/




Текст
flPAKmiCKAX
диагностика
АКШНОННЫХ
ГАЗОГтЛННЫХ
ЛВДНГСМЙ
Под редакцией В. П. Степаненко
МОСК1А
"ТРАНСПОРТ" 1985
УДК 629.735.017.1.004.64
Практическая диагностика авиационных газотурбинных дви-
гателей/Л. П. Лозицкий, В. П. Степаненко, В. А. Сту-
деникин и др.; Под ред. В. П. Степаненко. — М.: Тран-
спорт, 1985,— 102 с.
Освещены вопросы диагностики газотурбинных двигателей.
Рассмотрены методические основы лаборатории диагностирова-
ния, обобщен опыт диагностирования двигателей в передовых
авиационных производственных объединениях. Намечены пер-
спективы развития службы диагностирования на предприятиях
гражданской авиации.
Рассчитана на инженерно-технических работников авиапред-
Приятий.
Ил. 29, табл. 11, библиогр. 14 назв.
Авторы: Л. П. Лозицкий, В. П. Степаненко, В. А. Студени-
кин, В. Ф Лапшов, М. Д. Авдошко. А. В. Тарасенко
Рецензент д-р техн, наук Н. Д. Кузнецов
Заведующий редакцией В. С. Захаров
Редактор Л. В. Васильева
3606030000-000
049(01)-85
© Издательство «Транспорт», 1985
186-85
П
УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
Основные параметры
D —достоверность диагности-
рования
1 —количество информации
М —число Маха
Н — высота полета, энтропия
G —расходы воздуха, газа и
топлива
Р — сила тяги
Р — вероятность
R —газовая постоянная
V — скорость полета
0 — относительное изменение
признаков по наработке
а —угол поворота ,
у —скорость изменения пара-
метра по наработке
с — скорость течения газа или
воздуха
Суд — удельный расход топлива
К —диагностический признак
п — частота вращения
р —давление воздуха, газа и
топлива
s — скольжение роторов
Т —температура абсолютная
t —время, температура по
Цельсию
х —диалогический параметр
т] — коэффициент полезного дей-
ствия
р — плотность воздуха, газа, то-
плива
т - наработка
л —степень повышения (пони-
жения) давления
о —напряжение, дисперсия
Индексы
взл — взлетный режим
кр — крейсерский режим
м-г —земной малый газ
max —максимальный режим
max пр — максимальный продолжи-
тельный режим
н — невозмущенный поток воз-
духа
вх — сечение на входе в ГТД
к — сечен :е ! выходе из КВД
г —сечение на входе в турбину
т — сечение на выходе из тур-
бины, топливо
зад —заданное значение параме-
тра
изм —измеренное ачение шра-
метра
пр - приведенное значение па-
раметра
б — верхний индекс базового
параметра
О - нижний индекс подобного
параметра
э -верхний индекс'эталонного
значения
i текущие значения парамет-
ра
* - верхний индекс полного
параметра
Сокращения
АТ —авиационная техника
АТБ — авиационно-техническая ба-
за
АСУ — автоматизированные систе-
мы управления
БЦВМ — бортовая цифровая вычис-
лительная машина
ВД — высокое давление
ГТД —газотурбинный двигатель
ИАС — инженерно - авиационная
служба
КВД — компрессор ВД
КИВИ, — кустовой информационно-
вычислительный центр
3
КНД —компрессор низкого давле-
ния
КПВ — клапан перепуска воздуха
КПД — коэффициент полезного дей-
ствия
ЛА —летательный аппарат
ЛД —лаборатория диагностиро-
вания
МПР — максимальный продолжи-
тельный режим
МСПР — многоканальная система ре-
гистрации параметров
НА —направляющий аппарат
НД —низкое давление
НМК — неразрушающие методы ко-
нтроля
НТД - нормативно-техническая до-
кументация
ЛПР — плановый предупредитель-
ный ремонт
РВД — ротор ВД
РВНА — регулируемый входной НА
РНД —ротор НД
РТМС — расходомер топлива мгно-
венно суммирующий
РУД —рычаг управления двигате-
лем
РУР —рычаг управления ревер-
сивным устройством
РФ —рабочая форсунка
СА-81 —стандартная атмосфера
САР — система автоматического ре-
гулирования
СА — сопловый аппарат турбины
САУ —стандартные атмосферные
условия
ТВД — турбовинтовой двигатель,
турбина ВД
ТГП — термогазодинамические па-
раметры
ТМР —топливомасляный радиатор
ТНД —турбина НД
ТО — техническое обслуживание
ТОиР —техническое обслуживание
и ремонт
ТРДД — турбореактивный двухкон-
трольный двигатель
ТС — техническое состояние
УД — участок диагностирования
ЭСУД —электронная система управ-
ления двигателем
Глава 1
ТЕХНИЧЕСКАЯ ДИАГНОСТИКА В ЭКСПЛУАТАЦИИ ГТД
1.1. СИСТЕМЫ ДИАГНОСТИРОВАНИЯ
Одно из основных назначений технической диагностики га-
зотурбинных двигателей (ГТД) —создание систем диагностиро-
вания в процессах опытно-конструкторской доводки, серийного
производства, ремонта и эксплуатации. В каждом из указанных
процессов применяется своя система диагностирования, имею-
щая общую с остальными системами методологическую основу
и существенно отличающиеся друг от друга организационную и
технологическую подсистемы. Методы и средства каждой систе-
мы диагностирования обусловливаются ее назначением, условия-
ми ее применения, квалификацией и специализацией обслужи-
вающего персонала, правами на принятие решения, методичес-
ким, инструментальным и метрологическим обеспечениями и т. д.
Система диагностирования при .опытной доводке нового и
модернизированного ГТД предназначена: во-первых, для провер-
ки влияния на техническое состояние (ТС) различных конструк-
тивных решений, а также снижения стоимости и ускорения про-
цесса доводки; во-вторых, для отработки оптимального варианта
контроле'пригодности ГТД и основ его будущих штатных систем
диагностирования в производстве, ремонте и эксплуатации.
Система диагностирования в серийном производстве служит
для управления ТС, обеспечения качества выпускаемой продук-
ции и уточнения требований к системам диагностирования при
ремонте и эксплуатации.
Система диагностирования при ремонте предназначена для
управления ТС в процессе восстановления качества ГТД, утра-
ченного им в эксплуатации.
Система диагностирования в эксплуатации предназначена
для управления ТС ГТД при-хранении, техническом обслужива-
нии и использовании по назначению.
Система диагностирования ГТД при его доводке характери-
зуется: специальной конструктивной доработкой ГТД для уве-
личения его контролепригодности при испытаниях в условиях
стенда или летающей лаборатории; повышенными требованиями
к точности измерений параметров, число которых может дости-
гать 200... 1000 [14]; возможностью применения датчиков малой
долговечности, например тензотермометрических; применением
уникальной измерительной и вычислительной техники высокой
стоимости; отсутствием штатных приборов контроля параметров,
точность которых не удовлетворяет требованиям системы, напри-
5
мер мгновенно суммирующих расходомеров топлива (РТМС),
счетчиков наработки, если только они сами одновременно с ГТД
не проходят испытаний; высокой квалификацией и узкой специа-
лизацией обслуживающего персонала; возможностью принятия
разработчиком самостоятельных решений, если они в данном
конкретном случае не оговорены соответствующей нормативно-
технической документацией (НТД); высокой информативностью
процессов испытаний нового ГТД, поскольку они неизбежно со-
провождаются различного рода неисправностями и отказами;
использованием специальных программ диагностирования, пре-
дусматривающих для ускорения накопления технической инфор-
мации преднамеренное введение неисправностей и форсирование
режимов работы ГТД, его основных узлов и агрегатов.
В серийном производстве при испытаниях на стендах систе-
ма диагностирования характеризуется: пониженными в сравне-
нии с предыдущей системой требованиями к точности измере-
ний и числу параметров, которое равно 20... 100 для двигателей
с высокими запасами действительных значений параметров по
отношению к допустимым и G0...200 с малыми запасами [14];
применением систем автоматизированного управления испыта-
ниями ГТД и мощных ЭВМ с большой памятью и- высоким бы-
стродействием; отсутствием штатных приборов, точность кото-
рых не удовлетворяет требованиям системы; высокой квалифи-
кацией специалистов испытательных станций; ограниченными
возможностями принятия без согласования с разработчиком пли
заказчиком самостоятельных решений по повышению надежно-
сти и уровня контролепригодности ГТД; высокой информатив-
ностью массовых контрольно-сдаточных испытаний серийных
ГТД, а также испытаний отдельных экземпляров на ресурс, на
проверку стабильности технологии производства и до полного
разрушения основных узлов. ГТД — как серийный объем диаг-
ностирования, имеет штатный уровень контролепригодности, ко-
торый на период испытаний повышается без изменения конст-
рукции только за счет установки на запасные места дополни-
тельных датчиков и применения нештатных в эксплуатации не-
разрушающих методов контроля (НМК), например виброаку-
стической, рентгенографической и другой аппаратуры.
Система диагностирования при ремонте представляет собой
упрощенную систему, применяемую в серийном производстве.
Относительная упрощенность ее объясняется в основйом нали-
чием упреждающего опыта диагностирования в серийном про-
изводстве, снижением необходимого числа измеряемых парамет-
ров, строгой регламентацией правил принятия решений в соот-
ветствии с НТД, практическим отсутствием длительных испы-
таний на надежность, которые при ремонте ограничиваются
только кратковременными испытаниями рекламационных ГТД.
Система диагностирования ГТД в процессе его эксплуатации
в методологическом отношении во многом зависит от результа-
6
тов разработки, внедрения и опыта работы всех трех перечис-
ленных систем. Однако в отличие от них эта система благодаря
своему назначению имеет ряд особенностей:
диагностируемый ГТД работает в реальных условиях экс-
плуатации в составе силовой установки данного типа летатель-
ного аппарата (ЛА), а не испытывается в идеализированных
условиях стенда;
ГТД имеет два уровня контролепригодности: наземный,— со-
ответствующий требованиям контроля параметров, диагности-
рования и прогнозирования развития ТС; бортовой,— соответст-
вующий требованиям оперативного контроля работоспособности,
правильного функционирования двигателя на всех этапах поле-
та и требованиям к накоплению полетной диагностической ин-
формации для ее использования на земле;
уровни контролепригодности в эксплуатации, как правило, не
могут быть изменены до момента отправки двигателя в ремонт
или временного прекращения эксплуатации для проведения кон-
структивных изменений;
число контролируемых параметров и точность их измерений
меньше, чем в других системах;
безотказность штатных средств измерений за ресурс долж-
на быть соответственно выше безотказности узла, модуля или
агрегата, ТС которого диагностируется;
в работе системы принимает участие большое число непосред-
ственных исполнителей высокой квалификации с широким диа-
пазоном профессий и специализаций;
деятельность исполнителей и их ответственность строго рег-
ламентированы НТД; исключения допускаются только для дей-
ствий экипажа в ситуациях, не предусмотренных НТД;
в системе должны накапливаться и длительно храниться
очень большие массивы разнообразных статистических данных,
необходимых для выяснения закономерностей развития возмож-
ных неисправностей в отказы, которые ввиду высокого уровня
надежности современных ГТД представляют собой редкие по
времени события.
Нетрудно заметить, что в технической диагностике в зависи-
мости от назначения системы диагностирования ГТД как объект
диагностирования рассматривается в разные взаимосвязанных
качествах. Так, в процессе опытной доводки ГТД рассматрива-
ется как некоторая модель будущего объекта производства, ре-
монта и эксплуатации, для которой необходимо установить со-
ответствующие потребные уровни контролепригодности. В про-
цессах производства и ремонта ГТД* рассматривается, главным
образом, как объект контроля и диагностирования с целью обес-
печения гарантированного качества выпускаемой продукции.
В процессе эксплуатации ГТД рассматривается как объект, ТС
которого подлежит управлению с целью достижения максималь-
ной эффективности его применения по назначению.
7
1.2. ОСНОВНЫЕ НЕИСПРАВНОСТИ
И ИХ ДИАГНОСТИЧЕСКИЕ ПАРАМЕТРЫ И ПРИЗНАКИ
Многолетний опыт эксплуатации ЛА показывает, что доля от-
казов ГТД в полете в общем числе отказов, приходящихся на
самолет в целом, сравнительно невелика. Особенно это относит-
ся к высокоресурсным турбореактивным двухконтурным двига-
телям (ТРДД), имеющим высокие показатели безотказности в
полете. Вместе с тем отказы двигателей, являющиеся редкими
событиями, в большинстве случаев приводят к более тяжелым
летным происшествиям, чем отказы функциональных систем са-
молета.
Основными типичными неисправностями ТРДД в эксплуа-
тации, способными переходить в отказы в полете, являются: ме-
ханические повреждения деталей проточной части, ухудшение
характеристик проточной части, прогары камер сгорания и со-
пловых аппаратов (СА) I ступени турбины, закоксованность топ-
ливных рабочих форсунок (РФ), увеличение зазоров между ан-
тивибрационными полками (разбандажирование) рабочих лопа-
ток I ступени компрессора низкого давления (К.НД), самопро-
извольное выключение реверсивного устройства при посадке,
разрушение деталей подшипников опор роторов и приводов аг-
регатов, нарушение правильности функционирования агрегатов
системы автомобильного регулирования (САР) и других систем
двигателя.
/Леханическне повреждения деталей проточной части двига-
теля вызываются попаданием в нее посторонних предметов:
птиц, гальки, бетонной крошки, проволоки от металлических ще-
ток мусоросборочных машин и т. д. Эти повреждения прояв-
ляются в виде обрывов и погнутостей рабочих лопаток компрес-
сора, забоин, вмятин и царапин на поверхности. Следствие та-
ких повреждений—ухудшение характеристик проточной части и
появление возможности вторичных разрушений деталей, приво-
дящих к отказу двигателя в полете. Контроль за состоянием де-
талей в этом случае производится визуально и с помощью НМК.
Диагностический признак этой неисправности — изменение виб-
роскорости на опорах двигателя.
Ухудшение характеристик проточной части, т. е. снижение
КПД компрессора и турбины, коэффициентов потерь полных
давлений во входном устройстве и камере сгорания в целом при-
водит к снижению эффективного КПД двигателя и, как следст-
вие, к падению тяги, повышению расхода топлива и снижению
газодинамической устойчивости компрессора. Подобное сниже-
ние эффективного КПД происходит под влиянием изменения
формы проточной части двигателя из-за абразивного и эрозион-
но-коррозионного износа поверхностей деталей, а также загряз-
нения этих поверхностей отвердевшей смесью масел, топлива и
пыл I.
8
Прогары камер сгорания, точнее их жаровых труб, вызыва-
ют искажение расчетных полей температур, давлений и скорос-
тей газового потока перед турбиной, что приводит к разрушению
лопаток турбины и в первую очередь лопаток СА I ступени. Воз-
никновение прогаров жаровых труб в основном объясняется
склонностью к медленному накоплению нагарообразованпй на их
внутренних поверхностях, особенно в зонах горения и располо-
жения РФ, где температура стенок трубы выше, чем в других
зонах. Нагарообразование является следствием неполноты сго-
рания топлива и зависит от конструкции камеры сгорания и на-
работки двигателя. В местах нагарообразования нарушаются
условия охлаждения, что вызывает перегрев и перегар жаровой
трубы. Кроме того, прогар трубы может быть связан с наруше
нием распыла топлива из-за закоксованности РФ. Контроль за
состоянием камеры сгорания производится с помощью НМК.
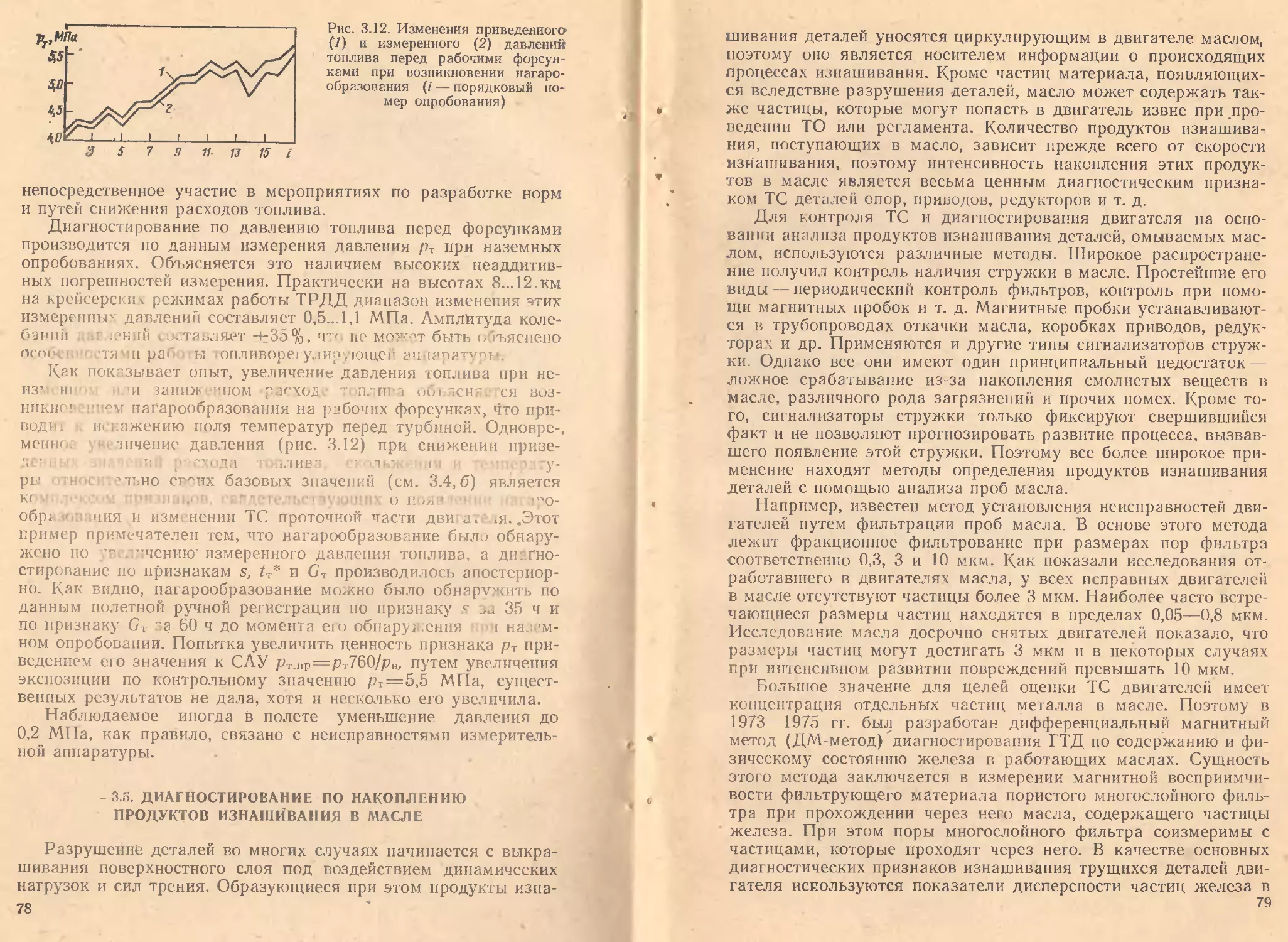
Закоксовайность РФ приводит, как уже отмечалось, к нару-
шению распыла топлива и к искажению поля температур, что
вызывает сначала прогары жаровых труб, а затем лопаток тур-
бины. Уровень закоксованности РФ зависит от конструктивной
схемы ее охлаждения и сдува осаждающегося на ней топлива,
а также в большой мере от наработки в эксплуатации. Одним
из возможных признаков этого явления может служить давле-
ние топлива перед РФ, которое по мере увеличения закоксован-
ности также может расти.
Увеличение зазоров между антивибрационными полками ра-
бочих лопаток I ступени КНД может стать причиной их разру-
шения и, следовательно, полного отказа двигателя. Контроль
за разбандажированием осуществляется прямым измерением за-
зоров между полками. Аналогично контролируется разбанда-
жирование рабочих лопаток турбины.
Как показал опыт диагностирования, все перечисленные не-
исправности, за исключением закоксованности РФ, имеют об-
щие диагностические признаки в виде скольжения роторов, рас-
хода топлива и температуры газа за турбиной. Следует заме-
тить, что эти признаки не указывают место неисправности, они
лишь позволяют поставить диагноз типа Исправен или неиспра-
вен двигатель без указания причин неисправности. Од-
нако, если на двигателе измеряются кроме указанных парамет-
ров и некоторые другие, например давление воздуха за компрес-
сором р*к, степень повышения давления в компрессоре л*к, от-
ношение полного давления газа за турбиной к полному давле-
нию воздуха на входе в двигатель рт/рК*, давление воздуха в
наружном контуре, то глубина поиска дефекта может быть уве-
личена до отдельного узла или модуля.
Самопроизвольное выключение реверсивного устройства при
посадке самолета очень редко встречающийся1, но чрезвычайно
опасный отказ, угрожающий безопасности полетов. Причины
отказа мало изучены и существует только одна практическая
9
рекомендация по его предотвращению, основанная на опыте экс-
плуатации и заключающаяся в требовании строгого поддержи
вания скольжения ротора в пределах допусков, установленных
НТД. Разумеется, рекомендации пригодны только в случае пра-
вильности функционирования агрегатов систем управления и
синхронизации реверсивного устройства.
Разрушение деталей подшипников опор роторов и приводов
агрегатов в основном происходит вследствие усталости матери-
алов, повышенного износа поверхностей, изменения зазоров и
посадок между деталями подшипников и опор, повреждений,
вызванных масляным голоданием и загрязненностью масла. Об-
щий признак этого вида неисправностей — наличие металличес-
кой стружки в масле, которая может быть обнаружена при ви-
зуальном осмотре поверхностей-фильтров и магнитных пробок,
по сигналу термостружкоизвещателя, по увеличению давлений
на фильтрах и по результатам спектрального анализа масла.
Кроме того, неисправности подшипниковых опор роторов могут
быть обнаружены по увеличениям температуры масла в опорах,
изменениям виброскоростей на опорах и времени выбега ро-
торов-
Появление неисправностей в агрегатах систем двигателя в
настоящее время определяется только методами прямого конт-
роля параметров их работы и практически не имеет известных
диагностических признаков.
Рассмотренные примеры далеко не исчерпывают подробный
перечень существующих и возможных неисправностей и их диаг-
ностических признаков. На практике подробный перечень содер-’
жится в письменной документации или в банке данных конкрет-
ной системы диагностирования, при этом его объем и содержа-
ние определяются назначением и целями системы. Действитель-
но, банк данных системы диагностирования, применяемый при
доводке ГТД, по своему объему и содержанию отличается от
банка системы, применяемой при серийном производстве и тем
более от системы, применяемой в эксплуатации.
Общим для этих банков является то, что в них обязательно
хранятся все сведения о неисправностях, наблюдаемых в экс-
плуатации, а также то, что их содержание непрерывно по мере
увеличения календарных сроков эксплуатации и суммарной на-
работки парка двигателей подвергается уточнениям и дополне-
ниям. Последнее объясняется тем, что по физической природе и
характеру проявления причины возникновения неисправностей
очень разнообразны и в большинстве случаев находятся в слож-
ных взаимосвязях между собой. Кроме того, причины возникно-
вения одной и той же неисправности могут изменяться под влия-
нием различного рода конструктивно-технологических и эксплу-
атационных факторов.
Поэтому перечень сведений о неисправностях и их диагности-
ческих признаках, характерных для данного срока эксплуатации
10
и суммарной наработки двигателей, является лишь информаци-
онной основой для периодического анализа существующих и воз-
можных в будущем неисправностей. Подобные анализы служат
для разработки алгоритмов поиска неисправностей с заданной
глубиной диагностирования, уточнения диагностических пара-
метров, признаков и их моделей, разработки конструктивно-тех-
нологических и эксплуатационных мероприятий по устранению
существующих и возможных неисправностей. При этом если экс-
плуатационные мероприятия, как правило, разрабатываются с
целью уточнения технологий управления и технического обслу-
живания (ТО) двигателя, то разработанные конструктивно-тех-
нологические мероприятия для подтверждения их правильности
подвергаются проверке с помощью специальных, в том числе и
летных, испытаний на надежность.
Для ускорения получения результатов испытаний высокоре-
сурсных двигателей во многих случаях они проводятся по так
называемым эквивалентным и ускоренным программам [9]. Сущ-
ность программ состоит в сокращении длительности испытаний
без изменения величин повреждаемостей, вносимых в двигатель
режимными нагрузками. Методы расчета долговечности двига-
теля, его узлов и деталей, лежащие в основе разработки про-
грамм, одновременно являются и основой разработки методов
диагностирования по прочностным критериям.
Методически анализ возможных неисправностей ГТД удобно
производить совместно с анализом вероятности безотказной его
работы на основе схемно-функционального метода [8]. Сущность
метода состоит в последовательном анализе безотказной рабо-
ты с оценкой вероятности правильного функционирования ГТД
в условиях возможного появления неисправностей его элемен-
тов, агрегатов и систем. Анализ производится по таблице воз-
можных несовместных событий для всех без исключения эле-
ментов с указанием влияния их характеристик на выполняемые
ГТД функции. В результате анализа определяются сочетания
групп событий, при которых с определенной вероятностью обес-
печивается правильное функционирование ГТД. Эта вероятность
определяется на основе теоремы сложения вероятностей несов-
местных событий и умножения вероятностей независимых собы-
тий выполнения функциональной системой i-й функции за вре-
мя tj:
т Г т / k \ '
Р, (,/) = П Ру 1 4 2 У ^/Р; ,
/=1 L /=1 \<=1 /.
где Pj — вероятность безотказной работы элемента; qJV—вероятность появ-
ления' отказа элемента / по неисправности v за время it при выполне-
нии функции (.
Таблица составляется для п функциональных групп, состоя-
щих из т элементов. В ней определяются число функций, выпол-
11
Таблица 1.1.
Узел или элемент
1 < / < т
Вид неисправностей ТРДД 1<*<Й Функция
режим работы этап полета
запуск земной МГ полетный МГ приемистость максимальный максимальный продолжительны* взлет набор высоты горизонтальный полет снижение пробег
Параметры
наличие стружки
Детали проточной части (группа 1)
1.1. Лопатки ВНА 1. Забоины 2. Обледенение 1 0 1 1 1 1 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 + + + —
1.2. Кок 1. Обледенение ' 0 1 1 0 0 ю 0 0 0 0 0 + + — —
1.3. Рабочие лопатки 1. Забоины 1 1 1 0 0 0 0 0 0 1 1 + + + —
КНД и КВД ' 2. Абразивный износ 1 1 1 0 0 0 0 0 0 1 1 + + + —
3. Вибрация 0 0 0 0 0 0 0 0 0 0 0 + — + —
4. Разрушение пера 5. » замка 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 > 0 0 0 0 0 0 0 + + + + + —
1.4. Лопатки НА КВД 1. Трещины 1 1 1 1 1 1 1 1 1 1 1 — — — —
и КНД 2. Разрушение 0 0 0 0 0 0 0 0 0 0 1 0 1 + + 4- —
3. Забоины 1 1 1 0 0 0 0 0 0 —— — + ——
4. Абразивный износ i 1 1 0 0 0 0 0 0 1 1 + — + —
5. Коррозия 1 1 1 0 0 0 0 - 0 0 1 1 — — + —'
1.5. Жаровые трубы 1. Трещины 2. Прогар 1 0 1 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 1 0 + + 4- + + —
3. Коробление- 1 1 1 0 0 0 0 0 0 1 1 + + 4-
4. Нарушение процесса 0 0 0 0 0 0 0 0 0 0 0 + 4“ + ——
смесеобразования
• 5. Пульсационное горе- ние 6. Нагарообразование 7. Износ сопрягаемых поверхностей 1 1 1 '1 1 1 1 I 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1 + + + + 1 + + —
1.6. Лспатки СА ТВД 1. Разрушение 0 0 0 0 0 0 0 0 0 0 0 + -1- + —
и ТНД 2. Трещины 1 1 1 0 0 1 0 0 1 1 1 — — + —
3. Оплавление, обгорание 1 1 1 0 0 0 0 0 0 1 1 — — + —
4. Забоины 1 1 1 0 0 0 0 0 0 1 1 — + ——
5. Эрозионно-коррозион- ный износ 1 -1 1 0 0 1 0 0 1 1 1 + — + —
1.7. Рабочие лдпатки 1. Обрыв 0 0 0 0 0 0 0 0 0 0 0 4- + + —
ТНД и ТВД 2. Трещины 1 1 1 0 0 0 0 0 0 1 1 — —
3. Оплавление, обгора- ние 1 1 1 0 0 0 0 0 0 1 1 — — + —
4. Забоины 1 1 1 0 0 0 0 0 0 1 1 — — —
5. Вытяжка 1 I 1 0 0 0 0 0 0 1 1 — — + —
6. Эрозионно-коррозион- ный износ 1 1 1 0 0 0 0 0 0 1 1 + 4- + —
7. Разрушение замка 0 0 0 0 0 0 0 0 0 0 0 + *+ —
8. Вибрация 0 0 0 0 0 0 0 0 0 0 0 + + —
9. Увеличение зазора в стыках бандажных по- лок Мас/ 1 осис 1 тема 0 (гру 0 ппа 0 0 0 0 0 0 1 1 + + г
п. 1. Маслобак , 1. Разрушение 0 0 0 0 0 0 0 0 0 0 0 — — + —
2. Малое количество масла 0 0 0 0 0 0 0 0 0 0 0 — — — —
п.2. Предохранитель- ный клапан 1. Отказ 0 0 0 0 0 0 0 0 0 0 0 + — — —
Продолжение
ИМЖ.{(11? ЭИЫНГЙН -l + + + +
о. ai”HJ ooHhOdu + + + 1 1
5
rt aiqiiHOHUBtloiia 1 1 1 1 1
с
пл + + + 1 1
о о о о
оинажинэ о о о о •—<
<s
lairoii
й о 1ПЧНП1ГР1ИО£ИС1си о о о о
й
е S3 niojwa йодвн О G о о
Л
СО
V xaires О О о •—ч
V/
ИННЧЬ'ЭХНЖи’О'ТГОЙи
« цннч1ггниэяви О о о о
X
X yiquqirpwuDMPH о о о о *—Ч г—1
о
о qiooioiiwanilii о о о о I—Ч 1—.
АО
£ JW ЦГТН1ЭГОЧ о о о о 7—-< W—<
£
CJ о, JW gOHW3E о о о о т“1 1
mdKubk о о о о »—Ч 1—н
Et
E[ 6
С
H Я
Ч
’X Я
к я
x
ca > ф ф
KJ \ 0.2 X СП СО го го а - 5 « си з ГО
ГО ГО го о си я
Я Я я я О ГО f_
4 го го о
Ef О о о о СОП- ч
X
CQ г—< —' -ч сч
го 1
го о ^7
ж я
x О н-. о ’Я »я »я
ли элеме /< tn О Я я ® 2 ’Я ГО О CD я к 3 я я ф \о о 3 Я £ - з о. & я «=; я •&
И Я Си н н о
Узел о го я я о ь о о я «V п Я Е Ф g п го S
СО LfS 2 го
е е о о 8* 2 ес -е- с
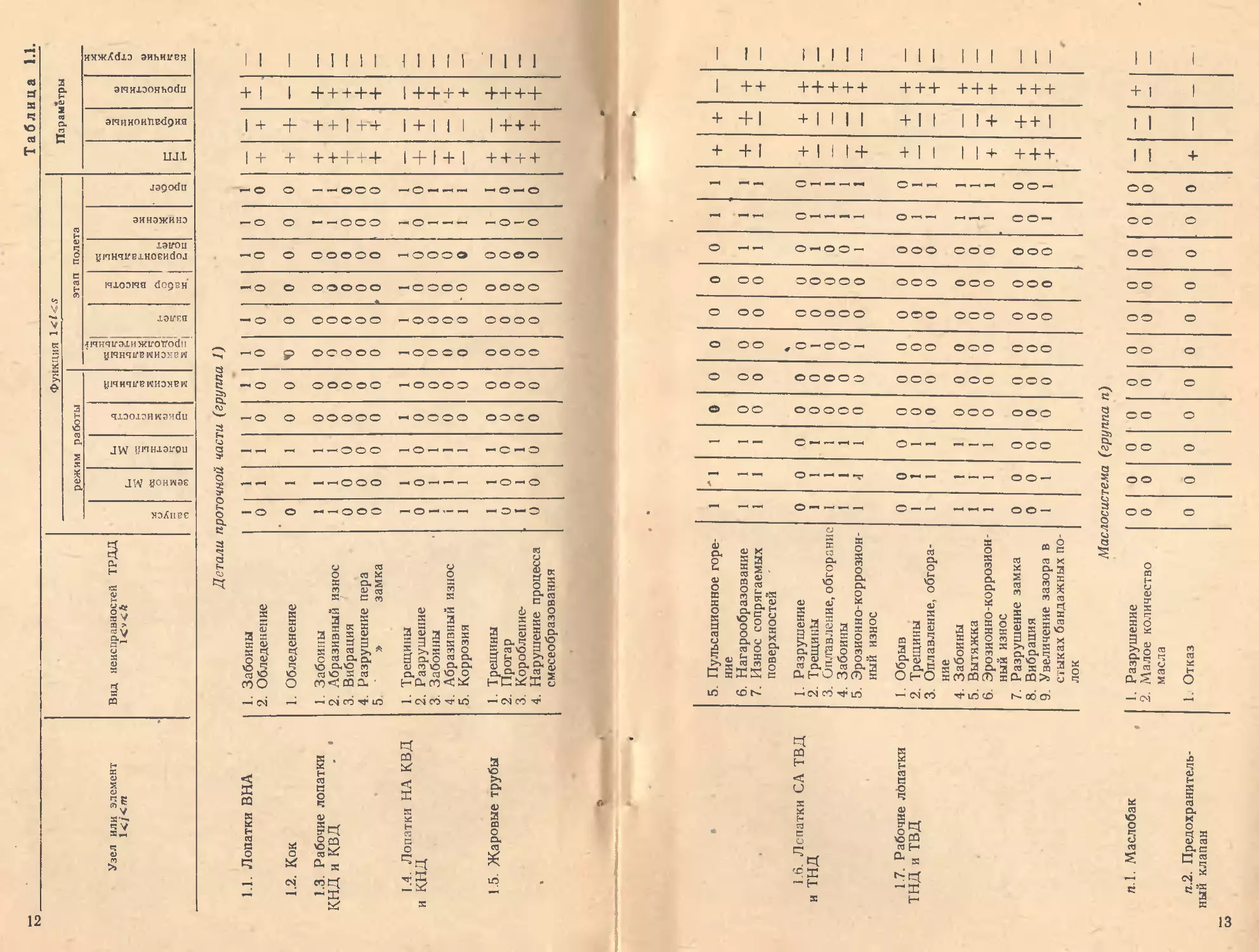
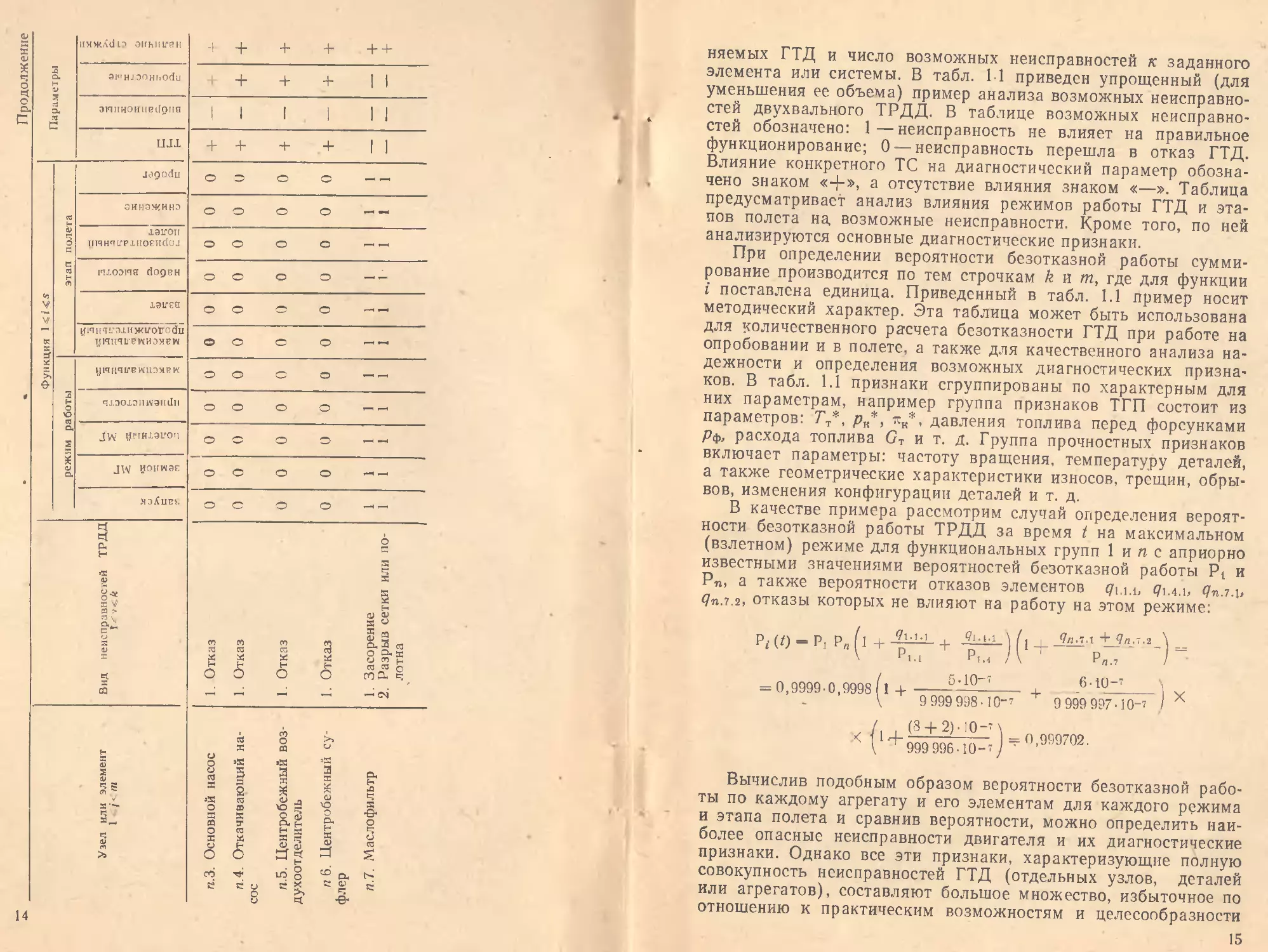
няемых ГТД и число возможных неисправностей к заданного
элемента или системы. В табл. 11 приведен упрощенный (для
уменьшения ее объема) пример анализа возможных неисправно-
стей двухвального ТРДД. В таблице возможных неисправно-
стей обозначено: 1—неисправность не влияет на правильное
функционирование; 0 — неисправность перешла в отказ ГТД.
Влияние конкретного ТС на диагностический параметр обозна-
чено знаком «+», а отсутствие влияния знаком «—». Таблица
предусматривает анализ влияния режимов работы ГТД и эта-
пов полета на, возможные неисправности. Кроме того, по ней
анализируются основные диагностические признаки.
При определении вероятности безотказной работы сумми-
рование производится по тем строчкам k и т, где для функции
i поставлена единица. Приведенный в табл. 1.1 пример носит
методический характер. Эта таблица может быть использована
для количественного расчета безотказности ГТД при работе на
опробовании и в полете, а также для качественного анализа на-
дежности и определения возможных диагностических призна-
ков. В табл. 1.1 признаки сгруппированы по характерным для
них параметрам, например группа признаков ТГП состоит из
параметров: ТТ*, р„*, itK*. давления топлива перед форсунками
Рф> расхода топлива GT и т. д. Группа прочностных признаков
включает параметры: частоту вращения, температуру деталей,
а также геометрические характеристики износов, трещин, обры-
вов, изменения конфигурации деталей и т. д.
В качестве примера рассмотрим случай определения вероят-
ности безотказной работы ТРДД за время t на максимальном
(взлетном) режиме для функциональных групп 1 и п с априорно
известными значениями вероятностей безотказной работы Pt и
Рп, а также вероятности отказов элементов qi.\.i, q\.n.\, qn.7.1,
qn.7.2, отказы которых не влияют на работу на этом режиме:
Рг(О = Р1 Р«(1 + -^- +
\ 1 i.i
= 0,9999-0,9998 1 +
91-1-1 \ Л , <?д.тл + Яп.1.2
Р1.< /\ РЯ.7 ‘
9 999 998-10-7
(8+ 2)-'.О-\
999 996-10-7)
= 0,999702.
Вычислив подобным образом вероятности безотказной рабо-
ты по каждому агрегату и его элементам для каждого режима
и этапа полета и сравнив вероятности, можно определить наи-
более опасные неисправности двигателя и их диагностические
признаки. Однако все эти признаки, характеризующие полную
совокупность неисправностей ГТД (отдельных узлов, деталей
или агрегатов), составляют большое множество, избыточное по
отношению к практическим возможностям и целесообразности
15
14
его применения. Поэтому из этого множества выбирается опти-
мальная по числу признаков совокупность, содержащая приз-
наки с наибольшей (по сравнению с другими) диагностической
ценностью. Определение указанной ценности производится по
количеству истинной информации, которая вносится признаком
в систему состояния (диагнозов) [3] и зависит от информацион-
ной производительности и погрешностей процессов его измере-
ния, регистрации, воспроизводства и т. п.
Выбор оптимального числа признаков обусловливается сле-
дующими основными обстоятельствами: теоретически с увели-
чением этого числа достоверность диагностирования должна так-
же увеличиваться; из выбранной совокупности должны быть
исключены зависимые признаки, т. е. такие, развитие которых
можно спрогнозировать по известному прогнозу развития дру-
гих, и поэтому не несущие новой информации; практически с
ростом числа признаков растут погрешности системы измерений
вследствие увеличения числа датчиков, устройств передачи, пре-
образования и воспроизведения информации и т. д., т. е. увели-
чения количества ложной информации. Как показывает опыт,
оптимальная совокупность должна состоять из 4...5 признаков.
В основном ценность данного признака количественно опре-
деляется: априорной вероятностью состояния (диагноза), уста-
новленного по всей совокупности признаков; апостериорной ве-
роятностью состояния, установленного по данному признаку; его
диагностическим весом, т е количеством информации о данном
состоянии.
Методы определения ценности зависят: от разрядности при-
знака (числа диагностических интервалов), под которой пони-
мается число возможных диагнозов по данному признаку; от
вида применяемых алгоритмов диагностирования и информаци-
онной производительности процесса измерения. Практический
опыт применения методов оценки диагностической ценности при-
знаков пока еще мал и не позволяет давать какие-либо реко-
мендации по их выбору. Теоретические основы этих методов до-
статочно хорошо и полно изложены в работах [3. 12].
1.3. КОНТРОЛЕПРИГОДНОСТЬ И ЕЕ ХАРАКТЕРИСТИКИ
Контролепригодность ГТД зависит от его конструктивного
совершенства и эксплуатационной технологичности (обеспечения
доступа для осмотра наиболее нагруженных узлов и деталей), от
степени оснащенности первичными преобразователями и конт-
рольно-измерительными средствами. Для достижения заданного
уровня контролепригодности ГТД как объект диагностирования
должен обеспечивать возможности: расчленения его конструк-
тивной схемы и функциональных систем на модули (подсисте-
мы) и каждого модуля (подсистемы) на полумодули (простые
16
подсистемы) до момента получения заданной для полетных и
земных условий глубины поиска дефекта; размещения па нем
первичных преобразователей, встроенных средств контроля п
аварийной сигнализации; создания подходов для визуального п
инструментального контроля ТС конструктивных элементов; кон
троля и тарировки системы автоматического регулирования ГТД
от пульта дистанционного управления им до регулирующего ор-
гана.
Уровень контролепригодности в полете и на земле должен
быть достаточен, в первую очередь, для обеспечения оператив-
ного контроля за наступлением отказов, угрожающих безопас-
ности полетов или приводящих к неправильному функциониро-
ванию ГТД. К первому виду отказов относятся разрушения де-
талей проточной части, дисков компрессоров и турбин, валов
турбокомпрессоров, подшипников опор, приводов и элементов
агрегатов и т. д. Ко второму виду относятся отказы, приводя-
щие к,снижению тяги на режимах, особенно максимальном и
максимальном продолжительном, появлению вибрации на от-
дельных режимах работы и. этапах полета, самопроизвольному
выключению двигателя при включении реверсивного устройст-
ва, увеличению расхода топлива и т. д.
Кроме перечисленного, уровень контролепригодности на зем-
ле должен обеспечивать раннее обнаружение неисправностей
до момента их перехода в отказ и прогнозирование изменения
ТС с помощью средств и методов диагностирования, применение
которых в полете невозможно или нецелесообразно. Уровень
контролепригодности не является чем-то неизменным, а разви-
вается беспрерывно по мере совершенствования технической ди-
агностики, систем диагностирования, успехов в области конст-
руирования и производства и т. д.
Предупреждение появления неисправностей осуществляется
с помощью различных методов контроля ТС ГТД в процессе
эксплуатации, которые также во многом определяют его конт-
ролепригодность. Наиболее прост и доступен визуальный метод
контроля. Он позволяет путем осмотра невооруженным глазом
обнаруживать явно выраженные неисправности, такие как тре-
щины', вмятины, коробления, ослабления креплений различных
узлов и агрегатов, течи топлива, масла и т. д. Несмотря на раз-
витие и широкое применение более эффективных, чем визуаль-
ный, инструментальных методов, он, по-прежнему, используется
на практике и обычно предшествует другим методам контроля.
Визуальный метод позволяет выявлять неисправности только
в доступных для внешнего осмотра местах конструкции. Для
осмотра конструктивных элементов, расположенных внутри дви-
гателя, применяют оптические трубки (бороскопы, эндоскопы).
Метод контроля с применением оптических трубок называется
визуально-оптическим. Для осмотра деталей, расположенных
внутри двигателя, в конструкции защитных кожухов и силовых
2—1369
1?
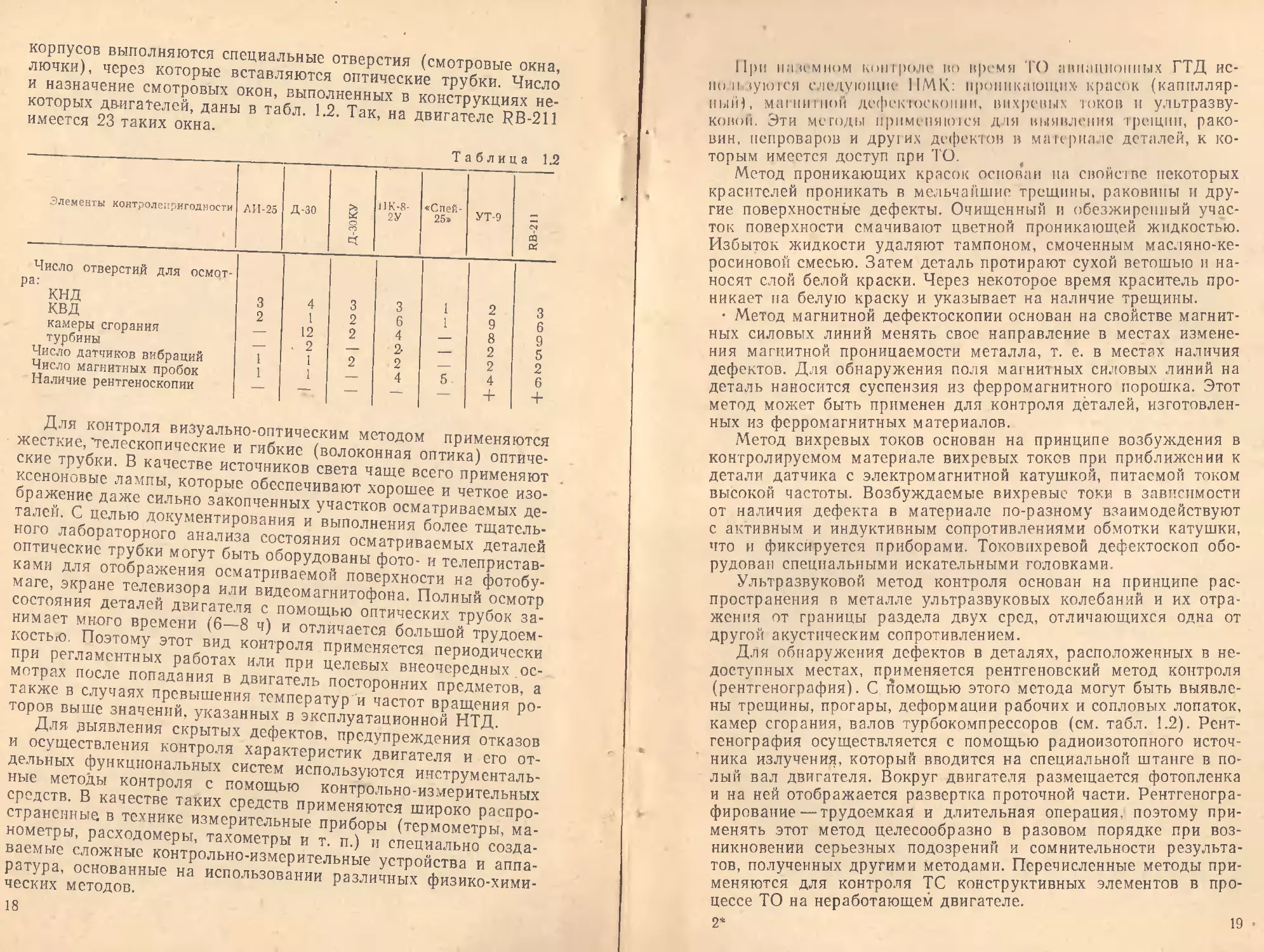
корпусов выполняются специальные отверстия (смотровые окна,
лючки), через которые вставляются оптические трубки. Число
и назначение смотровых окон, выполненных в конструкциях не-
которых двигателей, даны в табл. 1.2. Так, на двигателе RB-211
имеется 23 таких окна.
Таблица 1.2
Элементы контролепригодности
АИ-25 Д-30 Д-ЗОКУ 1IK-8- 2У «Спей- 25» УТ-9
CQ
Число отверстий для осмот-
ра:
КНД
КВД
камеры сгорания
турбины
Число датчиков вибраций
Число магнитных пробок
Наличие рентгеноскопии
4
1
12
. 2
1
1
3
6
4
2-
2
4
2
9
8
2
2
4
3
6
9
5
2
6
3
2
3
2
2
1
1
2
5
Для контроля визуально-оптическим методом применяются
жесткие,'телескопические и гибкие (волоконная оптика) оптиче-
ские трубки. В качестве источников света чаще всего применяют
ксеноновые лампы, которые обеспечивают хорошее и четкое изо-
бражение даже сильно закопченных участков осматриваемых де-
талей. С целью документирования и выполнения более тщатель-
ного лабораторного анализа состояния осматриваемых деталей
оптические трубки могут быть оборудованы фото- и телепристав-
ками для отображения осматриваемой поверхности на фотобу-
маге, экране телевизора или видеомагнитофона. Полный осмотр
состояния деталей двигателя с помощью оптических трубок за-
нимает много времени (6—8 ч) и отличается большой трудоем-
костью. Поэтому этот вид контроля применяется периодически
при регламентных работах или при целевых внеочередных ос-
мотрах после попадания в двигатель посторонних предметов, а
также в случаях превышения температур и частот вращения ро-
торов выше значений, указанных в эксплуатационной НТД.
Для выявления скрытых дефектов, предупреждения отказов
и осуществления контроля характеристик двигателя и его от-
дельных функциональных систем используются инструменталь-
ные методы контроля с помощью контрольно-измерительных
средств. В качестве таких средств применяются широко распро-
страненные в технике измерительные приборы (термометры, ма-
нометры, расходомеры, тахометры и т. п.) и специально созда-
ваемые сложные контрольно-измерительные устройства и аппа-
ратура, основанные на использовании различных физико-хими-
ческих методов.
18
При паи миом коп । роле во время ТО авиационных ГТД ис-
пои, tyioica следующие НМК: проникающих- красок (капилляр-
ный}, магии гной дефектоскопии, вихревых токов и ультразву-
ковой. Эти методы применяются для выявления трещин, рако-
вин, непроваров и дру! и.х дефектов в мап риале деталей, к ко-
торым имеется доступ при ТО.
Метод проникающих красок основан па свойстве некоторых
красителей проникать в мельчайшие трещины, раковины и дру-
гие поверхностные дефекты. Очищенный и обезжиренный учас-
ток поверхности смачивают цветной проникающей жидкостью.
Избыток жидкости удаляют тампоном, смоченным масляно-ке-
росиновой смесью. Затем деталь протирают сухой ветошью и на-
носят слой белой краски. Через некоторое время краситель про-
никает па белую краску и указывает на наличие трещины.
• Метод магнитной дефектоскопии основан на свойстве магнит-
ных силовых линий менять свое направление в местах измене-
ния магнитной проницаемости металла, т. е. в местах наличия
дефектов. Для обнаружения поля магнитных силовых линий на
деталь наносится суспензия из ферромагнитного порошка. Этот
метод может быть применен для контроля дёталей, изготовлен-
ных из ферромагнитных материалов.
Метод вихревых токов основан на принципе возбуждения в
контролируемом материале вихревых токов при приближении к
детали датчика с электромагнитной катушкой, питаемой током
высокой частоты. Возбуждаемые вихревые токи в зависимости
от наличия дефекта в материале по-разному взаимодействуют
с активным и индуктивным сопротивлениями обмотки катушки,
что и фиксируется приборами. Токовихревой дефектоскоп обо-
рудован специальными искательными головками.
Ультразвуковой метод контроля основан на принципе рас-
пространения в металле ультразвуковых колебаний и их отра-
жения от границы раздела двух сред, отличающихся одна от
другой акустическим сопротивлением.
Для обнаружения дефектов в деталях, расположенных в не-
доступных местах, применяется рентгеновский метод контроля
(рентгенография). С помощью этого метода могут быть выявле-
ны трещины, прогары, деформации рабочих и сопловых лопаток,
камер сгорания, валов турбокомпрессоров (см. табл. 1.2). Рент-
генография осуществляется с помощью радиоизотопного источ-
ника излучения, который вводится на специальной штанге в по-
лый вал двигателя. Вокруг двигателя размещается фотопленка
и на ней отображается развертка проточной части. Рентгеногра-
фирование— трудоемкая и длительная операция, поэтому при-
менять этот метод целесообразно в разовом порядке при воз-
никновении серьезных подозрений и сомнительности результа-
тов, полученных другими методами. Перечисленные методы при-
меняются для контроля ТС конструктивных элементов в про-
цессе ТО на неработающем двигателе.
2* 19 •
Таблица 1.3
Параметр Обозначение трдд
CF-6 «Олимп- 593» ( RB-211
Индика- ция Регистра- ция Индика- ция Регистра-| ция Индика- | Ция Регистра- ция
Наработка т + -f- 4-
Положение РУД «РУД + + + +
Частота вращения ротора вентиля- тора Частота вращения РНД, РВД Лв + + + + 4 +
ПНД’ лвд •+ + + 4- +
Отношение давлений Р*т/р*ВК + + + + +
Давление воздуха за вентилятором Р*вт + + + +
Температура воздуха за КВД t*K + +
Температура воздуха за КНД *КНД +
Давление воздуха за КВД Р*н + + + + +
Температура лопаток ТВД in + + +
Температура газа перед ТНД /*твД + + + + + +
Часовой расход топлива + + + + + +
Виброскорость в зоне корпуса дви- Ув + + + + + +
гателя
То же, КВД Ун + + + + + +
» коробки приводов » корпуса опоры подшипника: Ун.п +
№ 1 Уп1 + •
№ 2 Уп2 -1-
№ 4 УП4 +
№ 7 УП7 Т
Отбор воздуха Ge t + +
Сигнализация положения реверсив- ного устройства + "Г + +
Уровень повреждения:
лопаток роторов КНД и КВД + + +
камеры сгорания + + +
лопаток ротора турбины + 4- + +. +
лопаток СА + + +
Объем масла в маслобаке ' Ь'м + + 4- + + +
Давление масла на входе в двига- pH .8Х + + + + + +
тель
Давление масла на выходе из на- Рм.ВЫХ + + + +
coca
Температура масла на входе в дви- ^М.8Х + + + + 4- +
гатель
Стружка в масле Ст + + 1 +• + +
Температура масла на выходе из М . В Ы X + +
двигателя
Давление в коробке приводов Рк.п +’ +
Перепад давлений масла на фильт- ре в откачивающей магистрали Арм +
Сигнализатор минимального давле- Рм mln + + +
ння масла на входе в двигатель
Температура топлива на входе в + +
двигатель
20
Продолжение
Параметр Обозначение ТРДД
CF-6 „Олимп- 593“ RB-2U
Я И Is Регистра- ция га а S »'= X S Регистра- ция Я ж S х§ Регистра- ция
Температура топлива на выходе из
ТМР
Давление топлива на входе в дви-
гатель
Давление между ступенями топ-
ливного насоса двигателя
Температура топлива в баке
Перепад давлений топлива на регу-
ляторе расхода
Перепад давления топлива на ос-
новном фильтре
Сигнализатор минимального давле-
ния топлива на входе в двигатель
Напряжение на катушках зажига-
ния
Сила тока на катушках зажигания
Расход воздуха, отбираемого на са-
молетные нужды
Давление воздуха в противообле-
деьитезьной системе
Положение клапана в системе про-
тивообледенения
Температура воздуха для охлажде-
ния турбины
Температура воздуха на входе в
двигатель
Скорость воздушного потока на
входе в воздухозаборник
^ТМР +
Рт +
рт-н + + + +
^топ л АрТОП л + + +
Арт + + + + + +
Рт mln + + + + +
и +
I +
Св.отб + + +
Рпо.с +
— +
^ох л + +
/*ВХ + + + + + +
Свх + + + + + +
Для функционального или тестового диагностирования при-
меняются методы и средства, которые позволяют получать диаг-
ностическую информацию непосредственно с работающего дви-
гателя. Датчики и преобразователи диагностических сигналов
могут быть установлены’непосредственно на двигателе и являть-
ся частью его конструкции (встроенные средства контроля) или
располагаться отдельно от конструкции двигателя (внешние
средства контроля).
Информация со встроенных первичных преобразователей мо-
жет приниматься различными средствами индикации и регист-
рации как бортовыми в полете, так и наземными при ТО. Бор-
товые системы индикации выполняются в виде стрелочных и
цифровых указателей, дисплеев, световых табло и звуковых сиг-
нализаторов, расположенных в кабине экипажа.
21
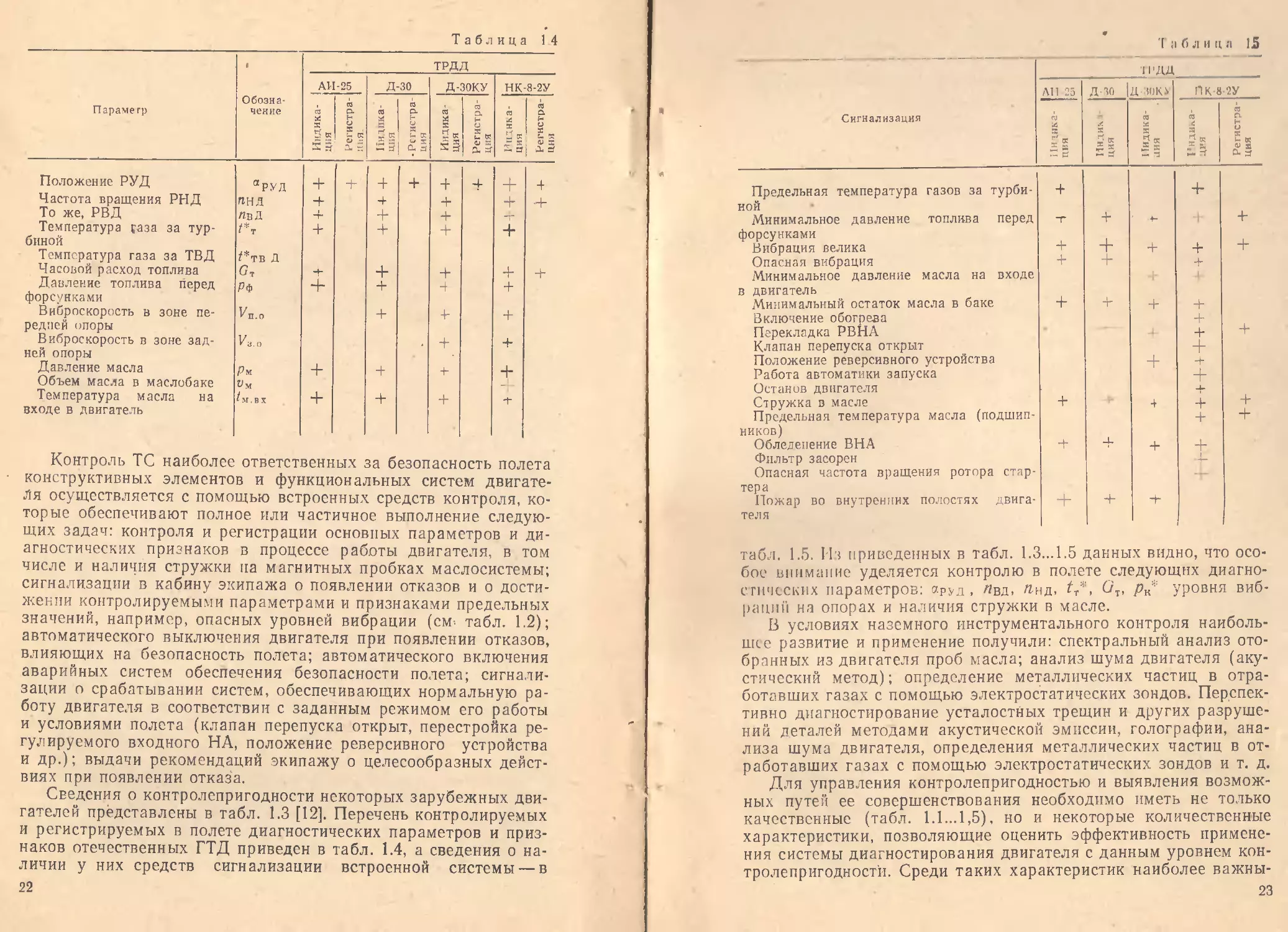
Таблица 14
Параметр « Обозна- чение ТРДД
АИ-25 Д-30 Д-ЗОКУ НК-8-2У
Индика- 1 ДНЯ I I Регистра- ция. Индика- ция • Регистра- ция S Регистра- ция Индика- ция Регистра- ция
Положение РУД аРУД + -j- + + -1- 4- + +
Частота вращения РИД пня -4- + + + +
То же, РВД Температура саза за тур- лвД 4- + +
/*Т + + + +
биной
Температура газа за ТВД ^*тв Д
Часовой расход топлива GT + + + +
Давление топлива перед форсунками РФ + + -1 +
Виброскорость в зоне пе- Гп.О + 4- +
редпей опоры Виброскорость в зоне зад- ней опоры У3.„ + +
Давление масла Рм + + +
Объем масла в маслобаке 1>м
Температура масла на М . В X + + + -f-
входе в двигатель
Контроль ТС наиболее ответственных за безопасность полета
конструктивных элементов и функциональных систем двигате-
ля осуществляется с помощью встроенных средств контроля, ко-
торые обеспечивают полное или частичное выполнение следую-
щих задач: контроля и регистрации основных параметров и ди-
агностических признаков в процессе работы двигателя, в том
числе и наличия стружки па магнитных пробках маслосистемы;
сигнализации в кабину экипажа о появлении отказов и о дости-
жении контролируемыми параметрами и признаками предельных
значений, например, опасных уровней вибрации (см табл. 12);
автоматического выключения двигателя при появлении отказов,
влияющих на безопасность полета; автоматического включения
аварийных систем обеспечения безопасности полета; сигнали-
зации о срабатывании систем, обеспечивающих нормальную ра-
боту двигателя в соответствии с заданным режимом его работы
и условиями полета (клапан перепуска открыт, перестройка ре-
гулируемого входного НА, положение реверсивного устройства
и др.); выдачи рекомендаций экипажу о целесообразных дейст-
виях при появлении отказа.
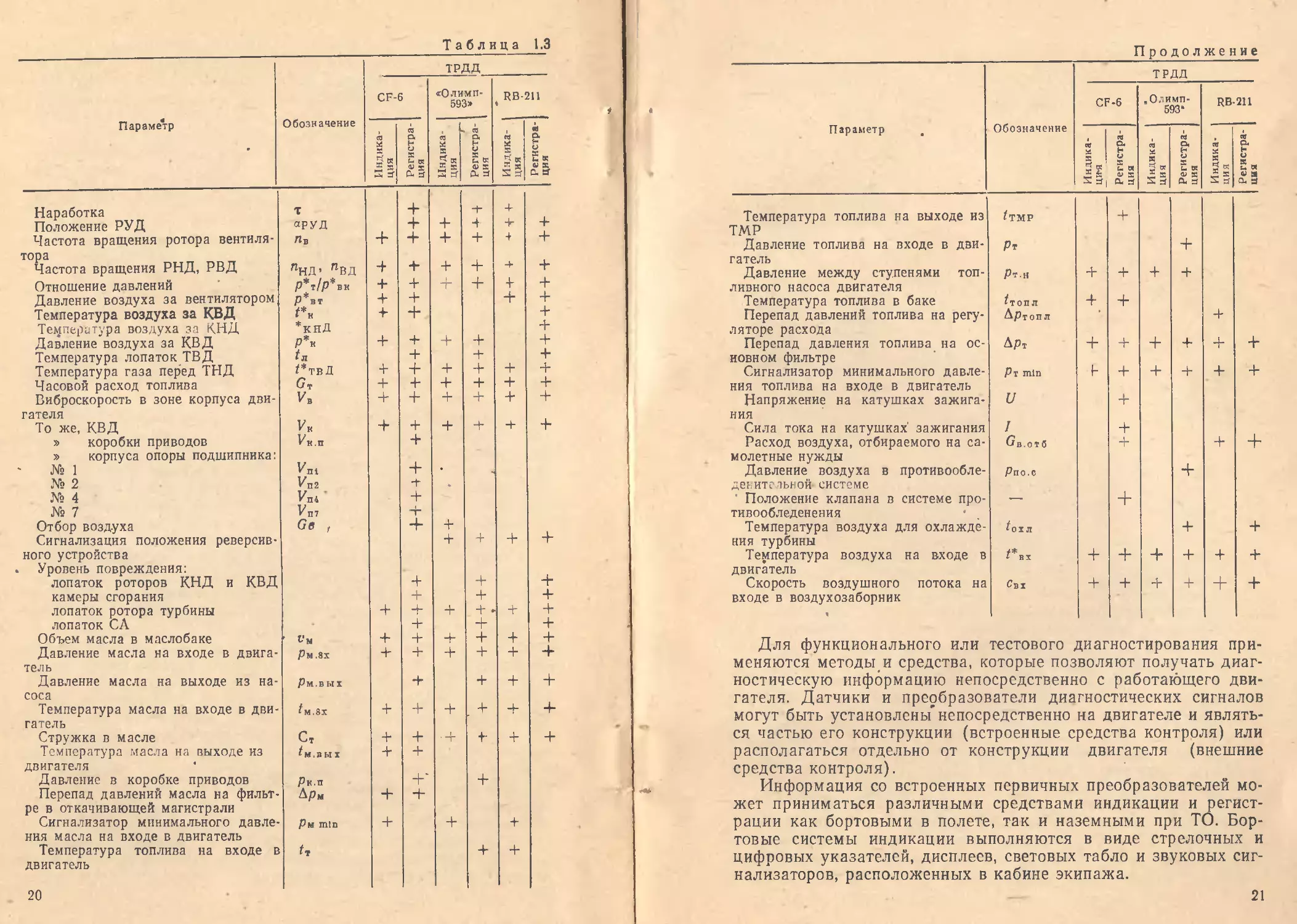
Сведения о контролепригодности некоторых зарубежных дви-
гателей представлены в табл. 1.3 [12]. Перечень контролируемых
и регистрируемых в полете диагностических параметров и приз-
наков отечественных ГТД приведен в табл. 1.4, а сведения о на-
личии у них средств сигнализации встроенной системы — в
22
'I а б л и ц a 15
Сигнализация ЛИ 25 д-10 _!_1’ДД Д 11)10 П К 8 2У
ВИП -ЕЯИьНЦ Индика- ция Индика- ция 1’ндила- цня Регистра- ция
Предельная температура газов за турби- ной Минимальное давление топлива перед + + 4- 4- +
форсунками Вибрация велика + + + + +
Опасная вибрация Минимальное давление масла на входе в двигатель Минимальный остаток масла в баке + + + + +
Включение обогрева Перекладка РВНА 4- + + +
Клапан перепуска открыт Положение реверсивного устройства Работа автоматики запуска Останов двигателя Стружка в масле + + + + н- + -4- 4- +
Предельная температура масла (подшип- ников) Обледенение ВНА д. + + + +
Фильтр засорен Опасная частота вращения ротора стар- тера Пожар во внутренних полостях двига теля + -4-
табл. 1.5. Из приведенных в табл. 1.3...1.5 данных видно, что осо-
бое внимание уделяется контролю в полете следующих диагно-
стических параметров: аруд , «вд, Инд, tr*, От, Рк" уровня виб-
раций на опорах и наличия стружки в масле.
В условиях наземного инструментального контроля наиболь-
шее развитие и применение получили: спектральный анализ ото-
бранных из двигателя проб масла; анализ шума двигателя (аку-
стический метод); определение металлических частиц в отра-
ботавших газах с помощью электростатических зондов. Перспек-
тивно диагностирование усталостных трещин и других разруше-
ний деталей методами акустической эмиссии, голографии, ана-
лиза шума двигателя, определения металлических частиц в от-
работавших газах с помощью электростатических зондов и т. д.
Для управления контролепригодностью и выявления возмож-
ных путей ее совершенствования необходимо иметь не только
качественные (табл. 1.1...1,5), но и некоторые количественные
характеристики, позволяющие оценить эффективность примене-
ния системы диагностирования двигателя с данным уровнем кон-
тролепригодности. Среди таких характеристик наиболее важны-
23
ми являются критерии эффективности, контролепригодности и
комплексный [12].
Критерий эффективности применения системы диагностиро-
вания учитывает все особенности ее работы:
в
/<Э-Р,Р; .. Ра=ПР/.
1
где Р{ — вероятности; «=1...6— индексы вероятностей соответственно: отсут-
ствия неисправностей в неконтролируемой части ГТД, правильной оценки
ТС оператором, правильного функционирования средств диагностирова-
ния, достоверностей алгоритма и метода диагностирования и достовер-
ности диагностирования (верного заключения).
Вероятности отсутствия неисправностей Pi и правильной
оценки Р2 определяются по статистическим данным о результа-
тах эксплуатации ГТД или его прототипа. Вероятность правиль-
ного функционирования средств Р3 в случае их непрерывного
действия при диагностировании представляет собой вероятность
безотказной работы. Если средства работают с перерывами, то
эта вероятность может быть определена с помощью коэффици-
ента их готовности Кг. В случае равенства интенсивностей отка-
зов и восстановления средств
Р3 = Кг + (1-Кг)е "(А'ггг.)г
где Кг=Т/(Т+Тв)-, Т и Тв — средние значения наработок на отказ и вос-
становление; t — время диагностирования.
Если все средства равнонадежны, а их отказы независимы,
то
р3= 1 - (1 -P3fr+i,
где Рзо — вероятность безотказной работы нерезервированных средств; m —
их число.
Вероятность достоверности алгоритма диагностирования при
появлении одной независимой неисправности
Р< ” ^В.Н ~ Чв Л,
где Кв.н — критерий оценки возможности определения неисправности при дан-
ном уровне контролепригодности; па и п — соответственно число вявляе-
мых и общее число возможных неисправностей.
, Вероятности достоверностей метода Р5 и диагностирования
Ре определяются количеством и качеством ложной информации,
участвующей в диагностировании.
Если точный расчет коэффициента эффективности затруднен,
то критерий может быть определен по приближенной формуле
Кэ = Т’д.о/Т’.
где Тд о и Т — наработка на отказ с применением и без применения методов
и средств диагностирования.
24
Критерий контролепригодности представляет собой отноше-
ние числа контролируемых параметров и к общему числу пара-
метров IV, характеризующих ТС: Кк—nfN'. Этот критерий прост
и удобен для практического применения. Для двигателей с вы-
соким уровнем контролепригодности он равен 0,95...0,98 и с низ-
ким — 0,3...0,35. Сдедует помнить, что в этом виде критерий не
учитывает информативность диагностических параметров. Точ-
ный расчет критерия контролепригодности производится по со-
отношению
Кк = апа„ Кэ.п^п.,.
В этой формуле критерий приспособленности ГТД к контролю
и диагностирования
А п ~ пд, А,
где лд — число доступных для контроля параметров; N — необходимое чис-
ло параметров;.
критерий инструментальной обеспеченности
Аи = ли/пд,
где ли — число параметров, которое можно измерить существующими мето-
дами и средствами;
критерий эксплуатационной приспособленности ГТД к кон-
тролю и диагностированию
Аэ.п = n3.n/A,
где лэ.п — число параметров, доступных для контроля в эксплуатации;
критерий влияния неисправностей.
Ар.ц = л.1/4,
где «в и п — соответственно число неисправностей, которое можно устано-
вить при данной контролепригодности, и общее число для данного ГТД.
Комплексный критерий оценивает глубину поиска дефектов,
полноту диагностирования, стоимость и целесообразность при-
менения системы диагностирования с учетом характеристик ГТД
как объекта диагностирования [11] и представляет собой про-
изведение критериев глубины поиска дефектов Тд, полноты ди-
агностирования Д и стоимостного Кс:
As = Г. ККС.
Критерий глубины поиска характеризует степень детализа-
ции конструктивных схем ГТД и их систем, в которых устанав-
ливается место возникшего дефекта,
Г., ’og2n''ogaA',
где /V 1 — соответственно общее число элементов 1 ТД шело элементов,
которых может быть определена неисправность
Критерий полноты диагностирования учитывает количество и
стоимость диагностической информации с учетом погрешностей
измерений:
У, (у, Pji logs Рд — logs Л ] (Ср/ + Спу)
ГМ | м=1/
N ~ гг \
У I У Рд logs Рд I (Ср/ + спу)
/-iLv=i /
где Рц — априорная вероятность i-ro состояния двигателя по /му парамет-
ру; п — число состояний; т — число средств; Дх3- — погрешность изме-
рения j-го параметра; (Срз+Спз)—ценность информации с использо-
ванием /-го параметра; Ср, — стоимость ТО, связанная с неконтролируе-
мым выходом /-го параметра за пределы допуска; Спстоимость ущер-
ба от невыполнения полетного задания из-за отсутствия контроля выхо-
да этого параметра за пределы допуска; N — общее число параметров,
характеризующих ТС двигателя.
, Стоимостный критерий (критерий целесообразности диагно-
стирования)
Кс = СЭ/(С„ + Сэ),
где Со — затраты на эксплуатацию системы диа1 ностирования; Со—ее пер-
воначальная стоимость.
Затраты на эксплуатацию системы
Сэ = (C3I/in + Сто) Тд Тр,
где Сзип и Сто — стоимости запасного комплекта системы и ее ТО; Тп —
среднее время диагностирования одного ГТД; Тр — ресурс средств диаг-
ностирования.
С учетом этой формулы
В итоге после преобразований комплексный критерий
_________________________1______________logs" ____
2 ’ _____Со_____ " 2,- X,- ’
1 + Сзип + Ст0 та X oga X
где X и X, — интенсивности отказов ГТД в целом и по i-му состоянию.
Критериальная оценка производится не только для определе-
ния уровня контролепригодности и эффективности системы ди-
агностирования, но и для решения задачи об оптимальной, степе-
ни ее автоматизации в данный момент эксплуатации конкретной
марки ГТД. Оценка эффективности системы диагностирования
должна производиться с учетом ее влияния на безотказность по-
летов, стоимость эксплуатации ГТД, трудоемкость ТО, эксплуа-
тационную технологичность, относительное время исправного
состояния и среднего времени восстановления на самолете.
26
1.4. МЕТОДЫ И СРЕДСТВА ДИАГНОСТИРОВАНИЯ
Конечная цель применения в эксплуатации методов и средств
диагностирования — распознавание вида ТС, определение типа
и вида дефекта и назначение управляющего воздействия для его
устранения. Применяемые при этом методы и средства зависят
от контролепригодности объекта, контролеспособности системы
диагностирования, условий эксплуатации объекта и системы, в
том числе от вида источника и природы диагностического сиг-
нала, периодичности его измерений, фаз существования объекта,
физической природы неисправностей и их признаков, принятых
диагностических моделей, степени участия человека в диагно-
стировании и т. д-
Влияние перечисленных факторов на выбор методов и средств
диагностирования нельзя оценить количественно, поэтому их
выбор производится на основе предшествующего опыта эксплуа-
тации ГТД или его прототипа и по результатам .опытной про-
верки на стадиях доводки, производства, ремонта и эксплуата-
ции. Вместе с тем, на основе первоначального опыта диагности-
рования ГТД можно систематизировать некоторые общие мето-
дические приемы, способствующие этому выбору.
Методы определения диагностических признаков и моделей
условно можно разделить на: экспериментальные, в которых
используются технические средства измерения, контроля и диаг-
ностирования объекта, имеющего определенный состав парамет- •»
ров и признаков; расчетные (косвенные), в которых признаки
вычисляются по значениям измеренных параметров при извест-
ных теоретических или экспериментальных зависимостях приз-
наков от параметров; эвристические, в которых признаки опре-
деляются человеком или коллективом на основе всех накоплен-
ных ими знаний, опыта, интуиции и т. п.
Диагностические признаки и модели подразделяются на диф-
ференциальные (единичные), интегральные (обобщенные) [7],
аналоговые и эвристические. Первые три вида признаков опре-
деляются на основе дискретной и аналоговой информации, за-
|мч портированной вручную и автоматически, а последний опре-
де im-гея па основе сенсорных восприятий человека.
Для пояснения методов практического использования дис-
кретной и аналоговой информаций с целью определения диагно-
стических признаков методически удобно воспользоваться поня-
тном о динамической характеристике двухвальных ТРДД [10].
Динамическая характеристика («портрет») ТРДД представляет
собой графическое отображение уравнений его динамики и .ос-
нована на предположении о том, что любой приведенный к ус-
ловиям стандартной атмосферы (СА-74) (или газодинамический
подобный) параметр двигателя xinp (или хг0) есть в случае двух-
вального ТРДД функция приведенных (или газодинамически
подобных) частот вращения и расхода топлива «biпр, «нл пр и
Дт.пр(«вЛ0 , «НД„ И Gt0).
27
Наиболее распространенные в практике диагностирования
приведенные параметры имеют вид:
^нСА /-> _ GiCA
время неустановившегося процесса
^нСА
-----, а газодинамические подобные
Г*
и
Ро —Р1Ра*9 ^то — ^т/ (pi-i* J Л|* .
По -- nil Та* , T0* = T*iT,,* и /0 = /р„* Ктн* •
Поскольку замена приведенных параметров на газодинамиче-
ские подобные не изменяет физической сущности функции, то в
дальнейшем в тексте будут использоваться подобные параметры.
Система уравнений динамики ТРДД [10] позволяет в соот-
ветствии с целями ее решения.заменить любой из трех аргумен-
тов («ид о, «вд о и G-го) на любой из параметров, входящих в
уравнения системы. Так как двухвальные ТРДД имеют кинема-
тическую схему с двумя степенями свободы, характеризующую-
ся частотами пнд и /гвц, то для диагностирования целесообраз-
но сохранить на динамической -характеристике в качестве абс-
циссы /гВд о и ординаты пНд о, а аппликату xi0 выбирать в соот-
ветствии с потребностями определения признака.
Таким образом, на всех установившихся и неустановившихся
режимах работы всегда можно по известной динамической ха-
рактеристике найти функциональные зависимости
ХЮ — fi ( пндо / пвдо)
где 5=лцдо/лвдо — отношение частот вращения двух смежных роторов,
т. е. их скольжение.
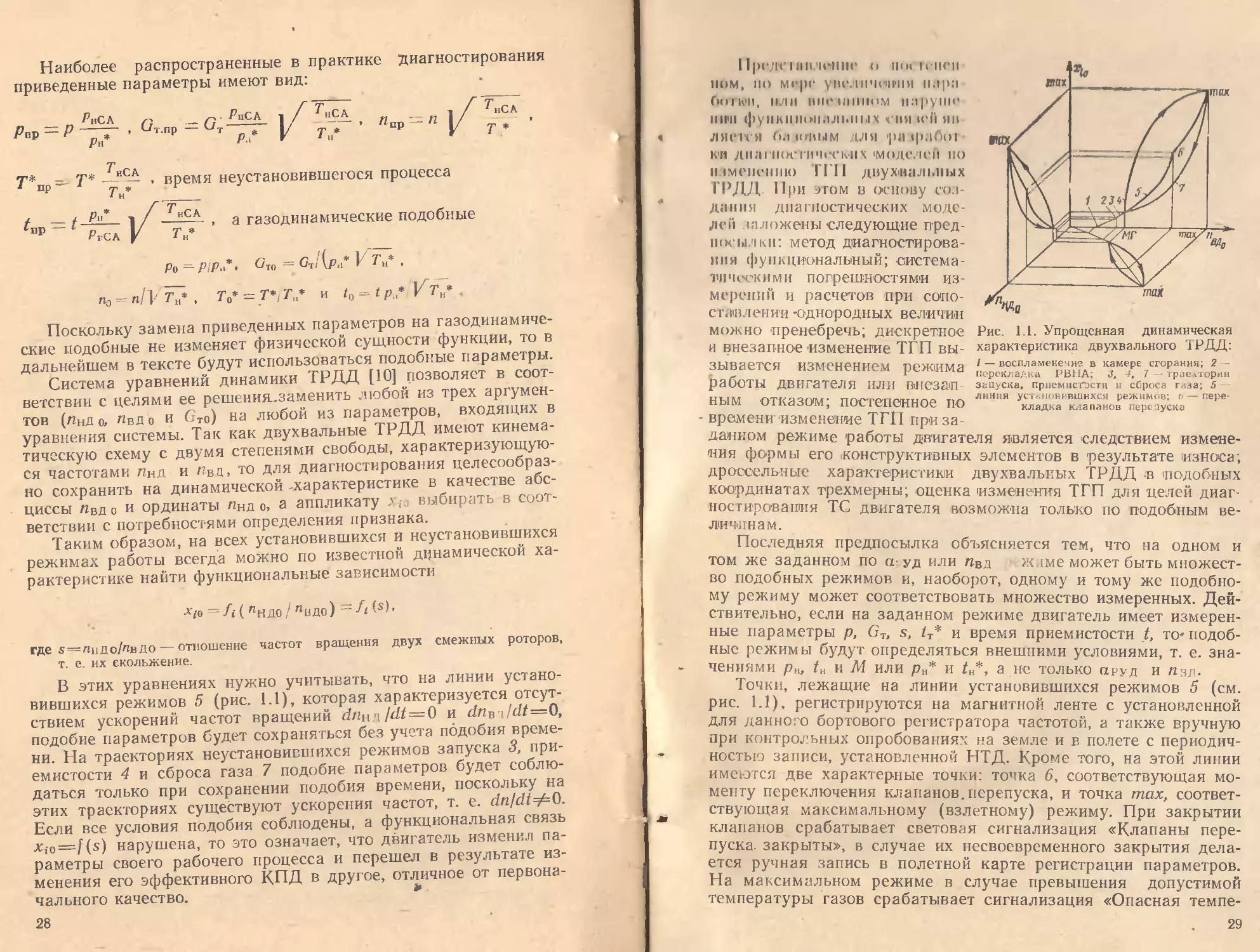
В этих уравнениях нужно учитывать, что на линии устано-
вившихся режимов 5 (рис. 1.1), которая характеризуется отсут-
ствием ускорений частот вращений dti^n /dt=O и dnBildt—G,
подобие параметров будет сохраняться без учета подобия време-
ни. На траекториях неустановившихся режимов запуска 3, при-
емистости 4 и сброса газа 7 подобие параметров будет соблю-
даться только при сохранении подобия времени, поскольку на
этих траекториях существуют ускорения частот, т. е. dnldt^=Q).
Если все условия подобия соблюдены, а функциональная связь
х,о—f(s) нарушена, то это означает, что двигатель изменил па-
раметры своего рабочего процесса и перешел в результате из-
менения его эффективного КПД в другое, отличное от первона-
чального качество. *
28
Рис. 1.1. Упрощенная динамическая
характеристика двухвального ТРДД:
/ — воспламенение в камере сгорания; 2 —
перекладке РВНА; J, / — траектории
запуска, приемистости и сброса газа; 5 —
линия установившихся режимов; t> — пере-
кладка клапанов перетуска
Ilpcjuiiin.’irlllie <i ikh n ik'ii
IIOM, III» Mope y|4'. Ill’H’liril 11 II.i,»:i
fMITIVII. ИЛИ Hili'UIIIIIOM linpyilll'
iiilut <|»yиkiiit<mi.1 лгиi>ix спя u'li ini
ЛИСГГН <>.! 111ЦЫМ ДЛИ |4I Ip.lAlll
K'H AiinriiiH'iii'h'Civiix im одел Hi no
изменению ТГП двухвальпых
ГРДД. При этом в основу соз-
дания диагностических моде-
лей заложены следующие пред-
посылки: метод диагностирова-
ния функциональный; система-
тическими погрешностями из-
мерений и расчетов при сопо-
ставлении -однородных величин
можно пренебречь; дискретное
и внезапное изменение ТГП вы-
зывается изменением режима
работы двигателя или внезап-
ным отказом; постепенное по
- времени изменение ТГП при за-
данном режиме работы двигателя является следствием измене-
ния формы его конструктивных элементов в результате износа;
дроссельные характеристики двухвальных ТРДД в подобных
координатах трехмерны; оценка изменения ТГП для целей диаг-
ностирования ТС двигателя возможна только по подобным ве-
личинам.
Последняя предпосылка объясняется тем, что на одном и
том же заданном по а уд или пвд ж лме может быть множест-
во подобных режимов и, наоборот, одному и тому же подобно-
му режиму может соответствовать множество измеренных. Дей-
ствительно, если на заданном режиме двигатель имеет измерен-
ные параметры р, Gy, s, tT* и время приемистости t, то* подоб-
ные режимы будут определяться внешними условиями, т. е. зна-
чениями рн, tn и М или рн* и t„*, а не только аруд и пзд.
Точки, лежащие на линии установившихся режимов 5 (см.
рис. 1.1), регистрируются на магнитной ленте с установленной
для данного бортового регистратора частотой, а также вручную
при контрольных опробованиях на земле и в полете с периодич-
ностью записи, установленной НТД. Кроме того, на этой линии
имеются две характерные точки: точка 6, соответствующая мо-
менту переключения клапанов, перепуска, и точка max, соответ-
ствующая максимальному (взлетному) режиму. При закрытии
клапанов срабатывает световая сигнализация «Клапаны пере-
пуска. закрыты», в случае их несвоевременного закрытия дела-
ется ручная запись в полетной карте регистрации параметров.
На максимальном режиме в случае превышения допустимой
температуры газов срабатывает сигнализация «Опасная темпе-
29
ратура газов», что может быть зарегистрировано автоматически
и вручную. Контроль температуры газов на этом режиме произ-
водится встроенными средствами.
В аналоговых записях неустановившихся режимов благодаря
высокой информационной производительности содержится очень
большой объем диагностической информации, которая состоит
из чисто аналоговой и точечной. Чисто аналоговая информация
поступает из записей траекторий неустановившихся режимов за-
пуска, приемистости, сброса газа и траекторий останова двига-
теля (выбега роторов), если они регистрируются. Точечная ана-
логовая информация содержится в характерных для работы
элементов системы автоматического регулирования (САР) на
неустановившихся режимах моментах воспламенения топлива в
камере сгорания, перекладки РВНА, перехода работы САР с од-
ного регулятора на другой, переключения автоматов приемисто-
сти и т. д.
Единичные признаки устанавливаются в основном экспери-
ментальными методами на основе опыта эксплуатации. Напри-
мер, ТС опоры ГТД может быть распознано по совокупности
независимых признаков: виброскорости, температуры и давле-
ния масла, расхода масла, акустического шума и наличия
стружки в масле.
Интегральные признаки представляют собой функциональные
или логические зависимости от единичных. Существуют два ос-
новных способа получения этих зависимостей. Первый способ
состоит в определении одного признака, наиболее полно харак-
теризующего ТС объекта. Во многих случаях таким признаком
может служить эффективный КПД ГТД гц, равный отношению
располагаемой энергии ГТД к затраченной энергии топлива, или
'р его основных узлов (компрессоров и турбин)- Использование
гр в качестве диагностического признака объясняется тем, что
он характеризует ГТД как тепловую машину и учитывает все
возможные в нем потери энергии, в том числе потери на вынос
тепла в струе газа, на трение газа и воздуха в проточной части,
механические потери на трение в подшипниках опор, на привод
агрегатов и т. д.
Например, эффективный КПД турбовинтового двигателя
(ТВД) может быть преобразован в диагностический признак
следующим образом:
»)г. '(<?. На) = const, р.,.к.:., (Gx const.) ри.к.м/Ст = Кт; .
где ЛД— винтовая мощность; //u=const2—низшая теплотворная способность
топлива; рп.к.и— давление масла в измерителе крутящего момента;
const]—коэффициент пропорциональности между и ри.к.м; Ку — ин-
тегральный признак по КПД.
Здесь ри.к.м и GT обязательно должны быть приведены к САУ
с учетом особенностей программы регулирования данного типа
30
ТВД. Достоинство признака состоит в возможности достаточно
точной оценки его изменения по наработке при больших сис-
тематических погрешностях измерения ри.к.м по бортовому ма-
нометру и GT по бортовому расходомеру топлива. Объясняется
это сокращением систематических погрешностей при последова-
тельном сопоставлении величин, измеренных одними и теми же
штатными приборами. Достоверность диагностирования по это-
му признаку при явных (нескрытых) дефектах типа прогаров
жаровых труб камер сгорания, лопаток £А и рабочих лопаток
турбин составляет не менее 70%.
Второй способ состоит в эмпирическом подборе функции ин-
тегрального признака от единичных признаков. Условия для
подбора этой функции следующие:
между единичными признаками должна существовать функ-
циональная или логическая связь. Примером единичных приз-
наков могут быть параметры рабочих процессов ГТД и его ос-
новных узлов: 7'г*:, Tr*, Тк \ p„v, гскя’,ке*, GT и т. п.;
априорные значения направленности изменения единичных
признаков должны определяться теоретически или по опыту
эксплуатации. Например, было определено, что параметры
Trs, Тт" и Gt по наработке увеличиваются, а Тк::'. р^ ', и<тсЕ*
— уменьшаются;
построение функции должно быть осуществлено таким обра-
зом, чтобы заранее была однозначно известна направленность
ее изменения, т. е. будет ли она по наработке увеличиваться или
уменьшаться;
единичные признаки по ГТД должны быть приведены к САУ
и к одному режиму работы ГТД.
Из перечисленных примеров единичных признаков можно
построить по крайней мере две функции интегральных призна-
ков:
К, = (Tr* Gt) и k2=Tt*;Gk*Tk*),
первая из которых по наработке увеличивается, а вторая —
уменьшается. Как видно, интегральные признаки можно опре-
делить расчетным путем по измеренным значениям единичных
признаков.
Аналоговые диагностические признаки и модели определя-
ются расчетным путем и основываются на аналоговой инфор-
мации, которая в конечном виде выдается в виде графиков и
таблиц. Аналоговые модели можно условно разделить на чисто
аналоговые, точечные (единичные) и условно аналоговые.
Чисто аналоговая модель представляет собой математическое
описание линии траектории неустановившегося режима в виде
комплекса параметров, сохраняющего постоянное значение
вдоль этой линии. Комплекс параметров определяется по изве-
31
стным уравнению закона регулирования и формуле регулятора:
К = GT„ ['-’вло ( Р*о +Q| = idem илн К = GTO/i пвдор*о) = idem,
где С — некоторая постоянная, характерная для данного регулятора, кото-
рая может быть равна нулю [10].
Подобные комплексы являются диагностическими моделями
правильности функционирования САР на характерном для ра-
боты данного регулятора отрезке траектории неустановившего-
ся режима- При правильном функционировании САР на основе
теории газодинамического подобия и аналоговой информации
можно найти закон изменения ТГП, не входящих в формулу
комплекса, и, следовательно, модели ТС двигателя по изменению
этих параметров на неустановившихся режимах, например
Т/ “ /(’)• /СО и т. п.
Точечные (единичные) аналоговые модели отражают пра-
вильность функционирования агрегатов механизации компрессо-
ра, элементов системы запуска, автоматов приемистости и опре-
деляются экспериментальным путем цо своевременности пере-
ключения механизмов и агрегатов. Признаками своевременно-
сти могут быть подобное или измеренное время, подобная или
измеренная частота, измеренное или приведенное давление
и т. п. Например, признаками правильности работы регулятора
перепуска воздуха могут быть /гвд<», «нди, и я*(), признаком
правильности запуска — измеренное время, если автомат запус-
ка временной, и подобное время, если автомат запуска работает
по внутридвигательным параметрам.
Условно аналоговые модели применяются тогда, когда нель-
зя получить по аналоговой информации функциональные зави-
симости между параметрами. В качестве таких признаков вы-
бираются средние скорости изменения параметров за время не-
установившегося режима
а = (.vz,rax — х,) Ш,
где Д/ = Ц!ОН—/нач—время неустановившегося процесса; /КОн — время окон-
чания процесса; ZHa4 —время начала процесса.
Эвристические модели основываются на представлении объ-
екта диагностирования в виде совокупности соединенных между
собой функциональных блоков, каждый из которых имеет один
выход. При диагностировании сложных технических систем прак-
тически всегда имеется некоторая неопределенность диагноза,
вызванная сложным взаимовлиянием противоречивых по харак-
теру факторов, возникновение которых нельзя заранее преду-
смотреть. Например, такая неопределенность возникает при ди-
агностировании по акустическому шуму и вибрации на основе
сенсорных ощущений человека.
В последнее время решение эвристических задач связь” яют
с понятием о тез 'урусс .человек i или коллектива. В узком смыс-
,з ’
ле слово тезаурус означает смысловой словарь, предназначен-
ный для поиска слов какого-либо языка по их смыслу, или сло-
варь, устанавливающий связь между ключевыми словами и ба-
зовыми понятиями,- Тезаурус сложной эргатической системы
представляет собой совокупность всей полезной информации о
самой системе, объекте и методах диагностирования, условиях и
режимах эксплуатации объекта, которая используется для рас-
познавания, и прогнозирования ТС объекта, а также для управ-
ления самой системой.
К сожалению, на практике понятие о тезаурусе лишь пояс-
няет, да и то далеко не полностью, как человек создает эвристи-
ческие методы диагностирования и управления. Вместе с тем,
несмотря на отсутствие формализованных количественных опи-
саний эвристических методов распознавания и управления, а
следовательно, отсутствие возможности их непосредственного
сравнения, конечные результаты их применения могут быть оце-
нены количественными мерами, например достоверностью диаг-
ностирования, вероятностью безотказной работы, своевременно-
стью выполнения заданий на диагностирование.
Оценки изменения диагностических признаков и моделей по
наработке в эксплуатации производятся по отношениям:
q = K3iK и 0 = (Лэ-Л)/7<9.
где № — эталонное (базовое) значение признака, устанавливаемое НТД или
опытным путем при доводке, производстве и эксплуатации.
Кроме того, широкое применение в практике диагностирова-
ния нашли оценки по средней скорости изменения признаков в
процессе наработки:
7 = (Ккон — Кнач)/А т; ©л = Тэ/т и ©т' = (7Э — 7)/т»,
где Дт=Ткон—тЕач — период наблюдения за изменением признака.
Установление эталонных моделей связано с определением
границ допусков статистического разброса данных о диагности-
ческих признаках.
Метод допускового контроля состоит в следующем. Если па-
раметр X имеет текущее значение х, то при условии нахожде-
ния его в пределах объект считается исправным, а
при нарушении этого условия — неисправным. Здесь величины
и хв представляют собой нижнюю и верхнюю границы поля .
допусков. Допуск может быть односторонним. Например, взлет-
ная тяга ГТД всегда имеет только нижнюю, а температура газа
за турбиной только верхнюю границы допусков.
В зависимости от фазы существования объекта и целей при-
менения допускового контроля различают следующие допуски:
арбитражные, производственные, эксплуатационные и ремонт-
ные [7].
3—1369 33
Арбитражные допуски указываются в проектно-конструктор-
ской документации и назначаются из условия правильного функ-
ционирования объекта. Они определяются на стадии проекти-
рования и уточняются при опытной доводке. Эти допуски могут
дифференцироваться по условиям эксплуатации, например по
климатическим зонам, территориям с повышенной запыленно-
стью или загрязненностью атмосферного воздуха и т- д,-
Производственные допуски приводятся в технологической
производственной документации и назначаются из условия обес-
печения арбитражных допусков. Они должны предусматривать
запасы значений параметров на неучтенные эксплуатационные
факторы. Например, такими факторами могут быть колебания
температур и давлений, повышенная влажность, колебания на-
пряжения питания и т. п.
Эксплуатационные допуски указываются в эксплуатационной
НТД и назначаются только для параметров, контролируемых в
эксплуатации. Они должны обеспечивать заданные показатели
надежности и правильности функционирования объекта. Уста-
навливаются эти допуски из условия, что если в данный момент
времени t0 параметр не вышел за пределы допусков хн^х^хв,
то объект с вероятностью Р^Р<„будет правильно функциониро-
вать в течение заданного времени /о+ДА
В практике контроля параметров и диагностирования разли-
чают эксплуатационные профилактические и контрольные до-
пуски, причем последние всегда больше первых, т. е. хн.к^хН[1
и Л'в.п^Хв.н. Профилактическая проверка параметров произво-
дится в соответствии с регламентом ТО (или при обнаружении
неисправности) с периодичностью Д/п. а контроль параметров —
с периодичностью A/KsAA/„. Потребность в профилактическом
регулировании параметра возникает тогда, когда он в некото-
рый момент времени А/«СД/П вышел за пределы поля допусков
Л'н.п^х^Хв.н, но сохранился в пределах хн.к<х<хв.к.
Оптимальное соотношение полей эксплуатационных профи-
лактических и контрольных допусков определяется по прототи-
пу объекта контроля и диагностирования, а также опытным пу-
тем. При этом учитывается то обстоятельство, что достовер-
ность контроля и диагностирования будет тем больше, чем боль-
ше контрольные допуски и меньше профилактические, посколь-
ку 0 = 1 —ДХп/ЛХк, где Ах — допуск.
Ремонтные допуски указываются в ремонтной технологиче-
ской НТД и назначаются с учетом технологии и организации
ремонта. Обычно они равны эксплуатационным профилактичес-
ким или меньше их.
Метод приведения режимов работы двухвальных ТРДД ос-
нован на использовании функциональной связи между скольже-
нием и параметрами двигателя. Он применяется при решении
некоторых задач генезиса, а также для исключения возмож-
ности появления ошибок 1 и II рода при диагностировании.
34
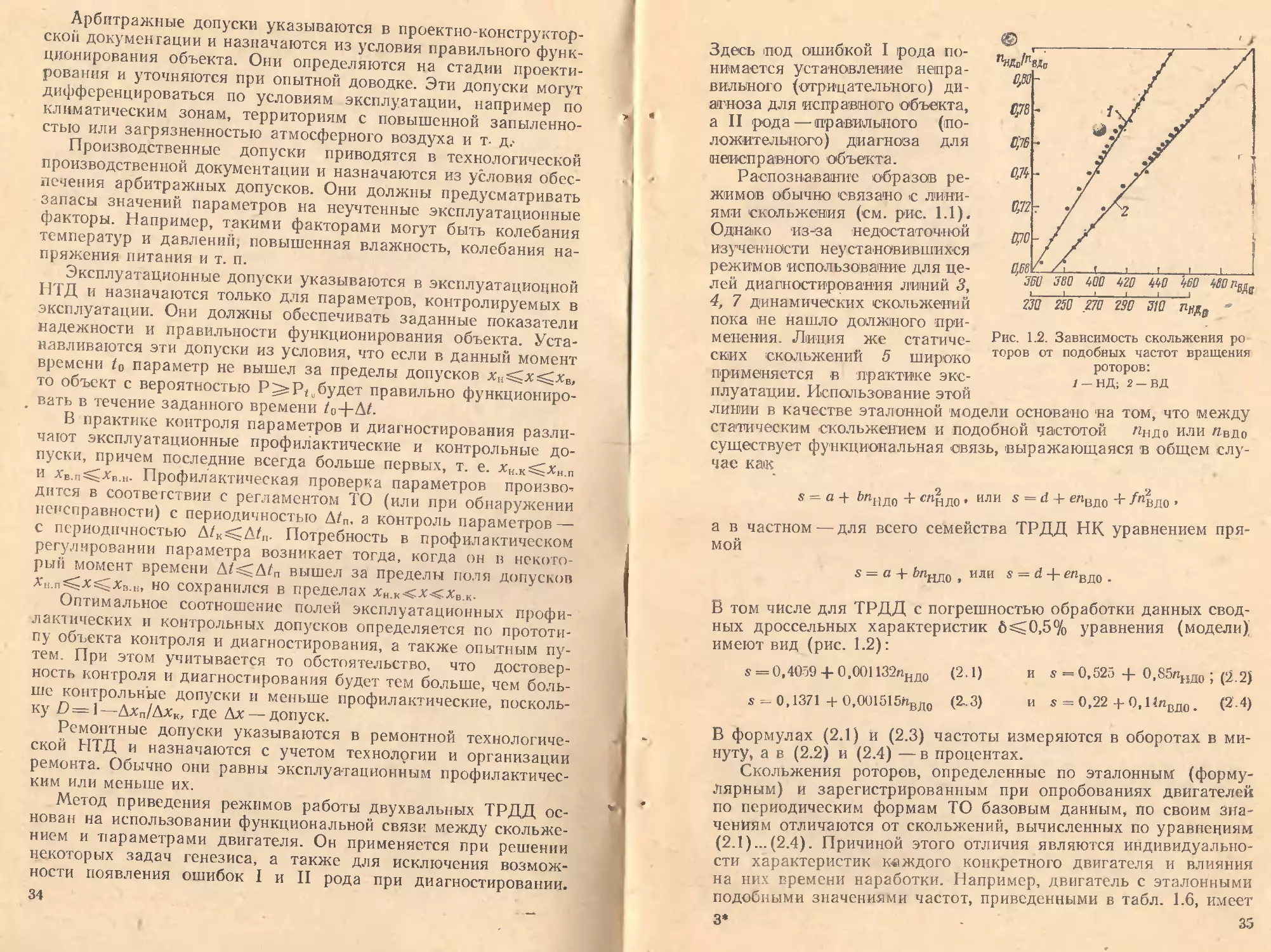
Здесь под ошибкой I рода по-
нимается установление непра-
вильного (отрицательного) ди-
агноза для исправного объекта,
а II рода—правильного (по-
ложительного) диагноза для
неисправного объекта.
Распознавание образов ре-
жимов обычно связано с лини-
ями скольжения (см. рис. 1.1).
Однако из-за недостаточной
изученности неустановившихся
режимов использование для це-
лей диагностирования линий 3,
4, 7 динамических скольжений
пока не нашло должного при-
менения. Линия же статиче-
ских скольжений 5 широко
применяется в практике экс-
плуатации. Использование этой
Рис. 1.2. Зависимость скольжения ро
торов от подобных частот вращения
роторов:
1- НД; 2-ВД
линии в качестве эталонной модели основано на том, что между
статическим скольжением и подобной частотой «ндо или /7Вдо
существует функциональная связь, выражающаяся в общем слу-
чае как
s — а + ^пндо + спндо • или s — d 4- епвдо + /ч'цдо .
а в частном — для всего семейства ТРДД НК уравнением пря-
мой
s = а + Цщю , или s = d 4- епвао .
В том числе для ТРДД с погрешностью обработки данных свод-
ных дроссельных характеристик 6^0,5% уравнения (модели)
имеют вид (рис. 1.2):
s = 0,4059 + 0,001132пндо (2.1) и s = 0,525 + 0,85лНД0 ; (2.2)
s = 0,1371 + О,ОО1515пВДо (г.3) и s = 0,22 + 0,11пВШ). (2.4)
В формулах (2.1) и (2.3) частоты измеряются в оборотах в ми-
нуту, а в (2.2) и (2.4) — в процентах.
Скольжения роторов, определенные по эталонным (форму-
лярным) и зарегистрированным при опробованиях двигателей
по периодическим формам ТО базовым данным, по своим зна-
чениям отличаются от скольжений, вычисленных по уравнениям
(2.1)...(2.4). Причиной этого отличия являются индивидуально-
сти характеристик каждого конкретного двигателя и влияния
на них времени наработки. Например, двигатель с эталонными
подобными значениями частот, приведенными в табл. 1.6, имеет
3* 35
Таблица 1.6
№ п/п 1 2 3 4 5 6 7 8 9 10
пндо 5,12 5,18 5,24 5,31 5,34 5,42 5,48 5,54 5,60 5,62 X
«вдо 5,27 5,30 5,33 5,37 5,40 5,43 5,46 5,50 5,52 5,56
$ 0,972 : 0,978 0,983 0,988 0,992 0,998 1,003 1,008 1,014 1,017
эталонные значения скольжений «э=О,539+О,О847пндо и хэ=
= 0,135+0,159/гвдо, которые явно отличаются от значений, по-
лученных по уравнениям (2.2) и (2.4).
Уравнения скольжений получены методом средней [6], кото-
рый предполагает для определения прямой s=bn0-[-a решение
системы уравнений:
т т
= п01 + та'<
1=1 1=1
п п
V, Si = Ь 2 n°i + <” — т) а<
i—m+l l-in+1
где п — общее число наблюдений; т — число наблюдений в каждой из двух
примерно равных групп.
Проиллюстрируем это решение на примере определения уравнения сколь-
жения по подобной частоте лндо. Для этого все данные табл. 1.6 разбива-
ются на две группы, в каждой из которых содержится пять значений лпДО.
и s. Система примет вид:
4,913=26,1 96+5g; 5,040 = 27,696+5а.
Откуда:
126,19 4,9131
I 27,69 5,0401
126,19 5 I
I27,69 5 I
|4,913 5 I
5,010*5 I
6=------------- 0,0547 и s® .= 0,539 + 0,0847пИд0 .
Скольжение роторов само по себе является одним из наибо-
лее диагностически ценных признаков. В процессе эксплуатации
оно в подавляющем большинстве случаев уменьшается. Это объ-
ясняется неизбежным падением эффективного КПД по нара-
ботке и, следовательно, уменьшением тяги на данном режиме..
В полете падение тяги компенсируется пилотом за счет увеличе-
ния («подтягивания») режима, например при регулировании по
закону пъд= const за счет увеличения частоты nBi, которое не
будет сопровождаться из-за падения эффективного КПД ротора
36
НД соответственным полным увеличением частоты nilD. Таким
образом, в отношении х=пнд/«вД числитель по мере роста на-
работки уменьшается, а знаменатель увеличивается, что приво-
дит к уменьшению скольжения, которое оценивается как @s=
= ($’—Si)/s3.
Так, у двигателя, эталонные параметры которого приведены
в табл. 1.6, базовое скольжение после 7500 ч суммарной нара-
ботки и одного ремонта s° = 0,l 10+0,159«вю- Нетрудно заметить,
что у этого двигателя разница в скольжениях определяется па-
раметрами масштаба (0,135 и 0,110) при равенстве угловых ко-
эффициентов (0,159), что, как правило, характерно для тенден-
ций изменений скольжений по наработке. Таким образом, аб-
солютное изменение скольжений равно изменению параметров
масштаба Дхэ=аэ—аб=0,025, а относительное для крейсерских
и повышенных режимов работы (ss«0,93... 1,03) составляет 8„ =
=0,025/зэ=0,027...0,023, т. е. примерно 2,5...3,Опо-
знание моделей базовых скольжений позволяет решить одну
из важнейших задач генезиса о распознавании образа режима
пилотирования при отсутствии информации о положении РУД
и частоте вращения пР^, но при известных значениях/Днд и t/'
Действительно, если априорно известны модели скольжений по
I и пвц , то, зная, что56==Цн+/?ндгн до=С!в4-^в«вд о, после не-
сложных преобразований получим:
пвло = (° a.i + г?п"ндо)/(’в »-1Ч
_ —а + ^1!пнд к Тн*) | f
Ппа-------------------------► 1 „
2/в
Погрешность распознавания по этому методу составляет
5 +ф + О/Тнд + 0,55 0,01 4-0,01 + 0.-5-0,01 <0,025=2,5%.
Здесь 6р^0,01 — погрешность расчета, поскольку погрешность
каждой из двух моделей 6^0,005; бпнт ^0,01 - суммарная,
т. е. инструментальная и субъективная, погрешность измерения
частоты вращения; 0,55Т„~ — о~ 0,50,01 0,005 —по-
грешность измерения температуры. При определении Тн* необ-
ходимо учитывать инструментальную поправку ДО
Для рассматриваемого двигателя s6 =0,5144-0,0847пнд о=
=0,114-0,159индо, поэтому яВд = 2,54 |/7п* 0,534«нд. Для
иллюстраций применения метода предположим, чд,о пнд=90%
tu* =— 30°С и Д7 7'С. Отсюда «Вд=2,54 | 2734-7 30-
+0,534-90== (88,3+2.5) %. что согласно регламентируемой НТД
функции ивд=^(аруд) соответствует крейсерскому режиму с
«руд = (96±2)°.
Эталонные и базовые модели скольжения применяются так-
же для приведения к режиму, т. е. для получения эталонных и
базовых моделей ТГП в виде функций xinp=xicn=f(зэ(б)), где
37
3750 3800 3850 г, у ' 3750 3800 3850 r,v
Рис. 1.4. Изменения измеренных зна-
чений параметров ТРДД по наработ
»ке в крейсерском полете (/7=10,2..
12,4 км; М = 0,80...0,86)
Рис. 1.3. Изменения базовых значений
параметров ТРДД по наработке в
крейсерском полете (Я= 10,2..12,4 км;
М = 0,80. .0,86)
параметры х,-сп называются специально приведенными. В об-
щем случае эти функции степенные, но могут быть линеаризо-
ваны. Появляющиеся при этом систематические погрешности
вызывают смещение параметров масштабов функции, не ока-
зывая при этом практического влияния на отклонения парамет-
ров относительно своих средних значений.
На рис. 1.3 показано изменение в течение наработки специ-
ально приведенных значений температуры газа за турбиной и
расхода топлива, рассчитанных по базовым моделям Т°т.пр —
=1483s6—643 и GDT.np=36 693$б—3135, которые были получены
методом средней по приведенным параметрам, измеренным при
опробовании рассматриваемого двигателя на земле.
Как видно из рис. 1.3, кривые TST и GST, имеющие однород-
ную функциональную связь со скольжением, подобны друг дру-
Рис. 1.5. Изменения скольжения ро-
торов и приведенных значений расхо-
да топлива и температуры газа за
турбиной ТРДД по наработке в крей-
серском полете (//= 10,2... 12,4 км;
М = 0,80.. .0,86)
-у и кривой s6, изменение же их
по наработке отражает измене-
ние газодинамически подобных
режимов работы исправного
двигателя, ТС которого зафик-
сировано в базовых моделях в
зависимости от реальных режи-
мов пилотирования и внешних
условий, т. е. высоты, скорости
полета и температуры наруж-
ного воздуха.
Реальные изменения изме-
ренных параметров (рис. 1.4)
не имеют подобия между собой
и только по кривой изменения
Двд можно распознать режим
пилотирования, а остальные но
несут явно выраженной днагно
38
этической информации. Вместе
с тем кривые приведенных зна-
чений температур и расходов
топлива становятся подобными
между собой и 'кривой измене-
ний фактических скольжений
(рис. 1.5), рассчитанных по
данным полетных карт регист-
рации параметров.
Естественно, что степень по-
добия кривых приведенных па-
раметров (см. рис. 1.5) и ре-
ального скольжения меньше
степени подобия их эталонных
кривых (см. рис. 1.3). Это объ-
ясняется влиянием на (приве-
денные параметры субъектив-
ных ошибок, вносимых бортин-
Зис. 1.6. Относительные изменения ди
агностических признаков ТРДД по
наработке (Н= 10,2... 12,4 км; М =
= 0,80. .0,86)
жсяером при считывании пока-
заний приборов, и реального, а
не базового состояния двигате-
ля В данном случае субъектив-
ные ошибки можно оценить как отношение половины це-
ны деления шкалы прибора к среднему значению изме-
ряемой величины. Для полетного крейсерского режима субъек-
тивные погрешности составят: для частот 6„ = 0,5/90^0,5%, для
температуры газа 674* = 5/500 = 1 % и для расхода топлива
6GT=5/2000=2,5 %.
Относительные разности значений базового и реального
скольжений, а также базовых и приведенных параметров пред-
ставляют собой диагностические оценки:
. е,( = eri.(vy4 И
©с. = (о1.-сГпр.)| о,;
Изменения оценок, определенных по рассмотренному методу, в
зависимости от наработки показаны на рис. 1.6.
Вторым методом специального приведения является обычное
приведение с переменной по режимам поправкой xip, т. е. х,сп =
=х^пр—XiP. Поправка зависит от разности между текущей при-
веденной режимной частотой пндпр и заданной для режима
приведения базовой (или эталонной) приведенной частотой
fl ?НДзад-
Л«Р = O(i ( ИНДпр — «НДзат) + ( ,!НДпр —пНДзад)2«
где a,t и а,2 — коэффициенты полинома второй степени, полученные путем
апроксимации методом наименьших квадратов [6] базовых (или эталон-
ных) дроссельных характеристик.
39
В базовой (или эталонной) модели поправка равна разнос-
ти между специально приведенным параметром и его значени-
ем на данном текущем режиме. Поэтому эта модель будет иметь
постоянное единственное значение
• -4п = 41Р - °п ( «НДпр “«НДззд) а£2 ( «НДпр ~«НДзад Г = xi6 = const-
а фактическое значение приведенного к режиму параметра дви-
гателя с наработкой будет переменным
-К.СП =-*.пр -Я.-1 ( пНДпр—пНДзал) — ( иНДПр — яНДзад )2 = var.
В данном методе диагностические оценки
Д -К/ = xi6 — *.Сп Н © V = xicn)lxi6-
i
Кривые изменения по наработке диагностических оценок, оп-
ределенных любым методом по данным регистрации вручную
полетной информации-, имеют большие статистические разбросы
(шумы) относительно кривой их средних значений. Например,
на рис. 1.6 для скольжений они могут достигать ±2%, для тем-
ператур ±2,5% и для расходов топлива ±7% и выше.
Основной причиной появления разбросов служат статистиче-
ские особенности сбора информации. Шумы затрудняют экс-
траполяцию функции поэтому перед экстраполяцией
они сглаживаются. Суть сглаживания состоит в усреднении ве-
личин 0 и т, которое гасит быстроменяющиеся составные шумов,
делая медленноменяющиеся кривые средних значений более от-
четливыми, например, так как это-показано на рис. 1.7, на кото-
ром кривые построены методом простых усреднений [5] по дан-
ным рис-. 1.6. Нетрудно заметить, что сглаживание привело к
снижению разбросов примерно в 1,5...4 раза и сделало их при-
ближенно равными субъективным погрешностям измерений, т. е.
о s^O,5%, 87/^1%, 8GT^2,5%.
Простое усреднение состоит в непрерывном определении те-
кущих средних значений:
3750 3800 3850 т,1
1
©zc = У ©,-М и =
i—n—1
где i—п—1 и । — текущие номера из-
мерений начала и окончания сово-
купности из п измерений.
Рис. 1.7. Изменения сглаженных зна-
чений относительных изменений диаг-
ностических признаков ТРДД по на-
работке (Н—10,2 ... 12,4 км; М =
= 0,80 ... 0,86)
40
Выбор числа п зависит от частоты опроса данных. Напри-
мер для кривой изменения базовых значений, определяемых че-
рез 300 ч, п=1, т. е. среднее значение признака равно его из-
i n
меренному: Qic — V, 0/1 = 0г. При сглаживании величин, опре-
!-1
деляемых внутри интервала 300 ч через 2...4 ч, как правило,
л=5, и при частоте 1 раз за 10...20 мин и» 10...20.
Другие методы сглаживания, например экспоненциальный,
так же, как и методы экстраполяции, применяемые при прогно-
зировании, в том числе методы наименьших квадратов, диспер-
сионного, регрессионного, факторного и последовательного ана-
лиза, не прошли достаточной проверки на практике и поэтому
в настоящей книге не рассматриваются.
Глава 2
ОРГАНИЗАЦИЯ СЛУЖБЫ ДИАГНОСТИРОВАНИЯ
2.1. ОСНОВНЫЕ ЦЕЛИ И ЗАДАЧИ
Рассмотрение практических вопросов технического диагнос-
тирования не может быть полным, если не остановится на не-
которых аспектах организации управления качеством эксплуа-
тации АТ, в которой служба диагностирования представляет
специфическое функциональное звено.
В целом система управления качеством эксплуатации граж-
данской авиации может быть расчленена на шесть иерархичес-
ких уровней: министр ГА, Министерство ГА, управления ГА,
эксплуатационные подразделения, службы подразделений и ис-
полнители. Служба диагностирования является системой управ-
ления ТС АТ, участвующей в работе трех нижних уровней. Ее
специфика состоит в том, что она непосредственно не участвует
в организации технологических процессов управления качеством
эксплуатации АТ, ограничиваясь выдачей технологических ре-
комендаций по управляющим воздействиям.
Значение и место этой службы в системе управления качест-
вом определится: характером и числом решаемых задач; функ-
циональными и технологическими обязанностями по отношению
к службам эксплуатационных йод разделений (цехов, летных от-
рядов, смен, летных экипажей, технических бригад); функцио-
нальными и административными обязанностями при взаимо-
действии с поставщиками; правовыми возможностями придания
правилам решений юридической силы.
4—1369 41
Службы диагностирования, как и само управление качест-
вом на уровне эксплуатационных подразделений (на уровне
АТБ), находятся в настоящее время на стадии осуществления
перехода к АСУ.
Согласно теории АСУ [5], всякая система управления, в том;
числе и система диагностирования, решает три основных задачи:
сбора и передачи информации о диагностируемом объекте,
обработки информации,
выдачи управляющих воздействий на объект диагностиро-
вания.
В простых системах управления на ЭВМ решаются только
отдельные задачи управления, т. е. осуществляется лишь частич-
ная переработка информации, этапы же сбора информации и
формирования управляющих воздействий вообще не автомати-
зируются.
Таким образом, существующую ныне систему управления в
АТБ можно классифицировать как ручную, которая имеет эле-
менты автоматизации в части сбора, передачи и обработки ин-
формации.
Различают два основных типа АСУ: системы управления
технологическими процессами (АСУТП) и системы организа-
ционного или административного управления (АСОУ). АСУТП
имеет дело с технологическими процессами управления двига-
телями, самолетами, ТС объектов диагностирования и т. д.,
АСОУ — с объектами экономической и социальной природы. Ос-
новные отличия систем состоят в характере объекта управле-
ния. Для АСУТП—это самолеты, двигатели, приборы, специа-
лизированные ЭВМ. а для АСОУ — прежде всего люди, т. е. кол-
лективы предприятий, цехов, служб, летные экипажи. Другое
отличие состоит в форме передачи информации. В АСУТП фор-
мой передачи служат различные информационные сигналы
(электрические, оптические, буквопечатные). В АСОУ основная
форма передачи — письменные документы. АСУТП для системы
диагностирования выполняет роль ее технологической подсисте-
мы, а АСОУ — организационную роль.
АСУТП могут быть автоматизированными и автоматически-
ми. Автоматизированная система включает в себя человеческое
звено, т. е. «ручной» труд исполнителей или администраторов.
Автоматическая система в принципе может функционировать и
без участия человека. АСОУ в силу своей специфики может
быть только автоматизированной, в которой люди выполняют
задачи: постановки и коррективки целей и критериев управле-
ния, меняющихся по времени и условиям; внесения творческих
элементов в поиск наилучших путей достижения поставленных
целей; выработки правил решений и придания им юридической
силы; снабжения системы первичной информацией, сбор кото-
рой невозможно или нерационально автоматизировать.
42
2.2. технологическая подсистема диагностирования
Назначение технологической подсистемы: получение диагно-
стической информации, ее обработка, выдача рекомендаций по
правилам решений и управляющим воздействиям. Человек в
технологической подсистеме выполняет функции оператора, уп-
равляющего ею и объектом диагностирования, и исполнителя,
принимающего решения по управляющим воздействиям, в том
числе решение о допустимости функционирования ГТД в полете.
Конкретное описание функциональной схемы подсистемы и
анализа ее работы методически удобно сделать на примере дей-
ствующей подсистемы, предназначенной для диагностирования
ТРДД и являющейся частью универсальной системы диагности;
рования самолетов. Эта подсистема состоит из бортовой и на-
земной частей (рис. 2.1). Бортовая часть включает в себя объект
диагностирования (двигатель), информационно-измерительную
систему, систему регистрации параметров, а также оператора
(бортинженера).
Информационно-измерительная система ТРДД состоит из:
штатных приборов измерения аруд, GT, «ил, «вл, tT*, рт, Vn.o
и Уз.о, рм, tM и Соте; световых табло встроенных средств контро-
Рис. 2.1. Схема наземно-бортовой системы диагностирования:
/ — бортовая часть системы; 2 — двигатель; 3—информационно-измерительная систему;
А— система регистрации; 5 — наземная часть системы
59
ля — обогрева входного устройства, обледенения РВНА, вклю-
чения реверсивного устройства, опасной частоты вращения стар-
тера, закрытия клапана перепуска воздуха, включения автомата
запуска, допустимого перепада давления топлива на основном
фильтре Лрт; аварийной световой сигнализации встроенных
средств контроля — прикрытия РВНА, наличия стружки в мас-
ле, опасной температуры Подшипника и повышенной вибрации.
Кроме того, на самолете штатными приборами измеряются: пол-
ная температура наружного воздуха tH*, высота Н, приборная и
истинная скорости Гп₽ и К„ст, а также число М полета.
Система регистрации параметров включает в себя автома-
тический регистратор МСПР-64-2 и полетные карты, заполняе-
мые вручную. Аналоговая запись производится для параметров
Кпр, Н, аюуя, Gy и ннд, а дискретная — для сигналов «Вибрация
велика», «Стружка в масле», «Опасная /подш». Полная продол-
жительность записи на магнитную ленту составляет примерно
23...25 ч. Дешифровке подвергается каждая четвертая лента,
если нет надобности расшифровки лент с записями аварийных
ситуаций.
Ручная регистрация производится в каждом полете. В кар-
ту регистрации бортинженером заносятся: сведения о наработ-
ках данного номера двигателя; /н и рк в аэропортах взлета и по-
садки; кроме того, один раз на режиме крейсерского полета на
заданном эшелоне при аруд=96±2 и Л4» 0,8...0,85 производится
запись Н, Кпр и Г„ст, М, t„*, пнд, «вд, t*, рг, pv, tM, Gr, Vn.o,
Кз.о и расход масла в полете.
Наземная часть технологической подсистемы включает в
себя: комплекс локальных средств диагностирования; участок
расшифровки полетной информации (УРАПИ); инженеров, от-
ветственных за технологию опробования двигателей (ОД) на
контрольных режимах и достоверность визуальных осмотров
(ВО); экспертную группу, формирующую правило решения и да-
ющую рекомендации по управляющим воздействиям (УВ), реа-
лизация которых осуществляется главным инженером и плано-
во-диспетчерским отделом (ПДО); кустовой информационно-
вычислительный центр (КИВЦ). Все составляйте наземной ча-
сти, за исключением локальных средств диагностирования и
групп экспертов, функционально связаны с ней, но организаци-
онно не зависят от нее.
Комплекс локальных средств диагностирования состоит из
групп: обработки информации о ТГП и вибросостоянии двига-
теля; спектрального анализа масла; неразрушающих методов
контроля; анализа полученной диагностической информации в
группе экспертов.
Группа обработки параметров взаимодействует с УРЛИН и
КИВЦ для получения аналоговой экспресс-информации и с ПДО
для получения дискретной информации по полетным и назем
ным картам регистрации параметров двигателей и систем са
44
молетов. В обязанности группы входят: обработка аналоговой
и дискретной информации, выдача ее в виде графиков и таблиц,
оперативный поиск и выдача информации по запросу группы
анализа результатов.
Группа спектрального анализа масла осуществляет: отбор
проб масла, доставку и их анализ в соответствии с действующей
НТД на фотоэлектрическом спектрометре МФС-5; обработку,
анализ и хранение результатов анализов с целью выявления
двигателей с устойчивым ростом концентрации продуктов из-
носа, находящихся в масле; разработку рекомендаций по опре-
делению источника повышенной концентрации продуктов износа.
Следует заметить, что квалифицированная работа на спек-
трометре МФС-5 требует подготовки обслуживающего персона-
ла на заводе-изготовителе и специального помещения. Последнее
объясняется тем, что достоверность показаний зависит от та-
ких факторов, как колебания температуры и влажности возду-
ха в помещении, длительность (до 4 ч) прогрева перед эксплу-
атацией, наличие в здании и около него вибропомех. Для соз-
дания необходимого микроклимата в помещении нужна систе-
ма кондиционирования воздуха, обеспечивающая поддержание
в помещении постоянной температуры 22—24° С и постоянной
влажности 50—60%. Система включает в себя бытовой конди-
ционер БК-2500, электрический теплонагрсватель, задатчик тем-
пературы и блок управления.
Участок диагностирования (УД) АТБ может быть оборудо-
ван бесшумной механической мешалкой с регулируемой часто-
той для перемешивания проб масел и масел стандартных образ-
цов, станком для заточки угольных электродов фасонных и под-
ставных, специально созданным устройством контроля выпари-
вания масла с целью поддержания в автоматическом режиме
постоянной температуры (+310°C) в выпаривателе. В послед-
нем случае контроль производится путем поддержания силы то-
ка в нагревательных элементах 8А в течение 70 мин, после чего
выпариватель автоматически отключается с помощью реле вре-
мени. Для равномерности подачи количества масла из каждой
пробы для выпаривания применяется специально разработан-
ный счетчик капель масла. .
Группа НМК оценивает ТС двигателей инструментальными
средствами контроля; обобщает опыт применения инструмен-
тальных НМК для целей диагностирования, разрабатывает тре-
бования и рекомендации по внедрению новых НМК Группа
применяет следующие методы: магнитный для поиска поверх-
ностных и находящихся на глубине не более 3 мм трещин с по-
мощью дефектоскопов ПМД-70, ПМД-ЗМ и 77ПМА-За; токо-
вихревой и индукционный с использованием дефектоскопов ВД-
1ГА, ТВД, ППД-1 и ППД-1МУ; ультразвуковой для выявления
трещин, раковин, пористостей с помощью дефектоскопов УДМ-
1М, ДУК-66ПМ, УЗДЛ-61-2М, а также с акустического дефек-
45
тоскопа ИАД-9; оптический для выявления повреждений поверх-
ностей деталей с помощью эндоскопов Н-200 и УСП-15М; линей-
но-угловых измерений с помощью микроскопа, индикаторов ча-
сового типа, индикаторов-нутромеров, микрометров, штангенцир-
кулей и т. д.
Группа оснащена приборами для измерения твердости и
спектрального анализа металлов, контроля размагниченности,
изменения удельной электрической проводимости, анализа азо-
та, нивелировки самолетов и др. Эффективность определения де-
фектов зависит от выбранного метода и разрушающей способ-
ности прибора. Например, для определения поверхностных тре-
щин наиболее эффективны токовихревой, капиллярный и магни-
топорошковый методы, а для определения подповерхностных де-
фектов— ультразвуковой. Очень эффективным оказалось при-
менение бороскопов Н-200, УСП-15М для обнаружения трещин
на фланцах коробок приводов агрегатов и контроле состояния
деталей проточной части ГТД. Так, с помощью бороскопа Н-200
только в 1981 г. были обнаружены 8 прогаров лопатки СА тур-
бины. Кроме того, на одном двигателе была обнаружена забои-
на 3 ступени турбины, а на 9 двигателях обнаружены забоины
на лопатках 1, 3, 5, 7 Ступеней-КВД.
Об эффективности применения НМК свидетельствует тот
факт, что в течение двух лет этими средствами было выполне-
но около 29 000 различных проверок, в 410 случаях были обна-
ружены скрытые дефекты (трещины, раковины, забоины и др.).
Однако наибольшего эффекта можно .добиться, лишь применяя
все диагностические методы и средства, позволяющие опреде-
лить диагностические ценности признаков данной неисправности.
Группа анализа результатов диагностирования обеспечива-
ет: разработку правил решения для определения достоверности
технических диагнозов; выдачу технологических рекомендаций
по дополнительному ТО или осмотру; связь с научно-исследова-
тельскими организациями и анализ их методических разрабо-
ток; ведение дела ЛА.
Обязанности экспертной группы — оценка достоверности
данного диагноза; оценка доверительности данного правила ре-
шения; установление предварительных норм на конкретные
критерии диагностирования; разработка алгоритмов диагности-
рования с остановкой при установлении диагноза в условиях
нечетко выраженных признаков; разработка и выдача в цех пе-
речня работ, необходимых'для устранения данного дефекта.
Основные рабочие документы этой группы — карта контро-
ля параметров работы двигателя и карта диагностирования си-
стем самолета, которые являются приложениями к цеховым кар-
там-нарядам на производство периодических регламентных ра-
бот. Карту контроля заполняет инженер смены, который отвеча-
ет за достоверность значений зарегистрированных параметров
o'-руд. Пвд. «нд. /т*, А*. Рм< Vn о и 1/3.0, полученных на контроль-
46
ных режимах МГ, 0,7 и 0,85,максимального продолжительного
(МПР), МПР и взлетном, а также времени выхода на МГ, при-
емистости, сброса газа, выбега и частот перестройки РВНА и
клапана перепуска воздуха (КПВ) при данных значениях /„ и
рн. Инженер УД выполняет приведение частот вращений и тем-
пературы газа за турбиной к САУ (ZH = 15°C и рн=760 мм
рт. ст.). Приведенные параметры используются в дальнейшем
для получения диагностических оценок ТС двигателя.
Карта диагностирования заполняется по данным полетных
карт регистрации параметров аРУд, Лвд, /т*. GT и по данным,
полученным группой НМК при обследовании состояния лопаток
1 ступени КНД и деталей проточной части и группой спектраль-
ного анализа масла Кроме перечисленного карта содержит све-
дения о поканальной оценке точности регистрации параметров
датчиками МСРП-64-2. Оценка параметров и решения об их со-
ответствии требованиям НТД производятся представителями
соответствующих групп. Карту подписывает инженер УД. После
дешифровки записей в УРАПИ и использования карт регистра-
ции параметров в ПДО полетная информация накапливается в
делах ЛА и частично в КИВЦ, а наземная — только в делах
ЛА, хранящихся в группе средств диагностирования.
В приведенной подсистеме диагностирования использование
автоматически записанной информации ограничено в первую
очередь номенклатурой регистрируемых параметров и реальны-
ми несистематическими погрешностями измерения угла поворо-
та РУД а,руд , обусловленными неточностями регулировки са-
молетной проводки системы управления двигателем; периодиче-
скими изменениями размеров фюзеляжа, вызванными измене-
ниями tn и ри, вибрациями и т. п. Поэтому при существующих
возможностях записи аналоговой информации и без привлече-
ния дополнительной информации можно решить лишь весьма
ограниченный круг задач генезиса и диагностирования.
К таким задачам относятся в первую очередь распознавание
образа режима пилотирования по признаку аруд , который
трудно определить из-за высоких погрешностей измерения уг-
ла, достигающих 7%. Например, при погрешностях измерений
5° значений аруд = 114°±2О и аРуд =106°±Г, соответствующих
взлетному и максимальному продолжительному режимам, воз-
можные изменения измеренных значений составят соответствен-
но 107 ..12Г и 100...112°, что не всегда позволяет однозначно рас-
познать режим. Определение режима пилотирования по пара-
метру GT в диапазонах работы регуляторов GT=const, Пвд =
= const (рис. 2.2) по скачкообразному изменению текущего зна-
чения расхода (рис. 2.3, в и г) возможно только при условии, что
известен предыдущий режим.
Режим пилотирования достаточно точно можно узнать по со-
поставлению записей аруд, GT и г?нд (см рис. 2.3), но при этом
нужно помнить, что частота «нд зависит от нерегистрируемых
Рис. 2.2. Зависимость областей работы регуляторов от высоты полета и пол-
ной температуры наружного воздуха на режимах:
а — максимальном продолжительном; б — взлетном;
1 — GT =const; 2 — п ид = const; 3 — переходная зона
Я.
/2
Я
13
п
8
7
6
5
I
3
2
.1
як
S3
GT.
кг/ч
-7000
so m
-W
LjTZ
70
- 60 -шс •
я
-3000
-2т-
-w
Иго
so
-во
70
S']
пнц
Or
6Gr
Ли,
320 340 360 370 3S0 HO 760 760 800 820 f,c
SO НО 130 240 260
L 30
Рис 2.3. Изменение параметров ТРДД НК -8-2У по данным аналоговых за-
писей;
а — перс-.од с режима МГ до 0,77 МПР; б — режим приемистости; е — сброс газа;
г набор высоты; д — режим высотной приемистости;
1 — срабатывание Статической части регулятора; 2 — переключение регуляторов
значений р„* и t„*. После накопления'опыта возможно также
установление диагноза о правильности функционирования сле-
дующих агрегатов и элементов САР: агрегата управления кла-
панами перепуска по дискретным изменениям измеренных пнд
и Ст (см. рис. 2,3,о); автомата приемистости при работе на
земле по дискретным изменениям измеренных иНд и GT (см.
рис. 2.3,6); статической части регулятора по дискретным изме-
нениям измеренных пнд и Ст (см. рис. 2.3, точка /); автомата
отрицательной приемистости при сбросе газа по дискретным
изменениям измеренных пнд и GT (см. рис. 2.3,. в); регулятора
GT=const в момент переключения на регулятор «вд =const
(см. рис. 2.3, точка 2) по началу изменения GT; дроссельных па-
кетов высотно-скоростной коррекции автомата приемистости на
высотах более 7 км.
48
Таким образом, при существующих номенклатуре и достовер-
ности аналоговых записей имеется возможность приближенного
определения: режима пилотирования; исправности агрегатов
управления клапанами перепуска; исправности элементов САР,
ответственных за приемистость и сброс газа; высоты и скорос-
ти, на которых происходит переключение регуляторов GT=const
и Лвд =const (см. рис. 2.2)
Отсутствие сведений о /и* и ри* не только затрудняет реше-
ние перечисленных ограниченных задач по статическим анало-
говым записям, но и не позволяет использовать записи переход-
ных процессов, содержащих наиболее ценную информацию о
работе двигателя на неустановившихся режимах. Основное за-
труднение в обработке аналоговых записей состоит в отсутст-
вии записей параметров ~рн* и /„*, без которых нельзя осущест-
вить приведение времени и ТГП.
Иллюстрацией этого недостатка служит (рис. 2.4), на кото-
ром представлены функции изменения измеренных давлений по
измеренному времени pK*=f(t) и приведенных к САУ рк*/он* =
^*=/(4р).
В анализируемой системе диагностирования полетная ручная
информация используется для систем этического контроля за
изменением по наработке «вд = /Друд.) = GT = /(t), tT* =
=Дт), Vn.o и V3.o с целью прогнозирования предотказовых со-
стояний по допускам, установленным опытным путем. Одним из
важнейших источиков информации в рассматриваемой системе
является карта контроля параметров двигателей после заверше-
ния обслуживания, в которой инженером регистрируются все
контрольные режимы и внешние условия. Параметры двигате-
ля', зарегистрированные на контрольных режимах после приве-
дения к САУ, используются для построения базовых дроссель-
ных характеристик, которые позволяют вести оперативную оцен-
ку: абсолютного скольжения роторов А пвд — пвд— «вд при за-
данной частоте Пнд ; уровня настройки агрегата ОГ-8-4; пара-
метров взлетного режима; максимального расхода топлива, а
также получить базовые моде-
ли S6, Тбт и G6T.
Контроль работоспособнос-
ти двигателя в полете осущест-
вляется бортинженером путем
визуального наблюдения с ре-
гистрацией параметров в спе-
циальную карту. Проводится
контроль и средствами объек-
тивного контроля типа МСРП.
Рис. 2.4. Зависимости измеренных и
приведенных давлений от измеренного
и приведенного времени
4*—1369
К числу контролирующих при-
боров относятся также свето-
вые табло.
Анализ реальной контроле-
способности приведенной диаг-
ностической системы показыва-
ет, что, несмотря на весьма
высокую контролепригодность
ТРДД и имеющиеся потенци-
альные возможности, он ис-
пользуется далеко не в полной
_ . мере. Свидетельством этому
Рис. 2.5. Аналоговые записи парамет- ' , , J
ров, используемые при контроле тех- м°Л\ет быть ТОТ факт, ЧТО
нологии опробования ТРДД .на земле: большинство дефектов выявля-
1 — зоны нечувствительности аппаратуры еТСЯ ПрН ТСХНИЧССКОМ обслуЖИ-
регистрации на режимах запуска и выбе- л л , __
га ротора НД; 2 - зона слабой чувстви- ВЗНИИ СИСТвМЫ СЭМОЛеТЭ И Не-
тельности аппаратуры на режиме опробо- значительная ЧЭСТЬ дефеКТОВ
ванпя работы реверсивного устройства 1
обнаруживается в полете,
ративиых. Оставшиеся 35% дефектов обнаруживаются в полете.
Увеличение периодичности выполнения регламентных работ
для повышения их эффективности приводит к большим мате-
риальным затратам, увеличению простоя самолетов, увеличению
расхода топлива, ресурсов двигателей и в итоге не дает желае-
мого эффекта при существующих методах диагностирования.
Пути увеличения контролеспособности существующей системы
следующие: увеличение числа расшифрованных магнитных лент
с 25 до 100%; разработка методик диагностирования по сово-
купности признаков; ввод каналов аналоговой записи tn*, рн*
и желательно /т*; повышение достоверности показаний прибо-
ров встроенного контроля; ввод автоматизированной обработки
данных в КИВЦ; ввод блоков внешней памяти в комплект
«Луч-74»; повышение надежности первичных преобразователен
МСРП-64-2 и коэффициента редукции обработки полетной ин-
формации; создание библиотек стандартных алгоритмов поис-
ка дефектов.
Регистрация параметров может быть использована для конт-
роля правильности действий и соблюдения технологии опробо-
вания после ТО инженером смены по данным аналоговых за-
писей на МСРП-64-2 (рис. 2.5)- Введение этого контроля позво-
лило не только повысить технологическую дисциплину столь
ответственной операции, как опробование двигателей, но и со-
кратить расход топлива на нее.
2.3. ОРГАНИЗАЦИОННАЯ ПОДСИСТЕМА ДИАГНОСТИРОВАНИЯ
Участок диагностирования на АТБ призван способствовать
развитию автоматизации систем диагностирования и управле-
50
ния качеством эксплуата-
ции, повышению технологи-
ческой культуры проведе-
ния ТО и управления двига-
телем в воздухе. Кроме то-
го, УД выполняет ряд от-
дельных смежных задач по
связи с промышленностью
и предъявлению ей рекла-
маций, обобщению опыта
эксплуатации и выполнению
Рйс. 2.6. Связи УД со службами АТБ
и поставщиками
ряда технологических опе-
раций при ТО. УД несет на
данном этапе своего разви-
тия, ответственность за достоверность принятия решений, объек-
тивность применяемых методов и средств систем диагностирова-
ния, внедрение в производство новых систем диагностирования
и оперативность выдачи диагностической информации.
В своей практической деятельности УД решает следующие
основные задачи: оперативной оценки и принятия решений о ТС
двигателей и некоторых изделий и систем самолетов; сбора ин-
формации для создания библиотеки алгоритмов поиска неис-
правностей объектов диагностирования по данным дешифровки
аналоговых записей на регистраторах МСРП-64 и МСРП-256 и
по данным ручных, наземных и полетных дискретных записей;
метрологического обеспечения дешифровки и систем диагности-
рования; изучения возможностей прогнозирования развития ТС
объектов диагностирования; совершенствования и обобщения
опыта технического диагностирования; создания банка данных
диагностической информации; внедрения в производство орга-
низационных, технологических и профилактических мероприя-
тий, связанных с развитием технического диагностирования;
технико-экономической оценки эффективности применяемых си-
стем диагностирования; обобщения опыта эксплуатации и оцен-
ки надежности.
При решении указанных задач УД взаимодействует со сле-
дующими службами АТБ (рис. 2.6): технолого-конструкторским
бюро (ТКБ) АТБ; цехами ТТл**^ также цехом проверки и ре-
монта авианавигационного и радиэлектронного оборудования
(АиРЭО) АТБ; участком расшифровки полетной информации
АТБ; кустовым информационно-вычислительным центром, при-
надлежащим управлению и являющимся частью подсистемы
«Диагноз»; летными отрядами (ЛО) объединения через ПДО
АТБ. Кроме того, УД имеет связи с ГосНИИ ГА, представите-
лями промышленности (ПП) и ОКБ. Связь УД с ПДО и
УРАПИ и КИВЦ носит систематический характер, несмотря на
их взаимную административную неподчиненность.
4**
51
Практическая деятельность УД, как одной из служб.АТБ,
осуществляется в соответствии с действующими организацион-
ными и технологическими ПТД и должностными инструкциями.
У службы УД основными технологическими управляющими воз-
действиями служат решения и зада-ния экспертной группы, соз-
данной при АТБ. Управляющие воздействия на цеха ТО служ-
ба УД оказывает через главного инженера путем выдачи ему
информации о технических диагнозах и правилах решения, ко-
торые он утверждает. Основой для принятия технологических
управляющих воздействий являются методические указания и
разработки ГосНИИ ГА, а также совместные с представителями
промышленности решения по вопросам диагностирования после
официального утверждения главным инженером АТБ протоко-
ла совместного решения экспертной группы. В протоколе обяза-
тельно указывается список членов экспертной группы, в кото-
рую входят по должностям начальник УД АТБ и представите-
ли промышленности. Он содержит описание выявленных сотруд-
никами УД признаков неисправности данного номера самолета
и двигателя и вывод группы с указанием мероприятий по уст-
ранению неисправности. Протокол подписывается всеми члена-
ми экспертной группы.
Управляющее воздействие оформляется в виде задания на
устранение дефекта. Задание выдается цеху диспетчером ПДО
АТБ и содержит в себе данные о самолете и двигателе, описа-
ние неисправности, дату подачи заявки и фамилию ее состави-
теля- В задании указываются метод устранения неисправности,
конкретный исполнитель, дата устранения и подпись исполните-
ля. После устранения неисправности задание возвращается в
УД.
Потребная диагностическая информация поступает в УД: из
ПО через ПДО — полетные карты регистрации параметров; из
цехов ТО — карты регистрации параметров при наземном опро-
бовании двигателей; из УРАПИ — экспресс-анализ полетной
аналоговой информации. Сведения о выполнении плановых из-
менений ТС сообщаются в УД непосредственно из цехов ТО и
ПДО. Обработка данных и вычисления по заданным програм-
мам, а также само программирование выполняются КИВЦ.
Штатный состав УД и его номенклатура утверждаются на-
чальником производственного объединения исходя из объемов
работ АТБ и типов ВС, приписанных к АТБ. Работой УД руко-
водит его начальник, непосредственно подчиненный главному
инженеру АТБ. Штат УД укомплектован: в группе анализа ин-
формации— старшим инженером, инженером по самолету и дви-
гателю (СиД), двумя инженерами АиРЭО; в группе спектраль-
ного анализа масла — старшим инженером и двумя инженера-
ми СиД, двумя авиатехниками; в группе НМК — старшим инже-
нером, тремя авиатехниками и двумя техниками; в группе ана-
лиза ТГП — старшим инженером, инженером АиРЭО и авиатех-
52
Рис. 2.7. Организационная структура УД
ником; в группе надежности—старшим инженером, инженером
СиД, двумя инженерами АиРЭО и техником; в группе реклама-
ции— старшим инженером, двумя инженерами СиД, инженером
АиРЭО и техником; в группе осмотров АТ — десятью авиатех-
никами.
Структура УД соответствует его функциональным обязанно-
стям и определяется идеей создания и развития общей автома-
тизированной системы диагностирования с универсальными и
специализированными методами и средствами. Причем в основу
создания системы положено представление о том, что она долж-
на быть постоянно обучаемой как по ширине обхвата объекта,
трк и по глубине поиска дефектов. В соответствии с функцио-
нальными и технологическими особенностями УД организацион-
но состоит из восьми групп (рис. 2.7).
Анализ опыта работы системы диагностирования и работы
ее служб показал следующие ее недостатки. Существующая
номенклатура регистрируемых на МСРП-64-2 параметров ТРДД
(аруд, ггнд , Ст) сильно ограничивает возможность диагности-
рования по данным аналоговых записей и делает нецелесооб-
разным на данном этапе их машинную обработку дчя целей ди-
агностики. Поступающие на УД из ПДО карты регистрации
параметров, заполняемые бортинженером в полете, карты на-
земных опробований двигателя при ТО и методика диагности-
рования двигателя по данным «вручную» зарегистрированной
информации, недостаточно точны и информативны для увеличе-
ния потребных скорости и достоверности принятия решений при
диагностировании ТРДД, имеющего высокий уровень контроле-
пригодности.
Гораздо более широкими и на данном уровне достаточными
возможностями для автоматизированной оценки ТС двигателя
НК-86 обладает информация, регистрируемая на МСРП-256. Об-
работка этой информации производится в УРАПИ на комплексе
«Луч-74» по специально разработанным алгоритмам и поступа-
53
ет в УД в виде таблиц и графиков. Объем и номенклатура об-
рабатываемой информации достаточны для оценки ТО по ме-
тоду допускового контроля ТГП, позволяющему оценить состоя-
ние проточной части двигателя, элементов САР и правильности
ее функционирования, элементов и режимов работы реверсив-
ного устройства, процессов запуска и вибрационного состояния
двигателя.
Кроме того, возможен анализ состояния двигателя на конт-
рольных, взлетном, максимальном продолжительном и крейсер-
ском режимах.
Оценка ТС по результатам обработки полетной информации
выполняется с периодичностью 10... 15 ч налета самолета. Одна-
ко в перспективе, по мере накопления опыта диагностирования
и совершенствования организационной структуры УД, имеется
возможность перехода на оценку ТС двигателя после каждого
полета или опробования на контрольных режимах для ведения
непрерывного следящего контроля за ТО и создания полного
банка данных диагностической информации, используемого для
решения задач прогноза и генезиса.
Для этой цели КИВИ, и УД совместно внедрили комплекс
рабочих программ для подсистемы КИВЦ «Диагностика» по
обработке на ЭВМ параметров, регистрируемых в полете. При
этом, если какой-либо параметр начинает приближаться к гра-
нице допустимых значений или его скорость изменения по на-
работке вызывает подозрения, то двигатель ставят на особый
контроль.
В этом случае группы УД предъявляют графики изменений
всех исследуемых ими параметров экспертной группе, которая
определяет дополнительные алгоритмы поиска дефекта.
Несмотря на все перечисленные недостатки, система диагно-
стирования доказала свою жизнеспособность и технико-эконо-
мическую эффективность в первую очередь благодаря: своевре-
менной замене двигателей и сохранению их высокой ремонтопри-
годности из-за отсутствия вторичных разрушений и возможно-
сти производства локальных (без общей переборки) ремонтов;
снижению трудоемкости ТО из-за сокращения или отмены не-
которых видов работ после внедрения новых методов и средств
диагностирования; увеличению безопасности и регулярности по-
летов, вызванных своевременностью предсказаний о необходи-
мости проведения работ по устранению неисправностей.
Результатом внедрения в эксплуатацию системы диагности-
рования явилось полное отсутствие ранее наблюдавшихся слу-
чаев помпажа и недостаточности взлетной тяги. За 2,5 года бы-
ло выявлено более 250 предотказов состояния, во время наступ-
ления отказа снято 13 двигателей. Совершенствование диагно-
стической информации приведет к еще более высоким технико-
экономическим результатам.
54
Глава 3
ДИАГНОСТИРОВАНИЕ АВИАЦИОННЫХ ГТД
3.1. ДИАГНОСТИРОВАНИЕ ПО ДАННЫМ ПОЛЕТНОЙ ИНФОРМАЦИИ
Диагностирование 1РДД по принятой в эксплуатационных
подразделениях методике предусматривает автоматизированную
обработку зарегистрированных на МСРП-256 информаций по
специальным программам для устройства «Дуч-74» и ЭВМ. При
этом в памяти ЭВМ содержится банк данных и программ, на
основе которых предполагается получить прогноз развития па-
раметров на ближайшие 20 ч налета, причем прогноз можно бу-
дет получить как с помощью диалога с ЭВМ на дисплее, так и
путем построения графиков. Диагностирование производится по
данным запуска установившихся режимов прямой и обратной
тяги.
Диагностирование в процессе запуска производится по изме-
ренным ТГП с целью .определения правильности функциониро-
вания систем воспламенения и топливной автоматики.
Диагностическими признаками правильности функционирова-
ния системы воспламенения являются измеренные частоты вра-
щения ротора ВД в моменты, соответствующие интенсивному
увеличению температуры газов за турбиной или скачкообразно-
му увеличению подачи основного топлива в камеру сгорания
ния (рис. 3.1, точки 2). Диаг-
ностирование производится по
тому параметру, который рань-
ше зарегистрирован на маг-
нитной ленте МСРП-256. Си-
стема считается правильно
функционирующей, если от-
клонения частот, зарегистри-
рованных по параметрам /т*
или GT, не выходят за преде-
лы контрольного допуска на
номинальное значение частоты
включения подачи основного
топлива: А/гвд= «вд— 1400 =
= ±50 об/мин, где 1400 — ча-
стота вращения РВД, на кото-
рой в соответствии с програм-
мой работы топливной автома-
тики включается подача основ-
ного топлива или происходит
воспламенение, об/мин.
Рис. 3.1. Изменение диагностических
параметров ТРДД в процессе . за
пуска:
1,2 — моменты подачи пускового и основ-
ного топлива; 3 — максимальная темпера-
тура газов за турбиной; 4 — малый газ
55
Диагностическими признаками правильного функционирова-
ния системы топливной автоматики на запуске являются изме-
ренные параметры пВд, время работы топливного автомата
запуска ta.3> момент подачи основного топлива. Система счита-
ется правильно функционирующей, если параметры tT* и Д.э
имеют значения ниже границ контрольных допусков:
Яшах < *т.к = 600°С; fa,3 < /а.9Л = 60'С.
Максимальная температура запуска определяется по графи-
ческому отображению ее записи на МСРП-256 (см. рис. 3.1, точ-
ка 3), или визуально по бортовому прибору при регистрации
вручную. Время работы автомата запуска определяется как раз-
ность времени выхода на малый газ (см. рис. 3.1, точка 4) и
времени подачи основного топлива (см. рис. 3.1, точка 2), т. е.
(Д—12) —ta.3, которое всегда меньше общего времени двигателя
С.з<С/зап--
Кроме перечисленного, при необходимости диагностирова-
ние производится по моментам включения пускового топлива
(см. рис. 3.1, точка /), если оно зарегистрировано на магнит-
ной ленте, и включения подачи основного топлива (см. рис. 3.1,
точка 2), по которому можно определить правильность функцио-
нирования пусковой топливной системы.
Диагностирование на установившихся режимах прямой тя-
ги производится по изменению единичных признаков, определя-
емых по методу приведения к одному режиму. Режимом приве-
дения в данном случае является режим, соответствующий, в САУ
(/Н = 15°С и рн=760 мм рт. ст.) частоте вращения инд =
=пНдпр=5500 об/мин.. Поэтому формула специального приве-
дения имеет вид:
xicn — kt — х/пр — а, (пНдпр ,5500) — 02 (лндпр. 5500)2.
Напомним, что базовая (или эталонная) модель определя-
ется обычно приведенным параметром, измерение которого про-
изошло на режиме приведения в САУ. Формула специального
приведения не учитывает влияния на ТГП отборов воздуха и
мощностей на самолетные нужды, поскольку все они, за исклю-
чением отборов воздуха на систему кондиционирования кабин,
ни на земле, ни в полете не регистрируются. Однако в первом
приближении этим влиянием можно пренеберчь. Это объясня-
ется тем, что регистрация ТГП производится на строго опреде-
ленных этапах полета и режимах работы двигателя. На каждом
этапе полета отборы воздуха и мощностей примерно одинаковы
и соответственно вызывают примерно одинаковые изменения
ТГП, которые подобно систематическим погрешностям" измере-
ний практически не снижают достоверности диагностирования.
56
Двигатель считается исправным, если все изменения единич-
ных признаков находятся в пределах профилактических допус-
ков:
Л kt — k3t — kt еС Д kln и 6 k{ = (k3j — kj)lk3i ^± 6 k3n.
В предотказном состоянии значения признаков больше, чем
профилактические, но меньше, чем контрольные допуски
1Д61П1 «£ 1ДЛ41 < |ДЛ,к| и 1&Лп1 IsС |8 Й,к1.
В отказавшем состоянии
|Д А?(-| kfa и |8 /}-| S* 8 kjf^.
Ориентировочные допуски на изменение диагностических па-
раметров следующие:
Профи- лактичес- кие Конт- рольные
ЛпвД, об/мин. ±100 ±125
AGT, кг/ч . . ±400 ±500
Т'т,-К . . ±20 —
Vn.o И уа.о, мм/с ±20 ±25
Регистрация ТГП на установившихся режимах прямой тяги
осуществляется на взлете, в наборе высоты, в момент перехода
в крейсерский полет и в крейсерском полете. Диагностирование
по ТГП, зарегистрированным на взлете, взаимосвязано с допус-
ковым контролем параметров и контролем техники пилотиро-
вания на этом этапе полета. При этом последним двум видам
контроля отдастся предпочтение. Поэтому параметры двигателя
и полета фиксируются в один из наиболее ответственных мо-
ментов взлета, а именно в -момент отрыва от взлетно-посадоч-
ной полосы, т. е. примерно через 30 с после вывода двигателя
на стартовый взлетный режим, что явно недостаточно для пол-
ного прогрева на этом режиме. Недостаточность времени на
прогрев в момент фиксации параметров приводит к тому, что
температурное состояние двигателя имеет неустановившийся ха-
рактер, обусловливающий неравное распределение по времени
и мест}' деформации деталей и их сопряжений. Это приводит к
непостоянству геометрической формы проточной части двига-
теля и к возникновению неустановившихся полей распределе-
ния газодинамических параметров по сечениям.
Последнее обстоятельство вызывает больший разброс изме-
ренных параметров, который на практике часто объясняют по-
вышенными погрешностями прямых измерений. В действитель-
ности, в диапазоне измерений, соответствующих установившим-
ся повышенным и взлетному земным режимам, суммарные по-
грешности приборов минимальны, поскольку минимальны их
неаддитивные составляющие. Таким образом, повышенный раз-
57
брос параметров, несмотря на достаточную точность измерений,
требует увеличения поля эксплуатационным профилактических
допусков, что приводит к снижению достоверности диагностиро-
вания на этом этапе полета, что видно из формулы Da = 1 —
— (А х„ Д хк).
Диагностирование неполностью прогретого двигателя по мо-
делям прогретого примерно соответствует случаю, в котором
используются неравновероятностные априорная и апостериор-
ная модели для неравновероятностных априорных и апостери-
орных ТС; A=#B=/=idem и idem, что обусловливает ве-
роятность появления ложного диагноза.
Рассмотренный недостаток диагностирования на этом этапе
взлета не отвергает, а, наоборот, усиливает необходимость до-
пускового контроля измеренных параметров, достоверность ко-
торого выше достоверности диагностирования. Объясняется это
тем, что при допусковом контроле профилактически допуски
равны погрешностям, которые меньше профилактических при
диагностировании, а контрольные, в свою очередь, намного боль-
ше, чем допуски на погрешность, т. е. DK— 1—(Дхпог/Ахк)
На взлетном режиме диагностируется также правильность
функционирования САР по поддержанию постоянной тяги до
/„=30 °C при Пн np=const. При температурах выше 30° про-
грамма регулирования двигателя предусматривает поддержание
постоянными либо измеренные частоты nBD=const, либо /т* =
=const, по которым контролируется соответствие тяги заданно-
му значению.
Зависимость изменения измеренных эталонных частот при
/„*^30 °C и условии пнд пр=const аппроксимируется уравне-
нием
ПНД = пНДзад + 8.-'4 (tH* — 15),
откуда
пНДзад — пНД ~ Он* ~~ 1’) 11
«НДзад=»НД-8.74(4,*-15).
Диагностические оценки правильности функционирования элек-
тронной системы управления двигателем по программе пндпр=
—const:
Д /2ИД = «нДзад ~ пНДзад 11 ®НД = Л ЯНД пНДзад •
Оптимальной для оценки функционирования двигателя при
наборе высоты является точка 4000 м, т. е. примерно через 5—7
мин после взлета самолета. На взлетном режиме ТГП двига-
теля имеют большой разброс, зависящий от степени прогрева
двигателей. Как показал опыт, на высотах крейсерского полета
разброс параметров больше, чем на высоте 4000 м, особенно
58 * .
для расхода топлива. Это связано с увеличением неаддитивных
погрешностей определения полной температуры и давления на
входе в двигатель.
Заторможенные параметры рассчитываются через баромет-
рическую высоту и скорость полета. Барометрическая высота
определяется измерением давления атмосферного воздуха. По-
скольку давление атмосферного воздуха на высоте крейсерского
полета (9000...10 000 м) небольшое, неаддитивная погрешность
измерения высоты и скорости полета возрастает. В наборе вы-
соты и на Н—4000 м двигатель уже достаточно прогрелся, па-
раметры его стабилизировались, а давление атмосферного воз-
духа существенно выше, чем на высотах крейсерского полета.
В высотных условиях и при /н=30°С система регулирования
обеспечивает поддержание постоянных измеренных частот двд =
=const при аруд=сопв1 и выдерживает зависимость «вд =
=/(аруд)-
Зависимость пвд=Иаруд ) аппроксимируется полиномом вто-
рой степени (данные берутся из формуляра дйигателя). Изме-
ренные частоты «вд приводятся по зависимости:
«ВДрег = «ВД + k< ( аРУД — 98 ) + k2 ( Яруд — 9S )2
Оценка выполнения программы регулирования на МПР выпол-
няется по отклонениям
Д /;вд = ПВдрег — Ядд!)8 .
Для оценки берется точка в наборе высоты Н—4000 м. Эта
точка выбрана потому, что на МПР или на режимах, близких
к нему, на этой высоте нет «срезки» топлива, так как потреб-
ные расходы топлива меньше отмеченных для условий Н=0,
Л4=0 при контрольных испытаниях. Оценка правильности функ-
ционирования системы регулирования по программе «вд =
=/(аруд ) может производиться и в крейсерском полете.
Ограничение максимальных приведенных частот «ндпр про-
изводится электронной системой управления двигателем (ЭСУД)
из условия обеспечения заданной тяги двигателя на высоте
11000 м и при числе М=0,85. Зависимость измеренных частот
от заторможенной температуры воздуха на входе в двигатель
на режиме ограничения задается уравнением
п’нд = лэНДзад+ 11,598 (V +60).
Данные для отладки частоты вращения ротора НД в форму-
ляре на двигатель задаются при температуре —60°C (точка
—60°C выбрана для упрощения технологии отладки ЭСУД).
Для оценки работы системы ограничения измерения частоты
приводятся по уравнениям:
«НДзад =«НД - 11 -598 (V + 6°); «НД см = «НД ~ 11 -598 (6 * + 60> •
которые справедливы для высот более 3000 м.
4* 43
Диагностические оценки
АпНД = иНДзад — яНДзад 11 ®« НД = "НД //гНДзад
Оценка работы системы ограничения производится в конце на-
бора высоты при работе двигателей на МПР перед переходом
в крейсерский полет, так как в этой точке максимальная веро-
ятность выхода параметров двигателя на режим ограничения.
При диагностировании правильности функционирования ЭСУД
значение параметров не должно быть больше формулярного на
величину, определяемую точностью работы системы ЭСУД
(20 об/мин) и погрешностью измерений (1%)-
Диагностирование ТРДД на установившихся режимах обрат-
ной тяги производится с целью определения правильности функ-
ционирования САР при включении реверсивного устройства. Ме-
тодика пользования реверсивным устройством предусматривает
следующее:
перед включением реверсивного устройства двигатели пере-
водятся на режим МГ;
с режима МГ при касании самолета посадочной полосы дви-
гателя переводятся на режим обратной тяги, внутренние — на
режим максимальной обратной тяги (аруд =0, наружные — на
режим ограниченной обратной тяги (аРуд = 10°+1°);
на скорости пробега самолета 150 км/ч рычаги управления
реверсивным устройством (РУР) внутренних двигателей пере-
мещаются на уменьшение обратной тяги до выравнивания ее с
обратной тягой наружных.
Программа регулирования параметров двигателя на режиме
обратной тяги предусматривает при /Н>5°С поддержание
пВд =const, а при Л,<5°С—GT=const. Оценка правильности
функционирования двигателей на режиме обратной тяги вклю-
чает в себяз определение положения РУД на режимах обрат-
ной тяги для наружных и внутренних двигателей и их соответ-
ствие отрегулированным упорам на РУР; определение ггвд на
режиме максимальной обратной тяги из условия превышения
измеренных частот над заданными с учетом погрешности изме-
рений.
Оперативный контроль состояния двигателей производится
через заранее заданные промежутки времени. С точки зрения
обеспечения безопасности полетов желательно организовать кон-
троль ТС перед каждым полетом по результатам обработки ин-
формации предыдущего полета. Однако возможности, имеющие-
ся в настоящее время в аэропортах (оборудование и специалис-
ты), не позволяют обеспечить переработку большого объема ин-
формации. С учетом организационных трудностей оптимальным
в настоящее время следует считать вариант оценки функциони-
рования двигателей после 10...15 ч наработки, т. е. по возвра-
щении самолета в базовый аэропорт, в котором имеются необ-
ходимое оборудование и подготовленные специалисты.
60
В процессе оперативного контроля через 10... 15 ч наработки
оценка функционирования производится только по наиболее ин-
формативным параметрам «нд, «ад, GT. Оценка изменения
лк и л,- производится реже, примерно через 50...70 ч наработки,
что снижает трудоемкость обработки информации при оператив-
ном анализе.
Для оценки вибросостояний двигателя берутся максималь-
ные замеренные виброскорости в одной из четырех точек поле-
та. Измеренные виброскорости по внешним факторам не приво-
дятся, поскольку их влияние на уровень виброскорости очень
слабое.' Предельный допуск уровня виброскоростей, при выходе
за который необходимо обратить внимание на состояние двига-
теля, равен 40., км/с.
Изменения диагностических оценок по наработке аппрокси-
мируются, как правило, полиномом второй степени методом на-
именьших квадратов, результаты обработки представляют в ви-
де уравнения и графиков с устройства графической регистра-
ции.
3.2. ДИАГНОСТИРОВАНИЕ ПО ПАРАМЕТРАМ
НАСТРОЕЧНОЙ ХАРАКТЕРИСТИКИ И СКОЛЬЖЕНИЮ РОТОРОВ
Диагностирование по параметрам настроечной характеристи-
ки /7вд=/(ируд ) производится с целью определения правиль-
ности функционирования самолетной системы управления дви-
гателем и топливного насоса-регулятора. Диагностическая мо-
дель, выраженная как функция измеренной, частоты вращения
РВД от угла поворота РУД «вд=/(аРуд ), отражает связь уп-
равляющего воздействия РУД с регулируемым параметром Ивд,
который является откликом на реплику этого воздействия.
Функция Пвд=/(аруд), построенная по формулярным за-
писям, представляет собой эталонную диагностическую модель
данного номера двигателя. Любое значимое отклонения реаль-
ной функции от эталонной свидетельствует о наличии дефектов
либо в самолетной системе управления двигателей, либо в са-
мом двигателе. Однако это будет справедливо в том случае, ес-
ли двигатель в момент проведения измерений работает по прог-
рамме регулирования пВд =const. При работе двигателя по
программе регулирования G,=const модель делается неинфор-
мативной, так как частота вращения пвд становится зависимой
от внешних условий (рн*, /и*) и независимой от настройки цен-
тробежного регулятора «Вд = const.
На практике для сокращения трудоемкости работ по измере-
нию частот пвд во всем диапазоне режимов от малого газа до
взлетного эталонную функцию часто заменяют точечными эта-
лонными значениями на одном из крейсерских режимов. Таким
значением выбрано пвд=89,5% при аруд =96О±1 , что соответ-
61
ствует 0,85 МПР с диапазоном допустимых частот «Ед =87,9...
91,1%- Опыт эксплуатации этого двигателя показал, что предот-
казовые состояния наступают при достижении на этом режиме
«вд =88,5% и /гвдтах=90,5%, и, следовательно, профилакти-
ческий абсолютный допуск Д«вдп=±1,0%, а относительный
б/гвд п=89,5—п Вд • 100/89,5=±1,1%.
Диагностическими оценками служат простые сотношения:
®«вд = Л ЯВд/Д /гВД п 1 • ®«ВД = ° ”В-П ° ПВД п 1
Практика использования модели показала ее высокую инфор-
мативность, но малую глубину поиска неисправностей, посколь-
ку она отвечает только на вопрос: годен или негоден двигатель
или самолетная проводка управления в целом. Примерно в 90%
случаев обнаружений неисправностей частота устойчиво снижа-
ется по наработке и только в 10% повышается.
Снижение частоты вращения по мере увеличения наработки
объясняется падением эффективных КПД двигателя и агрега-
тов САР, а повышение, по-видимому, можно объяснить только
регулировкой самолетной системы управления двигателя в ус-
ловиях полета и износом плунжерных и золотниковых пар на-
соса-регулятора. Последнее предположение о диагнозе часто
оказывается трудно проверить на земле, так как центробежный
регулятор работает на 0,85 МПР только при ?Н*^4-5°С.
Снижение лВд при заданном аруд приводит во многих слу-
чаях к снижению безопасности полетов и к преждевременному
ограничению взлетной тяги при положительных температурах
воздуха. Увеличение режима в этом случае вообще невозможно,
так как РУД находится на упоре. Описанные примеры послу-
жили причиной установления допуска Дггвд п = ±1 %- Завыше-
ние функции «вд =Г(аруд) в сравнении с эталонной приводит
к увеличению механических и тепловых нагрузок и как следст-
вие, к преждевременному исчерпанию ресурсов, а также к пе-
рерасходу топлива.
Устойчивое изменение критерия наблюдается примерно у
30% парка двигателей и начинается, как правило, при нара-
ботках выше 4000 ч с продолжительностью 30—1000 ч в зави-
симости от первоначального уровня частоты.
Восстановление исходного значения пвд на ТРДД НК-8-2У
производится регулировочным винтом Н-2 насоса-регулятора.
Этим винтом можно компенсировать отклонение по «вд не бо-
лее чем на 11 шлицах, что связано с возможностями .сжатия
пружин настройки. При больших потребностях в компенсации
восстановить частоту невозможно. В этом случае насос-регуля-
тор подлежит снятию и отправке в ремонт.
На рис. 3.2 показаны измерения частот лвд по наработке.
Нанесены осредненные по пяти измерениям значения парамет-
ров ,что сделано для уменьшения статистического разброса дан-
62
Рис. 3.2. Изменение диагностической оценки 0пВд в эксплуатации:
1—6 — наблюдаемые изменения оценок при развитии неисправностей
ных, вызванного погрешностями измерений и считывания пока-
заний приборов. Кривая 1 отражает нормальное изменение час-
тоты на первых часах наработки. Кривая 2 одной своей точкой
касается линии минимально допустимых значений. В этой точке
произведена регулировка винтом Н-2, после чего характеристи-
ка HBfl=f(apyfl ) восстановилась. Кривая 3 отражает особен-
ность самолетной проводки управления двигателем, которая со-
стоит в том, что с периодичностью 400... 1000 ч она системати-
чески требует подрегулировки. На двигателе, представленном
кривой 4, дважды производилась подрегулировка частоты. Кри-
вая 5 интересна тем, что двигатель, который она характеризует,
1 раз был подрегулирован по частоте «Вд и снят с самолета из-
за прогара сопловой лопатки 1-й ступени турбины, но при этом
практически никаких отклонений частоты не наблюдалось. Осо-
бенностью двигателя, характеризуемого кривой 6, является то,
что при устойчивом росте частоты «вд в конце выработки ре-
сурса он был снят так же, как и двигатель 5, из-за прогара
сопловых лопаток 1-й ступени турбины. Таким образом, модель
nBn—f(аРуд ) в основном отражает точность управления дви-
гателем на участке РУД — пружина настройки центробежного
регулятора'«Вд = const, а не его техническое состояние.
В табл. 3.1 и 3.2 представлены оценки характеристики «вд =
=f(uvay ) соответственно по данным наземных опробований с
приведением к САУ и по данным полетных карт.
* Таблица 3.1
Нара- ботка, ч Диагности- ческий при знак — снижение «ВД- % Технологическое мероприятие Нара- ботка, ч Диагности- ческий признак — снижение пвд Технологическое мероприятие
280 1,5 Винт Н 2 завер- 1550 1,6 5 ШЛИЦОВ
нуть на 2 шлица 1880 1,8 6
5801 1,5 То же 2 шлица 6010 2,3 > 8 »
45.50 1 » 2 » 2038 1 > 6
2369 1 » 2 » 3420 1 4 шлица
Примечание. Предотказовое состояние — снижение п вд.
63
Таблица 32
и/п ’ Наработка, ч Диагностический признак — изменение п о п , % ВД Технологическое мероприятие
1 4640, 5405,270 88,8...88,7; 88,5...88; - 88,3...88,7 Винт Н-2 завернуть на 2 шлица
2 2672 89,5...88,1 То же, 1 шлиц
3 1531, 3776 89,5...88; 89,2...87,9 » 3 шлица
4 4004, 3702 89,5...88; 89,2...88 » 4 »
5 2508. 2952, 810 2140, 1992, 3400 90.5...88; 89,2...87,7; 89,9...87,8; 88,5...87,9; 90,2.88,1; 90...87.8 » 5 шлицов
6 1704, 2570, 1210 2800, 3792, 4340 4220, 2308, 6250, 4846 165 89,7...87,5; 89,8...88,2; 89,1.„88,5; 89,1...88,3; 90 „87,8; 89,4 ..88; 90...87,8; 89,5...87,6; 89...88,1; 89,5. .87,9; 89,2.„88 » 6 » '
7 2309, 6900, 6200 ' 88,5...87,9; 88,7...87,9; 88,5.„87,7 » 7 »
8 2809 89...87,9 » 8 »
9 6200 88,9.„87,9 » 3 шлица, Н-7 отвернуть на 1 оборот
10 5014 88,5...87,7 Винт Н-2' завернуть на 5 шлицов, Н-7 отвернуть на 7 шли- цов
И 6240, 4780 90...90,9; 88,8...90,5 Винт Н 2 отвернуть на 3 шлица
12 5640, 4702, 4150 970 89.. 91; 89.91,1; 89..91; 91. .91.7 То же, на 4 шлица
13 1640 86,6...91 » , на 5 шлицов
14 2460 88,9.91 » » 6 »
15 4390; 89,5.„91,4 » » 10 »
Примечание. Предотказовое состояние — в пп 1—10-снижение па д
в пп. 11 —15 —превышение пвд.
Днагностирование по скольжению роторов ТРДД произво-
дится не только по своему прямому назначению, но и для обес-
печения максимально хороших эксплуатационных характерис-
тик, таких как тяговые, газодинамической устойчивости, вибра-
ционные и т. д. Скольжение роторов — наиболее ценный диаг-
ностический признак двухвальных ТРДД, широко применяю-
щийся в практике диагностирования двигателей.
Диагностирование ТС по скольжению роторов в настоящее
время производится при ТО через каждые 300 ч наработки по
графикам пВд np=f («нд пр) (рис. 3.3). Скольжение роторов в
данном случае определяется как отклонение А «вйпр = п’вл 1|р —
— «вдпр при постоянной «эдпр — (91 + 1)% или какАпндпр—
= «’дпр —«ндпрпри «|д = (92,5 + 1)% (линии 2). На практике
обычно применяют первый способ определения. Контрольная
64
Рис. 3.3. Определение скольжения ро- у, rz
торов:
1. 4 — контрольные границы поля допус-
ков; 2— эталонные режимы; 3—сколь-
жение, определенное по формулярным
данным;
а, б, в — базовые линии скольжения;
I— зона недостаточности тяги; II — зона
газодинамической неустойчивости компрес-
сора
граница 1 отражает ограничения по потере тяги, а граница 4 —
по потере газодинамической устойчивости компрессора. Профи-
лактическими границами служат значения Пвдпр, лежащие на
0,5% ниже контрольной границы 1 и на 0,5% выше границы 4.
Отсчет изменений скольжений Дпв д пр ведется от эталонной ли-
нии 3, построенной по формулярным данным. Например, реаль-
ные линии скольжений а, б, в имеют отклонения от эталонного
значения, определенного на режиме пНдПр—90%.
Анализ эксплуатации показал, что у большинства двигате-
лей НК.-8-2У происходит изменение скольжения роторов по пВд
с наработкой. Как правило, скольжение по мере наработки дви-
гателя увеличивается. Особенно это характерно для начального
этапа его работы. В результате проведения исследований уста-
новлено, что возможны две принципиально различные причины
увеличения пВд пр-
Во-первых, изменение скольжения роторов может происхо-
дить при перекомпоновке двигателей (замене и перестановке
различных агрегатов, реверсивного устройства). По этой причи-
не наблюдается изменение скольжения роторов примерно в 65%
случаев. Во-вторых, изменение скольжения происходит вследст-
вие изменения геометрических размеров газовоздушного тракта
двигателей.
Постоянный контроль и поддержание линии скольжения ро-
торов вблизи формулярных данных, что является одной,из ос-
новных задач группы исследования параметров УД, позволили
за период 1979—1982 гг. избежать на -базовом парке двигате-
лей таких крайне нежелательных явлений, как помпаж и хлопки.
За указанный период от экипажей не поступило ни одного за-
мечания на ощущение недостаточности тяги двигателей на
взлетном п максимальном продолжительном режимах, в том
числе при стабильно высоких температурах окружающего воз-
духа выше 30 °C. —
Опыт диагностирования по скольжению роторов позволил
выяви ь связь скольжения с вибрацией двигателя и разработать
рекомендации по ее устранению. При появлении в горизонталь-
ном полете повышенной вибрации (более 40 мм/с) передней или
Г 65
задней опоры рекомендуется выполнить следующий перечень
стандартных работ или только его часть: проверить аппаратуру
контроля вибрации (на соответствие НТД), крепление двига-
теля в мотогондоле, крепление вибродатчиков; осмотреть мас-
лофильтр двигателя и магнитные пробки передней, средней и
задней опор на отсутствие стружки; осмотреть рабочие лопатки
компрессора; проверить состояние лопаток 1-, 2-, 3-й ступеней
турбины, диафрагму соплового аппарата 2-й ступени турбины,
состояние дисков 2-й и 3-й ступеней Турбины.
Обычно, если выполненный перечень работ не дает желае-
мого результата по снижению уровня вибрации, то двигатель
подлежит досрочной съемке. Однако на практике у отдельных
экземпляров двигателей иногда удается снизить уровень вибра-
ций до нормальных значений п\ гем регулирования пЕдпр с по-
мощью изменения угла установки лопаток.
Такие регулировки не устраняют развивающиеся неисправ-
ности, а лишь уменьшают нежелательные последствия их прояв-
ления. Так, при увеличении Дпвдпр происходит потеря тяги дви-
гателя и для поддержания частоты вращения РВД в полете
при работе по программе регулирования пВд—const требуется
увеличение подачи топлива. Если не производить регулировку
скольжения роторов, то вступит в действие ограничение по
бттах, что может привести к попаданию двигателя в область
неустойчивой работы, к прогарам сопловых аппаратов турбины,
оплавлению их вставок и др. В этих случаях помимо регули-
ровки требуется обязательное выполнение осмотров горячей час-
ти двигателей.
К недостаткам метода оценки скольжения роторов по дан-
ным опробований при техническом обслуживании следует от-
нести значительную флуктуацию скольжения роторов (т. е. то
увеличение, то уменьшение значений параметра без каких-либо
регулировок). Это связано как с неточностями регистрации па-
раметров, так и с методическими погрешностями. В частности,
неучтенным является влияние влажности воздуха на дроссель-
ные характеристики.
Очень важный источник сведений об изменениях скольже-
ний внутри интервала времени между периодическими формами
ТО —полетные карты регистрации параметров на крейсерском
режиме. Несмотря на наличие больших субъективных погреш-
ностей записей, диагностические оценки изменения скольжений
по наработке, полученные методом простого усреднения, обла-
дают высокой достоверностью. Так, если принять за профилак-
тический допуск субъективную погрешность 6=0,005, то
= (s9 - s)/s9 < 3 s < 0,005.
Предположение о величине этого допуска нашло подтверж-
дение при диагностировании двигателей по причинам: разбан-
дажирования (увеличения зазора в стыках) антивибрационных
полок рабочих лопаток 1-й ступени КНД (рис. 3, 4, а); закок-
66
сованности рабочих топливных форсунок (рис. 3.4, б) и прогарй
камеры сгорания в районе штуцера подвода топлива (рис. 3.4,и
в). В первом случае базовой была модель s6=0,1244-0,156nB t>
во втором—«б=0,11+0,159пНд о и в третьем —s6=O,113-f-
-|-0,159пнд о- Время экспозиций, т. е. время перехода неисправ-
ности в отказ, может быть определено двумя методами: по
наработке, соответствующей началу стабильного выхода теку-
щей оценки за пределы профилактического допуска, и по нара-
ботке, после достижения которой наступает интенсивное и по-
стоянное изменение оценки по времени, т. е. d<E)/dr^>0.
Так, при разбандажировании (см. рис. 3.4, а) время экспози-
ции, определяемое по первому методу, составляет примерно 45 ч,
а по второму 75 ч. Время экспозиции закоксованности рабочих
форсунок (см. рис. 3.4,6), определенное по первому методу, со-
ставляет примерно 45 ч, а по второму 65 ч. Соответственно это
время для случая прогара камеры сгорания составляет 40 и 45 ч.
Диагностирование по настроечной характеристике «вд =
- / (< ) должно предшествовать любому другому методу ди-
агностирования, поскольку, если эта характеристика расстрое-
5» 67
на, диагноз может содержать в себе ошибки I и II рода. Сколь-
жение роторов, как показала практика, является наиболее цен-
ным и универсальным диагностическим признаком для большин-
ства неисправностей, определяемых по ТГП и вибросостоянию.
3.3. ДИАГНОСТИРОВАНИЕ ПО ВИБРАЦИОННЫМ
ПАРАМЕТРАМ
Основные причины вибраций двигателя следующие: несба-
лансированность и несоосность роторов, вызванные технологи-
ческими особенностями изготовления деталей и сборки двигате-
ля или повреждениями деталей в процессе эксплуатации; воз-
можная близость критических частот вращении роторов к рабо-
чим, возникающая при неисправностях или отказах конструк-
тивных элементов упругодемпферных опор; неравномерность
-распределения параметров потока (р, с и Т) по времени и по-
перечным сечениям проточной части двигателя, вызванная из-
носом поверхностей деталей, изменением скольжения роторов
или помпажными явлениями и др.
Внбросостояние двигателя характеризуется круговой часто-
той колебания ю (об/мин), если они изменяются в плоскости
вращения роторов, или линейной частотой f=w(2n) (Гц), если
колебания наблюдаются в .плоскости, параллельной оси двига-
теля, а также максимальной амплитудой колебаний (вибросме-
щениём) у (мм) или размахом S=2y (мм). Опыт эксплуата-
ции показывает, что отказы двигателей возможны в диапазоне
частот f = 12... 1800 Гц и вибросмещений уо= 1,00...0,0068 мм,
Т. е. fmax/fmin«Утах/z/min» 150. Подобный диапазон изменений
делает практически невозможным использование этих парамет-
ров в качестве диагностических признаков вибросостояния.
Однако в ТРДД с большой степенью двухконтурности вибро-
смещение иногда используется как мера оценки зазора между
рабочими лопатками вентилятора и его корпусом. Последний
может уменьшаться вследствие смещения диска, вызванного ви-
бросмещениями вала вентилятора в опоре относительно плос-
кости вращения, что может привести к касанию лопаток о кор-
пус и к их разрушению.
В качестве диагностических признаков вибросостояния на
практике применяются: виброскорость V (мм/с), представляю-
щая собой первую производную вибросмещения по времени
V=у\ коэффициент виброперегрузок ke, представляющий собой
отношение виброускорения к ускорению свободного падения.
На практике отказы двигателей наблюдаются в диапазоне изме-
нений &g = 15...0,32 и К=ЗО...9О мм/с. Таким образом, из пере-
численных параметров и признаков наибольшую диагностиче-
скую ценность имеет виброскорость. Объясняется это тем, что
виброскорости независимо от частот и форм колебаний имеют
68
прямую функциональную зависимость от действующих в дета-
ли напряжений:
V = с з,
где с — характерная для данной детали константа; о — действующее напря-
жение.
Коэффициент виброаерегрузок зависит как от частоты коле-
баний, так и от их форм. Поэтому он используется в основном
в ТВД, где круговая частота колебаний равна равновесной час-
тоте вращения ротора: со—npaBH=const в предположении, что
разрушения происходят при строго фиксированных формах ко-
лебаний.
Диагностирование по виброскорости позволяет определить
такие дефекты, как обрыв лопаток компрессора и турбины, тре-
щины дисков турбины, погнутости лопаток компрессоров, раз-
бандажированис полок 1-й ступени КНД и т. д.
Анализ вибросостояния. по данным полетной информации
показывает, что уровни вибррскоростей на исправных двигате-
лях незначительно увеличиваются по наработке и в среднем со-
ставляют на передней опоре Vn.o = 15...20 мм/с и на задней
К3.о=5...10 мм/с. При этом увеличение скорости их изменения по
наработке, y—dv/dt= (5...8) 10 Л мм-ч/с, допустимое по НТД
значение виброскорости на обеих опорах одоп=40 мм/с.
Достижение виброскоростей К.о и Р3.о=30 мм/с или превы-
шение .скорости их изменения по наработке у=(5...8)-10 3 ммХ
Хч/с служит причиной постановки его на особый контроль и на-
чала систематического спектрального анализа масла, если визу-
альный осмотр и осмотр бороскопом Н-200 нс показали явных
признаков разрушения деталей проточной части.
Методика обработки данных о вибросостоянии двигателя
предполагает выполнение следующих основных работ. Проверя-
ется исправность измерительной аппаратуры на отсутствие
ошибки I рода в виде выдачи ложного сигнала «Вибрация ве-
лика», поступающего на магнитную регистрацию при достиже-
нии 1/=85 мм/с, поскольку практическая достоверность этого
сигнала и его регистрации, как показывает опыт, не превышает
25°/о- Одновременно проверяется отсутствие ошибки II рода,
которая может появиться при опробовании двигателя на конт-
рольных режимах. Проверка .на «ложный сигнал» производит-
ся путем замены эксплуатирующейся аппаратуры на контроль-
ную, которая специально оттарирована и имеет малую наработ-
ку. Регистрация виброскоростей производится на МСРП с точ-
ностью до 0,2 мм/с.
Данные ручной регистрации виброскоростей осредняются по
пяти полетам: точки, имеющие явный выброс, не учитываются.
Полученные средние оценки наносят на график, на котором за-
писываются также номера самолетов и двигателя и наработка
69
Рис. 3.5. Изменение виброскоростей иа опорах ТРДД при развитии неисправ-
ностей и отказ:
1 — разрушение сепаратора подшипника средней опоры; 2 — обрыв 'А длины пера ра-
бочей лопатки 4-й ступени КВД; 3 — погнутость лопатки 7-й ступени КВД; 4—разбан-
датирование антивибрационных полок 1-й ступени КПД; 5 — развитие трещин лопатки
3-й ступени турбины; О — регулировка аппаратуры; X — отказ двигателя
двигателя. Рекомендуемые масштабы графика: 1 мм/с — в 1 мм
и ]0 ч в 1 мм.
При достижении на двигателе значений V=30 мм/с и
=dV/dt^5,8- 10 s вибродиагностирование должно дополняться
подключением к нему всех локальных средств диагностирова-
ния.
На основе сопоставления ценностей всех диагностических
признаков разрабатывается правило решения.
Проанализируем реальные случаи отказов (рис. 3.5). В пер-
вом случае на двигателе практически иа первых часах наработ-
ки наблюдались повышенные виброскорости УП.О»27 мм/с и
У3.о»13 мм/с вместо 20 и 10 мм/с соответственно. Скорость их
изменения составляла 70-10~3 мм-ч/с и превышала допустимую
70
(8-10-3 мм-ч/с) приблизительно в 9 раз. При постановке дви-
гателя на особый контроль путем спектрального анализа масла
установлен рост концентрации металлов: Fe до 2 г/т, Си до
1,2 г/т, Сг до 0,6 г/т и А1 до 0,7 г/т. При исследовании двигате-
ля на заводе обнаружено начальное разрушение сепаратора
подшипника средней опоры. Двигатель снят при ’достижении
Vn.o=37 мм/с< Vn.o доп=40 мм/с и практически неизменной
Кэ.о- Кроме разрушения подшипника на двигателе, обнаружена
погнутость рабочих лопаток 7-й ступени КВД.
Во втором случае на передней опоре двигателя наблюдался
рост виброскоростей до 37 мм/с при у=30-10~3 мм-ч/с. При
осмотре проточной части бороскопом Н-200 был обнаружен об-
рыв '/4 длины пера рабочей лопатки 7-й ступени КВД, что по-
служило причиной досрочного снятия двигателя.
В третьем случае, на передней и задней опорах произошло
увеличение виброскоростей до Vn0—37 мм/с и V3O=15 мм/с
при уп. =62-10-3 и 73.0=22-;0~7 мм-ч/с. Причиной этого по-
служила погнутость лопаток 7-й ступени КВД.
В четвертом случае произошло разбандажирование антивиб-
рационных полок 1-й ступени КНД. Здесь наблюдался только
рост Vn.o до 38 мм/с при упо=27-10“3 мм-ч/с и нормальных зна-
чениях Уз.о и 1’э.о « 0.
В пятом случае при развитии трещины лопатки 3-й ступени
турбины наблюдалось изменение только виброскоростей на пе-
редней опоре от Vno=20 мм/с до Vn.o=32 мм/с при уп.<> =
= 26-10-3 мм-ч/с и V3.o«5 мм/с «const. Изменение каких-ли-
бо других диагностических Признаков не наблюдалось.
Изменение виброскоростей па одной из опор не всегда сви-
детельствует о том, что дефект развивается именно на этой опо-
ре. Например, в пятом случае уровни виброскоростей не связа-
ны с реальными режимами нагруженности двигателя, что, по-
видимому, служит основной из причин статистических разбро-
сов данных. Это обстоятельство затрудняет получение достовер-
ных эталонных моделей виброскоростей и соответственно диаг-
ностических критериев.
В табл. 3.3 представлены некоторые технические диагпош
вибросостояний и рекомендаций по устранению отказов.
3.4. ДИАГНОСТИРОВАНИЕ ПО ТЕРМОГАЗОДИНАМИЧЕСКИМ
ПАРАМЕТРАМ
Диагностирование по изменению температуры газов за г
биной осуществляется по эталонной модели tf пр — / ('h'i’^J
и базовым моделям Тс,тлр =f(s6). Эталонная модель прошен
по формулярным данным, базовые модели по данным на земных
опробований при периодических формах ТО (рис. 3.G). Темпе
ратура контролируется на взлетном режиме Лцд= (96',оо). к<>
Таблица 3.3
Наработка, ч Диагностический признак Мероприятия по устранению отказа
1400, 1700, 3360, 1928, 3700, 4962, 5580. 200, 4060, 1585, 2100 1700 4150 4450 3900 3400 3372, 750, 1800 380 3797 3747 800 Vno = 37, 28. 30, 35, 35, 45. 35. 37, 35, 34, 45 мм/с Vn.o = 37 мм/с Тп.о = 30 • 10-3 мм-ч/с Vn.o = 32 мм/с уп.п = 26--10-3 мм-ч/с Vn.o = 33 мм/с •уп о = 27-10—3 мм-ч/с Уп.о = 27 мм/с Уп.о = 35 мм/с Vn.0 = 37, 25 55 м/с Vn.o = 27 мм/с Vп о=13 мм/с Тп.о = 70-10 ~а мм-ч/с Повышенная концен- трация Fe, Си, Сг и AI В полете мигнуло таб- ло «Вибрация велика» Уп.о = 32 мм/с Vn.o = 27 мм/с. Замена датчиков виб- роаппаратуры ДСД вследствие разру- шения ‘Д пера рабочей лопатки 4-й ступени ДСД вследствие тре- щины рабочей лопатки 3-й ступени турбины ' ЦСД вследствие раз- бандажирования антиви- брационных полок 1-й ступени КНД Зачистка забоины ра- бочей лопатки 1-й ступе- ни КНД Настройка измеритель- ной аппаратуры Регулировка винтами топливной аппаратуры ДСД вследствие прог- ну тости рабочей лопатки 7-й ступени КВД и раз- рушения сепаратора под- шипника средней опоры Установка эталонного комплекта виброаппара- туры и проверка в поле- те Замена платформы пе- редачей опоры ДСД вследствие недо- пустимой погнутости ра- бочей лопатки 7-й сту- пени КВД
Примечание. ЛСД — досрочное снятие двигателя с самолета.
торому соответствует контрольная граница /?.пр = 630°С, обес-
печиваемая предельным регулятором температуры.
Данные полетной информации используются для оператив-
ного контроля изменения температуры по установленному опыт-
ным путем профилактическому допуску для крейсерского режи-
ма t-t* =С520 °C. Использование измеренной температуры /•»* в
качестве диагностического признака показано на рис. 3.7. В табл.
3.4, 3.5 приведены характерные признаки неисправностей, опре-
деленных по измеренной температуре. Как видно, все они свя
заны с наличием ошибок II рода, вызванных неисправностями
контрольно-измерительной аппаратуры и заниженной частотой
»нд-
72
Таблица 3.4
Наработка, ч Предотказо- еое состояние Диагностический признак — измене- 1,ие**т.пр, °C И Пцд, % Технологические мероприятия
1967, 4300, 3700, Превыше- - 10. 10, 20, 13, ю, Винт Н 7 завернуть на
4100, 4602, 5508, ние /*т 6 1, 1, 1, 72, 72, 72 Оборо- та
6400, 1650, 550, То же 8, 19, 30, 17, 18, Заменить измерит зль-
5300, 2500, 3750, 28, 23, 26, 5, П, ную аппаратуру промыть
3750, 3071, 5716, 635, 4525 - 40 ШР термопар
4230 Превыше- ние лнд 1.5% Винт Н-7 отвернуть на 7г оборота, винт Н-1 за- вернуть на 8 шлицев
4230, 6560, 6142, Снижение 1; 1,1; 1,5; 1,9 1,5; Винт Н-7 отвернуть на
48G7, 6161, 5099, 495.1, 4707, 2538, 5450, 5303, 5553 пнд 1.7; 2.4; 3,4; 3,0- 4,0 1,3 1,3; 7г; 7г; 1; 1.5; 1; 1;. 1,5; 1; 7г; 1,5; 1; 1 оборота
4658 То же 5,4 Отрегулировать ход по- водка насоса-регулятора (HP) до упора «Взлет», винт Н-2 завернусь на 7 шлицов '
5360 3,4 • Отрегулировать пово- док HP до упора «Взлет»
4832, 3422, 4996, 4948, 4329, 5818, 4911, 4911 2 8, 1,5;- 2; 3; 3,о: 5,4; 5,9 2,9; Винт Н-2 завернуть на 5; 4; 2; 3; 3; 3; 3: 3; 3 ш ща
Примечани чинается при нара( е Стабп ъное изменение характеристики /т*==/(пнд на" 5отках более 4000 ч
Таблиц? 3.5
Наработка, ч Предотказовое состояние Диагностический призы — изменение GT, кг/ч
3720 Увеличение GT па од- , ном двигателе 2100...2800
3000 Одновременное увели- чение GT на всех двига- телях, установленных на 2000...3000
самолете
2000 То же 2100...2600
77 2150...3200
663
363
3050 2100...3000
2150
4550
Примечание. Неисправности устранены заменой датчиков-плотно-
меров.
5—1369 73
Рис. 3.6. Определение изменений темпера-
туры газа за турбиной ТРДД при ТО:
1 — контрольная граница для взлетного режима:
2— эталонная линия: 3 — базовые линии; 0 -
экспериментальные точки
Рис. 3.7. Изменение измеренной температу-
ры газа за турбиной ТРДД:
1 — при прогаре камеры сгорания; 2—прн про-
гаре СА 1-й ступени, турбины; X — отказ двига-
гателя
Неисправными эле-
ментами аппаратуры
контроля параметров мо-
гут быть: указатели тем-
пературы выходящих га-
зов; переходные колодки,
служащие для компенса-
ции влияния температуры
холодного спая термопар
на показания прибора;
загрязненные штепсель-
ные разъемы (ШР) тер-
мопар. Загрязнение про-
исходит в основном вслед-
ствие нагарообразования
и коррозии. Наблюдаемое
уменьшение или увеличе-
ние температуры выходя-
щих газов во многом свя-
зано с загрязнением ШР
термопар, которое устра-
няется промывкой этих
разъемов спиртом или за-
меной аппаратуры; 50% неисправностей устранено промывкой
ШР. В соответствии с регламентом указанный ШР промывает-
ся через 900 ч. Для предупреждения подобных отказов в каче-
стве профилактики потребовалось производить промывку через
300 ч.
Стабилизация характеристики t-r*=f (пил ) достигается ре-
гулировкой винтами Н-1, Н-2 и Н-7 насоса-регулятора.
Использование диагностической модели T°T_np—f(sb) и оце-
нок 0тб(т) = (7'тб—T-r.npj/T-r6 профилактическим допуском 0Т<
<6Т—0,01 повышает ценность признака Тт* (см. рис. 3.4, в и
рис. 3.8). На обоих рисунках показано развитие прогаров камер
сгорания, которые определялись соответственно по моделям
Ттв = 1098s6—268 и 7’т6 = 2233s6—1400. Как видно, время экспо-
зиций, ограниченных по стабильному выходу значения оценки
0т за пределы допуска и по скорости ее изменения, составляет
30 и 40 ч на рис. 3.4, в и 40...45 на рис. 3.8. Однако в случаях
разбандажирования антивибрационных полок рабочих лопаток
1-й ступени КНД (рис. 3.4,о), закоксования рабочих форсунок
(рис. 3.4,6), а также повышения tT* в крейсерском полете, при-
ведших к Досрочному снятию двигателя, диагностирование по
признаку Тт.пр оказалось несостоятельным (рис. 3.9).
Диагностирование по изменению расходов топлива имеет вы-
сокую нормативную ценность (см. рис. 3.4, а, б, 3.7, 3.8) с исполь-
зованием в качестве признака как измененного расхода, так и
специально приведенного. Однако этот процесс тесно связан
74
с наличием ошибок II ро-
да, вызываемых несисте-
матическими погрешно-
стями измерений (сМ.
табл. 3.5). Так, кажущее-
ся увеличение расхода
топлива может происхо-
дить в течение 200 ...
250 ч одновременно у
всех двигателей, установ-
ленных на самолете
(рис. 3.10).
Если бы увеличение
расхода было связано с
изменением ТС деталей
проточной части двигате-
5800 5850 5000 5050 8000 6050 т,Ч
ля, то, как показывает pi(f gg ij,MeHeHHe диагностических оценок
ОПЫТ, оно произошло бы рдд ПрИ прогаре камеры сгорания
не более чем на 5... 8 % _
(120...180 кг/ч) при одновременном изменении других ТГП..
Кроме о i io^.pe ь v } .тичепие расхода топлива у вс^х
трех двигателей маловероятно.
Проверки, проведенные в ПД, показали, что причиной кажу-
щегося повышения расхода является ошибка II рода, вызван-
ная неисправностями емкостного датчика-плотномера ДПЕ-5Т
в зимнее время. Назначение этого датчика—корректировка по-
казания РТМС по плотности керосина, которая меняется при из-
менении температуры топлива, находящегося в самолетных ба-
ках. Неисправности датчика свя >аны с наличием растворенной
Рис. 3.9. Изменение диагностиче-
ских оценок при заявленной неис-
правности «повышение температу-
ры газа за турбиной»
Gr, кг]ч
1 2 J 4 5 Б 7 6 в 10 11
Месяцы
Рис. 3.10. Сезонные изменения рас-
хода топлива (о — кажущееся
увеличение расхода топлива)
75
5*
в керосине воды, попадающей в полости между пластинами дат-
чика и тем самым вызывающей погрешности измерений. Описан-
ная неисправность не отражется на ТС двигателя, но очень не-
приятна для экипажа, поскольку ему становятся неизвестными
расходы как по отдельным двигателям, так и суммарный.
В качестве профилактических мероприятий по устранению
неисправностей датчика может быть предложено: конструктив-
ное усовершенствование датчика; увеличение слива отстоя керо-
сина до 5 л из каждой точки слива для уменьшения количест-
ва растворенной в керосине воды.
Измеренный признак GT в некоторых случаях достаточно
хорошо отражает ТС камер сгорания и сопловых аппаратов
турбин (см. рис. 3.7). Однако на практике были зарегистриро-
ваны случаи, когда ни один из применяемых в эксплуатации
диагностических признаков не изменил в сколь-либо заметной
степени свои значения, хотя двигатель находился в предотка-
зовом состоянии. Это свидетельствует о том, что необходимо
применять более ценные признаки, которые могут быть получе-
ны на основе специального приведения измеренного расхода
топлива.
Использование диагностической модели GT6 позволяет при
выходе оценок 0(; за пределы профилактических допусков
0c=(GT6—G-r.np)/GT6 = 6GT=0,025 определять такие неисправ-
ности, как разбапдажирование рабочих лопаток КНД (см. рис.
3.4, а), закоксованпость рабочих форсунок (см. рис. 3.4,6) и
прогары камер сгорания (см. рис. 3.8). Базовыми моделями в
этих случаях были соответственно GT6=4226s6+2174; GT6 =
=37 500s6—31 000 и GT6=47 371s6—41 256.
Время экспозиций, определенное по стабильному выходу
оценки за пределы допусков и по скорости изменения оценки, со-
ответственно составляет 60 и 80 ч, 10 и 60 ч, 190 и 220 ч. Как
показывает опыт, наиболее сложными для диагностирования по
параметрам s, К*, GT являются прогары СА турбины.
Службы диагностирования АТБ могут внести большой вклад
в развитие методов повышения экономии топлива, управляя со-
стоянием двигателя и ЛА и решая параллельные задачи опре-
деления влияния внешних условий полета и его режимов на рас-
ходы топлива. Управление состоянием двигателя в эксплуата-
ции связано с определением его изменения по наработке, а сле-
довательно, и с изменением расходов топлива в зависимости от
ТС. Так, для конкретного двигателя было установлено изме-
нение скольжения роторов за 7500 ч суммарной наработки при
наличии у него одного ремонта ®s=2,5%. Поскольку от сколь-
жения зависят эталонный и базовый расходы топлива
©Р = а3 8Э -|- Ь3 и 0д = а6«6 + Ьб,
то при условии примерного равенства аэ«аб расходы топлива
увеличатся не менее чем на 2,5%> что нужно учитывать при ус-
76
тановлении дифференциальных
норм расхода.
Другим примером экономии
топлива является использова-
ние контроля технологии опро-
бования двигателей после ТО
с помощью бортовых регистра-
торов (см. рис. 2.5). Примене-
ние этого контроля на самоле-
те позволило установить нор-
му расхода топлива в 520 кг,
в то время как ранее на опро-
бование тратилось до 1000 кг
топлива.
Рис. 3.11. Сезонное изменение рас-
хода топлива у двигателей
Анализ расхода топлива в крейсерском полете, проведенный
по данным вручную зарегистрированной информации, показы-
вает, что его значение зависит от времени года (рис. 3.11). Мак-
симальные расходы наблюдаются в зимние месяцы (GT=
= 2150...2650 кг/ч) и минимальные (GT = 1780...2500 кг/ч) в
летние, сезонный перепад расходов составляет AGT=300...350
кг/ч. Объясняется это тем, что зимой реальная полная темпе-
ратура наружного воздуха достигает Тн*=220 К, а летом Ти* —
=265 К, т. е. Д7\=45 /(.-Повышение температуры воздуха при-
водит при постоянной истинной скорости полета к снижению
числа М и соответственно к снижению сопротивления самолета
уменьшению потребной тяги. Кроме того, по мере увеличения
температуры падает плотность воздуха, что приводит к значи-
тельному падению тяги и относительно небольшому повышению
удельного расхода топлива и, как следствие, к снижению часо-
вого расхода.
Статистический разброс данных объясняется различием в на-
работках, газодинамически подобных режимах, высотах и ско-
ростях полетов, полетных массах самолета, а также малой точ-
ностью измерения с помощью системы РТМС в полете из-за на-
личия в ней больших неаддитйвных погрешностей.
У отдельных двигателей помимо сезонных изменений расхо-
да топлива наблюдается еще и’ кажущееся увеличение его до
3200 кг/ч, связанное с-погрешностью измерений. Это увеличение,
как правило, происходит в течение 200...250 ч одновременно у
всех двигателей, установленных на самолете (см. рис. 3.10).
Опыт работы УД показал также, что наряду с прямыми за-
дачами диагностирования могут решаться задачи учета изме-
нения расхода от условий полета, в том числе от такого фак-
тора, как боковой ветер. Так, в реальных условиях боковой ве-
тер может повысить расход топлива на каждом ТРДД в зави-
симости от этапа полета и скорости ветра до 65 кг/мин. Служ-
бы диагностирования не только могут, но и должны принимать
77
Рис. 3.12. Изменения приведенного
(7) и измеренного (2) давлений
топлива перед рабочими форсун-
ками при возникновении пагаро-
образования (i — порядковый но-
мер опробования)
непосредственное участие в мероприятиях по разработке норм
и путей снижения расходов топлива.
Диагностирование по давлению топлива перед форсунками
производится по данным измерения давления рт при наземных
опробованиях. Объясняется это наличием высоких неаддитив-
ных погрешностей измерения. Практически на высотах 8...12.км
на крейсерски< режимах работы ТРДД диапазон изменения этих
измеренны'- давлений составляет 0,5...1,1 МПа. Амплитуда коле-
баний ;г »енлн <.ктаьля.ет ±35%, чт< не может быть о ъяснено
ос<)1> тя и par гы опливорегулирующеп аппаратур»-.
Как показывает опыт, увеличение давления топлива при не-
из’ НН > и заниж -ном расход, топлипа ибьяснг. ся воз-
никло' ппеч нагарообразования на рабочих форсунках, что при-
водш и, кажению поля температур перед турбиной. Одновре-,
мениск \ I. тпчение давления (рис. 3.12) при снижении призе-
;:сгн!.' I. 'H'liii; ж ~х да т тлив? и,- । гу-
ры • > тъно своих базовых значений (см. 3.4,6) является
к< . о поя - ipo-
обр< юпг.ния и изменении ТС проточной части дви а, .я. .Этот
пример примечателен тем, что нагарообразование было обнару-
жено по - -чению измеренного давления топлива, а диагно-
стирование по признакам s, /т* и GT производилось апостериор-
но. Как видно, нагарообразование можно было обнаружить по
данным полетной ручной регистрации по признаку s за 35 ч и
по признаку GT за 60 ч до момента ею обнаружения i назем-
ном опробовании. Попытка увеличить ценность признака рт при-
ведением его значения к САУ рт.пр=рт760/рн, путем увеличения
экспозиции по контрольному значению /?т=5,5 МПа, сущест-
венных результатов не дала, хотя и несколько его увеличила.
Наблюдаемое иногда в полете уменьшение давления до
0,2 МПа, как правило, связано с неисправностями измеритель-
ной аппаратуры.
- 3.5. ДИАГНОСТИРОВАНИЕ ПО НАКОПЛЕНИЮ
ПРОДУКТОВ ИЗНАШИВАНИЯ В МАСЛЕ
Разрушение деталей во многих случаях начинается с выкра-
шивания поверхностного слоя под воздействием динамических
нагрузок и сил трения. Образующиеся при этом продукты изна-
78
шивания деталей уносятся циркулирующим в двигателе маслом,
поэтому оно является носителем информации о происходящих
процессах изнашивания. Кроме частиц материала, появляющих-
ся вследствие разрушения деталей, масло может содержать так-
же частицы, которые могут попасть в двигатель извне при .про-
ведении ТО или регламента. Количество продуктов изнашива-
ния, поступающих в масло, зависит прежде всего от скорости
изнашивания, поэтому интенсивность накопления этих продук-
тов в масле является весьма ценным диагностическим призна-
ком ТС деталей опор, приводов, редукторов и т. д.
Для контроля ТС и диагностирования двигателя на осно-
вании анализа продуктов изнашивания деталей, омываемых мас-
лом, используются различные методы Широкое распростране-
ние получил контроль наличия стружки в масле. Простейшие его
виды — периодический контроль фильтров, контроль при помо-
щи магнитных пробок и т. д. Магнитные пробки устанавливают-
ся в трубопроводах откачки масла, коробках приводов, редук-
торах и др. Применяются и другие типы сигнализаторов струж-
ки. Однако все они имеют один принципиальный недостаток —
ложное срабатывание из-за накопления смолистых веществ в
масле, различного рода загрязнений и прочих помех. Кроме то-
го, сигнализаторы стружки только фиксируют свершившийся
факт и не позволяют прогнозировать развитие процесса, вызвав-
шего появление этой стружки. Поэтому все более широкое при-
менение находят методы определения продуктов изнашивания
деталей с помощью анализа проб масла.
Например, известен метод установления неисправностей дви-
гателей путем фильтрации проб масла. В основе этого метода
лежит фракционное фильтрование при размерах пор фильтра
соответственно 0,3, 3 и 10 мкм. Как показали исследования от-
работавшего в двигателях масла, у всех исправных двигателей
в масле отсутствуют частицы более 3 мкм. Наиболее часто встре-
чающиеся размеры частиц находятся в пределах 0,05—0,8 мкм.
Исследование масла досрочно снятых двигателей показало, что
размеры частиц могут достигать 3 мкм и в некоторых случаях
при интенсивном развитии повреждений превышать 10 мкм.
Большое значение для целей оценки ТС двигателей имеет
концентрация отдельных частиц металла в масле. Поэтому в
1973—1975 гг. был разработан дифференциальный магнитный
метод (ДМ-метод) диагностирования ГТД по содержанию и фи-
зическому состоянию железа в работающих маслах. Сущность
этого метода заключается в измерении магнитной восприимчи-
вости фильтрующего материала пористого многослойного филь-
тра при прохождении через него масла, содержащего частицы
железа. При этом поры многослойного фильтра соизмеримы с
частицами, которые проходят через него. В качестве основных
диагностических признаков изнашивания трущихся деталей дви-
гателя используются показатели дисперсности частиц железа в
79
масле и их изменения, а также содержание (концентрация) же-
леза в масле (в граммах железа на тонну масла).
Для Определения железа в масле по указанному методу ис-
пользуют прибор ПОЖ-М. Для дифференциальной фильтрации
испытуемого масла используется специальное устройство ПОЗ-Т.
Измерение магнитной восприимчивости фильтрующего матери-
ала в местах протекания через него масла основано на взаимо-
действии отфильтрованного железа с постоянным Магнитом, ук-
репленным на крутильных весах. Магнитная связь с фильтрую-
щим элементом осуществляется через магнитную стенку прибо-
ра ПОЖ-М. По магнитной восприимчивости всех слоев филь-
трующего материала вместе судят о количестве железа в мас-
ле, а по относительной магнитной восприимчивости каждого слоя
судят о дисперсности частиц железа. Количество железа в мас-
ле определяется по углу закрутки крутильных весов, с которы-
ми связа. стряпка шкалы отсчет Шкала оттарирована в
граммах железа на тонну масла.
Широкое распространение получил метод спектрального
анализа масла. Сущность его заключается в количественном и
качественном анализе состава веществ на основании изучения
их сп строп излучения. При выполнении спектрально/ю анали-
за пробы масла сжигают в электрической дуге. При jtom ато-
мы имкческих элементов возбуждают фотоны света. Интенсив-
ность сь ния зависит от концентрации каждого химического
эле: ента ; данной пробе. Для анализа спектров излучения нс-
по а ются различные спектральные приборы. Практически все
спектральные приборы работают по одному принципу, з. та-
чающемуся в том, что при прохождении через прибор излучение
волн разделяется пространственно по их длинам. Для определе-
ния концентрации отдельных элементов в веществе производит-
ся измерение интенсивности характерных спектральных линий
и сравнения их с интенсивностью лийий основы и специально
приготовленных для этих целей эталонов.
Метод спектрального ана зиза характеризуется высокой чув-
ствительностью и точностью. С его помощью выявляется до 94%
зарождающихся дефектов деталей авиадвигателей, смываемых
маслом. Метод позволяет оценивать концентрацию продуктов
изнашивания в масле. При этом каждый металл, содержащийся
во взвешенном состоянии в масле, характеризует изнашивание
вполне определенной группы деталей двигателя. Химические
элементы, входящие в состав материалов деталей, являются
своеобразными индикаторами неисправностей и могут вполне
определенно указывать место неисправности. Квантомер МФС-5,
установленный на участке диагностики, способен определять
10 элементов (железо, медь, серебро, алюминий, свинец, крем-
ний, магний, хром, никель, олово).
Интенсивность свечения при сжигании масла в электричес-
кой дуге зависит от концентрации каждого химического эле-
80
мента в данной пробе. Для того чтобы получать результаты ана-
лиза не в виде электрического сигнала, регистрируемого циф-
ровым вольтметром Щ1513, а непосредственно в виде значений
концентрации каждого анализируемого элемента в граммах на
тонну масла или в процентах, в лаборатории была произведена
соответствующая настройка и калибровка ячеек устройства ЭРУ-
16, которое входит в комплект МФС-5.
В общем случае методика анализа проб масел на установ-
ке МФС-5 состоит из подготовительных работ и самого анали-
за с выдачей конкретных результатов. К подготовительным ра-
ботам следует отнести: приготовление стандартных образцов,
подготовку и проверку электродов, отбор масла с двигателя, вы-
паривание проб масла. Сам анализ заключается в установле-
нии концентраций продуктов изнашивания в масле.
Стандартные образцы масел (эталоны) приготовляются со-
гласно ГОСТ 8.315—78 и отвечают следующим требованиям.
1. Основу стандартных образцов должно составлять чистое
масло, применяемое для соответствующих типов ГТД и содер-
жащее не более 0,2 г каждого элемента в тонне масла, что со-
ответствует 0,2-10'6 частей элемента в тонне масла или
(0,2-10-4). Далее по тексту концентрация элементов в масле вы-
ражается в процентах. В качестве основы используются масла
МК-8, МК-8П, МС-8П, Г1ПМ-10, смесь 75% масла МК-8 и 25%
МС-20 и др.
2. Стандартные образцы приготовляются на окислах метал-
лов классификации ЧДА (чистый для анализа) и ОСЧ (особо
чистый).
3. В состав стандартных образцов входят те элементы, ко-
торые составляют материалы трущихся деталей ГТД и элемен-
ты, содержащиеся в твердых частицах, попадающих в двига-
тель с всасываемым воздухом (например, кремний). Обычно та-
ких элементов не более 10.
4. Стандартные образцы готовятся из предварительно при-
готовленных укрупненных навесок комплексных порошков окис-
лов металлов.
5. Погрешность взвешивания навески порошка окисла метал-
ла на аналитических весах 2-го класса должна быть не более
±1,5%.
6. Пределы концентрации элементов в приготовляемом комп-
лекте стандартных образцов должны соответствовать пределам
концентраций этих же элементов в анализируемых пробах ра-
ботающих масел.
7. Суммарная концентрация всех элементов, вводимых в ви-
де окислов в чистое масло при приготовлении стандартных об-
разцов, должна оставаться примерно одинаковой.
Для приготовления стандартных образцов необходимо подго-
товить окислы элементов: окись железа — Fe2O3, окись свинца
РЬО, безводную окись алюминия А12О3, окись кремния SiO2,
' 81
окись меди CuO, окись магния—MgO, окись никеля — NiO3>
окись хрома — Сг2О3, сульфат серебра — Ag2SO4. Для приготов-
ления одного стандартного образца берется суммарная навеска
окислов и вводится в отдельный стеклянный сосуд с маслом.
Так, отбирается суммарная навеска окислов 0,01217 и вылива-
ется в сосуд с чистым маслом. После этого сосуд со стандарт
ным образцом подвергается ультразвуковой обработке в тече-
ние 2—4 ч. По окончании ультразвуковой обработки стандарт-
ный образец перемешивается на механической мешалке не ме-
нее 1 ч. Стандартные образцы, хранившиеся более месяца со
дня их приготовления, должны пройти повторную ультразвуко-
вую обработку в течение 30—40 мин, так как при длительном
хранении наблюдается «слипание» частиц окислов и прочное их
прилипание ко дну сосуда. Общий срок использования стандарт-
ных образцов не более 3 мес.
Существовавшая ранее методика приготовления стандарт-
ных образцов была весьма громоздкой, а показания МФС-5 при
сжигании стандартных образцов имели значительный «разброс»
по воспроизводимости и градуировочным графикам. Сотрудни-
ками УД разработан новый способ приготовления «сухих» стан-
дартных образцов масла. Новым в способе является закрепле-
ние сухого остатка в кратере подставного электрода клеящим
раствором (спиртовым раствором 15Ф-2 1 : 10). Закрепление су-
хого остатка имеет следующие преимущества.
1. При калибровке МФС-5 получается лучшая воспроизво-
димость между параллельными сжиганиями, а градуировочные
графики имеют лучшую характеристику на 15—20%. Это объяс-
няется тем, что при сжигании стандартных образцов масла без
закрепления сухого остатка часть его выбрасывается из кра-
тера электромагнитным полетом дуги, а при сжигании «сухих»
стандартных образцов это явление не происходит.
2. Сокращается время, необходимое для калибровки и про-
верки установки МФС-5.
3. Обеспечивается неограниченное хранение стандартных об-
разцов без механического перемешивания и без обработки уль-
тразвуком.
Точность показания МФС-5 во многом зависит от качества
электродов. Наряду с таким обычным требованием, как соблю-
дение необходимой чистоты, электроды должны удовлетворять
требованиям по заданной пористости. Пористость применяемых
электродов может отличаться на 25—30%, поэтому и разброс в
показаниях МФС-5 может достигать таких же значений. Харак-
терным признаком различной пористости электродов является
повышение или понижение показания на цифровом вольтметре
при проведении центрального анализа всех ранее названных де-
сяти химических элементов. Проверка электродов на пористость
производится сжиганием стандартных образцов. Только в слу-
чае совпадения градуировочных графиков предыдущей и после-
82
дующей партии электродов вновь подготовленные электроды до-
пускаются к применению.
Одна из ответственных операций при выполнении спектраль-
ного анализа масел — отбор проб масел с двигателя. Отбор про-
t изводится авиатехниками УД в сосуды 250 мл с завинчивающи-
мися крышками, снабженными уплотнительными прокладками
из маслостойкого материала. Отбор проб материала произво-
дится из штатных мест слива масла только из прогретого дви-
гателя не позднее чем через 20—30 мин после остановки или его
опробования. Это требование обусловлено тем, что в маслоси-
стеме двигателя после его останова происходит осаждение ме-
таллических частиц, и это приводит к искажению данных о сред-
ней концентрации продуктов изнашивания в масле. Перед сли-
вом масла сливной кран тщательно протирают чистой салфет-
кой. Первые 30—50 мл масла сливаются в противень или дру-
гую посуду, затем сосуд наполняется маслом до 2/3 его объема.
Перед выполнением спектрального анализа сосуды с маслом
встряхиваются механической мешалкой в течение 30 мин. Это
необходимо для получения однородной массы масла.
В ГА опробованы две методики спектрального анализа ма-
сел: с вращающимся дисковым электродом и с предваритель-
ным обогащением пробы. Большинство лабораторий диагности-
рования, в том числе УД Внуковской АТБ, избрали методику
с предварительным обогащением пробы. Это объясняется тем,
что дисковый метод токсичен, в помещении наблюдается зага-
зованность, а также негигиеничен и возможен пролив масла на
рабочем месте. Основной недостаток дискового метода—боль-
шая степень зависимости достоверности показаний установки
МФС-5 от эксцентричности дисков, так как смачивание диска
в масле происходит неравномерно. Это снижает достоверность
показаний МФС-5 на 15—20%.
Методика с предварительным обогащением пробы основана
на обогащении пробы путем выпаривания масла в картере ниж-
него электролита и лишена недостатков, относящихся к мето-
дике с вращающимся дисковым электролитом. Предварительно
обогащенная проба сжигается и с помощью МФС-5 определя-
ется концентрация химических элементов в масле. Полученные
значения концентраций химических элементов сравниваются с
их предельными значениями.
При достижении концентрациями предельных значений экс-
пертной группе представляется протокол с указанием в нем ди-
агностического признака, номера самолета, двигателя и нара-
, ботки издания. При достижении профилактической границы
концентрации железа 1 г/т и меди 1 г/т двигатель ставится на
особый контроль.
За первый год использования установки МФС-5 на УД было
выполнено 4532 анализа проб масла, сливаемого из двигателей,
кроме того выполнено более 600 анализов масел стандартных
83
образцов. В результате выполненных исследований установле-
но, что появлению концентрации металлов в масле соответству-
ют два характерных периода (рис. 3.13). Период I характери-
зуется приработкой трущихся поверхностей для новых двигате-
лей, а период II является периодом нормальной эксплуатации.
На двигателях с нулевой наработкой по мере их эксплуата-
ции наблюдается интенсивное увеличение концентрации меди
и железа, реже появляются хром, никель, магний. Любопытным
является то, что появлению меди предшествует появление се-
ребра. Объясняется это тем, что сепаратор подшипника сред-
ней опоры изготовлен из бронзы с покрытием тонким слоем (не-
сколько микрометров) серебра. Так как подшипник средней
опоры двигателя наиболее нагружен, то в процессе приработки
он является основным «поставщиком» меди и серебра. Процесс
приработки в среднем длится 150—200 ч, после чего их концен-
трация падает практически до нуля и затем по мере увеличения
наработки медленно возрастает. Однако встречаются отдель-
ные экземпляры ГТД, на которых процесс приработки растяги-
вается во времени и доходит иногда до 600 ч. Может быть сле-
дующая причина длительной приработки: на заводе-изготови-
теле при производстве подшипников произошли незначитель-
ные отклонения от требований НТД. В этом случае самолет вы-
пускается в полет только на короткие рейсы с обязательным
контролем масла после каждого полета.
При достижении концентрации железа 4 г/т, а меди 2 г/т
двигатель подлежит досрочному снятию с самолета и отправке
на исследование. Среднестатистическое изменение концентра-
ции металлов в масле по наработке показано на рис. 3.14. Ука-
занные нормы предельных содержаний железа и меди являются
временными, а на магний, кремний, олово, алюминий, хром,
никель, серебро, свинец нормативы еще не разработаны.
По требованиям ГОСТа в маслах должны отсутствовать ме-
ханические примеси. Следовательно, масло, предназначенное
для заправки в двигатель, должно быть очищено. Однако еже-
дневный анализ масла, отбираемого из маслозаправщиков, ино-
гда выявляет наличие в наработавшем масле значительного со-
держания железа (1—2 г на 1 т масла), что намного превыша-
ет допустимую концентрацию. Причиной появления такой кон-
центрации является коррозия внутренних поверхностей емкос-
тей для хранения и транспортировки масла.
Используя спектральный анализ, удается выявить ряд неис-
правностей двигателя. Так, на одном из двигателей было заме-
чено интенсивное увеличение концентрации железа в масле.
Увеличение концентрации составило 12 г/т за 11 ч 50 мин нара-
ботки двигателя. При этом дважды производилась замена мас-
ла. Однако замена масла не изменила характер ’ нарастания
концентрации железа. При исследовании увеличения концентра-
ции железа было установлено следующее: при выполнении рабо-
84
ты по замене привода маслонасоса в результате небрежности
была оставлена часть контровки в открытой маслополости, что
и явилось причиной повышенной концентрации железа.
На другом двигателе было обнаружено значительное увели-
чение концентрации магния, превышающее средние статистиче-
ские значения в 100 раз. Одновременно был отмечен рост кон-
центраций меди, железа, хрома, свинца. При выяснении причи-
ны было обнаружено полное разрушение сепаратора подшипни-
ка в одном из агрегатов топливной системы. Замена масла не
изменила характер концентрации, двигатель имел наработку
3750 ч. Двигатель восстановлен путем замены этого агрегата.
По интенсивному росту концентрации железа, достигшей
уровня 7,2 г/т, третий двигатель был досрочно снят с самолета.
В этом случае характерно то, что увеличение концентрации же-
леза происходило с большой скоростью. Причиной отказа послу-
жило разрушение фланца вала-рессоры привода постоянных
частот вращения.
На четвертом двигателе концентрация магния превысила
среднестатистические данные в 2 раза. В результате проверки
установлено, разрушение сепаратора подшипника агрегата. При
обнаружении повышенной концентрации магния показания циф-
рового вольтметра Щ1314 составляли 400 ед. при норме 180—
200 ед.
На пятом двигателе при наработке двигателя 6830 ч был
произведен отбор пробы масла. При спектральном анализе мас-
ла на установке МФС-5 обнаружено резкое повышение кон-
центрации металлов. Интересно отметить, что концентрация
железа составила 4 г/т, а меди—2 г/т. При этом наблюдалось
превышение среднестатистических значений концентрации дру-
гих элементов. В частности, магния — в 3, свинца — в 2, алюми-
ния— в 5, никеля — в 3, хрома — в 3 раза. На маслофильтре
85
было обнаружено обильное выпадение стружки указанных ме-
таллов. При осмотре откачивающего маслонасоса задней опоры
ротора двигателя была обнаружена выпрессовка подшипника
шестерни. Этот отказ привел к досрочному съему двигателя.
На одном из двигателей визуально при очередном отборе
было обнаружено сильное потемнение масла. При его спект-
ральном анализе было установлено увеличение концентрации
железа в 2, алюминия в 6, никеля в 4 и хрома в 2 раза, что яви-
лось признаком разрушения межвального подшипника ротора.
В том случае, когда двигатели находятся на особом конт-
роле по повышенной концентрации каких-либо металлов, само-
леты выпускаются в полет лишь на короткие рейсы с отбором
проб масла после каждой посадки.
Спектральный метод особенно эффективен для обнаруже-
ния начального появления неисправностей трущихся деталей,
т. с. начала процесса их изнашивания, когда размер частиц
продуктов изнашивания возрастает, но еще не превышает
10 мкм. Однако, если размер частиц продуктов изнашивания
превышает 15 мкм, то точность спектрометрического анализа
заметно повышается.
Вышеперечисленные примеры свидетельствуют об эффектив-
ности спектрального анализа масла, сливаемого из двигателей.
К числу его недостатков следует отнести отсутствие методики
правил принятия решения по скорости нарастания концентра-
ции металлов, а также отсутствие норм предельного содержа-
ния серебра, алюминия, хрома и других металлов.
Глава 4.
ПЕРСПЕКТИВЫ ДИАГНОСТИРОВАНИЯ
АВИАЦИОННОЙ ТЕХНИКИ
4.1. ПЕРСПЕКТИВЫ РАЗВИТИЯ МЕТОДОВ ДИАГНОСТИРОВАНИЯ
Разработка, отладка и проверка методов диагностирования
ГТД представляет' собой непрерывный процесс, способствую- *•
щий созданию эффективных методик не только поиска возник-
ших неисправностей, но и предотвращения предотказовых ситу-
аций в полете. ч
Эталонные и базовые модели так же, как и методы диагно-
стирования, должны создаваться с учетом не только конструк-
тивных особенностей двигателя, но и условий его эксплуатации,
и других факторов, характерных для данного типа двигателей,
применительно к тем узлам и агрегатам, которые находятся в
86
наиболее неблагоприятных условиях работы и оказывают су-
щественное влияние на показатели надежности двигателя в це-
лом. Так, для двигателей, предназначенных для установки на
ЛА, эксплуатирующихся в запыленных районах, методы и сред-
1 ства диагностирования должны позволять, в первую очередь,
выявлять неисправности проточной части компрессора, подвер-
гающегося интенсивному эрозионному изнашиванию.
„ При диагностировании двигателя по отдельным узлам и эле-
ментам как модели, так и методики диагностирования будут от-
носительно простыми и лишенными недостатков, которые обыч-
но связаны с точностью оценок при использовании громоздкого
математического аппарата со всевозможными допусками и ог-
раничениями.
Эталонные и базовые мод-ли функционирования двигателя
могут быть самыми разнообразными. В основу этих моделей мо-
гут быть положены дроссельные и высотно-скоростные характе-
ристики двигателя, уравнения, описывающие рабочие процессы
отдельных узлов двигателя, модели накопления повреждений
как в отдельных конструкторских элементах, так и одновремен-
но в ряде наиболее ответственных деталей различных узлов
двигателя, модели виброхарактеристик двигателя, модели на-
копления продуктов изнашивания в масле, нормированные и
предельные значения отдельных диагностических параметров
и др.
Базовые характеристики двигателя в сравнении с эталонны-
ми изменяются в процессе эксплуатации, поэтому установление
соотношений между скоростями их изменений.и признаками по-
являющихся неисправностей является одной из важнейших за-
дач технической диагностики и практики диагностирования.
Для обеспечения эффективности диагностирования по изме-
нению ТГП, характеристик прочности некоторых конструктив-
ных элементов потребуется точное измерение таких парамет-
ров, как температура газов перед турбиной, частота вращения
роторов низкого, среднего и высокого давлений, расход топлива,
давление газового потока по сечениям проточной части (на
входе в двигатель, за компрессором, за турбиной, на вы-
ходе из двигателя), температура потока на входе в воздухоза-
борник, температура на входе в двигатель, число М полета, ви-
броперегрузки, действующие на ЛА, и виброскорости на всех
опорах ротора двигателя.
Для реализации измерений указанных параметров потребу-
ется создание электронных и пьезоэлектрических датчиков, спо-
собных свести к минимуму ошибку измерений.
Для оценки двигателя по изменению ТГП целесообразно ис-
пользовать их возможные функциональные связи с параметра-
ми, характеризующими геометрические формы элементов про-
точной части. При этом в соответствии с методом малых откло-
87
нений [12] уравнения рабочего процесса можно линеаризовать
и представить их в виде обобщенной формулы
k п
Ъ/ (*i. *2...xk; rlt r2, ... . rn) = 2 ?Ч -*7 + 2 V rr
i=l 7=1
где x,—'I ГГ1 и их соотношения; г,— параметры, характеризующие геомет-
рические формы элементов проточной части двигателя; р; — постоянные
коэффициенты влияния при i-м ТГП; у,- — постоянные коэффициенты влия-
ния при /-м геометрическом параметре элемента проточной части.
При диагностировании по изменению прочностных характе-
ристик в качестве обобщенного признака можно рассматривать
повреждаемость двигателя, представляющую собой корреляци-
онную функцию накопленных повреждаемостей нескольких де-
талей различных узлов. В этом случае обобщенная повреждае-
мость двигателя в целом представляется в виде зависимости
“У(^ii d2l . • • dn),
где di, d2, dn — повреждаемости п конструктивных элементов двигателя
Повреждаемость двигателя D является случайной величиной
и поэтому определяется с учетом рассеивания отдельных повре-
ждаемостей d. Можно предположить, что рассеивание повреж-
даемостей отдельных элементов определяется их средними квад-
ратическими отклонениями, которые являются зависимыми от
наработки двигателя, т. е.
Ч = Ч = Ч(");-> -dn = °dn^)-
При рассмотрении повреждаемостей двигателя необходимо
учитывать не только средние квадратические отклонения пов-
реждаемостей конструктивных элементов, но также и диспер-
сию функции, которая связывает эти повреждаемости. Для этих
целей функция повреждаемости двигателя должна быть про-
дифференцирована относительно входящих в нее параметров,
т. е.
д Dd <71 — д Dfd d2 — k2, . . . , d D/д dn~kn.
С учетом частных дифференциалов определяется дисперсия
как предельного, так и текущего значений повреждаемости дви-
гателя
s = ] rk\ [arfl (г)]2 + [od2 (г)]2 + . . . + [% (т)=].
Оценка дисперсии предельных и текущих значений повреж-
даемостей позволяет перейти к определению вероятности без-
отказной работы двигателя:
Р(т)=/(Д? Snp; SICK),
где D — математическое ожидание накопленной повреждаемости двигателя;
Snp и 5тек — дисперсии предельного и текущего значений повреждаемо-
сти двигателя.
8S
Производя диагностирование двигателя по изменению харак-
теристик прочности, необходимо особое внимание уделять оцен-
ке исчерпания прочности элементов горячей части двигателя.
Особо актуальна эта задача применительно к высокотемпера-
турным двигателям. Следует иметь в виду, что прочность эле-
ментов горячей части двигателя ограничивается не каким-то од-
ним фактором, а сочетанием нескольких факторов, таких как
температура, напряжение и время их действия, а также скорос-
ти изменения температур и напряжений, эрозионно-коррозион-
ные воздействия рабочей среды и др.
Повреждаемость должна оцениваться по соответствующим
моделям долговечности с учетом взаимодействия различных ви-
дов нагрузок. Если определение статических, термоциклических
и малоциклических нагрузок, а также резких смен тепловых ре-
жимов, приводящих к термоудару, не вызывает больших трудно-
стей, то оценка вибрационных нагрузок и соответствующих им
напряжений представляет сложную проблему, которую невоз-
можно решить без применения специальных косвенных методов
тензометрирования. Этим методам должно уделяться повышен-
ное внимание при их разработках и реализации на двигателях,
находящихся в эксплуатации. В первом приближении можно ис-
пользовать корреляционные зависимости между вибронапряже-
ниями, которые возникают в ответственных деталях конструк-
ции, и режимами работы двигателя на основании данных тен-
зометрирования при летных испытаниях двигателей. Однако по-
вышенные вибрационные нагрузки отдельных элементов конст-
рукции, вызываемые в эксплуатации различными факторами,
не могут не сказаться на общей вибрации двигателя в целом,
поэтому дальнейшее развитие получат методы диагностирования
ГТД по изменению его вибрационных характеристик. Для повы-
шения достоверности диагностической информации планируется
применение пьезоэлектрических акселерометров, которые долж-
ны устанавливаться на подшипниках опор роторов двигателей.
При этом будут получать дальнейшее развитие методы оценки
ТС по виброакустическим характеристикам двигателя путем
сравнения спектров шумов при неисправных состояниях с ис-
ходным спектром. Для этих целей требуется разработка специ-
альной аппаратуры и соответствующих методик диагностиро-
вания.
В настоящее время все большее развитие получает контроль
ГТД по накоплению продуктов изнашивания в масле, долива
масла, омического сопротивления масляной пленки, мелких ме-
таллических частиц в масле с помощью магнитных пробок и
сигнализаторов стружки в масле. Задача ближайшего будуще-
го — разработка и внедрение таких устройств, которые могут яв-
ляться бортовыми приборами и использоваться для спектраль-
ного анализа проб масла, с одной стороны, а с другой — быть ис-
точником информации о необходимости отбора пробы масла для
6-1369 ’ 89
проведения более точного контроля наличия в нем продуктов
изнашивания. В общем случае такие приборы должны измерять
температуру масла, разность давлений на фильтре, давление в
суфлирующей полости, в динамике контролировать качество
масла, оперативно выявляя отклонения характеристик масло-
системы от эталонных и базовых.
Дальнейшее внимание должно уделяться разработкам и соз-
данию сигнализаторов начала неисправностей, связанных с эро-
зионно-коррозионным изнашиванием деталей проточной части
двигателей. Эти сигнализаторы в виде электростатических зон-
дов будут использоваться для анализа плотности заряженных
частиц в струе выходящих газов.
Кроме этих устройств ожидается применение ионизационных
и светочувствительных сигнализаторов горения с целью установ-
ления неравномерности температурного поля газового потока и
выявления неработоспособного состояния рабочих форсунок ка-
мер сгорания.
Кроме указанных методов диагностирования ГТД дальней-
шее развитие получат такие методы, как акустический, течеис-
кания, электромагнитный, ультразвуковой, радиографический,
оптический, голографический и др. Указанные методы диагно-
стирования ГТД должны применяться в комплексе. Важная осо-
бенность их применения — сочетание неисправности и дискрет-
ности контроля работоспособности двигателя. Непрерывность
должна обеспечиваться специальными средствами, установлен-
ными на борту ЛА, которые регистрируют и ведут предвари-
тельную обработку диагностической информации, а также по
возможности осуществляют диагностирование.
Для этих целей определяющая роль отводится использо-
ванию магнитных самописцев и бортовых цифровых вычис-
лительных машин.
Дискретность контроля вызвана необходимостью использо-
вания специальной аппаратуры, техническое применение кото-
рой возможно только на земле. Например, использование ради-
ографии, оптических средств и др. При этом результаты конт-
роля должны документироваться и накапливаться как с целью
установления тенденций изменения ТС двигателя, так и для оп-
ределения корреляционных связей между информативностью
различных методов диагностирования и для оценки эффектив-
ности их применения с заданной глубиной поиска дефектов.
Обилие поступающей диагностической информации, ее анализ,
обработка, обобщение требуют применения мощных средств вы-
числительной техники, которая позволяла бы не только оцени-
вать ТС ГТД, но и выдавала бы конкретные рекомендации по
проведению соответствующих профилактических или восстано-
вительных работ.
90
4.2. ПОИСК НЕИСПРАВНОСТЕЙ
Поиск неисправностей основывается на принципе сравнения
признаков отказов и характеристик нормального функциониро-
вания системы. Для этих целей строятся соответствующие ма-
тематические модели объекта диагностирования.
Поиск неисправностей— сложный производственный процесс,
который характеризуется числом выполнения необходимых про-
верок, длительностью и стоимостью отдельных операций и все-
го процесса неисправностей, а также такими важными показа-
телями, как трудоемкости отдельных операций и диагностиро-
вания в целом.
Известными методами поиска неисправностей являются: по-
следовательное исключение неисправностей, проверка по возра-
стающей трудоемкости, контроль «слабых» точек, проверка по
возрастающему критерию «трудоемкость — вероятность», про-
верка путем половинного разделения элементов, комбинирован-
ные подходы, функциональная логика.
В основе метода последовательного исключения неисправно-
стей заложен принцип от простого к сложному. Сложную сис-
тему разделяют на отдельные участки, которые подвергаются
последовательной проверке. В результате проверок определяет-
ся участок системы, имеющий неисправность. Для неисправного
участка последовательно проверяются все элементы и находит-
ся неисправность. Этот метод целесообразно использовать при
отсутствии сведений о надежности элементов и трудоемкости
их проверок. При этом длительность проверок может быть са-
мой различной.
Метод проверки по возрастающей трудоемкости применяет-
ся в том случае, когда уже накоплен опыт поиска неисправно-
стей и известна трудоемкость выполнения операций. Сущность
метода заключается в очередности элементарных проверок в со-
ответствии с возрастанием трудоемкости выполнения операций.
Этот подход позволяет, как правило, существенно сократить
продолжительность поиска неисправностей.
Когда имеется достаточная информация о надежности си-
стем и их отдельных элементов, а также сведения о трудоемко-
сти выполнения проверочных операций, используется метод кон-
троля «слабых» точек и метод проверок «трудоемкость — веро-
ятность». Метод «слабых» точек Предусматривает очередность
проверок в порядке уменьшения коэффициентов отказов отдель-
ных элементов системы, а метод «трудоемкость — вероятность: —
в порядке возрастания соотношения трудоемкости проведения
проверок к средним значениям коэффициентов отказов отдель-
ных элементов или участков систем.
Метод половинного разделения элементов системы, или ме-
тод средней точки, заключается в том, что отказы всех элемен-
тов считаются равновероятными. Система делится на две no-
's* 91
ловимы, а затем каждую половину делят на более мелкие поло-
винные блоки. Этот метод применяется, как правило, в том слу-
чае, когда отсутствуют данные о надежности систем и их от-
дельных элементов, а также о трудоемкости и продолжительно-
сти выполнения отдельных операций. Сочетания этого метода с
принципами проверок по критерию «трудоемкость — вероят-
ность» или контроля «слабых» точек называют комбинирован-
ными методами поиска неисправностей.
Метод функциональной логики заключается в построении
схем поиска неисправностей путем установления логических свя-
зей функционирования объекта, на основании которых строят-
ся гипотезы о месте нахождения неисправного элемента. Функ-
ционально-логические схемы строятся на основании принципи-
альной схемы системы; отдельные элементы системы распола-
гаются в виде матрицы, в которой исключается пересечение ли-
ний передачи информации от элемента к элементу, не имеющих
логических-связей между собой [8].
В соответствии с выбранным методом поиска неисправнос-
тей разрабатывается его алгоритм. При разработке таких алго-
ритмов исходят из принципа максимальной информационной
производительности диагностирования. Для этих целей опреде-
ляется количество ожидаемой информации по известной форму-
ле из теории информации
V Л' N
/= S =3 ,о£-’ о м= ~ S h1о^
i=i i=i i=i
где р, — коэффициент отказа i-ro элемента системы; N — число элементов
проверяемой системы.
Под информационной производительностью данного этапа
диагностирования понимают отношение
W/ =
где Ij — количество информации, полученной на j-м этапе диагностирования;
tj — продолжительность j-го этапа.
Предположив ряд различных этапов диагностирования с
целью поиска неисправности, можно определить максимальную
информационную производительность, а в-соответствии с извест-
ными этапами максимальных производительностей строятся ал-
горитмы оптимального диагностирования.
На основании функционального анализа ГТД (см. табл. 1.1)
можно выделить его самостоятельные составляющие в виде
входного устройства, компрессора, камеры сгорания, турбины,
выхлопного устройства, приводов агрегатов, подшипников опор
ротора, масляной системы, топливной системы, топливно-регу-
лирующей аппаратуры, противообледенительной системы, сис-
темы запуска и др. Каждую из указанных составляющих можно
S2
разделить на определенные группы и для каждой группы Соста-
вить математическую модель объекта диагностирования.
На основании обобщения опыта эксплуатации и оценки на-
дежности элементов, входящих в определенную конструктивную
группу, можно оценить наиболее слабые элементы и для них со-
ставить номенклатуру признаков отказов, которые, в свою оче-
редь, могут быть определены в процессе функционирования или
при ТО на земле.
Естественно, что проведение поиска неисправностей ручным
способом — сложный, трудоемкий процесс, с большой длитель-
ностью выполнения операций. Кроме того, в ряде случаев, осо-
бенно при наличии предотказовой ситуации двигателя в полете,
может потребоваться немедленное принятие правильного реше-
ния, т. е. выбор необходимого вида управляющего воздействия
с целью предотвращения перехода опасной ситуации в аварий-
ную. Все это приводит к необходимости создания автоматичес-
ких и автоматизированных систем, позволяющих не только оце-
нить ТС объекта, но также определить причину неисправности
и выдать соответствующие рекомендации по устранению воз-
можного отказа и его последствий. Такая система должна состо-
ять из бортовых средств сбора и обработки информации, назем-
ных средств автоматизированного контроля, наземных средств
сбора,, накопления и обработки информации о ТС объекта
эксплуатации и их надежности, а также средств пере-
дачи информации. Эта система должна обязательно прогнози-
ровать ТС объекта.
Эффективность методов логического поиска неисправностей
авиационной техники (АТ) с помощью автоматизированных си-
стем в большой степени зависит от мощности средств вычисли-
тельной техники,ее памяти и быстродействия.
4.3. АВТОМАТИЗИРОВАННАЯ СИСТЕМА ДИАГНОСТИРОВАНИЯ
И УПРАВЛЕНИЯ ТС
Как показывает опыт диагностирования АТ, оптимальная
эффективность применения методов и средств диагностирования
в будущем может быть достигнута только путем использования
автоматизированных систем, способных решать задачи по обна-
ружению неисправности с глубиной поиска до съемного узла
включительно и производить прогнозирование изменений ТС.
Создание таких систем предусматривает разработку как аппа-
ратурной части, так и математического обеспечения. Анализ ло-
гики диагностирования, применяемой в различных системах, по-
казывает, что широко используемой методикой определения не-
исправностей является допусковый контроль по постоянным и
адаптивным пределам. При наличии на борту цифровой вычис-
лительной машины (БЦВМ) бортовая часть системы, кроме основ-
£3
ных функций, должна производить первичную обработку инфор-
мации и осуществлять диагностирование по упрощенным алгорит-
мам. При этом БЦВМ должна управлять работой эксплуатацион-
ного бортового регистратора, накапливая информацию для даль-
нейшего анализа и обработки на земле по сложным алгоритмам
диагностирования, которые не могут быть реализованы БЦВМ.
Конструкция бортовой части должна допускать возможность
расширения сбора и преобразования полетной информации за
счет включения дополнительных модулей и обеспечивать взаи-
мозаменяемость однотипных блоков без регулировок на ЛА. В
эксплуатационном регистраторе должна быть предусмотрена воз-
можность быстрой замены магнитного носителя полетной инфор-
мации. Частота опроса параметров должна определяться диаг-
ностическими моделями и быть программируемой с помощью
БЦВМ или специальных программирующих устройств. Разре-
шающая способность всех аналогово-цифровых преобразовате-
лей должна быть не менее 1/4096 полного диапазона изменения
регистрируемого параметра. При этом формат кадра записи па-
раметров должен предусматривать 64, 128, 512 кодов/с.
Бортовая часть системы должна быть также снабжена эле-
ментами встроенного контроля, которые обеспечивали бы обна-
ружение не менее 95% отказов с глубиной поиска дефекта до
съемного блока с вероятностью 0,95%- Кроме диагностической
информации, бортовая часть системы должна регистрировать
служебную информацию, а также все параметры, необходимые
для контроля правильности техники пилотирования ЛА.
Наземная часть системы предназначена для обработки, обоб-
щения и анализа диагностической информации в соответствии
с алгоритмами, задаваемыми диагностическими моделями; а
также для выдачи конкретных рекомендаций по управляющим
воздействиям на объект эксплуатации.
Наземная часть системы должна обеспечивать: автоматизи-
рованный ввод полетной информации с магнитных носителей
современных и перспективных аварийных и эксплуатационных
регистраторов; ввод диагностической и служебной информации,
получаемой из других источников; контроль работоспособности
бортовой части системы; диагностирование; прогнозирование ТС
ЛА и автоматизированный поиск неисправностей; контроль тех-
ники пилотирования и оценку физиологического состояния пило-
тов; сбор, обобщение и анализ статистической информации об
отказах ЛА и их систем; контроль выработки технического ре-
сурса и планирование работ' по ТО; хранецие информации о ТС
каждого экземпляра АТ на протяжении всего периода эксплуа-
тации; выдачу правил решений инженерно-авиационной служ-
бе и экипажам о принятии соответствующего управляющего воз-
действия и др.
Как показывают исследования, конфигурация наземной час-
ти автоматизированной системы должна определяться с учетом
•94
типа и парка ЛА авиапредприятий и в настоящее время может
быть выполнена в трех вариантах- или для трех иерархических
уровней.
Конфигурация первого уровня может использоваться на
крупных авиапредприятиях, имеющих более 20 ЛА, оборудован-
ных многоканальными регистраторами типа МСРП-64-2, МСРП-
256 и более совершенными самописцами, которые должны вы-
полнять функции не только аварийных, но и эксплуатационных
бортовых регистраторов. В качестве устройства расшифровки и
первичной обработки полетной информации целесообразно ис-
пользование системы «Луч-74». Ввиду ограниченных возмож
ностей процессора М-6000 устройства «Луч-74» создание и даль-
нейшее развитие автоматизированных систем диагностирования
должно идти по пути передачи полетной информации в ЭВМ, об-
ладающие большой памятью и высоким быстродействием. Пере
дача информации может осуществляться с магнитных носите-
лей бортовых регистраторов напрямую в ЭВМ с помощью сие
циальных устройств или через процессор системы «Луч-74» с ис-
пользованием каналов связи между вычислительными машина
мп. В качестве каналов связи могут использоваться серийные
устройства сопряжения типа УСВМ А71110, которые позволяют
вести оперативный двусторонний обмен информацией с ЭВМ.
установленными в КИВЦ. Программное обеспечение обрабо!
ки диагностической информации может быть организовано в ни
де программ сложной структуры, работающих под упранлени
ем операционной системы в диалоговом режиме.
Конфигурация второго уровня может использоваться па авиа
предприятиях, имеющих парк до 20 ЛА, оборудованных мною
канальными регистраторами МСРП-64-2, МСРП-256 и другими
Особенностью данной конфигурации системы является пс
пользование в качестве ’ центрального устройства «Л\ч-71
дополненного серийно выпускаемыми блоками. К таким бло
кам в первую очередь относятся два устройства внешней нами
ти на магнитных дисках, одно из которых используется для one
рационной системы и для хранения пакета программ алгорш
мов диагностирования, а второе — для обработки данных ио кч
ной информации. Кроме этого, предусматривается два ус iрои
ства внешней памяти на магнитных лентах для хранения пифор
мации о ТС парка ЛА и результатах контроля техники пи "чн
рования каждого экипажа.
Дополнительно может быть использовано устройств бьн i
рой печати, модули передачи данных и дисплейные модули ко
торые могут служить для вывода информации, получаемой in
различных источников, кроме бортовых регистр i торов, и i bi
вывода оперативной информации.
Возможности такой конфигурации намного пиж< нгрною
уровня, однако такая система может вести ди.н шн i ирон нк
ЛА и оценивать его ТС. Кроме того, эта система пошоля<-1 про
изводить контроль техники пилотирования ЛА, но она не в сос-
тоянии выполнять поиск неисправностей и выдавать рекомен-
дации об управляющих воздействиях на объект эксплуатации.
Конфигурация системы третьего уровня предусматривает ис-
пользование только устройства «Луч-74» и по своим возможно-
стям позволяет в ограниченном объеме производить допуско-
вый контроль по данным полетной информации и контроль тех-
ники пилотирования в зависимости от типа применяемого на
борту многоканального регистратора.
Наибольшими возможностями обладает конфигурация сис-
темы первого уровня, вычислительные возможности которой мо-
гут быть расширены за счет применения мощных ЭВМ, обла-
дающих практически неограниченной памятью.
В общем случае при создании автоматизированных систем
диагностирования объекта и управления его ТС в эксплуатации
необходимо располагать: диагностическими моделями; методи-
ками диагностирования изменения ТС; библиотекой директив-
ной информации; библиотекой возможных неисправностей объ-
екта и историей изменения конструкции объекта с момента вы-,
хода на эксплуатацию, включая ремонты и другие мероприятия;
методиками локализации неисправностей объекта, выбора пра-
вил решений и выдачи рекомендаций о возможностях на объ-
ект эксплуатации, определения оперативной надежности для
получения характеристик, являющихся критериями правильно-
сти диагностирования, и правил решений о воздействии на объ-
ект эксплуатации.
Для указанных моделей и методик должны разрабатываться
соответствующие алгоритмы и создаваться их программное
обеспечение. Естественно, что реализация всех алгоритмов и
программ может быть обеспечена только в автоматизирован-
ных системах конфигурации первого уровня, включающей в се-
бя мощные ЭВМ. Эти системы должны также обладать воз-
можностями ввода в них информации с отдельных периферий-
ных устройств и вывода ее по требованию абонентов различных
иерархических уровней общей организационной системы управ-
ления процессом эксплуатации АТ.
Учитывая, что наиболее важным и ответственным комплекту-
ющим изделием ЛА является его силовая установка, ниже рас-
сматривается структурно-функциональная схема автоматизиро-
ванной системы диагностирования и управления ТС объекта
применительно к ГТД (рис. 4.1). Для диагностирования двига-
теля и управления этим состоянием в процессе эксплуатации
автоматизированная система должна решать следующие задачи:
производить диагностирование и прогнозирование ТС; опреде-
лять признаки неисправностей; устанавливать конкретные неис-
правности и причины их возникновения; выдавать рекоменда-
ции инженерно-авиационным службам (ИАС) по управляющим
воздействиям; выдавать экипажам рекомендации по радиокана-
ле
Pic 4.1. Pi ; —рн; я схема поступления, обработки и использования инфор-
мации о техническом состоянии ГТД
лам борт — земля — борт о принятии соответствующего решения
в полете: производить оперативную оценку надежности; обеспе-
чивать передачу информации на более высокие иерархические
уровни для анализа и принятия решений.
Основную трудность представляет обеспечение ввода инфор-
мации, регистрируемой бортовыми самописцами. Для ввода ин-
формации требуется стыковка устройства «Луч-74» с машиной
М4030. Эта стыковка осуществляется с помощью устройства
сопряжения УСВМ и требует своего программного обеспечения.
В перспективе эксплуатационный регистратор должен рабо-
тать совместно с БЦВМ, управляющей режимами записи и про-
изводящей частичное диагностирование ГТД на борту ЛА по
упрощенным алгоритмам. Результаты диагностирования с ис-
i
97
пользованием БЦВМ должны выдаваться на блок индикации и
вывода данных в кабину экипажа.
В настоящее время с учетом параметров, регистрируемых
МСРП-64-2 и МСРП-256, разработаны и разрабатываются алго-
ритмы оценки ТС ГТД; реализация которых осуществляется- с
использованием устройства расшифровки и первичной обработ-
ки информации «Луч-74». Однако эти алгоритмы в большинст-
ве случаев выдают служебную информацию, а для целей диагно-
стирования требуют подключения дополнительных данных, ко-
торые регистрируются экипажем в полетных картах. Эффектив-
ность и достоверность таких алгоритмов могла бы быть сущест-
венно повышена, если бы число аналоговых параметров было
увеличено за счет использования хотя бы резервных каналов.
Как показывают исследования, для реализации некоторых мето-
дик диагностирования достаточно тех параметров, которые ре-
гистрируются системой МСРП-256. Однако эти методики осно-
вываются на допусковом контроле, с помощью которого затруд-
нительно конкретизировать признаки неисправностей.
Поиск неисправностей с заданной глубиной возможен на ос-
новании сравнения их признаков с эталонными и базовыми мо-
делями, хранящимися в библиотеке возможных неисправностей
объекта. Библиотека возможных неисправностей, и причины и*
возникновения должны формироваться на основании «дела» ка-
ждого экземпляра двигателя с учетом истории его создания,
испытаний, доработок, ремонтов и поведения в эксплуатации.
На основании установления конкретных неисправностей и
причин их возникновения, а также использования директивной
информации выбирается оптимальное решение, которое выдает-
ся наземной ЭВМ с помощью печатающего устройства или ра-
диоканалов в виде рекомендаций ПАС или экипажу о принятии
соответствующего управляющего воздействия на конкретный эк-
земпляр двигателя.
В общем случае рекомендации ПАС могут выдаваться или о
восстановлении работоспособности двигателя по соответствую-
щей технологии, или о снятии двигателя с ЛА. Для экипажа
рекомендации должны выдаваться в целях предотвращения пе-
рехода опасной ситуации в аварийную с продолжением полета
или с прекращением полета.
Задачи системы, связанные с выдачей рекомендаций экипа-
жу по радиоканалам «борт — земля —борт», будут решаться бо-
лее качественно и с высоким быстродействием при постановке
на ЛА БЦВМ, производящей диагностирование и выдачу реко-
мендаций непосредственно на бортуВ том случае, если БЦВМ
будет не в состоянии выдать необходимые рекомендации, она
должна иметь возможность обратиться по радиоканалу к на-
земной ЭВМ и получить соответствующую информацию.
Автоматизированная система диагностирования и управле-
ния техническим состоянием авиационных ГТД должна исполь-
98
зеваться для всего ЛА в целом и позволять выдавать обобщен-
ную информацию на более высокие иерархические уровни управ-
ления качеством эксплуатации АТ по специальным алгоритмам
и программам обращения. Для этих целей она должна распо-
лагать специальными модулями передачи данных, которые, в
свою очередь, должны взаимодействовать с дисплейными уст-
ройствами.
4.4. СЛУЖБЫ ДИАГНОСТИРОВАНИЯ И НАДЕЖНОСТИ
В перспективе, по-видимому, целесообразно создание при ве-
дущих авиапредприятиях не просто лабораторий или участков
технической диагностики, а мощных диагностических центров,
которые наряду с отдельными группами и лабораториями .долж-
ны иметь свой вычислительный центр, оборудованный достаточ-
но мощными ЭВМ.
ЭВ И • кны не. гольде) вч дип иную часть а < .пти-’
зированной сит ,ы диагно тиро и П]>ограммпро8ь. нч ТС,
не и ••• п д других ва . . Ср ди . i . 1 щ-
ставл" ' ' >ма важными контроль правильности техники пи-
лотирования, ь лавирования отхода ЛА и их кт иплс-ктующих из-
делий на ТО и в peMi нт, снабжение виалредприятий и ла годов
’.пас , ями, отдельными га ми, i же. не
оценки 1.:‘де.кности АТ, решение ряда чисто производственных
задач.
Пр| ром на емная «jeCTb автаматш ©дни и .мы до к-
н" им- 'рминалы, обеспечивающие как передачу и восприя-
тие инф ормации внутри авианр . г пгия, так пер> щчу наи-
более тСт1 информации в различные вычислите чьные комп-
лексы и различным абонентам на разных иерархических уров-
нях обще и < ... мы управления процессом эксплуатации АТ всей
отрасли.
Диагностические центры при ведущих авиапредпрпятиях
должны представлять собой слаженную, быстро реагирующую
на все события систему, наделенную юридическими полномочия-
ми в части использования АТ по ее прямому назначению, по
проведению на ней профилактических работ, по восстановлению
ее работоспособного состояния или по направлению ее в ремонт-
ные подразделения и др.
Диагностический центр авиационного предприятия должен
Состоять из отдельных подразделений и входящих в них групп,
которые з соответствии со’своим назначением получают диаг-
ностическую информацию, информацию о надежности, директив-
ную информацию, а также любую информацию о состоянии и
использовании АТ. Кроме групп, получающих информацию,
должно быть специальное подразделение, анализирующее ин-
формацию и обрабатывающее ее с целью выдачи конкретных
99
рекомендаций о воздействиях на объект эксплуатации, а также
с целью выдачи обобщенной информации на более высокие ие-
рархические уровни системы организации и управления процес-
сом эксплуатации АТ. Окончательное решение о производстве
работ на ЛА должна принимать экспертная группа, или группа
принятия решения, формирующаяся из числа высококвалифици-
рованных специалистов по различным системам и комплектую-
щим изделиям ЛА. Под руководством этих специалистов про-
изводятся все виды профилактических и восстановительных ра-
бот, углубленный контроль ТС, регулировочные и другие работы.
Создание центров диагностирования при авиационных пред-
приятиях неразрывно связано с созданием головного центра на-
дежности ГА. Возможности современной вычислительной техни-
ки и средств передачи информации на расстояние позволяют
создать высокоразветвленную систему управления качеством
АТ. Головной центр надежности с информационным банком
предназначается для обобщения информации о ТС и надеж-
ности АТ всей отрасли с целью разработки рекомендаций для
промышленности по совершенствованию АТ, а также с целью
разработки мероприятий по совершенствованию процесса экс-
плуатации конкретных типов ЛА.
На основании анализа обобщенной информации головной
центр надежности устанавливает тенденции изменений ТС всего
парка ЛА в зависимости от различных географических и клима-
тических условий в разные времена года. По таким зависимо-
стям прогнозируется изменение показателей надежности, плани-
руются мероприятия по поддержанию нормированных уровней
надежности каждого типа ЛА, принимаются своевременные ре-
шения о проведении необходимых доработок или выполнении
специальных работ, связанных с восстановлением их ТС и ра-
ботоспособности. По данным головного центра надежности дол-
жны также разрабатываться обоснованные требования к новым
типам ЛА с учетом их контролепригодности в эксплуатации и
контролеспособности систем диагностирования. Кроме того, на
основе всестороннего анализа диагностической информации и
информации о надежности АТ должны совершенствоваться ме-
тоды, средства и алгоритмы диагностирования, методы и техно-
логия производства, эксплуатации и ремонта АТ.
Головной центр надежности должен быть оснащен мощны-
ми ЭВМ, имеющими внешнюю память большой емкости, обла-
дающими высоким быстродействием и приспособленными к вос-
приятию и передаче информации в автоматическом режиме при
взаимодействии с вычислите'льными комплексами диагностиче-
ских центров авиапредприятий.
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Автоматизация испытаний и контроля авиационных ГТД/Т. П. Шиба-
нов, Р. Н. Агдамов, С. В. Дмитриев и др. М.: Машиностроение, 1977. 279 с.
2. А к и м о в В. М. Основы надежности газотурбинных двигателей. М.:
Машиностроение, 1981. 172 с.
3. Б и р г е р И. А. Техническая диагностика. М.: Машиностроение, 1978.
139 с.
4. Боднер В. А. Приборы первичной информации. М.: Машинострое-
ние, 1981. 344 с.
5. Глушков В. М. Введение в АСУ. Киев: Техшка, 1974. 320 с.
G. Г у тер Р. С., О в чи некий Б. В. Элементы численного анализа
и математической обработки результатов опыта. М.: Изд-во физико-матема-
тической литературы, 1962. 355 с.
7. Д р у ж и и и н Г. В. Методы оценки и прогнозирования качества.
М.: Радио и связь, 1982. 159 с.
8. Кос точки и В. В. Надежность авиационных двигателей и сило-
вых установок. М.: Машиностроение, 1976. 248 с.
9. К У з н е ц о в Н. Д., Цейтлин В. И. Эквивалентные испытания
газотурбинных двигателей. М.: Машиностроение, 1976. 213 с.
10. Любомудров Ю. В. Применение теории подобия при проектиро-
вании систем управления газотурбинных двигателей. М.: Машиностроение,
1972 199 с.
11. Оценка эффективности мероприятий по обеспечению надежности ра-
диоэлектронной аппаратуры/А. С. Груневич, В. А. Долгов, В. И. Елисеев.
М.: Советское радио, 1976. 135 с
12. Сиротин Н. Н., Коровкин Ю. М. Техническая диагностика
авиационных газотурбинных двигателей. М.: Машиностроение, 1979. 272 с.
13. Солохин Э. Л. Испытания авиационных воздушно-реактивных
двигателей. М.: Машиностроение, 1975. 356 с.
14 Теория двухконтурных турбореактивных двнгателей/Под ред. С. М.
Шляхтенко и В. А. Сосунова. М.: Машиностроение, 1979. 279 с.
ОГЛАВЛЕНИЕ
Условные обозначения . . - ..............
Глава 1. Техническая диагностика в эксплуатации ГТД
1.1. Системы диагностирования ...........
1.2. Основные неисправности и их диагностические парамет-
ры и признаки ....
1.3. Контролепригодность и ее характеристики ....
1.4. Методы и средства диагностирования
Глава 'Ч. Организация службы диагностирования ....
2.1. Основные цели и задачи . .
2.2. Технологическая подсистема диагностирования
2.3. Организационная подсистема диагностирования
Глава 3. Диагностирование авиационных ГТД .....
3.1. Диагностирование по данным полетной информации
3.2. Диагностирование по параме: и настроечной характе-
ристики и скольж нлю роторов.................
3.3. Диагностирование по вибрационным параметрам
3.;. Диагност, , аш . ,ьшдинг.-.тческкм параметрам
3.5. Диагностирование накоплению продуктов изнашивания
в мтсле ...
Глава 4 Перспективы диагностирования авиационной техники
4.1. Перспективы ра штия методов "иагностирования
4.2. Поиск неисправностей ....
4 3. Автомате и: >г ’ civ.it>:: зп > ги зания и прзг
ления ТС •
4.4 Слу бы Aiianioi । <tpoaai и на (ежности .
Список использованной литературы ..............
3
5
5
8
16
27
41
41
43
50
55
55
61
68
71
78
86
86
91
93
99
101