/































































































































































































































Текст
ГМ. МОСКАЛЕНКО
МЕХАНИКА
ПОЛЕТА
В АТМОСФЕРЕ
ВЕНЕРЫ
Г. М. МОСКАЛЕНКО
МЕХАНИКА
ПОЛЕТА
В АТМОСФЕРЕ
ВЕНЕРЫ
М о с к в а
«МАШИНОСТРОЕНИЕ»
1978
ББК 39.59
М81
УДК 629.78.015 : 523.42
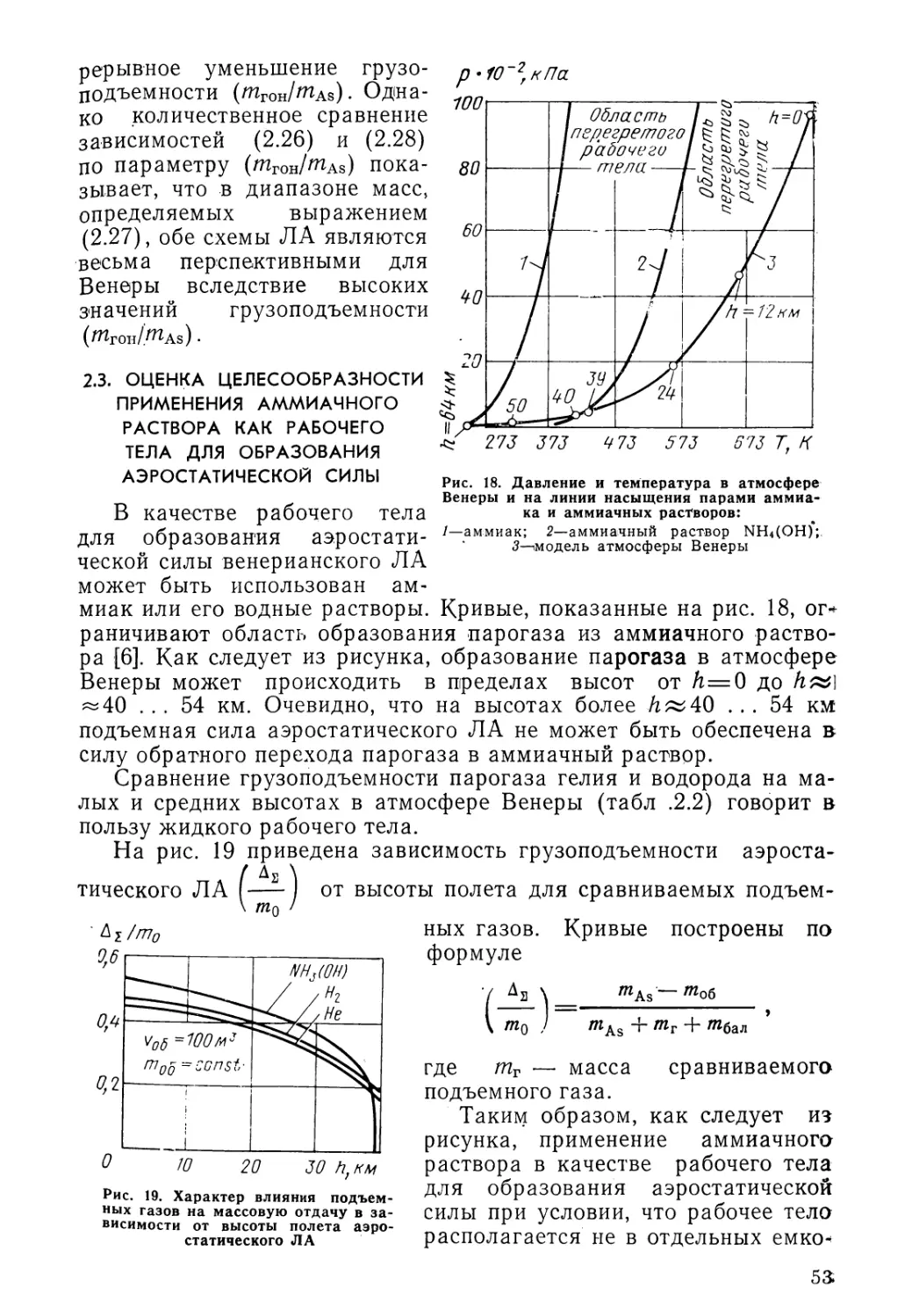
Рецензент канд. техн, наук И. М. Яцунский
Москаленко Г. М.
М81 Механика полета в атмосфере Венеры.— М.: Маши-
ностроение, 1978.— 232 с., ил.
В пер. 1 р. 10 к.
Книга посвящена проблеме летания в атмосфере Венеры. Обоснована тех-
ническая возможность создания венерианских летательных аппаратов при
комплексном использовании принципов проектирования воздухоплавательной,
авиационной и глубоководной техники. Разработаны методы расчетов основ-
ных характеристик летательных аппаратов с учетом аэростатической силы.
Показана целесообразность проникновения в атмосферу планеты и на ее по-
верхность с целью проведения широких научных исследований.
Книга предназначена для инженеров и научных работников, занимаю-
щихся проектированием космических аппаратов. Она может быть также по-
лезна студентам соответствующих учебных заведений.
31901-332
М 038(01)-78
332-78
ББК 39.59
6Т6
/
ИБ № 1643
Григорий Макарович Москаленко
МЕХАНИКА ПОЛЕТА В АТМОСФЕРЕ ВЕНЕРЫ
Редактор Ф. Г. Тубянская
Художественный редактор В. В. Лебедев
Технический редактор Н. Н. Скотникова
Переплет художника Е. В. Бекетова
Корректор В. Е. Блохина
Сдано в набор 22.05.78.
Формат 60X90716.
Печать высокая.
Тираж 900 экз.
Подписано в печать 10.10.78. у—18031
Бумага типографская № 3. Гарнитура литературная.
Усл. печ. л. 14,5. т л‘ 15Л
Заказ 614 Цена 1 р. Ю к.
Издательство «Машиностроение», 107885, Москва, Б-78, 1-й Басманный пер., 3.
Московская типография № 8
ппи Государственном комитете СССР
по делам издательств, полиграфии ” книжно торговли.
Хохловский пер., /.
© Издательство «Машиностроение», 1978 г.
ПРЕДИСЛОВИЕ
Для полетов в атмосфере Венеры с целью ее исследования тре-
буется решить целый комплекс сложнейших научно-технических
проблем, в числе которых одна из наиболее важных—это создание
летательных аппаратов (ЛА), способных летать в условиях, отлич-
ных от земных, при высоких значениях плотности, давления и тем-
пературы венерианской атмосферы. Поэтому в венерианских лета-
тельных аппаратах должны сочетаться признаки, характерные'для
авиационных, воздухоплавательных и глубоководных средств пере-
движения. Особые требования предъявляются и к энергосиловым
системам ЛА, так как в атмосфере Венеры почти отсутствует кис-
лород как окислитель. Новые задачи возникли и в области при-
кладной механики полета, решение которых требует комплексного
учета аэродинамических, аэростатических и массово-гравитацион-
ных факторов.
В предлагаемой читателю книге намечены пути для дальнейше-
го изучения аэрофизических условий полета в атмосфере Венеры
и отыскания перспективных средств летания в атмосфере планеты
по программе научных экспериментов.
Большое внимание уделено теоретическим предпосылкам мас-
сового анализа. Приведены массовые критерии, зависимости и
уравнения для различных схем ЛА, а также некоторые экстремаль-
ные решения. Массовому анализу подвергнуты аэродинамические,
аэростатические и комбинированные схемы конструкций. Эти ма-
териалы являются исходными для выполнения изысканий с учетом
массовых факторов.
Рассмотрены критерии, определяющие дальность полета и оп-
тимальную грузоподъемность аэродинамических и аэростатических
ЛА.
Сравнительные характеристики венерианских ЛА получены с
учетом обработки и систематизации статистических данных по
земным ЛА. Для определения .характеристик различных ЛА сде-
ланы комплексные расчеты грузоподъемности, дальности, скорости,
высоты и времени полета, а также оценки их компоновочных схем
с учетом степени сложности и объема работ по их реализации.
Исследовано восходящее и нисходящее движения свободного и
несвободного аэростатического ЛА при постоянстве и непостоянст-
ве виртуальной массы, изучены летные характеристики аэростати-
ческих ЛА с постоянным и переменным миделем в присутствии
крыла с параболической и произвольной полярами, рассмотрены
наклонный подъем и планирование в среде переменной и постоян-
ной плотности. Исследованы вопросы динамики и термодинамики
входа в атмосферу Венеры аэростатических ЛА с учетом их высот*
ности (стационарной высоты дрейфа).
В порядке постановки задачи высказаны некоторые соображе-
ния по вопросам проектирования новых аэростатических систем.
Однако вследствие новизны этой темы особое внимание при ее
изложении уделено не вопросам проектирования этих ЛА, а разъ-
яснению основных принципов, определяющих механику их полета.
В книге рассмотрен вопрос о правомерности пользования аэродина-
мическими коэффициентами для одноименных венерианских и зем-
ных ЛА, критерием чему, как известно, является близость чисел
Рейнольдса. Определены оптимальные зоны передвижения (суще-
ствования) венерианских ЛА с учетом их летных характеристик.
Рассмотрена механика полета в атмосфере Венеры самых разно-
типных летательных аппаратов — от аэростатических, самолетных
до аэрокосмических и смешанных (гибридных). Дана оценка целе-
сообразности применения аммиака и аммиачных растворов в каче-
стве рабочих тел для получения аэростатической силы и рассмот-
рены некоторые параметрические условия существования квазиба-
рометрического ЛА и вакуум-баллона. Исследования относятся к
поиску новых схем венерианских ЛА на базе изучения законов
аэромеханики.
Изучено влияние конструктивных факторов на высоту дрейфа и
подъема аэростатических ЛА, а также влияние скорости полета на
грузоподъемность ЛА самолетного типа. Исследуется влияние кры-
ла на грузоподъемность аэростатических ЛА.
В книге приведено описание различных схем венерианских ЛА,
в частности, аэростатических с присоединенным крылом, тороидаль-
ных, венерианских глубинно-высотных лифтов, аэростатических
дископланов, многорежимных конвертопланов и др. Сравнительная
оценка перспективных схем венерианских ЛА выполнена на базе
учета многих факторов, в том числе аэродинамических, аэростати-
ческих, массовых, компоновочных, геометрических, а также факто-
ров грузоподъемности и транспортабельности. Эта часть исследо-
ваний иллюстрирована перспективными и гипотетическими схемами
венерианских ЛА, обладающих сложным комплексом аэроме-
ханических, глубинно-высотных и аэростатических характеристик.
В книге рассмотрены варианты присоединенной массы, что свя-
зано с крупными габаритами венерианских аэростатических ЛА.
Уравнения движения составлены в общем виде и описывают все'
основные виды вертикального (восходяще-нисходящего) движе-
ний аэростатических ЛА в присутствии активных сил (несвобод-
ные ЛА) и без них (свободные ЛА) при постоянстве и непостоян-
стве присоединенной массы в среде переменной и постоянной плот-
ности при постоянном и переменном миделе ЛА.
Подробно изучены летные характеристики в режиме планиро-
4
вания, набора высоты и горизонтального полета различных схем
статически неуравновешенных ЛА в присутствии крыла с парабо-
лической и произвольной полярами. Показано, что присутствие
аэростатической силы (в случае сохранения аэродинамического
качества) не влияет на угол планирования. Режимы движений ис-
следованы на оптимальность по аэростатической силе и по скоро-
сти полета. Аналогичным образом исследованы также некоторые
виды движений в горизонтальной плоскости, а также в режимах
наклонного подъема и снижения.
Вследствие доминирующего влияния аэродинамических сил
аэростатическая сила практически не оказывает влияния на пара-
метры входа ЛА в атмосферу планеты. Однако ее присутствие не-
избежно связано с большими размерами газовмещающего корпу-
са, а следовательно, и с большим миделем ЛА, что чрезвычайно
важно при оценке летных’ данных, особенно если речь идет о высот-
ных ЛА. По этой причине особое внимание в книге уделяется так
называемым гиперзвуковым аэростатическим ЛА, осуществляющим
вход в атмосферу планеты с большой скоростью. Громоздкие по
размерам и массе баллоны сжатого подъемного газа сбрасываются
в конце подлетной траектории, чтобы не быть постоянным баллас-
том при входе в плотные слои атмосферы.
В свете современной теории полета представляют интерес ме-
тоды расчета оптимальных траекторий с использованием принципа
максимума Л. С. Понтрягина или принципа оптимальности
В. Ф. Кротова к решению краевых задач многорежимных траекто-
рий полета ЛА в присутствии не только аэродинамической, но и
аэростатической силы. В связи с этим в книге приведены методика
и аналитические зависимости по аппроксимации моделей плотно-
сти и температуры атмосферы Венеры, а также решение . одной
вариационной задачи определения оптимальной по быстродействию
траектории перелета космического аппарата с поверхности планеты
на заданную высоту.
Книга содержит также краткую программу научных экспери-
ментов применительно к различным схемам венерианских ЛА и
зонам их полета. Наиболее перспективными из схем являются
представители аэро-, гидро- и воздухоплавательной техники. Сюда
относятся прежде всего базовые аэростаты (свободноплавающие и
управляемые), многоцелевые ЛА типа «мезоплан» и глубинные
(низколетящие) батипланы. Их принципиальные конструктивно-
силовые схемы, компоновочные данные, аэродинамика и механика
полета подлежат первоочередному изучению.
Несмотря на «венерианскую» направленность представленных
в книге исследований, их результаты могут найти применение при
изучении перспективных ЛА «земной» воздухоплавательной тех-
ники. Работа может быть также использована при проектирова-
нии средств передвижения и исследовании механики полета в плот-
ных атмосферах других планет, таких как Юпитер или Сатурн.
Автор считает своим долгом обратить внимание будущих иссле-
дователей по аналогичной тематике на то, что в этой области зна-
5
ний возможны новые решения и формирование концепций, представ-
ляющих большой теоретический и практический интерес.
В книге не обсуждается тема, связанная с созданием бортовых
энергетических систем (энергосиловых установок), поскольку эта
тема по своей сложности и объему представляет самостоятельный
предмет исследований.
Результаты выполненных в книге исследований вызывают ас-
социацию исторической адекватности вероятных путей развития
венерианских и земных средств летания и подводят читателя к мыс-
ли о неизбежности освоения человеком планеты Венера в будущем
как близкого аналога нашей Земли. Возможно потребуется прин-
ципиально другой подход к венерианской проблеме на базе новых
открытий и технических решений, что, очевидно, внесет коррективы
в программы исследований не только Венеры, но и других планет
Солнечной системы.
В целом книга является попыткой проанализировать комплекс
научно-технических задач, который может возникнуть в будущем
при изучении планеты Венера.
Автор выражает искреннюю признательность инж. А. А. Гаври-
лову за участие в написании глав 1 и 7, канд. техн, наук И. М.
Яцунскому, сделавшему ряд полезных замечаний при рецензирова-
нии книги, а также всем лицам, которые способствовали выходу
книги в свет.
Все критические замечания и пожелания просьба направлять по
адресу: Москва, ГСП-6, 1-й Басманный пер., д. 3, изд-во «Машино-
строение».
УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
Аг — отношение аэростатической силы к силе тяжести ЛА
СХа— коэффициент лобового сопротивления
Суа — коэффициент аэродинамической подъемной силы
СУа
——— аэродинамическое качество
С
ла
Е — модуль упругости
Кт — коэффициент присоединенной массы
L — дальность полета
тАг — масса аэростатического ЛА с учетом массы подъемного газа
mAS — масса аэростатического ЛА без учета массы подъемного газа
тг — масса подъемного газа
тэ Ф — эффективная масса конструкции ЛА
mVirt — виртуальная масса
ig/Su — нагрузка на характерную площадь
Пат — коэффициент высотности аэростатического ЛА
Р — тяга двигателя
Руд — удельная тяга
q —поверхностная плотность теплового потока
R — удельная газовая постоянная
Rat — аэростатическая сила
t — текущее время полета
V — скорость полета
VR — характерная скорость
Ха — сила лобового сопротивления
Ya — аэродинамическая подъемная сила
а — угол атаки; коэффициент теплопередачи
|3 — показатель экспоненты
у — удельный вес
Ат — присоединенная масса
Ад
— грузоподъемность ЛА
б — толщина материала конструкции
X— удлинение; коэффициент теплопроводности
цэ ф — коэффициент эффективности конструкции
р — плотность
ps — поверхностная плотность
ВВЕДЕНИЕ
Венера с давних пор привлекает внимание ученых. Она ближе
других планет расположена к Земле и хорошо видна на западе ве-
чером, а на востоке рано утром. Минимальное удаление Венеры от
Земли составляет приблизительно 40 миллионов километров. Вене-
ра более чем какая-либо другая планета сходна с Землей по раз-
меру, массе, средней плотности и ряду других параметров. Она,
так же как и Земля, имеет облачный слой.
Систематические исследования Венеры с помощью космичес-
ких аппаратов были начаты советской автоматической станцией
«Венера-4» в октябре 1967 года. Достигнув планеты и впервые со-
вершив плавный спуск в ее атмосфере на глубину в 26 километров
от поверхности, станция в течение полутора часов передавала
данные о физико-химических и структурных параметрах ее атмос-
феры. Были измерены температура, давление, плотность, опреде-
лен химический состав газов на разных высотах. Станция проник-
ла в глубь атмосферы Венеры, достигнув давления среды около
18 атмосфер и температуры 280 градусов по Цельсию. Было уста-
новлено, что основным компонентом атмосферы Венеры является
углекислый газ, а не азот, как в земной атмосфере. Азот, кислород
и вода, как показал анализ, присутствуют в венерианской атмосфе^
ре лишь в небольших количествах. Физические характеристики
атмосферы планеты, полученные непосредственно из ее толщи, сви-
детельствовали о том, что условия на Венере весьма суровы и для
человеческого существования совсем непригодны: высокие темпера-
тура и давление, насыщенность углекислым газом, почти полное
отсутствие воды и кислорода.
В январе 1969 года к Венере были запущены еще две автома-
тические станции «Венера-5» и «Венера-6». Цель их запуска за-
ключалась в дальнейшем исследовании планеты и уточнении ранее
полученных «Венерой-4» данных о ее атмосфере.
Станции «Венера-5» и «Венера-6», совершив спуск в атмосфере
планеты, достигли больших глубин — до 20 километров над сред-
ним уровнем поверхности. Обе станции передавали информацию до
тех пор, пока давление и температура не достигли 27 атмосфер и
320 градусов по Цельсию. В результате этих исследований было
установлено, что атмосфера Венеры содержит 97% углекислого га-
за; не более 2% азота, не более 0,1% кислорода и 10~3 ... 10~4%
воды.
8
По содержанию влаги в верхних слоях атмосферы был опре-
делен уровень конденсации водяных паров, т. е. нижняя граница
облачного слоя, которая располагается примерно в 50 километрах
от поверхности (заметим, что на Земле основная масса облаков
находится лишь на расстоянии нескольких километров от поверх-
ности) . Можно предположить, что толщина облачного слоя Венеры
не менее 8—10 километров. Несмотря на это, воды на планете очень
мало и вся она находится в атмосфере. Существование водоемов
на венерианской поверхности исключено вследствие высокой тем-
пературы.
В августе 1970 года к Венере стартовала автоматическая стан-
ция «Венера-7». После четырех месяцев полета, в декабре 1970 го-
да, эта станция достигла планеты, совершила посадку и передала
на Землю научную информацию с поверхности Венеры.
Полетом станции «Венера-7» было положено начало прямым
экспериментам на поверхности планеты. Были получены научные
данные в условиях исключительно высоких давлений и температур.
Научные результаты, полученные «Венерой-7», значительно рас-
ширили наши знания о ближайшей к Земле планете.
В июне 1972 года «утренней звезды» достигла стартовавшая в
марте этого года станция «Венера-8». В отличие от всех предыду-
щих станций этой серии, совершавших посадку только на ночную
сторону планеты, спускаемый аппарат «Венеры-8» осуществил по-
садку на освещенную сторону планеты. Выбор места посадки на
освещенной стороне был продиктован принципиально новыми за-
дачами, поставленными перед этой станцией: узнать, какова осве-
щенность на дневной стороне планеты, под облачным слоем и на
ее поверхности, и получить данные о характеристиках вещества
Венеры.
В результате проведенных исследований были зафиксированы
давление в 93 атм, температура 465° С.
Значительный вклад в изучение нашей небесной соседки внес-
ли станции «Венера-9» и «Венера-10», выведенные на орбиту, пла-
неты в октябре 1975 года. Они обеспечили комплексное изучение
Венеры как с орбиты ее искусственных спутников, так и непосред-
ственным зондированием атмосферы с посадкой на поверхность
планеты (см. разд. 1.8).
Сравнивая параметры атмосферы Земли и Венеры, можно пред-
положить, что обе планеты имеют единую природу. Общее количе-
ство легколетучих компонентов (в частности, тех, которые входят
в состав атмосферы Земли и Венеры), выделяющихся при диф-
ференциации вещества обеих планет, почти одинаково. Однако на
Венере ввиду более высокой температуры некоторые компоненты
перешли в атмосферу, например, углекислый газ. На Земле же уг-
лекислый газ, а точнее углерод, находится в связанном состоянии
в карбонатах осадочных пород и в гидросфере. Это и определяет
основное различие состава атмосфер планет. Вместе с тем Земля
и Венера значительно различаются по содержанию воды. Какое бы
количество ее ни находилось в облаках Венеры, оно ни в какое
9
сравнение не может идти с количеством воды в гидросфере Земли.
Первопричиной этого является близость Венеры к Солнцу.
Наличие атмосферы, состоящей из углекислоты и воды, приве-
ло к развитию «парникового эффекта», т. е. таких условий, при ко-
торых солнечное тепло, проникая сквозь атмосферу, нагревает по-
верхность планеты, а тепловой поток, излучаемый поверхностью, в
значительной степени поглощается ее атмосферой. Поверхность
Венеры в результате «парникового эффекта» разогрелась до тем-
пературы 250—700 градусов по Цельсию; при этом многие карбо-
наты вступили в реакцию с окисью кремния, высвобождая в ат-
мосферу огромное количество углекислоты. Увеличение содержания
углекислого газа в атмосфере еще больше усиливало «парниковый
эффект», и таким образом происходило саморазогревание атмос-
феры Венеры.
3^ последние годы мы узнали много нового о Венере, то, что
веками оставалось для ученых неразгаданной тайной, но большая
часть тайн еще остается нераскрытой.
Освоение планет — задача наших дней и еще в большей степе-
ни — задача будущего. Сегодня для нас наиболее важны научные
данные о Солнечной системе: продолжение исследований Луны,
Венеры, Марса, их поверхности, недр, атмосфер, радиационных и
магнитных полей, а также изучение окраинных областей Солнеч-
ной системы и планет-гигантов — Юпитера и Сатурна [28].
В будущем мы полетим на планеты, чтобы углубить наши зна-
ния, чтобы расширить сферу материального производства, чтобы
жить там. В предвидении будущего, наших грядущих полетов на
другие планеты Солнечной системы, уже в настоящее время тре-
буются серьезные изыскания для разработки перспективных аппа-
ратов, доставляемых на планеты ракетными комплексами и совер-
шающих в дальнейшем автономный автоматический (а возможно
и пилотируемый) исследовательский полет.
Наиболее перспективными схемами ЛА для полетов на Венеру
можно считать аэростатические ЛА, главенствующие безотноси-
тельно их классификации, назначения или конструктивных осо-
бенностей. Для реализации этой идеи требуется проведение специ-
альных исследований с целью получения подъемного газа (или
других источников образования аэростатической силы) непосред-
ственно в атмосфере Венеры, поскольку транспортируемая на пла-
нету газобаллонная система легкого газа по массе является при-
мерно такой же, как и масса самого аэростатического ЛА с его
гондолой, научной аппаратурой и другим оборудованием. В буду-
щем не составит большой проблемы с точки зрения механики по-
лета и выбор аппарата тяжелее воздуха. Главным препятствием
к реализации венерианских ЛА тяжелее воздуха в настоящее вре-
мя является малое время их существования в атмосфере Венеры,
а также отсутствие надежных и долгоработающих энергетических
силовых установок большой мощности.
Существуют проекты преобразования атмосферы Венеры путем
доставки на планету зеленых растений. Предполагается, что тогда
10
углекислая венерианская атмосфера переродится: углекислота бу-
дет ассимилирована зелеными растениями, а взамен ее в атмосфе-
ру поступит свободный кислород. Вследствие поглощения углекис-
лоты снимется «парниковый эффект» и температура на планете
станет ниже. Все это создало бы благоприятные условия для оби-
тания на Венере.
Техническое решение проблемы представляется в виде посылок
аэростатических ЛА в атмосферу Венеры на высоту, где темпера-
тура порядка 20° С и куда проникают ультрафиолетовые лучи.
Эти аппараты должны быть оснащены зелеными растениями, мо-
жет быть, типа хлореллы. Питанием растениям будет служить уг-
лекислота, а весьма эффективным удобрением — нитрат аммония.
Ассимиляция углекислоты зелеными листьями будет сопровождать-
ся выделением кислорода за счет воды, которая образуется при
распаде нитрата аммония. Вследствие распада этого компонента в
атмосферу будет поступать и азот. Но при этом обязательно при-
сутствие в атмосфере Венеры нитрата амония (или эквивалентных
ему по количеству окислов азота, воды). Иначе регенерация ис-
ключается.
Очень умеренная скорость процесса ассимиляции углекислоты
лимитирует решение проблемы во времени. Она может быть реше-
на в течение 100 лет, если углекислота будет связываться в коли-
честве 1016 тонн в год.
Тем не менее мы не имеем оснований отказываться от мысли
изучать и в будущем осваивать планету Венеру, так как в ходе
энергетического развития Земли она может явиться потенциальным
объектом для проведения глобальных экспериментов, использования
ее в качестве средства для энергетического освоения всей Солнеч-
ной системы.
Глава I
АЭРОФИЗИЧЕСКИЕ ХАРАКТЕРИСТИКИ УСЛОВИЙ
ПОЛЕТА В АТМОСФЕРЕ ВЕНЕРЫ. ОБЩИЙ АНАЛИЗ
ВОЗМОЖНЫХ СХЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Аэродинамические нагрузки, аэростатические силы, траекторные перегрузки,
нагрев, характер движения, проектно-компоновочные характеристики летательно-
го аппарата существенно зависят от свойств атмосферы. Не только для точных
расчетов, но и для расчетов, связанных с поисковыми изысканиями, необходимо
располагать данными о физико-химических свойствах атмосферы.
Для изучения возможности полетов в атмосфере Венеры здесь использована
ее модель, рассчитанная М. Я. Маровым и О. Л. Рябовым [15].
С целью доказательства правомерности пользования «земными» аэродина-
мическими коэффициентами при расчете параметров движения ЛА в атмосфере
Венеры, особое внимание обращено на степень расхождения в земных и вене-
рианских числах Рейнольдса (Re).
Показано, что аэростатические летательные аппараты вследствие высокой
плотности атмосферы Венеры наиболее пригодны для полетов в ней.
Приведены также элементы теории аэростатических летательных аппаратов
с целью получения зависимостей для расчетов массово-габаритных и нагрузочных
параметров венерианских ЛА, а также некоторых аэрофизических величин, отно-
сящихся к подъемному и атмосферному газам:
1.1. МОДЕЛЬ АТМОСФЕРЫ ВЕНЕРЫ
Эта модель устанавливает численные значения основных тер-
модинамических параметров и других физических характеристик
атмосферы Венеры для области высот от —6 до 115 км.
Рис. 1. Зависимость температуры атмосферы Венеры от высоты для трех моделей
Рис. 2. Зависимость давления атмосферы Венеры от высоты для трех моделей
Рис. 3. Зависимость плотности атмосферы Венеры от высоты для трех моделей (п — число
' частиц в единице объема)
12
Для модели средняя относи-
тельная молекулярная масса ц
основных компонентов атмосфе-
ры принята исходя из следующих
объемных содержаний: СО2 —
97%, N2 —2%, Н2О и др. — 1%.'
Данному составу соответствует
р=43,4.
В основной расчетной модели
атмосферы Венеры (табл. 1.1)
значение температуры на среднем
уровне поверхности принято
750 К. В качестве предельных
рассчитаны две дополнительные
модели — максимальная и ми-
нимальная. Они учитывают воз-
можные отклонения от среднеста-
тистических значений Т и р на
уровне, на котором сопоставля-
ются результаты измерений всех
AM С «Венера».
За исходные параметры при-
няты значения температуры Т и
относительной молекулярной мас-
сы ц, которые задаются в табли-
це в зависимости от высоты h.
Рис. 4. Метеорологические слои атмо-
сферы Венеры
Ниже приведены значения физических характеристик атмосфе-
ры у поверхности планеты:
I модель (основная)
II модель (максимальная)
III модель (минимальная)
рп=9,74-М Па, Тп=750 К;
рп=9,34 • М Па, Тп=757 К;
Рп=10,2-М Па, Тп=743 К.
Профили температуры, давления и плотности по высоте для
основной, максимальной и минимальной моделей показаны на
рис. 1—3.
На рис. 4 приведена зависимость T = T(h), где показаны метео-
рологические слои (тропосфера, стратосфера, ионосфера) и харак-
терные высоты (однородная, аэронавтическая, условная граница
входа) атмосферы Венеры.
Если бы атмосфера сохраняла постоянной свою плотность на
всех высотах от нижнего до верхнего уровня, т. е. была бы в этом
смысле однородной, то масса столба атмосферы одинаковой по
высоте плотности была бы равна
= h0JfQaS,
где та — масса столба однородной атмосферы; ЛОд — высота стол-
ба однородной атмосферы; S — площадь поперечного сечения
столба однородной атмосферы; Qa — плотность атмосферы на дан-
ной высоте отсчета.
13
Основная модель атмосферы Венеры
Таблица 1.1
А, км КМ т, к р, Па Q, КГ/М3 N, м3 М/с2 а, м/с р., Н-с/м2 V, м2/с X, Вт/(м-К) ^ОД’ 1, м р-
-6 6044 797 1,39-107 8,91-10 1,2-1027 8,817 439 3,52-10-5 3,95-10-7 5,82-10-2 17642 1,3-10-9 43,4
-4 6046 781 1,24 8,13 1,1 8,812 434 3,46 4,25 5,67 17243 1,4 43,4
—2 6048 766 1,10 7,41 1,о 8,806 429 3,39 4,58 5,52 1§848 1,5 43,4
0 6050 750 9,97-106 6,73 9,3-1026 8,800 424 3,33 4,95 5,38 16460 1,6 43,4
2 6052 734 8,62 6,09 8,5 8,794 419 3,27 5,36 5,24 16080 1,8 43,4
4 6054 718 7,60 5,51 7,6 8,788 414 3,21 5,82 5,10 15703 2,0 43,4
6 6056 702 6,68 4,96 6,9 8,783 409 3,14 6,34 4,96 15330 2,2 43,4
8 6058 686 5,85 4,46 6,2 8,777 403 3,08 6,91 4,82 14959 2,4 43,4
10 6060 670 5,11 3,99 5,5 8,771 399 3,02 7,57 4,68 14607 2,7 43,4
12 6062 654 4,45 3,57 5,0 ' 8,765 393 2,96 8,29 4,54 14236 2,9 43,4
14 6064 637 3,86 3,18 4,4 8,759 388 2,90 9,11 4,41 13870 3,3 43,4
16 6066 621 3,34 2,82 3,9 8,754 383 2,83 1,00-10-6 4,27 13506 3,7 43,4
18 6068 604 2,87 2,50 3,5 8,748 378 2,77 1,11 4,14 13147 4,1 43,4
20 6070 587 2,46 2,20 3,1 8,742 372 2,70 1,23 4,00 12782 4,6 43,4
22 6072 570 2,10 1,94 2,7 8,736 367 2,64 1,36 3,87 12420 5,2 43,4
24 6074 553 1,78 1,69 2,4 8,731 361 2,57 1,52 3,73 12056 5,9 43,4
26 6076 536 1,51 1,48 2,1 8,725 356 2,51 1,70 3,59 11687 6,7 43,4
28 6078 519 1,27 1,28 1,8 8,719 350 2,44 1,90 3,45 11320, 7,6 43,4
30 6080 502 1,06 1,11 1,5 8,713 344 2,37 2,13 3,31 10931 8,7 43,4
32 6082 484 8,78-105 9,48-100 1,3 8,708 339 2,30 2,42 3,17 10637 1,0-10-8 43.,4
34 6084 466 7,25 8,18 11 8,702 332 2,22 2,72 3,03 10187 1,1 43,4
36 6086 448 5,94 6,96 9,7-1025 8,696 325 2,15 3,09 2,88 9804 1,3 43,4
38 6088 430 4,82 5,89 8,2 8,690 319 2,07 3,52 2,74 9415 1,5 43,4
40 6090 412 3,88 < 4,95 6,9 8,685 312 1,99 4,03 2,59 9021 1,8 43,4
42 6092 393 3,09 4,13 5,7 8,679 305 1,91 4,63 2,44 8619 2,1 43,4
44 6094 374 2,44 3,42 4,8 8,673 297 1,83 5,34 2,29 8211 2,5 43,4
46 6096 355 1,90 2,81 3,9 8,668 290 1,75 6,21 2,14 7804 3,0 43,4
48 6098 336 1,46 2,28 3,2 8,662 282 1,66 7,28 1,99 7395 3,6 43,4
50 6100 317 1,11 1,83 2,5 8,656 274 1,57 8,61 1,84 6990 4,4 43,4
52 6102 300 8,24-104 1,43 2,0 8,651 267 1,51 1,05-10-5 1,60 6643 5,5 43,4
54 6104 285 6,05 1,11 1,5 8,645 260 1,43 1,29 > 1,50 6315 < 6,9 43,4
. 56 6106 273 4,38 8,37-10-1 1,2 8,639 255 1,37 1,64 1,43 6053 9,0 43,4
58 6108 263 3,13 6,21 8,6-1024 8,634 250 1,32 2,13 1,36 5836 1,2-10-7 43,4
60 6110 254 2,21 4,53 6,3 8,628 246 1,28 2,82 1,31 5640 1,6 43,4
62 6112 246 1,54 3,26 4,5 8,622 242 1,24 3,80 1,26 5472 2,2 43,4
64 6114 239 1,06 2,32 3,2 8,617 238 1,20 5,20 1,21 5320 3,0 43,4
66 6116 232 7,25-103 1,63 2.3 8,611 235 1,17 7,16 1,17 5166 4,3 43,4
68 6118 225 4,90 1,13 1,6 8,605 . 231 1,13 9,97 1,13 5013 6,0 43,4
70 6120 218 3,26 7,81 • 10-2 1,1 8,600 228 1,10 1,40-10-4 1,08 4858 8,6 43,4
72 6122 211 2,15 5,31 7,4-1023 8,594 224 1,06 1,99 1,04 4705 1,2-10-6 43,4
74 6124 204 1,39 3,57 5,0 8,589 220 1,02 2,86 9,96-Ю-з 4550 1,8 43,4
76 6126 197 8,92-102 2,36 3,3 8,583 216 9,84-10-6 4,16 9,53 4395 2,7 43,4
78 6128 190 5,61 1,54 2,1 8,577 212 9,46 6,13 9,11 4241 4,0 43,4
80 6130 183 3,47 9,91-Ю-з 1,4 8,572 208 9,08 9,16 8,68 4085 6,1 43,4
82 6132 176 2,Н 6,26 8,7-1022 8,566 204 8,71 1,39-Ю-з 8,27 3931 9,5 43,4
84 6134 169 1,25 3,88 5,4 8,561 200 8.32 2,14 7,85 3775 1,5-10-5 43,4
86 6136 163 7,31-10 2,34 3,2 8,555 197 8,01 3,42 7,51 3650 2,4 43,4
88 6138 157 4,17 1,39 1,9 8,549 193 7,68 5,54 7,16 3518 4',0 43,4
90 6140 153 2,35 8,01-10-4 1,1 8,544 191 7,46-10-6 9,32-Ю-з 6,93-Ю-з 3430 6,8-10-5 43,4
92 6142 150 1,3 4,53 6,3-1021 8,538 189 7,30 1,61-10-2 6,76 3365 1,2-10-4 43,4
94 6144 150 7,19-100 2,50 3,5 8,533 189 7,30 2,92 6,76 3368 2,2 43,4
96 6146 151 3,97 1,37 1,9 8,527 189 7,35 5,35 6,81 3392 4,0 43,4
98 6148 157 2,23 7,41-10-5 1,0 8,522 193 7,68 1,04-10-1 7,16 3529 7,5 43,4
100 6150 163 1,28 4,09 5,7-1020 8,516 197 8,01 1,96 7,51 3667 1,4-Ю-з 43,4
105 6155 178 3,47-10-1 1.02 1,4 8,502 206 8,82 8,67 8,40 4011 5,9 43,4
110 6160 193 1,05 2,84-10-6 3,9-1019 8,489 214 9,63 3,39-100 9,30 4356 2,2-10-2 43,4
115 6165 208 3,48-10-2 8,73-10-7 1,2 8,475 222 1,04-10-5 1,19-10 1,02-10-2 4702 7,5 43,4
Далее легко получить
(1.1)
Аод
моря»,
что то
высоты
л __ Qa (J1)
од~ е(Л)
или с учетом экспоненциального характера qa(h) и §(h)
Qso
Qo
где Qso — поверхностная плотность атмосферы на «уровне
Таким образом, высота однородной атмосферы (или,
же,— барометрическая высота) не зависит от начальной
отсчета. Эта формула справедлива для изотермической атмосферы
или для участков высот ДА, где можно положить Т ж const.
На уровне моря в атмосфере Земли плотность и поверхностная
плотность воздуха соответственно равны р0= 1,225 кг/м3 (при t=-
= 15° С) и Qs0 = 1,0333 кг/м2. Следовательно, высота однородной ат-
мосферы составляет Лод® =8450 м.
Для Венеры, имеющей значения параметров у поверхности
qo = 63, 1 кг/м3 и £$0 =97-104 кг/м2, высота однородной атмосферы
равна Аод$ = 15400 м.
Соотношение между венерианской и земной высотами однород-
ных атмосфер составляет величину, равную (Аод?/Аод©)~ 1,8.
Для изотермической атмосферы Qs(h) =Q(h)/RT. При этом фор-
мула (1.1) принимает вид
h0JSt = RT = const.
Таким образом, полученный выше вывод о независимости вы-
соты однородной атмосферы от уровня отсчета А 2^0 справедлив
только для изотермической атмосферы.
Можно показать, что показатель экспоненты в законе плотности
изотермической атмосферы q(A) выражается зависимостью
р —---= const.
RT
Произведение RT в физическом смысле является высотой одно-
родной атмосферы. Следовательно,
А0;(
Параметры /г0Д9 и ЛОдэ для случая изотермических атмосфер
Венеры и Земли составляют h.^ =(22,07-238)=5250 м
и йод@=#@7'эф@=(29,27.248)=7250 м (где 7\ф — эффективная тем-
пература). При этом р9 = 1/АОд9 = 1/5250=0,19-10-3 1/м и Р©=
= 1/йс,д@= 1/7250=0,138-10-3 1/м. Заметим, что если соотношение
высот однородных атмосфер, вычисленное для Венеры и Земли
по параметрам на уровне моря, составляет Аод9/Аод© ~ 1,8, то это же
соотношение, вычисленное для условий 7=7Эф, равно Лод9/йод@ =
=5250/7250^0,725. Это расхождение свидетельствует о существен-
16
ном отличии значений параметров £ (или йод), вычисленных по
участкам Д/г или по всей высоте атмосферы h. Указанное обстоя-
тельство следует иметь в виду при рассмотрении конкретных задач
механики полета венерианских аэростатических и космических ЛА«
Можно показать, что
QsW=QSo 1
^ОД
ИЛИ
При этом Qs(A)=-'=Qs0(1 — w
Записанные формулы применимы для небольших отрезков вы-
сот Д/г^ЮОО м, где можно положить 7 = const. Эти зависимости
называют иногда барометрическими формулами.
Аэромеханическое движение тела в атмосфере Венеры, как и в
атмосфере Земли, зависит от его массы, размеров, формы, ориен-
тации и от поступательной скорости. Аэромеханические и аэрофи-
зические явления/ возникающие при прохождении тела через
атмосферу, связаны между собой. В связи с этим для динамики вхо-
да в атмосферу планет является существенным определение услов-
ной границы атмосферы, ниже которой учет аэродинамических фак-
торов в уравнениях движения становится обязательным. Критери-
ем к определению границы плотных слоев атмосферы является
величина аэродинамической нагрузки, которая на этой границе
становится заметной (соизмеримой с силой гравитации). Несмотря
на переменность скоростного напора (qV2/2) как фактора текущей
нагрузки по высоте входа, принято, что во всех случаях так назы-
ваемая условная граница атмосферы постоянна и определяется для
Земли некоторой постоянной высотой над уровнем моря, равной
Лвх©=100 км. Плотность воздуха на этой высоте равна Оея=юо=
= 5,5-10-8 кг/м3. Как показал опыт, внесенные этим допущением
погрешности при расчетах конкретных ЛА входа незначительны.
Следуя этому опыту, можно установить условную границу входа и
для атмосферы Венеры. Она соответствует высоте /гВХ(? ^132 км,
где также Q$^=i32 =5,5-Ю-8 кг/м3.
Если пренебречь изменением температуры атмосферы и ее отно-
сительного молекулярного веса при изменении выбранного интер-
вала высоты, например в случае изотермической атмосферы при
ZZ ДУ др. ац
Т Q р 4 Q
то получим экспоненциальный закон плотности атмосферы, который
уже в течение весьма продолжительного времени рассматривает-
ся в качестве первого приближения при исследованиях проблем
входа в атмосферу планет.
17
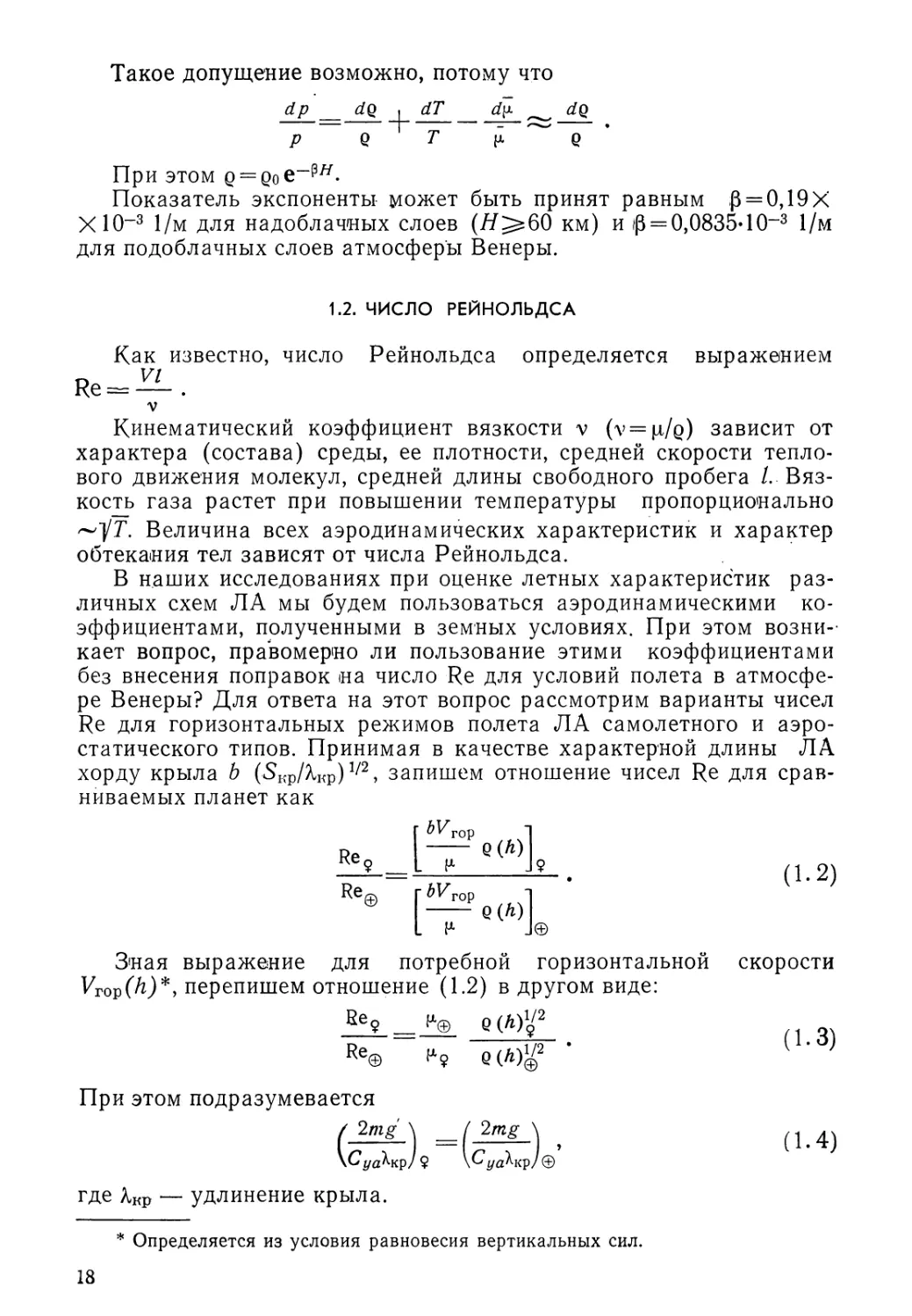
Такое допущение возможно, потому что
dp dQ < dT d[L dQ
P Q T {Л Q
При ЭТОМ Q = Qoe~₽//.
Показатель экспоненты может быть принят равным (3 = 0,19Х
Х10-3 1/м для надоблачных слоев (Я^60 км) и ip = 0,0835-10-3 1/м
для подоблачных слоев атмосферы Венеры.
1.2. ЧИСЛО РЕЙНОЛЬДСА
Как известно, число Рейнольдса определяется выражением
Re — — .
V
Кинематический коэффициент вязкости v (у = ц/р) зависит от
характера (состава) среды, ее плотности, средней скорости тепло-
вого движения молекул, средней длины свободного пробега /. Вяз-
кость газа растет при повышении температуры пропорционально
Величина всех аэродинамических характеристик и характер
обтекания тел зависят от числа Рейнольдса.
В наших исследованиях при оценке летных характеристик раз-
личных схем ЛА мы будем пользоваться аэродинамическими ко-
эффициентами, полученными в земных условиях. При этом возни-
кает вопрос, правомерно ли пользование этими коэффициентами
без внесения поправок на число Re для условий полета в атмосфе-
ре Венеры? Для ответа на этот вопрос рассмотрим варианты чисел
Re для горизонтальных режимов полета ЛА самолетного и аэро-
статического типов. Принимая в качестве характерной длины ЛА
хорду крыла b (Зкр/Хкр)1/2, запишем отношение чисел Re для срав-
ниваемых планет как
Г ^гор ~|
Re ----------
------ь_. (1.2)
Re@ гМЛ-ор 1
------ С(А)
L Iх--J©
Зная выражение для потребной горизонтальной скорости
Угор(Л)*, перепишем отношение (1.2) в другом виде:
Ве9 _ ^® е(й)у2
Re® е(< ‘ 1 '
При этом подразумевается
/ bug \ =/ 2mg \ , (j
\Сг/аХкр/ $ \Суа^кр/@
где ХКр — удлинение крыла.
* Определяется из условия равновесия вертикальных сил.
18
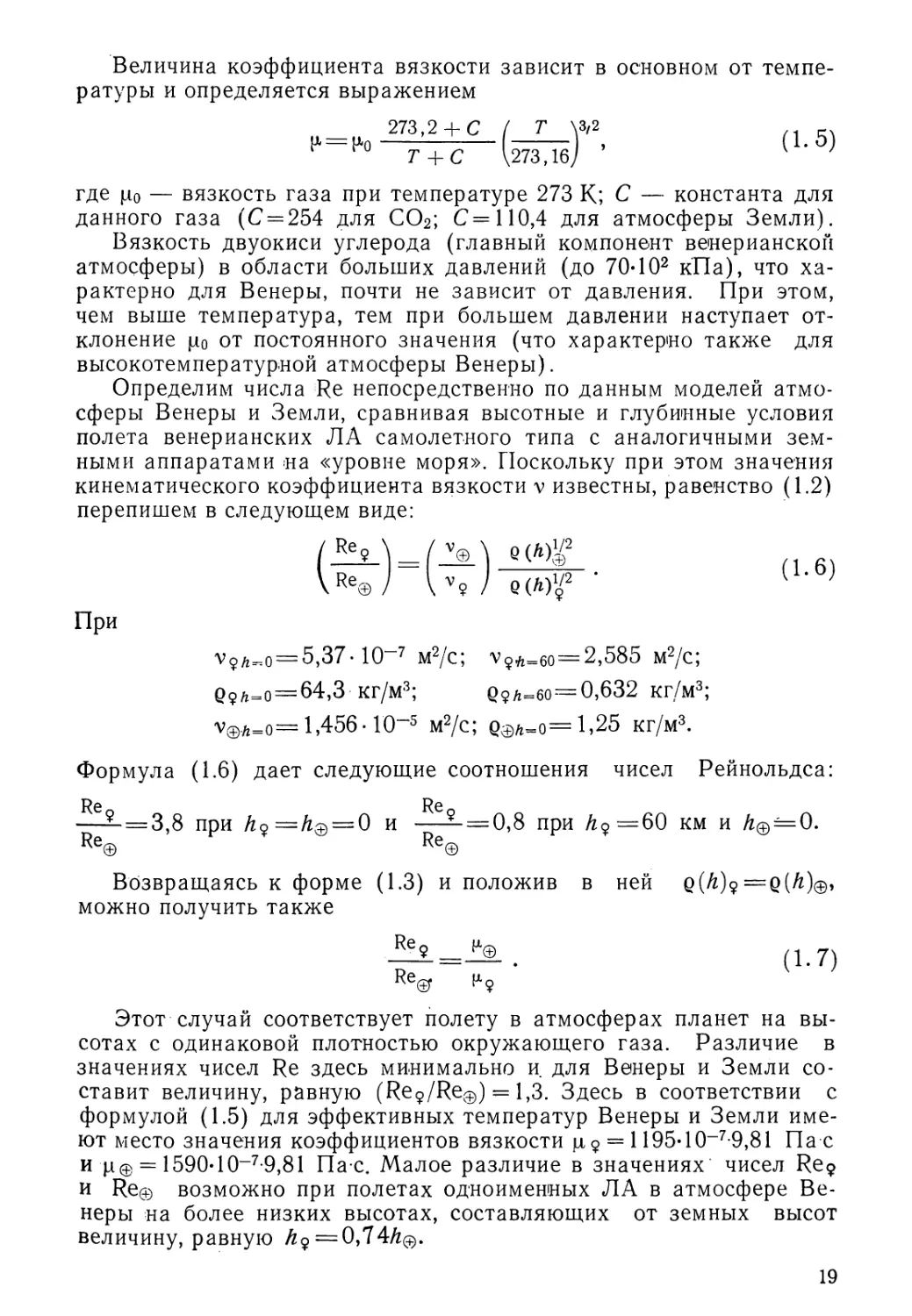
Величина коэффициента вязкости зависит в основном от темпе-
ратуры и определяется выражением
273,2 + С / Т \3/2
Ц = Цо ------------- -------
Г + С \273,16/
(1-5)
где цо — вязкость газа при температуре 273 К; С — константа для
данного газа (С = 254 для СО2; С= 110,4 для атмосферы Земли).
Вязкость двуокиси углерода (главный компонент венерианской
атмосферы) в области больших давлений (до 70-Ю2 кПа), что ха-
рактерно для Венеры, почти не зависит от давления. При этом,
чем выше температура, тем при большем давлении наступает от-
клонение цо от постоянного значения (что характерно также для
высокотемпературной атмосферы Венеры).
Определим числа Re непосредственно по данным моделей атмо-
сферы Венеры и Земли, сравнивая высотные и глубинные условия
полета венерианских ЛА самолетного типа с аналогичными зем-
ными аппаратами на «уровне моря». Поскольку при этом значения
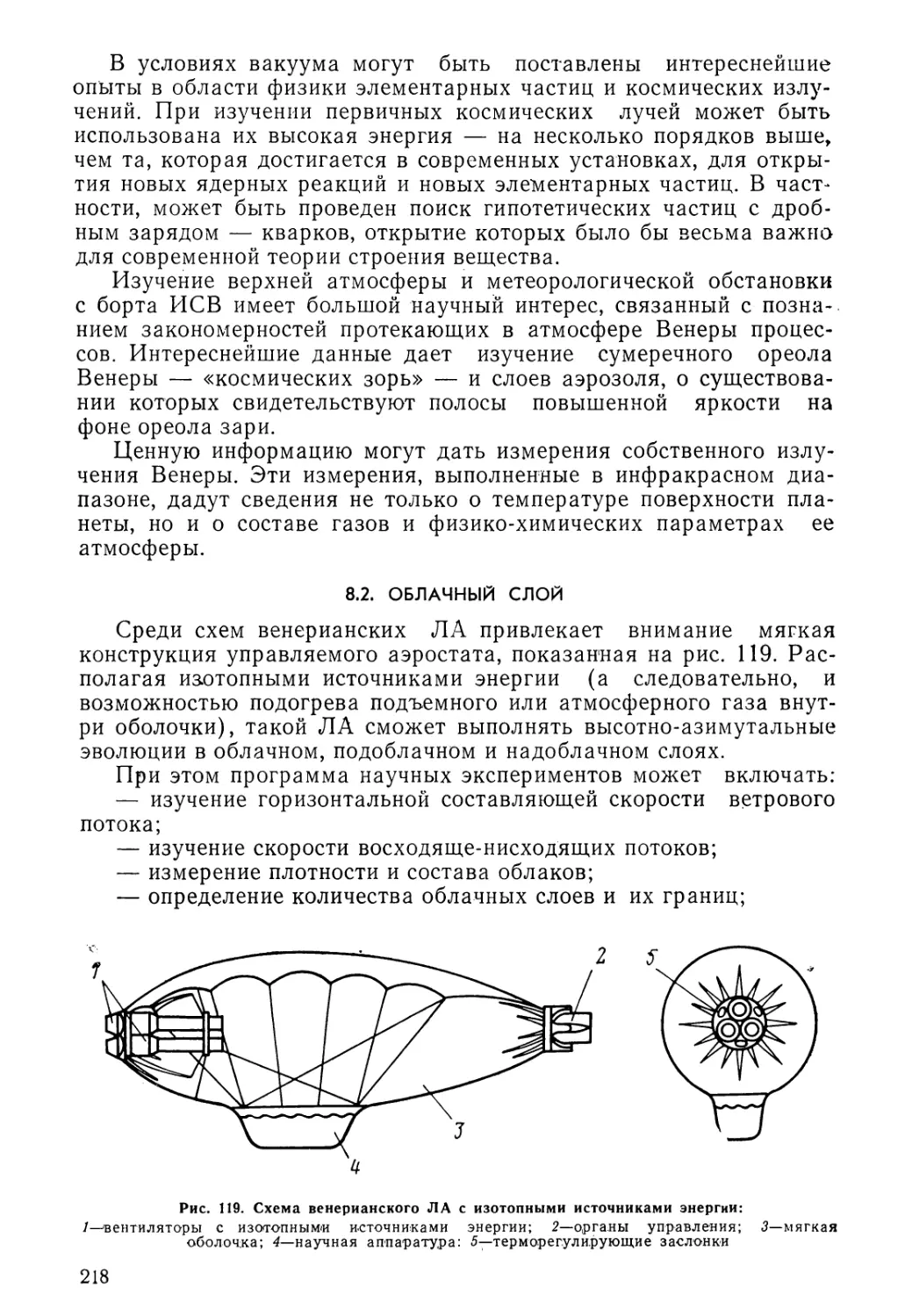
кинематического коэффициента вязкости v известны, равенство (1.2)
перепишем в следующем виде:
е W®
е (Л)9/2
(1-6)
При
v?a_q = 5,37- 10“7 м2/с; v?^=6o=2,585 м2/с;
р9Л=0 = 64,3 кг/м3; р$л=бо = 0,632 кг/м3;
v©.*=0= 1,456 • 10~5 м2/с; р©л=0=1,25 кг/м3.
Формула (1.6) дает следующие соотношения чисел Рейнольдса:
—i- = 3,8 при Л?=Л© = 0 и —*- = 0,8 при Л?=60 км и /г© = 0.
Re® Re©
Возвращаясь к форме (1.3) и положив в ней q(/z)? =р(Л)@,
можно получить также
Re2
Re®
^®
P'S
(1.7)
Этот случай соответствует полету в атмосферах планет на вы-
сотах с одинаковой плотностью окружающего газа. Различие в
значениях чисел Re здесь минимально и для Венеры и Земли со-
ставит величину, равную (Re?/Re©) = 1,3. Здесь в соответствии с
формулой (1.5) для эффективных температур Венеры и Земли име-
ют место значения коэффициентов вязкости ц $ = 1195-10-7-9,81 Па с
и цф = 1590-10-7-9,81 Пас. Малое различие в значениях чисел Res
и Re© возможно при полетах одноименных ЛА в атмосфере Ве-
неры на более низких высотах, составляющих от земных высот
величину, равную /г$ = 0,74/г©.
19
Рис. 5. Отношение чисел Re для Венеры и Земли,
по данным моделей атмосфер планет
Рис. 6. Величина отношения числа' Reg на высотах h^=hQ^ к числу Re© на высотах Л©—
=0 и Л© —50 км
Легко понять, что случай (1.7) может относиться и к аэроста-
тическим ЛА с постоянной горизонтальной скоростью на различ-
ных высотах VrOp(A) = const, для которых соблюдаются геометриче-
ское подобие и равенство параметров тяговооруженности.
На рис. 5 приведены кривые относительных величин Reg/Re©,
построенные по данным моделей атмосфер Венеры и Земли при
/$==/© и (mg/5M)$=(zng/SM)© по формуле (1.6). Расчет
кривых произведен совмещением различных венерианских высот,
принятых в качестве нулевых (й?=йо$), с высотой на уровне мо-
ря земной атмосферы (й©=0). Как следует из рисунка, (Re$/Re©X
<50. Это соотношение чисел Рейнольдса охватывает все возмож-
ные варианты движений сравниваемых венерианских и земных ЛА.
На рис. 6 приведены кривые отношений чисел Рейнольдса
Reg/Re© в функции смещенных венерианских нулевых уровней
отсчета йод для двух земных высот й© = 0 и й© =50 км, построен-
ные на основе зависимости, представленной на рис. 5. Рисунок ил-
люстрирует расхождение между земными числами Re, определен-
ными на высотах й@=0 и й©= 50 км, и венерианскими на высотах
йд=йо$+йо. Как следует из рисунка, расхождение в числах Re
уменьшается по мере увеличения венерианских высот полета и
достигает минимальных величин (т. е. Re$ ~Re©) при йод ^50 км.
Выражение (1.2) может быть представлено в следующем виде:
Легко видеть, что расхождение между венерианскими и земны-
ми числами Re может быть уменьшено не только смещением ве-
20
нерианских высот полета, но и вы-
бором соответствующих значений
параметров удлинения Хкр$ или на-
грузки на крыло (/ng75KP)$, как по-
казано на рис. 7. Этот график явил-
ся следствием перестроения кри-
вой А@ = 0 (см. рис. 6) по зависи-
мости
Рис. 7. Зависимость удлинения и наг-
рузки на крыло венерианских ЛА при
от высоты h о
1
(mg/SKp)9
(mg/S^
'v W®'
V (Л)9
с(*)9
^кр9
^кр©
Эта зависимость получена преобразованием выражения (1.8)
при (Re$/Re©)=l. Перестроение кривой h@ =0 выполнено для
случая
(^/5кр)$ __
(W£/SkP)@ VKp©/
Аналогичные графики можно построить также перестроением
кривой Л© =50 км и семейства кривых при различных значениях
Л©. Из рис. 7-следует, что при понижении венерианской высоты по-
лета глубинные ЛА трансформируются в формы с большим удли-
нением крыла (малые хорды) и малыми нагрузками на крыло.
Высотные ЛА, наоборот, по мере подъема на высоту приобретают
аэродинамические обводы малого удлинения с большими значения-
ми нагрузки на крыло.
Таким образом, венерианские ЛА как бы повторяют путь раз-
вития земной авиации — от дозвуковых самолетов (планеров)
большого удлинения А,кр и малой нагрузки mglS^ до высокоскоро-
стных истребителей малого удлинения и большой нагрузки на
единицу площади крыла.
Как отмечено выше, в области высот —50-4-55 км, где пара-
метры атмосферы Венеры сходны с земными на уровне моря, для
венерианских и земных ЛА имеет место Re?^Re©. Это важное об-
стоятельство указывает на одну из аэрофизических аналогий, име-
ющих место для планет Венера и Земля.
Полученные выводы справедливы и для ЛА аэростатического
типа, если принять во внимание зависимость для скорости марше-
вого полета V= (2m/SMCxaQ)1/2. Сравнение чисел Re можно про-
21
извести и для таких схем аэростатических ЛА, мидель которых при
изменении высоты полета меняется по экспоненте, как 5м = 5мОврл
(где SM0 — исходный мидель), а скорость маршевого полета оста-
ется постоянной независимо от высоты полета h. При этом легко
получить
Re9 \3/2 / пх<? \1/2 . (1 1Q)
\ *© / \ лй-© /
Если Z?=Z@ и пх$=пхо, то подстановка в эту формулу таблич-
ных значений параметра v(/z) =|x/q(/i) для сравниваемых условий
полета в атмосфере Венеры и Земли дает
(Re9/Re@) = (ve/v?) = 2,71 (при Л9=0, й© = 0);
(Re9/Re@) = (v@/v9) = 0,565(при й9=60 км, Л© = 0);
(Re9/Re@) = (v@/v9) = 1 (при = 54 км, /г© = 0).
Для получения потребных соотношений чисел Re необходимо
изменить либо высоту полета венерианского аэростатического ЛА,
либо масштаб длины корпуса в соотношении
Re9 ( 1 <2 \3/2
Re© \ 1® '
Таким образом, числа Re в атмосферах Венеры и Земли доста-
точно близки для одноименных самолетных и аэростатических
ЛА. Это дает основание в первом приближении, при выполнении
массовых расчетов, принимать одинаковыми значения аэродинами-
ческих коэффициентов для получения сравнительных характерис-
тик венерианских и земных ЛА. Указанная близость чисел Re де-
лает возможным обычный подход к расчету аэродинамических ха-
рактеристик для венерианских ЛА на базе экспериментальных
данных по продувкам «земных» моделей и получаемых при этом
конкретных чисел Re.
1.3. КЛАССИФИКАЦИЯ ВЕНЕРИАНСКИХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Как было отмечено выше, создание средств передвижения в
атмосфере Венеры — чрезвычайно сложная техническая задача,
обусловленная крайне напряженными характеристиками ее атмос-
феры.
В процессе перспективных изысканий по определению основных
характеристик венерианских ЛА (особенно долголетающих и мно-
гократно используемых) большие трудности возникают уже на
первых этапах поисковых работ, поскольку эти средства передви-
жения должны сочетать в себе свойства самолета (ЛА тяжелее
воздуха), аэростата или дирижабля (ЛА легче воздуха), а также
глубоководного аппарата (батискафа, батиплана или мезоскафа).
Как будет показано ниже, для большей части венерианских
ЛА характерна крупногабаритность, что вызывает необходимость
:22
решения ряда не ставив-
шихся ранее инженерных
проблем по обеспечению
ракетной транспорта-
бельности вплоть до
предъявления специаль-
ных требований к конст-
рукции самих ракет-носи-
телей.
Изучение модели ат-
мосферы Венеры показы-
вает, что для перемеще-
ния в ее среде могут быть
использованы три группы
средств (рис. 8), различ-
ных по характеру дейст-
вия и назначению: базо-
вые, глубинные и связные
(многоцелевые) ЛА.
Базовые ЛА пред-
назначены ДЛЯ ДЛИТеЛЬ- Рис. 8. Схема классификации венерианских ЛА
ного пребывания в атмо-
сфере Венеры в режиме дрейфа (свободноплавающего аэростата)’
или управляемого полета (по типу дирижабля) на больших высо-
тах (/г$ =504-70 км), где условия полета по параметрам плотности,
давления и температуры близки к земным.
Базовые ЛА обладают малой маневренностью (в горизонтальной
и вертикальной плоскостях) и являются тяжелыми носителями
многочисленных систем и грузов, в том числе многоцелевых ЛА.
Глубинные ЛА предназначены для передвижения вблизи
поверхности (в режиме парения или маршевого полета), а также
осуществления посадки на поверхность планеты. Глубинные ЛА
могут обладать определенной маневренностью по аналогии с глу-
боководными земными аппаратами типа батискаф, батиплан или
мезоскаф.
ЛА многоцелевого назначения предназначены для
зондирования различных слоев атмосферы Венеры, достижения ее
поверхности, осуществления связи между базовыми и глубинными
ЛА, маневрирования в районах интересуемых нас объектов и воз-
вращения (если система многоразового действия) на борт базово-
го ЛА. По конструкции и механике полета ЛА многоцелевого на-
значения составляют наиболее обширную и разнообразную по
техническим возможностям группу венерианских средств пере-
движения.
Остановимся на рассмотрении различных схем ЛА с целью срав-
нения их между собой и изучения наиболее вероятных путей раз-
вития с точки зрения возможности полета в атмосфере Венеры.
23
Сравнительная характеристика ЛА
Тип ЛА Общий вид ЛА СХ > Си ' С11 ха Уд иа СУа/Сха (mg/^M)©
V<a V<a V>a
(т^\.)9
Парашют Простейший Сх =0,3... 1,6 0 0 16.. 20 16
Вращающийся Сх =0,4-1,9 0 0. 16...20 30
Планирующий Сх =0,2...0,8 ла Сг/д=0,5—0,8 0,3...2,0 — 3-25 30
Паракон — 0 0,5 10-25 80
Параплан Дозвуковой 05 CN . О о II II и и Крыло 5,2...4,5 с подвес- кой 3 — ' 10-25 80
Гиперзвуковой СУд = 0,9 Сх =0,22 ла Кцыло 4 Крыло 3,6 с подвес- кой 2,4 25 80
Гибкое крыло Дозвуковой — 2,7...5 — 10-80 80
Гиперзвуковой — 2,7...5 0,58 10...80 80
Вертолет С двигателем СЛв=1...1,2 4 — 15...40
Ротошют дозву- ковой Сг = 1,2 Хо 3,2 — 25...75 80
Ротошют гипер- < звуковой С, =1,2 Хо 1,6...5 0,4 25..J5 80
24
в атмосферах Земли и Венеры
Таблица 1.2
Скорость полета, м/с Высота полета, км Время полета, ч-мин Дальность полета, км Масса средств спасе- ния, % Масса науч- 1 ной аппара- туры, % Режим полета Допол- нитель- ный ис- точник энергии
началь- ная конечная
230 7,5 •60...0 0-32 0 10...13 4 1,75 Парашюти- рование Нет
230 7,5 60...0 0-32 0 5...6 4 1,85 Парашюти- рование с вращением Нет
194 6,3 60...0 1-35 120 6...8 4 1,85 Планирова- ние Нет
194 6,3 60...0 0-48 30 13 7,2 1,55 Баллисти- ческий с элементами планирова- ния Нет
260 8,5 60. .0 2-42 260 22 8,8 0,93 Планирова- ние Нет
6800 8,5 100...0 2-55 260 22 8,8 0,93 То же Вентиля- тор
230 7 60...0 2-9 200 16 6,4 1,3 Нет
6800 7 100...0 2-42 200 22 8,8 0,93 » Венти- лятор
50 0 50 ±10 Равно ресурсу ДУ Опреде- ляется ресурсом ДУ 12...14 0,8 Маршевый От ос- новного двигате- ля
52 0 60...0 1-55 190 10 4 1,5 Авторотация От ро- тора
— — 60...0 1-55 190 10 4 1,75 То же То же
Тип ЛА Общий вид ЛА сх , с , с„ ха Уд аа СУаСха (т^5М)®
V<a V<a V>a
(т^5м)2
Дирижабль Мягкий (Л=3,5...4) С“а= =0,025..0,015 0 — —
Полужесткий (Х=4,5...5) 0 — —
Жесткий (%=5...6) >0 — mg—RKr
•$м
Свободно плаваю- щий аэростат Без вертикально- го маневра Сха = 0,5 — — —
С глубинным ма- невром — — — —
С глубинными зондами СХа=0,5 — — —
Планирующий сХа= =0,08. ..0,1 — — —
Тепловой С.Г =0,5 ла — — —
Лифт (А,=2,5 .. .3) <?и =0,03 CL — — —
Планер Дископлан на- ддувной — 4 — 10...25 80
Дископлан до- звуковой сУа = ь$ Сх =0,075 а 8 — 60
160
Дископлан ги- перэвуковой со о о II II 6 1,3 60
300
Дозвуковой с большим X С^ = 0,5 Сх =0,024 ла 91 0,5 (кон- тейнер) 15 15
Сверхзвуковой с малым Л — 5 0,5 (кон- тейнер) 120 300
Гиперзвуковой сУа=й,з 3,5...4,5 1,2 120...245 300
Винтопланер — 6 1-,2 245
300
26
Продолжение
Скорость полета, м/с Высота полета, км Время полета, ч-мин Дальность полета, км Масса средств спасе- ния, % Масса науч- ной аппара- туры, % Режим полета Дополни- , тельный источник энергии
началь- ная конечная
30 — 53 ±10 Опреде- ляется запасом топлива и ресур- сом ДУ Опреде- ляется запасом топлива и ресур- сом ДУ 18@ 3,0 Маршевый Солнеч- ные батареи
40 — 53 ±10 21® 2,5 »
45 — 53 ±10 37® 2,0 * »
Равна скорости дрейфа 60 Неогра- ниченно Неогра- ниченно 24, 1,7 Дрейф Солнеч- ные батареи
60...0...60 50 0,72
— — 60 24, 1,8
— — (0...40)@ (0...60)9 — — 32е 36® Скольжение
50, 0,7,
Равна скорости дрейфа ~70 Неограниченно на солнечной стороне — 2 Дрейф
Равна скорости дрейфа 60 Неограниченно 18...37 1,67 Дрейф - —
1х4
220 8 60...0 20-40 260 22 0,93 Планирова- ние Вентиля- тор
8,8
1110 6,5 60...0 5-20 480 — 0,95 То же То же
6800 10 100...0 5-2 360 — 1,0 я »
25 2,9 60.. .0 40-00 4260 — 0,9 л п
400 13 60. .0 1-56 300 — 0,9 п я
6800 10 100...0 4-20 420 — 1,0 п л
| 6800 3 100...0 5-00 660 5 0,95 л Ротор
2
27
Тип ЛА ( Общий вид ЛА \ , Си , си ха Уд “а си 1СХ Уд ла______
V<a V<g V>g
(т^5м)$
Самолет Надувной СУа = 0,5 CXfl = 0,05 10 — 25
25
Жесткий — 10 — 30
30
Аэрокосмический — 4,5 . 2,0 293
300
Вертикального взлета и посадки — 6 — 200 300 .
Конвертоплан — 6 — 15...40 300
Глубинный ЛА Батискаф — 0 — 0
Батиплан — 3 — -0
Мезоскаф сУа=0...0,б Сх = ла =0,5...0,0* О...7,5 * — 0...6
На водзушной подушке — — — —
28
Продолжение
Скорость поле та, м/с - Высота полета, км Время- no лета, 4‘МИН Дальность полета, км Масса средств спасе- ния, % Масса науч- ной аппара- туры, % Режим полета Дополни- тельный источник энергии
началь- ная конечная
35 — 60 ±10 Определяется запасом топлива и ресурсом ДУ — 0,6 Горизон- тальный; набор высо- ты; планиро- вание От ос- новного двигате- ля
35 — 60 ±10 — 0,5 То же
400 ^1-Ип 200.. .60 — 0,45 Многоре- жимный »
45 — 60...50 — 0,3 Горизон- тальный; вертикаль- ный; взлет и посадка Я
45 — 60 ...30 — 0,4 Я
— — 0,1...! Определяется запасом топлива и ресурсом ДУ — 0,93 Перемеще- ние вблизи поверхности От ос- новного двигате- ля
0,5— 20 — 1...0 * — 0,9 Планирова- ние на малых высотах То же
— 60 ...0 — 0,45 Высокома- невренный »
— 0 o' со о со 0,5 Перемеще- ние вблизи поверхности
29
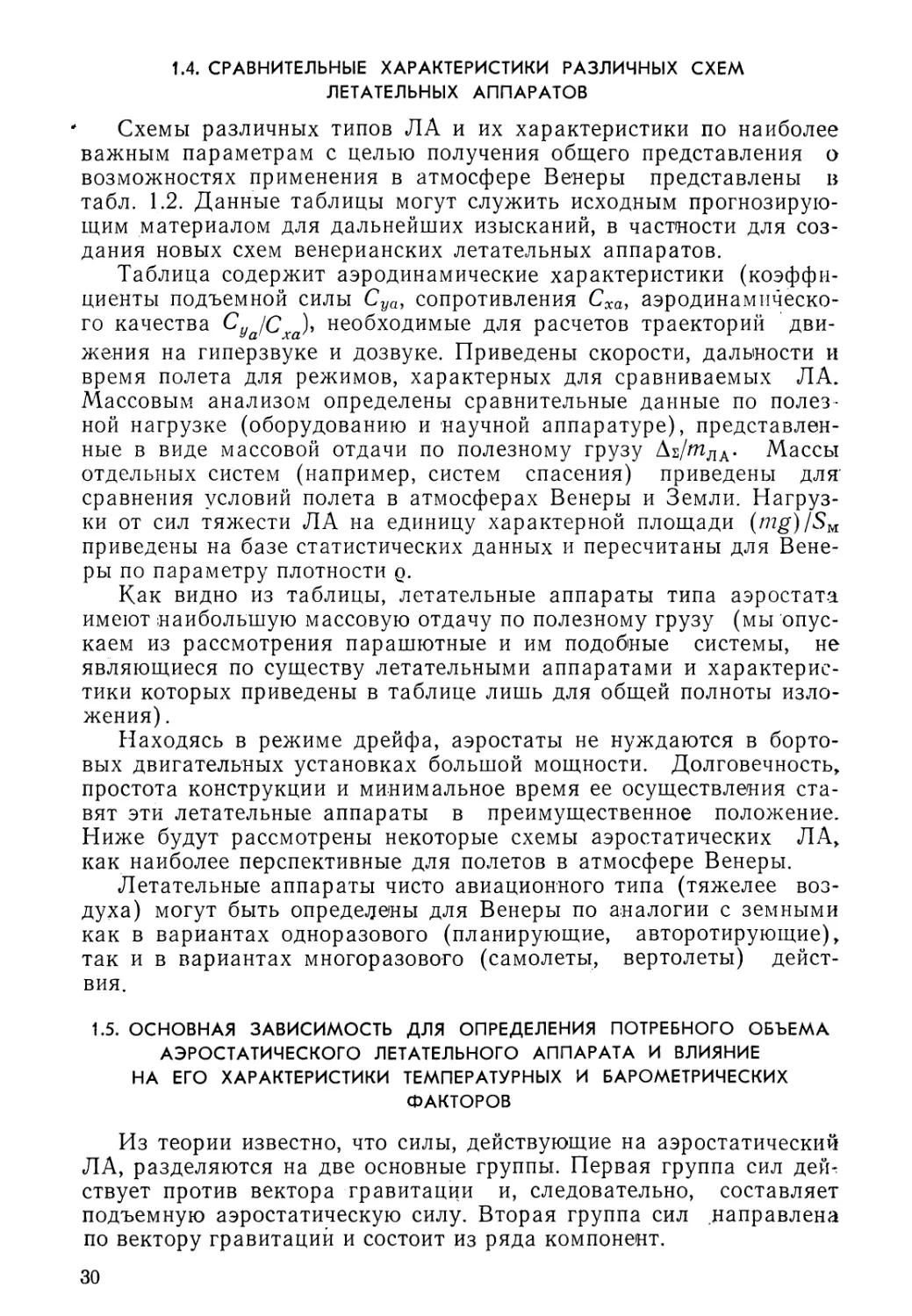
1.4. СРАВНИТЕЛЬНЫЕ ХАРАКТЕРИСТИКИ РАЗЛИЧНЫХ СХЕМ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Схемы различных типов ЛА и их характеристики по наиболее
важным параметрам с целью получения общего представления о
возможностях применения в атмосфере Венеры представлены в
табл. 1.2. Данные таблицы могут служить исходным прогнозирую-
щим материалом для дальнейших изысканий, в частности для соз-
дания новых схем венерианских летательных аппаратов.
Таблица содержит аэродинамические характеристики (коэффи-
циенты подъемной силы Суа, сопротивления Сха, аэродинамическо-
го качества СУа/СХ(^ необходимые для расчетов траекторий дви-
жения на гиперзвуке и дозвуке. Приведены скорости, дальности и
время полета для режимов, характерных для сравниваемых ЛА.
Массовым анализом определены сравнительные данные по полез-
ной нагрузке (оборудованию и научной аппаратуре), представлен-
ные в виде массовой отдачи по полезному грузу Массы
отдельных систем (например, систем спасения) приведены для’
сравнения условий полета в атмосферах Венеры и Земли. Нагруз-
ки от сил тяжести ЛА на единицу характерной площади (mg)/SM
приведены на базе статистических данных и пересчитаны для Вене-
ры по параметру плотности q.
Как видно из таблицы, летательные аппараты типа аэростата
имеют наибольшую массовую отдачу по полезному грузу (мы опус-
каем из рассмотрения парашютные и им подобные системы, не
являющиеся по существу летательными аппаратами и характерис-
тики которых приведены в таблице лишь для общей полноты изло-
жения) .
Находясь в режиме дрейфа, аэростаты не нуждаются в борто-
вых двигательных установках большой мощности. Долговечность,
простота конструкции и минимальное время ее осуществления ста-
вят эти летательные аппараты в преимущественное положение.
Ниже будут рассмотрены некоторые схемы аэростатических ЛА,
как наиболее перспективные для полетов в атмосфере Венеры.
Летательные аппараты чисто авиационного типа (тяжелее воз-
духа) могут быть определены для Венеры по аналогии с земными
как в вариантах одноразового (планирующие, авторотирующие),
так и в вариантах многоразового (самолеты, вертолеты) дейст-
вия.
1.5. ОСНОВНАЯ ЗАВИСИМОСТЬ ДЛЯ ОПРЕДЕЛЕНИЯ ПОТРЕБНОГО ОБЪЕМА
АЭРОСТАТИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА И ВЛИЯНИЕ
НА ЕГО ХАРАКТЕРИСТИКИ ТЕМПЕРАТУРНЫХ И БАРОМЕТРИЧЕСКИХ
ФАКТОРОВ
Из теории известно, что силы, действующие на аэростатический
ЛА, разделяются на две основные группы. Первая группа сил дей-
ствует против вектора гравитации и, следовательно, составляет
подъемную аэростатическую силу. Вторая группа сил .направлена
по вектору гравитаций и состоит из ряда компонент.
30
Обычно первую группу сил называют аэростатическими сила-
ми /?аг(Л) (в функции высоты полета) и записывают как
(п \
Ya(A)> (1-11)
4 = 1 /
где уэ*лг — объем f-ro элемента конструкции; п — количество «объ-
емных» элементов конструкции.
Если вторую группу сил составляет сила тяжести элементов
конструкции топлива mTg, полезного груза Дгр£ и подъем-
ного газа mYg, то для нее может быть записано уравнение следую-
щего вида:
(w
^^эл + ^т + Дгр
Z=1
(1.12)
где уг(^) — удельный вес подъемного газа на данной высоте по-
лета й; N — количество «массовых» элементов конструкции.
На основании равенств (1.11) и (1.12) при условии, что 7?Аг (Л) =
— nATtnArgf объем аэростатической части (оболочки) ЛА опреде-
лится как
®об(Д) =
/ N \ п
2пкх 2 + + Агр — Ya W
\Z = 1 / Z = 1
(1.13)
Ya (Л)— nArYr W
где пАт — коэффициент перегрузки от силы RAy(h). Его величина,
равная отношению силы RAT(h) к силе тяжести mATg, имеет вид
„ ___ R\r (^)
а а г —-----
™krg
п
«об(Л) + 2 vs>«i
i-1
Ya (Л)
/ N
Yr W ^об (Л) + g 2 ,n^ + + Arp
\Z=1
(1.14)
В общем виде справедливо выражение пАт = пАт(h) =^= const. Од-
нако в дальнейшем основной класс задач, связанный с изучением
различных видов движения аэростатических ЛА, будет рассматри-
ваться при условии пАт = const.
Очевидно, что при пАт>\ высота полета (подъем) аэростати-
ческого летательного аппарата увеличивается; npH nAr<l высота
полета снижается и при /гАг=1 — высота полета стабилизируется
(й = /iCT = const).
Формула (1.13) является основной зависимостью, выражающей
потребный объем аэростатического ЛА в функции гравитационных
(migf yO и объемных (уЭлг) параметров ЛА. Эта формула показы-
вает, какое существенное значение для габарита конструкции (объ-
ема оболочки) имеет плотность среды Qa при заданной полетной
массе аэростатического ЛА. В условиях Венеры высокая плотность
низших слоев тропосферы выгодно влияет на конструкцию и габа-
риты глубинных венерианских ЛА.
31
Особо важное влияние на характеристики аэростатических ЛА
имеют климатические, метеорологические и другие условия полета
в атмосфере Венеры. Это влияние определяется непостоянством
плотности атмосферы, подъемного газа и объема аэростатической
части, величины которых зависят от температуры и давления вне
и внутри аэростатической оболочки ЛА.
Известно, что изменения параметров глОб, Уа и уг определяются
следующими функциями абсолютной температуры Т и давления р:
Ya(A) = YaO
(1-15)
где индекс «О» отнесен к начальным условиям.
Имея выражения (1.13) и (1.14) и исключив из них переменные,
с помощью уравнений (1.40) получим
п
или при 2г>Эл( = 0
/=1
Выражения (1.16) и (1.17) показывают, что объем аэростати-
ческой части изменяется обратно пропорционально изменению про-
изведения параметров [ра W/Poalf^oa/^aWL в то время как подъ-
емная сила аэростатического ЛА изменяется пропорционально это-
32
му произведению. Легко видеть также, что увеличение внешнего
давления среды и температуры несущего газа вызывает уменьше-
ние габаритов аэростатического ЛА при Т?Аг(й) =const и увеличе-
ние аэростатической силы при v0^(h) = const
1.6. АППРОКСИМАЦИЯ МОДЕЛИ ПЛОТНОСТИ АТМОСФЕРЫ
АНАЛИТИЧЕСКИМИ ЗАВИСИМОСТЯМИ
Всю атмосферу планеты разбиваем на ряд слоев так, чтобы в
каждом слое можно было считать температуру или постоянной Т =
= const, или изменяющейся по линейному закону Th = TQ-]-b(h—
где Tq, й0 — температура по Кельвину и высота нижней границы
слоя; Ь = — ------- коэффициент пропорциональности, показываю-
-- Йд
щий изменение температуры по высоте, 7\ , hK — температура по
Кельвину и высота верхней границы слоя.
В общем случае плотность атмосферы выражается зависимо-
(н \
— I , где коэффициент k зависит от
Ло '
относительного молекулярного веса атмосферы и удельной газовой
постоянной.
Для случая 7\ = const модель плотности можно аппроксими-
ровать следующей зависимостью: *
Qft=Qoexp('-ft~/M , (1.18)
а для линейного закона T(h) — зависимостью
— 1
(?л=ео[1+^ (А-йо)] ’ (1-19)
где qo — плотность на высоте h, hQ\ hsQ — высота однородной
атмосферы в начале слоя с Th = To + b (h—й0); hs — высота однород-
ной атмосферы для слоя с 7\ = const.
Рассмотрим два любых соседних слоя с целью определения
и d^hldh на границе этих слоев. Параметры, относящиеся к нижне-
му слою, обозначим индексом «—», параметры верхнего слоя —
индексом «+». Параметры на верхней границе нижнего слоя обоз-
начим индексом «к».
Возможны следующие случаи комбинации слоев, сгруппирован-
ные по закону изменения температуры:
1 случай. Нижний слой Th = T0-]-b_(h — hQ_); |
верхний слой Гл = Го+ + &+(й--йо+). /
2 случай. Нижний слой 7\ = Т0_-\-Ь_(к — й0_); 1
верхний слой 7\=const. J
* Зависимость в форме (1.19) предложена И. М. Яцунским.
2 614 33
3 случай. Нижний слой Тh=const
верхний слой Th=TQ+-\-b+ (й — Ло+)
(1-22)
В верхнем и нижнем слоях (первый случай) температура из-
меняется по линейному закону, но интенсивность изменения тем-
пературы различна:
для нижнего слоя
__V___|
ей_=ео_Г1+^(А-Ло_)1 b-h*>- ;
L 1 о- J
(1.23)
для верхнего слоя
Г h , ?0+ 1
QA+=Qo+ [1 + -?^(Л-Ло+)1 b+h«>+ ; (1-24)
L 1 о+ J
на общей границе двух слоев
й_=йк_=й0+. (1.25)
Подставляя выражения (1.25) в формулы (1.23) и (1.24), полу-
чаем
е%+=ео+=ео-[1 +^-(йк_-а0-)]- -^--1=еЛк_. (1.26)
Таким образом, формулы (1.23) и (1.24) обеспечивают непре-
рывность плотности в точках стыка.
Рассмотрим производные d^hldh для нижнего и верхнего слоев.
Продифференцировав уравнение (1.23) для нижнего слоя, по-
лучим
(1.27)
где определяется выражением (1.26), а
П-= -(т-5- + [ 1 + -?=- (Л_ - Ао-)Г. (1.28)
\Л$о— 1 о—/ L 1 о— J
После дифференцирования уравнения (1.24) для верхнего слоя
получим
dQh +
dh
— Qa+'H+»
где определяется выражением (1.24), а
(1.29)
(1.30)
34
На границе слоев с учетом выражения (1.25) уравнения (1.27)
запишем в виде
dh |А_=/?К__ "к—
где Qhk_ определяется выражениями (1.25), (1.23), а
Пк- = -(т1- + [ 1 + (Ак_- Йо-Г1. (1.32)
\Л$о— 1 о— / L 1 о— J
Выражение (1.29) для верхнего слоя с учетом уравнения (1.25}
приведем к виду
й =Ч-Л+, (1-33)
dh |^ + = ^o+ и+
где Q/z0+ определяется выражением (1.26), а
Ло+ = — • (1.34)
\Л$0+ 1 0+ /
Сравнивая выражения (1.31) и (1.33) на границе слоев, прихо-
dQh . i
дим к выводу, что —-ф------- . (1.35)
dh dh Р_=А+
Эти производные ограничены.
Неравенство (1.35) вытекает из того, что имеет место
Пк_#По+- (1-36)
Следовательно, на границе двух слоев формулы (1.23) и (1.24)
обеспечивают непрерывность расчета плотности атмосферы, но пер-
вая производная от плотности по высоте при переходе с одной
формулы на другую терпит разрыв первого рода.
Аналогичными рассуждениями нетрудно показать, что к такому
же выводу сводятся второй (1.21) и третий (1.22) случаи.
Для получения непрерывности функции d^(h)!dh на границе:
слоев, введем в рассмотрение функцию
= (1.37)
где q(7z) — плотность на высоте ft; ai, Z = 0, 1, 2, 3 — коэффициен-
ты, различные для каждого слоя.
Тогда производную от плотности по высоте можно записать
так:
+ 2a<Ji Зй3Л2.
Функция (1.37) определена в конце каждого слоя на интервале
высот ДА = /г2—Ль где Л2 — высота верхней границы нижнего слоя
и нижней границы верхнего соседнего слоя; h\ — высота точки, рас-
положенной ниже верхней границы нижнего слоя на величину А/?.
2*
35
Коэффициенты сц (t = 0, 1, 2, 3) в выражении (1.37) находятся
из условий сопряжения:
Q(^i) Qi (^i)> (1 2g)
q(a2)=q2 (а2),'
где Qi(fti) — плотность амосферы, определяемая по формулам
(1.18) или (1.19) во внутренней точке слоя; р2(Л2) — плотность
амосферы, рассчитываемая по формулам (1.18) или (1.19) в нача-
ле произвольного слоя.
Конкретный вид функций pi(/ii) и р2(й2) определяется выраже-
нием (1.19), если температура в слое изменяется по линейному за-
кону, или выражением (1.18), если температура в слое постоянна.
Значения производных функций р(Л) по высоте в точках h\ и
й2 равны соответствующим значениям производных функций Qi(fti)
и р2(/г2) в тех же точках, т. е.
dh dh
dQ (h2) _ dQ2 №)
dh dh
(1.39)
Таким образом, имеем четыре неизвестных значения коэффици-
ента aif f = 0, 1, 2, 3 и четыре условия (1.38) и (1.39) для их опреде-
ления.
Составим систему уравнений для определения коэффициен-
тов ait
В общем случае получаем
ао 4~ 4" 4~ а3л?= Q (^1);
4" ^1^2 4“ а2^2 4“ #3^2 = q (й2);
ai + 2a2A1 + 3M?=^-| ;
dh |/г=А!
4~ 2а2й2 4“ ~ I
dh \h=hb
Решая эту систему уравнений, будем иметь
Л2(ЗЛ!-Л2) Л2(ЗЛ2-Л!) hih^dQih)
а0=----77.----Г7Г 6 (Л1) + -77--
(Л2 — Л1)3 (Л2 — Л1)3
h{h2 dQ (А)
(h2 — h{)dh h=h.
(Л2—Л1)2 dh h~h% ’
------6М2_ ( )]+fe2(fe2+ 2fti)
(А2-Л1)3 1 (Й2—fti)2 dh
Ai(fet + 2А2) rfQ (fe) I
(h2 — Zii)2 dh |/z=»/za
(1.40)
(1.41)
36
_ 3(A2 + Ai) _ ]_ hi + Zh2_ rfQWI _
(A2-Aj)3 1Ук v V 27J (Л2-Л1)2 dh \h=il,
h2 — 2Aj dQ (A) I
(A2—Л1)2 dh |л=л/
az=7h \ +
(Л2—Л1)3
. 1 pw)l 1 1
(A2—^l)2 I dh |/г=л1 dh |л=л, J
Для рассмотренных выше комбинаций слоев атмосферы коэф-
фициенты ai (f = 0, 1, 2, 3) будут выражаться следующим образом.
Температура изменяется по закону (1.20):
1
a° (Л2-Л1)2
Л2 (3Aj—/t2)
h2 — hi
XQ(^i) +
h\ (3A2-Ai)
h2 — hi \
a^7T^\\lp7-h^+2h^r- ,
(Д2-—Л1)2 ЦЛ2—«1 \hSQ— 7 0—
x е(Л1)_Г^+Л1 (Л1 + 2А2) U-
Lft2_ «1 \fts0+
1 ((,, I П, x I 1 , A \ г. ,
__----- 4 1,.
(.fi2-hi)2
1
Лао+ 1 o+ J )
1 0—
(1-44)
(1.45)
3 (^2~H^1)
h2—hi
1
^50—
' 1
Л$о+
1
. 2 f 1 . b_
a*—---------------
(A2—ЛО2 Цл2—hi \hs§— Го_
_p_+(_L+±L
L/fc2—Ai \Л$о+ Л)+
3(Л2+^1)
h2 — hi
(1-47)
где g(/ii) определяется соотношением (1.23), a Q(h2) — соотноше-
нием (1.26).
Во втором случае температура изменяется по закону (1.21):
^(Лх—Ло_)1”
1 0- J
1 f li. 1.2 I 1
---------1 hih2\------
(h2-hi)2 Ц Ui0-
^2 (3Ai—h2)
^2 —
XQ(/ZiH
A2(3A2—aia2
h2 — hi hg^.
(1-48)
«!=------!---l[^^—h2 (A24-2Ai) (——h—1 [ 1 4
(A2-Ai)2 Wh2-hi 17Ujo- T’oJL
X 6 (Ai) - + ftl(A1+2A2)l q (A2);
L^2 ^s+ J
(1-49)
37
— со-
Функция q(/zi) определяется соотношением (1.23), а ^(1г2)
отношением (1.18).
В
третьем случае температура изменяется по закону
й° (h2—Л1)2 Н- h2—hi
Гл^ЗЛг-ЛО 2 / 1
“Г-------------Г ^1^2----
1 L Л2-Л1 Uso+
_ 1 (Г fe2 (ft2 + 2fei)~| , .
1 (Л2-Л1)2 Цл2-Л1 fts_ J6(
-[^1V + A1(A1 + 2A2)(-1- + -^
|_Л2—"1 \«s04- 1 04-
----1---(ГЛк+2Л1_ ЗСЛ2+Л1)! }
(Л2-Л1) IL hs_ h2-hx\vxl>
+ [^^ + № + 2^)
|_ h2 — hi
1 (Г —1 I 2 1
(X3- ------- <-----
(Л2-А1)2 H- a2-^J
Г 2 t / 1 , b+
\_h2—hi \/*s04- ^04-
е(Лг)+
(1.52)
(Ь53)
$о+ 104-
(1;54)
(1.55)
1
B выражениях (1.52), (1.53), (1.54) функция p(/ii) определяет-
ся из соотношения (1.18), a q(A2) —из соотношения (1.19).
1.7. АППРОКСИМАЦИЯ МОДЕЛИ СКОРОСТИ ЗВУКА
АНАЛИТИЧЕСКИМИ ЗАВИСИМОСТЯМИ
В качестве аппроксимирующей кривой достаточно выбрать по-
лином 3-й степени.
Введем в рассмотрение функцию/
a*(h)= b^bih+^h^-^-b^h3.
Для определения коэффициентов b^ (Z = 0, 1, 2, 3) достаточно
знать на интервале, где скорость звука имеет физический смысл,
четыре высоты и значения скорости звука на этих высотах. Тогда
38
для определения значений bi получим следующую систему алгебра-
ических уравнений:
^1^1 "Ь ^2^1 + bjii= а\;
+ 4“ ^1^2 4“ ^2^2 4“ ^3^2 = #2;
+ 4~ ^1^3 4“ ^2^3 4" ^З^з = CL^\
b$ + bih4 -р b2h4 + b3/i4 = a 4,
где сц* — скорость звука на высоте hi (i= 1, 2, 3, 4).
Определитель этой системы после транспонирования является
определителем Вандермонда 4-го порядка; следовательно, он равен
Д= П (А/-Л;).
(1.56)
После решения системы (1.56) получим
h2h3h4 а*hih3h4,
(&2—М(Лз— Л1) (h4— hi) (h2— hi) (h3—h2) (h4—h2)
i hih2h4 hih2h3
(Л4 - h3) (Л3 - h2) (Л3 - hl) (h4 - h3) (Л4 - h2) (h4 - hi)
b __ h2h$ + A2A4 4“ CL _____^1^3 4~ ^1^4 ~H ^3^4 _
(Л3-М (Л4-Л1) 1^^-h2)(h3-h2)(h2-hx)
h\h2 4- h\h4 + h2h4 *_i h\h2 4- h\h^ 4- h2h% *
----------------------- <2з~Г'-------------------0-4,
(A4 — A3) (Аз — A2) (+ — ^1) (^4 — Л1) (^4 — +) (^4 — ^з)
h2 4" A3 4“ А4 Aj 4~ A3 4~ А4 * ।
(1.57)
(1.58)
Ь2 =--* 1 * "° 1 -Л1
(А4 — АО (А3 — АО (^2 — АО (Л4 — А2) (А3 — А2) (А2 — АО
।^1 4~ h2 4- А4 * Al 4~ А2 4~ А3
(1.59)
, #3---------’ "°----------:— а4\
(h4 - h3) (h3 - h2) (h3 - hl) (h4 - hl) (h4 - h2) (h4 - h3)
1 1 * I 1
vo—-----------------------------CL\ -4------------------------d2 —
(A4 - Ax) (Аз - AO (A2 - АО (A4 - A2) (A3 - A2) (A2 - AO
---------------------------&3 +---------------------------CL4. (1.60)
(A4 - A3) (A3 - A2) (A3 - AO (A4 - AO (A4 - A3) (A4 - A3)
До высот 120 км хорошее совпадение со скоростью звука в
основной модели атмосферы (до долей процента) дает следующая
зависимость:
Ц* = 424— 1,237764/z—0,059974/^+0,000494/г3.
Коэффициенты этого выражения Ь[, Ь2 и Ь3 определены на
основании зависимостей (1.57) — (1.60).
Полученные аналитические зависимости плотности атмосферы
и скорости звука от высоты, как показали расчеты на ЭВМ, с вы-
сокой точностью аппроксимируют модель атмосферы. Эти зависи-
мости могут быть полезными при решении вариационных краевых
задач динамики полета в атмосфере Венеры и других планет (см.
также разд. 7.1).
39
1.8. НОВЫЕ ДАННЫЕ О ПОВЕРХНОСТИ ВЕНЕРЫ И ОБЩИЕ ЗАДАЧИ
ИССЛЕДОВАНИЯ ПЛАНЕТЫ
22 и 25 октября 1975 г. были выведены на орбиты искусствен-
ных спутников Венеры автоматические межпланетные станции «Ве-
нера-9» и «Венера-10», а спускаемые аппараты этих станций совер-
шили мягкую посадку на поверхность планеты в разных районах и
в исключительно сложных условиях при температуре окружающей
атмосферы около 738 К и давлении 900 Па передали на Землю *
изображения поверхности в месте посадки.
Во время снижения спускаемых аппаратов станций «Венера-9»
и «Венера-10» в атмосфере планеты в лечение 68 и 75 мин соответ-
ственно и с поверхности Венеры в течение 53 и 65 мин научная
аппаратура передавала данные об облачном слое планеты, о физи-
ческих свойствах и характеристиках грунта в месте посадки и дру-
гие ценные научные сведения.
В результате эксперимента, проведенного с помощью автомати-
ческих станций «Венера-9» и «Венера-10», мировая наука обога-
тилась уникальными снимками двух участков поверхности Венеры,
расположенных в экваториальной области на расстоянии около
2200 км друг от друга (рис. 9 и 10). На снимках видно, что оба
участка поверхности Венеры, покрыты камнями, причем это непро-
стое нагромождение камней. Камни, в своем большинстве плоские,
расположены в один ряд на более темной поверхности. Края кам-
ней в основном резко очерчены, что свидетельствует об относи-
тельно недавнем их образовании. Поверхности камней достаточно
яркие, т. е. рассеивают много света. Их яркость сравнима с ярко-
стью посадочного кольца из отполированного металла, край кото-
рого виден на снимке. Это свидетельствует об относительно чистой*
не покрытой пылью или мелкими частицами, поверхности камней.
Наоборот, в промежутках между камнями поверхность темная, т. е.
отражает и рассеивает малое количество света, что характерно для
поверхностей, покрытых пылью, мелкими частицами либо очень
шероховатых.
Между изображениями поверхности есть и различие в том, что
камни в месте посадки «Венеры-9» меньше по размеру и больше
выступают над поверхностью, чем глыбы в месте посадки «Вене-
ры-10»-. Кроме того, на этих глыбах кое-где видны темные пятна,
которые могли возникнуть как вследствие эрозии, так и в резуль-
тате попадания на поверхность мелких частиц.
В целом можно предположить, что каменистая корка на поверх-
ности, способная растрескиваться, возможно, вследствие каких-то
тепловых процессов или воздействия агрессивных веществ из ат-
мосферы, является одной из характерных картин ландшафта Ве-
неры.
Оба снимка сделаны в условиях вполне достаточной освещен-
ности. Они полностью согласуются с данными, полученными «Ве-
нерой-8», где была измерена освещенность 400—500 лк при угле
Солнца над горизонтом, равном примерно 4,5° (освещение комна-
ты днем), — этого в общем уже достаточно для получения сним-
40
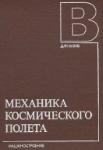
устройства, справа — лежащий на поверхности прибор — плотномер
(показан стрелкой). Полосы на снимке — участки передачи информации
о работе научной аппаратуры
Рис. 9. Изображение поверхности планеты Венера на месте посадки
спускаемого аппарата станции «Венера-9. На изображении видна по-
верхность планеты. Внизу: светлый сегмент — часть посадочного
Рис. 10. Изображение поверхности планеты Венера на месте посадки
спускаемого аппарата станции «Венера-10». На изображении видна
поверхность планеты. Внизу: светлый сегмент — часть посадочного уст-
»-* ройства. Светлая полоса из пяти секций — сброшенный защитный ко-
жух телефотометра, правее — лежащий на поверхности плотномер (по-
казан стрелкой). Полосы на снимке — участки передачи информации о
работе научной аппаратуры. (Изображение публикуется без предвари-
тельной обработки)
ков. Можно предположить, что в местах посадки «Венеры-9» и «Ве«
неры-10», где Солнце ближе к зениту, значение освещенности в
20—25 раз больше, чем в районе посадки «Венеры-8». Однако на-
личие толстого слоя облаков, сильно рассеивающего свет, наводит
на мысль о значительном преобладании рассеянного света над
направленным. В этом случае так же, как и на Земле в облачный
день, предметы практически не отбрасывают теней, хотя на сним-
ке «Венеры-9» видно большое количество деталей и ярко выражен-
ные тени от камней. Значит, прямые лучи Солнца доходят до по-
верхности планеты. На снимке, полученном «Венерой-10», плохо
различимы тени от камней, но ясно видна тень от кронштейна
плотномера. Наличие этой тени говорит о том, что и в этой облас-
ти прямой солнечный свет также достигал поверхности планеты.
Следовательно, и на Венере возможны разрывы облаков и стало
быть — солнечная погода.
На обоих снимках хорошо видна граница между небом и по-
верхностью. Правда, без обработки фотографий трудно сказать,
на каком расстоянии находится эта граница. Напомним, что из-за
большого показателя преломления луч, направленный под углом в
3° к поверхности, снова попадает на поверхность, благодаря чему
края горизонта кажутся как бы приподнятыми. Учитывая, что на
двух снимках горизонт виден в трех различных направлениях, мож-
но сделать предположение, что линия раздела находится доста-
точно далеко и атмосфера является достаточно прозрачной. А от-
сюда следует принципиальная возможность фотографировать по-
верхность Венеры с некоторой высоты с целью получения общего
вида больших районов.
Данные измерений температуры и давления на спускаемых ап-
паратах в целом согласуются с теми, которые были получены ранее
автоматической станцией «Венера-8». Это говорит об исключитель-
ной инерционности и стабильности теплового режима планеты.
Получены первые снимки облачного покрова с искусственного
спутника Венеры.
Научные исследования Венеры продолжаются, и мы ожидаем
еще много интересных результатов, которые помогут внести яс-
ность в наши познания о Венере, так как многие данные об этой
планете, полученные к настоящему, времени, все же остаются про-
тиворечивыми и не до конца понятными. Так, современная инфор-
мация о массе, радиусе и плотности Венеры позволяет сделать вы-
вод, что Венера имеет строение, аналогичное строению Земли.
Однако на основе данных о составе атмосферы и об отсутствии
магнитного поля можно прийти к заключению, что Венера сущест-
венно отличается от Земли. Почти сферическая форма Венеры и
высокие давления и температуры у поверхности позволяют пред-
положить, что поверхность планеты лишена деталей, а ее вещест-
во имеет низкую прочность. Однако недавно проведенное радиоло-
кационное зондирование планеты показало некоторые признаки
континентальной топографии с кратерами и горами, что указыва-
ет на более прочную кору, чем можно было предположить.
42
В целом же наиболее важные и фундаментальные вопросы от-
носительно Венеры остаются без ответа. Например, можно только
строить предположения об общем элементном составе и внутреннем
строении Венеры. До получения данных о составе, возрасте и внут-
реннем строении коры нельзя надеяться создать сколько-нибудь
достоверные модели термической эволюции планеты. Мы почти не
располагаем данными о тектонических процессах в ее коре, о дрей-
фе континентов или вулканизме, не знаем, имеются ли истинные
континентальные платформы. У нас нет данных, которые позволи-
ли бы раскрыть происхождение и эволюцию летучих веществ в
атмосфере Венеры. Наши наблюдения циркуляции венерианской
атмосферы ограничены полученными аппаратом «Маринер-10»
снимками со средним разрешением в ультрафиолетовых лучах,
проникающих в атмосферу на небольшую глубину.
Картографирование поверхности Венеры с помощью наземных
радиолокаторов, хотя и является техническим достижением высше-
го порядка, не позволяет пока получить информацию, достаточную
для интерпретации региональных и локальных геологических
структур и объяснения их эволюции.
Для получения ответов на интересующие нас вопросы, изложен-
ные выше, можно пользоваться как наземными средствами, так и
космическими аппаратами. Представление о внутреннем распреде-
лении масс планеты могли бы дать траекторные измерения аппа-
рата, вращающегося но орбите вокруг Венеры. Такой аппарат,
снабженный радиолокатором, может составить радиолокационную
карту планеты. Посадочный аппарат, способный функционировать
на поверхности Венеры, позволит получить подробную информа-
цию о ее составе и вести пассивное сейсмическое зондирование.
Глава 2
АНАЛИЗ И СРАВНИТЕЛЬНАЯ ОЦЕНКА СХЕМ
ВЕНЕРИАНСКИХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
В этой главе рассматриваются различные схемы ЛА и исследуются их пара-
метрические характеристики — грузоподъемность, скорость, высота, дальность
полета — с целью накопления определяющих факторов и выработки критериев
для отыскания наиболее вероятных путей развития венерианских ЛА.
Как известно, атмосферы Земли и Венеры имеют много общего с точки
зрения механики полета. Прежде всего это близость параметров атмосферы Зем-
ли на уровне моря и параметров атмосферы Венеры на высоте ~54 км (от ус-
ловного уровня отсчета при =6050 км). И если бы не отсутствие кислорода,
мы уже сегодня с достаточным основанием могли бы прогнозировать венери-
анские ЛА по типу и подобию земных с дозвуковой скоростью полета. Поэтому
в поисках вероятных путей развития летательных аппаратов в атмосфере Вене-
ры можно применить обычные, земные методы перспективных изысканий.
Здесь рассматриваются схемы венерианских летательных аппаратов с изме-
няемой геометрией; изучена схема гравистатического летательного аппарата, ис-
пользующего в своем движении помимо аэростатической аэродинамическую подъ-
емную силу. Изучены предельные возможности венерианских ЛА самолетного
типа по скорости, дальности и грузоподъемности. Показано, что эти величины
на Венере будут составлять соответственно 18, 40 и 200% от аналогичных пара-
метров на Земле.
2.1. НЕКОТОРЫЕ ЗАВИСИМОСТИ ДЛЯ МАССОВЫХ, ГЕОМЕТРИЧЕСКИХ.
И АЭРОСТАТИЧЕСКИХ КОМПОНЕНТ
При изменении высоты полета аэростатического ЛА происходит
трансформация некоторых массовых, геометрических и аэростати-
ческих величин, определяемых законом плотности среды р(Л).
Поскольку получение этих зависимостей не составляет больших
трудностей, они будут представлены здесь без выводов, но с не-
обходимыми коментариями.
44
Постоянство массы подъемного газа
Имея известные зависимости для случая изотермической ат-
мосферы Qa(^), £г(й), а также записав выражения для тг(Л) и
vos(h), легко получить
^M^ = 2k=COnst. (2.1)
тАг *г
Это означает, что количество подъемного газа, необходимого
для осуществления аэростатического полета в атмосфере планеты,
является величиной постоянной и определяется газовыми постоян-
ными и 7?г. Для Венеры и Земли в случае подъемных газов. Не
и Н2 зависимость (2.1) дает (/пне/тплг)? =0,104, (/ПщМаг)? =0,052,
(/Пне//ПАг)© = 0,138 И (7Пн2//ЯАг)© = 0,07.
Аэростатическая сила при V06 = const
Поскольку mArg = Yo^o6 и /?Аг=у^об,
то Яаг(Л)=-^- «Arg. (2.2)
Qo
Следовательно, изменение величины аэростатической силы при
постоянном объеме газовмещающего корпуса следует закону Q(h).
Закон регулирования количества подъемного газа в оболочке
постоянного объема может быть выражен зависимостью
00__ Q 00 (2 3)
mAr Qo
Таким образом, изменение объема подъемного газа, заполняю’
щего аэростатическую оболочку, также следует закону Q(h).
Объем оболочки при Т?Аг (h) = const
Рассмотрим случай, ког-
да изменение объема ^об(^)
при переходе на другую вы-
соту полета происходит при
сохр анении герметической
формы (геометрического
подобия) аэростатической
оболочки.
Такая оболочка приме-
нительно к сферической
форме (рис. 11) сохраняет
геометрическое подобие при
изменении объема -системой
тросов, закрепленных на ее
поверхности и сходящихся
радиально в стяжной блок.
Для сохранения аэродина-
мических характеристик
Рис. 11. Схема мягкой аэростатической оболочки
переменного объекта и сохраняемой геометриче-
ской формы:
/—положение при уменьшенном объеме; 2—стяж-
ной блок; 3—положение при увеличенном объеме;
4—тросы; 5—эластичная оболочка
45
3»ис. 12. Схема аэростатического ЛА с переменным миделем и объемом при L#=const (по
Циолковскому). Гофр поперечный
'Рис. 13. Схема аэростатического ЛА с переменным миделем при L=const. Гофр продольный
деформируемая сотовая поверхность оболочки может быть покры-
та эластичной пленкой большого удлинения.
Поскольку изменение объема оболочки происходит при сохра-
нении аэростатической силы, то можно записать
// \ Г 9(Л) I-1
г»об(/г =®o •
L ео J
(2.4)
Это означает, что изменение объема аэростатической оболочки
при 7?аг(й) = const следует закону 1/q(/z).
Очевидно, что все, сказанное выше, остается справедливым и
для случая оболочек, геометрическая форма которых не остается
постоянной при переходе на другую высоту, как например, в цель-
нометаллическом дирижабле К. Э. Циолковского (рис. 12).
Площадь миделевого сечения
Если габарит оболочки по вектору скорости остается постоян-
ным независимо от изменения объема этой оболочки (рис. 13), то
изменение площади миделевого сечения следует также закону
1/р(/г). При этом имеет место Sm.(A)q(A) =SoM = const, что означа-
ет постоянство скорости горизонтального полета на различных вы-
сотах Угор (А) = const при пт = const.
Можно записать также
(2.5)
Это означает, что при изменении высоты полета удлинение аэ-
ростатической оболочки изменяется обратно пропорционально изме-
нению плотности если при этом имеет место SM = const.
Критерии масс
О характеристиках ЛА можно судить по различным критериям,
уже известным или вырабатываемым в процессе исследований.
В практике расчетов масс обычно пользуются следующими кри-
териями:
46
Х(Л)=Х0Г-^
L Qo
а) максимум полезного груза Да = (Да)тах;
б) максимум грузоподъемности (массовой отдачи по полезному
грузу) (Д2/т0) = (AS/m0) max’,
в) максимум весовой отдачи по конечной массе (нк)тах;
г) максимум конечной скорости VK= (VK)max;
д) максимум дальности полета L = (L)max;
е) максимум развиваемой мощности по полезному грузу AaVK=
= (Да1/К)тах,
ж) максимальный выход производимой работы =
3) минимум СТОИМОСТИ S = Smln;
и) максимум надежности h = hmax и т. д.
В общем случае выбор критериев зависит от постановки задачи,
связанной с назначением ЛА.
Уравнения масс
Поскольку всякий ЛА является носителем полезного груза Агр =
= const и оборудования ДОб = const, то уравнение масс в общем виде
может быть представлено как
»1к = лрр + до< +V ( + (2.6)
\ Ум /
где тк — масса конструкции (конечная масса) ЛА: п — количест-
во агрегатов, составляющих конструкцию ЛА.
Развернутые уравнения масс достаточно полно описывают функ-
циональную взаимосвязь основных проектных параметров. Однако'
они сложны и громоздки, вследствие чего решения по ним могут
быть получены главным образом с помощью вычислительных ма-
шин.
Если главным аргументом является начальная (стартовая) мас-
са ЛА т0, то такие уравнения имеют вид
wK = /(m0) + AS) (2.7)
где Да = const — суммарная масса постоянных грузов.
Инвариантами уравнения (2.7) могут быть
ОТо=/(/по)+/пт+д2; (2.8)
Ав=р.к?По —/(т0); (2-9)
( As ) — ,t /(mo) . \ rn0 ) т0 (2.10)
I Дз Лс Г (2-11)
В зависимости от принятых критериев уравнения (2.7) — (2.11)
могут трансформироваться и в другие виды уравнений. Некоторые
из них для типовых ЛА приведены в табл. 2.1.
47
Экстремальные решения
Как уже отмечено выше, уравнения, составленные из функцио-
нально упрощенных массовых зависимостей, представляют возмож-
ным получение решений в аналитическом виде.
С помощью уравнений (2.8), (2.10) и (2.11) можно получить .
dm0 [/("?o)]_n Р'к , и» dmQ (2.12)
откуда т0=т0^к). (2.13)
Затем . Г f («о)! а
L niQ ] л —2 — L У ArWn (2.14)
dmQ dmQ
откуда (2.15)
Аналогично
f Ад \ d F/(ff;o)l
< /по / L m0 J
diriQ dniQ
откуда
/по=/По(Л)- (2.17)
Решения (2.13) и (2.15) идентичны, поскольку они вскрывают
зависимость, при которой максимальному значению суммарного
груза (Аз )тах соответствует минимальное значение массовой отда-
чи (pK)min. Это можно показать на примере уравнения, составлен-
ного для конечной массы ЛА в виде
7Пк=^1(А/)/По + ^2(^)^о/2 + Ае, (2. 18)
где kx (£z) ф k2 (Az)=const.
Из уравнения (2.18) легко получить
Дз = [л/п0 —р1(^)7По + А2(^)/?го/2] (2.19)
или
l\=M^) + -WW2+ —, (2.20)
и затем
4^- = Ни - К №•) - 3/2^ (^,.) Оту2=о,
ClHIq
48
Рис. 14. Характер влияния массы т0 на массовую отдачу цк, грузоподъемность Д^/ tn0 и
величину груза ДЕ. График построен по уравнению тк— а1т0+айт^+ Д^
т0'10
Рис. 15. Характер влияния массы т0 на массовую отдачу грузоподъемность ДЕ /пг0 и ве-
личину груза Да- График построен по уравнению р- =ai + a2m'
*' U и ТПо
откуда
= Г fa-Mfr). Т/2 (2.21)
L 3/2*2(fr) J
а также
А=Ш^_дЛ-2=0,
dmQ 2
откуда
г 2Д. 12/з
т0= —— . (2.22)
Lfr(fr) J
Здесь идентичны решения (2.21) и-(2.22). Это видно из под-
становки выражения (2.22) в (2.13), а затем из подстановки полу-
чаемого выражения
П\-ЫМ=з —
/и0
в формулу (2.21), что дает исходное выражение (2.22).
Характер кривых ДЕ = Аа(т0) и ,рк = Цн(^о), а также соответ-
ствие экстремальных точек ^s=(^s)max и цк= (Нк)тш одному и
тому же значению параметра т0 показаны на рис. 14 и 15.
49
Рис. 16. Характер влияния массы mQ на величину Ajj
и Да/т0. График построен по уравнению
т°““‘т0/3+рНа6т0/3*да
В общем виде в решениях уравне-
ний (2.9) и (2.11) экстремума может
и не быть, если приравнять нулю про-
изводные
, Г/(^о)1
а ------
^[/(w0)]о _L_^oJ_=o.
dmQ dm§
Решение (2.17) имеет место при ус-
ловии многочленной структуры исход-
ного уравнения, т. е.
д N
— =V (2.23)
где N — количество функциональных членов уравнения масс,
п — показатель степени /-того элемента.
Характер изменения параметра (Да/т0)(т0) показан на рис. 15 и
16. Как видно из рисунков, экстремальные точки (Да/т0)==(Да/т0)тах
и Да=(Да)тах не совпадают. Параметр (Дв/т0) не имеет экстремаль-
ного решения, если исходные уравнения имеют вид
Av
-^=^(A) + A2(^.)/n?. (2.24)
^0
Такой случай был показан на рис. 14. Некоторые наиболее час-
то встречающиеся виды уравнений масс и их решения приведены
в табл. 2.1.
Заметим еще раз, что зависимости и уравнения масс нам не-
обходимы в дальнейшем для изучения самых различных схем ве-
нерианских ЛА, зачастую напоминающих ЛА земной авиации и
воздухоплавания начальных периодов их развития.
2.2. ЭКСТРЕМАЛЬНАЯ ГРУЗОПОДЪЕМНОСТЬ АЭРОСТАТИЧЕСКИХ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Рассмотрим простейшую схему аэростатического ЛА, массовый
состав которого (mAs) определяется массами оболочки (тоб), кар-
каса (ткар) и гондолы (тгои).
Если принять формулу аэростатической оболочки ЛА в виде
эллипсоида вращения с работающим продольно-поперечным на-
бором, то уравнение масс, составленное на базе зависимостей мас-
сового анализа, может быть представлено в следующем виде:
Was -= a06^As + ft.ap^As "F /«гон- (2. 25)
50
Некоторые виды массовых уравнений и их решения
Таблица 2.1
ЛА Уравнения Производные Решения
Самолет- ный шк = (цт0 4- а2^о/2 + As = (лкт0 — (cti/n0 + а2/по/2) 1/2 Р-к = «1 + а'2/ио -г — /п0 f 1/^ 1 — / — [1к — «1 — а2^о = «! -|- a2znj/2 4- а3/п^1/3 4- AS 4- = 0 dniQ dm$ -^«1 = 0 dm$ OJ '"s 04 a s' 47 I , <1 8 | 1* co b 1 1 £ 4 ii I s g
Гибрид- ный /?гк = aiУ2 _р а2уз + дЕ As = ~ (ai^2 + а2У3) си а2 АЕ ак = — 4- — + р Р рУ2 ДБ Р-к = <* 1 4- СС2/пГ1/2 + аз^о/2 -г — т0 / ДЕ\ ) = Ок — «1) — \/и0 / — (а2^у1/2 4- a3Gj/2) mK = ai/n0 + атУ2, 4- a3WQ/2 4- дЕ = цк/п0 — (di/n0 4- а27Пд/2 4- + a3w0/2) dm$ Л-) -^ = 0 dmQ ^ = 0 dniQ r“Tx x / M — «1 \ \ a2 / ^ = piy/3 \ a2 / r. ^,3/2 ^1/2 a3^0 — ^2^0 — — 2Дб / a2 \ 1/4 mo = ( —I \ «3 /
51
В этом уравнении параметры оболочки аОб и каркаса 0Кар явля-
ются функциями числа величин, характеризующих прочность, аэро-
статические свойства, объем и геометрию ЛА, т. е.
«об «об(?об> ^об, ^об)»
₽кар = ?кар 17—7 Хоб, Ду] .
1_\ Ум / J
где Ау — разность удельных весов между атмосферным и подъем-
ным газами.
О грузоподъемности аэростатического ЛА можно судить по па-
раметру массовой отдачи (тгон/mAs), выражение для которой на
основании уравнения (2.25) принимает вид
1 -(ao6^s1/3 + U^s). (2.26)
\ rriks J
Зависимость (2.26) имеет экстремум в точке
НзЫуФ ’ (2.27)
\ Ркар /
Выражение (2.27) показывает, что аэростатический ЛА обла-
дает граничной грузоподъемностью, которая не может быть прев-
зойдена увеличением размеров (объема) аэростатической оболочки.
Как показано на рис. 17, для «высотных» ЛА (малые значения
объемной аэростатической силы) характерны большие полетные
массы, а для «низколетящих» ЛА — большие массовые отдачи по
полезному грузу при меньших полетных массах mAs. Следователь-
но, низколетящие ЛА являются также весьма перспективными для
Венеры, как носители большого количества научной аппаратуры,
радиооборудования и других систем, обеспечивающих научный
эксперимент.
Можно показать, что при учете работы оболочки от действия
аэростатических сил измене-
ние грузоподъемности аэро-
статического ЛА будет следо-
вать закону
(2.28)
^As
где параметр ар имеет такое
же происхождение, что и пара-
метры «об и Ркар-
Таким образом, для аэро-
статического ЛА с нагружен-
ной оболочкой фактор масш-
табности (увеличение полет-
ной массы mAs) вызывает неп-
Рис. 17. Характер влияния полетной массы
на грузоподъемность аэростатического ЛА
52
рерывное уменьшение грузо-
подъемности (mroH/mAs). Одна-
ко количественное сравнение
зависимостей (2.26) и (2.28)
по параметру (mr0H/^As) пока-
зывает, что в диапазоне масс,
определяемых выражением
(2.27), обе схемы ЛА являются
весьма перспективными для
Венеры вследствие высоких
значений грузоподъемности
(Шгон/.^As) •
2.3. ОЦЕНКА ЦЕЛЕСООБРАЗНОСТИ
ПРИМЕНЕНИЯ АММИАЧНОГО
РАСТВОРА КАК РАБОЧЕГО
ТЕЛА ДЛЯ ОБРАЗОВАНИЯ
АЭРОСТАТИЧЕСКОЙ СИЛЫ
В качестве рабочего тела
для образования аэростати-
ческой силы венерианского ЛА
может быть использован ам-
Рис. 18. Давление и температура в атмосфере
Венеры и на линии насыщения парами аммиа-
ка и аммиачных растворов:
/—аммиак; 2—аммиачный раствор NH4(OH);
3—модель атмосферы Венеры
миак или его водные растворы. Кривые, показанные на рис. 18, ог-
раничивают область образования парогаза из аммиачного раство-
ра [6]. Как следует из рисунка, образование парогаза в атмосфере
Венеры может происходить в пределах высот от h=0 до h&\
— 40 ... 54 км. Очевидно, что на высотах более h ^40 ... 54 км
подъемная сила аэростатического ЛА не может быть обеспечена в
силу обратного перехода парогаза в аммиачный раствор.
Сравнение грузоподъемности парогаза гелия и водорода на ма-
лых и средних высотах в атмосфере Венеры (табл .2.2) говорит в
пользу жидкого рабочего тела.
На рис. 19 приведена зависимость грузоподъемности аэроста-
( Д2
тического ЛА ---- от высоты полета для сравниваемых подъем-
\ т0 /
ных газов. Кривые построены по
формуле
7 Дд \ _ ^As —тоб
\ m0 J mAs ч- тг + /пбал
Рис. 19. Характер влияния подъем-
ных газов на массовую отдачу в за-
висимости от высоты полета аэро-
статического ЛА
где тг — масса сравниваемого
подъемного газа.
Таким образом, как следует из
рисунка, применение аммиачного
раствора в качестве рабочего тела
для образования аэростатической
силы при условии, что рабочее тело
располагается не в отдельных емко-
53;
стях, а непосредственно в аэростатической оболочке (при транс-
портировке на планету) повышает грузоподъемность ЛА на малых
и достаточно больших высотах в атмосфере Венеры.
Таблица 2.2
Параметры парогаза, гелия и водорода на малых и средних высотах
в атмосфере Венеры
h, км Па г, к °пар кг/м3 есо2 кг/м3 епар бНе, кг/м3 QHe еН2’ кг/м3 еН2
°СО2- епар 0сО2-бНе еСО 2~6Н2
0 97-105 768 28,00 63,10 0,80 6,00 0,105 3,00 0,05
12 45,7-105 664 15,40 34,40 0,81 3,26 0,105 1,63 0,0497
24 19,2-105 565 7,70 17,00 0,82 1,60 0,104 0,80 0,05
36 6,6-105 461 3,23 7,15 0,82 0,68 0,105 0,34 0,05
39 4,8-105 432 2,50 5,15 0,94 0,52 0,113 0,26 0,054
2.4. ВЫСОТА ПОЛЕТА КВАЗИБАРОМЕТРИЧЕСКОГО
ЛЕТАТЕЛЬНОГО АППАРАТА И ВАКУУМ-БАЛЛОНА
Квазибарометрическим называется летательный аппарат, ко-
лебание высоты полета которого вокруг расчетной определяется
жесткостью газовмещающего корпуса при уОб~ const.
Для оценки влияния аэрофизических и конструктивных факто-
ров на осредненную высоту полета квазибарометрического (вл на-
шем случае барометрического) ЛА рассмотрим схему идеального
ЛА — без учета деформации оболочки, — выполненного в виде
шара, без подвески, с абсолютно герметической и недеформирован-
ной оболочкой газовмещающего корпуса.
Имея выражение для избыточного давления подъемного газа
Ризб=Др+Дт(А)Чб. (2-29)
и принимая во внимание условия прочности оболочки
Ар + Ау (А) £>об п
о — ----------£>о6,
можно записать
2 / Стд \_____ Ар
3 \ Ум J А у (А)
(2. 30)
54
и затем получить
(рй)=—In
(2.31)
где £>об — диаметр оболочки; Др — избыточное давление, созда-
ваемое искусственно в оболочке; Ду0 — разность удельных весов
между атмосферным и подъемным газами у поверхности планеты.
В формуле (2.31) имеет место Do6 — ( —| . При этом
3 \Ум/
(₽Л)= In
(2.32)
Формула (2.32) показывает, что высота дрейфа квазибаромет-
рического ЛА тем больше, чем больше параметр разрывной длины
(—) и чем меньше величина избыточного давления Др.
\Ум/ ’
Из уравнения (2.30) легко определить также максимально до-
пустимый диаметр оболочки, обусловливаемый условием прочно-
сти от внутреннего избыточного давления подъемного газа. Он
будет равен
Ар
Ду (Л) ’
(2.33)
или при Др = 0
(2.34)
Необходимо отметить, что по свойству легкого газа в оболочке
ЛА автоматически возникает давление, большее (при подъеме),
чем давление окружающего атмосферного газа, благодаря чему
легкий газ внутри оболочки ЛА не только создает подъемную си-
лу, но и автоматически выполняет роль каркаса, обеспечивающего
полноту объема оболочки.
Большая масса газобаллонной системы наддува подъемного
газа, транспортируемая в атмосферу Венеры вместе с ЛА, обус-
ловливает заманчивость идеи вакуум-баллона, т. е. аэростатической
емкости без подъемного газа. Для удобства будем называть ваку-
ум-баллонами и такие аппараты, у которых внутреннее давление
подъемного газа не равно нулю (меньше наружного).
Принимая сферическую форму вакуум-баллона без гондолы (по-
лезного груза), запишем зависимости, связывающие между собой
параметры внешнего избыточного давления газа рИзб(Л), устойчи-
вости оболочки на критическое -напряжение ркр и силу тяжести
55>
^06Ya(A) = /nAsg + ‘f06Yr(A); (2.35)
^обУа (A) [1 —= mK3g-, (2.36)
L Ya(*) J
®обNa W [ 1 - Pr(^-a-]=CTAsg; (2.37)
I PaW/?rJ
/nAsg=JtZ)o6VM8o6; (2.38)
Ap=2^ ; (2.39)
A.H36W = Ap=A(A)-pr(A)==A [1 -^777-]’ (2-40)
L Pa 00 J
где доб — толщина оболочки, ркр — внешнее критическое давление
. Рг W
атмосферного газа, ——--------параметр, характеризующий соотно-
ся 00
шение между внутренним давлением подъемного газа и давлением
внешней среды на данной высоте полета, [pv(h)lpa(h)] = 14-0.
Из равенства выражений (2.39) и (2.40) находим
г Л PrW\ -11/2
Са I 1 —-----I
80б = ---k kE*~ (2Л1)
Подстановка правой части выражения (2.41) в формулу (2.38)
дает
/nAsg=3®o6YM
Ра(Л)(1-
PrW \
Ра W /
kE
(2.42
1/2
ь где 6 = 0,31 — коэффициент устойчивости оболочки на критическое
внешнее давление; Е — модуль упругости материала конструкции
баллона; ум — удельный вес материала конструкции.
Из равенства выражений (2.37) и (2.42) находим
г । Рг (6) ^а -|2
Ра W = kE Ра (h) Rr
Ya (Л)2 Л Рг W \ L Зум • J ’
k Ра W J
откуда
<?4>=-1"(т)(т)(1
Со г
Соа
Ум -|2
Yoa
Сог
YOa Rr -1
(2.43)
ГДе P0r/P0a = PrW/PaW = COHSt.
Формула (2.43) показывает, что при давлении подъемного газа
в баллоне, равном внешнему давлению среды PrW/PaW = l, вы-
сота полета (p/z)=oo. При этом дОб = 0. Это означает, что для ре-
56
альной оболочки при 6об¥=0, будет иметь место реальная высота
полета (.рА).
Если в формуле (2.43) положить рог/роа = 0 (давление газа в
оболочке равно нулю), то получим
(рй)=-1п (—'j
\ 10 / I £ Д Yoa /
(2.44)
Формула (2.44) выражает высоту полета вакуум-баллона. Ее
можно переписать и в другом виде как
Ум
(?A)=-ln(AU (2.45)
\ R- J. / /2 \
\Ум/
где /год — высота однородной атмосферы.
Если вакуум-баллон изготовлен из стали для полета- в атмос-
фере Земли (£ = 2,1-102 Па, ум=^7,8Н04 Н/м3, 7?а = 29,27 9,81 Дж/кг
К) и титана для полета в атмосфере Венеры (Е = 0,9102 ГПа, -ум=^
= 4,53-Ю4 Н/м3, 7?а= 19,89,81 Дж/кг К), то формула (2.45) дает со-
ответственно
(Р/г)ф= — In 580 и (РА)9 = —In 16,2.
Это означает, что вакуум-баллон не может существовать ни в ат-
мосфере Земли, ни в атмосфере Венеры. В обоих случаях высота
полета отрицательная, что указывает на необходимость облегче-
ния массы оболочки путем подачи в нее внутреннего давления
подъемного газа. Как следует из формулы (2.43), величина этого
наддува для полета у поверхности планеты составит
где
Формула (2.46) требует точных вычислений и ее целесообразно
упростить, полагая, что (RJRr) 1 и, следовательно, (рог/роа) X
X (RJRT) <С1; при этом, как следует из формулы (2.43), потребное
значение наддува вакуум-баллона выразится приближенной зави-
симостью
/Рог У Рог _____________L
\ Роа / Роа (^) а
(2.48)
где а определяется выражением (2.47).
57
Для приведенных выше данных, характеризующих условия
полета в атмосфере Венеры и Земли, формула (2.48) дает соответ-
ственно (рог/роа) $ =0,9983 и (рои/роа)© = 0,94. Это означает, что
даже при нулевых высотах полета в отсутствие полезного груза
практически имеет место не вакуум-баллон, а баллон аэростати-
ческого типа с легкой оболочкой.
Как легко видеть из формул (2.46) и (2.48), существование ва-
куум-баллона (рог/роа) =0 на минимальной высоте полета (рЛ)=О
возможно при выполнении условия
(2.49)
Однако, как легко убедиться подстановкой численных значений
в выражение (2.49), это условие для Венеры и Земли при сущест-
вующих конструкционных материалах невыполнимо.
2.5. ОПТИМАЛЬНАЯ ВЫСОТА ДРЕЙФА И ВЫСОТА МАКСИМАЛЬНОГО
ПОДЪЕМА АЭРОСТАТИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА
Оптимальность высоты дрейфа аэростатического ЛА обусловли-
вается различным характером функциональной зависимости массы
различных элементов конструкции от параметра h. Так, вследствие
изменения барометрического давления изменение массы герметиче-
ской части гондолы следует закону ехр (—<ЗЛ), в то время как из-
менение массы аэростатической части следует закону exp (-coipA)
(где со — коэффициент, определяемый массовым анализом). В ре-
зультате действия противоположных факторов для каждой кон-
кретной конструкции существует оптимальная высота полета, ко-
торой соответствует минимальная масса ЛА.
Для простейшей схемы аэростатического ЛА, состоящей из гер-
метического отсека, сферической оболочки и полезного груза, спра-
ведливо уравнение следующего вида:
wAs (1 - Р*) = Ао6 (е^)1/2 + Бге-^ + Дг, (2. 50)
где Ao6=^o6Qsn |—— --------]2/3; (2.51)
Ln (Yoa — Yor)j
(2-52)
здесь — коэффициент, учитывающий элементы крепления обо-
лочки; qs — поверхностная плотность оболочки; ро — барометри-
ческое давление при А = 0; (3* — массовый параметр для элементов
сборки ЛА.
Кривые безразмерных масс (zzzas/^b)=(^as/Ae)(A),
построенные по уравнению (2.50) для различных значений поверх-
ностной плотности оболочки (рис. 20), имеют явно выраженный
58
Рис. 20. Характер влияния высоты полета на параметр (т ^g/A в). Материал гондолы—титан
Рис. 21. Характер влияния параметра гондолы —— на оптимальную высоту дрейфа аэроста-
тического ЛА при различных значениях параметра оболочки Лоб/М
минимум, смещающийся в сторону малых высот при увеличении
параметра (при утяжелении оболочки). Здесь же приведена
пунктирная кривая, построенная по тому же уравнению (2.50), но
с учетом расхода хладоагента (воды) для поддержания заданной
температуры (Z=100°C) в приборном отсеке. (Для изучения каче-
ственной картины взята простейшая система охлаждения с непос-
редственным впрыском воды в отсек и последующим ее испарени-
ем; общее время работы системы т = 10 ч.). В расчетах величина
тв (масса воды) бралась четвертым слагаемым правой части урав-
нения (2.50). Как видно из рисунка, система охлаждения сдвигает
оптимум высоты в сторону увеличения h>. т. е. в сторону меньших
температур окружающей среды.
Для аэростатического ЛА с цилиндрической формой несущей
оболочки уравнение, составленное по аналогии с уравнением (2.50),
дает
/nAs
_р_а_
R 2 , А
Бге + Д2
м - А*обе^
где
М=1-₽*;
А» .
Дэб (Yoa — Yflr)
(2.53)
(2.54)
Оптимальная высота полета достигается в точке, определяемой
выражением
(2.55)
59
Рис. 22. Характер влияния параметра обо-
лочки А* в грузоподъемности /пд на мак-
симальную высоту подъема ^тах
Кривые влияния параметров
(Бг/Дб) и Аоб/М) на оптималь-
ную высоту дрейфа (₽А)Опт, по-
строенные по формуле (2.55),
представлены на рис. 21. Как
следует из рисунка, оптималь-
ная высота полета возрастаете
увеличением «удельного веса»
гондолы (характеризуемого величиной Бг/Дв) и уменьшением
«удельного веса» оболочки (характеризуемого величиной АОб/М).
Из формулы (2.55) видно также, что высота полета h0TlT воз-
растает с увеличением плотности атмосферы.
Потолок любого аэростатического ЛА (с постоянным запасом
подъемного газа) определяется внешним давлением среды, при ко-
тором несущая оболочка достигает максимального наполнения.
Многоцелевые ЛА рассчитаны на ' достижение определенных
глубин (включая поверхность Венеры) и, как уже было отмечено
выше — на возвращение на борт базовых ЛА. Очевидно, что в та-
кого рода «челночных» операциях масса гондолы (герметическая
часть) будет постоянной и определяться из условий максимальной
глубины погружения. Следовательно, в формуле (2.53) можно по-
ложить БГехр(—!РЛ/2) =тт = const и затем получить
где
_ тг 4- ДБ
771д =----------
™As
(2.56)
(2.57)
Параметр /пд является характеристикой грузоподъемности-'аэ-
ростатического ЛА (массовой отдачей).
Характер влияния параметра АОб, характеризующего массу
оболочки, на «потолок» аэростатического ЛА при различных зна-
чениях грузоподъемности т, определяемый формулой (2.56), по-
казан на рис. 22. Как видно из рисунка, увеличение грузоподъем-
ности йгд и утяжеление (по параметру АОб) аэростатической час-
ти существенно влияют на «понижение» потолка аэростатического
ЛА. Верхняя кривая характеризует высотность аэростатического
ЛА, не имеющего гондолы (тд =0).
2.6. ВЛИЯНИЕ КРЫЛА НА ГРУЗОПОДЪЕМНОСТЬ АЭРОСТАТИЧЕСКИХ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Рассмотрим комбинированную схему ЛА; состоящую из аэро-
статической и самолетной (крыло) частей. Для простоты выкладок
будем полагать, что силовой установкой таких гравистатических
60
летательных аппаратов (ГЛА) является двигатель (например,
ядерный) с нулевым расходом активной массы (тт = 0). Выберем
расчетную схему, при которой независимо от изменения скорости
полета всегда справедливо условие
Y а (Ю + ^АГ = m^g = const,
где ms— суммарная масса ГЛА.
Это означает, что по мере увеличения скорости и изменения
подъемной силы от Уа = 0 до Ya = mzg соответственно уменьшается
аэростатическая сила от /?Аг = m^g до /?аг = 0.
Уравнение массового баланса с учетом массы двигателя, обес-
печивающего тягу для преодоления сил сопротивления аэростати-
ческой части и крыла (с учетом вредных сопротивлений), имеет вид
/п2-аоб^/3(1 -^)2/3 + Ркар^/3 (1 -Y<№+
+ £д/у[ 1 - Ю2/Зга + /га2 /а 1 + aKpmsYa + As, (2.58)
I I Уд I I
I C x /
\ ла /кр
где Ya-= -Ь_ , Ят=| (
msg L\ C*a / J
акр = акр /•$.«» AY = (Ya — Yr);
CtKp = «кр (^кр’ > •
\ Ym /
В уравнении (2.58) опущен ряд массовых компонент (взлетно-
посадочные устройства, элементы механизации и т. д.), не имею-
щих в данном случае влияния на
качественную картину исследований.
Кривые грузоподъемности
(As//n2)=(As//nW/ns)(ya), построен-
ные по уравнению (2.58) при тъ=
= const и SKp = const, представлены
на рис. 23. Там верхнее семейство
кривых соответствует случаю поле-
та в атмосфере Земли, когда масса
подъемного газа не является транс-
портируемым компонентом — он вы-
рабатывается на Земле и потому
не влияет на характер кривых. Ниж-
нее семейство (две кривые) построе-
но применительно к венерианским
Рис. 23. Характер влияния подъемной силы на гру-
зоподъемность изолированного аэростатического
ЛА и в присутствии крыла:
/—ЛА с гипотетическим крылом нулевой массы;
2—изолированный ЛА; 3—ЛА с крылом; 4—ЛА
с крылом + Не; 5—изолированный ЛА+Не
61
условиям полета, где несущий газ, как массовый компонент (в на-
шем случае без баллонов) входит в общий баланс масс ЛА, дос-
тавляемых на планету. Масса газа (гелия) — как дополнительный
член правой части уравнения (2.58) — принята равной
= const = 0, 1/7Ze (1 —Ко),
— 1
тце = ГПъ
где J?r, — соответственно удельные газовые постоянные для
подъемного и атмосферного газов.
Из рисунка видно, что в условиях Земли присутствие крыла
уменьшает грузоподъемность аэростатического ЛА. Это происходит
потому, что увеличение массы аэростатического ЛА благодаря
присоединенному крылу (а также связанное с этим увеличение мас-
сы двигательной установки и других систем) не компенсируется
возникновением подъемной аэродинамической силы. Приведенная
на рисунке кривая для аэроста-
тического ЛА с крылом нулевой массы характеризует грузоподъем-
ность, которую «съедает» крыло действительной массы. На участке
больших значений параметра Ya(V) грузоподъемность значительно
возрастает, однако это означает, что система «АЛА'+крыло» вы-
рождается в высокоскоростную систему чисто самолетного типа.
Последнее обстоятельство в свою очередь свидетельствует о невы-
годности применения аэростатических оболочек в самолетных кон-
струкциях.
Картина существенно меняется при рассмотрении кривых при-
менительно к венерианским условиям. Элементы вырождения аэро-
статического ЛА в систему самолетного типа уже в самом начале
увеличения скорости полета заметно повышают грузоподъемность.
Последняя по мере увеличения параметра Уа(К) существенно воз-
растает вследствие уменьшения аэростатической части и связанно-
го с этим потребного запаса подъемного газа.
Полученные выводы справедливы для простейшей
«аэростатический ЛА + крыло». В других системах, где
системы
в полете
используется подъемная сила корпуса аэростатической части за
счет его аэродинамической механизации или, например, эффекта
Кноллера — Бетца, грузоподъемность превосходит чисто аэроста-
тические ЛА и в земных условиях.
2.7. СРАВНИТЕЛЬНЫЕ ХАРАКТЕРИСТИКИ ВЕНЕРИАНСКИХ И ЗЕМНЫХ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ САМОЛЕТНОГО ТИПА
Рассмотрим вопрос о скорости полета ЛА самолетного типа.
Формула для массы ЛА может быть записана в следующем ви-
де [31]:
/п=г1- руЖт+^+Д8Л’ (2-59)
1 — L \ Ан ' J
где kK — коэффициент массы конструкции; &д/у — коэффициент
62
массы двигательной установки; Се — коэффициент расхода массы;
Аи — статистический коэффициент.
Зная, что потребная для полета мощность Ny выражается за-
висимостью Ny= (Сха/75т])р(/г) (5кр/2) V3, легко получить предель-
ную скорость полета при Да =0 и т = 0:
Г 150 (1 - k) АрЛн -11/3
ПРМ L J ’
где pKP=/ng/SKp.
Соотношение предельных скоростей полета на Венере и Земле
при будет равно
(^пред) 9
^пред©
Q W© / ^кр$ \
Q (Л)? \ ^кР© /
W"M1/3
^д/у$ Р ^к©)_
(2.60)
Для условий полета «на уровне моря» могут быть применены
следующие значения входящих в формулу (2.60) параметров:
£д/у©= 1, q®=1,23 кг/м3, &к@=0,35; &д/у$=80;
q$=63 кг/м3, £к$=2/3.
При этом
(^пред)9 ^q,q5 ( А<р$ \1/3.
• (Упред)© \ Ркр© /
Как следует из соотношения (2.61), при равенстве параметров
ркр?=ркр@ уменьшение скорости полета на Венере по сравнению
с земной скоростью может составить ~95%.
Одним из лимитирующих звеньев в повышении маршевой ско-
рости полета является ограничение посадочной скорости. Придер-
живаясь земных критериев в условиях Венеры для сохранения
«земной» посадочной скорости параметр /?Кр? может быть увели-
чен пропорционально увеличению плотности на уровне поверхности
Венеры. Принимая при этом (q$/Q©) = 51,5, получим (^пред)$/(1Лпред)@=
= 0,185.
Таким образом, уменьшение предельной скорости полета на
Венере при Ар$=/?кр© может составить 81,5%. Поэтому при
разработке ЛА следует внимательно следить за характером изме-
нения аэродинамических характеристик, которые при увеличении
параметра /7кр$ ухудшаются.
Дальние полеты, как известно из теории, должны производиться
на режиме наибольшего аэродинамического качества. Тогда ЛА,
находясь все время в полете, будет преодолевать минимально до-
пустимое сопротивление.
Для венерианских ЛА самолетного типа, устроенных по типу
дозвуковых земных самолетов, дальность полета LK (в километрах)
можно выразить формулой
L ___270т]н
К“ Се
СУд \
C-J
In
(2. 62)
т
т — т7
63
или аналогичной приближенной зависимостью
4=270 . (2.63)
Се \ С*а ’ т _ ^1.
2
В этих формулах т — начальная масса ЛА; г]н — КПД движи-
телей на наивыгоднейшем режиме работы.
Для нашей цели преобразуем формулу (2.63), введя в
су ЛА самолетного типа по формуле
/п=(As + Щ + kbiyNу),
нее мас-
(2.64)
тогда при Де =0 получим предельную дальность полета:
(2.65)
где 8Н — избыток мощности над мощностью наивыгоднейшего ре-
жима; н — коэффициент аэродинамической подъемной силы
на наивыгоднейшем режиме полета.
Отношение предельных дальностей полета на Венере и Земле
при Пн$ = Лн©, Се$ =се@, {Суа/СХа\ = (CyalCxJ® составит величину
(^к^пред $
(^к)пред ®
l-k-k е» р_\1/_2ркр
К Д/У СУа \75т]н/ V CyaHQ(h)
С*а
Сравнительные дальности тем ближе между собой, чем больше
значения рКр<?=Ркр@- Если положить Ар? =Ар© = 0, то
/1 Ч~ \
(^к)пред 2_ \ 1 — / ©
(^к^прел© / 1 ,^к
\ 1 — / 9
Поскольку £к© = 0,35 И &к$=2/3, ТО (Дс)пред9/(Дс)пред©==0,4.
Таким образом, максимальная дальность полета на Венере со-
ставляет 40% от той же величины на Земле.
64
Как видно из выражения (2.66), увеличение венерианской даль-
ности может быть достигнуто, как и на Земле, путем уменьшения
конструктивных параметров &к и £д/у. Что касается параметра ркр,
то его уменьшение для получения максимальной дальности всегда
остается главенствующим.
Задача для ЛА самолетного типа, поднимающего наибольший
полезный груз Ав, решается с использованием формул потребной
мощности -Ny и уравнения (2.59). При этом
и затем
Де (1 ^к) Ркр
g L
(^)
2,75-q
Если принять, что £K = const, то Ав будет пропорционально
и, следовательно, предела увеличения ЛА самолетного типа и его
полезного груза не существует (имеется в виду отсутствие экстре-
мальных масс). Однако предположение, что feK = const оказывается,
справедливым лишь для узких пределов изменения размеров ЛА..
При больших изменениях 5кр или т по статистике замечается явное
увеличение kK с увеличением размаха ЛА. При этом можно сделать
следующую аппроксимацию:
:== ^0 “Ь V4pSKp.
Теперь формула для полезного груза примет вид
Де = [(1 £0 я V^Kp^Kp) Ркр
CxQ(h) ( k,\\
—(2-67)
Эта формула и будет основной формулой, прямо показывающей,
от каких факторов и в какой мере зависит As. При пользовании
ею следует помнить, что Сх также зависит от 2<кр. Однако при ре-
шении задачи о наибольшем грузе, можно сделать допущение, что
ЛА достаточно велик, а его аэродинамика совершенна, и положить
в первом приближении Сх = const.
Теперь задача о наибольшем грузе сведется к отысканию мак-
симума функции Ав с одной независимой переменной 5кр. Ищем
обычным путем этот максимум, приравнивая нулю производную
(dAs/rfSKp) =0. Опуская промежуточные выкладки, получим
г CXflQ(/z) / k]V/ \ у
(1 - £0) Ар - уз
с 1 2,7ат] \ Лн /
КР~ ХКр 3
3 614
65
Подставляя найденное значение 5кр в формулу (2.67), получим
предельный полезный груз
Г ь ч (^) (г , *д/у г/з"|3
G “ *о) Аср — 9 7г (+ ~7~~ /
в)пред=-------------2_7^--------AJ_J_ . (2> б8)
З^кр (Ркрк
Из этой формулы следует, что большое удлинение невыгодно,
так как параметр %кр входит в формулу делителем; этот параметр
влияет на коэффициент лобового сопротивления СХа, но это влия-
ние у быстроходных машин почти отсутствует и С.х ~const.
Очень сильно влияет на грузоподъемность заданная скорость по-
лета V: чем больше скорость полета, тем меньше полезный груз.
Нагрузка ркр также оказывает довольно сильное влияние.
Второй член в квадратных скобках формулы (2.68), в который
входит СХд, значительно меньше первого. Следовательно, в эту
формулу значение СХа можно подставить грубоприближенно. '
Затем, отбрасывая второй член, эту формулу можно записать
так:
(Дв)п ~0 8—(1~*о)3 ; (2.69)
V 7пред ’ З^Хкр ( 3 \2 V
Здесь коэффициент 0,8 учитывает также приближенно отброшенную
часть в формуле (2.68).
По аналогии с предыдущими формулами можно записать при
Ркр9=/?кр© И Хкр9 =Хкр®:
(Ад)пред9 О — ^о)$ ^©£© /2 7Q4
(Аа)пред© (1 ~- ^о)© 9£9
Если принять = ^09=2/3 и &0©=О,35 при g@ = 9,81 м/с
и £9=8,8 М/с, ТО (As)npeA9/(MipeA©~0,15.
Таким образом, предельная грузоподъемность венерианских
ЛА самолетного типа может составить всего 15% от земных зна-
чений.
Как видно из выражения (2.68), существенным фактором в
увеличении грузоподъемности венерианских ЛА самолетного типа,
как и на Земле, являются прежде всего уменьшение массы силовой
установки и затем уменьшение нагрузки на единицу площади
крыла.
2.8. ВОЗМОЖНЫЕ СХЕМЫ ВЕНЕРИАНСКИХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Выше-было показано (см. гл. 1), что среди базовых свободно-
плавающих ЛА наиболее перспективным является дрейфующий
зонд-аэростат. Американская фирма Martin разработала схему та-
кого ЛА в сочетании со сбрасываемыми (с борта аэростата) аэро-
66
специальные ЛА
Рис. 24. Схема тяжелого (базового) аэростата для Венеры:
/—панели солнечных батарей; 2—несущий тор; 3—лаборатории;
4—гондола; 5—подвес
логическими зондами минимальной массы (и
размеров), что, как видно из табл. 2.1, повы-
шает грузоподъемность, благодаря чему ста-
новится возможным увеличить массу научной
аппаратуры с целью получения более полной
информации о планете.
Базовые ЛА являются средством изучения
Венеры «сверху» (ее газового состава). Сре-
ди них могут быть названы тяжелые аэроста-
ты (рис. 24), дрейфующие платформы (оди-
ночные и составные), а также зондирующие
ЛА типа «лифт».
К перспективным базовым управляемым
ЛА относятся аппараты типа маршевого дири-
жабля, высокоманевренный дископлан, а таки
типа «тор-цилиндр». Последние могут быть носителями систем,,
обеспечивающих доставку венерианских контейнеров (с научной
информацией) на Землю.
Глубинные ЛА являются представителями средств изучения
Венеры «снизу» (ее пограничного слоя). К ним относятся мало-
подвижные батискафы, гравистатические батипланы и низколетаю-
щие мезоскафы. Реализация таких ЛА, обеспечение их надежности,
ресурса, информативности и т. д. составляет большую научно-тех-
ническую проблему, решение которой уже начато созданием совет-
ских автоматических станций типа «Венера».
Многоцелевые летательные аппараты представляют наиболее
обширный класс венерианских средств передвижения. Они, так же
как и земные ЛА, могут быть с двигателями (возвращаемые) и
без них (невозвращаемые).
Возвращаемые многоцелевые ЛА после базовых и глубинных,
могут быть отнесены к третьему4 поколению венерианских аппара-
тов. Сюда относятся ЛА типа самолета, вертолета, устройства вер-
тикального взлета и посадки. Главная сложность в их осуществле-
нии — создание силовых установок, способных длительное время
работать в бескислородной и высокотемпературной атмосфере
Венеры высокого давления.
Невозвращаемые многоцелевые ЛА не содержат проблемных
трудностей в реализации и могут быть использованы наряду с аэ-
рологическими контейнерами в качестве малогабаритных бортовых
посадочных средств. К ним относятся ЛА типа планера, автороти-*
рующая капсула, пограничный шар-зонд и др.
Особую группу составляют аэростатические и гравистатические
ЛА типа плавающих батипланов (моно- и полипланов). У этих ап-
паратов часть массы уравновешивается тягой силовой установки
либо аэродинамической подъемной силой, возникающей при обте-
кании атмосферным потоком несущих поверхностей. В силу высо-
3*
67
кой маневренности, многорежимности (маршевый полет, барражи-
рование, зависание на месте), а также возможности действовать в
различных зонах (высотные, глубинные), такие ЛА должны обла-
дать характеристиками авиационных, воздухоплавательных и глу-
боководных аппаратов.
Изучение других возможных схем многоцелевых аэростатичес-
ких и гравистатических ЛА (с подогревом подъемного газа, аэро-
динамической механизацией корпуса, применением бортовых энер-
гоустройств, двигателей и движителей и т. д.) показывает, что
венерианские ЛА могут обладать комплексом летно-технических
данных, характерных для высокоманевренных дозвуковых само-
летов, малоподвижных дирижаблей, свободноплавающих аэроста-
тов и глубинных мезоскафов.
Остановимся на описании некоторых схем венерианских ЛА.
Аэростатические летательные аппараты с изменяемой геометрией
Схемы аэростатических ЛА с изменяемыми геометрическими па-
раметрами представлены на рис. 25. Составляющими звеньями
таких ЛА являются аэростатические дископланы, форма которых
в зависимости от давления среды, может меняться от дисковой
(эллипсоид вращения) до шаровой и цилиндрической. На старте
они могут быть уложены в головной части ракеты-носителя, пред-
ставляя собой как бы пакет дископланов.
Для глубокого погружения в атмосферу Венеры в развернутом
виде дископланы (будучи аэродинамически обтекаемыми) долж-
ны обладать помимо аэростатической аэродинамической подъем-
ной силой, чтобы получить возможность широкого маневра ЛА.
Грузоподъемность аэростатических ЛА с изменяемой геометри-
ей значительно возрастает. Так, например, масса одиночного аэро-
статического ЛА с диаметром аэростатической части в 4 м будет
равна 1920 кг. Высотность такого аэростатического ЛА (при сфе-
рической оболочке) равна нулю (Л$=0). В случае трехдискового
аэростатического ЛА указанная масса распределится на три части
и составит на один диск 640 кг. Высотность такого трехдискового
пакета (без учета массы связей) h<? =22 км.
Важным преимуществом аэростатических ЛА с изменяемой гео-
метрией является также хорошая компонуемость с крупногабарит-
ными энергосиловыми установками, специфика работы которых в
условиях Венеры потребует открытого (частично или полностью)
расположения их на борту ЛА.
Летательные аппараты типа «лифт»
Лифт состоит из несущего аэростата, тросовой системы и ма-
лых (промежуточных) подъемных шаров (рис. 26).
На борту несущего аэростата установлены научная аппаратура,
источники тока, радиооборудование, система управления, силовая
установка (если таковая имеется) и другие грузы.
68
Рис. 25. Схемы аэростатических ЛА с изменяемой геометрией:
а—изменение формы несущей оболочки при изменении внешнего давления; б—в раскрытом
/положении; в^в сложенном положении
Рис. 26. Схема венерианского лифта:
/—несущий аэростат; 2—подъемные шары; 3—трос
Тросовая система лифта представляет собой сплетение высоко-
прочных проволок (типа рояльных), разделенных на участки раз-
рывной длины, равной
(2.71)
Ум
Подъемные шары предназначаются для компенсации массы и
нагрузок со стороны работающих на растяжение тросов, а также
подвешенных к ним грузов (оборудование, научная аппаратура и
Т. д.).
69
В местах крепления подъемных шаров может быть расположе-
на научная аппаратура для глубинно-высотного зондирования ат-
мосферы Венеры по трассе движения (дрейфа) лифта.
Лифт может быть подвижным (свободноплавающим, дрейфую-
щим или маршевым) и неподвижным (закрепленным на месте).
Подвижный лифт не имеет силовой установки, и в своем дви-
жении он следует воздушным потокам. Свободноплавающий лифт
может быть управляемым и неуправляемым. Маршевый лифт
несет на борту мощную силовую установку, которая обеспечивает
управляемое движение как центра масс, так и около центра масс.
Лифт может быть выполнен и по неполной схеме. В этом слу-
чае тросовая система может не достигать поверхности планеты.
В зависимости от назначения лифт может быть выполнен и с верх-
ним расположением тросовой системы.
Главное назначение лифта — забор грунта с поверхности Ве-
неры и передача его на борт несущего аэростата. На Землю данные
анализа или непосредственно сам грунт могут быть доставлены
при помощи ракеты, стартующей с несущего аэростата.
Лифт может выполнять большую программу комплексных ис-
следований планеты:
а) определение химического состава, давления, плотности, тем-
пературы атмосферы;
б) определение коэффициента преломления, альбедо, освещен-
ности, индикатрисы рассеяния;
в) нахождение общей циркуляции (система ветров, токи, харак-
тер переноса тепла от подсолнечных к антисолнечным точкам, ско-
рость движения атмосферных вихрей);
г) изучение природы и характера движения темных и светлых
пятен, полярных шапок и т. д.
Аппаратура, расположенная в нижней части лифта^ должна
помочь составить представление об общем рельефе планеты, эро-
зии ее почвы, о распределении поверхностных и глубинных тем-
ператур. Отдельные вопросы астроботаники и астробиологии могут
быть разрешены с помощью этой аппаратуры.
Таким образом, при висении на месте в штиль, в свободном
дрейфе, а также при управляемом полете по трассе лифт обеспечи-
вает большой объем высотно-глубинной и траекторной информа-
ции. Не вызывает сомнения идея лифта в атмосфере Венеры и с
точки зрения механики полета.
Однако в силу ряда причин, идея лифта еще не представляет-
ся осуществимой. Неясны вопросы надежности, нет опыта эксплуа-
тации таких систем. «Всплытие» лифта и рассогласование аэро-
статических сил подъемных шаров даже в тихую погоду может при-
вести к образованию петель и, следовательно, к разрыву тросовой
системы. Не могут удовлетворить и характеристики по массам, осо-
бенно масса тросовой системы лифта.
В этом плане может оказаться, что многоцелевой ЛА (мини-
мальных размеров) по массовым характеристикам, объему полу-
чаемой информации и надежности функционирования явится более
70
Рис 27. Тороидальный аэростатический ЛА,
выполненный в виде фотоэлектрического
зонда:
/—движитель; 2—аэростатическая оболоч-
ка; 3—гондола; 4—гайдроп
совершенным средством для
исследования Венеры.
Тем не менее идея лифта в
целом заслуживает определен-
ного внимания для ее изучения
в будущем.
Тороидальный аэростатический
летательный аппарат
Тороидальный аэростатичес-
кий ЛА (рис. 27) хорошо ком-
понуется с электроядерными установками большого удлинения. В
своем развитии такая схема может оказаться удобной для организа-
ции шахтного пуска составной ракеты с борта аэростата в сторону
Земли. Как показано на рисунке, тороидальный аэростатический
ЛА может явиться базовым средством для реализации идеи лифта
в атмосфере Венеры. Маневренность тороидального ЛА в значи-
тельной мере определяется габаритом подвесной его части. Торо-
идальный аэростатический ЛА может быть представлен и в виде
малогабаритного ЛА, например фотоэлектрического зонда. Послед-
ний, имея гайдроп, сможет двигаться эквидистантно поверхности
Венеры на заданном расстоянии. Поверхность тороидальной обо-
лочки больше поверхности сферической оболочки (при равных
объемах), что означает ее сравнительную невыгодность в весовом
отношении.
Конструкция тороидальных ЛА допускает хорошую компоновку
электросиловых элементов, двигателей, движителей и больших па-
раболических антенн в центральной части тороида. Это обеспечи-
вает хорошую центровку, минимальный момент инерции и возмож-
ность работы агрегатов в стороне от венерианских ветров. Измене-
ние геометрической формы зонда на различных высотах показано
в двух вариантах на рис. 28. Зонд, выполненный в варианте а,
Рис. 28. Виды геометрической трансформации тороидальных ЛА:
/—® раскрытом положении; 2—в закрытом положении; 3—аэростатическая оболочка
71
обладает большей транспортабельностью и сравнительно невысо-
кой горизонтальной скоростью управляемого полета; зонд, выпол-
ненный в варианте б, транспортабелен преимущественно в малых
размерах. Геометрическая форма сплющенного тороида обеспечи-
вает значительную скорость маршевого полета.
Тороидальный аэростатический летательный аппарат может
выполнить интересную программу научных исследований в погра-
ничном слое атмосферы Венеры: акустические измерения, исследо-
вание атмосферных движений, рельефа поверхности, определение
концентрации пылевых частиц и др.
Схема тороидального летательного аппарата представляет опре-
деленный интерес для ее дальнейшего изучения.
Гравистатические летательные аппараты
Одним из представителей гравистатических ЛА может быть
назван мезоплан. Отличительной особенностью гравистатических
ЛА является (см. разд. 2.6) наличие у них несущих аэродинами-
ческих поверхностей (крыльев), воспринимающих на себя в полете
часть массы ЛА. Конструктивно гравистатические ЛА представля-
ют собой комбинацию ЛА легче воздуха (дирижабль) и ЛА тя-
желее воздуха (самолет). При нулевой поступательной скорости
гравистатический ЛА не ограничен каким-либо потолком полета.
Подъем с места и выход на маршевый режим возможен при нали-
чии двигателей и систем вертикального взлета и посадки.
Наличие несущих поверхностей целесообразно, если возможно
достижение скорости, при которой подъемная аэродинамическая
сила и вызываемое ею уменьшение массы аэростатической части
с избытком компенсируют дополнительную силу тяжести двига-
тельной установки и несущих поверхностей.
Такой эффект может быть, в частности, достигнут применением
нововведений, основанных на принципе Кноллера — Бетца, изло-
женном ниже. Применением
обычных крыльев не может
быть увеличена грузоподъем-
ность аэростатического ЛА, но
зато может быть достигнута
сравнительно высокая манев-
ренность, что для венерианско-
го многоцелевого ЛА является
весьма важной характеристи-
кой.
Одной из наиболее слож-
ных задач, стоящих перед раз-
работчиками гравистатических
ЛА, является отыскание конст-
руктивно-технологических ре-
шений для подвижной (пере-
менного объема) аэростатичес-
Рис. 29. Изменение геометрической формы се-
чения газовмешающего корпуса большого уд-
линения (цифрами обозначены этапы погруже-
ния)
72
кой оболочки. Теоретическая часть этой проблемы хорошо обосно-
вана К- Э. Циолковским и частично подтверждена эксперимен-
том [29].
Одно из решений переменной по объему оболочки (корпуса ЛА)
может быть представлено, как показано на рис. 29, где цифрами
обозначена последовательность этапов погружения.
По своим техническим данным, объединяющим характеристики
авиационных, воздухоплавательных и глубоководных средств пере-
движения, гравистатические ЛА представляют наибольший инте-
рес как перспективные венерианские ЛА.
Аэрокосмические летательные аппараты
Среди летательных аппаратов тяжелее воздуха наибольшую
сложность представляют аэрокосмические ЛА. Многорежимность
движения, определяемая входом в плотные слои атмосферы, боль-
шие тепловые и аэродинамические нагрузки в режиме отражения
(рикошетирования), баллистического входа или квазистационарно-
го планирования с переходом в дозвуковой полет и режим по-
садки — все это требует решения сложнейшего комплекса задач,
подчас противоречивых в отношении аэродинамической и конст-
руктивно-силовой схемы ЛА. Задача еще более усложняется, если
учесть, что вход в плотные слои атмосферы Венеры должен проис-
ходить не на первой, а на второй космической скорости. Однако,
несмотря на указанные трудности, реализация аэрокосмических ле-
тательных аппаратов представит в будущем большой научный и
технический интерес.
Летательные аппараты типа дископлан
Схема дископлана, или летающего крыла, привлекает особое
внимание, независимо от назначения ЛА. Это обуславливается
прежде всего кажущейся простотой схемы, а также возможностью
входа в плотные слои атмосферы планеты по типу пилотируемых
космических кораблей «Союз» (СССР) или «Аполлон» (США).
Однако многочисленные трудности, с которыми сталкивается
проектировщик в процессе воплощения идеи дископлана в жизнь,
приводят по мере их разрешения к существенному искажению про-
ектируемой классической формы летательного аппарата как ле-
тающего изолированного крыла. Сюда относятся: смещение фоку-
са на дозвуке и гиперзвуке (необходимо оперение переменной эф-
фективности); ухудшение обзора при расположении кабины (в
пилотируемом варианте) в пределах обводов ЛА; снижение эффек-
тивности движителя в присутствии наполненной (подъемным га-
зом) аэростатической оболочки; ухудшение компонуемости сило-
вых установок и их движителей; ограничение грузоподъемности
из-за относительно малых размеров внешнего кольца жесткости
Дископлана, компонуемого на носителе.
Схема аэростатического дископлана показана на рис. 30. Газо-
вмещающий корпус переменного объема обеспечивает вертикаль-
73
Рис. 30. Схема аэростатического дископлана:
/—сопло ДУ; 2—оперение в сложенном положе-
нии; 3—двигатели малой тяги системы стабилиза-
ции; 4—оболочка; 5—днище оболочки; 6—оперение
в раскрытом положении
ный взлет и посадку. Управление во-
круг центра масс осуществляется
малыми двигателями. Слежение цен-
тра давления за центром масс в
полете обеспечивается поворот-
ными стабилизаторами. Баланси-
ровка и управляемость дископлана
на дозвуке обеспечивается смещени-
ем вперед (ближе к центру давле-
ния) аэростатической части (сфе-
ры) летательного аппарата.
Бортовая научная аппаратура,
расположенная на дископлане, смо-
жет производить измерения тем-
пературы поверхности (особенно в
районе критических точек: полюс,
точки подсолнечной и антисолнеч-
ной стороны); исследование рель-
ефа, электро- и радиофизических
свойств поверхности; исследование
атмосферных движений; акустичес-
кие измерения (измерение скорости
звука, получение разреза поверхности, измерение параметров ат-
мосферы, в частности, уточнение газового состава и т. д.).
Несмотря на компоновочные трудности и другие отмеченные
выше недостатки, поисковые работы по изучению аналогичных
схем дископланов представляют определенный практический ин-
терес.
Аэростатический конвертоплан
Наиболее вероятным применение дископлана представляется в
системе аэростатического конвертоплана, как показано на схеме
(рис. 31). Такой летательный аппарат, будучи аппаратом изменяе-
мой геометрии, обладает сравнительно большой грузоподъемностью,
так как скомпонован из нескольких дископланов.
На малой высоте (при высоком давлении среды) составляющие
конвертоплан дископланы помимо аэростатической силы обладают
и аэродинамической подъемной силой. Это обусловливает возмож-
ность сохранения маршевой скорости и высокой маневренности кон-
вертоплана в плотных слоях атмосферы Венеры. Существенным в
схеме является возможность компоновки силовых и энергетических
установок на свободной платформе, допускающей конструктивные
решения по обеспечению приемлемых тепловых режимов.
74
Рис. 31. Схема аэростатического конвертоплана:
1—маршевый движитель- 2—движители системы управления;
3—ядерный двигатель; 4—аэростатические оболочки перемен-
ного объема
Неясными для рассматриваемой схемы
конвертоплана являются некоторые вопро-
сы аэродинамики и прочности, которые в
будущем должны явиться предметом перво-
очередных исследований.
Очевидно, что аэростатический конвертоплан может быть вы-
полнен и по схеме гравистатического ЛА.
Научная аппаратура, установленная на конвертоплане так же,
как и на дископлане, позволит изучить характер движений вене-
рианской атмосферы (ветров, восходяще-нисходящих потоков), из-
мерить освещенность, провести электромагнитные измерения, опре-
делить концентрацию пылевых частиц и т. д.
Глубинные летательные аппараты
Назначение глубинных ЛА — исследование планеты в режиме
парения, маршевого полета в пограничном слое атмосферы Венеры
или длительного пребывания на ее поверхности. По аналогии с
глубоководными земными аппаратами типа батискафа или бати-
плана глубинные венерианские ЛА должны обладать определенной
маневренностью и стать надежным средством изучения атмосферы
Венеры «снизу» (рис. 32).
Одной из важных задач физики Венеры является выявление на
ее поверхности областей с различными физическими свойствами,
определение местоположения, размеров и форм этих областей и
сопоставление этих данных с другими характеристиками планеты.
В связи с непрозрачностью атмосферы Венеры для видимого
и инфракрасного излучения такие сведения могут быть получены
или прямым зондированием с помощью спускаемых аппаратов или
на основе радиоастрономических и радиолокационных измерений.
Спускаемые аппараты могут дать наиболее полную и точную
информацию о свойствах поверхности в местах их дрейфа и по-
садки. Однако их полезная нагрузка в процентном отношении бу-
дет небольшой из-за большой массы гондолы, холодильных и
Других систем, обеспечивающих проведение экспериментов в усло-
виях высоких температур и давлений газовой среды. Создание та-
ких аппаратов представляет большую на-
; 2 । J Ц- учно-техническую1 проблему.
\ \ £ \ Исследования Венеры в ее пограничном
слое могут включать: электромагнитные из-
мерения, физико-химический анализ поверх-
постного слоя (летучие элементы, связан-
Рис. 32. Схема глубинного аппарата:
$ п /—анализатор; 2—гондола; 3—антенна; 4—движители; 5—
~ аэростатическая оболочка
75
ная вода, радиоактивность), передачу фототелевизионных изобра-
жений участков планеты (при посадке и во время полета), иссле-
дование радиоотражающих свойств поверхности и др.
Термо-пневмоаэростатический летательный аппарат
При использовании аэростатических ЛА в качестве грузоподъ-
емных средств, их разгрузка может составлять до 30—40% от пол-
ной полетной массы. Это означает, что система должна изменять
подъемную силу ЛА в таких же значительных пределах.
Регулирование аэростатической силы в больших пределах воз-
можно на термо- или пневмоаэростатических ЛА путем подогрева
или механического сжатия газа.
В случае жесткой оболочки целесообразна конструкция типа
«монокок» вместо каркасной.
Жесткая оболочка (корпус) позволит применить принцип ежа-,
тия газа для уменьшения его подъемной силы. Она же лучше вы-
держивает термические нагрузки. Эти системы, позволяющие изме-
нять аэростатическую подъемную силу в больших пределах без
расхода подъемного газа, иногда называют энергетическими, по-
скольку они требуют расхода энергии (топлива).
Научная программа таких энергетических летательных аппара-
тов может быть весьма разнообразной, — это исследования высо-
ких, средних и нижних слоев атмосферы Венеры. Особый интерес
в этой программе представляет изучение границ облачного слоя,
характера движений атмосферы и рельефа поверхности планеты.
Аэростатический летательный аппарат, использующий принцип
Кноллера — Бетца
В 1909 г. немецкие ученые — проф. Кноллер, а за ним проф.
Бетц — нашли, что свободный планирующий полет птиц можно
объяснить обтеканием крыла воздушным потоком попеременно
сверху и снизу, то есть возникающим волновым течением. Если
поток направлен на крыло спереди, то создается сопротивление, а
если на это же крыло действует поток, попеременно направленный
под углом то снизу, то сверху, этот поток сам создает импульс
поступательного движения (рис. 33). В основе механизма движе-
ния рыб и морских млекопитающих лежит все тот же «волновой»
принцип.
Опираясь на фундаментальные исследования ученых ГДР —
д-ра В. Шмидта по*волновому приводу и инж. Ульриха, можно
предложить аналогичный ЛА, предназначенный для полета в под-
облачных слоях атмосферы Венеры.
Перед корпусом такого аэростатического ЛА (жесткая схема)
устанавливается генератор газодинамических волн. Частота созда-
ваемых волн устанавливается в зависимости от длины ЛА. Тем са-
мым корпус ЛА выполняет роль как бы гасителя газодинамических
волн и вместе с генератором образует единый волновой двигатель
(рис. 34). Установленный в хвостовой части ЛА второй волновой
76
Рис. 33. Схема волнового эффекта Кноллера —
Бетца
Рис. 34. Аэростатический ЛА, использующий эф-
фект Кноллера—Бетца:
/—корпус дирижабля с заполненными газом (ге-
лием) ячейками; 2—боковые рули; 3—носовой вол-
новой генератор; 4—хвостовые боковые рули; 5—
хвостовой волновой генератор; 6—гаситель волн;
7—концевой диск в форме полукапли
привод обеспечивает ламинарный характер газодинамического по-
тока над корпусом ЛА. Одновременно в результате сцепления ме-
ханизма сопротивления и привода обеспечивается экономия мощ-
ности и усиление горизонтальной тяги. Конструкция может быть
выполнена с двумя (как на схеме) или с тремя волновыми при-
водами.
Действующая модель, выполненная В. Шмидтом (размером
4X4 м), показала высокие летные качества [33, 34].
Можно заключить, что описанный ЛА объединяет в себе манев-
ренность вертолета, скорость дозвукового самолета, комфорт и
грузоподъемность морского лайнера. Для условий Венеры это озна-
чает создание базового ЛА, предназначенного для размещения в
нем научно-исследовательских лабораторий, стартовых площадок и
цехов для обеспечения активных работ по освоению сначала атмо-
сферы, а затем и поверхности планеты.
Экспериментальный мезоплан
Как было отмечено выше, среди многоцелевых ЛА венерианский
мезоплан является наиболее перспективным после базовых и глу-
бинных ЛА. Обладая высокой маневренностью, большим диапазо-
ном высот, возможностью пребывания в зонах высоких температур
и давлений, мезоплан обеспечивает: маршевое зондирование раз-
личных слоев атмосферы, недоступных для других ЛА; достижение
поверхности планеты; забор грунта и доставку его на борт транс-
портных ЛА; маневрирование в районах интересуемых объектов;
челночные операции аварийно-спасательной службы.
77
Рис. 35. Экспериментальный мезоплан:
/—гондола верхнего и дальнего обзора; 2—оперение типа «утка»; 3—подвижной газовмещающий корпус; 4—трубы подогрева газа; 5—хво-
стовое оперение; 6—манипулятор; 7—гондола нижнего обзора; 8—сопла струйной стабилизации; 9—топливные баки; 10—лифт; //—вентилятор;
12—манипулятор; 13—хвостовой движитель
По конструкции, производственно эксплуатационным качествам
и механике полета мезоплан составит наиболее проблемный и
трудоемкий объект, когда-либо создававшийся авиационной, воздух
хоплавательной и мореходной техникой.
Опыт авиационной промышленности показывает, что созданию'
новых ЛА предшествует постройка экспериментальных образцов,
без которых невозможно успешное развитие новой техники. Исхо-
дя из этого представляется целесообразным начать уже сегодня
целевые работы по изучению возможности создания эксперимен-
тального венерианского мезоплана.
Предварительные расчеты показывают, что экспериментальный
мезоплан может быть выполнен по схеме, показанной на рис. 35.
Его характеристики следующие:
Полетная масса, кг . . . . 3000
Масса научной аппаратуры, кг . 250
Скорость полета, км/ч
в атмосфере . . ... . 0 ... 100*
под водой . . ... . 0 ... 10
Высота полета, м . .............0 ... ЮОО
Глубина плавания, м .................. . 0 ... 1000
Помимо своего прямого назначения, экспериментальный мезо-
план может быть с успехом использован для разведки и изучения
морских глубин.
Глава 3
ВОСХОДЯЩЕ-НИСХОДЯЩЕЕ ДВИЖЕНИЕ
СВОБОДНОГО И НЕСВОБОДНОГО
АЭРОСТАТИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА
Под свободным (свободноплавающим) аэростатическим ЛА следует понимать
такой ЛА, полет которого происходит в отсутствии активных сил (например, сил
тяги двигателей вертикального взлета и посадки).
Восходящее движение может быть результатом прекращения ранее дейст-
вовавшей активной силы, направленной «вверх». Аналогично нисходящее движе-
ние может быть следствием ранее действовавшей силы, направленной «вниз» в
случае статически уравновешенного ЛА.
Если ЛА статически неуравновешен, восходяще-нисходящее движение обус-
ловливается наличием избыточной или недостающей аэростатической силы.
Венерианские ЛА могут быть выполнены с постоянным и переменным миде-
лем газовмещающего корпуса. В первом случае изменение объема происходит
вдоль вектора скорости при SM=# const; во втором случае изменение объема про-
исходит в перпендикулярном направлении к вектору скорости при SM#= const.
Схемы таких ЛА показаны на рис.,36 и 37.
Средства обеспечения эксперимента (носители научной аппаратуры) пред-
ставлены на рис. 38 и рис. 39. Роль газовмещающего корпуса выполняет кольце-
вой сильфон, в геликостате имеет место аэростатический ЛА с жесткой оболоч-
кой, по типу земных дирижаблей со свободной ориентацией вокруг центра масс
применительно к атмосфере Венеры.
Если аэростатическая оболочка (выполненная по схеме сильфона) распола-
гается внутри жесткого корпуса, статическая уравновешенность такого ЛА на
различных высотах полета достигается путем присоединения (при снижении) или
вытеснения (при подъеме) атмосферного газа, осуществляемого следящими
устройствами. Свободная ориентация в пространстве вокруг центра масс пред-
ставляет удобство как с точки зрения маневренности, так и с точки зрения рас-
ширения программы научного эксперимента.
К несвободным аэростатическим ЛА относятся аппараты воздухоплаватель-
ной техники, полет которых происходит под действием активных сил (бортовых
Рис. 37. Схема аэростатической оболочки (газовмещающего кор-
пуса) с переменным миделем
(%6^const; 5M^C0nst; C,-ra=const)
^Рис. 36. Схема аэростатической оболочки (газовмещающего кор-
пуса) с постоянным миделем
(%6^const; SM=const; Сха=Сха (x)^const)
80
Рис. 39. Гелиостатный ЛА *
Рис. 38. Схема венерианского ЛА с коль-
цевой аэростатической оболочкой перемен-
ного объема при Зм=£м(/г) (по рисунку
худ. А. Соколова)
н п
Рис. 40. Схема жестких аэростатических
оболочек с переменным объемом внутрен-
ней части при SM(h)=const и Cr =const:
11
а) ^м=^м^тах5
У-Утах: У-Утш;
SM(/i)=const; SM (/i)=const;
С =const; Су =const.
ха ха
силовых установок). Примером такого ЛА может быть геликостат, показанный
на рис. 40.
Оптимальные режимы подъема и снижения несвободных аэростатических ЛА
исследуются при действии тяги, направленной по вектору и против вектора ско-
рости.
В силу больших объемов аэростатических ЛА, определение параметров дви-
жения их связано с учетом присоединенной массы, чему в главе уделено особое
внимание.
По всей вероятности, еще долго мы не сможем сформулировать в приемле-
мой для изыскательских работ форме принципиальные основы проектирования
венерианских силовых (энергетических) установок. Реальной в настоящее время
является возможность изучения венерианских энергетических систем для элемен-
тов управления ЛА вокруг центра масс.
3.1. ВИРТУАЛЬНАЯ МАССА
При изучении механики полета аэростатических ЛА приходится
Довольно часто оперировать параметром виртуальной массы mvirt,
81
учитывающим влияние на характеристики движения эффекта при-
соединенной массы окружающей среды.
Виртуальная масса представляет собой действительную массу
ЛА (включая подъемный газ) и добавочную или присоединенную
массу атмосферного газа, увлекаемую во время движения ЛА. Та-
ким образом, виртуальная масса mVirt является суммой двух вели-
чин: величины действительной массы ЛА т и величины присоеди-
ненной условной массы атмосферного газа Дтг. Покажем это, рас-
смотрев изменение кинетической энергии ЛА и присоединенного
атмосферного газа в процессе ускоренного движения. Полная мгно-
венная кинетическая энергия ЛА и приводимого им в движение
газа будет равна
£'=тп-^-+^еа(А)-^^пр, (3.1)
где Qa(^) — плотность атмосферного газа в функции высоты поле-
та; У — местная скорость присоединенной частицы атмосферного
газа; ^пр — объем присоединенного атмосферного газа; т — мас-
са ЛА.
Удобно заменить интеграл по объему присоединенного газа вы-
ражением для дополнительной кинетической энергии, определяе-
мой как произведение некоторого коэффициента Ам на кинетичес-
кую энергию атмосферного газа, имеющего скорость V и объем
^об, вытесненный ЛА. Тогда полная кинетическая энергия выразит-
ся, как
E = -L{m + kMtnT)V^ (3.2)
где Лм — коэффициент присоединенной массы; тТ — масса газа в
объеме, вытесняемом ЛА.
Здесь величина Дтг=Лмтг является присоединенной массой, а
т+&мтг=^ + Д^г виртуальной.
Значения коэффициента &м определяются теоретически в пред-
положении безвихревого (потенциального) обтекания или экспери-
ментально для различных геометрических форм и характера дви-
жения тела. При этом оказывается, что &м=1,0 — для цилиндра,
ориентированного своей образующей перпендикулярно направле-
нию движения; kM = 0,5 — для сферического ЛА; kM = 0,2 — для эл-
липсоида вращения с удлинением Х = 2, большая ось которого
параллельна направлению движения.
Произведение силы F, потребной для ускоренного движения ЛА
вместе с присоединенной массой газа, на мгновенную скорость V
представляет собой мощность, затрачиваемую на ускорение. Эта
мощность равна скорости изменения общей кинетической энергии
82
по времени движения. Следовательно, полагая kM = const, можно
записать
FV = ^-(m+kHfnr)V^-, (3.3)
at at
ИЛИ
F = (m + kMmr}-^- . (3.4)
at
Таким образом, при определении полной силы F, потребной
для ускоренного движения, присутствие газа можно учесть, увели-
чивая массу ЛА на величину присоединенной массы Дтг=Лмтг.
Запишем далее выражение для виртуальной массы mvirt:
mVirt = (3.5)
зная, что пОб = Рг, преобразуем это выражение к виду
mvlrt = m[ 1-Нм 6а ^-1, (3.6)
L eAr<A) J
где одг(Л) — плотность ЛА в функции высоты полета.
Для ЛА самолетного типа (тяжелее воздуха) всегда имеет ме-
сто Qa(^) <СрлА (Л), вследствие чего гпу-1Т1^лт.
Виртуальная масса ЛА не равна действительной массе и в за-
висимости от принципиальной аэростатической схемы может иметь
различные случаи определения. Рассмотрим некоторые из них.
Случай переменного объема оболочки при постоянстве массы
и аэростатической силы летательного аппарата
Случай ^об(^) ¥=const при mg=RM= const имеет место для аэро-
статического ЛА, изменение высоты полета которого происходит
вследствие изменения объема оболочки при сохранении ее геомет-
рической формы (рис. 41, а). Поскольку при этом рАг(Л) =оа(/г),
то формула (3.6) получает вид
ZZZvirt = W ( 1 Д- kM).
Рис. 41. Схема аэростатических ЛА с различными величинами присоединенных масс:
в) SM(ft)=const;
/?Ar(ft)=#'C011st;
^Ar^(^)^const;
uo6^)=consl;
mArg(ft)#=const.
a) (ft) =/: const;
fo6(ft)¥=const;
=const;
RAr-const;
™Arg(ft)=£Ar(ft);
6) SM(ft)=const;
uo6^)=const;
mArg (ft) = const;
v tfAr(ft)=#const;
mArg(ft)=/=const;
а
83
Это общий вид формулы для подсчета виртуальной массы аэро-
статического ЛА при заданных выше условиях полета.
Таким образом, виртуальная масса для аэростатического ЛА с
оболочкой переменного объема при mg=7?Ar = const постоянна
(mvirt = const) и не зависит от высоты полета.
Случай постоянного объема оболочки при постоянной массе
летательного аппарата и mg
Случай voq(R) =const при неравенстве аэростатической силы
массе ЛА mg=£RAr(h) может иметь место для высокоманевренного
венерианского мезоплана с двигателями вертикального взлета и
посадки при автоматическом регулировании давления подъемного
газа в оболочке по закону рг(1г) =pa(h) (рис. 41, б).
При этом формула (3.6) с учетом экспоненциального закона из-
менения плотности Qa(A) принимает вид
= (3.8)
Как следует из формулы (3.8), виртуальная масса ЛА при по-
стоянном объеме аэростатической оболочки аОб = const и mg=£
=7LRAr(h) является функцией высоты полета h.
^Случай постоянного объема оболочки ^об(^) = const
при переменной массе летательного аппарата и mg = /?аг(А)
Этот случай возможен для обычной схемы аэростатического ЛА
с жесткой оболочкой, подъем или снижение которого осуществля-
ется путем забора или вытеснения окружающего атмосферного га-
за (рис. 41, в). Поскольку ^об(^) = const, то как и в предыдущем
случае, виртуальная масса, переменная по высоте полета, будет
определяться зависимостью (3.8). Однако в нашем случае, проис-
ходит присоединение или отделение переменной массы атмосфер-
ного газа km^h, величина которой равна
Дта (Л)= — [А>аг (А) — т\.
§
Поскольку
/?АГ (А)я=О = (/?Аг)я=ое_рЛ, (/?Аг)я=0 = ^£>
то Дтпа (/г) = /п(е~рл— 1).
Теперь равенство (3.5) следует дополнить членом Ama(/z) и
получить
wvlrt=пг + + Д/па (А),
или
/nVirt=/n(l+AM)e-^. (3.9)
Если аэростатический ЛА обладает высотностью, характери-
зуемой параметром /iAr = Qo/Q, то формула (3.9) перепишется как
/пУ1г1=^(/гАг + Ам)е-₽л. (3.10)
84
Таким образом, изменение суммарной массы ЛА постоянного'
объема ^об = const в зависимости от высоты полета h следует экс-
поненциальному закону.
Замечания к учету присоединенной массы
Исследования, изложенные ниже, распространяются на три
случая изменения миделя по высоте полета ЛА: случай постоянного
миделя SM(h) = const; случай переменного миделя в функции объ-
ема оболочки SM(h) =/= const; случай переменного миделя по экспо-
ненциальному закону SM = SM,(h).
Все три случая обеспечивают условия равенства аэростатичес-
кой и массово-гравитационных сил ЛА.
В первом случае мидель по полету остается постоянным, но для
сохранения равенства R&r(h) =mg(h) имеет место изменение пара-
метра длины по закону Л = Лоехр (—(3/г). Примером такой схемы
ЛА может служить аэростатическая оболочка, выполненная в виде
сильфона, движение которого происходит в направлении продоль-
ной оси (см. рис. 36).
Во втором случае изменение объема происходит при одновре-
менном изменении размеров аэростатической оболочки по трем ее
измерениям.
В третьем случае переменным по высоте полета является, ми-
дель Sw(h), величина которого следует экспоненциальному закону
5м=50мехр (—рЛ). Примером такого аэростатического ЛА может
служить также сильфон, но с поперечным расположением к векто-
ру скорости (см. рис. 37).
В первом и последнем случаях X(h) =£= const. Следовательно, для
них также mvirtW ¥= const. В наших исследованиях эти случаи, по-
мимо mvirtW =# const, будут рассмотрены также и при
/nVirt = const. Выполнение таких работ связано с необходимостью
оценки влияния присоединенной массы на величину параметров
движения ЛА в плотной венерианской атмосфере. Во втором случае
при 5м = ^об(Л)2/з виртуальная масса остается постоянной незави-
симо от высоты полета и определяется зависимостью (3.7).
Для случаев горизонтального полета при переменном объеме и
сохранении геометрической формы ЛА имеет место постоянство,
виртуальной массы, определяемой формулой (3.7).
3.2. УРАВНЕНИЯ ДВИЖЕНИЯ
Механика полета аэростатических ЛА включает прежде всего
механику вертикального полета и механику горизонтального по-
лета. В обоих случаях осуществляются активный полет в присут-
ствии тяги работающих двигателей (несвободный ЛА) и пассивный
полет при остановленных двигателях (свободный ЛА). При этом
случаи движения могут быть рассмотрены в среде постоянной и пе-
ременной плотности, с учетом и без учета присоединенной массы.
8S
Рис. 42. Схема сил, действующих на аэростатический ЛА при восходящем движении. Сила
AF направлена по вектору скорости
Рис. 43. Схема сил, действующих на аэростатический ЛА при восходящем движении. Сила
AF направлена против вектора скорости
Рис. 44. Схема сил, действующих на аэростатический ЛА при нисходящем движении. Сила
AF направлена по вектору скорости
Рис. 45. Схема сил, действующих на аэростатический ЛА при нисходящем движении. Сила
AF направлена против вектора скорости
Несвободный аэростатический ЛА может совершать следующие
виды движений:
— вертикальный подъем при действии активной силы, -направ-
ленной по вектору скорости;
— вертикальный подъем при действии активной силы, направ-
ленной против вектора скорости;
— вертикальное снижение при действии активной силы, на-
правленной по вектору скорости;
— вертикальное снижение при действии активной силы, направ-
ленной против вектора скорости.
Несмотря на большое разнообразие видов движений, все они
могут быть описаны единой системой уравнений, решаемой в каж-
дом частном случае с учетом аэрофизических и аэромеханических
условий полета.
Изучим эти виды движений, идя от частного к общему. Схемы
сил, действующих на ЛА в различных случаях'вертикального дви-
жения, показаны на рис. 42 ... 45. В соответствии с этими схема-
ми уравнения движения в общем виде принимают вид
at
— = + 1/,
dt “
где Д/7 = const — активная сила.
При подъеме скорость может увеличиваться Д77>0 или умень-
шаться Д77<0.
Аналогично при снижении скорость увеличивается при AF<0
и уменьшается при Д/7>0.
Возможны также следующие допущения:
— все силы, действующие на ЛА в режимах восходяще-нисхо-
дящих движений (аэростатическиеаэродинамические Xa(V),
массовые m(d2hldt2} и активно-реактивные), являются вертикаль-
ными;
(3.11)
86
— ускорение сил тяготения не зависит от высоты полета;
— давления атмосферного и подъемного газов равны, а именно-
— плотность среды меняется по экспоненциальному закону q(/z).
В тех случаях, когда речь будет идти о статически неуравнове-
шенных ЛА с.жесткой оболочкой постоянного объема, уравнения
(З.И) будут содержать также массово-гравитационные и аэроста-
тические члены. Следует также иметь в виду, что на Венере, как и
в земных условиях имеются три слоя атмосферы, отличных друг от
друга по своим физическим свойствам (см. рис. 4).
При взлете аэростатического ЛА газ в нем расширяется и вслед-
ствие этого охлаждается; на спуске газ сжимается и, следова-
тельно, должен нагреваться. Поэтому при прохождении аэростати-
ческого ЛА через тропосферу характер изменения температуры в
нем (рост или убывание) соответствует характеру изменения темпе-
ратуры внешней среды. Это позволяет с известным приближением,
как и в земных условиях, считать, что при вертикальных переме-
щениях аэростатического ЛА в венерианской тропосфере темпера-
тура несущего газа в нем и температура внешней среды равны
друг другу (или сохраняется постоянная величина разности этих
температур ДТ). Многолетний опыт полетов аэростатических ЛА
в тропосфере Земли обосновывает такое допущение для условий
полета в тропосфере Венеры.
При движении аэростатических ЛА в стратосфере (где Т— const)
наблюдается расхождение температур подъемного и окружающего
газов. При прохождении через третий (верхний) слой атмосферы
Венеры, где направления изменений температур, происходящих в
атмосфере и в несущем газе ЛА (вследствие расширения газа на
взлете и сжатия на спуске), противоположны, разность темпера-
тур газа среды и подъемного газа на взлете и спуске должна быть
наибольшей. При этом указанная разность температур будет про-
тиводействовать движению, уменьшая сплавную силу на взлете и
уменьшая ее при спуске аэростатического ЛА.
При изучении механики полета тропосферных ЛА, как уже была
сказано, можно принять АТ = const или ДТ = 0, имея в виду, что-
явления температурной инверсии по высотам отсутствуют. Необхо-
димо заметить, что подъем или снижение продолжаются непрерыв-
но независимо от значений активной силы AF. При этом всегда
V=H=0.
Система дифференциальных уравнений (3.11) описывает все
главные виды вертикальных и горизонтальных движений аэроста*
тических венерианских ЛА и представляет возможным в доста-’
точно полной мере изучить основные элементы механики их по-
лета.
3.3. ВОСХОДЯЩЕ-НИСХОДЯЩЕЕ ДВИЖЕНИЕ СТАТИЧЕСКИ УРАВНОВЕШЕННОГО
ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ (h) =const и уоб(h) const
Под восходящим движением, как было сказано выше, понима-
ется пассивное движение аэростатического ЛА, вектор скорости ко-
87
торого направлен в сторону, обратную направлению действия гра-
витационных сил. Примером такого движения может служить дви-
жение мезоплана на пассивном участке траектории после выклю-
чения двигателей, работавших в режиме вертикального взлета.
Под нисходящим движением понимается пассивное движение
аэростатического ЛА, вектор скорости которого совпадает с на-
правлением действия гравитационных сил. Примером такого дви-
жения может служить движение мезоплана на пассивном участке
после выключения двигателей, работавших в режиме снижения
(отрицательной тяги). Поскольку
^об const, mg=RxrW и const,
то уравнения движения (3.11) принимают вид
Wvirt-^=-Xa(V);
аг /о 1 г>\
где mVirt — виртуальная масса, определяемая выражением Верхние знаки в уравнениях (3.12) означают восходящее (3.7). движе-
ние; нижние — нисходящее движение. Решение системы уравнений (3.12) при условии, что С 5^ const, дает
^-= + —er$hdh V wv2x (3.13)
и затем
exp — ^-( + e_pA»Te_?A)j, (3.14)
где vx=(^^-\y2-, \ cXaQo ; (3.14')
ть=(1+&м) — коэффициент виртуальной массы; q0 — плотность
атмосферного газа на исходной (начальной) высоте полета; йю —
начальная (исходная) высота полета; т — масса аэростатического
ЛА без учета присоединенной массы атмосферного газа.
Если движение начинается с поверхности планеты, то формула
(3.14) при йо = О, принимает вид
_^L(i_e-₽A)l. (з.15)
И) L w J
Как видно из формулы (3.14), по мере увеличения высоты h
скорость подъема уменьшается (рис. 46).
S8
рис. 46. Зависимость скорости (V/Vo) и перегрузки пу от
высоты полета (р/г) при восходящем движении свободно-
го аэростатического ЛА (случай SM(/i)=const)
Из формулы (3.14) легко получить
также
(рА)= - In ±
(3.16)-
Если подъем начинается с поверхности
планеты (рйо)=О, то безразмерная высо-
та полета (р/г) определится как
(рА)= —In W
(3.17)
Таким образом, высота пассивного подъема увеличивается по
мере уменьшения безразмерной скорости V/VQ.
Перегрузка ny(h), действующая на ЛА от сил аэродинамическо-
го сопротивления во время вертикального подъема, на основании
первого уравнения системы (3.12) и выражения (3.14) равна
ny(h) = ~ = ехР [ — % — (± е~рл° + е-^ .
(3. 18)
При движении с поверхности планеты (p/io = 0) изменение пере-
грузки ny(h) следует закону
= f ехр Г-2-^(1-е-0л)1. (3.19)
Как видно из формул (3.18) и (3.19), перегрузка ny(h) не име-
ет оптимума и уменьшается по экспоненциальному закону по мере
увеличения высоты подъема h (см. рис. 46).
Наибольшее значение перегрузки в начале полета при h = h$.
(3.20)
если подъем начинается с высоты й0>0, и
(3.21)
если подъем начинается с высоты /г0 = 0.
89
Время восходящего движения находится подстановкой
ния (3.14) во второе уравнение системы (3.12):
h —— х
е -Y—dX.
dt=
dh
(-₽) ь,
выраже-
(3. 22)
где =
Разложение в ряд подынтегральной функции дает
Се 1 vz । /
(3.23)
n-n\
п=\
(что соответствует нашему случаю) интеграл (3.23)
При х>0
сходящийся.
Обращаясь к выражению (3.22) с учетом интеграла от транс-
цендентной функции (3.23) и проставляя пределы интегрирования
от t = 0 до t и от Х = Х0 до X, получим
ехр (— е ^Л°
t =—:
(-Р)П
v /
n-n[
. (3.24)
О
п = 1
При удержании
нимает вид
двух членов разложения формула (4.37) при-
exp (— е $h°
t=—Lv—:
2i(e-₽*o_e-₽ft)l. (3.25)
J
Таким образом, время восходящего движения тем больше, чем
больше текущая высота полета Л, и тем меньше, чем больше на-
чальная высота hQ.
Если подъем начинается с поверхности планеты, когда можно
положить ho = O, то текущее время восходящего движения будет
равно
е —
/=—(1-е-рЛ)1 • (3.26)
I v J
При подъеме с высоты Ло = О на достаточно большую высоту,
когда можно положить
р(Л-Ао)»— (1-е-^-е-РЛ), (3.27)
формула (3.25) принимает вид
Л
/=|еЧ (3.28)
90
47. Зависимость параметров скорости (V/Vo) и пере-
И узки fi от высоты полета (fl/i) при нисходящем движе-
гр нии аэростатического ЛА
Здесь множитель exp (hx/x\v) учитыва-
ет отклонение действительного времени
подъема от того, которое было бы при
постоянной скорости подъема Vo- Оче-
видно, что при неучете присоединенной
массы везде следует положить = 1.
При нисходящем движении, которое
продолжается до уровня Л = 0, формула
(4.27) принимает вид
—=ехрГ—(3.29)
^0 I v J
Из формул (3.15) и (3.29) видно, что
как и в случае восходящего движения,
при нисходящем движении скорость не-
прерывно уменьшается по мере убывания
высоты h (рис. 47). При этом предельное
уменьшение скорости при Л0 = оо и й = 0 составит величину, равную
Начальная перегрузка-при Л=Л0, как и в случае восходящего
полета, определяется выражением (3.20).
Зависимость ny(h), определяемая формулой (3.18), при нижних
знаках имеет максимум, лежащий в точке
(₽А)лтах=1п2-^.
(3.30)
Поскольку найденный экстремум (на основании формулы
(3.18) обусловливается уравнением
(А) 1
уК =—-------е-₽А=0.
dh 2g
№
(3.31)
То зависимость для максимальной перегрузки nymax при нисходя-
щем движении в соответствии с той же формулой (3.18) будет
иметь вид -г г j -
^тах=~ехр (23-е-М.
2ge к }
(3. 32)
91
Если аэростатический ЛА снижается с больших высот, когда
можно положить = то формула (3.32) принимает вид
Путж = "Z • (3.33)
Подставив выражение для параметра е+р/г из уравнения (3.31)
в формулу (3.14) при Л0=оо, получим
— ТГ-0,6!. (3.34)
Это означает, что при снижении с больших высот максималь-
ная перегрузка пуш^ статически уравновешенного ЛА имеет место
на скорости, составляющей от первоначальной ~61%.
Такому движению аэростатического ЛА соответствует движение
космического ЛА, скорость которого при входе в плотные слои
атмосферы достаточно велика, чтобы действием сил тяжести по
сравнению с аэродинамическими силами можно было пренебречь.
Время нисходящего маневра найдем, как и в случае восходя-
щего маневра, воспользовавшись вторым уравнением системы
(3.12) и формулой для скорости полета (3.14). Тогда получим
или после удержания двух членов разложения
Р(Ао_А)_^(е-₽л_е-₽А»)
i -----------. (3.35)
ехр ( —е—
\ /
Время снижения с высоты h = hQ высоты А = 0 при условии
(3.27) будет равно
/ = -^-ехр(—, (3.36)
где hQ — начальная (исходная) высота снижения.
Подставив выражение (3.30) в формулу (3.36), получим зави*
симость для времени снижения с высоты (A)^max, где перегрузка ’
имеет максимальное значение, т. е.
(зз7)
W I
92
Если аэродинамическое сопротивление аэростатического ЛА
определяется через коэффициент Сиа по формуле Ха=Сиа§
То главные параметрические зависимости восходяще-нисходящего
движения будут иметь вид
(3.38)
(3.39)
М+е-Ке-И
(3-41)
(3.42)
где верхние знаки относятся к восходящему движению, а нижние--
к нисходящему.
Очевидно, что и другие параметры полета, включая траектор-
но-параметрическую аналогию с космическими ЛА входа, также
качественно сохраняются.
3.4. ВОСХОДЯЩЕ-НИСХОДЯЩЕЕ ДВИЖЕНИЕ СТАТИЧЕСКИ УРАВНОВЕШЕННОГО
ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ S^(h) #=const
Рассмотрим случай, когда изменение аэростатического объема
ЛА происходит вследствие изменения площади сечения, располо-
женного перпендикулярно вектору скорости и, следовательно, явля-
ющегося миделевым сечением. При этом
5М (Л) ф const, ^o6(/z)^const и СХа (X)=const.
Уравнение восходяще-нисходящего движения с учетом зависи-
мости 5м = 5мо/е_рЛ принимает вид
— = +-Аг</Л, (3.43)
где Vx определяется зависимостью (3.14z).
Интегрирование уравнения (3.43) дает
(т^)=ехр[~Ч^(±4тад|- (3'44)
93
Рис. 48. Зависимость параметров скорости (V/Vo),
времени (рVo)/и перегрузки (^?//^0?/) от высоты
восходящего полета при Sm=Sm(/i):
1—безразмерное время полета; 2—отношение пере-
грузок пylnQ \ 3— безразмерная скорость V/VQ
Как следует из формулы (3.44),
скорость восходяще-нисходящего
движения в отсутствии активных сил
уменьшается по экспоненциальному
закону (рис. 48).
Подъему с поверхности планеты
соответствует преобразованная фор-
мула (3.44) при йо = О
(ЗЛ5)
Из этой формулы следует, что
пассивный участок подъема- реали-
зуется бесконечно долго, достигая
Е = 0 при h= оо.
йо до нулевой высоты
Если происходит снижение с высоты
й = 0, то уменьшение скорости составит
(-Э=и11>(-^Н- (346)
Из формулы (3.44) следует также
Л —Ло
(3.47)
откуда видно, что одинаковой потери скорости соответствуют оди-
наковые участки подъема или снижения.
Легко получить выражения для времени восходяще-нисходяще-
го полета:
(3.48)
или
=Пк-^-ехр[----(±й + Ло)- 11 . (3.49)
И) L -1
s )
Следовательно, равным участкам подъема или снижения соот-
ветствует одинаковое время полета t.
94
Имеем также
t
Текущая перегрузка составит
или с учетом зависимости (3.44)
(3. 50)
(3.51)
(3.52)
(3.53)
и
Перегрузка в начале полета пу = пОу, одинаковая для восходя-
щего и нисходящего движений, при /г = /г0 составит величину
^у=— (3.54)
Чу \vx !
С учетом выражений (3.54) формулы (3.52) и (3.53) перепи-
шутся как
<3-55>
\ ^0 /
иг,(Л)=/гОг/ехр[--^-(±А + й0)1. (3.56)
Если при подъеме Ло = О и /г = оо, а при снижении Л0 = оо и А = 0,
то в обоих случаях конечная перегрузка будет равна нулю
(рис. 48).
Из формулы (3.56) следует также, что одинаковым высотам'вос-
ходяще-нисходящего движения соответствуют одинаковые пере-
грузки ny(h).
Среди аэростатических ЛА имеются и такие, особенности кон-
структивных схем и характеристики восходяще-нисходящего поле-
та которых обусловливают запись дифференциального уравнения
в виде (3.43), а следовательно, идентичность их параметров, опи-
сываемых формулами (3.44) — (3.56). К ним относятся статически»
Уравновешенные ЛА с жесткой оболочкой при 5м(й)=const,
%6(A)=const, /?аг(А)=const, Rkx = mg и wVIrt=/n(l-|-AM)e-₽/l
и статически уравновешенные ЛА^движение которых происходит
в среде постоянной плотности при Ar= 1 и SM = const.
Параметрическая аналогия объясняется существованием об-
ратно пропорциональной зависимости между плотностью атмос-
феры и миделем ЛА, что обусловливает Xa(h) = const, как и в сре-
Де постоянной плотности.
95
3.5. ВОСХОДЯЩЕ-НИСХОДЯЩЕЕ ДВИЖЕНИЕ ЛЕТАТЕЛЬНОГО АППАРАТА
В СРЕДЕ ПЕРЕМЕННОЙ ПЛОТНОСТИ ПРИ Аг^ 1, и SM(h) = const
Для восходяще-нисходящего движения угол, составленный на-
правлением вектора скорости и линией горизонта, равен 0 = л/2.
Кроме того, из уравнения движения в проекции на нормаль к_тра-
ектории полета следует, что L = 0. Уравнения движения при Аг=;
= const, принимают вид
— — У=0;
dt
mg(kr— 1) + Ха=0;
dm __q
dt ~
Далее легко получить
и затем
dh v V>V<T-l±Ar
где функция 1(h) имеет вид
О
(3.57)
(3.58)
(3.59)
(3.60)
Рис. 49. Функция 1(h) для атмосферы Земли (fi@=0 . . .60 км) (см. табл. 3.1)
Рис. 50. Функция 1(h) для атмосферы Земли (h®=0 ... 20 км) (см. табл. 3.1)
96
Графическое изображение этой зависимости и численные значе-
ния ее, относящиеся к стандартной атмосфере Земли, а также мо-
дели атмосферы Венеры приведены на рис. 49, 51 ив табл. 3.1
и 3.2.
Таблица 3. Г
Функция 1(h) для атмосферы Земли (см. рис. 49 и 50)
h, км I (fi), км Л, км / (Л), км Л, км I (fl), км А, км / (Л), км |
0 0 9,0, 7,204 26 13,445 44 15,053 |
0,5 0,494 9,5 7,505 27 13,606 45 15,094 :
1,0 0,976 10 8,095 28 13,754 46 15,133 <
1,5 1,446 11 8,658 29 13,890 47 15,170 ;
2,0 1,906 12 9,183 30 14,016 48 15,204
2,5 2,354 13 9,649 31 14,132 49 15,236 '
3,0 2,790 14 10,098 32 14,239 50 15,266 :
3,5 3,215 15 10,513 33 14,338 55 15,291 i
4,0 * 3,629 16 10,897 34 14,429 60 15,310 ;
4,5 4,032 17 11,247 35 14,513 65 15,324 ;
5,0 4,425 18 11,575 36 14,592 70 15,334 ;
5,5 4,807 19 11,878 37 14,665 75 15,341
6,0 5,179 20 12,158 38 14,733 80 15,346 ;
6,5 5,541 21 12,417 39 14,796 85 15,349 i
7,0 5,893 22 12,656 " 40 14,855 90 15,351
7,’5 6,235 23 12,877 41 14,910 95 15,353 :
8,0 6,567 24 13,082 42 14,961 100 15,354 :
8,5 6,890 25 13,271 43 15,009
Таблица 3.2
Функция 1(h) для атмосферы Венеры (см. рис. 51)
А, км I (h), км А, км / (А), км А, км / (А), км
0 0 30 20,781 57 27,621 .
3 2,904 33 21,981 60 27,954
6 5,622 36 23,052 70 28,684
9 8,133 39 23,985 80 28,994
12 10,437 42 24,81 90 29,114
15 12,561 '45 25,551 100 29,156
18 14,526 48 26,190 НО 29,161
21 16,332 51 26,739 120 29,163
24 17,952 54 27,216 130 29,164
27 19,440
Для случая изотермической атмосферы
2(T]/e-^±]/e-N
± Аг
(3.61)
Сравнение точного (численного) решения с аналитическим по фор-
муле (3.60) для изотермической атмосферы Земли (рис. 52) дает
хорошее совпадение результатов.
4 614
97
Для определения пройденного пути запишем дифференциаль-
ные уравнения движения в следующем виде:
m~=-Xa(V} + mg ± /?Аг;
at
—=+v,
dt ~
(3.62)
а затем получим
dV
dh
V \_ ng • J
(3.63)
Интегрирование этого уравнения для случая экспоненциальной
атмосферы дает
V2= ±expl-^J- (±е-₽Л« + e-Pft)l 2g (т1*Хг) ехр (±-^- е-₽Л») X
хР(й)-7?(/г0)1. (3-64)
98
/?(й)=рй + Д-е-^-/'^е-РйУ—+ ...
₽1^2 к ₽1/2 ) 2.2! 1
У? (й0)=рй0 + -Др e-f^ - (е-Р^2 — +...
и7 г о_ pV2 ру2 ) 2.2! 1
или при удержании двух членов разложения
Я (й) - Я (Йо) Р (й - Йо) ± -Д- (е-Р* - е-Р^о).
(3.65)
(3.66)
При малых значениях ускорения dVIdt, обусловленных большим
миделем ЛА и малыми (=Fl±Ar), скорость полета в расчетах* пер-
вого приближения может быть определена из динамического
уравнения
Xe(V0=W( + l± Аг)
как
У(й)=[ 2та^/5м ( + 1 ± Аг)11/2.
L СxJi (Л) J
Расчеты численным интегрированием уравнений движения (3.57)
на ЭВМ применительно к спуску груза на парашютной системе по-
казали хорошую сходимость с результатами, полученными анали-
тическим методом по формуле (3.61).
3.6. ВОСХОДЯЩЕ-НИСХОДЯЩЕЕ ДВИЖЕНИЕ ЛЕТАТЕЛЬНОГО АППАРАТА
В СРЕДЕ ПЕРЕМЕННОЙ ПЛОТНОСТИ ПРИ Аг_^ 1, SM(A)¥= const
И В СРЕДЕ ПОСТОЯННОЙ ПЛОТНОСТИ ПРИ Ar^l и SM(A) = const
При режимах восходяще-нисходящего движения ЛА с пере-
менным миделем при Ar^l в среде переменной плотности
=/=const, dmldt = Q, /?аг = const и SM.(h) =#const при mVirt = ^ уравне-
ния движения принимают вид
(3.67)
Решение этой системы уравнений дает
_J__ = J 1 п К + Гт1±^Ж~/:;:1±А~Г-.
(~г") 2Т/<:р1±^г — ± Arj^+Ут! ±Аг^|
4*
99
Рис. 53. Характер влияния аэростатической силы Аг на скорость неустановившегося восходя-
ще-нисходящего движения
(3.69)
(3.70)
(3.71)
(3.72)
Формула (3.70) показывает, что присутствие аэростатической
силы увеличивает скорость подъема и уменьшает скорость сниже-
ния (рис. 53).
Для случая восходяще-нисходящего движений ЛА в среде по-
стоянной плотности при Ar^l уравнения движения (3.68) сохра-
няют свой вид, и решения (3.69) — (3.72) остаются в силе. Это
означает, что рассмотренные два вида движений имеют траектор-
но-параметрическую идентичность. Ее легко объяснить тем, что в
случае SM(h) =/=const и p(/z)y=const имеет место Xa(h) =const, как
и в случае SM(/z) = const и q(/z) = const.
3.7. ВЕРТИКАЛЬНЫЙ ПОДЪЕМ СТАТИЧЕСКИ НЕУРАВНОВЕШЕННОГО
ЛЕТАТЕЛЬНОГО АППАРАТА _НА ПАССИВНОМ УЧАСТКЕ ТРАЕКТОРИИ
ПРИ Аг<1 И Sm = const
Рассмотрим теперь случай, когда подобно зондирующей ракете
неуравновешенный ЛА после выключения двигателей вертикально-
го
го взлета продолжает движение на пассивном участке при Аг^=
== const. Уравнения движения без учета присоединенной массы и с
учетом того, что SM = const и q(/z) #=const, принимают вид
т = — Ха (V) — mg (1 — Аг);
(3.73)
—=V.
dt
Исключая время, получим
= - v [—+(1 - Аг)]. (3.74)
dh V L mg J
В общем виде интегрирование этого дифференциального урав-
нения можно выполнить с помощью приближенных методов. Одна-
ко, если коэффициент аэродинамического сопротивления принять
постоянным, то при условии экспоненциального закона изменения
плотности среды можно получить аналитическое решение:
V= Ио ехр [—2ХЖ (e-Pfto-e-₽ft)I-2g f 1—Аг) exp (2кхе~РА [/? (й)-/?(Л0)].
(3.75)
где ho — высота начала пассивного полета (в момент выключения
двигателя);
R + 2Ххе-^ - (2Ххе-^)2 + (2Ххе-₽л)з _2_ +...
Если 2Хх<<1, то решение существенно упрощается, так как тог-
да при любом 2Л,хехр (—р/г0) 1+2Ххехр (—$ho) и R(h)~h.
Как следует из формулы (3.75), аэростатическая сила увеличи-
вает градиент траекторной скорости.
3.8. ПОДЪЕМ И СНИЖЕНИЕ СТАТИЧЕСКИ УРАВНОВЕШЕННОГО
ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ДЕЙСТВИИ СИЛЫ, НАПРАВЛЕННОЙ
ПО ВЕКТОРУ И ПРОТИВ ВЕКТОРА СКОРОСТИ. СЛУЧАЙ SM(h) = const
^Рассмотрим вертикальное движение ЛА в присутствии постоян-
ной силы AF = const, действующей в направлении подъема или
спуска по вектору скорости. Этой силой может быть сила аэроста-
тического происхождения (сплавная сила положительная или от-
рицательная, A7?AApr(A) = const) либо сила, образуемая тягой дви-
гателей, работающих в режиме вертикального взлета или посадки.
Этому случаю соответствуют условия mg = const, RAr (h) = const,
^м(Л) = const, vo6(h) =#const, mg(h) =jRAT{h), mvirt = mr\v = const и
S (ft) =/= const.
101
Дифференциальные уравнения движения запишем в следующем
виде:
mvirt^-=-Xa{V)±^
at
dt ~~
(3. 76)
откуда -^к=+ g ^hV + J^j_, </л ' v v (3. 77)
и затем после замены у= V2 и 2V {dVldh')=dyldh\
н—e_flAz/ + 2g
dh -fyV2 *> - <>
(3.78)
где, как и прежде, т]у= (1-НМ — коэффициент виртуальной массы.
Мы получили линейное дифференциальное уравнение
y' + P(h)y=Q(h), (3.79)
где
P(h)=±^e^; (3.80)
V X
QW=±2g—- (3.81)
V
Решение уравнения (3.79) имеет вид интегрально-показательной
функции
h
у —exp — J P(Ji)dh
Ao
A / A \
Уо + jQW exp ^P(h)dh\dh . (3.82)
Ao
Ao
Далее
P(h)dh=±
(e—0ЙО — e0Й);
(3. 83)
h / h , h h exp (± 2^-e
Q (h) I exp P (A) dh | dh = 2g —\ =
ha ' ha / ^ftoexpfi—^72“
A
= ± 2g exp (+e-^o) \ exp (e-₽A) dh.
V ' /J K \ rfVx j
Ao
102
Необходимо проинтегрировать
h
I=\^ ехр^ +—^2- dh. (3.85)
1 i dx \
Сделаем подстановку для ехр (—0А) =х и для dh =---1---). Тог-
да получим
h
(3'86>
.Ло
или
/ = —-11ПЛ + х+(-^2-хУ——|-... (3.87)
Р I \ ' 2-21
В нашем случае всегда х#=0 и ехр (—0Л) =#0, поскольку полет
ЛА происходит в атмосфере планеты на конечных (и сравнитель-
но небольших) высотах h. Следовательно, записанный ряд (3.87) не
расходится. При этом
h / А
( Q (й) I ехр ( Р (h) dh | dh = + hF ехр (е-^ [A? (h)—R (й0)],
fto ' Aq '
(3. 88)
где
_/?(&)=рл +
2s е-₽л\2 _J_________i_
v / 2-21
ah \2 1
g—PAO ] ;----
J 2.2!
(3. 89)
С учетом выражений (3.83) и (3.88) уравнение (3.76) принима-
ет следующий вид интегральной показательной функции:
У2=ехр [-у^г (±е-,рА° + e-₽A)'j (Vo ±
+ 2g^.exP(± (3.90)
При удержании двух членов разложения формула (3.90) прини-
мает вид
^2== ехр [—2-^- ( + е~рЛо + {И) ± nF ^-ехр ^±2 — е~р/г°) х
X [р (й - й0) ± 2 (е-Р* - е-^о)]] . (3.91)
При nF = 0 формула (3.91) дает частный случай восходяще-нис-
ХоДящего движения (в отсутствии силы Д/7), выражаемой зависи-
мостью (3.14).
103
Формула (3.91) может быть представлена и в безразмерном
виде, как
(-£-) 2=ехр I - 2 (+ е-^о + е-₽Л)] + 2 -A. h ехр /2 е-₽^ х
' ио / L J V \ V '
X [р (А - Ао)+2 (е-?Л - е-^о)] , (3.92)
где
*о=^г. (3.93)
Ри0
Если начальная скорость отсутствует (Уо = О), то режим верти-
кального полета будет описываться зависимостью
V2= ± 2g ехр (± 2 е-₽А«) [/? (А) - /? (Ао)]. (3.94)
Г7)^ \ ^у J
Перегрузка на участке вертикального подъема ny(h) от сил
xa(V) и ДЕ (действующей по вектору скорости) найдется по пер-
вому уравнению системы (3.76), как
/»\ 1 dV 1 I / V “|
nuW=-------—=-------\tip- — е~₽А , (3.95)
s dt Уу L \ / J
где текущая скорость V=V(h) определяется по формуле (3.91). ’
В начале подъема стартовая перегрузка ny(h) = поу при h = 0
составит величину
пОу=— \nF — , (3.96)
V L \ vx / J
а в конце снижения при Ло
пук= — (3.97)
V L vx J J
где индекс «к» означает параметры в конце снижения.
Если начальная скорость отсутствует (Ео=0), то стартовая пе-
регрузка пОу в обоих случаях равна своему максимальному значе-
нию
^тах=—• (3.98)
Характер кривых V(h) и ny(h), выражаемых формулами (3.91)
и (3.95), показан для режимов взлета и снижения на рис. 54 и 55.
Как следует из рисунков, по мере увеличения высоты скорость
подъема увеличивается, что связано с непрерывным действием си-
лы ДЕ и уменьшением плотности среды р(/г).
При снижении, вследствие заметного увеличения плотности сре-
ды, кривая V(h) проходит через максимум (рис. 55). Что касается
перегрузки, то ее величина растет при подъеме и уменьшается при
снижении.
104
Рис. 54. Изменение параметров скорости. V/Vo и перегрузки п в режиме вертикального взле-
та. Сила AF направлена по вектору скорости
Рис. 55. Характер влияния высоты снижения (0/г) на параметры скорости (V/Vo) и перегруз-
ки пу. Сила ДГ направлена по вектору скорости
Если принять высоту h за новую независимую переменную, то
кинематическое уравнение вдоль вертикального направления с уче-
том динамического уравнения системы (3.76) запишется в виде
dt __ । 1
dh~± V
(3.99)
Интегрирование этого уравнения при условии, что £ = 0, h=hQ
и /=т, Л = ЛК, дает следующее выражение для времени восходяще-
нисходящего движения ЛА:
t = I (fep) — I (ft) , 100)
-V-
V rng
где
о
Для экспоненциального закона q = q (Л) формула (3.100) прини-
мает вид
t = 2 (±Уе~рЙ0 Т ~Ке~рл) . (3. 1Q2)
3^1/ —
Г rng
Следовательно, время подъема и снижения аэростатического ЛА
в присутствии силы, направленной по вектору скорости, одинаково.
105
Продолжим далее рассмотрение случаев вертикального подъ-
ема и снижения аэростатического ЛА, когда сила AF направлена
против вектора скорости и, следовательно, является тормозящей
силой. Такие случаи движения могут потребоваться для базовых
геликостатов или высокоманевренных мезопланов при выполнении
взлетно-посадочных и стыковочных маневров, а также других эво-
люций в вертикальной плоскости, связанных с выполнением науч-
ных экспериментов и выбором оптимального режима дрейфа или
маршевого движения по трассе полета.
Перегрузка ny(h) будет равна
е"₽А+гаЯ ’ (3-103>
g \ at / ^ly |_\ Vх / J
где V(h) определяется по формуле (3.91).
Для вертикального подъема начальная и конечная перегрузки
при Л = 0 и А = оо соответственно будут равны
При снижении, начальная перегрузка на высоте Ао и конечная
на высоте h = h^ определяется как
е-РАо+; (3.' 105)
v \\vx) J
^=^[(-^)2е“РЛк+^] • (3-106>
Кривые скорости V(h) и перегрузки ny(h), построенные по
формулам (3.90) и (3.103) для режимов подъема и спуска, приве-
дены на рис. 56 и 57. Как следует из рисунков, при подъеме ско-
рость и перегрузка непрерывно уменьшаются по мере увеличения
высоты/г, а при снижении эти параметры проходят через максимумы
К(А)шах И (Л)тах, определяемые влиянием как силы AF, так и
плотности среды, увеличивающейся по мере уменьшения высоты h.
В случае определения силы аэродинамического сопротивления
через параметры Сиа и цОб легко показать, что уравнения движе»
ния, записанные по аналогии с выражением (4.98) с учетом соот-
ношений SM(/i) =г>об(Л)2/3 и у0б=!^оехр (—p/i), дают следующие
выражения для главных параметрических зависимостей восходяще-
нисходящего движения:
l/2_eXD —2Х„ —1+е ®А° + е ’ иУо +
и . L v \ ^gnF г 2ХИ -1 — ехр + -2- е (—л L v ^°][W)-Wo)b * (3.107)
106
ГД® (3 / ₽ \ 2
/?(й)=^-й±а»е-зл_ аке-зл ^4
3 riy \ у\у ] 2.2!
0 / 0 \ 2
П / г \ 3 7 2к„ —о" Ло I 2Хц о М 1
я (Йо) =-£- Ло + —^ е 3 — — е 3
3 1)|Л \ "Чу
2.2!
и затем
у2 = ехр
-U
, з
-U
е 3
х Vo ± 2g
V
h-F
ехр I + е
\ V
₽ „ \
-----«0 1
! 3 X
х| —(Л —Ло)± — U 3 — е 3
L з
где Х„ определяется выражением (3.42).
Имеем также
(1Л 1 dV 11
)=-----— =-----pF —
У g dt
₽ h
-----Л
ь 3
. nF
raj/max
(3. 108)
(3.109)
(3.110)
(3.111)
Рис. 56. Изменение параметров скорости V/Vo и перегрузки пу в зависимости от высоты
подъема ^h. Сила А/ направлена против вектора скорости. Случай SM=const
**Ис- 57. Изменение параметров скорости V/Vo и перегрузки пу в зависимости от высоты сни~
жения р/г в присутствии тормозящей силы AF. Случай 5M=const
107
Выводы по характеру движения, определяемому зависимостями
V(h) и ny(h), одинаково справедливы для случаев Su(h) = const и
S^(h) = ^обМ)2/3- По этой причине в дальнейшем одноименные за-
висимости будут записываться по аналогии с зависимостями, опи-
сывающими случаи SM(7z) =const.
3.9. ПОДЪЕМ И СНИЖЕНИЕ СТАТИЧЕСКИ УРАВНОВЕШЕННОГО
ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ДЕЙСТВИИ СИЛЫ, НАПРАВЛЕННОЙ
ПО ВЕКТОРУ СКОРОСТИ. СЛУЧАЙ Sn(h)&const
Случаю S^=^=SM(h) соответствует закон изменения площади ми-
делевого сечения, при котором обеспечивается аэростатическое
равновесие ЛА на всех его высотах полета. Имеют место условия
т (h) = const, Rxr(h) = const,
/n(A)g=/?Ar(A), ^(A)/const, 5М(Л)/const,
/nVirt=--WAr(l+£M), Q (A)/const.
Уравнения движения имеют вид
at
—^+v
(3.112)
или
(3.113)
где верхний знак относится к режиму подъема, а нижний — к ре-
жиму снижения.
После разделения переменных интегрирование первого урав-
нения системы (3.113) дает
где Vx определяется зависимостью (3.14').
Если начальная скорость полета (подъема или снижения) рав-
на -нулю Vq = 0, то время движения составит
(3. 115)
Формулы (3.114) и (3.115) одинаково справедливы для режимов
подъема и снижения. Как следует из этих формул, увеличение пе-
регрузки nF уменьшает время вертикального маневра t.
108
Зависимость скорости от времени полета найдем из формулы
(3.114), как
(3.116)
При Vo формула (3.116) упрощается и принимает вид
/ 2g]<nf \
'-- \ /
nF-------------------
/
(3.117)
Из формулы (3.117) видно, что при t—>оо скорость вертикаль-
ного полета стремится к предельной величине, равной V =\f nFV х-
Формулы (3.116) и (3.117) также одинаково справедливы для
вертикального подъема и снижения. В них верхние знаки относят-
ся к случаю и а нижние — к случаю
]/^<(1//^) и r^<(I/0/Vx).
Найдем далее высоту подъема h в функции скорости V. Имея
систему уравнений (3.113), получим
затем
-^ = (+-^-+^2— • (3.119)
dh \ V2X - р) v
где произведена замена V2=y, (dy/dfi) =2V(dV/dh).
Разделение переменных и интегрирование уравнения (3.119)
дает
(3.120)
или при Vo=0
(3.121)
109
После замены в формуле (3.119) V
dh
= — и интегрирования по-
dt
лученного выражения получаем
2KV
или при Ио = О
В соответствии с первым уравнением системы (4.138) перегруз-
ка от сил Xa(V) и AF во время спуска и подъема будет равна
где скорость V(t) определяется по формуле (3.116).
Имеют место также зависимости
nF
И ^max~u_
Кривые скорости, высоты и перегрузки, характеризуемые при-
веденными здесь зависимостями V(t), h(V) и ny(V) для режимов
подъема и снижения, приведены на рис. 58 и 59. Как следует из
рисунков, в обоих случаях с течением времени скорость непрерывно
увеличивается, что в соответствии с вышеприведенной зависимо-
стью вызывает уменьшение перегрузки ny(V). Обращая внимание
на первый член правой части первого уравнения системы (3.113),
410
t/(i]4Vx/ZgVn'F)
Рис. 59. Характер изменения параметров V(0» МО и «?J(0 при вертикальном снижении га
действии силы Д/^, направленной по вектору скорости. Случай SM=const
Рис. 58. Характер зависимостей V(O. МО и /г^(О при вертикальном подъеме и дрействии ог-
лы ДГ, направленной по вектору скорости. Случай
можно провести аналогию с движением в горизонтальной плоскости
или в среде постоянной плотности, где параметры скорости V(t) и
перегрузки ny(t) меняются одинаково, независимо от направления
полета уравновешенного ЛА.
3.10. ПОДЪЕМ И СНИЖЕНИЕ СТАТИЧЕСКИ УРАВНОВЕШЕННОГО
ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ДЕЙСТВИИ СИЛЫ, НАПРАВЛЕННОЙ
ПРОТИВ ВЕКТОРА СКОРОСТИ. СЛУЧАЙ S^(h) =#const
Помимо описанных выше полетов аэростатических ЛА подъем
и снижение в присутствии активно-тормозящих сил А/7 необходи-
мы при выполнении маневренных движений, а также корректирую-
щих движений центра масс при расчете на посадку или причалива-
нии к базовому аэростатическому ЛА.
Поскольку отмеченные выше условия полета (см. разд. 3.3) ос-
таются в силе, запишем по аналогии с выражением (3.113)
dV =__Ч--
dt V V ’
—= + V.
dt —
(3.124)
111
Интегрирование первого уравнения системы (3.124) дает
(3. 125)
Формула (3.125) одинаково справедлива для режимов подъема
и снижения аэростатических ЛА.
Найдем далее параметрическую зависимость для высот манев-
ра в присутствии тормозящей силы AF. Поступая, как и выше (см.
разд. 3.8), получим
откуда
и затем
—^г(± h + йо)1 —
х J
(3. 126)
(3.127)
(3.128)
Высоты, на которых скорость подъема или снижения становится
равной нулю, в соответствии с формулой (3.128) при V = 0 опреде-
ляются как
А^т=±Т1п[1 + (^)2]' (3<129)
g /
Текущая перегрузка ny(Ji), как сле-
дует из первого уравнения системы
(3.124), будет равна
(3. 130)
где скорость V(/z) определяется по фор-
муле (3.128).
Рис. 60. Изменение параметров скорости V и перегрузки
п по высоте подъема h в присутствии тормозящей силы
AF.’ Случай
112
Кривые V(h) и ny(h), выражаемые зависимостями (3.128) и
(3.130) для вертикального подъема, представлены на рис. 60. Как
следует из рисунка, параметры скорости и перегрузки уменьшают-
ся по мере увеличения высоты полета h.
3.11. ВЕРТИКАЛЬНЫЙ ВЗЛЕТ АЭРОСТАТИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА
ПРИ пт= 0 И Ar^l В СРЕДЕ ПОСТОЯННОЙ ПЛОТНОСТИ
Для вертикального полета в поле постоянных гравитационных
сил (g = const), постоянной массы летящего ЛА (/и = const) и в
среде постоянной плотности (q = const) дифференциальное уравне-
ние движения запишется как
m^-=P-mg-Xa + R^ (3.131)
- at
ИЛИ
d-^=g (kr - (1 —Ar)] - . (3.132)
Случай, описываемый уравнением (3.131), может относиться к
венерианскому ЛА, осуществляющему подъем (старт) с поверхнос-
ти планеты на небольшую высоту (в пограничном слое атмосферы)
с целью последующего дрейфа и посадки в новом районе ее по-
верхности (рис. 61). Так как при полете по вертикальной траекто-
рии подъемная сила равна нулю, коэффициент лобового сопротив-
ления следует *брать для СУа = 0, т. е. СХа = Сх^. Скорость полета V
во время подъема невелика, небольшими получаются и числа М.
Это позволяет в первом приближении принять при расчете началь-
ного участка подъема const, т. е. пренебречь влиянием сжи-
маемости атмосферного газа на аэродинамические характеристи-
ки ЛА.
Рис. 61. Плавающий батискаф в глубинных слоях атмосферы Венеры
113
Разделяя переменные в уравнении (3.132) и интегрируя при ус-
ловии, что в начале полета Ми V=0, получим
,z ._________exp У nT —(1 —Аг)] — 1
Х-—У n0—(1 —Аг)----> --х-- . (3.133)'
х ехр (2t У пт— (1 — Аг) j + 1
Высоту полета найдем интегрированием скорости J Vdt=^dh,
исходя из выражения (3.133). Тогда получим
exp У пг — (1 — Аг)] + 1
-У—=2 In-----У . (3.134)
) 2 Рехр «т—(1—до)
Если /^>1 и /^>1п4, где /=ехр (2t — V n.t — (1 — Аг)),
то формулы (3.133) и (3.134) еще более упрощаются и принимают
вид
У=УхУпт-(1-Аг) = 1/^М«г-(1-Аг)]; (3.135)
h,=Vxt V/zT —(1 — Ar). (3.136)
На основании формул (3.135) и (3.136) можно получить также
V=V^h [,zT — (1 — Аг)]. (3. 137)
Формула (3.135) указывает на аналогию рассматриваемого слу-
ная вертикального движения с горизонтальным движением при
постоянной скорости (V=const), величина которой пропорциональ-
на множителю V — (1—Аг).
Формулы (3.135), (3.136) и (3.137) пригодны для приближен-
ной оценки параметров старта ЛА. Из них следует, что увеличение
параметров пт и Аг существенно влияет на увеличение скорости и
высоты взлета аэростатических ЛА.
Характеристики режима взлета ЛА могут быть представлены и
по-другому. Для этого запишем ускорение dV/dt в виде
dV _dV dh _ 1 dV*
dt ~ dh dt ~~ 2 dh
Подставив-это выражение в уравнение (3.131), получим
V Д^-^Я1-Аг)]=0. (3. 138)
Решение этого линейного дифференциального уравнения пер-
вого порядка относительно неизвестной V дает
(Х1)=[«т-(1-Аг)]{1-ехрГ — (-фМЬ (3.139)
\ *х ' V L \ V X /
114
Очевидно, что формулы (3.133) и (3.139) идентичны.
Взяв производную по h от правой части уравнения (3.139) - п
приняв во внимание, что 2(dV/dt) = dV2/dh, получим следующее вы-
ражение для времени взлета:
-------=- V
г________=_ ]/п.г-(1^Аг) + —
V fl., - (1 - Аг) In-----------. (3.140)
Уп.г-(1-Аг)--^-
V X
В силу q = const и SM = const, уравнения движения несвободного
аэростатического ЛА под действием сил +А/7 приобретают тот же
вид, что и в случае подъема или снижения статически уравновешен-
ного ЛА при действии силы, направленной по вектору (3.112) или
против вектора (3.124) скорости при SM(/z)= const (см. разд. 3.9 и
3.10). Полученные характеристики (3.114), (3.123), (3.116), (3.128),
(3.120), (3.121) и аналогичные им другие остаются справедливы
и для случая несвободного полета аэростатического ЛА в среде
постоянной плотности. Поскольку эти зависимости не содержат
показателя экспоненты р, расчет характеристик (в частности, опре-
деление параметра Vx), можно вести по этим формулам, произве-
дя замену СХа на Си и mg/SM на mglv2^.
3.12. ПОДЪЕМ УРАВНОВЕШЕННОГО АЭРОСТАТИЧЕСКОГО
ЛЕТАТЕЛЬНОГО АППАРАТА С ЖЕСТКОЙ ОБОЛОЧКОЙ ПОСТОЯННОГО
ОБЪЕМА ПРИ НЕПОСТОЯНСТВЕ ВИРТУАЛЬНОЙ МАССЫ И ДЕЙСТВИИ СИЛЫ,
НАПРАВЛЕННОЙ ПО ВЕКТОРУ И ПРОТИВ ВЕКТОРА СКОРОСТИ
Под жесткой оболочкой понимается такая, объем и геометриче-
ские обводы которой остаются неизменными при изменении высоты
полета и внешнего давления.
Рассмотрим аэростатический ЛА (см. рис. 39), сохранение же-
сткости и изменение высоты которого происходит путем забора
(снижение) или вытеснения (подъем) атмосферного газа.
Из уравнений движения (3.76) и условий полета m(h) #=const,
^Ar(/i)=#const, m(/z)g-=/?Ar(^), mVirt = w(l+£M) exp (—р/l),
= const, SM = const следует
dV ( g \ 172,. gnF
(3.141)
затем
V2=exp [--(h — A0)l x
L \УХ J
(3.142)
115
где верхние знаки соответствуют действию силы, направленной по
вектору скорости; нижние знаки — действию силы, направленной
против вектора скорости.
При отсутствии силы Д77 и nF = 0 имеем частный случай восхо^
дящего движения (3.44).
Для условий Vo = O и ho = O формула (3.142) дает
y2 = 2nFg expl
2#
2g \ 1
/ 2g ।
U^+fh
(3.143)
V^x
h
Зависимость V(h) при верхних знаках (3.142) имеет экстремум.
Найдем его, приравняв нулю производную (dV2/dh)=Q. Тогда по-
лучим
( 2g
I -п у2
\ Чу¥ х
н (А-Ао)=1п
( I/2 + И
2g V2O v х . е-^о — 1 ..
V* е
- V -*
(3.144)
Как следует из формулы (3.144), максимум скорости достига-
ется при тем большей высоте, чем больше начальная скорость Ко и
меньше перегрузка nF.
При «о, т. е. в случае старта с поверхности планеты, максималь-
ная скорость подъема достигается на высоте
(_2£_
A—In
2g
Vo
^nFg
Пу е-рл° — 1
(3.145)
При отсутствии начальной скорости Vo = O функция (3.143), как
это видно из формул (3.144) и (3.145), максимума не имеет и ско-
рость по высоте подъема непрерывно убывает.
Если в формуле (3.142) положить /?F = 0, то при Ло = О
^=ехр(~^Л)- (ЗЛ46)
у о \ lyv х /
Это означает, что при отсутствии активных сил имеет место
аналогия восходящего движения аэростатического ЛА в среде пе-
ременной и постоянной плотности при уОб = const.
При Ао = О и нижних знаках формула (3.142) принимает вид
1/2 —ехр
Vx
2^
(3. 147)
Как следует из формулы (3.147), скорость подъема при дейст-
вии тормозящей силы AF непрерывно уменьшается.
116
з13. СНИЖЕНИЕ УРАВНОВЕШЕННОГО АЭРОСТАТИЧЕСКОГО ЛЕТАТЕЛЬНОГО
АППАРАТА С ЖЕСТКОЙ ОБОЛОЧКОЙ ПОСТОЯННОГО ОБЪЕМА
ПРИ НЕПОСТОЯНСТВЕ ВИРТУАЛЬНОЙ МАССЫ И ДЕЙСТВИИ СИЛЫ,
НАПРАВЛЕННОЙ ПО ВЕКТОРУ И ПРОТИВ ВЕКТОРА СКОРОСТИ
В рассматриваемом случае условия полета, изложенные в разд.
3.12, сохраняются и уравнение движения приобретает вид
Решение его дает
-----2dL_
dh Vе ₽ft
Зависимость V(Л) (3.149) имеет максимум скорости по высоте
полета h. Приравняв нулю производную (dV2/dA)=0, получим
Г Л__2г_) T
(р-тЯ(,!-*")=1пК&- 1+1/° з»1/
\ РГг L 2nFg JJ
Если начальная скорость равна нулю (Ко=О), то
Если снижение происходит до поверхности планеты /г = О при
Ео=0, то формула (3.149) принимает вид
V2
(3.151)
Как видно из формулы (3.151), скорость у поверхности плане-
ты будет тем больше, чем больше сила ДЕ, и тем меньше, чем мень-
ше начальная высота снижения ho.
Имея условия (3.12) и следуя аналогии (3.141), запишем для
случая действия силы против вектора скорости
V —=(—-Ц-) И2 _|.
dh \^vVx)
nFg
V е^₽Л
(3. 152).
117
Решение этого уравнения дает
У2 — ехр
2g
V X
2nFg
2gh0
..2
exp (P
h0
(h0 — /i) X
хЙ
V
— exp Ip
(3.153)
Из формулы (3.153) следует, что при снижении с тормозящей
силой ДР скорость непрерывно уменьшается. У поверхности пла-
неты эта скорость при Л = 0 будет равна
1/2=ехр
VI
2nFg
Zgho
TZ2
<?VVx x
(3.154)
где Ло — исходная высота снижения.
Глава 4
ЛЕТНЫЕ ХАРАКТЕРИСТИКИ СТАТИЧЕСКИ
НЕУРАВНОВЕШЕННОГО ЛЕТАТЕЛЬНОГО АППАРАТА
С ПОСТОЯННЫМ МИДЕЛЕМ
Выше было показано, что статически неуравновешенные ЛА с несущими аэро-
динамическими поверхностями (крыльями) по своим летным характеристикам
уступают аналогичным ЛА, если они предназначены для полетов в атмосфере
Земли, и, наоборот, превосходят их, если они предназначены для полетов в ат-
мосфере Венеры.
С точки зрения маневренности статически неуравновешенные ЛА с крылом
обладают преимуществом перед другими венерианскими ЛА, благодаря чему
изучение механики их полета представляет очевидный теоретический и практи-
ческий интерес.
В этой главе летные характеристики рассматриваются для статически неурав-
новешенного летательного аппарата с крылом при следующих условиях: а) поля-
ра является параболической с постоянными коэффициентами; б) характеристики
силовой установки не зависят от скорости и пропорциональны некоторой степе-
ни относительной плотности атмосферы, в) мидель газовмещающего корпуса не
зависит от величины аэростатической силы и остается постоянным во время по-
лета.
Схемы статически неуравновешенных ЛА с постоянным миделем можно пред-
ставить в виде «летающего крыла» (рис. 62) или «летающего тела» (рис. 63), по
типу гибридного летательного аппарата американской фирмы Аэрон Корпорейшн.
Жесткие обводы таких обтекаемых ЛА образуют аэродинамическую подъемную
силу, а внутренняя оболочка переменного объема (наполненная легким газом)
образует аэростатическую подъемную
силу. Изменение внутреннего объема
(регулирование аэростатической силы)
может быть выполнено 'различными
методами, в частности механическим пу-
тем, подогревом или охлаждением подъ-
емного газа.
рис. 62. Схема жесткого аэростатического ЛА типа «летающее крыло* с постоянным миде-
лем и переменным внутренним объемом
рис. 63. Схема гибридного статически неуравновешенного ЛА американской фирмы Аэрон
Корпорейшн (проект)
119-
Характеристики энергетических установок являются условными для гипо-
тетических венерианских ядерных ТРД и силовых винтомоторных групп. Эти
предположения вносят существенные ограничения в наши исследования, однако
они позволяют получать вероятностные характеристики предполагаемых (прог-
нозируемых) ЛА, полет которых возможен в дозвуковом режиме на различных
высотах в атмосфере Венеры.
В настоящей главе рассматриваются также простейшие режимы движения
статически неуравновешенного ЛА с произвольной и параболической полярами
в вертикальной и горизонтальной плоскостях. Сюда относятся наклонный подъем
и планирование в среде постоянной и переменной плотности.
Наклонный подъем (скольжение от гравитационного центра) может проис-
ходить под действием неуравновешенной составляющей аэростатической силы,
когда Ar> 1.
Планирование (скольжение к гравитационному центру) происходит под влия-
нием неуравновешенной составляющей силы тяжести, когда Аг<1.
4.1. АЭРОДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ СТАТИЧЕСКИ
НЕУРАВНОВЕШЕННОГО ЛЕТАТЕЛЬНОГО АППАРАТА С ЖЕСТКИМ КОРПУСОМ
Аэродинамические коэффициенты СХа и СУа в- области малых
скоростей полета (когда атмосферу планеты можно рассматривать
как несжимаемую газовую среду) связаны между собой известным
квадратическим соотношением
Сх =схп + vCL, (4. 1)
1
тде v =-----; ?1эф — так называемое эффективное удлинение, свя-
лАЭф
занное с действительным удлинением крыльев Акр эмпирической
формулой вида
—1—|-o,oi.
лАЭф лАкр
При малых углах наклона траектории 8 можно записать
=(1 —Аг)
mg
и преобразовать зависимость (4.1) к следующему виду:
1 - \^ха /шах тде ул=1/_2^£_ ,7 У Q(h)SM У (1-А.у, (4.2) \Vg) 1 / v \г W -1 — = 1 / „ 3. с-0 V
120
__ характерная скорость; (С^)наив=КСЛолХэф — коэффициент
подъемной силы при наивыгоднейшем угле атаки, которому соот-
ветствует максимум аэродинамического качества
= 1 =J_ 1/ ЯАЭФ (-441
• Сх, /тах -21/vC, 2 У Сх
\ ЛО, / ГПаХ г Xq r Xq
—- максимальное аэродинамическое качество;
Ar = 7?Ar/mg — безразмерная аэростатическая сила.
Всегда Ar = const. При SM = const -постоянство параметра Аг
обеспечивается изменением внутреннего объема аэростатической
оболочки присоединением или удалением атмосферного газа либо
изменением удельного веса подъемного (или атмосферного) газа
путем его нагрева или охлаждения.
Для квазиустановившегося полета статически неуравновешен-
ного ЛА в вертикальной плоскости величина (1—Аг), представляю-
щая собой перегрузку от подъемной силы ny = Yalmg, всегда равна
или меньше единицы, т. е. пу = (1—Ar) <: 1.
Как следует из рис. 64, где представлена зависимость (4.2),
функция Xa = Xa(V) для параболической поляры имеет минимум.
Это является следствием того, что лобовое сопротивление при ну-
левой подъемной силе со скоростью монотонно возрастает, а индук-
тивное лобовое сопротивление убывает. Из рисунка видно также,
что увеличение аэростатической силы вызывает уменьшение пол-
ного аэродинамического сопротивления вследствие уменьшения ин-
дуктивного сопротивления, определяемого вторым членом в квад-
ратных скобках формулы (4.2). Этот результат справедлив для
случая горизонтального полета, когда на режиме движения не ска-
зывается влияние составляющей аэростатической силы (совпадаю-
щей с вектором аэродинамического сопротивления), как это быва*
ет, например, в режиме крутого планирования.
Можно видеть также, что при больших значениях безразмерной
скорости влияние аэростатической силы на полную силу аэродина-
мического сопротивления невелико. При этом функцию лобового
сопротивления (4.2) можно заменить упрощенным выражением, в
котором положить Аг = 0.
Дифференцирование и приравнивание нулю производной
d(Xa/mg)/d(V/VR) от правой части выражения (4.2) дает
О =/(1Г^). (4.5)
Это означает скорость квазиустановившегося полета, которой
соответствует минимальное лобовое сопротивление X = Xmln. Вели-
чина его на основании выражения (4.2) равна
_ (1 —Аг) (4 б)
\ mg /mln lCya \
\ с /
\ ха / шах
гДе индекс «V» означает оптимальность по скорости полета.
121
Рис. 64. Характер влияния скоро-
сти и аэростатической силы на аэро-
динамическое сопротивление ЛА с
жестким корпусом
Таким образом, безразмерная ско-
рость (V/VR) представляет собой от-
ношение действительной скорости по-
лета к той скорости, при которой пол-
ное лобовое сопротивление в горизон-
тальном полете минимально.
Как следует из формул (4.5), (4.6),
а также из рис. 64, минимальные зна-
чения сил сопротивления и им соот-
ветствующие оптимальные скорости
смещаются в сторону малых значений
при увеличении параметра Аг.
Безразмерная скорость неуравно-
вешенного венерианского ЛА (4.5),
которой соответствует минимальная
сила аэродинамического сопротивле-
ния, всегда меньше аналогичной скорости ЛА чисто самолетного
типа. Отношение этих скоростей составляет величину
(—1
\ V# /ала
(V \
\V# /сам
/(1-Аг),
(4.7)
где индексы «АЛА» и «САМ» отнесены к аэростатическому ЛА и
самолетному ЛА соответственно.
Отношение индуктивного сопротивления Xi к лобовому при ну-
левой подъемной силе XQ будет равно
Г2 -
С-— = у-^- = О - Аг)2 (4.8)
схо (V\4
а отношение действительного аэродинамического качества к его
максимальному значению определится как
1СУа\ / V \2
_ 2/g = 2(1~АГ)( .
(1^) 1+г (1-Аг)г+О
\^ха /max
При Аг=1 отношение (C^JCxJ/(C^JCxJmax = O,
видно для статически уравновешенных ЛА.
(4.9)
что оче-
4.2. УРАВНЕНИЯ ДВИЖЕНИЯ В ОБЩЕМ ВИДЕ
Ниже рассматриваются вопросы летных характеристик стати-
ческих ЛА при следующих условиях:
а) планета плоская и ускорение силы тяжести постоянно;
122
б) инерционные члены в динамических уравнениях пренебре-
жимо малы,
в) тяга направлена по касательной к траектории, не зависит от
скорости полета и пропорциональна некоторой степени плотности
атмосферы;
г) атмосфера находится в покое относительно Венеры и ее свой-
ства являются известными функциями высоты;
д) поляра параболическая с постоянными коэффициентами;
е) аэродинамические силы разделены на две ортогональные
компоненты: подъемную силу Ya(V) и аэродинамическое сопротив-
ление Xa(V). Сила аэродинамического сопротивления направлена
противоположно вектору скорости, подъемная сила перпендикуляр-
на вектору скорости и лежит в плоскости этого вектора;
ж) аэродинамические силы, сила тяги двигателя (если таковая
имеется) и аэростатическая сила проходят через центр тяжести
ЛА.
Очевидно, что эти предположения вносят определенные ограни-
чения, однако они позволяют получить простые аналитические ре-
шения, с помощью которых легко изучить основные особенности
летных характеристик венерианских ЛА. При выполнении принятых
условий квазиустановившийся полет в вертикальной плоскости
(его частным случаем является горизонтальный полет) описыва-
ется следующей системой кинематических и динамических урав-
нений:
—-I/ cos 6 = 0;
dt
——v sin 9 = 0;
dt
Р—Xa — mg sin 9 -(--А'аг sin 9 = 0;
Ka — mg cas 9-|-/?Ar cos 9 = 0;
^^-|-а*Р = 0,
dt
(4- 10)
где L — горизонтальная дальность полета; h — высота; V — ско-
рость; 6 —угол наклона траектории полета к горизонту; Р — тяга
и а* — удельный расход переменной массы (топлива). Два первых
Уравнения представляют собой кинематические уравнения вдоль го-
ризонтального и вертикального направлений, третье и четвертое
представляют собой динамические уравнения в проекциях на каса-
тельную и нормаль к траектории полета. Последнее уравнение опре-
деляет массовый расход топлива для двигателя.
Динамические уравнения показывают, что лобовое сопротивле-
ние и составляющая силы тяжести вместе с аэростатической силой
вДоль касательной к траектории полета уравновешиваются тягой,
а составляющая силы тяжести вдоль нормали к траектории поле-
подъемной аэродинамической и составляющей аэростатичес-
кой силами.
123
4.3. УГОЛ НАКЛОНА ТРАЕКТОРИИ И ВЕРТИКАЛЬНАЯ СКОРОСТЬ
ПРИ ПОЛОГОМ ПЛАНИРОВАНИИ
Для изучения траекторий планирующего полета в уравнениях
движения следует положить Р=0. Рассмотрим с целью упрощения
расчетов систему уравнений (4.10) для случая пологого планиро-
вания, когда угол наклона траекторий к горизонту мал. Тогда
sinO ~0, cos 0^1, и уравнения движения принимают вид
dt
— — 1/9=0:
dt
~ #Аг0 + + wg9 = 0;
^Ar + ra — mg^ = 0;
dt
Исследуем теперь свойства этой системы с локальной и с интег-
ральной точек зрения.
Динамическое уравнение в проекции на касательную к траек-
тории полета с учетом выражения (4.2) дает следующее решение
для угла планирования (модуля угла наклона траектории):
где УПл — скорость планирования.
Вертикальная скорость снижения, выраженная в безразмерной
форме, на основании второго уравнения системы (4.11) и формулы
(4.12), равна
(4.13)
где Уверт — вертикальная скорость снижения.
Кривые 9 (Аг) и (Ув'ерт/Кн) (Аг), построенные по формулам
(4.12) и (4.13) для различных значений безразмерной скорости
Кпл/Кв, приведены на рис. 65 и 66, из которых видно, что кривые
О (Аг) и (Кверт/К#) (Аг) имеют минимумы. Из формул (4.12) и
(4.13) также видно, что эти минимумы являются следствием дей-
ствия двух противоположных факторов. С одной стороны, при уве-
личении аэростатической силы растет ее составляющая, направ-
ленная по вектору аэродинамического сопротивления, что увеличи-
124
Рис. 65. Характер влияния аэростатической силы на угол наклона траектории при различных
значениях безразмерной скорости (VnJI/VR)
Рис. 66. Характер влияния аэростатической силы на вертикальную скорость планирования
при различных значениях безразмерной скорости (Упл/Гл)
вает общее сопротивление движению (первый член в квадратных
скобках увеличивается); с другой стороны, увеличение аэростати-
ческой силы уменьшает индуктивное сопротивление (второй член в
квадратных скобках уменьшается)__
Функция двух переменных Аг и 7Пл/^н при J9/dAr = 0 и
*ЙМ(УПЛ/Ук) =0 имеет единое решение, которому соответствует
минимум в точке
(1- Аг) = (^-}2. (4.14)
Подстановка этого выражения в уравнение (4.12) дает
-0=(-8)raln=7F2—• (4.15)
ЬУа \
\ ла ' max
Таким образом, абсолютное значение минимального угла на-
клона траектории 0 = 0min не зависит от скорости планирования и
величины аэростатической силы и определяется величиной, обрат-
ной аэродинамическому качеству.
Исследование на экстремум функции двух переменных (4.13)
показывает, что она содержит независимые решения с минимумами
в точках
(1-Аг)Др=(^2, (4.16)
= /(1 - Аг) , (4.17)
\ VR /mln уз
гДе индексы «Аг» и «V» означают оптимальность по аэростатичес-
кой силе и скорости соответственно.
125
Подстановка выражения (4.16) в уравнение (4.13) дает
/Ел л \
Уверт \ V# /
/mln
\ёГ~ /
\ ла / max
(4-18)
Поскольку зависимости (4.16) и (4.5) идентичны, то минималь-
ные значения угла наклона траектории 0 и безразмерной верти-
кальной скорости Уверт/^я наблюдаются в точке, которой соответ-
ствует минимальное аэродинамическое сопротивление в горизон-
тальном полете.
Минимальной скорости планирования, определяемой равенст-
вом (4.17), соответствует минимальная скорость снижения (вер-
тикальная скорость), равная
^верг \ V
VR ' 1
> mln
2 К(1-Аг) 4/-^-
3 ’/3‘
\^ха /max
(4-19)
Отсюда следует, что скорость при пологом планировании, опре-
деляемая зависимостью (4.17), на 32% выше скорости при сниже-
нии (4.19), причем этот процент заметно увеличивается при уве-
личении аэростатической силы. Заметим, что по условиям задачи
{СУа\С*<) 1 <СМ- РИС- 65 И 66 ) •
4.4. ДАЛЬНОСТЬ И ВРЕМЯ ПОЛОГОГО ПЛАНИРОВАНИЯ
Если высоту выбрать в качестве новой независимой перемен-
ной, то кинематические уравнения движения вдоль горизонталь-
ного и вертикального направлений принимают вид
где = (2mg/SMCroQ0)1/2 — характерная скорость, вычисленная
для условий полета на «уровне моря».
Постоянный угол атаки. Проинтегрируем уравнения (4.20) для
случая полета при постоянном угле атаки. При этом также СУа=
= const. Поскольку параметры V и VR одинаково обратно пропор-
циональны плотности q(/z), то их отношение также постоянно
126
Рис. 67. Характер влияния аэростатической силы и скорости на дальность планирования
при постоянном.угле атаки
Рис. 68. Характер влияния аэростатической силы и скорости на время планирования при пос-
тоянном угле атаки
V/V’B = const. Интегрирование уравнений (4.20) при условии, что
Л = 0, t=Q, когда h = h0, дает
(4.21)
/(Ао)-7 (А)
(4.22)
где ftp и h — начальная и текущая (в данной точке траектории —
конечная) высоты планирования, а функция 1(h) имеет вид (см.
разд. 3.5)
dh.
(4.23)
Характер влияния аэростатической силы на дальность и время
планирования при различных значениях безразмерной скорости
v/Vr, определяемые формулами (4.21) и (4.22), показан на рис. 67
и 68. Кривые А (Аг) и /(Аг) имеют максимумы, которым соответст-
вуют наибольшие значения дальности и времени полета при фикси-
рованных значениях (V/VR) = const. Вычисление производных
^пл/dAr и йАПл/^(Кпл/Кк) от правой части уравнения и приравни-
вание их нулю показывает, что функция двух переменных АПл =
127
о 0,4 of6 o,svn/1/vR
Рис. 69. Характер влияния скорости
и аэростатической силы на даль-
ность планирования при постоянном
угле атаки
= 1пл(Аг, Упл/Vb) имеет идентич-
ные решения, определяющие макси-
мумы в точке (рис. 69):
a-w„=(/)!- (4-24)
Таким образом, аэростатическая
сила и скорость максимизируют
дальность планирования в точке, ко-
торой соответствует минимальное
значение аэродинамической силы
лобового сопротивления в горизон-
тальном полете.
Подстановка правой части выра-
жения (4.24) в уравнение (4.21)
дает
(Ао-А). (4.25)
\ха шах
Следовательно, дальность планирования не зависит от аэроста-
тической силы и скорости и определяется (как и при Аг--=0) про-
изведением аэродинамического качества на высоту планирования.
Для функции ^(Аг, Упл/Ув) (4.22) справедливы экстремальные
решения в точках
(4-26)
/^пл у ; 1^(1 —Аг)
УЗ
(4.27)
Подстановка правых частей равенств (4.26) и (4.27) в уравне-
ние (4.22) дает
(/пл)аг = 77==^- 1НАо)-/(А)]; (4. 28)
V (1 —Аг)//?0
и^-iw].
2/3 У(1-Аг)/?0
(4. 29)
Как следует из формулы (4.29), при увеличении аэростатичес-
кой силы время планирования при оптимальной скорости монотон-
но возрастает, что является следствием перехода режима полета
статически неуравновешенного ЛА в режим полета ЛА чисто аэро-
статического типа при Аг= 1. __
В силу зависимости (4.26) характер кривых £Пл(Аг) и ^пл(Аг)
определяется теми же факторами, что и в случае зависимостей
О (Аг) и Кверт(Аг) (см. разд. 4.3).
128
Пользуясь зависимостями (4.26), (4.27) и (4.28), можно полу-
чить
/- (£11л)аг = а также (Л,л)аг =2^0,88.
у (^пл)у / 3 (^пл) У 3
Это означает, что при условии равенства коэффициентов аэро-
динамического качества планирование на дальность выгоднее в при-
сутствии оптимальной аэростатической силы. При этом скорости
(Упл)аг и (Упл)у будут одинаковы. Если представляет интерес не
дальность, а время планирования, то полет следует выполнять на
оптимальной скорости.
При Аг=1 дальность АПл = 0 и время планирования /Пл = 0. Это
означает, что гравистатический ЛА переходит в режим полета ста-
тически уравновешенного ЛА, исключающий режим планирования.
При Аг.= 0 характеристики планирования А = Л(1/ПЛ) и £=/(УПл)
для ЛА чисто самолетного типа.
Постоянная скорость. Рассмотрим теперь случай планирования
с постоянной скоростью Уцл = const. При этом безразмерная ско-
рость непрерывно возрастает вдоль траектории по закону
(4.30)
где (Упл/Vho) = const.
С учетом этой зависимости дифференциальные уравнения для
горизонтальной дальности и времени планирования (4.20) запишут-
ся в виде
(4.31)
(4.32)
Приняв пределы интегрирования как и в случае постоянного
угла атаки, получим после интегрирования
/С \ |МН‘-е^)(1-Аг)
(₽£пл)=2. -Л) arctg^'-------л-.—. ------, (4.33)
\G^/max (l-Ar^ + lp2-) e-<^+₽fto)
5
614
(М/пл)=2
arctg
Я (e-^_e-^o)(l-Ar)
(1 —Аг)2 +(р^)4
(4.34)
129
Рис. 70. Характер влияния аэростатической силы на дальность планирования при постоянной
скорости
Рис. 71. Характер влияния аэростатической силы на время планирования при постоянной
скорости
В случае планирования до полной потери высоты (Л = 0) фор-
мулы (4.33) и (4.34) принимают вид
где е~рЛо — относительная плотность* на исходной высоте плани-
рования.
Как следует из рис. 70 и 71, где показан характер влияния аэ-
ростатической силы на Дальность и время планирования при раз-
личных значениях скорости, определяемый зависимостями (4.35) и
(4.36), дальность планирования изменяется от конечной дальности
при Аг = 0 (ЛА самолетного типа) до нулевой дальности (р£Пл)
при Аг=1 (статически уравновешенный ЛА), проходя через максИ'
мум при Аг=(Аг)опт (статически неуравновешенный ЛА). АналО'
гичная зависимость относится и к продолжительности планир0'
вания.
130
Если взять производную по параметру Аг от правой части уравн
нения (4.33) или аналогичную производную по уравнению (4.34) й
приравнять ее нулю, то найдем
(1 -А<ах = (1 -Аг)^ах=(^У уе-(^м. (4.37)
шал шал у у у
Это означает, что аэростатическая сила имеет оптимальное зна-
чение Аг = (Аг)опт, одинаковое для максимальной дальности и вре-
мени планирования при постоянной скорости. Ее выражение явля-
ется функцией не только скорости, но и параметров (рй) и (ip/i0),
характеризующих физические свойства атмосферы на участке сни-
жения.
Если планирование происходит до поверхности планеты, то ра-
венство (4.37) при h = 0 принимает вид
(1-А<ах=(1-А<ах=(^-У 1/^. (4.38)
П1ах тах \Ч/ |/ Qo
Интегральная работа сил сопротивления возрастает с увеличе-
нием высоты планирования (отношение q/q0 уменьшается), что
вызывает необходимость увеличения аэростатической силы, в при-
сутствии которой при прочих равных условиях уменьшаются поте-
ри на индуктивное сопротивление. Очевидно, что при прохождении
максимально возможных высот, когда в равенстве (4.38) можно
положить (q/qo) =0, величина безразмерной аэростатической силы
должна быть максимальной и равной Аг=1.
Для нахождения параметров планирования при оптимальной
аэростатической силе (рАпл)тах и (р1Л?(/пл)тах необходимо подста-
вить правую часть равенства (4.37) в формулы (4.33) и (4.34).
Тогда получим
(Си \
(^пл)таХ=2|— arctg ._______________ , . (4.39)
ПЛЛпаХ \C-Umax 2/е-^А+₽Л«’
(Р^^о^пл )тах
1/е-(вЛ + ₽Ло) е—РЛ_е—₽Ло
у г arctg г. .
V(l-Ar) 2 К е—(₽л+₽л«)
(4.40)
Таким образом, оптимальная аэростатическая сила обеспечива-
ет одинаковую дальность независимо от скорости планирования.
При этом время планирования не остается постоянным и увеличи-
вается при увеличении параметра Аг.
Вычислив производную по безразмерной скорости от правой ча-
сти уравнения (4.33) и положив ее равной нулю, найдем, что
У(1-Аг)
у^е-СРЛ+РЛо)
(4.41)
Формулы (4.38) и (4.41) идентичны. Это означает, что опти-
Мальные параметры скорости и аэростатической силы обеспечива-
5* 131
ют одинаковые значения максимальной дальности и времени пла-
нирования при постоянной скорости.
Время полета будет максимальным, если безразмерная ско-
рость удовлетворяет трансцендентному уравнению
2 (И2(е-₽А-е-₽Л«) (1-Аг) х
V *о/
(1-Аг)2-(И4 е-(РЛ+ЭЛо)
X ______________________\ #0 /______.______________
[(1 _ Аг)2 + (^/е~(₽Л+РЛо)]2+[(^г)2 (1 “
(р^)2 (е-₽й-е-^)(1-Аг)
-arctg^^-------— --------— = 0, (4. 42)
(1_Аг)2+(^) 4е-<?л+рло)
которое может быть решено известными методами.
4.5. ГОРИЗОНТАЛЬНЫЙ ПОЛЕТ ПРИ ПОСТОЯННОЙ СКОРОСТИ
И ТЯГОВООРУЖЕННОСТИ
Для класса горизонтальных траекторий необходимо в уравне-
ниях движения угол наклона траектории к горизонту положит^
равным нулю. Тогда уравнения упростятся и примут вид
— — У=0;
dt
— = 0;
dt
Р-Ха=&,
ya + RXr-tnir=(y,
*№) +ct*p=o.
(4.43)
Исследуем тип уравнения с локальной и интегральной точек
зрения. Простейшим случаем горизонтального полета при постоян-
ной скорости и тяговооруженности является полет ЛА в отсутствии
расхода переменной массы при постоянной тяге двигателя, когда
= const, jP = P0=const и nT = const. Рассмотрим этот случай.
Имея динамическое уравнение в проекции на горизонталь сис-
темы (4.43), а также зависимость (4.2), можно записать *
1
(4.44)
max
и затем получить (рис. 72).
/У \2 (1-Аг)2
W1- (Хд2
\Уя)
132
При подкоренном знаке « + » фор-
мула (4.45) дает значения безразмер-
ной горизонтальной скорости большие,
а при знаке «—» меньшие, чем без-
размерная скорость при минимальном
лобовом сопротивлении. При этом
. W/VR)l,2
3
z
1
о
Рис. 72. Характер влияния тяговоору-
женности и аэростатической силы на
скорость горизонтального полета
при mg=const и r=const
случае имеют место малые
Как видно из формулы (4.45) и
рис. 72, при увеличении аэростатиче-
ской силы и тяговооруженности ско-
рость (V/VR)i возрастает (первый ре-
жим полета), а скорость (V/VR)2 убы-
вает (второй режим полета). В первом
углы атаки, обеспечивающие увеличение скорости вследствие
уменьшения индуктивного сопротивления; второму случаю соот-
ветствуют большие углы атаки, обусловливающие уменьшение ско-
рости в результате увеличения индуктивного сопротивления.
Формула (4.45) показывает, что горизонтальный полет с посто-
янной тягой возможен при минимальной тяговооруженности, рав-
ной
(^т)ппп
(4.46)
и соответствующей ее минимальной скорости
(4.47)
Пунктирная линия на рис. 72 указывает на минимально возмож-
ные скорость и тяговооруженность статически неуравновешенного
ЛА в горизонтальном полете при Р = const, определяемые зависи-
мостями (4.46) и (4.47).
Если тяговооруженность меняется по закону
то для изотермической атмосферы можно найти
п!1
(Рй)=-1п-^, (4.48)
«о
где tthv jiq — тяговооруженность на высоте h и на «уровне моря»
соответственно.
Поскольку минимальная тяговооруженность, при которой воз-
ожен еще горизонтальный полет, определяется выражением
133
(4.46), то, очевидно, что «потолок» неуравновешенного ЛА соста-
вит величину
. (4.49)
(1 — Аг) \^ха /тах
Таким образом, высота горизонтального полета неуравновешен-
ного ЛА при малых углах атаки тем больше, чем больше началь-
ная тяговооруженность п0, аэродинамическое качество (^а/^0)1Пах
и безразмерная аэростатическая сила Аг.
4.6. ПОЛЕТ С НАБОРОМ ВЫСОТЫ
Определение характеристик полета с набором высоты выполним
приближенным и точным методами. В первом случае будем пола-
гать, что поперечная перегрузка равна Пуа = (1—Аг) во втором слу-
чае, пользуясь динамическим уравнением системы (4.10) в проек-
ции сил на нормаль к траектории полета, запишем точное для нее
выражение
пУа = (\ — Аг) cos 6.
Определение характеристик полета приближенным методом
Динамически уравнение движения в проекции на касательную
к траектории полета с учетом зависимости (4.2) дает следующие
выражения для угла наклона траектории к горизонту 9 и верти-
кальной СКОрОСТИ (сКОрОПОДЪеМНОСТИ) УВерт
Дифференцируя и приравнивая нулю
W , (1 —Аг) .
(1 — Аг) "Г / V \2 ’
W
(4.50)
- / у \з
W I (1-Аг)
(1 —Аг)"1" ( V \
(4.51)
производную от правой
части выражения (4.50) rfsinO/rfAr, найдем, что наиболее крутой
подъем наступает при
(4-52)
или
/ V \Ar = (Суа\
\vR}^ у
», + |/(^У «?+(1-Аг)’_
1 ’ \"ха /шах
(4.53)
134
При этом выражение (4.50) принимает вид
При /гт = 0 (случай планирования) формула (4.54) при sinO^S
дает известное уже нам выражение (4.15). Очевидно, что зависи-
мость (4.52) справедлива для определения максимальной скоро-
подъемности.
Взяв производную от угла наклона траектории по безразмер-
ной скорости и приравняв ее нулю, получим, как и в случае плани-
рования (4.14) (Р7^л)Гтах = (1—Аг)1/2 . При этом выражение (4.50)
принимает вид
sin 0=(sin 9)max= Wf-------. (4.55)
(1— Ar) ЬУа\
/
\ ла / max
Условие наибольшей скороподъемности по параметру (V/16?) опт
находится из биквадратного уравнения
зП-2Л1(^) m2-(l-Ar)2=0. (4.56)
\ * R / \^ха / max \ V R /
Решая его, получим
Наибольшая скороподъемность при оптимальной аэростатичес-
кой силе с учетом выражения (4.52) равна
13 5
а при оптимальной скорости с учётом выражений (4.57)
Максимизация угла наклона траектории и вертикальной ско-
рости при увеличении параметра Аг происходит вследствие увели-
чения составляющей аэростатической силы в направлении дейст-
вия тяги и уменьшения индуктивного сопротивления, которые уве-
ливают угол Д В то же время увеличение аэростатической силы
связано с увеличением скорости полета, а следовательно, и с уве-
личением компоненты аэродинамического сопротивления при ну-
левой подъемной силе, что вызывает уменьшение угла 9. Максими-
зация тех же характеристик по параметру скорости происходит
также вследствие действия двух противоположных факторов, обус-
ловливающих при увеличении скорости увеличение аэродинамичес-
кого сопротивления при нулевой подъемной силе, но компоненты
индуктивного сопротивления при этом уменьшаются.
Определение характеристик полета точным методом
Равенство (4.2) преобразуем с помощью выражения пу=(1~-
—Аг) cos 0, зная, что это преобразование относится к индуктивно-
му члену уравнения (4.2). Тогда получим
(1 —Аг)
(1 — Аг) (cos2 6)
— sin 6 = 0.
Из этого уравнения получаем следующие выражения для сину-
са угла наклона траектории и безразмерной скороподъемности:
[^СУа
^), (4.60)
136
где
(4.61)
= SCxa Lx_ /_K_\3 / j __ l/j7Z7
(1-Ar) У
Как и в случае приближенных решений, точные решения макси-
мизируют крутизну и скороподъемность по параметрам аэроста-
тической силы и скорости, которые могут быть вычислены при-
ближенным методом.
Если в формулах (4.60) и (4.61) т]<^1, то, ограничиваясь пер-
вым членом ряда Маклорена fl—г) = 1—т]/2, точные решения мож-
но свести к упрощенным решениям (4.50) и (4.51).
4.7. ЛЕТНЫЕ ХАРАКТЕРИСТИКИ СТАТИЧЕСКИ НЕУРАВНОВЕШЕННОГО
ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПАРАМЕТРЕ ф и SM = const
При раздельном учете аэродинамических характеристик крыла
и газовмещающего корпуса целесообразно в исследованиях ввести
параметр ф, равный
(Сха)кор5кор 4 62)
(Схо)кр5-<₽
Этот параметр позволяет производить оценку летных характе-
ристик ЛА схемы «крыло-4-газовмещающий корпус», не прибегая
при этом к продувкам моделей в аэродинамических трубах.
На основе выкладок предыдущих разделов ниже приводятся за-
висимости для оценки различных режимов полета статически не-
уравновешенного ЛА по параметру ф, схему которого можно пред-
ставить по проекту гибридного летательного аппарата американ-
ской фирмы Мегалифтер компани (рис. 73).
Безразмерная сила лобового сопротивления:
Рис. 73. Схема гибридного ЛА аме-
риканской фирмы Мегалифтер ком-
пани (проект)
(4.63)
7
где
Полетное значение аэродинамического качества:
/ СУд \
/ Си \* 1 I Сх I
I Уд I _____________*__________ \ ха /max
\ /max j/"(l + Ф) (СXq)KpV у 1 ф
Угол и вертикальная скорость планирования:
h
/ (Ji)=J V<sdh.
о
(4.64)
(4.65)
(4.66)
(4-67)
(4.68)
Дальность и время пологого планирования при УПл = const:
(С \
-пл=—, arctgA^--------------—------------- ; (4.69)
Р |/ (1 _ Дг)2 + (—(1 + Ф)
(-^М2(а-с0)(1-Аг)/Т + ф
4л=--------Х7шах---arctg----\. (4.70)
(1-Аг)2+ аа0(1+ф)
° V I \ Ro
Горизонтальный полет при постоянной скорости, тяговооружен-
ности и массе аэростатического ЛА:
__ J __х
\ Vr ) 1,2 К1+Ф
2 __
_(14-ф)(1 —Аг)2 (4.71)
138
Полет с набором высоты:
Экстремальные решения для интересуемых характеристик и
режимов полета могут быть найдены по аналогии с решениями,
приведенными в предыдущих разделах настоящей главы.
4.8. НАКЛОННЫЙ ПОДЪЕМ И ПЛАНИРОВАНИЕ СТАТИЧЕСКИ
НЕУРАВНОВЕШЕННОГО ЛЕТАТЕЛЬНОГО АППАРАТА В СРЕДЕ
ПОСТОЯННОЙ ПЛОТНОСТИ
Наклонный подъем и планирование в среде постоянной плотно-
сти можно рассматривать как движение неуравновешенного ЛА,
осуществляемое в малом диапазоне высот (р^ const) при выпол-
нении взлетно-посадочных маневров, преодолении препятствий
вблизи поверхности планеты, а также при поисковых маневрах на
причаливании вблизи базовых ЛА.
Условия полета следующие: p(/z)=const, dmldt=Q, ^O6 = const,
*SM = const и P=#0. Последнее условие делает постановку задачи в
самом общем виде, когда при выполнении пассивных взлетно-по-
садочных маневров может быть включена малая тяга бортовой си-
ловой установки.
Уравнения движения в скоростной системе координат при ус-
тановившемся наклонном подъеме (верхние знаки) и планирова-
нии (нижние знаки) в соответствии с рис. 74 и 75 будут иметь вид
/?аг sin 6 + Xa = nig sin 6 + Р cos (а — ср); 1 (4 74)
/?АГ COS 6 + Y a = mg C0(S J
или для небольших углов (а—<р)
/?Аг Sin 6 + Xa = mg sin 6 + Р; | (4 75)
/?аг cos 6 + Ya = mg cos 9. J
139
Рис. 74. Силы, действующие на аэростатический ЛА при планировании с малой скоростью
Рис. 75. Силы, действующие на аэростатический ЛА при наклонном подъеме
Решая эту систему уравнений, легко найти
2/n^/SKp
где Пт = Р1(т§) — тяговооруженность в режиме планирования'.
В частном случае, когда аэростатический ЛА планирует с вы-
ключенным двигателем (пт = 0), формула (4.76) принимает вид
(-F1 i Ar)2/n^/SKp
(4.77)
Таким образом, присутствие аэростатической силы уменьшает
скорость планирования и увеличивает скорость наклонного подъ-
ема.
140
Из уравнений (4.74) можно определить, что в обоих случаях
при Аг=/=0 и Аг = 0 тангенс угла планирования не меняется и оста-
ется райным
tg6==/£^\ 1
\C*J
(4.78)
Таким образом, независимо от присутствия и величины аэроста-
тической силы наклон траектории в обоих случаях движения опре-
деляется только величиной аэродинамического качества CyJCXa.
Поскольку
(4.79)
то можно заключить, что присутствие аэростатической силы не
влияет на дальность планирования. При Аг>1 формула (4.79) так-
же остается в силе. Необходимо заметить, что одинаковые углы О
и дальности Апл не означают сохранение траекторных скоростей
полета, которые, как мы уже видели, распределяются в зависимо-
сти от величины параметра Аг по формуле (4.77).
4.9. СКОРОСТЬ ПЛАНИРОВАНИЯ И НАКЛОННОГО ПОДЪЕМА
АЭРОСТАТИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА С ПРОИЗВОЛЬНОЙ
• ПОЛЯРОЙ В СРЕДЕ ПОСТОЯННОЙ ПЛОТНОСТИ, ВЫРАЖЕННАЯ ЧЕРЕЗ
УГОЛ НАКЛОНА ТРАЕКТОРИИ 9
Если во время планирования статически неуравновешенного
ЛА положение крыльев, оперения, вектора аэростатической силы
и положение центра масс остаются без изменений, то неизменным
останется также и угол атаки а. Рассмотрим, какова будет траек-
тория полета ЛА при Ar^ 1.
Относя дифференциальные уравнения движения к нормали и
касательной к траектории, запишем (рис. 76).
Ya — m—— =zngcois0 — /?аг co?s 0;
/\
d —— = —rrtgdh -\-Kxdh — XadS,
\ r I
(4.80)
где г — радиус кривизны траектории, считаемый положительным,
когда траектория направлена вогнутостью вверх, a dS — элемент
Дуги траектории.
Далее замечаем, что dS = dh/sin 9 и
1 __ rfO __ sin 0^0___ d (cos 0)
r dS dh dh
(4.81)
141
Поэтому уравнения (4.80) можно написать в таком виде:
--------£₽---+ ^(££L?)_=4_(l_Ar)cos9;
\ С^кр /
Упл=-2£(1-Аг)(й0-Л)
0£Г .
mg \ J sin 0
CXflSKp /
Если предположить, что в уравнениях (4.82) угол 0,
Упл и плотность среды q постоянны, то получим
У2ПЛ=— (^5-) (1 - Аг) cos 6=2g (1 - Аг) Ло -
(4.82)
скорост J
-2gh (1-Ar)+ —
2
niz2
пл
(4.83)
sin 0
Так как УПл = const, то скобка при множителе 2gh должна быть
равной нулю [в обратном случае будет УПл= ^пл(Л)] и, следова-
тельно,
V2B„=— (1 - Ar) (у~-} COS 0=—-(1 — Аг) sifl 0’
0 \Сда8кр ) Q \Сха$кр )
откуда получим известную уже нам формулу (4.78) и затем
(~^г)2=( 1 — Ar) cos 0,
' vy ! *
Рис. 76. Схема сил, действующих на аэро-
статический ЛА в режиме планирования с
большой скоростью при Аг < 1
17* Г 2
где Vy=\ —
L Q
(4. 84)
mg XI1/2
/ j
Таким образом статистически
неуравновешенный ЛА будет пла-
нировать по наклонной прямой,
причем ’всякому углу 0 и величи-
не параметра Аг соответствует
своя скорость планирования.
Поступая аналогично для слу-
чая наклонного подъема при
Аг>1 можно получить также
tg 6= 1/(С^/СХа) и
M=(Ar-l)cos0. (4.85)
Vy '
Следовательно, угол наклона
траектории (его абсолютная ве“
личина) остается таким же, как и в случае Аг<1, а скорость на-
клонного подъема возрастает пропорционально увеличению аэро-
статической силы.
4.10. НАКЛОННЫЙ ПОДЪЕМ И ПЛАНИРОВАНИЕ СТАТИЧЕСКИ
НЕУРАВНОВЕШЕННОГО ЛЕТАТЕЛЬНОГО АППАРАТА С ПРОИЗВОЛЬНОЙ
ПОЛЯРОЙ В СРЕДЕ ПЕРЕМЕННОЙ ПЛОТНОСТИ
ПРИ МАЛЫХ УГЛАХ 0 И SM = const
Как было отмечено выше (см. разд. 4.8), наклонный подъем
(при отрицательных углах атаки) и планирование (при положи-
тельных углах атаки) происходят под действием избыточных аэро-
статических (в первом случае) и гравитационных (во втором слу-
чае) сил.
Эти виды движений можно рассматривать как составляющие
при осуществлении поиска интересуемых объектов в атмосфере
Венеры, безмоторного полета на дальность, глубинного движения в
пограничном слое планеты эквидистантно ее поверхности и т. д.
Рассмотрим наклонный подъем и планирование в среде пере-
менной плотности с малой скоростью, когда влиянием центробеж-
ных сил на параметры движения можно пренебречь. Условиями по-
лета являются уОб¥= const, SM = const, Сха = const, Суа = const, =
= const и q(/i) =#const. При этом в соответствии с рис. 76 при
(mV2/r) =0 уравнения движения принимают вид
V7njIcos.0 = O;
at
Vnj,sin9 = 0;
/?аг sin 9 + Ха — mg sin 6 = 0; (4.86)
/?аг cots 6 + Ya — mg cos 6 = 0;
dm___q
dt —
.Таким образом, при наклонном подъеме (верхние знаки) лобо-
вое сопротивление и составляющая силы тяжести вдоль касатель-
ной к траектории уравновешиваются составляющей аэростатичес-
кой силы Ar sin 0, а подъемная сила вместе с составляющей силы
тяжести на нормаль к траектории — составляющей аэростати-
ческой силы Ar cos 9 .
При планировании (нижние знаки) лобовое сопротивление вме-
сте с составляющей аэростатической силы Ar sin 9 уравновешива-
ется составляющей силы тяжести вдоль касательной к тоаектории
полета^ а подъемная сила вместе с составляющей аэростатической
силы Ar cos О уравновешиваются составляющей силы тяжести
вдоль нормали к траектории полета.
143
Преобразование динамических уравнений системы (4.86) при
условии, что sin9 ^0 и cos 0—1, дает
— V2
/ng6( + l±Ar) = CXaQ(A)5KP-^;
— V2
Wg( + 1 ± Аг)=СУае(й)5кр-у!-,
(4.87)
откуда получаем известную зависимость для угла наклона траек-
тории (4.78) и уравнение
Упл Ft i ± аг
(4.88)
Если выбрать высоту h за новую независимую переменную, то
кинематические уравнения вдоль горизонтального и вертикального
направлений запишутся в виде
(4.89)
Эти дифференциальные уравнения надлежит проинтегрировать
в предположении, что угол атаки вдоль траектории является посто-
янным (а = const). Следовательно, одновременно будут постоянны-
ми аэродинамические коэффициенты СУа = const, СХа = const и (Суа
lCxa)=™si.
При условии 7=0, Апл = 0 и А = й0 получаем после интегрирова-
ния
^пл= (± А);
/ Суа\
[±/ (*о) ±7 W]
' С* /
______ла /_______________
vy Ft i ± аг
(4.90)
(4.91)
h
где, как и ранее (см. разд. 3.5), /(Л)=
о
144
Для экспоненциального закона изменения плотности (q/qo) фор-
мула (4.91) принимает вид
/ су„ \
2 ьч ____________
t =----> Ха ! ± , (4.92)
^Ит1±Аг
где h>h0 при восходящем планировании и /г<йо при нисходящем
планировании.
Таким образом, присутствие аэростатической силы не влияет
на дальность наклонного подъема и планирования, но уменьшает
время наклонного подъема и увеличивает время планирования.
При 0 = const это означает увеличение скорости наклонного подъ-
ема и, наоборот — уменьшение скорости планирования. Время пла-
нирующего полета в среде постоянной и переменной плотности не
одинаково.
Заметим, что ввиду незначительности изменения градиента
плотности по высоте, тем более по траектории полета (ввиду мало-
сти углов 9), можно принимать скорости движения такими же, как
в установившемся полете на той же высоте.
Физически это нетрудно понять, представив траекторию поле-
та разделенной на участки р(ДЛ) = const и, следовательно, справед-
ливыми для этих участков зависимости (4.78) и (4.79). Очевидно,
что эти зависимости будут справедливы и для аналогичных смеж-
ных участков, а следовательно, и для всей траектории планирова-
ния при q(h) =/= const.
Как видно из формулы (4.90), коэффициентом преобразования
потенциальной энергии в работу сил сопротивления (для достиже-
ния дальности) является аэродинамическое качество. При этом
очевидно, что наибольшая дальность восходяще-нисходящего пла-
нирования достигается при полете с углом атаки, максимизирую-
щим аэродинамическое качество.
Что касается тангенциальных сил инерции
^пл т d (у2,)
dt 2 dS ’
то при движении на больших высотах они довольно значительны
и пренебрегать ими нельзя. Но их влияние оказывается не на ско-
рости движения, а на угле наклона траёктории 9.
Полная дальность (горизонтальная) и полное время t=x соот-
ветствующие полной высоте нисходящего планирования при А = 0,
будут равны Ьпл =(Суа/СХа)к0 и
2(» —
} Ха/ _ (1 -/е-₽*о). (4.93)
р^]/Т1±Аг
Если принять во внимание, что в случае 6 = const при наклон-
ном подъеме ЛА приобретает часть кинетической энергии, а при
6 614 145
планировании теряет ее, то укорочение (в первом случае) и удли-
нение (во втором случае) пути полета составит величину
AZ _± ^пл / суа т Го h / Q \1 f Суа \
пл \CrJ 2Д * U0AI
При этом
4.,=(-fM|(+*o ± *) +-J fl -(f)!)
\ Сха / I L \ Qo 'JJ
Если требуется обеспечить наибольшую дальность планирова-
ния аэростатического ЛА с заданной высоты, то планировать сле-
дует на режиме максимального качества. Наоборот, если жела-
тельно осуществить наиболее крутое планирование (случай ограни-
ченных размеров посадочного полигона), то необходимо лететь на
режиме, при котором качество (Су /Сха) невелико. При желании
выполнения указанных маневров с наибольшей скоростью необхо-
димо по мере возможности уменьшить величину аэростатической
силы 7?аг и, наоборот, увеличить ее, если планирование необходи-
мо осуществить при минимальной скорости. Последнее условие мо-
жет быть продиктовано необходимостью увеличить время прохож-
дения изучаемых слоев атмосферы Венеры при постановке экспери-
мента в летных условиях на борту ЛА.
4.11. СКОРОСТЬ, ДАЛЬНОСТЬ И ВРЕМЯ НАКЛОННОГО ПОДЪЕМА
И ПЛАНИРОВАНИЯ СТАТИЧЕСКИ НЕУРАВНОВЕШЕННОГО ЛЕТАТЕЛЬНОГО
АППАРАТА С ПРОИЗВОЛЬНОЙ ПОЛЯРОЙ В СРЕДЕ ПЕРЕМЕННОЙ
ПЛОТНОСТИ ПРИ БОЛЬШИХ УГЛАХ 0 И SM = const
Рассмотрим квазистационарный режим наклонного подъема и
планирования при больших углах наклона траектории к горизонту
и малой скорости, когда влиянием центробежных сил на парамет-
ры движения можно пренебречь. Имея в виду (dV/dt) ^0, запишем
систему кинематических и динамических уравнений в следующем
виде:
VnjIcos0=O;
at
— Упл sin 0= 0;
at
Xa + mg sin 0 + /?дг sin 0=0;
(4. §4)
Vx2a+Y2a + mg + RM = &,
dm
dt
где VX2a-\-Y2a—— полная аэродинамическая сила.
Планирование и наклонный подъем в среде переменной плотно-
сти относятся, строго говоря, к неустановившимся режимам дви-
146
1
Переходные участка
Планирование
Наклонный
подъем
Рис. 77. Крылатый аэростатический ЛА в безмоторном полете на дальность:
/—газовмещающий корпус переменного объема; 2—крыло; <3—оперение
Рис. 78. Траектория безмоторного полета на дальность крылатого аэростатического ЛА при
положительной и отрицательной подъемных силах
жения. По мере изменения высоты h и плотности q(A) при неизмен-
ном Су скорость полета изменяется. При рассмотрении этих ре-
жимов движения будем полагать поверхность планеты плоской и
g(h) = const.
Схему крылатого аэростатического летательного аппарата, спо-
собного осуществлять безмоторный полет на дальность, можно
представить, как показано на рис. 77. Характер полета такого ле-
тательного аппарата представляет пилообразную траекторию, со-
стоящую из чередующихся восходяще-нисходящих участков
(рис. 78).
Совместным решением третьего и четвертого уравнений систе-
мы (4.94) с учетом равенства ya=/?acos9 получим известную уже
нам зависимость между углом наклона траектории планирования О
и аэродинамическим качеством (CyjCXa), соответствующую слу-
чаю планирования с малой скоростью в среде постоянной плотно-
сти (4.79).
Вертикальная скорость планирования (—dhldt) = УВерт(^) (ско-
рость снижения) определится по второму уравнению системы
(4.94), как
В этой формуле текущая скорость планирования, на основании
Динамического уравнения системы (4.94), равна
^ПЛ(А)=
(1-Аг)
2/п^/5кр
с₽ае (Л)
11/2
где — коэффициент полной аэродинамической силы.
6*
147
Выбрав высоту за новую независимую переменную, легко полу-
чить
dh Гпл sin 0 Vr 1 ± Аг
(4.96)
где
2П1£{8к$ V2
V R =
Дифференциальные уравнения (4.96) следует проинтегрировать
в предположении, что вдоль траектории а = const, CRa = const и
(С^а/СХд) = const.Это дает
t
(й0-Л),
УЛУТ1 ± Аг
[ + / (Ло)-----Ь/ (й)],
(4.97)
где
о
Для случая экспоненциального закона р(й) формула (4.97) при-
нимает вид
t
± Аг
(+/е-^ + ’Ке-₽Л»).
(4.98)
Эта формула является общей параметрической зависимостью
для определения времени полета в диапазоне траекторных углов
л _
0^0^—• В случае пологого планирования при высоком аэроди-
148
намическом качестве (СУа1Сх^ 1 частным случаем формулы
(4.98) является зависимость (4.92) .
Очевидно, чтр полное время снижения (подъема) в интервале
высоты Л составит величину
-
х=—-------у v Ха_-- (1 - /е-₽А). (4.99)
?vRV Т1 ± Аг
В случае вертикального подъема или парашютирования в фор^
Муле (4.99) следует положить (CyjCXa)=0.
6*
614
Глава 5
ЛЕТНЫЕ ХАРАКТЕРИСТИКИ СТАТИЧЕСКИ
НЕУРАВНОВЕШЕННОГО ЛЕТАТЕЛЬНОГО АППАРАТА
С ПЕРЕМЕННЫМ МИДЕЛЕМ
В главе рассмотрены характеристики статически неуравновешенных венери-
анских ЛА в присутствии аэродинамической подъемной силы крыла. Общая
конструктивно-силовая схема таких ЛА обеспечивает возможность изменения
миделя газовмещающего корпуса при изменении его массы и высоты полета.
Изменение массы может происходить за счет расхода переменной массы, а из-
менение высоты полета — за счет изменения объема аэростатической части ЛА.
Наиболее подробно рассмотрены такие ЛА, у которых изменение высоты по-
. лета вызывает изменение не только геометрических, но и аэродинамических ха-
в рактеристик.
Статически, неуравновешенные ЛА с неменяющимися в полете аэродинамиче-
скими характеристиками (при изменении объема газовмещающего корпуса) рас-
смотрены кратко, а их летные характеристики приведены без параметрического
анализа в виде конечных аналитических формул.
5.1. АЭРОДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ СТАТИЧЕСКИ _
НЕУРАВНОВЕШЕННОГО ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ (Аг, р)
Предположим, что статически неуравновешенный ЛА обладает
крылом постоянной площади SKp = const, а мидель газовмешающе-
го корпуса является функцией аэростатической силы и плотности
среды SK0p=5K0p(Ar, о). Тогда выражение для коэффициента пол-
ного аэродинамического сопротивления системы «крыло + газовме-
щающий корпус» можно представить в следующем виде:
CXa=Cv=[l + /(Ar, (х, a, W](Cx0)KP + v(l-Ar)2C^, (5.1)
где (Схо)кр — коэффициент аэродинамического сопротивления кры-
ла при нулевой подъемной силе, отнесенный к площади крыла.
В равенстве (5.1) функция в квадратных скобках выражается за-
висимостью
(^хо)кор5кор - п
/(Аг, |Х, а, ф)=———— . (5.2)
(VxO7Kp»^Kp
Зная, что
д'- ^Аг
^=Ya%6> Аг =----- >
mg
-г Уа^об е *
Ar = SKop£ >
mg
150
Дг — Уа 0Р£* £ __ At mg
mg ’ K0₽ yaL*
можно записать
, ,-г t\ (С-го)кор Аг mg
/(АГ, |1, а, ф)=————— (5. 3)
(£ло)кр£кр7а^
и затем получить
/ (Аг, |1, а, ф)=ф — 1* (5.4)
<3
где
. (£хо)кор (5о)кор (^хо)кор (mo^)/SKp QQngf. (5 5)
(ОгсОкр^кр (Схо)кр£Оо^*
p=m,(t)/mQ—текущая массовая отдача.
Здесь параметры (So) кор, ^о, Qo и приведенная длина аэроста-
тического корпуса L* (зависит от геометрической формы) отнесе-
ны к начальным (исходным) условиям полета.
Функция (5.4) не учитывает схемы ЛА, у которых изменение
геометрической формы газовмещающего корпуса в процессе регу-
лирования аэростатической силы вызывает изменение аэродинами-
ческой характеристики (СХо)кор. Ниже эта зависимость будет уч-
тена для определенного класса схем статически неуравновешен-
ных ЛА. Имеется также в виду, что аэростатический корпус не<
обладает несущей способностью и для него всегда (С^л)кор=0.
Величина, обратная аэродинамическому качеству, на основании
уравнения (5.1) равна
+ / (Аг, И, а,ф)] + V(1 - Аг)2С^. (5.6)
\ ^Уа / ьУа
Дифференцируя это выражение по Су и приравнивая нулю
производную d (CxJcy^ldCya получим
=1/[1 + /(Аг,^а,ф)]1^(1-Аг)-1 (5.7)
\ ха /max г V
Подставив выражение (5.7) в равенство (5.6), найдем макси-
мальное аэродинамическое качество с учето*м аэростатической
силы:
/ суа V __________________1 ____________-
шах 2 (1 - Аг) V(СХо)кр V [1 + / (Аг,(1,в,ф)]
или '•
/ Суд \
fу Сха .... . (5.8)
\ С*а / max (1 — Аг) V 1 + f (Аг,ц,а,ф)
где CS'il) =_________....1
\ ^ха / max "j/^ (СХо )кр
6*
1 51
Рис. 79. Влияние аэростатической
силы и миделя газовмещающего
корпуса на величину аэродинамиче-
ского качества
Как следует из выражения (5.8),
присутствие. аэростатической силы
увеличивает полетное значение аэро-
динамического качества (СУа/С
*а)тах’
которое становится равным бесконеч-
ности при Аг=1 в режиме чисто аэро-
статического полета. Указанное обсто-
ятельство имеет место в отсутствии
газовмещающего корпуса, когда роль
последнего выполняет само крыло.
Летные характеристики такого ЛА,
выполненного по схеме «летающее
крыло» рассмотрены в конце главы
(см. разд. 5.8).
Для классической схемы статиче-
ски неуравновешенного ЛА типа «кры-
ло + газовмещающий корпус»,' влия-
ние миделя газовмешающего • корпуса
сказывается на уменьшении аэродина-
мического качества, что в соответствии
с зависимостями (5.4), (5.6) и кривы-
ми (рис. 79), определяет минимум, ле-
жащий в точке
Аг
ф|х — 2а
3<рр.
(5-9)
Подставив это выражение в формулу (5.8), получим минималь-
ное аэродинамическое качество в присутствии аэростатической си-
лы и газовмещающего корпуса, равное
СУд У __ 3 / СУа \
2И lCxJmax(«+W3/2 ‘
(5. 10)
Таким образом, имеет место (Си /Сх )* (Си !СХ )
г ’ \ У а' ха/тах^~- \ У а1 ха/тах
Как следует из формулы (5.8), при Аг = 0 аэродинамическое ка-
чество равно (CyaAa)max=(C</a/Cxa)max. а при Аг=1 аэродинамичес-
кое качество равно (СУа/СХаУтах=оо. Первый случай соответству-
ет чисто аэродинамическим режимам полета, второй случай — чис-
то аэростатическим.
Из выражения (5.1) следует, что на режиме максимального ка-
чества коэффициент лобового сопротивления при нулевой подъем-
ной силе [первый член в равенстве (5.1)] равен коэффициенту ин-
дуктивного сопротивления, т. е.
[l + /(Ar,[x,a,<p)](CXo)KP=vC3 . (5.11)
/ СУа V
I сх /
\ а max/
152
Дальнейшее преобразование этого выражения с учетом того,
что при малых углах наклона траектории Ya=mg(l—кт), дает
Ха 1
mg
(-Л^ + ЛАг, Н, °, Ф)]
, (1 — Аг)2'
“Г /_у\2
(5.12)
(где VR и (C^/CXfl)max — известные уже нам параметры, опреде-
ляемые зависимостями (5.8) и (4.3).
Для простейшей схемы «крыло + аэростатический корпус», аэро-
динамическое сопротивление при нулевой подъемной силе (СХо)ъ
можно записать (без учета интерференции) как (CXo)s = (СХо)кр-{-
+ (Сго)кор (гДе (£г0) кор коэффициент сопротивления газовме-
щающего корпуса, отнесенный к миделю корпуса). При этом в
случае ЛА постоянной массы при ц= 1
1 + /(Аг, О, Ф)=1+Ф (^)". (5.13)
Величина показателя степени п зависит от характера измене-
ния миделя при регулировании аэростатической силы и изменении
высоты полета. Для ЛА типа «сильфон», расположенного перпен-
дикулярно вектору скорости п=\. Если 5м = ^об3, то п = 2/3.
Ниже в основном будет рассмотрена более общая схема ЛА,
у которой в процессе регулирования аэростатической силой проис-
ходит изменение не только площади миделевого сечения, но и ха-
рактеристики по (Сго)кор. Для такой схемы ЛА (с учетом интер-
ференции и конструктивных особенностей крепления подвижной
аэростатической оболочки — щитки, механизация и т. д.) можно
записать в общем виде
/(Аг,аЛ)=ф(-^)Л[а+ф(^)"], (5-14)
где множитель (Аг/о)п как и прежде, является функциональным
для подвижной аэростатической оболочки, а выражение в квадрат-
ных скобках описывает изменение (0^)^ в функции аэродинами-
ческих обводов оболочки при изменении аэростатической силы и
высоты полета ЛА. Легко показать также, что имеет место а =
= const.
Параметры Аг, сг и ф могут принимать любые значения, но при
условии, что
ф Аг < (^-Уо)кортах
(^^о)корт1п
Где (Qrokopmin относится к исходному миделю, а (СХо)коРтах— к мак-
симальному миделю (в полете), определяемому схемой и конструк-
тивными возможностями газовмещающего корпуса.
Поскольку (фАг/о) = const, то очевидно, что высотность ЛА бу-
дет тем больше, чем меньшие значения будут принимать парамет-
ра
Рис. 80. Схема исходных миде-
лей ЛА с различными значения-
ми параметра (С_г<,)кор
ры ф и Аг. Для Венеры при гр = 1 и
Аг=1 (или ф=2, Аг = 0,5) и
(^хо) кор max/ (^хо) кор mln== 30 ВЫСОТНОСТЬ
(разность между максимальной и мини-
мальной высотами полета) составит
ДА = (Атях—Amin) 20 км.
Влияние параметра гр на (Схо)кор про-
исходит по схеме, показанной на.рис. 80.
Там видно, что исходный мидель не оста-
ется геометрически подобным для раз-
личных значений гр, а меняется по тому
же _закону, что и при изменении величи-
ны Аг^Следовательно, все три парамет-
ра (грАг/о) одинаково влияют на измене-
ние объема и аэродинамических обводов
газовмещающего корпуса, а следовательно, и на величину (Схо)кор.
Из выражений 5.14 можно получить выражение для множителя,
входящего в зависимость (5.12) при ц=1 и коэффициенте аппрок-
симации а = 2:
[1 +/(Аг, а, Ф)]=[1 + . (5.15)
Примем п=1 (случай двухкорпусного аэростатического ЛА с
крылом), и тогда
2^.=_______1___Г/2_\2(1 _|_ф Аг V । (1-Аг)2
mg 2(Суа Y ® / У \2
\ ^ха /шах _ ' V R /
(5.16)
Минимальная сила аэродинамического сопротивления на осно-
вании выражений 5.16 имеет место как при оптимальной скорости
(5.17)
(5.18)
На рис. 81 представлена зависимость (5.16) в функции безраз-
мерной аэростатической силы Аг при (С^д/СХд)тах и ф=а=1.
Лобовое сопротивление при нулевой подъемной силе монотонно
возрастает при увеличении аэростатической силы, а индуктивное
сопротивление убывает. В первом случае это происходит вследст-
вие увеличения миделя газовмещающего корпуса, во втором слу-
чае — вследствие уменьшения подъемной силы. Эти два противо-
154
Рис. 81. Характер влияния аэростатической силы на величину аэродинамического сопротив-
ления (Xjmg) при различных значениях безразмерной скорости (VJVR)
Рис. 82. Характер влияния аэростатической силы на соотношение минимальных аэродинами-
ческих сопротивлений при различных значениях параметра (М?/0)
Рис. 83. Характер влияния аэростатической силы и параметра (*ф/О’) на соотношение скоро-
стей <V/Vr)At/(V,Vr)v
положно действующих фактора и определяют величину (Xalmg) =
= (A'a/mgjmin При (V/Vh) = const.
Подстановкой выражений (5.17) и (5.18) в равенство (5.16)
можно получить формулы для расчета минимальных сил лобового
сопротивления (XJmg)n\n=fkt (Аг), в случае оптимальной скоро-
сти при задаваемом параметре Аг, и (Ха//и£)^1п =fv(V/VR), в слу-
чае оптимальной аэростатической силы при свободно выбираемом
параметре V/VR. Отношение этих сопротивлений в функции пара-
метра Аг показано на рис. 82. Как следует из рисунка, оптималь-
ная аэростатическая сила обусловливает меньшее аэродинамичес-
кое сопротивление, чем оптимальная скорость. Характеристики ЛА
по скорости, как отношение
г ° / у <3 \ (3 J
также лучше при оптимальной аэростатической силе (рис. 83).
Что касается параметра ф/a, то при его увеличении (подъеме на
высоту) скорости при оптимальной аэростатической силе (V/VR)Ar
все больше уступают оптимальным скоростям (V/Vh)v, сущест-
венно уменьшая при этом величину отношения {Xa/mg)m\nKXa/mg)min9
155
Очевидно, что выбор величины аэростатической силы и соответст-
вующей ей скорости зависит от назначения и условий полета
ЛА.
5.2. УГОЛ И ВЕРТИКАЛЬНАЯ СКОРОСТЬ ПРИ ПОЛОГОМ ПЛАНИРОВАНИИ
Принимая допущения разд. 4.3, а также воспользовавшись дина-
мическим уравнением в проекции на касательную к траектории по-
лета (4.11) и выражением для безразмерной силы аэродинамичес-
кого сопротивления (5.16) легко получить для модуля угла накло-
на траектории
(5.19)
и для вертикальной скорости снижения с учетом второго уравне-
ния системы (4.11) и формулы (5.19)
Исследование зависимости О = 0 (Аг) (5.19) показывает (рис. 84),
что в отличие от случая ЛА с постоянным миделем (где присутст-
вие аэростатической силы не сказывается на значениях 6 = 0mill,
(см. разд. 4.3) при переменном миделе угол наклона траектории
увеличивается при увеличении параметра Аг. Это является следст-
вием того, что увеличение миделя связано с увеличением лобового
Рис. 84. Характер влияния аэростатической силы на угол наклона траектории при различных
значениях безразмерной скорости (Упл/¥£>)
Рис. 85. Характер влияния плотности среды на модуль угла наклона траектории, вертикаль-
ную скорость снижения и на аэродинамическое качество (Су jCx )^пах
156
сопротивления, а следовательно, и с уменьшением аэродинамичес-
кого качества (CyJCx^m^ определяемого зависимостью (5.8).
Последнее обстоятельство в свою очередь обусловливает увеличе-
ние вертикальной скорости снижения КВерт-
Если вычислить производную по Аг от правой части уравнения
(5.19) и приравнять ее нулю, то найдем, что наиболее пологое пла-
нирование происходит при
(5.21)
что означает (-9)т1п=Хпл/2(СРа/СХа)тах и (-^верт/УЛ)=
=Хпл(1^пл/1/Л)/2(Ср /Сх )тах, где Хпл=Хпл(-£ч .
При (ф/<з)=0 имеет место Хпл = 0, что означает'
(-9)=1/(С,а/СЛа)тах и (-Иверг/^)=(1/пл/^)/(С!/а/СХа)тах
(случай = const).
Характер влияния плотности среды на минимальное значение
угла наклона траектории и вертикальной скорости снижения пока-
зано на рис. 85. Там же показан характер влияния плотности на
величину аэродинамического качества, определяемый формулой
(5.8). Как следует из рисунка, по мере погружения в плотные слои
атмосферы (для Венеры Л = 60 ... 0 км) модуль наклона траекто-
рии и вертикальная скорость снижения заметно уменьшается; что
является следствием уменьшения миделя статически неуравнове-
шенного ЛА, а следовательно, и увеличения аэродинамического ка-
чества. По условиям задачи, график зависимости, показанный на
рис. 85, справедлив для (pyj^x^ 1-
5.3. ДАЛЬНОСТЬ И ВРЕМЯ ПОЛОГОГО ПЛАНИРОВАНИЯ
ПРИ ПОСТОЯННОМ УГЛЕ АТАКИ
Выберем высоту, в качестве новой независимой переменной и,
используя выражение-для модуля наклона траектории (5.19), за-
пишем
^-^пл 1
dH ~ 0
(5. 22)
157
При постоянном угле атаки (V/VR) — const. Интегрируя выра-
жение (5.22) при начальных условиях £Пл=0 и сг=<Го=ехр (—§йо)
(изотермическая атмосфера), получим
где a=QA/QA_0=e-₽A, (14л/16?)<1.
Если планирование происходит до поверхности планеты, то
формула (5.23) при о=1 принимает вид
~ (1—Аг)
/Q/ \ \ ха/тах
кг^пл/— t\r \4
(1 _ Дг)2 + (-f-)
е2РЯо (1_Аг)2 + -Ai- (1 + фАг)2
in------L-----------\_Yr1----------
(1—Аг)2 4-4-ф АгеРл°)2
\ VR /
——4/—arctg
(1-Аг)
ф Аг
(1-Аг)
___ j)
4- ф Аг) (1 + ф Аг е^л°)
csi
ю
2
2
Рис. 86. Характер влияния аэроста-
тической силы и скорости на даль-
ность планирования при постоянном
угле атаки
где ho — начальная высота планирования.
Кривые безразмерной дальности в функции параметра Аг, по-
строенные по уравнению (5.24), показаны на рис. 86. Как и в слу-
чае SM=const, уменьшение индуктив-
ного сопротивления, связанное с уве-
личением аэростатической силы, уве-
личивает дальность планирования, ко-
торая, проходя через максимум, стре-
мится к нулю вследствие увеличения
аэродинамического сопротивления при
нулевой подъемной силе и наступле-
ния чисто аэростатического режима
полета при Аг=1. Вследствие пере-
менности миделя оптимальные. значе-
ния параметра Аг сдвинуты в сторону
меньши-х его значений по сравнению с
аналогичными точками при SM=const
(см. разд. 4.4). По той же причине
имеет место более прогрессивный спад
158
Рис. 88. Характер влияния скорости на время планирования_при различных значениях пара*
метра аэростатической силы Аг
Рис. 87. Характер влияния аэростатической силы на время планирования при различных
значениях скорости
дальности при SM#=const на меньших значениях параметра
Аг, чем при SM = const.
Как и следовало ожидать, уменьшение параметра оо существен-
но увеличивает дальность планирования.
Дальность р£пл по скорости V^JVr имеет экстремальное реше-
ние, которое может быть найдено численно по формуле (5.24). Оче-
видно, что оптимальная скорость при этом является следствием
параболической поляры, учитывающей неодинаковый характер из-
менения индуктивного сопротивления при нулевой подъемной силе
при изменении скорости полета статически неуравновешенного ЛА.
Поступая как и в случае уравнения (5.22), но используя выра-
жение для вертикальной скорости (5.20),-запишем кинематическое
уравнение движения вдоль вертикального направления при новой
независимой переменной в следующем виде:
Уравнение (5.25) в квадратурах не решается. Для интегриро-
вания численным методом его можно представить в виде
Кривые £пл = £пл(Аг) и ^пл = ^пл/(Упл V r) , определяемые зависи-
мостью (5.26), представлены на рис. 87 и 88. Как следует из рисун-
ков, время планирования при малых значениях Упл/Кн имеет экст-
ремум по аэростатической силе.
159
5.4. ДАЛЬНОСТЬ И ВРЕМЯ ПОЛОГОГО ПЛАНИРОВАНИЯ ПРИ ПОСТОЯННОЙ
СКОРОСТИ
Дифференциальные уравнения вдоль горизонтального и верти-
кального направлений с учетом выражений для угла наклона тра-
ектории (5.19) и вертикальной скорости (5.20) запишутся в следую-
щем виде:
Проинтегрируем эти уравнения при условии, что если L = 0, то
/г=Ао. Тогда получим
/-^V(l_Ar)(e-PA-e-^)
। а rctg-------Ra ------------------—;
шах (1 _ Аг)2 + f—1 (е-₽л+ фАг)(е~₽А° + фАг)
(5. 29)
(W= '
/-I^-V(l_Ar)(e-^-e-^)
________£oj__________________________
(1 - Аг)2 + [-^-)4(е-рл + ф Аг)(е--рЛо + ф Аг)
' 7?о '
(5.30)
Для случая планирования с полной потерей высоты формулы
(5.29) и (5.30) принимают вид
/г 7^) (1 — Аг)(1 — е-₽й<>)
(₽4J = 2^) arctg------------------ "•/---------------------------------.
\ xa/max (1_Ar)2+ (-22-1 (1 + фАг)(е-?А» + фАг)
(5.31)
160
Рис. 89. Характер влияния аэростатической силы
на дальность планирования при различных зна-
чениях постоянной скорости
Рис. 90. Характер влияния аэростатической силы
на время планирования при различных значениях
постоянной скорости
=2 \i;a/7 arctg х'
I пл I
м
X---------. (5.32)
(1 - Аг)2 + + ф Ar) +'ф Аг)
На рис. 89 и 90 показаны кривые, определяемые зависимости-,
ми (5.31) и (5.32). Как и в случае постоянного .миделя (см. разд.
4.4), при планировании с переменным миделем дальность и время
полета по параметру Аг имеют максимальные значения. Присутст-
вие аэростатической силы увеличивает дальность планирования
вследствие уменьшения индуктивного сопротивления, однако это
происходит до определенных (оптимальных) значений параметра
Аг, свыше которых доминирующим фактором становится аэродина-
мическое сопротивление при нулевой подъемной силе, в результа-
те чего дальность уменьшается и становится равной нулю в ре-
жиме статически уравновешенного полета.
Приравнивание нулю производной по аэростатической силе от
правой части выражений (5.31) и (5.32) дает
_______________________(1 - Аг) _____________________________
]/ (е“ф Аг) (е~^л° + ф Аг) + (1 — Аг) ф (е—+ е“рА° + 2ф Аг)
(5.33)
161
При этом максимальные дальность и время полета будут равны:
(₽£пл)п.ах=2|^ arctgX*; (5.34)
* / max
(₽^0)max = 2^ arctgX*, (5.35)
Wxa/max (i —Ar>
где
x#.=___________________zi/ya-e-^)____________________ .
(e~ 4- ф Ar) (е“РЛ° + ф Ar) [2 + (1 — Ar) ф (e—+ e~₽ft° + 2ф Ar)]
(5.36)
£=(е-ел+Ф Ar) (е-Рл»+Ф Ar)+(1 - Аг) Ф (e-₽A+e-₽Ao-j-2ф Ar).
(5.37)
Таким образом, вырождение статически неуравновешенного ЛА
в ЛА чисто аэростатического типа происходит при непрерывном
увеличении максимальных значений как дальности, так и времени
полета.
При ф = 0 формулы (5.33), (5.34) и (5.35) дают зависимости
(рЛпл)тах И (p/V/?0)max ДЛЯ Случая SM = COT!St.
Если вычислить производную по безразмерной скорости от
правой части уравнения (5.29) и приравнять ее нулю, то найдем
Упл \ =_____________(1- Аг)
У rq /V (е“рл 4- Ф Аг) (е“рл° + ф Аг)
(5. 38)
Сравнение формул (5.33) и (5.38) показывает, что дальность
планирования при оптимальной аэростатической силе уступает
дальности планирования при оптимальной скорости. Эти дальности
одинаковые только в случае аэростатического крыла постоянного
миделя, когда ф = 0.
5.5. ГОРИЗОНТАЛЬНЫЙ ПОЛЕТ ПРИ ПОСТОЯННОЙ СКОРОСТИ,
ТЯГОВООРУЖЕННОСТИ И МАССЕ АЭРОСТАТИЧЕСКОГО ЛЕТАТЕЛЬНОГО
АППАРАТА
Имея зависимость (5.16), легко записать для простейшего слу-
чая горизонтального полета в отсутствии расхода переменной мас-
сы и постоянной тяговооруженности
(5.39)
162
Решение этого уравнения дает
(5.40)
При этом
(5г)(-А=!1-М1+л&Г‘- (5-41)
\VrJvV#/2 \ /
Формула (5.40) определяет два режима полета .неуравновешен-
ного ЛА, из которых первый (знак « + ») происходит на скорости
большей, а второй (знак «—»)• на скорости меньшей, чем та ско-
рость (5.17), которой соответствует минимальное лобовое сопро-
тивление.
Минимальная скорость полета возможна при минимальной тя-
говооруженности:
Кривые, иллюстрирующие зависимости (5.40), (5.42) и (5.43),
приведены на рис. 91, из которых видно, что увеличение аэроста-
тической силы существенно влияет на понижение маршевой ско-
рости не только на втором, но и на первом режиме полета (при
малых углах атаки), что является следствием увеличения миделя
и уменьшения аэродинамического качества ЛА.
Из формул (5.42) и (5.43) следует также, что несмотря на
увеличение минимально потребной тяги двигателя, скорость при
увеличении высоты полета (уменьшении параметра <т) непрерывно
уменьшается. Это является также следствием ухудшения аэродина-
мических характеристик высотных аэростатических ЛА по сравне-
нию с глубинными. Последнее обстоятельство следует учитывать
при выборе и назначении характеристик венерианских аэростати-
ческих ЛА.
Очевидно, что скоростные и маневренные характеристики высо-
колетящих аэростатических ЛА с переменным миделем будут усту-
пать аналогичным характеристикам низколетящих аэростатических
в условиях полета в атмосфере Венеры.
163
Рис. 91. Характер влияния тяговооруженности и аэростатической силы на скорость горизон-
тального полета при SM=const и P=const
Рис. 92. Характер влияния аэростатической силы и тяговооруженности «т на максимальную
высоту полета при 5M=const
Для полностью статически уравновешенного ЛА (как в случае
SM = const, так 'и в случае SM=#const) минимальная тяга при
(ят)тт~0 и (V/VR)^0 обеспечивает наиболее экономический
режим полета на дальность вследствие минимальной работы, про-
изводимой при этом силами аэродинамического сопротивления.
Максимальная высота полета в изотермической атмосфере при
экспоненциальном законе изменения тяги двигателя, на основании
формулы (5.42) будет равна:
(PA)max=-lnX
(1-Аг)
JCy<A
21 г I п°
\^ха /птах
-Аг)
'а \
— I Ло
‘а / шах
2 I (1 — Аг) ф Аг
с- "°
Х^-^а/шах J
(5.44)
Характер такой зависимости показан на рис. 92, из которого
следует, что ЛА самолетного типа при Аг = 0 _имеет_ «потолок»
выше, чем статически неуравновешенный ЛА приАг=(Аг)(рЛ)т1п.
Это значение аэростатической силы может быть найдено дифферен-
цированием и приравниванием нулю производной d(p/z)max/^Ar от
правой части выражения (5.44). При этом получим
(С уа \
1 —„о(1 —2ф) 7^
(А г т" • (5.45)
I — п0(1 — |
\^ха /шах
Минимум «потолка» является следствием уменьшения скорости
полета при увеличенном миделе, когда подъемная сила заметно
уменьшается, а аэростатическая сила (будучи фактором высотно-
164
сти) недостаточно велика. При дальнейшем увеличении аэростати-
ческой силы «потолок» аэростатического ЛА, как и в случае SM —
= const, непрерывно увеличивается.
При необходимости определения минимума «потолка» полета
следует воспользоваться подстановкой выражения (5.45) в форму-
лу (5.44). Легко видеть, что при ф = 0 полученные здесь зависимо-
сти описывают характеристики неуравновешенных аэростатических
ДА при SM = const (см. разд. 4.5).
5.6. ПОЛЕТ С НАБОРОМ ВЫСОТЫ
Записав динамические уравнения движения в проекции на ка-
сательную к траектории полета с учетом безразмерного сопротив-
ления (5.16), получаем уравнение
В случае пт<1 наиболее крутой подъем наступает тогда, когда
безразмерная скорость удовлетворяет биквадратному уравнению
(С2 \2
-Л [4-(1-Аг)2Р=О. (5.49)
/шах
165
Решая его, находим
Айалогично наиболее быстрый подъем достигается тогда, когда
безразмерная скорость удовлетворяет уравнению
+ 2(1-Аг)2,
(5.51)
которое в общем случае надлежит решать приближенно.
Аэростатическая сила, равно как и скорость, максимизируют
крутизну траектории и скороподъемность, что может быть опреде-
лено приближенным вычислением. Вследствие непостоянства миде-
ля максимальные значения угла наклона траектории и вертикаль-
ной скорости существенно сдвигаются в сторону значений парамет-
ра Аг, близких к единице.
5.7. ЛЁТНЫЕ ХАРАКТЕРИСТИКИ СТАТИЧЕСКИ НЕУРАВНОВЕШЕННОГО
ЛЕТАТЕЛЬНОГО АППАРАТА С ПАРАБОЛИЧЕСКОЙ ПОЛЯРОЙ
ПРИ SM#= const И (Сх0)кор = const
Покажем летные характеристики статически неуравновешенного
ЛА с крылом, у которого независимо от изменения объема (аэро-
статической силы) аэродинамические характеристики газовмещакг
щего корпуса по параметру (CxJKop остаются постоянным11
(рис. 93).
166
Как следует из разд. 4.1, выражение для безразмерной силы
лобового сопротивления в рассматриваемом случае принимает вид
Величина максимального аэродинамического качества
(5. 52)
в полете
Следуя выкладкам настоящей главы и принимая во внимание
равенство (5.52), можно получить одноименные характеристики
для рассматриваемой схемы статически неуравновешенного ЛА.
Главные из этих характеристик приводятся ниже без выводов в
окончательном аналитическом виде.
Угол и вертикальная скорость при пологом планировании
®*ис. 93. Схема статически неуравнове-
шенного ЛА с переменным миделем
Пр" <Cxo)Kop=const: a) SM=GSM)mln,
mini б) (SM)max» ^_%ai
167
Дальность и время пологого планирования при постоянном угл^
атаки
Дальность и время пологого планирования при постоянной ско-
рости
,г ч 8(a0-°)(l-Ar)2[JM2
Lna=— ( arctg-----------=-----------_ ; (5. 58)
? \CxJmax 4 (1 - Аг)2 + (2а0 + ф Аг) (2а + ф Ar) k 7
8(* *о-’)(1-Аг)2ММ2
/пл =---1 —— ) a rctg----—----------=——-----—-. (5.59)
* 4(1-Аг)2 + (2со + ф Ar) (2а+ ф АО-
Горизонта ЛЬНЫЙ полет при постоянной скорости, тяговооружен-
ности и массе аэростатического ЛА:
ХУ ± /(>У «Г-(1-Аг)2(1+Ф^),
* \^ха / Г \^ха / max ‘ ° '
где .при (V/V2)XV/lZ^mIn и при
Полет с набором высоты:
[СУд\ / V V
sin 6 = ma _ Vr ' (1 + ; (5 .
(1 —Аг) ~ v
/ С Уд \ / V \3
^веРт _ \С*а /maxj. VR / /
VR (1-Ar)
(5.61)
168
Другие характеристики (в том числе и экстремальные их зна*
чения) по параметрам движения аэростатических ЛА могут быть
получены по аналогии с гл. 4.
5.8. ЛЕТНЫЕ ХАРАКТЕРИСТИКИ СТАТИЧЕСКИ НЕУРАВНОВЕШЕННОГО
ЛЕТАТЕЛЬНОГО АППАРАТА С ПАРАБОЛИЧЕСКОЙ ПОЛЯРОЙ
ПРИ 5кр=5Нр(а) И (Схо)кор = 0.
Представляет интерес рассмотреть схему статически неуравно-
вешенного ЛА, газовмещающий корпус которого выполнен в виде
«летающего крыла» переменного объема (рис. 94). Если при этом
хорда и относительная толщина профиля крыла остаются постоян-
ными, то при изменении высоты полета переменными будут пло-
щадь и миделево сечение крыла (газовмещающего корпуса). По-
скольку при &кр=const и С= (С/&кр) =const имеет место 5кр=^
==301ф/(q/qo) и, следовательно, выражение для безразмерной силы
аэродинамического сопротивления при (CXo)KOp = 0, принимает вид
(5.62)
Величина максимального аэродинамического качества в полете
равна
У = ) • (5.63)
/ max ]/ (СХо)кр 'max
Здесь условие Ar = const не нарушается, поскольку во время по-
лета mg = const и Аг = const независимо от изменения площади кры-
ла Ya = Суа80Щ)/ (q/qo) Q V2/2 = const.
Опуская известные уже нам по предыдущим разделам выклад-
ки, приведем основные летные характеристики в виде конечных,
пригодных для пользования, формул.
Угол и вертикальная скорость при пологом планировании
(1-Аг)
(5. 64)
1
а (1 — Аг)
7
614
169:
(1 - Аг)
/У„л\
UJ J
(5.65)
Дальность и
ле атаки
время пологого планирования при постоянном уг-
/Гпл \ \
, \ / \Сха / щах
ПЛ~ ₽^0(1-Аг)
(5.66)
Дальность и время пологого планирования при постоянной ско-
рости
Горизонтальный полет при постоянной скорости, тяговооружен-
ности и массе аэростатического ЛА:
170
Полет с набором высоты:
Потребная мощность горизонтального полета выражается за^
висимостью
ATn=(w)(l-Ar)IZ
О + A Ar) + vC,a + ( 1 -Аг)2
L \ ° / J
(5.73)
или
(mg)VR
(6-74)
Потребная мощность горизонтального полета уменьшается при
увеличении аэродинамического качества и аэростатической силы.
Дальность и время горизонтального полета с винтовым движи-
телем
3,6 1пЦ
___________\Се /
(<<Го)кр / ф — \ _
—------ 1 + ArU vCya(l - Аг)2
^Уа \ 7
3,6C-X^VZ-1 1пЦ
(^о)кр / Ф — \ -
—------ 1 + --АГ UvC^(l-Ar)2
^Уа \ а /
(5.75)
(5.76)
где Ц — число Циолковского; Се — удельный расход топлива.
5.9. УСТАНОВИВШИЙСЯ ПОЛЕТ СТАТИЧЕСКИ НЕУРАВНОВЕШЕННОГО
ЛЕТАТЕЛЬНОГО АППАРАТА САМОЛЕТНОГО ТИПА С ЯДЕРНЫМ
ДВИГАТЕЛЕМ
Рассмотрим сначала динамику полета статически неуравнове-
шенного ЛА самолетного типа с переменной массой, а затем перей-
Дем к изучению характеристик ЛА с ядерным-двигателем.
7* 171
В соответствии с рис. 95 уравнения движения в проекциях на
две ортогональные оси х и у принимаю^ вид
т -^-cos6=— cots (0ф) ( ms
dt k “T'\ 5a v dt j
-1/2Г_еЛ zC cos 9 + C„ sin 9)];
I 2 \ xa 1 Уа / ’
m sin 6 = — IF sin(9-|-<]>) [ms g°Pyi1 ) -
dt y \ W dt/
_ y21 Sin 9 _ сУа cos 9)1 - mg - Rkt,
(5-77)
где nis* — секундный расход атмосферного газа (например, в слу-
чае ТРД); ра — плотность атмосферного газа на данной высоте
полета.
Введем параметр, определяющий отношение скорости изменения
массы ЛА к массовому расходу атмосферного газа:
— .
т? dt
6 а
Для воздушно-реактивных ЛА с химическими двигателями этот
параметр есть отношение расходов топлива и атмосферного газа.
Учитывая это и используя уравнения (5.77), описывающие част-
ный случай горизонтального полета при 0 =гр = 0, получим
Al ________ ___эд/ / j I dm _____ у2 Сх^
dt \ ~ ) dt 2
V2 Са|м _ mg ( j _ дг) о.
(5.78)
Мощность двигателя складывается из мощности, расходуемой
на ускорение массы атмосферного газа и топлива до скорости ис-
течения W и мощности, расходуемой на нагрев газа, не преобразуе-
мой в тягу и другие потери. При этом можно записать
-T~\^rW2+m^ teo-M=
2т)/ L dt a J
(/ r-j \ 2
। j__________1 I |
’’’ \ w /.
(5.79)
где т]г- — эффективный КПД, равный отношению мощности, расхо-
дуемой на создание реактивной тяги 1/2 (dm/dt)W2, ко всей потреб-
ляемой мощности.
172
Мощность, расходуемая на преодоление сил лобового сопротив-
ления, на основании уравнения (5.79) и первого из уравнений
(5.78) для случая (dV/dt) =0, будет равна
у__ У2 dm
а ~~~^~dt
£0 ^уд\2
( W /
(5. 80)
Исключив X из уравнения (5.80) и разрешив его относительно
Vdt, получим
г v21
Vdt=---------. х“\ 14--L (5.81)
2g(l — Ar) SB? \ W / m ’
где аэродинамическое качество CyJCX является функцией аэро-
статической силы Аг.
Интегрирование этого уравнения от начальной массы т0 до
конечной*массы дает следующее выражение для дальности по-
лета:
1Г2
_____\ ла /
2g (1 — Аг)
^уЛ21
( W / J
In Ц.
(5. 82)
Так как число М меняется во время полета, то, очевидно, dVfclt
не равно нулю, как предполагалось, однако для всех практических
случаев величина dV/dt будет достаточно малой, чтобы пренебречь
ею в первом приближении.
Из формулы (5.82) видно, что для ЛА большой дальности по-
лета желательно иметь большее аэродинамическое качество. Его
можно определить, как уже было показано, из уравнения (5.8).
Для ЛА с ядерным двигателем из формулы дальности (5.82)
никаких полезных выводов сделать нельзя, так как*'в этом случае
/Пк = то, $Ш = 0 и величина L становится неопределенной. Если уст-
ремить тк к то как к
пределу
lim
т^0
/По —
mdt
= тк—> mQ,
разложить логарифм
In (m0/mK) в ряд и с по-
мощью уравнения (5.79)
исключить член в квад-
ратных скобках формулы
(5.82), то формулу даль-
ние. 95. Схема сил, действующих
статически неуравновешенный
ЛА самолетного типа
173
ности для статически неуравновешенного ЛА с ядерным двигате-
лем можно свести к виду
•ц/ДТц
------------
mg (1 — Аг)
(С-Го)кР
_ СУа
СУд(1 — Аг)
яХЭф
(5. 83)
где произведена замена
Суа(1 —Аг)
лХэф
Скорость полета при этом будет равна
V=---------
mg (1 — Аг)
_________________________________________
(Схо)кр [ ф — \ Суа (1 — Аг)2
~~С 1 Аг I + -
^Уа \ ° J лХЭф
Как следует из формул (5.83) и (5.84), дальность и скорость
полета пропорциональны аэродинамическому качеству и величине
аэростатической силы. При Ar = 1 имеет место случай статически
уравновешенного ЛА, когда достижение максимальной дальности
возможно при минимальной мощности N.
Другим параметром, важным для анализа характеристик ста-
тически неуравновешенного ЛА является максимальная скороподъ-
емность при заданной мощности двигателя. Если вновь рассмот-
реть аэростатический ЛА с ядерным двигателем, движущийся с
постоянной скоростью при условиях dmldt = Q, dVldt = Q, ф = 0 под
углом 9, отличным от нуля, то уравнения (6.130) можно привести
к виду
co,s 0 + ха cos 9 + Ya sin 9 = 0;
т8&ёйРул sin 0Т^а sin 9 —cos 9-]-/ng (1 — Ar)=0.
Выходная мощность определяется уравнением (5.79), как и вы-
ше, однако мощность x\iN в рассматриваемом случае равна сумме
мощности, расходуемой на преодоление аэродинамического сопро-
тивления, и мощности, расходуемой на преодоление силы тяжести
за вычетом аэростатической силы при подъеме ЛА, т. е.
n(W = [AT+wg(l—Ar) sin 9] V.
(5. 85)
Комбинируя уравнения (5.85), можно исключить члены, вклю-
чающие расход атмосферного газа ms^ а затем заменить сопротив-
ление Ха через N, используя только что записанное уравнение ба-
ланса мощностей. Решив полученное уравнение, можно определить
скорость набора высоты V = sin9 :
V sin 6
mg{\ — Аг)
(£-Го)кр / ф _ \ Суа\^ Аг)2
। 1 + Аг I + -
. ^Уа \ а / лХэф
Ctg0
(5. 86)
174
Таким образом, при прочих равных условиях, присутствие аэро-
статической силы увеличивает скороподъемность ЛА.
Рассмотрим горизонтальный полет с ускорением при постоян-
ной мощности аэростатического ЛА с ядерным двигателем. При
этом dm!dt = Q, 0 =0, m = m0 = const и уравнения (6.131) записыва-
ются в виде
re=/ng(l-Ar)=Xe
(5.87)
Используя уравнение (5.79) для записи ms* через N и учиты-
вая уравнение горизонтального полета (5.87), получим
______ (5.88)
dt т (g0Pym) I СУа \
\ ла !
Учитывая уравнение (5.84), можно записать
dV
dt
(i+JLArU
\ о ]
Cya(\-ktf '
(5.89)
(Cjfokp
_ СУа
Максимальная достижимая скорость при постоянной мощности
равна той, при которой ускорение равно нулю. Поэтому, полагая в
уравнении (5.89) dVldt=Q, получим У=1/2£0РуД.
Это и есть предельная скорость, независящая от аэродинамичес-
ких характеристик ЛА и аэростатической силы. В действительности
предельная скорость полета для реактивных ЛА равна ТГ=£о₽уД,
а не 1/2 (^уд). Полученные результаты применимы лишь в слу-
чае постоянной мощности двигателя и когда вся мощность потреб*
ляется воздушным потоком.
Глава 6
ДИНАМИКА И ТЕРМОДИНАМИКА ВХОДА
В АТМОСФЕРУ ПЛАНЕТЫ АЭРОСТАТИЧЕСКОГО
ЛЕТАТЕЛЬНОГО АППАРАТА
В главе исследуется характер влияния аэростатической силы на параметры
входа ЛА в плотные слои атмосферы с большой гиперзвуковой скоростью. В ка-
честве примера гиперзвукового аэростатического ЛА могут быть представлены
схемы, показанные на рис. 96—98. В целях уменьшения нагрузки на единицу
характерной площади вход в атмосферу осуществляется при непрерывном сбросе
баллонов сжатого (подъемного) газа и регулировании давления в газовмещаю-
щем корпусе в соответствии с изменением внешнего, (барометрического) давле-
ния среды. После прохождения плотных слоев атмосферы и сброса теплозащит-
ного экрана, аэростатический ЛА осуществляет выход на стационарную высоту
Рис. 96. Этапы входа гиперзвукового аэростатического ЛА в плотные слои атмосферы Вене-
ры. Оболочка шаровой формы:
1—полужесткая оболочка; 2—жесткая оболочка; 3—теплозащитный экран
Рис. 97. Этапы входа гиперзвукового аэростатического ЛА в плотные слои атмосферы Вене-
ры. Оболочка выполнена в виде фары:
1—вход в плотные слои атмосферы (оболочка не выполнена); 2—наполнение оболочки
подъемным газом и сброс теплозащитного экрана; 3—выполненная оболочка на расчетной
высоте дрейфа; 4—теплозащитный экран
Рис. 98. Этапы прохождения зон максимальных теплопотоков и перегрузок гиперзвуковой
/ Суа \
системы спускаемого и аэростатического ЛА при SM=const, z^^const и I — I > 0:
\с*а*
/—аэростатическая оболочка; 2—спускаемый аппарат
176
Рис. 99. Схема входа в атмосферу планеты высотного аэростатического ЛА:
1 —глуби н н о -в ы с отн ы й; 2—м а рш ев ы й
Рис. 100. Схема входа в атмосферу планеты глубинного аэростатического ЛА
дрейфа. Эта высота в зависимости от соотношения аэростатической силы и мас-
сы ЛА может быть достигнута сразу в результате снижения либо после достиже-
ния поверхности (или промежуточных высот) планеты и последующего само-
произвольного подъема (рис. 99—100).
Показано, что аэростатическая сила практически не оказывает влияния на
летные характеристики ЛА. Однако от аэростатической силы зависит объем газо-
вмещающего корпуса, а следовательно, и параметр tng/SM. Последнее обстоятель-
ство, как известно, играет существенную роль в изменении (в нашем случае улуч-
шении) динамических и термодинамических характеристик входа ЛА.
Другие вопросы, касающиеся входа аэростатических ЛА в атмосферу Венеры
без спускаемых аппаратов, а также возможности использования последних сту-
пеней ракетно-космических систем в качестве венерианских носителей научной
аппаратуры, рассмотрены в главе в порядке постановки наиболее актуальных и
перспективных задач.
6.1. УРАВНЕНИЯ ДИНАМИКИ ВХОДА ЛЕТАТЕЛЬНОГО АППАРАТА
В АТМОСФЕРУ ПЛАНЕТЫ ВЫСОКОЙ ПЛОТНОСТИ В ПРИСУТСТВИИ
АЭРОСТАТИЧЕСКОЙ СИЛЫ
Ниже приводится вывод основных уравнений динамики, описы-
вающих вход ЛА в атмосферу планет и последующее движение в
достаточно плотных слоях, где действует выталкивающая архиме-
дова сила Аг (70 =И= const.
Рассмотрим случай, когда во время полета масса ЛА, его на-
грузка на характерную площадь, объем и мидель остаются посто-
янными, т. е.
т=const; v л А = const;
)=const ’ = const •
В соответствии с рис. 101 проекция сил на направление скорос-
ти и ей перпендикулярное направление дает следующую систему
Дифференциальных уравнений:
т — = — Xa(h)-\-mg sin 9 — RAtW sin 6; (6. 1)
dt
~^mV — =Ya(h.) — mgcos0-(-/?Ar(/z) cos —cos 9, (6.2)
dt
177
Рис. 101. Схема действующих сил при
входе и движении ЛА в плотных ело*
ях атмосферы планеты
где /?аг(Л) — аэростатиче-
ская сила, переменная по
высоте полета; R=h+Rnjl—-
расстояние ЛА до центра
планеты во время движения;
0 — угол, составляемый век-
тором скорости и линией го-
ризонта (угол наклона тра-
ектории); т — масса ЛА
(для случая аэростатиче-
ских ЛА вместе с подъем-
ным газом).
На участке заметной пло-
тности атмосферы можно
положить, что ускорение
гравитационного поля пла-
неты мало меняется по тра-
ектории торможения и рав-
но его среднему значению.
Произведем замену переменных в левых частях уравнений
(6.1) и (6.2). Для этого запишем dS)dt = V (где dS — элемент рас-
стояния вдоль траектории полета). Преобразование левой части
уравнения (6.1) при помощи этого выражения дает
Имеем также
dV dV m dV*
m —=m— V=-------
dt
dS 2 dS
dt=
dh
V sin 0
(6.3)
(6.4)
Выполняя преобразование левой части уравнения (6.2), полу-
чим
mV—= mV — V sin 0 = тУ2 sin 6. (6.5)
dt - dh dh k
Уравнение локального изменения плотности атмосферы плане-
ты с высотой имеет вид
о________1 dQ (h)
Q(h) dh ’
откуда
dh =-----— . (6.6)
Q(ft) ₽ v
С учетом (6.6) выражение (6.5) принимает вид
mV — mV2------------------------sjn (6. 7)
dt Г 1___dQ (A) "I
I Q (Л) 3 J
178
Принимая во внимание выражения (6.3) и (6.7), перепишем
дифференциальные уравнения (6.1) и (6.2) следующим образом:
V ^7-=-^a(A)+«?gsin9-7?Ar(A)sin9; (6.8)
sin 9iZ9 > г / / \ л I га / г \ л I /л* га\
—[ - = У a W - mg шз 6 + ^Ar W cos 6 + m — cos 9 (6.9)
LoW p ]
и затем
(V2\ (JL\
\gR J = _ / \ g#/ . 2иЛА I W J . /g 10)
d§(h) \ / sin 9 m$R Q (A)
cos 9 1 /cya /CXSM \ , vnA cos 9 ( g#\ / 1 \ cos 9 f gR _
dQ(h) 2 \Cxa У4" m$R \ W2 J \?R J Q (h) { V? J
(6Л1)
Уравнения (6.10) и (6.11) являются точными уравнениями дви-
жения ЛА при спуске и движении в атмосфере планет высокой
плотности.
6.2. ЧИСЛЕННЫЕ РЕШЕНИЯ УРАВНЕНИЙ ДИНАМИКИ
Уравнения (6.10) и (6.11) аналитически не решаются. Они мо-
гут быть решены численным интегрированием на ЭВМ. Вследствие
того, что в знаменатель уравнения (6.10) входит sin 0, при вычис-
лениях на ЭВМ возникают ошибки при 0 = 0 и 6^0. Во избежание
этих ошибок уравнения (6.10) и (6.11) следует преобразовать к
удобному для численного интегрирования виду. Преобразования
выполним, умножив обе части уравнения (6.10) на произведение
Q(h) sin 0, а уравнения (6.11) — на произведение p/?p(/z) (V[V~gRY
Принимая во внимание также выражения dSldt=V, (6.3) и (6.4),
получим
----sin 6+ sin 9;
т
(6. 12)
(6.13)
179
Имеем также dS = Vdt,
. л dh d (рЛ)
— sin 9 --= V - ,
Vdt $Vdt
A sine j/"y.
При этом
— sin e
(6-14)
Уравнения (6.12), (6.13) и (6.14) также могут быть решены
численно на цифровой вычислительной машине, если задано дейст-
вительное изменение плотности атмосферы по высоте или прибли-
женная экспоненциальная зависимость плотности от высоты р(70.
Они могут быть легко приспособлены для расчета параметров дви-
жения аэростатических ЛА, входящих непосредственно в плотные
слои атмосферы Венеры (без спускаемых аппаратов) при полно-
стью выполненной оболочке, для спускаемых аппаратов с аэроста-
тическим ЛА (оболочка которого расположена в донной части теп-
лозащитного экрана), а также для расчета параметров движения
неаэростатических ЛА в атмосферах планет высокой плотности, но
малой архимедовой силы. К последним может быть отнесена пла-
нета Юпитер, главными составляющими атмосферы которой явля-
ются водород и гелий.
6.3. ВЛИЯНИЕ АЭРОСТАТИЧЕСКОЙ СИЛЫ НА ПАРАМЕТРЫ ВХОДА
ЛЕТАТЕЛЬНОГО АППАРАТА В АТМОСФЕРУ ПЛАНЕТЫ
Рассмотрим характер влияния аэростатической силы на пара-
метры входа ЛА в плотные слои атмосферы. Предположим, что во
время входа аэростатическая оболочка находится в выполненном
положении уОб = const, а давление газа в ней регулируется в соот-
ветствии с изменением внешнего давления. Для изотермической
атмосферы этр давление будет следовать закону р = роехр (—<рЛ).
По этому же закону при снижении будет увеличиваться аэростати-
ческая сила 7?аг(Л), все более уравновешивая массу ЛА и выводя
его на стационарную высоту дрейфа при достижении равенства
RAT(h) =mg.
Обращаясь к уравнениям (6.10) и (6.11) и принимая во внима-
ние, что Пдг —Qo/q(A), получим
_ Л
d cos 9 \^ха ' I I 2/3 * V2 ) ( cos 9 \ , cos 9 / gR
-----== ---------- I % А г — I-------- г" д г------1
dQ (h) 2---\ т? / р/?-\ Q (А) / Жо \ V2
. (6. 16)
180
Уравнения (6.15) и (6.16) справедливы для аэростатических ЛА’
с постоянным объемом газовмещающего корпуса на всем участке
спуска. Влияние аэростатической силы на параметры движения в
них учтено последними членами правых частей. Параметр пАТ,
является величиной, показывающей, во сколько раз аэростатичес-
кая сила 7?аг больше силы тяжести ЛА на «уровне моря».
Аналогично дифференциальные уравнения для численных реше-
ний на ЭВМ (6.12), (6.13) и (6.14) принимают вид
Для выяснения влияния аэростатической силы 7?аг(Л) на пара-
метры входа ЛА были выполнены специальные расчеты на ЭВМ
для случая баллистического входа в атмосферу Венеры при
CyJCXa)=0, /?$=6050,103 м, g$> =8,88 м/с2, =0,1608-Ю3 1/м,
(Я/₽) =55,25- 103 м2/с2 по уравнениям (6.17), (6.18) и (6.19) с уче-
том и без учета аэростатической силы. В последнем случае вместо
параметра (mg/CxaSM) =2920 Па и лгАг=Ю ... 102. . . 103 брались
величины 2920 .. . 630 . .. 136 . . . 29,2 Па. Резуль-
таты расчетов применительно к баллистическому входу при 6 =0,5°
представлены на рис. 102, применительно к вертикальному входу
при 0 = 90° — на рис. 103, квазистационарному планированию при
(CyJCx = 0,1 —на рис. 104 и рекошентирующему входу при
\cyJc“a) =2 — на рис. 105.
Анализ полученных данных показывает, что аэростатическая
сила практически не влияет на параметры входа ЛА при {mg/
/SMCX) = const, однако от нее зависит объем газовмещающего кор-
пуса и, следовательно, нагрузка на единицу характерной площади-
Последнее обстоятельство вызывает увеличение текущей высоты
входа h(V).
Пользуясь аналитической зависимостью для высоты квазиста-
Ционарного планирования (23), легко показать, что разность высот
181
Рис. 102. Характер влияния аэростатической силы на параметры баллистического входа ЛА
в атмосферу Венеры (точное численное решение на ЭВМ):
-------ic учетом аэростатической силы; О—без учета аэростатической силы
Рис. 103. Параметры вертикального входа ЛА в атмосферу Венеры с учетом и без учета
аэростатической силы (точное численное решение на ЭВМ):
-------с учетом аэростатической силы; О^без учета аэростатической силы
входа ЛА с различными параметрами нагрузки от сил тяжести на
характерную^площадь будет равна
(.у \ 2
д (₽Л)=(РА)1 —(РА)2=1П -М
I \у кр /
1
— In
IZ \2
И*Р \ __ ।
V /
(mg\
2 I--------I
Y = ln ^^ = lnnAr, (6.20)
2
где индексы «1» и «2» означают различные высоты полета.
Таким образом, вследствие того, что на участке гиперзвуковых
скоростей входа определяющим фактором для высоты полета яв-
ляется не величина аэростатической силы /?Аг, а нагрузка на еди-
ницу характерной площади (tnglS^), в исследованиях параметров
входа аэростатических ЛА с большой скоростью (где mg<^Xai
mg<^Ya)t учет аэростатической силы /?Аг(Л) можно не производить.
182
Рис. 104. Параметры баллистического входа ЛА в плотные слои атмосферы Земли в присут-
ствии аэростатической силы (численное решение на ЭВМ)
Рис. 105. Параметры входа рикошетирующего ЛА в плотные слои атмосферы Земли в при*
сутствии аэростатической силы (численное решение на ЭВМ)
Уменьшение параметра при увеличении высотности
аэростатического ЛА указывает на возможность существенного
снижения проекторных теплопотоков, величина которых, как изве-
стно, пропорциональна ^qV3. Последнее обстоятельство является
чрезвычайно важным, поскольку оно указывает на необходимость
изучения в будущем новых схем аэростатических ЛА, обладающих
способностью непосредственного входа в плотные слои ^атмосферы
планет без спускаемых аппаратов.
На рис. 102 и 104 приведены также кривые t=t(V) и 0 = 0 (V)
дополняющие характеристики движений различных схем аэроста-
тических ЛА.
6.4. КИНЕТИЧЕСКИЙ НАГРЕВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Для простоты изложения ограничимся самыми общими сообра-
жениями, которые оправданно можно положить в основу учета ки-
нетического нагрева при исследовании траекторий полета. Более
подробные сведения по вопросам, связанным с кинетическим нагре-
вом, можно найти, например, в работах [2 и 26]. В общем случае
183
температура поверхности определяется из баланса тепловых пото-
ков, подводящихся и отводящихся от стенки ЛА. Количество под-
водимого тепла сильно зависит от скорости и высоты полета и гео-
метрических размеров тела.
Уравнение теплового баланса для тела, движущегося на неко-
торой высоте h с некоторой скоростью V содержит, с одной сторо-
ны, величину Сконбум^Т’кон/Л) (где Скон — теплоемкость материа-
ла конструкции), обуславливающую температурный режим лета-
тельного аппарата (dTuou/dt^O — температура соответственно уве-
личивается, остается постоянной или уменьшается) и, с другой сто-
п
роны, сумму поверхностных плотностей тепловых потоков ±
i=i
(подводимых « + » или отводимых «—»), обуславливаемых трением
в пограничном слое, радиацией Солнца и планет, а также работой
бортовых систем (двигателей, научной аппаратуры и оборудова-
ния) .
Такое нелинейное дифференциальное уравнение описывает не-
стационарный тепловой процесс, при котором температура поверх-
ности тела изменяется с течением времени (dTKOH/d/y=0). Его ре-
шение, вообще говоря, можно получить методами численного интег-
рирования.
Полагая, что (dT^Jdt) =0 (температура конструкции лета-
тельного аппарата во время полета остается постоянной), а также
принимая во внимание, что основной причиной нагрева летатель-
ного аппарата является трение атмосферного газа о поверхность
обшивки, уравнение теплового баланса можно свести к виду
(7конв ^7из л*
' Решением этого уравнения с использованием известных зависи-
мостей
^коив = а(Л —Т'рав); (6-21)
^изл-е^₽ав, (6.22)
легко получить
^ав=[— (Л-^рав)Т/4> (6.23)
L j
где а —• коэффициент теплопередачи, имеющий различные пара-
метрические зависимости для плоской пластинки и для критичес-
кой точки сферического тела; е — коэффициент черноты, оцениваю-
щий излучающую способность тела по сравнению с абсолютно чер-
ным телом (для определенности в дальнейшем будем считать 8 =
. = 0,8); о — коэффициент излучения; Трав — равновесная темпера-
тура (гладкой пластинки при нулевом угле атаки или передней кри-
тической точке тела вращения); Тг—температура восстановления.
Формула (6.23) получена при допущении, что градиент давле-
ния вдоль большей части поверхности летательного аппарата не-
184
велик и его, как и для плоской пластинки при нулевом угле атаки
можно считать равным нулю. Очевидно, также, что эта формула не
учитывает индивидуальных особенностей конструкции свойства ма-
териалов и т. д., что является задачей специальной методики инже-
нерных расчетов по уже скомпонованным ЛА.
Равновесная температура поверхности, как уже упоминалось со-
ответствует установившемуся тепловому процессу, который полу-
чился бы, если бы аппарат летел неограниченно долго с данной
скоростью и на данной высоте полета. Равновесную температуру
можно рассматривать как критерий нагрева поверхности (верхний
предел нагрева), так как действительные температуры всегда будут
меньше равновесной.
Расчет по формуле (6.23) производится методом итераций с
использованием следующих зависимостей:
1. Температура полностью восстановления
+ (6.24)
где u = Cp/Cv — показатель изоэнтропы; Тж — температура невоз-
мущенного потока газа.
Вообще говоря, формула (6.24) справедлива для совершенного
(низкотемпературного) газа, у которого Ср и Cv не зависят от тем-
пературы. При высоких температурах показатель х уже нельзя
считать постоянным, так как Ср и Cv зависят от температуры. Кро-
ме того (и это самое главное), при высоких температурах Ср и Cv
изменяются вследствие диссоциации молекул газа. Однако неучет
последнего обстоятельства (т. е. при r = const) существенно упро-
щает методику расчета температур, которые при этом указывают
на их возможный теоретический предел.
2. Эффективная температура
7,эф = (Й1(7’рав + Г~) + Ш2 'Ж
ИЛИ
Лф=“1(Грав+Т.)+а>2(Тг-7'„)) (6.25)
где согласно Эккерту [2], с достаточной степенью точности можно
принять (01 = 0,5 и <02 = 0,22.
Анализ показывает, что если физические компоненты атмосфер-
ного газа q, Ср, ц, X и С/ брать для эффективной температуры ТЭф,
а затем вести расчет по формулам, полученным для несжимаемой
жидкости, то результаты расчета оказываются близкими к резуль-
татам точного решения. Так, например, погрешность, определяемая
коэффициентом теплопередачи для гладкой пластинки составля-
ет + 3%.
Эффективная температура слоя ТЭф является некоторой средней
величиной между температурой торможения газового потока Тг и
температурой стенки Tw.
185
3. Коэффициент восстановления
r=pri/3=/_£fM1/3, (6.26)
К /
где Рг — число Прандтля; Ср — теплоемкость при постоянном дав-
лении; и Xvr — коэффициенты вязкости и теплопроводности
газа вблизи стенки.
Число Прандтля зависит от температуры газа (табл. 6.1), одна-
ко эта зависимость слаба и для высоких температур, наблюдаю-
щихся при входе ЛА в плотные слои атмосферы, число Прандтля
можно считать постоянным.
При турбулентном течении Рг = 0,72 для воздуха и Рг = 0,77 ...
.. . 0,78 для СО2. Ввиду малых отличий эти значения чисел Рг
могут быть оставлены в расчетах первого приближения и для ла-
минарного пограничного слоя.
' Таблица 6.1
Влияние температуры на число Прандтля для воздуха
500 750 1000 1250
Рг 0,69 0,665 0,655 0,65
Коэффициент восстановления, определенный эксперименталь-
ным путем, обычно принимают равным г = 0,85 для ламинарного
пограничного слоя и г=0,88 . . . 0,90 для турбулентного.
4. Коэффициент теплопроводности
где dtldh — температурный градиент; dQ — элементарное количе-
ство тепла; dF — элемент изотермической поверхности.
Численно коэффициент теплопроводности X равен количеству
тепла, проходящему в единицу времени через единицу изотермиче-
ской поверхности при условии, что градиент температур в рассмат-
риваемой точке равен единице.
Согласно кинетической теории газов передача тепла в газах по-
средством теплопроводности осуществляется путем молекулярного
переноса энергии при соударениях молекул.
Коэффициент теплопроводности для газов определяется по
формуле
(6.28)
где И7м — средняя скорость движения молекул газа; /м — средняя
длина свободного пробега молекул газа между их соударениями;
186
Cv — теплоемкость газа при постоянном объеме; у — удельный
вес газа.
Для идеальных газов /му = const, так как с увеличением давле-
ния в равной мере повышается у и уменьшается /м. Поэтому коэф-
фициент теплопроводности для газов заметно не изменяется при
изменении давления. Однако для очень малых давлений, когда дли-
на свободного пробега молекул превышает размеры области, где
заключен газ, коэффициент теплопроводности такого сильно раз-
реженного газа (р< 100 Па) сильно зависит от давления и умень-
шается с его понижением.
При очень высоких давлениях газа оказывают заметное влияние
силы межмолекулярного взаимодействия и коэффициент тепло-
проводности возрастает с увеличением давления.
Температура газа влияет на среднюю скорость движения моле-
кул и теплоемкость Су, в результате чего коэффициент тепло-
проводности газов возрастает с увеличением температуры.
Гелий и водород отличаются высоким значением коэффициента
теплопроводности, который у них в 5—10 раз больше, чем у других
газов. С этой точки зрения планеты Венера и Земля являются бо-
лее благоприятными для встречи межпланетных кораблей, чем
планета Юпитер.
5. Коэффициент теплопередачи для гладкой пластинки при
ламинарном (аЛам) и турбулентном (атуРб) пограничных слоях
где
ала= 0,332 9. ; лам РГ2/3 / Re (6.29)
, о оз -гурб ->J,J pr°,6 Re°^ ’ (6.30)
Dp _ 1\еэф (6.31)
число Рейнольдса, вычисленное по эффективной температуре;
6эф=-^------ (6.32)
gRT^
— средняя плотность по толщине пограничного слоя.
Для коэффициента динамической вязкости цЭф, величина кото-
рого зависит в основном от температуры, можно принять формулу
(Т, \т
, (6.33)
1 р- '
дающую результаты, близкие к получающимся по более точной
формуле Сатерленда.
При выполнении конкретных расчетов следует иметь в виду, что
при обтекании гладкой пластинки, установленной под нулевым уг-
лом атаки, ламинарный пограничный слой реализуется в диапазо-
не 102Re105, а турбулентный — при Re>105 (обычно прини-
мают ReKpHT = 2 • 105).
187
Для притупленного тела вращения в его критической точке
(при всегда ламинарном течении) коэффициент теплопереда-
чи имеет вид
лпяГ ldV\\№
«кР 0,94 I 9эфР*эфО I II С pg.
где
dV 1
(6.34)
(6.35)
dx r0
— градиент скорости в критической точке тела вращения радиу-
са г0;
К
2
— давление за скачком уплотнения в критической точке (на теле
вращения);
(6.36)
Qoo
Со
X--- 1
1 + ---- М2
2
(6. 37)
—— М2
2
— отношение плотностей до -и за скачком уплотнения в крити-
ческой точке (для совершенного газа и в предположении, что плот-
ность в ударном слое за скачком постоянна);
еЭф„=-^- (6.38)
— плотность в критической точке по эффективной температуре
(бэфо ~ Оэф);
Qo=-^ (6.39)
— плотность за скачком уплотнения (на теле вращения).
Вследствие малой зависимости коэффициента вязкости от дав-
ления Нэфо(Тэф, Л/) его величина цЭфо=|Ыэф определяется по фор-
муле (6.33).
С учетом зависимостей (6.35) — (6.39) формула (6.34) может
быть представлена также в следующем виде:
а =0,94(ро)3/4[-^(—Г —1/ 2—1 Cpg,
₽ ’ [^Гэф1 го V J ps
где величины ТЭф, рох и kx определяются по формулам
(6.36) и (6.37).
Если формулу (6.36) представить в виде
, Г 9 / К \"1
/70=е-^ рА_о+еЛ-.о^«> р —-)] ,
(6.40)
(6.25),
(6.41)
188
то можно показать, что при числе М>5
и тогда остается справедливым для всех высот h выражение
у). (6.42)
Расчеты показывают также, что при числе М>5 равенство
(6.37) может быть упрощено и представлено в виде
k^*—. (6.43)
X + 1
С учетом выражений (6.42) и (6.37) формула (6.40) принима*
ет вид
что справедливо для гиперзвуковых режимов полета при числе
М>5.
Пользуясь приведенными выше зависимостями, по итеративной
формуле (6.23) и уравнению (6.44), графически или методом по-
следовательных приближений можно рассчитать равновесную тем-
пературу Грав гладкой пластинки или в критической точке затуп-
ленного тела применительно к различным режимам движения ЛА
в атмосфере планет.
В частном случае формулы (6.24), (6.25) и (6.44) после неслож-
ных преобразований принимают вид
Г / V2 \ I ^ко \2т
ТГ = Т„ 1+0,132 -7- — 1 ; (6.45)
[ \ и Кр J \ а / J
ЛФ= Грав + ?“ = 0,22(77-7+); (6.46)
aKp=10^/JLF ехр [о,41 In ( -^-Yl (6.47)
кр Чкр/ ГгоГэф Ч \ 273 /J
для Венеры при х = 1,3, г = 0,88, Ср = 4,18 • 0,195 кДж/(кг-К), g—
= 8,88 м/с2, R = 9,81 • 19,27 Дж (кг К), ро=9,81 -1,43 10-6 Па-с, т =
= 0,82;
тт= Т* окр= 1,15-IO-4 ( = 7\Jl + l,76(-p)2(-^)2l ; (6.48) L \ гКр / \ а / J (,= Грав^Г” +0,22(Тг-Г,); (6.49) Г_и_\з/2 Г 1п ( ^КР ) Уг0Тэф Ч \ 273 /] 189?
для Земли при х=1,4, Ср = 4,18 • 0,24 к Дж/(кг К), ^=9,81 м/с2,
R = 9,81 -29,27 Дж/(кг-К), Цо = 9,81 • 1,755 • 10~6 Па-с, т = 0,76.
Результаты расчетов по уравнению (6.44) и формулам (6.45) . . .
... (6.47) и (6.48) ... (6.50) для радиуса закругления носовой ча-
сти тела вращения г0=1 м (при ламинарном пограничном слое)
приведены на рис. 106 и 107. Там для оси абсцисс по числу М при-
нята средняя скорость звука а = 265 м/с, характерная для высот
входа в атмосферы Венеры и Земли.
Задавшись допустимой температурой поверхности ЛА на доста-
точном расстоянии рт критической точки и вблизи ее, при помощи
рис. 106 и 107, можно определить допустимую скорость в зависи-
мости от высоты полета. Очевидно, скорости, получающиеся при
расчете траектории, не должны превышать принятые таким обра-
зом определенные величины. Следует учитывать также, что изло-
женная методика дает верхнюю границу возможных температур
стенки без учета понижения ее вследствие диссоциации и иониза-
ции молекул высокотемпературного газа.
6.5. ТЕПЛОВОЙ МАКСИМУМ В АТМОСФЕРАХ ВЕНЕРЫ И ЗЕМЛИ
Рассмотрим теперь, каким образом распределяется температура
поверхности Трав по траекториям ЛА, входящих в атмосферу пла-
нет с большими гиперзвуковыми скоростями.
В качестве примера остановимся на траекториях квазистацио-.
парного планирования и наклонной траектории входа. Первая как
известно, характерна малыми текущими и большими интегральны-
ми тепловыми потоками; вторая, наоборот, большими текущими и
сравнительно малыми интегральными тепловыми потоками.
Для получения наиболее достоверных результатов воспользуем-
ся не экспоненциальным законом q(/z), а моделью атмосферы при-
менительно к планетам Венера и Земля.
Для этой цели запишем в удобном для расчетов виде зависи-
мости для квазистационарного планирования
(6.51)
и наклонной траектории входа [23]
(6.52)
В соответствии с формулами (6.51) и (6.52) на рис. 108 и 109
представлены зависимости TpaB=f(hV/^gR), полученные на осно-
вании рис. 106 и рис. 107.
190
Рис. 107. Зависимость равновесной темпе-
ратуры в критической точке на сфериче-
ской части тела в атмосфере Земли от
числа М
Рис. 106. Зависимость равновесной темпе-
ратуры в критической точке на сфериче-
ской части тела в атмосфере Венеры от
числа М
Рис. 108. Характер влияния высоты и скорости полета на равновесную температуру в атмо-
сфере Венеры
Рис. 109. Характер влияния высоты и скорости полета на равновесную температуру в атмо-
сфере Земли
191
Рис. 111. Характер влияния скорости и па-
раметра mg/S^ на равновесную температу-
ру при квазистационарном планировании в
атмосфере Венеры
V7|/^
ч- Рис. ПО. Зависимость высоты от скорости
полета и параметра mg/S^ при квазистаци-
онарном планировании в атмосфере Вене-
ры. Характер влияния высоты и скорости
полета на равновесную температуру
Рис. 113. Характер влияния скорости и па-
раметра на равновесную темпера-
туру при квазистационарном планировании
в атмосфере Земли
ч—Рис. 112. Зависимость высоты от скорости
полета и параметра mg/SM при квазиста-
ционарном планировании в атмосфере Зем-
ли. Влияние высоты и скорости полета на
равновесную температуру
Характеристики по нагреву поверхности в зависимости от тра-
екторных параметров для случая квазистационарного планирова-
ния в атмосфере Венеры и Земли приведены на рис. НО, 111, 112
и 113. Анализ этих характеристик показывает, что, во-первых, тем-
пературы нагрева Грав в атмосфере Венеры при (mg!SM) 100 Па
заметно ниже, чем в атмосфере Земли; во-вторых, имеет место мак-
симулМ зависимости TpdiB=f(V/^gR) и, в третьих, параметр mg/SM су-
щественно влияет на понижение максимума Грав = (Грав)тах.
Нулевые значения 7"рав=/(V/~]/gR) являются следствием отсутст-
вия кинетического нагрева при V/]/g7? = 0 И нулевой плотности q~0
при V/ygR=l. Пунктирные кривые при (V/ygR)—>0 означают (по-
мимо кинетического-нагрева) температуру среды Too=f(h)t что для
Венеры (см. рис. 111) указывает на наличие второго максимума.
192
Рис. 114. Траектория h(V) и тем-
пература Т’рав при вертикаль-
ном входе ЛА в атмосферу
Земли:
1—высота; 2—температура
Близость температур аналитического (в полете) и неаналитичес-
кого (у поверхности планеты) максимумов позволяет сделать опти-
мистические выводы (в порядке постановки задачи) о возможнос-
ти дальнейшего изучения и разработки новых схем венерианских
ЛА, входящих в атмосферу Венеры без спускаемых аппаратов.
Характеристики для случая вертикального входа ЛА (баллис-
тический при 9 =л/2) в атмосферу сравниваемых планет представ-
лены на рис. 114 и 115 зависимостями 7пРав=/( V/Уя^) Для мини-
мальных скоростей входа, равных круговым ^gR, причем для Ве-
неры помимо венерианской круговой скорости (У^) ?, приведены
характеристики земной скорости входа (Уй7?)@. Эти характеристи-
ки также подтверждают менее напряженные По сравнению с зем-
ными тепловые режимы полета в атмосфере Венеры.
-Максимумы температур в функции безразмерной скорости не
точно соответствуют значениям (V/Vo) = 1УЗ (для квазпстационар-
ного планирования) и (V/V0) = l/y £ (для баллистического вхо-
да), что является следствием закона p(/z) для неизотермической
атмосферы.
Отсутствие нулевых значений равновесной температуры при
Wy^=l обусловлено величиной q(/i)>0 на данной высоте входа.
Если (V/7gV?)—>0 (см. рис. 115), наступает быстрая потеря ско-
рости и ЛА переходит в режим вертикального снижения при отсут-
ствии аэродинамической подъемной силы.
Вернемся теперь к объяснению причин, в силу которых «горя-
чая» с высокой плотностью атмосфера Венеры является более бла-
гоприятной (в тепловом отношении) для встречи космических ко-
Рис. 115. Траектория h(V) и тем-
пература Грав при вертикаль-
ном входе ЛА в атмосферу Ве-
неры:
/—скорость входа; 2—высота;
3—температура
19а
Рис. 116. Сравнительная модель атмосфер
Венеры и Земли (не в масштабе)
раблей, чем атмосфера Земли.
На рис. 116 представлена мо-
дель атмосферы q(/z) для
сравниваемых планет. Там
видно, что на участках (высо-
тах) входа плотность атмо-
сферы Венеры, уступает плот-
ности атмосферы Земли. Это
подтверждается также и для
изотермической атмосферы по-
казателем экспоненты, кото-
рый для .Венеры имеет боль-
шее значение ((3 = 0,19-10-3
1/м), чем для Земли (|3 =
= 0,141-10-3 1/м).
Другим фактором, опреде-
ляющим меньший нагрев вене-
рианского ЛА, является мень-
шая скорость входа в атмосфе-
ру Венеры (У^)$ =
= 7,32-103 м/с. Та же скорость
для Земли (У^)© =
= 7,95-103 м/с). Таким образом, движение космического ЛА при
входе в атмосферу Венеры происходит в менее плотной среде'и с
меньшей скоростью, чем при движении аналогичного ЛА в атмо-
сфере Земли.
По аналогии с термином «звуковой барьер» в литературе ис-
пользуется термин «тепловой барьер». Понятие «звукового барье-
ра» связано с возрастанием сопротивления со скоростью полета
при числе М, близком к единице. Понятие «теплового барьера»
связано также с возрастанием температуры стенки. Как следует из
работы [9], «барьерные» точки максимальных температур для изо-
термической атмосферы отмечаются при К/УйТ?~0,72 и этим опре-
деляются три характерные области полета ЛА. Первая из них —
область сравнительно малых скоростей [(К/Уй^?) ~0,72], где тем-
пературы, хотя и велики, но не превосходят температур плавления
конструкционных материалов. Вторая область относится к «барь-
ерным» скоростям полета [(УУ^) ~0,72]. В этой области отмеча-
ется наибольшее влияние теплового барьера, вследствие чего до-
стигаемые температуры нагрева поверхности ЛА могут превосхо-
дить температуры плавления возможных конструкционных мате-
риалов. Третья область относится к начальному участку входа.
Ее можно характеризовать малыми температурами и возможностью
отыскания режимов полета, при которых задача предохранения
конструкции ЛА от возникающих температур нагрева может быть
решена наиболее успешно. Определенный интерес с точки зрения
194
изучения планеты (в частности, верхних слоев атмосферы) в этой
области могут представлять суборбитальные ЛА типа «ракето-
планер», осуществляющие длительный полет в сильно разреженной
среде при круговых и околокруговых скоростях
В условиях сильного нагрева при гиперзвуковых скоростях вхо-
да в атмосферу ЛА с радиационным охлаждением будут летать с
углами атаки, приблизительно находящимися в диапазоне от соот-
ветствующего С^лтах До соответствующего (^t/fl/^xa)max- Такой
режим полета можно объяснить с помощью выражения для кон-
вективного теплового потока при ламинарном обтекании:
<7^^-173,15, (6.53)
где / — характерная длина.
Имея выражение для плотности (6.51), можно найти зависи-
мость теплового потока от высоты и коэффициента подъемной
силы в установившемся полете
или для случая изотермической атмосферы
q~ уз,15(6.55)
Таким образом, при данной скорости для данного ЛА критичес-
кое значение теплового потока уменьшается с увеличением коэф-
фициента подъемной силы, или с увеличением высоты полета. Теп-
ловое равновесие поверхности с радиационным охлаждением дости-
гается при температуре, когда подводимое тепло равно
излучаемому:
Грав~р-|1/4- (6.56)
Следовательно, критическая температура поверхности также
понижается с увеличением коэффициента подъемной силы. Из
уравнений (6.54), (6.55) и (6.56) можно установить, что при опре-
деленных размерах и требованиях к характеристикам ЛА допусти-
мая температура конструкционных материалов в основном опреде-
ляется удельной нагрузкой на характерную площадь mglS^ что
было показано на рис. 111 — 113, 114 и 115.
При достижении =0,2 ... 0,3 можно ожидать приемлемой
температуры для «горячей конструкции» (~700° С при сходе ЛА с
орбиты Венеры). В этом случае представляет интерес рассмотре-
ние вопроса о создании незащищенных (радиационных) конструк-
ций с использованием жаропрочных сталей, никелевых и титано-
вых сплавов, работающих при равновесной температуре, когда
большая часть конвективного тепла излучается в атмосферу.
Такая «горячая» конструкция может оказаться перспективной
для многорежимных венерианских ЛА, осуществляющих полет в
глубинных высокотемпературных слоях атмосферы планеты.
195
Рис. 117. Схема многорежимного
венерианского ЛА:
/—двигатели струйной стабилиза-
ции; 2—подвижный лонжерон; 3—
гофрированная аэростатическая обо-
лочка; 4—гофрированная поверх-
ность параплана
Широкий диапазон режимов ско-
рости полета приводит к необходи-
мости, как уже было отмечено вы-
ше, жаростойких материалов в эле-
ментах конструкции. Важно иметь
в виду, что сплавы жаростойких ме-
таллов таких, как молибден, нио-
бий, тантал, вольфрам, сильно окис-
ляются при температуре, значитель-
но меньшей температуры плавле-
ния. Поэтому поверхность таких
сплавов должна быть защищена жа-
ропрочным покрытием с высокой
отражательной способностью. Кроме
того, жаростойкие сплавы отлича-
ются некоторой хрупкостью и труд-
нообрабатываемостыо. Существуют
еще и дополнительные факторы,
которые следует учитывать при выборе того или иного материала —
это его доступность, стоимость, характеристики по сгд/ум и др.
Определенный процент по массе теплозащиты составят передние
кромки и выступающие части ЛА, наиболее подверженные воздей-
ствию высоких удельных тепловых потоков.
Принципиальная схема венерианского ЛА, входящего в плотные
слои и совершающего многорежимный полет в атмосфере, пред-
ставлена на рис. 117. При сходе с орбиты и в режиме гиперзвуко-
вого планирования несущей поверхностью, обеспечивающей малые
нагрузки mgl-Sw, является полужесткая аэродинамическая поверх-
ность, закрепленная вместе с аэростатической оболочкой на А-об-
разном подвижном лонжероне. В этом режиме аэростатическая
оболочка еще не наполнена подъемным газом и, будучи плоской,
вместе с аэродинамической поверхностью образует общую несущую
поверхность А крыла. По мере снижения и достижения расчетной
высоты дрейфа (маршевого полета) гофрированный (аэростатичес-
кий) корпус принимает вид эллипсоида вращения будучи полно-
стью наполненным подъемным газом.
При снижении, под действием возрастающего давления, аэро-
статическая оболочка уменьшает свой объем, принимая в глубин-
ных слоях форму, близкую к исходной, при входе в плотные слои
атмосферы и гиперзвуковом планировании. Ракетные двигатели
системы струйной стабилизации служат для управления движения
центра масс и вокруг центра масс в пустотных условиях на трассе
полета к планете в режиме дискретного торможения и выхода на
орбиту ИСВ при суборбитальном полете, а также в режиме схода
с орбиты и гиперзвуковом планировании.
При достижении стационарной высоты дрейфа и полном израс-
ходовании топлива двигатели малой тяги и их системы могут быть
сброшены. Сборка такого космического ЛА возможна на орбите
исз.
196
Представляет интерес пробле-
ма использования последних сту-
пеней PH в качестве аэростати-
ческих средств в атмосфере Ве-
неры.
Такие ступени после сброса
силовых установок и других сис-
тем (ставших -ненужными в даль-
нейшем полете) могут войти в ат-
мосферу Венеры и, имея остаточ-
ный запас испарившегося топли-
ва (например, водорода), «завис-
Рис. 118. Трансформация последней
ступени PH в спускаемый аппарат и
глубинный венерианский ЛА:
/—«последняя ступень; 2—глубинный
аэростатический ЛА; 3—спускаемый ап-
парат
нуть» в глубинных слоях на высо-
тах, где объемная плотность кон-
струкции равна плотности среды,
Исследования показывают, что
эти высоты расположены на рас-
стоянии 10—15 км от поверхности
Венеры.
Модернизированные ступени с аэродинамической механизацией
и конструкцией, способной выдерживать температуры входа и
температуры глубиных слоев атмосферы, могут быть выполнены по
различным схемам, в частности с большой нагрузкой на мидель
(рис. 118) или малой нагрузкой на единицу несущей поверхности
(рис. 117). Обе эти схемы относятся к схемам ЛА с переменной
геометрией.
Глава 7
ВАРИАЦИОННАЯ ЗАДАЧА МЕХАНИКИ ПОЛЕТА
В АТМОСФЕРЕ ПЛАНЕТЫ
В настоящей главе рассматриваются некоторые вопросы, связанные с опре-
делением на ЭВМ оптимальных траекторий перелета ЛА с поверхности планеты
на некоторую высоту с заданными модулем и углом наклона к местному гори-
зонту вектора скорости центра масс аппарата безотносительно дальности переле-
та в атмосфере планеты. В качестве ЛА рассматривается крылатый аппарат с
гипотетическим двигателем типа ВРД, выполненным по одной из схем, указанной
в работе (2).
Для решения задачи следует выбрать такие оптимальные программы изме-
нения углов атаки а и температуры газа Тп в камере подогрева, которые при
ограничении их значений снизу и сверху обеспечат перелет с поверхности планеты
за минимально короткое время на требуемую высоту с заданным вектором ско-
рости. При этом надо иметь в виду, что правая граница диапазона достижимых
высот и, возможно, способ их достижения, а также, возможное значение вектора
скорости, в данном случае определяется физическими характеристиками выбран-
ного типа двигателя. Нас будут интересовать только такие высоты, на которых
ЛА может оставаться достаточно долго при работающем-двигателе.
Задачу оптимизации движения будем рассматривать без учета ограничений
по фазовым координатам, т. е. без учета ограничений по таким величинам-, как
скоростной напор, перегрузки, температура обшивки ЛА в характерных точках,
интегральные тепловые потоки.
7.1. АППРОКСИМАЦИЯ МОДЕЛИ ТЕМПЕРАТУРЫ АТМОСФЕРЫ
По аналогии с приведенными выше рассуждениями по аппрок-
симации модели плотности атмосферы (см. разд. 1.6) для участков
сопряжения слоев по температуре введем функцию
Гл(й)=Со + С1й + С2Л2 + СзА3, (7. 1)
формально аналогичную выражению (1.37). В функции (7.1)
Th(h) — температура в градусах Кельвина на текущей высоте А;
C\, i=0, 1, 2, 3 — коэффициенты.
Коэффициенты этой функций определяются из соотношений,
аналогичных соотношениям (1.40 ... 1.43), только вместо сц, / = 0,
1, 2, 3, q(Ai), 0(^2),— подставляются соответственно величины
dh
Cif f = 0, 1, 2, 3, Т с учетом соотношений (1.20) ...
dh
(1.22).
198
В результате получаем следующие выражения для коэффици-
ентов Ci, i = 0, -1, 2, 3:
(Л2 — Л1)3 (Л2 — Л1)3
М2 drh
h\h2 dTh
(Л2 —Л1)2 dh h=h, (Ji2—h№ dh h=h„'
(7.2)
С1=7Г^ТГз [7’й(А1)-Га(й2)]+ МЛг + 2А1) —1
(Л2—Л1)3
। hi (hi + 2Л2) дТh
(А2 — 2^)2
С _3№ + Л1) (А )_г (А )]_ Ai + 2fe2
(Л2-Л1)3 ft (Л2-А1)2
__ h2 + 2/г,
~(h2-hly
C3=----------
(Л2-Л1)3
(Л2-Л1)2
—I +
dh |А-Л1
dh h=kt
dry .
dh \h=ht ’
(Л2— Л 1)2
dTh
dh
В выражениях (7.2) -^-=bj, j = 1, 2,.. .N, где N — количество
слоев, на которые разделена атмосфера. Для слоев с линейным
изменением температуры bj=#O, я для слоев с T = const bj = O.
Коэффициенты Ci (r = 0, 1, 2, 3) для различных слоев различны,
поэтому, как и при аппроксимации модели плотности атмосферы,
рассмотрим выражение для коэффициентов Ci при следующих ком-
бинациях слоев.
Первый случай. Температура в соседних слоях изменяет-
ся по закону (1.20)
Со= [7V+Ь~(hl ~ Ao~)]+1(ЗЙ2 h Tl
(h<2 — Л1)3 (2*2 — Л1)3
М2 А h .
-- ____________ ___________— с? _i_,
(Л2—Л1)2----------/&2 — h\
q ___ tty (fi2 — 4:hi) b— + 2^i (h\ + 2fe2) b+ e
l— (h2-hi)2
C ___ (2^2 + 22&i) (b— — b+) e
2— (Л2-Л1)2
(Л2-Л1)2
(7.3)
199
Значения величин Ь_, Ло-, Т^, b+f hQ+ соответствуют их
значениям в соотношениях (1.20).
Второй случай. Температура в соседних слоях опреде-
ляется по закону (1.21)
С3 =
h% (ЗЙ1 — й2)
Со = - -h~ [TV + b_ - Йо)] +
(Л2 —
। (3/&2 М Й1Й2
(Й2-Й!)3 0+""(Л2-Л1)2
МЙ2--4Й1)^ .
(Й2-Й!)2
Й2 + 2Й1 £ .
(й2-Л02
z>_
(Л2— htf
(7-4)
^2
Значения величин 7V, 6_, Ло_, То+ соответствуют их значениям
в соотношениях (1.21).
Третий случай. Температура в соседних слоях определя-
ется по закону (1.22)
с _ [д2 (ЗЛ2 - hr) - Л2 (ЗА! - Л2)] го_ Л2Й2
0— (Л2-*1)3 (Л2- А1)2
£ Й1 (Й1 + 2Л2) .
1 (Й2-Л1)2 +’
<-> _ Й2 4~ 2й1 .
(Й2-Л1)2 +’
с3=—-—ь+.
<M-h&
(7.5)
Значения величин Г0-> V соответствуют их значениям *в соот-
ношениях (1.22).
7.2. УРАВНЕНИЯ ДВИЖЕНИЯ. ПОСТАНОВКА ЗАДАЧИ
Решение задач оптимизации движения в среде с переменной
плотностью в общем случае отличается значительной сложностью,
особенно при реализации алгоритмов на ЭВМ. Поэтому целесооб-
разно поставить сравнительно простую, но все же отличающуюся
достаточной сложностью задачу определения вертикально-плоской
оптимальной по быстродействию траектории перелета ЛКА с по-
верхности планеты на заданную высоту; будем считать, что на
этой высоте задан вектор скорости. Положим, что движение ЛА в
атмосфере планеты происходит при следующих допущениях.
1. ЛА рассматривается как материальная точка, в которой сос-
редоточена вся масса аппарата, движущегося в вертикальной плос-
кости, проходящей через центр тяжести планеты (вертикально-
плоское движение).
200
Движение ЛА как твердого тела вокруг центра масс не учиты-*
вается.
2. Венера не вращается, имеет форму шара с радиусом /? =
= 6050 км; поле сил тяжести планеты центральное.
3. Интенсивные перемещения газовых масс в нижних слоях ат-
мосферы Венеры отсутствуют.
4. При полете ЛА углы атаки а малы и не превосходят вели-
чин сс = 8 ... 10°. В связи с этим при определении оптимального
управления будем полагать, что sin а~ a, a cosa^l--В урав-
нениях движения остаются функции sin а и cos а.
С учетом сделанных выше допущений и выбранного типа дви-
гателя уравнения движения ЛА в скоростной системе координат с:
учетом известных кинематических связей запишутся в виде
Q72
Р cos а — СХа —~— S
У =-----------------1------
т + Ат
qV2
Р sin а +Суа —— S
9=--------------------------
(т 4- Д/п) V
। mV cos 6 I /?аг c°s О
(т 4- Д/п) г (т 4- Д/п) V
пщ sin в । 7?а г • а
---- -------ч------—— Sin 9 = Xi;
(т + Am) /*2 т 4- Ат
/пр. cos О
(/п + An/) rW
Х2;
(7.6)
L = -^~ V cos 6 = /3;
г
h = V sin 0 = Х4>
где Хг G’=l, 2, 3, 4) — функции, введенные для сокращения запи-
сей правых частей дифференциальных уравнений движения; а —
угол атаки; С — СГо-|- ВС2Уа, Су ==СУаа-- поляра ЛА; Р — тяга.
ЛА; V, 0, А, /г, т — скорость полета, угол наклона траектории,,
дальность полета по поверхности планеты, высота полета, масса.
ЛА; Am = kQV, где Дш — присоединенная масса; v — объем ЛА-
k — коэффициент присоединенной массы; r0, г — радиус планеты и
текущий радиус-вектор центра масс ЛА; S — площадь крыла в
плане; р — текущая плотность атмосферы; В — коэффициент от-
вала поляры; ц — гравитационный параметр Венеры.
Поскольку рассматривается гипотетический ЛА, то для упроще-
ния рассматриваемой задачи полагаем: CXo = const, СУа = const,
B = l, хотя в действительности ^ти величины изменяются во время
полета, являясь функциями числа М. Но так как, предположитель-
но, большая часть траектории перелета будет лежать в плотных;
слоях атмосферы, где скорости движения ожидаются малыми и
соответствующими значениям чисел М<1, то сделанное выше допу-
щение относительно постоянных величин СХо, СУа, В можно в пер-
вом приближении считать оправданным.
8 614 201
Тяга выбранного двигателя определяется из следующего вы-
ражения:
Р= l/1 2-^ Th [ Н
Г ^2 I L
й3}=
= П1/П2(7,п-Пз),
(7.7)
где /?тг = /?вхфд(М) — эффективная площадь диффузора; FBX — гео-
метрическая площадь входа диффузора; ^рд(М) — коэффициент
расхода диффузора в функции числа М; рд, 7\ — текущие плот-
ность и температура в градусах Кельвина невозмущенного потока.
Vh, М=-^-, k'— текущая скорость, число М, среднее значение
показателя адиабаты в диапазоне температур Тн, .. Тп; а* —мест-
ная скорость звука; Ср — удельная теплоемкость газа при посто-
янном давлении в диапазоне температур Тт ... Тп, где
[К' ___ 1 2"|
1-|----— М — температура торможения; Тп — темпе-
ратура газа в камере подогрева; k\ — коэффициент, учитывающий
потери мощности в двигателе, равный отношению мощности, рас-
ходуемой на создание реактивной тяги, ко всей потребляемой мощ-
ности; k2 — коэффициент эффективности, учитывающий потери
энергии при достижении максимальной температуры в диапазоне
температур Тт ... Тп\
2^iCn
rll = /? hQlYhl Л 2 = —7
«2
т1з=Гй[1 + ^^М2рз. (7.8)
Температура Th и плотность атмосферы планеты определя-
ются так, как указывалось в разд. 1.6:
ГЛ(й)=
1. TQ + b(h—h0) —для слоев с линейным изме-
нением температуры по вы-
< 71 к ~- Т о
соте; b = —--12 — градиент
Лк — Ло
изменения температуры в
слое с параметрами То, h0,
Тк, йк (температура и высо-
та в начале и конце слоя).
2. const — для слоев с постоянной тем-
пературой
3. Со+С^+Сг^ + Сз/г3—для участков сопряжения
слоев. Коэффициенты Ci
(г=0, 1, 2, 3) для каждого
слоя различны и вычисля-
ются по соотношениям
(7.3) ... (7.5).
202
0(Л)=
1. q0[ 1 —(й—Л0Д Oio —если температура в слое из-
L J меняется по линейному за-
' кону,
2. Qq ехр f — ft-~~— если температура в слое по-
\ hs ) стоянна.
3. a^ + aih-\-a2h2 + a3hs — для участков сопряжения
различных соседних слоев.
Коэффициент^щ (z = 0, 1, 2,
3) вычисляются по соотно-
шениям (1.40) ... (1.43) и
различны для каждого слоя.
В качестве управляющих функций выберем угол атаки а и тем-
пературу газа Тп в камере подогрева. На управляющие функции
наложим ограничения:
^min ® ’^С^гпах’
(7.9)
Т Т
1 п min л п
птах*
Под Tnmin будем понимать температуру торможения Тт. Систе-
ма (7.6) состоит из четырех уравнений с шестью неизвестными
переменными величинами V, 9, L, h, а, Тп и одним постоянным па-
раметром т, т. е. является незамкнутой. Задавая начальные зна-
чения для V, 0, L, h в начальный момент t\ и варьируя величинами а
и Тп при какой-то постоянном значении массы т, получим различ-
ные траектории. Введем в рассмотрение функционал
,к
dt== tK — /р
(7.10)
где /1, /к — начальный и конечный моменты времени перелета со-
ответственно. В начальный момент времени задаются следующие
величины:
Л, Ур бр Л, Ар (7.11)
В конечный, заранее неизвестный, момент времени заданы вели-
чины:
Ук, 0K, hK. (7. 12)
Конечный момент времени /к определяется как момент дости-
жения указанных в соотношении (7.12) значений величин.
Величины /к, £к должны быть получены из решения вариацион-
ной задачи.
Фазовое состояние ЛА в любой момент времени описывается
системой (7.6) и характеризуется переменными величинами V, О,
L, А; каждое такое состояние можно считать точкой х(хь х2, х3, х4)
фазового пространства X, где Xi = V, х2 = д, x3 = L, x4 = h. Тогда на-
чальное фазовое состояние ЛА в момент t\ можно принять за точ-
ку Xi, а конечное в момент tK — за точку хк фазового пространст-
7*
203
ва X. Совокупность всевозможных значений а и Тп с учетом соот-
ношения (7.9) определяет замкнутую область управления U. Под
допустимыми управлениями будем понимать кусочно-непрерывные
управления, принадлежащие области U, имеющие конечное число
точек разрыва первого рода, и непрерывные на концах отрезка
При таком определении допустимых управлений фазовая траек-
тория, полученная из решения системы (7.6), является непрерывной
>и кусочно-дифференцируемой, т. е. во всех точках, кроме точек раз-
рыва управлений, решение системы (7.6) будет непрерывно-диф-
ференцируемым. Таким образом, функции %;, /=1, 2, 3, 4 принад-
лежат к классу непрерывных и кусочно-дифференцируемых функ-
ций, a a(t) и Tn(t) — к классу кусочно-непрерывных функций. Бу-
дем считать, что для рассматриваемой задачи решение системы
(7.6), соответствующее какому-либо допустимому управлению
u(t) = (ui(t), u2(t)), переводящему ЛА из положения в
положение всегда определено на отрезке
С учетом всего изложенного выше решаемую, задачу можно
сформулировать следующим образом.
Среди всех допустимых управлений u = u(t)^U, переводящих
фазовую точку из положения в положение при наличии диф-
ференциальных связей (7.6) и ограничений (7.9), если такие управ-
ления существуют, найти такое, для которого функционал (7.10)
принимает наименьшее возможное значение.
Решение этой задачи при функционале типа (7.10) сводится к
решению вариационной задачи Майера.
7.3. МЕТОД ОПТИМИЗАЦИИ. ОПТИМАЛЬНЫЕ УПРАВЛЕНИЯ
Ввиду наличия ограничений типа (7.9) на управляющие функ-
ции, классические методы вариационного исчисления к решению
указанной задачи неприменимы. Правда, существуют методы, из-
ложенные, например, в работе (7), позволяющие путем нелиней-
ных преобразований превращать замкнутую область пространства
в открытую и затем к открытой области пространства применять
классические методы вариационного исчисления для отыскания
оптимального решения.
Для непосредственного решения задач оптимизации в замкну-
тых областях фазового пространства в настоящее время известны
различные методы оптимизации процессов движения. Рассматри-
ваемую нами задачу оптимизации процессов движения траектории
перелета ЛА с поверхности планеты на фиксированную высоту с
заданным на ней вектором скорости будем решать с помощью прин-
ципа максимума Понтрягина, являющегося одним из наиболее
мощных инструментов при отыскании оптимальных решений раз-
личных процессов, описываемых дифференциальными уравнениями.
Для применения принципа максимума Понтрягина введем в рас-
смотрение функции Гамильтона и систему уравнений для вспомо-
гательных переменных.
204
Функция Гамильтона записывается в виде
4
’ (7,13)
Z=1
где /г (/=1, 2, 3, 4) — правые части системы дифференциальных
уравнений: 3, 4) — вспомогательные переменные.
Система уравнений для вспомогательных переменных имеет вид
j=i
где Xi — составляющие вектор-функции фазового состояния ЛА
(фазовые координаты), описываемого системой (7.6).
Тогда системы (7.6) и (7.14) с учетом (7.13) можно записать в
виде гамильтоновой системы:
(7.15)
(7.16)
Уравнения (7.14) в рассматриваемом случае, описывают дви-
жение ЛА в открытой области фазового пространства X при изме-
нении управляющих функций в замкнутой области управлений U,
В каждый выбранный момент времени величины Xi и фг- фикси-
рованы, и функция Н зависит только от управлений
Согласно принципу максимума Понтрягина управления, «подо-
зреваемые» на оптимальность для траекторий, лежащих в открытом
ядре фазового пространства X, определяются из условия
-^-=0, (7.17)
где U(uit и2) — вектор-функция управления.
Таким образом, в каждый момент времени существует набор
различных управлений, определенных из условия (7.17). Естествен-
но, среди всего этого набора управлений надо выбрать только те,
которые удовлетворяют принципу максимума Понтрягина.
В управления войдут и неизвестные вспомогательные перемен-
ные фг 6’=1, 2, 3, 4). Поэтому выбор управлений в общем случае
зависит от значений фг-.
В частности, отыскание оптимальных управлений в начальный
момент времени t\ сводится к нахождению начальных значений
вспомогательных переменных фг1 (Z= 1, 2, 3, 4).
Ниже в этом разделе приводится метод определения прибли-
женных начальных значений вспомогательных переменных в нача-
ле траектории перелета.
205
1А. СИСТЕМА ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
ДЛЯ ВСПОМОГАТЕЛЬНЫХ ПЕРЕМЕННЫХ
Запишем развернутое выражение для функции (7.13) Гамиль-
тона в виде
т 4- kQv
Pcoisa — Сх qS—p(——sin 6
а Г2 HU
Ф1+
1 Г Р sin a+CyaqS
т + kQv I V
т
?2
mV
г
СО5б1ф2 +
_|_2±усоз6ф3 + У sin 6ф4, (7.18)
Г
QV2
где = -------скоростной напор.
Тогда система дифференциальных уравнений (7.16) с учетом
выражения (7.18) запишется в виде
где
= Fn<pi - Fx^2 - FX3^3 - Г14ф4;
Ф2=Л1Ф1 — E2$2 + ^зФз -
Фз=0;
Ф4=^41Ф1 — Т742’Ь + ЛзФз,
дР „ dq „
Р _ dV C03a~CxdV s
F11 —---------’
т + kQv
(7. 19)
E<
F12=Ex+E2 + E3+E4;
sin a + Cyaw s) V~{P sin a + c^s)
(m 4- kQv) V2
. /им. cos 0 e, m cos 0
2=----------------! E3=--------------- ; Ел =
(tn 4- kQv) r2V2 \r (m 4- kQv)
PQv cos 0
Го (m + kQv) V2 ’
F13—— cos 9; /714=sin6;
. __ mp cos 0 Qvp cos 0
21 (m 4- kQv)r2 fg (/n 4- kQv)
. ___ my- sin 0 mV sin 0 ^Qv sin 0
22 (m 4- kQv) v2V r (rn 4- kQv) r^V (m 4- kQv)
206
/723 = —V sin 6; F24=ycos6;
Г
E4i = E5^-E^E7;
[дР да \ dQ
— cos а — Сх -Л S (//г 4- kQv) — (Р cos а—CxqS) k — v
е, \dh dh < dh
(т + kQvft
Г dQ ]
///pi sin 6 k —- vr + 2 (/n 4- kQv)
& L dh J .
Eq — — ------------------------------- ,
(m 4- &Qv)2r3
dQ
vji sin 0/n-
Ei =-----27 ; F42=£’8 + £’9 + ^10 + ^u;
Tq (tn. + *qv)2
£8=
дР da \
— sin а + С» — S \(m 4- kgu) — kyu (P sin а 4- CyaqS)
,dh_________ya dh /___________________________a
(m 4- kQv)W
Г dQ "|
mp. cos 0 2 (ni 4- kQv) 4- k vr
Es =----------L-------------дЛ---1 ;
(m 4- kQv)^r^V
niV cos
E io=---------
(m 4- kQv)2
dQ dq
p. — V COS 0 (ni 4- kQv) — k — v2p,Q cos 0
dh dh
11 r^V (m + £qv)2
F43=2a 1/cosO.
43 f2
В приведенных выше соотношениях для Гц ... F43 входящие в
яих' производные определялись из следующих выражений:
^-=eV;
dV
др Fb*Q QЛ1£>24-<рд£)2 _ Л:4<рд)
дУ~ 2D
где
' k4=Q,24f]2THM.lk3,
где £) = г12(7'п—яз), а коэффициенты т]2, т]з, ^з определяются из со-
отношений (7.8);
= F Vh Г £)2 _
dh h А I дЛ
207
где
dQ
dh
1 l I h — ha\
I. Qo exp-------у — если температура в
hs \ hs ) хлое постоянна,
Th=const.
то 2
2. — |-1]qo 11 + — (fi — Ло)1 м*° — если температура в
\ -so / L то J слое изменяется по
линейному закону
Гй = 7'0-|-6(й — Ао).
3. а1 + 2а2ЛЦ-За3А2 —для участков соп-
ряжения слоев;
коэффициенты
az(Z=l, 2, 3)
для каждого слоя
различны и опре-
деляются из со-
отношений (1.41...
...1.43)
dTh _
dh
i t 7\ — То °
1. b=------у—для слоев с температурой, изме-
Ло няющейся по линейному закону
Л = Го + &(Л-Ло).
2. О —для слоев с постоянной темпера-
турой Th = const.
3. Cj-|-2C2/z + ЗС3Л2 — для участков сопряжения слоев.
Коэффициенты Cz(Z=l, 2, 3) оп-
ределяются из соотношений (7.3...
...7.5);
й6—г]1Т]2(1+0,12М2)й3, где коэффициенты тц, т]2 определяются ив
соотношений. (7.8).
7.5. ОПРЕДЕЛЕНИЕ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
Представим функцию Гамильтона в развернутом виде как функ-
цию управлений [27, 25]: угла атаки а и температуры газа в
камере подогрева.
Тогда выражение (7.18) можно переписать следующим обра-
зом:
н = (Т)4 V Т^з - 2С6) а2 + (п5 + с7) а -
-2п4 1/7^3+С8 (7.20)
где п — 1)1 • С — ^Су<^
2 (m 4- kQv) 2 (/n + kQv)
c = CxQqS . w sin 6 . . № sin 0фг
8 m 4- kQv 1 (m 4- kQv) r2 1 Tq (m 4- kQv)
20 8
my. cos б
(/и + kQv) rW
, . mV cos 8 , । uqv cos 0 . ,
Ф2Ч--------------Ф2Ч----9~^-----------Ф2 +
r (m + kQv) r^V (m + kQv)
+ — V COS бфз + V sin (ty4,
r
= /*02 Ф2 . q _ CyaqS^2
5 (m 4- kQv) V ’ 7 (m + kQv) V
Согласно принципу максимума Понтрягина оптимальное управ-
О дН Г\
ление в рассматриваемой задаче определяется из условия
где И=(иъ и2) = (а, Гп). Для полученных значений управлений
рассчитывается функция — Н. Управление, которое дает функции
Н точную верхнюю грань, и будет оптимальным.
Оптимальный угол атаки находится из уравнения
2(т)4КГп-т1з-2С6)а+т)5/Гп-т1з+С7==0. (7.21)
Разрешая уравнение (7.21) относительно а, получаем
’ll Z’te (Tn — Пз) + cya4s <р2
а== [’ll + 2 (Cay)2qS] V ф?
или с учетом соотношения (7.8)
Р + Суа^
а =—-----------у — •
24tW?s1
(7.22)
Для определения типа экстремума функции Н по управлению а
оценим знак второй производной:
VT = 2 (п4 - 2С6) = -
да2
Р + 2 (С“ )2qS
где 67=-------——>0
т + kQv
д^н___| + если Ф1 <Z 0 (имеем минимум)
и да2 ( — если Ф1 > 0 (имеем максимум)
Таким образом, функция Гамильтона имеет максимум при
ф1>0. Другими словами, на всей оптимальной траектории должно
выполняться условие
ф1>0 (7.23)
С другой стороны функция Н(Тп), заданная соотношением
(7.20), представляет собой параболу, не имеющую экстремумов по
Тп внутри области (7.9). Наибольшего значения функция Н может
достигать, следовательно, или при Тппигъ или при Тптах- Однако,
поскольку при Tnmin тяга двигателя практически отсутствует, так
как Тппип равна температуре торможения потока при каждом теку-
209
щем значении скорости полета, а полет в сопротивляющейся среде
при малых скоростях без тяги не представляется возможным, то
остается одно значение ГПшах> которое можно выбирать в качестве
оптимального управления.
Таким образом, верхняя грань функции Н = Н(ои, Тп) достигает-
ся при Тп = ТПтахл что вытекает из физических соображений, и при
значениях угла атаки, определяемых из выражения (7.22).
Следовательно, при численной реализации задачи на ЭВМ оп-
тимальные управления надо искать среди следующего набора уп-
равлений:
amin’ ^птах*’ (7. 24)
Р + С* qS
уа
+ (С‘а)М
Ф2 Т
. ’ 1 и max’
Ф1
(7.25)
max’ К тах»
(7.26)
Следует отметить, что практически надо проверять на опти-
мальность только управление (7.25), и если оно не удовлетворяет
условию ctmin^агатах, то тогда надо брать граничные управле-
ния: Либо (Xmln, ^птах, Либо ССщах, ^птах В ЗЗВИСИМОСТИ ОТ ТОГО, 33
какую границу выходит значение а, определенное из соотношения
(7. 25).
Указанные граничные управления будут удовлетворять прин-
ципу максимума Понтрягина, так как, во-первых выход а за гра-
ницы amin<агатах может произойти лишь вследствие особенно-
стей численной реализации алгоритма задачи на ЭВМ, когда интег-
рирование системы (7.6) ведется с каким-то шагом, а во-вторых,
граничные управления атщ, «max при соответствующем выборе шага
интегрирования должны получаться из соотношения (7.25) в силу
или непрерывности управления Ui(t) или равенства значения уп-
равления его пределу,- например, слева в точках разрыва 1-го рода,
т. е. по определению допустимых управлений.
7.6. ГРАНИЧНЫЕ УСЛОВИЯ. КРАЕВАЯ ЗАДАЧА.
УСЛОВИЯ ТРАНСВЕРСАЛЬНОСТИ
При оптимальном решении задачи определения траектории с
минимальным временем перелета с поверхности планеты на фик-
сированную высоту с заданным на ней вектором скорости, необхо-
димо совместно решать систему уравнения 7.15 и 7.16 с выбором
таких а(/) при 7’п = Тп1Пах, которые обеспечивают выполнение ус-
ловий:
—=0;
ди (7.27)
Я=1. .
Уравнение Н= 1 вытекает из рассматриваемых ниже условий
трансверсальности и известной теоремы о постоянстве функции FL
210
Система (7.15 и 7.16) состоит из 2п уравнений. Для ее интегри-
рования надо задать при фиксированном значении массы т 2п на-
чальных условий в момент времени t\
G1J Л; Ль (7.28)
Фь Фг, Фз, (7.29)
На левом конце траектории величины, входящие в параметры
(7.28), заданы,-а величины, входящие в параметры (7.29), неизве-
стны.
В то же время на правом конце траектории в какой-то заранее
неизвестный момент времени tK заданы величины
1/к, 9К, Лк. (7.30)
Значения tK, LK будут определены из решения вариационной за-
дачи.
Влияние величин фгк (1=1, 2, 3, 4) на момент времени /к можно
определить из условий трансверсальности, которые рассматривают-
ся ниже, причем, если фазовая координата, например LK, не зада-
на, то соответствующее ф3к определяется из условий трансверсаль-
ности однозначно; если же фазовые координаты заданы, например,
0 ю Лю то между ф1к, ф2к, Ч>4К можно установить лишь определен-
ную связь, и вопрос об определении числовых значений фД 1 =
= 1, 2, 4 остается открытым.
Таким образом, часть условий, которым должна удовлетворять
система уравнений (7.15) и (7.16), задана на левом конце траек-
тории, а часть — на правом конце траектории. Приходим к двух-
точечной краевой задаче оптимизации, решение которой является
довольно сложным процессом.
В результате*получаем следующий вывод.
При решении краевой задачи оптимизации необходимо совме-
стно интегрировать систему дифференциальных уравнений (7.15) и
(7.16) и решать конечные уравнения (7.27)
Xi = — (Z=l, 2, 3, 4);
,.= -^ (Z=l, 2, 3, 4); OXi ^ = 0; da (7.31)
// = 1.
Система (7.31) в рассматриваемом случае состоит из десяти
уравнений и содержит девять неизвестных переменных:
а(/), /=1, 2, 3, 4. (7.32)
Первые три соотношения системы (7.31) порождают девять
уравнений, которые замыкают систему и служат для определения
девяти неизвестных (7.32). Время перелета по траектории /к опре-
211
деляется из условия удовлетворения граничных условий на правом
конце траектории. Однако при этом из третьего соотношения сис-
темы (7.31), записываемого в общем случае как (дН/ди) =0, по-
лучаем набор управлений, из которых только некоторые или всего
одно являются оптимальными. Последнее соотношение системы
(7.31) и обеспечивает выбор оптимальных управлений u(t) из рас-
сматриваемого набора. При оптимальных значениях величин
(7.32) соотношение Н=1 системы (7.31) удовлетворяется автома-
тически.
Условия трансверсальности запишем в известном виде:
3/+[фзх - //8/]?.=8/ + ф?8Ук + е6К+фз8£к+Ф<8Ак “ Ф1»-
- ф^ - tpisZj - Ф18Л1 - Як8/к + = 0, (7.33)
где ф, х, Н — векторные функции.
На левом конце траектории имеем
^=^^^=^=^ = 0. (7.34)
На правом конце траектории получаем
8йк=8Ук=89к=О; 8/к/0; 8£к^0. (7.35)
Вариацию функционала запишем так:
8Z=B(/K — /i)=8/K. (7.36)
Тогда соотношение (7.33) с учетом выражений (7.34) ... (7.36)
перепишется в виде
Фз8/,к_1- 8/к— /7к8^к=0, (7.37)
откуда получим
фз = 0; (7.38)
Як=1. (7.39)
С учетом соотношения (7.39) и в силу известной теоремы [4] о
том, что функция //(ф(0, x(t), U(t))=M(ty переменного t посто-
янна на всем отрезке Л^/s^k, если ф(/), x(t), U(t) удовлетворяют
системе (7.15) и (7.16) и условию Н (ф(/), x(t)y —
max/У (ф (7), x(t), v) получаем, что на всей траектории /7=1.
v£U
В то же время известно, что на всей траектории ^3 = 0, т. е.
^3 = const.
С учетом условий Эрдмана — Вейерштрасса для рассматривае-
мой задачи получаем, что 'фг_ = 'фг+ (/=1, 2, 3, 4), где грс — значе-
ние -фг слева от рассматриваемой точки, а — значение ipi спра-
ва от рассматриваемой точки.
Тогда на всей траектории
Ф3=0. (7.40)
212
Записав функцию Гамильтона в развернутом виде, из формульк
(7.39) получаем для правого конца траектории перелета:
хЖ+хЖ+х№=’1, .
откуда, например:
к _ 1-xW-x^
4 *4
7.7. ОПРЕДЕЛЕНИЕ ПРИБЛИЖЕННЫХ НАЧАЛЬНЫХ ЗНАЧЕНИЙ
ВСПОМОГАТЕЛЬНЫХ ПЕРЕМЕННЫХ НА ЛЕВОМ КОНЦЕ
ТРАЕКТОРИИ ПЕРЕЛЕТА
Вопрос об определении начальных значений вспомогательных
переменных для решения краевой задачи является одним из самых
основных при численной реализации на ЭВМ задач, оптимизации
движения, разработанных на основе принципа максимума Понтря-
гина. Значительные результаты в этом направлении были достиг-
нуты разработкой метода последовательных приближений и реа-
лизацией некоторых известных методов решения краевых задач для
оптимизации движения [25, 30].
Рассмотрим один из возможных методов определения прибли-
женных начальных значений вспомогательных переменных на ле-
вом конце траектории перелета. Запишем следующие соотношения,
представляющие собой необходимые условия оптимальности уп-
равления и траектории.
На правом конце траектории имеем:
—=0; (7.41)
да
Як=1. (7.42)
С учетом условий трансверсальности для правого конца траек-
тории из соотношений (7.41) и (7.42) получаем
й 21'-»-[т + (суМ „
—=------—-----------i=Dt
+Г P + Cya4s
Фд 1
хНХ2£)б + х$^=^к--
(7.43)
Подставляя значение £)6 из первого уравнения во второе, бу-
дем иметь
1-Х4Ф4 . 2ГкССк [ 2 + (C^)2?S]
4 у К I у К __L ____________J
фК Л1ТЛ2 р + с* s
1 уа
consti^__ h
"IF- 7‘
(7.44)
Задаваясь значением ак, полученным из неоптимальной траектории
перелета, можно определить величину kq.
213
Зафиксировав ф1к, получаем выражения для ф2к и ф4к:
^2 —----7S---’
(7.45)
(7-46)
после
систс-
Затем подбираем значение ф1к таким образом, чтобы
определения фгк (f=l, 2, 3, 4) и обратного интегрирования
мы (7.16), в результате которого будут определены значения вели-
чин ф? (i=l, 2, 3, 4) и значение угла атаки а в момент времени
Л, выполнялись следующие условия:
ат1п а1 атах» (7.47)
Значения ф;1 1, 2, 3, 4), удовлетворяющие условию (7f47),
и будут приближенными начальными значениями вспомогатель-
ных переменных.
Таким образом, метод определения приближенных начальных
значений вспомогательных переменных сводится к выполнению сле-
дующих операций.
1. Рассчитываем траекторию неоптимального перелета с поверх-
ности планеты на требуемую высоту с заданным на ней вектором
скорости. Такую траекторию всегда можно получить, используя фи-
зические соображения. Запоминаем на этой траектории управле-
ние u(t), x(t).
2. Из полученной неоптимальной траектории берем на правом
конце величины £к и ак.
3. Определяем величину £7 = j из соотношения (7.44).
4. Задаемся на правом конце траектории значением ф1к и опре-
деляем ф2к и ф4к из соотношений (7.45) и (7.46).
5. Решаем задачу Коши для системы (7.16) справа налево до
момента времени при значении управления и(1) и для x(t).
6. В момент ti получаем значения фД фД фД значение вели-
чины фз1 = 0 известно из условий трансверсальности.
7. Вычисляем значения а и Н в момент t\ с учетом фД 7=1, 2,
3, 4. Проверяем попадание вычисленного значения а в диапазон
[amm, «max] и отклонения Нк от I.
8. Повторяем пп. 2 ... 7 до вычисления ац = ат1п, ai2 = amax- Фик-
,.К ,кК 1 1
сируем значения фц, Ф12, соответствующие ан и а22.
9. Варьируем ф? в интервале значений фц... фГД и повторя-
ем пп. 2 ... 7, каждый раз вычисляя функцию Н в начальный мо-
мент времени.
10. Фиксируем значения ф;1 (/=1, 2, 3, 4), соответствующие вы-
полненному условию //1 = 1.
Эти значения ф;1 и будут искомыми.
214
11. Если условие Hi=l выполняется в начальный момент вре-
мени при значениях а, лежащих вне диапазона amin^a^amax, то
варьируем значение ак на правом конце и весь процесс определения
гр? 2, 3, 4), повторяем заново до попадания а в диапазон
«min^a^amax и соблюдения условия /7=1 в начальный момент
времени.
После определения приближенных начальных значений вспо-
могательных переменных дальнейшее решение задачи можно осу-
ществлять по известным методам, изложенным, например, в рабо-
те [27] — непосредственно, или в [30], начиная с момента определе-
ния управления из условия максимума функции Гамильтона.
Глава 8
ВОЗМОЖНЫЕ НАУЧНЫЕ ЭКСПЕРИМЕНТЫ
ПО ИЗУЧЕНИЮ ВЕНЕРЫ С ПОМОЩЬЮ ЛЕТАТЕЛЬНЫХ
АППАРАТОВ РАЗЛИЧНЫХ ТИПОВ
Разнообразие перспективных схем венерианских ЛА, использующих в своем
движении аэро-, гидро- и воздухоплавательные принципы, делает возможным
выполнение обширной программы научных экспериментов. О некоторых разделах
этой программы применительно к конкретным схемам ЛА и зонам их полета
рассказано в этой главе.
8.1. ВЕРХНЯЯ АТМОСФЕРА
Искусственные спутники Венеры и траекторные ЛА, осущест-
вляющие полет в космическом пространстве, после отделения от
них спускаемых аппаратов могут быть использованы для самостоя-
тельного космического эксперимента.
Со спутников можно проводить регулярные сеансы радиосвязи
по приему разнообразной радио- и телеинформации: измерение
•температуры облачного и подоблачного слоев планеты, изучение
структуры и газового состава облаков; получение фотоизображений
облачного покрова, измерение формы планеты; спектроскопические
и фотометрические исследования атмосферы; исследование напря-
женности магнитного поля; изучение рассеянного ультрафиолетово-
го излучения в атмосфере, исследование гармоник гравитационного
поля; измерение поля яркостных температур; исследование верхних
-слоев атмосферы и ионосферы Венеры и др.
С борта автоматических пролетных* станций могут проводиться
исследования верхних слоев атмосферы и околопланетного про-
странства: регистрация спектра свечения верхней атмосферы пла-
неты с целью определения ее состава; измерения плотности ионов
и электронов методом радиозондирования; исследования энергети-
ческих спектров ионов и электронов на больших высотах с помо-
щью ионных ловушек; измерения слабых магнитных полей; иссле-
дования частиц в потоке солнечного ветра, обтекающего планету;
изучение спектральных, временных и пространственных характе-
ристик космических частиц; изучение метеорных потоков, их энер-
гетических характеристик и пространственной плотности; изучение
плазмы; исследование процесса обтекания солнечным ветром пла-
неты без собственного магнитного поля; радиопросвечивание ат-
мосферы Венеры; определение профиля распределения электронной
концентрации; измерение электронной концентрации в сверхкороне
Солнца; фотографирование на подлете; исследование радио-
излучения Солнца, измерение фронта изменения потока заряжен-
216
ных частиц вблизи планеты; исследование характеристик окружаю-
щих условий вблизи Венеры; различные научные технические ис-
следования в межпланетном пространстве; эксперименты в момент
захода ЛА за планету (для земного наблюдателя) с целью опреде-
ления стратификации венерианской атмосферы и др.
Среди типовых приборов научного эксперимента для пролетных
ЛА могут быть названы:
— инфракрасное сканирующее устройство для регистрации во-
дяных паров в атмосфере Венеры и тонкого облачного покрова в
верхних слоях атмосферы;
— магнитометр для обнаружения магнитного поля Венеры,
влияющего на взаимодействие между атмосферой и солнечным вет-
ром;
— радиоальтиметр для получения вертикального профиля по-
верхности Венеры в плоскости орбиты ЛА;
— ионный масс-спектрометр и ультрафиолетовый спектрометр
для измерения концентрации ионов потока электронов в солнечном
ветре и излучения Лайман-альфа в верхних слоях атмосферы, в
ионосфере и экзосфере Венеры;
— ультрафиолетовый спектрометр;
— датчик электронной температуры;
— анализатор солнечной плазмы;
— анализатор с задерживающим потенциалом;
— детектор электрического поля;
— фотополяриметр для съемки облачности;
— детекторы всплесков гамма-излучений и радиолокационный
высотомер, работающий в частотном диапазоне, обеспечивающем
распространение излучения до поверхности планеты.
Запуски ИСВ позволят начать систематическое изучение струк-
туры атмосферы планеты,- важнейших физико-химических процес-
сов, происходящих в верхних ее слоях, что послужит началом новой
области науки — венерианской аэрономии.
Одним из важных результатов первого периода исследований
должна явиться информация о динамичности верхней атмосферы,
обусловленной изменчивостью потоков энергии, идущей к Венере
от Солнца.
Из анализа движения спутников представится возможным об-
наружить степень колебания плотности атмосферы в зависимости
от солнечной'активности, времени венерианских суток и других
факторов. На основании этих данных можно будет прогнозировать
время существования космических аппаратов в верхних слоях ат-
мосферы Венеры.
Установка плазменных зондов и источников когерентного излу-
чения на ИСВ позволит получить многочисленные данные об эле-
ктронной и ионной концентрации в ионосфере, проследить их связь
с солнечным ультрафиолетовым излучением, сопоставить распреде-
ление электронной концентрации с характером распределения ра-
диоволн.
217
В условиях вакуума могут быть поставлены интереснейшие
опыты в области физики элементарных частиц и космических излу-
чений. При изучении первичных космических лучей может быть
использована их высокая энергия — на несколько порядков выше,
чем та, которая достигается в современных установках, для откры-
тия новых ядерных реакций и новых элементарных частиц. В част-
ности, может быть проведен поиск гипотетических частиц с дроб-
ным зарядом — кварков, открытие которых было бы весьма важно
для современной теории строения вещества.
Изучение верхней атмосферы и метеорологической обстановки
с борта ИСВ имеет большой научный интерес, связанный с позна-
нием закономерностей протекающих в атмосфере Венеры процес-
сов. Интереснейшие данные дает изучение сумеречного ореола
Венеры — «космических зорь» — и слоев аэрозоля, о существова-
нии которых свидетельствуют полосы повышенной яркости на
фоне ореола зари.
Ценную информацию могут дать измерения собственного излу-
чения Венеры. Эти измерения, выполненные в инфракрасном диа-
пазоне, дадут сведения не только о температуре поверхности пла-
неты, но и о составе газов и физико-химических параметрах ее
атмосферы.
8.2. ОБЛАЧНЫЙ СЛОЙ
Среди схем венерианских ЛА привлекает внимание мягкая
конструкция управляемого аэростата, показанная на рис. 119. Рас-
полагая изотопными источниками энергии (а следовательно, и
возможностью подогрева подъемного или атмосферного газа внут-
ри оболочки), такой ЛА сможет выполнять высотно-азимутальные
эволюции в облачном, подоблачном и надоблачном слоях.
При этом программа научных экспериментов может включать:
— изучение горизонтальной составляющей скорости ветрового
потока;
— изучение скорости восходяще-нисходящих потоков;
— измерение плотности и состава облаков;
— определение количества облачных слоев и их границ;
Рис. 119. Схема венерианского ЛА с изотопными источниками энергии:
/—вентиляторы с изотопными источниками энергии; 2—органы управления; 3—мягкая
оболочка; 4—научная аппаратура: 5—терморегулирующие заслонки
218
— изучение распределе-
ния атмосферного давления,
плотности и температуры в
облачном покрове и близле-
жащих слоях атмосферы;
— фотометрическое и
спектроскопическое иссле-
дование облачной и приле-
гающей к ней атмосферы;
— определение степени
поглощения солнечной ра-
диации;
— получение проб не-
сконденсированных ве-
ществ, входящих в состав
облаков;
Рис. 120. Общий вид высокоманевренного глубин-
но-высотного венерианского ЛА авиационного ти-
па
— измерение степени
конденсации (при помощи массо-спектрометрии пара) и темпера-
туры (прибором для определения точек замерзания);
— изучение модели общей циркуляции прилегающих к облач-
ному слою верхней и нижней атмосферы;
— изучение характера распределения звуковых колебаний;
— проведение электромагнитных измерений;
— изучёние газодинамических свойств подоблачной и надоб-
лачной атмосферы.
В осуществлении программы научных исследований Венеры с
успехом могут применяться и аппараты, показанные на рис, 120.
Роторная система несуще-тянущих винтов и двигателей с ядерным
источником энергии при возможности вертикального взлета и по-
садки обеспечивает многорежимность полета и высокую маневрен-
ность ЛА в атмосфере Венеры.
8.3. ТРОПОСФЕРА
Режимы полета тропосферных ЛА дают возможность осущест-
влять как локальную, так и глобальную программу научных экс-
периментов. Здесь прежде всего представляет интерес изучение
антиподобных (полярных) областей атмосферы Венеры — подсол-
нечных и антисолнечных; отыскание разрывов в облачности, ко-
торые позволили бы проникать в глубинные слои тропосферы; ре-
шение задач, связанных с организацией биологического и расти-
тельного микромиров на борту тяжелых базовых ЛА, а также
непосредственно в атмосфере Венеры. Некоторые из схем ЛА,
наиболее перспективных для выполнения данной программы науч-
ных исследований, представлены на рис. 121 и 122.
Аэродинамическая механизация с несущими поверхностями и
органами стабилизации обеспечивает маршевый режим и другие
управляемые виды движений на различных высотах полета ЛА
(см. рис. 121).
219
1
Рис. 121. Полужесткий ЛА с аэродинамической механизацией
Рис. 122. Аэростатический ЛА (проект «Титан», Франция):
/—баллонеты с гелием; 2—система, газоструйных движителей; 3—гондола
Чечевицеобразная конструкция, выполненная по типу француз-
ского дирижабля «Титан», обеспечивает многорежимный полет при
Ar^l с возможностью планирования и полета на дальность по
пилообразной траектории при наличии бортовых энергетических
систем малой мощности (см. рис. 122).
‘Маршевые ЛА с постоянным или переменным объемом газо-
вмещающего корпуса (рис. 123 и 124), а также ЛА с крылом и
ядерной силовой установкой могут производить длительные экспе-
рименты по уточнению газового состава атмосферы, а также регу-
лярно передавать метеорологические сводки.
Несвободные (управляемые) аэростатические ЛА могут быть
снабжены датчиками температуры и давления, нифелометром, или
оптическим детектором для измерения плотности облаков, широ-
кополюсным радиометром для регистрации распределения тепловой
и световой энергии в определенных точках или областях атмосфе-
ры Венеры, масс-спектрометром для регистрации нейтральных
частиц и газоЬым хроматографом для определения химического
состава атмосферы по заданной трассе полета.
Представляет большой интерес изучение периода и характера
флуктуаций атмосферного давления на различных широтах; полу-
чение данных о взаимосвязи между системой ветров', действием
220
1
Рис. 125. Схема зондирующего лифта
для выполнения длительного глубинно-
трассового эксперимента в атмосфере
Венеры:
1—^контейнер с научной аппаратурой
и оборудованием; 2—гондола; 3—дви-
житель; 4—манипулятор; 5—полужест-
кая оболочка; 6—подъемные шары;
7—шарнирные разъемы; 8—капсула
с приборами; 9—кабель; 10—кольцо;
11—тросы; 12—молниеотвод
приливных сил (солнечного происхождения) и резонансными явле-
ниями в атмосфере; изучение свободных и вынужденных колеба-
ний газовых слоев; исследование механизма выделения энергии
нижними слоямр атмосферы планеты; изучение характера и путей
распространения звукового луча.
Используя активно-пассивные виды движений, можно исследо-
вать атмосферу Венеры на различных высотах.
К активно-пассивным системам можно отнести известную нам
систему лифта, показанную на рис, 125. Маршевый (управляемый
или неуправляемый) полет такой «гирлянды» аэростатических ша-
ров может обеспечить долговременный эксперимент глубинно-трас-
221
1
Рис. 127. Глубинно-высотный аэроскаф:
а—в сложенном положении; б—в момент раскрытия; 1—механизм раскрытия и отвода пэдъ-
емных шаров; 2—^подъемный газ; 3—вогнутая поверхность сильфонной полусферы
сового и азимутально-высотного характера по изучению тропосфе-
ры Венеры и построению ее модели.
С аэростатических ЛА на поверхность планеты могут быть
сброшены зонды, рассчитанные на заглубление в грунт. Это позво-
лит получить важные данные о характеристиках поверхности Ве-
неры.
При длительном существовании аэростатических ЛА в атмосфе-
ре Венеры (рис. 126 и 127) целесообразно установить на них радио-
изотопные источники электроэнергии; при расчете на кратковре-
менное существование приемлемы химические батареи. Связь та-
кого ЛА с Землей осуществляется либо непосредственно, либо че-
рез аппарат, находящийся на орбите ИСВ.
8.4. ГЛУБИННЫЕ СЛОИ АТМОСФЕРЫ. ПрВЕРХНОСТЬ ПЛАНЕТЫ
На рис. 128—129 показаны венерианские ЛА, которые могут
быть доставлены спускаемым аппаратом в глубинные слои атмос-
феры вплоть до поверхности планеты.
Оборудование таких ЛА могут составить:
— трехосный сейсмограф, микробарограф и взрывной заряд
для проведения активных сейсмических исследований с целью опре-
деления структуры и упругих свойств поверхности;
— сейсмограф и тепловой анемометр для пассивных сейсмичес-
ких исследований с целью определения уровня сейсмической актив-
ности самой планеты в течение исследуемого периода;
— у-спектрометр и источник нейтронов для определения соста-
ва поверхностных пород;
— панорамная и микроскопная телекамеры для проведения то-
пографических работ (выявление элементов рельефа, измерение
перепада высоты), идентификации деталей поверхности, получения
микроскопических изображений поверхностных пород и петрогра-
фии;
222
Рис. 129. Венерианский аэроскаф с пере-
менной геометрией:
/—механизм -изменения геометрии ЛА;.
2—баллоны с подъемным газом
Рис. 128. Схема глубинного аэростатиче-
ского ЛА:
/—запас 'подъемного газа; 2—энергоуста-
новка; 3—силовая капсула; 4—движитель;
5—оболчка; 6—холодильная установка;
7—теплоизоляция; 8—научная аппаратура;
9—гайдроп; 10—тоннельная труба
Глубинные аэростатические ЛА с переменной геометрией (рис.
129) включают также следующий комплекс работ:
— петрографические исследования, получение изображений ма-
териала поверхности-с большим увеличением;
— определение вероятного состава ядра планеты;
— измерение тепловых потоков, идущих из недр планеты;
— измерение суточного распределения плотности давления и
температуры атмосферы на поверхности планеты;
— измерение физических характеристик поверхности вблизи
точек посадки;
— физико-химический анализ летучих элементов;
— "определение количества связанной воды;
— измерение общей радиоактивности поверхностных пород;
— проведение электромагнитных измерений;
— измерение освещенности;
— изучение микроструктуры грунта;
— уточнение пограничного газового состава атмосферы;
— изучение радиоотражающих свойств поверхности планеты
(грунтовых пород);
— получение фототелевизионных изображений участков мест-
ности (локальных, панорамных, в режиме дрейфа и управляемого
полета, в районах барражирования и посадки).
Множество задач научного и прикладного характера может
быть решено с помощью летательных аппаратов, доставляемых в
глубинные слои атмосферы Венеры. Среди них наиболее важные —
это определение физико-химических параметров среды, типов рель-
ефа и морфологии поверхностных слоев Венеры.
223
8.5. ЭКСПЕДИЦИЯ «ВЕНЕРА-83»
Французский национальный центр космических исследований в
г. Тулузе разработал проект аэростата, который будет введен в
атмосферу планеты Венера зондом и около двух суток будет ис-
следовать ее атмосферу. Это будет один из первых экспериментов
по изучению планет, в котором Франция примет непосредственное
участие.
Основой проекта «Венера» является аэростат, масса которого
составляет 700 кг, из них 254 кг весит плавающая автоматическая
станция ПАС (гондола — 160 кг, аэростат — 55 кг, вспомогатель-
ная аппаратура — 15 кг, газ — 24 кг) и 446 кг — сбрасываемое
оборудование (парашют и контейнер — 40 кг, контейнер для обо-
лочки — 11 кг, баллоны с газом — 274 кг, устройства для напол-
нения аэростата — 16 кг, конструкция — 105 кг). Диаметр аэро-
стата — 8 метров.
' Оболочка аэростата «Венера» изготовлена из материала с мно-
гослойной структурой из полиэстерной алюминизированной пленки
толщиной 12 микрон, арамирующей ткани для обеспечения меха-
нической прочности, двух слоев тефлона толщиной 12 микрон; с
внешней стороны — антикоррозионное, антиабразивное и противо-
солнечное покрытие со слоем алюминия толщиной 0,05 микрон.
Оболочка состоит из шестнадцати одинаковых раскроев, соединен-
ных тефлоновыми лентами. Для обеспечения герметичности с внут-
ренней стороны ленты приклеиваются адгезивом; с наружной сто*
роны для обеспечения механической прочности они привариваются
и приклеиваются.
Аэростат с гелиевым наполнением сконструирован таким обра-
зом, что срок его жизни должен быть не менее двух земных суток;
более длительный срок существования маловероятен из-за сложных
условий венерианской окружающей среды. Уже на пути к Венере
(около НО дней) аэростат должен выдержать укладку, затем
должно произойти разворачивание (с помощью вытягивающего па-
рашюта) при спуске на планету со скоростью 10 м/с. Аэростат
должен выдержать крайне неблагоприятные условия пребывания в
атмосфере Венеры. Огромные перепады дневной и ночной темпе-
ратуры не могут не сказаться на его летных характеристиках. Кро-
ме того, аэростат будет плавать в основном слое облаков, состоя-
щем из капелек серной кислоты, которые обладают большими кор-
родирующими свойствами (для защиты от коррозии и использует-
ся тефлоновая пленка),
Цель экспедиции «Венера-83» (рис. 130) — ввод в атмосферу
планеты аэростата с заирытой оболочкой, в гондоле которого раз-
мещены приборы для определения химического состава атмосферы
планеты, ее динамики и некоторых характеристик. После 110-днев-
ного полета одного из двух запущенных зондов' аэростат, уложен-
ный в контейнер, будет сброшен над планетой. Спускаемый аппарат
пройдет плотные слои атмосферы планеты на парашютах торможе-
ния и извлечения. Парашют, обеспечивающий разворачивание аэро-
стата, раскроется и развернет его оболочку на высоте около 56 км.
224
Рис. 130. Схема входа в.атмосферу планеты «Венеры-83»:
1—вход в плотные слов атмосферы; 2—раскрытие тормозного парашюта; 3—увод полусферы
корпуса; 4—сброс полусферы корпуса; 5—раскрытие основного парашюта; 6—снижение на
парашюте; 7—вытягивание аэростатической оболочки; 8—наполнение аэростатической обо-
лочки гелием; 9—отделение парашюта и сброс гелиевых баллонов; 10—достижение мини-
мальной высоты полета; 11—восходящее движение аэростата; 12—выход аэростата на ста-
ционарную высоту дрейфа
В это время скорость спуска составит 10 м/с. Затем начнется на-
полнение оболочки гелием, содержащимся в баллонах под давлени-
ем 300-105 Па, расположенных под гондолой. Через 250 с эти бал-
лоны сбрасываются вместе с парашютом, выполняющим операцию
извлечения. Наполненный аэростат опустится до высоты 54 км, за-
тем поднимается со скоростью 5,5 м/с за 500 с на высоту 55 км, где
он примет свою нормальную сферическую форму (270 м3) и полетит
в атмосфере на стационарную высоту дрейфа. Гондола с научной
аппаратурой оснащена передатчиком и антенной для обеспечения
связи со спутником, остающимся на околопланетной орбите для
передачи информации на Землю. По последним данным, получен-
ным советскими учеными на высотах от 0 до 70 км соответствую-
щие температуры располагаются в пределах +480 . . . —30° С, если
считать от поверхности до вершины облаков, покрытых дымкой.
Толщина основного слоя облаков около 35 км, ниже на высоте 30—
35 км лежит слой аэрозолей, который доходит до высоты 20 км.
Французский аэростат должен находиться в этом плотном слое об-
лаков на высоте 55 км [32]. <
Ниже приведены основные разделы и методы исследований пла-
неты по проекту «Венера-83».
А. Динамика атмосферы
1. Исследование общей циркуляции атмосферы методом ин-
терферометрии.
2. Измерение угловых координат ИСВ и аэростата методом
сверхдальней интерферометрии.
22 5
3. Измерение высоты и горизонтальной скорости движения
аэростата.
4. Измерение характеристик турбулентности, градиентов ско-
рости ветра и температуры в атмосфере Венеры.
Б. Состав и структура атмосферы
1. Определение химического состава атмосферы и конденсиро-
ванной фазы облачного слоя с помощью высокочувствительного
хроматографа.
2. Исследование малых составляющих атмосферы и химическо-
го состава облачного слоя.
3. Масс-спектрометрические исследования химического состава
атмосферы.
4. Исследование с помощью волокнистых фильтров ФП содержа-
ния, форм существования и состава аэрозолей в атмосфере и в об-
лачном слое.
5. Измерение радиационного баланса и его компонент в атмо-
сфере.
6. Спектроскопия рассеянного света в облачном слое.
7. Определение яркости неба и прозрачности атмосферы в верх-
ней части облачного слоя.
8. Инфракрасная спектроскопия Венеры с орбитального аппа-
рата.
9. Исследование спектра рассеянного ультрафиолетового излу-
чения планеты с ИСВ.
10. Исследование спектра собственного свечения атмосферы в
области 4000—12000 А.
11. Фотополяриметрические исследования планеты с орбиталь-
ного аппарата.
В. Поверхность
1. Определение рельефа поверхности и электрофизических ха-
рактеристик поверхностного слоя методом бистатической радиоло-
кации с использованием аппаратуры аэростата и ИСВ.
2. Бистатическая радиолокация Венеры с использованием штат-
ной радиолинии ИСВ — Земля.
3. Измерения распределения радиояркостной температуры по
поверхности планеты на двух длинах волн.
4. Исследование температурных полей в атмосфере и на по-
BepxHQCTH планеты.
5. Определение диэлектрической проницаемости и теплового ре-
жима поверхностного слоя с помощью многочастотного поляризо-
ванного радиометра.
Взаимодействие межпланетной среды с планетой
1. Изучение области взаимодействия солнечного ветра с атмо-
сферой планеты.
2. Изучение магнитных явлений в окрестностях Венеры.
3. Изучение ионосферы Венеры методом дисперсионного интер-
ферометра.
Современная эпоха — эпоха величайших достижений естество-
знания и техники, характеризуемая все возрастающей ролью кос-
мических исследований, открывает все новые возможности для
более глубокого познания планет Солнечной системы. Программа
исследований планеты Венера продолжается.
СПИСОК ЛИТЕРАТУРЫ
1. Абгарян К. А., Рапопорт И. М. Динамика ракет. — М.: Машиностроение,
1969.—378 с.
2. Авдуевский В. С., Данилов Ю. И., Кошкин В. К. и др. Основы теплопере-
дачи в авиационной и ракетной технике. — М.: Оборонгиз, 1960.—390 с.
3. Бассард Р., Делауэр Р. Ядерные двигатели для самолетов и ракет. — М.:
Воениздат, 1967.—400 с.
4. Болтянский В. Г. Математические методы оптимального управления. —
М.: Наука, 1969.—408 с.
5. Бретшнейдер С. Т. Свойства газов и жидкостей. — М.—Л.: Химия, 1966,
535 с.
6. Варг^фтик Н. Б. Справочник по теплофизическим свойствам газов и жид-
костей. — М.: Наука, 1972.—720 с.
7. Воробьев А. М., Воробьева Т. М. Нелинейные преобразования в приклад-
ных вариационных задачах. — М.: Энергия, 1972.—208 с.
8. Гельфанд И. М., Фомин С. В. Вариационное исчисление. — М.: Физмат-
гиз, 1961 —228 с.
9. Голубев И. С. Конструкция летательных аппаратов. — М.: Изд. МАИ,
1964,—223 с.
10. Горбатенко С. А., Макашов Э. М., Полушкин Ю. Ф., Шефтель Л. В.
Механика полета. — М.: Машиностроение, 1969.—420 с.
И. Карпов В. А. О турбулентном пограничном слое на поверхности затуп-
ленных конусов. — Механика жидкости и газа. 1968, № 3, с. 147—150.
12. Карпов В. А. Теплообмен на пластине при продольном обтекании турбу-
лентным струйным потоком. — Механика жидкого газа, 1971, № 6, с. 154—158.
13. Коваль А. Д., Успенский Г. Р. Космос человеку. — М.: Машиностроение,
1974.—199 с.
14. Кротов В. Ф. Об оптимальном режиме горизонтального полета самолета:
Сб. трудов МВТУ, № 104, — М.: Оборонгиз, 1963.
15. Кузьмин А. Д., Маров М. Я. Физика планеты Венера. — М.: Наука,
1974.—408 с.
16. Ламб Г. Гидродинамика (Пер. с англ, под ред. проф. И. А. Слезкина;—
М.—Л.: ГТТИ, 1947.—928 с.
17. Лейтман Г. О максимальной длине полета ракеты в горизонтальной плос-
кости. — ПММИ, 1963, т. XXVIII, вып. 3.—с. 167—177.
18. Литвин А. М. Теоретические основы теплотехники. — М.: Энергия, 1969.—
328 с.
19. Лох У. Динамика и термодинамика спуска в атмосфере планет. — М.:
Мир, 1966.—276 с.
20. Маров М. Я. Автоматические аппараты исследуют Венеру. — Земля и
Вселенная, 1971, № 3, с. 42—47.
21. Миеле А. Механика полета.— М.: Наука, 1965.—408 с.
22. Мороз В. И. Физика планет.— М.: Наука, 1967.—496 с.
23. Москаленко Г. М. Инженерные методы в ракетодинамике.— М.: Маши-
ностроение, 1974.—392 с.
24. Мур П. Планета Венера.— М.: Ил, 1961.—146 с.
228
25. Основы теории полета и элементы проектирования искусственных спут-
ников Земли. Ред. М. К. Тихонравова.— М.: Машиностроение, 1974.—332 с.
26. Остославский И. В., Стражева И. В. Динамика полета.— М.: Машино-
строение, 1969.—499 с.
27. Л. С. Понтрягин, В. Г. Болтянский, Р. В. Гамкрелидзе, Е. Ф. Мищенко,
Математическая теория оптимальных процессов.— М.: Наука, 1976.—392 с.
28. Сагдеев Р. 3. Космонавтика: достижения и перспективы. — Природа,
1977, № 10,—С. 4—9.
29. Циолковский К. Э. Собр. соч. Т. III.— М.: Изд-во АН СССР, 1959.—316 с.
30. Черноусько Ф. Л., Баничук Н. В., Вариационные задачи механики и уп-
равления.— М.: Наука. 1973.—238 с.
31. Юрьев Б. Н. Пределы современной авиации и способы их преодоле-
ния.—М.: Изд. ЦАГИ, 1936.—51 с.
32. Air et Cosmos, 1977, v. 14, N 669, p. 47—49.
33. Wochenpost, 1970, N 8, S. 17.
34. Wochenpost, 1970, N 39, S. 16—17.
ОГЛАВЛЕНИЕ
Стр.
Предисловие . . 3
Условные обозначения 7
Введение......................................................... ... 8
Глава 1. Аэрофизические характеристики условий полета в атмосфере Ве-
неры. Общий анализ возможных схем летательных аппаратов. 12
1.1. Модель атмосферы Венеры........................................12
1.2. Число Рейнольдса . . . ...........................18
1.3. Классификация венерианских летателньых аппаратов .... 22
1.4. Сравнительные характеристики различных схем летательных ап-
паратов ?........................................................ 30
1.5. Основная зависимость для определения потребного объема аэро-
статического летательного аппарата и влияние на его характерис-
тики температурных и барометрических факторов......................30
1.6. Аппроксимация модели плотности атмосферы аналитическими за-
висимостями .......................................................33
1.7. Аппроксимация модели скорости звука аналитическими зависи-
мостями ...........................................................38
1.8. Новые данные о поверхности Венеры и общие задачи исследова-
ния планеты.................................................. . 40
Глава 2. Анализ и сравнительная оценка схем венерианских летательных
аппаратов........................................................44
2.1. Некоторые зависимости для массовых, геометрических и аэро-
статических компонент.................................................44
2.2. Экстремальная грузоподъемность аэростатических летательных
аппаратов.............................................................50
2.3, Оценка целесообразности применения аммиачного раствора, как
рабочего тела для образования аэростатической силы ... 53
2.4. Высота полета квазибарометрического летательного аппарата
и вакуум-баллона......................................................54
2.5. Оптимальная высота дрейфа и высота максимального подъема
аэростатического летательного аппарата ...............................58
2.6. Влияние крыла на грузоподъемность аэростатических летатель-
ных аппаратов....................................................... 60
2.7. Сравнительные характеристики венерианских и земных летатель-
ных аппаратов самолетного типа . .....................62
2.8. Возможные схемы венерианских летательных аппаратов. Аэроста-
тические- летательные аппараты с изменяемой геометрией. ЛА типа
«лифт». Тороидальный аэростатический летательный аппарат. Гра-
вистатические летательные аппараты. Аэрокосмические летательные
аппараты. Летательные аппараты типа дископдан. Аэростатический
конвертоплан. Глубинные летательные аппараты. Термо-пневмоаэро-
статический летательный аппарат. Аэростатический летательный
аппарат, использующий принцип Кноллера-Бетца. Эксперименталь-
ный мезоплан.....................................................66—77
2 30
Стр.
Глава 3. Восходяще-нисходящее движение свободного и несвободного аэ-
ростатического летательного аппарата.....................................80
3.1. Виртуальная масса. Случай переменного объема оболочки при
постоянстве массы и аэростатической силы летательного аппарата.
Случай постоянного объема оболочки при постоянной массе ле-
тательного аппарата и Случай постоянного объема
оболочки Уоб = const при переменной массе летательного аппа-
рата и tng=RAr(h). Замечания к учету присоединенной массы .81—85
3.2. Уравнение движения . .................................85-
3.3. Восходяще-нисходящее движение статически уравновешенного ле-
тательного аппарата при Sw(h) = const и t>O6(ft)¥=const ... 87
3.4. Восходяще-нисходящее движение статически уравновешенного ле-
тательного аппарата при Su(h)=^ const...............................93
3.5. Восходяще-нисходящее движение летательного аппарата в среде
переменной плотности при Arg=l и SM (ft) = const . 96
3.6. Восходяще-нисходящее движение летательного аппарата в среде
переменной плотности при Ar^l, SM(h)5^ const и в среде посто-
янной плотности при Аг^1 и SM (ft) = const..........................99
3.7. Вертикальный подъем статически неуравновешенного летательно-
го аппарата на пассивном участке траектории при Аг<1 и
SM = const.........................................................100
3.8. Подъем и снижение статически уравновешенного летательного ап-
парата при действии силы, направленной по вектору и против
вектора скорости. Случай (ft) = const........................101
3.9. Подъем и снижение статически уравновешенного летательного ап-
парата при действии силы, направленной по вектору скорости.
Случай SM (h) =/= const............................................108
3.10. Подъем и снижение статически уравновешенного летательного ап-
парата при действии силы, направленной против вектора скоро-
сти. Случай SM(ft) =И= const...................................... Ill
3.11. Вертикальный взлет аэростатического летательного аппарата при
/гт=#0 и Аг<1 в среде постоянной плотности......................ИЗ
3.12. Подъем уравновешенного аэростатического летательного аппара-
та с жесткой оболочкой постоянного объема при непостоянстве
виртуальной массы и действии силы, направленной по вектору и
против вектора скорости ........................................... 115
3.13. Снижение уравновешенного аэростатического летательного аппа-
рата с жесткой оболочкой постоянного объема при непостоянстве
виртуальной массы и действии силы, направленной по вектору
и против вектора скорости ........................................ 117
Г лава 4. Летные характеристики статически неуравновешенного летатель-
ного аппарата с постоянным миделем................................119
4.1. Аэродинамические характеристики статически неуравновешенного
летательного аппарата с жестким корпусом..........................120
4.2. Уравнение движения в общем виде . 122
4.3; Угол наклона траектории и вертикальная скорость при пологом
планировании .................................................... 124
4.4. Дальность п время пологого планирования.......................126
4.5. Горизонтальный полет при постоянной скорости и тяговооружен-
ности ............................................................132
4.6. Полет с набором высоты........................................134
4.7. Летные характеристики статически неуравновешенного летатель-
ного аппарата при параметре ip и SM=const.....................137
4.8. Наклонный подъем и планирование статически неуравновешенного
летательного аппарата в среде постоянной плотности .... 139
231
Стр.
4.9. Скорость планирования и наклонного подъема аэростатического
летательного аппарата с произвольной полярой в среде постоянной
плотности, выраженная через угол наклона траектории 0 141
4.10. Наклонный подъем и планирование статически неуравновешенно-
го летательного аппарата с произвольной полярой в среде пере-
, менной плотности при малых углах 0 и SM=const . . . 143
4.11. Скорость, дальность и время наклонного подъема и планирова-
ния статически неуравновешенного летательного аппарата с про-
извольной полярой в среде переменной плотности при больших
углах 0 и SM=const.......................................... ..... 146
Глава 5. Летные характеристики статически неуравновешенного летатель-
ного аппарата с переменным миделем......................................150
5.1. Аэродинамические характеристики статически неуравновешенного
летательного аппарата при SM=SM(Ar, р)............................150
5.2. Угол и вертикальная скорость при пологом планировании . . 156
5.3. Дальность и время подогого планирования при постоянном угле
атаки.............................................................157
5.4. Дальность и время пологого планирования при постоянной скорости 160
5.5. Горизонтальный полет при постоянной скорости, тяговооруженно-
сти и массе аэростатического летательного аппарата . . . . 162
5.6. Полет с набором высоты.......................................165
5.7. Летные характеристики статически неуравновешенного летательно-
го аппарата с параболической полярой при SM=^const и (Сх0)кор —
= const...............................................• . 166
5.8. Летные характеристики статически неуравновешенного летательно-
го аппарата с параболической полярой SKpc=5Kp(o) и (Схо)кор=0 169
5.9. Установившийся полет статически неуравновешенного летательно;
го аппарата самолетного типа с ядерным двигателем . . . . 171
Глава 6. Динамика и термодинамика входа в атмосферу планеты аэро-
статического летательного аппарата ....................................176
6.1. Уравнения динамики входа летательного аппарата в атмосферу
планеты высокой плотности в присутствии аэростатической силы 177
-6.2. Численные решения уравнений динамики . ...... 179
6.3. Влияние аэростатической силы на параметры входа летательного
аппарата в атмосферу планеты.................................180
6.4. Кинетический нагрев летательных аппаратов................183
6.5. Тепловой максимум в атмосферах Венеры и Земли .... 190
Глава 7. Вариационная задача механики полета в атмосфере планеты 198
7.1. Аппроксимация модели температуры атмосферы .... 198
7.2. Уравнения движения. Постановка задачи........................ 200
7.3. Метод оптимизации. Оптимальные управления.....................204
7.4. Система дифференциальных уравнений! для вспомогательных пере-
менных ...........................................................206
7.5. Определение оптимального управления..........................208
7.6. Граничные условия. Краевая задача. Условия трансверсальности 210
7.7. Определение приближенных начальных значений вспомогательных
переменных на левом конце траектории перелета.....................213
Глава 8. Возможные научные эксперименты по изучению Венеры с по-
мощью летательных аппаратов различных типов.............................216
8.1. Верхняя атмосфера . . . ................. 216
8.2. Облачный слой . . . ................. 218
8.3. Тропосфера................................................... 219
8.4. Глубинные слои атмосферы. Поверхность планеты . . . 222
8.5. Экспедиция «Венера-83» . . . ................. 224
Список литературы , . . . ................. 228