



















































































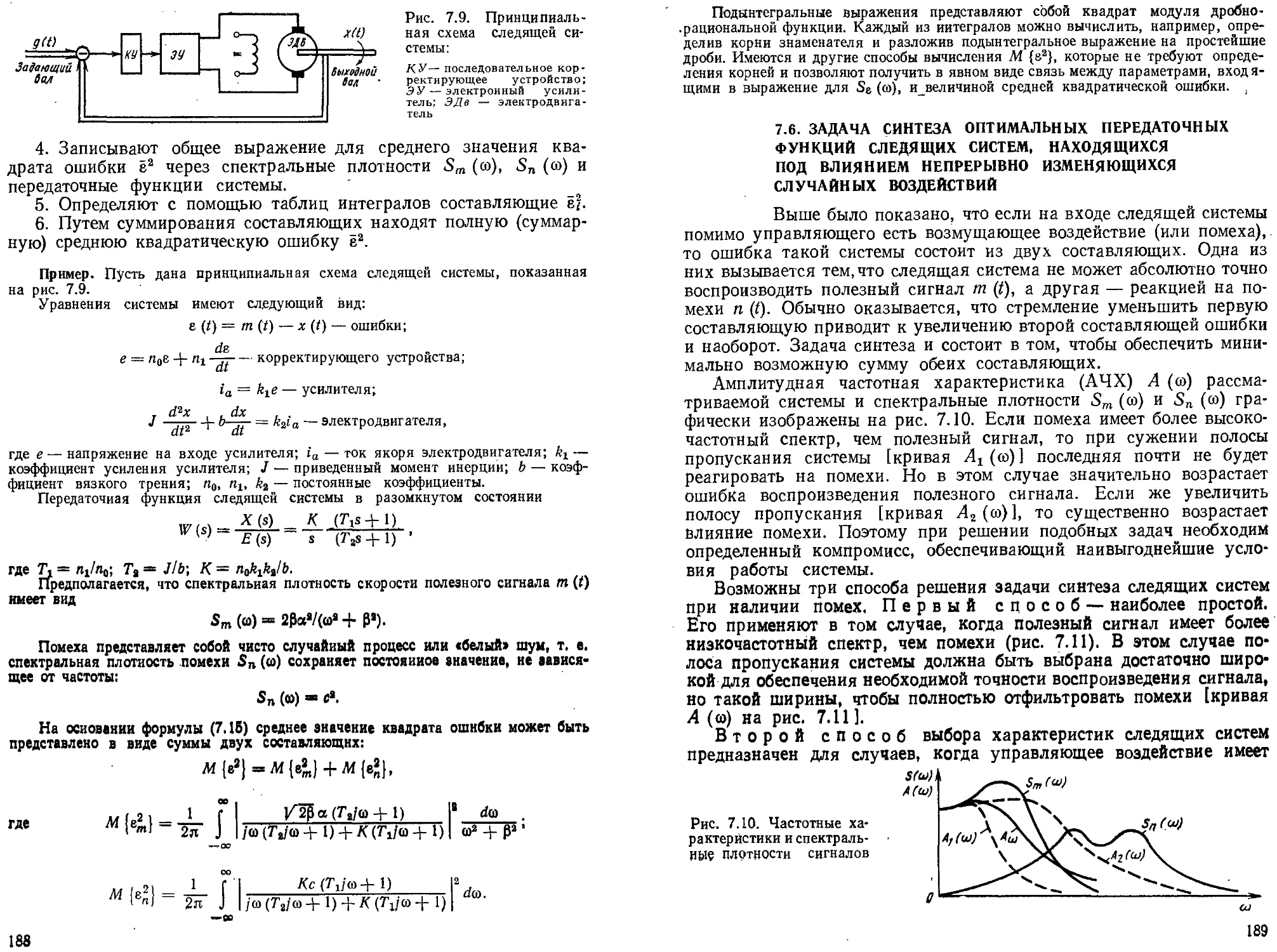




























































































































































Автор: Солодовников В.В. Плотников В.Н. Яковлев А.В.
Теги: автоматика системы автоматического управления и регулирования интеллектуальная техника технология управления оборудование систем управления техническая кибернетика радиоэлектроника машиностроение измерительные приборы теория автоматического управления
Год: 1985




ББК 32965,
С 60^
УДК 68171^075.8)
Форум на
AVIA.RU
представляет
Рецензенты: кафедра автоматики и процессов управления
ЛЭТИ им. В. И. Ульянова-Ленина;
д-р техн, наук проф. В. В. Семенов
Солодовников В. В., Плотников В. Н., Яковлев А. В.
С60 Основы теории и элементы систем автоматического регули-
рования. Учебное пособие для вузов. — М.: Машиностроение,
1985. — 536 с., ил.
В пер.: 1 р. 70 к.
Изложены вопросы теории автоматического регулирования. Даны основные
понятия и определения, методы анализа н синтеза систем автоматического регулиро-
вания (САР). Основное внимание уделено частотному методу н методу переменных
состояния. Рассмотрены методы анализа динамической точности, элементы нелиней-
ной теории, теории оптимального управления, дискретно-иепрерывиые системы,
а также дано понятие об автоматизации проектирования САР. Описаны датчики,
измерительные устройства, усилительные, корректирующие и исполнительные эле-
менты.
_ 1502000000-004 . ос
С 038 (01)-85-----4'85
ББК 32965
6Ф6.8
© Издательство «Машиностроение», 1985 г.
ОГЛАВЛЕНИЕ
Предисловие ...................................................... 7
Введение.......................................................... 9
Раздел 1. Теория автоматического регулирования
Глава 1. Основные понятия теории автоматического регулирования ... 13
1.1. Принципы действия САР ............................... 16
1.2. Классификация и основные устройства САР...........
1.3. Прямое и непрямое регулирования, одноконтурные и
многоконтурные, несвязанные н связанные САР............... 18
1.4. Статическое и астатическое регулирование ............ 23
1.5. Классификация САР в зависимости от идеализации, при-
нятой при их математическом описании'*.................... 25
1.6. Системы непрерывного и дискретного действия .... 27
1.7. Основные требования, предъявляемые к САР............. 27
1.8. Примеры САР ......................................
Глава 2. Дифференциальные уравнения и частотные характеристики систем
автоматического регулирования ....................................... 33
2.1. Уравнения САР........................................ 33
2.2. Методика составления дифференциальных уравнений
элементов САР, допускающих линеаризацию .................. 35
J2.3. Свободные и вынужденные колебания САР. Частотные
характеристики............................................. 41
L.2.4. Передаточная функция непрерывной линейной стацио-
нарной САР ............................................... 45.
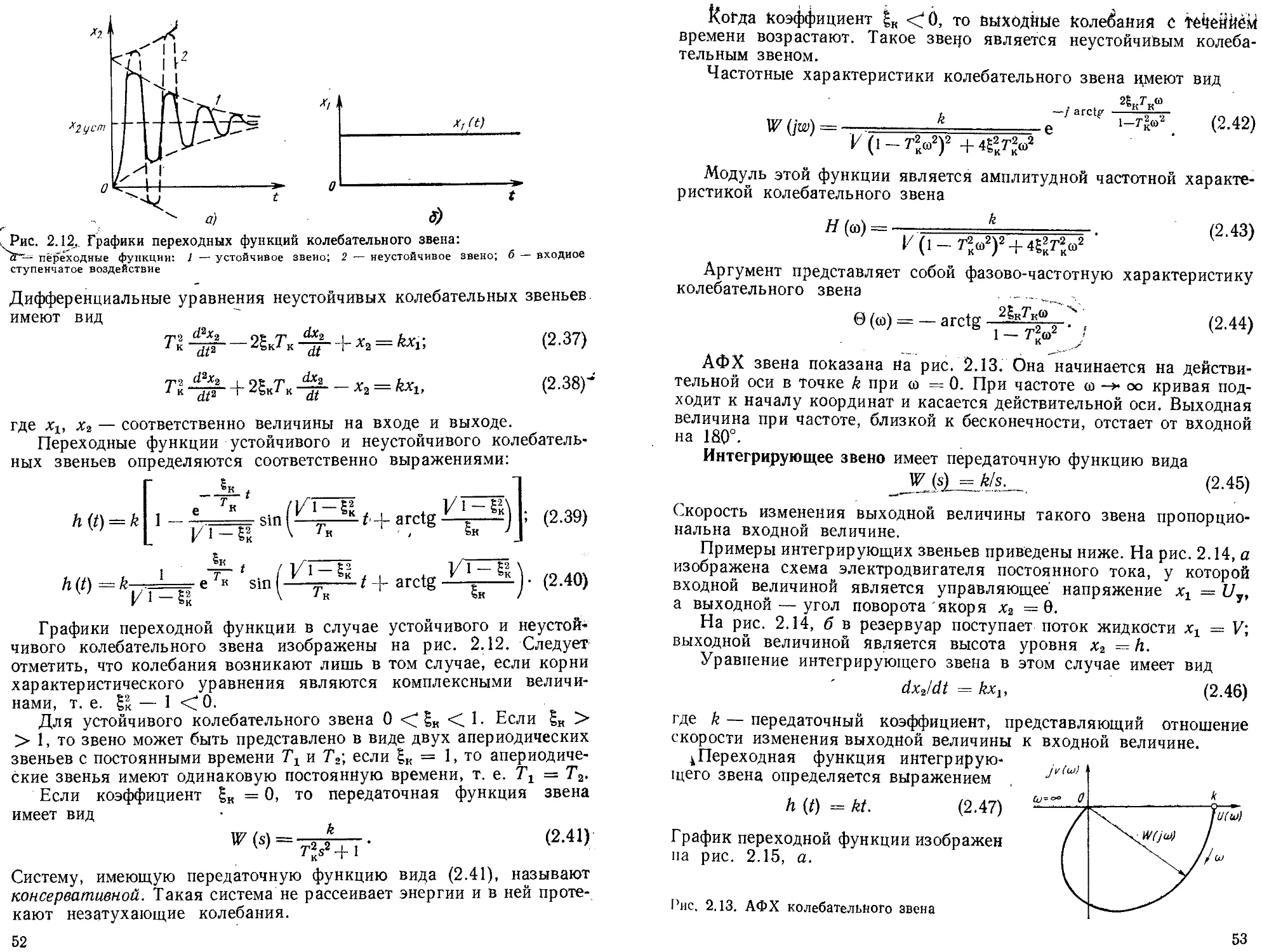
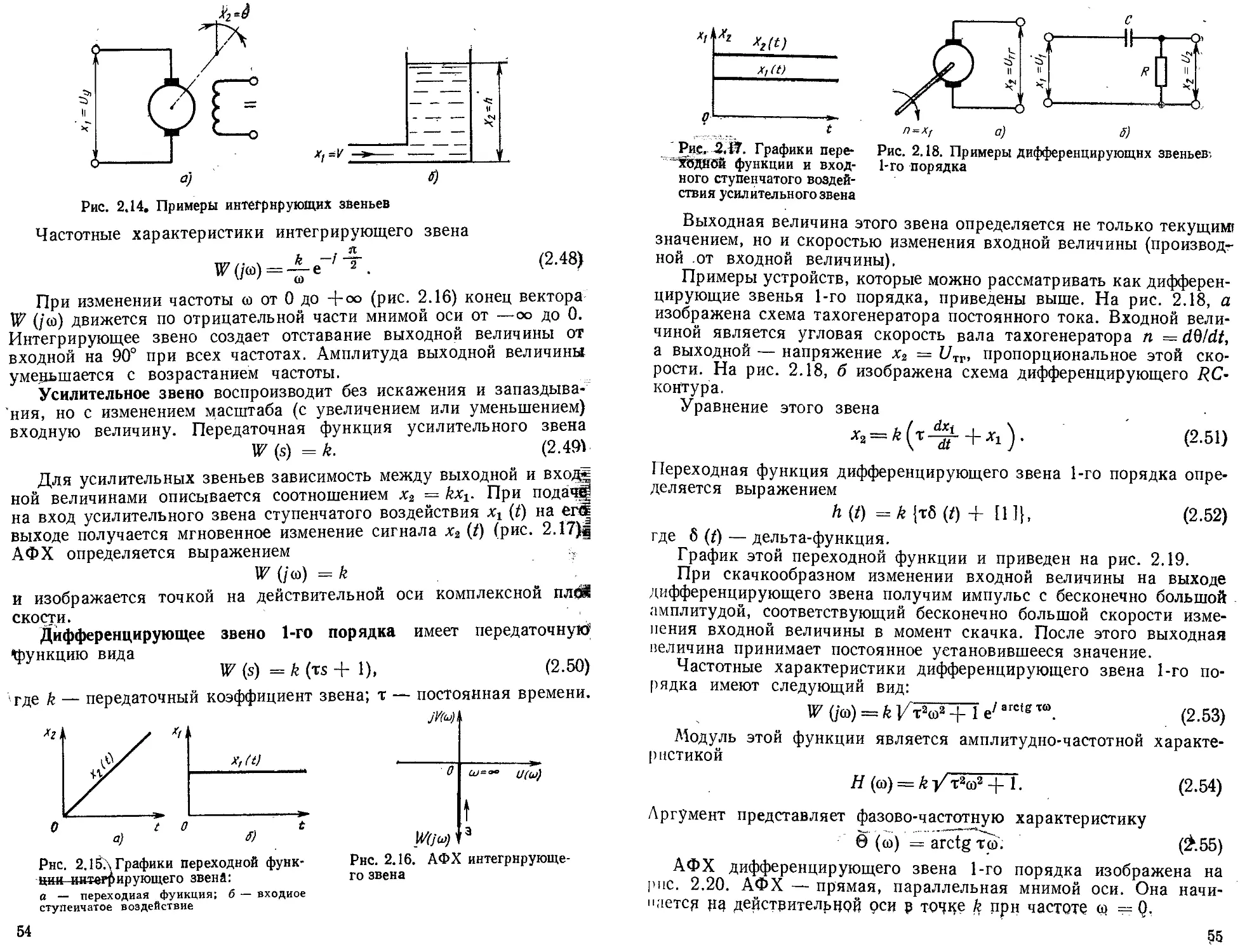
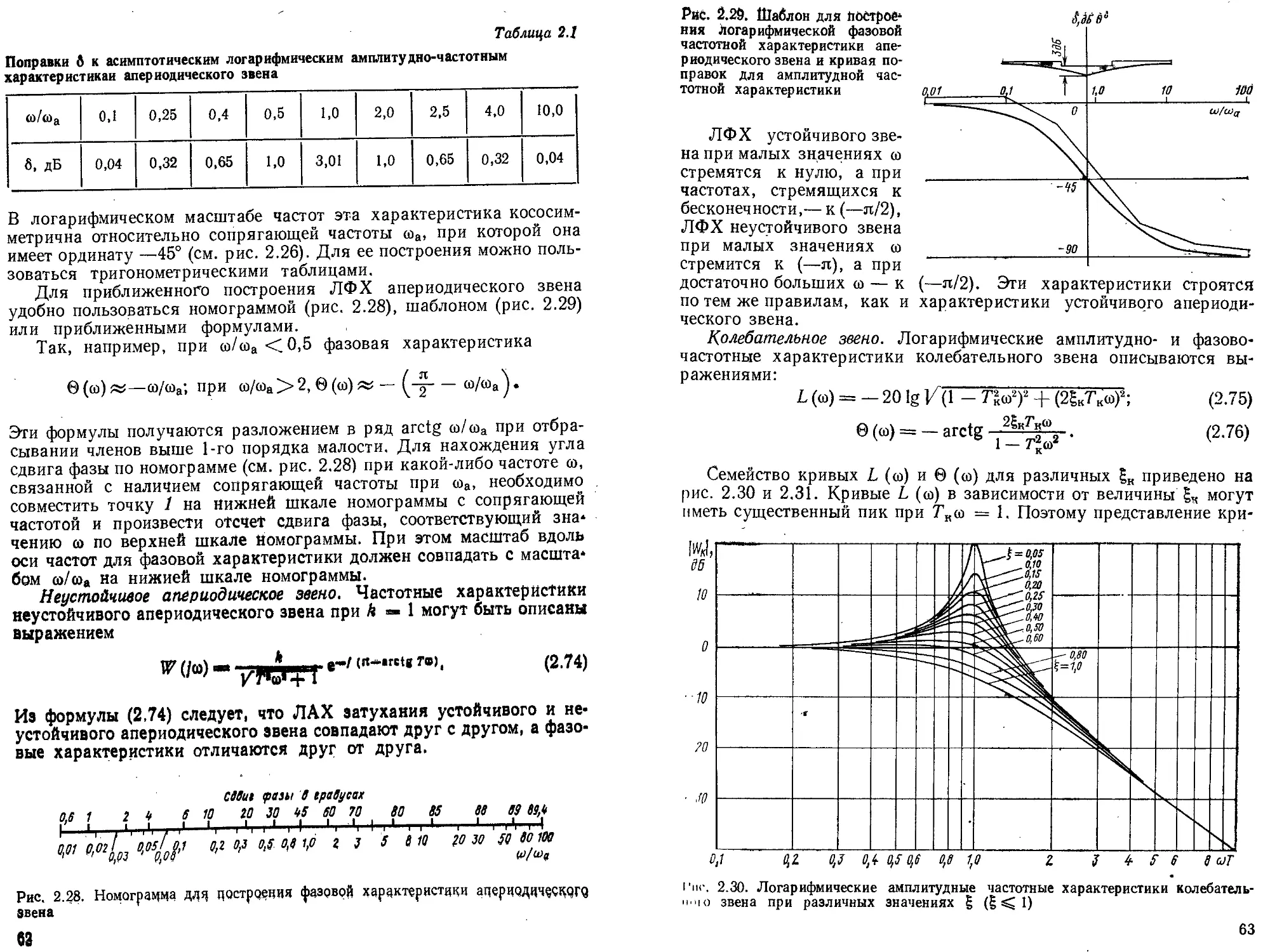
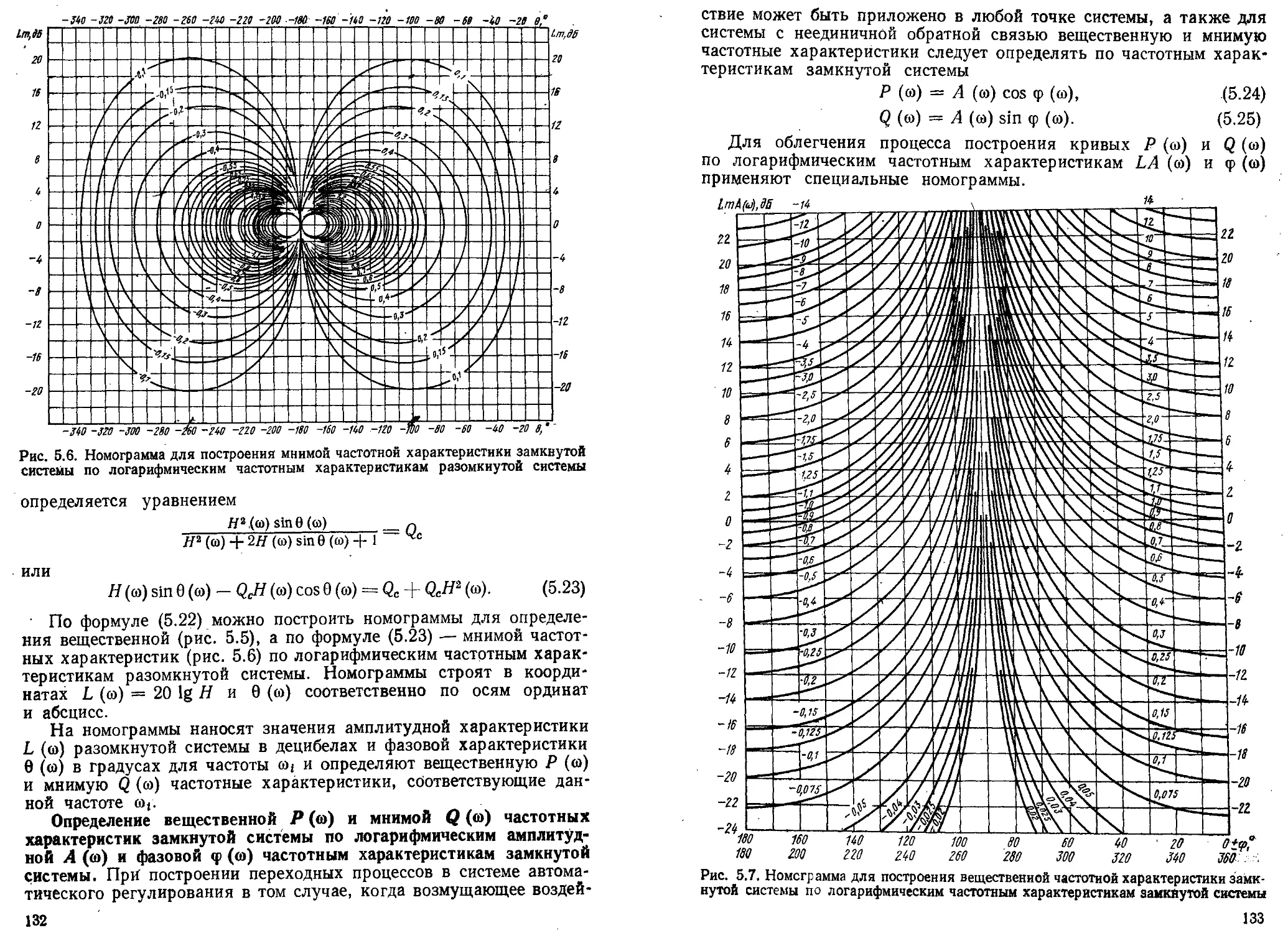
Д5. Типовые звенья САР.................................... 49
2.6. Логарифмические частотные характеристики ............ 59
2.7. Приближенный способ построения логарифмических час-
тотных характеристик одноконтурных систем................ 69
2.8. Преобразование структурных схем САР ................. 74
2.9. Номограммы для замыкания системы .................... 78
Глава 3. Метод переменных состояния ................................. 82
•<3.1. Переменные состояния и уравнения состояния динамиче-
ской системы................................................ 82
3.2. Матричная передаточная функция ...................... 89
3.3. Управляемость и наблюдаемость ..................... 91
3.4. Управляемость и наблюдаемость подсистем ........... 98
3.5. Задача минимальной реализации ...................... 100
Глава 4. Анализ устойчивости линейных непрерывных систем автоматиче-
ского регулирования .................................................. 101
4.1. Основные понятия об устойчивости ................... 101
4.2. Критерии устойчивости линеаризованных САР .... 105
3
4.3. Критерий устойчивости Рауса........................... 106
.4,4; Критерий устойчивости Гурвица ....................... 108
4.5. Частотные критерии устойчивости ....................... НО
4.6. Анализ устойчивости одноконтурных САР по их логариф-
мическим частотным характеристикам ......................... 116
4.7. Запасы устойчивости системы по модулю и по фазе ... 119
4.8. Выделение областей устойчивости........................ 120
Глава 5. Анализ качества линейных непрерывных систем автоматиче-
ского регулирования ................................................... 123
5.1. Методы анализа качества................................ 123
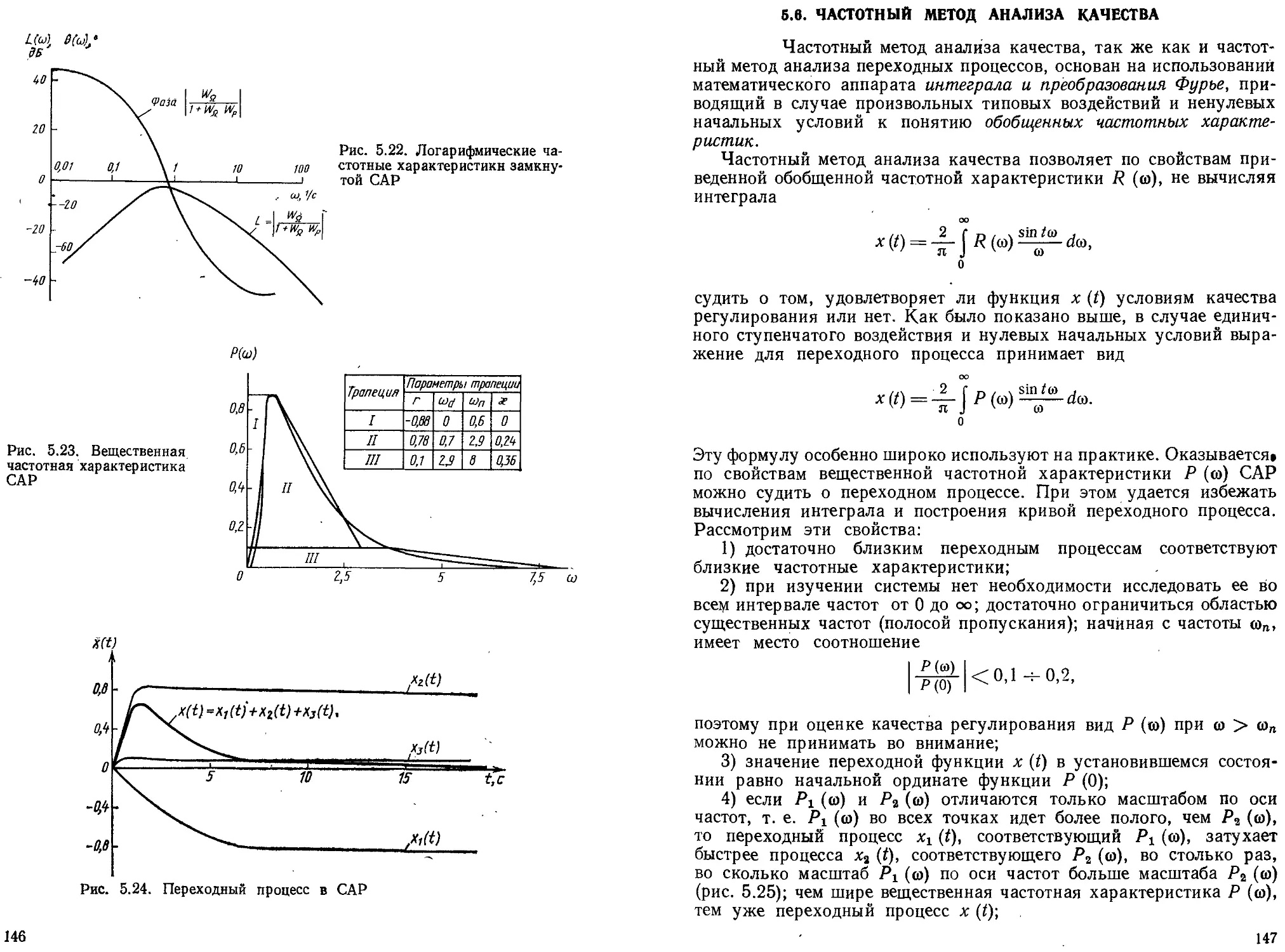
5.2. Частотный метод анализа качества линейных непрерыв-
ных САР .................................................... 124
5.3. Анализ переходных процессов методом трапецеидальных
частотных характеристик .................................... 135
5.4. Вычисление переходного процесса в САР при помощи
ЭВМ......................................................... 141
5.5. Построение переходного процесса в случае, когда система
имеет неединичную обратную связь ........................... 144
5.6. Частотный метод анализа качества ...................... 147
5.7. Определение величины передаточного коэффициента или
добротности системы по ЛАХ.................................. 149
5.8. Коэффициенты ошибок .................................. 150
Глава 6. Синтез корректирующих устройств систем автоматического регу-
лирования ............................................................. 154
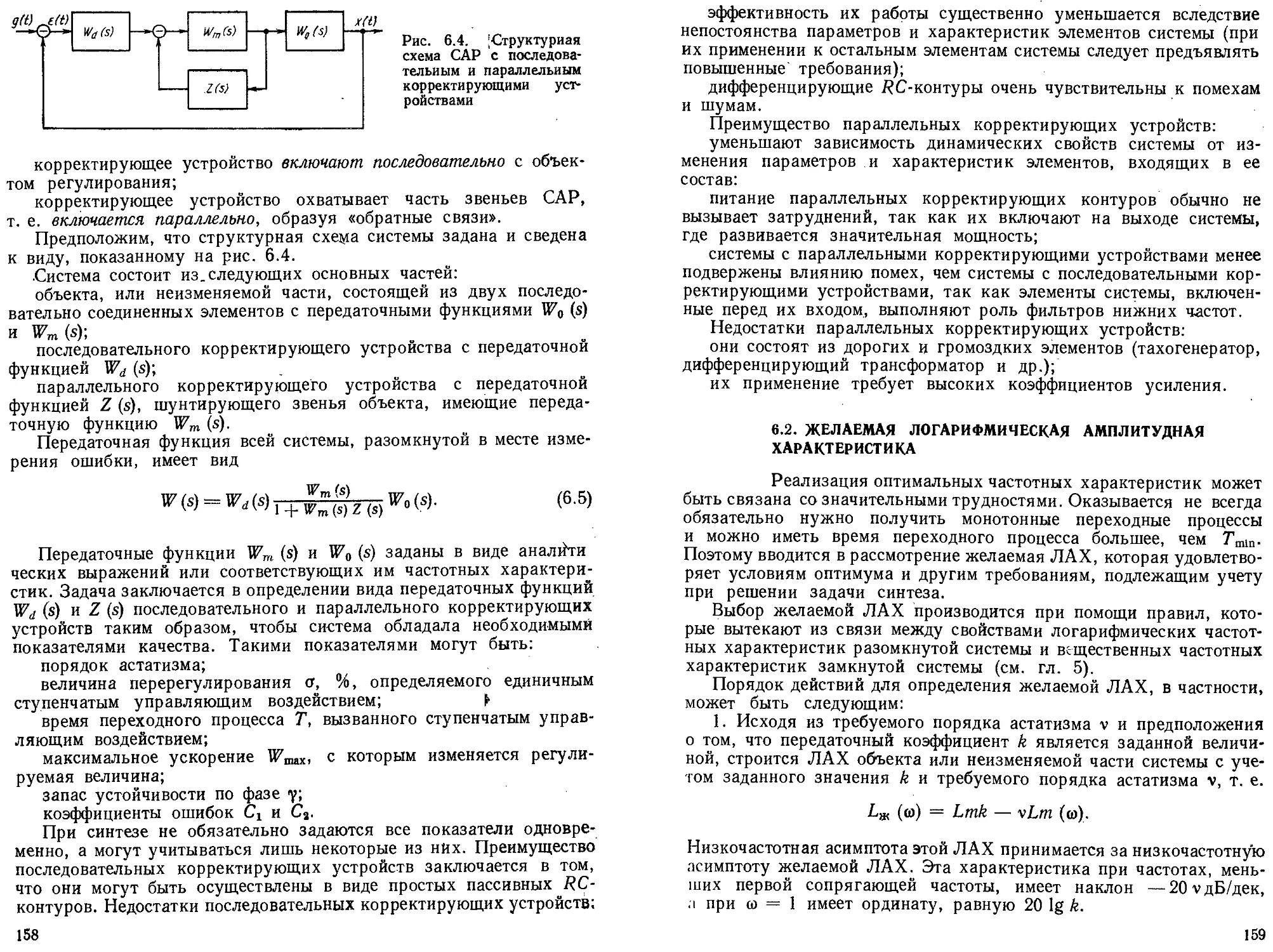
6.1. Постановка задачи синтеза ............................ 154
6.2. Желаемая логарифмическая амплитудная характеристика 159
6.3. Синтез последовательных корректирующих устройств. . 162
6.4. Синтез параллельных корректирующих устройств . . . 165
6.5. Синтез последовательного и параллельного корректирую-
щих устройств .............................................. 168
6.6. Пример построения желаемой ЛАХ...................... 169
6.7. Номограммы для определения запаса устойчивости, пока-
зателей качества и коэффициентов ошибок САР по виду ЛАХ 171
Глава 7. Анализ динамической точности систем автоматического регули-
рования ............................................................... 175
7.1. Постановка задачи анализа динамической точности. . . 175
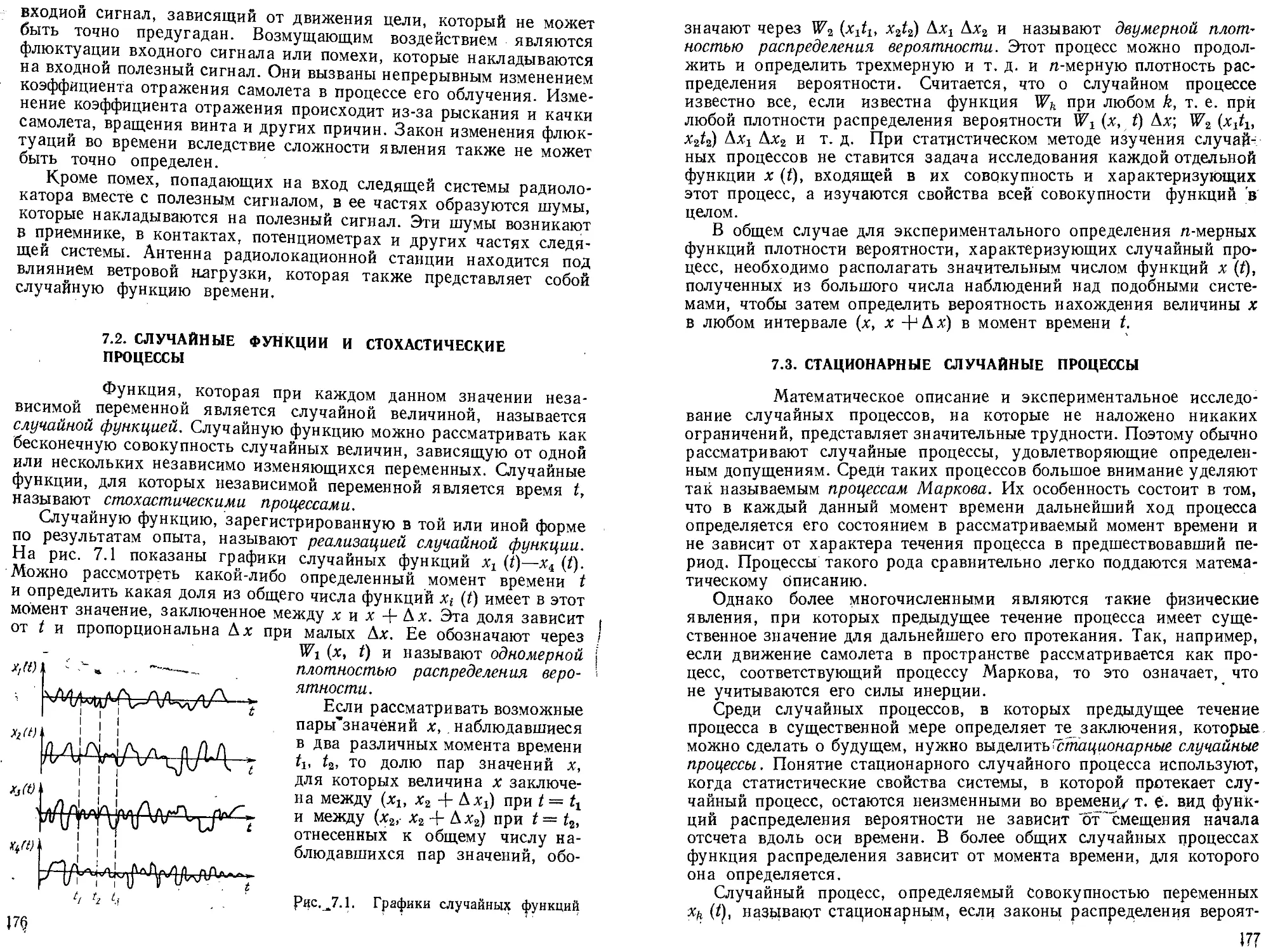
7.2. Случайные функции и стохастические процессы .... 176
7.3. Стационарные случайные процессы ...................... 177
7.4. Корреляционная функция и функция спектральной плот-
ности ...................................................... 179
7.5. Связь между спектральными плотностями и корреляцион-
ными функциями на входе и выходе линейной динамической
системы..................................................... 185
7.6. Задача синтеза оптимальных передаточных функций сле-
дящих систем, находящихся под влиянием непрерывно изме-
няющихся случайных воздействий ............................. 189
Глава 8. Дискретные системы автоматического регулирования ............. 194
8.1. Определение дискретной системы. Разностные уравнения 195
8.2. Методы математического описания дискретных систем. . 197
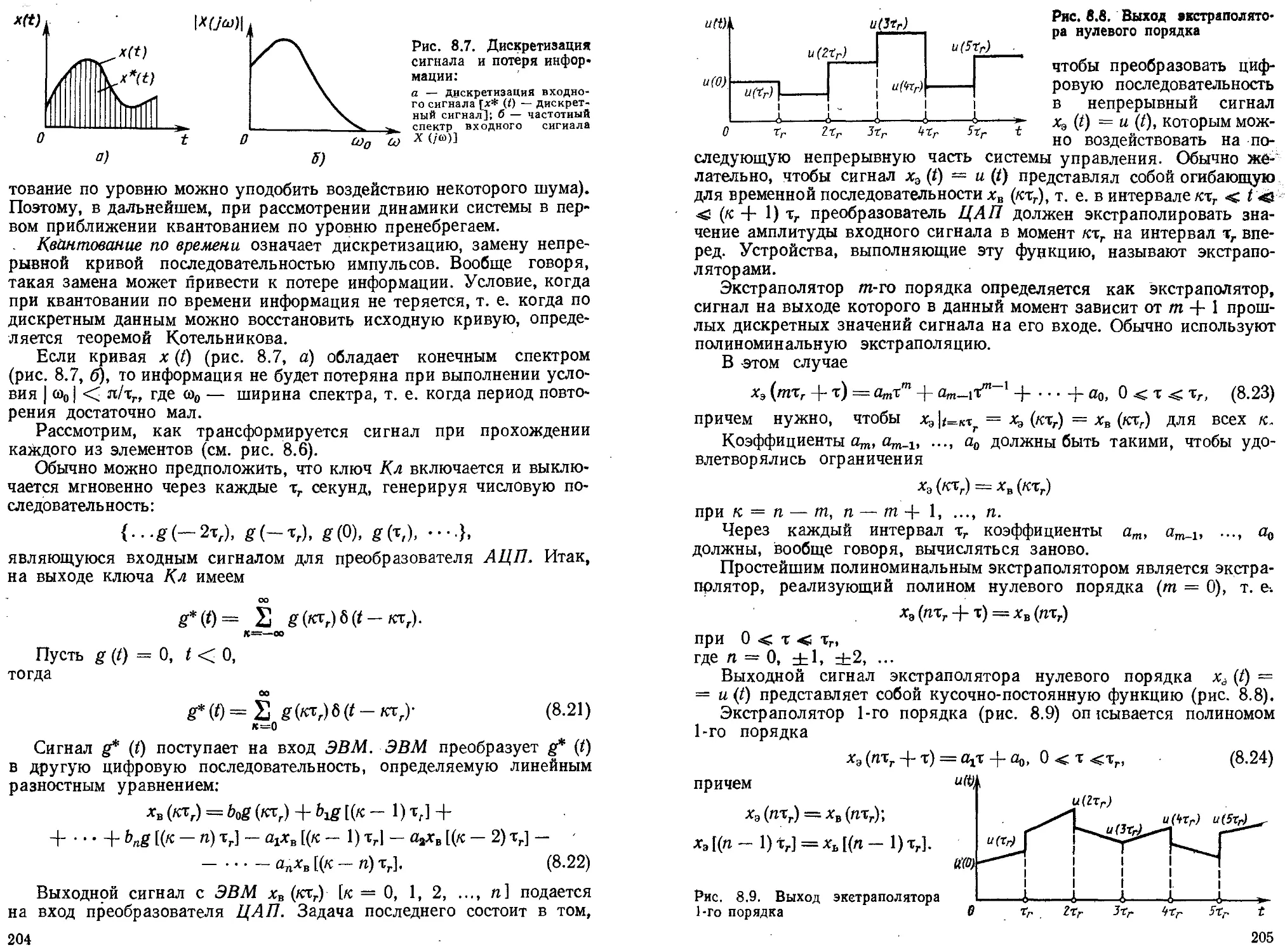
8.3. Прохождение непрерывного сигнала через цифровую ЭВМ 203
8.4. Преобразование частотного спектра непрерывного сиг-
нала при его прохождении через цифровую ЭВМ............ 206
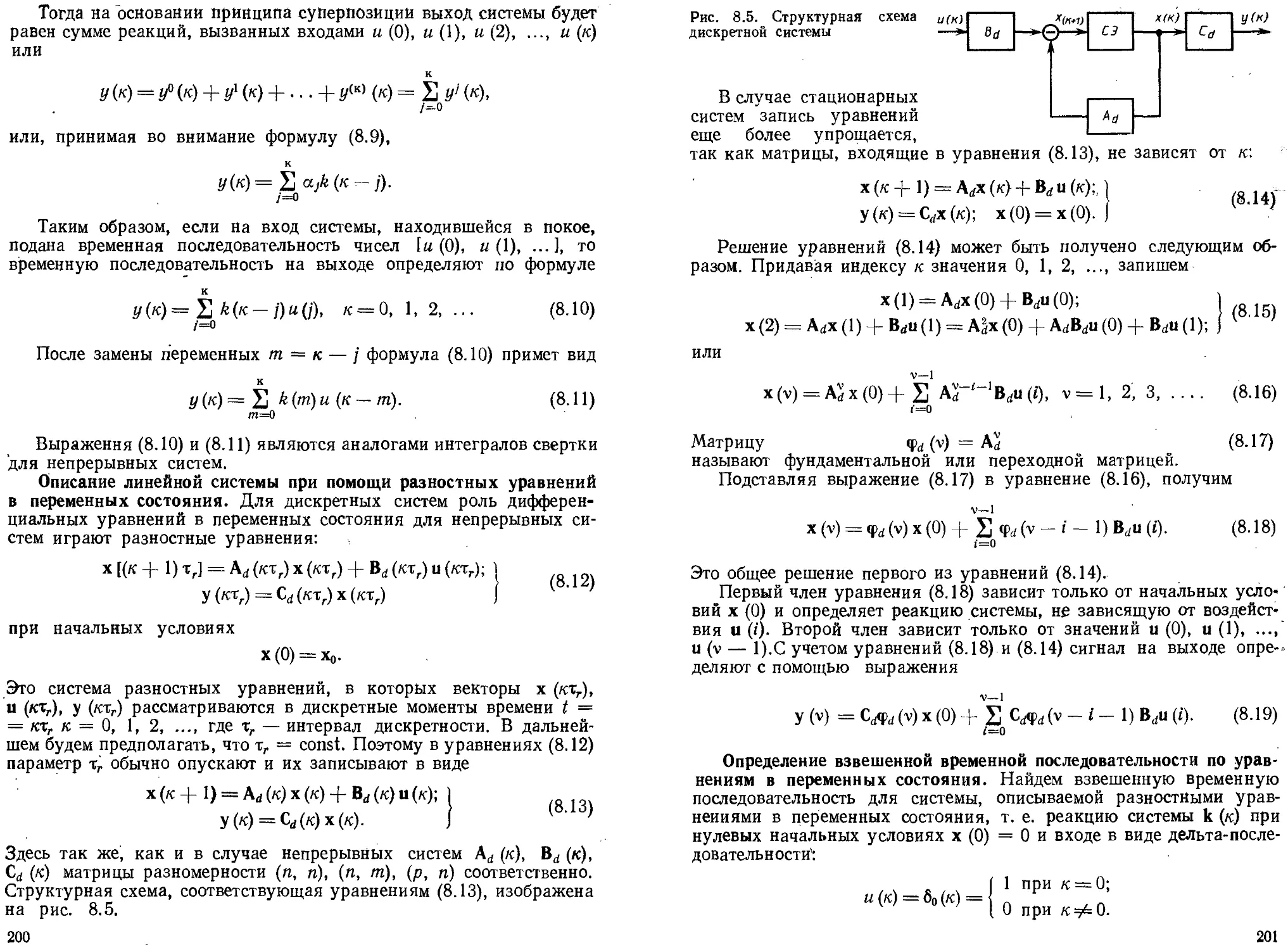
8.5. Передаточные функции дискретных систем ............. 211
8.6. Передаточная функция САР с управляющей ЭВМ в контуре
регулирования .............................................. 214
8.7. Z-преобразоваиие...................................... 215
а
8.8. Z-передаточная функция дискретной системы ........... 219
8.9. Типовые дискретно-непрерывные системы ............... 222
8.10. Анализ дискретно-непрерывных систем, описываемых
уравнениями в переменных состояния ........................ 226
8.11. Анализ устойчивости дискретных САР ................. 230
Глава 9. Элементы теории нелинейных систем автоматического регулиро-
вания ................................................................ 236
9.1. Нелинейные системы .................................. 236
9.2. Метод фазовых траекторий '........................... 237
9.3. Автоколебания в нелинейных САР....................... 243
9.4. Пример нелинейной САР релейного типа................. 245
9.5. Метод припасовывания ................................ 250
9.6. Применение метода гармонической линеаризации для ана-
лиза устойчивости нелинейных САР ........................ 251
9.7. Определение амплитуды а0 и частоты <о0 автоколебаний.
Устойчивость автоколебаний................................. 256
Глава 10. Оптимальное управление..................................... 259
10.1. Постановка задачи оптимального управления. . . . 259
10.2. Квадратичный критерий, линейный объект ............. 262
10.3. Общий случай........................................ 267
10.4. Формулировка и классификация методов математического
программирования........................................... 270
10.5. Сведение задачи оптимального управления к задаче ма-
тематического программирования ............................ 271
10.6. Формулировка задачн^оптималыюго управления в дис-
кретной форме ............................................. 272
10.7. Оптимальные ПИ-регуляторы........................... 274
Глава 11. Автоматизация проектирования............................... 278
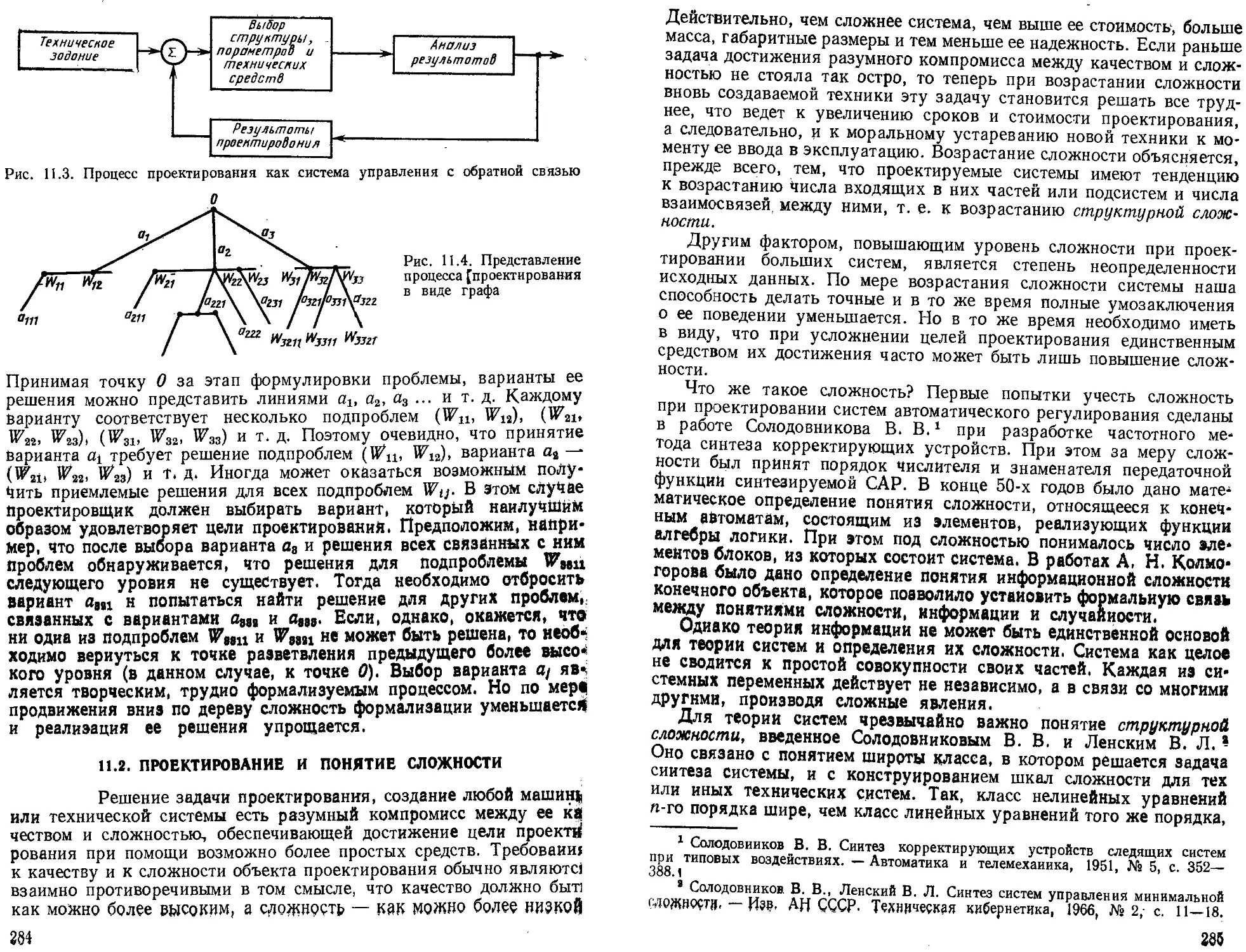
11.1. Сущность процесса проектирования .................. 279
11.2. Проектирование и понятие сложности ................ 284
11.3. Системный подход к проектированию ................. 287
11.4. Особенности автоматизации проектирования систем уп-
равления ................................................. 290
11.5. Системы автоматизированного синтеза (САС) ......... 292
11.6. Математическое, алгоритмическое и программное обеспе-
чение САПР ............................................... 294
11.7. Обобщенная схема САПР.............................. 300
11.8. Технические средства САПР......................... 301
Раздел 2. Технические средства автоматики 303
Глава 12. Основные определения и классификация........................ 303
12.1. Технические средства автоматики. Определения .... 303
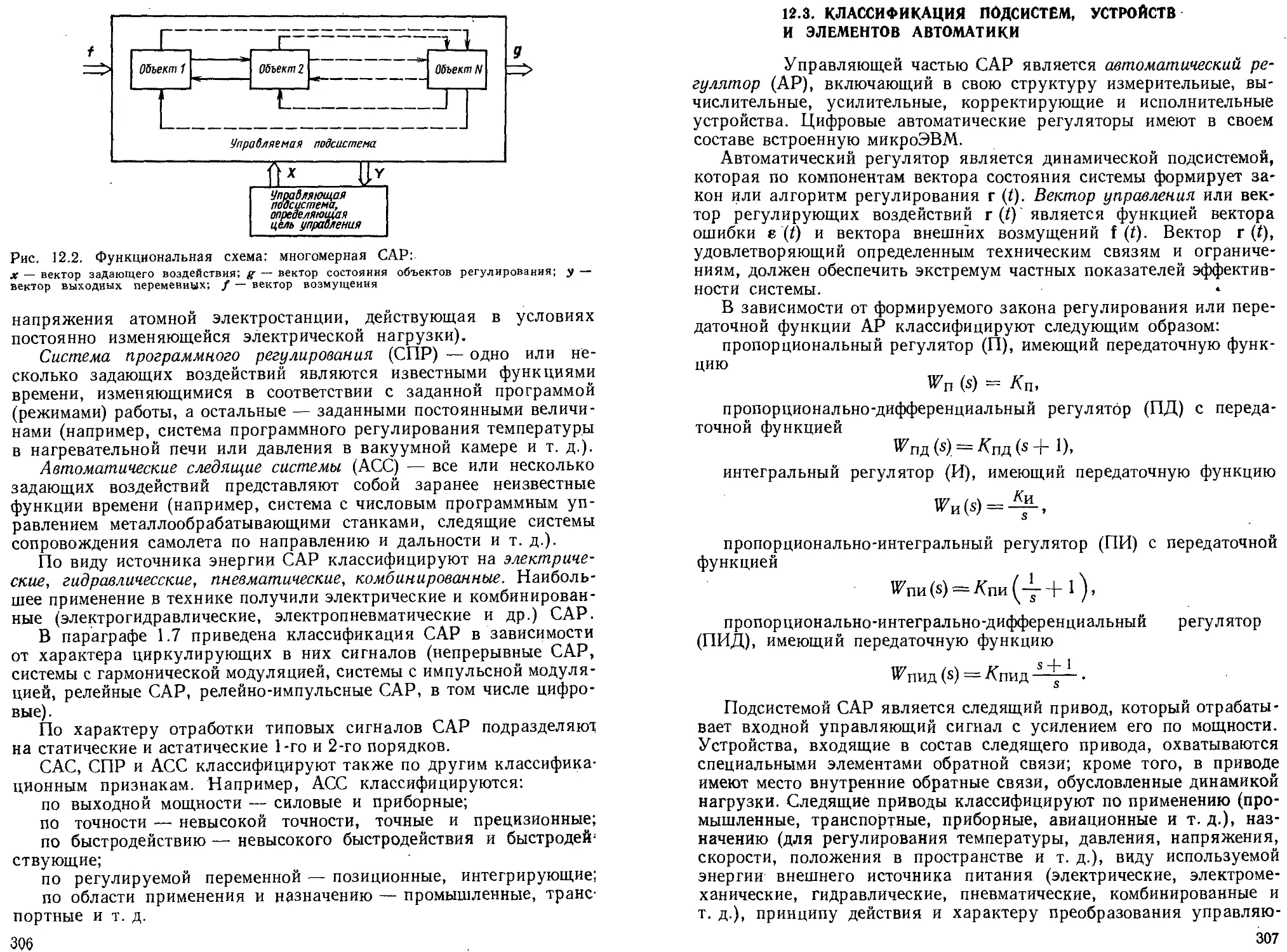
12.2. Классификация систем автоматического управления и
регулирования ............................................ 305
12.Д, Классификация подсистем, устройств и элементов авто-
матики ................................................... 307
12.4. Технические характеристики элементов, устройств и
систем автоматики......................................... 309
Глава 13. Датчики, измерительные и преобразующие устройства автома-
тики ................................................................. 310
13.1. Минимальный состав измерительных средств САР. Клас-
сификация погрешностей и возмущений ...................... 310
13.2. Классификация датчиков, измерительных и преобразу-
ющих устройств............................................ 314
5
13.3. Потенциометрические датчики и преобразующие уст-
ройства .................................................. 318
13.4. Индукционные датчики и измерительные устройства. 324
Сельсины...............................................
13.5. Прецизионные вращающиеся трансформаторы .... 336
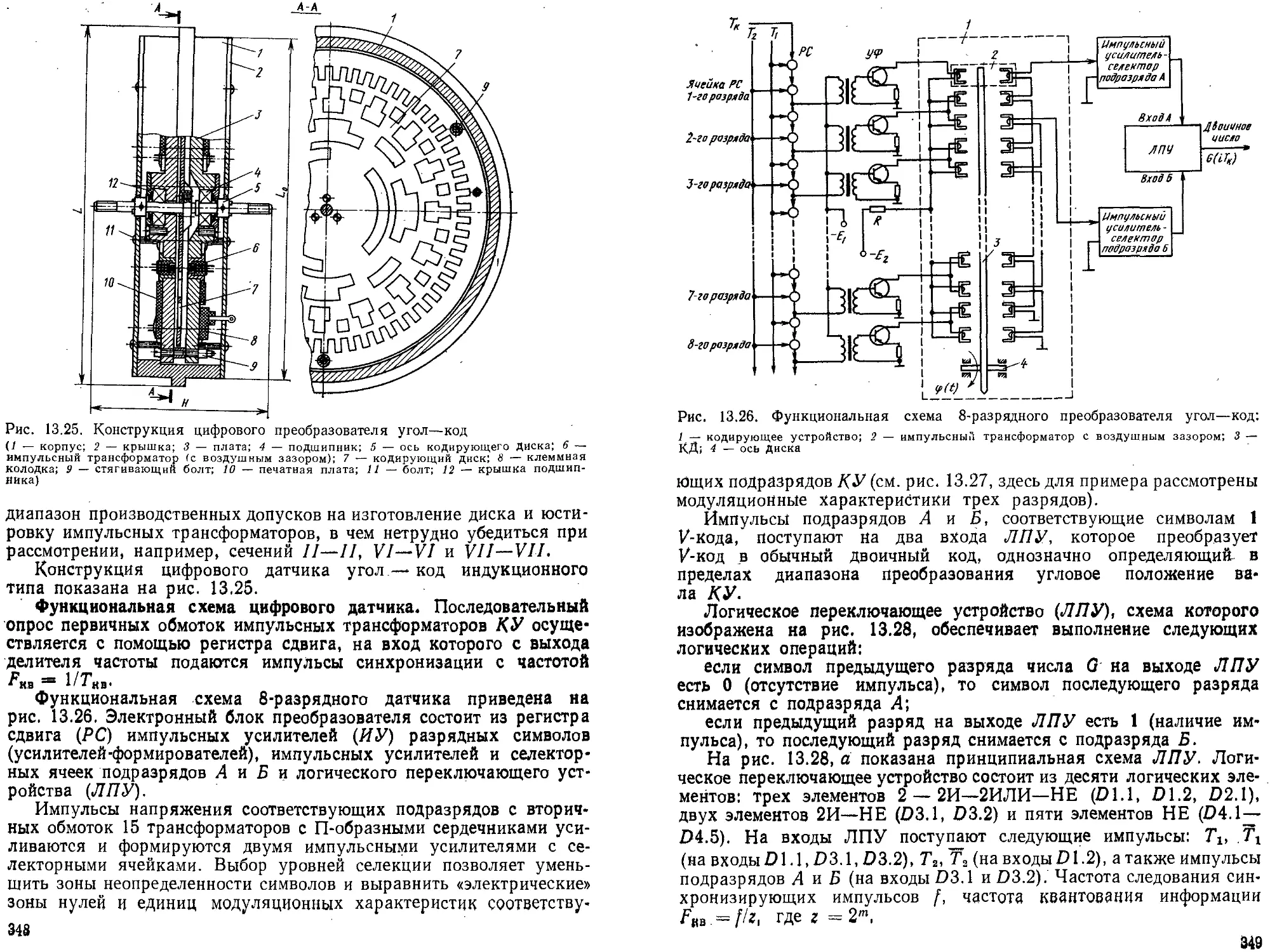
13.6. Цифровые датчики и преобразователи ................ 344
13,7. Цифровые датчики и измерители линейных перемещений 351
• 13.8.' Фотоэлектрические датчики и измерительные устройства 357
13.9. Термоэлектрические датчики......................... 361
13.1бЪПреобразователи электрических сигналов ............. 364
13.ТГГ Электромагнитные преобразователи................... 374
Глава 14. Усилительные устройства и корректирующие элэменты автома-
тики ................................................................. 377
14.1. Классификация усилительных и корректирующих уст-
ройств САР и САУ. Технические требования................. 378
14.2. Типы электрических нагрузок. Математические модели
и структурные схемы нагруженных усилителей................ 380
14.3. Релейные усилительные и распределительные устройства 388
14.4. Транзисторные усилители ........................... 398
14.5. Тиристорные усилители мощности .................... 411
14.6. Магнитные и магнитно-транзисторные усилители . . . 415
14.7. Электромашинные усилители мощности ................ 431
14.8. Корректирующие элементы и устройства .............. 438
14.9. Дискретные корректирующие устройства .............. 442
Глава 15. Исполнительные устройства. Автоматические приводы........... 447
15.1. Назначение и классификация исполнительных устройств
и приводов................................................ 448
15.2. Типы механических нагрузок. Механическое сопротивле-
ние 450
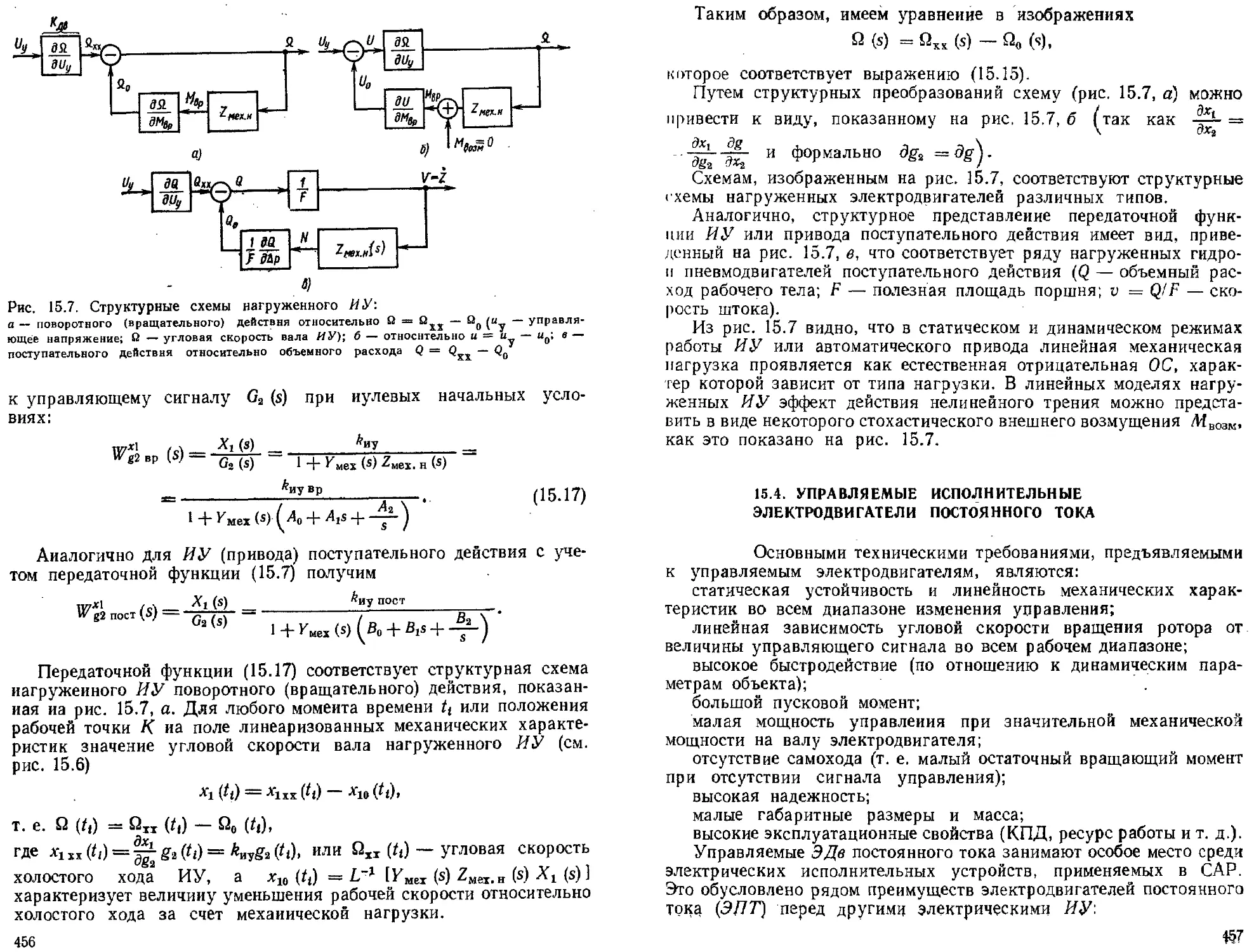
15.3. Математические модели нагруженного привода.... 453
15.4. Управляемые исполнительные электродвигатели посто-
янного тока............................................... 457
15.5. Управляемые двухфазные асинхронные электродвигатели 463
15.6. Синхронные шаговые электродвигатели и дискретные
приводы .................................................. 472
15.7. Линейные электродвигатели и приводы ............... 477
15.8. Электрический цифровой следящий привод с электро-
двигателем постоянного тока............................... 481
15.9. Электрогидравлический силовой привод с золотниковым
распределителем........................................... 487
15.10. Энергетический расчет исполнительных устройств и
автоматических приводов .................................. 493
Глава 16. Системы автоматического регулирования ................... 496
16.1. Модульный принцип построения САР................. 496
16.2. Электронный регулятор напряжения синхронного гене-
ратора ................................................... 499
16.3. Автоматический релейный регулятор давления....... 502
16.4. Электромеханические следящие системы радиолокацион-
ной станции .............................................. 506
16.5. Цифровая следящая система ........................ 510
16.6. Электрогидравлическая следящая система ............ 514
Указатель важнейших аббревиатур обозначений и буквенных сокращений
в индексах............................................................ 520
Список литературы .............................................. 527
Алфавитно-предметный указатель........................................ 528
6
ПРЕДИСЛОВИЕ
Настоящая книга, посвященная общим принципам, ме-
тодам построения и техническим средствам автоматических систем,
является учебным пособием по курсу «Основы автоматики» для сту-
дентов приборостроительных специальностей.
В условиях развитого социализма автоматизация является мощ-
ным технико-экономическим и социальным фактором. В «Основных
направлениях экономического и социального развития СССР на
период 1981—1985 годы и на период до 1990 года» в области автомати-
зации производства формулируется следующая задача: на основе
использования достижений науки и техники развивать производство
и обеспечить широкое применение автоматических манипуляторов
(промышленных роботов), встроенных систем автоматического упра-
вления с использованием микропроцессоров и микро-ЭВМ, создавать
автоматизированные цехи и заводы.
Книга состоит из двух разделов. Первый раздел книги посвящен
теории, а второй — техническим средствам систем автоматического
регулирования (САР). Авторы поставили себе целью изложить курс
с учетом наиболее важных достижений последних лет в данной обла-
сти. Поэтому наряду с такими традиционными разделами, как анализ
устойчивости, частотный метод, элементы теории стохастических и
нелинейных систем, в первую часть книги введены главы, посвящен-
ные: методу пространства состояний, дискретно-непрерывным систе-
мам с цифровыми ЭВМ в контуре управления, элементам теории
оптимального управления и автоматизации проектирования.
Во втором разделе книги описаны не только технические средства,
используемые в настоящее время в САР, но и показано, каким обра-
зом элементы и устройства, входящие в их состав, на основании
методов, изложенных в первой части, могут быть объединены в си-
стемы, удовлетворяющие заданным техническим требованиям. Ряд
параграфов книги посвящен применению цифровых систем.
В отечественной литературе имеются книги, каждая из которых
посвящена одному из этих вопросов, но учебных пособий, излагаю-
щих в сжатой и доступной форме современную теорию и состояние
техники автоматического регулирования, пока еще недостаточно.
Хотелось бы подчеркнуть, что содержание книги ограничено тео-
рией и техникой автоматического регулирования, а не автоматиче-
ского управления. Системы автоматического регулирования (САР)
7
отличаются от систем автоматического управления (САУ) тем, что
в последних происходят как формирование, «выработка» желаемого
поведения объекта на основании цели управления в виде задающих
(управляющих) воздействий, так и их «отработка»; в САР происходит
лишь их отработка, а сами управляющие воздействия, поступаю-
щие на элемент сравнения, считаются заданными.
Таким образом понятие системы автоматического управления
является более общим, чем системы автоматического регулирова-
ния прежде всего в том смысле, что в САР задача определения
входных воздействий (уставок регуляторов) не решается, а в САУ
она является одной из основных.
Необходимость в появлении термина «автоматическое управле-
ние» тем и объясняется, что проблема «автоматического управления»
является более общей и выходящей за рамки проблемы «автомати-
ческого регулирования». На наш взгляд, учебное пособие по «Осно-
вам автоматики» должно быть ограничено именно этой последней
более простой проблемой.
Книга написана на основании многолетнего опыта чтения авто-
рами лекций по курсу «Основы автоматики» на факультете «Приборо-
строение» МВТУ им. Н. Э. Баумана.
Книга предназначена для студентов вузов, но может представлять
интерес и для инженеров, специализирующихся в области автома-
тического регулирования или занимающихся автоматизированными
системами управления технологическими процессами.
ВВЕДЕНИЕ
Автоматика — это наука об общих принципах и методах
построения автоматических систем, т. е. систем, выполняющих по-
ставленные перед ними цели без непосредственного участия человека.
Использование принципов автоматики, а также технических средств,
реализующих эти принципы, в различных отраслях народного хо-
зяйства называется автоматизацией.
Автоматические системы можно подразделить на два основных
класса: циклические, или разомкнутые, действующие по жесткой
программе (например, автоматы, станки-автоматы, поточные линии
и т. д.); ациклические, или замкнутые, действующие на основе прин-
ципа обратной связи.
Принцип обратной связи широко используется в технике. Он за-
ключается в том, что желаемое или оптимальное поведение объекта
(двигателя, технологического процесса, самолета и т. д.) сравни-
вается с его действительным поведением и получающаяся при этом
ошибка используется для того, чтобы последняя стремилась к нулю
или сохранялась в заданных пределах.
Первые автоматические системы, основанные на принципе об-
ратной связи, т. е. системы автоматического регулирования, были
предложены И. И. Ползуновым (1765 г.) для регулирования уровня
воды в котле и Д. Уаттом (1784 г.) для регулирования паровых ма-
шин при помощи центробежного регулятора. В дальнейшем системы
автоматического регулирования стали широко использовать в раз-
личных областях техники.
Автоматическое регулирование представляет собой наиболее
эффективный принцип автоматики при частичной автоматизации,
когда технические средства автоматики осуществляют лишь простые
функции управления, связанные с измерением, анализом, контролем
различных физических величин и отработкой решений, принятых опе-
ратором ввиде уставок, программ или других сигналов управления.
На смену частичной пришла комплексная автоматизация, когда
осуществляется автоматизация не только функций управления, свя-
занных с отработкой сигналов управления, но и вызванных самой
выработкой этих сигналов или принятием решений, исходя из целей
управления. В настоящее время САР являются основным техниче-
ским средством для создания автоматизированных производств,
цехов, технологических процессов.
9
Сложность современных автоматических систем значительно воз-
росла. Если в период частичной автоматизации они обычно состояли
из отдельных систем автоматического регулирования, взаимная
координация действий которых осуществлялась человеком, то те-
перь возникла необходимость в автоматической координации их дей-
ствий и, следовательно, в создании сложных взаимосвязанных и мно-
гоуровневых систем автоматического управления (САУ). Причем,
на первом уровне исследуются и автоматизируются сравнительно
простые локальные процессы регулирования, а на втором и пос-
ледующих — процессы управления, имеющие более общий и слож-
ный характер.
С этой точки зрения теория автоматического регулирования яв-
ляется основой построения первого уровня, а теория автоматиче-
ского управления — основой всей иерархической структуры инфор-
мационных процессов управления, необходимых для комплексной
автоматизации сложных объектов.
Таким образом, теорию автоматического управления можно рас-
сматривать как обобщение и дальнейшее развитие теории автомати-
ческого регулирования, требующее, в частности, широкого исполь-
зования понятия информации, которое в теории регулирования иг-
рает сравнительно небольшую роль.
Принцип действия любой САР состоит в том, чтобы обнаружить
отклонение регулируемых величин, характеризующих работу ма-
шины, или протекание процесса от требуемого режима, и при этом
воздействовать на машину или процесс так, чтобы устранить возник-
шие отклонения. Автоматическое определение требуемого режима
в виде законов изменения или некоторых постоянных значений регу-
лируемых величин, с учетом цели управления, не входит в задачи
САР и производится не при частичной автоматизации, а на стадии
комплексной автоматизации следующими уровнями САУ, для кото-
рых системы регулирования играют роль усилителей управляющих
сигналов, формируемых на верхних уровнях.
В теории автоматического регулирования основными являются
проблемы: устойчивости, управляемости, наблюдаемости, качества
и переходных процессов, динамической точности, автоколебаний,
оптимизации, синтеза и идентификации.
В теории автоматического регулирования, с помощью которой
решаются прикладные инженерные задачи, используется довольно
сложный математический аппарат. Это объясняется тем, что САР
представляют собой динамические системы со многими степенями
свободы и содержат не только постоянные, но и переменные, нели-
нейные и распределенные параметры. Поэтому необходимо иметь
в виду, что для эффективного использования методов теории регу-
лирования обычно целесообразна, во-первых, определенная идеали-
зация математического описания системы; во-вторых, учет того, что
теория автоматического регулирования часто дает лишь прибли-
женные результаты и, в-третьих, что для уточнения результатов и
окончательного выбора параметров системы регулирования обычно
необходимо использование средств математического моделирования
и вычислительной техники с последующей окончательной доводкой и
настройкой регуляторов в реальных условиях.
За последние два десятилетия теория автоматического регулиро-
вания получила существенное развитие. Если сначала наиболее
широко применяемым был метод переменных вход-выход (передаточ-
ных функций и частотных характеристик), то в настоящее время
наряду с ним широко используется метод переменных состояния.
Существенной особенностью последнего метода является введение
понятий управляемости и наблюдаемости, развитие методов решения
широкого класса линейно-квадратичных задач (метод аналитиче-
ского конструирования регуляторов — АКОР) как в детерминиро-
ванной, так и в стохастической постановке (фильтры Калмана, см.
гл. 3).
Другим существенным результатом этого периода, связанного
с интенсивным развитием вычислительной техники и выходящим за
рамки классической теории автоматического регулирования, явля-
ется дальнейшее развитие теории дискретных и дискретно-непре-
рывных систем с цифровыми ЭВМ в контуре управления (см. гл. 8).
Задача разработки САР состоит в том, чтобы, располагая некото-
рыми априорными сведениями об объекте и заданными техническими
требованиями к системе в целом (качеству точности, запасу устой-
чивости, надежности, усилению по мощности и т. д.), выбрать соот-
ветствующую элементную базу и составить схему системы, обес-
печивающую реализацию этих требований. Для этого необходимо
располагать достаточно полными сведениями об элементах и устрой-
ствах, которые предполагается включить в состав САР. В случае от-
сутствия необходимых серийных элементов, выпускаемых промыш-
ленностью, разработчик должен сформулировать технические тре-
бования на разработку новых средств автоматики. При выборе эле-
ментов и устройств, образующих систему регулирования (см. гл. 12—
16), последние должны рассматриваться во взаимодействии друг
с другом, а вся система в целом — обладать требуемыми свойствами.
Разработка и проектирование САР является сложной задачей,
которая состоит из следующих этапов:
определения характеристик и параметров объекта регулирования
и условий его работы; составления математических моделей;
формулировки требований к САР;
выбора структуры и первоначальной схемы;
выбора элементов схемы регулирования с учетом статических,
динамических, энергетических и эксплуатационных требований и
И т. д.;
определения законов регулирования и расчета корректирующих
устройств, обеспечивающих заданные требования;
уточнения структурной схемы системы регулирования, выбора
и расчета ее элементов и параметров;
экспериментального исследования системы регулирования (или
отдельных ее частей) в лабораторных условиях и внесения соответ-
ствующих исправлений в ее схему и конструкцию;
проектирования и производства системы регулирования;
11
наладки системы регулирования в реальных условиях ее работы;
опытной эксплуатации.
За последние годы большое значение приобрела проблема автома-
тизации проектирования технических объектов и, в частности, си-
стем управления и регулирования технологическими процессами и
объектами. В настоящее время чрезвычайно важно существенное
сокращение сроков создания и освоения новой техники, для чего
необходимо расширить автоматизацию проектно-конструкторских
и научно-исследовательских работ с применением электронно-вы-
числительной техники.
Решение данной проблемы в особенности применительно к авто-
матизации проектирования систем управления в большой степени
зависит от успехов теории регулирования и управления, так как
системы автоматизированного проектирования (САПР) любых объек-
тов, систем управления и регулирования, в частности, сами являются
системами управления технологическим процессом производства
технической документации.
В настоящее время в стадии интенсивного развития находятся
теория и техника иерархических многоуровневых систем управле-
ния технологическими процессами и объектами. Однако, теория
и техника систем автоматического регулирования, непосредственно
связанных с процессами материального производства и играющих
в этих сложных системах роль подсистем нижнего уровня, остается
базой для их построения.
Основные понятия, принципы, задачи и методы автоматического
регулирования сохраняют свою актуальность и получают дальней-
шее развитие в современной теории и подходах к проектированию
сложных, автоматизированных систем. Новым в этих подходах яв-
ляется, как это уже было сказано, существенное возрастание зна-
чения понятия информации и компьютеризация процессов обработки
информации, поскольку любая система управления представляет
собой систему, выполняющую поставленную перед ней задачу при
помощи сбора, передачи, переработки и использования информации
на основе принципа обратной связи.
РАЗДЕЛ 1
ТЕОРИЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
ГЛАВА 1. ОСНОВНЫЕ ПОНЯТИЯ ТЕОРИИ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
1.1. ПРИНЦИПЫ ДЕЙСТВИЯ САР
Известны случаи, когда в течение достаточно продолжи-
тельного времени необходимо изменять или поддерживать постоян-
ными какие-либо физические величины, называемые регулируемыми
переменными (частоту вращения вала турбины, координаты движу-
щегося объекта, напряжение, температуру, давление и т. д.), харак-
теризующие работу машины, технологический процесс или динамику
движущегося объекта. Для этого используют достаточно сложные
устройства, называемые автоматическими регуляторами. Автомати-
ческие регуляторы должны на основании измерения регулируемых
переменных, формировать воздействия на объект регулирования.
Вообще говоря, изменение поведения объекта во времени может
осуществляться по принципу разомкнутого (рис. 1.1) или замкнутого
(рис. 1.2) циклов.
В системе разомкнутого цикла (см. рис. 1.1) управляющее воз-
действие перемещает движок 2 потенциометра 1 и изменяет напря-
жение на входе усилителя 3. Это приводит к изменению тока в якоре
электродвигателя 4, что вызывает изменение его угловой скорости.
Последняя измеряется при помощи тахогенератора 5 и стрелочного
прибора 6. Следует отметить, что операцию управления (перемеще-
ние движка 2 потенциометра J) может осуществлять также человек.
В этом случае управление будет ручным.
Схема не имеет замкнутого пути обхода, т. е. является разомкну-
той. Для нормального функционирования систем разомкнутого
цикла необходимо соблюдение ряда мер. Они должны быть тщательно
отградуированы, т. е. каждому положению движка потенциометра 2
должна соответствовать в установившемся режиме определенная ча-
стота вращения электродвигателя 4. Однако сохранение градуировки
при износе и старении элементов, а также при колебаниях темпера-
туры и т. д. представляет трудную задачу. Поэтому системы, рабо->
тающие по принципу разомкнутого цикла, не могут обеспечить высо-;
кую точность. В них не измеряется результат, вызываемый управля-
ющим воздействием, т. е. перемещением движка, и не осуществляются
действия, влияющие на этот результат с тем, чтобы он соответство-
вал желаемому.
Система замкнутого цикла (см. рис. 1.2) отличается от системы
разомкнутого цикла тем, что выходное напряжение тахогенератора
5 сравнивается с напряжением, которое снимается с потенциометра
/. Если угловая скорость электродвигателя постоянного тока отли-
13
Рис. 1.2. Схема системы автома-
тического регулирования числа
оборотов электродвигателя по-
стоянного тока, работающая по
принципу замкнутого цикла
Рис. 1.1. Схема системы регу-
лирования числа оборотов
электродвигателя постоян-
ного тока, работающая по
принципу разомкнутого цик-
ла
чается от заданной, то возникает сигнал ошибки At/ = Un
Этот сигнал усиливается и передается на якорь электродвигателя.
При этом сигнал ошибки уменьшается до допустимой величины,
а угловая скорость возвращается к заданному значению^ ПринциЖ
уйравйёнйя, о’снованн^'^^ч^еволъ'зиватШТГ'ббратнби связи, ценен)
тем, что не требует точной градуировки и сохраняет свою точность и
в тех случаях, когда параметры ддежнтоЕ..си£темыи:о.времейем-ТЦ-
меняют свои значения
В некоторых случаях оба принципа управления (по разомкну-
тому и замкнутому циклам) используются в сочетании друг с другом.
В системах с замкнутым циклом или с обратной связью точность
регулирования, т. е. точность поддержания требуемой функцио-
нальной связи (чаще всего пропорциональной) между входом и вы-
ходом, в основном зависит от точности, с которой производится
сравнение требуемого и действительного изменения регулируемой
переменной.
Итак, системой автоматического регулирования (САР) называете^
динамическая система, стремящаяся сохранять в допустимых пре?
делах отклонения между требуемыми и действительными измене\
ниями регулируемых переменных при помощи их сравнения на основе
принципа обратной связи (замкнутого цикла) и использования полу/
чающихся при этом сигналов для управления щеточниками энергии.
х*41зменения регулируемых величин вызываются не только упрад\
/ляющими, но и возмущающими воздействиями, приложенными к си-
стеме автоматического регулирования. Возмущающим называется
«всякое воздействие, которое стремится нарушить требуемую функ-
Сдиональную связь между управляющими воздействиями и регули-
руемой переменной. Например, для схемы, изображенной на
рис. 1.2, возмущающими воздействиями могут быть момент нагрузки,
приложенный к валу электродвигателя, или изменение напряжения
В обмотке возбуждения последнего.
САР должна вести себя.по отношению к управляющему и возму-
щающему воздействиям различным образом. Если управляющее ВОЗ;
действие должно определять изменение регулируемых переменных,
то возмущающие воздействия должны наименьшим образом влияр
на изменение регулируемых переменных.
САР с одной регулируемой величиной показана на рис. 1.3.
14
Цифрой 1 обозначено сравнивающее устройство, которое служит
для сравнения управляющего воздействия и регулируемой пере-
менной. Отметим, что если управляющее воздействие g (t) может
быть приложено к системе только через сравнивающее устройство,
то возмущающее_воздействие f (/) может быть приложено к любой
точке системы.
Внешние воздействия, приложенные к системе, приводят к тому,
что требуемые и действительные значения регулируемой величины
отличаются друг от друга. Разность между необходимым и действи-
тельным значением регулируемой величины называют ошибкой си-
стемы автоматического регулирования.
Отклонением регулируемой величины называют разность между
значением регулируемой величины в данный момент времени и неко-
торым фиксированным ее значением, принятым за номинальное или
за начало отсчета (рис. 1.4, а).
В то время, как отклонение х (t) регулируемой величины при
неограниченно возрастающих управляющих воздействиях является
также неограниченно возрастающей функцией времени, ошибка-
е (/) остается ограниченной (рис. 1.4, б). Воздействие, приложенное
к сравнивающему элементу системы регулирования, называют вход-
ным сигналом, или сигналом на входе системы автоматического регу-
лирования. Регулируемой величиной называют сигнал на выходе
системы.
САР часто называют системами с обратной связью (ОС). Это
объясняется тем, что в них имеется не только прямая связь между
входом (управляющим воздействием) и выходом (регулируемой ве-
личиной), но и обратная связь между выходом^и входом, служащая
для сравнения этих величин.
Введение обратной связи создает систему, которая слабо реаги-
рует на возмущающие воздействия и подчиняется главным образом
управляющему воздействию, т. е. замкнутая система регулирова-
ния по существу представляет собой фильтр, который достаточно
Рис. 1.3. Схема САР с одной регулируемой
величиной:
R (t) — управляющее воздействие; х (t) — регу-
лируемая величина (величина иа выходе системы);
I (<) — возмущающее воздействие (воздействие,
которое стремится нарушить требуемую функци-
ональную связь между управляющим воздейст-
нием g (() и регулируемой переменной х ((); в (t) —
сигнал ошибки, е (/) = g {t) = х (t)
Рис. 1.4. Ошибка и отклонение
регулируемой величины:
g (0 — воздействие; х (t) — откло-
нение; г (f) — ошибка
15
точно передает управляющее воздействие и подавляет возмущающие
воздействия.
Сигнал, который поступает с выхода системы на ее вход, назы-
вают сигналом главной обратной связи, а разность между входным
сигналом и сигналом главной обратной связи — сигналом ошибки.
"• САР обладают направленностыо'действия. Это означает, что вы-
ходной сигнал последующего элемента может оказать влияние на
формирование ошибки на выходе элемента сравнения только через
обратную .связь.
'Итак, САР — это замкнутые активные динамические системы
направленного действия. Активной называют систему, содержащую
источники энергии.
1.2. КЛАССИФИКАЦИЯ И ОСНОВНЫЕ УСТРОЙСТВА
САР
В зависимости от характера изменения управляющего-
воздействия g (t) САР могут быть подразделены на следующие три
основных класса: автоматической стабилизации, программного .ре-
гулирования и следящие системы.
"В системах автоматической енюбилиэации, или собственно в си-
стемах автоматического регулирования, управляющие воздействия
представляют собой заданные постоянные величины (уставки); в си-
стемах программного регулирования задающие воздействия яв-
ляются известными функциями времени (изменяются по программе};-:
в следящих системах задающие воздействия представляют собой
заранее неизвестные функции времени.
Если на схеме, показанной на рис. 1.2, входной сигнал сохра-
няет постоянное значение (движок потенциометра неподвижен), то
такая система представляет систему автоматической стабилизации
(угловой скорости электродвигателя.^Постоянное значение, которое
(имеет входной сигнал, называется настройкой, или уставкой регу-
лятора. Оно соответствует требуемому значению регулируемой ве-
'личины.
Если движок потенциометра перемещается по программе, на-
пример, с помощью кулачкового механизма и снимаемое с него на-
пряжение является заданной функцией времени, то такая система
' представляет систему программного регулирования.
Если движок потенциометра перемещается по заранее неизвест-
ному закону, например, в соответствии с показаниями какого-либо
измерительного прибора, и угловая скорость электродвигателя
должна находиться в определенной функциональной зависимости
.от... положения движка, то система является следящей системой.
' На рис. 1.5 приведена типовая функциональная схема САР с од-
ной регулируемой величиной х (/). Она состоит из объекта регулиро-
вания и автоматического, регулятора. Объект регулирования — ос-
новной элемент системы регулирования, т. е. машина или уста-
новка, заданный режим работы которых должен поддерживаться
регулятором при помощи регулирующих органов.
16
ло равно заданному. В простейших регуляторах чувствительный-
элемент непосредственно осуществляет перемещение регулирующего
органа. Такие САР, где чувствительный элемент воздействует непо-
средственно на изменение положения регулирующего органа, назы-
ваются системами прямого регулирования, а регуляторы — регуля-
торами прямого действия (см. рис. 1.10). В эти^ регуляторах энер-
гия, необходимая для изменения положения регулирующего органа,
поступает непосредственно от чувствительного элемента. Следует
отметить, что реакция регулирующего органа на чувствительный
элемент снижает чувствительность этого элемента, в результате чего
ухудшается качество регулирования.
В системах непрямого регулирования для перемещения регули-
рующего органа используются вспомогательные устройства, кото-
рые работают от дополнительного источника энергии. При этом чув-
ствительный элемент воздействует на управляющий орган вспомога-
тельного устройства, а вспомогательное устройство осуществляет
перемещение регулирующего органа (см. рис. 1.11).
Системы непрямого регулирования необходимо применять в тех
случаях, когда мощность чувствительного элемента недостаточна
для перемещения регулирующего органа и необходимо иметь высо-
кую чувствительность измерительного элемента.
Одноконтурные и многоконтурные САР. Современные САР,
помимо главных обратных связей, часто имеют местные обратные
связи или параллельные корректирующие устройства (см. рис. 1.5).
САР' с одной регулируемой величиной, имеющие только одну главную
обратную связь и не имеющие местных обратных связей (системы
с одним контуром регулирования), называют одноконтурными^
В этих системах воздействие, приложенное к какой-либо точке
системы, может обойти систему и вернуться в первоначальную точку,
следуя только по одному пути обхода (см. рис. 1.3). .
САР, которые помимо одного контура главной обратной связй
имеют еще главные обратные связи или местные обратные, св&ми
называют многоконтурными. В многоконтурных системах воздейст-
вие, приложенное к какой-либо точке, может обойти систему и вер-
нуться в эту точку, следуя по не-
скольким различным путям обхода
(см. рис. 1.5).
Системы несвязанного и свя-
занного автоматического регули-
рования. Системы с несколькими
регулируемыми величинами (мно-
гомерные САР, рис. 1.7) можно
подразделить на системы несвязан- ,
ного и связанного регулирования. '
Системами несвязанного регу-
лирования называют такие, в кото-
рых регуляторы, предназначенные
Рис. 1.7. Многомерные САР
1S
для регулирования различных величин, не связаны друг с другом у
могут взаимодействовать через общий объект регулирования. Систе-
мы несвязанного регулирования можно подразделить на зависимый
и независимые. , . . ;
В зависимых системах несвязанного регулирования на изменение^
одной из регулируемых величин влияют изменения остальных/.;
Поэтому в таких системах процессы регулирования различных рой
гулируемых параметров нельзя рассматривать изолировацно -друж
от друга. " ' ................ '
' Примером зависимой системы несвязанного регулирования яв-
ляется самолет с автопилотом, который имеет самостоятельные ка-
налы управления рулями. Предположим, что самолет отклонился
от заданного курса. При этом автопилот вызовет отклонение руля
поворота. При возвращении к заданному' курсу угловые скорости,
обеих несущих поверхностей самолета, а следовательно, и действую-
щие на них подъемные силы будут неодинаковыми. Это вызовет крен
самолета. Автопилот отклонит элероны. В результате отклонения
руля поворота и элеронов лобовое сопротивление самолета возрастает.
Самолет начинает терять высоту и его продольная ось отклонится от
горизонтали. При этом автопилот отклонит руль высоты. Таким об-
разом, процессы регулирования трех регулируемых величин —
курса, бокового крена и тангажа нельзя считать независимыми друг
от друга, несмотря на наличие самостоятельных каналов управле-
ния.
' В независимых системах несвязанного регулирования изменение?
каждой из регулируемых величин не зависит от изменения остальных
Поэтому процессы регулирования различных величин можно j)ac<
сматривать изолированно друг отдруга.-
Примером независимых систем несвязанного регулирования яв-
ляется САР угловой скорости гидротурбины и САР напряжения гене-
ратора, который вращает эта турбина. Процессы регулирования1
в этих системах независимы.
Процесс регулирования напряжения протекает во много раз
быстрее, чем процесс регулирования угловой скорости гидротурбины.
В системах связанного регулирования регуляторы различных
величин имеют друг с другом взаимные связи, которые осуществляют
взаимодействие между ними вне объекта регулирования.
Примером системы связанного автоматического регулирования
может служить электрический автопилот. На рис. 1.8 приведена
упрощенная схема электрического автопилота ЭАП. Он предназна-
чен для поддержания заданных курса, крена и тангажа самолета.
Кроме того, автопилот позволяет стабилизировать положение само-
лета в горизонтальном полете, производить подъем, спуск, плани-
рование, плоские и координированные развороты при различных
режимах полета и т. д. Ниже будут рассмотрены лишь функции авто-
пилота, которые относятся к поддержанию курса, крена и тангажа.
Чувствительным элементом, который воспринимает отклонения
самолета от заданного курса, является гиДрополукомпас 12. Его
основной частью является азимутально-свббодный гироскоп, ось
ап
9
Рис. 1.8. Упрощенная схема электрического автопилота ЭАП
21
Рис. 1.9. Мостовая схема автопилота
которого направлена^вдоль заданно-
го курса._При отклонении самолета
от курса ось гироскопа и связанные е
ней при помощи рычага 11 ползунки
реостатных датчиков курса 7 и по-
ворота 10 сохраняют свое положение
в пространстве, а корпус самолета вместе с датчиками 7 и 10 сме-
щается, в результате чего происходит смещение ползунков относи-
тельно средних точек сопротивлений, пропорциональное величине
отклонения самолета от заданного курса.
Чувствительным элементом,' который воспринимает отклонения
самолета от заданного в пространстве направления (например, от
вертикали или от горизонтальной плоскости), служит гировертикаль
14. Основная ее часть — свободный гироскоп, ось которого перпен-
дикулярна горизонтальной плоскости. Гировертикаль связана с пол-
зунками реостатных датчиков по двум осям. При отклонении оси
самолета от горизонта в продольной оси происходит относительное
смещение ползунка датчика тангажа 13; при отклонении самолета
в горизонтальной плоскости возникают относительные смещения
ползунков датчиков крена 15—17.
, Регулирующими органами самолета являются рули поворота 1,
высоты 18 и элероны 19, а исполнительными элементами, которые
управляют положениями рулей, — рулевые машинки курса, тан-
гажа и крена. Принцип действия всех трех каналов управления авто-
пилота аналогичен. Рулевая машинка каждого из рулей связана с по/
тенциометрическим датчиком ОС. Основной потенциометрический
датчик 13 (рис. 1.9) соединен с соответствующим датчиком ОС по мо-
стовой схеме. Диагональ моста подключена к усилителю 6 (см/
рис. 1.8). Когда самолет отклоняется от заданного направления по-:
дета, ползунок основного датчика смещается. В диагонали мостам
появляется сигнал. В результате срабатывает соответствующей
электромагнитное реле на выходе усилителя, которое замыкает цепь:
электромагнитной муфты 4. Барабан 3 соответствующей рулевой ма-
шинки сцепляется с валом непрерывно вращающегося электродви-
гателя постоянного тока 5. Наматывающиеся на барабан (или сма-
тывающиеся с него) тросы начинают поворачивать соответствующий
руль самолета и перемещать при этом щетку потенциометра ОС 2.
Когда щетка потенциометра обратной связи сместится на величину,
равную смещению щетки потенциометрического датчика, сигнал
в диагонали моста станет равным нулю и движение данного руля
прекратится. При этом руль повернется на угол, необходимый для
поворота самолета на заданное направление, и самолет начнет воз-
вращаться к заданному направлению под действием аэродинамиче-
ского момента. Щетка основного датчика, по мере устранения рас-
согласования, возвратится к среднему положению, что приведет
к действию рулевой машинки в обратном направлении и к повороту
руля в исходное начальное положение. Выходные каскады автопи-
22
лота, начиная от усилителей 6 и кончая рулевыми машинками, иден-
тичны, а входные — несколько отличаются друг от друга. Ползунок
датчика курса связан с гирополукомпасом не жестко, а с помощью
пружины 8 и демпфера 9. Поэтому кроме перемещения, пропорцио-
нального отклонению от курса, ползунок получает дополнительное
смещение, пропорциональное первой производной отклонения по
времени. Кроме того, во всех каналах, кроме основных потенцио-
метрических датчиков, предусмотрены дополнительные датчики, ко-
торые осуществляют связанное регулирование между собой по pai-
личным осям, т. е. необходимую координацию действий всех трех
рулей. Такое включение обеспечивает алгебраическое сложение
сигналов основного и дополнительного датчиков на входе усили-
теля 6.
В канале управления курсом такими вспомогательными датчи-
ками служат датчики крена и разворота, который осуществляется
летчиком вручную. В канале управления креном установлены до-,
полнительные датчики поворота и разворота. Следует отметить, что
датчик поворота отличается от датчика курса тем, что его отклонение
пропорционально только отклонению от курса и не зависит от первой
производной. В канале управления тангажом установлен дополни-
тельный датчик крена.
Влияние каналов управления друг на друга приводит к тому,
что при движении самолета его крен, например, вызывает изменение
тангажа и наоборот.
Следует отметить, что систему связанного регулирования назы-
вают автономной, если связи между входящими в ее состав регуля-
торами таковы, что изменение одной из величин в процессе регулиро-^
вания’не вызывает изменения остальных величин.
А
1.4. СТАТИЧЕСКОЕ И АСТАТИЧЕСКОЕ
РЕГУЛИРОВАНИЕ
САР подразделяются на статические и астатические
в зависимости от того, имеют они или нет ошибку в установившемся
состоянии при определенного рода воздействиях.
На рис. 1.10 приведена схема статической САР уровня h воды
в резервуаре с помощью поплавкового регулятора. Следует отме-
тить, что такая система является системой прямого регулирования.
Поплавок в ней жестко связан с регулирующим органом-задвижкой,
которая изменяет количество воды, поступающей в единицу времени
по питающей трубе в резервуар. Такая система — пример статиче-
ского регулирования, при котором регулируемая величина при раз-
ных, но постоянных внешних воздействиях на объект по окончании
переходного процесса принимает различные значения, зависящие от
величины внешнего воздействия (нагрузки). Чем значительней рас-
ход жидкости Q в системе, тем больше открыта задвижка и, следова-
тельно, тем ниже в состоянии равновесия будет находиться поплавок.
Характерные особенности статической системы регулирования:
равновесие системы статического регулирования может быть при
различных значениях регулируемой величины;
23
каждому значению регулируемой величины соответствует един-
ственное определенное значение регулирующего органа;
контур регулирования системы должен состоять из статических'
звеньев, осуществляющих зависимость хьых = [ (хвх).
В схему САР уровня жидкости (рис. 1.11) включен электродви-
гатель постоянного тока. В ней при увеличении (уменьшении) pact
хода жидкости поплавок (чувствительный элемент) опускается (под-
нимается) и замыкает верхний (нижний) контакт. При этом электро-
двигатель начинает вращаться в таком направлении, чтобы поднять
(опустить) задвижку — регулирующий орган и увеличить (умень-
шить) приток жидкости. Такая схема — пример астатического регу-
лирования, когда при различных постоянных значениях внешнего
воздействия на объект.отклонение регулируемой величины от требуе-
мого значения по окончании переходного процесса становится рав-
ным нулю. Степень открытия засклонки зависит от расхода жид-
кости, а поплавок при заданном значении уровня занимает одно опре-
деленное положение, равное заданному. Связать поплавок и заслон-
ку следует таким образом, чтобы одному положению поплавка могло,
соответствовать любое положение заслонки. ;
Характерные особенности астатической системы регулирования:
равновесие системы астатического регулирования имеет место
при единственном значении регулируемой величины, равном задан-
ному;
регулирующий орган в астатической системе должен иметь воз-
можность занимать различные положения при одном и том же зна--
чении регулируемой величины.
В реальных астатических системах первое условие выполняется
с некоторой погрешностью, так как чувствительный элемент обладает,
разрешающей способностью (нечувствительностью). Для осущест-.
вления указанной связи между чувствительным элементом и регу-
лирущим органом в контур регулирования должно быть введено
астатическое звено. В данном случае таким звеном является электро-
двигатель. При отсутствии напряжения вал электродвигателя непо-
движен в любом положении, при наличии напряжения он непрерывно
вращается. Астатическое звено находится в состоянии безразлич-
ного равновесия при отсутствии на него внешнего воздействия и
выходит из равновесия при наличии воздействия.
Следует различать системы статические и астатические по отно-
шению к возмущающему и управляющему воздействиям. В системах,
Рис. 1.11. Астатическая САР
24
Рис. 1.12. Переходные процессы в стати-
ческой (кривая 1) и астатической (кривая
2) системах по отношению к возмущаю-
щему воздействию
Рис. 1.13, Переходные процессы в ста-
тической (кривая 1) и астатической
(кривая 2) системах по отношению к уп-
равляющему воздействию
статических по отношению к возмущающим воздействиям, не одина-
ковым по постоянной величине, возмущающим воздействиям соот-
ветствует различное значение регулируемой величины. В астати-
ческих системах по отношению к возмущающим воздействиям зна-
чение регулируемой величины не зависит от величины возмущающего
воздействия. Значение регулируемой величины остается постоянным,
равным заданному.
В системах, статичёских по отношению к управляющим воздей-
ствиям, постоянным значениям этого воздействия соответствует по-
стоянная ошибка системы, величина которой зависит от величины
управляющего воздействия.
В астатических системах по отношению к управляющему воз-
действию после окончания переходного процесса ошибка равна
нулю. _ -------
Для пояснения всего сказанного выше на рис. 1.12 и 1.13 при-
ведены кривые процессов в статической и астатической системах
по отношению к возмущающему f (/) и управляющему g (i) воздей-
ствиям.
1.5. КЛАССИФИКАЦИЯ САР В ЗАВИСИМОСТИ
ОТ ИДЕАЛИЗАЦИИ, ПРИНЯТОЙ
ПРИ ИХ МАТЕМАТИЧЕСКОМ ОПИСАНИИ
При анализе и расчете САР возникает необходимость
выбора с определенной степенью приближения адекватной мате-
матической модели, которая определяла бы с течением времени из-
менение переменных состояния системы.
Следует отметить, Что почти все САР представляют собой нели-
нейные системы, которые содержат как переменные, так и распреде-
ленные параметры, в которых значение переменных в данный момент
времени может зависеть не только от текущих, но и от прошлых
значений этих переменных.
Точное математическое описание САР представляет собой боль-
шие трудности и не всегда связано с практической необходимостью.
Методы теории автоматического регулирования разработаны при-
менительно к различным типовым математическим моделям реаль-
ных систем автоматического регулирования.
25
Рис. 1.14. Классификация САР в зависимости от идеализации, принятой^при^их
математическом описании: *
1,2 — соответственно сосредоточенные и распределенные параметры
САР подразделяют на линейные и нелинейные (рис. 1.14) в зави-
симости от того, какую математическую модель выбирают при их
исследовании (являются ли линейными или нелинейными диф-
ференциальные, интегральные, дифференциально-разностные
уравнения, которые применяют при их математическом рписа-;
нии).
Линейные и нелинейные системы подразделяют на следующие
три класса: непрерывные, дискретные и дискретно-непрерывные.
Непрерывные системы описываются дифференциальными уравне-
ниями; дискретные—дифференциально-разностными, а дискретно-
непрерывные — обоими видами уравнений. Каждый из этих трех
классов подразделяют на подклассы:
стационарные системы с сосредоточенными параметрами;
стационарные системы с сосредоточенными и распределенными
параметрами;
. нестационарные, или переменные, системы, с сосредоточенным»
параметрами;
нестационарные, или переменные, системы, с сосредоточенными
нераспределенными параметрами.
Кроме того, системы (или их математические модели) каждого из
классов и подклассов могут быть подразделены на детерминирован-
ные или статистические.
Математическую модель системы называет детерминировайМ&
если приложенные к ней воздействия и параметры модели являк?йЙ
постоянными или детерминированными функциями переменных со-
стояния и времени. Математическую модель системы называют ста-
тистической, если приложенные к ней воздействия и параметры
модели являются случайными функциями или случайными величи-
нами.
20
1.6. СИСТЕМЫ НЕПРЕРЫВНОГО
И ДИСКРЕТНОГО ДЕЙСТВИЯ
В зависимости от прохождения и характера сигналов си-
стемы автоматического регулирования могут подразделяться на
непрерывные и дискретные, или прерывистые.
Если в процессе регулирования структура всех связей в системе
остается неизменной, то такая система является системой непре-
рывного регулирования. Сигналы на выходе элементов такой си-
стемы являются непрерывными функциями воздействий и времени.
Между элементами на входе и выходе системы существует непре-
рывная функциональная связь. Примером системы непрерывного
действия может служить схема, показанная на рис. 1.2, в которой
ток в цепи якоря является непрерывной функцией напряжений на
входе усилителей.
Системы прерывистого регулирования отличаются тем, что в них
через дискретные промежутки времени происходит размыкание или
замыкание цепи воздействий..
Системы прерывистого действия подразделяют на импульсные
и релейные. В импульсных системах размыкание цепи воздействий
производится принудительно и периодически специальным преры-
вающим устройством. В течение передачи импульсов процессы в этих
системах протекают так же, как и в непрерывных САР. Импульсные
системы содержат импульсные элементы и осуществляют квантова-
ние сигнала по времени. В системах релейного действия размыкание
или замыкание цепи воздействия производится одним из элементов
системы при непрерывном значении входного воздействия. Размы-
кание или замыкание осуществляется с помощью реле или элемента,
имеющего релейную характеристику. Реле срабатывает при опреде-
ленном значении воздействия да его чувствительный орган.
Релейные системы осуществляют квантование сигнала по уровню.
Пример САР релейного действия показан'на'рис. 1.11. Следует от-
метить, что существуют релейно-импульсные, или кодово-импульсные
системы, в которых происходит квантование сигнала как по времени,
так и по уровню. *
К кодово-импульсным системам относятся системы, содержащие
в контуре управления цифровые вычислительные машины (ЦВМ),
или их элементы. Такие^кодово-импульсные системы^ называют циф-
ровыми.
В зависимости от конструктивного выполнения САР подразде-
ляют на электронные, электрические, электромеханические, пнев-
матические, электрогидравлические и гидравлические.
1.7. ОСНОВНЫЕ ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ
К САР
Применимость САР в каждом конкретном случае зависит
от того, насколько система удовлетворяет предъявляемым к ней тре-
бованиям. Основным требованием является сохранение заданной
27
функциональной зависимости между управляющими и регулируе-'
мыми переменными на входе и выходе системы. Идеальных систем^-
которые бы выполняли это требование абсолютно точно, не сущест-
вует. Поэтому речь может идти о приближении работы системы к иде-
альной. Чем больше степень этого приближения, тем сложнее полу-
чается система. В связи с этим задача проектирования САР заклю-
чается в том, чтобы найти разумный компромисс между стремлением'
получить высокое качество работы и достигнуть это простыми тех-
ническими средствами. Требования, предъявляемые к поведению
системы в динамике, зависят от ее назначения, характера работа,
конкретных условий работы и т. д.[Разлйчают“следующие категории
требований: - ---
к запасу устойчивости системы;
к величине ошибки в установившемся состоянии или статиче-
ской точности;
к поведению системы в переходном процессе (совокупность этих
требований называется условиями качества);
к динамической точности системы, т. е. к величине ошибки при
непрерывно изменяющихся воздействиях.
Наиболее важным и необходимым из перечисленных требований
является устойчивость работы системы. ____ ________
САР из-за наличия обратных связей склонны к колебаниям.
В устойчиво работающей системе происходят затухающие с течением
времени колебания, и система приходит в согласованное состояние.
Устойчивость системы не должна нарушаться во время ее работы при
изменении в определенных пределах внешних и внутренних условий,
например, окружающей температуры, напряжения питающей сети,
и т. д. Требование устойчивости должно удовлетворяться с некото-
рым запасом, предусматривающим возможные изменения параме-
тров системы во время ее работы.
Следует отметить, что принцип обратной связи, лежащий в основе
действия САР и применяемый для подавления колебаний и умень-
шения ошибки, при определенных условиях может способствовать'
генерации колебаний и увеличению ошибки.
В качестве примера можно рассмотреть самолет, имеющий авто-
мат курса, который реагирует на отклонение самолета от требуемого
направления. Пусть в начальный момент времени под действием воз-
мущающих сил продольная ось самолета не совпадает с требуемым
направлением движения. Чувствительный элемент автомата курса
вырабатывает сигнал, который заставит отклониться рули направ-
ления. В результате этого возникает вращающий момент, который;
будет стремиться возвратить самолет на заданный курс. Однако^
в момент, когда продольная ось самолета совпадет с требуемым на^
правлением движения, его вращательное движение не прекратится.-
Это произойдет потому, что самолет имеет значительный момент
инерции и при подходе к заданному курсу будет обладать определен-
ным запасом кинетической энергии, а также потому; что автомат
курса, обладающий некоторым запаздыванием, возвратит руль
в нейтральное положение лишь через некоторый промежуток вре-
28
Рис. 1.15. Виды воздействий:
а — единичное ступенчатое воздействие; б — воздействие в виде б-функцни; в — типовое
воздействие при постоянной скорости (кривая /) и постоянном ускорении (кривая 2); г —
типовое управляющее воздействие радиолокационной станции g (О = arctg Р/
мени после того, как продольная ось самолета совпадет с заданным
курсом. Поэтому самолет будет отклоняться от заданного курса в на-
правлении, противоположном первоначальному, до тех пор, пока
автомат курса не произведет переналадку руля и не возникнет вра-
щающий момент, достаточный для того, чтобы опять возвратить са-
молет к заданному курсу. Затем весь процесс повторится снова и т. д.
Если при этом демпфирование самолета невелико, а инерция и за-
паздывание автомата курса значительны, то амплитуда колебаний
самолета относительно заданного курса будет возрастать и сохране-
ние заданного курса не будет достигнуто.
Требование устойчивости является необходимым, но не достаточ-
ным условием для характеристики динамических свойств системы
автоматического регулирования в реальных условиях их работы при
наличии различного рода воздействий.
Виды воздействий. Поведение САР существенно зависит от вели-
чины и характера воздействий на систему. Воздействия, приложен-
ные к системам регулирования, представляют собой непрерывно из-
меняющиеся функции времени, точный закон изменения которых
невозможно предугадать. Однако при рассмотрении конкретных ус-
ловий работы системы оказывается можно выбрать такое воздействие,
которое для данной системы было наиболее типичным или наиболее
неблагоприятным. Выбрав такое воздействие и изучив вызванный им
переходный процесс, можно судить о динамических свойствах си-
стемы. В виде типового воздействия при анализе динамики САР часто
выбирают ступенчатое воздействие или единичный скачок (рис. 1.15,а).
Такого рода воздействию соответствуют, например, сбросы или уве-
личение нагрузки в системах регулирования угловой скорости элек-
тродвигателя, отказ мотора в системе двухмоторный самолет—авто-
мат курса, внезапное изменение положения задающей оси в следя-
щих системах и т. д.
Типовое воздействие может иметь форму б-функции (рис. 1.15, б),
т. е. импульса произвольной формы, и весьма малой продолжитель-
ности по сравнению с ожидаемым временем переходного процесса.
В реальных условиях такое воздействие имеет место, например,
в случае внезапного вхождения самолета в струю воздуха, движу-
щегося перпендикулярно траектории движения самолета. При этом
29
Рис. 1.16. Основные тины
переходных процессов
б-функцию можно рассматривать как производную от единичной
ступенчатой функции.
При исследовании следящих систем часто пользуются типовым
управляющим воздействием вида.
g (0 = go +'git + gi? Н-----1- grtr при t > 0.
Частичными случаями такого воздействия являются:
g (t) = git при t >0;
g (0 = 0 при t < 0.
Этому соответствует изменение управляющего сигнала с постоян-
ной скоростью (кривая 1, рис. 1.15, в) или
g (t) = g^ при t > 0;
g (0 = 0 при t < 0.
Этому соответствует изменение управляющего сигнала с постоян-
ным ускорением (кривая 2, рис. 1.15, в).
При исследовании некоторых следящих систем, например, при-
меняемых для управления антенной радиолокационной станцией,
в качестве типового воздействия используют выражение g (0 =
= arctg fit, которое представляет собой закон изменения азимутного
угла между направлением на цель и некоторым фиксированным на-
правлением в случае прямолинйного и равномерного движения цели
(рис. 1.15, г).
В отдельных случаях типовые воздействия могут иметь сложную
форму, которая определяется экспериментальным путем. Любое
воздействие вызывает в системе переходный^ процесс, по окончании
которого система переходит в новое установившееся состояние.
Переходные процессы при статическом отклонении, не равном
нулю, можно подразделить на следующие типы (рис. 1.16):
колебательные процессы (кривая /), которые характеризуются
наличием двух или большего числа перерегулирований;
малоколебательные процессы (кривая 2), которые характери-
зуются наличием только одного перерегулирования;
процессы без перерегулирования (кривая 3), которые характе-
ризуются тем, что отклонение регулируемой величины остается в пе-
реходном процессе меньше установившегося значения, т. е. выпол-
няется условие х (0 < х (оо) при всех t (с точностью до Д);
30
Рис. 1.17. Воздействие, являющееся слу-
чайной функцией времени
монотонные процессы (кривая 0 I
4), которые характеризуются тем,
что скорость изменения регули-
руемой величины не меняет знака в течение всего переходного
процесса, т. е. выполняются условия
dxldt 0 при 0 < t < Т и (/)— х (оо) [ < Л при t > Т,
\
где Т — время переходного процесса.
В случае воздействий, неограниченно возрастающих с течением
времени, отклонение регулируемой виличины также неограниченно
возрастает. Поэтому будем рассматривать не установившееся
и максимальное отклонение, а установившуюся и максималь-
ную ошибку регулируемой величины от установившегося значе-
ния.
Иногда реальные условия работы системы могут быть такими,
что само понятие «переходный процесс» теряет смысл. Это относится
к случаю (рис. 1.17) когда воздействие представляет собой непре-
рывно и быстро изменяющиеся функции времени (например, шумы
или помехи).
В качестве примера может быть рассмотрена следящая система
для управления антенной радиолокационной станции. На входной-
сигнал такой системы, который воспроизводит действительный за-
кон движения цели, накладываются помехи, или флюктуации, пред-
ставляющие собой быстро изменяющиеся случайные функции вре-
мени. Флюктуации входного сигнала создаются непрерывным изме-
йением коэффициента отражения самолета вследствие рыскания и
качки последней, а также неоднородности отражающей поверхности
и других причин. Такого рода воздействия при анализе систем не
могут быть заменены типовыми воздействиями в виде заданной функ-
ции времени, и в то же время ими нельзя пренебречь, так как от них
зависит общая величина ошибки системы. При этом такие показатели
качества, как время переходного процесса, статическое' отклонение
регулируемой величины, число колебаний, перерегулирование, те-
ряют смысл. Сохраняет значение или максимальное отклонение хшах
регулируемой величины, которое характеризует динамическую точ-
ность системы в неустановившемся состоянии, или среднее ее значе-
ние х за достаточно большой промежуток времени.
Наряду с требованиями к динамической точности системы регу-
лирования должны удовлетворять требованиям, связанным с усло-
виями их эксплуатации. Эти требования часто имеют решающее
значение при выборе элементов систем регулирования .
При проектировании САР следует учитывать и экономические
показатели, такие, как расход энергии на управление, экономиче-
скую эффективность регулирования, стоимость и окупаемость обо-
рудования и другие показатели.
31
1.8. ПРИМЕРЫ CAP
САР температуры печи (рис. 1.18). Предположим, что
необходимо поддерживать температуру 0 в электропечи постоянной
или изменять ее по некоторому закону, который задается напряже-
нием Uo на входе системы. Температуру 0 в печи измеряют термопа-
рой, которая дает напряжение £/т, пропорциональное температуре 0.
Это напряжение сравнивается с напряжением на входе системы при
наличии цепи обратной связи (ОС). В результате образуется раз-
ность напряжений ЛU ~ ий — Urt. которую называют рассогласо-
ванием, или отклонением (ошибкой системы регулирования). Оно
пропорционально отклонению температуры от требуемого значения
Uo. Разность напряжений А(7 усиливается усилителем (электрон-
ный, магнитный или какой-либо другой усилитель). Напряжение
с выхода усилителя U7 подается на привод, который осуществляет
перемещение s движка реостата и изменяет сопротивление г в элек-
трической цепи нагрева печи. При увеличении сопротивления г ток
в цепи нагрева уменьшается, а температура в печи снижается и на-
оборот. Характерной особенностью системы автоматического регули-
рования является то, что сама разность между требуемым и действи-
тельным значением регулируемой величины является причиной, стре-
мящейся устранить это расхождение при помощи обратной связи.
В рассматриваемом примере обратная связь осуществляется
с помощью измерительного устройства — термопары. Она является
чувствительным элементом, который реагирует на действительное
значение регулируемой величины (температуры 0) и формирует сиг-
нал ошибки A U.
Автоматическое управление летательным аппаратом (рис. 1.19).
Отклонение действительного угла тангажа О от требуемого опреде-
ляется с помощью свободного гироскопа, снабженного потенциоме-
тром. Нулевое положение потенциометра соответствует требуемому
углу тангажа йп и задается программным механизмом. Напряжение
на выходе потенциометра UE пропорционально ошибке е = — &.
Сигнал ошибки Ue преобразуется в управляющий сигнал U7. Для
придания системе автоматического управления требуемых динамиче-
ских свойств к сигналу ошибки с помощью корректирующего устрой-
ства (электрической #С-цепи) добавляются сигналы, пропорциональ-
ные его производным и интегралам. Электрический сигнал затем
Рис. 1.18. САР температуры печи:
1 — усилитель; 2 — привод; 3 — реостат; 4 ** электропечь; 5 — нагреватель; 6 — тер*
мопара
32
Рис. 1.19. Автоматическое уйравление лёта?ельным аппаратом по программе в вер*
такальной плоскости — программное значение угла тангажа:
1 — программный механизм; 2 — потенциометр; 3 — корректирующее устройство; 4 —
усилитель; 5 -* рулевая машинка; 6 — летательный аппарат
усиливается электронным или магнитным усилителем. Выходной
ток iy усилителя управляет рулевой машинкой. Рулевая машинка
поворачивает на угол 6 органы управления (рули), которые создают
момент, вращающий летательный аппарат вокруг центра масс и из-
меняющий при этом угол тангажа &. Этот угол й сравнивается с тре-
буемым углом &„, и таким образом система замыкается обратной
связью. Управляющим воздействием в системе является программ-
ное значение входной величины (/). Возмущающее воздействие —
силы и моменты (FB и А1В), приложенные к летательному аппарату и
вызываемые производственными погрешностями и ветром.
ГЛАВА 2. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
И ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ
СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
2.1. УРАВНЕНИЯ САР
Для анализа САР необходимо располагать ее математи-
ческим описанием — дифференциальными или интегродифферен-
циальными уравнениями. Для систем с распределенными параме-
трами уравнения имеют вид уравнений в частных производных. Они
определяют поведение системы автоматического регулирований
в переходном процессе при действии возмущающих сил или после
прекращения их действия.
Уравнения называют уравнениями динамики, если они описы-
вают изменение входящих в них переменных во времени. Из уравне-
ний динамики обычно можно получить уравнения статики, если
положить все входящие в них производные и воздействия равными
нулю или некоторым постоянным величинам, Уравнения статики
описывают поведение системы в установившемся режиме.
При составлении дифференциальных уравнений динамики си-
стемы автоматического регулирования последнюю обычно разби-
вают на отдельные элементы, или звенья, и записывают уравнение
каждого звена в отдельности. Уравнения всех звеньев образуют еди-
?ную цистему, которую можно преобразовать к одному уравнению
путем исключения промежуточных переменных.
Солодовников В. В. и др. 33
Рис. 2.1. Статически нехарактеристика
электронного усилителя постоянного
тока t/вых” f (t/вх)
Рис. 2.2. Статическая характеристика
(характеристика холостого хода) элек-
тродвигателя постоянного тока
Уравнение звена должно быть составлено так, чтобы оно выра-
жало зависимость между входными и выходными сигналами данного
звена, т. е. между теми величинами, которые представляют воздей-
ствие данного звена на последующее звено и воздействие предыдущего
звена на данное. Звено может иметь не одну входную'величину, а не-
сколько (например, при наличии дополнительных обратных связей).
Кроме входных и выходной величин звено может иметь внешнее воз-
мущение.
Дифференциальные уравнения составляются на основании тех
физических законов, которые определяют протекание процесса в изу-
чаемом элементе. Чаще всего исходным является закон сохранения
вещества и энергии, записанный применительно к рассматриваемому
явлению.
При составлении дифференциального уравнения выявляются все
факторы, от которых зависит изучаемый процесс, или переменные,
входящие в это уравнение. Для большого диапазона изменения регу-
лируемой величины уравнение статики нелинейно. Например, для
генератора с независимым возбуждением при малых изменениях
возбуждения можно написать линейное уравнение вида
Uv =
где Ur — напряжение на выходе генератора; UB — напряжение
возбуждения генератора.
При значительных изменениях тока возбуждения приходится
учитывать насыщение магнитной цепи машины, т. е. перейти к не-
линейному уравнению вида
Ur = f
Для малых отклонений регулируемой величины можно пользо-
ваться линеаризованными уравнениями, а для больших отклонений—
нелинейными уравнениями вида
х = f (у); х = / (z),
Где х, у и z — абсолютные значения регулируемой величины, регу-
лирующего и возмущающего воздействий.
Геометрическое изображение уравнений статики системы пред-
ставляют так называемые статистические характеристики — кри-
вые, построенные в координатах х, у или х, z.
34
Рис. 2.3. Линеаризации нелинейной статической jjj
характеристики
Примером таких характеристик яв-
ляется статическая характеристика элек-
тронного усилителя ивых — f (UBX) о
(рис. 2.1), электродвигателя постоянного иУ° иУ
тока Q = f (17у) (рис. 2.2). Здесь 17вых —
напряжение на выходе усилителя, 17вх — напряжение на его входе,
Q — угловая скорость вала, рад/с, U7 — управляющее напряжение
на якоре.
Из рис. 2.1 и 2.2 видно, что статические характеристики являются
нелинейными. Для упрощения расчетов их следует линеаризовать
(рис. 2.3), когда это возможно, например "методом касательной
для небольшого диапазона изменения входной и выходной величин.
Точка’с характеристики Q = f (Uy) с координатами й0, С/у0 соот-
ветствует номинальному режиму работы электродвигателя. Вели-
чины AQ и A(Jy — соответственно достаточно малые отклонения
угловой скорости и управляющего напряжения, поэтому криволи-
нейный участок статической характеристики Q == / (17у), прилежа-
щий к точке с, можно заменить прямой (касательной или секущей).
Рассматриваемый рабочий участок можно изобразить в новых осях
координат (AQ, А(7у), обозначающих отклонение величин Q и (7у от
их номинального значения. Такую замену реальной нелинейной ха-
рактеристики линейной, основанной на малости отклонений, назы-
вают линеаризацией. Рабочий участок описывается формулой AQ
= k0 &Uy, vpft k0 — крутизна характеристики (ka = tg a).
Следует отметить, что имеются так называемые существенно не-
линейные характеристики, среди этих характеристик можно выде-
лить ряд характеристик, типичных для систем автоматического ре-
гулирования. При анализе систем, элементы которых содержат
такие характеристики, применяют методы нелинейной теории авто-
матического регулирования.
2.2. МЕТОДИКА СОСТАВЛЕНИЯ ДИФФЕРЕНЦИАЛЬНЫХ
УРАВНЕНИЙ ЭЛЕМЕНТОВ САР,
ДОПУСКАЮЩИХ ЛИНЕАРИЗАЦИЮ
Первым шагом в составлении уравнений динамики эле-
мента системы регулирования является выявление физического
закона, определяющего его поведение. Такими законами, как уже
отмечалось, является закон сохранения вещества, закон сохранения
энергии, второй закон Ньютона или какой-либо из других основных
законов физики. Математическое выражение соответствующего фи-
зического закона, который определяет процесс, протекающий в дан-
ном элементе системы, является исходным дифференциальным ура®’
нением этого элемента.
Вторым шагом является определение факторов, от которых зави-
сят переменные, входящие и исходное уравнение, и установление
2» 35
выражений, характеризующих эту зависимость. Последние могут
быть выражены аналитическими функциями или заданы графически.
В большинстве случаев они являются нелинейными зависимостями.
Подстановка найденных выражений в исходное уравнение дает нели-
нейное уравнение элемента (в частности, объекта регулирования).
С целью упрощения исследования процесса регулирования полу-
ченное уравнение линеаризуется, если для данного уравнения лине-
аризация допустима. Достаточными признаками для проведения ли-
неаризации обычно являются отсутствие разрывных, неоднозначных
или резко изменяющихся характеристик и справедливость уравне-
ния в течение всего интервала времени регулирования.
Линеаризацию дифференциальных уравнений производят при
/помощи формулы Тейлора. Используя последнюю, можно разложить
нелинейную функцию нескольких переменных по степеням малых
приращений этих переменных, которые берутся в окрестностях их
значений, соответствующих установившемуся режиму. Формула
Тейлора содержит остаточный член, исследование которого позво-
ляет оценить величину ошибки, при учете только первых членов раз-
ложения. Формула Тейлора, например, для трех переменных х, у
и z имеет вид
F (х, у, z)~ F (х0 + Ах, у0 4- Ay, z0 + &z) = F (х0, у0 г0) +
1 dF * • J dF A . dF А 1 1
-4- — Дл 4~ — Ду 4" *~з"“ Дг 4" • * • 4-
1 дх± 1 1 ду v 1 dz 1 1
п
Здесь х =» х0 + Ах; у — уй + Az/; z = г0 + Аг; х0 »= const; уй ««
const, х = const; — остаточный член. Показатели степени
указывают на необходимость возведения выражения в скобках в соот-
ветствующую степень, например:
+ ТВГ Дг" + ТВ* + 2-Sf + 2 w М*
Частные производные в этом случае вычисляют в точке с координа-
тами Хо, Уо, Zq и поэтому являются постоянными.
При линеаризации нелинейных уравнений обычно ограничиваются
лишь членами первого порядка малости, пренебрегая остаточным
членом Кг. Тогда
F (х, у, z) » F (х0, у0, z0) + Ах + At/ + Лг.
Для исследования устойчивости процессов регулирования такого
приближения в большинстве случаев бывает достаточно. Однако
иногда линеаризованные уравнения используют для исследования
качества процесса регулирования, и в этом случае приращения
36
переменных могут быть не всегда малыми. Тогда для строгой оценки
допускаемой погрешности производится анализ остаточного члена Т?2.
Выражение приращения AF (х, у, г) функции F (х, у, г) опре-
деляется как разность между текущим значением этой функции
F (х, у, г) и ее значением F (х0, yQ, z0) в некоторой фиксированной
точке, заданной координатами х0, уй и z0, т. е.
AF (х, у, г) = F (х, у, z) — F (х0, уй, гр).
После подстановки в это выражение значения F (х, у, г), кото-
рое определяется по формуле Тейлора, получим приближенное,
с точностью до R, соотношение
bF(x, у, z)&^bx+~-Ьу-}--^Ьг. (2.1)
Последним удобно пользоваться при линеаризации нелинейных
дифференциальных уравнений.
В результате линеаризации мы получили уравнение в отклоне-
ниях (или в приращениях), выраженное в абсолютных единицах.
Каждый член уравнения имеет определенную размерность. Однако
при исследовании систем автоматического регулирования удобнее
иметь уравнения в относительных единицах с безразмерными коэф-
фициентами или с коэффициентами, имеющими размерность времени
в степени, равной порядку производной, при которой стоит данный
коэффициент. .
При приведении дифференциального уравнения в абсолютных
отклонениях к уравнению в относительных единицах с безразмер-
ными ^коэффициентами следует произвести_следующие элементарные
операции.
1. Все члены уравнения делят на некоторую постоянную вели-
чину, имеющую размерность членов этого уравнения. Такой величи*
ной может быть, например, номинальное значение, максимальное
значение, некоторое начальное значение данной переменной. В ре*
зультате этого каждый член уравнения станет безразмерным. х
2. Переходят к относительным единицам. Выбирают постоянное
значение для каждой координаты, каждого приращения. входящего
в полученное уравнение, и к нему относят его приращение.
3. Вводят обозначения относительных единиц и коэффициентов
уравнения.
В качестве примера рассмотрим составление уравнений объекта
системы регулирования угловой скорости вала электродвигателя.
Составим уравнения объекта регулирования.
Исходным уравнением объекта здесь будет
= = (2.2)
где J момент инерции движущихся частей, приведенный к валу
двигателя, он может быть постоянным, зависеть от времени или
интеграла от угловой скорости; w — угловая скорость вала; А1Д —
37
движущий момент вала; Мс — момент сопротивления на валу элек-
тродвигателя; t — время.
Следует прежде всего определять, от каких величин зависят и
какими величинами определяются движущий момент Л4Д, момент
сопротивления Ма и является ли постоянной величиной приведенный
момент инерции J.
Исходное уравнение (2.2) справедливо для любого типа электро-
двигателя, однако конкретный вид этих зависимостей определяется
его типом.
Для случая регулирования числа оборотов авиационного двига-
теля при помощи винта с изменяющимся шагом движущий момент
зависит от угловой скорости двигателя и величины наддува, которая
задается летчиком и не может быть заранее определена (является
неизвестной функцией .времени). Поэтому
Мл — Мл (<о, /).
Момент сопротивления зависит от угловой скорости двигателя <о,
угла установки лопасти винта <рл и ряда других факторов (плотности
воздуха, скорости полета и др.), изменение которых учесть трудно.
Выражение для момента сопротивления имеет вид
Мс = Ма(ы, Фл/0'
На основании теории двигателей можно записать аналитические за-
висимости полученных функций или представить их в виде графиков.
Приведенный к валу двигателя момент инерции вращающих частей
считается постоянным. Уравнение установившегося режима
2ИДО Л4СО. (2.3)
Малыми отклонениями от установившегося режима являются при-
ращения ДЛТд и ДМС. Тогда Мя « Мд0 + ДА4Я; ЛГС « Мс0 + ДЛ40.
В результате вычитания из исходного уравнения (2.2) уравнения
установившегося режима (2.3) (уравнения статики) получим урав-
нение в приращениях или вариациях:
7-^-=ж ДЛ4Я-ДМ0. (2.4)
Для линеаризации выражения (2.4) следует воспользоваться фор-
мулой Тейлора (2.1). Приращения ДМЯ и ДЛ40 определим с помощью
выражений:
- ДМя = -^-Д® + ДМц(0;
где AMj (t) и ДМс (0 составляющие приращений Мп иМс, изме-
няющиеся во времени по неизвестному или заданному закону. Угол
установки лопастей винта <рл изменяет при помощи исполнитель-
38
його механизма регулятора, координату ^которого обозначают Че-
рез т:
Афл == -г2- &т-
|л дт
Функция фл — f (tri) задана обычно графически и частную производ-
ную определяют как тангенс угла наклона касательной к кри-
вой фл = f (m) в точке, соответствующей установившемуся режиму.
Тогда
АМе = А(о + 4^°' ?- Ат -4- АМС (Q.
° да 1 д<рл дт 1 с' ’
Полученные выражения подставляют в уравнение (2.4) в прираще-
ниях
Жо = дМ^ д + дм (,) _ дМ±_ д _ Мк *₽л_ Д(0 _ дм
dt да 1 д'' да д<рл дт с' ’
(2-5)
После переноса в левую часть уравнения членов, содержащих А со,
получим линеаризованное уравнение двигателя в отклонениях (или
приращениях), выраженных в абсолютных единицах.
Для приведения дифференциального уравнения в абсолютных
отклонениях к уравнению в относительных единицах с безразмер-
ными коэффициентами выбирают номинальное значение момента 7ИН
и на него почленно делят уравнение (2.5):
' 4+ 1 Л__^дш =
/ИН dt 1 м3 \ до до /
_ . (О______1 дМс дфд л
Л1В Мя дфл дт ’
где
Ш (0 = АМд (t) — AAfc (О-
Каждый член уравнения стал безразмерным. Для каждой коорди-
наты каждого приращения, входящего в полученное уравнение, вы-
бирают некоторые постоянные значения, к которым относят его при-
ращения.
Для угловой скорости принимают ее номинальное значение сон,
для координаты серводвигателя — его максимальный ход тт. Каж-
дый член уравнения, в который входит та или иная переменная,
умножается и делится на соответствующую ей выбранную постоян-
ную величину.
После этого уравнение принимает следующий вид:
JaH da । <nH / дМс _ дМа \ Лев _
Л1н<вн dt "т- Мп \ да да ) ан
___ ДМ (/) тт дМс д<рл Дт
Мп Мв дфл дт тт
39
4» . , dw d (Aw) . д А Л/
Далее учитывая, что — = ^2-, —_ = и т.
нее уравнение можно переписать в виде
, АЛ4е , АТИд \
Мн _ Мн \ Aw _
& I Wh
<он /
d( —
___'н X «Он
Л-1Н dt
./w.
, Aw
д---
Wh
d-™L
~AM(Q . Мн
Мй
dffji Лт
Зфп $ Лт тт '
Iftm
/Мд
Вводя обозначения!
Aw Ant
— = ф; -— = и;
«Ой - т тт г
мй -ХД’
«7 Wjj /7^
мГ = у<1”
уравнение (2.6) принимает вид
Т1 I /
4~di~ 'r \ дф ~
АЛ4й — к
^- = М);
Ми
д*с дфд _ д
дфл ~
Д.,
Ибслёд-
(2.6)
или окончательно
7’ф-^- + ^сФ = /м(0-М- (2.7)
Все величины, входящие в уравнение (2.7), за исключением вре-
мени t и постоянной Тф, приведены к безразмерному виду. Получен-
ные уравнения пригодны и для других двигателей, так как их дина4
мика во многом аналогична. Более распространена следующая форма
уравнения объекта регулирования:
где х. — (р; хг = р; Т — TJkc — постоянная времени объекта регу-
1 k
лирования; f (/) = /м (/); k = — передаточный коэффи-
циент объекта регулирования.
В заключение приводится несколько типовых линеаризованных
уравнений различных объектов регулирования, записанных в опера-
торной форме:
(Тр + 1) х2 = /(/) — kxf,
Трхг = f (0 — хх;
(Т1р2 + Лр)х2 = /(0-х1;
(T2y + T1p+l)x2 = f(/)-Axi.
40
Рис. 2.4. Определение постоянной времени Т;
хк — установившееся значение процесса
„ d
В этих уравнениях р = ---сим-
вол дифференцирования. Методика состав-
ления уравнений элементов регулятора
аналогична методике составления уравне-
ний объектов регулирования. В уравне-
ниях Т представляет собой постоянную времени объекта. В случае
экспоненциального процесса изменения регулируемой величины
Т — постоянная времени экспоненты, численно равна длине отрезка
асимптоты экспоненты, заключенного между ординатой, проходя-
щей через любую точку этой кривой, и точкой пересечения касатель*
ной (рис. 2.4), проведенной в той же точке экспоненты.
Другой способ определения постоянной времени состоит в том,
что откладывается ордината, равная 0,632лй. Абсцисса, заключенная
между осью координат и точкой пересечения прямой, параллельной
оси t с кривой процесса, численно равна постоянной времени Т. Фи-
зически постоянная времени экспоненциального процесса измене-
ния величины х представляет собой то время, через которое эта ве-
личина достигла бы своего конечного значения, являющегося ее пре-
делом в бесконечности, если бы она изменялась с постоянной ско-
ростью, равной скорости ее изменения в начальный момент, т. е.
если бы кривая изменения х, начиная с этого момента, совпадала бы
с касательной к экспоненте, проведенной в начальной точке.
2.3. СВОБОДНЫЕ И ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ САР.
ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ
Система линеаризованных дифференциальных уравнений,
описывающих физические процессы элементов САР, может быть
сведена к одному дифференциальному уравнению путем исключения
промежуточных координат, кроме одной;
dnx . dn~lx , , dx . , dmf .
а'г IFan-1 ~dFr + ' ’ ’ + a' ~dF + a<>x = b™ +
+ bm-l ddtm-{ + + bl(2-8)
где f — входное воздействие; x — изменение выходной величины;
at, bi — постоянные величины, которые определяются физическими
свойствами системы.
Уравнение (2.8) описывает физические процессы' в замкнутой
системе.
Решение уравнения состоит из двух частей: из общего решения
или решения уравнения без правой части вида
Hnr dP ~ 1 х dx
ац-^г+an-i-^r+...+a^+^x^O (2.9)
41
и из частотного решения уравнения (2.8). Если частотное решение
подставить в левую часть уравнения, то оно дает правую, т. е. обра-
щает уравнение в тождество.
Решение уравнения (2.9) находим в виде
х(0 = е« (2.10)
Решение однородного уравнения (2.9) определяет свободные ко-
лебания системы, т. е. колебания, которые совершает система, вы-
веденная из состояния равновесия некоторым воздействием после
того, как это воздействие исчезло. Подставляя выражения (2.10)
в (2.9), получим
(йп^П йп—Д” ~ 1 Йо) = 0.
Выражение (2.10) является решением уравнения (2.9) при условии,
что Л является корнем уравнения:
ctnkn an-iX'*-1 -f- ... -|- fliA, dg = 0.
Так как последнее уравнение имеет п корней Х2, .., Ап, все корни
которого различны, то общее решение уравнения (2.9) может быть
представлено в виде
х (0 = С^{ 4- + ... + Сп^п\
гле'Сг, С2, ..., Сп — постоянные, зависящие от начальных условий.
Решение уравнения (2.9) удовлетворяет' условию lim х (f) = 0,
/->оо
г. е. свободные колебания системы с течением времени затухают
только в том случае, если все корни А, характеристического уравне-
ния имеют’отрицательные вещественные части.
Вычисление вынужденных колебаний. Пусть воздействие / (t)
представляет собой гармоническую функцию времени, т. е. может
быть представлено в виде линейных комбинаций функций sin at и
cos at или в виде f (t) = /0 cos (<W + <р), где со — угловая частота,
/о"— амплитуда, <р — фаза. Или, если начальная фаза <р0 = 0, то
f (0 = /о cos
Гармоническое воздействие может рассматриваться как сумма двух
экспоненциальных воздействий, т. е.
/ (t) = f0 cos at == -А е/ш/ + A-
где / = V — Г.
Рассмотрение экспоненциальных воздействий удобно с математи-
ческой точки зрения, так как производная и интеграл от экспонен-
циальной функции представляют собой экспоненциальную функцию.
Данная система предполагается линейной. Поэтому к ней приме-
ним принцип суперпозиции и ищется эффект, создаваемый каждым
из'экспоненциальных воздействий в отдельности.
42
При f (t) ~ e1®* частное рейаеййе уравнения (2.8) ищется
в виде х1в (0 = у У (/и) ti<ot
Подстановка выражений f (t) и х1в (/) в уравнение (2.8) дает
[ап (ja)n 4- a„_i (/со)'*-1 + ... + щ (/со) + а0] Y (/со) =
— [bm (j<>))rt 4" bm—i (/CO)"*-1 4~ ... -j~ bi (ja>) Ц- &o] c^®*
и, следовательно,
Y{кй = bm+ bm-{ №)т1 + -“+bi (M + bo (211)
(I > a^y + a^^^ + .-.+a^ + a, *
Последнее выражение может быть представлено через амплитудную
А (со) и фазовую <р (со) частотные характеристики системы
Y (/со) = А (со) е/ф<®).
Если подставить выражение У (/со) в формулу для xiB (/), то
Xie (0 = А (со) е/’[<0/+<к®)1.
Если в уравнении (2.8) f (t) = ~ , то вынужденные колеба-
ния х28 (0 определяются выражением
или
х2в (0 = А (со) е-Я®'-<₽(“»].
Если f (f) является гармонической функцией времени вида / (/) ~
= /о cos со?, то
хв (t) = х1в (0 4- х2в (() = А- л (со) + е-/®^е-/ф<®>] =
== f0A (со) cos [со/ 4~ <Р («)]• (2.12)
/
Последнее выражение показывает, что вынужденные колебания,
вызываемые в линейной динамической системе гармоническим воз-
действием, представляют собой также гармоническую функцию
времени, имеющую ту же угловую частоту со, что и воздействие, но
отличающуюся от последнего по амплитуде и по фазе. При этом отно-
сительная амплитуда и фаза вынужденных колёбаний определяются
амплитудной А (со) и фазовой <р (со) частотными характеристиками.
Если в выражении для функции Y (/со) (2.11) в числителе и зна-
менателе отделить вещественную часть от мнимой, .то оно может быть
записано
У U®) = ~’ (2.13)
и ' С (со) + ]d (со) v 7
43
w
а (со) ~Ьв~ 62со- Д- 64<о4 — ...;
b (а») = Ьхсо — &3со3 Ь6а>5 — ...;
с (со) = а0 — а2со2 -|- а4со4 — . ..;
d (со) = ах© — а3со3 + а5(о5 — ...
Выражение (2.13) может быть представлено в виде
tzа(ш) с (®) + Ь (w) d. (со) 1 . b (со) с (<о) — а (со) d (со)
У Ч®) — С2 di (m) il сг (®) + d2 (<о)
ИЛИ
Y (/со) = Р (со) + /Q (со),
где Р (<о), Q (со) — соответственно вещественная и мнимая частотные
характеристики системы;
Р (со) — (ас + b d)/(c2 + d2); Q (со) ~ (be — ad)/(с2 + d2).
Амплитудная частотная характеристика
А (со) = V (а2 + fe2)/(c2 + d2).
Фазовая частотная характеристика
<р (со) = arctg l(bc — ad)/(ac + bd) ].
Характеристики A (co) и ср (co) связаны с характеристиками P (co)
и Q (co) следующими соотношениями:
P (co) = A (co) cos <p (co);
Q (co) = A (co) sin <p (co);
A (co) = /P2(co) + Q2 (co);
ф (co) = arctg
На основании выражения (2.12) можно экспериментально опре-
делить амплитудную и фазовую частотные характеристики системы.
Для этого к системе Прикладывается
гармоническое воздействие хвх (() =
= cos со/, (А — 1), имеющее угловую
частоту со. В результате в системе воз-
никает переходный процесс и вы-
нужденные колебания с частотой со.
Через некоторое время произойдет
Рис. 2.5. Экспериментальное определение
частотных характеристик системы или
звена:'
а — динамическая система или звено; б
кривые на входе и выходе
44
Рис. 2.6. Схема включения Из-
мерительной аппаратуры для
определения частотных харак-
теристик
затухание переходного процесса, если система устойчива, а оста-
нутся лишь вынужденные колебания. Они будут иметь частоту со,
равную частоте воздействия, но отличаться от входного воздействия
по амплитуде и фазе (рис. 2.5). Амплитуда выходного сигнала и угол
сдвига фазы выходного сигнала хвых = А (со) cos [со£ + <р (cd) 1 йо
отношению к входному зависят от угловой частоты со.
На рис. 2.6 приведена схема включения измерительной аппара-
туры для определения частотных характеристик, которая позволяет
генерировать синусоидальные входные колебания различной частоты,
измерять амплитуду колебаний на входе и выходе объекта и сдвиг
фазы между этими колебаниями. Для экспериментального опреде-
ления частотных характеристик САР, представляющих собой обычно
низкочастотные системы, разработана специальная низкочастотная
аппаратура. В ее состав входят следующие приборы (см. рис. 2.6):
низкочастотный генератор периодических колебаний (И Г ПК) для ге-
нерирования входных колебаний синусоидальной, прямоугольной,
треугольной, трапецеидальной форм и одиночных импульсов пря-
моугольной, треугольной и трапецеидальных форм; низкочастотный
фазометр-частотомер (НФ) для определения частоты и фазы колеба-
ний, которые измеряются с помощью счета импульсов стандартной
частоты (100 кГц) за время одного периода при измерении частоты
и за время между двумя смежными прохождениями через нуль
кривых входного и выходного напряжений при измерении фазы; двой-
ной пиковый вольтметр (ДПВ) для измерения амплитуды на входе,
и выходе системы; П1 и П2 — преобразователи для преобразования ’
сигнала.
Приборы рассчитаны на напряжение ±100 В и диапазон частот
от 0,001 до 100 Гц.
Синусоидальные воздействия различных частот можно подавать
не на все объекты. Так, иногда удобно подавать на вход колебания
прямоугольной формы (включение — выключение), треугольной
формы (равномерное открытие и закрытие регулирующего органа)
и т. п.
Кривые отношения амплитуды выходной переменной хвь1х к ам-
плитуде воздействия хБХ и сдвига фазы между ними в зависимости
от частоты представляют собой соответственно амплитудную и фа-
зовую частотные характеристики системы.
2.4. ПЕРЕДАТОЧНАЯ ФУНКЦИЯ НЕПРЕРЫВНОЙ
ЛИНЕЙНОЙ СТАЦИОНАРНОЙ САР
В теории автоматического регулирования широкое при-
менение получил способ математического описания, основанный на
использовании передаточной функции. Как уже отмечалось, физи-
45
teckiie й^оцёёск в ёйс^еме (или элёмёИё ёйётемы) айтомй1ийёбкоМ
регулирования в общем случае описываются уравнением (2.8).
Пусть воздействие f (t) удовлетворяет условиям:
f (0 = 0; t < 0;
оо
j l/(01e~ci< °°,
о
где с — абсцисса абсолютной сходимости. Тогда преобразование
Лапласа для функции f (/) ......
<£(*)=J )
Если все члены уравнения (2.8) при нулевых начальных условиях
умножить на erst и проинтегрировать от 0 до оо, то получим
(ansn + finis'1-1 + ... + aAs + а0)X(s) =
= (bms'" + bm-^-'+...+b1S + b0)F(s), (2.14)
где
оо
X(s)= J x(t)e~stdt.
0
Следовательно, X (s) = Y (s) F (s), где
r(s) = 4^ + + (2-15)
? (s) ans 4- an_xs + • • • + ais + ao
является передаточной функцией системы.
Согласно выражению (2.15) передаточной функцией линейной
стационарной динамической системы называют отношение преоб-
разования Лапласа X (s) величины х (/) на выходе системы к преобра-
зованию Лапласа F (s) воздействия f (t) на ее входе при нулевых на-
мяльных условиях,.
Передаточная функция полностью характеризует динамические
свойства системы. Зная передаточную функцию системы и вид воз-
действия, можно определить переходный процесс на выходе системы.
Передаточные функции устойчивых динамических систем обла-
дают следующими основными свойствами:
передаточная функция Y (s) представляет собой дробно-рацио-
нальную функцию вида (2.15), причем в реальной системе порядок т
числителя не превышает порядок п знаменателя;
все коэффициенты b0, Ьь ..., bm_i, bm; а0, аъ ..., ап_ъ ап переда-
точной функции вещественны. Это следует из того, что они пред-
ставляют собой функции параметров системы, которые могут быть
только вещественными;
невещественные нули и полюсы передаточной функции могут
быть лишь комплексно-сопряженными;
'46
Рис. 2.7. Схема САР:
Wo (s), Wp <s) — соответственно
передаточные функции объекта ре-
гулирования и регулятора
все полюсы передаточной функции Y (s) расположены в левей
полуплоскости комплексной плоскости, что является условием
устойчивости системы.
Передаточные функции САР. Общие дифференциальные уравне-
ния линейной САР, приведенной на рис. 2.7, можно записать в виде
Z) (р) х (/) = М (р) f (t) + С (р) г (f) — объекта регулирования; (2.16)
В (р) г (О = А (р) е (/) — регулятора; (2.17)
е (/) = g (/) — х (/) — ошибки. (2.18)
Применим к уравнениям (2,16)—(2.18) преобразование Лапласа.
Обозначим:
оо оо
X(s)~ j x(/)e“sQ#; E(s) = j
о о
оо
G (s) = J g (t)
о
oo
7? (s) = j r (t) e~sidt,
о
OO
F(s)= J /(/)e-s^
о
и с учетом начальных условий, уравнения (2.16) — (2.18) можно
представить в виде
D (s) X (s) = М (s) F (s) + С (s) R (s) + 7И1Я (s);
В (s) R (s) = N (s) Е (s) + М2Н (s);
E(s) = G(s)-X(s).
(2.19)
Если из уравнений (2.19) исключить функции R (s) и Е (s) и
разрешить их относительно X (s), то
N (s) С (s) G (s) + В (s) М (s) F (s) ф Л7Н (s)
w D (s) В (s) -f- C (s) (s)
(2.20)
Если из уравнений (2.19) исключить функции R (s) и X (s) и раз-
решить их относительно Е (s), то
F М - D 3 G(.s)~B (s) М (s) F (s) - AfH (s) 9 n
D (s) В (s) + C (s) N (s) ’
47
Делением всех членов уравнений (2.20) и (2.21) на D (s) В (s) опре-
деляют
« = <2-22>
и
Е = 1 4- г (s) ° (s) 1 4- w (s) р “ 1 4-H®'\s) ’ (2-23)
где
(4) = С ® N V (s) — М ’ V (s) — Л>н
W [s> D(s)B(s) ’ VW~ D(S) ’ D(S)B(S) •
Первое слагаемое в правой части выражений (2.22) и (2.23) ха-
рактеризует эффект управляющего воздействия g (/), второе слагае-
мое — эффект возмущающего воздействия f (0, а третье слагаемое —
эффект начальных условий. В случае нулевых начальных условий
формулы (2.22) и (2.23) могут быть переписаны в следующем виде:
X (s) = Ф (s) G (s) + Г (s) F (s); (2.24)
£ (s) = Фе (s) G (s) - Y (s) F (s); (2.25)
Фв (s) — 1 Ф (s) — J r •
Если возмущающее воздействие f (0 = 0, то X (s) = Ф (s) G (s)
и Ф (s) = „ ' , т. e. функция Ф (s) является передаточной функ-
цией замкнутой САР по отношению к управляющему воздействию
g (/). Если же управляющее воздействие g (0 = 0, то X (s) =
= Y (s) F (s) и Y (s) = -44% > т. e. функция Y (s) представляет
Г (S)
собой передаточную функцию замкнутой САР по отношению к воз-
мущающему воздействию f (0.
Функцию ФЕ (s) = Е (p)/G (s) называют передаточной функцией
ошибки.
Если САР (см. рис. 2.7) разомкнуть в точке (чувствительный эле-
мент, измеряющий разность между входом и выходом, отключен
от регулируемой переменной), то уравнение ошибки (2.18) перестанет
существовать, а уравнение регулятора будет иметь вид
В (р) г (0 = М (р) g (0
или
В (s) R (s) = N (s) G (s). (2.26)
Если уравнение (2.26) разрешить относительно 7? (s) и результат
подставить в уравнение для объекта (2.16), то для разомкнутой си-
стемы
X (s) = —F (s) + -N C -- G (s)
D(s) г B(s)D(.s) I/’
В том случае, когда возмущающее воздействие / (/) = О,
Хр (s) N (s) С (s)
G (s) ~ Я(«)О (8)
= F(s),
(2.27)
т. е. функция W7 (s) представляет собой передаточную функцию
разомкнутой САР по отношению к управляющему воздействию
g(t). Когда управляющее воздействие g (/) =0,
Хр (s) М (s)
7® D(s)
= V(s),
(2.28)
т. е. функция V (s) представляет собой передаточную функцию
разомкнутой САР по отношению к возмущающему воздействию
f (0-
2.5. ТИПОВЫЕ ЗВЕНЬЯ САР
При анализе динамических свойств САР вводят в рас-
смотрение понятие типовых звеньев, как некоторых простейших
частей динамического элемента.
Разнообразные элементы систем регулирования, имеющие раз-
личное конструктивное выполнение и функциональное назначение,
описываются одинаковыми дифференциальными уравнениями и,
следовательно, имеют одинаковые передаточные функции. Коэф-
фициенты, входящие в выражения для передаточных функций,
непосредственно связаны с конструктивными параметрами элементов
систем регулирования.
Так как звенья имеют различные передаточные функции, то
они различаются по виду переходного процесса, который возникает
при изменении входной величины. Для сравнения звеньев принято
рассматривать переходный процесс при скачкообразном изменении
входной величины на единицу и при нулевых начальных условиях
(звено в покое), т. е. при единичном ступенчатом воздействии. Функ-
цию, определяющую изменение величины на выходе звена при
этих условиях, называют переходной функцией звена. Она может
быть получена экспериментально путем записи изменения выходной
величины при скачкообразном изменении входной. Эту функцию
иногда называют кривой разгона. Частотные характеристики звеньев
могут быть получены из дифференциальных уравнений (передаточ»
ных функций) звена, а также определены экспериментально.
Можно указать семь типовых звеньев: апериодическое, колеба-
тельное, интегрирующее, усилительное, дифференцирующее 1-го по-
рядка, дифференцирующее 2-го порядка и запаздывающее.
^Апериодическое (инерционное) звено имеет передаточную функ-
цию вида
W (s) = k!(Ts + 1) (2.29)
где k — передаточЦЕПГкоэффициент; Т — постоянная времени.
Примеры устройств, которые можно рассматривать как апериоди-
ческие звецья, приведены на рис, 2.8. На рис. 2.8, а входной вели-
Рис. 2.8. Примеры апериодических звеньев
чиной является напряжение 1/г на входе Т^С-контура, выходной —
напряжение U, на его выходе; на рис. 2.8, б входной величиной
является давление воздуха в магистрали Рг, выходной — давление
воздуха в резервуаре Р2; на рис. 2.9, в входной величиной является
температура жидкости ть выходной — температура тела, опущен-
ного в жидкость т2.
Дифференциальное уравнение апериодического звена может быть
записано так
+ = (2.30)
где xL — величина на входе; х2 — величина на выходе.
Переходная функция h (t) апериодического звена для случая,
когда хг представляет собой единичную ступенчатую 'функцию
Xi (t) — [11, определяется выражением
h(f) = k(l -е-ит).
Эта функция изображена на рис. 2.9, а в виде кривой 1.
Неустойчивое апериодическое звено имеет передаточную функцию
W (s) = U(Ts — 1) (2.31)
и переходную функцию
h(t) = k^lT- 1).
Эта функция изображена на рис. 2.9, а в виде кривой 2.
Частотные характеристики апериодического звена могут быть
получены из выражения для передаточной функции (2.30) путем
формальной замены аргумента s аргументом /<о:
W (/“) = -г-, kT ч = = A- arct« Гш. (2.32)
и ' Tj® +1 Уj { v
x(t)
(Рис. 2.9- Апериодическое звено:
а «^переходные функции звена:
1 — устойчивого; 2 — неустойчи-
вого; б — входное ступенчато^
воздействие
50
Рис. 2.10, АФХ апериодического Зйейй
Модуль этой функции представляет
собой амплитудно-частотную характе-
ристику апериодического звена
Я(<в) = ^/ИТ2<в2+ 1.
Аргумент этой функции является фазово-частотной характеристикой
апериодического звена----- -----------л
1^& (со) = —arctg Tcoj
Кривую (рис. 2.10), описываемую концом вектора W (/со) на ком-
плексной плоскости [годограф вектора W (/«)] при изменении
частоты от —оо до +<ю, называют амплитудно-фазовой частотной
характеристикой АФХ. АФХ апериодического звена при поло-
жительных значениях частоты (со > 0) представляет собой полу-
окружность, диаметр которой равен передаточному коэффициенту k.
При частотах и, стремящихся к бесконечности, выходная величина
отстает от входной на 90°.
"Колебательное звено имеет передаточную функцию вида
) (ft ^(5)=д2-г ; *---------, (2-33)
J 4 ф2 + 2§KTKs +1 4 ’
где Тк — постоянная времени; £к — коэффициент демпфирования;
k — передаточный коэффициент.
Неустойчивые колебательные звенья имеют передаточные функции
вида
W (s) = -£----
^-2^4-1
(2.34)
или
W (s) = .
^2 + 2gZKs-l
(2.35)
Примеры колебательных звеньев приведены на рис. 2.11, а, б.
Динамические свойства колебательного звена описываются диф-
ференциальным уравнением
= kxr
(2.36)
Рис. 2.11. Примеры колебатель-
ных звеньев;
а — электрическая система: L —ка-
тушка индуктивности; R — ре-
зистор; С — конденсатор; б — меха-
ническая система: т — масса;
Ку — коэффициент упругости пру-
жины; г — коэффициент демпфиро-
вания
51
. Рис. 2.12, Графики переходных функций колебательного звена:
переходные функции: 1 — устойчивое звеио; 2 — неустойчивое звено; б — входное
ступенчатое воздействие
Дифференциальные уравнения неустойчивых колебательных звеньев
имеют вид
П 2£ктк + х2 = kxi, (2.37)
г 2 d2x2
K'~dt2‘
E2gKTK-^--x2 = fevb
(2.38)
где xlt х2 — соответственно величины на входе и выходе.
Переходные функции устойчивого и неустойчивого колебатель-
ных звеньев определяются соответственно выражениями:
h (t) = k 1 -
_________ ________
^sl0(E^s(.+ arctgEL^'
У 1 — 1к ' /к ' • SK -
(2.39)
h(t) = k . 1 : e *Sin ( t + arctg )• (2.40)
v И 1 - Ik \ Tk Ik /
Графики переходной функции в случае устойчивого и неустой-
чивого колебательного звена изображены на рис. 2.12. Следует
отметить, что колебания возникают лишь в том случае, если корни
характеристического уравнения являются комплексными величи-
нами, т. е. — 1 <0.
Для устойчивого колебательного звена 0 <7 £к <_ 1. Если >
> 1, то звено может быть представлено в виде двух апериодических
звеньев с постоянными времени 7\ и ТУ, если = 1, то апериодиче-
ские звенья имеют одинаковую постоянную времени, т. е. 7\ = Т2.
Если коэффициент = 0, то передаточная функция звена
имеет вид
«'«“JCTTT- (2.41)
Систему, имеющую передаточную функцию вида (2.41), называют
консервативной. Такая система не рассеивает энергии и в ней проте-
кают незатухающие колебания.
52
Когда коэффициент |К <6, то выходные колебания с Тейенйбм
времени возрастают. Такое звецо является неустойчивым колеба-
тельным звеном.
Частотные характеристики колебательного звена цмеют вид
2^кгк“
Г (}w) = ....* е-/ arCt? (2.42)
И(1-Т2Х)2 +4В2к7>2
Модуль этой функции является амплитудной частотной характе-
ристикой колебательного звена
Н (со) = - ...-------- .
(/(l-rXH + ^Ttco2
(2.43)
Аргумент представляет собой фазово-частотную характеристику
колебательного звена ..... _ .
0 (со) = - arctg ^^2 ? , (2.44)
АФХ звена показана на рис. 2.13. Она начинается на действи-
тельной оси в точке k при со = 0. При частоте со -> оо кривая под-
ходит к началу координат и касается действительной оси. Выходная
величина при частоте, близкой к бесконечности, отстает от входной
на 180°.
Интегрирующее звено имеет передаточную функцию вида
W(s) =kls. (2.45)
Скорость изменения выходной величины такого звена пропорцио-
нальна входной величине.
Примеры интегрирующих звеньев приведены ниже. На рис. 2.14, а
изображена схема электродвигателя постоянного тока, у которой
входной величиной является управляющее' напряжение хг = U7,
а выходной — угол поворота якоря х2 = в.
На рис. 2.14, б в резервуар поступает поток жидкости = V’,
выходной величиной является высота уровня х2 = h.
Уравнение интегрирующего звена в этом случае имеет вид
dxjdt = kxlt (2.46)
где k — передаточный коэффициент, представляющий отношение
скорости изменения выходной величины
^Переходная функция интегрирую-
щего звена определяется выражением
h (0 = kt. (2.47)
График переходной функции изображен
па рис. 2.15, а.
Рис. 2.13. АФХ колебательного звена
к входной величине.
53
Рис. 2.14. Примеры интегрирующих звеньев
Частотные характеристики интегрирующего звена
Г(/и) = -^-е-/'т. <2-48)
При изменении частоты и от 0 до +<ю (рис. 2.16) конец вектора
W (ja) движется по отрицательной части мнимой оси от —оо до 0.
Интегрирующее звено создает отставание выходной величины от
входной на 90° при всех частотах. Амплитуда выходной величины
уменьшается с возрастанием частоты.
Усилительное звено воспроизводит без искажения и запаздыва-
'ния, но с изменением масштаба (с увеличением или уменьшением)
входную величину. Передаточная функция усилительного звена
W(s)=k. (2.49У
Для усилительных звеньев зависимость между выходной и вход®
ной величинами описывается соотношением х2 = kxt. При подачЙ
на вход усилительного звена ступенчатого воздействия (/) на егс|
выходе получается мгновенное изменение сигнала х2 (/) (рис. 2.17)«
АФХ определяется выражением
Г (/и) = 6
и изображается точкой на действительной оси комплексной пл«Л
скости.
Дифференцирующее звено 1-го порядка имеет передаточную*
функцию вида
W (s) = k (ts + 1), (2.50)
-где k — передаточный коэффициент звена; т — постоянная времени.
Ж,
Рнс. 2.15.\ Графики переходной функ- Рнс. 2.16. АФХ интегрнрующе-
цию-интегрирующего звена: го звена
а — переходная функция; 6 — входное
ступенчатое воздействие
54
х'"*г Хг(1)
X,(t)
о^—----—------*-
t
Рие, -2.17. Графики пере-
хедйОй функции и вход-
ного ступенчатого воздей-
ствия усилительного звена
Рис. 2.18. Примеры дифференцирующих звеньев-.
1-го порядка
Выходная величина этого звена определяется не только текущим?
значением, но и скоростью изменения входной величины (производ-
ной от входной величины).
Примеры устройств, которые можно рассматривать как дифферен-
цирующие звенья 1-го порядка, приведены выше. На рис. 2.18, а
изображена схема тахогенератора постоянного тока. Входной вели-
чиной является угловая скорость вала тахогенератора п = dQldt,
а выходной — напряжение х2 = UTr, пропорциональное этой ско-
рости. На рис. 2.18, б изображена схема дифференцирующего RC-
контура.
Уравнение этого звена
Ха==*(т^ + Х1)- (2-51)
Переходная функция дифференцирующего звена 1-го порядка опре-
деляется выражением
h (t) = k {тб (t) + [1]}, (2.52)
где 6 (t) — дельта-функция.
График этой переходной функции и приведен на рис. 2.19.
При скачкообразном изменении входной величины на выходе
дифференцирующего звена получим импульс с бесконечно большой
амплитудой, соответствующий бесконечно большой скорости изме-
нения входной величины в момент скачка. После этого выходная
величина принимает постоянное установившееся значение.
Частотные характеристики дифференцирующего звена 1-го по-
рядка имеют следующий вид:
W (/со) = k ]/тасоа + 1 ez arctg тш. (2.53)
Модуль этой функции является амплитудно-частотной характе-
ристикой
Я(со) = £/тасоа+ 1. (2.54)
Аргумент представляет фазово-частотную характеристику
0 (со) = arctg та. (£.55)
АФХ дифференцирующего звена 1-го порядка изображена на
рис. 2.20. АФХ — прямая, параллельная мнимой оси. Она начи-
нается на действительной реи ₽ тонне k прн частоте а = О,
£5
h(i)
к
I
I
h(t)
<7 ----------------------------------------------*»
. . . t
Рис. 2.19. График переходной функции
‘'дифференцирующего звена 1-го порядка
Рис. 2.20. АФХ дифференцирующего
звена 1-го порядка
Дифференцирующее звено создает опережение выходной вели-
чины по фазе. При частоте со -> оо сдвиг по фазе стремится к 90°.
Наличие дифференцирующего звена 1-го порядка в основном кон-
туре системы регулирования означает введение производной в закон
регулирования и применяется для улучшения динамических свойств
системы.
Дифференцирующее звено 2-го порядка имеет передаточную функ-
цию вида
W (s) = k (ф2 + 2£dTds + 1 )• (2-56)
Предполагается, что выражение (2.56) нельзя разложить на простые
сомножители, т. е. нельзя представить в виде двух двучленов первой
степени. Дифференциальное уравнение такого звена имеет вид
*2 - k (т> + 2£dTd ^- + Хх) . (2.57)
Здесь выходная величина определяется не только входной величи-
ной, но также первой и второй производными от нее. Звено харак-
теризуется тремя параметрами: передаточным коэффициентом k.
постоянной времени rd и параметром t,d. Переходная функция диф-
ференцирующего звена 2-го порядка определяется выражением
/г (0 + (/) + [!]}• (2-58)
График переходной функции изображен на рис. 2.21. При скачко-
образном изменении входной величины на выходе получаются им-
пульсы бесконечно большой амплитуды, соответствующие беско-
нечно большой скорости изменения входной величины и ее производ-
ной в момент скачка. После этого выходная величина принимает
постоянное значение.
Частотные характеристики идеального дифференцирующего звена|
2-го порядка описываются формулой
____________________ /arctg--j-j-
= - т^и2)2 + (2£dTd<o)2 e . (2.59)
Модуль этой функции является амплитудно-частотной характери-
стикой дифференцирующего звена 2-го порядка
И (а) = k /(1 - т|со2)2 -f (2^ф)2.. (2.60)
ApryMerif йреДстайляёТ собой фазово-чайотнуЮ характеристику
звена
в («>) = arctg (2.61)
Афх звена представляет собой параболу, которая начинается из
точки k (рис. 2.22).
Дифференцирующее звено 2-го порядка при частотах, стремя-
Щихся к бесконечности, вйосит опережение по фазе, стремящееся
к 180°. Наличие дифференцирующего звеПа 2-го порядка в основном
йонТуре САР означает введение первой и второй производных в за-
кон регулирования и применяется для улучшения динамических
свойств системы.
Запаздывающее звено имеет передаточную функцию
U7(s) = e-^S (2.62)
и частотную характеристику
Г (/Ю) = е~^'и, (2.63)
где т0 — постоянное запаздывание.
Примеры систем с запаздыванием приведены ниже. На рис. 2.23, а
изображена схема автоматического регулирования концентрации
смеси А и В. Датчик Д измеряет состав смеси и по прошествии вре-
мени т0 = UV в зависимости от состава смеси регулирующее устрой-
ство Р изменяет положение заслонки, открывая или закрывая ее.
Здесь I — расстояние измерительного элемента (датчика Д) от
заслонки; V — скорость движения жидкости.
На рис. 2.23, б изображена схема САР толщины проката. Регу-
лирующее воздействие поступает на валки с запаздыванием т0 =
= 1/V, где I — расстояние датчика Д от валков; V — скорость про-
ката.
Уравнение запаздывающего звена
Хг = (^ — т0). (2.64)
Входной сигнал воспроизводится на выходе запаздывающего
звена без искажения, но с запаздыванием, равным т0 (рис. 2.24).
J
hit)
Рис. 2.21> Переходная функция диф-
ференцирующего звена 2-го порядка
Рис. 2.22. АФХ дифференцирующего
звена 2-го порядка
57
Амплитудно-частотная характеристика запаздывающего звена
Н (со) =1, фазово-частотная характеристика 0 (со) = — т0со.
АФХ представляет собой окружность единичного радиуса с цен-
тром в начале координат (рис. 2.25). При увеличении частоты век-
тор W (/со) вращается по часовой стрелке.
Большинство звеньев САР обладает направленным (детектиру-
ющим) действием. Поэтому передаточные функции последователь-
ного соединения таких элементов могут быть получены как резуль-
таты перемножения каждого из этих звеньев.
В общем виде выражение для передаточной функции можно за-
писать ' в следующем виде:
х Ц Г]
П kt п (t^S -р 1) П ^>dtxdis + О
W (s) = -1 ~----------------------e-T»s, (2.65)
sv П (7\s+l) П + О
С= 1 1=1
где П — знак произведения.
Выражение состоит из произведения простых сомножителей
1-го порядка. Звенья, имеющие передаточные функции, соответ-
ствующие трем типам сомножителей, входящих в знаменатель,
называют интегрирующими, апериодическими (инерционными) и ко-
лебательными. Если все члены какого-либо сомножителя положи-
тельны, то звено устойчивое; если хотя бы один из членов отрица-
телен, то звено неустойчивое. Звенья, имеющие передаточные функ-
Рис. 2.24,Графики входного х± и вы-
'-ходпогсГх2 сигналов запаздывающего
звена
Рис. 2.25. АФХ запаздывающего звена
58
ции и входящие в числитель, называют усилительными, дифферен-
цирующими 1-го порядка и дифференцирующими 2-го порядка. Звено,
имеющее передаточную функцию e_T»s, называют запаздывающим.
2.6. ЛОГАРИФМИЧЕСКИЕ ЧАСТОТНЫЕ
ХАРАКТЕРИСТИКИ
Исследование САР значительно упрощается, если поль-
зоваться не обычными амплитудно-фазовыми частотными характе-
ристиками, а логарифмическими частотными характеристиками.
АФК определяется выражением
W (ja) = Н (со) (2.66)
где Я (со) — амплитудная частотная характеристика; 0 (со) — фа-
зовая частотная характеристика.
Прологарифмировав это выражение, получим
In W (/со) = In Н (со) + /0 (со). (2.67)
Кривые, соответствующие функциям In Н (со) и 0 (со), построенные
в логарифмическом масштабе частот In со, называют натураль-
ными логарифмическими амплитудной и фазовой частотными ха-
рактеристиками.
На практике обычно пользуются логарифмическими частотными
характеристиками, основанными на десятичных, а не натуральных
логарифмах.
Логарифмической амплитудно-частотной характеристикой
(ЛА^Х) разомкнутой системы называют кривую, соответствующую
20 десятичным логарифмам модуля передаточной функции W (/со)
разомкнутой системы, построенной в логарифмическом масштабе
частот. Эту характеристику обозначают через L (со) или Lm | W (jal) |:
L (со) ~ 20 1g | W (ja) | - Lm\W (/co) |.
Логарифмической фазово-частотной характеристикой (ЛФК)
разомкнутой системы называют фазово-частотную характеристику
0 (со), построенную в логарифмическом масштабе частот. Лога-
рифм модуля передаточной функции W (/со) отсчитывают в деци-
белах. Децибел заимствован из теории связи, где он является еди-
ницей измерения для усиления или затухания. Если усиление или
затухание определяется числом А, то это соответствует 20 1g А де-
цибелам. В теории связи децибел является безразмерной величиной.
В теории автоматического регулирования децибел выражает 20 де-
сятичных логарифмов отношений амплитуды выходной величины к ам-
плитуде воздействия на его входе. Эти величины могут иметь разные
размерности.
При двукратном изменении частоты считается, что частота изме-
нилась на октаву, а при 10-кратном изменении — на декаду. Число
октав В интервале частот (со2 — ац) определяется соотношением
1g <Ог/<О1 д до
1g? ’
89
число декад, соответствующее тому же интервалу частот, равно
lg (Da/Wp
Логарифмические частотные характеристики типовых звеньев
САР. Апериодическое звено. Частотная характеристика апериодичес-
кого звена описывается формулой
W (/со) = k е~' агс(8 ™
’ К T^w2 + 1
Логарифмические частотные характеристики при k = 1 можно за-
писать следующим образом:
(2.68>
In W (/со) = — 1п У Т2со2 + 1 - / arctg Тео.
Логарифмические амплитудно- и фазово-частотные характеристики
апериодического звена определяются выражениями
L (со) = — 201g ]/Т2<о21 (2.69)
и
0 (а) = —arctg Та. (2.70)
Если в выражении (2.69) для L (со) пренебречь величиной 7"2<о2
по сравнению с единицей при Та < 1 и единицей по сравнению
с Т2со2 при Тео 2» 1, то приближенно можно написать
L (со) = — 201g УТ2а2 |1 л- 0 при Та < 1;
Б(со)г=*— 2OlgT<o при Та5» 1;
Е(а)^ —ЗдБ при Тсо=1.
(2.71)
Соотношения (2.71) показывают, что ЛАХ апериодического звена
L (<о) приближенно может быть представлена двумя прямолиней-
ными отрезками (асимптотами):
L (со) fit 0 при со < у-;
1 (2-72)
L (со)» —.201g Тео присосу,)
которые сопрягаются друг с другом при частоте соа » 1/Т. Эту
частоту называют сопрягающейся частотой. Максимальная ошибка,
которая получается при такой апроксимации, будет при сопряга-
ющей частоте и равна — 3 дБ, так как
L(co) = -201g|/y- + 1 = -201g /Г эй-ЗдБ.
Наклон, который имеет асимптота при частотах со > соа по от-
ношению к оси частот, определяется следующим образом. При
coj > соа L (cOj) == — 20 lg Tcoh
а при со = 2'сог
L (2<о;) = —20 lg 2Ta>i,
и, следовательно L (2<ог) — L (со;) = —20 1g 2 —6 дБ. При дву-
кратном изменении частоты характеристика затухания L (со) умень-
60
Рис. 2.26. Логарифмические амплитудная L (со) и фазовая 0 (<о) характеристики
апериодического звена
шилась на 6 дБ или асимптота имеет наклон, равный — 6 дБ на
октаву.
Если изменить частоту <о; на декаду, т. е. положить со = 1Осо;, то
L (Юсог) = —20 1g 1074
и разность
L (Юм;) — L 4) = —20 дБ.
Таким образом наклон ЛАХ — 6 дБ на октаву эквивалентен
наклону —20 дБ на декаду.
На рис. 2.26 приведены ЛАХ апериодического звена, построенные
по точной (сплошная кривая) и приближенной (штриховая кривая)
формулам.
Вне интервала, равного двум октавам вправо и влево от сопря-
гающей. частоты, обе характеристики (точная и приближенная)
не отличаются друг от друга.
В табл. 2.1 приведены значения ошибки б для различных а/сов,
которые получаются при замене точной ЛАХ двумя сопрягающимися
аснмптомами.
На рис. 2.27 показана кривая зависимости поправок б от со/фв.
Логарифмическая фазовая частотная характеристика апериоди-
ческого звена описывается формулой
0(ф) = 5,16 0 Г -1 - Рис. 2.27. Кривая зависи- _ мости поправок 6 от <о/<оа г -3 - V “ arctg(2.7 ш/ав ?2 0,5 1,0 2,0 3,0 5,0 10 Ulf
61
Таблица 2.1
Поправки д к асимптотическим логарифмическим амплитудно-частотным
характеристикам апериодического звена
<о/<оа 0,1 0,25 0,4 0,5 1,0 2,0 2,5 4,0 10,0
6, дБ 0,04 0,32 0,65 1,0 3,01 1,0 0,65 0,32 0,04
В логарифмическом масштабе частот эта характеристика кососим-
метрична относительно сопрягающей частоты ма, при которой она
имеет ординату —45° (см. рис. 2.26). Для ее построения можно поль-
зоваться тригонометрическими таблицами.
Для приближенного построения ЛФХ апериодического звена
удобно пользоваться номограммой (рис. 2.28), шаблоном (рис. 2.29)
или приближенными формулами.
Так, например, при w/wa<0,5 фазовая характеристика
© (со) «—<в/соа; при <о/соа > 2, 0 (со)« — -со/соа ).
Эти формулы получаются разложением в ряд arctg <о/соа при отбра-
сывании членов выше 1-го порядка малости. Для нахождения угла
сдвига фазы по номограмме (см. рис. 2.28) при какой-либо частоте со,
связанной с наличием сопрягающей частоты при соа, необходимо
совместить точку 1 на нижней шкале номограммы с сопрягающей
частотой и произвести отсчет сдвига фазы, соответствующий зна-
чению со по верхней шкале Номограммы. При этом масштаб вдоль
оси частот для фазовой характеристики должен совпадать с масшта-
бом св/соа на нижией шкале номограммы.
Неустойчивое апериодическое звено. Частотные характеристики
неустойчивого апериодического звена при k « 1 могут быть описаны
выражением
k
7ЮТГ
1Г(/со)-
е—/ (it-arctg 70),
(2.74)
Из формулы (2,74) следует, что ЛАХ затухания устойчивого и не-
устойчивого апериодического звена совпадают друг с другом, а фазо-
вые характеристики отличаются друг от друга.
СОЛ/t фазы в ipatycax
0,6 1 2 4 6 10 20 30 05 60 70 80 85 88 69 89,i
|---Ц—f 11 i‘r-r-4—4—i г । । 4- I-, I, 4-i ! T, I-,—UT-rV.,..j
001 0,021 0,05 f 0,1 0,2 0,3 0,5 0,8 1,0 2 3 5 8 10 20 30 50 80 100
1 ' fyOg &/u)g
Рис. 2.28. Номограмма ддм построения фазовой характеристики апериодического
звена
63
Рис. 2.29. Шаблон для построй
ния Логарифмической фазовой
частотной характеристики апе-
риодического звена и кривая по-
правок для амплитудной час-
тотной характеристики
ЛФХ устойчивого зве-
на при малых значениях со
стремятся к нулю, а при
частотах, стремящихся к
бесконечности,— к (—л/2),
ЛФХ неустойчивого звена
при малых значениях со
стремится к (—л), а при
достаточно больших со — к
по тем же правилам, как и
ческого звена.
(—л/2). Эти характеристики строятся
характеристики устойчивого апериоди-
Колебателъное звено. Логарифмические амплитудно- и фазово-
частотные характеристики колебательного звена описываются вы-
ражениями:
L (со) = - 201g /(1 - Лео4)2 ф- (2£кТксо)2; (2.75)
0 (со) = - arctg
v ' 1 —
(2.76)
Семейство кривых L (со) и 0 (со) для различных приведено на
рис. 2.30 и 2.31. Кривые L (со) в зависимости от величины могут
иметь существенный пик при Тцсо — 1. Поэтому представление кри-
1'iic. 2.30. Логарифмические амплитудные частотные характеристики колебатель-
„ 4 0 звена при различных значениях £ (ё С О
63
Рис. 2.31. Логарифмические фазовые частотные характеристики колебательного
звена при различных значениях £ (5 1)
вых L (оо) в виде сопрягающих прямолинейных отрезков в окрест-
ностях точки Тк(о =1 не всегда возможно. Однако при значениях
ю < 1/Тк и ю > 1/Тк ЛАХ L (оо) (2.75) может быть приближенно
заменена прямыми линиями, т. е.
L (оо) ж 0 при оо 1/Тл;
L (оо) « —20 1g (Тк(о)а при ю > 1/Тк.
] ЛАХ колебательного звена при малых оо асимптотически стре-
мится к оси частот, т. е. к прямой, имеющей нулевой наклон, а при
больших со асимптотически стремится к прямой, имеющей наклон,
равный —12 дБ на октаву или —40 дБ на декаду.
Для облегчения построения ЛАХ колебательных звеньев в ин-
тервале частот, в котором они не могут быть заменены прямолиней-
Таблица 2.2
Поправки 6 к асимптотическим логарифмическим амплитудно-частотным
характеристикам колебательного звена
1 Поправки б, дБ. Частота <0» С"*1
0,1 0,2 0,3 0,4 0,5 0,6 0,8 1,00
0,05 0,087 0,353 0,814 1,505 2,480 3,838 8,665 20,0
0,10 0,086 0,348 0,802 1,48 2,425 3,728 8,094 13,98
0,15 0,083 0,338 0,781 1,43 2,33 3,546 7,28 10,46
0,20 0,08 0,325 0,744 1,36 2,201 3,305 6,345 7,96
0.25 0,076 0,312 0,708 1,274 2,04 3,016 5,38 6,02
0,3 0,071 0,292 0,658 1,179 1,857 2,681 4,439 4,439
0,40 0,059 0,24 0,533 0,927 1,414 1,94 2,68 1,94
0,50 0,044 0,17 0,371 0,627 0,902 1,137 1,137 0,0
0,60 0,024 0,092 0,19 0,292 0,354 0,326 —0,217 —0,217
0,80 -0,025 —0,103 —0,245 —0,474 —0,8 —1,24 —2,474 —4,08
1,00 —0,086 —0,34 —0,748 —1,29 — 1,938 —2,67 —4,296 —6,02
64
Рис. 2.32- Кривые поправок 6 для асимптотических амплитудных частотных ха-
рактеристик колебательного звена
ними асимптотами, пользуются кривыми поправок (рис. 2.32) или
табл. 2.2.
Правило построения ЛАХ или характеристики затухания коле-
бательного звена:
1. На оси частот отмечают сопрягающую частоту ®к = 1/Ук
и из точки <ок проводят прямую с наклоном —40 дБ на декаду.
В результате получают первое приближение для ЛАХ характери-
стики в виде прямолинейных асимптот, которые сопрягаются в точке
(Ок = 1/Ук-
2. Уточняют вид ЛАХ. При этом используют кривую поправок,
которой соответствует значение наименее отличающееся от рас-
сматриваемого, или табл. 2.2. Поправки откладывают от сопря-
гающихся асимптот.
Для вычисления значений ЛФХ пользуются тригонометриче-
скими таблицами, шаблонами (рис. 2.33), специальными таблицами
(табл. 2.3) и приближенными формулами:
arctg ,2^М-2- « 2LTK® при 7> < 0,4;
1—гксо
и
arc,S-fzfe^,t-7S- "РнТи»>2,5.
Ошибка при вычислении фазы по этим формулам при любой со
не превышает 2°.
3 Солодовников В. В. И Др.
Рис/2.33. Пример шабло-
на для построения фазо-
вой частотной характери-
стики колебательного зве-
на (£к = 0,5)
Неустойчивое колебательное звено. В случае неустойчивого ко-
лебательного звена, имеющего передаточную функцию вида (2.35),
выражения для логарифмических амплитудно- и фазово-частотных
характеристик при k = 1 имеют вид
L (ш) = - 201g ]Л(1 + Т2ш2)2 + (2£КТК®)2; (2.77)
0 (ш) arctg(2.78)
Кривые отклонений точных амплитудных характеристик от
асимптотических, определяемых формулой (2.77), приведены на
рис. 2.34; семейство фазовых характеристик, описываемых формулой
(2.78), приведено на рис. 2.35.
Таблица 2.3
Логарифмическая фазово-частотная характеристика колебательного звена
(8 - о,5)
<в/сок о ф 0,01 —0,6 0,04 —2,3 0,06 —3,4 0,08 —4,6 0,1 -5,8 0,2 —11,8 0,3 —18,3 0,4 —25,4
ф 0,5 -33,7 0,6 -43,1 0,7 —53,9 0,8 —65,8 0,9 —78,1 1,0 -90 1,1 — 100,8 1,25 —114,2
<в/<вк ф° 1,5 —129,8 2,0 —146,3 3,0 —159,4 4,0 -165,1 5,0 —168,2 6,0 —170,3 7,0 —171,7
о ф 8,0 —172,8 9,0 — 173,6 10 — 174,2 20 — 177,1 30 —178,1 50 —178,8 100 — 179,4
66
Рис. 2.34. Кривые отклонений логариф-
мических амплитудных частотных ха-
рактеристик
£(«>) =
= -20 1g /(1-Т2в>2)2+””>
^’ + (25№
неустойчивого колебательного звена,
имеющего передаточную функцию:
W (s) = Т2 s2 + 2gKTKs - 1 ’
от асимптотических
Рис. 2.35. Семейство фазовых частот-
ных характеристик
0 (со) = arctg j
В случае неустойчивого колебательного звена, имеющего пере-
даточную функцию (2.34), выражения для логарифмических ампли-
тудной и фазовой частотных характеристик при k — 1 имеют вид
L (со) = - 201g ]Л(1 -Т2ксо2)2 + (2^кТксо)2; (2.79)
Q(co) = arctg. (2.80)
1 1 ий)
Сравнивая формулы (2.79) и (2.80) с формулами (2.75) и (2.76),
отметим, что характеристики затухания L (со) рассматриваемых
неустойчивого и устойчивого колебательных звеньев одинаковы,
а фазовые характеристики отличаются лишь знаком.
Таким образом, при построении ЛАХ (2.79) можно пользоваться
рис. 2.30, а при построении фазовых характеристик (2.80) —
рис. 2.31, зеркально отобразив последние относительно оси со.
3* 67
Рис. 2.36. Логарифмические амплитудная
L (со) и фазовая 0 (со) частотные характери-
стики интегрирующего звена
Интегрирующее звено. Логариф-
мические амплитудно- и фазово-час-
тотные характеристики интегрирую-
щего звена при k= 1 определяются
формулами
L (со) = —20 1g со (2.81)
и
0 (со) = —л/2. (2.82)
Эти характеристики приведены на рис. 2.36. Сдвиг фазы, создаваемой
интегрирующим звеном, не зависит ют частоты и равен (—л/2).
Дифференцирующее звено 1-го порядка. Логарифмические ампли-
тудно- и фазово-частотные характеристики дифференцирующего звена
1-го порядка имеют вид
L(co) = 201g /т2®2 + 1; (2.83)
0 (со) = arctg тсо. (2.84)
Если выражения (2.83) и (2.84) сравнить с соответствующими
выражениями (2.69) и (2.70) для апериодического звена, то при
т = Т они отличаются друг от друга лишь знаком. Следовательно,
логарифмические характеристики этого звена могут быть пред-
ставлены как зеркальное отображение от логарифмических ампли-
тудно- и фазово-частотных характеристик апериодического звена
относительно оси частот (рис. 2.37).
Для использования таблиц ошибок необходимо изменить знак
поправок.
Дифференцирующее звено 2-го порядка. Логарифмические ча-
стотные характеристики дифференцирующего звена 2-го порядка
при k = 1 определяют с помощью формул:
L (со) = 201g У(1-т|со2)2 + (2С</тйсо)2; (2.85)
Рис. 2.37. Логарифмиче-
ские амплитудная L (со) и
фазовая 6 (со) частотные
характеристики диффе-
ренцирующего звена 1-го
порядка
68
Рис. 2.38. Шаблон для построения
логарифмической фазовой частот-
ной характеристики запаздываю-
щего звена
Если сравнить формулы
(2.85) и (2.86) с соответствую-
щими формулами (2.75) и
(2.76) Для устойчивого ко-
лебательного звена, то при
= Тк и = gK они отли-
чаются друг от друга лишь
знаком. Поэтому кривые L (<а)
и © (®) для дифференцирую-
щего звена 2-го порядка могут
быть получены как зеркаль-
ное отображение относительно оси частот соответствующих кривых
колебательного звена (см. рис. 2.31 и 2.32). Для использования
таблиц ошибок следует изменить знак поправок.
Запаздывающее звено. Логарифмические частотные характери-
стики запаздывающего звена определяют с помощью выражений:
L (<о) = 0;.
© (®) = — Т0<0.
(2.87)
ЛАХ совпадает с осью частот. При построении ЛФХ удобно пользо-
ваться шаблоном (рис. 2.38).
При построении лагорифмических частотных характеристик ти-
повых звеньев САР предполагалось, что k = 1. Если передаточный
коэффициент звена &у= 1, то, например, для апериодического звена
W (/о) = k/(l + 77<й) и L (оз) = 20 1g k — 20 1g КT^w2 -J- 1. Таким
образом, полученную ранее ЛАХ для k — 1 следует переместить
параллельно самой себе на величину 20 1g k вверх или вниз в зави-
симости от величины k. Если k > 1, то вверх, так как 20 1g k >0,
а при k << 1 — вниз (20 lg k < 0).
2.7. ПРИБЛИЖЕННЫЙ СПОСОБ ПОСТРОЕНИЯ
ЛОГАРИФМИЧЕСКИХ ЧАСТОТНЫХ ХАРАКТЕРИСТИК
ОДНОКОНТУРНЫХ СИСТЕМ
Передаточная функция разомкнутой одноконтурной си-
стемы
П kt П (т/S + 1) П Д- 1)
^ (*) = - '.р-------------------------------> (2.88)
П (rts + 1) П (г2к/ + 2lK(TKls + 1)
i=i <=i
где П — знак произведения.
69
Если обозначить LmF (со) = 26 1g F (со), то выражение для ЛАХ
или характеристики затухания L(со) может быть представлено в виде
L (со) = £ Lmki + £ Lm /т^со2 + 1 +
1=1 1=1
"П _____________________
+ Ё Lm |/(1 — Tjhco2)2 + 2(^«t(j/co)2 — vLmco —
i=l
- £ Lm VTW + 1 - 2 Lm /(1 - Пс®2)2 + (2^fTKco)2. (2.89)
i=d ' 1=1
При этом видно, что ЛАХ одноконтурной системы может быть
получена в результате суммирования ординат ЛАХ типовых звеньев,
входящих в ее состав.
Правило ‘построения ЛАХ одноконтурной системы:
1. Определяют сопрягающие частоты сог = 1/тх; соа = 1/т2, ...
и т. д. и отмечают их вдоль оси частот.
2. Проводят низкочастотную асимптоту ЛАХ L (со), которая
представляет собой при со < сох прямую с наклоном —20v дБ/дек
(здесь v —, порядок астатизма системы, число интегрирующих
звеньев). Эта прямая, или ее продолжение, при частоте со = 1 должна
иметь ординату, равную 20 1g k дБ (здесь k — передаточный коэф-
фициент разомкнутой системы).
3. После каждой из сопрягающих частот со, наклон характери-
стики L (со) изменяют по сравнению с тем наклоном, который эта
характеристика имела до сопрягающей частоты сог, в зависимости
от того,, какому звену принадлежит эта частота. Наклон изменяют:
на —20 дБ/дек, если сопрягающая частота принадлежит апериоди-
ческому звену,
на —40 дБ/дек — колебательному звену,
на +20 дБ/дек — дифференцирующему звену 1-го порядка
и на +40 дБ/дек — дифференцирующему звену 2-го порядка.
; 4. Уточняют вид L (со) при помощи кривых или таблиц поправок.
Следует отметить, что высокочастотная асимптота ЛАХ, т. е/
ее часть, при частотах, больших наивысшей сопрягающей частоты,
должна иметь наклон —20 (п — т) дБ/дек, где п — порядок зна-
менателя; т — порядок числителя передаточной функции W (s).
Выражение для логарифмической фазово-частотной характер и-
стики, соответствующей передаточной функции (2.88) разомкнутой
одноконтурной системы, имеет вид
р а
0 (со) == V -5- - У arctg Тгсо - У arctg +
< + У arctg т,со + arcig
f=l c=i
ЛФХ одноконтурной системы так же, как и ЛАХ, может быть
получена в результате простого сложения ординат фазовых характе-
теристик типовых звеньев, входящих в ее состав.
Для приближённого построения фазовых Характеристик звейЬей
Удобно пользоваться номограммами, шаблонами, а также приближен-
ными формулами.
При построений графиков логарифмических амплиДуднё- и фй-
зово-частогных характеристик по оси абсцисс откладывают лога-
рифм частоты со [1/Н в линейном масштабе, в результате чего в от-
ношении 1g со шкала вдоль оси абсцисс оказывается равномерной.
Разметку оси абсцисс обычно производят не по значениям 1g со,
а по соответствующим значениям самой частоты со, поэтому шкала
в отношении со получается неравномерной. При построении ЛАХ
но оси ординат откладывают в линейном масштабе увеличенное
в 20 раз значение логарифма модуля (децибелы), а при построении
Л ФХ — значение фазового угла (в градусах).
Логарифмические частотные характеристики строят на полу-
логарифмической или миллиметровой бумаге. При построении ха-
рактеристики на миллиметровой бумаге удобно принять следующие
масштабы:
по оси абсцисс: 1 декада — 50 мм;
по оси ординат: 1 децибел — 2 мм;
1 градус — 1 мм.
Пересчет линейного масштаба оси абсцисс в логарифмический
масштаб удобно производить по табл. 2.4.
При построении логарифмических частотных характеристик при
принятых масштабах пользуются шаблонами (см., например, для
апериодического звена шаблон на рис. 2.29). . • • ;
Для перевода натуральных чисел в децибелы и для обратного
пересчета в натуральные числа пользуются номограммой рис. 2.39.
Пример. Построение ЛЧХ одноконтурной системы (рис. 2.40).
Пусть необходимо построить логарифмические частотные характеристики
< ЛР,^имеющей передаточную функцию:
W (s) _;_______?0(3s+ 1>у_. _
w s (10s + I)2 (0,2s + 1) (0,04s + 1)'
Таблица 2.4
Связь линейного масштаба оси абсцисс с логарифмическим
со, 1/с 1 1,1 1,2 1,3 1,4 1,5 1,6 1,7 1,8 1,9
d, мм 0 2,06 3,95 5,70 7,30 8,80 10,2 11,51 12,75 14,4
со 2 2,1 2,25 2,5 2,75 3 3,5 4 4,5 5
d, мм 16,05 16,2 17,6 20,0 21,8 23,8 27,2 30,0 32,6 36
СО 5,5 6 6,5 7 7,5 8 8,5 9 9,5 16
d, мм 37 39 40,5 42,2 43,7 45 46,4 47,7 48,8 50
Обозначения: о) — значение частоты по оси абсцисс; d — расстояние по оси
абсцисс, соответствующее дайной частоте.
71
Рис. 2.39. Номограмма для перевода натуральных чисел и в децибелы и для обрат-
ного перевода децибел в натуральные числа
Построение производят на миллиметровой бумаге, которая соответствующим
образом подготавливается.
Сначала определяют сопрягающие частоты, которые обратны по величине по-
стоянным времени системы:
= 777 = 0,1 1/с; со3 =-|-= 0,33 1/с;
1 v О
«з = 07 = 5 l/c: со4 = ?1_ = 0,25 1/с.
Сопрягающие частоты отмечают на оси частот.
Затем строят низкочастотную'асимптоту ЛАХ. Она имеет наклон — 20 дБ/дек,
так как система является астатической 1-го порядка (число интегрирующих
звеньев v = 1). Эту прямую проводят так, чтобы ее продолжение при частоте со = 1
имело ординату, равную 20 lg k = 26 дБ.
Далее, ввиду того, что частота со4 принадлежит двум апериодическим звеньям,
то наклон асимптотической логарифмической характеристики изменяют на
—40 дБ/дек. В интервале cot—соа асимптотическая логарифмическая характеристика
имеет наклон —60 дБ/дек. При частоте со = соа начинает влиять эффект двух диф-
ференцирующих звеньев с одинаковыми постоянными времени. Поэтому иаклои
асимптотической логарифмической характеристики изменяют на -j-40 дБ и в ин-
тервале соа— cos делают равным —20 дБ/дек. При частотах, больших со», вследствие
влияния апериодического звена наклон становится равным —40 дБ/дек, а для
со > со4 асимптотическая ЛАХ будет иметь наклон — 60 дБ/дек.
На рис. 2.40 (в верхней части) приведены кривые поправок для соответству-
ющих типовых звеньев, отложенные при сопрягающихся частотах. Их суммирование
с асимптотической характеристикой дает действительную логарифмическую частотную
72
Рис. 2.40. Пример построения
логарифмических амплитудной дБ
и фазовой частотных характери-
стик одноконтурной системы
характеристику разомкнутой си-
стемы. Там же приведены по-
строенные по шаблонам фазовые
характеристики типовых звеньев,
входящих в систему 0 (<o)ai>
0 (<0)д, 0 (и)а8, 0 (<о)а4, 0 (<0)и-
ЛФХ всей системы получа-
ется путем суммирования ЛФХ
звеньев этой системы.
Следует отметить, что
наклон высокочастотной
асимптоты ЛАХ в этом слу-
чае равен —20 (п — т)
дБ/дек = —20 (5 — 2) =
-----60 дБ/дек, где п —
порядок числителя; т —
порядок знаменателя пе-
редаточной функции ра-
юмкнутой системы.
ЛФХ при Частоте, стре-
мящейся к бесконечности,
стремится к значению
—-2-(п —щ) = —
-^-(5-2) = -4л.
е&)/>
Кривые поправок
SO
ЦО
го-
-20
В(ш)а
40
~60
0^
0,01
I I LXJ-»
з ц ввт^л
LmlWI
'2 зч 68 hr 1
20tgk~26d5
Ы. Ыц
1—Ш----L
46810 2
в(ш)а
гв(ш)а
ЛАХ разомкнутой САР может быть разбита на три характерных
участка (рис. 2.41):
Область низких частот — участок ЛАХ, лежащий в области
частот, меньших первой сопрягающей частоты. Вид ЛАХ в этой
области определяет порядок астатизма и статическую точность си-
стемы. Для статических систем логарифмическая характеристика
представляется горизонтальной прямой, отстоящей от оси частот на
величину 20 lg k, для астатических систем 1-го порядка характери-
стика имеет наклон, равный —20 дБ/дек.
Рис. 2.41. Области низ-
ких, средних и высоких
частот логарифмической
амплитудной частотной
характеристики:
<л>1 — первая сопрягающая
частота; сос — частота среза;
сов — наибольшая сопряга-
ющая частота
73
При частоте со = 1 эта прямая или ее продолжение должна
иметь ординату 20 1g k дБ.
Если система имеет астатизм ^-порядка, то наклон прямой должен
быть равен —20v дБ/дек.
Область средних частот. Вид ЛАХ в этой области определяет
в основном запас устойчивости и качество САР. В этом интервале
находится частота среза системы <ос, характеризующая время пере-
ходного процесса при достаточных запасах устойчивости. Область
«редких частот заканчивается частотой <ов.
Область высоких частот (сов — оо). Этот участок может быть,
назван интервалом малых параметров. Он содержит сопрягающие
частоты, пренебрежение которыми не оказывает существенного влия-
ния на вид логарифмических характеристик в интервале средних
частот.
2.8. ПРЕОБРАЗОВАНИЕ СТРУКТУРНЫХ СХЕМ САР
Различные способы преобразования структурных схем
облегчают определение передаточных функций сложных систем
автоматического регулирования и дают возможность привести мно-
гоконтурную систему к эквивалентной ей одноконтурной системе.
Пример 1. Пусть система состоит из двух последовательно включенных элемен-
тов с передаточными функцияи (s) и й?2 (s) (рис. 2.42). Первый из этих элемен-
тов охвачен рядом параллельных ОС с передаточными функциями Zx(s), Z2 (s), ...,
Zn (s). Так как передаточная функция нескольких параллельно соединенных эле-
ментов может быть представлена как сумма передаточных функций этих элементов,
тоехема, показанная на рис. 2.42, а, может быть преобразована к виду, изоб-
рйкенному на рнс. 2.42, б, где
Z (s) = Z, (s) + Z2 (s) + ... + Zn (s).
: H© передаточная функция элемента Wj (s) охваченного обратной связью Z (s), имеет,
i ВИД
11 w 1 + Fi’(s) Z (s) ’
ИЛИ
________________($)________________
llW 1 + F1(s)[Z1(s) + Z2(3)+ ...+z„(s)r
Рис. 2.42. ПримерТпреобразования структурной схемы
74
Рис. 2.43. Пример преобра-
зования структурной схемы
Таким образом,~двухконтуриая система заменяется одноконтурной, которая
состоит из последовательного соединения элементов (s) и U72 (s) (рис. 2.42, в).
Передаточная функция системы с разомкнутой обратной связью имеет вид
W (s) = (s) Г2 (s) = ] + (s} [Zi (2s)( . + (s)] •
Пример 2. Передаточная функция многоконтурной (четырехконтурной) системы
(рис. 2.43, а) элемента W'i(s), охваченного ОС Z4(s), имеет вид
W ZM__________^4 (s)
При этом~четырехконтуриая схема может быть сведена к трехконтуриой схеме
(рис. 2.43, б).
Два последовательно соединенных структурных элемента с^передаточными
функциями Ws (s) и (s), охваченных обратной связью, в контуре которой есть
звено Zs (s), могут быть заменены эквивалентным структурным элементом с пе-
редаточной функцией
Гм(з) =
^»(s) ^44 (S)
+ %з (s) (s) IF44 (s) ’
или
w zsl , ______________________________uz3 (s) (s)__________
88 W 1 + Z4 (s) r4 (S) 4- Z8 (s) F3 (s) r* (S) •
В этом случае трехконтурную схему можно свести к двухконтурной схеме
(рис. 2.43, в), которая, в свою очередь, может быть сведена к одноконтурной схеме
(рис. 2.43, г).
Для схемы, показанной на рис. 2.43, г, передаточная функция
«7 z-ч W2 (s) W3S (s) _
22 U 1+Z2(s)B72(s)№33(s)
____________________________________________________________________
1 4- Zt (s) (s) + Z8 (s) WS (s)Wi (s) + Z2 (s) W2 (s) Ws (s) Г* (s) ’
Передаточная функция всей системы с разомкнутой главной обратной связью
имеет вид
r(s) = Z1(s)^1(s)r22(s) =
__________________Zx (s) (з) Wt (S) W3 (з) Г4 (s)____________
1 + (s) Wt (s) 4- Z8 (s) Ws (s) Wt (s) + Z2 (s) W2 (s) Ws (s) (s) ’
75
Рис. 2.44. Пример преобра-
зования структурной схемы
Передаточная функция системы в замкнутом состоянии
<D(S)=_J________^_ =
_______________________У1 (S) ^2 (S) У» (s) ^4 (S)______________
1 + zt (s) Wt (s) + Za (s) W3 (s) (s) +Za (s) W2 (s) №3 (s) Wt (s) + *
+ Zi(s) (s) У2 (s) F, (s) (s)
Пример 3. Для упрощения структурной схемы системы, изображенной на
рнс. 2.44, а, преобразуем ее к виду, показанному на рис. 2, 44, б, исходя из
того, что сигнал на входе элемента 11^3 (л), прежде чем попасть на выход системы
и в цепь обратной связи Zt(s), должен пройти через элемент №3 (s).
Передаточная функция части системы, которая обведена на рис. 2.44, б штри-
ховыми линиями,
те' zs\__________^2 (s)________
2’U 1 + Zx (s) W2 (s) Й73 (s) •
Схема рис. 2.44, б может быть преобразована к схеме рис. 2.44, в, передаточная
функция которой в замкнутом состоянии имеет вид
Ф ™ - W1 (s> W" & <s> -
U l + Z2(S)ir1(S)ir23(S) “
__________________Wi (s) Уз (s) Уз (s)_________________________
1 + Zi (s) Уз (s) Уз (s) + Z, (s) yt (s) У2 (s) •
Пример 4. Преобразование структурной схемы сложной САР с несколькими
регулируемыми величинами — самолет с автопилотом (рис. 2.45).
Система включает в себя самолет (объект регулирования) и автопилот, который
состоит из трех регуляторов, осуществляющих координированное друг с другом
управление самолетом по трем каналам: руль высоты, руль поворота и элероны.
Рис. 2.45. Размещение и соеди-
нение агрегатов автопилота са-
молета:
1 — канал курса; 2 — руль поворо-
та; 3 — руль высоты; 4 — канал
креиа; 5— элероны; 6 —гировер-
тикаль; 7 — курсовой гироскоп;
8 — канал высоты
76
Для упрощения можно предположить, что боковые и продольные движения
самолета являются независимыми друг от друга, и ограничиться рассмотрением
курсовой и поперечной стабилизации самолета с автопилотом.
Чувствительным элементом курсовой стабилизации служит свободный гиро-
скоп с горизонтальной осью свободного вращения. При помощи чувствительного
элемента, специального демпфирующего устройства и потенциометра в автопилоте
вырабатывается напряжение, пропорциональное углу отклонения самолета от за-
данного курса и его угловой скорости относительно вертикальной оси. Это напря-
жение подается на вход электронного усилителя, который воздействует на серводви-
гатель (рулевую машину), управляющий движением руля поворота. Серводвига-
тель имеет электрическую обратную связь. На вход усилителя канала руля пово-
рота подается напряжение, пропорциональное не только углу рысканья, но и углу
бокового крена самолета. Это напряжение поступает от потенциометра, которым снаб-
жен другой чувствительный элемент автопилота — гироскоп продольно-поперечной
стабилизации, представляющий собой свободный гироскоп с вертикальной осью
свободного вращения. На вход электронного усилителя канала элеронов подается
сумма напряжений, одно из которых пропорционально углу бокового крена, а дру-
гое — углу отклонения самолета от заданного курса. Этот усилитель воздействует
на серводвигатель, управляющий поворотом элеронов. Серводвигатель канала эле-
ронов также имеет электрическую обратную связь.
Если не рассматривать системы продольной стабилизации и внутренних об-
ратных связей в автопилоте, то систему самолет—автопилот можно представить
состоящей из четырех замкнутых контуров:
самолет—гироскоп курсовой стабилизации — усилитель и серводвигатель кур-
сового канала — руль направления—самолет;
самолет—гироскоп продольно-поперечной стабилизации — усилитель и сер-
водвигатель канала элеронов — элероны—самолет;
самолет—гироскоп курсовой стабилизации—усилитель и серводвигатель ка-
нала элеронов — элероны—самолет;
самолет—гироскоп продольно-поперечной стабилизации—усилитель н серво-
двигатель канала направления — руль направления — самолет.
Структурная схема системы самолета с автопилотом показана на рис. 2.46, а,
где через Wg (/) и Ф^ (I) обозначены необходимые законы изменения курсового
угла и угла бокового крена, а через ?(() и Ф (/) — их действительные значения:
8чг(0 = ’?«>-Т(0; еф(0 = Фг(0-Ф(0.
Через Wi (s) и (з) обозначены передаточные функции каналов руля направ-
ления и элеронов автопилота, соответственно, а через Wa (s), (s), Й76 (s) и
lt’e (s) — соответственно передаточные функции самолета, характеризующие эф-
фекты отклонений элеронов на углы боковоого крена и отклонений руля на углы
бокового крена и рысканья.
На рис. 2.46, б приведена преобразованная схема, на которой самолет пред-
ставлен в виде четырех параллельно соединенных элементов с передаточными функ-
циями Й73 G)—(s). Так как сигнал от каждого из элементов сравнения распро-
страняется по двум параллельным путям через каналы (s) и (s),
io для определения передаточной функции, характеризующей изменение курсового
угла ’F (t) в зависимости от сигнала ошибки схема рис. 2.46, б расклады-
вается на две схемы рис. 2.46, виг. Схема рис. 2.46, в характеризует влияние
сигнала ошибки вф(/) на курсовой угол Y (t) через канал руля (s), а схема
рис. 2.46, г — влияние сигнала ошибки вф. (f) на Чг (/) через канал элеронов (s).
Для выявления параллельных путей распространения сигнала на рис. 2.46, в
и г закон изменения угла бокового крена Фя (/) полагается равным нулю, т. е.Фв
- 0, н элемент сравнения для угла бокового крена Ф (t) заменяется передаточ-
ной функцией, равной — 1. Это возможно на основании того, что если в уравне-
нии <
Вф(0 = Ф<(П-Ф(0> Фв(0 = 0,
ТО Дф(8)/Ф(5) = — 1.
77
Рис. 2.46. Структурная схема системы самолета с автопилотом
Схемы, показанные на рис. 2.46, виг, могут быть сведены к виду, изображен-
ному на рис. 2.46, д и е. Схема,приведенная на рис. 2.46, в, преобразуется к
виду, изображенному на рис. 2.46, д, так как сигнал ошибки еф (/) после про-
хождения через структурный элемент Wy (s) разветвляется по двум параллельным
путям: через элементы lFe (s) н (s), сумматор, элемент с передаточной функцией,
равной —1, элементы W2 (s) и (s).
Схема, показанная на рис. 2.46, г, приводится к схеме, изображенной на
рис. 2.46, е. Передаточные функции для каждой из этих схем можно записать
следующим образом. Для схемы рис. 2.46, д
f У (s) ] _w W -4- IT IT IV
(s) ~ W1We + 1 - (_ Г2) Г3 •
Для схемы рис. 2.45, е
( ЧЧз)
(-Г1) •
f = 1Г2Й74 + Г2Й731Г„ ————.
1 —(—W'lJW'e
Искомая передаточная функция системы с разомкнутым каналом курса
^1^6+^2^4~
1 + 1 + VM
2.9. НОМОГРАММЫ ДЛЯ ЗАМЫКАНИЯ СИСТЕМЫ
В дальнейшем для анализа САР понадобится решение
следующей задачи: известны логарифмические амплитудно- и фазово-
частотные характеристики Н (со) и 0 (со) разомкнутой системы,
78
необходимо найти логарифмические амплитудно- и фазово-частотный
характеристики А (со) и ср (со) замкнутой системы.
Передаточная функция замкнутой системы в случае единичной
обратной связи связана с передаточной функцией разомкнутой си-
стемы следующим соотношением:
ф (/ш) = W (/со)/ [1 + W (/со) ]. (2.90)
Через амплитудно- и фазово-частотные характеристики они могут
быть записаны':
Ф (/со) = А (со) е^ <ш); W (jo)) = Н (со) е/0 <Q).
Если значения
то получим
Ф (/со) и W (jo>) подставить в выражение (2.90),
А (со)е>ч> <“>
Н (со) е/е (ю)
1 +//(со)е/0 (ш)’
В последнее уравнение подставим
е/<₽ (<а> _ cos ф р. / д}п ф
е/6 (га) _ cos@ j Sin @ (q),
приравняем вещественную и мнимую части, а также произведем не-
обходимые преобразования, разрешив полученные выражения от-
носительно Н (со) и 0 (со). В результате получим исходные формулы
для построения номограмм, позволяющие по заданным логарифми-
ческим (или обычным) частотным характеристикам разомкнутой
системы Я (со) и 0 (со) определять логарифмические (или обычные)
частотные характеристики замкнутой системы Л (со) и ср (со). Эти же
номограммы могут быть использованы для решения обратной задачи.
Номограммы удобно строить по формулам, приведенным к виду
я = 2018 в <».) ± <"> + Ч ~ П . (2.91)
\ ^нч 1 /
Н = 20 lg siM0 (<o)-q> .(<o)l (2.92)
° sinq)(<o) v '
где Лнч — значение амплитудной частотной характеристики замкну-
той системы в натуральных числах.
Придавая в выражении (2.91) величине Лнч некоторые дискрет-
ные постоянные значения в натуральных числах, а в формуле (2.92) —
<р — в градусах и изменяя 0 от 0 до ±360°, для каждого 0 можно
получить соответствующие значения L (со) в дБ.
При построении номограмм по оси ординат откладывают значе-
ния И (со/ в децибелах, а по оси абсцисс — фазы 0 (со) в градусах
(рис. 2.47).
На этой плоскости (с координатами Lm Н (со) и Q (со)) строят
кривые, соответствующие геометрическим местам точек, имеющих
постоянные значения А и постоянные значения ср. Значения Л и ср,
для которых построены кривые, составляющие номограмму, отме-
чены соответствующими цифрами (индексами).
79
Рис 2.47. Номограмма для определения амплитудной и фазовой частотных харак-
теристик замкнутой системы по амплитудной и фазовой частотным характеристи-
кам разомкнутой системы
80
Рис. 2.48. Схема системы с единичной Рис. 2.49. Схема системы с неединичной
ОС ОС
Следует отметить, что при больших по абсолютному значению
отрицательных И уравнение (2.90) сводится к виду sin (0 — ф) ~ 0,
или 0 « ф, т. е. линии равных значений примерно совпадают с вер-
тикалями, отметки которых для 0 равны значениям ф.
Номограммой пользуются следующим образом: в координатах
логарифм модуля — фаза, в которых построена номограмма, стро-
ится для системы кривая L (0), представляющая зависимость
L (®) = Lm | W (/<о)| от 0 (®) = arg (/<о)}. При этом угловая
частота ® рассматривается как параметр и значения со отмечаются
вдоль L (0).
Если кривая L (0) пересекает одну из кривых номограммы,
имеющую индекс Nr — Lm Ai при значении со — <оь то при этом
значении со логарифмическая амплитудно-частотная характеристика
замкнутой системы Lm А имеет значение, равное Nt.
Если при со = сох кривая L (0) пересекает одну из кривых но-
мограммы, имеющую индекс фх, то при со = сох фазовая частотная
характеристика ф (со) имеет значение, равное фр
Номограммы применимы для систем, имеющих единичную обрат-
ную связь (рис. 2.48).
Передаточная функция такой системы в замкнутом состоянии
Ф(з)
1 + й? (S)’
Если система имеет неединичную обратную связь (рис. 2.49),
то передаточная функция системы в замкнутом состоянии имеет вид
ф(5) =______________
' ' 1 + Z (s) W (s) •
Для того чтобы применить номограмму для получения логариф-
мических частотных характеристик замкнутей системы в этом слу-
чае, следует представить передаточную функцию замкнутой системы
следующим образом:
w Z(s) L 1 + W (s)Z(s) J
Выражение в квадратных скобках дает возможность воспользо-
ваться номограммой и найти логарифмические характеристики, со-
ответствующие этому выражению. Из полученных логарифмических
характеристик следует вычесть характеристики, соответствующие
81
передаточной функции Z (s). В результате получаются искомый
логарифмические частотные характеристики замкнутой системы
с неединичной обратной связью.
ГЛАВА 3. МЕТОД ПЕРЕМЕННЫХ СОСТОЯНИЯ
3.1. ПЕРЕМЕННЫЕ СОСТОЯНИЯ И УРАВНЕНИЯ СОСТОЯНИЯ
ДИНАМИЧЕСКОЙ СИСТЕМЫ
Метод переменных состояния основан на понятии состоя-
ние системы. Состояние динамической системы описывается совокуп-
ностью физических переменных хх (/), ..., хп (/), характеризующих
поведение системы в-будущем при условии, если известно состояние
В исходный момент времени и приложенные к системе воздейст-
вия.
Рассмотрим систему, показанную на рис. 3.1, описываемую пере-
менными состояния хг (^), х2 (/), ..., хп (/), позволяющими по началь-
ным значениям переменных хх (t0), х2 (t0), ..., хп (t0) (в начальный
момент времени t0) и заданным воздействиям щ (t) и и2 (/) при t^ta
определить будущие значения переменных состояния и выходных
переменных.
Поясним понятие переменных состояния на простом примере
объекта (рис. 3.2), состоящего из груза с массой т, подвешенного
на пружине с коэффициентом упругости k и двигающегося в ци-
линдре с коэффициентом трения f. Дифференциальное уравнение
этой системы можно представить в виде
<зл>
В качестве переменных состояния введем переменные
•МО = 1/(0;
г /а — (О — dx'
х* W ~ dt ~ dt '
Рис, 3.1. Пример системы, описываемой
переменными состояния хъ х2.......хп:
и, (0. (0. нп (О — входные переменные;
Hi (0. Уг (0. Уп (0 — выходные переменные
Рис. 3.2. Пример, поясняющий понятие
переменных состояния
82
Подставляя выражения (3.2) в уравнение (3.1), получим
т + f х2 4- kxi ~ и (f)
и, учитывая выражения (3.2), можно написать
dxY
~м~
*2;
(3.3)
Система уравнений 1-го порядка (3.3) и является системой урав-
нений в переменных состояния для рассматриваемого объекта.
В общем случае нелинейной системы уравнения в переменных
состояния имеют вид
*i(O = Al*i> х2> V- «1- ит, fl;
^2 (0 =/а [АГ1, Х2, хп; lh, th, Um, fl;
(3.4)
xn (0 — /n x2, • • •, Xn, Ui, th, • • •> Um, fl-
Если же предположить, что в (3.4) функции flf f2, ..., fn линейны
относительно переменных хь ..., хп, иг, ..., Щп и не зависят от вре-
мени t, то их можно привести к виду
%1 ~ Яц*! 4- О12х2 4“ • • • 4” а1пхп 4- ^11и1 4- Ь12«2 4- • • 4- Ь±т11т',
х2 = п2л 4- fl22*2 4- • • • + а2пхп 4- ^2iui "г Ь22и2 4- ... 4- Ь2тит;
(3-5)
хп — аП1х1 атх2 4- ••• 4- иппхп 4- 4~ Ьп2и2-\-... 4- bnmtim.
В матричной форме уравнения (3.5) имеют вид
х2
Он й12 • а1п Х1
Он П22 • аап х2
ап1 ап2- • Unn Хп
Ьц .. • Ь1т ~Ui "
4- &21 . . •Ь^т U2
bnl- • Ьпт Un
(3.6)
Матрицу-столбец, содержащую все переменные состояния в пра-
вой части уравнения (3.6), называют вектором состояния и обозна-
чают просто через х, т. е.
xi
х2
х =
п
83
Вектор входных сигналов обозначают через и. Таким образом*’
в компактной векторно-матричной форме система может быть описана
при помощи уравнения
х = Ах + Ви, (3.7)?
где А — квадратная [n, п! матрица:
°11 • • -а1п
_&п1 • • -^пп
и В — прямоугольная
[п, т] матрица:
В =
&п • • -bim
•'^пт_
Для полного описания системы к уравнениям состояния (3.5)
или (3.6) необходимо добавить уравнения, устанавливающие связь'
между переменными состояния хх ... хп и выходными переменными
Уъ Ур, которая обычно выражается в виде системы линейных
алгебраических уравнений:
У1 -- С11Х1 + £12*2 + • • • + С1пХп',
У2 — С21Х1 “h С%2Х2 4- ... 4“ С2пхп',
Ур — сР1х14~ сргх2 + ... + српхп
или в векторно-матричной форме
У = Сх.
(М
При этом матрицу-столбец
У1
У*
— Ур —
называют выходным вектором, а матрицу С (р, п) — матрицей
выхода:
С11 • • -с1п
С =
_Ср1. .. СрП _
Решение векторного дифференциального уравнения (3.7) можна
получить при помощи такого же метода, который применяют для»
84
решения уравнения 1-го порядка. Действительно, рассмотрим урав-
нение 1-го порядка:
х == ах + Ьи, (3.9)
где х и и — скалярные функции времени, а а и b — постоянные
величины. Преобразуя уравнение (3.9) по Лапласу, получим
sX (s) - х (0) = аХ (s) + bU (s),
откуда
(3.10)
Взяв обратное преобразование Лапласа от уравнения (3.10), решение
найдем в виде
t
х (t) = еа‘х (0) + J е“ ~ *>Ьи (т) dr. (3.11)
о
Решение векторного уравнения (3.7) определим аналогичным об-
разом, а именно:
sX (s) - х (0) = АХ (s) + BU (s) (3.12)
или
X (s) = [si — Арх (0) + [si - A]-1BU (s), (3.13)
где I — единичная (п, п) матрица:
О ' 1
По аналогии с решением (3.11) получим следующее решение
неоднородного векторно-матричного уравнения (3.7):
t
х (t) = eAtx (0) + j еА <*—'>Bu (т) dr, (3.14)
о
где матричная функция еА/ может быть представлена в виде ряда,
г. е.
А2/2 А*/*
еА^1 + А^А^ + ...+_А£_+...)
сходящегося для всех конечных значений t.
Общим решением однородного уравнения (3.7) при u (t) = 0,
описывающим свободное колебание системы, является
Хсв (0 = еА'х (0). (3.15)
85
Функцию
Ф11 (0 • • -Ф1п(0
Ф (t) = еА/ =
(3.16)
_ Фп1 (0 • • • Фп п (0 _
называют переходной, или фундаментальной, матрицей. В развер-
нутой форме выражение (3.15) имеет вид
Xi(0
Фи(0 • • -Фш (О
~Х1 (0)
Хп (0_ _фп1(0 • • -Фпп (0_ _ХЛ (0).
Откуда
х, (0 = ср^ (0) -|- фг2х2 (0) + фгпхп (0) = хп (0 +
+ xig(0+ ... +xin(0 (i=l,...,n). (3.17)
Очевидно, что выражение (3.17) описывает изменение Z-й состав-
ляющей вектора состояния хг (0, вызываемое начальными условиями
xt (0), а каждый из членов выражения в правой части
Хо(0 = Фи(0*Л°)
представляет собой изменение i-й составляющей вектора состояния
Xi (0, вызываемое j-м начальным условием.
Следовательно, каждый из элементов <рг; (0 переходной матрицы?
Ф (0 можно рассматривать как реакцию i-й переменной состояние
при Xj (0) == 1 и нулевых начальных значениях всех остальных
переменных состояния.
Уравнение (3.14) с учетом выражения (3.16) можно представит^
также в виде суммы общего и частного решения
t
х(0 = хсв(0 + хвын(0 = ф(0х(О) + J ф(/— т) Bu(t)(Zt, (3.18),
о
где хвын (0 — реакция системы на вектор управления и (t); при
учете решения (3.14)
Ф (I — т) - еА </-т).
Составляющая хвын (0 является частным решением дифферен-
циального векторно-матричного уравнения (3.7).
Методы вычисления переходной матрицы. Вычисление переход-
ной матрицы ф (0 в случае, когда матрица А не зависит от времени,:
можно выполнить одним из следующих методов.
Метод разложения в ряд. Переходную матрицу можно представ
вить в виде бесконечного ряда
да/з дз/з
ф(0 = еА* = 1 + А/ + -^_+_^_+ ...
86
Ограничившись конечным числом членов ряда и произведя их
суммирование, найдем приближенное выражение для ф (/).
Метод, основанный на определении собственных значений ма-
трицы.
Применяя к выражению (3.16) преобразование Лапласа, получим
Ф (s) = L (t)} = L {еА/[ = [si - А]-1
и, следовательно,
ф(/) — L-1 {[si — А]-1}. (3.19)
Определение ф (t) сводится к вычислению собственных значений
матрицы А.
Рассмотрим пример вычисления переходной матрицы. Пусть
уравнения системы имеют вид
Xi = х2;
х2 = —Ьхг — ох2.
В этом случае
fs — 1
[si —А]= . .
|_Ь s-j-aj
В результате обращения матрицы получим
! Fs + а Г
Ф (s) = [si - АГ1 = -т-А-т-г
V' 1 s (s 4- а) 4- 6 [ — ь S J
Пусть матрица А имеет действительные и различные собственные
значения
= + Х2 = ^--^-[/^4Ь,
где а2 >4Ь.
Тогда
y(0 = L-i[O(s)]= . 1 х
V а2 — 46
Г(Xi — а) е~М — (Х2 — а)е~^* е_%»* — е~%»г
X Ь(е~^— е—л,г9 Хге——Х2е—
Метод, основанный на теореме Сильвестра. Предположим, что
имеется некоторая функция f (А) от матрицы А, которую можно
представить в виде степенного ряда:
HA)=£CftA*.
А=1
где А — квадратная матрица (и, и) с п различными собственными
значениями Хг.
Тогда согласно теореме Сильвестра
п
t=i
87
где
В частном случае, когда
f(A) = <p(O = e«
имеем
п
<₽(/)= Se^F(4-
Пример 1. Предположим, что уравнения системы имеют вид
= Xi — Зх2;
Х3 — Xi — х2.
В этом случае
1—А, —3 1 „
1 — 1 — A.J ~
или
Л» + 2 = О,
так что
X]. = j |/" 2; Xg —Jy/"2«
. Имеем
ф (/) = / (А) = еА/
= fe^F(M,
причем
ч:
— 3
— 1
Согласно Ю. Ту *
F(M=A±1OL;
/2/2
/2/2
Таким образом
/ (А) _ 1А + )Г2П./^-|А-,У211.-'^ = (отГ5(), +
/2 /2
= Ф(0
cos /2Z + sin /2/
y^sm/2/
з
—TFSin/2/
cos /2--sin /2/
r
* Ю. Ту. Современная теория управления. М.: Машиностроение, 1971. 472 с.
88
3.2. МАТРИЧНАЯ ПЕРЕДАТОЧНАЯ ФУНКЦИЯ
Применяя преобразование Лапласа к уравнениям в пере-
менных состояния (3.7), (3.8), получим
sX (s) = АХ (s) + х (0) + BU (s);
(3.20)
Y(s) = CX(s),
откуда, исключая X (s) и полагая х (0) = 0, найдем
Y (s) = С (si - A)"1 BU (s). (3.21)
Матрицу
<D(s) = C(sI — А)'1 В, (3.22)
устанавливающую связь между векторами выхода Y (s) и входа U (s),
называют матричной передаточной функцией системы (МПФ).
Если система имеет только один вход и (?) и только один выход
у (?), то матрицы В и С в (3.20) превращаются в скаляры, которые
обозначим, соответственно, через b и с.
Таким образом, для одномерной системы
Ф(5) = 4ц§- = с(51-А)”1/?- (3-23)
Из формулы (3.21), (3.22) очевидно, что определение передаточ-
ной функции системы по уравнениям состояния (3.7), (3.8) требует
обращения матрицы (si — А), что в случае высокой размерности
матрицы А может представлять некоторые трудности. Один из спо-
собов решения этой задачи основан на так называемом алгоритме
Леверье.
Пусть
(si- A)-1 = T-1(s)R(s),
где
Т (s) — sn 4- an_isn’-1 .'.. + ais -f- a0
и
R (s) = sn-ll 4- S"-2Rt 4- ... 4- R„_b
Тогда at и Ri можно вычислить по следующим формулам:
Al = А; ->• an_! = — spur Ах Rx = Ах 4- an-J;
A2 = ARi —> On—2 = —2~ spur Аг —»- R2 = Аг 4~ ^n— 2^i
An_x — ARn_ 2 —> fli
= — i spur An—i — Rn_! = An_i 4- axI;
An = ARn-i — ob ---spur An -> Rn = 0.
89
Таким образом,
Пример 2.
Пусть
Имеем
Ai = А;
аа = 2;
и—1
' iSs
1 0 2
01 = — 1;
Аа = ARi = — 2 1 О
r2 = A2+(-1)
0 0 2
— 2 0 О
2 —1—1
As = ARa = 0 2 0
о« = — ——±—= — 2; R3 = 0.
2
1 о о
О 1 о
О О 1
2 0 0
0 0 2
И, следовательно,
90
или
i fГ8 91 Г~1 —3] Г“7 ~611
®(s)= s3 + 2sa—s —2 ([17111 +1 29 7 JS + [ 14 2]]’
ф — 65sa + 80s-|-70 35 (— 0,93sa+1,14s + 1)
Ф W ~ s3 + 2sa —s —S 0,5s3+sa —0,5s — 1 '
Решение обратной задачи — определение уравнений состояния
по заданной передаточной функции, в особенности для многомерных
систем, связано с более существенными трудностями, см. п. 3.6.
3.3. УПРАВЛЯЕМОСТЬ И НАБЛЮДАЕМОСТЬ
Предыдущий этап развития теории автоматического регу-
лирования, до широкого использования в ней понятия переменных
состояния, был связан с описанием САР при помощи переменных
вход-выход. Этот способ математического описания удобен для ин-
женерной практики, но развитие метода переменных состояния
показало, что.метод вход-выход имеет и существенные ограничения.
Эти ограничения связаны в основном с понятиями управляемости и
наблюдаемости, которые не учитывались в методе .переменных
вход-выход. При получении передаточной матрицы сложной системы
по передаточным матрицам или передаточным функциям ее подсистем
(элементов) возможно сокращение полюсов (нулей), оказывающих
существенное влияние на динамику системы. Пренебрежение этим
сокращением при расчете систем управления, как показывает опыт,
может привести к ошибочным результатам.
Управлять состоянием системы х (/) можно изменением вектора
входа u (t), а наблюдать ее состояние можно, измеряя вектор выхода
у (/). В связи с этим возникают два вопроса, имеющих кардиналь-
ное значение для теории автоматического управления.
Можно ли выбрав соответствующим Ъбразом входы u (t), пере-
вести объект управления из некоторого произвольного состояния
х (t0) в другое произвольное состояние х (^)?
Можно ли, наблюдая вектор выхода у (/) в течение достаточно долго-
го промежутка времени, определить начальное состояние объекта х(/0)?
Ответ на первый вопрос связан с понятием управляемости,
а ответ-на второй вопрос — с понятием наблюдаемости.
Определение понятий управляемости и наблюдаемости. Понятие
управляемости связано с возможностью приведения системы в задан*
ное состояние с помощью входных или управляющих воздействий.
Понятие наблюдаемости связано с возможностью определения пере-
менных состояния по результатам измерения выходных переменных.
В качестве примера, поясняющего эти понятия, рассмотрим
объект, описываемый уравнениями состояния:
*1 — Xi,
Xj = — Xg — u;
X3 = 2xs u;
x4 = — 3x4 — 2u;
У = Xi X3 0,5x4.
91
Рис. 3.3. Структурная схема системы с одним
неуправляемым (л = 1) [и] одним ненаблюдае-
мым (Л = —1)_полюеом
Из рис. 3.3 видно, что переменная xt
не соединена со входом и поэтому он
не может влиять на ее изменение во вре-
мени. Такую переменную состояния
называют неуправляемой. Переменная х8
не соединена с выходом и поэтому по
наблюдению выхода у невозможно опре-
делить х2. Такую переменную состоя-
ния называют ненаблюдаемой.
Более общее определение управляемости заключается в следующем.
Состояние [х0, называют управляемым, если можно найти
момент времени (/г > t0) и вход u (t), переводящий систему за
интервал времени Uo, из состояния [х0, £0] в состояние [0,
Если любое состояние х £ X является управляемым для t0, то объект
называют полностью управляемым в момент времени t0. Если объект
полностью управляем в указанном выше смысле для любого t0,
то его называют полностью управляемым.
Можно также дать следующее определение. Систему называют
полностью управляемой, если для любых моментов времени 10 и tlt
h ^>t0 и любых заданных состояний х0 и хг существует управление
и (О» (А> <31 <3 4), переводящее начальное состояние х0 в конечное Яр
Судить о том является ли система управляемой по виду ее урав-
нений состояния в общем случае (за исключением примера одно-,:
мерной системы) очень трудно.
Однако, если уравнения системы
X = Ах + Ви; Г (3.24)
у = Сх /
приведены к канонической форме
х = Ах + Ви;
у = Сх,
где А — диагональная матрица, то судить о том, является ли си-
стема управляемой, можно исходя из следующего.
Запишем первое уравнение (3.25) в развернутой форме
xi = 4- 5цйг;
i=i
• т
Х2 = Х2Х2 4" S
i=l
(3.2Ш
хп 4" £
1=1
92
Эти уравнения показывают, что управляющие воздействия йг
не будут оказывать какого-либо влияния на переменную если
т
2] BjiUi = о,
i=i
т. е. если все элементы /-й строки матрицы В равны нулю.
Следовательно, канонические переменные состояния х, которые
соответствуют нулевым строкам матрицы В, являются неуправляе-
мыми. Это означает, что изменение этих переменных происходит
независимо от управляющих воздействий и, и целиком определяется
начальными условиями, а также внешними возмущениями.
Таким образом, система (3.24) является управляемой, если
матрица В не содержит строк, все элементы которых равны нулю.
Условия управляемости для системы, описываемой уравнениями
(3.24), не требующими их приведения к канонической форме (3.32),
определяются следующей теоремой (или критерием), полученной
Калманом.
Необходимое и достаточное условие для управляемости системы
(3.24) заключается в том, чтобы матрица
Q = [В, АВ, А2В.....АП~'В] (3.27)
имела ранг п.
Часто матрица (3.27) имеет ранг п для некоторого v < и, т. е.
rang Qv = rang [В, АВ,.. ., Av-1B] = n. (3.28)
Наименьшее значение v, при котором имеет место равенство
(3.28), называют показателем управляемости.
Из выражения (3.27) видно, что управляемость определяется
свойствами матриц А и В. Критерий управляемости (3.27) остается
справедливым и для дискретной системы, если ее уравнения пред-
ставить в виде
xA+i = Ах* + Ви*.
Как было показано в рассмотренном выше примере, переменная х^
является ненаблюдаемой, если она не соединена с выходом и по
наблюдению выхода у ее определить невозможно. Но для управления
необходимо располагать сведениями о текущих значениях вектора
состояния. Поэтому возникает вопрос: при каких условиях, наблю-
дая векторы выхода и входа, можно найти переменные состояния х?
Систему (3.24) называют наблюдаемой, если по данным измере-
ния или наблюдения векторов у (0 и u (t) на конечном интервале
времени t0 с t с можно однозначно определить начальное состоя-
ние х (t0). Систему (3.24) называют полностью наблюдаемой, если
наблюдаемы все ее состояния в любые моменты времени.
Предполагая, Что уравнения системы приведены к нормальной
форме, рассмотрим уравнение связи между вектором выхода у и
вектором состояния х:
у = Сх, (3.29)
93
где
Си С12
Сах С22
.. . Си .. . Cjn
. .. C2l- ... C2n
_C„1 Cn2
• • Cni .. . Cnn_
Уравнение (3.24) в развернутой форме имеет вид
У1 (0 = S ci*** (0 — С1Л + • • • + cuxj + • • • + cinxn>
А=Г
n
УI (0 — £ cikXk (0 == CilXl -(-•••+ CijXi + • • • + CinXn>
k=l
Ур (0 = Ij cphxk (0 = cplxl + • • • + cpiXj + • • • + Cpnxn-
£s=l
Из этих уравнений следует, что переменная х} может быть опре-
делена по переменным ylt у2, ..., ур, если коэффициенты ci; (для
i = 1, 2, .... р) не все равны нулю. Другими словами, Xj является
наблюдаемой переменной, если элементы /-го столбца матрицы €
не все равны нулю, или линейная, стационарная система является
наблюдаемой, если матрица выхода С не содержит столбцов, эле-
менты которых равны нулю.
Условия наблюдаемости в общем случае, когда уравнения (3.20)
не приведены к нормальной форме, определяются следующей теоре-
мой (или критерием).
Необходимые и достаточные условия для полной наблюдаемости
состоят в том, чтобы матрица
R= [Ст, АТСТ, (АТ)2СТ,..., (АТ)"-1СТ] (3.30)
имела ранг п. Из выражения (3.30) очевидно, что наблюдаемость
определяется свойствами матриц А и С. Так же как и в случае кри-
терия управляемости, если матрица R имеет ранг п для некоторого
р < п, т. е.
rang Ru = rang [Ст, ATfr,.... (AT)*i-1CT] = п,
то наименьшее р, при котором имеет место равенство (3.20), назы*
вается показателем наблюдаемости.
Дуальность критериев управляемости и наблюдаемости. Очевид-
ная аналогия между критериями управляемости и наблюдаемости
позволяет сделать вывод об их дуальности.
94
Рис. 3.4. Структурная схема линейной
системы в переменных состояния
Рис. 3.5. Структурная схема системы, со-
стоящей из управляемой 1 и неуправляе-
мой 2 подсистем
Назовем два объекта S и S* дуальными, если их можно описать
соответственно уравнениями:
S:
S* :
х= Ах + Ви;
У = Сх;
z = ATz + CTu: Г (3.32)
w = Bz. j v '
и (3.31), (3.32) очевидно, что если S
(3 31)
Из уравнений (3.27), (3.30)
управляема в t0, то S* наблюдаема в t0 и наоборот.
Таким образом, наблюдаемость одной из систем можно прове-
рить анализом управляемости дуальной ей системы.
Декомпозиция системы. Любая система, описываемая уравне-
ниями состояния (3.24), может быть представлена в виде структур-
ной схемы на рис. 3.4.
Рассмотрим теперь систему, которая может быть декомпозирована
на две системы: управляемую и неуправляемую. Она может быть
представлена в виде структурной схемы, показанной на рис. 3.4.
Верхняя часть этой ехемы соответствует неуправляемой подсистеме,
так как вектор входа и не может, как это следует из рис. 3.5, влиять
на происходящие в ней процессы.!
Уравнения состояния этой системы можно представить в виде
ха
Ха
У = [С1С2]
В/
о
и;
(3.33)
Ац А12
. 0 A22J [Хь J '
’ха’
Lxz>.
Точно также декомпозируем систему на две подсистемы: наблю-
даемую / и ненаблюдаемую 2 (рис. 3.6). Нижняя часть этой схемы
соответствует ненаблюдаемой подсистеме, так как ее вектор состоя-
ния никак не связан с выходом у.
Уравнения состояния этой системы
Хо
.Xd.
__ А1Х
А21 А;
У = [Ci 0]
0 Гхс'
22 J L Xd .
хс'
.Xd.
имеют вид
+[в‘]
LB, ]
и;
95
Рис. 3.6. Структурная схема системы,
состоящей из наблюдаемой 1 и ненаблю-
даемой 2 подсистем
Рис. 3.7. Структурная схема системы,
декомпозированной- на четыре подси-
стемы
В общем же случае система может быть декомпозирована на
четыре подсистемы (рис. 3.7): управляемую и ненаблюдаемую (Si),
управляемую и наблюдаемую (S2), неуправляемую и ненаблюдаемую
(S3), неуправляемую и наблюдаемую (S4).
Наличие связей между подсистемами определяется из следу-
ющих соображений:
если Si — ненаблюдаема, то она не может воздействовать на S2
и S4, которые наблюдаемы;
если S3 — неуправляема и ненаблюдаема, то на нее не могут
воздействовать подсистемы Sx и S2, которые управляемы и
т. д.
Уравнения состояния системы (см. рис. 3.7) в общем случае можно
записать в виде
хь
хс
_xd_.
Ац А12
О А22
о о
о о
(3.34)
у = [ОС2ОС4] [xaxbxcxd]T.
Для того чтобы система была наблюдаемой и управляемой, она
должна была бы Состоять только из подсистемы S2.
Значение понятий управляемости и наблюдаемости. Возможно
существование двух особых значений или мод (одной неуправляем
мой при s = 1 и другой — ненаблюдаемой при s = —1). Для про-
стой,одномерной’системы неуправляемость и ненаблюдаемость легко-
обнаружить непосредственно по ее уравнениям или рис. 3.3. Рас-,
смотрим теперь пример, когда система описывается передаточной
96
функцией. Эта система, состоящая из двух последовательно соеди-
ненных подсистем с передаточными функциями
(*) = V+WW ” и (i+Vi^i> .
изображена на рис.13.8.
Передаточная функция системы
И/ /с) ________(s ~ О (s + 0____
(s+ 1) (s + 2) (s + 3) (s- 1) ’
или
(s + 2) (s + 3) •
После сокращений нули и полюса при s=±l выпали из рассмотре-
ния. Однако такое сокращение полюса и нуля возможно лишь
теоретически. На самом же деле такое сокращение не учитывает
образование диполя (рис. 3.9). Если этот диполь расположен в левой
полуплоскости вблизи точки —а, то ему в переходном процессе
будет .соответствовать член вида re~at, где г — вычет, связанный
с полюсом. Последний очень мал, так как вблизи полюса располо-
жен нуль. В большинстве случаев этим членом можно пренебречь.
Если же диполь расположен в правой полуплоскости, то он даст
неустойчивый член reat каким бы малым г не было.
Заметим, что если по стрелке (от входа к выходу) сначала распо-
ложен нуль, а затем полюс, как, например, при s — 1, то имеет
место неуправляемость, а если по стрелке сначала расположен
полюс, а затем нуль, как, например, при s = —1, то имеет место,
нен аблюдаемость.
В случае многомерных систем с многими входами и выходами,
когда сокращение может происходить в результате свойств опре-
делителей, обнаружение неуправляемости и ненаблюдаемости го-
раздо сложнее. Однако во всех случаях это происходит из-за тех
или иных сокращений между подсистемами. Следует подчеркнуть
различие между неуправляемыми (или ненаблюдаемыми) полюсами
(или нулями) в зависимости от того, расположены они в левой или
в правой полуплоскости.
Предположим, что в системе имеется наблюдаемый, но неуправ^
ляемый неустойчивый полюс. Так как он наблюдаем, то выход не-
устойчив. Он не может быть не замечен, но его неуправляемость
J
Рис. 3.8. Представление схемы (см. рис. 3.3)
в виде двух последовательно соединенных
подсистем
Рис. 3.9. Нули и полюса
в левой и правой полу-
плоскости
4 Солодовников В. В. и др.
97
Рис. 3.10. Структурная схема системы, состоя-
щая из управляемой Sx и неуправляемой S_ под-
систем
исключает возможность управления
системой. В этом случае выходом из
положения может быть не изменение
закона регулирования, а изменение
структуры системы.
Предположим теперь, что система имеет управляемый, ио не-
наблюдаемый неустойчивый полюс. Так как этот полюс ие связан
с выходом, то выход будет наблюдаться как устойчивый. Но тем
ие менее внутренняя неустойчивость системы может привести к ава-
рии, когда неустойчивая переменная достигнет определенной ампли-
туды, либо к появлению эффекта насыщения из-за выхода системы
из линейной зоны.
Выше говорилось, что входное воздействие не может влиять на
неуправляемую часть системы. Покажем, что введение обратной
связи также не позволяет устранить эту трудность.
Рассмотрим структурную схему системы с обратной связью
(рис. 3.10), состоящую из управляемой и неуправляемой S2
частей.
Уравнения системы в разомкнутом состоянии
Xi = А^! + BjU + К2х2;
х2 — А2х2;
У = CjXi 4- С2х2
Учитывая, что е = g — у, уравнения системы в замкнутом состоя-
нии
— Ai — BjC, К2 — В]С2 V + В/ g;
-Х2. О а2 -х2_. О
У — [С]С2] [XjXj]7.
При этом ее характеристическое уравнение
det [si — Аг BxCxl det [si — A2] = 0.
Корни последнего уравнения состоят из корней управляемой
части замкнутой системы (первый множитель) и неуправляемой
части разомкнутой системы (второй множитель).
Таким образом, введение обратной связи не повлияло н-а дина-
мику неуправляемой части. К аналогичному выводу можно прийти
и по отношению к ненаблюдаемой части.
3.4. УПРАВЛЯЕМОСТЬ И НАБЛЮДАЕМОСТЬ ПОДСИСТЕМ
Всякая система может рассматриваться как некоторое
соединение подсистем. Поэтому очень важно уметь определять
свойства системы по свойствам ее подсистем. Здесь будут рассмо-
98
Рис. 3.11. Параллельное соединение
подсистем Sa и Sb
Рис. 3.12. Последовательное соединение
подсистем Sa и Sb
трены условия для управляемости и наблюдаемости: параллельного
и последовательного соединения двух подсистем, а также их соеди-
нения в виде контура обратной связи.
Рассмотрим две подсистемы Sa и Sb соответственно, имеющие
размерность па и пь, и собственные значения Х[а, ..., ХПаа и Хи, ...,
^пъЬ-
Параллельное соединение подсистем. Предположим, что под-
системы Sa и 5ь соединены параллельно и образуют систему
(рис. 3.11), тогда необходимые и достаточные условия того, чтобы,
система S была управляема (наблюдаема), состоят в том, чтобы обе
подсистемы Sa и Sb были управляемы (наблюдаемы).
Последовательное соединение подсистем. Для того чтобы система S
(рис. 3.12), являющаяся последовательным соединением подси-
стем Sa и Sb, была управляемой (наблюдаемой), необходимо (но не
достаточно), чтобы обе подсистемы Sa и Sb были управляемы (на-
блюдаемы) .
Если Sa и Sb управляемы (наблюдаемы), то все неуправляемые
(ненаблюдаемые) моды S возникают в Sb (в Sa).
Пример. Рассмотрим случай, когда S неуправляема и неиаблюдаема, не-
смотря иа то, что Sa и Sb управляемы и наблюдаемы.
Пусть
Х1а = — Xia + и1>
Xib = — 2хх + игъ — и2ь;
У1а = х1а,
Уъа ~ Xia;
У1 = хгь.
Тогда уравнения системы S имеют вид
Г—1 0 1 Г01
х = х 4- . и,;
[О — 2] ^[1] 1
У1 = [0 1] х,
из которых видно, что система S неуправляема и неиаблюдаема.
Система с обратной связью (рис. 3.13). Обозначим последова-
тельное соединение Sa и Sb через Sc, а последовательное соедине-
ние Sb и Sa через So и предположим, что (I + D0Db) — несингу-
лярна (невырождена). Тогда для того, чтобы система S была управ-
ляемой (наблюдаемой), необходимо и достаточно, чтобы система
Sc (So) была управляемой (наблюдаемой);
4*
99
Рис. 3,13. Система с обратной связью
необходимое, но недостаточное
условие для управляемости (наблю-
даемости) S состоит в управляемос-
ти (наблюдаемости) как Sa, так и
Sb, причем неуправляемые (ненаблю-
даемые) моды S являются неуправляемыми (ненаблюдаемыми)
модами Sc (So) и возникают в Sb.
Во всех трех рассмотренных случаях
п = па + пь
• • > — ^1а, . . ., ^п„а> ^16, • • • > ^п.Ь-
а ъ
Подчеркнем практическое значение понятий управляемости и
наблюдаемости. Так, например, при имитационном моделировании
проектировщики, полагаясь на устойчиость каждой из подсистем
и в то же время наблюдая неудовлетворительное поведение всей
системы в целом, иногда делают вывод, что это объясняется явлением
насыщения в интеграторах и стремятся его устранить, заново мас-
штабируя переменные. Это естественно не помогает и они приходят
к выводу, что неправильно функционируют сами интеграторы. Но
их замена опять не приводит к положительному результату. Отсюда
видно, каких излишних затрат времени можно избежать при пред-
варительном анализе свойств подсистем, входящих в состав САР.
Неучет неуправляемости или/и ненаблюдаемое™ при вводе
системы управления в эксплуатацию, когда расчеты дают хорошие
результаты, может привести к неполадкам в действительности.
3.5. ЗАДАЧА МИНИМАЛЬНОЙ РЕАЛИЗАЦИИ
Найдем матрицу передаточных функций, соответству-
ющую уравнениям (3.7)’, (3.8). Применяя преобразование Лапласа
в предположении нулевых начальных условий, получим
ф(з)’»С(з1 —• А)“ХВ. (3.35)
Учитывая теперь структуру матриц А, В и С, найдем ~ (si - Аи)‘1 X X X
Ф(з) = [ОС2 ОС4) С С (si - A22)-i X 0 (si - Азз)’1 X X х
С 0 0 (sl-A^-i.
X << 1 1 II ° ° ? 1 1 = С2 (з! — А22) 1В2; ОС2 ОС4] [х1х2х3х4]т. (3.36)
100
Таким образом, она совпадает с матрицей передаточных функций
системы, описываемого уравнениями:
х2 = А22х2 “I- B2U; 1
У = С2Х2. J
Следовательно, матрица передаточных функций (МПФ) представ-
ляет собой только управляемую и наблюдаемую части системы и не
содержит информации о неуправляемой и ненаблюдаемой частях.
Это указывает на то, что задача перехода от заданной МПФ Ф (s)
к эквивалентной форме описания в переменных состояния требует
корректности.
Первая часть задачи состоит в нахождении тройки матриц (А,
В, С) так, чтобы
ф (s) = С (si — А)" ХВ.
Однако этому уравнению удовлетворяет бесконечное число та-
ких «троек» и не все из них являются решением задачи. Размерность
вектора состояния не определяется выражением (3.35), так как
ему можно поставить в соответствие любое число лишних перемен-
ных состояния, не изменяя вида Ф (s), лишь бы они описывали не-
управляемые и ненаблюдаемые моды. Следовательно, для получе-
ния описания системы в переменных состояния соответствующего
МПФ Ф (s) необходимо решить две подзадачи:
тройка матриц (А, В, С) должна удовлетворять уравнению (3.35);
тройка должна быть управляемой и наблюдаемой, т. е. чтобы
матрица С- имела минимальную размерность (задача минимальной
реализации).
Решение первой задачи достаточно просто, а второй — связано
с определенными трудностями.
ГЛАВА 4. АНАЛИЗ УСТОЙЧИВОСТИ ЛИНЕЙНЫХ
’ НЕПРЕРЫВНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО
РЕГУЛИРОВАНИЯ
4.1. ОСНОВНЫЕ понятия ОБ УСТОЙЧИВОСТИ
Одной из основных задач теории автоматического регули-
рования является изучение динамических процессов, происходящих
в системах регулирования. Система всегда подвергается действию
внешних возмущающих сил, которые могут вывести систему из со-
стояния равновесия. Если система устойчива, то она противостоит
внешним силам, а выведенная из состояния равновесия возвра-
щается снова к нему. Устойчивость САР является одним из основных
условий ее работоспособности и включает требование затухания во
времени переходных процессов. Система с расходящимся процес-
сом будет неработоспособной.
.101
Рассмотрим определение понятия устойчивости, которое было
дано А. М. Ляпуновым. САР соответствует определенная система
дифференциальных уравнений, которая может быть приведена
к виду
= Ук(У1, У*„- Уп); («=1,2,..., л), (4.1)
где ук — обобщенные координаты системы, т. е. переменные, опи-
сывающие ее состояние; YK — известные функции, определенные
в некоторой фиксированной области G пространства переменных у1г
Уъ •••, Уп-
Пусть величины yw, у20, ..., упо обозначают начальные зиаче^-
ния переменных у1г у2, ..., уп- Каждой системе начальных значений
у10, у20.. уп0 соответствует решение
Ук = Ук (Ую, Уга.Упо, 0; (« = 1, 2,. . ., п) (4.2)
уравнения (4.1).
Установившиеся процессы можно описать так называемыми
очевидными решениями уравнения (4.1).
Эти решения
У\~У\, У2 —Уг, , Уп = Уп (4 3)
представляют собой корни уравнений
УК(У1, У2,- •> Уп); («=1,2..и).
Они входят в семейство решений (4.2) и определяются начальными
значениями ук0 = ук-
Обычно рассматривают случаи, когда имеется одно решение
(4.3), соответствующее вполне определенному установившемуся про-
цессу в системе регулирования. .
Введем отклонение координат хк от установившихся значений у*:
Хк = Ук~у£- (4-4)
Подставляя (4.4) в уравнение (4.1), получим
-^^Хк(хъх2,...,хп); (4.5)
где Хк (xi, х2, ..., хп) = YK (х, + у*; ...; хп + у*п).
Уравнения (4.5) называют уравнениями возмущенного движения.
Формула (4.4) определяет преобразование переноса начала
координат в точку у*, вследствие чего (4.3) соответствует решение
xf = 0; ...; х* = 0. (4.6)
По терминологии Ляпунова уравнения (4.6) называют невозму-
щенным движением системы.
При t = t0 переменные хк принимают свои начальные значения,
которые называют возмущениями. Каждой заданной системе таких
возмущений отвечает однозначное и непрерывное решение
Хк = Хк (xlo, Х20, ..., хпв, /)
уравнений (4.5). Это решение называют возмущенным движением
системы.
102
Исследования Ляпунова об устойчивости движения позволяют
судить об интересующих нас свойствах возмущенного движения,
не прибегая к интегрированию уравнений (4.5), и рационально рас-
считывать регулятор.
Если окажется, что при определенной настройке регулятора
решение (4.6) будет устойчивым, то система регулирования сама,
без постороннего вмешательства, изберет режим невозмущенного
движения, который соответствует этому решению. Если же решение
(4.6) будет неустойчивым, то такого установившегося режима полу-
чить нельзя. При сколь угодно, малых возмущениях хк0 система
будет удаляться от этого режима.
В большинстве задач теории автоматического регулирования
функции Хк (хъ х2, хп) допускают разложение в степенные ряды,
сходящиеся в некоторой Я-окрестности начала координат (4.6):
S < Н,
К=1
если Н >0 достаточно мала. В этих случаях уравнениям (4.5)
можно придать вид
=«КЛ -Ь • • +«КА +А(*ь *2,. • •> х„); к = 1, 2,. .., п,
(4-7)
где aKS (k, s — 1, 2, ..., и) — постоянные линейные части разло-
жения; при этом функции Fh не содержат членов ниже 2-порядка
малости. На практике судят об устойчивости решения (4.6), рас-
сматривая лишь уравнения, называемые уравнениями 1-го прибли-
жения вместо уравнения (4.7):
= ак1х1 + ^2^2 + • • • + якпхп; к = 1, 2, ..., п. (4-8)
Так как справедливость замены (4.7) уравнениями (4.8) зара-
нее не ясна, возникла задача найти случаи исследования уравне-
ний (4.7), в которых устойчивость (неустойчивость) решения (4.6)
вытекает из рассмотрения уравнений 1-го приближения (4.8). Эту
задачу решил Ляпунов. Он показал, что все случаи исследования
уравнений (4.8) следует разделять на категории некритических и
критических случаев. К первой из них относятся случаи, в которых
вопрос оп' устойчивости (неустойчивости) невозмущенного движе-
ния однозначно разрешается на основании исследования уравне-
ний 1-го приближения (4.8). Для того чтобы обнаружить эти слу-
чаи, следует составить характеристическое уравнение системы
а12
@22 — &
аП2
ат
din
апп-^
(4.9)
и исследовать ег\ корни Хк (к = 1, 2, ..., и).
103
Ляпунов доказал две теоремы, которые позволяют исследовать
все случаи 1-й категории.
Теорема 1. Если вещественные части всех корней Хк харак-
теристического уравнения (4.9) первого приближения отрицательны,
то невозмущенное движение асимптотически устойчиво независимо
от членов разложения выше 1-го порядка малости.
Теорема 2. Если среди корней %к характеристического
уравнения (4.11) первого приближения найдется по меньшей мере
один с положительной вещественной частью, то невозмущеиное
движение неустойчиво независимо от членов разложения выше
1-го порядка малости.
Критические случаи имеют место, когда среди всех корней Хк
уравнения (4.9) имеется некоторая группа корней, вещественная
часть которых равна нулю, а остальная группа корней имеет отри-
цательную вещественную часть. В критических случаях вопрос
об устойчивости невозмущенного движения (4.6) не может быть раз-
решен на основании исследования уравнений первого приближения.
В критических случаях устойчивость (неустойчивость) невозмущен-
ного движения определяется видом нелинейных функций FK. По-
этому в приведенных случаях необходимо рассматривать уравнения
(4.9) в их исходном виде.
Характеристическое уравнение, соответствующее системе урав-
нений (4.8), имеет вид
ап-Ап'_1 “Ь • • • 4~— ао = О- (4-Ю)
Пусть для определенности все корни уравнения {4.10) различны,
тогда решение уравнения
х = Л1е?-1; -|- Ап&п*,
где 12, %3, ..., — корни характеристического уравнения; А1г
Лг, А3, ..., Ап — постоянные интегрирования, зависящие от началь-
ных условий.
Пусть — вещественный корень. Если %к >0, то член Лкек^
с течением времени непрерывно возрастает и стремится к бесконеч-
ности.
В этом случае х также стремится к бесконечности и 'система не-
устойчива.
Если Хк < 0, то член Акекь* с течением времени стремится к нулю
(затухает). Пусть один из корней — комплексный, тогда всегда
существует сопряженный с ним
Хг = а /Р; = а — у’р.
В этом случае
Аге'-А -|- ЛгеМ = Атеа( sin (р/ + ф).
Если а >0, то имеют место колебания с частотой р и нараста-
ющей амплитудой — движение неустойчиво.
Если а = 0, получим незатухающие колебания — система на
границе устойчивости.
104
Рис, 4.1. Расположение корней характеристиче- ,
ского уравнения устойчивой САР
Л,
Если а < 0, то амплитуда колеба- л4 х *
ний с течением времени уменьшается — х |
колебания затухают. л6 5
Отсюда можно сделать следующие —х-----------х----
Плоскость з
Вещественная
ось
выводы:
если все вещественные части корней
характеристического уравнения отрица-
тельны, то система устойчива (рис. 4.1);
если хотя бы один из корней имеет
X
Л2
х
положительную вещест-
венную часть, то система неустойчива.
Если в каких-либо корнях характеристического уравнения ве-
щественная часть равна нулю, а у остальных — отрицательная, то
об устойчивости невозмущенного движения по первому приближе-
нию ничего сказать нельзя и требуется специальное исследование
полного уравнения.
Если среди корней характеристического уравнения имеется один
или несколько нулевых корней, а вещественные части остальных
корней отрицательны, то говорят, что система нейтрально устойчива.
Этот случай называют критическим и для определения устойчивости
системы требуется специальное исследование нелинейных членов
разложения.
4.2. КРИТЕРИИ УСТОЙЧИВОСТИ ЛИНЕАРИЗОВАННЫХ
САР
Вычисление корней характеристических уравнений просто
для уравнений 1-й и 2-й степени. Если общие выражения для корней
уравнений 3-й и 4-й степени известны, но они громоздки и практи-
чески мало удобны. Уравнения более высоких степеней не имеют
общих выражений для корней. Поэтому важное значение приобре-
тают правила, которые позволяют определить устойчивость системы,
минуя вычисление корней. Эти правила называют критериями устой-
чивости. Они позволяют в ряде случаев не только установить, устой-
чива система или нет, но и выяснить влияние тех или иных пара-
метров и структурных изменений в системе на устойчивость. Суще-
ствуют различные формы критериев устойчивости. Но математически
эти формы критериев устойчивости эквивалентны, так как все они
определяют условия, при которых корни характеристического урав-
нения лежат в левой части комплексной плоскости.
Критерии устойчивости можно разбить на две группы: алгебраи-
ческие и частотные. Критерии, которые позволяют определить,
устойчива ли система, ограничиваясь лишь алгебраическими вычис-
лениями над коэффициентами характеристического уравнения, на-
зывают алгебраическими критериями. К этим критериям относят
критерий устойчивости Рауса (Routh) и критерий устойчивости
Гурвица^(Ниг^Иг). Рассматриваемые критерии для систем, описы-
ваемых уравнениями выше 4-й степени, дают лишь возможность
105
определить, устойчива ли система при заданных численных значе-
ниях коэффициентов уравнения. Но их применение для определения
изменения параметров системы с тем, чтобы сделать ее устойчивой,—
затруднительно.
Частотный критерий устойчивости, впервые сформулированный
Найквистом, был применен для исследования устойчивости САР
А. В. Михайловым. Кроме того, им был сформулирован частотный
критерий, получивший название критерия устойчивости Михай-
лова. Достоинством частотных характеристик является наглядность
и возможность использования частотных характеристик, полученных
экспериментально, когда неизвестны дифференциальные уравнения
системы или ее элементов. Частотные критерии могут быть разделены
на две подгруппы.
Исследуется непосредственно замкнутая система (критерий устой-
чивости Михайлова). Этот критерий целесообразно применять тогда,
когда размыкание системы не приводиткзаметномуупрощениюзадачи.
Об устойчивости замкнутой системы судят по частотным харак-
теристикам разомкнутой системы (критерий устойчивости Найк-
виста—Михайлова). Во многих случаях частотные критерии устой-
чивости дают представление о качестве процесса регулирования.
4.3. КРИТЕРИЙ УСТОЙЧИВОСТИ РАУСА
Критерий устойчивости Рауса формулируют следующим
’образом. Если система автоматического регулирования описывается
Линеаризованным характеристическим уравнением вида (4.12), то
(для устойчивости системы (т. е. все корни уравнения должны иметь
I отрицательные вещественные части) необходимо и достаточно, чтобы
(все элементы столбца I таблицы (алгоритма)'^Рауса (табл. 4.1)
: для данного уравнения были одного знака.
i Таблица 4.1
; Алгоритм Рауса
Значения г Номер строки Номера столбцов
I II III
— 1 ап ап-2 °П-4
— 2 ап-1 ап-3 °П-Б
Г — йп г0 — ' 3 «13 = аП_2—г0аП-3 с23 “ ап-4 г0аП-6 «33 “ ап-з Г0аП-1
Ufi-1
г — а»-1 с13 4 «14 = ап-1—«1«23 «24 = аП-Ъ—г1с33 «34 = аП-1 Г!««
_ _ с13 5 «15 = «23—г2«24 «25 = «33—г 2«34 «35 = «43—«2«44
Н-З С1, г+з = ^2» 1+3 » «3, !+3 =
с1, 2+2 «2, i+1 ric2, г+2 = с3, i+1 i+2 = «4, г+1—П«4, 1+2
106
Если ап >0, то все элементы I столбца таблицы (алгоритма)
Рауса должны быть положительны.
Таблицу (алгоритм) Рауса составляют следующим образом.
В строку 1 таблицы вписывают коэффициенты уравнения (4.10)
с индексами (ап, ап_3, ап_^ ...), в строку 2 — коэффициенты
уравнения с индексами (an_i, ап_3, ап_в, ...), в строку 3 —
коэффициенты с13, с23, которые подлежат определению. В после-
дующие строки вписывают коэффициенты cKi (где k — номер столбца,
a i — номер строки, в которой стоит коэффициент). Каждый из
коэффициентов равен определителю; I столбец определителя состав-
лен из‘двух элементов, записанных в следующем за искомым коэф-
фициентом столбце таблицы на двух расположенных выше строках.
Первый элемент II столбца определителя образован из частного
от деления двух элементов, расположенных в столбце I таблицы на
двух вышележащих строках. Второй элемент II столбца определи-
теля равен единице.
Так, с13 —
«п-2
0П-1
1
= «п-2 - «з;
«п-i!
«й+1, i-2
ck+l, i-1
Значения г выписываются в дополнительном столбце, слева.
На них умножается ряд коэффициентов.
Следствия из критерия устойчивости Рауса
1. Все коэффициенты характеристического уравнения устойчи-
вости системы должны быть одного знака. Обращение в нуль одного
из коэффициентов аг (за исключением коэффициента старшего члена)
свидетельствует о неустойчивости системы или о том, что она на-
ходится на границе устойчивости.
Если коэффициенты характеристического уравнения положи-
тельны, то все вещественные корни (если они есть) отрицательны.
Комплексные корни могут быть и правыми.
2. Число отрицательных коэффициентов clt столбца I таблицы
Рауса равно числу корней с положительной вещественной
частью.
3. Обращение в нуль а0 приводит к появлению нулевого корня.
Обращение в нуль последних v коэффициентов а0 = 0; аг — 0; ...;
«v-i — 0 приводит к появлению нулевых корней. При этом обра-
щаются в нуль последние коэффициенты си таблицы Рауса (с1>п =
«1, п-1 * ’ ' «1, n-V+1 0)-
4. Обращение какого-либо промежуточного ' коэффициен-
та в нуль свидетельствует о появлении пары чисто мнимых кор-
ней.
107
4.4. КРИТЕРИЙ УСТОЙЧИВОСТИ ГУРВИЦА
Критерий устойчивости Гурвица достаточно просто полу-
чить из критерия Рауса. Для этой цели выразим коэффициенты сгь
ввиде определителей:
&П-1 ап
?и — £12 — an-i — Ах! £1з —
an-ian-2 апЯп-з
ап-1
ап-3 аП-2
ап-1
Аг .
Л1 ’
£14 —
аП-2
ап~1
ап-1
аП-5
ап
аП-4
ап-1 ап
ап-3 аП-2
п
отчеркиванием строк и граф. Ёсе коэффициенты с отрицательными
индексами заменяют нулями. Определитель составляют по следу-
ющему правилу. По диагонали выписывают коэффициенты харак-
теристического уравнения, начиная с an_j. Строки определителя,
начиная с диагонали, заполняют коэффициентами вправо по убы-
вающим, а влево — по возрастающим индексам.
Согласно критерию Рауса необходимым и достаточным условием
устойчивости является
Сц — ап >» 0; с12 — an-i >0; £is 0;...; Ci, n+i 0.
108
Этим неравенствам, как следует из соотношения (4.12), эквива-
лентны неравенства вида
ап>0; Дх> 0; Д2 > 0; ..Дп>0.
Таким образом, критерий Гурвица формулируется следующим
образом: для того чтобы система была бы устойчива, необходимо и
достаточно, чтобы выполнялось неравенство ап >0, а определители
Гурвица Дх, Д2, ..., Д„ были положительными.
Для уравнений высоких степеней порядок определителей воз*
растает, и практическое вычисление их обычным путем становится
громоздким.
Необходимые, но недостаточные, условия устойчивости заклю-
чаются в том, что в случае уравнения n-го порядка все коэффи-
циенты ап, ап_ъ ..., а0 должны быть положительны и ни один из
них не должен равняться нулю.
Условия устойчивости для систем, уравнения которых имеют
низкую степень:
1. а^ ~Ь а0 — 0.
Условия устойчивости: а0>0; ах>0.
2. а2№ Ч~ gxA, а0 = 0.
Условия устойчивости: а0 >0; аг >0; а2 >0.
3. а3№ 4* а2№ gxA, а0 = 0.
Условия устойчивости: ао>0; ах >0; а2 >0; а3>>0;
/ Д2 = «ха2 — gug3 >> 0,
- 4~ а2Г^
Условия устойчивости: а0 >0; ах >0; а2 >0; а3 >0; а4 >0;
Д2 = а^12 — а^1 > 0; дД8 == а3а2ах — а^а.} — а^ > 0.
&. а^Хв'-р *а4Х4 + аз^ + а2^2 + ахХ + а0 = 0.
Условия устойчивости: аа>0; ах >0; а2 >0; а3 >0; а4 >0;
а8 >0;
Дз —
Д« —
Дг —
а4
аБ
«2
а3
= а4а3 — а5а, > 0;
а^.
«Б
а2
а3
а0
ах
(^= aia3a,_ + а3а^ — а^ах — а!ав
а^' tao” Ю
0 Ot 'й2 Оо
0 аъ а^
7---------—
0 а. а2
0;
= а4а3а2ах + 2авс4схао + аваз«2«о —
' 11 2 " о 2 2 2 2
— ^5^2^! — а^а3а3 — ада3 ~ а$а\ 0.
109
Для п = 2 условием устойчивости является лишь положитель-
ность коэффициентов характеристического уравнения.
Для п = 3; п = 4 и п — 5 положительность коэффициентов
характеристического уравнения недостаточна. Кроме этого, коэф-
фициенты должны удовлетворять дополнительным неравенствам.
4.5. ЧАСТОТНЫЕ КРИТЕРИИ ^УСТОЙЧИВОСТИ^
Частотные критерии в большинстве случаев используют
в качестве графоаналитических критериев. Поэтому они отличаются
наглядностью инженерных расчетов.
В основе частотных методов лежит принцип аргумента — след-
ствие из теоремы теории функций комплексного переменнного,
а именно теоремы Коши относительно числа нулей и полюсов функ-
ции, аналитической в заданной области.
Принцип аргумента. Рассмотрим алгебраическое уравнение п-й
степени с действительными коэффициентами:
Z) (X) = d-^Kn —dn\Кп 1 ... —cz^X 6Zq = 0.
Если через Хг, Х2, ..., Хп обозначить корни этого уравнения, то
многочлен D (X) можно представить в виде произведения простых
сомножителей:
D (X) = ап (X - Хх) (X - Х2) ... (X - Хп).
На комплексной плоскости X каждому корню соответствует
вполне определенная точка (рис. 4.2, а). Геометрически каждый
корень Хг можно изобразить в виде вектора, проведенного из начала
координат к точке Хг (рис. 4.2, б). Длина этого вектора равна мо-
дулю комплексного числа Хг, т. е. |Хг|, а угол, образованный векто-
ром с положительным направлением действительной оси, — аргу-
менту или фазе комплексного числа Хьт. е. arg Х(. Величины (X — Хг),
входящие множителями в D (X), геометрически изображают век-
торами, проведенными из точек Хг к точке X. Этот вектор является
разностью двух векторов, соответствующих X и Х; (рис. 4.3).
Если положить X = /со в D (X), то
ПО
Рис. 4.2. Корни характеристического урав-
нения:
а — расположение корней; б — модуль и фаза
вектора
Рис. 4.3. Элементарный
вектор (X — X;)
Рис. 4.5. Изменение аргумента вектора'
(/ш — А,,) и (/со — Лк) при возрастании
частоты со от —оо до 4~оо
Концы элементарных векторов будут находиться на мнимой оси
в точке % = /со (рис. 4.4). Модуль этого вектора равен произведению
модулей элементарных векторов и ап:
| D (/со) | = ап | /со — Xi 11 /со — А21... |/со - А„ |,
а аргумент или фаза его равна сумме аргументов элементарных век-
торов:
arg D (/со) = arg (/со — Ах) + arg (/со — А2) + • • • + arg (/со — Ап).
Направление вращения вектора против часовой стрелки прини-
мают за положительное. Тогда при изменении со от —оо до +оо
каждый элементарный вектор (/со — Аг) повернется на угол +л,
если его начало (корень Аг) лежит в левой части комплексной пло-
скости, и на угол —л, если его начало (корень Ак) лежит в правой
части комплексной плоскости (рис. 4.5). Предположим, что-уравне-
ние D (X) = 0 имеет т корней в правой части плоскости А и, следо-
вательно, п — т корней в левой части комплексной плоскости.
Тогда при возрастании со от —оь до 4~оо изменение аргумента век-
тора D (jay) или угол поворота D (/со) (равный сумме изменений
аргументов элементарных векторов) будет
Д arg D (/со) = (п — т) л — тл = (п — 2m) л. (4.13)
—оо^со^ао
Отсюда следует, что изменение аргумента D (/со) при возрастании
со от —оо до +оо равно разности (п —• т) корней уравнения D (А) =
= 0, лежащих в левой части плоскости и числом т корней уравне-
ния, лежащих в правой части плоскости, умноженной на л.
Критерий устойчивости Михайлова. Он непосредственно вытекает
из принципа аргумента (4.13) и является геометрической интерпре-
тацией соотношения
д arg D (/со) ~(п — т) л — тл — (п — 2т) л,
---00^0.^00
где т — число корней в правой части комплексной плоскости,'
а (п — т) — число корней в левой части комплексной плоскости
111
Пусть характеристическое уравнение системы имеет вид.
Z) (^) = “F пп—1 Ч~ • • • Ч- + а0 — о.
Если все корни этого уравнения лежат в левой части комплексной
плоскости % (система устойчива) и в правой части плоскости корней
нет, то т = 0 и изменение аргумента
д arg D (/ю) = пл.
---00^6)^00
Отсюда следует вывод: САР будет устойчива, если при возраста-
нии & от —оо до 4~оо изменение аргумента вектора D (/<о) будет
равно пл, где и — степень характеристического уравнения D (л) = 0.
При изменении частоты со от —оо до +оо вектор D (j(a) на ком-
плексной плоскости опишет своим концом кривую, которую на-
зывают характеристической кривой, или годографом вектора D (jai).
Уравнение характеристической кривой определяется подста-
новкой X = /со в многочлен D (X) и разделением действительной
и мнимой частей:
D (/®) = ап(/®)п + ап-1 . • • + 01 (/®) + о0;
D (jm) = и (со) + /о (со),
где и (со) = ай — а2со2 + v (со) = а^> — со3со3 +
4- а5со5 — ...
Действительная часть и (со) является четной функцией, а мнимая
часть v (со) — нечетной функцией частоты со, т. е. и (—со) = и (со),
v (—со) = —v (со).
Поэтому для отрицательных значений со
D (—]’(£>) = и (со) — jv (со).
Отсюда следует, что характеристическая кривая симметрична
относительно действительной оси при со и —со. При построении
характеристической кривой можно ограничиться лишь положитель-с
ными значениями со от 0 до оо. При этом угол поворота вектору
£> (/со), т. е. изменение аргумента D (/со) уменьшается вдвое и кри-
терий устойчивости формулируют следующим образом. 1
САР будет устойчивой, если при возрастании частоты со от О
до оо вектор D (/со) повернется на угол п-^-, где п — степень урав-
нения D (X) = 0, или, что то же самое, если характеристическая
кривая при изменении частоты со от 0 до <х>, начиная с положитель-
ной действительной оси, обходит последовательно в положительном
направлении, т. е. против часовой стрелки п квадрантов.
На рис. 4.6 приведены характеристические кривые, соответству-
ющие устойчивой системе. При п = 1 изменение аргумента равно
л/2, при п = 2 изменение аргумента равно л и характеристическая";
кривая проходит через два квадранта и т. д.
На рис. 4.7 приведена характеристическая кривая для п = 4
которая соответствует неустойчивой системе. Последняя будет на-
ходиться на границе устойчивости, если соответствующая ей харак-
теристическая кривая при некотором значении пересекает начало
112
Рис. 4.6. Характеристические кривые
для устойчивых систем (п= 1, 2, 3,
4, 5)
Рис. 4.7. Характеристическая кривая
неустойчивой системы
координат, обходя при этом (м — 1) квадрантов. Частота ® является
одновременно корнем уравнения и (со) — 0 и v (о) = 0.
Иногда может оказаться удобным критерий устойчивости, назы-
ваемый критерием перемежаемости корней (рис. 4.8 и 4.9).
Действительно, характеристическая кривая при изменении <о
от 0 до оо будет обходить в положительном направлении п квадран-
тов и система устойчива, если и (0) > 0 и и' (0) = 0 и уравнения
и (щ) = 0; и (®) = 0 имеют все действительные и перемежающиеся
корни, т. е. если между каждыми двумя соседними корнями v (со) =
= 0 лежит корень уравнения и (со) = 0 или между двумя соседними
корнями и (со)=0 лежит корень уравнения v (со) — 0.
Для устойчивости системы корни должны перемежаться и быть
вещественными, а сумма корней — равна порядку уравнения п.
На рис. 4.8 при п = 4 изображены характеристические кривые,
соответствующие устойчивой системе, а на рис. 4.9 — неустойчивой
системвс/Ц п л z
Амййитудно-разовый критерий устойчивости (частотный крите-
рий устойчивости^айквиста^-Михайлова). Этот критерий, осно-
ванный на рассмотрении частотных характеристик разомкнутых
систем автоматического регулирования, был впервые доказан Найк-
вистом применительно к ламповым усилителям с обратной связью
и введен в теорию автоматического регулирования А. В. Михайло-
вым. Данный критерий, как и критерий Михайлова, вытекает из
принципа аргумента.
Рис. 4.8. Вещественная и мнимая части
кривой D (j<n) устойчивой системы
(«= 4)
Рис. 4.9. Вещественная и мнимая ча-
сти кривой D_(Ja>) неустойчивой систе-
мы (п = 4)
113
Для вывода амплитудно-фазового критерия устойчивости раЫ
смотрим вспомогательную функцию ф (/со), которая связана с ча?
стотной характеристикой разомкнутой системы W (jot) следующим
соотношением:
Ф (/со) = 1 + W Цы).
Частотная характеристика разомкнутой системы W (/со) может
быть выражена через полином числителя 7ИР (/<») и полином знаме-;
нателя £>р (/со) разомкнутой системы
Л1Р (/и)
£>р (/и) ‘
Тогда
.. . (/®) + Л1р (/ш) £>(/ш)
£>р(/й) ~Рр(/<0) •
Знаменатель функций ср (/со) представляет собой характеристик
ческую кривую разомкнутой системы, а числитель — характери-
стическую кривую замкнутой системы. Предполагается, что разомк-
нутая система устойчива. Устойчивость разомкнутой системы можно
установить без всяких вычислений непосредственно по схеме си-
стемы. Например, разомкнутая система, состоящая из устойчивых
звеньев и не содержащая обратных связей, заведомо устойчива.
Если разомкнутая система устойчива, то изменение аргумента
при возрастании частоты со от 0 до оо будет
A arg Dp (ja>) = п,
0<в><оо
где п — степень характеристического уравнения разомкнутой си-
стемы Dp (X) = 0. Она совпадает со степенью характеристического
уравнения замкнутой системы, так как в реальных системах степень
числителя передаточной функции не может превосходить степень
знаменателя.
Изменение аргумента D (/со) при возрастании со от 0 до оо в об-
щем случае равно
A arg D (/со) ~(п — 2т) ~,
О^СО^оо
где т — число корней характеристического уравнения D (X) = 0,
лежащих в правой части комплексной плоскости.
Изменение аргумента функции ф (/со) == при возра-
J5
станин со от 0 до оо равно разности изменении аргумента D (/со)
и Dp (/со), т. е.
A arg ф (/со) = д arg D (ja>) — д argDp(/co) — (n — 2т) X
_ Л Л
X ~2---п — = — тп.
Система будет устойчивой, если т = 0, т. е. если
д arg ф (/со) — 0.
0<<0^оо
114
Рис. 4.10. Годографы век-
торов:
« — годограф вектора <₽ (/и);
6 — соответствующий ему
। одограф вектора W (/со)
в)
Вектор q> (/со) опишет угол, равный нулю, лишь в том случае, когда
его годограф не охватывает начало координат (рис. 4.10). Точка А
отстоит от начала координат на единицу. От этой кривой можно
перейти к амплитудно-фазовой характеристике (АФХ), построенной
по выражению W (/и), если сместить эту кривую влево на единицу.
В плоскости IF (/со) начало вектора ф (/со) находится в точке
(—1, / 0), а конец вектора при изменении со скользит по АФХ.
Изменение аргумента ф (/со) равно нулю, если точка (—1, / 0) будет
находиться вне АФХ.
Амплитудно-фазовый критерий устойчивости можно формули-
ровать следующим образом:
САР будет устойчивой, если АФХ W (/со) не охватывает точки
с координатами (—1, /0).
При рассмотрении многоконтурных систем, имеющих местные
обратные связи, а также систем, содержащих неустойчивые звенья,
разомкнутая система может оказаться неустойчивой. Для такой
системы возможность экспериментального определения АФХ исклю-
чается. Однако она может быть построена по уравнениям системы.
По ней можно судить об устойчивости системы. В этом случае изме-
нение аргумента Z)p (/со) при возрастании со от Q до оо будет
A arg Dp(/co) = (и — 2Р)-5-,
0<а><оо *
где Р — число корней характеристического уравнения разомкну-
той системы, лежащих в правой части комплексной плоскости.
Если замкнутая система устойчива (Р = 0), то на основании
принципа аргумента
A arg L>(/co) = n-£-
0<<0<оо Z
и, следовательно,
A arg ф (/со) = A arg D (/со) — A arg Dp (/со) == п -5— (и — 2Р) х
0<й<оо 0<ю<оо Л
Х^- = Рл=-^-2л.
САР будет устойчивой, если АФХ охватывает точку (—1; / 0) в
положительном направлении Р/2 раз. ПриР = 0 получим прежний
результат.
115
tyfasi Рис. 4.11. Иллюстрация к формулировке амплитуд-
•' '' ‘ но-фазового критерия устойчивости
\ На практике удобнее пользоваться
[ д. следующей формулировкой критерия
k/j®v j о ]и(а>) устойчивости, исключающей необходи-
хД/ / мость непосредственного определения из-
--------------менения аргумента: изменение аргумента
Ф (/со) при возрастании ® от 0 до оо
т-------------будет равно нулю, если число переходов
АФХ W (/со) через отрезок действительной оси (—ос-.—1) из верх-
ней полуплоскости в нижнюю и из нижней полуплоскости в верхнюю
равны между собой. Это изменение аргумента будет равно
если разность между ними равна ±Р/2. Переход W (/со) (с воз-
растанием со) из верхней полуплоскости в нижнюю считается по-
ложительным, а из нижней в верхнюю — отрицательным.
В окончательном виде амплитудно-фазовый критерий устой-
чивости можно сформулировать следующим образом.
САР будет устойчивой, если разность между положительными
и отрицательными переходами АФХ отрезка действительной оси
(—оо-;—1) равна Р/2, где Р — число корней характеристического
уравнения разомкнутой системы с положительной вещественной
частью.
Следует отметить, что если W (/со) при со = 0 начинается на
отрезке действительной оси (—оо-;—-1), то считается, что W (/со)
при со = 0 совершает половину перехода.
В частном случае, когда Р = 0, что соответствует устойчивой
или нейтральной разомкнутой системе, последняя будет устойчивой,
если разность между положительными и отрицательными перехо-
дами АФХ отрезка действительной оси (—оо-;—1) равна нулю.
Пример. На рис. 4.11 изображена АФХ разомкнутой системы. В точках ее пере-
хода через участок действительной оси (—ооч—1) ставят стрелки в сторону воз-
растания ш и подсчитывают разность между числом стрелок, направленных вверх
и вниз. Для АФХ, изображенной на рис. 4.11, разность между положительными
и отрицательными переходами равна единице (2—1= 1). Если разомкнутая
система неустойчива и Р = 2, то замкнутая система будет устойчивой.
Таким образом, критерий устойчивости Найквиста—Михайлова позволяет
по годографу амплитудно-фазовой частотной характеристики разомкнутой системы
судить об устойчивости замкнутой системы.
Критерий может быть использован в тех случаях, когда дифференциальные
уравнения системы (или отдельных ее звеньев) неизвестны, но экспериментально
определены частотные характеристики. Кроме того, критерий дает возможность
исследовать устойчивость не только систем с сосредоточенными, но и с распреде-
ленными параметрами, а также позволяет связать исследование устойчивости с
с последующим анализом качества.
4.6. АНАЛИЗ УСТОЙЧИВОСТИ ОДНОКОНТУРНЫХ САР
ПО ИХ ЛОГАРИФМИЧЕСКИМ ЧАСТОТНЫМ
ХАРАКТЕРИСТИКАМ
АФХ систем в зависимости от пересечения с вещественной
осью относительно критической точки с координатами (—1; / 0)
можно подразделить на два типа: на АФХ 1-го рода, все точки пере-
116
сечения которых с вещественной осью расположены справа от кри-
тической точки (кривая 1, рис. 4.12), и на АФХ 2-го рода, точки
пересечения которых с вещественной осью расположены как слева,
так и справа от критической точки (кривая 2).
В системах 1-го рода увеличение передаточного коэффициента k
выше критического приводит к нарушению устойчивости, а его умень-
шение ниже критического значения — к стабилизации системы.
Следует отметить, что критическим значением передаточного коэф-
фициента k называют то его значение, при котором АФХ проходит
через критическую точку (—1, / 0) и система находится на границе
устойчивости.
В системах 2-го рода при увеличении передаточного коэффициента
выше его критического значения система может превратиться из
неустойчивой в устойчивую, а при уменьшении — из устойчивой
в неустойчивую.
На основании амплитудно-фазовых критериев устойчивости могут
быть сформулированы требования, которым должны удовлетворять
логарифмические частотные характеристики разомкнутой системы
для того, чтобы она была устойчива в замкнутом состоянии.
Если система имеет АФХ 1-го рода, то система является устой-
чивой в том случае, если всем точкам АФХ вплоть до точки пересе-
чения с окружностью единичного радиуса соответствуют значения
фазы © большие, чем (—л). Но точке пересечения АФХ с окруж-
ностью единичного радиуса соответствует точка пересечения ЛАХ
L (со) с осью частот (так как 1g 1 = 0). Поэтому для того, чобы си-
стема, устойчивая в разомкнутом состоянии и имеющая АФХ 1-го
рода, была устойчива в замкнутом состоянии, необходимо и доста-
точно, чтобы при всех частотах, при которых ЛАХ положительная,
т. е. L (®) 0, значения фазы 0 (®) не превосходили (—л).
На рис. 4.13, а, б приводятся логарифмические частотные характе-
ристики соответственно устойчивой и неустойчивой систем.
Если система устойчивая в разомкнутом состоянии имеет АФХ
2-го рода, то длй того, чтобы она была устойчива в замкнутом со-
стоянии, необходимо и достаточно, чтобы разность между числом
положительных (сверху вниз) и отрицательных (снизу вверх) пере-
ходов АФХ отрезка действительной оси (—оо, —1), была равна
Рис. 4.12. АФХ 1-го и 2-го Рис. 4.13. Логарифмические частотные характеристики:
рода а — устойчивой и б — неустойчивой систем
117
Рис. 4.14. Логарифмические частотные характеристики разомкнутых систем, ус-
тойчивых в замкнутом состоянии:
а — число корней в правой полуплоскости Р = 0; б — число корней в правой полупло-
скости Р = 2
нулю. Но в точках пересечения АФХ отрезка (— оо-=—1) ЛАХ L (со)
положительна, а фазовая характеристика © (со) пересекает прямую
(—л) снизу вверх (положительный переход) или сверху вниз (отри-
цательный переход). Поэтому для того, чтобы система, устойчивая
в разомкнутом состоянии, была бы устойчива и в замкнутом состоя-
нии, необходимо и достаточно иметь разность между числом поло-
жительных и отрицательных переходов, между фазовой характери-
стикой & (со) и прямой (—л), равную нулю, при тех значениях со,
для которых ЛАХ L (со) положительна.
Если логарифмические частотные характеристики разомкнутой
системы имеют вид, показанный на рис. 4.14, а, разомкнутая си-
стема устойчива или нейтрально устойчива, т. е. имеет полюс в на-
чале координат, то замкнутая система будет также устойчива.
Если система в разомкнутом состоянии неустойчива и характе-
ристическое уравнение разомкнутой системы имеет Р корней в пра-
вой полуплоскости, то для того, чтобы система в замкнутом состоя-
нии была устойчива, на основании амплитудно-фазового критерия
устойчивости необходимо и достаточно, чтобы разность между чис-
лом положительных и отрицательных переходов АФХ отрезка
(—оо-;—1) равнялась Р/2. Поэтому для того, чтобы система, харак-
теристическое уравнение которой в разомкнутом состоянии имеет Р
корней в правой полуплоскости, была устойчива в замкнутом со-
стоянии, необходимо и достаточно иметь число положительных
переходов между фазовой характеристикой © (со) и прямой (—л),
превышающих на величину Р/2 число отрицательных переходов
при тех значениях, частоты со, при которых ЛАХ положи-
тельна.
На рис. 4.14, б приведены логарифмические частотные характе-
ристики, соответствующие системе неустойчивой в замкнутом со-
стоянии, если Р — 0.
Если характеристическое уравнение такой разомкнутой системы
имеет два корня с положительной действительной частью (Р = 2),
то такая система будет устойчивой в замкнутом состоянии, так как
118
разность между числом положительных и отрицательных перехо-
дов равна 1.
Для анализа устойчивости по логарифмическим частотным ха-
рактеристикам следует построить логарифмическую амплитудную
и фазовую частотные характеристики системы и найти интервал
частот, в которых ЛАХ положительна [L (со) >0]. Сосчитать число
пересечений в этом интервале частот ЛФХ 0 (со) с прямой (—л)
снизу вверх (+) и сверху вниз (—). Если разность между числом
точек пересечения, отмеченных знаком (+), числом точек пересе-
чения, отмеченных знаком (—), равна Р/2, то система устойчива;
еслй она равна какому-либо другому числу, то система не устойчива.
В случае астатических систем при подсчете числа точек пересечения
необходимо учитывать точку пересечения (или касания) АФХ от-
резка (—оо4—1), получающуюся при бесконечно малых значениях со.
4.7. ЗАПАСЫ УСТОЙЧИВОСТИ СИСТЕМЫ
ПО МОДУЛЮ И ФАЗЕ
Устойчивость замкнутой САР зависит от расположения
годографа W (/’со) разомкнутой системы относительно критической
точки с координатами (—1, / 0). Чем ближе эта кривая проходит от
критической точки, тем ближе замкнутая система к границе устой-
чивости.
Для устойчивых систем удаление годографа W (/<») от критиче-
ской точки (—1, /0) характеризуется запасом устойчивости по мо-
дулю и фазе (рис. 4.15). Минимальный отрезок действительной
оси h, характеризующий расстояние между критической точкой и
ближайшей точкой пересечения годографа W (/со) с действитель-
ной осью, называют запасом устойчивости по модулю.
Минимальный угол у, образуемый радиусом, проходящим через
точку пересечения годографа W (/со) с окружностью единичного
радиуса с центром в начале координат и отрицательной частью
действительной оси, называют запасом устойчивости по фазе. Си-
стема обладает необходимым запасом устойчивости если она, удов-
Рис. 4.15. Запасы устойчивости по мо-
дулю и по фазе
Рис. 4.16. Запасы устойчивости по АФХ
119
Рис. 4.17. Запасы устойчивости по логариф-
мическим частотным характеристикам
летворяя условию устойчивости, име-
ет значения модуля характеристиче-
ского вектора W (]&), отличающиеся
от единицы не менее чем на заданную
величину h, называемую запасом
устойчивости по модулю, и угол по-
ворота или фазу, отличающуюся от
(—л) не менее чем на величину у,
называемую запасом устойчивости по углу, или по фазе (рис. 4.16).
АФХ систем, обладающих требуемыми запасами устойчивости, не
должны входить внутрь области I—I, II—II.
В случае применения для анализа устойчивости логарифмических
частотных характеристик (рис. 4.17) запасу устойчивости системы
по модулю соответствует отрезок I — 20 1g h при том значении ча-
стоты, при котором фазовая характеристика 0 (®) = —п (для рас-
сматриваемых характеристик можно говорить и о запасах устой-
чивости по модулю, соответствующих частотам и ®2 — Zx и Z2).
Запасу устойчивости системы по фазе соответствует значение
угла, представляющее превышение фазовой характеристики на (—л)
при частоте среза <ас.
4.8. ВЫДЕЛЕНИЕ ОБЛАСТЕЙ УСТОЙЧИВОСТИ
Критерии устойчивости позволяют определить, устойчива
ли система не только при заданных параметрах, но и в том случае,
когда один или два из них неизвестны. Последние могут изменяться
в некоторых пределах и требуется определить, при каких значениях
этих параметров система будет устойчивой.
Для установления областей устойчивости нужно много раз
повторять построение годографа Михайлова или АФХ или, если
пользоваться критерием устойчивости Гурвица, производить анализ
сложных и^громоздких выражений.
Области устойчивости в плоскости двух действительных пара-
метров системы были впервые выделены И. А. Вышнеградским.
Пусть в характеристическом уравнении
ап_il"-’ а0 = 0 (4-14)
все коэффициенты, кроме двух (например, а0 и ап) определены.
При некоторых фиксированных значениях а0 и ап уравнение (4.14)
имеет в плоскости корней К корней, лежащих слева, и п — К кор-
ней, лежащих справа от мнимой оси. Изменение в определенных
пределах значений коэффициентов а9 и ап не вызывает изменения
числа корней, расположенных слева и справа от мнимой оси в пло-
скости корней. Поэтому на плоскости а0, ап можно выделить такую
область, каждая точка которой определяет многочлен (4.14), также
имеющий К корней, лежащих слева, и п — К корней, лежащих
справа от мнимой оси. Обозначим эту область D (/().
120
Число К может иметь любое целое значение; в плоскости а0, ап
можно указать области D [/£], соответствующие разным значе-
ниям К,. Например, если характеристическое уравнение имеет
третью степень (п = 3), то могут быть указаны области D [0 1, D [1J,
D [2] и D [31- Область/) [3] будет являться областью устойчивости
в пространстве коэффициентов. Если не существует области D [3],
то это значит, что при любых значениях неопределенных коэффи-
циентов (Oq и ап) и при заданных значениях остальных коэффициен-
тов уравнение не может иметь трех корней с отрицательной действи-
тельной частью слева от мнимой оси, т. е. система не может быть
устойчивой.
При трех неопределенных коэффициентах, например при ай,
alt ап, следует рассматривать трехмерное пространство с осями
координат а0, и ап. При большем числе коэффициентов приходится
рассматривать многомерное пространство коэффициентов и область
D [/(] выделяется гиперповерхностью. Такое разбиение простран-
ства коэффициентов называют D-разбиением.
Пусть К корней полинома
опХп а^к -ф- Од = О
лежат слева от мнимой оси.
Если плавно изменять значения коэффициентов а, то корни мо-
гут перейти в правую полуплоскость. Этот переход может осуще-
ствляться через мнимую ось или через бесконечность, при значении
параметров, обращающих в нуль коэффициент а0.
Переход в пространстве D-разбиения соответствует в плоскости
корней переходу их через мнимую ось. Отсюда следует метод опре-
деления границы D-разбиения, которая определяется заменой в ис-
следуемом полиноме к на и может быть построена изменением
значения ® от —сю до сю, т. е. граница /5-разбиения есть отражение
мнимой оси плоскости корней на пространство коэффициентов харак-
теристического уравнения.
Аналогичным образом можно построить D-разбиение простран-
ства любых параметров, от которых зависят коэффициенты харак-
теристического уравнения (например, постоянных времени и коэф-
фициентов усиления).
Построение области устойчивости в плоскости одного комплекс-
ного параметра. В том случае, когда необходимо исследовать влия-
ние на устойчивость только одного параметра, при заданных значе-
ниях других параметров удобно ввести вместо неизвестного пара-
метра комплексную величину, вещественная часть которой равна
этому параметру.
Для определения влияния, например, параметра k характери-
стическое уравнение разрешается относительно этого параметра k,
т. е. приводится к виду
Q (к) + kR (к) = 0, откуда k = - -Ш.
А 1Л/
Предполагается, что
k = U (ш) + jV (®).
121
Рис. 4 18. Выделение области устойчивости:
Da[l], D [2],D [3]—области, соответствую-
щие разным значениям корней
Для построения области устойчивос-
ти принимают X — ja и разделяют
вещественную и мнимую части:
‘ = -%7S = WW + 'VW'
Задавая различные значения частоты <о от —оо до -f-оо-, строят
в плоскости U, V (плоскости k) границу D -разбиения. При движении
по мнимой оси от со = —оо до* со = +оо на плоскости корней область
корней с отрицательными^вещественными частями остается слева.
Принтом отмечают^направление’движения от —оо до +оо и заштри-
ховывают^ левую часть^кривой по отношению к этому движению.
В той частщплоскостиДв,сторону которой направлены штрихи, на-
ходится отображение левой полуплоскости корней. Поэтому областью
устойчивости может быть только эта часть плоскости. Так как область
устойчивости ищется в плоскости только одного параметра, то области
устойчивости может и не быть. Поэтому для выделенной области
необходимо проверить условие устойчивости с помощью какого-
либо критерия. После выделения области устойчивости рассматри-
вают лишь действительные значения k.
Пример. Пусть дано характеристическое уравнение системы
Х3+Х2+Х+й=0.
Уравнение разрешим относительно параметра
k = —X3 — № — X.
Вместо X подставим /ш, т. е. X = /ш. Тогда
k = / ш3 + ш2 — /ш = U + jV,
где
U = й>2, V = ш3 — со.
В плоскости U и V (рис. 4.18) строим область D-разбиения. При частоте со = 0
U = 0 и V = 0; при со = 1 U = 1 и V — 0; при со—> оо U—*-oo и V—> оо.
Кривую границы области штрихуем слева при движении от со — —оо к со = оо.
Областью, соответствующей полиномам, имеющим наибольшее число корней
слева от мнимой оси, будет область, заштрихованная на рис. 4.18.
Проверим, является ли эта область областью устойчивости. Для этого выбе-
рем, например, граничную точку k = 0. При k = 0 уравнение сводится к виду
X (X2 -f- X -f- 1) = 0. Его корни Хг = 0, Xj, 3 =
2
3
—, т. е. один
4
корень нулевой, а два лежат слева от мнимой оси.' Внутри области число корней,
расположенных слева от мнимой оси, должно быть на Один больше, так как при
этом происходит движение в сторону штриховки. Следовательно, этой области соот-
ветствуют полиномы, у которых все три корня лежат слева от мнимой оси. Здесь
существенны только действительные значения k, принадлежащие области устой-
чивости. Они определяются отрезком оси U, лежащим внутри области D [3].
Условию устойчивости рассматриваемой системы отвечают значения 0< /г< 1.
122
ГЛАВА 5. АНАЛИЗ КАЧЕСТВА ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ
СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
5.1. МЕТОДЫ АНАЛИЗА КАЧЕСТВА
Для определения качества работы САР (удовлетворяет
ли она заданным требованиям, правильно ли выбран и настроен
регулятор) нужно иметь определенные количественные критерии.
При этом предполагается, что система устойчива.
Оценивать качество регулирования можно или непосредственно
по опытным или расчетным кривым переходного процесса, илй
косвенно, по каким-либо другим динамическим параметрам.
Оценки качества, полученные непосредственно по кривой пере-
ходного процесса, называют прямыми оценками качества, а оценки,
получаемые другим путем, называют косвенными (щенками.
Анализ переходных процессов сводится к отысканию общего ре-
шения неоднородного дифференциального уравнения, описывающего
физические процессы в системе при заданных начальных условиях
и воздействиях, а также к анализу влияния изменения параметров
системы на вид этого решения. Следует отметить, что аналитическое
решение уравнений требует вычисления корней характеристического
уравнения и вычисления произвольных постоянных, связь которых
с конструктивными параметрами для уравнений выше 3-го порядка
установить невозможно. Поэтому применяют приближенные методы
анализа переходных процессов, не требующие, так же как и три
анализе устойчивости, непосредственного решения дифференциаль-
ных уравнений. При анализе качества необходимо лишь установить,
находится ли переходный процесс внутри области допустимых зна-
чений или выходит из нее.
Основными методами анализа качества и переходных процессов
в линейных САР являются следующие: частотный; распределения
нулей и полюсов передаточной функции системы; интегральных оценок.
Частотный метод основан на рассмотрении преобразования Лап-
ласа X (s) для регулируемой величины при чисто мнимых значениях
аргумента s'= и на связи, существующей между частотными
характеристиками замкнутой и разомкнутой системы и переходным
процессом.
Одно из основных различий между прямым методом анализа
переходных процессов, основанным иа преобразовании Лапласа,
и частотном методе анализа переходных процессов заключается
в том, что первый является аналитическим, требующим вычисления
корней характеристического уравнения системы, а второй (как и
частотный метод анализа устойчивости) — графоаналитическим, ие
требующим вычисления корней.
При использовании частотного метода анализа переходных про-
цессов исходными данными могут быть экспериментальные частотные
характеристики. Этот метод позволяет:
производить полный анализ динамики и синтез корректирующих
устройств САР;
123
учитывать своеобразие САР, которое заключается в том, что их
анализ в разомкнутом состоянии обычно проще, чем в замкнутом;
осуществлять анализ устойчивости переходных процессов и ка-
чества в системах любого порядка как одноконтурных, так и много-
контурных, содержащих не только сосредоточенные, но и распре-
деленные параметры;
решать вопросы анализа и синтеза систем при непрерывно изме-
няющихся воздействиях.
Метод корневых годографов основан на связи между расположе-
нием нулей и полюсов передаточной функции системы в замкнутом
и разомкнутом состоянии и на изучении их перемещения при изме-
нении параметров системы.
Если в процессе проектирования САР были получены характе-
ристики переходного процесса, не соответствующие предъявляемым
требованиям,то изменением положения корней характеристического
уравнения можно изменить показатели качества. Метод корневого
годографа (траектории корней) позволяет проследить, как меняются
корни характеристического уравнения при изменении от —оо до
4-оо линейно-входящего параметра системы, и показывает, как нужно
изменять эти корни.
Метод логарифмических корневых годографов основан на анализе
свойств замкнутой системы по логарифмическим комплексным ча-
стотным характеристикам разомкнутой системы, т. е. характеру-
стикам, построенным для комплексных значений аргумента s =
= о 4- в выражении для передаточной функции W ($).
Для метода интегральных оценок используют определенные инте-
гралы по времени от функции регулируемой величины или ошибки.
При этом для косвенных интегральных оценок обычно не требуется
знания корней характеристического уравнения. Он может быть
отнесен к аналитическим методам, хотя во многих случаях требует
значительных числовых расчетов. Этот метод эффективен при ис-
пользовании ЭВМ.
Из перечисленных методов только частотный метод позволяет
производить оценку первичных, или прямых, показателей качества
(время переходного процесса, величину перерегулирования, число
перерегулирований). Остальные методы дают лишь косвенные оценки
качества (например, степень устойчивости, показатель колебатель-
ности и т. п.) и поэтому их иногда называют неконструктивными.
5.2. ЧАСТОТНЫЙ МЕТОД АНАЛИЗА КАЧЕСТВА
ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ САР*
Показатели качества. Поведение системы в переходном
процессе, вызванном типовым воздействием, стремящимся с тече-
нием времени к постоянному установившемуся значению, можно
* Частотный метод построения переходных процессов, номограммы и таблицы
дай в книге В. В. Солодовников, Ю. И. Топчеев и Г. В. Крутикова. Частот-
ный метод построения переходных процессов с приложением таблиц и номограмм.
М.: Гостехтеориздат, 195о. 195 с.
124
х(0
Рис. 5.1. Определение пока-
зателей качества САР
Рис. 5.2. Область допустимых
значений переходного про-
цесса:
xmax— максимальное Отклонение регулируемой величины; х (оо) —
установившееся значение регулируемой величины (статическое от-
клонение); Т — допустимое время переходного процесса; А — задан-
ное значение, определяемое точностью системы
охарактеризовать при помощи так называемых показателей качест-
ва (рис. 5.1);
максимальным динамическим отклонением регулируемой вели-
чины хшах, или величиной перерегулирования
0==хшах-^ 10()
х (оо) /и ’
где х (оо) — статическое отклонение;
статическим, отклонением х (оо);
временем переходного процесса, или временем регулирования Т,
т. е. наименьшим значением времени, отсчитываемым от момента
приложения воздействия, после которого имеет место неравенство
\х (() — х (оо) | < Д,
где Д — заданная малая постоянная величина.
Число колебаний регулируемой величины х (t) в течение времени
переходного процесса Т.
Показатели качества выбирают в зависимости от требований,
предъявляемых к системе. Система обладает необходимым качеством,
если она удовлетворяет заданным условиям качества, а переходный
процесс не выходит из области допустимых значений (граница обла-
сти на рис. 5.2 обозначена штриховкой).
Связь между частотными характеристиками замкнутой системы
и переходным процессом. Математической основой частотного метода
анализа качества САР является преобразование Фурье. Оно позво-
ляет получить на основании дифференциальных уравнений с учетом
начальных условий и приложенных к системе воздействий или
С использованием экспериментальных данных некоторые функции,
называемые обобщенными частотными характеристиками.
Можно показать, что изменение обобщенной координаты или
регулируемой переменной х (t) для широкого класса воздействий как
125
при ненулевых, так и при нулевых начальных условиях определяется
выражениями:
х (t) = хп (/) + J RT (со) cos at da, (5.1)
о
или
' x(t)—xn(f)—J Sy (®) sinco/dco, (5.2)
о
где хп (t) — нерегулярная часть функции х (/) (при t -> оо яв-
ляется расходящейся, или периодической, функцией, или постоянной
величиной); Rr (а) и Sr (®) — обобщенные вещественная и мнимая
частотные характеристики процесса. Они получаются, если преоб-
разование Лапласа для функции Xr (s), положив $ = ja, предста-
вить в виде
Хг (/«) = Rr (со) + jS (®)
(здесь Xr (s) — регулярная часть функции X ($), т. е. когда все
полюсы ее расположены в левой полуплоскости и lim хт (/) = 0).
Формулы (5.1) и (5.2) можно переписать в виде
Дх (/) = х (/) — хп (/) = -^- j Rr (®) cos /со da-, (5.3)
о
Дх (/) = х (/) — хп (/) =-j Sr (со) sin /со da. (5.4)
о
Левые части уравнений (5.3) и (5.4) представляют собой откло-
нения регулируемой величины от нерегулярной части хп (/) пере-
ходного процесса. В том случае, когда функция X ($) не содержит'
особенностей, во всей правой полуплоскости и на мнимой оси
lim sX (s) = lim x (/) = 0
S-их f-*oo
и функция x (t) имеет только регулярную часть. Поэтому выраже
ния (5.3) и (5.4) сводятся к виду
х (/) = j Rr (со) costa da, (5.5)
о
или
оо
2 с
х (/) =----— I Sr (<в) sin ta da, t > 0. (5.6)
о
126
Если RT (со) совпадает с вещественной частью (со) выражения
X (ja), a Sr (со) — с мнимой S (со), то обобщенные частотные харак-
теристики определяют с помощью выражений:
Р (®) = Р (®) Pg (®) - <2 (®) Qg (®) + Рп (®);
s (со) = р (со) + Qg (со) + Q (со) Pg (со) + Qh (®),
где Р (со) и Q (со) — соответственно вещественная и мнимая частот-
ные характеристики системы; Pg (со) и Qg (со) — вещественная и
мнимая частотные характеристики воздействия; Рн (со) и QH (со) —
вещественная и мнимая частотные характеристики начальных ус-
ловий.
В том случае, когда функция X ($) может иметь простой полюс
в начале координат, а все остальные ее полюсы расположены в ле-
вой полуплоскости, эти формулы имеют вид
ОО
х (/) = -L J Sin /со da, t>0, (5.7)
О
или
оо
X (t) = R (0) + cos /со da, />0. (5.8)
о
При единичном ступенчатом воздействии g (/) = [1J и нулевых
начальных условиях функциями R (со) и S (со) являются собственные
вещественная Р (со) и мнимая Q (со) частотные характеристики
замкнутой системы, и формулы (5.7) и (5.8) примут вид
ОО
J-^-sln/codco, -(5.9)
о
или
оо
Й(/)=:Р(О) + -^ J-^-cos/codco. (5.10)
о
Таким образом, первым шагом при вычислении переходного
процесса является нахождение функций Р (со) или Q (со).
у Определение вещественной и мнимой частотных характеристик
замкнутой системы по ее АФХ в разомкнутом состоянии. Круговые
диаграммы. Взаимная связь между частотными характеристиками
замкнутой и разомкнутой системы описывается выражением
ф«“)=ттЖ- <5Л1>
Как было показано выше, частотная характеристика замкнутой
системы Ф (/со) через вещественную Р (со) и мнимую Q (со) частотные
характеристики замкнутой системы может быть выражена следу-
ющей формулой;
Ф (/со) = Р (со) + jQ (со). (5.12)
127
Частотная характеристика разомкнутой системы W (fa) через
вещественную V (о) и мнимую V (о) частотные характеристики —
зависимостью
W (/со) = U (со) + jV (со). (5.13)
Подставляя формулы (5.12) и (5.13) в выражение для передаточ-
ной функции Ф (/со) (5.11), получим
1^(Ц>) + /У(<о)][1+^(Ц>) + /У(<о)1
- [1 + и (со)]2 4 V2 (со)
__ I/ (со) [1 4- (Ц>) + /V (со)] П -Н (со)] - jU (со) V (со) + Г2 (со) .. .
_ [1 4-С/ (со)]2 4- V2 (со) .
Отделяя вещественную часть от мнимой, найдем формулы для
определения вещественной Р (со) и мнимой Q (со) частотных харак-
теристик замкнутой системы. Вещественная частотная характе-
ристика замкнутой системы
р - О «о) {1 + Ы (со)} 4- И2 (со) ,, .
[1 4- U (со)]2 -|- V2 (со) '
Мнимая частотная характеристика замкнутой системы
= (1 + t/ (<о)]2 4- V2 (со) ’ (5.16)
где U (со) и V (<о) — значения координат АФХ системы W (/со)
в разомкнутом состоянии, соответствующие частоте, при которых
определяется вещественная Р (со) или мнимая Q (со) частотные
характеристики.
Графический способ нахождения частотных характеристик замк-
нутой системы по АФХ разомкнутой системы основан на том, что
в плоскости W (jco) строится сетка кривых, которая позволяет при-
вести в соответствие каждой точке этой плоскости (в случае прохож-
дения через нее АФХ) определенное значение той или иной частот-
ной характеристики замкнутой системы. Для случая вещественной
частотной характеристики при Р (со) = Рс, некоторого заданного
значения Р (со), формула (5.15) может был представлена в виде
[С/ + 2К^Й)Г + ^=4(Т^- <517)
Это уравнение окружности радиусом г — 1/[2 (1 — Рс)1 в пря-
моугольных координатах с центром, расположенным по оси U
на расстоянии d — — (1 — 2Рс)/[2 (I — Рс) J от начала координат.
По формуле (5.17) можно построить семейство окружностей
(рис. 5.3), которое называют вещественной круговой диаграммой.
Если АФХ при некоторой частоте пересекает одну из кривых
вещественной круговой диаграммы, то ордината частотной харак-
128
Рис. 5.3. Круговая диаграмма для построения вещественной частотной характери-
стики замкнутой системы по амплитудно-фазовой частотной характеристике разом-
кнутой системы
теристики Р (со) при этой частоте равна тому значению индекса Рс,
которым обозначена кривая вещественной круговой диаграммы.
Аналогичным образом можно построить семейство окружностей
(рис. 5.4), позволяющее определить по АФХ разомкнутой системы
мнимую частотную характеристику. Q (и) замкнутой системы.
Уравнение (5.16) при Q (и) = Qc, заданного значения Q (®),
можно привести к виду
Это уравнение окружностей с центрами, расположенными на
прямой, параллельной мнимой оси V, проходящей через точку (—I,
/0). Центры окружности радиусом г = 1/[2|QC|J размещаются
вдоль прямой на расстоянии d = —I/[2QC] от вещественной оси.
Это семейство окружностей называют мнимой круговой диаграммой.
Построив на листе прозрачной бумаги круговые диаграммы и на-
ложив их на АФХ, можно найти собственные частотные характе-
ристики замкнутой системы Р (®) и Q (со).
Определение вещественной и мнимой частотных характеристик
замкнутой системы по ЛЧХ разомкнутой системы. Как было пока-
зано выше, передаточная функция разомкнутой системы W (/<в)
через амплитудную Н (и) и фазовую 0 (ш) частотные характеристики
разомкнутой системы может быть представлена следующим образом:
Г(/®) = Я(й))е/0(“>. (5.18)
5 Солодовников В. В. и др.
129
Рис. 5.4. Круговая диаграмма для построения мнимой частотной характери-
стики замкнутой системы по амплитудно-фазовой частотной характеристике разом-
кнутой системы
Подставляя выражение (5.18) в формулу (5.11), получим
Ф (/®) =
Н (ю) cos 6 (ю) + jH (ю) sin 0 (со)
1 Н (а>) cos 0 (<а) jH (ю) sin 0 (со) *
(5.19)
130
Отделяя в правой части выражения (5.19) вещественную часть Р («>)
от мнимой Q (со), найдем
р /.а _ я2 (<о) + н (<о) cos е (<») . (С-
' ' Я2 (со) 4- 2Н (со) cos е (<о) 4- 1 ’ * '
л /,-л__________Я (со) sin 6 (со)_ /коп
V(®)— я2 (<о) + 2Я (<о) cos6 + 1 ’
Геометрическое место точек Р (со) = Рс = const определяется
уравнением
Я2 (со) + Я (со) cos 0 (со) р
Н* (со) 4- 2Я (со) cos 6 (со) + 1 Г<=
или
Н (со) cos 0 (со) (1 4- 2РС) = № (®) (Рс -1)4- Рс- (5.22)
Точно также геометрическое место точек
Q (®) = Qc = const
Рис. 5.5. Номограмма для построения вещественной частотной характеристики
замкнутой системы по логарифмическим частотным характеристикам разомкну-
той системы
5*
131
определяется уравнением
И2 .(со) sin 0 (со) _______________________
Н2 (со) + 2Я (со) sin 0 (со) + 1 ~' Чс
или
Н (сй) sin 0 (со) — Qcli (сй) cos 0 (сй) = Qc + QCH2 (w). (5.23)
• По формуле (5.22) можно построить номограммы для определе-
ния вещественной (рис. 5.5), а по формуле (5.23) — мнимой частот-
ных характеристик (рис. 5.6) по логарифмическим частотным харак-
теристикам разомкнутой системы. Номограммы строят в коорди-
натах L (со) = 20 1g Н и 0 (сй) соответственно по осям ординат
и абсцисс.
На номограммы наносят значения амплитудной характеристики
L (сй) разомкнутой системы в децибелах и фазовой характеристики
0 (сй) в градусах для частоты и определяют вещественную Р (сй)
и мнимую Q (<о) частотные характеристики, соответствующие дан-
ной частоте ©(.
Определение вещественной Р (сй) и мнимой Q (сй) частотных
характеристик замкнутой системы по логарифмическим амплитуд-
ной А (сй) и фазовой ср (со) частотным характеристикам замкнутой
системы. При построении переходных процессов в системе автома-
тического регулирования в том случае, когда возмущающее воздей-
132
ствие может быть приложено в любой точке системы, а также для
системы с неединичной обратной связью вещественную и мнимую
частотные характеристики следует определять по частотным харак-
теристикам замкнутой системы
Р (®) = А (®) cos q> (м), (5.24)
Q (ю) — А (®) sin ф (®). (5.25)
Для облегчения процесса построения кривых Р (®) и Q (®)
по логарифмическим частотным характеристикам LA (о) и ф (о)
применяют специальные номограммы.
1S9 гои гго гм zso zso зоо зго зм збо
Рис. 5.7. Номограмма для построения вещественной частотной характеристики замк-
нутой системы по логарифмическим частотным характеристикам замкнутой системы
133
Рис. 5.8. Номограмма для построения мнимой частотной характеристики замкну-
той системы по логарифмическим частотным характеристикам замкнутой системы
Для определения вещественной частотной характеристики Р (со)
пользуются номограммой (рис. 5.7), а для определения мнимой ча-
стотной характеристики Q (со) — номограммой (рис. 5.8).
Номограмма Р (со) (см. рис. 5.7) строится по формуле (5.24),
а номограмма Q (со) (см. рис. 5.8) — по формуле (5.25). Имея за-
висимость LA (со) от ср (со), построенную на кальке в масштабе но-
мограммы, и наложив ее на номограмму, можно найти вещественную
и мнимую частотные характеристики замкнутой системы.
134
Пересечение кривой L А (со) = f [ср (со) J с кривой номограммы Рс
или Qc при частоте со = ы, означает, что при частоте со = сог веще-
ственная характеристика Р (со) имеет значение Рс, а мнимая частот-
ная характеристика — Qe. Положительным фазовым углам соответ-
ствуют положительные значения Q (<о), а отрицательным — отри-
цательные.
5.3. АНАЛИЗ ПЕРЕХОДНЫХ ПРОЦЕССОВ МЕТОДОМ
ТРАПЕЦЕИДАЛЬНЫХ ЧАСТОТНЫХ ХАРАКТЕРИСТИК
Формулы (5.9) и (5.10) применимы для вычисления пере-
ходных процессов при нулевых начальных условиях, стремящихся
при достаточно больших значениях времени t к постоянной величине,
которая в частном случае может быть нулем. Первый шаг при вы-
числении переходного процесса по этим формулам состоит в нахож-
дении функций Р (со) и Q (со). .
Следующим шагом является вычисление интеграла в выраже-
ниях (5.9) и (5.10). Для приближенного нахождения переходного
процесса можно применить графоаналитический метод, который
требует задания графиков функций Р (со) и Q (со). Для этой цели
используют трапецеидальные частотные характеристики.
Типовая трапецеидальная вещественная частотная характери-
стика (рис. 5.9). Эта характеристика определяется следующими
основными параметрами: высота г0; интервал равномерного пропуска-
ния частот со^; интервал пропускания частот соп.
Отношение со^/соп = х характеризует наклон типовой трапе-
цеидальной частотной характеристики.
Если r0 = 1, con = 1, то мы имеем единичную типовую трапе-
цеидальную частотную характеристику. Коэффициенты наклона
единичной характеристики могут быть любыми. Единичной веще-
ственной частотной характеристике соответствует переходный про-
цесс Лх (0.
Значения h в функции времени t для различных % приведены
в табл. 5.1.
Зная х, по табл. 5.1 можно определить Лх и t. Для перехода от
hK-функции переходного процесса, соответствующего единичной
частотной характеристике к заданной, следует значение функции
/ix (0 умножить на г0, а величину аргумента t, найденную в таблице,
разделить на соп. Так, например, если г0 == 5, = 15, со = 0,75. , Из табл. 5.1 для х = 0,75 находим значения 1габл и hK (t) и составляем табл. 5.2. Разбивка вещественной частотной характеристики на трапецеидальные частотные характеристики (рис. 5.10). Рнс, 5.9. Типовая трапецеидальная частотная характеристика п = 20, то х = cod/con — (ш)\, ft?- <.. | . ''г > ! \ ’ ,\—L_v u>d <»п ш 135
^Таблица 5.1
Таблица й-фуикций
Табличное время /табл , .z Коэффициент наклона и 4 L
0,0 0,05 0,10 0,15 о,io 0,25 0,30 0,35 0,40 0,^5 Q.SO олб —4 0, 60 0, >5 0.70 0,75 0,80 0,85 0,90 0,95 1,00
АО 0,5 1,0 1,5 2,0 2,5 3.0 з,А 4,0- 4,5 5,0 5,5 № 6,5 7,0 7,5 8,0 8,5 АО 9,5 10,0 10,5 11,0 11,5 -12,0 12,5 13,0 13,5 14,0 14,5 15,0 15,5 16,0 16,5 17,0 17,5 18,0 18,5 19,0 19,5 20,0 -1 20,5 21,0 21,5 22,0 22,5 23,0 23,5 24,0 24,5 25,0 25,5 26,0 0,000' -0.17А 0,340 0,494 0.62А 0,739 0,828- 0,892 0,937- 0,960 0,977- 0,986 0,9311 0,980 0,978 0,980 -А600- А+84~ -0,356- 0,516 -А65А 0,771 -А863 0,928 -А.974 0,998 -4-jO42- 1,015 С 009 1,006 1,005 •еде 9,192- -М74- 0,538 оде 0,9|63 1,0108 1,029 -4,0(42- 1,042 1*029 1,024 1,021 -1,ОЙА 1,021 1,025 1,028 "1Ж 1,080 1,028 W*- 1,019 1,015: i.oir 1,008 1,008, 1,006 1,006 1,006 1,005 1,005 1,003 1,002 1,000 0,998 0,996 А994 0,994 0,994 0,994 0,995 0,995 0,995 0,905 0,905 оде о,де 9,000 0,199 4,386- 0,560 4,709- 0,833 А-92А 0,994 еде- 11,057 4т067- 1,063 Ь043 1,034 1,027 -1,024 1,024 1,025 1,026 С 026 1,024 1,021 -4,045- 1,010 1,004 1,000 0,997 0,996 0,995 0,995 0,995 ! 0,996 0096 0,995 0,994 0,993 0,992 0,991 0,991 0,991 ,0,992 0,994 0,995; 0,997 4,998 0,998? 0,999.! •А99А 0,999 0,909 еде 0,207 0,402 0,594 9,732 0,862 "А658“ 1,024 1,066 1,084 4,087 1,079 1 *050 1,037 1,027 1,021- 1,018 1,017 1,018 1*016 1,013 1,010 1 апл TjVVT 0,998 0,993 0,990 0,987 0,986 0,987 0,989 0,990 0,992 0,993 0,994 0,994 0,994 0,994 0,994 0,964 0,995 0,996 0,999 1,000 1,002 1,003 1,004 1,005 1,005 1,004 1,004 1,003 еде 0,245 0,417“ 0,603 0,7611 0,891' -еде- 1,050 1,090 1,104 4,402" 1,088 С 049 1,033 1,020 1,014 1,007 1,006 1,006 1*004 1,002 0,998 0*990 0,986 0,983 0,983 0,984 -0,986 0,989 0,992 0,995 0,998 0,999 1,000 1,001 1,001' 1,001 4004- 1,001 1,002 1,004 1,005 1,006 1,006 1,006 1,006 1,005 1,904- 1,002 1.001 еде- еде 0,432 (Ш7 где L074 >Uv0 U023 Ж ftj, ода 0,992 ода, А9Й 0,993 ода ода 0,984 Аде 0*.994 ода. i’,oos 1,007 1де 1.0Q5. Тда 1,003 1,003 1,004 1,003 А-обо е,99А 0,997 оде 0,447 одй Ж Тде 4,127- -Ы2А -41447- 1,096 1]р 1,009 оде 0*078 0,078 0,082 оде 0,090 0,991 10,090 0,989 0,989 оде 0,991 0,094 о,0й- 1,002 >1,007 1,009 1,011 1,011 1,010 1,009 1,006 1,004 >4де 1,000 0,999 0,998 0,998 0,998 0,998 0,098 0,998 0,997 еде оде оде еде 6=240: 0,000 0,24® 0,( Ои 00 59Н 05- 22 30 -16-J 58 62- 38 97- 50 01- 65 41 31 34 48 67 87 06 19 27 29 26 . 19 12 04 98 94 94- 92 94 95 96 0,000 -е.267 0,-000 А275- 0,000 "А282^ 0,600- 6,290 -еде еде^ оде -еде- еде 0,314
идюи W 0,449
-А335- 0,469
0,665 0,967 иде 1,115 1’138 ЪН?" 1,090 w i,is 4,114- LOfj' ; о'тоб 1 ,|1о 1’145 “Tltr Ь064 0,1 "Тс Tip м “-+,1 1,1 “ф,( 0,740 —A QM4- "и,УВ4 0,758 0,547 0,776 "0;50i 0,794 0,575 0,813 0,<j90 0,832 0,002 0,844
АвН- 0,674 А,755" 0,815 9г850- 0,883 Л one 0,707 -АТ92- 0,853 -0-.898 0,923 О 1,050. 1,067 1,084 1,090 U, Jsj I 1,105 • 1,000 г 1Д20 1,133
i,i65; - 1 Т/143 1 1,170 1,1U4 1,174 . -l ir/J " г; 1055" 1,174 t «ел 1,175 —i-'tffr- 1,176 ,"~Т71|7Т 1,175
1,132 • 1,084- 1,032' -о.де- 0,948 0,927 0,922 е,932- 0,951 0,976 1,000 -1,026- 1,033 1,039 1,037 -1,029- 1,017 1,005 0,995 0,987 0.983 -0,983 0,985 0,990 0,995 0,999 1,002 1,004 1,005 1,004 1,003 -1OQ3- 1,127 1*016 ода 0,917 0,919 ”А99А” 0,958 0,990 1,015 -е-де- 1,046 1,047 1,039 —'3,026 1,010 0,993 0,982 0,975 0,970 -ее??- 0,984 0,993 1,001 1.008 1,012 1,014 1,012 1,009 1,005 1,111 оде 0*,920 0,911 0,920 А944- 0,974 1,006 1,033 -еде- 1,054 1,048 1,034 —Ь045 0,995 0,980 0,968 0,965 0,969 ••еде- 0,991 1,003 1,014 1,020 1,023 1,020 1,014 1,006 0,998 a nni 1,099 -А.-03А- 0,979 0*910 0,909 0,927 и, «mjv ' 0,990 1,023 1,048 rjvo’T -1,058 1,044 1,024 1,000- 0,980 0,965 0,958 0,961 0,971 -А987- 1,003 1,018 1,027 1,030 1,027 1,018 1,007 0,995 0,985 п поп 1,085 оде ода 0,911 0,934 -А97А- 1,006 1,038 1,059 -+де- 1,055 1,034 1,010 оде 0,965 0,955 0,954 0,965 0,981 -4де- 4Л19 1,031 1,035 1,032 1,023 1,008 0,993 0,981 0,973 п ма 1,071 0*951 0*904 0,917 0,946 -А986 1,023 1,051 1,065 •Аде- 1,048 1,021 0,994 0,970 0,955 0,952 0,958 0,976 0,997 1,032 1,040 1,037 1,026 1,013 0,993 0,978 0,970 0,967 —ьз ш 1,053 0,932 0*,905 0,926 0,962 “+де- 1,041 1,060 1,066 ~i;056‘ 1,033 1,005 0,997 Аде- оде 0,955 0,970 0,991 1,010 1,де- 1,048 1.039 1,028 1,012 0,994 0,978 0,969 0,967 0,973 Л Айв
0,900 0,940
0,903 0,904 0,904 0,907 0,94'5 0,943 0,945 0,945 1,018 0,992 0,974 еде 0,964 0,968 0,975 ж 0,975 Ahi 0,962 0,972 оде 0,994 1,001 1,006 1,0№ 1,007- 1,006< 1605, Т005 1,066- ieo7 Koos' l.qot 0,982 0,957 0,044 0,948 0,061 0,077 -еде- 1,005 1,014 1,017 ~И048~ 1,015 1,012 1,008 1,005 1,003 -А0ОА- 1,001 1.001, 1,001 _11йОО 0,1 0,! 0,1 •»А1 0,1 0,1 0,1 —4,( 1,( 1,( 1,( —1-,( 1,с 1.< 1,( 0,1 0,1 —ОД 0,1 0,1 0,1 01
U,W! 1 0,918 0,925 0,932 -еде- 0,946 0,947 0,949 /t л КА 0,950 0,950 0,950 0,951 0,954 А956 0,959 0,961 0,964 0,965 0,966 0,966 0,966 0,966 0,967 0,968 0,968 0,969 0,971 0,973 J.973 0,975 0,975 0,975 0,956 0,966 0,972 -Aw- О.985 0,988 0,988 -Aw- О.989 0,989 0,990 0,990 0,990 А99Э" 0,995 0,998 0,999 1,001 1,002 1,002 1,001 1,002 1,001 1,002 1,002 1,003 1,004 .1,005 1,006 1,006 1,006 1,006 , ЛЛС 0,989 0,996 1,004 -1,009- 1,013 1,015 1,016 4,015- 1,013 1,012 1,011 1,010 1,011 1,012 1,013 1,015 1,016 1,016 1,016 1,015 1,014 1,013 1,012 -4,044- 1,0Ю 1,010 1,010 1,011 1,011 1,011 1,011 1,010 1,009 4.008 1,007 1,006 1,010 1,016 1,020 L028 1,028 1,027 1 пае 1,022 1,019 1,016 1,015 1,014 1,014 1,014 1,014 1,015 1,014 1,013 1,012 1,010 1,008 1,006 1,003 1,003 1,002 1,002 1,002 1,002 1,002 1,001 1,000 0,998 0,997
0,988 0,993 0,996
0,997 0,997 0,998 0,999 1,002 где 1,010 1,011 1.012 1,009 1,008 1,005 1,001 0,998 оде 0,994 0,993 0,994 0,995 0,996 0,997 0,998 0,999 1,000 +де. 1,000 1,000
1Д& Аде 0,995 оде 0,992 0,995 0,997 1.000 1,002 1,003 1,004 1,004 1,004 1,003 1,002 § § § § § § § i 0,1 0,1 0,1 0,1 0,1 • 0,5 0,1 1,( 0,1 1,< 1,( 1,( 1,1 1,( 1,( =А9 0,9 0,1 97 971/ 97 97 97 98-
99 01 95 04 05 07 06 04 02 да 97 95 1,002 1,002 1,002 1,002 1,002 1,002 1,001 0,999) 0.99А <0,99As 0,995 0,995 0,998 0,996 0,995 0,995 0,996 0,997 0,998 0,999 0,999 1,000 1,000 0,987 0,987 0,988 0,991 0,996 1,001 1,004 1,007 1,007 -4)007-- 1,005 1,002 0,978 0,982 0,988 0,997 1,006 1,011 1,015 1,015 1,012 -з-де- 1,001 0,997 0,977 0,989 0,998 1,010 1,018 1,022 1,021 1,016 1,007 -Аде- 0,989 0,984 0,990 1,001 1,013 1,024 . 1,028 1,025 1,016 1,006 0,995 •Аде- оде 0,978 1,001 1,015 J.025 1,029 1,028 1,016 1,002 0,990 0,979 “А97&- 0,977 0,983
0,975 0,975 1,006 1,006
136
137
Рис. 5.10. Разбивка вещественной ча-
стотной характеристики на трапецеи-
дальные частотные характеристики
Рис. 5.11. Трапецеидальные частотные
характеристики, полученные при раз-
ложении кривой Р (<в)
Кривая Р (<в) может быть представлена в виде совокупности из
некоторого числа трапецеидальных частотных характеристик. Заме-
ним кривую Р (<в) мало отличающейся от нее ломаной Р (<в), со-
стоящей из сопрягающихся друг с другом прямолинейных отрезков,
и проведем через каждую из точек сопряжения прямую линию,
параллельную оси частот <в (штриховые линии). В результате кри-
вая может быть заменена определенным числом типовых трапецеи-
дальных частотных характеристик гг (<в):
п
Р(ч>)—Р (&) =Yiri ((B).
(=1
Так, например, вещественная частотная характеристика Р (<в),
показанная на рис. 5.10, может быть аппроксимирована прямыми
ABCDEFGH и заменена суммой трех.типовых трапеций (рис. 5.11):
ONDF(I), OKGH (II), ОАВС (III).
Вычисление кривой переходного процесса. После того, как веще-
ственная частотная характеристика разбита на трапеции, следует
найти переходный процесс xrt (t), соответствующий каждой из них.
При этом пользуемся таблицами hK-функций, как это было изло-
жено выше. Затем выполним алгебраическое суммирование
ординат кривых, соответствующих переходным функциям xri (t)
(рис. 5.12).
Таблица 5.2
Пример определения /действ и Л (О
*табл (О t „ — *табл 'действ п Л (0 = hK (t) r0
0,0 0,0000 0 0
1,0 0,5344 0,05 2,672
2,0 0,9383 0,1 4,6915
138
Рис. 5.12. Составляющие кривой
переходного процесса xrt (i) и сум-
марный процесс х (О
Рис. 5.13. Логарифмические частот-
ные характеристики системы
В качестве примера рассмотрим построение переходного
процесса в системе автоматического регулирования, имеющей в
разомкнутом состоянии передаточную функцию вида
300 (0,6s + 1)
^(s) (22s + 1) (0,06s + 1) (0,01s 1) (0,002s 4- 1) *
Логарифмические амплитудная и фазовая частотные характеристи-
ки, построенные по этому уравнению, приведены на рис. 5.13. Поль-
зуясь номограммой (см. рис. 5.6), определим вещественную ча-
Рис. 5.14. Вещественная ча-
стотная характеристика си-
стемы:
1—IV — типовые трапецеидаль-
ные частотные характеристики
139
Рис. 5.15. Разложение кривой
Р (со) (см. рис. 5.14) на трапеце-
идальные частотные характери-
стики
стотную характеристику Р (®) (рис. 5.14). Аппроксимируем кривую
Р (©) прямолинейными отрезками и разбиваем частотную характери-
стику на четыре трапеции (рис. 5.15). Находим параметры каждой
трапецеидальной характеристики (см. таблицу на рис. 5.15). Определим
Значения составляющих кривой переходного процесса
Таблица 5.3
^табл h ^действ — Лг0 ^табл h ^действ —• = ftr0
I трапеция (х = 0,2) III трапеция (х = 0,5)
0 0 QzL 0 0 0 0
I 0,371 — ПгЯ 1 0,461 0,033 —0,124
2 0,682 1,0 ~=О95 2 0,831 0,067 —0,224
3 0,895 1,5 —0,125 3 1,061 0,1 —0,286
4 1,008 2,0 —0,142 4 1,141 0,133 —0,308
5 1,042 2,5 —0,146 5 1,117 0,167 —0,301
6 1,037 3,0 —0,145 6 1,051 0,2 —0,284
8 1,020 4,0 —0,143 8 0,966 0,267 —0,261
10 1,030 5,0 —0,144 10 0,982 0,33 —0,265
12 1,024 6,0 —0,143 12 0,997 0,4 —0,269
15 1,006 7,5 —0,141 15 1,005 . 0,5 —0,271
20 0,995 10,0 —0,139 20 0,995 0,67 —0,268
25 0,995 12,5 —0,139 25 1,000 0,833 —0,27
II трапеция (х = 0,4) - IV трапеция (х = 0,5)
0 0 О . L-O-J 0 0 0 0
1 0,432 0,089 ' 0,625 1 0,461 0,016 —0,046
2 0,785 0,178 1,188 2 0,831 0,033 —0,083
3 1,013 0,268 1,532 3 1,061 0,05 —0,106
4 1,110 0,355 1,676 4 1,141 0,066 —0,114
5 1,112 0,446 1,§|8 5 1,117 0,083 —0,112
6 1,068 .0,536 6 1,051 0,1 —0,105
8 0,998 СГ7Г4 1,506 8 0,966 0,133 —0,097
10 0,994 0,893 1,500 10 0,982 0,167 —0,098
12 0,988 1,072 1,492 12 0,997 0,2 —0,1
15 0,991 1,34 1,494 15 1,005 0,25 —0,100
20 1,004 1,786 1,518 20 0,995 0,333 —0,099
25 0,999 2,235 1,508 25 1,000 0,416 —0,100
140
Рис. 5.16. Составляющие переход-
ного процессами переходный про-
цесс в системе
по табл. 5.1/ix-функций пере-
ходные процессы, соответ-
ствующие каждой из трапе-
ций (рис. 5.16) (табл. 5.3).
Суммируя ординаты этих
переходных [процессов, на-
ходим искомый переходный
процесс в системе х (/).
5.4. ВЫЧИСЛЕНИЕ
ПЕРЕХОДНОГО
ПРОЦЕССА В САР
ПРИ ПОМОЩИ ЭВМ
Современные сред-
ства вычислительной техни-
ки позволяют строить пере-
ходные процессы САР в ав-
томатическом режиме, т. е. без непосредственного участия проек-
тировщика. Рассмотрим два способа построения переходных про-
цессов.
Первый способ. При его применении используют численное инте-
грирование дифференциальных уравнений, соответствующих замкну-
той системе. Он состоит в выполнении следующих операций
(рис. 5.17, а).
1. Ввод коэффициента усиления, постоянных времени и коэффи-
циентов демпфирования передаточной функции W (s).
2. Представление W (s) в виде отношения двух полиномов
где т и п — соответственно степени полиномов числителя и зна-
менателя разомкнутой системы, т < п.
3. Вычисление передаточной функции замкнутой системы
ф (S) =
w 1 + W (s)
M (s) _ Ms
£> (s) n+1
Zj ats‘
где
at =
at bi\
at\
i = 1, tn + 1;
i = tn -j- 1, n + 1.
141
°) Б)
Рис. 5.17. Блок-схемы программы построения переходных процессов:
а — с использованием численного интегрирования; б — с использованием вещественной
частотной характеристики Р (со)
4. Переход к уравнениям в пространстве состояний вида
х (t) — Ах (t) 4- Ви (t),
(5.26)
142
5. Интегрирование системы (5.26) при нулевых начальных усло-
виях и и (<) = 1 (£).
6. Вычисление переходного процесса по формуле
/п+1
t=i
Отметим, что если известно выражение для передаточной функции
замкнутой системы Ф (s), то переходный процесс может быть построен
и путем разложения этой передаточной функции на элементарные
слагаемые с последующим суммированием функций, являющихся
оригиналами от элементарных составляющих Ф ($). Однако такой
подход требует вычисления корней знаменателя Ф (s), что при высо-
ких порядках системы может привести к существенным погреш-
ностям.
Второй способ. При его применении для построения переходных
процессов в качестве исходной информации используют значения
вещественной частотной характеристики Р (®). В этом случае также
можно предложить несколько алгоритмов построения переходных
процессов.
Первый алгоритм основан на методе трапецеидальных частотных
характеристик и его разновидностях. Проектировщик проводит
аппроксимацию Р (®) трапециями, задавая в качестве исходной
информации для ЭВМ значения ®г, на которых изменяется наклон
аппроксимирующей ломаной линии и соответствующие ординаты Pt.
Все остальные, наиболее трудоемкие операции выполняют на ЭВМ
в соответствии с методом трапецеидальных характеристик. Про-
грамма использует постоянно хранящиеся в памяти таблицы /i«-
функций. Такой подход позволяет создать очень быстродействующие
программы для построения переходных процессов, однако требует
большого объема памяти ЭВМ. Точность построения зависит от точ-
ности аппроксимации и шага таблиц, т. е. также непосредственно
связана с объемом требуемой памяти ЭВМ. Другой алгоритм со-
стоит в непосредственном вычислении выражения
оо
h (/) = j - sin/® d®
о
для требуемых значений t.
В этом случае удобно использовать метод Филона для интегри-
рования так называемых осциллирующих функций, т. е. функций
вида f (о) sin <at.
Исходную информацию берут из таблицы величин Pj — Р (©;)>
соответствующих дискретных значений частоты ®;, i = 1, п. Для по-
строения одной точки непереходного процесса
hk = h k = 1, m,
где m — необходимое число точек, выполняют следующие операции:
1. Вычисляют значения функции f (®г, th) = i = 2, п-
143
Ряс. 5.18. Переходный процесс в сле-
дящей системе
2. Берут интеграл
%
Jk ~ Jk + j f (®, tk) d(£>,
0>2
3. Определяют значения
hh =—Jk
* л й
переходного процесса.
Такой алгоритм переходного процесса является менее быстро-
действующим, чем описанный выше, однако для него необходим
существенно меньший объем памяти ЭВМ. Кроме того, он не требует
участия проектировщика в построении переходных процессов, позво-
ляя Сосредоточить больше внимания на менее формализованных
этапах синтеза САР.
На рис. 5.18 в качестве примера приведена кривая переходного
процесса рассмотренной выше следящей системы, рассчитанная
на ЭВМ с использованием численного интегрирования, а также опре-
деления интегралов методом Филона.
5.5. ПОСТРОЕНИЕ ПЕРЕХОДНОГО ПРОЦЕССА
В СЛУЧАЕ, КОГДА СИСТЕМА ИМЕЕТ НЕЕДИНИЧНУЮ
ОБРАТНУЮ СВЯЗЬ
Упрощенная структурная схема САР угловой скорости
турбины приведена на рис. 5.19. Рассмотрим построение переходного
процесса в системе по возмущающему воздействию. Последнее
непосредственно приложено к турбине. В цепи обратной связи на-
ходится регулятор. Передаточная функция объекта
1
10s + 1
(в данном случае можно считать, что передаточная функция объекта
по отношению к управляющему и возмущающему воздействиям
одинакова). Передаточная функция сервомотора (s) — 2/s. Пере-
даточная функция изодрома Z (s) = s/(s +1).
Передаточная функция центробежного маятника kd = 0,09 (ма-
ятник считают безынерционным).
Передаточную функцию регулятора достаточно просто получить
аналитическим методом:
TW /„\ (з) _ 0,06 (s -f- 1)
l+iy5(s)Z(s) s (0,33s •+ 1) '
Порядок операции по построению переходного процесса: пред-
ставим структурную схему системы как показано на рис. 5.20;
144
строим логарифмические амплитудные и фазовые характеристики
(рис. 5.21), соответствующие передаточным функциям ТГе ($) и
Гр (s);
пользуясь номограммой для замыкания системы, находим лога-
рифмические частотные характеристики, соответствующие переда-
точной функции
(s) (S)
1 + F0(s)Fp(s) ’
вычитая из полученных характеристик характеристики регулятора
U7p (s), получим логарифмические частотные характеристики зам-
кнутой системы (рис. 5.22), соответствующие передаточной функции
системы по отношению к возмущающему воздействию
W'fl (S)
1 + Га (s) 1ГР (8) ’
У(5) =
пользуясь номограммой | для определения вещественной час-
тотной характеристики, ' по’ логарифмическим характеристикам
замкнутой системы
(рис. 5.22) находим
Р (со) (рис. 5.23).
Разбивая веществен-
ную частотную харак-
теристику Р (со) на тра-
пеции “(таблица на
рис. 5.23), методом тра-
пецеидальных частот-
ных характеристик
строим переходный про-
цесс х (/) (рис. 5.24).
Рис. 5.21. Логарифмические
частотные характеристики
САР
145
Рис. 5.22. Логарифмические ча-
стотные характеристики замкну-
той САР
Рис. 5.23. Вещественная
частотная характеристика
САР
Параметры трапеции
со
Рис. 5.24. Переходный процесс в САР
146
5.6. ЧАСТОТНЫЙ МЕТОД АНАЛИЗА КАЧЕСТВА
Частотный метод анализа качества, так же как и частот-
ный метод анализа переходных процессов, основан на использований
математического аппарата интеграла и преобразования Фурье, при-
водящий в случае произвольных типовых воздействий и ненулевых
начальных условий к понятию обобщенных частотных характе-
ристик.
Частотный метод анализа качества позволяет по свойствам при-
веденной обобщенной частотной характеристики R (со), не вычисляя
интеграла
00
4) = 4|/ф)^.
о
судить о том, удовлетворяет ли функция х (t) условиям качества
регулирования или нет. Как было показано выше, в случае единич-
ного ступенчатого воздействия и нулевых начальных условий выра-
жение для переходного процесса принимает вид
оо
о
Эту формулу особенно широко используют на практике. Оказывается»
по свойствам вещественной частотной характеристики Р (со) САР
можно судить о переходном процессе. При этом удается избежать
вычисления интеграла и построения кривой переходного процесса.
Рассмотрим эти свойства:
1) достаточно близким переходным процессам соответствуют
близкие частотные характеристики;
2) при изучении системы нет необходимости исследовать ее во
всем интервале частот от 0 до оо; достаточно ограничиться областью
существенных частот (полосой пропускания); начиная с частоты соп,
имеет место соотношение
I р(®1.1 о 1 — 0 2
поэтому при оценке качества регулирования вид Р (со) при со > соп
можно не принимать во внимание;
3) значение переходной функции х (t) в установившемся состоя-
нии равно начальной ординате функции Р (0);
4) если Рх (со) и Р2 (со) отличаются только масштабом по оси
частот, т. е. Л (®) во всех точках идет более полого, чем Р2 (со),
то переходный процесс хх (t), соответствующий Рх (со), затухает
быстрее процесса х2 (t), соответствующего Р2 (со), во столько раз,
во сколько масштаб Рх (со) по оси частот больше масштаба Р2 (со)
(рис. 5.25); чем шире вещественная частотная характеристика Р (со),
тем уже переходный процесс х (/); ,
147
Р(ш).
Рис. 5.25. Вещественные частотные характе-
ристики и соответствующие им переходные
процессы:
о — вещественные частотные характеристики;® —
переходные процессы
Рис. 5.26. Положительная невоа*
растающая вещественная частот"
иая характеристика
5) время переходного процесса будет тем меньше, чем положе
вещественная частотная характеристика;
6) если характеристика Р (св) положительна и представляет
dP
собой невозрастающую функцию частоты Р (со) 0, «8 0 при
всех частотах со (рис. 5.26), т. е. Р (со) не выходит за пределы пря-
моугольника, то перерегулирование не превышает 18 %;
7) если вещественная частотная характеристика Р (со) в точке
со = (01 претерпевает разрыв, т. е. Р (coi) = оо, то это означает,
что система находится на границе апериодической неустойчивости
и в ней происходят незатухающие гармонические колебания с ча-
стотой сох (рис. 5.27); наличие острых экстремумов в вещественной
частотной характеристике свидетельствует о существовании медленно-
затухающих колебаний; качество процесса повышается с уменьше-
нием крутизны вещественных частотных характеристик и отсут-
ствии острых экстремумов;
8) если производная dP/dat — отрицательная неубывающая не.*
прерывная функция от со (рис. 5.28), то процесс монотонен, а время?
регулирования
Т > 4л/Юп,
где соп — частота, определяющая интервал, на котором веществен-
ная частотная характеристика положительна;
Рис. 5.27. Вещественные частотные ха-
рактеристики для систем, находящихся
на границе устойчивости
Рис. 5.28. Вещественная частотная
характеристика, которой соответствует
монотонный переходный процесс
9) если вещественная частотная характеристика положительна
па интервале [О, юп], то время переходного процесса Т больше,
чем л/шп (т. е. Т > л/(Вп).
Как отмечалось выше, эти свойства вещественных частотных
характеристик позволяют судить о качестве переходного процесса.
5.7. ОПРЕДЕЛЕНИЕ ВЕЛИЧИНЫ ПЕРЕДАТОЧНОГО
КОЭФФИЦИЕНТА ИЛИ ДОБРОТНОСТИ СИСТЕМЫ ПО ЛАХ j
Передаточная функция САР в разомкнутом состоянии,
обладающая астатизмом v-ro порядка по отношению к управляющему
воздействию, может быть представлена в виде
kW0 (s)
sv ’
и. следовательно, выражение для ЛАХ имеет вид
L (со) — Lmk — vLma + Lm | 1Г0 (jco) |.
11|>и значениях со, меньших первой сопрягающей частоты юх = 1/7\,
можно приближенно написать
L (ш) ~ L (ш) = Lmk — vLmw, 0 < co < coj. (5.27)
I !|>ямую, описываемую уравнением (5.27), называют низкочастотной
асимптотой ЛАХ L (со). По ней достаточно просто определить
передаточный коэффициент k при любом порядке астатизма v. Дей-
। тнительно, при со = 1 выражение (5.27) сводится к виду
Lut q (со) | <0—1 — Lmk,
из которого следует, что величина передаточного коэффициента k,
выраженная в децибелах, определяется ординатой низкочастотной
амплитуды LH.4 (со) при значениях угловой частоты со, равной еди-
нице (рис. 5.29).
В статических системах выражение для низкочастотной асимптоты
принимает вид
L (ю) л; Lmk,
из которого следует, что продолжать низкочастотную асимптоту
и» значения со — 1 излишне, так как асимптота представляет пря-
мую, параллельную оси частот, и значение k в децибелах равно рас-
> гоянию этой прямой от оси частот о.
Другой способ определения k заключается в следующем. Про-
должим низкочастотную асимптоту LH.q (со) До пересечения с осью
частот (см. рис. 5.29). В точке пересечения со = coft
7-н. ч (®) | = О
и, следовательно, согласно выражению (5.27)
Lmk = vLmatu
ИЛИ
k = <t>l
149
Рис. 5.29. Определение
передаточного коэффи-
циента системы по лога-
рифмической амплитуд-
ной частотной характери-
стике
т. е. значение k равно значению угловой частоты в точке пересе-
чения низкочастотной асимптоты с осью частот в степени v, равной
порядку астатизма системы.
5.8. КОЭФФИЦИЕНТЫ ОШИБОК
Исследование САР при медленно изменяющихся воздей-
ствиях можно производить при помощи коэффициентов ошибок.
Связь между величиной х (I) на выходе и управляющим воздей-
ствием g (t) на входе системы может быть представлена в виде
х (t) = j g (t — т) k (т) dx, (5.28)
о
где k (т) — импульсная переходная функция.
Коэффициенты ошибок в ряде случаев позволяют избежать
необходимости вычисления интеграла (5.28). Если ввести в рассмо-
трение ошибку
8 (О = g (0 — х (0,
то
e(/) = g-(O-'jg-(/-T)^(T)riT. (5.29)
о
Предположим, что воздействиеg (t) является функцией, имеющей г
первых производных в интервале 0 « t с Т. Тогда можно написать
g (t - х) = g (t) - xg (t) + ~x*g (t) - ... -|-lz3Lrgrr-i(f) +
+ R(r)-, (5.30)
0 < t < To-,
/?, = —- 0<A<1,0<t<T (5.31)
150
Подставляя выражение (5.30) в уравнение (5.28), получим
в (0 = Cog (/) + Cig (0 + g (t) + ... + ® +
+ ^-+Kd;
т
Со = 1 — j k (т) dx;
о
т
Сх = j xk (т) dx;
о
т
С2 = (— 1) j т2& (т) dx-,
о
(5.32)
(5.33)
т
Сг = (— 1)г-1 j xrk (т) dx;
о
г
Кг = (— 1 )г-1 jx'#' (t — Дт) k (т) dx;
о
оо
= ~ J g(t-x)k(x)dx.
т
Если функция g (/) имеет г первых производных в интервале
О < оо и Т = оо, то формулы (5.33) принимают вид
ОО
Со = 1 — | k (т) dx;
о
Сг = (— 1/-> J тчЦт)^;
о
Кт = (— 1) r~x j xrkT (t — Дт) k (т) dx;
о
Kd = 0.
В этом случае
8 (0 = 8С (0 + 8д (т),
где
Г
e^) = STH(O(0: 8H0 = -7T-
1=0
151
Выражение (5.32) представляет собой разложение ошибки в (/)
в ряд по производным от воздействия. В случае медленно изменя-
ющихся воздействий, когда в выражении (5.32) можно ограничиться
небольшим числом членов, оно оказывается удобным для вычисления
е (t), так как при этом не требуется знание корней характеристиче-
ского уравнения.
Коэффициенты Ci могут быть вычислены и по заданной переда-
точной функции ошибки Фе (s), или Ф (s):
оо оо
Фе (s) = 1 — Ф (s) = 1 — j & (т) e~STch; = j ke (т) e~sX dx. (5.35)
0 °
Разложим выражение для передаточной функции Ф8 (s) в ряд '
Маклорена при малых s:
Фе (s) = Ко + Kis + K2s2 + • • •
Преобразование Лапласа Е (s) для ошибки е (t) на выходе можно
представить в следующем виде:
[К (s)]s_>o = [Фе (s) G (s)]s_>o = [(Ко Kis -|- Кг®2 4~ • • ) G (s)]s_>o- (5.36)
Применяя к выражению (5.36) обратное преобразование Лапласа,
получим
e(0 = Kog(0 + Ki9(0 + K2g(0+-- (5.37)
Сравнивая выражение (5.37) с выражением (5.32), имеем
Со = Ко! Сх = Кь С2 = 2! К2; ...Ст = г! Кг. (5.38)
Таким образом, вычисление коэффициентов. Сг сводится к опре-
делению коэффициентов разложения в ряд Маклорена передаточной
функции Фв (s) при s—>0.
Формулы для определения коэффициентов Сг имеют вид
Ко == Со = lim Фе (s);
s->-0
Ki — Сх — lim — [Фе (s) — Ko];
s->-o 4
K2 = = lim ± [Ф8 (s) - (Ko + K1S)];
K, = -£. = lim±
11 s-H) 5
i —1
Фе (s) — KftS*
В общем случае
(5.39)
Формула (5.39) позволяет найти каждый последующий коэффициент
Ci по известным предыдущим коэффициентам Со, Сх, ..., С^.
152
Таблица 5.4
Коэффициенты ошибок
Тип системы КоэффН’ цненты Формулы
Статическая Со 1/(1 + К)
Q (<*!-₽!) А/(1 + А2)
са 2 (а2 — Р2) К , 2«i (Pi — at) A 2flt (рх — at) A3 (1+A)2 1 (1+A)3 1 (1+A)3
С8 6A («о — Po) . (1+A)2 1 , 6A [2«t«2 - 2APiPo + (A - 1) (appi + «iPo)] , 1 (1 + A)3 'r , 6A («1 — Pi) («1 + APi)3 + (1+A)4
Астатическая 1-го порядка Со 0
Ci 1/A
С2 2(ai-pi) 2 A A2
Co 6 12(Pi-ai) , 6(a2-p2) , ept (Pt-at) A3 1 A2 A К
Астатическая 2-го порядка о о о СО to м © 0 0 2/A 6(«i—Pi)/A
Передаточную функцию ошибки Ф8 (s) через передаточную функ-
цию разомкнутой системы можно записать в виде
Ф® = 1 + F (s) = D (s) + Л1 (s) ’ . (5‘40)
где М (s), D (з) — соответственно числитель и знаменатель переда-
точной функции разомкнутой системы.
Коэффициенты ошибок Сг можно получить простым делением
D (s) на D (s) + М (s) и сравнением коэффициентов при одинаковых
степенях s, получающегося таким образом ряда с коэффициентами
ряда, который находится в результате разложения передаточной
функции ошибки Ф8 (s) по степеням s, сходящихся при малых s.
Коэффициенты ошибки могут быть выражены через коэффици-
енты передаточной функции разомкнутой системы. В табл. 5.4
приведено несколько первых коэффициентов ошибок для статиче-.
153
ских и для астатических систем 1-го и 2-го порядка, вычисленных
для случая
1W / ч ^(1+P1s + P2s2-1--FPm5"1)
sv (1 + ссjS + a2s2 + • • + a"s")
ГЛАВА 6. СИНТЕЗ КОРРЕКТИРУЮЩИХ УСТРОЙСТВ
СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
6.1. ПОСТАНОВКА ЗАДАЧИ СИНТЕЗА
Задача синтеза и проектирования САР заключается в та-
ком выборе ее структурной схемы, параметров, характеристик и
способа их технической реализации, при котором требуемые дина-
мические и эксплуатационные свойства всей системы обеспечиваются
наиболее простыми и надежными техническими средствами.
Особенностями постановки задачи синтеза систем автоматиче-
ского регулирования являются:
1. САР содержит объект регулирования и элементы с трудно
изменяемыми параметрами и характеристиками. Но в состав системы
могут входить также элементы с легко изменяемыми параметрами и
характеристиками, которые вводят в систему для придания ей тре-
буемых динамических свойств. Такие элементы называют корректи-
рующими устройствами. Поэтому при синтезе необходимо учитывать
динамические свойства объекта и той части системы, которая не
подлежит изменению, но существенно влияет на динамические
свойства всей системы в целом.
2. При синтезе важно знать оптимальные динамические харак-
теристики, к реализации которых следует стремиться. Требования
(условия) качества задаются лишь на верхние допустимые границы
отдельных показателей качества. Они ограничивают лишь область
допустимых значений, но не определяют однозначно вид переход-
ного процесса. Поэтому задачей синтеза является получение тре-
буемого качества, определяемого областью допустимых значений
регулируемой величины.
3. Решение задачи синтеза не является однозначным. Одни и
те же требования можно удовлетворить при помощи различных
корректирующих устройств. Поэтому выбирают такое корректиру-
ющее устройство, которое технически наиболее просто осуществимо.
4. Вследствие сложности многих современных САР, являющихся
динамическими системами со многими степенями свободы, содержа-
щими кроме постоянных и переменные, а иногда и распределенные
параметры, во многих случаях нельзя получить точных результатов
расчетным путем. Поэтому теоретический анализ и расчет обычно
имеют целью лишь облегчить выбор рациональной схемы системы,
а также схему и ориентировочное значение параметров корректиру-
ющих устройств, входящих в ее состав. Затем значения этих пара-
метров уточняют в результате последующей наладки и настройки
154
системы в реальных условиях ее работы. Следует отметить, что при
синтезе САР большая роль отводится вычислительной технике,
которая облегчает разработку и проектирование новых систем.
Синтез состоит из следующих этапов:
1) анализа свойств объекта регулирования и определения его
статических и динамических характеристик;
2) формулировки и обоснования критерия оптимизации, условий
качества регулирования и других требований, которым должна
удовлетворять система регулирования;
3) выбора структурной схемы системы и технических средств
ее реализации;
4) синтеза оптимальных динамических характеристик;
5) аппроксимации оптимального режима, т. е. выбора желаемых
динамических Характеристик, отвечающих качеству регулирования,
с одной стороны, и простотой технической реализации, а также
надежностью — с другой;
6) определения динамических характеристик корректирующих
устройств, обеспечивающих желаемые динамические свойства всей
системы в целом;
7) выбора схемы, способа технического осуществления и пара-
метров корректирующих устройств;
8) анализа полученной схемы САР, цель которого состоит в про-
верке расчетным или экспериментальным путем соответствия схемы
предъявляемым требованиям качества.
Для пояснения понятия оптимальных динамических характе-
ристик рассмотрим оптимальный переходный процесс, вызванный
воздействием в виде единичной ступенчатой функции. Назовем этот
процесс оптимальным, если он является монотонным и время пере-
ходного процесса имеет минимально возможное значение Tmln,
при ограничениях, наложенных на значение ускорения регулируе-
мой величины. В течение периода разгона 0 < t < Tmin/2 (рис. 6.1),
когда ускорение W = сохраняет максимально возможное
значение ТГтах, переходный процесс определяют с помощью выра-
жения
х(0 = >таХ/2;
z z (6.1)
х (t) = о t < 0.
Переходный процесс для всех значений t, включая период за-
медления:
может быть составлен из трех парабол 1—3 (рис. 6.2). Первая пара-
бола описывается выражением (6.1) для всех t > 0, вторая сдвинута
вправо на Тшш/2 и имеет постоянную по величине вторую производ-
ную, равную (—2Ц7тах)> третья сдвинута вправо на ТМп и имеет
значение второй производной, равное 1Гшах.
155
S)
Рис. 6.1. Оптимальный переходный процесс:
а — переходный процесс; б — ускорение
Рис. 6.2. Представление опти-
мального переходного процесса
в виде трех парабол)
Выражение для оптимального переходного процесса можно пред-
ставить в виде
Х0ПТ (0 = (0 - ^max (t ~ Ifa)2 1 (Т - +
+ ^max (t - Tmln)2 1 (t - Tmln), (6.2)
где 1 (/); 1 (j; — 1 (t—T'min) — единичные ступенчатые
функции.
Предел
lim Хопт (ty — Х-опт (°°) == 7 WmaxTaiin (6.3)
/->-0 4
Правую часть выражения (6.3) обозначим через
д = -W Т2
°0 4 max mln'
Это выражение характеризует величину ступенчатого управля-
ющего воздействия, которое нужно приложить к астатической
системе с оптимальными характеристиками для того, чтобы полу-
чить переходный процесс вида (6.2). Время оптимального переходного
процесса Tmin при заданном максимальном ускорении 1ГтЯт зависит
от величины приложенного ступенчатого воздействия и определяется
соотношением
^„ = 2/^7^. (6.4)
При использовании оптимальных частотных характеристик сле-
дует учитывать, что минимальное время оптимального переходного
процесса Тт^п зависит от величины управляющего воздействия g0,
или начального рассогласования [см. формулу (6.4)1. Поэтому
оптимальная частота среза должна определяться для ступенчатого
управляющего воздействия, равного ие единице, а значению, выби-
раемому на основании рассмотрения конкретных условий работы
системы. Таким значением, например, может служить наибольшее
начальное рассогласование, при котором еще возможно линейное
рассмотрение системы.
156
Рис. 6.3. Коррекция амплитудно-фазовых частотных характеристик САР
Смысл введения в систему автоматического регулирования кор-
ректирующих устройств можно пояснить, рассмотрев их влияние
на изменение частотных характеристик системы.
Пусть САР имеет АФХ W (/со), изображенную на рис. 6.3, а
(кривая /). Система, имеющая такую характеристику, будет неустой-
чивой. Для ее стабилизации можно уменьшить передаточный коэф-
фициент k (кривая 2). Часто коэффициент k уменьшать нельзя (от
значения k зависит статическая точность системы). Тогда необхо-
димо скорректировать форму АФХ на средних частотах (сн—<о2)
так, как это показано на рис. 6.3, а кривой 3. Система станет устой-
чивой и обеспечит заданную точность регулирования. Это может
быть сделано при помощи корректирующего устройства.
АФХ 1, показанная на рис, 6.3, б, соответствует устойчивой
системе. Однако система не имеет достаточного запаса устойчивости
и кривая пересекает окружности вещественной круговой диаграммы
с большими по абсолютной величине значениями индексов Рс. Это
означает, что переходный процесс в такой системе будет колеба-
тельным. Уменьшение передаточного коэффициента k не может
существенно уменьшить склонность системы к колебаниям. Но если
при помощи корректирующего устройства скорректировать форму
АФХ так, как это показано на. рис. 6.3, б (кривая 2), создавая по-
ложительный сдвиг фазы в интервале частот ох—<о2, то можно обес-
печить достаточный запас устойчивости и требуемые качественные
показатели системы. ЭД
САР имеет АФХ 1-го рода (кривая 1, рис. 6.3, в). Система не
должна иметь установившейся ошибки при подаче на ее вход воздей-
ствия в виде постоянной скорости. Для этого необходимо, чтобы
АФХ при частотах, стремящихся к нулю, проходила вдоль отрица-
тельного направления не мнимой, а вещественной оси (кривая 2),
что можно достигнуть введением в систему дополнительного интегри-
рующего звена (сделать систему астатической 2-го порядка). Однако
в данном случае система становится неустойчивой. Поэтому необ-
ходимо скорректировать ее форму так, как это показано на рис. 6.3, в
(кривая 3).
Существует два основных способа коррекции динамических
свойств САР:
157
Рис. 6.4. [Структурная
схема САР с последова-
тельным и параллельным
корректирующими уст-
ройствами
корректирующее устройство включают последовательно с объек-
том регулирования;
корректирующее устройство охватывает часть звеньев САР,
т. е. включается параллельно, образуя «обратные связи».
Предположим, что структурная схема системы задана и сведена
к виду, показанному на рис. 6.4.
•Система состоит из. следующих основных частей:
объекта, или неизменяемой части, состоящей из двух последо-
вательно соединенных элементов с передаточными функциями 1Г0 (s)
и Fm(s);
последовательного корректирующего устройства с передаточной
функцией Wd (s);
параллельного корректирующего устройства с передаточной
функцией Z (s), шунтирующего звенья объекта, имеющие переда-
точную функцию Wm (s).
Передаточная функция всей системы, разомкнутой в месте изме-
рения ошибки, имеет вид
+ (6.5)
Передаточные функции Wm (s) и 1Г0 (s) заданы в виде аналйти
ческих выражений или соответствующих им частотных характери-
стик. Задача заключается в определении вида передаточных функций
Wd (s) и Z (s) последовательного и параллельного корректирующих
устройств таким образом, чтобы система обладала необходимыми
показателями качества. Такими показателями могут быть:
порядок астатизма;
величина перерегулирования сг, %, определяемого единичным
ступенчатым управляющим воздействием; ►
время переходного процесса Т, вызванного ступенчатым управ-
ляющим воздействием;
максимальное ускорение W'max, с которым изменяется регули-
руемая величина;
запас устойчивости по фазе у;
коэффициенты ошибок Сх и Са.
При синтезе не обязательно задаются все показатели одновре-
менно, а могут учитываться лишь некоторые из них. Преимущество
последовательных корректирующих устройств заключается в том,
что они могут быть осуществлены в виде простых пассивных RC-
контуров. Недостатки последовательных корректирующих устройств;
158
эффективность их работы существенно уменьшается вследствие
непостоянства параметров и характеристик элементов системы (при
их применении к остальным элементам системы следует предъявлять
повышенные требования);
дифференцирующие 7?С-контуры очень чувствительны к помехам
и шумам.
Преимущество параллельных корректирующих устройств:
уменьшают зависимость динамических свойств системы от из-
менения параметров и характеристик элементов, входящих в ее
состав:
питание параллельных корректирующих контуров обычно не
вызывает затруднений, так как их включают на выходе системы,
где развивается значительная мощность;
системы с параллельными корректирующими устройствами менее
подвержены влиянию помех, чем системы с последовательными кор-
ректирующими устройствами, так как элементы системы, включен-
ные перед их входом, выполняют роль фильтров нижних частот.
Недостатки параллельных корректирующих устройств:
они состоят из дорогих и громоздких элементов (тахогенератор,
дифференцирующий трансформатор и др.);
их применение требует высоких коэффициентов усиления.
6.2. ЖЕЛАЕМАЯ ЛОГАРИФМИЧЕСКАЯ АМПЛИТУДНАЯ
ХАРАКТЕРИСТИКА
Реализация оптимальных частотных характеристик может
быть связана со значительными трудностями. Оказывается не всегда
обязательно нужно получить монотонные переходные процессы
и можно иметь время переходного процесса большее, чем Тт[п.
Поэтому вводится в рассмотрение желаемая ЛАХ, которая удовлетво-
ряет условиям оптимума и другим требованиям, подлежащим учету
при решении задачи синтеза.
Выбор желаемой ЛАХ производится при помощи правил, кото-
рые вытекают из связи между свойствами логарифмических частот-
ных характеристик разомкнутой системы и вещественных частотных
характеристик замкнутой системы (см. гл. 5).
Порядок действий для определения желаемой ЛАХ, в частности,
может быть следующим:
1. Исходя из требуемого порядка астатизма v и предположения
о том, что передаточный коэффициент k является заданной величи-
ной, строится ЛАХ объекта или неизменяемой части системы с уче-
том заданного значения k и требуемого порядка астатизма v, т. е.
L» (со) = Lmk — vLm (со).
Низкочастотная асимптота этой ЛАХ принимается за низкочастотную
асимптоту желаемой ЛАХ. Эта характеристика при частотах, мень-
ших первой сопрягающей частоты, имеет наклон —20удБ/дек,
а при со = 1 имеет ординату, равную 20 1g k.
159
Рис. 6.5. Кривые зависимости omax = f (Ршах) и Тшах = f (Лпах):
а — для Л > 0,5; > 0,4; б — для х < 0,8; 0,1 < Л < 0,5; < 0,4
2. Выбирается частота среза желаемой ЛАХ. Она должна удо-
влетворять неравенству
®с (ЛиIn) < ®С < ®с опт,
где ®с(тт1п)—частота среза, определяемая по кривым рис. 6.5
по заданным значениям сггаах и Ттах. Кривые = / (Pma) и
Т’тах — / (Лщах) получены гна основании построенияпереходных
ИроцёсСбв, соответствующих типовым вещественным частотным ха-
рактеристикам (рис. 6.6), для различных значений
х = cOrf/Юп; иа = ®0/ю6; Л. = юь/ю„.
Частоту среза оптимальной логарифмической амплитудной ха-
рактеристики ®соц|’ определяют по формуле
®С ОЦТ ---- 2/7\Т11п>
где Tmin = 2 /g0/Wmax*
Если заданное значение Ттах таково, что ®с оцт < ®стт1п,
то частоту среза следует выбирать не превышающей значения ®сопг-
3. Через точку ®0 проводят прямую с наклоном —20 дБ/дек
(среднечастотная * асимптота желаемой ЛАХ).
Наклон —20 дБ/дек выбирают потому, что такой наклон имеет
оптимальная логарифмическая амплитудная характеристика.
4. По заданному значению <ттах
(В %) ПО КрИВОЙ Отах = f (Рты)
(см. рис. 6.5) находят соответст-
вующее значение Ртах и опреде- ,
ляют | Pmin | по формуле
| Р mln | Рmax 1 •
Рис. 6.6. Типовая вещественная частотная
характеристика
160
По номограмме, Приведенной на рис. 5.7, накодят наименьшей
допустимое значение избытка фазы системы ус, обеспечиваемое на
всем интервале частот, на котором желаемая ЛАХ удовлетворяет
неравенству
£>м Ьж (ей) LM.
Величины 2LM и 2ус являются сторонами прямоугольника,
которыми приближенно можно заменить область на номограмме
рис. 5.5, ограничиваемую кривой с индексами Ртах и Pmin.
5. Сопрягаются низкочастотная и среднечастотная асимптоты
ЛАХ таким образом, чтобы в том интервале частот, в котором спра-
ведливо неравенство LM (ш) 0, избыток фазы был не меньше
величины ус. Проверка выполнения этого условия производится
при помощи приближенной формулы
у=« + ©(©)=л-v-J-L-f--2-5-1 +
\ /==1 /<а><»(
+ ('•? -?•)• (6.6)
\ 1=1/
где — сопрягающие частоты меньше того значения to, при кото-
ром определяют значение фазы 0; и 4 — число сопрягающихся
частот, в которых наклон ЛАХ соответственно увеличивается или
уменьшается на 20 дБ/дек. В формуле (6.6) частоты сопряжения,
превышающие частоту среза, не принимают во внимание, так как
обычно среднечастотная асимптота желаемой ЛАХ занимает зна-
чительный интервал частот (порядка декады и больше). Проверку
можно также производить путем построения фазовой характери-
стики, например, при помощи шаблонов.
6. Среднечастотная асимптота желаемой ЛАХ сопрягается с вы-
сокочастотной частью логарифмической амплитудной характери-
стики (областью малых параметров) так, чтобы в том интервале
частот, в котором справедливо неравенство
0 (<й) LM
избыток фазы у был не меньше ус.
Проверку выполнения этого условия производят при помощи
Приближенной формулы
tn
у — Л,Ц-©((й) — л —-^-gep — 2 (6.7)
г=1
Где Чсъ — наклон Среднечастотной асимптоты ЛАХ (при наклоне
—20 дБ/дек q — 1), т — число сопрягающих частот <ос, удовлетво-
ряющих условию иг > ш0. —
При сопряжении среднечастотной асимптоты с низкочастотной,
а также с высокочастотной частью желаемой ЛАХ следует обращать
внимание на то, чтобы желаемая ЛАХ имела наклон, возможно
6 Солодовников В. В. и др.
161
менее отличающийся бт наклона характеристики Неизменяемой
части системы на каждом из участков сопрягающих частот. Это
необходимо для того, чтобы получить более простую передаточную
функцию корректирующего устройства, имеющую числитель и зна-
менатель возможно более низкого порядка.
6.3. СИНТЕЗ ПОСЛЕДОВАТЕЛЬНЫХ КОРРЕКТИРУЮЩИХ
УСТРОЙСТВ
Предположим, что структурная схема САР имеет вид,
показанный на рис. 6.7. Необходимо определить тип последователь-
ного корректирующего устройства и его параметры. Передаточная
функция разомкнутой САР >
W (s) = Wd (s) Fo (s). (6.8)
Предположим далее, что обе передаточные функции, входящие
в правую часть выражения (6.8), являются минимально-фазовыми:
Fd(j®) = Hd(®)e/e</(<,>);
Fo (/’») = Но (ai)
и
Lm|IT| = Lm/fd4-LmH0; 0 (®) — 0</ (®) + 0О (®). (6.9)
Эти уравнения показывают, что логарифмические амплитудная
L (®) и фазовая 0 (®) частотные характеристики всей системы со-
ответственно равны сумме логарифмических амплитудных Lm Hdt
Lm Но и фазовых &d (®) и 0О (®) характеристик последовательного
корректирующего устройства и объекта.
Порядок операций для определения передаточной функции по-
следовательного корректирующего устройства:
а) строим ЛАХ Lo (®) = Lm Но той части системы, схема и па-
раметры которой предполагаем заданными;
б) строим желаемую ЛАХ Lm (®) = Lm Нж;
в) требуемую ЛАХ Ldm (®) последовательного ^корректирующего
"устройства находим путем вычитания из желаемой характеристики
Lm (<в) характеристики неизменяемой части системы Lo (®);
г) путем аппроксимации ЛАХ Ldm (®) = Lm Н^ж дробно-ра-
циональиой функцией или полиномом с требуемой степенью точности
находим желаемую характеристику последовательного корректиру-
ющего устройства;
д) выбираем схему корректирующего устройства; в общем случае
синтез пассивного электрического НС-контура производим мето-
дами, принятыми в теории электрических цепей; НС-корректиру-
ющий контур выбираем, например, в соответствии с формой характе-
ристик, приведенных в табл. 6.1;
е) непосредственно проверяем удовлетворение заданных требо-
ваний при выбранной ЛАХ корректирующего устройства.
Рис. 6.7. Структурная схема САР с по-
следовательным корректирующим уст-
ройством
162
Таблица 6:1
Некоторые пассивные корректирующие RC-устройства
Схема корректирующего устрой
ства н асимптотическая лога-
рифмическая амплитудная
характеристика
Передаточная функция (s)
H7K(s) =
Eds) 1
L\(s) T’isH- 1
L„ = 1*, Loo = 0, = Rd^t'
H7K(s) =
£8 (s) Lo
Ei (s) T±s + 1
Ri .
«I + R2 ’
Loo = (0); Ti —
RiRt „
Ri + R2 1
о
~za
Lm.™
W (si — — ^1S •
Lq ~ 0; L,co = 1; ~~
it /s\ = _'jr Tis~^ L •
Гк(5) Ej(s)
Ей==--‘ ;£„«!;
1+Л;
T^R^
______________1
?W+ [7t(l + $)+ ’
+ T’aj s + I
Ли == Ij Loo Oj
7*1 — ^2 — jRzCb
Продолжение табл. 6.1
Схема корректирующего устрой-
ства и асимптотическая лога-
рифмическая амплитудная
характеристика
Передаточная функция IFK (s)
г -
Гк ( ' Ех (s)
Т 2s________,
W> + [тх (i+g)+ ’
4" ^2 j s + 1
L,q ~ Oj L,oo — 0;
7\ = ^iQt> 7*2 ~ ^2^2
П7 is\ _ ^2 (s) - _
W^~E1 (s)~
._______TlT2s2_______.
W + [T1(l+g) +
+ Л] s+1
Aq = 0; Loo — 1;
T\ ~ 7^2 ™ R2C2
C2
U7 z„\ ^1121
Is ~ -l)(r2s+l)
Г1Т2з^ +
4* r2 j S 4~ 1
1 £<q s 1; Lx 35514»
7*1«
(r^+l)(Tts+l)
4 1 1Щ ""ЗЕО
"'till 1
. r1r,s«+'[r1(i + |.»)+ ’
4* T'aj s 4“ 1
J /J
- 1 • т r.
™ • L. J 4-QO 1 ,
1 I *3
^4-^
t — c - т — p p
71 — ц_ И» 7 a — ^3^2
164
Продолжение табл. 6,1
Схема корректирующего устрой-
ства и асимптотическая лога-
рифмическая амплитудная
характеристика
Передаточная функция IFK (s)
WK (s) = =
и ' Ex (s)
(rts+l)(r2s4-t)
T.T
Le= 1
Аоо =
Rt
+ Ri
T\ = RiCx', T2~ R3C2
! 1г»111 411 т, HI 1Н
111 3 6
11IIIIIIM
WK (s) = =
' Ex(s)
(7\s -|- 1) (TgS 4- 1)
T,T,s‘ + (1 + ^) +
+Г,[1 + Щ^])х
L AiKa J)
.. . 1
, 1___________.
, R, , WW»)’
Loo «= 1} Tj ®s Ta ®s Я3С1
6.4. СИНТЕЗ ПАРАЛЛЕЛЬНЫХ КОРРЕКТИРУЮЩИХ
УСТРОЙСТВ
Часто для коррекции динамических свойств системы при-
меняют параллельные корректирующие устройства. Они позволяют
уменьшить влияние нестабильности и нелинейности характеристик
отдельных элементов на динамические свойства всей системы в целом.
Следует отметить некоторые свойства ЛАХ последовательных
звеньев, шунтированных параллельным корректирующим звеном
(рис. 6.8),
165
Wm(s)
Z(s)
Рис. 6.8. Последовательность звеньев,
шунтированных параллельным коррек-
тирующим звеном
Передаточная функция этой системы имеет вид
<6Л0>
Допустим, что передаточная функция Wm (s) задана. Необходимо
определить передаточную функцию Z (s) параллельного корректи-
рующего устройства в классе минимально-фазовых систем. Для
того чтобы введение параллельного корректирующего устройства
не понижало порядок астатизма системы, требуется, чтобы порядок
нуля передаточной функции Z ($) при s = 0 был не ниже порядка
полюса передаточной функции Wm (s) неизменяемой части при
s = 0.
Следующее свойство передаточной функции вида (6.10) состоит
в том, что в интервале частот, в котором
| Z ((co) Wm (» |» 1, (6.11)
амплитудная частотная характеристика, соответствующая переда-
точной функции (6.10), имеет вид
<6|2>
или
Lm|IFro|«-Lm|Z|.
Из формулы (6.11) видно, что в интервале частот, для которого спра-
ведливо условие (6.11), ЛАХ системы, состоящей из последователь-
ных звеньев, шунтированных параллельным корректирующим уст-
ройством, приближенно равна ЛАХ параллельного корректирующего
звена с обратным знаком.
Если J1AX Lm | Wm (/со) | отличается от характеристики
—Lm IZ (/со) | в некотором интервале частот (со1( со8) не более чем
на ±Д£, то это значит, что в этом интервале частот должно удо-
влетворяться неравенство
1 | I т
тЩ |l + Z^ml TzT ‘
дь
где т = 10 20 ,
или
т < 11 + I
Выражение
®zm = W(H^m)
166
ЙМёёт такук) же структуру, как к соотношение Ф .= $7(1 + $*),
представляющее зависимость между передаточными функциями си-
стемы в замкнутом и разомкнутом состоянии. Отсюда следует, что
для удовлетворения приближенного равенства (6.12) в некотором
интервале частот ((оъ и2) с требуемой степенью точности ±AL не-
обходимо и достаточно, чтобы в этом интервале вектор Z (/©) Wm (jco)
йе попадал внутрь окружностей амплитуды круговой диаграммы
с индексами т и 1/т.
При рассмотрении способа синтеза параллельных корректиру-
ющих устройств предполагается, что последовательное корректиру-
ющее устройство в структурной схеме САР (рис. 6.9) отсутствует.
Тогда порядок действий для определения передаточной функции
параллельного корректирующего устройства может быть следующим:
а) строим ЛАХ Lm [ Wm | неизменяемой части системы;
б) из заданных условий качества строим желаемую ЛАХ
Lm | Wm | всей системы;
в) определяем интервал частот (ац, со2), в котором для характе-
ристики Lm|Z| имело бы место приближенное равенство
Lm | Z | » — Lm |;
г) строим характеристику Lm]’Z|;
д) выбираем значение Kz так, чтобы обеспечить удовлетворение
неравенства (6.11) в интервале частот (©j, о2);
е) проверяем, является ли выбранное значение Kz совместимым
с требованием устойчивости контура, охваченного параллельным
корректирующим устройством, при соблюдении для него заданного
запаса устойчивости. Для этого строим фазовую характеристику,
соответствующую выбранной ЛАХ Lm|ZI^d|;
ж) по выбранной передаточной функции Z синтезируем параллель-
ное корректирующее устройство; при этом руководствуются теми же
соображениями, что и при синтезе последовательного корректиру-
ющего устройства;
з) выбираем коэффициент усиления Kd так, чтобы величина К
имела заданное значение;
и) уточняем вид логарифмической амплитудной и фазовой ха-
рактеристик, соответствующих передаточной функции Wml(l +
+ ZWm); для этого суммируем ординаты ЛАХ и ЛФХ, соответству-
ющих функциям W-M и 1/(1 + ZWm)',
к) производим проверку удовлетворения заданных условий ка-
чества.
Примером схемного решения параллельных корректирующих
устройств можно привести схему с тахометрической обратной связью,
которую обычно применяют в следящих системах.
Рис. 6.9. Структурная схема САР с па-
раллельным корректирующим устрой-
ством
167
Рис. 6.11. Корректирую-
щее устройство в виде
мостовой тахометрической
обратной связи:
ЭУ — электронный усили-
тель; ЭМУ — электрома-
шннный усилитель; ЭДв —
электродвигатель постоян-
ного тока; RC — контур па-
раллельное корректирую-
щее устройство
Рис. 6.10. Параллельное
корректирующее устрой-
ство . с тахогенератором
На рис. 6.10, а изображено параллельное корректирующее
устройство, состоящее из тахогенератора ТГ, механически связан-
ного с валом исполнительного^электродвигателя и пассивного
однозвенного /?С-контура. Передаточная функция этого устройства
Z (s) = kTs2/(l + Ts).
Вместо однозвенного может быть применен двухзвенный /?С-контур
(рис. 6.10, б). Тогда передаточная функция корректирующего уст-
ройства имеет вид
Z(s) = ^/[(1 + 7\s) (1 + T2s)L
На рис. 6.11 приведена схема' корректирующего устройства
с мостиковой тахометрической ОС. Если мост сбалансирован, то на-
пряжение на выходе пропорционально угловой скорости вала элек-
тродвигателя, а если мост не сбалансирован, то угловой скорости
й ускорению.
6.5. СИНТЕЗ ПОСЛЕДОВАТЕЛЬНОГО
И ПАРАЛЛЕЛЬНОГО КОРРЕКТИРУЮЩИХ УСТРОЙСТВ
Если система содержит как последовательное, так и па-
раллельное корректирующие устройства (общий случай структурной
схемы рис. 6.4) и передаточная функция системы имеет вид (6.5),
то выражение для ее ЛАХ имеет вид
Lmiri^Lmirj + LmlFol + Lml-p-^— (6.13)
168
Первый шаг процесса синтеза, состоящий в выборе на оснований
заданных условий качества и характеристик объекта ЛАХ, остается
тем же, что и ранее. Дальнейший ход решения задачи может, на-
пример, заключаться в следующем. Принимаем
тогда вместо выражения (6.13) можно написать
Lm|r| = Lm|rrf-| + Ьш|Го|. (6.14)
Выражение (6.14) имеет такой же вид, как и формула (6.9) для
Lm | W | при синтезе последовательных корректирующих устройств.
Поэтому выбор передаточной функции Wd' может быть выполнен
способом, которым производится синтез последовательных коррек-
тирующих устройств. После определения Lm | Wd' | и выбора
Lm | Wa | с использованием четырехполюсников находим ЛАХ
Lm 11 + ZWm|
путем вычитания из Lm | Wd- \ соответствующих характеристик.
ЛАХ описывается выражением
Lm | 1 + ZWm I = Lm I 1 + (ZWm)-11 ' (6‘15)
По ЛАХ (6.15) и соответствующей ей фазовой характеристике при
помощи номограмм для замыкания системы обратным преобразо-
ванием определим логарифмическую характеристику, соответству-
ющую передаточной функции (ZlFm)-1.
По этим характеристикам находим характеристики, соответ-
ствующие передаточной функции ZWm, как зеркальное отображение
характеристик (ZWm)-1. Путем вычитания из этих характеристик
ЛАХ Lm | Wm | определяем искомую логарифмическую характе-
ристику Lm|Z|. После этого выбираем схему корректирующего
устройства и производим проверку заданных требований при полу-
ченных корректирующих устройствах.
Задача синтеза упрощается, если во всем интервале частот удо-
влетворяется неравенство |ZU7m| > 1. При этом логарифмическая
амплитудная характеристика Lm | Wd' | сводится к виду
Lm|№d, |«Lm|№d|-Lm|Z| (6.16)
и способ синтеза не отличается от способа синтеза последовательных
корректирующих устройств. После определения характеристики
Lm I Wd' | выбираем последовательное корректирующее устройство
,Wd, а по формуле (6.16) определяем амплитудную характеристику
параллельного корректирующего устройства Lm|Z|.
6.6. ПРИМЕР ПОСТРОЕНИЯ ЖЕЛАЕМОЙ ЛАХ
Передаточная функция неизменяемой части системы имеет
вид
= s (0,012s + 1) (0,05s 1) ’ ^6-1
1§9
ординату Lm = 20 lg k = 46 дБ.
Рис. 6.12. Пример построения желаемой
ЛАХ и синтез последовательного кор-
ректирующего устройства
Система должна иметь сле-
дующие показатели качества:
астатизм 1-го порядка, пе-
редаточный коэффициент k =
= 200 1/с;
перерегулирование не долж-
но превышать <тшах % < 30 %;
время переходного процесса
Утах 0,3 С.
максимальное ускорение ре-
гулируемой величины 300 рад/с2
при начальном рассогласова-
нии до go = Л© = 0,1 рад.
Необходимо построить же-
лаемую ЛАХ системы регули-
рования.
Для этого сначала по пере-
даточной функции (6.20) строят
низкочастотную ЛАХ с учетом
передаточного коэффициента
k — 200 1/с и v = 1 (рис. 6.12).
При этом низкочастотная асим-
птота при частоте со = 1 имеет
Затем выбирают частоту среза
желаемой логарифмической амплитудной характеристики (ос. По
заданному значению <тгаах % по кривой <ГтЯХ % = f (Лтах) опреде-
ляют Ртах (1,25), а по кривой — f (Лгаах) находят Ттах:^
==^2 = 0’3 с> 0ТКУДа Мтт = 39 1/с и
luQ Шал
(о>с)оПТ = /^ = /^ = /ЗббО~55 1/с.
Таким образом, частота среза желаемой ЛАХ должна находиться
в диапазоне
39 с <ос < 55.
Частоту среза желаемой ЛАХ выбирают равной 40 1/с.
После этого проводят среднечастотную асимптоту желаемой ЛАХ
и определяют значение Ртш = Ртах — 1 = 0,25.
По номограмме линий равных значений Р (со) (см. рис. 5.5)
в координатах логарифм амплитуда—фаза по найденным значениям
Ртах и Pmln строят прямоугольник со сторонами 2Lm ^ 30 дБ и
2ус s* 86°. Откуда Lm « 15 дБ; ус = 43°.
Далее сопрягают низкочастотную и среднечастотную асимптоты
желаемой ЛАХ отрезком прямой, имеющим наклон —40 дБ/дек.
1 7П
При помощи формулы (6.6) находим наибольшее значение со-
прягающей частоты (02, при которой еще у ус. /
Среднечастотную асимптоту сопрягают с высокочастотной
частью ЛАХ Lm] Ц70|. На устойчивость системы и на ее качество
высокочастотная асимптота влияет незначительно, поэтому для
упрощения корректирующего устройства сопряжение осуществляют
отрезком прямой с наклоном —40 дБ/дек и в дальнейшем желаемая
ЛАХ совпадает с Бт|Ц70|. Проверку наличия избытка фазы у0
проводят с помощью формулы (6.7).
Построенная желаемая ЛАХ может быть уточнена с использова-
нием номограмм, приведенных в конце главы.
Пример синтеза последовательного корректирующего устрой-
ства. Пусть объект имеет передаточную функцию (6.17) и построена
желаемая ЛАХ, удовлетворяющая требуемым показателям качества
(см. рис. 6.12). Из желаемой ЛАХ L;K (<в) вычитают характеристику
Lo (со) и находят желаемую ЛАХ LdyK (со) последовательного кор-
ректирующего контура (рис. 6.12). По этой амплитудной характе-
ристике определяют передаточную функцию корректирующего уст-
ройства в виде
Схема электрического пассивного корректирующего контура, соот-
ветствующая данной передаточной функции, может иметь вид, по-
казанный на рис. 6.13.
6.7. НОМОГРАММЫ ДЛЯ ОПРЕДЕЛЕНИЯ ЗАПАСА
УСТОЙЧИВОСТИ, ПОКАЗАТЕЛЕЙ КАЧЕСТВА
И КОЭФФИЦИЕНТОВ ОШИБОК САР ПО ВИДУ ЛАХ
Типовые ЛАХ Lm 1IF| можно представить состоящими из
следующих основных частей (рис. 6.14); среднечастотной асимптоты
СД с наклоном —20 дБ/дек, пересекающей ось частот в точке, со-
171
бУётствующей частоте среза йс; низкочастотной асимптоты АВ,
имеющей наклон —20 v дБ/дек, где v — порядок астатизма; отрезка
прямой ВС с наклоном —40 4—60 дБ/дек, соединяющего низкоча-
стотную асимптоту с отрезком прямой, пересекающим ось' частот;
отрезка прямой ДЕ с наклоном —404—60 дБ/дек, определяющим
вид амплитудной характеристики при повышенных частотах и вы-
сокочастотной части, которая мало влияет на качество системы
и в первом приближении может не приниматься во внимание. По-
этому ЛАХ можно подразделить на ряд основных типов и для лога-
рифмической амплитудной характеристики каждого типа составить
номограммы, приводящие в непосредственную связь основные пара-
метры ЛАХ с показателями качества. Номограммы составлены для
минимально-фазовых систем. Они представляют интерес не только
для анализа, но и для синтеза корректирующих устройств САР.
Ниже будут рассмотрены лишь типовые ЛАХ астатических си-
стем 1-го порядка. При этом можно выделить четыре основных типа
ЛАХ. Они имеют низкочастотные и среднечастотные асимптоты
с одним и тем же наклоном —20 дБ/дек и отличаются друг от друга
наклоном в интервале частот («!—со2) (отрезок ВС) и в интервале
частот (<в3—оо) (отрезок ДЕ).
Передаточные функции и наклоны асимптотических ЛАХ в ука-
занных интервалах частот приведены в табл. 6.2.
Каждая из типовых ЛАХ табл. 6.2 полностью определяется
следующими параметрами: передаточным коэффициентом, или доброт-
ностью k, и сопрягающимися частотами a>j = 1/74;
а»з = 1/T3. Однако удобнее пользоваться совокупностью параме-
Таблица 6.2
Передаточные функции W (s) для типовых логарифмических характеристик
Тип ЛАХ (рис. 6.15) Передаточная функция Наклоны в интервалах, дБ/дек
3 1 о 3 3 3 L 3 8 L S
/ k (T2S 4-1) s (Tls + 1) + 1) —20 —40 -20 —40
и fe (Tas+ l)a _ з(Т15+ l)a(T3s+l) —20 —60 -20 —40
III & (T2$ 4~ 1) -20 —40 —20 -60
IV k (T2S 4- l)a s(^4-l)a (7’3s4-l)2 —20 —60 —20 —60
172
ординатой при to = ©х, частотой среза toc и Относителййк^Й
сопрягающимися частотами ©х/©с и ©3/©с.
Каждому типу передаточной функции соответствует своя номо-
грамма, позволяющая определять показатели качества, запас устой-
чивости и точность системы непосредственно по виду типовых ЛАХ,
заданных параметрами: Lr\ ©с; ©х/©с.; юе/©с.
Для астатических САР 1-го порядка эти номограммы приведены,
например, в книге [221; для статических и астатических САР 1-го
и 2-го порядка имеются специальные альбомы. Аналогичные номо-
граммы могут быть построены и для других типов ЛАХ. Кривые
номограмм представляют собой зависимости динамических показа-
телей: о %; Тр©с/10; ©cCf, ©?с2 и у от относительной сопрягающей
частоты ©x/toc при различных фиксированных значениях Ц и <Дв/юс,
где а % — перерегулирование; Тр — время переходного процесса;
у — запас устойчивости по фазе; сг н с2 — коэффициенты ошибки,
которые определяют точность системы при медленно изменяющихся
управляющих воздействиях. Номограммы построены для значе-
ний Lj, равных 80; 70; 60; 50; 40; 30; 20 дБ, и значений ю3/юс, рав-
ных 1, 2, 4, 8.
Способ применения номограмм для определения перечисленных
динамических показателей, соответствующих какой-либо конкретной
ЛАХ, относящейся к одному из четырех перечисленных типов,
заключается в следующем:
1) определяют тип, к которому относится рассматриваемая ЛАХ,
и выбирают соответствующую номограмму;
2) находят параметры ЛАХ Li, ©х/©с; ©3/юс; ©с и при помощи
кривых, приведенных в номограмме, определяют динамические
показатели.
Пример. Допустим, имеется ЛАХ типа II (рис. 6.15). Ее параметры: L = 60;
©х/ис = 0,04; <0з/Ис =2; v = 1. Снечала выбирают номограмму для v = 1 с от-
метками L = 60 и и3/и0 == 2. На оси абсцисс (Их/и0) отмечают точку 0,04 и из
иее восстанавливают перпендикуляр до пересечения с кривыми номограммы. В ре-
зультате получают искомые динамические показатели: а % = 45%; Тр<яе/\0=*
= 0,75; ©(.q = 0,025; cd*C2 = 2,2; у = 58°.
Если значения параметров ЛАХ отличаются от имеющихся в но-
мограмме, то динамические показатели могут быть определены по
имеющимся на номограмме кривым при помощи интерполяции»
Следует отметить, что номограммы часто можно применять не
только для передаточных функций, приведенных в табл. 6.2, име-
ющих кратные полюса и нули, но и для передаточных функций, не
имеющих кратных полюсов и нулей. Однако в этом случае необхо-
димо, чтобы порядки числителя и знаменателя рассматриваемой и
соответствующей типовой передаточной функции были одинаковы.
Так, например, номограммой, построенной для ЛАХ II типа,
можно пользоваться для систем с передаточными функциями вида
W (s\ ~____k ^sS + О (T1S + О_. (6 18)
s(T1S+ 1) (Tas+ l)(TBs+ 1) ’
173
Рис. 6.15. Определение динамических показателей системы по номограммам:
а — ЛАХ II типа: б — лист номограммы (кривые: 1 — ocCj; 2 — 3 — а %; 4—
Т(ОС/Ю; 5 - т°)
номограммой III типа — для систем с передаточными функциями
вида
W («) = "7т J . i{ ’• (6.19)
s(7> + 1) (?зз+1) (T4s+ 1)’ v
Номограммой IV типа — для систем с передаточными функциями
вида
W(s\ ________________________________ (6 20)
s(Tls+i)(TaS+l)(rBS+l)(res+l)-
Правило перехода от передаточных функций (6.18)—(6.20) к пере-
даточным функциям табл. 6.2 состоит в том, что две соседние постоян-
ные времени Tt и Ti+i заменяют двумя одинаковыми постоянными
времени, определяемыми по формуле
Ошибка в ЛАХ, которая получается при замене двух соседних
неодинаковых постоянных времени 7;, Ti^ одной постоянной
Ti,M при l/T'i+i <4/Тг, меньше 2 дБ.
Номограммой можно также пользоваться в тех случаях, когда
вместо двух апериодических звеньев с одинаковыми постоянными
времени имеется одно колебательное звено. Ошибка при этом будет
уменьшаться с убыванием коэффициента затухания колебатель-
ного звена.
174
ГЛАВА 7. анализ динамической точности систем
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
7.1. ПОСТАНОВКА ЗАДАЧИ АНАЛИЗА ДИНАМИЧЕСКОЙ
ТОЧНОСТИ
При анализе качества САР предполагалось, что воздей-
ствия представляют заданные функции времени. Иногда допущение,
что воздействие, вызвавшее переходный процесс, является заданной
функцией времени, т. е. функцией, значение которой в любой буду-
щий момент времени t однозначно определяется ее изменениями
в предыдущие моменты времени, не дает возможности описать реаль-
ные условия работы системы и правильно подойти к выбору ее ха-
рактеристик. Зависимость воздействий от времени, которым подвер-
жена система, нельзя заранее установить. Воздействия, приложен;,
ные к САР, представляют, случайные непрерывные изменяющиеся
функции времени, так как ни знание величины воздействия в любой
момент времени, нй известность всех его предыдущих изменений
не позволяют однозначно определить закон изменения воздействия
в последующие моменты времени. Методы анализа и синтеза САР при
наличии случайных непрерывно изменяющихся, воздействий имеют.,
большой практический интерес. Проблему динамической точности
можно определить как проблему анализа и синтеза систем автомати-
ческого регулирования, находящихся под влиянием таких непре-
рывно изменяющихся воздействий, когда понятие о переходном
процессе теряет смысл, и полной характеристикой неустановившегося
процесса, происходящего в системе, может служить абсолютное
значение разности | е (t) [ между требуемым и действительным зна-
чением регулируемой величины в заданном интервале 7\ < f с Т%.
Это направление теории автоматического регулирования основы-
вается на методах теории вероятностей и математической статистики.
В качестве первого примера САР, находящейся под влиянием
помех (шумов), которые накладываются на управляющее воздей-
ствие (полезный входной сигнал), можно рассмотреть систему само-
лет-автопилот. В ней полезным сигналом могут являться сигналы,
поступающие на вход автопилота и определяющие требуемый закон
движения самолета, а помехами — непрерывные случайные измене-
ния лобового сопротивления и подъемной силы самолета вследствие
хаотического движения частиц воздуха, колебаний плотности атмо-
сферы и других причин.
Вторым примером подобного рода систем может служить система
регулирования скорости турбогенератора. В ней задающим воздей-
ствием является постоянный сигнал, соответствующий номиналь-
ному значению скорости, а возмущающим — непрерывные колебания
нагрузки, которые создает подключенная к генератору внешняя
цепь. Эти колебания нагрузки зависят только от потребителей и
заранее не могут быть предугаданы.
Третьим примером таких систем может быть следящая система
радиолокационной станции. В ней задающим воздействием является
|75
входной сигнал, зависящий от движения цели, который не может
быть точно предугадан. Возмущающим воздействием являются
флюктуации входного сигнала или помехи, которые накладываются
на входной полезный сигнал. Они вызваны непрерывным изменением
коэффициента отражения самолета в процессе его облучения. Изме-
нение коэффициента отражения происходит из-за рыскания и качки
самолета, вращения винта и других причин. Закон изменения флюк-
туаций во времени вследствие сложности явления также не может
быть точно определен.
Кроме помех, попадающих на вход следящей системы радиоло-
катора вместе с полезным сигналом, в ее частях образуются шумы,
которые накладываются на полезный сигнал. Эти шумы возникают
в приемнике, в контактах, потенциометрах и других частях следя-
щей системы. Антенна радиолокационной станции находится под
влиянием ветровой нагрузки, которая также представляет собой
случайную функцию времени.
7.2. СЛУЧАЙНЫЕ ФУНКЦИИ И СТОХАСТИЧЕСКИЕ
ПРОЦЕССЫ
Функция, которая при каждом данном значении неза-
висимой переменной является случайной величиной, называется
случайной функцией. Случайную функцию можно рассматривать как
бесконечную совокупность случайных величин, зависящую от одной
или нескольких независимо изменяющихся переменных. Случайные
функции, для которых независимой переменной является время t,
называют стохастическими процессами.
Случайную функцию, зарегистрированную в той или иной форме
по результатам опыта, называют реализацией случайной функции.
На рис. 7.1 показаны графики случайных функций х4 (/)—х4 (/).
Можно рассмотреть какой-либо определенный момент времени t
и определить какая доля из общего числа функций xt (t) имеет в этот
момент значение, заключенное между х и х + Ах. Эта доля зависит ।
от t и пропорциональна Ах при малых Ах. Ее обозначают через /
Wi (х, 0 и называют одномерной j
плотностью распределения евро-
ятности.
Если рассматривать возможные
парьГзначёний х, . наблюдавшиеся
в два различных момента времени
t2, то долю пар значений х,
для которых величина х заключе-
на между (хь х2 4- Ах4) при t =
и между (х2,- х2 + Ах2) при t = t2,
отнесенных к общему числу на-
блюдавшихся пар значений, обо-
х,Н)
t
1 । 1
ill
I ! I
. । I I
t
гЛ(й
t
t
Рис,_7.1. Графики случайных функций
17Q
значают через W2 (х^, x2t2) АХ} Ах2 и называют двумерной плот-
ностью распределения вероятности. Этот процесс можно продол-
жить и определить трехмерную и т. д. и л-мерную плотность рас-
пределения вероятности. Считается, что о случайном процессе
известно все, если известна функция W/. при любом k, т. е. при
любой плотности распределения вероятности (х, t) Ах; W2 (xjtb
x2t2) AXi Ax2 и т. д. При статистическом методе изучения случай-
ных процессов не ставится задача исследования каждой отдельной
функции х (0, входящей в их совокупность и характеризующих
этот процесс, а изучаются свойства всей совокупности функций в
целом.
В общем случае для экспериментального определения л-мерных
функций плотности вероятности, характеризующих случайный про-
цесс, необходимо располагать значительным числом функций х (/),
полученных из большого числа наблюдений над подобными систе-
мами, чтобы затем определить вероятность нахождения величины х
в любом интервале (х, х -рДх) в момент времени t.
7.3. СТАЦИОНАРНЫЕ СЛУЧАЙНЫЕ ПРОЦЕССЫ
Математическое описание и экспериментальное исследо-
вание случайных процессов, на которые не наложено никаких
ограничений, представляет значительные трудности. Поэтому обычно
рассматривают случайные процессы, удовлетворяющие определен-
ным допущениям. Среди таких процессов большое внимание уделяют
так называемым процессам Маркова. Их особенность состоит в том,
что в каждый данный момент времени дальнейший ход процесса
определяется его состоянием в рассматриваемый момент времени и
не зависит от характера течения процесса в предшествовавший пе-
риод. Процессы такого рода сравнительно легко поддаются матема-
тическому Описанию.
Однако более многочисленными являются такие физические
явления, при которых предыдущее течение процесса имеет суще-
ственное значение для дальнейшего его протекания. Так, например,
если движение самолета в пространстве рассматривается как про-
цесс, соответствующий процессу Маркова, то это означает, что
не учитываются его силы инерции.
Среди случайных процессов, в которых предыдущее течение
процесса в существенной мере определяет те заключения, которые
можно сделать о будущем, нужно выделить ^стационарные случайные
процессы. Понятие стационарного случайного процесса используют,
когда статистические свойства системы, в которой протекает слу-
чайный процесс, остаются неизменными во времени/ т. С. вид функ-
ций распределения вероятности не зависит 'от'"смещения начала
отсчета вдоль оси времени. В более общих случайных процессах
функция распределения зависит от момента времени, для которого
она определяется.
Случайный процесс, определяемый совокупностью переменных
Хд (£), называют стационарным, если законы распределения вероят-
vn
ности двух групп значений этих переменных [х (^), х (4), х (£п)1
и [х + т), х (f2 + т), х (tn + т)] тождественны друг другу,
причем число п, моменты времени ti, t^, tn и промежуток т могут
быть выбраны совершенно произвольно.
Случайный процесс также называют стационарным, если его
статистические свойства не зависят от начала отсчета во времени.
Это означает, что два процесса х (t) и х (t + т) имеют одинаковые
статистические свойства для любого т.
В случае стационарного случайного процесса среднее значение
или математическое ожидание (момент 1-го порядка) р,ж для сово-
купности функций х (t) постоянно, т. е.
= j xW (х, t) dt = const,
где W (х, t) — плотность распределения вероятности.
Среднее по времени
х = lim -hU Г х (t) dt = const.
T->oo J
Это также относится и к моментам функций х (t) более высоких
порядков:
хп =
Стационарный случайный процесс обладает эргодическим свой-
ством или подчиняется эргодической гипотезе. Случайный процесс
х (t) называют эргодическим процессом, если все его статистические
свойства могут быть определены по одной-единственной реализации
Xt (t). Эргодическим можно также называть такой процесс, для кото-
рого среднее значение по времени равно средним значениям по ан-
самблю.
Согласно эргодической гипотезе большое число наблюдений над
одной системой, движение которой представляет собой стационарный
случайный процесс, в произвольные моменты времени имеют те же
статистические свойства, что и то же число наблюдений в один и
тот же момент времени над произвольно выбранными подобными ей
системами.
Под системами, подобными друг другу, подразумевают системы,
приближающиеся с течением времени сколь угодно близко к любому
|из возможных состояний любой из них.
Таким образом, каждая из систем'” может' 'быть использована
для анализа поведения целого множества систем/ определяя : не
только все их возможные состояния, но и вероятность любой сово-
купности этих состояний- Это значительно упрощает исследование
системы.
178
14. КОРРЕЛЯЦИОННАЯ ФУНКЦИЯ Й ФУНКЦИЯ
СПЕКТРАЛЬНОЙ ПЛОТНОСТИ
Корреляционная функция R (т). Автокорреляционной
Или просто корреляционной функцией R (tlt t2) называют момент
2-го порядка р,2х (ti, t2) случайной функции х (/), т. е.
ОО оо
— J J (Xlt x2,tlt t2) dx± dx2. (7.1)
—oo —oo
Выражение для корреляционной функции R (т) стационарного
процесса может быть записано так:
СО
R (т) = j Х1 (t 4- т) х2 (t) W (хъ х2, т) dxt dx2 =
«— 00
Т
= lim ~ [ x(tA-n')x(t)dt = x(i-]-T:)x(t). (7.2)
T-»oo
Физический смысл понятия корреляционной функции состоит
в определении вероятности того, что если случайная функция х (t)
в момент t имеет значение хъ то в момент времени t + т она имеет
значение х2, т. е. характеризует взаимную связь между х (t) и х (t + т).
Если т мало по сравнению с постоянным времени системы, то связь
между х (t + т) и х (t) велика, а значение R (т) достигает максимума,
т. е. при очень малых т вероятность того, что значение функции
х (t + т) мало отличается от значения х (t), будет близка к единице
и близка к достоверности. По мере увеличения т составляющая
х (t), определяемая начальным значением х (t), при t = 0 затухает,
связь между величинами х (t) и х (t + т) ослабевает, они делаются
взаимно независимыми, а функция R (т) —>0. Другими словами,
при достаточно больших т вероятность того, что величина х (t + т)
будет мало отличаться от величины х (t), практически равна нулю.
Некоторые свойства корреляционной функции R (т). 1. Корре-
ляционная функция R (т) случайной функции со средним значением,
равным нулю при достаточно больших т, также стремится к нулю,
т. е.
lim R(x) = R (оо) = 0.
Т-*-оо
2. Начальное значение R (0) корреляционной функции R (т)
равно среднему значению квадрата случайной функции х (t) и по-
этому положительно, т. е.
Я(0) = ШпЯ(т) = х2>0.
т-»о
Согласно определению
т
fl(0)=lim-A. f x(t)X(t)dt = x\
Т-ж
179
Рис. 7.2. Корреляционные функции случайных сигналов:
а — белого шума; б — случайного процесса, содержащего постоянную составляющую;
в — случайного процесса с периодической составляющей; г — случайного процесса без по-
стоянной н периодической составляющих
3. Корреляционная функция R (0) является четной функцией
от т, т. е. R (т) = R (—т).
4. Значение корреляционной функции R (т) при любом т не
может превышать ее начального значения, т. е. R (0) | R (т) |.
При анализе случайных процессов часто используют понятие
нормированной корреляционной функции р (т) = R (r)/R (0). Оче-
видно, р (0) = 1.
При рассмотрении связи двух случайных процессов х (/) и у (t)
используют взаимную корреляционную функцию RTj!/(t):
т
Rx, У (т) == lim — J х (0 у (t 4- т) dt. (7.3)
—т
Взаимная корреляционная функция Rx>y (т) определяет связь
различных случайных процессов между собой, т. е. имеется ли между
ними статистическая связь. Примером таких процессов могут быть
две координаты пространственного положения подвижной цели.
Некоторые примеры корреляционной функции R (х) 1. Белый
шум — это случайный процесс х (t), который характеризуется от-
сутствием какой-либо взаимной связи между предыдущими и после-
дующими значениями х (/). Такой случайный процесс называют
абсолютно случайным процессом. Корреляционная функция белого
шума равна нулю при всех значениях т, кроме т = 0, и ее можно
представить в виде дельта-функции (рис. 7.2, а) или практически
в виде импульса достаточно малой ширины, площадь которого равна
единице.
180
i. Случайный процесс х (t) соДержйТ йостояййую с6ставЛякйцу(0.
Корреляционная функция R (т) также будет содержать постоянную
составляющую (рис. 7.2, б).
3. Случайный процесс х (t) содержит периодическую составля-
ющую. Корреляционная функция R (т) также будет содержать
периодическую составляющую, которая имеет тот же период
(рис. 7.2, в).
4. Если стационарный случайный процесс х (/) не имеет постоян-
ной и периодической составляющих, то корреляционная функция
R (т) имеет вид, показанный на рис. 7.2, г.
На практике корреляционную функцию обычно определяют об-
работкой экспериментальных данных, представляющих собой записб'
или реализацию изучаемого случайного процесса.
Корреляционная функция R (т) описывается выражением
т
Rx(x)^-^ \ x(t)x(t + i:)dt.
—т
Промежуток времени Т разделяют на N весьма малых интерва-
лов А так, чтобы функция х (7) мало изменялась на протяжении ин-
тервала А (рис. 7.3), т. е. Т = 7VA; t и т придают дискретные зна-
чения, кратные А, т. е.
t — v — 1, 2, ...;
т = рА, р = О, 1, ...
При сделанных допущениях интеграл в последней формуле для
определения Rx (т) можно заменить знаком суммы, т. е.
N
7?(т) = 7?(рА)~ У, x(vA)x[(v + p)A],
V—— N
при т = рА, р = 0, 1, ...
Вводят обозначения:
R (рА) = R (р); х (vA) = xv; х [(v 4~ р) А ] = xv+u,
последнее выражение можно записать в виде
1 N
Rx (н) = 2М i I ^v^i^+v
v——N
Рис. 7.3. Определение
корреляционной функции
по экспериментальным
данным
181
При рассмотрений положительного промежутка времейи Т формула
примет вид
N-\x
(р) А/ ХуХу+ц, р, 0. (7-4)
r V=1
Для взаимной корреляционной функции Rxy (?) можно написать
N—ц
^хд (Н) _ ц У ХуУу+11> И > 0- (7-5)
v«=l
Формулы (7.4) и (7.5) показывают, каким образом могут быть
вычислены корреляционная функция экспериментальной кривой
х (0 и взаимная корреляционная функция кривых х (t) и у (t) при
помощи измерения ординат этих кривых, расположенных друг от
друга на расстоянии А в пределах рассматриваемого интервала Т.
Приведенный способ определения корреляционной функции по
экспериментальным данным представляет собой трудоемкий про-
цесс. Так, например, для того чтобы вычислить ординату корре-
ляционной функции, необходимо произвести N — р действий умно-
жения и N — р действий сложения. Поэтому разработаны приборы-
корреляторы, которые позволяют в ряде случаев автоматизировать
вычисление корреляционной функции.
Формулы (7.2) и (7.3) для автокорреляционной и взаимной кор-
реляционной функций показывают, что корреляторы должны про-
изводить следующие операции (рис. 7.4):
x(t) y(t)
преобразовывать ордина-
ты кривых х (/) и у (t), за-
данных, например, в виде
осциллограмм, в некоторые
пропорциональные им физи-
ческие величины (пере-
мещения, напряжения и
т. д.);
производить перемноже-
ние величин, соответствую-
щих ординатам кривых х (/)
и у (/), для значений t, сдви-
нутых друг относительно дру-
га на величину т;
интегрировать результат
умножения в пределах вы-
бранного промежутка Т.
Кроме того, прибор дол-
жен допускать регулировку
Рис. 7.4. Структурная схема кор-
релятора
182
сдвига т между перемножаемыми ординатами кривых х (/), у (t)
в требуемых пределах.
Технические варианты осуществления 'коррелятора могут быть
различными. V-'TЛ :Лл-' <
Спектральная плотность S (со), как и корреляционная функция
7? (т), является характеристикой стационарного случайного про-
цесса. Она представляет собой разложение кривой случайного про-
цесса х (/) и связана с корреляционной функцией преобразованием
(интегралом) Фурье;
СО
&(“) = j Rx(x)e~iax dx;
СО
я* <т)= J s* Ие/шт do)-
—00
т. е. корреляционная функция и спектральная плотность представ-
ляют друг для друга преобразование Фурье, так же как переходная
и передаточная функции.
Если применить преобразование Фурье к корреляционной функ-
ции [выражение (7.2) ], то можно получить другую формулу для опре-
деления Sx (со), т. еИ'^ » "V "У”"
Sx(co)= lim ’ |xr(/co)|2. (7.6)
Действительно, для реализации случайной хт (t) функции на
интервале [—Т, 7'1
т
RT(x)= lim ( xTx(t^x)dt,
ИЛИ
j Rt (t) e-7“T dx — J lim ~ j xT (i) xT (t + r) dt e~iax dx.
—oo —co ^"*0° —f
Поскольку Хт (/) не зависит от т,
J (т) e-/ot dr = lim-^r j xT(t) xT (t \-x)e~>ax dt dx.
—oo T->oo
Умножением левой части этого выражения на — i
и заменой / + т = O’, dx = dft получим
Sx (со) = lim J хт (t) dat dt= j xT (ft) dft,
рткуда следует формула (7.6).
18.3
ГД*
т
Хт (jat) = J x (t) e'at dt\
—T
т
Ф* (/co) = J k (Л) e'M>- dZ;
-T
т
m* (fa) = j m (t) tint di;
~-T
k (X) — импульсная переходная функция системы.
Перемножение правых и левых частей выражений (7.8) и (7.9)
дает
хт (/®) Х*т (fa) = Ф (/о) Ф*щт (fa) Шт (fa),
ИЛИ
| хг (/®) |2 = | ф (/©) |21/пг (/©) |2. fP г т’’ Л
Применяя к полученному выражению формулу (7.6) и производя
деление левой и правой части на 271, а также при Т -> оо получим
5х(со) = |Ф(/со)|25т(®). (7.10)
Взяв обратное преобразование Фурье от уравнения (7.10), можно
определить соотношение между сигналами на входе и выходе системы
во временной области *
^'х(т)= f fe(X)dX j° Rm (т + к — iq) АГ(г)) drj. (7.11)
г—ОО — ОО
Если выражение (7.9) умножить на m* (fa), то получим
$хт (®) = Ф (j®) Sm (®) (7-12)
и
Rxm СО = f Rm (t - X) k (к) dk. (7.13)
—00
Для анализа динамической точности систем регулирования необ-
ходимо уметь вычислять спектральную плотность ошибки SB (и)
и средний квадрат ошибки е (t)2, Формулу для вычисления Se (и)
можно получить, используя выражение (7.10).
Спектральная плотность ошибки SE (со) состоит из двух состав-
ляющих:
1. Определяемой выражением
5£1(®) = |Фе(/®)|25т(®).
* В выражении (7.11) переменные т, к и г] имеют смысл времени и отличаются
моментами начала отсчета.
186
Эта формула описывает спектральную плотность ошибки через
спектральную плотность величины полезного сигнала (со) и через
передаточную функцию ошибки ФЕ (/со).
2. Описываемой выражением
5Ег(со)-|У(/со)|25п(со).
Эта формула определяет спектральную плотность ошибки через
спектральную плотность помехи Sn (со) и через передаточную функ-
цию замкнутой системы по отношению к возмущающему воздействию
¥ (/со). Выражение для спектральной плотности ошибки имеет вид
Se (Ю) = | Фе (/®) I2 Sm (СО) + [У (/СО) |2 Sn (со).
Если точки приложения управляющего и возмущающего воздействия
совпадают, т. е. Y (/со) — Ф (/со), то
Se (со) = | ФЕ (/со) |2 Sm (со) + | Ф (/со) |2 S„ (со). (7.14)
Подставляя в формулу (7.14)
l-cTVC t j
Фе (/®) = j + г
И
выражение для спектральной плотности ошибки может быть запи-
сано в следующем виде!:
(®) “ | 1 + Г (/со) I Sm + | 1 + W (/со) | 5/1 •
Последняя формула позволяет определить спектральную плот-
ность ошибки SE (со) по заданным спектральным плотностям полез-
ного сигнала Sm(со), помехи Зп(со) и передаточной функции разомк*
кнутой системы W (J&),
Среднее значение квадрата ошибки по аналогии с формулой (7.7)
вычисляют с помощью выражения
Г + f |TTW^r|ISn(®)d®’
(7.15)
Анализ динамической точности САР состоит из следующих шагов:
1. На основании кривых случайного процесса полезного сигнала
т (i) и помехи п (() определяют соответствующие им корреляцион-
ные функции Rm (т) и Rn (т).
2. По графикам корреляционных функций определяют функции
спектральных плотностей Sm (со) и $п (со). Их можно находить по
формулам или с помощью трапецеидальных характеристик.
3. Методом интерполяции или с помощью логарифмических
характеристик спектральную плотность выражают дробно-рацио-
нальной функцией,
187
Рис. 7.9. Принципиаль-
ная схема следящей си-
стемы:
К.У— последовательное кор-
ректирующее устройство;
ЭУ— электронный усили-
тель; ЭДв — электродвига-
тель
4. Записывают общее выражение для среднего значения ква-
драта ошибки ё2 через спектральные плотности Sm (со), Sn (®) и
передаточные функции системы.
5. Определяют с помощью таблиц интегралов составляющие ё2.
6. Путем суммирования составляющих находят полную (суммар-
ную) среднюю квадратическую ошибку ё2.
Пример. Пусть дана принципиальная схема следящей системы, показанная
на рис. 7.9.
Уравнения системы имеют следующий вид:
е (/) = т (У) — х (t) — ошибки;
, de
е — пое + «х ---корректирующего устройства;
io = — усилителя;
d^x dx
J + b-^ = k2ia — электродвигателя,
где е—напряжение на входе усилителя; ia — ток якоря электродвигателя; —
коэффициент усиления усилителя; J — приведенный момент инерции; b — коэф-
фициент вязкого трения; n0, пг, k2 — постоянные коэффициенты.
Передаточная функция следящей системы в разомкнутом состоянии
W - Л Jle+IL
£(s) ~ s (7’aS + l) 1
где Т, = Д1/ло; Ts = Jib; К. = Пок^/Ь.
Предполагается, что спектральная плотность скорости полезного сигнала т (?)
имеет вид
Sm (о) == 2₽а2/(со2 + Р>).
Помеха представляет собой чисто случайный процесс или сбелый» шум, т. е.
спектральная плотность помехи Sn (®) сохраняет постоянное значение, не завися-
щее от частоты:
Sn (») “ с2.
На основании формулы (7.16) среднее значение квадрата ошибки может быть
представлено в виде суммы двух составляющих:
М{82}=Л1{88т)+ЛЦе«},
м („21___fl /2^«(Та/й) + О 1 da> .
* 2п J I/ш (Та/ш + 1) + К(Г1/ш+ 1) +
Л4 (е21 = F I Кс (7'1/<в4-1)
—00
I2
da.
188
Подынтегральные выражения представляют собой квадрат модуля дробно-
.рациональной функции. Каждый из интегралов можно вычислить, например, опре-
делив корни знаменателя и разложив подынтегральное выражение на простейшие
дроби. Имеются и другие способы вычисления М. {в2}, которые не требуют опреде-
ления корней и позволяют получить в явном виде связь между параметрами, вход я-
щими в выражение для Se (®), ^величиной средней квадратической ошибки. ,
7.6. ЗАДАЧА СИНТЕЗА ОПТИМАЛЬНЫХ ПЕРЕДАТОЧНЫХ
ФУНКЦИЙ СЛЕДЯЩИХ СИСТЕМ, НАХОДЯЩИХСЯ
ПОД ВЛИЯНИЕМ НЕПРЕРЫВНО ИЗМЕНЯЮЩИХСЯ
СЛУЧАЙНЫХ ВОЗДЕЙСТВИЙ
Выше было показано, что если на входе следящей системы
помимо управляющего есть возмущающее воздействие (или помеха),
то ошибка такой системы состоит из двух составляющих. Одна из
них вызывается тем, что следящая система не может абсолютно точно
воспроизводить полезный сигнал т (t), а другая — реакцией на по-
мехи п (t). Обычно оказывается, что стремление уменьшить первую
составляющую приводит к увеличению второй составляющей ошибки
и наоборот. Задача синтеза и состоит в том, чтобы обеспечить мини-
мально возможную сумму обеих составляющих.
Амплитудная частотная характеристика (АЧХ) А (со) рассма-
триваемой системы и спектральные плотности Sm (со) и Sn (со) гра-
фически изображены на рис. 7.10. Если помеха имеет более высоко-
частотный спектр, чем полезный сигнал, то при сужении полосы
пропускания системы [кривая А1(со)1 последняя почти не будет
реагировать на помехи. Но в этом случае значительно возрастает
ошибка воспроизведения полезного сигнала. Если же увеличить
полосу пропускания [кривая А2 (со)], то существенно возрастает
влияние помехи. Поэтому при решении подобных задач необходим
определенный компромисс, обеспечивающий наивыгоднейшие усло-
вия работы системы.
Возможны три способа решения задачи синтеза следящих систем
при наличии помех. Первый способ — наиболее простой.
Его применяют в том случае, когда полезный сигнал имеет более
низкочастотный спектр, чем помехи (рис. 7.11). В этом случае по-
лоса пропускания системы должна быть выбрана достаточно широ-
кой для обеспечения необходимой точности воспроизведения сигнала,
но такой ширины, чтобы полностью отфильтровать помехи [кривая
А (со) на рис. 7.11 ].
Второй способ выбора характеристик следящих систем
предназначен для случаев, когда управляющее воздействие имеет
Рис. 7.10. Частотные ха-
рактеристики и спектраль-
ные плотности сигналов
189
Рис. 7.11. Выбор полосы частот в слу-
чае высокочастотной помехи
Рис. 7.12. Выбор амплитудной частот-
ной характеристики системы при быст-
роубывающем спектре частот полезно-
го сигнала при наличии помехи в виде
белого шума
спектр частот, быстро убывающий при возрастании частоты, а спектр
помех близок к «белому» шуму (рис. 7.12). По этому способу форму
АЧХ | W (ja>) | разомкнутой системы выбирают при низких частотах
[когда | W (/®)| >1 и где сконцентрирована основная энергия по-
лезного сигнала] возможно более близкой к форме АЧХ полезного
сигнала. При этом АЧХ разомкнутой системы должна быстро убы-
вать, по возможности следуя за убывающей АЧХ сигнала.
Таким образом достигается, с одной стороны, равномерное осла-
бление влияния всего основного спектра частот полезного сигнала
на^'ошибку (в интервале частот, содержащем основную энергию
сигнала, амплитудный спектр ошибки оказывается приблизительно
равным малой постоянной величине 1/Х), а с другой стороны, умень-
шение влияния помех ввиду быстрого убывания величины | W (/«») |.
Быстрота убывания функции | W (/®)| ничем не ограничивается лишь
при 117 (/и) | > 1. Для значений и, при которых | W (/и) | лг 1, слиш-
ком быстрое убывание этой величины может привести к уменьшению
запаса устойчивости или даже к нарушению устойчивости системы.
Третий способ синтеза применим в общем случае,когда
спектры частот полезного сигнала и помехи накладываются друг на
друга, как это изображено на рис. 7.10, и имеют произвольную форму.
Этот способ дает наиболее строгий и общий подход к решению задачи
синтеза не только следящих, но и других преобразующих систем при
наличии помех. В этом случае систему часто строят так, чтобы ее
частотная характеристика максимально приближалась к спектраль-
ной характеристике полезного сигнала.
При определении оптимальной частотной характеристики замкну-
той системы Ф (/©) по критерию минимума среднего квадрата ошибки
?(/) между идеальным сигналом хив(0и оптимальным сигналом x(t)
(рис. 7.13) можно предположить!
идеальная частотная характерис-
тика Фид (/и) или идеальная импульс-
ная переходная функция (t) из-
вестны;
Рис. 7.13. Определение оптимальной ча-
стотной характеристики замкнутой системы
Ф (/«)
190
ййлёзйый сигйал fn. (/) и помеха п (t), сГацйойарйые эргодические
случайные процессы с нулевыми средними значениями,' действующие
на входе системы, представлены своими корреляционными функциями
Rm (т), Rn (т) или спектральными ^плотностями Sm (со), Sn (со);
на время переходного процесса ограничение не накладывается.
В таких случаях говорят, что решение ищется в классе систем «с бес-
конечной памятью».
Эта задача была решена Н. Винером. Он получил необходимое
условие, которому должна удовлетворять искомая оптимальная им-
пульсная переходная функция k (/) в виде интегрального уравнения
оо
f Яф (т - 9) k (0) de = R^ (т)
о
При Т^гО, (7.16)
где \RV (т) — корреляционная функция суммарного сигнала ср (t) ==
= tn (t) + п (t), определяемая по формуле
Rv (т) = Rm (т) + Rn (т) + Rmn (т) + Rnm (т);
Rp.v (т) — взаимная корреляционная функция сигнала на входе и
выходе идеальной системы.
Условие т сэ 0 отражает принцип физической осуществимости
системы.
Если взаимной корреляции между полезным сигналом и помехой
нет, то корреляционные функции Rmn (т) = 0 и Rnm (т) = 0.
Решение уравнения (7.16) наиболее просто осуществляется в ча-
стотной области. Уравнение (7.16) можно преобразовать к виду
ОО
Kw(t)-J /?ф(т-0)^(0)с/9 = с/(т), (7.17)
о
где q (т) — некоторая функция, равная нулю при т 0. Условие
q (т) = 0 при т 0 приводит к тому, что функция Q (/со), связанная
с q (т) преобразованием Фурье, не будет содержать полюсов в верх»
ней полуплоскости плоскости со.
Преобразование Фурье позволяет перейти от выражения (7.17)
к выражению [см. формулу (7.12)] в частотной области:
8ЦФ (со) - Ф (/со) (со) = Q (со). (7.18)
Далее для простоты полагаем, что 8Ф (со) имеет дробно-рациональ-
ный вид или может быть аппроксимировано дробно-рациональным
отношением следующего вида:
8Ф (со) = | ¥ (/со) |2 = ¥ (/со) Т* (/со).
Последнее выражение записано в форме, аналогичной (7.10), и
означает, что ¥ (/со) имеет все нули и полюсы в верхней полупло-
скости плоскости со, а Ч* (/со) — в нижней.
191,
Рис. 7.14. График кбрреляЦибнной функции
#п (т)
Произведя деление выражения (7.18)
на 4е* (/со), получим
= (7.19)
Дробь (со)/Т* (/со) = В (/со) можно представить в виде суммы
В (/со) = В+ (/со) + В~ (/со), причем В+ (/со) имеет все нули и по-
люсы только в верхней полуплоскости со, а В~ (ja) — в нижней.
Действительно, обратное преобразование Фурье от В (/со) опреде-
ляется выражением
ОО О ОО
ь (/) = ~ j В (/со) da = — j В (/со) + j в (/со) е/»/ dco
»— оо —со О
и, наоборот,
О <50
В (/со) = j b (/) е-1'о/ di + j b (t) dt~B~ (/co) -ф- B+ (/co).
—oo 0
С учетом сказанного формулу (7.19) можно преобразовать к виду
В+ (j») + В- (jtd) - Ф (/со) Т (/со) = .
Последнее выражение справедливо для всей плоскости со. Од-
нако, поскольку для исходного уравнения (7.16) необходимо выпол-
нение условия т 2s 0, решение уравнения ищется только в верхней
полуплоскости со. В этом случае полученное уравнение принимает
вид
В+ (/со) - Ф (/со) Т (/со) - О,
т. е.
Ф (/со)
В+ (/со)
’Г (/со)
Порядок процесса вычислений оптимальной передаточной функ-
ции можно проиллюстрировать следующим примером.
Пусть корреляционная функция полезного сигнала т (/) задана
выражением Rm (т) = а2е~1х I, а помеха — выражением — Rn (т) =
= fe2e-alTl; помеха и полезный сигнал не коррелированы, Фид (/со) —
— 1, т. е. должна быть решена задача оптимальной фильтрации (или
сглаживания).
Прежде всего необходимо по известным Rm (т) и Rn (т) вычислить
Sm (со) и (со).
График корреляционной функции Rn (т) показан на рис. 7.14.
.192
Для определения Sn (®) представим интеграл Фурье в виде суммы
ОО О ОО
S„(®) = j £2е—а|г|е—/сот — j ^e-(a+/<o)T j ^2е(а-/й>)г =
--OO —00 0
— 62 I b2 _ 2&2«
a + /Р ' a — a2 -f- co2 '
Аналогично получим
о / \ 2a2
(CO I - ' 1 1 2 *
' 1 + со2
Далее процесс решения задачи Винера состоит из следующих
операций:
1. Вычислим S<p (со) = Sm (со) + Sn (и),а также ¥ (со) и Т* (со):
о 2а* I 2&2а Р2 + т2а»2
'Р1 > 1 + со2 “Г a2 + Р2 (l+w2)(a2 + w2) ’
где р2 = 2а2а2 + 2£>2а, у2 = 2а2 + 2£>2а.
Для определения Т (/со) и Т* (/©) разложим на комплексно-со-
пряженные множители (со):
с /пй _ Vю - /Р_____________________
ф 1 ' (W — /) (W — /а) (со + /) (со + /а) 1
Vco + /Р
Отсюда
T (/co) = —?C0~/P ;
u ’ (co — /) (co — /a)
4f*(/®) =____7co + /P__.
u ’ (co + /)(co+/a)
2. Вычислим взаимную спектральную плотность Sw (со) и ис-
пользованием общей формулы (7.16) и определим
5(/®) = 5цф(®)/Т*(/®).
Поскольку т (/) и п (/) не коррелированы,
(®) == ^иц (/®) (®)>
С / \ 2a2 1 .
Оцф (®) - ] _|_ ю2 1 ’
2«2 (со + /) (со + /а) _ 2а2 (со +/а)
(1+а>»)(та> + /р) (а>_/)(?со + /Р) '
3. Определим функцию В+ (/со). Ее можно вычислить:
а) путем определения функции
й (0 = j В (со) е/м/ da,
о
7 Солодовников В. В. и др.
193
а затем обратным преобразованием
В+ (/со) = j b(t) e-int df,
о
б) путем разложения В (/со) на слагаемые с неопределенными
коэффициентами и вычисления этих коэффициентов:.
Лхусо ф- Лх/0 4- Л2® 4- Л2/ = 2а2 (со 4- /а).
Умножением уравнения на / и выделением членов при равных
степенях /со получим два алгебраических уравнения:
Лху 4- Л2 = 2а2;
—Лхр — Л2 = —2а2а,
откуда
. _ 2аЦ1+а)
1- (у+Р)
и
4(LV 1 ..
J ' (у+Р) ® — 1
4. Вычислим частотную характеристику оптимальной системы
ф (;т\ = 2а2 0 + к) 1 (ю — /) («) — /«) = 2о2 (1 + «) (/<>) + а
U ’ У + Р Гсо — j) (уа> — /Р) (у + Р) у(/®) + Р
В тех случаях, когда задана неизменяемая часть системы, после
вычисления Ф (/со) необходимо провести синтез корректирующего
устройства. При этом Ф (/со) считают желаемой характеристикой
и синтез^прсводят обычным образом.
ГЛАВА 8. ДИСКРЕТНЫЕ СИСТЕМЫ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
В последние годы ЭВМ получили чрезвычайно широкое
применение. Еще более широкие перспективы их использования от-
крылись в связи с появлением микроЭВМ. Решение многих сложных
технических задач сейчас возможно только при помощи цифровых
ЭВМ как для расчета, так и для регулирования и управления. По-
этому знание основных понятий, определений, методов математиче-
ского описания и расчета систем, содержащих цифровые ЭВМ и
называемых дискретными системами, является совершенно необхо-
димым.
194
8.1. ОПРЕДЕЛЕНИЕ ДИСКРЕТНОЙ СИСТЕМЫ.
РАЗНОСТНЫЕ УРАВНЕНИЯ
В дискретных системах в отличие от ранее рассматривав-
шихся непрерывных систем мы имеем дело не с непрерывными, а с ди-
скретными сигналами. Обычно входные и выходные сигналы яв-
ляются функциями времени t, играющего роль независимой пере-
менной. Если независимая переменная t принимает непрерывную
последовательность значений, то сигнал называют непрерывным. Если
независимая переменная Л принимает только конечное множество
значений tK, где k = 0, ±1; ±2; .... то сигнал называют дискрет-
ным.
На рис. 8.1, а показаны соответственно непрерывный и дискрет-
ный сигналы. Формирование дискретного сигнала можно представить
себе следующим образом. Пусть имеется ключ Кл (рис. 8.2), который
включается на очень короткий промежуток времени Дт, а затем
остается разомкнутым в течение интервала т. Если на вход такого
ключа подать непрерывный сигнал g (/), то на его выходе образуется
последовательность импульсов g* (/), разделенных друг от друга во
времени интервалами тг, причем величина (амплитуда) каждого из
импульсов будет равна амплитуде непрерывного сигнала в дискрет-
ные моменты времени тг. В дальнейшем интервал тг будем называть
интервалом, или шагом, дискретности во времени, и принимать
тг = const. Поэтому, если сигнал наблюдают в течение времени Т,
то Т = тг, где п — целое число. Ключ К.л играет роль амплитудного
модулятора непрерывного сигнала в дискретные моменты времени
и его называют импульсным элементом.
Системы, в которых входные и выходные сигналы являются ди-
скретными, называют дискретными. Системы, характеризуемые как
непрерывными, так и дискретными сигналами, называют дискретно-
непрерызными. Дискретные системы описываются разностными урав-
нениями, а непрерывные системы — дифференциальными уравне-
ниями. Понятие разностного уравнения можно пояснить на следую-
щем примере. Предположим, что необходимо выполнить численно
операцию интегрирования, т. е. вычислить интеграл х
t
а) 5)
Рис. 8.1. Примеры сигналов:
а — непрерывного; б — дискретного
7* 196
Рис. 8.2. Работа ключа Кл\
1 — вид сигнала на входе; 2 — сигнал на
выходе
Рис. 8.3. Численное интегрирование
Последнее необходимо, например, если подынтегральная функ-
ция и (т) не интегрируемая в замкнутой форме. В этом случае функ-
цию и (т) аппроксимируют кусочно-постоянной функцией й (т)
(рис. 8.3), причем
й (т) — u(kx)
при kxr с
Тогда
т < kxr + тг.
ктг к-1
r/(^tr)=j м(т)с/т®^ тгм (irr). (8.1)
oJ 1=0
Эта формула является обычным определением процесса интегри-
рования при тг 0. Она требует запоминания всех прошлых значе-
ний сигнала и (itr), i = 0, 1, ... k — 1 для того, чтобы определить
значение интеграла в данный момент t — kxr. Гораздо более простой
способ состоит в том, что вначале находят
У (kxr + rz) = J и (т) dx хги (1Х)> (8-2)
о /=0
а затем вычитают выражение (8.1) из соотношения (8.2).
В результате получают
У №г + *,) - У (Ьхт) = х,и (kxr),
или
У [(6 + 1) = y(kxr) + xru (kx,): (8.3)
Согласно формуле (8.3) необходимо запоминать только предыду-
щее значение интеграла у (£тг) и значение и (т) в данный момент
и (kxr), чтобы определить значение интеграла в последующий момент
(k + 1) тг. '
^Выражение (8.3) является разностным уравнением 1-го порядка.
Алгоритм его интегрирования заключается в следующем:
1) запоминается начальное условие
У (0) = 0;
196
2) формула (8.3) применяется последовательно для значений
k — 0, 1, 2, т. е.
У (*,) = тги (0) + у (0) = хги (0);
г/(2тг) = тги(тг) + г/(тг);
У (Зтг) = тгм (2тг) + у (2тг);
«/(iTr) = Tru[(i- 1)тг].
На каждом шаге этого итерационного процесса каждое после-
дующее значение выхода у (ixr) вычисляют сложением предыдущего
значения у [(i — 1) тг[ с предыдущим значением входа и t(i — 1) тД
умноженным на тг.
В общем случае линейное разностное уравнение имеет вид
у (п + &) + Я1У (п + k — 1) 4- • • • 4- апу (k) —
= bou (п 4- k) 4- Ьхи (п 4- k — 1)4----F bnu (k). (8.4)
Для того чтобы при помощи этой формулы вычислить у (п 4- ty,
необходимо запомнить предыдущие значения выхода у (п 4- k — 1),
у (п 4- k — 2), ..., у (k) и входа и (п + k), и (п + k — 1), ..., и (k),
а затем выполнить указываемые действия умножения и сложения.
8.2. МЕТОДЫ МАТЕМАТИЧЕСКОГО ОПИСАНИЯ
ДИСКРЕТНЫХ СИСТЕМ
Дискретные системы, так же как и непрерывные системы,
имеют три формы математического описания во временной области
в виде:
разностных уравнений вход-выход, являющихся аналогом диффе-
ренциальных уравнений;
взвешенной временной последовательности, являющейся аналогом
описания непрерывных систем при помощи импульсной переходной
функции;
разностных уравнений в переменных состояния, являющихся ана-
логом дифференциальных уравнений в переменных состояния для
непрерывных систем.
Разностные уравнения вход-выход. Разностное уравнение вход-
выход [уравнение (8.4) ] часто используют для описания связи между
входом и выходом цифровой ЭВМ. При этом его приводят к следую-
щему виду:
у (k) = Ьйи (k) 4- btu (k - 1) 4-- • -4-
4- bnu (k — ri) — aty (k — \) — a^y (k —2)-------any (k — ri).
(8-5)
Число у (k) представляет собой выход в момент времени kxr (шаг
дискретности тг обычно для простоты написания формул опускают).
Числа у (k -— 1), у (k — 2), ... характеризуют предыдущие значе-
ния выхода, запоминаемые в памяти ЭВМ. Аналогично, числа и (k),
197
МОП Ли;
М2)
М3)
I к^М5)
Рис. 8.4. Взвешенная временная последова-
тельность k (к)
и (k — 1), ... характеризуют вход в
дискретные моменты k, k — 1,... и
т. д., которые также хранятся в па-
А мяти машины. Уравнение (8.5) на-
зывают рекурсивным, или разностным уравнением, позволяющим
вычислить каждое последующее значение выхода по предыдущим
данным.
Описание линейной системы при помощи взвешенной временной
последовательности. Для систем, описываемых линейными диффе-
ренциальными уравнениями, очень важным является понятие
импульсной переходной функции (ИПФ). Если для системы, находя-
щейся в покое, известна ИПФ, то, пользуясь интегралом суперпо-
зиции или интегралом свертки, можно найти реакцию системы на
любое входное воздействие. Аналогичное понятие, называемое вре-
менной последовательностью, существует и для дискретных систем.
. ИПФ для непрерывной системы определяют как ее реакцию на
дельта-функцию. Она имеет вид некоторой непрерывной функции.
В дискретных системах в случае входного воздействия в виде дельта-
функции получается последовательность чисел, а не непрерывная
функция времени. Эта последовательность чисел может быть полу-
чена следующим образом.
Рассмотрим систему, описываемую разностным уравнением (8.5)
вход-выход, находившуюся в состоянии покоя до момента приложе-
ния входного воздействия, т. е. у (к) = 0 при к = — 1, —2, ...
Пусть
( 1 при к ~ 0;
и (к) = б0 (к) = < _. .
' I 0 при к=#0;
функцию 60 (к) называют дельта-последовательностью Кронекера.
Положив в уравнении (8.5) и (к) = 60 (к) и обозначив получаю-
щуюся при этом реакцию системы через k (к), можно записать
k (к) = Ь08 (к) 4- (к — 1)4------F Ьп8 (к — п) —
— аф (к — 1) — a2k (к — 2)-------------— ank (к — п). (8.6)
Взвешенную временную последовательность k (к) называют весо-
вой последовательностью (рис. 8.4).
Вычисление k (к) по уравнению (8.6) производим следующим об-
разом. Полагая k (к) = 0, к < 0, получим
£(0) = Z>0;
k (1) = Ьф (0) — аф (0) — — аД;
k (2) == &гб (0) — аф (1) — аф (0) = Ьг — ахЬх 4- a\bQ — а2^о
(8.7)
и т. д.
198
Предположим теперь, что входной последовательностью ябЛяёТсй
дел ьта- последователь ность
и (к) = а060 (к) =
а0 при к = 0;
0 при к =#0.
Тогда у° (к) = aok («),
где значок сверху у означает взвешенную (множителем а0) реакцию
системы (8.6) на дель та-последовательность, приложенную в момент
к = 0.
Найдем реакцию системы у1 (к) для входа в виде дельта-последо-
вательности, приложенной в момент к = 1:
, . («1 при к — 1:)
и (к) — (к) — { У
' (0 при « #= 1. j
В этом случае у (к) = 0 при к< 1 и
г/(1) = Ьои(1) = аЛ;
у(2) = а1(Ь1-а1Ьоу,
У (3) = ос.) [&2 — О(4о — Oi^oJi
и т. д............................
(8.8)
Сравнивая систему уравнений (8.8) с (8.7), получим
у1 (к) = аок (к — 1).
Точно так же, если дельта-последовательность приложена в момент
к — j, т. е.
и(к)-аД(4 =
ctj при к — /;
.0 при к Ф j,
то у (к) = 0 при к < j и, следовательно, согласно уравнению (8.6)
«/(/) = М(/) = « Д; ।
у (i + 1) — aj l4i — а1^о];
у (i 4~ 2) — аД&2 — 4“ А 4-
У1 W == «Л (.к-i).
Рассмотрим теперь общий случай, когда вход представляет собой
сумму дельта-последовательностей, приложенных в моменты k «• 0,
1, 2, ..., т. е.
, , (0 при 0;
и (к) = . Л
(ак при к^0,
или
и (к) = ао6о (к) 4- «161 (к) 4- а26г («) 4- ’' •
199
Тогда на основании принципа суперпозиции выход системы будет
равен сумме реакций, вызванных входами и (0), и (1), и (2), и (к)
или
У (к) = у0 (к) + у1 (к) + ... + у™ («) = S у’ (к),
/—о
или, принимая во внимание формулу (8.9),
у(к) = S «Л (* - /)•
i=o
Таким образом, если На вход системы, находившейся в покое,
подана временная последовательность чисел [и (0), «(1), ...], то
временную последовательность на выходе определяют по формуле
У(к) = S k(к — /)и(/)> к —0, 1, 2, ... (8-10)
i=o
После замены переменных т = к — j формула (8.10) примет вид
t/(/c)=S k (tri) и (к — tri). (8.11)
m=0
Выражения (8.10) и (8.11) являются аналогами интегралов свертки
для непрерывных систем.
Описание линейной системы при помощи разностных уравнений
в переменных состояния. Для дискретных систем роль дифферен-
циальных уравнений в переменных состояния для непрерывных си-
стем играют разностные уравнения:
х [(к + 1) тг] = Ad (кхг) х (кхг) + Bd (кхг) и (ктг);
у (/стг) = Cd (/стг) х (ктг)
при начальных условиях
х (0) == х0.
Это система разностных уравнений, в которых векторы х (ктг),
u (KTr)> У (кхг) рассматриваются в дискретные моменты времени t =
= кхг к = 0, 1, 2, ..., где хг — интервал дискретности. В дальней-
шем будем предполагать, что тг = const. Поэтому в уравнениях (8.12)
параметр тг обычно опускают и их записывают в виде
х (к + 1) = Ad (к) х (к) + Bd (к) и (к);
У (к) = Q («)*(«)•
Здесь так же, как и в случае непрерывных систем Ad (к), Bd («),
Cd (к) матрицы разномерности (и, и), (и, tri), (р, ri) соответственно.
Структурная схема, соответствующая уравнениям (8.13), изображена
на рис. 8.5.
(8.12)
(8.13)
200
Рис. 8.5. Структурная схема
дискретной системы
В случае стационарных
систем запись уравнений
еще более упрощается,
так как матрицы, входящие
в уравнения (8.13), не зависят от к:
x(«+l) = Atfx(K) + Brfu(K);,| 4>
y(/c) = Cdx(/c); x(0) = x(0). J
Решение уравнений (8.14) может быть получено следующим об-
разом. Придавая индексу к значения 0, 1, 2....запишем
x(l) = Adx(0) + Bdu(0); ]
x(2) = Adx(l) + Bdu(l) = A^x(0) + AdBdu(0) + Bdu(l); Р '
или
x(v) = Adx(0)+£ Ad-r“'Bdu (i), v=l, 2, 3, .... (8.16)
1=0
Матрицу <pd (v) = Ad (8.17)
называют фундаментальной или переходной матрицей.
Подставляя выражение (8.17) в уравнение (8.16), получим
х (v) = <₽d (v) х (0) + £ q>d(v-i - 1) Bdu (i). (8.18)
1=0
Это общее решение первого из уравнений (8.14).
Первый член уравнения (8.18) зависит только от начальных усло-
вий х (0) и определяет реакцию системы, не зависящую от воздейст-
вия и (г). Второй член зависит только от значений и (0), и (1), ...,
и (v — 1).С учетом уравнений (8.18) и (8.14) сигнал на выходе опре-
деляют с помощью выражения
y(v) = Cd<pd (v) х (0) + £ Cd<pd(v-i - l)Bdu(i). (8.19)
1=0
Определение взвешенной временной последовательности по урав-
нениям в переменных состояния. Найдем взвешенную временную
последовательность для системы, описываемой разностными урав-
нениями в переменных состояния, т. е. реакцию системы к (к) при
нулевых начальных условиях х (0) = 0 и входе в виде дельта-после-
довательности':
ч с 1 при к = 0;
и (к) — Оо (к) = { _
( 0 при к=£0.
201
Последовательно решая уравнения (8.14), при к = 0, 1, 2, ...
получим
x(l) = Bd; у(0) = 0;
x(2) = AdBd; y(l) = CdBd;
х(3) = АЖ/; y(2) = CdAdBd;
х (к) з= Aj *Bd, у (к—1) = C^Ad 'Bd.
Итак, искомая взвешенная временная последовательность опре-
деляется формулой
, [ 0 при к с 0;
к («) = 1 ,
[ Cd АГ Bd при «>0.
(8.20)
Пример. Найти взвешенную временную последовательность для дискретной
системы:
xi (к + 1)1
х2 (к + 2)]
Г— 0,3
[ 1
0,41 pi (к)
0 J |.Х2 («)
г/(к) = [1-1]
pl («)1
|х2 (К)|
«(к);
Воспользовавшись формулой (8.20), получим
Для вычисления
* (к) = [1 — 1]
0,41 к-1
0
Г0‘
[1
—0,3
1
0,41к—1
0
1.
применим формулу Сильвестра. Собственные значения матрицы определяются
характеристическим уравнением
ГХ + 0,3
= (X + 0,3) X — 0,4 = (X + 0,8) (X — 0,5) = 0,
. так что Xj = —0,8, = 0,5.
Имеем
А Ad— М 1 Г—0,3 —0,5 0,41 1 Г 0,8 — 0,41
~-1,з[ ! _0,5р1,з|_1 _о,б];
_АЙ — 1 Г0,3 + 0,8 0,41 1 ГО,5 0,4‘
d2“ ;2_Х1 ~ 1,3 | 1 о,8.] ~ 1,3[ 1 0,8.
Подставляя в формулу (8.20) k (к), найдем
1 (г, ,, Г0,8 — 0,41(01 .
“'’-гИ11-1|[ I o.sJLiJ*-0-8»" +
ГО,5 0,41(01 ,11,
-М1-1Ц 1 O,8JL1J(O>5)к"1] = Т^з {-°.9 (-°.8)— °.4(°,5)к~’} =
яе— 0,692 (— 0,в)*"4 —0,308 (0,5)к-‘.
202
8.3. ПРОХОЖДЕНИЕ НЕПРЕРЫВНОГО СИГНАЛА ЧЕРЕЗ
ЦИФРОВУЮ ЭВМ
В контуре управления САР и САУ часто содержат ЭВМ.
Для пояснения принципа действия таких систем и методов их расчета
рассмотрим, каким образом можно представить себе прохождение
сигнала через ЭВМ. Схема, имитирующая этот процесс, изображена
на рис. 8.6.
Составными элементами схемы являются: ключ Кл (или импульс-
ный элемент), преобразующий непрерывный сигнал (например, от
измерительного устройства) в аналоговый, дискретный преобразова-
тель АЦП, ЭВМ, преобразователь ЦАП, экстраполятор Э.
Следует различать аналоговый дискретный сигнал на выходе
ключа Кл от дискретного. Первый может принимать любое значение
в заданном амплитудном диапазоне, в то время как амплитуда ди-
скретного сигнала ограничена некоторой совокупностью значений,
определяемой разрядностью ЭВМ. Далее сигнал поступает на цифро-
вую ЭВМ в цифровой бинарной форме со скоростью, соответствую-
щей интервалу дискретности по времени тг. После ЭВМ цифровой
сигнал трансформируется преобразователем ЦАП в дискретно-ана-
логовую форму. Наконец, экстраполятор Э приводит сигнал к анало-
говому непрерывному виду, форма которого определяется порядком
экстраполятора.
Влияние на динамику системы имеют лишь три из перечисленных
выше элементов; ключ, ЭВМ и экстраполятор, а характеристики
АЦП и ЦАП обычно не влияют на математическое описание си-
стемы. Поэтому схему, показанную на рис. 8.6, а, можно представить
в упрощенной форме — рис. 8.6, б. Далее предполагается, что:
1) шаг дискретности тг постоянен;
2) запаздыванием, создаваемым процессом вычисления в ЭВМ,
можно пренебречь;
3) ЭВМ выполняет любую линейную операцию (дифференциро-
вание, интегрирование, решение линейных дифференциальных и ин-
тегральных уравнений и т. д.);
4) ЭВМ работает в реальном времени;
5) ЭВМ может использовать настоящую и прошлую, но не буду-
щую информацию (принцип физической осуществимости).
Система, содержащая ЭВМ, квантует сигнал и по уровню и по вре-
мени.
Квантование по уровню создает на выходе эффект второго порядка
малости по сравнению с эффектом от квантования по времени (кван-
Рис. 8.6. Элементы схемы, имитиру-
ющей прохождение сигнала через
ЭВМ;
а — схема с преобразователями А—Ц
и Ц— А (Кл — ключ (импульсный эле-
мент); АЦП — преобразователь ана-
лог-цифра; ЦАП — преобразователь
цифра—аналог; Э — экстраполятор);
б — схема динамически эквивалентная
схеме а
й)
203
Рис. 8.7. Дискретизация
сигнала и потеря инфор-
мации:
а — дискретизация входно-
го сигнала [х* (0 — дискрет-
ный сигнал]; б — частотный
спектр входного сигнала
Ы *</<>)}
тование по уровню можно уподобить воздействию некоторого шума).
Поэтому, в дальнейшем, при рассмотрении динамики системы в пер-
вом приближении квантованием по уровню пренебрегаем.
Квантование по времени означает дискретизацию, замену непре-
рывной кривой последовательностью импульсов. Вообще говоря,
такая замена может привести к потере информации. Условие, когда
при квантовании по времени информация не теряется, т. е. когда по
дискретным данным можно восстановить исходную кривую, опреде-
ляется теоремой Котельникова.
Если кривая х (/) (рис. 8.7, а) обладает конечным спектром
(рис. 8.7, б), то информация не будет потеряна при выполнении усло-
вия | со0| < л/тг, где <оо — ширина спектра, т. е. когда период повто-
рения достаточно мал.
Рассмотрим, как трансформируется сигнал при прохождении
каждого из элементов (см. рис. 8.6).
Обычно можно предположить, что ключ Кл включается и выклю-
чается мгновенно через каждые тг секунд, генерируя числовую по-
следователь ность:
2т,), g(— т,), g(O), g(x,), •••},
являющуюся входным сигналом для преобразователя АЦП. Итак,
на выходе ключа К.л имеем
g*(0 = S g(/CT,)6(F-KT,).
FC——ОО
Пусть g (t) = 0, t < О,
тогда
£*(0 = S £(ктг)б(^-мг,)- (8.21)
FC=O
Сигнал g* (0 поступает на вход ЭВМ. ЭВМ преобразует g* (0
в другую цифровую последовательность, определяемую линейным
разностным уравнением:
хв (к*,) = bog (кхг) + big [(« - 1) т, ] +
+------h bng [(« — п) гг] “ [(« - 1) *г1 - [(к — 2) тг] - '
--------апхв [(к - и) тг]. (8.22)
Выходной сигнал с ЭВМ хв (кхг) [/с = О, 1, 2, .... п] подается
на вход преобразователя ЦАП. Задача последнего состоит в том,
204
u(2tr)
и(0)
О
uftr) |-
।
------А-
тг
I и(<нг)-
i I
-A------U
Jrr 4rr
Рис. fi.8. Выход экстраполято-
pa нулевого порядка
чтобы преобразовать циф-
ровую последовательность
в непрерывный сигнал
хэ (t) = и (/), которым мож-
но воздействовать на по-
следующую непрерывную часть системы управления. Обычно же-
лательно, чтобы сигнал хэ (t) — и (/) представлял собой огибающую
для временной последовательности хв (стг), т. е. в интервале к.хт < /
С (к + 1) тг преобразователь ЦАП должен экстраполировать зна-
чение амплитуды входного сигнала в момент кхг на интервал тг впе-
ред. Устройства, выполняющие эту функцию, называют экстрапо-
ляторами.
Экстраполятор m-го порядка определяется как экстраполятор,
сигнал на выходе которого в данный момент зависит от m 4- 1 прош-
лых дискретных значений сигнала на его входе. Обычно используют
полиноминальную экстраполяцию.
В этом случае
и Ю Ik
U(ltr)
хэ (mxr -|- т) — йщТ -j- dm—iV" -J- • • • -J- Но, 0 т хг, (8.23)
причем нужно, чтобы хэ = хэ (ктг) = хв (кт.) для всех к.
Коэффициенты а™, а™-!, ..., а0 должны быть такими, чтобы удо-
влетворялись ограничения
хэ (кхг) = хв (стг)
при к = п — m, п — т 4- 1, ..., п.
Через каждый интервал тг коэффициенты ат, am_i, •.., а0
должны, вообще говоря, вычисляться заново.
Простейшим полиноминальным экстраполятором является экстра-
прлятор, реализующий полином нулевого порядка (т = 0), т. е.
хэ (пхг т) = хв (пхг)
при 0 < х с тг,
где п — 0, ±1, ±2, ...
Выходной сигнал экстраполятора нулевого порядка xd (/) =
= и (/) представляет собой кусочно-постоянную функцию (рис. 8.8).
Экстраполятор 1-го порядка (рис. 8.9) оплывается полиномом
1-го порядка
хэ (пхг 4- т) = Oj
причем
хэ(птг) = хв(птг);
хэ[(п~-1)тг] = хь[(п—1)тг].
т
Рис. 8.9. Выход экстраполятора
1-го порядка О
205
Рис. 8.10. Общая схема прохождения сигнала через ЭВМ:
М — модулятор, Э — экстраполятор
Общая схема прохождения сигнала показана на рис. 8.10. В им-
пульсном элементе (модуляторе) происходит модуляция последова-
тельности импульсов непрерывным входным сигналом g (t). Полагая
в (8.24) т = 0 и г = —тг, получим
п _ „ v п хв(птг)-хв [(п — 1)тг]
Следовательно, уравнение экстраполятора 1-го порядка имеет вид
хэ(птг + т) = т + Хв о < т < тг, (8.25)
где п = 0, ±1, ±2, ...
8.4. ПРЕОБРАЗОВАНИЕ ЧАСТОТНОГО СПЕКТРА НЕПРЕРЫВНОГО
СИГНАЛА ПРИ ЕГО ПРОХОЖДЕНИИ ЧЕРЕЗ ЦИФРОВУЮ ЭВМ
Рассмотрим преобразование частотного спектра сигнала
при его прохождении через те же элементы (см. рис. 8.10). Это позво-
лит наглядно представить влияние шага дискретизации и характе-
ристик экстраполятора.
Саму цифровую ЭВМ заменим разностным уравнением вход-вы-
ход. Характер сигнала на выходе преобразователя АЦП позволяет
рассматривать его как модулятор, т. е. как устройство, осущест-
вляющее модуляцию бесконечной последовательности импульсов
q (t) входным сигналом g (t). Проследим за теми изменениями, кото-
рые претерпевает сигнал g (t) в частотной области, при прохождении
по схеме, показанной на рис. 8.6.
Преобразование Фурье от входного сигнала
оо
G (/®) = j g (0 &-iat dt.
—оо
Пусть амплитудный частотный спектр [G (/®) ] входного сигнала
g(t) (рис. 8.11, а) имеет вид рис. 8.11, б. Действие ключа иа схеме
рис. 8.6 состоит в том, что сигнал g (t) модулирует последователь-
ность импульсов g (0 (рис. 8.11, в). Последовательность бесконечно
узких импульсов единичной площади обладает бесконечно широким
линейчатым спектром (рис. 8.11, г), т. е. ее спектр представляет бес-
конечную систему гармоник, частоты которых кратны величине
<£>,. = 2л/тг, где тг — шаг дискретизации.
206
Рис. 8.11. Преобразование частотного'спектра непрерывного сигнала, проходящего
через импульсный элемент (ключ):
а — входной сигнал & (t); б — амплитудный частотный спектр G (Jo); в — последователь-
ность импульсов q (t); г — линейчатый спектр Q (/со) последовательности импульсов q (t);
д — сигнал на выходе ключа в виде последовательности импульсов g* (/)
Действительно, преобразование Лапласа для последовательности
оо
дельта-функций q(t) = 2 6(Z —/стг) имеет вид -
—оо
оо
Q О) = J 2 6 - кх^ dt=l+ e'“Tr +
—оо
+ е-г“Л + е2/’“Л + е-2/“Л. + . . . (8.26)
Таким образом, сигнал на выходе импульсного элемента представ-
ляет собой последовательность импульсов, модулированных по ам-
плитуде':
g* (0 = Я (О g (О = g (О fl 6 (t - ктг).
—00
Так как дельта-функция равна нулю, кроме моментов времени i —
= кхГ и g(t) =0 при t < 0 (рис. 8.11, 5), то
S g(«Tr)6(f-KTr). (8.27)
n=0
Найдем преобразование Лапласа для g* (/).
Вывод основан на следующем свойстве — преобразование Лап-
ласа для. произведения оригиналов равно свертке их изображений
в области комплексного переменного:
с+/оо
L[q(t)g(t)] = ^- J Q(X)G(s-X)A. (8.28)
С—/ор
207
В правой части записан интеграл свертки двух функций Q (s) и
G (s), где Q (s) и G (s) — преобразования Лапласа для q (t) и g (t).
Если один из сомножителей подынтегрального выражения (8.28)
представляет собой функцию, обладающую только простыми полю-
сами, то интеграл берется достаточно просто.
Пусть q (X) представлено дробно-рациональной функцией
A (к)1В (X) и имеет только простые полюсы, т. е. корни уравнения
В (X) =0 разные. Тогда согласно теории вычетов
яЛ 5>;c(s-!')*=s4M°(s-у, <8-29>
е—/°° ?-К
где Хк — полюсы функции Q (X), а
' R' с 1 \_ Г (^) 1
В нашем случае
Q(X) = L[8(H8(f-tr)4----Ь б (/ — дет,.)! == 1 +e-V +
_]--+e~rtt'-s;
Q (X) представляет собой сумму убывающей геометрической прогрес-
сии, которую можно представить в виде
Q(X) = —(8.30)
1 —е г
и, следовательно, А (X) = 1, В (X) = 1 — Полюсы Q (к) —
корни уравнения 1 — е”1^- — о. Корни этого уравнения
Хк = ± / v = j<orv, v — 0, 1, 2, • • •,
*Г
где шг = 2л/тг — угловая частота.
Далее
В' (Хк) = Ье-Т^=ьк = xre*i2mr.
Согласно уравнению (8.27), (8.30)
ОО
G*(s)=2iG(s~^)=r S G<s+w.
—оо
Если положить з = /со, то получим соотношение, выражающее спектр
дискретного сигнала G* (/®) через спектр непрерывного сигнала
G
§ G(> + jv<or). (8.31)
-V—_«п
208
Рис. 8.12. Периодический частотный
спектр G* дискретного сигнала g* (0
на выходе модулятора ключа
Из последнего равенства следует, что спектр дискретного сигнала —
периодическая функция, т. е.
G* (/©) = G* (/со + /®г).
Действительно, согласно соотношению (8.31)
G* (/<» + /®г)' = 4" S G I/® + j (v + О = G* (/©).
*‘r —оо
так как пределы суммирования бесконечны.
Таким образом, влияние модулятора в частотной области
(рис. 8.12) соответствует периодизации спектра модулированного
сигнала (амплитуда каждой гармоники спектра G (/®) уменьшается
при этом в тг раз). Период спектра G (/со) равен периоду спектра
Q (fa) модулируемой последовательности импульсов g (/), т. е. =
= 2n/Tr.
В результате модуляции дискретного преобразования спектр
сигнала становится периодическим и бесконечно широким.
Форма спектра G* (/со) дискретного сигнала на каждом периоде
будет мало отличаться от формы G (/®) только в том случае, если
спектры соседних периодов не налагаются друг на друга, т. е. если
выполнено условие
|<о0| < о)г/2 = л/т,..
Сигнал g* (t) преобразуется ЭВМ в соответствии с алгоритмом ее
работы в сигнал х*„ (0 (рис. 8.13, а), что приводит к изменению формы
его частотного спектра (рис. 8.13, б). При этом спектр XJ (jo) сиг-
нала %в (0 остается периодическим, сплошным и бесконечным.
Для сопряжения ЭВМ с последующими непрерывными элемен-
тами необходимо сгладить сигнал х% (/) так, чтобы получить его оги-
бающую х;) (t), показанную на рис. 8.13, в.
x!(t)
а)
Рис. 8.13. Преобразование дискретного сигнала х* (0 при его прохождении через
цифровую ЭВМ и экстраполятор:
а — сигнал xj (i) на выходе ЭВМ; б — частотный спектр Xj (/й>) дискретного сигнала на
выходе ЭВМ; в — огибающая дискретного сигнала xj (/) на выходе ЭВМ
209
Аацц^
Рис. 8.14. Амплитудная частотная характеристика идеаль-
ного фильтрующего устройства (экстраполятора)
В частотной области эта операция соответ-
ствует выделению только первого периода и
фильтрации всех высокочастотных составляющих
спектра X в (/’©)
Задача сглаживания возлагается на преобразователь ЦАП (экс-
траполятор).
Для идеально точной фильтрации амплитудная частотная харак-
теристика фильтрующего устройства (экстраполятора) должна иметь
вид, показанный на рис. 8.14. Реализация идеального экстраполя-
тора практически невозможна, поэтому осуществляют приближенное
экстраполирование.
Самый простой способ приближенного преобразования дискрет-
ного импульсного сигнала в непрерывный — способ запоминания
(величина импульса сохраняется экстраполятором до момента по-
ступления следующего импульса), т. е. применение экстраполятора
нулевого порядка.
Для того чтобы экстраполятор мог производить операцию запо-
минания, его импульсная переходная функция должна иметь вид,
изображенный на рис. 8.15, а. Реализация такого экстраполятора
с помощью дискретных элементов не представляет особого труда.
Импульсная переходная функция k.d (t) может быть представлена
двумя единичными функциями, сдвинутыми друг относительно
друга на тг (рис. 8.15, б), т. е. kg (i) = 1 (0 — 1 (t — тг). Переда-
точная функция экстраполятора определяется как преобразование
Лапласа от £э (t):
r3(s) = (l-e-V)/s. (8.32)
Устройство, реализующее эту передаточную функцию, должно об-
ладать частотной характеристикой
Гэ(» = (1-е-т//<й)//®
или, соответственно, амплитудной
|Гэ(/ш)| = тг
Рис. 8.15. Импульсная переходная функция экстраполятора нулевого порядка:
а — импульсная переходная функция экстраполятора; б— импульсная переходная функция
экстраполятора нулевого порядка, представленная двумя единичными ступенчатыми функ-
циями; « — амплитудная н фазовая частотные характеристики экстраполятора
210
и фазовой частотными характеристиками (рис. 8.15, в)
фа (и) = — тг оз/2.
При этом видно, что рассматриваемый экстраполятор является филь-
тром низких частот. Последний отличается от идеального тем, что он
хотя и ослабляет, но все же пропускает высокочастотные составляю-
щие спектра Хв (/оз). Поэтому сигнал хэ (t) — u (t) на выходе экстра-
полятора имеет ступенчатый (см. рис. 8.8), а не плавный характер,
как это было бы в идеальном случае.
8.5. ПЕРЕДАТОЧЙЫЕ ФУНКЦИИ ДИСКРЕТНЫХ СИСТЕМ
Понятия передаточной функции и частотных характери-
стик оказались весьма полезными для анализа и синтеза непрерыв-
ных систем. Поэтому обобщим их на дискретные и дискретно-непре-
рывные системы.
Рассмотрим дискретно-непрерывную систему (рис. 8.16), состоя-
щую из непрерывной части (объект, имеющий ИПФ w0 (t) и переда-
точную функцию Wo (s)) и импульсного элемента, на вход которого
подан непрерывный сигнал g (t).
Сигнал на выходе импульсного элемента
оо
g* (0 = U g (nxr) 8(t- пхт). (8.33)
п—0
Преобразование Лапласа для g* (t) имеет вид
G*( s) = У g (пхг) e~nXrS, (8.34)
n=0
а сигнал на выходе непрерывной части
х (0 = Е w0 (t - кхг) g (кхт). (8.35)
№0
• Преобразуя по Лапласу уравнение (8.35), получим
ос Г оо
X (s) = j 2 w0 (t - кхг) g (кт,.)] eTstdt =
0 1к=о
oo oo
= У g(KXr) e~KX's j Wo (t - KXr) e~steKX'sd (f - kxt);
№=0 0
oo oc
X(s) = у g (kxt) eTKxrs J ay0 (t - kx/) e~s ^Kxr)d (t — ктг) =
к=0 0
^y^(KTr)e~'£vr0(s) =
K-^Wg(s)G*(s). (8.36)
Рис. 8.16. Типовая схема дискретно-не-
прерывная система
211
Г.....-I X3(t)
----- э —*-
Рис. 8.17. Экстраполятор
Таким образом, передаточная функция непрерывного выхода
х (0 по отношению к дискретному входу g* (f) объекта (см. рис. 8.16)
Wo (s) = X (s)/G* (s). (8.37)
В качестве примера системы рассмотрим экстраполятор, на вход
которого подается дискретный сигнал хв (kxr) (рис. 8.17).
Выходной сигнал ха (/) экстраполятора нулевого порядка связан
с его дискретным сигналом на входе хв (kxT) соотношением
х3 (кхг + т) = *в (/стг), 0 < т <: тг.
Если предположить, что хъ (t) =0, t < 0, то
x9(t) = хв(ктг)[1(/-ктг)— 1 (/ — ктг — тг)], (8.38)
№0
но так как преобразование Лапласа L от функции 1 (t — кхт) равно
L [1 (t — ктг)] = e~SKX.r/s,
то преобразование Лапласа для выражения (8.38) имеет вид
-skxt _ e-s(K+l)Tr
s ’
L [x9 (01 = Хэ (s) = хв (кхг)
к=0
( 1 ~STi
или Х3 (s) = \—------
к=0
или X3(s) = H73(s)Xb ($);
здесь №9(s) = -!^|—-
e“SKT>
(8.39)
и
X* (s) = U хв (кт) е SKt\
к=0
Но Хв (s) есть преобразование Лапласа для сигнала хв (0 на входе,
а Хэ (s) — преобразование Лапласа для сигнала хэ (t) на выходе.
Поэтому согласно общему определению передаточной функции
функцию Wa (s) можно рассматривать как передаточную функцию
экстраполятора нулевого порядка, на вход которого подан дискрет-
ный сигнал.
Формула (8.37) определяет передаточную функцию W (s) как от-
ношение преобразования Лапласа X (s) непрерывного сигнала на
выходе непрерывной части к преобразованию Лапласа G* (s) дискрет-
ного сигнала на входе. Получить выражение для передаточной функ-
ции в замкнутой форме, если рассматривать непрерывный вход G (s),
212
а ие дискретный, как в предыдущем случае, для системы (рис. 8.16),
нельзя.
Действительно,
G*<s) = vSG(s + /v^)- (8-40)
V
Преобразование Лапласа X (s) для сигнала х (f) на выходе объекта
X(s) = TF(s)^-^G(s + /v®r) (8.41)
V
и, следовательно,
w (s)= X{s) =__________________________ X(s}____________________.
У G (s -|- jwr) . -G (s — /cor) -f- G (s) -f- G (s -f- /(Or) + .. . J
•Г *F
. (8.42)
Из формулы (8.42) следует, что передаточная функция системы
W (s) не может быть представлена в замкнутой форме, так как ее
знаменатель является бесконечным рядом. Найдем теперь выражение
для передаточной функции цифровой ЭВМ. Как это было указано
выше, цифровая ЭВМ, осуществляющая любую линейную операцию,
описывается разностным уравнением (8.4). Преобразуя его по Лап-
ласу, получим
х; (8) = b0G* (s) + bur^G* (s) + ... + 6„e-n^G* (s) - aXB (s) e""' -
- ... - a,X(s)e~',sV
Откуда для передаточной функции цифровой ЭВМ получим выраже-
ние
п
V h е—VTS
Y* , . —st- , , , — nsx- Zj v
пр* /_\ __ 60 4- 6te + . + Ьпе__________ v=o_________.
v*' G* (S) , , — ST- . . — nsx п
' ' 1 + а1е + • • + апе , , V — VTrS
1 + Zjeve г
V“0
(8.43)
Пример. Предположим, что ЭВМ поручено дифференцирование,
которое может быть выполнено лишь приближенно, согласно формуле
х*в (t) = [g* (t) ~g*(t — ^)]/т,.
Преобразуя это уравнение по Лапласу, получим,
X;(s) = [G’(s)-e-VG’(s)]/Tr>
откуда для передаточной функции W-a (s) цифрового дифференциа-
тора найдем
FB(s) = (l - e-V)/Tr, (8.44)
а для частотной характеристики запишем
FB(/®) = (1-e-V“)/Tz. (8.45)
213
Рис. 8.18. Частотные характеристики идеального
№ид 0’®) и цифрового IFB (ja>) дифференциатора
На рис. 8.18 изображены частотные харак-
теристики идеального дифференциатора
(/®) = /® и цифрового дифференциа-
тора WB Как видно из формулы
(8.45), WB (/и) является периодической
функцией с периодом сог, причем диффе-
ренцирование осуществляется тем точнее,
чем меньше полоса частот дифференци-
руемого сигнала по сравнению с частотой дискретизации шг (во вся-
ком случае она должна быть меньше &г на порядок величины).
8.6. ПЕРЕДАТОЧНАЯ ФУНКЦИЯ САР С УПРАВЛЯЮЩЕЙ ЭВМ
В КОНТУРЕ РЕГУЛИРОВАНИЯ
Рассмотрим САР с ЭВМ в контуре регулирования
(рис. 8.19). Эта замкнутая система с ОС состоит из сравнивающего
элемента, формирующего сигнал ошибки е ((), ключа (или импульс-
ного элемента) Ел, преобразующего непрерывный сигнал е (/) в ди-
скретный е* (t\, ЭВМ, имеющей передаточную функцию WB (s); экс-
траполятора Э с передаточной функцией Wa (s), преобразующего
дискретный сигнал хв (0 на выходе ЭВМ в непрерывный сигнал хд (/)’,
объекта регулирования О с передаточной функцией IFO (s) и элемента
ОС с передаточной функцией fl70C (s), формирующего сигнал обратной
связи г (t), который сравнивается с входом g (/).
При этом имеем
XB‘(s) = rB‘(s)E’(s)
и
y(s)=W0(s)W9(s)W; (s)E‘(s),
или
K(s) = r0(s)^(s)E,(s)> (8.46)
где W (s) = №0 (s) (s).
Преобразуем схему, показанную на рис. 8.19, к эквивалентной ей
схеме (рис. 8.20), имеем
Е* (s) = G* (s) — R* (s);
R* (s) = W*B (s) IW (s) Woc (8)]* E’ (s),
Рис. 8.19. CAP с ЭВМ в контуре регулирования
214
ИЛИ
откуда
с ЭВМ в
управления
G
Рис. 8.20. Эквивалентная
схема САР
контуре
(рис. 8.19)
£’ (в) + Гв* (s) [W (8) Гос (s)]* £’(s) = G* (в),
G* (S)
E* (s) = ,
1 + ^в(5)[Г(5)ГОс(«)]*
или, учитывая (8.40),
оо
~ 2 G(S + /v“r)
£* (s) =------------------------------------------ . (8.47)
1 +(S) (S + 7vWr) 1ГОС (s +/vcor)
V=—ОО
Подставляя (8.47) в (8.46), получим
оо
2 G(s + /V“r)
Y (8) =----------------—-------------------------- . (8.48)
1 + ir; (s) J- У Г (S 4- /• v<M Гос (s + /vwr)
v=—00
Из формулы (8.48) видно, что для дискретных систем нельзя полу-
чить выражение для передаточной функции Y (s)/G (s) в замкнутой
форме, так как связь между Y (s) и G (s) выражается через бесконеч-
ные суммы. Для того чтобы преодолеть это затруднение, введем поня-
тие о /-преобразовании.
8.7. 2-ПРЕОБРАЗОВАНИЕ
При анализе дискретной системы необходимо решение раз-
ностных уравнений, устанавливающих связь между ее входом и вы-
ходом. /-преобразование сводит это решение к алгебраическим опе-
рациям. Преобразование Лапласа £ превращает непрерывные функ-
ции времени t в функции комплексного переменного s, а /-преобразо-
вание функции дискретного времени (последовательность чисел) —
в функции комплексного переменного z = ег'л. /-преобразование
позволяет ввести понятие /-передаточной функции, имеющей анало-
гию с понятием обычной передаточной функции для непрерывных
215
систем. Последовательность чисел возникает при вычислительном
процессе, выполняемом ЭВМ, а также при дискретизации непрерыв-
ных функций времени. Запишем последовательность чисел в виде
/(к) : {..., / (-1), f (0), f (1), f (2), ...},
где аргумент к указывает на порядок следования чисел в последова-
тельности. При дискретизации функции важным параметром
является интервал дискретности тг. Однако для простоты записи мы,
как и ранее, будем его опускать.
Если последовательность чисел / (к) установлена только для по-
ложительных значений к, то одностороннее Z-преобразование для
/ (к) определяют при помощи соотношения
Z [f (к)] — Е (z) = f (к) г-к. (8.49)
к=0
Если / (к) определена как для положительных, так и для отрица-
тельных целых чисел, то двустороннее /-преобразование для f (к)
дается формулой
Z[f(K)]=F(z)= £
к=—оо
Обратное /-преобразование определяется формулой
f(K) = Z-'\F(z)\=^\F(z)Z*~idz, (8.50)
г
где Г — некоторый замкнутый контур в плоскости z.
Связь /-преобразования с теорией дискретных систем достаточно
просто показать на примере соотношений, описывающих импульс-
ный элемент. Как было показано, преобразование Лапласа для им-
пульсного элемента имеет вид
оо
G’(s)=U g(vTr)e~vV (8.51)
v=0
и представляет собой бесконечный ряд по отрицательным степеням
етЛ Поэтому, используя подстановку z = erS и заменяя в вы-
ражении (8.51) s на s = — In z, можно записать
оо
G‘(s) = G‘(^lnz) = ^gr(vTr)z-v, (8.52)
v=0
т. е. получим выражение, совпадающее с соотношением (8.49), опре-
деляющим /-преобразование.
Итак
оо
2[Г(01=Е (8.53)
v=o
Важно подчеркнуть, что /-преобразование содержит информацию
о соответствующей непрерывной функции времени только в дискрет-
216
Рис. 8.21. Множество непрерывных фунК- |
ций у (t), имеющих одно и то же Z-преобра- ' /\
зование
ные моменты времени, поэтому оно
определяет не саму непрерывную 11 -
функцию, а ряд ее последовательных Г ° ° ; ° Г*
дискретных значении. Значит, одно- т г
му Z-преобразованию может соответствовать [много непрерыв-
ных функций, имеющих одинаковые значения в моменты времени кхт
(рис. 8.21), так как им будут соответствовать одни и те же дискретные
функции. Поэтому при применении Z-преобразования информация
о непрерывном сигнале за исключением дискретных моментов вре-
мени ктг полностью теряется. Другими словами, можно считать, что
введение Z-преобразования соответствует включению на выход си-
стемы не существующего в реальной системе импульсного элемента,
т. е. исходная система (рис. 8.22, а) заменяется системой, показанной
на рис. 8.22, б,
Примеры Z-преобразований:
1) Z-преобразование последовательности импульсов одинаковой
высоты. Ранее было получено выражение для преобразования Лап-
ласа функции вида (рис. 8.23, а)
Перейдя к Z-преобразованию, т. е. заменяя в этом выражении е Хг*
через г-1, получим
F (z) = г/(г — 1); (8.54)
2) Z-преобразоъаниеединичной ступенчатой функции (рис. 8.23, б)
не отличается от Z-преобразования функции, рассмотренной в пер-
вом примере, так как в моменты ктг они имеют одинаковые дискрет-
ные значения f* (t):
F (z) = z/(z — 1).
Это лишний раз показывает, что Z-преобразование «не чувствует»
промежуточных значений исходной функции;
3) Z-преобразование линейной функции (рис. 8.23, в) f (t) == t.
Этой функции соответствует дискретная последовательность х (ктг) =
= кхТ \к = 1, 2, 3, ...}, применяя формулу (8.49), получим X (г)
в форме суммы бесконечного ряда:
F (z) = TpZ-1 -j- 2тгг-2 + 3rrz-3 + ...
Рис. 8.22. Непрерывная система с импульсным элементом:
а — на входе; б — на входе н фиктивным на выходе
217
Рис. 8.23. Примеры Z-преобразования:
а—/-преобразование последовательности импульсов одинаковой высоты; б — Z-преобразова»
мне единичной ступенчатой функции; в — /-преобразование линейной функции
Поделив обе части уравнения на гтг, получим
2j£L = ± + _2. + A +
этг а2 ~ 2» т- Т • •
Интегрируя обе части уравнения, найдем
г F (г) , 1 1 1 , .
где с — постоянная интегрирования.
Правая часть выражения — сумма убывающей геометрической про-
грессии, первый член которой а0 = Vz, а знаменатель q = 1/г:
1 X
+
Z /
Дифференцируя обе части выражения, найдем
F (г) _ 1
гтг (г— I)2 ’
Г (г)
гтг
1
г— 1
откуда
Z-преобразование получено в замкнутой математической форме.
Ниже приведена таблица Z-преобразований (табл. 8.1) для наиболее
часто встречающихся функций:
Z-преобразование обладает рядом свойств [10]; ниже приведены
лишь теоремы о начальном и конечном значениях.
Теорема о начальном значении. Предположим, что задано
Z-преобразование F (г) и требуется определить начальное значение
f (0) последовательности, которой соответствует F (z).
Согласно определению F (?)
Р (г) = f (0) + f (1) г"1 + f (2) г-2 + • • •
Этот ряд сходится при всех |z| >1.
Поэтому при г -> оо
/ (0) = ton F (z). (8.55)
2-»-оо
218
Таблица 8.1
Таблица Z-преобразоваиий для некоторых функций
Функция времени Преобразование Лапласа Z-преобразование
6(0 6 (/ — Ktr) 2 6(/ —MTr) n=0 КО t /2 2 e-« sin at 1 1/(1 _ e-V) 1/s l/sa l/s8 l/(s -f- a) a/(s2 + a2) 1 z~n zl(z — 1) z/(z — 1) Trz/(z — I)2 1 _2 2 (г + 1) 2 r (г — I)2 ^(z-ey^r) z sin axr — 2г cos arr 1
Теорема о конечном значении. Ограничим последовательность
/ (/стг), положив к = N, где N — достаточно большое число. Обра-
зуем функцию / (ктг — тг), запаздывающую относительно / (ктг) на тг.
Если
N
^(z)= S Z(KTr) z-K,
к=0
то Z-преобразованием для fN (кгг — тг) будет
N—1
FN (z) = J] / (ктг) z^z'1 — z~*F (z).
к=0
Найдем разность между FN (?) и FN_X (z), положив z = 1:
n w-i
U /(ктг)Гк-2Г1 £ /(kt,)z'k = f(Nrr).
. к=0 к=0 Jz=l
Пусть N оо, тогда
/(oo) = lim(l — z“1)F(z). (8.56)
Z»1
8.8. Z-ПЕРЕДАТОЧНАЯ ФУНКЦИЯ ДИСКРЕТНОЙ СИСТЕМЫ
Как было показано выше, дискретный сигнал у (к) на
выходе линейной системы, первоначально находившейся в покое,
имеет вид
у(к)= S k(K — ni)g(m), (8.57)
т=—оо
где k (к) — взвешенная временная последовательность системы.
219
- Взяв Z-преобразование от выражения (8.57), получим
Z\у (к)\ = Y (z) = Е У(к)г~к,
К=—оо
ИЛИ
Y(z) = S k(K — m)g(m) z~K ~ £ g(ni) £ k(K — m)zTK.
K=—00 Lttl=—00 J ffl=—00 K=—OO
(8.58)
Сделав замену переменных n = к — m, найдем
Y (z) = S g (m) S (») z~n~m =
m——oo n=—oo
= S g(tri)z~m S k(n) z~n = G (z)W (z). (8.59)
m——oo n=oo
Откуда
W® = 7$T . (8’6°)
Функцию W (z) называют Z-передаточной функцией дискретной
системы.
В формуле (8.60) через У (z), G (z) обозначены Z-преобразо-
вания, соответственно, последовательностей импульсов у (тТ),
g
Обычно непрерывная система задается своей передаточной функ-
цией в области комплексного переменного s. Поэтому для использо-
вания формулы (8.59) необходимо по заданной функции W (s) уметь
определять функцию W (г). Для этого применяют довольно простой
способ, основанный на использовании формулы
№(?)- £ k(KTr)z~K,
где k(t) = L~l [W (s) ]
и
k (кхг) = k (t)t=KTr, К = 0, 1, 2, ...
Поясним этот способ на следующем примере. Пусть необходимо
определить W (г), соответствующую
W (s) = a/ls(s + а)].
Взяв обратное преобразование Лапласа от W (s), получим
k(0 = L-1 [IT(S)J = L-> [± _ -j_] (1 _ е-9 1 (О,
так что
k (кхг) = 1 — е'акТг при к 0;
k (к%Т) = 0 при к < 0;
220
Z-преобразование этой последовательности
оо
при |z|> 1.
Аналогичным способом можно определить Z-преобразования, соот-
ветствующие наиболее часто встречающимся функциям W (s).
Вычисление реакции дискретной системы по ее Z-передаточной
функцйи. Рассмотрим способ вычисления реакции дискретной си-
стемы с заданной Z-передаточной функцией на дискретный входной
сигнал.
Предположим, что Z-передаточная функция системы имеет вид
= + •"+6п , (8.61)
z a-ji -j- • • 4- ап
а также допустим, что полюсы передаточной функции W (г) про-
стые и не совпадают с полюсами Z-преобразования входного сиг-
нала G (г). Тогда, разлагая правую часть выражения (8.59) на
простейшие дроби, можно написать
У(2) = ао + -^+-^_+...+г^_ +
+ {разложение на простые дроби G(z)}. (8.62)
Пользуясь табл. 8.1, для обратного Z-преобразования выраже-
ния (8.62) найдем
У (к) — ai (^i)K 1 + а2 (^г)к 1 + • • • + ап (^п)к 1 +
4-Z-1 {разложение G(z) на простые дроби}. (8.63)
В формуле (8.63) члены at (Хг)к-1 характеризуют переходный
процесс; они определяются полюсами W (г).
Член Z-1 {разложение G (z) на простые дроби} характеризует
вынужденные колебания; он определяется полюсами G (г).
Пример. Найти реакцию дискретной системы с передаточной
функцией
пр (z) _____612 ь»____
г2 — (Xj ^2) г 4~ ^1^-2
на дискретный ступенчатый вход.
При этом имеем
у /_\__________bjZ2 4- 63г_________ Ci . Сг
{ > (г — М (г — М (г— 1) г —Х1~г г —
4~ ^2
(1 — ^а) (1 — ^а)
г— 1
221
где
М (6i%i + 62) . _ A-а (^1Л2 + М
1 ~ (Х1-М(М-1) ’ 2 (Х2- М (Л2-1) •
Взяв обратное Z-преобразование от Y (г), получим
У (к) = ci (Мк 1 + с2 (MK+I + •
Причем реакция системы в установившемся состоянии будет равна
дискретной последовательности
у (ао) = -—ТТ7Г2-5ГГ •
' (1 — *i) (1 — л»)
Z-передаточные функции цифровых ЭВМ. Выше было приведено
разностное уравнение. (8.22), описывающее связь между входом и
выходом ЭВМ. Рассмотрим теперь, каким образом при помощи этого
уравнения можно получить передаточную функцию ЭВМ (в смысле
Z-преобразования).
Взяв обратное Z-преобразование от уравнения (8.4), получим
У (г) = (Ьо 4- Ьг2~1 --4- bnz~n) G (z) - (а^14-----1- anz~n) Y (z),
или Y (z) = WB (z) G (z), (8.64)
где WB(z) = feo + M~1 + ---+frng|
1 + OjZ + • • • + OnZ
Функция WB (z) является передаточной функцией цифровой
ЭВМ, осуществляющей любую линейную операцию над цифровой
последовательностью g (птг).
8.9. ТИПОВЫЕ ДИСКРЕТНО-НЕПРЕРЫВНЫЕ СИСТЕМЫ
Дискретно-непрерывная система с экстраполятором. На
основе соотношений, полученных в предыдущем параграфе, можно
при помощи Z-преобразования производить анализ различных
дискретно-непрерывных систем.
Рассмотрим, например, типовую систему (рис. 8.24) с экстрапо-
лятором нулевого порядка, имеющим передаточную функцию H4>(s):
№,(«) = О -e’sS/s. (8.65)
Найдем Z-преобразование для выражения
Z [W9(s)W0(s)]. (8.66)
Подставляя формулу (8.65) в выражение (8.66), получим
Z [Wo (s) Wo (s)J = Z — 7o(S) •
b(s) 43
W„(s)
Рис. 8.24. Типовая дискретно
непрерывная система
222
Рис. 8.25. Дискретно-непрерывная система с ЭВМ
Вводя обозначение h (f) = L"1 £ J и применяя теорему
смещения, найдем преобразование Лапласа.
L-*[ e~ST^?.(s) = h(t-xr).
При этом
= Z [h (t — тг)] = z-1Z [h (ктг)] = z-1Z [ ] •
e~STrtt% (s)
s
Итак,
Z[F8(s)ro(s)] = (l -z-i)z[-^].
(8.67)
Полученная формула определяет способ вычисления Z-преобра-
зования для системы, состоящей из последовательного соединения
экстраполятора и объекта.
Типовая схема с цифровой ЭВМ. На рис. 8.25 показана другая
типовая дискретно-непрерывная система. Ее отличие от предыдущей
схемы состоит в наличии ЭВМ, включенной между входным импульс-
ным элементом и экстраполятором.
Обозначая через Хв (г) преобразование сигнала хв (0 на выходе
ЭВМ,
Хв (z) = Z [хв (птг)] = Z
оо
2 хв (пхг - кхг) g (кхг)
— 00
Кроме того,
можно написать
Y (г) = Z lF8(s) Г0(з))Хв(г)
и
Хв (?) = WB (z) G (г).
Следовательно,
Y (г) = rB(z)Z[ra(s) r0(s)]G(z). (8.68)
Замкнутые дискретные системы, содержащие управляющую ЭВМ.
Рассмотрим САР с обратной связью, содержащую ЭВМ в прямой
цепи (рис. 8.26). Найдем Z-передаточную функцию этой системы.
Обозначая через Е (г) Z-преобразование для ошибки
Е (z) = Z {е(птг)),
получим
Y (?) = Гв(г) Z {Г8 (s) Го (s)} Е (г). (8.69)
223
Рис. 8.26. САР с обратной связью, содержащая УЦВМ в прямой цепи
Точно также можем написать
Я (г) = Гв (г) Z{Wa (s) Wo (s) Гос (s)} Е (z), (8.70)
где через R (г) = Z {г (птг)} обозначено Z-преобразование сигнала
г (t) на выходе цепи обратной связи, имеющей передаточную функ-
цию Foc (s).
Но так как
е (ктг) — g (кхг) — г (к.хг), (8.71)
где g (кхг) и г (кхт) — дискретные последовательности, соответству-
ющие входному g (t) и выходному г (t) сигналам в цепи обратной
связи, то
Е (z) = G (г) — R (г). (8.72)
Пользуясь выражениями (8.70) и (8.72), получим
Е = 1 + Гв (г) Z {Г8 (s) Го (s) ГОс («)} G (8’73)
На основании выражений (8.73) и (8.69) найдем следующее соот-
ношение для Z-передаточной функции системы (рис. 8.26) с обратной
связью и ЭВМ в контуре управления:
(Т) - г<г> = 0)2{Га (з) Го 0)}
G (г) 1 + Гв (г) Z {Г8 (s) Го (s) Гос (s)} ' { ’
Передаточная функция ЭВМ Ц7В (г) оказывает основное влияние на
динамические свойства системы, имеющей передаточную функцию
(8.74). Поэтому основная задача проектирования состоит в таком
выборе WB (г), при котором система обладала бы необходимыми ди-
намическими свойствами.
В качестве примера, иллюстрирующего последовательность вы-
числений переходного процесса у (пхт) на выходе системы с обратной
связью, рассмотрим частный случай схемы (см. рис. 8.26), не со-
держащей ЭВМ и имеющей единичную обратную связь, т. е. схему,
показанную на рис. 8.27, для которой Ц70С (s) = 1:
фм - w° W (Я
G (г) ~ 1 + Z {Гэ (s) Г„ (s)} ’
где
r0 (s) = 1/[S (s 4- 1) ]
224
й
№э($) = (1 - e~sT»-)/s.
Имеем
Z (07, (s) V, (s)| = Z {(1 - e-’O -Jijlpi)-} =
=- z’‘>zWW=(1 ~2-1>z {т - т + тп-j •
откуда, пользуясь табл. 8.1, найдем
2{rjS)r0(S)} = (l-z^)F-^F-T^r + —.
Пусть тг = 1, тогда
Z|H7,(S)07o(s)1=^№±^_. (8.76)
Предположим, что входом системы является единичная ступенчатая
функция g (0 = 1 [Н.
Тогда
G (z) = z!(z — 1). (8.77)
Подставляя выражения (8.76), (8.77) в формулу (8.75), найдем
(0,368г+ 0,264) г
V -1) (г-0.368) (г-1)
1 0,368г + 0,264 ’
1 + (г — 1) (г —0,368)
или
у _______(0,368г + 0,264) г /я 7Я\
Y(z>~ (г — 1) (г2 — г + 0,632) ‘
Установившееся значение сигнала на выходе
у (оо) = lim (г — 1) У (г) = 1,
___________1
т. е. система имеет нулевую статическую ошибку. Для вычисления
временной последовательности у (гп;г) разложим выражение (8.78)
в ряд по степеням г'1:
Y (г) = 0,368г-1 + 1,000г-2 + 1,399г-3 +
4- 1,399г-4 + 1,147г-6 + 0,894г-® + ...
Итак
у(птг) = {0,368; 1,000, 1,399; 1,399; 1,147; 0,894; ...}.
Понятие Z-передаточной функции упрощает исследование ди-
скретно-непрерывных систем. Однако следует подчеркнуть, что,
Рис. 8.27. Пример диск-
ретной системы с единич-
ной обратной связью
8 Солодовников В. В. и др.
225
Таблица 8.2
Основные соотношения для непрерывных и дискретных систем
Математическое описание Система
непрерывная дискретная
Уравнения системы Переходная матрица Преобразование пе- реходной матрицы Передаточная матрица Обратное преобразо- вание передаточной матрицы Векторно-матричные х(0 = Ах (0 + Ви (0 у(0 = Сх(/) Ф (0 = еА/ ф ($) = [si — А]-* W (s) = СФ (s) В ' Ф (0 = Cq> (0 В Конечно-разностные х (к 4-1) = А</х (к) + BdU (к) У («) = Cdx (к) q>d («) = Ad ф<г (z) = Z [zl — Ad]-1 Wd (z) = Z-iCd®d (s) Bd Ф(«) = 0,^ (к — l)Bd 1
пользуясь Z-передаточной функцией, можно определить переходный
процесс на выходе дискретно-непрерывной системы лишь в дискрет-
ные моменты времени ктг (к = О, 1,2...). Поэтому на выходе систем
(например, рис. 8.22, б) штриховой линией показан «фиктивный»
импульсный элемент, для того чтобы отметить, что нам известен
лишь ход переходного процесса в дискретной, а не в непрерывной
форме, в которой он получается на самом деле на выходе объекта.
Основные соотношения для непрерывных и дискретных систем при-
ведены в табл. 8.2.
8.10. АНАЛИЗ ДИСКРЕТНО-НЕПРЕРЫВНЫХ СИСТЕМ,
ОПИСЫВАЕМЫХ УРАВНЕНИЯМИ В ПЕРЕМЕННЫХ
состояния
Реакция непрерывной системы на кусочно-постоянный
входа Рассмотрим некоторые вопросы анализа дискретных систем,
описываемых разностными уравнениями в переменных состояния.
В частности, большой интерес представляет вычисление выход-
ного сигнала (в виде дискретной последовательности) системы
(рис. 8.28), если ее непрерывная часть (объект), к которой подклю-
чен экстраполятор, описывается дифференциальными уравнениями
в переменных состояния.
Предположим, что сигнал xa (t) с выхода экстраполятора посту-
пает на вход непрерывной системы, описываемой уравнениями:
х (0 = Ах-|-Вц (0; x(/0) = *0;l ,d7Qx
у(0 = Сх, /
Рис. 8.28. Непрерывная
часть системы (объект),
к которой подключен эк-
страполятор
226
где через u(t) обозначено входное воздействие, приложейное к
объекту, являющееся в данном случае сигналом хэ (0 на выходе
экстраполятора, т. е. и (0 = хэ (0. При этом ограничимся рас-
смотрением экстраполятора нулевого порядка, для которого
и(0 = и(ктг), кхг < (к + 1) хг. (8.80)
Начальные условия для [интервала [ктг — (к4-1)тг1: х (t0) =
= х (£тг).
Решение первого уравнения системы (8.79) имеет вид
t
х (t) = еА х0 + j еА Ви (т) dx. (8.81)
t.
Для определения х (0 в конце интервала (к 4- 1)тг полагаем t0 =
= кхт и t = (к + 1) тг. Тогда
(к+1) тг
х [(к + 1) тг] = еАт'х (ктг) + j еА 1(к+1) Ь-Ч Ви (ктг) dx,
ктг
но вход и постоянен в течение интервала интегрирования, поэтому
произведя замену переменных < = («+ 1) тг— т,. для интеграла
в правой части получим
(fe+l) тг )
j eA[(fe+l)rr-r]BdT
j eATrBdr
0
u (кхг)
или окончательно
Гг
еАТгх (ктг) + j •*’»• В dx и (кх,).
о
Последнее уравнение есть векторное разностное уравнение 1-го
порядка. Если положить
eAtr «в А4 (xf) => А4
х[(к+1)тг]
(8.82)
(8.83)
и
’г
j eA^BdT = Bd(Tr) = Bd, (8.84)
о
то уравнение (8.82) можно привести к виду
х [(к + 1) тг] = Ad (tz) х (ктг) + Bd (тг) u (Ktf). (8.85)
При этом второе уравнение системы (8.89) принимает вид
у(ктг) = Сх(ктг). (8.86)
Уравнения (8.85), (8.86) представляют собой дискретную модель
непрерывной системы при кусочно-постоянном входе, Эти уравне-
в* 227
ния аналогичны по виду уравнениям дискретной системы в пере-
менных состояния, а математическая модель непрерывной системы
с кусочно-постоянным входом эквивалентна линейной дискретной
системе со входом в виде числовой последовательности. Отличие
заключается лишь в том, что матрицы Ad (тг) и Bd (т,.) зависят от
интервала тг.
Если матрица А неособенная
Bd (тг) = А'1 (еАТг — 1) В. (8.87)
Таким образом, матрицы Ad (ту), (тг) — постоянные матрицы,
элементы которых являются функциями от тг. Из уравнения (8.83)
следует два основных свойства матрицы Ad:
А2 = А Д/гтг) = еАлт- (8.88)
АД0) = 1. • (8.89)
Произведенный анализ показывает следующее. Подадим на вход
дискретной модели, описываемой уравнениями (8.85), (8.86), сигнал
и (кхг) и предположим, что Матрицы Ad и Bd удовлетворяют соот-
ношениям (8.83), (8.84). Тогда ее вектор состояния и вектор вы-
хода у в каждый дискретный момент времени кхт будут принимать
те же значения, которые принимает вектор состояния x(i) и век-
тор у (?) непрерывной модели на рис. 8.28. Этот результат позволяет
имитировать поведение непрерывных систем при помощи цифровых
ЭВМ. Изложенный подход можно также рассматривать как метод
решения дифференциальных уравнений (8.79), даЮщйй результат
для дискретных моментов времени кхг.
Определение дискретной модели, эквивалентной Непрерывной,
Требует вычисления матрицы еАт>-. Для этого можно воспользоваться
одним из способов, приведенных ниже:
1. Способ разложения в ряд. При разложении в ряд имеем
еАгг = 1 + Атг + -5рН-----------1-
hnxnr
п|
Зная А и хг и ограничиваясь конечным числом членов этого
ряда, можно найти еАтг. Вообще говоря, этот способ неудобен,
так как для обеспечения требуемой точности требует учета большого
числа членов ряда.
2. Матрица А диагональна. В этом случае еА1> также диа-
гональна; если А = diag (М, Ха, .... Хп), то е*1' = diag [exi\
.... e^TJ.
Полученный результат показывает, что часто оказывается удоб-
ным предварительно приводить матрицу А к диагональной форме.
3. Применение формулы Сильвестра. Если все собственные зна-
чения матрицы А различны, то
Анализ дискретных систем, описываемых разностными уравне-
нениями в переменных состояния. Изложим метод вычисления дис-
кретного сигнала на выходе дискретной системы, в частности, для
дискретной системы эквивалентной непрерывной.
Применяя Z-преобразование к уравнениям (8.85), (8.86) состоя-
ния дискретной системы, получим
zX(z)-Zx(0) = AdX(z)-4-BdU(z); (8.90)
У(г) = СД(г), (8.91)
где X (z), U (z), Y (z) — векторы соответственно размерности (n, 1),
(т, 1), (р, I).
Решение (8.90) относительно X (z) дает
X(z) = (zI-AJ-1zx(0) + (zI- Ad)’xBdU(z). (8.92)
Подставляя выражение (8.92) в уравнение (8.91), найдем
Y (г) == Cd \(z I - Ad)-1 zx (0) + (z I - Ad)-i BdUz|. (8.93)
Покажем, каким образом, пользуясь уравнением (8.93), можно
найти дискретную последовательность у (/г) на выходе. Тем самым
будет установлена взаимосвязь между описаниями во временной
и в z-комплексной области.
Полагая в уравнении (8.92) U (z) = 0 и применяя обратнре
Z-преобразование, найдем выражение для фундаментальной ма-
трицы cpd (к):
<р («) Z-1 [z (z 1 — А,)-1]; (8.94)
Такнм образом, фундаментальная матрица является' обратным
^-преобразованием матрицы z (zl — А)*х, имеющей размерность
(п, п).
Алгоритм вычисления обратной матрицы (zl —• А)‘х заключается
в следующем. Пусть имеем
(zI^Ad)-1 = -^adj(21-Ad), (8.95)
где D (г) — детерминант матрицы (zl — Ad).
Представим D (г) в виде полинома от z:
D (z) = г” - р12п-г - р2гп’2---0П. (8.96)
. Тогда можно показать, что
adj (z I — Ad) = I г”'1 + Н12^2 + • • + Н„_г; (§.97)
здесь Н| = Ad — PjI, где = spur Ad;
229
где р2 = у spur(AdH1);
Н3 = АЛг-|М,
где 0з = -у spur (AdH2); (8.98)
Hn = AdH„_l-0nI>
где 0n = -у spur (AdH„_x).
В формулах (8.98) через spur обозначен след матрицы, определяемый
как сумма ее диагональных элементов. Пользуясь уравнениями
(8.95)—(8.98), можно найти (г! —Ad)-1, а затем по формуле (8.94)
вычислить <р (к).
8.11. АНАЛИЗ УСТОЙЧИВОСТИ ДИСКРЕТНЫХ САР
В случае дискретных систем передаточная функция разомк-
нутой системы согласно выражениям (8.47) или (8.48) при мнимых
значениях s имеет вид
= Е ^(/Ъ + М), (8.99)
т. е. представляется бесконечной суммой. Однако она все же может
быть использована для исследования дискретных систем. Это объяс-
няется тем, что непрерывная часть системы в виде экстраполятора
и объекта обладает свойствами низкочастотного фильтра и поэтому
в правой части формулы (8.99) можно учитывать лишь несколько
первых его членов.
Покажем, каким образом частотные характеристики дискретной
системы могут быть применены для анализа ее устойчивости. Для
простоты предположим, что ЭВМ в контуре управления отсутствует.
Тогда частотный спектр выходного сигнала Y (/ш) согласно фор*
муле (8.48) принимает вид
Г (Му S O(/<o + /v®c)
У (/«>)=----------------------------(8.100)
1 + ~Z~ W’W’ ос (/® + /V(flc)
V~-00
Из формулы (8.100) очевидно, что устойчивость дискретной
системы определяется корнями характеристического уравнения
1+-L S Wo0(s + /v<dc) = 0, (8.101)
—оо
которое является аналогом характеристического уравнения непрб’
рывной системы
1 + W (s) (s) = 0.
830
причем выражение
W (j®) = 4- 2 Wo0 (s + /v<or) (8.102)
может рассматриваться как передаточная функция разомкнутой
системы.
На основании сделанного выше замечания заменим бесконечную
сумму в уравнении (8.102) суммой небольшого числа членов, т. е.
(/со + W ~ 4- {WWOC (/о) + Wo0 (у® + М) +
('Г
+ Woc (/со 4- 2/4) + • • • + Woc (/со - /а>г) +
4- - 2/юг) 4- • • 4. (8.103)
Члены в правой части выражения (8.103) представляют собой
векторы, проведенные из начала координат до точек со, (со 4- ®г),
(со 4- 2сог), ..., (со —- <вг) амплитудно-фазовой характеристики (АФХ)
т;ЧГ1Г00 (/со) непрерывной части системы. Из выражения (8.103)
следует, что АФХ дискретной системы может быть получена сумми-
рованием этих векторов. Так как W'W'oc (/<о) является периодиче-
ской функцией частоты со с периодом /сог, то переменной со доста-
точно придавать значения в интервале от 0 до сог. Более того, так
как IWW1* (/со) симметрична относительно действительной оси,
т. е. ее годограф в диапазоне частот от сог/2 до сог является зеркаль-
ным отражением годографа для частотного диапазона от 0 до со/2,
то оказывается достаточным изменять частоту со в интервале (0,
со/2).
Количество необходимых членов в выражении (8.103) зависит
от ширины полосы частот непрерывной части системы и частоты
дискретности сог. Если частота сог велика по сравнению с шириной
полосы, то часто можно ограничиться первыми тремя членами в вы-
ражении (8.103).
После того, как АФХ или годограф дискретной системы построена,
анализ ее устойчивости можно производить при помощи частотного
критерия устойчивости, который применяется для анализа устой-
чивости непрерывных систем (см. гл. 4). Таким образом, для дискрет-
ных систем можно сформулировать следующий частотный критерий
устойчивости.
Для того чтобы дискретная САР, устойчивая в разомкнутом
состоянии, была устойчива в замкнутом состоянии, необходимо и
достаточно, чтобы амплитудно-фазовая частотная характеристика
разомкнутой системы W* (/со) не охватываала критической точки
(—1, /0) при изменении со в интервале (—<ог/2 < <в< <вг/2).
Анализ дискретных систем с помощью их амплитудно фазовых
характеристик является трудоемким процессом в особенности, когда
необходимо учитывать больше трех членов разложения выражения
(8.103). Кроме того, он не строг, так как бесконечная сумма заме-
няется небольшим числом членов.
231
Рис. 8.29. Отображение
мнимой оси плоскости s в
окружности единичного
радиуса на плоскости z
Аналог частотного критерия устойчивости для плоскости.
Z-передаточная функция дискретной САР с ЭВМ в контуре опреде-
ляется формулой (8.74)-. Вводя обозначение
W (z) — WB(z)Z\Wo(s)WQ(s)Woc(s)\ (8.104)
и ограничиваясь единичной обратной связью, вместо формулы (8.74)
можно написать
Ф (s) = W (z)/[l + W (z) L (8.105)
Характеристическое уравнение дискретной системы имеет вид
1 + W (z) = 0.
Корни этого уравнения определяют устойчивость. В плоскости ком-
плексного переменного s для устойчивости требуется, чтобы все
корни характеристического уравнения находились в левой полу-
плоскости. Следовательно, для того чтобы судить об устойчивости
в плоскости комплексного переменного z = eV, необходимо ото-
бразить левую полуплоскость в плоскости s в соответствующую ей
область в плоскости г.
На мнимой оси $ - /со и г = eV“, т. е. мнимая ось отобра-
жается на плоскость z в окружность единичного радиуса (рис. 8.29),
причем z = е/тг“ представляет собой многозначную функцию со
с единичной амплитудой и фазовым углом тгсо. Таким образом, отре-
зок мнимой оси, лежащий между точками со = 0 и со = сог, где
сог = 2п/гг, отображается в единичную окружность плоскости z.
Этот процесс повторяется, когда со возрастает до и + °V, ® + 2сог
и т. д. То же самое, но в обратном направлении вращения по окруж-
ности единичного радиуса происходит, если со изменяется от 0 до
—(£>Г, —со—сог, —со—2сог и т. д. В любой точке плоскости s = о + /со
и
В точке o' — — оо, со — 0 плоскости s величина 2 — 0, т. е. точка, ле*
жащая в бесконечности на отрицательной действительной оси пло-
скости s, отображается в начало координат плоскости z.
Для любых значений ст < 0, т. е. для любой точки в левой полу-
плоскости s, еотг < 1 и |z| < 1. Следовательно, левая плоскость s
232
отображается во внутреннюю область единичной окружности в пло-
скости z. С другой стороны, так как |z| >1 для о >0, правая
половина плоскости отображается в область, лежащую вне единич-
ной окружности. При этом очевидно, что дискретная система устой-
чива, если все корни характеристического уравнения лежат внутри
единичной окружности с центром в начале координат плоскости z.
Предполагая, что Z-передаточная функция W (г) является дробно-
рациональной функцией от z, можно Написать
; (г) = 1 4- W (г) = fr + M+---+6nz" (8 л Об)
V «o+«1z+ ••• +апгч V ’
ИЛИ
(8107>
где Ti> Тп — нули, а Х,х, ..., Хп — полюсы вспомогательной функ-
ции £ (z).
Рассуждая так же, как и в случае непрерывных систем, доста-
точно просто получить критерий, являющийся аналогом частотного
критерия устойчивости для непрерывных систем.
Если дискретная система устойчива в разомкнутом состоянии,
то для того, чтобы система была устойчива в замкнутом состоянии,
годограф W (z) не должен охватывать критическую точку (—1, / 0)
при изменении частоты от 0 до ®г = 2п/т,.
Если же дискретная система неустойчива в разомкнутом состоя-
нии и р полюсов W (z) расположено внутри единичной окружности,
то для того, чтобы система была устойчива в замкнутом состоянии,
число оборотов годографа W (г) относительно точки (—1, /0) при
изменении частоты от 0 до юг = 2л/тг должно быть равно п — р.
Пусть
Кг (1 — е~Тг
(z — 1) (г — е'Тг)
При построении годографа W (z) необходимо для каждого значе-
ния z умножить или разделить друг на друга векторы типа К, z,
(z — е"т') и (z — 1), 1 — е~хг. Все они без особого труда могут
быть получены на плоскости z графическим путем.
Предположим, что
W(z) = ._ °:792/<г___
(?—l)(z— 0,208)
Пусть z равно некоторому значению zlt т. е. z = zt (вектор А) (см.
рис. 8.30, а), тогда вектор zx — 1, равный разности векторов zx и 1,
изображенных на рис. 8.30 через векторы А и В, можно изобразить
вектором М, а вектор (zx — 0,208), равный А — С, — вектором N-
Произведя необходимые перемножения, получим на плоскости
W (z) (рис. 8.30, б) вектор W (zj. Частоту <въ соответствующую дан-
ному zx, определяют из соотношения zt = e'ffllV Например, если
§33
W (z); 6 — кривая (годограф) W (2)
Рис. 8.30. Критерий устойчивости:
а — построение кривой
Я /
/
равенство / = е удовлетворялось, нужно,
степени был /л/2, т. е. = /л/2, откуда ©j =
Zi = /, то, чтобы
чтобы показатель
= 1 рад/с и т. д.
При изменении г по окружности единичного радиуса, как это
видно из рис. 8.30, б, годограф W (z) не охватывает критическую
точку, т. е. система при данном коэффициенте усиления устойчива.
Анализ устойчивости на плоскости г. Рассмотрим теперь кри-
терий, позволяющий производить анализ устойчивости по располо-
жению полюсов Z-передаточной функции замкнутой системы. Этот
критерий удобен, если имеется цифровая ЭВМ, снабженная про-
граммой для вычисления полюсов Z-передаточной функции, т. е.
корней характеристического уравнения дискретной системы. Со-
гласно формуле (8.74) можно написать
Y (z) = Ф (z) G (z),
где передаточная функция Ф (z) является дробно-рациональной
функцией от ~
G (z) = 1.
Тогда
z. Предположим, что все полюсы Ф (г) различны и
и временная
ф = . । —_____I_____1
последовательность k (ктг) определяется выражением
k (КТГ) = Ь\К\ 1 -|- 1 4“ ‘ ' 4“ ’•
..., Хп являются п простыми полюсами Ф (z).
что последовательность k (ктг) будет оставаться огра-
Числа Х2,
Очевидно,
ниченной при кэь 1, если удовлетворяется следующее условие:
|Хг|< 1, i = l, 2, .... п, (8.108)
334
т. ё. если полюсы передаточной функции расположены нйутри круга
единичного радиуса. Можно доказать, что этот результат справедлив
также и для случая, когда полюсы передаточной функции являются
кратными.
Устойчивость дискретных систем, описываемых уравнениями
в переменных состояния. Рассмотрим критерий устойчивости для
дискретных систем, описываемых линейными разностными уравне-
ниями в переменных состояния:
х [(/с + 1) тг] = Adx (ктг) + Bdu (ктг).
Как это было показано ранее, его решение имеет вид
К—1
х (кхг) = AdX (0) 4- 2 Ad'1-lBdu (zTr).
i=0
Для анализа устойчивости можно ограничиться случаем, когда
u (irr) = 0, т. е. решением однородного уравнения
х [(/с + 1)тг] = Adx(/CTr),
имеющим вид
х (ктг) = AdX (0). (8.109)
Если предположить, что собственные значения переходной ма-
трицы в формуле (8.109) различны, то при помощи теоремы разло-
жения Сильвестра матрица А^ может быть представлена в виде
ряда. Так, если матрица А</ является матрицей (п, п) с собственными
значениями Л1( Х2, ..., Хп, то
Ad=ibi№, (8.110)
i=l
где
Подставляя выражение (8.110) в уравнение (8.109), найдем (опуская
*г)
х (к) = 2 АЛ?Х(О). (8.111)
i=i ‘
Из этого выражения очевидно, что последовательность векторов
{х(0)> х(1)........................х(к)...|
стремится к нулю при произвольных начальных условиях только
в том случае, если каждый из членов X? стремится к нулю.
Таким образом, для того чтобы дискретная система была устой-
чива, собственные значения Хг матрицы А должны удовлетворять
условию
|Хг|<1, 1 = 1,2.......п. (8.112)
335
Выше был рассмотрен случай, когда всё собственные значений
матрицы А различны. Однако можно показать, что критерий устой-
чивости в виде неравенства (8.112) справедлив и для систем с соб-
ственными значениями любой степени кратности.
Пример. Предположим, что
А_ ГО,368 — 0,6321
“ [0,632 — 0,632]
й шаг Дискретности, тг = 1.
Тогда собственные значения определяют с помощью уравнения
(X I — А) =
% —0,368
—0,632
0,632
X — 0,632
= X2 — X + 0,632 = 0,
откуда | Xj | = [ Ха | = 0,796 < 1, и, следовательно, система устойчива.
ГЛАВА 9. ЭЛЕМЕНТЫ ТЕОРИИ НЕЛИНЕЙНЫХ СИСТЕМ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
8.1. НЕЛИНЕЙНЫЕ СИСТЕМЫ
Системы автоматического регулирования (САР), содержа-
щие звенья, движение которых можно описывать нелинейными диф-
ференциальными уравнениями, относятся к нелинейным системам.
Они часто включают в себя так называемые типичные нелинейности
хвых:
и)
*вх
Рис. 9.1. Статические характеристики хвых = /(хВх)
типичных нелинейностей САР:
а — релейная однозначная; б — то же, при наличии межкои-
тактного расстояния; в — релейная неоднозначная; в — ха-
рактеристика элемента с ограничением изменения выходной
координаты; д — релейная неоднозначная характеристика
элемента при наличии зазора; е—нелинейная неоднозначная
характеристика при наличии зазора и ограничения измене-
ния выходной координаты; ж — нелинейная характеристика
типа «идеального диода» (Детектора)»; з — нелинейная ха-
рактеристика типа «модуль»; и — линейная характеристика
с зоной нечувствительности
236
Рис. 9.2. Структурная схема нелинейной САР
х
систем автоматического регулирова- Линейная Нелинейная
ния, для которых справедлива за- часть часть
висимость системы системы
ХВЫХ f (Хвх)> У
где хвх — входной сигнал; хвых — ---------------
выходной сигнал.
Статические характеристики типичных нелинейностей САР при-
ведены на рис. 9.1. К нелинейным относятся релейные системы, со-
держащие элементы с релейными характеристиками. Моменты вре-
мени, при которых происходит размыкание и замыкание системы,
заранее неизвестны. Они определяются внутренними свойствами
системы. Физические процессы в системе описываются дифферен-
циальными уравнениями с переменными коэффициентами, но эти
коэффициенты представляют собой функции регулируемой вели-
чины, а не времени t.
Нелинейные САР могут быть представлены в виде структурной
схемы, изображенной на рис. 9.2, для получения которой выполняют
следующие операции:
составляют дифференциальные уравнения для всех звеньев
систем автоматического регулирования;
производят линеаризацию тех звеньев, где это допустимо (в ре-
зультате разделяют звенья на линейные и нелинейные);
объединяют линейные звенья в один блок (линейная часть);
производят анализ систем одним из методов нелинейной теории
автоматического регулирования.
Для анализа нелинейных САР применяют следующие методы:
фазовых траекторий (метод фазовой плоскости); припасовывания
и гармонической линеаризации.
9.2. МЕТОД ФАЗОВЫХ ТРАЕКТОРИЙ
При изображении процесса на фазовой плоскости урав-
нение 2-го порядка удобно свести к двум уравнениям 1-го порядка
вида
где /х и /2 — в общем случае нелинейные функции координат. Для
изображения процесса на фазовой плоскости делением второго
уравнения на первое исключают время, т. е.
dy _ у)
dx К(х, у) •
В результате получают нелинейное дифференциальное уравне-
ние, общих методов точного решения которого не существует. В каж-
237
Рис. 9.3. Периодические колебания:
а — кривая х — f (t); б — фазовый портрет системы при периодических незатухающих
колебаниях
дой задаче приходится изыскивать частный метод его решения.
Решением уравнения будет некоторая функция у = F (х), графиче-
ское изображение которой на фазовой плоскости называют фазовой
траекторией.
Фазовая плоскость — это плоскость, на которой по двум оордина-
там х и у откладывают какие-либо две переменные, характеризу-
ющие поведение системы, например, отклонение регулируемой ве-
личины х и скорость х = у = dx/dt.
Изображение процесса на фазовой плоскости обеспечивает доста-
точную наглядность. Однако рассмотрение ограничено только та-
кими системами, когда динамика системы описывается уравнением
2-го порядка. В тех случаях, когда динамика системы описывается
уравнениями более высокого порядка, применяют многолистные
фазовые плоскости.
Изображение на фазовой плоскости основных типов процессов
регулирования. Периодические колебания (рис. 9.3). Периодические
колебания с постоянной амплитудой и частотой на фазовой пло-
скости изображаются в виде некоторого замкнутого контура —
замкнутой фазовой траектории. Каждому периоду колебаний соот-
ветствует прохождение изображающей точкой Л4 всего контура (Д,
В, С, D, Е, F).
Если колебания синусоидальные, то фазовая траектория имеет
вид эллипса и описывается уравнениями;
х (t) — a sin <о/;
z/ (0 — = пи cos со/,
где со = 2л/Т — круговая частота (здесь Т — период колебаний);
а, а® — соответственно полуоси эллипса по осям х и у.
Если колебания не синусоидальные, то замкнутый контур отли-
чается от эллипса.
Затухающий колебательный процесс
(рис. 9.4). Затухающий колебательный процесс изображается на
фазовой плоскости в виде спиралевидной сходящейся фазовой троек-
238
тории. Когда наступает та же фаза колебаний, что и в начальный
момент времени, изображающая точка М окажется на расстоянии
меньшем, чем хнач.
Расходящийся колебательный процесс
(рис. 9.5). Расходящийся колебательный процесс изображается на
фазовой плоскости в виде спиралевидной расходящейся фазовой траек-
тории.
Затухающие к нулю апериодические про-
цессы (рис. 9.6) имеют на фазовой плоскости фазовые траектории,
изображенные на рис. 9.6.
Расходящиеся апериодические процессы
имеют на фазовой плоскости фазовые траектории, изображенные на
рис. 9.7. 2
Правило построения фазовых тракторий. Фазовые траектории
строят по заданным уравнениям динамики САР.
В верхней половине фазовой плоскости, где у >0, изобража-
ющая точка всегда движется слева направо в сторону увеличения х,
а в нижней половине фазовой плоскости, где у < 0, справа налево.
Это правило используют для расстановки стрелок вдоль фазовой
траектории.
На оси х, которая разделяет верхнюю и нижнюю половины фа-
зовой плоскости, у = 0, dx/di = 0, т. е. скорость изменения коорди-
наты х = 0, фазовая траектория пересекает ось х под прямым углом.
По полученным фазовым траекториям можно судить о динами-
ческих свойствах САР.
При анализе фазовых траекторий выделяются особые точки.
В этих точках не существует определенного направления касатель-
ной к фазовой траектории, т. е. dyldx = 0/0. _
В особых точках фазовые траектории не пересекаются друг
с другом. Фазовые траектории сходятся к особым точкам или вы-
ходят из них. Особые точки являются точками равновесия.
Для нелинейных САР могут быть выделены, например, следу-
ющие случаи:
1. Система имеет элемент с зоной нечувствительности и насы-
щением. Статическая характеристика такого элемента изображена
на рис. 9.1, б. Установившемуся состоянию равновесия на фазовой
плоскости соответствует целая область возможных состояний рав-
новесия (рис. 9.8). Особая точка на фазовом портрете превращается
в отрезок прямой АВ. Его величина зависит от зоны нечувствитель-
ности и величины насыщения.
2. Поведение системы характеризуется расходящимся процес-
сом, но до определенных пределов. Система неустойчива в «малом»,
но амплитуда расходящихся колебаний ограничена. В начале ко-
ординат на фазовой плоскости находится неустойчивый фокус.
Фазовая диаграмма системы показана на рис. 9.9. Спирали фазовых
траекторий расходятся из фокуса и приближаются асимптотически
к замкнутому контуру, который имеет конечные размеры. Все изоб-
ражающие точки, которые начинают свое движение вне этого кон-
тура, также асимптотически приближаются к этому контуру. При
239
Рис. 9.4. Затухающий колебательный процесс:
а — кривая х ~ f (t); б — фазовый портрет системы при затухающем колебательном
процессе
Рис. 9.5. Расходящийся ко-
лебательный процесс:
а — кривая х — f (i); б — фа-
зовый портрет ' системы при
расходящемся .колебательном
процессе
Рис. 9.6. Затухающие апериодические процессы:
а — /—б — кривые х — f (t); Л — начальное значение процесса; В — максимальное (ми-
нимальное) значение; С — х (0 = 0; б — фазовый портрет системы (кривые Г —б') при
затухающих апериодических процесса^ ‘
240
Рис. 9.7. Расходящиеся аперио-
дические процессы:
'а — 1—4 — кривые х — f (0; б —
фазовый портрет системы (кривые
Г—4') при расходящихся аперио-
дических процессах
этом контур называют устойчивым предельным циклом (ПЦ). Он
представляет собой замкнутую изолированную траекторию. Если
изображающая точка под влиянием внешнего воздействия сойдет
на другую траекторию, то она обязательно будет двигаться по вну-
тренней или внешней спирали, т. е. будет «наматываться» на контур
и приближаться к нему асимптотически. Устойчивый предельный
цикл свидетельствует о наличии области устойчивых колебаний.
Такие колебания называют автоколебаниями.
3. В системе происходит затухающий процесс до тех пор, пока
начальные отклонения не выйдут за пределы некоторой области.
Система устойчива в «малом», но неустойчива в «большом». Здесь
также имеется изолированная замкнутая траектория —• неустойчи-
вый предельный цикл (ПЦ) (рис. 9.10). Если изображающая точка
находится внутри предельного цикла, то она движется к устойчи-
вому фокусу — началу координат. Если же изображающая точка
находится вне предельного цикла, то она удаляется по спирали
в бесконечность. Изображающая точка не может двигаться по не-
устойчивому циклу.
4. В системе имеется несколько предельных циклов. На рис. 9.11
показана фазовая диаграмма системы, когда имеется два пре-
дельных цикла — внутренний неустойчивый ПЦ (с него сма-
тываются фазовые траектории) и внешний устойчивый ПЦ2
(на него наматываются фазовые траектории).
а
Рис. 9.8. Фазовый портрет для системы
с зоной нечувствительности и насыще-
нием
ПЦ
Рис. 9.9. Фазовая диаграмма системы,
имеющей устойчивый предельный цикл
§41
Рис. 9.10. Фазовая диаграмма системы,
имеющей неустойчивый предельный
цикл
Рис. 9.11. Фазовая диаграмма системы,
имеющей два предельных цикла
Возможен также полуустойчивый предельный цикл, когда со-
седние фазовые траектории навертываются на предельный цикл
с одной стороны и свертываются с другой.
Построение фазовой трактории в системе, имеющей характери-
стику, показанную на ]эис. 9.1, б. Вид фазовой траектории можно
получить из уравнения
dt* + х~
где р — постоянная величина, не зависящая от времени.
Или в операторной форме
(Т2рг + 1) х = ±р.
Общее решение этого уравнения находится как сумма общего
решения однородного уравнения и частного решения. Таким
решением может быть, например, ±р. Общее решение будет
х = ±Р + A cos со/; х = —Дсо sin со/,
где со = 2п/Т — круговая частота; А — коэффициент, определяе-
мый начальными условиями.
Уравнение фазовой траектории
т!+ш=’-
Последнее уравнение представляет собой эллипс с центром в точке
(±р; 0). Знак перед р находят из условия — сила трения направ-
лена против движения. Движение по
фазовой траектории начинается от
У,
точки I (рис. 9.12), имеющей коорди-
наты х = xQ; у = 0. От точки I до
точки II фазовая траектория пред-
ставляет собой эллипс с центром в
точке 0х (OOi = р). Уравнение эл-
Рис. 9.12. Построение фазовой траектории
в системе, имеющей насыщение
242
Лйпса находят после определения значения Лх по начальным усло-
виям. При t ®= О'х ха, у = 0.
, Уравнение эллипса для участка /—II
+ (х~^\2 । Г-„.У....12=1
\ А / ' \ «А / ’ \Хо — Ц / I L «О (х0 — Ц)2 J
Координаты точки II: х — —х0 + 2 ц; у = 0. При изменении на-
правления движения за точкой II сила трения меняет свой знак
на противоположный.
Уравнение фазовой траектории на участке II—III
(£±±Л2 + = 1
\ А / ' \ «А / к
Это уравнение эллипса с центром в точке О2. Для определения А
исходят из начальных условий точки II:
х = — х0 + 2ц; у = 0.
Значение А2 определяют из уравнения
(=ТрО2=1‘> Л = Хо-Зр.
Уравнение эллипса на участке II—III
/ х + ц \2 Г у 12 _ J
\ х0 — Зц ) ' L «О (Хо — Зц) J
Координаты точки III:
х = х0 — 4ц; у = 0.
Построение фазовых траекторий продолжается о тех пор, пока
изображающая точка не попадет в зону нечувствительности О2ОХ
(точка IV), после чего движение прекращается.
9.3. АВТОКОЛЕБАНИЯ В НЕЛИНЕЙНЫХ САР
Как уже отмечалось, в нелинейных САР при малых на-
чальных отклонениях может быть расходящийся колебательный
процесс (кривая /; рис. 9.13), а при больших отклонениях — затуха-
ющий колебательный процесс (кривая 2). На фазовой плоскости эти
процессы разграничивает замк-
нутый контур — устойчивый
предельный цикл. Он соответ-
ствует периодическому колеба-
тельному процессу (кривая 3) с
постоянной амплитудой а0 и
постоянной частотой соо — авто-
колебаниям. К этому контуру
асимптотически приближаются
Рис. 9.13. Автоколебания в нелиней-
ных САР
243
разовый траектории изнутри и снаружи. Период колебаний Т из
фазового портрета системы траектории не ясен. Равновесное состоя-
ние системы неустойчиво. Но процесс расходится до определенной
амплитуды а0. Практически колебательный процесс будет устойчи-
вым, так как при одних начальных значениях он расходится, а при
других — затухает.
Относительно равновесного состояния эта система неустойчива,
но она обладает устойчивыми периодическими колебаниями с опре-
деленной амплитудой а0. Такая система пригодна для целей регули-
рования, если амплитуда колебаний ай невелика и частота их не
опасна, т. е. наложение этих колебаний на постоянное значение
регулируемой величины практически допустимо по техническим
требованиям, предъявляемым к данной системе. В этом случае
систему можно считать практически устойчивой.
Если же амплитуда устойчивых периодических колебаний а0
велика настолько, что для целей регулирования система не годится,
то последнюю считают практически неустойчивой. Такая система
равноценна системе с расходящимся колебательным процессом.
Следует отметить, что эти колебания не являются вынужденными ко-
лебаниями, так как возмущающее воздействие f (t) = 0. Они яв-
ляются собственными свободными колебаниями системы и имеют
вполне определенную амплитуду и частоту, которые не зависят от
начальных условий процесса, а зависят только от параметров самой
системы, т. е. объекта и регулятора.
Эти устойчивые собственные свободные периодические колебания
системы возникают не только при одних каких-то граничных соче-
таниях параметров системы, а в целой области сочетаний параметров
системы (подобно области устойчивости равновесного состояния
в линейной САР). Такого рода устойчивые собственные свободные
колебания, которые обладают отмеченными выше свойствами, и назы-
вают автоколебаниями. Автоколебания могут возникнуть только
в нелинейных системах. Если в реальных САР наблюдаются автоко-
лебания, то это является следствием наличия нелинейности в этих
системах.
Автоколебания могут возникать не только в САР. К автоколеба-
тельным системам можно отнести ламповый генератор, электрома-
гнитный прерыватель, часы, духовой инструмент, поршневой дви-
гатель (паровой и двигатель внутреннего сгорания), шимми (колеба-
ния управляемых колес автомобиля), флаттер (вибрация крыла или
хвостового оперения самолета). Автоколебательный характер носят
и такие процессы в живых организмах, как дыхание и работа
сердца.
Дадим следующее определение автоколебательной системе —
устройство (система), способное создавать незатухающие колебания.
Оно характеризуется наличием, источника энергии, клапана (вен-
тиля), который регулирует поступление энергии в колебатель-
ную систему, и обратной связи с колебательной системы на кла-
пан.
244
М. ПРИМЕР НЕЛИНЕЙНОЙ САР РЕЛЕЙНОГО ТЙЙА
Для понимания работы нелинейной системы снача-
ла рассмотрим линейную САР температуры непрерывного
действия (рис. 9.14). Пусть необходимо поддерживать постоян-
ную температуру объекта 2, охлаждаемого воздухом. Регулирую-
щим органом являются шторки 1, угловое положение кото-
рых ф определяет интенсивность поступления охлаждающего
воздуха.
Измерительное устройство регулятора состоит из термометра
сопротивления 3, включенного в качестве одного из плеча моста 4,
л гальванометра 5, имеряющего ток в диагонали моста. Мост 4 на-
страивают так, чтобы при заданной температуре, которую надо под-
держивать неизменной, ток в диагонали моста отсутствовал. Чув-
ствительный элемент регулятора (<3—5) перемещает стрелку потен-
циометра 6 на величину S, пропорциональную отклонению темпе-
ратуры 6. Потенциометр управляет работой электродвигателя ЭДв
с помощью усилителя 7. Электродвигатель через редуктор 8 изменяет
положение шторок 1.
Недостаток системы— стрелка гальванометра 5 имеет значитель-
ную механическую нагрузку. Это снижает чувствительность измери-
теля и всего регулятора. Для устранения этого недостатка при управ-
лении работой привода шторок вместо гальванометра 5 и потенцио-
метра 6 может быть применено релейное звено — поляризованное
реле 5', 6' (рис. 9.15).
Средний контакт поляризованного реле в зависимости от знака
тока в диагонали моста 4, т. е. от знака отклонения регулируемой
величины 0, замыкается с правым или левым контактом. Ток якоря
включается в одном или в другом направлении. Электродвигатель
ЭДв через редуктор 8 перемещает шторки 1, увеличивая или умень-
шая охлаждающий воздушный поток.
Рис. 9.14. Линейная САР регулирования температуры непрерывного действия
245
Рис. 9.15. Релейная сис-
тема регулирования тем-
пературы
Уравнение объекта регулирования может быть записано в виде
' To-f- + 9 = -M+/(O. (9-1)
где То — постоянная времени объекта; 9 — отклонение темпера-
туры; k0 — «коэффициент усиления» объекта регулирования, коэф-
фициент эффективности воздействия регулирующего органа на
объект; <р — угол поворота шторок; f (t) — возмущающее воздействие
на объект — изменение температуры за счет любых других причин,
кроме поворота шторок, например, изменение теплового режима
работы самого объекта, изменение температуры охлаждающего
воздуха и т. п.
Параметры объекта Тв и k0 могут определяться экспериментально.
Измерительное устройство (термометр сопротивления 3 и мост 4)
характеризуется тем, что ток I в диагонали моста, т. е. в управля-
ющей обмотке реле, пропорционален 0, т. е.
I = М-
Из сети в управляемую цепь реле (цепь контактов) подается
постоянное напряжение U — с. Напряжение U, питающее электро-
двигатель, изменяется в зависимости от величины тока / в диагонали
моста (рис. 9.16).
Нейтральному положению среднего контакта реле соответствует
значение U = 0 при малых величинах тока — b < /< b (рис. 9.16, в).
Интервал — b < I < Ь, где U = 0, называют зоной нечувстви-
тельности реле. Зависимость выходной величины реле U от входной
называют статической характеристикой реле.
Рис. 9.16. Характеристики реле'(7 —JJJY
bi. Ьа — соответственно токи отпускания и срабатывания реле
246
Рис. 9.17. Структурная
схема нелинейной САР
температуры:
ОР — объект регулирования;
РО — регулирующий орган;
П — привод; ЧЭ — чувстви-
тельный элемент; Р — реле
При величине тока I — b реле срабатывает, включая напряже-
ние U = с. При обратном (отрицательном) направлении тока I
реле срабатывает при / = —Ь. При этом электродвигатель изменит
направление вращения.
Если величина тока срабатывания реле не совпадает с величиной
тока отпускания, т. е. коэффициент возврата реле kB #= 1, то ста-
тическая характеристика реле имеет петлю (рис. 9.16, б).
Зона нечувствительности реле (рис. 9.16, а и б) получается тогда,
когда средний контакт имеет нейтральное положение. Если этого
нет, то якорь реле будет перебрасываться из одного крайнего поло-
жения в другое (рис. 9.16, в). В этом случае получается идеальная
релейная характеристика без зоны нечувствительности и
без петли гистерезиса. Реальная характеристика при отсутст-
вии зоны нечувствительности будет иметь петлю гистерезиса
(рис. 9.16, г).
Статическая характеристика реле описывается уравнением
U = F (I),
где F (/) — нелинейная функция, которая задается графически
одной из форм, приведенных на рис. 9.16.
Уравнение реле существенно нелинейно. Его нельзя линеари-
зовать.
Уравнение электродвигателя с редуктором и со шторками с уче-
том электромеханической постоянной времени 7\ можно записать
в следующем виде:
т d2<₽ । d<₽
11 dt* "Г dt
k3U,
где q> — угол поворота шторок.
Таким образом, система замкнулась и ее можно представить
в виде структурной схемы, изображенной на рис. 9.17. Релейный
регулятор называют трехпозиционным, если он имеет релейные
характеристики, показанные на рис. 9.16, а, б, и двухпозиционным,
или регулятором по принципу «да—нет», при релейных характери-
стиках, изображенных на рис. 9.16, в, г. Если принять характе-
ристику реле идеальной (см. рис. 9.16, в) и не принимать во
внимание постоянных времени регулятора, то закон регулирова-
ния в релейной системе без нейтрального положения (двухпози-
247
ционной системы) определяется характеристикой,
рис, 9.18, а;
= k3c при 6 > 0;
показанной на
= —k3c при 9 < 0.
Для трехпозиционной системы с нейтральным
(рис. 9.18, б) закон регулирования будет
= k3c при 9 > 0;
положением
-#=о при е=°;
—k3c при 9<<0.
Работа реле во времени показана на рис. 9.19, а. Если реле
имеет характеристику типа, изображенного на рис. 9.16, а, то изме-
нение напряжения U, которое подается на электродвигатель, будет
происходить так, как это показано на рис. 9.19, б. Переключения
реле происходят при определенных значениях входной величины
I = ±Ь.
Для определения хода процесса регулирования выделяют не-
линейное звено, а все остальные звенья системы, включая и объект
регулирования, объединяют в линейную часть (рис. 9.20). Уравне-
ние динамики линейной части получают, подставляя значение 9,
z . выраженное через /, в уравнение (9.1)
।--—»—:------1 объекта:
----------------- ------------- т "+/ = _^1ф + ^(0.
лч-------------------из-“
”1 и 1 Рис. 9-20- Линейная часть САР и нелинейное звено:
—........ ... ... . ,77 — линейная часть; НЭ — нелинейный элемент
248
Из Последнего выражения путем нескольких преобразований ПО-
лучим уравнение динамики линейной части системы в виде
тл -5- + (Т. + 7-,) 5- + 4 = - WJ + к ( Г, -g- + 4)..,
(9.2)
где ka ~ k±k3 — коэффициент усиления линейной части регуля-
тора.
Уравнения нелинейного звена можно представить в виде нели-
нейной функции
U Р (/),
которая соответствует одной из характеристик, показанной на
рис. 9.16.
Следует отметить, что к релейным системам регулирования и
управления относят не только системы, содержащие реле, а всякие
системы, в составе которых есть звенья, обладающие статическими
характеристиками релейного типа, когда выходная величина звена
меняется скачкообразно при непрерывном изменении входной ве-
личины.
Выше рассматривалась система, в которой релейное управление
осуществлялось приводом регулирующего органа. Однако часто
встречаются нелинейные САР, в которых сам регулирующий орган
работает в релейном режиме. Типичным примером двухпозиционного
релейного регулирования с релейным режимом работы регулиру-
ющего органа является вибрационное регулирование напряжения
генератора постоянного тока. Принципиальная схема такого гене-
ратора Г показана на рис. 9.21. Регулируемой величиной является
напряжение U.
Уравнение чувствительного элемента — электромагнита ЭМ с уче-
том постоянной времени (индуктивности) можно записать следу-
ющим образом:
Изменение тока Л/ вызывает изменение тягового усилия Электро-
магнита ЭМ. При его уменьшении пружина замыкает контакты X
и выключает добавочное сопротивление 7?д в цепи обмотки возбуж-
дения ОВ генератора Г. Уравнение регулирующего органа в этом
случае имеет вид релейной Характеристики
\r = F (А/),
Показанной На рис. 9.22.
Регулируемый объект (генератор) описывается уравнением
To^ + W = ^kobr + f(t).
249
Рис. 9.21. Принципиальная схема САР на-
пряжения генератора постоянного тока
Аг
-4,,0
\аг=1-Яа
Ь л!
Рис. 9.22. Релейная характерис-
тика регулирующего органа
9.5. МЕТОД ПРИПАСОВЫВАНИЯ
Одним из методов отыскания процесса регулирования в не-
линейных системах является метод припасовывания. Ниже он будет
рассмотрен на примере нелинейной САР температуры. При этом
предполагается, что реле имеет характеристику типа а (см. рис. 9.16).
Пусть далее известны начальные условия процесса, которые харак-
теризуют начальную точку искомой кривой I (/). Если 111 < Ь,
то U = 0. Уравнение (9.2) решают при этом условии; решение про-
должают до тех пор, пока не станет I = Ь. Когда I i>b, уравнение
(9.2) решают при U = с и т. д.
Если пренебречь малой величиной произведения T0Ti и поло-
жить возмущающее воздействие f = 0, то метод припасовывания
состоит в последовательном решении уранений;
(П + Л)-^-+4г = ° при
(То + Л) + % = -koknc при I > Ь-
Го + Л)-^+# = 0 при ]/]<&;
(7,о + Л)-^г + -^- = ^лС при/<— бит. д.
Таким образом, процесс в нелинейной релейной системе может
быть найден путем решения различных линейных уравнений по
участкам, границы между которыми определяются достижением
величиной I значений I = b и I — —Ь. Прн этом в качестве началь-
ных условий для уравнения каждого участка берутся значения
переменных, полученные в конце предыдущего участка.
Картина фазовых траекторий для_ этой системы может быть
нанесена на фазовой плоскости.
Здесь метод припасовывания рассмотрен на примере системы,
которая содержит электромагнитное реле для управления работой
привода регулирующего органа.
250
Следует отметить, что для улучшения процесса регулирования
в релейных системах применяют те же средства, что и в непрерывных
линейных системах. К этим средствам относятся:
последовательные корректирующее устройства (введение произ-
водных и интегралов в закон регулирования):
параллельные корректирующее устройства (введение жестких
и гибких ОС);
корректирующее устройства по возмущению (комбинация прин-
ципа регулирования по отклонению регулируемой величины с прин-
ципом регулирования по возмущающему воздействию).
Кроме введения перечисленных корректирующих средств для
изменения качественных показателей работы релейных САР суще-
ственное значение имеют изменения ширины зоны нечувствитель-
ности и ширины петли гистерезиса.
9.6. ПРИМЕНЕНИЕ МЕТОДА ГАРМОНИЧЕСКОЙ
ЛИНЕАРИЗАЦИИ ДЛЯ АНАЛИЗА УСТОЙЧИВОСТИ
НЕЛИНЕЙНЫХ САР
Амплитуда а0 и частота <о0 и сам факт возникновения авто-
колебаний существенно зависят от параметров системы. Для опре-
деления этих зависимостей следует привлекать дифференциальные
уравнения системы 3-го и более высокого порядка (иногда бывает
достаточно 2-го). Решение этих уравнений возможно методом при-
пасовывания. Однако получение этим методом зависимостей а0 и w0
От параметров систем выше 2-го порядка достаточно сложно. Поэтому
применяют приближенный метод, который для практических целей
обладает достаточной точностью и дает непосредственные выражения
требуемых зависимостей амплитуды и частоты автоколебаний от
параметров системы. Этот метод можно использовать для общего
анализа свойств системы регулирования и при выборе структуры
системы и параметров во время проектирования и наладки системы.
Сущность метода гармонической линеаризации состоит в отыска-
нии периодического решения на входе нелинейного элемента, разло-
жении сигнала на выходе нелинейного элемента в ряд Фурье и его
замены первой гармоникой. Такая замена справедлива, если САР
является фильтром низких частот, хорошо гасящим колебания
высших гармоник.
Основой метода является предположение о том, что автоколеба-
ния приближенно можно искать в синусоидальной форме
х — a sin со/.
В принципе, автоколебания всегда имеют несинусоидальную
форму, хотя практически могут быть очень близки к синусоиде.
Метод гармонической линеаризации можно рассмотреть на при-
мере нелинейной САР температуры, приведенном выше. Структур-
ная схема этой системы изображена на рис. 9.23.
Входная величина реле здесь обозначена через х, выходная
величина — через у (ранее эти величины были обозначены через
951
У/
Рис. 9.23. Структурная схема
нелинейной САР
Рис. 9.24. Представление пря-
моугольной кривой в виде суммы
ряда синусоид
6)
I я U соответственно). Характеристика реле у (х) идеальная (см.
рис. 9.16, б). Если входная величина реле изменяется по синусоиде,
то изменение выходной величины выражается прямоугольной за-
висимостью у (t) (см.,, рис. 9.23).
Зависимость у (I) может быть показана в виде суммы ряда си*
нусоид (рис. 9.24) или гармонических составляющих (гармоник).
1-я гармоника
sin со/,
где
<4Х = 4с/'л;
3*я гармоника
Уа Аа sin Зы/,
где
А а == 4с/(3я);
5-я гармоника
уь » sin бсо/,
где
Аь = 4с/ (5л)
и т, д., где со — 2л/Т — частота.
Если увеличивать число гармоник, то сумма синусоид ряда
у = у± + у3 4- уъ + у-; + ... будет стремиться к прямоугольной
зависимости.
Данное представление произвольной периодической кривой в виде
суммы гармонических составляющих называют разложением в ряд.
252
Фурье, а все гармоники, кроме первой, — высшими гармониками
разложения. В общем случае ряд Фурье содержит еще и четные гар-
моники (z/2, z/4, z/e ...).
Для того чтобы входная величина реле х (t) была близка к си-
нусоиде, нужно, чтобы колебания с частотой со (1-я гармоника у±)
с выхода реле хорошо передавались через все звенья системы (на
рис. 9.23 это'привод, регулирующий орган, регулируемый объект,
чувствительный элемент), но одновременно с этим нужно, чтобы все
колебания с высшими частотами (высшие гармоники у3, у-а ...) плохо
передавались через те же звенья системы, т. е. амплитуды высших
гармоник гасились. Это, как правило, наблюдается в реальных САР.
Элементы САР являются фильтрами нижних частот. Прямоугольная
зависимость у (t) в результате прохождения через все звенья системы
превращается в синусоиду х (1), а пройдя через реле х (t), преобра-.
зуется снова к прямоугольному виду и т. д. Следовательно, можно
искать автоколебания для переменной х (/) в синусоидальной форме.
Первый этап приближенного определения автоколебаний в ре-
лейных системах состоит в гармонической линеаризации релейной
(нелинейной) характеристики. Гармоническая линеаризация бази-
руется на том предположении, что в разложении зависимости пря-
моугольной формы на выходе реле все высшие гармоники в после-
дующих звеньях гасятся и во внимание не принимаются. Учитывается
только первая гармоника. Релейную характеристику в общем слу-
чае обозначают как нелинейную функцию
У ~ Р (х).
При х = a sin at 1-я гармоника ух для релейных характеристик без
петель (однозначных релейных характеристик) определяется фор-
мулой
У1 *“ Ai sin at,
где Ах является коэффициентом ряда Фурье;
ая
Д = — j F (a sin at) sin at dat,
о
Для петлевых релейных характеристик 1-я гармоника опреде-
ляется формулой
Ух — Ах sin wf + Вх cos at,
причем
2л
= F (a sin (itf) sin otf dcat;
о
2Л
Bx = j F(a sin at) cos at dat.
о
Следует отметить, что в расчетных формулах интегралы отсут-
ствуют. Так как х = a sin at, то sin at = х/а,
dx/dt = й® cos at,
253
Рис. 9.25. Линеаризация релейной харак-
теристики
Откуда
. 1 dx
cos at ------57 ,
am at
тогда для однозначных релейных ха-
рактеристик 1-ю гармонику определяют
по формуле
а для петлевых релейных характеристик используют выражение
У^=~ТХ +
Bi dx
am dt
Зависимость yt — x можно пояснить следующим образом.
Задана, например, однозначная релейная характеристика Obef
(рис. 9.25). При этом, если входная величина Изменяется по закону
х = a sin at, то 1-я гармоника выходной величины = Ar sin at
будет такой, как если бы вместо релейной характеристики Obef
была бы линейная Od с крутизной (т. е. с та, генсом угла наклона),
равной Aja.
Следовательно, при определении 1-й гармоники периодических
колебаний на выходе релейного звена при синусоидальной входной
величине и отсутствии петель релейное звено можно заменить идеаль-
ным звеном
у (9.3)
с коэффициентом усиления
q » Aja. (9.4)
В случае петлевой характеристики в том же режиме колебаний
релейное звено можно заменить идеальным линейным звеном с вве-
дением производной
0 ““ 9* + “ЗГ (9-5)
с коэффициентами усиления
q = Aja, Qi = В J а. (9.6)
Для петлевых характеристик гистерезисного типа величина л
всегда получается отрицательной, т. е. производную в уравнение (9.6)
вводят с отрицательным коэффициентом. Эта производная дает за-
паздывание в работе звена. Первый член уравнения (9.5) дх играет
точно такую же роль, что и в уравнении (9.3), т. е. является идеаль-
ным линейным звеном, с коэффициентом усиления д. Второй член
означает, что при рассмотрении 1-й гармоники на выходе
релейного звена запаздывание реле, выраженное нелинейно гисте-
резисной петлей, можно заменить линейным-выражением запаздыва-
254
ния в виде производной от входной величины с отрицательным коэф-
фициентом (<7i < 0).
Таким образом, ограничиваясь рассмотрением 1-й гармоники
на выходе релейного звена при синусоидальных колебаниях входной
величины, нелинейное уравнение релейного звена заменяют линей-
ными уравнениями вида (9.3) или (9.5). Такую линеаризацию назы-
вают гармонической линеаризацией нелинейных зависимостей. «Гар-
монической» она названа потому, что связана с разложением нели-
нейных колебаний на гармонические составляющие. Величину q
называют гармоническим коэффициентом усиления нелинейного звена.
Принципиальное отличие гармонической линеаризации от обыч-
ной линеаризации состоит в том, что при обычной линеаризации
нелинейную характеристику заменяют прямой линией с определен-
ной крутизной k, которая не зависит от входной и выходной пере-
менных звена х и у. При гармонической линеаризации нелинейную
характеристику заменяют прямой линией, крутизна которой q
зависит от величины амплитуды входного сигнала. Гармоническая
линеаризация позволяет вместо нелинейного звена получить не чисто
линейное, как при обычной линеаризации, а линейное звено, коэф-
фициент усиления которого q зависит от амплитуды входной ве-
личины а.
Гармоническая линеаризация позволяет методами линейной тео-
рии автоматического регулирования определять свойства нелиней-
ных САР.
Для идеальной релейной характеристики гармонический коэф-
фициент усиления
q = 4с((ла),
а для релейной характеристики с зоной нечувствительности
4с i /. £>» . ,
о =--- 1/1------г> « >
ла г а* ’
Коэффициенты усиления вычисляют по формулам (9.4) и (9.6).
Для двухпозищонной релейной характеристики с петлей гисте-
резиса коэффициенты гармонической линеаризации определяют с по-
мощью выражений:
4с л [, £>2 4с& ,
Г—а5-’ = а>Ь-
Для трехпозиционной релейной характеристики с гистерезисной
петлей
q ла Д V 1 а» + V 1 а2/’ <71 — па» ’ а>0»-
Графическая зависимость коэффициентов гармонической линеа-
ризации от амплитуды колебаний входной величины а для трех
типов релейных характеристик показана на рис. 9.26.
Гармонический коэффициент усиления q уменьшается с увеличе-
нием амплитуды а, начиная со значения а = b V2. Это оправдано
255
Рис. 9.26. Графическая Зависимость коэффи-
циентов гармонической линеаризации от ам-
плитуды колебаний входной величины
физически, так как выходная вели-
чина реле у = с остается неизмен-
ной при увеличении входной ве-
личины х > Ь. Коэффициент qlt
характеризующий запаздывание,
вследствие наличия гистерезисной
петли по абсолютной величине умень-
шается с увеличением амплитуды.
Коэффициенты q и для всех
типов релейных звеньев при боль-
ших амплитудах сближаются друг
нечувствительности и гистерезис-
с другом, так как роль зоны
ной петли с увеличением амплитуды в работе реле становится
менее заметной.
9.7. ОПРЕДЕЛЕНИЕ АМПЛИТУДЫ а0 И ЧАСТОТЫ
АВТОКОЛЕБАНИЙ. УСТОЙЧИВОСТЬ АВТОКОЛЕБАНИЙ
Метод гармонической линеаризации позволяет решить
задачу нахождения параметров (амплитуды а0 и частоты со0) авто-
колебаний и проверить их устойчивость.
Пусть имеется нелинейное уравнение САР вида
D (р) х + М (/?) F (х; рх) = 0.
Оно с допустимой погрешностью может быть заменено линейным
уравнением
[D(p)+ (q + ^p)M(p)]x = 0.
Коэффициенты усиления q и вблизи искомого периодического
решения изменяются незначительно и без скачков.
Характеристическое уравнение системы после гармонической
линеаризации будет
[П(р)+ (7 + -^)Л4(Д)] = 0. (9.7)
Подставляя в уравнение (9.7) р = /со, получим
D (/со) + (q + ?1/) М (/со) = 0.
Коэффициенты q и qv являются функцией амплитуды а и частоты ы.
После разделения вещественной и мнимой частей имеем
х (а, со) + ]У (а, и) = 0.
Совместное решение уравнений х (а, со) и у (а, со) позволяет опреде-
лить амплитуду а и частоту со автоколебаний, которые должны быть
256
Рис. 9.2?. блок-схема нелинейной САР:
ЛЧ — линейная часть; НЭ — нелинейный элемент
положительными и вещественными. Отрица-
тельные и комплексные решения свидетель-
ствуют об отсутствии автоколебаний.
Дальнейшей задачей является проверка
устойчивости автоколебаний. Для этого су-
ществуют различные критерии. Наиболее про-
стым является следующий. Если автоколебания устойчивы и проис-
ходят с амплитудой Оо и частотой со0, то случайное увеличение ампли-
туды на величину Да должно вызвать постепенное уменьшение
амплитуды колебаний до совпадения ее с установившимся значе-
нием Oq, т. е. происходит сходящийся процесс.
При случайном уменьшении амплитуды процесс будет расхо-
диться и стремиться к а$. При неустойчивых автоколебаниях процесс
происходит в обратном порядке. При увеличении амплитуды на Да
амплитуда колебаний продолжает увеличиваться, а при уменьше-
нии — уменьшаться. Согласно критерию устойчивости Гурвица,
если характеристическое уравнение имеет все корни, расположен-
ные в левой полуплоскости, кроме пары мнимых сопряженных
корней на мнимой оси, то все определители Гурвица положительны,
кроме предпоследнего Дп_1, который равен нулю, и последнего
Дц
Общими признаками устойчивости автоколебаний являются:
1. При значениях Оо и соо, отвечающих устойчивым автоколеба-
ниям, предпоследний определитель Гурвица равен нулю, т. е.
Ап-i (Оо, ®о) = 0.
2. Все определители Гурвица для характеристического уравне-
ния замкнутой нелинейной системы после гармонической линеари-
зации при увеличении амплитуды Oq на Да остаются положитель-
ными.
3. Все определители Гурвица для того же характеристического
уравнения при уменьшении амплитуды а0 на Да остаются положи-
тельными, кроме Дл_1 и Дп, которые становятся ’отрицательными.
Этот критерий должен соблюдаться при малых' отклонениях от
значений частоты автоколебаний соо на величину ±Дсо.
На рис. 9.27 показана структурная схема нелинейной системы.
'Для линейной части уравнение, связывающее вход и выход линей-
ной части системы, может быть записано
х3 = W (/со) х2,
где W (/со) — передаточная функция системы.
Для нелинейного элемента
ха = / (А/а) %! = NI0 (Ala) гр, х3 = хх,
где / (Л/а) — эквивалентный комплексный коэффициент усиления,
который показывает, во сколько раз 1-я гармоника на выходе не-
линейного элемента больше амплитуды А синусоидального входного
9 Солодовников В. В. и др.
257
сигнала; /0 (Ala) — Нормированный комплексный коэффициент усИ-
ления.
Уравнение свободных колебаний будет
Левая часть уравнения — величина комплексная. Приравнивая
отдельно ее действительную и мнимую части нулю, получим урав-
нения с двумя неизвестными: частотой со и амплитудой (А! а) коле-
баний. Если в результате решения этих уравнений со будут иметь
действительные значения, то колебания в системе возможны. Реше-
ние может быть получено графически. Для этого уравнение пере-
писывают в виде
Годограф левой части при изменении частоты со от —оо до оо пред-
ставляет собой АФЧХ линейной части разомкнутой системы, уве-
личенной в N раз, годограф правой части при изменении амплитуды
от 0 до оо — амплитудную характеристику нелинейного элемента
системы. Точка пересечения АФЧХ и амплитудной характеристики
нелинейного звена определяет частоту и амплитуду возможных
автоколебаний.
Если характеристики не пересекаются (рис. 9.28, а), то это
означает, что нет действительных значений частоты со и в системе
не могут существовать колебания с конечной амплитудой. При
касании характеристик друг друга (рис. 9.28, в) система находится
на границе устойчивости. Изменением параметров нелинейного
звена можно устранить' касание характеристик, т. е. подавить авто-
колебания.
Частота автоколебаний определяется по АФХ W (/®), а ампли-
туда — по обратной амплитудной характеристике нелинейного эле-
мента.
Если характеристики пересекаются в двух точках (рис. 9.28, б),
то осуществляется проверка устойчивости автоколебаний (рис. 9.29).
Точка N с частотой сог соответствует неустойчивым колебаниям,
а точка М с частотой <о2 — устойчивым колебаниям.
Если рассмотреть установившиеся колебания в точке N и увели-
чить их по амплитуде на величину 6 (A/а), т. е. колебания возра-
стут и будут иметь амплитуду (А/а)1 + 6 (A/а), то согласно ампли-
Рис. 9.28. Возможные ва-
рианты взаимного располо-
жения амплитудно-фазовой
частотной характеристики
линейной части системы и
обратной эквивалентной ха-
рактеристики нелинейного
элемента
258
Рис. 9.29. Определение периодических решений
в нелинейной системе автоматического регули-
рования
тудно-фазовому критерию устойчивости
система оказывается неустойчивой. Точ-
ка охватывается АФХ и колебания
будут возрастать.
При уменьшении амплитуды на вели-
чину б (А!а) система оказывается устой-
чивой. Точка N2 не охватывается ампли-
тудно-фазовой характеристикой и колеба-
ния будут затухать. Если в такой системе
начальные колебания были меньше, чем
(А/а)ъ то колебания не возникают.
Если рассмотреть точку М, соответствующую частоте <о2> т0 ПРИ
увеличении амплитуды колебаний на 6 (A/а) система становится
устойчивой. Точка 7И1 не охватывается АФХ и колебания умень-
шаются. При уменьшении амплитуды на величину б (А!а) система
становится неустойчивой. Точка М2 охватывается АФХ и колебания
возрастают. Система переходит в режим, соответствующий точке М.
Итак, можно сформулировать следующий вывод: если точка
амплитудной характеристики, соответствующая увеличенной ампли-
туде (А/а) + б (A/а), не охватывается амплитудно-фазовой частот-
ной характеристикой, то рассматриваемые колебания будут устой-
чивыми, а в противном случае они будут неустойчивыми,
ГЛАВА 10. ,
ОПТИМАЛЬНОЕ УПРАВЛЕНИЕ
10.1. ПОСТАНОВКА ЗАДАЧИ ОПТИМАЛЬНОГО
УПРАВЛЕНИЯ
Задачу оптимального управления можно сформулировать
следующим образом: даны цель управления, математически пред*
ставленная в виде некоторого функционала или критерия управ*
ления;
уравнения системы (обычно в виде уравнений состояния);
система граничных условий в начальный и конечный момент
времени;
система ограничений, которым должны удовлетворять перемен*
ные состояния и управления.
Требуется найти вектор управления, при котором критерий цели
управления имеет экстремум (т. е. минимум или максимум).
Математическая формулировка задачи оптимального управления
состоит в следующем. Предположим, что управляемый динамиче-
ский объект описывается системой нелинейных дифференциальных
уравнений;
х = f (х, и, 0; х(/0) = х0 (юл)
269
на интервале времени (/0, /к)- При этом векторы состояния х и уп-
равления и могут изменяться лишь в некоторой допустимой об-
ласти, т. е.
х(0€Х; u(0eU, (10.2)
где X, U — заданные множества.
Необходимо найти такой вектор оптимального управления и*,
чтобы он обеспечивал экстремум некоторого функционала (целевой
функции или критерия управления):
1 = jF[x(0, u(0, t]dt + FK[x(Q], (10.3)
*0
т. е. переводил систему из начального х (/0) = х0 в новое состояние,
расположенное внутри области FK | (хк) | 0, и удовлетворял огра-
ничениям на векторы состояния х (/) и управления и (<), которые
могут быть представлены в виде выражений (10.2) или системы
неравенств:
Gx(x, u)^0; G8(x, u) = 0. (10.4)
Следует подчеркнуть, что оптимальное управление в ряде слу-
чаев может и не существовать, и обычно очень трудно утверждать
заранее, существует ли оптимальное решение для данной конкрет-
ной задачи. Поэтому часто проще решить задачу, если вообще это
возможно, и тем самым установить, что оптимальное управление
существует, Кроме того, решение задачи нахождения оптимального
управления, за исключением ограниченного числа случаев, может
быть неоднозначным.
Найдем необходимые условия для решения задачи оптимального
управления. Эти условия дают локальный оптимум, но если найдены
все локальные оптимумы, то оптимальное управление, соответствую-
щее мобильному оптимуму, можно найти, выбрав среди локальных
оптимумов то управление, для которого функционал (10.3) имеет,
например, наименьшее минимальное значение, Таким образом, в точке
«глобального» оптимума управление и* минимизирует функционал /:
/•=jF[x*, u*. i]d/ + FH(x*(/H),
< J F [x, u, t] dt + FK [x (Q, tK] (10.5)
to
при всех u U, для которых x X.
Задача Лагранжа (отсутствие ограничений). Предположим, что
допустимые состояния х и управления и не ограничены, т. е. не
должны удовлетворять никаким ограничениям, кроме уравнения
(10.1), что начальные условия х (/0) = х0, момент времени t9 и ус-
860
ловия на конечном моменте времени tK заданы, причем х — п-мер-
ный вектор, а и — /n-мерный вектор.
Итак, для объекта управления
Х=/(Х, U, 0, х(/0) = х0.
Необходимо найти управление u*, t £ [/0, /к], минимизирующее
функционал (10.3) без учета ограничений (10.4).
Предположим, что функции F и FK, входящие в функционал (10.3),
являются гладкими, т. е. непрерывными и дифференцируемыми
функциями.
Пусть
Z*[x(0, 0 = min Z [х (0, u(0, 0. (10.6)
u (t, tK)
В уравнении (10.6) левая часть не содержит и (0. Действительно,
если оптимальное управление найдено, то минимум функционала
(10.3), т. е. Z* [х (0, /1, уже от него не зависит. ч
Имеем
'it
/* — min f F (х, u, T)dr-|-fF(x, u, т) dx - j- FK[x (/„), 0-]
или, учитывая формулу (10.6):
Z*[x(0, 0=s min f F(x, u, t)dt + Z»[x(0), 4]
“ ('• Ml;
(10.7)
Пусть ti t 4- At тогда, разлагая правую часть (10.7) в ряд ТеЙ»
лора, получим
/*£х(0, 0=* mln + u(f4-&A0, (/ + «Д0] +
tt It, f+Af) v
+ /*lx(0, fl + [тг1*(0. fl]f-yAZ +
4--^x(fl, ZJ А/4-0 (AZ)’}, 0<а<1,
откуда при AZ ->0 найдем
-^-=-min{F(x, и, 0 + [^.р(х, и*, 0}. (10.8)
Обозначим через и* управление, минимизирующее правую часть (10.8),
тогда
= -F[x, и*, 0 + [-^]Т f (х, U.0. (10.9)
Граничное условие для уравнения (10.3) имеет вид
Z* [х (ZK), ZK] = F [х (/„)]. (10.10)
Уравнение (10.9) — уравнение Гэмильтона—Якоби,
361
10.2. КВАДРАТИЧНЫЙ КРИТЕРИЙ, ЛИНЕЙНЫЙ ОБЪЕКТ
Рассмотрим теперь задачу оптимального управления для
частного случая линейного объекта и квадратичного критерия,
которую часто называют задачей аналитического конструирования
регуляторов (АКОР). Пусть уравнения объекта имеют вид
х = А(0х(04-В(0и(О, х(/0) = х0, (10.11)
где х (0 — n-мерный вектор состояния; u (0 — m-мерный вектор
управления; А (0—непрерывная матрица [лхл1; В (t)— непре-
рывная матрица [пхт].
Критерий качества регулирования
С
I {X (10), и (•), t\ = J (uTR (О Ц + х Q (0 х) di + хт (tB) FKx (tK),
<0 (10.12)
где Q (0 — симметричная, неотрицательно-определенная весовая мат-
рица [п, п ]; R (0 — симметричная, положительно-определенная *
матрица [mхmЦРК — неотрицательно-определенная матрица [пхя]т.
Требуется найти вектор управления и, при котором функцио-
нал (10.12) имеет минимум, а также определить значение I* =
= min I.
U
Смысл этого квадратичного функционала можно пояснить сле-
дующим образом.
Выражение jxTQxtft является мерой нормы ]|х]| вектора х (0,
*0 .
т. е. мерой его колебательности в процессе регулирования. Выра*
с
жение J uTRu dt является мерой количества энергии, используемой
а
для управления. Наконец, выражение x’FKxK характеризует вели*
чину нормы ||хн|| вектора х (0, т. е. отклонение от установившегося
значения на конце интервала регулирования.
Очевидно, что нужно стремиться к тому, чтобы все эти три вели*
чины были возможно меньшими. Поэтому задача оптимального ре-
гулирования состоит в том, чтобы минимизировать функцио-
нал (10.12).
Предположим, что в соответствии с видом выражения (10.12),
являющегося квадратичной формой, выражение для I* [х (0, f]
также можно представить в виде квадратичной формы
/*[х(0, Л = хт(0Р(0х(0, (10.13)
где Р (0 — симметричная матрица.
* Квадратная матрица М называется положительно (неотрицательно) опреде-
ленной, если скалярная величина uTMu положительна (неотрицательна) для всех
значений вектора и, отличных от нуля,
262
Сравнивая уравнения (10.12) с (10.3) и уравнения (10.1) с (10.11),
легко видеть, что в рассматриваемом случае
F (х, и, /) = uTRu + xTQx; (10.14)
/(х, u, /) = A(0x+B(/)u. (10.15)
Согласно выражению (10.13)
(^)Т = 2хТр (1016)
и
д7*/$ = хтРх. (10.17)
Подставляя выражения (10.14), (10.15), (10.16), (10.17) в уравне-
ние (10.8), получим
хтРх = min [uTRu 4~ xTQx 4~ 2хтРАх 4~ 2хтРВи].
и (О
Последнее выражение можно преобразовать к виду
хтРх — —min [(u + R-1BTPx)T R (и 4- R-1BTPx) 4~
+ xT(Q- PBR 1ВтР4-РА + АтР)х]. (10.18)
Если матрица R положительно определенная, то выражение (10.18)
имеет минимум при
и* (/) == — R-i (/) Вт (0 Р (t) х (/),
т. е. когда первые две скобки в выражении (10.18) обращаются
в нуль.
Но тогда
хтРх = — хт (Q - PBR 'BTP 4- РА + АТР) х.
Полученное уравнение справедливо для в<?ех х (t), поэтому
—Р (/) = РА 4~ АТР — PBR-1BTP 4~Q- (Ю.19)
Уравнение (10.19) является матричным нелинейным дифферен-
циальным уравнением Риккати. Граничные условия можно опре-
делить из следующих соображений. Согласно выражению (10.12),
полагая в нем t0 = tK, получим
/*[х(4,), /i;] = xT(/)FKx(/K),
откуда, учитывая формулу (10.13), найдем
xT(/K)P(/K)x(M = xT(QFKx(/K)
и, следовательно,
P(Q = FK.
Если F„ — 0, то
Р(М = о.
263,
Согласно (10.13) оптимальноеЗначение /* критерия (16.12):
С[Х(«. /]-хт(4)Р(/о)х(/о). (10.20)
Выражения (10.19) и (10.20) остаются справедливыми для любого
начального значения t, т. е.
u*(/) = —R-i(/)BT(/)P(0x(/) (10.21)
и
1*[х(0, /о] = хт(0Р(/)х(0. (10.22)
Формулы (10.21) и (10.22) представляют собой решение постав-
ленной задачи оптимизации.
Равенство (10.21) можно переписать в следующем виде:
и*(/)=К(/)х(0, (10.23)
где
K(/) = -R-i(0 вт(0Р(0.
Анализ выражения (10.23) позволяет сделать следующие выводы:
1) закон регулирования (10.23) приводит к структурной схеме
с ОС, так как он ставит вектор управления в непосредственную
зависимость от вектора состояния х (/);
2) закон регулирования (10.23) является «кинематическим», а не
«динамическим», так как он не содержит производных или интегра-
лов от х;
3) закон регулирования (10.23) даже в случае объекта и крите-
рия с постоянными параметрами содержит матрицу К (<), зависящую
от времени, и, следовательно, замкнутая система регулирования
является системой с переменными параметрами;
4) основные трудности задачи оптимизации — необходимость ре-
шения матричного уравнения Риккати и выбор весовых матриц Q и R;
. 5) решение характеризует свободные колебания системы.
Заметим, что решение задачи оптимизации выше было получено
в предположении, что внешние задающие (или управляющие) воз-
действия отсутствуют.
Рассмотрим решение задачи оптимального регулирования для
случая, когда интервал оптимизации Т = tK — t0 бесконечен, а не
конечен, как это было предположено ранее.
Эта задача имеет решение только в том случае, если система пол-
ностью управляема. Можно показать, что в этом случае оптималь-
ное регулирование имеет вид
u*(/) = -R-i(0 Вт(/)Р(0х(0,
где Р (0 так называемое установившееся решение уравнения Рик-
кати (10.20) при граничном условии Р (/, 7\):
P(Z) = limP(Z, 7\).
Поясним приведенные выше результаты на простом примере.
264
Пример. Рассмотрим уравнение объекта 2-го порядка
d2y t du ,
а*-^+а'~£ + а<>у = и
(10.24)
и критерий оптимизации вида
ru2) dt.
Вводя переменные состояния
уравнение (10.24)
Xi = у, ха = Xi = у,
можно переписать в виде
О
Ор
«2
1 '
ai +
о2.
и, следовательно,
О
а<>
о»
1 ‘
01
«2 _
Матричное уравнение Рнккати (10.19)
принимает
ИЛИ
Ри
.Р12
Р12
р22
Откуда, сравнивая
Ри
Р12
Р12
Р22
Яр
“2
Qi
«2
Ри
Р12
Р12
Р22.
Г1 О
Q = P °
loo
вид
Ри
.Р12
Ор
&2
_£i_
а2
Р12
Р22.1
Ри
.Р12
Р12
Р22.
0] + 2
ol
----тг Р12
а2
Ор
—ТГР22
02
01
Ри-------- Р12
а2
01
Р12 — — PZ2
02
Р?2
Р12Р22
о!
P^Palal
левую и правую части этого равенства, получим
—Ри — 1 — 2 ——Pts
а2
-Pi2 = 2pn —2 -^-р12
а2
Р12Р22 .
rai ’
А =
. Г1 о
р =
О О
1
О
т
о
-Ч
О
Г о 1
В =
’ о 1 го1
1
02 _
' 0
1
. Оз _
О
О
1
и
— f
Р12 .
rat ’
__ Р22
га§
—Р22 — 2pi3 — 2 —- Р22
02
При этом оптимальное регулирование будет описываться согласно формуле (10.21)
выражением
Г-1[0 ИРК- Р^у-Р^у
а2 J LP12 P-iz\ LpJ raj ra2
355
На рис. 10.1 приведены кривые, полученные в результате решения уравнений
на ЭВМ при а0 = Oj = аа = 1; г = 1. При этом видно, что по мере увеличения t
функции р11; р1а, раа стремятся к установившимся постоянным значениям и для
достаточно больших t дифференциальные уравнения для р12, раа сводятся
к алгебраическим уравнениям:
о=1-2^Р1а--2Ь.;
а2 ral
0 = 2р11-2^-р13-^-;
r а3 r ral
0 = 2р1а —2—раа--
а2 raz
Но полученные уравнения нелинейны и непосредственное решение их затруд-
нительно. Поэтому их решение удобнее находить, набирая дифференциальные
уравнения для переменных р1ь р12, р22 на математической модели и наблюдая,
к каким установившимся значениям они стремятся для достаточно больших зна-
чений времени t. Для рассматриваемого случая
Рп (°°) = 0,91; (оо) = 0,41; р22 (оо) = 0,35.
Найдем условия, при которых матрица К коэффициентов уси-
ления в законе регулирования (10.23) не зависела от времени. Для
этого необходимо, чтобы решение Р уравнения (10.19) удовлетво-
ряло условию Р = 0 и чтобы все матрицы в правой части уравнения
Риккати (10.19) не зависели от времени.
В этом случае установившееся решение Р является решением
нелинейного алгебраического уравнения
PAJATP PBR1BTP Q = O.
Таким образом, матрица К не зависит от времени только в том
случае, если оптимизация производится на бесконечном интервале,
объект регулирования стационарен и весовые матрицы R и Q, вхо-
дящие в критерий (10.12), не зависят от времени.
Для этих условий можно сформулировать критерий устойчивости
замкнутой оптимальной системы регулирования. Уравнения для
этой системы легко получить подстановкой закона (10.21) в уравне-
ние (10.11):
х = (А - BR-W) X
и критерий устойчивости заключается в следующем.
Замкнутая система регулирования асимп-
тотически устойчива, если пара [A, D]
полностью наблюдаема, где D любая мат-
рица, удовлетворяющая условию
DDT = Q,
а квадратичная форма хтРх является функ-
цией Ляпунова.
Рис. 10.1. Решение уравнения в виде кривых, полу-
ченных при помощи ЭВМ
266
ЮЛ. Общий СЛУЧАЙ
В этом параграфе будут получены необходимые (но нё до-
статочные) условия для оптимального управления в общем случае
нелинейного объекта (10.1) и нелинейного критерия (10.3).
Предположим вначале так же, как и ранее, что ограничений (10.2)
нет и что начальные условия х (Л) = х0 и начальный момент вре-
мени t0 заданы, причем
х==/[х(Л, и (Л, Л, х(/0) = х0
и
Л
/ = Ек[х(Л), у + р[х(0, и(Л, t\dt. (10.25)
^0
Если FK дифференцируемая функция, то
Л
Л, [х (Л). Л1 = J 4 <х dt + Iх
to
и, следовательно, вместо (10.25) можно написать
Л
Z=J{F[x(O, и(Л, Л+4Рл(х(Л, 01} ^ + FK[x(Z0), Л],
/о
Так как х(Л) и t0 фиксированы, то они не влияют на результат
оптимизации. Поэтому можно ограничиться оптимизацией выра-
жения
Л
/ = J [р [х (0, 11 (Л, Л + 4 lfк (х (Л, Л1) dt =
to
л
= j {f [х (Л, U (Л. Л + [^-х4)’ °-]Т * (0 + dF~dir °-}di-
to
Учтем теперь имеющиеся ограничения. Для этого необходимо
ввести множители Лагранжа рг (Л, рп (Л- Тогда целевая функ-
ция примет вид
'к
/* = j {f[х (Л, «(0. Л + [4гГх + -^г + рт (01/(х> и> 0 ~ М dt =
to
fK
= J {<3[х(Л, i(0. и(Л, Р(Л> t]\dt.
t<3
267
В оптимальной точке йрй йарйацйй переменных А/* = 8 и
х* = /(х*, u*, t). (10.26)
Можно показать, что
Р* =* — [ (-^У (х*> и*, о] р* — -fr (х*> и*> 0- (10.27)
Это уравнение называют сопряЖенньсм, а вектор р* (/) — сопряжен-
ным вектором.
Кроме того, можно также показать, что
< + Ш’|,’=0' (10.28)
Уравнения (10.26)—(10.28) представляют собой необходимые
условия для оптимума в виде 2га дифференциальных уравнений 1-го
порядка [га уравнений (10.26) состояния, га сопряженных уравне-
ний (10.27) ] и т алгебраических уравнений (10.28) для вектора р*
на интервале (/0, /к). Для решения этих уравнений необходимо рас-
полагать 2га краевыми условиями, из которых га дается начальными
условиями х0. Остальные га условий определяются в зависимости
от того, задан или нет конечный момент времени /«•
Чтобы записать необходимые условия оптимальности в более
компактной форме, введем специальную функцию, называемую га-
мильтониан. Она составляется в виде суммы подынтегрального вы-
ражения в критерии оптимизации (10.25) и правой части уравнений
объекта,, умноженной на сопряженный вектор рт:
Я (х, и, р, /)==Г(х, и, /)Ц-рт[/(х, и, /)].
В этом случае
= 0 = 4г- (Ю-29)
В частном случае, если фиксировано, а х (tK) — свободно, то
краевые условия имеют вид
-^(x*(Q)-P*(Q=0.
При FK = 0 имеем р* (tK) = 0.
Таким образом, решение задачи оптимального управления сво-
дится к решению нелинейной системы уравнений 2га-го по-
рядка (10.29), причем для вектора состояний х (i) заданы условия
в начале интервала (t0, tK), т. е. в точке t0, а для сопряженного век-
тора р* заданы условия на конце интервала (t0, tR), т. е. в точке tK.
Такого рода задачи называют двухточечными краевыми задачами',
они обычно не имеют аналитического решения, поэтому их решают
при помощи численных методов.
В случае линейной задачи с квадратичным критерием, рассмот-
ренным в предыдущем параграфе, эти трудности в значительной
мере отпадают. Они сводятся к решению уравнения Риккати по за-
268
ДИЙЙЙШ усЛойййМ йа койце интервала I — tK и йоЛучёййю оптималь-
ного закона регулирования (10.23), справедливого для любых на-
чальных условий.
Для решения же нелинейных двухточечных краевых задач обычно
применяют ту или иную итеративную процедуру, основанную на вы-
боре некоторого более или менее произвольного решения, которое,
вообще говоря, должно удовлетворять следующим условиям: урав-
нениям состояния, сопряженным уравнениям, ограничениям как на
управление, так и на состояние, а также граничным условиям. Это
исходное решение, обычно не удовлетворяющее указанным условиям,
затем используют для улучшения результатов, т. е. получения сле-
дующего решения, более близкого к удовлетворению необходимых
условий оптимальности, и т. д. до тех пор,.пока не будет получено
решение, удовлетворяющее им с требуемой степенью точности.
При решении задач оптимального управления используют:
вариационное исчисление, принцип максимума, а также методы
динамического и математического программирования.
Вариационное исчисление применяют в тех случаях, когда огра-
ничения на переменные состояния и управления отсутствуют. Ана-
литическое решение такой двухточечной граничной задачи, за ис-
ключением нескольких очень простых случаев, связано с большими
трудностями. Получение численного решения также достаточно
сложно.
Принцип максимума позволяет учитывать ограничения на управ-
ление. Однако он также приводит к двухточечным краевым задачам,
решение которых даже при помощи ЭВМ для практически интерес-
ных случаев оказывается невозможным.
Наибольшими возможностями обладает метод динамического
программирования. Его основной недостаток заключается в очень
высоких требованиях к объему памяти ЭВМ. Так, если имеется
четыре переменных состояния и каждая переменная представлена
100 значениями, то нужна таблица в 108 данных. В случае систем
более высокого порядка, чем четвертый, и при нескольких перемен-
ных управления решение задач оптимального управления во многих
случаях оказывается вообще невозможным. За последнее время для
решения задач оптимального управления все шире применяются
методы математического программирования.
Метод математического программирования состоит в отыскании
экстремума функции многих переменных при ограничениях в виде
системы неравенств и равенств. Методы математического программи-
рования нашли основное применение в области исследований опера-
ций. Но в настоящее время их все шире применяют для численного
решения задач оптимального управления. К числу достоинств мето-
дов математического программирования можно отнести:
сложные ограничения на переменные состояния и управления
учитываются достаточно просто;
объем памяти ЭВМ может быть значительно меньше, чем при
динамическом программировании.
269
10.4. ФОРМУЛИРОВКА Й КЛАССИФИКАЦИЯ МЕТОДОВ
МАТЕМАТИЧЕСКОГО ПРОГРАММИРОВАНИЯ
Пусть / — целевая функция вектора х переменных (xlt
х2, ••> хп). Необходимо, чтобы вектор х удовлетворял ограничениям
в виде равенств
G2/(x) = 0, /= 1, 2, . .., q
или в векторной форме
G2(x) = 0.
Задачу математического программирования можно сформулиро-
вать следующим образом: найти экстремум функции (функционала)
/ (х) при условии
ОДх^О; G2(x) = 0
или, кратко, найти
extr{/(x); С] (х)5а0; G2(x) = 0}.
Если вместо определения экстремума функции I (х) ограничиться,
например, определением ее минимума, то задача не теряет общности,
так как минимизация функции I (х) эквивалентна максимизации
функции — I (х). Это же замечание справедливо и для ограничений.
Действительно, если, например, заданы ограничения
Gu (х) С О,
то, определйв множество функций
G; == —Gn,
вновь получим ограничения в виде неравенств.
Если I (х), G1 (х) и G2 (х) являются линейными функциями отх,
то мы имеем задачу линейного программирования, т. е.
I (х) = Е = стх.
1=1
Если целевая функция квадратичная, в то время как все ограни-
чения линейны, то мы имеем задачу квадратичного программирова-
ния, для которой
/ (Xi, ..., хп) = £ сгхг + £ XidMxj,
»=1 i, /=!
или
I (х) = стх -f- xTDx.
В предпоследней формуле с113 обозначают элементы симметричной
(так как хгх2- = х,хг) матрицы D размерностью (п X п).
270
К'нелинейному программированию относятся те задачи, в кото-
рых целевая функция нелинейна и (или) имеется по крайней мере
одно нелинейное ограничение на переменные х.
Задачи линейного программирования, в которых переменные при-
нимают лишь дискретные целочисленные значения, относятся к це-
лочисленному программированию.
Если параметры, входящие в ограничения или в целевую функ-
цию, являются случайными переменными, то в этом случае мы при-
ходим к задачам стохастического программирования.
10.5. СВЕДЕНИЕ ЗАДАЧИ ОПТИМАЛЬНОГО
УПРАВЛЕНИЯ К ЗАДАЧЕ МАТЕМАТИЧЕСКОГО
ПРОГРАММИРОВАНИЯ
Для сведения задачи оптимального управления к задаче
математического программирования прежде всего рассмотрим интег-
рал, входящий в критерий оптимального управления (10.3). Этот
интеграл можно представить как предел суммы
(F[x(0, и(0, ИЛ = Ит Vf[xOD, u(^), ЭД Ot “
J N^<x>
t<s l — l
где для каждого из интервалов (it — (i = 1, ..., N) выбрано
некоторое значение fl, удовлетворяющее ^условию t{-i « ti.
Дифференциальные уравнения состояния при такой дискрети-
зации времени примут вид
Пт^-[х(/г)-х(/г_1)]=/[х(/г.1), U (/;_!), /г_г],
д, >о
где A t = tt — i — 1, 2..........TV; N -+ oo.
Аналогично можно записать ограничения (10.4) в виде
GJx^i), u(Z;)]>, 0;
G2[x(ti), u(tff)] = 0, i = 0, 1........N.
Условия FK (xK) 0 на конце интервала и второй член FK (хк)
в выражении (10.3) являются функциями только одной части в про-
странстве состояний и поэтому остаются неизменными.
Таким образом, задача оптимального управления сводится к сле-
дующей задаче математического программирования. Найти экстре-
мум выражения:
extr
N
lim У F [х (ЭД, u (ЭД, t}] - ti-i) + Fr. [х (/„)]
А/—►оо
4=4
удовлетворяющего условиям:
д.-и) ai
&i — tt — ti-i, i—1, 2, N\ AT—»oo;
FK[xO^0
при наличии ограничений
uftbO; G2lx(/;), uO = 0;
i = 0, 1, ..., N; N-^oo.
(10.30)
Задача, описываемая системой уравнений и неравенств (10.30),
отличается от обычной задачи математического программирования
лишь тем, что она_содержит бесконечное, а не конечное число пере-
менных.
10.6. ФОРМУЛИРОВКА ЗАДАЧИ ОПТИМАЛЬНОГО
УПРАВЛЕНИЯ В ДИСКРЕТНОЙ ФОРМЕ
Для решения задачи оптимального управления на ЭВМ
ее необходимо привести к дискретной форме. Разделим весь времен-
ной интервал [£0, tK] на N в общем случае неодинаковых интерва-
N
лов т; = ti — ti.r, i = 1, 2, ..., N, причем £ xi ~ T = t* — Не-
часто T, а также все тг заранее неизвестны. Критерий оптимального
управления примет вид суммы
N
/ = Е F[x(Z), U(i- I), ^-Шх(1У)].
(=1
При этом каждую (скалярную) составляющую Xi, ut_r рассматри-
вают для каждого дискретного момента времени ti как отдельную
переменную. Т^ким образом, общее число переменных равно N (п +
+ т + 1), где N — число рассматриваемых моментов времени;
п, т — соответственно размерности векторов состояния и управ-
ления.
Естественно, что уравнения состояния должны удовлетворяться
в любой момент времени. Если решение уравнений состояния в ана-
литической форме неизвестно, что имеет место в большинстве задач,
то необходимо произвести их численное интегрирование. Для этогЬ
уравнения состояния (10.1) дискретизируют и записывают в виде
разностных уравнений
x(i4-l)-x(0 = Tj+1f[x(i), u(i), ti\, 1=0, 1, ..., N—\. (10.31)
Уравнения (10.31) можно рассматривать как nN ограничений
в виде равенств, которые, однако, вследствие дискретизации яв-
ляются приближенными. Заметим, что уравнения (10.31) получены
при помощи достаточно простого подхода. Применяя более совре-
менные разностные схемы, можно улучшить точность решения,
Итак, задача оптимального управления может быть сформули-
рована следующим образом. Найти экстремум выражения
(N 1
extr £ F [x (i), и (i — 1), ft] Ti + FN [x (tf)l|
U=i J
при ограничениях на переменные состояния х и управления и:
/к[х(Л^)]^0; Gx [х (/), u(i), ti]^0;
G2[x(i), u(i), = 0, t=l, N,
если известно, что переменные состояния удовлетворяют следующим
уравнениям:
х (j —1) — x(i) — Ti+1f[x(i), ц(г), i]; i — 0, 1, ..., N— 1.
Рассмотрим применение метода математического программиро-
вания в случае непрерывных линейных систем. Предположим, что
объект управления можно описать системой линейных дифферен-
циальных уравнений n-го порядка:
х = Ах-|-Ви, (10.32)
где матрицы А и В постоянны, причем критерий оптимального уп-
равления можно представить в виде линейной или квадратичной
формы (10.12).
Решение уравнений состояния (10.32), как это было показано
в гл. 8, можно представить в замкнутой форме
t
х (t) = Ф (t, f0) х (0) + j Ф (t, т) Ви(т) dx,
о
где Ф (t, т) — [п х т]-мерная переходная матрица состояния.
Переходя к дискретному времени, получим для интервала вре-
мени между моментами tj^ и t}
Ж(/-) = Ф(^, /м)х(/-1)+ J Ф(/м, T)Bu(/-l)dT,
'/-г
/=1, (Ю.зз)
Для линейных систем
' Ф (/) = еА<
и
Ф (*/, *м) = Ф (h - tjJ = еА = еАг<
Уравнения (10.33) можно теперь переписать в виде ограничивающих
равенств:
х (/) — еАТ/х (/ — 1) — | еА Ви (/ — 1) dr — 0,
'/-1
/ = 1, .(10.34)
?73
Если учесть, что размерность вектора х равнап, то уравнения (10.34)
образуют систему из nN ограничивающих равенств. Вектор u (j—1)
предполагается постоянным в интервале
< t < tj-
Итак, задача линейного оптимального управления в терминах
математического программирования может быть сформулирована
следующим образом. Найти экстремум критерия
( N 1
extr £Р[х(/), u (/— '>
u=i J
при условии что переменные управления и переменные состояния х
удовлетворяют ограничениям в виде неравенств:
игяах-|иг|>0; r=l, ximax - | хг|>0, i=l......п;
Fk[x(N)1>0,
а переменные состояния х удовлетворяют равенствам:
tj
x(j) — eAx3x(j — 1) — j еА Bu (j — 1) dr — 0, j = 1, ..., N.
Ограничения (10.4) общего вида заменены ограничениями вида
Uf шах | Uj | 0 1 = 1, . . ., П1‘ 1
Ximax - |Х.| >°> ' = •••.«,)
согласно которым ограничены абсолютные значения переменных
состояния и управления.
10.7. ОПТИМАЛЬНЫЕ ПИ-РЕГУЛЯТОРЫ
В параграфе 10.2 был дан метод расчета линейных опти-
мальных регуляторов с обратной связью по вектору состояния.
Такие регуляторы позволяют свести к нулю с течением времени
влияние на выход объекта ненулевых начальных условий или кратко-
временных импульсных воздействий. Однако в случае постоянных
или медленно изменяющихся входных воздействий такие регуляторы
не могут обеспечить требований равенства нулю отклонений регу-
лируемых величин от заданных значений. Для того чтобы они удов-
летворяли такому требованию, закон регулирования должен содер-
жать не одну, а две составляющие, одна из которых зависит от век-
тора состояния, а другая —от интеграла вектора состояния. Такие
регуляторы называют пропорционально интегрирующими, или ПИ-ре-
гуляторами.
Рассмотрим следующую задачу.
Предположим, что задан линейный динамический объект с по-
стоянными параметрами, описываемый уравнениями
X = Ax-J-Bu, х(/0) = х°, (10.35)
274
АрйчёЛ крйтёрий качестйй рё^улйрований имеет ёйД
оо
I [х (t0), u, to] = j (uTRu + uTS u -j- xTQx) dt,
^0
(10.36)
где S — положительно определенная, a R и Q — неотрицательно
определенные симметричные матрицы. Предположим, что начальное
значение управления u (t0) = и0 задано. Необходимо найти управ-
ление и*, минимизирующее этот критерий.
Введем новые переменные
z
v = u
и новые матрицы
ГА В’
А1 = 0 0 ’
Ri = S,
Q 0-
0 R
В новых переменных соответственно уравнение (10.35) и крите-
рий (10.36) примут вид
z = Ajz + BjV, z (t0) — z°;
I [z (t0), v, t№] = j [vTRxv + zTQz] dt.
to
(10.37)
(10.38)
На рис. 10.2 показана система, описываемая уравнениями (10.37).
Применим к этой системе теорию оптимального регулирования,
предварительно проверив условия управляемости и наблюдаемости.
В результате получим схему регулирования, изображенную на
рис. 10.3. Эта схема с безынерционным регулятором может быть
преобразована в схему, показанную на рис. 10.4, состоящую из
первоначального объекта регулирования ОР, описываемого урав-
нением (10.35), и линейного динамического регулятора РО. Ниже
будет показано, что эту схему можно также преобразовать к виду,
показанному на рис. 10.5, где регулятор осуществляет обратную
связь по вектору состояния и интегралу от вектора состояния (ре-
гулятор типа ПИ). То, что эти регуляторы являются искомыми опти-
275
Рис. 10.4. Схема, состо-
ящая из объекта регули-
рования и линейного ди-
намического ^регулятора
мальными регуляторами, будет ясно из дальнейшего изложения.
Итак, найдем минимум функционала (10.38) при условии (10.37).
Предварительно заметим, что для существования закона регулиро-
вания и конечности функционала (10.38), а также для асимптоти-
ческой устойчивости замкнутой системы необходимо принять два
дополнительных допущения:
пара [Аъ Вх] полностью управляема;
пара [Ах, DJ полностью наблюдаема для любой D[, удовлетво-
ряющей условию DXD{ — Qv
При выполнении этих условий можно использовать результаты,
полученные ранее, согласно которым оптимальный закон регули-
рования имеет вид
v*= RiB[Pz
и
Z*[z(/0), /ol = zT(/o)Pz(U
здесь
Р = 1ппР(/, T) = limP(/, Г).
Т->оо
Причем Р — есть решение уравнения Риккати:
Р = РА! + А1Р - PBtRi'BlP + Q,
Р(Т, Т) = 0.
Рис. 10.5. Система с оп-
тимальным ПИ-регулято-
ром
276
Первое допущение обеспечивает существование Р, а второе
ние определяет асимптотическую устойчивость замкнутой системы
Можно показать, что оба допущения эквивалентны допущениям,
Которые ранее делались для уравнений (10.35), (10.37), и что опти-
мальные значения показателей качества регулирования управле-
ний (10.36) и (10.38) одинаковы.
Перейдем теперь к интерпретации результатов минимизации
расширенной системы для того, чтобы получить решение задачи
минимизации для первоначальной системы. Как это было замечено
ранее, оптимальное управление и* для модифицированной проблемы
регулирования удовлетворяет равенству u = v при u* (t0), равном
заданному и (Zo). Минимальное значение I, одинаковое для обеих
задач:
Z*[x(4), u(/0), t0] = /*[z(A>), /о!-
Оптимальное управление -и* и минимальное значение I* можно
выразить через параметры модифицированной задачи следующим
образом.
Пусть
Р Гр11 Р21”
. Р21 Р22_
Оптимальное регулирование
й = v* при u* (t0) = u°
определяется выражением
й‘ = _ Rf'BjPz = —S’1
= —S *Рг1Х — S 'P22U ,
t. e. оптимальное регулирование u* имеет вид (см. рис. 10.4)
и* = КТх + К2и" и u‘(/o) = u°, (10.39)
здесь
КТ = -s-fp21; 1
K^-S^P^. J
Минимальное значение показателя качества /:
/[х(/0), u(Z0), Zo] = 7* [z (t0), 4] = zT(/0)Pz(Q =
= lx'W. U'WI [£” Й] [J<«]=X’(W1>„X(M +
+ 2uT (to) P21X (to) + UT (to) P22U (to).
11еобходимо заметить, что при u (t0) — 0
7* = xT (t0) pux (t0).
277
Матрицу ри, p2j, 022. вкбдйЩйё fi бйТиМаЛйнЫЙ зайбй регулиро-
вания и в минимальное значение I, можно найти как пределы ри,
р21 и р22 при t ->—оо, причем
—Рн== РнА + АтРи — p2iS-1p21 -р Q, Ри (Т) = 0;
Р21 — Р21А -р BTpu p22S хр21, р21 (Т) — 0;
-—Р22 = Р21 в + втр21 — P22S *ргг 4- R> Р22 (Т) — о.
Итак, получено решение задачи оптимального регулирования при
наличии производной и от регулирующего воздействия и.
Полученным результатам можно придать несколько другую
форму, свидетельствующую о том, что регулятор действительно
является ПИ-регулятором. Согласно уравнению (10.35)
и = В"1 (х - Ах) = (ВТВ)4 Вт (х - Ах).
Полагая, что ВТВ положительно определена, уравнение (10.39)
перепишем в следующем виде:
и = КзХ + Kix; u* (t0) = u°, (10.40)
здесь
Кз=К2(ВтВ)-’Вт; Ki = Ki - КзА.
Интегрируя уравнение (10.40), получим
и* (0 = Klx (t) + J Kjx (т) dx + u (t0) - Кзх (t0). (10.41)
to
Из уравнения (10.41) видно, что оптимальное регулирование
реализовано в виде ПИ-регулятора. Таким образом, схема оптималь-
ного регулятора имеет вид, показанный на рис. 10.4 или рис. 10.5.
Рассматривая расширенную систему (10.37) как первоначальную
систему и применяя ту же процедуру, можно получить решение
задачи оптимального регулирования при наличии вторых производ-
ных от управления и.
ГЛАВА 11. АВТОМАТИЗАЦИЯ ПРОЕКТИРОВАНИЯ
Проектирование сложных объектов—трудоемкий и длитель-
ный процесс. Это приводит к тому, что идеи, заложенные в проектируе-
мый объект, устаревают еще до его ввода в эксплуатацию. Велико
число лиц, занятых в сфере проектирования, и оно постоянно уве-
личивается, причем время, сложность и стоимость проектирования
возрастают. В процессе создания новой техники научное исследо-
вание — проектирование — производство сдерживающим фактором
является медленное освоение научных достижений при проектиро-
вании и внедрении их в производство.
Развитие ЭВМ, периферийной аппаратуры, алфавитно-цифровых
и графических дисплеев открыло широкие перспективы для автойа-
278
тизации процесса проектирования — в первую очередь рутинных,
формализуемых этапов проектирования.
Применение систем автоматизированного проектирования (САПР)
по сравнению с обычным проектированием дает целый ряд преиму-
ществ: убыстряет, улучшает и уменьшает стоимость проектирова-
ния; позволяет осуществить на ЭВМ сложные расчеты, освобождая
проектировщика от громоздких рутинных вычислений, а в некоторых
случаях и необходимости привлечения специалистов высокой ква-
лификации; уменьшает возможность ошибок при расчете сложных
систем; позволяет быстро выполнять несколько вариантов расчетов
при изменении постановки задачи, критериев, технических средств;
дает возможность получить детальную документацию для всех стадий
проектирования при помощи организации базы знаний и библио-
теки, содержащей необходимые данные.
Вначале термин автоматизация проектирования (АПР) приме-
нялся во всех тех случаях, когда ЭВМ использовались для расче-
тов, связанных с проектированием. Сейчас этот термин приобретает
более специфический смысл, относящийся к интерактивным систе-
мам, т. е. к человеко-машинным системам, в которых проектировщик
и ЭВМ при проектировании взаимодействуют друг с другом. При
помощи АПР результаты проектирования объектов, использующих
новые идеи и технические средства, могут быстро сообщаться про-
ектировщику в графической форме. Кроме облегчения анализа и
синтеза АПР позволяет получить необходимую документацию и
проверить полученные результаты. В настоящее время АПР всту-
пила в новый этап своего развития — этап создания систем автома-
тизированного проектирования (САПР).
Согласно определению, рекомендуемому ГОСТом, «САПР —
это комплекс средств АПР, взаимосвязанных с необходимыми под-
разделениями проектной организации или коллективом специалистов,
выполняющих АПР». По существу САПР — это система проектирова-
ния, в которой произведено рациональное на данном этапе развития
технических и программных средств распределение функций проек-
тирования между людьми-проектировщиками и техническими сред-
ствами. При этом весь процесс проектирования рассматривается
с системных позиций как единый процесс, начинающийся с разра-
ботки технического задания и кончающийся изготовлением техни-
ческой документации.
САПР можно определить так же, как человеко-машинную систему
управления процессом проектирования, представляющую собой авто-
матизированную систему управления технологическим процессом
(АСУ ТП) создания технической документации, необходимой для
изготовления проектируемого объекта.
11.1. СУЩНОСТЬ ПРОЦЕССА ПРОЕКТИРОВАНИЯ
Созданию любого объекта предшествуют проектирование,
означающее описание объекта, который еще не существует, но он
уже задуман человеком и должен быть создан в будущем.
279
Цель процесса проектирования состоит в том, чтобы на основа-
нии априорной (исходной) и апостериорной (дополнительной) инфор-
мации, поступающей в процессе проектирования, получить полное
описание объекта проектирования в виде технической документации,
необходимой для его изготовления, удовлетворяющего заданным тре-
бованиям и ограничениям. Или короче: проектирование — это про-
цесс создания прототипа, прообраза объекта, требуемого для изго-
товления этого объекта.
Проект представляет комплект документации, необходимый и
достаточный для того, чтобы:
оценить принципиальную возможность и целесообразность созда-
ния объекта или системы (аванпроект, или технические предложе-
ния по созданию системы, содержащие технико-экономическое обос-
нование и некоторые наиболее важные методы и способы решения
основных задач) -г
обрисовать способы технического решения всех важных проблем
по созданию объекта и его систем управления (эскизный проект)',
дать точное описание всего объекта, его подсистем, блоков, узлов
и деталей (технический проект) с описанием точного взаимодействия
со средой, всех подсистем на всех режимах работы (в том числе и
аварийных).
Нужно иметь в виду, что проектирование в подавляющем боль-
шинстве случаев ведется в условиях, когда имеется прототип объекта
или отдельных его частей. Поэтому приведенное выше разделение
на этапы, т. е. на разработку аванпроекта, эскизного проекта
технического проекта, является условным.
Первая основная характеристика процесса проектирования —
его многоэтапность. На рис. 11.1 показаны основные этапы проек-
тирования, их последовательность и возможные циклы возвращения
к уже пройденным этапам. Последнее необходимо, если на каком-
либо из перечисленных этапов получе-
но отрицательное решение. Так, если
на этапе эскизного проектирования выяв-
лена невозможность технического испол-
нения проекта с заданной точностью,
осуществляется возврат на любой из
пройденных этапов и их повторение с
учетом отрицательных результатов эс-
кизного проектирования.
Детализация этапов проектирования
показана на рис. 11.2.
Техническое задание (ТЗ) обычно содер-
жит:
назначение системы, условия эксплуа-
тации: климатические, механические
(вибрация, ускорение и т. д.), режим ра-
боты и другие условия (условия транс-
Рис. 11,1. Основные этапы проектирования
Техническое задание
на разработку объекта
или системы
разработка технических
предложений
________________f
Эскизное
проектирование
Техническое
проектирование
-
Изготовление объекта
или системы. Испытонил
Рис. 11.2. Детализация этапов проектирования
портировки, наличие радиации и т. д.), габаритные размеры и
массу;
точность, стабильность, требования к динамике;
энергопотребление, надежность, компоновку, условия производ-
ства, технологию, стоимость.
Предварительное проектирование предусматривает:
изыскание или разработку принципов построения, разработку
структурной схемы, выбор технических средств, математическое
описание и идентификацию объекта, динамический расчет, выбор
параметров системы, проведение оптимизации;
математическое моделирование проектируемой системы;
анализ результатов и сравнение с техническим заданием.
Эскизное проектирование предусматривает:
уточнение структурной схемы и ее приборную реализацию;
уточнение состава подсистем, их функций, основных характери-
стик, взаимосвязь;
анализ характеристик технических средств, проведение оптими-
зации, сокращение номенклатуры технических средств;
моделирование (математическое, имитационное, полунатурное,
физическое);
эскизную документацию (схемную, конструкторскую, монтаж-
ную, текстовую);
изготовление экспериментальных образцов, создание специаль-
ных стендов, тренажеров, разработку документов на них, их кор-
ректировка.
Эскизный проект включает:
пояснительную записку, эскизную техническую документацию,
заключение о соответствии полученных результатов требованиям
технического задания.
281
Техническое проектирование Предусматривает!
углубление и детализацию полученных результатов в условиях,
близких к эксплуатационным, проведение испытаний.
Вторая основная характеристика процесса проектирования —
содержание ряда циклов, причем каждый из последующих уточняет
предыдущие.
Проектируемый объект или система, в большинстве случаев,
представляют собой сложную систему, состоящую из различных
подсистем. Например, летательный аппарат состоит из таких под-
систем, как двигательная установка, система управления, приборы
целевого назначения, навигационное оборудование, радиосис-
темы и т. д.
Характеристики каждой из подсистем неразрывно связаны с ха-
рактеристиками всей системы и поэтому проектирование подсистем и
всей системы должно вестись взаимосвязанно. К тому же следует
учесть и то обстоятельство, что требования, предъявляемые отдель-
ными подсистемами к системе в целом, часто противоречивы и, сле-
довательно, получаемые проектные решения почти всегда оказы-
ваются компромиссными.
Третья основная особенность процесса проектирования — на-
личие в нем нерутинных, творческих элементов. Именно эта осо-
бенность не позволяет полностью автоматизировать процесс проек-
тирования.
Перечисленные выше особенности процесса проектирования пока-
зывают, что его автоматизация представляет собой трудную, проб-
лемную задачу, для решения которой необходимо следующее:
1. Произвести анализ всего процесса проектирования с целью
выявления формализуемых на данном этапе развития науки состав-
ляющих этого процесса.
2. Поскольку созданием проекта любой сложной системы зани-
маются большие коллективы проектировщиков, необходимы орга-
низационные мероприятия, направленные на то, чтобы хорошо «со-
стыковать» формализованные и неформализованные элементы про-
цесса проектирования, а это далеко не просто, если учитывать суще-
ствующую иерархию проектных организаций и соответствующую им
иерархию в принятии решений. В существующих (традиционных, как
их иногда называют) системах проектирования согласование решений;
производится посредством совещаний или обмена информацией на;
так называемых «твердых» носителях: бумаге, кальке, ватмане.
Упомянутые «организационные мероприятия» могут принять форму<
полного пересмотра организационной структуры коллективов, а это;
является, безусловно, сложной проблемой, потому что затрагивав^
интересы большого числа людей. 1
3. Формализованный процесс должен быть математически точна
описан и по этим описаниям составлены и отлажены программу
для ЭВМ и устройств, работающих с ней. Но программы составляются
различными людьми, поэтому необходимы специальные мероприя*
тия по обеспечению работоспособности большой программы, состав-!
ленной из частей.
282
Перечисленные проблемы — общие для автоматизации проекти-
рования вне зависимости от назначения объекта. Проектная органи-
зация содержит следующие составные части:
1) коллектив проектировщиков;
2) технические средства;
3) организационную структуру, включающую в себя схему об-
мена информацией и принятия решений, средства связи и управле-
ния, а также оценивающий и координирующий орган;
4) методические, инструктивные и нормативные материалы.
Система автоматизированного проектирования (САПР) по совре-
менным представлениям содержит те же составные части, но специ-
ально ориентированные на применение ЭВМ и их программного
обеспечения. Поэтому САПР включает:
1) коллектив проектировщиков, умеющий работать с новыми
методами проектирования, специально ориентированными на широ-
кое применение вычислительной техники с развитой сетью терми-
нальных устройств;
2) технические средства: вычислительные машины, сети вычис-
лительных машин, терминальные устройства (алфавитно-цифровые
и графические дисплеи, графопостроители, автоматизированные
рабочие места и т. д.), машинные носители информации, линии и
устройства связи, множительная техника (в том числе с возмож-
ностью редактирования и кодирования) и т. д.;
3) новую организационную структуру, приспособленную эффек-
тивно эксплуатировать и обслуживать технические средства и про-
граммное обеспечение САПР;
4) машинно-ориентированные методики, инструкции и норма-
тивные материалы, развитое программное обеспечение, операцион-
ные системы и специальное математическое обеспечение технических
средств, а также специальные проблемно-ориентированные языки.
Под системой автоматизированного проектирования нужно по»
ннмать следующее: САПР — система технических и программных
средств с методическим сопровождением, автоматизирующая проек*
тирование объектов (процессов) некоторого класса.
Если предположить, что коллектив проектировщиков, техни-
ческие средства и соответствующая организационная структура уже
имеются, то основной проблемой в создании САПР является разра-
ботка машино-ориентированных методов, т. е. таких методов рас-
чета и принятия решения, которые могут быть реализованы на ЭВМ
в виде программ.
С кибернетической точки зрения процесс проектирования, по
существу, представляет собой процесс управления с обратной связью
(рис. 11.3).
Техническое задание (ТЗ) на проектирование формирует входы
или уставки, которые сравниваются с результатами проектиро-
вания и в случае отклонений цикл проектирования повторяется
вновь до тех пор, пока ошибка не окажется в допустимых пределах.
Процесс проектирования можно представить также в виде иерар-
хии решений, которую можно представить в виде графа (рис, 11.4).
283
Рис. 11.3. Процесс проектирования как система управления с обратной связью
Рис. 11.4. Представление
процесса [проектирования
в виде графа
Принимая точку 0 за этап формулировки проблемы, варианты ее
решения можно представить линиями аъ а2, а3 ... и т. д. Каждому
Варианту соответствует несколько подпроблем (1Гц, ^Tis),
1Г22, ITas)) (W31, W32, 1Г33) и т. д. Поэтому очевидно, что принятие
Варианта at требует решение подпроблем (1Гц, ТГц), варианта аа —
(IT2i, 1Г22, VT23) и т. д. Иногда может оказаться возможным полу-
пить приемлемые решения для всех подпроблем Wtj. В этом случае
проектировщик должен выбирать вариант, который наилучШйм
образом удовлетворяет цели проектирований. Предположим, напри-
мер, что после выбора варианта а3 и решения всех связанных с ним
Проблем обнаруживается, что решения для подпроблемы 1FMU
следующего уровня не существует. Тогда необходимо отбросить
вариант ап1 н попытаться найти решение для Других проблем»;
связанных с вариантами Овв1 и аП9. Если, однако, окажется, что
ни одна из подпроблем Vmu и 1ГШ1 не может быть решена, то необ-
ходимо вернуться к точке разветвления предыдущего более высо-
кого уровня (в данном случае, к точке 0). Выбор варианта в/ яв-
ляется творческим, трудно формализуемым процессом. Но по мере
продвижения вниз по дереву сложность формализации уменьшается!
и реализация ее решения упрощается.
11.2. ПРОЕКТИРОВАНИЕ. И ПОНЯТИЕ СЛОЖНОСТИ
Решение задачи проектирования, создание любой машину
или технической системы есть разумный компромисс между ее ка
чеством и сложностью, обеспечивающей достижение цели проект»
рования при помощи возможно более простых средств. Требоваии»
к качеству и к сложности объекта проектирования обычно являются
взаимно противоречивыми в том смысле, что качество должно был
как можно более высоким, а сложность — как можно более низкой
284
Действительно, чем сложнее система, чем выше ее стоимости, больше
масса, габаритные размеры и тем меньше ее надежность. Если раньше
задача достижения разумного компромисса между качеством и слож-
ностью не стояла так остро, то теперь при возрастании сложности
вновь создаваемой техники эту задачу становится решать все труд-
нее, что ведет к увеличению сроков и стоимости проектирования,
а следовательно, и к моральному устареванию новой техники к мо-
менту ее ввода в эксплуатацию. Возрастание сложности объясняется,
прежде всего, тем, что проектируемые системы имеют тенденцию
к возрастанию Числа входящих в них частей или подсистем и числа
взаимосвязей, между ними, т. е. к возрастанию структурной слож-
ности.
Другим фактором, повышающим уровень сложности при проек-
тировании больших систем, является степень неопределенности
исходных данных. По мере возрастания сложности системы наша
способность делать точные и в то же время полные умозаключения
о ее поведении уменьшается. Но в то же время необходимо иметь
в виду, что при усложнении целей проектирования единственным
средством их достижения часто может быть лишь повышение слож-
ности.
Что же такое сложность? Первые попытки учесть сложность
при проектировании систем автоматического регулирования сделаны
в работе Солодовникова В. В.1 * * * * при разработке частотного ме-
тода синтеза корректирующих устройств. При этом за меру слож-
ности был принят порядок числителя и знаменателя передаточной
функции синтезируемой САР. В конце 50-х годов было дано мате-*
магическое определение понятия сложности, относящееся к конеч-
ным автоматам, состоящим из элементов, реализующих функции
алгебры логики. При этом под сложностью понималось число эле-
ментов блоков, из которых состоит система. В работах А, Н. Колмо-
горова было дано определение понятия информационной сложности
конечного объекта, которое позволило установить формальную связь
между понятиями сложности, информации и случайности.
Одна ко теория информации не может быть единственной основой
для теории систем и определения их сложности. Система как целое
не сводится к простой совокупности своих частей. Каждая из си-
стемных переменных действует не независимо, а в связи со многими
другими, производя сложные явления.
Для теории систем чрезвычайно важно понятие структурной
сложности, введенное Солодовниковым В. В. и Ленским В. Л.9
Оно связано с понятием широты класса, в котором решается задача
синтеза системы, и с конструированием шкал сложности для тех
или иных технических систем. Так, класс нелинейных уравнений
n-го порядка шире, чем класс линейных уравнений того же порядка,
1 Солодовников В. В. Синтез корректирующих устройств следящих систем
при типовых воздействиях. — Автоматика и телемеханика, 1951, № 5, с. 352—
388.1
а Солодовников, В. В., Ленский В. Л. Синтез систем управления минимальной
сложности, — АН СССР. Техническая кибернетика, 1966, № 2,- с. 11—18.
236
и поэтому решение задачи в этом классе сложнее, чем в классе ли-
нейных уравнений. Технический смысл такого понятия сложности
можно пояснить следующим образом. Рассмотрим множество или
класс операторов X, х — оператор, принадлежащий этому множе-
ству, т. е. х £ X (например, импульсная переходная функция,
передаточная функция, частотные характеристики и т. д.), и пусть
CE(X) = supcE(x); #E(X) = suprE(x); Хе (X) = sup цЕ (х),
х£Х х£Х х(2Х
где се (х) — минимальная стоимость реализации х с точностью до е;
ге (х) — ненадежность (вероятность отказа) системы, реализующей х
.с точностью до е; пе (х) — минимальное число операций для опре-
деления с точностью до 8. Пусть Х1сХ2, т. е. Хх более узкое мно-
жество, чем Х2, тогда
СМ^Се(Х2)- ЯЛХ^сЯДХ,); N^XJ^N^XJ,
поскольку максимальное значение функции не может уменьшаться
при расширении области ее определения. Таким образом, чем выше
класс, тем выше вероятность отказа, больше минимальная стоимость
и число операций.
Не следует ожидать, что сложные задачи могут быть решены про-
стыми средствами. Поэтому сложность применяемых средств или
методов должна согласовываться со сложностью решаемых задач.
Чем сложнее цель и объект проектирования, тем сложнее методы и
технические средства, реализующие результаты проектирования.
Сложная проблема при проектировании — это разрешение про-
тиворечия между стремлением улучшить, усложнить, расширить
класс моделей решаемой задачи и стремлением,выбрать простейший
метод ее решения, сохраняющий адекватность исходной постановке,
поскольку по мере расширения класса моделей получение решения
становится все более трудным, а по мере его сужения решение ста-
новится все более приближенным,
Рассмотрим роль понятия сложности в системах управления.
До недавнего времени методы теории автоматического управления
"были направлены в основном на обеспечение требуемого дйнамиче-'
ского качества и точности и почти не учитывали ни сложности тех-
нической реализации полученных результатов, ни многочисленных
других требований, предъявляемых к системе автоматического
управления, как, например, надежность, стоимость, масса, габа-
ритные размеры и т. д., имеющих непосредственное отношение
к понятию сложности, В настоящее время, в особенности в связи
с проблемой создания САПР систем управления, требуется постановка
задач проектирования, синтеза и выбора технических средств, отли-
чающихся от традиционных тем, что они должны учитывать не только
требования к динамике и статике, но и к сложности реализаций-
результатов расчета. Такого рода задачи называют корректно тех-
нически поставленными. Кроме того, необходимо учитывать, что
основным техническим средством автоматизации проектирования и
расчета систем управления являются ЭВМ, Поэтому методы проек-
286
тиробания. должны йрййодйть к алгоритмам, которые можно рёали*
зовать на ЭВМ. При этом оказывается, что известные методы решения
задач теории управления часто непригодны прежде всего потому,
что они не обеспечивают устойчивости решения в связи с неизбеж-
ными ошибками реализации алгоритмических процедур на ЭВМ
и из-за погрешности исходных данных.
Таким образом, возникает проблема обеспечения не только тех-
нической, но и математической корректности задачи проектиро-
вания. Принцип, или подход, направленный на то, чтобы при поста-
новке задачи управления учитывать требования как технической,
так и математической корректности, был назван принципом слож-
ности.
11.3. СИСТЕМНЫЙ ПОДХОД К ПРОЕКТИРОВАНИЮ
Системный подход к проектированию состоит из некото-
рого набора приемов, облегчающих преодоление основных трудно-
стей проектирования сложных технических систем в условиях много-
этапное™ и итеративном характере самого процесса проектирова-
ния.
Системный подход к проектированию не предлагает рецептов для
решения технических проблем, но указывает общее (генеральное)
направление, следуя которому уменьшается риск принятия невер-
ного решения.
Системный подход решения сложных задач состоит из следующих
этапов'.
разбивки сложной задачи на ряд подзадач;
решения подзадач;
решения общей задачи с помощью решений подзадач.
Таким образом, разделение общей задачи на подзадачи и при-
нятие решения, используя решения подзадач, и составляет суть
системного подхода.
Декомпозиция — рациональное разделение интегрированного це-
лого на части с целью упрощения решения проектных задач с после-
дующим обобщением результатов: Основную смысловую нагрузку
в этом определении несет слово «рациональное». Имеется в виду,
что рациональным является то, что улучшает характеристики си-
стемы в целом.
Значение применения метода декомпозиции особенно возрастает,
если учесть, что приходится рассматривать большое количество
альтернативных вариантов. Вообще при автоматизированном проек-
тировании число рассматриваемых результатов много больше, чем
при проектировании традиционными методами, так как в последнем
случае проектировщик отвергает большое число вариантов на осно-
вании опыта и интуиции. Количество рассматриваемых вариантов
растет с ростом сложности задач, стоящих перед системой управ-
ления'и глубиной рассмотрения каждого варианта. Именно поэтому
для каждого конкретного этапа проектирования определяется ра-
зумный уровень детализации, который и определяет число рассмат-
риваемых вариантов.
287
Декомнозицйю обычно осуЩёстйлйкУг ho уробйям ййЗЛйЗа: функ-
циональный, алгоритмический и структурный.
Для задач комплексного проектирования систем управления
с учетом технической реализации следующим уровнем анализа (иерар-
хически подчиненным структурному уровню) является уровень
технической реализации.
Свойства системы, формирование критериев. Свойством системы
называют каждую из множества ее сторон, которую выделяют при
сравнении данной системы с другой системой.
Свойствами системы могут служить все параметры, характери-
стики, факторы и т. д., отличающие систему от других си-
стем .
Необходимость использования приведенного термина объясняется
тем, что при комплексном проектировании, как правило, применяют
такие разнородные понятия, как устойчивость, вес, стоимость, на-
дежность и т. д.
Можно указать несколько групп свойств:
1. Свойства, характеризующие функциональные качества работы
системы управления: точность, расход рабочего тела, динамические
качества (устойчивость, быстродействие), рабочие диапазоны, струк-
турная надежность и т. д.
2. Свойства, характеризующие технологические и производствен-
ные аспекты создания систем управления: стоимость, время разра-
ботки, технологичность, преемственность разработки и степень
унификации, наличие научно-технического задела, производствен-
ных мощностей и специалистов, дефицитность используемых мате-
риалов и т. д.
3. Технические свойства: масса, энергопотребление, габаритные
размеры, объем и особые требования к конструкции, надежность
элементной базы и блоков, допустимый диапазон внешних условий
(перегрузки, вибрации, температурные режимы, радиационная стой-
кость и д р.), помехозащищенность и т. д.
Кроме этих групп свойств существует ряд факторов, которые
могут существенно влиять на процесс принятия решения:
ра циональное распределение функций между автономными, неав-
тономными и наземными подсистемами;
желательность проверки новых принципов построения какой-либо
системы и т. д.
При проведении комплексного проектирования отбирается огра-
ниченное число наиболее важных свойств, из которых в дальнейшем
составляются критерии. При этом предполагается, что отобранные
свойства достаточно хорошо описывают систему; их состав и число
достаточны для принятия обоснованного решения. Используя пере-
чень свойств, характеризующих систему, можно определить крите-
рий (или группу критериев), который позволял бы судить о пригод-
ности (преимуществах) создаваемой системы, а также составить
«переговорное множество» (упорядоченное множество вариантов
систем управления, оставленных для рассмотрения на последующих
этапах проектирования).
288
Критерии составляют как функции свойств систем. На различ-
ных этапах принятия решения используются различные критерии,
причем, чем выше уровень принятия решения, тем больше свойств
системы управления должен учитывать критерий.
Критерии могут быть общими и частными. Общий критерий
характеризует комплекс свойств и позволяет выбрать оптимальный
вариант построения системы управления с учетом взаимосвязи ее
свойств.
Частный критерий характеризует часть процесса проектирова-
ния или одну из его сторон и служит для принятия решения на про-
межуточных этапах проектирования.
Выбор оптимального варианта системы. Процесс принятия ре-
шения — это выбор оптимального варианта системы из числа воз-
можных на основе одного критерия или множества критериев, учи-
тывающих требования, предъявляемые к системе.
В многокритериальных задачах оптимизации или задачах вектор-
ной оптимизации множеству критериев соответствует и множество
функций цели, сформулированных перед системой управления, кото-
рые математически могут выражаться линейными или нелинейными
функционалами.
Решением многокритериальной задачи является результат, опти-
мальный по каждому из используемых критериев. Но такой резуль-
тат может быть получен только для непротиворечивых критериев.
Поэтому в общем случае решением многокритериальной задачи счи-
тают тот результат, который может не являться оптимальным ни по
одному из критериев, но оказывается приемлемым для всего множе-
ства критериев. Такое решение задачи называют компромиссным
решением.
Расчет оптимальных управлений по векторному критерию. При
создании современных систем управления проектировщикам чрезвы-
чайно редко приходиться иметь дело с системами, работоспособность
и качество которых можно оценить одним-единственным показате-
лем. Чаще всего существует целое множество таких показателей
(критериев), каждый из которых характеризует тот или иной аспект
функционирования системы управления. Проблему решения задач
оптимизации с учетом множества показателей эффективности назы-
вают проблемой решения многокритериальных задач или проблемой
векторной оптимизации. Очевидно, что этой проблемы не существо-
вало бы, если все отдельные показатели (локальные критерии)
могли бы быть выражены в одних единицах измерения (например,
в рублях или тоннах) и тем самым сведены к единому глобальному
критерию. Проблемы векторной оптимизации не существовало бы
и в том случае, если бы (даже не сводимые один к другому) локаль-
ные критерии были не противоречивы, т. е. если бы изменение пара-
метров управления приводило бы к одновременному улучшению
(или одновременному ухудшению) всех локальных критериев. Од-
нако в задачах векторной оптимизации всегда присутствуют проти-
воречивые критерии, когда улучшение одного приводит к ухудше-
нию другого и наоборот. Например, увеличение надежности системы
10 Солодовников В. В. и др. 289
управления обычно связано с увеличением веса, увеличение быстро-
действия с увеличением мощности и т. д. Таким образом, проблема
векторной оптимизации возникает всякий раз, когда результаты
проектирования системы управления приходится оценивать по
нескольким не сводимым один к другому и противоречивым пока-
зателям.
Проблема векторной оптимизации возникает также и тогда,
когда:
задачи управления решаются в результате совместного функцио-
нирования нескольких объектов или нескольких систем управления,
эффективность каждого (каждой) из которых оценивается различ-
ным критерием;
объект управления находится в различных режимах эксплуата-
ции и каждый режим характеризуется собственным показателем
эффективности;
программа использования объекта может быть разделена на этапы
и каждый этап оценивается отдельным показателем эффективности
функционирования объекта.
Приведенный перечень показывает, что проблемы векторной оп-
тимизации в той или иной форме приходится решать для подавляю-
щего большинства современных объектов управления.
Проблемы векторной оптимизации возникают не только при вы-
боре оптимальных траекторий движения, но и в задачах синтеза
оптимальных управлений и оптимальных систем. В этих задачах
используют методы скаляризации.
11.4. ОСОБЕННОСТИ АВТОМАТИЗАЦИИ
ПРОЕКТИРОВАНИЯ СИСТЕМ УПРАВЛЕНИЯ
Общим для всех САПР является то, что они вне зависимо-
сти от объекта проектирования могут сами рассматриваться как
автоматизированные системы управления технологическим процес-
сом производства технической документации. Но САПР систем уп-
равления (СУ) имеют и ряд характерных для них особенностей,
отличающих их от большинства САПР других технических объек-
тов.
1. При проектировании различных систем управления основные
трудности связаны с выбором структуры, информационных потоков,
функциональных, динамических, логических и алгоритмических
связей между подсистемами.
2. Вычислительные машины, обслуживающий персонал и потоки
информации между ними входят в состав не только САПР СУ, но и
являются составными элементами системы управления. Поэтому,
например, САПР АСУ ТП можно рассматривать не только как обоб-
щенную модель процесса проектирования АСУ, но и как модель
конкретной системы управления в процессе ее нормальной эксплуа-
тации.
3. Математические модели СУ создаются в условиях существенно
неполной информации об объекте управления, о действующих на него
290
Рис. 11.5. Стадии процесса проектирования СУ
возмущениях, а также в условиях неполной измерительной инфор-
мации, искаженной помехами.
4. Системам управления обычно адекватны не статические, а ло-
гико-динамические модели высокой размерности, учитывающие прин-
ципиальную структурную особенность СУ, представляющих собой
системы с ОС, для которых важными условиями работоспособности
является устойчивость, управляемость, наблюдаемость, динамичес-
кая точность и качество.
5. САПР СУ должна предусматривать возможности исследова-
ния вопроса о рациональном распределении функции между чело-
веком и ЭВМ в процессе эксплуатации системы управления.
Последовательность процесса проектирования систем управления.
Процесс проектирования СУ состоит из следующих этапов (рис. 11.5).
Технико-экономическое обоснование (ТЭО). Основная цель — фор-
мирование обоснованного (с позиций заказчика) предложения о соз-
дании СУ, содержащего ее основные функции и технические харак-
теристики.
Техническое задание (ТЗ). Основные работы на этом этапе — обос-
нование возможности создания эффективной СУ, удовлетворяющей
исходным техническим требованиям; планирование всех необхо-
димых научно-исследовательских, опытно-конструкторских, проект-
ных и монтажно-наладочных работ; подготовка материалов, необ-
ходимых для проведения проектных работ. При этом в общем слу-
чае выполняют следующие работы:
а) предварительное обследование объекта
управления или процесса управления, позво-
ляющее обосновать целесообразность и возможность создания си-
10*
291
стемы управления, удовлетворяющей исходным техническим тре-
бованиям;
б)предпроектные научн о-и сследователь-
ские работы, состоящие в проведении исследований наиболее
сложных задач управления и выбора способов их решения. Этот
этап имеет целью: составление структурной схемы, математических
моделей, анализ информационных потоков; формулировку крите-
риев управления и ограничений, определение содержания функций,
которые должна реализовать СУ, и оценку возможности выполне-
ния этих функций при помощи ЭВМ и других технических средств;
в) эскизная разработка, состоящая в разработке
основных материалов, подтверждающих целесообразность и возмож-
ность создания СУ. Эти материалы включают в себя: разработку
функциональной и алгоритмической структур системы, синтез
основных алгоритмов регулирования, управления и контроля с уче-
том возможности их" декомпозиции; выбор технических средств;
разработку общего программного обеспечения системы; выбор алго-
ритмических и программных модулей, пакетов и библиотек приклад-
ных программ из соответствующих фондов; расчет надежности;
формулировку требований к ЭВМ; экспериментальную проверку
результатов. После завершения эскизной разработки производится,
при необходимости, корректировка ТЭО создания системы.
Технический проект. Выполняемые работы на этом этапе — про-
ведение общесистемного и структурного синтеза СУ; разработка мате-
матического и информационного обеспечения; выпуск проектно-смет-
ной документации; составление заявок на разработку новых техни-
ческих средств; расчет ожидаемой технико-экономической эффек-
тивности; составление общей документации по проекту.
Рабочий проект. Цель работы —: выпуск рабочей документации
на создаваемую систему. Работы завершаются выпуском рабочего
проекта СУ, состоящего из проектно-сметной документации, необ-
ходимой и достаточной для приобретения, монтажа и наладки комп-
лекса технических средств системы; документации программного
и организационного обеспечения, необходимой для наладки и экс-
плуатации системы; программ специального программного обеспе-
чения на машинных носителях.
Внедрение. Главный результат работ на этом этапе — передача
действующей системы в промышленную эксплуатацию.
Анализ функционирования. Цель работ — получение объективных
и систематизированных данных о качестве созданной системы, теку-
щем состоянии и реальном эффекте от использования системы на
основании опыта ее промышленной эксплуатации.
11.5. СИСТЕМЫ АВТОМАТИЗИРОВАННОГО СИНТЕЗА
(САС)
Интерактивные человеко-машинные системы управления
процессом проектирования называют системами автоматизирован-
ного проектирования (САПР). В настоящее время автоматизация
292
Рис. 11.6. Система автоматизированного синтеза (САС) как часть САПР
проектирования САУ находится в основном на уровне, когда проек-
тировщик и ЭВМ взаимодействуют друг с другом в режиме диалога
при помощи пакетов прикладных программ (ППП), реализующих на
ЭВМ методы теории автоматического регулирования и вычислитель-
ной математики.
Следующий более высокий этап АПР СУ будем называть автома-
тизированным синтезом СУ. Он связан в основном с начальными
этапами проектирования, с автоматизацией предпроектных работ
и эскизным проектированием. Человеко-машинные системы, выпол-
няющие автоматизированный синтез, называют системами автомати-
зированного синтеза (САС) СУ (рис. 11.6).
Автоматизированный синтез решает следующие задачи:
1. Составление математической модели объекта управления и
внешней среды по имеющейся априорной информации и результа-
там идентификации действующих объектов или их физических мо-
делей.
2. Составление предварительной структурной схемы СУ на ос-
новании анализа: особенностей объекта или процесса управления,
необходимых информационных потоков, возможности получения
измерительной информации, возможных точек приложения управ-
ляющих воздействий, учета возможностей декомпозиции системы
в случае ее сложности и распределения функций управления по
соответствующим уровням (распределенные системы).
3. Формулировка критериев управления (целевых функций) и
ограничений по уровням (локальные и глобальные цели управления).
4. Формализация постановок задач оптимального управления и
выбор методов их решения.
2931
5. Разработка алгоритмической базы и программного обеспече-
ния для решения задач регулирования, локального и глобального
управления.
6. Решение задач многокритериальной оптимизации.
7. Выбор технических средств.
8. Разработка общего и специального программного и инфор-
мационного обеспечения и формулировка требований к ЭВМ.
9. Цифровое, гибридное, полунатурное моделирование проекти-
руемой системы.
10. Общесистемный, структурный и параметрический синтез
системы.
11. Составление документации.
Таким образом, задача автоматизированного проектирования на
этапе автоматизированного синтеза состоит в том, чтобы определить
структуру проектируемой системы, законы регулирования, управ-
ления и координации и алгоритмы их реализации, выбрать техни-
ческие средства, разработать требования к цифровой ЭВМ и составу
их программного обеспечения и определить режимы интерактивного
взаимодействия между операторами и ЭВМ. При этом следует обес-
печить не только требуемое качество и точность регулирования и
управления, но и другие требования, предъявляемые к системе
(эффективность, надежность, сложность, стоимость, масса, габа-
риты и т. д.).
11.6. МАТЕМАТИЧЕСКОЕ, АЛГОРИТМИЧЕСКОЕ
И ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ САПР
Математическое обеспечение (МО). Математическое обеспе-
чение САПР представляет собой совокупность математических
методов, моделей и алгоритмов, необходимых для решения задач
автоматизированного проектирования и обработки информации
с применением вычислительной техники в САПР. МО САПР позво-
ляет эффективно разрабатывать программы решения на ЭВМ конкрет-
ных задач АПР, управлять работой ЭВМ в процессе решения этих
задач, контролировать правильность работы ЭВМ.
МО САПР служит для предоставления пользователю широкого
спектра услуг по технологии проектирования. Разработку МО
производят с учетом конкретных ЭВМ, которыми оснащена проек-
тируемая система, МО САПР подразделяют на общее и специальное
математическое обеспечение (ОМО и СМО). Общее математическое
обеспечение (машинно-ориентированное) представляет собой сово-
купность математических и логических методов, а также комплекс
программ, реализующих эти методы при конкретных задачах си-
стемы. ОМО поставляется разработчиком (САПР) вместе с ЭВМ и
предназначается для максимального сокращения времени и затрат
на подготовку, отладку и внедрение задач системы АПР, а также
для увеличения ее производительности. СМО — математический
аппарат, необходимый для формализации определенного класса
задач.
294
Одной из важнейших осйов спёцйаЛьйОго ^атёматййеского обес-
Нечения САПР и САС являются методы теории автоматического
регулирования и вычислительной математики. Однако «адаптация»
этих методов к форме, которую возможно и удобно реализовать
средствами вычислительной техники, представляет собой сложный
и трудоемкий процесс. Первым этапом этого процесса является раз-
работка алгоритмического обеспечения.
Алгоритмическое обеспечение (АО). Понятие алгоритма было
определено А. А. Марковым как точное предписание, определяющее
процесс преобразования исходных данных в искомый результат и
обладающее следующими свойствами: определенностью, т. е. точ-
ностью и понятностью для исполнителей; результативностью, спо-
собностью приводить к получению искомого результата после ко-
нечного числа достаточно простых шагов; массовостью, т. е. при-
годностью для решения любой задачи из некоторого класса.
Трудности создания алгоритмического обеспечения связаны,
в частности, со свойствами «конечности» алгоритма. Естественно,
алгоритм должен заканчиваться после конечного числа шагов (это
свойство называют потенциальной осуществимостью), причем число
шагов является критическим параметром, определяющим эффек-
тивность (и сложность) алгоритма. Решить алгоритмически, в прин-
ципе, можно большое число задач, но время для получения решения
может быть столь большим, что практически задача остается нере-
шенной. Поэтому практически реализуемый алгоритм должен давать
ответ после небольшого числа шагов, которые могут быть выполнены
за достаточно малый промежуток времени.
Быстрое возрастание времени вычислений, известное как комби-
наторный взрыв, является ограничивающим фактором во всех об-
ластях, связанных с обработкой информации, и, в частности, исклю-
чает применение формальных алгоритмических методов, направ-
ленных на точное оптимальное решение. Но сама сущность задач
регулирования и управления не требует реализации точных опти-
мальных решений.
Кроме того, при проектировании невозможно (и даже нежела-
тельно) получить точное однозначное решение (в большинстве слу-
чаев оно и не существует).
Реализовать теоретически оптимум обычно невозможно (или
неэкономно). Поэтому нужно ограничиваться удовлетворительным
квазиоптимальным решением. Так как суть проектирования состоит
в поиске удовлетворительного, а не точного решения, то значитель-
ный интерес представляют методы реализации такого поиска на
ЭВМ.
Форма, в которой разрабатывается база алгоритмического обес-
печения, основана на так называемом принципе модульности. Сог-
ласно этому принципу каждый из видов обеспечения (а не только
алгоритмический) процессов проектирования декомпозируется на
совокупности отдельных автономных частей, называемых модулями.
При этом алгоритмическое обеспечение синтезируется из модулей,
между которыми вводятся определенные связи, Таким образом,
295
осуществляется расширяемость, открытость и адаптируемость алго-
ритмического обеспечения.
Итак, алгоритмический модуль представляет собой математичес-
кое и алгоритмическое описание решения какой-либо частной задачи
проектирования. Модуль описывает решение отдельной, логически
законченной задачи, для которой однозначно определены входная
и выходная информация; при делении модуля на более мелкие струк-
турные части теряется его функциональный смысл; модуль возможно
объединять с другими модулями и многократно использовать для
решения задачи в различных условиях; кроме того, он обладает
инвариантностью к программной реализации и фиксированной
формой представления.
Совокупность алгоритмических модулей, связанных в единый
алгоритм, образует алгоритмический макромодулъ. Совокупность
модулей и макромодулей, объединенных общим целевым назначе-
нием, позволяющая получать алгоритмы решения различных задач
из заданного класса, называют пакетом алгоритмических моду-
лей.
После разработки алгоритмического обеспечения возникает проб-
лема создания программного обеспечения САПР.
Программное обеспечение (ПО). Программное обеспечение САПР—
это совокупность программ для реализации целей и задач АПР,
обеспечивающих функционирование комплекса технических средств
САПР. Программное обеспечение подразделяется на общее и спе-
циальное (ОПО и СПО). ОПО — совокупность программ на носи-
телях данных (программных изделий) и программных документов,
поставляемых в комплекте со средствами вычислительной техники:
вычислительными машинами, комплексами, системами. СПО — со-
вокупность программ на носителях данных, разработанных и изго-
товленных в организациях, разрабатывающих СУ САПР с необ-
ходимой программной документацией и не поставляемых в комплексе
с вычислительными машинами, комплексами, системами.
Главные вопросы при разработке программного обеспечения
САПР — организация данных и программ в системе. По существу,
программное обеспечение САПР можно рассматривать как одну гло-
бальную программу, имеющую иерархическую структуру. На^ ниж-
нем уровне находятся программные функциональные модули. Более
высокие уровни занимают программы-диспетчеры,. обеспечивающие
совместно с операционной системой ЭВМ управление работой функ-
циональных модулей, вызов модулей в определенной последователь-
ности, модификацию их структуры, их объединение^ т. д.
Программное обеспечение, так же как и алгоритмическое, осно-
вано на принципе модульности. Программный модуль представляет
собой программу или ее часть, которая при помощи средств опера-
ционной системы может объединяться с другими программными;
модулями в единую программу, включаемую в состав.программного
обеспечения.
Модульный принцип позволяет при сборке программы использо-
вать модули, составленные на различных алгоритмических языках.
296
Возможность накапливать модули и затем их многократно применять
позволяет экономить труд программистов.
Из программных модулей можно составлять библиотеки про-
грамм, служащие для решения задач сбора и обработки информации;
моделирования объектов и систем управления; решения задач управ-
ления; организации, управления и обслуживания вычислительных
процессов.
Кроме того, в состав библиотек входят обслуживающие программы,
предназначенные для связи пользователя с библиотекой.
Еще более высокой формой организации программных средств
являются пакеты прикладных программ, т. е. совокупность программ
для реализации целей и задач системы, обеспечивающих функцио-
нирование комплекса технических средств системы.
Весьма важным свойством ППП, обеспечивающим удовлетворе-
ние требований различных пользователей и удобство в эксплуата-
ции, является принцип генерации, лежащий в их основе. Использо-
вание этого принципа обеспечивает настройку пакета на параметры
конкретного объекта управления, в результате чего универсальный
по природе инструмент ППП превращается в специализированный
программный комплекс, реализующий конкретную систему управле-
ния. Важнейшая особенность ППП состоит в том, что они отражают
принципы организации управления, содержат методы реализации
этих принципов в виде алгоритмов и формализованных описаний
процессов управления и принятия решений, а также являются про-
граммной реализацией алгоритмов.
Имитационное моделирование и банки данных. Важнейшим сред-
ством автоматизированного синтеза является имитационное модели-
рование, сущность его состоит в том, что с помощью ЭВМ имити-
руется поведение исследуемой системы, а проектировщик, управляя
ходом моделирования и анализируя полученные результаты, делает
выводы о свойствах проектируемой системы. Имитационная модель
представляет некоторую комплексную программу для ЭВМ, учиты-
вающую структуру проектируемой системы и взаимодействие между
ее элементами. В отличие от математического моделирования имита-
ционное моделирование не требует аналитического решения проб-
лемы. В имитационной модели должны быть описаны лишь правила
действий объектов системы. Модель строится таким образом, что
в ходе ее испытаний объекты начинают функционировать самостоя-
тельно, выполняя предписанные им операции и взаимодействуя друг
с другом. Задача исследователя в результате сводится к наблю-
дению и последовательной модификации модели, а также к оценке
полученных данных. Итак, имитационное моделирование можно
рассматривать как управляемый эксперимент, производимый при по-
мощи модели проектируемой системы, реализованной на ЭВМ.
Дальнейшим требованием и важным фактором при разработке
САПР является организация банка данных, содержащего всю пер-
вичную и вновь получаемую информацию. Информация должна хра-
ниться в памяти в такой форме, которая позволяет эффективно извле-
кать и обрабатывать данные, включая накопление данных, модифи-
297
кацию, поиск и сравнение. Кроме того, память должна обладать спо-
собностью расширяться или сокращаться в процессе проектиро-
вания. Данные обычно накапливаются в виде таблиц, обрабатывае-
мых затем ЭВМ. Табличное представление данных может иметь раз-
личную форму: простое перечисление, двухмерные структуры гра-
фов (отражающих иерархические соотношения), сложные много-
связные кольцевые структуры и т. д. Таким образом, банк данных —
это такая их организация, которая, объединяя все имеющиеся све-
дения для проектирования, допускала бы их многоаспектное исполь-
зование.
Лингвистическое обеспечение и системы общения (ЛО). Работо-
способность САПР и ее эффективность в значительной мере зависят
от лингвистического обеспечения (ЛО) (совокупность языковых средств,
включая термины и определения), а также правила формализации
естественного языка, включая методы сжатия и развертывания тек-
стов в целях повышения эффективности машинной обработки инфор-
мации и облегчения общения человека с машиной.
По существу ЛО представляет собой набор используемых язы-
ков, на которых удобно выражать требования к вычислительным про-
цессам и которые однозначно интерпретируются ЭВМ. Под языком
программирования понимают знаковую систему, применяемую для
описания процессов решения задач на ЭВМ, которые задают алфа-
витом, словарем, синтаксисом, семантикой и прагматикой.
Алфавит — это набор символов, с помощью которых выражается
входная информация (цифры, буквы, знаки арифметических или ло-
гических операций и т. д.).
Словарь — перечень используемых слов или правил их построе-
ния.
Семантика — набор правил, позволяющий ЭВМ однозначно вос-
принимать смысл предложения.
Прагматика — набор правил, определяющих связь между вход-
ным текстом и состояниями элементов комплекса.
В настоящее время известно более 2 тыс различных алгоритми-
ческих языков и более 700 областей их применения для решения
соответствующих задач на ЭВМ. Любой язык, используемый для
ввода информации в ЭВМ, должен иметь транслятор, переводящий
текст на этом входном языке в соответствующий набор команд ЭВМ.
Эффективным способом общения пользователя с ЭВМ является
использование диалогового режима. В настоящее время известно
два его вида: 1) язык вопросов и ответов, допускающий возможность
расширения набора вопросов; 2) накопление и формализация в ре-
зультате общения с пользователем данных для генерации пакета.
В процессе диалога уточняется модель и формируется набор данных
для генерации пакета.
САПР как «интеллектуальная» система [15]. В процессе проек-
тирования САПР выступает как своего рода партнер конструктора
в его деятельности. Для обеспечения этого партнерства при созда-
нии системы ее необходимо наделить определенным «интеллектуаль-
ным» уровнем, т. е. необходимо ввести в ее память некоторую сумму
298
знаний, относящихся к конкретной области деятельности конструк-
тора. Объем знаний зависит от степени разработки теории данного
класса объектов проектирования.
Наличие достаточно развитой теории проектируемых объектов
заданного класса позволяет образовать в памяти ЭВМ формальную
модель предметной области. Такая модель содержит все понятия и
отношения между ними и образует знание о конкретной области
интересов конструктора. Эти знания реализуются в ЭВМ в виде
пакета программ. В руках конструктора они становятся средством
решения конкретных задач. При этом нет надобности подробно из-
лагать машине программу решения возникшей у него задачи. До-
статочно на профессиональном естественном языке кратко изложить,
что он хочет получить от машины. Программа сама запросит у Кон-
структора необходимые ей исходные данные, проанализирует их,
составит план решения задачи и сообщит о результатах решения.
В этом случае знание, облеченное в математическую форму, начинает
играть роль особого вида ресурса творческой деятельности конструк-
тора. Это знание можно назвать информационным ресурсом в системе
проектирования. Носителями знания являются конструктор и раз-
личные математические модели, реализованные в системе. Чем выше
качество информационного ресурса системы, тем обширней ее «ин-
теллектуальный» уровень, тем большее количество знаний переходит
в проектируемый объект, а значит, тем весомей труд, сэкономленный
при разработке, организации производства и эксплуатации проекти-
руемого объекта.
Процесс проектирования — непрерывное потребление и перера-
ботка информационных ресурсов, в результате чего производятся
генерирование и отбор вариантов построения проекта, его анализ
и оптимизация.
Информационные ресурсы выступают в САПР в форме информа-
ционных и математических моделей объектов, пакетов прикладных
программ, банков данных и организационно методических материалов.
В зависимости от фазы или этапа процесса проектирования информа-
ционные ресурсы могут носить характер объективных закономер-
ностей природы, отраслевых правил и предписаний, полученных
в результате обобщения опыта в данной отрасли, а также быть пред-
ставлены в форме данных, отражающих специфику отдельного пред-
приятия.
Разработка и создание информационных ресурсов, представление
их в форме программного и информационного обеспечения САПР
являются сложными и трудоемкими процессами, в которых участ-
вуют специалисты из различных областей знаний. Поэтому одна
из наиболее острых проблем — обеспечение максимальной инва-
риантности информационных ресурсов, их слабой зависимости от
конкретной области применения, простота настройки на неизбеж-
ную отраслевую специфику. Разработка информационных ресурсов
и комплектование ими систем проектирования являются важней-
шей задачей в области создания САПР. Ведущая роль информацион-
ных ресурсов в процессе проектирования ставит задачу разработки
299
й такого их представления в САПР, при которой обеспечивалась бы
сквозная совместимость как моделей объектов, так и моделей про-
цессов проектирования с учетом развития, и пополнения этих ресур-
сов в процессе эволюции САПР.
11.7. ОБОБЩЕННАЯ СХЕМА САПР
Обобщенная схема САПР приведена на рис. 11.7. Ее цен-
тральным элементом является банк данных, непосредственно свя-
занный с каждым функциональным пакетом САПР, а также некото-
рыми ППП. Во время работы ППП могут получать необходимые
входные данные от банка данных или от других пакетов. Внешние
входы для САПР создаются обычно проектировщиками, которые
вначале обращаются к библиотеке, состоящей из каталога модулей,
ограничений и других расчетных параметров. Другие входящие
данные, вводимые в терминал проектировщиком в интерактивном
режиме, в идеале, в реальном времени содержат исходное описание
системы, запросы к документации, модификацию и коррекцию биб-
лиотеки, выбор расчетных критериев и т. д. Все эти входные опе-
рации должны выполняться операционной системой САПР, которая
осуществляет управление всеми функциями системы, например, вы-
бором и очередностью применения пакетов.
Эффективность САПР еще более повышается включением в ее
структуру пакетов синтеза на основе диалога. Это позволяет про-
ектировщику на основе технического задания решать вопросы оп-
тимизации и технической реализации проектируемой системы при
помощи набора соответствующих модулей технических и програм-
мных средств. Кроме того, это соответствует возрастанию техниче-
ских возможностей проектировщика по мере его обучения в процессе
взаимодействия с машиной.
Рис. 11.7. Обобщенная
схема САПР
300
11.8. ТЕХНИЧЕСКИЕ СРЕДСТВА САПР
Для традиционных систем проектирования характерно
то, что подготовка исходных данных для цифровых ЭВМ, представ-
ление результатов расчетов (вычерчивания графиков или чертежей)
и многие другие операции выполняются вручную. Для САПР свой-
ственно максимальное использование для этого ЭВМ и устройств,
работающих совместно с ней. ,
В настоящее время применяют САПР, предусматривающие:
автоматизацию расчетных работ;
автоматизацию вычерчивания типовых элементов и симметрич-,
ных частей деталей;
автоматизацию расчетов при геометрических преобразованиях
чертежей;
представление возможности использования диалоговых систем
для корректировки чертежей, текстов, программ, исходных данных
программ и т. д.;
широкие возможности по хранению промежуточных результатов
на машинных носителях, получению твердых копий и т. д.;
возможности работы с ЭВМ на расстояниях как небольших (до
1 км — на территории одного предприятия), так небольших расстоя-
ниях (соединенных телефонным кабелем — совместная работа не-
скольких предприятий над одним проектом);
возможности работы с ЭВМ нескольких пользователей одновре-
менно.
Перечисленные работы выполняются большой группой перифе-
рийных устройств, которые могут быть разбиты на несколько групп:
устройства хранения информации;
накопители на магнитных лентах (НМЛ);
накопители на магнитных барабанах (НМБ);
накопители на магнитных дисках (НМД);
устройства ввода-вывода информаций перфокарточного и перфо-
ленточного вида;
устройства вывода на бумажные носители:
буквенно-цифровые печатающие устройства;
графопостроители — специальные устройства для вывода лю-
бой графической информации (графики, чертежи и т. д.);
устройства диалога:
дисплеи алфавитно-цифровые;
дисплеи графические;
устройства, предназначенные для кодирования графической
информации и введения ее в вычислительную машину;
устройства телеобработки данных:
устройства сопряжения каналов ЭВМ с аппаратурой передачи
данных по линиям связи (мультиплексоры);
устройства передачи данных.
Следует заметить, что применение любых из перечисленных
технических устройств при использовании ЭВМ для выполнения
проектных работ не дает оснований говорить об автоматизации
301
процесса проектирования. Лишь объединение этих устройств в си-
стему вместе с решением организационных и методических проблем
может быть названо системой автоматизированного проектирования.
В последнее время все более широкое распространение получают
так называемые автоматизированные рабочие места (АРМ) — ком-
плекты устройств, предназначенных для автоматизации решения
научных, инженерных и конструкторских задач, подготовки, пре-
образования, редактирования текстовой и графической информации,
а также для организации диалога проектировщика с САПР.
АРМ является средством коллективного пользования и может
устанавливаться непосредственно на рабочих местах проектиров-
щиков.
В состав АРМ обычно включается небольшой процессор, обслужи-
вающий устройства АРМ и обрабатывающий информацию при вза-
имодействии с процессором САПР.
РАЗДЕЛ 2 ТЕХНИЧЕСКИЕ СРЕДСТВА
АВТОМАТИКИ
ГЛАВА 12. ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ И КЛАССИФИКАЦИЯ
В данной главе на основе информационного подхода при-
ведены основные определения и классификация технических средств
автоматики. Все технические средства автоматики представлены
в виде иерархической структуры, состоящей из трех уровней:
системы управления и системы автоматического регулирования
(высший уровень);
автоматических регуляторов, следящих приводов и других под-
систем, входящие в состав систем управления и регулирования
(средний уровень);
элементов и устройств подсистем, регуляторов, приводов систем
автоматического управления и регулирования (нижний уровень
иерархии). Технические средства этого уровня представляют собой
элементную базу автоматики.
В заключение главы приведен перечень основных технических
характеристик средств автоматики и сформулированы технические
требования, предъявляемые к ним.
12.1. ТЕХНИЧЕСКИЕ СРЕДСТВА АВТОМАТИКИ.
ОПРЕДЕЛЕНИЯ
Объектами автоматизации являются различные техниче-
ские объекты (машины, аппараты, средства транспорта, печи и др.)
и производственные процессы, выполняемые одним или целым ком-
плектом технологических агрегатов, машин или установок во вза-
имодействии с управляющей системой. По мере развития и совершен-
ствования техники автоматизация все шире внедряется во все от-
расли народного хозяйства.
Следует отметить, что совершенствование технологии и внедре-
ние автоматизации в соответствующие отрасли народного хозяйства
являются процессами взаимосвязанными. С одной стороны, для ин-
тенсификации различных отраслей необходимо разрабатывать и вне-
дрять системы автоматизации и механизации в уже действующие
производства, а с другой — при создании принципиально новой
технологии должны быть предусмотрены пути ее эффективной авто-
матизации.
Технические средства автоматики по своей иерархической струк-
туре классифицируют на два класса [231:
303
Рис. 12.1. Обобщенная схема одномерной СУ:
Ху (0 — управляющий сигнал; х (0 — сигнал обратной связи; у (0 — регулируемая пере-
менная; г (0 — регулирующее воздействие; f (0 — возмущение
системы автоматического (автоматизированного) управления
(САУ) и регулирования (САР);
элементы, устройства и подсистемы САУ и САР.
Общей функциональной частью систем автоматического управле-
ния и регулирования [23] является объект управления (регулиро-
вания). Объектом управления называют управляемую часть системы,
т. е. агрегат, машину или установку, требуемый режим функциони-
рования которых должен поддерживаться управляющей частью си-
стемы в соответствии с выбранной или заданной целью управления.
' Система управления (СУ) — замкнутый динамический комплекс,
состоящий из управляемых объектов и трех подсистем: информацион-
ной, логико-вычислительной и исполнительной. Обобщенная схема
одномерной СУ показана на рис: 12.1. Совокупность технических
средств, предназначенных для получения, передачи и представления
информации, называют информационной подсистемой: К средствам,
предназначенным для получения и преобразования первичной ин-
формации о внешних и внутренних факторах работы управляемых
объектов, относятся следующие элементы СУ: датчики первичной
информации, чувствительные и измерительные элементы, анализа-
торы, преобразователи, вычислительные устройства для первич-
ной обработки информации и др., а также средства для передачи
и представления информации в форме, удобной для управления, —-
передатчики, каналы связи, кодирующие и декодирующие устрой-
ства, преобразователи информации, приемники и т. д.
Совокупность технических средств, предназначенных для обра-
ботки информации, называют логико-вычислительной подсистемой.
Основная функция средств обработки информации состоит в вы-
работке решений, необходимых для достижения цели управления,
сформулированной в техническом задании на систему в целом, на
основе имеющейся у проектировщиков информации. Эти решения
обычно реализуются в форме управляющих или задающих сигналов.
К техническим средствам для переработки информации относятся
разнообразные вычислительные средства, включая микроЭВМ.
304
Технические средства для формирования управляющих воздей-
ствий, осуществляющие непосредственное управление объектами
в соответствии с целью управления, образуют исполнительную под-
систему. Техническими средствами для использования информации
являются разнообразные регуляторы, следящие системы, автомати-
ческие приводы и сервомеханизмы регуляторов.
Системы управления, в которых в процессе их эксплуатации
все информационные этапы управления, включая принятие решений
или выработку управляющих воздействий, производятся без участия
человека-оператора (последний выполняет лишь функции наблюде-
ния), называют системами автоматического управления (САУ).
Системы управления, в которых в процессе принятия человеком-
оператором решений, обеспечивающих достижение цели управле-
ния, участвуют вычислительные машины (аналоговые, цифровые
или гибридные), называют автоматизированными системами управ-
ления (АСУ).
12.2. КЛАССИФИКАЦИЯ СИСТЕМ АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ И РЕГУЛИРОВАНИЯ
САУ и САР классифицируют по функциональному назна-
чению и в соответствии с основным критерием управления, кото-
рый реализуется данной системой. Например, оптимальная цеховая
система управления производством стали, обеспечивающая требуе-
мое качество стали при минимуме затрат сырья и энергии; оптималь-
ная по быстродействию САУ управления реактивным самолетом;
оптимальная по точности и быстродействию система управления про-
мышленным роботом и т. д.
Классификация САР в зависимости от идеализации, принятой
при их математическом описании, рассмотрена в параграфе 1.5.
По этому признаку САР классифицируются на многомерные и одно-
мерные, линейные и нелинейные, непрерывные, дискретные и диск-
ретно-непрерывные, стационарные и нестационарные и т. д.
Система автоматического регулирования — замкнутая динами-
ческая система, стремящаяся сохранить в допустимых пределах
отклонения (ошибки) между требуемыми и действительными изме-
нениями регулируемых переменных посредством их измерения,
сравнения и использования получающихся при этом сигналов для
управления источниками энергии. Функциональная схема много-
мерной САР, состоящая из N объектов'и регуляторов, приведена
на рис. 12.2. САР всегда работают в условиях тех или иных возму-
щающих воздействий и помех, которые должны быть соответствую-
щим образом скомпенсированы системой.
В зависимости от характера изменения компонент вектора зада-
ния, называемых управляющими воздействиями, САР в реальных
условиях работы подразделяют на следующие три класса.
Системы автоматической стабилизации (САС) — компоненты
вектора задания представляют собой априорно известные постоян-
ные величины (например, система автоматической стабилизации
305
Рис. 12.2. Функциональная схема: многомерная САР:
х — вектор задающего воздействия; g — вектор состояния объектов регулирования; у —
вектор выходных переменных; f — вектор возмущения
напряжения атомной электростанции, действующая в условиях
постоянно изменяющейся электрической нагрузки).
Система программного регулирования (СПР) — одно или не-
сколько задающих воздействий являются известными функциями
времени, изменяющимися в соответствии с заданной программой
(режимами) работы, а остальные — заданными постоянными величи-
нами (например, система программного регулирования температуры
в нагревательной печи или давления в вакуумной камере и т. д.).
Автоматические следящие системы (АСС) — все или несколько
задающих воздействий представляют собой заранее неизвестные
функции времени (например, система с числовым программным уп-
равлением металлообрабатывающими станками, следящие системы
сопровождения самолета по направлению и дальности и т. д.).
По виду источника энергии САР классифицируют на электриче-
ские, гидрсивличесские, пневматические, комбинированные. Наиболь-
шее применение в технике получили электрические и комбинирован-
ные (электрогидравлические, электропневматические и др.) САР.
В параграфе 1.7 приведена классификация САР в зависимости
от характера циркулирующих в них сигналов (непрерывные САР,
системы с гармонической модуляцией, системы с импульсной модуля-
цией, релейные САР, релейно-импульсные САР, в том числе цифро-
вые).
По характеру отработки типовых сигналов САР подразделяют
на статические и астатические 1-го и 2-го порядков.
САС, СПР и АСС классифицируют также по другим классифика-
ционным признакам. Например, АСС классифицируются:
по выходной мощности — силовые и приборные;
по точности — невысокой точности, точные и прецизионные;
по быстродействию — невысокого быстродействия и быстродей-
ствующие;
по регулируемой переменной — позиционные, интегрирующие;
по области применения и назначению — промышленные, транс-
портные и т. д.
306
12.3. КЛАССИФИКАЦИЯ ПОДСИСТЕМ, УСТРОЙСТВ
И ЭЛЕМЕНТОВ АВТОМАТИКИ
Управляющей частью САР является автоматический ре-
гулятор (АР), включающий в свою структуру измерительные, вы-
числительные, усилительные, корректирующие и исполнительные
устройства. Цифровые автоматические регуляторы имеют в своем
составе встроенную микроЭВМ.
Автоматический регулятор является динамической подсистемой,
которая по компонентам вектора состояния системы формирует за-
кон или алгоритм регулирования г (t). Вектор управления или век-
тор регулирующих воздействий г (t) является функцией вектора
ошибки е (t) и вектора внешних возмущений f (t). Вектор г (/),
удовлетворяющий определенным техническим связям и ограниче-
ниям, должен обеспечить экстремум частных показателей эффектив-
ности системы.
В зависимости от формируемого закона регулирования или пере-
даточной функции АР классифицируют следующим образом:
пропорциональный регулятор (П), имеющий передаточную функ-
цию
Wn (s) = Ап,
пропорционально-дифференциальный регулятор (ПД) с переда-
точной функцией
^пд(5) = АпдЦ+1),
интегральный регулятор (И), имеющий передаточную функцию
пропорционально-интегральный регулятор (ПИ) с передаточной
функцией
Гпи(8) = Апи(4-+1)’
пропорционально-интегрально-дифференциальный регулятор
(ПИД), имеющий передаточную функцию
^пид(S) = Апид S--y-".
Подсистемой САР является следящий привод, который отрабаты-
вает входной управляющий сигнал с усилением его по мощности.
Устройства, входящие в состав следящего привода, охватываются
специальными элементами обратной связи; кроме того, в приводе
имеют место внутренние обратные связи, обусловленные динамикой
нагрузки. Следящие приводы классифицируют по применению (про-
мышленные, транспортные, приборные, авиационные и т. д.), наз-
начению (для регулирования температуры, давления, напряжения,
скорости, положения в пространстве и т. д.), виду используемой
энергии внешнего источника питания (электрические, электроме-
ханические, гидравлические, пневматические, комбинированные и
т. д.), принципу действия и характеру преобразования управляю-
307
11
Рис. 12.3. Функциональная схема типовой СПР
щих сигналов (непрерывные аналоговые, импульсные, дискретные
и т. д.).
Принцип действия и характеристики некоторых типовых САР
и следящих приводов будут рассмотрены в гл. 15 и 16.
Классификацию нижнего уровня технических средств автома-
тики по функциональному назначению рассмотрим на примере ти-
повой СПР, функциональная схема которой показана на рис. 12.3.
СПР осуществляет программное регулирование параметров механи-
ческого объекта.
Чувствительный элемент 9 воспринимает изменение регулируе-
мой переменной у (t), преобразующий элемент 10 согласует сигнал,
получаемый от чувствительного элемента, с управляющим сиг-
налом Ху (t).
Задающее устройство 1 формирует программный сигнал управле-
ния процессом ху (t). Сравнивающее устройство 2 вырабатывает
рассогласование (t) = ху (t) — z (/).
Преобразующее устройство 3 согласует сигнал (t) с входом
: последовательного корректирующего устройства 4, которое придает
/ СПР необходимые динамические свойства.
Усилительное устройство 6 осуществляет усиление сигнала е2 (0
по мощности. Исполнительное устройство 7, кинематически связан-
ное с механическим объектом регулирования, является наиболее
инерционным звеном системы. Поэтому исполнительное устройство
системы охватывается местной корректирующей обратной связью
(элемент 8). Сравнивающее устройство 5 измеряет разностный сиг-
на е2 (f) = g (t) — р (/), который усиливается по мощности усили-:
телем 6. Исполнительное устройство вырабатывает регулирующее^
воздействие г (/), непосредственно прикладываемое к объекту регули-s
рования.
В энергетическом отношении рассмотренная система программ!
ного регулирования управляет передачей энергии от источника пй|
тания 11 в нагрузку за счет незначительной мощности программного;
управляющего воздействия ху (f).
Устройства подсистемы 4—8 составляют силовой следящий при-
вод СПР, 1—3, 9, 10 — измеритель, а 1—10 — регулятор системы^
308
12.4. ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ] ЭЛЕМЕНТОВ.
УСТРОЙСТВ И СИСТЕМ АВТОМАТИКИ
/ Техническиехарактеристики элементов, устройств и систем
автоматики (САР и САУ) классифицируют на пять групп: статиче-
ские, динамические, точностные, эксплуатационные и экономические.
1. Статические характеристики: коэффициенты усиления и пе-
редаточные коэффициенты (чувствительность); линейность статиче-
ских характеристик (для линейных элементов и устройств); минималь-
ные и максимальные значения входных и выходных параметров
(Порог чувствительности, зона нечувствительности или неоднознач-
ности, значения параметров насыщения, рабочий диапазон изменения
сигналов и параметров); входная и выходная мощность; номиналь-
/ные значения параметров; коэффициенты добротности и т. д.
/ 2. Динамические характеристики: степень астатизма; частотные
характеристики (передаточные функции); полоса пропускания; по-
казатели качества, характеризующие переходные режимы (постоян-
ные времени, величины демпфирования, перерегулирования); за-
пасы устойчивости по фазе и амплитуде; статистические динамиче-
ские характеристики и др.
3. Точностные характеристики: статическая точность (или по-
зиционная, скоростная и другие ошибки); точность в переходных
'режимах (быстродействие, точность при типовых воздействиях);
точность при наличии возмущений; статистическая точность (дина-
мическая или флюктуационная ошибка).
; 4. Эксплуатационные характеристики: эффективность приме-
нения согласно выбранным критериям; стабильность характери-
стик и параметров в условиях нормальной эксплуатации; устойчи-
юсть к возмущениям внешней среды (термостойкость, влагостой-
кость, вибропрочность, работа в условиях вакуума, допустимые
Механические перегрузки и т. д.); радиационная стойкость; время
готовности к работе; безопасность при эксплуатации; ремонтоспособ-
ность и взаимозаменяемость; масса (вес), габаритные размеры;
энергоемкость (удельная мощность); устойчивость к длительному
хранению; требования к источникам питания и др.
! 5. Экономические характеристики: надежность; стоимость, вос-
производимость параметров и характеристик в условиях произ-
водства; КПД; ресурс работы; чувствительность технических пара-
метров к величинам производственных допусков и т. д.
Кроме того, решение задачи синтеза структуры САР требует
определения управляемости и наблюдаемости системы. Энергетиче-
ские параметры элементов и систем обычно входят косвенным обра-
зом в статические, динамические и эксплуатационные характеристики.
Технические требования к элементам, системам автоматики,
а также требования на условия их эксплуатации формулируют
в соответствии с рассмотренными выше техническими характеристи-
ками на этапах проектирования, производства и испытания опыт-
ного образца. Кроме этого, к элементам, устройствам и системам мо-
гут предъявляться эргономические и другие специальные требова-
309
ния (например, степень живучести системы, плавность движения
механической нагрузки, соблюдение норм стандартов безопасности
труда и охраны окружающей среды и др.).
Следует отметить, что к САР и САУ как к сложным и многофунк-
циональным техническим средствам предъявляют все перечисленные
выше технические требования.
При анализе (выборе) или проектировании элементов и устройств
систем автоматики, выполняющих отдельные частные функцио-
нальные задачи по сбору, передаче, переработке и использованию
информации, можно выделить основные технические требования,
соответствующие функциональному назначению данного элемента.
Например, основными требованиями, предъявляемыми к преобра-
зующим устройствам, являются статическая и динамическая точность
при необходимом быстродействии, к усилительным устройствам —
коэффициенты усиления и быстродействие, к корректирующим уст-
ройствам — необходимые частотные характеристики, к исполни-
тельным устройствам — выходная мощность и быстродействие. Ос-
новными техническими требованиями, предъявляемыми к управляю-
щим ЭВМ (встроенным микроЭВМ), как к логико-вычислительным
подсистемам, являются быстродействие и объем памяти, а также
логические и технические возможности сопряжения ЭВМ с управляю-
щими объектами.
ГЛАВА 13. ДАТЧИКИ, ИЗМЕРИТЕЛЬНЫЕ
И ПРЕОБРАЗУЮЩИЕ УСТРОЙСТВА АВТОМАТИКИ
Задача разработки САР состоит в том, чтобы, располагая
некоторыми априорными сведениями об объекте (процессе) и техник
ческим заданием (ТЗ) на систему в целом (по точности, коэффициент
там передачи, мощности, надежности и т. д.), выбрать технические
средства из числа серийных (а в случае необходимости сформулиро-^
вать технические условия на разработку новых средств автоматики^
и составить схему системы, обеспечивающую реализацию данного Т3|
При выборе устройств, входящих в САР, последние должны рассмад
триваться во взаимодействии друг с другом, а вся система в целом
обладать заданными свойствами.
Особое место среди элементов и устройств САР занимают датчик!
первичной информации, измерительные и преобразующие устрой
ства, от статической и динамической точности которых непосред
ственно зависит точность системы в целом. В данной главе рассмД
триваются некоторые типовые датчики, измерительные и преобр^
зующие устройства САР различного назначения.
13.1. МИНИМАЛЬНЫЙ СОСТАВ ИЗМЕРИТЕЛЬНЫХ
СРЕДСТВ САР. КЛАССИФИКАЦИЯ ПОГРЕШНОСТЕЙ
И ВОЗМУЩЕНИЙ
Одной из технических задач, решаемой проектировщикам^
САР, является задача определения минимального состава измеритель'
ных элементов, фиксирующих или воспринимающих соответствуй)
310
Рис. 13.1. Структурная схема многомер-
ной САР
щие компоненты вектора состояния
или их линейные комбинации, с
целью эффективного управления
системой.
Если с помощью измерительных средств может быть получена
полная информация о векторе состояния многомерной САР (изме-
рены все компоненты вектора состояния), то задача синтеза системы
математически разрешима. Это означает, что требуемое по техни-
ческому заданию расположение корней системы управления с обрат-
ными связями может быть обеспечено (см. параграф 3.4). Однако
измерение всех компонент вектора состояния с помощью той или
иной элементной базы не всегда может быть технически реализо-
вано или оправдано.
Пусть многомерная линейная САР n-го порядка, структурная
схема которой дана на рис. 13.1, описывается векторно-матричными
уравнениями:
х (0 = Ах (/) + Ви (/);
у (0 = Сх (О,
(13.1)
где х = х2, .... хп |т — вектор состояния системы, представляю-
щий собой матрицу-столбец nxl, элементы х, вектора являются пе-
ременными состояния системы (/ = 1, 2, ..., п); у — вектор (матрица-
столбец г xl), характеризующий выходные измеряемые переменные yt
системы (1=1, 2, .... г); и — вектор управления; А — матрица
(п %п) исследуемой системы; В —матрица управления (nxm);
С — матрица выхода (гхп).
Переменные состояния CAP х} в отношении возможности их
измерения с целью формирования закона (алгоритма) управления
классифицируются на три группы:
технически доступные для измерения — координаты системы,
которые могут быть непосредственно измерены с помощью соответ-
ствующих измерительных устройств (ИУ);
труднодоступные для измерения — измерение координат воз-
можно лишь технически сложными и дорогими устройствами (или
измерительными подсистемами), поэтому измерение таких перемен-
ных состояния системы экономически нецелесообразно;
технически недоступные для измерения — координаты не могут
быть измерены, так как соответствующие технические средства
(элементная база) для их измерения вообще отсутствует.
Как показано в параграфе 3.3, переменные состояния, недоступ-
ные для непосредственного измерения, могут быть оценены косвенно
с помощью наблюдающего устройства. Последнее идентифицирует
(определяет) вектор состояния САР, непосредственно измеряя лишь
часть переменных состояния вектора х. При неполной информации
о векторе состояния САР свободное управление корнями системы
невозможно. Применение же наблюдающего устройства при усло-
311
Рис. 13.2. Структурная
схема двухконтурной сле-
дящей системы
вии измерения определенной части компонент вектора состояния
позволяет восстановить весь вектор, что означает возможность син-
тезировать САР в соответствии с заданным ТЗ.
Математическое определение понятия полной наблюдаемости си-
стемы (13.1) связано с нахождением матрицы наблюдаемости R„
и вычислением ее ранга. Матрица определяется матрицей А
(свойствами системы) и матрицей выхода С системы (т. е. некоторым
набором измеряемых, переменных) в соответствии с выражением
rm = [ст: атст : (Ат)2 ст ... i(AT)"-1 ст].
Если ранг матрицы R^ равен порядку системы (т. е. rang RM = п),
то система полностью наблюдаема. Если число наблюдаемых пере-
менных меньше числа переменных состояния п, то для восстановле-
ния вектора состояния необходимо использовать наблюдающее уст-
ройство.
Если ранг матрицы наблюдаемости меньше порядка САР
(rang R^ < и), то это означает, что по измеренному (наблюдаемому)
вектору у (t) можно оценить не все, а лишь некоторую часть перемен-
ных состояния системы.
На этапе эскизного проектирования САР решается задача — ка-
кие измерительные устройства (измерительные подсистемы) и в ка-
ких сочетаниях целесообразно ввести в состав САР для получения
полной информации о векторе состояния системы с целью последую-
щего синтеза алгоритма управления и (/). Эта задача сводится к оп-
ределению ранга матрицы наблюдаемости САР, т. е. к проверке ра-
венства ранга Rjj порядку синтезируемой системы.
Использование наблюдающих устройств для формирования ал-
горитма управления открывает возможность свести число измери-
тельных устройств (подсистемы) САР до принципиально необходи-
мого минимума.
Пример. Структурная схема двухконтурной следящей системы показана на
рнс. 13.2: 1-й контур содержит элемент ОС по угловой скорости вала нагрузки;
а 2-й контур — звено позиционной ОС. Переменные состояния системы: х2 — уг-
ловая скорость вала; хх— угол поворота нала нагрузки; вектор х (/) = |хх; xt |т.
Система имеет порядок п = 2, пусть статические коэффициенты численно равны ме^
жду собой, т. е. = k2 = ks = k.
Уравнения следящей системы:
*i = 0 4- х2 + 0;
х2 = — kxt — kx2 + ku,
поэтому матрицы п X п А н Ат системы в соответствии с формулой (13.1)
(13.2|
312
Допустим, что координату xt можно измерить, а х2 непосредственно измерить
нельзя (т. е. в матрице С компоненты Cj = 1, с2= 0).
Необходимо определить, наблюдаема лн система, описываемая уравнениями
(13.2).
Вычислим субматрицы матрицы наблюдаемости Ru:
Ст =
Матрица наблюдаемости
АТСТ =
и имеет
rang Иц = 2.
Таким образом, Ранг RM = п — 2, т. е. следящая система имеет полный
ранг. Это означает, что система наблюдаема и координата х2 может быть восстанов-
лена наблюдающим устройством. Итак, при технической реализации системы, опи-
сываемой уравнениями (13.2), не требуется специального устройства (датчика)
для непосредственного измерения переменной х2.
Система уравнений (13.1) описывает линейную САР, которая ра-
ботает в идеальных условиях. Эти условия определяются двумя
факторами: во-первых, все элементы, устройства и подсистемы САР
являются абсолютно точными (в частности, их статические характе-
ристики являются идеально линейными); во-вторых, на систему
не действуют внешние возмущающие факторы, т. е. система функцио-
нирует не в возмущенной среде (по температуре, напряжению ис-
точников питания и т. д.). Модель реальной САР описывается сле-
дующей системой векторно-матричных уравнений:
х = Ах + Bu + Ew; 1
у = Сх + Dv, J
где w — вектор внешних возмущений; v — вектор шума измерений
компонент вектора состояния; Е и D — соответствующие матрицы.
Величины компонент вектора измерительного шума v существенно
зависят от погрешностей измерительных элементов системы управ-
ления. Чем меньше эти погрешности, тем выше точностные показа-
тели САР в целом.
Рассмотрим классификацию погрешностей измерительных эле-
ментов САР по признакам, предложенным в работах [22, 23]. Эти
погрешности являются причиной шума измерения соответствующих
компонент х (().
1. Классификация погрешностей в зависимости от режима ра-
боты ИУ:
статические погрешности — ошибки ИУ при установившемся
режиме измерения;
динамические погрешности — ошибки ИУ при неустановившемся
режиме измерения (в переходных режимах работы САР).
2. Классификация погрешностей по характеру связи между ее
величиной и уровнем входного сигнала ИУ (измеряемой величины):
313
йДДйтйвнЫё погрешности Ошибки ИУ, не зависящие от вели-
чины входного сигнала ИУ;
мультипликативные погрешности — ошибки ИУ, пропорциональ-
ные входному сигналу;
периодические погрешности — ошибки, изменяющиеся в зависи-
мости от сигнала на входе по периодическому закону.
3. Классификация погрешностей по закономерности их воспроиз-
ведения при многократных реализациях:
систематические погрешности — ошибки, имеющие определен-
ное значение в каждой точке характеристик ИУ и повторяющиеся
при многократных испытаниях в одних и тех же условиях;
случайные погрешности — ошибки ИУ, имеющие рассеяние по
величине и знаку при многократных испытаниях в одних и тех же
условиях (появление тех или иных значений случайных погрешно-
стей при конкретных реализациях незакономерно).
4. Классификация погрешностей по причинам их возникновения:
методические погрешности — ошибки, возникающие из-за несо-
вершенства метода измерения;
инструментальные погрешности — ошибки ИУ, возникающие
вследствие несовершенства технологического процесса изготовле-
ния измерительного устройства (подсистемы), изменения геометри-
ческих (конструктивных) размеров и физических параметров эле-
ментов ИУ при отклонении параметров окружающей среды, изме-
нения режимов работы элементов при непостоянстве характеристик
источников питания'
13.2. КЛАССИФИКАЦИЯ ДАТЧИКОВ, ИЗМЕРИТЕЛЬНЫХ
И ПРЕОБРАЗУЮЩИХ УСТРОЙСТВ
Статическое и динамическое состояния объекта управле-
ния и управляемого процесса в любой момент времени характери-
зуются переменными состояния, которые должны непрерывно фик-
сироваться или измеряться. Характерная особенность управляемых .
процессов в автоматике — они, как правило, представляют собой >
инфранизкочастотные процессы, описываемые переменными, имею-
щими инфранизкочастотный спектр. Инфранизкочастотный сигнал —;
сигнал, имеющий амплитудный частотный спектр от /н = 0 до не--
которого значения fB = fnp [Гц], обычно не превышающего долей
или нескольких единиц герца (fa — нижняя и fB верхняя частоты, ;
/пр—частота пропускания).
Устройства, предназначенные для 'непосредственного получения^
информации о переменных состояния системы регулирования (объ-
екта) или управляемого процесса, называют датчиками первичной^
информации. Иногда в технической литературе датчики называют^
чувствительными устройствами. Датчики формируют физически^
сигнал, фиксирующий переменные состояния системы, которые со*;
ответствуют определенным компонентам вектора состояния.
Устройства, осуществляющие сравнение переменных состояния
системы или соответствующих им физических сигналов с задан-
314
ними или управляющими сигналами, называют измерительными
устройствами. Датчик, который имеет элементы (схемы), соответст-
вующие эталону фиксируемой переменной, а также ее градуировке,
одновременно выполняет функции и датчика первичной информа-
ции, и измерительного устройства.
Для измерения рассогласования, или ошибки, между двумя фи-
зическими переменными в системах автоматического регулирования
применяют разнообразные схемы соединения двух или нескольких
датчиков. Например, для измерения углового рассогласования
между входным и выходным валами (валом нагрузки) широко при-
меняют измерительные устройства, выполненные на двух сельсинах
или двух синусно-косинусных поворотных трансформаторах.
Основными техническими требованиями, предъявляемыми к дат-
чикам первичной информации и измерительным устройствам, яв-
ляются статическая и динамическая точность при низком уровне по-
мех, а также стабильность характеристик.
Классификация датчиков и измерительных устройств приведена
на рис. 13.3, а.
В автоматике преобразующими устройствами (преобразователями)
называют такие технические элементы, которые непосредственно не
выполняют функции измерения переменных состояния, усиления сиг-
налов или коррекции свойств системы в целом и не оказывают пря-
мого воздействия на регулирующий орган или управляемый объект.
Преобразователи (ПУ) в автоматике являются промежуточными уст-
ройствами. Они выполняют вспомогательные функции, связанные
с эквивалентным преобразованием сигналов, а также функции
согласования элементов.
Преобразующие устройства в САР предназначаются для экви-
валентного преобразования сигнала без изменения вида энергии или
315
Рис. 13.4. Спектры сигналов ДУС
использование которого при формиро-
вании регулирующего воздействия яв-
ляется более целесообразным.
ПУ, осуществляющее эквивалент-
ное преобразование инфранизкочас-
тотного сигнала в «высокочастотный»
модулированный, называют модуля-
тором, а устройство, выполняющее обратное преобразование моду-
лированного сигнала в инфранизкочастотный, — демодулятором.
При преобразованиях в общих случаях может иметь место изме-
рение вида энергии сигнала (или его физической природы). Например,
потенциометрический преобразователь линейных перемещений осу-
ществляет преобразование линейного перемещения выходного эле-
мента гироскопического датчика пространственного положения
объекта в немодулированный электрический сигнал. Или электриче-
ский сигнал управления преобразуется электромагнитным преобра-
зователем в эквивалентное линейное перемещение плунжера золот-
никового распределителя гидравлического следящего привода и т. д.
Устройства, преобразующие электрический или другой анало-
говый сигнал в эквивалентный цифровой, называют аналого-цифро-
выми преобразователями (АЦП). Устройства, осуществляющие об-
ратное преобразование, т. е. преобразование цифрового сигнала
в аналоговый эквивалент, — цифроаналоговыми преобразователями
(ЦАП). Разнообразные АЦП и ЦАП применяют в системах автомати-
ческого регулирования и управления с цифровой ЭВМ.
На рис. 13.3, б дана классификация преобразующих устройств с
детализацией ПУ типа электрический вход — электрический выход.
Датчики, измерительные и преобразующие элементы и устройства
без модуляции. Амплитудный спектр выходного сигнала датчика
(измерительного или преобразующего устройства) без модуляции
не смещен по оси частот относительно спектра инфранизкочастотного
входного воздействия. Примером такого элемента является потенцио-
метрический преобразователь гироскопического датчика угловой ско-
рости (ДУС) объекта. В этом случае проекция на ось чувствитель-
ности вектора измеряемой угловой скорости Q (/) преобразуется,
в эквивалентный угол поворота ф (/) измерительной оси. Амплитудные
спектры временных функций й(1) и ip (t), соответственно, Q (<о) =3
= mod Q (/®) и Ф (о) — тобФ (/со), являются инфранизкочастот-;
ными (рис. 13.4, кривые 1 и 2). Амплитудный частотный спектр функ-
ции ф (t) отличается от спектра £2 (со)ввиду динамических погрешно-
стей гироскопического датчика, но при этом эти спектры не разне-
сены по частоте. Потенциометрический преобразователь осуществ-
ляет эквивалентное преобразование ф (t) в немодулированный элек-.
трический сигнал ивЫХ (t),\ амплитудный спектр которого (кривая 5^
не отличается от спектра функции Ф (со), если предположить, что
потенциометрический преобразователь — идеальный безынерцион-
ный элемент, а также пренебречь квантованием по уровню.
316
Датчики, измерительные и преобразующие элементы и устройства
с модуляцией несущей частоты. Такие технические средства автома-
тики называют элементами с модуляцией (ЭМ). Функциональная
схема ЭМ показана на рис. 13.5, а.
Амплитудный инфранизкочастотный спектр X (и) = | X (/и)
входной функции х (t) показан на рис. 13.5, б. Рассмотрим лишь]
частный случай, когда f (t) — гармоническая функция модуляции:
f (t) = и~ (t) = Um sin (aot 4- ф0),
здесь w0 = 2nf0 — несущая (опорная) частота напряжения (t);
ф0 — произвольная фаза.
Элемент с модуляцией является безынерционным модулятором
несущей частоты, который осуществляет во временной области не-
линейную операцию типа
«вых (0 = Кх (0 Um sin W + Фо). (13.3)
где К — коэффициент передачи ЭМ.
Процесс модуляции сигнала, описываемый выражением (13.3),
называют амплитудной балансной модуляцией (АБМ). '
Амплитудный спектр выходного сигнала ивых (t):
4-00
^вых (®) = mod U3ax (ja) = К S спХ [/ (со — псо0)] (13.4)
п=—оо
не содержит линейчатого спектра напряжения несущей частоты.
Амплитудный спектр ивых (о) получим путем переноса | X (/со) |
входной функции по оси частот на величину <о0 (рис. 13.5, в).
В соответствии с выражением (13.3) прямое изображение по Лап-
ласу от сигнала ивых (t)
ивык (s) = L [«вых (/)] = ^{L[x (t) e'“«q -L[x (t) e1'^]} =
= ^[X(S-/<o0)-X.(S + /(o0)L (13.5)
где L [x (0] = X (s) = j x (t) e~si di.
о
Рис. 13.5. Элемент с амплитудной балансной модуляцией:
f (i) — функция модуляции (опорное напряжение); “вых(0 — выходной модулированный
сигнал; а — функциональный элемент; х (f) — входная нифраиизкочастотиая функция уп-
равления; б, а — амплитудные спектры сигналов при АБМ
317
Рис. 13.6. Амплитудная
балансная модуляция:
а — статические характери-
стики; б — временные диа-
граммы
Статические характеристики процесса АБМ показаны на
рис. 13.6, а. Кусочно-ломаная функция 1 является амплитудной
характеристикой А (х) процесса, отражающей линейную зависимость
между модулем мгновенного значения х (0 и соответствующим зна-
чением амплитуды модулированного сигнала wBbiX (0. Характери-
стика А (х) — четная, т. е. неоднозначная. Разрывная функция
(кусочно-ломаная 2) — фазовая характеристика АБМ <р (х) опреде-
ляет фазу выходного сигнала нвых (t) относительно опорного напря-
жения несущей частоты. Из выражения (13.3) видно, что при поло-
жительном значении функции х (t) фаза ивых (t) совпадает с фазой
напряжения (t), при отрицательной х (0 фаза цвых (0 противо-
положна фазе (0. На рис. 13.6, б показаны временные диаграммы
А БМ, в точке t — tK происходит «опрокидывание» фазы выходного
напряжения.
Модулированный сигнал типа (13.3) соответствует выходным
сигналам сельсинов-трансформаторов, синусно-косинусных поворот-
ных трансформаторов, индукционных и других преобразователей
на несущей частоте, работающих в САР.
, Л n I 13.3. ПОТЕНЦИОМЕТРИЧЕСКИЕ ДАТЧИКИ
\ Л И ПРЕОБРАЗУЮЩИЕ УСТРОЙСТВА
Потенциометрический датчик (преобразователь) — элек-
/тромеханический элемент, состоящий из проволочного потенциометра
и токосъемника, соединенных по определенной схеме с источником
питания и электрической нагрузкой. В качестве напряжения пита-
ния, как правило, используют напряжение постоянного тока; по-
этому потенциометрические датчики относятся к элементам без мо-
дуляции. Нагрузкой потенциометрического датчика (ПД) является
полное входное электрическое сопротивление усилителя, реле, элек-
тромагнитного преобразователя и т. д.
ПД осуществляет преобразование линейного х (0 или угло-
вого а (0 механического перемещения чувствительного элемента
первичного датчика информации в выходной электрический сигнал
Ч1Я
в соответствии с линейным или нелинейным законом при кванто-
вании сигнала по уровню. При значительном числе витков потенцио-
метра и малом диаметре провода (d с 0,05 мм) эффектом квантова-
ния выходного сигнала обычно пренебрегают.
Закон преобразования перемещения в электрический сигнал
(или вид статической характеристики ПД) определяется конструк-
цией датчика (профилем каркаса потенциометра), схемой подключе-
ния к источнику питания и нагрузке, а также режимом работы.
В частном случае ПД реализует релейный закон преобразования
перемещения в напряжение. Такой ПД называют релейным потен-
циометрическим. датчиком.
Потенциометрические датчики, применяемые в САР, отличаются
простотой конструкции, удобством в эксплуатации, однако наличие
подвижного токосъемного элемента снижает их надежность.
Схема релейного ПД показана на рис. 13.7, а. Половина каркаса
ПД, выполненного из изоляционного материала, покрыта токопро-
водящей пленкой, например, пленкой хрома (участок об), а другая
Рис. 13.7. Схемы и статические характеристики ПД:
1 — каркас релейного потенциометра; 2 — токосъемное устройство'
(U — напряжение источника питания; / — ток, потребляемый от источника питания на-
груженным ПД; ZH — сопротивление нагрузки; /н — ток, протекающий через ^ВЫх ж
« /НЯН — выходное напряжение нагруженного ПД при ZH = RH; а — схема релейного ПД;
б — характеристика релейного ПД; в — схема линейного (функционального) ПД (Я —
омическое сопротивление ПД вдоль рабочей Дорожки I = /а ; и ^^в — сопротивле-
ния соответствующих участков Дорожки); г — относительные статические характеристики
линейного нагруженного ПД
319
половина каркаса свободна от покрытия (участок бв). Контактный
элемент токосъемника, установленный с помощью пружины, обеспе-
чивающей необходимое контактное давление, жестко соединен с под-
вижной частью датчика первичной информации (например, с рамкой
гироскопа). Поэтому перемещение х (/) или a (Q токосъемного эле-
мента относительно каркаса (вход релейного ПД) является выходом
датчика первичной информации. Токопроводящий участок аб кар-
каса ПД соединен последовательно с подвижным токосъемником,
нагрузкой Zw и источником питания Un = U. При перемещении кон-
тактного элемента вдоль участка бв выходное напряжение ПД на
нагрузке будет равно нулю, при нахождении токосъемника в любой
точке участка аб напряжение UBax = U. Статическая характери-
стика ПД UBax = f (х) является релейной нечетной характеристи-
кой с точкой разрыва б (рис. 13.7, б) системы координат ПД.
Конструкция линейного (или функционального) проволочного ПД
отличается от релейного ПД тем, что на его каркасе намотано w
витков высокоомного провода (например, из нейзильбера, констан-
тана и т. д.). Изоляция с верхней части витков сошлифовывается,
образуя контактную дорожку, по которой перемещается токосъем-
ный элемент. Схема такого ПД, имеющего нечетную статическую
характеристику, показана на рис. 13.7, в (провод намотан на каркас
в соответствии с линейным законом, внутреннее сопротивление источ-
ника напряжения равно нулю).
Рассматривая нагруженный ПД как электрический четырех-
полюсник при фиксированном х, запишем уравнения, характеризую-
щие статический режим датчика, в виде
\
7Н = 4~ ^12^! &Н — ^ВЫХ — ^21^ 4- ^22^7,
где kn; k12; k21; k22 — частные коэффициенты передачи ПД.
Из уравнений Кирхгофа нетрудно получить следующие соотно-
шения:
^11-- ----ЛбЁ’ ^21 ----- ^22-- !•
Для нахождения аналитического выражения статических харак-
теристик ивыт = <р (х), нагруженного ПД, воспользуемся полным
статическим коэффициентом передачи четырехполюсника
ггивых__ ^вых _ 1
д“ “ и k21 ’
или с учетом значений коэффициентов kn и k21
RQbRh
(13.6>
R6bRh "Ь RaflRii "Ь Ra6R6B
Обозначив через о = хН — текущее относительное перемещение
(положение) токосъемника, а через р = RdR — коэффициент на-
грузки (относительную величину сопротивления нагрузки) и упро-
320
бтйв Ёыражение (13.6), получим семейство относительных статйЧё;
ских характеристик нагруженного ПД
аз.?)
где изыДи = (7вых — относительное напряжение нагрузки.
Семейство нелинейных статических характеристик (7вых =
= Ft (U, о) при различных значениях коэффициента р (pt < р2 < р3
и т. д., кроме рс = оо) показано на рис. 13.7, г. Относительная ста-
тическая характеристика холостого хода ПД (7Н = 0) является ли-
нейной функцией о (штриховая прямая на рис. 13.7, г), т. е.
^вых. XX == Pl (U> О)|р=*оо = Uo. (13.8)
Относительные нелинейные искажения характеристик за счет на-
грузки определим следующим образом:
е(а, р, U) = (U3m.^-U^)lU (13.9)
или, используя формулы (13.7) — (13.9), найдем
8 (а, р, U) == (—а2 + а3)/[(1 — о) а + р],
в частности, если р = оо, то 8 (о, р, U) |р=оо = 0.
Аналогично характеристикам 1ДЫХ = Fr (а, р, U) можно полу-
чить семейство статических характеристик /« == Fa (о, р, U), т. е.
Га = 1о/(р ф- р).
Динамические характеристики ПД. В процессе перемещения токо-
съемника нагруженный ПД работает как динамическое устройство.
Если нагрузка Za (s) является, например, активно-индуктивной,
т. е. ZH = RH + Las (эквивалентная схема нагрузки показана на
рис. 13.8, а), тогда передаточная функция ПД относительно тока
1В (s) на выходе и линейного перемещения X (s) на входе
IV/ /М _ Al (s) _ &ПД
— THs+l ’
где /гпд = -А/^ст—- коэффициент передачи нагруженного ПД
(Д/п,усг — приращение тока нагрузки, соответствующее переме-
о—
u(t)
tH(t)
б)
а)
Рис. 13.8. Эквивалентная схема нагрузки ПД:
а — электрическая схема; б — схема в переменных состояния
И Солодовников В. В. н др.
321
Щейию Ах токосъемника); Тв~~~— постбЯййая врёйёйй' ёбпрб*
Ди
тивления нагрузки.
Нагрузкой ПД, используемых в САР, является, например, об-
мотка поляризованного реле, обмотка управления МУ и т. д.
Непрерывное векторно-матричное уравнение нагруженного ПД
= (13.10)
где v (1) — | х (f); i’h (0 Г — вектор-функция ПД в режиме, близком
к холостому ходу иВых (0 = kx (t).
Решение векторно-матричного уравнения (13.10) имеет вид
у(/) = Ф(0у(0),
где Ф (t)— матрица-перехода нагруженного ПД’, v (0) — |х (0);
i'h (0) Г — вектор начальных условий.
Если х (0 — единичная ступенчатая функция и начальные усло-
вия нулевые, то
1 0 х(0)
Схема нагруженного ПД в переменных состояниях приведена
на рис. 13.8, б.
Схемы соединения потенциометрических датчиков. Потенцио-
метрический датчик со средней точкой (рис. 13.9, а) в соответствий”
с выражением (13.7) и схемой имеет семейство знакопеременных
(нечетных) статических характеристик (рис. 13.9, б).
На рис. 13.9, в показана функциональная схема следящей- системы
с потенциометрическим измерительным устройством. Два потенцио-
метрических датчика П1 и П2, соединенные по мостовой схеме, пред-
ставляют собой устройство, позволяющее измерять относительное
рассогласование хе = хВх— хвых между токосъемниками и преобра-
зовывать его в пропорциональное напряжение ие = kxe. Преобразо-
ванный и усиленный по мощности сигнал ие (t) подается на вход
обмотки управления ЭДв, который через кинематическую передачу
редуктор—винт—гайка перемещает нагрузку и токосъемник П2.
Потенциометрические преобразователи в САР можно использо-
вать в качестве элементов отрицательной обратной связи (ООС).
На рис. 13.10 приведена силовая часть с элементом отрицательной ОС
гидравлического следящего привода. Элементом ООС являются два
ПД, соединенных по схеме моста. К одной диагонали моста подво-
дится напряжение питания U\ выходное напряжение 77ВЫх, пропор-
циональное линейному перемещению штока гидравлического двига-
теля, снимается с другой диагонали моста. Перемещение штока z (t)
является выходной переменной привода, поэтому напряжение ивых (t)
представляет собой напряжение ООС.
322
Рис. 13.9. Схемы соединения ПД и статические характеристики:
а — схема ПД со средней точкой (1 — потенциометр со средней точкой; 3 — токосъемник);
б— семейство статических характеристик; в — следящая система с потенциометрическим
иамерительным устройством (УК — усилитель с корректирующим устройством, Уп — уси«
литель'преобразователь, УМ — усилитель мощности. Эд» — асинхронный Двухфааиый
электродвигатель, Р и ВГ — редуктор а иинематичесиой парой виит*гайка)
Рис. 13.10. Силовая часть
гидравлического привода с
элементом отрицательной
ОС:
1 — потенциометры; 2 — сдво-
енный токосъемник; 3 — силовой
цилиндр; 4 — поршень; 5 —
шток; 21 — длина рабочей до-
рожки; Pi н Давление
В полостях
п*
323
13.4. ИНДУКЦИОННЫЕ ДАТЧИКИ И ИЗМЕРИТЕЛЬНЫЕ
УСТРОЙСТВА. СЕЛЬСИНЫ
Индукционный датчик — электромеханическое устрой-
ство, предназначенное для преобразования угловых и линейных пере-
мещений в модулированное напряжение. Принцип действия индук-
ционных датчиков и преобразователей основан на изменении коэф-
фициента взаимоиндукции М. между подвижным и неподвижным
элементами при изменении их относительного положения. Индук-
ционные датчики и преобразователи — устройства с балансной мо-
дуляцией несущей частоты.
Основными типами индукционных датчиков являются:
датчики угловых перемещений (сельсины, поворотные трансфор-
маторы, микросины, функциональные вращающиеся трансформа-
торы, индуктосины и др.);
датчики линейных перемещений различных типов для измерения
параметров механических процессов.
Индукционные измерительные устройства, которые представляют
собой соединение двух датчиков, выполненное по определенной
схеме, предназначены для измерения угловых или линейных рассо-
‘тласовзний. Их применяют в регуляторах и следящих системах. Ин-
дукционные измерительные устройства обладают высокой точностью
и надежностью (например, точность поворотных трансформаторов
должна быть не хуже одной угловой минуты).
Сельсин — индукционный датчик, выполненный в виде-миниатюр-
ной электрической машины переменного тока. Обмотку возбуждения
однофазного сельсина подключают к напряжению несущей частоты.
В ней создается пульсирующий магнитный поток возбуждения.
Обмотки синхронизации смещены в пространстве на 120° и со-
единены в звезду. Индуктируемые в этих обмотках ЭДС и токи имеют
одну и ту же временную фазу. Обмотка возбуждения — сосредоточен*
кая или распределенная, а обмотки синхронизации — всегда рас*
пределенные.
В автоматике сельсины наиболее широко применяют в качестве
измерительных устройства САР для определения угловых рассогла-
сований между входом и выходом. Сельсины с одной парой полюсов
применяют в одноотсчетных следящих системах, а многополюсные —
в двухотсчетных прецизионных системах.
Измерительные схемы на сельсинах, выполненные по типу угол
рассогласования — фаза—код, обладают высокой точностью и
удобны для соединения с микро-ЭВМ.
Конструкции и принцип действия сельсинов. По конструктивному
исполнению сельсины подразделяют на контактные и бесконтактные.
Принцип действия бесконтактного сельсина основан иа простран-
ственном вращении вектора пульсирующего магнитного потока <Dd
при соответствующем угловом повороте ротора’. Бесконтактный сель-
син (как и контактный) является обратимой электрической микро-
машиной. В трансформаторном режиме этот поток индуктирует в од-
нофазной обмотке сельсина-приемника синусоидальную ЭДС
324
изменяющуюся в зависимости от углового рассогласования 9 между
роторами сельсина-датчика и сельсина-приемника.
Конструкция бесконтактного сельсина показана на рис. 13.11.
Сельсин состоит из трех основных частей: корпуса 1, статора с си-
стемой обмоток и магнитопроводов, сложного ротора.
Цилиндрический корпус 1 служит для крепления статора сель-
сина и двух подшипников, в которых установлен ротор. Обмотка
возбуждения 2, конструктивно выполненная в виде двух тороидаль-
ных катушек, расположена на статоре сельсина. Сельсин имеет пять
отдельных магнитопроводов: основной, два тороидальных (на ста-
торе) и два специальных (на роторе). Магнитопроводы смонтированы
В пакеты из листовой электротехнической стали.
Основной магнитопровод 3 служит для размещения трехфазной
обмотки синхронизации 4. На торцах статора установлены два торо-
идальных магнитопровода 5, которые замыкаются рабочим магнит-
ным потоком через секции (пакеты) внешней части основного магнито-
провода 10. Конструкция ротора бесконтактного сельсина показана
также на рис. 13.11. Два скошенных магнитопровода //, выполнен-
ные в виде пакетов, запрессованы в цилиндрический пластмассовый
(или силуминовый) корпус 6. Листы пакетов ротора параллельны
продольной оси сельсина. Как видно из рис. 13.11, эти пакеты раз-
делены немагнитным промежутком 9, являющимся частью корпуса
ротора, 8 — подшипники ротора. Такая конструкция ротора позво-
ляет изменять угловое положение пульсирующего магнитного по-
тока в плоскости, перпендикулярной оси сельсина, по отношению
к обмоткам синхронизации в соответствии с угловым положением
оси сельсина 7. Пакеты статора и ротора с соответствующими воз-
душными зазорами образуют единый замкнутый магнитопровод бес-
контактного сельсина. Концы соответствующих обмоток выведены
на клеммную колодку 12.
Рассмотрим принцип действия отдельного бесконтактного сель-
сина вне индикаторной или трансформаторной схемы. Предположим,
что мгновенный ток возбуждения в обмотке 2 имеет направление,
показанное на рис. 13.11. Силовые линии магнитного поля, образо-
325
iL'
u~(t)
—"Су
aguxd)
СП 2
51
Рис. 13.12. Схемы соединения сельсинов:
а — индикаторный режим; б — трансформаторный режим (Ф~ — пульсирующий магнитный
поток; Фв — поток, создающий ист (/); УП — усилитель-преобразователь
1
3 (
ванного левой обмоткой 2 как соленоидом, направлены по оси сель-
сина слева направо. Магнитный поток, распространяясь по левому
скошенному магнитопроводу ротора, встречает на пути немагнитный
промежуток. Поэтому поток меняет направление и. через радиаль-
ный воздушный зазор бх входит в основной магнитопровод 3 под уг-
лом в плоскости, перпендикулярной обмоткам синхронизации,
соответствующим угловому положению ротора. Поток проходит по
основному магнитопроводу путь в 180“ (см. знаки на рис. 13.11)
и через зазор поступает в правый скошенный магнитопровод ро-
тора. Далее поток раздваивается и через зазор S8 проходит в правый
тороидальный магнитопровод. Затем по пакетам внешнего магнито-
провода и через зазор поток попадает вновь в левый пакет ротора.
При прохождении по основному магнитопроводу, в пазах которого
уложены обмотки синхронизации, поток сцепляется с ними, индук-
тируя в них ЭДС, знаки и величины которых зависят от положения
потока относительно обмоток. Таким образом, в бесконтактном сель-
сине направление пульсирующего потока изменяется при повороте
ротора по отношению к неизменным в пространстве магнитным осям
обмоток синхронизации.-
Наиболее широко в системах автоматического регулирования
применяют бесконтактные сельсины (в трансформаторном режиме),
так как они имеют существенно ббльшую надежность по сравнению
с контактными.
Работа сельсинов в индикаторном режиме. Индикаторный ре-
жим — это двигательный режим электрической микромашины —
сельсин-приемника. Схема соединения сельсинов, работающих
в индикаторном режиме, приведена на рис. 13.12, а. Это устройство
из двух сельсинов предназначено для дистанционной передачи угла.
Однофазные обмотки сельсина-датчика (СД) и сельсина-приемника
(С/7) подключены к напряжению и (Q с частотой /0 = w0/2js Гц
326
(50, 400 или 1000 Гц). Соответствующие обмотки синхронизации —
1—3 связаны кабельной линией. Угловое мгновенное положение
роторов сельсинов — асд и асп = авых. При относительном угло-
вом рассогласовании 0 = асд — асп 0 на валах роторов СД
и СП возникает вращающий момент как результат взаимодействия
продольного и поперечного магнитных потоков Ф^ и Ф9, сдвинутых
в пространстве на 90°. Среднее значение этого момента за период
питающего напряжения называют статическим синхронизирующим
моментом A4C0(i). Мгновенное значение момента 7ИС0 равно вектор-
ному произведению потоков Фй и Ф?, т. е.
тсинхр = ± 1/2ЛФ^Рши [COS ф — COS (2(О(/ — ф)] sin 0,
где А — постоянный коэффициент;
Рщгх == Iшах 4 2^одЦ)/л;
kO5 — обмоточный коэффициент; w — число витков одной обмотки
синхронизации; /шах — наибольшее действующее значение тока об-
мотки синхронизации; ф — фазовый угол между потоками Ф^ и Ф3.
Среднее значение статического синхронизирующего момента
Мт = ±0.5ЛФяГтЯт cos ф sin 6, (13.11)
или
Мсс = zbAlcc шах Sin 0,
Где Местах = О^б.ЙФ^Рщах COS ф;
знак плюс соответствует синхронизирующему моменту на валу СП,
минус — на валу СД.
Статический синхронизирующий момент Мсс (рис. 13.13, а) ха-
рактеризует свойство механической самосинхронизации сельсинов
в индикаторном режиме. Точка 0 = 0 (или 0 = 360° п, п = 0,
±1, ±2, ...) на характеристике Мсс — F^ (0), в которой удельный
синхронизирующий момент
Л1УД = dMcc/dQ [9=о > 0, (13.12)
является точкой устойчивого механического равновесия роторов
сельсинов, или устойчивым ^механическим нулем, а точка 0 = 180°,
(0 = 180° ± 360° п), в которой
Муд = dMcc/dQ |e=i8o° 0,
— точкой неустойчивого равновесия (или неустойчивый нуль).
Рис. 13.13. Статические характеристики сельсинных схем:
<1 — характеристика синхронизирующего момента при индикаторном режиме работы; б —
характеристика выходного напряжения при трансформатор ш режиме
327
Индикаторная схема СД—(?Т7 в ДийпЙЗойё угЛОйОГО раёСбМйёб-
вания 9 = ±180° имеет единственный устойчивый механический нуль
(точка Аг) при 0 = 0 и один неустойчивый нуль (точка Лг) при 0 =
= ±180°. Если системе, находящейся в устойчивом начальном со-
стоянии, задать со стороны СД некоторый угол асд = 0, то сельсин-
приемник отработает это угловое рассогласование в соответствии
со знаком 0 по кратчайшему пути. Любой угол 0j < 180° будет от-
работан по часовой стрелке, а угол 02 > 180° — против часовой
стрелки.
Свойство механической самосинхронизации сельсинов, имеющих
небольшой удельный самосинхронизирующий момент, не может
быть использовано эффективно в системах автоматики из-за значи-
тельных статических и динамических ошибок. Механическая нагрузка
типа трения Мнагр = .'Итр на валу СП является причиной статиче-
ских ошибок, так как равновесие моментов
.'Итр = Мнагр = МудД9 (13.13)
будет иметь место при соответствующем угловом рассогласовании ДО,
отличном от нуля. Следовательно, статическая ошибка по модулю
согласно выражению (13.13) будет не меньше
Д0 = Мнагр/Л1уд.
Применение силовых сельсинов для технической реализации ди-
станционной передачи угла нецелесообразно по двум причинам;
во-первых, проводной канал связи должен быть рассчитан на значи-
тельные синхронизирующие токи; во-вторых, силовые сельсины не
приводят к существенному уменьшению ошибок, так как индикатор-
ная схема СД—СП не является системой с обратной связью, хотя и
устраняет угловое рассогласование между роторами.
Трансформаторный режим работы сельсинов. Включение двух
сельсинов по трансформаторной схеме отличается от индикаторной
схемы тем, что выходная (сигнальная) обмотка шВЫх сельсина-транс-
форматора (СТ) соединяется с входом усилителя-демодулятора си-
стемы автоматического регулирования (см. рис, 13.12, б), а ось ро-
тора СТ кинематически связана с валом нагрузки системы.
Статическая характеристика ПпЫх = Пст — Fu (0) трансформа-
торной схемы СД—СТ представляет характеристику балансной мо-
дуляции, т. е. действующее значение выходного напряжения в функ-
ции угла рассогласования 0 между роторами СД—СТ (в диапазоне
0 = ± 180ь) изменяется по синусоидальному закону при условии
начального рассогласования 9нач — 90° (рис. 13.13, б). При поло-
жительных значениях угла 0 фаза выходного модулированного на-
пряжения иаЫХ совпадает с фазой опорного напряжения и~ (I) —
== Um sin со0Е а при отрицательных — фаза ивых противоположна
фазе напряжения и~.
Идеальная статическая характеристика схемы СД—СТ без учета
зоны неопределенности выходного сигнала вблизи точки 0 = 0
в режиме электрического холостого хода имеет вид
^вых = ^Лпах 81П 0, (13.14)
39Я
Рис. 13.14. Структурные схемы типовой позиционной следящей системы:
^уд Кст: Куд н *Ум “ передаточные функции н коэффициенты СТ, усиди*
теля-демодулятора н усилителя мощности: се, гм — электрические и электромехани-
ческие параметры ЭДв-, J — суммарный приведенный момент инерции всех вращающихся
частей системы; Кред — передаточное отношение редуктора; ЛЦр и -^СТр“ вращающий
момент и момент сопротивления; а — вариант 1; б — вариант 2
где [Дцах — действующее значение выходного напряжения при
9 = ±90°.
Удельная ЭДС идеальной выходной характеристики (13.14)
определяет ее крутизну в начале координат, т. е.
Дуд = dE
ВЫХ/сЮ{е=о.
Синусоидальная зависимость (13.14) для идеально изготовлен-
ных сельсинов СД и СТ может быть получена .при выполнении сле-
дующих условий:
индукция В в воздушном зазоре между статором и ротором рас-
пределена точно по синусоидальному закону (это достигается соот-
ветствующим выбором обмоток, величины воздушного зазора, чисел
пазов ротора и статора для контактных сельсинов и т. д.);
конструкция контактных сельсинов неявнополюсная (для исклкн-
чения обмоточных гармоник).
Схема СД—СТ выполняет две функции: измерения рассогласо-
вания 0 между угловыми положениями валов СД и СТ и пре-
образования этого рассогласования по закону балансной модуляции.
Схема СД—СТ при 191 < 30° на рис. 13.14 представлена двумя
звеньями — элементом сравнения, формирующим 0 (t) = tzBX (0 —
— “вых (0> и звеном с коэффициентом feCT.
Рассмотрим работу схемы СД—СТ, являющейся измерительно-
преобразовательным устройством силовой позиционной следящей
системы, вариант 1 структурной схемы которой приведен на
329
рис. 13.14. а. Сельсины СД и СТ имеют по одной паре полюсов.
Поэтому измерительную схему называют одноотсчетной. Примем
следующие обозначения: 0 (t) = авх (t) — авых (t) — функция уг-
лового рассогласования; йст = dU^JdQ = const — коэффициент
передачи СТ по напряжению в диапазоне, где статическая характе-
ристика СТ с учетом входного сопротивления усилителя-демодуля-
тора 1/вых = f (9) может быть аппроксимирована линейной функ-
цией, т. е. при | 0| с 30° (йст является паспортным параметром СТ).
Исполнительным элементом следящей системы является Эде постоян-
ного тока с якорным управлением ия (t).
Система отслеживает функцию tzBX (f) поворота вала СД с усиле-
нием механической мощности, затрачиваемой на входе, в результате
регулируемой передачи энергии от источника питания к механической
нагрузке. Выходной вал редуктора жестко соединен с механической
нагрузкой и с валом ротора СТ. Таким образом, элементом позицион-
ной единичной ООС следящей системы является силовой механиче-
ский вал системы.
Определим пусковой вращающий момент следящей системы Л4вр.пуск
при йдв = 0. Для этого преобразуем структурную схему так, как
показано на рис. 13.14, б (вариант 2). Точка структурной схемы,
характеризуемая переменной Мвр, в результате преобразования ока-
залась вынесенной из контура с естественной обратной связью
с коэффициентом се. Поэтому коэффициент передачи участка прямой
цепи следящей системы от 0 — углового рассогласования между
роторами СД и СТ — до вращающего момента Л4вр при йдв = 0
/Сд = dMBp/dQ |Ядв=0 == ^ст&у^умСм/^я*
Пусковой момент следящей системы при |0| С 30°
Мвр. Пуск I 0 |<30° — КдЭ,
а при любых значениях угла рассогласования
А4вр. пуск == lAnax Sin 0/(д I= Afn max Sin 0 = AfcAP maxSlH 0. (13.15)
Характеристика пускового вращающего момента следящей си-
стемы, описываемая формулой (13.15), отличается от идеальной ста-
тической характеристики [формула (13.14)] измерительной схемы
СД—СТ (рис. 13.15, а), и от характеристики синхронизирующего
момента [формула (13.11)1 индикаторной схемы только масштабом
(рис. 13.15, б). Так же, как индикаторная схема, позиционная сле-
дящая система обладает свойством механической самосинхронизации
в пределах одного оборота вала нагрузки, т. е. характеристика, опи-
сываемая формулой (13.15), удовлетворяет условиям вида (13.12).
Точки и Вг на статических характеристиках 1/выХ (0) и Мвр.п (0)
называются соответственно устойчивыми электрическим и механиче-
ским нулями, а точки Л2 и В2 — неустойчивыми нулями.
Но в отличие от индикаторной схемы в позиционной следящей
системе за счет соответствующего выбора коэффициентов передачи
усилителя-демодулятора, усилителя мощности, параметров испол-
нительного электродвигателя и редуктора при заданной измеритель-
330
Рис. 13.15. Статические характеристики следящей системы:
а — характеристика измерительного устройства СД—СТ', б — характеристика пускового
вращающего момента системы — устойчивый механический нуль; Вг — неустойчивый
механический нуль системы)
ной схеме СД—СТ можно получить такое значение коэффициента
т. е. наклон характеристики пускового момента следящей системы,
при котором статическая ошибка системы от суммарного момента
трения не будет превышать заданного значения. Если Л9ДОЦ —
допустимое по техническим условиям значение статической ошибки
следящей системы, то
1 А9Доп — Л^тр. d/Л^САР уд»
где Мгр.ц —максимальное значение момента трения покоя
(при йвых = одв = 0);
Л/Г ______ пуск
'“САР уд — jq
«Ле — удельный пусковой момент сис-
0=0
Q=0
темы.
Коэффициент Ке не должен превышать значения, при котором за-
пас 'устойчивости системы по фазе будет меньше допустимого. Уси-
ление сигнала ошибки ивЫх = (t) по мощности и возможность
уменьшения статической ошибки в соответствии с формулой А0доп
является принципиальным отличием позиционной следящей системы
с измерительной схемой СД—СТ от индикаторной схемы СД—СП.
Указанные свойства справедливы только при условии линейности
характеристики (13.15) вблизи нуля углового рассогласования, т. е.
для идеальных СД—СТ.
Реальные сельсины из-за конструктивных и технологических
погрешностей имеют при 9=0 ненулевое (остаточное) напряжение,
т. е. напряжение ивЪ!х ф 0. Последнее составляет 0,2—0,3 % от
максимального амплитудного значения i7ElJx. т. Остаточное напря-
жение представляет собой случайную величину. Одна из реализаций
статической характеристики ивЫх = f (9) сельсина, а следовательно,
и моментной характеристики следящей системы показана на рис. 13.16.
На рис. 13.16, а изображена экспериментальная характеристика
одноотсчетной схемы СД—СТ в зоне устойчивого электрического
нуля, который определяется точкой О с координатами 9 = 0, =0
331
Рис. 13.16. Статические карЗкТёрй*
стики схемы одноотсчетного СД—
СТ при малых 0 с учетом неидеаль-.
ности магнитной системы;
а — экспериментальная; б — аппрокси-
мированная
(через эту точку проходит
идеальная синусоидальная
характеристика /). Кри-
вая 2 — характеристика СД—
СТ с учетом несинусоидаль-
ности индукции в воздушных
зазорах сельсинов в функции
угла 0. Зона 3 — среднеста-
тистическая характеристика
по некоторому множеству од-
нотипных сельсинов с учетом|несинусоидальности закона изменения
напряжения, а также высших гармоник в функции 0. Точки а—г —
устойчивые электрические нули, которым в системе регулирования
соответствуют устойчивые механические лгули, если в системе от-
сутствуют нелинейные элементы, кроме измерительной схемы на
сельсинах.
В установившемся состоянии согласованное положение СД и
СТ может характеризоваться любым из этих устойчивых нулей в за-
висимости от динамики системы при отработке рассогласования. При
рассматриваемом законе {7ВЫХ = f (0) не существует истинного устой-
чивого механического нуля, напряжение £/ВЫх 0 при 0=0 на-
зывают нулевым, или остаточным. Точки а' — Ь' — неустойчивые
электрические нули, которые не могут привести к установившемуся
равновесию системы. Таким образом, установившаяся ошибка си-
стемы будет величиной случайной, но не выходящей за пределы уг-
лового диапазона, обозначенного на рис. 13.16, а зоной (—А0шах) —
— (4-А0гаах). Выполнив усреднение зоны неопределенности, получим
сначала левую (—А0), а затем правую (4~А0) границы. В результате
аппроксимации нелинейная статическая характеристика, осреднен-
ная по некоторому множеству однотипных сельсинов и по ансамблю
углов 0, имеет вид, показанный на рис. 13.16, б. Формально нели-
нейным параметром такой симметричной нечетной характеристики
является зона неопределенности А0ЗН устойчивого нуля, которая оп-
ределяет статическую ошибку одноотчетной системы.
Методы повышения статической точности измерительной схемы
СД—СТ. Для повышения точности измерительных схем на сельси-
нах применяют методы электрической и механической редукции,
которые в отношении их статических характеристик при идеаль-
ном редукторе с передаточным отношением ip не отличаются друг
от друга.
Рассмотрим метод электрической редукции. Эквивалентная схема
измерительного устройства, реализующего этот метод, приведена
на рис. 13.17, а. В индукционных преобразователях получение
332
электрической редукции связано б увеличением йисла пар пблюсбй
роторной и статорной обмоток. Суть этого метода повышения точ-
ности заключается в использовании двух пар сельсинов, соединенных
в двухотсчётное измерительное устройство. Сельсины СД1—СТ1,
имеющие по одной паре полюсов, называют сельсинами грубого от-
счета (ГО). Выходное модулированное напряжение, формируемое
схемой ГО:
^го = ^стт81П0, (13.16)
где 0 — угол рассогласования между роторами СД1 и СТ1, имеющих
2рг0 = 2 (здесь рг0 = 1 — число пар полюсов).
Пусть этой статической характеристике соответствует значе-
ние Л0ГО зоны неоднозначности, которое определяет максимальное
значение статической ошибки.
Сельсины СД2—СТ2, имеющие по рто (р,10 = 4, 8, 16, 24) пар
полюсов, называют сельсинами точного отсчета (ТО). Для получе-
ния большого передаточного отношения электрической редукции
при малых габаритных размерах сельсинов статорная обмотка имеет
число витков в каждой секции, пропорциональное синусу угла
<р = 360°Иг (г — число зубцов пакета, i = 0, 1, 2, 3, ...), а магнит-
ная ось секции смещена на одно зубцовое деление. Напряжение на
вторичной обмотке сельсина ТО в функции угла рассогласования 0
Uto — s№ дД
(13.17)
где а = kUmwlwr — постоянный коэффициент; гс — число зубцов
статора; га., — коэффициент электрической редукции (na = р); k —
коэффициент сельсина; Um — напряжение возбуждения; w — мак-
симальное число витков одной фазы, которое можно уложить в один
паз; Wr — число витков первичной обмотки.
Рис. 13.17. Дву.хотсчетиое измерительное устройство на сельсинах:
а — эквивалентная схема, реализующая метод электрической редукции; б — статические
характеристики при —180° <0 <180°; в — аппроксимированные характеристики при
малых углах 0
333
„ Следует отметить, что на стадии преобразования углового рас-
согласования 9 в фазовый сдвиг не используется внешний источник
опорного напряжения и не требуется стабилизация амплитуды
напряжения несущей частоты.
13.5. ПРЕЦИЗИОННЫЕ ВРАЩАЮЩИЕСЯ
ТРАНСФОРМАТОРЫ
Вращающиеся (поворотные) трансформаторы (ВТ) — эле-
менты с балансной модуляцией несущей частоты. Вращающийся
трансформатор — прецизионная электрическая машина перемен-
ного тока, предназначенная для преобразования угла а поворота
ротора в напряжение; амплитуда этого напряжения пропорциональна
самому углу или некоторой тригонометрической функции угла
рассогласования 0 (например, sin 0 или cos 0); фаза напряжения
соответствует знаку'угла поворота.
Вращающиеся трансформаторы, осуществляющие преобразова-
ние тригонометрических функций угла sin 0 и cos 0, называют синусно-
косинусными ВТ (СКВТ или СКПТ). Конструкция синусно-коси-
нусного вращающегося трансформатора (продольный^разрез) по-
казананарис. 13.19, а, а схема соединения обмоток — на рис. 13.19, б.
Вращающийся трансформатор состоит из статора 1 и ротора 4,
набранных в виде пакетов из листов пермаллоя (2 и 7). В пазах
воздушного зазора;
а — конструкция (D, Н, d — габаритные размеры; б — величина
I. и 1п — биения); б — схема соединения обмоток (w„,, — главная и вспомогательная
14 \ Cl
обмотки статора; — синусная и косинусная, или квадратурная, обмотки ротора)
статора и ротора уложены по две распределенные обмотки (3 и 5),
сдвинутые между собой на 90 электрических градусов.
Концы 6 обмоток иус1 и иус2 подводят непосредственно к клеммной
колодке, а концы 9 обмоток иур1 и дор2 — к токосъемному устрой’
ству. На рис. 13.19, а токосъемник не показан. Соединение рото-
ра 4 с валом системы осуществляют через соединительную втул-
ку 8.
Конструкция и технология изготовления СКВТ должны обеспе-
чивать при повороте ротора изменение коэффициента взаимоиндук-
ции между обмотками статора и ротора в воздушном зазоре 6 по
синусоидальному закону.
СКВТ в системах автоматики в зависимости от схемы включения
применяют для точного измерения угловых рассогласований, а так-
же для выработки тригонометрических функций от угла пово-
рота.
Класс точности ВТ и СКВТ, так же как и сельсинов, определяется
следующими основными показателями [14, 23, 27 J:
ошибками в выработке линейной зависимости для линейного ВТ
(в процентах от максимального выходного напряжения в рабочем
диапазоне измеряемых углов);
ошибками в выработке синусоидальной (косинусоидальной) за-
висимости СКВТ в процентах от t/BMxmax;
асимметрией нулевых точек в угловых минутах;
максимальным значением ЭДС на квадратурной обмотке в про-
центах от напряжения возбуждения Um при любом положении ро-
тора и разомкнутых обмотках шр1 и иур2.
Для определения асимметрии на обмотку щс1 подают напряжение
возбуждейия, обмотку и>с2 замыкают накоротко, затем определяют
углы поворота ротора, при которых ЭДС обмоток ротора равна
нулю; максимальное отклонение этих углов соответственно от 0,
90, 180, 270° представляет собой асимметрию нулевых точек.
Асимметрия нулевых точек может быть определена эксперимен-
тально по статической характеристике ВТ (СКВТ), она аналогична
статической характеристике, показанной на рис. 13.16.
Принцип работы ВТ. Рассмотрим схему нагруженного синусного
поворотного трансформатора (рис. 13.20, а), когда импеданц на-
грузки Z„ (s) = + LHs. В схеме будем использовать одну ста-
торную дос1 (для создания потока возбуждения) и одну роторную иур1
обмотки, к которой подключено сопротивление нагрузки ZH (s).
Ток ротора, или нагрузки
Ms) = /B(s) = M)/(WW- (13.20)
где £р1 (s) — ЭДС, индуктируемая в роторной обмотке; Zp (s) —
импеданц обмотки wp.
Предположим, что коэффициент взаимоиндукции между обмот-
ками ®С1 и иур1 в зависимости от угла поворота ротора ВТ изменяется
строго по синусоидальному закону. Продольный магнитный поток
<Dd (s) является результатом совместного действия МДС статорной
рбмотки и МДС продольных роторных витков шр1. Поэтому индук-
§3?
О U^-UrnSLnui Q
a) If)
Рис. 13.20. Нагруженный поворотный трансформатор:
а — схема; б — статические храактеристики
тируемая этим потоком в продольных роторных витках ЭДС взаимо-
индукции
EP1M (s) = kEcl (s) sin а,
где а — угол поворота ротора; k — коэффициент пропорциональ-
ности.
Ток нагрузки (s), протекая по поперечным виткам дор1 cos а,.
создает поперечный магнитный поток Ф? (s), который не сцеплен
с обмоткой статора и»с1 и поэтому не может быть скомпенсирован
за счет увеличения тока в к’с1. Этот магнитный поток индуктирует
в поперечных витках к’р1 cos а ЭДС самоиндукции
EplL (s) = 8Lpl/pl (s).
Общая ЭДС, индуктируемая в роторной обмотке,
Ер1 (s) = £р1М (s) + £plL (s) = kEcl (s) sin a — slvl (wvl cos а)2 Л, (13.21)
так как Lpl = (дор1 cos a)2 Л;
здесь Л — магнитная проводимость.
Подставляя в выражение (13.21) ток нагрузки (13.20), получим
Epi (s) = kEcl (s) sin a — b (s) £pl cos2 a; (13.22)
b (s) = swpiA/[/?H 4- Rpi 4- s (£H 4~ £pi)],
где b (s) — передаточная функция, характеризующая искажения^
статической и фазовой характеристик рассматриваемой схецц
независящая от угла поворота ротора.
Таким образом, из соотношения (13.22) следует, что
Epi (s) = sin a (k£c| (s))/[ 1 4- b (s) cog2 a],
338
й частности, fe рёжймё электрического хоЛбсТбгб Хбда инДукцйоИ-
ная связь между ш»с1 и юр1 отсутствует, поэтому Л = 0 и, следо-
вательно,
ЕР1 и (s) = kEcl (s) sin а.
Из последнего выражения видно, что амплитудное или действу-
ющее значение ЭДС ненагруженного идеального ВТ (статическая
характеристика) является функцией синуса угла поворота ротора
(кривая 1, b = 0, рис. 13.20, б). При этом фазовые искажения от-
сутствуют.
Относительную погрешность нагруженного ВТ определим в виде
ДЕ = (Ер1 хх (s) — Ер1 (s))/kEС1 (s) = b (s) cos2 a sin а/[ 1 -|- b (s) cos2 а].
(13.23)
На рис. 13.20, б показаны также статические характеристики
нагруженного ВТ, вычисленные в соответствии с модулем Epl(s), —
кривые 2 — 4.
Погрешности, найденные по формуле (13.23), при b = 0,5; 1,0;
3,0 — кривые 5—7.
Статическая характеристика Ер1 = <р (а) нагруженного ВТ отли-
чается от синусоидальной ввиду искажений, вносимых поперечным,
потоком Фд. При этом имеют место также фазовые искажения вы-
ходного сигнала.
Симметрирование. Для компенсации амплитудных и фазовых
ошибок нагруженных ВТ применяют симметрирование с использова-
нием статорной дос2 и роторных дор1,2 обмоток. Различают первич-
ное симметрирование (со стороны статора) и вторичное (со стороны
ротора). В качестве примера на рис. 13.21 приведена схема СКВТ
с полным (первичным и вторичным) симметрированием. Условием
первичного симметрирования является равенство
^2 (S) ~ Za (в),
где Zn (s) — внутреннее сопротивление источника питания.
При выполнении вторичного симметрирования имеем
ZH1 Ч- Zpl (s) = ZH2 (s) -|- Zp2 (s).
Если выполнено первичное и вторичное симметрирование, то попе-
речный поток реакции ротора ВТ компенсируется полностью и ста-
тическая характеристика нагруженного ВТ не отличается от харак-
теристики холостого хода.
Измерительное устройство на СКВТ. Поворотные трансформаторы
в качестве высокоточных машин применяют в САР для измерения
углового рассогласования между входным и выходным элементами
системы (например, устройства для формирования модулированного
сигнала рассогласования в позиционных следящих системах).
Типовое измерительное устройство на СКВТ приведено на
рис. 13.22, а. Вход измерительного устройства — угол поворота
339
Рис. 13.22. Измерительное устройство на_СКВТ:
а - - схема СКВТ1 — СКВТ2 (СКВТ1 — датчик; СКВТ2 —
приемник); б — статическая характеристика
Рис. 13.21. СКВТ с пол-
ным симметрированием
авх ротора СКВТ1, выход — напряжение, снимаемое с роторной
обмотки СКВТ2, угловое положение ротора которого равно авых
(в той же системе координат, что и ротора CKBTV). Общее число
контактных токосъемных элементов в данной схеме — 2.
Для получения уравнений измерительного устройства введем
следующие обозначения, предполагая СКВТ идентичными (первый
цифровой индекс обозначает номер соответствующей обмотки, вто-
рой — номер СКВТ)-.
Яри = Ri> -^pi2 — Rt — омические сопротивления роторных об-
моток СКВТ1 и СКВТ2-,
Rell = #С12 = /?2 и #С21 = Rew = R3 — омические сопротив-
ления статорных обмоток;
Lpll = Lj и Lpl2 = Lt — коэффициенты самоиндукции роторных
обмоток;
Loii — Lcl2 = L2 и Д21 = Ьс22 = L3 — коэффициенты самоин-
дукции статорных обмоток (L2 = L3)- Mpu-cii = AfPii->c2i =
= Ml И Mc22-P12 = МС12^12 = М2 — коэффициенты взаимо-
индукции между соответствующими роторными и статорными об-
мотками СКВТ1 и СКВТ2;
ЛТси->-с21 = Afci2->c22 = 0 — коэффициенты взаимоиндукции
между. ортогональными статорными обмотками; причем Afpn-cii —
— Мс11-Рц; МрИ^сЗ! = Л4с21->.Р11 и т- Д-
ZH (s) = /?н — сопротивление нагрузки СКВТ — приемника;
G (0; t2 (0; гз (0; h (0 — контурные токи, протекающие через
соответствующие элементы схемы.
340
Система ди<|)ференцйалЬйыХ уравнений Кирхгофа для четырёЯ
контуров измерительной схемы при равенстве нулю соответству-
ющих коэффициентов взаимоиндукции имеет вид
iiRi 4 4 4 Л/рц^сп 4 Afpn^c2i -^4 = и;
Hl Hl Ш
«2^011 + 411 -4т- + Afpll-cll -тг- 4 ^412 4 412-^4 — Oj
til- til III
.. н- Я* I (13-24)
1зКс21 + Lz2\-4t~ 4 АТрЦ-нД! -тг- 4 44г2 + 422 ~7Т~ — 0;
til tit ui
I4R4 4“ URh 4“ Bi~4r--Afp 12->cl2 —jf- 4“ Afpi2^c22 ~4т~ ~ 0.
Полное симметрирование измерительного устройства рис. 13.22, а
обеспечивается автоматически, так как СКВТ1 и СКВТ2 идентичны.
Определим зависимость выходного напряжения схемы в функ-
ции от угла рассогласования между роторами идеальных СКВТ1
и СКВТ2, т. е. статическую характеристику измерительного уст-
ройства ивых = <р (9), где 9 = авх — авых — угловое рассогласо-
вание между роторами СКВТ.
Для решения этой задачи представим систему уравнений (13.24)
в виде изображений по Лапласу; непосредственное определение
тока /4 нагруженной измерительной схемы выполним по формуле
Крамера; в этом случае
Uвых (s) — Rh^i ($)•
(13.25)
Уравнения системы (13.24) при нулевых начальных условиях
запишем в параметрической форме относительно углов авх СКВТ1
и “вых СКВТ2. Так как законы изменения коэффициентов взаимо-
индукции в функции углов поворота tzBX и авых соответствуют си-
нусу и косинусу, то
Afpn^cu =Л/1со5авх; Afci2^Pi2 =Af2sinaBblx; |
Afpll->c21 — Al] Sin CtBX, Alc22-*-pl2 — Al2 COS <ХВых» J
Таким образом, подставляя равенства (13.26) в (13.24), для
идентичных СКВТ получим систему уравнений:
(Ri 4- Lts) /4 (s) -|- (s) cos aBX 4- Af4s/3 (s) sin aBX = t/(s);
2 (Rv 4~ 4®) 12 (s) 4” AffSli (s) cos <zBX = 9;
2 (7?3 4- L3s) Ia (s) 4 Al1s/1 (s) sin aBX = 9;
(R 4 Ii(s) — Ма81а (s) sin<zBbjX 4
4 Al2s/3 (s) cos ссбых = 9,
где R = Rt 4 Rr.
В соответствии с формулой Крамера
h (s) = Д4/Д;
(13.27)
(13.28)
здесь Д — главный определитель системы параметрических уравне-
ний (13.27); Д4 — дополнительный определитель, получающийся
341
йз А путём замены Четвёртой столбца сбб^йИёТйукМЦйМ столбцом
свободных членов системы (13.27).
Определим 1/вых (s), используя соотношения (13.25), (13.28),
предварительно вычислив определители Л и Л4 из системы уравнений
(13.27);
\U (s) sin (<%вых ^вх)]
rj /с\___________________УМ Лн'^1^2 5111 У^вых — Ц-вхИ_____________ /1 о оп\
вых W ~ (R + Lts) {(/?! + L1S) Ц/?а + R3) + (La + L3) s] + Лф*} ’
где изображение по Лапласу
_________________U (S) КнМ1Ма___________________,, , , ,<о
(R + L.s) {(/?! + L1S) [(Я2 + R3) + (L2 + L3) s] + Mis*} ~
Переходя к оригиналу, из уравнения (13.29) получим выражение
для статической характеристики схемы СКВ ТТ—СКВ Т2
(рис. 13.22, б)
^вых — ^Лпах Sin (<Хвых ®вх) == max SiO 0, (13.31)
где {7шах — действующее значение выходного напряжения изме-
рительного устройства при 0 = 90°, определяемое электрическими
параметрами СКВТ в соответствии с формулой (13.30).
Из выражения (13.31) следует что в зависимости от углового
рассогласования 0 напряжение на роторной обмотке СКВТ-прием-
ника изменяется пропорционально синусу угла 0 = авЫК — авх.
Таким образом, статическая характеристика измерительного уст-
ройства на СКВТ аналогична схеме на трехфазных сельсинах, но
противоположна по знаку [формула (13.14) J.
Если число пар полюсов СКВТ р = 1, то угол 0 = 2л. соответ-
ствует окружности в реальном масштабе углов.
Из формулы (13.31) следует, что равенство С/вЫХ = 0 измери-
тельного устройства на СКВТ является следствием равенства нулю
относительного углового рассогласования между их роторами и
выполняется при:
. отсутствии асимметрии коэффициентов трансформации статор-
ных обмоток;
отсутствии асимметрии обмоток цепей синхронизации;
ортогональности статорных обмоток;
синусоидальности изменения коэффициента взаимоиндукции от
угла рассогласования (отсутствие отклонения формы кривой выход-
ного напряжения в функции 0 от синусоиды).
В действительности при 0 = 0 на выходной обмотке СКВТ-прп-
емника возникает напряжение, называемое нулевым, или остаточ-
ным, которое обусловливает погрешность индукционного измери-
тельного устройства и, следовательно, системы автоматического
регулирования, в состав которой входит подсистема измерения на
СКВТ.
Основными составляющими суммарной погрешности СКВТ, опре-
деляющей классы их точности, являются следующие:
отклонение статической характеристики [/вых = <р (0) от сину-
соидального закона;
342
величина нулевого (остаточного) напряжения на выходе схемы;
расхождение электрических нулей относительно 0 = ±180° (т. е.
отличие угла между двумя соседними положениями ротора, при
которых напряжения на статорных обмотках ВТ будут равны оста-
точному, от угла 9 = 90°).
Суммарную статическую погрешность СКВТ, так же как и схемы
СД—СТ, формально можно характеризовать зоной неопределенности
нулевого напряжения. Величина этой зоны определяется в виде
среднестатистической оценки А0 (см. рис. 13.16).
Повышение точности измерительного устройства на СКВТ. Метод
электрической редукции как метод повышения точности применим
и для измерительных схем на СКВТ. Если выходное напряжение
измерительного устройства на двухполюсных СКВТ грубого отсчета
1/ВЫх го — —^шах sin 6. а среднестатистическая зона неопределенности
равна А0ГО, то выходное напряжение устройства на СКВТ, имеющих р
пар полюсов (схема точного отсчета), t/BUKT0 = —^шах sin_na9,
среднестатистическая зона неопределенности
п
А0ТО = А0го/Нд = Jj Aq>f то,
i=i
где пэ — передаточное отношение электрической редукции, равное
числу пар полюсов многополюсной индукционной системы; Афг —
составляющая суммарной погрешности СКВТ точного отсчета.
Таким образом, статическая точность многополюсного измери-
тельного устройства на СКВТ в пэ раз выше точности двухполюсной
схемы. Однако САР с многополюсным измерительным устройством
не будет обладать механической самосинхронизацией, так как число
периодов изменения выходного напряжения в пределах 360° в реаль-
ном масштабе угловых рассогласований будет равно передаточному
отношению электрической редукции (аналогично характеристике,
показанной на рис. 13.17).
Зона неопределенности А0ГО является суммой конструктивных
и технологических погрешностей СКВТ, перечисленных выше.
Например, погрешность СКВТ от асимметрии обмоток цепей синхро-
низации
* __ Дфцс го___ 1719 sin 2пэ9 cos ф У&R2 ф- АХ2
ФЦСТ° Ъ пэ У (Т?о11 + /?С21)2 + (Хс11 + ХС21)2 ’
где несимметрия характеризуется следующими равенствами:
АТ? = А/?1 — А/?2> А/?* = 7?с11 — Т?С12> А/?2= T?c2i — Т?С22;
АХ — AXj — АХ2; АХ1 = Хс11 — Хс12; АХ2 = XC2i — ХС2г‘,
ф =11)! — ф2 — угол начального сдвига фазы вектора напряжения
ошибки по отношению к вектору напряжения рассогласования:
Ф1= arctg АХ/А/?; ф2 = arctg (XC2i + Xc22)/(T?c2i Т?с22).
Из выражения для Афцсто следует, что при одинаковых условиях
погрешности измерительного устройства на СКВТ точного отсчета
343
в rt 3 Раз меньше, чем для схемы без электрической редукции. В част-
ности, если пэ — 1, то
Дфцс то — Дфцо го-
Перспективным направлением является создание на базе много-
полюсных СКВТ и АЦП типа угол—фаза—код прецизионных циф-
ровых подсистем измерения углового или линейного рассогласо-
вания.
13.6. ЦИФРОВЫЕ ДАТЧИКИ И ПРЕОБРАЗОВАТЕЛИ
Цифровые датчики и преобразователи широко применяют в
системах автоматики. Они обеспечивают более высокую разрешающую
способность, точность, быстродействие и надежность по сравнению
с аналоговыми преобразователями.
Преимуществами цифровых датчиков (ЦД) прямого действия
в системах с ЭВМ являются:
простота генерации, преобразования и запоминания цифровых
сигналов (на перфолентах, магнитных дисках, лентах и т. д.);
возможность использования для высокоточных измерений и по-
рогового контроля;
защищенность цифровых сигналов высокого уровня от действия
внешних шумов;
простота обслуживания и резервирования;
эргономичность, состоящая в возможности наиболее простого
представления информации (цифровая индикация исключает ошибки
оператора, возникающие при считывании со шкал или графиков
и т. д.).
Принцип действия цифровых датчиков угловых и линейных пере-
мещений основан на модуляции светового потока (ЦД оптического
или фотоэлектрического типа) или магнитного потока (ЦД индук-
ционного типа) при соответствующем перемещении подвижного эле-
мента датчика. Применяют также ЦД контактного типа.
Наибольшие точности обычно достигаются за счет применения
прецизионных оптических кодирующих дисков и линеек (например,
современные ЦД типа угол — код обеспечивают точность, соответ-
ствующую 20-двоичным разрядам).
В зависимости от способа считывания информации ЦД классифи-
цируют на датчики абсолютных значений (с периодическим опросом)
и датчики накапливающего типа (датчики- приращений).
В накапливающих цифровых преобразователях используют дат-
чик и счетную схему, суммирующую отдельные приращения. В та-
ких измерительных устройствах необходима специальная шкала,,
относительно которой приращения должны суммироваться или;
вычитаться в зависимости от направления движения объекта, соеди|
ценного с входным элементом ЦД. Кодирующие преобразователя
абсолютных значений такой шкалы не требуют, обеспечивая цифровой
считывание абсолютного значения углового или линейного пере-^
мещения.
Рис. 13.23. Формирование разрядных символов:
а — схема модуляции индукционной связи; б — модуляционная характеристика 1-го раз-
ряда
Основные технические характеристики цифрового датчика угол —
двоичный код:
диапазон преобразования угла;
число двоичных разрядов т или числовая емкость zm датчика;
способ представления выходного числа G (последовательный или
параллельный двоичный код);
частота опроса ЦД или такт квантования Ткв непрерывной пре-
образуемой функции <р (/), а также период следования разрядных
символов двоичного числа Т, если дискретная функция G (iTKB)
представляется числами в последовательном коде;
статическая и динамическая точность преобразования.
Принцип действия ЦД угол—код. Цифровой датчик угол—код
состоит из электромеханического кодирующего устройства (КУ)
и электронного блока. Принцип действия КУ цифрового датчика
основан на модуляции кодирующим диском индукционной связи
(магнитного потока) между двумя сердечниками 1, 2 импульсного
трансформатора с воздушным зазором, имеющего первичную и вто-
ричную обмотки. Формирование разрядных символов двоичного
числа показано на рис. 13.23. Первичная обмотка иц (рис. 13.23, а)
трансформатора периодически возбуждается импульсами тока малой
длительности (делитель частоты формирует периодические импульсы
с параметрами: Тяв = 1/FHB — период следования; т — длитель-
ность). Во вторичной обмотке w2 трансформатора индуктируются
импульсные ЭДС. Амплитуда этих ЭДС зависит от величины индук-
ционной связи или коэффициента взаимоиндукции, который изме-
няется при повороте кодирующего диска 3 на угол q> вокруг оси 4.
Кодирующий диск (КД) размещен в зазоре, образуемом двумя пла-
тами, в которых определенным образом устанавливают сердеч-
ники 1, 2 импульсных трансформаторов. Процесс формирования ко-
345
Десятичной шкала
3031 0173050709 1011171319151617101973217723207570777313303101
♦
“\ll 1
Уделачение числа
1-й разряд |
2-й разряд И
3-й разряд М
9-й разряд М
5-йразряд ML
Ж
числац-
\гмтио\
Ziz
iF
Я111^88М8ИИ1И88ИИ8ЙИ8М^ИИИИИЯ8ай
..——^i
\Ш
И
\Ш L Ml
' ' Zip
Zip
2ts
26г
~73.
•Ж
•M
Wk
w.
?6ц
И
\'/M'SAW.\W,
Г
X
ш
N
9
Рис. 13.24. Развертки кодирующих дисков:
а — двоичного; (А^—Л4; Б2—Б4) — положения импульсных трансформаторов; б — двоично-
сдвинутого; NN — линия считывания; положениям NN соответствуют следующие коды б—*
разрядного двоичного числа: I—I — 00000; II—II— 00000(1); III—III — 00001; IV —
ZV01011; V—V — Ю1И; VI-VI - 00000(1); VII- VII — 00001(0); VIII-VIII - 14110;
IX — IX — НПО (1); Х-Х — 11111
дирующим устройством двоичных символов 0 и 1 1-го разряда числа
G (1ТКЪ) показан на рис. 13.23, б. Кривая Е0Г (<р) — огибающая
импульсных ЭДС при изменении угла <р.
Если в воздушном зазоре между торцами сердечников трансфор-
матора находится непрозрачный сектор (перемычка) диска, импульс-
ная ЭДС, наведенная на вторичной обмотке w2, будет минимальной
(е0 = ДШ1П). Этот импульс принимают за кодовый символ 0 выход-
ного двоичного числа G. Если между торцами сердечников находится
прозрачный сектор «окно» диска, то ЭДС, индуктируемая в обмотке
оу2, будет максимальной (ех = Дшах) — символ 1.
Сердечники трансформатора не являются точечными, поэтому
при повороте КД в пределах угла <р = А ЭДС е, наведенная в об-
мотке wit изменяется не скачком от 0 до 1, а плавно, как показано
на рис. 13.23, б. Кривую изменения амплитуды Еот в функции угла
поворота диска называют модуляционной характеристикой КУ.
Угол поворота диска 2е, соответствующий интервалу плавного изме-
нения амплитуды ЭДС от 0 до 1, называют зоной неопределенности
символа.
Развертка четырехразрядного кодирующего диска, выполненная
по закону двоичного кода, показана на рис. 13.24, а. Диск имеет
346
разрядные дорожки, каждая из которых представляет последова-
тельность белых и черных участков, чередующихся по закону двоич-
ного кода. Белый участок изображает окно в диске, черный — пере-
мычку диска. Участок развертки или угол поворота КД, в пределах
которого символ разряда остается постоянным, называют зоной нуля
(или зоной единицы). При идеальных трансформаторах (точечное се-
чение сердечника) зоны нуля или единицы соответствующих разря-
дов Ах — А; А2 = 2АХ; А3 = 4АХ; А4 = .8АХ и т. д. (см. рис. 13.24, б).
Десятичная шкала отсчета приведена в верхней части
рис. 13.24, а, б.
Вертикальная линия NN (например, /—/) на развертке означает
радиальную линию диска (или плат КУ), вдоль которой расположены
торцы сердечников трансформаторов. Эту линию называют линией
считывания. Каждое положение линии считывания относительно
развертки диска характеризуется однозначной комбинацией нулей
и единиц, чередующихся в соответствии с законом формирования
двоичного кода. Процесс формирования двоичного числа, пропор-
ционального угловому положению вала КД, называют чтением
числа. Неидеальность считывающей системы, т. е. производственные
погрешности элементов датчика исключают практическое применение
простых дисков, выполненных по закону двоичного кода. Поэтому
в преобразователях угол — код применяют двоично-сдвинутое ко-
дирование.
Особенностью двоично-сдвинутого кода (по У-методу) является
представление каждого разряда (за исключением 1-го) двумя под-
разрядами (дорожками) А и Б. В основу построения этого кода по-
ложена возможность считывания одного из двух значений каждого
разряда в зависимости от значения предыдущего разряда. Правило
построения развертки диска КУ заключается в следующем. Дорожка
каждого подразряда Б (рис. 13.24, б) сдвинута относительно дорожки
подразряда А на 0,5 ширины зоны нуля или единицы своего разряда
вправо, а дорожка 1-го разряда располагается симметрично отно-
сительно подраэряда А 2-го разряда. Подразряд Л каждого после-
дующего разряда сдвинут на 0,25 зоны подразряда А предыдущего
разряда влево, за исключением 1-го. При считывании кода, харак-
теризующего угловое положение диска, подразряды А и Б образуют
некоторую совместную комбинацию нулей и единиц, называемую
V-кодом, или кодом Баркера.
Такой закон построения развертки КД определяет следующий
логический алгоритм преобразования У-кода в обычный двоичный
код: если предыдущий разряд двоичного числа есть 0, то последу-
ющий символ определяется подразрядом А; если предыдущий раз-
ряд двоичного числа 1, то последующий символ должен сниматься
с подразряда Б.
Двоичное число, определяемое положением /—/ линии считыва-
ния AW, — 00000. Перемещение линии считывания вправо относи-
тельно линии нулей соответствует увеличению двоичного числа.
Применение двоично-сдвинутого кодирования исключает возмож-
ность появления ошибок на границах соседних разрядов, расширяет
347
1
А A-А
Рис. 13.25. Конструкция цифрового преобразователя угол—код
(1 — корпус; 2 — крышка; 3 — плата; 4 — подшипник; 5 — ось кодирующего Диска; 6 —
импульсный трансформатор (с воздушным зазором); 7 — кодирующий диск; 8 — клеммная
колодка; 9 — стягивающий болт; 10 — печатная плата; 11 — болт; 12 — крышка подшип-
ника)
диапазон производственных допусков на изготовление диска и юсти-
ровку импульсных трансформаторов, в чем нетрудно убедиться при
рассмотрении, например, сечений II—II, VI—VI и VII—VII.
Конструкция цифрового датчика угол — код индукционного
типа показана на рис. 13.25.
Функциональная схема цифрового датчика. Последовательный
опрос первичных обмоток импульсных трансформаторов КУ осуще-
ствляется с помощью регистра сдвига, на вход которого с выхода
делителя частоты подаются импульсы синхронизации с частотой
^КВ = I/T'kB1
Функциональная схема 8-разрядного датчика приведена на
рис. 13.26. Электронный блок преобразователя состоит из регистра
сдвига (РС) импульсных усилителей (ИУ) разрядных символов
(усилителей-формирователей), импульсных усилителей и селектор-
ных ячеек подразрядов А и Б и логического переключающего уст-
ройства (Л ПУ).
Импульсы напряжения соответствующих подразрядов с вторич-
ных обмоток 15 трансформаторов с П-образными сердечниками уси-
ливаются и формируются двумя импульсными усилителями с се-
лекторными ячейками. Выбор уровней селекции позволяет умень-
шить зоны неопределенности символов и выравнить «электрические»
зоны нулей и единиц модуляционных характеристик соответствуй
348
2-го разряда
Ячейка РС
1-го разряда
3-го разряд
Рис. 13.26. Функциональная схема 8-разрядного преобразователя угол—код:
1 — кодирующее устройство; 2 — импульсный трансформатор с воздушным зазором; 3 —
КД; 4 — ось диска
ющих подразрядов КУ (см. рис. 13.27, здесь для примера рассмотрены
модуляционные характеристики трех разрядов).
Импульсы подразрядов А и Б, соответствующие символам 1
V-кода, поступают на два входа ЛПУ, которое преобразует
V-код в обычный двоичный код, однозначно определяющий- в
пределах диапазона преобразования угловое положение ва-
ла ЛУ-
Логическое переключающее устройство (ЛПУ), схема которого
изображена на рис. 13.28, обеспечивает выполнение следующих
логических операций:
если символ предыдущего разряда числа Q на выходе Л ПУ
ъстъ 0 (отсутствие импульса), то символ последующего разряда
снимается с подразряда А;
если предыдущий разряд на выходе ЛПУ есть 1 (наличие им-
пульса), то последующий разряд снимается с подразряда Б.
На рис. 13.28, а показана принципиальная схема ЛПУ. Логи-
ческое переключающее устройство состоит из десяти логических эле-
ментов: трех элементов 2 — 2И—2ИЛИ—НЕ (Dl.l, D1.2, D2.1),
двух элементов 2И—НЕ (D3.1, D3.2) и пяти элементов НЕ (D4.1—
D4.5). На входы ЛПУ поступают следующие импульсы: Т\, Л\
(на входы D 1.1, £>3.1, D3.2), Т2, Т2 (на входы D 1.2), а также импульсы
подразрядов А и Б (на входы D3.1 и D3.2). Частота следования син-
хронизирующих импульсов f, частота квантования информации
.= //г, где г = 2т.
349
Рис. 13.27. Модуляционные
характеристики трех разрядоа
цифрового датчика:
а — на выходе КУ; б — на выходе
импульсного усилителя; в — на
выходе селекторной схемы;
ис2’ «с3 и ис2* М” Уровни
селекции
Логические элементы
£>1.1, 04.1 и 01.2, 04.4
охвачены местными обрат-
ными связями, a D1.1,
04.1, 01.2, 04.4, 02.1,
04.5 охватываются глав-
ной обратной связью с
выхода ЛПУ.
Принцип работы ЛПУ
заключается в следующем.
Предположим, что началь-
ное состояние схемы ха-
рактеризуется символом
V = 0 на выходе, импуль-
сы = 1,7^! =0. Если,
например, в начальный
момент времени tx — 1)
символы А 1 и
Б =я 0, то при срабатыва-
нии Элементов £>3.1, 04.2
и 03.2, 04.3 на выходах 04.2 и 04.3 будут сформированы значе-
ния 1 и О, В тот же момент времени на выходе 04.1 формируется
значение 0, которое сохраняется до момента В момент tt (7\ « 1)
на выходе 04.4 имеем 0, а на выходе элемента D1.2—1. Значения
1с выходов 04.2 и D1.2 суммируются в соответствии с логической
операцией И, образуя 1, которая поступает на вход 1 схемы 02.1.
Рис. 13.28. Схема ЛПУ:
о — принципиальная схема;0 «• диаграмма ттовэх имульсов Т»; 7,; г,; 7,
350
Значения 0 с Выходов D4.3 и Z>4.4 объёдййЯЮТсй йа схеме И й об-
разуют 0. Далее в соответствии с операцией ИЛИ — НЕ на выходе
£>2.1 'формируется 0, который инвертируется и образует на выходе
ЛПУ значение 1. Таким образом, первый импульс на выходе ЛПУ
определяется кодовым символом подразряда А и т. д.
Далее можно показать, что если V = 0, то в соответствующий
момент времени на выходе D1.2 формируется значение 1, а на вы-
ходе D4.4 — 0. В результате элемент D2.1 обеспечивает прохожде-
ние на выход ЛПУ кодового символа подразряда А и не пропускает
значение подразряда Б. Если Е=1, то в соответствующий момент вре-
мени на выходе D1.2 формируется 0, поэтому элемент D2A оказы-
вается подготовленным для приема значения подразряда А. При
этом на вход 2 схемы И элемента D2.1 с выхода D4.4 поступает 1.
Эта схема формирует значение в соответствии с сигналом подраз-
ряда Б и т. д.
13.7. ЦИФРОВЫЕ ДАТЧИКИ И ИЗМЕРИТЕЛИ
ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ
Цифровой датчик линейных перемещений (ЦДЛП или
//Д) — датчик, выполняющий функции измерителя-преобразователя
линейных перемещений в унитарный или двоичный код. ЦДЛП —
датчик с модуляцией, осуществляющий эквивалентное преобразова-
ние непрерывной временной функции в импульсные сигналы на вы-
воде. Цифровые датчики линейных перемещений фотоэлектрического
типа применяют, например, для точного измерения перемещения
суппорта металлорежущего станка с числовым программным управ-
лением (ЧПУ).
Цифровой датчик — автономное измерительное устройство, со-
стоящее из кодирующей решетки (линейки) и сканирующей головки
с встроенным электронным модулем, осществл яющим обработку
сигналов, получаемых с фотоэлектронных элементов (фотоприемни-
ков) головки.
Рассмотрим ЦДЛП накапливающего типа как наиболее простые
и надежные в эксплуатации. Технические характеристики ЦДЛП
аналогичны характеристикам ЦД угол—ход, приведенным выше.
В зависимости от типа (конструкции) кодирующих решеток
ЦДЛП подразделяют на датчики [14):
с пропускающей решеткой (аналогичные рассмотренным в пара-
графе 13.6 цифровым датчикам угловых перемещений);
с отражающей решеткой.
Цифровой датчик с отражающей решеткой имеет стальную ко-
дирующую линейку, укрепленную неподвижно на некотором основа-
нии, относительного которого сканирующая головка перемещается
на величину х. Схема конструкции такого ЦД и ход лучей изобра-
жены на рис. 13.29, а, б.
На основании 1 укреплена отсчетная решетка 2, представляющая
собой равномерно чередующиеся светлые (отражающие) и темные
(поглощающие) линии, выполненные методом травления. Решетка ЦД
351
Рис. 13.29. Цифровой
датчик линейных пере-
мещений:
а — конструкция; б — ход
лучей через сканирующую
(модулирующую) головку
Рис. 13.30. Формирование ЭДС на выходах фотоприемников:
а — модуляция отраженного светового потока; б ~ кривые ЭДС Е^; Е&', Eq', Eq
352
имеет v темных линий (штрихов) на 1 мм длины. Основным элемен-
том четырехфазной сканирующей головки 9, скрепленной, напри-
мер, с суппортом или патроном станка, является стеклянная диаф-
рагма 4 с четырьмя щелями. Источник подсветки 6 излучает свето-
вой поток, который, пройдя через оптический конденсор 5 и щели
стеклянной диафрагмы 4, «расщепляется» на четыре элементарных
потока ФА, Фв, Фс, Фд и отражается от светлых полос отсчетной
линейки. Конструкция элементов сканирующей головки такова,
что при выбранных углах падения и отражения лучей отраженные
стветовые потоки после прохождения через оптическую систему 7
фиксируются четырьмя фотоэлектрическими элементами 8, преоб-
разующими эти потоки в напряжения ЕА, Ев, Ес, ED, которые
поступают на. схему обработки информации (СОИ).
На стальной отсчетной линейке вытравливается также дополни-
тельная шкала 3 (маркер) для формирования фиксированной опор-
ной метки абсолютного положения. Этот маркер привязан к квази-
абсолютной системе отсчета. Он используется для восстановления
показаний ЦДЛП после выключения последнего.
Принцип действия, цифрового датчика линейных перемещений
(рис. 13.30) основан на модуляции отраженных световых потоков Ф
при перемещении подвижного элемента (стеклянной диафрагмы 2)
относительно неподвижной линейки 1 и преобразовании этих потоков
в соответствующие модулированные напряжения, а затем — в ко-
довую последовательность импульсов, пропорциональную перемеще-
нию диафрагмы.
Введем следующие обозначения: х (t) — линейное перемещение
диафрагмы (сканирующей головки), d — период измерительной ре-
шетки, т. е. расстояние от границы n-го штриха до соответствующей
границы (п + 1)-го штриха. Ширина штриха 3 равна ширине отра-
жающей полосы 4. Четыре щели 5 (А, В, С, D) диафрагмы 2 скани-
рующей головки выполнены следующим образом: щель В смещена
относительно щели А на расстояние l,5d, щель С относительно
щели А — на 2,25d и щель D относительно щели — на 3,75d. По-
этому, если точно по ширине поглощающего штриха решетки сов-
местить щель А диафрагмы с n-м штрихом, т. е. участком решетки,
не отражающим световой поток, то щель В будет полностью совме-
щена с отражающим участком решетки; щель С наполовину пере-
кроет (п + 2)-й штрих, наконец, щель D также наполовину, но
в другой фазе перекроет (п + 4)-й штрих решетки. В результате
через щель А отраженный световой поток ФА будет равен нулю
при полном поглощении потока линией штриха. Через щель В
пройдет максимальный отраженный поток Фв, через щель С пройдет
половина отраженного потока (Фс) и через щель D — также поло-
вина потока противоположной фазы Фп. Максимальное значение
ЭДС фотоприемника достигается при таких х, когда соответству-
ющая щель диафрагмы находится точно над соответствующей отра-
жающей линией решетки.
Смещение сканирующей головки относительно решетки на ве-
личину х вызывает модуляцию световых потоков и, следовательно,
12 Солодовников В. В. и др. 353
Рис. 13.31. Функциональная схема обработки сигналов
модуляцию ЭДС Ea_d фотоприемников ФП по синусоидальному
закону. Период синусоидальных относительно смещения х ЭДС
равен периоду (шагу) решетки, т. к. d. Расположение щелей отно-
сительно отсчетной линии диафрагмы таково, что ЭДС фотоприем-
ников сдвинуты по фазе на четверть периода d, как показано на
рис. 13.3, б, ЭДС Ес (х) с фотоприемника ФП3 сдвинута на 90° отно-
сительно Еа (х), ЭДС Ев и Ed (х) имеют фазовый сдвиг на 180° по
отношению к ЕА (х) и Ес (х). Значения ЭДС EA_D, изображенные
на рис. 13.30, б, при х = хх соответствуют рис. 13.29.
Рассмотрим функциональную схему обработки сигналов ЕА,
Ев, Ес, Ed и формирования импульсного кода на выходе скани-
рующей головки (рис. 13.31). Фотоприемники ФПА, ФПВ и ФПС,
ФПО соединены попарно и образуют двухтактные схемы (ДС) с вы-
ходами 1/х (х) и U2 (х). Выходной сигнал U1 (х) сдвинут по фазе
по отношению к сигналу U2 (х) на 90°, как показано на рис. 13.32, а.
Электронная схема, включающая формирователи прямоугольных
импульсов (ФПИ) и инверторы (Ине), преобразует сигналы Ui и
в противофазные напряжения прямоугольной формы UA (х); Uc (х)
и UB (х); UD (х), которые поступают на соответствующие входы
одновибраторов ОВУ~ОВ^
Последующие диаграммы (рис. 13.32, б, в) отражают временные
соотношения между различными сигналами прямоугольной формы.
Схемы одновибраторов запускаются на положительных фронтах
прямоугольных импульсов. Импульсы с выходов ВыхГ — Вых4'
подаются на схемы совпадения СхСА и СхС2. Комбинации выходов
ВыхГ—ВыхГ образуют три выхода схемы обработки сигналов —
Вых1, Вых 2, Вых 3. Таким образом в зависимости от требуемой
точности преобразования можно получить один, два или четыре
счетных импульса на один шаг d оптической решетки (унитарный
код). j
Два сдвинутых на 90° синусоидальных сигнала Ul (х) и U2 (х)'
дают возможность применять электронные логические интер пол я-’
торы с целью повышения точности и преобразования линейного
перемещения х непосредственно в двоичный код. Например,
в интерполяторе с четырьмя импульсами на один шаг решетки, фор-
354
мируемыми напряжениями Uc', Ud> Ue и Uf датчика, по-
ложения сканирующей головки в пределах шага d могут идентифи-
цироваться 3-разрядными двоичными числами, которые образуются
следующей логической комбинацией импульсов с соответствующих
выходов:
CDEF = ООО CDEF = 100
CDEF = CDEF=КА
= 000 + 001 = 001 CDEF=U0
CDEF = 010 ' CD£F=111
CZ)£F = Oil CD£F = 000
В данном случае основной шаг линейного оптического датчика
интерполируется восемью уровнями двоичного квантования. .
В заключение рассмотрим интерполятор на 10 уровней квантова-
ния. Вариант устройства — резисторный фазовращатель, схема ко-
торого изображена на рис. 13.33, а. На входы интерполятора по-
даются два основных сигнала (квазисинус Ut (/) = Um sin at и
квазикосинус U2 (/) = Um cos at) и инвертированный синусоидаль-
ный сигнал Us (/) = —Um sin Выходные напряжения, снимае-
мые с отводов А, В, С, D, Е, К, образуют систему квазисйнусоидаль-
ных сигналов, которые отличаются по фазе в соответствии с положе-
нием отводов резисторной схемы. Каждый отдельный сигнал фазо-
вращателя используется для образования напряжений прямоуголь-
ной формы, отличающихся одно от другого по фазе, как показано
на рис. 13.33, б. Из этих напряжений с помощью логической схемы
o)
12*
355
u,(t) e-----A ° “A
uBo—.. 48
uc ° ЧС
uz(t)o------4
uDo---ЛВ
uEo---
u3(t)o------ГК o-|
0)
U(4
.цшшшшь
Рис. 13.33. Резисторный
фазовращатель — интер-
полятор:
а — электрическая схема;
б — временные диаграммы
напряжений «д! ив; и&;
и£ н импульсов '«i — и9;
в — счетные импульсы
формируются десять коротких импульсов в соответствии с алго-
ритмом:
ЛВ = 0; ЛЕ = 3; ВС —6; Л£ = 9;
ВС=1; ЛВ = 4; С£> = 7;
CD =2; ЛВ = 5; ЁЕ = 8.
Счетные импульсы 1/сч генерируются одновибратором, запуск
которого осуществляется на каждом периоде d положительными
фронтами всех десяти импульсов.
Современные ЦДЛП измеряют перемещения до 0,5 м с разре-
шающей способностью около 0,0005 мм при общей погрешности
системы не более 0,001 мм.
Цифровые датчики линейных перемещений накапливающего типа
являются простыми и надежными устройствами, широко применяе-
мыми в различных отраслях техники. Одно из преимуществ ЦДЛП
накапливающего типа — возможность измерять линейную скорость
перемещения по интервалу времени между выходными импульсами.
Пример. Определим статическую точность серийного ЦДЛП, отсчётным элемен-
том которого является стальная линейка с v = 40 штрихами на \мм длины.
В этом случае период измерительной решетки
d = 1/v = 1!ю = 25,0 мкм.
При использовании логического интерполятора, формирующего п = 8 импуль-
сов на период d, разрешающая способность Д ЦДЛП
Д8 = din = 25/8 = 3,1 мкм.
Интерполятор на 10 уровней позволяет получить
Дю = din = 2»/10 = 2,5 мкм
356
и т. д. Дальнейшее повышение точности ограничивается конструктивными и тех-
нологическими возможностями производственной базы.
В прецизионных муаровых датчиках линейных перемещений, принцип дей-
ствия которых основан иа муаровом эффекте, обычно применяют решетки, име-
ющие 50 штрихов на миллиметр,' Выходы фотоприемников комбинируют попарно
с целью получения двух синусоидальных сигналов, сдвинутых по фазе на 90°,
которые используют для формирования сигнала направления, а также интерполя-
ционных сигналов. Разрешающая способность таких датчиков равна 1 • 10-8 мм.
13.8. ФОТОЭЛЕКТРИЧЕСКИЕ ДАТЧИКИ
И ИЗМЕРИТЕЛЬНЫЕ УСТРОЙСТВА
Фотоэлектрические датчики и измерительные устройства^
работающие в оптическом диапазоне электромагнитного излучения,,
преобразуют световой поток в электрический сигнал. Основными до-
стоинствами фотоэлектрических датчиков информации являются
высокое быстродействие и точность, а также отсутствие механиче-
ской связи с контролируемым процессом.
Фотоэлектрические датчики (ФЭД) применяют как в системах
релейной автоматики, так и в непрерывных системах регулирования
и управления [6]. Элементной базой фотоэлектрических датчиков
и измерительных устройств являются все типы, фотоэлектронных
приборов: вакуумные и газонаполненные фотоэлементы с внешним
фотоэффектом, фотоумножители, вентильные фотоэлементы, фото-
диоды, фототранзистбры, фоторезисторы и др.
Основным типовым ФЭД, применяемым в САР, является фото-
электрический релейный датчик (ФРД), обладающий высокими экс-
плуатационными характеристиками.
Классификация ФРД в зависимости от их функционального
значения и от характера фиксируемого (измеряемого) параметра
в САР приведена соответственно на рис. 13.34, а, б.
К техническим характеристикам ФРД относятся статические и
динамические параметры: чувствительность, быстродействие, точ-
ность срабатывания, а также светотехнические параметры срабаты-
вания и отпускания.
Статическая характеристика ФРД — двух- или трехпозицион-
ная релейная характеристика, связывающая выходной сигнал (на-
пряжение (7ВЫХ) с входным воздействием (световым потоком Фсв
или соответствующей ему контролируемой физической величиной).
Непрерывному изменению Фсв соответствует скачкообразное изме-
нение напряжения £/ВЫх. Значение Фсв =ФСВ. сраб> ПРИ котором
напряжение на выходе скачкообразно изменяется до £/вЫхшм>
соответствующего включению исполнительного устройства, назы-
вают параметром срабатывания, или порогом чувствительности;
значение Фсв = Фсв. отп, при котором напряжение скачком изме-
няется до t/BUxmin> соответствующего отключению исполнитель.-*
ного устройства, называют параметром отпускания. с
357
МННШ9НН 9 HTH9M9IU 5)
р£^°Фз.ЛтнКМйГе6^1йФ11ия фотоэлектрических релейных датчиков:
а — по функциональному навЯ&ению; б — в зависимости от характера измеряемого пара-
R9T9RMR ,ЯАЭ а М1а.
определяет динамику ФРД при
изменениях контролируемого параметра. Временная динамическая
^О^йй’^ййй'ЖЙЧФрдатЖчй^Т^мвэвиде зависимости выходного на-
^йМЭДдац^-на вход типового воздействия.
Надежность ф^ИхйлёЫИичФвйо^В релейного датчика как элемента
j)fe§iWpH¥g&?a %й^ёдеЛйёТ<5'й'ЧВероятностью безотказной
рйбЗтыэув^йдедеш^ задайй^’ВрШёВД непрерывной работы, сред-.
йМШГСИйностью отказов X на
заданном временном интервале и т. д. -R-
составе типовых
сЯёЛ W0i^#(HW^Se®WcaGf<M6Ri:b 1*дак»^,тмййьдафференциаль-
иоФ, ^ёй«опВми^ёа'дёл^8и^э[веуцвс^йИййЯДвй Мийередственный
о4ё^’УВ&йро¥йй.йёй^нф$<ШШт^Ж®ИеН1^тмдаяТзМостовые
ЭДйВ'РМййЖнайдавиа'ИКи как
й-’рейЯййе (фййнеаця .^в^зме^нФеЛЗЗййХБ^родаайа^нйнгкягйРрежиме
Hfeac^^CT^H^WWefim. ®ШЙОЯйй§*э ийЙрйЗДльййл^бЯОйаВДФ^:
бь^^Л^нй1ЙН^тшиед1ШиО№ВДВвгда няюпснуатэтэатоо^
•<» рт«юбр»ма1хт«йв
cW#xЦИзмерени^’ геом^рйЧ^М»
pd^pb&p^o^iBtf^.oWHieftHSMJaoytyjb^sraepeMeiiieaH^ лапрншерн
при контроле
3SS
Изделий (в ме'УйЛлургййёёйой промышленности), а также при необ-
ходимости обеспечения высокой точности и быстродействия (в част-
ности, в металлообрабатывающей промышленности).
Рассмотрим несколько типов ФЭД, применяемых в САР в каче-
стве пороговых элементов.
Фотоэлектронные датчики на фотоумножителях. Как известно,
ток фотоумножителей с внешним фотоэффектом составляет десятые
доли миллиампера, поэтому в ФРД на фотоумножителях используют
электрометрические ламповые усилители фототока, имеющие вы-
сокие входное сопротивление и низкий уровень шумов.
На рис. 13.35, а приведена электрическая принципиальная
схема ФРД на фотоэлектронном умножителе (ФЭУ) с усилителем
на пентоде VL- При затемненном ФЭУ пентод заперт отрицательным
сеточным напряжением и исполнительное электромагнитное реле Д
и анодной цепи пентода выключено. При освещении ФЭУ фото-
ток /фЭУ создает смещение на резисторе Р, открывающее пентод.
Реле срабатывает, когда анодный ток /а превысит ток срабатывания
реле; отпускание реле произойдет при значении тока /а, меньшем
тока отпускания.
4) • г)
Рис. 13 35. Электрические принципиальные схемы ФРД:
— иа фотоумножителе; б — иа фоторезнсторе; в — с тиристорным ключом и электромаг-
нитным реле; г — иа фототраизнсторах
359
ФЭД на фотдрезисторах. Принцип действия фоторёзистора (ФР)
основан на изменении его омического сопротивления, а следова-
тельно, и тока, протекающего через него, при изменении площади
светового пятна, падающего на активную часть фоторезистора,
ФЭД на фоторезисторах по сравнению с датчиками на фотоэле-
ментах с внешним фотоэффектом обладают рядом преимуществ:
большая интегральная чувствительность, возможность работы в бо-
лее широком спектральном диапазоне и при низких напряжениях
питания, простота конструкции и высокая эксплуатационная надеж-
ность, меньшие габаритные размеры и масса. Недостатки фоторези-
сторов — повышенная инерционность и зависимость характеристик
от температуры внешней среды.
Электрическая принципиальная схема ФЭД на фоторезисторе
показана на рис. 13.35, б. В схеме использован высокочувствитель-
ный магнитный усилитель (МУ) с самонасыщением. Основные эле-
менты МУ — обтлткн управления &уу; рабочие обмотки дараб и
диоды VD3, VD2 в их цепях; электрическая нагрузка усилителя
(обмотка управления реле К.) включена по дифференциальной схеме.
В цепь обмотки управления усилителя включен фоторезистор ФР-
входной световой поток Фсв, падающий на него, вызывает увеличе-
ние тока /у. Следовательно, увеличивается выходной ток МУ,
что приводит к срабатыванию электромагнитного реле К. Форси-
рующая электрическая цепочка, состоящая из резистора R, кон-
денсатора С2 и диода VD2, увеличивает быстродействие датчика при
отключении. Время срабатывания и отпускания ФЭД на фоторе-
зисторе составляет 0,04—0,06 с.
В автоматике применяют также ФЭД на фоторезисторах с тран-
зисторными и тиристорными усилителями. ФЭД на фотодиодах
обладают достоинствами датчиков на фоторезисторах, но превосхо-
дят их по быстродействию и стабильности характеристик при изме-
нении температуры внешней среды.
Фотодиоды (ФД) в ФЭД используют в двух режимах — фото-
диодном и вентильном. Фотодиодный режим — работа ФД в схеме;
с внешним источником питания; вентильный (фотогальванический)
режим — работа ФД без источника питания. Фотогальванический
режим отличается от фотодиодного отсутствием темновых токов.;
Последнее является существенным преимуществом при контроле;
малых световых потоков. Однако инерционность ФД в фотогальва-
ническом режиме значительно выше, чем в фотодиодном, поэтому;
ФД в фотодиодном режиме используют чаще.
Чувствительность ФЭД с фотодиодами, а также выходная мощ-
ность повышаются при использовании в схеме усилителей фототока.
Одна из возможных схем ФЭД, схема с тиристорным ключом и элек-
тромагнитным реле приведена на рис. 13,35, в.
ФЭД на фототранзисторах. Фототранзистор (ФТ) — фотодиоду
со встроенным полупроводниковым усилителем. Чувствительность’1
ФТ по напряжению приближается к чувствительности многокаскад-
ных ФЭУ, но ФТ не требуют высоковольтных источников питания.
Максимальная чувствительность у ФД и ФТ одного порядка (у фото-
360
транзисторов ее можно получить при меньших сопротивлениях
нагрузки).
В различных схемах ФТ включается как обычный транзистор
(с общим эмиттером, общей базой или общим коллектором), а также
как диод со свободной базой, эмиттером или коллектором.
Дифференциальная схема ФЭД на фототранзисторах приведена
на рис. 13.35, г. Электромагнитное реле, являющееся нагрузкой
датчика, включено между коллекторами VT1 и VT2, работающими
в схемах с общим эмиттером. Ток, протекающий через обмотку упра-
вления реле, пропорционален разности световых потоков Фх и Ф2.
Балансировка дачика при равной освещенности VT1 и VT2 произво-
дится потенциометром 7?. „
Фотоэлектрические датчики (приемники) очень широко приме-
няют в разнообразных системах и устройствах автоматизации и ме-
ханизации: в устройствах контроля, подсчета изделий при серийном
и массовом производстве, в системах дозировки, защиты й т. д.
Фотоэлектрические датчики применяют также в качестве чувстви-
тельных элементов в прецизионных цифровых устройствах для изме-
рения линейных и угловых перемещений.
Фотоэлектрические приемники применяются в системах простран-
ственного наведения. В этом случае фотоэлектрические приемники
являются чувствительными элементами анализаторов изображения,
которые осуществляют пространственную селекцию объектов и
вырабатывают сигнал, характеризующий положение изображения
объекта относительно оптической системы [231.
13.9. ТЕРМОЭЛЕКТРИЧЕСКИЕ ДАТЧИКИ
Разнообразные нагревательные агрегаты, печи, атомные
реакторы, турбины, генераторы и двигатели различных типов отно-
сятся к тепловым (или энергетическим) объектам. Характерной осо-
бенностью многомерных систем управления такого рода объектами
и процессами (включая разнообразные криогенные и холодильные
машины) является контур регулирования температуры. Техниче-
ская реализация систем регулирования (управления) тепловыми
процессами связана с первую очередь с получением информации
о температурном поле. Термоэлектрические датчики являются уст-
ройствами для получения такой информации.
Термопарой называют чувствительный элемент генераторного
типа, измеряющий температуру в окрестности определенной точки
температурного поля относительно другой. Термопара (рис. 13.36)
состоит из двух проводников (электродов), выполненных из различ-
ных металлов, два конца которых спаяны. Если концы термопары
поместить в точках поля с разной температурой, то между спаями
образуется ЭДС, функционально связанная с разностью темпера-
тур. ЭДС термопары подается на вход мостовой схемы, усилителя
или реле системы регулирования. Концы электродов, расположен-
ные в точке измерения температуры, называют горячим спаем.
Термопары применяют в диапазоне температур от О К до 1600 °C,
но наибольшую точность термопары обеспечивают до 1000 °C. В ка-
- '' 361
Рис. 13.36. Термопара:
а — схема соединения электродов; б —
конструкция; 1 — корпус; 2 — пружина;
3 — передвижной штуцер; 4 — защитная
гильза; 5 — термоэлектроды; 6 — кол-
пачок
Рис. 13.37. Функциональная схема си-
стемы регулирования температуры:
иг — напряжение с выхода термопары,
Мод — модулятор; УМ — усилитель мощ-
ности; ДАД — двухфазный асинхронный
двигатель; Р — червячный редуктор; Н —
механическая нагрузка; ПД — потенцио-
метрический датчик измерительного моста
честве металлов (сплавов) используют следующие пары: медь —
константан (в диапазоне температур +180-4—500 °C), хромель —
алюмель (+2004- + 1200°С), платинородий — платина (+2504-
4- + 1450°С), вольфрам — вольфрам—молибден (до 2000° С) и др.
Постоянная времени различных типов серийных термопар харак-
теризуется величинами от нескольких секунд до сотен секунд. Го-
рячий спай термопары, помещенный в защитный кожух, имеет
небольшие размеры, что делает термопару удобным чувствительным
элементом для измерения температурного поля в ограниченных
объемах.
Конструкция серийной термопары показана на рис. 13.36, б.
Одной из типовых схем использования термопары в САР яв-
ляется схема системы регулирования температуры с уравновешива-
ющим мостом (рис. 13.37). Чувствительным элементом системы
362
является термопара, напряжение + на выходе которой является
сигналом ошибки системы. Принцип работы САР основан на ком-
пенсационном методе. С выходным валом червячного редуктора же-
стко соединен регулирующий элемент (нагрузка) и токосъемник ПД,
включенный в схему измерительного моста.
Малые значения ЭДС термопары определяют необходимость при-
менения усилителей с модуляцией, обеспечивающих стабильную
работу.устройстда^... ----_ -
” металлический термометр сопротивления (термбрезистор)
чувствительный элемент параметрического типа, принцип действия
которого основан на изменении электрического сопротивления ме-
талла (сплава) при изменении его температуры. Удельное сопротив-
ление чистых металлов
Р = Ро + Р (Л>
где ро — начальное удельное сопротивление, не зависящее от тем-
пературы; р (f) — kT в диапазоне температур до 30—40 К; р (f) =
= Т5 — при Т ->* 0 К.
В качестве металла терморезистора наиболее часто используют
платину (для температур от —200 до +500 °C) и медь (для темпера-
тур от —40 до +180 °C). Платина — химически инертный металл,
обладающий значительным удельным сопротивлением. Он имеет
практически линейную зависимость от температуры до 60 РК. Ниже
20° К удельное сопротивление платины мало и ее применение в ка-
честве терморезистора не целесообразно. В области температур
жидкого гелия и ниже применяют бронзовые терморезисторы [23],
так как их температурный коэффициент не зависит от магнитных
полей, наводимых при этих температурах.
Термометр сопротивления — самый точный термоэлектрический
датчик, позволяющий измерять температуру с точностью до
10~4 для этого необходимо фиксировать электрическое сопроти-
вление с точностью до-3-10+
Угольный термометр сопротивления имеет высокое удельное элек-
трическое сопротивление и значительный отрицательный температур-
ный коэффициент. Чувствительным элементом угольных термометров
являются стержни из графита или углей. Графит не изменяет своих
свойств при высоких температурах, поэтому такие термометры при-
меняют для измерения температур до 2300° К. Угольный термометр
не чувствителен к магнитным полям.
Полупроводниковые термометры (термисторы) в отличие от
терморезисторов имеют удельное электрическое сопротивление, ко-
торое изменяется в зависимости от температуры по экспоненциаль-
ному закону:
р = Аев/Г,
где А и В — постоянные параметры, зависящие от материала тер-
мистора.
Чувствительный элемент термистора изготовляют из медно-
марганцевых и кобальтомарганцевых и других соединений в виде
363
ператур небольшой — от —60 до +180
Рис. 13.38. Схема измеритель-
ного устройства с термопарой
стержней, дисков или ша-
риков. Шариковые термис-
торы монтируют на тонких
проводниках в вакуумиро-
ванной или наполненной
инертным газом ампуле.
Диапазон измеряемых тем-
°С. Но термисторы обладают
высокой точностью и наименьшей постоянной времени (по сравнению
с другими типами термометров).
Пример. На рис. 13.38 показана схема измерительного устройства температуры
выходных газов системы регулирования турбореактивного двигателя.
Измерительное устройство состоит из термоэлектрического датчика (термопары)
и форсирующей электронной схемы.
Передаточная функция термодатчика
где — коэффициент передачи; Ттд— постоянная времени термодатчика (Ттд =
Из-за значительной постоянной времени'^7'тд температура рабочих газов из-
меряется со значительной динамической ошибкой. Для уменьшения этой ошибки
термодатчик подключают к форсирующей схеме, выполненной на базе операционного
усилителя ОУ.
Передаточная функция форсирующей схемы
М =
&2 (Тф5 1)
^з^ф® + 1
R R
где й2 = -75—* и ka = у-—[Цг- < 1 — коэффициенты передачи; = RiC —
Ki Т <4 ах -г Ь?2
постоянная времени форсирующей схемы.
Если выбрать Тф — Ттд, то передаточная функция измерительного устройства
ь,ь,
W (s) = Гтд (s) 1Гф (з) = - -^1 ,
1 иу» -г 1
где Тиу = й3Ттд — постоянная времени измерительного устройства.
Так как ks < 1, то ТИу < Ттд, поэтому может быть выбрано необходимое по
техническим условиям быстродействие устройства для измерения температуры га-
зов системы турбореактивного двигателя.
13.10. ПРЕОБРАЗОВАТЕЛИ ЭЛЕКТРИЧЕСКИХ СИГНАЛОВ
Преобразователи электрических сигналов — вспомогатель-
ные устройства САР, осуществляющие эквивалентное преобразова-
ние входного сигнала типа модуляции (гармонической, амплитудно-
фазовой, частотной, импульсной и т. д.), синхронного детектирова-
ния (демодуляции), а также аналого-цифрового и цифроаналогового
преобразования.
| Преобразователи электрических сигналов (ПЭС) как типовые
1 элементы систем автоматики выполняют функции согласующих
364
up)‘U„cosu,t u(t)=Un,eos(aat+^
a) 5)
Рис. 13.39. Блок-схемы гармонических преобразователей:
а — модулятора; б — демодулятора (0 — напряжение несущей, нлн опорной, частоты)
устройств без изменения количества информации, содержащегося
в преобразуемом сигнале. Основными техническими требованиями,
предъявляемыми к ПЭС, являются точность и стабильность пре-
образования, а также высокое быстродействие.
^Модуляторы — нелинейные электрические многополюсники,
предназначеннБге Дл“я“эквйвалентного преобразования инфранизко-
частотных управляющих сигналов в гармоническое или импульсное
модулированное напряжение в зависимости от типа модуляции.
Ниже рассматриваются гармонические модуляторы, осуществля-
ющие балансную модуляцию, при которой инфранизкочастотный
входной сигнал преобразуется в электрический сигнал на несущей
частоте с амплитудой, пропорциональной величине входного сиг-
нала, и фазой, изменяющейся на 180° при изменении его полярности.
Импульсные модуляторы типа ШИМ будут рассмотрены в пара-
графе 14.4.
В системах автоматики наибольшее распространение получили
двухполупериодные гармонические модуляторы, выполненные на
полупроводниковых диодах или транзисторах.
Как известно, гармонический модулятор (рис. 13.39, а) осуще-
ствляет следующее нелинейное преобразование. Входной сигнал
и (/) модулирует несущую частоту, в результате выходное модули-
рованное напряжение
uMOA(t) = u(t)UmcoS(i>0t,
или
имод(0 = -^(е/ш“' + е-/“о')ц(0.
Преобразуя сигнал имод (/) по Лапласу, получим
^мод (s) = [U (s - /и0) + U (s + /<о0)],
где по определению
(7(s) = J u(t) e~si dt\
о
09
£7МОд (s) = Um j u (t) cos aote-si di.
о
365
Рис. 13.40. Двухполупериодный диод-
ный модулятор:
а — электрическая схема; б — эквивален-
тная схема; и — контурные токи; —
падение напряжения на дноде; /?! = /?* =
= 1/? — эквивалентные сопротивления;
— сопротивление нагрузки; а — пара-
метры импульса
иной
Схема двухполупериодного диодного модулятора с несимметрич-
ным входом и симметричным выходом показана на рис. 13.40, а.
Схема легко согласуется с двухтактным электронным или транзи-
сторным усилителем. Напряжение- u_(0 = Um sin ®ot — опорное на-
пряжение, а инфранизкочастотный сигнал и (/) — выходной (преоб-
разуемый сигнал). Для каждого полупериода опорного напряжения
справедлива эквивалентная однополупериодная схема, приведенная
на рис. 13.40, б. На интервале первого полупериода напряжения
и Jit] работают диоды VD1 и VD2, в течение второго полупериода —
VD3 и VD4. Вольт-амперные характеристики диодов идентичны.-
При кусочно-линейной аппроксимации характеристик диодов
имеем
ii = i2 = i = ид/7?д при £/д>0; i = 0 при 1/д<0.
Если Um > ег (ех = ивХ) и R = RH + R„aT > Rfl, то напря-
жение мМод (/) на выходе однополупериодной схемы является пря-
моугольным, тогда
Пмод (0 — -у—I-----( Sin -] 5~ sin Зй)0/ (13.32)
£ л \ о /
Форма импульса на выходе модулятора показана на рис. 13.40, в.
Выделяя с помощью полосового фильтра первую гармонику
напряжения иыод (i), как имеющую небольшую амплитуду
2 2
Uml = — et = — и, получим
^мод (0 Sin .
(13.33)
366
Из выражения (13.33) следует, что при изменении знака входного
сигнала и (f) фаза первой гармоники выходного напряжения изме-
нится на 180°, так как
2 2
----— (7sin й)0/= — sin (соо£ ± л).
При прямоугольном выходном напряжении двухполупериодного
модулятора выражение для первой гармоники, полученное при
разложении импульсов в ряд Фурье, имеет вид
г т __ m R Г/l ft I I 1ft П I 1®11 "4" 1®г1 1 /14 ЧЛЛ
4- [U т Pal) н 2 J’
где 0j = —arcsin ----начальный угол отсечки; 02 =
L'm "т
1 \ Rn о
—йн-------। « 7Т”-“оп— конечный угол отсечки.
"т I 1 I итп
Rn /
Из соотношения (13.34) следует, что при малых углах отсечки,
т. е. при Um U и R > R„ Uml = -^-U.
Выражение (13.34) представляется как суперпозиция двух раз-
нополярных последовательностей импульсов. Это справедливо при
условии, что обе пары эквивалентных контуров двухполупериодного
модулятора можно считать взаимно независимыми (при R 7?дат,
7?дат — внутреннее сопротивление датчика, работающего на моду-
Л ЯТДр)^-;--—-s - • • '-------------------------------------- * "' ~
Демодуляторы {синхронные детекторы) — нелинейные электри-
ческие многополюсники, осуществляющие эквивалентное преобра-
зование модулированного напряжения в инфранизкочастотный вы-
ходной сигнал (при изменении фазы входного сигнала на 180° и
постоянной амплитуде — на выходе демодулятора изменяется по-
лярность напряжения при его постоянном среднем значении).
Демодулятор выполняет нелинейную операцию умножения, а за-
тем фильтрацию (см. рис. 13.39, б). Пусть изображение модулиро-
ванного сигнала на входе демодулятора
U («)'= ^вх м (s) = -у [U (s — /ш0) -ф U (s + /ш0)] У ($).
Применяя к этому выражению обратное преобразование Лап-
ласа, получим
« (0 = «вх И (0 = 4 {L-' [У (S + /ш0) и (s)] +
+ L’1 [К (s — /о)0) U (s)]
Это выражение можно записать в виде
«вх м (0 = «Р (0 cos a>ot + juq (t) sin
367
Рис. 13.41. Двухполупериодный гармонический демодулятор на диодах:
а — принципиальная электрическая схема;, б — эквивалентная схема; в — форма сигнала
на выходе
где 1 {[У (s + /си0) Y (s — /ю0)] U («)} — синфазная соста-
вляющая; ич (/) = Л-1 {[У (s — /®0) — Y (s 4- /®0)] U (s)} — квадратур-
ная составляющая.
Демодулятор умножает модулированный сигнал uBSM (t) на
сигнал несущей частоты t/mcos (®0/ 4- ф0), где ф0 —фазовый сдвиг,
Um = 1, в результате получим
2ивх м (t) cos (соо/ + Фо) = 2 [ир (t) cos <о0/ 4- juq (t) sin aoi] x
X cos (v>ot + Фо) = [tip (0 cos фо + juq (t) sin фо] +
+ [cos фо cos 2®0/ + sin фо sin 2®0Z] Up (0 + j [cos ф0 sin 2(O0Z —
— sin Фо cos 2®</] u4 (0- (13.35)
После фильтрации демодулятор не пропустит напряжение двой-
ной частоты, поэтому сигнал идм (I) на выходе демодулятора будет
определяться первым членом в квадратных скобках выражения
(13.35), т. е.
Идм (0 =: tip (£) COS фо -J- jHq (0 Sin фо,
где Up (?) cos фо — синфазная составляющая сигнала на выходе де-
модулятора; uq (/) sin фо — квадратурная составляющая.
Принципиальная электрическая схема двухполупериодного гар-
монического демодулятора на диодах [23] приведена на рис. 13.41, а,
эквивалентная схема — на рис. 13.41, б (нагрузка не имеет средней
точки).
Основным параметром, характеризующим работу демодулятора,
является коэффициент преобразования /гдМ — отношение среднего
значения напряжения на нагрузке Un ср — 1п ср7?н к действующему
значению напряжения Uc на половине вторичной обмотки входного
трансформатора.
При входном сигнале ивх (/) = 0 и мгновенной полярности на-
пряжений, соответствующей первому полупериоду коммутирующего
напряжения ек (t), открыты диоды VD1 и VD2, а диоды VD3 и VD4
закрыты, во втором полупериоде — наоборот. При этом в оба полу-
периода коммутирующего напряжения ток в нагрузке отсутствует.
368
При wBX =# 0 и Ек > Uc направление тока (см. рис. 13.41, б) в оба
полупериода показано стрелками (Ек и Uc — действующие значе-
ния напряжений). При этом штриховой линией изображена та
часть схемы, по которой в первый полупериод токи не протекают.
Если фазу входного сигнала изменить на обратную, то изменится
направление тока в нагрузке в оба полупериода.
В каждый полупериод схема представляет собой однополупериод-
ный демодулятор. Полагая, что сопротивление диодов в проводя-
щем направлении мало, а в непроводящем — равно бесконечности,
Ек > Uс и сдвиг фазы ф = О или л, а также, пренебрегая омическим
сопротивлением вторичных обмоток трансформаторов Т1 и Т2,
получим аналитические зависимости, связывающие параметры схемы.
Для ограничения токов во внешнем контуре включается добавочное
балластное сопротивление Rq (на рис. 13.41, б R = R6 + Ra).
Составляя уравнения напряжений для контура а б в г а и
а б в д а (см. рис. 13.41, б), после преобразований получим уравне-
ние для мгновенного значения тока, протекающего через нагрузку:
= Ucm sin ®о//(/?н 0,5/?).
Действующее значение тока в нагрузке при R — r
In = Uc/(Ro-\-Qtbr)
и выходное напряжение
= IhRh = UMRn + 0,5r) = (13.36)
при пвх (/) = ис (t).
Форма сигналов на выходе демодулятора изображена на рис. 13.41, в.
Из выражения (13.36) следует, что при Ек > t/c ток/н и выходное
напряжение не зависят от В этом случае статическая характе-
ристика демодулятора будет иметь вид, показанный на рис. 13.42, а.
Рассматривая электрический контур ад е г а, получим условие
запирания диода VD4:
Рис. 13.42. Статические характеристики демодулятора:
а — характеристика = f (Дих). ~ характеристика ^вых = /(i/g/i'jj)
369
откуда следует, что соотношение между величиной максимального
сигнала ивх в демодуляторе и коммутирующим напряжением ек
определяется неравенством
F - U + R
^к^^стах 2ЯН + Я •
При этом очевидно, что
Ек mln ~ Ес max j R ' (13.37)
В этих формулах Uc max и Ея т1п — соответственно максимальное
напряжение входного сигнала на вторичной обмотке Т2 и мини-
мальное коммутирующее напряжение.
Если равенство (13.37) не будет соблюдено, то диод будет открыт,
и ток потечет в направлении, противоположном направлению основ-
ного тока. Это приводит к уменьшению выходного напряжения,
увеличению мощности, потребляемой от источника сигнала, умень-
шению коэффициента преобразования и КПД схемы.
Если Ек < Uc, то управление диодами будет осуществляться
источником сигнала, но не коммутирующим напряжением, и они
как бы поменяются местами. Величина выходного напряжения
при этом будет пропорциональна значению Ек.
Рассматривая контур аде ба (см. рис. 13.41,6), определим
максимальное обратное напряжение, прикладываемое к диодам:
ГТ _ пгт 4/?н -f- f _ пр
— zc7cmax г — mln>
и максимальный ток, протекающий через диод
max = Uc тах (— + 2flH + /• ) '
На рис. 13.42, б показана характеристика демодулятора — за-
висимость выходного напряжения от отношения UJEK.
Коэффициент преобразования демодулятора
^дм — ср/^с = 2/[^ф (2 ро)]>
где k$ = /н//нср — коэффициент формы тока переменного сигнала
(для синусоидального тока k$ = 1,1);
№£« — относительное сопротивление.'
^-'Аналого-цифровой преобразователь (АЦП) — устройство, осу-
ществляющее квантование по времени и уровню аналогового входного
сигнала при выбранных Ткв — такте квантования и т-числе двоич-
ных разрядов рйзрядноДдедисаД1асаналого-цифровое преобразование,
или ЛД-преобразбвание, затрачивается конечный интервал времени;
цифровой сигнал на выходе обычно запаздывает по отношению
к соответствующему мгновенному значению аналогового сигнала.
Обработка сигналов с выходов различных АЦП, входящих в состав
САР, осуществляется ЦВМ.
АЦП характеризуются тактом квантования, апертурным време-
нем и точностью преобразования.
370
Апертурное время ДУд —временной, интервал характеризующий
неопределенность момента преобразования выборочного значения
сигнала и вызывающий появление дополнительной динамической
погрешности:
ДТА = 1/(2л/2т),
где f — частота сигнала (в Гц), который при прохождении через
нулевой уровень изменяется за апертурное время на единицу млад-
шего разряда; т — число разрядов двоичного числа.
Максимальная точность ДЦ-преобразования ограничена погреш-
ностью квантования, зависящей от разрядной сетки и максимальной
скорости изменения преобразуемого сигнала. Погрешность преобра-
зования
Ае = ±0,5 (1 +k
где k — скорость изменения входного аналогового сигнала, выра-
женная через число единиц младшего по весу разряда за 1 с.
В зависимости от вида промежуточного сигнала преобразования
различные АЦП классифицируются на следующие типы:
аналог — временной интервал — код;
аналог — частота—код.
Функциональная схема АЦП первого типа показана на
рис. 13.43, а, все элементы выполнены на микросхемах. Аналоговое
входное напряжение ывх (/), соответствующее моменту времени Л,
сначала преобразуется в импульс с длительностью Tt{, пропорцио-
нальной значению входного напряжения, а затем — в унитарный
код. В схеме происходит сравнение входного напряжения ивх (7)
с линейно-нарастающим напряжением «л (/), формируемым схемой
371
генератора пилообразного напряжения (ГПН), синхронизированной
генератором импульсов опорной частоты f (ГОЧ). Генератор пило
образного напряжения — операционный усилитель, работающие
в режиме интегратора. Сравнение напряжений uBX (t) с ия (t) осуще
ствляется периодически с периодом Тп11 пилообразного импульсг
на компараторе К, поэтому период квантования входного напря'
жения Ткв = Тпл. В результате сравнения формируются прямо-
угольные импульсы длительностью Tti, следующие с частотой f =
= 1/Ткв. Передний фронт прямоугольного импульса совпадает
с началом пилообразного импульса, а задний фронт определяете
компаратором в момент равенства ивх (/) = un (t).
Импульсы ГОЧ за интервал Tti пропускаются устройством логи-
ческого управления (УЛУ) в регистр-счетчик.
Суммарное число импульсов, накопленное за время Tti, пред-
ставляет в цифровой форме аналоговый сигнал в момент tt.
Максимальное время преобразования равно 2т т, где ш — тре-
буемое число разрядов, т — период следования импульсов ГОЧ.
Апертурное время ДТА при полном преобразовании также равно
2/?,т. По сравнению с периодом Ткв = 1/f ГОЧ время ДТА велико;
это ограничивает применение метода. Но в САР с ЦВМ при неболь-
шом числе входов, когда не требуется высокая точность АЦ-преоб-
разования, преобразователи типа аналог — временной интервал —
код целесообразны.
Рассмотрим АЦП типа аналог—частота—код, функциональная
схема которого приведена на рис. 13.43, б. Схема состоит из пре-
образователя напряжение—частота (ПНЧ), генератора опорной
частоты (ГОЧ), счетчика времени (СВ), устройства логического
управления (УЛУ), выходного счетчика-регистра (ВСР), выходного
логического устройства (ВЛУ). Входное аналоговое напряжение
подается непосредственно на преобразователь напряжение—частота.
Выходной сигнал с ПНЧ — последовательность импульсов, частота
которых пропорциональна входному напряжению, а длительность
равна периоду ГОЧ. В качестве ГОЧ применяют таймер ЦВМ, причем
начало измерения соответствует поступлению с ЦВМ импульса за-
пуска. С этого момента происходит накопление в СВ импульсов,
поступающих с ГОЧ. Одновременно схема ВСР подсчитывает число
импульсов ПНЧ. Счетчик времени используется для масштабирова-
ния. Счет импульсов в обоих счетчиках прекращается, когда число
импульсов в СВ достигает заданного значения, которое определяет
момент окончания интервала времени, отсчитываемого с момента
поступления импульса запуска. Сформированное число записы-
вается в выходном регистре и в выбранном масштабе воспроизводит
входное напряжение.
АЦП могут входить в состав дистанционных подсистем много-
объектных САУ. В этом случае регистр подключается к каналу связи.
Выходной сигнал передается в линию передачи только при получе-
нии адресного сигнала, соответствующего выбранному преобразова-
телю (объекту). Перед каждым новым циклом преобразования оба
регистра устанавливаются в нулевое состояние.
372
Рис. 13.44. Функциональные схемы:
а — ЦАП с суммированием взвешенных раз-
рядов: О (1ТКВ) — входное двоичное число в
параллельном коде; О± — Gm — разрядные
символы числа; 2° — 2^-1 — весовые коэф-
фициенты двоичного числа; б — АЦП с ЦАП
в цепи обратной связи (К — коммутатор; ЦГ—
цифровой генератор)
для фор-
мирования аналогового сигнала, пропорционального входному циф-
ровому сигналу. Схема типового ЦАП показана на рис. 13.44, а.
Аналоговый усилитель (4У), выполненный на микросхемах, исполь-
зуют для суммирования взвешенных соответствующим образом долей
опорного напряжения Um, которое поддерживается на определен-
ном постоянном уровне, что достигается применением прецизионных
элементов и стабилитронов. Выходное напряжение ЦАП (усилителя)
равно сумме напряжений, создаваемых резисторными делителями,
электронные ключи ЭКл в цепях которых замкнуты. В схемах
делителей напряжения используются прецизионные резисторы ==
= 2N~lR; R3 = 2N~2R; R3 = 2N~3R; ...; RN = R, где N — число
резисторов, а также резистор обратной связи АУ ROc = R. Цифро-
вой входной сигнал G (iTKB) отпирает только те ключи, на входах
которых разрядный символ равен 1. Выходное напряжение £/вЫ1
равно сумме соответствующих напряжений по разрядам и представ-
ляет прямой эквивалент входного числа при условии, что значения
сопротивлений резисторов соотносятся как разряды прямого двоич-
ного кода; например:
если замкнут ключ 9Kan_x, то
л __________________л _____ Rm rt —л
С, вых — '-'оп— с/ оц,
если замкнут ключ 9Kan_3, то
^вых = l/w_8 = 1/оц = 0,25Gon;
если замкнуты ключи 9Kan_x и 9Ran..3, то
Увыи = U(N-i) (W-3) = 1,25£7Оп
и т. д.
373
Результирующая точность ЦАП определяется стабильностью и
точностью источника опорного напряжения и резисторов.
Цифроаналоговые преобразователи широко применяют в САУ
с ЭВМ в контуре управления (в частности, с микро-ЭВМ).
Частное применение ЦАП — в устройствах АЦП с обратной
связью (рис. 13.44, б), в которых ЦАП используют для формирова-
ния аналогового сигнала и„ял (t), пропорционального цифровому
выходному сигналу. Этот сигнал сравнивается с преобразуемым
аналоговым напряжением uBX (f). Выходной сигнал компаратора К
используют для управления процессом формирования выходного
кода. После достижения равенства напряжений ицац (/) = ивх (/)
компаратор обеспечивает фиксацию цифрового кода, значение ко-
торого представляет цифровой эквивалент G (1ТКВ) входного напря-
жения в соответствующий момент времени.
13.11. электромагнитные преобразователи
Электромагнитный преобразователь (ЭМП) — типовой
элемент автоматики, преобразующий электрические сигналы в со-
ответствующие механические перемещения. ЭМП в основном пред-
назначены для управления электрогидравлическими и электропнев-
матически распределительными (усилительными) устройствами.
ЭМП классифицируют на поступательного и поворотного дей-
ствия [23]. ЭМП поступательного действия осуществляют линейное
перемещение механической нагрузки (плунжера золотникового рас-
пределителя или заслонки усилителя типа сопло-заслонка и т. д.),
а ЭМП поворотного типа предназначаются для углового поворота
механической, нагрузки.
Принцип действия ЭМП основан на взаимодействии ферромагнит-
ных тел с магнитным полем, создаваемым управляющим электриче-
ским сигналом.
Конструкция и принцип действия ЭМП. Конструкция ней-
трального ЭМП поступательного действия, работающего на постоян-
ном токе, показана на рис. 13.45. Две обмотки управления 2 и 3,
имеющие одинаковое число витков, включены по дифференциальной
схеме и установлены во
внутреннем пространстве ци-
линдрического магнитопро-
вода 4, который закреплен в
корпусе 1. Подвижный эле-
мент ЭМП — якорь 5 имеет
небольшую массу, при помо-
щи двустороннего штока 6
его крепят к плоским пружи->
нам 7. Зазоры 8 между кони-5
ческими срезами якоря и ко-;
Рис. 13.45. Конструкция ЭМП ней-
трального типа
374
ническими полюсными наконечниками магнитопровода являются
рабочими, а зазор между цилиндрической поверхностью якоря и
цилиндрической поверхностью полюса магнитопровода — паразит-
ным. Входным сигналом ЭМП является разность токов в его об-
мотках, а выходным — линейное перемещение якоря х (/).
При обесточенных обмотках управления якорь удерживается
в нейтральном (по отношению к коническим полюсам магнитопро-
вода) положении двумя плоскими уравновешивающими пружинами,
имеющими линейную зависимость прогиба от приложенного усилия.
При равных токах в обмотках управления, т. е. при нулевом входном
сигнале ивх (/), возникают два магнитных потока, направленные
противоположно. Проходя по магнитопроводу, якорю, паразит-
ному и рабочим зазорам, эти магнитные потоки образуют два замкну-
тых контура. Под действием магнитных потоков в рабочих зазорах
на конических поверхностях магнитопровода и якоря появляются
силы взаимного притяжения. Силы, возникающие в паразитном
зазоре на цилиндрических поверхностях магнитопровода и якоря,
осевого воздействия не вызывают. При одинаковых токах в обмотках
управления, числе витков и величинах рабочих зазоров усилия на
концах якоря будут одинаковыми и направлены в противоположные
стороны. При этом результирующее усилие будет равно нулю.
Входной сигнал в виде разности токов в катушках управления
вызывает появление двух различных по величине магнитных пото-
ков и, следовательно, различных усилий на концах якоря. В этом
случае создается неуравновешенное результирующее усилие, под
действием которого якорь смещается в сторону контура, обтекаемого
большим током. Перемещению якоря противодействуют плоские
пружины, их деформация создает силу, пропорциональную пере-
мещению якоря. Движение ненагруженного якоря происходит до
тех пор, пока электромагнитные силы не будут уравновешены уси-
лием плоских пружин. При этом наступает состояние механического
равновесия и якорь занимает новое положение, отличающееся от
среднего. Направление движения якоря зависит от того, в какой
катушке управления возникает больший магнитный поток, а вели-
чина перемещения, пропорциональна величине входного сигнала
^вх (0•
Динамика ЭМП. Якорь ЭМП связан жестко, например, с плун-
жером золотникового распределителя, поэтому необходимо составить
уравнение движения для системы двух масс — якоря ЭМП и плун-
жера с учетом присоединенных масс рабочего тела гидравлического
распределителя.
Семейство механических (статических) характеристик ЭМП
представляется в виде семейства уравнений в отрезках (рис. 13.46, а)
^яА ~ ^1/яА ^2-^А
или
Гя(0 = ^я(0“М(0- (13.38)
375
Рис. 13.46. Характеристики ЭМП:
а — механические Ря — f (х); А — рабочая точка при 1Я = 1яд; б — логарифмические ча-
стотные; Юд! = l/Ttf; 6>Э = 1/Тэ — частоты сопряжения
где — усилие на якоре; iH — разностный ток в обмотках управ-
ления; х — перемещение якоря; ki и k2 — коэффициенты пропор-
циональности.
Если ввести обозначения: /?у — омическое сопротивление цепи
обмотки управления (шу); Ly — индукционность обмотки; се —
коэффициент пропорциональности ЭДС, наводимой в обмотке шу
при движении якоря со скоростью dxtdt, то уравнение баланса на-
пряжений
«у(О = ^я(0 + Ьу-^-1я(0 + се-^-х(О. <13-39)
Сумма динамической и вязкой сил, действующих на нагружен-
ный якорь ЭМП:
F(t) = m-^x(t) + kB-±-x (t), (13.40)
а уравнение механического равновесия с учетом уравнений (13.38)
и (13.40)
kiia (t) = m-^x(t) + kB-±-x (i) + kiX (0, (13.41)
где т = тя + m,s— суммарная масса якоря ЭМП и плунжера
золотника; kB — коэффициент вязкого сопротивления.
Если в выражении (13.39) пренебречь ЭДС е (0 = се-^ х (t),
то из соотношений (13.39) и (13.41) при нулевых начальных усло-j
виях получим следующую систему уравнений в изображениях nq
Лапласу:
^у (s) ~ FyIB (s) + LysIB (s); 1
^/H(s) = msaX(s) + ^sX(s) + ^X(s). J ( -A
376
Исключая из системы (13.42) ток /я (s), получим передаточную
функцию ЭМП в виде
или
F(s) =
X(s)
^вх (s)
ki
k%Ry
^ЭМП
IF («) =---------7V5----------------Г ,
(T3S+ 1) (72^ + 2^ +1)
(1.3.43)
ki
где -
ступательного
механическая постоянная времени (подвижных частей ЭМП и
— статический коэффициент передачи ЭМП по-
деИСТВИЯ (^-ЭМП -^уст^^вх. уст)» Гм V Щ/^g
плунжера золотника); |м = йв/(2 |/ tnk2) — коэффициент относитель-
ного демпфирования; Та = Ly/Ry — электрическая постоянная вре-
мени ЭМП.
Частотные характеристики ЭМП, вычисленные по выражению
(13.43), показаны на рис. 13.46, б (кривые 1 и 2). Для серийных
ЭМП Тм < (5-4-10) Тэ, поэтому приближенная передаточная функ-
ция ЭМП представляет собой колебательное звено с коэффициентом
передачи йэмп:
Г(«) =
^ЭМП
+ 2gHTHs + 1 ’
(13.44)
частотные характеристики которого показаны в виде кривых 3 и 4
на рис. 13.46, б.
Аналогичные передаточные функции можно получить для поля-
ризованных ЭМП поворотного действия.
ГЛАВА 14. УСИЛИТЕЛЬНЫЕ УСТРОЙСТВА
И КОРРЕКТИРУЮЩИЕ ЭЛЕМЕНТЫ
АВТОМАТИКИ
Общей функцией усилительных устройств (усилителей и
распределителей) САР является усиление по мощности сигнала управ-
ления (или сигнала рассогласования) до уровня, необходимого для
управления исполнительным устройством системы.
Усилительное устройство САР, как правило, представляет собой
многокаскадный усилитель, управляющий передачей энергии от
источника питания в нагрузку, со сложными обратными связями,
которые вводятся для улучшения его статических, динамических и
эксплуатационных характеристик.
Корректирующие элементы и устройства применяют для обеспе-
чения устойчивости и улучшения динамических свойств САР в со-
377
ответствии с техническим заданием на систему в целом. Важными
требованиями, предъявляемыми к корректирующим устройствам
(КУ), являются возможность реализации сложных частотных ха-
рактеристик и адаптации структуры КУ в процессе функционирова-
ния системы регулирования. В наибольшей степени этим требова-
ниям удовлетворяют цифровые КУ, реализуемые в виде перена-
страиваемых программ встроенных микро-ЭВМ. Для этого САР
должна быть оснащена соответствующим интерфейсом (аналого-
цифровыми и цифроаналоговыми преобразователями и т. д.).
14.1. КЛАССИФИКАЦИЯ УСИЛИТЕЛЬНЫХ
И КОРРЕКТИРУЮЩИХ УСТРОЙСТВ САР И САУ.
ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ
В зависимости от вида используемой энергии усилитель-
ные устройства САР и САУ классифицируют на электрические,
гидравлические и пневматические.
К группе электрических усилителей, управляющих энергией
электрического источника, в зависимости от типа усилительного
(управляющего) элемента относят электромагнитные, электронные
(ламповые, транзисторные, тиристорные), магнитные, электро-
машинные, а также комбинированные усилительные устройства.
Общность некоторых физических свойств жидкостей и газов
позволяет объединить гидравлические и пневматические усилители
(распределители) в другую группу. В зависимости от типа рас-
пределительного элемента гидравлические и пневматические усили-
тели классифицируют следующим образом: распределители расхода
и давления золотникового типа, распределители с соплом и заслон-
кой, распределители струйного типа, а также комбинированные
устройства.
По виду статической характеристики, связывающей выходные
и входные величины усилительных устройств, последние классифи-
цируют на линейные (или с несущественно нелинейной статической
характеристикой) и нелинейные усилители (с существенно нелиней-
ной характеристикой). К усилительным элементам, имеющим суще-
ственно нелинейные, например, релейные, характеристики, относят
электромагнитное реле, .тиристор, тиратрон и др. Важными достоин-
ствами таких усилительных (распределительных) элементов являются
высокие энергетические показатели, малая чувствительность к раз-
бросу их технических параметров, а также к стабильности питающих
напряжений и температуры окружающей среды и т. д. Для линеари-
зации характеристик усилителей, построенных на релейных эле-
ментах, применяют специальные методы управления передачей
Энергии из источника в нагрузку, например, вибрационную линеа-
ризацию (или ШИМ различных типов, ФИМ и другие виды моду-
ляции).
При проектировании усилительных устройств САР (или выборе
их из выпускаемых серийно) предъявляют требования к следующим
техническим характеристикам:
378
величинам коэффициентов усиления и передачи (в том числе
к коэффициентам усиления по мощности);
динамическим (частотным) или временным характеристикам;
линейности статической характеристики (для линейных уси-
лителей);
энергетическим параметрам (входной, выходной мощности, энер-
гоёмкости, и т. д.);
стабильности параметров и характеристик при возмущениях
со стороны внешней среды и их воспроизводимости при серийном
производстве;
долговечности, надежности и т. д.
Корректирующие элементы и устройства САР и САУ по энерге-
тическому признаку классифицируют на следующие группы: элек-
трические (пассивные и активные 7?ЛС-четырехполюсники, работа-
ющие как на постоянном, так и на переменном токе; перестраивае-
мые цифровые корректирующие программы встроенных микроЭВМ);
механические и электромеханические (тахогенераторы, дифферен-
цирующие и интегрирующие гироскопы, рычажные устройства ме-
ханических обратных связей и т. д.); гидравлические и пневматиче-
ские (гидравлические и пневматические регуляторы: пропорциональ-
ный, пропорционально-дифференциальный, интегральный, пропор-
ционально-интегральный, пропорционально-интегрально-дифферен-
циальный, а также элементы обратных связей по давлению, расходу
и др.).
В зависимости от типа уравнений, описывающих корректирующие
устройства, последние классифицируют на линейные (как мини-
мально-фазовые, так и неминимально-фазовые) и нелинейные. К не-
линейным корректирующим элементам и устройствам относятся
функциональные, логические, параметрические, а также цифровые,
реализующие нелинейные алгоритмы управления.
Нелинейные корректирующие элементы и устройства имеют боль-
шие динамические возможности, чем линейные /(У.
В зависимости от способа включения в контур САР корректиру-
ющие элементы и устройства подразделяют на последовательные,
параллельные и корректирующие обратные связи (см. параграф 14.8
настоящей книги).
Особый перспективный класс корректирующих устройств, пре-
образующих сигналы в цифровой форме, представляют цифровые
ЭВМ (в том числе и микро-ЭВМ).
Быстродействующая цифровая ЭВМ, функционирующая в замкну-
том контуре управления многомерной САУ в реальном масштабе
времени, имеет практически неограниченные математические и ло-
гические возможности. Основной функцией управляющей ЭВМ в мно-
гомерной САУ является вычисление оптимальных управлений и за-
конов, оптимизирующих работу системы в соответствии с требуемым
критерием качества в процессе ее нормальной эксплуатации. Высо-
кое быстродействие и большой объем памяти управляющей ЭВМ
позволяют наряду с основной задачей параллельно выполнять ряд
дополнительных операций, связанных, например, с контролем режи-
379
мов или диагностикой отдельных устройств и подсистем САУ, а
также с коррекцией статических и динамических характеристик
системы.
Частотные характеристики непрерывного КУ или логические
функции нелинейного устройства должны соответствовать расчет-
ным, т. е. требуемым по техническому заданию на характеристики
системы в целом — это основное требование, предъявляемое к кор-
ректирующему устройству. Кроме того, к ним предъявляют требо-
вания в отношении стабильности характеристик, долговечности и
надежности.
14.2. ТИПЫ ЭЛЕКТРИЧЕСКИХ НАГРУЗОК.
МАТЕМАТИЧЕСКИЕ МОДЕЛИ И СТРУКТУРНЫЕ СХЕМЫ
НАГРУЖЕННЫХ УСИЛИТЕЛЕЙ
Нагрузкой электрических усилителей является эквива-
лентное .RLC-устройство, представляющее собой одну из комбина-
ций активного R и реактивных LC-элементов. Импеданц Z (s) (ком-
плексное электрическое сопротивление) или адмитанц Y(s) (ком-
плексная проводимость нагрузки) являются функциями комплексной
переменной s = а + /со (а = 0).
Комплексное электрическое сопротивление определим как s-опе-
ратор, связывающий изображение тока I (s), протекающего через
сопротивление, с напряжением U (s), вызывающим этот ток. Поэтому
формально Z (s), а также Y (s) можно рассматривать как соответ-
ствующие передаточные функции электрической нагрузки. Такие
определения относятся также к входному, выходному (внутреннему)
и проходному комплексным сопротивлениям и проводимостям уси-
лительных устройств (У У), которые в дальнейшем будем обозначать
через Z (s) или Y (s) с соответствующими индексами.
В общем случае электрической нагрузкой УУ является полный
импеданц ZH (s), содержащий в качестве элементов R, L и С. Для
последовательной (рис. 14.1, а) и параллельной (рис. 14.2, а) схем
соединения активных и реактивных компонентов нагрузки можно
записать
Zh. поел (S) = = /? + Ls + -±- = + 2cSf1S —, (14.1)
где ZH. поел (s) — импеданц при последовательном соединении эле-
ментов; Ti — V LC — постоянная времени последовательной цепи;
= -у- у------коэффициент относительного затухания;
У М- Ms) - 1 | 1 |С;_ r22s2 + ^2r2s+ I (142)
Гн. napVV— — R -t- Ls -|-GS - Ls
или
7 (к) — U* !____==_______—_______ (14 3)
^H.napW - /h(s) yH.nap(s) Т^ + 2?Т^+ 1 ’ U }
380
Рис. 14.1. Схемы электрических нагрузок (последовательное соединение элементов):
а — принципиальная; б — структурная; в — в переменных состояния
гДе Ун. пар (s), ZH. цар (s) — адмитанц и импеданц при параллельном
соединении элементов; Т2 = ]/ LC — постоянная времени парал-
лельной цепи; — ----коэффициент относительного за-
тухания процесса в параллельной цепи.
Выражениями, аналогичными (14.1) и (14.3), в общем случае
описывают также входной, выходной (внутренний) и проходной
импеданцы или адмитанцы УУ.
Если в соотношения (14.1), (14.3) подставить s = /со, то получим
выражение полного комплексного электрического сопротивления
в форме, принятой в электротехнике.
Сумме сопротивлений /?, Ls и (Cs)rl, подключенных к напряжению
ип (0 (см. рис. 14.1, а), соответствует структурная схема с экви-
валентной естественной отрицательной обратной связью (рис. 14.1, б).
Действительно, для такой схемы, как для последовательного соеди-
нения элементов, имеет место уравнение баланса напряжений
«н (/) = ил (() + uL (t) + ис (().
Структурная схема может быть также получена из выражения
(14.1):
Ун. поел (s) — у" (2 = /s\ •
ин ^н. поел \s/
Если ввести в рассмотрение расширенный вектор-функцию со-
стояния нагрузки v (() = |«н ((); ис ((); iH (t) |т, где iH (() = iL (t),
то схема электрической нагрузки в переменных состояния при по-
следовательном соединении R, L и С имеет вид, показанный на
рис. 14.1, в (где iL (0) и ис (0) — ненулевые начальные условия).
381
LH
Рис. 14.2. Схемы электри-
ческих нагрузок (парал-
лельное соединение элеме-
нтов):
а — принципиальная; б —
структурная
6)
Этому расширенному вектору может быть поставлена в соответ-
ствие матрица перехода Фо (I), тогда
у(0 = Фо(0у(О),
где v (0) = |«н (0); -ис (0); iL (0)|т — вектор-столбец входа и на-
чальных условий (переменных состояния электрической нагрузки).
Сумме адмитанцев (14.2), подключенных к напряжению ия (t)
(см. рис. 14.2, а), соответствует структурная схема с отрицательной
обратной связью, показанная на рис. 14.2, б, так как согласно
уравнению Кирхгофа
/л(0 = tB(0 — »Z.(O — «с(0-
Структурную схему, приведенную на рис. 14.2, б, можно полу-
чить из выражения (14.2):
ZH. пар (в) ~ (s)/Ai (s) = 1/Кн. пар (в)-
Схему нагрузки в переменных состояния при параллельном
соединении R, L и С для расширенного вектора v (() ~ |цн; ис\
tc|T можно составить по аналогии с рис. 14.1, в.
Из рассмотрения выражений (14.1), (14.2), соответствующих
структурным схемам, а также схемам в переменных состояния,
могут быть получены передаточные функции и схемы для чисто
активного сопротивления нагрузки, активно-индуктивной нагрузки,
активно-емкостной нагрузки и т. д.
Например, если С = 0, то импеданц типа (14.1) для активно-
индуктивной нагрузки
7н. цосл (s) = R 4~ Ls.
Схема в переменных состояния для этого случая может быть
получена из схемы, показанной на рис. 14.1, в, если разорвать
ветвь 1с->ис, так как С= 0 (рис. 14.3, а, б), или из уравнения
(() = Un (() Uf^ (().
Двумерный вектор состояния, описывающий эту схему:
у(0 = [цн(О; МОГ-
382
L
Рнс. 14.3. Электрическая нагрузка типа RL:
а — электрическая схема; б — схема в переменных состояния
Расширенная матрица перехода для единичного входного воздей-
ствия ин (/)
<М) =
1
1(1-е)
где Т = L/R — постоянная времени ДЛ-схемы.
Решение уравнения состояния электрической 7?Л-нагрузки имеет
вид
цн (О
v(/) =
— t/T
tL(O)
Далее, если R = оо, то адмитанц типа (14.2) для случая LC-
параллельного колебательного контура без затухания (рис. 14.4, а)
Ун. пар = (1 + LCs*)/(Ls).
Рис. 14.4. Электрическая нагрузка типаДЪС:
а — электрическая схема (г—сопротивление, включенное последовательно с L); б — схема
в переменных состояния (точки 1—3 —• номера элементов расширенного вектора состояния);
в — временные диаграммы
383
Согласно 2-му закону Кирхгофа при г = О
d2
uc(t)=-L^-q(ty (и4)
Cue(t) = q(t),
где q (t) — заряд на конденсаторе С.
Из уравнений (14.4) получим
^uc(t)+(&c(t) = O, (14.5)
где соо = V \/(LC) — собственная частота колебаний ЕС-контура.
Уравнению (14.5) соответствует схема (рис. 14.4, б) в перемен-
ных состояния и расширенный вектор состояния
v(/) = |«H; ис; «с|т.
Расширенная матрица перехода
О О
COS (dot — sin (dnt
(do 0
— COo Sin COo; COS 0),/
Если начальный вектор состояния
v0 (0) = | ыс(0) = U- «с(0)=0|т,
то при г = 0 колебания свободного LC-контура описываются урав-
нением
Vo (0 = Фо (0 v0 (0),
где фо (/) — субматрица расширенной матрицы Ф (£).
Из этого векторно-матричного соотношения следуют выражения
для скалярных функций, известных из электротехники:
dur
ис (t) = CcoStOo/; (t) = — t/coosin (dot.
ф(/)= -Л- (1 — cosciV) “о
1 . , Sin СОо/
Поэтому ток, протекающий через элементы контура, показанного
на рис. 14.5:
ic (0 — Сйс (t) — — sin сооЕ
Если г 0, то ток
lc (0 = -^77sin®°C
где ₽ = -£- и
384
' Пример. Рассмотрим резонанс токов в rLC параллельном контуре при г — 0.
При резонансе токов индуктивная проводимость одной части цепи контура
компенсируется емкостной проводимостью другой ее части, параллельной первой
(см. рис. 14.4, а). В результате реактивная проводимость и реактивная мощность
на клеммах контура равны нулю.
Выражение для комплексной проводимости контура
V (s) /s=/<o = /<оС — / , (14.6)
резонанс токов наступает на частоте о>0, когда имеет место равенство
<aaL = 1/(а>0С).
Варьируя частоту напряжения (?) = Um sin <о~/, приложенного к клеммам
£С-контура, можно найти такую
<о~ = <оо = 1/VLC, (14.7)
при которой наступит резонанс токов, характеризуемый максимальным входным
сопротивлением контура; резонанс токов используют для компенсации индуктив-
ной составляющей управляющих обмоток электрических двигателей и других эле-
ментов.
Математические модели нагруженных усилительных устройств
без обратных связей. Обобщенное операторное уравнение усилитель-
ного устройства с учетом его работы на комплексную электрическую
нагрузку согласно закону Ома для полной цепи можно записать
в следующем виде:
Usa(s) + UH(s) = U^(s), (14.8)
где t/BH, UH — падения напряжений на внутреннем сопротивлении
усилителя и на нагрузке, или
/н (s) Zbh (S) + /н (S) 2н (S) = t/xx (S), (14.9)
где /н (s) — ток нагрузки; ZBH (s) — полный внутренний импеданц
УУ; ZH (s) — импеданц нагрузки; t/xx (s) | /н=0 = KyCUy (s) — на-
пряжение на выходе УУ в режиме холостого хода (/н = 0) при управ-
ляющем сигнале на входе (/); Кус — коэффициент усиления уси-
лителя в режиме холостого хода.
Импеданцы (передаточные функции) ZBH (s) и ZH (s) определяются
выражениями типа (14.1) или (14.3) в зависимости от эквивалентной
электрической схемы, внутреннего сопротивления и нагрузки уси-
лителя.
Уравнениям (14.8), (14.9) соответствует структурная схема, по-
казанная на рис. 14.5, а; обратная связь характеризует эффект
падения напряжения U№ (s) на внутреннем сопротивлении усили-
теля при протекании через него тока нагрузки /и (s).
Уравнения (14.8) и (14.9), как уравнения в отрезках при различ-
ных значениях (/у, могут быть представлены графически в виде
внешних статических характеристик усилительного устройства,
известных из курса электротехники. Семейство линеаризованных
характеристик (/вык = t/H = f (/н), Uyl = const (i = 0; ±1; ...
.... ±n) показано на рис. 14.5, б. Рассмотрим внешнюю характеристику
с параметром UyA = const, проходящую через точку А и характе-
13 Солодовников В. В. и др. 385
Рис. 14.5. Нагруженный усилитель без обратной связи:
а — структурная схема; б — семейство внешних (нагрузочных) характеристик; в — нагру-
зочная характеристика 1 и траектория 2 перемещения рабочей точки А (3 — нагрузочная
характеристика при ZB = 0)
ризующую мгновенный режим работы усилителя при токе 1яА и
напряжении UnA на нагрузке. В соответствии с уравнением (14.8)
имеем
AtA CtgC^A Н~ ^НА = ^ХхА>
где ctg аА — InAIUmA — Udi™, «а— угол наклона внешней
характеристики, определяющий внутреннее сопротивление усили-
теля', 1ЯЭ — ток короткого замыкания (для семейства линеаризован-
ных характеристик а = const на всем поле параметра UBK—Uy).
Или
-^ctgaA + ^=l;
^ХХ ^хх
+ (14Л°)
'КЗ иХХ
Соотношение (14.10) представляет собой уравнение внешней;
характеристики с параметром UyA усилителя в отрезках. Аналогич-
ными уравнениями описываются также механические характери-,
стики исполнительных устройств CAP. 'j
Математические модели нагруженных усилителей с отрицательно^
обратной связью по напряжению. Цепи отрицательных обратны»
связей (ОС) применяют для улучшения статических и динамических;
характеристик УУ. В электрических усилителях различают отри-
цательную ОС по напряжению и по току.
386
Рассмотрим отрицательную ОС по напряжению. В этом случае
напряжение обратной связи иос (0, суммируемое с входным напря-
жением иу (0, пропорционально выходному напряжению инос (0 на
нагрузке усилителя. Структурная схема нагруженного электриче-
ского усилительного устройства без обратной связи с учетом
t/zx (0 - Uv (S) = Uv (S) Го (5)
показана на рис. 14.6, а. Здесь Zn₽ (s) и ^вх (s) — проходной и вход-
ной импеданцы усилителя без ООС.
Из системы уравнений, характеризующих динамику электриче-
ского УУ с отрицательной ОС, составим структурную схему усилив
теля с обратной связью по напряжению (вариант 1, рис. 14.6, б),
гос (s) — передаточная функция цепи отрицательной ОС по напря-
жению (соответствующие переменные усилителя с ООС имеют в ин-
дексе ОС).
Если ввести обозначение
ф М — (4i_ocjs) _______га (s) ... ...
U7(s) 1 + U70 (s) U70c (S) ’
где Ф (s) — передаточная функция ненагруженного [/н. ос (s) = 0;
U№. ос (s) = 0 ] усилителя с отрицательной ОС по напряжению,
то последнюю структурную схему с учетом равенства
Гос (s) £/„. ос (s) = [£/„ (s) - t/BH. oc (s)] Гос (s)
можно привести к более простому виду (вариант 2, рис. 14.6, в).
Далее получим передаточные функции нагруженного УУ с от-
рицательной ОС по напряжению
(14.12)
Ф(8)___________
_________^вн (s)_______
Zn (S) [1+ Го (s) Woa(s)]
Рис 14.6. Структурные схемы нагруженного усилителя:
а — без обратной связи: б —С ООС по напряжению (вариант 1); « — вариант 2
13*
387
Рис. 14.7. Структурная
схема нагруженного уси-
лителя с ОС по току:
Гос / (s) — передаточная
функция цепи ОС по току;
2СВ (s) — комплексное со-
противление связи
Отрицательная ОС по напряжению уменьшает внутренний импе-
данц усилителя в 1 + Го (s) Гос (з) раз. Действительно, из схемы,
показанной на рис. 14.6, в, следует
ZBn. ос (s) — вн. ос (s)/1^h. ос (s)l — ZBH (s) [ 1 — Ф (s) Woc (s)l =
' =2BH(s)/[l 4-Го(з)Г0с(з)].
Соответствующие частотные характеристики нагруженных элек-
трических усилительных устройств с отрицательной ОС по напря-
жению можно получить из выражений (14.11), (14.12).
Отрицательную обратную связь по напряжению используют
в разнообразных транзисторных усилителях (в эмиттерных повто-
рителях, в У ПТ, в обычном и интегральном исполнении), в ЭМУ,
а также в электрических приводах.
Математические модели нагруженных усилителей с отрицатель-
ной ОС по току. В случае отрицательной ОС по току напряжение
«ос I (О, суммируемое с напряжением ивх (/), пропорционально
выходному току гн. ос / (0> который протекает через нагрузку уси-
лителя.
Структурная схема нагруженного электрического усилителя
с отрицательной ОС по току показана на рис. 14.7. Путем структур-
ного преобразования получим
Zbh.Oc/(s) = -^^ = Zbh(s) + Zcb(S)[1 + r0(s)roc/(s)]. (14.13)
1 и. ОС I \л)
Из выражения (14.13) следует, что в противоположность отри-
цательной ОС по напряжению обратная связь по току увеличивает
внутренний импеданц усилителя. Электрические усилители с «силь-
ной» ОС по току называют генераторами (источниками) тока. Вну-
треннее выходное сопротивление источника тока бесконечно велико
в противоположность нулевому внутреннему сопротивлению источ-
ника ЭДС.
Отрицательную ОС по току широко применяют в транзисторных,
магнитных и других усилителях и электрических приводах.
14.3. РЕЛЕЙНЫЕ УСИЛИТЕЛЬНЫЕ
И РАСПРЕДЕЛИТЕЛЬНЫЕ УСТРОЙСТВА
Наиболее широко применяемыми элементами автоматики
являются разнообразные электромагнитные, электронные, пневмати-
ческие, механические и другие реле. В настоящем параграфе кратко
388
рассматриваются только электромагнитные реле, так как принципы
использования реле других типов аналогичны электромагнитным [23 ].
Электромагнитное реле — типовой элемент автоматики, который
управляет подачей значительной мощности источника питания в на-
грузку, переключая контакты реле за счет использования неболь-
шой мощности в цепи управления.
Основными преимуществами реле, как устройств контактной
коммутации, по сравнению с элементами бесконтактной коммутации,
являются устойчивость к изменению температуры, широкий диапа-
зон коммутируемых токов и напряжений, устойчивость к электри?
ческим перегрузкам в цепи обмоток управления и контактов, радиа-
ционная стойкость, возможность коммутации большого числа галь-
ванически развязанных цепей, а также небольшая масса, габаритные
размеры, стоимость и др. Преимущества электромагнитных реле
особенно проявляются у миниатюрных герметизированных реле
объемом менее 10 см3 и массой менее 50 г.
Электромагнитные реле классифицируют в зависимости от вида
напряжения (тока) управления на реле достоянного и переменного
тока. В технике в основном применяют реле с управлением постоян-
ным током. Электромагнитные реле постоянного тока по функцио-
нальному признаку подразделяются на нейтральные и поляризован-
ные. Дальнейшую классификацию реле производят в соответствии
с их конструктивными особенностями, принципиальной схемой и
назначением (например, герметизированные электромагнитные реле
или реле с магнитно-управляемыми контактами и т. д.).
Новый тип реле постоянного тока — дистанционные переключа-
тели; они управляются импульсами тока или напряжения и для
удержания контактов в переключенном состоянии управляющего
тока не требуется.
Нейтральное электромагнитное реле не изменяет знака выход-
ной величины Ym при изменении знака входного управляющего сиг-
нала X. Нейтральное реле имеет два устойчивых состояния — кон-
такты реле разомкнуты или контакты реле замкнуты (и наоборот)»
а) Ь)
Рис. 14.8. Нейтральное электромагнитное реле:
а, б, в — статические характеристики; xcpag и хотп — параметры срабатывания и отпу-
скания; Ym — величина коммутируемой мощности (или сигнала, условно принимаемого
за единицу)
389
Рнс. 14.9. Конструкция уле с по-
воротным якорем^
условно эти состояния обо-
значают как 0 и 4-1 (или 4-1
и 0, а также 0 и —1; —1 и 0).
Статическая характеристика
вход-выход нейтрального ре-
ле— двухпозиционная. На
рис. 14.8, а показана стати-
ческая характеристика иде-
ального нейтрального двух-
позиционного реле без гистерезиса, а на рис. 14.8, б, в —- харак-
теристики двухпозиционного реле с гистерезисом.
Принцип работы нейтрального электромагнитного реле можно
пояснить с помощью -рис. 14.9.
Электромагнитная система нейтрального реле состоит из магнито-
провода (сердечников 1,2 — статорной части и подвижного якоря 4)
и обмоток управления, выполненных в виде катушек 3, установлен-
ных на сердечнике 2 магнитопровода. Срабатывание или отпускание
реле заключается в быстром механическом перемещении якоря 4
из одного устойчивого положения в другое в зависимости от подачи
или снятия управляющего сигнала х(/) = иу(/) при определенном
начальном состоянии реле. Электромагнитная сила, создаваемая
сигналом управления, возрастает от некоторого минимума до макси-
мальной величины, вызывая срабатывание реле, или уменьшается
от максимума до минимальной величины, обеспечивая отпускание
якоря под действием возвратной пружины 7.
Контактная группа 5 реле, установленная на клеммной колодке 8,
состоит из нормально разомкнутых и (или) нормально замкнутых
контактов, которые включаются последовательно с нагрузкой ZB
и источником питания Ym = U (постоянного или переменного на-
пряжения). При срабатывании реле нормально разомкнутые кон-
такты 5 замыкаются толкателем 6, установленным на якоре, в ре-
зультате нагрузка ZH подключается к источнику питающего напря-
жения.
Электромагнитные и механические процессы, характеризующие
динамику нейтрального реле, описываются следующей системой
нелинейных уравнений:
. п\ • I г ^7 W । ! dL d8 (t) ,
«у (0 — «у (0 + L h ly (0 -gy dt >
Ft (0 = fl fiy (0; 6(01;
FM(0=f2(6);
Г /А Г /А d2S (0 I „ dS (0 I Г d6 (t) 1
Fт (0 FM (/) — m |- cTp sign J,
uB (Zq) — U', (t^ = t Fcp),
(14.14)
390
где iy (/) — ток управления в обмотке wy реле при подаче сигнала
иу (Z); L — индуктивность обмотки управления (L = var — зави-
сит от величины 6); 6 (/) — величина воздушного зазора между
якорем и торцом магнитопровода; FT (/) — тяговое усилие, или элек-
тромагнитная сила, создаваемая током управления iy (/) и зависящая
от величины зазора 6; FM (z) — механическая характеристика реле,
т. е. зависимость приведенной результирующей силы FM всех ме-
ханических сил, препятствующих движению якоря к сердечнику,
от величины зазора 6; т — приведенная к точке отсчета перемеще-
ния масса подвижных частей реле; св — коэффициент вязкого тре-
ния; стр — коэффициент трения.
Последнее уравнение системы (14.14) — уравнение коммутации
электрической нагрузки реле: U — напряжение, подключаемое через
контакты реле к нагрузке в момент срабатывания (падением напря-
жения на контактах пренебрегаем).
Решение системы уравнений (14.14), представленное в виде
временных диаграмм изменения токов iy (t) и гн (/) при ступенчатом
«у (/), нулевых начальных условиях и ZH = Rs, показано ща
рнс. 14.10.
Время срабатывания и отпускания реле определяют по фор-
мулам:
Тсраб = Агр ^дв>
Т + Г (14.15)
где /тр и /тр — время трогания якоря реле соответственно при воз-
растании и уменьшении управляющего напряжения; t№ и t'№ —
время движения якоря при возрастании и уменьшении uy (t);
^тр— Т1ПЙ3/(Й3 1),
/тр —: Т 1П £3/,
где т = L/R (L — индуктивность об-
мотки управления при д — бшах;
R — активное сопротивление обмот-
ки); т' = L’/(R 4- р) (здесь L' —
индуктивность при 6 = 6mln; р —
сопротивление искры); k3 =
~ ^у//сраб > 1 — коэффициент за-
паса (/у — установившийся ток в
обмотке управления; /сраб — ток сра-
батывания реле); kB = /отц//сраб
(Jo™ — ток отпускания контактной
группы).
Рис. 14.10. Временные диаграммы срабаты-
вания и отпускания реле:
а, б — процессы в обмотке реле; в — ток /н =
«= протекающий через омическую нагрузку
391
Электрической нагрузкой реле является одна из обмоток (аух или
w3) в зависимости от положения его среднего контакта.
Если управляющий сигнал | {7„ | < | (7сраб |, то обмотки возбужде-
ния ЭДв обесточены (здесь 1/сраб — напряжение срабатывания
реле К). Пусть <7У = Ult (иг >+ Исраб); в этом случае реле под-
ключает напряжение U источника к обмотке В результате вза-
имодействия магнитного потока Фх = +Ф0 с током 1Я = const
нагруженный выходной вал электродвигателя будет вращаться
с установившейся угловой скоростью +□•
Если {/у = — U2 (—Ua < —t/сраб), то напряжение U источника
будет подключено к обмотке w2, магнитный поток Ф2 = —Фо и уста-
новившаяся угловая скорость вала будут иметь противоположный
знак, т. е. —Q. Поэтому статическая характеристика Q = F (U7)
схемы регулирования, т. е. зависимость установившейся угловой
скорости вала ЭДв от соответствующего напряжения управления,
будет так же, как и функция — ср (U7), иметь вид релейной
характеристики. Если при этом напряжение U„ будет иметь разную
величину, то зависимости Q = F (LL) будут представлены семей-
ством релейных характеристик 7—3 при l!nl < U„3 < UM
(рис. 14.14, в).
Обладая высокой надежностью и простотой, релейная схема
регулирования имеет недостаток — невозможность плавного изме-
нения установившейся скорости Q при соответствующем изменении
управления иу (/).
Рассмотрим регулирование средней скорости ЭДв методом вибра-
ционной линеаризации или двусторонней широтно-импульсной мо-
дуляции (ДШИМ).
Симметричная статическая характеристика вход-выход поляри-
зованного реле может быть преобразована в линейную нечетную
характеристику методом вибрационной линеаризации при заданном
периоде Т синхронизирующих импульсов. Релейный усилитель
с линеаризацией отличается простотой технического исполнения,
высокой энергоемкостью и надежностью. Линеаризованная харак-
теристика реле представляет собой линейную нечетную зависимость
среднего за период Т значения регулируемой переменной от вход-
ного управляющего сигнала, подаваемого на вход 1 поляризованного
реле (рис. 14.15, а).
На вход 2 реле подается высокочастотный линеаризую-
щий сигнал, в качестве которого может использоваться симмет-
ричный пилообразный или синусоидальный сигнал (последний
фактически выполняет функции л синхронизирующего напряже-
ния).
В качестве примера рассмотрим систему регулирования средней
угловой скорости якоря ЭДв постоянного тока с независимым воз-
буждением. Принципиальная электрическая и структурная схемы
системы приведены соответственно на рис. 14.15, а, б. Поляризован-
ное реле имеет два входа: на обмотку te»yl подается медленно изменя-
ющееся напряжение управления му (/); на обмотку wy2 — линеари-
зующее напряжение ил (/), являющееся симметричным пилообраз-
394
Вход 1
Вход 2
Рис 14.15 Регулирование средней скорости ЭДв методом вибрационной линеари-
зации:
а — схема включения обмоток реле; б — структурная схема системы (обозначения см.
рис. 13.14)
ным напряжением с амплитудой U}1 и периодом Т, выбираемым из
условий:
TCpa6«T«TB„ (14.16)
где Тсраб — время срабатывания реле; Тяч — период высокоча-
стотной гармонической составляющей в частотном спектре сигнала
иу (/). Левая часть условия (14.16) определяет срабатывание реле
в самом начале переднего фронта линеаризующего напряжения,
а правая часть гарантирует в соответствии с теоремой Котельникова
воспроизведение управляющего сигнала на выходе системы без
заметных искажений.
Пусть статическая характеристика поляризованного нагружен-
ного реле — идеальная двухпозиционная характеристика вида
Ui - Um sign U
(криваяЗ/^на рис. 14.16, а).
Предположим, что (0 — 0, тогда сигнал, коммутирующий
контакты реле, и (/) = мл (0 и 7\ = Т2 = Т/2 (Т = Т31). В этом
случае подвижный контакт реле в течение каждого полу периода
ил (0 удерживается у каждого неподвижного контакта в течение
одинакового интервала времени А/ = t4 — t3 = ts — t2 — t2 — tx и
т. д. в соответствии с напряжением ил (/) (кривая 2). Среднее за
период Т значение выходного напряжения ия (/) на нагрузке, пред-
ставляющего собой разнополярное импульсное напряжение с ампли-
тудой Um (кривая 3):
т
и0 = ия ср - ~ J ын (0 dt = -Т1~Т2 Um = 0.
О
395
Рис. 14.16. Вибрационная линеаризация:
“у") = — “у!
а — при отсутствии сигнала управления; б — при
Если, например, tL (/) — —иу1 (/) (см. рис. 14.16, б), то 7\ =
т 9 т
® ---2\Т и Т2 = —- + 2ДТ, т. е. средний контакт удержи-
вается по времени больше у одного неподвижного контакта и
меньше — у другого контакта, но при этом сохраняется равенство
Л + Т8 = Т.
’ ' Среднее за период Т значение выходного напряжения ия (t),
являющегося разнополярным напряжением с амплитудой Um и
с разными по длительности положительными и отрицательными
импульсами, определяют по формуле
т
-= t/н СР! = 4- J W Л ДТ>
О
т. е. оно линейно зависит от ДТ = —(7\—Т2)/4.
Из рис. 14.16 видно, что
Т = 4t7J1/tg у; tg-y = £/у1/ДТ,
поэтому с учетом выражения для U01 имеем (кривая 4)
UOi=^(-Uvl) = -KeilUyl,
V л
где /Свл — UJU, — коэффициент релейного усилителя с вибра-
ционной линеаризацией (или усилителя с ДШИМ).
Статическая характеристика усилителя с ДШИМ относительно
среднего значения выходного- напряжения за период линеаризу-
ющего сигнала изображена на рис. 14.17. Линейный диапазон ха-
рактеристики ограничен величинами ±(/л, при значениях |{7у| >
>• Un имеет место «залипание» подвижного контакта реле у непо-
движного в зависимости от знака иу (t).
396
Рис. 14.17. Статическая характеристи-
ка усилителя с ДШИМ (Um — напря-
жение источника питания; —£/л —
---— линейная зона)
Если нагрузка релейного усилителя с вибрационной линеариза-
цией представляет механическое, электрическое или другое инер-
ционное устройство, то при некотором значении постоянной времени
она будет отфильтровывать высокочастотные составляющие, име-
ющиеся в спектре выходного сигнала. Так, если нагрузкой релейного
усилителя является инерционный якорь ЭДв, то при ДШИ-моду-
ляции угловая скорость вала в установившемся режиме будет про-
порциональна среднему значению напряжения Uo, т. е. статиче-
ская скоростная характеристика ЭДв будет нечетной линейной функ-
цией управляющего напряжения.
На рис. 14.18 показана временная диаграмма ДД7Я-модуляции,
осуществляемой трехпозиционным релейным усилителем с гистере-
зисом. Высокочастотный линеаризующий сигнал может быть полу-
чен специальным автоколебательным контуром САР, состоящим из
реле с петлеобразной характеристикой, и апериодической ОС. Обоб-
щенная структурная схема САР показана на рис. 14.19. Коэффициент
передачи К и постоянная времени Т элемента ОС выбирают так,
чтобы период автоколебаний удовлетворял соотношению (14.16),
а частота автоколебаний в системе с достаточной степенью точности
была равна частоте колебаний внутреннего (линеаризующего) кон-
тура. При этом можно считать, что по автоколебаниям САР ока-
зывается разомкнутой, а по управляющему сигналу иу (t) — зам-
кнутой.
Рис. 14.18. Временная
диаграмма ШИ-модуля-
тора с трехпозиционным
реле с гистерезисом;
1 — характеристика реле;
2 — кривая линеаризующе-
го напряжения; 3 — кривая
выходного напряжения; 4 —
среднее значение выходного
напряжения; а, а' — вклю-
чение реле; б, б' — отклю-
чение реле
397
Рис. 14.19. Структурная схе-
ма САР с автоколебатель-
ным линеаризующим конту-
ром:
- Uoc - 1/лос -
сигнал иа входе реле
Релейные САР с различными видами ШИ-модуляции нашли
широкое применение в различных областях автоматики вследствие
простоты конструкции систем, высокой стабильности и надежности
в эксплуатации в условиях значительных возмущений.
14.4. ТРАНЗИСТОРНЫЕ УСИЛИТЕЛИ
Многокаскадные транзисторные усилители, обеспечива-
ющие высокий КПД при низких напряжениях питания и больших
токах, протекающих через нагрузку, широко используют в силовых
системах автоматики. Срок службы транзисторных усилителей
достигает 7• 103ч, эксплуатационная надежность составляет в среднем
97 %. Каскады предварительного преобразования и усиления сигна-
лов управления обычно исполняют в виде микросхем, что повышает
компактность усилителя в целом.
Различают следующие типы транзисторных усилителей на несу-
щей частоте (или усилители переменного тока; электрическая
нагрузка усилителя — цепи управления асинхронных и других
электродвигателей);
с широтно-импульсной или импульсной модуляцией (нагрузка —
управляющие цепи электромагнитных преобразователей пневмати-
ческих и гидравлических распределительных устройств; электро-
магнитных муфт; ЭДв постоянного тока, работающих в импульсном
режиме; дискретных (шаговых) двигателей и др.);
постоянного тока (нагрузка — электромагнитные реле различ-
ных типов, обмотки управления ЭМУ и т. д.).
Входное и выходное напряжения усилителя переменного тока
представляют собой модулированные напряжения несущей частоты,
в качестве которой в автоматике в основном используют частоты
переменных питающих напряжений 50, 400 и 1000 Гц. Усилители
с импульсными сигналами на входе и выходе также относятся к группе
усилителей переменного тока.
Усилители с модулированным входным сигналом и детектирован-
ным инфранизкочастотный выходным называют усилителями —
демодуляторами, или фазочувствительными усилителями.
Усилители с инфранизкочастотный сигналом на входе и модули-
рованном на выходе называют усилителями-модуляторами. К числу
таких усилителей относят различные усилители с широтно-импульс-
ной модуляцией (ШИМ-усилители).
398
Если входной и выходной сигналы усилителя представляют собой
немодулированные инфранизкочастотные сигналы, то такой усили-
тель называют усилителем постоянного тока (У ПТ}.
Транзисторные усилители на несущей частоте, или усилители
с гармонической модуляцией. Структурная схема САР с усилителем
переменного тока показана на рис. 14.20. Усилитель мощности САР,
а также сельсин-трансформатор, ЭДВ и тахогенератор являются
элементами, работающими на напряжении несущей частоты ==
= Um sin sin ®оА Перёдаточная функция усилителя
G (s). Пусть т (/) —- огибающая сигнала ошибки, тогда модулирован-
ное напряжение на входе усилителя [23]
мвх (0 = т (0 sin (<оо/ + Фо),
где соо — несущая (опорная) частота модулируемого напряжения;
Фо — начальная фаза, если т (t) = const, то /« имеет смысл постоян-
ной амплитуды синусоидального сигнала мвх (/).
Сигнал нвх (t) представим в виде
«вх(0 = /п(0^[е/(Ио<+фо) - е-7
тогда в соответствии с теоремой смещения в комплексной области
имеем
t/вх (S) = 4 (s ~ /®о)е/Ч” - М (s + /®о) ,
где t/Bx (s) и М (s) — изображения по Лапласу входного модулиро-
ванного сигнала и его огибающей.
Так как изображение выходного сигнала усилителя
t/вых (s) - u№ (s) G (s) = ± [М (S - /(Оо) е7ф° - М (s f /®о) е~/ф° ] G (s),
то, переходя во временную область, запишем
«вых ю=(s+/®о)м <s>iе/ (<м+фо) -
— L-1 [G (s - /со0) М (S)] е-7 }, <14.17)
где G (s + /соо) и G (s — /соо) — передаточные функции усилителя
на несущей частоте соо.
Рис. 14.20. Структурная
схема САР с усилителем
переменного тока:
Кст, Кред — коэффициенты
передачи сельсииа-траисфор-
матора и редуктора; G ($);
гЭДв (s) и “ пеРе’
даточные функции соответ-
ственно усилителя, ЭДв, та-
хо генератора
399
Выражения в квадратных скобках соотношения (14.17) являются
комплексными функциями вещественной переменной t, т. е.
L-4G(s + /co0)M(s)] = a(0 + /fe(0; 1
L~l[G (s - /соо) M(s)] = a (t) - jb (t) J (4 )
а показательные функции, входящие в соотношение, представим
в тригонометрической форме
е/ (о>«Н-то) = cos у sln фо); 4 ]
e-Z (<M+q>o) = cos _ j sin ф- ф0). |
Подставляя выражения (14.18) и (14.19) в соотношение (14.17),
получим
^ВЫХ (0 == «син (О «Кв (0>
где «син (0 = а (0- sir* (®о* + Фо) — синфазная составляющая,
а «кв (0 = b (t) cos (соо£ + ф0) — квадратурная составляющая вы-
ходного напряжения.
В выражении для ивых (/) a(t) — огибающая синфазной состав-
ляющей; ее можно записать, используя систему уравнения (14.18),
в виде
G (s + /соо) Л4 (s) 4- <3 (s — /сор) М (s)
2
a (f) = L 1Г
а огибающую квадратурной составляющей b(t} представить в виде
b Г ° (s + М) M(s)~G(s — /сор) М (s) 1 (14 20)
L 2/ J
Если ввести обозначения
Лых (О = VWJ+W);
. «X 4. b(t)
Ф (0 = arctg ,
то модулированное напряжение на выходе усилителя
^вых (0 ^вых (/) sin [cooZ + Фо + ф (t) 1, (14.21)
где ф (t) — переменная фаза, нелинейно зависящая от а (/) и b (/)
и характеризующая эффект фазовой модуляции.
Огибающая Лвых (/) в выражении (14.21) по форме не подобна
огибающей т (/) входного сигнала, так как в выходном напряжении
присутствует квадратурная составляющая икв (/), искажающая оги-
бающую напряжения ивых (/).
Возникновение фазовой модуляции согласно формуле (14.21)
и искажение огибающей выходного напряжения «вых (/) определяется
свойствами передаточной функции G (s) транзисторного усилителя.
Пусть частотный спектр входного сигнала т (£) представляет собой
линейчатый спектр М (иг), (i = 1, 2, ..., п), где частотные составля-
ющие ±о); располагаются симметрично относительно несущей ча-
стоты соо. Если амплитудная и фазовая характеристики усилителя
400
в диапазоне частотного спектра сигнала т (t) изменяются, то верх-
ние (соо + а»;) и нижние (соо — сог) боковые частоты проходят через
усилитель с различным усилением и различными фазовыми сдвигами.
Этот эффект и является причиной искажения огибающей Авых (/)
сигнала на выходе транзисторного усилителя. При симметричном
канале передачи сигнала имеет место равенство передаточных функ-
ций G (s + /соо) и G (s — /и0). При этом условии верхние и нижние
боковые частотные составляющие передаются усилителем одинаково,
огибающая Авых (/) по отношению к т (t) не имеет искажений (ра-
бота усилителя на несущей частоте в этом случае будет подобна
усилителю постоянного тока).
Действительно, представим напряжение ивых (t) с учетом выра-
жений (14.17) и (14.19) в следующем виде:
«вых (0 = -jr IG (s + j®o) М (s)j -
— L-1 [G (s — /соо) М (s)]} cos (соо/ + <р0) -ф-
+ 4- {A"1 [G (s + /соо] М (s') + L-1 [G (s - ;u)0) М (s)]} sin («</ + Фо)- (14.22)
При G (s + /соо) = G (s + /соо), что соответствует симметричной пере-
даче и одинаковому усилению боковых частот (относительно со0),
согласно выражению (14.20) квадратурная составляющая отсут-
ствует и формула (14.22) примет вид
Ивых (0 = A-1 [G (s + /соо) М (s) ] sin (и0/ + Фо)- (14.23)
Окончательное выражение для выходного сигнала получим из
соотношения (14.23) с учетом первого уравнения (14.18) или непо-
средственно из выражения для «ВЬ1< (t):
(0 = а (/) sin (соо/ + Фо)-
Если т (t) = const, то отношение амплитудных значений сигналов
на выходе и входе усилителя
вых/^m вх == И//71 = Кус>
где Аус — коэффициент усиления по напряжению для огибающих
на выходе и входе усилителя.
Типовой схемой транзисторного усилителя мощности на несущей
частоте соо является схема усилителя, имеющего реверсивную ста-
тическую характеристику по огибающей А = <р (т). Для полу-
чения такой характеристики усилитель (или его оконечный каскад)
выполняют по двухтактной схеме.
Двухтактные транзисторные усилители нашли наибольшее рас-
пространение в приборных электромеханических системах для уп-
равления угловой скоростью вала исполнительных ЭДв, в качестве
которых используют двухфазные асинхронные электродвигатели
типа ДИД, АДП, ДАД и др.
На рис. 14.21 показаны три основные схемы связи оконечного
каскада усилителя с обмоткой управления ЭДв.
401
5)
Рис. 14.21. Основные схемй свя-
зи окоиечиого каскада усили-
теля с обмоткой управления
ЭДв-.
а — схема 1; б — схема 2; в — схе-
ма 3; wB — обмотка возбуждения
Схема 1 — автотрансформаторная связь. Коэффициент трансфор-
мации между обмоткой шг автотрансформатора Т и обмоткой шу
электродвигателя равен двум (и = 2, где п — коэффициент транс-
формации по напряжению).
Схема 2 — трансформаторная связь; в схеме используют повы-
шающий трансформатор Т (п >2).
Схема 3 — схема с понижающим трансформатором Т (п < 2). Все
варианты схем связи имеют симметричный вход, являющийся нагруз-
кой двухтактного оконечного каскада транзисторного усилителя.
Силовые транзисторы, входящие в состав выходных каскадов,
работают либо с отсечкой (режим классов АВ, В, С), либо в режиме
переключения (класс D). Для обеспечения соответствующих рабочих
режимов транзисторов в схемах многокаскадных усилителей мощ-
ности используют следующие типы цепей смещения: с последова-
тельной ОС, с параллельной ОС и специальным источником смеще-
ния, с параллельной ОС без дополнительного источника [231.
Каскад усиления мощности должен обеспечить подведение к об-
мотке управления ЭДв наибольшей активной мощности.
Условием получения максимальной мощности от транзистора
при выбранном режиме его работы является равенство сопротивле-
ния нагрузки внутреннему сопротивлению оконечного каскада.
Как известно, такое согласование осуществляет выходной транс-
форматор связи Т, вторичная обмотка которого подключена к об-
мотке управления шу двухфазного асинхронного электродвигателя
и шунтирована емкостью Су.
Обмотка шу представляет собой RL-цепь (параметры цепи управ-
ления ЭДв — Ry и Ly), конденсатор Су служит для компенсации
реактивной составляющей электрической мощности управления.
Выходной 7?ЬС-контур усилителя в соответствии с формулой (14.6)
или (14.7) выбором величины Су настраивают на резонанс токов.
В результате эквивалентное сопротивление нагрузки усилителя
становится чисто активным, т. е. Z„ = Ry3, и ее согласование
с внутренним сопротивлением оконечного каскада упрощается.
402
Усилитель должен быть рассчитан на выходную мощность, СО*
ответствующую пусковому режиму работы асинхронного электродви-
гателя. Расчетная активная выходная мощность оконечного каскада
Рвых = Ру акт = Uy/Руа>
где 17у — максимальное напряжение управления.
Коэффициент трансформации согласующего трансформатора (см,
рис. 14.21) для одного плеча его первичной обмотки
п = ау2/цух == >< Ру0/Рк~,
где 7?к~ = итк11тк — сопротивление цепи коллектора одного тран-
зистора.
Отдельные каскады многокаскадного транзисторного усилителя
на несущей частоте объединяют с помощью комплексных (реостатно-
емкостных и трансформаторных) связей; каскады усилителя посто-
янного тока имеют гальванические связи.
Стабилизация и линеаризация характеристик транзисторного
усилителя обеспечивается цепями отрицательной обратной связи.
При этом достигается, во-первых, воспроизводимость технических
параметров усилителей при их серийн i производстве; во-вторых,
взаимозаменяемость транзисторов и других элементов усилителя
при ремонте и, в-третьих, требуемая стабильность и линейность
характеристик при заданном диапазоне изменения температуры.
Стабильность режима транзисторов обеспечивается обратной связью
по постоянному току в отдельных каскадах или в многокаскадном
усилителе с гальваническими связями. Стабильность дифференци-
альных параметров усилителя достигается за счет обратной связи
по переменному току.
По виду АЧХ транзисторные усилители на несущей частоте отно-
сятся к полосовым усилителям. Желаемая ЛАЧХ типового транзис-
торного усилителя на несущей частоте б0 показана на рис. 14.22.
Низко- и высокочастотные области ЛАЧХ усилителя описываются
следующими передаточными функциями:
(14.24)
ур /j\ _ ____________(7\hS 4~ 1) (Т4HS)2__________.
(Т ihs 4-1 )2 (713Hs 4-1) (Т\ss 4-1 )* 2
ну (s\ =_________________(^2Bs4- 1)______________
(TiBs 4-1)2 (T3Bs 4-1) (Tiss 4- l)fe 2
Рис. 14.22. ЛАЧХ тран-
зисторного усилителя:
“ср. и и “ср. в - частоты
среза (в области низкой и вы-
сокой частот соответственно);
со- — резонансная частота;
участки 1, 2, 3, 4 ЛАЧХ с
наклоном 4-п20; -{-40; 4-20;
4-40 дБ/дек
403
Рис. 14.23. Принципиальная схема двухтактного транзисторного усилителя мощ-
ности
где k — целое число, соответствующее числу элементарных звеньев,
определяющих наклоны асимптот желаемой ЛАЧХ в области низ-
ких и высоких частот со < со4н и со >со4в.
Для обеспечения технических требований к дифференциальным
параметрам усилителя необходимо согласно выражениям (14.24)
выбрать соответствующие величины ОС и частот сопряжения со1н
и со1в.
Синтез цепей коррекции для получения желаемой ЛАЧХ усили-
теля выполняют в соответствии с формулой
rK(s) = G!K(S)/U7y(S),
где GH( (s) — передаточная функция желаемой ЛАЧХ', Wy (s) —
передаточная функция прямого тракта транзисторного усилителя.
Из выражений (14.24) и рис. 14.22 следует, что частотный канал
передачи сигнала управления относительно частоты соо является
симметричным. Поэтому в соответствии с выражением (14.23) на
выходе такого усилителя квадратурная составляющая будет отсут-
ствовать.
Принципиальная схема двухкаскадного транзисторного усили-
теля изображена на рис. 14.23. Предоконечный каскад собран На
транзисторе VT3 по однотактной схеме с общим эмиттером и работает
в режиме класса А. Оконечный каскад, собранный на транзисторах
VT1 и VT2, работает по двухтактной схеме.
Если сигнал иу (t) = 0, то в цепях эмиттера, коллектора и базы
транзисторов каждого плеча схемы протекают токи покоя, направ-
ления которых показаны на рис. 14.23. Ток I = ~Ь (Ля + /ба)
делителя напряжения, состоящего из параллельно включенных ре-
зисторов 7?!, R2 и резистора Rs, создает падение напряжения, которое
через вторичную обмотку трансформатора Т1 подается на базы тран-
зисторов VT1 и VT2 для обеспечения их работы в режиме АВ. Тер-
мокомпенсация каскада осуществляется с помощью терморезистора
Т?2 с отрицательным температурным коэффициентом.
404
(14.25)
При подаче на вход усилителя сигнала иу (/) через первичную
обмотку трансформатора Т1 будет протекать переменная составля-
ющая коллекторного тока 1К транзистора VT3. Во второй обмотке
Т1, имеющей вывод от средней точки, возникает переменное напря-
жение, и на базах транзисторов VT1 и VT2 двухтактного каскада
будут действовать два равных напряжения, сдвинутых по фазе
на 180°. Например, на базе VT1 первого плеча каскада напряжение
«б1 === Um cos (оо/, а на базе VT2 второго плеча соб2 = —Um cos ю0.
При таких фазовых соотношениях напряжений увеличение тока
в цепи коллектора одного плеча будет сопровождаться уменьшением
тока в цепи коллектора транзистора второго плеча усилителя.
Напряжения иб1 и «62, действующие относительно постоянного
смещения иб0, создают коллекторные токи /К1 и /к2, протекающие
через первичную обмотку трансформатора Т2 в противоположных
направлениях. /
Пусть токи /К1 и /к2 изменяются по закону.
гк1 (0 = Л:0 Ь Д11 C0S «(/ + Л<21 C°s 2с0(/ /к31 cos Зо)о/ + • • •;
1д2 (0 == Л,о Л<12 COS С0(/ -{- IK22 COS 2о)о/ — /к32 COS ЗсО(/
где и0 = 2л/0; 1ки, Лмь /Кз1 — амплитуды токов первой, второй
и третьей гармоник, протекающих через VT1; /к12; /к22; /к32— ам-
плитуды токов первой, второй и третьей гармоник, протекающих
через VT2.
Напряжение ин (t), создаваемое на вторичной обмотке трансфор-
матора Т2 (следовательно, на RH), определяется разностным током
1разн (0 = 1к1 (0 1к2 (О'
При симметрии плеч двухтактного каскада согласно уравнениям
(14.25)
ия (0 = /?н«1разн (0 = Rnn (2/к1 cos to0t 4- 2/к3 cos Зсоо/ +•"), (14.26)
где /К1 = /к11 = /н12; /к3 = /к31 = /к32, п — коэффициент транс-
формации, и т. д., т. е. если выходные статические характеристики
/к = <р (С7К) транзисторов и элементы двухтактного каскада иден-
тичны, то напряжение на нагрузке усилителя содержит только не-
четные гармоники.
Диаграммы работы двухтактного трансформаторного каскада
показаны на рис. 14.24, на котором совмещены входные и выходные
статические характеристики идентичных силовых транзисторов VT1
и VT2, работающих по двухтактной схеме (рис. 14.24, а, б). Совме-
щенная динамическая линия нагрузки А1А2 (линия разностного
тока /разн), построена в соответствии с уравнениями в отрезках /К1
и /К2 типа (14.10). Точки и Аг характеризуют начальный режим
транзисторов при ивх (t) ~ Um (t) sin (o0t = 0; IKm и UKm — макси-
мальные амплитудные значения коллекторного тока и переменного
напряжения на коллекторе (при максимальном входном сигнале).
На рис. 14.24, б показана суммарная динамическая характеристика
/к = tp ((7К; /б = const); 1в0 — начальный ток базы; 1бт — ампли-
тудное значение тока базы; форма выходного тока ipa3n == iK =
405
Рис, 14.24. Диаграммы работы и характеристики двухтактного каскада:
а — входные характеристики: б — выходные характеристики; в — форма тока г'(/) =
= iK (0 г 3
— i’ki—1*к2 при синусоидальном входном сигнале на несущей и0
изображена на рис. 14.24, в.
Если выходные статические характеристики IK = q> (UK, /б)
транзисторов с общим эмиттером идентичны, то разностный ток
ipaan (0 — ia (0 содержит только нечетные гармоники. Протекание
коллекторных токов tK1 (t) и iK2 (f) через обмотки согласующего
трансформатора Т2 создает специфические особенности работы двух-
тактного усилительного каскада перед однотактным.
Во-первых, возможно существенно уменьшить начальные кол-
лекторные токи, довести их до величины меньшей амплитуды тока
переменной составляющей. Поэтому силовые транзисторы могут
быть поставлены в режимы классов АВ и В. Как известно, работа
транзисторов в таких режимах при значительных амплитудах коле-
баний тока обеспечивает хороший КПД, а при малых амплитудах —
небольшой расход мощности источника питания.
Во-вторых, нелинейные искажения, обусловленные нелиней-
ностью характеристик транзисторов, уменьшаются, так как в соот-
ветствии с выражением (14.26) четные гармоники разностного тока
компенсируются.
В-третьих, вследствие отсутствия в разностном токе ipa3H (О
постоянной составляющей существенно уменьшается эффект под-
магничивания сердечника Т2. Если подобрать транзисторы VT1
и VT2 с равными начальными токами, то подмагничивание вообще
исключается. Режим работы стального сердечника трансформатора
определяется большими значениями магнитной проницаемости. По-
этому габаритные размеры, масса и стоимость двухтактного транс-
форматора получаются существенно меньше, чем трансформатора
однотактного каскада при одинаковых электрических парамет-
рах.
406
В-четвертых, снижаются требования к источнику питания, так
как пульсация напряжения питания может быть допущена большей
[разностный ток ipa3H (t) не зависит от одинаковых и одновременных
колебаний напряжений на коллекторах транзисторов VT1 и VT2}.
Мощность источника питания можно понизить (каскад, работающий
в режимах классов АВ и В, потребляет максимальную мощность
лишь при максимальном управляющем сигнале).
Выбор режимов работы транзисторов VT1—VT3 и трансформа-
торов TI, Т2, а также расчеты каскадов усилителя при заданных
параметрах нагрузки на выходе приведены в работе [231.
Для определения КПД силового каскада транзисторного усили-
теля (режим работы транзисторов — класс АВ или В) воспользуемся
следующими соотношениями. Полезная мощность каскада, как из-
вестно, определяется площадью заштрихованного треугольника на
рис. 14.24, б:
Р — — 7 11
г ~ ~ 2
Электрическая мощность, расходуемая на питание транзисторов
VT1 и VT2:
Р — 2/к среднике 2/к средцД
Из выражений для Р~ и Р следует, что КПД каскада
р 1 I
n = = (14.27)
г * 7 к средн
где | = Usm/E — 0,754-0,90 — коэффициент использования напря-
жения источника питания; 7К средн = 7кт/л — среднее значение тока
для полусинусоиды.
Окончательно КПД каскада получим согласно формуле (14.27)
в виде
Л с.
Максимальная полезная мощность каскада
Р — Р
г ~ max — । 27_g ГК доп>
где Рцдоп — допустимая мощность рассеяния для транзистора
данного типа.
Транзисторные усилители постоянного тока имеют следующие
принципиальные отличия от рассмотренных выше усилителей на
несущей частоте. Во-первых, полоса пропускания УПТ перекрывает
диапазон от нулевой частоты до верхней частоты равной
нескольким десяткам или сотням герц. Поэтому УПТ в отличие от
усилителей на несущей частоте обладают плохой помехозащищен-
ностью по отношению к инфранизкочастотный возмущениям внеш-
ней среды. Во-вторых, электрические связи между каскадами УПТ,
а также связь с нагрузкой являются чисто гальваническими.
407
- 5)
Рис. 14.25. Широтно-импульсная модуляция:
а — преобразование входного управлякнцего'сигнала; б — расчетная схема ШИ-усилителя
САР; («у (г) — непрерывный сигнал на входе ШИ-усилит.еля; и1 (I) — разрывный сигнал
на выходе Э; и2 (/) •— импульсный сигнал на выходе НЭ; авх (/) и авьгх(0— непрерывные
переменные на входе и выходе САР); в — временная шкала квантования
Принцип работы, схемы и применение У ПТ в системах автома-
тики и вычислительной техники изложены в работе [23].
Транзисторные усилители с широтно-импульсной модуляцией.
Для усиления инфранизкочастотных управляющих сигналов в авто-
матике широко применяют транзисторные (а также тиристорные)
усилители-преобразователи с широтно-импульсной модуляцией
(ШИМ), при которой управляющий сигнал (/) преобразуется
в последовательность прямоугольных импульсов (рис. 14.25, а)
с постоянной амплитудой Um, постоянным периодом Т и переменной
длительности тпм, изменяющейся в соответствии с величиной сиг-
нала иу (t).
Широтно-импульсную модуляцию подразделяют на следующие
виды:
односторонняя ШИМ (ОШИМ) — модулируется временно^ по-
ложение одного из фронтов импульса (в основном используется
ОШИМ с модуляцией заднего фронта);
двусторонняя ШИМ (ДШИМ) — изменяется временное положе-
ние обоих фронтов импульса;
ШИМ 1-го рода — момент формирования фронта импульса опре-
деляется мгновенным значением управляющего сигнала в тот же
момент времени;
ШИМ 2-го рода — момент формирования фронта импульса опре-
деляется значением сигнала в момент времени, соответствующий
некоторой тактовой точке, которая повторяется с периодом Т.
Коэффициент преобразования Я/Я-усилителя определяют как
отношение приращения длительности Дтим импульса к соответ-
ствующему приращению управляющего сигнала Диу, т. е.
йт = Дтим/(Дпя)
4.оа
или безразмерным коэффициентом команды
Хком ---- (^ИМ Тц)//",
где тим и тп — длительности импульса и паузы.
Так как у /////-модулированных сигналов информация заключена
во временном положении фронтов импульсов, то при преобразовании
таких сигналов допускаются любые искажения, не приводящие
к смещению фронтов. Шнротно-импульсные усилители не требуют
стабилизации коэффициентов передачи. В качестве основных каска-
дов /////-усилителей могут быть использованы релейные (ключевые)
каскады, обладающие больТпим коэффициентом преобразования по
мощности, высокой надежностью и стабильностью, а также меньшим
энергопотреблением, чем линейные усилители.
Характерной особенностью работы транзисторного /////-усили-
теля в замкнутой САР является то, что он взаимодействует с электри-
ческой нагрузкой, постоянная времени которой на несколько по-
рядков больше постоянной времени самого усилителя. При этом
транзисторный усилитель с односторонней модуляцией временного
положения заднего фронта рабочих импульсов следует рассматри-
вать как дискретную систему, осуществляющую квантование сигнала
ошибки при постоянном такте коммутации Т. Это связано с тем, что
синхронизирующие импульсы с периодом Т задают временное поло-
жение переднего фронта рабочих импульсов /////-усилителя-преоб-
разователя, модулирующего их длительность ти„; (i = 0~п).
Расчетная схема /////-реверсивного усилителя САР (рис. 14.25, б)
представляет собой последовательное соединение трех звеньев:
ключа Кл с мгновенным замыканием (Т = const; ДТ = 0), фикса-
тора уровня (например, экстраполятора Э нулевого порядка с за-
поминанием на такт коммутации) и нелинейного элемента НЭ —
формирователя длительности тим разнополярных рабочих импульсов
постоянной амплитуды Um.
/////-усилитель осуществляет нелинейное преобразование вход-
ного сигнала на n-м такте работы системы в соответствии с уравне-
ниями (для относительных величин сигнала на выходе Э):
Тим (п) == | (^Т+) |; Тим (п) Т> Для | ti\ (пТ*) | <С 1;
Тим (П) = т для I «1 (/гТ+) 11;
п2==/7т при «1(п7’+)>0; (14.28)
— — Um при (пТ+) < 0,
где тим (п) — длительность рабочего импульса на n-м такте; и
«2 — переменные, входящие в качестве компонентов в вектор со-
стояния системы; пТ* (зцесъ п = 0, 1, 2, 3, ...) — тактовые моменты
времени, определяющие дискретные значения их (пТ) справа от
точек разрыва этой функции.
Наиболее адекватным и эффективным методом описания дина-
мики САР с транзисторным ШИМ-усилителем является векторно-
матричный метод пространства состояний. Отличительной осо-
409
бенностью метода является возможность определения состояния
системы в некоторый момент /г+1 по вектору состояния в момент tt.
Компоненты этого вектора рассматриваются в качестве некоторых
заданных нли известных начальных условий. В данный момент
происходит изменение управляющей или другой компоненты век-
тора состояния. В этом смысле уравнение
v (X) — Av (X)
(где 0 < X < т, X — переменный временной параметр) и его решение
v (X) = Ф (X) Tv (0~) = Н (X) v (0+) (14.29)
являются универсальными [26].
В выражении (14.29) v (0+) — Tv (0”) — вектор начальных усло-
вий (Т — матрица квантования, характеризующая дискретную си-
стему в момент замыкания ключа); Ф (X) — матрица перехода системы
для интервала О <Х < тим; Н (X) = Ф (X) Т — матрица дискрет-
ной системы.
Действительно, рассмотрим временную шкалу квантования
(рис. 14.25, в) для дискретной модели системы с транзисторным
ДШМ-усилителем; Т — const — период квантования; тим — дли-
тельность рабочего импульса изменяется в интервале от 0 до Т,
причем положение заднего фронта импульса «пробегает» ряд дискрет-
ных значений ti (i = 1, 2, 3, ..., k) в соответствии с законом ШИ-
модуляции; тп — длительность паузы; п — целочисленные значе-
ния (0, 1, 2, ..., оо), определяющие номер такта, на котором иссле-
дуется динамика системы. В работе [26] показано, что для произ-
вольного n-го временного интервала пТ + t} < tt пТ + ti+1 век-
тор состояния в общем виде
v (t) = пТ) v (пТ). (14.30)
В выражении (14.30) приняты следующие обозначения:
Ъ (t - пТ) = Hi(t-nT- it) (ti - t^) ... Нг x-
X (4 — 4) Ho (4); (14.31)
Hf (t — nT — ti) = ^i(t-nT- ti) Тг, (14.32)
где Фг (t — nT — ti) — матрица перехода усилителя на интервале
tt < t — пТ с tl+1 (начальные условия задаются вектором v (пТ +
+ tt)', Т{ — матрица квантования для того же интервала.
Формулы (14.30)—(14.32) описывают процесс ОШИМ как част-
ный случай при ti = тим. Транзисторный (или тиристорный) усили-
тель с ОШИМ характеризуется на n-м такте двумя состояниями:
интервалами импульса тим и паузы тц, а также соответствующими
переключениями. •
На интервале импульса пТ < t < пТ + тим вектор-функция
состояния согласно формулам (14.30)—(14.32)
V (t) = Фим (t- пТ) Tv (пТ), (14.33)
где Фим (t — пТ) — матрица перехода на n-м такте на интерва-
ле Тим-
410
Определим вектор состояния усилителя на n-м такте в момент
окончания рабочего импульса, так как при t = пТ + тим
v (пТ + тим) = Фим (тим) Tv (пТ) = Фим (тим) v (пТ+). (14.34)
На интервале паузы пТ + тим < t < (п + 1) Т вектор-функция
v (/) = Фп [t - (пТ + тим)] v (пТ 4- тим), (14.35)
где Фц — матрица перехода на интервале паузы.
В момент формирования переднего фронта следующего (п + 1)-го
рабочего импульса, т. е. в t = (п 4- 1) Т = п + 1Т
v (п 4- 1Т“) = Фп (Т — тим) v (пТ 4- тим),
а также с учетом соотношения типа (14.29)
v (п+ТП = Tv (п“НТ-),
где вектор v [(п 4- 1) Т+1 является начальными условиями для
определения рабочего импульса ШИ-усилителя на (п + 2)-м такте
коммутации.
Далее осуществляется переход к следующему интервалу (п 4-
+ 2)-го импульса, т. е. к вектору типа (14.34) и т. д. Процедуры
(14.33)—(14.35) выполняют для некоторого множества целочислен-
ных п. В случае необходимости переход от переменных состояния
к длительности тим <«> или тп (п) можно осуществить, используя
систему нелинейных уравнений (14.28).
Рассмотренные выше соотношения справедливы для анализа и
расчета транзисторных, тиристорных, электромашинных, гидравли-
ческих и других усилителей с широтно-импульсной модуляцией,
а также для исследования статики и динамики разнообразных испол-
нительных устройств автоматики с ШИ-модуляцией.
14.5. ТИРИСТОРНЫЕ УСИЛИТЕЛИ МОЩНОСТИ
Использование тиристоров, имеющих малые габаритные
размеры и значительный ресурс работы (до 104 ч), обеспечивающих
высокий КПД (до 98 %) и большую выходную мощность (до 10 кВт)
при низких напряжениях питания и значительных токах, в сочета-
нии с устройствами управления на интегральных микросхемах позво-
ляет существенно расширить применение электронных методов
преобразования сигналов в разнообразных силовых системах уп-
равления.
Тиристорным усилителем (ТУ) называют электронное устройство,
состоящее из силовой части — регулятора электрической мощности,
собранного на тиристорах, и схемы управления, осуществляющей
коммутацию тиристоров в соответствии с временной диаграммой
работы устройства.
Тиристорные усилители классифицируют [231:
с питанием от сети постоянного тока (нереверсивные и реверсив-
ные схемы);
411
a) 5)
Рис. 14.26. Методы регулирования тока тиристора:
а — амплитудный; б — амплитудно-фазовый;
с питанием от сети переменного тока (схемы с выходом на по-
стоянном токе и с'выходом на переменном токе).
Электрическую нагрузку подключают к тиристЬору в цепь ис-
точника питания последовательно.
Методы управления тиристорами. Включение тиристора, т. е.
перевод его из закрытого состояния в открытое, осуществляют
подачей специального маломощного электрического сигнала на
управляющий электрод тиристора. Способ отключения тиристора
зависит от типа источника питающего напряжения.
В электротехнике и автоматике применяют три метода переклю-
чения тиристора: амплитудный, фазовый и широтно-импульсный.
В усилительных устройствах переменного тока управление тири-
сторами состоит в регулировании среднего значения тока в течение
одного полупериода питающего анодного напряжения u~(t) =
— Um sin at при со = const (однополупериодные схемы) или двух
полупериодов напряжения (двухполупериодные схемы).
Рассмотрим амплитудный метод регулирования тока тиристора
(рис. 14.26, а). Метод применим при питании ТУ переменным анод-
ным напряжением и~. Регулирование тока тиристора возможно
только при положительных полупериодах напряжения и~. Так как
на интервале каждого полупериода анодное напряжение переходит
через нуль, то создаются естественные условия для отключения
тиристора, поэтому при отрицательных полупериодах и~ тиристор
оказывается запертым, а нагрузка — отключенной от источника
питания.
Амплитудный метод обеспечивает изменение момента включения
тиристора /внл в течение положительного полупериода при из-
менении напряжения управления иу, приложенного к управляющему
электроду. Так же как в тиратроне, увеличение иу приводит к умень-
шению напряжения включения тиристора ивкл. На интервале каж-
дого полупериода синусоидального анодного напряжения при за-
данной функции управления uy (t) тиристор включается, а в мо-
мент изменения знака — отключается. Углом включения тири-
стора называют фазовый угол авкл = <о^вкл, соответствующий мо-
менту включения тиристора и отсчитываемый от перехода анодного
412
напряжения питания через нуль (от отрицательного полупериода
к положительному). Таким образом, импульс анодного тока или
тока нагрузки zH протекает в однополупериодной схеме в интервале
О < аВкл < -у- > поэтому
Л/2
^нср = ^п- J t/msin(o/d(ot
авкл
Амплитудный метод регулирования среднего значения анодного
тока обеспечивает изменение угла авкл от нуля до л/2, поэтому воз-
можно лишь двукратное изменение среднего напряжения на нагрузке.
Кроме того, амплитудный метод имеет ограниченное применение
также из-за нестабильности работы тиристора при изменении тем-
пературного режима ТУ.
Рассмотрим фазовый метод регулирования тока тиристора, ко-
торый широко применяют в технике. Этот метод обеспечивает вы-
сокую стабильность, широкий диапазон регулирования анодного
тока, а также более высокую экономичность по сравнению с ампли-
тудным методом.
При фазовом методе (рис. 14.26, б) регулирование фазового угла
включения достигается изменением фазы управляющего напряже-
ния иу относительно фазы питающего напряжения и~. Фазовый
метод подразделяется на амплитудно-фазовый и фазо-импульсный.
При амплитудно-фазовом методе угол включения тиристора регу-
лируется путем изменения фазы синусоидального управляющего
напряжения (той же частоты со, что и анодное напряжение) в преде-
лах 0 < авнл « л.
При фазо-импульсном регулировании тиристор открывается им-
пульсами тока iy, фаза которых изменяется от 0 до л, поэтому имеем
О < авкл < а среднее значение тока
Л
4cp==^ I Umslnatdfat. (14.36)
“вкл
Фазовый метод регулирования анодного тока существенно умень-
шает влияние разброса и нестабильности параметров тиристоров
на характеристики ТУ.
Кроме того, рассмотрим широтно-импульсное регулирование
анодного тока тиристора. Этот метод применим как при переменном,
так и постоянном анодном напряжении. Широтно-импульсный метод
регулирования среднего значения тока за период синхронизации Т
основан на изменении соотношения между длительностью открытого
(ТО и закрытого (Т2) состояния тиристора (при постоянном периоде
Т = Ti + Т3). Наиболее эффективным /////-регулирование оказы-
вается при питании ТУ от сети постоянного тока. Для принудитель-
ного отключения тиристоров применяют специальные прерыватели,
периодически (с периодом Т) подающие напряжение в анодную
цепь тиристора, в результате чего анодное напряжение снижается
413
O')
Рис. 14.27. Нереверсивный ТУ с ШИ-преобразованием:
а — функциональная схема;- б — временные диаграммы
до нуля или до некоторой отрицательной величины. Импульсное
напряжение подается через ключевые схемы, коммутируемые спе-
циальным синхрогенератором, или с помощью колебательного кон-
тура, способного накапливать энергию, достаточную для отключе-
ния регулируемого тиристора.
На рис. 14.27, а приведена функциональная схема нереверсив-
ного ТУ с /////-преобразованием, работающего от сети постоянного
тока напряжением Ес. Синхрогенератор (СГ) вырабатывает импульсы
/сг (/) стабильной частоты с периодом Т (рис. 14.27, б). Импульсы
jcr (t) подаются на СГ/7-схему генерирования пилообразных им-
пульсов иц (/), которые поступают на вход 2 фазо-импульсной схемы
(ФИС). Последняя преобразует управляющий сигнал иу ((), посту-
пающий на ее вход 1, в импульсы_запуска i3 (t), фаза которых изме-
няется относительно импульсов icr (/) пропорционально величине иу
в момент сравнения этого напряжения с соответствующим пилооб-
разным импульсом un ((). Импульсы ивкл (/) с выхода схемы форми-
рования СФИ подаются на управляющий электрод тиристора для
его включения. Периодическое отключение тиристора через интервал
тим = Т—7\ осуществляется импульсами иотк (/), вырабатывае-
мыми схемой прерывания (СП), которая синхронизируется СГ.
Импульсы тока /н (/), формируемые тиристором, протекают через
нагрузку, включенную в цепь источника питающего напряжения
последовательно с тиристором. Среднее значение напряжения на
омической нагрузке RH (см. рис. 14.27, б)
U ~Е ~ = Е (1 —
ин. ср — т —сс * ЦГГ)’
* \ ишп/
где Ес; Uy; Unm — соответственно напряжение питания (сети),
управления н амплитуда пилообразного напряжения ип (О-
Пример. На рис. 14.28 приведена принципиальная электрическая схема ревер-
сивного ТУ мостового типа, предназначенная для управления угловой скоростью
вала электродвигателя постоянного тока. Положительное напряжение управления
«у (t) включает тиристоры VS1 и VS4 (тиристоры VS3 и VS2 закрыты), ток
414
Рис. 14.28. Принципиальная элек-
трическая схема ТУ мостового типа: 4
ФИ — фазоинвертор; ЭДв — управляемый
электродвигатель; угловая скорость
вала ЭДв
1Я (/) протекает через якорь ЭДв в
направление от точки а к б. При от-
рицательном напряжении «у(0> пода-
ваемом через фазоинверсную схему,
включаются тиристоры VS3 и VS2
(VS1 и VS4 закрываются). Ток /я (/)
протекает от точки б к а, следова-
тельно, направление вращения яко-
ря ЭДв изменяется на противополож-
ное. Отключение всех силовых тирис-
торов осуществляется одним коммутирующим тиристором VS5, который подклю-
чает напряжения на конденсаторах С1 и С2 через к одному или другому
плечу схемы. --4^ '
Величину угловой скорости якоря ЭДв при использовании фазо-импульсного
метода управления можно также регулировать ТУ мостового типа.
14.6. МАГНИТНЫЕ И МАГНИТНО-ТРАНЗИСТОРНЫЕ
УСИЛИТЕЛИ
Принцип действия магнитного усилителя (МУ) основан
на изменении динамической магнитной проницаемости ^феррома-
гнитного сердечника дросселя при его подмагничивании током управ-
ления.
Широкое применение МУъ автоматике определяется следующими
свойствами: высокой эксплуатационной надежностью и стабильностью
параметров; значительным по величине коэффициентом усиления по
мощности на один каскад (до 10а); высокой чувствительностью (порог
чувствительности 10-6—10-7 А); питанием непосредственно от сети
переменного тока; возможностью суммирования нескольких управ-
ляющих (входных) сигналов на гальванически развязанных обмот-
ках; большой перегрузочной способностью по входу и выходу;
возможностью объединения функций усиления с амплитудной, фа-
зовой или ШЯ-модуляцией и др.
В САР магнитные усилители выполняют следующие функции:
усиления слабых электрических сигналов, поступающих от различ-
ных датчиков первичной информации; преобразования инфранизко-
частотных сигналов в модулированные колебания с целью их даль-
нейшего усиления. При этом они могут быть использованы в качестве
усилителей промышленных регуляторов, следящих систем, испол-
нительных механизмов, решающих элементов, выполняющих опе-
рации алгебраического суммирования, умножения, интегрирования,
дифференцирования и т. д.
Существенным недостатком МУ является его инерционность,
обусловленная индуктивностью обмоток управления.
Разнообразные схемы МУ классифицируют на следующие типы:
без цепей обратной связи;
с цепями положительной и отрицательной ОС;
415
Рис. 14.29. Статические характеристики магнитопровода МУ:
а — характеристики (//_): Но < Н± < Н2 < ... < Нт: б — характеристики
= В~1 < Л~2_ < Л~3 <••• < В~п
однотактные (нереверсивные) и двухтактные (реверсивные);
с самонасыщением;
комбинированные с полупроводниковыми каскадами (транзистор-
ными или тиристорными).
Ниже будут рассмотрены свойства и характеристики однотакт-
ных МУ без обратной связи, однотактные МУ с цепями смещения
и обратной связи, характеристики двухтактных магнитных усили-
телей, МУ с самонасыщением и, наконец, магнитно-полупроводни-
ковые усилители.
Характеристики намагничивания. Математический анализ ра-
боты однотактного МУ [241 основан на рассмотрении двух семейств
линеаризованных статических характеристик — семейства В~ =
= fi (Я~) при некоторых дискретных значениях Ht = const (i = 0;
±1; ±2; ...; ±п) и семейства Н~ = f2 (Н) приВ~7- = const (/ ~ 0;
±1; ±т). Статические характеристики магнитопровода МУ
(рис. 14.29, а) представляют собой семейство кривых В~ = ft (Н~),
Ht = const одновременного намагничивания дросселя МУ перемен-
ным Н~ и постоянным Н магнитными полями. Функция В~ — ин-
дукция магнитного поля, изменяющаяся с частотой питающего
напряжения усилителя, — напряженность поля, соответству-
ющая индукции В~, является аргументом функции В~; Н — на-
пряженность постоянного магнитного поля является параметром
функции В~ = (#~). Заметим, что обратные характеристики
Н~ — f* (В~) при Ht = const являются аналогами выходных ха-
рактеристик 1К — (UK, /б = const), транзистора типа р-п-р
р схеме с общим эмиттером (или аналогами вольт-амперных харак-
теристик полупроводникового диода в непроводящем направлении).
Статические характеристики 1К — (UK, /б — const) транзистора
изображены, например, на рис. 14.24, б.
Статические характеристики Н~ — f2 (Н) при некоторых дис-
кретных значениях В~/ = const (рис. 14.29, б) также являются
семейством кривых одновременного намагничивания, но аргументом
416
этого семейства является Н — постоянная напряженность магнит-
ного поля, а параметром — индукция Поэтому семейство Н~ =
-= /2 (//), = const можно получить из (//~), Hi - const
соответствующим преобразованием координат и параметров.
Семейство статических характеристик В~ — /\ (//_), Н, = const
или Н~ = f2 (Н), B~j = const может быть получено эксперимен-
тально, а затем линеаризовано с использованием кусочно-линейной
аппроксимации.
Из семейства В~ Ht — const определим цд— диф-
ференциальную ^магнитную- проницаемость в точке М для перемен-
ного потока в виде (см. рис. 14.29, а)
дВ~ |
^л~дН~ = ^!=а>
~ |H=const
представляющую собой тангенс угла а элементарного треугольника
с катетами ДЯ~ и ДВ~. Для семейства кусочно-линейных харак-
теристик = fi (Н J); Ht = const дифференциальная магнитная
проницаемость [хд = const, так как a = const на всем поле харак-
теристик.
Из семейства — f2 (Н), В~/ = const находим S—крутизну
характеристики дросселя насыщения как частную производную
в точке М (рис. 14.29, б).
5 = =tg₽-
дН |B~=const
Величину S в точке М графически интерпретируют как тангенс
угла 0, если выполнить кусочно-линейную аппроксимацию Н~ =
= f2 (Н), В..,- — const, то 5 = const на соответствующем поле ха-
рактеристик.
Принципиальные электрические схемы однотактного МУ без
обратной связи приведены на рис. 14.30, а, б. Как известно из курса
электротехники, в однотактном МУ используют два дросселя Др1
и Др2, имеющих одинаковые параметры. Магнитный усилитель пред-
Рис. 14.30. Принципиальные электрические схемы однотактиых МУ без обратной
связи:
а — с выходом на переменном токе, б — на постоянном токе (с выпрямительным мостом
VDI— VD4 в цепи нагрузки)
14 Солодовников В. В. и др. 417
ставляет собой трансформатор, его первичные (рабочие) обмотки аураб,
соединенные последовательно и согласно, подключены к сопротив-
лению нагрузки ZH и источнику переменного напряжения =
= Um sin wot. В качестве несущей частоты (о0 = 2nf0 питающего
напряжения используют частоты 50, 400 или 1000 Гц. Вторичные
обмотки ®у являются обмотками управления МУ, на вход которых
подается управляющий сигнал uy (t). Обмотки ®у включены после-
довательно и встречно. Поэтому ЭДС, индуктируемые в обмотках юу,
одинаковы по величине и противоположны по фазе, результирующая
ЭДС в цепи управления будет равна нулю.
Индукция В магнитного поля сердечника является функцией
двух переменных: напряженности Я~, которая создается перемен-
ным питающим напряжением, и напряженности Н, создаваемой
обмотками подмагничивания (в общем случае обмотками управле-
ния ®у, смещения эдсм и обратной связи а>ос).
Изменение мгновенного положения рабочей точки (см.
рис. 14.29, а) на поле характеристики намагничивания (например,
из точки М в М' в плоскости аргументов и Н) определяется пол-
ным дифференциалом функции = /2 (Я; В~),
дН дН
(1Н~ = -^(1Н + -^(1В~, (14.37)
являющимся главной частью полного приращения этой функ-
ции, линейного относительно приращений Д/7 и ДВ~ ее аргументов.
Выражение (14.37) преобразуем к виду
dH^ = SdH + — dB~= — (SnadH + dB~), (14.38)
Нд Ид
где S — крутизна характеристики дросселя насыщения; рд — диф-
ференциальная магнитная проницаемость для переменной составляю-
щей магнитного потока, зависящая от материала сердечника, тем-
пературы, напряжения и частоты источника питания и других фак-
торов.
Статическая характеристика /„ = ф (/у) однотактного МУ. Ста-
тический режим работы однотактного МУ (ОМУ) на нагрузку опи-
сывается следующей системой: уравнением магнитной цепи усили-
теля, получаемым из выражения (14.38), и уравнением цепи нагрузки,
т. е.
dB
dH~ = SdH Н------
Ид
(/н^н + /н^раб)2 + (Яр. раб + ЛЛГ = U*.
(14.39)
где /н, Яр. раб и U — действующие значения тока нагрузки, напря-
жения на реактивной составляющей рабочих обмоток а>раб И питаю-
щего напряжения соответственно; /?н, — ®о^н — активная и
реактивная составляющие сопротивления нагрузки; /?раб — оми-
ческое сопротивление цепи рабочих обмоток.
Крутизна S и дифференциальная проницаемость цд в первом урав-
нении системы (14.39) могут быть определены экспериментально из
418
статических характеристик намагничивания магнитопровода МУ
(см. рис. 14.29, а).
Для ОМУ согласно закону полного тока имеем /н =
и /у = lHlwy, т. е. ток /н зависит от напряженности а ток управ-
ления /у — от Н. Кроме того,
^р. раб = ~ АВт,
где А = 4£0/0twpa6Q — постоянный коэффициент (для данной схемы
и конструкции ОМУ); I — средняя длина магнитной цепи дросселя;
Q — площадь поперечного сечения; Вт — амплитудное значение
индукции.
Из системы уравнений (14.39) с учетом введенных обозначений
получим следующее соотношение между дифференциалами dla
и d/y:
dla =------
Н ^раб
21
S
wy~r
ЛДЯн + Яраб)2 ““I dIv' (14‘40)
- =~ + Лн
^-'«(Ян + Яраб)2
Из выражения (14.40) статический коэффициент усиления ОМУ
по току в данной точке М
k ______________________ у I______________
dly , 1 Г IaR2 , v 1
2Z + - (^)2 “]
(14.41)
где R = /?раб + RH — активное сопротивление цепи нагрузки.
Как видно из выражения (14.41), коэффициент ki зависит от ве-
личины !„ тока нагрузки, т. е. от режима работы ОМУ (от положе-
ния рабочей точки на статической характеристике (вход—выход),
который в свою очередь зависит от значения динамической магнит-
ной проницаемости рд сердечника для переменной составляющей маг-
нитного потока.
Интегрируя и преобразуя соотношение (14.40), получим прибли-
женное нелинейное уравнение для характеристики вход-выход 1„ —
= ф(/)у однотактного МУ при активно-индуктивной нагрузке
И
дараб
21
1 , У / Wy \2 ,
G
(14.42)
_ /|^раб .
ГДе G = \~~2Г +
419
\ ccJyS -
Рис. 14.31 Характеристики МУ:
а — идеальная кривая намагничивания; б — статическая характеристика (идеальная),
в — аппроксимированная экспериментальная характеристика
При чисто активной нагрузке (Za = 7?н) нелинейное уравнение
статической характеристики ОМУ имеет вид
Линеаризация статической характеристики /а — if (/у) ОМУ
сводится к выбору прямой наилучшего приближения к реальной ха-
рактеристике усилителя. Для этого выбирают некоторые значения
расчетного тока /а. расч> по которому определяют kln в виде постоян-
ного коэффициента в диапазоне от /и = 0 до 1а = /я. расч. Если в ка-
честве такого расчетного значения /а. расч выбрать
/в.расч = 0,85i//ZH, (14.44)
то постоянное значение коэффициента k/a для указанного диапазона
w„
________________-Fs_________________
wpa6 1 Г 0,85^ л
21 АНп ]/Х + 0.287?2
(14.45)
Из формулы (14.41) или (14.43) можно получить выражения для
статической характеристики /и = ф (/у) и коэффициента усиления
по току идеального однотактного МУ, которые непосредственно сле-
дуют из закона равенства ампер-витков IRwpa6 = Iywy первичной
н вторичной цепей МУ как идеального трансформатора [23]. Дейст-
вительно, для материала, обладающего идеальной релейной харак-
теристикой намагничивания (рис. 14.31, а), а — 90° на всем поде
характеристик В~ = fj (Н~), = const и поэтому дифференциаль-
ная магнитная проницаемость рд = оо, а крутизна характеристики
дросселя насыщения
5 = дН~[дН = дНйр/дН = 6Ф,
420
где &ф — коэффициент формы кривой напряжения; 77ср — среднее
значение переменной составляющей напряженности магнитного поля.
Поэтому из выражения (14.42) следует, что среднее значение
тока 7Н за полпериода питающего напряжения
ОУрабШу
2/2 .
н-ср~ / шраб\2 /у’
\ 2Z /
т. е. при £ф = 1
Ль ср — ... „ == ид/у ~
“фаб
где 1г/ад — 2ti)y/a)pa6 — коэффициент усиления по току идеального
однотактного МУ без цепей обратной связи.
Естественно, что тот же результат можно получить из формулы
(14.45) для kj ОМУ, собранного на дросселях с неидеальными ха-
рактеристиками намагничивания. Статическая характеристика 1а ~
=ф (/у) идеального ОМУ, являющаяся четной функцией тока I#.
и содержащая линейные участки аб и аб' и участки насыщения
и б'в', показана на рис. 14.31, б.
Из сравнения аппроксимированных экспериментальных стати-
ческих характеристик 7Н = ip (7У) с характеристиками (14.43) сле-
дует, что линейный участок аб (рис. 14.31, в):
= Л) ^/нд1у, (14.46)
где 70 — начальный ток МУ (ток холостого хода) при 7У = 0.
Из схемы (см. рис. 14.30) имеем
j - и
° К(хДР + хн)2 + я2 ’
где ХЯР = Храб — индуктивное сопротивление дросселя насыщения
при токе управления 7у = 0, т. е. при рд = рд0
(здесь рд0 — значение динамической магнитной проницаемости
при 7у = 0):
X — L — 2л/ О,4яа;Раб^>хд0
ЛДР Z3l/0^BP &Чо 21 ]Q8
Уравнение линейного участка аб аппроксимированной экспери-
ментальной характеристики 7Н = (7У) ОМУ с учетом выражения
(14.41) имеет вид
н
У ,___________
Г(*др + *н)2+Я2 ^раб
2/
2 Г 0.85Л2
]/ + 0 28Л2
(14.47)
421
Рис. 14.32. Однотактный МУ с выходом на постоянном токе и с цепью смещения:
а — принципиальная электрическая схема (^см — напряжение источника смещения; /см—
ток смещения; о>см — обмотки смещения; Ясм — регулировочный резистор); б — статиче-
ские характеристики:
1 = п₽и ^см = °; 2 - при /см = + /см1; з - при /см = -/сма; /0 - ТОК нагрузки при
при этом уравнение участка насыщения бв можно записать в виде
”ПФ и
- j _j______________
1Л Хи + Ra
I ylj.-
Для статической характеристики идеального ОМУ начальный
ток /0 = 0.
Цепь смещения МУ с обмотками ®см служит для задания поло-,
жения начальной рабочей точки на его статической характеристике,
т. е. для смещения минимума статической характеристики влево
или вправо относительно оси ординат в зависимости от знака ампер-
витков смещения.
Принципиальная электрическая схема однотактного МУ с выхо-
дом на постоянном токе и с цепью смещения показана на рис. 14.32, а\
статические характеристики изображены на рис. 14.32, б, т. е.
/H = /on + Wy±^M^^D> (14.48)
где /оц — начальный ток и kln — коэффициент усиления МУ
с выходом на постоянном токе.
Для первых слагаемых в правой части уравнения (14.48) МУ с вы-
ходом на постоянном токе отличается от правой части уравнения
(14.47) коэффициентом выпрямления полупроводникового моста Къ,
т. е.
/в — kB
V(Хдр -j- Хц)* + ф + «'Раб 1 Г 0,857?а
2/ Лр.д у~Х2и + 0.28/?2
423
Аналитическое выражение для статической характеристики /н —
= фсм (/у) однотактного МУ с выходом на переменном токе и с цепью
смешения аналогично уравнению (14.48).
Передаточная функция однотактного МУ. Инерционность МУ
определяется эквивалентной индуктивностью цепи управления с уче-
том характеристик магнитопровода и цепи нагрузки. Уравнение
баланса напряжений, если управляющее напряжение представляет
собой ступенчатую функцию времени, имеет вид
«у(0 = ^у(0 + АуЭ41’у(0,
поэтому передаточная функция однотактного МУ
^му (*) = /у («Ж (s) - k‘j(Ts + 1),
где ku — I/Ry — коэффициент передачи;
7-.^ = 10-- (14.49)
Ку KyZy
постоянная времени МУ;
здесь р,ду = dB/dH — дифференциальная магнитная проницаемость
для потока управления.
Для идеального МУ коэффициент усиления по току й/ид =
= дау/йураб, поэтому постоянная времени
Т 1 wy , kp kp
ун~ 4М] и>раб и~ 4/оП D~’
где т) = /?н/(27?и) — КПД цепи нагрузки МУ; ku и kp — соответ-
ственно коэффициенты усиления по напряжению и мощности; D =
= 4/о’П — добротность МУ [23, 24].
Постоянная времени цепи управления реального МУ (как элек-
трической цепи с магнитопроводом) может быть определена из рас-
смотрения семейства статических характеристик = f (Д=) при
В~ = const, для которого полный дифференциал
dB= = -^- dH=-j--^=-dB^ = n=dH==- kdB~, (14.50)
где ц== дВ=/дН== — магнитная проницаемость для постоянной со-
ставляющей потока; k — дВ=1дВ~ (при Н= = const) — тангенс угла
наклона касательной к кривой В= = f (В~); коэффициент k харак-
теризует изменение постоянной составляющей индукции В= в зави-
симости от изменения переменной составляющей В~.
Если семейство характеристик В= — f (Н=), В~ — const ап-
проксимировать семейством отрезков так, как показано на
рис. 14.33, то уравнение (14.50) можно представить в виде
= ЦдИфД= + Вк - kB~,
где ЦдПф = дВ=/дН= = const — дифференциальная магнитная про-
ницаемость для данного МУ; Н= — значение напряженности по.
423
Рис. 14.33. Семейство аппроксимирован-
ных характеристик = f (Н=) при J
= const
нитного потока при Я= = О
= const);
k = &В=/&В~ = (Вк0 - в
стоянного потока, определяемой'
токами управления и смещения;
Вк = В~к — значение индукции
для постоянной составляющей маг-
и = 0 (для данного МУ Вк =
к tnax)/^~ max == COHSt.
Как показано в работе [241, магнитная проницаемость цу для
потока управления реального однотактного МУ в соответствии с урав-
нением для В=
Ру = Рдиф 4~ —kBm0 ’ (14.51)
где Вт0 — амплитудное значение переменной составляющей магнит-
ной индукции в режиме /у = 0; Нт — напряженность магнитного
поля, соответствующая максимальному току нагрузки (току насы-
щения /н. нас).
Как следует из формулы (14.51), магнитная проницаемость ру
для потока управления реального МУ определяется параметрами
цепи постоянного тока — первые два слагаемых правой части фор-
мулы (14.51) и цепи переменного тока — третье слагаемое формулЬ
(14.51).
Подставляя значение р.у из формулы (14.51) в выражение (14.49)
для постоянной времени ТМу, получим
\ 0,4та^у 1й_8Г 1// 1 \2 / S V1
1МУ Ryly [Рднф+ я_ kBm0 у { н_) {Нт) J >
(14.52)
где ТМу — прстоянная времени реального однотактного МУ.
Если выбрать некоторое среднее значение напряженности /7= =
= #=Ср, то для данного однотактного МУ будем иметь T^y = const
при различных /у.
Однотактные МУ с цепями обратной связи. Введение положи-
тельной обратной связи позволяет резко увеличить чувствительность
МУ, а также коэффициент усиления по мощности kp, не усложняя
конструкцию усилителя и не увеличивая его габаритные размеры и
массу.
Обратные связи, используемые в схемах МУ, подразделяют на
следующие типы: положительные и отрицательные, внешние и вну-
тренние, по току и напряжению.
Рассмотрим принципиальную схему однотактного МУ с внешней
ОС по току (рис. 14.34, а) и с выходом на постоянном токе. Цепь ОС
реализована в виде специальной обмотки шос, в зависимости от поляр-
ности ее включения вводится положительная (ПОС) или отрицатель-
ная (ООС) обратная связь.
424
В однотактном МУ с ОС ток нагрузки /в = /Н1 создает в об-
мотке Шос поле обратной связи Лпдаос> совпадающее по знаку с полем
!yWy и эквивалентное дополнительному сигналу
Подставляя в последнее выражение ток Ли в соответствии с вы-
ражением (14.46), получим ток
{y = (fo + kIIy)WtxIWy,
который создает ток нагрузки 7Н1.
Рассуждая аналогично, можно получить формулу для тока /н
МУ с обратной связью
/н = (/0 + V7) [ 1 ± k, 4- k} +...], (14.53)
где выражение в квадратных скобках представляет собой сумму
бесконечной геометрической прогрессии со знаменателем q =
= k^oJWy <1.
Из выражения (14.53) найдем
у ___ Л + kjly _____ }0 ! kfly
Н 1 । ь шос 1 /,’:>с ' 1 ± Л>с
где знак «минус» в знаменателе соответствует ПОС, а «плюс» — ООС;
kOc — kiWo,Jwy = woclw^. — коэффициент обратной связи МУ.
Таким образом, линейный участок, например, абг статической
характеристики /п == фос (/7) МУ с внешней ОС
Л1 = Л ос 4“ осУу,
где /0Ос = 70/(1 ± koc) — начальный ток МУ с ОС; kloc = Лу/(1 ±
± ^ос) — коэффициент усиления по току МУ с ОС (если koc < 1,
$4 5g
Рис. 14.34. Однотактный Л4У с внешней ОС по току:
а — принципиальная электрическая схема; б — статические характеристики /д == фос
ПРИ Кос1 <КОсз <КОСЗ и т. д.
425
Рис. 14.35. Структурная
схема однотактного МУ
с внешней ОС:
— Яя. Кос — коэффици-
ент ОС; /уэ = 1оаКд - ток
ОС, эквивалентный току / ;
/?ос э ”” эквивалентное со-
противление цепи ОС
то коэффициент усиления по току МУ с положительной обратной
связью k/nQC > k„ при &ос 1 kInoc > kh а при koc & 1
kj ООС < fe/) •
Семейство статических характеристик /и = фоС (/у) для различ-
ных дискретных значений koc показано на рис. 14.34, б. Харак-
тер ОС зависит от знака тока/у: при положительных /у ОС—положи-
тельная, при отрицательных /у — отрицательная. При fe00^l МУ
с ОС работает в релейном режиме. Ток насыщения усилителя при
введении обратной Связи не изменяет своего значения.
Аналогично выражению для fe/oc можно получить формулы для
коэффициентов усиления по напряжению и мощности МУ с ОС, т. е.
feyoc = fey/U ± feoc); 1 /14 641
fep0C = feP/(l±fe0B)2J ( }
Передаточную функцию однотактного МУ с внешней ОС получим
из структурной схемы, изображенной на рис. 14.35:
МУ ос (s) = с a (s)/^y (s) = fey ос/(^МУ ocs + 1),
где fey ос —коэффициент усиления по напряжению: Тмуос =
— Тму/(1 ± feoc) — постоянная времени (Тмуос > Тму при koc =
fenoc)-
Из рассмотрения соотношений (14.54) и постоянной времени Гм, ос
можно заключить, что добротность магнитного усилителя с ПОС
больше добротности МУ без ОС'.
^пос “ fenoc)
т. е. при одинаковых значениях kP и fePoc ПОС позволяет умень-
шить постоянную времени МУ.
МУ с внутренней ОС (МУ с самонасыщением). Обратную связь,
осуществляемую включением однополупериодного выпрямителя (де-
тектора) последовательно с рабочими обмотками, называют внутрен-
ней обратной связью. Принципиальная электрическая схема одно-
тактного МУ с внутренней ОС, в качестве которой используют
рабочие обмотки ^раб, показана на рис. 14.36, а. Переменное на-
пряжение питания (Z) = Um sin <&ot оказывается приложенным
к обмотке шраб лишь в течение одного полупериода, который назы-
вают рабочим. В этом полупериоде изменение магнитного состояния
ненасыщенного сердечника происходит под действием напряжения
несущей частоты в соответствии с законом электромагнитной индук-
ции, так как можно пренебречь падением напряжения на активном
426
сопротивлении цепи переменного тока по сравнению с напряже-
но „
нием uL = шраб-^- на обмотке шраб ненасыщенного сердечника.
В следующем полупериоде диод отсекает источник питания от
обмотки Шраб рассматриваемого сердечника, изменение его магнит-
ного состояния происходит под действием напряжения, приложен-
ного к клеммам цепи управления. Этот полупериод называют управ-
ляющим.
Допустим, что сердечник МУ имеет прямоугольную характери-
стику намагничивания (см. рис. 14.36, б), Вг — Bs; при насыщении
сердечника dBIdH — 0; диоды имеют малое прямое сопротивление
и бесконечно большое обратное. Кроме того, в цепи wy включено
большое активное сопротивление Zy, исключающее появление пере-
менного тока в результате трансформаторной связи между обмот-
ками &Ураб и Шу.
Уравнение цепи нагрузки для рабочего полупериода
(рис. 14.36, в)
4- = (14.55)
где /? = /?„ + 7?раб +'₽дП — суммарное активное сопротивление
цепи нагрузки (Лраб и ^дп — активные сопротивления рабочей
цепи и диода в прямом направлении); (/) = Um sin — питаю-
щее напряжение.
До насыщения сердечника величину тока iH — определяют
как для обычного трансформатора (^ — намагничивающий ток
ненасыщенного сердечника). Так как величина незначительная,
падением напряжения можно пренебречь.
Интегрируя уравнение (14.55), получим
B = By4-Bm(l — cos ©оО. (14.56)
где Ву — значение индукции управления в сердечнике при t = 0,
т. е. к началу рабочего полупериода; Вт — Um/(©ошраб5) — ам-
плитудное значение индукции переменного поля.
427
Сплошной кривой на графике В = (в>0 показано изменение
индукции в рабочем полупериоде, которая увеличивается в соответ-
ствии с выражением (14.56) до значения В = В$ при a>ot = а, поэ-
тому
Bs — Bv
coscc=l----s-b—(14.57)
"7П
Фазовый угол а, при котором В — В$, называют углом насыще-
ния «нас. После насыщения сердечника dBldt = 0 и
iH = Um sin G>oW, (14.58)
причем ток iH, определяемый по формуле (14.58), протекает до зна-
чения ю0/ = л (кривая i = Т2 (to/)). При фазовом угле wot > л
напряжение питания изменяет полярность и диод запирает цепь
переменного тока до <not = 2л. Этот полупериод называют управляю-
щим; суммарная индукция управления изменяется от установивше-
нося значения до Ву (штриховая кривая).
Определим среднее значение тока нагрузки
л
/и. средн = /н = 4- J + /р (О] dtoot = (1 + COSa).
О
Заменяя cos а в соответствии с выражением (14.57) и пренебре-
гая средним значением тока намагничивания, получим
'• = ^г(2~АЕН <14.59)
Это выражение справедливо для двухполупериодной схемы, если
увеличить его правую часть вдвое. Выражение (14.59) показывает,
что ток нагрузки на выходе МУ с самонасыщением не зависит от про-
цесса изменения индукции Ву на интервале управляющего полу-
периода. Значение тока /н определяется только величиной В7,
устанавливаемой в конце управляющего полупериода.
Если выбрать величину питающего напряжения так, чтобы
Вт = Ва, то выражение (14.59) для тока /в упрощается. Для двух-
полу пер иодного МУ с самонасыщением имеем
+“*“>—s-0+тг).
где Ву = Кв/У; /Св — коэффициент пропорциональности; /у — ток
управления.
Максимальное значение тока нагрузки
j ___ 2 Um
^ншах— я •
Статическая характеристика МУ с самонасыщением, описывае-
мая выражением для показана на рис. 14.37. Участок характе-
ристики, расположенной правее точки г, соответствует положитель-
ной ОС, а участок гд — отрицательной ОС. Точка г определяется то-
ком управления /у = —/уХ.
428
Рис. 14.37. Статическая характеристика МУ
с самонасыщением
Двухтактные МУ. Статическая ха-
рактеристика двухтактного МУ 1„ =
= 'Рдму (/у) является нечетной функ-
цией /у.
Двухтактный магнитный усилитель
(ДМУ) представляет собой соединение
двух однотактных усилителей, имею-
щих общую нагрузку, включенную по дифференциальной или мосто-
вой схеме. В качестве примера на рис. 14.38 приведена принци-
пиальная электрическая схема дифференциального ДМУ. Обмотки
управления однотактных МУ, входящих в состав двухтактной схе-
мы, соединяют последовательно. Полярность включения этих обмо-
ток должна быть< такой, чтобы для данного сигнала управления
однотактный МУ1 работал в режиме положительной ОС, а одно-
тактный МУ2 — в режиме отрицательной ОС.
Выходные цепи однотактных МУ, входящих в схему ДМУ, об-
разуют два электрических контура; токи 1Я1 и /н2 этих контуров
протекают через общую нагрузку ZH (s).
На рис. 14.39 показана схема замещения дифференциаль-
ного ДМУ.
Статическая характеристика двухтактного МУ является резуль-
татом суммирования статических характеристик однотактных МУ.
В соответствии с выражением (14.48) для однотактных усилителей
с выходом, например, на постоянном токе без ОС имеем
/Hi = /on1 + Wy-F/CMi-^^n; ' (И.60)
У
/Я2 — /опа &/па/у + /см a ~
(14.61)
Рис. 14.38. Принци-
пиальная электрическая
схема дифференциального
ДМУ
429
Рис. 14.39. Схема замещения дифференциального
ДМУ:
Я и хдр — активное и реактивное сопротивления Дрос-
селя; — полное сопротивление нагрузки; /Н1 и /Н2 —
контурные токи; /н = /Н1 — /н2; п— коэффициент транс-
формации
Если однотактные МУ имеют идентич-
ные характеристики и параметры
(рис. 14.40, а), т. е. /оп1 = /0ц2 = /0„;
kinl — k[n2 — k/n, ^см 1 — И'см 2 == ^см',
—^|см21 = |^см|,
то статическая характеристика двухтактного МУ, исходя из урав-
нений (14.60) и (14.61):
-- All Al2 --- 2&jn/y -- К/
где Л/дму = 2£/п, т- е. коэффициент усиления по току двухтакт-
ного ДМУ в 2 раза больше коэффициента k^. Ток смещения Гсы
выбран из условия нахождения точек в и е, являющихся серединами
линейных участков аб и гд, при токе /у = 0 на оси ординат статиче-
ской характеристики ОМУ.
На рис. 14.40, б показаны статические характеристики /и1,
/н4 и /й ДМУ, соответствующие току смещения Гсм, при котором
точки в и е не являются серединами линейных участков характе-
ристик.
Особенностью дифференциальных схем ДМУ является наличие
разделительного трансформатора питания. Дифференциальные схемы
МУ в основном используют в усилителях с выходом на переменном
токе, а мостовые схемы применяют как в усилителях с выходом на
переменном, так и на постоянном токе.
Рис. 14.40. Статические характеристики двухтактного ДМУ без ОС:
а — при /см = Iсм: б — при /см = — /см; Tqj = Iq^: ^нас 1 ^нас2
430
Рис. 14.41. Статическая характеристика
'1МУ с ОС:
'in ~ !02’ ^нас 1 ~ 'нас 2
Аппроксимированные статиче-
ские характеристики двухтактных
ДМУ с положительной ОС пока-
заны на рис. 14.41. Коэффициент
усиления по мощности ДМУ с по-
ложительной ОС может достигать
величины 10+3—10+внаодин каскад.
Магнитно - транзисторными
усилителями называют усилители,
выполненные с использованием М
применяют следующие типы магнитно-транзисторных усилителей
(МТУ), в которых транзисторный каскад используют в качестве пред-
варительного усилителя;
транзисторы работают в режиме переключения в силовых цепях
ДМУ с выходом на постоянном токе для повышения их КПД, в ко-
торых МУ малой мощности используют в качестве предварительного
усилителя, управляющего транзисторным каскадом, работающим
в режиме переключения;
транзисторы используют в статических магнитно-полупроводни-
ковых преобразователях тока, питающих основной МУ повышенной
частотой питания.
Применение магнитно-транзисторных усилителей позволяет сни-
зить порог чувствительности, расширить динамический диапазон,
повысить быстродействие и экономичность, уменьшить массу и га-
бариты усилителя.
14.7. ЭЛЕКТРОМАШИННЫЕ УСИЛИТЕЛИ МОЩНОСТИ
Электромашинные усилители мощности (ЭМУ) как спе-
циальные машины получили широкое распространение в системах
автоматического регулирования и управления в металлургическом,
прокатном и других производствах, а также на транспорте. Наша
промышленность выпускает большую серию ЭМУ мощностью от 0,5
до 100 кВт.
Основными достоинствами ЭМУ являются высокие эксплуата-
ционные показатели, значительные по величине коэффициенты уси-
ления по мощности, току и напряжению; более высокое быстродей-
ствие по сравнению с электрическими генераторами соответствую-
щей мощности; высокая перегрузочная способность и др.
Классификация и принцип действия ЭМУ. ЭМУ — специальный
электрический агрегат постоянного тока, преобразующий механи-
ческую мощность приводного электродвигателя (как правило, асин-
хронного) в электрическую мощность при изменении управляющего
напряжения, поступающего на вход обмотки управления ЭМУ.
По числу ступеней каскадов усиления различают одно-, двух-
и трехступенчатые ЭМУ. По ориентации управляющего магнитного
431
Рис. 14.42. ЭМУ попереч-
ного поля:
а — принципиальная элект-
рическая схема; а, иа/у2 —
обмотки управления;
и wn — Дополнительная,
компенсационная и попе-
речная обмотки соответст-
венно; Ei н Et — ЭДС холос-
того хода первой и второй
ступеней усиления; б — ста-
тическая характеристика
холостого хода
потока второй ступени усиления двух- и трехступенчатые ЭМУ под-
разделяют на мощные с поперечным и продольным полем, а также
на ЭМУ с поперечно-продольным полем.
Конструкцию и принцип работы ЭМУ с поперечным полем, ко-
торые получили наибольшее применение, рассматривают в электро-
технике. ЭМУ с поперечным полем (рис. 14.42) имеет две ступени
усиления. Магнитный поток управления второй ступенью ориенти-
рован перпендикулярно относительно потока управления первой
ступени, который возбуждается током управления и совпадает по
направлению с продольной осью машины. Поэтому такой тип двух-
ступенчатых электрических машин постоянного тока и получил
название ЭМУ с поперечным полем [23].
На коллекторе якоря ЭМУ установлены две пары щеток (см.
рис. 14.42, а); щетки 1—1 расположены по поперечной оси машины
и соединены с соответствующими секциями обмотки якоря, лежащей
в продольной плоскости; щетки 2—2 расположены по продольной оси
ЭМУ и соединены с секциями обмотки якоря, лежащей в поперечной
плоскости машины.
Первая ступень усиления ЭМУ: обмотка управления шу— цепь
поперечных щеток 1—Г, вторая ступень усиления: цепь щеток 1—1 —
цепь продольных щеток 2—2, которые подключены к последователь-
но соединенным нагрузке ZH и компенсационному контуру wK—Rm.
Так как щетки 1—1 закорочены и сопротивление цепи мало, то не-
большая по величине ЭДС, наводимая потоком управления Фу
при вращении якоря ЭМУ с угловой скоростью Q, создает в цепи
щёток 1—1 значительный по величине ток и, следовательно, зна-
чительный'поперечный рабочий поток Фрп = Ф9, являющийся входным
магнитным потоком второй (основной) ступени усиления мощности.
Режим электрического холостого хода ЭМУ (ток нагрузки /н =
= 0) характеризуется следующей системой дифференциальных урав-
нений, записанных в изображениях:
£/y(S) = (7?y + LyS)/y(S);
ЙМуя х/у (s) + (R. + L1S) A (s) = 0;
&МЯЯ11 (s) — Двых (s) ~ 0>
(14.62)
432
где Uy (s) = L [Uy (t) ]; uy (£) = uyl (£) — сигнал управления; /?у;
Ly; Ri, Li — электрические параметры цепей управления и ще-
ток 1—1; МуЯ1 — коэффициент взаимной индукции между обмот-
ками управления и секциями поперечной цепи ЭМУ; Мяя — коэф-
фициент взаимной индукции между секциямиtякоря, соединенными
со щетками 1—1, и соответствующими секциями якоря, соединенными
со щетками 2—2; Евых (s) = L [и (t) ] — ЭДС, наводимая в продоль-
ной цепи ЭМУ (на щетках 2—2).
Если из уравнений (14.62) исключить Zy (s), то передаточная функ-
ция ЭМУ с поперечным полем в режиме /н = О
W(s) = E
ВЫХ (s)/t/y (S)
-- А"эму хх/[(Tys+ l)(7’1s+ 1)1, (14.63)
где /Самухх = ^2МуЯ1Мяя/ЕуЕл — передаточный коэффициент ЭМУ
по напряжению (в режиме холостого хода), пропорциональный ква-
драту угловой скорости вращения якоря приводного асинхронного
электродвигателя; Ту = Ly/Z?y; 7\ = L^R! — соответствующие по-
стоянные времени.
Статическая характеристика холостого хода ЭМУ Еьых = <р (/у)
с учетом гистерезиса магнитопровода показана на рис. 14.42, о.
Система уравнений (14.62) или передаточная функция (14.63)
соответствует структурной схеме ЭМУ с поперечным полем в режиме
холостого хода (рис. 14.43, а). Действительно, первое и третье
уравнения системы (14.62) представляют первым и четвертым звень-
ями структурной схемы; второе уравнение, записанное в виде
1
1 = Ri (T^s -f- 1)
соответствует второму и третьему звеньям схемы (пятое звено —
передаточная функция управляемого электродвигателя — рассма-
тривается в схеме ЭМУ—Эдв).
Динамика ЭМУ в режиме нагрузки. Структурные схемы. В авто-
матике ЭМУ обычно применяют в паре с электродвигателем постоян-
ного тока с якорным управлением как совместимые по электрическим
а)
Рис. 14.43. Структурные
схемы ЭМУ:
а — в режиме холостого хода
И полной компенсации реак-
ции якоря; б — в иедоком-
пеисироваииом режиме
5)
433
и динамическим характеристикам. Поэтому в качестве электрической
нагрузки ЭМУ поперечного поля будем рассматривать цепь якоря
ЭДв с независимым возбуждением, т. е. Рн = Ряэдв и £н =
= эдв (Ля эдв и ЬЯэдв — активное сопротивление и индуктивность
якоря ЭДв).
Работа ЭМУ в режиме /н — Лэдв #= 0 характеризуется тем, что
под действием тока нагрузки, протекающего по цепи щеток 2—2,
компенсиционному контуру и цепи якоря управляемого ЭДв, в ЭМУ
создается рабочий магнитный поток Фр. цр — поток реакции якоря
по продольной оси ЭМУ, который направлен навстречу потоку Фу
и эквивалентен отрицательной ОС по продольной оси. Результирую-
щий магнитный поток Ф2 = Фу — Фр пр.
Для компенсации потока Фр. пр, т. е. отрицательной ОС, по про-
дольной оси ЭМУ на статоре машины намотана специальная компен-
сационная обмотка wK, зашунтированная сопротивлением Рш. По
обмотке, являющейся обмоткой положительной связи wK, протекает
ток /к = /н — 1Ш (см. рис. 14.42, а). В результате магнитный поток
Фк = в зависимости от установившегося значения /к компенси-
рует полностью или частично действие Фр. пр.
С учетом отмеченной особенности работы ЭМУ при /н #= 0 с
ЭДв постоянного тока независимого возбуждения дифференциальные
уравнения, записанные в изображениях по Лапласу, имеют следую-
щий вид:
t/y (s) = (Лу -j- LyS) Iу (s) s/WKy/K (s) зЛ1уя (s);
— Q [Л4уЯ i/y (s) + Л4КЯ ]/K (s) — Мяя/И (s)] -j- (Лх -j- Ajs) Д (s) = 0;
- ЙМяЛ (s) + (Ря2 + L„2s) /н (s) + (Лк + LKs) /к (s) -
-s(MKa2l/K(s) + /H(s)l + s(MKy-Mya2)/y(s)-{- t/H(s) = O; }
(s) — (Лн ~t~ Т-н®) (^)SCe ССдВ (s), CmIjj(s)= 8г<7<Хдв(8),
/Н(5) = /К(5) + /ш(5);
ЛщЛл ($)= (Лк “i- 7-kS) Ik (s) -j- sM^Iy (s) яЛ4кя 2/H (s),
(14.64)
где RK, LK, — электрические параметры компенсационного кон-
тура положительной обратной связи; Ляг, Ьяа — активное сопротив-
ление и индуктивность секций якоря продольной цепи ЭМУ; МКу,
Муя г, Мкя ь Л4Кя2 — коэффициенты взаимоиндукции соответственно
между обмотками и wK, обмоткой и секциями якоря продоль-
ной цепи машины; Ua, 1и — 1яэяа— соответственно напряжение,
приложенное к цепи якоря управляемого ЭДв с параметрами см
и се, ток, протекающий по цепи якоря электродвигателя; J — ме-
ханическая нагрузка, приложенная к управляемому ЭДв; адв =
= 0 — угол поворота вала ЭДв.
Исключая ток /ш из двух последних уравнений системы (14.64),
получим соотношение между /к; /н и 1У:
Л( — 7Н (Лш + 52ИКЯ2)/(Лш + Лк + sLK) — /у8Мук/(Рщ Лк + sLK),
434
пли
/н = Мн-ау/у. (14.65)
где
= (йт 4“ sAfKH г)/(йш 4“ йк 4“ sLK)’,
ау = 8Л1уК/(йш + йк + sLK).
Вводя обозначения
:= 1 ^-н-^4ук/^4уя 2» -^4ук == ^4ку> ^2== 1 ^у44Кя 1/Л1уя х»
b3— 1 -анЛ4Кя1/Л1Яя, (14.66)
а также
Ту = (Ly — ауЛ4Ку)/йу; Ti=Li/Ri’,
Т% = (ЙЯ2 4- йнТк — (1 — аи) Л4кя г)/(йя2 4~ <2ийк)>
Тк = [Л1уя2 Л4ук Ну (Л4кя 2 Йк)]/йуйк’> Ти = Тя эдв == Тн/йи>
систему уравнений (14.64) после несложных преобразований можно
привести к виду
Uy (s) = йу (ГуЗ + 1)/у (s) — 5&1Муя2/н(5);
- Qfe2My„ х/у (s) + QMWh (s) + Й! (TxS + 1) Л (S) - 0;
— ЙУИдяЛ (s) + (Йя2 4- анйк) (T,S 4- 1) /н (s) — Йуйк (TKS 4- ... «уч
+ l)/K(s) + £7H(s) = 0;
(7Н (s) = йн (THs 4- 1) /н (s) 4- sceaflB ($);
(s) ~ ^дв (s),
где Ту, Ti; Т'ъ, Т'к—электрические постоянные времени соответствую-
щих цепей ЭМУ, а Тн -— постоянная времени управляемого ЭДв.
Уравнения (14.67) удобны для исследования динамических про-
цессов, происходящих в системе ЭМУ — нагруженный управляе-
мый ЭДв (с якорным управлением), а также анализа их устойчивости.
Предположим, что ЭМУ работает в режиме полной компенсации
реакции якоря при йш = °°, т. е. Фр.Цр = Фк за счет соответствую-
щего подбора числа витков wK. В этом случае 1К = /н и из уравне-
ний (14.65) и (14.66) следует, что ау = 0; ан = 1; Ьг = Ь3 — 0;
Ь2 = 1.
В результате система уравнений (14.67) ЭМУ — управляемый элек-
тродвигатель будет иметь вид
(7у(8) = йу(7’у5 4- l)/y(s);
- ЯМуя х/у (s) + йх (T1S = 0;
- ЙМяя/1 (S) 4- (йя 4- RK) (TiS 4- 1) /и (s) + uw (s) = 0;
t/H (s) = йн (T„S 4- 1) /н (s) 4- cesaAB (s);
(s) = S2JИдв (s),
(14.68)
так как
Ту = Ту — Ly/Йу! ^2 = Т2 = (ЙЯ2 4“ Йк)/(йя2 4“ Йк) И Т. Д.
435
Из системы уравнений (14.68) обычным методом получим пере-
даточную функцию ЭМУ — управляемый электродвигатель с инер-
ционной нагрузкой
Г (s) = адв (s)/£7y (s) = К/{s (Tys + 1) (Txs + 1) [TMs (T2s + 1) + 1],
где R = Q2 Л4уя 2 Мяя/се Ry Ri —
передаточный коэффициент; Тм = J (Rn + RK + Рн)/(сесм) —
электромеханическая постоянная времени.
Для постоянных времени Т2 и Тм — выполняется неравенство
Т2 < Тм, поэтому
W (8) = K/[S (TyS + 1) (7\S + 1) (TMS + 1)].
Структурная схема ЭМУ—ЭДв в режиме компенсации реакции
якоря показана на рис. 14.43, а. Отсутствие замкнутых контуров
на схеме свидетельствует о,полной компенсации реакции якоря
ЭМУ по продольной оси машин.
Рассмотрим работу ЭМУ в недокомпенсированном режиме (при
= оо и /к = /н), который устанавливают также подбором числа
витков &Ук. Аналогично режиму Фр.цр = Фк имеем ау — 0; ан = 1;
£>2=1, но bi =# Ь3 у= 0 и в соответствии с уравнениями (14.65)
и (14.66) получим
b{ = 1 — Мук/Л!уя 2; £з = 1 — Мкя 1/Мяя. (14.69)
Систему уравнений (14.67) с учетом формул (14.69) можно пре-
образовать к виду
Uy (s) = Ry (TyS + 1) Iу (s) — 8&[МУя 2/и (s);
- QMya 1/y (S) + ЬзЙМяя/н (S) + R1 (T1S + 1) /j (s) = 0;
- ЙМяя/у (s) + (Ря4 + RK) (T2s + 1) /н (8) + £/я (s) = 0;
(s) = RH (Ths + 1) /н (s) + 8Сеадв (s);
(s) == (s)-
(14.70)
Этим уравнениям соответствует двухконтурная структурная
схема с внутренними ОС (рис. 14.43, б): первый контур с отрицатель-
ной ОС ( звено И700С (s) = , а BTOpOg К0Нтур с положи-
' См Ь'М J
тельной ОС (звено И7ПОС(8) = —1-—2—s3). Динамическое звено
ООС охватывает выходную и поперечную цепи системы ЭМУ—ЭДв,
а звено ПОС — выход системы с ее входом.
Из системы уравнений (14.70) следует, что динамические свой-
ства схемы ЭМУ—ЭДв в недокомпенсированном режиме ухуд-
шаются, так как ее инерционность увеличивается.
Нагрузочные статические характеристики ЭМУ. Статической
нагрузочной характеристикой ЭМУ при некотором постоянном уп-
равляющем напряжении £7у (или токе /у) называется зависимость
выходного напряжения £/н от тока нагрузки /н. Различные дискрет-
ные значения ±t/y (i = 1,2, ..., п) образуют семейство нагрузочных
характеристик ЭМУ.
436
Общее уравнение в отрезках нагрузочной характеристики ЭМУ
при (7у = const
^н = Ввых-/н^Ф-4(/?вн + /?н). (14-71)
। п<- /-’вых = Пнхх— установившееся напряжение на выходе ЭМУ
при /„ = 0; кф — коэффициент пропорциональности между суммар-
ным продольным магнитным потоком Ф2 = Фр.пр + Фк и током на-
(рузки /н, причем
Фр. пр (/) ~ ^р. Пр/н (О
и Фк (0 = ^к/н (0>
/-’ RBH + RH — сумма омических сопротивлений продольной цепи.
Согласно формуле (14.63) ЭДС ЭМУ поперечного поля
^аых уст ~ /-эму = ^/уЛ4уЯ 1Л4яя^/2//?у/?1 — Кэму xxRy/y> (14.72)
j уменьшение напряжения на нагрузке при действий суммарного
потока Ф2
\UB = 4Ф/„ = (ц;Л1кя 1 - МяяНнМяяйТКь (14.73)
Уравнение (14.71) с учетом выражений (14.72) и (14.73) будет
иметь вид
Пн = Кэму ххКу/у ^яя/?1/?з/н — (Rbh RH) /н> (14.74)
1 де = Л4ЯЯ£2//?Г, Ьз = 1 йиК1Кя 1/Л4Яя [здесь аи — Rm/(Rni
I Rk)L
Из уравнения (14.74) следует, что наклон нагрузочной характе-
ристики ЭМУ зависит не только от падения напряжения на сопро-
швлении RBH + RH, но и от действия суммарного магнитного по-
тока Фр.Цр + Фк, который возникает в ЭМУ поперечного поля при
его работе на нагрузку. Относительный коэффициент Ьз определяется
соотношением потоков Фр.пр и Фк; так, если | Фр.пр | = |ФК |>
io Ьз = 0.
Если в уравнении (14.74) ввести параметр RbttB, численно рав-
ный &яЯК1/4 + Rbh + Rh, то семейство нагрузочных характери-
стик ЭМУ при различных /у
(7Я == Кэму xxRy7yj КэквЛи / == 1 > 2, 3, . . ., П.
В зависимости от значения Кэкв различают недокомпенсирован-
ный, полностью скомпенсированный и перекомпенсированный режим
работы ЭМУ (рис. 14.44).
Недокомпенсированному режиму рабо-
ту ЭМУ соответствует Кэкв > 0. Нагру-
зочные характеристики 3 в этом случае
имеют отрицательный наклон и распола-
гаются в области, ограниченной характе-
ристикой полностью скомпенсированного
Рис. 14.44. Нагрузочные характеристики ЭМУ (ре-
жим Is — /«)
режима и характеристикой ЭМУ, у которого компенсационный
контур отсутствует.
Если 7?Экв = 0 (режим полной компенсации, характеристика 2),
то выходное напряжение не зависит от тока /н и равно ЕВЪ1Х. Маг-
нитный поток Фк компенсирует как продольный поток реакции ма-
шины, так и падение напряжения на внутреннем сопротивлении RBH.
Нагрузочная характеристика ЭМУ — горизонтальная прямая при
/у = const, проходящая через точку /н = 0; Ua = k„B 2/?у/у (см.
рис. 14.44).
Если RaKB <0 (режим перекомпенсации, характеристика 1),,
то нагрузочная характеристика ЭМУ располагается над характери-
стикой Т?5КВ = 0 и имеет положительный наклон. Перекомпенсиро-
ванный режим работы соответствует образованию внешнего контура
с положительной обратной связью, что может вызвать автоколеба-
ния. Поэтому режим работы ЭМУ при RaKB = 0 практически не
используют.
В заключение отметим, что ЭМУ как усилитель мощности целе-
сообразно применять в силовом следящем приводе с электродвига-
телем постоянного тока, обладающим малым внутренним электриче-
ским сопротивлением, для управления инерционными объектами.
Это связано с удобством энергетического согласования системы
ЭМУ—ЭДв постоянного тока при обеспечении высокого КПД
и надежности.
14.8. КОРРЕКТИРУЮЩИЕ ЭЛЕМЕНТЫ И УСТРОЙСТВА
Корректирующие элементы и устройства САР и САУ
осуществляют коррекцию статических и динамических характери-
стик. В системах автоматического регулирования и управления ис-
пользуют электрические (постоянного и переменного тока), электро-
механические, гидравлические и пневматические корректирующие
элементы и устройства (КЭУ).
Корректирующие элементы и устройства САР и САУ, как и дру-
гие функциональные звенья, могут быть классифицированы на ос-
нове различных признаков.
В зависимости от аппроксимации, принятой при математическом
описании, КЭУ подразделяют на два типа: линейные и нелинейные.
Линейные КЭУ описываются линейными дифференциальными урав-
нениями, нелинейные КЭУ — нелинейными. В отличие от линей-
ных КЭУ (как минимально-фазовых, так и неминимально-фазовых)
коэффициент передачи и фазовая характеристика нелинейных КЭУ
зависят не только от частоты, но и от амплитуды входного сигнала'.
Поэтому они могут обеспечить в заданном частотном диапазоне лю-
бой требуемый вид амплитудной Lm (А, о) и фазовой ср (А, со) ча-
стотных характеристик. Динамические возможности нелинейных
элементов значительно больше, чем соответствующих линейных КЭУ.
В зависимости от характера сигналов, передаваемых корректи-
рующими элементами, последние подразделяют на три подкласса:
непрерывные (сигналы на входе и выходе представляют собой не-
438
в)
14.45. Эквивалентные корректирующие устройства:
1н'следовательная коррекция; б — параллельная коррекция; в — корректирующая ОС
прерывные функции времени), корректирующие элементы с модуля-
цией входных сигналов (гармонической, частотной, фазовой, импульс-
цщ|) и цифровые корректирующие устройства (специализированные
..|>ровые ЭВМ и микро-ЭВМ).
11о энергетическому признаку КЭУ классифицируют на
ндующие группы: электрические, механические (электроме-
.ншческие), гидравлические, пневматические комбинирован-
III, II'.
В зависимости от вида частотных характеристик электрические,
к ханические, гидравлические и другие линейные КЭУ подразде-
i'.iiot на дифференцирующие, интегрирующие, интегродифференци-
ечющие и др. В зависимости от способа включения в контур системы
КЭУ подразделяют на последовательные, параллельные и корректи-
1Ч1ющие обратные связи.
Эквивалентные корректирующие устройства (рис. 14.45). Резуль-
i.iгом синтеза корректирующих устройств в частотной области яв-
1яется передаточная функция последовательного КУ (относительно
основных звеньев САР). Коррекция САР последовательным коррек-
шрующим устройством не является единственным средством полу-
чения требуемых динамических характеристик системы в целом. Для
коррекции САР могут быть использованы также параллельные КУ
н корректирующие ОС.
Пусть необходимо скорректировать динамические характеристики
элемента U70 (s) системы регулирования так, чтобы получить звено
с априорно заданной передаточной функцией W (s). Предполагается,
что техническая реализация КУ возможна тремя способами: последо-
вательная коррекция при помощи КУ с передаточной функцией
^посл ($); параллельная коррекция — КУ с передаточной функ-
цией и^пар (s); корректирующая ОС с передаточной функцией U7K00 (s).
При этом имеем
W (в) = U70 (8) №посл (8) = U70 (8) + uznap (s) = 1+1Foy^oc(s) •
(14.75)
Используя равенства (14.75), получим следующие фор-
мулы перехода от передаточной функции КУ одного типа
439
к передаточной функции эквивалентного элемента другого
типа:
1Г/ i I- ro(s> + rnaP(s) .
поел (s)~
М = М)№Посл(5)-11;
ту/ Ц^посл (s)
кос W - И70 (з) й/посл (S) ’
1 (14-76)
^посл(8)^= l + iro(S)]FKoq(S) 5
ту/ /_\________(s) Ц^кос (s) .
пар1'~ 1 + 1Г0 (з) 1ГКОС (s) ’
ту/ /м____________Ц^пар (s)____
^koc^- ir8(S) + ir0(S)irnap(S) •
Рассмотрим, например, третье соотношение эквивалентных пере-
ходов (14.76). Пусть в результате синтеза САР найдена передаточ-
ная функция Ц7цосл (s) корректирующего устройства, включенного
последовательно с Wo (s), причем сумма логарифмических частотных
характеристик (ЛЧХ) Й7О (/<о) и IFn0Cn (/<о) соответствует желаемым
ЛЧХ W (/со). По третьей формуле (14.76) может быть найдена пере-
даточная функция эквивалентной корректирующей обратной
связи Ц7КОС (s), которая совместно с охватываемым звеном Wo (s)
формирует ЛЧХ W (/<о).
Корректирующие устройства последовательного типа целесо-
образно применять, если сигнал, функционально связанный с сиг-
налом ошибки, является немодулированным электрическим сигна-
лом. Корректирующие элементы параллельного типа удобно исполь-
зовать при формировании сложного закона регулирования с введе-
нием интеграла и производных от сигнала ошибки. Корректирующие
обратные связи (КОС), охватывающие усилительные или исполни-
тельные устройства в прямой цепи САР, находят наиболее широкое
применение благодаря простоте технической реализации. Кроме того,
при использовании КОС, во-первых, на вход элемента ОС поступает
сигнал сравнительно высокого уровня (например, с выходного кас-
када усилителя или электродвигателя); во-вторых, КОС стабили-
зирует статические коэфффициенты охватываемых устройств в усло-
виях действия дестабилизирующих факторов; в-третьих, использо-
вание КОС позволяет уменьшать влияние нелинейных характе-
ристик тех устройств системы, которые ими охватываются.
Пример. Передаточная функция 1Г0 (з) == К, пусть последовательное КУ,
обеспечивающее требуемые динамические характеристики звена ]Ц7(з), имеет пе-
J’s -|- 1
редаточиую функцию последовательного типа 1ГПосл (s) = —“—(Т=1,0с).
Необходимо найти эквивалентное параллельное КУ.
Так как требуется ^определить Н/пар (з) при известных 1Г0 (з) и 1ГП0Сл (s),
поэтому воспользуемся второй формулой системы (14.76):
к (it!—
440
I’m-. 14.46. Схема изодромного КУ
1 |руктурная схема синтезированного изодромного КУ
иподрома) показана на рис. 14.46. Изодром пред-
• сшляет собой параллельное соединение двух звень-
. и — интегратора и усилителя, на входы которых по-
. >упает сигнал Сигнал на выходе изодромного
h У равен сумме ивых (0 = ui (0 + (t).
ЛЧХ элементарных типовых корректирующих устройств приве-
дены например, в работах [22, 23].
Таблица 14.1
Схемы эквивалентных корректирующих устройств
Основное звено Пара- метры Звено последовательного типа Корректирующая отрицательная связь Свой- ства
Безынер- ционный усили- тель U^yc (S) = ^ус Схема Дифференцирующее пассивное звено Апериодическое звено Подав- ление низких частот
1 *'1 и)с — —о 02
кус 'ЧО иг Г Но
тс У*
Фор- мулы X « § II II ++ § * * ZZ ъ - js 'I Р V sis II S 1 X = «’'кос (S) — <2 1
ri -Ь 2 Л«+ 1 Л-Т2 АусТ'г ’ ff)c=T1 г Тг/
Т1 + Г2
Безынер- ционный усили- тель «’'ус (S) = Аус Схема Интегр одиффер ен пи- рующее звено Апериодическое и диф- ференцирующее звенья Подав- ление средних частот
—и£1 > ' 1 кус Ui !—О
и. кус п _. «гМ иг 1
1 с4-. "г
Фор- мулы ^ПОСЛ (S) — _ (^*18 ~Ь 0 (Чз-р 1) (T8s+ 1) (Т4з+ 1) = Tz » Т3Т4 = ЛТа, Тз + Ti = 7\ + А2 WK0C (л) = = у (T1S-b 1)(7’2s+ 1) х -,Г1 - Г1 + Г2 гС^ (Г1 -|- ^2)62 Т2 г2 _ Ri
441
В табл. 14.1 показано два основных типа эквивалентных ХУ,
рассчитанных по формулам (14.76). В качестве корректируемого
элемента рассмотрен безынерционный усилитель. Корректирующими
устройствами последовательного типа 117цосл (s) являются следую-
щие 7?С-цепи: дифференцирующая и интегродифференцирующая.
14.9. ДИСКРЕТНЫЕ КОРРЕКТИРУЮЩИЕ УСТРОЙСТВА
Цифровые фильтры. Как было показано в параграфе 14.8,
существуют две формы представления алгоритма цифровой филь-
трации, реализуемого дискретным корректирующим устройством
САР:
п п
у(пТ) = £ x(rT) k(nT — гТ)~ £ х(пТ — гТ) k(rT) (14.77)
г=0 г=0
И
М N
у(пТ)=^ атх(пТ — /пТ)+2 bmy(nT — тТ), (14.78)
zn=o m=i
где х (пТ), у (пТ) — значения входного и выходного сигналов в дис-
кретные моменты времени (п =0, 1, 2, ..., оо; Т = const — такт
квантования); k (гТ) — дискретная ИПФ.
Фильтры, описываемые уравнением (14.77), в которых при фор-
мировании дискретного выходного сигнала используют лишь соот-
ветствующие значения входного сигнала, называют простыми или
нерекурсивными.
Структурная схема нерекурсивного цифрового фильтра, описы-
ваемого формулой (14.77), показана на рис. 14.47, а. Импульсная
переходная функция k (гТ) определяется последовательностью с ко-
нечным числом членов, элемент Z-1 соответствует задержке на ин-
Рис. 14.47. Структурные схемы цифровых фильтров:
а — нерекурсивного; б — рекурсивного; |Х| « элемент умножения
442
тервал Т, элементы умножения фильтра осуществляют умножение
в дискретные моменты входного сигнала х (пТ — гТ) на соответст-
вующие значения ИПФ. Для практической реализации алгоритма
нерекурсивного фильтра необходимо, чтобы ИПФ содержала конеч-
ное число членов. Если элементы ИПФ не убывают по величине,
алгоритм нерекурсивного фильтра является нереализуемым. Об-
ласть применения нерекурсивных алгоритмов — это реализация
цифровых фильтров с ИПФ, содержащей небольшое число членов.
Цифровые фильтры, в которых при формировании дискретного
выходного сигнала у (ПТ) используют соответствующие значения
входного сигнала х (пТ), а также значения выходного сигнала в ка-
честве сигнала ОС, называют рекурсивными. Структурная схема ре-
курсивного цифрового фильтра, описываемого формулой (14.78),
изображена на рис. 14.47, б. Элементы умножения осуществляют
умножение в дискретные моменты значений входного и выходного
сигналов на соответствующие коэффициенты cy>, аг, ..., ам и Ьл,
Ь2, ..., bn •
Алгоритмам цифровой фильтрации (14.77) и (14.78) соответствует
z-передаточная функция корректирующего устройства
D(г} - ао + а1г~1+---+амг~М
( ) \— Ь.г~1— b„z~2 — ... ~—bNz~N ’
1л /V
где ат (т = 0; 1; 2, ..., Л1), bm (т = 1; 2; ..., N) —соответственно
коэффициенты числителя нерекурсивной и знаменателя рекурсив-
ной частей цифрового КУ- Если дискретная ИПФ содержит Nh
членов, то для определения одного значения у (пТ) при использо-
вании нерекурсивного алгоритма (14.77) требуется выполнить 2Nh
операций, а при применении рекурсивного алгоритма (14.78) — три
операции. Это наряду с высокой вычислительной точностью является
основным преимуществом рекурсивных фильтров перед нерекурсив-
ными.
Пример. Рассмотрим реализацию КУ, аиалогичиого РС-интегрирующей цепи,
в виде нерекурсивного и рекурсивного цифровых фильтров. ИПФ непрерывной ре-
интегрирующей цепи с постоянной времени т = RC имеет вид
____________t_
k (t) — т-1е т .
1. Если ограничить членами ИПФ, то сигнал на выходе нерекурсивного
цифрового фильтра
у (пТ) = т“1 [х (пТ) + е~т'хх (пТ — Т) + t~2Tlxx (пТ — 2Т) + ...
... +^NT!xx(nT- NkT)],
где х (пТ) — дискретный сигнал на входе цифрового фильтра.
Передаточнаи функция цифрового нерекурсивного аналога РС-интегрирующего
фильтра в соответствии с выражением (14.77)
D (г) = т-1 (1 + е-т'хг~1 + е~2Т'хг~2 + ... + e~NT/^Nh),
схема которого приведена на рис. 14.47, а.
2. Сигнал на выходе рекурсивного цифрового фильтра, эквивалентного
РС-интегрирующей цепи:
у (пТ) = аох (пТ) 4- bty (пТ — Т),
443
где а0=
поэтому
Рис. 14.48. Схема рекурсивного фильтра
(аналога 7?С-интегрирующего фильтра)
т-': 61= е-г/\
D(z)~ 1_е-г/тг-1
Этому алгоритму фильтрации соответствует z-передаточиая функция D (г);
схема рекурсивного фильтра показана на рис. 14.48.
Синтез сложного дискретного корректирующего устройства. Рас-
смотрим синтез дискретного КУ во временной области для линейных
непрерывных САР [25] с квантованием сигнала ошибки по времени
(при предположении,. что квантование по уровню отсутствует).
На рис. 14.49 показаны структурные схемы САР.
Схемы САР без коррекции и с дискретным корректирующим уст-
ройством приведены соответственно на рис. 14.49, а и б, где W (s) —
передаточная функция непрерывной части системы, включающая
передаточные функции объекта, регулятора и экстраполятора нуле-
вого порядка с запоминанием на такт квантования Т = Ткп =
= const; D (г) — z-передаточная функция дискретного корректи-
рующего устройства (ДКУ), включенного в прямую цепь системы
последовательно с W (s). Класс входных воздействий х (t) — ступен-
чатые, линейные, параболические непрерывные функции времени.
На входе экстраполятора действует дискретный сигнал
Е2 (г) = (z) D (г),
зависящий от сигнала ошибки (г) и программы ДКУ- Требования,
предъявляемые к переходному процессу, определяют минимальное
число членов z-передаточной функции ДКУ и, следовательно,
сложность программы для цифровой ЭВМ, реализующей эту переда-
точную функцию.
Модифицированное z-преобразование сигнала на выходе САР
с ДКУ
У (г, о) = Е2 (z) W (г, о), (14.79)
где ст — локальное время, 0 < ст < 1.
Рис. 14.49. Структурные схемы САР:
а — без коррекции; б — с дискретным корректирующим фильтром D (z); в с эквива-
лентным ДлУ D0 (z)
444
Для сигнала на входе экстраполятора имеем
E^z^E^D^^*^^ D(z). (14.80)
Комбинируя выражения (14.79) и (14.80), получим
Y (г, а) = Е (z)D(z) W (z, а), (14.81)
г-преобразование сигнала ошибки ех (t) системы
Ех (г) = X(z) — Y (z) = , (14>82)
следовательно, X(z) = E1(z)[l+D(z)U7(z)].
Учитывая соотнош< ствия хп = |x0, *1 X где I — единичная wn (0) = ;ние (14.82), матрицу-столбец входного воздей- ..., хл|т представим в виде n = {I + lwn(0)dn]}eln=Geln> (14.83) матрица пХп; w0(0) 0 0 ... 0 wi (0) М°) 0 ... 0 wn (0) oa„_i (0) wn-2 (0) ... w0 (0)
— дискретная передаточная матрица, соответствующая передаточ-
ной функции непрерывной части CAP; dn — передаточная матрица
ДКУ, имеющая структуру, аналогичную wn (0); е1п = |е10, еи, ...
..., е1п\т— матрица-столбец сигнала ошибки.
Из уравнения (14.83) получим матрицу-столбец е1п:
e1n = {/ + wn(0)dn}-1xn. (14.84)
Уравнению (14.81), с учетом выражения (14.84) соответствует век-
торно-матричная форма выходного сигнала во временной области
уп (ст) = wn (ст) [dn {I4-wn(0)dn}“1Jxn, (14.85)
где w„ (ст) — передаточная матрица непрерывной части системы.
Используя г-преобразование (14.79), получим
уп(ст) = wn(CT)e2n. (14.86)
Из уравнения (14.86) можно установить, каким должен быть
дискретный сигнал на входе экстраполятора (т. е. последователь-
ность чисел е2в, е21, е22, ..., е2п), чтобы в результате был получен же-
лаемый выходной сигнал уп (ст). Если изображение этой последова-
тельности может быть получено в конечной форме, то дискретное
корректирующее устройство D (г), как это следует из уравнения
(14.80), будет иметь конечное число элементов памяти и задержки.
445
Из сравнения выражений (14.85) и (14.86) следует, что между
передаточной матрицей ДКУ и матрицей-столбцом е2п при заданных
техническим заданием xn, wn (сг) и wn (0) имеет место сложная зави-
симость. Это затрудняет нахождение программы ДКУ, определяю-
щей е2п так, чтобы на выходе получился желаемый сигнал уп (о).
Указанная принципиальная трудность может быть устранена, если
использовать разомкнутую эквивалентную модель САР с эквивалент-
ным ДКУ, приведенную на рис. 14.49, в.
На вход системы W ($) с выхода эквивалентного ДКУ D3 (г)
подается сигнал е2 (t), или е2л. На входе этого ДКУ действует непре-
рывный сигнал х (/), или его дискретный аналог X (z).
Из структурной схемы (см. рис. 14.49) видно, что зст-преобразо-
вание выходного сигнала
Y (г, ст) = Е2 (z) W (г, ст) == X (z) D3 (z) W (г, ст),
az — преобразование сигнала на входе экстраполятора
£2 (z) = X (z) £)э (z). . (14.87)
Комбинируя выражения (14.80) и (14.87), получим z-передаточ-
ную функцию эквивалентного ДКУ в следующем виде:
D9(z) = L»(z)/[l+D(z)r(z)], (14.88)
из которой можно определить z-передаточную функцию синтезируе-
мого ДКУ'-
D(z) = £»9(z)/[I-Z?s(z)«7(z)]. (14.89)
Непрерывный выходной процесс скорректированной САР в со-
ответствии с выражениями (14.86) и (14.87) имеет вид
Уп(ст) = wn(o)d9nxn, (14.90)
а сигнал
ean = d9nxn. (14.91)
В выражении (14.90) d3n — передаточная матрицы эквивалент-
ного ДКУ, соответствующая Da (z).
Введение в рассмотрение эквивалентного ДКУ позволяет заме-
нить сложную зависимость между сигналом е2п и программой D (z)
синтезируемого ДКУ простым соотношением (14.91) между е2п
и программой D„ (z). Далее, если найти Da (z), то по формуле (14.89)
достаточно просто определить программу D (z) ДКУ синтезируе-
мой САР.
Сигнал е2п при типовых входных воздействиях, которым соответ-
ствуют s-изображения вида 1/s» (q =0, 1, 2, ...), должен состоять
из переходной и установившейся составляющих при длительности
переходной составляющей, не превышающей требуемого времени
установления. Поэтому z-передаточная функция (z) должна иметь
Вид
г"* 4- diz”1-1 4- d^z"1-2 + ... + dm /1 д
D3 (г) = Do (г) F (z) = —Z-J---F (z), <14-92)
446
где P(z)— соответствует той части ДКУ О (г), которая обеспечивает
требуемое усиление и установившееся значение, и выбирается, ис-
ходя из пределов ошибки установившегося процесса.
Передаточная функция Do (г), входящая в выражение (14.92),
является полиномом от г-1, т. е.
Da (z) = I -j- drz~l + d2z~2 + • • + dmz~m
и влияет как на длительность, так и на форму переходной состав-
ляющей. Выбор числа членов полинома является процессом итера-
тивным и осуществляется с учетом общих требований к динамике
САР и в зависимости от особенностей объекта регулирования.
Сигнал е1п определяется конечным числом неизвестных пара-
метров ДКУ. Установившийся сигнал на выходе системы при ну-
левой ошибке не зависит от этих неизвестных и, таким образом,
их выбор определяется только требованиями к переходному про-
цессу.
Переходной процесс как функция дискретного времени при ovar
описывается уравнением (14.90), которое определяет связь неизвест-
ных параметров ДКУ с непрерывной выходной функцией. Отсюда
следует, что синтез ДКУ, основанный на временных методах, яв-
ляется обоснованным методом проектирования в том смысле, что
требования, предъявляемые к переходному процессу, могут быть
непосредственно использованы для выбора неизвестных параметров
корректирующего устройства.
Экономически целесообразным способом технической реализации
ДКУ при наличии соответствующего интерфейса является реализа-
ция в виде программы (14.88) для микроЭВМ.
ГЛАВА 15. ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА.
АВТОМАТИЧЕСКИЕ ПРИВОДЫ
Исполнительные устройства и автоматические приводы
САР осуществляют усиление сигналов по мощности до уровня, до-
статочного для воздействия на управляемый объект (в ряде случаев
с помощью специальных регулирующих органов) в соответствии
с поставленной целью управления.
Основными техническими показателями, характеризующими ра-
боту исполнительных устройств и автоматических приводов, яв-
ляются: быстродействие, точность, максимальная полезная мощность,
максимальная или номинальная нагрузка, коэффициент усиления
по мощности, мощность управления, энергоемкость, КПД, ресурс
работы и т. д. При выборе исполнительных устройств и приводов
используют различные критерии оптимальности: максимального
быстродействия, минимальной ошибки (статической или динамиче-
ской), максимальной полосы пропускания, минимума расхода энер-
гии, наибольшего КПД, высокой надежности и др.
447
15.1. НАЗНАЧЕНИЕ И КЛАССИФИКАЦИЯ
ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВ И ПРИВОДОВ
Исполнительные устройства (ИУ) и приводы САР пред-
назначены для выработки регулирующих воздействий и могут пред-
ставлять собой сложные подсистемы, состоящие из многих элементов
различной физической природы.
, Исполнительное устройство — оконечный ‘каскад в системе авто-
матического регулирования или управления, воздействующее не-
посредственно или через согласующее устройство на регулирующий
элемент или объект системы (например, возбудитель, питающий
обмотку генератора; электродвигатель, управляющий положением
регулирующего клапана или заслонки, и т. д.). Ниже будут рас-
смотрены исполнительные элементы с механическим, выходом, согла-
сующими устройствами которых являются механические передачи
различного типа.
Регулирующий элемент (регулирующий орган, например, за-
слонка, клапан, вентиль, аэро- или гидродинамический руль, газо-
вое рулевое устройство и т. д.) осуществляет изменение режима
функционирования управляемого объекта.
Классификация исполнительных устройств САР приведена на
рис. 15.1.
Исполнительные устройства и приводы в зависимости от вида
используемой энергии источника питания подразделяют на элек-
трические, гидравлические, газовые (пневматические), а также
комбинированные.
Электрический исполнительный элемент с механическим выходом—
электродвигатель (постоянного, переменного тока, шаговый, син-
хронный, асинхронный, моментный и т. д.), электромагнитная муфта
(электромагнитная фрикционная, электромагнитная порошковая,
индукционная и т. д.), электромагнит (поворотный, втяжной) или
другое устройство, применяемое в САР в качестве оконечного уси-
лителя-преобразователя электрической мощности. Эффект, оказывае-
Рис. 15.1. Классификация исполнительных устройств САР
448
Рис. 15.2. Классификация ИУ: .
а — электрических; б — гидравлических и пневматических
мый объектом или механической нагрузкой на исполнительный эле-
мент, эквивалентен действию внутренних или естественных ОС.
Классификация электрических И У приведена иа рис. 15.2, а.
Электрический привод САР — электрическое ИУ, преобразующее
управляющий сигнал в механическое воздействие с одновременным
усилением по мощности за счет внешнего источника энергии. Привод
ие имеет специального звена главной ОС и представляет собой сово-
купность усилителя мощности, электрического исполнительного
элемента, механической передачи, источника питания и вспомога-
тельных элементов, объединенных определенными функциональ-
ными связями. Математическая модель (структурная схема) привода
имеет естественные линейные или нелинейные ОС по нагрузке.
Выходными переменными электрического привода являются: угло-
вое или линейное перемещение, угловая или линейная скорость,
вращающий момент или тяговое (перестановочное) усилие, ускорение
нагрузки, механическая мощность и т. д.
Электрический следящий привод входит в структуру САР, он
отрабатывает входной управляющий сигнал с усилением его по
мощности. Электрический следящий привод охватывается специаль-
ными элементами ОС. Структурная схема электрического следящего
привода имеет как внутренние (естественные), так и специальные
конструктивные ОС.
В автоматике используют гидравлические и пиевматичесике И У
и следящие приводы с дроссельным, струйным и объемным управле-
нием, а также одноступенчатые и многоступенчатые приводы.
Классификация гидравлических и пневматических ИУ приве-
дена на рис. 15.2, б.
Гидравлические и пневматические ИУ имеют более высокую
удельную мощность (мощность на единицу массы), чем электриче-
ские ИУ с электронными, магнитными и электромашинными усили-
телями. Для гидравлических и пневматических устройств она равна
в среднем 10 кВт/кгм, а для электромеханических — 1 кВт/кгм.
Как следствие, динамические характеристики гидравлических и
*7gl5 Солодовников В. В. н др. 449
пневматических приводов существенно превосходят соответствующие
характеристики электромеханических систем.
Гидравлические и пневматические ИУ обладают рядом преиму-
ществ перед электрическими: высокой надежностью и большим ре-
сурсом работы, возможностью плавного изменения выходных па-
раметров в достаточно широком диапазоне, простотой преобразова-
ния энергии потока жидкости или газа в механическую мощность
на выходе ИУ, устойчивостью к вибрации и др.
15.2. ТИПЫ МЕХАНИЧЕСКИХ НАГРУЗОК.
МЕХАНИЧЕСКОЕ СОПРОТИВЛЕНИЕ
Механическими нагрузками в электромеханических, ги-
дравлических и пневматических автоматических приводах и следя-
щих системах являются динамические сопротивления, проявля-
ющиеся при разгоне и торможении объектов.
При анализе и расчете разнообразных приводов и САР необхо-
димо учитывать также нагрузки, определяемые следующими
сопротивлениями: при перемещении объекта, зависящими от
свойств среды (трение без смазочного материала, вязкое трение);
вызываемыми движущимся потоком жидкости или газа; упругими
свойствами объекта.
Кроме того, в системах управления металлорежущими станками
необходимо учитывать сопротивление резанию, связанное с разру-
шением^материала в процессе его обработки; в системах подъемно-
транспортных машин — сопротивление при преодолении силы тя-
жести в процессе подъема груза или перемещения неуравновешен-
ных масс; а в таких технологических машинах, как мельницы и
камнедробилки, — стохастическое сопротивление и т. д.
Механические нагрузки как функции переменных движения
механического объекта подразделяются на два класса — линейные
и нелинейные.
Линейные механические сопротивления. Общее операторное урав-
нение комплексной механической нагрузки (сопротивления), свя-
зывающее переменные состояния — угловую скорость (Q) и нагру-
зочный момент при вращательном движении (Л4Н), имеет вид
AfH(p) = (A0 + A1P + -^-)Q(p), (15.1)
где Аа, А1; А2 — постоянные коэффициенты, характеризующие фи-
зические параметры механического сопротивления.
Уравнение типа (15.1) является линейным интегродифферен-
циальным, которому могут быть поставлены в соответствие разно-
образные схемы соединения механических сопротивлений.
В частности, если коэффициенты = О, А3 = 0, то уравнение
нагрузки; характеризующейся вязким трением, имеет вид
MB(O = AoQ(f).
(15.2)
450
1’ис. 15.3. Передаточные функции (структурные схемы) комплексных механических
нагрузок:
— для вращательного движения; б — для поступательного движения
Из уравнения (15.1) следует также, что при Ло =0; Лх =0
момент упругой нагрузки
t
му(0 = л2 = а20(0. (15.3)
о
где 0 (I) — угол поворота вала нагрузки
Если коэффициенты Ло =0; Л2 = 0, то уравнение инерционной
нагрузки, зависящей только от первой производной скорости £2 (/),
можно записать в виде
М„ (() = A1-±-Q(t) = л18 (0, (15.4)
где е (/) — угловое ускорение нагрузки.
Передаточная функция комплексной механической нагрузки, или
комплексное механическое сопротивление ZMei, и ($), соответству-
ющее уравнению (15.1) для вращательного движения (рис. 15.3, а):
^Е.зР(5) = 2мез.Ер(8) = -^- = Л0 + А13 + 4-- (15-5)
Для механической системы, описываемой переменными v и N
(соответственно скорость и сила сопротивления) при поступатель-
ном движении нагрузки, можно получить уравнения, аналогичные
(15.1)—(15.4), т. е.
П(р) = (В0 + В1Р + -^-) V (р) '
или
JVB(/) = Boi>(0;
i
Ny(f) = В2^ v(i) dt = B2z(t);
о
Na(t)=Bl^-u(t)^B1a(t),
(15.6)
где Во, Blt В2 — постоянные коэффициенты, характеризующие: Во—
вязкое трение; Вг — инерционные свойства, Вг — упругие свойства
нагрузки; v (/); г ((); a (i) — соответственно линейная скорость,
перемещение и ускорение, являющиеся функциями непрерывного
времени t.
Vai 5*
451
Передаточная функция комплексной механической нагрузки, или
механическое сопротивление, соответствующее первому уравнению
(15.6) для поступательного движения (рис. 15.3, б):
ПСС1 (s) = Z,iex. пост (з) = = Д+Д« 4- А-. (15.7)
.. Выражение (15.5) используют при описании механических со-
противлений, являющихся нагрузкой различных электрических,
гидравлических и пневматических двигателей с вращательным дви-
жением выходного вала, а выражение (15.7) — при описании дина-
мики нагруженных электрических, гидравлических и пневматиче-
ских двигателей поступательного действия.
Нелинейные механические сопротивления представляют собой
аналитические или графические выражения, характеризующие не-
линейные связи И У или привода САР с нагрузкой.
Нелинейная характеристика сухого трения занимает особое
место среди других существенно нелинейных характеристик. Ста-
тические характеристики трения приведены на рис. 15.4. Наиболее
точно нелинейному эффекту сухого трения соответствует характери-
стика, показанная на рис. 15.4, а. Аналитическое выражение такой
характеристики
ЛГТр — (Со -f-
С1 \
р Ц-т^в |
sign Йдв,
где с0 — коэффициент, определяющий превышение трения покоя
над минимальным значением трения движения; сг — коэффициент,
характеризующий минимальное трение движения; тк — коэффи-
циент крутизны падающего участка характеристики трения.
Для математического моделирования такой характеристики ис-
пользуют различные аппроксимации, среди которых наиболее часто
применяют аппроксимации двух типов:
1) по Кулону — аппроксимация имеет вид идеальной ре-
лейной характеристики (рис. 15.4, б). Уравнения такой характе-
Рис. 15.4. Статические характеристики трения:
а _ точная характеристика; б — аппроксимация по Кулону; в — кусочная аппроксимация
по Булгакову; к — линейная или угловая скорость; Утр — сила или момент трения
452
ре особенность заключается в том, что при скорости X = 0 сила
(момент) трения в принципе может принимать любое значение в ин-
(срвале ±/т, где она должна доопределяться каждый раз путем
составления уравнения баланса сил;
2) по Булгакову — аппроксимация учитывает различие
и значениях трения покоя и трения движения (рис. 15.4, а).
Уравнения такой характеристики
Утр = — yasign X при X 0;
|Гтр|=«.Уп при X = 0(Уп>Уд).
15.3. МАТЕМАТИЧЕСКИЕ МОДЕЛИ НАГРУЖЕННОГО
ПРИВОДА
Для анализа динамики нагруженного ИУ или привода
САР введем обобщенные переменные:
& и — входные переменные (например, ток и управляющее
напряжение для электрических исполнительных устройств или ток
и напряжение на входе регулирующих устройств гидравлических и
пневматических приводов);
хг и х2 — выходные переменные, произведение которых пред-
ставляет собой выходную механическую мощность (например, угло-
вая скорость вала и вращающий момент для электрических ИУ
или линейная скорость и усилие на выходном штоке гидравлических
или пневматических приводов).
Пусть нагруженное ИУ описывается нелинейным функционалом F3
или вида
Xi = Л (gi, х2); | (15 8)
= х2). J
Функционал Fr (или Р2) обычно задается графически (см.
рис. 15.5, а, на котором переменная условно определена только
положительными значениями). Связь между установившимися зна-
Рис. 15.5. Описание нагруженного ИУ или привода:
а — функционал — F, (g,; х2); значения параметра функционала g10; gu; ...» gle; —
— — вертикальные плоскости сечения; б — семейство механических характеристик;
К. — рабочая точка; 3 угол наклона характеристики, проходящей через А
15 Солодовников Б. В. и др.
453
чейиями х2 = хгуст и = *1уОт ИУ определяется семейством меха-
нических характеристик
xi — Фх хг) ~ Фа (Si > ХФ-
Механические характеристики ИУ являются проекциями на
плоскость XLOX2 кривых xj = ip! (х2; & = const), которые представ-
ляют собой пересечение поверхности функционала хл = (gp, хг)
вертикальными плоскостями Hlt Н2, Н9 и т. д., проходящими через
точки с координатами gu: g12; Sis и т. д. параллельно оси ОХ2.
Семейство механических характеристик хг =Чч (хг; gx = const) по-
казано на рис. 15.5, б, параметром которого является в соответствии
с функционалами (15.8) ток gx или напряжение g2 (параметр g2
определен некоторым множеством как положительных, так и отри-
цательных значений).
Механические характеристики ИУ или привода, обычно опре-
деляемые экспериментально с помощью специальных нагрузочных
стендов, могут быть использованы в качестве исходных при анализе
его динамики.
Если функция X! = ф2 (х2, g2), зависящая от параметра g2 =
= const, имеет непрерывные частные производные dxjdgz и дхр'дх^
в окрестности рабочей точки К на поле механических характери-
стик, а функции g2 (t) и х2 (t) дифференцируемы в точке t = tt, то
dxx __ дхх - dXx dx2 f 14 QX
di dgi dt ' dx2 dt ' ' ' ’
В выражении (15.9) частные производные dX]/dg2 и дхх/дх2 пред-
ставляют собой дифференциальные значения статического коэффи-
циента передачи исполнительного устройства и выходной (вну-
тренней) механической проводимости умех ИУ, которые соответст-
вуют точке К на поле его механических характеристик:
dgi |^_0,
<15JO>
Кроме того, введем обозначения:
zMexK=-|N 0 = т1т-; <15Л1)
4 0X1 |dg,=0 f/мех К
= (15.12)
здесь гмехХ и г»лк — дифференциальные значения выходного (вну-
треннего механического сопротивления И У) и входного электриче-
ского сопротивления.
Значения &иу, умех, zMex ИУ являются переменными, зависящими
от положения рабочей точки в данный момент времени на поле нели-
нейных механических характеристик. Изменение мгновенного положе-
ния рабочей точки (например, изКв Л^) относительно аргументов g2
454
где дифференциал dx{ является главной частью полного приращения
Лхх, линейного относительно приращений Ag.t и Дха ее аргумен-
тов.
Осуществляя линеаризацию семейства нелинейных механических
характеристик xt = фа (х2; gs) по степеням малых приращений пере-
менных, взятых в окрестности их значений (например, вблизи
точки X), соответствующих установившемуся режиму работы нагру-
женного ИУ или привода, вместо выражения (15.13) можно запи-
сать (рис. 15.6)
Д^ +Дх2 = Лйу Д^2 + г/мех Дх2, (15.14)
где йиу. и t/Mex — передаточный коэффициент и механическая про-
водимость ИУ при линеаризованных механических характеристиках.
Таким образом, линеаризованное уравнение (15.14) в изображе-
ниях имеет вид
($) = £„yG2 ($) + Умех (s) Х2 (s), (15.15)
где Xj ($); Ga (s) и Xs (s) — изображения соответственно угловой
скорости выходного вала (линейного перемещения штока); управля-
ющего сигнала, вращающего момента (усилия) на выходе нагружен-
ного ИУ; Умех(з) = -=—Ц-т механическая проводимость испол-
нительного устройства (привода), определяемая согласно формулам
(15.10)—(15.11).
В соответствии с принципом Даламбера и уравнением механиче-
ской нагрузки (15.1) для вращательного движения
Ха (s) — 2иех, а (s)Xr (s),
(15.16)
где ZMM>8 (s) =ZMei. вр—комплексное механическое сопротивле-
ние нагрузки.
Решая совместно уравнения (15.15) и (15.16) с учетом знака при
производной дх^дхг (т. е. при Умех ($)), получим передаточную функ-
цию нагруженного ИУ в виде отношения угловой скорости Хд (s)
15* 455
ц
Рис. 15.7. Структурные схемы нагруженного ИУ-.
а — поворотного (вращательного) действия относительно Й » Й^х — Йо — управля-
ющее напряжение; Й — угловая скорость вала ИУ); б — относительно и = в —
поступательного действия относительно объемного расхода Q « Q —
к управляющему сигналу G2 (s) при нулевых начальных усло-
виях:
/ <д — W -_____________*иу________=
* В₽ Gi (s) 1 + Yмех (s) ZMex. н (s)
“-------------------------м’ (15-17)
1 + Гмех (s) (4 4- 4---— )
Аналогично для ИУ (привода) поступательного действия с уче-
том передаточной функции (15.7) получим
/<Л_ Xi(s) _ ^иупост
" g2 пост Л / »---------------Б •
2() 1 + ГМех(5)(Во + В1* + -у-)
Передаточной функции (15.17) соответствует структурная схема
нагруженного ИУ поворотного (вращательного) действия, показан-
ная на рис. 15.7, а. Для любого момента времени tt или положения
рабочей точки К на поле линеаризованных механических характе-
ристик значение угловой скорости вала нагруженного ИУ (см.
рис. 15.6)
Xi(/i) = X1xx(^)- xw(ti),
т. е. Q (/,) = (ft) - Qe (tt),
где xlxx(tt) = ^g2(ti) = kayg2(tt), или QXI (tt) — угловая скорость
холостого хода ИУ, а х10 (tt) = L~l [Уме1 (s) ZMei.H (s) (s) ]
характеризует величину уменьшения рабочей скорости относительно
холостого хода за счет механической нагрузки.
456
Таким образом, имеем уравнение в изображениях
Й (s) = (s) - Qo (s),
которое соответствует выражению (15.15).
Путем структурных преобразований схему (рис. 15.7, а) можно
привести к виду, показанному на рис, 15.7, б (так как —
и формально dgt =dgj.
Схемам, изображенным на рис. 15.7, соответствуют структурные
схемы нагруженных электродвигателей различных типов.
Аналогично, структурное представление передаточной функ-
ции ИУ или привода поступательного действия имеет вид, приве-
денный на рис. 15.7, д, что соответствует ряду нагруженных гидро-
и пневмодвигателей поступательного действия (Q — объемный рас-
ход рабочего тела; F — полезная площадь поршня; v = Q/F — ско-
рость штока).
Из рис. 15.7 видно, что в статическом и динамическом режимах
работы ИУ или автоматического привода линейная механическая
нагрузка проявляется как естественная отрицательная ОС, харак-
тер которой зависит от типа нагрузки. В линейных моделях нагру-
женных И У эффект действия нелинейного трения можно предста-
вить в виде некоторого стохастического внешнего возмущения /Ивозм,
как это показано на рис. 15.7.
15.4. УПРАВЛЯЕМЫЕ ИСПОЛНИТЕЛЬНЫЕ
ЭЛЕКТРОДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
Основными техническими требованиями, предъявляемыми
к управляемым электродвигателям, являются:
статическая устойчивость и линейность механических харак-
теристик во всем диапазоне изменения управления;
линейная зависимость угловой скорости вращения ротора от
величины управляющего сигнала во всем рабочем диапазоне;
высокое быстродействие (по отношению к динамическим пара-
метрам объекта);
большой пусковой момент;
малая мощность управления при значительной механической
мощности на валу электродвигателя;
отсутствие самохода (т. е. малый остаточный вращающий момент
при отсутствии сигнала управления);
высокая надежность;
малые габаритные размеры и масса;
высокие эксплуатационные свойства (КПД, ресурс работы и т. д.).
Управляемые ЭДв постоянного тока занимают особое место среди
электрических исполнительных устройств, применяемых в САР.
Это обусловлено рядом преимуществ электродвигателей постоянного
тока (ЭПТ) перед другими электрическими ИУ:
457
значительный диапазон плавного регулирования угловой ско-
рости и вращающего момента;
линейность механических характеристик;
значительная величина пускового момента;
высокий КПД (до 90 %);
высокая надежность;
удобство управления с помощью ЭМУ и т. д.
Недостатками ЭДв постоянного тока являются значительная
инерционность и невысокая энергоемкость (по сравнению с гидро-
и пневмодвигателями), а также наличие коллектора.
Классификация ЭПТ. Электродвигатели постоянного тока клас-
сифицируют на электродвигатели с электромагнитным возбужде-
нием и с возбуждением от постоянных магнитов. ЭПТ с электро-
магнитным возбуждением в свою очередь подразделяют на электро-
двигатели с независимым, последовательным и смешанным возбуж-
дением.
В соответствии с уравнением скоростной характеристики воз-
можны три способа регулирования угловой скорости электродвига-
теля — за счет изменения управляющего напряжения, потока воз-
буждения и сопротивления в цепи якоря.
В автоматике нашли применение в основном два первых способа,
в которых используют якорное (независимое возбуждение), полюс-
ное (со стороны обмотки возбуждения) а также комбинированное
управление.
Вид механических и скоростных характеристик ЭПТ зависит от
способа регулирования угловой скорости якоря.
Конструкция, принцип действия и механические характеристики
ЭПТ должны быть известны читателю из курса электротехники.
При рассмотрении электродвигателей постоянного тока, как
элемента САР., ограничимся лишь анализом статических и динами-
ческих характеристик электродвигателей с якорным управлением.
Этот метод управления угловой скоростью и вращающим моментом
ЭПТ позволяет получить достаточный во многих случаях диапа^
зон регулирования, плавность регулирования и другие показатели.
ЭПТ с якорным управлением. Составим систему уравнений,
описывающих динамику электродвигателя, нагруженного на инер-
ционно-вязкое механическое сопротивление. При этом введем следую-
щие обозначения:
ия (0 — напряжение управления;
1Я (0 — управляющий ток в цепи якоря ЭПТ, имеющего элек-
трические параметры R и L;
е (/) — противо-ЭДС якоря (се — коэффициент ЭДС);
Мвр (0 — вращающий момент на валу электродвигателя (ем —
коэффициент вращающего момента);
Q (/) — угловая скорость вала электродвигателя (0 (/) — угол
поворота вала);
J — суммарный приведенный момент инерции всех вращающихся
частей (У = /я Jпр. ред "Ь Jпр. н)> где Jя, JПр, ред, Jдр. в мо-
менты инерции соответственно якоря, редуктора и нагрузки (при-
458
веденные); ев — приведенный коэффициент вязкого трения; Л4тр (й) —
момент трения (также на валу якоря).
Дифференциальное уравнение баланса напряжений согласно
закону Кирхгофа
= + (15.18)
Уравнение вращающего момента электродвигателя
Мвр(0 = см/я(0. (15.19)
Избыточный вращающий момент создает угловое ускорение вала
электродвигателя, нагруженного на линейное инерционно-вязкое
сопротивление и нелинейный момент трения:
мнз5 (0 = Мвр (0 - [М в (0 + Мт sign Й], (15.20)
где Мв (0 = евй (0— момент вязкого сопротивления; Л4отр =
= Мт sign й — момент статического трения.
По определению Л1Изб (0 и в соответствии с принципом Далам-
бера имеем
MBp(0-MB(0-MmsignV = J-^2(t). (15.21)
Систему уравнений «замыкает» уравнение противо-ЭДС якоря
электродвигателя
е(0 = сеЙ(0. (15.22)
Соотношения (15.18)—(15.22) представляют собой нелинейную
систему, описывающую динамику ЭПТ. Если пренебречь моментом
сил трения, который характеризует нелинейную связь через на-
грузку, то система линейных уравнений, преобразованных по Лап-
ласу, будет иметь вид:
Т /М £ (s) U (s) .
4 Ls + R R(L/Rs + l)' 2) Мвр (s) = c^IB (s); (15.23)
3) Й (s) Js = MBp (s) — евй (0; 4) Й4ИЗ(5 (s) = A4Bp (s) MB (s),
5) E (s) = с«Й (s).
Уравнения 1) и 3) или 4) системы (15.23) можно представить
структурными схемами в виде замкнутых контуров с обратными
связями Ls и св (рис. 15.8, а и б). Полная структурная схема управ-
ляемого электродвигателя, соответствующая системе уравне-
ний (15.23), показана на рис. 15.8, в (вариант 1). Отрицательная ОС,
охватывающая схему по угловой скорости вала электродвигателя
(так же, как и элементы Ls и св внутренних контуров схемы), яв-
ляется структурным отображением свойства электродвигателя по-
стоянного тока создавать ЭДС якоря е (t), пропорциональную его
угловой скорости и направленную против напряжения управле-
ния ия (f}, поэтому и (0 = ия (0 — е (0.
459
г)
Рис. 15.8. Структурные схемы:
а — схема баланса напряжений в якорной цепи ЭДв\ 6 — схема баланса моментов: ef г -*
полная схема ЭДз (соответственно 1-й н 2-й варианты)
Передаточные функции электродвигателя постоянного тока с якор-
ным управлением могут быть получены или из системы (15.23),
или из структурной схемы рис. 15.8, г. Передаточная функция по
угловой скорости вала нагруженного электродвигателя
(s) = ~u^i = cb/?(t3s-h)(W + i) + № ’ 5,24)
передаточная функция по углу поворота вала
П7 ____ в (s) _ ___________см____________
We^>— UK(s) ^[Св/^ТэЗ-ННТэмз+О + сеСм] ’
по вращающему моменту
П7 /с\ _ ^BP (s)
И"'5) Ua(s) и т’ Дм
где Тэ = L/R — электрическая постоянная времени (от 0,01 до 0,1 с
для разных серий ЭПТ)\ Тэм = Лс3 — электромеханическая по-
стоянная времени, прямо пропорциональная суммарному моменту
инерции всех вращающихся частей, измеренному на оси электро-
двигателя (величина Тэк зависит от параметров якоря и механи-
ческой нагрузки).
460
Рис. 15.9, ЛЧХ управляемого ЭДв посто-
янного тока (/, 4 — кривые ЛЧХ при дей-
ствительных корнях характеристического
уравнения и kRB = 2,4 — кривые
ЛЧХ при действительных корнях и йдв =
= /?2; Афх — запас устойчивости по фазе;
3, 5 — кривые ЛЧХ при комплексных
корнях И &дв = k3)
Из выражения (15.24) получим
статический коэффициент передачи
по угловой скорости ЭПТ, нагру-
женного на инерционно-вязкое ме-
ханическое сопротивление:
h ___ °уст_________£м_____
дв cBR -f- сесм
Вид частотных характеристик электродвигателя зависит от кор-
ней характеристического уравнения
TW + (Т9 + Т’эм) S + 1 + Сесм = 0.
(15.25)
Например, если Т9 < ^Тм, то уравнению (15.25) соответствует
колебательное звено с параметрами Тк и £к, которые можно найти
из системы уравнений:
т-з_____ГЭГЭМ
к 1 +сесм ’
П'Р Е __Т'э 4* Т'эм
kSk “ 1 + СеСм ’
где Тк — постоянная времени колебательного звена; — коэф-
фициент относительного демпфирования.
При этом условии ступенчатое изменение напряжения ия (/)
вызывает колебательный процесс нарастания угловой скорости
в соответствии с выражением (15.24).
ЛЧХ, построенные по передаточной функции 1Ге (s), показаны
на рис. 15.9.
Пример. Рассмотрим переходные процессы в электродвигателе постоянного
тока с якорным управлением, структурная схема которого показана на рис. 15.10, а
(упрощенная модель). Анализ выполним методом пространства состояний. ЭПТ
представляет собой систему 1-го порядка с двумя входами и одним выходом.
Формализованная схема в переменных состояния исходной системы при ну-
левых начальных условиях показана иа рис. 15.10, б. Пусть параметры см; /н;
се ЭПТ численно равны 1, поэтому электромеханическая постоянная времени
Т’эм = 1,0.
Определим расширенный вектор состояния схемы согласно (3.6) в виде
V (/) = | ия (£); /Инозм (0> ® (О I ’
обозначим v(0=|u(<); х (/) |т, где и(/)=|ия(0; Мвовм(0|г; х (0 = Q (/).
Расширенная матрица перехода формализованной модели ЭПТ
Ф(1) =
I О О
О 1 О
1 — е_< 1 — e"z
461
В соответствии с размерностями вектора v (t) имеем субматрицы
1 о
О 1
Ro (0 =
h0 (0=11-е-*;
1— е‘Ч; фо (0 = 1е<1>
так как расширенная матрица перехода
Ф(0 =
Ro (О
ho (О
о
Фо (О
где Ro (/) — субматрица, определяющая значение вектора входа (матрица пе- рехода для управляющего воздействия); he (/) — субматрица управляемого пере- хода; фо (0 — субматрица перехода. Решение системы, как известно, имеет вид:
v(0 = Ro (0 0 1 ho (0 Фо (0 1 u(0+) х(0+) = Ro (0 ho (0 u(0+) и(0+)+фо(Ох(0+) (15.26)
Пусть v (0 = 11; 1;"0|т и v0 (0 = 10; 0; О |т, начальные условия нулевые,
тогда получим
1
1 ,
2(1 — е'9
т. е. при одновременном действии двух ступенчатых функций ия (0 и Л4ВОЗМ (Z)
угловая скорость вала 3/7TQ(() изменяется по экспоненте 2 (1 —е_/), стремясь
к установившемуся значению, равному 2,0 (рис. 15.10, в).
Тот же результат можно получить, если воспользоваться векторно-матричным ра-
венством
v(t =ho(Z)u(O
в соответствии с формулой (15.26).
Рис. 15.10. Якорное управление ЭДв постоянного тока:
а — структурная схема при св = 0, «я (О — управляющее напряжение (Вх. 1 системы);
Мвозм ~ внешннй возмущающий момент, приложенный к валу ЭПТ (Вх. 2); М (() —
вращающий момент; М . (О = М (() — М_„,„ (() — избыточный момент; й (() — уг-
ловая скорость вала; о — формализованная схема в переменных состояниях; в — переход-
ные процессы; й (О и Й (/) — угловая скорость и ускорение вала
462
15.5. УПРАВЛЯЕМЫЕ ДВУХФАЗНЫЕ АСИНХРОННЫЕ
ЭЛЕКТРОДВИГАТЕЛИ
Двухфазные асинхронные электродвигатели (ДАД) находят
в системах автоматики широкое применение как обладающие сле-
дующими преимуществами по сравнению с электродвигателями по-
стоянного тока: незначительная механическая инерционность; отсут-
ствие коллектора и щеток; простота и стабильность усиления на
несущей частоте управляющего сигнала. Основные недостатки ДАД—
низкий КПД (не более 10—25 %) и нелинейность механических
характеристик. Из-за низкого КПД двухфазные асинхронные элек-
тродвигатели применяют, как правило, в качестве исполнительных
устройств приборных электромеханических систем.
Система регулирования с ДАД является системой на несущей
частоте. Методы анализа работы элементов САР на несущей частоте
рассматривались в параграфах 13.5 и 14.5. На вход исполнительного
устройства переменного тока поступает управляющий балансно-
модулированный сигнал, содержащий полезную информацию в оги-
бающей, на которую реагирует ДАД. Поэтому одной из основных
задач исследования двухфазного асинхронного электродвигателя
является задача нахождения его передаточных функций по оги-
бающей, учитывающих процессы преобразования модулированного
сигнала в угловую скорость и вращающий момент как в электро-
механическом демодуляторе [23].
Принцип действия, конструкция и схема двухфазного асинхрон-
ного электродвигателя. ДАД является электрической машиной пере-
менного тока. Поэтому принцип действия ДАД основан на взаимо-
действии управляемого вращающегося магнитного поля с вихревыми
токами, индуктируемыми в проводниках или стенках ротора. Угло-
вая скорость и вращающий момент нагруженного ротора из-за его
механической инерционности определяется не мгновенным, а дей-
ствующим значением управляющего напряжения. Следовательно,
скорость и вращающий момент изменяются пропорционально изме-
нению управляющего напряжения прн условии, что его действую-
щее значение модулируется с частотой, меньшей несущей частоты.
По конструктивному исполнению двухфазные асинхронные элек-
тродвигатели различают: электродвигатели с ротором типа «беличья
клетка» и с пустотелым немагнитным ротором. Рассмотрим схему
конструкции ДАД с полым немагнитным ротором, электромехани-
ческая постоянная времени которого в среднем на порядок меньше
постоянной времени электродвигателя с ротором типа «беличья
клетка». Двухфазный асинхронный электродвигатель имеет два
статора (рис. 15.11, а). Внешний статор 1 набирают из штампован-
ных листов электротехнической стали, изолированных друг от друга.
В пазах внешнего статора уложены две обмотки 2 — возбужде-
ния щв и управления щу, сдвинутые в пространстве относительно
друг друга на 90° (электрических градусов). Магнитные оси обмо-
ток wy и wB для двухполюсной машины взаимно перпендикулярны.
Внутренний статор 4 также набирают из листов стали на цилнндрн-
463
ческом выступе 5 одной из подшипниковых крышек 9. Внутренний
статор уменьшает магнитное сопротивление на пути основного маг-
нитного потока, проходящего через воздушный зазор. Полый ро-
тор 3, отштампованный из немагнитного материала, размещают
в воздушном зазоре. Торец ротора жестко укрепляют на валу 8
электродвигателя; вал свободно вращается в подшипниках 6, уста-
новленных в крышках 9, которые укреплены на корпусе 10. Концы
обмоток выведены на клеммную колодку 7.
Подый ротор 3 имеет малую массу и, следовательно, незначи-
тельный момент инерции, что обеспечивает высокое быстродействие
ДАД с полым ротором (электромеханическая постоянная времени
составляет 0,01—0,15 с в зависимости от мощности электродвига-
теля).
Электрическая схема ДАД показана на рис. 15.11, б. Обмотка
возбуждения wB подключена к источнику питания переменного тока
(/) — Um sin &Д (несущей частоты). К обмотке и>у модулирован-
ное управляющее напряжение ну (/) той же несущей частоты под-
ведено с выхода управляющего усилителя. Как известно, максималь-
ную угловую скорость ротора получают при максимальном напря-
жении иу (0> если оно сдвинуто по фазе относительно (/) на ±90°.
Вращающее электромагнитное поле в воздушном зазоре будет кру-
говым при одинаковых амплитудах магнитных потоков, действую-
щих вдоль магнитных осей обмоток ьув, оуу, и эллиптическим, если
амплитуды магнитных потоков не равны друг другу. Изменение
направления вращения ротора (и вращающего момента) связано
с изменением фазы управляющего напряжения на 180°, что приво-
дит к изменению направления вращения поля.
Методы управления двухфазными асинхронными электродвига-
телями связаны со способом образования и изменения вращающего
магнитного поля. Из применяющихся на практике амплитудного,
фазового, пространственного и амплитудно-фазового управления
рассмотрим последний метод как обладающий рядом преимуществ.
Схема ДАД с амплитудно-фазовым (конденсаторным) управле-
нием показана на рис. 15.1? [231. Фазосдвигающий конденсатор С
464
Рис. 15.12. Схема ДАД с амплитудно-фазовым управ-
лением
и последовательно соединенная с ним
обмотка возбуждения щв подключены к
напряжению несущей частоты u~(f) =
— Um sin0 <оЛ На обмотку wy подается
управляющее напряжение несущей частоты
через регулятор (например, усилитель
переменного тока). Управление электро-
двигателем осуществляется изменением величины иу (/). Несмотри
на то, что фаза напряжения управления не изменяется (рамм« О
или 180° по отношению к напряжению возбуждения), при измене
нии uy (t) наблюдается одновременное изменение как величины,
так и фазы напряжения «в (/).
Такое же явление происходит и при изменении угловой скорости
ротора за счет изменения момента нагрузки при постоянном по ам-
плитуде напряжении управления, так как возбуждение £7В равно
геометрической разности £/~и напряжения на конденсаторе Uc, т. е.
UB = U~-UC.
Напряжение Uc при изменении управления иу (/) или угловой
скорости ротора изменяется вследствие непостоянства тока в цепи
возбуждения, который зависит от величины скольжения и коэф-
фициента сигнала, т. е.
t)c = -/7BXc.
Поэтому меняется по величине и фазе напряжение Uv на обмотке
возбуждения ДАД.
Круговое вращающееся поле формируется при условии UB =
== jUy, поэтому при выбранном значении С в цепи щв круговое поле
возможно только при строго определенном коэффициенте сигнала
a = и определенном значении скольжения 5. Обычно зна-
чение С, а также а выбирают так, чтобы обеспечить круговое поле
при пуске электродвигателя (S = 1). При другом напряжении
ну (t) и других режимах работы электромагнитное поле в воздушном
зазоре не будет круговым.
При амплитудно-фазовом управлении механические характе-
ристики ДАД являются наименее линейными по сравнению с дру-
гими способами управления. С уменьшением коэффициента сигнала
механические характеристики Q = фг (Л4вр) смещаются в сторону
меньших вращающих моментов и угловых скоростей при всех спо-
собах управления (рис. 15.13, а). На поле нелинейных механических
характеристик показано также семейство характеристик механи-
ческой мощности Рмех — <р2 (Мвр) на валу электродвигателя.
Вращающий момент и механическая мощность на валу ДАД
максимальные при прочих равных условиях при амплитудно-фазо-
вом методе управления, так как с увеличением угловой скорости
465
Рис. 15.13. Статические характеристики
а — механические характеристики — кривые
Кривые 4, 5, 6 (соответственно при £7^
ДАД-
1, 2, 3; характеристики мощности на валу —
- V х < U д); б — линеаризованные механические
характеристики'при малых £7^; 3 — const при £7^ < £7< ... < £7В; & — при больших
£7yi ₽=£ const при £7у6_;_ ^уП ~ £7В‘» е — характеристики холостого хода (кривая 1) н
короткого замыкания (кривая 2)
ротора увеличивается" напряжение на обмотке возбуждения, при
этом растет магнитный поток обмотки возбуждения и, следова-
тельно, вращающий момент на валу.
Мощность возбуждения — мощность, потребляемая цепью о>в
электродвигателя:
Л = £47вСО5фв,
где /в — действующее значение тока возбуждения; <рв — фазовый
угол между напряжением несущей частоты и током /в.
Мощность управления — мощность, потребляемая цепью
электродвигателя:
= (7у/у cos фу,
где /у = var — действующее значение тока управления; фу — фазо-
вый угол между напряжением и током в обмотке управления.
Наиболее высокий коэффициент мощности имеют ДАД с ампли-
тудно-фазовым управлением (cos ф = 0,85-?-0,95) вследствие нали-
чия конденсатора в цепи возбуждения. В отношении КПД электро-
двигатели с амплитудно-фазовым управлением занимают промежу-
точное положение между ДАД с амплитудным и фазовым управ-
лением. Самый низкий КПД имеют электродвигатели с фазовым
управлением ввиду значительной мощности управления независимо
от величины сигнала управления.
Врашрющий момент. Известно, что если при модуляции проис-
ходит процесс переноса спектра входного сигнала из низкочастотной
области в высокочастотную, то при демодуляции совершается пере-
нос спектра из высокочастотного диапазона в низкочастотный.
По отношению к модулированному входному напряжению и
выходному пусковому моменту, как функции времени, двухфазный
асинхронный электродвигатель является электромеханическим демо-
дулятором.
Действительно, пусть ток в обмотке возбуждения
<в (0 = lB sin O)0t, (15.27)
466
а ток в обмотке управления, модулированный гармонической функ-
цией управления cos й/ (причем й < со0), изменяется по закону
iy (О = -р-cos (<°о + й) cos (ш0 — £2) t. (15.28)
Токи, индуктированные в роторе от потоков возбуждения и уп-
равления, будут соответственно равны
iPB(O = MBsin((o(/ + 01); (15.29)
rpy (f) = k2 -^cos [(ш0 + Й)t + 02] К ±2- cos [(ш0 - Q)/ + 03], (15.30)
где kr, kt, k9 — коэффициенты пропорциональности; 01( 0г, 08 —
фазовые углы, близкие к 90° вследствие трансформаторного эффекта.
Пусковой вращающий момент на валу ротора электродвигателя
определяется из выражения
МВр(0 = /См[г'у(0^р»(0 — ^в(Ог'ру(О], (15.31)
где Дм — коэффициент взаимоиндукции между ротором и статором.
Если в выражении (15.31) подставить значение токов из урав-
нений (15.27)—(15.30), то получим окончательную формулу для
пускового момента электродвигателя
Мпуш< = {cos Qt \k± [/у1 + /уаJ sin 0r + k2Iyl sin 02 +
+ ^3/y2 sin 0S} + sin Qt {— kr [/yl — /y2] cos 0r + k2Iy2 cos 02 —
— sin 08) -J- &i/yi sin |(2co0 4~ Й) t -f- 0j] -f- (15.32)
+ krly2 sin [(2co0 — Й) t + 0i) — krIyl sin [(2co0 -^H + OaH-
+ Vy2Sin[(2coo + Q);+ 03]|.
Заметим; что составляющие Мпуск с высокими частотами (2со0 4-
4- й) и (2со0 — й) по величине незначительны и не способны вы-
звать механическое движение нагруженного вала электродвигателя.
Для небольших значений Й имеем
ky да k2 да kg, /у1 = /уj = 1 у3; 0j = 02 = 08 = 90 ,
тогда уравнение (15.32) упрощается:
М
пусн (/) = Лм^1/в/уСОЗЙД
что соответствует огибающей сигнала на входе электродвига-
теля.
Динамика двухфазного асинхронного электродвигателя. Рассмо-
трим работу ДАД с механической нагрузкой на валу, состоящей из
суммарного момента инерции J, вязкого трения, характеризующегося
коэффициентом св, и нелинейного момента трения Мтр. Система
467
уравнения электродвигателя при такой нагрузке в
форме имеет вид [23]
Uв = (Яв + LBp) Jlc 4-
Uу ~ (Яу 4~ ^уР) Ло 4“ Afjp/jpJ
(г 4~ 1р) 11р М ,р/1е 4~ (М212с 4~ И2Р) р0 = 0;
(г + 1р) /2р 4- M2pllc 4~ (Л1]/10 4- //1Р) рд = 0;
JP^ + cBPQ + Мтр sign рб = M2Ilpl2o — Mil2plle.
операторной
(15.33)
где Uy, UB — соответственно напряжение управления и возбужде-
ния; /10 и /2С — токи в обмотках возбуждения и управления; /1р
и Лр — токи в эквивалентных фиктивных обмотках ротора; 0 —
угол поворота вала ротора ДАД\ г, RB, Ry — активные сопротив-
ления эквивалентной роторной и статорных обмоток юв = и
оуу = w2, I, LB, Ly — соответствующие коэффициенты самоиндук-
ции; Mt, Мг — коэффициенты взаимоиндукции; J = Jp 4- Jnp. н —
суммарный момент инерции (сумма инерции ротора электродвига-
теля и приведенного к его валу момента инерции нагрузки).
Если электродвигатель симметричен; то в уравнениях (15.33)
Яв = Яу = Я; LB = Ly = L; Мг = М2 = М.
При условии, что активное сопротивление ротора велико по
сравнению с его реактивным сопротивлением, а также пренебрегая
сопротивлением связи между цепями статора и ротора, из системы
уравнений (15.33) можно получить следующее выражение для се-
мейства механических характеристик ДАД [231:
П______1 ]______________Мвр
Ui + U*y * K(Ul + U2y)>
(15.34)
где ю0 — круговая частота напряжения несущей частоты; UB и
Uy — действующие значения напряжений;
rk2^
К = —г; Р Ч'к-----постоянный коэффициент, зависящий от г;
Я(1+®2о^)
kp — MU', тр = Ur, R; тс = Ь/Я (здесь kp — коэффициент связи
между цепями статора и ротора, тр — эквивалентная электрическая
постоянная времени ротора, тс — электрическая постоянная вре-
мени обмоток статора).
Связь между переменными Q, Л1вр и Uy, устанавливаемая соот-
ношением (15.34), в общем случае нелинейная. Однако при Uy < UB,
т. е. при малых управляющих напряжениях, выражение (15.34)
можно преобразовать к виду
Q 2(00 ,,
W ив иУ
Мвр
ки1 ’
это линейное уравнение в отрезках соответствует подмножеству
механических характеристик при параметре Uy UB (Uy = const),
такое поле характеристик имеет р = const (рис. 15.13,6).
В общем случае коэффициент внутреннего демпфирования =
= ctg р электродвигателя постоянен и зависит от величины управ-
468
ляющего напряжения. Действительно, из выражения (15.34) следует,
что
Лдв = ~^ = Л(^ + ^). (15.35)
т. е. подмножество механических характеристик при значениях
соизмеримых с UB; имеет р const (см. рис. 15.13, в). Коэффициент
внутреннего демпфирования возрастает с увеличением управляю-
щего напряжения.
Из семейства механических характеристик, описываемых выра-
жением (15.34), нетрудно найти соотношения для характеристики
холостого хода Q = ((/,; Мн = 0) и короткого замыкания /Ипуск =
= /а (£/y; Q = 0):
2<р0£7в
Ul + Uy
Й4дуск — 2Ktt)ot/Bt7y,
(15.36)
соответствующие кривые показаны на рнс. 15.13, г.
Характеристика холостого хода определяет коэффициент пере-
дачи ДАД по скорости йЭдв =dQ/dUy,. а так как характеристика
Q] == /у (Uy, Л1Н = 0) в соответствии с первым выражением (15.36)
нелинейная, то кэяв — величина непостоянная. Наиболее существен-
ное уменьшение £,дв имеет место при больших значениях напряже-
ния иу и угловой скорости Q. При Uy < Um коэффициент &,дВ =
= <2auIUm =2aJUB = const.
По величине внутреннего демпфирования согласно формуле (15.35)
и’суммарному моменту инерции J может быть определена электро-
механическая постоянная времени нагруженного ДАД, также за-
висящая от уровня управляющего напряжения:
Т _ J J
(эдв к(1?в + бу)*
Если управляющее напряжение Uy изменяется во времени, то
электромеханическая постоянная Т также будет функцией t. При
этом увеличение Uy соответствует уменьшению Т. Это свойство
можно использовать для повышения быстродействия следящей си-
стемы с пропорциональной ОС (управляющее напряжение изме-
няется вместе с изменением ошибки). Для уменьшения электромеха-
нической постоянной времени Т и увеличения быстродействия необ-
ходимо иметь на время отработки рассогласования управляющее
напряжение максимальным. Это может быть реализовано путем
включения в цепь ОС САР нелинейного элемента, обеспечивающего
искусственное увеличение сигнала ошибки во время его отработки.
Передаточные функции двухфазного асинхронного электродви-
гателя. Вывод передаточной функции ДАД с инерционной нагрузкой
основан на системе уравнений (15.33) и следующих допущениях:
ив (/) = Um cos аД — напряжение несущей частоты (UB = L/m);
Uy (£) = a sin (coot + q>) — управляющее напряжение;
469
Рис. 15.14. Соединение несимметричного ДАД с транзисторным усилителем:
а — электрическая принципиальная схема; б — эквивалентная схема выходного каскада
усилителя (£» — индуктивность контура намагничивания; С — емкость, шунтирующая
обмотку Щу ЭДв-, ЛТранз — выходное сопротивление транзистора; Л1тр н Я2тр ~ омиче-
ские сопротивления первичной и вторичной обмоток Т4; ZB — полное сопротивление обмотки
приведенное к первичной цепи Т4; Lls и Д2в — индуктивность рассеяния обмоток Т4)
где амплитуда огибающей сигнала управления а Um, <р — фазо-
вый угол;
— влияние ЭДС вращения ротора на величину тока возбуждения
незначительно;
— электродвигатель симметричен, т. е. Л1р = 7?в =
= = Я и т. д.
— момент трения Л4тр = 0, а также коэффициент св =0.
Передаточная функция ДАД по огибающей входного напряжения
117 Q(s) — 1 2соо cos <р + s sin q>
^дад(З) —-у- , (10.0/)
~ 2JRl 2JRl
где Т = —2------ ==—2—~— электромеханическая постоянная вре-
Umkp'CpM UmrkpTp
меня нагруженного электродвигателя.
Если фазовый угол <р = 0, то выражение коэффициента пере-
дачи ДАД по угловой скорости £дад из передаточной функции (15.37)
совпадает с k3RB, полученным из характеристик холостого хода (15.36).
На рис. 15.14, а показана схема соединения выходного каскада
электронного усилителя мощности с несимметричным ДАД.
Предварительный каскад усиления, имеющий вход «вх (1), яв-
ляется усилителем напряжения (трансформатор Т1, транзистор VT1
и другие элементы). Оконечным каскадом является двухтактный
усилитель мощности на транзисторах VT2 и VT3. Для согласования
двухтактного каскада с однотактным каскадом усиления напряже-
ния используется трансформатор ТЗ, средняя точка вторичной
обмотки которого соединена с делителем У?1Д2 для подачи напря-
жения смещения на_базы VT2 и VT3. Трансформатор Т4 является
470
согласующим, его вторичная обмотка шунтируется конденсатором Су,
величина которого выбирается из условия компенсации индуктив-
ного сопротивления обмотки w? ДАД. Конденсатор С2, включенный
последовательно с обмоткой wB электродвигателя, обеспечивает
(разовый сдвиг на 90° между напряжениями управления и возбуж-
дения. Выпрямительное устройство усилителя собрано на элемен-
тах Т2, VD1, VD2 и С1.
Электронный усилитель имеет ограниченную выходную мощ-
ность, поэтому его рассматривают как источник питания с внутрен-
ним сопротивлением ZBH (s), отличным от нуля. Значительное по
величине сопротивление ZBH (s) может привести к существенному
изменению статических и динамических характеристик ДАД как
элемента, питающегося от этого источника.
Передаточная функция несимметричного ДАД, управляемого
электронным усилителем мощности, имеет следующий вид [23]:
W м — Q(s) — К Qis3 + + 1
W'' ' I (s) АУД (Ts-\- 1) -j-+ 1)
где /<уд — ^уст^уст — коэффициент передачи усилитель—электро-
двигатель по угловой скорости, зависящий от параметров ДАД
и усилителя; alt а-2 — постоянные коэффициенты; Т — электроме-
ханическая постоянная времени нагруженного ДАД; Т\ — электри-
ческая постоянная времени; — коэффициент относительного демп-
фирования.
Следует отметить, что цепь управления (см. рис. 15.14, а) обычно
настраивается на резонанс токов на несущей частоте, т. е.
г />„2 1 I ЮоЧТг
LoCfflo — 1 +
где значения Lo, С, а также т2 и т2 соответствуют эквивалентной схеме
усилителя мощности, нагруженного на обмотку w7 ДАД, (см.
рис. 15.14, б):
n*L9
1 яа/?1тр + Rt тр + Ry *
_ П^Ьа1 + 7-82 + Ьт с
2 тр -( Ri тр + Ry *
где п — коэффициент трансформации согласующего трансформа-
тора Т4.
Логарифмические частотные характеристики ДАД, соответствую-
щие передаточным функциям (15.37) при различных значениях фазо-
вого угла ср, приведены (на рис. 15.15.
Если частота изменения огибающей Q. полезного сигнала зна-
чительно меньше несущей частоты <оо. то фазовый угол <р влияет на
ЛАХ во всем диапазоне со, а на ЛФХ — только в области высоких
частот.
Электрический привод с ДАД в основном применяется в разно-
образных приборных (маломощных) следящих системах и автома-
тических регуляторах.
471
Рис. 15.15. Логарифмические частотные характеристики ДАД:
кривые 1 и 2 — ЛЧХ соответственно прн ф = 0 н ф == ±75°; кривые 3—5 — ЛФХ при
ф = —75°; ф = 0°; ф = -j-75e
15.6. СИНХРОННЫЕ ШАГОВЫЕ ЭЛЕКТРОДВИГАТЕЛИ
И ДИСКРЕТНЫЕ ПРИВОДЫ
Дискретный привод с шаговым электродвигателем и элек-
тронным управляющим устройством {коммутатором) является дис-
кретной исполнительной подсистемой частотного регулирования
с возможностью изменения частоты от нуля до максимальной.
Принцип действия и классификация [231. Шаговые электро-
двигатели (ШД) с электронным коммутатором осуществляют преоб-
разования унитарного кода в угол поворота или угловую скорость
вращения вала. Каждому импульсу управления соответствует пово-
рот вала на некоторый фиксированный угол — шаг электродвига-
теля, величина которого зависит от конструкции ШД и способа
коммутации его обмоток. Угловая скорость вращения и накоплен-
ный угол поворота вала ШД пропорциональны соответственно ча-
стоте и числу импульсов управления.
Функциональная схема дискретного электропривода приведена
на рис. 15.16, а. Электронный коммутатор имеет два входа (Вх.1
и Вх.2) для обеспечения реверса ШД. Схема электронного комму-
татора определяется числом управляющих обмоток ШД и включает
кольцевой реверсивный счетчик. Сигналы управления на входы ком-
мутатора поступают от программирующего устройства ЭВМ.
Отличительная особенность ШД от обычных синхронных элек-
тродвигателей — возможность вхождения в синхронизм из состоя-
ния покоя без скольжения, а торможения — без выбега ротора.
Поэтому ШД обеспечивает в рабочем диапазоне частот пуск, оста-
нов и реверс без потери информации, т. е. без пропуска шагов.
При изменении управляющих импульсов по требуемому закону ШД
работает в режиме слежения, воспроизводя с точностью до одного
шага сложное движение, заданное последовательностью импульсов.
При отсутствии управляющего сигнала на входе коммутатора ча-
472
к>та командных Импульсов равна нулю. В этом режиме ШД разви-
1..1СГ фиксирующий момент, «запоминая» конечные координаты угло-
i.i н о перемещения с точностью до долей шага.
По принципу действия электрические ШД различают трех типов:
нагнитоэлектрические, индукторные и реактивные. Рассмотрим реак-
швные ШД, которые получили наиболее широкое применение.
Из электротехники известно, что синхронными реактивными
шектродвигателями называют ЭДв, в . которых вращающееся маг-
нитное поле образуется только за счет магнитодвижущей силы ста-
к>ра. При этом полюса явнополюсного ротора не возбуждены,
а вращающий реактивный момент создается в результате упругой
|еформации магнитных силовых линий при рассогласовании маг-
нитных осей ротора и вращающегося магнитного поля статора [231.
Реактивные ШД — синхронные реактивные электродвигатели,
преобразующие командные импульсы в фиксированный угол поворота
вала (или фиксированное линейное перемещение штока—для ли-
нейных ШД).
Конструкция реактивного редукторного ШД с тремя обмотками
управления 3, установленными на шести полюсных выступах 2
статора 1, показана на рис. 15.16, б. Ротор 4 шагового электродви-
гателя — зубчатый, зубцовые деления 5 ротора и статора равны.
Зубцы ротора соосны с зубцами одной диаметрально расположенной
пары полюсных выступов ПВ1—ПВ6 и смещены на 1/3 зубцового
деления соответственно по и против часовой стрелки по отношению
к зубцам двух других пар полюсных выступов. При поочередном
переключении обмоток управления происходит поворот МДС ста-
тора на 60° и реактивный момент поворачивает ротор на х/3 зуб-
цового деления в положение наибольшей магнитной проводимости
относительно возбужденной пары полюсов, т. е. на угол, значи-
тельно меньший угла поворота МДС. При применении шеститактной
схемы управления величина шага ротора уменьшается вдвое.
Основные параметры и характеристики ШД. Работу ШД можно
характеризовать рядом параметров.
Рис. 15.16. Дискретный электропривод:
а — функциональная схема; ШД —- шаговый электродвигатель; УУ — устройство управ-
ления; Э/( — электронный коммутатор; ФУ — фазовые усилители; ИП — источник питания;
б — конструкция (я, к — соответственно начала и концы обмоток управления)
16 Солодовников В. В, и др.
473
Рис. 15.17. Принцип работы ШД:
а — статический синхронизирую-
щий момент Мссщд = F (6); б —
временные диаграммы; (t), ut (f),
us (t) — напряжения на обмотках
управления; 6 (0 — переходные
процессы по углу поворота, ротора
Величину шага определяют по формуле
аш = 3607(»myZp),
где п — коэффициент (п = 1 при раздельном
п = 2 при раздельно-совместном включении);
управления ШД; гр — число зубцов ротора.
В электрических градусах величину шага
360° гр 180°
«т ---------л —-----.
лтугр 2 л«у
включении обмоток,
ту — число обмоток
находят по формуле
(15.38)
Реактивные ШД можно изготовить с зубцовым делением до 2 мм,
поэтому шаг аш современных серийных ШД в соответствии с фор-
мулой (15.38) составляет несколько градусов (или долей градуса)
при небольшом диаметре ротора.
Статический синхронизирующий момент 7ИССШД = В (6) в функ-
ции 0 — угла поворота ротора — является реактивным моментом.
Он устанавливает ось ротора в согласованное положение с направ-
лением вектора МДС статора при соответствующих токах в обмотках
управления (рис. 17, а).
С увеличением частоты переключения обмоток" управления ШД
среднее значение ЛГССШЛ уменьшается. Последнее связано с тем,
что ЭДС самоиндукции в обмотках управления становится соизме-
римой с напряжением источника питания и ток в обмотках управ-
ления за время такта не успевает увеличиться до установившегося
значения. Это снижает величину результирующей МДС. <
Пусковой момент 7ИШДП определяется точкой пересечения С
исходной характеристики статического синхронизирующего мо-
мента ШД (кривая 1 на рис. 15.17, а) с характеристикой ЛГСсшд=:
— F (0), сдвинутой на один шаг в электрических градусах (штри-
ховая кривая 2).
Из рис. 15.17, а видно, что ШД с симметричными зубцами ста-
тора и ротора должен иметь минимум три обмотки управления
(кшэ — л/3) для того, чтобы его пусковой момент был отличен от
нуля (если, например, ту < 3, т. е. ту = 1 или ту = 2, пересе-
чение исходной и сдвинутой характеристик происходит на оси абс-
474
инее, где Afccran= О, т. е- пусковой момент равен нулю). Физически
ин объясняется тем, что шаг ашэ = л, если my = 1, и при переклю-
чении обмотки ротор останется в положении устойчивого равнове-
ня И т. д.
Устойчивость ШД — способность ротора занимать устойчивое
положение, соответствующее положению вектора результирующей
МДС статора, при каждом шаге вектора МДС.
Зоной статической устойчивости 0су является окрестность точки
\< гойчивого равновесия 0 на статической характеристике Л4ССШД =
F (0), из любой точки которой после снятия управляющего (или
возмущающего) воздействия ротор возвращается в устойчивую
ючку, равновесия, не проходя точек неустойчивого равновесия А
и В (см. рис. 15.17, а). Зону 0су статической устойчивости ШД
<• симметричными зубцами симметрично относительно точки устой-
чивого равновесия 0 определяют по формуле
поэтому в общем случае
Зоной динамической устойчивости ШД является окрестность
точки О на исходной характеристике статического синхронизирую-
щего момента, из любой точки которой ротор после окончания
переключения попадает в точку устойчивого равновесия О' новой
характеристики, смещенной на один шаг, не проходя точек неустой-
чивого равновесия А' и В' новой характеристики (кривая 2).
Зону динамической устойчивости ШД определяют в соответствии
с выражением
6ду =*» (1 " (1 4“ атэ‘ (1S.39)
Из выражения (15.39) следует, что в направлении движения. ро«
тора ШД с любым числом обмоток управления обладает запасом
устойчивости, превышающим величину шага; в обратном направле-
нни запас динамической устойчивости ШД может быть меньше
шага.
Частота приемистости ШД — частота следования управляю-
щих импульсов (унитарного кода), при которой ротор втягивается
в синхронизм с места без потерь шага. Частота приемистости прямо
пропорциональна динамической добротности ШД, под которой по-
нимают отношение максимального синхронизирующего момента
к моменту инерции ротора, и обратно пропорциональна величине
шага, т. е.
f — Л4шах/ J.
Статической ошибкой называют угол рассогласования оси ро-
тора нагруженного ШД в режиме фиксированного останова под
током по отношению к направлению вектора МДС, который может
быть в пределе равен отрицательной части зоны 0₽г Динамической
16* 475
ошибкой называют мгновенное значение угла рассогласования дви-
жущихся вектора МДС и оси ротора, обусловленного наличием на-
грузки и свободных колебаний ротора и равного в пределе отрица-
тельной части зоны динамической устойчивости. Следовательно,
при повышении устойчивости ШД за счет увеличения числа обмоток
управления статическая и динамическая ошибки ШД будут воз-
растать и. могут значительно превысить величину шага, что неже-
лательно. ... ............................ ...
Устройство управления ШД переключает ток в разных обмотках-
* в определенной последовательности в момент поступления очеред-
ного управляющего импульса. В состав устройства управления входит
электронный коммутатор и т транзисторных (или тиристорных)
; файовых усилителей мощности (см. рис. 15.16, а, т — число фазовых
обмоток ШД).
Электронный коммутатор осуществляет управление фазовым»
; усилителями, включенными в обмотки ШД, и обеспечивает заданную
последовательность их переключения без потери информации при
вращении электродвигателя в обоих направлениях. Кроме того,
схема обеспечивает включение обмоток ШД на длительный интервал
при остановке. Электронные коммутаторы изготавливают на основе
.кольцевого реверсивного счетчика и дешифратора. На рис. 15.17, б
приведена временная диаграмма работы дискретного электропривода
с 3-тактным коммутатором.
Усилитель мощности выполняет следующие функции: форсиро-
вание Тока фазы при включении, поддержание тока при увеличений
частоты и дефорсирование обмотки. Форсирование и дефорсирбванйе
необходимо, так как электрическая нагрузка — обмотка ШД
представляет собой реактивную £7?-цепь. Фазные . обмотки
ШД коммутируются в различные моменты времени, поэтому
каждая обмотка имеет отдельный усилитель мощности (см>-
рис. 15.16, а).
Если управляющий импульс переключает обмотки управления
в тот момент, когда ротор в процессе качания относительно точки
устойчивого равновесия 0 (см. рис. 15.17, а) отклонился, например,
в сторону, обратную направлению вращения (за точку Д'), то ротор
оказывается вне зоны устойчивости относительно новой характе-
ристики ЛГссшд = F (9)> смещенной на один шаг «вперед». При этом
ротор повернется в направлении «назад», т. е. происходит опрокид
давание, или сбой ШД. Наиболее опасным в этом отношении является,
режим холостого хода, когда амплитуда свободных колебаний ротора
максимальна и может достичь величины шага аш. Работа Д1Д без
Сбоев во всех режимах, включая холостой ход, обеспечивается в том
случае, если отрицательная часть зоны динамической устойчивости
будет не меньше величины шага Ощ. Последнее условие выполняется
яру работе реактивного ШД с тремя обмотками управления по 6-такт-
схеме, В этом случае одновременно включается то одна, то две
обмотки управления (и = 2). Реактивные ШД с числом обмоток
управления четыре и более работают устойчиво без удваивания такт-
ности схемы,
476
Дискретный электропривод применяют в системах программного
управления движением. Наиболее широко дискретные приводы (ДП)
применяют в системах с числовым программным управлением стан-
ками (ЧПУ). Современный ДП, выполненный на базе микроЭВМ
с применением интегральных микросхем, обеспечивает работу без
сбоев. Поэтому привод строится по разомкнутому циклу, он имеет
высокую точность и быстродействие при относительно простой кон- .
струкции.
15.7. ЛИНЕЙНЫЕ ЭЛЕКТРОДВИГАТЕЛИ И ПРИВОДЫ
Линейные электрические исполнительные устройства соле- .
ноидного типа применяют в системах магнитных дисковых накопи-
телей цифровых ЭВМ для записи и считывания информации.
Линейные электроприводы, выполненные на их базе, относятся
к классу быстродействующих автоматических устройств.
Быстродействующим приводом называют привод, в котором
характеристики элементов и связи выбраны так, что определенного
вида процесс перехода из одного равновесного состояния в другое
протекает с требуемой точностью за наименьшее время при заданных'
ограничениях на параметры привода. К последним относятся, на-
пример, определенные или допустимые значения линейной скорости
или ускорения, мощность энергоносителя и др.
Функциональная схема линейного электрического привода (ЛЭП).
Схема ЛЭП приведена; на рис. 15.18, а, б. Устройство управления
с программатором У У Пр, посылая к накопителю адрес АТ требуе-
мого цилиндра, начинает его поиск. Сравнивающее устройство СУ
сравнивает этот адрес с действительным адресом А, который форми-
руется датчиком адреса цилиндров (ДАЦ). Код ошибки G£, равный
числу цилиндров, на которые должны переместиться магнитные го-
ловки; с помощью дешифратора Дш преобразуется в аналоговое-
напряжение и подается на вход усилителя тока УТ. Напряжение
с выхода УТ управляет скоростью линейного электродвига-
теля (ЛЭДД Для улучшения Динамических свойств ЛЭП исполь-
зуется тахометрический датчик, напряжение с выхода которого
усиливается усилителем У и подается на второй вход УТ.
Основные динамические свойства ЛЭП могут быть определены
двумя показателями — точностью и быстродействием. Точность
(или обратная величина — ошибка позиционирования) ЛЭП оп-
ределяется инструментальными погрешностями привода и его эле-
ментов.
Быстродействие ЛЭП зависит от мощности источника питания,
закона подключения энергоносителя к линейному электродвига-
телю и вида связи, обеспечивающих управление подкдюченЙЙ.
источника энергии в процессе перемещения подвижного элемёнтаЛЗ^г
из одного равновесного положения в другое.
Устройство и принцип действия ЛЭД. Устройство ЛЭД пока-
зано на рис. 15.18, а. Двигатель состоит из цилиндрического cfa-
тора 1, представляющего собой постоянный магнит 2, выполненный,
№
a)
Рис. 15.18. Линейный электропривод накопителя на магнитных дисках:
а — функциональная схема; б — устройство ЛЭД\ х^ — расстояние между информаци-
онными дорожками двух соседних цилиндров
в виде стакана, и цилиндрической катушки 4, линейно перемещаю-
щейся в воздушном зазоре 3. Катушка имеет выводы 4, соединяющие
ее с электронным блоком управления. С катушкой жестко соединен
шток и рабочая каретка 5 накопителя, перемещающиеся на вели-
чину
Принцип действия ЛЭД соленоидного типа основан на взаимо-
действии сильного магнитного поля, создаваемого постоянным
магнитом 2, с импульсами тока, протекающими в цилиндрической
катушке 4, 10 — электронный блок управления.
Из электротехники известно, что сила, создаваемая соленоидом:
РСОЛ = К.Ди s ’
где 1Я — ток в катушке; т — масса подвижных частей; Kh k —
коэффициенты пропорциональности,
Движение нагруженной катушки с постоянным линейным уско-
рением поддерживается за счет подачи в катушку токовых импульсов,
полярность которых может изменяться. Импульсы положительной
полярности разгоняют катушку, а импульсы отрицательной поляр-
ности осуществляют ее торможение. Амплитуда и время приложения
токовых импульсов зависят от расстояния (количества цилиндров),
на которое должна переместиться катушка. Характер сигнала управ-
ления всегда априорно известен.
Форму переходного процесса катушки ЛЭД с механической на-
грузкой ZMex (s) можно выбирать, исходя из различных условий.
Например, условия, при которых не допускается превышения линей-
ных ускорений или замедлений в процессе перемещения каретки;
необходимы кратковременный форсаж и резкое торможение, а также
обеспечение определенного характера переходных процессов и т. д.
Устройство и динамика ЛЭП (см. рис. 15.18, б). Основными
элементами линейного электрического привода магнитного накопи-
теля ЭВМ являются: ЛЭД (1—4), рабочая каретка 5, электронное
устройство управления перемещением и позиционирования маг-
нитных головок. Подвижный элемент ЛЭД жестко соединен с рабо-
чей кареткой, включающей специальный кронштейн, на котором
укреплены голрркц 7 устройства Записи И считывание
478 ' . I..
па диски 8. Точное направление Перемещения каретки 5 обеспечи-
вается прецизионной направляющей 6. Каретка контактирует с нап-
равляющей в трех точках опоры. Три точки опоры обеспечивают
минимальное трение и наименьший боковой зазор при движении
каретки. Каждая опора имеет два прецизионных подшипника, кон-
тактирующих с верхней и боковой поверхностями направляющей.
Пакет магнитных дисков накопителя установлен на шпинделе 9,
вращающемся с угловой скоростью Q.
Управление быстрым перемещением каретки и точное удержание
магнитных головок на рабочей дорожке заданного цилиндра осуще-
ствляется специальным электронным блоком ЭБ. ЛЭП выполняет
операции в режиме позиционирования или в линейном режиме.
Режим позиционирования необходим для грубого, но быстрого пере-
мещения рабочей каретки от исходного положения до момента, когда
расстояние х до заданной дорожки равно расстоянию хц, затем ЛЭП
переходит в линейный режим. Линейный режим обеспечивает пре-
цизионное позиционирование каретки и удержание магнитных голо-
вок на дорожках заданного цилиндра.
Когда магнитные головки вводятся в пакет дисков, они стремятся
к соприкосновению с поверхностями дисков. Воздушный поток,
вызванный вращением пакета с большой угловой скоростью Q,
является причиной «плавания» головок над рабочей поверхностью
магнитных дисков.
Основные технические требования, предъявляемые к линейному
электрическому приводу магнитного накопителя:
высокое быстродействие при переходе из исходного состояния
к требуемому цилиндру (рабочей дорожке);
высокая точность установки и удержания блока магнитных голо-
вок на данном цилиндре;
отсутствие колебательности в законе перемещения катушки ЛЭД
вместе с рабочей кареткой.
Рассмотрим один из вариантов построения быстродействующего
ЛЭП, основанный на поддержании старшей производной в течение
всего переходного процесса на предельных значениях. Такое уп-
равление является квазиоптимальным ПО, 22].
Предположим, что динамика ЛЭП описывается уравнением
тх + свх = F (х; х), (15.40)
где F (х; х) — нелинейное управление, подлежащее определению,
при ограничении | F (х; х) | < 1; т— масса подвижных частей
ЛЭП; св — вязкое трение.
Привод поддерживает линейное ускорение нагрузки на предель-
ном значении
х — xmax== const.
Это можно реализовать, если уравнение движения ЛЭП будет иметь
вид
тх = +С = const, (15.41)
479
Рис. 15.19. Динамика линейного электропривода:
а — фазовый портрет в координатах р; ц; б — временные Диаграммы: I, 2, 3 — кривые
х (/), х W, х (t)
где знак «минус» соответствует участку разгона каретки, если на-
чальное отклонение и линейная скорость привода положительны,
т. е. х0 > 0, х0 > О, а знак «плюс» — участку торможения.
Функция управления в соответствии с уравнениями (15.40)
и (15.41)
Е(х; х) = + С — свх. (15.42)
Дважды интегрируя уравнение (15.41), найдем
х = (15.43)
х = х0х0/+ ^Д2. (15.44)
Если исключить из уравнения (15.44) время t и ввести обозначе-
ние х = у, получим уравнение интегральных кривых
У ~ Уо — Н—~ (х ~ хо)>
т. е. на фазовой плоскости х, у изображающая точка при квазиоп-
тимальном управлении должна перемещаться по участкам парабол.
Цель управления — подойти к положению равновесия за мини- -
мальное время. Поэтому фазовый портрет нужно построить таким
образом, чтобы фазовые траектории на участке торможения каретки
приходили в начало координат плоскости. Такое построение при
положительных начальных отклонениях х0 > 0, х0 = 0 показано
на рис. 15.19, а. Фазовые кривые В2А2О, В3А3О, при изме-
нении относительной величины регулируемой переменной р харак-
теризуют динамику системы.
Временные диаграммы соответствующих процессов х Ц), х (t)
и х (/) изображены на рис. 15.19, б. Диаграммы построены по урав-
нениям (15.41)—(15.44) при следующих начальных условиях: х0 =
= хотах, хо = 0 — на участке разгона каретки ЛЭД-, х0 = х2,
х0 = х2 — у2 — на участке торможения, где х2, у2 — координаты
точки А2 (см. рис. 15.19, а).
480
Из выражений (15.41) и (15.42) следует, что для поддержания
переменной х на пределе необходима дополнительная затрата энер-
гии, чтобы компенсировать линейно изменяющуюся на каждом
участке движения диссипативную силу свх. Так как мощность источ-
ника ограничена | F\ < 1, то и линейная скорость х, при которой F
изменяется по закону (15.42), будет ограничена по модулю. Часть
полезной силы, которая компенсирует свх, обозначим через Мп
(п > 1). Тогда С = 1 — Мп. Учитывая в выражении (15.42) знак
минус перед С и подставляя F = —1 и С = 1 — 1/п, найдем мак-
симально возможную скорость перемещения каретки
I *max I = Л77 ' (15.45)
Ограничение скорости по модулю отображается на фазовой плос-
кости полупрямой Д20 (рис. 15.19, а). Следовательно, при началь-
ных отклонениях х0>х01МХ переходный процесс не будет опти-
мальным.
Найдем выражение для х2, используя уравнение интегральных
кривых:
х2 = т/[2с£п (п - 1)].
Учитывая симметрию траекторий на участках разгона и тормо-
жения относительно вертикальной прямой х = xt (i = 1, 2, ...),
определим
х0тах = 2х2 = т/[сйп(п— 1)]. (15.46)
Суммарное время переходного процесса ts = 2t'o при любых
| х01 < Л'о щах, где t'o — время прохождения изображающей точки
по участку разгона.
Из уравнений (15.45) и (15.46) окончательно найдем
tz = 2t0^=2 У^х0.
Аналогично можно рассмотреть второй вариант управления ЛЭП,
при котором функция F (t) имеет релейный характер. Можно пока-
зать, что переходный процесс в таком линейном приводе будет
оптимальным, так как в этом случае источник энергии подключается
к ЛЭД релейно при разгоне и торможении.
15.8. ЭЛЕКТРИЧЕСКИЙ ЦИФРОВОЙ СЛЕДЯЩИЙ
ПРИВОД С ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА
Структурная схема типового электрического цифрового
следящего привода (ЭЦП) многоканальной системы управления пока-
зана на рис. 15.20, а.
Входной сигнал gBX (пТ) — цифровой многоразрядный код, харак-
теризующий требуемое угловое положение объекта управления.
Эффект квантования сигналов по времени на схеме представлен
ключом с мгновенным замыканием; такт замыкания ключа Ткв = Т.
Цифровой сигнал рассогласования eg (пТ) поступает на ЦАП,
481
Рис. 15.20. Электрический
цифровой следящий при-
вод:
а — структурная схема; 7V —
нелинейный элемент(усили-
тель мощности); б — схема
в переменных состояния;
в — статическая характери-
стика нелинейного элемента
являющийся экстраполятором нулевого порядка с запоминанием
на такт квантования Т. Передаточная функция ЦАП
^цап(*) = ^Чап(17 е"Г)-.
Непрерывная часть привода состоит из безынерционного усили-
теля мощности, имеющего статическую характеристику с насыще-
нием, и моментного электродвигателя постоянного тока, нагружен-
ного на чисто инерционную механическую нагрузку.
Передаточная функция непрерывной части привода
1Fh(s) =
^УДР
s (Гэм5 + 1)
где йудр — передаточный коэффициент усилитель—электродвига-
тель—редуктор; Тж — электромеханическая постоянная времени
привода.
1 На выходном валу привода установлен многоразрядный АЦП
угол-код, коэффициент преобразования которого kyK. Преобразова-
тель угол-код формирует код gBllx (пТ), пропорциональный угло-»
вому положению вала авых. Пренебрегая эффектом квантования
по уровню (так как шаг квантования по уровню соизмерим с задан-
ной ошибкой регулирования), преобразуем структурную схему
привода к виду, показанному на рис. 15.20, б. Здесь /С =
= ^цап^удр^ук — статический коэффициент привода при разомкну-
той ОС. Характерной особенностью цифрового привода является
нелинейное звено N с характеристикой насыщения, приводящее
к ограничению фазовых переменных системы.
Исследование переходных процессов в цифровой системе с нели-
нейной характеристикой типа насыщения при значительных по мо-
дулю рассогласованиях нельзя выполнить частотными методами,
изложенными в параграфах 5.2, 5.3. Анализ процессов в нелинейной
системе выполним методом переменных состояния, рассматривая
эффект нелинейного преобразования сигнала рассогласования как
482
Мгновенное изменение статического коэффициента передачи системы
на каждом такте квантования.
Введем следующие обозначения переменных привода: gBX (пТ) —
ступенчатая функция; гп1 (пТ) и т2 (пТ) — сигналы соответственно
на входе и выходе нелинейного элемента (НЭ): хх (пТ) — авых (пТ\,
х2 (пТ) = авых (пТ). Не нарушая общности, допустим, что К —
— 1,0; Тэм = 1,0 с; Ткв — 1,0 с.
Схема в переменных состояния ЭЦП приведена на рис. 15.20, б,
статическая характеристика нелинейного элемента — на рис. 15.20, в.
Предположим, что искомой вектор-функцией является выраже-
ние х = |хх; х2[т, а расширенный вектор исследуемой схемы
V = | ёж, Х^Х2- |т,
где т — знак транспонирования.
При нулевых начальных условиях и управляющем воздействии
й'вх (0) = 0, (пТ) = 2,0 запишем расширенный вектор системы
в момент t = 0:
v (0) = ] 2; 0; 0; 0; 0 |т.
Вычисление переходных процессов в цифровом следящем приводе
по дискретным значениям компонент вектора состояния. В качестве
численного метода определения переходных процессов в системе
по дискретным значениям компонент вектора v (пТ) воспользуемся
методикой переменного (дискретного) коэффициента передачи, осно-
ванной на аппроксимации сигналов прямоугольниками Эйлера
116, 26].
Определим матрицу квантования Т следящего привода из сле-
дующих уравнений (см. рис. 15.20, б):
WynP (^^+) WynP )> • (15.47)
хх («Т+) = хх (пТ-); х2 (яТ+) = х2 (пТ-); m (пТ+) = (пТ+) = цупр (пТ+) — хх (пТ ),
поэтому “ 1 0 0 0"
0 1 0 0
Т = 0 0 1 0 • (15.48)
_1 — 1 0 0_
В’уравнениях (15.47) переменные цупр (/), хх (Z), х2 (Z), tn it) =
= tn1 (t) в соответствующих дискретных точках t = пТ опреде-
ляются двумя значениями: цудр (пТ~), хх (пТ~) [И т. д.—слева;
иупр (пТ+), хх (пТ+) и т. д. — справа относительно ;рассматриваемой
точки пТ.
Расширенный вектор v в момент t — 0 по условию задачи
v (0~) = v (/0) = [2, 0; 0; 0; 0]т.
(15.49)
483
Общий вид расширенной матрицы перехода следящего привода
1 0 0 0
0 1 1 - е->- (X — 1 е (в)
®w= о о е-х. (1 — e~z) kN (П) ’ (15.50)
.0 0 0 1
а так как X = Ткв = 1 с, то матрицу (15.50) можно записать в виде
1 0 0 0
0 1 0,632 0,368Xw (п}
Ф (Ткв) = Ф (kN (п)) = 0 0 0,368 0,632Xw (Л1) ’ (15.51)
0 0 0 1
где kN (П) — мгновенный коэффициент передачи нелинейного эле-
мента N на п + 1-м периоде (такте) прерывания (в момент t = пТ),
определяемый в виде отношения сигналов на выходе и входе эле-
мента N:
<15И>
Для иллюстрации вычислительного алгоритма выполним сначала
несколько элементарных рекуррентных процедур в соответствии
с известными матричными выражениями:
v (пТ+) = Tv (пТ~); (15.53)
v (/ГГ1Т-) = Ф (Г) v (пТ+). (15.54)
Первый период прерывания. Используя выра-
жения (15.53), (15.48) и (15.49) при п = 0 и нулевых начальных усло-
виях, имеем
v (0+) = Tv (0~) = [2;0; 0; tn1 = 2,0]т,
так как
(0+) = цупр (0+) — лу (0+).
Мгновенный коэффициент передачи нелинейного элемента (НЭ)
в соответствии с (15.52) и его статической характеристикой: т2 (0) =
= Л! = 1, так как т1 = (0+) = 2,0
^V(0> = 5^W = ()’5-
Используя матрицу (15.51), определим расширенную матрицу Ф(&м (о>)
для 1-го периода прерывания при ^(0) = 0,5:
~ 1 0 0 0 ~
0 1 0,632 0,184
Ф (kN (0)) = 0 0 0,368 0,316
_0 0 0 1
484
Получим расширенный вектор состояния при t = Т~
v (Т_) = Ф (^v (о>) v (0+) = [2,0; 0,368; 0,632; 2,0]т.
Второй период прерывания, п = 1. Расширен-
ный вектор состояния системы при t = Т+
v(Т+) = Tv(Т-) = [2,0; 0,368; 0,632; m1 = l,632]T.
Определим мгновенный коэффициент передачи нелинейного эле-
мента
kN (1) = т1(Т+) = 1,632 ==0>6)2-
Расширенная матрица перехода Ф (kN щ) в соответствии с матри-
цей (15.50):
-1 0 0 0
Ф (kN (1)) = 0 1 0,632 0,225
0 0 0,368 0,387
• _0 0 0 1
Расширенный вектор состояния при t = 2Т
v(2T-) = O(A:v(i))v(T+) = [2,0; 1,135; 0,864; 1,632]т.
Третий период, прерывания, п = 2, расширен-
ный вектор при t = 2Т+
v (2Т+) = Tv(2T") = [2,0; 1,135; 0,865; m, = 0,865|т.
Мгновенный коэффициент передачи элемента N соответствует
мгновенному положению рабочей точки на линейной части статиче-
ской характеристики, т. е.
/П2 _ 0,865 = 1,0.
п w (2Т+) 0,865
Вычислим матрицу перехода Ф (kN ру)'.
"1 0 0 0 “
Ф (kN (2)) — 0 1 0,632 0,368
0 0 0,368 0,632
0 0 0 1
Расширенный вектор состояния системы при t = ЗТ
v (ЗТ") = Ф (kN (2)) v (2Т+) = [2,0; 2,0; 0,865; 0]т и т. д.
Аналогичным образом могут быть вычислены соответствующие
компоненты расширенного вектора состояния при п = 3, 4, 5, ..., ш
(где tn определяется временем затухания переходного процесса
в исследуемом цифровом следящем приводе).
На рис. 15.21 приведены переходные функции лу (t) следящего
привода с усилителем, имеющим зону насыщения, вычисленные
485
Рис. 15.21. Переходные функ-
ции ЭЦП-.
1 — 3 — кривые Xi (/),’’вычислен-
ные соответственно при u =
= 2,0; 1, 5; 1,0 У Р
Рис. 15.22. Схема программы
вычисления вектор-функ-
ции
в соответствии с рекуррентными процедурами при различных зна-
чениях gBX (пТ). Эффект ограничения фазовых координат становится
понятным при сравнении функций хх (t), соответствующих разным
по модулю входным воздействиям.
Схема программы вычисления векпгор-функции v (пТ) на ЭВМ
нелинейного цифрового привода в соответствии с выражениями
(15.52)—(15.54) показана на рис. 15.22. Вычислительная программа,
имеющая два цикла, состоит из следующих блоков.
Блок 1 — ввод исходных данных. Расширенная матрица пере-
хода Ф (&;v(n)) вводится в форме (15.51), а затем в цикле после вы-
числения kN{n} осуществляется следующее преобразование:
ф24 = 0,368£;v (п)> ф34 = 0,632£;v (п)-
Блок 2 — задание цикла с шагом Т = 1,0 с, п = 14-50,
предполагая при этом, что 50 тактов квантования достаточно для
наблюдения переходных процессов в исследуемом нелинейном при-
воде.
Блок 3 — вычисление значений компонент вектора v (пТ+).
486
Блоки 4, 5 и 6 — определение в цикле мгновенного (дискрет-
ного) на данном такте п коэффициента передачи kx (п) нелинейного
элемента с заданной характеристикой насыщения (рис. 15.20, в).
Блок 7 — определение матрицы Ф (&w(n)) для n-го такта кван-
тования, соответствующие элементы которой зависят от мгновен-
ного коэффициента передачи, вычисленном на п — 1-м такте.
Блок 8 — вычисление вектора состояния в конце n-го периода
прерывания, т. е. вектора v (пТ~) = v (м — 1Т).
Блоки 9, 10 й 11 — вывод на печать, оператор конца цикла,
стоп.
15.9. ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СИЛОВОЙ ПРИВОД
С ЗОЛОТНИКОВЫМ РАСПРЕДЕЛИТЕЛЕМ
Электрогид равлический силовой, привод — система авто-
матического регулирования, состоящая из электромеханической элек-
тронной подсистемы управления приводом и гидравлических элемен-
тов — источника энергии (насоса'), распределителя расхода и давле-
ния (гидроусилителя) и исполнительного двигателя.
Электромеханические (электромагнитные) преобразователи
(ЭМП), входящие в состав устройства управления приводом и пред-
назначенные для преобразования электрического сигнала в переме-
щение регулирующего элемента гидравлического распределителя,
подразделяют на ЭМП поступательного и поворотного действия.
В электрогидравлических силовых системах применяют' золотни-
ковые и струйные распределительные устройства, а также распре-
делители типа сопло-заслонка, клапанные и др.
Используемые в системах автоматики гидравлические двигатели
(ГД) классифицируют следующим образом [23]:
поступательного действия [дифференциального и недифферен-
циального типов: одинарные (рис. 15.23, а, б), составные
(рис. 15.23, в) I;
поворотного действия (рис. 15.24, а);
лопастные гидравлические двигатели (рис. 15.24, б);
гидродвигатели объемного регулирования (с пространственной
кинематикой) (рис. 15.25) и др.
Гидравлические двигатели иногда называют силовыми цилинд-
рами.
Особенности конструктивного исполнения перечисленных выше
ГД очевидны из рассмотрения соответствующих схем, показанных
на рис. 15.23—15.25.
Рассмотрим принцип действия, статические и динамические харак-
теристики электрогидравлического силового привода, наиболее рас-
пространенного в автоматике, гидравлическая часть которого со-
стоит из золотникового распределителя и одинарного силового
цилиндра поступательного действия. Подвижный элемент ЭМП по-
ступательного (или поворотного) действия соединен через соответ-
ствующее кинематическое звено с плунжером золотникового рас-
пределители,
487
Рис. 15.23. Конструкции ГД (силовых цилиндров поступательного действия):
а — одинарного дифференциального: б — недифференциального типа; 1 — цнлнндр; 2 --
поршень: 3 — шток; 4 — штуцер: 5,6 — уплотнение; в — составного ГД-. I — цилиндр:
2, 4 — штоки: рь р2 — статические давления, Nz, N3 — силы; Fif F2, F3 — рабочие
площади поршней
Совместное рассмотрение работы элементов электрогидравли-
ческого привода связано с удобством их описания в составе системы
регулирования при взаимодействии друг с другом.
Электромеханические преобразователи были рассмотрены выше
в параграфе 13.11. Семейство механических характеристик ЭМП
описываются уравнением (13.38), а передаточные функции — выра-
жениями (13.43) и (13.44).
Золотниковый распределитель. Золотниковым распределителем
(усилителем) называют прецизионное механическое устройство, со-
стоящее из специальной гильзы с дросселирующими окнами и плун-
Рис. 15.24. Конструкции ГД поворотного действия:
а — силовой цилиндр поворотного Действия (/ — тороидальный цнлнндр; 2 — перегородка;
3 — шток; 4 — шарнир: 5 — ребро жесткости; 6 — ось; 7 — струйный распределитель;
8 — приемник давления); б — лопастной ГД-. 1 — цилиндр; 2 — лопасть: 3 — уплотнение;
4 — вал; 5 — приемник давления; 6 — штуцер
488
Рис. 15.25. Гидродвигатель объемного
регулирования:
1 — блок поршней: 2 — поршень; 3 —
шток: 4 — люлька; 5 — выходной вал;
6 — карданный шарнир; — угол накло-
на люльки; Q — угловая скорость выход-
ного вала
жера, которое предназначено для перераспределения давления и
расхода рабочей жидкости (масла), поступающей по напорному тру-
бопроводу от насоса привода к распределителю. Для соединения
золотникового распределителя (ЗР) с насосом и двигателем с помо-
щью трубопроводов на гильзе распределителя имеются специальные
штуцера.
Преобразование энергии масла, нагнетаемого насосом, осно-
вано на дросселировании его потока через рабочие окна золотнико-
вого распределителя. Посредством изменения проходных сечений
окон при перемещении плунжера золотника относительно его гильзы
происходит изменение степени дросселирования и, следовательно,
регулирование расхода и давления масла. Золотниковые распреде-
лители являются устройствами с переменными дросселирующими
элементами. Дросселирование масла происходит на соответствую-
щих парах рабочих кромок распределителя; оно сопровождается
изменением скоростей частиц движущегося масла по величине и
направлению, т. е. потерей энергии на участке деформации потока
масла. Потери расхода и давления можно формально описать гид-
равлической проводимостью G дросселирующего окна, т. е. величи-
ной, обратной гидравлическому сопротивлению Y:
G=\/Y = pax -j/^2/p ,
где р = Q/Qo — безразмерный коэффициент расхода; Q и Qo — объ-
емные расходы соответственно реальной и идеальной, т. е. абсо-
лютно невязкой жидкости, протекающие через рассматриваемое
рабочее окно (гидравлическое сопротивление); а — ширина рабочего
окна (конструкция распределителя обеспечивает постоянство ве-
личины а); х — переменная длина проходного окна (величина х
изменяется при изменении положения плунжера золотника отно-
сительно его гильзы); р — плотность рабочей жидкости.
По числу пар кромок, образующих переменные гидравлические
сопротивления, золотниковые распределители подразделяются на
одно-, двух- и четырехкромочные [231. Конструкция четырехкро-
мочного золотника приведена на рис. 15.26, а.
Характерной особенностью ЗР являются наличие радиального
зазора 6 между внешним диаметром плунжера и внутреним диамет-
ром гильзы. Золотниковые распределители по типу перекрытия под-
разделяют на усилители с положительным, нулевым и отрицатель-
ным перекрытием. На рис. 15.26, б изображена схема ЗР с поло-
жительным перекрытием
Дх = (d — /ц)/2,
489
Рис. 15.26. Четырехкромочный золотниковый распределитель:
а — конструкция (/ — гильза; 2 — плунжер; 3 — напорный трубопровод; 4 — уплотни-
тельное кольцо; 5 — трубопровод; 6 — силовой цилиндр; 7 — шток с поршнем); б — схема
ЗР с положительным перекрытием
где d — диаметр напорного трубопровода; /ц — ширина пояска
плунжера, и с ненулевым радиальным зазором
6 = (dr с?пл)/2;
здесь — внутренний диаметр гильзы; dn3l — внешний диаметр
пояска плунжера.
Рассмотрим работу привода с четырехкромочным симметрич-
ным ЗР совместно с ГД поступательного действия, нагруженным
на упругую нагрузку (рис. 15.27).
Предположим, что золотник имеет нулевой зазор (6 = 0) и нуле-
вое перекрытие (Д% = 0), рабочая жидкость несжимаема; при /у = 0
плунжер золотника находится в нейтральном положении (х .== 0),
которому соответствует нейтральное положение силового поршня
(г = 0), соединенного с~нагрузкой. Кроме того, введем следующие
Рис. 15.27. Схема привода с четырехкромочным симметричным ЗР:
1 — золотниковый распределитель; 2 — гидравлический силовой цилиндр; 3 упругая
нагрузка; (рх н р9 — статические давления в 1-й и 2-й полостях цилиндра)
490
обозначения: рн — давление в напорной магистрали (рся — р1(ТМ —1
давление в сливном трубопроводе); а — ширина рабочего окна
золотникового распределителя; р и ц- плотность рабочей жидко-
сти и коэффициент расхода — постоянные величины при данном
температурном режиме привода; Др == Дрц = р± — р?. — перепад
давлений в цилиндре на силовом поршне (см. рис. 15.27); z — пере-
мещение поршня относительно нулевого положения; N — переста-
новочное усилие на рабочем штоке; су — коэффициент упругой
нагрузки.
Рассмотрим работу золотникового распределителя совместно
с ГД в режиме механического холостого хода (перепад давлений на
поршне Др = 0, т. е. pt = р2). Пусть под действием управляющего
сигнала плунжер золотника смещен на величину +%. В этом случае
объемный расход жидкости через левый штуцер ЗР в соответствии
с уравнением Бернулли
Qi = “j/A дЛ х == А (Рц _ Л) х> (15.55)
где Дрх — рн — рг — падение рабочего давления на входном окне
золотника, а расход через правый штуцер
Q2 = pa Др2 х = р.а ]/ -у(р2-Ратм)^ (15.56)
где Др2 = р2 — Ратм — падение давления на выходе ЗР.
Так как жидкость несжимаема, отсутствует механическое сопро-
тивление со стороны нагрузки (pt = р2), а гидравлические сопро-
тивления на входе и выходе золотника равны между_собой или
Дрх = Др2 (золотник симметричный), то' ~
Pi = Рг = (рн + Ратм)/2;
используя (15.55) или (15.56), получим
Q1 == Qz = ]/ 4-(Рн - Ратм) X = kqX, (15.57)
' Г f
где kQ = fit? у А (р„ — ратм) = const — коэффициент передачи золо-
тникового распределителя (постоянный для каждого типа рас-
пределителя и определенного режима работы).
Соотношение (15.57), называемое уравнением объемного расхода
золотникового распределителя в режиме холостого хода, является
линейной функцией перемещения х плунжера в пределах —хт с
< х < ф- хт. Расходная статическая характеристика ЗР показана
на рис. 15 28, а. При изменении знака направление потока жидко-
сти через золотник изменяется на противоположное.
Работа ЗР в режиме заторможенного штока гидравлического
двигателя = Q2 = 0) характеризуется мгновенным нарастанием
статического давления до рн — ратм в полости 1 или 2 силового
491
Рис. 15.28. Статические характеристики ЗР:
а — расходная Q (X) при Др — 0 и б — 0; б — по перепаду давлений Др (X) при Q = 0;
в — обобщенные Q (Др) при б — 0; г — обобщенные Q (Др) при ненулевом радиальном за-
зоре б; х, < х2 < х3 и т. д.
цилиндра в зависимости от знака перемещения плунжера золот-
ника, т. е.
Др = (рн — Ратм) Sign х. (15.58)
Действительно, в случае отсутствия движения жидкости пр и
х > 0
= Л = pi = pH;
^р2 == р2 Ратм == 0; == Ратм?
Р1 Ръ — Рн Ратм!
при X < 0
Др2 = Рн — Pi = 0; р2 = Рн,
&Р1 = Р1 Ратм О', Р1 = Ритм,
Р1~Р2 = —(Рн-Ратм)-
Статические характеристики по перепаду давлений, построен-
ные в соответствии с выражением (15.58), показаны на рис. 15.28, б.
Обобщенные статические или механические характеристики рассмат-
риваемого золотникового распределителя приведены на рис. 15.28, в.
Если предположить, что радиальный зазор 6 между плунжером
и внутренней поверхностью втулки золотника не равен нулю, то,
как показано в работе [231, уравнение обобщенных характеристик ЗР
имеет вид
Q = kQx — k^ptAp, (15.59)
где Q — рабочий расход, определяющий линейную скорость движе-
ния нагруженного штока исполнительного устройства; — пере-
даточный коэффициент (^Др = ^Ц0П31)-
Семейство обобщенных характеристик в соответствии с уравне-
нием (15.59) является семейством уравнений в отрезках (см.
рис. 15.28, г); например, для точки А имеем
Qa == Qxx Qo = kp^A &Q Ар ^РА-
492
Рис. 15.29. Статические характеристики ГД:
а — скоростная (кривая /); силовая (кривая 2): б — механические (обобщенные) Z (N)
при %1 < х2 < х3 и т. д., Л1Л2 — траектория рабочей точки А
Гидродвигатель. Статические характеристики гидравлического
двигателя определяют следующим образом:
N = F Ар — силовая характеристика ГД при z = 0 (здесь F—
полезная площадь поршня недифференциального ГД)-, z — Q/F —
скоростная характеристика ГД при Ар = 0.
Аналитическое выражение семейства обобщенных (механических)
характеристик нагруженного ГД аналогично уравнению (15.59), т. е.
z = kiX — kixN, (15.60)
где kz — коэффициент передачи по скорости; kzN — коэффициент
пропорциональности (kt = —р-', kiN = Умех) •
Силовая, скоростная и семейство механических характеристик
ГД при различных дискретных значениях х — перемещения регу-
лирующего элемента золотникового РРД показаны на рис. 15.29.
Временные уравнения, соответствующие силовой и скоростной
характеристикам гидродвигателя, имеют вид
N (t) = F Ар (t)-, z(t) = -p-Q(t).
Уравнение (15.60) или семейство механических (обобщенных)
характеристик ГД используют при выводе дифференциальных урав-
нений и передаточных функций нагруженного гидравлического
исполнительного привода.
Уравнения гидравлических приводов с распределителями струй-
ного типа, а также типа сопло-заслонка аналогичны (15.59) и (15.60).
15.10. ЭНЕРГЕТИЧЕСКИЙ РАСЧЕТ ИСПОЛНИТЕЛЬНЫХ
УСТРОЙСТВ И АВТОМАТИЧЕСКИХ ПРИВОДОВ
Основной задачей энергетического расчета привода САР
является выбор серийного исполнительного устройства (И У). Реше-
ние этой задачи является итерационным процессом, в результате
которого из числа серийных выбирается ИУ, удовлетворяющее тех-
ническому заданию (ТЗ). Задача решается в два этапа. На первом
' 493
Рис. 15.30. Кинематическая схема привода
этапе выбирают тип ИУ (электрическое, гидравлическое, пневмати-
ческое или комбинированное), который определяется следующими
факторами:
режимами работы и условиями эксплуатации ИУ (например, для
САР с значительной механической нагрузкой и с большими ускоре-
ниями предпочтительным является гидравлический привод и т. д.);
типом источников питания;
эксплуатационными условиями (областью рабочих температур,
допустимыми массой, габаритными размерами, надежностью и т. д.);
стоимостью и другими требованиями.
На втором этапе на основании ТЗ определяют связи между харак-
теристиками ИУ и нагрузкой, на основании которых устанавливают:
требуемый вращающий момент (перестановочное усилие);
угловые (линейные) скорости и ускорения;
мощность И У (привода);
оптимальное передаточное число между двигателем и механи-
ческой нагрузкой.
Для правильного выбора ИУ требуется знание характеристик
нагрузки или объекта регулирования (см. параграфы 15.2 и 15.3).
Например, для силового привода вращательного действия необхо-
димо знать: момент инерции нагрузки и всех соединенных и вра-
щающихся с ней частей, моменты трения, внешний возмущающий
момент, максимальные значения перемещения, угловые скорости и
ускорения нагрузки и т. д. Задача заключается в том, чтобы выбрать
электродвигатель соответствующей мощности, обеспечивающий пе-
ремещение механической нагрузки, заданной величинами 7Н, Л4СТ,
с определенной скоростью QH и ускорением Йн. На основании ис-
ходных данных необходимая мощность ИУ и оптимальное переда-
точное число редуктора могут быть получены в результате сле-
дующего расчета (см. кинематическую схему рис. 15.30).
Необходимую мощность ЭДв определяют по формуле
РМех = ^аи+(-^ + ЛДВ^йЛ, (15.61)
где Рмех — требуемая механическая мощность ЭДв; Мст — стати-
ческий момент, определяемый статическим трением и несбаланси-
рованностью нагрузки; JH — момент инерции нагрузки относи-
тельно ее оси вращения (включая приведенный момент инерции
494
Мст Jн^н
/ эдв^н
опт
силового редуктора); /9ДВ — момент инерции якоря ЭДв-, 1Р пере-
даточное число редуктора; т]р — КПД редуктора; йн, QH — угловая
скорость и ускорение вала нагрузки.
Неизвестными в формуле (15.61) являются требуемая мощ-
ность Рмех, момент инерции электродвигателя Л,дв и передаточное
число fp. Если ввести дополнительное условие на вращающий мо-
мент Л1вр ЭДв в зависимости от величины ip и исключить два неиз-
вестных параметра 1Р и /Эдв в выражении (15.61), то можно опре-
делить мощность ЭДв по заданным требованиям.
Из соотношения (15.61) вращающий момент электродвигателя
при Т] = 1
Мвр = 4^+ (4^+/эдл)ян. (15.62)
Далее определим число /р, при котором необходим минимальный
момент на валу электродвигателя для получения заданного углового
ускорения вала нагрузки. Продифференцировав выражение (15.62)
по ip и приравняв результат нулю, получим
<Швр Мст Jи^п I т А п
"Л7 —2 —2 1- «'эдв^н —
F р опт р ОПТ
Из этого равенства определим оптимальное передаточное число
редуктора _____
(15.63)
Подставляя выражение z'ponT из формулы (15.63) в исходное соот-
ношение (15.61), найдем
Р мех — 2 (A4CTQ„ -j- J HQHQH).
По каталогу выбираем серийный электродвигатель, мощность кото-
рого равна или несколько больше Рмех. Зная паспортное значе-
ние 7адв для выбранного электродвигателя, по формуле (15.63)
находим передаточное число 1Р.
Выбранный электродвигатель, удовлетворяющий ТЗ по мощно-
сти, может не удовлетворять требованиям по развиваемому ускоре-
нию или скорости. Из соотношения (15.62) следует, что ускорение
перемещения нагрузки и Л4вр при выбранном zp однозначно свя-
заны, поэтому проверку следует проводить по моменту и угловой
скорости.
Полагая, что механическая мощность выбранного -лектродви-
гателя равна требуемой мощности, можно записать
*^вр. номОэдв. ном = ^TpQH тах^'р опт,
где Мвр. ном и £2адв. ном — номинальные момент и.угловая скорость ЭДв
(паспортные значения); QHtnax— максимальная угловая скорость
нагрузки.
При этом возможны два случая:
1. Л1вр, крм <: МРр и Пэдв, ном шах/р одг.
495
Известно, что у современных электродвигателей постоянного
тока пусковой момент Л4Пуск достигает в среднем 10 Л1адв.Ном, а у
электродвигателей переменного тока Млуск равен 3 Мдв.ном. По-
этому, если при проверке получим, что для электродвигателя по-
стоянного тока Л1пуск = 10А1Вр.Ном > МВР, а для электродвига-
теля переменного тока А4пуск = ЗЛ4вр.Н0М > Л4вр, то такие элек-
тродвигатели будут удовлетворять всем поставленным техническим
требованиям.
2. А1вр. ном Л1вр, ^эдв. мом -^и тах^'р опт•
В этом случае выбранный электродвигатель не сможет обеспе-
чить заданную угловую скорость вращения нагрузки Йнтах. Поэтому
необходимо выбрать другой электродвигатель и изменить переда-
точное число редуктора, которое найдем из выражения /р1 =
“эдн. max
так, чтобы выбранный ЭДв с измененным передаточным числом си-
лового редуктора /р1 обеспечивал заданную угловую скорость.
Рассмотренная итерационная процедура энергетического расчета
может быть алгоритмизирована для ЭВМ.
ГЛАВА 16. СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
Наиболее рациональным и перспективным подходом при
проектировании САР является модульный принцип, основанный на
применении систем (рядов) унифицированных элементов автоматики".
датчиков первичной информации, измерительных, преобразующих,
усилительных, корректирующих и исполнительных устройств,
а также управляющих микро-ЭВМ. Унифицированные элементы или
модули должны соединяться между собой и обеспечивать оператив-
ное и экономичное проектирование разнообразных САР и регулято-
ров для большого класса технологических и других объектов [7].
В данной главе рассматривается ряд САР промышленного назна-
чения — электронный регулятор напряжения, цифровая следящая
система с ШИМ, электрогидравлическая следящая система, элемент-
ной базой которых являются унифицированные модули.
Кроме того, дано описание принципа работы и анализа динамики
автоматического релейного регулятора давления, также выполнен-
ного с применением унифицированных элементов.
В качестве примера САР, состоящей в основном из сложных не-
унифицированных устройств, рассмотрена электромеханическая сле-
дящая система радиолокационной станции.
16.1. МОДУЛЬНЫЙ ПРИНЦИП ПОСТРОЕНИЯ САР
В СССР унификация существующих и разработка новых
элементов автоматики и модулей САР проводилась и проводится в на-
стоящее время в рамках Государственной системы промышленных
приборов (модулей) и средств автоматизации (ГСП).
496
Основное назначение ГСП — обеспечение техническими сред-
ствами разнообразных систем контроля, регулирования и управле-
ния технологическими процессами (САР и САУ ТП) при ограничен-
ной номенклатуре унифицированных модулей. Основой построения
ГСП являются определенные системотехнические принципы, позво-
ляющие наиболее рационально решить задачу проектирования САР
(САУ). Одним из этих принципов является совместимость отдельных
приборов ГСП одного е другим. При этом должна обеспечиваться
информационная совместимость (по физической природе и допусти-
мым пределам изменения сигналов); энергетическая (по виду энер-
гии для питания модулей); конструктивная (по присоединительным
и габаритным размерам, а также по применяемым модулям); метро-
логическая (по допустимой погрешности, т. е. по классам точности);
эксплуатационная (по защищенности от окружающей среды).
Возможность сопряжения отдельных модулей (приборов) и уст-
ройств ГСП в САР обеспечивают прежде всего тем, что информация
передается унифицированными сигналами, которые можно класси-
фицировать на следующие группы:
электрические непрерывные сигналы тока и напряжения;
электрические непрерывные сигналы на несущей частоте;
электрические импульсные (кодированные) сигналы;
пневматические сигналы.
По роду энергии, поступающей от внешнего источника и исполь-
зуемой для передачи сигналов, модули и устройства ГСП (а также
и функциональные элементы, не входящие в эту систему) подразде-
ляют на электрические, пневматические и гидравлические. Кроме
того, существует и четвертая группа устройств ГСП, не требующих
внешнего источника энергии (регуляторы прямого действия и изме-
рительные приборы).
САР; комплектуемые из модулей электрической группы, т. е.
в значительной части из электронных элементов, имеют преимуще-
ства по сравнению с другими типами элементов — высокая чувстви-
тельность, точность и достаточное быстродействие для целого ряда
САР ТП, а также возможность передачи сигналов на большие рас-
стояния.
Пневматические модули безопасны при применении в легковоспла-
меняемой или взрывоопасной среде, надежны в тяжелых эксплуата-
ционных условиях, например, в агрессивной среде.
Преимущество гидравлических модулей состоит в том, что они
обеспечивают точное перемещение регулирующих органов при боль-
ших усилиях.
В одной системе можно применять устройства из различных
групп в том или ином рациональном сочетании (комбинированные
устройства и системы), например, электропневматические или элек-
трогидравлические и т. д.
Классификация средств ГСП по функциональному признаку яв-
ляется основной. При этом можно выделить следующие группы.
1. Устройства для получения нормированной информации о со-
стоянии процесса (датчики), которые формируют унифицированный
497
сйГнал, соответствующий значению Контролируемой физической ве-
личины. Эта группа включает датчики первичной информации и из-
мерительные преобразователи.
Назначение первичного датчика состоит в том, чтобы изменения
контролируемой (наблюдаемой) переменной преобразовать в другие
величины, удобные для дальнейшего преобразования автоматиче-
ским регулятором (например, в перемещение, усилие, электрическое
сопротивление, напряжение, ток, частоту). Сигнал на выходе дат-
чика, называемый естественным сигналом, по своей физической при-
роде отличается от контролируемой переменной. Нормирующий мо-
дуль завершает начатое преобразование и унифицирует пределы из-
менения сигнала.
Если естественный выходной сигнал является электрическим
или пневматическим, то нормирующий модуль обычно выполняют
в виде отдельного конструктивного элемента. Измерительный пре-
образователь в этом случае состоит из двух элементов. При другой
физической природе естественного выходного сигнала оба элемента
(преобразователя) конструктивно объединяют в одно измерительное
устройство.
2. Устройства преобразования, обработки, хранения информа-
ции и формирования команд управления — центральная группа ГСП,
которая включает анализаторы сигналов, функциональные и опера-
ционные преобразователи, логические устройства, устройства па-
мяти, задатчики, программные задатчики, регуляторы, а также
управляющие вычислительные устройства и комплексы. Эта группа
содержит как собственно регуляторы, так и функциональные модули,
из которых их собирают. В том числе группа модулей ГСП включает
агрегатированный комплекс средств вычислительной техники
(АСВТ) для управления САР и САУ ТП. Центральной частью АСВТ
являются управляющие мини- и микроЭВМ, а также устройства и
модули связи с объектами регулирования.
3. Устройства использования командной информации для воз-
действия на процесс — это исполнительные устройства. К их числу
принадлежат усилители мощности командного сигнала, поступаю-
щего от регулятора или иного управляющего комплекса, и исполни-
тельные механизмы, воздействующие на регулирующий орган объекта
(или объектов).
4. Устройства для приема, преобразования и передачи информа-
ции по каналам связи — телеустройства, шифраторы, дешифраторы
и т. д. Данная группа содержит модули и устройства, обеспечиваю-
щие взаимодействие функциональных блоков первых трех групп.
Во многих системах роль таких устройств выполняют проводные ли-
нии, связи (при соединении электрических элементов) или трубо-
проводы (при объединении пневматических и гидравлических эле-
ментов), а перечисленные выше устройства используют лишь при не-
обходимости передавать информацию на большие расстояния (в си-
стемах телеуправления) или в условиях значительных помех.
В ряде отраслей народного хозяйства используется Генеральный
каталог по ГСП, в который включены необходимые сведения о мо-
498
дулях и устройствах этой системы (описание принципа действия
схем типовых конструкций, а также примеры применения средств
ГСП в САР и САУ ТП).
Модули ГСП могут применяться не только в промышленности,
но и при автоматизации других технических процессов (например,
на транспорте, в связи и т. д.). Кроме модулей ГСП в САР и САУ
могут быть использованы также другие унифицированные элементы
и устройства.
16.2. ЭЛЕКТРОННЫЙ РЕГУЛЯТОР НАПРЯЖЕНИЯ
СИНХРОННОГО ГЕНЕРАТОРА
Электронный регулятор напряжения (ЭРН) предназначен
для регулирования напряжения синхронных генераторов большой
мощности в условиях изменяющейся электрической нагрузки.
Функциональная схема ЭРН приведена на рис. 16.1, а, она вклю-
чает объект регулирования — синхронный генератор большой мощ-
ности (СГ), подключенный к нагрузке; измерительный элемент
с ГС-четырехполюсником (ИЭЧ), представляющий собой при номи-
нальном напряжении Ссг уравновешенный мост; корректирующий
элемент гибкой обратной связи (ЭГОС); фазочувствительный усили-
тель (ФЧУ), преобразующий сигнал разбаланса моста в соответствую-
щий сдвиг фаз управляющего напряжения тиристоров тиристорного
усилителя (ГУ). Электромашинный возбудитель С Г с обмоткой воз-
буждения служит исполнительным элементом регулятора.
Электронный регулятор напряжения является автоматической
системой статического регулирования, т. е. при изменении нагрузки
Рис. 16.1. Электронный регулятор напряжения:
а — функциональная схема; Т1 и 72 — измерительные трансформаторы напряжения и
тока; 7 — суммирующий трансформатор; и - регулировочный н балансировочный
резисторы; с»в — обмотка возбудителя; — обмотка СГ; £2 — угловая скорость вала
турбины; б — статические характеристики электромашннного возбудителя; в — синхрон-
генератора (кривые 1 — зксперимецтад^ные; ? — л^неаризо^аииь;?)
499
на СГ для поддержания напряжения на номинальном уровне необ-
ходимо устанавливать различные токи возбуждения.
Принцип работы, уравнения и статические характеристики эле-
ментов ЭРН. Для получения требуемой характеристики компаунди-
рования в ЭРН применяют трансформаторы тока и напряжения, ко-
торые формируют напряжение на входе ИЭЧ. Отклонение напряже-
ния СГ от номинала вызывает изменение Uy на выходе суммирующего
трансформатора, т. е.
l/j=^Tl/cr, (16.1)
где kT — коэффициент трансформации; Ucr — напряжение синхрон-
ного генератора.
Напряжение на выходе измерительного моста
(4м = &пМ(А, (16.2)
где kim — передаточный коэффициент моста.
Сигнал uaM (t) поступает на четырехполюсник, состоящий из ре-
зистора R и емкости С. Дифференциальное уравнение четырехпо-
люсника
7,ч^^- + «у(0 = «им(/), (16.3)
где Uy (t) — напряжение, поступающее на вход ФЧУ\ Тч = RC —
постоянная времени четырехполюсника.
Напряжение на базе входного транзистора ФЧУ равно разности
напряжений:
ыб(0 = «у(0-«ос(0> (16.4)
где «ос (0 — сигнал обратной связи элемента гибкой ОС.
Напряжение на выходе ФЧУ (на входе тиристорного усилителя)
Ыту (0 = ^фчу«б (0- (16.5)
Из рассмотренных выше уравнений (16.1)—(16.5) получим сле-
дующие передаточные функции:
Wi ($) = - = kT — схемы на входе ЭРН, включающей трансфор-
Ucr Is)
маторы ТГ, Т2, Т;
Uy (S) fe £
^2 (s) — 7/1У3,— измерительного элемента совместно с четы-
(s) 14s -р 1
рехполюсником;
(7Ту (s)
W3 (s) = иб ф = «Фчу — фазочувствительного усилителя.
Передаточная функция ТУ регулятора
где ыв (t) — напряжение на входе возбудителя; kTy — коэффициент
передачи ТУ.
С выхода оконечного каскада усилителя напряжение поступает
на обмотку о>8 возбудителя, затем на якорь генератора постоянного
500
тока и обмотку возбуждения синхронного генератора &асг. Дифферен-
циальное уравнение обмотки wB возбудителя и якоря генератора,
питающего обмотку возбуждения СГ, имеет вид
«вых (Тв 4 «вых (0 + «вых (0 = Мв(0, (16.6)
( где ывых (/) — напряжение на выходе электромашинкою возбудителя;
: Тв — постоянная времени обмотки возбуждения генератора по-
; стоянного тока; Тт — постоянная времени обмотки возбуждения
СГ; kB — передаточный коэффициент возбудителя.
Дифференциальное уравнение синхронного генератора
Гсг «сг (0 4- «сг (О = ксгиеых (/), (16.7)
где kKB — передаточный коэффициент СГ; Гсг— постоянная времени.
Экспериментальные статические характеристики электромашин-
ного возбудителя и С Г приведены на рис. 16.1, б, в. Соответствующие
коэффициенты передачи определяют по линеаризованным характе-
ристикам: kB = tg a; kcr = tg р.
Дифференциальное уравнение корректирующего элемента —
гибкой ОС
t
^ос«вых(0 = ^'с(0+-^| (16.8)
О
где kroc — коэффициент гибкой обратной связи; ic (t) — ток коррек-
тирующего элемента.
В соответствии с уравнениями (16.6)—(16.8) получим переда-
точные функции:
П7 ____ бВЫХ (S) _ ___kB_____
UB(s) W* + 2gn + 1
электромашинкою возбудителя (здесь Г2 — ГВГГ; ? = ГВ +
+ Гг/(2/Г^г);
^(5) = -дМДГ= (16-9)
ВЫХ 1 СГ3 “Г 1
— объекта регулирования — синхронного генератора;
______ бос (S) _ feonTocs
7(J~6BBIX(S) TocS+l
— элемента гибкой ОС (здесь Гос — постоянная времени).
Структурная схема ЭРН, составленная в соответствии с переда-
точными функциями W± (s) — Wi (s) и уравнением сравнивающего
элемента фазочувствительного транзисторного усилителя
С о (s) = U вь1х (s) U ос (s),
показана на рис. 16.2,
501
Рис. 16.2. Структурная
схема ЭРН:
f (f) — возмущающее воздей-
ствие, приведенное ко входу
ЭРН; С/треб — требуемое
значение напряжения на вы-
ходе СГ
Передаточная функция системы с разомкнутой главной ОС
W7 /,.\ ^1 (s) '^2 (s) Г3 (s) '^4 (3) 1Г6 (s) We (s) ., „ ,
1 + r3 (S) F4 (s) W, (s) W7 (s) • ;
Используя выражение (16.10) и выражения передаточных функ-
ций элементов, получим Ф (s) — передаточную функцию электрон-
ного регулятора напряжения как замкнутой САР:
ф (s) (з) Г4 (s) W6 (s) W„ (s) ,. fi . n
U 1 + F3 (s) F4 (s) W6 (s) [IFj. (s) W, (s) F6 (s) + W7 (s)] ’ I10-11/
если s —> 0, то получим статический коэффициент ЭРН
Аэрн=А/(1+А),
где К = ^т^ч^иэ^фчу^ту^в^сг, который характеризует статизм регу-
лирования напряжения.
Анализ устойчивости процесса регулирования напряжения СГ,
а также анализ качества поддержания напряжения относительно но-
минального значения можно выполнить в соответствии с выраже-
ниями (16.10) и (16.11) методами, изложенными в параграфах 3—5.
Величина статизма регулирования в системе может изменяться
с помощью схемы токовой стабилизации, состоящей из резисторов,
включенных в цепь трансформатора тока. Таким образом обеспечи-
вается устойчивое распределение реактивной нагрузки между парал-
лельно работающими генераторами.
Для синхронных генераторов, работающих на дальние линии
электропередачи, закон регулирования усложняется за счет введе-
ния воздействия по отклонению напряжения и его производных по
времени, а также по току статора и его производным.
16.3. АВТОМАТИЧЕСКИЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР
ДАВЛЕНИЯ
Рассмотрим динамику типовой автоматической релейной
системы регулирования давления, например, систему регулирования
абсолютного давления в кабине самолета [10].
Функциональная схема автоматического регулятора давления
(АРД) показана на рис. 16.3, а. Давление рнаб в кабине 1 летчика вос-
принимается сильфоном 6, который при изменении величины рнаб
относительно нормального на некоторую величину, соответствую-
щую порогу срабатывания контактного устройства 7, перемещает
его средний контакт. При замыкании контактов (например, среднего
контакта с левым) включается ЭДв 5, который с помощью червячного
502
редуктора 4 перемещает заслонку 3. Последняя изменяет сечёнйё ка-
нала 2; через него стравливается в атмосферу избыточное давление,
создаваемое системой жизнеобеспечения. Реверс электродвигателя 5
осуществляется контактным устройством 7, подключающим ЭДв
к разным полюсам источника питания 8.
Рассмотренная система регулирования относится к классу одно-
каскадных релейных регуляторов. Структурная схема АРД при-
ведена на рис. 16.3, б.
Релейная функция Ф регулятора определяется зоной нечувстви-
тельности реле (или контактного устройства) и люфтом в редукторе.
Петля гистерезиса пропорциональна приведенному зазору в редук-
торе.
Предположим, что исполнительный электродвигатель и регули-
руемый процесс описываются в первом приближении передаточной
функцией №л (s) = k/s2 линейной части системы. Обобщенные урав-
нения АРД, описывающие свободные колебания, имеют вид
^о-^Р(0 = -Ф(е);
е = ^осР- + Т р. (О,
(16.12)
где Ro — Mk — относительный коэффициент передачи АРД.
Если выбрать в качестве фазовых координат х=р,иг/ = ци
исключить время t из первого уравнения системы (16.12), то получим
дифференциальное уравнение фазовых траекторий
Рис. 16.3. Автоматический релейный регулятор давления:
а — функциональная схема; рвх; Ркаб’ РатМ статические давления соответственно па
входе системы, в кабине, вне кабины; Й — угловая скорость вала ЭДВ', г — линейное
перемещение заслонки; б — структурная схема: Ф (е) — нормированная симметричная
релейная функция контактного устройства, принимающая значения 0 и ±1; е — аргумент
релейной функции, представляющий собой линейную комбинацию переменных; Ц7Л(§) —
передаточная функция линейной части регулятора; &QC, Т — передаточные коэффициенты
позиционной и тахометрической ОС; ц — относительная величина регулируемой перемен-
ной (выходная координата — регулируемое давление PKag); fCII (О — относительная ве-
личина сигнала настройки
503
Рис. 16.4. Фазовый портрет АРД:
1 — участки парабод AF; BE; CD
(F'A'\ Е’В’; D'C’): 2 — прямые отрез-
ки AV4; А'В‘, С'С; DD'; Е'; FF’;
C’CDD' — предельный « .л
Из уравнения (16.13) по
условию неопределенности
найдем: положением равно-
весия служит отрезок на оси
абсцисс, заключенный в пре-
делах | х| с е2/Т.
Как известно, если релей-
ная характеристика имеет
зоны нечувствительности, фа-
зовая плоскость САР будет
трехлистной, а при наличии
еще и зон неоднозначности
эти листы будут иметь облас-
ти наложения друг на друга,
ширина которой определяется величиной петли гистерезиса. Края
листов (т. е. их границы) представляют.собой линии переключения,
определяющие переход от одной системы линейных дифференциаль-
ных уравнений к другой.
Фазовый портрет АРД в соответствии с системой уравнений
(16.13) построен на рис. 16.4. В данном случае линии переключения
N, М представляют собой параллельные прямые с отрицательным
наклоном. При релейной характеристике общего вида они описы-
ваются следующими уравнениями:
где
е0 — параметр зоны нечувствительности; Д — ширина петли гисте-
резиса характеристики Ф (е).
Фазовые траектории на отдельных листах определяют интегри-
рованием первого уравнения системы (16.12) при соответствующих
постоянных значениях релейной функции Ф (е). Поэтому, формально
положив Ф = const, найдем уравнение интегральных кривых в об-
щем виде:
-у- (у - Уо) = —Ф (х — х0),
где х0 и у0 — начальные условия, задаваемые на фазовой плоскости
соответствующей точкой Ко.
Следовательно, на листах Ф = ±1 фазовые траектории предста-
вляют собой участки парабол 1, а на листе Ф = 0 — прямые от-
резки 2, параллельные оси х.
504
Устойчивость и автоколебания АРД. Положение равновесия
регулятора, имеющего передаточную функцию Мл (s) = /е/s8 и при
А =^= 0, ьсегда неустойчиво, а на фазовой плоскости существует пре-
дельный цйкл, который является единственным и устойчивым. Если
система не имеет скоростной ОС (т. е. при Т = 0), то предельный
цикл отсутствует.
Стационарным состоянием регулятора давления со скоростной ОС
является автоколебательный режим. Амплитуда и частота автоколе-
баний могут быть найдены из [рассмотрения фазового портрета
(рис. 16.4). На листе Ф = 0 фазовыми траекториями служат отрезки
горизонтальных прямых, поэтому замкнутая кривая CDD'C, пред-
ставляющая предельный цикл, образуется, когда траектория листа
Ф = +1 (или Ф = —1) проходит через точки С, D линий переклю-
чения N, М, расположенные симметрично относительно оси абсцисс
(хс = xD; ус = yD). Подставляя эти соотношения в уравнения линий
переключения
kocxc -f- Ту с = е2; k0CxD -|- TyD = e1;
найдем
„ __ е2 + е1 _ 80 . __ е2 - Е1 _ к
с~ 2kw koc’ Ус~ 2Т 2Т '
Амплитуда автоколебаний АРД определяется точкой пересече-
ния фазовых траекторий с осью абсцисс, поэтому уравнение интег-
ральных кривых листа Ф = +1 фазовой плоскости дает
Gc — z/o) = —хс + хо,
а при условии у0 = 0 и х0 = ха имеем
х“ = ”1” ’ (16.14)
где ха — амплитуда автоколебаний.
Из выражения (16.14) следует, что амплитуда автоколебаний
возрастает с увеличением А петли гистерезиса и зоны нечувствитель-
ности е0 и уменьшается — с увеличением коэффициентов koc и Т
цепей обратных связей.
Период автоколебаний Тй равен удвоенной сумме времени дви-
жения в верхней части листа Ф = 0 фазовой плоскости и времени
движения t2 по листу Ф = +1. На листе Ф = 0 движение происхо-
дит с постоянной относительной скоростью ус = А/(271), поэтому
t __ 2вр ___ 4е07'
^осУс
Для листа Ф = +1 время движения определяется путем интегри-
рования уравнения системы (16.12):
t2 = 7?0 (ус — уо) — WT.
17 Солодовников В. В. и др.
505
Поэтому период автоколебаний ЛРД
= + у = + (16.15)
Из анализа выражения (16.15) следует, что наименьший период,
т. е. максимальная частота автоколебаний АРД, имеет место при
выполнении равенства А/Т = 2уЛ7?0/(&ос71) , которому соответствует
амплитуда автоколебаний ха = 1,5е0/Лгос. С уменьшением или увели-
чением амплитуды относительно этого значения частота автоколеба-
ний уменьшается.
Если релейная характеристика АРД не имеет гистерезиса (А = 0),
то система при любом Т > 0 является устойчивой. Изображающая
точка при любых начальных отклонениях после затухания колебаний
будет асимптотически приближаться к положению равновесия в
скользящем режиме движения [10, 23].
16.4. ЭЛЕКТРОМЕХАНИЧЕСКИЕ СЛЕДЯЩИЕ СИСТЕМЫ
РАДИОЛОКАЦИОННОЙ СТАНЦИИ
Радиолокационные станции (РЛС) являются дальномер-
ными пеленгационными радиотехническими системами управления,
которые позволяют однозначно определить местоположение объекта
в пространстве относительно некоторой системы координат, начало
которой находится в точке расположения РЛС. Радиолокационные
измерительные системы (РИС), предназначенные для измерения угло-
вых координат объекта, называют пеленгационными РИС, радиоло-
кационные измерительные системы, предназначенные для измере-
ния наклонной дальности и относительной скорости перемещения
объекта, — дальномерными.
Принцип действия. Рассмотрим обобщенную функциональную
схему пеленгационной РИС, состоящую из двух идентичных электро-
механических следящих систем (рис. 16.5), работающих в режиме
иА
H(t)
ГОН
~г~~
*ск
Приемное Отраженные импульсы
устройство а
РИГ *
9(0
X
РА
РУМ
‘РДА
ие
ЛА
?ДУМ
ие
ПУМ
Рис. 16.5. Обобщенная функ-
циональная схема пеленга-
ционной РИС;
ППА • — приемно-передающая
антенна; В — излучатель (виб-
ратор); ФДА и ФДУМ — фазо-
вый детектор азимута и угла ме-
ста; ПА и ПУМ — следящие
приводы азимута и угла места;
РА и РУМ — редуктор азиму-
та и угла места; ГОН — гене-
ратор опорных напряжений;
010 — направление на объект
(в вертикальной плоскости
ХОхУ); 0,0g — ось параболоида
ППА
/Ьмг
506
Рис. 16.6. Принцип обра-
зования сигнала ошибки:
а — схема сканирования:
1 — сечение луча; 2 — траек-
тория движения луча; б —
огибающие отраженных им-
пульсов
автоматического углового сопровождения объекта. Следящие си-
стемы сопровождения непрерывно изменяют направление оси прием-
но-передающей антенны так, чтобы она была с заданной точностью
направлена на объект. При этом РИС автоматически определяет уг-
ловые координаты объекта [22].
Процесс слежения за объектом по угловым координатам ослож-
няется рядом обстоятельств. Пространственное движение объекта,
которое можно рассматривать как управление Q (t) для следящих
систем РИС, является непредсказуемым: объект может двигаться
равномерно и прямолинейно или совершать различные маневры.
Сигнал управления представляет собой случайную функцию времени.
Слежение осуществляется при наличии флюктуации отраженных сиг*
налов от объекта и других помех. Для формирования и выделения
полезного сигнала из помех применяется метод конического сканиро*
вания, при котором излучающий вибратор антенны РИС совершает
вращение относительно собственной оси с частотой Оок. Ось излуче-
ния, отклоненная на небольшой угол от осн параболической антенны,
описывает в пространстве круговой конус.
Принцип образования сигнала ошибки в системе координат х&ул
антенны поясняется рис. 16.6. Схема сканирования показана на
рис. 16.6, а.
Если объект находится в центре конуса А (на оси параболоида
антенны), то при вращении луча он облучается равномерно. При
этом амплитуда отраженных импульсов постоянна (огибающая 3 на
рис. 16.6, б). При смещении объекта от оси параболоида интенсив-
ность облучения периодически изменяется. Так, если объект нахо-
дится в точке В, то интенсивность будет минимальной, когда луч
находится в точке Ел, и максимальной, если луч переместится в точку
Ил- При смещении объекта от оси параболоида амплитуда отражен-
ных сигналов будет изменяться ПО синусоидальному закону с часто-
17* Б07
той вращения луча, а амплитуда огибающей модулированного сиг-
нала будет пропорциональна угловому отклонению объекта от оси
параболоида (огибающая 4). При перемещении объекта в точку С на
угол а от точки В произойдет сдвиг фазы огибающей также на угол
а (кривая 5). После высокочастотной обработки принятого сигнала
напряжение сигнала ошибки на выходе резонансного усилителя РИС
«со (0 = Ут™м sin (QCK/ + а),
где mM — коэффициент модуляции,
или
«со (0 — sin + У г COS QCK/, (16.16)
где QCK — угловая частота вибратора антенны (или частота скани-
рования); Йр = Um cos а — напряжение, пропорциональное состав-
ляющей угловой ошибки по азимуту; UE = Um sin а — напряжение,
пропорциональное составляющей угловой ошибки по углу места.
Положение объекта относительно системы координат хА, уА, свя-
занной с антенной, можно изобразить вектором AL. Модуль этого
вектора пропорционален амплитуде огибающей отраженных сигна-
лов, а его аргумент а равен фазе огибающей относительно некоторого
начального направления на объект.
Следящие системы отрабатывают отклонение оси параболоида от
направления на объект по азимуту и углу места. Для этого сигнал
ошибки (вектор огибающей) разлагается на две проекции по соответ-
ствующим осям х и у и вырабатываются согласно выражению (16.16)
напряжения (Д и UE, пропорциональные этим проекциям (см.
рис. 16.5). Напряжения (Ур и ИЕ подаются на входы следящих при-
водов ПА и ЛУЛ1, поворот антенны осуществляется двумя электро-
двигателями через редукторы РА и РУМ.
Разложение напряжения и00 (/) на составляющие выполняется
с помощью генератора опорных напряжений. Ротор генератора, име-
ющий две взаимно перпендикулярные обмотки, вращается синхронно
с вибратором и вырабатывает два переменных напряжения 1/гон р и
Угов> той же частоты, что и частота сигнала (по огибающей), но сдви-
нутых относительно друг друга по фазе на 90. Эти напряжения и сиг-
нал ошибки У00 поступают на ФДА и ФДУМ, в результате на входе
следящего привода азимута вырабатывается Ул = Ут cos а, а на
входе следящего привода угла места — Us = Um sin а.
Функциональная и структурная схемы. Рассмотрим функцио-
нальную схему следящей системы по углу места. Управляющим воз-
Рис. 16.7. Функциональная схема следящей системы по углу' места
508
действием g (0 является угол места объекта, выходной координатой
(0 — угол места антенны. Эта координата преобразуется в на-
пряжение по углу места. Напряжение на входе фазового детектора
угла места пропорционально рассогласованию еЕ (/) = g (/) —
&ВЫХ G) •
Выпрямленное напряжение с выхода ФДУМ поступает на вход
оптимального сглаживающего фильтра ОСФ. Напряжение на выходе
фильтра нф (t) (сглаженное инфранизкочастотное напряжение) про-
порционально рассогласованию между осью параболической антенны
и направлением на объект по углу места. Это напряжение поступает
на двухтактный усилитель постоянного тока УПТ, питающий об-
мотки ЭМУ. Разность намагничивающих ампер-витков этих двух
обмоток, пропорциональная ее (/), вызывает на выходе ЭМУ напря-
жение нЭМУ (/), которое подводится к якорю ЭПТ. Когда ось антенны
совпадает с направлением на цель, еЕ (I) и нЭМУ (/) равны нулю, якорь
ЭПТ неподвижен. При появлении еа (/) вал электродвигателя начи-
нает вращаться с угловой скоростью, пропорциональной нэму (t),
поворачивая с помощью редуктора РУМ антенну по направлению
к объекту.
Кроме основного контура сопровождения объекта, пеленгацион-
ная РИС имеет двухотсчетную систему ввода начальных угловых
координат Рнач и енач. Измерительное устройство этой системы
реализовано на двухполюсных сельсинах ТО (см. параграф 13.4).
За счет применения двухотсчетной измерительной схемы СД—СТ
следящая система обладает большой чувствительностью. Для преоб-
разования начального углового рассогласования в цифровой код с
последующим вводом его в ЦВМ применяют схему угол—фаза—код.
Без корректирующих устройств следящая система РИС неустой-
чива. В системе в качестве КУ применяют мостовую схему тахоме-
трической ОС (тахометрический мост ТМ'), которая вырабатывает
напряжение цтм (/), пропорциональное угловой скорости якоря ЭПТ.
Специальный корректирующий фильтр КФ это напряжение преоб-
разует в «ad (/). Делитель напряжения на выходе фильтра позво-
ляет получить требуемый коэффициент отрицательной ОС. Напря-
жение «00 (t) подводится к цепи управления двухтактного транзи-
сторного усилителя, УОС, питающего ЭМУ и включено навстречу
напряжению ошибки ме (/).
Структурная схема следящей системы пеленгационной РИС по
углу места показана на рис. 16.18. Передаточная функция системы
с разомкнутой главной отрицательной ОС
тр - WWV9(s)Wt(s) F,(s) W7(s)
WW~ 1+к,к1оГв($)Г7(5)Г11(5)й71а(5) ’
так как передаточная функция W-, (s) привода содержит интегрирую-
щее звено, система является астатической первого порядка.
При соответствующем выборе параметров корректирующих уст-
ройств можно не только добиться устойчивости следящей системы,
но и придать процессу слежения требуемые показатели качества и
точности,
509
Рис. 16.8. Структурная схема следящей системы пеленгационной РИС по углу
места:
коэффициенты усиления: Ki — приемника РЛС', и /С5 — усилителя постоянного тока;
Кэ — усилителя ОС; Кю — усилителя постоянного тока ОС; — передаточное
отношение редуктора; передаточные функции: W2 (s) — фазового детектора и усилителя
сигнала ошибки we (/); (s) — оптимального сглаживающего фильтра; We (s) — ЭМУ;
W- (s) — ЭДВ; Wn (s) — корректирующего фильтра ОС; W12 (s) — тахометрического
моста
16.5. ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА
Рассмотрим цифровую следящую систему (ЦСС), управля-
ющее воздействие на входе которой формируется управляющей ЭВМ.
Функциональная схема ЦСС, являющейся подсистемой грубой по-
дачи металлорежущего станка с числовым программным управле-
нием, показана на рис. 16.9, а.
Пусть такт обмена информацией между цифровой ЭВМ и следя-
щей системой равен Т. На первый вход АС с выхода ЭВМ поступает
Рис. 16.9. Схемы ЦСС-.
а функциональная: УЦВМ управляющая ЦВМ; АС арифметический сумматору
ЦАП и АЦП — цифроаналоговый н аналого-цифровой преобразователи; ШИМУ — уси?
литель с ШИМ; ИУ — исполнительное устройство; МП — механическая передана; TQQ
тахометрическая 0Q; б — структурная
510
информация в виде 6ВХ (пТ), на второй — Св1ЛХ(пТ) с выхода Л ЦП.
Цифроаналоговый преобразователь преобразует код-рассогласова-
ние G (пТ) = GBX (пТ) — GBHX (пТ) в напряжение е (/) по закону
экстраполяции нулевого порядка с запоминанием на такт обмена Т.
Напряжение е (<) поступает на вход ZZ/Я-тиристорного усилителя
с односторонней модуляцией, который питается напряжением по-
стоянного тока Uo. Синхронизация выходных импульсов осущест-
вляется с постоянным периодом коммутации, равным Т. В качестве
исполнительного устройства ИУ используют электродвигатель не-
зависимого возбуждения.
Работа Я/Я-тиристорного усилителя ЦСС описывается системой
нелинейных уравнений типа (14.28), длительность рабочих импуль-
сов тим („) пропорциональна амплитуде е (t) в момент коммутации,
а амплитуда импульсного сигнала ивых Ц) равна Uo.
Упрощенная математическая модель ЦСС — структурная схема
с позиционной единично ОС и с передаточной функцией непрерывной
части
W(s) = [s(Tas+ 1)Г
показана на рис. 16.9, б.
Соответствующие переменные состояния обозначим через
-'-1 zBX, ух = гвых, (GBX GBMX = G£), /Tij = Уъ i/i", пусть
Т = Ткв =1,0 с, Та = 0,5 с — электромеханическая постоянная
времени нагруженного электродвигателя.
Анализ динамики позиционной ЦСС во временной области вы-
полним методом пространства состояний (см. параграфы 3.1, 14.4).
Рассмотрим нелинейные уравнения ШИ -усилителя. Рабочие им-
пульсы (0> формируемые усилителем на n-м и (и + 1)-м периодах
коммутации, показаны на рис. 16.10, а:
1) длительность тим (п) ц-го рабочего импульса
Тимщ) = |/ni (пТ+)[, тим(га)<7 при |mi(nT+)|<em;
Тим (я) = Г При |/7Ц (пЯЩ^йЕт,
где еп, — (%1 — z/i) — некоторая максимальная величина
сования;
2) амплитуда n-го рабочего импульса
ц2 — +Ц) при /71! (иТ+) > 0;
«2 = —Ио при mJ (пТ+) <С 0;
н2 = 0, если тИМ(„)<Т при гаТ + тим(п)<^ <(п4-1)Т'.
Векторы состояния и начальных условий ЦСС заданы в виде
v = |xf, ух; у2\ тх |т;
v(0) = | 1,0; 0; 0; 0|т.
| (16.17)
рассогла-
(16.18)
.611
Рис. 16.10. Временнйе диаграммы:
а — рабочие импульсы иа n-м и п -4- 1-м тактах; б — функция хг (1) — входное воздействие;
(/) — импульсы на выходе ШИМУ; yY (t) — переходной процесс иа выходе ЦСС
Матрицу квантования Т исследуемой следящей системы опреде-
лим из следующих очевидных уравнений независимо от периода ком-
мутаций:
хупТ+) = хупТу
У1(пТ+) = у1(пТУ
Уг (пТ+) = У2 (пТу
ГП1 (пТ+) = X! (пТ+) — (пТу
поэтому
1 000
0 10 0
т = 0 0 10 (16.19)
1—10 0
612
Общий вид расширенной матрицы перехода, характеризующий
динамику на интервале действия рабочего импульса тпм (л>:
О
_________л — 2 -4- 2е~^2)
/пх (пТ+) Г г ’
1
(16.20)
где X = t — пТ , а матрица перехода на интервале паузы тп (П), так
как сигнал — 0;
Фх(Х) =
ООО
1 2(1-е-^2)0
0 е-^2 0
0 0 1
(16.21)
Для иллюстрации вычислительного алгоритма рассмотрим не-
сколько элементарных рекуррентных процедур в соответствии с при-
веденными матричными выражениями, при этом допустим, что ет =
= 1,0 и Uo = U2 = 1,0.
Первый такт квантования (1-й период коммутации тиристоров)
п = 0; v (0) = 11; 0; 0; 0 |т; em = 1 — 0=1, поэтому согласно
соотношениям (16.17) m1 (0+) = 1, а длительность 1-го рабочего им-
пульса тИм (0) = 1- Вычислим Фо (^им (0)) ПрИ Тим (0) = % = 1:
10 0 0
0 1 0,787 0,426
(Тим (0)) 0 0 0,607 0,787 (16.22)
0 0 0 1
В соответствии с выражениями (16.19) и (16.22) найдем
v (тим (0)) = v (Т-) = 11,0; 0,426; 0,787; 1,0 |т.
Аналогичным образом определим вектор v (тим (1)) на втором так-
те квантования и т. д. Таким образом получим
п = 0; тим (0) = т0 = 1,0; и2 (о> = +Н2;
v (т0) = v (Т-) = I 1,0; 0,426; 0,787; 1,0 |т;
v(T+) -=| 1,0; 0,426; 0,787; 0,574 |т;
п = 1; тим (I) = Ti == 0,574; п2 <1> = +Н2;
v (Т-j-тх) = | 1,0; 0,968; 1,091; 0,574 |т;
v(27”) = | 1,0; 1,386; 0,881; 0,574 |т;
v(2T+) = | 1,0; 1,386; 0,881; —0,386 |т;
/4 = 2; т,ш (2) = т2 = 0,386; «2 (2) = — U2;
513
v (27 + 0 = I 1,0; 1,628; 0,373; —0,386 |т;
v (ЗГ-) = | 1,0; 1,825; 0,274; —0,386 |т;
v(3T+) = | 1,0; 1,825; 0,274; —0,825 |т;
n = 3; тим о) = т3 = 0,825; u2 (3> = —//г!
у(ЗГ + т3) = | 1,0; 1,716; —0,497; —0,825 |т;
v(4T-) = | 1,0; 1,633; —0,455; —0,825 |т;
v (4Т+) = I 1,0; 1,633; —0,455; —0,633 |т
И Т. д.
Как следует из выражений (16.17)—(16.21), переходные процессы
в ЦСС с ШИМ. зависят от ее параметров, в том числе от постоянной
времени Та.
На рис. 16.10, б в. качестве примера показаны функции хг (t);
и2 (О, У1 (0> вычисленные в соответствующих тактовых точках пГ*;
пТ + тин(п) при Та = 0,5 с и Т = 1,0 с.
Компоненты вектор-функции vx = |хх; ур, уЦт являются непре-
рывными функциями непрерывного времени t, функция тх (/), фор-
мируемая экстраполятором нулевого порядка с запоминанием на
такт коммутации, — разрывная функция непрерывного времени;
(0 — импульсная функция дискретного времени, представляющая
собой серию рабочих импульсов, формируемых /////-усилителем.
Эти кривые хорошо иллюстрируют физические процессы, происхо-
дящие в следящей системе с /////М-тиристорным усилителем. Вывод
об устойчивости ЦСС с ШИМ и степени ее колебательности переход-
ных процессов можно сделать во временной области, используя ре-
зультаты выполненного расчета.
16.6. ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ
СИСТЕМА
Электрогидравлические следящие системы (электроги-
дравлический следящий привод) широко применяют в машинострое-
нии как эффективное средство автоматизации. В станкостроении и
роботостроении электрогидравлические следящие системы (ЭГСС) со-
ставляют основу большинства систем с числовым программным упра-
влением. Применение ЭГСС в системах управления самолетами,
а также колесными и гусеничными транспортными машинами позво-
ляет обеспечить достаточно простое и легкое управление при высоком
быстродействии.
Широкое применение ЭГСС объясняется следующими преимуще-
ствами гидромашин: небольшие габаритные размеры и масса при
высокой удельной энергоемкости, что определяет незначительную
инерционность подвижных частей и, следовательно, высокое быстро-
действие и точность воспроизведения. ЭГСС отличают плавность
движения и устойчивость движения выходного элемента, простота
конструкции, изготовления и эксплуатации, а также большой срок
службы в результате самосмазываемости и др,
514
Гидравлические машины эффективны при применении их совмеет
но с электрическими элементами управления, что позволяет неволь*
зовать положительные свойства как электрических, так и гпдрявли*
ческих элементов.
Динамика, надежность и стоимость ЭГСС в целом зависят от
выбора метода управления. В этой связи большое значение имеет
широтно-импульсное управление электрогидравлическими следя-
щими системами, при котором в импульсном режиме работают магнит-
но-полупроводниковый усилитель и электрогидравлический распре-
делитель сопло-заслонка, а исполнительный гидродвигатель имеет
непрерывное регулирование. При этом упрощается конструкция,
увеличивается надежность, повышается чувствительность системы,
а также происходит вибрационная линеаризация трения в гидро-
распределителе.
Классификация ЭГСС. В зависимости от типа управления ЭГСС
подразделяют на системы непрерывного и импульсного управления.
ЭГСС непрерывного управления — электрогидравлическая систе-
ма, в которой непрерывному изменению входной величины соответ-
ствует непрерывное изменение выходной переменной.
ЭГСС импульсного управления — система, в которой осущест-
вляется релейное, широтно-импульсное (широтно-амплитудное) или
числовое управление.
t По типу технических средств, с помощью которых осущест-
вляется изменение скорости слежения, ЭГСС подразделяют на си-
стемы “с дроссельным и объемным регулированием.
ЭГСС с дроссельным регулированием — система, в которой изме-
нение объемов жидкости, поступающих в исполнительные гидродви-
гатели, осуществляется дросселированием в рабочих щелях распре-
делителей расхода и давления.
ЭГСС с объемным регулированием — система, в которой измене-
ние объемов жидкости, поступающих в исполнительные гидродви-
гатели (следовательно, и изменение скорости вращения вала гидро-
двигателя), осуществляется изменением рабочего объема насоса или
гидродвигателя.
По числу каскадов усиления, участвующих в осуществлении
воспроизведения гидродвигателем программы, сообщаемой задаю-
щим устройством, ЭГСС подразделяют на одно-, двух- и многокаскад-
ные. По числу замкнутых контуров регулирования различают одно-
контурные и многоконтурные схемы ЭГСС.
Функциональная схема типовой ЭГСС дроссельного регулирования.
В системах автоматики нашли широкое применение двухкаскадные
быстродействующие ЭГСС, в которых высокочувствительный распре-
делитель типа сопло-заслонка управляет положением плунжера зо-
лотникового распределителя. Функциональная схема унифицирован-
ной двухкаскадной ЭГСС приведена на рис. 16.11.
Гидрораспределитель типа сопло-заслонка представляет собой
предварительный каскад усиления, а дроссельный привод является
основным каскадом усиления по^мощности, с„помощью которого
приводятся в движение в зависимости от назначения ЭГСС различ-
515
Рис. 16.11. Функциональная схема унифицированной двухкаскадной ЭГСС:
ЗД — задатчик (например, программатор микроЭВМ); ЭУ — электронный усилитель;
ЭМП — электромагнитный преобразователь; 4 НА — насосный агрегат; Р — редуктор
Давления; РРД СЗ — распределитель расхода 'и давления сопло-заслонка; РРД 3 — рас-
пределитель золотниковый; ГД — гидродвигатель; ЭООС — элемент ООС (потенциометри-
ческий или цифровой датчик); z — линейное перемещение штока (или механической иа-
груз ки)
ные объекты регулирования (рули летательных аппаратов, столы
металлорежущих станков, дросселирующие заслонки и задвижки
регуляторов технологических агрегатов и т. д.).
Высокое быстродействие ЭГСС, полоса пропускания которого
может достигать 10—20 Гц, обеспечивается за счет применения вы-
сокодинамичных элементов и унифицированных гидравлических
модулей без введения дополнительных стабилизирующих и коррек-
тирующих связей. Частоту собственных колебаний и быстродейст-
вие дроссельного привода выбирают достаточно высокими с тем,
чтобы обеспечить необходимый запас устойчивости ЭГСС при боль-
ших коэффициентах передачи.
Золотниковый распределитель представляет собой совокупность
регулируемых дросселей, с помощью которых изменяется гидравли-
ческое сопротивление движению рабочей жидкости. Простота метода
управления золотником заключается в том, что величина гидравли-
ческих сопротивлений (проводимостей) обеспечивается изменением
площади рабочих окон дросселей. Это достигается при сравнительно
малых перемещениях плунжера золотникового распределителя.
Симметричный двухступенчатый метод дросселирования в ЭГСС
определяет возможность применения простой конструкции золотника
реверсирующего поток жидкости. Схема двухкаскадной ЭГСС по-
казана на рис. 16.12.
Динамика гидропривода при различных типах механической
нагрузки. Гидропривод, состоящий из ЭМП, двухкаскадного РРД и
нагруженного ГД, является составной частью ЭГСС.
Рассмотрим структурную схему гидропривода (рис. 16.13, а),
составленную на основе уравнения объемного расхода вида (15.59)
или (15.60). При этом допустим, что распределители сопло-за-
слонка и золотник — идеальные, трение в гидроприводе отсутствует,
жидкость несжимаема.
516
Рис. 16.12. Схема двухкаскадной ЭГСС:
1 — ЭМП («у (О — управляющий сигнал); 2 — РРД -сопло-заслонка; 3 — золотниковый
РРД\ 4 — гидродвигатель; 5 — нагрузка (т — масса; Су — коэффициент упругости); 6 —
резервуар; 7 — приводной двигатель; 8 — насос; 9 — редуктор давления; 10 — фильтр;
рн — напорное давление
Уравнение инерционной механической нагрузки (см. рис. 16.13, а)
Na(t) = mz(t), (16.23)
где т — масса подвижных частей ЭГСС (полезной нагрузки, штока,
поршня и т. д.); z (t) — линейное ускорение нагрузки.
Из семейства линеаризованных механических характеристик ги-
дропривода (без учета позиционной обратной связи ЭГСС} можно
получить
z(t) = v(t) = Kuz(t)-YMexN(t), (16.24)
где Д' = &эмп = Zxx YCT — коэффициент передачи (здесь F — по-
Г ^8 уст
лезная площадь ГД недифференциального типа; и& (t) — сигнал
ошибки ЭГСС)-, Умех — внутренняя механическая проводимость ГД.
FK
°) а
Рис.’16.13. Структурные схемы гидропривода:
а — при инерционной механической нагрузке; б — при упругой нагрузке
517
Применяя принцип Даламбера, подставим уравнение на^рузкй
(16.23) в выражение (16.24). При этом получим следующее линейное
уравнение гидропривода:
2 (0 === А«е (0 У Mex^HZ (0,
из которого определим передаточную функцию гидропривода как
подсистемы ЭГСС при инерционной нагрузке
ГГП(и)(«) yMexms+1>
но Умехщ — Ти — постоянная времени гидропривода, поэтому
окончательно можно записать
Wгп ('и) (s) = Frn (И) («) = t- >
а также (и) (s) = ~s 4) •
Если коэффициенты усиления электронного усилителя и элемента
отрицательной ОС равны kyQ, koc соответственно, то передаточная
функция ЭГСС
1ЕЭГсс (и, (s) = - Д = ХГП<И(Л+1 • <16-25)
^ВХ Vv А«ОСИ/ГП (и) 1
Как следует из выражения для 1Ггп (и) («), ЭГСС при инерционной
нагрузке является астатической системой по управляющему воздей-
ствию; структурные схемы гидропривода и ЭГСС приведены на
рис. 16.13, а.
Уравнение упругой механической нагрузки (см. рис. 16.13, б)
Ny (/) = cyz (t), (16.26)
где су — коэффициент упругости.
Используя принцип Даламбера, подставим уравнение (15.26) в вы-
ражение (16.24). При этом получим уравнение гидропривода при
упругой нагрузке
Z (/) = KU£ (t) У мех-Су г (/),
из которого найдем передаточную функцию гидропривода при упру
гой нагрузке
______к______
ГмехСу(гД-+1)
^~у
ГуУ -j-1 ’
где Ау = А/(ЕМехСу) — коэффициент передачи; Ту = 1/(ЕмехСу) —
постоянная времени гидропривода.
518
Если коэффициент усиления электронного усилителя &у0, коэф*
фициент элемента ОС равен йОС)то передаточная функция ЭГСС при
упругой нагрузке
W7 2(s) _ Wrn(y)(s)
W ЭГСС (у) (S) - увх (s) oocWn (у) (s) _|_ 1 >
т. е. ЭГСС при упругой нагрузке является статической системой по
управляющему воздействию «вх (t).
Аналогичным образом могут быть получены математические мо-
дели ЭГСС при комплексной механический нагрузке.
Устойчивость и качество регулирования электрогидравлических
следящих систем можно проанализировать частотным методом или
методом пространства состояний.
УКАЗАТЕЛЬ ВАЖНЕЙШИХ АББРЕВИАТУР,
ОБОЗНАЧЕНИЙ И БУКВЕННЫХ СОКРАЩЕНИЙ
В ИНДЕКСАХ
1. Аббревиатуры
АБМ — амплитудная балансная
модуляция
АКОР — аналитическое констру-
ирование регуляторов
АПР — автоматизация проекти-
рования
АРД — автоматический регуля-
тор давления
АРМ — автоматизированное ра-
бочее место
АСВТ — агр вотированный комп-
лекс вычислительной
техники
АСС — автоматическая следящая
система
АСУ ТП — автоматизированная си-
стема управления тех-
нологическим процессом
АФХ — амплитудно-фазовая ха-
рактеристика
АЦП — аналого-цифровой преоо-
разователь
АЧХ — амплитудная частотная
характеристика
БР — безынерционный регуля-
тор
ВТ — вращающийся трансфор
матор
Г — генератор
ГД — гидравлический двигатель
ГО — грубый отсчет
ГСП — Г осударственная система
промышленных приборов
ДАД — двухфазный асинхрон-
ный двигатель
ДКУ — дискретное корректиру-
ющее устройство
ДМУ — двухтактный магнитный
усилитель
ДП — 'декретный привод
ДПВ — двойной пиковый вольт-
метр
ЗР —• золотниковый распреде-
литель
Инв — инвертор
ИПФ — импульсная переходная
функция
ИУ — исполнительное устрой-
ство
ИЭ — импульсный элемент
К — контакты (реле)
Кл — ключ (импульсный эле-
мент)
КУ — корректирующее уст-
ройство
КУ — кодирующее устройство
КЭУ — корректирующие эле-
менты и устройства
ЛАХ — логарифмическая амп-
литудно-частотная ха-
рактеристика
ЛО — лингвистическое обеспе-
чение
ЛФХ — логарифмическая фазовая
частотная характеристика
ЛЧ — линейная часть системы
ЛЭД—линейный электродвига-
тель
ЛЭП — линейный электропривод
М — модулятор
МО — математическое обеспе-
чение
МПФ — матричная передаточная
функция
МУ — магнитный усилитель
НГПК — низкочастотный генера-
тор периодических ко-
лебаний
НМБ — накопитель на маг-
нитном барабане
НМД — накопитель на магнит-
ном диске
НМЛ — накопитель на магнитной
ленте
НФ — низкочастотный фазо-
метр-частотомер
НЭ — нелинейный элемент
ОВ — обмотка возбуждения
ОМО — общее программное обе-
спечение
ОМУ — однотактный магнитный
усилитель
ОПО — общее программное обе-
спечение
ОР — объект регулирования
ОС — обратная связь
П — привод
Ш, П2 — преобразователи
ПД—потенциометрический дат-
чик
ПИ — пропорционально-ин-
тегральный регулятор
ПИД—пропорциональный ин-
тегрально-дифференциаль-
ный (закон регулиро-
вания)
ППП — пакет прикладных про-
грамм
520
ПТ — поворотный трансфор-
матор
ПУ — преобразующее устройство
ПЦ — предельный цикл
РИС — радиолокационная из-
мерительная система
РЛС—радиолокационная стан-
ция
РО — регулирующий орган
РРД — распределитель расхода и
давления
САПР — система автоматизирован-
ного проектирования
САР — система автоматического
регулирования
САС — система автоматизирован-
ного синтеза
САС — система автоматической
стабилизации
САУ — система автоматического
управления
СГ — синхронный генератор
СД — сельсин-датчик
СКВТ — синусно-косинусный вра-
щающийся трансформатор
СМО — специальное математиче-
ское;_ обеспечение
СПО — специальное программное
обеспечение
СПР — система программного
регулирования
СТ — сельсин-трансформатор
СУ — система управления
СЭ — сдвигающий
Тг — тахогенератор
ТЗ — техническое задание
ТО — точный отсчет
ТУ — тиристорный усилитель
ТЭО — технико-экономическое
обоснование
УПТ — усилитель постоянного
тока
УУ — усилительное устройство
ФП — фотоприемник
ФРД — фоторелейный датчик
ФЧУ — фазочувствительный уси-
литель
ФЭ — фотоэлемент
ФЭД — фотоэлектронный датчик
ЦАП — цифроаналоговый пре-
образователь
ЦД — цифровой датчик
ЦДЛП — цифровой датчик линей-
ных перемещений
ЦСС — цифровая следящая си-
стема
ЧЭ — чувствительный элемент
ШД — шаговый двигатель
ШИ — усилитель — широтно-им-
пульсный усилитель
ШИМ — широтно-импульсная мо-
дуляция
Э — экстраполятор
ЭВМ — электронная цифровая вы-
числительная машина
ЭГСС — электрогидравлическая
следящая система
ЭДв — электродвигатель
ЭМ — электромагнит
ЭМП — электромагнитный преоб-
разователь
ЭМУ — электр ом ангинный уси-
литель
ЭПТ — электродвигатель по-
стоянного тока
ЭРН — электронный регулятор
напряжения
ЭУ — электронный усилитель
2. Обозначения
К (0 — матрица коэффи-
циентов
Н — наблюдаемая си-
стема
— ненаблюдаемая си-
стема
П — знак произведе-
ния
Y — управляемая си-
стема
— неуправляемая
система
А — матрица
Aj — коэффициент ря-
да Фурье
А — диагональная ма-
трица
А (со) — амплитудная ча-
стотная характе-
ристика
а0 — амплитуда авто-
колебаний
adj — адъюнкта опре-
делителя
а (со) — вещественная
часть числителя
передаточной
функции Y (/со)
В — матрица
b (со) — мнимая часть чи-
слителя 'переда-
точной функции
Y (/со)
С — матрица выхода
с — абсцисса абсолют-
ной сходимости
с0, сх.. сп — коэффициенты
ошибок (посто-
янные интегри-
рования)
531
ск1> ri — коэффициенты ал-
горитма Рауса
с (<о) — вещественная
часть знаменате-
ля передаточной
функции У (/со)
det — детерминант
(определитель)
d tag — диагональная
(матрица)
D (/«) — функция комп-
лексного пере-
менного (кривая
D-разбиения про-
странства пара-
метров)
Dp (7®) — полином зна-
менателя переда-
точной - функции
разомкнутой САР
D [К] — области, соот-
ветствующие
различным зна-
чениям корней К
D (Л) — полином _ от Л
D (р) — полином от р
D (z) — детерминант мат-
рицы
d (со) — мнимая часть зна-
менателя переда-
точной функции
У (7®)
е — напряжение иа
входе усилителя
е — основание нату-
ральных логариф-
мов
вх, е3 — напряжения на
входе и выходе
корректирующего
устройства со-
ответственно
е* (/) — дискретный сиг-
нал ошибки
Е* (s) — преобразование
Лапласа для сиг-
нала е* (/)
£3 (s) — преобразование
Лапласа для
функции е3 (/)
extr — экстремум функ-
ции
F — сила
F (х, у, z) — функция трех пе-
ременных
F (s) — преобразование
Лапласа для
функции / (О
F (?) — Z-преобразование
для функции / (ft)
7 — функция (коэффи-
циент трения)
/о — амплитуда коле-
баний
f (t) — возмущающее
(входное) воз-
действие
7 (к) — последователь-
ность чисел (ар-
гумент к указы-
вает последова-
тельность следова-
ния чисел)
G (s) — преобразование
Лапласа для функ-
ции g (О
G* (s) — преобразование
Лапласа для
сигнала на выхо-
де импульсного
элемента g* (t)
G (г) — Z-преобразование
сигнала g* (t)
g («) — дискретный сиг-
нал на ходе
линейной системы
g (0 — управляющее воз-
действие
g* (/) — последователь-
ность импульсов
на выходе ключа
(сигнал на вы-
ходе импульсного
элемента)
И (со) — амплитудная ча-
стотная характе-
ристика
h — запас устойчи-
вости по модулю
(уровень жидко-
сти)
h (/) — переходная функ-
ция
h* (0 — переходный про-
цесс, соответству-
ющий едииичнойв
частотной ха-
рактеристике
I — единичная ма
трнца
, / А \
J ( — ) — эквивалент коми
лексный коэф-
фициент усиления
нелинейного звена
1Я — ток якоря элект-
родвигателя
«У — выходной ток уси-
лителя
/ — момент инерции
628
I-
K, k -
кв -
, Кл’
Ao'
^ид (О
МО
к (О
L (W)
Ак (®)
LmH (<о)
М
А! до
Мн
мс
Мео
т
т (I)
п (О
мПимай едипйца
/ = к~1
передаточный
коэффициент (пе-
редачи, усиления)
коэффициент воз-
врата реле
коэффициент уси-
ления линейной
частя
коэффициент уси-
ления объекта ре-
гулирования
(крутизна харак-
теристики)
импульсная пе-
реходная функция
идеальная им-
пульсная пере-
ходная функция
импульсная пе-
реходная функция
экстраполятора
матрица коэффи-
циентов
логарифмическая
амплитудная ча-
стотная характе-
ристика
желаемая лога-
рифмическая амп-
литудная час-
тотная характе-
ристика
логарифм модуля
характеристики
Я(®)
- момент
движущий момент
вала двигателя
• установившееся
значение движу-
щего момента
номинальное зна-
чение момента
- момент сопро-
тивления на валу
электродвигателя
- установившееся
значение момен-
та сопротивления
масса (порядок
числителя переда-
точной функции)
- максимальный ход
серводвигателя
- управляющее слу-
чайное воздействие
- возмущающее слу-
чайное воздействие
(помеха)
Р — ЧИСЛО KOpiK'/l КН-
рактерпс!пчгскпгп
уравнении, л«*
жащих npHRnll
полуплоскости
Рдм — давление воадухв
в магистряли
Рр — давление воздухе
в резервувр»
Р (/) — симметричная мат-
рица
Рх (/), .... Рп (/) — множители Лдг-
рапжа
Р (со) — вещественная ча-
стотная характе-
ристика замкну-
той САР
Q — матрица
Q (s) — преобразование
Лапласа для функ-
ции q (О
Q (<о) — мнимая частот-
ная характеристи-
ка замкнутой САР
q, <7Х — гармонические
коэффициенты
усиления нелиней-
ного звена
7?доб — добавочное со-
противление
<р (т) — взаимная корре-
ляционная функ-
ция на входе и
выходе системы
R (s) — преобразование
Лапласа для
функции r(t)
Рч (w) — обобщенная ве-
щественная ча-
стотная характе-
ристика
R (т) — корреляционная
функция
Rx, у (т) — взаимная кор-
реляционная
функция
R (/) — положительно-
определенная мат-
рица
rang — ранг матрицы
г — сопротивление в
электрической це-
пи (вычет) (ко-
эффициент демп-
фирования)
г (0 — регулирующее воз-
действие (сигнал
ОС)
Sx; S2; Sa; S& — системы
S (w) — функция спект-
ральной плотности
523
•S'e (u>) — спектральнай
плотность ошибки
Sm, п (®), — взаимная спект-
Sn, т (®) ральная функция
плотности
spur — след матрицы
sup — верхняя граница
Т — время переходно-
го процесса (по-
стоянная времени)
T'min — минимальное вре-
мя переходного
процесса
То — постоянная време-
ни объекта регу-
лирования
t — время
17п — напряжение по-
тенциометра
1/тг—напряжение тахо-
генератора
<7Г — напряжение на
выходе генера-
тора
Uy — напряжение на
выходе усили-
теля
UB — напряжение воз-
буждения гене-
ратора
иопт (0 — оптимальное уп-
равление
и* — вектор оптималь-
ного управления
u (I) — вектор управле-
ния
u (s) — вектор входа
и& — сигнал ошибки
V, v — линейная ско-
рость
V (s) — передаточная
функция разомк-
нутой САР по от-
ношению к воз-
мущающему воз-
действию
V (w) — мнимая часть
D (/и)
Й7п1ах — максимальное зна-
чение ускорения
регулируемой ве-
личины I^max =
_________ сРх
~ ~dP~
W (s) — передаточная
функция разомк-
нутой САР по от-
ношению к управ-
ляющему воздей-
ствию
fi?oc (s) — передаточная
функция элемен-
та обратной связи
^цд (s) — передаточная
функция цифрово-
го дифференциа-
тора
Wd (s) — передаточная
функция после-
довательного кор-
ректирующего
устройства
(s) — передаточная
функция регуля-
тора
№Ор (s) — передаточная
функция объекта
регулирования
(неизменяемой ча-
сти системы)
Wa (s) — передаточная
функция экстра-
полятора
X (/w) — частотный спектр
входного сигнала
X (s) — преобразование
Лапласа для х (t)
х (О — регулируемая ве-
личина
хвх — входной сигнал
хвых — выходной сигнал
х (оо) —• установившееся
значение регу-
лируемой вели-
чины
хНач — начальное значе-
ние процесса ре-
гулирования
хОпт (0 — оптимальный пе-
реходный про-
цесс
хгаах — максимальное от-
. клонение регули-
руемой величины
хк — отклонение коор-
динат от уста-
новившегося зна-
чения
х* (/) — дискретный вход-
ной сигнал
х* (/) — дискретный сиг-
нал на входе эк-
страполятора (вы-
хода ЭВМ)
хв (кхг) — выходной сигнал
с ЭВМ
ха (0 — выходной сигнал
экстраполятора
х — вектор состояния
Y (/и) — частотная харак-
теристика САР
524
V (s) — передаточная к — коэффициент на- клона вещест- венной частотной
функция САР по отношению к воз-
мущающему воз- характеристики
действию К- X = Wd/wn
Г(г)- — Z-преобразование корни характе-
для у (k) ристического
У (0- — выходные пере- уравнения
менные V — порядок астатиз-
У — выходной вектор ма САР
Z(s) — передаточная 5к- коэффициент демп-
функция парад- фирования коле-
лельного коррек- бательного звена
тирующего уст- ройства Р со - нормированная корреляционная
! л \ функция р (т) =
° (v)' — амплитудная ха- £(О
рактер истина не- Я(0)
линейного эле- ©% — величина пере-
мента регулирования
ai — коэффициенты пе- т — постоянная вре-
редаточной функ- мени дифференци-
ции САР рующего звена
Pi — коэффициенты пе- 1-го порядка
редаточной функ- Td — постоянная вре-
ции САР мени дифферен-
У — запас устойчи- цирующего звена
вости САР по фазе 2-го порядка
д — допустимая ошиб- л> — постоянное за-
ка регулируемой паздывание
величины л-; т-, ткв — такт квантования
Лк — определитель Гур- (дискретизации)
вица Ф (/со) - - частотная ха-
ДЛ1 (0 — разность откло- рактеристика
нений моментов замкнутой САР
(движущего и со- ф _ переходная функ-
противления) Ф (0 - ция состояния
S — поправки к асим- переходная мат-
птотическим ЛАХ, Ф(о- рица
угол поворота ру- передаточная
ля функция замкну-
S(/) — дельта-функция той САР по от-
£ (s) — преобразование ношению к управ-
Лапласа для ляющему воздей-
сигнала ошибки ствию [преобра-
8(0 зование Лапласа
E(z) — Z-преобразование ДЛЯ ф (/)]
для ошибки Фе (s) - передаточная
Ы — коэффициент дёмп- функция ошибки
фирования диф- Ф (S) - матричная пере-
ференцирующего даточная функция
звена 2-го порядка [преобразование
в (о) — логарифмическая Лапласа для
фазовая частотная Ф (?) — матрицы ф (/) ]
характеристика - Z-передаточная
(фазочастотная ха- функция систе-
рактеристика) мы с обратной
& — угол тангажа связью и управ-
МО — программное зна- ляющей ЭВМ в
чение угла тан- контуре управ-
гажа ления
525
Ср (I) —- переходная или
фундаментальная
матрица
Ф (/®) — вспомогательная
функция
<р (а>) — фазовая частотная
характеристика
замкнутой САР
'Г (з) — преобразование
Лапласа для ф (t)
(характеристиче-
ский полином)
Рэдв — угловая скорость
вала электро-
двигателя
□о — номинальная ско-
рость вала элект-
родвигателя
<а — угловая скорость
(угловая частота)
wH — номинальная уг-
ловая скорость
<вс — частота среза
(ЛАХ)
<ок — сопрягающая ча-
стота ЛАХ ко-
лебательного звена
<оо — частота автоколе-
баний
®с (^тш) — частота среза, со-
ответствующая ми-
нимальному вре-
мени переходного
процесса
опт — частота среза, со-
ответствующая оп-
тимальному пере-
ходному процессу
3. Буквенные сокращения в индексах
в — возбуждение
в — вязкая (нагрузка)
вн — внутреннее (сопротивление)
возм — возмущающий (момент)
вр. п — вращающий пусковой
(момент)
вх — вход
вын — вынужденные (колебания)
вых — выход
Г — замкнутый контур
г — генератор
ГО — грубый отсчет
д — добавочное (сопротивление)
д — движущий (момент)
дв — двигатель
зн — зона нечувствительности
(зона неоднозначности)
й — инерционная (нагрузка)
ид — идеальный
изб — избыточный (момент)
к — колебательное звено
кз — короткого замыкания (ре-
жим)
л — лопасть (линейная часть)
ЛЧХ — логарифмические частотные
характеристики
мех — механическое (сопротив-
ление)
мод — модулятор
н — номинальное значение (на-
чальные условия)
н — нагрузка
нач — начальное (значение)
ном — номинальная (угловая ско-
рость)
н. ч — натуральные числа
п — потенциометр (программа)
пар — параллельная (связь)
ПО — программное обеспечение
поел — последовательная (связь)
пост — поступательное (движение)
пуск — пусковой (момент)
Р — регулятор
р — роторная (обмотка)
раб — рабочая (обмотка)
ред — редуктор
с — статор
с — частота среза
св — свободные (колебания)
ср, ч — среднечастотная (асимптота
ЛАХ)
сс — статический синхронизиру-
ющий (момент)
ст — статический (момент)
ст — сельсин-трансформатор
Т — знак транспонирования
т — термопара
тр — трение
тг — тахогенератор
то — точный отсчет
у — усилитель (упругость)
у — управление
уд — удельный
хх — холостой ход
эм — электромеханическая (по-
стоянная времени)
я — якорь
d — дифференцирующее звено
т — порядок числителя передато-
чной функции (максималь-
ный)
п — порядок знаменателя пе-
редаточной функции
opt — оптимальный, оптимальное
СПИСОК ЛИТЕРАТУРЫ
1. Воронов А. А., Титов В. К-, Новограиов Б. Н. Основы tpojiiih itHnMih
тического регулирования и управления. М.: Высшая школя, 1977 Jill 1
2. Задачник по теории автоматического управлепия/ПоД ред, А, llhfii
лова. М.: Энергия, 1979. 540 с.
3. Иващенко Н. Н. Автоматическое регулирование. Теория Н MtMlHfM lit
стем. М.: Машиностроение, 1978. 736 с.
4. Квакериаак X., Сиваи Р. Линейные оптимальные системы УВВШМИН.
М.: Мир, 1977. 650 с.
5. Кузовков Н. Т. Модальное управление и наблюдающие уагреЙ8Ш> Md
Машиностроение, 1976. 184 с.
6. Литвак В. М. Фотореле в системах автоматики. М.: Эиаргия, lift,
104 с.
7. Макаров И. М., Меиский Б. М. Линейные автоматические СНОТеММ. М<1
Машиностроение, 1977. 464 с.
8. Моисеев Н. А., Иваиилов Ю. Н., Столяров Е. М. Методы ОПТИМИаишН!
Учебное пособие. М.: Наука, 1979. 351 с.
9. Нореиков И. П. Введение в автоматизированное проектирование тед»
иических устройств и систем. М.: Высшая школа, 1980. 311 с.
10. Петров В. В., Гордеев А. А. Нелинейные сервомеханизмы. М.! Мяшипо*
строение, 1979. 472 с.
11. Плотников В. Н., Зверев В. Ю. Оптимизация оперативно-ор|'ИПИ«анион-
ного управления. М.: Машиностроение, 1980. 253 с.
12. Попов Е. П. Теория линейных систем автоматического регулировании и
управления. М.: Наука, 1978. 256 с.
13. Попов Е. П. Теория нелинейных систем автоматического регулпршиншя
и управления. М.: Наука, 1979. 255 с.
14. Расчет элементов цифровых устройств/Под ред. Л. Н Прсснухнил. М,:
Высшая школа, 1982. 384 с.
15. Семенков В. И. Введение в системы автоматизации проектировании. —
Минск: Наука и техника, 1979. 86 с.
16. Следящие приводы/Под ред. Б. Н. Чемоданова в 2-х книгах. М.: Энергия,
1976., кн. 1.^367 с.; кн.: 2, 384 с.
17. Солодовников В. В., Бирюков В. Ф., Тумаркин В. И. Принцип сложности
в теории управлениями.: Наука, 1977. 344 с.
18. Солодовников В. В. Проблемы автоматизации проектирования и методы
теории автоматического управления.—Изв. АН СССР. Техническая киберне-
тика, 1980, № 5, с. 23—30.
19. Солодовников В. В. Системный анализ и проектирование многообъектных
систем управления. М.: МВТУ, 1982. 43 с.
20. Суворова В. И., Любомирский М. А. Мини-ЭВМ в управлении произ-
водством. М.: Экономика, 1978. 64 с.
21. Теория автоматического управления. Ч. I. Теория линейных систем ав-
томатического управления/Под ред. А. А. Воронова. М.: Высшая школа, 1977.
303 с.; Ч II. Теория нелинейных и специальных систем автоматического регули-
рования/Под ред. А. А. Воронова. М-: Вмещая шкода, 1977. 228 с.
537
22. Техническая кибернетика. Теория автоматического регулирования/Под
ред. В. В. Солодовникова. — Кн. 1, 2, 3. М.: Машиностроение, кн.: 1. 1967.
768 с.; кн. 2, 1967. 779 с.; кн. 3, 1969. 974 с.
23. Техническая кибернетика. Устройства и элементы систем автоматического
регулирования и управления/Под ред. В. В. Солодовникова в 3-х книгах. — М.:
Машиностроение, кн. 1. 1973, 680 с., кн. 2. 1975. 688 с.; кн. 3. 1976. 736 с.
24. Тищенко Н. М. Стабильность магнитных усилителей. М.—Л.: Энергия,
1964.
25. Топчеев Ю. И., Цыплаков А. П. Задачник по теории автоматического
регулирования. М.: Машиностроение, 1977. 592 с.
26. Ту Ю. Современная теория управления. М.: Машиностроение, 1971. 472 с.
27. Электромеханические преобразователи угла с электрической редукцией/
Под ред. А. А. Ахметжанова. М.: Энергия, 1978. 223 с.
АЛФАВИТНО-ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
А
Автоколебания 243, 256
— регулятора давления 505
Автоматика 9
Автоматизация проектировании 278
— производства 303
Автоматизированная система упра-
вления 305
Автоматизированный синтез 292
Автоматический привод 447
Автоматический регулятор 305, 307
Автопилот 20
Адмитанц 380
Алгоритм 295
Алгоритмическое обеспечение 295
Амплитудно-балансная модуляция
317
Амплитудно-фазовая характеристика
-------второго рода 117
-------динамических звеньев 50—58
------- первого рода 117
Амплитудно-частотная характери-
стика 43
Амплитудный метод регулирования
412
Анализ
— дискретно-непрерывных систем 226
— дискретных систем 229
— качества регулирования 123
— нелинейных систем 237
— устойчивости
— — дискретных систем 230
— — непрерывных систем 101
----по АФХ 113
----по ЛЧХ 116
Анализ спектра 184
Аналого-цифровой преобразователь
370
АСВТ 498
Асинхронный электродвигатель 24
Астатическая система 24, 306, 509
Б
Балансная модуляция 317
Белый шум 180
Бесконтактный сельсин 324
Быстродействие 516
Быстродействующий привод 477
В
Вектор возмущения 306
— задания 305
— наблюдения
—- начальных условий 322, 511
— состояния 93, 306, 511
— управления
Векторно-матричный метод 409
---, уравнение 322
Вещественная частотная характери-
стика 44
-------замкнутой системы 44'
-------обобщенная 126
-------, применение 135
-------, свойства 147
Взаимозаменяемость 309
Вибрационная линеаризация 394
Внутреннее сопротивление 386
— проводимость 454, 517
Внутренняя обратная связь 307
Воздействие
— возмущающее 15, 305
— единичное ступенчатое 29
— типовое 29
Вращающий момент 329, 458,466 и т. д.
Вращающийся трансформатор 336
Временные характеристики (см. По-
стоянная времени) 318, 335, 391 и т. д.
Время дискретное
— запаздывания 57
— отпускания 391
— переходного процесса регулирова-
ния 125
— срабатывания 391
Выбор
— измерительного устройства 310
— исполнительного устройства 447
— технических средств 310
— усилителя 378
Вынужденные колебания 42
Вычислительная подсистема 304
Г
Гармоническая линеаризация 252
— модуляция 317
Генератор
— опорных напряжений 508
синхронный 499
Гидравлический двигатель
--------- классификация 487
------------конструкция 488
------ уравнения 517
------характеристики 493
Гидравлический привод 514
Гидравлический усилитель (см. Рас-
пределитель расхода :н давления)?
487
Гипотеза эргодичности 178
Гироскопический датчик 316
ГСП 497
Грубый отсчет — 333
Грубый — точный отсчет 333
529
д
Датчик
— индукционный 324, 336
— линейных перемещений 351
— первичной информации 314
— потенциометрический 318
— релейный 319
— термоэлектрический 361
— технические характеристики 309
— угол — код 345
— угловых перемещений 324
— фотоэлектрический 351, 357
— цифровой 334
Двоичный код 344
Двоично-сдвинутый код 347
Двусторонняя ШИМ 394
Двухтактный каскад 401 ,
— схема 404
— усилитель 378
----магнитный 429
----транзисторный 404
Демодулятор 367
— двухполупериодный 368
— однополупериодный 369
Декада 59
Декомпозиция системы 95, 287
Дельта-функция 29
Децибел 59
Диаграмма круговая 129, 130
Диапазон регулирования 309
Динамическая магнитная проница-
емость 415
— точность 175
Динамические характеристики (см.
также Уравнения динамики) 33
Дискретная САР 194
--------, анализ
-------, — устойчивости 230, 234
— —, математическое описание 197
-------, передаточные функции 211, 214,
219
Дифференциальная система 429
Дифференциал
— полный МУ 418, 423
— функции 454
Дифференциальные уравнения (см.
также Уравнения динамики) 33
---- гидродвигателя
---- измерительного устройства на
СКВТ 341
----корректирующего устройства 442
----МУ 423
— — нагрузки 451
---- механической 450
---- электрической 380
— — привода 518
----САР
----электродвигателя 459
— ---двухфазного 468
-------- постоянного тока 459
--------ЭМУ 432, 434 и д. т.
Добротность
— МУ 423, 426
— САР 129
Д-разбиение 121
Дуальность критериев 94
Е
Естественная обратная связь 449
Естественный сигнал 498
Ж
Желаемая ЛАЧХ 159
Жесткая (позиционная) ООС 330
Жидкость 489
3
Задача анализа
— Винера 190 Д
— Лагранжа 260
— определения состава технических
средств 310
— синтеза 154
--- при наличии помех 189
Задающее устройство 17
Запас устойчивости
— — по модулю 119
---по фазе 119
Звено
— апериодическое (инерционное) 49
— дифференцирующее (форсирующее)
364
---второго порядка 56
--- первого порядка 55
— запаздывающее 57
— интегрирующее 53
— колебательное 51
— неустойчивое апериодическое 50
--- колебательное 51
— структурной схемы 329, 459
— усилительное 54
Золотниковый распределитель 487
— — с перекрытием 489
--- четырехкромочный 489
Зона
— «залипания» реле 397
— линейности 330
— насыщения 236
— неоднозначности
— неопределенности пуля 343
— нечувствительности 505
— нуля (единицы) 347
--- сельсина 332
---СКВТ 343
z-передаточная функции дискретнс
САР 219
-------корректирующего устрс
ства 443
-------эквивалентного КУ 446
530
и
Измерительное устройство 308
— — индукционное 324
----------на сельсинах 326, 332
----------на СКВТ 339
------ — угол — фаза — код 334
----потенциометрическое 322
------ температуры 364
----фотоэлектрическое 344
----------линейных перемещений 351
Изображающая точка 239
Импеданц 380
Импульсная переходная функция
(ИПФ) 150
----------дискретной системы
----------непрерывной системы
----------цифрового фильтра 442
Импульсный элемент (см. Ключ) 203
Индикаторный режим 326
Инерционная нагрузка 451
Интегродиффереицирующее звено 441
Интервал частот 59
Интерполятор 354
Информация 304
Информационная подсистема 304
Инфранизкочастотный сигнал 314
— спектр 314
Исполнительный привод 448
----дискретный 472
----линейный 477
4——, математическое модели 453
----электрический 449
—---------цифровой 481
—---электрогидравлический 487
Исполнительное устройство 18
----гидравлическое 449, 487
— — —, классификация 449, 487
— — пневматическое 449
----- электрическое 448
—---------, классификация 449
— * —, энергетический расчет 493
К
Качество САР 123
- —, анализ 123, 124
Квадратурная составляющая 400
Квантование
«- по времени 204
- по уровню 203
Кинематическая схема 494
Класс точности 334
Классификация
- датчиков 315
- динамических звеньев
- нелинейных характеристик 236
- преобразователей 315
- САР 305
- устройств САР 301, 16—27
- — измерительных 315
---исполнительных 448
------ корректирующих 378
---усилительных 378
Ключ (см. Импульсный элемент) 203
Код Баркера 347
Кодирующее устройство 345
Коммутирующее (опорное) напряже-
ние 368
Компаратор 372
Комплексная нагрузка 450
Конструкция
— бесконтактного сельсина 325
— двухфазного асинхронного двига-
теля 464
— СКВТ 336
— термопары 362
— цифрового датчика 352
преобразователя 348
— реле 390
---герметизированного
--- нейтрального
--- поляризованного
— ЭМП 374
Корректирующая обратная связь 379
Корректирующее устройство (фильтр)
--- параллельное 158
— — последовательное 158
--- эквивалентное 439
Коррелятор 182
Корреляционная функция 179
— —, свойства 179—180
— , связь со спектральной плот-
ностью 185
Коэффициент
— гармонической линеаризации 254—
256
— демпфирования 51
— ошибки 150—154
— передаточный 40
КПД
— редуктора
— электродвигателя
Критерий
— векторный 289
— • качества регулирования 147—142
— квадратичный
— монотонности 148
— перемежаемости корней 113
— устойчивости 105
---Михайлова 111
---амплитудно-фазовый (Найвн-
ста — Михайлова) 113
---Рауса и Гурвица 106—109
Круговая диаграмма
---вещественная 127—129
---мнимая 129—130
Л
Линейное сопротивление
--- механическое 450
— — электрическое 380
531
Линейный привод 477
Линейный электродвигатель 477
Линеаризация
— вибрационная 394
— гармоническая 251—256
— дифференциальных уравнений 36—
40
— механических характеристик 466
— нелинейных характеристик 35
Логарифмическая амплитудная ча-
стотная характеристика (ЛАХ) 59
желаемая 159--162
•------, построение для однокон-
турной разомкнутой САР 70
-------типовые 171—172
—------устройств САР
Логарифмические частотные характе-
ристики (ЛЧХ)
-------, анализ устойчивости 116—119
------- динамических звеньев 60—69
-------, метод построения 60—69
-------САР 69
Ложный нуль 333
Люфт (зазор) 236
М
Магнитный усилитель (МУ) 415
---двухтактный 429
— — однотактный 417
Математическая модель
— — нагрузки 380
---усилителя 385
--- без обратной связи 385
-------с обратной связью 386
--- исполнительного устройства
453
Матрица 84
— выхода 84
— единичная 85
— квадратная 262
— квантования 410
— переходная (фундаментальная) 86,
322
— расширенная 384
— симметричная 262
Матричная передаточная функция 89
Метод вычисления переходной ма-
трицы 86
• — математического описания 197
— мгновенного коэффициента 483
— механической редукции 332
— переменных состояния 82
Метод трапецеидальных частотных
характеристик 135—141
— частотный 42
Метод анализа качества САР 124, 147
-------переходных процессов 135
-------устойчивости 110
------- дискретных САР 232
Метод фазовой плоскости (траекто-
рий) 237
532
— электрической редукции 332
Механическое сопротивление 450
Механические характеристики 454
Мнимая частотная характеристика
44, 127
Многополюсный сельсин 334
Моделирование имитационное 297
Момент
— вращающий 329
— избыточный
— номинальный
— • пусковой
— трения 329
Н
Наблюдаемость 91, 93
Надежность 309
Нагрузка
— механическая 450
— нелинейная 452
Нагрузка электрическая 380
Напряжение
— квадратурное 400
Напряжение нулевое 331, 342
— опорное 317
— синфазное 368, 400
Нелинейная система 236
Нелинейная характеристика 236,
245, 246
— , линеаризация 35
Нелинейный элемент 248
Несимметричный электродвигатель 471
Номограмма
— замыкания 78—80
— для определения Р (со) 129, 131, 133
-------Q(w) 130, 132, 134
-------запаса устойчивости, пока-
зателей качества 171
— — перевода натуральных чисел 72
— — построения 0 (со) апериодиче-
ского звена 62
О
Обеспечение САПР 294
•— — алгоритмическое 295
------ математическое 294
------ программное 297
Область устойчивости 120
Обобщенная характеристика
---вещественная 127
--- мнимая 127
--- статическая 493
Обратная связь (см. Связь обратная)
9, 14, 16, 17, 32
--- отрицательная 14
---в САР 15
--- позиционная 312
---положительная 424, 436
— — скоростная 312
Объект регулирования 16, 262
---, дифференциальные уравнения
37, 40
Одноотсчетная следящая система 330
Октава 59
(Операторное уравнение
|Определитель Гурвица 108
«Оптимальная система 275
«Оптимальное управление 259, 272, 289
^Оптимальный линейный регулятор
274
— переходный процесс 155
Особая точка 239
— отрезок 234
Отклонение регулируемой вели-
чины 15
Оценка точности
---динамической 175
• — — сельсина 334
---СКВТ 343
Ошибка (погрешность) 15
— аддитивная 314
— динамическая 313
— инструментальная 314
— методическая 314
— мультипликативная 314
— периодическая 314
— систематическая 314
— случайная 314
— статическая 313
П
Параметр
— системы 34
Параметр характеристик 385, 417
Пассивный корректирующий фильтр
163-165
Передаточная функция
— —, определение 46
— — ошибки 48
---САР 47, 502, 509, 518
— -— — дискретной 211, 214, 219
— — — непрерывной 43, 47
— — элементов и устройств САР 58
Передаточный коэффициент (коэффи-
циент передачи)
---, определение 149
---САР 40
---элементов и устройств САР
Переменные состояния 82, 382
Перерегулирование 125
Переходная функция 49
Переходный процесс 123, 124
— —, определение методом трапе-
ций 135
Плоскость фазовая 237
Пневматическое устройство 378
Показатели качества регулирования
124, 125
Постоянная времени 40
— —, определение 41
---устройств САР 381, 423, 433
и т. д.
Предельный цикл 241, 242
Преобразователь 315
Преобразование
— сигнала 315, 317, 344 и т. д.
— структурных схем 74—78
— частотного спектра 206—211
Привод (сервомеханизм) САР 18
Приемистость 475
Принцип аргумента 110
Проблема динамической точности 175
— сложности 284—287
Программа вычисления 486
Программирование математическое
270, 271
Проектирование САР
— , сущность 279
— предварительное 281
— техническое 280
— эскизное 281
Прямой метод Ляпунова 102—104
Р
Радиолокационная измерительная
система 506
Разрешающая способность 347
Распределитель расхода и давления
487
Расчет САР (см. Проектирование)
Регулирование 9
— импульсное 27
— непрерывное 27
Регулируемая величина 13, 14, 15
и т. д.
Регулятор 18, 19, 274—278
Резонансный (полосовой) усилитель
403, 508
Релейная САР 246, 249, 250
Режимы работы 326, 328, 402, 407
и т. д.
С
Самосинхронизация механическая 330
САПР
— «интеллектуальная» 298
— обобщенная схема 300
САПР, технические средства 301
САР, САР ТП 14, 16, 496, 497 и т. д.
Связь обратная (см. Обратная связь)
9, 14, 16, 17, 32
Сельсии 324
Сервомеханизм 17, 18
Сигнал
— входной 15
— выходной 15
— главный обратной связи
— ошибки 15
Следящая система
— — позиционная 329
533
-----скоростная 312
-----цифровая 481
-----электромеханическая 31, 496
Сложность, определение 284—287
Синтез корректирующего устройства
----- дискретного 444
-----—параллельного 165
----- последовательного 162
-----последовательных и парал-
лельных 168
-----, постановка задачи 154
Синтез САР (при наличии помех) 189
Синхронизирующий момент 327
Синхронный генератор 499
— детектор 367
— электродвигатель 472
Система
— автоматизации проектирования
(САПР) 278, 279
— автоматизированного синтеза 292
Система автоматического регулиро-
вания (САР)
------- астатическая 24—25
Система автоматического регулиро-
вания (САР) дискретная 27, 1944-197
----- многоконтурная 19
----- нелинейная 236
-----непрерывная 27
-----релейная 27, 246
-----— статическая 23—24
Система
— несвязанного регулирования 19—
23
— связанного регулирования 19—23
— стабилизации 16
Сопротивление (см. Нагрузка)
Спектр
— дискретного сигнала 209
— непрерывного сигнала 184, 207
— иифранизкочастотиого 316, 400
Спектральная плотность 183—185
Сравнивающее устройство 17
Статическая характеристика 34, 35
— — датчиков 319, 338, 350 и т. д.
-----систем 331, 502
----- устройств
-----измерительных 327, 333, 340
и т. д.
----------исполнительных 455, 466, 474
-----преобразующих 369, 376
-----усилительных 392, 397, 420,
432 и т. д.
Стационарный случайный процесс
177
Структурная схема
----- датчиков 329
----------приводов 456
-----САР 75, 76, 78 и т. д.
— — устройств 386
-----измерительных 329
-----исполнительных 456, 462. 482
Структурные схемы устройств уси-
лительных 395, 426, 433 и т. д.
Счетчик 335
Т
Таблица
— передаточных функций 172
— поправок 62, 64
— соотношений для систем 226
— формул для коэффициентов ошиб-
ки 135
— ^-функций 136, 137
— г-преобразований 219
Тахометрическая обратная связь 168
Теорема Котельникова 204, 395
— Ляпунова
Термометр 363
Термопара 361
Технические средства автоматики 303
Технические характеристики
----САР 309
-----устройств САР 309
Техническое задание 280, 493
Точность динамическая 175
— статическая 125
Тиристорный усилитель 411
-----, методы регулирования 412
------, схема 415
Транзисторный усилитель 398
-----двухкаскадный 404
-----, схема 404
Трапецеидальная частотная характе*
ристика
------- единичная 135
-------- —, применение 135—141
Треиие 329, 452
Триггер Шмитта 335
У
Угол насыщения 428
— рассогласования 327
Унификация 496
Управление оптимальное 259
Управляемость и наблюдаемость
—------, определение 91
-------системы 91—100
Управляющее воздействие 14
Уравиеиие (см. Дифференциальные
уравнения)
— динамики 33
— линеаризации 35—40
— объекта, регулирования 40
— ошибки 14
— статики 33
— статических характеристик 34
Усилие перестановочное 491
Усилитель
— гидравлический 488
— демодулятор (32^
534
магнитный 415
— тиристорный 411
— транзисторный 398
— релейный 388
— электромашинный (ЭМУ) 431
Усилительное устройство
•---, классификация 378
----, технические требования, 378
Устойчивость
— автоколебаний 256
Устойчивость в «большом», в «малом»
241
— одноконтурных САР 116
— , определения 102
— по Ляпунову 102
Ф
Фазовые координаты 503
Фазовая плоскость 237
Фазовый портрет 238—242,„504
Фазовая частотная характеристика 44
Фазовращатель 334
Фазочувствительный усилитель <499 )
Фильтр
— дискретный 442
— корректирующий 162
Фотоэлектрический датчик 357
Фотоэлемент 351
Функциональная схема
-------- многомерной САР 306
------САР 14
— — системы программного регули-
рования 308
---- преобразователя 349
----электронного регулятора на-
пряжения 499 и т, д.
X
Характеристика
— временная 50, 125
— механическая 376
— модуляционная 345
— статические 34, 35
— статистическая 179
— технические 309
— частотные (см. Частотные харак-
теристики) 44
Характеристическое уравнение 112
Ц
Цепь смещения 422
Цикл регулирования
----замкнутый 13
— предельный 241, 242
---- разомкнутый 13
Цифро-аналоговый преобразователь
373
Цифровая ЭВМ 213, 223, 486 и т. д.
Цифровой датчик 344
Цифровая следящая система 510
Ч
Частота
—автоколебаний 251, 256
— сканирования 506
— резонансная 385
— сопрягающая 60
— среза 73
Частотный критерий устойчивости
------- автоколебаний 256
-------САР 110—120
Частотная характеристика
----- амплитудная 44
----амплитудно-фазовая 51
— вещественная 44, 127—129
----------логарифмическая_амплитудиая 59
----- фазовая 59
----мнимая 44, 127—129
-----обобщенная 126, 127
-----типовых звеньев 49—57
—трапецеидальная 135
Частотная характеристика^фазовая 44
-----, экспериментальное определение
44, 45
Четырехполюсник 500
Чувствительность 309
Чувствительный элемент 18
Ш
Шаговый электродвигатель 472
--, классификация 473
----, технические характеристики 474
Широтно-импульсная модуляция (§78>
^ПИ-усилитель 409
Э
Экспериментальное определение
----- корреляционной функции 182
----механических характеристик
376, 454
----- спектральной плотности 184
-----статических характеристик 386,
418
-----частотных характеристик 44, 45
и т. д.
Экстраполятор 205, 206, 212, 409
и т. д.
Электрический двигатель 53, 393, 458
Электрический привод 458, 510
Электромагнитное реле 389
Электромагнитный преобразователь 374
Электромеханический демодулятор 466
ЭМУ 431
Эргодичность 178
Ю
Юстировка 348
Я
Ядро 191
Якорь реле 390
— электродвигателя 393, 459
— ЭМП 374
—ЭМУ 432