуле
где п — число участков с различными значениями мощности Pt
за цикл Гц (см. рис. 232, 6) работы двигателя.
Условием правильного выбора мощности двигателя в этом
случае будет
Метод эквивалентной мощности применяют для двигателей
постоянного тока независимого возбуждения и асинхронных дви-
гателей, работающих при неизменной угловой скорости с ред-
кими пусками и остановами.
297
Повторно-кратковременный режим (ПВ) работы двигателя,
график которого приведен на рис. 233, характеризуется продол-
жительностью включения
/7В = (2/Р/Гц)-100.
Для работы в повторно-кратковременном режиме выпускают
специальные двигатели, рассчитанные на стандартные значения
продолжительности включения: 15, 25, 40, 60%, на которые и сле-
дует ориентироваться при выборе двигателя по мощности для
такого режима.
Если нагрузка за цикл не меняется, но ПВ=£ ПВ„, это озна-
чает, что двигатель выбран по мощности правильно: средняя
мощность потерь за цикл при ПВ не превышает среднюю мощ-
ность потерь за тот же цикл при Рн и ПВСГ, т. е. \Р\ПВ^.\Р„ПВ^.
Условие выбора двигателя при этом принимает вид
ЬР^ЬР^ПВ/ПВп).
Проверка предварительно выбранного двигателя по мощно-
сти проводится по формуле
Если при работе электропривода наблюдаются резкие колеба-
ния нагрузки, то следует проверить перегрузочную способность
электродвигателя. Для асинхронного двигателя она определяется
отношением критического Мк к номинальному Л4„ моменту:
Мк/Мн.
Р„^Р^ПВ/ПВСГ.
§ 98. Управление электроприводами
► Системы управления электроприводами подразделяются на
два вида. К первому виду относятся разомкнутые системы,
обеспечивающие автоматизацию процессов пуска, торможе-
ния, изменения скорости, защиту и т. д., ко второму виду —
замкнутые системы управления, в которых используются
различные обратные связи: по скорости, эдс, току и т. д.
Обратные связи совместно с задающим — управляющим
сигналом позволяют формировать статические и динамиче-
ские характеристики электроприводов в соответствии с за-
данными технологическими требованиями.
Системы управления электроприводов состоят из типовых
узлов, выполняющих отдельные функции.
Разомкнутые системы управления
электроприводами
Одной из главных функций управления электроприводом <
являются пуск и отключение двигателя.
Электрическая схема управления асинхронным двигателем
приведена на рис. 234. Пуск асинхронного короткозамкнутого
298
двигателя М производится путем подключения обмотки статора
к сети силовыми контактами контакторов КВ или КН, катушки
которых подключаются к двум фазам питающей сети при замы-
кании кнопок S1 или S2. Блокировочные замыкающие контак-
ты КВ и КН шунтируют кнопки SI, S2, что позволяет отпускать
их после кратковременного нажатия. Двигатель отключается при
нажатии на кнопку S3, размыкающий контакт которой разры-
вает цепь питания катушек контакторов.
► Использование контакторов для управления включением и
отключением двигателя позволяет производить эти опера-
ции дистанционно и, кроме того, обеспечить защиту от
перегрузок, коротких замыканий и снижения напряжения.
Тепловые реле РТ1 и РТ2 защищают двигатель от длитель-
ных перегрузок, превышающих номинальную нагрузку на
10—20%. При срабатывании одного из тепловых реле его раз-
мыкающий контакт РТ1 или РТ2 размыкается и разрывает цепь
питания катушек контакторов КВ, КН. Если напряжение сни-
зится до значения, меньшего 0,8£7н, двигатель отключается от
сети, так как магнитный поток, создаваемый катушкой контак-
тора при таком напряжении, недостаточен для удержания якоря
контактора во включенном состоянии. Плавкие предохраните-
ли F защищают силовую цепь от коротких замыканий. Два
контактора КВ и КН используются для реверсивного управле-
ния асинхронным двигателем, особенностью которого является
необходимость введения в цепь управления блокирующих кон-
тактов КВ и КН, исключающих короткое замыкание в силовой
299
цепи, которое могло бы произойти при одновременном включе-
нии обоих контакторов.
Если необходимо затормозить двигатель после отключения
его от сети, то применяют динамическое торможение. Для этого
на обмотку статора посредством контактора КТ подают напря-
жение от сети постоянного тока (рис. 235, а) или от сети пере-
менного тока через полупроводниковый выпрямитель. Управле-
ние динамическим торможением производится с помощью реле
времени РВ, контакт которого в цепи катушки контактора тор-
можёния КТ открывается с выдержкой времени после отключе-
ния контактора КЛ. Реле времени настраивается таким образом,
чтобы его выдержка была несколько больше времени торможе-
ния двигателя. Характеристика динамического торможения дви-
гателя приведена на рис. 235, б.
Для быстрого торможения двигателя используется режим
противовключения (рис. 236, а). Контактор КТ подключает об-
мотку статора к сети таким образом, что поле статора враща-
ется в сторону, противоположную направлению вращения ро-
тора, что приводит к процессу торможения противовключением.
Процесс торможения контролируется с помощью реле, контроля
угловой скррости КС, подвижный элемент которого устанавли-
вается на валу двигателя. Если двигатель вращается, то кон-
такт реле КС замкнут. Характеристики при торможении асин-
300
хронного двигателя противовключением приведены на рис. 236,6.
При скорости двигателя, близкой к нулю, контакт реле КС раз-
мыкается, а контактор КТ отключает двигатель от сети.
Управление асинхронными двигателями с фазным ротором
осуществляется путем переключения резисторов в цепи ротора
(рис. 237). Пуск происходит в функции времени в две ступени,
а торможение — противовключением. В силовой цепи схемы
включены рубильник Q, контакты силового контактора КП, ре^
версирующих контакторов КВ и КН и три катушки реле макси-
мального тока КМ, имеющего контакт в цепи управления. В ро-
торную цепь двигателя включены три ступени резисторов, огра-
ничивающих ток при противовключении и пуске, которые шунти-
руются контактами КП, КУ1, КУ2.
Цепи управления асинхронным двигателем с фазным ротором
обычно подключаются к сети постоянного тока рубильником Q1
через плавкие предохранители F.
В схеме управления используется релейно-контакторная аппа-
ратура постоянного тока, более надежная в работе, чем аппа-
ратура переменного тока, и допускающая большее число сраба-
тываний в час.
Пуск двигателя с ограничением тока и регулирование частоты
вращения осуществляется с помощью командоконтроллера S
(рис. 237), который в нейтральном (нулевом) положении ру-
236
301
237
коятки размыкает цепи управления всех контакторов, кроме реле
минимального напряжения KV. Реле KV включается только в
нулевом положении командоконтроллера S и обеспечивает защи-
ту при исчезновении напряжения в сети, т. е. не позволяет вклю-
чить повторно двигатель при подаче напряжения, если командо-
контроллер находится не в нулевом положении. Командоконтрол-
лер S имеет по три рабочих положения при перемещении рукоят-
ки вправо и влево. После замыкания контактов реле KV пере-
мещение рукоятки командоконтроллера вправо или влево
(замкнут путевой выключатель SB или SH) приводит к включе-
нию соответствующего контактора направления вращения КВ
или КН и линейного контактора КЛ.
Замыкание цепей командоконтроллера обозначено на схеме
точками. Так, например, в нулевом положении замкнута цепь
катушки реле KV, а цепи контактора КЛ замкнуты в трех поло-
жениях при ходе рукоятки командоконтроллера влево и в трех —
вправо. При переводе рукоятки командоконтроллера сразу на
третью ступень вправо или влево включается контактор противо-
включения КП, который шунтирует часть резисторов в цепи
ротора двигателя. Затем с заданными выдержками времени, от-
302
считываемыми реле времени РВ1 и РВ2, обеспечивающими раз-
гон двигателя до соответствующей скорости, включаются кон-
такторы ускорения КУ1 и КУ2, которые шунтируют соответст-
вующие резисторы в цепи ротора двигателя. При реверсе и тор-
можении двигателя контактор КП остается разомкнутым и в
цепь ротора вводится дополнительное сопротивление.
На рис. 238 приведена схема управления двигателем постоян-
ного тока независимого возбуждения, обеспечивающая пуск в
две ступени в функции времени, изменение направления враще-
ния и динамическое торможение. После включения рубильника
303
под напряжением оказывается только обмотка возбуждения ОВ
двигателя. При нажатии на кнопку S1 включается контактор КВ,
контакты которого в силовой цепи обеспечивают подключение
якоря двигателя М к питающей сети постоянного тока с поляр-
ностью, вызывающей вращение двигателя в направлении «Впе-
ред». Размыкающий контакт КВ в цепи катушки контактора КН
при этом размыкается, исключая тем самым возможность вклю-
чения контактора КН. Замыкающий контакт КВ блокирует
кнопку SI. Пуск двигателя происходит с полностью введен-
ными резисторами в цепи якоря. Особенностью управления
пуском двигателя постоянного тока в функции времени явля-
ется включение реле времени параллельно пусковым резисто-
рам.
При включении двигателя вследствие наличия падения напря-
жения на пусковых резисторах реле времени РВ2 мгновенно
включается и размыкает свои контакты в цепи контактора уско-
рения КУ2. Также включается и размыкает свои контакты в
цепи контактора КБ реле РВ1, которое с этого момента начинает
отсчет выдержки времени. После замыкания контактов реле РВ1
в цепи контактора ускорения КУI шунтируется первая ступень
пускового резистора контактами контактора КУ1 и при этом за-
корачивается обмотка реле РВ2, что приводит к медленному
спаданию магнитного потока реле и замедлению замыкания его
контактов в цепи контактора КУ2. По истечении выдержки вре-
мени, обеспечиваемой реле РВ2, контакты контактора КУ2 за-
мыкают вторую ступень пускового резистора. Двигатель выходит
на естественную характеристику.
Аналогичным образом происходит работа схемы при пуске
двигателя в обратном направлении при нажатии на кнопку S2.
Изменение направления вращения двигателя в рассматриваемой
схеме возможно только после торможения двигателя, осуще-
ствляемого нажатием на кнопку S3. При этом замыкаются кон-
такты КВ и КН в цепи контактора торможения КТ й он включа-
ется, так как контакты реле динамического торможения КДТ
к этому моменту также замкнуты. Напряжение срабатывания
реле КДТ устанавливают равным немногим более половины на-
пряжения питания, что приводит к замыканию его контактов
еще в процессе пуска. Включение контактора КТ обеспечивает
замыкание якоря двигателя на резистор /?, что соответствует
генераторному режиму работы двигателя с преобразованием ки-
нетической энергии, накопленной якорем, в тепловую, выделяе-
мую в резисторе. Происходит быстрое торможение двигателя,
которое заканчивается, когда эдс якоря становится мень-
ше напряжения отпускания реле КДТ, контакты которого раз-
мыкают цепь катушки контактора КТ и отключают рези-
стор К.
Замкнутые системы управления
электроприводами
► Для управления технологическими процессами и установи
ками в большинстве случаев необходим привод, с помощью
которого можно регулировать в широком диапазоне частоту
вращения с хорошими энергетическими показателями.
Такая регулировка возможна при использовании замкнутых
систем управления с обратными связями по основным парамет-
рам двигателя: частоте вращения, напряжению, току, моменту.
Наиболее широкое применение получили замкнутые системы
электропривода с двигателями постоянного тока независимого
возбуждения, управляемыми от электромашинных или вентиль-
ных (тиристорных) преобразователей переменного тока в регули-
руемый постоянный.
В качестве преобразователей переменного напряжения в регу-
лируемое постоянное получили применение тиристорные преоб-
разователи (см. гл. 8).
На рис. 239 приведена замкнутая схема управления двига-
телем постоянного тока с тиристорным преобразователем. Якорь
двигателя М, частоту вращения которого необходимо регулиро-
вать, подключается непосредственно к выходным зажимам трех-
фазного однополупериодного выпрямителя, выполненного на ти-
ристорах VI —V3, включенных во вторичную цепь трансформа-
тора Т. Формирование импульсов управления тиристорами
VI —V3 и регулирование их фазового сдвига относительно точки
естественного отпирания обеспечивается системой импульсно-
фазового управления (СИФУ), на вход которой подается напря-
жение управления Uy и сигнал обратной связи по частоте вра-
щения Uoc(n), снимаемый с тахогенератора ТГ.
Выпрямленное напряжение тиристорного преобразователя со-
20—85
305
держит постоянную и переменную составляющие; последняя ока-)
зывает неблагоприятное влияние на процесс нагрева и коммута-
цию двигателя. Для уменьшения переменной составляющей в
цепь якоря вводят сглаживающий реактор L.
► Тиристорные преобразователи работают в двух режимах:
выпрямительном, когда угол включения а<л/2, выходное
напряжение положительно и совпадает по знаку с током
преобразователя, а мощность передается от сети перемен-
ного тока в нагрузку, которой является двигатель М,
и инверторном, когда а^л/2, выходное напряжение отри-
цательно и направлено встречно току преобразователя, а
мощность передается от нагрузки в сеть переменного тока.
Выпрямительный режим тиристорного преобразователя со-
ответствует режиму вращения двигателя. При инверторном
режиме происходит торможение двигателя, изменение ско-
рости с высокой на низшую.
Особенностью тиристорных преобразователей является одно-
сторонняя проводимость. При изменении знака выходного напря-
жения тиристорного преобразователя в инверторном режиме ток
изменить направление не может. Это свойство тиристорных пре-
образователей создает определенные трудности при построении
схемы реверсивных приводов.
Для построения схем реверсивного привода используются
нереверсивные или специальные реверсивные тиристорные преоб-
разователи (ТП), состоящие из двух нереверсивных. Реверс
306
двигателя осуществляется путем изменения направления тока в
обмотке возбуждения (рис. 240, а) при неизменном направлении
тока якоря или путем изменения направления тока якоря с по-
мощью контактного реверсора (рис. 240,б) при неизменном на-
правлении тока в обмотке возбуждения. Эти схемы имеют низкое
быстродействие при реверсе. Более высокое быстродействие до-
стигается в схемах тиристорных преобразователей с комплектами
(рис. 240, в), режим работы которых изменяется путем согласо-
ванного регулирования угла а.
Тиристорные преобразователи имеют относительно высокое
эквивалентное внутреннее сопротивление, которое ограничивает
диапазон регулирования частоты вращения двигателя. Для
увеличения диапазона регулирования привода в системе ТП—Д
применяют обратные связи по частоте вращения и току. При
отрицательной обратной связи по частоте вращения и увеличении
коэффициента усиления системы за счет введения операционных
усилителей в цепь управления тиристорных преобразователей
удается получить большой диапазон регулирования частоты вра-
щения.
§ 99. Промышленные роботы и манипуляторы
Промышленные роботы и манипуляторы используются на про-
изводственных участках с опасными, вредными для здоровья,
тяжелыми или монотонными условиями труда. Их можно приме-
нять для выполнения работ, которые не могут быть механизи-
рованы или автоматизированы иными средствами. Основным
преимуществом промышленных роботов является возможность
быстрой переналадки для выполнения задач, различающихся
последовательностью и характером манипуляционных действий.
Они позволяют автоматизировать не только основные операции,
связанные с различной обработ-
кой изделий, но и вспомогатель-
ных — таких, как подача и пе-
ремещение заготовок и готовых
изделий, сборка изделий, нанесе-
ние на них покрытий, сварка
и т. д.
Промышленным роботом называют
механическое устройство, оснащенное ма-
нипулятором и системой управления.
Манипулятор — это устройство, ими-
тирующее двигательные или рабочие
функции рук человека и управляемые
оператором или автоматически.
Манипулятор состоит из не-
сущих конструкций 1, приводов
2, 3, 4, 7, передаточных механиз-
мов 10, 11, уравновешивающего
241
20*
307
груза 5 и захватных устройств (рис. 241). Исполнительный меха-
низм 6, 9, представляющий собой совокупность' подвижно соеди-
ненных звеньев, осуществляет транспортирующие и ориентирую-
щие движения объекта манипулирования (заготовки, детали,
инструмент и т. д.) и называется рукой промышленного робота.
В зависимости от конструктивной схемы манипулятора рука про-
мышленного робота может перемещаться в различных системах
координат: прямоугольных и криволинейных. В прямоугольной
системе координат (плоской и пространственной) объект достав-
ляется в определенную точку пространства путем только прямо-
линейных перемещений звеньев по двум или трем взаимно пер-
пендикулярным осям.
В криволинейной системе координат (полярной, цилиндриче-
ской, сферической) объект доставляется в заданную точку за
счет линейного движения руки и ее угловых перемещений в двух
взаимно перпендикулярных плоскостях. На рис. 241 стрелками
обозначены виды движений, осуществляемые отдельными звень-
ями манипулятора. Маневренность манипулятора, определяемая
числом степеней подвижности или числом независимых движе-
ний, осуществляемых рукой, характеризует возможность обхода
рукой препятствий в рабочем объеме и способность выполнять
сложные операции.
Промышленные роботы и манипуляторы оснащены электриче-
скими, пневматическими и гидравлическими приводами. Элект-
ропривод выполняется на базе двигателей постоянного тока и
шаговых двигателей. Гидравлический привод из-за высокой энер-
гоемкости и быстродействия широко используется для промыш-
ленных роботов большой грузоподъемности (свыше 10 кг). Пнев-
матический привод получил широкое применение в упрощенных
цикловых промышленных роботах грузоподъемностью до 20 кг.
§ 100. Электрооборудование электрического
транспорта
► По назначению и характеру работы электрический транс-
порт подразделяют на магистральный (электровозы), при-
городный (электропоезда), промышленный и городской
(трамваи, троллейбусы).
Электрической тягой называется электрический привод на
базе тяговых двигателей, осуществляющий движение электро-
транспорта.
Каждый из видов электротранспорта можно классифициро-
вать по двум признакам: по способу передачи энергии к тяговым
электродвигателям и по типу используемого пути.
По способу передачи энергии к тяговым электродвигателям
электрический транспорт можно разделить на три типа: электри-
ческая энергия поступает от внешнего источника (трамвай, трол-
лейбус и т. д.), источник энергии установлен на подвижном
308
составе (автомобиль, тепловоз и т. д.) и сочетание двух типов
(троллейные автомобиль и автобус).
► По типу пути электрический транспорт можно подразделить
на рельсовый, монорельсовый и безрельсовый. К рельсовому
транспорту относятся электровозы и электровагоны, а без-
рельсовому — троллейбусы,электробусы,электромобили.
В зависимости от рода тока, подводимого к подвижному со-
ставу, различают систему электрической тяги постоянного, трех-
фазного, однофазного тока пониженной частоты (162/з Гц и
25 Гц) и однофазного тока промышленной частоты.
При использовании системы постоянного тока номинальное
напряжение в контактной сети магистральных железных дорог
обычно составляет 3000 В, промышленного транспорта — 1500 В,
для метрополитенов — 750 В, для наземного электрического
транспорта среднее напряжение на токоприемниках — 550 В.
Нагрузка на сборных шинах тяговой подстанции не остается
постоянной, так как непрерывно изменяется количество поездов,
находящихся в районе подстанции, а также ток, потребляемый
каждым поездом. По ГОСТу номинальное напряжение на шинах
постоянного тока для различных тяговых подстанций составляет
600, 825, 1650 и 3300 В. Около 24% общей протяженности элек-
трических железных дорог всех стран получает электроснабже-
ние однофазным током промышленной частоты.
Система однофазного тока промышленной частоты наиболее,
простая и экономичная для электрической тяги. Переменный ток
по сравнению с постоянным имеет более высокое напряжение
25; 20; 16; 6,25 кВ. Это обстоятельство позволяет увеличить
расстояние между подстанциями, а также значительно снизить
сечение проводов контактной сети. В конструктивном отноше-
нии тяговые подстанции превращаются в простые трансформа-
торные.
В связи с тем, что на электроподвижном составе устанавли-
вают электродвигатели постоянного тока, локомотивы должны
быть снабжены специальными агрегатами, которые понижают
высокое напряжение, получаемое из сети, и выпрямляют его.
ЗАПОМНИТЕ
Нагрузка однофазного тока промышленной частоты от си-
стемы электроснабжения трехфазного тока вызывает не-
равномерность загрузки фаз. Несимметрия нагрузки ухуд-
шает качество энергии и вызывает существенные помехи на
линиях связи и влияет на металлические коммуникации,
расположенные вдоль полотна.
На городском электрическом транспорте используется только
постоянный ток, на железнодорожном — как постоянный, так и
переменный ток (с преобразованием его в постоянный непосред-
ственно на подвижном составе). Источниками питания контакт-
309
ных сетей во всех случаях служат тяговые подстанции. Номи-
нальная мощность тяговых подстанций городского транспорта в
зависимости от числа агрегатов составляет 600—5000 кВт, а
коэффициент полезного действия 0,85—0,87. Для передачи элек-
трической энергии от тяговых подстанций к подвижному составу
используется тяговая сеть, которая состоит из питающих линий
и контактной сети (два провода или провод и рельс). Для обес-
печения независимого питания частей контактной сети и сокра-
щения длины участков, отключаемых при перегрузках или ава-
риях, ее секционируют, т. е. разделяют на отдельные участки
длиной 500—1000 м, которые электрически изолированы друг от
друга изоляторами СИ (рис. 242). Наивыгоднейшее место рас-
положения тяговых подстанций ТПП, их число и мощность,
а также количество и месторасположение питающих пунктов ПП
(обозначены точками) устанавливаются расчетным путем.
В больших городах с сильно разветвленной контактной сетью
количество тяговых подстанций исчисляется несколькими десят-
ками.
§ 101. Электроинструменты
Электроинструментом называют машину, предназначенную длн выполнении
механической работы и составляющую единое целое с электрическим двигателем.
По назначению и области применения электроинструменты
могут быть: общего применения — сверлильные, шлифовальные,
310
полировальные, фре-
зерные; для обработки
металлов — разверты-
вающие, зенковальные
ножницы, кромкорубы,
шаберы, пилы; для об-
работки древесины —
пилы, рубанки, лобзи-
ки, сучкорезы; для об-
работки каменных ма-
териалов грунта и гор-
ных пород — молотки,
перфораторы, трамбов-
ки, бетоноломы, бороз-
доделы; для сборочных
работ — резьбонарез-
ные, гайковерты, шпиль-
коверты, шуруповерты,
клепальные молотки,
скобозабивные, гвозде-
забивные.
Электроинструмент имеет корпус, в котором размещены дви-
гатель с механической передачей, рабочий орган и устройство
управления. Корпус служит защитой оператора от прикоснове-
ния к движущимся и находящимся под напряжением частям.
В большинстве случаев корпус выполняется из термопластиче-
ского материала, достоинством которого является малая масса,
высокая технологичность, обеспечение дополнительной электри-
ческой изоляции, повышающей безопасность работы.
В электроинструментах применяются в основном высокоско-
ростные коллекторные двигатели последовательного возбужде-
ния, выполняемые, как правило, в пластмассовом корпусе. Пи-
тание двигателя осуществляется от однофазной (реже трехфаз-
ной) сети переменного тока напряжением 220 и 380 В. На
рис. 243 приведена типовая электрическая схема включения дви-
гателя электроинструмента.
Недостатком коллекторного двигателя переменного тока явля-
ется то, что он служит источником высокочастотных помех, по-
этому для их снижения в корпусе двигателя устанавливаются
емкостные фильтры Cl, С2, СЗ.
Двигатели для электроинструмента применяют мощностью от
60 до 1500 Вт при частоте вращения вала под нагрузкой от 12
до 20 тыс. об/мин. Достоинствами этих двигателей являются
возможность непосредственного подключения к электрической
сети общего пользования без применения трансформаторов и
преобразователей, способность переносить значительные пере-
грузки и колебания напряжения, работать в режимах частых
пусков.
Во многих ручных инструментах применяют трехфазные асин-
311
хронные двигатели, работающие от питающей сети частотой 50,
200, 400 Гц. Эти двигатели по конструктивному исполнению не
отличаются от двигателей общего применения с одной номиналь-
ной частотой вращения. Реже применяют многоскоростные дви-
гатели со ступенчатым или плавным регулированием частоты
вращения. В первую очередь трехфазными двигателями обору-
дуется тяжелый ручной инструмент: мощные сверлильные пере-
носные установки, молотки, пилы, трамбовки и другие инстру-
менты.
САМОЕ ВАЖНОЕ
1. Если источником механической энергии является элек-
трический двигатель, то машину или механизм приводят в
движение с помощью электрического привода. Станки, элек-
трический транспорт, промышленные роботы и манипуля-
торы приводятся в движение с помощью электропривода.
2. Основными составляющими электропривода являются
электродвигатель, передаточный механизм и аппаратура
управления.
3. Выбор вида электропривода и способа управления им
зависит от системы электропередачи, режимов работы и
механических характеристик объекта (станок, транспортные
средства, механизм и др.).
Темы докладов и рефератов
1. Основные функции электроприводов и их классификация.
2. Как выбрать электродвигатель?
3. Системы управления электроприводами.
4. Промышленные роботы и манипуляторы в твоей про-
фессии.
5. Электрооборудование электрических подъемно-транспорт-
ных средств.
6. Электроинструменты в твоей профессии.
,'Ах\ Что называется электроприводом? Каковы его основные функции?
По каким основным показателям выбирают тип электродвигателя для
лифта, вентилятора, токарного станка?
Сравните диаграммы работы электродвигателей для различного вида на-
грузок (рис. 232 и 233). Одинаковы ли для них условия нагрева?
На какие группы делятся системы управления электроприводами?
Поясните по рис. 234, как осуществляется пуск и торможение асин-
хронного двигателя с короткозамкнутым ротором.
Поясните по рис. 235, как осуществляется пуск, регулирование частоты
вращения и торможение асинхронного двигателя с фазным ротором.
Поясните по рис. 238, как осуществляется пуск и торможение двигателя
постоянного тока.
Поясните по рис. 239, как осуществляется пуск и торможение двигателя
постоянного тока с тиристорным преобразователем (ТП—Д).
Что называют промышленными роботами и каково их назначение?
Какой вид электротранспорта применяется в вашей профессии?
Какие виды электроинструментов применяются в вашей профессии?
Составьте подробное описание работы одного из них.
ПОТРЕБЛЕНИЕ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ
§ 102. Установки электронагрева
► При протекании тока в твердом или жидком проводнике
выделяется теплота. Если проводник является объектом
нагрева, то происходит прямой нагрев. Если же в провод-
нике выделяется теплота, которая затем передается объ-
екту нагрева, то происходит косвенный нагрев; проводник
в этом случае называют электронагревателем или нагрева-
тельным элементом.
Косвенный способ нагрева используется в электрических печах сопротив
ления, в установках контактного инфракрасного нагрева и в электробытовых
приборах (электроплиты, электродуховки, калориферы, электрокамины, паяль-
ники и т. д.).
Наиболее энергоемкими из всех установок электронагрева
являются электрические печи сопротивления (ЭПС). Наряду с
небольшими лабораторными печами мощностью в сотни ватт или
в несколько киловатт в промышленности применяют печи, мощ-
ность которых измеряется сотнями и тысячами киловатт. Область
применения их — нагрев металла под термическую обработку и
пластическую деформацию, плавка металлов, сушка материалов,
пайка. Конструкции электропечей сопротивления чрезвычайно
разнообразны.
Простейшая печь косвенного нагрева (рис. 244) имеет ко-
жух /, воспринимающий механические нагрузки; он обложен
слоями огнеупорного 2 и теплоизоляционного 3 материалов, об-
разующих стены, свод 8 и под 6 печи. На поверхности свода, стен
и на части пода с помощью специальной огнеупорной арматуры
укреплены нагревательные элементы 5, излучающие теплоту на
изделие 4. Материал нагревательных элементов имеет большое
удельное электрическое сопротивление, устойчив к высоким тем-
пературам, к химическому воздействию окружающей его среды.
Этим требованиям удовлетворяют сплавы никеля, хрома, железа,
нихрома. В печи имеется отверстие, служащее для загрузки и
выгрузки изделий, которое закрывается футерованной дверцей 7.
Печи сопротивления косвенного действия подключаются не-
посредственно к трехфазной сети напряжением 380, 660 В или к
понижающим электропечным трансформаторам. Коммутационная
аппаратура управления и автоматического регулирования уста-
навливается в специальных щитах управления. При большом
количестве печей в цехе используют один контрольно-распреде-
313
лительный пункт, в котором
размещают всю аппаратуру.
Для изменения температур-
ного режима печей сопро-
тивления регулируют их мощ-
ность переключением ступе-
ней напряжения питающих
трансформаторов или спе-
циальными регуляторами на-
пряжения, например, тири-
сторными.
От печей сопротивления
косвенного действия прин-
ципиально отличаются печи
прямого нагрева, в которых
нагреваемое изделие непо-
средственно подключается к
сети через понижающий трансформатор. Таким способом можно
нагревать относительно длинные однородные изделия с одинако-
вым сечением (прутки, трубы, проволоку, ленту), поскольку лишь
в этих случаях обеспечивается равномерный нагрев. Наиболее
широко он используется для нагрева заготовок под ковку, вы-
садку, оттяжку, закалку.
Электрические печи сопротивления имеют коэффициент мощно-
сти, близкий к единице. Печи сопротивления обычно устанавли-
ваются группами, образующими термические участки или цехи.
Это позволяет обеспечить равномерную загрузку электрической
сети.
В дуговых печах нагрев производится электрической дугой,
горящей между двумя электродами. Электрическая дуга — один
из видов электрического разряда в газовой среде или парах ме-
талла.
В камере печи при горении дуги возникают большие темпера-
турные перепады, что приводит к неравномерному нагреву ме-
талла. Поэтому в дуговых печах плавят только металлы.
Электрические печи, в которых теплота от дуги, горящей между двумя
электродами, передается нагреваемому металлу излучением, называются дуго-
выми печами косвенного действия. Обычно это небольшие печи для плавления
цветных металлов.
В печах прямого действия дуга возникает между электродами
и расплавляемым металлом. Дуговые печи прямого действия,
отличающиеся большой мощностью, предназначены в основном
для выплавки высококачественной и легированной стали из ме-
таллического лома (скрапа). Плавка стали в дуговых печах—
дорогой и энергоемкий процесс. Так, например, на 1 т выплавляе-
мой стали расходуется 500—1000 кВт-ч, поэтому лишь неболь-
шую часть всей получаемой из скрапа стали (около 10%) вы-
плавляют в электрических печах.
314
ЗАПОМНИТЕ
Современные дуговые сталеплавильные печи — это печи пе-
риодического действия. Плавка в них продолжается 1,5—
3,5 ч, после чего металл полностью сливается.
Все дуговые сталеплавильные печи имеют одинаковую кон-
струкцию, питаются трехфазным током промышленной частоты.
Ток подводится к трем вертикальным электродам 1 (рис. 245),
выполненным из электрографита, через электрододержатели 2.
Электроды перемещаются с помощью специального механизма,
приводимого в движение электроприводом. Корпус печи пред-
ставляет собой круглый стальной кожух, футерованный огне-
упорным кирпичом. Нижняя часть футеровки образует непро-
ницаемую для жидкого металла чашу — ванну, верхняя — стен-
ки плавильного пространства. Сверху кожух закрыт куполооб-
разным сводом 3 из огнеупорного кирпича. В своде по вершинам
расположены три отверстия, уплотненные водоохлаждаемыми
кольцами 4, предотвращающими прорыв из печи в цех горячих
газов. Для загрузки печи свод с электродами приподнимается
и отводится в сторону. Шихту загружают в раскрытую печь в
специальных корзинах подъемным краном. В стене кожуха име-
ется сливное отверстие 10 и рабочее окно 5 для обслуживания
ванны при плавке и удаления из печи расплавленного шлака 7,
скапливающегося на поверхности жидкого металла 8. Через ра-
245
315
бочее окно 5 в печь также вводят шлакообразующие и легирую-
щие добавки. Окно закрыто футерованной дверцей 6. Для слива
металла печь наклоняют по направляющим 9 на 40—45° в сто-
рону сливного отверстия 10, а для удаления шлака — на 10—15°
в сторону рабочего окна.
Основным техническим параметром печи является ее ем-
кость — масса стали, которую печь выдает за плавку при нор-
мальном режиме работы. Емкость определяет габариты печи,
потребляемую ею энергию и установленную мощность печного
трансформатора. Печи емкостью 0,5—25 т считаются малыми,
емкостью 40—100 т — средними и емкостью более 100 т —
крупными.
Линейные напряжения на электродах малых печей состав-
ляют 250 В, у самых крупных — 800 В, поэтому реализовать до-
статочно большие мощности можно только при токах дуг от
1000 А у малых печей и до 60—80 кА у самых крупных. Это
предопределяет подключение печи к сети 6, 10, 35 и 110 кВ через
специальные трансформаторы с глубоким регулированием вто-
ричного напряжения под нагрузкой. Вследствие больших токов
токоподвод к электродам от выводов низкого напряжения транс-
форматора выполняют как можно более коротким с целью умень-
шения потерь. Этот токопровод называют короткой сетью
печи.
Вначале дуги проплавляют в шихте под каждым электродом
ямы («колодцы»), постоянно погружаясь в них. Куски шихты,
обваливаясь с краев «колодцев», часто за-
мыкают дуговые промежутки накоротко.
Эти так называемые эксплуатационные ко-
роткие замыкания (ЭКЗ) являются нор-
мальными и для этапа расплавления. При
эксплуатационных коротких замыканиях
вступает в действие автоматика печи, элек-
троды резко перемещаются вверх и повторно
образуется электрическая дуга. При слу-
чайных обрывах дуг с помощью автоматики
электроды перемещаются вниз до соприкос-
нования с металлом и затем вверх, образуя
дугу. Броски тока при коротком замыкании
ограничиваются в основном индуктивным
сопротивлением соответствующей фазы ко-
роткой сети. Общее сопротивление печного
контура рассчитывают так, чтобы бросок
тока при коротком замыкании не превос-
ходил 2,5—3,5 номинального.
В состав электрооборудования дуговых
сталеплавильных печей входят печной транс-
форматор ПТ, высоковольтные выключате-
ли ВВ, короткая сеть КС, разъединитель Р,
дроссель Др (рис. 246).
246
316
ЗАПОМНИТЕ
Печной трансформатор отличается от обычного силового
трансформатора большой мощности тем, что номинальные
токи на стороне низшего напряжения (НН) составляют
тысячи и десятки тысяч ампер при относительно низком
вторичном напряжении.
Он отличается повышенной механической прочностью и тер-
мической устойчивостью к частым толчкам токов при коротком
замыкании. Для этого обмотки НН трансформатора имеют спе-
циальную конструкцию и усиленное крепление, занимая в баке
гораздо больше места, чем у обычного трансформатора той же
мощности. Печные трансформаторы рассчитывают таким обра-
зом, чтобы они могли переносить 20%-ную перегрузку по току
в течение 1,5—2 ч. Такая перегрузка часто возникает на этапе
расплавления металла. Высоковольтный выключатель ВВ за сут-
ки производит до 20 оперативных включений — выключений,
поэтому для дуговых сталеплавильных печей выпускают специ-
альные выключатели усиленной конструкции.
§ 103. Установки индукционного нагрева
► При индукционном нагреве электромагнитное поле, созда-
ваемое переменным током, возбуждает в нагреваемом теле
вихревые токи. Этот эффект используется для плавки ме-
таллов и сплавов в индукционных печах, а также для тер-
мической обработки и для нагрева металлических тел в
индукционных нагревательных установках.
Устройство, создающее переменное электромагнитное поле, называется
индуктором.
Индуктор представляет собой цилиндрическую или плоскую
спиральную катушку, или же проводник, форма которого зависит
от формы нагреваемого изделия. Индуктор питается переменным
током промышленной, средней или высокой частоты. Изделие
помещают внутри катушки, переменное поле, созданное индук-
тором, наводит в детали вихревые токи. Так как сопротивление
материала детали мало, то токи, протекающие в ней, велики,
и деталь быстро (за десятки секунд) нагревается. Нагрев может
быть сквозной и поверхностный.
Сквозной нагрев заготовок используется для последующей их
обработки давлением (ковка, прессование и т. д.), а также для
термообработки (отжиг, отпуск). При этом требуются относи-
тельно низкие частоты. Цикл нагрева, особенно массивных дета-
лей, составляет единицы и десятки минут.
Поверхностный нагрев деталей в индукционных закалочных
установках используется для закалки деталей. Индуктор имеет
317
малое число витков и питает-
ся токами средней и высокой
частоты (2 кГц — 500 кГц).
Нагрев носит локальный ха-
1 рактер и его длительность
составляет секунды и десят-
ки секунд. Индукционный
нагрев деталей используют
таже для их пайки мягкими
и твердыми припоями, куз-
нечной сварки труб. Ввиду
относительно небольших раз-
меров деталей и необходи-
мости механизации нагрева
применяют средние и высо-
кие частоты.
Разнообразие применений
индукционного нагрева обус-
лавливает, в свою очередь,
247 различие конструкций печей
и установок.
Для питания установок их либо непосредственно подключают
к сети промышленной частоты, либо используют специальные
преобразователи частоты — электромашинные, полупроводнико-
вые, ламповые. Мощность преобразователей — от единиц ватт до
нескольких мегаватт.
К установкам, питаемым от сети промышленной частоты,
относятся канальные трехфазные печи, крупные однофазные ти-
гельные печи и крупные установки сквозного нагрева. В каналь-
ной печи (рис. 247) расплавленный металл образует вокруг
стального сердечника явно выраженный короткозамкнутый ви-
ток 3, находясь в закрытом канале из высокоогнеупорной кера-
мики. На сердечнике 4—4' находится обмотка индуктора 5, под-
ключаемая к источнику питания. Обмотка индуктора выполнена
из медной водоохлаждаемой трубки. Такая печь подобна транс-
форматору, первичной обмоткой которого служит индуктор, а
вторичной — короткозамкнутый виток обычно прямоугольного се-
чения. Устье канала находится у дна ванны 1 печи. В нижней
части ванны находится основная масса расплава 2. Канал от-
делен от индуктора и от кожуха печи монолитным фасонным
блоком 6 из высококачественной огнеупорной керамики — так
называемым подовым камнем. Нагреваясь вихревыми токами,
металл циркулирует по каналу, постепенно вымывая его стенки.
При высокой температуре подовые камни быстро разрушаются.
Подовый камень 6, индуктор 5 и стержень 4 сердечника конст-
руктивно образуют съемный узел — так называемую индукцион-
ную единицу. Печь оснащают одной трехфазной или тремя одно-
фазными индукционными единицами. Такая печь является трех-
фазной нагрузкой для питающей сети.
318
248
замкнутые контуры.
Для плавки черных металлов и тех
цветных металлов, которые при плавке
в канальной печи быстро разрушают
подовые камни, применяют индукцион-
ные тигельные печи (рис. 248). Их ос-
новой служит тигель 1 из огнеупорной
керамики. Тигель охватывается индук-
тором 2 — катушкой из водоохлаждае-
мой медной трубки. Тигель и индуктор
крепятся внутри каркаса 3. Металли-
ческая часть каркаса печи выполня-
ется таким образом, чтобы по возмож-
ности не образовались электрические
Недостатками индукционных печей являются весьма большая
потребляемая мощность и необходимость их глубокого регулиро-
вания. Так, индукционные канальные печи в настоящее время
потребляют мощность 200—1000 кВ-А.
Индукционные печи мощностью свыше 300 кВ-А питаются от
высоковольтных электропечных трансформаторов с регулировани-
ем вторичного напряжения под нагрузкой путем переключения
витков вторичной или первичной обмотки без выключения печи.
► Ввиду того что все индукционные печи и установки осна-
щены компенсирующими батареями конденсаторов со сту-
пенчатой регулируемой емкостью, их коэффициент мощности
cosq) по отношению к источнику питания при правильной
работе близок к единице.
Значительное место по потреблению электрической энер-
гии занимают в промышленности установки переплава ме-
таллов: вакуумные дуговые и индукционные печи, печи
электрошлакового переплава, плазменные, электронно-луче-
вые и лазерные установки. Они обеспечивают высокую чис-
тоту металлов, их структуру и качество.
В вакуумных дуговых печах переплавляют наиболее ответ-
ственные сорта стали. При наличии вакуума от переплавляемого
металла хорошо отделяются газовые образования и неметалли-
ческие включения.
Вакуумные дуговые печи работают на постоянном токе. Они
питаются от мощных кремниевых выпрямительных преобразова-
телей энергии. Напряжение питания вакуумной дуговой печи
составляет несколько десятков вольт, а токи достигают 50—
100 кА.
§ 104. Электронно-лучевые
и лазерные установки
Применение для переплава металлов электронно-лучевых
установок относительно невелико. Напряжение на них достигает
50—100 кВ при мощности до 2000 кВ-А.
Электронно-лучевая плавильная установка (рис. 249) состоит
319
249
других материалов, в
из вольфрамового кольцевого ка-
тода 1 и анода — электрода 2, рас-
плавляемого при температуре 2500 К
Электроны, выходящие из катода,
концентрируются экраном 3 в виде
пучка и направляются на электрод
и жидкометаллическую ванну. Ко-
нец электрода 2 расплавляется под
действием бомбардирующих его элек-
тронов, и металл каплями стекает
в ванну 4. Поднимая и опуская
электрод, можно изменять количе-
ство падающих на него электронов
и полностью прекратить плавление,
подняв его. Ниже жидкометалличе-
ской ванны в установке образуется
переплавленный слиток 5, который
постепенно опускается по кристал-
лизатору 6.
► Новые направления открыва-
ются в различных технологи-
ческих процессах с расширени-
ем применения лазеров. Их ис-
пользуют для переплава ме-
таллов, при обработке стекла и
медицине, сельском хозяйстве и т. д.
Лазеры являются источниками электромагнитного излуче-
ния, имеющего строго определенную частоту и направление.
Узкие пучки излучения лазера характеризуются высокой
плотностью мощности.
Лучи лазера возникают в оптически активных материа-
лах под действием световых лучей. Атомы этих материалов
легко возбуждаются и переходят на более высокий энерге-
тический уровень, а затем самопроизвольно возвращаются
на низкий уровень, отдавая приобретенную им энергию в
виде излучения строго определенной длины волны, соответ-
ствующей данному материалу. В качестве активных мате-
риалов в лазерах могут быть использованы твердые ди-
электрики, газы, полупроводники, жидкости.
Устройство простейшего лазера на твердом теле приведено
на рис. 250. В качестве твердого тела может быть использован
алюмоиттриевый гранат с ниодимом, стекло с примесями ниоди-
ма или рубин с добавкой хрома. Энергия от источника питания /
подается к импульсной ксеноновой лампе 2, которая освещает
активный элемент 3. Лампа 2 и элемент 3 располагаются на
двух фокальных осях корпуса отражателя 4, выполненного в
виде эллипса, полированного с внутренней стороны. Под действи-
ем светового потока атомы хрома в рубине возбуждаются и из-
320
лучают фотоны. В верхней и нижней частях активного элемента 3
(в его торцах) находятся зер-
кала 5. Лучи, возбужденные в
элементе 3, многократно отра-
жаются от зеркал, при этом
увеличивается их энергия. При
достижении определенного ее
уровня, который повышается в
результате столкновения фото-
нов с возбужденными атома-
ми, излучающими новые фото-
ны, .происходит прорыв лучей
через один из торцов с зерка-
лом. Лучи, имея высокую кон-
центрацию энергии, устремля-
ются через фокусирующую
линзу 6 к обрабатываемой де-
тали 7.
§ 105. Электрическая
сварка
Сваркой называют способ получения неразъемного соединения деталей с
обеспечением сплошности материала. Различают дуговую, контактную, плазменно-
дуговую и электронно-лучевую сварку.
Рассмотрим наиболее распространенные виды сварки — дуго-
вую и контактную.
Дуговая сварка
► При дуговой сварке детали нагревают с помощью электри-
ческой дуги. Детали сами служат одним из электродов дуги.
Черные металлы сваривают стальным электродом с обмаз-
кой. В процессе сварки электрод расплавляется и образует
шов. Детали из цветных металлов чаще сваривают с по-
мощью угольного или графитового электрода — катода.
Присадку вводят в зону сварки в виде отдельного приса-
дочного прутка.
Устройства дуговой сварки отличаются повышенной электро-
опасностью. Поэтому напряжение холостого хода источников пи-
тания не превышает 90 В, рабочее напряжение составляет
35—70 В, напряжение дуги находится в пределах 35—50 В.
Сварочный ток в зависимости от толщины деталей может
быть 100—1200 А.
► Простейшим источником питания для сварки постоянным
током является генератор смешанного встречного возбуж-.
дения с последовательной размагничивающей обмоткой воз-
21—85
321
251
буждения РО (рис. 251, а). Внешняя характеристика гене-
ратора U (/) представлена на рис. 251,6.
Напряжение холостого хода генератора регулируется реоста-
том в цепи независимой обмотки возбуждения НО, а регулиро-
вание тока короткого замыкания /к осуществляется изменением
числа витков размагничивающей обмотки.
В настоящее время получила большее распространение свар-
ка переменным током, так как она обеспечивает не менее высо-
кое качество свариваемого шва при меньшей стоимости источ-
ника тока, меньшем расходе электрической энергии на единицу
свариваемой продукции, большей надежности электрооборудова-
ния и меньших эксплуатационных расходах.
В качестве источников питания для дуговой сварки перемен-
ным током применяют однофазные сварочные трансформаторы
с первичным напряжением 220 и 380 В. Существует три разно-
видности конструкции трансформаторов. В трансформаторах с
нормальным магнитным рассеянием (рис. 252, а) и дополнитель-
ной реактивной катушкой первичная wl, вторичная w2 и реак-
тивная обмотки размещены на магнитопроводе /. Подвижная
часть магнитопровода 2 образует регулируемый зазор 6, при
изменении которого меняется индуктивное сопротивление реак-
тивной обмотки, включенной последовательно с нагрузкой. Чем
больше зазор, тем меньше индуктивное сопротивление обмот-
ки и больше сварочный ток /2. Подвижная часть магнито-
провода перемещается с помощью электропривода с дистанцион-
ным управлением. Такие трансформаторы выпускают на нор-
мальные сварочные токи от 500 до 2000 А.
В трансформаторах с подвижными катушками (рис. 252,6)
перемещают одну из обмоток, обычно вторичную w2. При сбли-
жении обмоток магнитная связь между ними усиливается, ток
нагрузки растет, и наоборот. По такой схеме построены транс-
форматоры на сварочные токи от 150 до 600 А.
Трансформаторы с магнитными шунтами (рис. 252, в) снаб-
жены поворотным шунтом 3 между вторичной w2 и первич-
ной wl обмотками. Шунт закорачивает часть магнитного потока,
322
создаваемого обмоткой wl; чем меньше зазор между шунтом и
основным магнитопроводом 1, тем меньший поток проходит через
вторичную обмотку и тем меньше сварочный ток /2.
Контактная сварка
► Контактная электросварка имеет разновидности: стыковая,
точечная и роликовая. Точечная и роликовая (шовная)
сварка производится на контактных машинах мощными
однополярными импульсами тока.
Свариваемые детали устанавливают между электродами кон-
тактной машины, плотно сжимают и включают ток. В месте
контакта металл расплавляется и образуется сварная точка, при
роликовой сварке заготовки устанавливают между роликами.
При вращении роликов к ним импульсом подключается ток.
Высококачественная точечная сварка достигается при опре-
деленной амплитуде и длительности импульса тока. Коммутация
тока производится в цепи первичной обмотки сварочного транс-
форматора Тр (рис. 253). Напряжение и ток вторичной обмотки
21*
323
трансформатора регулируются тиристорными ключами (контак-
торами Т1 и Т2), управляемыми специальным устройством УУ
посредством изменения фазы угла открывания тиристора.
§ 106. Использование электрической энергии
в электрохимическом производстве
В металлургии цветных металлов и в ряде химических произ-
водств широко используются электрохимические процессы, и в
первую очередь электролиз, который применяется для рафини-
рования меди, никеля, свинца, получения алюминия, цинка, маг-
ния, водорода, хлора и ряда других химических веществ.
► Сущность электролиза заключается в выделении из элек-
тролита при протекании через него постоянного тока частиц
вещества и осаждении их на электродах (этот процесс на-
зывается экстракцией) или в переносе веществ с одного
электрода через электролит на другой (электролитическое
рафинирование).
В электролитах переносчиками зарядов служат ионы обоих
зарядов. При протекании ионного тока (рис. 254) положительно
заряженные ионы — катионы будут двигаться к катоду (это в
основном металлы и водород), а отрицательно заряженные
ионы — анионы (хлор, кислород, ОН-, SOr) — к аноду. У анода
анионы отдают свой заряд и превращаются в нейтральные час-
тицы, оседающие на электроде. У катода катионы отбирают
электроны и превращаются в нейтральные частицы. Выделяю-
щийся на электроде газ в виде пузырьков поднимается наверх.
При этом раствор электролита обедняется и для поддержания
непрерывности процесса электролиза его концентрацию необхо-
димо сохранять на определенном уровне, пополняя электролит
исходными соединениями.
► При электролитическом рафинировании материал анода
вступает в реакцию с электролитом, растворяется в нем по
мере его обеднения, и частицы анода, приобретая положи-
тельный заряд, направляются к катоду. На катоде выде-
ляется материал, свободный от примесей, гораздо более чис-
324
Электроны
Катионы
Na,к, Си
Анионы
Cl, N03,S0^
254
тый, чем тот, который растворяется на аноде (например,
производство меди).
Электролиз кроме перечисленных процессов широко при-
меняется для нанесения металлических покрытий из мате-
риалов анода или соединений, растворенных в электролите,
на поверхность детали, служащей катодом (хромирование,
лужение, никелирование и т. п.). Такой процесс называется
гальваностегией.
Электрохимические процессы используются для получе-
ния металлических копий с изделий, получивших название
матриц. Такой процесс называется гальваноплас-
тикой.
Широкое применение гальванопластика получила в полигра-
фии. Явление электролиза используется при очистке (травлении)
поверхностей деталей от загрязнений путем снятия с них тонкого
поверхностного слоя. Объект травления в этом случае служит
анодом.
Электрохимические процессы широко используют в цветной
металлургии для производства алюминия. Процесс получения
алюминия заключается в разложении глинозема А12О3. При этом
на катоде выделяется алюминий, а на аноде — кислород. Однако
глинозем имеет высокую температуру плавления (2050°С) и не
электропроводен. Поэтому его растворяют в расплавленном
криолите Na3AlF6. Смесь оксида алюминия с криолитом имеет
более низкую температуру плавления (950°С) и служит электро-
литом для получения алюминия. Такая относительно высокая
рабочая температура процесса заставляет в качестве материалов
электродов и футеровки электролизеров ванны, где получают
металл, применять уголь или графит.
Современные электролизеры для получения алюминия рабо-
тают на постоянном токе при плотности тока на аноде 7000—
10 000 А/м2, при дальнейшем увеличении плотности тока усили-
ваются побочные реакции, которые приводят к увеличению паде-
ния напряжения на ванне и увеличению удельного расхода элек-
троэнергии. Нормальное напряжение на ванне составляет 4,2—
325
4,5 В, а удельный расход электроэнергии на тонну алюминия
14 000—18 000 кВт-ч.
Ванны включают последовательно; они образуют серию, со-
стоящую из десятков и сотен ванн. Токи ванн достигают 200—
250 тыс. ампер. В связи с этим к ошиновке ванн предъявляются
высокие требования, особенно к качеству неразъемных и разъ-
емных контактных шин и шинных пакетов.
> Производство алюминия является одним из наиболее энер-
гоемких процессов, поэтому для питания электролизных
ванн постоянным током в десятки и сотни тысяч ампер ис-
пользуется мощный выпрямительный агрегат, который под-
ключается к заводским сетям напряжением 6, 10 и 35 кВ.
Этот агрегат состоит из специального понизительного транс-
форматора, выпрямительных блоков, высоковольтного выключа-
теля и аппаратуры защиты управления и сигнализации. Мощные
выпрямительные агрегаты выполняются на ртутных управляемых
вентилях, а также на кремниевых силовых диодах.
Установки промышленного электролиза относятся к крупным
потребителям электроэнергии. Они потребляют из сети активную
мощность в течение продолжительного времени. Отключения
установок очень редки лишь в период ремонта. Пусковые режимы
установок характеризуются плавным повышением напряжения и
мощности в течение нескольких десятков часов, таким образом
не создается трудности для системы электроснабжения. Коэффи-
циент мощности установок промышленного электролиза не ни-
же 0,92.
§ 107. Применение электрических полей
в технологических процессах
Сильные электрические поля все в большей степени исполь-
зуются в различных технологических процессах, к которым могут
быть отнесены очистка газов от пыли, электроокраска, нанесение
порошковых покрытий в электрическом поле и т. д.
> Принцип создания указанных процессов заключается в том,
что частицам твердого вещества или жидкости сообщается
некоторый заряд, а электрическое поле, в которое они вно-
сятся, создает их движение в определенном направле-
нии.
Следует отметить, что во многих технологических процессах
отходы производства улетучиваются в виде пыли и газов, засо-
ряя при этом окружающую среду.
Наиболее мощными источниками отходов являются тепловые
электрические станции, особенно работающие на топливе с боль-
шой зольностью, металлургические заводы и предприятия хими-
ческой промышленности. Для улавливания пыли используются
326
электрические фильтры, которые во много раз снижают загряз-
ненность атмосферы, а также повышают выход полезного про-
дукта, что создает основы безотходных технологических про-
цессов.
Принцип действия электрических фильтров может быть пояс-
нен рисунком 255, а. В зону между электродами / (катод) и 2
(анод) направляется газовый поток с частицами пыли 3. Если
к электродам от источника питания 4 подводится напряжение,
то между ними создается электрическое поле и начинается дви-
жение электронов 5 и положительно и отрицательно заряженных
ионов 6. Все эти частицы в соответствии с зарядами направля-
ются к электродам. Ток между электродами будет мал вследствие
незначительного уровня ионизации межэлектродного простран-
ства.
> Эффективным ионизатором пространства между электрода-
ми может служить коронный разряд, который образуется
вокруг малого цилиндра — катода 1 при напряженности
327
электрического поля более 15 кВ/см. При большей иониза-
ции межэлектродного пространства возникает интенсивный
поток отрицательных частиц, они налипают на частицы
пыли и вместе двигаются в сторону анода. У анода частицы
пыли теряют свой заряд и оседают на нем. При периодиче-
ском встряхивании анода пыль направляется в бункера.
Электрические фильтры отличаются высокой эффективно-
стью очистки газов, достигающей 97—99%.
Простейшая электрическая схема включения фильтра приве-
дена на рис. 255, б. Катод К и анод А получают питание от ис-
точника, состоящего из трансформатора Тр, преобразователя ПР
и регулятора Р. Поток газа направляется между электродами
К и А, где и происходит процесс его очистки от пыли по принци-
пу, который был изложен выше.
Весьма перспективным является использование сильного элек-
трического поля для крашения различных изделий. Наиболее
простым является устройство с электропневматическим распы-
лителем (рис. 256); оно создает красящую струю для покрытия
поверхности любой формы. Под действием воздушного потока
тонкая струя краски вытекает из горловины головки и попадает
на игольчатый электрод / — носитель высокого потенциала. Под
действием электрического поля источника 2 струя краски вытя-
гивается, на конце ее образуется капля, заряженная скопивши-
мися ионами. Частицы теряют заряд, когда действие отталки-
вающей силы между каплей и полем будет равно притягивающей
силе. При этом она отделится от струи и унесет некоторый заряд;
на конце нити вновь образуется капля с зарядом.
Качество окраски поверхности 3 определяется зарядом частиц
краски, ее вязкостью и проводимостью. Напряженность поля на
кромке распылителя составляет примерно 100 кВ/см.
256
328
§ 108. Электрическое освещение
и источники света
Электрическое освещение и источники света предназначены
для создания световых условий, требуемых для труда и отдыха
человека. В последние годы источники света все шире приме-
няются для технологических целей (сушка, облучение сельско-
хозяйственной продукции, получение химических веществ, в ин-
формационной технике и т. д.). На освещение в нашей стране
используется около 10% всей производимой электроэнергии.
Источником света называют тело, излучающее свет в результате преобра-
зования энергии. Практически все современные источники света в качестве носи-
теля первичной энергии используют электрический ток и называются электриче-
скими. К источникам света относятся устройства с оптическим излучением в
видимой части спектра (длина волн 380—780 нм), в ультрафиолетовой (10—
380 нм) и инфракрасной (780—10® нм).
Источники оптического излучения делят на тепловые (при
нагревании тела накала до высокой температуры) и газоразряд-
ные (при прохождении электрического тока в газах). К тепловым
источникам относятся лампы накаливания, угольные дуги, элек-
трические инфракрасные нагреватели. К газоразрядным источ-
никам относятся люминесцентные лампы, дуговые ртутные лам-
пы, лампы дугового высокочастотного и импульсного раз-
ряда.
Электрические источники света характеризуются электриче-
скими и световыми параметрами. К электрическим параметрам
относятся: номинальное напряжение U„; номинальная мощ-
ность Р„; номинальный ток лампы /н; к световым — световой по-
ток Ф, излучаемый лампой, измеряемый в люменах (лм); свето-
вая отдача лампы, равная отношению светового потока Ф к по-
требляемой ею мощности Р; стабильность светового потока, ко-
торым считают световой поток лампы в конце срока службы,
выраженный в процентах к начальному световому потоку.
Основной частью лампы накаливания (рис. 257, а)
является тело накала, нагревание которого при
прохождении электрического тока приводит к
появлению оптического излучения. Стеклянная ;
колба 1 изолирует тело накала 2 и токопроводя- •?
щие проводники 4 от внешней среды. Из поло /
сти колбы через откачную трубку 5 отсасыва- \ \ W 1
ется воздух и она заполняется инертным газом
или смесью газов. Токопроводящие провода
припаяны к внешним электродам 6, 7, которые $
изолированы друг от друга. Для усиления свето- .'
отдачи увеличивается поверхность тела на- | и
кала. Поэтому в большинстве ламп тело накала / 1''" 6
выполняется в виде нити или спирали из тонкой 7
нити. В некоторых конструкциях ламп накали-
вания используются отражающие покрытия. 257
329
Такие лампы называют зеркальными. Для устойчивости тела
накала применяют дополнительные держатели 3.
Материал тела накала должен иметь высокую температуру
плавления, пластичность, низкую скорость испарения при рабочих
температурах. Последнее свойство непосредственно влияет на
срок службы. Этим требованиям в наибольшей степени соответ-
ствует вольфрам. Скорость испарения вольфрама при темпера-
туре 3000°С составляет около 9-10~9 кг/(см -с). Вторым метал-
лом по свойствам, близким к вольфраму, является рений. В прак-
тике в качестве тела накала широко используются вольфрам и
его сплавы с рением и другими тугоплавкими материалами.
Токоподводящие провода изготовляют в большинстве случаев
из меди или никеля вследствие их хорошей ковкости, электро-
проводимости и теплопроводимости. Материалом для держателей
нити накала служит молибден, который имеет высокую темпера-
туру плавления (2620°С) и сохраняет упругость при высокой
температуре. Чем выше температура тела накала, тем больший
поток оно излучает и тем выше его светоотдача. Например, лам-
па мощностью 60 Вт с вольфрамовой спиралью при рабочей
температуре (3410°С) имеет светоотдачу 10 лм/Вт, а при темпе-
ратуре плавления — 53 лм/Вт. С увеличением температуры воль-
фрама увеличивается скорость его испарения, следствием кото-
рого является уменьшение сечения проволоки и ее перегорание.
При заполнении колбы газом снижается скорость испарения
вольфрамовой нити и повышается светоотдача.
По назначению лампы накаливания делятся на две группы:
общего применения (для осветительных установок зданий, со-
оружений, открытых пространств) и специального назначения
(самолетные, автомобильные, проекционные, индикаторные, об-
лучательные и т. п.).
Лампы накаливания применяют во всех отраслях народного
хозяйства. Их номенклатура достигает 1600 наименований, а
выпуск более 2 млрд, штук в год. Во многих случаях они не име-
ют равноценной замены даже более экономичными газоразряд-
ными лампами.
► Основным электрическим параметром ламп накаливания
является номинальное напряжение лампы. При повышении
напряжения на 10% срок службы лампы снижается в
5 раз, а на каждый процент изменения напряжения свето-
вой поток изменяется на 4%. Обычно напряжение должно
соответствовать номинальному напряжению питания. Одна-
ко напряжения питающих электрических сетей в условиях
эксплуатации колеблются. В целях улучшения эксплуата-
ционных характеристик ламп ГОСТом допускается колеба-
ние напряжения в пределах ±5%.
Следует заметить, что для ламп накаливания одинаковой
мощности и конструкции световая отдача больше у ламп, рас-
считанных на меньшее напряжение. Основным их недостат-
ком можно считать сравнительно низкую светоотдачу, малый
330
срок службы (не более 2000 ч)
и низкую механическую проч-
ность.
► Стремление повысить све-
тоотдачу ламп накалива-
ния при достаточно высо-
ком сроке службы привело
к созданию вольфрамо-
галогенных (галогенных)
ламп. В этих лампах ма-
258
териалом для тела накала служит вольфрам. Колба лам-
пы наполнена ксеноном с добавкой соединения галоген-
ного элемента (фтора, хлора, брома и йода) с водородом.
При высоких температурах тела накала они образуют хи-
мическое соединение с вольфрамом, препятствуя его испа-
рению. Галогенные лампы малых размеров имеют прочную
в виде трубки колбу из кварцевого стекла и обладают по-
вышенной светоотдачей и яркостью.
Конструкция галогенной лампы представлена на рис. 258.
В колбе лампы 1 расположено тело накала 2. Вводы 4 из молиб-
деновой фольги заштампованы в кварц. Внутренняя часть элек-
тродов 3 выполнена из вольфрама, внешние выводы 5 — из мо-
либдена. Для крепления и присоединения к сети на концы лампы
надеты цоколи 6.
В настоящее время галогенные лампы применяют для све-
тильников общего и киносъемочного освещения, прожекторов,
инфракрасных облучателей, аэродромных огней и т. п.
Газоразрядным источником света называют прибор, в котором опти-
ческое излучение возникает в результате электрического разряда в среде инерт-
ных газов, паров металла или их смесей.
Современные газоразрядные лампы имеют ряд преимуществ
перед лампами накаливания. Это прежде всего более высокая
светоотдача и коэффициент полезного действия при большом
сроке службы (до 14 000 ч). Газоразрядные лампы в зависимо-
сти от инертного газа или паров металла, в которых происходит
разряд, дают световой поток в любой области спектра и любой
цветности. В связи с этим газоразрядные лампы, создающие
интенсивные ультрафиолетовые лучи, широко используются в
медицине и обезвреживании продуктов. Безынерционность излу-
чения газоразрядных ламп используется для создания импульс-
ных источников света большой мощности и любой длительности.
Наряду с перечисленными преимуществами газоразрядные лам-
пы имеют ряд недостатков, в числе которых следует указать на
пульсации светового потока при питании от сети однофазного
тока.
Для увеличения светоотдачи колбы газоразрядных ламп покрывают спе-
циальным веществом, называемым люминофором. Такне лампы называют люми-
несцентными. Люминофоры под воздействием ультрафиолетовых лучей, возни-
кающих при электрическом разряде в газах, преобразуют их в спектр видимого
излучения. Такое явление называют люминесценцией.
331
Люминесцентная лампа (рис. 259) представляет собой длин-
ную стеклянную колбу 1, в торцы которой впаяны два электрода
с катодом 2 в виде вольфрамовой спирали, покрытой слоем
оксида, облегчающего выход электронов. В колбу вводится не-
большое количество ртути, преобразующейся в пары при 30—
40°С, и инертный газ. Добавка инертного газа к парам ртути
облегчает возникновение электрического разряда.
При использовании в качестве люминофора 4 веществ на
основе редкоземельных элементов светоотдача лампы достигает
90—100 лм/Вт.
По форме колбы люминесцентные лампы бывают прямые
цилиндрические, кольцевые и П-образные.
Напряжение зажигания у этих ламп обычно значительно пре-
вышает рабочее напряжение. Поэтому с учетом необходимости
регулирования тока для включения ламп применяют пусковые
регулирующие устройства.
На рис. 259, б представлена схема включения люминесцент-
ной лампы со стартером Ст и балластным дросселем Др. Стар-
тер представляет собой колбу, заполненную инертным газом;
один из электродов стартера выполнен в виде крючка из биме-
таллической пластинки. Напряжение зажигания тлеющего разря-
да в стартере меньше напряжения сети, но больше рабочего на-
пряжения на лампе. При подключении лампы к сети контакты
стартера нагреваются и замыкаются — через электроды лампы
протекает ток, нагревающий их до температуры 800—900°С, при
которой облегчается работа выхода электронов и начало элек-
трического разряда в колбе лампы. При остывании контактов
стартера они размыкаются и разрывают цепь, в которую включен
дроссель.
332
Как известно, при коммутации в цепи с индуктивностью на-
пряжение на дросселе резко возрастет и все оно будет прило-
жено к лампе. Под действием этого импульса напряжения начи-
нается электрический разряд.
Люминесцентные лампы выполняются небольшой мощности
и они не пригодны для уличного освещения, особенно зимой.
В качестве мощных источников света используются газораз-
рядные ртутные лампы высокого и сверхвысокого давления.
Источником лучистой энергии в этих лампах высокого давления
служит электрический разряд между электродами. Колбы ламп
выполняются из кварца, способного выдерживать значительные
давления при высоких температурах (800—900°С). Эти лампы
взрывоопасны в рабочем и нерабочем состояниях.
САМОЕ ВАЖНОЕ
1. Электрическая энергия в электрических паяльниках, пе-
чах сопротивления, дуговых и индукционных печах преоб-
разуется в тепловую, а в лампах накаливания, люмине-
сцентных лампах, светотехнических установках — в свето-
вую энергию.
2. В электрохимическом производстве с помощью электро-
лиза и электрогальваники преобразуют электрическую энер-
гию в химическую.
Темы докладов и рефератов
1. Установки резистивного электронагрева.
2. Электросварка.
3. Лазерные и электронно-лучевые установки для переплава
металла.
4. Использование электроэнергии в электрохимическом произ-
водстве.
5. Защита окружающей среды от пыли с помощью электри-
ческих полей.
6. Лампы накаливания, газоразрядные лампы и другие источ-
ники света в твоей профессии.
Объясните назначение и принцип действия установок резисторного элек-
тронагрева.
2. Каков принцип действия установок электродугового нагрева и для каких
целей их применяют?
Что называют сваркой? Объясните принцип действия дуговой сварки;
контактной сварки.
Как работают лазерные и электронно-лучевые установки переплава
металлов?
Как используется электрическая энергия в электрохимическом произ-
водстве? В чем состоит сущность электролиза?
Поясните способы защиты окружающей среды от пыли с помощью
электрических полей.
7 Чем отличаются лампы накаливания от газоразрядных ламп?
ОГЛАВЛЕНИЕ
Предисловие
Введение
3
4
Раздел
1
Электрические и магнитные цепи
' Основные понятия об электрических я магнитных цепях 7
§ 1. Определение электрической и магнитной цепей 7
§ 2. Электрические и магнитные величины 8
§ 3. Пассивные элементы электрической цепи 1,3
4. Электрическая цепь. Уравнения электрического состояния цепи 15
* Электрические цепи постоянного тока 19
§ 5. Расчет простой электрической цепи 19
§ 6. Расчет сложной электрической цепи 22
$ 7. Рационализированные методы общего расчета электрических \
цепей ' 23
§ 8. Методы анализа режимов отдельной ветви или части электри-
ческой цепи 26
§ 9. Нелинейные электрические цепи при постоянных токе и напря-
жении 28
• * Магнитные цепи 33
§ 10. Классификация магнитных цепей. Элементы магнитной цепи 33
| 11. Расчет магнитной цепи 36
Электрические цепи переменного тока 41
* § 12. Параметры переменного тока и напряжения. Классификация
электрических цепей переменного тока 41
§ 13. Формы представления электрических величин 43
§ 14. Однофазные синусоидальные электрические цепи. . 47
$ 15. Последовательное, параллельное и смешанное соединение
приемников переменного тока. Векторные диаграммы 52
§ 16. Анализ и расчет простых электрических' цепей переменного
тока с помощью комплексных чисел 57
$ 17. Активная, реактивная и полная мощность переменного тока.
Коэффициент мощности ' 59
§ 18. Резонанс напряжений и токов в электрических цепях пере-
менного тока 63
§ 19. Анализ электрических цепей с переменными элементами с
помощью круговых диаграмм 65
$ 20Э лектрические цепи с индуктивно-связанными элементами 67
$ 21. Электрические цепи с периодическими иесинусоидальиыми
токами и напряжениями 69
§ 22. Электрические фильтры 72
§ 23. Переходные процессы в электрических цепях 74
Многофазные электрические системы 80
§ 24. Общие понятия и определения 80
§ 25. Схемы соединения обмоток трехфазиого генератора 81
§ 26. Соединение фаз нагрузки в звезду и треугольник............ 83
334
§ 27 Мощность трехфазной электрической цепи 87
6. Нелинейные электрические цепи переменного тока 89
§ 28. Электрические цепи с нелинейным резистивным элементом 89
§ 29. Электрические цепи с нелинейной индуктивностью. Дроссели.
Магнитные усилители 91
Раздел
2
Электротехнические устройства
7. Общие понятия об электротехнических устройствах 100
§ 30. Преобразование электрической энергии в другие виды энергии 100
* § 31. Электротехнические устройства контроля и регулирования 103
§ 32. Режимы работы и энергетическая диаграмма электротехни-
ческих устрс“"'тв. Роль электрической изоляции 105
8 Электронные приборы и устройства 108
• § 33, Назначение и классификация электронных приборов 108
§ 34. Электронно-лучевые приборы 1 Ю
’ § 35. Полупроводниковые диоды 111
§ 36. Биполярные транзисторы 115
• § 37. Тиристоры 117
- $ 38. Полевые (униполярные) транзисторы 119
• § 39. Фотоэлементы. Оптроны 122
• § 40. Выпрямительные устройства 123
§ 41. Стабилизаторы постоянного напряжения 127
» § 42, Преобразователи постоянного тока в переменный (инверторы) 128
§ 43. Электронные усилители 131
§ 44. Операционные усилители 138
§ 45. Электронные генераторы 141
§ 46, Мультивибраторы (генераторы прямоугольных импульсов) 142
$ 47. Цифровые интегральные микросхемы 145
§ 48. Логические элементы 147
§ 49. Большие интегральные микросхемы и микропроцессоры 151
9. Электроизмерительные приборы 154
§ 50. Виды и методы электрических измерений. Классификация
погрешностей 154
•г § 51. Средства измерения электрических величин. 156
<г § 52, Общие сведения об электромеханических измерительных при-
борах 157
§ 53. Магнитоэлектрические мехет'лзмы и приборы 16С
» $ 54. Электромагнитные механизмы и приборы 161
$ 55. Электродинамические механизмы и приборы 162
§ 56. Индукционные механизмы и приборы 163
§ 57 Электростатические механизмы и приборы 163
§ 58, Электронные аналоговые приборы 164
§ 59. Цифровые измерительные приборы 166
§ 60, Измерение тока и напряжения 169
§ 61. Измерение электрической мощности и энергии 172
§ 62. Измерение частоты и сдвига фаз 175
§ 63. Измерение параметров электрических цепей 177
§ 64. Методы и средства измерения магнитных величин 182
§ 65. Понятия об измерении неэлектрических величин электроиз-
мерительными приборами 184
10. Трансформаторы 188
§ 66, Назначение, устройство и принцип действия трансформатора 188
$ 67 Однофазный трансформатор. Режим холостого хода и на-
грузки 191
§ 68. Электрическая схема замещения трансформатора 192
§ 69. Определение паспортных параметров, и внешняя характерис-
тика трансформаторов........................................... 194
335
§ 70. Трехфазные трансформаторы 197
§ 71. Автотрансформаторы 198
$ 72. Параллельная работа трансформаторов 200
§ 73. Трансформаторы специального назначения 202
II- Электрические машины 205
§ 74. Принцип действия н устройство электрических машин 205
— § 75. Генераторы постоянного и переменного тока 215
§ 76. Электромашинные усилители, преобразователи, тахогенера-
торы 224
§ 77 Основные понятия о работе электрических двигателей 227
§ 78. Двигатели постоянного тока 229
§ 79. Синхронные электродвигатели 232
* $ 80. Асинхронные электродвигатели 234
§ 81- Электрические двигатели малой мощности (микродвигатели) 243
§ 82. Информационные электрические микромашины 248
12 Электрические аппараты и реле 255
$ 83. Назначение и классификация электрических аппаратов 255
§ 84. Принцип действия и устройство коммутирующих аппаратов 256
§ 85. Аппараты неавтоматического управления 259
§ 86. Предохранители 261
§ 87 Автоматические воздушные выключатели (автоматы) 263
§ 88. Электрические реле 265
§ 89. Контроллеры, магнитные пускатели и электромагниты. 268
§ 90. Магннтоуправляемые контакты 270
§ 91. Бесконтактные реле 271
Раздел
3
Производство, распределеине н потреблеине электрической энергии
13. Электрические станции, сети и электроснабжение 274
§ 92. Электроэнергетические системы 274
§ 93. Электрические станции 276
§ 94. Электрические сети. Подстанции. Распределение электриче-
ской энергии 281
$ 95. Электроснабжение промышленных предприятий 287
14 Электропривод 292
§ 96. Основные понятия и определения. Классификация' электро-
приводов 292
$ 97. Режимы работы и выбор электродвигателя 293
§ 98. Управление электроприводами 298
§ 99. Промышленные роботы и манипуляторы 307
§ 100. Электрооборудование электрического транспорта 308
§ 101. Электроинструменты 310
15. Потребление электрической энергии 313
§ 102. Установки электронагрева 313
§ 103. Установки индукционного нагрева 317
§ 104. Электронно-лучевые и лазерные установки 319
§ 105. Электрическая сварка 321
§ 106, Использование электрической энергии в электрохимическом
производстве 324
§ 107. Применение электрических полей в технологических процессах 326
§ 108. Электрическое освещение и источники света............... 329