/



































Текст
Б
ПЕРЕДАЧА
ИНФОРМАЦИИ
С ОБРАТНОЙ
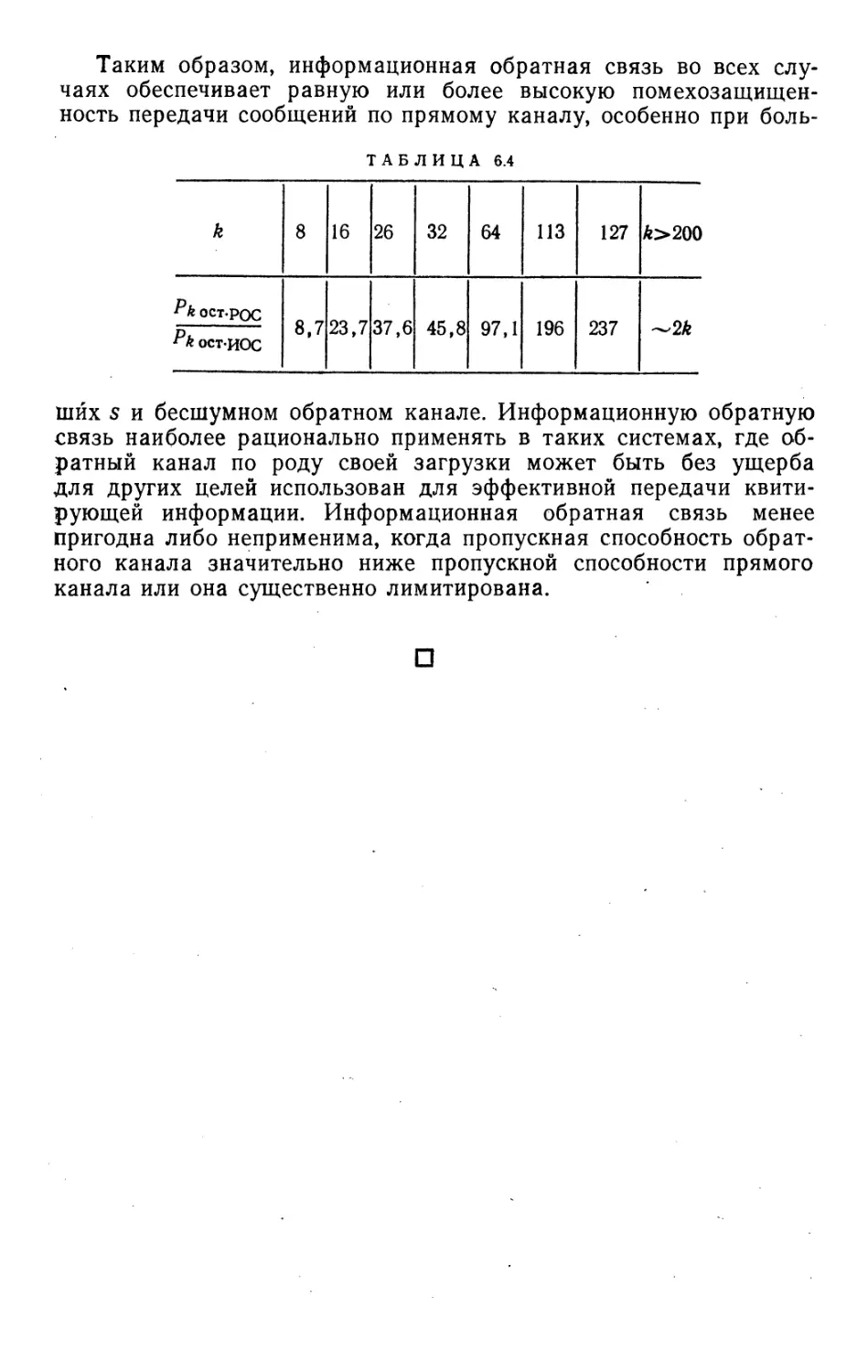
СВЯЗЬЮ
Под редакцией
3. М. Каневского
ИЗДАТЕЛЬСТВО «СВЯЗЬ»
МОСКВА 1976
6Ф1.1
П23
УДК 621.39:681.327.8
Авторы:
Каневский 3. М., Дорман М. И., Токарев Б. В.,
Кретинин В. В.
с обратной связью. М.,
П ередача ян-форм аций
П23 «Связь», 1976.
352 с. с ил.
На обороте тит. л. ащт.: Каневский 3. М., Дорман М. И.,
Ток а ре ов Б. Б., Кретинин В. В.
Излагаются вопросы обшей теории и методы инженерных расчетов
систем передачи информации с ИОС, РОС и КОС. Даются аналитические
соотношения, номограммы и графики для определения достоверности и скорости
передачи сообщений по каналам с постояниыми и переменными параметрами
при различных методах модуляции и кодирования и различных видах
обратной связи. Рассматриваются вопросы синтеза и оптимизации параметров
системы передачи информации с ОС в целях обеспечения максимальной
скорости передачи сообщений, при минимальных значениях вероятностей ошибок.
Книга предназначена для научных работников, инженеров, аспирантов,
занимающихся проектированием и исследованием аппаратуры ПД.
п
30401—049
045(01)—76
12—76
6Ф1.1
Издательство «Овязь», 1976 г.
ПРЕДИСЛОВИЕ
Обратная связь (ОС) как средство повышения достоверности
передачи сообщений по проводным и радиоканалам все больше
привлекает внимание исследователей и конструкторов. Это
обусловлено тем, что использование ОС позволяет обеспечить
передачу сообщений с высокой достоверностью и скоростью путем
несложного кодирования при сколь угодно малой длине кода.
Особенно благоприятные результаты получаются в случае
бесшумного обратного канала. При этом в значительной мере
удается реализовать пропускную способность прямого канала, что
практически недостижимо в односторонних системах связи.
Системы с обратной связью и повторениями по своей природе4
являются системами адаптивными — число повторений в них
автоматически поддерживается на уровне, необходимом для
надежного прохождения сообщений. Адаптивные свойства системы
могут быть усилены автоматическим поддержанием Оптимальных
режимов передачи и приема сообщений в изменяющихся условиях.
Существует еще ряд показателей в пользу применения систем
передачи сообщений с обратной связью.
Хотя идея применения обратной связи на линиях передачи
информации возникла сравнительно недавно (пятидесятые годы),
уже опубликовано значительное количество работ, посвященных
этому методу. Его описание с раскрытием основных возможностей
можно найти сейчас во многих книгах, посвященных вопросам
общей теории передачи сообщений по непрерывным или дискретным
каналам связи ([69, 115, 168, 171 и др.]. В 1963 и 1969 гг. вышли
две монографии, посвященные решающей [7] и информационной
{78] обратной связи соответственно. Дальнейшее развитие вопроса
и накопление новых материалов послужило основанием для
подготовки и издания данной книги. Многие рассматриваемые в ней
вопросы ранее в печати не освещались или публиковались в виде
отдельных статей.
Модификации систем с различной обратной связью (решающей,
информационной) рассматриваются с позиций единой обобщенной
схемы замкнутой системы передачи информации. Соотношения,
определяющие скорость и достоверность передачи сообщений по
однородным и неоднородным каналам, выводятся методом
вероятностных графов. Даются выражения для вероятностей ошибок,
возникающих при приеме двоичных элементов и кодовых
комбинаций при однопороговом и двухпороговом методах приема при
различных видах модуляции и кодирования в прямом и обратном
3
каналах и различных помехах. Рассматриваются вопросы
управления сигналами посредством регулирования излучаемой
мощности или прерываний приема сообщений при передаче информации
по каналам с переменными параметрами.
Излагаются вопросы передачи аналоговых сообщений
системами с информационной и решающей обратной связью. Получены
соотношения для определения ошибок при различных способах
избыточного и безызбыточного кодирования и разных законах
распределения вероятностей входных функций времени.
Большое внимание уделяется вопросам оптимизации систем
с обратной связью, в частности, ее приемных устройств. Задачи
решаются на основе общепринятого в теории статистических
решений критерия среднего риска с привлечением методов
динамического программирования и ряда других.
Описаны некоторые новые принципы построения систем
передачи информации с обратной связью, в том числе системы со
стохастической аппроксимацией при фазовой модуляции, с
рекуррентным квитированием и ряд других.
Книга в значительной мере базируется на оригинальных
материалах и разработках в области систем передачи информации
с обратной связью, осуществляемых в течение ряда лет кафедрой
радиотехники Воронежского политехнического института.
В отдельных исследованиях совместно с авторами участвовали
В. И. Ледовских (Модели ошибок в каналах связи с
замираниями, передача сообщений- с прерываниями), В. Н. Кондращенко
(Стохастическая аппроксимация, применение трехпозиционной
модуляции), В. В. Бутенко (Регулирование энергии сигналов),
В. Н. Поддубный (Поэлементный прием кодовых комбинаций,
применение двойной модуляции), А. И. Усачев (Рекуррентное
квитирование) и другие товарищи. Ссылки на соответствующие работы
даны в списке литературы.
Главы 1, 2, 7 и § 4.1 написаны 3. М. Каневским, гл. 3, 10
и § 1.5 — М. И. Дорманом, гл. 4 — Б. В. Токаревым, гл. 8 —
В. В. Кретининым. Главы 5 и 6 написаны совместно 3. М.
Каневским и Б. В. Токаревым, гл. 9 — 3. М. Каневским и В. В. Крети-
циным.
Авторы выражают глубокую признательность рецензенту
книги доктору технических наук профессору А. Г. Шереметьеву и
кандидату технических наук В. И. Шляпоберскому за ценные
замечания и советы, высказанные при чтении рукописи, а также В. А. Чер-
навцеву и Л. И. Бабаниной за большую помощь при подготовке
рукописи к печати.
Отзывы о книге просьба направлять в издательство «Связь» по
адресу: 101000, Москва, Чистопрудный бульвар, 2.
Авторы
ГЛАВ А 1
Системы передачи сообщений
с обратной связью
1.1. ОБЩИЕ ЗАМЕЧАНИЯ
Линии связи (телеграфные, телефонные), как правило,
двусторонние. Таким образом, передачу информации в направлении
от пункта А к пункту В можно осуществлять одновременно с
передачей в направлении от В к А Другие линии, например для
передачи команд управления, также обычно действуют в
комплексе с обратными каналами, по которым передаются сведения
о выполнении команд или другие данные.
Системы, в которых хотя бы часть информации, передаваемой
из пункта В в пункт А, используется для повышения
достоверности или скорости передачи сообщений в направлении от А к Б,
называются систем а м и передачи сообщений с
обратной связью. При этом канал от А к В считают прямым, & от В
к А — обратным. Названия эти отйосительны, поскольку в
двусторонних системах передача информации может осуществляться
встречно и оба канала использоваться для взаимного улучшения
качества связи в обоих направлениях. Системы с обратной
связью — замкнутые системы передачи информации; их иногда
называют системами с логической обратной связью (ЛОС).
Последний .термин является общим для различных модификаций
систем с обратной связью и отражает тот факт, что речь идет
о передаче определенной смысловой и соответственно кодируемой
информации как по прямому, так и по обратному каналам. Этим
системы с ЛОС отличаются от систем автоматического
регулирования, усилителей, генераторов, где также используется
положительная либо отрицательная обратная связь по напряжению или
току. Однако в последнем случае ОС имеет другое назначение,
например для поддержания режима работы системы на некотором
устойчивом уровне, для возбуждения колебаний и других целей.
В системах с ЛОС обратная связь может использоваться для
получения сведений, необходимых для адаптации системы к
переменным внешним условиям путем, например, изменения
мощности сигналов передатчика в зависимости от степени замирания
сигналов. Системы с ЛОС приближаются по принципу действия
и назначению к системам автоматического регулирования.
5
1.2. ФУНКЦИОНАЛЬНАЯ СХЕМА
Будем называть сообщением букву, знак, цифру, отрывок
телеграфного текста, команду управления — все то, что подлежит
передаче по проводному или по радиоканалу из пункта А в пункт
В и имеет обусловенную длительность Т. Такие сообщения
называются дискретными. Ассортимент дискретных сообщений при
Тфоо ограничен. Он определяется количеством разнородных букв
или их сочетаний, знаков, команд и других символов,
употребляемых при передаче. Совокупность или множество всех возможных
сообщений называется алфавитом сообщений.
При передаче аналоговых сообщений (непрерывных функций
времени) полагается, что они предварительно дискретизируются
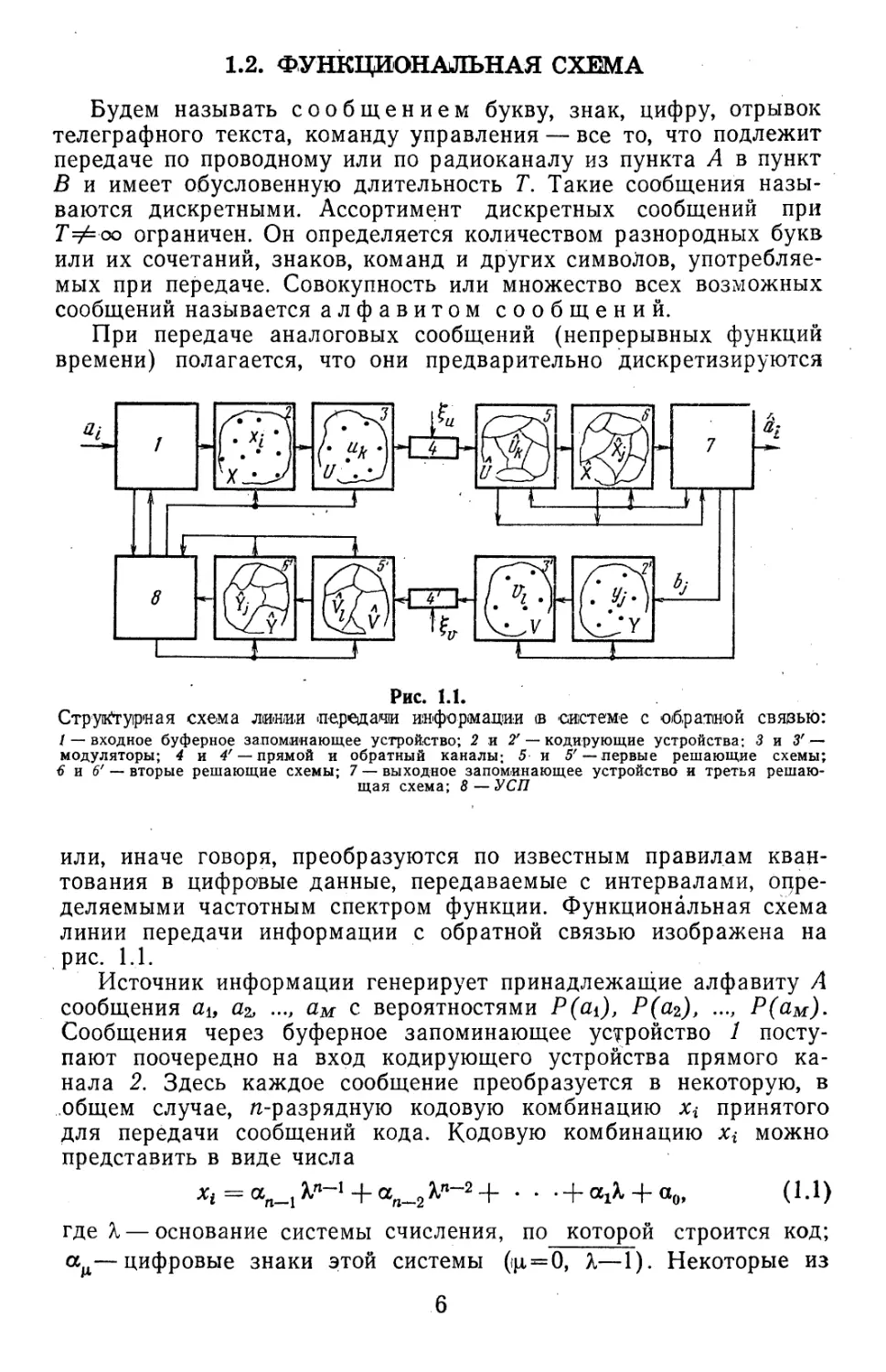
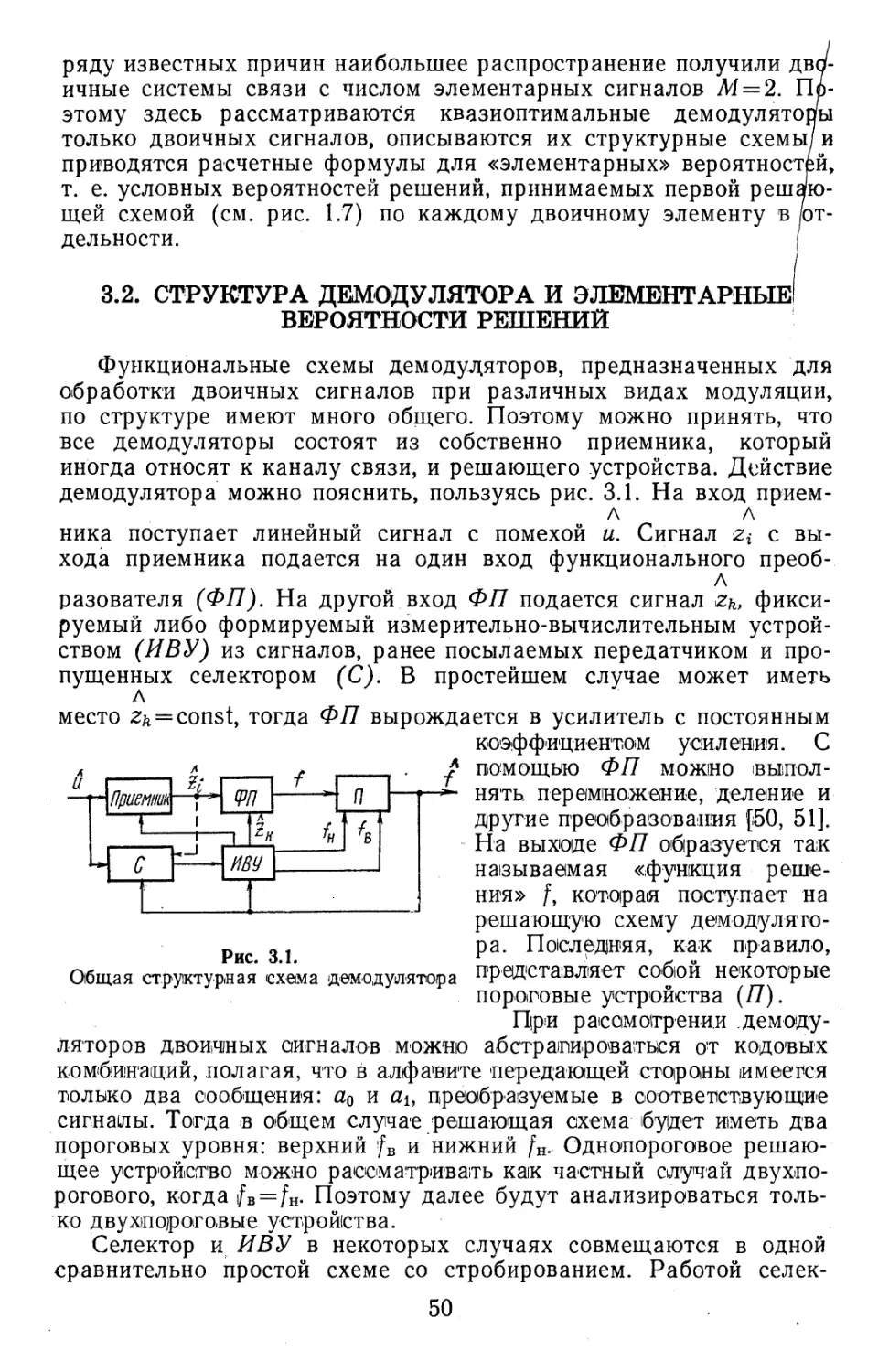
Рис. 1.1.
Структурная схема линии «передачи информации ш системе с обратной связью:
/ — входное буферное запоминающее устройство; 2 и 2' — кодирующие устройства: 3 и 3' —
модуляторы; 4 и 4'— прямой и обратный каналы; 5 и 5' — первые решающие схемы;
€ и 6' — вторые решающие схемы; 7 — выходное запоминающее устройство и третья
решающая схема; 8 — УСП
или, иначе говоря, преобразуются по известным правилам
квантования в цифровые данные, передаваемые с интервалами,
определяемыми частотным спектром функции. Функциональная схема
линии передачи информации с обратной связью изображена на
рис. 1.1.
Источник информации генерирует принадлежащие алфавиту Л
сообщения аи аъ ..., ам с вероятностями Р(а{), Р(а2), ..., Р(ам)-
Сообщения через буферное запоминающее устройство 1
поступают поочередно на вход кодирующего устройства прямого
канала 2. Здесь каждое сообщение преобразуется в некоторую, в
общем случае, д-разрядную кодовую комбинацию Х\ принятого
для передачи сообщений кода. Кодовую комбинацию хг- можно
представить в виде числа
Xi = <*„__! Я»-* + <V_2X«-2 +...+ 0^ + 00, (1.1)
где X — основание системы счисления, по которой строится код;
ад—цифровые знаки этой системы (^ = 0, %—1). Некоторые из
6
этих знаков в зависимости от i и \х могут быть равны* друг другу
или равны нулю. Геометрически Хг может интерпретироваться как
вектор в я-мерном пространстве X с п определяющими его
координатами 1171]. Чаще других употребляется двоичная система
счисления, в которой Я=2 и кодовые комбинации составляются
из единиц и нулей.
Условимся называть Х\ кодированным сообщением (или
просто сообщением, имея в виду взаимооднозначное соответствие
между их и его кодовым выражением Х{)у а число разрядов в нем
(элементов кодовой комбинации) п — длиной сообщения.
В зависимости от модификации системы сообщения могут
передаваться либо посредством избыточного кодирования, либо
посредством безызбыточного (минимального) кода. В первом случае
число возможных кодовых комбинаций установленной длины пу
которые можно образовать при основании А,, превосходит число
всех возможных сообщений М. Вследствие этого часть их не
используется для передачи. Это делартся с целью обнаружения или
исправления ошибок [141, 164]. Неиспользуемые при передаче
сообщений кодовые комбинации будем называть
неразрешенными.
Кодированное сообщение поступает на модулятор 3, где
преобразуется в сигнал Uk(t), обеспечивающий возможность
передачи сообщений на расстояние по данному каналу связи. Чаще
всего имеет место поэлементное преобразование кодовых
комбинаций в сигналы. Число разнородных сигналов uk(t)
соответствует при этом числу элементов (символов) кода, из которых
составляются кодовые комбинации. Относительно сигналов можно
также говорить как о векторах в многомерном дискретизирован-
ном пространстве U. Расстояние между векторами определяется
объемом пространства передаваемых сигналов, зависящего от
энергии сигналов, их частотного спектра и вида модуляции.
Между сообщениями х* и отображающими их сигналами может и
не быть однозначного соответствия. Это имеет место при
относительных видах манипуляции (например, при ОФМ [136, 137]).
Однако полагается, что приемнику всегда точно при отсутствии
помех известно (пусть с учетом предшествующего сигнала),
какому сообщению соответствует данный сигнал.
На приемной стороне линии связи осуществляются обратные
преобразования — демодуляция сигналов в первой (по
терминологии Л. М. Финка [168])' решающей схеме с воспроизведением
на ее выходе элементов кодовой комбинации и декодирование —
во второй решающей схеме.
Вследствие действующих в канале связи помех поступающий
л
в приемник сигнал Uk(t) в общем случае отличается от передан-
л
ного uh(t). Так, при аддитивной помехе
7
а при мультипликативной помехе
М0==М0Ь(0. (Ь2)
где 5лСО и ЬСО — случайные функции времени, а точнее, их
реализации, определяемые статистической структурой помех.
л
В силу действия помех векторы.uk(t) принимают в общем
случае иное пространственное положение по сравнению с uh(t),
поэтому и при демодуляции, и при декодировании возможны
ошибки. Решение о принадлежности сигнала uk(t) (его отождествление
с тем или иным сигналом множества \U) принимается первой
решающей схемой прямого канала после предварительного разде-
л
ления всего пространства принимаемых сигналов \U на
непересекающиеся области -f/i, Uz и т. д., соответствующие сигналам
л
Ui(t), u2(t) и т. д. Область Uk, попадание в которую конца вектора
л
uk(t) интерпретируется как прием сигнала uk(t), называется
собственной областью этого сигнала. В оптимальном варианте
выполнения приемного устройства разбиение пространства на
непересекающиеся области и выносимые этим устройством
решения выполняются на основе известных методов теории
статистических решений с учетом также априорных вероятностей
передачи по линии различных сообщений.
По аналогичному принципу строится пространство принимае-
л
мых кодированных сообщений X, которое также разбивается на
л л
непересекающиеся собственные области Х\, Х2 и т. д. сообщений
хь х2 и т. д. При избыточном кодировании в целях обнаружения
ошибок в пространстве принимаемых сообщений выделяется, кро-
Л
ме того, область неопределенности Х^у отделяющая одну от
другой собственные области разрешенных к передаче сообщений.
Попадание вектора сообщения в область неопределенности
интерпретируется приемными решающими устройствами как прием
неразрешенного (неразборчивого) сообщения, требующего
уточнения. Это собственно и обозначает обнаружение в сообщении
л
ошибки. Область неопределенности U'~ может выделяться также
л
в пространстве принимаемых сигналов U.
Действие помех на качество приема сообщений можно в
конечном итоге выразить посредством .матриц переходных )вероят-
л л
ностей \\P(Xj/xi)\\, где P(Xj/Xi)—условная вероятность приема
л
сообщения Xj при передаче хх. При j=i сообщение декодировано
л
правильно, при \Ф1 — с ошибкой. Вероятности P(Xj/xi)
определяются всей совокупностью факторов, влияющих на качество
передачи сообщений.
8
В линиях связи с приемом кодовых сообщений в целом [127, 168]
первая и вторая решающие схемы (рис. 1.1) сливаются в одну
решающую схему декодирования сообщения по принятому
сигналу Ui(t) без предварительного расчленения на элементы.
Обратный канал линии с обратной связью (см. рис. 1.1)
строится по аналогичному принципу и содержит в общем случае
тот же набор функциональных элементов, что и прямой. Основное
отличие состоит в том, что источником сообщений Bj для
обратного канала служит выход прямого канала. Кодированные
сообщения и сигналы, передаваемые по обратному каналу, обозначим
через t/j и Vi, как показано на рис. 1.1. Декодированные сообще-
л
ния av поступают к получателю через выходное запоминающее
устройство 7, где они хранятся до полной проверки и
апробирования системой с обратной связью. Управление процессом
продвижения сообщений от источника через запоминающее устройство 1
на вход системы и через запоминающее устройство 7 к
получателю осуществляют соответственно третья решающая схема
приемника (совмещенная на рисунке с выходным запоминающим
устройством 7) и управляющая схема передатчика.
Сейчас уже почти общепринято делить системы с обратной
связью на два класса: на системы с информационной
обратной связью (ИОС) и системы с решающей обратной связью
(РОС). В системах с ИОС по обратному каналу передаются
сведения о поступающих на приемную сторону сигналах или
сообщениях (кодовых комбинациях) до их окончательной обработки
приемными устройствами и принятия заключительных решений.
При этом возможны два варианта:
— передаются сведения о поступающих в приемник совместно
с помехами сигналах до их демодуляции, т. е. обработки первой
решающей схемой (см. рис. 1.1);
— посылаются сведения о демодулированных сигналах или
о кодовых комбинациях, поэлементно обработанных первой
решающей схемой, но не прошедших вторую.
Будем называть сведения, посылаемые по обратному каналу
в ответ на получение сигнала или сообщения (кодовой
комбинации), квитанциями, а процедуру их формирования и передачи
(по обратному каналу)—квитированием. В простейшем
случае квитирование осуществляется ретрансляцией поступающих на
приемную сторону сигналов, кодовых комбинаций или их
элементов. Соответствующие системы называются
ретрансляционными. В более общем случае приемник вырабатывает квитанции
на основе некоторой автономной процедуры кодирования
передаваемых по обратному каналу сведений.
Если количество содержащейся в квитанции информации
равно количеству информации в сообщении, передаваемом по
прямому каналу, то обратная связь называется полной. Если
квитанция не полностью отражает содержание сообщений, а лишь
9
определенные его отличительные признаки (например, на
приемную сторону поступает четная или нечетная комбинация), то
обратная связь называется укороченной. Так как алфавит
квитанций при укороченной обратной связи меньше алфавита
сообщений, то одна и та же квитанция употребляется для
квитирования некоторого подмножества сообщений, комплектуемого по
одинаковым признакам. Передатчик сопоставляет сообщение с
квитанцией и в случае их соответствия извещает об этом приемник,
посылая специальный сигнал ДА, а в случае несоответствия —
сигнал НЕТ и дополнительную (корректирующую) информацию
для устранения обнаруженной ошибки. Последнее часто
осуществляется простым повторением сообщения.
Таким образом, в системах с информационной обратной
связью заключение о достоверности принятого сообщения или
необходимости его корректировки принимается передающей
стороной.
В системах с РОС функцию обнаружения ошибок и запроса
дополнительной информации выполняет приемник. Для этого все
возможные сообщения или сигналы делятся на разрешенные и
неразрешенные или сомнительные. Сообщение или сигнал
сомнительны, если они под влиянием помех попадают в область
неопределенности. Приемник сигнализирует об этом передатчику, а
последний повторяет сообщение или дополняет его новой
информацией, необходимой для корректировки. Системы с РОС иногда
называют системами с переспросом [7, 107] или автоматическим
запросом ошибок (АЗО).
Допустимое число передач одного и того же сообщения при
повторениях может быть ограниченным либо неограниченным.
Приемное устройство как в РОС, так и в ИОС может либо
отбрасывать неверно принятые или сомнительные искаженные помехами
сообщения (сигналы), либо накапливать их в процессе получения
повторных сигналов в целях сопоставления и принятия более
достоверного решения по их совокупности. Сигналы, применяемые
для целей переспроса или подтверждения в системах с РОС,
стирания или подтверждения в системах с-ИОС, назовем
служебными и обозначим знаками: 0 (стирание, переспрос) и О
(подтверждение) .
Для обеспечения наибольшей вероятности безошибочного
приема этих сигналов можно использовать модуляцию и селекцию
различных видов, в том числе временную, частотную, фазовую,
кодовую и др. (см. гл. 7). При этом один из сигналов, например
знак подтверждения О, га явном виде может не передаваться^
а обозначаться переходом системы к передаче следующего
сообщения; сигналы же стирания (переспроса) 0 передаются чаще
в явном виде. Служебные сигналы могут квитироваться и в
системах с РОС и в системах с ИОС и корректироваться при
возникновении ошибок подобно основным сообщениям.
Системы с обратной связью, в принципе, являются
адаптивными системами. Свойство адаптивности проявляется уже в прос-
10
тейших вариантах реализации этих систем — они автоматически
повторяют и прекращают повторение сообщений в соответствии
с конкретными условиями прохождения их по каналам связи;
среднее число повторений возрастает с возрастанием
интенсивности помех и наоборот. Адаптивные свойства системы могут быть
расширены (введением автоматического регулирования мощности
или энергии сигналов, их кодовой структуры, пороговых уровней
приемо-решающих устройств и других параметров системы в
зависимости от уровня и характера действующих в каналах помех
и условий прохождения сигналов.
1.3. ПОМЕХИ В КАНАЛАХ СВЯЗИ
Характер помех, действующих на сигналы сообщений,
квитанций и знаков служебной информации в прямом и обратном
каналах, зависит от диапазона частот, используемых для передачи
сообщений,, состояния среды и ряда других факторов. Можно
полагать, что в диапазоне ультракоротких волн при
относительно небольших расстояниях между станциями и
непродолжительных сеансах связи помехи и сигналы практически не изменяют
своих характеристик (дисперсии, средней или пиковой мощности,
законов распределения и пр.) с течением времени. Каналы, для
которых это справедливо, называются однородными или
каналами с постоянными параметрами. В таких
каналах в большинстве случаев доминирующей является флуктуацион-
ная (шумовая) аддитивная помеха с нормальным (гауссовым)
законом распределения |[113, 156, 96], одномерная плотность
вероятности которой определяется известным выражением
где I — напряжение помехи в некоторый момент времени t\
<т|=а2 — дисперсия помехи, называемая также ее мощностью.
Корень квадратный из дисперсии представляет собой действующее
значение напряжения или тока'помехи ап. Здесь будут
рассматриваться, главным образом, стационарные случайные процессы
(помехи), характеристики которых не зависят от выбора начала
отсчета времени L
Обозначим через ■£* отношение £/ап; плотность вероятности
этой величины при нормальном законе распределения равна
ш(|*)=кке 2- (1-3,)
Флуктуационная помеха неизбежно присутствует в каждом
приемном устройстве, так как она порождается случайными коле-
11
баниями напряжения, тока, температуры и другими факторами
в самом приемном устройстве. Определяющей характеристикой
канала связи с флуктуационной помехой является отношение
№=Е/хус? энергии сигнала Е к спектральной плотности помехи ia2o.
Спектральная плотность полагается при этом постоянной в полосе
частот канала. При напряжении сигнала Uc (действующее
значение) и его длительности тс, согласованной с полосой
пропускания канала Af (тс=1/1Д/), величина h2 равна
А2 = —. (1.4)
Плотность вероятности огибающей Uc.u суммы
синусоидального сигнала и аддитивной шумовой помехи (1.3) выражается
равенством (закон Раиса)
U2 4-U2
ис. пт we
^с.п) = Л^~ •* /.Р^). (1.5)
где Umc — амплитуда синусоидального сигнала;
h(z)—модифицированная функция Бесселя нулевого порядка.
При Umc = 0 ф-ла (1.5) дает выражение для плотности
распределения огибающей Un одной помехи без сигнала
п —С/2/2а2
w(Un)=^e n/ \ (1.5')
В ряде случаев помехи проникают в канал извне. Такими
помехами являются так называемые станционные помехи,
создаваемые различного рода радиостанциями, работающими на
совпадающих или близко лежащих частотах. Помеха от одной
радиостанции, попадающая в полосу пропускания приемника и
имеющая относительно узкий спектр, называется
сосредоточенной. Несколько станций, работающих <в полосе приемника, в
совокупности создают помеху, близкую по закону распределения
к флуктуационной (1.3). Это утверждение согласуется с
центральной предельной теоремой теории вероятностей А. М.
Ляпунова [24, 25], устанавливающей, что плотность вероятности суммы
независимых случайных величин с произвольными законами
распределения, сравнимых по дисперсии, образует случайную
величину с распределением (1.3). Кроме того, известно, что случайные
процессы любой структуры при прохождении через относительно
узкополосные избирательные устройства обладают способностью
нормализоваться [156], т. е. также приобретают структуру,
описываемую выражением (1.3).
Наряду со статистически неизменными каналами на практике
широко встречаются неоднородные каналы, в которых условия
передачи могут плавно либо скачкообразно изменяться с течением
12
времени. Характерной в этом смысле является передача в
диапазоне коротких волн при наличии замираньй (федингов).
Напряженность поля (и соответственно отношение сигнал/шум) на входе
приемника в периоды замираний может быть намного ниже
уровня, необходимого для удовлетворительного приема. Вследствие
этого резко возрастают вероятности ошибок. Продолжительность
замираний может изменяться от долей секунд до нескольких
минут и, в зависимости от длительности импульсов сигнала,
перекрывать десятки и сотни элементов кодовых комбинаций.
Физически замирания связаны с особенностями
распространения радиоволн в KB диапазоне и обусловлены известными
процессами в ионосфере. Математически канал с так называемыми
общими замираниями [168] обычно представляют в виде такой
модели линии связи, >в которой коэффициент передачи напряжения
сигнала от передатчика к приемнику \i изменяется во времени,
подчиняясь закону распределения вероятностей Рэлея (рэлеевские
замирания)
_ д2 •
ai(|i)«^e ^ (1.6)
W
или обобщенному закону Рэлея (квазирэлеевские замирания)
Д2+Др
.2
ИЮ=^е Дф '.№), (1.60
где |х2о — средний квадрат коэффициента передачи; р,ф и \iv —
средние квадратические значения флуктуирующей и регулярной
составляющих этого коэффициента соответственно (\i2o=\i% + \i2v)*
Структурно ф-ла (1.6') совпадает с (1.5), а ф-ла (1.6) с (1.5 ).
Введение коэффициента 2 при случайной переменной в (1.6) и
(1.6') объясняется тем, что в данном случае речь идет не об
амплитудных, а о действующих ее значениях. Закон (1.6)
действует при многолучевом распространении радиоволн, когда
разность времен распространения по различным трассам превышает
период средней частоты сигнала; закон (1.6') справедлив,
наоборот, когда разность фаз лишь с весьма малой вероятностью
достигает значения 2я. Учитывая, что \\i2/\i2Q=h2,/h\ где h2 —
отношение мощностей сигнал/помеха на входе приемного устройства и
h\ — среднее значение этого отношения, выражение (1.6) можно
привести к виду
— JaL
w(h) = ^e °, (1.7)
ho
где w(h) — плотность вероятности напряжения сигнала на входе
приемного устройства. Аналогичным путем можно преобразовать
выражение (1.6').
13
Пусть h представляет относительный уровень сигнала в
прямом канале и Л7 в обратном. Двумерная плотность распределения
вероятностей величин h и А' в случае рэлеевских замираний
определяется известным равенством [113]
w(h9 h')
\hh'
hl(\-r)
Arhh' '
(1.8)
где г — величина, связанная с коэффициентом корреляции р
величин h и W соотношением
P = ^[{i]ri + (i-y+ • • •] = 0,921^+ 0>576гЧ • • •
При независимых замираниях в прямом и обратном каналах
[г=0, /0(0) = 1] ф-ла (1.8) принимает вид
h* h'*
w(ht /г) = —е е , (1.9)
h2 h'2
rt0 "0
*0 среднее значение отношения мощностей сигнал/помеха
в обратном канале. При согласных («дружных») замираниях в
каналах h'=h и
где Л'2
л»
w(h, ti) =
2h
8(h'-h),
(1.10)
l"0
где 6(ft'—h)—дельта-функция (символ Кронекера), равная
единице при h'=h и нулю при Ыфк.
Функция распределения величин Л и Л7 определяется известным
равенством
/i2
■ + 1;
F{h, ft') = (l~r')J]
Г.-н.;-^ 1
T(i'+\)
x
Л'»
/2
VO-'2)
r%
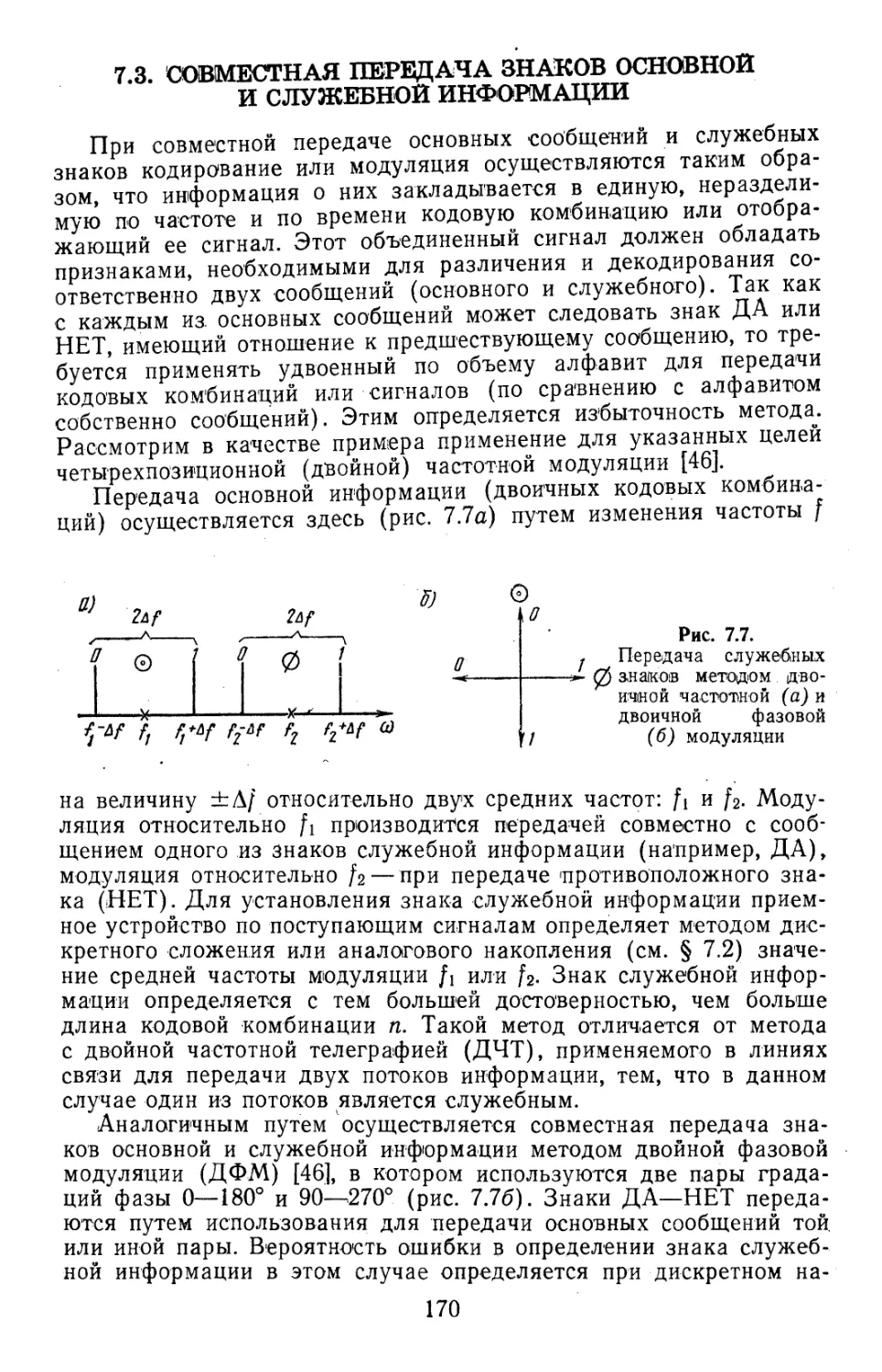
(1.11)
Г(1 + 1)
где Г(/+1; а:) —неполная гамма-функция.
Замирания, кроме KB каналов, наблюдаются также при
тропосферной радиосвязи в УКВ диапазоне волн. Важную роль при
оценке действия замираний на прием радиосигналов играют
временные характеристики замираний. Средняя частота замираний
в тропосферных каналах связи по данным некоторых источников
лежит в пределах от одного (иногда ниже) до 8—10 Гц, и,
следовательно, средний их период колеблется в пределах от одной де-
14
сятой до нескольких секунд. Средний период так называемых
интерференционных замираний в КБ каналах связи изменяется в
пределах от 0,4 до 4 с [97]. Длительность замираний (перерывов
связи) Тпер на коротких волнах подчиняется рэлеевскому
распределению
где Тпер — среднеквадратическая длительность перерывов
(падений уровня сигнала ниже определенного предела).
Функция автокорреляции коэффициента передачи KB канала
связи при замираниях аппроксимируется гауссовой кривой
(1.13)
или экспоненциальной функцией
р(т) = ехр(-^1), (1.13')
где то — время, в течение которого функция автокорреляции
уменьшается в е раз. На различных трассах то принимает значения от
0,5 до 3 с. Наблюдаются более медленные по сравнению с
интерференционными изменения уровня сигналов, соответствующие
логарифмически-нормальному закону распределения вероятностей [97]
w (К) = =г— ехР
MGh /2я
In A + 2,6502
"о
2M2G2h
(1.14)
где h0 — средиеквадратическое значение отношения напряжений
сигнал/помеха; G\ — дисперсия величины Лп h\ M = In 10^2,303.
Медленные замирания связаны с абсорбционными явлениями
в ионосфере и тропосфере и зависят от времени суток и года,
географического места, периода солнечной активности и
метеорологических условий. Интерференционные (рэлеевские и квазирэ-
леевские) и другие замирания могут быть с большой точностью
представлены в форме распределения Накагами [156] (т —
распределение)
"«--r^Tir)- ">0, (U5>
где т=(ц20)2/(»Ц2— \ь\)г>%
При im=l равенство (1.15) представляет собой рэлеевские
замирания (1.6), при >т=;ц2о/(ц2о— ц.2Р) — квазирэлеевские зами-
15
рания '(1.6'). Замирания и некоторые другие, сходные но своему
действию, явления в каналах -связи приводят к специфическим
ошибкам при приеме кодовых комбинаций (группирование ошибок)..
1.4. ПОКАЗАТЕЛИ КАЧЕСТВА ПЕРЕДАЧИ В СЯНСТЕМАХ
С ОБРАТНОЙ СВЯЗЬЮ
При оценке качества передачи информации по каналам,
образованным системой с обратной связью, можно пользоваться теми
же показателями, что и при оценке качества передачи по
односторонним каналам. Однако при этом следует учитывать
некоторые специфические явления, имеющие место в системах с
обратной связью. Распространенным критерием оценки качества
передачи дискретных сообщений (телеграфных знаков или команд
управления) служит достоверность передачи сообщения.
Этот показатель характеризуется обычно вероятностью (или ее
логарифмом) необнаруживаемого искажения сообщения /(ошибки),
под чем понимается воспроизведение на приемной стороне и
выдача получателю некоторого другого знака, буквы и т. д. вместо
переданного. В системах с обратной связью, кроме того, могут
возникать и такие виды искажений, как выпадения и
вставки. В первом случае сообщение вообще не доходит до получателя
(«аннигилирует»), во втором — в регистрируемом приемником
тексте появляются как основные, так и дополнительные сообщения.
Оба вида искажений возникают вследствие искажений служебных
знаков ДА —НЕТ (см. гл. 2). Эти искажения могут оцениваться
и как обычные ошибки путем указания вероятностей их
возникновения. В некоторых случаях они могут быть опаснее других
искажений, характерных для систем без обратной связи.
Если нет необходимости в дифференциации, все ошибки можно
объединить и характеризовать единой вероятностью искажения
сообщения Phcki(av). В общем случае эта величина зависит от v.
Средняя по алфавиту сообщений вероятность искажения
определяется равенством
P-cK=l-Q=2^(flv)PH«(flv). (U6)
где P(av) = P(xv) (см. рис. 1.1) — вероятность передачи
сообщения av по каналу связи; Q — вероятность неискаженного приема
этого сообщения.
Если сообщения (кодовые комбинации) передаются по
двоичному каналу связи с числом информационных элементов в
сообщении &, во многих практических случаях удобно пользоваться
эквивалентной (по Л. М. Финку), приведенной к одному
информационному элементу, вероятностью искажения (2.47). Достоверность
передачи при данном уровне помех зависит от мощности сигналов,
используемой полосы частот и других факторов, которые следует
16
учитывать при сравнительной оценке различных систем по
качеству передачи.
Важным показателем при прочих равных условиях является
время передачи, сообщения. В системах с обратной связью с
недетерминированным числом повторений время передачи каждого
данного сообщения зависит от конкретных условий прохождения
его по каналу связи и является величиной случайной. Для
характеристики свойств системы определяют среднее время передачи
одного сообщения Тср=гСрТСу где Тс — время передачи одного
сообщения в системе с обратной связью без учета повторных его
передач и гср — среднее число передач одного сообщения,
определяемое равенством
М гт
'•cP = XP(av)SrPv('-)' <U7>
v=*i r=a
где Pv(r)—закон распределения вероятностей числа передач г
сообщения av> который сам по себе является важной
характеристикой системы с обратной связью; гт — максимально допустимое
число передач одного и того же сообщения.
Отнеся Гср к числу информационных элементов в
кодированном сообщении k, получим среднюю эквивалентную длительность
одного двоичного элемента в системе с обратной связью
*cp=^f. (MS)
Аналогичным путем можно ввести понятие средней энергии,
приходящейся на элемент сообщения, или (учитывая прямую
пропорциональность между энергией и мощностью) среднего отношения
мощностей сигнал/помеха по формуле:
h% = h\v, (1.19)
где Л2 — отношение мощностей сигнал/помеха в системе без
обратной связи. Эти характеристики удобны при сравнительном
анализе различных систем передачи информации.
Для определения достоверности передачи аналоговых
сообщений по системам с обратной связью можно пользоваться средне-
квадратическим отклонением (СКО) функции времени на выходе
системы от этой функции на входе. При вычислении СКО в
реальном масштабе времени необходимо, кроме амплитудных ошибок,
учитывать влияние на нее случайных интервалов между отсчет-
ными значениями функции на выходе системы с обратной связью
вследствие задержек, вызываемых по:вторениями (см. гл. 8). При
оценке эффективности системы передачи информации с обратной
связью следует'учитывать сопутствующий расход ресурсов (время,
энергия, занимаемая полоса частот) как в прямом, так и в
обратном направлениях. В определенных условиях, когда в системе
связи имеется обратный канал, использование которого для
передачи квитанций или знаков служебной информации не сопряжено
17
с относительно большими дополнительными затратами, ресурсы
обратного канала могут не учитываться.
В ряде случаев обратный канал обладает значительно большей
мощностью сигналов, чем прямой, например, при связи
космической радиостанции или самолета с наземным пунктом (когда
наземная станция работает в режиме квитирования). Если
мощность сигналов в приемнике обратного канала более чем в 5—
10 раз превосходит уровень флуктуационной помехи и энергия
сигналов в нем достаточно велика для практически безошибочного
приема квитанций, обратный канал можно полагать бесшумным.
1.5. КРИТЕРИЙ СРЕДНЕГО РИСКА
Для анализа и особенно синтеза систем с обратной связью
так же, как для других систем передачи или приема информации
(радиолокация, телеуправление и пр.), удобно пользоваться
понятием среднего риска [12 и др.]. Известно, что средним риском
называется взвешенная сумма нежелательных последствий (потерь)
при передаче информации: ошибок, затрат времени на передачу
основного сообщения и повторения, энергии и пр. Если учитывать
только остаточную вероятность искажения сообщения Риск и
среднюю (с учетом повторений) затрату мощности Л2ср, то средний
риск можно записать в виде
L = CLPmK + C2htv, (1.20)
где Ci и Сг — весовые коэффициенты, имеющие смысл
относительных стоимостей ошибок и затрат мощности.
Если весовые коэффициенты заданы и указаны другие условия
работы системы, средний риск можно рассматривать как
числовую характеристику качества работы системы. При этом Си С2
и другие коэффициенты могут устанавливаться соглашением
между разработчиком и заказчиком на основе тактических и
технических требований к аппаратуре или опыта эксплуатации систем
аналогичного назначения. При решении некоторых задач
оптимизации, например, методом Лагранжа (для отыскания режима,
обеспечивающего минимум среднего риска при заданных
ограничениях) смысл весовых коэффициентов придается неизвестным
множителям Лагранжа. В такой постановке решалась задача
определения оптимальных пороговых уровней в системах с решающей
и информационной обратной связью в работах [41, 78]. При этом
средний риск теряет качество оценочной характеристики системы,
но приобретает значение важной целевой функции в процессах
оптимизации работы системы. В общей постановке задачи [34, 47]
средний риск должен учитывать вклад каждого цикла работы
системы в общие потери L.
Рассматривая систему передачи и приема информации как
решающую систему, назовем условным частным риском rLv при
r-й, г=1, гт, передаче сообщения av, v=l, Ma, потери в результате
18
Л Л . .
вынесения решений djf /=1, Ма, и dj, i=l, Mb, в прямом и обрат-
л л
ном каналах по принятым реализациям wv и uv соответственно
равны
'л л
ма мь
^=2члШ+1ч^и1У, (121>
где rCv- и rCv. — стоимости решений dj и d* на r-м цикле пере-
' 1 л
дачи сообщения #v; гу№|и) и rY(di|i>) — условные вероятности
вынесения решений dj и diy имеющие смысл решающих функций,
удовлетворяющих условиям:
U,|2) >0, ry(dt\v)>0,
Л Л
/=1 £-1
Совокупности решающих функций удобно представить в виде век-
торов: rYu={rY(^j|")}» ГУ»={Г7№ИЬ Yur= (4Yu, V» • • •> гУи),
Yw= ('y*, Y» ..., ryv), Yr= (Yur, Yw).
Взвешенную сумму частных рисков (1.21) за все гт возможных
передач назовем условным риском
гт
^v-I^Cr-,,^ О'22)
->
где Я^П(г-1)=Рп(^у, Yr-i) —весовой коэффициент, равный условной
вероятности осуществления г-го цикла с учетом того, что имели
г—1
место предшествующие г—1 циклов; PVn(r-i) = П^п- Средний
(безусловный) риск L определяется как математическое ожида-
л
ние по всем возможным значениям принимаемых реализаций и
л
и v в прямом и обратном каналах при передаче сообщений ду
с известными априорными вероятностями Pv, v=l, Ma:
Л Л
Мл Мь
./-1 *-1
SrCv/fvUU)+£rCv<rYUU)
X
v=l r=i л л
С/ V
г vr
/Л Л| \ А Л
X w \и, v I av J dude/, (1.23)
л л л
где w(u9 v\as) — совместная условная плотность вероятностей и
19
л л л
и v за г циклов передачи (посылок) сообщения av\ Ur и Vr — об-
л л
ласти возможных значений принимаемых реализаций и и v на
r-м цикле.
Обозначив вероятности вынесения решений d< и di при любых
л л
значениях и и v через
л л
Л Л
можно получить более компактную запись среднего риска
U III
^ == 2j ^v ^ "v п (r-i)
v=l г=1
Л
Л1Ь
L/=i '-1
(1.24)
Если различные ошибочные решения одинаково нежелательны,
обеспечивается достоверная передача служебных знаков, а потери
за счет правильных решений равны нулю (rCv=const(v, г)=0), то
^1Ч^н,(ЧнГ^ + Ч„^п). (1-25)
v=l r=i
где rPVH, rPva — условные вероятности принятия неправильных
решений и решений на повторение на r-м цикле передачи
сообщения av ; rCVH, rC vn — соответствующие стоимости этих решений.
Как видно из (1.25), средний риск состоит из двух слагаемых:
2 22р-р—-"гС'"гр-
v vn (г—1) v/ v/
v*=l s«=i /=l
МЬ гтМЬ
^т ^ ^ 2j 2j v v п <г"1> v * v p
где iLE — необратимые ошибки при приеме сообщений; LT —
временные затраты. Если rCVH=const(v, г) = 1 и rCvn=const(v, г) = 1,
то первая часть совпадает со средней вероятностью искажения
сообщений (1.16), а вторая — со средним числом передач (1.17).
20
1.6. ИНФОРМАЦИОННЫЕ КРИТЕРИИ
Из общей теории связи известно, что потенциально
возможная скорость передачи информации R по каналу с помехами
определяется его пропускной способностью [181]
С = max [Н (х) — Н (х/у)\, (1.26)
где Н(х) —производительность источника сообщений на входе
канала; Н(х/у) — условная энтропия сообщений на выходе канала,
зависящая от уровня помех и характеризующая степень
неопределенности поступающей к получателю информации.
В случае нормального шума (см. § 1.3)
С = A F In (1 + ft2), нат/с, (1.27)
где h2= ^ср/^п — отношение мощности сигнала к дисперсии шума
(1 нат равен 1,45 бит).
При неограниченно широкой полосе частот канала, т. е. при
AF->-oo, больших М (объем алфавита сообщений), и
ортогональных сигналах, согласованных по длительности с полосой
пропускания канала, выражение (1.27) приводится к виду
C = 5»ep/og, (1.28)
где оо — спектральная плотность помехи.
Темп поступления информации на вход линии со стороны
источника при М равновероятных сообщениях в алфавите
выражается известным равенством
# = !^, нат/с, (1.29)
где Т — длительность сообщения. Объем алфавита сообщений М
связан с производительностью источника R и длительностью
сообщения Т вытекающим из (1.29) соотношением
M = eRTt (1.29')
где RT — длина сообщения в натах.
При скорости R^C возможно вести передачу по каналу с
шумами со сколь угодно малой вероятностью искажения
сообщения. [181]. Это положение доказано для односторонних каналов*
связи применительно к так называемым случайным кодам,
структура которых не устанавливается. Кроме того, известно, что
достижение предельной скорости передачи R = C при РИсК-^0
возможно лишь при длине кода Т-^оо. Последнее означает, что для
выполнения процедур кодирования — декодирования сообщений
при указанных условиях требуется бесконечно долгое время. При
этом соответственно усложняются кодирующие, декодирующие,,
запоминающие и другие устройства, служащие для передачи и
приема сообщений. ■ *
Если длина кода Т ограничена, вероятность искажения
сообщения в односторонних каналах связи не может быть доведена
21
до нулевого значения и при наилучших, в принципе, способах
кодирования сообщений определяется выражением [182]
Рщ*=ПТ, R)e~TE{R\ (1.30)
где |f(T, R) — медленно изменяющаяся алгебраическая функция Г,
a E(R) — неотрицательная функция R, называемая
надежностью. Значение ее для ортогональных сигналов при
неограниченной полосе частот определяется равенствами [182]:
( С/2 — R при 0 < R < С/4,
Е(Я)= _ __ (1.31)
I {VC-VR? при С/4 < R ^ С.
Расчеты, выполненные для систем без обратной связи,
показывают, что при вероятности искажений примерно 10~7 скорость
передачи ^? = 0,8С достигается при длине кодовой комбинации
не менее 2000 дв. ед. При обычно применяемых длинах кодов
в несколько десятков или сотен двоичных единиц и вероятности
искажений сообщения примерно 10~6—Ю-7 пропускная
способность канала связи используется не более чем на 20—25%.
Положение существенно меняется в случае применения
обратной связи. В [193] показано, что при полной информационной
обратной связи и бесшумном обратном канале можно вести
практически безошибочную передачу сообщений по прямому каналу с
шумами при сколь угодно малой длине кодовых комбинаций
(вплоть до п=1) и простейших структурах кода. Нетрудно
показать, по крайней мере, на частных примерах, что в замкнутой
системе передачи информации можно обеспечить достоверность
передачи сообщений в обоих направлениях, определяемую лучшим
из двух каналов. Значительное повышение достоверности по
сравнению с односторонними системами достигается также при равных
уровнях шумов в прямом и обратном каналах и
надлежащей структуре сигналов и квитанций. Это утверждение
распространяется на однородные и неоднородные каналы связи.
Предложены специальные процедуры кодирования сообщений
для каналов с обратной связью [210 и др.], позволяющие
реализовать пропускную способность прямого канала при высокой
достоверности, небольших длинах кодов и незначительных
временных задержках (гл. 7).
Степень использования пропускной способности прямого
канала RjCy где R — фактическая скорость передачи, при заданной
достоверности с учетом используемой длины кода и
возникающих в связи с этим задержек при кодировании и декодировании,
является одним из наиболее общих -критериев оценки качества
систем передачи информации вообще и с обратной связью в
частности.
□
ГЛАВА 2
Обобщенная схема систем с ОС.
Основные расчетные соотношения
2.1. ОПОЗНАВАНИЕ СООБЩЕНИЙ
Известно, что в случае применения для передачи сообщений
группового избыточного кода [164] каждую кодовую
комбинацию Xi (см. гл. 1) можно разделить на две части: информационную
длиной k, однозначно отображающую собственно сообщение а1у
и контрольную (проверочную) длиной s = п—k. Контрольная часть
служит опознавателем того, относится ли принятая
комбинация длиной п в целом к числу разрешенных или
неразрешенных в данной системе связи. Таким путем обнаруживаются
ошибки при действии помех на кодовые комбинации (если только они
не переводят одну разрешенную кодовую комбинацию в другую,
также разрешенную).
В системах с РОС опознаватель передается вместе с
сообщением, (информационной частью кодовой комбинации) по прямому
каналу и вместе с ним подвержен действию помех. В системах
с ИОС опознаватель вырабатывается на приемной стороне
прямого канала по фактически принятому сообщению и посылается по
обратному каналу в виде квитанции. В частном случае в качестве
опознавателя можно передавать копию собственно сообщения
длиной k, что имеет место в системах с ИОС при
ретрансляционной обратной связи.
Обнаружение ошибок осуществляется сличением
информационной и контрольной частей кодированного сообщения путем
выполнения определенных логических операций (например,
совместная проверка информационной и проверочной частей на четность
[141, 164] и др.). Одна и та же проверочная комбинация может
служить опознавателем для некоторого подмножества
сообщений (информационных комбинаций), с которыми она приводит
к одинаковому исходу поверочной операции. Таким способом
пользуются для обнаружения ошибок в системах с РОС и с
укороченной информационной обратной связью (см. гл. б и 6).
В дальнейшем термин «опознаватель» будет употребляться,
главным образом, применительно к системам с РОС, а термин
23
«квитанция» — применительно к системам с ИОС, хотя для зам^
кнутой системы эти термины имеют одинаковое значение.
При передаче сообщений семиэлементным кодом [185] с
постоянным соотношением (3:4) единиц и нулей в комбинации все
кодовые комбинации обладают единым отличительным признаком.
В этом случае не требуется с каждым из сообщений посылать
поверочную комбинацию, так как алгоритм опознавания,
одинаковый для всех комбинаций, предопределен их кодовой
структурой. При этом условно будем считать, что опознаватель находится
на приемном конце системы, по каналам связи не передается,
действию помех не подвергается.
Аналогичное положение имеет место и при поэлементной
передаче двоичных сообщений в системах с РОС с выделенной
областью неопределенности. В таких системах задачу опознавания
выполняет двухпороговая приемная схема с заранее
определенными пороговыми уровнями (гл. 3). Если двоичный сигнал,
например, при амплитудной модуляции не достигает нижнего либо
превосходит верхний пороговый уровень, он принимается как О
или 1 соответственно; в противном случае признается
сомнительным, требующим повторения. В адаптивных системах пороговые
уровни могут изменяться в соответствии с состояниями каналов
связи.
В связи с изложенным удобно системы с решающей обратной
связью разделить на две категории: РОС-1, в которых
присоединяемый к сообщению опознаватель передается вместе с ним по
прямому каналу связи, и РОС-2, в которых опознаватель по
каналу связи не передается, а обнаружение ошибок производится по
признакам, присущим комбинации в целом. Деление это в
определенной мере условно, так как комбинацию с отделимой
поверочной частью можно рассматривать и как слитную комбинацию,
анализируемую в целом. Однако такое деление систем полезно
в том отношении, что позволяет описать системы с РОС и ИОС
посредством однотипных выражений, зависящих от некоторой
совокупности возможных исходов при передаче сообщения.
Передача сообщения в системе с обратной связью
осуществляется в несколько этапов:
1. Передача сообщения по прямому каналу вместе с опозна-
вателем (в системах РОС-1) или без опознавателя (в системах
РОС-2 и с ИОС).
2. Сопоставление сообщения с опознавателем: на приемной
стороне прямого канала в системах с РОС, на передающей стороне
в системах с ИОС.
3. Оповещение противоположной стороны о результатах
сопоставления путем передачи тем или иным способом одного из двух
знаков служебной информации: ДА (О) — положительный
результат, НЕТ(0)— отрицательный результат (несоответствие).
Если обнаруживается несоответствие, то следует процедура
уточнения сообщения. В наиболее распространенном случае это
осуществляется простым повторением сообщения. Одновременно
24
повторяется и весь цикл передачи — проверка соответствия,
посылка знака служебной информации и т. д.
В комбинированных системах передачи информации с обратной
связью (КОС) опознаватели могут расчленяться и посылаться
частично с сообщением по прямому каналу и частично в виде
квитанции — по обратному. При этом сопоставление их с
сообщениями осуществляется как на приемной, так и на передающей
сторонах системы. Служебные знаки ДА и НЕТ могут в явном
виде не передаваться, а соответствующая им информация должна
заключаться тогда либо в структуре последующих сигналов,
несущих совместно основную и служебную информацию (см. гл. 7),
либо в определенных заранее обусловленных манипуляциях
системы (переход к следующему сообщению вместо передачи знака ДА
и др.). Отвлекаясь пока от конкретных способов передачи
служебных знаков, будем считать, что информация вида О или 0 тем
или иным способом всегда передается после проверки сообщения
на соответствие'. Системы с детерминированным числом
корректирующих сигналов, не требующие передачи ДА—НЕТ, будут
рассмотрены особо в гл. 7.
Правильность приема знаков служебной информации может, в
свою очередь, контролироваться передачей соответствующих
квитанций (в системах с ИОС — от приемника к передатчику, в
системах с РОС — в противоположном направлении) с
корректировкой возникающих ошибок. При передаче собственно сообщения
и сопоставлении его с опознавателем возможны следующие
четыре исчерпывающих исхода:
ПР — правильный прием сообщения и соответствие его опозна-
вателю;
00 — обнаружена ошибка (сообщение принято неверно и не
соответствует опознавателю);
НО — не обнаружена ошибка, хотя сообщение искажено
помехами и не соответствует истинному;
ЛО — ложная ошибка (само сообщение поступает в приемник
без искажений, но искажается помехами опознаватель).
Перечисленные исходы представляют собой полную группу
событий, так что сумма их вероятностей Рпр + Роо + Рв.о+Рло=1-
В системах, где опознаватель по прямому либо обратному каналу
связи не передается (РОС-2), ложная ошибка не возникает и
Рло =0. Аналогичные исходы могут возникать при передаче
знаков служебной информации. Будем их обозначать теми же
буквами ПР, НО, 00 и ЛО с одним штрихом применительно к знаку
стирания 0 и с двумя штрихами применительно к знаку О-
Вероятности различных исходов зависят от структуры кода,
применяемого для передачи сообщений, опознавателей (квитанций) и
служебных знаков, а также от мощности сигналов и помех,
действующих в прямом и обратном каналах. Необходимые для их
вычисления соотношения даются ниже (см. гл. 3 и 4 и др.).
25
2.2. ИДЕНТИЧНЫЕ СОСТОЯНИЯ
Различным системам с обратной связью свойственны
некоторые идентичные состояния, приводящие к одинаковым исходам
передачи сообщения. Поясним это на примере. Будем считать,
что процесс развивается по схеме, описанной выше, и состоит
из ряда замкнутых циклов, каждый из которых включает в себя
передачу собственно сообщения, опознавателя или квитанции, их
сопоставление и передачу знака служебной информации О или 0.
После каждого такого цикла система либо повторяет сообщение,
либо переходит к трансляции следующего. Примем, что
максимальное число передач одного и того же сообщения ограничено
значением г=>гт\ после этого система переходит к следующему
сообщению независимо от исходов передачи предыдущего.
По окончании каждого цикла передачи данного сообщения х\
система приходит в одно из состояний или благоприятное с точки
зрения достоверности передачи сообщений, или поправимое, или
неблагоприятное, приводящее к непоправимым ошибкам.
Все возможные после очередного цикла передачи сообщения
и служебного знака исходы можно укрупненно свести к пяти
определяющим состояниям системы (табл. 2.1):
ПП — правильный прием собственно сообщения и успешное его
подтверждение посредством знака служебной информации©;
В — обнаружение ошибки и возврат системы в исходное до
начала цикла состояние;
HI — необратимая ошибка первого рода. Ни передатчик, ни
приемник ошибки не обнаруживают, вследствие чего приемник
регистрирует неверно принятое сообщение, а передатчик
переходит к следующему сообщению;
Н2 — необратимая ошибка второго рода. Ошибку обнаруживает
либо получает о ней ложное извещение со стороны передатчика
приемник, отбрасывающий сообщение. Передатчик ошибки не
обнаруживает и переходит к следующему сообщению. Ошибка типа
Н2 влечет за собой необнаруживаемое выпадение данного
сообщения из регистрируемого.приемной стороной текста
(«аннигиляция» сообщения);
НЗ — необратимая ошибка третьего рода. Ее обнаруживает
либо получает о ней ложное извещение со стороны приемника*
передатчик, повторяющий сообщение. Приемник ошибки не
обнаруживает и регистрирует сообщение, подлежащее отбрасыванию.
Поскольку передатчик в итоге ошибки НЗ не прекращает
повторений, в регистрируемом приемником тексте могут появиться
одно или несколько дополнительных, не связанных с выдачей их
источником, сообщений, называемых вставками. В табл. 2.1
событие НЗ расчленено дополнительно на два подсобытия: НЗ-П
и НЗ-И, из которых первое представляет собой верно
зарегистрированное приемником сообщение, предшествующее вставке, а
второе—искаженное помехами сообщение, также перед вставкой.
26
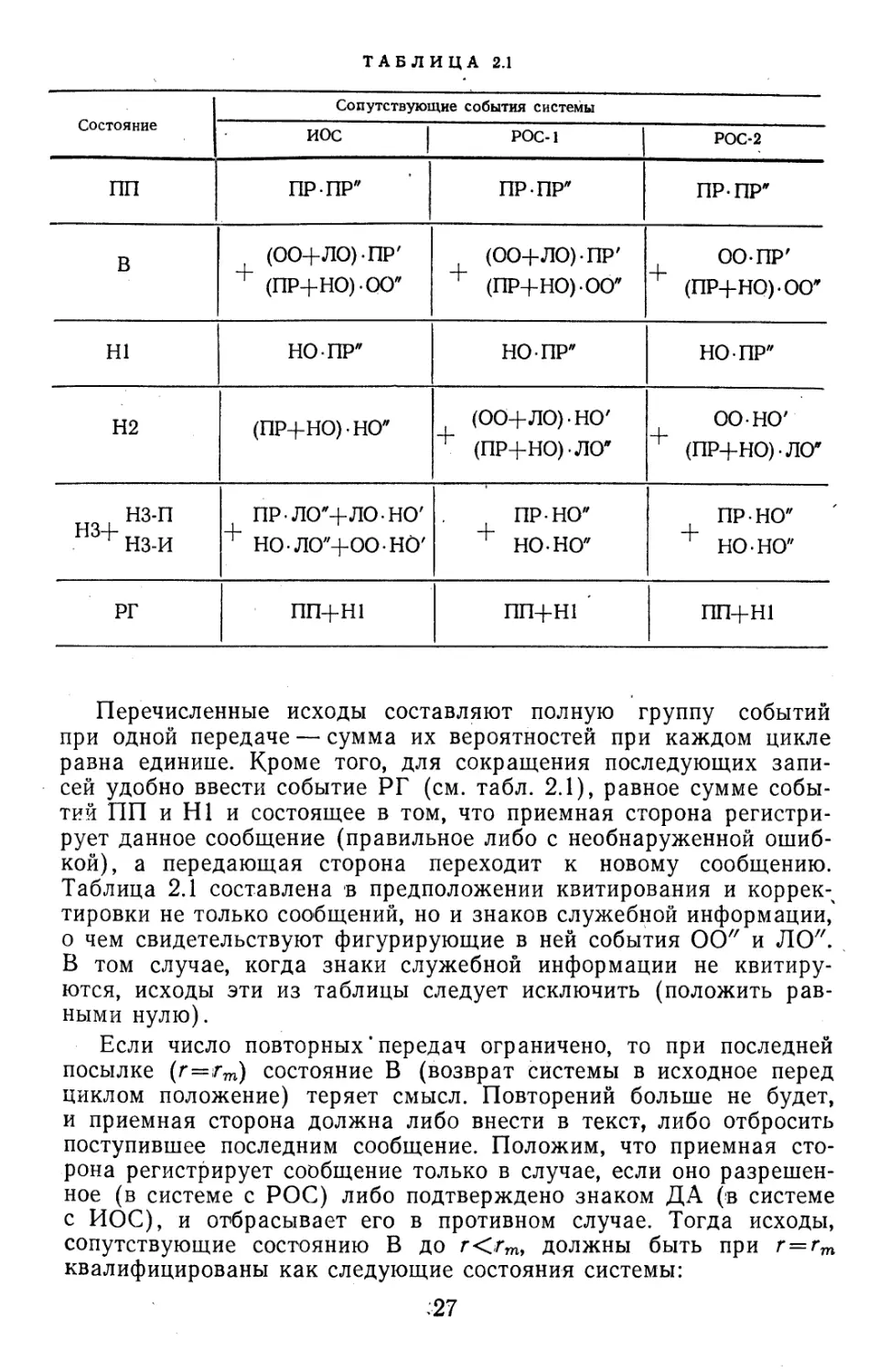
ТАБЛИЦА 2.1
Состояние
пп
в
HI
Н2
НЗ-П
нз+нз-и
РГ
Сопутствующие события системы
ИОС 1 РОС-1 1
ПРПР"
(00+ЛО)ПР'
+ (ПР+НО)00"
НОПР"
(ПР+НО)НО"
ПРЛО'+ЛО.НО'
Г НОЛО"+ООНО'
ПП+Н1
ПРПР"
(00+ЛО)-ПР'
+ (ПР+НО).00#
НО-ПР*
(00+ЛО)НО'
+ (ПР+НО)-ЛО*
ПРНО"
+ НО-НО"
ПП+Н1 '
РОС-2
ПР-ПР"
00-ПР'
(ПР+НО)ЮО*
НОПР"
00 НО'
+ (ПР+НО)-ЛСГ
ПР-НО"
+ НО-НО"
ПП+Н1
Перечисленные исходы составляют полную группу событий
при одной передаче — сумма их вероятностей при каждом цикле
равна единице. Кроме того, для сокращения последующих
записей удобно ввести событие РГ (см. табл. 2.1), равное сумме
событий ПП и HI и состоящее в том, что приемная сторона
регистрирует данное сообщение (правильное либо с необнаруженной
ошибкой), а передающая сторона переходит к новому сообщению.
Таблица 2.1 составлена в предположении квитирования и коррек-ч
тировки не только сообщений, но и знаков служебной информации,
о чем свидетельствуют фигурирующие в ней события 00" и ЛО".
В том случае, когда знаки служебной информации не
квитируются, исходы эти из таблицы следует исключить (положить
равными нулю).
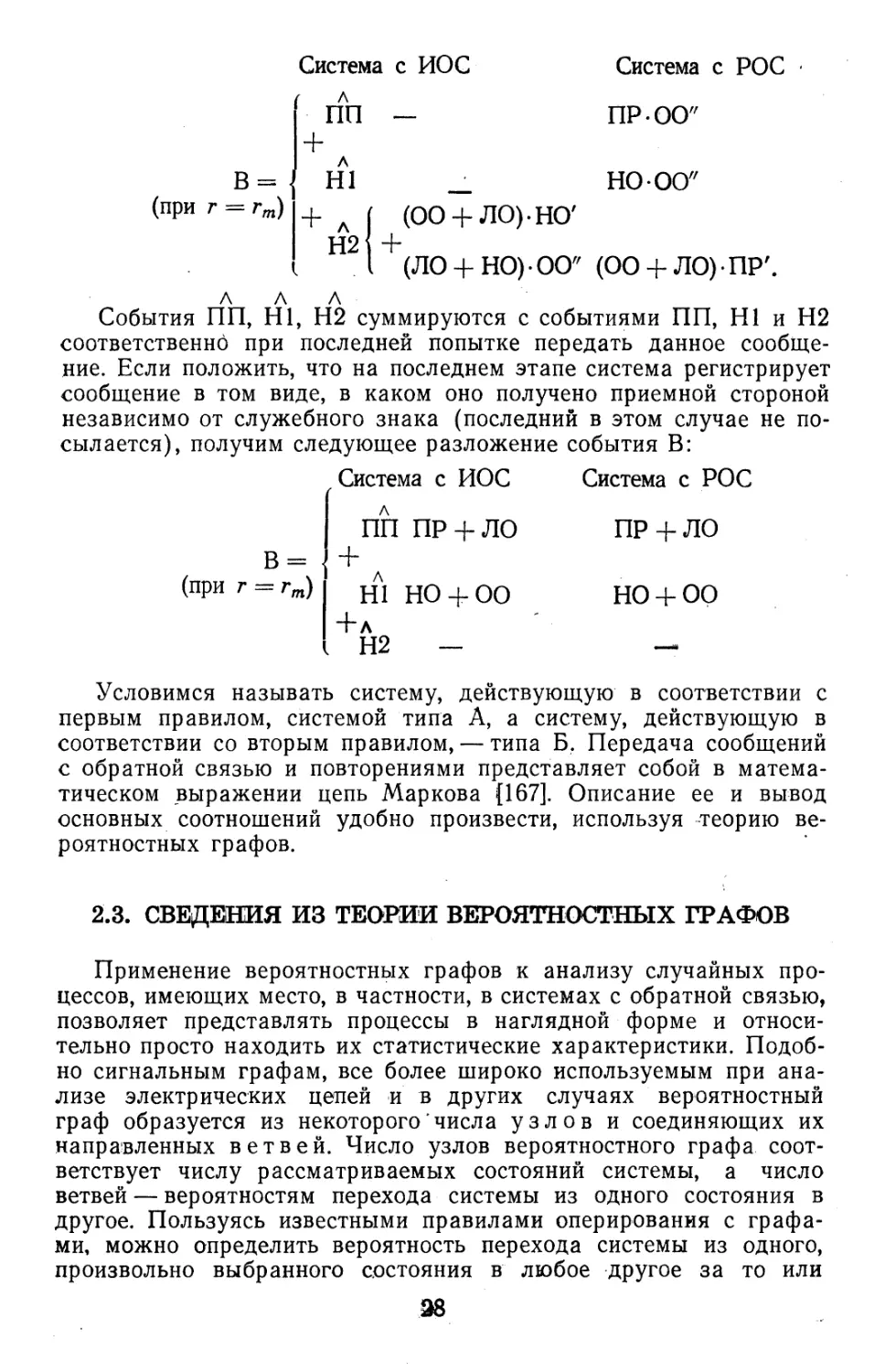
Если число повторных*передач ограничено, то при последней
посылке (г=гт) состояние В (возврат системы в исходное перед
циклом положение) теряет смысл. Повторений больше не будет,
и приемная сторона должна либо внести в текст, либо отбросить
поступившее последним сообщение. Положим, что приемная
сторона регистрирует сообщение только в случае, если оно
разрешенное (в системе с РОС) либо подтверждено знаком ДА (в системе
с ИОС), и отбрасывает его в противном случае. Тогда исходы,
сопутствующие состоянию В до г<гт, должны быть при г = гт
квалифицированы как следующие состояния системы:
;27
Система с ИОС
В= |
(при г = гт)
л
ПП
+
Л
HI
Система с РОС
ПР-ОО"
НО-00"
+
Н2 +
(ОО-НЛО).НО'
I
(ЛО + НО). 00" (00 + ЛО) • ПР\
АЛЛ
События ПП, HI, Н2 суммируются с событиями ПП, HI и Н2
соответственно при последней попытке передать данное
сообщение. Если положить, что на последнем этапе система регистрирует
сообщение в том виде, в каком оно получено приемной стороной
независимо от служебного знака (последний в этом случае не
посылается), получим следующее разложение события В:
В =
(при г = гт)
Система с ИОС
ПП ПР + ЛО
+
HI НО+ 00
+л
Н2 -
Система с РОС
ПР + ЛО
НО+ 00
Условимся называть систему, действующую в соответствии с
первым правилом, системой типа А, а систему, действующую в
соответствии со вторым правилом, — типа Б. Передача сообщений
с обратной связью и повторениями представляет собой в
математическом выражении цепь Маркова [167]. Описание ее и вывод
основных соотношений удобно произвести, используя теорию
вероятностных графов.
2.3. СВЕДЕНИЯ ИЗ ТЕОРИИ ВЕРОЯТНОСТНЫХ ГРАФОВ
Применение вероятностных графов к анализу случайных
процессов, имеющих место, в частности, в системах с обратной связью,
позволяет представлять процессы в наглядной форме и
относительно просто находить их статистические характеристики.
Подобно сигнальным графам, все более широко используемым при
анализе электрических цепей и в других случаях вероятностный
граф образуется из некоторого числа узлов и соединяющих их
направленных ветвей. Число узлов вероятностного графа
соответствует числу рассматриваемых состояний системы, а число
ветвей — вероятностям перехода системы из одного состояния в
другое. Пользуясь известными правилами оперирования с
графами, можно определить вероятность перехода системы из одного,
произвольно выбранного состояния в любое другое за то или
28
иное число шагов г системы и ряд других статистических
показателей процесса.
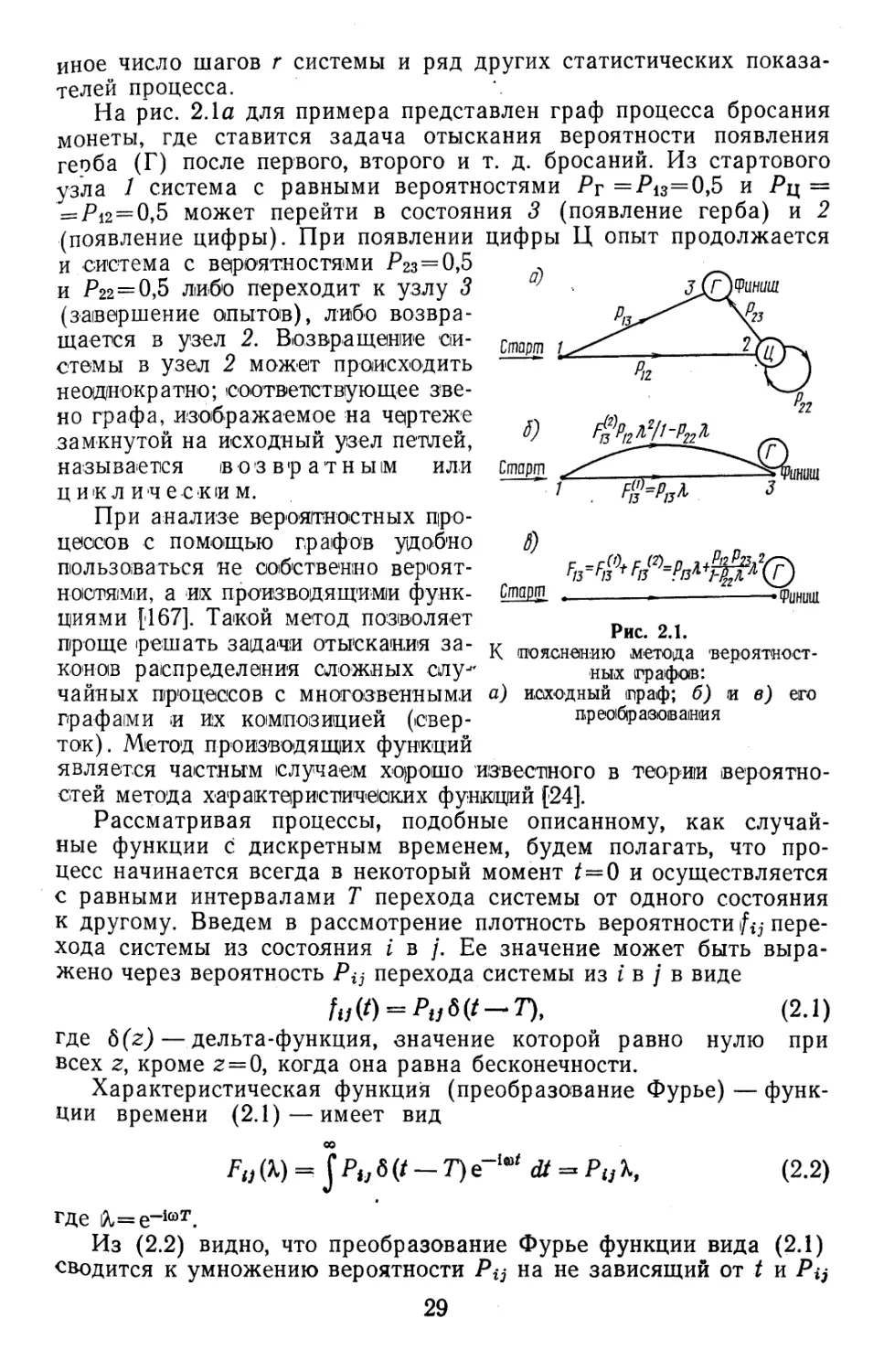
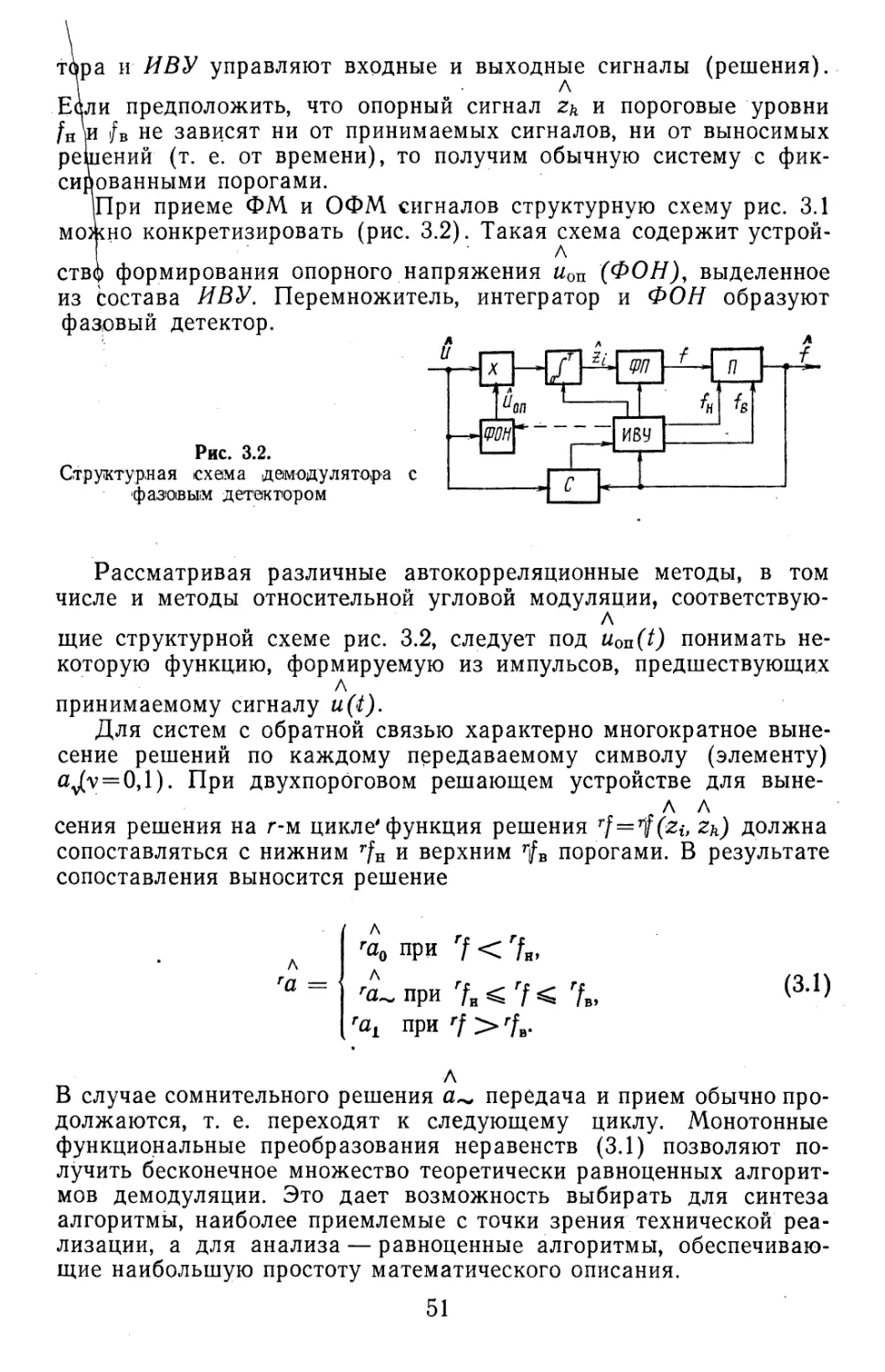
На рис. 2.1а для примера представлен граф процесса бросания
монеты, где ставится задача отыскания вероятности появления
геоба (Г) после первого, второго и т. д. бросаний. Из стартового
узла / система с равными вероятностями Рт =Лз=0,5 и Рц =
===р12 = 015 может перейти в состояния 3 (появление герба) и 2
(появление цифры). При появлении цифры Ц опыт продолжается
и.система с вероятностями Р2з = 0,5
и р22=0,5 либо переходит к узлу 3
(завершение опытов), либо
возвращается в узел 2. Возвращение
системы в узел 2 может происходить
неоднократно; соответствующее
звено графа, изображаемое на чертеже
замкнутой на исходный узел петлей,
называется \в о з в«р а т н ы im или
цикл И'че-ски м.
При анализе вероятностных
процессов с помощью графов удобно
пользоваться не собственно
вероятностями, а их производящими
функциями [167]. Такой метод позволяет
проще решать задачи отыскания
законов распределения сложных олу-"
А)
Рис. 2.1.
К пояснению метода
'вероятностных (графов:
чайных процессов с многозвенными а) исходный шраф; б) и в) его
графами и их композицией (свер- преобразования
ток). Метод производящих функций
является частным случаем хорошо известного в теории
[вероятностей метода характеристических функций [24].
Рассматривая процессы, подобные описанному, как
случайные функции с дискретным временем, будем полагать, что
процесс начинается всегда в некоторый момент /=0 и осуществляется
с равными интервалами Т перехода системы от одного состояния
к другому. Введем в рассмотрение плотность вероятности (ц
перехода системы из состояния i в /. Ее значение может быть
выражено через вероятность Рц перехода системы из i в / в виде
/|/(0 = Л*в(/-7), (2.1)
где 6(2) — дельта-функция, вначение которой равно нулю при
всех г, кроме 2 = 0, когда она равна бесконечности.
Характеристическая функция (преобразование Фурье) —
функции времени (2.1)—имеет вид
ад)=^1*в(/-Г)е
г-Ш
dt-Pijk
(2.2)
где Л,=е-1соГ.
Из (2.2) видно, что преобразование Фурье функции вида (2.1)
сводится к умножению вероятности Рц на не зависящий от / и Рц
29
множитель Л. Величину Я можно в соответствии с этим
рассматривать как оператор преобразования Фурье функции вида (2.1).
Плотность вероятности перехода системы из состояния i в /
при первом шаге и из / в k при втором при независимых
вероятностях Pij и Pjk равна
hk(t) = PifjkW-2n (2-3)
а ее преобразование Фурье
об
F» (Ь) = J Pifik б (/ - 27) е-/м< dt = Fu (I) Fjk (I), (2.4)
0
где Fi} (X) = PijX и Fjk {X) = PjkX.
Функция Fik (iX) называется переходной функцией системы из
состояния i в k. Иногда ее условно называют просто переходной
вероятностью, имея в виду не собственно вероятность, а ее
преобразование Фурье. В общем случае переходная функция системы
из состояния i в m за г шагов при известных вероятностях
промежуточных переходов Pijy Pik, ..., Ры определяется равенством
Fim(b) = PijPjk • • -Я/»АЛ (2.5)
Полагается, что переходы системы из одного состояния в другое
зависят лишь от индексов этих состояний и не зависят ни от
времени, ни от предшествующих состояний сиетемы. Выражение
типа (2.5) в данном и более сложных случаях можно легко
получить, приписывая к каждой из вероятностей перехода системы из
одного состояния в последующее за время одного шага
множитель X.
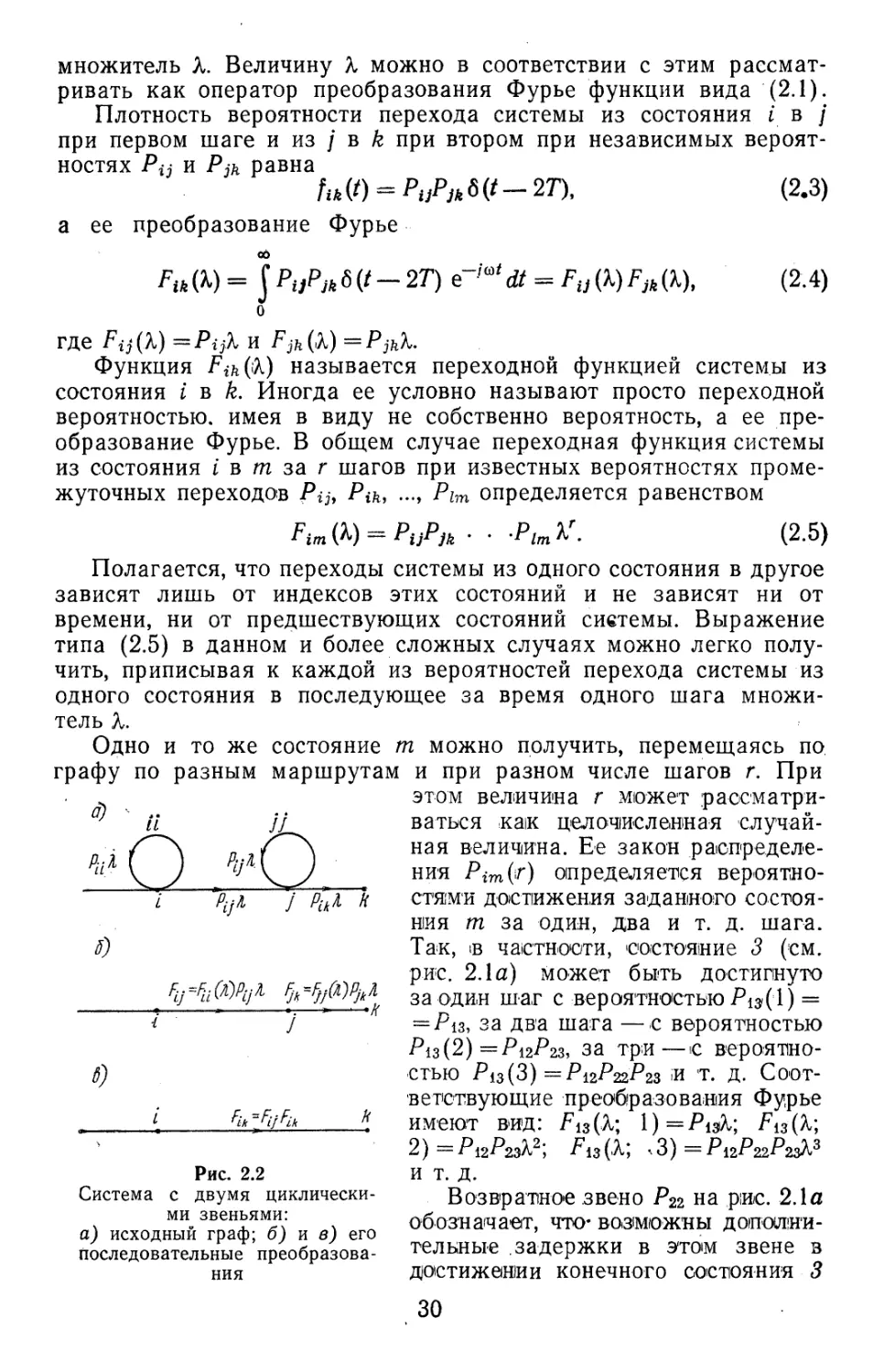
Одно и то же состояние m можно получить, перемещаясь по
графу по разным маршрутам и при разном числе шагов г. При
^ этом величина г может раосматри-
// jj ваться как целочисленная случай-
P-'-i f~^\ Р-1\^\ ная велич,ина- Ее закон распределе-
11 \^J ж У \^у ния Pt-m(ir) определяется вероятно-
I Рц1 j Pikl К стям'и достижения заданного
состояния m за один, два и т. д. шага.
Ю Так, iB частности, состояние 3 (см.
n r r/vza рис. 2.1а) может быть достигнуто
. nrhiWnfr чуЦЩк* за один шаг с вероятностью Лз(1) =
i J =^i3, за два шага —с вероятностью
Лз(2) =Pi2^23, за три—с вероятно-
6) СТЬЮ Pi3{3)=Pi2P22P2Z И Т. Д. СООТ-
ветствующие преобразоваиия Фурье
. L h^/iffik 1 имеют вид: Fl3(X\ l)=Pi3X; Fi3(X]
2)=Р12Р23Я2; Fi3(X; Л)=РъРъР*№
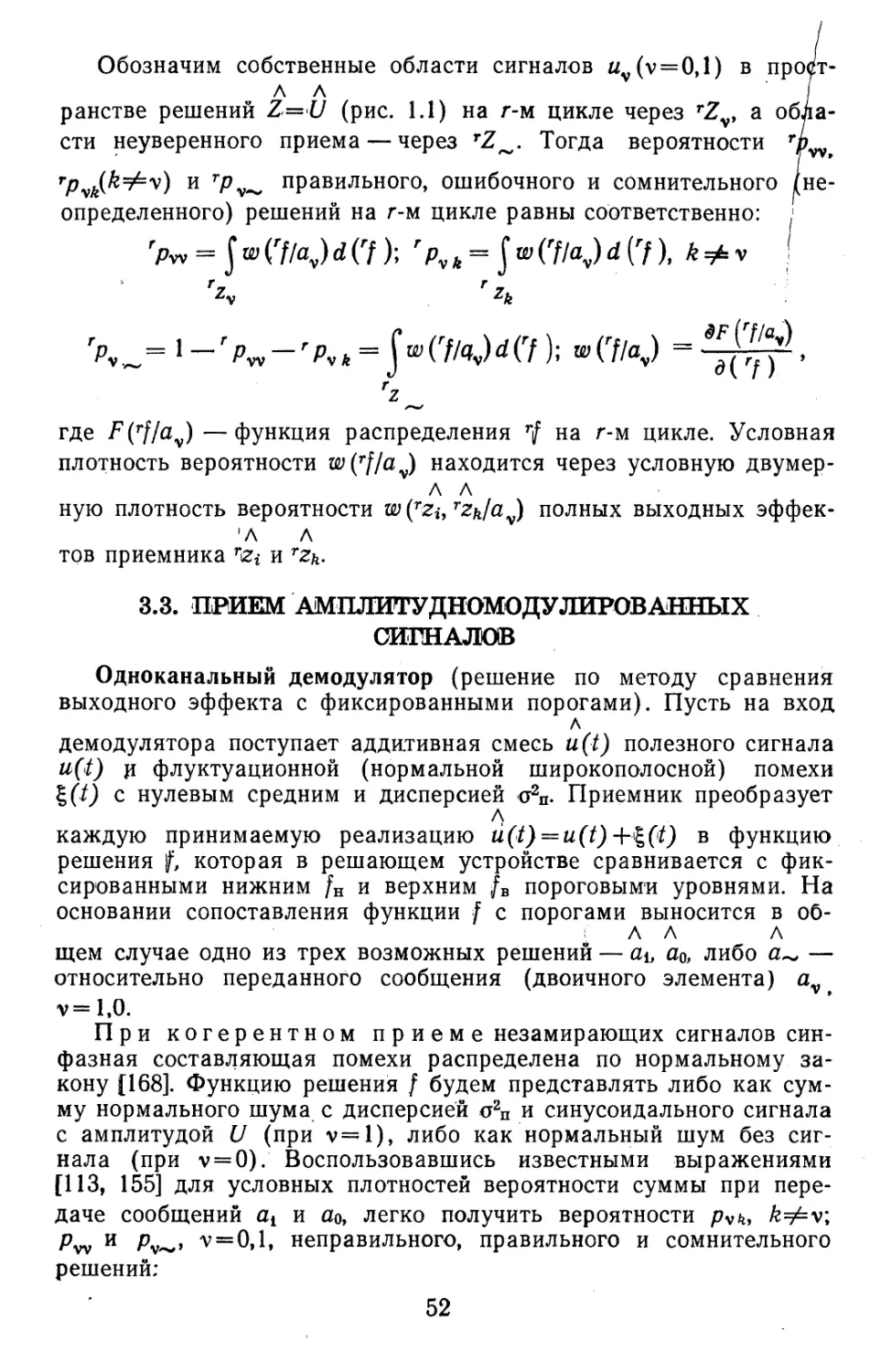
Рис. 2.2 И Т. Д.
Система с двумя циклически- Возвратное звено Р22 на рис. 2.1 я
а) исходив3граф;Мб): и в) его обозначает, что-возможны допаши-
последовательные преобразова- тельные задержки в ЭТОМ звене з
ния достижении конечного состояния 3
30
на один, два, три и т. д. шага с вероятностями, 'соответственно
равными Р22, Р222, Р3&, ..., где Р22—i (вероятность возврата системы в то
же состояние 2.
Рассмотрим отдельно возвратное звено ц, изображенное на
рис. 2.2а, с вероятностью возврата системы в исходное состояние i9
равной Рц. Вероятность перехода системы из узла i в узел / с
учетом этого звена равна
Ри + РиРи+Р*иРи+ ■ ■ -=-г^--
1 —Гц
Преобразование Фурье этой функции выражается равенством
ад = г^^-==^(адл (2.6)
где
FH(K)= 1- . (2.7)
"v ' \-Ра% v ;
Выражение (2.7) представляет собой производящую функцию
возвратного звена П. Это звено, включенное последовательно в
маршрут i->/, вместе с примыкающей ветвью Р^ можно заменить
одной прямой ветвью с переходной функцией (2.6), как это
изображено на рис. 2.26.
Вообще вероятностные графы можно преобразовывать и
упрощать по известным правилам преобразования сигнальных
графов. Переходные функции последовательно соединенных ветвей
перемножаются, функции параллельных ветвей складываются и
все ветви объединяются в одну ветвь с суммарной переходной
функцией. Примеры такого рода преобразований приведены на
рис. 2.16, в и 2.26, в.
Переходная функция системы (см. рис. 2.2) из узла i в узел k
равна
'»«-^»М-„_,%5-Р,,Н- (2-8)
Разложим функцию (2.8) в ряд по степеням Я:
Л* W = PuPjk%* + (Ри + Р„)РиР,к%* + (Р*а +PuPu+Pj,)PuPskV+...
• • • -^/T^^PuPjkK г = 2, 3, • - . (2.9)
v=o
Коэффициенты ряда (2.9), как нетрудно убедиться, обращаясь
к графу (см. рис. 2.2), равны вероятностям перехода системы из
состояния i в состояние k за г шагов (в соответствии с
показателем степени оператора к):
Р^г)* 2 ^Г^ЛЛЛ*. (2-9')
V-0
31
Минимальное число шагов, необходимое для перехода системы
из i в kf в данном случае равно г=2, максимальное условием
не ограничено.
Функция переменной К в виде степенного ряда, подобного (2.9),
с указанными свойствами коэффициентов является [167]
производящей функцией вероятностей Рм(г). В дальнейшем, говоря
о Fih(X), будем пользоваться именно этим ее названием.
Правило получения производящей функции при известном
графе ясно из вышеизложенного. Переход от производящей функции
Fik(h) к вероятности перехода системы из состояния i в k
осуществляется простой подстановкой в Fik{X) значения Я=1.
Запишем это положение в виде
Ptk = Fik(l), (2.10)
где Pik — вероятность перехода системы из состояния i в k
безотносительно к тому, через; какое число шагов это событие наступает.
Знание производящей функции Ль-(Я), кроме прочего,
позволяет определить среднее число шагов (математическое ожидание
величины г) до достижения системой заданного состояния k по
формуле [167]
rQp = M(r) = F'ik(l) (2.11)
и дисперсию случайной величины г по формуле
D(r) = F"ik(l)+F'ik(l)-F>k{l). (2.12)
Вычислить М(г) и D(r) по ф-лам (2.11) и (2.12) обычно
проще, чем определить их по известным формулам математического
ожидания или дисперсии [24, 25] с непосредственным
использованием для этого законов распределения величины г (2.9').
2.4. ВЕРОЯТНОСТНЫЙ ГРАФ ОБОБЩЕННОЙ СИСТЕМЫ
Несмотря на разнообразие систем передачи информации с
обратной связью и повторениями, все они могут быть приведены
к единой обобщенной схеме. Основанием для этого служат
одинаковые, в смысле возможных последствий, состояния у
различных систем, рассмотренные выше (см. § 2.2, табл. 2.1). Исходя
из этого, можно построить обобщенный граф замкнутой системы
передачи информации, справедливый как для РОС, так и ИОС,
и получить, пользуясь им, все необходимые для расчетов
соотношения.
Рассмотрим три возможных вида искажений, описанных выше:
первого рода (регистрация вместо переданного некоторого другого
сообщения); второго рода — выпадение сообщения; третьего
рода— вставка. К ним ведут ошибки HI, H2 и НЗ соответственно
(см. табл. 2.1). Отметим здесь дополнительно, что искажение
первого рода может наступать как при HI, так и при НЗ-И
(см. табл. 2.1), если вслед за НЗ-И возникает состояние Н2. Ина-
32
че говоря, когда состояние НЗ-И, ведущее при других условиях
к вставке, будет скомпенсировано последующим выпадением
сообщения.
Аналогичное положение имеет место и при правильном приеме
сообщения, к которому ведут состояния как ПП, так и НЗ-П,
если вслед за последним также возникнет состояние Н2
(выпадение сообщения). В этом случае в тексте остается одно
неискаженное сообщение.
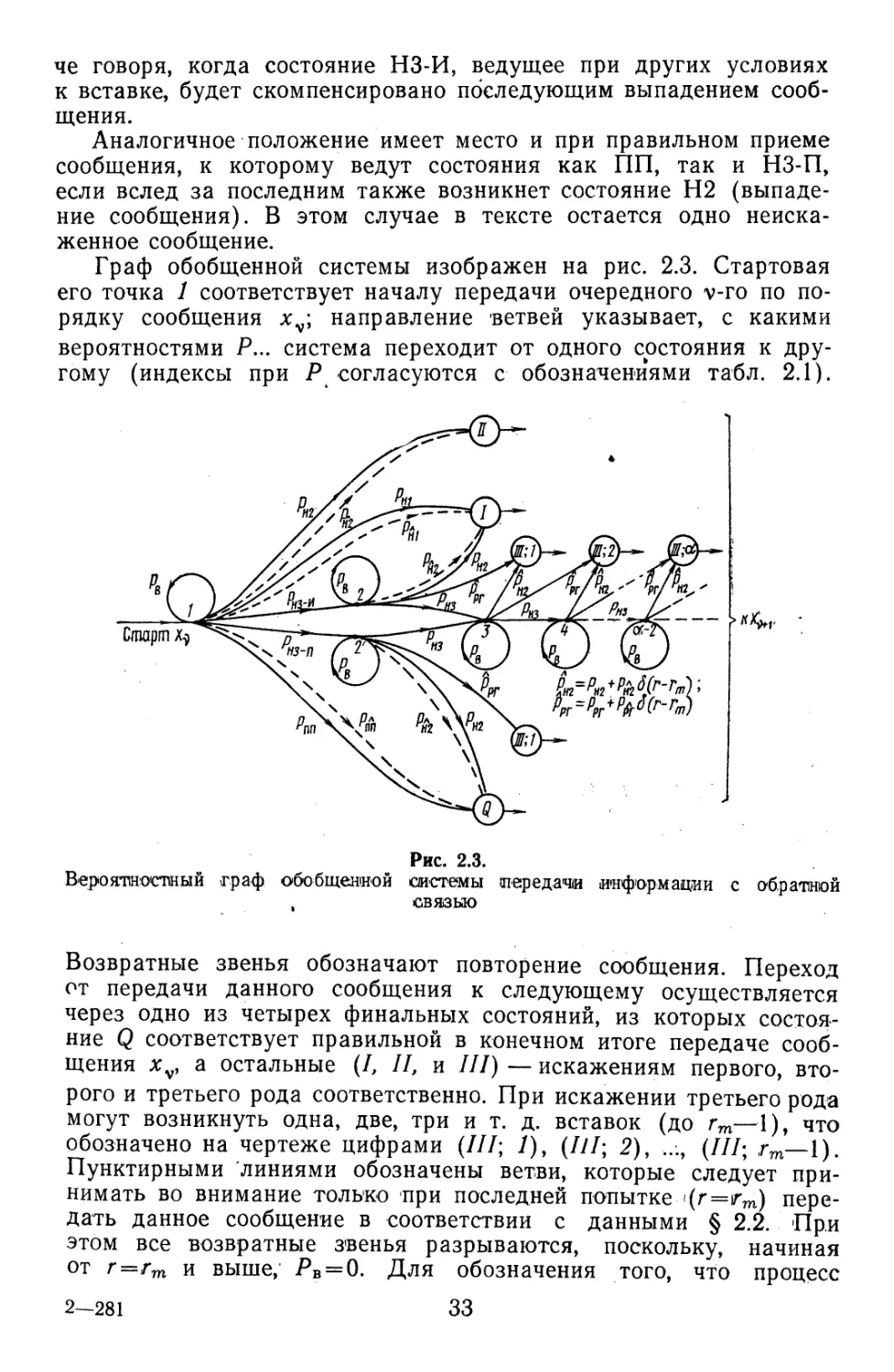
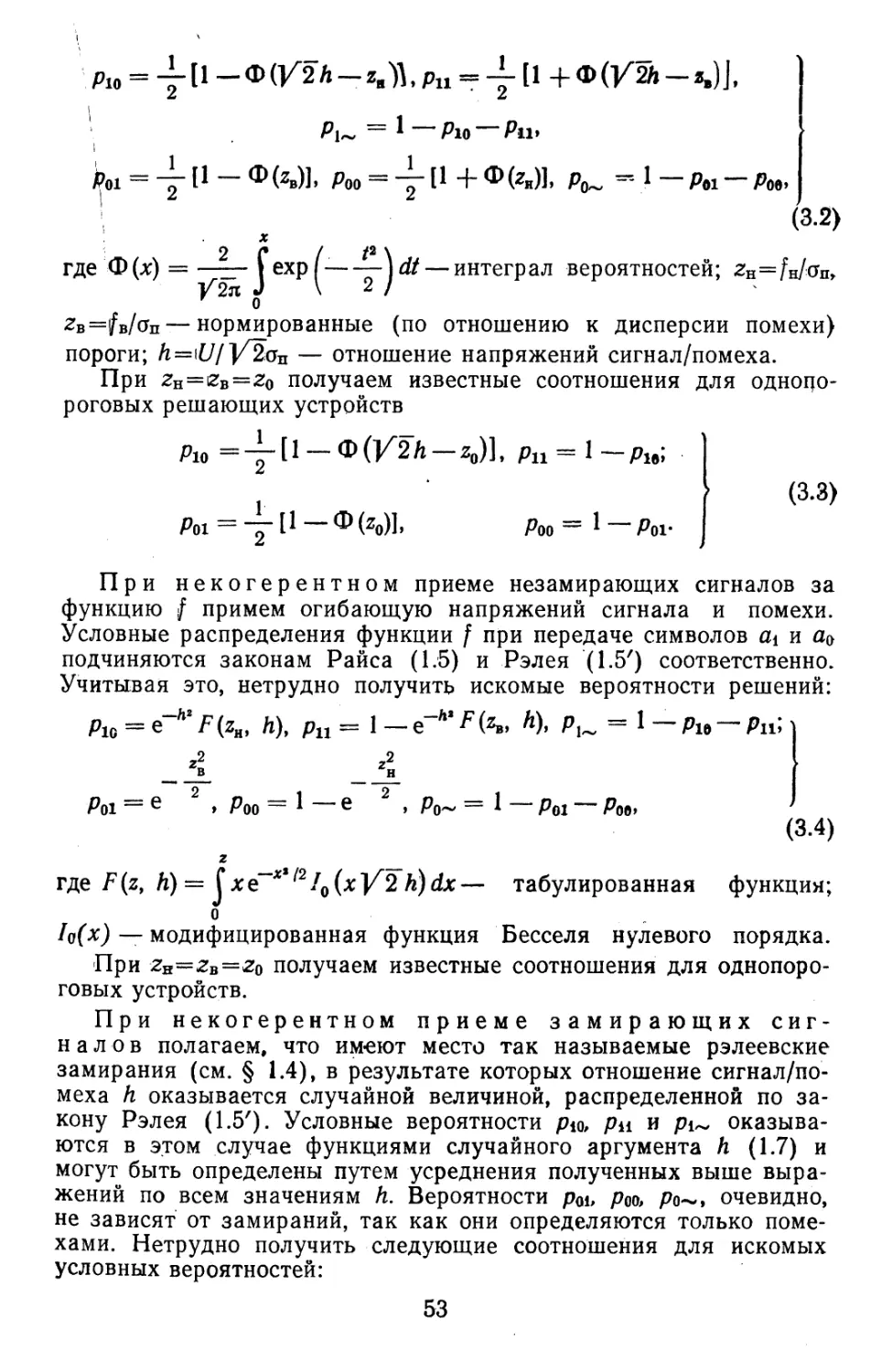
Граф обобщенной системы изображен на рис. 2.3. Стартовая
его точка / соответствует началу передачи очередного v-ro по
порядку сообщения xv; направление ветвей указывает, с какими
вероятностями Р... система переходит от одного состояния к
другому (индексы при Р согласуются с обозначениями табл. 2.1).
Рис. 2.3.
Вероятностный граф обобщенной системы передачи ««формации с обратной
связью
Возвратные звенья обозначают повторение сообщения. Переход
от передачи данного сообщения к следующему осуществляется
через одно из четырех финальных состояний, из которых
состояние Q соответствует правильной в конечном итоге передаче
сообщения xv, а остальные (/, II, и ///) — искажениям первого,
второго и третьего рода соответственно. При искажении третьего рода
могут возникнуть одна, две, три и т. д. вставок (до гт—1), что
обозначено на чертеже цифрами (///; /), (///; 2), ..., (///; гт— 1).
Пунктирными линиями обозначены ветви, которые следует
принимать во внимание только при последней попытке-«(г=irm)
передать данное сообщение в соответствии с данными § 2.2. При
этом все возвратные звенья разрываются, поскольку, начиная
от г=гт и выше, Рв = 0. Для обозначения того, что процесс
2—281
33
(2.13)
повторений в общем случае ограничен значением г = гт, в
дальнейшем вводится множитель
1 при 0 < г < гт\
О при г>гт.
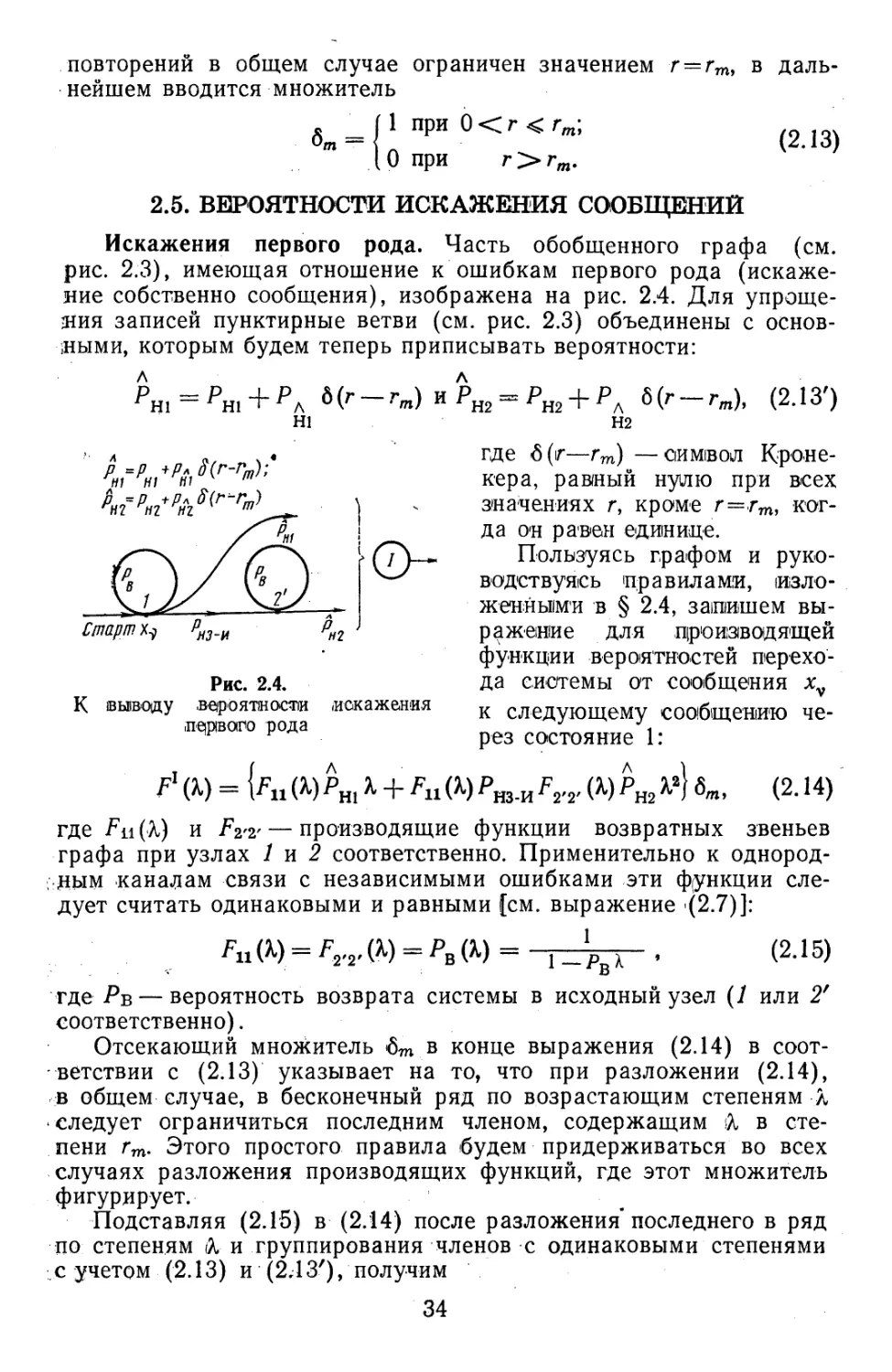
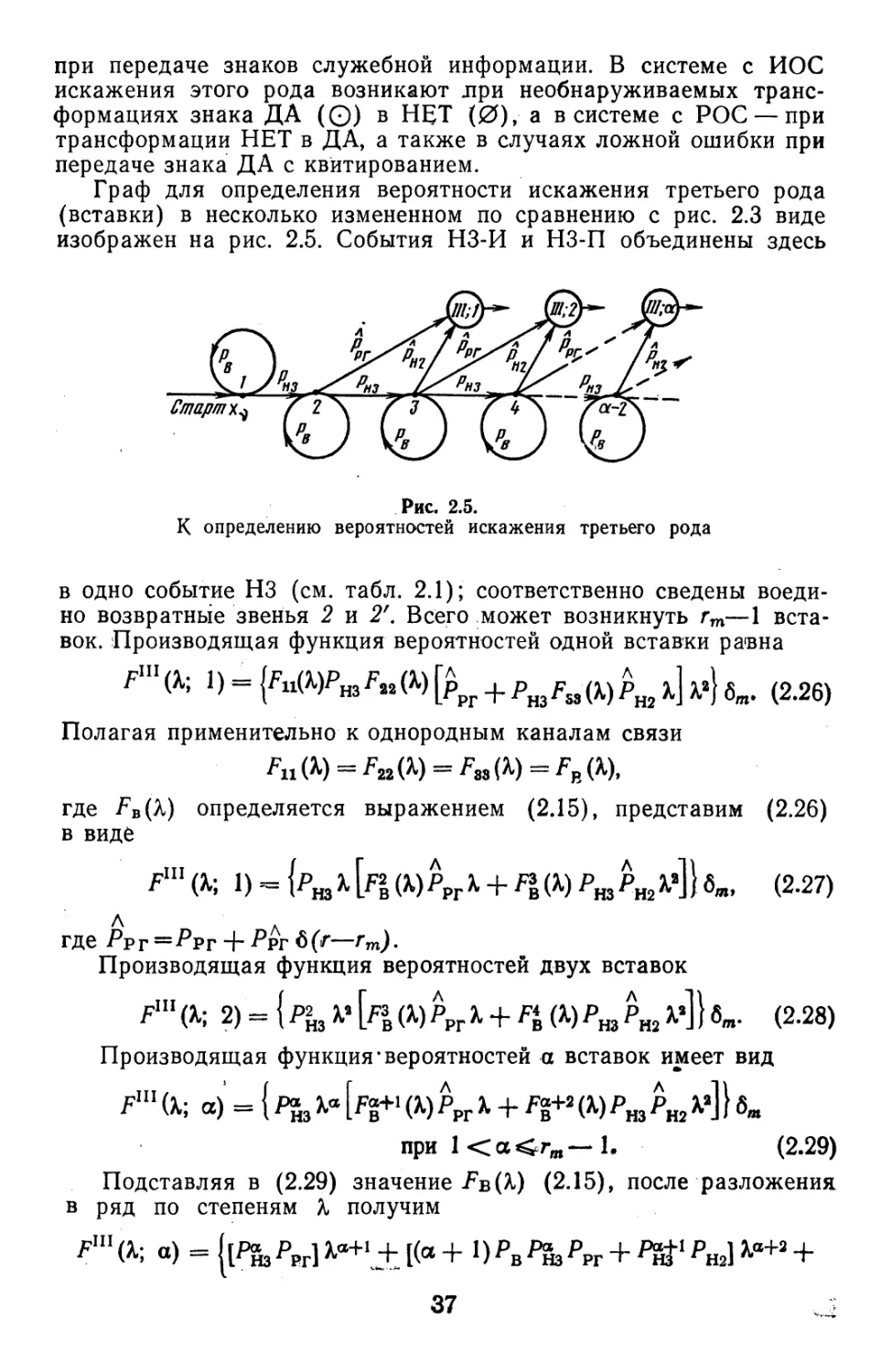
2.5. ВЕРОЯТНОСТИ ИСКАЖЕНИЯ СООБЩЕНИЙ
Искажения первого рода. Часть обобщенного графа (см.
рис. 2.3), имеющая отношение к ошибкам первого рода
(искажение собственно сообщения), изображена на рис. 2.4. Для
упрощения записей пунктирные ветви (см. рис. 2.3) объединены с
основными, которым будем теперь приписывать вероятности:
^ш^н. + ^л б(г-^)иРН2 = РН2Н-Рл 6(7—rm), (2.13')
Н2
HI
р =р +рл S(r-rm);
ГН1 HI HI V т
инг ннг rwz m
Старт х^
Рис. 2.4.
К выводу .вероятности .искажения
первого рода
где 6(ir—гт) —символ Кроне-
кера, рав(ный нулю при всех
значениях г, кроме г=гт,
когда О'н равен единице.
Пользуясь графом и
руководствуясь 'правилами,
изложенными в § 2.4, запишем
выражение для производящей
функции вероятностей
перехода системы от сообщения xv
к следующему сообщению
через состояние 1:
F\%) = {Fn(X)PmX + F11(%)Pm_uFrr(K)PH2V\8m, (2.14)
где Fa(K) и Fv%—производящие функции возвратных звеньев
графа при узлах 1 и 2 соответственно. Применительно к
однородным каналам связи с независимыми ошибками эти функции
следует считать одинаковыми и равными [см. выражение (2.7)]:
• _ . V В
где Рв — вероятность возврата системы в исходный узел (1 или 2'
соответственно).
Отсекающий множитель &т в конце выражения (2.14) в
соответствии с (2.13) указывает на то, что при разложении (2.14),
в общем случае, в бесконечный ряд по возрастающим степеням Я
следует ограничиться последним членом, содержащим (К в
степени rm. Этого простого правила будем придерживаться во всех
случаях разложения производящих функций, где этот множитель
фигурирует.
Подставляя (2.15) в (2.14) после разложения" последнего в ряд
по степеням ft, и группирования членов с одинаковыми степенями
•с учетом (2.13) и (2ЛЗ'), получим
34
f {X) = Pm I + (PB Pm + Рш.и PH2) W+(P% PHl + 2PB Рю-и рш) ^3+-
• • ■ + [р;"-2Рн1+(г>п-2)р;'»-зрт.ирт)Ьг>"-1 +
+ [*>-' (^Hi + \) + (>•« ~ 1)р^~2рт-и (pm + *&)] *>• (2Лб>
Коэффициенты при Xr равны вероятностям (см. § 2.3)
возникновения ошибки первого рода при первой'(/—1) или следующих
(г = 2, 3, ..., гт) попытках передать сообщение xv.
Вероятность искажения первого рода безотносительно к
номеру передачи найдем на основании (2.10), положив в (2.16) Я=1:
^иск = РН[ + [^В РН\ + ^НЗ-И PH2i + l^B ^Hl + 2РВ РШ-И ^Нг! + * \. '
■• • • + [^"1(^ш + ^1)+^-1)Рв^^нз.и(^н2 + ^2)]- <2Л7>
Значение Рв — вероятности обнаружения ошибки, влекущей за
собой повторение сообщения в системах с обратной связью,
обычно много больше значений вероятностей других ошибок Рнг и Рнз.
Поэтому в (2.17) можно пренебречь вторыми слагаемыми в
каждой из квадратных скобок и приближенно принять
Формула (2.18) при сделанном допущении может быть принятаг
в качестве окончательной для вычисления вероятности ошибки1
первого рода при передаче сообщений по однородным каналам
связи без памяти. В случае неоднородных каналов связи
необходимо учитывать то, что вероятность одного и того же события при
повторных передачах может иметь различное значение вследствие
изменения состояний каналов. Обозначая через Р^'> и ^hV
вероятности событий В и HI на k-м цикле передачи данного сообщения,
на основании (2.18) можем записать
Пек = t Рн\ П Рф + (р№ + **"* ) П *вЛ)- (2.19)
r=\ k=\ v Hl / k=l
Далее необходимо усреднить величину (2.19) по всем
возможным сочетаниям состояний каналов с учетом их вероятностей на!
протяжении всего времени передачи одного сообщения xv. Вопрос
этот при некоторых упрощающих предположениях
рассматривается в § 2.12. В дальнейшем, там, где не оговаривается
противное, будем полагать, что каналы однородные и имеют
неизменные параметры, по крайней мере, на протяжении рассматриваем
мого сеанса связи.
В случае каналов, с памятью вероятности событий на каждом
Цикле системы должны рассматриваться как условные
вероятности, которые следует вычислять с учетом исходов всех
предшествующих циклов, влияющих на вероятность данного исхода.
Применительно к однородным каналам без памяти полное
выражение (2.17) преобразуется к виду
1 ~ рвт п or 1 о 1 - ('<» - О р>~2 + С* - 2) р»т~1
— рн, + р*т рл +
X ^/m + ^-O^W (2-20)
Положив в (2.20) rm=oo, получим
oopi _ pi _ H1 j нз~и Н2 (2 2П
иск ост j_pB "Г (1_рв)2 ' V ' '
где Р^ст — остаточная вероятность искажения первого рода,
имеющая место при неограниченно допустимом числе повторений.
При упрощающих предположениях Риз-иРи2<.Ри1 и Рв<1
(что обычно выполняется на практике), выразив Phi и Рв через
вероятности элементарных исходов (см. табл. 2.1), приближенно
получим
pi _ Рт я- ^но ^пр»
ост~ 1-Рв ~ 1-[(РОо + ^ло)(1-^но0 + (рпР + ^но)^оо^ '
(2.22)
где Рпр" и Poo- — вероятности правильного приема и
обнаружения ошибки при передаче знака подтверждения О и Рно—
вероятность необнаруживаемой ошибки при передаче знака
стирания.
Как видно из (2.22), главной причиной искажения первого
рода являются необнаруживаемые ошибки (НО) при приеме
собственно сообщения. В случае Рно=0 Р1Ост = 0.
Искажения второго и третьего рода. Производящая функция
вероятностей искажения второго рода (выпадение сообщения)
имеет вид (см. рис. 2.3)
А
Fu(%)^Fn(K)PmUm = r^TSw, (2.23)
л
где Риг — определяется выражением (2.13'). Отсюда, положив Х= 1,
досле несложных преобразований с учетом (2.13) получим
1— Р гт
ри _ р __ в р
^иск — 'выл — — — гл
1~",/В
ш + ^-'^ш + ^л)- (2-24)
При гт=оо (неограниченное число повторений)
1-Л
^^cK^nU^-T^-- (2-25)
Выражения (2.24) и (2.25) совместно с табл. 2.1 показывают,
что искажения второго рода появляются в результате ошибок
36
при передаче знаков служебной информации. В системе с ИОС
искажения этого рода возникают лри необнаруживаемых
трансформациях знака ДА (О) в НЕТ (0), а в системе с РОС —при
трансформации НЕТ в ДА, а также в случаях ложной ошибки при
передаче знака ДА с квитированием.
Граф для определения вероятности искажения третьего рода
(вставки) в несколько измененном по сравнению с рис. 2.3 виде
изображен на рис. 2.5. События НЗ-И и НЗ-П объединены здесь
Старту
ЮЮ(0
Рис. 2.5.
К определению вероятностей искажения третьего рода
в одно событие НЗ (см. табл. 2.1); соответственно сведены
воедино возвратные звенья 2 и 2'. Всего может возникнуть гт—1
вставок. Производящая функция вероятностей одной вставки ра'вна
FU1(X; ^{ад^Л^ (2.26)
Полагая применительно к однородным каналам связи
где FB(X) определяется выражением (2.15), представим (2.26)
в виде
в«, (2.27)
л л
где Ррг =^рг + Ррг д(г—гт).
Производящая функция вероятностей двух вставок
Fm(X; 2) = {p>mv[Fl(X)Pprl + FiMPmPmv]}6m. (2.28)
Производящая функция'вероятностей а вставок имеет вид
при 1<а<гот—1. (2.29)
Подставляя в (2.29) значение/в (А,) (2.15), после разложения
в ряд по степеням X получим
Fm(X; а) = {[Р?кР»г]Ьа+1±[(а+1)Рв*%РРг + Р&1рн^а+а +
37 ,,?
+ [(a + 2)2f + 3) P\P«mPpr + (a + 2) PBP&PH2] Г+3 + • • .}fim
при l<a<rm— 1. (2.30)
Коэффициенты при A,a+ft, k=l, 2, ..., выделенные квадратными
скобками, равны вероятностям появления а вставок после (а+1)-й,
(а + 2)-й и т. д. попыток передать сообщение, заканчивающихся
событием НЗ. При а = 0 выражения (2.29) и (2.30) соответствуют
вероятности однократной регистрации данного сообщения без
вставок (в неискаженном виде либо с ошибкой первого рода).
Положим гт = оо. При этом бт=1 и, исходя из (2.29), нетрудно
получить
pa р ря+1 р
Fm(X; а) = нз Рг Я**1 + нз Рт Г+2. (2.31)
(l-PBX)a+1 (l-^BMa+2
Откуда вероятность а вставок определится выражением
р (а)= Г77^ + ^ ' Г^" при г'»^00- (2-32)
(1~М + 0-^в)а+2
Выражение (2.32) представляет собой закон распределения
вероятностей целочисленной случайной величины а. При <а = 0
получим
рш (0) = _^L_ + ^нЛ = pl Q {2ЯЗ)
где Q — вероятность неискаженного приема сообщения (см. § 2.9)у
Воспользовавшись (2.32), можно найти среднее число вставок
atp _ J . ^,., _ РРГ j -fijj-- + Pm j _f^_ _
__ ^НЗ РРГ , PH3PH2 /9 oq/4
~~ (^рг + V + (l-MC'W + W ' l '
Определим вероятность хотя бы одной вставки при передаче
сообщения, которую и будем называть вероятностью искажения
m
третьего рода. Вообще говоря, она равна сумме Ръ*к^У\РшЫ)-
а=1
Однако ее проще найти как дополнение к единице суммы
вероятностей всех других возможных исходов передачи данного
сообщения, составляющих полную группу событий. С учетом (2.33)
запишем
^=1-^-^-^=1-^-^(0)- (2.34)
После подстановки в это выражение (2.20) и (2.24) и
простых преобразойаний с учетом данных табл. 2.1 получим
38
_ РНЗ + У"(Ррг + РН2)., р rm-l Грл+рЛ)_
Гиск — IP В V РГ Т- ^Н2|
1 — /B
(2.35)
При гш-+оо выражение (2.35) преобразуется к виду
рш __ рнз рнз ян2 __ рнзррг ,9 ofiv
''иск" 1_рв (1_рв)2~(1_рв)2- ^-*>J
Первопричиной вставок являются искажения служебных
знаков, влекующие за собой событие НЗ. В системе с ИОС к этому
ведут необнаруживаемые трансформации знака НЕТ в ДА
(табл. 2.1) и ложные ошибки при передаче знака ДА; в системе
с РОС — трансформации знака ДА в НЕТ. При не слишком
сильных помехах, когда Рт<^1 и Рв<С1, можно пренебречь вторым
членом в правой части равенства (2.36) и приближенно записать
рш = Р™ . (2.37)
ИСК ID X '
В
иск 1—А,
Искажение третьего рода определялось выше как результат
появления вставки (или нескольких вставок) в регистрируемом
приемником тексте без учета того, возникла ли вставка после
верно принятого или искаженного помехами основного сообщения.
При этом вид вставки (или вставок) также не учитывался.
Пользуясь методом производящих функций и исходя из графа (рис.
2.3), нетрудно детализировать задачу и найти вероятности всех
возможных вариантов, связанных с появлением вставок.
Ошибки второго и третьего рода иногда называют ошибками
сдвига. При появлении таких ошибок принимаемая
последовательность сообщений смещается относительно передаваемой во
времени из-за нарушения соответствия между числом
поступающих от источника и выдаваемых получателю сообщений. В
некоторых частных случаях искажения третьего рода не имеют
значения. Так, при спорадической передаче команд управления на
инерционный объект (скажем, самолет) последний обычно не успевает
реагировать на быструю смену кодовых комбинаций в процессе
их проверки и повторений и выполняет только последнюю,
остающуюся в его запоминащем устройстве команду. Ошибки сдвига
играют, однако, весьма негативную роль в телекодовых и
телеграфных системах, особенно при передаче безызбыточной
цифровой информации. Их влияние существенно сказывается также при
передаче дискретизировднной аналоговой информации (см. гл.8).
Остаточная вероятность. Суммируя вероятности различного
рода искажений при г^,= оо и исходя из выражений (2.21), (2.25)
39
и (2.37), получим следующее выражение для остаточной
вероятности искажения сообщения:
^ = !»„ + П'сх + Р%= -~Г- . (2-38)
1 "" *В
где Рн = Рш + Рн2+Рнз— сумма вероятностей всех необратимых
ошибок (см. табл. 2.1).
Остаточная вероятность искажения в определении (2.38)
представляет собой вероятность одного из всех возможных искажений
при передаче данного сообщения независимо от характера
искажения (ошибка при регистрации собственно сообщения,
выпадение, вставки). При ограниченном числе передач {гтфоо)
вероятность искажения сообщения можно записать в виде
'иск == 'ост г А * VmJt
где ЛР(гт)—разность вероятностей искажения сообщения в
системе с обратной связью при ограниченном и неограниченном
числах повторений.
Если при некотором допустимом гт выполняется условие
АР(гт)<^Рост, соответствующее значение гш будем называть
достаточным. Расчеты показывают, что при не очень сильных
помехах достаточным является rm=3-i-4. Это значит, что
практически во многих случаях число повторений можно ограничить
относительно небольшим значением без заметного ущерба для
достоверности передачи сообщений.-В том случае, когда знаки
служебной информации передаются безошибочно, что можно
принять при некоторых способах достаточно помехоустойчивой их
передачи (см. гл. 7), можем записать Рн2 = Рнз=0 и Phi = Pho,
где Рно — вероятность необнаруживаемой ошибки при приеме
собственно сообщения (см. § 2.2). Учитывая, кроме того, что
при этом Рв=1—Рпо—Р ш>, выражение для остаточной
вероятности искажения сообщения можно записать в виде
Рост = _^о_=__^_> (239)
1 — ^в ^но + ^пр
При передаче некоторого составного сообщения в виде ряда
более простых, например телеграммы из п букв, при независимой
вероятности искажения каждого из них помехами, равной Pi ост,
вероятность искажения хотя бы одной буквы определяется по
формуле
*ост = * " \ * *\ ост)
или определяются все другие возможные варианты искажений
последовательности из п сообщений по известным формулам ком-,
бинаторики. Раскладывая выражение (2.39) в ряд, получим
+ РУ>/Ч?>Щ+ •■■•. (2-40)
40
где цифры в скобках показывают номер передачи сообщения, при
котором совершаются соответствующие события (НО или В). При
Рв<С1 вероятность необратимой ошибки Рно при первой передаче
является существенно более весомым членом в (2.40) по
сравнению с остальными, взятыми в сумме. При любом допустимом
числе повторений
Отсюда величина Рно может служить нижней оценкой
вероятности искажения сообщения в системе с обратной связью. При
/>в<1
Л>с«^но- <2-42)
Если ставится задача обеспечить возможно меньшую
вероятность ошибки (2.38) безотносительно к затратам времени на
повторение сообщений, следует стремиться к таким способам
передачи и приема сообщений и служебных знаков, при которых
события HI, H2 и НЗ имеют возможно меньшую вероятность пусть
за счет некоторого увеличения Рв- Иногда это достигается
расширением областей неопределенности в пространстве
принимаемых сообщений или сигналов за счет собственных областей (см.
гл. 1). Однако чрезмерное увеличение Рв за счет Рн сопряжено
с уменьшением относительной скорости передачи и задачу часто
приходится решать методом компромисса.
Эквивалентная вероятность ошибки. Возвращаясь к графу
(см. рис. 2.3), нетрудно найти вероятность правильного приема
сообщения Q. Часть графа, имеющая отношение к событию Q,
структурно совпадает с той его частью, которая использовалась
при определении вероятности ошибки первого рода. Различие
состоит только в том, что вместо события ПП, обозначающего
правильный прием собственно сообщения, ранее (2.20) фигурировало
событие HI. Отсюда, воспользовавшись ф-лой (2.20) для
вероятности искажения первого рода, путем простой замены индексов
HI на ПП и НЗ-И на НЗ-П для рассматриваемого случая получим
Q = — Рпп + РгпГхР л + * 5 X
1—Рв ПП^ в ПП Л (1— рв)2
X Vll РН2 + ('*-!) Km~2 РНЗ-П Кг (2-43)
Очевидно, что должно выполняться условие
Q + ^„ck = 1, (2-44)
где РИск = Р1КСК+ Р£к + Р™к . При гт = оо, исходя из (2.43),
получим
(1=1^^ = -*™-+ РппРн2 . (2.45)
°» 1-Яв т (1-РвУ
41
Обычно Рт^Ртт, -Рв<С1 и, следовательно,
Q«-^S-. (2.46)
Подобно тому, как это было сделано Л. М. Финком
применительно к избыточным кодам [168], для систем с обратной связью
при, передаче сообщений по двоичным каналам можно ввести
понятие эквивалентной (или приведенной) вероятности ошибки
в расчете на один информационный элемент сообщения в
соответствии с формулой
p3 = l~Q1/k, (2.47)
где k — число информационных элементов в двоичном сообщении
(кодовой комбинации). Формула (2.47) удобна для сравнения
между собой систем с обратной связью с различными по длине
и структуре кодами, а также систем с ОС с системами без ОС
при равных энергетических и других условиях.
Вероятности Q, Р0ст и другие зависят, кроме прочего, от
конкретного сообщения (кодовой комбинации), передаваемого по
каналу связи. Для получения представления о частоте ошибок в
потоке разнородных сообщений остаточная вероятность искажения
(как и другие, зависящие от конкретных сообщений вероятности)
подлежит усреднению по алфавиту сообщений по формуле
м
Poor = ^iP(xi)Pocr(xi), (2.48)
где /ост (х%) — остаточная вероятность искажения и'-го сообщения
из алфавита объемом М\ P(xi)—вероятность передачи этого
сообщения источником (волнистая черта над Рост обозначает
усреднение по алфавиту). В случае симметричных каналов связи
•Рост(^г) не зависит от г и усреднение по алфавиту не требуется.
При этом
*ост == *ост \%i) == ''ост* \ ^«^* /
В случае неоднородных каналов связи следует произвести
усреднение и по состояниям каналов (см. § 2.7).
2.6. ОТНОСИТЕЛЬНАЯ (ЖОРОСТЬ ПЕРЕДАЧИ
В системе с обратной связью сообщения повторяются каждый
раз при наступлении одного из двух событий — В или НЗ (см.
табл. 2.1), сумму которых обозначим через ОБ (обнаружение
ошибки). Событие, противоположное ОБ, состоит либо в
регистрации сообщения приемником, либо в его необнаруживаемом
выпадении. Обозначим для краткости прекращение передачи данного
сообщения через ПК. Процесс повторений можно представить в
виде вероятностного графа (рис. 2.6). При последней допустимой
попытке повторения прекращаются независимо от исхода послед-
42
ней передачи, что отображено на схеме (рис. 2.6) введением
дополнительной ветви (пунктир) Яд » «включающейся» в схему
[пк"
при г = гт:
ПК I 0 при других гш.
Пользуясь графом, определим сред- /р Л ^^ \н^*г
:нее числю передав и другие отатистичес- у* J.^ _ [
кие характеристики процесса 'повторе- старт* Р Ч-Р
ний. Производящая функция вероятности
того, что процесс повторений оста'ношпг- р 26
ся на г-и (перед ач«е и система пе1рей'дет от к определению' среднего
данного сообщения к следующему, равна числа (повторных передач
Fr W = { FОБ (X) /Рпк + Р,U j бОТ) (2.50)
где (бт определяется выражением (2.13) и
Раскладывая (2.50) в ряд по степеням Л, с учетом (2.49) и;
(2.51), получим
ад) = (1-РОБ)Я + РОБ(1-РОБ)^+ . . .+Р-1(1_РОБ)Я'+...
- + Роът~1[(1-Роъ) + Ров)ЬГт- (2-52)
Коэффициенты ряда (2.52) выражают закон распределения
случайной величины г — числа передач сообщения л; (включая
первую его передачу):
Р(г)
рг£ при г = гш, (2.53)
0 при г>гт.
Практические расчеты показывают, что величина г
сравнительно редко достигает больших значений. Так, при Ров =5-10~2
вероятность более чем трех передач приближенно равна 2,5-10~3,
а вероятность более пяти передач равна 6,25-10~6. Среднее число
передач (математическое ожидание) г найдем, исходя из (2.50),
по ф-ле (2.11)
rzv = Mir) = F'r(\)J^^. (2.54)
1— 'об
43
При неограниченном числе передач (rm->ioo)
Гср = т=^- (2-55)
Заменяя в (2.55) Роб его значением Рв+Рш с учетом данных
табл. 2.1 для случая информационной обратной связи, получим
Гср = О-'оОО-'ок-) ' (2'56)
где Рок = Роо + Рло — вероятность приема ошибочной квитанции
сообщения; Рок" = Роо" + Рло" —то же, при приеме квитанции
знака подтверждения.
Величина гср определяется в системах с ИОС частотой
обнаружения ошибок при квитировании сообщений и знаков
подтверждения. Если служебные знаки не квитируются, то ошибки при их
приеме не обнаруживаются (Роо"=Рло" = 0) и величина гср равна:
т. е. определяется обнаруживающей способностью применяемого
для сообщений и квитанций кода. Так как Рок=1—Ряо—Рп )
(см. § 2.2), то выражение для гср можно записать также в виде
гсР = в I p— • (2.58)
^НО ' М1Р
В случае решающей обратной связи без квитирования среднее
число повторений определяется той же ф-лой (2.57), где Рок
можно трактовать так же, как вероятность попадания избыточно
кодируемого сообщения или сигнала при наличии помех в
область неопределенности (см. гл. 1). Пусть Гп — интервал времени
от одной передачи сообщения до другой (период повторений),
включающий в себя длительность самого сообщения, опознавателя
или квитанции, продолжительность их анализа, время
распространения и пр. Тогда среднее время передачи одного сообщения
от источника к получателю с учетом повторений определится
выражением
ПР = ^еР. (2-59)
Величину, обратную fCp, равную
G=l/rcp, (2.60)
условимся называть относительной скоростью передачи
сообщений. Она показывает, в какой мере скорость передачи
сообщений (в бодах) в системе с обратной связью замедляется за счет
повторений по сравнению со скоростью передачи в системе без
обратной связи. При rm=oo относительная скорость передачи, как
следует из (2.60) и (2.55),
g=i-pob. (2.61)
44
\ Используя производящую функцию (2.50), нетрудно найти
дисперсию числа передач по ф-ле (2.Г2), подстановка в которую
значений F'r(X) и F"rCk) после несложных преобразований приводит
к выражению
D (г) = — - -—-^ 2- (2.62)
| 2.7. УСРЕДНЕНИЯ В УСЛОВИЯХ НЕОДНОРОДНЫХ
КАНАЛОВ
Известно, что параметры (мощность сигналов в точке приема, уровень
помех и пр.) канала связи практически часто изменяются в процессе передачи
одного сообщения или от сеанса к сеансу (например, вследствие замираний);
поэтому возникает задача получения средних показателей достоверности и
скорости передачи сообщений при изменяющихся параметрах. Для решения этой
задачи можно также воспользоваться методом вероятностных графов с
применением обобщенной матрицы передаточных функций 184]. Однако в общей
подстановке этот метод оказывается весьма громоздким в вычислительном
отношении, особенно при учете всех факторов, которые влияют на передачу
сообщений квитанций и служебных знаков (при действии помех в прямом и
обратном каналах).
Рассмотрим два предельных случая:
а) параметры каналов изменяются медленнее, чем темп передачи
сообщений, и за время передачи одного сообщения со всеми его повторениями их
можно принять практически неизменными;
б) параметры изменяются быстро, и можно считать, что прием уже двух
соседних сообщений (кодовых комбинаций или даже их элементов) происходит
независимо.
Все другие возможные скорости изменения параметров в процессе
передачи укладываются между этими двумя крайними случаями.
Обозначим параметр, определяющий состояние прямого канала, через ц, а
обратного — через ц/. Будем считать, что случайные процессы \i(t) и \i'(i) —
эргодические 1113, 109]. В случае быстрых изменений параметров р, и ц' среднее
значение вероятности исходов передачи с обратной связью может определяться
по тем же полученным выше формулам, что и для каналов с постоянными
параметрами, но с подстановкой в них средних значений вероятности
привходящих событий. Так, в частности, остаточная вероятность искажения
сообщения, определяемая при неизменных параметрах каналов выражением (2.38),
при быстрых изменениях параметров может быть записана в виде
1-Я*
(2.63)
где Рн и Рв — средние по состоянию каналов значения Рп и /V Вычисление
их осуществляется по известным, формулам математического ожидания:
во оо
Рн« J |<Мц, \1')Р*(\ь, р'ММу'. (2.64)
о о
00 00
?в = j |о>2(,и. lOMH, |i')*Ml*'. (2.65)
о о
где ш2(ц, ц')—двумерная плотность вероятности случайных величин ц и \i'.
При независимых изменениях параметров прямого и обратного каналов
да2C|xf |х') =w4(|л)Wi(.цОf Pn(V>i\i')=Pn(\JL)Pn(v>'), />B(|i,|i/)=^B»(*i)^»<l*/) и каж-
45
дый из интегралов 1(2.65), }(2.64) заменяется произведением интегралов; при
Согласных (полностью коррелированных) изменениях w2(\i, \i,y^,wi(\i)6(\i/—.[L) =
= wi(\i')6(\i—\i'), где wt(n) и wi(n') —одномерные плотности распределения
вероятностей параметров прямого и обратного каналов соответственно, б (г) —
дельта-функция. Аналогичным образом находятся усредненные по параметрам
каналов значения среднего числа передач (2.55) и относительной скоростр
передачи (2.60):
1
Гср = Т=Гр0Б
G = i- = l-POB. (2.67)
Можно расчленить вероятности событий Н, В, ОБ, входящие в (2.62) —
(2.66) и другие, на более простые — вплоть до вероятностей искажения
отдельных элементов кодовых комбинаций. При этом для определения средних
показателей в системе с быстрыми изменениями параметров находят среднее
значение только вероятности искажения одного элемента сообщения, которое
затем вводится в расчетные формулы для rcp, G, Рост (см. гл. 4, 5, 6) тем же
порядком, что и в случае каналов с неизменными параметрами. Это положение
не требует специального доказательства, поскольку при быстрых колебаниях
параметров искажения уже двух соседних элементов в кодовых комбинациях
происходят независимо.
Перейдем к случаю медленных в определенном выше смысле изменений
параметров каналов. При этом следует различать две ситуации:
1) сообщения от источника поступают на вход линий спорадически либо в
определенном порядке, но с такими, относительно продолжительными
интервалами, при которых они практически не наталкиваются на задержки на входе
.линии, связанные с процессом проверки и повторений предшествующих
сообщений;
2) сообщения генерируются источником одно за другим без длительных
перерывов (как, например, при автоматической работе телеграфного аппарата)
и поступают на вход линии через буферное запоминающее устройство (см.
рис. 1.1) с переменной задержкой, зависящей от прохождения
предшествующих сообщений. Такого рода подачу информации со стороны источника, в
отличие от спорадической, будем называть плотной.
При спорадической передаче сообщений усреднение может производиться
по ансамблю [94] реализаций подобно тому, как при быстрых колебаниях
параметров ф-лы (2.64) и (2.65). В этом случае в подынтегральном выражении
должны фигурировать собственно усредняемые показатели Рост, fcp, G.
Выражение для остаточной вероятности искажения сообщения соответственно этому
запишем в виде
оо оо
Р~ост = j" j w2 (\i, pi')Рост (Р> lO d\xd\i', (2.68)
6 о
где Poct(|a, \l')—остаточная вероятность искажения сообщения при данных
jli и ц'. Аналогично
со оо
^р = [ \ Щ 0*. Р') Гср (|i, |i') d \i d p/, (2.69)
6 6
G"= — . (2.70)
rCP
Формулы (2.68) — (2.70) для спорадической передачи сообщений дают
результат, который можно получить экспериментально либо теоретически путем
усреднения Ррст, /"ср, G по времен^ на одной реализации по законам эргоди-
ческих процессов.
46
\ В случае плотной передачи сообщений следует учитывать тормозящее
действие процесса повторения на прохождение сообщений от источника к
получателю при различных состояниях каналов: Для пояснения этого положим сна-
чалХ, что параметры прямого и обратного каналов изменяются дискретно и:
характеризуются при каждом данном состоянии некоторым общим для обоих
канаров показателем м-г- Все сообщения имеют одинаковые вероятности исходов
передачи при данном |л» независимо от их номера в алфавите. Положим, что
передача сообщений ведется неограниченно долго (Т-*~оо) с аппаратурной
скоростью R сообщений в секундах (с учетом также повторных передач). При
этом вероятность P(\ii) представляет собой относительное время пребывания
системы в состоянии |лг- за все время передачи сообщений Т при Г->оо.
3$. время P(]ii)T в канал от источника поступает Ni=P(\ii)TiRG(\ii)
сообщений, где G(\ii)—относительная скорость передачи сообщений,
характеризующая тЬмп их обновления на входе линии при данном ее состоянии ji*. При этом
с искажениями (при неограниченном числе повторений) пройдет N0cv(\ii) =
=NiPoc?(\ii) сообщений. Полное число искаженных за время Т при
различных \i{ сообщений равно
#ост= 2 ^°ст (fx/)=TR 2р ^G fe) р°ст fe) • (2-71)
i i
Полное число принятых от источника для передачи получателю сообщений
при Т-+оо равно
_ N~TRG~f (2.72)
где G — средняя по состояниям каналов относительная скорость передачи
сообщений.
Отнеся (2.71) к (2.72), получим искомую среднюю по состояниям каналов
остаточную вероятность искажения в виде
?ост= Y J] P (N) G (|*|) ^ост Ы • (2.73)
i
Из выражения (2.73) следует, что при медленных изменениях состояний
каналов и плотной передаче сообщений остаточная вероятность искажения
сообщения должна усредняться с весовыми коэффициентами G(\ii)/G,
пропорциональными относительным скоростям передачи сообщений при различных
состояниях каналов |ш*. При этом средняя по состоянию каналов относительная
скорость передачи сообщений G определяется по обычной формуле усреднения
G = ]£p(|i,)-G Ох,). (2.74)
i
При подстановке в ф-лы (2.73) и (2.74) значений Р0ст(иО из (2.38) и
G(\ii) из (2.61) получим:
— * П рн Ы
Рост= -= >J Р (И,) [1 - Роб №/)] "J ^—Г . ' (2-75)
G i l гв \rt)
0 = 2P(|1')[1-pob(W)]. (2.76)
i
Положим для упрощения, что знаки служебной информации передаются
безошибочно. Тогда
Роь = Рв= Лж, Р-77)
рн = Рт = Рцо, (2-78)
47
где Рок — вероятность обнаруживаемой ошибки в применяемом для
сообщений и опознавателей или квитанций коде и Ян о — вероятность необнаруживае-
мой ошибки в нем. Учитывая это, перепишем выражения (2.76) и (2.75) в виде:
г_.-2
Г
1
G
PMPOK(Vi)
-]jP(^)Pho
= 1-
ы =
' рок -
G
: ^но
=г
+ ^ПР »
(#79)
{2.80)
Формулы эти, справедливые для медленных изменений параметров при
Плотной передаче, имеют в данном случае такой же вид, как и при быстрых
изменениях состояний каналов (2.67) и (2.63) и безошибочной передаче знако?
служебной информации. Можно показать, что при плотной передаче сообщений к
аналогичному виду приводятся выражения для Рост и G также в случае
промежуточных (между быстрыми и медленными) изменений параметров прямого
и обратного каналов.
Выражения (2.79) — (2.80) имеют большое практическое значение. Дело в
том, что существующие математические модели каналов связи и статистические
измерения направлены обычно на определение средних значений Ян о и Яок-
Ими можно воспользоваться для непосредственного вычисления Я0Ст и G в
каналах с обратной связью при плотной передаче.
В заключение приведем выражения (2.79) и (2.80) к более общему виду,
полагая, что параметры в общем случае меняются не дискретно, а непрерывно
как в прямом, так и в обратном каналах по закону w2(\i, ц')- При этом:
со оо
о о
«Ми. |ОЛю(1*' и'ММи'. С2-81)
G = j JiMli, P')G(P> |i')dM|i'. (2-82)
oo
Среднее число_повторений rcv во всех случаях удобно определять как
величину, обратную G.
D
ГЛАВА 3
Модуляция и демодуляция
3.1. ОБЩИЕ СВЕДЕНИЯ
Модуляция и демодуляция являются важными процессами при
передаче и приеме дискретных сообщений. Модулятор (см.
рис. 1.1) выполняет физическое согласование источника
кодированных сообщений с используемой линией связи пугем
формирования сигналов сообщений, соответствующих параметрам линии.
В демодуляторе осуществляется обратная операция — из
принимаемых сигналов выделяются сигналы в той форме, в какой они
поступили на вход модулятора. Вследствие действующих в
канале связи помех выделенные демодулятором сигналы сообщений
будут отличаться от сигналов источника. Поэтому по каждому
выделенному демодулятором сигналу сообщения должно быть
вынесено решение (выполнено распознавание), т. е. определено,
носителем какого сообщения выделенный сигнал является. Схема
распознавания обычно входит в состав демодуляторов сигналов
кодированных сообщений.
Так как для обеспечения двусторонней связи на каждом конце
линии используются и модулятор, и демодулятор, то оба эти
устройства часто объединяют в одно, называемое модемом. При
построении модема в первую очередь следует выбирать вид
модуляции, позволяющей формировать такую совокупность (систему)
сигналов, при которой обеспечиваются наилучшие условия
распознавания полезных сигналов на фоне действующих помех при
заданных ограничениях на мощность, полосу частот, время передачи
и другие параметры. Рекомендации по выбору системы сигналов
можно найти в целом ряде работ [168, 155 и др.]. При
теоретических исследованиях и при решении практических задач передачи
информации системами как с обратной связью, так и без нее
используется модуляция различных видов: частотная, фазовая,
амплитудная и др. Поскольку вид модуляции почти однозначно,
с непринципиальными схемными вариациями, определяет
структуру модулятора, то будем считать, что система сигналов и
структура модулятора известны (заданы), и все внимание обратим на
обратную процедуру — демодуляцию. При передаче данных по
49
ряду известных причин наибольшее распространение получили
двоичные системы связи с числом элементарных сигналов М = 2.
Поэтому здесь рассматриваются квазиоптимальные демодуляторы
только двоичных сигналов, описываются их структурные схемы/ и
приводятся расчетные формулы для «элементарных» вероятностей,
т. е. условных вероятностей решений, принимаемых первой
решающей схемой (см. рис. 1.7) по каждому двоичному элементу
в/отдельности.
3.2. СТРУКТУРА ДЕМОДУЛЯТОРА И ЭЛЕМЕНТАРНЫЕ!
ВЕРОЯТНОСТИ РЕШЕНИЙ
Функциональные схемы демодудяторов, предназначенных для
обработки двоичных сигналов при различных видах модуляции,
по структуре имеют много общего. Поэтому можно принять, что
все демодуляторы состоят из собственно приемника, который
иногда относят к каналу связи, и решающего устройства. Действие
демодулятора можно пояснить, пользуясь рис. 3.1. На вход прием-
л л
ника поступает линейный сигнал с помехой и. Сигнал £г- с
выхода приемника подается на один вход функционального преоб-
л
разователя (ФП). На другой вход ФП подается сигнал гк>
фиксируемый либо формируемый измерительно-вычислительным
устройством (ИВУ) из сигналов, ранее посылаемых передатчиком и
пропущенных селектором (С). В простейшем случае может иметь
л
место zk = const, тогда ФП вырождается в усилитель с постоянным
коэффициентам уои л ения. С
* помощью ФП можно
выполнять перемножение, деление и
другие преобразования [50, 51].
На выходе ФП образуется так
называемая «функция
решения» /, которая поступает на
решающую схему демодулято-
D ~ t pa. Последняя, как правило,
Г ИСа О. I. ■ Ct °
Общая структурная схема демодулятора представляет сооюи некоторые
пороговые устройства (Я).
Цря рассмотрении
демодуляторов двоичных сигналов .можно абстрагироваться от кодовых
комбинаций, полагая, что в алфавите передающей стороны имеется
только два сообщения: а0 и аи преобразуемые в соответствующие
сигналы. Тогда в общем случае решающая схема будет иметь два
пороговых уровня: верхний /в и нижний /н. Однопороговое
решающее устройство можно рассматривать как частный случай двухпо-
рогового, когда i/B = /H- Поэтому далее будут анализироваться
только двухпороговые устройства.
Селектор и ИВУ в некоторых случаях совмещаются в одной
сравнительно простой схеме со стробированием. Работой селек-
Приемник
L_^_
С
1ЛЛ
1
1
—1—
U.-J
Рп
IL
А
2н
ИВУ
/
fn
П
J 6
/
50
тира и ИВУ управляют входные и выходные сигналы (решения).
Е<ши предположить, что опорный сигнал Zk и пороговые уровни
fnW /в не зависят ни от принимаемых сигналов, ни от выносимых
решений (т. е. от времени), то получим обычную систему с
фиксированными порогами.
(При приеме ФМ и ОФМ сигналов структурную схему рис. 3.1
можно конкретизировать (рис. 3.2). Такая схема содержит устрой-
1 Л
ствф формирования опорного напряжения и0Т1 (ФОН), выделенное
из Состава ИВУ. Перемножитель, интегратор и ФОН образуют
фазовый детектор.
fi
и
' '
Рис. 3.2.
Структурная схема демодулятора с
фазовым детектором
X
ц
—*
/
?сх
X ^=-
ФОН
*-
■
~
1 с
[W
3.
ИВУ
/ 1
fn
п
ц
А
1 г7^-
Рассматривая различные автокорреляционные методы, в том
числе и методы относительной угловой модуляции, соответствую-
Л
щие структурной схеме рис. 3.2, следует под uon(t) понимать
некоторую функцию, формируемую из импульсов, предшествующих
Л
принимаемому сигналу u(t).
Для систем с обратной связью характерно многократное
вынесение решений по каждому передаваемому символу (элементу)
0^ = 0,1). При двухпороговом решающем устройстве для выне-
л л -
сения решения на r-м цикле'функция решения rf=r$(Zi, Zk) должна
сопоставляться с нижним rfu и верхним г(в порогами. В результате
сопоставления выносится решение
Л
га
га0 при 7 < 7н,
^пРи 7.<7< 7в,
г а, при '/>г/в-
(3.1)
В случае сомнительного решения а^, передача и прием обычно
продолжаются, т. е. переходят к следующему циклу. Монотонные
функциональные преобразования неравенств (3.1) позволяют
получить бесконечное множество теоретически равноценных
алгоритмов демодуляции. Это дает возможность выбирать для синтеза
алгоритмы, наиболее приемлемые с точки зрения технической
реализации, а для анализа — равноценные алгоритмы,
обеспечивающие наибольшую простоту математического описания.
51
Обозначим собственные области сигналов wv(v = 0,l) в
л л
ранстве решений Z=U (рис. 1.1) на r-м цикле через rZv, a
сти неуверенного приема — через rZ„. Тогда вероятности
грук(кф\) и rpv^ правильного, ошибочного и сомнительное
определенного) решений на г-м цикле равны соответственно: <
>w = ]w(rf/av)d(rf); rpvk = $w('flav)d(rf), k^v !
ZV Zk
4.^=1->w-rPv, = j^(7/av)d(7); *(7/<0 = ^f^>
где F(rfjav)—функция распределения г/ на г-м цикле. Условная
плотность вероятности w(rf/av) находится через условную двумер-
Л Л
ную плотность вероятности w(rZurZkla^ полных выходных эффек-
'Л л
тов приемника T<Zi и rZk.
3.3. ПРИЕМ АМПЛИТУДНОМОДУЛИРОВАННЬ1Х
СИГНАЛОВ
Одноканальный демодулятор (решение по методу сравнения
выходного эффекта с фиксированными порогами). Пусть на вход
л
демодулятора поступает аддитивная смесь u(t) полезного сигнала
u(t) ji флуктуационной (нормальной широкополосной) помехи
£(Т) с нулевым средним и дисперсией oV Приемник преобразует
л
каждую принимаемую реализацию d(t) = u(t)+^(t) в функцию
решения f, которая в решающем устройстве сравнивается с
фиксированными нижним /н и верхним }в пороговыми уровнями. На
основании сопоставления функции / с порогами выносится в об-
( Л Л Л
щем случае одно из трех возможных решений — aif a0, либо а^ —
относительно переданного сообщения (двоичного элемента) av
v=l,0.
При когерентном приеме незамирающих сигналов
синфазная составляющая помехи распределена по нормальному
закону [168]. Функцию решения / будем представлять либо как
сумму нормального шума с дисперсией <т2п и синусоидального сигнала
с амплитудой U (при v—1), либо как нормальный шум без
сигнала (при v = 0). Воспользовавшись известными выражениями
[113, 155] для условных плотностей вероятности суммы при
передаче сообщений cii и do, легко получить вероятности pVk, k¥=v;
Pw и #v~» ^ = 0,1, неправильного, правильного и сомнительного
решений;
52
о (не-
р10 = ^[1-Ф(ул2А-О^Ри-^-[1+Ф(/2А-.в)],
Р{„ = 1— Рю — Pn>
i
Poi = "J U - ф(гв)1. Poo = -j П + Ф(гн)1, P^ « 1 - pn - pM,
\ (3.2)
где Ф(л:) = —— iexP( )dt — интеграл вероятностей; 2н=/н/стпг
/2я J \ 2 /
о
2B=|fB/cTn —нормированные (по отношению к дисперсии помехи)
пороги; h=\Uf]/r2oJ1 — отношение напряжений сигнал/помеха.
При zH=zB=z0 получаем известные соотношения для однопо-
роговых решающих устройств
Рог = Т [1 ~ ° ^о)1, Роо = ! — Pov
(3.3)
При некогерентном приеме незамирающих сигналов за
функцию f примем огибающую напряжений сигнала и помехи.
Условные распределения функции / при передаче символов а,\ и аа
подчиняются законам Раиса (1.5) и Рэлея (Кб7) соответственно.
Учитывая это, нетрудно получить искомые вероятности решений:
р10 = e-hz F{zH, ft), рп = 1 — е"ля F(zm9 А), рх„ = 1 — р1ь — рп;
zl zl
в
Poi = е 2 > Роо = 1 — е 2 , Р0~ = 1 —Poi —Роо.
(3.4)
г
где ffo h)— txe~x*i2I0(xV2h)dx— табулированная функция;
о
1о(х) — модифицированная функция Бесселя нулевого порядка.
При zH=2B=Zo получаем известные соотношения для однопоро-
говых устройств.
При некогерентном приеме замирающих
сигналов полагаем, что им-еют место так называемые рэлеевские
замирания (см. § 1.4), в результате которых отношение
сигнал/помеха h оказывается случайной величиной, распределенной по
закону Рэлея (1.5'). Условные вероятности рю, рн и /?i~
оказываются в этом случае функциями случайного аргумента h (1.7) и
могут быть определены путем усреднения полученных выше
выражений по всем значениям ft. Вероятности р0ь Рт Ро~~, очевидно,
не зависят от замираний, так как они определяются только
помехами. Нетрудно получить следующие соотношения для искомых
условных вероятностей:
53
-s2 -I2 -I2 -I2
Рю=1-е ",. P. = e H,pw-e H-e
Poi = e . Poo = l — e » P0~ = e — e
(S.6)
где Ен = fH / ]/" ^ + ап > Ев = /в / ]/ ac + ап — нормированные (по
суммарной дисперсии сигнала и помехи) 'пороги.
Двухканальный демодулятор (решение по методу сравнения
отношения выходных эффектов со «следящими» порогами). При
неизвестном отношении сигнал/помеха или >при сравнительно
медленных замираниях можно улучшить качество приема, осуществив
регулирование (слежение) пороговых уровней в соответствии с
изменениями огибающей принимаемого сигнала [49]. Структурная
схема двухканального демодулятора, т. е. демодулятора с
дополнительным каналом слежения за огибающей, аналогична
приведенной на рис. 3.1 схеме. Собственно приемник демодулятора
содержит фильтр, не искажающий закон модуляции полезного
сигнала, но устраняющий находящиеся вне полосы частот сигнала
составляющие помехи и линейный амплитудный детектор. Пола-
л л л л
гаем, что ФП образует частное f=izt-/i2ft, где Zi — Vi— огибающая
л л
входного сигнала; Zh=iU^^— опорный сигнал, формируемый
селектором С и ИВУ и соответствующий среднему уровню «нулей» или
Л
«единиц». Полагаем также, что (Д изменяется в точном
соответствии с уровнем огибающей входного сигнала с помехой либо
одной помехи.
л
При приеме незамирающих сигналов Uk — сред-
Л Л Л
ний уровень «нулей», т. е. Uk = mt{U/ao}9 U — огибающая
принимаемой смеси сигнала с помехой. Очевидно, при воздействии
флуктуационной помехи
Ьк = ап У-%- = const, / = £ У± .
Найдем, исходя из (1.5), условные плотности вероятности
функции решения -f при передаче символов at и До, учитывая, что
л
условные плотности вероятности случайной величины >Ui равны:
Л2
W
(£/I/fl0J = 4exp --V К ий>0,
U — огибающая передаваемого сигнала.
54
л
Рассматривая / как произведение случайной величины Ui на
л -
константу l/Uky легко найти
(3.6)
a»(f/o,)=^-exp(-2£),/>0.
Интегрируя полученную плотность вероятности w(f/a\) в
соответствующих пределах, получим следующие условные вероятности
решений при передаче:
(3.7)
ft. = ]*>№df = exp( **-* ) JJ (*|Ф.(K^/B),
fB _ »=l
X /я (КяЛ/в), P,~ = 1 - Pi0 - Pu,
где in (x) — модифицированная функция Бесселя первого рода
п-го порядка. Аналогично, интегрируя w(f/ao)9 получим:
Рп = j о» (//а0) 4f = exp f — ^р ) .
J t»(f/flo) d/ = 1- exp (-^-j, P0~ = 1 -Poi-Poo- (3.8)
Poo =
0
Если Л> 1, выражения (3.7) можно упростить, используя
асимптотическое представление функции /0(лг)» — е* , jc> 1:
р10«[1-ф(К2Л-/^/н)], ■^»[1+ф(}/»-/?/.)],
Pir = 1 — Pie — fti- (3-9)
л
При приеме замирающих сигналов Uk — средний
уровень «нулей», т. е.
Uk = щ{и1а} = 0П ]/-*- = const, / = %L У А..
Найдем условные плотности вероятности функции •/ при передаче
ах и до, учитывая, что при общих рэлеевских замираниях [1681
и независимости сигнала и помехи
55
w(ij,la,) =-£ехр[ — -f).
где а2с — дисперсия замирающего сигнала.
Следовательно, условные плотности вероятности частного равны:
в» (//«i) =
я/
ехр
2(1 + Л§)
я/а / я/2
[ 40 + <
"?)
. />0;
w№o) = ^ехр (-«А), / > 0, Д>,. -L .
Интегрируя эти плотности вероятности в соответствующих
пределах, нетрудно найти
^Н Г *2
4(1 + hl)
«fl
(3.10)
Pio= \w(!la1)df= 1 — ехр
о
со 1~
Рп = ( wiflajdf = ехр — ■
'B
^B
Poo= Jte;(//a0)d/= l-exp( — ^-j ,
о
PN = 1 — Ло — Рп» P0~ — 1 — Poi — Poo-
Если для однопороговых устройств определить оптимальный
порог /н=/в=/о из условия, что я> (/о опт/ai) = w(/оопт/^о),
то
4«
»/*2
»+»«
Pio = 1 —
'~(~^г) "•Л,-(т?г)"
что совпадает с известными результатами [155, 168].
56
(3.11)
Пусть Uk соответствует текущему уровню «единиц». При
слабых помехах (ia2n<Ca2c) можно в первом приближении принять,
л
что Uk распределено по закону Рэлея (1.5'). Как показано в [49]>
при отсутствии корреляции помехи между соседними элементами:
w(f/a0) =
ml
1
w(f/aL) =
H+i)('+"4)
\/[{'+n+i)'-"l,,J
(3.12)
где рс=рс(Т) — значение огибающей нормированной
автокорреляционной функции сигнала; Т — длительность единичного элемента.
Можно показать, что при этом:
Pol
,2 а
H-4/i
Роо =
1 +
t2A
н"0
= 1 — Poi — Роо-
(3.13)
Вероятности решений при передаче символа at выражаются
через условную функцию распределения F(f/ai):
шщшш%шш5зтшшт:.
Рю = FtfJ<*i)> Рп = 1 —FifM
где
pZ=F(fJa1)-F(fJal),
(3.14)
n%
Г (2+26)
(l + A2+/2ft2^J Г(* + 1)Г(* + 2)«
f4 \
X
X Л 1,2ft+ 2, ft+ 2,
l + P + Z»*?
T(x) — гамма-функция; zFi(a, p, y, x) —гипергеометрическая
функция.
В [49] также показано, что при рс = 1 Л2е>-1
Ао«-
Г
'Н
7Г> Рп » J
/.2
гГ./н</Гр. (3-15)
а /гр ориентировочно определяется из условия /*гр=Л2оО—f2roiu
57
3.4. ПРИЕМ ЧАСТОТНОМОДУЛИНЮВАННЫХ СИГНАЛОВ
При когерентном приеме демодулятор (рис. 3.3) состоит из
общей части, двух фильтров — Ф* и Фк — с неперекрывающимися
частотными характеристиками, функционального преобразователя
ФП и порогового устройства П. При некогерентном приеме
демодулятор содержит, помимо
фильтров Ф{ и Ф&,
амплитудные детекторы.
л
Ь
Одщая
масть
—
Ol
, ^
W\
и
'
ФП
4
*
2И
т Г
'я
Л
Iff
6
да
л
- 1
] т
Рис. 3.3.
Структурная схема двухканально-
го демодулятора ЧМ сигналов
Предположим, что сигнал подвержен квазирэлеевским зами-
А
рациям (см. § 1.4). В этом случае сигнал u(t) на входе
приемника обычно представляют в виде суммы двух составляющих:
детерминированной (регулярной) и случайной (рассеянной) с нор-
л
мальными распределениями мгновенных значений. Огибающая JJ
такого сигнала характеризуется плотностью вероятности
где о2с — дисперсия (средняя мощность) рассеянной
составляющей сигнала; U :— амплитуда детерминированной составляющей.
Пусть в канале действует широкополосная нормальная помеха
£((Г) с дисперсией а2п и нулевым средним. Составим выражение
для совместной условной плотности вероятности мгновенных зна-
А А
чений напряжений Zi и гь на выходе фильтров Фг- и Фн, а также
А А
их огибающих Z* и Zh при равноустойчивых сигналах:
л Л0
W
W
л
А
1
2яо*
-ехр
2noi
-ехр
*4п J
л л, т
**.. J
= °l + °l>
(3.16)
W
(к
w[Zt,
Zklai) =
2*/ a0) =
л л
ztzk
ехр I
л л
Z»Zft
<£п °п
•ехр
z{+u*
K.n
г л
V
К.
z2k+u*
58
2<Z
Рассмотрим логарифм отношения правдоподобия (3.16)
щЛ2 = In"(^W =_М£-Д) •
2 /л л \ о2
w\zit zk/a0J с. п
Как видно, при фиксированных значениях U и а2с.п решение
целесообразно выносить путем сопоставления разности f = Zi—zk .с
пороговыми уровнями /н и fB.
Рассмотрим логарифм отношения правдоподобия (3.17)
In Az = In —
,(z..Z.lJ *<* V«t-n
Л \
— In/,
ад/
•ч.
)
Если сигнал подвержен общим рэлеевеким замираниям (£7=0), то
,пА,--?-(й-Й)
2<.
и решения должны приниматься по разности квадратов
огибающих (необходимы квадратичные детекторы). Если же сигнал не
замирает
i/= constat0, Щ = 0, <тс2.п = а2,
л
>1, / = *, *,
и л л
то, поскольку lnIo(z)^zt при 2>1, имеем lnAz~—^C^—Z&).
«*
В этом случае решения должны приниматься по разности
огибающих (необходимы линейные детекторы). Рассмотрим сначала
«алгоритм разности».
Когерентный прием незамирающих сигналов (см. рис. 3.3).
1-т Л Л
Пользуясь двумерной плотностью вероятностей w(ziizk/ay)i v=l,0
А Л
[см. (3.16)] и учитывая независимость Zi и zk> найдем условные
л л
плотности вероятности разности ./=£;—#ь при передаче а4 и а0:
со l-z-lx*+(f-U-x)*i
1 С* 20
w№i)=—— Iе п Л =
2яо£ J "
2яап ^
1 Г (/ — V)2
ехр ■ v- 1—
[
2 Vnon I . К
59
(3.18)
ш(//а0) =
2*0* _-e
и*
I
2*1
l(x-V)' + <f+*)«]
dx =
2/яап
exp —
r_J/±tOLl
L ** J
(3.19)
По полученным условным плотностям вероятности функции f
находим искомые вероятности:
PlO
Pll
Pox
Poo
т[-Ф(^)];
V2
V2h — zB
2 L \ г*
2 I \ V2
Pu — Pn>
•)]•
Pol — * — Poi — A>o>
(3.20)
где 2н=/н/ап и izB'=fB/an.
В частности, в однопороговых устройствах при jfH=jfB=/о=0
получаем известные соотношения [155, 168]:
/>io = Au = P = ^rfl
Ф(А)], Л1=Роо = ^-П+Ф(й)],
Pw = Po~=0' (3-20
Некогерентный прием замирающих сигналов. В случае общих
рэлеевских замираний решения должны выноситься по разности
л л л л
квадратов огибающих f=Z\—Z\. Амплитуды Zi и Z* независимы
и распределены по закону Рэлея (1.5') ■ Легко определить плотно-
А Л
сти вероятностей квадратов огибающих Wi=Z?i, Wh=Z2k [137]:
wiWtlaJ^
Wt
•exp
2o* B ' I 2a2.
w(Wtla0) = -*1-«рЛ—^ , W% > 0;
HHW =-^* exp
Ы)
w
Wklaa) = -^- exp (~l±\,Wk> 0.
2o?
I 2a;
Wjl\
(3.22)
Плотность вероятности разности f=Wi—Wh находим как
свертку соответствующих одномерных плотностей вероятности [ИЗ]
60
wfflafi
»(f/e.)-
! exp (JJ\, f < .0;
1
exp
/
K.n
, />0;
»«. + «!)
exp
Ш
, /<0;
-exp
f-4-U»o
(3.23)
Интегрируя указанные плотности вероятности в
соответствующих пределах, получим искомые условные вероятности решений:
1 /- \ _ /н >
^Lexpr__i!_]>z-B .i.> о,
*5 L 20+Ao)J -2
Pu =
i+'
2 +
^=-iirexp(—^);
1+A
Poo = —exP
2 + h\
Pq^ = l~ Pot — Poo-
2(1+Ла)
(3.24)
Для однопороговых решающих устройств, положив в (3.24)
£h=£b = zo=0, получим известное выражение
1
Ри = Poi = Р
2 + Й
(3.25)
3.5. ПРИЕМ ФАЗОМОДУЛИРСШАННЫХ СИПНАЛОВ
При фазовой модуляции со сдвигом фазы на 180° двоичные
сообщения av, v=0,l, передаются с помощью противоположных
сигналов «T(/) = f/cos(co/+^T), ^1=г|?о+л, v=0,l. При этом могут
использоваться демодуляторы для когерентного и некогерентного
приема. Простейший вариант демодулятора когерентного приема,
функционирующего на основе сопоставления скалярного
произведения принимаемого и опорного напряжений с пороговыми
уровнями, показан на рис. 3.4. Этот демодулятор состоит из перемно-
л
жителя, устройства формирования опорного напряжения иои
(ФОН), интегратора на интервале импульса O^t^T и порогового
61
(решающего) устройства (Я). Кроме того, в состав демодулятора
необходимо включать измерительно-вычислительное устройство для
установки необходимых пороговых уровней, синхронизации,
включения и «сброса» интегратора.
Простейший вариант демодулятора некогерентного приема
(двухканальная суммарно-разностная схема) изображен на
с
пфон
-_пг-
f,
W
ИВУ
1
1
/
Рис. 3.4.
Структурная схема одноканального
когерентного демодулятора ФМ
сигналов
рис. 3.5. Демодулятор состоит из неискажающего фильтра (Ф),
суммирующего и вычитающего устройств, амплитудных
детекторов (АД), функционального преобразователя, образующего
функцию решения f (в частности, разность f=Wi—Wh), порогового
устройства U и устройства, формирующего опорное напряжение
л
ФОН. Опорное напряжение и0и может формироваться из прини-
ФОН
Z/
4г
АД
^ОП'ЬОП
АД
W;
ФП
fu
Wk
-чиву
Рис. 3.5.
Структурная схема двухканального (суммарно-
разностного) некогерентного демодулятора
маемых сигналов, например, по методам А. А. Пистолькорса,
В. И. Сифорова или др. [137]; оно представляет собой сумму по-
л
лезной «on и помеховой £0п составляющих, т. е. м0п=Иоп+5оп.
На входе АД некогерентного демодулятора имеем:
А А
Ч = «v + I + Um + i*n» *k = % + l — um — |0Г1, v - 0,1;
где 5 — флуктуационная помеха в фильтре Ф; £0п — помеха в
опорном канале.
Считая помехи в опорном тракте достаточно слабыми, имеем,
А
например, 'UoU&ui(t)=Ucos(®t + tyL). Тогда при передаче
символа at
62
%k — 5 Sen»
а при передаче символа Яо
л
гх = I + ion,
Л
(3.26)
г* = 2U cos (со / + %) + I - lon J
(3.27)
Совместные условные плотности вероятности огибающих на
входе амплитудных детекторов представлены выше [см.
выражения (3.17)].
Когерентный прием незамирающих сигналов (рис. 3.4). При
действии флуктуационной помехи синфазная (опасная)
составляющая помехи имеет также нормальное распределение с
нулевым средним и дисперсией а2п- Учитывая это, нетрудно получить
условные вероятности решений в двухпороговых устройствах:
z _7/ Х*
Л. = —= f e ^ dx=Ml-<S>{V2h-z4)\;
Рп
V2nan J .. 2
*B-y
Px„ = l— Pit — Pu'<
x*
p01 = —ir— f e 2"n ^ = -i-[l-0(K2A-2B)];
zB+c/
Poo e _.
V2n <Ъ J
e п Лс-^-Ц + Ф^гк + г.)].
(3.28)
/V~ =! } ~ Poi — A>e-
Из (3.28) вытекают известные соотношения для однопороговых
устройств при zH=2B = 2o=0 [168]:
Рю = Рог = Р = 4" [1 ~ ф(^2Л)],
Рь*
Р0~ = Р = °-
63
(3.28')
Когерентный прием замирающих сигналов. Основные
вероятности решений определяются теми же соотношениями, что для
замирающих сигналов с относительной фазовой модуляцией (см.
ниже):
— оо
Рп - J w(fK)df - -f(i - Pcf Н-т^-), h>0;
/в
00
} (3.29)
/ж
Л,- |-(//ao)d/=i(l + Pe^)exp(T^r)) /и<0;
P^=l--PVk—Pvv> ЬФ*> V> * = °. !>
где Mv= (—l)vhohoou, h\ h2QOu — средние отношения
сигнал/помеха в основном и опорном трактах; L = Y (1+Л2о) (1+Л2ооп).
Некогерентный прием замирающих сигналов. Как ясно из
предыдущего (см. § 3.4), при некогерентном приеме замирающих
сигналов целесообразен алгоритм, основанный на вычислении
разности квадратов огибающих в суммарном и разностном каналах
А л
f=Wi—Wk=Z2i—Z\ (рис. 3.5). Воспользовавшись выражением
(3.17), можно показать, что модуль нормированного
коэффициента корреляции рс одноименных квадратурных составляющих
сигналов uv(t) и опорного напряжения иои($) равец единице; помехи
в опорном канале значительно слабее помех в основных каналах,
что на практике обычно имеет место {168].
Кроме того, можно показать, что при больших отношениях
сигнал/помеха А2о=а2с/ст2п>1 выходные эффекты Wi и Wk
практически некоррелированны, поскольку значение коэффициента вза-
Л Л
имной корреляции квадратурных составляющих Zi и Zk в
совпадающие моменты времени pik~ 1/Л2о< 1.
Воспользовавшись известными соотношениями для
функциональных преобразований [113], условные плотности вероятности
Л Л
разности f=Z2i—Z2k (для случая, когда полоса опорного тракта
значительно уже полосы основного тракта) можно представить
в следующем виде:
64
a»(f/fli)
w(fla0) =
l
exp
(srV'<0:
4o*(l + 2ft») ^
1 .__ Г /
4(i +К)
i
I 4(1+2^)
-exp
■exp
[-
i 4 0 + 2*2) * L ^0 + ^) J
i
exp
[ 2«*n(l + 4ft§) J'
, />0;
f<0.
(3.30)
На основании (3.30) находим условные вероятности решений:
Рп-
Poi:
Роо
-ехр
/■
2(1 +2ft2,) '\K
1+4Й2
2(l+2hl)
1
exp
2cr;
h
. /н < 0; jo, = 1 — р10 — pu;
, L > 0;
i0 + «8)J
7ГехР I — "T" > /в > 0, p0_ = 1 - p01—p00;
2(l + 2ft2) \ 2al
1(3.31)
2(1+2/$
exp
/h
2a2n(l + 4A20)J
, 'f„ < 0.
J
Очевидно, для однопороговых решающих устройств при |/в = /н=0
1
Pio = Poi
2(l+2ft2)
'. Ро~ = Р<~ = °-
(3.32)
Если же при действии флуктуационной помехи полосы
пропускания основного и опорного трактов одинаковы, то
И/Х) =
w{f/a0) =
1
ехр/+Л, /<0;
1 Г /
■ехр
, />.0;
■ехр
8с2п(1+^) |_4а^(1 + 2^0)
, /<0;
\ (3.33)
lfc*0 + *S)
.("*)
ехр/ L.\t />0>
3—281
65
В этом случае искомые условные вероятности решений равны
1
Рп =
Poi=-
Роо =
2(1 +h20)
l+2ftg
2(1+Ag)
1
2(1+*S)
i
1 + 2/tg
2(1+ hi)
eXP (<5~) ' '" < °' Pl~ = ] ~ Pl° ~ Piii I
'" J . /в > 0;
^-) , /. > 0, p = 1 — p01 — p00;
\ 1, f*<0.
[4ol(l + 2hl)\
4ol
}(3.34)
Для однопороговых систем при /в=/н=0
(3.35)
Применение относительной фазовой (фазоразностной)
модуляции (ОФМ), предложенной Н. Т. Петровичем [138], позволяет
устранить ряд недостатков фазовой модуляции, в частности
«обратную работу». Достоинство ОФМ заключается в том, что
происходит трансформация канала с переменными параметрами в
канал с постоянными параметрами [137], поскольку длительность
отдельных импульсов значительно меньше интервала корреляции
сигналов при замираниях. По-прежнему полагаем, что на вход
демодулятора двоичных сигналов (элементов) uv(t), v = 0,l,
длительности Т воздействует флуктуационная помеха %(t). В отличие
от рассмотренных выше методов абсолютной модуляции, при ОФМ
вероятности принятия решений на данном такте (даже при
независимых искажениях отдельных элементов) зависят также и от
результатов приема на предыдущем такте.
Один из возможных вариантов построения одноканального
демодулятора (метод «сравнения фаз») [137]) с решением по
алгоритму разности приведен на рис. 3.6» В таком демодуляторе схе-
л
а
6
Р
х
i
1
л
Фон
(
Г
/
/ г
Z/sj L
л
*jL
п
1
ИВУ
[*"
л
Рис. 3.6.
Структурная схема авто-
код реляционного
демодулятора ОФМ сигналов
ма ФОН осуществляет либо простую задержку сигналов на один
такт (т=71), т. е. представляет собой элемент памяти на Т, либо
осуществляет задержку с последующей фильтрацией. Обработка
66
л л
принимаемого на данном такте сигнала u(t) = uv(t)=uv(t)+li(t),
v = 0,l, состоит в образовании скалярного произведения
г
•£v=yJ'«v(0«o„,(0*, (3-36)
О
Л
где uoni(t) = Ui(i)+li(t)t и' = 0,1 — опорный сигнал; £v> U — помехи
в основном и опорном трактах.
Л
Выходной сигнал zty (либо пропорциональная ему величина f}
поступает на двухпороговое решающее устройство Я.
Двухканальный суммарно-разностный демодулятор для
сигналов ОФМ отличается от показанного на рис. 3.5 лишь тем, что
устройство ФОН осуществляет задержку принимаемых сигналов/
(либо задержку с фильтрацией).
Автокорреляционный прием незамирающих сигналов (рис. 3.6).
Предполагаем, что опорное напряжение формируется путем
задержки принимаемого сигнала на один такт. Простые выражения
для условных плотностей вероятности выходного эффекта
(функции решения) / несложно получить, используя предположение о
сравнительной широкополосное™ приемника (63], ГА^ (12-М5),
где А — полоса пропускания:
w
(fK)
■ ехр —
ft«[/ + (_l)vp
jA(-s) i 2('+i") Г
v=0,l; А =
и
V2on
(3.37)
Интегрируя (3.37), определяем условные вероятности решений:
3*
Риг
Ри
Рог
Poo
1 (
J + ф
1 —ф
М/н-1)
1 —ф
J_ (
2 ]
1 + Ф
" М/в-1)
А(/в+1)
/
1 +
2ft»
J; )
67
(3.38)
Для однопороговых систем при /н=^в = 0 из (3.38) следует
Рю = Рог = Р « -у
1 — Ф)
Рп = Роо ~ —
1 +
/'+£
ш]-—°
| (3.39)
Автокорреляционный прием замирающих сигналов (рис. 3.6).
Полагаем, что имеют место общие рэлеевские замирания сигнала.
л л
Колебания uy(i) и и0т можно рассматривать как узкополосные
нормальные процессы
т
О
л л
где Uv Uoui, cpv и ф0Пг — медленно изменяющиеся огибающие и
л л
фазы колебаний uy(t) и u0Ui(t).
Далее будем считать, что Г=2зш/коо, где п — целое число,
соо=const. При таких условиях
т
А 1 С ft ft 12пп.. \ /2яп, . \ 1,
^V = T"J v onfCO \Т" +Фу/С08(^ +Фоп V
= -г(**х* + У*У0'
(3.40)
л л л . л
ГДе *v=£/vCOS(pv, #v = l£/vSin<pv, Л^'^опгСОЗфопг, */г = |£Лш i Sin фоп ;.
Квадратурные составляющие ху, Xi, yv,yi при общих рэлеев-
ских замираниях распределены по нормальному закону с нулевым
средним 1137]; xv и yv> а также Xi и у\ попарно независимы.
Поскольку длительности сигналов значительно меньше интервала
корреляции между ними (см. § 1.4), то xv и хи а также уу и у%
зависимы. Дисперсии квадратурных составляющих xv и уу
одинаковы и равны дисперсии принимаемого сигнала о*
,+«,
2
nv
{a2cV и a2nv — дисперсии замирающего сигнала uy(t) и помехи
5v(i0 соответственно). Дисперсии квадратурных составляющих Xi
и yi опорного напряжения одинаковы и равны дисперсии опорного
напряжения а20щ, a20ni='Oaci+<ftn (<J2c t и сРщ — дисперсии
полезного опорного сигнала и помехи в опорном тракте). Используя
метод обращения характеристических функций [30, 113], можно
68
определить условную плотность вероятности «нормированной»
функции решения f = -~
civ
vCTn/
W
Wav)
|rxp[w]-/<0i
iexp[- po+pv)]'^0'^0'1.
(3.41)
где P = (Tvffoni/2anvanb pv = pv(T) —значение нормированной
корреляционной функции квадратурных составляющих xv и дс, (или
уу и г/i) выходного эффекта приемника при передаче символа
av, v = 0,l.
Как известно fl55, 168], нормированная корреляционная
функция pv квадратурных составляющих равна огибающей коэффи-
л л
циента корреляции самих сигналов uy(t) и Uom(t). Учитывая
независимость сигналов и помех и полагая pnv t=p(D~О [137] (помехи
в основном и опорном трактах некоррелированны), находим
' _V«on(-l)Vpc
/О+ФО+О*
(3.42)
гдей*=о«Х* Аоп = ^Хг
средние отношения
сигнал/помеха; ipc=ipcvi(jr>) —нормированный коэффициент корреляции ква-
Л
дратурных составляющих сигналов и помех в реализациях tiv(t)
Л
И Uoui(t).
Если опорный сигнал формируется методом простой задержки
предыдущего импульса на один такт, то Л20п=Л2о и тогда из (3.42)
следует:
Pv = —(— l)v—^-- (3.43)
При слабых помехах (h%^>l) степень корреляции выходного
эффекта приемника определяется только характером замираний
полезного сигнала pv~— (—l)vpc- Условную плотность
вероятности функции решения можно при этом привести к виду
1 + PCL exp(xi^r)^<0>v = 01-.
WW%) = \
Mv
J_~Pc —
T
(3.44)
где Mv = (_ l)"hJioa. L = 1/(1 + Л»)(1 + hi).
69
Интегрируя (3.44), можно определить искомые вероятности
решений. В частности, при h2Q=h20n (простая задержка) имеем
A-f I-
ЛрРс
1+4
Рп
Poi
1 Л , ЧРс
2 [ i+*2
i'
hi
Орс
1+А?
1 Л ^5Рс
"" = т И + три
^
1
ехр
ехр
ехр
|ехр
2/„
1 + Л?0-Рс)
2/в
1 + *о(1 + Рс)
, /н<0;
fB>0;
2/в
Рю — Ргъ Ра
J+Agd-Pc)
2/н
I+AgU + Pe)
1 — Poi — Poo-
} (3-45)
Из (3.44) вытекают также соответствующие вероятности
решений для однопороговых устройств при fn=fB=fo=0-
Рю = Poi = Р =
1
*?
1+*о2
Рс . PW =>o~ = °-
(3.46)
В частном случае при рс=1 Pio=Poi=l/(l+ft2o), что совпадает
с известными результатами (168].
Приведенные здесь соотношения пригодны и для определения
вероятностей решений при приеме ФМ сигналов (см. выше).
Некогерентный прием замирающих сигналов (рис. 3.5). Пусть
л
опорное напряжение иоп образуется путем задержки входного сиг-
л
нала u(t) на один такт (как по методу сравнения фаз). Можно
Л Л
показать, что напряжения zt- и zk, независимо от индекса v
передаваемого сигнала mv, v = i,k, некоррелированны. При передаче
символа й{
zt = 2£/cos(co0/ + iW + Е + Eon, гк = E — Eon,
где я|м — начальная фаза сигнала при av=a.i. Если же передается
символ аоУ то
Л Л
«I = Б + ion, *k = 2Ucos{(o0t + %) + i —Еоп,
где фо — начальная фаза при av=ao.
При осуществлении простой задержки опоцного напряжения
колебаний щ и Uk при передаче символа <zv (ac=tfc.om ап=ап.оп)
дисперсии а2гуИ a2ftV соответственно'равны:
70
^v==2[ac + (-1)VacPc + ^]» V = 0,1,
где ,pc = pc(T) —значение модуля коэффициента корреляции
квадратурных составляющих сигналов на интервале Т.
Поскольку обычно [168] рс^ 1, то из (3.47) следует
При общих рэлеевских замираниях амплитудные детекторы
должны быть квадратичными, а функциональный преобразователь
должен вычислять разность квадратов огибающих колебаний на
выходе суммирующего и вычитающего устройств. Далее находим
условные плотности вероятности функции /=Н?г—Wk, пользуясь
методом функциональных преобразований; эти плотности
вероятности совпадают с (3.33). Если же опорный сигнал формируется
путем задержки и фильтрации, то соответствующие условные
плотности вероятности совпадают с (3.30). Следовательно,
условные вероятности решений не отличаются от приведенных выше
выражений (3.34) и (3.31).
3.6. СОВМЕСТНОЕ ВОЗДЕЙСТВИЕ ПШРОКОПОЛОСНЫХ
И УЗКОПОЛОСНЫХ (СОСРЕДОТОЧЕННЫХ) ПОМЕХ
Кроме широкополосной (флуктуационной) помехи, существенное влияние на
работу системы связи в ряде случаев оказывают узкополосные
(сосредоточенные) помехи (см. гл. 1). В частности, при значительном числе работающих в
ограниченном диапазоне радиостанций сильное влияние на помехоустойчивость
(и скорость) передачи оказывают сосредоточенные «станционные» помехи.
Будем считать, что, кроме полезного сигнала u(t), на вход демодулятора
воздействуют независимые аддитивные нормальные стационарные помехи:
широкополосная li(t) с равномерным энергетическим спектром в полосе приема А
и узкополосная fofO со спектром, сосредоточенным в полосе 6<Д.
Проанализируем далее прием замирающих сигналов (общие рэлеевские замирания).
Полагаем при этом средние значения принимаемых сигналов и помех равными
нулю, а средние мощности (дисперсии) соответственно равными <т2с, <J2m и а2па.
Рассмотрим два характерных случая, имеющих практическое значение.
Некогерентный прием замирающих ЧМ сигналов (решения по алгоритму
Л Л
разности квадратов огибающих). Напряжения z{ и Zh на выходе фильтров (см.
рис. 3.3) с неперекрывающимися частотными характеристиками независимы. При
передаче символа ai
*/ = "i + lit + latf *k = lift + Uk.
где git, lift — широкополосные помехи с дисперсиями <J2ni< и a2ni*; £г<» hk —
узкополосные помехи с дисперсиями <У2П2< и о2П2Л-
При передаче символа а<>
А л
Полагаем, что a2nii = cr2nifc=o*2ni и что дисперсии передаваемых сигналов
Л Л
"i и и0 одинаковы и равны а2е. Напряжения 2< и г*, независимы и подчиня-
(3.47)
71
ются нормальным распределениям с нулевыми средними и дисперсиями а2с.п
(при наличии полезного сигнала) и о2п (при отсутствии полезного сигнала).
Квадраты огибающих Wi=Z2i и Wh=Z2h подчиняются экспоненциальным
законам (3.22) с соответствующими параметрами. Для определения условных
плотностей вероятности w(f/av ) разности /=№;—Wh воспользуемся
соотношениями (3.23), учитывая, что при передаче символа at имеем a2c.n = CT2c+o"2ni+a2B2i,
<T2n=a2ni+a2n2k, а при передаче символа а0 — а2с.п=а2И-о-2п1+о-2в2»,
<J?n = a2ni+a2n2i, т. е.
w(f/ai):
, х Г /
*£. (*+*?+<? + «?) ехр|_2<40 + $.
/<0;
"ТГ ехР "
яо L
/
w (f/a0) = J
I **l (2+ *?+«? +
2^,(2 + *»+^+^) 6XP [ 2ol, (l + A* +ql)
, / >0;
I (3.49)
./<0;
^!Texp["
/
12^.(2 + ^ + ^ + 4?)^ 4 2o*,(l+??)J
где ft2 = ofro*,, 92 = a^/o^,, q\ = oj^/o*, .
, />0,
Pio =
Интегрируя (3.49) в соответствующих пределах, получим:
<0;
2 + ^o + <?o+<7f
-ехр
2(1
1+А§+Ч?
Ри = ——-г—п—г ехР
2+^+^+9, L 2(1+/«2 +
£н _1 - = _/н
+ 4) У гн о»,
*П1
Poi:
!+<?,
2 + ^+<?0+<?1
-ехр
Роо = : — ехР
2 + ^o + ^o+^i
L 20 + «?) Г
(3.50)
)
Как видно из (3.50), вероятности ошибок при передача единиц и нулей »
данном случае различны. Лишь в частном случае, если дисперсии узкополосных
помех в__ каждом из каналов одинаковы (<72i = <72o) и пороги симметричны
(|zH| = |zB|), вероятности ошибок одинаковы Рю — ро1==Р- При отсутствии
сосредоточенных помех (a2n2i=ia2n2fe=0) приходим к выражениям (3.24).
Автокорреляционный прием замирающих ОФМ сигналов методом сравнения
фаз (решение по алгоритму разности). Воспользуемся приведенными выше
результатами, полагая наличие широкополосных и узкополосных помех с
соответствующими дисперсиями: в основном тракте a2ni v и a*n2v > a2nv =a2niv +
+o*2n2v; в опорном тракте сг2пн и a2ll2t, <J2ui=<J2nn+o2n2i. Можно показать
(50], что в данном случае нормированная корреляционная функция
квадратурных составляющих Xi и х (или yi и yv) при передаче символа av , v—0,1,
равна
Pv =
Рп —(—l)VMonPc
К(1+*8)(1+1£Г
(3.51)
72
где hi = •
gcv
2 i 2 '
Jnlv i Qn2v
Pn =
tiL
A
Jnli
+ °n2i
РП2
РП2 — Pn2vt (^)»
nlv
^on^1
Jnli
un2V
un2*
В частности, если опорное напряжение формируется способом простой
задержки предыдущего импульса на время Т, то h2on = h2, я1п = с12> Рп = 1 •
Далее можно представить условные плотности вероятности выходного
эффекта /=«vl-/<Jnv(Tni в виде (3.44), полагая
Рп
Л*=(- 1Г*Л
Рс
, L=V(l+hl)(l+hln)t
и вычислить искомые вероятности решений по ф-лам (3.45). При h=hon и q=q*
из (3.45) получаем:
} (3.52)
Из (3.52) видно, что коррелировапностъ помехи приводит к асимметрии канала,
Pio¥=poi- Лишь при рп-К) канал становится симметричным. Для однопороговых
решающих устройств при /н=/в = 0
Рю
Poi
1 —
ftp Рс + Рп
1+*2о
^оРс-Рд
1+Л?
= Рю-
(3.53)
п
ГЛАВА 4
Кодирование
4.1. РАСПРЕДЕЛЕНИЕ ОШИБОК
В КАНАЛАХ СВЯЗИ
При оценке эффективности различных методов кодирования
сообщений как в однонаправленных линиях передачи
информации, так и в системах с обратной связью существенную роль
играют действующие в каналах помехи (см. § 1.4).
Для определения соотношений, необходимых для вычисления
вероятности верного, неверного либо сомнительного приема
кодовых комбинаций, помимо обнаруживающей или исправляющей
способности кода, требуется знать вероятности возникновения всех
возможных сочетаний ошибок в комбинации. При этом различают
две характерные ситуации:
а) помехи действуют на элементы кодовой комбинации
независимо при вероятностях искажений «единиц» и «нулей»,
соответственно равных рю и рои
б) имеется определенная вероятностная связь между
искажениями отдельных элементов в кодовой комбинации.
Здесь будут рассматриваться только симметричные каналы,
цля которых piQ=p0f=p. Пусть длина кодовой комбинации (число
элементов в ней) равна п и помехи действуют на ее элементы
независимо. В этом случае вероятность искажения любых т
элементов из п может быть записана в виде (ф-ла Бернулли):
Pn(m) = CZpm(l-p)n-mt m=0^. (4.1)
При т = 0 выражение (4.1) представляет собой вероятность
неискаженного приема всех элементов комбинации. Величина р
при прочих равных условиях зависит от отношения сигнал/помеха
h2 (см. гл. 1 и 3). Независимые искажения практически возникают
при передаче сообщений прямым лучом в УКВ диапазоне волн,
где доминирующими являются помехи в виде нормального белого
шума и канал можно считать однородным. Формула (4.1)
применима для вычисления Рп(т) также в нестационарных
(неоднородных) каналах, если скорость изменения их параметров
настолько велика, что время корреляции между состояниями канала
меньше длительности одного элемента кодовой комбинации. При этом
74
2 J k 5 6789Ю 20 /Л
вместо р в ф-лу (4.1) подставляется среднее по состояниям каналу
значение вероятности искажения элемента кодовой комбинации р
(см. § 2.6).
Совокупность выражений или графиков, определяющих
значения Рп(т) при данных параметрах канала связи, принято
называть моделью этого канала. Канал с независимыми
ошибками характеризуется одним параметром р (или р) либо
соответствующим значением Л2, от которого эти величины зависят.
Совокупность из т ошибок в комбинации длиной п называют
ошибкой кратности т. Обычно р<^1/п и р<С1/я, вследствие чего
наибольшую вероятность в комбинации имеют ошибки кратности
/п=1. Вероятности ошибок большей кратности при р<с1/я быстро
убывают с возрастанием т. Характерные кривые для случая
p—\0~2t вычисленные по ф-ле (4.1) для трех значений п,
изображены в логарифмическом
масштабе на рис. 4.1 nyHKTiHpOiM.
Более сложная картина
наблюдается в случае зависимых
ошибок. Для (каналов с такими
ошибками не существует пока
общепринятой модели,
определяющей значение /5n(lm).
Многочисленные экспериментальные
данные говорят о -наличии эффекта
группирования ошибок.
Проявляется он в том, что ошибки
относительно высокой кратности {т^> рфА
^>1) имеют такой же порядок ве- п
роятности Рп(т), как и при т=А.,
либо даже превосходят значение Рис. 4.1.
Р«(1). Группирование ошибок вы- За™ распределения .вероятностей
"v ' rj ;r ошибок в двоичных кодовых хомби-
зываотся «в'спышками» помех наЩ!ЯХ даИ(Н0Й п при независимых
(или падениями уровня сишала) а=0 ^штриховые линии) и прушшру-
в отдельные • интервалы вре- ющихся а=0,5 (сплошные линии) ис-
мени при относительно низкой шжшя'х элементов ,щ>и р=10-«
их интенсивности во времени в
среднем. Такие вспышки возникают часто в линиях проводной
связи за счет наводок от соседних каналов при включениях и
выключениях аппаратуры; при этом считают, что ошибки
объединяются в пакеты. К группированию ошибок приводят также
флуктуации уровня сигналов, которые возникают вследствие замираний
в линиях коротковолновой связи, в тропосферных линиях и др.
Многообразие причин, вызывающих группирование ошибок,
породило значительное количество разнородных моделей каналов
связи. Известны модели каналов Беннета—Фройлиха [192],
Гилберта [31], Мертца [125], Эллиота [187]. В последние годы
появились модели [142, 8 и др.], расчетные соотношения для которых
основаны на некотором числе параметров, определяемых путем
Ю'
ю21
ф
ff
ч>
*о
\
\
*\
\
\
\
±
\\
\Р
\\ 1
fh
Vj/
/7=5 Ю Л
75
многократных статистических измерений на линиях связи данного
типа. Так, в частности, в модели [142] такими параметрами
являются вероятности искажения элемента кодовой комбинации р и
показатель группирования а. Значения последнего колеблются в
пределах от 0,615 для кабельных телефонных каналов с ОФМ
до 0,33 для телефонных каналов с ЧМ коротковолновых
радиолиний. Величина Рп(т) определяется выражением
Р.И- *-+'in) — in) fl """'"Т ■ (4-2)
т ■ ■ ч * — 1
vm+1(n)-— i=i Vi(n)-—^—
где vm(n) — плотность ошибок порядка т, определяемая при
рп^а<^\ и т/п<0,3 приближенным равенством
vm(ra)«(f)1_a. (4.3)
Вероятность т или более ошибок в комбинации длиной п
определяется выр ажением
п
Pn(>m) = VPn(0 « (— )l~"P при т/п < 0,3. (4.3')
Зависимости Рп(т), вычисленные по ф-ле (4.2) для случая
/?=10~2, а = 0,5 при ft, равных 5; 10 и 31, показаны на рис. 4.1
сплошными линиями.
Использовать приведенные выше и другие известные
соотношения для вычисления Рп(т) в случае радиоканалов затруднено
вследствие большого числа параметров этих каналов (диапазон
рабочих частот, отношение мощностей сигнал/помеха на входе
приемного устройства, вид модуляции, длительность сигналов
и пр.). Поэтому определение множества статистических
характеристик является сложной процедурой и не решает задачи до
конца. Кроме того, требуется учитывать необходимость
проектирования новых каналов, отличающихся по своим параметрам от
ранее действующих.
В [94, 105] сделано предположение об относительной
медленности изменения параметров KB каналов по сравнению со
скоростью передачи двоичных сообщений даже при так называемых
быстрых (см. § 1.4) замираниях. Иначе говоря, полагается, что
период замираний много больше длительности кодовой
комбинации п%с, вследствие чего за время ее передачи отношение
сигнал/помеха h2 на входе приемного устройства практически не меняется.
Правомерность этого допущения применительно к используемым
на практике длинам кодовых комбинаций подтверждается в [89]
сопоставлением расчетных соотношений с данными, полученными
при статистических измерениях в реальных каналах и в
лабораторных условиях.
76
При сделанном допущении закон распределения ошибок Рп(т)
может быть найден как среднее по состояниям канала значение
вероятности появления т ошибок в я-элементной комбинации
00
Рп(т)=\Рп(т, h)w(h)dh, (4.4)
6
rjxe\w(h)—закон распределения h; Pn(m,h) — закон
распределения! ошибок для фиксированного значения отношения
сигнал/помеха h. Если при h = const ошибки в элементах независимы, то
в соответствии с (4.1)
Рп (tn, h) = С%р»*(Н)[1-р (h)]™. (4.4')
Рассмотрим для примера случай некогерентного приема
элементов кодовых комбинаций при частотной модуляции в условиях
рэлеевских замираний (см. § 1.4). При этом Рп(т, h)
определится поф-ле (4.1) [155}
р(Л) = |-ехр(-^-). (4,5)
Подставляя (4.4') с учетом (4.5) в (4.4) и интегрируя, получим
т п-т i
2«-1 Ц \ 2 / /т + /)Л2 + 2
г=0
где Л2о — среднее по состояниям канала значение отношения
сигнал/помеха на входе приемного устройства.
В частном случае при т = п ф-ла (4.6) приобретает вид
Рп^)=—-^- -. (4.7)
2n~l (nh\ + 2)
В расчетном отношении весьма полезным может оказаться
вытекающее из (4.6) рекуррентное соотношение
Рп(т) = ^±±-Рп(т+\)+ \ ■ (4.8)
В сочетании с (4.7) она позволяет последовательно рассчитать
значения Pn(tn) для всех чисел т, начиная с больших. При
больших п(я»1) и 0^т<п/2 вместо общего выражения (4.6) удобно
пользоваться приближенным соотношением
cm2,+ t Г(»-« + 2,г(«+^
Рп(т)~-1 ' ■, (4.9)
(n_m+i)ft2 гЛ + 1 + А>
77
где Т(х) — гамма-функция. Отсюда, в частности, для Л20>2/ и
1г£^т<—находим .
и
Рп(пг).
mh\
(Ь')
Для значений п/2<ш^.п при h\^$>2 можно получить
/ п \п—пг+\
ст т — (п — т)\
2т
т?
л—1 ь2
2т — п
(4.10)
На рис. 4.2 и 4.3 приведены значения Рп(т) и Рп(^т) =
п
= 2 Pn(i), вычисленные по ф-лам (4.9) и (4.10) соответственно
i=m
для нескольких значений h\ и п. Крестиками на рис. 4.3 показаны
точки, полученные экспериментально на лабораторном макете
линии связи с 'имитацией за-
1 -2 3 4 5 67-Ю 20 30 W5060 100 Я МИранИЙ ;ПР!И Л20 = 70, КРУЖ-
ка'М'и — д ан'н ы е, пол у ч енн ы е
в реальных условиях на KB
линии связи при скорости
телеграфирования 75 Б од
[142]. Имеет место, как
видно, вполне
удовлетворительное совпадение
теоретических и экспериментальных
данных.
Рис. 4.2.
Законы распределения ошибок
Рп\т) в комбинации длиной п
три частотной модуляции, рэлеев-
оких замираниях и различных
средних значениях отношения сиг-
юал/июмеха h20
Вероятность хотя бы одной ошибки в комбинации из п
элементов удобно находить из следующего рекуррентного соотношения:
Pn-li>l) +
Рп(>1) =
[-F
пК
(4.11)
nhi
при формальном условии Яо(^1)=0. Из этого выражения
нетрудно показать, что при /г^б и Л20>1 (/iV>oo)
78
| 1=6
2 3 4 567 Ю 20 30W5060 m
(4
HO
:2lnrt.
(4.1Г)
На рис. 4.4 приведены
рассчитанные по ф-лам (4.11) и
J1T) кривые, по которым мож-
определить вероятность
появления ошибки Рп(^\) в
комбинации длиной ft=l-f-100
элементов при значениях h\^\ [по
вертикали отложено произведение
h\Pn(>l)l
Канал, описываемый
выражениями (4.5) —(4.11),
определяется, как и в случае независимых
ошибок, только одним
параметром h\. Величина h\
вычисляется на практике по известным
формулам распространения
радиоволн и является обычно исходной
при проектировании KB каналов
связи.
Аналогичным путем можно
получить выражения для других
законов распределения
замираний при ЧМ. Так, для
логарифмически-нормального
распределения уровней сигналов (1.14)
при Л2о>2 нетрудно получить [89]
РЯИ«С-[Р1(1)Н1-Р1(1)Г—,
(4.6')
где
0^ "-*
\.
1 X^J,
\о
> ^ 0
No \
|\о
X
/1=15
Lil.._
1 J
!. j
^ч
1
63
127
I
|
pnm
Рис. 4.3.
Зависимости вероятности появления
т или более ошибок в комбинации
длиной п при частотной модуляции,
ралеавских замираниях и отношении
сигнал/помеха h20 = 70 (крестиками и
кружками обозначены .результаты,
полученные экспериментально в
лабораторных и натурных условиях)
ф)-К
ад)-^-
1 2,65а£
— е \
2Л0
(4.6")
1 1
п
в/ц'/
vt*h(
У,
Й>
НШ
4.
П,1
/
' ' V
|
ТТ"
2 \з
7S12J3
I I
4
2.80
III °°
¥
р
t
&
Щ1
5
3,21
7^
W
^
V-r
2
t
X'
^
У
ktfv
ш
ш
к Б 8
20 60 §0JOn
Рис. 4.4.
Выражение (4.6х) ДЛЯ Рп(т) Вероятности появления хотя бы од-
структурно совпадает с биноми- ной оши,бки ? ^м'би'нации длиной п
rj Jf ^ П)рИ частотной модуляции, медленных
альным законом распределения р|Леев.аких замираниях и .различных
числа Ошибок. отношениях сигнал/помеха /i2o
79
Определим теперь Рп(т) для канала с рэлеевскими замир/а-
ниями при фазовой модуляции. Здесь, как и выше, при
фиксированном значении А ошибки в элементах независимы и согласно
(3.280 '
p{h)=±[l-0(V2h)}.
В рассматриваемом случае интеграл (4.4) в элементарных
функциях не выражается и потому целесообразно воспользоваться
известными приближениями [116] для интеграла вероятностей: i
1 _ ф (]/2 А) я*
Ф(]/ТЛ)«
1 -—А2
е при А> 1;
/я/i
Vn
h при 0 < А< 1.
-h2ihl
Полагая далее, что при Л/А0<С 1 е ° ~ 1, и используя указанную
кусочную аппроксимацию в подынтегральном выражении (4.4),
после интегрирования получим выражение для закона
распределения ошибок
Рп(т).
пС"
2mh*
Л(— (я — т), 2, от+3, — 1)
2"-т+1(/я+1)(т + 2)
+
+
'['-
3
-('-
т+1
X 2
1 \л+П |
2еУ7Г j J J
ет-1(т+1) J
(4.12)
Для приближенных вычислений при 0<т<м/3 можно
пренебречь первым слагаемым в правой части выражения (4.12), а при
т>п/3 — вторым. Кривые, вычисленные по ф-ле (4.12) для
нескольких значений А20 и я, приведены на рис. 4.6.
При относительной фазовой модуляции (ОФМ) ошибки на
позициях кодовой комбинации возникают взаимосвязанно даже при
независимом действии помех на соседние позиции. Это
обусловлено тем, что при искажении одного элементарного импульса
(двоичного символа) помехами ошибочно воспринимается также
следующий импульс, поскольку предыдущий является для него
опорным.
Положим, что прием осуществляется методом сравнения
полярностей {155]. Будем считать, что перед началом каждой кодовой
комбинации длиной п передается один элемент, не несущий
информации, но являющийся опорным для приема первого
информационного элемента сообщения. Можно показать, что при этих
условиях вероятность появления т ошибок в комбинации длиной п
80
/ 2 J if 5 67 Ю 20 501405060
1 2 3 ^ 5 67 10 20 50W 5060m
Рис. 4.5.
Рис. 4.6.
Распределение ошибок в я-элемент- Зависимости Рп(т) три относи-
ной комбинации при фазовой моду- тельной фазовой модуляции и
лящии и рэлеевских замираниях различных значениях п и л2о
(сплошные линии — четное т,
■пунктирные — нечетное т)
при фиксированном значении h определяется выражениями:
2 т—\ т—\
2 £ Сь\ C~T-pk{h)[\-p{h)\n-k^
~^ . в.—1 П—в.
Pn(m,h) = \
«+i
т—2
*=*
при /72 — нечетном,
т—2 т
т т—2
С 2 С2 +С2 С 2
Л—I /г—k k—l n—k
Pk(h)[i-p(h)]
Пг-k+l
при т — четном.
При небольших значениях p(h), пренебрегая членами суммы
с относительно большими значениями k, можно приближенно
записать
( т—\ т+1 _ т— 1
Pn{m,h)
2С 2 т+1 р 2 (й)[1 —р(Л)] 2 при т — нечетном,
4L — — т~~2
С2 т р2 (h)[l—p(h)] 2 при т — четном.
(4.13)
81
При приеме по методу сравнения полярностей, как известно,
p(h) выражается той же формулой, что и для фазовой модуляций.
Подставляя тогда (4.13) в общую ф-лу (4.4) при рэлеевских
замираниях в канале и пользуясь, как и выше, кусочной
аппроксимацией подынтегрального выражения, после интегрирования
Находим
г / т—1\ т + 7 1
Рп(т)ъС 2_м ,_",„{. ' _,) ^-т-т^т-^гт: +
»_ «±1(^2 у-1 а»
• „_m+i (m+3)(m+5)
2 2
+
т— 1 т+3
е 2 я 4 (т+1)
ряИ«с*
т т
п —
2 22/lg
при т — нечетном,
(Л[-(.-^)...
, -1
т
п
г> 2
+
+ '
Ф-КткГ
т—2
* 2
т+2
2
Я J (Л+1)
(т+2)(т+4)
при т — четном.
(4.14)
Построенные по ф-ле (4.14) кривые для нескольких значений п
и h\ с нанесенными экспериментальными точками приведены на
рис. 4.6.
При анализе помехозащищенности двоичных кодов, помимо
величины Рп(т), в ряде случаев требуется знать условную
вероятность искажения е элементов в некоторой части кодовой
комбинации длиной 5 при условии, что в остальной ее части длиной
k = n—s искажено помехами к элементов. Значение этой
вероятности можно найти путем следующих рассуждений.
Предположим, что все возможные варианты размещения т
ошибочных элементов среди п возможных элементов (и аналогично
к ошибочных среди k элементов) равновероятны. Тогда условная
вероятность Р8(е/к) одного определенного варианта размещения
е ошибочных элементов среди s возможных с одновременным
размещением % ошибочных элементов среди k возможных
определится из выражения
г>т /-»х
где m=M+ie, n=k+s.
Искомая условная вероятность Ps(e/^) одного любого варианта
размещения е ошибочных элементов среди s элементов равна
82
Ps(e/x) =CesPs(e/x). Подставляя сюда представление Ps(e/x) из
записанного выше выражения, окончательно найдем
P,m = £llbfL. (4.15)
В этой формуле вероятность Р&(х) определяется по тем же
формулам и графикам, что и Рп(т).
4.2. КОДЫ, ПРИМЕНЯЕМЫЕ В СИСТЕМАХ С ОБРАТНОЙ
СВЯЗЬЮ
Существуют два способа повышения достоверности передачи
информации с применением избыточного кодирования:
— непосредственное исправление ошибочных элементов в
получаемых кодовых комбинациях;
— обнаружение неверно принятых комбинаций с последующим
их исправлением путем повторной передачи.
В системах с обратной связью применяется в основном только
второй способ. Он обладает двумя преимуществами:
1) обнаруживающая способность кода при одной и той же
избыточности всегда выше исправляющей [7, 164, 171];
2) число логических операций, которое должно выполняться
декодером для обнаружения ошибок, значительно меньше числа
необходимых операций для их исправления.
Поэтому при ориентировочно одинаковой технической
сложности аппаратуры, предназначенной для кодирования и
декодирования, второй способ, в принципе, позволяет обеспечить большую
помехозащищенность передачи, чем первый.
Будем рассматривать здесь, главным образом, групповые
систематические коды длиной п, каждая комбинация которых рас-
членима на две части: информационную длиной k и контрольную
(проверочную) длиной s = n—k. В системах с РОС вся кодовая
комбинация передается по прямому каналу, в системах же с ИОС
информационная (безызбыточная) часть комбинации передается
по прямому каналу, а контрольная, в виде квитанции, — по
обратному. Требования, предъявляемые к параметрам применяемых
кодов, определяются видом обратной связи. В случае применения
РОС особо важное значение приобретает вопрос о длине
комбинации. Известно, что в условиях сильно группирующихся ошибок
при использовании двоичных групповых кодов вероятность необ-
наруживаемой ошибки определяется величиной порядка 2~s.
Поэтому при не слишком большой избыточности (s/n^Z10%)
передачу сообщений рекомендуется вести комбинациями длиной в
200 элементов и более.
В настоящее время для передачи телеграфных сообщений
(знаков, букв) утвержден в качестве международного минимальный
семиэлементный код (код № 5); он же принят в качестве
стандартного и в СССР [3, 58]. Поскольку передачу целесообразно ве-
83
сти длинными комбинациями, элементарные сообщения перед
передачей компонуются в блоки, которые затем кодируются в
соответствии с выбранным кодом.
В случае использования информационной обратной связи
некоторые вопросы (в частности, о рациональной длине блока, об
оптимальной избыточности кода) могут решаться по-другому.
В тех случаях, когда загрузка обратного канала не имеет
решающего значения и можно применять полную обратную связь,
система ИОС позволяет при умеренных помехах вести передачу
информации со скоростью, близкой к скорости ее передачи,
минимальным (безызбыточным) кодом. При этом большинство ошибок
обнаруживается и нет необходимости передавать сообщения
длинными блоками. Это позволяет резко упростить операции
кодирования и декодирования сообщений.
Современная теория кодов в основном разработана
применительно к передаче сообщений без обратной связи. Выявлено
большое число кодов, обладающих высокой исправляющей
способностью. Наибольшее распространение из них получили
циклические коды (12, 141, 164] вследствие относительной простоты
технической реализации процедур кодирования и декодирования. В
частности, для передачи сообщений в условиях независимых ошибок
рекомендуется применять циклические совершенные коды
Боуза—Чоудхури (15, 11), (23, 12), (31, 26), циклические
квазисовершенные коды (255, 239), (127, ИЗ), (31, 21) и др.1).
Эти же коды целесообразно применять и в системах с РОС,
если алгоритм системы предусматривает использование не только
обнаруживающей, но и исправляющей способности кода. *
Структура группового (п, k) -кода, обнаруживающего ошибки,
значительно отличается от структуры кода с теми же
параметрами, но исправляющего ошибки. В частности, при независимых
ошибках оптимальными по исправляющей способности являются
совершенные (плотно упакованные) коды [12, 123, 128]. Эти коды
дают возможность исправлять все ошибки определенной,
ограниченной сверху кратности, но не позволяют не только исправить,
но и обнаружить ошибки большей кратности. Специфической
особенностью совершенных кодов является принципиально
неодинаковый вес кодовых комбинаций [128, 141]. Например, совершенный
код Хэмминга (7, 4) содержит семь разрешенных комбинаций
весом три, семь комбинаций весом четыре и одну комбинацию весом
семь. К совершенным кодам по исправляющей способности близко
примыкают квазисовершенные коды [12, 128}, позволяющие
исправлять все ошибки определенной кратности и часть ошибок
кратности, большей на единицу.
Оптимальными по обнаруживающей способности при
фиксированном числе разрешенных комбинаций М и их длине п являются
4> В скобках дается общепринятое обозначение параметров избыточных
кодов: первая цифра указывает длину кода /г, вторая — длину его
информационной части k.
84
эквидистантные коды |104]. Характеризуются эти коды тем,
что в них все разрешенные комбинации имеют одинаковый вес и
удалены друг от друга на одинаковое кодовое расстояние d.
Многочисленные примеры показывают, что структуры кодов
^одинаковыми параметрами п и к, максимизирующие их исправляющую
либо обнаруживающую способность, не совпадают. Например,
эквидистантный код (7,3) с кодовым расстоянием d = 4,
обнаруживающий все ошибки, за исключением кратности т = 4, в режиме
исправления дает возможность устранять семь одиночных, либо
семь двойных, либо одну тройную ошибку в комбинации. Если
соответствующим образом изменить структуру кода, сократив
кодовое расстояние до d = 3 (и тем самым ухудшив
обнаруживающую способность кода), то число исправляемых двукратных
ошибок можно довести до восьми (правда, с потерей возможности
исправлять тройную ошибку, что менее важно). Исходя из
границы Плоткина (см. § 4.6), можно предположить, что существует
совершенный (либо квазисовершенный) код, изменяя структуру
которого можно хотя бы на единицу увеличить его
обнаруживающую способность за счет исправляющей.
Наряду t эквидистантными кодами существует целый ряд
других групповых кодов, обладающих высокой обнаруживающей
способностью. Однако широкое распространение в системах как с
обратной связью, так и без нее получили пока только циклические
и итеративные коды [3, 12, 171]. В частности, при использовании
для передачи сообщений кода № 5 рекомендуется применять
итеративный с двухступенчатым обнаружением ошибок код
(264, 224)1).
Для передачи сообщений нестандартной длины
преимущественное распррстранение получили циклические коды (260, 244),
(500, 484) и т. д. с образующим полиномом х16 + л:12+л:5+1.
Задача выбора оптимального кода применительно к каналам
с группирующимися ошибками остается пока далекой от решения
не только для систем с обратной связью, но и для систем без
обратной связи. Объясняется это тем, что существующие
математические модели каналов [8, 22, 31, 192] достаточно сложны для
аналитического решения проблемы оптимального кодирования.
На практике наряду с теоретическими поисками эффективных
кодов ведутся экспериментальные исследования эффективности более
или менее приемлемых к данным условиям кодов и лучший из них
выбирается путем сравнения. Результаты одного из таких
исследований, проведенных применительно к действующим каналам
связи, приведены в [142]. Показано, что циклические коды,
исправляющие кратные ошибки (код Боуза—Чоудхури), коды,
исправляющие пачки ошибок (код Файра), и даже рекуррентные (цеп-
*> Итеративным, как известно, называется код, в котором блок комбинаций
записывается в виде /г-мерного куба и кодирование осуществляется
последовательно по всем координатам этого куба. В частности, при двухступенчатом
кодировании комбинации записываются в виде таблицы и кодирование
производится сначала по строкам, а затем по столбцам {12].
85
ные) коды неэффективны (в частности, в KB каналах) для
комбинаций длиной вплоть до я = 500. Применение решающей обратной
связи в сочетании с кодами, используемыми в режиме
обнаружения ошибок, дает возможность снизить значение минимально
необходимой длины кодовых комбинаций при указанных условиях до
я:= 60-^80.
Перспективным методом борьбы с помехами, вызывающими
группирование ошибок, является организация передачи сообщений
с искусственной декорреляцией ошибок. В этом отношении весьма
удобным оказывается применение информационной обратной
связи. В самом деле, в системах с ИОС сообщения и квитанции
передаются друг относительно друга с задержкой во времени и, кроме
того, по разным каналам. Это само по себе, без применения
дополнительных мер способствует декорреляции информационной и
контрольной частей кодовых комбинаций. При сильном
группировании ошибок в каналах в системах с обратной связью следует
применять коды, обнаруживающие пачки ошибок ![120].
Объясняется это тем, что вероятность искажения одного и того же числа
элементов в кодовой комбинации зависит от расположения этих
элементов: она тем больше, чем они ближе расположены друг
к другу. Однако коды (в частности, циклические) всегда можно
сконструировать так, что возникнет возможность обнаруживать
большее число близко расположенных ошибочно принятых
элементов, чем ошибочных элементов, произвольно удаленных друг
от друга.
4.3. ОБОБЩЕННЫЕ СПЕКТРЫ КОДОВ
Как уже говорилось ранее, все д-элементные кодовые
комбинации, которые составляют систематический (п, &)-код, можно
разбить на две части: ^-элементную информационную (х{),
являющуюся собственно передаваемым сообщением, и s-элементную
контрольную (х*г) или проверочную, выполняющую функцию
опознавателя ошибок. В зависимости от ошибок в
информационной и контрольной частях кодовой комбинации (т. е. в сообщении
и опознавателе) прием кодовой комбинации может завершиться
одним из четырех исходов: НО, ПР, 00 и ЛО (см. гл. 2).
Вероятности этих событий Ряо(Х{), Рщ>(Х(), Poo(xi) и Pno(xi)
определяют достоверность и относительную скорость передачи
информации по каналам с обратной связью. Рассмотрим, как
определяются эти вероятности применительно к двоичным системам с
симметричными каналами.
Задача решается относительно просто, когда вероятности
ошибок при приеме двоичных элементов в информационной (р) и
контрольной (р') частях кодовой комбинации равны между собой и
корреляционная связь между ошибками не зависит от того, к
какой части кодовой комбинации они относятся. Также просто
решается задача, когда элементы контрольной части передаются
безошибочно (// = 0). В этом случае при s<k одна и та же кон-
86
трольная комбинация ставится в соответствие подмножеству из
2k~s различных информационных комбинаций. При /?'=0 не
обнаруживаются ошибки лишь внутри подмножества и проблема
кодирования в целом сводится к такому распределению кодовых
комбинаций между подмножествами, при котором вероятность
этих ошибок становится минимальной. Это можно сделать на
основе существующей теории кодирования. Если рфр' и р'фО, то
при анализе достоверности передачи сообщений в системах с
обратной связью нельзя непосредственно использовать результаты
существующей теории кодирования. В этом случае перечисленные
выше вероятности событий определяются предварительным
определением для данного кода числа комбинаций zxe, содержащих
ровно х единиц в информационной части и ровно е в проверочной.
Множество чисел {2гке} (1 ^x^fe, O^e^s) условимся в
дальнейшем называть обобщенным спектром систематического кода.
Частным случаем такого спектра является спектр кода в
общепринятом смысле, под которым понимается множество чисел {zm}y
где zm — число Ti-элементных кодовых комбинаций, содержащих
т=к+£ единиц [141]. Обобщенный спектр обладает следующими
свойствами:
1) 2ое=0 при 8=7^=0 и £оо=1, так как в групповом коде имеется
только одна комбинация, в которой информационная часть
состоит из одних нулей — это 0 0 0 ... 0 0;
2)1
**e = C£> (4Л6)
8=0
так как общее число комбинаций веса и в минимальном
^-элементном групповом коде равно CV,
3) спектр кода ib общепринятом смысле и обобщенный спектр
связаны соотношением
8 к
*»в2г«—.»в2 **.*»* (4Л7)
8=0 К=1
причем zo=l.
Получим соотношения для обобщенных спектров некоторых
известных кодов.
Симплексные коды [12, 128]. Такие коды относятся к классу
эквидистантных. Они характеризуются тем, что все кодовые
комбинации в них имеют равный вес zm и удалены друг от друга на
одинаковое кодовое расстояние d. Согласно геометрической теории
кодирования этим кодам соответствуют в я-мерном пространстве
вершины правильной фигуры — симплекса. Число разрешенных
комбинаций симплексного кода М, их длина п и спектр {zm}
определяются формулами: M=2ft, n=2h— 1 и
1 при т = 0,
">£ 1 „™, <~, Скк—\
2— 1 при т = 2й-1, т = 1, -л,' (4.18)
0 при тфО либо тф2к~1.
87
Как следует из этих соотношений, кодовое расстояние
симплексного кода между комбинациями к=2к~}. Симплексные коды
обнаруживают все ошибки в кодовых комбинациях, за исключением
ошибок кратности m=d = 2h-i.
Нетрудно найти обобщенный спектр {гхе} симплексных кодов.
Так как суммарный вес всех комбинаций (исключая тривиальную
000—0 0) одинаков, а число комбинаций с весом
информационной части х равно Сх&, то
(4-19)
Ортогональные коды (128]. Эти коды также относятся к классу
эквидистантных. Согласно геометрической теории этим кодам
соответствуют вершины усеченного кроссполитопа в д-мерном
пространстве. Параметры ортогонального кода определяются
формулами: M = 2k, п=2к и
*ке = «
1 при х = 0, 8 = 0,
Ck при е = 2*"1 — х, х = 1, k,
k 0 при е ф 2k~~l — х, х = 1, k.
1 при т = 0,
2*— 1 при m- 2k~\
0 при т Ф 0 либо m Ф 2к~~х.
(4.20)
Как видно, обнаруживающая способность ортогональных кодов
такая же, как и у симплексных, однако длина комбинаций на
единицу больше.
Обобщенный спектр определяется выражением
( 1 при х = 0 и 8 = 0,
гне
С* при
k-\
х, где х= 1, k,
(4.21)
[ 0 при е Ф 2 — х, где х = 1, k.
Приведенные соотношения показывают, что эквидистантные
(симплексные и ортогональные) коды обеспечивают высокую
помехозащищенность передачи, однако достигается это ценой
большой избыточности. Например, избыточность s/n симплексного кода
при k=5 составляет 85%, а при k = 7 — 95%. Это ведет к
определенной сложности их использования в системах с ИОС, а в
системах с РОС, кроме того, обусловливает весьма малые скорости
передачи. Анализ эффективности эквидистантных кодов проделан
в [145], один из возможных методов построения описан в [146].
Биортогональные коды |[12, 128]. .Эти коды представляют собой
соединение двух ортогональных кодов. В геометрической
интерпретации биортогональные коды соответствуют полному кросспо-
литопу, их параметры характеризуются формулами:
n = 2h~i и
М = 2\
zm =
1 при т = О,
ъ*-2
г>*-1
(4.22)
2* — 2 при m
1 при т = 2R
О при тфО, либо тф2к~2, либо тф2к~\
Нетрудно написать теперь формулу для расчета обобщенного
спектра
1 при х = 0 и 8 = 0,
Ck при е
*Хв =
л*-2
— X, И = 1, А,
1 ПрИ X = 8 = ky
(4.23)
0 при
8 =£2* 2— X, X:
1, *>
либо х = k я ефк.
По своим свойствам биортогональные коды примыкают к
эквидистантным, поэтому их еще называют почти-эквидистантными
кодами. Избыточность биортогональных кодов меньше, чем
симплексных и ортогональных. Например, при k = b величина s/n
составляет 69%, а при k = 7 — 90%. Однако и кратность
обнаруживаемых ошибок этих кодов ниже (вдвое), чем предыдущих.
Связано это с тем, что кодовое расстояние между комбинациями
d = 2k~2 вдвое меньше; лишь одна комбинация удалена от всех
других на то же расстояние, что и у симплексных и ортогональных
кодов.
Коды с проверкой на четность [128, 185]. Эти коды строятся
путем добавления к информационной части одного элемента,
такого, чтобы вес всей кодовой комбинации оказался четным.
Параметры таких кодов определяются выражениями: M = 2k, n=k+\ и
1 при т = 0,
zm =
С™ при т — четном,
(4.24)
0 при т — нечетном.
В соответствии с правилом построения обобщенный спектр
определяется выражением
( 1 при х = 0 и & = 0,
Х8
при б=0их — четном
либо 8=1 и х — нечетном,
при 8—1 их — четном
(4.25)
либо б = 0их — нечетном.
Несмотря на то, что с точки зрения реализации процедур
кодирования и декодирования коды с проверкой на четность
являются простейшими, они обладают достаточно хорошей помехо-
89
устойчивостью — обнаруживают все нечетные ошибки. Требуемая
для построения кода избыточность s/n=l/k+l с увеличением
длины кода быстро уменьшается. Поэтому коды с проверкой на
четность по некоторым критериям относят к оптимальным [128].
Повторительные коды ([12, 185]. Проверочная часть таких кодов
представляет собой точную копию информационной части.
Поэтому параметры повторительного кода определяются формулами:
M = 2k, n=2k и
II при т = О,
С™/2 при т — четном, (4.26)
О при т — нечетном;
II при х = О и 8 = 0,
С* при х = 8, (4.27)
0 ПрИ Х^8.
По возможности реализации повторительный код является
простейшим из всех кодов с 50%-ной избыточностью. Практически он
не требует специальных кодирующих и декодирующих устройств.
Максимальная кратность всех обнаруживаемых ошибок т0=1.
Инверсные коды [185]. Эти коды строятся в соответствии с
правилом: проверочная часть кода должна полностью совпадать с
информационной, если число единиц в последней четно, и должна
быть инвертирована (ее элементы заменены противоположными),
если число информационных элементов нечетно. Запишем для
этого кода сначала формулу, определяющую обобщенный спектр.
Согласно правилу построения кода е=х, если х — четное, и e=k—х,
если х — нечетное. Поэтому
1 при х = 0 и 8 = 0,
2не =
при х — четном, в = х л осч
либо х — нечетном, е = k — х,
0 При 8 ф X ЛИбо 8 ф k — X.
Найдем выражение для числа комбинаций веса /п. В
соответствии с правилом построения кода комбинации могут иметь вес,
только кратный четырем, т.е. m = 4v (v=l, 2, ..., — , где знак
[х] означает целую часть дробного числа х). Число комбинаций
веса m = 4v определяется числом комбинаций, в которых x = 2v.
Это число равно
кфМу /=1, 2, 3, . . .
z4v = C!VnPH ГТТ] (4-29)
Число комбинаций веса m=k при кфМ (/=1, 2, 3, ...)
определяется числом комбинаций с нечетным весом в информационной
части и равно
90
^-1
zk = 2«-1 при кф\1 (4.30)
Если же k=4l. то к этому надо добавить еще комбинации, число
которых согласно (4.29) равно 2ц=С21ы при /=1, 2, 3, ... . Для
инверсного кода при k-фМ (1= 1, 2, 3, ...)
Zm^ \
С™'2 при т =4v, где v = 1,
[f]-
>*-!
при m
(4.31)
а при k = 4l
{ 0 при m Ф k и m^Avy
0
Cm/2
2*-
(4.3Г)
при m^=4v,
при m = 4v, где v =' 1, -у , но v=?^-j-
+ С*'2 при m = k = 4/, где / = 1, 2, 3, . . .
Например, код (10,5) согласно (4.31) содержит десять
комбинаций веса 4, шестнадцать комбинаций веса 5 и пять комбинаций
веса 8. При k = 4 по (4.3Г) имеем z4=14, z8=l. Это, согласно
(4.22), почти-эквидистантный код (8,4).
Избыточность инверсных кодов, как и повторительных, равна
50%, однако используется она более рационально —
максимальная кратность всех обнаруживаемых ошибок инверсных кодов
яг0 = 3. Техническая реализация этих кодов особых трудностей
не представляет.
Циклические коды [12, 99, 107, 120, 141, 164]. Основное
свойство циклических линейных кодов можно сформулировать
следующим образом: если какая-либо комбинация принадлежит
циклическому коду» то другая комбинация, полученная из первой
циклическим сдвигом всех элементов на одну позицию вправо,
также принадлежит этому коду. Это свойство позволяет
технически просто с помощью обычных регистров сдвига решить
проблему кодирования и декодирования. В частности, поэтому
циклические коды получили наибольшее распространение.
Алгебраическая теория циклических кодов разработана
достаточно полно. Однако следует заметить, что задача определения
спектра кода (и тем более обобщенного) четкого разрешения пока
не получила. Обсуждение этой проблемы и некоторые
предложения по оценкам приведены в [107, 147].
Условимся спектр циклического кода {zm} оценивать в
дальнейшем приближенной формулой
( 1 при т = 0,
0 при 1 < т < dt
(4.32)
91
Циклические
коды
Коды для
сравнения
№ пп.
(я, к)
d
№ пп.
(л, к)
d
1
(39,3)
13
Г
(35,3)
20
2
(7,4)
3
2'
(7,4)
3
3
(21,4)
9
3'
(21,4)
13
4
(15,5)
7
4'
(15,5)
8
5
(65,5)
13
5'
(63,5)
32
6
(12,6)
4
6'
(12,6)
4
7
(31,6)
15
7'
(31,6)
16
Не останавливаясь на методике формирования циклических
кодов (этому вопросу посвящена многочисленная литература),
дадим сравнительную оценку некоторым из них. В табл. 4.1
перечислены некоторые коды (в основном коды Боуза—Чоудхури).
Коды (7, 4), (15, 11), (31, 26), (63, 57) относятся к классу
совершенных; их параметры п и k определяются формулами
n=2s—1 и k = n—s, где 5 — длина проверочной части (5^3).
По своим параметрам эти коды совпадают с аналогичными кодами
Хэмминга (в табл. 4.1 это коды № 2', 10', 14', 16'), обладающими
наибольшей исправляющей способностью. Код (23, 12) является
также совершенным; в литературе он известен под названием
кода Голея. Код (15,7) относится к классу квазисовершенных;
параметры циклических кодов этого класса определяются формулами
n=2s—1 и k = n—2s. Как видно из таблицы, квазисовершенный код
Хэмминга в режиме обнаружения ошибок несколько
предпочтительнее циклического (кодовое расстояние d у него больше).
Коды (12,6), (47,24), (31,16) и (63,30) обладают почти 50%-ной
избыточностью. Первые два из них по оценке Хэмминга (см.
§ 4.6) обладают хорошей обнаруживающей способностью, а
последние два обеспечивают максимальную кратность
обнаруживаемых ошибок, на два меньшую максимально возможной.
Сопоставление циклических кодов (31,6) и (63,7) с почти-эквидистайтными
(31,6) и (64,7) говорит о высоких обнаруживающих качествах
первых; коды же (31,3) и (65,5) весьма существенно уступают
эквидистантным (35,3) и (63,5), причем последний сразу по двум
параметрам.
Уже это беглое сравнение показырает, что циклические коды
по своим качественным показателям весьма разнообразны.
Поэтому вопрос об использовании циклического кода в каждом
конкретном случае надо решать в сопоставлении с другими кодами,
близкими по показателям к эквидистантным либо совершенным.
92
ТАБЛИЦА 4.1
8
<1Ь.7)
5
8'
(15,7)
6
9
(63,7)
31
9'
(64,7)
32
10
(15,11)
3
10'
(15,11)
3
11
(23,12)
7
1Г
(23,12)
7
12
(31,16)
7
12'
(31,16)
9
13
(47,24)
11
13'
(47,24)
12
14
(31,26)
3
14'
(31,26)
3
15
(63,30)
13
15'
(63,30)
15
16
(63,57)
3
16'
(63,57)
3
Случайные групповые коды [115, 141, 168]. Такие коды
образуются путем приписывания к единичной матрице произвольной
дополняющей матрицы размера (kXs). Целесообразность
рассмотрения этих кодов объясняется удобством их применения в
теоретических исследованиях. При больших п они позволяют
достаточно просто получить средний результат, которого можно
добиться, применяя какой-либо конкретный групповой код. В
инженерной практике это часто оказывается вполне достаточным.
Предположим, что при выборе дополняющей матрицы каждая
может быть взята с одинаковой вероятностью. Определим среднее
по всем образуемым таким образом кодам значение г%г. Оно,
очевидно, определяется выражением
Nks
(4.33)
где Nks — общее число кодов, образуемых путем приписывания
всех возможных дополняющих матриц; Z *8— общее число
кодовых комбинаций в этих кодах, содержащих ровно х единиц в
информационной части и г единиц в контрольной.
Все дополняющие матрицы, определяющие общее число кодов
Nks, образуются путем всевозможного перебора единиц и нулей
в дискретном прямоугольнике размера (kXs). В каждой строке
прямоугольника можно записать всего "УСе« —2s вариантов раэ-
8=0
мещения произвольного числа единиц, где С*5 — число вариантов
размещения в строке 8 единиц. Поскольку все варианты
размещения нулей и единиц во всех k строках независимы, полное
число кодов равно
#*s = 2**. (4.34)
93
Теперь определим число ZX8. При фиксированном х это число
по всем дополняющим матрицам определяется суммой любых
% строк. Покажем, что сумма любого числа одинаковых (по всем
матрицам) строк дает общее число векторов Ze веса е, равное
Ze =2<*-1>e.
Пусть, например, % = 2. Зафиксируем во всех матрицах строки
с номерами / и /. Так как при фиксированных двух строках с
помощью остальных k—2 строк можно на основании (4.34) построить
2(fc-2)s всевозможных матриц, то Z8=2(ft_2)sZg(/, I), где Z8 (7,1) —
общее (по всем матрицам) число векторов веса е, получающихся
в результате сложения в каждой матрице строк с номерами / и L
Это сложение при всевозможных наборах единиц и нулей в
выделенных строках эквивалентно сложению сначала одного
вектора (с фиксированным размещением единиц и нулей) с
множеством 2s всех возможных векторов длины 5 другой строки, затем
другого вектора с тем же множеством и т. д. Так как множество
2s векторов представляет собой полную группу, то каждая сумма
образует ту же группу. Поскольку групп всего 2s, а в каждой
содержится Ces векторов веса е, то Z8(/, l)=2sCes. Следовательно,
Ze = 2(k-vC*s.
Используя метод индукции, нетрудно доказать справедливость
этого выражения для любого 1^х^&. Учитывая, что в
соответствии со сделанным выше замечанием ZKE = C*hZel окончательна
найдем
ZX8=(M 2(*-1)s. (4.35) '
Отсюда среднее (по всем кодам) число комбинаций zxe,
содержащее ровно х единиц в информационной части и е единиц в
контрольной, согласно (4.33) равно
—r-CkCt при х = 1, k и е = 0,*,
2s F (4.36)
0 при х = 0, г Ф 0.
Формула (4.36) определяет собой обобщенный спектр кода
в случае, когда в качестве дополняющих равновероятно берутся
любые матрицы, даже явно нецелесообразные. Однако и при
случайном кодировании можно придерживаться определенных правил.
Например, можно брать только те матрицы, которые позволяют
обнаруживать все ошибки в комбинации от 1 до т0 включительно.
Тогда должно выполняться условие х + е^то+1. Предполагая,
что среднее значение zxe от отбрасывания кодов с весом
x + e<m0+l меняется незначительно1), найдем
*> Следует, однако, подчеркнуть, что предположение о независимости zxe от
т0 справедливо практически лишь при условии s/fc<l, т. е. для кодов с малой
избыточностью. Если говорить строго, то с увеличением отношения sjk число
яхе, как показывают конкретные расчеты, постепенно увеличивается. Задача
выявления функциональной зависимости 2n9(s/\k) пока не решена.
гН8 =
94
1
i при x = 0, е Ф О,
CkCt при х = ТГ* и х + 8>т0+1, (4.37)
О при х + е < т0.
Получим теперь частную формулу, определяющую среднее
число кодовых комбинаций веса т при случайном кодировании без
условного деления всей комбинации на информационную и
контрольную части. Пусть m=x+e>s. Тогда на основании (4.17)
с учетом (4.36) запишем
2j *K» m~K 2j
к=т—$
1 />к лт-х
— Ь* Cs
2s
Заменив индекс суммирования х на 1 = т—х и приняв во
внимание, что [109]
£С^-' = С*+т, (4.38)
/-=о
найдем
S
гт=,-1у;сГ'с! = — С£н при т>*.
Пусть теперь m^s. Тогда, исходя из (4.17) и (4.36), имеем
т-\
L *т~8'8 2s L
8=0
е=0
[2'
Le=0
С-8 с? = — V. сг* с8—с!
= ^[с£и-сГ]
Учитывая, что &+<s=n, окончательно получим
/ 1
%т —
j-(C—Cf) при m<s.
£СГ
при m>s.
(4.39)
Если случайный код строится так, чтобы он мог обнаруживать
все ошибки до кратности 1Щ, то
0 при т<т0+ 1,
1 / « тч (4-40)
-^(С-СГ) при т>т0+1.
Формулы (4.39) и (4.40) совпадают с выражениями, полученными
Другим путем в [180].
95
4.4. СВЯЗЬ ВЕРОЯТНОСТЕЙ ОСНОВНЫХ ИСХОДОВ
ПЕРВДАЧИ СО СТРУКТУРОЙ КОДА
Вероятности правильной однократной передачи сообщения
Рпр (xi), обнаруженной и необнаруженной ошибок Poo(Xi) и
Рио(х1), а также ложной ошибки Рдо(Хг) определяются
структурой кода и статистикой помех, воздействующих на
информационную и-контрольную части кодовой комбинации. Чтобы при
известном спектре кода рассчитать среднее значение этих вероятностей,
надо знать среднюю вероятность PfeS(x, е) появления х ошибочных
элементов среди k информационных и е ошибочных элементов
среди 5 проверочных (при произвольном расположении ошибочных
элементов в обеих частях кодовой комбинации)
с* се
Р*.(*. *) = £SP*(X|' *J)> (4-41)
где Phs(>tu ej)—вероятность перехода из-за действия помех
k + 5-элементной последовательности 0 0 ... О 0 0 в
последовательность Xhs(та, Bj) с определенным порядком расположения х единиц
в информационной части и е единиц в проверочной. Вероятность
Pks{K> e) можно понимать как обобщенную модель канала (или
каналов) по отношению к модели канала, характеризуемой
вероятностью Рп(т) (см. § 4.1). Ясно, что вероятность Pn(tn),
являющаяся по смыслу вероятностью перехода м-элементной
комбинации 00 0...О0 в любую комбинацию, содержащую ровно m
единиц, т. е,
(здесь Pn(^i)—вероятность приема последовательности xn(mi),
содержащей m единиц в определенном порядке с i-м вариантом
размещения), представляет собой частный случай обобщенной
модели P/tS(x, е) при условиях n = k+s и mi=%i + ej, причем
фиксированной величиной является число Ш\.
Кроме того, величину P&s(x, e) можно получить, исходя из
модели канала вида Рп(т), по формуле
^. = ^(х)Р,(е/х), (4.42)
где Ри{к) —вероятность ровно х ошибок в комбинации длиной k,
получаемая подстановкрй в формулы для Рп(ш) (см. § 4.1) или
по соответствующим графикам для значений n = k и /п = х;
Ps(s/%)—условная вероятность .е ошибок в комбинации длиной
s = n—&, вычисляемая по ф-ле (4.15) при допущениях, указанных
в §4.1.
Покажем (см. также [78]), что знание вероятностей Рп{ы)
и P/is(x, e) при известном спектре кода можно использовать для
96
расчета вероятностей РПр, Рно> ^оо и Рло- При симметричных
каналах значения этих вероятностей для всех комбинаций
линейного кода, получаемых из заданной образующей матрицы,
совпадают. Поэтому, вывести расчетные формулы для них можно, взяв
за основу комбинацию из одних нулей.
Разобьем множество М кодовых комбинаций на
непересекающиеся подмножества М(х, е), содержащие лишь те комбинации,
которые на информационных позициях имеют ровно х единиц,
а на контрольных позициях — ровно е единиц. Комбинации
Xks(Ki, ej) подмножества М(х, г) должны отличаться друг от друга
только порядком расположения единиц в контрольной и
информационной частях. Пусть PftS(x;, е;)—вероятность перехода
комбинации 00 0...О0 в комбинацию xfes(xi, 8j). Усреднению по
вариантам размещения пораженных элементов (т. е. по состояниям:
каналов) вероятности Рк8(ки ej), определяемому ф-лой (4.41),.
соответствует такое же усреднение вероятностей Рпр, Рпо, Рло»
и Роо. Поэтому среднее по состояниям каналов значение
указанных вероятностей в соответствии с их определением можно
выразить следующими формулами:
РПр = Р*.(0, 0), (4.43)
но - 2 2 2 р*
y.£k egs i, /е^(х, в)
8=1 /=1
Р = 1 — Р —Р -
*оо 1 пр но
ks(x>i,
е7*)>
-Р
Г ло
(4.45)
(4.46)
Из этих выражений следует, чтб задача об усреднении по
состояниям каналов вероятностей РПр, Лло, Рпо и Р0о,
определяемых при фиксированных состояниях индексами i и /, сводится
к задаче об усреднении тех же вероятностей по всем кодам,
которые можно получить из данного путем всех возможных
перестановок столбцов (содержащих элементы на одинаковых позициях)
внутри информационной и отдельно внутри проверочной частей
кодовых комбинаций.
Получим сначала расчетные формулы для однородных каналов
с независимо возникающими ошибками в элементах кода. При
независимых ошибках вероятность Pks (хг-, е;) не зависит от-т и /
и определяется согласно (4.1) формулой
Pks(y-i, 4) = p4l~P)k-*p,e{\-p'r\ (4.47)
где р — вероятность ошибки в информационной части кодовой
комбинации; р'— в проверочной. Средние по кодам, получающимся
в результате перестановок столбцов, значения вероятностей РПр>
-мно, Рло* Роо в этом случае совпадают с теми же вероятностями
для конкретного кода. Поэтому такие коды применительно к
независимым ошибкам принято называть эквивалентными [164].
4—281 97
Учтем, что по смыслу определения обобщенного спектра
^ 1 представляет собой число кодовых комбинаций 2Х, е, содер-
it /еМх, е)
жащих в данном коде ровно х единиц в информационной части
и ровно е единиц в проверочной. Кроме того, V 1 = C8S. Поэтому
/-1
при независимых ошибках расчетные формулы указанных выше
вероятностей будут иметь вид
Pnp = (l-p)*(l-p')s, (4.48)
^но = 2 t ^еРН(1-Р)*">'8(1-Р'Гг> (4.49)
H=l 8=0
^o=icss(i-p)Ve(i-pTe
8=1
или же после суммирования
Рло = (1-Р)М1-(1-р'Л. ' (4.50)
Вероятность Роо определяется ф-лой (4.46).
В случае группирующихся ошибок коды, получающиеся в
результате перестановок столбцов, неэквивалентны, так как
вероятности Рно и Рло зависят от относительного расположения
пораженных единиц и нулей и, следовательно, для каждого
построенного кода различны. Значение вероятности безошибочной
передачи не зависит от перестановки одинаковых элементов (нулей)
по позициям, поэтому
PnP = Pks(0, 0) (4.51)
или
РПР=РА(0)Р;(0/0), (4.51')
где P's(0/0)—условная вероятность отсутствия пораженных
элементов в проверочной части кодовой комбинации при условии,
что пораженных элементов нет и в информационной части. Эта
вероятность рассчитывается по (4.15).
Аналогично среднее значение вероятности ложной ошибки
Рло не зависит от перестановки нулей в информационной части
комбинации. Все перестановки элементов в проверочной части
учитываются исходной ф-лой (4.45). Подставляя в (4.45) ф-лу
(4.41) при условии х=0, найдем
^ло = 2^(0, е) (4.52)
или же, записывая по-другому,
98
^ло = 2Р*(0)^(е/0)> (4'52,)
е=1
где P's(е/0) -^условная вероятность, определяемая выражением
(4.15).
Перейдем теперь к расчету средней вероятности Рно- Так как
общее число перестановок информационных элементов в
комбинации равно &!, а проверочных 5!, то средняя по всем кодам
вероятность необнаруженной ошибки в комбинации равна
?"о=^г S Sp"<" <4-53)
пк=оп=о
где Пи и П8 — порядковые номера перестановок. Подставляя (4.41)
в (4.44), получим
k\ s!
nek 8(3 s/, f£N(x, e) Я^=0Я&=0
*! s!
Рассмотрим выражение У V Phs(x.i, ej). В каждой части
я^1оя5=о
кодовой комбинации (проверочной и информационной) все
перестановки представляют собой перемену позиций только единиц
между собой, перемену позиций только нулей и перемену позиций
единиц и нулей между собой. Перемена местами только единиц
и только нулей (таких перестановок возможно всего х! (k—к)!
в информационной и e!(s—е)! в проверочной частях) не изменяет
вида комбинации xks{^u е,-). Поэтому
J] 5]Р*,(х„ e>) = x!(ft-x)!.el(*-8)!jj JjP4i(x,,.e;).
nk=ons=o 1=1 /=i
Подставив это выражение в (4.54), с учетом (4.41) получим
р __
_ ffts(*. «)
но hh h c$c\
-ss s
Так как V 1=2X8, окончательно найдем
*\ feN (x,e)
X=l E=0 * S
*> Волнистая черта над Рно для простоты записи опущена.
4* 99
С учетом изложенного в § 4.1 эту формулу можно представить
в следующем виде:
рно = J] 2j 2* * —с^с*— • (4-55,)
х=1 е=0 k s
где Р'в(е/х)—условная вероятность, рассчитываемая по (4.15).
Средняя вероятность обнаруживаемого искажения Роо
определяется из (4.46).
Типовые кривые вероятностей РПр, Рло, Рпо и Р0о,
рассчитанные по полученным выше формулам, приведены на рис. 4.7—
4.10. На. рис. 4.7 сплошными линиями показаны кривые, которые
Рис. 4.7.
Зависимости вероятностей РПр>
Рпоу Роо и Pjiq от
превышения сигнал/помех а А20 для
инверсного кода (14,7) при
медленных (рэлеевских замираниях:
— ошибки между
информационной и проверочной частями
кодовой комбинации зависимы;
ошибки независимы
Рис. 4.8.
Зависимости вероятностей Рпр,
Рпо, Роо и Pjiq от
превышения сигнал /помеха h\ для
случайного кода ,('И4,7) гори
медленных рэлеевских замираниях:
ошибки между
информационной и проверочной частями
кодовой комбинации зависимы;
— ошибки независимы
были рассчитаны по ф-лам (4,51), (4.52), (4.55) и (4.46) с
учетом (4.8) и (4.31) применительно к передаче сообщений
инверсным кодом (14,7) сигналами с частотной модуляцией при
некогерентном приеме в условиях действия медленных рэлеевских
замираний. Предполагается, что информационная и контрольная
части кодовой комбинации полностью декоррелированы (р(х, **) =
==0, при расчете это учитывается условием Р^(х,е)=^(х)Р$(€));
превышение сигнал/помеха на информационных и проверочных
позициях одинаково (h\=h%).
100
На рис. 4.8 также сплошными линиями показаны кривые
вероятностей, рассчитанных по тем же формулам с учетом (4.37)
применительно к передаче сообщений случайным кодом (14,7)
при максимальной кратности всех обнаруживаемых ошибок т0=4.
На рис. 4.9 приведены кривые, рассчитанные по ф-лам (4.48) —
(4.50), (4.46) с учетом (4.1), (4.31) и (4.25) при условии р = р'
применительно к передаче информации инверсным кодом (14,7)
-/
ЦР
-1
-k
ы
ill
**z^^
Лч
Pm N
Г
V
Л
4wip
^00
Ч. р=р'
\ МО
\
\ \
\
\
I
\ I
\ ;
N
.Л
н
-6
■ЦР\
Рис. 4.9.
Зависимости вероятностей ^пр,
Рно, Роо и Pjiq от
вероятности (искажения элемента р три
независимых ошибках в
комбинации (инверсного кода (14,7)
(сплошные линии) и кода (8,7)
с прове>ркой на четность
(пунктирные линии)
с
"/
-2
-J
-4
-5
-6
ЦР
-1
чш ^
*Ч1
м?р
,„,.
-1
\
V
\%
4-J
_
р=р
1 tqP
t
Рис. 4.10.
Зависимости вероятностей ^пр»
Рно, Роо и Pjiq от
вероятности /искажения элемента р при
независимых ошибках в
комбинации для случайного кода
(14,7)
(сплошные линии) и кодом (8,7) с проверкой на четность
(штриховые линии) в условиях 'действия независимых ошибок. На
рис. 4.10 показаны кривые, рассчитанные аналогичным образом
применительно к случайному коду (14,7) при максимальной
кратности обнаруживаемых ошибок то=4.
Кривые рис. 4.7—4Л0 показывают, что наименьшее значение
по сравнению с другими и при независимых, и при
группирующихся ошибках имеет вероятность необнаруживаемой ошибки
^но. Это благоприятный результат, поскольку именно эта
вероятность определяет в основном остаточную вероятность искажения
при передаче сообщений (см. гл. 2).
101
При слабых помехах преобладающей является вероятность
правильного приема Рпр, поэтому при хорошем состоянии канала
система связи работает практически как разомкнутая. При
сильных помехах превалирующей становится вероятность
обнаруживаемой ошибки. Это обстоятельство в сочетании с действием
обратной связи позволяет путем повторений передавать информацию
с высокой достоверностью.
Формулы (4.51) и (4.55) получены применительно к случаю,
когда помехи, воздействующие на информационную и
проверочную части кодовой комбинации по своему характеру либо
интенсивности, различны. Если характер возникающих ошибок не
требует разделения кодовой комбинации на информационную и
проверочную части, ф-лы (4.51) и (4.55) можно при расчетах
заменить более простыми, полученными в [187]:
рт=р.т, №56)
т=\ п
где {zm} — спектр кода в общепринятом смысле.
Вероятность ложной ошибки и в этом случае определяется
ф-лой (4.52). Формулы (4.56) и (4.57) можно легко получить из
(4.51) и (4.55), перейдя от суммирования по двум индексам — и
и е — к суммированию по одному индексу — т — с учетом того,
что Pn(m)=Pks(K,e) при n=k + s и т=х+»е. На рис. 4.7 и 4.S
пунктирными линиями показаны кривые, рассчитанные по
указанным формулам применительно к передаче сообщений с
частотной модуляцией при действии медленных рэлеевских замираний и
предположении, что для передачи используется инверсный либо
случайный код (14,7). Из сопоставления кривых, показанных
сплошными штриховыми линиями, видно, что декорреляция при
передаче информационной и проверочной частей кодовых
комбинаций позволяет в определенной степени снизить вероятности Рно
и Рло- Последнее в конечном итоге должно сказаться лишь на
скорости передачи сообщений, но не на достоверности.
Полученные в данном параграфе формулы позволяют
рассчитать вероятности событий, которые (какие-либо из них)
сопровождают передачу самого сообщения. Удобство применения для
расчета полученных формул обусловлено тем, что вероятности
PkS(x., e) и Рп(т) не связаны со структурой какого-либо
конкретного кода, а определяются лишь статистикой помех в каналах.
4.5. АСИМПТОТИЧЕСКАЯ ОЦЕНКА ОБНАРУЖИВАЮЩЕЙ
СПОСОБНОСТИ ГРУППОВЫХ КОДОВ
Из сказанного выше следует, что достоверность передачи
сообщений в системах с обратной связью при выбранных
параметрах кода п и k (и при условии, что он используется лишь в ре-
102
жиме обнаружения ошибок) определяется в основном
максимальной кратностью т0 всех обнаруживаемых ошибок кратности
т(0<т^.то). Распространены две оценки максимальной
кратности т0 конкретного кода. Первая из них носит название
границы Плоткина [12, 141]. Согласно этой оценке величина т0
определяется формулой
т0<п(2^~1"'1) -1. (4.58)
2*
Вторую принято называть границей Хэмминга [141]; Согласно этой
оценке параметры кода k, n и т0 связаны соотношением
т0/2
1°ёг У Cln ПРИ Щ — четном,
т0-1 (4.59)
п — k >{
1 + log2 У С1п__х при т0 — нечетном.
i=0
Между этими оценками есть качественное различие. Формула
(4.58) получена в предположении, что при любых значениях п
и k можно построить эквидистантный код. Эквидистантные коды
относятся к классу максимальных, т. е. таких, которые при
фиксированном числе разрешенных комбинаций M = 2k и их длине п
обладают наибольшим значением минимального кодового
расстояния d = m0+l между комбинациями [104, 128]. Следовательно,
граница Плоткина определяет оптимальное (наибольшее)
значение кратности всех обнаруживаемых ошибок, которое можно
достичь при условии, что эквидистантный код с параметрами пик
реализуем. Однако, как показывают исследования,
эквидистантные коды не являются оптимальными в широком смысле.
Изменением структуры кода иногда удается увеличить число
разрешенных комбинаций M = 2ky а следовательно, и скорость передачи
информации, сохранив при этом общую длину кода п и
рассчитанную до этого по (4.58) кратность т0.
Коды, которые при заданных длине комбинации п и
максимальной кратности всех обнаруживаемых ошибок т0 обеспечивают
максимальное число разрешенных комбинаций, называются
максимальными [128]. К классу максимальных относятся
совершенные коды. В частности, совершенными являются все
исправляющие одиночные ошибки коды Хэмминга (m0=2). Формула
(4.59) записана применительно к совершенным кодам в
предположении, что при лкэбых п и /По они существуют. Она определяет,
по существу, то наименьшее значение длины проверочной части
кодовой комбинации s (наибольшее значение длины
информационной части &), которое можно было бы получить при условии, что
совершенный код реализуем. На практике более широкое
распространение получила оценка Хэмминга. На рис. 4.11 приведены
103
зависимости s(m0), вычисленные по ф-ле (4.59). При
практическом пользовании кривыми надо значения s, отсчитываемые по
графикам, округлять до ближайшего большего целого. При
больших значениях п определение 5 из ур-ния (4.59) в вычислитель-
Рис. 4.11. Рис. 4.12.
Минимально необходимое число про- Аоиметтотические границы обнаружи-
верочных элементов s для юбнаруже- вающей способности двоичных груш-
ния в кодовой комбинации всех оши- новых кодов
бок кратности т0 и менее (по
оценкам Хзммиига)
ном отношении становится затруднительным. Исследование ур-ний
(4.58) и (4,59) показывает, что если при фиксированном
отношении k/n длину кода п неограниченно увеличивать, то отношение
(то+1)/п будет стремиться к постоянной величине [HI].
Предельные значения границ Хемминга и Плоткина показаны
на рис. 4.12. График дает возможность ориентировочно определять
наибольшее значение кратности всех обнаруживаемых ошибок т0
при фиксированных значениях п и k либо, наоборот, оценивать
наибольшую эффективность кода при заданных значениях п и /п0.
□
ГЛАВА 5
Системы с информационной
обратной связью
5.1. ОБЩИЕ СООТНОШЕНИЯ
Тенденция развития всех известных к настоящему времени
систем с ИОС состоит в поиске наиболее рациональных
методов кодирования сообщений и квитанций и передаче знаков
служебной информации в целях получения возможно большей
скорости передачи сообщений при минимальных вероятностях ошибок.
В двоичных системах, где информация о сигналах на выходе
прямого канала передается по обратному каналу после первой
решающей схемы, считается, что сообщение и квитанция
представляют собой в совокупности комбинацию некоторого
обнаруживающего ошибки группового (п, &)-кода [171]. Первые k элементов
этого кода составляют собственно сообщение, остальные s = n—k
проверочных элементов выполняют роль квитанции, сопоставление
которой с истинно переданным сообщением дает возможность
передатчику установить наличие ошибки (в рамках обнаруживающей
способности кода). Полагается, что передатчик, обнаружив
ошибку, подает об этом сигнал приемному устройству и затем
повторяет сообщение, начиная тем самым новый цикл его передачи.
Так продолжается до тех пор, пока не исчерпывается допустимое
число передач одного сообщения rm.
Частным вариантом группового кода, применяемого в
ретрансляционной системе, является повторительный код, в котором
опознавательная часть (квитанция) имеет тот же вид, что и само
сообщение. Предельным случаем являются код (2,1) с длиной
сообщения и квитанции k=s=l. Такой код используется при
поэлементной ретрансляции передаваемых сочетаний двоичных
элементов.
При выводе ниже общих (для систем с ИОС, использующих
групповые коды) соотношений, определяющих достоверность и
скорость передачи информации по прямому каналу при
различных состояниях обратного канала, предполагается, что знаки
служебной информации передаются приемнику безошибочно. Таким
образом выявляются предельные возможности различных систем
с ИОС, использующих групповые коды для сообщений и квитан-
105
ций при различных сигналах и воздействующих помехах. Вопросы
передачи служебной информации для систем с информационной,
решающей или комбинированной обратной связью
рассматриваются отдельно в гл. 7.
Выше показано (см. гл. 2), что основные показатели систем
с обратной связью — достоверность и скорость передачи
сообщений— выражаются через вероятности определенных
совокупностей событий. Вероятность правильного приема сообщения х\ и
знака его подтверждения О при одном цикле передачи находится
как
ЛхпЧ*!) = Рпр (*«) Рпр (О/*)-" (5-1)
Здесь и далее индексы при Р соответствуют обозначениям,
принятым в табл. 2.1. Рпр (хО обозначает вероятность правильного
приема сообщения хи а Рпр(0/*г) — условную вероятность
правильного приема при этом знака .подтверждения О, зависящую, в
общем случае, от исходов передачи сообщения Х\ и его квитанции.
Вероятность приема сообщения с необнаруженной ошибкой
первого рода (искажение собственно сообщения) равна
— "но'**) "пр (0/*i). (5.2)
Вероятность обнаружения ошибки (в сообщении или
квитанции), т. е. возврата системы к новому циклу повторения
сообщения, определяется выражением
Л>(*«) = 1Роо(**) + Рло(**)1Рпр(0/**) +
+ [Рпр (*i) + Рно (х,)] Роо (О/*,). (5.3)
Вероятность необнаруживаемой ошибки второго рода (см. гл. 2),
влекущей за собой выпадение сообщения из текста, равна
рт (**) = [Рпр (**) + Рно (*«)] V (О/*)- (5-4>
Вероятность необнаруживаемой ошибки третьего рода
(вставки лишнего сообщения)
Рнз Ш-[Рт(х1) + Рж(хг)]Рло(0/хй) +
+ [Рло (**) + Роо (*«)] Л*>(0/^)- <5'5>
При условии безошибочной передачи знаков служебной
информации вероятности
^пр(О/**)=^пр(0/**)=1.
Яно(0/*|) = Рно (0/«i) = Рло (Olxt) = Poo (O/Xt) = 0.
В этих условиях ф-лы (5.1) — (5.5) принимают вид:
Лт(*!) = рпр(*1). (5-1#)
PHi(xi) = PHo(xi), (5.2')
^в(*|) = роо^|) + Рло(ж«). (5-3'>
106
Pm{xt) = 0, (5.4')
Pm(xt)^0. (5.5')
Четыре события — ПР, НО, 00 и ЛО, — вероятности которых
входят в правые части равенств (5.Г) — (5.3'), применительно
к информационной обратной связи имеют смысл:
ПР — правильный прием и сообщения и квитанции;
НО — прием сообщения с необнаруженной ошибкой; событие
наступает при таком искажении сообщения и квитанции, при
котором факт возникновения ошибки не устанавливается
передающей стороной системы при данной структуре кода;
00 — обнаружение в принятом сообщении ошибки по виду
принятой квитанции;
ЛО — принятие ложного решения о наличии ошибки («ложная
тревога»); событие наступает при правильном приеме самого
сообщения, но искажении квитанции. Со стороны передатчика ложная
и обнаруживаемая ошибка не отличимы одна от другой, хотя при
повторениях с учетом возможных искажений служебных знаков
приводят к различным последствиям.
Будем обозначать полученное сообщение (в отличие от пере-
л
данного Хг) знаком хи как это было принято в гл. 1 (рис. 1.1);
Л
переданные и полученные квитанции — буквами у и у
соответственно; объем алфавита (множество) сообщений — М\
употребляемых квитанций — N.
Разобьем алфавит сообщений М по тем или иным
объединяющим признакам на N непересекающихся подмножеств Mif Мъ ...,
МГз ..., MN_ и каждому сообщению Xi(i=l, M), входящему в
подмножество МГу поставим в соответствие квитанцию уг из
множества N. Пусть N^M. Условию N<M соответствует
укороченная обратная связь, при которой одна квитанция ставится в
соответствие нескольким сообщениям,, составляющим подмножество
Мт. Условию N = M соответствует полная обратная связь, при
которой в каждом подножестве оказывается только одно
сообщение.
С учетом изложенного общие выражения для вероятностей
перечисленных выше четырех событий можно записать в следующем
виде:
P„p(Xi)-p{Xtlxu АУг1Уг\1емГ9 (5.6)
Рно(**) = £ £/>&/*,. Уг1У1)и£мг = 1Ь P(%IXi, Уг1УХеМг +
+ 2 lLp(XklXt, Ayrlyi)ueM , (5.7)
k£MtieN Lt/
\1фг
где yr — квитанция, соответствующая подмножеству сообщений
•Mr, в которое входит сообщение Х\.
107
Смысл написанного состоит в том, что ошибка не
обнаруживается передатчиком как в случае искажения сообщения в рамках
своего подмножества [чему соответствует первая сумма в правой
части равенства (5.7)], так и в случае зеркального искажения
сообщения и квитанции, при котором сообщение Xi(i^Mr) в
результате воздействия помех переходит в сообщение Xk другого под-
Л
множества Мг{1фг), а квитанция щ переходит обратно в уг
[двойная сумма в равенстве (5.7)]:
Лх>(**) = 1 22 РМ**' УМ\1емг- (5-8)
\тфг
Ошибка в сообщении х\ обнаруживается во всех случаях, за
исключением тех, когда по обратному каналу приходит квитан-
л
ция уг, соответствующая сообщению х\\ наконец,
Рло (*f) = 2 Р {*i,x» ^W' <5'9>
mQN \тфг
Сумма вероятностей (5.6) — (5.9) равна единице, поскольку
соответствующие им события составляют полную группу (см.
§ 2.1). Если обратный канал бесшумный, то
«=f при тф1;
[I при т = /.
В этом случае выражения для приведенных выше вероятностей
упрощаются и принимают вид:
^пр(*|) = ^&/^)|^г. (5.6')
Vx^l^W, (5.7')
/эмг
\!Ф*
А
■^oo(*i) = 2P(x'/x'Wr • (5-8/)
ieM \ieMr
Рда(х,)=-0. (5.9')
Важной, связанной с вопросами оптимизации систем с ИОС,
является задача выбора кода для передачи сообщений и
квитанций. В общем случае применительно к каналам с произвольной
структурой помех эта проблема пока не решена; результаты,
полученные в области кодирования для односторонних систем связи>
к системам с ИОС непосредственно не применимы. Задача
упрощается, если прямой и обратный каналы системы симметричны,
что выполняется в подавляющем большинстве практически
используемых линий. При симметричном обратном канале вероятность
108
перехода квитанции уи посылаемой в системе с ИОС в сторону
л
передатчика, в квитанцию ут совпадает с вероятностью обратного
л
перехода квитанции ут в у^ т. е. выполняется равенство
Р(Ут/У1) = Р(У11Ут). (5.Ю)
Это важное обстоятельство позволяет использовать некоторые
известные из теории кодирования результаты в случае применения
информационной обратной связи при одинаковых по
помехоустойчивости прямом и обратном каналах.
Обозначим информационную и проверочную части
тривиальной кодовой комбинации (комбинации, состоящей из одних нулей)
через Xi и у\. Поскольку вектор ошибки [171] для всех
принимаемых кодовых комбинаций при симметричных каналах
одинаков, можно написать
P(XilXi, yriyr) = P(Xilxlt yxlyx). (5.11)
Это означает, что вероятность правильного приема любого
сообщения и соответствующей квитанции совпадает с вероятностью
правильного приема сообщения и квитанции из одних нулей:
/5пр(^) = Рпр(^)- ' (5Л2>
Покажем, что если для передачи информации используется
систематический групповой код, то и остальные вероятности
исходов любого сообщения Xi совпадают с теми же вероятностями
для сообщения 0 0...0 0. Представим (5.7) с учетом (5.10)
следующим образом:
'°но(**)= X 2 p(xj/xf У11Уг\£мг =
л л л л
= 2 £РМ**' yilyr\i£Mr — p(Xilxb yT\yr\
feMi iqn
Первое слагаемое по смыслу есть вероятность перехода
некоторой комбинации кода в любую другую разрешенную
комбинацию этого же кода; в симметричных каналах эта вероятность не
зависит от номера комбинации [164, 171]. Второе слагаемое есть
вероятность правильного приема. Таким образом,
*W**) = Pho(*i)- (5-13)
Далее, согласно (5.7), (5.8) и (5.11)
4o(*«) + poo(*i)= 2 2 р№|)=2 рС*}1*1\т =
jeM} i£N /ем
= 1-P{xjxi)=l-P^1lxl).
109
Отсюда с учетом (5.13) следует, что /
Poo(xi) = Poo(xi)- / (5-14)
Наконец, непосредственно из (4.46) можно заключь/ть:
Из всего изложенного следует, что задача расчета
вероятностей Pnp(Xi), Pko(xi), Рдо(х{), Poo(xi) для системы с ИОС при
симметричных каналах сводится к определению^ тех же
вероятностей в односторонней системе. Отличие состоит лишь в том, что
информационная и проверочная части кодовой комбинации в
системах с ИОС под действием помех могут искажаться
по-разному— от полной независимости до однозначной
предопределенности (в зависимости от степени корреляции помех в прямом и
обратном каналах). При определении этих вероятностей для
различных систем с ИОС можно применять формулы, полученные
в гл. 4: в случае независимых ошибок в каналах — ф-лы (4.48) —
(4.50) и (4.46), в случае группирующихся ошибок — ф-лы (4.51),
(4.52), (4.55) и (4.46).
Будем считать далее, если не оговаривается противное, что
система с ИОС при повторениях сообщений работает без памяти,
число повторных передач не ограничивается, служебные знаки
передаются без искажений и расходами ресурсов на их передачу
можно пренебречь. При этих условиях относительную скорость
передачи ^-элементных сообщений следует согласно (2.58), (2.60)
и (2.79) рассчитывать по формуле
О^^пр + ^но. (5-16)
а остаточную вероятность искажения сообщения согласно (2.39),
(2.63) и (2.80) — по формуле
PkoCr = PHolGb- (5-17)
Для оценки действенности применения к передаче сообщений
различных кодов целесообразно достоверность передачи
характеризовать эквивалентной вероятностью ошибки. При независимых
ошибках в каналах ее следует согласно (2.47) определять по
формуле .
Рэ=1-(1-^ост)1/й. (5.18)
5.2. СИСТЕМА С РЕТРАНСЛЯЦИОННОЙ ОБРАТНОЙ
СВЯЗЬЮ
Систему с ИОС, в которой отсылаемая с приемной стороны
квитанция совпадает с принятым сообщением, будем называть
системой с ретрансляционной обратной связью.
Функционирование этой системы основано на использовании повторительного
кода. Отличается такая система простотой алгоритма работы, для
ПО
реализации которого не требуется включать в комплект
аппаратуры приёмной станции специального кодера квитанций.
Определим достоверность и скорость передачи сообщений в
такой системе (с учетом принятых в § 5.1 допущений) и
рассмотрим некоторое вопросы оптимизации. Пусть сообщения
передаются по однородным каналам с независимыми ошибками. При
этих условиях вероятности правильной передачи сообщения Рпр
и передачи с нврбнаруживаемой ошибкой Рно должны согласно
(4.27), (4.48) и (4.49) рассчитываться по формулам:
\РПР = (1-/>)*(!-/>')*. (5.19)
Рт = %С%(рр'Г 1(1-P)(l-P')\k
-k\pp) iu— PMi— p)lk *
= Ipp' + (1-P)(l-P')}k-Pnp . (5-20)
где р — вероятность поражения помехами двоичного элемента в
прямом канале; рг — то же, в обратном; k — длина сообщения,
равная длине квитанции.
Подставив (5.19) и (5.20) в (5.16) и (5.17) и проделав
несложные преобразования, можно показать, что
^ост=1-[1-^остЛ (5.21)
Gk = Gt (5,22)
где Pi ост и G\ — остаточная вероятность искажения и
относительная скорость передачи одноэлементного сообщения (&=1),
определяемые формулами:
^i ост — Тл Т7л ГГ~1 Г» (5.23)
(1— р)(1— р') + рр'
G^(l-p)(l-p') + PP'- (5.24)
При использовании в системе с ИОС повторительного кода
вероятности, определяемые ф-лами (5.23) и (5.18), согласно
(5.21) совпадают, т. е.
Лост = Рэ. (5.25)
На рис. 5.1 приведены зависимости рэ(р) и G\(p) для
различных значений параметра Я, определяемого формулой
р' = ±(2р)\ (5.26)
Величина его
. log(2p')
00
(5.26')
111
характеризует относительную
помехоустойчивость обратного
канала в сравнении с тоямым: при
Х=оо обратный кан/л бесшумен,
при Я=0 его помехоустойчивость
по сравнению с прямым
практически равна нулю/1).
Зависимость /ръ(р) для
системы без обратной связи показана
на рис. 5.1 штриховой линией. Из
кривых следует, что чем выше
помехоустойчивость обратного
канала (больше параметр А,), тем
большую достоверность передачи
позволяет ! обеспечить
применение ретрансляционной обратной
связи. При бесшумном обратном
канале (Я=оо) система с ИОС,
использующая повторительный
код, позволяет, в принципе, вести
безошибочную передачу
сообщений по прямому каналу. Скорость
передачи сообщений
существенно снижается по сравнению с
односторонней системой только при
относительно сильных помехах в
прямом и обратном каналах.
Для системы с
ретрансляционной обратной связью
нетрудно получить общие формулы,
применимые как в случае
симметричных, так и в случае
'асимметричных каналов связи. Пусть по
прямому каналу посылается
^-элементное сообщение Xi(l),
содержащее / единиц и k—/ нулей. Вероятность правильной его
передачи по прямому каналу и квитанции по обратному в одном цикле
определяется выражением
PnA*i) = [0 -Ло)(1 -Р[0)У [0 -Poi)(l -РоОГ'. (5.27)
где рю, р'м — вероятности трансформации единицы в нуль и poi,
p'oi — нуля в единицу в прямом и обратном каналах
соответственно. Сумма вероятностей правильной передачи и необнаружи-
ваемой (зеркальной) ошибки хотя бы в одном из k элементов
равна
Рис. 5.1.
Зависимости эквивалентной
вероятности 'ошибки рэ и относительной
скорости Gi от помехоустойчивости
прямого (р) и обратного (К)
каналов |в системе с ретрансляционной
обратной связью и незшишмыми
ошибками в каналах ^пунктир для
односторонней системы связи)
1> Можно показать, что в частном случае некогерентного приема ЧМ
сигналов на фоне флуктуационных помех X=h'2lh2, где К2 и h'2 — уровни сигналов
по отношению к помехам в прямом и обратном каналах соответственно.
112
•Pox) +
(5.28)
рно(*t) + Рпр (*t) = [(l- Рю) (l - P'10) + PioP'oiY [(1 - Poi)(J
\ +PoiP;0I*"'-
Отсюда нетрудно с учетом (5.27) определить вероятность необна-
руживаемой дщибки Рно(Х{) при приеме сообщения х{(1).
Если тепер^ь предположить, что все сообщения
вырабатываются источникам информации с одинаковыми вероятностями
Лют(xt) = Clk/2ky уго после подстановки (5.27) и (5.28) в (5.16)
и (5.18) и несложных преобразований можно получить следующее
выражение для эквивалентной вероятности ошибки:
л -Р - I \ PloP'01
Ръ — *1 ост — Г— ~
L (1—pi^(i—рщ
+
Pol Р\о
»io) + Рю Poi (1~~ Poi) (1 — Poi) + Poi Pio
\ (5.29)
Относительная скоррсть передачи одного элемента сообщения
при этом равна
-Рю) (1 —Рю) + РюРш] [0 — Poi) (l —Poi) + PoiРш]
0,-з-Ы
(1 — Рю) (1 — Pio) + Рю Poi + 0 — Poi) 0 — Poi) + Poi Pio
(5.30)
Формулы (5.23) и (5.24) для симметричных каналов
получаются подстановкой pio = poi=p и p/io=p/oi = p' в (5.29) и (5.30).
Величины рэ и Gi для асимметричных каналов с
ретрансляционной обратной связью можно находить, пользуясь кривыми рис. 5.1,
если ввести параметры
р*=
Pio + Ppi
Pio + Poi
и f^jnzj™.. (5.31)
Эквивалентная вероятность ошибки рэ и относительная
скорость передачи Gi определяются в этом случае выражениями:
Ps = kppl> (5.32)
G^k.G^ (5.33)
где р*э и G*i — эквивалентная вероятность и скорость, найденные
по кривым рис. 5.1. Коэффициенты kv и kg следует вычислять по
формулам:
iVff
ч = 1 -ti/o;,
К =
1
kg
1 ' i (
1 — аа + [х
1 J
\х = р* а + р*' а' — 2 ос р* р*
(5.34)
Параметры
ос =
Рю — Poi
Рю + Poi
и а =
113
Рю — Poi
Pio + Poi
(5.35)
характеризуют асимметрию каналов (при симметричных^каналах
а = а' = 0 и kp=kg=l). Формулы (5.32) — (5.35) позволяют
рассчитать рэ и Gi также в случае, когда асимметричен только один из
каналов — прямой или обратный. /
Искусственным введением асимметрии в прием/воичных
элементов при амплитудной или угловой модуляции /90, 93] можно
добиться условия рю=р/ю-^0 или pxoi = Poi->0 и тем самым
обеспечить сколь угодно малую остаточную вероятность искажения
сообщения, что следует из выражения {5.29). /
5.3. СРАВНЕНИЕ СИСТЕМЫ С РЕ1ФАНСЛЯ1ЩОННОЙ
ОБРАТНОЙ СВЯЗЬЮ И ОДНОСТОР01^ЕЙ СИСТЕМЫ
/
Сравнение системы с ретрансляционной обратной связью и
односторонней проведем по двум критериям: принимая во
внимание скорость передачи и энергетические затраты только в
прямом канале (критерий I) и учитывая дополнительно затраты
ресурсов в обратном канале (критерий II). При этом оба канала,
прямой и обратный, будем полагать симметричными.
Сравнение по критерию I. В работе |[91] применительно к
частотной модуляции были найдены граничные значения
относительной энергии импульса Л2, при которых система с ИОС
обеспечивает меньшую эквивалентную вероятность ошибки р9, чем система
односторонняя. Однако в {160] показано, что если сравнивать
системы по достоверности при одинаковой энергии с учетом в
системе с ИОС повторных передач (Л2ср=/г20дн, где Л2ср—
отношение сигнал/помеха в системе с ИОС с учетом расходов энергии
на повторения, Л20ДН — то же, в односторонней системе), то
существуют значения Л2, при которых система с обратной связью
уступает по показателям односторонней системе. Определим
граничное значение отношения сигнал/помеха Л2гр для этого случая.
Как показано в [160], необходимым (но недостаточным) условием
существования области граничных значений является наличие
минимума функции
Ь2(Р)
Gk
hlp = ±±EL9 (5.36)
в которой относительная скорость передачи /^-элементного
сообщения в случае повторительного кода должна определяться согласно
(5.22), (5.24) и (5.26) по формуле
Gk =
[±{2pf+l + (l-p)[l--L(2p?
(5.37)
В выражении (5.36) h2(p)—функция, обратная вероятности
искажения элемента р(к2) в прямом канале.
114
Из условия dh2cv/dp = 0 находим уравнение, определяющее
максимум и минимум (если последний существует) функции /i2cp:
"Нй^-**-*
(5.38)
itj^zp
Корни Piy{Kk) aWo трансцендентного уравнения нетрудно найти
графоаналитическим путем или путем вычисления на ЭВМ. При
этом следует иметк в виду, что
из двух значений £гр искомым,
как показывает анаЛиз, является
меньшее. Если же корень один,
то он соответствует Максимуму
функции Л2сР и потому
неприемлем.
Определим в качестве
примера границу целесообразности
перехода к использованию
обратной связи применительно к неко- ~0,2\
герентному приему ЧМ сигналов
в присутствии флуктуационных
помех. В этом случае вероятность -о,6
искажения элемента кодовой
комбинаций определяется выражени- °>°
ем [155] -1о\
Р =
1
-h»/2
(5.39)
"?2l
ОЛ
ii, следовательно,
dh* 1
(5.39')
Рис. 5.2.
К расчету состояний прямого р=рт-р и
обратного pf—f(Kp) каналов,
определяющих границу преимущества
системы с ретрансляционной обратной
связью то сравнению с
односторонней системой в условиях независимых
ошибок и частотной модуляции
сигнала при различной длине
сообщений к
dp /i2 p In (2p)
На рис. 5.2 изображено
семейство решений ЯГр(ргр, k) ур-ния
(5.38) с учетом (5.39') при
различных длинах кода k. Область
значений Я и р, при которых
система с ИОС предпочтительнее
односторонней, лежит над соответствующей кривой (т. е.
отвечает условиям: Я>Яср, если р = ргр, либо р</?гр, если Я = Ягр).
При противоположных значениях обратная связь невыгодна, так
как из-за большого числа повторений слишком возрастает расход
энергии в прямом канале.
Формулы (5.36), (5.37), (5.39') и кривые рис. 5.2 в
совокупности определяют минимальную относительную энергию импульса
^2ср.гр (с учетом расходов на его повторение), начиная с которой
имеет смысл применять обратную связь. Величина /i2cp зависит
115
'сргр
от длины сообщения и от относительной помехоустойчивости
обратного канала. Семейство кривых Л2ср.гр(^Д) приведено в
верхней части рис. 5.3. При переходе от одностороннего способа
передачи сообщений к использованию ИОС необходимо скачком
уменьшить энергию импульса, сократив его длительность так, чтобы
с учетом повторений ско-
к рость передачи оставалась
ЯЩ—. «—т—i—^г^я » /той же, т./е. до величины,
определяемой ф-лой (1Л9).
Этот пароход обеспечивает
с к ач!к ооф) а зно е п ов ыш ен и е
достоверности сообщений
(умен ьйгени е ib ер о ятности
ошйбвд «а один элемент) от
значения р0дн,
определяемого /ОД'НОСторшией системой
связи, до Рэ.гр,
определяемого системой с ИОС.
Результаты расчета для
различных значений k
эквивалентной вероятности рэ.гр
iHa «границе перехода
представлены на рис. 5.3. Чем
выше ,по1мехюуст1ойчиво1сть
обратного каната (больше
Я), тем больший скачок в
п омехаз ащищенности п ере -
дата можно обеспечить
применением обратной связи
при заданной длине
сообщения. Например, при тереда-
Рис. 5.3. че сообщений семиэлемент-
Зависимость среднего (с учетом повторе- кстаи ^гумехозашишен-
шй) превышения сига ал /помеха в -прямом ньш ка*т помехозащищен
канале (модуляция частотная) системы с ность возрастает в два раза
ИОС Д2ср.гр |(Л, Я) от длины сообщения и при Х=(0,43 (Л2Ср.гр= 14,8,
состояния обратного канала и обескючивае- lg лэгр = 3,8), (В 16 раз пр'И
мая «при этом эквивалентная вероятность of i'nn m n lo^n пЯо ПП|И
ошибки /7э -(пунктир соответствует одно- ^^о '* В *ZW P*t™i™
сторонней системе при Л2=/*'ср.гР) Я=4,12. Кроме того, ошноси-
телыная помехоустойчивость
системы с обратной связью возрастает по сравнению с
односторонней при увеличении длины сообщения k.
Сравнение по критерию II. Сравнивать системы с ИОС и
односторонние системы связи можно также по объему сигнала (полоса
X мощность X длительность), который необходим для передачи
заданного количества информации с одинаковой скоростью и
достоверностью в каждой из этих систем [155J. В работе [160]
показано, что качество системы с ретрансляционной обратной связью
численно определяется показателем Q:
116
a2 >*2
где Л20дн — отношение мощностей сигнал/помеха в односторонней
системе связи, необходимое для обеспечения в сравниваемых
системах одинаковой достоверности (рэ = Родн) и скорости передачи
сообщений (тср=т0дн); Л^одн и Д^иос — полосы частот,
занимаемые системами связи; /i2cp и Л'2ср — превышения отношения
сигнал/помеха в прямом и обратном каналах системы с ИОС; а2о
и а/2о — спектральные плотности флуктуационных помех там же;
показатель Q учитывает полную энергию, расходуемую в прямом
и обратном каналах системы с ИОС.
Определим условие, при котором эффективность передачи
сообщений с обратной связью, например, при некогерентном приеме
ЧМ сигнала по критерию II выше (Q>1), чем без обратной связи.
Из условия Рэ=Родн согласно (5.23), (5.26) и (5.39) следует
равенство
^рди
_L(2pfH-L = J-e 2 '
4 v H; Gx 2
Подставим отсюда А20ДН в (5.40). Учтем при этом, что h2=-vc3bc/o2o
и A/2=Tc5s/c/a/2o (S^c и «2Р'С — импульсные мощности сигналов в
прямом и обратном каналах) и что полоса частот, занимаемая
системой с ИОС, вдвое больше полосы, занимаемой прямой
системой связи (А|/7иос=2А/7одн). Тогда получим
о\
&>'' а2 о
1+ —*-—?- + — ln(2Gjt)
^с a2 h*
(5.40')
При достаточно хорошем прямом канале (когда Л2-^» и Gfti->1)
2 1 + ^;/#>е
Из этого выражения следует, что система с ретрансляционной
обратной связью лучше односторонней системы (Q>1.) и по
критерию II при условии
■^■>-г!—■ <5-41>
Это возможно, если спектральная плотность помехи в обратном
канале, по крайней мере, в два раза меньше плотности помехи
117
Э прямом (а/2о<0,5а2о). Справедливость такого вывода (при
наличии флуктуационных помех в каналах) можно доказать
применительно и к амплитудной и фазовой модуляции при когерентном
и некогерентном методах приема. /
Перейдем теперь к оценке достоверности и скорости передачи
сообщений с ретрансляционной обратной связью по неоднородным
каналам. Будем считать, что в каналах действуют Общие
замирания, описываемые законом Рэлея (см. § 1.4); прямой и обратный
каналы независимы. При этих условиях средние по состояниям
каналов значения относительной скорости передачи сообщений и
остаточной вероятности искажения определяются ф-лами (2.79)
и (2.80).
Рассмотрим сначала случай, когда в каналах действуют
медленные замирания. Тогда входящие в ф-лы (2.79) и (2.80)
вероятности Рно и Рпр следует рассчитывать по ф-лам (4.51) и (4.55).
Учтем, что при независимых прямом и обратном каналах
вероятность поражения помехой х элементов в сообщении и г в
квитанции PfeS(x, е) =Pfe(x)Ps(e). Подставив это соотношение, а также
вечичину гке> характеризующую обобщенный спектр
повторительного кода из (4.27), в ф-лы (4.51) и (4.55), получим расчетные
выражения вероятностей ^пр и Рно:
РПР = Р4(0)Р;(0)> (5.42)
k
pHo=E-irp*(x)W' (5>43)
mm Су
к=1 *
где /\(х) и Р\{к) —средние вероятности поражения х элементов
в последовательности из k элементов в прямом и обратном
каналах соответственно.
Пусть, например, сообщения передаются в условиях
медленных рэлеевских замираний ЧМ сигналами при некогерентном
приеме. Результаты вычислений вероятности Ри ост И СКОрОСТИ Uk
с использованием ф-лы (4.6) применительно к сообщениям длиной
k=\\ 7; 12 и 21 показаны для этого случая на рис. 5.4 сплошными
линиями (каналы прямой и обратный считаются одинаковыми
h20=h'2o). Там же приведены кривые, определяющие вероятность
искажения Pkoj^=Pk(^l) при передаче тех же сообщений
минимальным кодом в односторонней системе связи; они получены при
условии n=k из семейства Pn(^l, h\ л), представленного на
рис. 4.4. Видно, что применение ОС позволяет существенно
повысить достоверность передачи. Например, ценой снижения скорости
передачи лишь на 25% можно добиться уменьшения вероятности
искажения сообщения Р*0ст при &=7 почти на два порядка, а при
А = 21 — на 3,5.
Выясним, как зависит преимущество системы с ИОС перед
односторонней от длины сообщений k. Определить его в полной
мере непосредственно сравнением кривых при различных k нельзя,
потому что каждой из них соответствует разное количество инфор-
118
мации. Поэтому надо ввести параметр, численно приведенный к
одному элементу сообщения. Условимся системы связи,
эксплуатирующие каналы с замираниями, характеризовать эквивалентным
отношением сигнал/помеха h\ (по аналогии с принятым для
каналов с независимыми ошибками показателем — эквивалентной це-
Рис. 5.4.
Скорости передачи
сообщений Gh и
остаточной вероятности
искажения Рк ост в
системе с
ретрансляционной обратной
связью и вероятности
искажения Рк одн в
односторонней
системе при медленных
(сплошные линии) и
быстрых (пунктирные
линии) замираниях
(модуляция
частотная)
k ocm
роятностью ошибки рэ). Под h\ будем понимать такое отношение
сигнал/помеха, которое необходимо обеспечить в односторонней
системе связи с тем, чтобы при передаче двоичным минимальным
кодом по тому же каналу (с замираниями) равного количества
информации можно было добиться той же вероятности искажения
сообщения, что и в оцениваемой системе. В этом смысле
одностороннюю систему следует считать эквивалентной по достоверности
передачи рассматриваемой системе. Применительно к системе
с ИОС величина h\ должна определяться из равенства
ПосТИОс(^)=^одн(^). (5-44)
На рис. 5.5 сплошными линиями изображены зависимости
Л2э(Л2о), построенные по кривым рис. 5.4 (методика определения
Л2Э показана на рис. 5.4; горизонтальными стрелками указана
в логарифмическом масштабе величина отношения h\jh\
определяемая фиксированным значением А20). Из кривых следует, что
119
увеличение длины сообщения k повышает эффективность
ретрансляционной обратной связи. Например, удлинение сообщения с
k=\ до £ = 21 при /*2o«32(lg/i2o= + l,5) увеличивает
эквивалентное отношение сигнал/помеха h% в 18 раз (Alg А2Э = 2,5).
Сопоставление величин Л2Э и h\ дает возможность судить о преимуществе
в энергетике прямого канала, которое обеспечивается
применением обратной связи. Однако показатель h% (как и показатель рэ)
не учитывает энергетических потерь (как и потерь в скорости),
Рис. 5.5.
Эквивалентное превышение
оштнала над помехой Л2Э
при передаче сообщений s ;в
системе с ретрансляционной
обратной сшязью
повторительным кодом .разной
длины в условиях медленных
(сплошные линии) и
быстрых (пунктирные линии)
замираний ((модуляция
частотная)
Рис. 5.6.
Энергетический выилрыш
h\lh2cv i(b прямом канале
связи) дри передаче
сообщений в системе с
ретрансляционной обратной с
частотной модуляцией в
условиях медленных (оплошные
линии) и быстрых
(пунктирные линии) замираний
обусловленных повторными передачами. Поэтому простое
сопоставление этих величин при среднем числе передач, значительно
отличающемся от единицы (т. е. в области сильных помех),
завышает оценку системы с ИОС в сравнении с односторонней системой
связи. Ввиду этого характеризовать систему с ИОС следует
отношением Л2э/Л2ср, где Л2ср — среднее превышение сигнал/помеха в
прямом канале с учетом повторений. Согласно (1.19) оно
определяется выражением
hi hi
hL
ср
Gk
(5.45)
Это соотношение определяет энергетический выигрыш в прямом
канале, получаемый от применения обратной связи. На рис. 5.6
120
сплошными линиями изображены кривые энергетического
выигрыша, построенные по данным рис. 5.4 и 5.5 применительно к
передаче сообщений длиной k=\\ 7; Г2 и 21 в условиях медленных
рэлеевских замираний. Каждому значению h\ соответствует
определенное, оптимальное значение длины сообщения k,
обеспечивающее по критерию (5.45) наибольшее преимущество системы с ИОС
по сравнению с односторонней. Например, при lg/i2o>2 передачу
следует вести сообщениями длиной k>2\\ в области l,4<lg/i20<2
следует брать длину, заключенную в интервале 12—21; в области
0,75 <lg/*2o< 1,4 надо брать 7<£<12 и т. д. Чем меньше
превышение сигнал/помеха h\ в канале, тем короче следует брать код.
При Л2о< 1 передачу выгоднее вести без применения
ретрансляционной обратной связи (следует, однако, заметить, что
получающиеся при этом вероятности ошибок и в односторонней системе
будут иметь неприемлемые для практики значения).
При передаче сообщений по каналам с быстрыми замираниями
вероятности Рпр и Рно можно рассчитывать по ф-лам (4.48) и
(4.49), заменив лишь в них фиксированные значения р и р' на
средние р и р\ определяемые средним превышением сигнала над
помехой в прямом и обратном каналах h\ и h'\ Расчет этих
вероятностей дан в гл. 3, их можно определить также по ф-лам
(4.4) и (4.4х), положив в них т = п=1. При быстрых замираниях
каналы становятся как бы. однородными и потому достоверность
передачи можно характеризовать также средним значением
эквивалентной вероятности ошибки, определяемой ф-лой (5.18); точно
так же относительную скорость передачи можно оценивать в
среднем по ф-лам (5.16) и (5.17). Кроме того, при расчетах можно
пользоваться кривыми, которые были приведены на рис. 5.1 для
стационарных каналов, полагая в них и в ф-ле (5.26')
переменными средние значения величин р й //.
На рис. 5.4 штриховыми линиями изображены кривые
эквивалентной вероятности рэ(к20) и скорости передачи сообщений
Gk(h2o), рассчитанные по перечисленным выше формулам для
случая некогерентного приема ЧМ сигналов при условии, что
прямой и обратный каналы одинаковы (Л2о=,/г'2о). Среднее значение
вероятности поражения помехой двоичного элемента определялось
по (3.25). Кроме того, на рис. 5.4 штриховой линией показана
кривая вероятности ошибки, соответствующая передаче сообщений
без обратной связи. Из сравнения кривых следует, что применение
ретрансляционной обратной связи позволяет в условиях быстрых
замираний также весьма существенно повысить достоверность
передачи сообщений.
На рис. 5.5 и 5.6 штриховыми линиями изображены графики
эквивалентного превышения Л2Э и энергетического выигрыша
й2э/Л2Ср, обеспечиваемых применением обратной связи. Из них
следует, что в условиях быстрых замираний передачу информации
с ретрансляционной обратной связью разумнее вести
сообщениями малой длины — по возможности даже путем поэлементной
ретрансляции.
121
Оценим теперь, как сказывается на вероятности Ръ, ост и
скорости Gh помехоустойчивость обратного канала. На рис. 5.7
приведены результаты проведенного по (2.79), (2.80), (5.42) и (5.43)
расчета применительно к передаче сообщений длиной k=7 в
условиях медленных замираний ЧМ сигналами с последующим
некогерентным приемом. Параметр Ал, определяемый в данном случае
выражением Л/1=Л/2о/Л2о(О^Я/1^оо), характеризует относительную
помехоустойчивость обратного канала. Из кривых следует, что
даже при весьма сильных помехах в прямом канале (Л2о~5-МО)
можно за счет некоторого снижения скорости обеспечить вполне
удовлетворительную достоверность передачи сообщений с
помощью простой ретрансляционной обратной связи.
5.4. АВТОНОМНОЕ КОДИРОВАНИЕ КВИТАНЦИЙ
ПРИ ПОЛНОЙ ОБРАТНОЙ СВЯЗИ
Систему с ИОС, в которой длина квитанции равна длине
сообщения (s = k), но сами сообщение и квитанция друг от друга
отличаются, назовем системой с автономным
кодированием квитанций. Применение автономного кодирования
позволяет весьма существенно повысить кратность
обнаруживаемых ошибок т0 при прочих равных условиях по сравнению с
ретрансляционной обратной связью и тем самым повысить
достоверность передачи сообщений.
Рассмотрим, как влияют (сказываются) на скорость и
достоверность передачи сообщений некоторые способы автономного
кодирования квитанции. Предположим вначале, что в системе
с ИОС прямой и обратный каналы одинаковы и ошибки в них
возникают независимо, а для передачи сообщений используется
инверсный -код. Тогда вероятность правильного приема сообщения
Pup и приема его с необнаруженной ошибкой Рко должны
согласно (4.48), (4.49) и (4.28) рассчитываться по формулам:
*пр = О-Р?(1-Р')*. (5.46)
^но= icr+1[P(i-p^V(i-P)]*-(2v+1) +
V=0
+ 2,<?1РР'ГЦ1-Р)(1-Р')1Г*. (5-47)
v=l
где [х] — целая часть числа х. В этих выражениях при
одинаковых помехах в каналах необходимо положить p=pf.
На рис. 5.8 показаны зависимости рэ(р) и Gh(p), рассчитанные
по ф-лам (5.46), (5.47) с учетом (5.16) и (5.17) применительно
к инверсным кодам (8,4), (14,7) и (32,16). Там же для сравнения
штриховой линией изображены зависимости рэ(р) и Gk(p) для
122
повторительного кода (14,7). Из кривых следует, что в случае
независимых ошибок инверсные коды разной длины обеспечивают
практически одинаковую вероятность ошибки на элемент
сообщения рд. Объясняется это тем, что максимальная кратность
обнаруживаемых ошибок т0 у всех инверсных кодов одинакова:
coir шп
Рис. 5.7.
Остаточная вероятность искажения
Рк ост и .скорость Gh при передаче
сообщений повторительным кодом
(14,7) в системе с ИОС в условиях
медленных рэлеевских замираний и
разной помехоустойчивости
обратного канала
Рис. 5.8.
К "оценке эффективности применения
инверсных кодов для передачи
сообщений (в системе с ИОС при
независимых ошибках в каналах [пунктир
соответствует повторительному коду
(44,7)]
гласно (4.31) /п0=3. Скорость же передачи G& с увеличением
длины сообщений k уменьшается. Из этого можно сделать
заключение, что для передачи сообщений в условиях независимых
ошибок целесообразно применять инверсные коды малой длины.
Сравнение инверсных кодов с повторительными по
обнаруживающей способности показывает, что максимальная кратность
обнаруживаемых ошибок т0 у первых кодов выше, чем у вторых
(у повторительных т0=1). Поэтому эквивалентная вероятность
ошибки рэ у инверсных кодов меньше; скорость же передачи G&
при использовании обоих кодов практически одинакова. В силу
123
зтого инверсные' коды в целом лучше повторительных. Однако
для использования их преимущества требуется определенное, хотя
и небольшое усложнение аппаратуры кодирования.
Оценим теперь эффективность применения инверсных кодов
в зависимости от помехоустойчивости обратного канала. На рис. 5.9
и 5.10 приведены зависимости оэ(р) и Gk(p), рассчитанные по ука-
щ
ОМ
Щ
0
Л=<*>-
7,5* "^
ОД-
жА
z^\
-0^3
^0,25
Рис. 5.9.
Влияние обратного канала
н а экв ив алентную ве ро ят-
ность ошибки р9 и скорость
передачи сообщений G*
инверсным иодом (8,4) при
независимых ошибках в
каналах
Рис. 5.10.
Влияние обратного .канала
на показатели рэ и Gk три
передаче сообщений
инверсным «кодом (14,7) в системе
с обратной связью цри
независимых ошибках в
каналах
занным выше формулам применительно к инверсным кодам (8,4)
и (14,7). Как видно из кривых, с улучшением состояния
обратного канала (ростом ft,) эквивалентная вероятность ошибки падает.
При бесшумном обратном канале (Я=оо) вероятность рэ у кода
(8,4) равна нулю, у кода же (14,7) она ограничена значением,
большим нуля. Объясняется это тем, что, как следует из (4.28),
в спектре кода (14,7) присутствует комбинация с параметрами
х = 7, е=0, т. е. комбинация, проверочная часть которой совпадает
с проверочной частью тривиальной комбинации 0 0...0 0. Такое
положение имеет место у всех инверсных кодов с нечетным k.
Коды с четным k комбинаций се=0 (кроме тривиальной)
согласно (4.28) не имеют. Поэтому инверсные коды с четным k при
124
бесшумном обратном канале обеспечивают, в принципе,
безошибочную передачу сообщений, коды с нечетным k таким качеством
не обладают.
На скорость передачи сообщений инверсными кодами
состояние обратного канала существенно влияет лишь в области, где
помехоустойчивость обратного канала ниже прямого (Я<1), при
обратном соотношении скорость передачи определяется
практически помехоустойчивостью только прямого канала. Пусть теперь
для передачи сообщений применяется укороченный циклический
код, например (12,6), образованный генераторным полиномом
х6+х^+х3+\. Обобщенный спектр {zKe} этого кода, взятый
из [120], приведен в
табл. 5.1.
В оюпол шова1вши1сь
соотношением (4.17),
нетрудно по этим
данным найти спектр
кода 'в общепринятом
смысле (табл. 5.2).
Данные таблицы
показывают, что
максимальная кратность
обнаруживаемых ошибок
этого кода такая же, как и у инверсного (14.7), т. е. i/n0=3.
Эквивалентную вероятность ошибки pQ и скорость передачи Gk
применительно к этому коду можно рассчитать иго формулам, указанным
и
1
2
3
4
5
6
'0
0
0
0
0
0
0
1
0
0
6
0
0
0
ТАБЛИЦА
Величина г
*С8
2 1 3
0
7
0
7
0
1
3
0
12
0
5
0
5.1
при е
4
0
8
0
7
0
0
5
3
0
2
0
1
0
6
0
0
0
1
0
0
т
Z/71
0
1
1
0
2
0
3
0
Т/
4
16
L Б ЛИЦА
5
0
6
30
5.2
7
0
8
15
9
0
10
2
11
0
12
0
ранее. При этом для расчета вероятности Рно следует
воспользоваться ф-лой (4.49), а значения z<xe Для нее взять из табл. 5.1 (при
одинаковых по помехоустойчивости прямом и обратном каналах,
т. е. при р = р\ можно, как показано в § 4.4, для (расчета
использовать данные табл. 5.2). Найденные таким образом кривые рэ(р)
я Gk(p) показаны штриховыми линиями на рис. 5.11.
Расчеты, выполненные по данным табл. 5.1, для разных по
помехоустойчивости каналов показывают, что циклический код
(12,6) вполне приемлем и в случае, когда помехоустойчивость
обратного канала значительно выше, чем прямого. При
бесшумной обратной связи такой код позволяет осуществить
безошибочную передачу сообщений, так как в его спектре (по данным
табл. 5.1) нет ни одной комбинации (исключая тривиальную) с
весом проверочной части, равным нулю (2хв = 0). Следовательно,
125
Рис. 5.11.
К оценке эффективности применения в системе с
ИОС циклических и случайных кодов с 50%-ной
избыточностью при независимых ошибках в
каналах:
циклический код (12,6); случайные
коды (8,4^1 и (14,7^1
если при одинаковой
помехоустойчивости каналов этот код практически не
отличается по качеству от инверсного с
нечетным k (кривые рис. 5.8 и 5.11), то
при высокой помехоустойчивости
обратного канала его качество много лучше.
Оценим теперь потенциальные
возможности автономного кодирования
квитанций при полной обратной связи,
обратившись к понятию случайного кода (см,
§ 4.3). Вероятность Рдр при случайном
коде следует (рассчитывать также по
ф-ле (5.46); формулу для вероятности
Рно получим после несложных
преобразований, подставив (4.37) с учетом (4.16)
в (4.49):
Е Р(х)+Е ЕPkM e)
:=m0+l >c=^l e=m0~j-l
н=т0+1
(5.48)
х=1 г=т04-1—и
На рис. 5.11 сплошными линиями изображены зависимости
Рэ(р) и Gk(p), рассчитанные по ф-лам (5.46) и (5.48) при условии
р = р' применительно к случайным кодам (8,4) и (14,7),
обладающим согласно (4.59) максимальной кратностью обнаруживаемых
ошибок соответственно т0 = 3 и /п0 = 4. При т0=3 достоверность
и скорость случайных кодов не отличаются от инверсных. Однако
при т0=4 случайные коды оказываются эффективнее. Это
означает, что при k = 7 и я=14 можно, в принципе, построить код
более помехоустойчивый, чем инверсный. На скорости передачи
сообщений структура кода при небольших п практически не
сказывается.
126
На рис. 5.12 приведены кривые, иллюстрирующие влияние
обратного канала на достоверность и скорость передачи сообщений
случайным кодом (14,7). Особенность состоит в том, что этот
код, как и другие случайные, не позволяет уменьшить вероятность
искажения сообщения до нулевого значения даже при
бесшумном обратном канале. Формально это объясняется тем, что в
выражении (5.48) второе слагаемое равно нулю, первое же
слагаемое определяется параметрами прямого канала и, следовательно,
отлично от нуля. А согласно (5.17) это означает, что остаточная
вероятность искажения также не может быть равной нулю.
Причина этого заключается в том, что при случайном кодировании
контрольные части комбинаций (квитанции), состоящие из одних
нулей, может иметь не только тривиальная кодовая комбинация
О 0 ... О 0 0, но и некоторые другие.
Рассмотрим теперь случай передачи сообщений и квитанций
по однородным каналам. Предположим, что прямой и обратный
каналы системы с ИОС по помехоустойчивости одинаковы
(Л2о=Л'2о) и по ошибкам независимы (Ялв(х, е)=Ялв(,к)Я/в(в),
где s±=k). Как уже отмечалось ранее, средние значения
остаточной вероятности искажения ^-элементного сообщения Рь ост и
относительной скорости его передачи G& можно рассчитывать в этом
случае по ф-лам (2.79) и (2.80). Входящую в эти выражения
вероятность Япр следует находить по ф-ле (5.42). Вероятность Рно,
если для передачи квитанций применяется случайный код с
наперед известной кратностью обнаруживаемых ошибок, нужно
вычислять по формуле, получаемой с учетом (4.16) из (4.55) и (4.37):
Р =-L
НО 2*
/ k tn9 k
Vx=m04-1 к=1 e=m0+l—x
Если же для передачи используется код инверсный, то согласно
(4.55) и (4.28) вероятность Ящ> должна рассчитываться по
формуле
[*г]
Рно = J -^r^(2v+l)^(*-2»-l)+ "
V=0 k
+ S -^rp*(2v)P*(2v)- (5-5°)
v=l k
Пусть сообщения и квитанции передаются по каналам с
медленными рэлеевскими замираниями посредством ЧМ сигналов с
последующим некогерентным приемом. Тогда вероятности Р&(х)
и Р\(е), входящие в выражения (5.42), (5.49) и (5.50), можно
определить по ф-ле (4.6).
127
На рис. 5.13 приведены зависимости скорости передачи Gk
и энергетического выигрыша h\lh2cv от отношения сигнал/помеха
в прямом канале h\ для случайных кодов (8,4), (14,7) и (32,16),
обладающих согласно (4.59) максимальной кратностью
обнаруживаемых ошибок, соответственно равных т0=3, 4 и 8. Они рас-
°и
щ
и,/5\
Ц3и\
0,25]
о\
in*
ю
да*
105
t
Рэ
vM
tyoA
i,o-A
0,664
-1
-2
-3
\
к
k\
-4
-Л=оо
-9J0
г■&
•r
lories
Ш5
i
"^•Ll
op
4i>
Рис. 5.12.
Влияние помехоустойчивости
обратного канала на достоверность и
скорость передачи сообщений при
случайном кодировании [случайный код
(14,7)] и независимых ошибках в
каналах
* ЦК
6
5
k
3
2
1
0
\
i
А
\ /
У/
У
Мб;
7
•V
J
Щ
Рис. 5.13.
К оценке преимущества
системы 'С ИОС до энергетике
(Прямого канала три (передаче со-,
общений случайными кодами
(2k, k) в условиях (медленных
замираний
считаны по ф-лам (5.45), (5.44), (2.79) и другим упомянутым
выше с использованием семейства зависимостей Pn(^l,h\n)f
приведенного на рис. 4.4. Кривые показывают, что при h%> 2
информационная обратная связь и при группирующихся ошибках
дает возможность существенно улучшить показатели передачи,
причем тем значительнее, чем больше длина сообщения k.
Объясняется это тем, что при большем k можно построить код,
обладающий большей кратностью всех обнаруживаемых ошибок т0.
Сопоставим теперь эффект от применения в условиях
группирующихся ошибок кодов разной структуры. На рис. 5.14
изображены кривые энергетического выигрыша h%/h2CVt обеспечиваемого
128
применением в системе с ИОС при одинаковых, но независимых
каналах повторительного, инверсного и случайного кодов (14,7),
укороченного циклического кода (12,6) и инверсного кода (8,4).
Кривые для первого и третьего кода взяты с рис. 5.6 и 5.13, для
инверсных кодов рассчитаны по
ф-лам (5.45), (5.44), (2.79), (2.80)
и (5.50), а для циклического — по
тем же формулам, за исключением
(5.50) (вероятность Рно
рассчитывалась по (4.55) и (4.6) с учетом
дадоных табл. 5.1).
Казалось бы, инверсный и
случайный ((средний из лучших) коды
(1<4, 7), максимальная кратность
обнаруживаемых сшибок которых
выше, чем у повторительного
(соответственно /п0=3 'и 4 против т0=1),
должны обеспечивать лучшие
показатели передачи при вюех
значениях h20. Однако, как показывают
кривые, при достаточно высокой гшме-
хоустойчиВ|ОСтл каналов лучшим
еж а з ы ва е тоя код п о втори те л ын ы й.
Это объясняется следующим.
Структура первых двух кодов такова, что
не обнаружив а ем а я ошибка в
сообщении может возникнуть даже при
безошибочно переданной квитанции,
поскольку эти коды содержат, по
крайней мере, две разрешенные
комбинашки,-контрольные части
которых одинаковы. Повторительный же код такой пары комбинаций
не имеет. А группирование ошибок в канале приводит к тому, что,
например, вероятность поражения нсех (семи в данном случае)
элементов сообщения и, таким образом, перепутьгвания
комбинаций с % = 0, 8 = 0 и и=7, е=0, принадлежащих инверсному коду
при lg/i20>2,7, оказывается выше, чем вероятность поражения
помехой одного определенного элемента в сообщении и такого же по
расположению элемента в квитанции, тождественно повторяющей
принятое сообщение при условии, что ошибки, относящиеся к
разным каналам, возникают независимо. Инверсный, код (8, 4) и
укороченный циклический (12, 6) также не содержат комбинаций,
проверочные части которых совпадают. Поэтому они, как и
повторительный, начиная с некоторого h\ становятся эффективнее
инверсного и -случайного кодов (14, 7).
Пусть теперь каналы независимы, но помехоустойчивость
различна (к\фк%). Положим вновь, что сообщения и квитанции
передаются ЧМ сигналами с последующим некогерентным приемом.
На рис. 5.15 приведены зависимости Pkoci(h\) и Gh(h2o) для раз-
Рис. 5.14.
К сравнению кодов с 50% -ной
избыточностью при
использовании их для передачи
сообщений в системе с ИОС при
частотной модуляции и
медленных замираниях ib каналах:
1 — укороченный циклический код
(12, 6); 2 — инверсный код (8, 4);
3 — повторительный код (14, 7); 4 —
случайный код (14, 7); 5 —
инверсный код (14, 7)
5—281
129
личных значений отношения X=h'2o/h20, рассчитанные по приве*
денным выше формулам для случайного кода (14,7) с кратностью
т0=4. На рис. 5.16 и 5.17 построены те же зависимости, но
применительно к инверсным кодам (14,7) и (8,4). Сопоставление
указанных трех кодов по зависимости Рлост(Ял) позволяет сделать
Рис. 5.15. Рис. 5.16.
К ©опросу о влиянии помехоустойчиво- Остаточная вероятность искажения
сти обратного канала на достоверность Ра ост и скорость передачи сообще-
и скорость передачи сообщений случай- ний Gk инверсным кодом с нечетным
ным кодом (1,4,7) в условиях медлен- k в условиях медленных замираний
ных замираний '(модуляция частотная) при различных состояниях обратного
канала [модуляция частотная; код
i(44,7)]
вывод, что первые два кода — случайный (14,7) и инверсный с
теми же параметрами — далеки от оптимальных в случае, когда
обратный канал по помехоустойчивости много лучше прямого.
Действительно, изменение состояния обратного канала в сторону
улучшения (%h>l) практически не сказывается при этих кодах на
помехозащищенности передачи. В этих условиях целесообразнее
применять инверсный код (8,4), так как при Хь-^оо он
обеспечивает, в принципе, безошибочную передачу сообщений. Причина
этого качественного различия кодов указывалась выше. Расчеты
130
показывают, что аналогичный вид имеют кривые, присущие
укороченному циклическому коду (12,6) -при различных значениях %k-
Из приведенных примеров видно, что коды, оптимальные для
разных по помехоустойчивости прямого и обратного каналов, должны
строиться по принципам, отличным от разработанных в теории
кодирования для случая р — р\ В частности, при передаче сообще-
IfiO
0J5
0№
о
1
Я„=°о
10//
7//
{//
/0,1
0,01
________
Рис.* 5.17.
Остаточная (вероятность
искажения Ph ост и скорость
передачи сообщений Gh инверсным
кодом с четным к в условиях
медленных замираний при
различных состояниях обратного
канала [модуляция частотная;
код (8,4)]
Рис. 5.18.
Эквивалентная вероятность ошибки рэ и
■необходимое превышение сигнал/помеха
в системе с укороченной обратной
связью h2 и независимыми ошибками в
каналах при частотной модуляции и
одинаковых с односторонней системой
энергетических затратах (пунктир
соответствует системе (без обратной связи)
ний по каналам с медленными замираниями необходимо (но
недостаточно) для передачи квитанций брать код с такой структурой,
при которой проверочные части всех разрешенных кодовых
комбинаций отличаются хотя бы в одной позиции. Этому требованию,
в частности, отвечают инверсные коды с четным k, а также (что
еще лучше) многие укороченные циклические коды, например
коды (6,3), (12,6), (30,15), (126,63) и др.
5*
131
5.5. УКОРОЧЕННАЯ ОБРАТНАЯ СВЯЗЬ В УСЛОВИЯХ
НЕЗАВИСИМЫХ ОШИБОК
Будем называть обратную связь укороченной, если длина
квитанции в двоичных единицах меньше длины сообщения (s<k).
Поскольку алфавит квитанций i/V=28 при этом соответственно
меньше алфавита сообщений M = 2ky то обеспечить безошибочную
передачу сообщений невозможно. Однако в целом ряде случаев
выбранный соответствующим образом для передачи квитанций код
яри s<k может обеспечить достаточно малую остаточную
вероятность искажения сообщения при значительно меньшей загрузке
обратного канала.
Рассмотрим вопрос о рациональном кодировании сообщений и
квитанций при s<k и независимых ошибках в каналах,
учитывая энергетические и другие ресурсы только прямого канала
(критерий I). В соответствии с (5.17) и (5.18) основные
характеристики системы с ИОС — эквивалентная вероятность ошибки и
относительная скорость передачи — связаны соотношением
А-Ч'-ТГГ- <5-51>
Среднее (с учетом повторений) превышение энергии сигнала
над энергией помехи Л2ср в прямом канале связано с отношением
сигнал/помеха h2 единичного импульса очевидным соотношением
Лс2Р = ВД. (5.52)
Формулы (5.51) и (5.52) показывают, что величины рэ и Л2ср
зависят от вероятности Рно противоположно: с уменьшением Рно
вероятность ошибочной передачи сообщений уменьшается, а энер-.
гетические затраты на передачу из-за увеличения числа
повторений увеличиваются. Естественно предположить поэтому, что
существует оптимальное значение вероятности Рно, которое при
заданном значении /i2cp обеспечивает минимум вероятности рэ.
Вероятность Рно при заданных k, p и р' зависит от числа
элементов в квитанции 5, а при известном 5 определяется
максимальной кратностью всех обнаруживаемых ошибок т0. Задача, таким
образом, состоит в определении оптимального числа двоичных
элементов в квитанции 50пт(^о) либо в отыскании оптимальной
величины moowr(s) при заданном s.
Решим поставленную задачу применительно к случайному,
т. е. к среднему из возможных с фиксированным m^m0 кодов.
При одинаковых каналах (р=р') обобщенный спектр случайного
кода, определяемый ф-лой (4.37), совпадает со спектром кода в
общепринятом смысле (4.40). Нетрудно при этом показать, что
при условии р = р' ф-ла (4.49), определяющая вероятность Рно
в системе с ИОС, переходит в ф-лу (4.57). Поэтому на основании
(4.40) и (4.57) можно написать, что при случайном кодировании
квитанций и одинаковых прямом и обратном каналах вероятность
132
Рно = 4- £ (C*+s - CO p' (1 - P)k+S-1, (5.53)
где m — кратность полностью обнаруживаемых ошибок. В
зависимости от структуры кода т может принимать значения от О
до то, определяемого по (4.59).
Пусть функция h2(p) известна. В общем случае она
определяется видом модуляции, методом приема и типом действующих
в каналах помех. Тогда, используя ф-лы (5.51) — (5.53), можно
рассчитать зависимость рэ(к2с^) и путем их сопоставления
сравнить по эффективности коды разных классов. На рис. 5.18
приведены зависимости рэ(Л2ср) и ft2(7i2Cp), соответствующие условиям
некогерентного приема ЧМ сигналов при наличии флуктуацион-
ных помех. При этом учтено, что [155]
А2 = —21п(2р). (5.54)
Кривые построены для случая £ = 7, 5=1, 2, 3. При этом
согласно (4.59) гпо= 1 при 5= 1—3, т0=2 при 5 = 4, то=3 при 5=5 и 6
и imo = 4 при 5 = 7. На этом же рисунке показаны зависимости,
соответствующие передаче сообщений по системе без обратной
связи. Жирной линией показана минимально достижимая
вероятность рэ при заданной средней величине расходуемой
относительной энергии Л2ср сигнала и оптимальном режиме работы системы
с обратной связью.
При большом уровне помех (й2ср^6,2) в случае ЧМ
модуляции система с обратной связью уступает по достоверности системе
без обратной связи. При /i2cp>6,2 сообщения целесообразно
передавать с обратной связью, причем с повышением Л2ср следует
увеличивать число элементов в квитанции 5. Начиная с некоторых
значений s, система с ИОС оказывается способной обеспечить
высокую достоверность передачи сообщений практически без
увеличения (при флуктуационных помехах) энергетических затрат.
Среднее значение отношения сигнал/помеха в этом случае
определяется минимумами функции к2с^(рэ) и условием Рно^С^пр-
Выясним, существует ли при фиксированных значениях пик
структура кода (оптимальное значение то), при которой режим
передачи по системе с ИОС оказывается энергетически наиболее
выгодным. На рис. 5.19 изображено семейство кривых h2cv(hz)
и А)(Л2ср) для кода (23,15), рассчитанных применительно к
различным значениям т. Согласно кривым минимальные значения
Л2сР для всех т практически одинаковы. Это означает, что все
структуры кода с Q^im^Zmo энергетически, по существу,
равноценны. Наибольшую же достоверность обеспечивает структура с
максимально возможной кратностью m=!mo. Следовательно, она
и является оптимальной. Найдем соотношение, позволяющее
рассчитать соответствующий этим условиям энергетически
оптимальный режим h20JIT(k,s) (или, иначе говоря, p0ni(k,s)). Учтя, чта
133
Рис. 5.19.
Зависимости эквивалентной
вероятности ошибки рэ от среднего (с
учетом повторений) превышения
сигнала над помехой /i2cp (модуляция
частотная) щри передаче сообщений с
обратной связью кодами (23,15) с
разной кратностью обнаруживаемых
ошибок j(пунктир соответствует
односторонней системе)
dGk
dps
dh*
dQk
dp
dh*
I dp9 m
I dp '
— = £L I dp9
dps dp j dp * ■
Hh2 '"РИ|Ра1В1НЯ,в производаую
"Л ср/арэ, зависящую от (Ьшж-
Пий (5.51) и (5.52), нулюФ
выясняем, что минимумы
функции ft2cp(p3) •полностью
определяются минимумами функции
(0.52), т. е. определяются
условием
__1МРопт)
+
*8^Ропт)
dp
dp
С*(Ропт) = 0,
(5.55)
_ Положив теперь G*«Pnp =
-{l—p)h+*, получим искомое
соотношение
1
l£s^.d№(Poxn)
h* (Pom) dp
В частности, при
рентном ЧМ приеме
1 — Ропт
-=* + *.(5.36)
некоге-
Р„„.1п(гТ„7 = * + 8' <557>
л. (6ll) и (5.53) сТп^ьз^ваКм^иГ^Г^ГЖ^О
™,J.„ 0»TH0CT» Р.. При заданных длине сообщения * и веооят.
общений „/взывают™ „^„ГльныТн" Прн^од^аковыТ^елГ
°ь,с;я„х„lZT"ZlZ67Zt"Г"™""8 <*■- ""•«
прямого и обра™ ?«»S„)' *актическм помехоустойчивость
должна быть^ разл„,„оГ(,в^ИЛТГ иЬ"°М реЖиме раб°™
определяемый 'нофIT^fc»™ ГТо IT"™" V
134
Рассмотрим теперь вопрос о выборе кода для бесшумного
обратного канала. Известно, что при s<k одна и та же квитанция
ставится в соответствие не одному, а нескольким сообщениям и,
следовательно, даже при бесшумном обратном канале вероятность
необнаруживаемой ошибки Рно не равна нулю. Это неизбежное
при укороченной обратной связи обстоятельство связано с
возможностью перепутывания сообщений, объединенных одним опоз-
навателем (квитанцией). При двоичном групповом коде каждой
10 №
10'
ю2
"am
р=р' I
ы
ъ Ж иг* Ю'8 -рэ
Рис. 5.20.
Оптимальные •
значения превышения шг-
аал /помеха h2
импульса оишала при
различной длине
сообщений и квитанций
(модуляция
частотная)
Рис. 5.21.
К определению оптимальной
длины квитанций 50Пт при
передаче /г-элементлых
сообщений с заданной эквивалентной
вероятностью ошибки рэ по
каналам с независимыми
ошибками (модуляция частотная)
квитанции соответствует подмножество (группа) из 28 сообщений.
Если группы образуются по известным правилам построения
смежных классов конкретного кода, то каждая из групп будет
представлять, по существу, (k,k—s) -групповой код. Задача состоит
в том, чтобы выбором соответствующих сообщений из нормальной
таблицы декодирования обеспечить минимальную вероятность Яно
этого кода. Проблема оптимального кодирования при
безошибочной обратной связи сводится, таким образом, к определению кода
с другими заданными параметрами.
Решим частную задачу, связанную с проблемой оптимального
кодирования. Найдем длину квитанции s, необходимую для
обнаружения всех ошибок кратности до т0 включительно в сообщении
длиной k при свободном от помех обратном канале. Подставив
параметры эквивалентного кода в (4.59), найдем
135
( m0/2
S>\
log2 ]£ Ck, если т0 — четное,
/=o
(5.58)
1 + l°g2 2 ^*~ь если mo — нечетное.
t=0
Рис. 5.22.
Кривые для
определения необходимой
длины квитанций s при
передаче сообщений в
системе с бесшумной
обратной овязью и
независимыми
ошибками в прямом
канале
На [рис. 5.22 даны зависимости
необходимой длины квитанции 5 от (максимальной
кратности обнаруживаемых ошибок при
различном числе элементов k в сообщении,
вычисленные по (5.58) (дробное значение 5,
полученное из кривых, необходимо
округлять до ближайшего .большего целого).
Например, для обнаружения всех
однократных и двукратных ошибок © пятиэлемент-
ном сообщении надо брать число элементов
в квитанции 5 = 3, для обнаружения всех
ошибок вплоть до кратности т0 = 3 надо
брать 5 = 4. Однако при 5=4 могут быть
обнаружены все ошибки и более высокой
кратности т0 = 4. Для безошибочной
передачи сообщений (|/По = 5) необходимо
использовать квитанции с числом
элементов 5 = 5.
Формулу (5.58) и кривые рис. 5.22
можно применить, в принципе, и к случаю
группирующихся ошибок, однако
соответствующее независимым ошибкам структурное
решение групп, объединяемых одной
квитанцией, может оказаться, как уже
показывалось ранее, неоптимальным.
5.6. УКОРОЧЕННАЯ ОБРАТНАЯ СВЯЗЬ В УСЛОВИЯХ
ГРУППИРУЮЩИХСЯ ОШИБОК
Достоверность и скорость передачи сообщений в условиях
группирующихся ошибок можно характеризовать средними
значениями Р^ост и Gfe, проводя усреднение по всем возможным
состояниям каналов. Расчетные представления величин /\0ст и Gh
выражаются ф-лами (2.79) и (2.80). Входящие в эти формулы
средние значения вероятностей Рпр и Рно следует в условиях"
группирующихся ошибок рассчитывать в общем случае по ф-лам
(4.51) и (4.55).
136
При независимых прямом и обратном каналах вероятность
Phs(Kt e) представляется формулой '
PkA*, е) = Р,(к)Р;(8), (5.59)
где Рк{у) и Р'8(е)—средние вероятности появления х ошибок
среди k элементов в прямом канале и соответственно г ошибок
среди 5 элементов в обратном канале. В частности, вероятность
Рпр при независимых каналах выражается формулой
^=^(0)^(0). (5.60)
Расчетную формулу для определения вероятности Рно удобно
представить в виде
k s . me s
>c=m04-l 8=0 * s x=l e=m0-fl— к * s
(5.61)
В частности, при случайном кодировании квитанций и
независимых каналах согласно (4.37) и с учетом (4.16) имеем
Ik m0 s ч
Е P,w+E Е w;(e)L- (5-62)
Если же mo=0, то на основании (4.55) и (4.36) нетрудно
показать, что
Рно = -$г11-РьШ (5-63)
Случайный код с увеличением Длины его проверочной части
5 и длины п кодовой комбинации по своим параметрам
приближается к оптимальному (в смысле минимума Рно). Это означает,
что вероятность Рно всех «хороших» в указанном выше смысле
кодов лежит между значениями, определяемыми ф-лами (5.62)
и (5.63) Ч Следовательно, указанные формулы можно.
использовать в качестве приближенных оценок в случаях, когда передача
сообщений ведется длинными кодами.
Рассмотрим вопрос о целесообразности поиска оптимального
кода при использовании сильно укороченной обратной связи
(s/n<0,3) для передачи длинных сообщений в условиях
группирующихся ошибок. Из графика, приведенного на рис. 4.12,
следует, что обнаруживающая способность т^п кодов с малой
избыточностью (s/n<0,3) невелика — менее 10%. При таком условии
вероятности Рп(1) и Рп(^о+1) появления в последовательности
из п элементов одного или т0+1 ошибочных элементов в условиях
группирующихся ошибок практически одинаковы. Следовательно,
*) При произвольном отношении s/k указанная оценка справедлива лишь
для равных по помехоустойчивости каналов с независимыми ошибками. В
случае группирующихся ошибок ее можно применять лишь при s<ife (см. § 4.4).
137
вероятности Рно для кодов любой кратности определяются, по
существу, только отличием их обобщенных спектров.
Даже при бесшумном обратном канале в системе с ИОС
вероятность Рно любого конкретного кода практически не
отличается от вероятности, определяемой ф-лой (5.63). В самом деле,
при бесшумном обратном канале квитанции можно передавать
таким (k+s, £)-кодом, что вероятность его необнаруживаемой
ошибки будет определяться вероятностью Рно кода (k, k—s). Но
избыточность последнего кода R2=s/k связана с избыточностью
основного iRi=s/n выражением /?2=t/?i/(1—#1). При iRi^Cl,
очевидно, #2~J#i и, следовательно, по обнаруживающей способности
то/а эти коды практически одинаковы. Следовательно, при малой
избыточности (s//z<0,3) и при группирующихся ошибках в
каналах вероятность Рно можно рассчитывать по ф-ле (5.63). В этом
мЪжно убедиться, например, проведя расчет для системы с ИОС
с одинаковыми прямым и обратным каналами, взяв за основу
модель, предложенную в [142]. Согласно этой модели вероятность
поражения т и более элементов в последовательности из п
элементов определяется ф-лой (4.2). Кроме того, из этого выражения
с учетом (4.3) можно получить справедливое при х/£<0,3
рекуррентное соотношение
,_(*±2у-а .1 _(-£)"
Рк(„ + 1) = Рк(к) ^±^ V k > . (5.64)
\1—a
Выражения (4.3') и (5.64) позволяют при условии т/п<0,3
рассчитать вероятность необнаруживаемой ошибки в условиях
группирующихся ошибок в модели [142].
Расчет, проведенный по ф-лам (2.79), (2.80), (5.59), (5.62) и
(5.64) для кода (31,21) с кратностью обнаруживаемых ошибок
/По=5 применительно к тропосферному телефонному каналу с
параметрами р = 6,34-10-4 и а = 0,439, дает приближенно следующий
результат:
_ f 3,45-КГ8 при т0 = 0,
k ОСТ I
11,26- Ю-6 при т0 = 5.
Как видно, значения Р^ост для т0=5 и т0 = 0 практически
совпадают. Этот пример показывает, что при малой избыточности
используемого кода (s//z<0,3) не только в односторонней системе,
но и в системе с обратной связью нет смысла тратить усилия на
поиски оптимального кода. Достаточно произвольно (случайно)
выбрать дополняющую матрицу кода, исключив только матрицы
из одних нулей или одних единиц. Все это не означает, однако,
что система с ИОС при сильно укороченной обратной связи и
группирующихся - ошибках теряет преимущества в достоверности
138
ТАБЛИЦА 5.3
№
канала
1
2
3
4
5
Вид канала
Кабельный телеграфный ОФМ
Радиорелейный телеграфный ЧМ
Радиотелеграфный KB
Тропосферный телефонный ЧМ
Радиорелейный телеграфный ЧМ
р
3,08-Ю--4
7,04-Ю-4
1,37-Ю-"2
6,34-10"4
1,ЗЬ Ю-"3
а
0,615
0,545
0,449
0,439
0,330
Скорость, Бод
1200
1200
75
1200
1200
передачи перед односторонней системой связи. В табл. 5.3 даны
значения р и а для некоторых стандартных каналов связи, взятые
из [142а].
Результаты расчетов остаточной вероятности искажения Рь ост
в системе с ИОС, проведенных для различных каналов по ф-лам
(2.80), (5.59), (5.63) с учетом (4.32) применительно к
циклическому коду (255, 239), приведены в табл. 5.4. В ней же даны
результаты, определяющие достоверность передачи ^-элементных
сообщений без применения обратной связи. Расчет в последнем случае
проводился по формуле
P0№ = kx-«p, (5.65)
вытекающей из (4.3х). Как видно, применение укороченной
обратной связи позволяет существенно повысить достоверность
передачи информации в случае группирующихся ошибок в каналах связи
даже при малом отношении s/k.
Пусть теперь обратный канал — без помех. Поскольку в этом
случае Ркв(к, е)=0 при гфО, то вероятность необнаруживаемой
ошибки согласно (5.61) определяется выражением
Рно= £ ^Г **<*>• (5-66)
Если, например, для передачи квитанций используется
случайный групповой код, то согласно (5.62)
p™=v E Рк{х)- (5-67)
K=m0-f 1
В табл. 5,5 приведены результаты расчета вероятности Рь. ост
для случая передачи сообщений циклическим кодом (255, 239)
по каналу с безошибочной информационной обратной связью
(параметры каналов взяты из табл. 5.2). Там же даны результаты
расчета относительной скорости передачи Gh.
139
ТАБЛИЦА 5.4
ТАБЛИЦА 6.5
№
канала
1
2
3
4
5
р.
k ост
1,96-Ю-8
0,58-Ю-7
2,13-Ю-6
0,77-Ю-7
2,58-10—7
Gk
0,996
0,989
0,721
0,974
0,931
Ne
канала
1
2
3
4
5
Односторонняя
система
(минимальный код)
2.8Ы0""3
8,46-10"3
2,79-Ю-1
1,36-Ю-2
5,22-10-2
Система с ИОС
(каналы
одинаковые)
3,87-Ю-8
1,35- Ю-7
б,зз. ю-6
2,12-Ю-7
7,26-10~7
Сопоставление данных табл. 5.4 и 5.5 показывает, что при
сильно укороченной обратной связи (s/n<0,3) даже безошибочная
обратная связь не позволяет в условиях группирующихся ошибок
существенно повысить достоверность передачи по сравнению с той,
которая обеспечивается при одинаковых по помехоустойчивости
каналах.
Выясним, имеет ли смысл использовать для передачи
сообщений и квитанций в этих условиях длинные коды. Для этого
воспользуемся моделью, описанной в [142]. Параметры этой модели
р и *х в определенных пределах не зависят друг от друга. Это
дает возможность оценивать достоверность передачи сообщений
с безошибочной обратной связью эквивалентной вероятностью
ошибки рэ, определяемой из равенства
Рк ост (Р, а) = pk одн (р* а). (5.68)
При этом будем считать, что для передачи сообщений без
обратной связи используется двоичный минимальный код.
Выразив в соответствии с (2.80) вероятность искажения сообщения
Ркост через вероятность Рпр, учтя, кроме того, что согласно (4.3/)
Pnp=pk1~a, и приняв во внимание (5.65), найдем связь между
относительной скоростью передачи сообщений Gh и эквивалентной
вероятностью ошибки рд:
Gk= l~Pkl~a при 0<рэ<р. (5.69)
На рис. 5.23 приведено семейство кривых Gk(pQ), рассчитанных
по (5.69) для кодов разной длины, в предположении, что
сообщения передаются по телеграфному KB каналу с параметрами
р=1,37-10~2 и а = 0,449 (обратный канал бесшумен). Кривые
показывают, что уменьшение длины сообщений k при сохранении
длины квитанции s не только несколько увеличивает
достоверность, но, главное, повышает скорость передачи сообщений.
Например, при укорочении сообщений с &=127 до & = 7. и длине
квитанций 5 = 3 достоверность повышается приблизительно на 3%>
а скорость — на 13%. Увеличение скорости передачи при сокра-
140
щении длины сообщений объясняется тем, что при бесшумной
обратной связи с уменьшением k вероятность правильного исхода
передачи сообщений возрастает.
Рассмотрим вопрос о рациональной структуре кода при
безошибочной обратной связи и избыточности кода k/n>0,3.
Сопоставление ф-л (5.63) и (5.67) при т0=0 показывает, что они
совпадают. Это означает, что при высокой помехоустойчивости
обратного канала кодирование квитанций путем случайного выбора
дополняющей матрицы, вообще говоря, неэффективно. В [78]
показано, что с помощью информационной обратной связи можно
ОА 0J 0Л9 , 0,97 Q99
^ ,
S=0
(5езОС)
0 1 2 3 4 Щ
0
ю1
ю"
10*
D
-\Vi
^
\3
гЦ
■ 4г°°
л
щ
Н-12756 21 1
Рис. 5.23. Рис. 5.24.
Зависимость эквивалентной вероят- К вопросу влияния структуры
ности ошибки /?э от скорости Gk при кода на достоверность переда-
передаче (Общений в условиях груш- чи сообщений в системах с об-
пирующихся ошибок кодами раз,ной ратной связью в условиях
длины и избыточности группирующихся ошибок:
/ — случайный код (13, 7); 2— код
(13, 7) оптимальный с то=3
обеспечить при s^ky в принципе, безошибочную передачу
сообщений. В случае s<k безошибочная передача невозможна. Однако
соответствующий способ кодирования позволяет в ряде случаев
существенно снизить вероятность Рно. Выше было показано, что
определение помехозащищенности передачи сообщений (ife + s, k)-
кодом по системе с ИОС с бесшумным обратным каналом
сводится к определению достоверности передачи сообщений (£, k—s)-
кодом по системе без обратной связи. Если правило построения
смежных классов исходного кода определено и вероятность Pk(%)
искажения ровно х элементов в последовательности из k
элементов известна, то среднюю вероятность необнаруживаемой ошибки
Рно можно согласно (4.57) рассчитать по формуле
k
но
х=1
■Р*(*),
(5.70)
141
где 2х—спектр (k, k—sj-кода в общепринятом смысле. Вероятч
ность правильной передачи сообщения и квитанции при безоши/
бочной обратной связи должна рассчитываться согласно (4.56j(
по формуле ' /
Если, в частности, для передачи квитанций применяется
случайное кодирование, то согласно (4.40)
I и=тв-}-1 k )
Pnp = l-Pk(>l). (5.73)
Покажем, что с увеличением избыточности кода необходимость
выбора его оптимальной структуры возрастает. Положим, что
сообщения передаются стандартным кодом № 5 с помощью кода
(13,7) по KB каналу, в котором действуют общие рэлеевские
замирания; обратный канал бесшумен. Пусть для передачи
сообщений и квитанций используются ЧМ сигналы с некогерентным
приемом. Тогда вероятности Р&(и), входящие в выражения (5.70) —
(5.73), можно рассчитать по (4.6).
На рис. 5.24 представлены кривые Люст(Л2о), рассчитанные
по ф-лам (2.80), (5.72) и (5.73) для случайного кода (13,7) при
кратности обнаруживаемых ошибок т0=0 и т0 = 3. Из кривых
видно, что код с то=3 при бесшумном обратном канале
обеспечивает несколько большую достоверность, чем код с т0=0.
Но достоверность можно увеличить, если подобрать
соответствующий способ кодирования квитанций (см. § 4.4). На том же
рисунке приведена кривая Phост(Ь>2о) (нижняя), рассчитанная по
(2.80), (5.62) и (5.73) для кода (13,7) со структурой, в качестве
смежных классов которой выбраны подмножества, содержащие по
две комбинации с максимально возможным кодовым расстоянием
d = 7. Код (7,1), образующий смежный класс, обладает спектром
2i = 0 и 22=7. Такой код, по-видимому, является оптимальным по
своей обнаруживающей способности. Подбор структуры кода дает
возможность снизить вероятность ошибки в сообщении по
сравнению со случайным кодом.
Очевидно, что чем большим весом к обладают сообщения,
составляющие смежный класс, тем меньшую остаточную вероятность
искажения /\0ст обеспечивает система с ИОС при бесшумном
обратном канале. Если, в частности, каждый класс состоит только
из одного сообщения (что возможно лишь при s^k)y т. е.
выполняется условие 2^0 = 0 при всех х=^=0, то использование
информационной обратной связи позволяет вести безошибочную передачу
по прямому каналу независимо от уровня помех в нем.
142
В табл. 5.6 приведены величины Рь. ост.от/Рь. ост.ел, вычисленные
на ЭВМ применительно к кодам (2k—l,k) при разной длине k.
ТАБЛИЦА 5.6
k
Pk ост-опт
Pk ост «ел
8
0,81
16
0,295
26
0,186
32
0,152
64
0,072
113
0,036
127
0,030
Индексы при PfcocT означают, что речь идет об оценке вероятности
искажения, обеспечиваемой оптимальным, в указанном выше
смысле, кодом по отношению к коду недетерминированному
(случайному).
Более подробный анализ показывает, что отношение
* k ост.опт /Pk ост.ел с ростом k в случае использования ЧМ сигналов
при некогерентном приеме уменьшается в соответствии с
выражением /\ост.опТ/Люст.сл~3,2/&. Чем больше длина сообщения, тем
целесообразнее подбирать оптимальный код, не ограничиваясь
случайным его выбором.
□
ГЛАВА 6
Системы с решающей обратной
связью
6.1. ОБЩИЕ СООТНОШЕНИЯ
Системы с решающей обратной связью характеризуются тем,
что в них решения о регистрации сообщения или о
необходимости переспроса принимаются на приемной стороне. Для этого
все подлежащие передаче сообщения кодируются на передающей
стороне с помощью избыточного кода. В качестве такого кода чаще
всего применяется групповой систематический (п, &)-код.
Согласно принятой в гл. 2 классификации система, в которой
передаваемые сообщения кодируются таким образом, что к
информационной части добавляется проверочная часть (опознава-
тель), обозначается РОС-1. Такая система по принципу
обнаружения ошибок отличается от системы ИОС, использующей тот же
код (см. гл. 5), только тем, что опознаватель в ней передается
по тому же каналу, что и сообщение.
Другой модификацией систем с РОС является система РОС-2,
в которой все сообщения длиной п обладают единым признаком
опознавания принадлежности их к разряду разрешенных или
неразрешенных. Этот признак известен на приемной стороне и
поэтому опознаватель по прямому каналу специально не передается.
К таким системам относится, например, система, в которой для
передачи используются из числа 2п только комбинации, имеющие
одинаковый вес (количество единиц в комбинации). Хорошо
известна распространенная система РОС-2 радиотелеграфной связи
в KB диапазоне с применением кода 3 из 7 112, 107, 185]. При
приеме комбинаций «в целом» [127, 168] различие между РОС-1 и
РОС-2 в описанном выше смысле теряется. К РОС-2 относится
также система с поэлементной передачей двоичных сообщений и
двухпороговым приемом, когда область неопределенности
заключена между верхним и нижним порогами [43, 45].
Рассмотрим системы этих типов при передаче сообщений по
однородным и неоднородным каналам при условии, что
служебные знаки передаются безошибочно и число повторных передач
не ограничивается. Определяющими событиями при передаче
сообщений с решающей обратной связью так же, как при ИОС, яв-
144
ляются события ПР, НО, 00, ЛО *). Эти события в совокупности
с возможными исходами передачи знаков служебной информации
приводят к известным (см. гл. 2) исходам ПП, В, HI, H2 или НЗ,
завершающим цикл передачи сообщения. Вероятности исходов ПП
(правильный прием сообщения, опознавателя и знака
подтверждения) и HI (прием с необнаруженной ошибкой первого рода) для
систем с РОС вычисляются также по ф-лам (5.1) и (5.2).
Вероятности других исходов могут быть записаны в виде
Рт == 1Роо (*) + Рло (*)] Рно (0 *i) +
+ [Рпр (*«) + Рно М] Рло (Olxt), (6.1)
Рнг = [Рпр (Ь) + Рно (*)] Рт /0*г)- (6.2)
При безошибочной передаче служебных знаков переспроса—
подтверждения вероятности событий ПП, HI, В, Н2 и НЗ
определяются ф-лами (5.Г) — (5.5'), в одинаковой мере справедливыми
для систем с РОС и ИОС. Особенность вычислений для систем
с РОС состоит только в том, что опознаватель, передаваемый по
прямому каналу, всегда находится под действием тех же помех,
что и сообщение. Степень корреляции ошибок зависит от
характера помех, длины сообщения и опознавателя и степени их
разнесения во времени в том случае, когда они передаются раздельно.
Обозначим опознаватели в системе с РОС буквами х* с
индексами, соответствующими подмножеству сообщений, которое
данный опознаватель представляет (N — число употребляемых
опознавателей). Тогда вероятности основных исходов при
передаче сообщений и опознавателей по прямому каналу можно
записать в виде:
Рно (*) = 2 Ц Р A. Kl*f К)иемг. (6-4)
л л
\тф1
Рт(х1) = 2,Р(х*,К,/*. <W- (6-6)
rriQN \тфг
Сумма вероятностей (6.3) — (6.6), представляющих полную
группу событий, равна единице.
Согласно логике работы системы РОС-2
Р(х*/х}) = 1° "РИ тф1' (6.7)
v 7 11 при т = 1,
*} Вероятность события ЛО в системе РОС-2 равна нулю, поскольку
специальный опознаватель в этой системе не передается.
145
поэтому для этой системы справедливы выражения (5.6') — (5.9'),
характеризующие систему с ИОС с бесшумным обратным
каналом. Если сообщения с опознавателями передаются с помощью
группового кода по симметричному прямому каналу, вероятности
(6.3) — (6.6) совпадают по значению с (5.12) — (5.15) для системы
с ИОС
Достоверность передачи сообщений в системе с РОС удобно
характеризовать остаточной вероятностью искажения,
определяемой при принятых в данной главе допущениях ф-лой (5.17) или
при независимых ошибках в каналах эквивалентной вероятностью
ошибки (5.18) в расчете на один информационный элемент
сообщения.
Относительная скорость передачи сообщений с учетом
тормозящего действия процесса повторений для систем с РОС должна
определяться по формуле
R \os**LGk (68)
п
Условимся величину Rk называть относительной
информационной скоростью. В случае группового (п, k)-кода ф-ла (6.8)
преобразуется к виду
^ = -~Gk. (6.9)
К ~\- S
6.2. ПЕРЕДАЧА СООБЩЕНИЙ ГРУППОВЫМ КОДОМ
В СИСТЕМЕ С РОС (РОС-1) ПРИ НЕЗАВИСИМЫХ
ОШИБКАХ
Если сигналы служебной информации передаются
безошибочно, ошибки в элементах кодовых комбинаций возникают
независимо и каналы симметричны, то система РОС-1 и система с ИОС
при использовании одинаковых кодов и равной
помехоустойчивости прямого и обратного каналов обеспечивают одинаковую
достоверность передачи. Это вытекает из ранее доказанного
положения (см. § 5.1), состоящего в том, что вероятность
трансформации одного опознавателя x*k в другой x*i в прямом канале при
указанных условиях равна вероятности трансформации x*i в х*и
в обратном. Векторы ошибок в обоих случаях одинаковы, поэтому
обнаруживающая способность кода не зависит от того, где
происходит сравнение сообщения с опознавателем — на передающей
или на приемной стороне системы. При s<k решающая обратная
связь по достоверности подобна укороченной информационной
обратной связи, при s = k — полной и при s>k — избыточной. В
соответствии с этим вероятности ошибок в РОС-1 можно вычислять
А
по ф-лам (5.6) — (5.9), лишь заменив в них уг на х*г и у^ на х*,.
Из сказанного следует также, что количество повторных
передач (среднее число) as сопоставляемых системах совпадает;
энергетические затраты на передачу одного сообщения (без учета рас-
146 1
ходов на передачу служебных знаков) в сумме по прямому и
обратному каналам также одинаковы. Справедливыми остаются
все замечания, сделанные в предыдущей главе относительно
выбора оптимальной структуры кода, и кривые, построенные для
систем с ИОС при соответствующих условиях (см. рис. 5.4,
5.8, 5.11).
Информационная скорость передачи сообщений по прямому
каналу в системе РОС-1 меньше, чем в системе с ИОС при том же
коде, в Rnoc^Rpoc=Gh/\Rh = k+s/k раз, где </?рос определяется вы*
ражением (6.9). Объясняется это тем, что в системе РОС-1 с
каждым сообщением длиной k дополнительно передается 5
проверочных элементов, а в системе с ИОС эти элементы следуют по
обратному каналу.
6.3. РАБОТА СИСТЕМЫ РОС-1 В УСЛОВИЯХ
ГРУППИРУЮЩИХСЯ ОШИБОК
В § 5.6 было отмечено, что в случае применения относительно
длинных кодов (/1^100) с небольшой избыточностью оценку
достоверности и скорости передачи сообщений удобно производить,
пользуясь случайным (недетерминированным) кодом, который при
больших k и 5 по своим показателям приближается к одцому из
лучших. Это положение остается справедливым и для систем
с РОС, в которых передача сообщений и опознавателей ведется
систематическими кодами. При этом величины Gk и Риост следует
рассчитывать по ф-лам (2.79) и (2.80). Входящие в эти формулы
средние значения вероятностей Рпр и Рно надо определять в
общем случае по ф-лам (6.3) и (6.4). В том случае, когда эти
вероятности оцениваются на базе недетерминированного кода, их
следует рассчитывать по формулам, которые получаются из (4.56)
и (4.57):
РпР=Рпр(°)=1-рЛ>1), (6.10)
ст \
1--МРД/Я). (6.11)
с?;
При использовании длинных кодов с небольшой избыточностью,
у которых Ст8<.Стп при всех т^то,
п
Рно«-7 Е РпСп)=—РЛ>то+^ (6.110
2 лт 2
В этих формулах Р«(^/п)—вероятность появления в
последовательности из п элементов не менее, чем т ошибочных
элементов.
147
Оценим эффективность применения РОС-1, пользуясь моделью
из [142]. Подставляя в (6.10) и (6.11) значение Рп(^гп) из (4.3'),
согласно (2.79) и (2.80) получим:
^но
#*ост="£ • р » (6.12)
РПР , ,i_HO
РПР
1—а
РНО 1
trr) р
(6.13)
РПР 2s 1—я1-«р
При Рно<^пр и /г1"ар< 1
Из графика, приведенного на рис. 4.12, следует, что
обнаруживающая способность кодов с малой избыточностью (s/n<0,3)
невелика (/п0//г<0,1). Отсюда согласно (6.13х) вытекает, что
в условиях группирующихся ошибок не обнаруживающий
ошибки код с т0=0 и код с максимально возможной кратностью
обнаруживающих ошибок т = то обеспечивают практически
одинаковые значения остаточной вероятности искажения сообщения.
Расчет, проделанный для кода (255, 239), обладающего максимальной
кратностью то = 5, применительно к радиотелеграфному каналу
(р= 1,37-10~"2, а = 0,449; скорость телеграфирования 75 Бод) дает
результат: /\ ост = 8,5- Ю-6 при т0=0, Р^0ст = 3,1б-10~6 при т0 = 5.
Следовательно, при малой избыточности (s/n<0,3) нет смысла
тратить усилия на поиски «хорошего» кода. Это позволяет при
сохранении практически тех же показателей системы упростить
процедуру его составления.
Сказанное целиком относится и к модели ошибок в каналах,
разработанной в [89] и описанной в § 4.1. Объясняется это тем,
что вероятности однократных ошибок и ошибок кратности,
достигающей /По» (0,3-т-0,4)я, имеют практически одинаковую величи-
таблица 61 НУ» что видно из кривых рис. 4.2—
4.6. Все это, однако, не означает,
№
канала
Односторонняя
система
(минимальный код)
2,81-1С3
8,46-10—3
2,79-КГ"1
1-36-10-2
5,2210— 2
что применение решающей обрат-
Система РОС-1 •
ной связи в условиях группирую-
щихоя ошибок неэффективно. В.
4,97-1(Г~8 табл. 6.1 даны значения Люст Для
1,83-Ю-7 системы РОС-1 и Pkojm Для односто-
8,5-10~~6 ронней системы -связи при коде
2-78-10~~7 (255, 239) применительно к кана-
8,58-Ю~7 лам> параметры которых приведены
—! в табл. 5.3. Вероятность Р&0дн при
этом раюочитывалась по ф-ле (5.65).
Данные таблицы показывают, что применение РОС позволяет
значительно повысить достоверность передачи информации по
сравнению с односторонней системой с минимальным кодом.
148
^
Вариация же структуры кода при s/n<0,3, как было показано
выше, не приводит к существенно отличным результатам. Можно
дополнительно показать, что система РОС-1 в описанных
условиях существенно превосходит одностороннюю по достоверности
передачи даже в случае применения в последней исправляющего
ошибки кода длиной n = k + s [142].
С увеличением избыточности кода его конкретная структура
начинает в большей мере сказываться на достоверности передачи.
Покажем это на примере передачи сообщений посредством кода
с 50%-ной избыточностью, сравнив по остаточной вероятности йн-
В1ерсный код с недетерминированным (случайным). В случае
инверсного кода вероятность Рно согласно (4.57), (4.31) и (4.3Г)
определяется выражением
ш
р =
С*Р*Цу)+
v=l
4h
i 2*-* р*ь (*)
^QCttt
(6.14)
Рис. 6.1.
Остаточная вероятность
искажения Pk ост 'И СКОрОСТЬ
передачи " сообщений R^ в
условиях медленных рэлеев-
эких замираний при
использовании инверсных
(сплошные линии) и» случайных
(л у нкти ри ы е линии) к о дов
(модуляция частотная)
Рис. 6.2.
Энергетический выигрыш
в прямом канале/i28//i2Cp
при передаче сообщений
в системе с РОС при
медленных замираниях
в канале и частотной
модуляции:
инверсный код;
-,"—■—•—»— • случайный код
Вероятность РРп определяется ф-лой (6.10). Пусть сообщения
передаются ЧМ сигналами по каналу с рэлеевскими замираниями
при некогерентном приеме. Расчетное выражение для Pkoc?
получается при этом подстановкой (4.6) в (6.10), (6.14) и в (6.12).
149
На рис. 6.1 приведены кривые Люст(Л2о)> рассчитанные
применительно к инверсным кодам (8,4), (14,7) и (32,16) с кратностью
обнаруживаемых ошибок соответственно то=3, 4 и 8 (сплошные
линии) и случайным кодам с такими же параметрами. Сравнение
соответствующих кривых показывает, что при 50%-ной
избыточности можно подобрать такую структуру кода, при которой он
будет обеспечивать большую достоверность передачи, чем код
инверсный. На скорость передачи сообщений различие в
структуре кодов практически не влияет.
На рис. 6.2 приведены кривые энергетического выигрыша в
прямом канале Л2э/Л2ср, обеспечиваемого применением решающей
обратной связи. Расчет производился по формуле
h2 h2
^- = ^-Rk (6.15)
^ *8 .
с использованием, кроме того, ф-л (5.44), (4.11) по методике,
описанной § 5.3. Кривые показывают, что увеличение длины кода,
обладающего достаточно большой избыточностью (не менее 50%),
повышает преимущество системы с РОС по сравнению с
односторонней. При этом чем больше длина кода, тем существеннее
сказывается его структура.
С дальнейшим увеличением избыточности разница в
достоверности применяемых кодов с то=0 и m=m0 возрастает. Это
подтверждается данными табл. 6.2, в которой приведены значения
Рь, ост применительно к ЧМ сигналам при А20=70 для
почти-эквидистантного и случайного кодов (16,5). При расчете вероятности
^Рно для первого кода использовались ф-лы (4.57), (4.22) и (4.6).
ТАБЛИЦА 6.2
Коды
Код (16,5) случайный, т0=0
Код (16,5) почти-эквидистантный, т0=8
Код (16,5) случайный, /л0=8
**к ост
39.10"6
2,34-10~6
1,02-Ю-"6
Для сравнения систем с РОС с другими системами подобно
тому, как это было сделано при сравнении систем с ИОС (см.
гл. 5), удобно ввести понятие эквивалентной вероятности ошибки
рэ. Расчетная формула для системы с РОС в условиях
группирующихся ошибок, описываемой моделью [142], с учетом (5.65) и
(5.68) определяется выражением
р. = -^-. (Мб)
Согласно (5.16), (5.18) и (6.10)
Р — 1 1№ — 1
150
где Gk определяется в соответствии с (5.16) и (6.1 Г) выражением
л
е*=1-я,(>;1) + ^- J] Р„(т).
Из этих формул, включая также (6.9), следуют расчетные (в
функции длины опознавателя s) соотношения:
р(*) =
k + s {
fl-p(k + s)l-a+
Рэ =
1
U + sj
ft + s "11—«*'
1
n-
(6.17)
(6.18)
О 0? Oft 036 0,8 0,9 0,920% 0% 0,96 0,99Rk
Р.—
±s=d
И
\^¥*-5\
в
R(s) \ k + s) [m(s)+\]1
где m(s)—кратность обнаруживаемых ошибок, определяемая
структурой и параметрами используемого в системе с РОС кода;
Ru —' отмооител ьн ая инфор м ацион -
ная скорость (6.9).
На рис. 6.3 приведена за|виси-
моють pQ(Ru) при различных длинах
опознавателя 5 применительно к
сообщением длиной k = 7, 56 и 127.
Расчеты сделаны для канала с
параметрами р =il ,37 • Ш"2, а=0,449.
Из кривых следует, что увеличение
скорости передачи Rk в системе
РОС-1 достигаецоя за счет
уменьшения достоверности и наоборот.
Наибольшая скорость достигается при
k/n^rl, когда обнаруживающая
способность ко[да снижается до нуля.
Из кривых, кроме того, следует, что
для каждого знамения рэ
существует оптимальная длина сообщения k,
при которой скорость передачи Rk
максимальна.
Исходя из ф-л (5.65), (6.13'), можно показать, что применение
системы с РОС позволяет уменьшить вероятность искажения
сообщения в
\5б4
P\f=f2:
т\
Рис. 6.3.
Влияние иабытовдности
используемого кода на зависимость
аивюаалентшой вероятности
ошибки рэ от скорости передаv
т сообщений \Rk при
различной величине \k в условиях
группирующихся ошибок
Рк
ОДН
Phi
2,Ь+1>4тГраэ
с минимальным кодом
по сравнению с односторонней системой
при той же длине сообщения k.
6.4. ПОЭЛЕМЕНТНАЯ ПЕРЕДАЧА СООБЩЕНИЙ
В СИСТЕМЕ С РОС (РОС-2)
Под системой с решающей обратной связью с поэлементной
передачей сообщений понимается система, в которой
контролируется и при необходимости повторяется каждый элемент двоичного
сообщения.
151
Это обеспечивается приемом элементов сообщения по двухпо-
роговому принципу с областью неопределенности между двумя
порогами; избыточность передачи связана с наличием именно этой
зоны. Систему с поэлементной РОС в описанном виде можно
рассматривать как систему с трехпозиционными сигналами, один из
которых в процессе передачи двоичных сигналов не используется
(неразрешенный).
Будем рассматривать каждый двоичный сигнал как
элементарное сообщение, выбираемое из двоичного алфавита и
принимающего два возможных значения: Xi= 1 и х0=0. Условимся считать,
что при передаче х4 сигналу придается значение, превышающее
верхний пороговый уровень, а сигналу х0 — не достигающее
нижнего уровня (понятия «верхний» и «нижний» имеют физическую
основу лишь в случае амплитудной модуляции; при модуляции
других видов, например при ЧМ, они чисто условны). Вероятность
необнаруживаемой ошибки перехода единицы в нуль запишем
в виде
^ho(^i) = P№i) = Pio, (6.19)
а противоположную вероятность (переход нуля в единицу) в виде
^HoW = ^(Vo) = Pai. (6.19')
Ошибки этого типа возникают в первом либо втором
решающем устройстве прямого канала (рис. 1.1), когда сообщение
(сигнал) Xi попадает в собственную область сообщения (сигнала)
Хо или наоборот. Среднее значение вероятности необнаруживаемой
ошибки равно
Рно = Р (Xl) Р (х0/хг) + Р (х0) Р (W (6.20)
где P(Xi) и Р(хо) — вероятности передачи по прямому каналу
сообщений Xi и х0 соответственно.
При симметричной установке порогов относительно зоны неоп-
Л л
ределенности выполняются равенства P(xo/xi)=P(Xi/xo) и потому
независимо от вероятностей Р(х0) и P(Xi). Вероятность
обнаруживаемой ошибки при передаче единицы определяется
равенством
PooW = PMi) = ^ (6-21)
а при передаче нуля —
Р0о(хо) = Р(х~1Хо) = Ро~, (6.2Г)
л
где х^—область неопределенности, определяемая интервалом
между верхним и нижним порогами.
152
При симметричной расстановке порогов
Poo = Pi~ = Po~ = P~- (6-21")
Вероятность правильного приема определяется выражениями:
^пр (*i) = P (*i/*i) ="■ J -I^oo (*i) - Рно W> (6.22)
^пр W = Р №о) - 1 ~ ^оо (*о) - Р*о (*•)• (6.22')
Вероятность ложной ошибки (ЛО) равна нулю. Вероятности
рм, Poi, Pi~~ и ро~ зависят от отношения энергии сигналов к
спектральной плотности помех, вида модуляции, порядка разбиения
области принимаемых сигналов посредством пороговых уровней
на три области и определяются выражениями, которые для
различных способов приема приводятся в гл. 3. Подстановка их
в общие выражения (см. гл. 2) для остаточной вероятности
искажения сообщения, среднего числа повторений с учетом возможных
исходов при передаче по обратному каналу служебных знаков
позволяет определить все необходимые характеристики системы.
Варьируя пороговыми уровнями, можно обеспечить сколь угодно
асимметричный прием единиц и нулей, влияя тем самым на
достоверность и скорость передачи, добиваясь компромисса либо
оптимального значения с учетом тех или иных весовых коэффициентов.
Будем характеризовать степень асимметрии в приеме
сигналов xq и х{ коэффициентом р. Введем его в соответствии со
следующим алгоритмом работы приемных решающих устройств при
обработке поступающих сигналов: выносится решение «единица»,
если сигнал Xq в тракте ожидания нулей имеет значение
x0<$*lt (6.23)
и решение «нуль», если
х0> -j-*!, (6.23')
Р
где Xi — уровень сигнала в тракте ожидания единиц.
На рис. 6.4 приведена в качестве примера зависимость
показателя у
У = Ы\-%Ш-0>] (6.24)
L * k ост J
от отношения сигнал/помеха h в прямом канале для различных
вероятностей ошибок при приеме знаков служебной информации
Ро иск. Кривые рассчитаны в предположении передачи ЧМ
сигналов и приема по методу сравнения огибающих [155] при
оптимальных для каждого h значениях р.
На рис. 6.5 приведены зависимости у от выбора р при
отношении мощностей сигнал/помеха /г20= 10.
Как видно из рис. 6.4, поэлементная передача в системе с РОС
дает выигрыш по показателю у при указанных условиях и надеж-
153
ной передачи знаков служебной информации (РОиск=10-7), дает
проигрыш при передаче с неудовлетворительной достоверностью
(?оиск=5-10-1) и обладает некоторой ограниченной областью
эффективности при средней достоверности (от Л = 5 до h = 30 при
Риск 5Ю
Г7
Рис. 6.4.
Преимущество (ло
критерию у) системы
с РОС и
поэлементной ретрансляцией
перед односторонней
системой ев яви при
[различном числе
допустимых элементов гт
и различной
вероятности искажения
служебного знака Яиско
Гт = <Х>
Рис. 6.5.
Зависимости показателя
преимущества у системы с РОС
перед односторонней системой
от размера зоны
сомнительного приема элемента (параметр
р) при ограниченном (гт=2)
и н еопр аниченном (г т = оо)
числе допустимых элементов и
различной достоверности
передачи служебных знаков
^иско =Ю~3). При модуляции других видов и достоверностях
передачи знаков служебной информации области эффективности
поэлементной РОС могут изменяться. Дальнейшее развитие
системы лежит на пути оптимизации пороговых уровней на каждом
шаге повторения сообщений и уровней сигнала в соответствии
с идеями, изложенными в § 10.1.
6.5. ПЕРЕДАЧА СООБЩЕНИЙ РАВНОВЕСНЫМ КОДОМ
В СИСТЕМЕ РОС-2
В системах с решающей обратной связью нашел широкое
применение благодаря простоте декодирования так называемый
равновесный код [12, 107, 185]. Для n-элементного равновесного кода
число разрешенных комбинаций равно
М = С£, (6.25)
где I — вес кода (число единиц в комбинации).
Равновесный код относится к категории несистематических,
так как в нем невозможно отделить информационные элементы
154
от проверочных. Однако он обладает некоторыми свойствами,
присущими групповым кодам: при перестановке во всех комбинациях
элементов, занимающих одинаковые позиции, код переходит сам
в себя, вероятность перехода какой-либо комбинации во все
другие для всех комбинаций кода одинакова. Поэтому для анализа
достоверности и скорости передачи сообщений с помощью этого
кода в целом можно, как и в групповых кодах, воспользоваться
тривиальной комбинацией из одних нулей.
Ошибки обнаруживаются приемником в случаях, когда число
единиц в комбинации оказывается меньшим или большим
установленного, и не обнаруживаются, когда их число точно равно /.
Исходя из правил комбинаторики, нетрудно получить следующее
выражение для вероятности необнаруживаемой ошибки в
сообщении при независимом действии помех на элементы кодовой
комбинации:
[//2]
Рно -= £ № ^10 <* - Л*)'"/] [С"-1 & У - АдГ'"'], (6.26)
где рю — вероятность трансформации единицы в нуль, a poi —
вероятность трансформации нуля в единицу. Первый множитель
в квадратных скобках представляет собой вероятность искажения
ровно i единиц среди общего их числа /, а второй — стольких же
нулей.
Вероятность передачи сообщений без искажения равна
/>пр = (1-Рхо)'(1-Ро»Г'. (6-27)
а вероятность обнаруживаемой ошиоки равна
Роо=1-рно-рпР- (6-28)
Сопоставим равновесный код со случайным по достоверности
и скорости передачи сообщений при использовании решающей
обратной связи, полагая прямой канал симметричным, а обратный
(в котором передаются служебные знаки) безошибочным. В табл.
6.3 приведены подходящие для сопоставления по объему алфавита
и скорости передачи случайные групповые и равновесные коды.
На рис. 6.6 приведены кривые ръ(р), вычисленные
применительно к независимым ошибкам для равновесных кодов «3 из 7»,
«4 из 9», «14 из 31» и групповых кодов (7,5), (9,7) и (31,28)
соответственно, обладающих максимальной кратностью всех
обнаруживаемых ошибок т0=1. Кривые показывают, что
помехоустойчивость групповых кодов с т0=1 и равновесных кодов одинакова.
На том же рисунке приведены кривые для равновесного кода
«2 из 9» и группового (9,5) с т0=2 и для равновесных кодов
«3 из ЗЬ, «4 из 31» и групповых (31,12), (31,15) и (31,23) с
кратностью обнаруживаемых ошибок, соответственно равной /n0=ll; 9
155
ТАБЛИЦА 6.3
Равновесные коды
Групповые коды
л
/
т,оьС»
п
k
tn$
k/n
7
3
0,73
7
5
1
0,71
9
2
0,57
9
5
2
0,56
9
4
0,78
9
7
1
0,78
12
2
0,50
12
6
4
0,50
12
3
0,65
12
8
2
0,67
12
4
0,75
12
9
1
0,75
23
2
0,39
23
8
9
0,39
23
4
0,57
23
19
5
0,57
23
5
0,66
23
15
4
0,65
23
7
0,78
23
18
2
0,78
23
10
0,88
23
20
1
0,87
31
3
0,39
31
12
11
0,38
31
4
0,49
31
15
9
0,48
31
8
0,74
31
23
4
0,74
31
14
0,90
31
28
1
0,90
и 4. При т0>1 помехоустойчивость групповых кодов выше, чем
у равновесных. Объясняется это тем, что равновесные коды
обнаруживают лишь часть ошибок кратности т = 2. В целом с
увеличением длины кода п помехоустойчивость равновесных кодов
уменьшается, но весьма незначительно, а при фиксированном п
от веса кода I практически
не зависит.
По скорости передачи
Rk(p) сопоставляемые
групповые и равновесные коды,
как показывает анализ,
практически одинаковы.
Рис. 6:6.
К сравнительной оценке
грунтовых случайных (сплошные линии)
и равновесных (пунктирные
линии) кодов при использовании их
для передачи сообщении в
системе с РОС в условиях
независимых ошибок
Рис. 6.7.
К оценке эффективности применения
равновесных кодов при передаче
сообщений (В системе с РОС по асй,мметрич-
ны)М каналам
Пусть теперь каналы асимметричны (рюфрм). Для таких
каналов удобно ввести в расчетные формулы параметр асимметрии
p/Pz(Pz =Pio+Poi — вероятность ошибочной передачи
безразлично какого элемента —0 или 1 [142]) следующим образом:
Рх + 9
157
Подставляя эти формулы в (6.26) и (6.27), получим:
X
1 —
^(l-t)]'"'x[i-^('+t)r'(6-29>
р =
2
Pz
1 +
p
)Г
(6.30)
В [142] дано заключение по некоторому числу обследованных
каналов с активной паузой: приблизительно 53% от общего числа
составляют каналы, параметр асимметрии которых |р/р2| (по
модулю) заключен в интервале 0 — 0,2; 25% —в интервале от 0,2
до 0,4; 15% — от 0,4 до 0,6 и лишь 5% —от 0,6 до 0,8. На рис. 6.7
приведены кривые рэ(р^) и Rk(p^), рассчитанные по (5.17), (6.8),
(6.29) и (6.30) для кодов «3 из 7», «3 из 31» и «14 из 31» с
параметром асимметрии ip/p2, равным 0 и ±0,8. Кривые показывают,
что даже большая асимметрия в приеме единиц и нулей
(\р/рх | =0,8) не ведет к существенному повышению
достоверности передачи сообщений. Асимметрия больше сказывается на
скорости передачи Rk, причем если вес кода больше половины его
длины (/>л/2), то выгоднее канал, в котором преимущественно
искажаются нули (p/pz>0)y если же /</г/2, то выгоднее канал,
в котором в основном искажаются единицы (ip/p2 <0).
Рассмотрим теперь случай группирующихся ошибок в
симметричном канале. В этом случае средняя вероятность приема
сообщения с необнаруженной ошибкой при использовании
равновесного кода согласно (4.57) равна
л/2]
но
С/ Cn—i
i=l
Pn(2i)
(6.31)
где Pn(2i)—средняя вероятность искажения 21 элементов среди
п возможных. Вероятность правильного приема определяется
ф-лой (6.10). Остаточная вероятность искажения сообщения Ял ост
и относительная информационная скорость Rk определяются
выражениями (2.80), (2.79) и (6.8).
Сравним помехоустойчивость равновесных и групповых кодов
при использовании,симметричных каналов с медленными
замираниями. Положим, что сообщения передаются посредством ЧМ сиг-
158
налов с последующим некогерентным приемом; превышение
сигнал/помеха велико (Л20»2). В соответствии с (4.4), (4.5) после
несложных преобразований запишем
1 m-I+ —т
P„(m) = 4-V W-У) (l+y)n-mdy.
hl 2" i
Согласно [36, 116]
l
U\-y)m-l{l + y)n-mdy = ±2F1[-(n-m), 1, m+1, -1] =
J m
mCn • „
C1
(6.32)
Следовательно,
n—m
Рп(т)ъ-——V| Ci при —«1 и m^h (6.33)
hi m2n La v Ajj
/=o
При большом значении h\ можно согласно (2.79), (4.56) и (4.6)
положить Gu~l и, значит, остаточная вероятность искажения
Ркост — Рно. Подставив в
(6.31) выражение РпЩ) из
(6.33) и учтя [116], что
г' г'
с?
i rl-i
Г1 Г'
21 п~~2i
,(6.34)
ю
ю-
Рис. 6.8.
К сравнительной оценке
групповых случайных (отмечены
кружками) и равновесных (отмечены
точками) кодов при
использовании ах для передачи сообщений
в системе с РОС в условиях
медленных замираний
/4
$оиЛ'
J
т
/Щ
&Д)
А
02 0,4 0,6 0;8 1,0р
получим расчетную формулу для определения Я* ост
применительно к равновесным кодам
159
Аналогично, подставив (6.33) в (6.11), получим расчетную
формулу для групповых кодов
Pkocr^±± у ±(i-£LAyb-, (б.зб)
На рис. 6.8 приведены результаты вычислений, проделанных
по (6.35) и (6.36) для некоторых из указанных в табл. 6.3
групповых и равновесных кодов (по вертикали отложено в
логарифмическом масштабе произведение Рь. ост h\). При группирующихся
ошибках групповые коды в конечном итоге (при т0>\)
оказываются эффективнее равновесных.*
6.6. СРАВНЕНИЕ СИСТЕМ С ИНФОРМАЦИОННОЙ
И РЕШАЮЩЕЙ ОБРАТНОЙ СВЯЗЬЮ
При симметричных и одинаковых по помехоустойчивости
прямом и обратном каналах (р=р') с независимыми ошибками
системы с ИОС и РОС-1 обеспечивают равную достоверность
передачи сообщений. Это утверждение справедливо при безошибочной
либо одинаковой по достоверности передаче служебных знаков
[78]. Различие в логике работы систем проявляется в скорости
передачи. В большинстве случаев передача служебных знаков
(а именно они передаются по прямому каналу в системе с ИОС)
требует меньших затрат энергии и времени, чем передача по
прямому каналу опознавателей в системе с РОС. Поэтому скорость
передачи сообщений в прямом направлении в системе с ИОС
больше.
Если помехоустойчивость обратного канала выше
помехоустойчивости прямого, то достоверность передачи сообщений в
системах с ИОС также выше. В случае полной бесшумной
информационной обратной связи можно обеспечить, в принципе,
безошибочную передачу сообщений по прямому каналу независимо от
уровня помех в нем. Для этого надо дополнительно организовать
корректировку искажаемых в прямом канале служебных знаков
(алгоритм такой коррекции описан в гл. 7). Такой результат, в
принципе, недостижим в системах с РОС распространенного типа.
В случае группирующихся ошибок существенную роль играют
условия, в которых передаются информационная и контрольная
части кодовых комбинаций в обеих системах связи. При
использовании ИОС часто имеет место естественная декорреляция
ошибок в прямом и обратном каналах. При обычной РОС, когда
сообщение и опознаватель передаются слитно, такая декорреляция
отсутствует. Это вызывает увеличение вероятности необнаружи-
ваемой ошибки Рно (см. рис. 4.7 и 4.8) и, как следствие,
ухудшение помехозащищенности передачи сообщений в системах с РОС.
Важную роль при сравнении систем с РОС и ИОС играют
также длина используемого кода п и его избыточность s/n. Если
избыточность невелика (s/n<0,3), то даже при бесшумном обрат-
160
ном канале ИОС практически не обеспечивает по достоверности
преимущества перед РОС. Этот вывод следует из сопоставления
табл. 6.5 и 6.1. Например, при передаче сообщений циклическим
кодом (255,239) по тропосферному телеграфному ЧМ каналу с
параметрами р = 6,34- Ю-4 и а=0,439 система с РОС обеспечивает
остаточную вероятность искажения Р^0ст = 2,78-Ю-7, а система
с ИОС — 0,77-10~7. Однако скорость передачи у систем с ИОС
по-прежнему выше.
Следует указать еще на одно преимущество систем с ИОС,
обусловленное различием в скорости. В [142] показано, что
каждому заданному значению эквивалентной вероятности ошибки рэ
соответствует оптимальная длина кода п0Т1Ту при отклонении от
которой скорость передачи сообщений в системе с РОС
уменьшается. Это же подтверждают кривые рис. 6.3. В системах с ИОС
при s/n<0,3 (см. рис. 5.23) передачу сообщений выгоднее вести
короткими кодами. При заданной наперед достоверности скорость
передачи от этого становится больше. Это выгодно с практической
точки зрения, так как осуществлять кодирование и декодирование
при коротких кодах легче.
С увеличением избыточности кода преимущество систем с ИОС
по достоверности передачи возрастает даже при одинаковых по
помехоустойчивости прямом и
обратном каналах, особенно, если передача
сообщений и квитанций в системе с
ИОС организована так, что ошибки в
ни х ок аз ы в а ют|с я н е/корр елиро в анн ы -
М1И. На рис. 6.9 приведены кривые
энергетического выигрыша /г2э/Л2Ср для
систем с ИОС ^сплошные линии) и. с
РОС (пунктирные линии) при
передаче сообщений случайными кодами с
50%-ной избыточностью (32, 16),
(14, 7) и (8, 4) в условиях медленных
рэлеевоких замираний (кривые сняты
с рис. 5.13 и 6.2). Энергетический
выигрыш в прямом канале системы
с ИОС оказывается на порядок выше,
чем в системе с РОС.
При бесшумной обратной связи и
sjn=\k— \)l\{2k— 1) (т. е. почта 50%-
ной избыточности кода) выигрыш в
достоверности при &>20 и Л2о>5
асимптотически возрастает
пропорционально величине 2k. Результаты
проделанного на ЭВМ расчета для некоторых
значений k приведены в табл. 6.4.
При s = k (полная обратная связь) в системе с ИОС можно вести
безошибочную передачу сообщений по прямому каналу как при*
независимых, так и при группирующихся ошибках.
Рис. 6.9.
К сравнительной оценке
энергетического выигрыша в
прямом канале /i2a/^2cp при
передаче сообщений в
системах с ИОС -(сплошные
линии) и РОС (пунктирные
линии) кодами разной
длины лри медленных
замираниях ib каналах
6—281
161
Таким образом, информационная обратная связь во всех
случаях обеспечивает равную или более высокую
помехозащищенность передачи сообщений по прямому каналу, особенно при боль-
ТАБЛИЦА 6.4
k
Pk
ост.рос
Pk ост-ИОС
8
8.7
16
23,7
26
37,6
32
45,8
64
97,1
ИЗ
196
127
237
А>200
—2k
шйх s и бесшумном обратном канале. Информационную обратную
связь наиболее рационально применять в таких системах, где
обратный канал по роду своей загрузки может быть без ущерба
для других целей использован для эффективной передачи
квитирующей информации. Информационная обратная связь менее
пригодна либо неприменима, когда пропускная способность
обратного канала значительно ниже пропускной способности прямого
канала или она существенно лимитирована.
D
ГЛ ABA 7
Передача служебной информации
7.1. ОБЩИЕ ЗАМЕЧАНИЯ
Надежность передачи знаков служебной информации типа ДА—
НЕТ играет важную роль в тех системах с обратной связью,
где они предусматриваются алгоритмом работы системы.
Искажение этих знаков помехами приводит в общем случае к весьма
нежелательным последствиям (выпадениям и вставкам сообщений).
Поэтому обеспечению достоверности передачи служебных знаков
следует уделять соответствующее внимание. В тех случаях, когда
обеспечение достоверности сопряжено с трудностями
энергетического, конструктивного или иного характера, разумные требования
можно установить, положив
^Рст+Рвып< еЯиск, (7.1)
где Р^ск — вероятность искажения первого рода (собственно
сообщения), о'бычно слабо зависящая от достоверности служебных
знаков; е — достаточно малый весовой коэффициент, сводящий
вероятность вставок и выпадений к пренебрежимо малой величине.
Для передачи знаков ДА—НЕТ и их опознавания на приемной
стороне могут использоваться различные способы модуляции,
кодирования и выделения сигналов на фоне помех или других
сообщений. Эти способы можно разделить на три категории:
1) передача знаков ДА—НЕТ по обособленным временным,
частотным или другим каналам, практически исключающая их пере-
путывание с основными сообщениями;
2) совместная передача знаков основной и служебной
информации посредством слитных (совмещенных по частоте, времени и
пр.) кодовых комбинаций или сигналов;
3) смешанная передача.
Знаки ДА—НЕТ можно передавать в явном виде посредством
некоторых совмещенных либо обособленных физических сигналов
или передавать один знак в явном виде (чаще всего знак
стирания НЕТ), ,а второй (знак ДА) определять при этом по отсутствию
в тексте первого з'нака. Знаки стирания (переспроса) могут не
иметь определенной структуры и обозначаться, например, инвер-
6*
163
тированием двоичных элементов в кодовой комбинации сообщения
(заменой нулей единицами и наоборот) в ответном сигнале
(квитанции). Служебные знаки могут квитироваться и
корректироваться наряду с основными сообщениями и по совместному с ними
алгоритму.
7.2. ПЕРЕДАЧА ЗНАКОВ СЛУЖЕБНОЙ ИНФОРМАЦИИ
ПО ОБОСОБЛЕННЫМ ВРЕМЕННЬШ ИЛИ ЧАСТОТНЫМ
КАНАЛАМ
Передача знаков ДА—НЕТ по обособленному временному
каналу осуществляется путем выделения для этих знаков заранее
обусловленных временных позиций, например, перед каждым
очередным сообщением или после него. Заслуживает внимания [78]
возможность использования для этой цели стартстопных или
синхронизирующих сигналов, которые так или иначе передаются по
Оснобные сообщения
Служебные знаки (они же синхронизирующие им
старю-стопные сигналы j
Рис. 7.1.
Передача служебных знаков на обособленных временных .позициях
линиям связи и управления. При этом для обозначения двух
знаков противоположного смысла (ДА—НЕТ) следует употреблять
два стартстопных или синхронизирующих сигнала с определенным
различием между ними (рис. 7.1).
Примем, что для обозначения знаков ДА—НЕТ (одновременно
и для синхронизации) употребляются две двоичные кодовые
комбинации одинаковой длины 1\ пусть / — число нечетное. В целях
уменьшения вероятности перепутывания знаков при наличии
помех положим, что одна комбинация, соответствующая, скажем,
знаку НЕТ, составляется из одних нулей, а другая (знак ДА) —
только из единиц. При этом кодовое расстояние между ними
будет иметь максимально возможное значение d — t.
Положим, что декодирование знаков ДА—НЕТ осуществляется
«по большинству». Если в принятой комбинации остается более
половины нулей, она интерпретируется как НЕТ, в противном
случае (больше единиц) —как ДА. Вероятность перепутывания двух
комбинаций при этом в случае симметричных каналов связи с
независимыми ошибками выражается равенством (ф-ла Бернулли)
164
Я(О/0) = Р(0/О)==Р(>^) = J] С\р1(1-р)1-', (7.2)
где p— вероятность неверного приема одного двоичного
элемента в комбинации. Приближенно при р<С1
^(0/0)^^(0/0) = С/ р\ (7.2')
В табл. 7.1 приведены значения вероятностей искажения
служебных знаков при различных значениях I и р, вычисленные в
соответствии с ф-лой (7.2). Из нее видно, что уже при р^10~2 мож-
ТАБЛИЦА 7Л
р
ю-1
10~2
ю-3
Вероятность искажения знаков ДА-HET при /, равном
3
0,03
0,0003
3-Ю-6
5
0,0086
9,8-10~5
ю-9
7
0,0027
З-Ю""7
3-ю-11
9
0,00089
10~8
ю-13
11
0,00029
5-Ю-10
5-Ю-16
13
0,00009
ю-11
0,б-10""18
но обеспечить достаточно высокую помехоустойчивость передачи
знаков служебной информации в случае небольших по длине
кодовых комбинаций. При р>10_? длрну кода следует увеличить.
Практически, по-зидимому, не следует требовать вероятности
ошибки при передаче сообщений, меньшей, чем 10~8—Ю-12, даже
в весьма ответственных случаях (в других случаях она может
быть выше). Надежность современной электронной аппаратуры
такова, что вероятность выхода ее из строя за доли секунды
значительно превосходит эти цифры.
Декодирование «по большинству» может осуществляться как
описанным выше способом дискретного сложения (подсчетом
сохранившихся единиц и нулей в комбинации), так и методом
аналогового накопления (прием комбинаций «в целом» [168]). Второй
метод позволяет получить дополнительное увеличение
достоверности приема знаков служебной информации.
На рис. 7.2 и 7.3 даны зависимости вероятности искажения
служебного знака от отношения напряжений сигнал/помеха h при
разных / и флуктуационной помехе, действующей на ЧМ и ФМ
сигналы соответственно. Кривые /=1 указывают значения р при
соответствующих значениях h. Пунктирные кривые относятся к
случаю дискретного, а сплошные — к случаю аналогового
накопления. При ФМ, как видно, достаточны значения / = 3-т-5 при
Л^З для обеспечения весьма малых вероятностей перехода одной
служебной комбин-ации в другую. Кривые, приведенные на рис. 7.2
165
Рис. 7.2.
Вероятности ошибок при декодировании «по .большинству» методом аналогового
■(сплошные кривые) и дискретного .накопления при ЧМ сигналах в условиях не-
когерентного (а) и когерентного (б) приема
и 7.3, в .сочетании с
формулами гл. 2 и соотношениями гл. 5
или 6 позволяют- вычислить
вероятность искажения
сообщения в системе с ИОС или РОС
с учетом искажений знаков
служебной информации и при
необходимости — построить
полные характеристики
помехоустойчивости Рэ(Лэ). Для
примера на рис. 7.4 даны
зависимости рэ(кэ) для системы с
РОС гцри k=4 и 7 и 1=3 и 5;
модуляция фазовая. На рис.
7.5 приведены аналогичные
кривые для случая применения
инверсного иода в системе с
ИОС.
Рис. 7.3.
^ Вероятности ошибок при
декодировании знаков служебной информации
при фазовой модуляции
166
Рис. 7.4.
П ом ехоустойчив ость рэ (Л с Р) с и -
стемы с ИОС при передаче
сообщений повторительным кодом
(ретрансляционная ОС) с учетом
энергетических затрат на
передачу зшашв служебной информации
(модуляция фазовая)
II
Ю'г
.**
иг*
ж*
is*
if1
щ*
жт
0.
4
ч^»«
> 1
1
i
Ь
1 1216 20 24 hep
^
^№,1=5
-К*7, >3
\
|
Если длина кодовой комбинации служебного знака
достаточно велика, так что взроягтиоютью ее искажения можно
пренебречь, значения рэ имеют практически ту же величину, что и при
безошибочной передаче
служебных знаков (см. гл. 5 и 6) при
У * fog том же уровне помехи.
Изменяются, главным образом,
значения Нэ и GQ (относительная
скорость передачи), которые с
учетом знаков служебной
информации для системы с ИОС
вычисляются по формулам
G = Gt
k
(-о k +1
и № = A2
J(-l)
(7.3)
Рис. 7.5.
Помехоустойчивость Pd(hCj>) с ИОС ори
передаче сообщений инверсным кодом
167
где G(_z)=l/rCp — относительная скорость передачи сообщений по
прямому каналу без учета знаков служебной информации; k —
длина сообщения.
В системе с РОС служебные знаки, передаваемые без
квитирования, загружают дополнительно только обратный канал и
относительная скорость передачи по прямому каналу, зависящая от
избыточности применяемого для обнаружения ошибок кода,
определяется по-прежнему формулами гл. 6. В неоднородных каналах
с группирующимися ошибками вероятности искажений
служебных знаков находятся с помощью формул и кривых Рп(^^),
приведенных в § 4.1, при условии п = 1 и т= (/+1)/2.
В качестве двух кодовых комбинаций для передачи служебных
знаков вместо описанных выше (одни нули и одни единицы)
можно использовать позитивную и негативную последовательности
кода Баркера [156] или им подобные, обеспечивающие надежное
разделение соответствующих сигналов приемником посредством
оптимальных фильтров. Сигналы типа ДА—НЕТ, совмещенные с
синхронизирующими или стартовыми сигналами, могут играть
дополнительную роль детекторов качества каналов, например, в
системах с прерываниями либо с регулированием мощности сигналов
(гл. 9; см. также [78, 88]). По степени искажений сигналов ДА—
НЕТ можно судить об уровнях помех или сигналов в каналах с
переменными параметрами.
Перейдем к вопросу передачи служебных сигналов по
обособленному частотному каналу. Примем, что наряду с основным
каналом связи с полосой пропускания А/ (или за счет нее)
выделяется относительно узкая полоса частот для передачи знаков
служебной информации, равная А/Сл='Л/Лг, где п — длина основного
сообщения в дв. ед. Сужение полосы в п раз эквивалентно
снижению дисперсии флуктуационной помехи в служебном канале также
в п раз по сравнению с основным каналом. Выделив
относительно небольшую часть мощности основных сигналов для передачи
знаков служебной информации, можно обеспечить достаточно
высокую помехоустойчивость при п^>1. Положим, для примера, что
в служебный канал отводится только р-я часть мощности
основных сигналов. Пусть п =100 и отношение мощностей
сигнал/помеха в канале передачи основной информации Л2 = 4. При фазовой
модуляции это соответствует вероятности ошибки в одном
элементе кодовой комбинации, равной (3.28'), /? = —(1—Ф(У21г)]ж
«2-Ю""3. Положим, р=20; при этом отношение мощностей
сигнал/помеха в служебном канале равно
hL = jh* = 5h* = 20; Лсл~4,5,
откуда
Р(О10) = Р(0Ю) = РФСЛ) = 0,5[1 - Ф(уТ Aj]» КГ* .
168
Таким образом, затратив только У2о часть мощности сигналов
основного канала и заняв 1 % его полосы, можно обеспечить
практически безошибочную передачу знаков служебной информации.
Метод тем более экономичен, чем больше длительность п (в дв.
ед.) кодовых комбинаций основной информации; он рекомендован
МККТТ к использованию в качестве одного из рациональных
способов передачи служебных знаков по каналам с обратной связью.
В целях декорреляции оши'бок в каналах, где возможно их
группирование (см. § 4.1), знаки служебной информации могут
передаваться с обусловленным временным сдвигом (задержкой)
относительно сообщения, в течение которого сообщение
удерживается в памяти системы (до сопоставления со своим служебным
знаком). Как и в случае передачи по обособленным временным
каналам, знаки служебной информации, передаваемые по
обособленному частотному каналу, могут использоваться для целей
групповой (поблочной) синхронизации, а также для выделения
когерентных колебаний, необходимых для согласованной работы
модуляторов и демодуляторов основных сигналов при когерентном
приеме.
В целях групповой синхронизации знаки ДА—НЕТ бывает
удобно передавать методом относительной модуляции. Так, в
случае безошибочного прохождения блоков основной информации
служебные знаки передаются с переключением начальных фаз ВЧ
колебаний на 180° (рис. 7.6). При обнаружении ошибки фаза сох-
блоки основной информации
./ / / /
О ! О ! 0
Рис. 7.6.
0 i (i Передача знаков служвб-
\MmimrnjmhimMfWjmjmj ?±™traT™°la
/ / / L l
Служимые знаки
ообленнсму частотному
каналу
раняется такой же, как при предшествующей передаче, что
указывает на повторение сообщения. Так как ошибки возникают
сравнительно редко, чередование фаз при правильной передаче
сообщений облегчает установление границ между блоками основной
информации на приемной стороне системы.
Для передачи знаков основной и служебной информации по
выделенному частотному или временному каналам можно
применять модуляцию разных видов, например: ЧМ—ФМ, AM—ФМ и
др. Это оправдывается, в частности, в системах с прерываниями
(гл. 9; см. также [78]), когда стартовый сигнал одновременно
используется для передачи служебной информации и выполняет
роль зондирующего ключа. При этом он должен иметь более
чувствительную к помехам, чем основные сообщения, структуру.
169
7.3. СОВМЕСТНАЯ ПЕРЕДАЧА ЗНАКОВ ОСНОВНОЙ
И СЛУЖЕБНОЙ ИНФОРМАЦИИ
При совместной передаче основных сообщений и служебных
знаков кодирование или модуляция осуществляются таким
образом, что информация о них закладывается в единую,
неразделимую по частоте и по времени кодовую комбинацию или
отображающий ее сигнал. Этот объединенный сигнал должен обладать
признаками, необходимыми для различения и декодирования
соответственно двух сообщений (основного и служебного). Так как
с каждым из. основных сообщений может следовать знак ДА или
НЕТ, имеющий отношение к предшествующему сообщению, то
требуется применять удвоенный по объему алфавит для передачи
кодовых комбинаций или сигналов (по сравнению с алфавитом
собственно сообщений). Этим определяется избыточность метода;
Рассмотрим в качестве примера применение для указанных целей
четырехпозиционной (двойной) частотной модуляции [46].
Передача основной информации (двоичных кодовых
комбинаций) осуществляется здесь (рис. 7.7а) путем изменения частоты f
d)
2л г
©
Uf
0
-#-*-
Ю
tfbf ff fj+4 ffuf h Vйf
со
a
<<
iff
7
/
Рис. 7.7.
Передача служебных
0 анаков методом
двоичной частотной (а) и
двоичной фазовой
(б) модуляции
на величину ±Д/ относительно двух средних частот: f{ и f2.
Модуляция относительно /i производится передачей совместно с
сообщением одного из знаков служебной информации (например, ДА),
модуляция относительно /2 — при передаче 'противоположного
знака (НЕТ). Для установления знака служебной информации
приемное устройство по поступающим сигналам определяет методом
дискретного сложения или аналогового накопления (см. § 7.2)
значение средней частоты модуляции fx или f2. Знак служебной
информации определяется с тем большей достоверностью, чем больше
длина кодовой комбинации п. Такой метод отличается от метода
с двойной частотной телеграфией (ДЧТ), применяемого в линиях
связи для передачи двух потоков информации, тем, что в данном
случае один из потоков является служебным.
Аналогичным путем осуществляется совместная передача
знаков основной и служебной информации методом двойной фазовой
модуляции (ДФМ) [461, в котором используются две пары
градаций фазы 0—180° и 90—270° (рис. 7.76). Знаки ДА—НЕТ
передаются путем использования для передачи основных сообщений той.
или иной пары. Вероятность ошибки в определении знака
служебной информации в этом случае определяется при дискретном на-
170
коплении ф-ми (7.2), табл. 7.1 или кривыми рис. 7.2 и 7.3; при
аналоговом накоплении — кривыми рис. 7.2 и 7.3. Вероятности
элементарных ошибок (в определении частот или фаз сигналов) при
четырехпозиционной модуляции имеют большую величину по
сравнению с двухпозиционной. Известно, в частности [155], что при
флуктуационной помехе и ЧМ (когерентный прием)
Р~°~-[1-Ф(Л)], (7.4)
где а — число позиций, равное в интересующем нас случае
четырем; Ф(к) — интеграл вероятностей. Вероятность (7.4)
приблизительно в три раза выше той, которая имеет место при
двухпозиционной модуляции при том же отношении напряжений
сигнал/помеха в канале связи h. В случае фазовой модуляции
р= — [1 — ®(V2hsmnla)]. (7.5)
Из (7.5) следует, что переход от двухпозиционной модуляции к
четырехпозиционной равносилен снижению величины h в канале
декодирования служебных знаков до величины /i9=/isinn/4 =
—hjY^ или, иначе, повышению мощности помех в два раза. При
определении величин Р {01Q ) = Р (О/0) по кривым (см. рис. 7.3)
необходимо вместо h пользоваться значениями Лэ. Отсюда
вытекает, что для обеспечения одинаковой достоверности передачи
служебных знаков необходимая длина комбинации п в системе с
совместной передачей основной и служебной информации должна
быть больше, чем / в случае обособленного временного канала
(см. §7.2).
Для более строгого сравнения Ci системой, имеющей
обособленней временной канал, положим, что энергии сигналов на
сообщение плюс служебный знак в двух системах одинаковы:
совм * совм — ^обос обое> V •&)
ГДе 1 совм и Гобое — длительности двоичных комбинаций в
системах с совместной и обособленной передачей, соответственно
равные
^совм = тсовм П и ^обос = тобос (п + О» (7-7)
где л — длина сообщения в дв. ед. в елстеме с совместной
модуляцией, равная также длине кодовой комбинации служебного знака
в этой системе; / — длина служебного знака при обособленной
передаче; Тсовм и Тобос — длительности двоичных элементов в этих
двух системах.
Полагая, что полосы пропускания каналов по ширине обратно
пропорциональны длительностям элементарных сигналов т, и
приравнивая в (7.7) ГСовм=^обос, П0ЛУчим следующее соотношение
между полосами:
171
А/обос = А/совМ(1 + ^). (7.8)
Равенство ТСовм = Т0бос означает также одинаковую скорость
передачи сообщений в рассматриваемых системах. Такое же
соотношение, как между полосами (7.8), имеет место между
дисперсиями шума в двух системах: а20бос и а2СовМ. Из (7.6) и (7.8)
следует
где Л —отношение напряжений сигнал/помеха (шум).
Подставляя (7.9) в (7.5), придем к следующим выражениям
для вероятностей искажения одного двоичного элемента в
системах с совместной и обособленной передачей служебных знаков:
Рсовм - 4" [1 -Ф(Лсовм)] = -т[1-Ф{У1 + 1Г *•*•)]• (7Л0>
Ро6ос^^1~Ф{Ноб°^^- (7Л1)
Сопоставляя (7.10) и (7.11), замечаем, что вероятности
ошибок робос и рсовы равны между собой при п = 1 или, что то же, при
1 +\1/п=2. При 1<п вероятность ошибки в одном 'элементе знака
служебной информации в системе с обособленной передачей ниже,
чем в системе с совместной передачей.
Вероятности искажения двоичных знаков основной информации
определяются также ф-ми (7.10) и (7.11). Однако при надежной
передаче (достаточно большом п) служебных знаков можно при
совместной модуляции использовать результаты их декодирования
для определения плоскости манипуляции (см. рис. 7.66). Хотя
процедура декодирования при этом несколько усложняется,
однако на приемной стороне (в первой решающей схеме) создается
двухальтернативная ситуация вместо четырехальтернативной
(а = 4) и вероятность ошибки снижается до значения
КоВЫ * 4" [] - Ф (^2\6ос V1 + -г)] • (7-12)
что меньше, чем (7.10). Пусть / фиксировано и удовлетворяет при
данном /i06oc требованиям практически безошибочной передачи
знаков служебной информации. Как указывалось выше (см. §7.2),
этому при фазовой модуляции и аналоговом накоплении
удовлетворяют значения (при h^3) / = 3-~5. При п^>1 вероятности
ошибок в смысловой информации (7.12) и (7.11) для систем с
совместной и обособленной передачей служебных знаков отличаются
незначительно и системы эти при указанном условии можно
считать практически равноценными по помехозащищенности.
172
7.4. СМЕШАННАЯ ПЕРЕДАЧА. ОБРАЗОВАНИЕ
ЗАЩИТНОГО ИНТЕРВАЛА
Знаки служебной информации ДА—НЕТ (или один из них)
могут передаваться в неявной форме, т. е. без выделения
физически отображающих их сигналов или признаков. С энергетической
точки зрения в явном виде рациональнее передавать знаки
стирания (НЕТ), поскольку в нормально функционирующей системе
ошибки возникают обычно с небольшой вероятностью и знаки
стирания приходится посылать соответственно редко. Знак ДА
обозначается при этом отсутствием в тексте знака НЕТ.
Если в качестве знака НЕТ выбрана одна из кодовых
комбинаций общего с сообщениями алфавита, передача сообщений и
служебных знаков называется смешанной. Служебный знак
передается на общих с сообщениями основаниях и включается в
основной текст по мере необходимости стирания сообщения и
'последующего его повторения. В такой системе при наличии помех
возможен переход знака стирания в одно из сообщений и
наоборот. Для уменьшения вероятности такого перехода принимают
различные меры, например образование между сообщениями и
служебным знаком защитного или буферного кодового интервала.
Поясним это на примере системы передачи сообщений с
решающей обратной связью.
Положим, что передача сообщений и знака стирания
осуществляется посредством двоичных кодовых комбинаций длиной п.
Пусть знак стирания обозначается комбинацией из одних нулей,
каналы симметричные. В целях образования защитной зоны
исключим из обращения все комбинации, имеющие вес (число
единиц в комбинации), меньший d0. При этом относительное число
исключенных комбинаций будет равно
где С« — число комбинаций с весом v^d0.
Нетрудно показать путем простых вычислений, что при /г»1
и do.<n/2 доля неиспользуемых из-за образования буферной зоны
комбинаций незначительна. Так, при /г=30 и do=7 % = 2,8-10-2,
что составляет менее 3% от полного числа 2п возможных
комбинаций кода длиной п. При л=50 и d0 = 20 х = 0,08 и т. д. Изъятие
небольшой доли комбинаций из алфавита сообщений влечет за
собой незначительное повышение избыточности передачи, а код
практически не меняется.
Примем теперь, что комбинация при искажении помехами
воспринимается еще как знак стирания, если в ней насчитывается не
менее чем п0=п—d\ нулей (не более d\ единиц; di<do). При
значениях До, заключенных в пределах п—do<n0<n—du комбинация
полагается неразборчивой, требующей переспроса. Тогда
вероятность необнаруживаемого перехода нулевой кодовой комбинации
173
(знака стирания 0) в информационную х jt минимально
допустимым весом d0 при независимом действии помех на двоичные
элементы кода определится выражением
P(0^*)^C„V° при лр<1.
Вероятность противоположного перехода комбинации л; в 0 в
наихудшем случае (при том же весе х, равном do) равна
P(x->0)*Cddrd>pd°-d\
Пусть d0 — нечетное. Положив di = d0—1/2, приведем последнее
выражение к виду
Р{*-+ 0)*С I р 2 .
Вычисления, выполненные, исходя из приведенных выражений,
применительно к вышеприведенным примерам, показывают, что
Р(0->д;)=4,6.1О-14, Я(х-И2)=2,2-10-8 при п=30, р=5-10~3 и
rf0=7; Р(0-^)=Й-1О-29, Р(х->0)=2.1О-18 при п=50 и rf0=19.
Отсюда следует, что путем образования защитного интервала при
достаточно длинных кодовых комбинациях можно обеспечить
вполне надежную передачу знаков служебной информации без
существенного увеличения избыточности применяемого для сообщений
кода.
7.5. КВИТИРОВАНИЕ ЗНАКОВ СЛУЖЕБНОЙ ИНФОРМАЦИИ
При коротких кодовых комбинациях и в ряде других случаев,
когда простая передача знаков служебной информации по
прямому или обратному каналам не обеспечивает достаточной
помехоустойчивости, применяется квитирование знаков служебной
информации. Квитирование применяется как в системах с РОС, так
и в системах с ИОС и тем более эффективно, чем выше
помехоустойчивость канала, по которому передаются квитанции
служебных знаков.
В системах с РОС квитирование осуществляется путем
передачи по прямому каналу с каждым очередным сообщением
некоторого дополнительного сигнала (НЕТ или ДА) или признака,
извещающего приемник о том, является ли это сообщение
ответом на переспрос или новым сообщением. Бели сообщение
приходит со знаком НЕТ, в то время как переспроса не было,
приемник отбрасывает это сообщение, посылает знак подтверждения и
ожидает следующее сообщение [48]. Таким путем можно
существенно уменьшить вероятность появления вставок (см. гл. 2) за счет
искажений знака ДА в обратном канале.
Действительно, пусть условная вероятность трансформации
знака ДА->НЕТ в обратном канале, приводящая к вставке, равна
jP'(0/O), а вероятность обратной трансформации квитанций
НЕТ-^ДА в прямом канале — Р(О10). При этом вероятность
вставки, связанная с необнаруживаемым искажением ДА, при не-
174
зависимых ошибках в прямом и обратном каналах
пропорциональна произведению Р' (0/О) Р (-О/0)- Эта величина
практически много меньше, чем Р' (0/О), приводящая к вставке,в системе
с РОС без квитирования. Сходным образом можно уменьшить
вероятность выпадения сообщения за счет трансформации знака
НЕТ->ДА в обратном канале.
В системах с ИОС квитирование знаков служебной
информации позволяет при бесшумном обратном канале практически
полностью избавиться от ошибок в прямом канале с помехами
независимо от структуры кодовых комбинаций (сообщений) или их
длины. Один из возможных путей достижения этого состоит в
применении алгоритма, предложенного Чангом [193] для систем с
ИОС, в которых в явном виде передаются только знаки стирания
НЕТ (см. § 7.4). С определенными вариациями алгоритм
применим и к системам с выделенными служебными каналами (см.
§ 7.2) или к системам с ИОС и РОС с совместной передачей
сообщений и служебных знаков. Знак НЕТ в системе Чанга
квитируется и при необходимости повторяется подобно другим
сообщениям.
Исправление возникающих ошибок при передаче смысловых
сообщений Xi и знаков 0 осуществляется следующим- образом.
Если необходимо стереть сообщение, но обнаруживается по
квитанции, что переданный при этом знак НЕТ ошибочно воспринят
как некоторое другое сообщение (не НЕТ), передатчик дважды
посылает знак НЕТ. Это делается для того, чтобы указать
приемнику на необходимость стереть как первоначально искаженное
сообщение Хи так и ошибочно принятое вместо него некоторое
другое сообщение хк. Такого рода двукратная передача знаков НЕТ
производится каждый раз при обнаружении искажения этого
знака. Вследствие этого стирание сообщения обращается в общем
случае в некоторый процесс случайной продолжительности
r(r=J, 3, 5, ...), зависящий от исходов первой и повторной
передач знака НЕТ. По завершении процесса передатчик повторяет
сообщение Х\.
Если, наоборот, обнаруживается по квитанции, что i-e по
порядку следования сообщение воспринято как НЕТ, передатчик
повторяет .(i—l)-е (предшествующее) сообщение как ошибочно
стертое, а затем снова передает Х\. И так далее.
Вероятностный граф, поясняющий принцип работы системы,
изображен на рис. 7.8, а'процесса стирания — на рис. 7.9.
Приняты следующие обозначения:
Рис. 7.8.
Вероятностный (граф
системы Чанга
175
«x,
ВозбраА
Старту
Рис. 7.9.
'Граф .процесса стирания сообщения
НО^ — необнаруживаемая (зеркальна^) ошибка при
одноразовой передаче и квитировании знака стирания (трансформации
0->х в прямом канале и х'-+0' — обратном; х\ и 0' —
квитанции);
HO"i — аналогичная ошибка при передаче сообщения х
(х-+09 0'-ис');
O0"i и 0-0"i — обнаруживаемые ошибки (х->0, 0'-+0' и
0-не, х'-+х') при передаче сообщения и знака стирания
соответственно;
ЛО"1 и ЛО'1 — ложные ошибки (х-+х, х'-+0' и 0->0, 0'->х');
ПР^ — безошибочный исход передачи знака стирания 0 и
квитанции 0'.
Под НО' и ПР' (без нижних индексов) понимаются исходы
всего процесса стирания. Кроме того, использованы принятые в
пл. 2 обозначения ПР, НО,
00 и ЛО, имеющие
отношение к переходам одних
сообщений х в другие, IHO не в
знаки стирамия. Процесс
передачи сообщения Х{,
начинающийся условно в узле i
(icm. рис. 7.8), может
задерживаться в этом узле .из-за
передачи знаков стирания и
псштдрений >и сокращаться
назад ((влево) к ранее уже
переданным сообщениям на
сколь угодно шагов. ur
Будем считать, что число
повторных передач не
ограничивается. Необратимо
искажающими исходами
процесса стирании (рис. 7.8)
являются при этом событие
ДО', под которым
условимся понимать (возникновение
хотя бы одной ошибки item a
HO'i при стирании, и Л О' —
появление хотя бы одной
ложной ошибки JIO'i. Ложные ошибки влекут за собой ненужные
повторения знака 0 и ошибочные стирания (выпадение
сообщений, ом. гл. 2). Определение вероятностей различных исходов
процесса стирания начнем с правильного исхода процесса ПР'
(рис. 7.10).
Производящая функция (см. § 2.4) вероятностей события ПР'
при учете только первого циклического звена на рис. 7.10 (все
другие звенья, начиная от узла 2, справа, мысленно отсекаются)
равна
176
Возбрат
Рис. 7.10.
К определению (вероятностей исходов
процесса стирания
Р Л
OOj nPj
при учете двух циклических звеньев (до узла 3)
fnP^) =
Р Л
nPi
1
OOj nPj
1 — Р ,Р , А,2
OOj nPj
при неограниченном количестве звеньев
Р Л
пр,
'-(*) = гтт-^—• (7ЛЗ)
00, ПР,
1 —
Р ,Р ,№
00, ПР,
1 —■
Обозначив знаменатель цепной дроби (7.13) через 1—/(А,), где
Р , Р Л2 Р ,Р Л2
ОО, ПР, ОО, ПР,
/(Я) = ! ! = ! ! ,
■ Р , Р Л2 1—/(b)
ОО, ПР,
1 — —
1—...
и решая последнее уравнение относительно f(X)f после
подстановки результата в (7.13) и несложных преобразований получим
Р Л
пр,
*пр.(Ь) =
Yi
I + V -г- — р > р >№
2 У 4 nPj OOj
Положив здесь А,= 1, придем к искомому значению
вероятности правильного исхода процесса стирания в виде
пр,
V = —: 7Т~ ~~==^' (7Л4)
2 у 4 nPj OOj
Путем разложения (7.13) в ряд по степеням К подобно тому,
как это делалось в гл. 2, можно получить выражение для
вероятности безошибочного завершения процесса стирания ПР7 через г
шагов (г=-1, 3, 5, ...):
г-\ г+1
PnP,(r) = SrP02o;Pn2p;, (7.15)
где fir при г>3 определяется рекуррентной формулой
177
/
^==S^-D—>• д*=27Лг3) -24"1- (7Л6)
« 1т)!
r—\
2
с ,
Br = 2 —^±-, r — нечетное. (7.17)
/-+ 1
Выражения (7.15) и (7.16) совпадают с выражениями,
полученными другим путем в [78].
Возвращаясь к графу (см. рис. 7.10), замечаем, что
вероятности двух других возможных исходов процесса стирания НО' и
ЛО'1) на каждом шаге пропорциональны значениям HO'i и JIO'i.
Учитывая, что события Н(У, ЛО' и ПР' в процессе стирания
образуют полную группу и, следовательно,
Рно' + Рло>=1-Рпг'. (7-18)
получим
р , ■ р ,
HOj HOj
Рно' = р / + р / (] - Рпр') = р t + p f X
HOj Л01 HOj Л01
Р ,
I ПР, »
XI — (7Л9)
-J-+1/4--P ,р .
2 у 4 nPj OOj
Р ,
ПР,
рт = - Л 1 ' : ,. — \- (7-20)
ло, / пр,
но, - ло, ( . 4-+I/ -4--/' 'Р <
• t+j/i
4 nPj OOj
Аналогичным путем, используя метод направленных графов,
нетрудно найти вероятности различных исходов в процессе под-
*> Из четырех возможных в общем случае исходов процесса стирания ПР\
НО', ЛО', 00 один (00') в данном случае имеет вероятность, равную нулю,
поскольку процесс не ограничен и не прекращается при ошибках типа 00'.
Ошибки типа 00' только продлевают процесс стирания, не внося каких-либо
искажений в передачу сообщения х\.
178
тверждения сообщения. Приведем здесь необходимые для
расчетов соотношения в готовом виде (вывод можно найти в работе
[101]):
Р
р _ РНО + РРО РЛО- р ^ Л°1
1 — мэо мпр 1 "~ мэо гпр
р •
00,
р ~ * р __ 1 р р р
*00" ~ 1 р р ' ПР" ~" Х *Н0" 'ЛО* *00".
1 ~" МЭО МПР
(7.21)
Подстановка выражений (7.14), (7.19), (7.20) и (7,21) в общие
формулы гл. 2 после несложных преобразований приводит к
следующему приближенному значению остаточной вероятности
искажения сообщения:
Рос1« РН! + РШ + РИЗ > ' (?22)
1 ~ ( ^00 + РЛо) ^ПР' — ^оо"
где
рн, = рно: (7.23)
Рн2 = рНО; + (Роо+рло)Рло<. (7-24)
Ph3=V + (Poo + ^o)Pho" • (7-25)
'1
События HI, H2 и НЗ приводят к искажениям первого,
второго и третьего рода (см. гл. 2) соответственно.
При равных по уровню помехах в прямом и обратном
каналах наиболее весомой по вероятности является ошибка типа ЛО"ь
так как она возникает при искажении помехами только одной
квитанции. Можно показать, что вероятность такой ошибки
уменьшается с увеличением длины кодовой комбинации п. Ее можно
минимизировать путем асимметричного декодирования квитанций
[78] или введением буферной области (см. § 7.4).
При отсутствии помех в обратном канале и полной обратной
связи все ошибки обнаруживаются. Вероятности их (7.23) — (7.25)
равны при этом нулю, что позволяет вести полностью
безошибочную передачу сообщений по прямому каналу (Рост:=0), хотя и
при наличии в нем помех. Этим описанный метод выгодно
отличается от других, изложенных в данной главе.
Среднее число передач сообщений и знаков стирания вместе
определяется выражением
rcp- 2pJt-i при рпр. = рпр;- <7-26)
Относительный объем сигналов служебной информации (в
среднем) по сравнению с основной в данной системе при умеренных
помехах незначителен.
179
7.6. КВИТИРОВАНИЕ И КОРРЕКТИРОВКА ЗНАКОВ
СЛУЖЕБНОЙ ИНФОРМАЦИИ В СИСТЕМЕ
С ИОС ПРИ ТОФМ/(ТФМ)
Интересный в определенном отношении вариант системы
передачи сообщений с информационной обратной связью получается
путем сочетания рассмотренной выше (см. § 7.5) процедуры
квитирования и корректировки знаков основной и служебной
информации с трехпозиционной (трехкратной) относительной фазовой
модуляцией (ТОФМ). Принцип действия системы описывается в
[78] и коротко состоит в следующем.
Элементы двоичного сообщения 1 и 0 и знак стирания
передаются посредством трех фазомодулированных сигналов
(импульсов) с разносом фаз, равным 2я/3 (рис. 7.11а). В случае относи-
а)
^00
®
S)
*01
"01
Рис. 7.11.
К применению принципа
трех.позвджжной (а) и
относительной фазовой
(б) модуляции при
передаче сообщений в
системах с обратной
связью
тельной фазовой модуляции единица обозначается поворотом
фазы на угол плюс 2л/3 по отношению к фазе предыдущего сигнала,
знак стирания — на угол минус 2я/3 и нуль — сохранением
прежнего значения фазы (рис. 7.116).
Фазовая модуляция при когерентном приеме обладает
наиболее высокой помехоустойчивостью к флуктуационнои помехе по
сравнению с другими видами модуляции. При поэлементной
передаче двоичных сообщений стирается только элемент, пораженный
помехами, а не целая кодовая комбинация, как при поблочной
передаче двоичных сообщений. В конечном итоге экономятся время
и энергия на передачу сообщения. Система, естественно, может
функционировать и^ при других видах трехкратной модуляции,
например, частотной.
Вероятности ошибок, входящие в выражение для остаточной
вероятности искажения (7.22), при симметричной трехкратной
фазовой модуляции (ТФМ) определяются выражениями:
00
но
оо
но
р — р
*ло— -
ло
00,
= ^ = 4-w>'
но
= Рло=-т(1-Р^'>
(7.27)
где р и р'— 'вероятности ошибочного приема троичного элемента
180
в прямом и обратном каналах соответственно, определяемые при
фазовой модуляции выражением (7.5) при а=3, а при относитель-
, ной трехкратной фазовбй модуляции
p«qr(lf23A;' 0,71 А)— — е""*'/,, (0,87 А1),1) (7-28)
где h{z)—модифицированная функция Бесселя нулевого
порядка; h2 — отношение мощностей сигнал/помеха.
На рис. 7.12 проведены кривые Рост (Л) при ТФМ и ТОФМ,
построенные в соответствии с выражением (7.22) ч ф-лами f7.27)
для различных значений h и h! (hf — ошо- о / 2 * я*
шание напряжений сига ал/помеха в
обратном канале). При h' = h
помехоустойчивость системы примерно равна той,
которую можно получить в прямом двоичном
канале без применения обратной связи. При
h'>h остаточная вероятность искажения
сообщения резко снижается. При h'=oo
передача сообщений по прямому каналу
становится безошибочной. Определяющей
являемся, как видно, помехоустойчивость
обратного канала.
Дальнейшего улучшения передачи
можно достигнуть с помощью асимметричной
фазовой модуляции, при которой углы cp0i, Ю~*\
фо 0 -и■ ф10 (ом. рис. 7.11) устанавливаются
таким образом, чтобы минимизировать ве- р
рояцности наиболее опасных ошибок. Мож- рис 7 |2
но показать, что таким путем можно дошл- помехоустойчивость .ои-
нителыно снизить остаточную вероятность стемы с ИОС при пере-
иокажения сообщения в некоторых случаях даче трехкратной ФМ
более чем на порядок. Среднее число пов- ^Ж?ш^ые лини'и) и
, ^ А . о ОФМ (пунктирные ли-
. тарении при Л>!2-мЗ незначительно. нии
Рассмотренная система может быть
рекомендована к применению в тех случаях, когда резерв -времени на
повторения ограничен и обратный канал обладает большей
мощностью оишалов по сравнению с прямым (например, пр'и
получении телеметрических данных от удаленных маломощных
радиостанций центральным пунктом). При бесшумном обратном канале
метод позволяет реализовать около 75% пропускной способности
прямого канала (по Шеннону), что значительно выше, чем у
многих других известных систем.
7.7. РБЖУРРЕОТНОЕ КВИТИРОВАНИЕ
Дополнительные возможности обнаружения ошибок при использовании
обратного канала открывает метод рекуррентного квитирования, идея которого
заключается в следующем (95]. Получив некоторое сообщение, приемная сторо-
*) Графики функций q{x\ у) можно найти в работе [202].
181
на посылает кодовую комбинацию, образуемую каждый раз совместной
обработкой t последних сообщений. Таким образом, удается локализовать обычно
не обнаруживаемые при помехах в обратном канале ошибки зеркального
характера, а также ложные ошибки. /
Рассмотрим наиболее простой случай поэлементной передачи двоичных
сообщений. Положим, что квитанция образуется простым сложением по mod 2
последних t двоичных элементов, и проследим за структурой квитанций,
поступающих к передатчику при различного рода ошибках. Величину t будем
называть шагом сложения.
Пусть </=3. Примем для наглядности, что на приемную сторону прямого
канала требуется передать длинную последовательность двоичных элементов,
состоящую из одних единиц. При безошибочной передаче этих элементов по
прямому и обратному каналам квитанции должны иметь вид
последовательности так же из одних единиц, как это показано в подтаблице А табл. 7.3.
ТАБЛИЦА 7.3
Подтаблица
А
Б
Прямой
канал
передано
1
1
1
1
1
1
1
1
1
1
принято
1
1
1
1
1
0
1
1
1
1
Обратный
канал
квитанция
0
0
0
1
1
принято
1
1
1
1
1
1
ioi
|о|
1
1
Характер
искажения
Неискаженный прием
Зеркальная
ошибка '
Подтаблица
В
Г
Прямой
канал
передано
1
\
1
1
1
1
1
1
1
1
принято
0
1
1
1
1
1
1
1
1
1
Обратный
канал
квитанция
0
0
0
1
1
1
1
1
1
1
принято
0
101
1о|
1
1
|о]|-
о
X
а.
Характ
кажени
Ошибка в
прямом
канале
Ошибка в
обратном
канале
В подтаблице Б в первой строке показан случай зеркального искажения
единицы, не обнаруживаемого обычной системой (ошибки подчеркнуты). Как видно,
вслед за этой ошибкой в квитанциях появляются подряд два нуля, обведенные
рамкой. Такие же два нуля появляются вслед за ошибкой в одном прямом
канале (подтаблица В). При ошибке только в обратном канале («ложная
ошибка») в последовательности двоичных единиц на выходе обратного канала
появляется только один нуль (подтаблица Г).
Таким образом, по виду квитанции можно отличить ошибки в прямом
канале от возникающих в обратном канале. В случае ложной ошибки
(подтаблица Г) передатчик без ущерба для получателя может продолжать
транслировать сообщения, как если бы ошибки не было. Можно показать, что
вероятность необнаруживаемой ошибки в рассмотренном примере рекуррентного
квитирования приближенно равна
^но.рек^ноР'. (7-29)
где Рно — вероятность необнаруживаемой (зеркальной) ошибки при обычном
(нерекуррентном) квитировании; р' — ошибка в обратном канале.
Еще большее различие между квитанциями при различных ошибках
получается при увеличении шага сложения t Так, при /=5 последовательности зна-
182
ков на выходе обратного канала при исходах, приведенных в первых строках
табл. 7.3 (А—Г), имеют вид
11111, В- О О О О О
Б--1 10 0 0 0 { Г— 0 1 1 1 1.
Здесь признаком наличия ошибки в прямом канале (зеркальной или
незеркальной) являются уже четыре нуля в квитирующей последовательности, в то
время как ложная тревога (Г) вызывает по-прежнему появление только одного
нуля. Такая возможность рассортировки ошибок по каналам при рекуррентном
квитировании, ломимо описанного здесь назначения для передачи сообщений с
обратной связью, может быть использована при статистических исследованиях
каналов связи в целях выявления вероятностей возникновения ошибок в
прямом и обратном каналах в отдельности при замыкании их шлейфом. Обычно,
насколько известно, при замыкании шлейфом рассортировывать ошибки по ка-
налам не удается [183].,
Рекуррентное квитирование можно сочетать с трехкратной модуляцией (см.
§ 7.6) и другими методами образования квитанций и корректировки сообщений
в системах с обратной связью.
7.8. СИСТЕМЫ С ДЕТЕРМИНИРОВАННЫМ ЧИСЛОМ
ПЕРЕДАЧ
Системы передачи сообщений с информационной обратной связью могут
функционировать без передачи знаков служебной информации типа ДА—НЕТГ
если заранее установить некоторое фиксированное число корректирующих
(повторных) передач, одинаковое для всех сообщений. Выигрыш в энергии
сигналов по сравнению с односторонними системами с тем же числом повторных
передач г—п достигается при этом за счет спадающей (в среднем) мощности
сигналов от одной корректирующей передачи к другой.
Идея построения систем, такого рода состоит в следующем. Передатчик,
используя, скажем, метод амплитудной модуляции, посылает сообщение ау в виде
импульса напряжения иу —uv j, которое ^ силу действия помех поступает в
Л
приемник в виде wvl=wv>i+§, гДе I"напряжение помехи (аддитивного шума),
Л
искажающее сообщение. Приемник по величине и { вычисляет наиболее
вероятное (с позиций приемника) апостериорное значение сигнала и посылает его
передатчику в виде квитанции ид#1, в общем случае не совпадающей с и х г
(первый индекс v и \i означает номер сообщения в алфавите, второй — номер
передачи].
Передатчик вычитает из иу1 величину w j и посылает по прямому каналу
во второй раз лишь поправочное (разностное) значение напряжения uv 2 =
Л
= MV>1—уд>1 . Приемник получает uv 2==wv,2~r"5 и> обрабатывая теперь уже
Л Л '
совместно t/vj и mv2, вновь вычисляет наиболее вероятное значение сигнала
АЛ
и формирует ответный сигнал в виде ы 2=if (wVil , uv 2). Передатчик повторно
вычитает этот сигнал из t/v>1 , посылает поправку и т. д.
По истечении п таких передач приемник принимает окончательное решение
о передававшемся сообщении (по совокупности сигналов uvU ttv,2» ••• , wv,n)«
которое направляет получателю; передатчик переходит к следующему
сообщению. Как видно, начиная со второй передачи, передатчик только компенсирует
возникающие вследствие помех расхождения. По мере накопления сигналов
приемником вероятность отклонения ответного сигнала от истинного сообщения
падает и соответственно уменьшается мощность корректирующих сигналов.
183
Описанная система, функционирующая по принципу проверки гипотез
приемника относительно фактически переданного сообщения, называется
системой с проверкой гипотез [211]. Примерный вид блока информации
(огибающей AM сигнала), отображающего сообщение av>1=av вместе с /г—1
поправочными сигналами каждый длительностью т, изображен *на рис. 7.13.
Квитанции можно формировать
и пю несколько иному принципу.
Например, передаваггь в качестве
ответного напряжения v координату
центра тяжести [21)1] сишалыюй
структуры, составленной из разнесенных в
пространстве принимаемых сигналов
точек с весами, равными
Рис. 7.13.
Блок .и:нфор;маци.и длиной п
А
v,r
), / = 1, М9
где P(Uj/uvr) — апостериорная вероятность у-го сообщения из алфавита
источника объемом М, вычисляемая каждый раз с учетом всех /, поступивших к
моменту формирования ответного сигнала корректирующих сигналов.
Система с квитированием по центру тяжести предполагает возможность
континюалького управления напряжением ответных сигналов, что не всегда
удобно в конструктивном отношении. Однако она позволяет более точно
компенсировать ошибки при меньшей средней мощности поправочных сигналов.
7.9. МЕТОД СТОХАСТИЧЕСКОЙ АППРОКСИМАЦИИ
U Т
Описанный выше принцип реализуется в системе передачи
информации с обратной связью, использующей метод
стохастической аппроксимации, предложенный Роббинсом и Монро и
получивший развитие для указанной цели в работах [210, 212] и др.
Единичный модуляционный
интервал (рис. 7.11(4) в системе со
стохастической а1П!П1ро1К1С1Имацией
разбивается ,на М отрезков —по числу
сообщений 'в алфавите источника.
Каждому сообщению ставится в
соответствие средняя точка av, v=l,M
на своем отрезке. Сигналы
передаются посредством амплитудной
модуляции с предельными
значениями амплитуды от —U/2 до +U/2.
Сообщению av соответствует
амплитуда U v. Прямая, соединяющая точ-
ми av и v (см. рис. 7.14), с угловым
коэффициентам а играет роль мо-
Рис. 7.14.
Образование сигналов при
стохастической аппроксимации
184
дуляциюниой характеристики. Отрицательные значения амитлитуды
сигналов обозначаются в системе переменой фазы
высокочастотных колебаний на 180°.
Когерентный (додетекторный) прием высокочастотных сигна-
лов осуществляется путем г-кратного их накопления (г=1, п) в
процессе квитирования и корректировки. В остальном процедура
соответствует описанной в § 7.8. Задача приемника состоит в
определении с помощью корректирующих сигналов истинного
положения точки v, соответствующей av или ее принадлежности к
отрезку V ±U/2M (собственной области сообщения av). При
r-кратном когерентном накоплении сигналов результирующее
напряжение шума в приемнике уменьшается пропорционально корню
квадратному из г. Ошибочный прием сообщения возникает, когда
суммарное напряжение сигнала и помехи после всех п
накоплений выйдет за пределы собственной области данного сообщения;
вероятность этого при нормальном гауссовом шуме в
соответствии с (1.3') равна
где
Ш-Л™-М-£. (7.31)
Выберем соотношение между п и М так, чтобы выполнилось
условие
n = M2il~-e) при 8>0. (7.32)
Тогда при п-+оо величина h(n) будет также стремиться к
бесконечности, а вероятность ошибки (7.30) — к нулю. Иначе говоря,
прием сообщений при указанных условиях оказывается
безошибочным. Вывод справедлив для бесшумного обратного канала. При
этом скорость передачи информации по прямому каналу в пре-
дельном случае (при е-ИЗ и М=п ) в соответствии с (1.29)
приобретает значение
R = lim — = lim — In ny нат/с, (7.33)
где Т — Бремя передачи сообщения длиной п. Средняя энергия
сигналов на протяжении п передач равна
м
^кор»
. . (7.34)
где Е\—усредненная по алфавиту сообщений энергия первой
передачи собственно сообщения, равная при P(\UV) = 1/М
185
/?!='( 1/2) ((/2/12)тс; ^кор — не зависящая от сообщений,
определяемая шумами средняя (т — символ математического ожидания)
Т
энергия корректирующих сигналов; тс= длительность сигнала
п
(сообщения или корректирующего сигнала), согласованная с
полосой пропускания канала.
Пренебрегая при я->оо энергией Et по сравнению с £Кор, на
основании (7.34) получим
Л
£«$£Kop = limm -f-V(£/,.,-",. PJ» К =
п-+<х> I *> hm I
/I
= a*lim\]^ = -Lc*lnn, (7.35)
где On — дисперсия шума. Определяя отсюда значение 1пл, после
подстановки его в (7.33) получим
где S^cp — средняя мощность сигналов.
(Величина в правой части равенства (7.36) равна пропускной
способности канала связи С (1.28). Отсюда следует, что
описанный метод передачи сообщений с обратной связью позволяет
вести передачу со сколь угодно малой вероятностью ошибок при
скорости, в пределе равной пропускной способности прямого канала.
Это весьма важный результат, не достижимый, как отмечалось
(см. § 1.7), в односторонних каналах связи при известных
(детерминированных, не случайных) методах кодирования.
При ограниченном п вероятность искажения сообщения в
описанной системе не равна нулю. Однако, исходя из (7.30), с
учетом (7.32) можно показать, что она не превышает величины
P„eR<expj—_^-ехр[27ЧС-Я)]1 (7.37)
Значение вероятности искажения, как видно, убывает с
ростом временных задержек в 2Т на кодирование и декодирование
сообщений по двойной экспоненте, в то время как для
односторонних каналов ее величина убывает по экспоненте (1.30), т. е.
медленнее. Выражение (7.37) выводится в предположении, что
частота манипуляции согласована с полосой пропускания канала так,
что выполняется условие
я «2 ст
2Af = -T = ±T-. (7.38)
С ростом п необходимая полоса частот 2Д/ неограниченно
возрастает.
186
Можно получить столь же высокие показатели по скорости и
помехоустойчивости передачи и при ограниченной полосе
пропускания канала 2Л/. При этом алгоритм образования
корректирующих сигналов несколько видоизменяется. Уровень их ставится в
л
зависимость не только от расхождения между U и U г, но и от
номера корректирующего сигнала г. Последнее равносильно
вращению модуляционной прямой (см. рис. 7.14) от импульса к
импульсу в рамках передачи одного сообщения £/v. Подбирая
соответствующим обр адом зависимость
а (г), удается оптимизировать систему
в целях получения максимальной (по
отношению к С) скорости передачи
информации при минимальной
частоте ошибок.
Для иллюстрации возможности
метода стохастической аппроксимации
на рис. 7.15 приведены зависимости
эквивалентной вероятности ошибки рэ (в
расчете на один двоичный элемент) от
относительной по сравнению с
пропускной способностью канала
аппаратурной скорости передали сообщений R
при различной длине
информационного блока /г. Здесь же показана
аналогичная зависимость для
односторонней линии передачи при фазовой
модуляции и когерентном приеме.
Метод стохастической
аппроксимации, описанный выше, можно сочетать
с последовательным анализом Вальда,
применяемым в системах с РОС [7], и
получить таким образом
комбинированную систему с повышенной
достоверностью передачи сообщений. Идея
такой системы описана в [82] и
коротко состоит в следующем.
Между собственными областями сообщений av(v=l,M) на
модуляционном интервале [0-,1] (рис. 7.16) вводятся области
неопределенности шириной (l—b/М) каждая. В случае попадания
после всех" п передач результирующего сигнала плюс помеха в об-
03 Ok 0.5 0,6 0.
/Г
т-2\
/0
ю *!
w
ю8
ш
On
V
7
/л
1
\
1 i
1
5 1
1
1 1
1
\ 1
/ /
1
1
1/;7
№
1/ /7-7
7 * 0,8 RIC
//"
п
.
L
Л
77
1
г
|
/.7/
6
' J
Рис. 7.15.
По м ехоу сто й чивость с исте -
мы передачи информации
при стохастической
аппроксимации (штрих-пунктщюм
п ок аз ан ы соо тв етств узощи е
х а;р актеристики од ностр oih-
,ней системы)
Рис. 7.16.
К сочетанию стохастической
аппроксимации с поеледова-
тельньш .анализом
О
Обяати неопределенности
bjli
я,
т
ласть неопределенности приемник сообщение не регистрирует, а
передатчик растягивает цикл его корректировки на следующие п
передач. Таким путем несколько уменьшается скорость передачи
сообщений, но может быть существенно уменьшена вероятность
ошибки. Вероятность Роо попадания сигнала плюс помеха в об-
ласть неопределенности, усредненная по алфавиту сообщений
#v(v=l,M), определяется при описанном алгоритме
приближенным равенством
Р00«Ф[(2-Ь)2]-Ф(6г), (7.39)
где
Г ^+* 1
, = 1/3 п R/c ;
А— отношение напряжений сигнал/помеха в прямом канале.
(Вероятность ошибки при этом равна
Рш-1-Ф[«(2-6)]. (7.40)
Скорость передачи сообщений снижается до величины
*' = (1-роо)*. (7-41)
где R — скорость передачи в той же системе без выделения
областей неопределенности (Ь = 1).
Расширяя зону неопределенности, можно сколь угодно
уменьшать вероятность искажения (7.40), но при этом увеличивается
Ах> (7.39) и соответственно снижается скорость передачи.
Существует оптимальное значение Ъ для различных п, зависящее также
от уровня сигнала h в канале связи. В конечном итоге описанным
способом можно уменьшить вероятность искажения сообщения на
несколько порядков при незначительном уменьшении скорости.
Для реализации процедуры Роббинса и Монро при
использовании амплитудной модуляции требуются неограниченные
возможности управления напряжением и, следовательно, мощностью
передатчика. Необходимость в таком управлении возникает при
формировании поправочных сигналов в целях компенсации всех
возможных флуктуации нормального шума, теоретически
неограниченных по своей величине. Практически доступная регулированию
пиковая мощность передатчика должна, по крайней мере, в три—
пять раз превосходить его среднюю мощность. Требование это не
всегда удобно в конструктивном отношении. Однако достаточно
эффективную передачу сообщений можно осуществлять с помощью
стохастической аппроксимации также при ограниченной пиковой
мощности передатчика вплоть до уровня, не превышающего ее
среднего значения.
В работе [100] рассмотрена система со стохастической
аппроксимацией, в которой вместо амплитудной применяется фазовая
модуляция сигналов. В этом случае единичному интервалу (рис.
7.12) соответствует фазовый сдвиг от —л до d-jt, разбиваемый
188-
так же, как и при амплитудной модуляции, на М интервалов (по
числу сообщений в алфавите). Передатчик сопоставляет
переданное и принятое по обратному каналу значения фазы и вносит
коррективы, как и раньше, на протяжении установленного числа п
корректирующих сигналов.
Математический анализ системы сопряжен с определенными
трудностями. Поэтому исследование ее было произведено путем
моделирования на ЭВМ. На рис. 7.15 приведена кривая (СА—
ФМ), иллюстрирующая эффективность этого способа передачи
сообщений по сравнению с однонаправленной передачей (штрих-
пунктир), а также со способом «классической» стохастической
аппроксимацией при неограниченной амплитудной модуляции.
Наряду с фазовой могут быть использованы другие виды
относительной модуляции, например частотная.
Применение угловой модуляции позволяет упростить
построение передатчиков и вести передачу по неоднородным (с
флуктуирующим коэффициентом передачи мощности) каналам. При
амплитудной стохастической аппроксимации последнее
затруднительно вследствие случайных изменений соотношения мощностей
излучаемого и ответного сигналов, которые при AM должны быть
точно известны !>.
7.10. СРАВНЕНИЕ НЕКОТОРЫХ МЕТОДОВ ПЕРЕДАЧИ
ИНФОРМАЦИИ С ОБРАТНОЙ СВЯЗЬЮ
На рис. 7.17а приведены характеристики помехоустойчивости
передачи информации по каналам с полной обратной связью для
описанных выше систем с применением стохастической
аппроксимации (при амплитудной и фазовой Модуляции), двойной и
трехкратной фазовой модуляции и алгоритма Чанга (АЧ) при
минимальном (безыз'быточном) двоичном коде. Кривые построены в
координатах: приведенная тю ф-ле (2.47) к одному двоичному
элементу вероятность искажения рэ—относительная (по
сравнению с пропускной способностью прямого канала) скорость R/C
передачи сообщений. При расчете R учитывалось снижение
скорости передачи сообщений за счет повторных передач2). В
качестве параметров при построении кривых использовались значения
я (длина кодовой комбинации) и допустимое число повторных
передач тт (в системах ДФМ, ТФМ и АЧ). Эти две величины
дают представление о возможных задержках сообщений в системе
связи, связанных с процессами кодирования, декодирования и
корректировки ошибок. Обратный канал полагается бесшумным.
*) В работе [83] излагается метод, позволяющий преодолеть указанный
недостаток AM стохастической аппроксимации путем взаимно относительной ам*
плитудной и фазовой модуляции при передаче основного и корректирующих
сигналов в пределах каждого сообщения.
£) Величина \R обратно пропорциональна объему сигнала, необходимому для
обеспечения заданной достоверности (рэ), и является поэтому характеристикой
не только скорости, но и помехоустойчивости передачи сообщении.
189
Характеристики помехоустойчивости различных систем с обратной связью:
а) при бесшумном обратном канале; б) при одинаковом уровне 'помех в
прямом «и обратном каналах (код инверсный)
Наибольшую относительную скорость передачи при прочих,
примерно, равных условиях (п и рэ) обеспечивает система
передачи информации со стохастической аппроксимацией при
амплитудной модуляции (СА-АМ); некоторый дополнительный выигрыш
дает применение в этой системе последовательного анализа
(САПА), как это описывалось выше (см. § 7.9, рис. 7.14). Обе кривые
(СА-АМ и СА-ПА) с увеличением п стремятся к вертикальной
прямой, соответствующей предельно достижимой скорости
передачи по Шеннону при рэ-^0; п-+оо. Левее этих двух кривых
расположены характеристики помехоустойчивости систем СА-ФМ и
ТФМ. Далее следуют системы с ДФМ и АЧ, конкурирующие
между собой в отношении скорости передачи при различных
значениях п. Отклонение кривых влево в верхней части чертежа (при
больших значениях рэ) объясняется возрастающим -числом
повторных передач при сильных помехах.
При АЧ и ТФМ вероятность ошибки убывает с увеличением гт
и стремится к нулю при rm->oo так же, как при СА в случае
п-+оо, но при другой предельной скорости передачи. При ДФМ
она стремится к некоторому конечному значению, определяемому
для бесшумного обратного канала контролируемыми ошибками
при передаче знаков служебной информации.
На рис. 7.18 показаны зависимости достижимой относительной
скорости передачи сообщений R/C от длины кодовой комбинации п
для систем с алгоритмом Чанга при рэ=0 и ДФМ (рэ=Ю~15) при
190
Система с ДФТ при малых п, декодируемых «по большинству»
(см. § 7.3), неэффективна вследствие низкой помехоустойчивости
передачи знаков служебной информации. При п=3 эта система
незначительно отличается по скорости и помехоустойчивости от
Я/с _. u . ,
oj§
0,5
Рис. 7.18.
Зависимость коэффи- q^
циента ишользовайия '
пропускной способио-
сти прямого канала
от длины кодовой д
комбинации п 1 2 Ь 6 8 10 12 1Ь 16 18 п
односторонней системы. С ростом п скорость передачи
информации возрастает, достигая максимума при некоторых
промежуточных значениях п (15—46 на рис. 7.18), и снова падает при
удлинении кода (по причине, указанной выше для системы с АЧ).
Максимально достижимая скорость при рэ= Ю-*15 примерно равна
/?/С=0,4-г-0,45. Она несколько возрастает при снижении
требований к помехоустойчивости передачи (/78>10~15) и падает при
более жестких требованиях.
Приведенные кривьЕе, построенные для случая использования
бесшумного обратного канала, иллюстрируют предельные
возможности различных систем передачи информации с полной обратной
связью, зависящие от принципа функционирования систем.
' Кривые (см. рис. 7.17а) практически справедливы также при
зашумленном абратном канале, если относительное напряжение
помех в нем не превосходит одной трети от напряжения помех в
прямом канале. На рис. 7.176 приведены зависимости рэ(Л/С) для
систем с полной информационной обратной связью при равных по
уровню помехах в прямом и обратном каналах. Как видно, при
небольших п (равных 5—9) и жестких требованиях к
достоверности (/?э<10-6) преимущество по скорости передачи на стороне
системы с алгоритмом Чанга с защитной зоной (указана в
скобках при п). При п=13 большая скорость у системы ДФМ. При
я>20-^-30 системы с алгоритмом Чанга, ДФМ и с выделенным
служебным знаком (ВСЗ) в форме ключевого (стартового) или
синхронизирующего сигнала длиной n&=3-f-4 обеспечивают
практически одинаковые достоверности и скорости передачи сообщений.
Это видно из сопоставления кривых для п=31. Сказанное
согласуется с изложенным в § 7.2—7.6.
ГЛАВА 8
Передача непрерывных
сообщений
8.1. ОБЩИЕ ЗАМЕЧАНИЯ
В телеметрических системах, а также в системах
телеуправления и автоматического регулирования непрерывные
(аналоговые) сообщения являются основным видом передаваемой
информации.
Унификация систем передачи на основе цифровых методов —
одно из перспективных направлений развития техники связи, в
рамках которого для повышения помехоустойчивости передачи
непрерывных сообщений могут быть непосредственно использованы
те же методы, что и для дискретной информации.
При практической реализации методов повышения
помехоустойчивости необходимо решить ряд задач, связанных прежде
всего с анализом качества передачи и воспроизведения непрерывных
сообщений, а также с вопросами оптимизации способов передачи
по выбранным критериям качества.
Для оценки качества передачи непрерывных сообщений
наибольшее распространение получил критерий среднего риска (см.
§ 1.7) с квадратичной функцией потерь, который обычно называют
критерием среднеквадратичеокой ошибки (СКО) [21, 26].
Применение этого критерия во многих случаях позволяет провести
точное аналитическое исследование и приводит к легко
интерпретируемым результатам.
В общем случае аналоговое сообщение представляет собой
некоторую непрерывную функцию времени x(t). Тогда по критерию
СКО качество ее передачи оценивается величиной
q = M{[Ax(t)-x(t)n (8-1)
л
где x(t)—принятое сообщение и М — оператор усреднения.
В зависимости от свойств переданного и принятого сообщений
используют статистическое усреднение или (и) усреднение по
времени [21, 204]. При цифровом методе передачи сообщение x(t)
дискретизируется по времени и по уровню, т. е. представляется в
виде последовательности квантованных по амплитуде отсчетов
192
{х\1)}> где нижний индекс I определяет положение отсчета на
временной оси, а верхний — номер ближайшего уровня, которым
заменяется истинное значение амплитуды отсчета x(ii). Замена
континуального множества сообщений дискретным ограничивает
точность передачи и равносильна искусственному введению
дополнительного шума — шума квантования. Возможность такой замены
оправдывается тем, что сообщение восстанавливается на приемной
стороне с принципиально ограниченной точностью [26]. Однако
квантование сообщения в сочетании с канальным кодированием
уровней позволяет резко уменьшить влияние помех в канале, т. е.
повысить помехоустойчивость. Одновременно ошибка квантования
может быть снижена до требуемой величины выбором
соответствующего шага квантования [106, 206].
Так как величина я|>, определенная по ф-ле (8.1), существенно
зависит от метода восстановления непрерывного сообщения по
последовательности отсчетов, то при анализе помехоустойчивости
систем по критерию СКО целесообразно определять г|) как средний
квадрат разности A(t) между сообщением, принятым в условиях
помех, и тем же сообщением, принятым при безошибочной
передаче. Расчет ty по этому определению значительно упрощается, если
восстановление осуществляется с помощью экстраполятора
нулевого порядка [163]. В этом случае при tejj//, ti+\)
Д0 = А/= *}'> — *}'>, (8.2)
л .
где х\1)к x\j) —абсолютные значения i'-го переданного и /-го
принятого уровней.
Если исходное сообщение представляется последовательностью
из L отсчетов, то выражение (8.1) преобразуется к виду
L L
ъ-тЕ^^тЕ5"'' (8-3)
где tn\{-}—символ математического ожидания; A2i — среднеквад-
ратичеокая ошибка, приходящаяся на 1-й отсчет сообщения.
При независимости статистических характеристик отсчетов от
их положения в общей последовательности (стационарное
сообщение) A2i=A2, т. е. фь=Д2. Установившееся (стационарное)
значение СКО находится из (8.3) предельным переходом при L->oo
ф = lim ф = lim — V Ц. (8.4)
1=1
Таким образом, при использовании экстраполятора нулевого
порядка определение ф сводится к нахождению* СКО,
приходящейся на 1-й отсчет сообщения. Экстраполятор нулевого порядка
7—281
193
является удобной моделью восстанавливающего устройства и,
кроме того, для некоторых гнпов сообщений он близок к
оптимальному и легко реализуется практически.
При принятом определении \|> из рассмотрения выпадает
эффект квантования. Однако при большом числе уровней шум
квантования практически не коррелирован с передаваемым
сообщением [113] и поэтому при необходимости этот шум легко учесть
добавлением к af> его дисперсии.
Корректная оценка возможностей цифровых систем передачи
аналоговой информации с обратной связью может быть
проведена лишь путем их сопоставления в соответствующих условиях с
односторонними системами. Поэтому в данной главе
рассматриваются также вопросы, связанные с расчетом СКО в системах без
обратной связи, которые представляют и определенный
самостоятельный интерес.
8.2. СРЕДНЕКВАДРАТИЧЕСКАЯ ОШИБКА ПРИ ПЕРЕДАЧЕ
НЕПРЕРЫВНЫХ СООБЩЕНИЙ В ОДНОСТОРОННИХ
СИСТЕМАХ
Минимальное двоичное кодирование. В цифровых системах
каждому передаваемому х^ соответствует определенная кодовая
группа сигналов, образующая кодовую комбинацию. При
минимальном двоичном кодировании число уровней М, на которое
квантуется сообщение, кратно двум, т. е. М = 2к. Таким образом,
минимальная значность кода, необходимая для кодирования М
уровней, равна k.
Соответствие между М уровнями и 2к=М кодовыми
комбинациями задается обычно в виде так называемой кодовой таблицы
или сетки кодирования. Очевидно, что можно построить М\
различных таблиц, каждая из которых, по существу, является
некоторым минимальным кодом. Так как при однотипном искажении
кодовой комбинации ошибка воспроизведения уровней будет
различной для разных сеток кодирования, то величина среднего
квадрата ошибки может характеризовать помехоустойчивость того или
иного кода, применяемого для передачи непрерывных сообщений.
Из минимальных кодов наибольшее распространение получил
прямой (натуральный) код. При кодировании этим кодом йго
уровня последний представляется в виде комбинации А^=
= {а\1\ а{2'\ ..., а^}9 являющейся номером уровня в двоичном
исчислении, т. е. i = 2°a\i) + 2lai2i)+...+2к~1а^ . На практике
используются и другие коды, которые можно или получить из
прямого или свести к нему путем функциональных преобразований
над элементами первичного кода. К таким кодам относятся
рефлексный код Грея, свернутый код [163] и др. В табл. 8.1
приведены сетки кодирования для указанных кодов при Af=8.
194
ТАБЛИЦА 8.1
Уровень
0
1
2
3
Прямой
код
000
001
010
01 1
Код
Грея
000
001
01 1
010
Свернутые коды
СК (1) | СК(2)|СК(3)
000
111
010
101
000
001
111
1 10
000
001
010
01 1
Уро- '
вень
4
5
6
7
Прямой
код
100
101
1 10
111
Код
Грея
110
1 1 1
101
100
Свернутые коды
СКО)
100
01 1
1 10
001
СК (2)
100
101
01 1
010
СКО)
111
1 10
101
100
Код Грея приводится к прямому с помощью преобразования
а, = 2ф6" (8,5)
где Ьг—элемент, стоящий на i-й позиции в коде Грея, а знак ф
обозначает суммирование по модулю 2.
Коды, получаемые из прямого с помощью преобразования
назовем свернутыми СК (т)- Случай m = k соответствует
свернутому коду, описанному в работе [21]. Обратное преобразование имеет
вид (8.6). Так как при преобразовании кодов взаимное располог
жение уровней не меняется, то опщбка воспроизведения в
эквивалентном коде, полученном в результате преобразования, будет
равна ошибке, которую дает первичный код. Учитывая это
обстоятельство и пользуясь методикой определения СКО, предложенной
'В работе [86] для прямого кода, можно получить точное
аналитическое решение задачи расчета СКО для кодов, приводимых к
прямому.
Здесь и далее будем считать, что статистические
характеристики передаваемых отсчетов не зависят от их положения в общей
последовательности, элементы кодовых комбинаций в канале
искажаются независимо. Тогда статистические характеристики
искажений отсчета х\1) будут зависеть только от номера уровня £, а
следовательно, от вида функции распределения уровней
передаваемого сообщения. Таким образом, среднеквадратическая ошибка
передачи будет равна среднеквадратической ошибке,
приходящейся на один отсчет (8.1), т. е. ф=Д2г=д"2.
Предположим, что шкала сообщения ограничена, т. е.
Хупт^Х(t) ^ЛГмакс* Полагая ЛГМИн = И Ломаке
= jtW и следуя [81],
запишем относительную СКО для эквивалентного прямого кода
при равномерном квантовании шкалы на М=2к уровней
7*
195
*-<.-.-.,-?-Ed£r' 1P'<°-,">'(0)+
Jfe A
2£~1.2/-l
+ pai-o)Pai)i+S2l7f^^/(0^1'0^1)'x
,=,,=, ^-^
(8.7)
xPtt/(0, 0) + P._ .(1 + 0, 1-*0)P. Д1, 1)-
_P. .(0->1, I-0)P/f/(0, 1)-P. .(1+0, 0->l)x
XPw(1.0)](l-e(i/),
где Pi(ai)—априорная вероятность появления элемента а{ на 1-й
позиции; Pi,j(ai,a,j) — априорная вероятность одновременного
появления элементов а; и uj на i-й и /-и позициях эквивалентного
прямого кода; Pi(ai-^ai)—вероятность ошибки (перехода
ai-+ai = ai@ 1) на f-й позиции; Pi,j(ai-+aif aj-nij)—вероятность
одновременного искажения элементов на гй и /-й позициях в
эквивалентном коде; бг, j — символ Кронекера.
Если вероятности искажения элементов первичного кода
известны, то с помощью функционального преобразования,
переводящего исследуемый код в прямой, легко находятся указанные выше
переходные вероятности для эквивалентного кода. Более сложной
задачей является установление взаимосвязи между априорными
вероятностями и статистическими характеристиками сообщения.
В случае, когда переходные вероятности в (8.7) не_зависят от
номеров позиций, причем Pi(ai-*ai)=Pf a Pifj(ai-+ai9 aj-HZj)=AS,
где P^S^l, выражение (8.7) приводится к компактному виду
k k
з 2k — i LA U (2k — l)2
X
X [Pit ,(0,0) + Pit ,{\Л)-Ри f(0,l)-Plt ,(1,0)]. (8.8)
Двойную сумму, входящую в (8.8), можно выразить теперь
через дисперсию Дс и среднее значение х квантованного сообщения
[86], так что
1 2*-1-1 Dx + [x-
fi2 = _L_f+i_p(i_5) + 4P5 ^ >—. (8.9)
° * l ^макс '"'мин;
При выводе (8.9) никаких ограничений на вид функции
распределения передаваемого сообщения (в пределах шкалы) не
накладывалось. При х=—(*Макс+*мин) СКО — минимальна. Допуская
это равенство и вводя пикфактор квантованного сообщения,
определяемый соотношением
2 _ Имакс Л'мин) /о 1 г\\
4DX ' ' '
196
из (8.9) окончательно будем иметь
3 2k — 1 v
Отсюда, в частности, следует, что аналоговые сообщения с
различными функциями распределения уровней, но центрированные
и обладающие одинаковым пикфактором при прочих равных
условиях, передаются с одинаковой СКО. Формулы (8.7) и (8.9)
непосредственно применимы, если для передачи используется
прямой код. В несимметричных каналах с вероятностями искажения
нулей и единиц /?0i и р10 соответственно ф-ла (8.7) сворачивается
для центрированного сообщения только при симметричных
функциях распределения и приводится к следующему виду [86]:
*2 = 4" -4±i" fo* 0 - Poi) + fto 0 - Рю)] + A foil + P*Y. (8-11)
6 2* 1 4v2
Можно показать, что при равновероятном появлении уровней
= з^
2*.
тату [152]
„»_* 2*+J
v2 _ з Д-—f поэтому из (8.11) приходим к известному резуль-
2* —1
— 1 9* -|- Г
0 б 2* -1
Poi
+ Рю—jip0i-Piof]- (8.1 Г)
«2- — ■^riJ-/'(1-P) + -T/'a- (8.12)
Если канал симметричный (Poi=Pio = P), то выполняются условия,
при которых выведена ф-ла (8.10'). Так как p<,j(ai-HXb flj-Kij) =
=р2, то для любых функций распределения центрированного
сообщения
1 2* +1 /1 ч,1
-г р(1 —р)+_
3 2* — 1 va
Равновероятному появлению уровней соответствует
62=± ji±i_Ps (8.i2')
3 2* — 1
т. е. ОКО пропорциональна вероятности искажения элемента
кодовой комбинации. Практически при &^4-i-5 v совпадает с пик-
фактором vo исходного аналогового сообщения. При этом
(2h+l)/(2h—l)»lf и при больших длинах кода с высокой
степенью точности можно пользоваться приближенной формулой
^«4[^(1-^i) + Pio(l~Pio)] + -^(Poi + Pio)a> (8.13)
которая в несимметричных каналах справедлива для
симметричных функций распределения, а в симметричных — для любых
функций распределения центрированного сообщения. Из ф-лы
(8.13) следует, что в прямом коде зависимость ОКО от пикфакто-
ра сообщения проявляется лишь при сильных помехах (рои ры>
197
>0,1); при относительно слабых помехах (рои рю<0,1) можно
пользоваться приближенным выражением
Ч»у(Л1 + Ло)- (8ЛЗ'>
Если для кодирования отсчетов используются свернутые коды,
то в эквивалентном прямом коде, как следует из (8.6),
одновременное искажение элементов на i-й и /-й позициях (1фт и }фт)
возможно либо при одновременном искажении элементов на i-й
и /-й позициях и отсутствии искажения на m-й позиции
первичного кода, либо при искажении т-го элемента и отсутствия
искажений i4o и /-го элементов. Тогда в симметричных каналах при
ьфт и ]Фт
Pt, i(at^ah aj+lj ) = p*(l - p) + p(l -pf « p(l -p). (8.14)
При i (или /), равном m, соответствующий переход возможен
лишь при ошибке на т-й и отсутствии искажения на /-й (или i-й)
позиции, поэтому выражение (8.14) справедливо и в этом случае,
т. е. при любых ьф\. При этом
РЛаг^~а1)^\2р{1~Р)'1фт' (8.15)
\р , / = т.
Подставляя (8.14) и (8.15) в ф-лу (8.7), после перегруппировки
членов в суммах получим СКО для кода СК (т)
g2 _i * 2^ + 1 , 1
-[
СК (т) - I з 2k__x
р(1-р)-т^-аР(1-2р).(8.16)
(2* - 1 )а
Из этой формулы следует, что минимальная СКО достигается при
т=£, т. е. для кода СК (к). При &>1 из (8.16) приближенно
находим
4K(»~(j + -jy(l-P)-TPV-2p)- (8-16')
Сравнение (8.16') и (8.13) показывает, что при любых р и vo>2
свернутый код СК (к) обеспечивает меньшую СКО, чем прямой
код. Таким образом, использовать код СК (Л) наиболее
целесообразно при передаче аналоговых сообщений с малым разбросом
уровней относительно среднего значения.
Для кода Грея из соотношения (8.5) следует, что искажение
элемента на i-й позиции эквивалентного прямого кода происходит
при любом нечетном числе ошибок в интервале от i-й до k-й
позиции первичного кода включительно, т. е. для симметричных
каналов
и
/>4(а(-»-а()=Р,= j? C£+V*»+i(l-P)*+1-'-(2m+1), (8-17)
m—О
198
где [z] — целая часть числа г. Одновременное искажение
элементов на 1-й и /-й позициях (*>/) эквивалентного прямого кода
возможно при любом нечетном числе ошибок между /-й и k~ik
позициями включительно и одновременно при любом четном их числе
(включая нуль) между /-й и (i—1)-й позициями первичного кода.
Так как, по предположению, ошибки независимы, то для i>j
т']
-|(-?гг),,,' + ,И7?^р'8'-'^'вд +
Р,.;(о,-а,,ву—в<)-Р, ^iqilf^(l-py-l-"=P,Sil. (8.18)
Подставляя'(8.17) и (8.18) в общую ф-лу (8.7) и учитывая
симметрию априорных вероятностей относительно индексов i и /,
получим
к
б!
AJ V 2* — 1 / '
+ Р; f{ll)-P(j{0,l)-Pif(lt0)]. (8.19)
При равновероятном появлении уровней передаваемого сообщения
в ф-ле (8.19) выражение в квадратных скобках обращается в нуль
и тогда с учетом свойств биномиальных коэффициентов [36]
окончательно находим
{2—l)bg- g g 4 —(1 —2р) ' {b'ZU)
что совпадает с результатом, приведенным в [175]. При k^>\
6f«——4^—. (8.20')
На рис. 8.1 показаны зависимости относительной СКО б2 от
вероятности искажения элемента кодовой комбинации в
симметричном канале для рассмотренных кодов при равномерной
функции распределения передаваемого сообщения (vo=j/"3). В этом
случае наименьшую СКО при прочих равных условиях
обеспечивает прямой код.
Избыточное кодирование. В цифровых системах с избыточным
кодированием каждому передаваемому уровню i (i=l,M)
ставится в соответствие некоторая кодовая комбинация из числа М*>М.
Оставшиеся (М*—М) комбинаций- являются запрещенными, так
что ошибки, сопровождающиеся переходами в эти комбинации,
обнаруживаются, а при известных обстоятельствах [12] частично
исправляются.
Обозначим через Pij = P(j/i) условную вероятность перехода
с i-го передаваемого уровня на /-й разрешенный уровень. Тогда
при избыточном кодировании
£Л, + Лю(0-1. (8.2J)
/-1
199
где Poo(i) — вероятность обнаруживаемой, но не корректируемой
ошибки в кодовой комбинации, соответствующей j-му уровню.
Если при передаче отсчета х\1) обнаружена такая ошибка, то он
не поступает на формирующее устройство и возникает задача
восстановления непрерывного сообщения на интервале [U, tw]. Эта
задача обычно решается различными методами экстраполяции или
интерполяции [21, 178] по зарегистрированным отсчетам, т. е. по
тем отсчетам, в которых ошибки не обнаружены. Таким образом,
результирующие искажения аналогового сообщения
определяются, с одной стороны, амплитудными искажениями зарегистриро-
7zos оз Ю'1 щ;2р ванных отсчетов, а с другой —
ошибками восстановления на тех
интервалах, где отсчеты выпадают из общей
последовательности. При любом
методе восстановления последние
возникают вследствие нарушения
естественного порядка следования отсчетов во
времени. Поэтому в дальнейшем
соответствующие искажения будем
называть временными.
Для удобства количественной
оценки амплитудных искажений
рассмотрим вероятности переходов с уровня
на уровень в зарегистрированных от-
i счетах, т. е.
Рис. 8.1.
Зависимость
относительной СКО от
вероятности 'Искажения элемента
кодовой комбинации для
минимальных 1Кодо?в
ри =
lA Ра
■Роо (О "
/=г
(8.22)
Предположим, что статистические характеристики амплитудных
искажений не зависят от времени. Тогда по общему определению
[21] СКО, приходящаяся на один зарегистрированный отсчет,
будет равна
м м
(Л*)г = £Р^£Р*/А?/' (8.23)
г=1
/=1
аб-
где Р(0—априорная вероятность передачи i-ro уровня;
Абсолютная ошибка при переходе с i-ro на у'-й уровень.
^ Из ф^-лы (8.23) следует простой физический смысл величины
Р ц. Действительно, Р*ц можно рассматривать как вероятность
перехода между уровнями в эквивалентной по структуре переходов
и величине амплитудных искажений системе с минимальным
кодированием. Если вероятность обнаруживаемой ошибки Роо (0 не
зависит от номера передаваемого уровня, .ф-лы (8.22) и (8.23)
упрощаются и, в частности, из (8.23) находим
200
(Д*)2 = Т^Ано> (8.23')
где
м м
Aho = 2P^S^A?/ (8-24)
— СКО, обусловленная необнаруживаемыми искажениями
передаваемых отсчетов.
Для определения влияния амплитудных и временных ошибок
на качество передачи определим результирующую СКО при
восстановлении аналогового сообщения экстраполятором нулевого
порядка, сравнивая восстановленное сообщение с тем же
сообщением, но при безошибочной передаче отсчетов (см. § 8.1).
Предположим, что ошибки в отсчетах статистически независимы,
Роо(0—Роо, а сообщение центрированно и представлено в виде
последовательности квантованных по амплитуде отсчетов {х\1)},
где /=1,L. Пусть также статистические характеристики отсчетов
не зависят от их номеров, а восстановление сообщения на
интервале [U, /z+i), где произошло выпадение (обнаружена ошибка),
осуществляется фиксацией предшествующего
зарегистрированного уровня [203] на этом интервале. Таким образом, на интервале,
соответствующем передаче отсчета x\Q\ будет фиксироваться уро-
л .
вень, соответствующий некоторому отсчету *j£Lw),
зарегистрированному на (I—т)-м интервале. Здесь т=0, 1, 2, ..., /—1; при этом
естественно положить, что при т—1 достоверно регистрируется
нулевой уровень. Следовательно, абсолютную ошибку на 1-й
интервале можно записать в виде
А/ =
f %!1т - ф = [V. ~ *£ J + [ *VL - *П т < I, (8>25)
— х^\ т = 1.
Заметим, что х{/]_т—x\^m=Ai-m—амплитудная ошибка в
отсчете, зарегистрированном на (■/—/п)-м интервале. Случайная
величина ki-m в о'бщем случае зависит только от номера уровня,
передаваемого в момент ti-m. Однако в практических ситуациях эта
связь слабо выражена, что наиболее наглядно проявляется, если
компоновка информационных элементов избыточного кода по
структуре совпадает с прямым минимальным кодом. Используя
приближение слабой связи, из (8.25) находим
'Ц * 2 2 pi-m. i с. я) ^ (/1 о {ди+[ *&■ - Aq)f} +
m=0 i, qt j
+ 2 Ж'>/>,(?) [*$«>]'. (8.26)
9=1
201
где Pi(q) — априорная вероятность передачи q-то уровня в момент
U\ Pi-m,i(i,q) — априорная вероятность передачи /-го и д-го
уровней в моменты ti-m и U соответственно; Р® — вероятность
выпадения /-го и всех предшествующих отсчетов; P(m)(j/i)—совместная
вероятность выпадения отсчетов с /-го до (/—яг-И)-го
включительно и необнаруживаемого перехода с /-го на /-й уровень в
(/—т)-м отсчете. Из последнего следует, что
Р«> = /><,0, (8.27)
■*тЧП?)~Р%оРи, т<1. • (8.28)
Формулу (8.28) можно преобразовать к виду
рс»> (/10 = Pgo (1 _ Рш) р;. = Р(«) Г1Гт<1, (8.28')
где Р(п1) — вероятность появления серии из /п</ выпадений. Если
учесть (8.27), то закон распределения числа подряд выпавших
отсчетов принимает следующее выражение:
КооО—роо). т<1,
р(т)== °°V оо;> ^щ
Коо , /л = /.
Проводя в (8.26) усреднение и используя ф-лу (8.3), получим
^ = & (L) = (А*)» + [О,- (А*)8] ^ -г—^ +
L l — *00
L /-1
+2D* т S Sp(m) [1 ~p NL (8*30)
/«=1 т=»0
где Dx — дисперсия квантованного сообщения;
р(лг)—коэффициент корреляции между (/—т)-м и 1-м отсчетами. Заметим, что
L 1-Х L-X
22**«>-2
22 Л(т) = 2 (^«ми.
Чтобы выяснить влияние корреляционной связи между
отсчетами на СКО, положим, например, p(m)=pim\ Тогда после
суммирования, из (8.30) окончательно находим в относительном
выражении
9m„m + fe-mff^ + ±\!£ffiL-
оо
^оо 1-4 [, / 1 -Роо V (1 - (Р W
[-'О
I 1-Роо [ V-pPooJ I-Pqq
202
(8.31)
Стационарное (установившееся) значение СКО получается из
(8.31) предельным переходом
б* = 11т6*(L) = (б^)"2 + — (1~Р)Я°° . (8.32)
Результирующая СКО складывается и^ CKQ амплитудных
искажений зарегистрированных отсчетов (5*)2 и составляющей,
обусловленной только временными ошибками. Эта составляющая
существенно зависит от степени корреляции между отсчетами и
уменьшается с ростом р. При р=1 временные искажения для
любого значения Роо<1 не влияют на результирующую СКО,
которая, в этом случае определяется величиной (б*)2. Таким образом
СКО амплитудных искажений зарегистрированных отсчетов
является минимальной возможной ошибкой, которая достигается в
системах с избыточным кодированием при р->1. В силу этого (б*)2
назозем остаточной СКО и будем в дальнейшем обозначать ее
через б2ост- Величина о ост для каждого конкретного кода может
быть найдена из ф-л (8.23) или (8.23') по известной для того
кода матрице вероятностей переходов UPtjII на разрешенные
уровни. Из этой же матрицы определяется и вероятность
обнаруживаемой ошибки Роо. Тем самым при наших предположениях
результирующая СКО находится по ф-ле (8.30).
Если для двоичного кодирования отсчетов используются
систематические (п, &)-коды и из k информационных элементов
образованы все 2к = М комбинаций, то в ряде случаев удается получить
точное аналитическое выражение для б20ст, не прибегая к
матрице переходных вероятностей. Однако прежде чем перейти к
примерам расчета СКО, отметим весьма важное при цифровой
передаче аналоговых сообщений обстоятельство, заключающееся в
том, что ошибки, происходящие в разрядах двоичного
представления номера передаваемого уровня, вносят различный вклад в
суммарную величину СКО. Как показано в [28, 190, 191],
применение взвешенной ИКМ с оптимальным распределением
отводимой на передачу отсчета энергии между разрядами позволяет
существенно повысить качество передачи по критерию СКО, хотя
при этом и возрастает вероятность ошибки в отсчете.
Известные преимущества взвешенной ИКМ могут быть
частично реализованы при избыточном кодировании, если (п—k)
проверочных элементов использовать лишь для контроля т старших
разрядов в двоичном представлении номера уровня. В этом
случае уменьшается вероятность обнаруживаемой ошибки и
соответственно СКО временных искажений. Вместе с тем при
соответствующем выборе лг уменьшается и остаточная СКО.
Предположим, что уровни сообщения равновероятны, а
передача кодовых комбинаций ведется по двоичному симметричному
каналу в присутствии нормального белого шума. Если
обнаруживающая способность кода не зависит от структуры кодовой
комбинации, а коррекция обнаруженных ошибок не проводится, то
203
относительную СКО необнаруживаемых искажений в
эквивалентном прямом коде (см. § 8.1) можно записать в виде
i=l t=k—m+l
1 лк—т 1 *k __ Ak—m
= р+ р*9 (8.33)
где р — вероятность искажения неконтролируемого разряда,
равная вероятности искажения элемента кодовой комбинации в
канале; р* — вероятность необнаруженного искажения
контролируемого разряда, зависящая от свойств используемого кода.
Рассмотрим, например, код (k+l9 k)9 обладающий
минимальной избыточностью и обнаруживающий в общем случае любые
комбинации ошибок нечетной кратности в (k+l) элементах. Пусть
теперь избыточный (&+1)-й элемент используется для контроля
т старших информационных разрядов кода. Тогда код (£+1, k)
будет обнаруживать ошибки нечетной кратности в (m+l) элементах
и вероятность обнаруживаемой ошибки определится как
[т/2]
Яоо = У <ЭД P2i+{ (1 - рГ+1~ <2^> = у И - (1 - 2р)т+1 ]. (8.34)
1=0
Вероятность необнаруживаемой ошибки в контролируемом
разряде эквивалентного прямого кода равна вероятности искажения
соответствующего элемента первичного кода и любого числа
ошибок нечетной кратности в оставшихся т элементах, т. е.
[(m-D/2] ,
р* = р 2 C^lp2i+l(l~p)m~(2Ж) —^p[i—(1~2рГ1.
(8.35)
Из полученных выражений для р* и Ррр по ф-лам (8.33), (8.23х)
и (8.32) легко теперь находятся б20ст и б2. Аналогичным образом
можно определить СКО для кодов, которые получаются из
прямого путем повторения т его старших разрядов и общем числе
двоичных элементов, равном n=k+m. Такие (,& + т, &)-коды
позволяют обнаруживать в 2т элементах, соответствующих старшим
разрядам, любые сочетания ошибок нечетной кратности, а также
большое число ошибок четной кратности. В рассматриваемом
случае вероятность обнаруживаемой ошибки равна
т
Роо ~ ! - S С- р2/ (1 ~ рУ (т"° в ' ~ 1р2 + (1 ~~ Р)*]т- (8'36)
Вероятность же необнаруживаемого искажения в одном из
контролируемых старших разрядов эквивалентного прямого кода равна
вероятности одновременного искажения двух соответствующих
204
элементов первичного (k+m, &)-кода при любом числе (включая
нуль) необнаруживаемых ошибок в остальных (2т—2)
элементах. Следовательно,
р*=р* £ c«-ip2i (I _p )2 <т~'~') = р8^+(1 ~p)aim_1 • (8-37)
1=0
Отсюда, как и выше, определяются б20ст и б2.
На (рис. 8.2 показаны зависимости
остаточной .ареднеквадрагш'ческой ошибки и
результирующей СКО пр|и (некоррелированных
отсчетах от вероятности искажения
элемента кодовой комбинации р в канале для
случая m=k=\0. Здесь же для орашения
приведена за(ВИ1си1мо!Сть СКО при минимальном
кодировании уровней. Можно заметить, что
код (2k, k), обладающий большей
обнаруживающей способностью, чем код (£+1, k),
обеспечивает и большее значение б2, тогда
как для него б20Ст почти на порядок меньше,
чем для кода (k + 'l, k).
Более объективные выводы
относительно применения тех или иных кодов можно
сделать, если их сравнение проводить при
одинаковых энергетических затратах на
передачу одного отсчета. Так, если Е
—удельная энергая на один передаваемый отсчет,
а No/2 —> интенсивность белого шума, то при
некогерентном приеме и частотной
модуляции
РВ= 2 еХР( N0 2nJ'
В соответствии с ф-лой (8.38) на рис. 8.3 приведены зависимости
СКО для рассмотренных выше кодов от отношения
сигнал/помеха 2E/N0, приходящегося на один отсчет. В этом случае лучшими
характеристиками и по б20ст и по б2 обладает код (£+1, k). Этот
результат качественно вполне понятен, ибо с ростом п возрастает
и вероятность искажения элемента кода.
На рис. 8.4 показаны зависимости СКО от числа
контролируемых разрядов т, построенные с учетом ф-л (8.34) — (8.37). С
увеличением т растет вероятность обнаруживаемой ошибки,
увеличиваются временные искажения. Однако существует некоторое
оптимальное при заданном отношении 2E/N0 число контролируемых
разрядов, при котором остаточная СКО б20ет достигает минималь-
ного значения. Например, для кода (10+яг, 10) значение б20СТ
(при лг = 4) почти на порядок меньше, чем в случае контроля всех
Рис. 8.2.
Зависимости остаточной
и результирующей ОКО
от отношения сиг.нал/
/шум, приходящегося ;на
один отсчет, для кодов
(20,,10), (14,10) и
минимального кода '(штрих-
пунктир)
(8.38)
205
Рис. 8.3. Рис. 8.4.
Зависимость СКО от отноше- Зависимости остаточной .и
рения сигнал/помеха, приходяще- зультарующей ОКО от числа
гося iHa один отсчет контролируемых разрядов для
кодов i(10+/n, НО) я (1.1,-Ю)
k информационных элементов. Таким образом, оптимальным
перераспределением обнаруживаемых и необнаруживаемых искажений
можно существенно снизить остаточную СКО.
8.3. ОСОБЕННОСТИ ДИСКРЕТНОЙ ПЕРЕДАЧИ
НЕПРЕРЫВНЫХ СООБЩЕНИЙ В СИСТЕМАХ
С ОБРАТНОЙ СВЯЗЬЮ
В процессе передачи по цифровым системам с обратной связью
дискретные сообщения проходят ряд адекватных состояний,
определяющих дальнейшее их поведение и возникающие при этом
ошибки. Благодаря этому удается построить обобщенную схему
'передачи сообщений, а при анализе оперировать вероятностями
переходов из одного состояния в другое, зависящими от
особенностей конкретных систем (см. гл. 2). Такая же методика может
быть использована и при исследовании качества передачи
непрерывных сообщений. Однако в этом случае следует учитывать
весьма важное обстоятельство, заключающееся в том, что при
восстановлении сообщения по отсчетам в общем случае важно знать не
только их амплитуды, но и. взаимное расположение. В связи с
этим на приемную сторону приходится дополнительно передавать
временную информацию.
Таким образом, процесс передачи непрерывного сообщения
сводится к последовательной трансляции отсчетов х\1) и временных
меток h, указывающих положение /-го отсчета на временной оси.
Ограничимся далее периодической дискретизацией, когда U—//-i=»
= Г для любых I и период Т известен на приемной стороне. Тогда
для восстановления сообщения достаточно знать только амплиту-
206
ды хф отсчетов, которые могут передаваться либо в темпе
дискретизации без нарушения временного* масштаба (в реальном
времени), либо с другим темпом, определяемым характеристиками
канала связи. В первом случае, который назовем передачей с
детерминированным тактовым интервалом, каждый новый
отсчет поступает в канал через интервал времени Т. Следовательно,
обратная связь может быть организована лишь при ТП<^Т (где
Ти — период повторения отсчета после обнаружения ошибки).
Практически преимущества обратной связи начинают
проявляться при Т^ (3~-5)ГП. Возможность такой передачи возникает,
например, в системах телеуправления, где, как правило, имеется
большой относительный резерв времени.
В некоторых ситуациях отсчеты сообщения вначале
накапливаются в запоминающем устройстве, расположенном на
передающей стороне," а затем последовательно передаются с высокой
скоростью в течение сеанса связи. При этом каждый новый отсчет
поступает в канал сразу же после окончания цикла передачи
предыдущего отсчета. Таким образом, информация проходит по линии
связи плотным потоком; назовем этот вариант плотной
передачей отсчетов. При плотной передаче системы с обратной связью
функционируют так же, как и при передаче дискретной
информации. Следовательно, в этом случае полностью применима
обобщенная схема (см. гл. 2). ,
8.4. СТРУКТУРА ПЕРЕХОДНЫХ ВЕРОЯТНОСТЕЙ
ПРИ «ПЛОТНОЙ» ПЕРЕДАЧЕ
При дискретной передаче непрерывных сообщений и средне-
квадратическом критерии качества1 в системах с обратной связью
важньгм является то, каким конкретно искажением (первого,
второго или третьего рода) сопровождается передача отсчетного
значения функции х\1) .В целях наглядности и простоты
интерпретации, последующих результатов будем считать, что служебные
знаки не квитируются и не перепутываются с основной информацией.
Такая постановка вопроса позволяет получить достаточно общие
выводы для основных типов систем с обратной связью.
В соответствии, с общими принципами работы систем с
обратной связью, описанными в гл. 2, в табл. 8.2 показаны адекватные
состояния и последовательности событий (переходов) за цикл,
приводящие к этим состояниям в системах с ИОС, РОС и
комбинированной обратной связью (КОС). Под системой с КОС
понимается такая система, в которой используются избыточное
кодирование в прямом канале для обнаружения ошибок (как в
системах с РОС) и квитирование для обнаружения ошибок на
передающей стороне (по принципу работы ИОС). Служебные знаки
подтверждения и отрицания при КОС передаются и по прямому
(и©, "0) и по обратному (у©, v@) каналам. Такая система
является очевидным обобщением ИОС и РОС.
207
ТАБЛИЦА 8.2
Состояние 1
В
РГ
т
нз
Последовательности образующих событий в системах с
иос
xl ^ xl П Уl -*"
A(i) л
xl ^xl П.У1 ^
л л
л
РОС. | КОС
л
^*0
л
^*0
'р-^П*®-^
ИОС (В) U РОС (В)
ИОС (РГ)
ИОС (Н2) U РОС (Н2)
ИОС (НЗ)
Поя'сним выражения и символы, принятые в табл. 8.2, на
примере состояния Н2 (выпадение отсчета х\1) из последовательности
переданных после окончания цикла). Символами ft и U
обозначены соответственно логическое произведение (совмещение) и
логическая сумма (объединение) событий, стоящих слева и справа
от них. В системах типа ИОС состояние Н2 достигается при
появлении в течение цикла следующей последовательности событий:
1) переход передаваемого сообщения (отсчета х\1)) в прямом
л .
канале в сообщение х(/>, соответствующее некоторому уровню /;
л .
2) переход квитанции у^\ соответствующей x\j), в у\1)
обратном канале, так что принятая квитанция соответствует отсчету
х{/\ переданному по прямому каналу;
3) переход в прямом канале сигнала подтверждения % в
сигнал отрицания U0.
Л
В результате х{р стирается как ошибочно принятый отсчет, а
передатчик прямого канала приступает к трансляции xi+\. Таким
образом, 1-я отсчет выпадает из- последовательности переданных.
)В системах с РОС ошибки обнаруживаются на приемной
стороне прямого канала. Для этой цели, помимо собственных обла-
208
стей принимаемых сообщений или сигналов, вводится так
называемая область сомнительного приема или область неопределен-
ности Э. Область Э может быть организована, например, сужением
собственных сигнальных областей и выделением таким образом
некоторой промежуточной зоны неуверенного различения
сигналов. При избыточном кодировании 8 образуется совокупностью
запрещенных кодовых комбинаций. Следовательно, в системах с
РОС состояние Н2 достигается при переходе х\1) в некоторое со-
общение %[у)е9 и последующей трансформации в обратном канале
л
знака отрицания в знак подтверждения (^0->^©).
Наконец, в комбинированных системах переход в Н2
возможен либо при зеркальном искажении сообщения в прямом
канале и квитанции в обратном при трансформации О -^-0 в прямом,
либо при обнаружении ошибки на приемной стороне прямого
канала (х(р ^x^^Q) и трансформации 0-КЭ в обратном канале.
л
Состояние РГ соответствует регистрации отсчета х\}) с
последующим переходом к передаче Xi+X. Остальные обозначения
соответствуют обозначениям, принятым в гл. 2.
Предположим, что события, связанные с переходами в
адекватные состояния, статистически независимы, а каналы стационарны
во времени. Тогда совместные вероятности переходов в эти'состоя-
л
ния и искажения вида х\1)-*~х*р в прямом канале не зависят от
номера отсчета / и легко находятся исходя из табл. 8.2. Формулы
для вычисления этих вероятностей приведены в табл. 8.3.
ТАБЛИЦА 8.3
Вероятности
исходов
рът)
РрГ(//0
Рт (//«')
ЯнзО'/О
иос
Рц^-р'п)х
ХР(0/0)
РцР'цР(®!®)-
РцР'цР(0/®)
р«{1-р'»)х
ХР(®/0)
РОС
p(%[kWp)x
ХР' (0/0)
РцР' (©/©)
p(%\kWp)x
ХР'(®/0)
РцР' (01®)
кос
pli(l-p'ji)p(0/0) +
+ Р'(%\к)/х\1))Р'(0/0)
РцР'цР(®1®)
РцР'цР(01®) +
+ Р(%\к)/х\1))Р'(®/0)
Ри{1-Р'ц)Р(®/0)
209
л
В табл. 8.3 Pi^=P(xilf) /х{р) —вероятность перехода сообщения
хр с /-го на разрешенный /-й уровень в прямом канале; Р'ц =
л
~Р{у\ 1у\!))—вероятность перехода квитанции, соответствующей
л
х[^(т. е. /-му уровню), в квитанцию, соответствующую /-му
уровню в системах с ИОС и КОС; Р(0/0) и Р'(0/0) —вероятности
соответствующих переходов служебных знаков в прямом и
обратном каналах; Р(х\к)/х\£))—вероятность перехода х\()в некоторое
запрещенное сообщение (сигнал) в прямом канале.
Так как переход системы в какое-либо состояние за цикл,
сопровождающийся каким-либо искажением отсчета в прямом
канале, — достоверное событие, то
м
V [Рв (//О + РРГ 070 + Рт 070 + Рнз 070 ] - 1 • (8.39)
В этом легко убедиться непосредственно из табл. 8.3, если учесть,
что
Р{010) + Р(О/0) = Р(0/0) + Р(0Ю) = 1, (8-40)
Р' (0/0) + Р' (О/0) = Р (О/О) + Р' (0/G) = 1. (8.41)
Кроме того,
Р'=1. (8.42)
1'и
/-1
В системах с ИОС также
2^-1, (8.43)
/-1
а в системах с РОС и КОС
м k
£' Р„ = 1 - V Р<( X(W>) =■ 1 - Р00 (0, (8.44)
/-1 А—1
где Poo(i) — вероятность возникновения обнаруживаемой и неис-
праъляемой ошибки в сообщении х^1\ переданном по прямому
каналу. Величина Poo(i) определяется обнаруживающими
способностями используемого кода или размером области
неопределенности.
8.5, ЭКВИВАЛЕНТНАЯ ВЕРОЯТНОСТЬ ПЕРЕХОДА
МЕЖДУ УРОВНЯМИ
На передачу отсчета х\1) в системах с обратной связью
обычно отводится некоторое число гт>1 циклов. Каждый цикл
начинается последовательностью событий, ука'занных в табл. 8.2, и
заканчивается переходом системы в то или иное адекватное со-
210
стояние. Предположим, что структура переходов в эти состояния
у всех циклов одинакова, а сами* циклы проводятся в
независимых условиях.
Л
Отсчет х\[\ принятый по прямому каналу на r-м цикле
передачи х\1\ будет зафиксирован и передан на формирующее
устройство лишь тогда, когда этот цикл завершится переходом системы
в состояние РГ или НЗ. В противном случае отсчет х\1) либо
выпадает ('переход в невозвратное состояние Н2), либо цикл его
передачи повторяется при г<гт (переход в возвратное состояние В).
Таким образом, пр аналогии с ф-лой (8.22) можно ввести в
рассмотрение эквивалентную вероятность перехода между
уровнями за цикл, которая при наших предположениях не зависит от
номера цикла и равна
^""^^ГГр^о-- (8'45)
где
м
РРгЮ"\]РРг(/70, (8.46)
м
Pm(0==VPH3070 (8.47)
/-1
—вероятности того, что цикл передачи х{р закончится переходом
системы в состояния РГ и НЗ соответственно. Так как при
переходе системы в состояние РГ или при первом же переходе в состоя-
л
ние НЗ принятый отсчет x\j) фиксируется и передается на
формирующее устройство, то величина Р*ц также будет определять
возможные амплитудные искажения отсчетов после того, как
использованы все гш циклов, отводимых на передачу х(^
Пользуясь табл. 8.3, определим P*ij для рассматриваемых
систем с обратной связью:
(Г \ - [1-(Р® + Р0)]Р"Р'и + Р0РЧ ,о 4^
V 07ИОС ~ ^ ' (0.40)
[i-(%+p0)]Sp^+p0
/-1
s*«
/Р- ч _ У~{р® + Р0)1рчр',с + Р0ра ,« m
I1 - (p® + p0)] £ W'u + p0 P - poo <<)]
/-1
211
В этих формулах для сокращения записи через Ро обозначены
вероятности искажения соответствующих служебных знаков.
Функционирование любой системы с обратной связью
основано на введении избыточности в передаваемые сообщения. При
использовании кодовых методов число избыточных элементов
определяется в системах с ИОС длиной квитанции s' в обратном
канале, в системах с РОС числом контрольных элементов s в
прямом канале, а в системах с КОС суммой (s + s'). Если число
информационных элементов равно k, в системах с ИОС и КОС
УЛ,р;, = 1~роо(0, 8.51)
где Р'ооО) — вероятность обнаруживаемой ошибки в коде
(k+s\k)\ в системах с РОС и КОС Роо(г)— вероятность
обнаруживаемой ошибки в коде (k + s, k).
Из соотношений (8.49) и (8.50) следует, что эквивалентные
вероятности переходов между уровнями за цикл в системах с РОС
и КОС не зависят явно от вероятностей искажения служебных
знаков в обратном канале. Этот результат есть следствие того,
что служебные знаки в обратном канале передаются лишь после
л
того, как принято какое-то решение относительно сообщения х\1).
Из (8.49) также видно, что (Р%-)рос структурно совпадает с
эквивалентной переходной вероятностью Р%- в односторонних
системах (8.22).
Рассмотрим теперь более детально ф-лу (8.48) и проследим,
как изменяется (P*ij) иос при искажении отсчетов и служебных
знаков в прямом канале и квитанций в обратном. Предположим,
что s'=\k (полная ретрансляция), и выделим особо подканал
передачи служебной информации. Для удобства записи с учетом
(8.51) перепишем (8.48) в виде
ТОиос = П - Q (01 Р"Р" + Q (0 Ри, (8-48')
где А
Q (0 = ^ , = . (8.48")
V-{p®+p0)]ll-poo(i)] + P0
Так как в симметричных каналах Я©+^0^1, то Q^.Q(i)^.\.
Отсюда
PilP,i
роо(9
<(p'l,)«oc<ptJ> '*/'• (8-48"0
Нижняя граница в (8.48'") достигается при Q(i)=0, т. е. при
безошибочной передаче знака отрицания (^0-0); верхняя — при
Q(i) = ly т. е. либо при Р©+/>0=-1 (служебный подканал
полностью подавлен помехами), либо при P'oo(i)-+l9 что выполняется
при М^>1 и Р'н=\/М (подавлен помехами обратный канал). При
212
безошибочном обратном канале нижняя граница в неравенстве
(8.48'") переходит в нуль. Так что при Р'^ = 6^ и Р0=О система
с ИОС обеспечивает безошибочную передачу отсчетов. Следует
только иметь в виду, что речь идет об отсчетах, поступающих на
формирующее устройство. Поэтому полученный результат может
быть достигнут при ограниченном гт ценой потери определенного
числа отсчетов либо при гт=оо ценой больших задержек, т. е.
снижения скорости передачи.
Интересный результат получается при Р@=0 и Pij=\jM
(прямой канал полностью подавлен помехами). В этом случае
(P*ij) iioc = P'ij, т. е. искажения отсчетов определяются
переходными вероятностями наиболее помехоустойчивого в данной
ситуации обратного канала. Если при этих условиях использовать
укороченную- ретрансляцию с числом квитанций М'<М, то
происходит как бы переход на более грубое квантование отсчетов.
8.6. ОСТАТОЧНАЯ СРЕДНЕКВАДРАТИЧЕСКАЯ
ОШИБКА
Используя полученные выше результаты по аналогии с односторонними
системами (см. § 8.2), можно определить остаточную СКО в расчете на один
зафиксированный, т. е. подтвержденный, отсчет
М М
1=1 /=1
В системах с РОС, как следует из 1(8.49), остаточная СКО аналитически
совпадает с СКО в односторонних системах при идентичных кодах. Это
позволяет для расчета остаточной СКО воспользоваться теми соотношениями,
которые получены в § 8.2. Для систем с ИОС ф20ст существенно зависит от
качества передачи служебных знаков и от состояния обратного канала. Опустим
для упрощения записи знак «штрих» у вероятности обнаруживаемой ошибки
Роо и определим остаточную СКО для системы с полной ретрансляционной
ИОС при условии, что прямой и обратный каналы симметричны, а отсчеты
передаются минимальным кодом (см. § 8.2) длины &, так что M = 2h. Тогда
Ptl=pd4{l-p)k~d4, (8.63)
P'u = 0>')d" V-P')k dih
2
ij=W) " li-P'\ '" (8.54)
м
РцРц = * - ^oo W = f(1 - p) (1 -p')+PP']k•• (8.55)
где p и p' — вероятности искажения элемента кода в прямом и обратном
каналах соответственно, a dij^=d3i — расстояние по Хэммингу между
комбинациями, соответствующими i-му и у-му уровням. Отсюда
-^^ = ^(1-^/. I*»)
где рэ — эквивалентная вероятность искажения элемента кода в системе с
полной ретрансляцией при безошибочной передаче служебных знаков, равная
РР'
(1 —Р)(\ ~р )+ Рр
213
Таким образом, как следует из сопоставления (8.56) и (8.53), структура
остаточных искажений при безошибочной передаче служебных знаков
совпадает со структурой искажений в односторонней системе. Так что, подставляя
(8.48) в общую ф-лу (8.52), находим
(V)noc~V-Q)tl+Q6l
(8.58)
где Q определяется выражением (8.48") н_зависит, главным образом, от
вероятностей искажения служебных знаков; .620 — СКО в соответствующей
односторонней системе, определяемая формулами, полученными в § 8.2; 62э —
остаточная СКО при безошибочной передаче служебных знаков, определяемая
аналитически по тем же формулам, что и б20, но с заменой вероятности искажения
элемента р на эквивалентную вероятность ошибки рь (8.57). В частности, при
равновероятном появлении уровней аналогового сообщения, которое передается
прямым кодом длины &^>1,
1
«
'1{1-Q)Pb + QpI
(8.59)
Для иллюстрации на рис. 8.5 приведены зависимости остаточной СКО с учетом
ошибки квантования
8* =
12 (2Л — I)2
(8.60)
от вероятности искажения элемента р в прямом канале при р'—р для &=5 и 10
и различных вероятностях искажений служебных знаков Рq< ==^>®=^о* Срав-
нение с односторонней системой показывает, что при достаточно надежной
передаче служебных знаков уровень ошибки квантования о2кв достигается в
нашем случае при вероятностях ошибки в прямом канале на два-три порядка
больших, чем в односторонней системе. С улучшением качества обратного
канала это преимущество возрастает.
Однако следует иметь в виду, какой
ценой этот выигрыш достигается. На
рис. 8.5 пунктиром показаны
зависимости среднего числа повторных
отсчетов от р. В области сильных
помех резко возрастает число
повторений, а значит, растут и
энергетические затраты на передачу отсчета.
Поэтому для правильной оценки
возможностей систем с обратной связью
необходимо учитывать это
обстоятельство. В области /ср<0,1 дополни-
Ъ1)*
<юо70
10
10
10
tri1
1U
К?
if
4*
\
\
\
\
\
11
ht
i
\jr-10
T* К
>\
&v\
.$<C
\
К
i* tf
\nr
ati
4v
?
\w
,-
V f\
%
\
\
rs to
V
4\
k*5
V
с
-' ю
V
^
v.
•* p
\mo
Рис. 8.5.
Зависимости остаточной СКО и
среднего числа повторных передач
(пунктир) от вероятности искажения
элемента р в прямом канале при р'=р
и различных вероятностях
искажений служебных знаков для системы
с полной ретрансляцией ИОС (штрих-
пунктиром показаны
соответствующие характеристики односторонней
системы)
214
тельные энергетические затраты в прямом канале относительно невелики, и в
этом случае следует ожидать наилучшее качество передачи по сравнению с
односторонними системами.
При Роо<1 и ^0<1 коэффициент Q~?0- Если />0<1, то из (8.59)
ЖГ*-у (рэ+р0р)- (859,)
где рэ<0. В случае безошибочного обратного канала /?э=0 и повышение
качества передачи отсчетов может быть достигнуто только за счет снижения
вероятности искажения знака отрицания. Требования к достоверности передачи
квитанций по обратному каналу определяются соотношением (8.59), если
заданы р и Р0 либо по р и р' найдена величина Pq, обеспечивающая необходимое
качество.
В 'системах с РОС остаточная СКО в явном виде от достоверности
передачи служебных знаков не зависит. Вместе с тем для их передачи требуются
определенные энергетические затраты в обратном канале. В этих системах
остаточная СКО, как и в односторонних системах, может служить критерием для
оценки качества и сопоставления различных систем при прочих одинаковых
условиях, если не принимать во внимание возможные временные ошибки. В
системах с обратной связью нарушение взаимного расположения сообщений
(отсчетов) в общей последовательности происходит в основном за счет ошибок
при передаче служебной информации, тогда как в односторонних системах —
за счет той или иной реакции приемника на обнаружение ошибки. При
повышении обнаруживаемой способности кода временные ошибки в односторонних
системах являются преобладающими (см. § 8.2) и остаточная СКО
принципиально не достигается, а в системах с обратной связью для той же
обнаруживающей способности СКО, равная б20ст, может быть получена при надежной
передаче служебных знаков.
8.7. СРВДНЕКВАДРАТИЧЕОКАЯ ОШИБКА
ПРИ «ПЛОТНОЙ» ПЕРЕДАЧЕ
В' случае «плотной* передачи каждый новый отсчет поступает на вход
прямого канала лишь после того, как заканчивается процесс передачи предыдущего
отсчета, состоящий, возможно, из г циклов. Поэтому при конечной
достоверности передачи служебных знаков на приемной стороне не известно точно,
повторяется ли еще отсчет х\ или же началась трансляция следующего отсчета
Xi+i. Вследствие этого после максимально возможного числа тт циклов
передачи х\ этот отсчет может выпасть из общей последовательности либо ему
могут соответствовать несколько ложных отсчетов (вставок). Подобные
исходы следует классифицировать как ошибки. Каждая такая ошибка
сопровождается сдвигом всей последовательности зафиксированных отсчетов
относительно последовательности переданных.
Если последовательно перенумеровать переданные и зафиксированные
отсчеты, то принятому и подтвержденному- отсчету X ^ ' может на самом деле
соответствовать отсчет xi , являющийся следствием передачи ху , причем
цфп. Если после передачи L отсчетов на приемной стороне зафиксировано
Л Л ,, v Л
/z<;L отсчетов, то Хкп ' =0 для п>п. В этом случае абсолютную ошибку на п-й
позиции можно представить в виде
д<*.*> = x(k) _,<<> = | Х< *"• П ^ (8.61)
—xll) п> п.
215
л
В свою очередь, для п^.п выражение (8.61) целесообразно переписать как
д<<.*> =[ty) _ ,U>] + [ ХЩ _,<0] = д(1.» + ( ,<»> _,<<>] f (8.610
где i, k к I — случайные номера уровней аналогового сообщения, a q — индекс,
связанный со случайными сдвигами в последовательности принятых отсчетов.
Для расчета СКО необходимо знать совместные статистические
характеристики этих параметров. Обозначим через ^п(Я\ l~+k) вероятность того, что на
/1-й позиции в последовательности принятых отсчетов зарегистрирован xyQ' , яв-
Л(0
ляющиися результатом искажения отсчета хуп' , переданного на q-н позиции.
Пусть также JPa (0)—вероятность того, что на л и позиции отсчет не будет
L м
зарегистрирован, т. е, л>п; ^ ^ ^п(я\ l-**k) —вероятность того, что на /г-й
<7=i k=\
позиции будет зафиксирован какой-либо отсчет из последовательности L
переданных. Тогда, очевидно,
L М
2 2 *n{q; l-+k) + &n(0)=U (8.62)
так как левая часть равенства (8.62) есть вероятность достоверного события.
Для упрощения выкладок предположим, что число циклов передачи одного
отсчета не ограничено (гт = °°), и обозначим через sq число отсчетов,
зафиксированных после окончания трансляции х^ ' , так что sq—0, 1, 2,... Исходя из
обобщенной схемы передачи сообщений с обратной связью без квитирования
служебных знаков, находим, что
, Л-Т9 5=0,
P(s) = \ m ' (8-63)
А As-1
^рг ^нз , s > 0,
АЛЛ
где Рнг, Рпз, Рр^ —вероятность первого достижения соответствующих
состояний в процессе повторений х^ , т. е.
Л Рт (0
Л РНЗ (I)
p™=-r^W' (8-65)
Кг= РРГ(1) +Р™{1)Р™(1). (8.66)
Рг i-PB(i) ^ [1-Рв(01а 1 '
В ф-лах (8.64)—(8.66) фигурируют вероятности достижения адекватных
состояний за цикл, которые были определены выше. Так как по предположению
(см. § 8.5) циклы передачи одного или различных отсчетов проводятся в
независимых условиях, то
п м-1 \
»n{q\ 1-+-*)= 2 рЬя>т\ /^*}PJV sv = n-m 1
m=l lv=l J
(8.67)
216
где Р { ^. Sv=n—m\—вероятность того," что после передачи [q—1) отсчетов
lv=l J
на приемной стороне зафиксировано (п—т) отсчетов; P{sq^m\
l-*k)—вероятность того, что q-u отсчет зафиксирован т или более раз и при т-к
регистрации произошел переход xq ^~*xq .
Пользуясь табл. 8.3 и выражениями (8.63) — (8.66), можно показать, что
P{sq>m; l-+k} = P*lkP{sq^m}, (8.68)
где P*ik — эквивалентная вероятность перехода между уровнями / и k за цикл
(см. § 8.6), а
Р {Sq >т} = Pg-l (l - Рш) т {8Щ
К этому же результату, очевидно, можно было бы прийти и из тех
соображений, что искажения служебных знаков, определяющие величину sg, не зависят
от искажений кодовой комбинации, определяющих переход х^-*-х^* . Таким
образом,
&n(q; 1-+Ь)=Р]к0>п(Я), (8.67')
где &n(q)= V P{Sq^m}P П? sv=n- ml. (8.70)
m=l lv=l J
В силу того что общее число зафиксированных отсчетов равно
L
-2
v=l
(8.71)
находим, наконец,
^»(0) = Я J] «у<я • -(8.72)
Если вероятности элементарных событий, входящие в ф-лы (8.64) — (8.66),
не зависят от номера передаваемого уровня, что выполняется, например, в
симметричных каналах, то из (8.61) и (8.6Г) легко определить
результирующую СКО.
Для стационарного сообщения (см. § 8.1) с нулевым средним значением
М
МК'ТЬ Е'оКТ-ъ. (8-73)
t"=l
"^i{[^l)-x^]2[q}^2DxU-9x(q, n)], (8.74)
где Dx — дисперсия отсчетов квантованного сообщения; px(q, n) — коэффициент
корреляции между q-м и п-м отсчетами в передаваемой последовательности.
Кроме того, для прямого кода практически
Щ{*<*-1)[*У>-$>]\Я)*>0. (8.75)
поэтому СКО, приходящаяся на /г-й зафиксированный отсчет, равна по
абсолютной величине
L
А2п » ^ &п (Я) { Д? + 2DX [1 - рх (q,n)]} + *>„(0) Dx% (8,76)
q=\
217
где А1«г=А*оот определяется по формулам, полученным в § 8.7. Отсюда
находим результирующую СКО в расчете на L переданных отсчетов:
L L L
Л *^L + \ J] &п (0)[DX - АД + -J- £} JJ ^rt(^[l-p^,«)]Dv, (8.77)
n=l n=l <7=1
Обычно А2ост<^х, поэтому (8.77) можно переписать в виде
L L L
"*£ »"*L + Y J] ^ (°) ^ + \ J] J] *» W П - Р* (* л)]. (8.77')
п=\ /1=1 <7=1
Два последних слагаемых в ф-ле (8.77') характеризуют временные ошибки,
возникающие при «плотной» передаче. Первое из них определяет возможную
ошибку за счет укорочения принятой последовательности отсчетов, а второе —
взаимную ошибку, обусловленную ложными вставками и выпадениями
отсчетов. Как видим, эта последняя составляющая зависит от степени
корреляционной связи между отсчетами и при прочих равных условиях достигает
максимального значения для случая некоррелированных отсчетов.
Предположим далее, что
Px(q, я)= 6д,п={1[ \ ,1' (8-78)
т. е. отсчеты некоррелированны. Для этого наихудшего случая из (8.77')
получим
врем
где
ост+ AL_0.. ' (8.79)
"Д| » 2DX 4" Y. [ 1 —~ ^п(0) - 0>п(п)
я=1
(8.79')
Входящие в (8.79') вероятности &п (0) и {Рп (п) определим из
соотношений (8.63), (8.69), (8.70) и (8.72), пользуясь методом характеристических
функций. Опуская громоздкие комбинаторные преобразования, будем иметь:
L—п г
П Л ..Л, Л Л Л lL—1—n ., ,
*>„■«)) = п J Р$' Plm L />РГ - />Н2 РНз J <£" <£-!+/ , (8.80)
/-о
^Я(я) = (1-Явд) £ (^^зН^рг-А^^нзГ""1^ ^/<£-,+,, (8.81)
Строгое аналитическое исследование СКО временных искажений по ф-ле
(8.79') наталкивается на определенные технические трудности. Однако
некоторые общие закономерности можно проследить, пользуясь определениями «^(0) и
fPn (я). Из (8.70) и (8.72) следует, что для любых конечных п
lim &>п (0) = lim^R (п) « 0 (8.82)
и, следовательно,
lim A? = 2Д*.
L-<» ^вреи Л (8.82')
218
Таким образом, с ростом числа передаваемых отсчетов временные искаже-
Л Л
ния имеют тенденцию к накоплению при любых Рнг и Put, отличных от нуля.
Так как при временных сдвигах отсчетов средняя мощность восстановленного
сообщения не изменяется [204], то результат (8.82') говорит о том, что
временные ошибки при L-+<x> приводят к полной декорреляции принятого сообщения
по отношению к переданному. При больших L временные ошибки могут стать
преобладающими и целиком определят качество передаваемой информации в
рассматриваемых системах. Поэтому целесообразно выявить характер
зависимости А| врем от L и привести ее к удобному для практического использования
Л Л Л Л
виду. В двух крайних случаях — Рнз^Рнг^О и Рн2>ЯНз = 0 — из (8.79) —
(8.81) легко находятся выражения для Л|врем в свернутом виде. Действитель-
Л
но, при Рн2=0 (отсутствуют выпадения отсчетов)
#я(0) = 0,
&n(n) = (l-Pm)
п-\
(8.83)
поэтому
к
врем
«2£>,
1 1
-('-^нзГ
i-(i-K3) J
(8.84)
Если LP-b.i4Z.-1, то с достаточной для практики точностью находим
А?
£—»(£-!) ЯнзДс-
(8.84')
Аналогично при Рнз=0 (отсутствуют ложные вставки)
^„(0) = < P<b2(i-Pmy
L—n
(8.85)
*>»(»)=(i-*юу,
откуда
Af.
а при LPhj<i1
2D J l
2
л
1-Я,
Н2
Н2'
А1.
Л
f»LP,
т
Dx
l-V-Pmf
(1.
Л
РН2) J
(8.86)
(8.86')
В общем случае из (8.80) и (8.81) находятся нижние границы для $°л(0)
и & п(п), соответствующие члену с ^0 в этих суммах. Соответственно из
Л
(8.79) определяется верхняя граница для СКО, которая при Х^Ю и L(Pn$+
А
+^нз)<!1 практически совпадает с точным значением и равна
Т2 л а
219
(8.87)
Для систем с ИОС и РОС
1_-/oo(1~-/0)
а значит, если #0^^0» то ПРИ ^оо<1
Яю+^нз**© (8.88')
и, следовательно, временные ошибки в этом случае определяются, главным
образом, вероятностью искажения знака подтверждения, т. е. основным
источником этих ошибок являются выпадения отсчетов в системах с ИОС и ложные
вставки в системах с РОС.
При заданном числе L передаваемых отсчетов требуемая величина AL
может быть получена соответствующим снижением Pq и р0, используя,
например, дополнительное квитирование служебных знаков. Причем при Р™ « Pq
достаточно квитировать лишь знак подтверждения. В системах с РОС
временные ошибки устраняются при безошибочном обратном канале, так как_по нему
идет передача служебной информации. Для систем с ИОС величина А20ст
существенно зависит от величины Р™, а временные искажения определяются
величиной Pq (8.88'). Поэтому при ограниченной энергии, отводимой на
передачу служебных знаков, может быть поставлена задача рационального ее
распределения между знаками подтверждения и отрицания в различных
конкретных ситуациях.
Если задать допустимую величину временных искажений, то по ф-ле (8.87)
находится максимально возможное число отсчетов Lm, которые можно
передать с этой точностью. Тогда при L>Lm) производя разбиение исходной
последовательности на блоки по Lm отсчетов в каждом и осуществляя после
передачи такого блока временную привязку, можно локализовать временные
ошибки. В результате этой процедуры заданная величина СКО достигается без
накопления временных искажений при увеличении L. Временные ошибки следует
принимать во внимание лишь в тех случаях, когда важен порядок следования
отсчетов во времени. В некоторых системах со сжатием исходной аналоговой
информации передача нового отсчета сопровождается указанием его временной
координаты. При этом при достаточно надежной передаче временной
информации можно избежать сдвига последовательности принимаемых отсчетов
относительно передаваемых или, по крайней мере, резко сократить влияние
временных искажений на качество передачи.
8.8. СРАВНЕНИЕ СИСТЕМ ПО КРИТЕРИЮ
СРЕДНЕКВАДРАТИЧЕОКОЙ ОШИБКИ.
ПОРОГОВЫЕ ХАРАКТЕРИСТИКИ
Сравним рассмотренные выше системы по критерию СКО, не
накладывая ограничения на полосы частот, которые они занимают.
Такое сравнение имеет смысл, если замедление скорости передачи
отсчетов за счет механизма повторений и передачи служебной
информации в системах с обратной связью относительно мало. При
рациональном построении таких систем и нормальных условиях
работы это условие обычно выполняется. При этом различные
системы можно сравнить между собой по величине СКО при
заданных энергетических затратах на передачу одного отсчета либо по
величине энергетических затрат при заданной СКО [21].
220
В системах с обратной связью энергия Еи затрачиваемая на
передачу отсчета за один цикл, перераспределяется между
прямым и обратным каналами, а в системах с ИОС дополнительно в
прямом канале между информационными и служебными
символами. Для систем с ИОС
Ei = Ех инф + £1Сл + £io6p* (8.89)
где £io6p = £kb — энергия, затрачиваемая на передачу квитанции
в обратном канале за цикл. Въедем параметры, характеризующие
парциальные составляющие энергии Е\\
I - ^- , (8.90)
&1 инф
Р = ^^, (8.91)
^1 инф
к - &-, (8.92)
где ^0 и е0— энергии, отводимые на однократную передачу
знаков отрицания и подтверждения соответственно.
Определение параметров по ф-лам (8.90) — (8.92)
представляется наиболее целесообразным, так как позволяет варьировать
значениями £гсл и Е\ обр независимо от величины £цтф. Пусть в\ —
энергия, отводимая на передачу одного информационного
элемента кодовой комбинации в прямом канале. Тогда, если отсчету
соответствует /^-элементная кодовая комбинация:
Е1шлФ = кеи (8.93)
£io6P = P*ei=l(i — k)e[, (8.94)
Ei*=lkel9 (8.95)
где е\ — энергия, отводимая на передачу одного элемента (п—k)-
элементной квитанции в обратном канале. Величина Е\ Сл с
учетом вероятности передачи того или иного служебного знака
может быть представлена в виде
£юл = Роо%+ (1 -Роо)*@ = e@[l "(I -k)Poo], (8.95')
где Роо — вероятность обнаруживаемой ошибки в коде (п, k). Из
(8.93) —(8.95) находим
в; = р-*-в1, (8.96)
П — к
е0 = и е&, (8.98)
Ei пр = £инФ + Е1 сл = (1 + I) кеъ (8.99)
221
а также
£1= ^mp + Ex ^ = (1 + g + P) A*!. (8.100)
Для нахождения энергии, затрачиваемой на передачу одного
отсчета^ достаточно Е{ и ^щр умножить на среднее число
повторений г, определяемое по формуле
7= 22-.
В системах с РОС энергия, отводимая на однократную
передачу отсчета в прямом канале, равна
Eln? = neL, (8.101)
тогда как
Ег обр = Е1сЛ = 1Ег пр =lnelt (8.102)
Ъ= ^ . (8.103>
Предположим, что в прямом и обратном каналах действует
нормальный белый шум с одинаковой интенсивностью N0/2.
Примем, что для передачи сообщений, квитанций и служебных
знаков применяется частотная модуляция, а прием некогерентный.
При этих условиях необходимые вероятности искажения
элементов кодовых комбинаций и служебных знаков определяются как
'-Х-Й-'-тЧЧК-т'Ч-^)-
где PQ—вероятность искажения служебного знакаО«или &•
Ограничимся теперь случаем гт=оо и сравним по величине
остаточной С КО одностороннюю систему с минимальным кодом,
систему с РОС, использующую в прямом канале код (&+1, &), с
контролем четности и систему с ИОС с полной ретрансляцией
(k=s\ так что n = 2k). Такое сравнение будет правомерно, если
приняты специальные меры для снижения временных искажений
или же когда эти искажейия непринципиальны. В соответствии с
(8.96) — (8.103) для этих систем можно в параметрическом виде
построить зависимости относительной остаточной СКО от
относительной энергии, затрачиваемой на передачу отсчета в прямом
канале, т. е. от 2EUV/N0i или от полной энергии. В некоторых
ситуациях энергетические затраты в обратном канале непринципиальны,
т. е. их стоимость значительно меньше стоимости энергетических
затрат в прямом канале, например, в системах связи космос—
Земля, между подвижными (летательными) аппаратами и
стационарными объектами. __
На рис. 8.6 и 8.7 приведены зависимости б20Ст с- учетом шума
квантования от 2Env/N0 при различных значениях £, р и х=1 для
систем с ИОС и РОС соответственно. Пунктиром показаны
зависимости СКО в односторонней системе с такими же энергетиче-
222
Ю3 2Епр
Рис. 8.6.
Зависимости остаточной
СКО с учетом шума
квантования от отношения
сигнал /помех а и а отсчет
в'.прямом канале системы с
полной ретрансляцией ИОС
(£=0,2)
Рис. 8.7.
Зависимости остаточной
СКО от отношения
сигнал/помеха на отсчет я
п р ям ом к ан а л е си стем ы
с РОС при передаче
кодом <(&+.!, k) и 6=0,2
скими затратами на передачу одного отсчета. Как видим, в
области больших СКО системы с обратной связью существенно
проигрывают по затратам энергии на отсчет. Особенно это проявляется
в системах с ИОС, где при высокой обнаруживающей способности
резко возрастает среднее число повторений. Вместе с тем уровень
б2 -б2
OCT KB
12(2*-1)2
(8.104)
достигается при значительно меньших значениях 2EUp/N0l чем в
односторонней системе. Начиная с этого уровня, 62ОСт быстро
растет, -что указывает на обострение порогового эффекта в системах
с обратной связью. По величине полной энергии системы с ИОС
и РОС (при больших I) уступают односторонней системе, однако
в области б2ост^б2кв, где их полные энергии на отсчет примерно
одинаковы, уровень шума квантования достигается при меньших
энергетических затратах в прямом канале. На рис. 8.8 приведены
аналогичные кривые для случая безошибочной передачи
служебных знаков, энергия которых не принимается во внимание. Здесь
пунктиром показаны зависимости для системы с РОС и штрих-
пунктиром — для односторонней системы при £=il0.
223
Рис. 8.8.
Зависимости остаточной
СКО от отношения сигнал/
помеха на отсчет в
прямом канале при
безошибочной передаче служебных
знаков кодом (k+Uk) в
системах с полной
ретрансляционной ИОС и РОС
(пунктир)
Рис. 8.9.
Пороговое отношение сигнал/
помеха для одного
информационного элемента в прямом
канале системы с полной
ретрансляционной ИОС
(г-0*
ЯГ* 0,5 W 2,0 5,0 Ю,0
Рис. 8.10.
Относительная задержка
при передаче отсчетов для
пороговых значений
отношения сигнал/помеха в
системе с полной
ретрансляционной ИОС
*
Ц,0
3,0
2,0
W
0,0
IS
ч
!г
—
^~
^s
£ф
12,0s
POCjflM
w
.
и=
ю
ч'ч^£
'
05
Щ.
Рис. 8.11.
3 ависим ости относительн ого
. он и жен и я лорого в о го о тн ош е -
■ния сигнал/шум по энергии на
отсчет в прямом канале от
относительных затрат на
передачу служебных знаков
224
Соотношение (8.104) можно рассматривать как уравнение,
определяющее пороговую энергию, затрачиваемую на отсчет Enj>
или на элемент кода е{ в прямом канале, так как при меньших
энергетических затратах СКО резко возрастает (26]. Результаты
численного решения ур-ния (8.104) относительно величины
(2e*i/.N0) для системы с ИОС приведены на рис. 8.9. С
увеличением энергии, отводимой на передачу служебных знаков,
(2ei/#0)nop вначале резко уменьшается, а далее целиком
определяется качеством обратного канала. Если увеличивать значение р>
то величину (2ei/jV0)nop можно сделать сколь угодно малой.
Однако при этом увеличивается число повторных передач, что
иллюстрируется результатами расчета, приведенными на рис. 8.10, где
кривые определены для пороговых значений энергии на элемент
коп
ом
0J
о.г
0J
к*п
н--А
J r **fi
0t1 ф 1JJ 2,0 Щ
mftfi
Рис. 8.12.
Зависимости £опт от
относительных
энергетических затрат б обратном
канале системы с полной
ретрансляционной
обратной связью
Рис. 8.13.
'Зависимости порогового отъа-
шен.ия сигнал/шум 'и
соответствующей относительной
задержки (пунктир) jip-и
безошибочной передаче служебных
знаков для систем с ИОС «
РОС
в прямом канале. На этих графиках минимум величины (г—1)
соответствует равенству р = р\ при выполнении которого вероятность
обнаруживаемой ошибки минимизируется.
На рис. 8.11 показаны зависимости относительного снижения
пороговой энергии на отсчет в прямом канале системы с ИОС по
отношению к пороговому значению энергии в односторонней
системе, которое в относительном, выражении для k=\\0 равно
(2£,пр/Лго)пор = 290. Здесь же пунктиром построена аналогичная
зависимость для системы с РОС при коде (11,10). Из рисунка видно,
что в системе с ИОС существует ярко выраженный максимум,
положение которого зависит от значений р и £. При любых р этот
максимум соответствует значениям £<0,4; в системах с обратными
каналами хорошего качества (р>2) можно достигнуть снижения
порога в два-три раза при менее чем 40%-ных дополнительных
8—281
225
затратах на передачу служебных знаков. В области р^2-^3
величина goiiT, соответствующая максимальному значению т], связана
с р приближенным выражением
Еопт*Р/*- (8Л05)
График зависимости £опт(Р) приведен на рис. 8.12. При р>4 и
|>0,5 выигрыш по пороговой энергии уменьшается, что является
результатом повышения г. На рис. 8.13 и 8.14 показаны
аналогичные кривые, но для случая безошибочной передачи служебных
5 (НЦЮ
0J 0,5 1,0 2,0 t/J) Юр
юь
ю
10k
ю2
10
0
3=1\
1
\\
h
2\ k\
J /
МО X=l\
!
V
05
W
т
Рис. 8.14. Рис. 8.15.
' Зависимости относительного Зависимости максимального
снижения порогового отноше- числа отсчетов Lm от g три
н.ия сигнал/шум ло анергии на различных Р
отсчет iB прямом канале при
безошибочной передаче
служебных знаков в ИОС и РОС
(пунктир)
знаков и без учета затрачиваемой на них энергии. Наконец, на
рис. 8.15 приведены результаты расчета максимального числа
отсчетов Lmy которые могут быть _переданы_при условии, что
результирующая ошибка 62Lj='82ocT+'62LBpeM='62KB, а вклад остаточной и
временной ошибок в б2ь одинаков. Кривые построены в
зависимости от относительных энергетических затрат на передачу
служебного знака в прямом канале системы с полной ретрансляционной
ИОС при значениях 2£,Пр/Лго, определяемых из соотношения б20ст =
= 1/2б^в.
В заключение отметим, что при малых отношениях
сигнал/помеха на элемент качество передачи аналоговых сообщений в
системах с обратной связью можно значительно повысить, если для
вынесения решения о принятом элементе кода и о комбинации
(отсчете) в целом использовать неподтвержденные отсчеты. В этом
случае энергия, затрачиваемая на один отсчет, будет
использоваться наиболее эффективно.
226
8.9. ПЕРЕДАЧА С ДЕТЕРМИНИРОВАННЫМ ТАКТОВЫМ
ИНТЕРВАЛОМ
Дискретная передача аналоговой информации в реальном
масштабе времени от неуправляемого источника [168], который дис-
кретизируется с детерминированным тактовым интервалом,
обладает рядом специфических особенностей, определяемых
характером передаваемых сообщений и принципом работы системы с
обратной связью. При детерминированном тактовом интервале на
приемной стороне достоверно известно, что в течение этого
интервала передается лишь один отсчет. Тем самым автоматически
исключается эффект размножения отсчетов, возникающий из-за
искажений служебных знаков. Однако вследствие повторений
зафиксированные отсчеты будут поступать на устройство
восстановления аналогового сообщения (формирующее устройство) со
случайной задержкой относительно тактовых меток. Случайные
отклонения приводят к появлению ошибок при восстановлении [85]
аналоговой функции. Наконец, при передаче с детерминированным
тактовым интервалом на приемной стороне возможно появление
неопределенности в фиксации момента прекращения повторений
(остановки передатчика). Не получив тогда подтверждения ни на
одно повторение отсчета х{/\ приемник, в принципе, может
зарегистрировать ложный отсчет, сформированный только помехой.
Рассмотрим некоторые варианты передачи и восстановления
аналоговых сообщений, если каждый новый отсчет х\1\
соответствующий моменту ti = lT, поступает в канал через интервал Т =
—NTn, где jV3>1 и 7V— период возможного повторения.
Вариант 1. Допустим, что в процессе повторений при
обнаружении ошибки участвует одна и та же комбинация,
соответствующая х\1). Повторения могут иметь место только внутри интервала
Т, т. е. максимально возможное число передач rm = N. Как видим,
применение этого варианта возможно лишь при наличии на
передающей стороне устройства памяти, рассчитанного на один
отсчет с относительным временем хранения ..V циклов. Если ттосле гш
передач знак подтверждения не поступает, то передаваемый
отсчет выпадает из общей последовательности и начинается
трансляция xi+\. В этом случае восстановление сообщения на приемной
стороне может быть организовано следующими способами:
а) с начала тактового интервала до получения подтверждения
фиксируется некоторый уровень Х0\ подтвержденный отсчет
фиксируется до истечения тактового интервала независимо от
последующих действий передатчика;
б) подтвержденный отсчет фиксируется до истечения
тактового интервала и далее до получения нового подтвержденного
отсчета;
в) с начала тактового интервала каждый неподтвержденный
отсчет фиксируется на период повторения Гп, а подтвержденный—•
до конца такта.
8*
227
Если при восстановлении сообщения допустима задержка
отсчетов на Г, то с помощью дополнительной буферной памяти на
приемной стороне подтвержденные отсчеты можно выравнять во
времени (привязать к тактовым меткам), устранив тем самым
случайное отклонение.
Вариант 2. Принципиально можно организовать передачу и без
использования запоминающих устройств, если в процессе
повторений передавать текущее отсчетное значение сообщения, т. е.
xilT+gTn), где g — Oy\N—1 и указывает номер повторной передачи
{g = r—1). Этот вариант существенно отличается от первого, так
как здесь осуществляется случайная дискретизация исходного
аналогового сообщения, причем периодом дискретизации управляет
устройство обнаружения ошибок в канале. Таким образом,
восстановление сообщения проводится по отсчетам, взятым
непосредственно перед получением подтверждения.
Могут быть предложены и другие варианты передачи и
восстановления аналоговых сообщений. При их детализации важную
роль играют методы организации обратной связи и конкретные
алгоритмы функционирования систем передачи информации.
Так как обобщенный подход к системам с детерминированным
тактовым интервалом еще находится в стадии развития, то
ограничимся далее определением частных результатов для
иллюстрации методической стороны исследования.
Рассмотрим вариант 1 в предположении, что служебные знаки
подтверждения и отрицания передаются безошибочно, ошибки в
каналах независимы и восстановление осуществляется экстра'по-
лятором нулевого порядка (см. п. «б»). Пусть также x(t)—
стационарный случайный процесс с нулевым средним значением и
конечным пикфактором v (8.10). Восстановленный сигнал в момент
t^{ti, ti+i] можно записать в виде
yW^Xi-JuV-td-uit-tt-qtT^ + Xtluit-tt-qtTn)-
-u(t-tw)l (8.106)
л
где u(t) — единичная функция; xi — зарегистрированный отсчет;
qi=0, N — случайная величина, определяющая сдвиг
зарегистрированного отсчета относительно ft, причем
((1—рв)рдв> q<N>
Индекс т учитывает возможное выпадение отсчетов на
предшествующих моменту ft тактовых интервалах за счет использования
резерва, отведенного на повторения. При определении
установившегося значения ошибки величина i/n-=l, 2, 3, ... распределена
по геометрическому закону
Р(т) = (1 _Р£) (Р£у*-1. (8.108)
228
Сравнивая теперь восстановленный сигнал с тем же сигналом,
но при отсутствии искажений (см! § 8.1) и учитывая
независимость амплитудных искажений и 'временных сдвигов, по известной
методике [59, 204] из (8.106) находим
— / л \2 ?ср / л \а /1 qCp\
Д* = Д? -U-^J Y+ Ui-*iJ [ Т)' (8.
109)
ГД6 1-Р*
9cp = PB^cp-^B-rZpf-- (8.П0)
в
После несложных преобразований, как и в (8.25), приближенно
получим -
U-*/_,J &2Dx%P(m)[l-px(rn)] + [xl-Ax[_J.
Л
При наших условиях (xi—Xi)2 есть остаточная СКО в
зарегистрированном отсчете, которая не зависит от его номера.
Следовательно, из (8.109) в относительном выражении окончательно будем
иметь
2v* N
-J]P(m)p,(m)
1
+ 6*. (8-1И)
Величины Рв и б20Ст, входящие в (8.111), зависят от принятого
метода кодирования, вероятностей искажения элементов и вида
обратной связи (ИОС, РОС или КОС). В полученном выражении
пёр'вое слагаемое определяет ошибки, возникающие лишь за счет
случайной задержки отсчетов и их выпадений. При
некоррелированных отсчетах (рх(т)=0 при т>0) временные ошибки
достигают наибольшего значения. При фиксированном значении Рв
путем увеличения N=rm эти ошибки могут быть снижены до
желаемого уровня. Аналогичным образом рассчитывается качество
передачи и для других вариантов, а также в случае, когда источник
аналогового сообщения дискретизируется в случайные моменты
времени.
В заключение отметим, что при кодовом представлении
отсчетов существенное снижение временных ошибок достигается
переходом к поэлементному повторению, но только в случае, если
задержки в прямом и обратном каналах невелики. В нормальных
условиях работы систем с обратной связью вероятности этих
искажений весьма малы (см. гл. 7) и во многих практическух
ситуациях их влиянием можно пренебречь.
□
ГЛАВА 9
Системы с управляющей
обратной связью
9.1. ОБЩИЕ ЗАМЕЧАНИЯ
В реальных линиях связи наряду с различными аддитивными
помехами наблюдаются мультипликативные искажения
передаваемых сигналов, сопровождающиеся изменением их амплитуд
и фаз. Наиболее ярко эти искажения проявляются ъ радиолиниях
коротких и ультракоротких диапазонов волн, в оптических и
гидроакустических линиях. Природа и характер мультипликативных
помех весьма разнообразны. На одной и той же линии они могут
изменяться с течением времени [69, 97]. В связи с этим реальные
каналы передачи информации (собственно линии связи вместе с
каналообразующей аппаратурой) представляют собой
нестационарные системы, параметры которых случайным образом
меняются во времени.
Одним из основных источников нестационарности каналов
являются флуктуации уровня (замирания) полезного сигнала,
принимаемого на фоне аддитивных помех. В результате замираний
изменяется отношение сигнал/помеха, т. е. качество канала, и
связанные с ним характеристики системы передачи (достоверность и
др.). В частности, при снижении уровня растет частость ошибок,
возникает их группирование, что резко ухудшает работу
декодирующих устройств и снижает эффективность использования кодов.
Наконец, при очень глубоких замираниях связь -может быть
полностью нарушена. На практике заданные выходные
характеристики системы, работающей при замираниях, обеспечиваются
приемом на разнесенные антенны, различными автоматическими
регулировками в приемниках, сложным кодированием либо
повышением энергетического потенциала линии. Однако указанные
методы позволяют получить требуемое качество передачи лишь при
ограниченных условиях, определяемых техническими и
экономическими соображениями.
Принципиально новые пути для борьбы с замираниями
открываются в системах передачи информации с обратной связью, в
которых представляется возможным совместными усилиями
передающей и приемной сторон активно воздействовать на параметры
230
нестационарного канала с целью их «стабилизации». Если же
внутренние ресурсы системы не позволяют этого сделать, то,
например, в периоды глубоких замираний по сигналам обратной связи
передачу информации можно прекратить и возобновить ее при
наступлении благоприятных условий приема. Одним из
важнейших моментов в функционировании подобных систем является
оценка состояния канала по параметрам информационных или
испытательных сигналов специальными анализаторами. В
простейшем случае роль анализаторов состояния канала (АСК) могут
выполнять детекторы качества [186].
Системы, в которых результаты оценки состояния канала
используются для. управления параметрами передаваемых
информационных сигналов, называются системами с
управляющей обратной связью (УОС).
Системы с логической обратной связью (ЛОС) уже сами по
себе обладают определенной способностью стабилизировать
характеристики канала, по крайней мере, с точки зрения получателя
информации. При ухудшении состояния канала за счет
механизма повторений происходит обмен скорости на достоверность и
частость ошибок изменяется незначительно. Однако при глубоких
замираниях и неограниченном максимально допустимом числе
повторений возникает «зацикливание», при котором новые сообщения
в канал не поступают, что равносильно прерыванию передачи.
Эффекту зацикливания можно придать пороговые свойства, если
передаваемые сообщения сопровождать специальными ключевыми
сигналами, чувствительными к мультипликативным искажениям.
9.2. КРИТЕРИИ ЭФФЕКТИВНОСТИ СИСТЕМ
С УПРАВЛЯЮЩЕЙ ОБРАТНОЙ СВЯЗЬЮ
В системах с изменяющимися во времени ^параметрами одним
из основных показателей качества является надежность связи JV
[97, 115], которая определяется как относительное время, в
течение которого обеспечивается достоверность не ниже заданной. Для
оценки достоверности будем пользоваться вероятностью
искажения одного двоичного элемента р, которая зависит от способа
модуляции, метода приема и величины отношения сигнал/помеха
на входе приемного устройства. Если «Э^п — средняя мощность
флуктуационной аддитивной помехи, а коэффициент передачи
канала с замираниями \x(t) [168] за время, равное длительности
элемента, сохраняется практически постоянным (медленные общие
замирания [69]), то отношение сигнал/помеха по мощности
ф ф
»№ = $* = )*£._ (9-D
где 2РС— мощность полезной составляющей сигнала на входе
приемника; 5s — мощность сигнала на выходе передающего устрой-
231
ства; |л — коэффициент передачи канала, в данном случае
представляющий собой случайную величину с плотностью
распределения ш(ц) ((см. § 1.4)..
При заданной предельно допустимой вероятности ошибки ро,
т. е. при соответствующем отношении сигнал/помеха А2о, и
фиксированных З5 и S5,, из (9.1) можно найти минимальное значение
коэффициента передачи °ji, определяющее надежность связи
оо
tf(°|i)= fo>(|i)d|i. (9.2)
Отсюда следует, что надежность N-+-1, если только °|х-^0. Как
видно из (9.1), для сохранения достоверности потребуется
значительное повышение энергетического потенциала линии связи. В
каналах с замираниями при 1—iV<Cl время пребывания
коэффициента передачи jljl ниже порогового уровня V относительно мало.
Поэтому система, которая построена из условия достижения
требуемой надежности, оказывается строго согласованной с каналом в
его наихудшем состоянии. В остальное же время при jx>V
обеспечивается достоверность выше требуемой, что явно
нецелесообразно, так как при этом обычно имеет место значительный
перерасход энергетических и временных ресурсов.
От указанных потерь в определенной мере свободна система с
УОС (рис. 9.1). В такой системе, исходя из соотношения-(9.1),
стабилизация вероятности ошибки осуществляется автоматичес-
JI !#) Рис. 9.1.
1 ' Структураая схема уп-
ВЫХОд равлания параметрами
■~1—*~ сигнала, излучаемого пе-
| р ©датчиком:
I / — передатчик; 2 — прием-
| ник; З — АСД; 4 — обратный
канал; 5 — схема управления
ким регулированием энергетического потенциала линии,
согласованного с изменением коэффициента передачи ц. При конкретной
реализации в системе с УОС может быть организовано
автоматическое регулирование излучаемой мощности (АРМ) либо
скорости передачи (АРС) за счет изменения длительности сигналов при
соответствующем изменении полосы пропускания приемного
устройства.
Рассмотрим основные показатели, по которым оценивается
эффективность систем с УОС. Но предварительно отметим, что в
соответствии с (9.1) и (9.2) величины р0 и N могут быть заданы
независимо и однозначно определяют требуемую излучаемую
мощность SPm в нерегулируемой системе. В системе с АРМ требуемая
надежность обеспечивается максимальной излучаемой мощностью,
равной SPm, при средней излучаемой мощности ^СрЩ ^V Таким
образом, эффективность систем с АРМ можно оценивать
отношением
Вход
■&Щ
^ш
232
r cp
которое характеризует выигрыш в энергетических затратах на
передающей стороне регулируемой системы относительно
нерегулируемой при одинаковой надежности N. Применение этого критерия
целесообразно в таких ситуациях, когда передающая сторона
обладает ограниченными энергетическими ресурсами, а затраты на
их стоимость значительно превосходят затраты в обратном
канале, например, как в системах передачи информации с подвижных
объектов на стационарные. При необходимости в (9.3) можно
включить также сопутствующие затраты, в частности, на передачу
измерительной информации по обратному каналу, на обеспечение
нормального режима функционирования передатчика и др.
Например, с учетом КПД передатчиков в регулируемой (ярг) и
нерегулируемой (хнрг) системах из (9.3) получим коэффициент
эффективности АРМ в виде
J J *нрг
Если в регулируемой системе пренебречь затратами на схему
управления (рис. 9.1), то
Кнрг
хрг
Инрр + Л^> О — ^ирг)
Отсюда определим
%> = —г^ г- . (9-3">
J Инрг + %>(1~ *нрг)
Как видно, выигрыш от АРМ получается чтем больше, чем
выше КПД используемых передатчиков. При Инрг-И величина т)^>
стремится к т]^>, т. е. к предельно возможному значению.
Принимая мощность, излучаемую в нерегулируемой системе,
равной ^ср, оценку эффективности АРМ можно провести,
сопоставляя системы по надежности. В этом случае максимальная
излучаемая мощность в регулируемой системе больше, чем в
нерегулируемой. Но при заданной достоверности именно
максимальная излучаемая мощность определяет минимально допустимое
значение коэффициента передачи V, которое соответственно будет
меньше, так что в регулируемой системе Npr>N. Таким образом,
при одинаковых энергетических затратах эффективность
регулирования оценивается коэффициентом
Так как Л^ и Nvr близки к единице, то может оказаться удобным,
по крайней мере количественно, сравнивать системы по
ненадежности z=\l—N с помощью коэффициента
233
т|, = — • (9.4')
В системе с АРС при постоянной излучаемой мощности
средняя мощность помехи пропорциональна скорости передачи, т. е.
9ba = kVf где k — коэффициент, зависящий от спектральной
интенсивности шума и формы импульса, отображающего элемент
сообщения, а V — скорость передачи элементов сообщений в бодах.
Если в нерегулируемой системе V0 — максимальная скорость,
обеспечивающая требуемые значения р = ро и N, то в регулируемой
системе VCv>V0. При заданных N и ^т коэффициент
К = Vf (9-5)
характеризует эффективность системы с АРС. Приравнивая КСр
и Vq при фиксированном N, можно произвести сравнение
регулируемой и нерегулируемой систем по излучаемой мощности и
таким образом сопоставить по эффективности системы с АРМ
и с АРС.
Стабилизация качества системы при использовании УОС
может быть достигнута и без изменения энергетического потенциала,
если учесть, что коэффициент передачи канала ц зависит обычно
от несущей частоты колебаний. Если в рабочем диапазоне частот
выделить несколько резервных узкополосных каналов, то при
соответствующем разносе частот этих каналов изменения
коэффициента передачи в каждом из них можно считать статистически
независимыми. Тогда в случае ухудшения состояния рабочего
канала путем изменения несущей частоты колебаний целесообразно
перейти на резервный канал с большим значением ц, продолжая
работу в нем вплоть до нового ухудшения состояния и т. д.
Системы с автоматическим регулированием несущей частоты
(АРЧ) наиболее предпочтительны при действии сосредоточенных
по спектру помех, когда эффективность регулирования мощности
или скорости резко падает. Эффективность систем с АРЧ можно
оценивать по тем же показателям, что и систем с АРМ и АРС.
9.3. НЕПРЕРЫВНОЕ РЕГУЛИРОВАНИЕ МОЩНОСТИ
Оценим предельные возможности метода АРМ при
безошибочном регулировании, когда АСК точно определяет коэффициент
передачи канала ц и без задержки оповещает о его величине схему
управления излучаемой мощностью. Пусть излучаемая мощность
5s устанавливается таким образом, что вероятность ошибки при
любых и-^V равна предельно допустимому значению pQ. В этом
случае
*a = H2f- = VSr^02. (9.6)
и п V п
234
где SPm — максимальная мощность, излучаемая при |х=0^. Если
|ы<У, то h2<h20 и заданная достоверность не достигается. Чтобы
избежать потери достоверности, передачу информации на таких
интервалах целесообразно прекращать, а проводить лишь
контрольное зондирование канала [135].
Далее для удобства расчетов введем относительный
коэффициент передачи канала
х = ц / ]/V>
(9.7)
где \12=ц%
'средний квадрат коэффициента передачи (см. §1.4).
Используя (9.6) и (9.7), запишем закон изменения излучаемой
мощности для сохранения заданных ро и N при х^х0 (хо^мУмю)
9(x) = 9m(±J.
(9.8)
При х<х0 производится контрольное зондирование со средней
излучаемой мощностью 35зонд=»855т, где б — коэффициент
зондирования канала [135]. Обычно 0<5<Cl, так как при медленных
изменениях |х короткие зондирующие импульсы можно передавать
относительно редко. Учитывая затраты на зондирование, из (9.8)
находим среднюю излучаемую мощность при АРМ
оо poo Х% 1
дьср= {$>(x)w(x)dx ==$>„} {^Jw{x)dx + 6^w{x)dx\ . (9.9)
О lx0 О J
Для аппроксимации закона распределения коэффициента
передачи канала воспользуемся m-распределением (см. § 1.4). В
нормированном виде
w(xy m) =
2тп
Г(т)
* ехр (—- т.*2), х > О,
так что из (9.9) после интегрирования получим
б]Ь — (ЛЬ
ср
mxi
Г {т —- 1, mxfy
6
у(т, mxl)
(9.9')
Т(т) Г (т)
00
где Т(т)—полная гамма-функция; Г(/п, а) = Г йт-1ъ-Ш — непол-
а
ная гамма-функция, связанная с Т(т) и \(ту а) известньш
соотношением [36] Г(т, а)+у(т, а)=Т(т). Выигрыш по излучаемой
мощности х\д> (9.3) в системе с АРМ согласно (9.9х) будет равен
Ч* = ■ Ш • (9.Ю)
mxl Г (m — 1, /пл-q) + бу (т, тдгд)
На рис. 9.2 представлены зависимости т]^> от 'параметра
распределения /п, построенные по ф-ле (9.10) для различных N и 6 = 0,
т. е. без учета затрат на зондирование. Выигрыш от АРМ может
быть весьма значительным особенно при высоких требованиях к
235
надежности и плохих каналах (как
известно, малым значениям т
«соответствуют более глубокие замирания).
Предварительные исследования, проведенные
в работах [15, 17], дают аналогичные
выводы относительно эффективности АРМ
в каналах с замирающими аддитивными
помехами, а также в случае
одновременного действия медленных и быстрых
замираний.
Определим теперь, какой выигрыш
по надежности дает непрерывное
регулирование, если энергетические затраты в
регулируемой и нерегулируемой
системах одинаковы, т. е. Зг>Нрг= ^ср, где
^ср — средняя излучаемая мощность,
определяемая по ф-ле (9.9), а З^нрг—
мощность, излучаемая в нерегулируемой системе. Отсюда пиковая
мощность при АРМ
^ = Л^^нРг, (9Л1)
У
Ю
ю2
/0
/
Ч ,
^Сс
/А®
w
05 2
8
т
Рис. 9.2.
Зависимость
энергетического выигрыша от параметра
распределения т при
непрерывном АРМ
поэтому
X2 =
*0нрг
%>•
(9.12)
•Следовательно, надежность связи в нерегулируемой системе
будет равна
N
j w{x)dx=\—F[x0Y^)>
(9.13)
•1Л
'&
где F(a)—интегральная функция распределения коэффициента
передачи. Сравнивая (9.13) и (9.2), находим
_Npr _ l-f(Ar0)
(9.14)
Так как всегда г)^)^1, то и rjiv^l. В случае т-распределения
т(». Ч)
%:
(9.15)
у(т, тх^дъ)
При рэлеевских замираниях (т=1) из (9.15) можно получить
236
или через N
Лдр-'
Если Т| а>, то последнее соотношение дает T]jv^l/iV, т. е. выигрыш
по надежности практически равен максимально возможному.
При сравнении систем по ненадежности z (9.4) по аналогии с
предыдущим получаем
_ г F{^Y^)
2рг F (х0)
что для т-распределения дает
Г(m, m*02V)
Тут, тх^)
В частности, для рэлеевских замираний из (9.17) получим
1—tfV
1-Я
Из последнего равенства следует, что при l/V-И величина Цг-^ц^*
т. е. при высокой исходной надежности выигрыш по ненадежности
весьма значителен.
9.4. ВЛИЯНИЕ ОШИБОК РЕГУЛИРОВАНИЯ
НА ЭНЕРГЕТИЧЕСКУЮ ЭФФЕКТИВНОСТЬ
И НАДЕЖНОСТЬ СВЯЗИ
Ошибки при регулировании систем с АРМ могут возникать
вследствие ненадежной оценки состояния канала и запаздывания
управляющих сигналов.'Степень влияния той или иной причины на
ошибки существенно зависит от конкретных характеристик
системы связи и используемого канала. Далее для упрощения анализа
ограничимся оценкой раздельного влияния точности измерения |л
и запаздывания на показатели эффективности АРМ.
Рассмотрим вначале, как изменяются показатели системы по
сравнению с потенциально возможными (§ 9.3), если текущее
состояние канала на приемной стороне *> оценивается точно, а
регулирование мощности излучаемого сигнала происходит с
постоянной задержкой т. Эта задержка складывается из времени тИзм,
затрачиваемого на измерение, времени распространения тр ко-
*> Эта оценка может проводиться также и на передающей стороне по тем
данным, которые передаются по обратному (измерительному) каналу.
237
мандной (или измерительной) информации в обратном канале и
времени Тупр, необходимого для управления передатчиком
прямого канала, т. е.
t = тизм + тр + тупр. (9.18)
Так как, по предположению, задержка в регулировании
постоянна, то излучаемая мощность изменяется во времени
согласованно с копией реализации \i(t)> но сдвинутой на т относительно
истинной. Отсюда следует, что задержка в регулировании не
изменяет среднюю излучаемую мощность 3°cv (9.9) и не влияет на
энергетический выигрыш ч\д>. Однако временное рассогласование
приведет к снижению надежности связи N, так как при ухудшении
состояния канала передатчик не успеет перестроиться и будет
излучать мощность, недостаточную для поддержания заданной
достоверности.
В регулируемой системе коэффициент передачи канала \х
подвергается нелинейному преобразованию, вид которого зависит от
условий, накладываемых на мощность полезной составляющей
принимаемого сигнала ёРс Так как на приемной стороне точное
значение излучаемой мощности неизвестно, то коэффициент
передачи «регулируемого» канала может быть определен как
отношение Эдс к некоторой номинальной излучаемой мощности. В
качестве этой мощности удобно выбрать пиковую мощность 3*ту
излучаемую при ia = V- Таким образом, относительный коэффициент
передачи «регулируемого» канала будет равен
U
&>с \1/2
■^рг \ ар ) %
<*>
1/2
(9.19)
Отсюда в соответствии с законом изменения излучаемой мощности
(9.8) 'получим
*рг=(*°' Х>4' (9.20)
, х, х <^. Xq
Пусть теперь имеет место задержка на т в регулировании
мощности, тогда
^cW^W^fo ('-*)], (9.21)
где закон изменения SP[\u{t—т)] соответствует (9.8).
Следовательно,
хрЛг) = \Х°&)'Хх>Х°' (9.22)
[х, хх <z Xq ,
где для сокращения записи обозначено x(t—т) =хх. При
отсутствии запаздывания (т=0) хх=х и ф-ла (9.22) переходит в (9.20).
Если известна двумерная плотность распределения w2(x, xx), то
из (9.22), пользуясь известной методикой [113] или путем простых
рассуждений, легко определить надежность связи в системе с
задержкой
238
Nx = f dxT f оу2 (a:, xx) dx + f dxT j* ay2 (а:, *t) dx. (9.23)
*0 *г ■ о *0
Отсюда после преобразований будем иметь
х —О
оо Т
NX = N—Uxx ( ш2 (х, *т) dx. (9.23')
Крайние случаи, когда т = 0 и т = оо (практически для г, больших
интервала корреляции), исследуются по ф-ле (9.23') элементарно.
При отсутствии, задержки
Щ(х9 xx) = w(xx)8(x — xx),
гак что второй член в (9.23х) обращается в нуль и N(i = 0) =N.
Для независимых х и хх
w2(x, xx) = w{x)w(xx),
причем поверхность w2>(x, xx) симметрична относительно
плоскости х = хх. Учитывая это, после интегрирования из (9.23') получим
NX = N[\
-f). (9.24)
Таким образом, при задержках, превышающих интервал
корреляции коэффициента передачи, и высокой начальной
надежности (Af-^1) результирующая надежность Nx падает практически
до N/2.
Оценим теперь, как влияют ошибки измерения коэффициента
передачи канала на показатели регулируемой системы при отсут-
л
ствии задержки в управлении мощностью. Пусть х — измеренное
значение относительного коэффициента передачи, х — его истин-
л
ное значение и е = х—х — ошибка измерения, которую будем
считать статистически независимой от л: и имеющей нулевое среднее
значение и среднеквадратическое отклонение А<С*о. При этих
условиях излучаемая мощность находится из'соотношения (9.8)
и вследствие ошибок измерения отличается от истинно требуемой.
Если we (и) — плотность распределения ошибки, то учитывая
независимость х и е и пренебрегая затратами на зондирование, из
(9.25) получим
Л
" ср
= J 9> (х) w (х) dx = $>т J (\ V J" w {у) ws [x-x)dxdx. (9-26)
х„ хЛ X I 6
239
Произведем замену переменных х—х=и и перепишем (9.26) в
виде
00 » Г 00 -1
^сР= SPmj(-f Jw{x)dx j J](- 1)*(Н1)(|П»,Р. (9-26')
л0 —x Lfc=o J
Л
Расчет 5*Cp no (9.26') достаточно сложен, поэтому воспользуемся
лишь верхней оценкой для средней излучаемой мощности, которая
может быть получена, если в подынтегральной сумме
ограничиться членом второго порядка малости, а нижний предел второго
интеграла заметать на —оо. При этом, очевидно, результат
интегрирования не уменьшится. После соответствующей замены и
интегрирования получим
^ср<^п=^ср 1 + ЗА
ср
(9.27)
где 3й ср определяется по (9.9). Факт увеличения средней
излучаемой мощности вытекает из (9.25). Действительно, одинаковые по
абсолютной величине ошибки измерения в сторону занижения и
завышения коэффициента передачи вызывают различные
изменения мощности, причем изменение в сторону завышения будет
всегда больше. Однако, как .показывают конкретные расчеты, при
Д<С#о энергетические затраты возрастают незначительно и прак-
л
тически SPcv&.&cv
Исследуем далее влияние неточности измерений на надежность
связи. Относительный коэффициент передачи канала в
регулируемой системе с ошибками по аналогии с (9.22) записывается в виде
X Л
Хрг \
"о л
X
X ^ Xq,
Л
х <z. Xq.
(9.28)
Так как в нашем случае
w2[x, x)=w(x)wАх — х),
(9.29)
то в соответствии с (9.28) надежность связи N в системе с
ошибками равна
л
х-0
N = N — \ dx \ w(x)ws\x — х)dx.
(9.30)
Учитывая область определения переменных х и х и изменив в
(9.30) порядок интегрирования, получим
240
A '00 °0 / A \ Л
N = N — j w (x) dx f we (x — x) dx, (9.30')
откуда
M = NFe{0), (9.30")
где /78(a)—интегральная функция распределения ошибки
измерения. Если wE(u) симметрична относительно нулевого среднего
значения (или 8 = 0 — медиана), то 77е(О)=0,5 и результирующая
л
надежность N=\N/2. Такое резкое снижение надежности
происходит при любых (ненулевых) ошибках измерения.
Итак, рассмотренные ошибки регулирования прежде всего
снижают надежность связи, почти не изменяя среднюю излучаемую
мощность, т. е. энергетический выигрыш. Однако резкое падение
надежности компенсируется (при малых т и Д) 'Незначительным
повышением излучаемой мощности. Так, в последнем случае,
занижая, например, результаты измерений на некоторую постоянную
величину а, сместим соответственно среднее значение ошибки и
вместо Fe (0) в (9.30") войдет F& (а). Но с ростом а величина
л
Fe(a)-+l, поэтому N-*N.
9.5, ДИСКРЕТНОЕ РЕГУЛИРОВАНИЕ МОЩНОСТИ
Основным недостатком, ограничивающим применение
непрерывного АРМ, является необходимость организации специального
измерительного обратного канала, по которому информация о
состоянии прямого канала должна непрерывно поступать в
передающее устройство. Объем измерительной информации можно резко
сократить, если отказаться от непрерывного регулирования и
использовать лишь несколько дискретных уровней излучаемой
мощности. При этом переход с одного уровня на другой должен
осуществляться скачкообразно по командам управления в те
моменты, когда коэффициент передачи канала выходит за
определенные пределы. При медленных изменениях состояния канала эти
команды передаются редко и практически их легко включить (в
дуплексных системах) ъ поток проходящих по обратному каналу
сообщений без существенного снижения его пропускной
способности по «основной информации.
Предположим, что мощность, излучаемая передатчиком, имеет
п уровней Зьт> 5^m-i> ... > 2F*mr-n+u причем ffimr-i излучается при
Xi^x<xi+i. Здесь Х{ = 1]х1\ю — относительный пороговый
коэффициент передачи канала, соответствующий мощности ^т~г и
обеспечивающий требуемую надежность и достоверность связи.
Следовательно, набору излучаемых мощностей соответствует набор
пороговых коэффициентов передачи, причеАм х$<Х\< ... <хп-\ и
*?^ = *§5V - (9,31)
241
При выборе Xi (или 8Pm-i) в соответствии с (9.31) для всех х^х0
отношение сигнал/помеха h2^h20. Если х<х0, то h2<h\ и на
таких интервалах с целью сохранения достоверности целесообразно
прерывать передачу информации, зондируя канал со средней
мощностью 6&>т. При дискретном регулировании в области х>х0
величина h2 не остается постоянной, однако при больших п она
изменяется в гораздо меньших пределах, чем в системе без
регулирования.
Средняя излучаемая мощность в п-уровневой системе будет
равна
^V = 2 ^rn-i P (0 + №тР{х< *о)> (9.32)
(=0
где
*/+1
P(t)=P(xt<x<xl+l)= f w(x)dx. (9.33)
Из (9.32) с учетом (9.31) получим
&W = дьп
/1—1
S^)fp(i)+e(1~yv)
(9.34)
где N(x0)—надежность, определяющая выбор Xq. При
вычислении Р(п—1) по ф-ле (9.33) верхний предел интеграла хп
представляет собой максимально возможное значение коэффициента
передачи, поэтому в каналах с замираниями положим jtn^oc По
известной плотности w(x) из (9.34) можно найти энергетический
выигрыш при дискретном регулировании. В частности,, для т-рас-
пределения будем иметь
!п— 1
%^[у(т,тх*+1)-у(т,тх>)] +
1—1
+ 8у(тутх1)\ . (9.35)
Значения Xi(i>0) в общем случае могут выбираться произвольно.
Однако несомненный интерес представляет такой их выбор, при
котором оптимизируется та или иная характеристика системы.
Так как каждому Х\ соответствует уровень излучаемой мощности
SV_i, a w(x) — неравномерная функция, то выбор Xi проводят
таким образом, чтобы минимизировать SP^ и получить тем самым
наибольшую эффективность [16]. Можно показать из (9.34), что
maxri^D обеспечивается, когда х^ удовлетворяет рекуррентному
соотношению
242
Г 2 1Г
L Ж
и; (x) dx
, i= 1,2, • • -,n — 2.
(9.36)
В каналах с m-распределением из (9.36) находим
х2 — х2
", , т(».
1 1
_
mxj+2)-y(m,
mmxj^.l
m*?+i) „m4+i]
1
. (9.36')
Из соотношения (9.36') определяются значения Xi и
соответствующие уровни излучаемой мощности по известному их числу п и
величине х0. Для этого необходимо предварительно задать
величину максимального уровня хп-л (или соответствующей
(минимальной мощности). Рассчитывая далее зависимости Xi=fi(xn-\) по
(9.36'), находим требуемые х%. Указанные зависимости приведены
на рис. 9.3 для случая рэлеевских замираний (т=<1). Порядок
использования этого семейства кривых сводится к следующему.
Исходя из требуемой надежности, на оси ординат откладываем
значение х\. Через полученную точку проводим линию,
параллельную оси абсцисс (оси A-i), до пересечения с кривой х2п-и
соответствующей 1 = п, где п — выбранное число уровней.
Абсцисса точки пересечения определит значение х2п-и а через него —
значения остальных уровней. На рис. 9.3 для примера стрелками
показан порядок определения уровней при л:2о= 10-3 и /г=4.
Аналогичные кривые для случая т=2 приведены на рис. 9.4.
J
ю
ю2
ю3
W5
„2
h-zj
Г* "
X2
лП-5
0J
ЦГ
0,3 Ofi OJ 1ft fa
Рис. 9.3. Рис. 9.4.
К выбору оптимальных уровней из- К выбору оптимальных уровней излу-
лучаемой энергии при рэлеевских за- чаемой энергии при т — 2
мираниях (т=\)
243
Далее, по вычисленным х{ можно рассчитать максимальный
энергетический выигрыш т|$> в системе с дискретным
регулированием. Зависимости т)$> от надежности связи N при различном
числе уровней п без учета мощности, расходуемой на
зондирование (6 = 0), для т=1 и т = 2 показаны на рис. 9.5 и 9.6
соответственно. Здесь же для сравнения приведены зависимости х\#> в
системе с непрерывным регулированием (/i=oo). Как видим, уже
при /1^4-г-8 дискретное регулирование обеспечивает
энергетическую эффективность, близкую к предельной. Так как при
дискретном регулировании отношение сигнал/помеха h2 не остается
постоянным, то эффект группирования ошибок полностью не
устраняется. Однако его можно значительно снизить, если уровни
излучаемой мощности и соответственно *,- выбирать из условия
минимизации флуктуации hz(x) при заданном числе уровней п.
0,9
0,99 0,999 0,9999 Ц ^р-^ Q)ggg jgggg J
0 Рис- 9.5. Рис. 9.6.
Зависимости максимального энерге- Зависимости максимального
энергетического выигрыша от надежности тического выигрыша от надежности
связи при различном числе уровней связи при т = 2 и 6=0
для т=Ц и 6=0
Так как отношение сигнал/помеха h пропорционально
относительному коэффициенту передачи канала (9.1), то в системе с
прерыванием передачи при х<х0 значения хх молено найти,
минимизируя средний квадрат флуктуации х:
п-1 */+1
А*в2 J ix-xt)*w(x)dx.
(9.37)
/=0 х
Легко показать, что в этом случае х{ удовлетворяют
рекуррентному соотношению
244
xt -- %i+\ j
1 —
2 V2 T
f (x—xt )w(x)dx\
*t+\
4+1
/=1,2, - • ., n — 2. (9.38)
Так как xn = oo, то по заданному значению хп-\ находятся хи
минимизирующие (9.37). В такой постановке задача выбора Хг
принципиально не отличается от задачи оптимального квантования
шкалы измеряемого параметра в телеметрии [206].
9.6. НЕПРЕРЫВНОЕ РЕГУЛИРОВАНИЕ СКОРОСТИ
ПЕРЕДАЧИ
Если допустить возможность изменения полосы частот,
занимаемой каналом связи, то при фиксированной излучаемой
мощности SP заданные достоверность и надежность могут быть
достигнуты регулированием скорости передачи сообщений V и
соответственно полосы пропускания приемного устройства. В
нерегулируемой системе скорость передачи V0 должна обеспечивать
требуемые показатели качества при наихудшем состоянии канала,
т. е. при х=хо, где х0 определяется из (9.1). В системе с АРС
скорость Vo является минимальной, а всякое увеличение х будет
сопровождаться согласованным увеличением V вплоть до некоторого
максимального значения УМакс, которое допустимо с практической
точки зрения [69].
Учитывая, что 3bu=kVy а при х<х0 передача информации
прекращается, из (9.1) легко получить требуемый закон изменения
скорости в регулируемой системе ,
0, Х<Х0)
У(х) =
•'макс» X^> Хи
. х <с хм
(9.39)
где Хмакс и Vmslkc связаны очевидным соотношением
у _у ( *макс \2
(9.40)
Из (9.39) определим среднее значение скорости передачи в
системе с АРС
Гоо оо
Vcp = ^-nx^w(x)dx- j
(x2 — xlaKC)w(x)dx
(9.41)
Как показывают расчеты (для лг-раснределения, в частности),
при хМаксЗ>1 вторым интегралом в (9.41) можно пренебречь, так
что практически
245
00
УСр = — \x2w(x)dx.
(9.41')
В соответствии с_определением относительного коэффициента
передачи величина *2=1, поэтому для x0<Cl(bV~ 1) из (9.41)
приближенно получим
% = -^«l/*g. (9.42)
Отсюда следует, что эффективность по скорости системы с АРС
при высоких требованиях к надежности и фиксированном
пороговом уровне хо слабо зависит от вариации формы закона
распределения. Для т-распределения из (9.41') будем иметь
^ 1 Г (т + 1, mxl)
lriv='J Г(т+1)
(9.43)
Пользуясь известными представлениями неполной гамма-функции
[36], можно показать, что при тх20<^\ надежность связи
N =
Г (т,
4)
Т(т)
1
К)"
Г(т+1)
и соответственно выигрыш по скорости
т
%■
[Г(/72+1)(1-Л/)]
\/т
(9.44)
(9.45)
Зависимости tjv от параметра
m при различных значениях
надежности представлены на
рис. 9.7. Как и для систем
с АРМ, эффективность
регулирования скорости растет с
увеличением надежности и
глубины замираний. Значительное
повышение средней скорости
при АРС делает подобные
системы весьма
привлекательными при сеансной связи, ибо
они позволяют резко увеличить
объем информации,
передаваемой за сеанс.
Если выровнять скорости
передачи в регулируемой и
нерегулируемой системах, то
выигрыш по скорости r\v легко трансформировать в выигрыш
по мощности, причем г1^АРс=т]^. Действительно, при
повышении скорости до Vcp в нерегулируемой системе в r\v раз
возрастает мощность помехи, так что для сохранения достовёр-
Рис. 9.7.
Зависимости выигрыша по скорости
от параметра распределения т при
АРС
246
ности и надежности при том же пороговом уровне Хо
потребуется в r\v раз поднять излучаемую мощность. Таким
образом, величину г\у можно непосредственно использовать для
сравнения по эффективности систем с АРС и АРМ. Сопоставляя
графики на рис. 9.7 и рис. 9.2, видим, что эффективность систем с
АРС несколько превосходит эффективность систем с АРМ,
причем это различие наиболее существенно при глубоких замираниях.
Так, в канале с рэлеевскими замираниями (т=\) и N=0,9999
величина r\v почти на порядок больше, чем г\^.
Б расчетных 'соотношениях для r\v не учитывалось возможное
ограничение скорости сверху. Вместе с тем в некоторых случаях
(например, в коротковолновых радиоканалах) существуют
достаточно сильные объективные ограничения УМакс, снижающие
эффективность систем с АРС. Поэтому прежде чем отдать
предпочтение той или .иной системе, необходимо тщательно оценить их
возможности с учетом конкретных особенностей используемых
каналов, сложности реализации и других требований.
9.7. РЕГУЛИРОВАНИЕ НЕСУЩЕЙ ЧАСТОТЫ
(ВЫБОР КАНАЛА)
Предположим, что для передачи информации в системе связи
предусмотрены 5 идентичных по параметрам частотных каналов, .а
изменения их состояний статистически независимы. Пусть далее
в каждый момент времени допускается передача лишь по одному
каналу, если его относительный коэффициент передачи х>хо. При
уменьшении коэффициента передачи, до значения х^х0
автоматически происходит изменение несущей частоты и переход на
ближайший канал, у которого х>х0. При одинаковой .мощности SP m,
излучаемой в каналах, и заданной достоверности пороговый
уровень Хо определяет надежность каждого канала N\. Полагая, что
состояния каналов оцениваются безошибочно и задержки при
переходе с калала на канал отсутствуют, определим эффективность
регулирования по основным показателям (см. § 9.2).
Так как потеря надежности связи происходит лишь при
одновременном снижении х во всех каналах ниже уровня x0i то
надежность в регулируемой системе будет равна
A^l-U-^y5, (9.46)
т. е. при заданном Nt с увеличением числа резервных каналов
надежность связи быстро растет. Соотношение (9.46) можно
использовать для выбора 5 по заданным Л/рГ и JVi. При работе по
одному из каналов (нерегулируемая система) надежность связи равна
по условию Nu так что
247
Если 1—<М4<1, то с ростом s величина r\N-+4\NM8LKc=\/Ni. При
одинаковых требованиях по надежности связи в регулируемой и
нерегулируемой системах, как следует из (9.46), сохраняя
достоверность, можно за счет АРЧ понизить надежность в каждом
канале, т. е. увеличить х0 до х*0 и соответственно уменьшить
излучаемую мощность ЗРШ до 2Р*т. Как следует из (9.6),
у2 ср
«№
(9.48)
так что энергетический выигрыш будет равен
V
(9.49)
Если положить NpT=Ni(xo), надежность в каждом канале
регулируемой системы можно снизить до значения
#;=!— (1 — ЛГ,)1'*,
(9.50)
откуда и определяется х*0. В каналах с рэлеевскими
замираниями, например,
х\ = -lnW1( (x'0f = -In [l -(1 -Ntf»],
так что
ln[l — (1—Л^х)1/^]
(9.51)
Ш99
от
Рис. 9.8.
Зависимости энергетического
выигрыша от числа резервных каналов для
системы с АРЧ
Зависимости х\^ от числа
каналов s при различных Nt
приведены на рис. 9.8. Из
графиков следует, что с ростом
числа резервных каналов
энергетический выигрыш вначале
резко возрастает (до s = 4-^-5),
а затем изменяется
незначительно. Такой характер
зависимости r\^>(s) еще сильнее
будет проявляться, если учесть
энергетические затраты на
контрольное зондирование
свободных каналов.
Энергетический выигрыш от АРЧ можно
существенно повысить, исполь-
248
зуя для работы канал с максимальным коэффициентом передачи
или применяя комбинированные методы управления параметрами
сигналов, например АРЧ и АРМ одновременно.
9.8. ПЕРЕДАЧА СООБЩЕНИЙ С ПРЕРЫВАНИЯМИ
В периоды глубоких замираний достоверность передачи информации резко
снижается и становится, как правило, ниже допустимого значения. Вследствие
этого вести передачу сообщений в такие моменты времени либо нецелесообраз-
Рис. 9.9.
К расчету вероятности ошибки и относительной скорости передачи в системах
с прерываниями
но, либо даже вредно. Системы, в которых передача информации при плохих
состояниях каналов прекращается, называют системами с прерывистой
связью или просто с прерываниями [88, 97, 126].
На возможность прерывания связи, когда коэффициент передачи канала
падает ниже уровня, определяемого заданной надежностью, указывалось в
предыдущих параграфах. Однако там рассматривались системы, в которых
непрерывно контролировался коэффициент передачи, что не всегда технически
возможно. Прерывистая связь может быть организована и более простыми
методами, например путем лишь периодического контроля состояния канала.
Наконец, весьма интересным представляется реализация прерывистой передачи в
системах с логической обратной связью (см. § 9.1). Эти системы потенциально
обладают возможностью автоматического прерывания передачи, так как в
плохих состояниях канала наблюдается зацикливание, если только максимальное
число повторений не ограничивается. При зацикливании новые сообщения в
канал не поступают, что равносильно прерыванию их передачи.
Рассмотрим системы с прерываниями, в которых периодический контроль
осуществляется путем точечной оценки состояния канала. При этом
неизбежны ошибки в интерпретации результатов контроля или, иначе говоря, оценки
носят вероятностный характер. Для проведения периодического контроля в
канал, по которому передается информация, вводятся испытательные или
зондирующие сигналы (ЗС). В качестве зондирующих могут быть использованы
сигналы синхронизации или стартовые импульсы, предшествующие сообщению в
стартстопных системах [88]. Если искажения зондирующего сигнала превышают
допустимые или он принят с ошибкой, это становится известным приемной или
передающей стороне и прием или передача сообщений прекращаются.
249
Зондирующий сигнал на приемной стороне выполняет функцию ключа,
который при безошибочном приеме разрешает регистрацию сообщения, в
противном случае — не допускает этого. Сообщение может передаваться
одновременно с зондирующим (пусковым) сигналом либо после того, как зондирующий
сигнал прошел правильно.
Для выяснения особенностей систем с ЛОС и прерываниями предположим
вначале, что ЗС передается одновременно с сообщением. Если ЗС не проходит,
производится повторная передача его и сообщения вплоть до правильной
регистрации ЗС. Сообщение, сопутствующее правильно принятому ЗС с ошибкой
или без нее, выдается получателю. Вероятностный граф, соответствующий
описанному алгоритму, приведен на рис. 9.9а, где Рпр Зс — вероятность
прохождения ЗС; Рош = Рош\Пр зс ~*—^пр —в °бщем случае условная вероятность
необнаруженной ошибки в сообщении, регистрируемом после правильного
приема ЗС. Если циклы передачи ЗС и сообщения независимы, то, пользуясь
методами, изложенными в гл. 2, из графа рис. 9.9а легко находим вероятность
ошибки в системе с прерываниями
Кш^Рош (9.52)
и соответственно относительную скорость передачи
G=l/rOT=*np.3cf ' (9.53)
где /-Ср — среднее число передач ЗС.
Отсюда следует, что при зависимых искажениях ЗС и сообщения в
системе с прерываниями и рациональном выборе их структуры результирующая
вероятность ошибки может быть ниже, чем в системе без прерываний, где
рош.бп = С1 - -Рпр.зс) Р (°ш I ош зс) + Vacр (°ш I ПРЗС> • (9-54)
Очевидно, Рош БП есть безусловная вероятность ошибки в сообщении.
Повышение помехоустойчивости в рассмотренном случае достигается ценой
снижения относительной скорости передачи.
Рассмотрим поведение системы с прерываниями в случае, когда параметры
канала изменяются во времени; для простоты положим, что могут иметь место
только два состояния: плохое (индекс «1») и хорошее; (индекс «2»), которые
возникают с вероятностями Р\(\) и Р(2) соответственно. Пусть среднее время
нахождения канала в каждом из состояний значительно превышает среднее
время, затрачиваемое на передачу ЗС и сообщения вместе с их повторениями. При
этих условиях систему с прерываниями можно охарактеризовать средними
значениями вероятности ошибки и относительной скорости передачи. Пользуясь
результатами § 2.11, находим:
& = Р(1)Р&\эс + Р&Р&\зс. (9.55)
Лш = =Г [Р (1) ^.зс РЩ + Р (2) Р%Ж fffi] • 0-56)
Для примера положим, что Р(1) =Р(2) =0,5 и вероятность правильного
приема ЗС в хорошем состояний Р^1 зс ^ ^пр. ЗС- Если теперь структура ЗС
и сообщение выбраны таким образом, что
p(D p(D_D(2) р(2)
*пр.ЗС *ош ~~ ^пр.ЗС *ош ,
т. е. в хорошем состоянии Р^щ < Р^ , то из (9.55) и (9.56) приближенно
получим
ni „ J_ р(2) -г*- 2Р(2) .
?50
Отсюда следует, что в рассматриваемой системе с прерываниями средняя
вероятность ошибочного приема сообщения определяется вероятностью его
ошибки в хорошем состоянии. Это обусловлено тем, что при выполнении условия
^пр зс ^ ^пр ЗС передача сообщений от источника к получателю
практически протекает только в хорошем состоянии канала. В предельном случае, когда
ЗС проходит только в состоянии «2», Р' зс ~* и 'пр. зс =^' так что 6**=
= 1/2 и Р*ош — Р2ош. При N возможных состояниях канала ф-лы (9.55) и (9.56)
можно записать в виде
N
G* = £p(0^.3c, (9.57)
i=l
N
~^>ш= ^J]P(0 Сзс ^ой. 0-58)
1=1
где Р(0 — вероятность i-ro состояния канала связи.
При континуальном множестве |я возможных состояний канала с
плотностью распределения w(\i)
СО
G*= j Vac (I*) »(!*)''И. <9-59)
— 00
00
"C=-gi j VscM^oinWHn)^- (9-60)
00
Зондирующие сигналы могут быть также введены в системы, в которых
обратная связь используется для обнаружения ошибок в передаваемых
сообщениях и их исправления методом повторении (см. гл. 2).
Пусть, как и выше, на передающей стороне достоверно известен результат
прохождения ЗС по прямому каналу. Рассмотрим два характерных варианта
построения системы. В первом случае будем считать, что ЗС передается до тех
пор, пока он не будет правильно принят, а сообщение поступает в канал
только после правильного прохождения ЗС. Если при этом в принятом сообщении
зафиксирована ошибка, то далее повторяется одно сообщение (без ЗС) опять-
таки до получения подтверждения о его правильном приеме. Как известно,
такое подтверждение может иметь место и при возникновении необнаруживаемой
ошибки. В результате сообщение, в конце концов, регистрируется с некоторой
остаточной ошибкой. Вероятностный граф подобной системы представлен на
рис. 9.96. Из графа находим:
(1)Рост= , "р --Рост, (9.61)
<1)Гор = ~^Ьс~ + ~^~ = ''Р.ЗС + 'ср.с, 0-62)
где гср з<з и ''ср.с — среднее число передач ЗС и сообщения соответственно.
Остальные обозначения те же, что и ранее.
Схему, представленную на рис. 9.96, можно несколько видоизменить, если
считать, что ЗС всегда передается вместе с сообщением в случаях, когда ошибка
251
обнаруживается в самом ЗС или (при правильном приеме ЗС) в сообщении.
В этом случае вероятностный граф принимает вид, показанный на рис. 9.9в.
Аналогично предыдущему из графа получим:
(2)Р- = ТГ^-=^осТ. (9.63)
(2)'ор = 'ср.зс гсрс. (9.64)
Сопоставляя (9.62) и (9.64), можно заметить, что при -РПрзс ==^>в имеет
место равенство (1)/*Ср-=(2)гСр. Если ^прзс >^в, то <1VCp>(2^'cp.
Относительная скорость передачи в обоих случаях определяется выражением
G*=l/rCP, . (9.65)
где/Ср находится из (9.62) и (9.64).
Положим, что сообщения с зондирующими сигналами передаются по
каналам с замираниями, протекающими относительно медленно по сравнению с
временем передачи каждого данного сообщения. При этом Р*0Ст и G*
определяются конкретными значениями А и А' (отношения сигнал/помеха) в прямом и
обратном каналах во время передачи. Усредняя W/^oct по всем возможным
значениям А и Л' с учетом весовых коэффициентов G*(A, А') в соответствии с
ф-лами § 2.11, получим
a oo B np'3C (9.66)
где
^ r 1 — PR(A, А')
(1)G*= - w(h, h')dhdh'.
• J J 1-PB <*■*') +Vac <*•*'>
— средняя по состояниям каналов относительная скорость передачи сообщений;
w (А, А') — двумерная плотность распределения вероятностей А и А'.
Для второго способа (9.63) и (9.64) дают:
QO 00
<^т = = J J %.зс№. л'>*но(л. *')»(*. Л')**'. (9.68)
о о
00 00
(2)°*™И Vac<A. ЮП-^в^Л')]»^ Л') Ли'. [(9.69)
о о
Обращаясь к (9.66) и (9.67), замечаем, что Рпр зс^*' ^') в обоих случаях
играет роль своеобразного «демпфера», снижающего вклад в Р*0Ст необнару-
живаемых ошибок в моменты, когда уровень помех высок и вероятность
Рно(А, А') велика. При этом Рпр зс падает, задерживая передачу сообщений
получателю. Соответственно снижается в обоих случаях относительная скорость
передачи G*. По сравнению с (9.66) второй способ (9.68) действует более
эффективно — Рпр зс входит здесь в подынтегральное выражение только в
качестве множителя.
252
В целях обеспечения более высокой чувствительности зондирующего
сигнала к ухудшениям состояния канала оказывается иногда целесообразным
использовать для его передачи менее помехоустойчивый вид модуляции по
сравнению с информационными сигналами, например амплитудную. Если при этом
ЗС все же проходит, информационные сигналы принимаются с меньшей
вероятностью ошибки.
1£*(Л,А7 АМ-ФМ АМ-ЧМ
АМ-9МАМ-ЧН
Рис. 9.10.
Зависимости относительного времени
передачи сообщений и вероятности
необнаруживаемой ошибки при
согласных |рэлеевских замираниях в
(Прямом и обратном каналах с
зондирующим сигналом
Рис. 9.11.
Зависимости относительного времени
передачи я вероятности
необнаруживаемой ошибки Л;ри независимых
замираниях в каналах
В (9.68) величину, равную Рпр зо^но» обозначим через Р*яо(К h') и
величину Рпр 3c[\—PB]w(h, Ы) в (9.69), отнесенную к <2><3*, — через w*(ht hr).
Первая представляет собой вероятность приема сообщения с необнаруженной
ошибкой при наличии ЗС, вторая — эквивалентную плотность вероятности
величин h и /i', учитывающую время фактической передачи сообщений от
источника к получателю (за вычетом интервалов прерывания). На рис. 9.10 даны
кривые w*(h, hr) и Р*но(А, Ы) для случаев передачи пятиэлементных двоичных
сообщений методами частотной (ЧМ) и фазовой (ФМ) модуляции с зондирую-
253
щей комбинацией длиной ai3k=4, передаваемой методом амплитудной
модуляции в условиях согласных (полностью коррелированных) рэлеевских замираний
в прямом и обратном каналах. Пунктиром изображены кривые, вычисленные
при отсутствии зондирующего сигнала (Р зс = П-
Аналогичные кривые для случая независимых рэлеевских замираний в
прямом и обратном каналах при тех же значениях /г0=/г,0 = 4,5; 7 и 10 приведены
на рис. 9.11. По сравнению с
пунктирными кривыми величина Р*но
при малых h и К' существенно
снижена, причем значения ее меньше в
случае независимых замирании.
\G*(ftff,/i'ff)
\С*(*аЛ)
8 9 W h0,h'Q
АМ-ЧМ
АМгФМ
Рис. 9.12.
Зависимости остаточной
вероятности ошибки и относительной
скорости передачи от средних
значений отношения сигнал/помеха /i0
и Л'о при согласных замираниях
VmmW
АМ-ЧМ
АМ-ЧМ
Рис. 9.13.
Зависимости остаточи ой
вероятности ошибки и относительной
скорости передачи при независимых
замираниях /з каналах
• На рис. 9.12 и 9.13 показаны зависимости <2>Я*ОСт и <2)G*0CT от средних
значений отношения напряжений сигнал/помеха Л0, А'о в прямом и обратном
каналах соответственно при согласных и независимых замираниях. На рис. 9.13
приведены также кривые P0c*(fto> А'о) для системы с обратной связью без ЗС
и для односторонней системы (пунктир) без повторений. Кривые в наглядной
форме иллюстрируют эффективность метода прерываний в сочетании с
информационной обратной связью с повторениями, позволяющими свести
остаточную вероятность ошибки к достаточно малому уровню за счет определенного
снижения скорости передачи. Более благоприятные результаты получаются в
случае согласных замираний, при которых относительное время хорошего
состояния и прямого и обратного каналов вместе больше, чем при независимых.
Регулируя пороговые уровни в приемнике, усложняя или упрощая
структуру зондирующей комбинации (ее длину п8н), можно в широких поеделах
изменять остаточную вероятность ошибки и скорость передачи сообщений по
каналам с прерываниями. Ключевые зондирующие сигналы могут одновременно
выполнять роль сигналов подтверждения — стирания (см. гл. 7).
9.9. ДЕТЕКТОРЫ КАЧЕСТВА КАНАЛОВ
Рассмотренные выше методы повышения эффективности
систем связи, работающих в нестационарных условиях (каналы с
замираниями и др.), предполагают оценку состояния каналов, т. е.
254
прямое либо косвенное измерение коэффициента передачи |х. Для
проведения таких измерений в системе должны*быть
предусмотрены специальные устройства, а также, возможно, и
дополнительные сигналы, вводимые в канал. В зависимости от конкретных
особенностей системы связи, используемых каналов и характера
передаваемой информации оценка состояния каналов может
проводиться .непрерывно или периодически. В последнем случае
период должен быть согласован с темпом передачи сообщений и
скоростью изменения состояния каналов. Во времени оценка
может быть точечной или проводиться на основании сведений о
канале, получаемых в течение некоторого определенного интервала
наблюдения.
В настоящее время можно выделить, два основных способа
получения информации относительно состояния канала. Первый
способ предусматривает оценку состояния канала на основании
контроля за первичными параметрами сигналив (амплитудой,
длительностью, величиной краевых искажений импульсов, степенью
дробления и др.) [2, 61, 186]. Подобный контроль может быть
проведен только до первой решающей схемы. Второй способ
предусматривает получение необходимой информации путем анализа
вторичных параметров [103, 129]. В кодовых системах вторичные
параметры характеризуют последовательность зарегистрированных
символов сообщения. К таким параметрам можно отнести
различные кодовые признаки, частоту появления ошибок, статистические
характеристики, определяющие тонкую структуру потока ошибок
[144] и др. Так как вторичные параметры являются менее
информативными, то для получения приемлемой точности оценки
требуются значительные временные затраты, которые целесообразны
лишь при весьма медленных изменениях состояния канала по
сравнению со скоростью передачи информации. Однако в некоторых
практических случаях контроль за вторичными параметрами
является единственно возможным методом определения состояния
канала, например, в многоканальных системах, где потребители,
как правило, не имеют доступа к групповому тракту для
выявления первичных параметров сигналов.
Высокой эффективностью обладают комбинированные методы
одновременного контроля за первичными и вторичными
параметрами [186].
В системах с обратной связью возможности оценки состояний
каналов значительно расширяются. Наличие обратного канала
позволяет, например, на передающей стороне получить
необходимые сведения о параметрах сигналов в приемном устройстве. Эту
информацию можно далее использовать для оценки состояния, а
затем известить о результате, если необходимо, приемную
сторону. В таких же системах легко может быть реализован контроль
качества каналов по коэффициенту взаимной корреляции между
сигналами на входе и выходе [29]. Целесообразность
использования обратной связи при косвенных методах контроля отмечается
в работах [144, 159].
255
Отметим, что служебная информация, проходящая по прямому
и обратному кайлам, может быть также использована для
измерительных целей. Необходимость введения специальных
зондирующих сигналов в этом случае отпадает.
.Всякие изменения условий передачи в системах с обратной
связью отражаются на вторичных статистических
характеристиках, таких, например, как среднее число повторений, скорость
поступления новых сообщений в канал и др. Следовательно,
вторичные характеристики могут также служить показателями качества
каналов. Специальные алгоритмы (рекуррентное квитирование
[95]) позволяют провести разделение прямого -и обратного каналов
и получить оценку состояний каждого из них в отдельности.
Правильное (или надежное) определение состояния каналов в
сочетании с определенной реакцией системы (регулирование
мощности сигналов, скорости передачи, прерывания, изменение
несущей и пр.) могут обеспечить практически сколь угодно
достоверную передачу информации в тяжелых условиях связи.
□
ГЛАВА 10
Оптимальные приемно-решающие
устройства систем с обратной
связью
10.1. ОБЩИЕ ЗАМЕЧАНИЯ
Проблема построения оптимальной информационной системы
(связи, радиолокации, телеуправления и т. п.) включает в себя
две задачи: первая состоит в отыскании оптимальной структуры
(оператора) системы, а вторая — в определении оптимального'
управления. Первая задача может быть решена аналитическими
методами дифференциального и классического вариационного
исчисления, методами теории статистических решений и др. Для
решения второй задачи можно использовать как известные
аналитические, так и мощные вычислительные методы теории
оптимального управления [4, 5, 6]. Синтез информационной системы
представляет собой, таким образом, объединенную процедуру
целенаправленной интерпретации критерия оптимальности Q (см. гл.. 1) и
решения задачи на условный экстремум с ограничениями [5, 42J.
Можно выделить четыре класса ограничений:
— алгоритмические ограничения, т. е. ограничения,
характеризующие некоторые общие требования к способу
функционирования системы (например, тип обратной связи — РОС, ИОС и др.,
способ обработки сигналов, наличие или отсутствие памяти и т. д.);
— ограничения, задаваемые совокупностью фиксированных
параметров (например, средних мощностей или энергий
передаваемых сигналов, коэффициентов передачи каналов связи,
допустимого числа повторений и пр.);
— ограничения типа равенств (уравнений связи),
устанавливающие функциональные зависимости между показателями
качества и различными состояниями системы (например, равенства,
устанавливающие требуемые средние вероятности ошибок,
средние длительности передачи или энергии сигналов и т. п.);
— ограничения типа неравенств, устанавливающие допустимые
или предельные значения показателей качества, ресурсов или
координат системы (например, предельно допустимые мощности и
длительности сигналов, предельные скорости, достоверности
и т. п.).
Критериальная (целевая) функция Q зависит от структуры
системы, совокупности управляющих (оптимизируемых) перемен-
9—281
257
ных, а также от множества фиксированных параметров.
Оптимизируемые структурные свойства системы представим с помощью
«вектора структуры» у. Так, формулируя задачу синтеза приемно-
решающих звеньев информационных систем, следует вектор
структуры отождествлять с совокупностью решающих вектор-функций
—> -> —>
у=(уи, yv) (1.21), (1.21х) из функционального пространства
Г,"?ееГ.
Совокупность управляющих переменных представим вектором
управления х из пространства допустимых управлений /С, х^/С,
—^ —>■
), N — число независимых компонент х. С-ОВО-
^и
Х=(хЬ Х2, ..
купность Na фиксированных параметров определяет неоптимизи-
руемый вектор <d=(<di, со2, ..., сош) из пространства Q, co^Q. За-
/дача синтеза состоит в отыскании структуры системы у и
управления х, обеспечивающих экстремум критериальной функции Q
лри заданном векторе со и ограничениях gi и Gf
Q*=jatr,4(Y. x, ю); ]
ft (y, x, o>) = 0, i = 1, #,, JV, <iVx;
(10.1)
G;(y, x, со) {>, <}, / = 1, ty,
где gi и Gj — заданные функции, независимые и
непротиворечивые; К czK — область допустимых управлений для структуры y-
Критерий (10.1) -можно представить в форме, указывающей
последовательность процедуры синтеза:
Q*=extrQ;(x, со), Q; = extrQ(Y, х, со);
«6К«
ver
(10.2)
gi{y, х, со) = 0, Gj{yf х, со){>, <}0.
Понимая далее под целевой функцией Q средний риск L (1.6),
из (Ю.2) получаем
I* ~ L{у*, х*, со) = min L* (х, со), L* (х, со) = mini (y, x, со);
иеК«
ver
gi(y, x, со)=0, G/(y, x, со) {>, <}0.
(10.3)
• Отметим некоторые общие свойства управляющих переменных:
оптимальные значения их взаимно зависимы и изменяются от цик-
258
Ла к циклу и от символа к символу; на каждом r-м цикле
передачи символа av, v=l, Ма одна часть'переменных гх*, * = 0, 1, 2, ...
может оказаться не связанной с конкретными значениями
индекса v; обозначим эти переменные гхд, |х=0, М (например, пороги
в прямом канале, мощности передатчика обратного канала и др.);
другая часть переменных гщ может зависеть от конкретных
значений индекса v; обозначим эти переменные rKnv, я= 1, П (например,
пороговые уровни в обратном канале, мощность передатчика
прямого канала >и др.).
Будем считать, что значения гх на каждом цикле постоянны..
Если они зависят от времени, то целесообразнее их представлять,
в виде сходящихся рядов [179]. Ограничиваясь конечным числом
членов, в любом случае можно свести задачу синтеза управления-
к определению дискретных значений rKi (или коэффициентов
разложения). При синтезе потенциальных оптимальных систем
(систем наивысшего качества) предполагается безошибочный счет
циклов передачи (идеальная сигнализация).
Введем некоторые обозначения: цикловый вектор управления
на каждом r-м цикле передачи символа av
Гх = (Гх0> гхь • . ., rxMt rxlv, rx2v, . • -,rxnv), v= 1, Ma.(l0.4)
—>■
Множество всех ftx, &=1, г, образует полный текущий вектор
управления хг= (*х, 2х, ..., гх), в котором сконцентрирована вся
история управления от k=\ до k=r.
При отсутствии ограничений типа равенств и неравенств син-
—>
тез сводится к отысканию оптимальной структуры у* и
внутренних стационарных точек х* целевой функции Q (синтез
оптимального управления). Для поиска оптимального управления х*. при
ограничениях только типа равенств необходимые условия
экстремума задаются системой уравнений оптимальности (уравнений
стационарности и связи):
dQ(y9 х, со)
дгщ
= 0, г = 1, гт, / = 0, 1, 2,
gi (Y> и, со) = 0, i = 1, Ni9 Nt < N
(10.5)
Из подобной системы уравнений в результате надлежащей
интерпретации иногда можно получить и оптимальную структуру.
Достаточные условия экстремумов определяются по поведению
дифференциала второго порядка функции Q в стационарных точ-
как х* (условия Лежандра—Клебша и Сильвестра [169]).
9*
259;
В рамках данной главы рассмотрим только вопросы
оптимизации решающих устройств, осуществляющих прием сообщений, и
управления системой.
Будем считать, что совокупность сигналов (их кодовая
структура, вид модуляции), отображающих сообщения av, v=l, Ma, и
принцип функционирования системы в целом (способ передачи
корректирующей информации, квитирования и пр.) заданы. Как
известно, прием многосимвольных, в частности, двоичных,
сообщений может производиться либа «поэлементно» (в два этапа),
либо «в целом». При избыточном кодировании оптимальным
является метод приема «в целом» [127, 168,174]. Метод
поэлементного приема сообщений, закодированных с избыточностью, не мо-
;жет быть оптимальным даже в том случае, когда отдельные
элементы принимаются оптимально и решающие устройства
функционируют по оптимальным алгоритмам. Недостатком приема «в целом»
является сложность приемно-решающих устройств, которая
возрастает в степенной зависимости от длины сообщения п. По-видимому,
но мере повышения надежности элементов аппаратуры, и
улучшения технологии их производства этот недостаток будет терять свое
значение. Поэтому, рассматривая потенциальные возможности
систем передачи информации, необходимо иметь в виду именно прием
сигналов «в целом». В подобных случаях задача сводится к
синтезу структуры демодуляторов, осуществляющих обработку и
распознавание сигналов, и к определению оптимального плана
управления (пороговыми уровнями решающих устройств, мощностями
передатчиков прямого и обратного каналов и пр.).
j.
10.2. СИНТЕЗ ОПТИМАЛЬНОЙ СТРУКТУРЫ
Задача синтеза имеет физический смысл лишь при задании
совокупности ограничений. Однако наличие ограничений, особенно
неравенств, затрудняет в общем решение задачи. Поэтому
предварительно необходимо оценить возможность уменьшения числа
ограничений. Во многих случаях решение общей задачи синтеза
представляется возможным провести в два этапа. На первом этапе
определяется оптимальная структура с минимально возможным
числом ограничений [желательно лишь с ограничениями
принципиального (алгоритмического) характера] при заданных значениях
остальных переменных и фиксированных параметров. После
осуществления синтеза структуры накладываются все остальные
ограничения и с помощью универсальных (в том числе и
вычислительных) методов определяется оптимальный план управления
(этап синтеза управления).
Под структурой информационной системы при заданных
сигналах и помехах (способе передачи и каналах связи) понимаем
совокупность решающих правил у. Представим целевую функцию
L с алгоритмическими ограничениями (1.23):
260
W J2£v.<«
л л v=i r=i
[л
£rcv/Y№K) +
л
+ SrCtirY(rf,|or)
/—1
Л Л Л Л Л
(w (иг | av)) a; (vr | av> ar) dar, Л/,,
л
л "*«
Ч(^1«г)=^>о, /=i, л*а,£ rY*= i;
/=i
ry(dt\vr)=ryi>0, /=1,4,
Л
2'т.->.
(10.6)
где rCv/H rGVi —стоимости решений dj и rfj в лрямом и обратном
каналах при передаче символа av, v=l, Afa (опускаем далее ин-
л л л л
деке г при, ur, vr, ur, vr, Ur, Vr)> В результате анализа принятой
л
реализации и, зависящей от av, выносится с вероятностью Р^
решение о передаче по обратному каналу сообщения Ь , rj == 1, Мь,
мь
2JP =1, также зависящего от v. Тогда
л
л л л л л w(u\ a )
w(u\av)w(v\avt u) = w(u\av)w{v\b4)*= \ X
w (и I a0)
w(v\b„\ л л
х-^-^»(а|а0)ю(о|6,),
»(о|*о)
(10.7)
где ао, 6о — условные символы, означающие «только шум».
Обозначим отношения правдоподобия в прямом и обратном
каналах на r-м цикле соответственно
w (v | Ь0)
Л
w(u\a0)
(10.8)
и подставим в (10.6), усредняя L по всем индексам т|, т)==1, Мь,
261
Ma Mb rm
i-!isii:w
Л Л V—1 fl=l г=*1
U V
[л
ма
YrCvfy(dj\Au
Л
мь л
+ ^rCjy{dt\v)
•) +
Л Л
rAv {и) rAn (v) w (и | av) w {и | 60) Aafo. (10.9)
Поиск оптимальной структуры сводится к решению вытекающего
из (10.9) вариационного уравнения
К{к, co) = mimL(Y, и, со), у = (V/> Уг)-
ver
(10.10)
Структуры Yi={r'Yj} и Yt={rYt} демодуляторов прямого и
обратного каналов взаимно зависимы, поскольку подынтегральная
Л Л
функция (10.9) содержит произведение rAv(u)rAn(v)t а также
.поскольку вероятности Pv П(г-о зависят от решений, принимаемых как
в прямом, так и в обратном каналах. Условные плотности вероят-
„ Л Л Л Л
ности w(u\a0) и w(v\b0) в пространствах U и V неотрицательны
и не зависят от индексов v, f, i. Поэтому уравнение (10.10) можно
упростить:
Ма МЬ тт
г- А
^-т1пПХ 2 S р/^,.,м,
7€Г Л Л v=1 Чв1 ГжхХ
U V
lrCyry(dj\u) +
/-1
Л
+ 2'С«ГУ(Ш
/-1
Л . Л Л Л
rA(u)rA(v)dudv.
Введем функции r<pj и гфг-:
Л Л
ма мь
гф/ {и. *) - Е 2 pvр. к п (л.1, ЧЛ с> Ч м.
/'= i, А*„, r = l, rm;
11^=1 v=l ,
г == 1, M
, >wfr.
Тогда из (10.11) следует
262
(10.11)
(10.12)
[Л Л -.
^г АгЛЛ ^г ЛГЛЛ
£ У (di I«) Ъ ("- v) + £ ry (dt | у) ГФ< (о. «)
X
л л
X dwdy, (10.13)
Нерандомизированные правила rYj и гуг вынесения решений d,-
и d* (компоненты векторов структуры yj и уг) таковы, что
ry{d,\u)=l,ry{dk\u)=0, кфу,
(10.14)
ry{di\v) = l,ry(dn\v) = 0,n^i,r=l,rm.\
Полагаем, что в прямом канале, кроме уверенных решений,
могут приниматься и сомнительные решения d«^,. В обратном
канале принимаются только уверенные решения (в частности, только
утвердительные dy и повторительные dn). Оптимальная структура
демодуляторов, вытекающая из уравнения (10.13), соответствует
следующим правилам вынесения решений. На всех циклах
передачи, кроме последнего, выносятся решения dj и di, х=И=п, если при-
л л л л
нимаемые реализации u^U и v^V таковы, что выполняются
условия
^Г. Л Л Л Л 1 _W АЛ Л Л]
У [ Ф/ {и, v) + q>, {v, и)\ = min У L q>k (и, v) + <р„ {v, u)\9
г—\
*■ П г=1
кф'и пф1,
(10.15)
|,sb1. rm_i;
а оптимальные координаты вектора ry—(ryh, ryn) равны
Л «1. *=/,
1, п = /,
О, Я=^*\
Л I 1
'y№i«>-{0;
(10.16)
Повторительное решение dn выносится в том случае, если
1т [ Л Л , ЛЛ"| J-? Гг лл г Л Л1
У ГфДи, v) +гФп (о, «)J -minУ 1гф*(и, о)+ ф„(о, «)J,
«•=1
(10.16')
YV ' ; 10, кф}; 10, п^п; r=l, rm_,.
На последнем цикле сомнительные <2~и повторительные dn
решения не принимаются (предполагается безошибочная нумерация
циклов передачи на приемном пункте).
263
Приемно-решающие устройства прямого и обратного каналов
Л Л
должны формировать отношения правдоподобия rAv(w) и ГЛ (v)
л л л л
по полным (многомерным) реализациям и = ит и v=vr. Эти
отношения (выходные эффекты согласованных фильтров) должны
запоминаться, умножаться на весовые коэффициенты (10.12),
зависящие от априорных вероятностей Pv, P t стоимостей различных
решений rCv/, rCv/, вероятностей достижения г-го цикла Pv щг-\) и
соответствующих отношений правдоподобия «противоположного»
"л л
канала rAn{v) или rAv(u). Затем должны формироваться суммы
m
указанных «взвешенных» выходных эффектов "V (r<fk+r4n) и от-
бираться минимум. Таким образом, оптимальный алгоритм
оказывается сложным, требующим запоминания всех выходных
эффектов в прямом и обратном каналах за все rm возможных циклов
передачи. При этом неизбежна нежелательная задержка по
меньшей мере на время, определяемое величиной гт.
Чтобы устранить эти трудности, наложим дополнительнее
алгоритмическое ограничение, заключающееся в требовании
немедленного вынесения решений на каждом текущем цикле передачи. Это
означает, что минимизация среднего риска (10.10), (10.12)
должна, достигаться в результате выбора таких решений, которые
минимизируют частные риски rLv/ и rLY/ на каждом отдельном цикле:
мп
А А Л Л
rL*/ = min Г f V ry {dj \ u)r (fj (w, v) du do
?/ еГ/ а л /==i
' и v
мл
rVj>0>%ryj=l r=l9 rm;
/=i
Mh
Л Л Л А
rLyi = min f f V ry (dt | v)r (pt (v, u) du dv
uv
A
Mb
rY«>0, £rYi= I r=l, rn
/=i
(10.17)
Из (10.17) следуют условия создания оптимальной структуры.
В прямом канале выносятся уверенные решения dj, если при-
Л Л Л ^
нимаемые реализации u^U и t/еУ удовлетворяют условиям
264
'<p, = min ГФЛ <>„, k = 1, Maf r = 1, rm^ ■ (10.18)
при этом оптимальные координаты вектора rv
[0, кф].
Сомнительное решение d— принимается, если
r9_ = min^( Л= 1, Ма, г=1, /•„,_,, (10.19)
в этом случае оптимальные координаты ветстора гу
Л (\ Ъ •
У v ' ' \Q, кФ~.
На последнем гт-м цикле передачи область сомнительных
решений d~* устраняется и выносятся только уверенные решения в
соответствии с условием
Л
г«Ф; = ттгтфъ £= 1, Ма9
k
Л \\ k — 1
г-у*(<Ы«)= с* ''
В_обратном канале принимаются только уверенные решения du
л
i=l, Мь, удовлетворяющие условию
rq>i = min гф„, п = 1, Мь, г = 1, rm
при г(^|2) = (!* "т!'
[0, пфг.
МЬ Л Л<а
Множители />v£ P^vncr-o ^/Л^-) = %л P^P/vn(r_,fCvix
Tl=l V=l
Л Л Л
XAv(a)=r^T1inpH отношениях правдоподобия rAv (а) и rAa(v) имеют
смысл обобщенных стоимостей решений, изменяющихся от цикла
к циклу передачи. Для определения указанных стоимостей
необходима некоторая априорная и рабочая информация (знание
Р * Рп> ^vn(r-i)' rCv/, rCVi и др.). Неизвестные данные следует
определять с помощью измерительно-вычислительного устройства
(ИВУ) в процессе функционирования системы.
Условия вынесения решений (10.18), (10.19) можно
детализировать:
б прямом канале выносится решение dj, если
265
Ma
\ (10.19')
S rKir\W < £'Ч* А>(")• A=-l. АГв, * * ~, /;
v=l v=l
ма ма -
2rVAv(«)<2av~'Av("). r=1> ^-1;
v=l v=l
M0 A Ma Л
J rmKimK ("X £ 4* X («0. r = rm;
v=l v=l
в обратном канале выносится решение du если
^ л ■ "ь л
*1=1 V=l
Функциональная схема (структура) системы определяется
соответствующей интерпретацией полученных правил вынесения
решений. Как видно, оптимальные приемно-решающие устройства
прямого и обратного каналов должны содержать Ма и Мъ ветвей
приема соответственно. Каждая ветвь на каждом цикле формирует
Л Л
отношение правдоподобия rAv{u) в прямом канале и гЛл(а) — в
обратном. Выходные эффекты умножаются на соответствующие
стоимости (весовые) коэффициенты 'Xv/, ^ и суммируются.
Затем в прямом канале производится отбор экстремума и оценка его
" % Л
надежности по пороговому уровню^ rXv^rAv(u). Индекс надеж-
v=l
но отобранного экстремума суть уверенное решение. Из
полученных правил следует, что, в .принципе, структура не изменяется от
цикла к циклу, за исключением последнего цикла, когда
устраняется область неопределенности в прямом канале, а в обратном
канале в любом случае выносится утвердительное решение.
Рассмотрим подробнее приемно-решающую часть прямого
канала. Из (10.19') следует неравенство, отображающее процедуру
вынесения уверенных решений dj (распознавания)
ма
2л»(гЧ/-'Ч*)<°>
v=l
либо в развернутой форме
(%к - %}У Л2 + (%А - %,) 'А, +...+ (%„ - %,У А„ +...
- + {%k - %,)'&, +-+(r\k ~ т%ма)гАма > °-
Отсюда следует неравенство «надежности» решения dj
266
л
r=l, rm-l. V (10.20)
Из (10.19') получаем также неравенство, отображающее
процедуру оценки надежности решений. Для этого неравенство
Ма Л
у т% (u)^%v. — r\J)<Q также представим в развернутом виде
Отсюда следует неравенство «надежности» решения dj
Ма
1 v=l
= гЛ,пор, г=1, rm-l, (10.21)
где rAjnop — порог «надежности» на г-м цикле, формируемый как
взвешенная сумма всех ГЛ*, кроме экстремального rAj.
По смыслу решаемой задачи rCvp> rCv~J> rCvv^0 и,
следовательно, rKp> rK~*> r^vv^0, v, /=1, Ма. Итак, для вынесения
решения в прямом канале отбирается максимум rAj (10.20) и
сопоставляется с порогом надежности rAjnop. Если максимум rAj выше
rAjnop, то выносится уверенное решение dj. Если же максимум rAj
недостаточно высок, rAj RAjnop, то выносится сомнительное
решение.
(Весовые коэффициенты rXv/ и ГХЦ1 можно рассматривать как
управляющие (оптимизируемые) переменные оптимальной
процедуры выделения экстремума и оценки его «силы» (надежности).
Поэтому целесообразно определение этих переменных отнести ко
второй части общей задачи синтеза —к синтезу управления.
Процедуру вынесения решения di (распознавания) в обратном
канале, не требующую оценки надежности, также представим в
развернутом виде
мь ■
(10.22)
Оптимальная структура приемо-решающих устройств прямого и
обратного каналов в упрощенном виде показана на рис. 10.1. Для
правильного функционирования системы необходимо надежное
разделение первичных и повторных передач (сигнализация), а также
достаточно точная синхронизация.
267
От источника
информации
переоатчик
А прямого канала]
Ркч
ir
in,
H8H~\Л»ь
гч
Рис. 10.1.
Оптимальная структура приемно-решающих устройств прямого
и обратного каналов
Возможны некоторые очевидные упрощения. Будем полагать,
что потери получателя в результате правильных решений равны
нулю, rCVv=0, v=l, Ма, а различные неправильные решения
одинаково нежелательны, rCv/=rCVA=rC=const(v, k), k=fcv> кф\.
Кроме того, стоимости сомнительных решений полагаем не
зависящими от индекса v передаваемого символа av, rCv~=rC~,=
мь
=const(v). При этих предположениях ГА^ = 0, r^v-=-PvV Лш(г—i)X
Ми
Т1=1
X rC„'Aft), K,=PV%РчPvn (г-i)гСГ\М = 'К a неравенства
(10.20), (10.21), определяющие оптимальную структуру приемно-
решающего устройства прямого канала, существенно упрощаются.
Aj(u)>-^rAk(u), A=l. Afef кфуЛ
%'
мл
rXv — rkv^ r
М А/~
(10.20а)
v=l
Обозначим множители, имеющие смысл весовых коэффициентов:
'«
%
Av A,y
Эти множители, вычисляемые по результатам «текущих»
измерений, априорным данным и ограничениям, можно трактовать как
268
подлежащие оптимизации компоненты вектора управления
(пороговые коэффициенты). Тогда неравенства (10.20а) удобно
представить через эти коэффициенты и отношения правдоподобия
'Л;(«)>Ч;'Л*(а), k^ltMai кф'и г=1,
rm~U
м„
'Л,(и)>2%/Л>) = 'А.
7 пор-
v=l
(10.23)
)
В частных случаях, когда символы av равноценны и
передаются равноустойчивыми сигналами r4j=const(r, k, /) = 1, %,• =
= г1 = —— = const (v, /), что еще более упрощает основные не-
равенства (10.23) и оптимальную структуру
rAj(u)>rAk(u), k=\,Ma, кфи r=l, rm-l;
л*„
'ЛН«)>;/2Л(") = ГЛ.
7 пор-
v=l
(10.24)
Таким образом, при оптимальной структуре прямого канала
осуществляется выделение экстремума отношения правдоподобия
rAj и сопоставление его на каждом цикле с порогом надежности
(субэкстремумом) гЛ;-Пор. Пространство решений обратного
канала состоит из двух подпространств: утвердительных d7 и
повторительных dn решений. Таким образом, из (10.22) получаем
следующее неравенство, отображающее правило вынесения
утвердительных и повторительных решений:
rAy(v)>^An(k rl
УП
rAn{v)>rln/Ay(v)t г1пу = —
гХпу-'ГЬп
Луп"
1
"%У
УП
(10.25)
Пороговые (весовые) коэффициенты г/уп и Г1Щ также можно
рассматривать как оптимизируемые переменные (компоненты
вектора управления). В обратном канале порог надежности равен
нулю (оценка надежности распознавания не требуется).
Однозначными преобразованиями неравенств (10.23), (10.24), (10.25) и
других можно получить бесконечное множество равноценных
вариантов структуры. В частности, второе неравенство (10.24)
можно преобразовать к виду
ма _
'Aj (и) > П Y: rAv (и), П = -^з- = const (v). (10.26)
v=l
269
1 + 4
Как видно, порог надежности может формироваться в виде
функции (взвешенной суммы) всех выходных эффектов rAv, включая
экстремум. Пороговые коэффициенты Ч или Ч определяются с
привлечением системы ограничений.
Процедура распознавания сообщений носит экстремальный
характер и практически может осуществляться различными
способами. Наиболее быстрой является, по-видимому, «одноразовая»
процедура выделения и регистрации экстремума по всем ветвям
приема с помощью специализированных «экстремальных
анализаторов» [132, 168]. Прием считается достаточно надежным, если
выделенный экстремум является относительно сильным, т. е. если он
существенно больше (или меньше) некоторого порога надежности.
Чем выше требования к достоверности, тем относительно более
сильным должен быть экстремум и, следовательно, тем более
обширной на каждом цикле должна быть область неуверенных
решений d в пространстве rD. Демодуляторы замкнутых систем
всегда содержат специфические детекторы надежности или качества,
определяющие относительную силу экстремумов [186]. Можно (но
не обязательно) требовать на практике, чтобы экстремум был не
только относительно, но и абсолютно сильным, т. е. достаточно
«высоким» или «глубоким» по абсолютной величине.
Выше показано, что порог надежности rAjnop формируется, как
монотонная функция (например, сумма) всех выходных эффектов.
Более простой является эвристическая процедура формирования
порога надежности в виде функции единственного (но наиболее
существенного) субэстремального выходного эффекта. В
некоторых случаях оптимальная структура может быть определена
совместно с оптимальным управлением на основе интерпретации
соответствующих уравнений оптимальности (стационарности),
составляемых для поиска управления.
10.3. СИНТЕЗ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
ПРИ ОТСУТСТВИИ ОГРАНИЧЕНИЙ ТИПА РАВЕНСТВ
И НЕРАВЕНСТВ
Положим, что оптимальная структура определена из условия
L* =minL (см. § 10.2), а дополнительные ограничения задаются
"тег
вектором со. Поиск оптимального управления осуществляется по
критерию
L* = minL*(x, со),
где L; = L(Y*,x, со) = £ %Р^п{г-^ = Ь„(к, со). (10.27)
Рассмотрим два случая дополнительных ограничений.
270
Общий случай (система с памятью). Задача заключается в
отыскании управления х, доставляющего глобальный минимум
целевой функции Lx (10.27). Система уравнений оптимальности
представляет сабой совокупность уравнений стационарности, т. е.
необходимых условий существования внутренних экстремумов:
*=1, г,
dLK (м)
д*х/
0, / = 0, 1,..., М, lv, 2v,..., nv, (10.28)
1, Ма
При общепринятой формулировке среднего риска, как
неотрицательной и непрерывной функции всех переменных гхг (внутри
области допустимых управлений), привлечение громоздких условий
достаточности представляется излишним. В случае нескольких ста-
ционарных точек х в<се они должны проверяться на глобальный
минимум. Рассмотрим одно из уравнений оптимальности (10.28)
вида
Я 1 ri a ™
-JL- = -r—Y,Vp«p»ntrurI'« = 0> |* = 0,-Ж" (10.29)
** * v=I r=l
Условные частные риски rLv и вероятности /vnr не зависят от
будущих значений переменных: *х, k>r\ rLv = r^v(xr), ^vnr =
==Л>пг(хг)» ■_* r£v = 0, . Pvnr = 0, &>r. Оптимальные же
значения на любом &-м цикле зависят как от всех предыдущих,
, —>•
так и от всех последующих значении гх, г=1, тШу гфк. Учитывая
это, нетрудно убедиться, что
vn(k-l) дь
А-Р
' vn (п—I)
V
d\j
(10.30)
Рассмотрим одно из уравнений стационарности (10.28) вида
a m
SS
ЛЛ, „„_,/£„■ я=1, П.
При независимости передаваемых символов av переменные йхя ,
и *хя/ » *' /='» ^<*> \Ф1* также независимы:
d'LjId'xn^drLt/d'xn^O.
271
dL„
dkL„
д**т
-Pv Pvn(H)a4kV + JJ
Jtv n=k+l
+
' vn(n-l)
anL.
d*x„
(10.31)
Из (10.28) получаем систему уравнений оптимальности:
мп
7i \
v=l
= о,
г= 1, rm, ц = 0, М;
дг L,
а гк.
SP п1 == О
п=г+1
Л= 1. П.
(10.32)
Для строгой оптимизации необходимо учитывать всю
предысторию и все будущие состояния системы по отношению к r-му циклу.
Предыстория заключена во всех предыдущих реализациях и в
принятых по ним решениях, а будущее — во всех последующих
реализациях и решениях, сконцентрированных в будущем условном
риске ^vFr= У Pvn{r^l)nLv. До начала передачи символа a
L
■'vFO *
n=r-fl
= maxL =L а на последнем цикле L
v^=n?inLv^=0-
Очевидно, синтез оптимального управления состоит в совместном
решении системы ур-ний (10.32). Для этого необходимо иметь
полное статистическое описание сообщений, сигналов и помех в
прямом и обратном каналах. Изменения состояний системы на
любом цикле влекут за собой изменения оптимального алгоритма
не только на данном, но и на всех других циклах передачи. Если
будущие состояния априори не известны, то недостающую для
оптимизации информацию необходимо добывать с помощью ИВУ
в процессе функционирования системы. В общем случае
оптимальной может быть лишь адаптивная система с памятью и
прогнозированием.
В некоторых случаях (например, при синтезе систем с
двоичными алфавитами оптимальная структура может быть получена
на основе соответствующей интерпретации уравнений
оптимальности вида (10.32).
Алгоритмические ограничения памяти. Пусть наложено
алгоритмическое ограничение, состоящее в том, что память системы
272
не простирается за пределы одного цикла передачи. Тогда преды-
Л Л
дущие реализации и и v не используются, а значения
оптимизируемых переменных гх непосредственно не влияют на все
последующие решения, если будущие циклы состоятся. Такое свойство
управления назовем отсутствием последействия.
Переменными без последствия могут быть пороговые уровни решающих
устройств, мощности и др. При отсутствии последействия rLv=
= rZ/v(rx); drLv/d*xJfv33drLv/d*xMssOf кфг. Уравнения
оптимальности (10.32) при этом существенно упрощаются:
^ Г drL ^Л дР
1|- vKvn(r-l) dr% + 2j ^ d'xu
v=I M n-r+1
vn (n—1)
o,
0, M, r= 1, r„
drL,
vn(r-i) дЫ
nr- ^vn(n-l)
n=r+l
йгх,
= 0, Л= 1, П.
\ (10.33)
Учтем далее рекуррентное соотношение Pvnr=Pvn(r-ifPvn, а также
dPvnr/dft^=dPvnr/dfcx„v = 0, £>г; ^Р^/д^^,^дгРт1дккт =0,
&#г, и преобразуем (10.33) к виду
Г1РР f^L_ + / ^п\п
v=l > ** и« /
[i) = 0, Af r= 1, rm;
агд
dr/>,
_2L + J *"_ = о, Я = 17nf
^4V Vf <>rx.
(10.34)
n-1
J
где Jvr— r+iLv+ 2 I Lv П ipvn) — ФУНКДИЯ> характеризующая
n=r+2 V i=r+l /
будущее.
Перед началом передачи символа av функция /у0 равна
гт л—1 гт
5^ n^v П /^vn(n-i) = 'V^vn(rt-i) nLv.B результате решения системы
п=1 *=1 п=1
ур-ний (10.34) получаем оптимальные значения рисков nLv = nL*
и вероятностей nPvu=nP*vJi. Поэтому в оптимальной системе
величина «f*0 = Y ^vn(n-i)^vпредставляет собой минимальный условный
риск при передаче символа av. Каждое из ур-ний (10.34) обра-
273
щено в будущее в том смысле, что для определения оптимального
управления г% на любом r-м цикле нужно знать все будущие
значения hLv и kPvn, k>rf r=l,rm. Оптимальное управление может
быть, в принципе, найдено и непосредственно из условия
l; = mm v pv pv n (r_1} {rLv + jvr rpv n)i
X V=l
PV n <r-l) = Cmf (**)■ Jv r = C0I1rSt (*X)> Г = ] > 'm,
и другими методами (в частности, методами поисковой
оптимизации). При передаче равновероятных и равноценных сообщений
с помощью равноустойчивых сигналов (ЧМ, ФМ, ОФМ и т. п.)
и при симметричных распределениях принимаемых реализаций,
когда rPviL=rPn = const(v), rLv=rL = const(v), /vr=/r=const(v),
уравнения оптимальности (10.34) несколько упрощаются:
^ + ,,£!Ц_о.
V=l
r=l, rm, ц = 0, M, (10.35)
где
/r = '+'L+ J "L П 'Л, .
Рассматривая уравнения оптимальности вида (10.35), легко усмотреть
возможность поэтапного решения задачи кот конца к началу» (по типу
динамического программирования). В этом случае система рекуррентных ур-ний (10.35)
распадается на гт более простых «частных» (цикловых) систем уравнений,
что существенно упрощает задачу, поскольку на каждом цикле приходится
решать систему всего из М+[ уравнений.
На первом шаге решения задаем г—гт. При этом тРп===:0,
Jrm = 0, д mPvu/d mx/1 ф 0, а из (10.35) получаем простую систему уравнений
Ма
v=l ° *ц
= 0, ц = 0, м*
решая которую, определяем оптимальное управление тх* на гт-м
((последнем) цикле передачи. Находим также mL* = m L \ тк* ) .
На втором шаге решения задаем г=гт—1 и, используя
определенное на предыдущем этапе значение Jr _i= mL*, составляем систему уравне-
т
НИИ
274
м„
v=l
дГт l Lv r дГт'
am x
Л--1
= 0, jx = 0, M,
/A
определяющую оптимальное управление m x* на (г
Определяем для следующего шага значения:
— 1
г„—\
PnC™ !й*) и т. д.
-1)-м цикле передачи.
На произвольном гт—г+ 1-м шаге решения (на г-м цикле
передачи) используем полученные на предыдущих шагах значения nL* и пР*п
для составления уравнений оптимальности:
Е
v=l
дгк.
+
п-1
'+•/,* + J] К*ПЧ
п=г+2
t=r+l
и rv\
= 0» ц=0, М
Из этой системы уравнений находим оптимальное управление гх* на г-м цикле
и т. д. -
На последнем гш-м шаге решения (на первом цикле передачи г=\)
используем все полученные на предыдущих шагах значения nL* и пР*п и
составляем следующую систему уравнений оптимальности:
ЛГ
v=l
dlL„
d1*.,
п—1
w * Л)
^х,,
= 0, р. =0, Л1,
из которой находим оптимальное управление на первом цикле передачи.
По полученным hK*i можно определить не только средний риск, но и все
другие информационные характеристики: помехоустойчивость, скорость передачи,
распределение задержек и др. В рассматриваемом случае существенно
упрощается и процедура «экспериментального» поиска экстремума, поскольку на
каждом г-м цикле минимизируется функция всего М-+1 • переменных:
х v=l I L n=*r+2 V i=r+\ J J J
где nL* и пР*п определяются по данным расчета на предыдущих шагах п>г9
ГХ = (ГХ0, гХь
%)•
10.4. СИНТЕЗ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
ПРИ ОГРАНИЧЕНИЯХ ТИПА РАВЕНСТВ
Произвольность и неоднозначность в задании абсолютных или
относительных стоимостей rCvy-, rcvi и других можно устранить, используя зависимости
между управляющими переменными, возникающие при наложении ограничений
типа равенств (уравнений связи). Наложение подобных ограничений не только
возможно, но и необходимо для обеспечения требований, удовлетворяющих
заинтересованные стороны по существенным показателям качества системы:
средней скорости передачи, допустимой вероятности ошибок, расходу энергии и пр.
Формулируемая таким образом задача на условный экстремум может быть, в
принципе, решена методами неопределенных множителей Лагранжа,
последовательных приближений ид стоимости и др.
Ограничения на средние скоростные показатели ('метод множителей
Лагранжа). Пусть задается допустимая требуемая средняя длительность передачи
275
7,=ГДоп, а длительность одного цикла передачи Т0 постоянна, Г0 = const(v, г).
Ма rm г-1
Тогда {42, 65] T=kTT0, £т = гср=Яср+1, kT = ^ £ Л>ГгЛш- Задание допу-
v=l r=l t=0
стимой длительности Г=ГДОа равносильно введению одного из ограничительных
условий вида
й m
2j 2j ^v ^vn(r-l) —^гДоп,
v=l r«=l
"a '* ,
}j 2j Pv Pvnr = ^ср.доп = kT - l>
2j Р*пг ^ RcW Д°п» V = l * Мф
v=l r=i
m *m
ГЛщ=ГАТдоп, Г=1, rm, V = 1, Me>
0<r£r <1, °Jfer =1, Г/П^г =0.
1 доп ' доп i доп
Таким образом, чтобы обеспечить равенства
М„
Мл г„ г—1
r,„-E S'*-.,-£ >v \„-2 2". П*
или
V=l Г=1
ма rm
v=l
ДОП <•— «^ " уДОП
V=l r=l t=0
"ср.допe 2j ^j v "vnr ~~ 2j v ^ср.удоп ~~^y 2j V I I Г
v=l r=\
v-1
v=l r=l
i=0
уцоп.
(10.36)
(10.37)
Задача заключается в нахождении управления, доставляющего условный
минимум целевой функции Q=L при удовлетворении уравнений связи (10.36).
Введем неизвестные относительные стоимости повторений т cvu r L = r P -\-
+ rcvn rPvn и составим функции Лагранжа L для L=L% с различными
уравнениями связи:
L = 2j .2d ^v ^vn(r-l) rLv +
v=l r=l
Lv=i r=i
£п = 2j jLd v vnr ср.доп ="»
P p Tp D I
v x vn(r—1) vn ^ср.доп I»
= lr=l
(10.38)
276
ма тт Ма Г гт 1 j
^ = 2j ii ^v ^vn(r-l) r^v + 2d ^vn ^v I 2j ^vn(r-l) rf>vn "" ^ср.доп »
v=l r=l v=l Lr=l J I
£vn=X Pvn(r-i)rpvn~ VvAon=0» v=l, Afa;
[(10.39)
r=l
^ — ^ 2j ^v ^vn(r-l) ^v + 2Li 2^ ^vn ^v
v=l r=l
r^y rp ru
gvn~ On— «7
v--l r=l
Dm(r— 1) ^vn "~ I I ^Tvaoii I»
t=0 J I
= 0,
VAon
v=l, Mfl, r=l, rm,
где ^ср.доп, ^срУдоп И rkj
V ДОП
(10.40)
заданные константы (10.30). Преобразуем
функцию Лагранжа L к виду
Ма гт
Г = S I ^^п(г-1)ГЧп +const (х)],
(10.41)
v=l r=i
где rLvn= rPVH+( rcvn+Xn) г/%п. L = ^n, либо £n=Vn, либ° ^п=\п.
Как видно, оптимальнмй алгоритм миниминизует составляющую среднего рис-
а т
ка Le=\ V Pv Pvn (r_!)Г PVH, характеризующую помехоустойчивость, при
v=l г=1
о о о о
заданных ограничениях gn=0, где gu=gn, либо gu=gvnt либо £п = %п.Итакг
в общем виде имеем критерий оптимальности
a m
й m
^ v=l r—\ v=l r=l
о о о
gn = 0> ^vn ~ cvn "b ^n •
Используя-уравнения связи, число которых должно быть равно числу неиз-
-О
вестных множителей Лагранжа Avn. устраняем произвол в определении
относительных стоимостей повторных передач.
Общий случай. Систему уравнений оптимальности составим,
сопоставляя (10.27), (10.32) с (10.42):
М,
drL„
vn(r-i) дг^т дГ^
*vn(n—1) ^vn
n=r+l
= 0,
Ц =
Pvn(r-
gu = 0
0,
-1)
"П
M, r
^vn
^"«v
rJ —
= 1,
+1>
rp
rm>
д
n-
L l
=r+l
o
+ r^Vn fpvn
277
(10.43)
Оптимальное управление можно найти из (10.43) методами поисковой
оптимизации:
rr* = min V Р V Р п1
* -> г Zj v Zj vn(n-i) Sn,
x v=l n=r
r= 1, rm, x= ^ x, . . ., mxj^
где r/CH — область допустимых управлений на r-м цикле, ограниченная
уравнениями связи, gn — 0.
Случай управления без последействия. Функция Лагранжа
_ ма гт
L = S Ij Pv ^п(М)Г^п,\п=Г^н+ГЧпГ/)Уп, с точностью до неизвест-
v=lr=l
о о
ных множителей r^vn=r^vn +^п совпадает со средним риском. Поэтому,
сопоставляя (10.27) и (10.34) с (10.42), получим следующие уравнения оптимальности:
М„
2} Pv Лш(г—1)
^VH , о о ^r^Vn
d2xM
"('Чп + Л*)'
дгк„
0,
ja = 0, М, г= 1, гт\
дгР<
дгР„
дгк
VH ° ° VT1
+(r4n + V)^=0'
(10.44)
я= 1, П; ga = Q,
w/vr=^Lvn+x Г4п+ П 'рт\-
л=г+2 \ i=r-f 1 /
Эти уравнения можно конкретизировать с учетом заданных уравнений свя-
о о
зи £п = 0 и соответствующих неопределенных коэффициентов rXvn, Из (10.44)
видно, что влияние будущего на «текущий» (на /"-м цикле) алгоритм системы
о о
зависит от соотношения между стоимостями rA,vn и /vrB частности, на пос-
о
леднем гт-м цикле / г =0 и оптимальный режим от будущего вообще не зави-
v m
сит. Систему ур-ний (10.44) можно решать совместно. Однако решение сильно
упрощается, если в соответствии со смыслом задачи ограничительные условия
о
могут быть заданы в виде gn = rigvn=0. В этом случае имеем
Мп
r-l
v=i i=o
удоп
^ *VH ° О ' v *\>П
дгк
дгк„
= 0,
и = о, м} r = i, rm;
д Рун о о д PVn
rPvn-rkT = 0»
v доп
(10.46)
278
'ikTvAon )> Г Lvn — fpvn+ ГЬ vn rpv
«*^г-Н'Чп+ 2 К". П
n=r+2\ t=r+2 /
Оптимизацию управления по ур-ниям (10.45) вообще можно производить
поэтапно (по циклам) в любой последовательности: «от конца к началу» или,
наоборот, «от начала к концу». При этом коэффициент rkv— Xvn + ^Vr»He3a*
висящий от управления на данном r-м цикле, представляет собой некоторый
«приведенный» неизвестный множитель Лагранжа.
Если уравнения связи могут быть заданы в виде (10.45), синтезируемая
система оказывается оптимальной, когда она оптимальна на каждом отдельно'
взятом цикле передачи. В соответствии с назначением проектируемой системы
«скоростные» («временные») показатели могут быть заданы и в другом виде.
В частности, могут быть заданы ограничения на среднюю задержку тср—
—тср.доп = 0, среднюю дисперсию задержки ^(t)—/)Тдрп=0, среднюю
вероятна
ность превышения задержкой т заданного значения to, / Pv P(fv >t0)—РТдоп=
v=l
= 0 и т. д.
Ограничения на средние показатели помехоустойчивости (метод
множителей Лагранжа). Пусть задается допустимая средняя вероятность ошибок РСр =
= Рср.д,оп- Наложение ограничений на помехоустойчивость эквивалентно
заданию одного из следующих условий связи:
м.
а т
2j 2j ^v ^п(г-1)ГЛш — P(
ср.доп,
v=l r=\
V* p rp — p
vn(r—1) vh
VH ДОП>
v=l, Mat
либо
r=l
(10.46)
Pvn (г—l)r^VH — Г^ндоп, V—l, ^fl» r~ l' Гт> )
выбираемых таким образом, чтобы удовлетворялись равенства
а т
АГ,
р -V V р р гр -V р р -\ V р гр
ср.доп ^j ^j v ^vn(r— 1) 'vh JL v VHflon /' Z.i v
УНДОП»
v=l r=l
v=i
v=l r=\
Задача заключается в отыскании управления х, доставляющего при РсР = -Рср.доа
а т
условный минимум среднего числа повторных передач У / PvPvn(r—\{Pvn ~
v=lr=l
/?ср-Составим для среднего риска. Хх и усл0вий связи i( 10.46)
соответствующие функции Лагранжа, полагая, что г Lv= г cVH r PVH+r ^vrb rcVH
—относительные стоимости ошибок:
а т а т
Г==Хя5] 2Pv^vn(r-l)^VH + S 2 Pv ^vn(r-l)^vn + Const(x),|
v=l r=i v=l r=l
v=l r=l
p _
vn(r— 1) ^vh
rP = 0-
^ср.доп u'
(10.47>
279
мл
а т
£"= 2 *™ Pv 2 *W-l) ^vh + £ 2 Pv Лш<г-.> 'Лш +Const (x),
v=l r=\ v*=l r=l
rm
^н = 2^п(г-1)Г^н-^ндоп = 0» V=l, Ma;
\ (10.48)
Г= 2 2avH ^v Лгс<г-1)ГЛ* +S2Pv ^vn(r-I)^vn +const (x)t
v=l r=I
v=l r=l
rr — О rD Гр — Л
=>vh ^vn(r— 1) ^vh ^ундоп u'
v = 1, Mu, r = 1, rm,
(10.49)
где Рср.доп, Ру;НДрп и ГРундоп —заданные постоянные. Преобразуем
функции ЛагранжаТ (10.47), (10.48) и (10.49):
Г= 2 2 ?v Pvn(r-l) lrK*+ const (*>Ь
v=l r=i
''Г' г p т r? rp
О О О
где %н = %и+ гст> либо %н = bVH + rcVH, либо %н = гХт + \н.
Представим критерий оптимальности в общем виде
ГМа гт Ма гт
L'T =min 2 2 Pv *W-I) rpvn + 22 ^vh Pv Pvn(r-l) rp,
н Lv=lr=l v=l r—\
о о о о
£н = 0, (£н = £н> £н = £ун, £н = %н)-
Составим систему уравнений оптимальности для управлений с последействием,
сопоставляя (10.27), (10.32) и (10.50):
, (10.50)
У Р \ Р VH ■ д V р гг
v=i L ц ц rt==r+I
|A = 0, M, r=l, rm;
Prn(r-1) дГ + ar ^ Pvn(r-1) fLVH—°»
/i=r-j-i
= 0
(10.51)
я=1, П, gH = 0.
Оптимальное управление можно определить и поисковыми методами,
минимизируя сумму:
а; = min £ 2 Pv ^vn(n-l) "Чн, r = 1, rm.
*fc Kk v==1 rt=r
О
Область допустимых управлений ГКК ограничивается уравнениями связи gH=0.
280
Составим систему уравнений оптимальности для управлений без
последействия, сопоставляя (10.27), (10.34) и (10.50):
где
Ма г
Zu Pv Pvn(r-\)\ Г '
d2Pvn ...,<> d'Pvn
drKtl
+ (l + Jvr)
дгк„
= 0,
ji = 0, Af, r = 1, rm\
о О * vh °
jt=l, П, gH= 0,
0,
rt-1
— ^vh + 2d I W^VH ' ' tPym
n=r+2 \ f=r+l >
(10.52)
Если символы av, v = l, Ma равновероятны, равноценны, сигналы равно-
устойчивы (по отношению к помехам), а распределения их симметричны:
Pv = const (v), Pvnr = Pur = const (v), rPVH = rPH = const (v), rXVH = rC =
= Const (v) , Jvr = Jr = Const (Я) , rPVH доп = ГРН ДОП = Const (V) , PVH доп = Ря доп,
то система уравнений оптимальности (10.52) значительно упрощается:
Хн
дгР
+ (1 + /г)
drxM
= 0, г=1, гт; £н==0| (Ю.53)
п=1
где/, = г+1^н+ 2 *Lh Г1 'Ail. г1н = гХнГРн+гЯп.
п=г+2
i=r-f-l
Смысл множителей Лагранжа в уравнениях оптимальности. Как видно из
предыдущего, множители Лагранжа имеют смысл относительных стоимостей
повторных передач, ошибочных решений, ресурсов системы и пр. Эти
неизвестные множители определяются как решения расширенной системы уравнений
оптимальности в процессе синтеза с привлечением ограничений типа равенств.
Можно показать [65], что множители Лагранжа с точностью до знака
равны скорости изменения экстремального значения функций РСр =
-У
а т
■^ J Pv ^п(г-1)Г^н(или #ср = £ £ Pv Pvu(r-l)rpvn) при изме-
v=lr=l ■ \ . v=lr=l /
нении значений Яср.доп, #cpVAom 'кТущт (или Рсрдоп> Л>ндоп, ^ндоп )
в условиях связи. В уравнениях оптимальности с ограничениями средней
длительности передачи:
Ад :
дР,
СР
дР~
дЯ
%п —
ср.доп
дРср
dRt
v=\,Ma;
cpv доп
drkT
1. Ма, r=l, rmt
УДОП
а в уравнениях с ограничениями средней вероятности ошибок:
281
i dflCP __ dRCP -——
Ан=— лр ; a,vh — — dP , v — i, ма,
UJrc$.flpn w vh доп
dRCP
v *УНДОП
Относительные стоимости неотрицательны. Поэтому в оптимальной системе
с увеличением вероятности повторений уменьшается минимальная вероятность
ошибок и, наоборот, с уменьшением rPvn минимальные вероятности ошибок
растут. Отрицательность производных означает, что системы с обратной связью,
использующие метод последовательного статистического анализа, целесообразны
(отвечают требованиям оптимальности) лишь тогда, когда потери потребителя
за счет повторных передач компенсируются соответствующим повышением
помехоустойчивости, и наоборот. Определив оптимальный алгоритм системы при
заданных ограничениях, целесообразно проверить, удовлетворяют ли стоимости
X условию неотрицательности (Х^О). Если определяемые по системе уравнений
оптимальности стоимости (неизвестные множители Лагранжа) оказываются
отрицательными, то наложение ограничений не имеет смысла (и даже вредно).
В этом случае надо искать управление, обеспечивающее глобальный экстремум.
Такая проверка на «разумность» ограничений представляется весьма полезной.
Метод последовательных приближений по стоимости. Сущность
метода состоит в целенаправленном переборе входящих в
уравнения оптимальности стоимостей до получения характеристик
системы, удовлетворяющих заданным ограничениям. Чем меньше
стоимости повторения rCvn или rcVUf тем больше повторных передач
допускает оптимальная система (снижается скорость передачи).
Снижение скорости в «разумной» системе компенсируется
повышением помехоустойчивости. Наоборот, чем больше rCv п или rcvn
(чем меньше стоимости ошибок rCVH или гсГн), тем меньше
длительность передачи, но ниже помехоустойчивость.
Можно рекомендовать следующую последовательность решения
задачи. Сначала произвольно выбирают значения rCVH, rCvn (или
rcVH, r?vn) и определяют оптимальное управление (и структуру),
как указано выше. Затем вычисляют интересующие потребителя
показатели качества (помехоустойчивость, среднюю длительность
передачи и др.). По полученным данным производят необходимую
корректировку стоимостей с целью приближения показателей
качества к требуемым. Если длительность передачи окажется
больше допустимой, следует увеличить стоимости rCvn, rcvn или
уменьшить rCVH, ^vH. Если вероятность ошибок больше допустимой,
следует увеличить стоимости rCVH, rcVB и наоборот. После
корректировки стоимостей вычисляют новые показатели качества и т. д.
Корректировка производится до тех пор, пока показатели
качества системы не окажутся приемлемыми. Если с помощью
корректировки стоимостей довести показатели качества до требуемых
значений не удается, to это означает, что выделенные для системы
ресурсы (энергия, длительность передачи, полоса частот и пр.)
недостаточны. В таких случаях остается либо согласиться со
снижением требований к системе, либо изыскать возможность
увеличения ресурсов.
282
Рассмотрим процедуру поиска оптимального управления без последействия
при ограничениях вида
бП &vn V
■rkr
1 V ДОП
= 0.
Обозначим rXvn == rXvn+/vr «приведенные» множители Лагранжа, учитывающие
будущее. В рассматриваемом случае поиск можно осуществлять на каждом г-м
цикле независимо по «частной» системе уравнений оптимальности:
а г~~х ( дгР дгР \
Е^ГК 1Г^+%п17^ =0'
Z, *=о доп \ Ухм *** I
v=?l
ix = o, м, г = 1, гт;
^Г+%п^~ = 0, я=], П,
%п = Const (f£) ;
rpvn~rkT =0' v=l, Afe.
УДОП
(10.54)
По полученным данным ?'х* вычисляем на каждом цикле rP VH\ на послед-
г г г *
нем цикле передачи т ^vn= "^ =0t m^VH^0-
10.5. СИНТЕЗ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
ПРИ ОГРАНИЧЕНИЯХ ТИПА РАВЕНСТВ И НЕРАВЕНСТВ
Пусть, помимо ограничений типа уравнений связи g(y,K,<o)=09
заданы ограничения типа неравенств rGv("y, х, хо) ^0, v=l,Ma>
r=l,rm, или У V r3bv(y9 x, со) ^0. Наложение большого числа
v=l г={
разнотипных ограничений не только усложняет решение, но может
оказаться некорректным (противоречивым). Поэтому, как и при
синтезе структуры, сначала необходимо выяснить возможность
уменьшения числа ограничений, исходя из назначения системы и
физических особенностей ее функционирования. При наличии
ограничений типа равенств и неравенств поиск оптимального
управления осуществляется в следующей последовательности.
Вначале любым методом находят стационарные точки целевой
функции Q (или L) или соответствующей функции Лагранжа X
без ограничений типа неравенств, например,
le=™* 2 £ pyp™w(,p~+rKnrp,n)> & - о,
где Kg—область допустимых управлений, ограниченная уравне-
о»
ииями связи ga=Q.
283
Далее определяют область Kg допустимых управлений по огра-
ничительным неравенствам G(yy x, <о)<0. Чтобы удовлетворить
указанным условиям, значения оптимизируемых переменных и
из области Kg должна принадлежать также и области Ко- Если
целевая функция Q имеет только стационарные точки, совместно
принадлежащие Kg и Kg, то в качестве оптимального (допусти-
мого) управления к* следует выбрать координаты той точки из
области K=Kg(] Kg, x*e/C, которая обеспечивает условный
экстремум критерия. Оптимальное управление определяется при этом
лишь уравнениями стационарности и связи:
Если же стационарные точки критериальной функции из
области Kg, n^Kg не принадлежат области Kg, to это значит, что
условный экстремум, если он существует, находится на границе
области Kg- Следовательно, задача сводится к отысканию
условного экстремума с дополнительными уравнениями связи, опреде-
ляющими границу области Kg, например rGv(y,x,i(o)=0. В этом
случае необходимо расширить систему уравнений связи.за счет
привлечения уравнений, получаемых путем обращения
ограничительных неравенств в предельные равенства (методы составления
уравнений оптимальности см. выше).
Составим уравнения оптимальности при наличии
ограничительных равенств и неравенств. Пусть заданы ограничения типа ра-
о
венств ^п=0 на допустимую среднюю длительность передачи (на
скоростные показатели) и ограничения типа неравенств на
некоторые ресурсы системы. Такими могут быть, в частности,
ограничения на средние или пиковые мощности сигналов в прямом и
обратном каналах, на отношения сигнал/помеха, на диапазон
частот, длительности сигналов, некоторые комбинированные
показатели (энергию и пр.) и т. д. Можно, например, задать систему
ограничительных неравенств, учитывающих усредненные ресурсы
прямого и обратного каналов ЯМДОп, ffVA0U:
а т
£ £^Pvn(,VG«(4v)-"«»°n<0.
v=ir=l
а т
2j S^v^n(r-l)rG*CXt>v) — ^°ДОп < °»
v=lr=l
(10.55)
а также «цикловые» ресурсы или допустимые значения
управляющих переменных гЛ2мудоп, rh2vv доп:
(10.56)
284
Постановка задачи синтеза без задания ограничений (в любом
виде) на энергетические ресурсы 'вообще является некорректной.
Действительно, при отсутствии таких ограничений некоторые ком-
—>■
поненты и норма вектора х при оптимизации устремляются в
бесконечность и задача синтеза теряет физический смысл.
В соответствии с изложенной выше методикой необходимо
составить уравнения оптимальности, включающие уравнения связи
о
gn=0, rGw = 0, rGv = 0 и т. п. Введем дополнительные неизвестные
множители Лагр анжа г%ли и rAnt)
и представим целевую функцию
Q, например, в виде (10.42)
Ма гт _
Q = LE = X 2 PvPvn(r-l) rLvn >
• rL = ^v.+ \n %п + 'к/Пи v + 'К/**
Тогда расширенная (за счет неравенств) система уравнений
оптимальности аналогична (10.43)
м1У
/ J V
V=l L
drU
vn(r-l) дг
JL \П nL p
дгк Ш vn(n-l)
л=г+1
о,
jx = 0, 1,..., М, v\
д'Г,
vn(r-l) dr
+
дгк„
SnL P
vn vn(n-l)»
/i=r-|-l
v= 1, Ma; я = 1, 2,..., П, а;
| (10.57)
v=lr=l
О fft
J] 2j^v^vn(r-l)rx»~^°Aon = 0-
В ряде случаев ограничения ресурсов могут быть иными. Так,
например, отношения сигнал/помеха rh2Ui rh\ или пиковые
мощности сигналов на каждом* цикле должны одновременно
удовлетворять заданным условиям реализуемости (10.55) и (10.56):
мл
2 2 ^v Л> п(r-i)rK~Htiдоп < 0;
v=lr-l
22^^(г-„^-явдОП<о.
285,
V=l Г=1
(10.58)
Рассмотрим другие ограничения. Пусть заданы ограничения типа
о
равенств gH = 0 для допустимой средней вероятности ошибок и
ограничения типа неравенств для энергетических или иных
ресурсов системы. Неравенства можно, например, представить в виде
(10.55). Тогда, используя (10.51) и вводя дополнительные
неизвестные множители Лагранжа rXKUv и rA,Ht>, при которых rLVH=
о
= r/)VH + r'XVHr^vH + rAHuvrXuv + r^H/>Cu, ПОЛуЧИМ:
'р...,. „ VH +-^т— V "L ,_n|-0,
v=l
** n=r+l J
1
ц = 0, 1,..., М, v;
drZ,„
дгк„
— V nL P
• „ 7} vh vn(n— 1)
о,
п=г+1
v= 1, Ма, я = 1, 2,..., П, и,
£н = 0. _£ _^/v "v п (г-1) Г,сн v ~ ^" Доп " 0,
v=l г=1
(10.59)
Vх vn (г-1) ^ "»Доп
v=l г—\
Возможны и многие другие варианты постановки задачи
синтеза, например, на совместную оптимизацию алгоритмов
модуляции (кодирования) и демодуляции (декодирования).
10.6. ДИНАМИЧЕСКОЕ ПРОГРАММИРОВАНИЕ В ЗАДАЧАХ
СИНТЕЗА ОПТИМАЛЬНЫХ СИСТЕМ ПЕРЕДАЧИ
ИНФОРМАЦИИ
Известный принцип оптимальности Беллмана [4, 5, 6] и
вытекающий из него универсальный метод динамического
программирования могут быть применены для решения многих задач
синтеза информационных систем. Принцип, сформулированный Белл-
маном, состоит в том, что «оптимальное управление не зависит от
предыстории системы и определяется ее состоянием в
рассматриваемый момент времени, независимо от того, каким образом
(т. е. когда и в результате какого управления) система пришла
в данное состояние». Этот принцип применим к системам, будущее
которых в детерминистическом или статистическом смысле
определяется их текущим состоянием, коль скоро оно достигнуто. При
этом прошлое может не отбрасываться, а сохраняться в виде
предыдущих решений, накопленных отсчетов, реализаций и пр.
Информационные системы (в частности, замкнутые системы связи,
286.
радиолокационные системы и др.) удовлетворяют условиям
применимости метода динамического -программирования [4, 5, 6],
вытекающего из принципа оптимальности. Во-первых,
функционирование информационных систем тождественно поэтапной процедуре
вынесения решений. Применению вычислительной процедуры
динамического программирования благоприятствует при этом
«естественная» многошаговость систем последовательного анализа.
Характерные для них повторные наблюдения (передачи)
ненадежных сообщений четко определяют необходимое расчленение
процесса оптимизации. Во-вторых, число оптимизируемых переменных
реальных систем всегда конечно и не зависит от номера шага,
за исключением, быть может, первого или последнего шага.
Третье необходимое условие состоит в том, что характер
управления на -предыдущих циклах не должен влиять на будущее
управление. Синтезируемые алгоритмы информационных систем во
многих случаях (например, при отсутствии последействия)
удовлетворяют этим условиям.
При наложении требуемой совокупности ограничений задача
оптимизации управления системой передачи информации сходна
с экономическими задачами оптимального распределения ресурсов
[5, -23]. Используемый критерий оптимальности должен иметь
сепарабельный (аддитивный) характер, согласованный с
отдельными шагами (циклами) функционирования. Критерий среднего
риска Q (см. § 1.5) отвечает этому требованию. Формальным
подтверждением применимости принципа оптимальности Беллмана
является возможность составления рекуррентных уравнений
оптимальности, позволяющих осуществить поэтапную оптимизацию.
Основная ценность метода динамического программирования
состоит в снижении размерности экстремальных задач (примерно
в гт раз) и в соответствующем уменьшении объема вычислений
на каждом из шагов оптимизации. Однако динамическое
программирование следует рассматривать не просто как удобный
вычислительный метод решения вариационных задач на основе
рекуррентных соотношений, но и как эффективный «аналитический»
аппарат. Получаемые при этом аналитические соотношения нужно
рассматривать как программу для ЭВМ.
Синтез структуры и управления требует сочетания
вычислительной схемы динамического программирования с надлежащей
интерпретацией уравнений оптимальности на каждом шаге
оптимизации.
Применительно к информационным системам задачи
динамического программирования могут иметь детерминированный или
стохастический характер, хотя в любом случае учитывается
воздействие на систему случайных возмущений (помех). Если
составляющие целевой функции не зависят от случайных параметров
(рассматриваются, как математические ожидания), то задача является
детерминированной. Если составляющие целевой функции зависят
от случайных аргументов, то задача имеет стохастический
характер [23]. Здесь рассматриваются детерминированные задачи.
287
Введем некоторые обозначения. Векторы управления и
конечного состояния системы на произвольном г-м цикле передачи сим-
вола av обозначим соответственно rxv и zvr. Компонентами
вектора rxv являются все оптимизируемые переменные, а компонен-
тами вектора Zvr — выходные координаты xvr и yvr системы в
(некотором абстрактном пространстве состояний Z. Согласуем
выходные координаты системы с составляющими rQ целевой функции
Q. Для представления вектора zvr выберем прямоугольную
систему координат на плоскости {xvry #v/v) следующим образом:
(10.60)
Координаты «предначального» (исходного, г = 0) состояния
системы ^v0=^o=const(v) = l, yv0 = Уо=const(v) =0, так как °P^n =
= const (-v) = 1, °PVH = const (v)=0.
Координаты конечного (r = rm) состояния xvr =xr =
1 v ' mm
= const(v) =0, так как mPvn= тЯп = const (v) =0, yvr =
=xV(r _i) mPVH¥=0. Заметим, что xvr и yvr определяются из
рекуррентных соотношений (10.60) как произведения одной и той же
величины xV(r-i) (не зависящей от управления на данном цикле)
на вероятности rPvn и rPVH, зависящие от управления rxv. Это
дает возможность при отсутствии последействия представить
целевую функцию Q (10.1) как сумму составляющих rQ,
выражающих средний вклад каждого цикла в общие потери:
х __ р .гр _ х
r"vn == Чп(Ч)'
и = P ГР — x
Чн = sh(4)'
rp \
) vn »
rp
1) VH'
j
III
r=l
где rQ=y^Pvxv{r_l)rLv(yrirK)=:rQ^yriXr_urK^rQ _ средние поте-
v=l
ри на г-м цикле передачи. Управление, приложенное к системе,
изменяет состояние к концу г-го цикла так, что xvr=xv (r-ifPva
yvr=xv (r_D rPVH. При отсутствии последействия вероятности rPvn
и rPVH, определяющие изменения состояния за данный цикл, не
зависят от управления на предыдущих циклах. Шаги процедуры
оптимизации совпадают (за исключением начала нумерации)
288
с соответствующими циклами передачи сообщений. Необходимые
обозначения, поясняющие разбиение процесса оптимизации, даны
на рис. 10.2. Потери rQ на r-м цикле при фиксированном началь-
sVO
Ч/
Х^2 Х$(г-г) xv(r-0 x^r x
Начало
передач^
Конец
оптими-\
зации
Ъ
2-~
On =/
Р =0 7Р
ЦМ) Ыгт-2)Х^т-г) Чгт
Г1Н
Г1П
%
м*
Г-2П
гч
Г-1
ГЧ
*"?
W
*2
Конец
передачи,
1 Начало
оптимизации
чн
Чп
'-In
rV/7
р
ЧН
'P. JP m~2P гт~'Р
Hin Чп чп чп
bPiTB
Роя ™Р rn~2P> r*~fP 'ЪРмФО
iff vh iff 4ff riff¥U
Рис. 10.2.
Схема разбиения процесса оптимизации на отдельные этапы (схема
этапирования)
ном состоянии xr-i зависят только от управления на этом цикле
-»■->-> —>•
(если последействие отсутствует): rQ=rQ(yr, #r-i, гк), где rxr-i и
->
гх — аргументы, указывающие на зависимость rQ от множества
всех состояний xV(r-n и управляющих переменных rx v при
передаче символов av^At y=lyMa. Цель оптимизации состоит в опре-
делении структуры у и управления х, минимизирующих при
заданных ограничениях функционал Q. При оптимальных значениях
Q = Q*= min Q = Q(y*, x0t x*).
ver, ~ZeKy
Потери за несколько шагов оптимизации «от конца»
обозначим Qr, где г — номер цикла передачи. Тогда потери за гт—г+\
первых шагов равны
(10.61)
fe=r
Очевидно, общие потери за все гт циклов (шагов) равны
гт ' г
Q = Qi = У\ hQ, а потери на первом шаге Ягт= mQ-
*=i
10.7. СИНТЕЗ ОПТИМАЛЬНОЙ СТРУКТУРЫ ПО МЕТОДУ
ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ
Уравнения оптимальности структуры вытекают из критерия качеста (10Л)-
(10.2). Полагаем, что, кроме прочего, требуется обеспечить заданную
неравномерность скорости передачи символов av. Введем для этого вектор «неравно-
10—281
289
мерности.» P=(Pi, P2, ..., Рмв), 0^j5vs^l, v=l, Ma. Компоненты Pv
рассматриваются как произвольные весовые множители, которые могут
варьироваться в процессе оптимизации до удовлетворения заданным ограничениям по
скорости передачи. При этом
г
rPvn = PvГР*> Pvnr = PvPnr, Рш = П kPn, (Ю.62)
где rPa — вероятность повторительного решения для символов av с
минимальной требуемой скоростью передачи, -PrV = l.
В частности Pv, v=l, Ma, могут быть подобраны так, чтобы
обеспечивались одинаковые вероятности Pv пг=Рпг=const (v). Средний риск (10.6), учитьь
вая введенную неравномерность р, представим в форме
Мл
L = £ 'Q, ,Qe£ PvKTlPutfr-i)H**, '?),
(10.63)
r=l
v=l
<где
4*v, rY) = ^v =
л л L/=r /=i
л л L/=r
U V
Л Л А Л
IF (и, v)dudv.
При отсутствии, последействия векторы структуры уг и ky, r<.&, независимы.
Составим рекуррентные уравнения динамического программирования - на основе
принятого критерия оптимальности (10.3) и с учетом независимости уг и ку,
L*y=Ly (?."£,«) = rain J 'Q,
(10.64)
'Y/
= rY№l")>0, /=I,Afe, ]g ry(dj\u)=\;
л
( ryi = ry(di\v)>0, i=\,MbK £ Y№I»)«I.
1=1
Рассмотрим процедуру оптимизации «от конца к началу». На первом; шаге
оптимизации, &=1, г=гт, ищем -
mm Qrm = <£л?а. min J Pv Pv" ' Я» (7гж-1) * (< Tm Y) =
fmY /"ту v==1
= Рп(7^1)В*М.
Af
Л*Л
r^^(g»min2?vP^lL^ ^Pvm '^(fm).
'mY v=l
v=l
290:
^v (rm) = L(av, Гт~У* ).
На втором шаге оптимизации, 6=2, r=rm— 1, ищем
mi
rm v
iin Qr _, =; Q:_ _1)y = min ('» 'Q-bQ; ) =
i v m V
'" ( V' ) 2 Pv P^ *- («v , ""-1 T) L ( «v., '« > ) =
V=l J
M„
:Pn(Vrm-2)^*(^m-l),
где Б* (rm - 1) = mir^ J Л, P£w 2 [L( av!m ' v) + Ai (*v> r™ '"?) I>m)]~
V v=l
Af„
= 2 Pv Km 2^v(rm-l),
v=l
На третьем шаге оптимизации, k=3, r=rm—2, ищем
min Qrm-2= min
v^ ('--«+V)-<M-
= min
' Щ у
M„
+ Pn
где
-v=l
Ma "Г
°а (Яж-3 ) 2 Pv PC"* 3 Pn(°v. Tm 7) K('m- 1) =
v=l J
= Рп(~УГпг3)в*(гт-2),
B* (rm - 2) = min^ Pv ft* 2 [ I ( av< г™ 2 у) +
rm Vv=l
■+ Pn ( *v, r» 2 y) *>«,- 1)] = £ Pv PCm ^ iTm ~ 2).
v=l
l^(rm-2)~x(°vfmr2Y)+Pn(av, Гт_2Т) ^ (*■«-1)"h т. Д.К
10*
291
На произвольном (rm — г+1)-м шаге (на r-м цикле передачи) оптимальная
структура гу* удовлетворяет рекуррентным уравнениям
Ма
q; = l;v= nun £ pv рг-. [L (v ~) + Ра (^ r^) L. (r+I)]t r=1 (rmi
v v=l (10.65)
где i; (г + 1) = L (av /+1/) + Pn (av, r+1^) L; (r + 2).
Представим рекуррентные ур-ния (10.65) для «текущей» структуры гу на
r-м цикле в интегральной форме через координаты вектора гу (10.63):
Л -, Л л л л
+ rV(dn\v)Lv(r+ 1) U(«, v\ov)dudv,
y(di\v) +
^1» >m,
тде 'йп — повторительное решение в обратном канале.
Компоненты r\j и rYi вектора структуры гу на r-м цикле определяются
рекуррентными соотношениями для прямого и обратного каналов, Lr„= ^r«/+ ^w •
М„
А
Л
b;Y/ = ^nJ |2 '«КГ'Е гС¥/Т№|и)ш(|1.о]а,)Л*.
V/ л лу1
л*л
'~1
fl Г Ь А
V/ л AV=1 |_*-1
U V 1фп
Л , 1 Л Л Л Л
+ ry(dn\v)Lv(r+ \J\w(ut v\av)dudv.
+
(10.66)
л Л Л Л , Л
Для прямого канала, принимая во внимание, что ш(и, v\av)dv = 't&(u\av),
из (10.66) получаем уравнения оптимальности •?
Л
V
мл
i /у* , л y=*i
Y/ и
мп
rY/>0, . J] ryj=l, r=l,rm, j = l,Mfi,
/-1
(10,67)
МЛ
«е^9Д«):-.2.^тPC~lf,<VAv («), / = 1. Me.
• ' " v=J "" ' ■ -
292-
Уточним систему уравнений оптимальности для обратного канала, полагая
возможными лишь утвердительные и повторительные решения d7i dn:
L* =min J lry(dj\v)r^(v) + ry(dn\i)^(v)]w(v\b0)k
1 V 0
rYy>0. rm>0. r7y + rYn = b r=l77~I (Ю.68)
Л
где гФу(*) = Х ^vP;"lrCv/AvW,
Л "Л
%W -J Л, Pr1[^vn+ *>+!)] rAv (v).
v=l
Л
Преобразуем последнее равенство для rq>n(v), обозначив через rCvn=^
c=r^vn+^v(r+l) приведенную (с учетом будущего) стоимость повторных
передач:
ма
Прямой и обратный каналы зависимы. Действительно, решения,
принимаемые в прямом канале, влияют на «будущие» частные риски 1^ (ir+1),
определяющие стоимости rCvn. Стоимости rCvn связаны с rCvy системой ограничений.
Рассмотрим отождествляемую с правилом вынесения решений структуру
/Г
прямого канала (10.67). Принимаются уверенные решения dj, /=1, Ма, если
Л Л
реализация u^U удовлетворяет условию
Л Л Л А
ГФ/ (") = min гщ (") < ГФ~ ("Ь k = 1, Ма, кф -
л м_ * = /,
принимается сомнительное решение d^, если
(10.69)
Л Л Л
гф~ (") = min rq>k («), k = i, ма,
k
А М & = —,
л- П.
ч<41«>-{0;
Структура обратного канала соответствует правилу (10.68). Принимается ут-
Л Л
вердительное решение d7t если реализация v^V удовлетворяет условию
л л
Лру(о)<гФп(зЬ (Ю.70)
Л Л
в противном случае, т. е. при г<рп(р)^гфу(0), принимается повторительное
решение dn- Неопределенные коэффициенты ipv на этапе синтеза структуры или,
293
что удобнее, на этапе синтеза управления необходимо целенаправленно
.варьировать до удовлетворения ограничениям по относительной скорости передачи
символов.
Рассмотрим поэтапную процедуру оптимизации управления при заданной
(оптимальной) структуре.
Случай отсутствия ограничений типа равенств н неравенств. Первый шаг
оптимизации, k=l, r—rm. Задаем начальные состояния *rm_j = ixV(r —n
из интервала 0^xv^ _i)^l, v=l, Ma (ограничение на возможные состояния,
*V(r —и =^vn(r—1))- Находим условное оптимальное управление тк на гт-м
цикле из условия
= V(Jfrm-0V
Минимум определяется по всем составляющим вектора тх, тх = \ mxv /,
v = I71Wa:
Ма
Гт^ ^ V ру xv{rnrX)rmLv ('<)
г ->
Условное оптимальное управление тх* и минимальные потери mQ*
предоставляют собой функции произвольно заданных (в пределах области допустимых
значений) начальных состояний: хг , , mx* = mx*(xr i)/mQ* =r,nQ*(*r _i/.
Второй шаг оптимизации, &=2, г=гт—\. Задаем начальные со-
->-
стояния д: г _2~f xv(r —2)>из области допустимых значений. Общие потери
-* .-*-►/-*
за два шага зависят от состояния хг __2 , поскольку хг « =дгг « 1дгг __2 »
от m m m
от х от rm l m '
Далее ищем условное оптимальное управление m х* на втором шаге из
условия
<я-| ft.-!) - mi^ [rm_1 Q ft»-*, rm_1*) +
'1*-'",~l'>?(ivm-*).
f —1
m
При этом используются оптимальные значения mx* и mQ*, выбираемые из
полученных на предыдущем шаге, r=rm.
Третий шаг оптимизации, £=3, r=rm—2. Задаем начальные
состояния хт * из области допустимых значений. Общие потери за три шага
от
представим в форме Qr _2 = ГпГ Q (хг _3» Г/7Х~ х ) + Q* -1 (*> -2^ -з.
. , /я m от \ m m °*
'-"Ч
294,
г —2—> г —2-** /->■' \
Далее ищем условное оптимальное управление т х* — т х* \хг _3/
т
из условия
<?;т-2 (*„,-») - «^ [Гт"2 q рт-з t'-2 х) +
+ <Ы*^(^/-~^))].
используя данные расчетов .на предыдущих шагах, оптимизации, и т. д.
Произвольный (гт—г+1)-й шаг оптимизации (г-й цикл
передачи). Задаем начальные состояния xr-i из области допустимых значений.
Общие потери за все гт—г+1 шагов оптимизации равны Qr = r>Q(xr-i, гх) +
♦ -*->-> -> ->
+ Qr+i(xr(xr-u гх)). Условное оптимальное управление гх* = гх*(д;г-1) ищем из
условия
г.
q; (г-1)=mm [rQ (*,_,§ 'x) + q;+1 р (*,_,§ гx))]t
используя данные расчетов на предыдущих шагах и т. д.
Последний, гт-й шаг оптимизации, г=1. Задаем исходное (пред-
начальное) состояние х0 и определяем Q = 'Q(a;o, /x)+Q*2(^i(xo) *>с)). Условное
оптимальное управление *х* на первом цикле находим из условия
Q* = Q\ (Т>) = min [»Q (To, lx) + Q; ( * (T0, * x))] f !х* = '"£ (£).
X
используя данные, полученные на предыдущих шагах. Далее для определения
оптимального (безусловного) управления необходимо действовать в обратной
последовательности:
— задать конкретное значение координат предначального состояния, x0v=a
■=*о=const (v) = l;
-> -»»
— определить оптимальное управление на первом цикле 'XohtCxo—I);
-> -+>->->■
— найти начальные координаты второго цикла Xi onj=x*i(x0, ^опт);
-> -> ->
— определить оптимальное управление на втором цикле ax0nT=2x*(xi опт)
и т. д. до последнего цикла передачи.
—>
По полученным цикловым управлениям гх0Пт, г=1, гт, построить полное
управление
-* /1-* 2-* rm"* \
**опт 3= \ 5*опт» ^опт» • * •» ^опт /•
Процедуру оптимизации иногда можно представить более компактно с
помощью функционального уравнения динамического программирования.
Составим уравнение для важного частного случая равноценных, равновероятных и
равноустойчивых сигналов (символов), когда векторы состояния и управления
не зависят от индексов v, передаваемых символов av (обычно при угловой
модуляции: ЧМ, ФМ, ОФМ и т. п.):
гР<м ==г/эн = const (v), rPvn = rPn = const (v),
xvr = *r = ^n(r-i) rpn = const (v), rLv = rL = const (v) .
rm rm
Q = 2 *r-lTL = 2 Pn(r~l) 'L. rL = rL (Гх ).
Заметим, что Pn(r-u от fex не зависит, если £>г.
2§5
Условное оптимальное управление на r-м цикле передачи удовлетворяет
условию:
^(Я-i) = mjn l'Q+ J *Q») = min [ i>n(r_n ri C7*) +
+ P^, Фп(^)Г+1£ C+,T*) + Pn {r_l}rPn (?) '+' Pn Г^*) X
X Г+2 L (***) + . . .+ />„<,_„ VB (' *) . . /--' Pa С-"1 *) X
X rm I C*"?)] = Pn(r_0 min fa (rx ) +
+ ^Qmin[r+1lf+1x) + f+1Pn(.)]) (10.71)
Обозначая min I L + Яп (#)J = /r_i_i (•*>)> получим функциональное уравне-
ние, определяющее последовательность операций оптимизации по методу
динамического программирования:
/г("?,+!) = min ['!■( ъ)+'/>п('х) fr+l(7r)]. г=17^ (Ю.72)
Условные минимальные потери на всех шагах оптимизации от первого до
текущего (гт—/*+1)-го равны
Q;(Vi) = ^n(r-i)/r(*,-i)-
Случай наложения ограничений типа равенств на средние показатели
скорости передачи. Пусть цель оптимизации состоит в определении управления,
т а
минимизирующего средние потери за счет ошибок \Q=LE= 2_\ ^^v ^vn(M)^
т а
г=1 v=l
X r/)VH при заданном ограничении ^У \ Pv Pvn^r_D =гСр.доп на среднее
число передач, /*Ср.доп^1. Состояния системы в начале каждого r-го цикла
определяются координатами х v (r_jy = Pv п ^г—1), 0 < xv (г_^ < 1, г = 1, rm.
Процедура оптимизации выполняется в следующей последовательности.
Первый шаг, г=гт. Задаем xr . =/л- ,г .Л, v=l, Ma, из области
m v т ')
ма
допустимых значений, определяемой неравенством 0< /, ^v ^v (г — !)<
m
v=l
г ->
<тт(/Ср.дод—ll, 1'). Условное оптимальное управление тУ? на первом шаге
(последнем цикле передачи) находим из равенства
$т(*Г™-Х ) ^ 2. Pv *v(rm-l) ГШ Pvh Cm *)>
296
По найденному управлению тх= тх*/дгг _j \ определяем оптимальное зяа-
чение Г/п Я^н ( Г/"к* ). Заметим, что 'тР* п = ° •
Второй шаг, г==гт— 1. Задаем яг _2=f *v/r —2)1» v=l, Affl> из обла-
■» /71 V /71 J
сти допустимых значений, определяемой неравенствами
ма / ма \
О <£ Р„ ^v(rm_2) < min rcp доп - 1 - J Pv x^.,, ,1 .
v=l Л v=1 '
Координаты Xy,r _,. зависят от тх и дг (г _2) так что х (г _и=
т т гп
"^ *у(гт"~2) m ЛиД m xv )' Общие потери за два шага
"а
r —l-> r —1->- /-> \
Условное оптимальное управление m и* = m и*1-*> __2' находим из
равенства
r —1->
После определения m x* проверяем (а при необходимости корректируем)
выполнение условия допустимого распределения ресурсов (среднего числа
передач) :
v=l
Оставляем лишь такие значения xv^r __2), которые удовлетворяют указанному
неравенству. По определенному условному управлению m x* находим
условную оптимальную вероятность ошибок m ^Сн^ m Руц\т \ /• Оста-
гок распределяемого ресурса rcp=fcr равен гср.Доп — V /^ *V(r — 1)' гДе
v=l
* _ rm~~l d f Г/7Г"1~** V
Xv(rm— 1)— Xv{rm—2) ^VH^ \/
297
Третий шаг, r=<rm—2. Задаем xr _z = fxv(r *Л,v=l, Ma, из облз-
сти, определяемой неравенствами
О < £ Pv дгу(Гт_3) < min I гсрД0П _ 1- J] Pv [ Arv(rm_2) + <(rm_,)], 1
V=l A V=1 )
y Y rm p
v(rm-2) — и v(rm~3) ^vn [ xv /.
Общие потери за три шага оптимизации ?
_ Ма
v=l
г —2-*- г — 2-*- /-*■ \
Ищем условное оптимальное управление m х*= т к* \хг —з) из равенства
^«-"(V* ).= m2n2Jy pv vrm-3)rm Чн(Гт~2>ч)+
Гт я Lv=i
+«m-.(V»(V»/"-2'?))].
'т р I'm v* I —' т р
'vn ^ xv) ~ 'vn.
г —2->
Определив т >cv , проверяем выполнение условия допустимого
распределения ресурсов
ма
0<2^ { *«гт^>[»+Г|11""2 ^п(Гт""2^)] + <(гт-.1,}<^ср,доп-Ь
v=l
Оставляем лишь такие значения xv,r __3у которые удовлетворяют указанному
условию. По условному управлению т xv находим оптимальную вероятность
ошибок m - Я^н = т Р^ ( т и*). Остаток распределяемого ресурса ра-
вен гСр.д0П--2 Pv [4(rm-2)+^(rm-i)] и т- Д-
v=l
Последний шаг, г = 1. Задаем исходное состояние *о= {xv0}^ xv0=дгв=
= 1 и ищем безусловное оптимальное управление на первом цикле из равенства
ма г. т
V=l J
V=l
298
Очевидно, x*vl =дг01Руп(1^)= 1Pvn(l^*)t 1'£* = l~Z*(70) = ^„т,
rm Ma
2j 2j i>VJrv<r-l)==rcp.fl
>.доп.
r«i v=i
Далее проходим все циклы (шаги оптимизации) в обратном порядке — от
начала к концу:
->
— по оптимальному безусловному управлению ^опт находим
1 д- =10 (1% V
•*vonT vn\ ^vomv»
— определяем Иуопт^ х™ *vonT/
Рассмотрим модификацию основной схемы динамического
программирования. Часто удобным оказывается вариант процедуры решения с
использованием множителей Лагранжа.
Случай ограничений типа равенств. Пусть требуется минимизировать
средние потери за счет ошибок при заданном ограничении среднего числа передач
гСр или среднего числа повторений /?Ср= гср—1. Цель оптимизации (критерий)
представим в виде
Q* = min Q = min £ 'Q, xj= {'xw },
v. r=l
r= 1, rm, v= 1, Ma, n = 0, 1> 2, v k .;
rQ=YiPv ^п(,-1)(Я(г_1))[Г^н(Ч )+W«(4 )],
v=l
2d jLk v vn(r—1) "vn ^ср.доп~~0»
r=l v=4
(10.73)
где Яп — неизвестный множитель Лагранжа.
Введя вектор «неравномерности» P={PV}, v=l, Ma, конкретизируем
критерий оптимальности управления (10.73):
т а
Q* = min£ 'Q=min J 2 ^v"' V-i) x
у, г»1 х r=l v=l
(10.74>
2j 2j ^v^ ^vn(r-l) ГЛга ~" ^ср.доп— °'
г—l v=l
Составим рекуррентные уравнения динамического программирования.
299
Первый шаг оптимизации, £=1, г=гт. Ищем оптимальное управ-
ление отх* из условия
Q* = minPr =pmin V Pv рОя-1 Р, rm p (rml? )
rm r + m r .+ *J vrv n{rm~~l) vh V xv '»
mx mx v=I
r"PVH = 0, r»x = {r«xv}.
Оптимальное управление можно определить из системы уравнений
стационарности >
dQr,
= О, v= 1, Ма, п = 0, 1, 2,
Рп1 г _,) = Р^-1 const (у)
или
М
д
6 *v> v=,
2 PvPJ»-1 r^v„=0. (10.75)
Оптимальное управление mxv , v=l, Ma и оптимальные значения вероятностей
ошибок т ^ун= т-^уи( т>С) находятся или прямым решением системы
ур-ний (10.75) или методами лолсковрй оптимизации (например, градиентными
методами). Потери Qr определяются с точностью до Рп /г _jv
v=l
Второй шаг оптимизации, /г=2, г—гт—1. ИщемГт х* из условия
'fit Ki 'Ш кг ч ' v '
л = 0, 1, 2,
или
+ ^-1Руп(гт-1-)(Яп+гтР;н)]#
Обозначим «вклад будущего» в средний риск для (гт—1)-го цикла через
01 A,v = Лп + т PVH • Этот вклад определяется по данным оптимизации на
предыдущем шаге. Тогда, очевидно, оптимальные потери равны
0* = min V Р firm—2 Р <АГт 1 Р 4-Гт~~1Х Гт l P \
300
'от x
v=l
Оптимальные значения т *v , т Pw и т Pvn лаходятся непосредствен-
г —,1
но из системы уравнений стационарности dQ _j j[д т *cv/l = 0, v=l, Ma,
/t=0, 1* 2,... или методами поисковой оптимизации. Потери Q* _j
определяются с точностью до
v=l
г —2->
Третий шаг оптимизации, &=3, г=rm—2. Управление m x ищем
из условия
Q* ~-2 = min Q^m-2 = min (Гт ~2 Q + Qr -l)
r™~2t = {r™-2 Hw}# л = 0, 1, 2, . . .
или Ma
«*,-»- ™2п_2 рх^-чр^-^-2 p™(r"-2t) +
r"» и V=I
+ (^n + ^-1 ^ + ^-^/m-' ^nXm-2Pvn(rm-2^)] .
Г —20)
Обозначим «вклад будущего» для (rm—2) -го цикла через т A,v = ku +
+ т ^Vh+ m ^v m ^vn (определяется по результатам оптимизации на
предыдущем шаге). Следовательно,
Ма
Q'm-2 = °£ £ PV P>"" Vm-*> {T"~2 Pv. + r»-2X /«-* Л-п).
_ /•_—2->* f —2 * Гт"~2 „*
Оптимальные значения m >cv , m РуЕ и ш fvnнаходятся из системы урав-
г —2 .-< :
нений стационарности dQr « /d m >«vn=0, v=*=l, Л1в, я=0, 1, 2,... или метода-
гт ' ^
ми поисковой оптимизации. Тогда потери Q* __2 с точностью до Яп(г _3) Равнь*
ма
Ql-2 - I Pv Р>-3 *Vm-3) (^"2 ^н + '« "2 Xv '» "2 О и т. д.
v=l
На произвольном (rm—г+\)-м шаге оптимизации (на г-м
цикле передачи) имеем следующие рекуррентные функциональные уравнения
динамического программирования:'
* v=i Г(Ю.76>
где lv =X„+r+1 Р^+Г+1К Г+1 P'n. r=l, rm-% r™-\ = Xn +r" P*w;
Гт^ = 0, rmP'vn=0.
Множители Xn и p"v , влияющие на оптимальное управление, относительные
скорости передачи отдельных символов и среднюю скорость передачи, целена-
301
правленно варьируют до удовлетворения заданным ограничением. В
рассматриваемом случае требуется найти управление, удовлетворяющее уравнению свя-
зи ^j ^ ^v ■ \kPvn~^cvnou=0 и заданной неравномерности скоростей
nepers 1 v=i k=o
-> , i
дачи р. Заметим, что все оптимальные значения kPvw Л=1, тт—1 становятся
известными в конце процедуры оптимизации (на первом цикле передачи).
Во многих весьма важных случаях символы' av используемого кода
равновероятны, равноценны, а соответствующие им сигналы равноустойчивы по
отношению к помехам (симметричные распределения). При этом Р v = const(v)
"Лш = Г/Эн = const (v), г Pvn = г Рп = const (v), lv =1 = const (V), % =
= x = const (v), Pv = const (v) = 1, вследствие чего ограничительное
уравнение связи и рекуррентные уравнения динамического программирования
упрощаются:
;=^п(г-1)^п \гРш(г^)+г1гРи(гж \
Q =
Гт Т
где ГХ = 1п +
1и
* г-4-1 ° г 4-1 * —
(10.77)
'li = xn гтР*н
Случай ограничений типа равенств и неравенств. Пусть задача состоит в
отыскании управления, минимизирующего целевую функцию Q (средний риск)
при заданных ограничениях на средние показатели скорости передачи
информации, а также на энергетические или другие ресурсы системы:
CL
2j 2mi ^Vn(r-l) ^Vn~~ ^СР.ДОИ —0»
Г=\ V=l
r=l
v=l
^j rQv 2^ Pv Лга(г— l)~Hv
r=l v=l
, 0 ^ <7и ^ <7ымакс»
либо
(10.78)
[ 0 ^ ^v ^ qv MaKc»
где Ни и Hv — заданные средние энергетические ресурсы прямого и обратного
каналов; rqu макс, rqv макс — предельно допустимые значения переменных rqUt
цх> (мощностей, энергий и т. п.) на г-м цикле в прямом и обратных каналах.
Иногда-ограничительные, неравенства (10.7&) удобнее задавать в виде
0 ^ qpir ^ Qur макс ^ .?, <7ы макс» Цит = V ^«J
*=1 k=\
г г.
0 ^ qvr ^ <?Wмаис = /\ ^ макс» ?ar = -.^\ qv ]
А=1 А=1
302
(10.79)
Переменные rqu и rqv рассматриваются как компоненты вектора управле-
-> -. — rt г-> (г-+ г г \
ния rxv , v = l, Ма* помимо других компонент r*v, xv=\ /v, qu> Я-jS •
Целевую функцию оптимизации представим как функцию Лагранжа с не-
известными множителями Лп, Хи и kv:
Г=1 »* Г=1 V=l
где rLv = rPVH + bn r^vn + *« rqu + fyv, **= { r*vn), r = 1. rm, /z=0,1,2,...
Если последействие отсутствует, то
av='PVHf/v> '?«■ r^) + ^r^vn(^v '?"' r4v) + Krqu+Wqv.
Условные вероятности Pv n(r-i\ от переменных r/v , г^м и rqv не зависят^
Произвольные коэффициенты (стоимости) Ап, ^и и %v целенаправленно
варьируются до удовлетворения ограничениям (10.78) и очевидному условию
(Х£Чпг<1, г=1, гт. В принципе, значения r=irm не фиксируются и также
могут оптимизироваться методом динамического программирования.
Рассмотрим процедуру оптимизации и составим рекуррентное уравнение
динамического программирования, полагая rPvn=^vrPny г=1, гт—1, гР^п^=г^п
соответствует Pv =1. Если в процессе оптимизации окажется, что оптимальные
значения rq*u, rq*v (или q*Ur> q*vr) больше соответствующих допустимых
значений г<7м макс, г(/« макс (или qUr макс, ^вгмакс), то в качестве оптимальных
выбираются предельно допустимые значения.
Первый шаг оптимизации £=1, /,=irm. Оптимальное управление
^»==(rm/* Jmq*u) ищем из условия
Ма
Q* =minQr =min£ p^-l р } [rm PVH(^) , + ^j; (10.81)
посколькуr/wPvn = 0, rmqv~0 (на последнем цикле передачи энергия в
обратном канале не расходуется). Оптимальное управление находится поисковыми
методами или как решение системы уравнений стационарности
dQr _*.
1— ==0, л = 0, 1, 2, . . ., {rmy,vA = rm% v~l,Ma.
° xvn
Из (10.81) еледует> что с точностью до Рп ,г _1у
Ма
Q*m=S PvK™-1 Ри{гт-1) (ЬРк + ЬиГ"я1)ш ^^h = ^^vh ('«"£). >
v=l "'.'.'
Все "вероятности : rjPvn и Pvnr , r=l, rm—1, становятся известными ' в конце
процедуры оптимизации (по результатам расчета на всех шагах). ..
Второй шаг оптимизации &=2, г=гт—1. Ищем m и =v m / w
г —1 * г —1 *\
т Чи* т %) ^ УСЛОВИЯ
\ : ,
303
X [Г<* -l Лш (r«_11) + Km~l Яи + Wm~X qv + '« "l Pvn (rm f^ ) x
+ (Xn + '**« + Хи 'm <£)] § ^Vn(rm -2) = P>"2 Р*гщ-2).
Обозначим определяемый по данным оптимизации на предыдущем цикле «вклад
будущего» Гт~[1 = %п+ ГтР\я+%/тя*и . Тогда
ма ,
Q*m-l = min^2 PvKm~2 Рп(гт-2) (r* ?v* +
+ К rm-1 qv + ЬГпГх qv + 'm"1 £v rnTv P^m
Оптимальное управление находится поисковыми методами или по системе
уравнений стационарности
dQr —1 __i -> г __i л
~ =0, г« tf=Vm*w}. v=l. Ма> я = 0, 1, 2, . . „
В результате оптимизации на втором шаге получаем (с точностью до Рп (г _2ъ)
Ма
v=l
+*»'« -1 ъ+г*'~1 &Гж -1 *«).
г — 2-*
Третий шаг опт и м и з ации Л=3, г=гт—2. Ищем m и* =
?=Л от /v. ?«. ^о) из Уровня
Q; __2 = min Qr -2 = min (r«-*Q+ Q* ) я
"a-
e Л!! PvPv-""3 ^п(^З) [Г-"2 M'1»"* **) +
r^T"2
+ X/m -2 ^ + %Jm ~2 ^ + r« -2 Pvn ('m-2^ ) X
X^u + ^m-1 P^ + ^m"1 Я1+Ъ,Гт-1 q*0 + rm-4vrmp^^
Обозначим «вклад будущего» на (гт—2)-м цикле:
гт ~2%, = Яп + 'т -' ?;н + rm -I £ rm-l р^ + х. rm-> ^ +X/m ~l д*0 .
г — 2->
Таким образом, определяем оптимальное управление w x* из условия
Q*m-2= тЛ-2 PvP>~3 Vm-3) (Г'»""2 ^н +
304
пользуясь методами поисковой оптимизации или уравнениями стационарности
аг«
^—~ = 0, r'*-2~Z={r>n-2Kvn}> л = 0, 1, 2, . . .; v=l.Afa.
Далее находим минимальные потери Qr __2 с точностью до РП(Г *):
м„
Q*m-*=£ *v р>-3 рп(гш-з) е«_2 <н+v» -2 *;+ь0 '* -2 «;+
v=l
+ rm 2°Xvrm 2p*j и т д
На произвольном (гт—/*+1)-м шаге оптимизации, т. ь. на
г-м цикле передачи, имеем следующее рекуррентное уравнение динамического
программирования для нахождения х* = х\ /*, ^и» <fo):
Л1Л
Qmr = mm ]g Pv РГ1 ^n(r-l) [^vh ('x) + ХЛ« + Wqv+rK 'Лш ('"£)]. <"> .82)
r+! n* , r+i? '+1 n*
'+1
r+1
где A,v = bn + ^VH+ К pvn + bu qu+bv qv, r = I, rm—2;
Гт~1°К=Ьп+ГтРун+1иГтя*и> 4v = o, f«p;nE0.
Во многих весьма важных случаях рекуррентные ур-ния (10.82)
существенно упрощаются. Так, если символы av используемого кода равновероятны и
равноценны, а передаваемые сигналы равноустойчивы по отношению к помехам,
то ГРШ = rPn = const (v), Pv = const (v) = 1, rPVH = rPH = const (v), rKv =Л «
= const (v), а из (10.82) следует
Of = Pn(r-i) min ['PB (Г%) + */*, + V?» + г Я грп ('"£)], (Ю.83)
где Х = Хп+ Рн+ X Ра + Ьи Яы+Ь Я0. г=*1, гт-2;
При этом упрощаются также и ограничительные соотношения (10.78):
rm r )
r=-l *=0
fft
2^Пч-яи=о,
г=1 *=0
Ё'^ГК-я.-о.
г=«1 *=0
(10.84)
305
10.8. УРАВНЕНИЯ ОТГИШАЛЬНОСТИ ДЕМОДУЛЯТОРОВ
Рассмотрим передачу сообщений av> v=l,Ma, с помощью
независимых (ортогональных) сигналов. Составим уравнения
оптимальности по критерию среднего риска (1.20). Для/этого
вычислим условные частные риски rL , определяемые цикловыми
вероятностями ошибок rPVH и повторений rPVn, а также
стоимостями, которые, в свою очередь, зависят от налагаемых на систему
ограничений. Пусть используется метод приема «в целом»,
обеспечивающий наивысшее качество системы; передача информации
в прямом канале производится с помощью символов {а}, а в
обратном— с помощью символов Ш. Обозначим области в прост-
л л л л
ранствах rU и rV- принимаемых реализаций и, v\
Л Л
rUv>rVn — собственные области символов av и ап в прямом
канале на r-м цикле; v, n=l,Ma;
л
г£/~ — область неуверенного приема в прямом канале;
Л Л Л
rU — все области пространства rU, кроме rU~\
л л
r^©v, гУ~у — области подтверждения и отрицания обратного
канала, зависящие, вообще, от индекса v передаваемого
символа av.
Рассмотрим для определенности систему с решающей
обратной связью. Символы, передаваемые по обратному каналу,
обозначим б© и Ь^ а совместные условные плотности вероятности при-
Л Л
нимаемых реализаций и и v сигналов с помехами — через
ЛЛ
И^|(и, y|av,&T1), rj = 0» ~. Нетрудно видеть, что вероятности
решений на г-м цикле равны
Л Л
Л Л
rPVH=l— J j a>(a,'0|av> b^dudv —
cr л л л л
— J J w{u9 v\avbjdudv,
n n Л Л Л Л
rPvn= j J w{u, v\av, bjdudv +
+ J j w{u, v\av, be)dudv m .>
306
(10.85)
Вероятности решений rPVH и г/\,п необходимо далее подставить
в уравнения оптимальности типа, соответствующего решаемой
задаче, с койрретной совокупностью ограничительных условий.
Выберем для рассмотрения ©дин из сравнительно простых случаев,
а именно систему с РОС с управлением без последействия и
с ограничениями на среднюю скорость передачи (10.45):
Е
Pv *T v (r-1) ~ ^v — °>
д х„
rLv = rpvH + VPvn • r=l,rm, ц = 0, М,
г—\
?к.
4 = 0. W-.^ГИ
Т V ДОП ,
{=0
«-1.П, 'Pvn-'*rvwn = 0.
(10.86)
Для сокращения записей представим rPVH и rPVn (10.85) через
условные вероятности соответствующих решений;
Л А
j | w{uf v\av, b^jdudv^ r/?//?0v,
л л
л л : ~
| J" а; (и, o|av, bjdudv = rfivrp^,
гл гл
л л
л л
j J ш(и, 01av, 60)dudv=(l— %)гре^
где rpv, rPv—условные вероятности правильного и
сомнительного приема символа av на r-м цикле; rp©v, rP0v = l—rP©v—
условные вероятности правильного и неправильного приема символа
подтверждения Ь© при передаче av ; rp^v, r/V-r = 1—rP<~v —
условные вероятности правильного и неправильного приема символа
отрицания (переспроса) Ь^ при передаче av.
Нетрудно видеть, что
'Lv = 'A«v - 'p0v pv - rNv %,
где rMv=l + rVp0v, ^v=(l—r4)rP-v +rAvrp©v.
307
Замечая, что r/^n==rP©v+(rP~v—rP®v) rPv , получим/из (10.86)
уравнения оптимальности:
мл
I Л
S р, К v <г-1) -г- Л - r%v Ч - % Ч) =А
v=l
агк
•(Ч-^Ч-^^) = о.
'яу
~ %
% =
Т У ДОП P0V
P~v ~~ ГР©у
, rt=l, П.
(10.87)
Уравнения (10.87) можно упростить, учитывая, что rMv и rNv не
зависят от переменных гхй прямого канала drMv/dr7c[l^drNv/drxll ss
=0, а вероятности rpv, rpv и коэффициенты rXv не зависят от
переменных гкпу обратного канала (будем под оптимизируемыми пе-
->
ременными х понимать, например, пороговые уровни решающих
устройств). Тогда система ур-ний (10.87) приводится к более
простому виду
у=1 L Д д
ц = 67Ж г = 17^;
^ = % + %у-%) ^р©у
= 0,
я = 1, П, х = и;
^Г у доп Р©у
ТР
гу
P^v~ P©v
F — Р k
1 v "" N^vlr-I)*
(10.88)
Введем далее обозначения:
л
ип — выходной эффект /г-й ветви приема, согласованной с
символом ап;
и'п — сумма выходных эффектов Ма—1 ветвей, кроме ветви,
л
содержащей ип\
Л Л о
иэ, и°э — экстремальный и субэкстремальныи выходные эффекты;
л
и'э — сумма всех выходных эффектов, кроме экстремального;
308
л л
w(un, и п\ар) — совместная условная плотность вероятности
\ Л Л
выходных эффектов ип и и'п при передаче av;
л л л
ш(иЭу а/эи°э|ау) —совместная условная плотность вероятности
Л Л Л
экстремума иэ, суммы а'9 и субэкстремума и°э.
Напомним, что под экстремумом нужно понимать максимум.
Оптимальный уровень надежности определяется стоимостями
сомнительных и ошибочных решений, которые, в свою очередь,
зависят как от номера цикла передачи, так и от полной совокупности
ограничений. Полагая, в частности, передаваемые символы
равновероятными, равноценными и равноустойчивыми, можно на
основании (10.24) представить порог надежности на каждом г-м цикле
: , Л
в виде простейшей линейной функции г/в суммы ufQ всех выход-
л
ных эффектов, кроме экстремального, г/в=г/в(и'э) = г1ви>'э, где г/в=
л
= const(Va) — пороговая константа на r-м цикле. При этом
условные вероятности решений rpvH rpv равны:
? г л л л л
—оо
г
f
Л Л Л Л Л
% = J j / W(U*> U'** U°s\^)d^BdKdul
9 Э
В любом случае большим весом в формировании порога
надежности обладают более «сильные» выходные эффекты. Наибольший
вес имеет субэкстремальный выходной эффект. Желая упростить
вычислительную часть процедуры оптимизации, можно
рассматривать порог надежности как функцию субэкстремума, приписы-
Л л
вая остальным выходным эффектам нулевой вес, и°9=и'э.
Далее используем следующие обозначения:
Л
Uno — экстремум из совокупности выходных эффектов Ма—I
Л
ветвей приема, кроме ветви, содержащей ип\
л л л л
w(un, Mn9|av), w(Uq9 u'q\civ) — соответствующие совместные ус-
Л Л
ловные плотности вероятности и'э=и°э.
Определим условные вероятности решений, входящих в
уравнения оптимальности (10.88), при передаче символа av на r-м
цикле. Очевидно, в прямом канале
309
а л
д л
4= J J" w(uv, u^\av)duvduv3, '/.(«v,)>ttvi
~ . -»i »' л л ~ ..
7>V = J J a»(«,, «;jav)da,d«;.
oo ' в '
Д Л
(10.89)
Условные вероятности решений в обратном канале легко
определяются через совместные условные плотности вероятности
выходных эффектов i>0 и v~* демодулятора обратного канала
И0©Л>~|М,т|=.О, ~:
Л Л
й Л
"ч(-)
00 00
Л Л
Л Л
r%v= I" j j «Ч°0. °~|6©)*©*~= l-rP©v-
ч
;(V)
i (10.90)
J
где rjf'v— однозначная функция аргумента" tu, , устанавливающая
л л
пороговый уровень обратного канала, в частности, rf\(v~)=v~.
Определим также производные условных вероятностей,
входящих в систему уравнений оптимальности (10.88), учитывая, что
d
dt
я, (О
я,(0
я, (О
i
Kit)
f w{t, X)dX= Г Г-уш(*, X)\dK +
+ w{t9 k2)^h--w{t, %г)^
dt
dt
а плотности вероятности w от оптимизируемых пороговых
уровней решающих устройств не зависят. Тогда нетрудно получить
_агр.
Л Л Л
где «Уи=о>(ы„,Ипв|ау), о>'н=«>(и'в|ау);
310
(10.91)
_а_гД
#*А
Jtv _oo
(10.92)
л л
Пусть оптимизируемые переменные гхц и rxnv есть пороги
(пороговые коэффициенты) в прямом и обратном каналах г/в
л л л л л
и ri'v, при которых rh(u)=rlBu, r./B=const(X), TvW^^v^, r''v=
Л
= const(V), r=l,rm, v= 1, Afa. Тогда производные вероятностей
решений (10.91) соответственно равны:
ЯГД °° л л л л )
)rpv Г А Л Л Л
—— = — \ и w(rLи % и \a\du .
г «*уЭШГв V9» ^э| V/ V Э»
1 «в "
—оо
г/-«^ 00
р /» Л Л Л Л
-— = «>и (% и'а, и31 av) йиэ,
' /в -о.
дгр„„ л л л л л
-7-г= j t^w„(V~. ^W°~»
V —ao
I
dr~Pr\« n А А А ' Л
dr/: J - V v - -I ©; -
v _«>
(10.93)
Переменными aVa, u'9 и ,сц в данном случае являются
неотрицательные величины — отношения правдоподобия. Поэтому
нижний предел интегрирования — оо в (10.93) нужно заменить нулем.
00
Обозначим /= {uwu(rlBuf u\av)du, где w — двумерная условная
—00
Л
плотность вероятности выходного эффекта (экстремума) ип и суб-
л
экстремума ипэ при передаче av. Легко заметить [ИЗ], что инте-
л л
грал / есть условная плотность вероятности частного т1ъ^ип\ипь
на ,г-м цикле, т. е.
J = w
А
А
W
№v)-
зм
Отсюда следует, что
о U a In
(10.94)
дгР,
дГР&,
^f—CW- -7?—.(W
(10.95)
где wv — условные плотности вероятности частного экстремума
в v-й (v=l,Ma) ветви и субэкстремума в остальных ветвях;
л л
г/в=иу/ЫуЭ; о>э— условная плотность вероятности частного экстре-
Л Л
мума и субэкстремума; г1в=ид/и'э\ wv — условная плотность ве-
л л л л
роятности частного выходных эффектов vq и v^9 rl'y = a©/tu,.
Соотношения (10.94) и (10.96) подставим в уравнения
оптимальности (10.88). Совместное решение этих уравнений определяет
оптимальные пороговые уровни (управление) на всех циклах
передачи:
£ МО - rPe ~) *v {% | *v) - ^v ». (Т. I av)] = 0, r-1, rm;
v=l
v = 1. M„
МЧ>~) _ 'pv+'Mi-r7v)
• 'в"э
J J w(u3, u9\av)du3du9 = —-^ .
о л,
U
9
P^V~ P0V
Л Л
(10.96)
где rPv=j J .tw(av, ^K^V
о r* л ЛГ
^ °° в э Л „ „ ,*
*В «V3
Л Л
0 Л,
7 л л л л л
о г*, л
v
Л Л
312
о ,, л
Упрощенная структурная схема оптимального демодулятора
приведена на рис. 10.3. Демодулятор прямого канала содержит
Ма ветвей (фильтров), согласованных с возможными сигналами
Вход \ЯЩляЩ
канала
rf rEH
ТЕ
а
ч
и
|ЧаГн
w
Выход
&
Рис. 10.3.
Структурная схема
оптимальных
демодуляторов системы с обратной
связью
и помехами, экстремальный анализатор ЭА, выделяющий на каж-
л л
дом цикле экстремум иэ и субэкстремум и'Э| функциональный пре-
л л
образователь ФП, вычисляющий частное г/в=^э/^/э и пороговое
устройство П с единственным порогом г\1*в (порог надежности).
Если частное г/в на r-м цикле превышает уровень г/*в, ЧЪ>Ч*Ъ>
выносится решение ап, где п — индекс «экстремальной» ветви.
Демодулятор должен содержать также
измерительно-вычислительное устройство ИВУщ> для вычисления оптимальных порогов на
основе анализа данных о состояниях прямого канала и о
вероятностях решений гр^и rp ©v , принимаемых в обратном канале.
Демодулятор обратного канала содержит две ветви,
согласованные с возможными сигналами у© и v„ , ФП (вычислитель
л л
частного v®\vj) и Я5У0бр, определяющее оптимальные значения
порога r/'v в зависимости от состояний прямого и обратного ка-
налов (по значениям вероятностей rpv , rpv и др.). Для нахождения
оптимального плана управления при непостоянных или
неизвестных параметрах необходимо в состав Я5Упр и ИВУ0^ включать
соответствующие экстраполяторы. Кроме того, оптимальная
система содержит счетчики циклов, синхронизатор и другие
вспомогательные цепи. Для оптимального управления требуется
взаимный обмен информацией служебного характера (о состояниях
каналов) между приемной и передающей сторонами системы.
10.9. УРАВНЕНИЯ ОПТИМАЛЬНОСТИ ДЕМОДУЛЯТОРОВ
ДВОИЧНЫХ СИГНАЛОВ
Исследуем более подробно систему с РОС с двухпозиционными кодами
{av}t Л7==1'»/й{ ^•п},т1=:®» — и соответствующими известными сигналами %9V
Пусть заданы ограничения на допустимую скорость передачи и на ресурсы
прямого и обратного каналов. Воспользуемся системой ур-ний (10.57). Введем
313
обозначения:
rL -rL
^vn~~^n» ^пы — ^и» ^гш— kv* ^иу^" hu — const (v),
xt> = ' Лp = const (v)» где А^ /io—отношения сигнал/помеха в прямом и
обратном каналах. Тогда Lv = PVH+^n ^vn + ^« ^2+V Ло, v = *\ /. От мно-
ГЛ ГЛ ГЛ ГЛ
гомерных пространств £/v, U~, V^y, V^, (10.85) перейдем к одномерным
[171]. При независимых помехах в каналах связи
w(ruro | av b^dudv^ ( rl, TV \ av Ьц) drldrV «
= w(rl\av)w(rl' | br\)drldrl\
Выделим области решений в соответствии с символическими равенствами:
оо г/н г^в v се
J-J- J-M-J- I-M-J-
ГЛ r/n ГЛ —о» Г Л г1а Г Л —оо г Л г/'
ГЛ
ГЛ —оо
^0У
гЛ
где г/в, г/н — верхний и нижний пороги в прямом канале на г-м цикле, а r/v —
порог в обратном канале на г-м цикле при передаче символа av #
Под оптимизируемыми (управляющими) переменными х можно понимать
пороговые уровни r/B, r/H, r/v. r=-\t тт> v=x, /, энергетические параметры
rh2u и ГЛ2„ (мощности или энергии сигналов, отношения сигнал/помеха и др.).
Представим систему ур-ний (10.57) для рассматриваемого случая
VI Г d'Lv д Й
\ Р 1 Р Z__ i> Г. V nt р
2j rv\ ^vn(r-I) дг% ~Т~ $rK Zi v vn(n-l)
drLv д r*
P JL- j_ X1 fit p П *» -
^vn(r-l) dr + dr 2j v *W-1) ~u» V-
Гш* Г=1
=0, r=l, rm;
■*#2 ^v-d ГЛ»-+/>' 2 p/n(^D r*I-*«
ДОП1
r=l
^ 2 P/n(r-l)r^ + Pi V P/n(r_1} 'Л» - Я, доп.
«0;
0,
(10.97)
r=l
r=l
где Ни доп и #* доп — заданные энергетические ресурсы прямого и обратного
каналов.
Производные отдельных составляющих условных частных рисков и
вероятностей повторных передач можно вычислить без особого труда. Однако
система ур-ний (10.97) оказывается достаточно громоздкой.
Для случая системы без памяти с ограничениями типа равенств под
оптимизируемыми переменными будем понимать пороговые уровни г/в, г/и и ri'v в
314
прямом и обратном каналах. Составим систему уравнений оптимальности при
ма гт
ограничениях на среднюю длительность передачи вида (10.36) \ Л Pv Pvn(r_1)—
v=ir=i
— kT =0. Используем обозначения Lvn= PVH+ UVn ^vn, V==I» /» учтем, что
вероятности ^Vn(r—пне зависят от и , а также, что при независимых
символах ai и a,- drLjnfdrl'i^drLinldrl'j^O. Тогда из (10.44) можно получить
следующую систему уравнений оптимальности:
•■ с/;|а/) " PiPt^-x) x
1 - (1 + '£/„) r J - (1 -^/n)'p_/ .
s\ ' ——_——————— -—'A •
=гл:
PjPj„(r-\)
P{P(n(r-l)
•Kb)
%nrP0f + (1-а/дКр_/
= 'л:
1 - (1 + г*ш) rP®, - (1 - r^m) rP~*
»K'1»~) _ Ч+^о-Ч) _ .,
*К'Ы (i-d^K ~^'
v*53!» /;
r=l *-0
r=l ft=0
ДОП
= 0;
n-i
n=r+2 V ft=r+l /
n=r+2
^1, rm> v=*\ /;
A=r+1
*pf» Г w(*/|fl/)d*/;
'в
(10.98)
315
ч*
*р/ = J" в(*/|в/)Л;
00
К
%=\ w(4\av)d4, v = i, /;
к
ft»*'
*v
■ о»
*^ = J »(*/'|60)Л'. v = t\/.
'v
При других ограничениях (10.36) можно получить аналогичные уравнения
оптимальности. Уравнения (10.98) определяют как оптимальную структуру, так
и оптимальное управление. Оптимальная структура демодуляторов прямого и
обратного каналов содержит вычислители отношений правдоподобия
Л"~ М/ )-w<ri\oi)9 Л^ЛЧ©/^^(ГП60)
л л
и реализует следующие правила вынесения решений а, Ъ в прямом и обратном
Л Л " ' Л
каналах: а»-^гЛи>гЛ*в, аг>гЛи<гЛ*н, я^->гЛ*н<гЛи<гЛ*в; при передаче
Л Л Л
av правило вынесения решений Ъ„ и ^в обратном канале таково: b^,-+rAv^
> Av , &0-»" Л0 < Av •
Поскольку отношение правдоподобия гЛи=гЛ"и(г/) есть однозначное
функциональное преобразование аргумента г/, то между оптимальными пороговыми
уровнями *"*ЛН и ГЛ*В и соответствующими оптимальными пороговыми
значениями г/*н, г/*в аргумента Ч существует функциональная связь, гЛ*н=гЛ*н(г^*н,
г/*в), гЛ*в = гЛ*в(т7*н, г/*в). Уравнения оптимальности существенно упрощаются
при передаче равноценных и равноустойчивых символов.
Как видно из (10.98), оптимальные пороговые уровни отношения
правдоподобия ГЛ*Н, ГЛ*В и *Лу' (и оптимальные пороговые уровни г/*н, г/*в, г1у)
взаимно связаны, зависят от прошлых и будущих состояний каналов связи, номера
цикла передачи г и заданных ограничений. Предположим, что для передачи
равновероятных и равноценных символов av используются равноустоичивые
сигналы (ЧМ, ФМ, ОФМ и т. п.). В этом случае при симметричных
распределениях принимаемых реализаций от индексов v не зависят:
о гс»
— относительные стоимости повторных передач rXvn — %)
— условные вероятности очередных циклов
. = РПГ и kT =
— kj
УДОП
доп»
— функции /vr, определяющие «удельный вес» будущего, /vr =/r;
— условные вероятности решений rpv =rp, rp^ =*p, rPvn = rPn,
— оптимальные пороговые уровни обратного канала г/* =г/*'. .
316.;
Предположим, что используется совокупность ограничений rPn—rkT доп=0,
г=1, тт. Тогда из (10.44) получаем:
1 - (1 + °%У Р"© ~ (1 - ГУ 'рм
»K\*t)
w (rt*' | 6_)
гьгр©+(1-агр_
1-(1+^)гр®-(1-гя)гр;
"н »
'д.;
гр + гХ(1_гр)
(1-гЯ)гР
= ГЛ*\
г
р®
rK^rK + Jr, r=\,r„
rp~-p@
00 Н
rp = rpiBSrpIsa ^W(l\ai)dl= j ш(/|а/)<»,
Г/* —00
00
rP^v = rP~= J »<П »_)««';
?p = r~=r~= §w(l\ai)dl= §w(l\aj)dl;
00
'P©v = ftP©= J »(П *©)*'•'
I (10.99)
Из ур-ний (10.99) следует, что 'Л*НГЛ*В=1. Очевидно, ГЛ*Ш^0, ГЛ*В^0 и
в любой «разумной» системе ГЛ*В>ГЛ*Н. Разомкнутую (однопороговую)
систему можно получить преобразованием системы с РОС. Для чего необходимо:
допустить только однократную передачу (rm = \) и разомкнуть обратный канал,
поскольку по этому каналу всегда посылался бы только один символ
подтверждения b 0 (информация не передается и расходовать ресурсы системы в
обратном канале не имеет смысла). В таком идеальном обратном канале разомкнутой
системы условные вероятности решений на первом (и единственном) цикле
передачи равны:
1р0=1р-^=
/г=о, °к-
1> 1% = 1р_ = о,
= 1Х = ХР, хр = 0.
Из (10.99) получаем 1Л*н=Яр/(1—М. 'A*B= (1—ЛР)ДР, 1А*/-^оо. Поскольку
в однопороговом решающем устройстве 1Л*Н=1Л*В, то Яр=0,5.
Значит, при безошибочном (или весьма надежном) обратном канале
оптимальной является замкнутая система (с обратной связью), если
относительные стоимости повторных передач меньше 0,5. В противном случае
замкнутая система неоптимальна. Если Яр>0,5, то 1Л*Н>1Л*В и построить
оптимальную систему вообще невозможно из-за появления областей неоднозначных
решений. В идеализированной системе с РОС и безошибочным обратным кана-
317/
лом оптимальные пороговые уровни отношения правдоподобия связаны со стои-
о ■» .
мостями ГЯР повторных передач (10.99) следующим; образом:
о
1 ГХ
г<=77^=—Т°- <10Л00>
о
Если стоимости гЛ,р->0,. то гЛ*н-Н), а гЛ*в-*оо, что соответствует режиму
многократных повторений или «зацикливания». В этом случае ошибочные решения
не принимаются, а передача информации замедляется или прекращается в
результате повторения одного и того же символа.
При изменении стоимостей т% в интервале (0,1) происходит следующая
деформация оптимальной системы:
о-
— при 0<ГХ<0,5 оптимальной является система с обратной связью; чем
меньше гк, тем больше вероятности повторений;
о
— при ГХ=0,5 оптимальной является разомкнутая (односторонняя) система,
в которой допускается однократная передача;
— при ГА,>0,5 построение оптимальной системы передачи информации
невозможно.
Качественное объяснение указанных закономерностей таково. Если
повторные передачи обходятся получателю («дешевле», чем необнаруживаемые ошибки,
то выгодно повышать надежность приема символов (уменьшать вероятность
ошибки) за счет организации обратного канала и повторения неуверенно
принимаемых символов. Если повторная передача ровно в два раза «дешевле»
ошибки, то целесообразна разомкнутая система, допускающая однократную
передачу; допускать двукратную передачу невыгодно, так как две передачи
получателю так же нежелательны, как одна ошибка (получатель, соглашаясь на
о
ошибку или двукратную передачу, ничего не выигрывает). Условие ГЯ-И
означает, что расходы на передачу настолько возрастают, что выгоднее выбирать
решения наугад, чем эксплуатировать систему. В этом случае потребитель пред-
о
почитает отказаться от передачи информации вообще. Стоимости ГХ
определяются совокупностью ограничений, а,не выбираются,.умозрительно. Идеальность
сигнализации в простой системе с РОС означает безошибочность передачи по
обратному каналу.
Рассмотрим коротко условия целесообразности функционирования системы
с РОС при наличии помех в обратном канале, когда rp©>0> a 7U,<1. Если
полагать, что построение системы с РОС целесообразно при ГЛ*Н<ГЛ*В, то это
равносильно условию (10.99)
ГЬ< — ^ - Г, (Ц. Ю1)
2 гр~-гр®
о
или, в первом приближении, ГД,<0,5. Рассмотрим условие связи (10.99). В
реальной системе гр^,>гр @, а Гр^0 и поэтому должно выполняться неравенство
TkT .>rP0- Значит, величины г&гдоп, выбираемые из условия обеспечения
заданного значения kT доп, должны превосходить условные вероятности
ошибочного приема символов подтверждения Ь.ф. Это объясняется
тем, что повторные передачи являются не только следствием попадания
символов av в область неопределенности, но и следствием искажения служебных
знаков Ь@ (что приводит к появлению «вставок»). Однако г&т -on<.rpv^t
поскольку гр<1. Таким образом, ур-ния »(10.99) позволяют определить дополни^-
тельное условие, ограничивающее выбор величины г&гдоп, гр0 <г^гдо > гр^,
<г=1, г«—1.
31&
10.10. ОПТИМАЛЬНАЯ СТРУКТУРА ДЕМОДУЛЯТОРОВ
ДВОИЧНЫХ СИСТЕМ С РОС
, Г"
ПРа
гл
А
*ГЛ
и ПОП
ц00р
77 L
я(я.|
иву^
1 л
1 Ъ
1 *"■
Структура демодулятора вытекает из (10.98), (10.99) и т. д. Отношения
правдоподобия гЛи (или rAv) рассматриваются как функции принимаемой
реализации г/=7 (или г2'=/'). В оптимальных по-
генциальных системах предполагается надежная
передача вспомогательной информации,
обеспечивающая безошибочный счет ' номеров циклов
передачи и точную тактовую и групповую
синхронизации, т. е. безошибочное подключение
решающих устройств в момент окончания
обработки каждого переданного символа и сброс
накопленных данных до начала обработки
следующего символа (*как и при синтезе разомкнутых
систем [168]).
Оптимальный приемник ПРа прямого канала
(рис. 10.4). На каждом г-м цикле такой
приемник образует выходной эффект
ГЛМ—неслучайную функцию случайного аргумента г/, гЛи =
= ГЛ(Г/). Этот эффект сравнивается в пороговом
устройстве П с пороговыми уровнями ГЛН и ГЛВ, которые вырабатываются
измерительно-вычислительным устройством ИВУП$. К получателю, а также на пе-
Л Л
редатчик обратного канала ЯР Добр уверенные решения а\ и а,- поступают для
Л
формирования знака подтверждения 6q, а сомнительное решение а^,—для
Л
формирования знака переспроса Ь ^. Кроме того, решения а изменяют от цикла
к циклу пороговые уровни ГАН и ГЛВ с помощью «внутренней» обратной связи
по решениям. Выходной эффект ГЛМ (в момент вынесения решения)
характеризуется условной плотностью вероятности ш(гЛи|Оу), v=i, j. Очевидно,
Рис. 10.4.
Структурная схема
демодулятора прямого
канала двоичной системы
с РОС
Рассмотрим тождество
00
'« = j w('Au\a,)d'Au,
о
ГЯ= \ w{rAu\av)d'Au,
rPv = l— rPv
r\=
а>(/|«у)
А/ (О
Pv, v = », J. )
"А/(О
V = I, /, Г = 1 , Г„
(10.102)
(10.103)
Опираясь на выражение (10.103), можно представить демодулятор как двух-
канальное устройство, выполняющее процедуру оптимального распознавания
сигналов на фоне помех по правилу:
319
at ■* 'A, (I) > rK ГЛ/ (0. a, -* ' A, (I) < 'A^ 'A/ (/),
a_ - 'Л* 'A/ (0 < rA/ (/) < 'A; 'Ay(Q.
Упрощенная структурная схема оптимального демодулятора,
функционирующего по описанному алгоритму, приведена на рис. 10.5 (РУ— решающее
устройство, рализующее логику отбора экстремума). Условные вероятности решений
на каждом цикле могут быть определены через совместные условные
вероятности выходных эффектов ГЛ* и ГЛ$:
00 00
)
О Г А* ГК
АвА/
Г Л*ГЛ
- ЛН А/
rPi = j f *(ГЛ,, ГЛ/ | ofid'AidTAj.
00 ЛВ А/
т7V = J J ^ (ГЛ,, 'A/ | av ) <f A*f A/,
AH A/
(10.104)
f~
-тять
гтТ;
-H Гу1^' h
^
,
1? Л
i-9
ли d
,бл< т
I
| w f-
Л Л/
г—^^~
ЛУ//Я
Рис. 10.5.
Структурная схема двух-
к анального
демодулятора прямого канала
двоичной системы с РОС
Отношение правдоподобия rAu можно рассматривать и как частное
выходных эффектов гЛг и rAj двухканального демодулятора (рис. 10.6) с
функциональным преобразователем ФП в ш*&е - вычислителя частного. Тогда
условные вероятности решения определяются через условные плотности вероятности
частного rf=rAi/rAj:
7н
Vi= J»(7lfl/)d7. гм = } »(7l«/№7.
r7v= J w(7lav)d7. rpv = 1 -%-rK, v = /, /,
j
(10.105)
В принципе, можно построить и другие оптимальные алгоритмы, основанные
на сравнении некоторой однозначной функции ф(гАи) с функциями пороговых
констант ф(гА*н) и ф(гА*в).
320
Рассмотрим еще одну модификацию оптимальной структурной схемы
(удобную при анализе воздействия флуктуационных помех) — логарифмическую
структуру. Пусть оптимальный демодулятор формирует логарифмическую функ-
At
т.
л;
:> Шд,
\-&~\
г *\
■!%
—л
П
щ
ИВУ
"1
in Л;
&
и ПРАоЪу
Q *А
Д. т%
,п. t
1 1
ИВУ
1 Я*
ГГ
шУ -
1
Рис. 10.6.
Структурная схема демодулятора
.прямого канала, реализующего
логику деления выходных
эффектов "
Рис. 10.7.
Оптимальная логарифмическая
структура прямого калала
двоичной .системы с РОС
цию 7 аргумента гЛи, т. е. rf=rf(rAu)=ln гЛи = 1п ГД*—In rA.jt и сравнивает
полученную разность логарифмов с логарифмами^ пороговых уровней In ГЛ*Н и.
In ГЛ*В (рис. 10.7). Сформулируем правило принятия решений:
Л ♦ л *
at -* in r Аи > 1пгЛв t а\-+ 1пЛц< 1пг Лн .
а_ — In' Л* < Ш 'Л^ < In rAu < In rAl . fro # mj
Условные вероятности решений могут быть найдены по условной плотности
вероятности w(rf\av) логарифма частного r/^ln(rAi/rAj):
rPi= J И71«/)<*7. rP/= j wi?f\aiWf,
mr a!
шЛ ло
lnr Л*
(10.107)
v= it ].
Оптимальные алгоритмы, выбираемые для практической реализации
устройств и для вычисления качественных показателей системы, могут не
совпадать. Для реализации необходимо выбирать структурную схему, наиболее
простую или надежную в техническом. отношении, а для выполнения
математических операций наиболее простую в отношении вычислений функций распреде^
ления. С этой точки зрения между собственно приемником, формирующим
отношения правдоподобия, и пороговым (решающим) устройством могут быть
включены (в действительности или мысленно) функциональные
преобразователи, осуществляющие «согласование» приемного и решающего устройств
демодулятора в указанном выше смысле.
Оптимальный приемник ПР& обратного канала (рис. 10.8). Как следует из
(10.97), (10.98) и (10.99) на каждом r-м цикле образует отношение
правдоподобия
*©) ПО. 108)
где Ь0— «нулевой* символ (собственный шум), г=1, Гт.
11-281 321
В пороговом устройстве выходной эффект ГЛ„ сопоставляется с
единственным порогом rAv v=i> П ЯЛ — передатчик прямого канала. Оптимальные
значения управляющих переменных (порогов ГЛ^ ) вычисляются ИВУобр. Если
определена условная плотность вероятности отношения правдоподобия, то
условные вероятности решений равны
Г А*'
00
rP©v= j" «'(rA0|6©)drA0=l-'p@v.
'<
(10.109)
НПА]
mm
r. ,
п.и*
%
r 1-
яс,-
Y
Рис. 10.8.
Структурная схема
демодулятора обратного
канала системы с РОС
Рис. 10.9.
Структурная схема двухканально-
го демодулятора
обратного'канала системы с РОС
Оптимальный демодулятор обратного канала можно представить и как двух-
канальное устройство (рис. 10.9), реализующее следующее правило решения:
6©-гЛ_(Г)<гЛ;'гЛ0(Г),
основанное на сравнении выходного эффекта одного из каналов, например,
ГЛ ^(/') со случайным пороговым уровнем rAv ГЛ0 (/'). Это правило
равноценно правилу, основанному на сравненЩ^разности rA^,—гЛугЛ0С нулем. Для
определения вероятностей rp^v и rP0V необходимо знать совместные условные
плотности вероятности выходных эффектов ГЛ^(/') и ГЛ0(/') при передаче Ь~9
*1=~, ©• Тогда
00 00
Г *>~* = I 1 w (ГД~> ГЛ® ' ь~)dT A~ dr %
AV Л©
%V
о»
J J • ('Л_'Л@|60)«ГЛ_<ГЛ@.
Av А©
Если рассматривать ГЛ„ (10.108) как частное выходных эффектов двухка-
нального приемника, то легко составить структурную схему оптимального
демодулятора, содержащего функциональный преобразователь ФП в виде вычис-
322
лителя частного (рис. 10.10). Если известны условные плотности вероятности
w(rf'\b%\ ) частного rff=rA^lrA(^ при передаче Ь^, т]= ~, ©, то
00 00
rp~v = J w(Г I О<r/'. rp@v = J ю (7' 16©)<*T• (юлю)
7,
%
4
ДЗ~^ЕН
тПял
ИВУ
Рис.10.10.
Структурная схема
демодулятора обратного канала,
реализующего логику деления
выходи ых эффектов
Рис. 10.11.
Оптимальная логарифмическая
структура демодулятора обратшь
го канала системы с РОС
И, наконец, приведем вариант демодулятора с логарифмической структурой
(рис. 10.11). Правило вынесения решений в данном случае формулируется как
процедура сравнения разности rf=ln rAt, = ln ГЛ^—In 'AqC величиной 1пгЛ^;
6_ -+ Ш>А^ - In 'Л0 > In 'Aj' t 60 -* In 'Л_ — In 'Aq < In' Л^' #
Если определены условные плотности вероятности величины г//=1пгЛ„ =
= 1пгЛ^,—1пгЛ0„ то
оо оо
.v = J »(7' I О *7'. %у = J »(7' I ье drff, v = i,/.
(10.111)
in г л*'
Можно построить и другие равноценные варианты оптимальной структуры
демодуляторов.
Уравнения оптимальности логарифмической структуры. Уравнения
оптимальности для логарифмической структуры отличаются от ур-ний (10.98) лишь по
форме, а именно тем, что с пороговыми уровнями 1пгЛн = г/н, 1пгЛв = г/в,
lnrAv=r/y сравниваются соответственно lnrAu = r/u и \nrAv = rIv, где г1и и rIv
имеют смысл приращений количеств информации [98]. Условные вероятности
решений нетрудно выразить через условные плотности вероятности приращений
количества информации r/u = ln гЛи=1п(гЛг/гЛ;) и rIv = lnj(rA^jrA q):
'р,= J w(Itt\ai)dftt9 ■'/},= j w(lu\a,)dltt9 rIu = Iu;
oo
rP~v = J.
w(lv\b„)dlv, rp@v
00
('■I *©)«*/©, r'«=/*
11"
323
Тогда система ур-ний (10.98), например, при ограничениях rPvn—r^Tv-
легко приводится к виду
г-1 пь
п
'/доп
Pt ■ ■ nkT
п=0 l i Доп
+
1-(1 +Г%Ы) J »=(/* I *©)<"«+ (1 -г£/п) J ИЛ, I 0<"»
+ ln
''/
г'<
am j да (/„ I 6©) d/0 + (1 - %и) §w(ID\b_) dh
rl'i
ru = m ^-
i доп
+
+ In
2j j_
— . —
1- (1+ rW j w (/„■ I ft@) d/0- (1 -%-n) J ю (/„ I 6_) rf/0
7; n',
00 I * В
j ai(/.u|a<)d/« + -%n 1— j w(lu\at)dltt
■/;•- in
7H
} (10.
r/V=ln
(l-%n) J w(lu\ai)dlu
j a> (/„ I a/) d/„ +l/n 1 -f ai(/« | a/) d/„
—oo L ' /h
(1-a/n) j^(/H|a/)d/„
oo
*Лг "" f w (7* I 6©)^ %
Vflon J, w/
[v
00 '00
j w (/„ I 6_) d/0 - j" w ( /„ I 6@)d/0
v=«, /,
где г/в=г/*в, г/я=г/*н, r/v =r/v — оптимальные пороговые уровни.
324:
Решая эту систему, находим оптимальный план управления пороговыми
уровнями на каждом цикле передачи, в зависимости от состояний системы. Если
символы ai и ctj равновероятны и равноценны, а для их передачи используются
равноустойчивые сигналы, ур-ния (10.112) существенно упрощаются, поскольку
•rPi = rPj = rP> rPi = rPi
rP©* = rP©/=rP©,- rP~i = rP~i = rP~9
r r' —r r' —rv r? r? r?
г/в+г/н = 0,
° г— / °\ г •
p®
In
1_(1+1Гр@_(,_1Гр^
fP+fi(i-7) rfeT -
(i
r = l, rn
• V P
p =
'Доп
p®
ГР~-ГР0
(10.113)
Системы уравнений, аналогичные (10.112), (10.113), можно решать поэтапно
в любой последовательности — от первого цикла к последнему или наоборот.
10.11. ОПТИМАЛЬНЫЙ АЛГОРИТМ ДЕМОДУЛЯТОРОВ
ДВОИЧНЫХ СИСТЕМ ПРИ ФЛУКТУАЦИОННОЙ ПОМЕХЕ
Для определения алгоритма примем обычные упрощения: в
прямом и обратном каналах действуют независимо стационарные
нормальные аддитивные помехи §и и ^х^равномерными в полосе
Частот сигналов энергетическими спектрами <GU и GVy параметры
полезных сигналов и и v постоянны, длительности Ти и Tv
сигналов а и v от цикла к циклу не изменяются. Обозначим принимае-
л
мые по прямому каналу на г-ж цикЛе реализации ru=ruv+rlu, а по
л
обратному rv—rv^ +%v- Как ясно из предыдущего, обработка
сигналов в приемных устройствах сводится к вычислению на каждом
цикле отношений правдоподобия:
ГК =
Л
w(u\aj)
л
w(u\aj)
л
Мм)
л
А/(и)
w$\bj) A^A
Л Л
w(v\b®) Л@(оУ
Рассмотрим сначала демодулятор прямого канала. Отношение <
правдоподобия rA(i/j) на r-м цикле, tr<t<tr+TUi равно [98, 156]
/ t -\-т
'Л(^-) = ехр—J- J Ww-^Wf-raiO-'BXOl")'*
325
Обозначая энергию сигнала ruv(t)f v = i,j на г-м цикле rEv =
= f ru\ dt, получим
'г
Как указано выше, правило принятия решений таково: прини-
Л Л
мается решение щ, если 1пгЛи>1пгЛв; принимается решение ajf
л
если 1пгЛи<1пгЛн; принимается сомнительное решение а„9 если
1пгЛн^1пгЛи^1пгЛв. Для построения оптимальной структуры
демодулятора это правило удобно представить в виде
л 'Г + Г" л
+ ±{rEi_rEj) = rL
Л rr u Л g
а,-* '/ = ги(гщ — г uj)dt<^-lnr An +
±l'Et-'Ej)='fv (10.114)
Пороговые значения ГЛВ и ГЛН взаимно зависимы, изменяются от
цикла к циклу и должны определяться из системы уравнений
оптимальности (10.112). Полученные неравенства позволяют
построить оптимальную структуру демодулятора прямого канала
при любом способе модуляции. Как видно (10.114); для
вынесения решений демодулятор на иедкдом цикле производит
сравнение корреляционных интегралов'с пороговыми уровнями г/в и г/н.
Отношение правдоподобия в обратном канале на г-м цикле равно
*r+Tv
dt
+■
rA(g) = exp—1- J [41-^ + 2^(^-^)1
Обозначим энергию сигнала rv (t), т]=~,0, на г-м цикле
*r+Tv
г£„= j rv*dt. Тогда
In rAv ■■
326
Правило принятия решений в обратном канале на r-м цикле:
ь„-+ m 'Л0 > in 'л;, ь& - in 'Л,< in 'л;, v = t, j.
Для построения оптимальной структуры представим правило в
виДе
л *Г+Т" л
+ -f(r£~-r£©) = 7;>
По указанным неравенствам может быть построена
оптимальная структура демодуляторов без памяти. Демодуляторы на
каждом цикле производят сравнение корреляционных интегралов с
порогами г/н, ^в, r/'v . Основываясь на полученных неравенствах,
построим два варианта оптимальной структуры. На рис. 10.12а
Ф | Y
Вход, ищ , . % __
—^^ мошятор jj UyL-Jr*|
Г*' Т й
I"/1 I
ш нвнало\
в)
Sxodjm
А у
ТШШШор
то нот
шщ
г\№,
Ш1 \Ktr-H,r
Нх
I
^ьЛ
рта £Щ\
1—" I му» И
i1
т помятой
обратного нана/ю
Рис. 10.12.
Двухканальная и одноканальная структуры приемно-решающих устройств
системы с РОС при флуктуацмонных помехах
327
показан «двухканальный» вариант структуры. Приемные
устройства прямого и обратного каналов/содержат по два идентичных
тракта, состоящие из вычислителей скалярных произведений на
каждом цикле. Опорные сигналы киу и kvn считаются известным^.
Разности скалярных произведений поступают на пороговые уст^
ройства Пи и hv прямого и обратного каналов. Измерительно-
вычислительные устройства ИВУ осуществляют управление
порогами и «сброс» интеграторов, задают моменты отсчетов
(синхронизацию) и производят счет циклов передачи (сигнализации).
На рис. 10.126 показан одноканальный вариант структуры,
отличающийся от предыдущего варианта тем, что в качестве
опорных сигналов взаимных корреляторов (вычислителей скалярных
произведений) прямого и обратного каналов используются
соответственно разности ktii—kUj и kv^—^q.V Управление пороговыми
уровнями и задание моментов отсчета производятся также с
помощью ИВУ. ■'.'■■
10.12. УРАВНЕНИЯ ОПТИМАЛЬНОСТИ И ВЕРОЯТНОСТИ
РЕШЕНИЙ ПРИ ФЛУКТУАЦИОННОЙ ПОМЕХЕ
Определим сначала условные плотности вероятности выходных
эффектов rf и rf, поступающих на пороговые устройства прямого
и обратного каналов, полагая, что сигналы rUu ru0, riu, и rv §
известны на каждом r-м цикле, г= 1, rm, v = 0,l.
Передача сигналов по прямому каналу, Поскольку
л -
ку принимаемая реализация ru = ruv + rlUi-'л? = 0,1 имеет НОрМаЛЬ-
ное распределение, то интеграл f v= Г (ruv+r£;u)(rUi—rUo)dt так-
*г '"■
же подчиняется нормальному закону. Для определенности пред-
л
положим, что ruv = ruu ru = rUi + rlu, Обозначим неслучайный
множитель rUi—ru0=Aru. Тогда
f1 = J Aru{rUi+rlu)dtz=zrEi_rEoi+ J %a{t)dtt (10Л15)
tr tr
где r£"v= [rUy{t)dt — собственные энергии сигналов rav, v = 0,l;
tu
*r+Tu
rEot= {ru0(t)rUi(t)dt — взаимная энергия сигналов, rUo(t) и rtii(t);
i
%u(t)=rt,u:=Aru%u — случайная составляющая выходного
эффекта.
Случайный характер величины r[v определяется третьим
членом (10.115). Найдем математическое ожидание rfi = mi{r\fi} и дис-
328
Персию Af2{fi}=02ri. Поскольку mi{^„}=0, то ifi^-Ei—гЕ0и
Определим далее дисперсию
Автокорреляционная функция флуктуационной помехи равна
Щ{ %(h) %&)> = Ru\t2-h) = \Gib(к~h),
следовательно,
°2n = YGu j U{AruY
dt.
Дисперсия случайной величины r£w определяется энергетическим
спектром помехи GM, энергией сигналов и степенью их
ортогональности (величиной ГЕ0{):
т2 ^ _5fL. Г / ru2 J_ г„2 _ 9' и. тиЛ М = _^i- С г/7 ! г/7 _ О г/
^П
J ('и* + '«g -2' иг гщ)dt = ^-( 'Ег + гЕ0-2 'Е01).
Определим параметры распределения выходного эффекта r/v
при передаче сигнала щ (нуля). Так как математическое
ожидание rfo=mi{rfo}=rEoi—rEo, а дисперсия а2тю=*т2г1 = а2г=в2и, то
условные плотности вероятности величины r/v равны
w(rf1) = w(/f\a1)
/2яаи
-ехр
7-r/i)2 1 *
2о5" J'
(10.116)
w(%) = t0{rf\ao) = —j— exp[- (Tf Tf/ T.
Теперь выразим искомые вероятности решений на r-м цикле через
- г
табулированную функцию Ф(Х)=—=z-( ехр/ )dt:
У2п J V 2 У
%=
гр0=1 — >-р0_ ^
329
Рассмотрим вероятности решений при различных видах
модуляции:
при амплитудной модуляции (передаче с пассивной паузой):
ги0 = const (г) = 0, гих = иг = const (г) Ф О,
ГЕ0 = const (г) = О,
ти
гЕг = [ ttjd* = const (r) = £f r£0i = 0,
т2 =
<?*£
rfi = E, rf 09
тогда
Ъ-т[''-*(-ЙМ-
*-т[*+ф(-та-^)]-
*-t[—g&)]- -=Я1+фШ}
при частотной модуляции (ортогональные сигналы):
^ = г£0 = £ = const (r), г£о1 = const (/•) = О,
о* =<£, = <?„£ = const (r, v),
(10.117)
тогда
(ЮЛ 18)
при фазовой модуляции (противоположные сигналы)'
% = — rUlt | rU0 | = | гщ | = и = Const (г),
'£i = '£„ = £ = const (г), '£о1 = — £,
Ст2 = о»„ = 2 С„Е = const (г, v), £ = 2£, % = -2Е = - %
Тогда
(10.119)
330
Как видно, вероятности решений изменяются от цикла к циклу,
зависят от энергий сигналов, степени их ортогональности и
спектральной плотности помех и не зависят от конкретного закона
модуляции сигналов.
# Передача сигналов по обратному каналу. Поскольку принимае-
А
мая реализация Tv=rv +rlv имеет нормальное распределение, то
*r+Tv
и выходной эффект r^= Urvr]+rlv){rv^—rv ^)dt также подчи-
няется нормальному закону. Обозначим rv^—rv^)=Arv9rvr{=rv^y
rv=rv^+rlv. Тогда
t -\-т
rL-rE^-rE^+ J "riv{t)dt, (10.120)
где rEr]= f rv^dt—собственные энергии сигналов; rvn, т)=-~, О;
rE@^ = f rv@rv^,dt —взаимная энергия.
Случайный характер величины rf^ определяется третьим
членом (10.120). Найдем математическое ожидание Tf-« =т\{^^.} =
='Е.—'£@^и дисперсию M2{i'J=o\= ^('Е^+'Е &—2'Е@„).
Аналогично находятся параметры распределения г/© ПРИ
передаче rv q:
Следовательно, условные плотности вероятности выходного
эффекта на выходе приемника обратного канала равны:
, Г ( 7' -1 )21
•m--(riM-^eip^L_^.J.
w( Г@) = »(f 1 be) = ~=Jr- exp [-( V ~^/@)2|.
Определим вероятности решений в обратном канале:
■>-т[,-ф(:Ь^-)]- '^-'-'^-
(10.121)
Ш10.122)
331
Аналогично могут быть рассмотрены вероятности искажений
сигналов, передаваемых по обратному каналу при различных видах
модуляции:
при амплитудной модуляции гЕф=0, гЕ^Ф0, г£0^=О:
= 1-г/^>
(10.123)
^-т[-(-^)1: *
v = 0, 1;
при частотной модуляции r£^=r£,0==£' = const(>), tEq^ = 0:
rp = —
' P®<*. о
1—Ф
1 — Ф|
E+4'v
VgTe
, r/U = l — 'P-v •
rP©v ~~ J rP®v '
(10.124)
v = 0, 1;
при фазовой модуляции rE~= tEq=.E = const(r), tEq„ =—E:
rP^
P®V о
1—Ф|
1—Ф1
2£-г/;
2E + rr'v
rn — 1 rn
p0v ~" * /*©•
[(10.125)
V20o£
v = 0, 1.
Составим уравнения оптимальности для случая, описываемого
системой ур-Бий (10.113). Для этого сначала определим условные
плотности вероятности приращения количества информации. Для
равноустойчивых сигналов rIu = 2rf/GUi rIv = 2rf/fGv выражении-
(10.116) и (10.121) принимают явд
1
2 Кяц^
1
2 j^jt [л /iu
1
ехр
ехр
w(rIv\b )=—— ехр
л ~' 2j/jtjiV
•»{ЪЫ=
2Yn\ihv
ехр
(
(
■(.
(
rlu-V?hlf
4И*Л»
4^
4|*»Ag " j j
(10.126)
332
где h2\ = rh2Uy h2v = rh2v — отношения сигнал/помеха в прямом и
\ ?Е ТЕ
обратнсЫ каналах rA2w=-7^-, v = 0,l;*7^=-—^-, tj = Oi ~; м>2=2—
для ортогональных сигналов, ji2=4 — для противоположных
сигналов. ; ■ ■$■$$
Обозначим пороговые значения: г/в = |я2гЛ2в, г/н=—г/в, г/' =
= r/'=const(v), rf/ = [i2rh20i тле rh2B и r/i20 имеют смысл и
размерность пороговых значений отношений сигнал/помеха! Нетрудна
получить условные вероятности решений, входящие в (10.113):
ГР
1+Ф
Гр=Л-\ф
ГР^=~ |1 + ф
г?0 = т11-ф
•А»
Ф
/2
hv
(10.127)
где ru = rhzB/rh2u, rv = rh\lTh2v — нормированные пороги.
При постоянных параметрах сигналов в прямом и обратном
каналах на любом r-м цикле Thzu = hzu, rh\ = h2v и из (10.127)
имеем
ТР
ГР =
ГР~
1 + ф(^^лц
V2
■1
]/2
V2
1 + Ф
/1
Р© = 1Г
V"2
цА„
\x,hv
(10.128)
Определение оптимальных порогов. Подставим в систему
уравнений (10.113) выражения (10.128) для вероятностей решений:
ги =-
V*#u
•In
/"7+1
1 + Ф —J-И»
го / V+ 1 \ •
(1 — ГЯ) Ф —^—|*А„ +(1
Л У2- У
^)Ф|-^=^- ||*Л0
333
-Чф(тг^)+Ф(^-)]
"i о-
т[ф(т^)+Ф(7^)]
2ГА.
гдоп -1 + Ф(^-^Л0
_ *_
ф(тМ-*(1?Ч *-*
(10.129)
В данном случае при заданных значениях rkT оптимальные
нормированные пороговые уровни ru, rv9 r=l,rm могут быть
найдены как решения частных систем нелинейных уравнений
независимо для каждого цикла. Эта задача решалась графо-аналити-
Ф
г- г-
V. и
г1гги
\ч
10
W1
к
*■
2
<>
^
%
5JL
У
ВВва
4i\
/
1
*/
Щ=2
0,2
Oft 0,6 гк
л1
'.и-
I
X:*
9
Wa
ты
0,2
Qfi ofi ч7Л
ton
Рис. 10.13.
Зависимости пороговых уровней прямого и обратного каналов системы с РОС
от допустимого «удлинения» передачи
чески._На рис. 10.13 приведены зависимости оптимальных порогов
ти и rv от требуемых значений rkT и отношений сигнал/помеха
rhu и rhv. Как видно, с увеличением г&г соответственно
увеличивается оптимальный разнос между верхним и нижним порогами
в прямом канале (увеличивается ги). Кроме того, требуется ввести
334
асимметрию в обратный канал [34, 41]. Для реализации
оптимального плана управления порогами необходимо измерять
(прогнозировать) ^отношения сигнал/помеха. Если требуемые значения ГРП
заданы, уРп==г^тД0П, то оптимальные показатели системы
находятся немедленно. Более сложной задачей является нахождение
оптимального управления порогами при уравнениях связи вида
gn=0 (10,38). В этих случаях требуется произвести оптимальное
распределение вероятностей гРи по циклам передачи,
удовлетворяющее таюке уравнению связи. Подобные задачи могут решаться
методами нелинейного или динамического программирования.
□
Список литературы
1. Альперт Я. Л. Распространение радиоволн и ионосфера. Изд-во/АН СССР,
1960. 480 с. /
2. Антошевский В. С, Шпилевский Э. П. К вопросу об эффективности систем
передачи данных с контролем первичных параметров. — «Вопросы
радиоэлектроники», серия ТПС, вып. 2, 1969, с. 58—64. '
3. Передача данных. М., «Связь», 1969. 177 с.
4. Беллман Р. Динамическое программирование. М., «ИЛ», 1960. 400 с.
5. Беллман Р., Дрейфус С. Прикладные задачи динамического
программирования. М., «Наука», 1975. 458 с
€. Беллман Р., Калаба Р. Динамическое программирование и современная
теория управления. М., «Наука», 1969. 118 с.
7. Блох Э. Л. Помехоустойчивость систем связи с переопросом. Изд-во АН
СССР, 1963. 172 с.
8. Блох Э. Л., Попов О. В., Турин В. Я- Модели источника ошибок в каналах
передачи цифровой информации. М., «Связь», 1971. 312 с.
9. Блох Э. Л., Попов О. В., Турин В. Я. Об обобщенной схеме системы
передачи цифровой информации с обратной связью. — «Сб. трудов МЭИС»,
вып. 1, 1970, с. 40—45.
10. Болотов А. А., Фикс Я. А. Оценка эффективности применения системы
передачи дискретной информации с автозапросом на линиях ионосферного
рассеивания.— «Электросвязь», 1971, № 12, с. 20—25.
11. Некоторые вопросы статистического синтеза информационных систем. —
«Известия АН СССР», серия «Техническая кибернетика», 1970, № 2, с. 153—
170.
12. Бородин Л. Ф. Введение в теорию помехоустойчивого кодирования. М.,
«Советское радио», 1968. 408 е.
13. Буга Н. Н. Основы теории связи и передачи данных, ч. II. Л., Изд-во
ЛВИКА им. А. Ф. Можайского, 1970. 707 с.
14. Бурнашев М. В. Блочный метод передачи слабого сигнала по каналу без
памяти. — «Проблемы передачи информации», вып. 1, 1973, с. 11—21.
15. Бутенко В. В. Влияние помех на безынерционную систему автоматического
регулирования мощности передатчика. — В сб. трудов ВПИ: «Вопросы
излучения и приема сигналов в условиях действия помех», вып. 3. Воронеж,
1972, с. 68—73.
16. Бутенко В. В., Каневский 3. М. Дискретное регулирование параметров
сигнала в системах передачи информации с обратной связью. — В сб.: «IV
конференция по теории передачи и кодирования информации», секция 3.
Москва—Ташкент, 1969, с. 34—38. "Ч^
17. Бутенко В. В., Каневский 3. М. Об эффективности автоматического
регулирования мощности передатчика в каналах с медленными и быстрыми
замираниями. — iB сб. трудов ВПИ: «Вопросы излучения и приема сигналов в
условиях действия помех», вып. 3. Воронеж, 1972, с. 127—130.
18. Бутенко В. В., Каневский 3. М. Об эффективности автоматического
регулирования мощности передатчика. — «Вопросы радиоэлектроники», серия
«Техника радиосвязи», 1972, № 4, с. 174—181. ~
19. Валиев Т. А. Помехоустойчивость систем передачи данных с дискретным
накоплением. Ташкент, «Фан», 1969. 111 с.
20. Васильев П. В. Способ обнаружения ошибок в системах передачи данных
с применением обратного канала. — «Вопросы радиоэлектроники», серия XI,
вып. 2, 1965, с. 19—23.
21. Величкин А. И. Теория передачи непрерывных сообщений. М., «Советское
радио», 1970. 296 с.
22. Вётшев Ж. Н., Петров Ю. А. Статистика ошибок в каналах связи с
замираниями. — В сб.: «IV конференция по теории передачи и кодирования
информации», секция 3. Москва—Ташкент, 1969, с. 51—57.
336
23. Вентцель Е. С. Элементы динамического программирования. М., «Наука»,
19б\. 175 с. *
24. Вентцель Е. С. Теория вероятностей. М., Физматгиз, 1962. 576 с.
25. Вентйель Е. С, Овчаров Л. А. Теория вероятностей. М., «Наука», 1969. 366 с.
26. Возенкрафт Дж., Джекобе И. Теоретические основы техники связи. М.,
«Мир*, 1969. 540 с.
27. ТВоронин А. А. К вопросу о потенциальной помехоустойчивости в каналах
со случайным изменением параметров. — «Электросвязь», 1961, № 10, с. 11—
18. *
28. Воронин Е. В. Об одном методе кодирования при передаче двоичных чисел
по каналу связи с шумом. — «Радиотехника и электроника», 1963, № 8,
с. 1312—1318.
29. Ганзинг К. И. Оценка качества канала связи по коэффициенту взаимной
корреляции между сигналами на входе и выходе канала. — «Вопросы
радиоэлектроники», серия ТПС, вып 3, 1970, с. 13—19.
30. Герастовский П. А. О плотности вероятности на выходе перемножителя при
корреляционном приеме. — «Известия вузов», серия «Радиотехника», 1964,
№ 1, с. 91—96.
31. Гилберт Э. Н. Пропускная способность канала с. пакетными ошибками. —
«Кибернетический сборник № 9», М., «Мир», 1974, с. 107—122.
32. Головин Д. Б., Федоров И. Б. Прием сигналов «в целом» в системе с
квитированием.— «Радиотехника», 1970, № 1, с. 44—49.
33. Гольдфельд Л. И. Помехоустойчивость системы связи с переспросом,
оптимальной в смысле комбинированного критерия. — «Труды учебных инсти-^
тутов связи», вып, 49, 1970, с. 54—60.
34. Гольдфельд Л. И., Конторович В. Я. К вопросу об оптимизации систем
связи с переспросом. — «Радиотехника», 1971, № 12, с. 9—15.
35. Гольдштейн Ю. А. К вопросу о помехоустойчивости систем прерывистой
связи. — «Труды учебных институтов связи», вып. 25, 1965, с. 61—66.
36. Градштейн И. С, Рыжик И. М. Таблицы интегралов, сумм, рядов и
произведений. М., Физматгиз, 1962. 1100 с.
37. Основы передачи данных по проводным каналам связи. М., «Связь», 1964.
311 с.
38. Гуткин Л. С. Современная радиоэлектроника и ее проблемы. М.* «Советское
радио», 1968. 105 с.
39. Добрушин Р. Л. Передача информации но каналу с обратной связью. —
«Теория вероятностей и ее применения», т. 3, 1958, № 4, с. 395—419.
40. Добрушин Р. Д. Асимптотическая оценка вероятности ошибки при передаче
сообщения по каналу без памяти с использованием обратной связи. —'
«Проблемы кибернетики», 1962, № 8, с. 161—168.
41. Дорман М. И. Влияние асимметрии решающих устройств на качество
системы передачи информации. — В сб. трудов ВПЙ: «Вопросы излучения и
приема сигналов в условиях действия помех», вып. 1. Воронеж, 1968, с. 60—
71.
42. Дорман М. И. Критерий оптимальности и метод синтеза систем с логической
обратной связью. — В сб.' трудов ВПИ: «Генерирование и усиление
колебаний», вып. 4. Воронеж, 1971, с. 53—60.
43. Дорман М. И. О самонастройке замкнутых систем передачи информации. —
В сб. трудов ВПИ: «Вопросы излучения и приема сигналов в. условиях
действия помех», вып. 1. Воронеж, 1968, с. 182—189.
44. Дорман М. И. О синтезе приемно-решающих устройств' замкнутых систем
передачи информации. — В сб.: «IV конференция по теории передачи и
кодирования информации», секция 3, Москва—Ташкент/1969, с. 58—63.
45. Дорман М. И. Передача информации в двоичных системах с решающей
обратной связью при частотной манипуляции сигнала. — «Известия вузов»,
серия «Радиоэлектроника», 1968, № 2, с. 129—140.
46: Дорман М. И. Передача информации в системах с решающей обратной
связью при двоичной модуляции сигнала. — «Электросвязь», 1967, № 9,
с. 41—48.
337
47. Дорман М. И. Синтез системы передачи информации с обратной связью.—
«II научно-техническая конференция по космической радиосвязи». /Тезисы
докладов. М., 1971, с. 32—33. I
48. Дорман М. И., Поддубный В. Н. Об использовании совместной модуляции
сигналов для передачи служебной информации в системах с юбратной
связью. — В сб. трудов ВПИ: «Вопросы излучения и приема сигналов в
условиях действия помех», вып. 1. Воронеж, 1968, с. 147—158. I
49. Дорман М. И., Поддубный В. Н. Об одной возможности «следящего»
приема замирающих сигналов с амплитудной манипуляцией. — В сб. трудов
ВПИ: «Вопросы излучения и приема сигналов в условиях действия помех»,
вып. 1. Воронеж, 1968, с. 199—218.
50. Дорман М. И., Поддубный В. Н. О помехоустойчивости приема сигналов
ОФТ при щррелированных помехах. — «Радиотехника», т. 25, 1970, № 2,
с. 24—29.
51. Дорман М. И.> Поддубный В. Н. О структуре решающих устройств для
распознавания сигналов. — «Радиотехника и электроника», т. 14, 1969,
№ 5, с. 781—788.
52. Дорман М. И., Поддубный В. Н. Передача информации в системах с
решающей обратной связью при относительной фазовой модуляции сигнала. —
В сб. трудов ВПИ: «Вопросы излучения и приема сигналов в условиях
действия помех», вып. 1. Воронеж, 1968, с. 95—109.
53. Дорман М. И., Поддубный В. Н. А. С. № 331496 (СССР). Опубл. в бюлл.
«Изобретения. Промышленные образцы. Товарные знаки», 1968, № 9, с. (182.
54. Дорман М. И., Поддубный В. Н. Совместная оптимизация пороговых уров-
5 ней в замкнутых системах передачи информации. — «Электросвязь», 1970,
№ 9, с. 66—68.
55. Дорман М. И., Поддубный В. Н., Прнбельская В. Д. Применение ЦВМ для
оптимизации пороговых уровней в некоторых системах передачи
информации с обратной связью. — В сб. трудов ВПИ: «Узлы, приборы и системы
радиоэлектронной аппаратуры и их применение», вып. 1. Воронеж, 1970,
с. 18—24.
56. Дьячков А. Г. Асимптотика вероятности ошибок при передаче по каналу
с белым гауссовским шумом и бесшумной мгновенной обратной связью. —
«Проблемы передачи информации», вып. 1, 1«970, с. 33—44.
57. Ерош С. П. О группировании ошибок в канале связи. — В сб.: «Системы
передачи данных». Л., ВАС, 1969, № 3, с. 46—52.
58. Ескин Б. А., Кнреев О. П. Стандартный код для передачи данных. —
«Электросвязь», 1969, № 2, с. 35—42.
59. Ефимов М. В. Квантование по времени при измерении и контроле. —
«Библиотека по автоматике», вып. 332. М., «Энергия», 1969. 87 с.
60. Жигора П. П. Контроль дискретного канала при применении электрополя-
ции его параметров. — «Труды ЛЕЙКА им. А. Ф. Можайского», вып. 560.
Л., 1970, с. 19—25. <
61. Жигора П. П. Методы контроля качества каналов связи. — «Труды ЛВИКА
им. А. Ф. Можайского», вып. 552. Л., 1969, с. 11—16.
62. Жигулин Л. Ф., Зяблов В. В. Экспоненты вероятности ошибки в системе с
обратной связью при использовании каскадного кода. — «Проблемы
передачи информации», вып. 1, 1973, с. 3—10.
63. Зелигер Н. Б. Основы передачи данных. М., «Связь», 1974.
64. Зелигер А. Н. Сравнительный анализ систем связи. — «Вопросы
радиоэлектроники», серия ТПС, вып. 2, -1969, с. 50—54.
65. Зельдович Я. Б., Мышкнс А. Д. Элементы прикладной математики. М., Физ-
матгиз, 1967. 646 с.
66. Зигангиров К. Ш. Передача сообщений по гауссовскому каналу с обратной
связью. — «Проблемы передачи информации», вып. 2, 1967, с. 98—101.
67. Злотннков Ю. С. Применение производящих функций для анализа систем
передачи дискретной информации с переспросом. — «Электросвязь», 1970,
№ 12, с. 65—67.
338
68. Зл^тников Ю. С. О применении кодов с переменной избыточностью в
системах передачи данных. — «Вопросы радиоэлектроники», серия XI, вып. 2,
1965. с. 13—18.
69. Зюко А. Г. Помехоустойчивость и эффективность систем связи. М., Связь-
издат. 1963. 320 с.
70. Ибрагимов И. А., Хасьминский Р. 3. Передача слабого сигнала по каналу
*без памяти. — «Проблемы передачи информации», 1972, вып. 4, с. 28—39.
71. Казаков В. А. О помехоустойчивости систем связи со сравнением. —
«Электросвязь», 1968, № 2, с. 25—34.
72. Казаков В. А. Помехоустойчивость систем связи со сравнением без памяти
при ограниченном числе повторных передач. — «Электросвязь», 1968, № 8,
с. 18-25.
73. Каневский 3. М., Усачев А. И. Система передачи данных с решающей
обратной связью.А. С. № 467486 (СССР). Опубл. в бюлл. «Открытия. Изобретения.
Промышленные образцы. Товарные знаки», 1975, № 14. Система передачи
данных с информационной обратной связью. А. С. № 472469 (СССР). Опубл.
в бюлл. «Открытия. Изобретения. Промышленные образцы. Товарные знаки»,
1975, № 20.
74. Каневский 3. М. Остаточная вероятность искажения при передаче
сообщений с информационной обратной связью. — «Радиотехника», т. 20, 1965,
№ 3, с. 3—8.
75. Каневский 3. М. Об одном условии эффективности передачи с
информационной обратной связью. — «Радиотехника и электроника», т. II, 1966, № 3,
с. 536—537.
76. Каневский 3. М. Передача сообщений с обратной связью с переменным
верхним числом повторений. — «Электросвязь», 1966, № 9, с. 24—27.
77. Каневский 3. М. Сравнительный анализ передачи с решающей и
информационной обратной связью. — «Электросвязь», 1968, № 6, с. 1—6.
78. Каневский 3. М. Передача сообщений с информационной обратной связью.
М, «Связь», 1969. 263 с.
79. Каневский 3. М. Передача сообщений с обратной связью. М., «Знание»,
1969. 46 с.
80. Каневский 3. М., Бутенко В. В. Об аппроксимации законов распределения
коэффициента передачи каналов связи с замираниями. В сб. трудов ВПИ:
«Вопросы излучения и приема сигналов в условиях действия помех», вып. 3.
Воронеж, 1972, с. 105—110.
81. Каневский 3. М., Бутенко В. В. Характеристики системы передачи инфо,р-
мации с дискретным регулированием параметров сигнала. — В сб. трудов
ВПИ: «Генерирование и усиление колебаний», вып. 2. Воронеж, 1969, с. 148—
156.
82. Каневский 3. М., Кендращенко В. Н. Избыточность в схеме кодирования,
использующей обратную связь и стохастическую аппроксимацию. — В сб.
трудов ВПИ: «Вопросы излучения и цриема сигналов в условиях действия
помех», вып. 3. Воронеж, 1972, с. 45—49.
83. Каневский 3. М., Кондращеико В. Н. Об одном возможном способе
реализации метода стохастической аппроксимации. — В сб. трудов ВПИ: «Вопросы
излучения и приема сигналов в условиях действия помех», вып. 3. Воронеж,
1972, с. 21—24.
84. Каневский 3. М., Кретинин В. В. Применение метода вероятностных графов
к анализу неоднородных сиетем с обратной связью. — В сб. трудов ВПИ:
«Вопросы излучения и приема сигналов в условиях действия помех», вып. 2.
Воронеж, 1969, с. 19—25.
85. Каневский 3. М., Кретинин В. В. Об ошибках аапаздывания при
квантованной передаче непрерывных функций времени ио дискретным каналам с
обратной связью. — «Радиотехника», т. 25, 1970, № 6, с. 40—45.
86. Каневский 3. М., Кретинин В. В. О помехоустойчивости импульсно-кодовой
модуляции при передаче непрерывных сообщений по дискретным каналам.—
«Известия вузов», серия «Приборостроение», 1970, № 11, с. 45—48.
87. Каневский 3. Мм Кретинин В. В., Рачинскмй Г. Р. Об эффективности
применения информационной обратной связи при передаче непрерывных
сообщений по дискретным каналам. — «Электросвязь», № 12, 1969, с. 22—26.
339
88. Каневский 3. М., Ледовских В, И. Передача дискретных сообщений/по
каналам с обратной связью с прерываниями. — «Электросвязь», 1970, № 8,
с. 6.8. /
89. Каневский 3. М., Ледовских В. И. Распределение ошибок в
коротковолновом канале связи. — «Радиотехника», т. 26, 1971, № 2, с. 29—35. /
90. Каневский 3. М., Токарев Б. В. Минимизация вероятности ошибк/i при
передаче сообщений с информационной обратной связью в системах! с
частотной манипуляцией. — «Радиотехника», т. 22, 1971, № 10, с. 94—96./
91. Каневский 3. М., Токарев Б. В. Об эффективности систем с информационной
обратной связью в сравнении с прямыми системами и требования к
помехоустойчивости обратного канала. — «Радиотехника», т. 24, 1969, № 3,
с. 15—21.
92. Каневский 3. Мм Токарев Б. В. Определение вероятности искажения в
числе посылок сообщений в системах с информационней обратной связью. —
В сб.: «IV конференция по теории передачи и кодирования информации»,
секция 3, Москва—Ташкент, 1969, с. 94—99.
93. Каневский 3. М., Токарев Б. В. Оптимальный пороговый уровень при приеме
импульсно-кодовых сообщений в системах с информационной обратной
связью, -г- «Радиотехника», т. 21, 1966, № 12, с. 50—57.
94. Каневский 3. М., Токарев Б. В., Ледовских В. И. Определение
относительной скорости и достоверности передачи сообщений с обратной связью по
каналам с переменными параметрами. — В сб. трудов ВПИ: «Вопросы
излучения и приема сигналов в условиях действия помех», вып. 2. Воронеж,
1969, с. 26—31.
95. Каневский 3. М., Усачев А. И. Рекуррентное квитирование при передаче
сообщений с информационной связью. — В сб. трудов ВПИ: «Вопросы
излучения и приема сигналов в условиях действия помех», вып. 3. Воронеж,
1972, с. 136-4138.
96. Каневский 3. М., Финкельштейн М. И. Флуктуационная помеха и
обнаружение импульсных радиосигналов. М.—Л., Госэнергоиздат, 1963. 216 с. с ил.
97. Кловский Д. Д. Передача дискретных сообщений по радиоканалам. М.,
«Связь», 1969. 375 с.
98. Клюев Н. И. Информационные основы передачи сообщений. М., «Советское
радио», 1966. 360 с.
99. Колесник В. Д., Мирончиков Е. Т. Декодирование циклических кодов. М.,
«Связь», 1968. 251 с.
100. Кондращенко В. Н., Каневский 3. М. Передача дискретной информации
при бесшумной обратной связи с применением стохастической
аппроксимации. — В сб. трудсгв ВГУ: «Вопросы рассеяния и оптимального приема
электромагнитных волн», Воронеж, 1973, с. 48—52.
101. Кондращенко В. Н., Каневский 3. М. Передача сообщений с
информационной обратной связью с применением трехпозиционной манипуляции. — В сб.
трудов ВПИ: «Вопросы излучения и приема сигналов в условиях действия
помех», вып. 2. Воронеж, 1969, с. &8^95.
102. Кондращенко В. Н., Каневский 3. М., Заика В. С. Сравнение некоторых
методов передачи сообщений с информационной обратной связью по
критерию относительной информационной скорости. — В сб. трудов ВПИ:
«Вопросы излучения и приема сигналов в условиях действия помех», вып. 3.
Воронеж, 1972, с. 139—141.
103. Копничев Л. Н. Принципы построения аппаратуры для передачи дискретной
информации. М., «Связь», 1972. 155 с.
104. Коржик В. И. Границы по вероятностям необнаруживаемых ошибок и
оптимальные групповые коды в каналах с обратной связью. — «Радиотехника»,
т. 25, 1965, № 1, с. 27—33.
105. Коржик В. И. Распределение ошибок в канале с рэлеевскими
замираниями. — В сб.: «II Всесоюзная конференция по теории кодирования и ее
приложениям», секция 3, ч. II. М., «Наука», 1965, с. 46—61.
106. Косякнн А. А.. Статистическая теория квантования по уровню. —
«Автоматика и. телемеханика»* 1961, т. 22, №6, с. 69—75.
107. Котов П. А. Повышение достоверности передачи цифровой информации.
М., «Связь», 1966. 184 с.
340
108. Котельников В. А. Теория потенциальной помехоустойчивости. М., Госанер-
гоиздат, 1956. 151 с.
109. Крамер Гн Лидбвттер М. Стационарные случайные процессы. М., «Мир»,
,1969.. 398 с.
ПО. Кретйрнин В. В. К расчету достоверности среднего числа посылок в
системе с ретрансляционной ИОС в условиях рэлеевских замираний. -^ В сб.
трудов ВПИ: «Вопросы излучения и приема сигналов в условиях действия
ломех», вып. 2. Воронеж, 1969, с. 53—60.
111. Кретинин В. В., Каневский 3. М. Среднеквадратическая оценка влияния
ложных команд на асинхронные системы. — В сб. трудов ВПИ: «Вопросы
рассеяния и оптимального приема электромагнитных волн». Воронеж, 1973,
с. 150—154.
112. Ланко А. А. О применимости корректирующих кодов в каналах с
замираниями. — «Труды ЛВИКА им. А. Ф. Можайского», вып. 560. Л., 1970,
с. 3—5.
113. Левин Б. Р. Теоретические основы статистической радиотехники. Книга
первая. М., «Советское радио», 1966. 728 с.
114. Ледовских В. И., Каневский 3. М., Усачев А. И. Экспериментальное
исследование системы передачи дискретной информации с обратной связью с
прерываниями. — В сб. трудов ВПИ: «Вопросы излучения и приема
сигналов в условиях действия помех», вып. 2. Воронеж, 1969, с. 178—L86.
115. Лекции по теории систем связи. Под .редакцией Е. Дж. Багдади. М., «Мир»,
1964. 402 с.
116. Люстерник Л. А., Червоненкис О. А., Янпольский А. Р. Математический
анализ. Вычисление элементарных функций. М., Физматгиз, 1963. 247 с.
117. Макаров А. А., Чесноков А. Ф. Некоторые методы повышения
устойчивости систем передачи информации с РОС. — «Электросвязь», 1969, № 8„
с: 22—26.
118. Мановцев А. П. Синтез оптимального алфавита сигналов. — В сб.: «II
Всесоюзная конференция по теории кодирования и ее приложениям», секция 2,
ч. IL М., «Наука», 1975, с. 61—76.
119. Мартынов Ю. М. Эффективность использования каналов связи в системах
передачи информации с запросом. — «Электросвязь», 1964, № 1, с. 17—24.
120. Мартынов Ю. М. Обработка информации в системах передачи данных. М.„
«Связь», 1969. 200 с.
121. Мартынов Ю. М. Система передачи информации с адресным запросом
кодовых слоев, забракованных в предыдущих передачах. — «Электросвязь»,
1964, № 7, с. 26—32.
122. Мельников Ю. Н. Сравнение экспериментальных и расчетных значений
вероятности ошибки в сообщении. — В сб.: «IV конференция по теории
передачи и кодирования информации», секция 3, Москва—Ташкент, '1069,
с. 100—104.
123. Мельников Ю. Н., Ольдерогге Г. Б. Некоторые вопросы
помехоустойчивости передачи цифровой информации при групповых ошибках. —
«Электросвязь», 1965, № 5, с. 50—56.
124. Мельников Ю. Н. Об условиях целесообразности применения
корректирующих кодов в каналах с групповыми ошибками. — «Электросвязь», 1967,
№ 12, с, 20—24.
125. Мертц П. Модель импульсных помех в системах передачи данных. — В сб.:
«Статистика ошибок при передаче цифровой информации». Под ред. С. И.
Самойленко. М., «Мир», 1966, с. 169—193.
126. Метеорная радиосвязь на ультракоротких волнах. Сб. статей под ред. А. Н.
• Казанцева. М., «ИЛ», 1961. 287 с.
127. Мешковский К. А. Вопросы помехоустойчивости систем связи,
осуществляющих прием «в целом». — «Радиотехника», т. 13, 1958, № 6, с. 3—17.
128. Мешковский К. А., Кириллов И. Е. Кодирование в технике связи. М.„
«Связь», 1966. 324 с.
129. Мизин И. А., Уринсон Л. С, Храмешин Г. К. Передача информации в
сетях с коммутацией сообщений. М., «Связь», 1972. 319 с.
341
130. Митрофанов И. Е. Об адаптации в системах телемеханики с обратной
связью. — «Труды Казанского авиационного института», вып. 117, 1970,
с. 31—34.
131. Назаров В. И. Прием сигналов фазовой телеграфии с «вращающейся
фазой». — «Электросвязь», 1964, № 11, с. 5—15.
132. Олейников В. А., Зотов Н. С, Пришвин А. М. Основы оптимального и
экстремального управления. М., «Высшая школа», 1969. 296 с.
133. Ольдерогге Г. Б. Критерии сравнения различных методов повышения
достоверности цифровой информации, передаваемой по каналам связи с
помехами. — «Электросвязь», 1967, Йя 7, с. 10—13.
134. Отчет № 7249 Национального, бюро стандартов США, 1 ноября 1962 г. —
«Обзорная информация о зарубежной технике связи», серия «Радиосвязь,
радиовещание, телевидение», выл. 6, 1966. 156 с.
135. Ошеров Р. Г. Эффективность прерывистой системы автоматического
регулирования мощности передатчика. — «Известия вузов», серия
«Радиоэлектроника, 1968, № 1, с. 51—61.
136. Петрович Н. Т. Новые способы осуществления фазовой телеграфии. —
«Радиотехника», 1957, т. 12, № 10, с. 47—54.
137. Петрович Н. Т. Передача дискретной информации в каналах с фазовой
манипуляцией. М., «Советское радио», 1965. 263 с.
138! Петрович Н. Т. Передача сигналов по методу сравнения параметров
элементарных .посылок. — «Радиотехника», 1961, № 1, с. 3—10.
139. Поддубный В. Н., Дорман М. И. О применении сложных сигналов для
совместной передачи нескольких потоков информации в замкнутых системах
связи. — «II научно-техническая конференция по космической радиосвязи».
Тезисы докладов. М., 1971, с. 60—61.
140. Пинскер М. С. Вероятность ошибки при блоковой передаче по гауссовскому
(каналу без памяти с обратной связью. — «Проблемы передачи
информации», вып. 4, 1968, с. 3—19.
141. Питерсон У. Коды, исправляющие ошибки. М., «Мир», 1964. 338 с.
142. Элементы теории передачи дискретной информации. М., «Связь», 1972. 232 е.
142а. Пуртов А. П., Замрнй А. И. Основные закономерности распределения
ошибок в дискретных каналах связи. — «Электросвязь», 1967, № 2.
143. Растригин Л. А. Статистические методы поиска. М., «Наука», 1968. 376 с.
144. Рышков Ю. П. Характеристики статистического контроля каналев связи.—
«Труды ЛВИКА им. А. Ф. Можайского», вып. 552, 1969, с. 41—44.
145. Семаков А. В., Зиновьев В. А. Эквидистантные М-ичные коды с
максимальным расстоянием и разрешимые уравновешенные неполные блок-схемы. —
«Проблемы передачи информации», вып. 2, 1968, с. 3—10.
146. Семаков А. В., Зиновьев В. А., Зайцев Г. В. Класс максимальных
эквидистантных кодов. — «Проблемы передачи информации», вып. 2, 1969, с. 84—
87.
147. Сидельников В. М. О спектре весрБ кода Боуза—Чоуджири—Хоквингема. —
В сб.: «IV конференция по теоршг^передачи и кодирования информации»,
(секция V, Москва—Ташкент, 1969, с. 152. ~
148. Сервинский Е. Г. О критериях оценки систем передачи дискретной инфор-
■мации. — «Электросвязь», 1968, № 6, с, 7—-12.
149. Смольянинов В. М., Филиппов Л. И. Синтез оптимальных радиоприемников
дискретных сигналов. М., «высшая школа», 1969. 104 с.
150. Соловьев В. В. Об оптимальной длине кодовой группы и радиолинии с
(информационной обратной связью без памяти. — «Электроовязь», 1966, №6,
с. 53—58.
151. Соловьев В. В., Шарикова Л. С. Быстродействие системы передачи с
информационной обратной связью с памятью, адаптирующейся к помехам по
избыточности кода. — «Электросвязь», 1968, № 8, с. 12—17.
152. Солодов А. В. Теория информации и ее применение к задачам
автоматического управления и контроля. М., «Наука», 1967. 432 с.
153. Статистика ошибок при передаче цифровой информации. — «Сб. переводов*.
Под ред. С. И. Самойленко. М., «Наука», 1966. 304 с.
342
154. Сысоев Л. П. Оценка параметров, обнаружение и различение сигналов. М.,
«Наука», 1969. 230 с.
155. Теплое Н. Л. Помехоустойчивость систем передачи дискретной
информации. М., «Связь», 1964. 359 с.
156. Тихонов В. И. Статистическая радиотехника. М., «Советское радио», 1966.
678 с.
157. Токарев Б. В. К расчету вероятности искажения и числа посылок
служебных знаков в системах с информационной обратной связью. — В сб.
трудов ВПИ: «Вопросы излучения и приема сигналов в условиях действия
'помех», вып. 1. Воронеж, с. 121—131.
158. Токарев Б. В. Об эффективности передачи данных с ретрансляционной
обратной связью. — В сб. трудов ВПИ: «Автоматика, электроника и
автоматизация измерений», вып. 2. Воронеж, 1969, с. 49—54.
159. Токарев Б. В. О достоверности и скорости передачи сообщений по
неоднородным каналам в системах с обратной связью с блокировкой и
детектором качества. — В сб. трудов ВПИ: «Вопросы излучения и приема
сигналов в условиях действия помех», вып. 3. Воронеж, 1972, с. 16—20.
160. Токарев Б. В. О критериях эффективности передачи дискретных сообщений
с обратной связью. — В сб. трудов ВПИ: «Вопросы излучения н приема
импульсных сигналов в условиях действия помех», вып. 2. Воронеж, 1969,
с. 78—87.
161. Токарев Б. В. Скоростные и энергетические характеристики систем с
информационной обратной связью. — В сб. трудов ВПИ: «Вопросы
излучения и приема сигналов в условиях действия помех», вып. 1. Воронеж, 1968г
с. 72—85.
162. Токарев Б. В., Каневский 3. М. Передача сообщений с ретрансляционной
обратной связью по каналам с замираниями. — В сб. трудов ВПИ:
«Вопросы излучения и приема сигналов в условиях действия помех», вып. 2.
Воронеж, 1969, с. 46—52.
163. Ту Ю. Т. Цифровые и импульсные системы автоматического управления.
М., «Машиностроение», 1964. 703 с.
164. Удалов А. П., Супрун Б. А. Избыточное кодирование при передаче
информации двоичными кодами. М., «Связь», 1964. 270 с.
165. Уайлд Д. Д. Методы поиска экстремума. М., «Наука», 1967. 268 с.
166. Фано Р. Передача информации. Статистическая теория связи. М., «Мир»,
1965. 438 с.
167. Феллер В. Введение в теорию вероятностей и ее приложения.; М., «Мир»,
1964. 498 с.
168. Финк Л. М. Теория передачи дискретных сообщений. М., «Советское
радио», 1970. 727 с.
169. Фельдбаум А. А. Основы теории оптимальных автоматических систем. М.,
«Наука», 1966. 623 с.
170. Ханович И. Г., Рут Э. Э. О выделении сигналов из смеси их со случайной
стационарной помехой априорно известной структуры. — «Материалы
юбилейной научно-технической конференции ЛЭИС», вып. 1, 1967, с. 33—37.
171. Харкевич А. А. Борьба с помехами. М., Физматгиз, 1963. 275 с.
172. Хасьмннский Р. Э. О последовательной передаче сигналов в гауссовском
канале с обратной связью. — «Проблемы передачи информации», вып. 2,
1967, с. 47—54.
173. Хасьмннский Р. Э. Каналы с малой пропускной способностью и
посимвольная передача. — «Проблемы передачи информации», вып. 2, 1970, с. 58—67.
174. Хворостенко Н. П. Статистическая демодуляция дискретных сигналов. М.,
«Связь», 1968. 335 с.
175. Хуан Т. Соображения по конструированию КИМ — систем для передачи
неподвижных одноцветных изображений низкой четкости. — «ТИИЭР», т. 55,
1967, № 3, с. 97—101.
176. Цикин И. А. О помехоустойчивости приема сигналов в канале с
неизвестными параметрами. — «Радиотехника», т. 21, 1966, № 6, с. 39—47.
343
177. Цнкин И. А. Оптимальные алгоритмы и помехоустойчивость разнесенного
приема в каналах с неопределенными параметрами. — «Известия вузов»,
серия «Радиоэлектроника», 1967, № 5, с. 463—472.
178. Чайковский В. И. Квантование и интерполяция сигналов в импульсных
радиотехнических устройствах. Киев, «Техника», 1966. 126 с.
179. Чернецкий В. И., Дидук Г. А., Потапенко А. А. Математические методы и
алгоритмы исследования автоматических систем. М.—Л., «Энергия», 1970.
374 с.
180. Вальд А. Последовательный анализ. М, Физматгиз, 1960. 328 с.
181. Шеннон К. Математическая теория связи. — В сб.: «Работы по теории
информации и кибернетике». М., «ИЛ», 1963, с. 243—332.
182. Шеннон К. Вероятность ошибки для оптимальных кодов в гауссовском
канале. — В сб.: «Работы по теории информации и кибернетике». М, «ИЛ»,
1963, с. 540—586.
183. Каналы передачи данных. Под ред. В. О. Шварцмана. М., «Связь», 1970.
304 с.
184. Ширман Я. Д., Голиков В. Н. Основы теории обнаружения
радиолокационных сигналов и измерения их параметров. М., «Советское радио», 1963.
278 -с.
185. Шляпоберский В. И. Элементы дискретных систем связи. М., Воениздат,
1965. 304 с.
186. Шувалов В. П. Косвенные методы обнаружения ошибок в системах
передачи дискретной информации. М., «Связь», 1972. 81 с.
187. Эллиот Е. О. Оценка частоты ошибок при использовании кодов в канале
с пакетными помехами. — В сб.: «Статистика ошибок при передаче
цифровой информации». Под ред. С. И. Самойленко. М., «Мир», 1966, с. 242—
268.
188. Эльсгольц Э. Л. Дифференциальные уравнения и вариационные
исчисления. М., «Наука», 1969. 424 с.
189. Юнаков П. А. Определение вероятности обнаружения возмущенного
состояния канала. — «Труды ЛФ ЦВДИС», 1970, № 24, с. 83—87.
190. Bedrosien E. Weigted PCM «IRE Trans.», March, 1958, v. IT-14.
191. Bellman R., Kalaba R. On weighted PCM and meansquare deviation.—
(«IRE Trans.», v.IT-4, N 1.
192. Bennet M. P., Froclich F. R. Same Results in the Effectiveness of Error
Control Procedures in Digital Data Transmission. IRE Trans, on Comn.
Sist., PGCS-9(1) March, 1961.
193: Chang S.'S. L. Theory, of Information Feedback Systems.—«IRE Tr.»,. IT-2,
1956,.N 3.
194. Chang S. S. L. Improvement of two—way communication'by means of
feedback. — «IRE Int. Conv. Rec», 1964, pv. 9, p. 4.
195. Csibi S. On optimissing communication with decision—feedback under typical
constraints of two—way commun^^on. — «Proc. 4th Collog. microwave
commun.», Budapest, 1970, v. 1.
196. Dupont J. J. Le Systeme de Radiotelegraphie Multiplex T.O.R. «L'Onde
Electrique», Mai, 1954.
197. Ferguesion M. J. Optimal signal design for sequential signaling over a
channel with feedback. — «IEEE Trans. Inform. Theory», 1968, pt. 14, N 2.
198. Glave F. Communication over fading dispersive channels with feedback.—
«IEEE Trans. Inf. Theory», 18, 1972, N 1.
199. Hyggins W. H. Signal—flow graphs and random signals. — «Proc. IRE»,
January, 5, 1967, v. 45, N 2.
2.00. Korn J. Optimal commun. syst. with noiselles feedback for a bynary source
and with Gaussian channel. — «IEEE Trans. Inform. Theory», 15r pt. 1,
1969, N 1.
201. Kramer A. J. Improving communication reliability by unuse on intermittent
feedback channel. — «Trans. Inform.. Theory, 1969,. v. IT-15.
202. Lawton J. G. Theoretical orror rates of differentially coherent binary and
«Kineplex» data transmission Systems. — «PIR.E», 1957, N 2. t., :.,
203. Lees A. B. Interpolation and extrapolation of sampled data. ^—«IRE Trans.»,
1956, N 1, v. IT-2.
344
204. Leneman 0. A. Z. Random sampling of random processes: optimum linear
interpolation. — «J. Franklin Inst.», 1966, v. 281, N 4.
205. Mavkum J. I. A statiatical theory of tauget detection by pulsed random. —
-«Trans. IRE», 11—6, 1960, N 6.
206. Max J. Quantizing for minimum distortion. — «IRE Trans.», 1960, v. IT-6>
207. Nacagami M. The m^distfibutioti — a general formula of intensity distribution
of rapid fading. Statistical methods in radio wave propagation, Pergamon
Press, New York, 1960.
208. Rutman S., Gretenberg T. L. Optimum linear coding for additive noise
systems using feedback. — «IEEE Internat. Conf. Commun. Digest»,
Minneapolis Mium, 1967.
209. Sacks J. A simptotic distribution of stochadtic approximation procedures. —
«Ann. Math* Stat.», June, 1958, v. 29.
210. Schalkwijk J. R. M. A coding scheme for additive noise channels with
feedback, Part 2, band; limited signals. — «IEEE Trans, on Information
Theory», April, 1966, v. ПЛ2.
211. Schalkwijk J. R. M. Recent pevelopment in Feedback Communication.—
«Proceeding of the ЩЕЕ», 1969,'July, 7, v. 57.
212. Schalkwijk J. R. M., Kailoth Т., A coding schema for additive noise channels
with feedback, Part, no bandwidth constaint. — «IEEE Trans, on Information
Theory», April, 1966, v. IT-j.2.
213. Schalkwijk J. R. MM Rieter M., Barron Mark E. Sequential signaling under
a peak constraint. — «IEEE Trans. Inform. Theory», 1971, v. 17, N 3.
214. Spilker J. J. Theoretical bounds on the performance of sample data commu
nication Systems. — «IRE Trans.», 1960, v. CT-7, N 3. ■
215. Wiesner L. Funkfernschreibanlage fur gesicherte Nachrichtenubertragung aut
Kurzwellenverbindungen. — «Fernmelde Prax.», 1970, 47, N 15.
216. Wyner A. D. On the probability of error for communication in white Caussian
noise. — «IEEE Trans. Inform. Theory», 1967
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Алфавит сообщений 6
Анализатор состояния каналов
(АСК) 231
— экстремальный 270, 313
Вектор «неравномерности» 289
— управления цикловой 259
Вероятность вставки 38
— выпадения 36
— искажения сообщения 16, 22, 35
остаточная 39
_ средняя 45
< эквивалентная 42
— ошибки эквивалентная ПО, 119,
140, 150
— перехода между уровнями
199—200
эквивалентная 210—212,
217
— правильного приема 41
— регистрации сообщения 27, 37
Взвешивания ИКМ 203
Выбор структуры 258
Гамма-функция 57
Граф вероятностный (краткие
сведения) 28
- обобщенной системы 32
Динамическое программирование
286, 289
Замирания 230
Звено графа возвратное 29
Знаки служебные 10
Измерительно-вычислительное
устройство 50
Искажения амплитудные 200, 203, 211
— временные 200, 215, 218—220
Квантование 193, 213, 223
Квитанция, квитирование 9
Код минимальный 194, 201
прямой 194, 197, 204, 217
рефлексный (Грея) 195, 198
свернутый 195, Г98
— систематический 203
Кодирование избыточное 199, 203, 209
Коды оптимальные по исправляющей
способности 84
по обнаруживающей
способности 84
Комбинация кодовая 7, 23
разрешенная 7
Коэффициент зондирования 235
— передачи канала 231
Критерий среднеквадратической
ошибки 192—193
Множитель Лагранжа 18
приведенный неизвестный 275
Модель канала 75
обобщенная 96
Модем 49
Надежность решений 267
— связи 22, 231
Накопление искажений 219
Нормированные пороги 53
Ограничения алгоритмические 257
— типа равенств и неравенств
257, 283
Опознаватель 23
Оптимальное управление 257, 270
Ошибка временная 200, 203, 215,
21,8, 220, 226, 229
— квантования 193, 1214
— ложная 25
— необратимая 26
— обнаруживаемая 25
— среднеквадратическая 192,
«194—195
остаточная 203, 213—215
Пикфактор '196—197
Показатели качества системы с ОС
16—22, Ш<6, 153
Помехи стационарные нормальные
аддитивные 325
— флуктуационные 11
— узкополосные (сосредоточенные)
12, 7.1
Последействие (273.
Принцип оптимальности Беллмана
286
Риск средний 18, 20, 192, 258
— условный 19
будущий 272
Регулирование мощности 232
дискретное 241
непрерывное 234
— несущей частоты 247
— скорости 232, 245
346
Связь обратная информационная
9, 24
логическая 231
полная 9, 107, 122
ретрансляционная 110
решающая 9, 24
укороченная 9, (107, 132
управляющая 231
Селектор 50
Сигнализация 267
Скорость передачи информационная
22, 146
относительная 44, 45—48,
ПО, '140
средняя 45—48
Сообщение 6, 7
— кодированное 7
— непрерывное 192, 206
—■ — центрированное 197, 201
Спектр кода 87
обобщенный 87—90, 94, 125
— энергетический 325
Стоимости относительные 276
— решений 19, 282
Структура логарифмическая 321
— оптимальная 257, 260
Таблица кодирования 194
Уравнения оптимальности 259
— стационарности 259, 271
Функциональное уравнение
динамического программирования 296
Функциональный преобразователь
(ФП) 50
Функция Бесселя модифицированная
53, 55
— вероятностей переходная 30
— — производящая 32
— гипергеометрическая 57
— Лагранжа 276
— решающая 19
— целевая 257
Экстраполятор нулевого порядка
193, 201, 228
Энергия пороговая 225—226
— сигнала собственная 328
— сигналов взаимная 328
ОТЛАВЛ ЕН ИЕ
WW^^^'^'^ " Стр.
Предисловие • 3
Глава 1. Системы передачи сообщений с обратной связью
1.1. Общие замечания 5
1.2. Функциональная схема 6
1.3. Помехи в каналах связи . 11
1.4. Показатели качества передачи в системах с обратной связью . . 16
1.5. Критерий среднего риска . . . ... . . . . . . . 18
1.6. Информационные критерии 21
Глава 2. Обобщенная схема систем с ОС. Основные
расчетные соотношения
2.1. Опознавание сообщений 23
2.2. Идентичные состояния 26
2.3. Сведения из теории вероятностных графов 28
2.4. Вероятностный граф обобщенной системы 32
2.5. Вероятности искажения сообщения 34
2.6. Относительная скорость передачи . . . . • 42
2.7. Усреднения в условиях неоднородных каналов 45
Глава 3. Модуляция и демодуляция
3.1. Общие сведения 49
3.2. Структура демодулятора и элементарные вероятности решений . . 50
3.3. Прием амллитудномодулированных сигналов 52
3.4. Прием частотномодулированных сигналов 58
3.5. Прием фазомодулированных сигналов . 61
3.6. Совместное воздействие широкополосных и узкополосных
(сосредоточенных) г помех 71
Глава 4. Кодирование
4.1. Распределение ошибок в каналах связи ......... 74
4.2. Коды, применяемые в системах с обратной связью ..... 83
4.3. Обобщенные спектры кодов . . 86
4.4. Связь 'вероятностей основных исходов передачи со структурой кода
4.5. Асимптотическая оценка обнаруживающей способности групповых
кодов . 96
Глава 5. Системы с информационной обратной связью
5.1. Общие соотношения 102
5.2. Система с ретрансляционной обратной связью 105
5.3. Сравнение системы с ретрансляционной обратной связью и
односторонней системы »»»n«B-»*tllO
5.4. Автономное кодирование квитанций при полной обратной связи . . 114
5.5. Укороченная обратная связь в условиях независимых ошибок . . 122
5.6. Укороченная обратная связь в условиях группирующихся ошибок . 132
5.7. Избыточная информационная обратная связь 136
348
Глава 6. Системы с решающей обратной связью
6.1. Общие соотношения .. . . . ... . . . 144
6.2. Передача сообщений групповым кодом в системе с РОС (РОС-1) при
независимых ошибках 146
6.3. Работа системы РОС-1 в условиях группирующихся ошибок . . . 147
6.4. Поэлементная передача сообщений в системе с РОС (РОС-2) . . 151
6.5. Передача сообщений равновесным кодом в системе РОС-2 . . . 154
6.6. Сравнение систем с информационной и решающей обратной связью 160
Глава 7. Передача служебной информации. Комбинированные системы
7/1. Общие замечания 163
7.2. Передача знаков служебной информации по обособленным
временным или частотным каналам .... 164
7.3. Совместная передача знаков основной w служебной информации . 170
7.4. Смешанная передача. Образование защитного интервала . . . 173
7.5. Квитирование знаков служебной информации 174
7.6. Квитирование и корректировка знаков служебной информации в
системе с ИОС при ТОФМ (ТФМ) 180
7.7. Рекуррентное квитирование 181
7.8. Системы с детерминированным числом передач . . . . . . 183
7.9. Метод стохастической аппроксимации 184
7.10. Сравнение некоторых методов передачи информации с обратной
связью 189
Глава 8. Передача непрерывных сообщений
8.1. Общие замечания 192
8.2. Среднеквадратическая ошибка при передаче непрерывных сообщений
в односторонних системах 194
8.3. Особенности дискретной передачи непрерывных сообщений в
системах с обратной связью . . . . 206
8.4. Структура переходных вероятностей при «плотной» передаче . . . 207
8.5. Эквивалентная вероятность перехода между уровнями .... 210
8.6. Остаточная среднеквадратическая ошибка 213
8.7. Среднеквадратическая ошибка при «плотной» передаче . . . . 215
8.8. Сравнение систем по критерию среднеквадратической ошибки.
Пороговые характеристики 220
8.9. Передача с детерминированным тактовым интервалом .... 227
Глава 9. Системы с управляющей обратной связью
9.1. Общие замечания 230
9.2. Критерии эффективности систем с управляющей обратной связью . 231
9.3. Непрерывное регулирование мощности 234
9.4. Влияние ошибок регулирования на энергетическую эффективность
и надежность связи . 237
9.5. Дискретное регулирование мощности . . 241
9.6. Непрерывное регулирование скорости передачи 245
9.7. Регулирование несущей частоты ('выбор канала)
9.8. Передача сообщений с прерываниями 247
9.9. Детекторы качества каналов 254
Глава 10. Оптимальные прнемно-решающие устройства
систем с обратной связью
10.1. Общие замечания 257
10.2. Синтез оптимальной структуры 260
10.3. Синтез оптимального управления при отсутствии ограничений типа
равенств и неравенств 270
10.4. Синтез оптимального управления при ограничениях типа равенств 275
349
10.5. Синтез оптимального управления при ограничениях типа равенств
и неравенств
10.6. Динамическое программирование в задачах синтеза оптимальных
систем передачи информации
10.7. Синтез оптимальной структуры по методу динамического
программирования
10.8. Уравнения оптимальности демодуляторов
10.9. Уравнения оптимальности демодуляторов двоичных сигналов .
10.10. Оптимальная структура демодуляторов двоичных систем с РОС
10.11. Оптимальный алгоритм демодуляторов двоичных систем при флук-
туационной помехе
10.12. Уравнения оптимальности и вероятности решений при флуктуацион-
ной помехе
Список литературы
Предметный указатель. . . ,
Зиновий Моисеевич Каневский, Моисей
Исакович Дорман, Борис Васильевич
Токарев, Виктор Васильевич Кретинин
ПЕРЕДАЧА ИНФОРМАЦИИ
С ОБРАТНОЙ СВЯЗЬЮ
Ответственный редактор В. И. Шляпоберский
Редактор Н. М. Улановская
Обложка художника Г. Р. Левина
Технический редактор К. Г. Маркоч
Корректор Л. И. Чекрыжова
Сдано в набор 19/ХН .1975 г.
Подп. в печ. IM/III 1976 г.
Т-06606 Формат 60X90/ie Бумага писчая № 2
22,0 усл.-печ. л. 24,<18 уч.-изд. л.
Тираж 5 800 экз. Изд. № 15309. Зак. № 281
Цена 2 руб. 45 коп.
Издательство «Связь»., Москва 101000,
Чистопрудный бульвар, д. 2
Типография издательства «Связь»
Госкомиздата СССР
Москва 101000, ул. Кирова, д. 40
©Издательство «Связь», 1976 г.
ГОТОВЯТСЯ К ВЫПУСКУ КНИГИ:
Мизин И. А., Уринсон Л. С, Храмешин Г. К. ПЕРЕДАЧА
ИНФОРМАЦИИ В СЕТЯХ С КОММУТАЦИЕЙ СООБЩЕНИЙ.
Изд. 2-е, доп. и перераб. М., «Связь», 1976.
Рассматриваются вопросы построения и функционирования
информационных сетей (ИС) с коммутацией сообщений,
имеющих более высокие характеристики, чем системы обмена
данными других типов. Определяются исходные данные для
проектирования ИС и совокупность показателей эффективности
функционирования ИС. Описываются алгоритмы функционирования
ИС в целом и их основных компонентов.
Книга предназначена для инженеров, аспирантов и
студентов вузов связи, занимающихся разработкой систем ПД и АСУ.
ВЫЧИСЛИТЕЛЬНЫЕ СРЕДСТВА В ТЕХНИКЕ И
СИСТЕМАХ СВЯ8И. Под редакцией С. Д. Пашкеева. Издание
периодическое. М., «Связь», 1976.
Рассматриваются вопросы синтеза коммутационных систем,
построение кваэиэлектронйых АТС, цифровых фильтров.
Большое внимание уделяется вопросам математического
обеспечения вычислительных средств в связи.
Книга предназначена для научных и
инженерно-технических работников, специализирующихся в области
исследования, разработки и эксплуатации техники и систем связи
различного назначения.
ТЕХНИКА ПЕРЕДАЧИ ДАННЫХ. Под редакцией В. О.
Шварцмана. М., «Связь», 1976.
Рассматриваются последние достижения техники передачи
данных. Значительное внимание уделяется вопросам,
представляющим практический интерес, например, вопросам оценки и
выбора алгоритмов защиты от ошибок, а тажже алгоритмов
ЭВМ, управляющих каналами ПД. Излагаются проблемы
сопряжения и эксплуатационной надежности.
Книга рассчитана на-ручных работников, инженеров и
аспирантов, занимающихся теорией и техникой передачи данных.
Алтарев В. П., Шакун Г. И., Трофимов П. И. ПРОЦЕССЫ
ОТКАЗОВ И ВОССТАНОВЛЕНИЙ СИСТЕМ ПЕРЕДАЧИ
ДАННЫХ. М., «Связь», 1977.
Книга знакомит читателя с процессами отказов и
восстановлений систем передачи данных. Рассматриваются модели и
характеристики качества функционирования системы ПД во
взаимосвязи с процессами отказов и восстановлений;
рассмотрение ведется для автономных каналов и каналов ПД,
функционирующих в (составе автоматизированных систем. Приводятся
методы оценки вероятности связности многополюсных систем—
сетей ПД.
Книга дредагазначена для инженерно-технических
работников, занимающихся вопросами повышения надежности
технических систем и систем ПД.