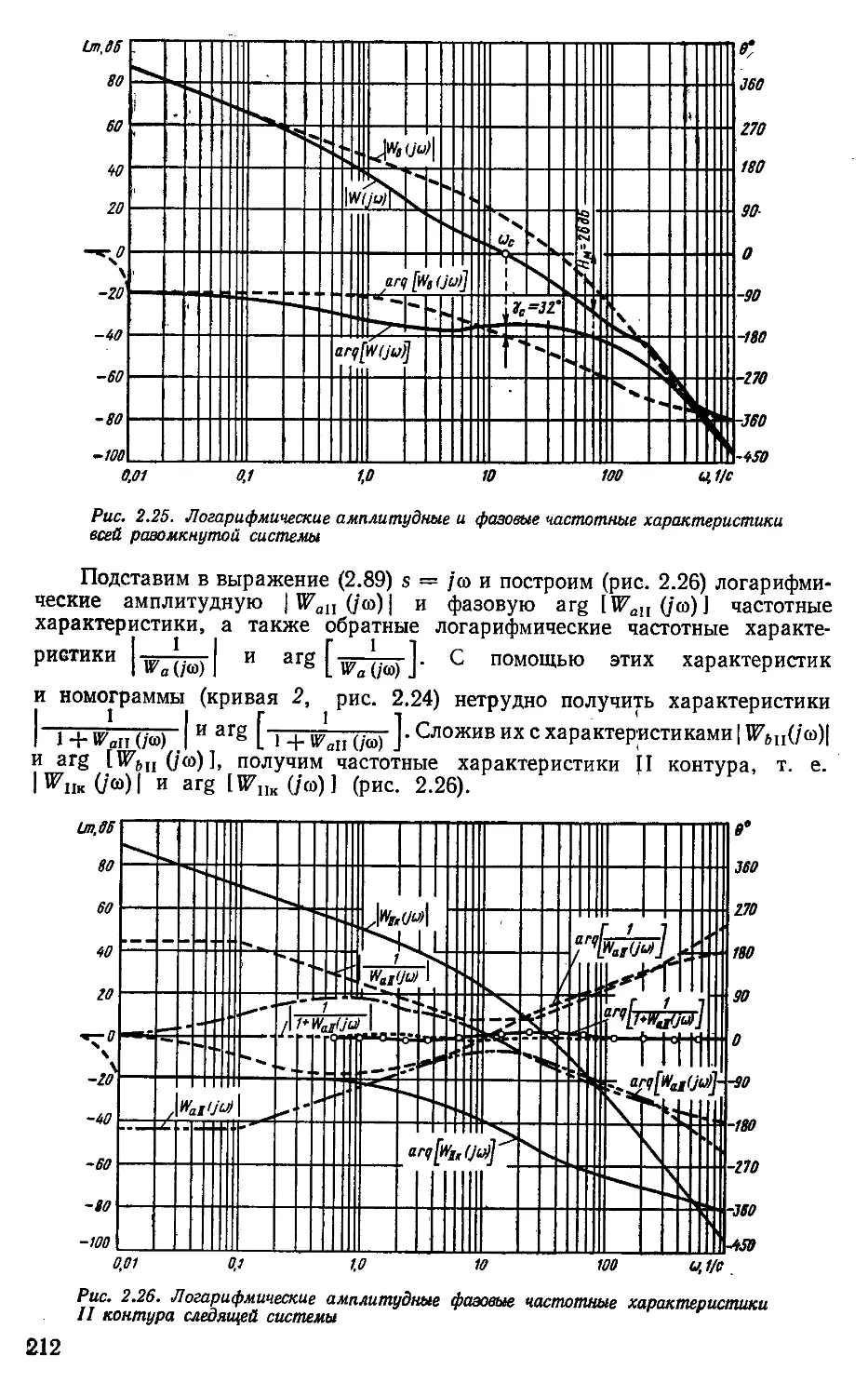
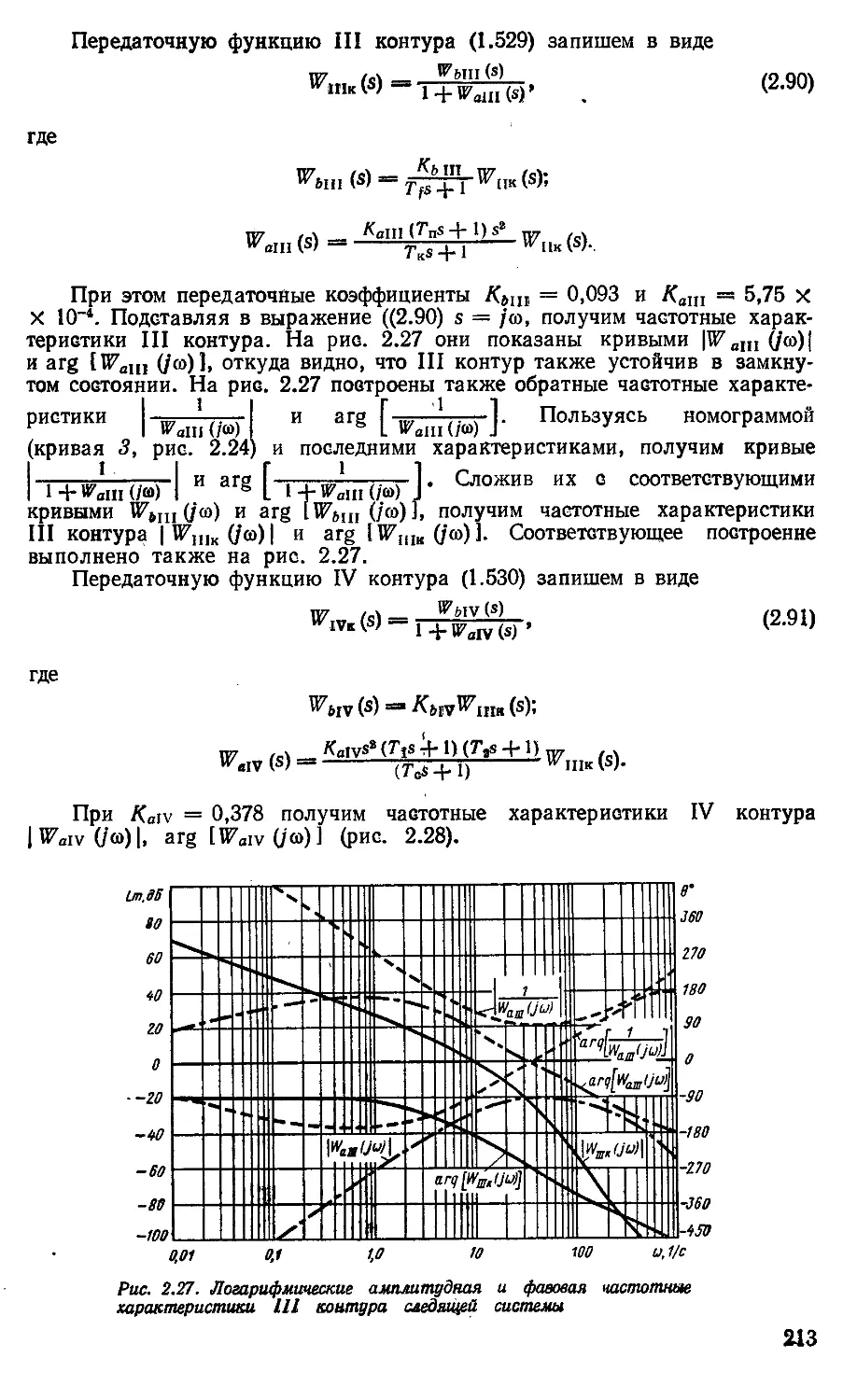
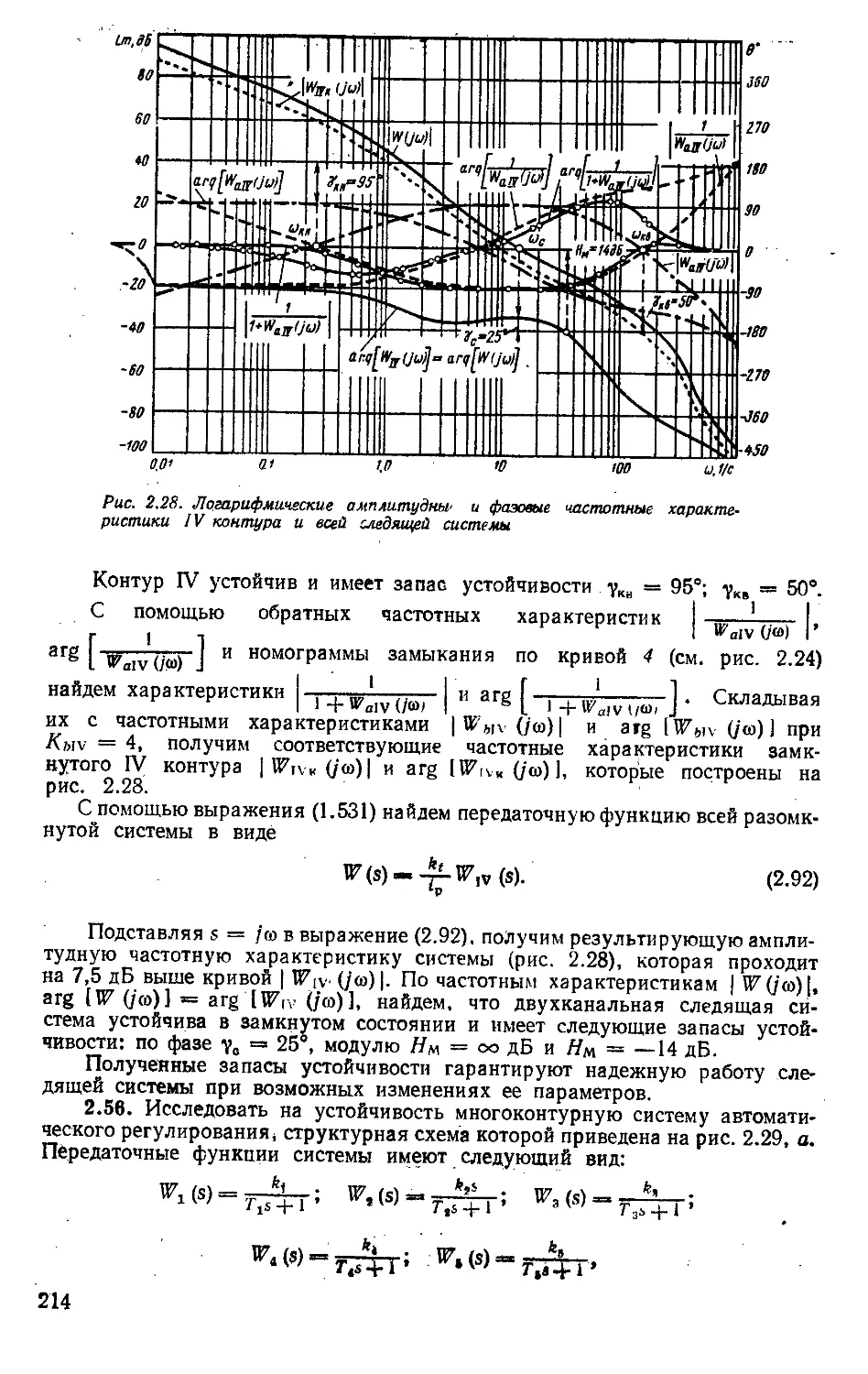
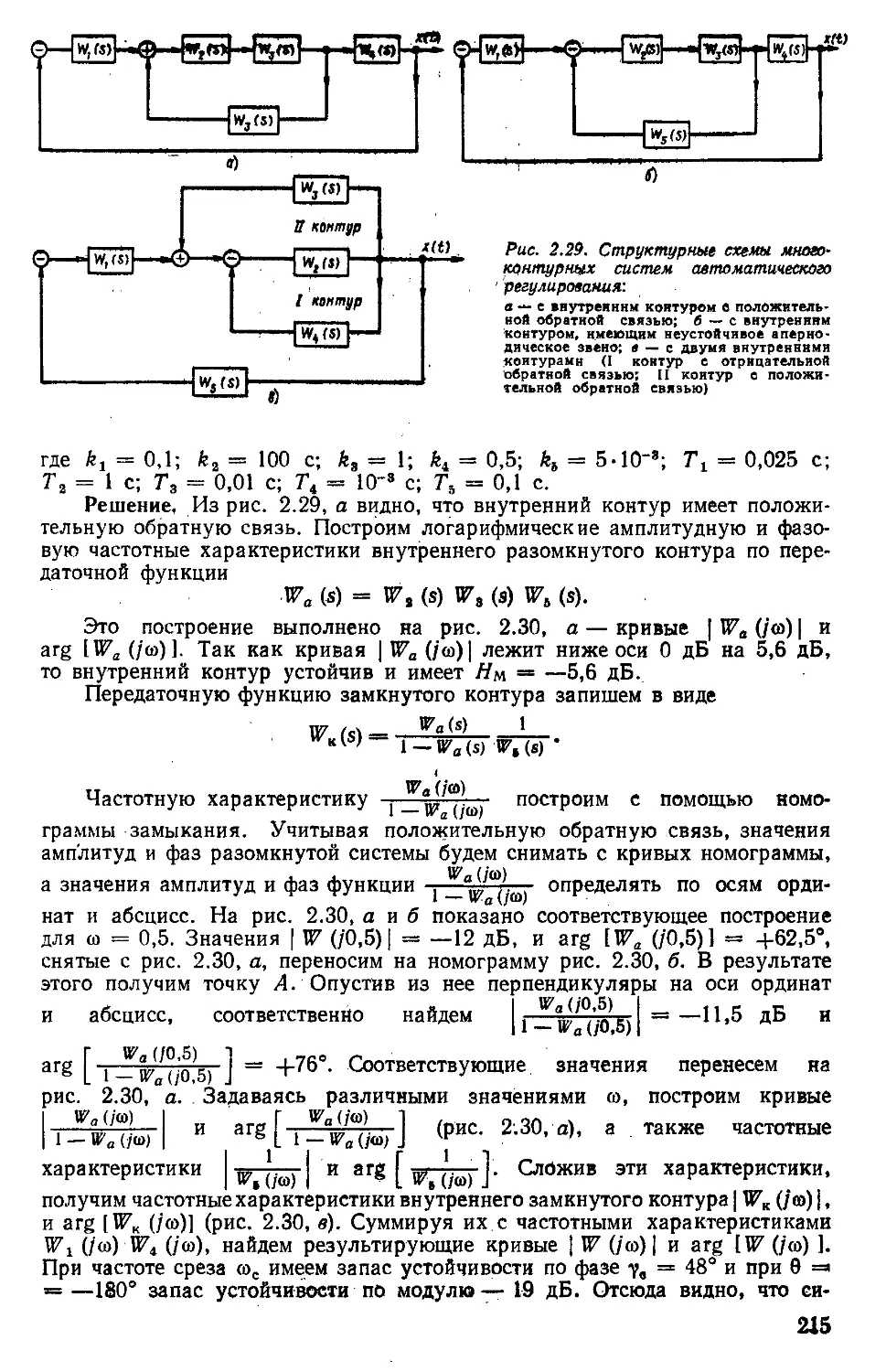
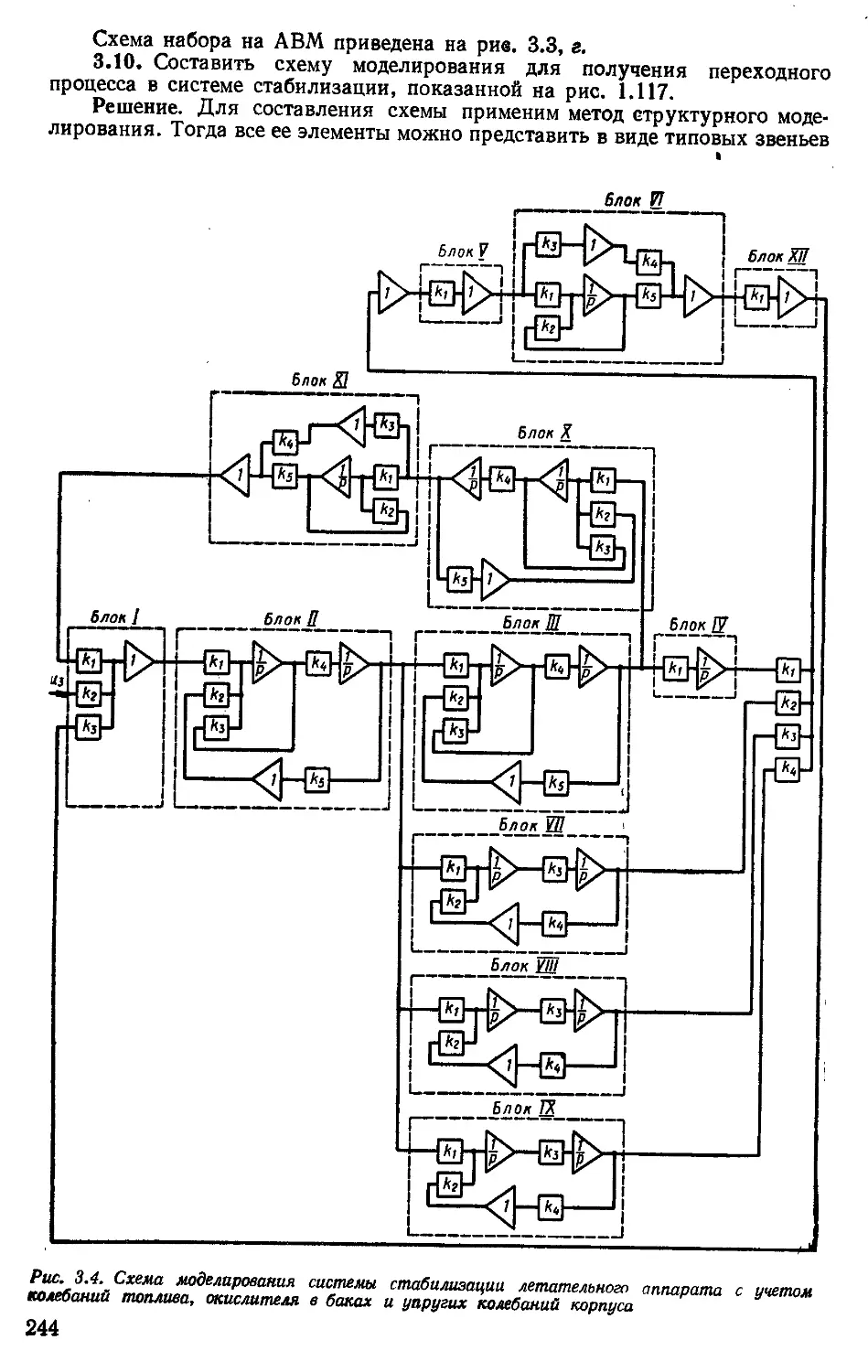
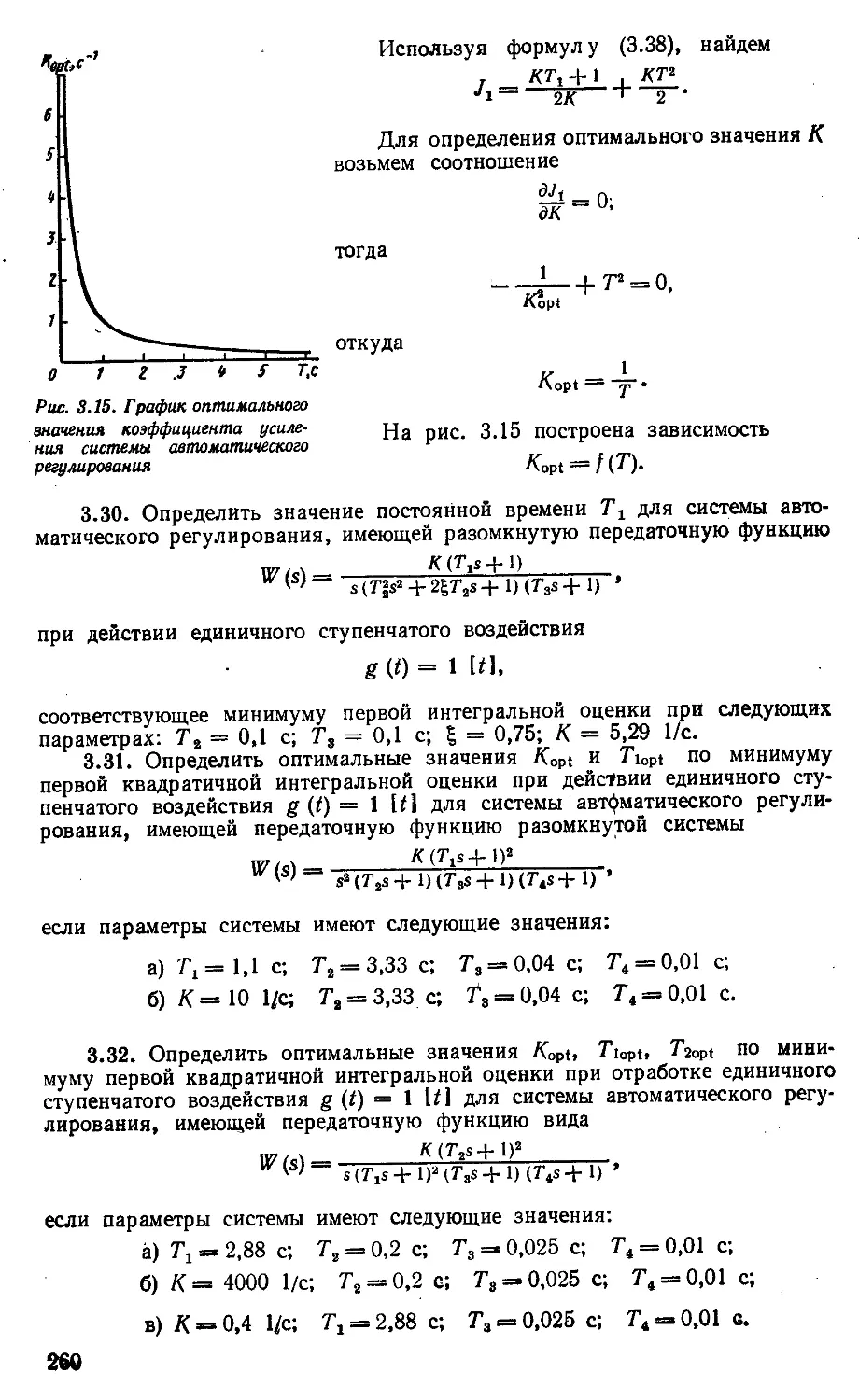
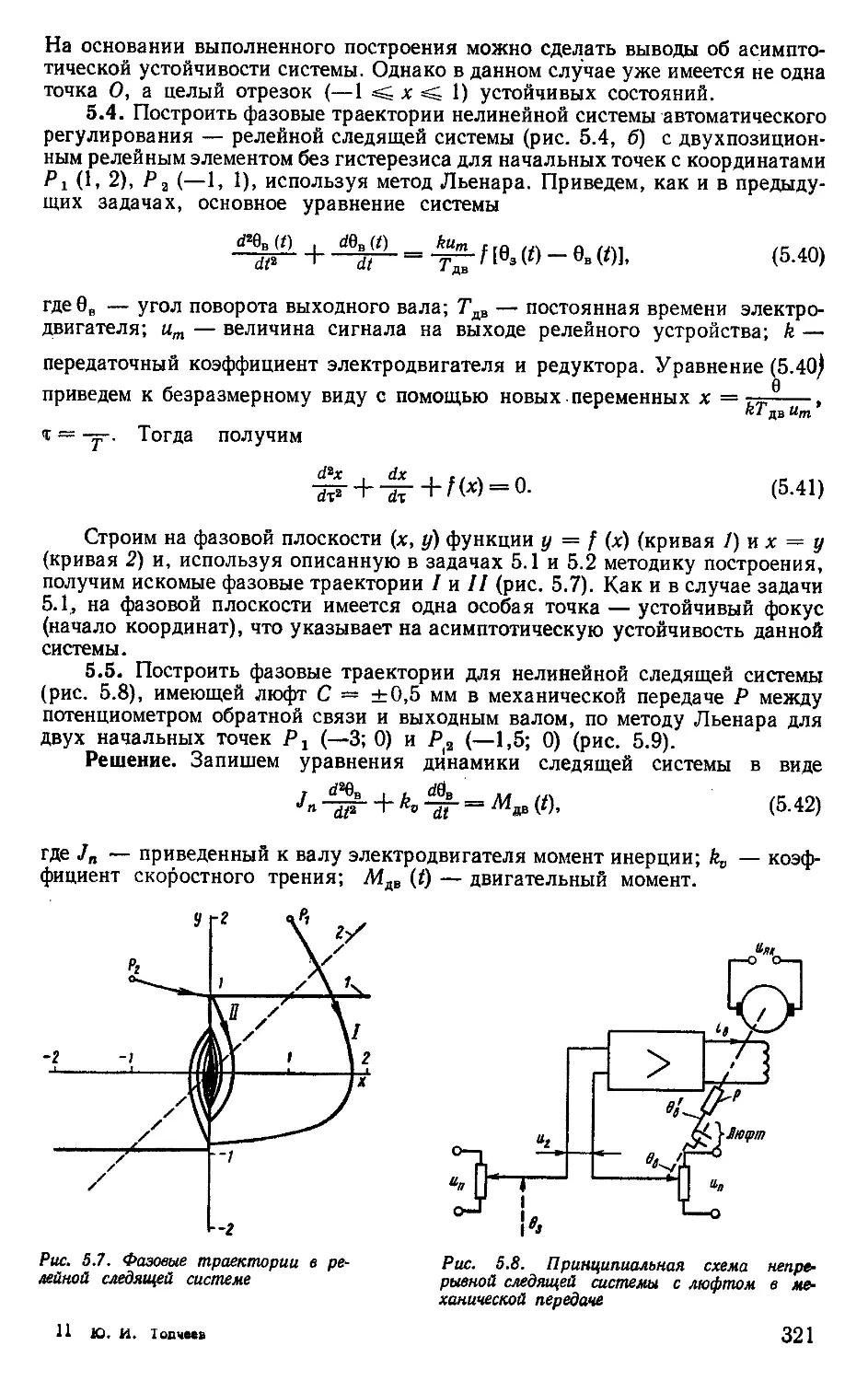
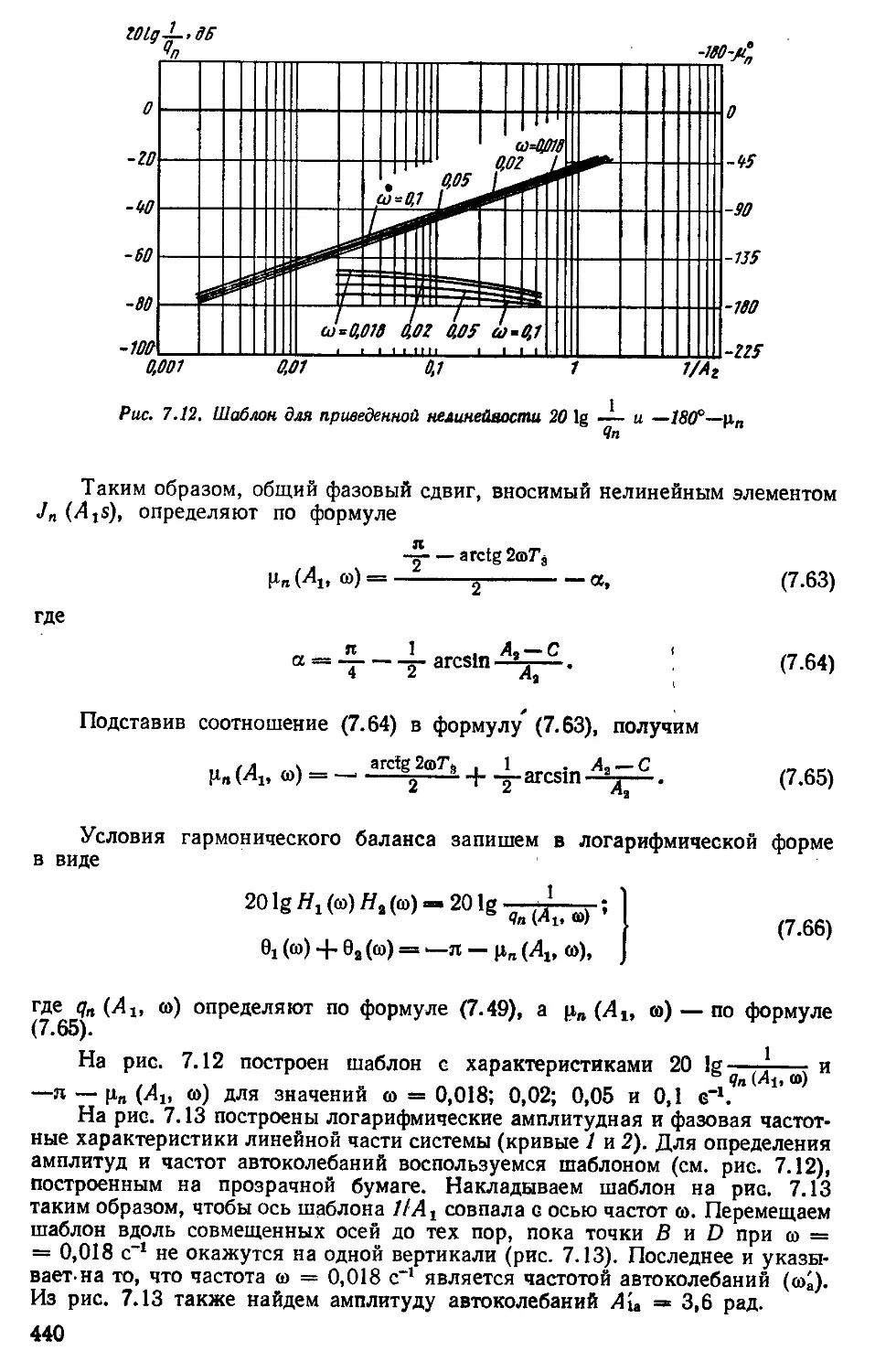
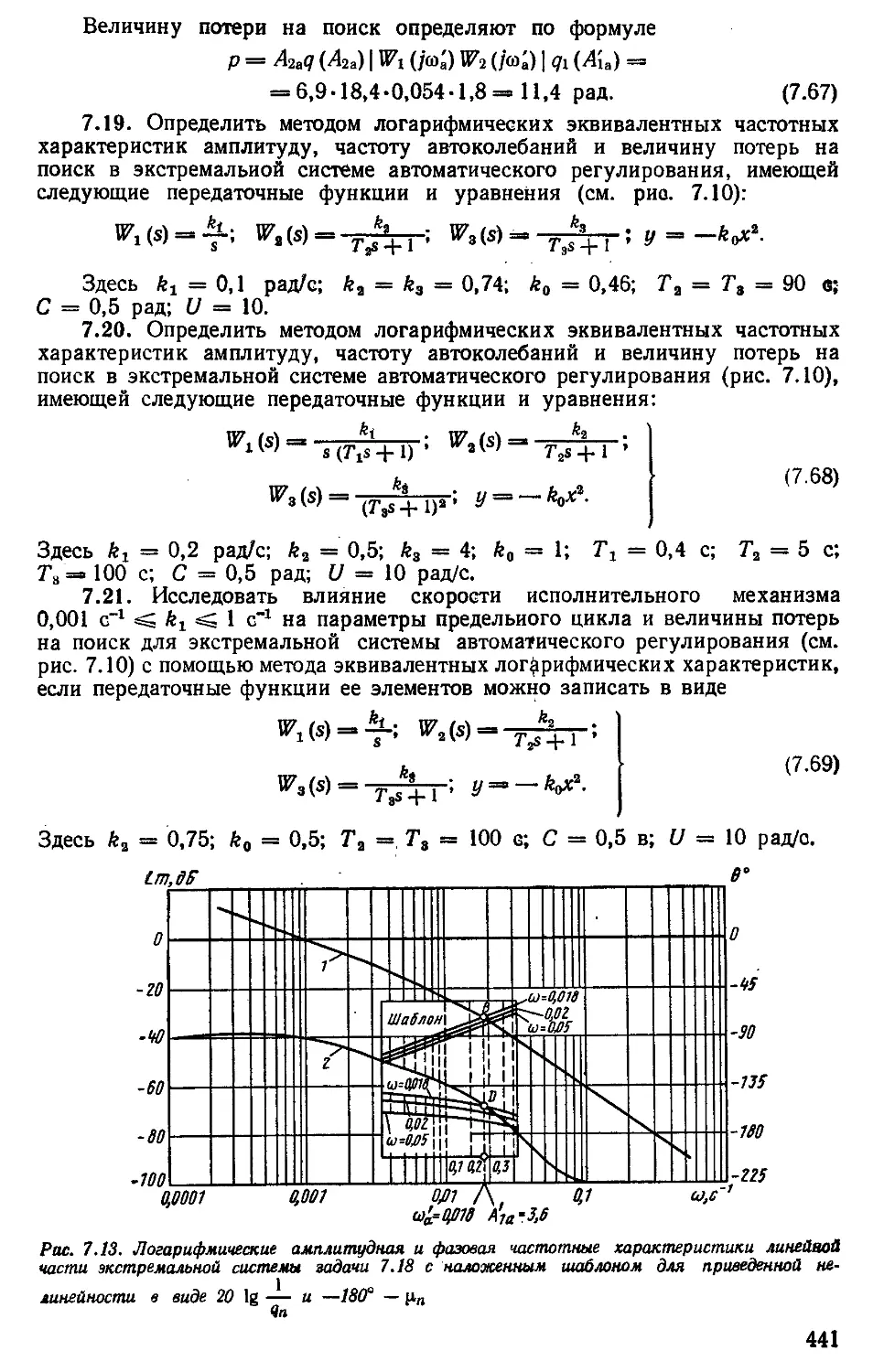
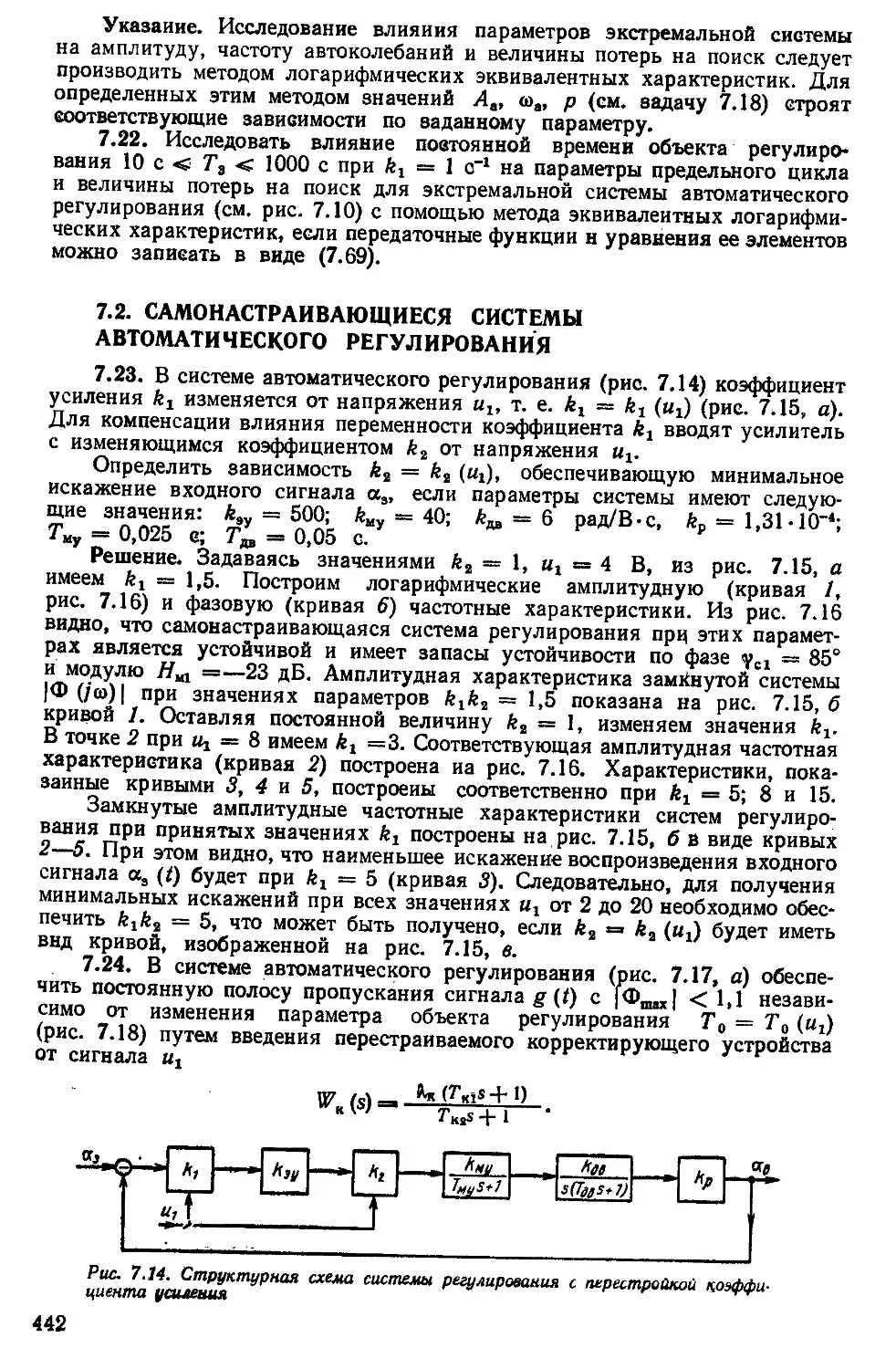
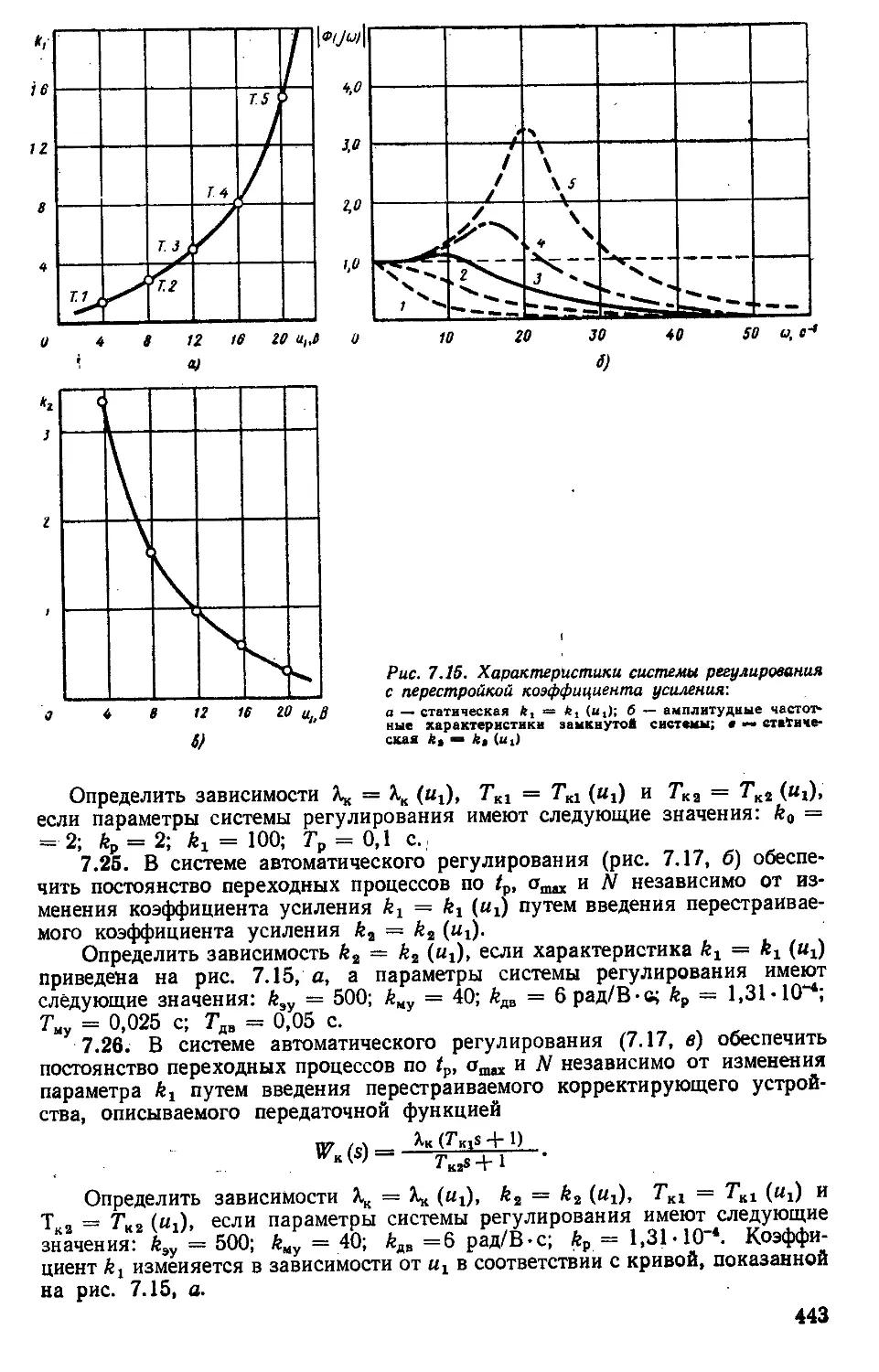
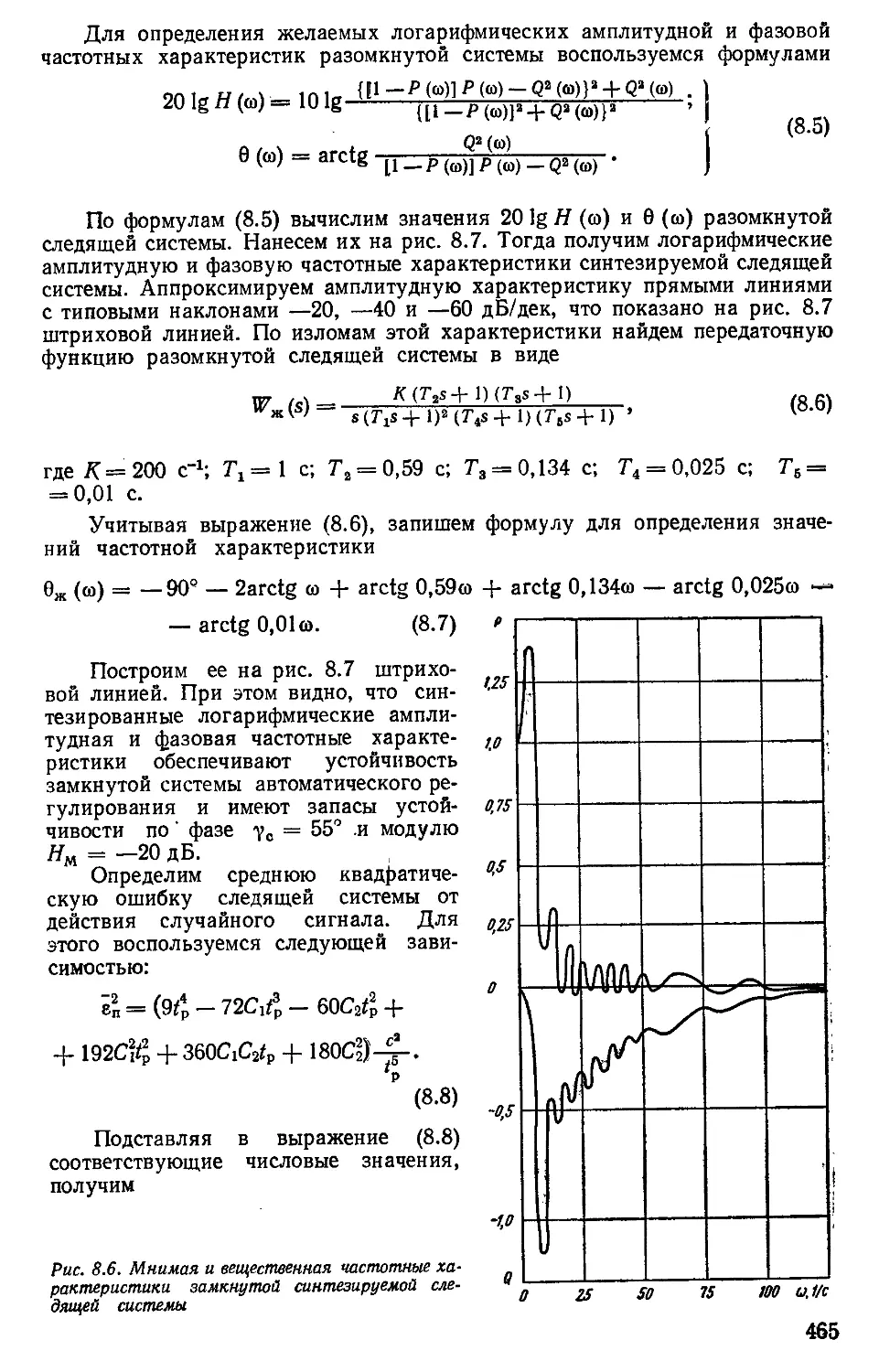
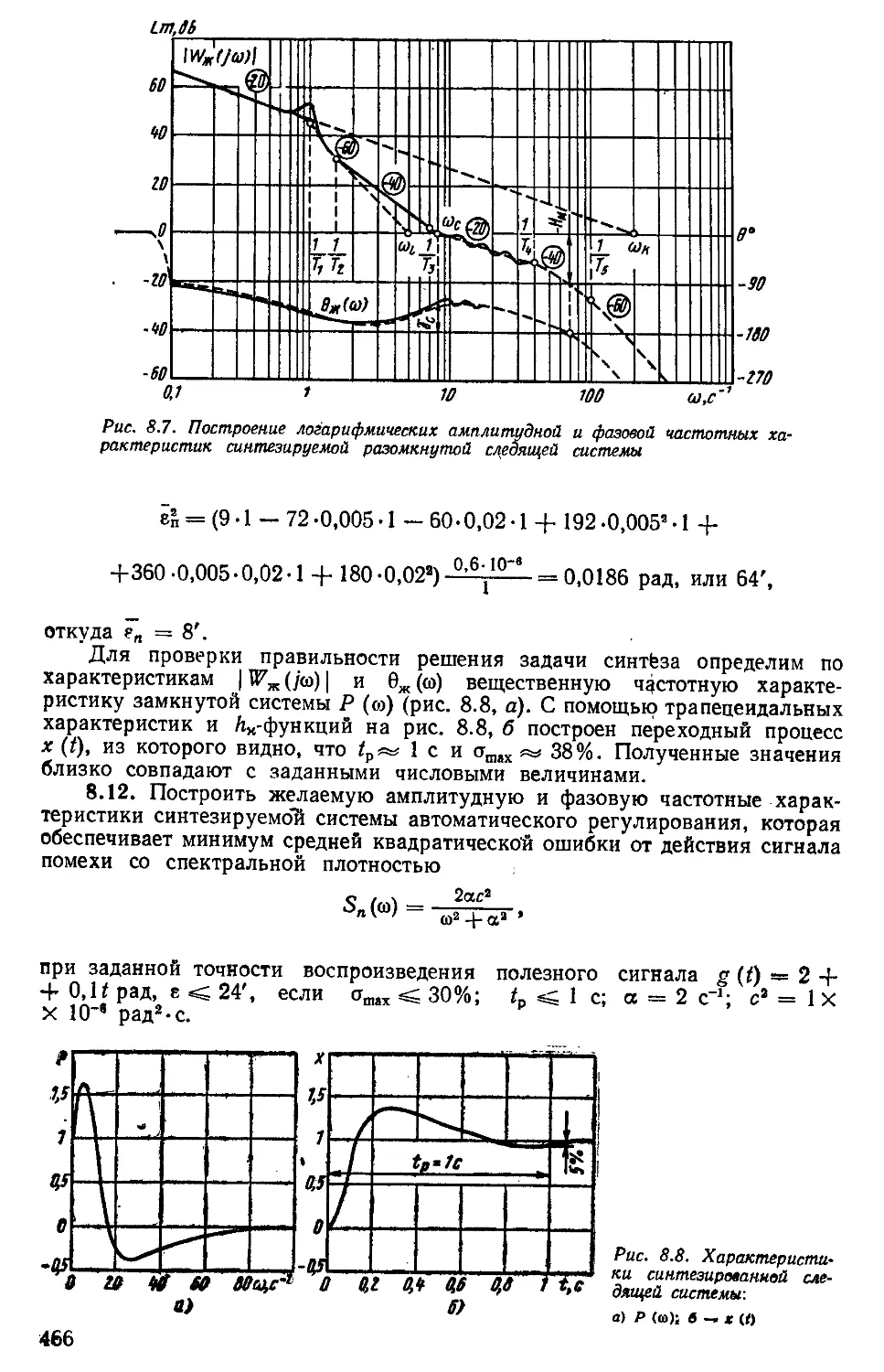
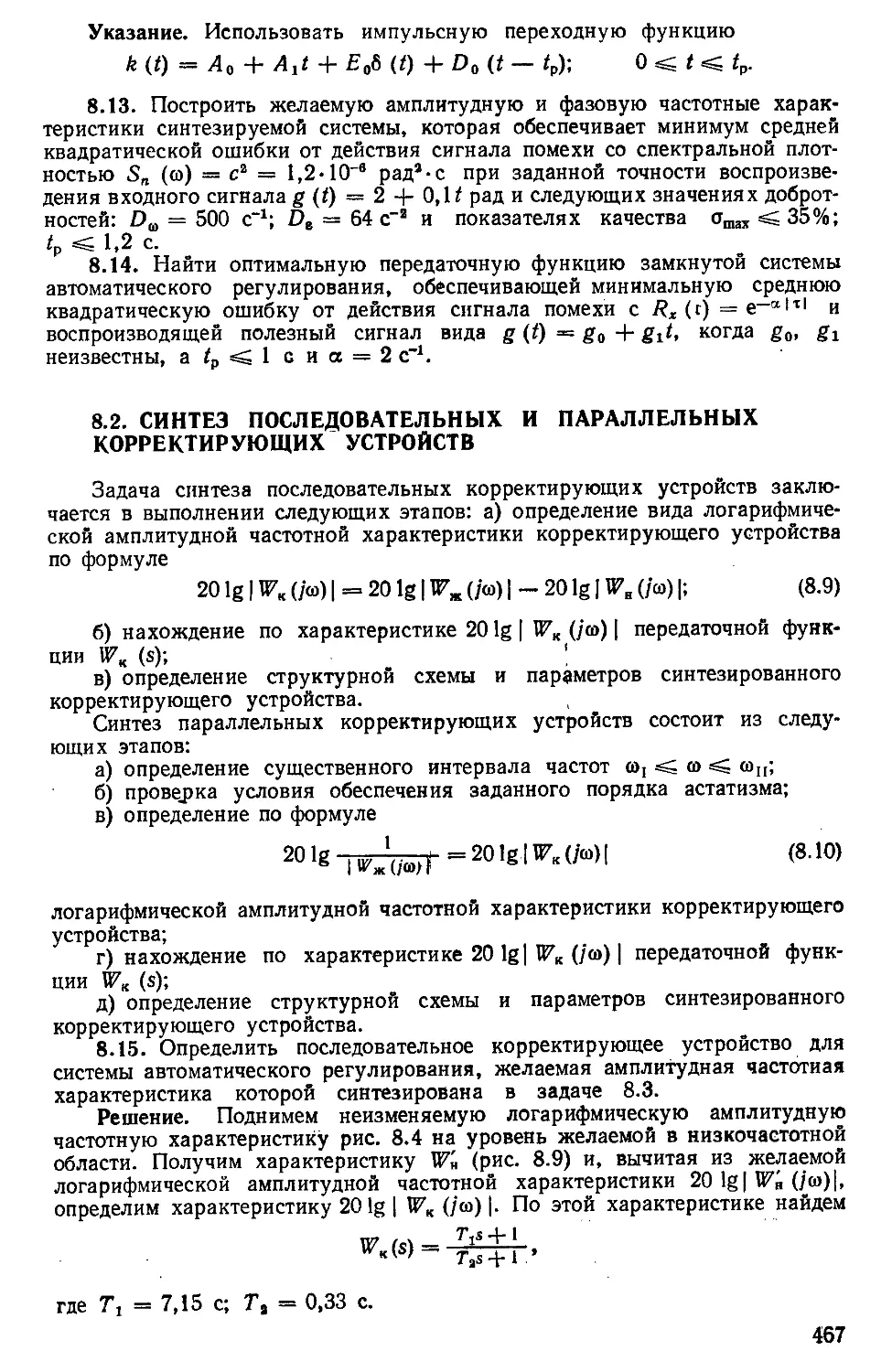
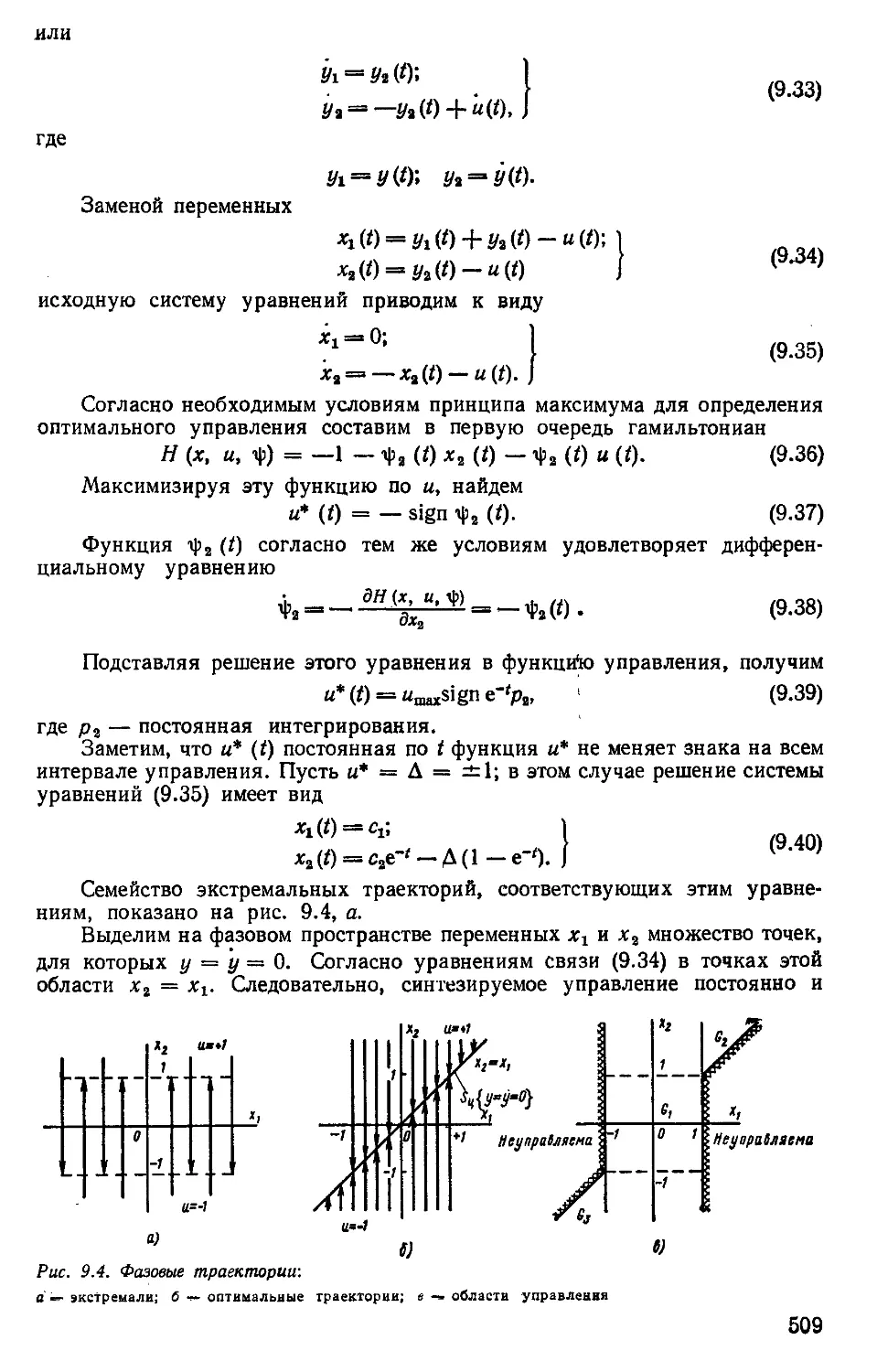
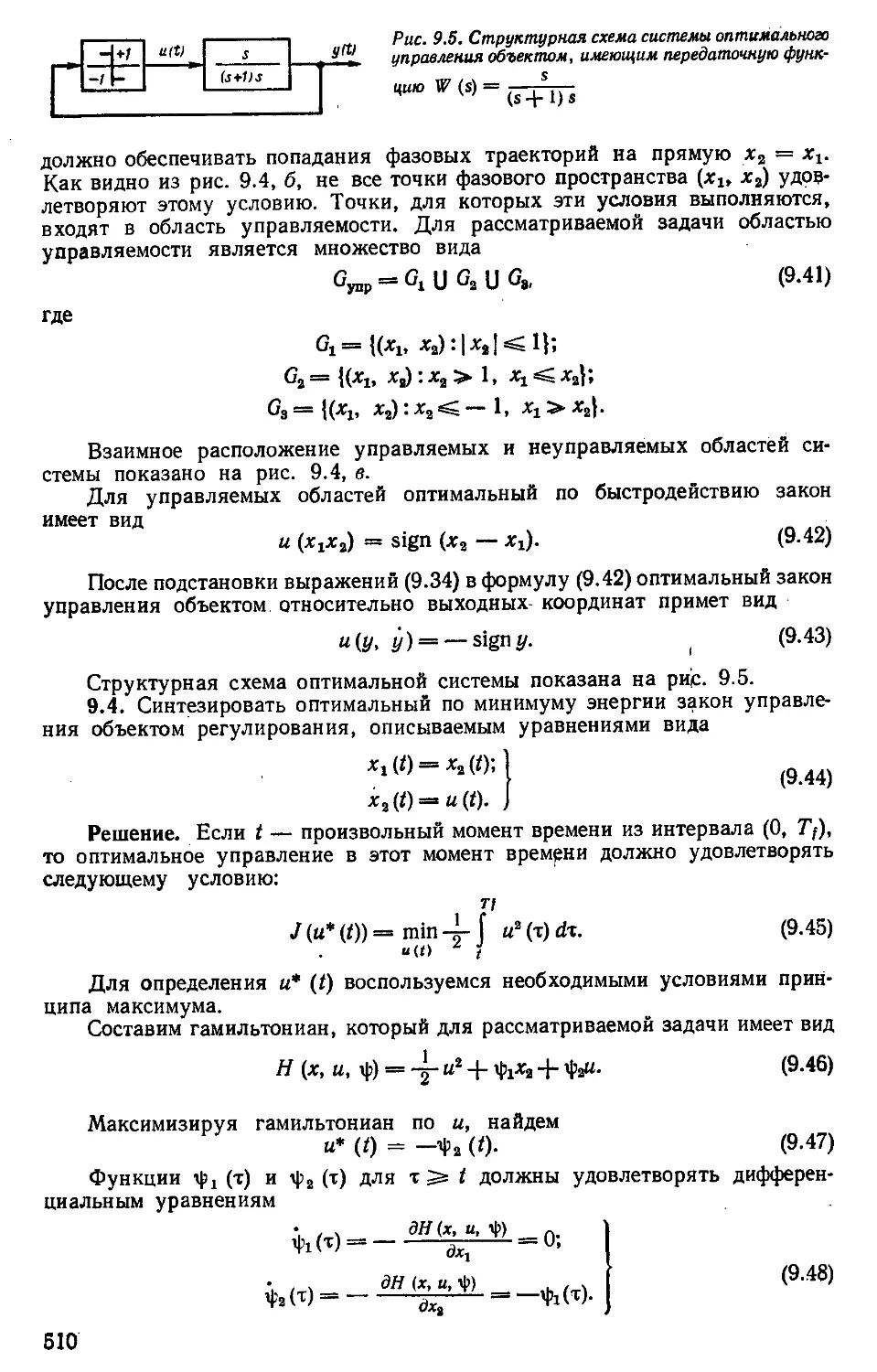
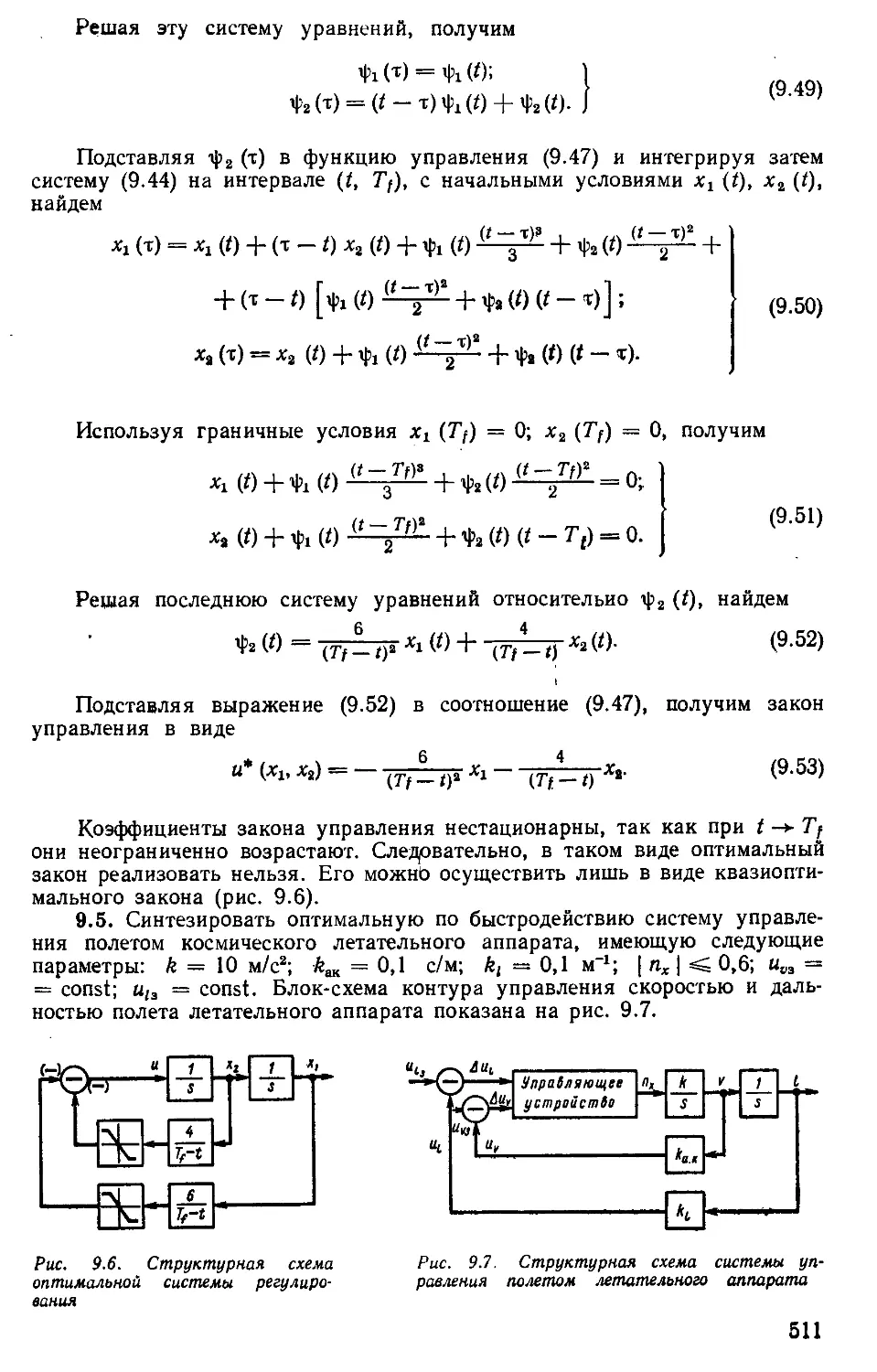
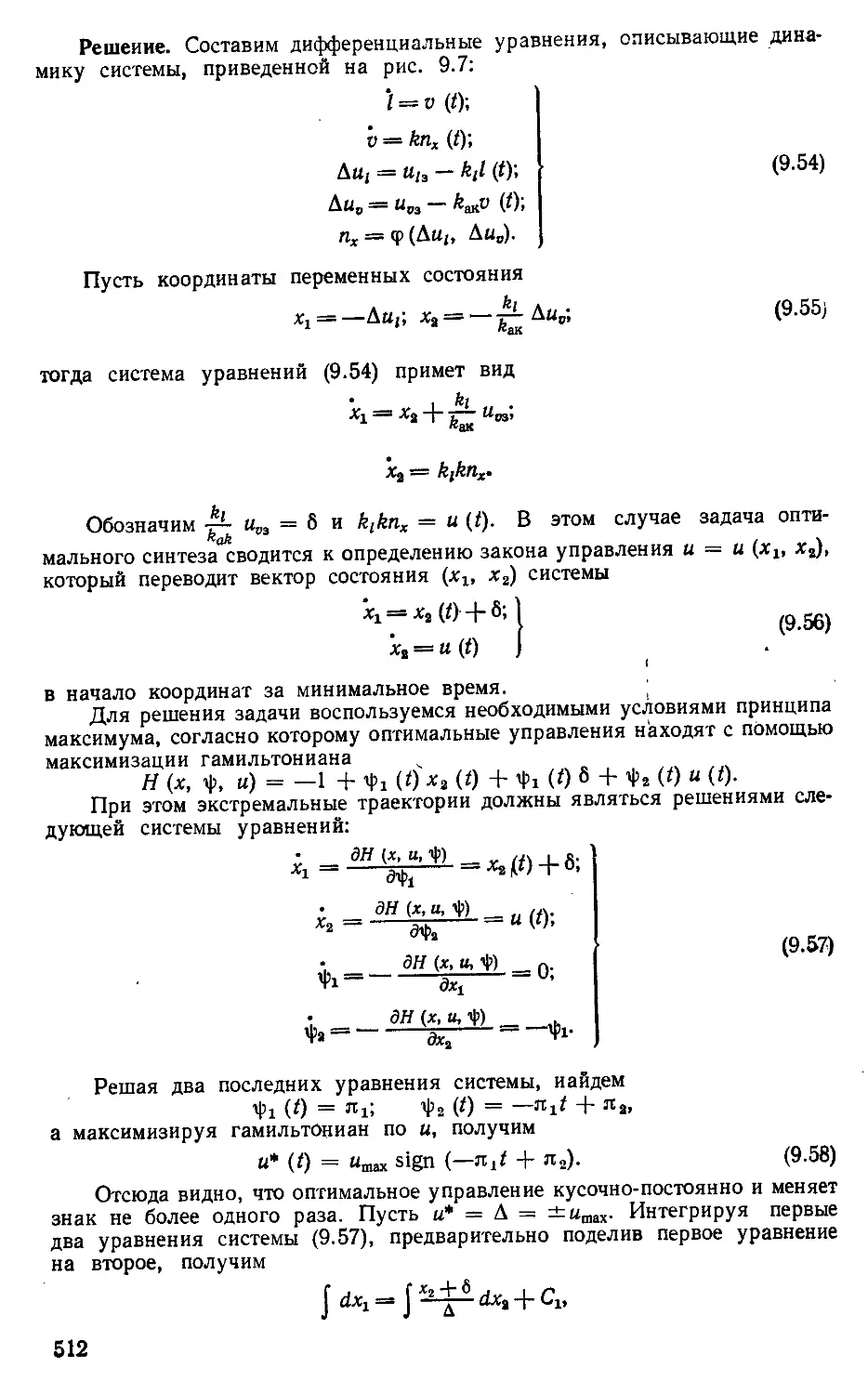
/




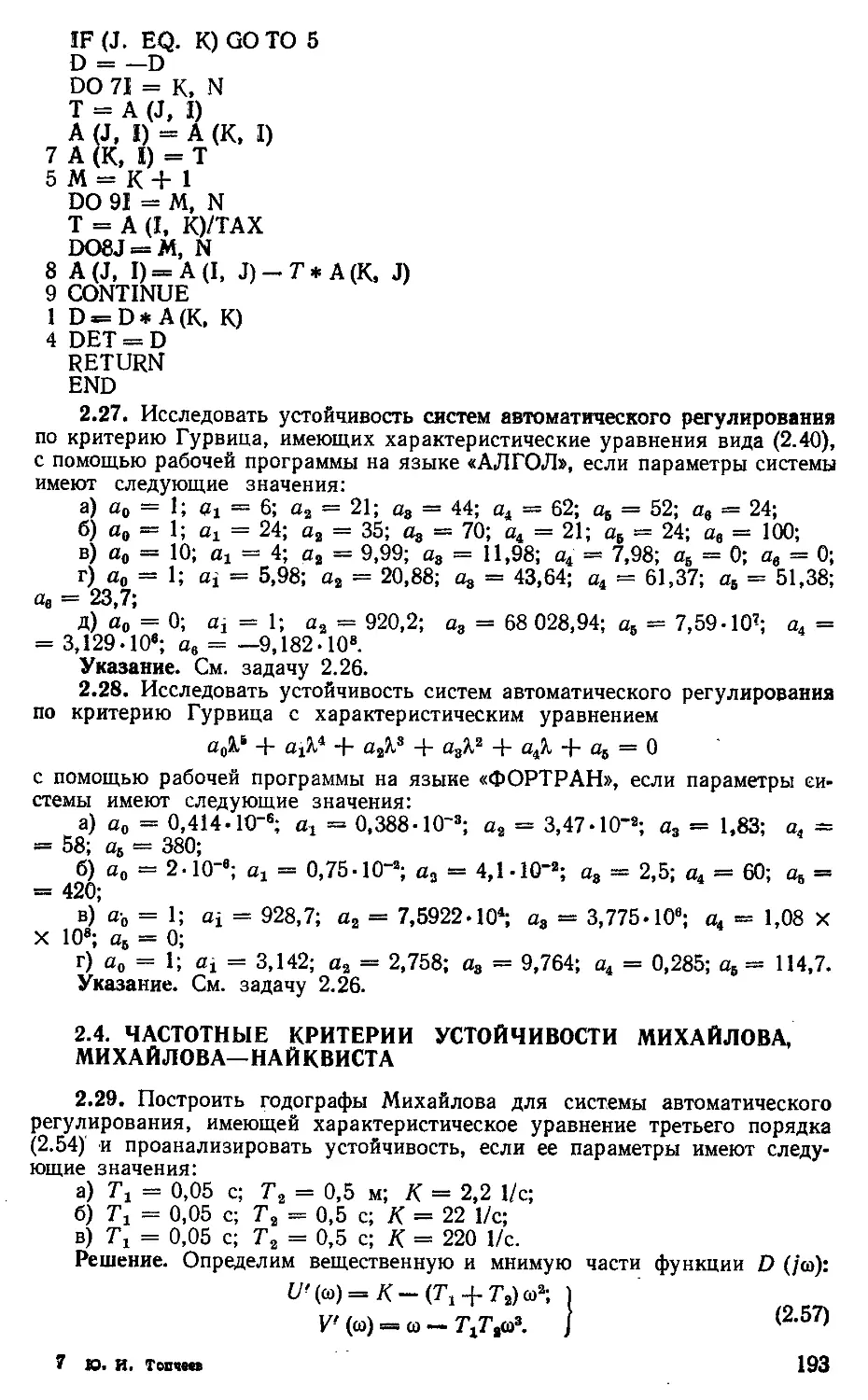
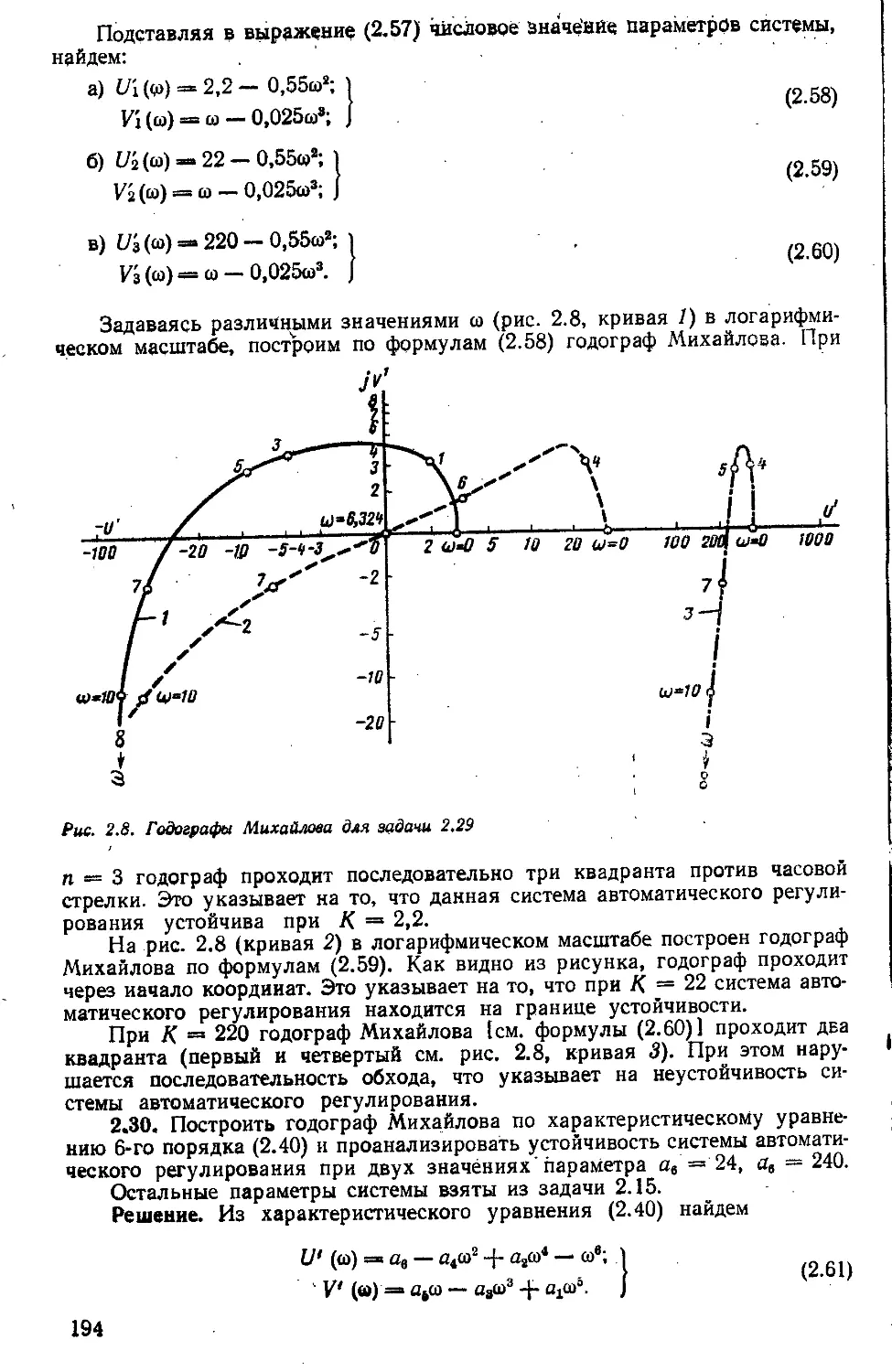




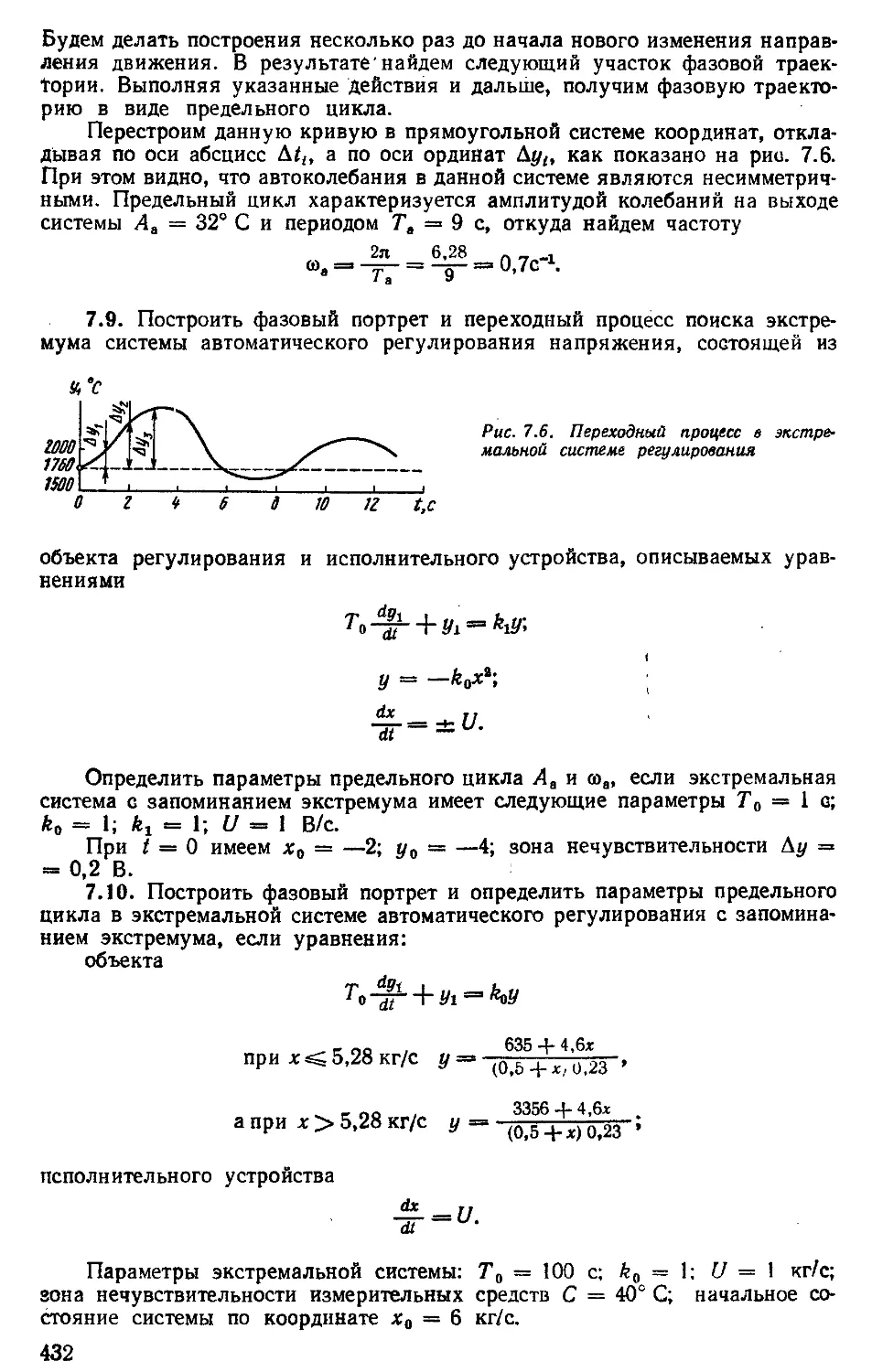
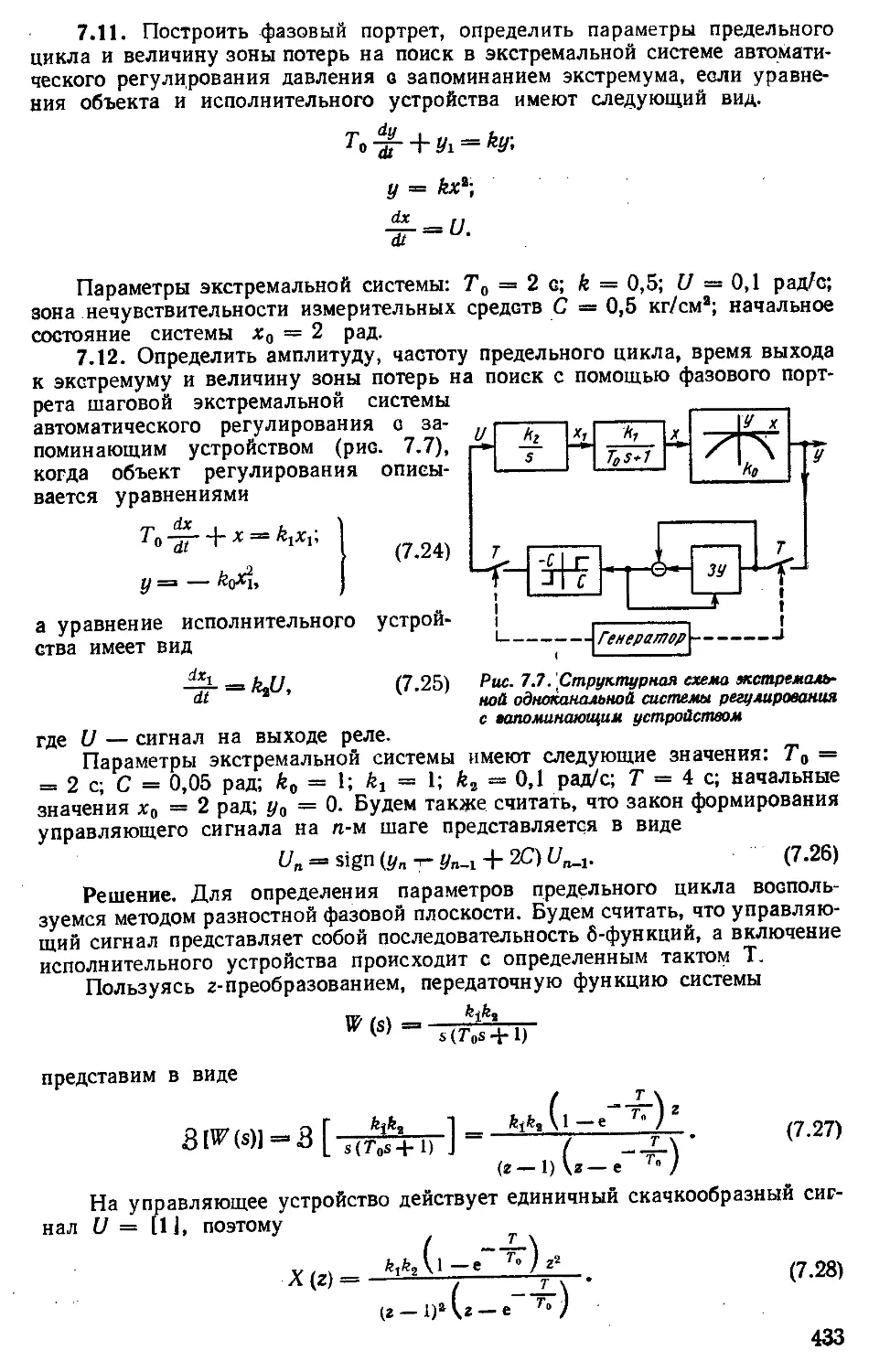









Текст
^ИТипч&я
АНЦыпляков
- Задачник
по теории
автоматического
регулирования
Ю.И.Топчеее
АЛ,Цыпляков
Задачник
по теории
автоматического
регулирования
Допущено Министерством высшего
и среднего специального образования СССР
в качестве учебного пособия для студентов
высших технических учебных заведений
МОСКВА «МАШИНОСТРОЕНИЕ» 1977
6Ф6
Т58
УДК 681.5.01 (076)
РЕЦЕНЗЕН ТЫ: 1. Кафедра МВТУ соответствующего профиля, зав.
кафедрой д-р техн, наук проф. В. В. СОЛОДОВНИКОВ.
2. Чл.-кор. АН СССР Е. П. ПОПОВ
Топчеев Ю. И., Цыпляков А. П.
Т58 Задачник по теории автоматического регулирования.
Учебное пособие для вузов. М., «Машиностроение»,
1977.
592 с. с ил.
В пособии приведены задачи с решениями и задачи для самостоятельной
проработки по курсу «Теория автоматического регулирования» для высшая
технических учебных заведений. Задачник охватывает следующие разделы:
уравнения движения, передаточные функции и структурные схемы элементов
н систем автоматического регулирования; методы анализа устойчивости, каче-
ства и динамической точности лнвейных н нелинейных систем, Методы расчета
импульсных, цифровых, экстремальных и самонастраивающихся систем;
синтез систем при регулярных и случайных воздействиях; способы синтеза,
основанные на применении принципа максимума и метода динамического про-
граммирования.
Большое внимание уделено применению ЭВМ для расчета систем авто-
матического регулирования. Рабочие программы для ЭЦВМ даны на языке
«АЛГОЛ» н «ФОРТРАН».
30501-058
038(01>77
© Издательство «Машиностроение», 1977 г.
Оглавление
Предисловие ...... ............................................................. 6
Список принятых обозначений .................................................. 8
Глава 1. Уравнения движения, передаточные функции и структурные схемы эле-
ментов и систем автоматического регулирования........................ 13
1.1. Составление дифференциальных уравнений и их линеаризация. Определение пе-
редаточных функций и структурных схем динамических элементов.................... 14
1.1.1. Динамические стационарные непрерывные элементы с сосредоточенными
параметрами................................................................ 15
1.1.2. Динамические нестационарные непрерывные элементы с сосредоточенными
параметрами................................................................ 49
1.1.3. Динамические стационарные непрерывные элементы с распределенными
параметрами................................................................ 57
1.1.4. Динамические нестационарные непрерывные элементы с распределенными
параметрами................................................................ 70
1.1.5. Динамические дискретные элементы.................................... 73
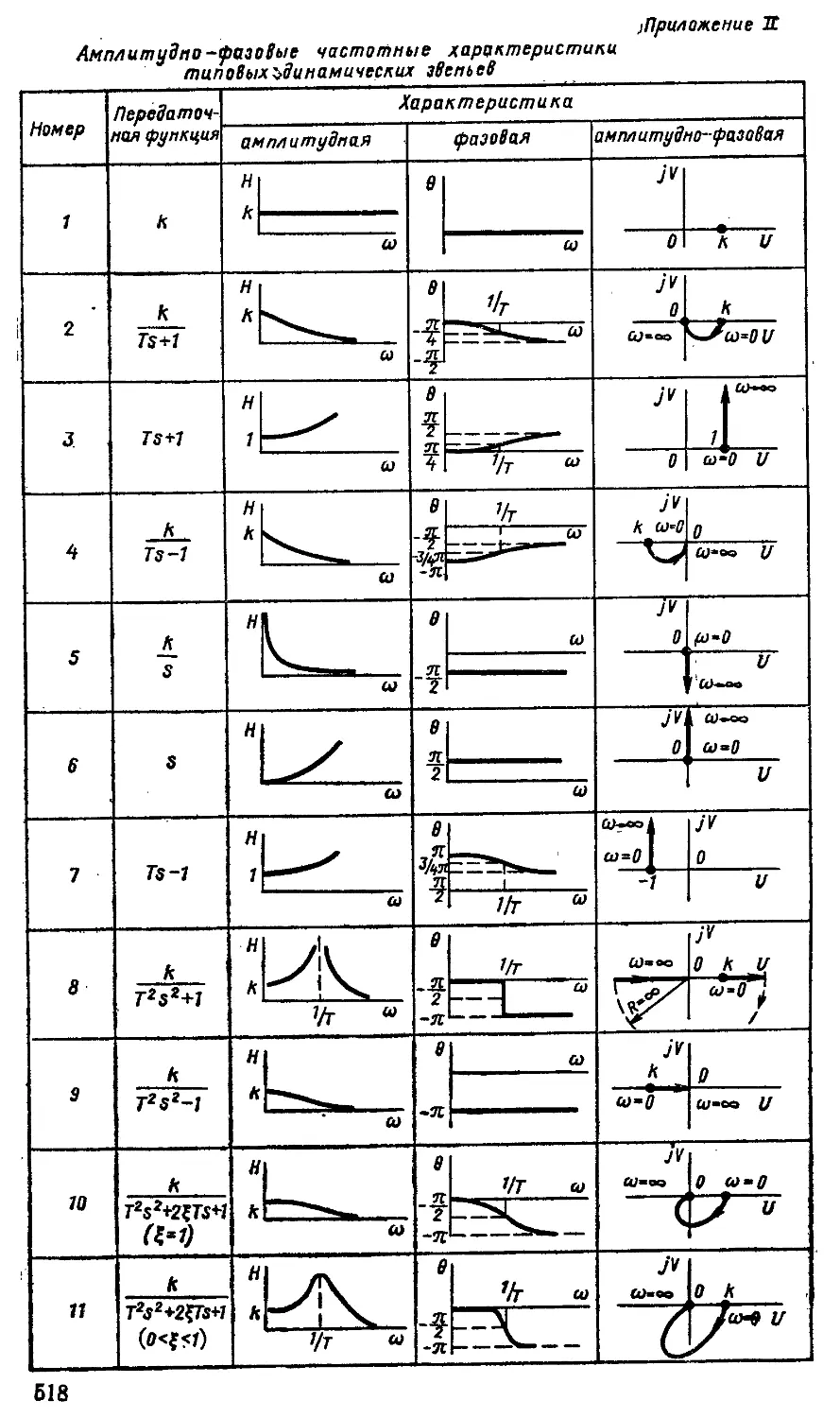
1.2. Частотные характеристики динамических элементов........................... 81
1.2.1. Амплнтудио-фазовые частотные характеристики ........................ 82
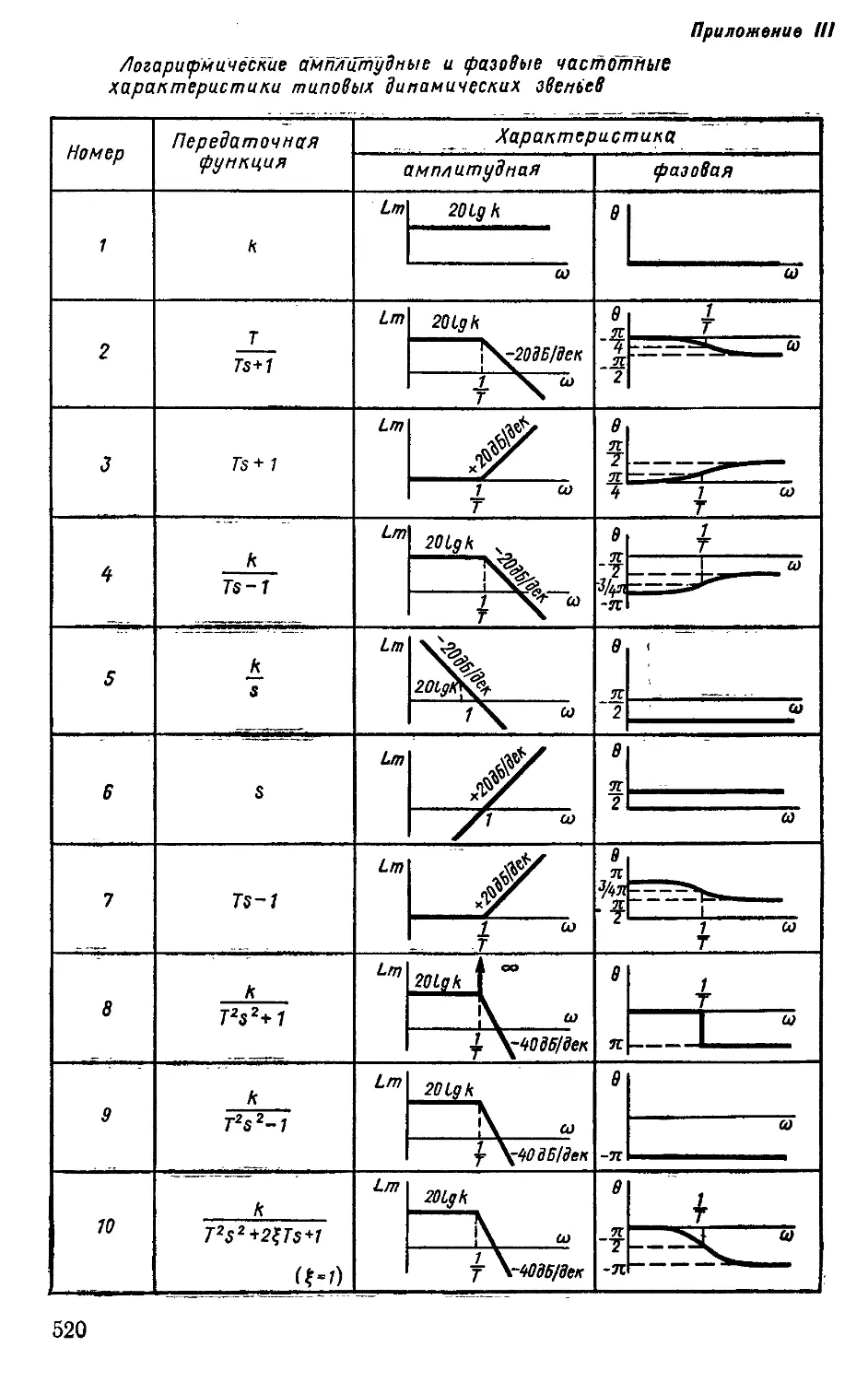
1.2.2. Логарифмические частотные характеристики............................ 88
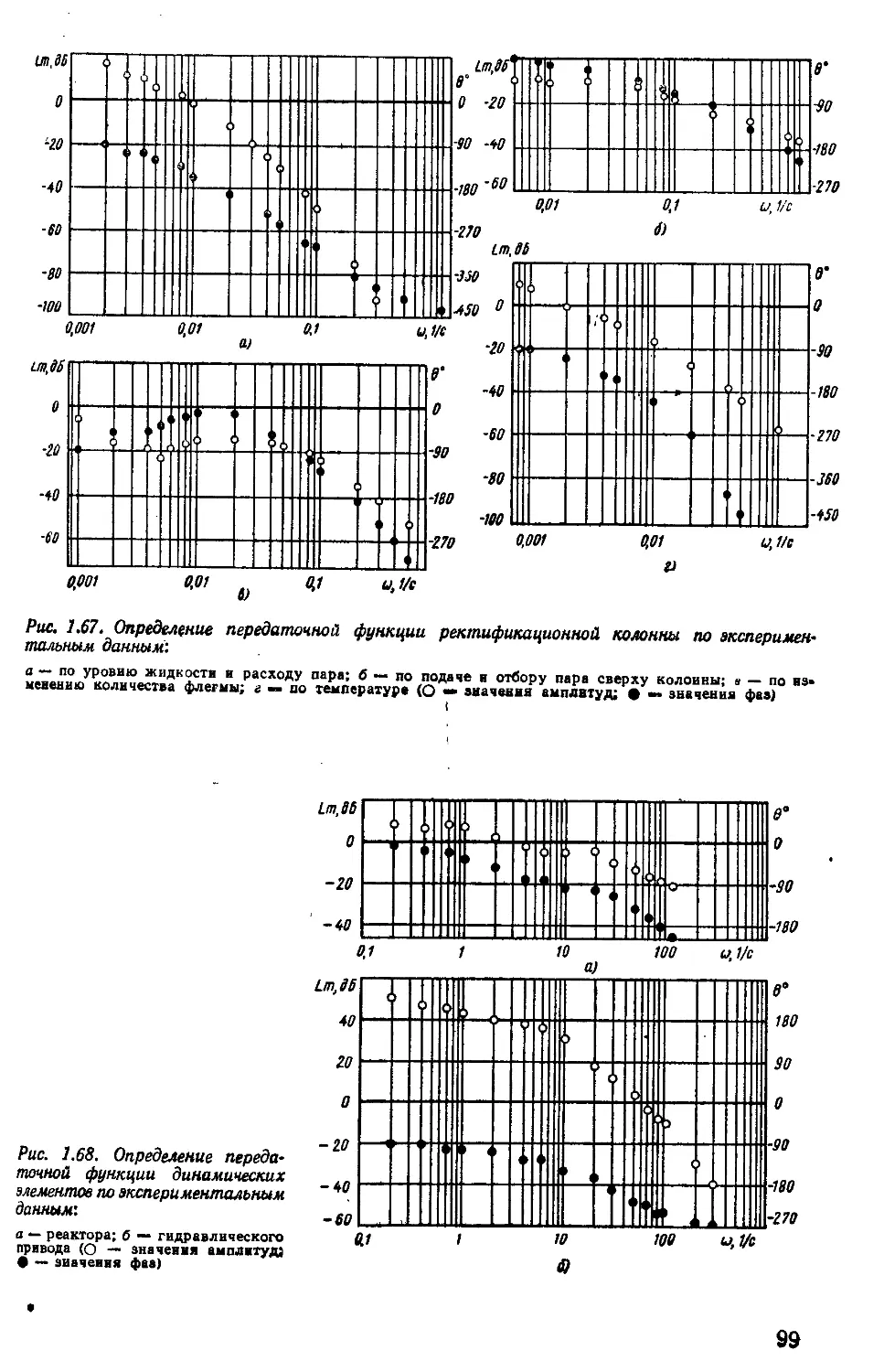
1.3. Определение динамических характеристик линейных элементов по эксперимен-
тальным данным ............................................................... 94
1.3.1. Определение динамических характеристик линейных элементов методом
частотных характеристик.................................................... 94
1.3.2. Определение динамических характеристик лииейных элементов методом
импульсных переходных функций............................................. 101
1.3.3. Определение динамических характеристик линейных элементов методом
регрессионного анализа ........................................ 107
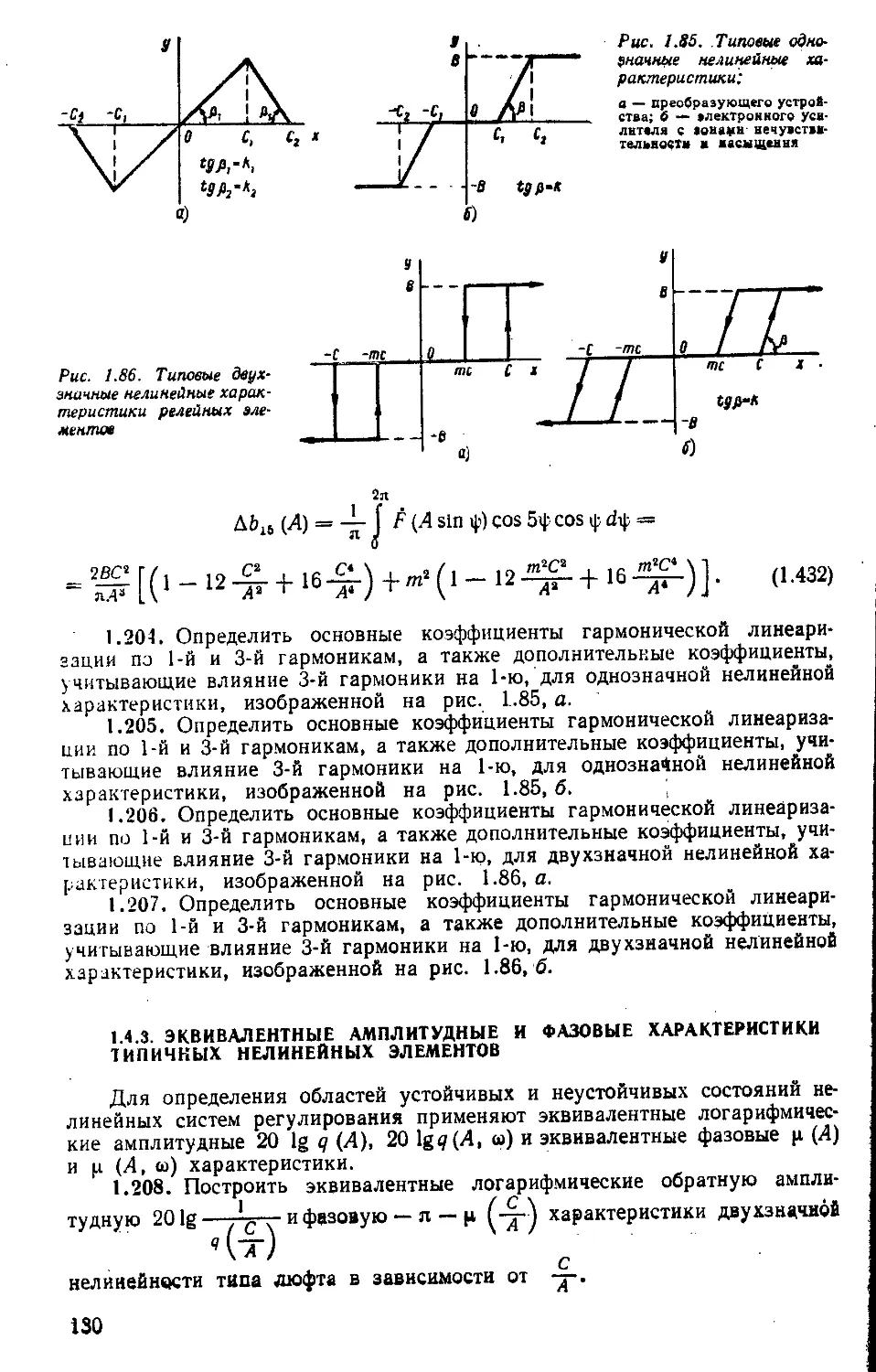
1.4. Типичные нелинейные элементы............................................. 111
1.4.1. Математическое описание типичных нелинейных элементов.............. 112
1.4.2. Коэффициенты гармонической линеаризации типичных нелинейных эле-
ментов ......................-........................................... 117
1.4.3. Эквивалентные амплитудные и фазовые характеристики типичных нели-
нейных элементов ......................................................... 130
1.5. Составление дифференциальных уравнений, передаточных функций и структур-
ных схем систем автоматического регулирования................................. 134
1.5.1. Системы с динамическими стационарными элементами и сосредоточенными
параметрами............................................................... 135
1.5.2. Дискретно-непрерывные системы .................................... 159
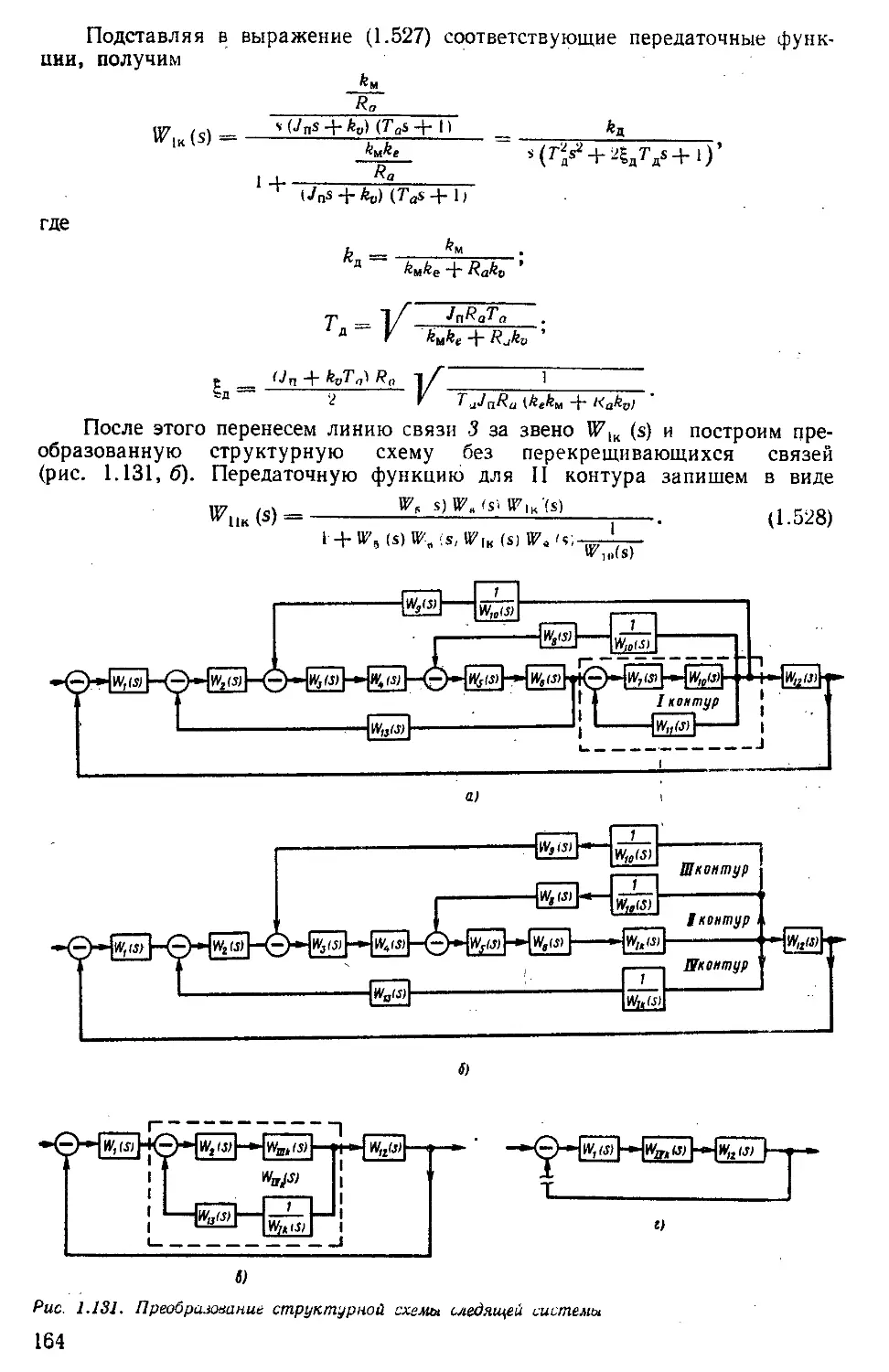
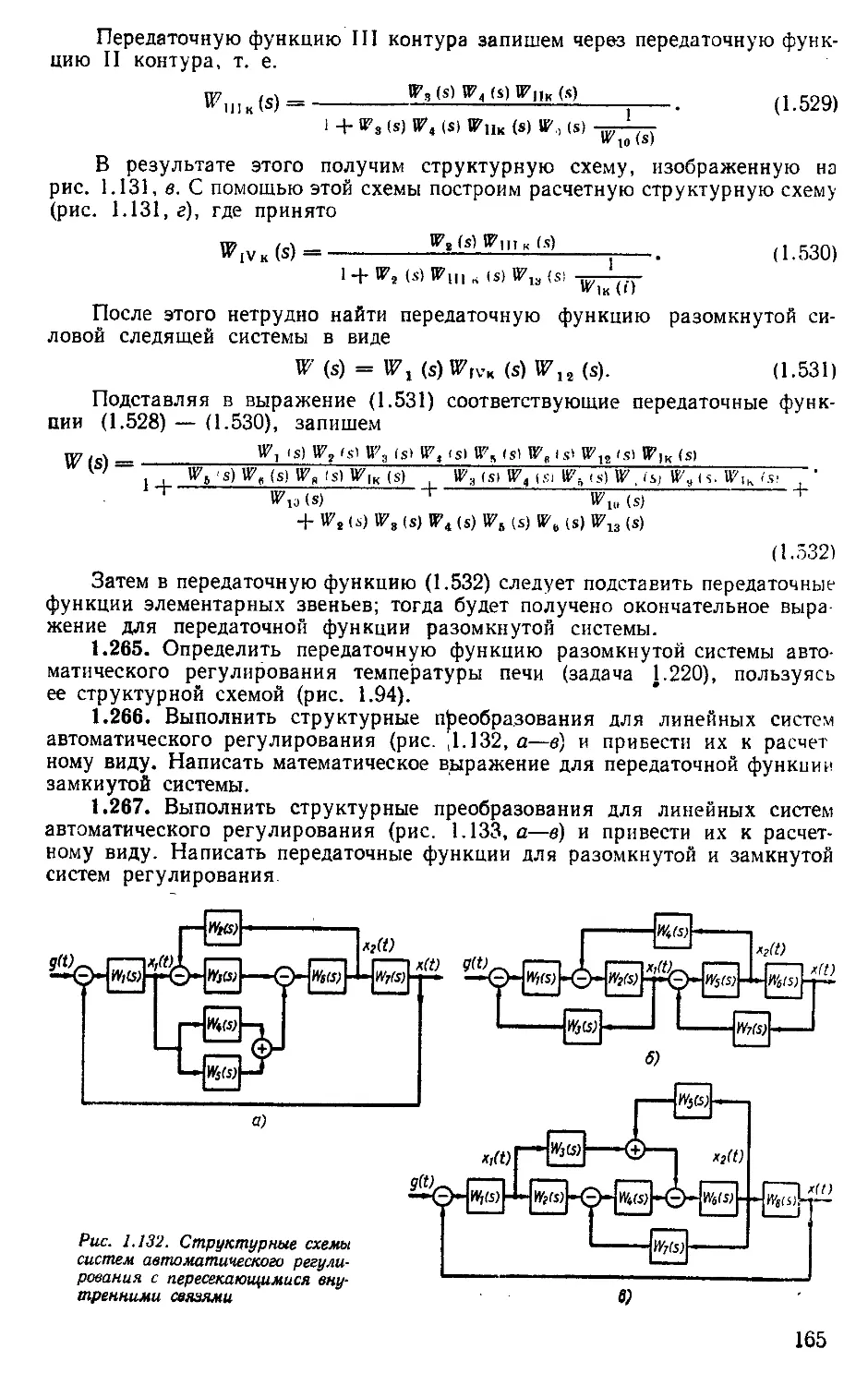
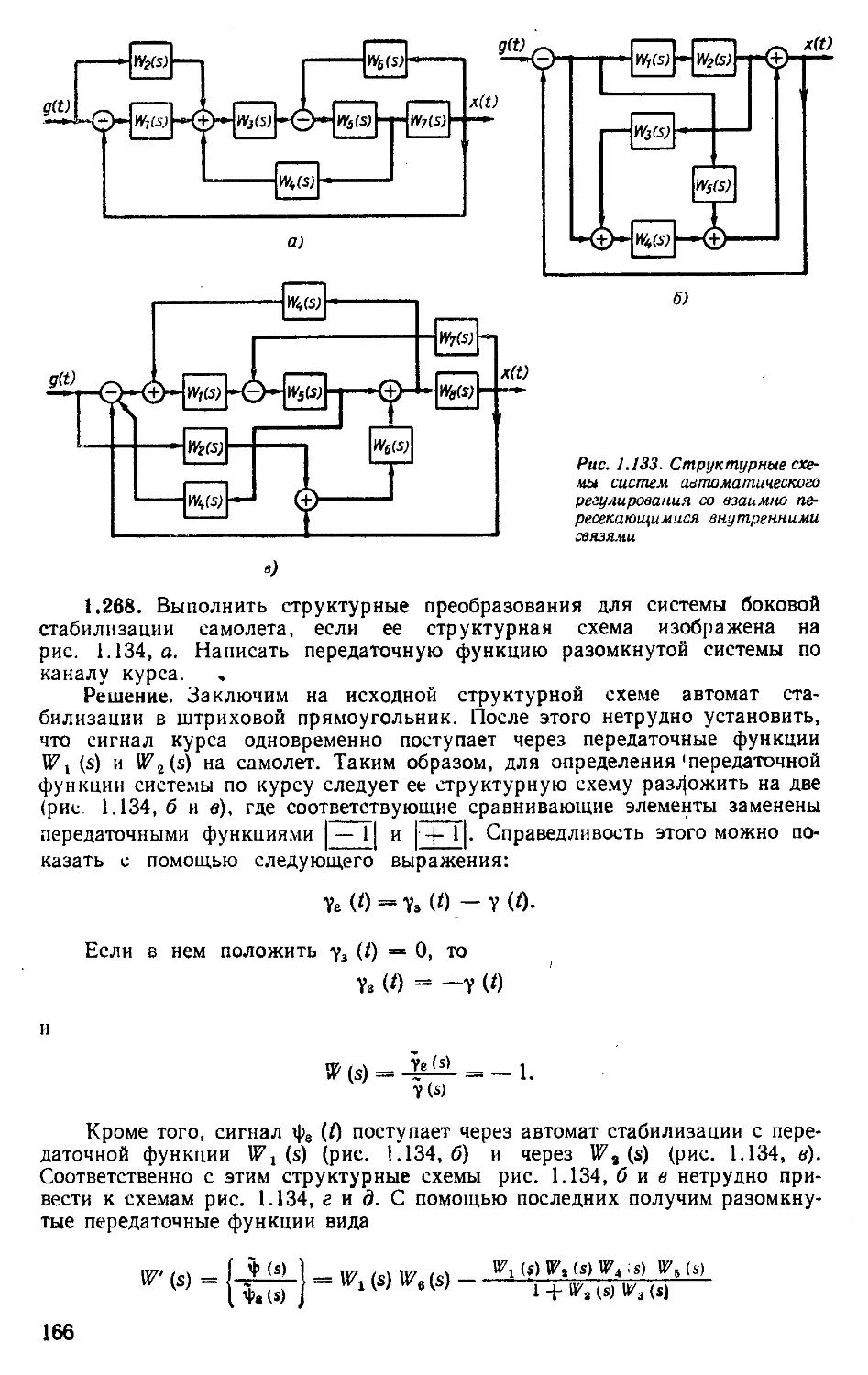
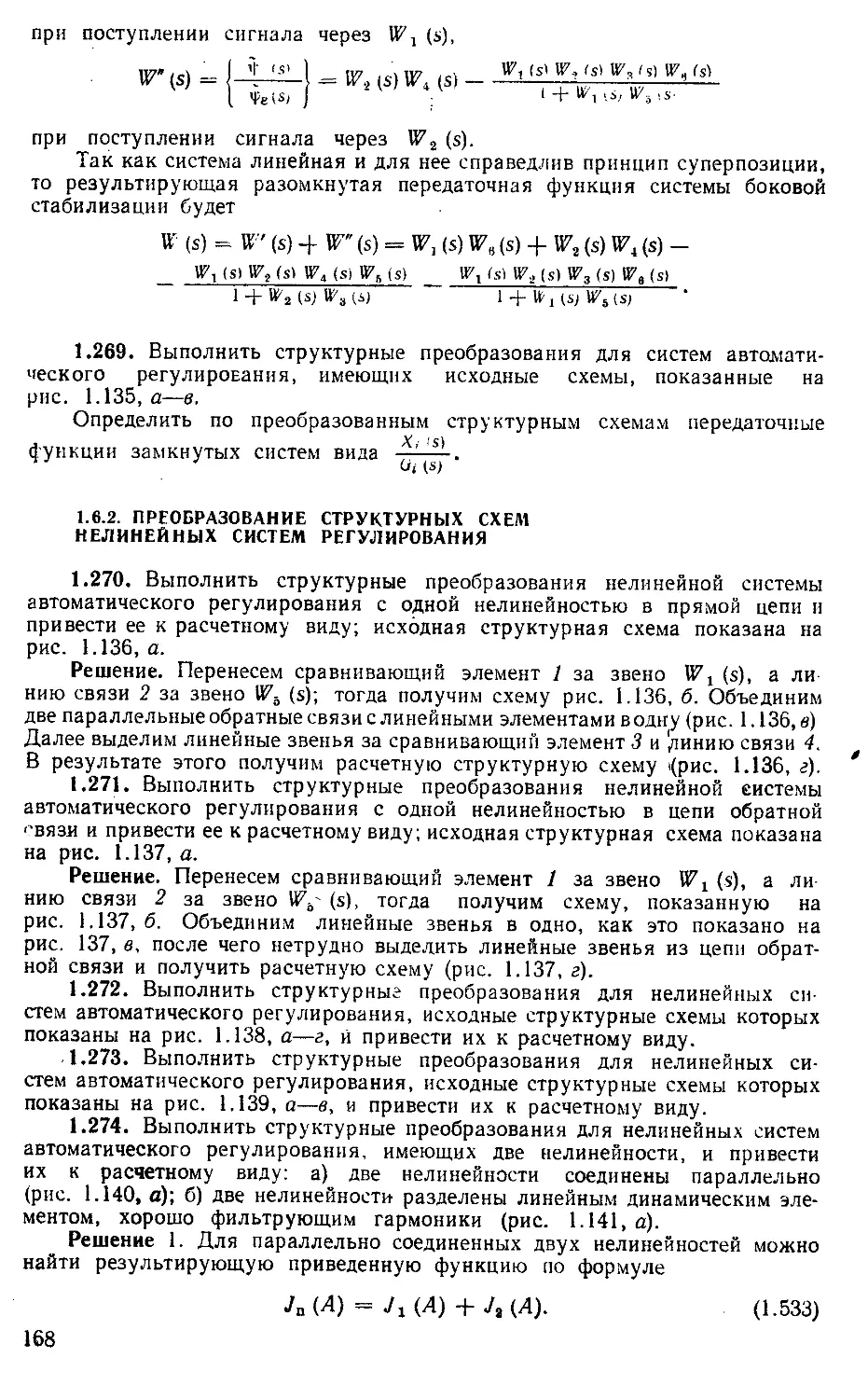
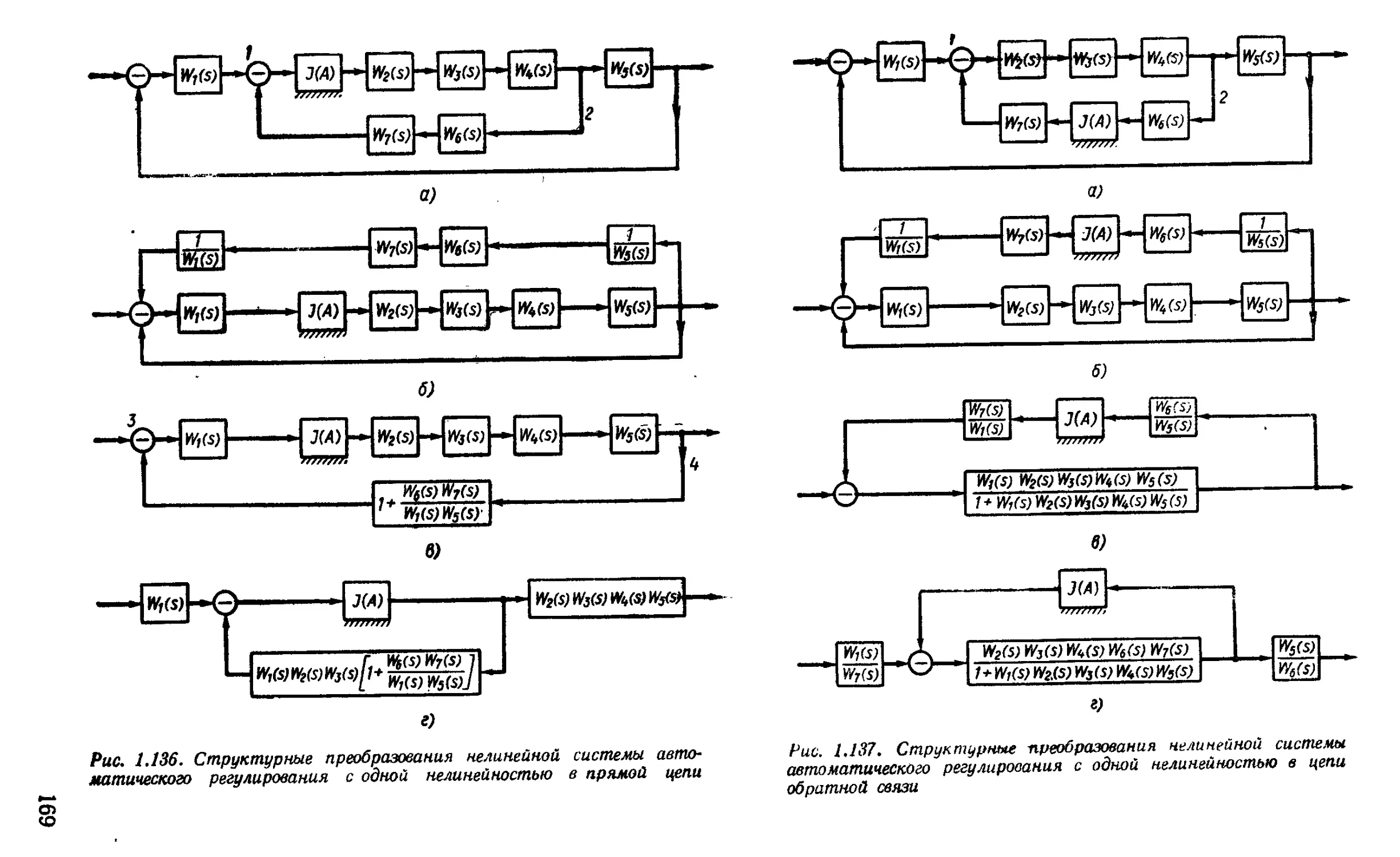
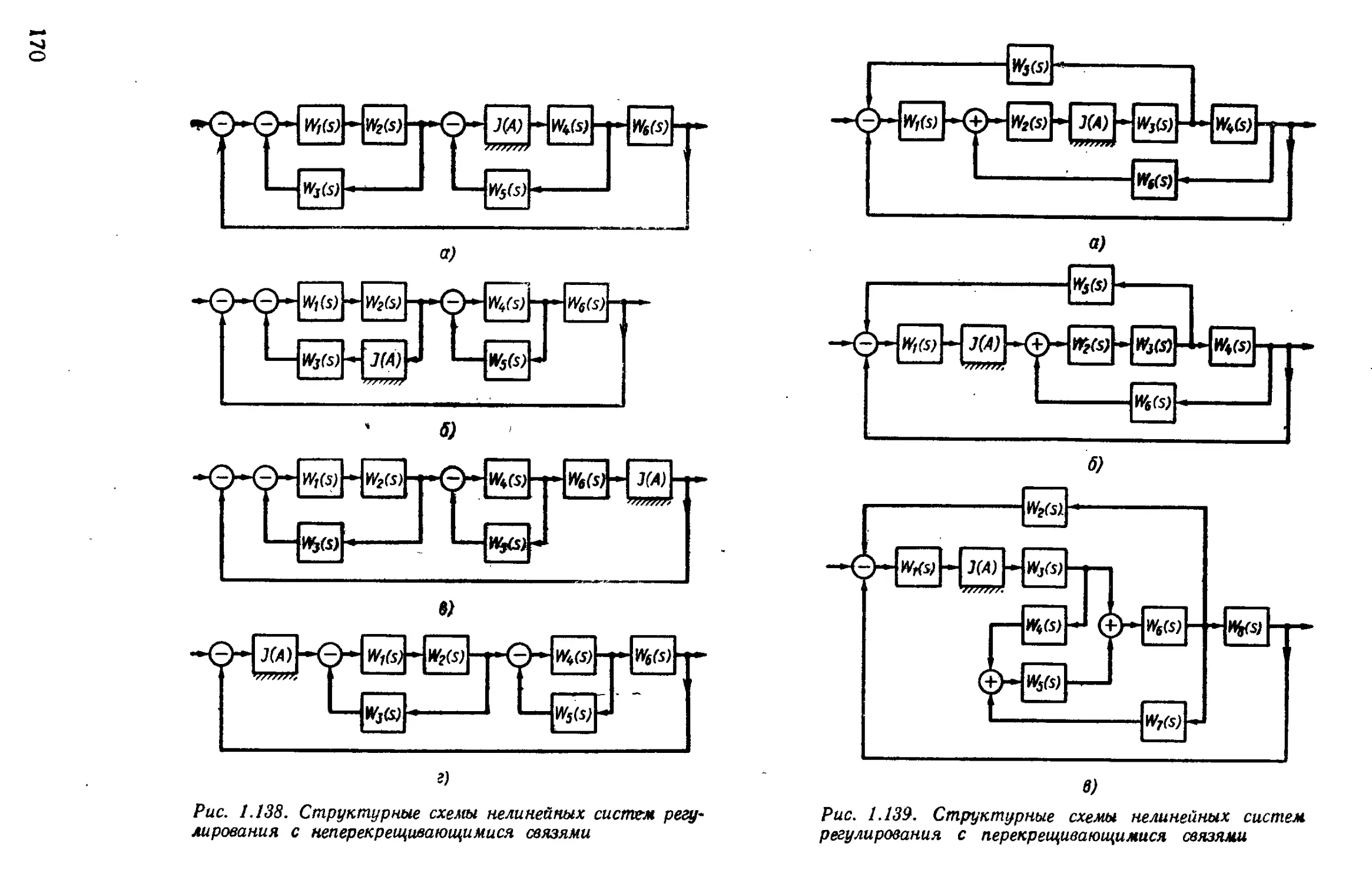
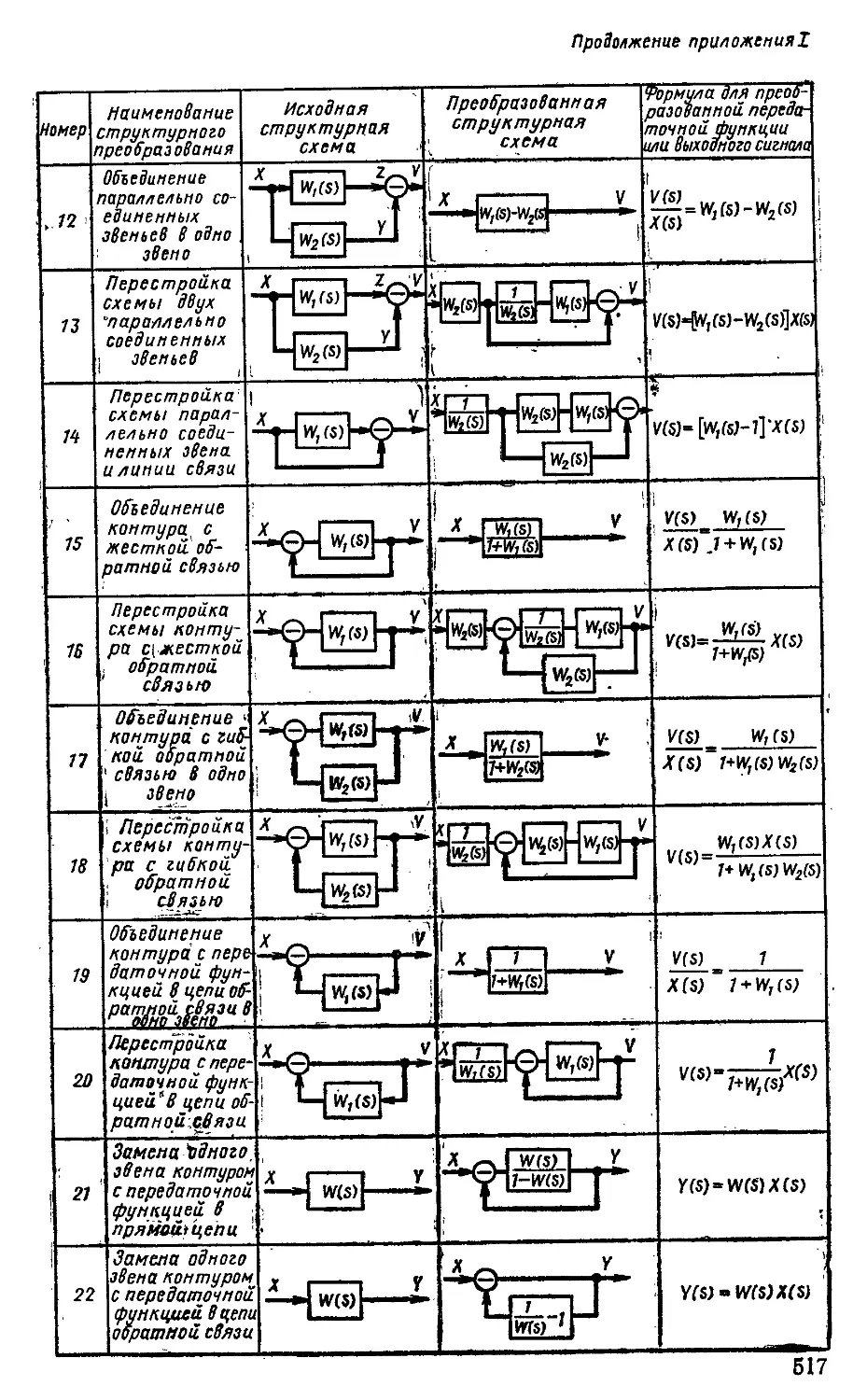
1,6. Преобразования структурных схем ............................. 162
1.6.1. Преобразование структурных схём линейных систем регулирования . . . 163
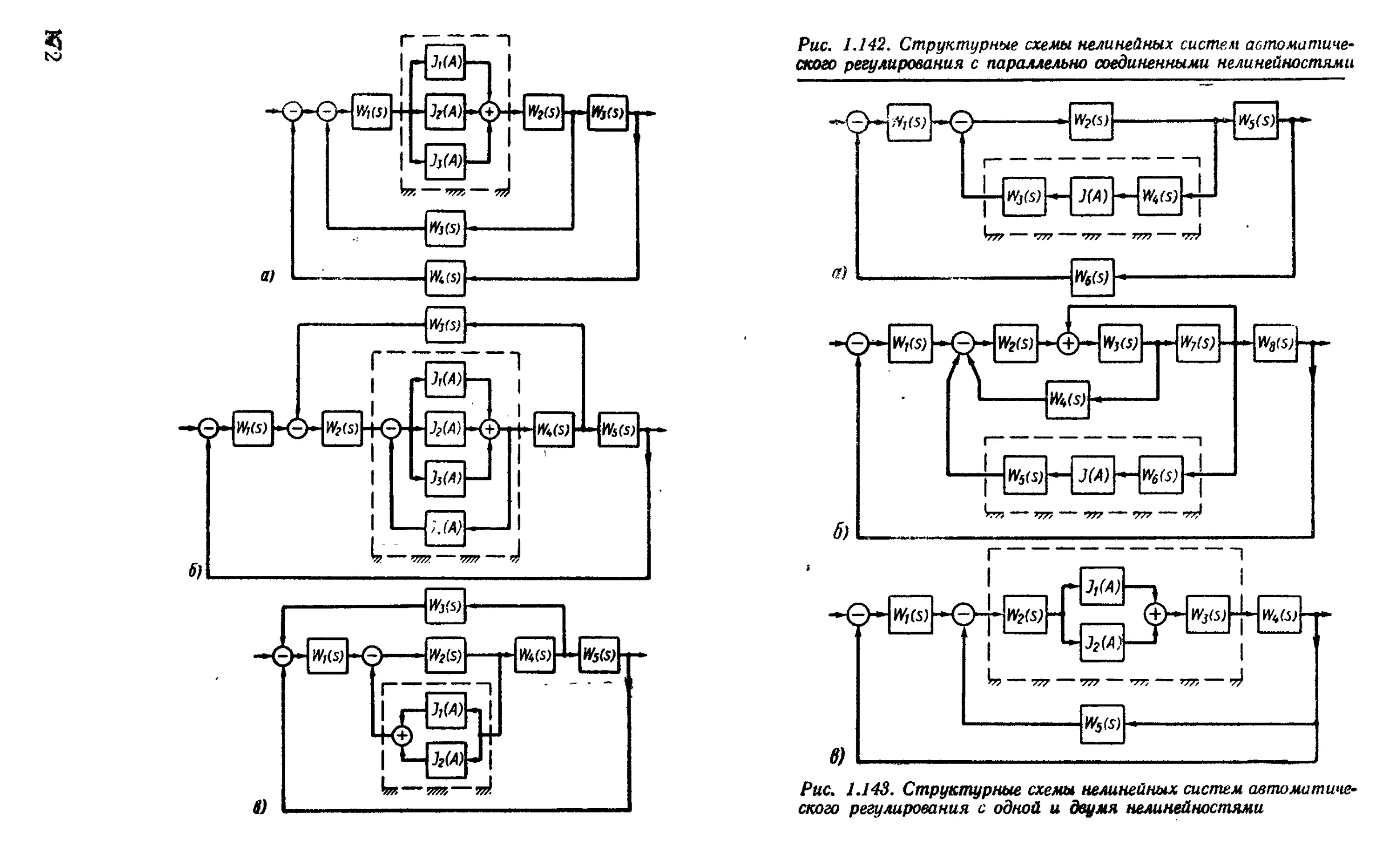
1.6.2. Преобразование структурных схем нелинейных систем регулирования 168
1.7. Приближенные методы определения передаточных функций линейных систем
по виду амплитудно-фазовых частотных характеристик............................. 171
Глава 2. Исследование устойчивости непрерывных линейных систем автоматического
регулирования ................................................................. 175
2.1. Анализ устойчивости систем с помощью 1-го метода Ляпунова................ 175
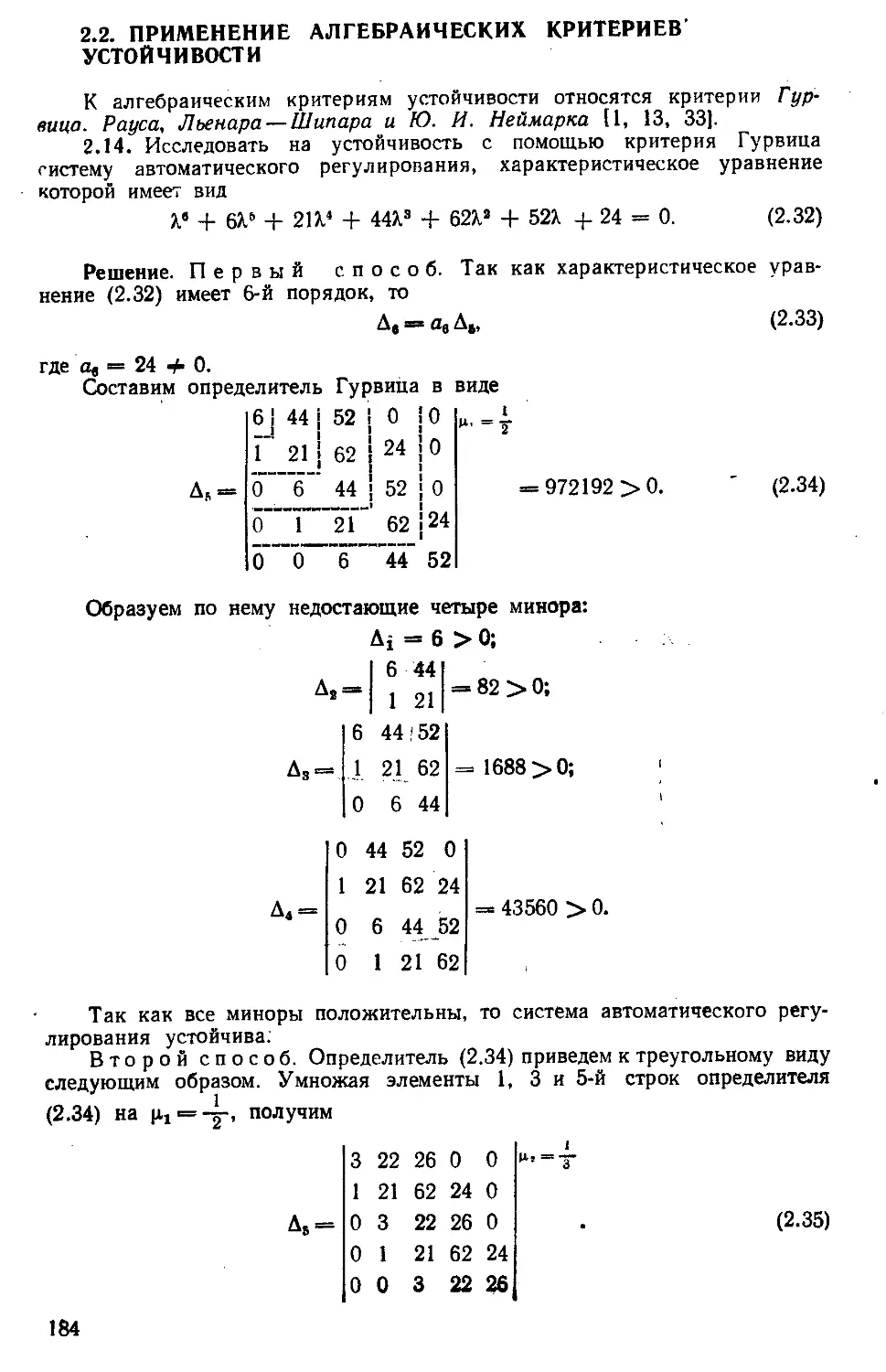
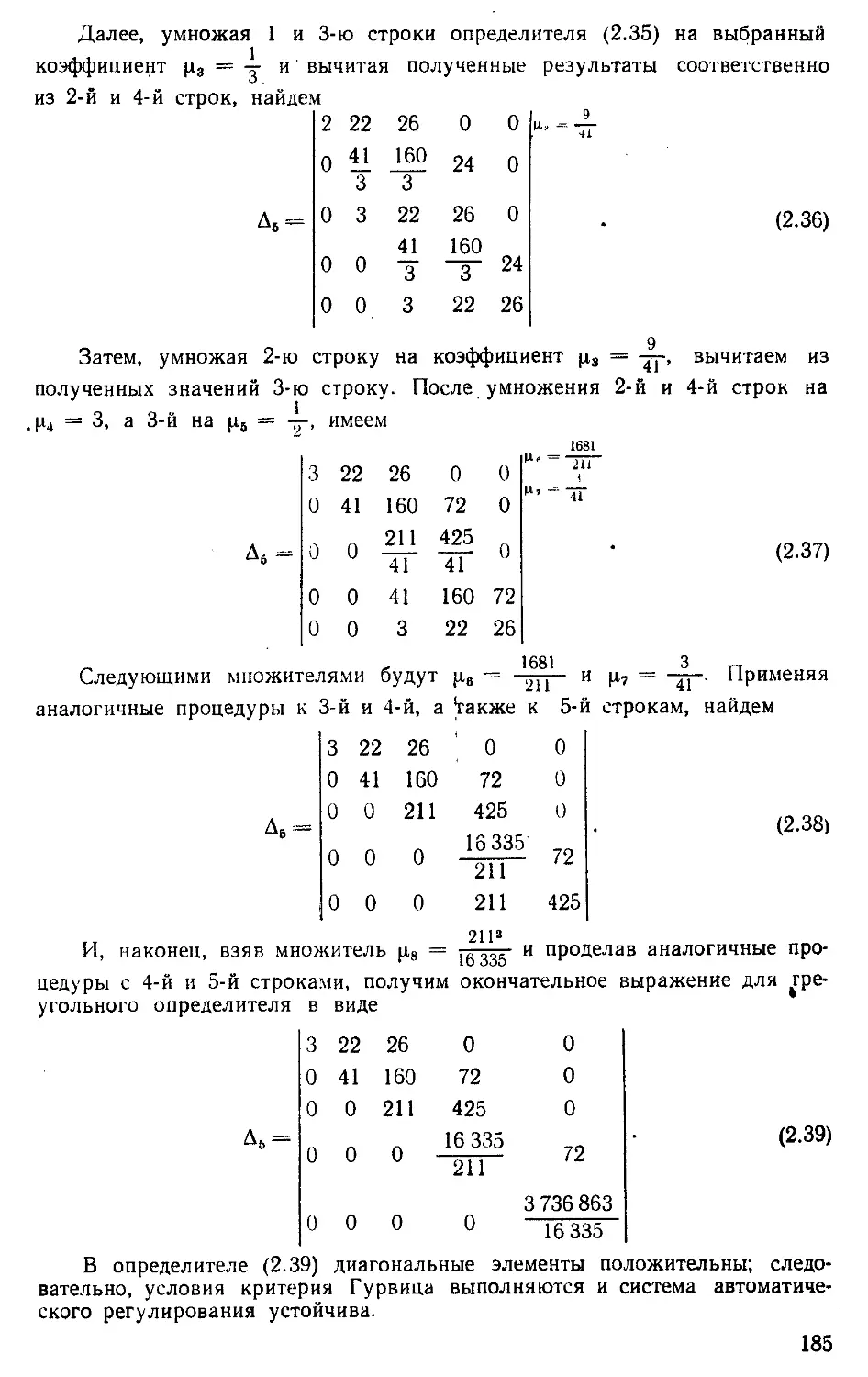
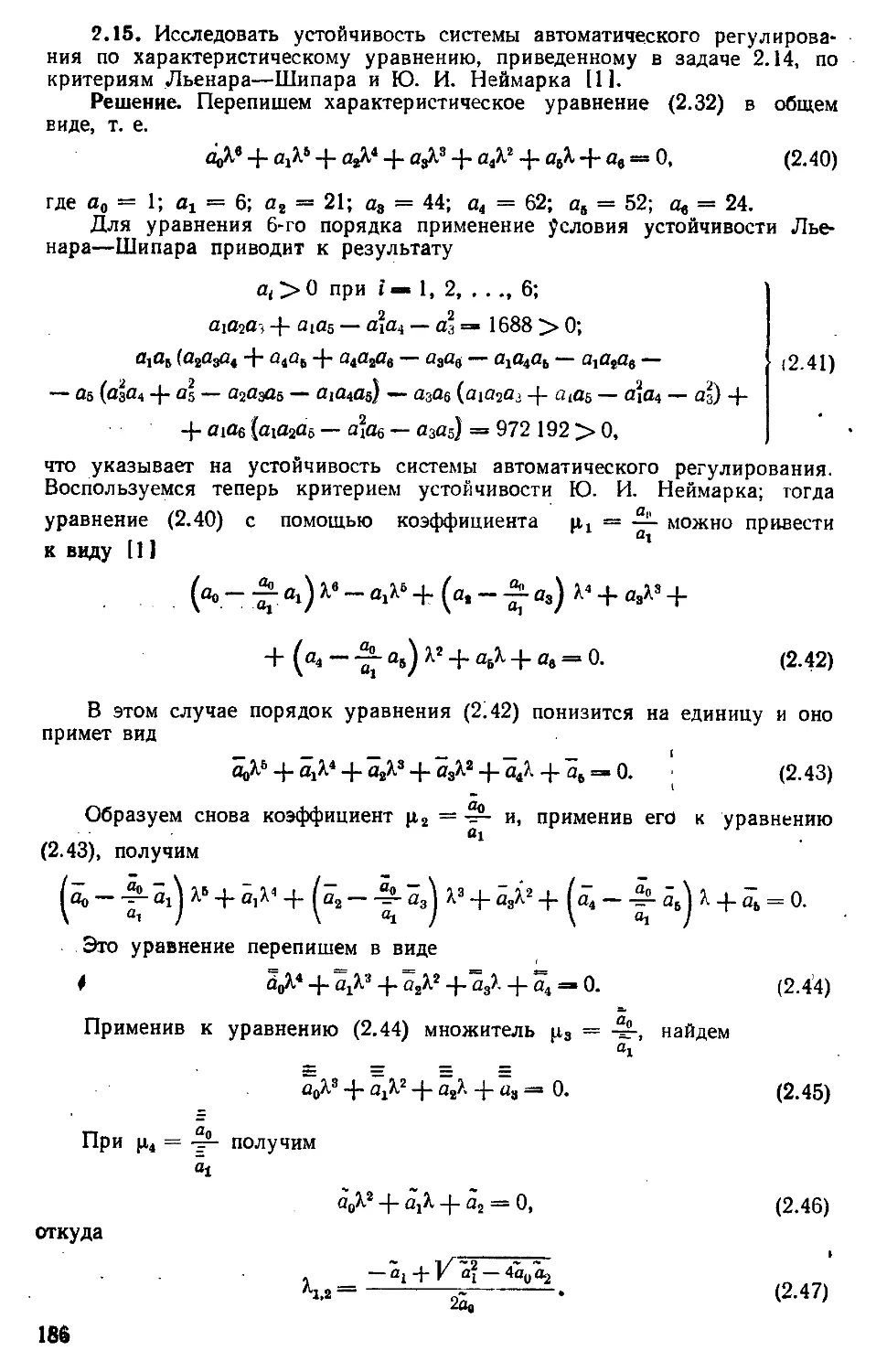
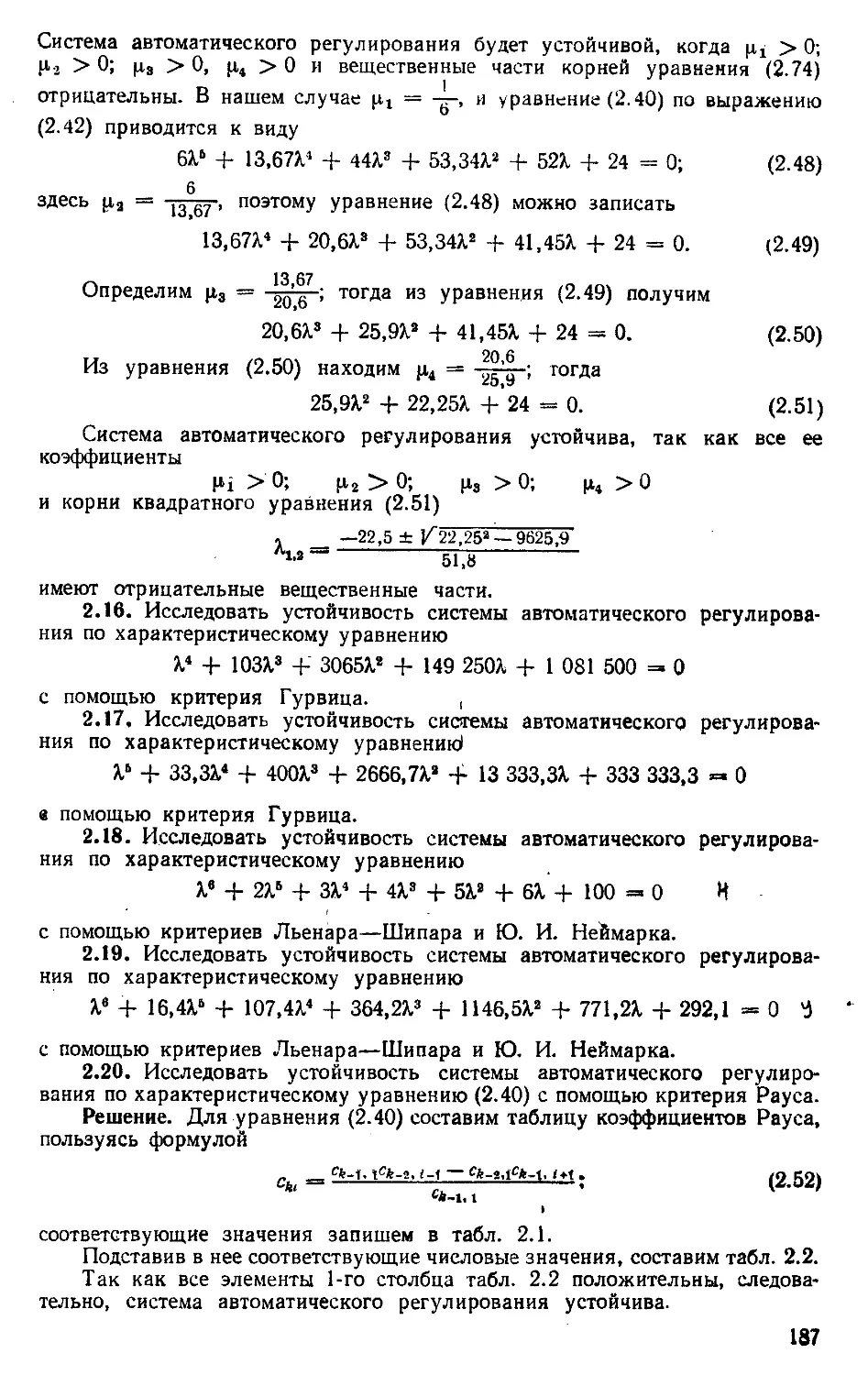
2.2. Применение алгебраических критериев устойчивости......................... 184
2.3. Анализ устойчивости систем регулирования с помощью ЦВМ................... 190
2.4. Частотные критерии устойчивости Михайлова, Михайлова—Найквиста .... 193
2.5. Логарифмические критерии устойчивости одноконтурных систем регулирования 201
2.6. Логарифмический критерий устойчивости миогокоитурных систем регулирова-
ния ........................................................................... 208
1* 3
2.7. Анализ устойчивости систем автоматического регулирования с трансцендентными
звеньями ........................................................................ 222
2.8. Выделение областей устойчивых и неустойчивых состояний по параметрам с по-
мощью логарифмических частотных характеристик.................................... 228
2.9. Выделение областей устойчивости с помощью D-разбиения....................... 231
Глава 3. Исследование качества непрерывных линейных систем автоматического
регулирования................................................................ . 236
3.1. Построение переходных процессов по заданным передаточным функциям замк-
нутых систем аналитическими способами............................................ 236
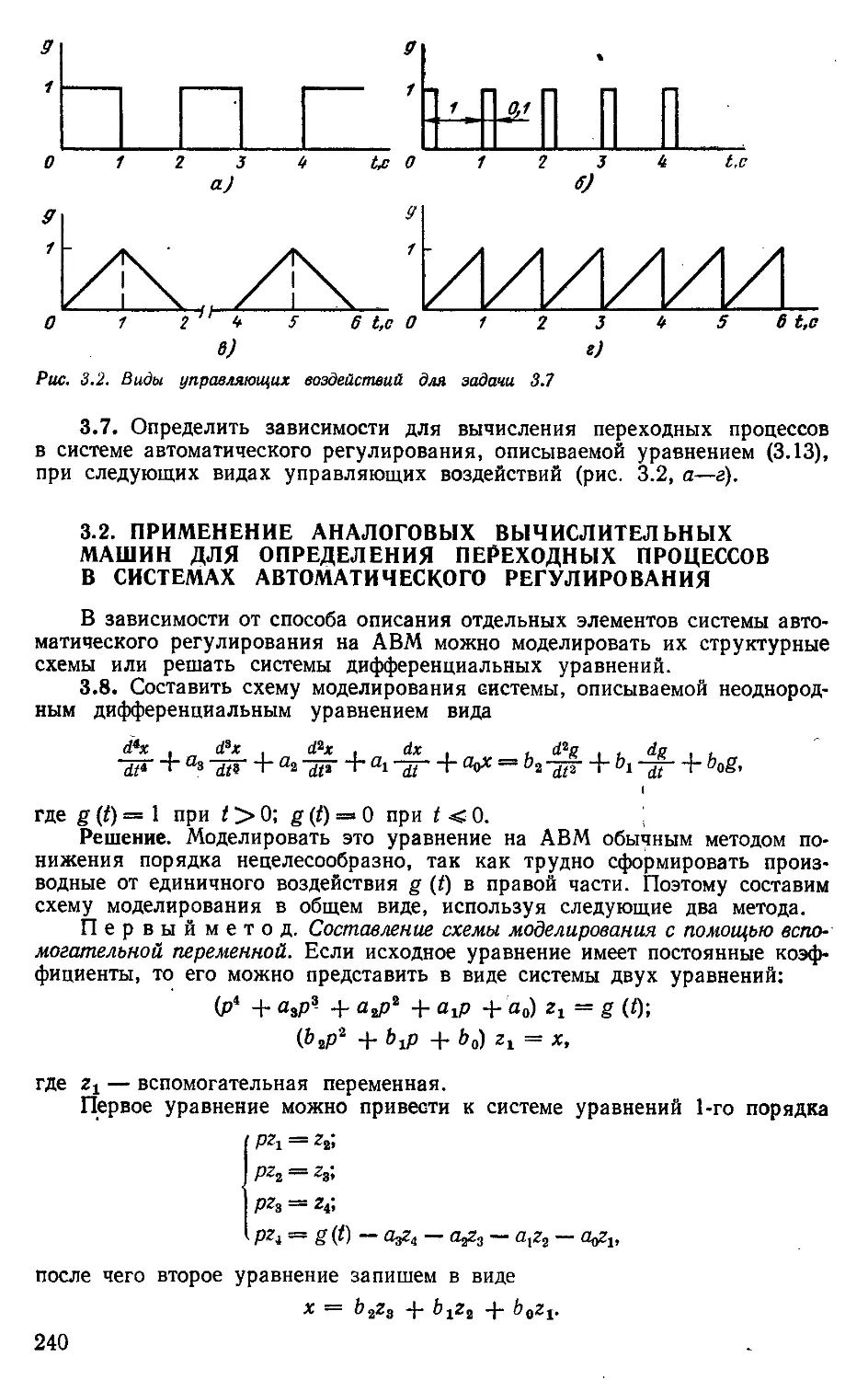
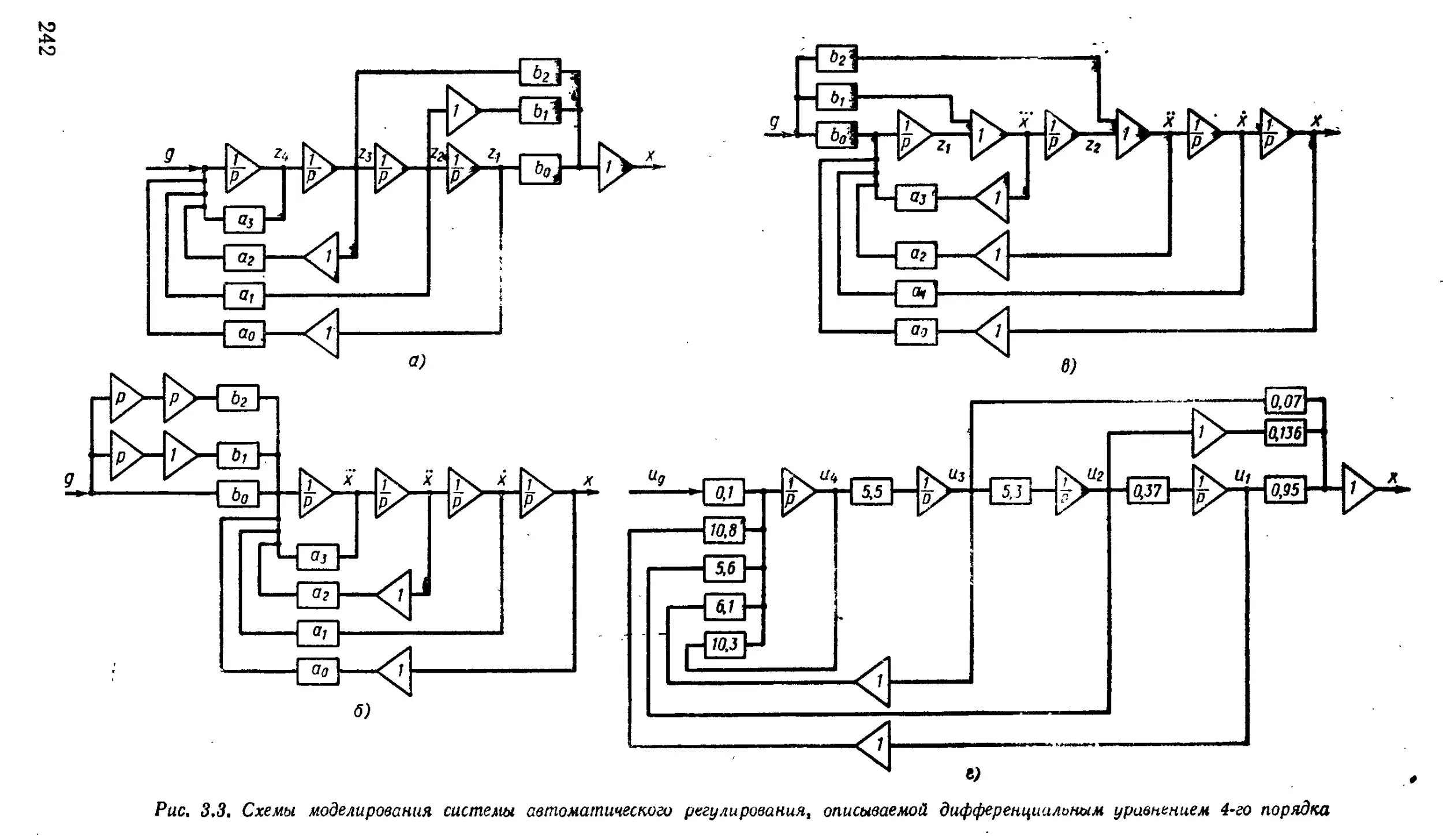
3.2. Применение аналоговых вычислительных машин для определения переходных
процессов в системах автоматического регулирования............................... 240
3.3. Метод корневого годографа................................................... 250
3.4. Интегральные оценки качества ............................................... 255
3.5. Приближенные методы анализа качества систем регулирования по свойствам
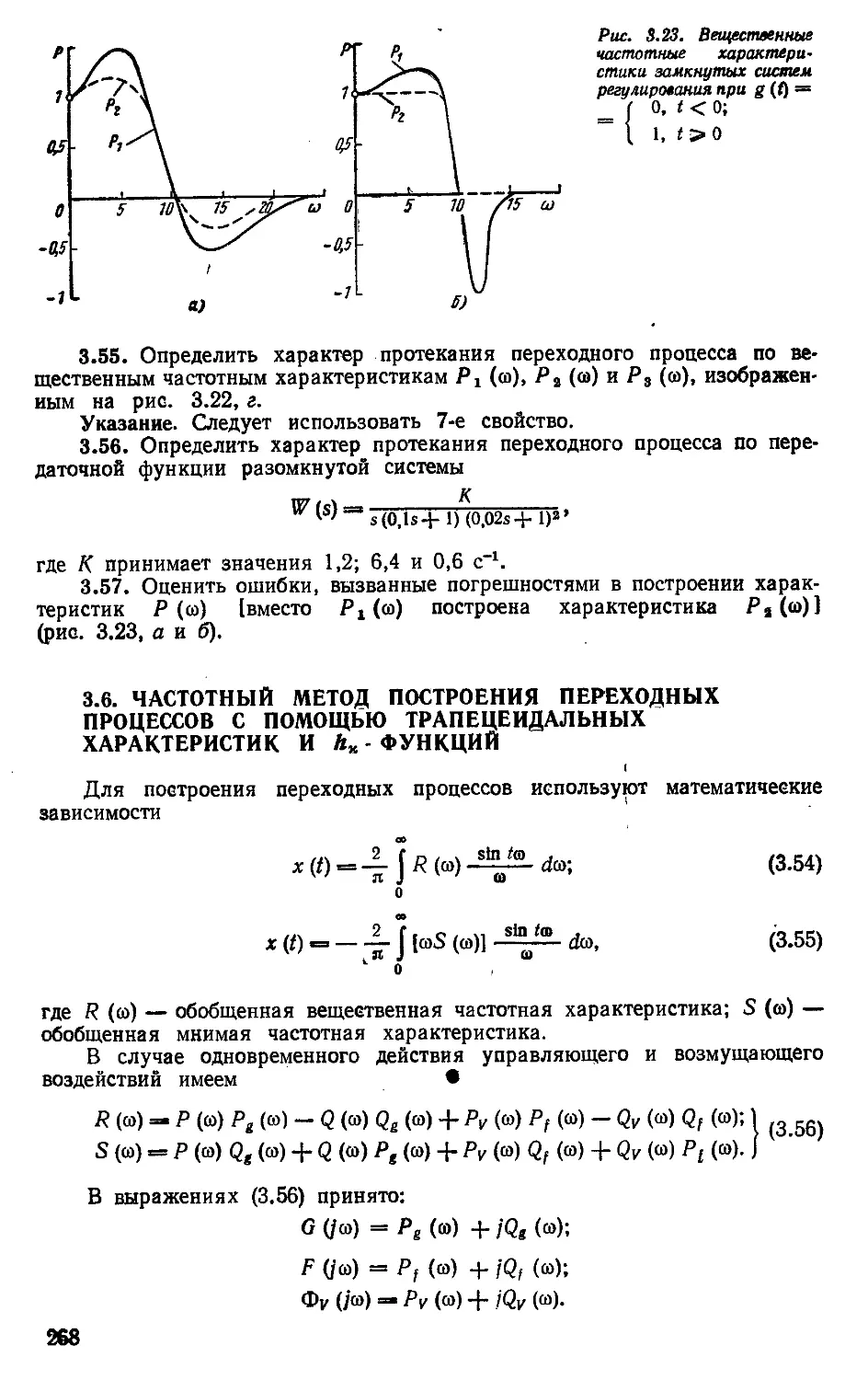
вещественных частотных характеристик ............................................ 262
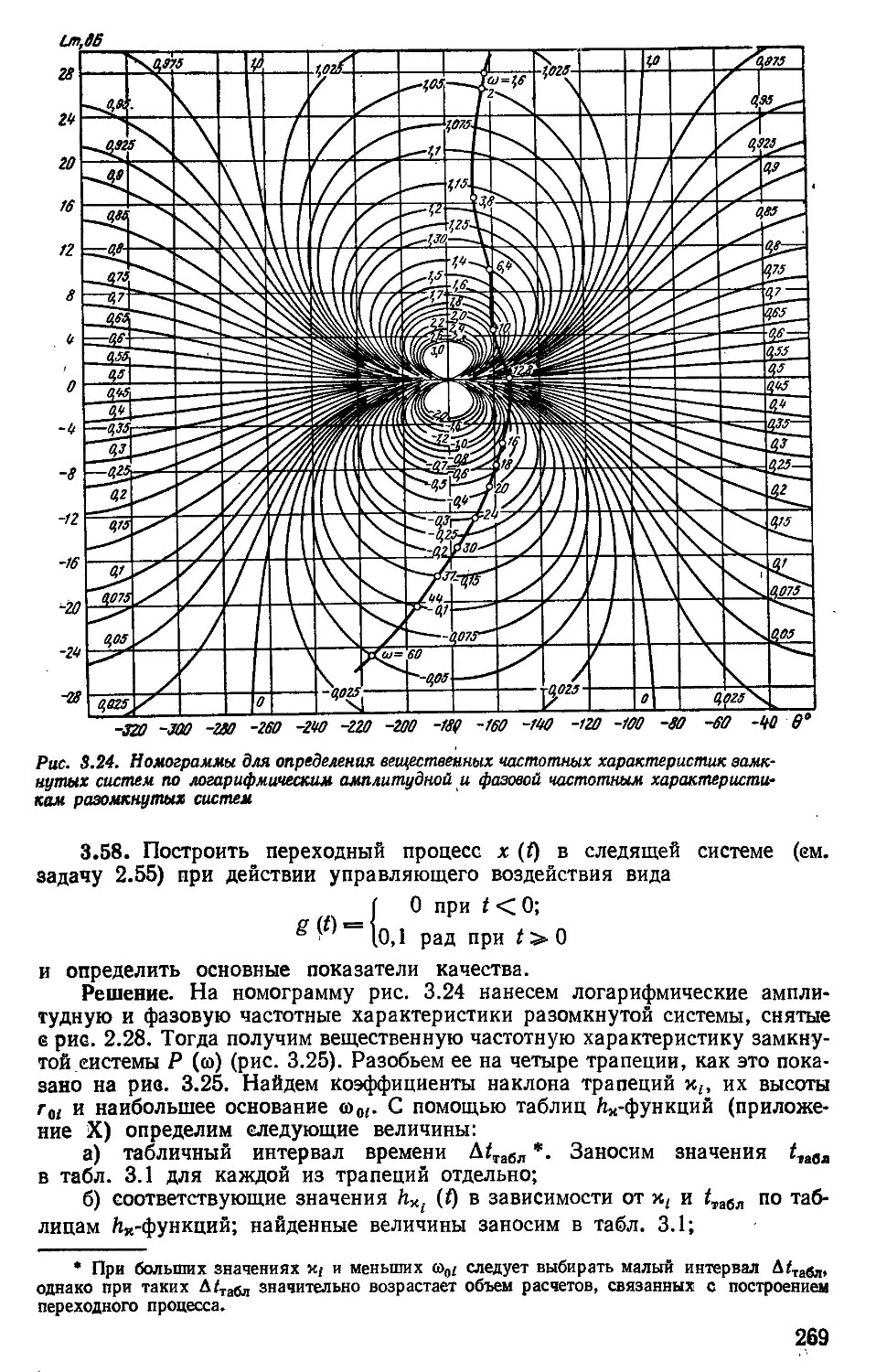
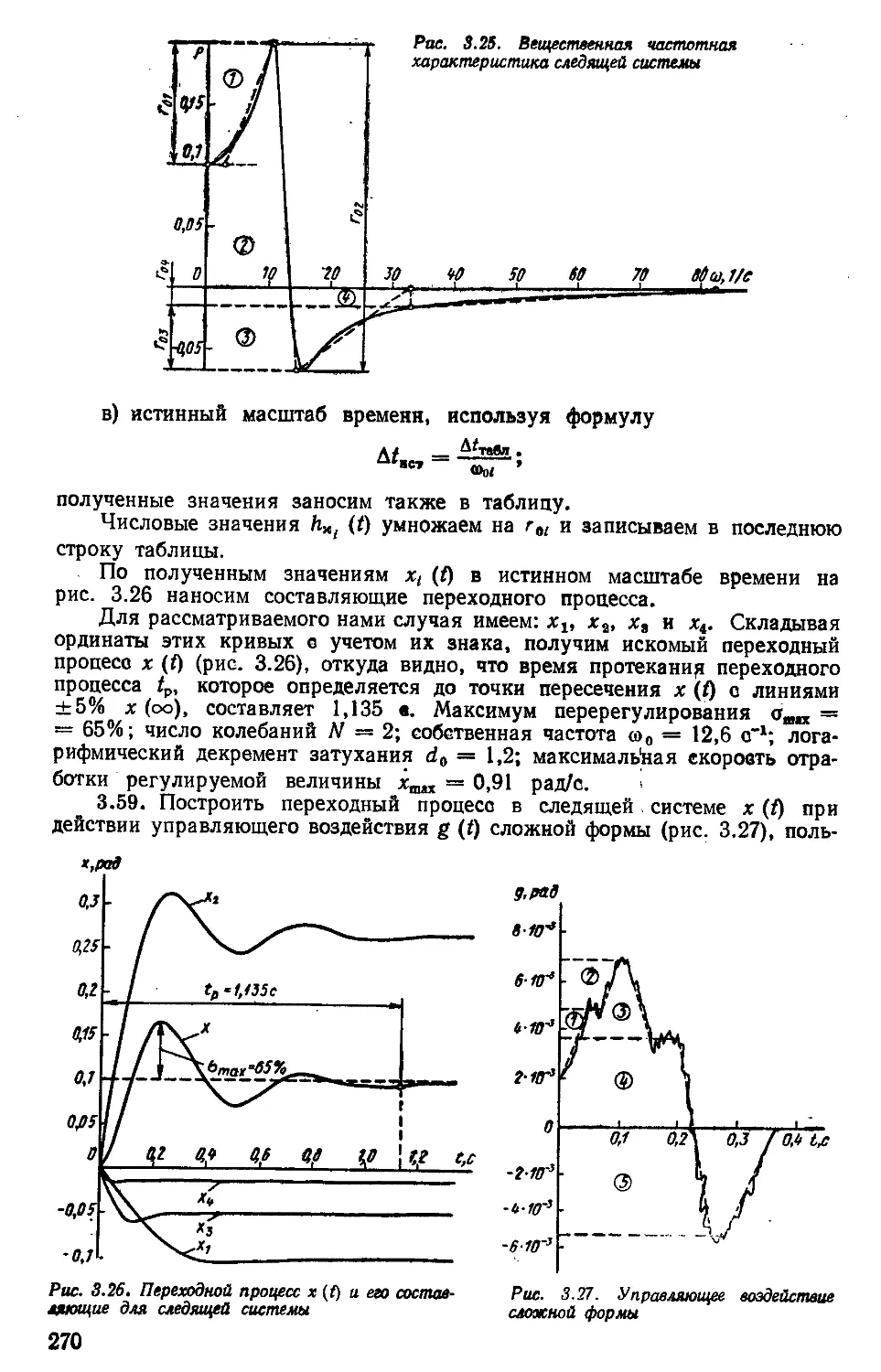
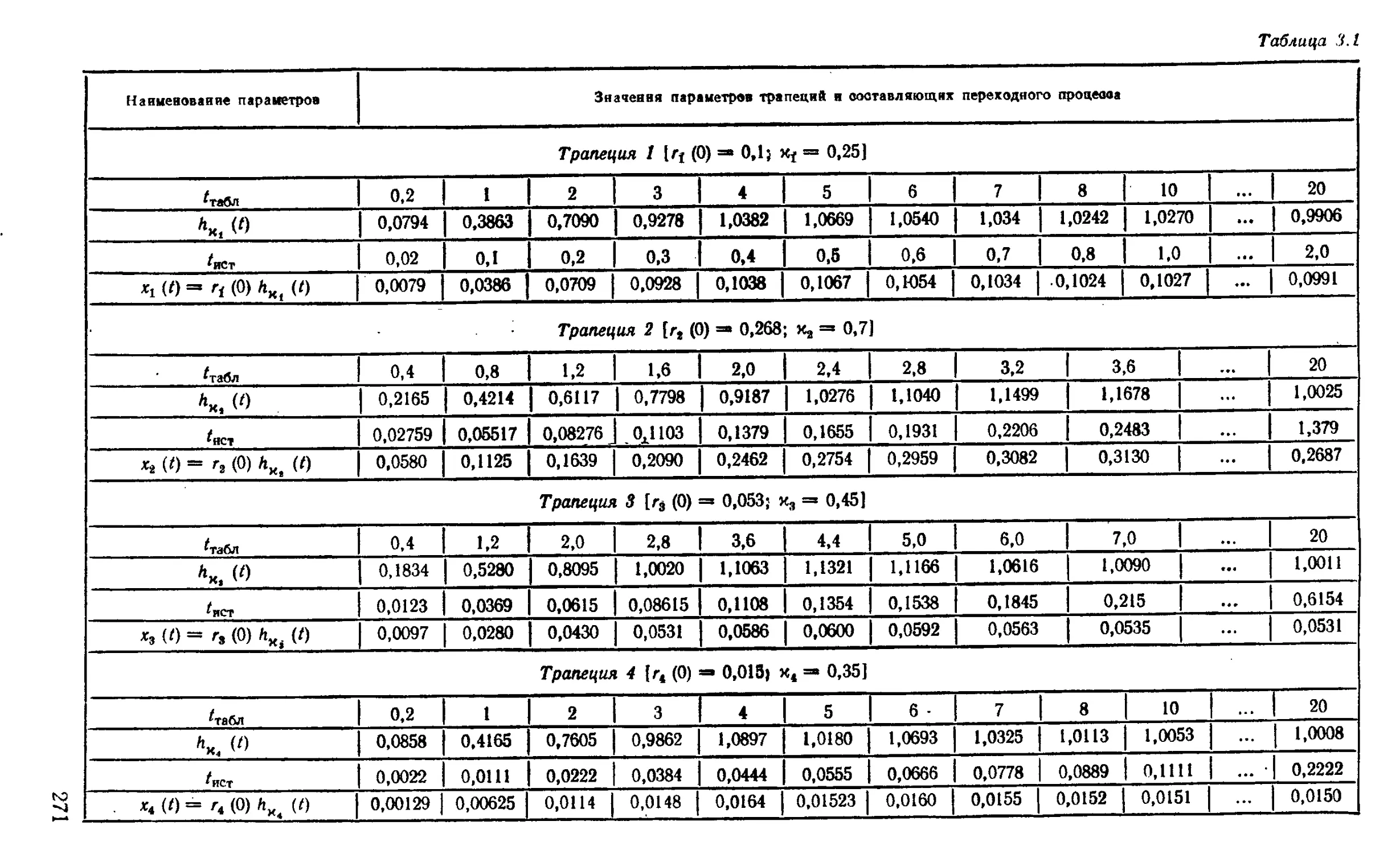
3.6. Частотный метод построения переходных процессов с помощью трапецеидальных
характеристик и йх-функций .................................................... 268
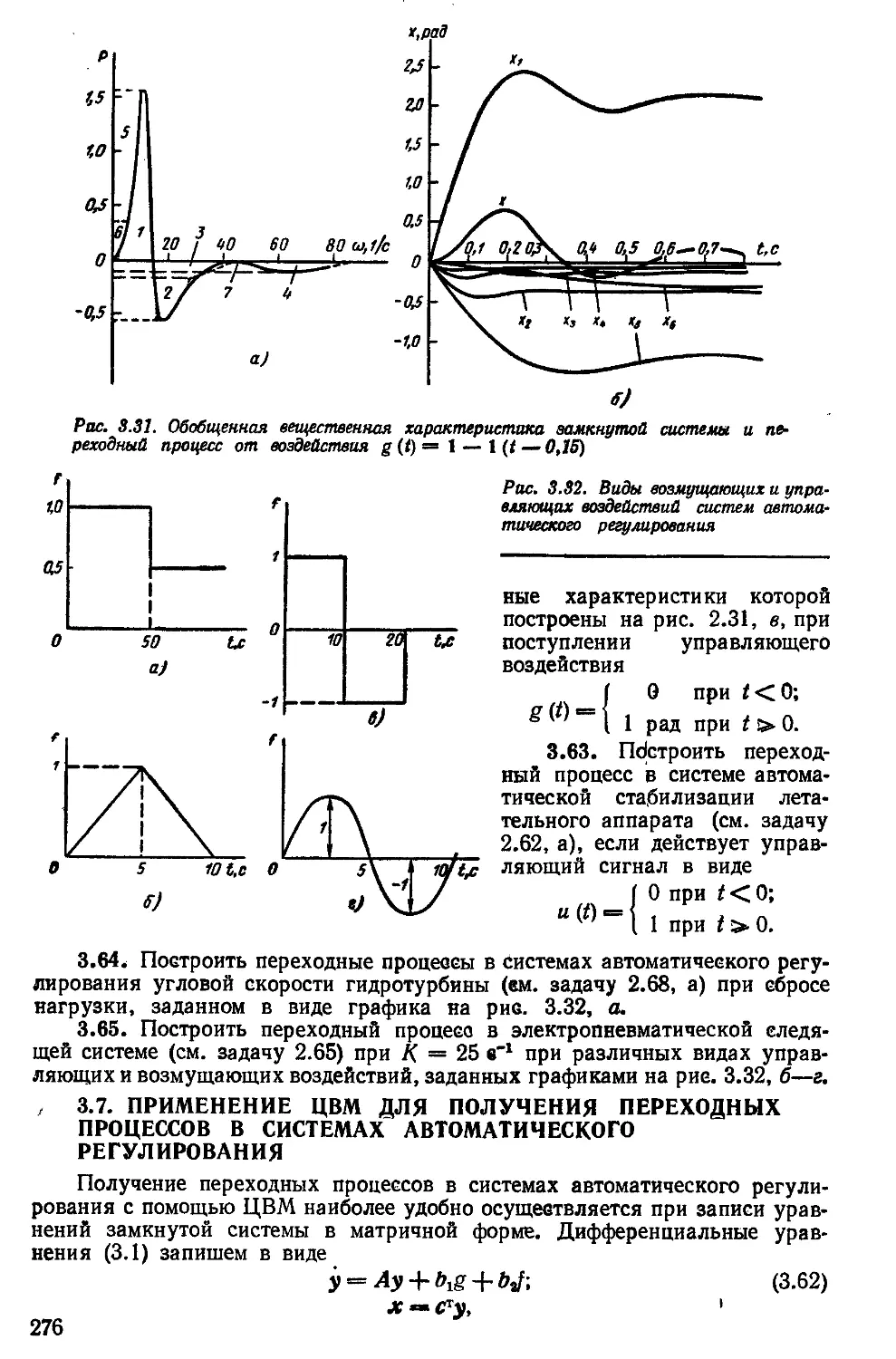
3.7. Применение ЦВМ для получения переходных процессов в системах автоматиче-
ского регулирования ............................................................. 276
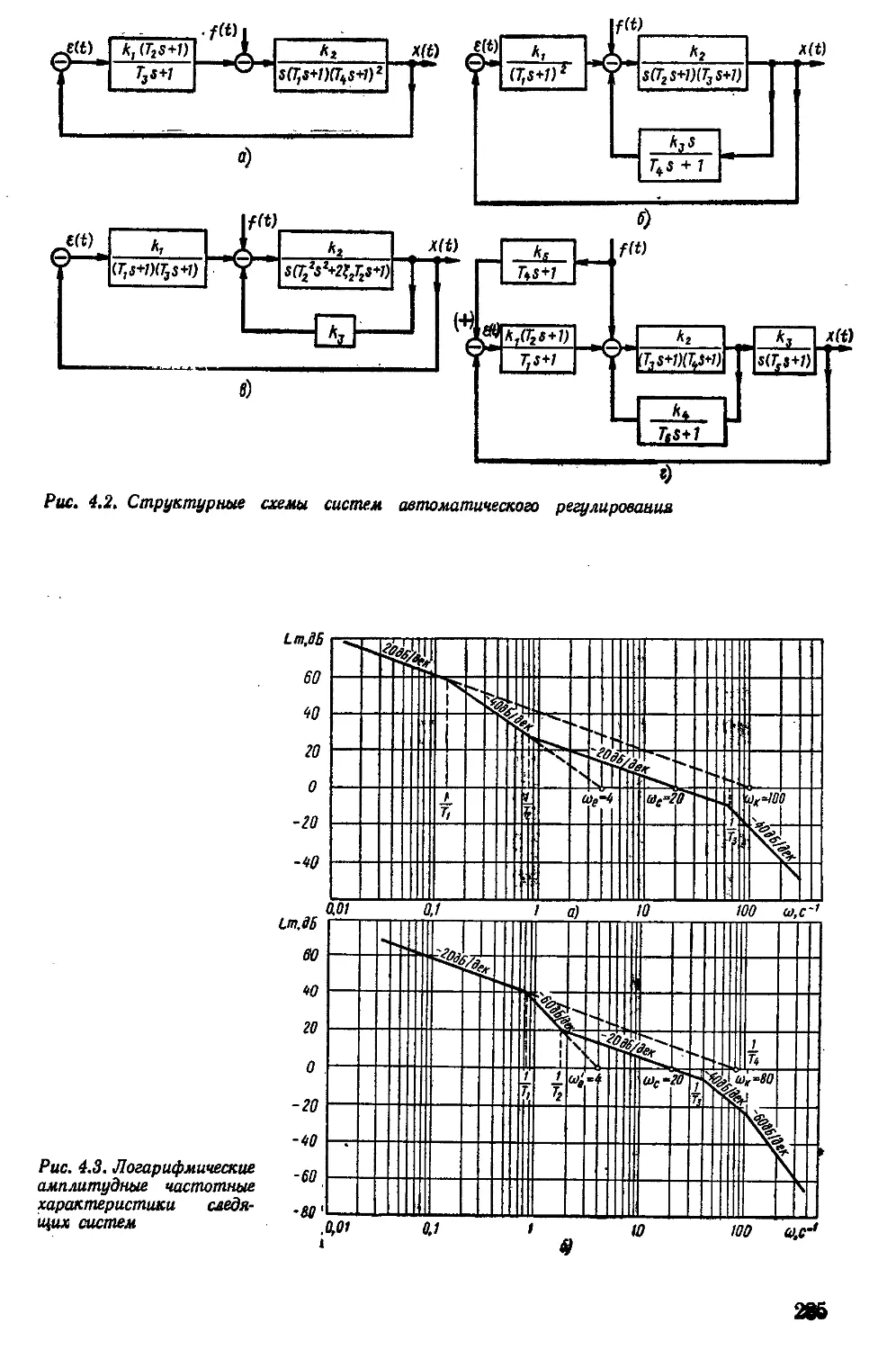
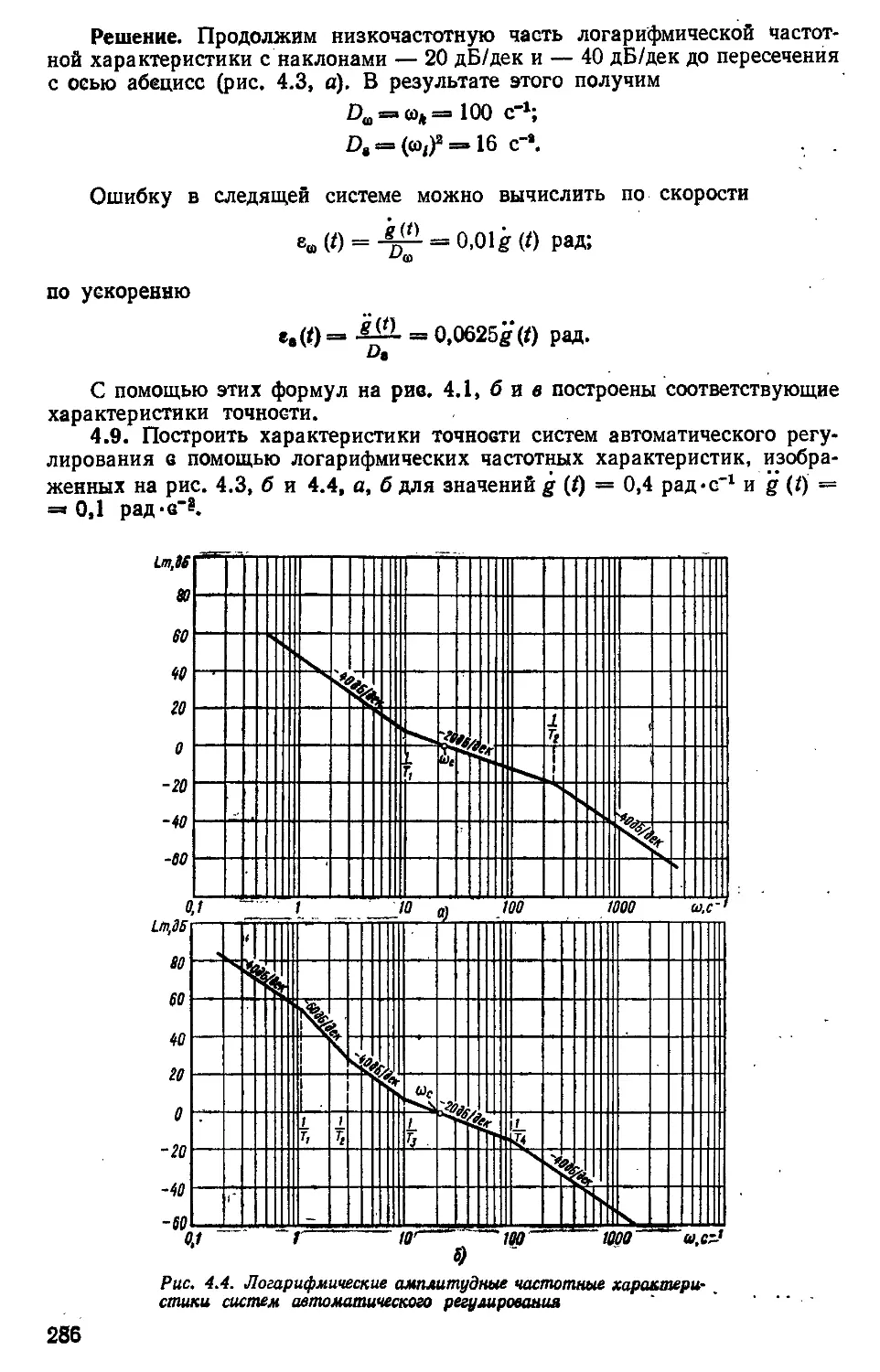
Глава 4. Исследование динамической точности линейных систем автоматического
регулирования ................................................................... 281
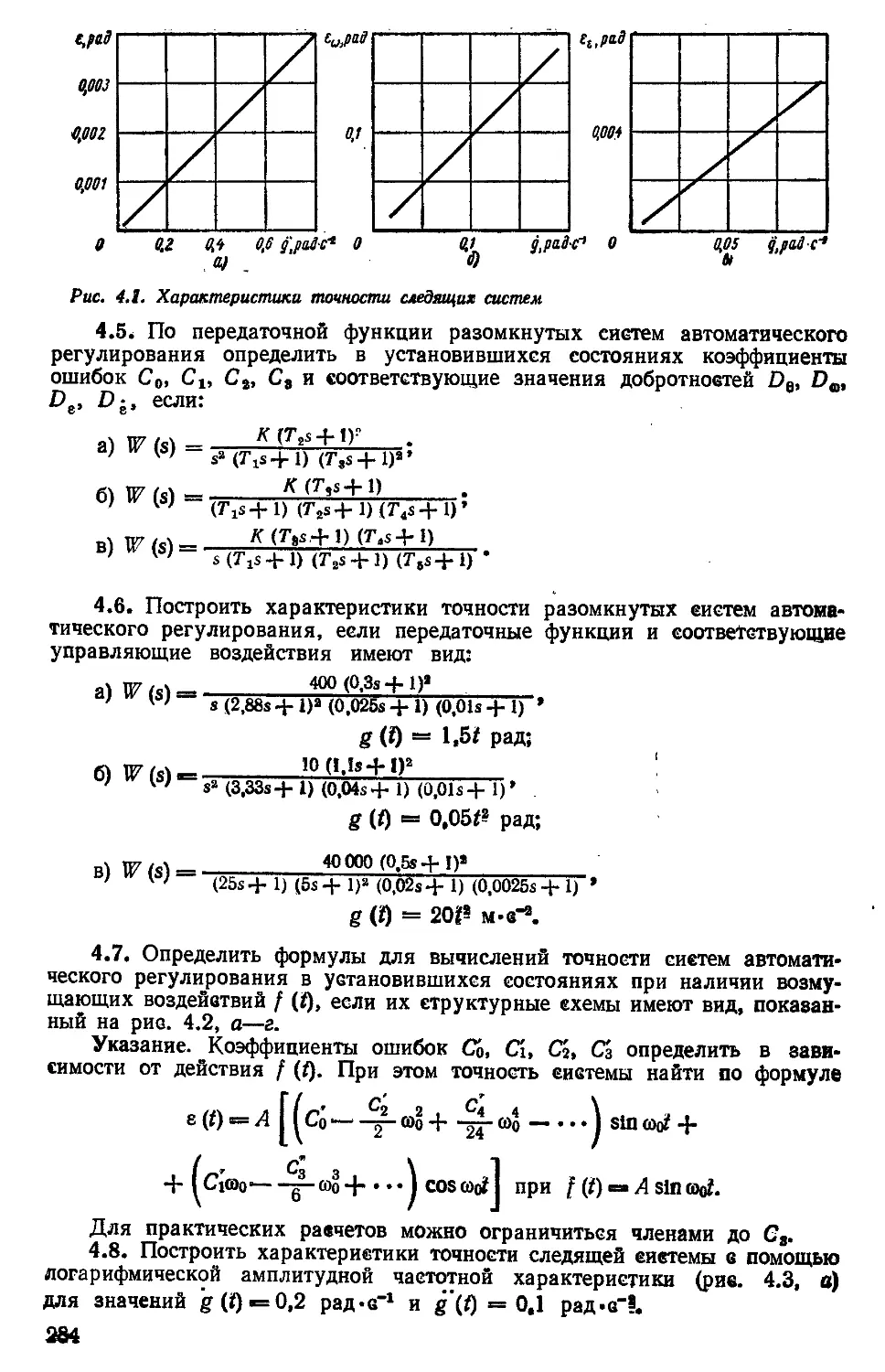
4.1. Определение характеристик точности систем автоматического регулирования
при регулярных воздействиях .................................................... 281
4.2. Повышение точности систем, автоматического регулирования с использованием
теории инвариантности ........................................................... 289
4.3. Случайные процессы в системах автоматического регулирования................. 296
4.4. Определение характеристик точности систем регулирования при стационарных
случайных воздействиях .......................................................... 303
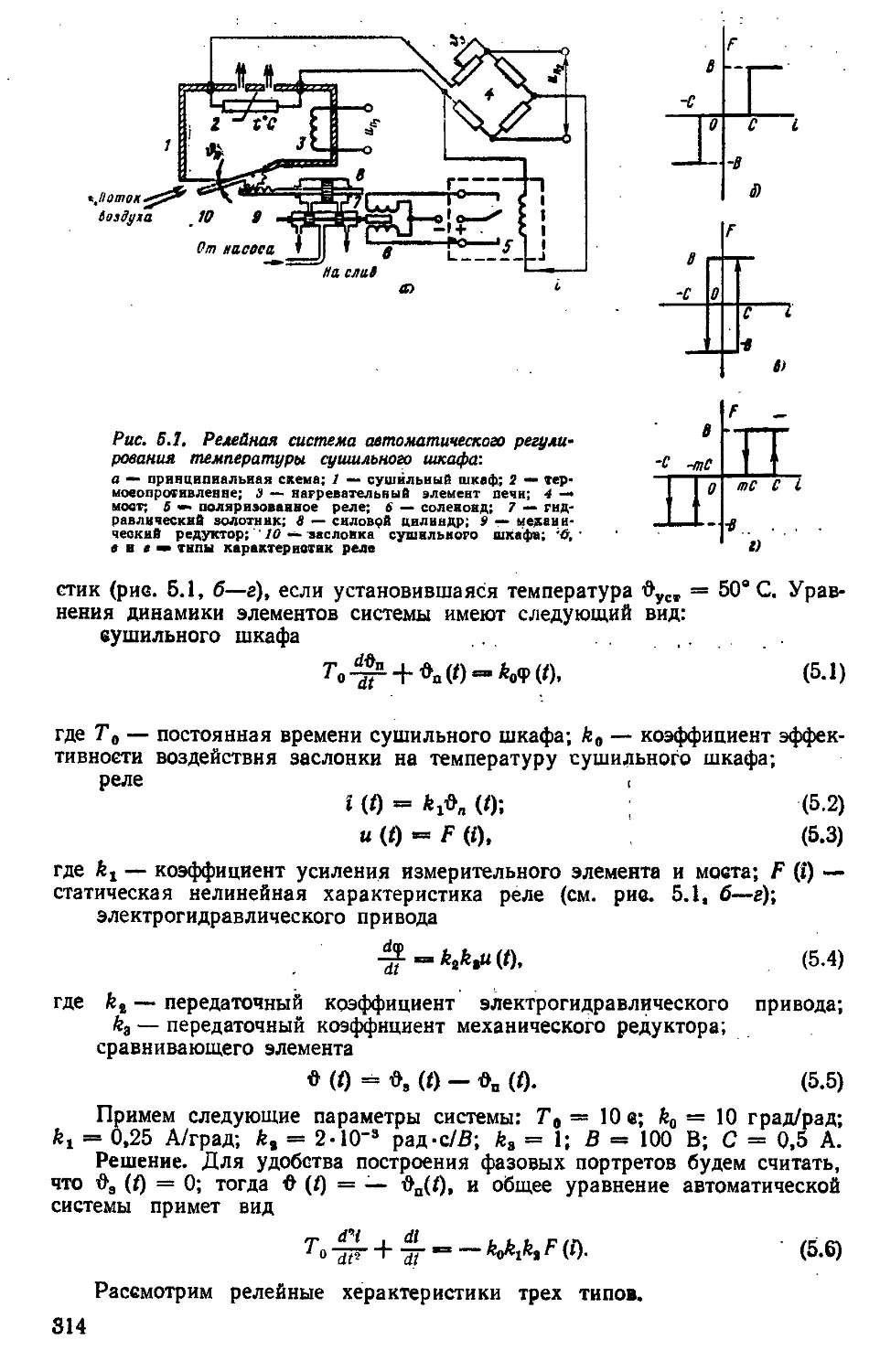
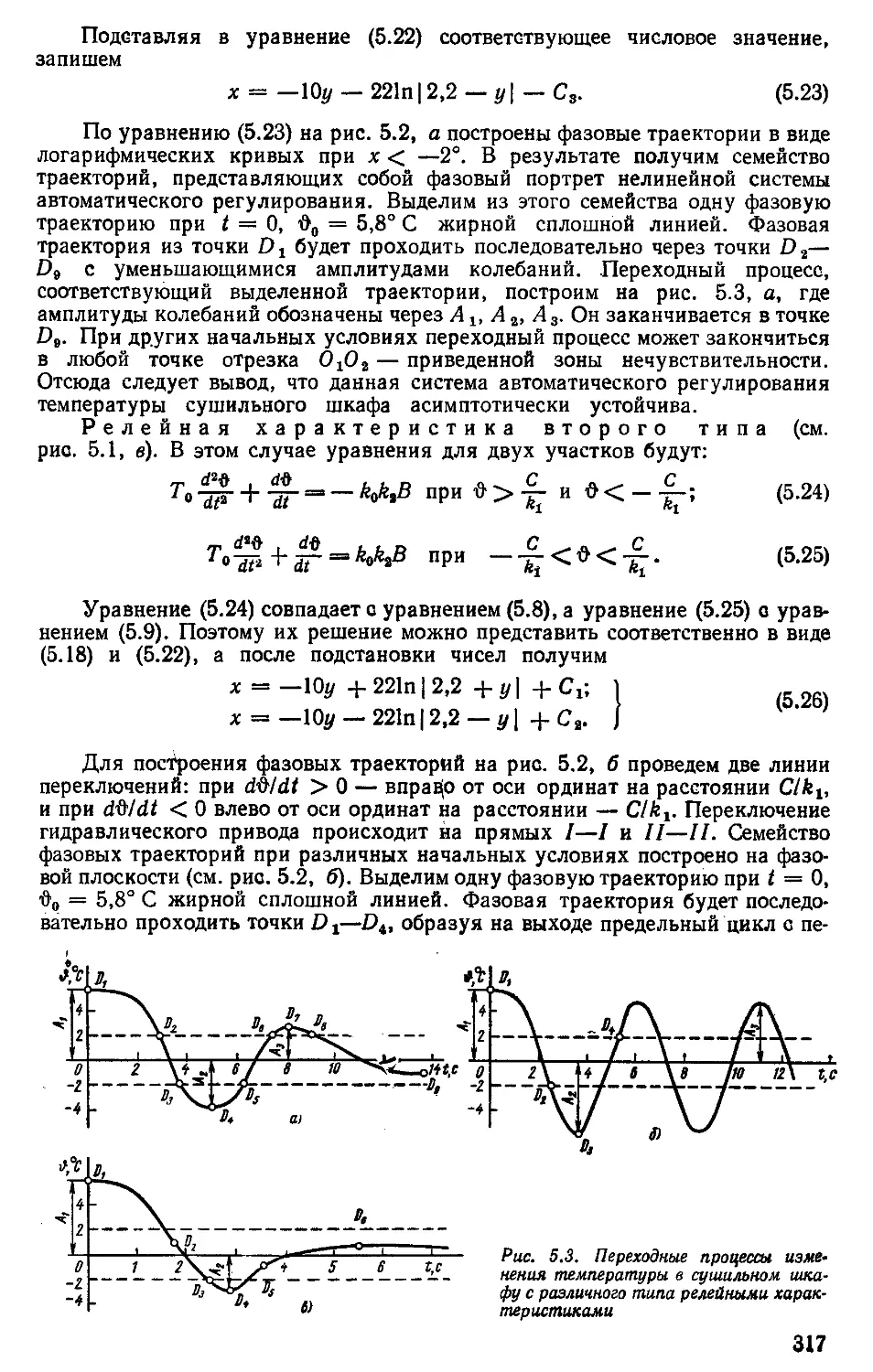
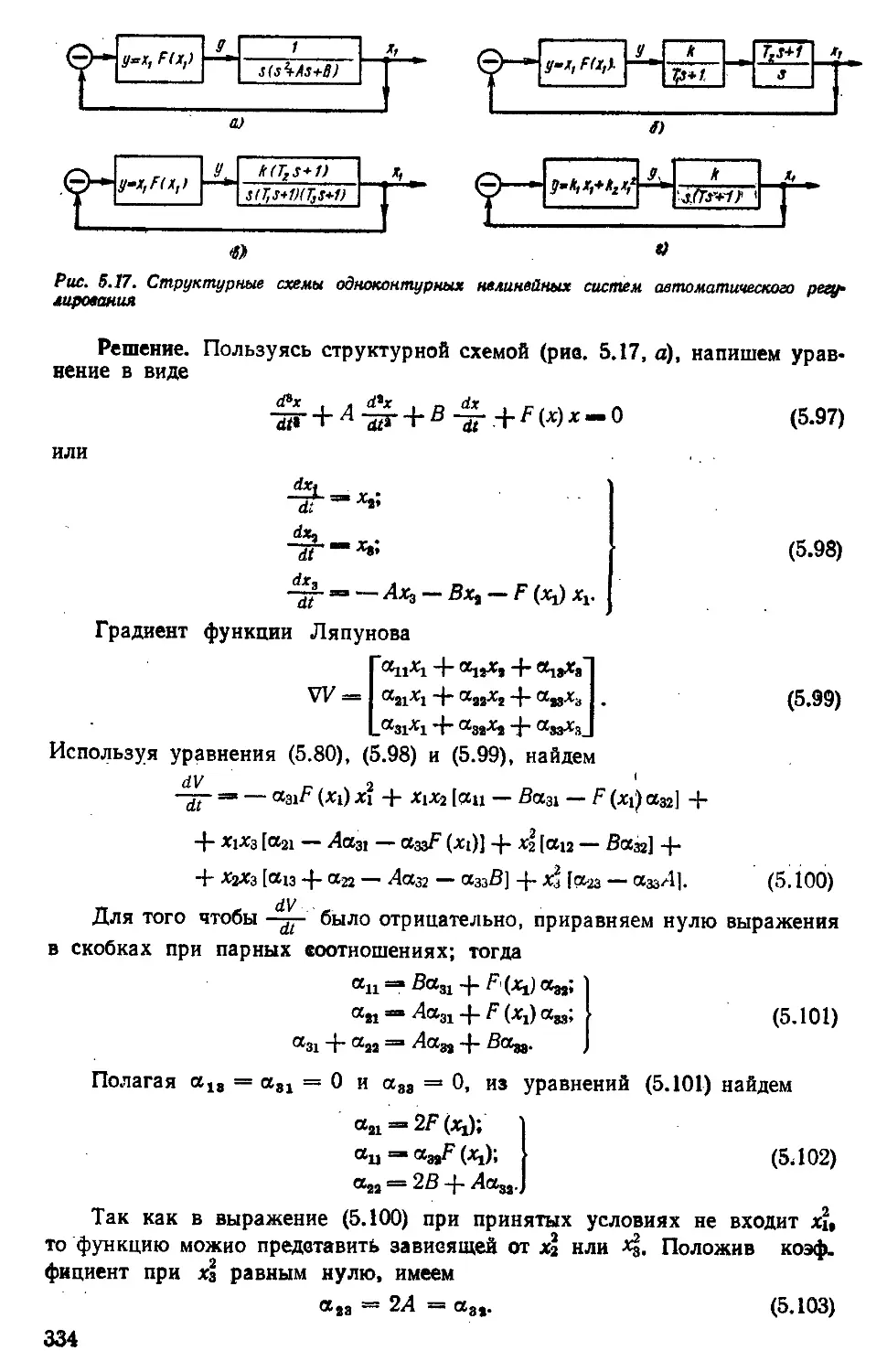
Глава 5. Нелинейные системы автоматического регулирования........................ 313
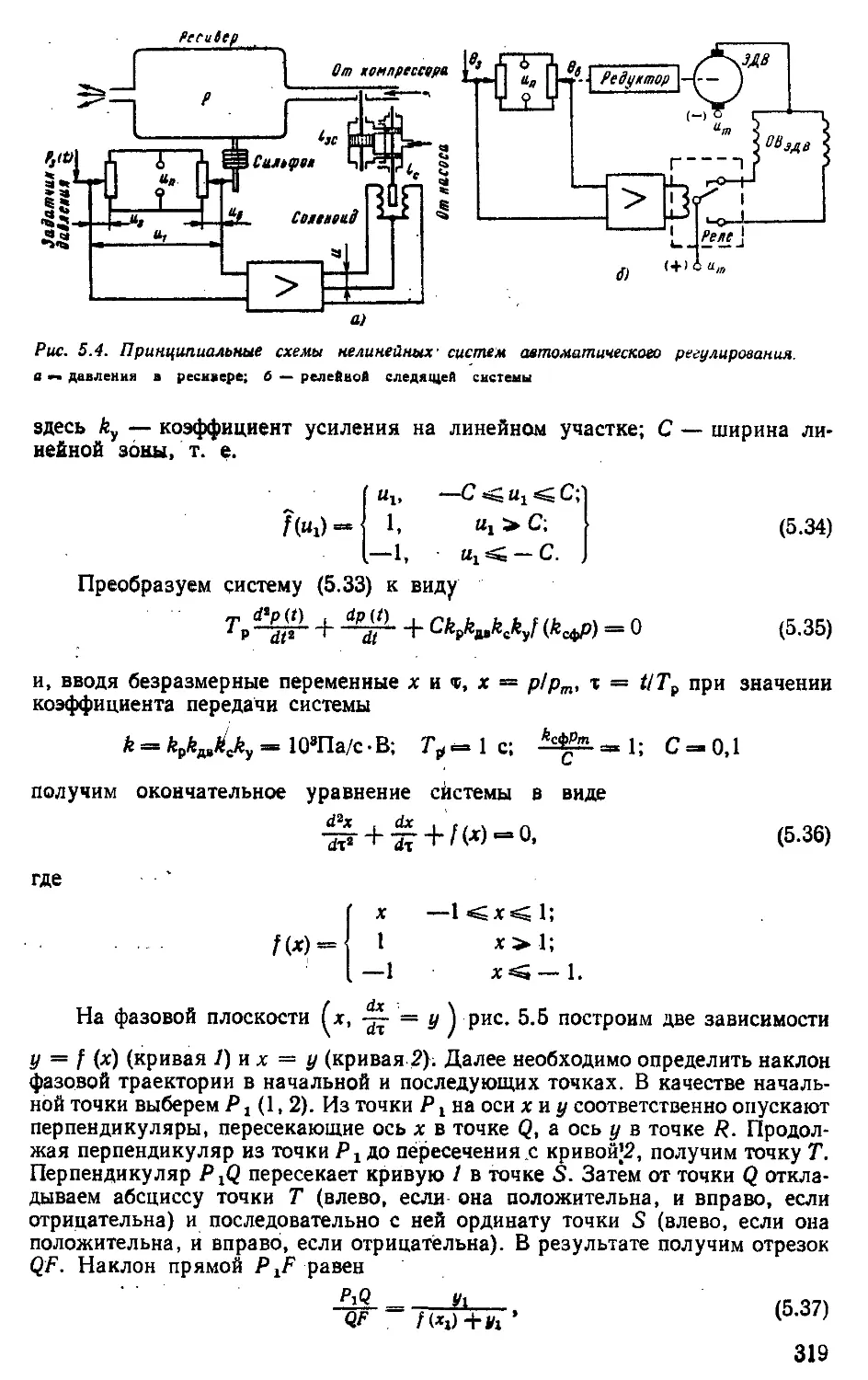
5.1. Применение метода фазовой плоскости для анализа устойчивости и определения
показателей качества нелинейных систем ........................................ 313
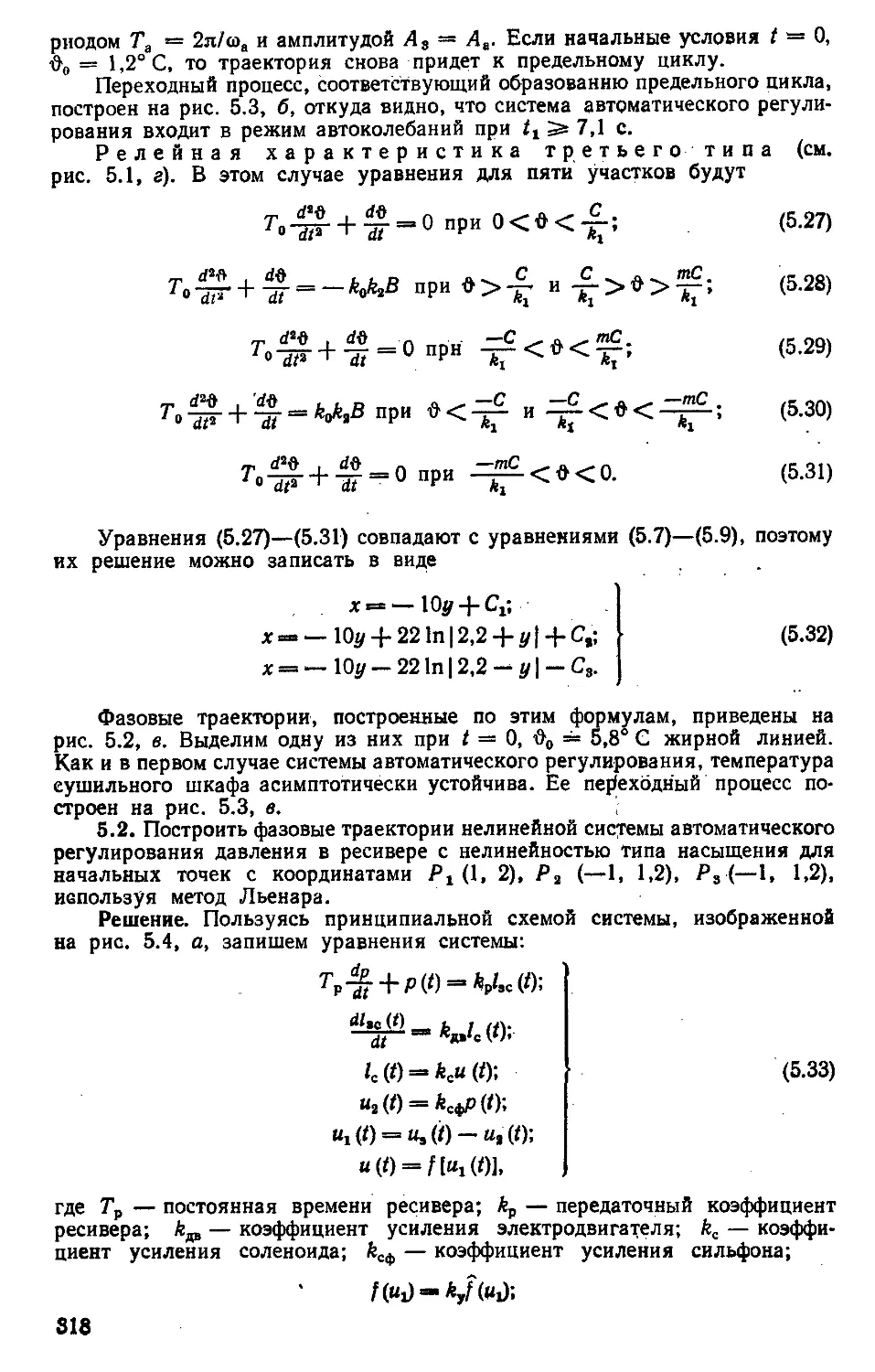
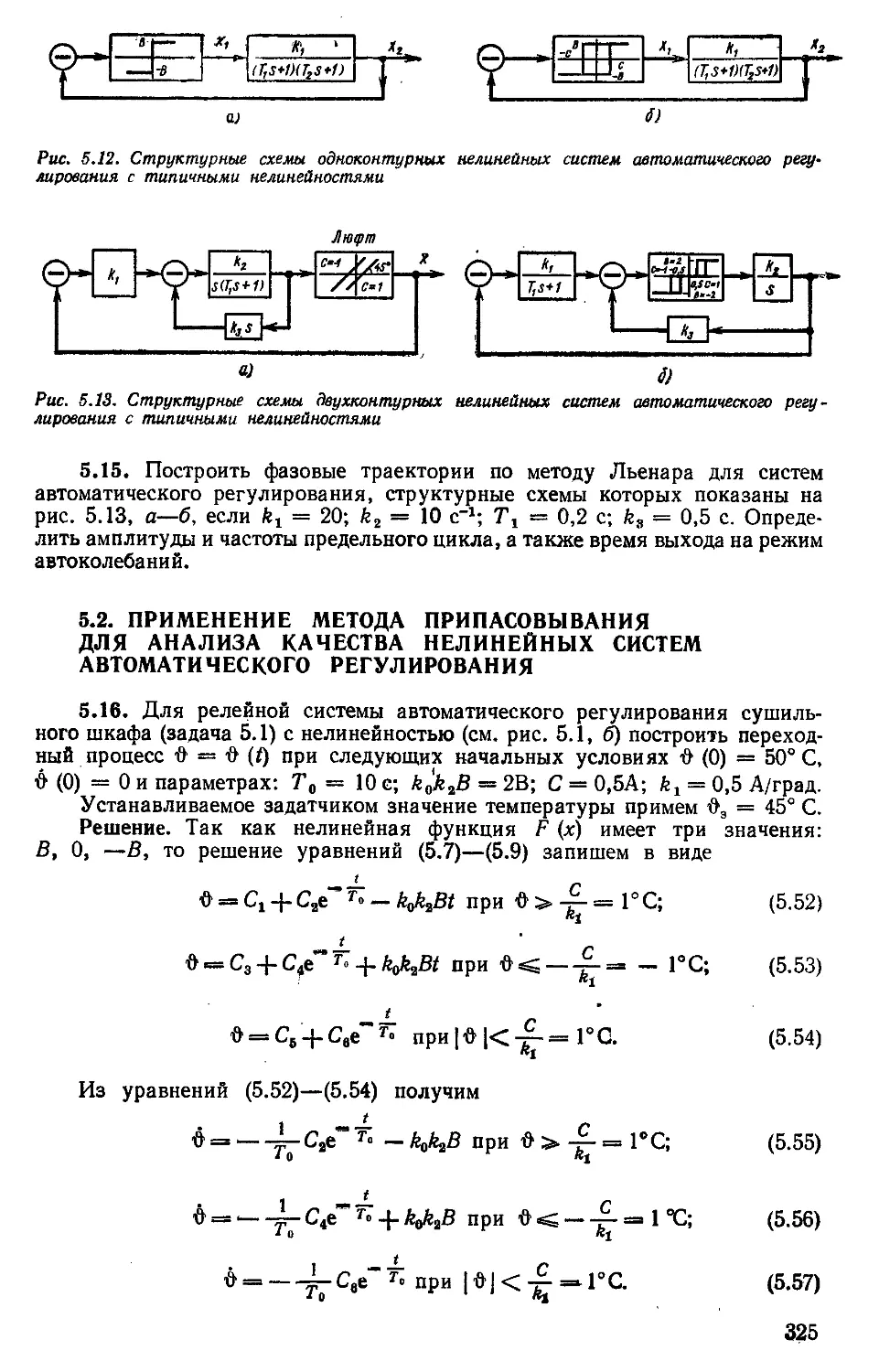
5.2. Применение метода припасовывания для анализа качества нелинейных систем
автоматического регулирования.................................................... 325
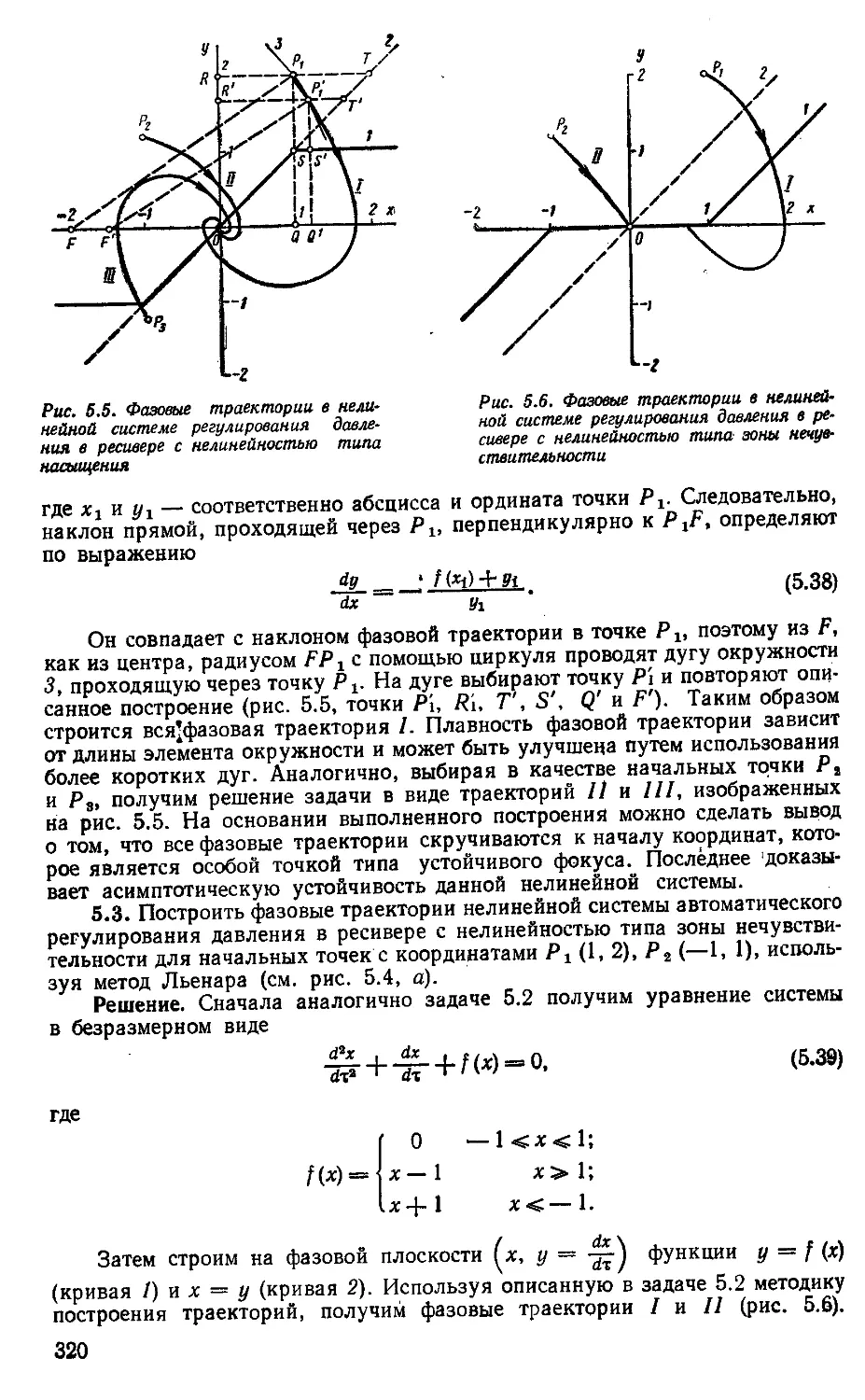
5.3. Анализ устойчивости нелинейных систем автоматического регулирования на
основе 2-го метода Ляпунова..................................................... 328
5.4. Применение метода гармонической линеаризации для анализа устойчивости
нелинейных систем автоматического регулирования ........................... 343
5.5. Влияние высших гармоник на области устойчивых состояний и автоколебаний 364
5.6. Несимметричные и вынужденные колебания в нелинейных системах автоматиче-
ского регулирования ............................................................. 369
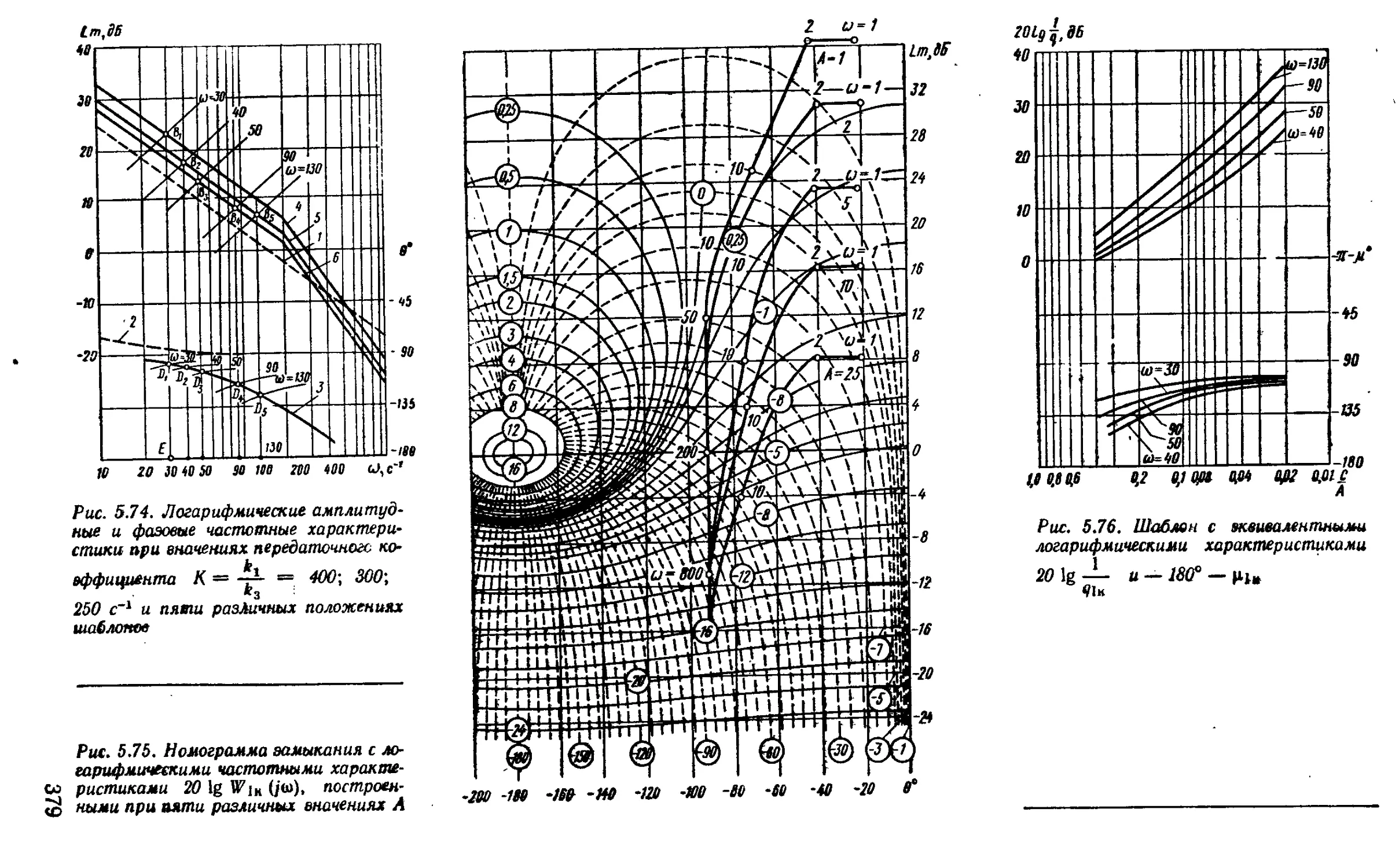
5.7. Определение частотных характеристик замкнутых нелинейных систем автома-
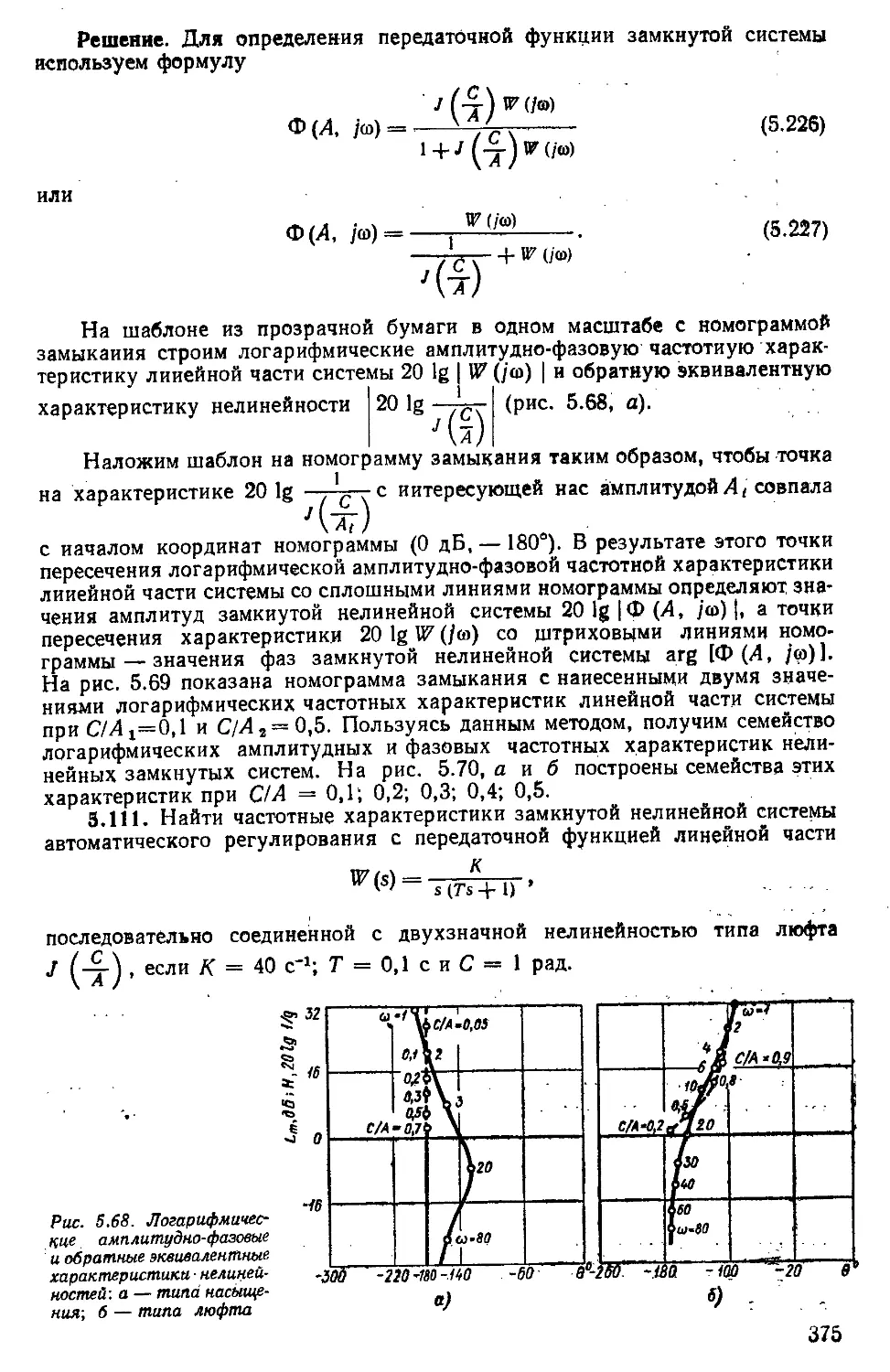
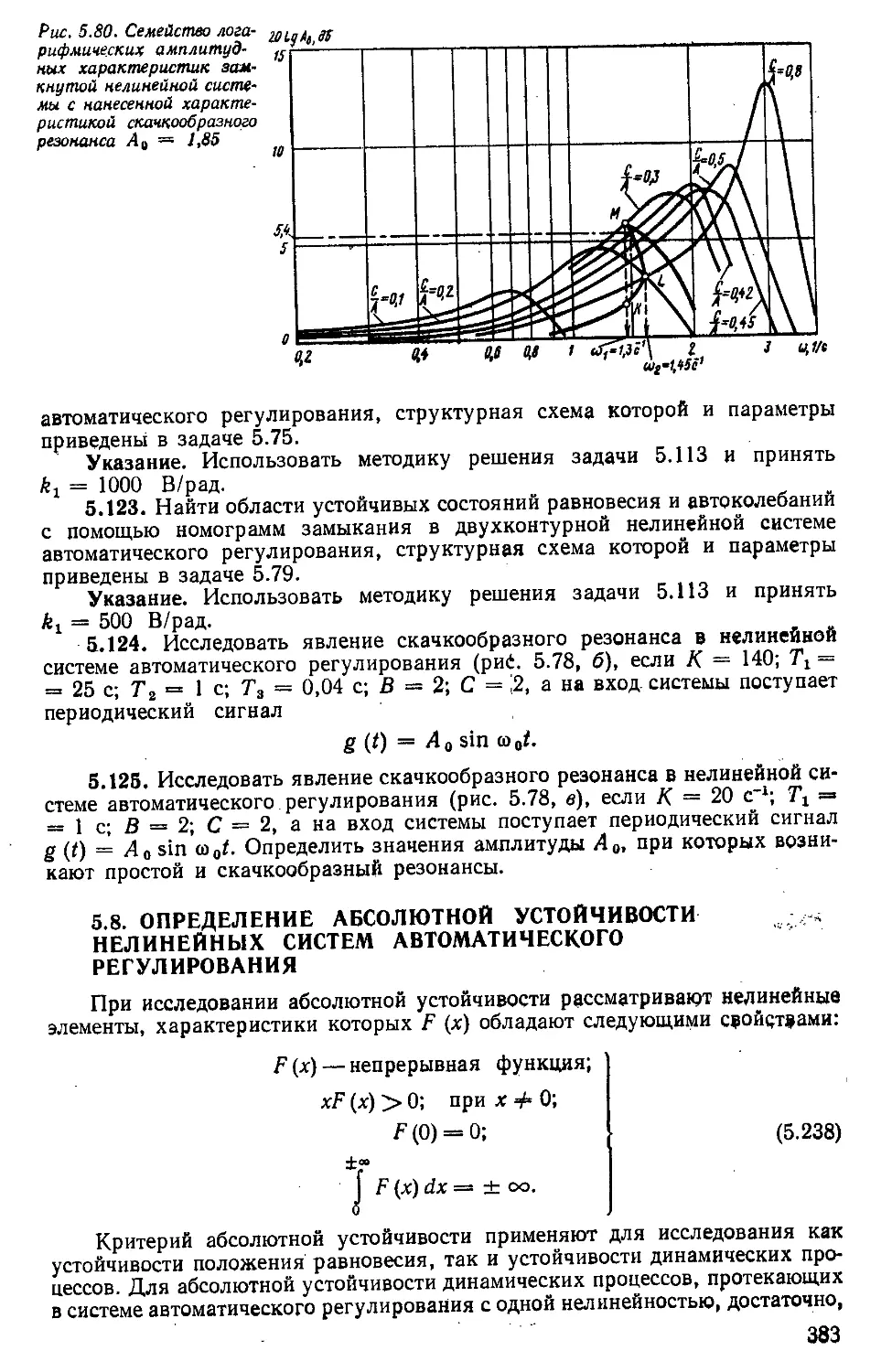
тического регулирования ......................................................... 374
5.8. Определение абсолютной устойчивости нелинейных систем автоматического ре-
гулирования ..................................................................... 383
5.9. Применение метода статистической линеаризации к расчету нелинейных си-
стем автоматического регулирования .....................l........................ 388
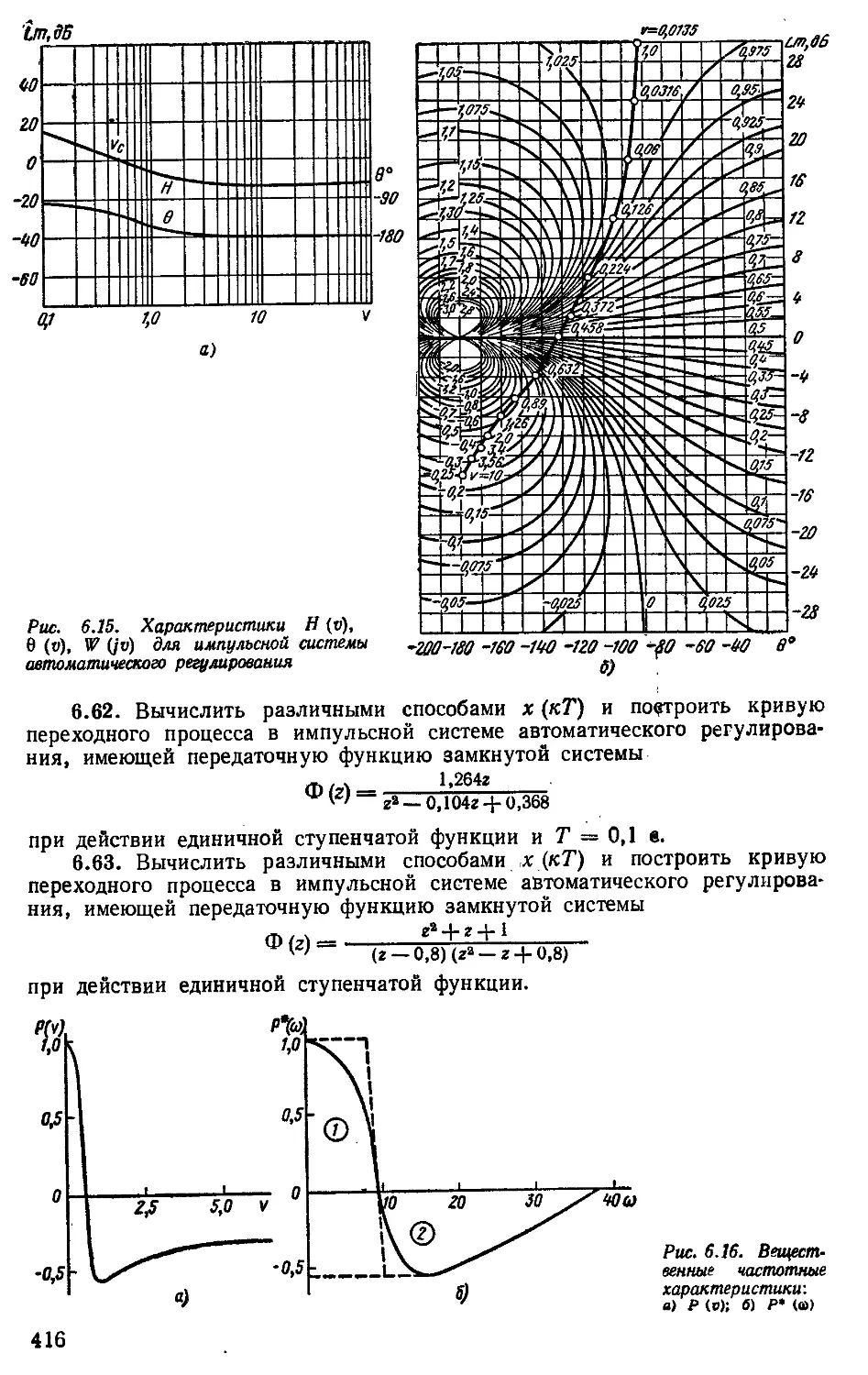
Глава 6. Импульсные и цифровые системы автоматического регулирования............ 394
6.1. Применение г-преобразования к импульсным передаточным функциям .... 395
6.2. Передаточные функции замкнутых импульсных и цифровых систем автоматиче-
ского регулирования ............................................................. 398
6.3. Анализ устойчивости импульсных и цифровых систем автоматического регу-
лирования ....................................................................... 401
6.4. Анализ качества импульсных и цифровых систем автоматического регулиро-
иания ........................................................................... 412
6.5. Анализ динамической точности импульсных и цифровых систем автоматического
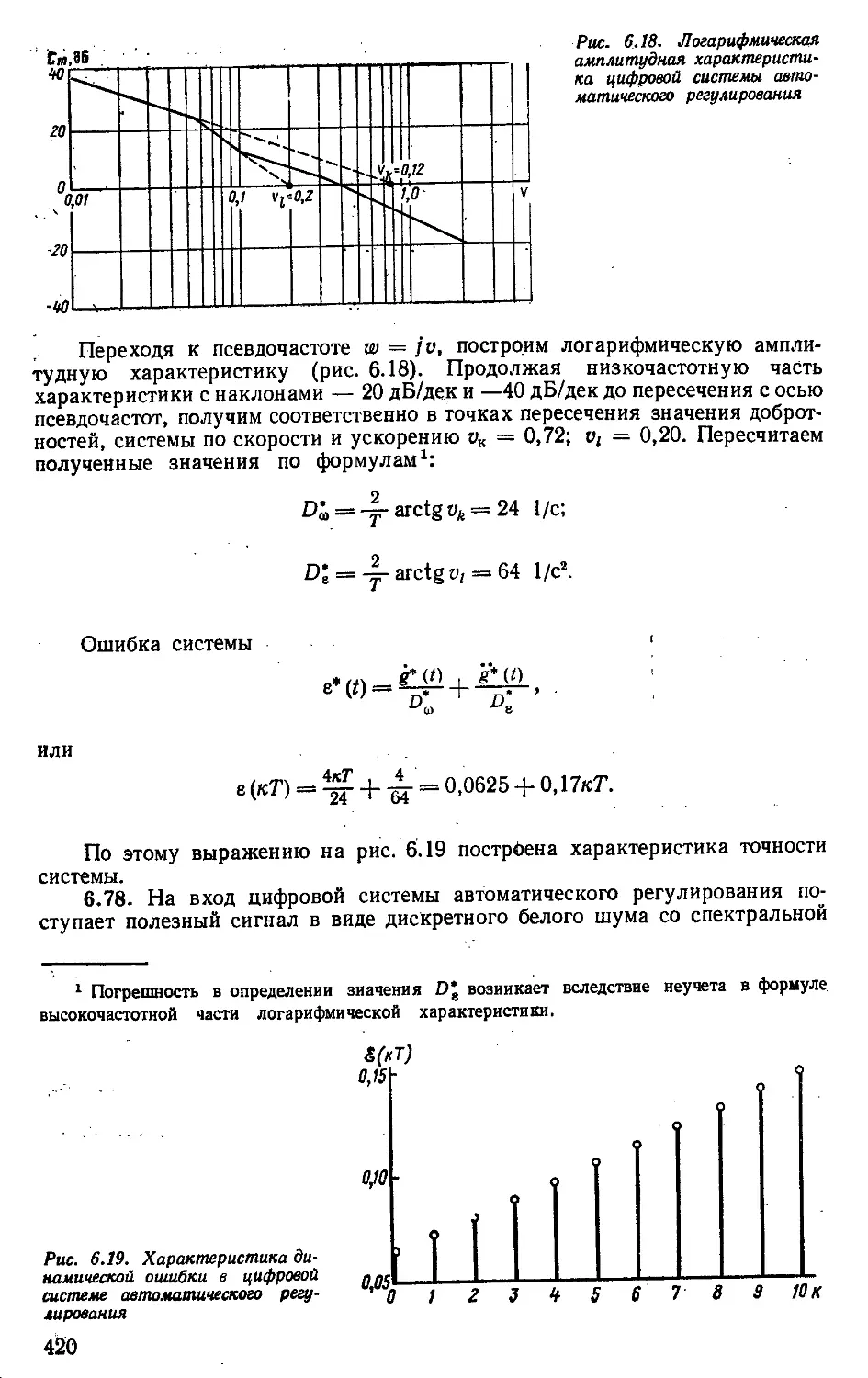
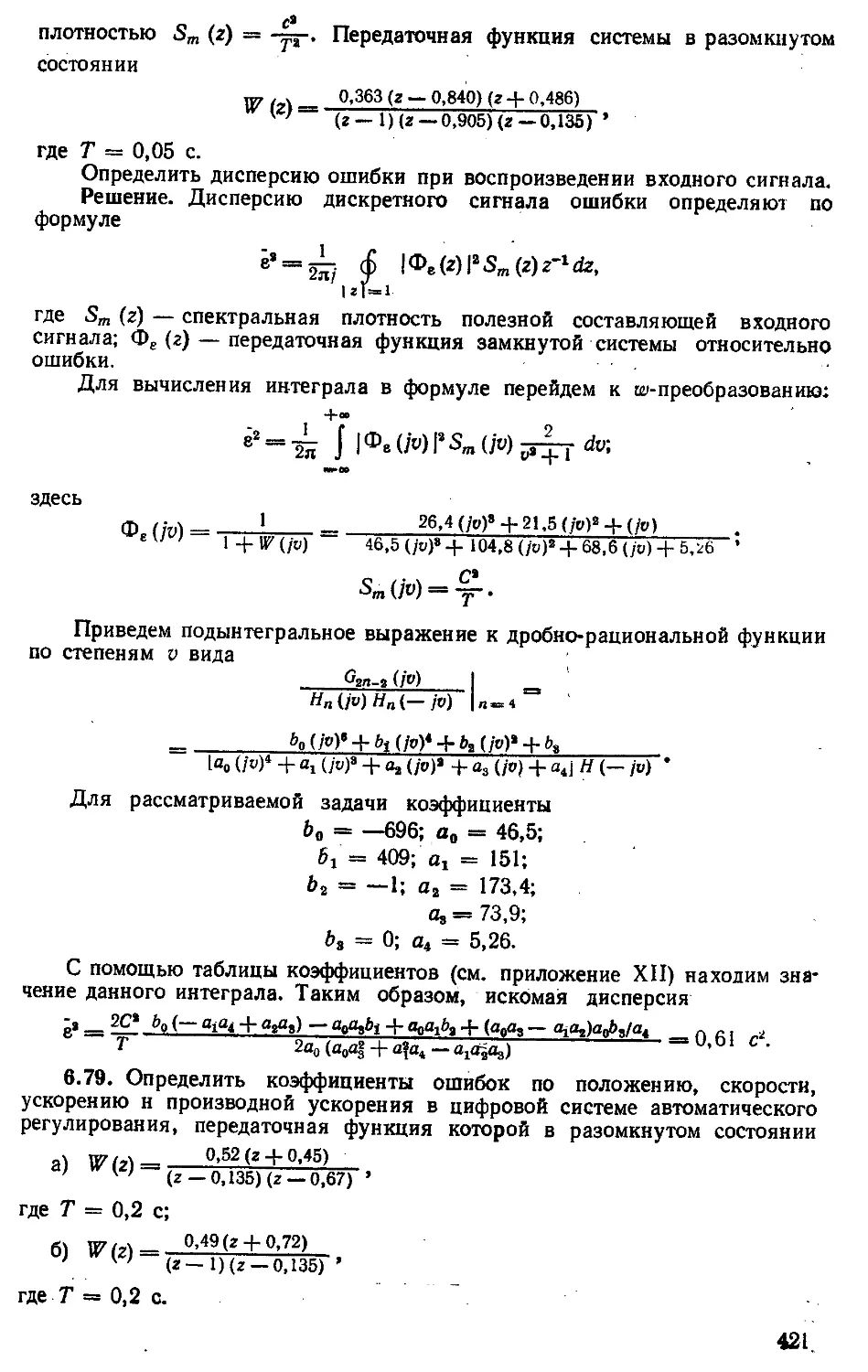
регулироиания.................................................................... 418
6.6. Применение модифицированного (г, /^-преобразования к анализу устойчиво-
сти, качества И точности импульсных систем автоматического регулирования 422
Глава 7. Экстремальные и самонастраивающиеся системы автоматического регули-
ровании ......................................................................... 425
7.1. Экстремальные системы автоматического регулирования......................... 425
7.2. Самонастраивающиеся системы автоматического регулирования................... 442
4
Глава 8. Синтез непрерывных и цифровых систем автоматического регулирования
при регулярных и случайных воздействиях ....................................... 458
8.1. Построение желаемой логарифмической амплитудной частотной характеристики
синтезируемой системы автоматического регулирования при регулярных и слу-
чайных воздействиях........................................................... 458
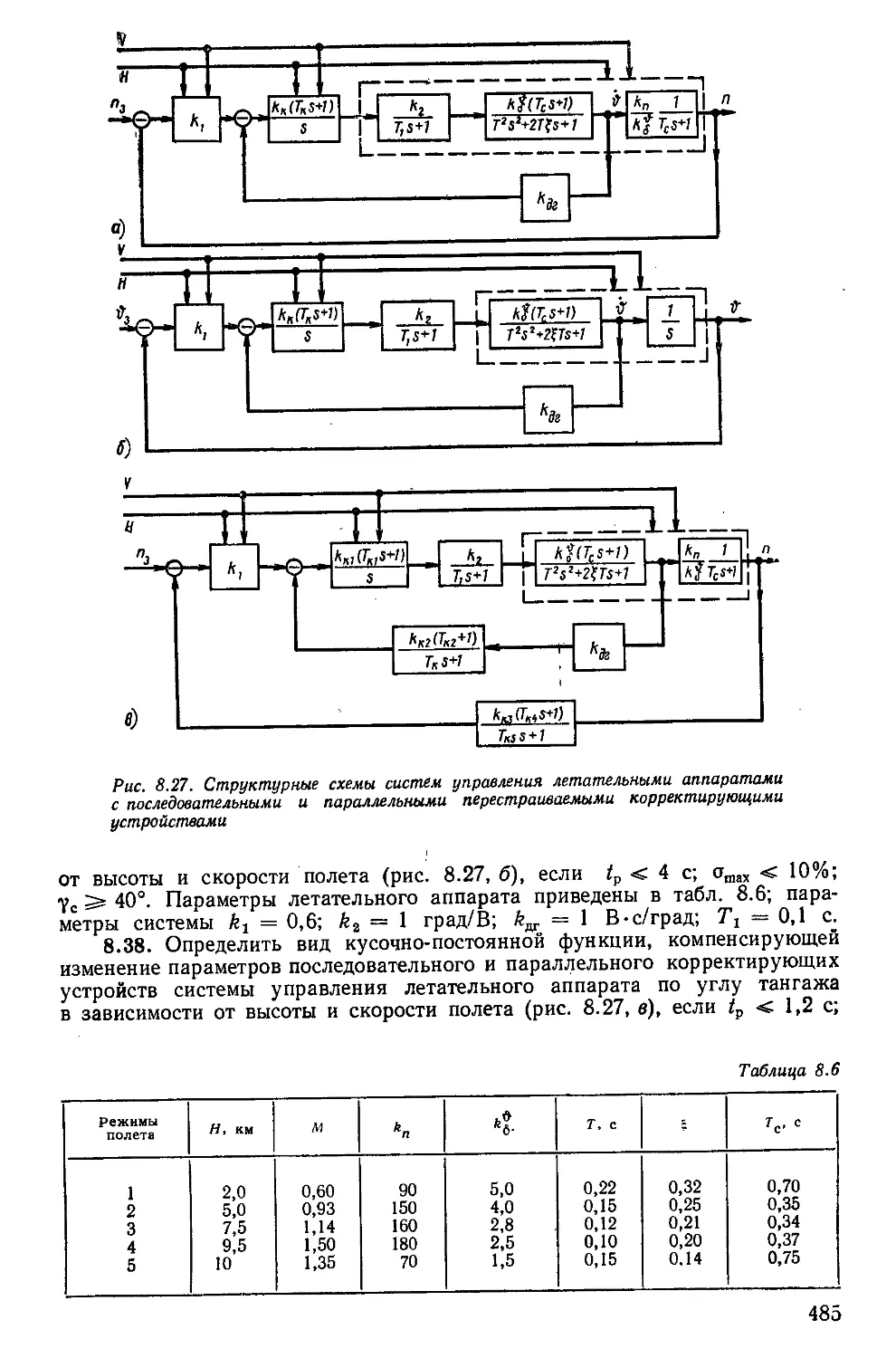
8.2. Синтез последовательных и параллельных корректирующих устройств.......... 467
8.3. Синтез последовательно-параллельных корректирующих устройств.............. 473
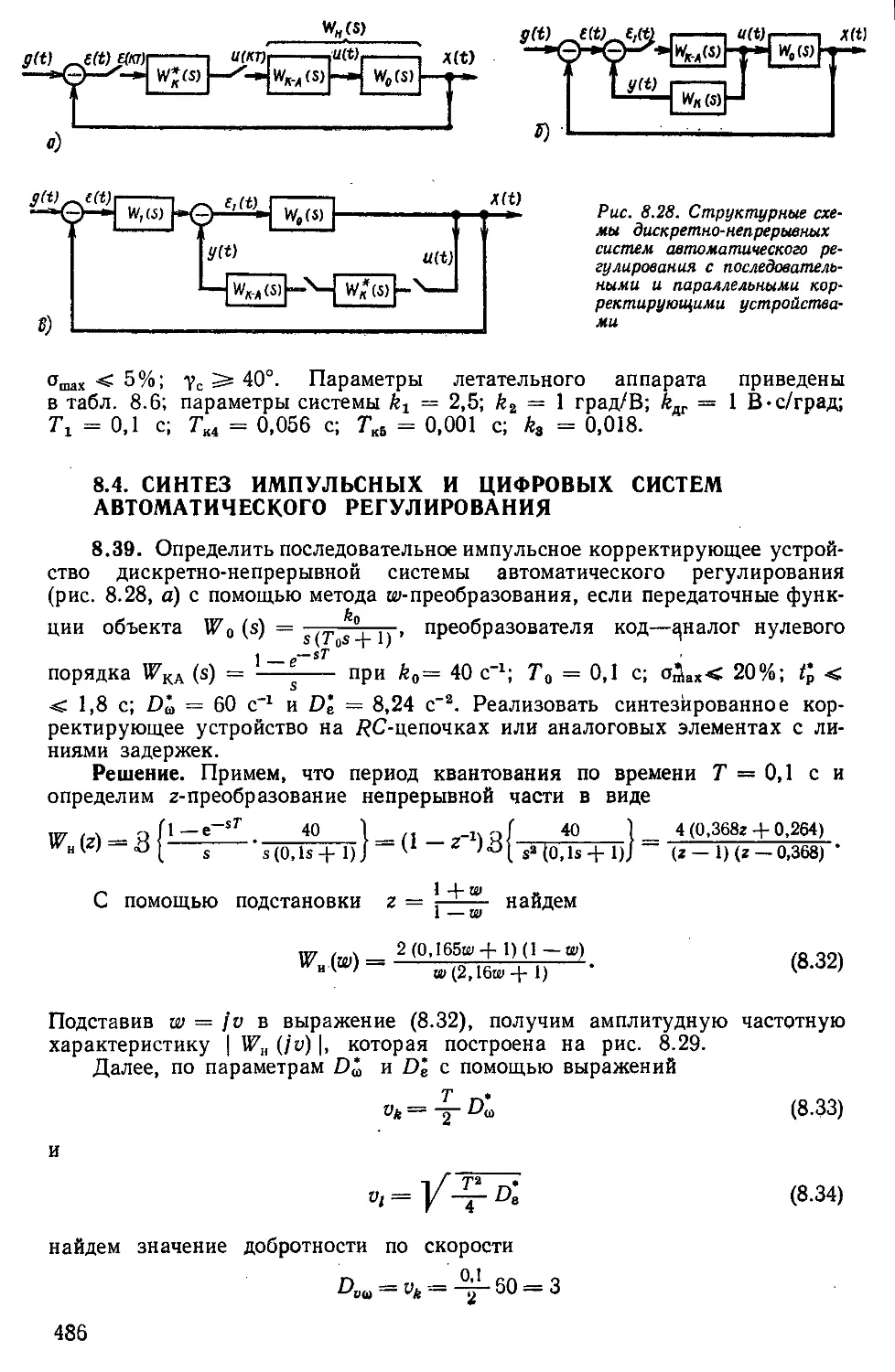
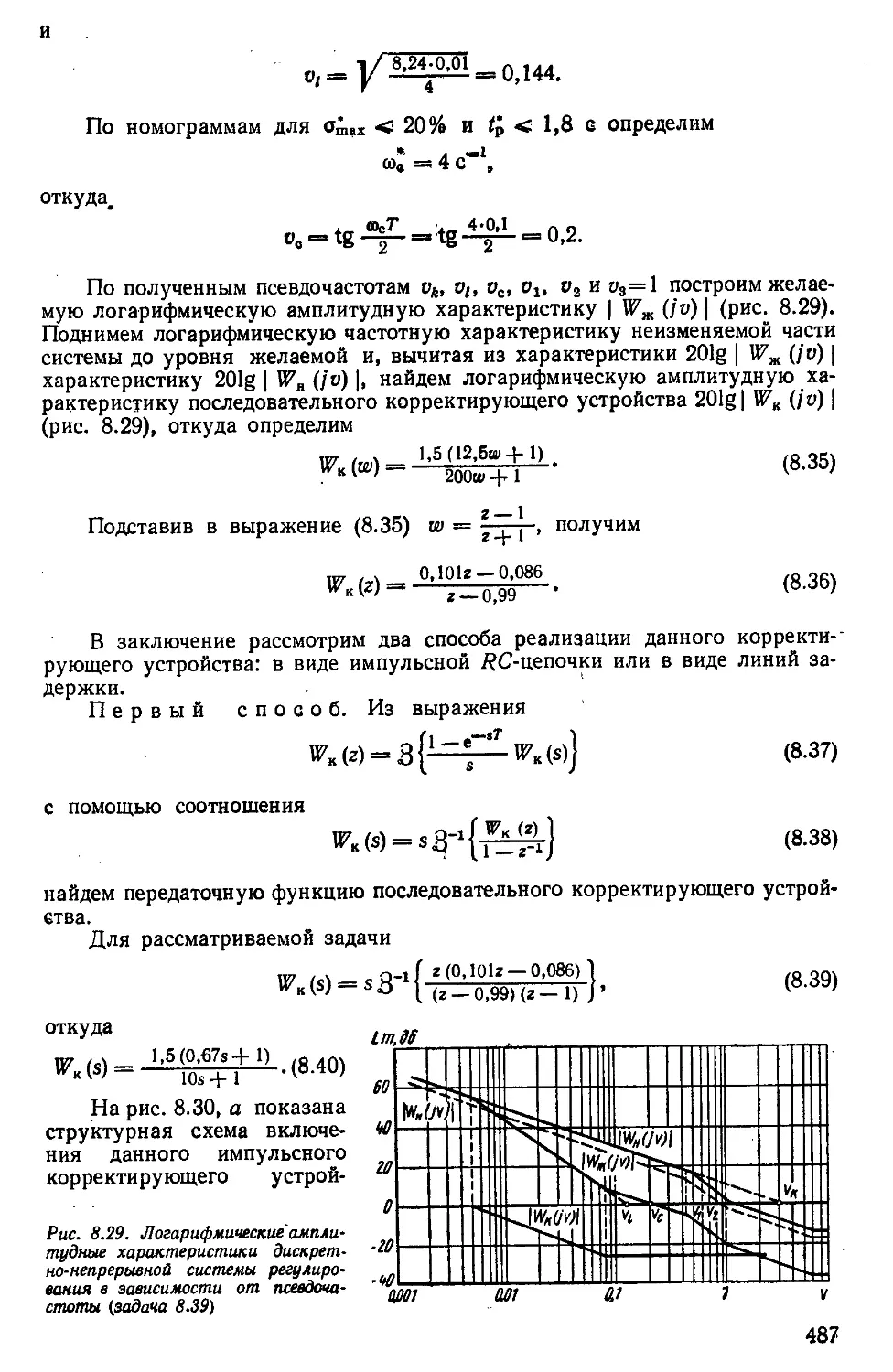
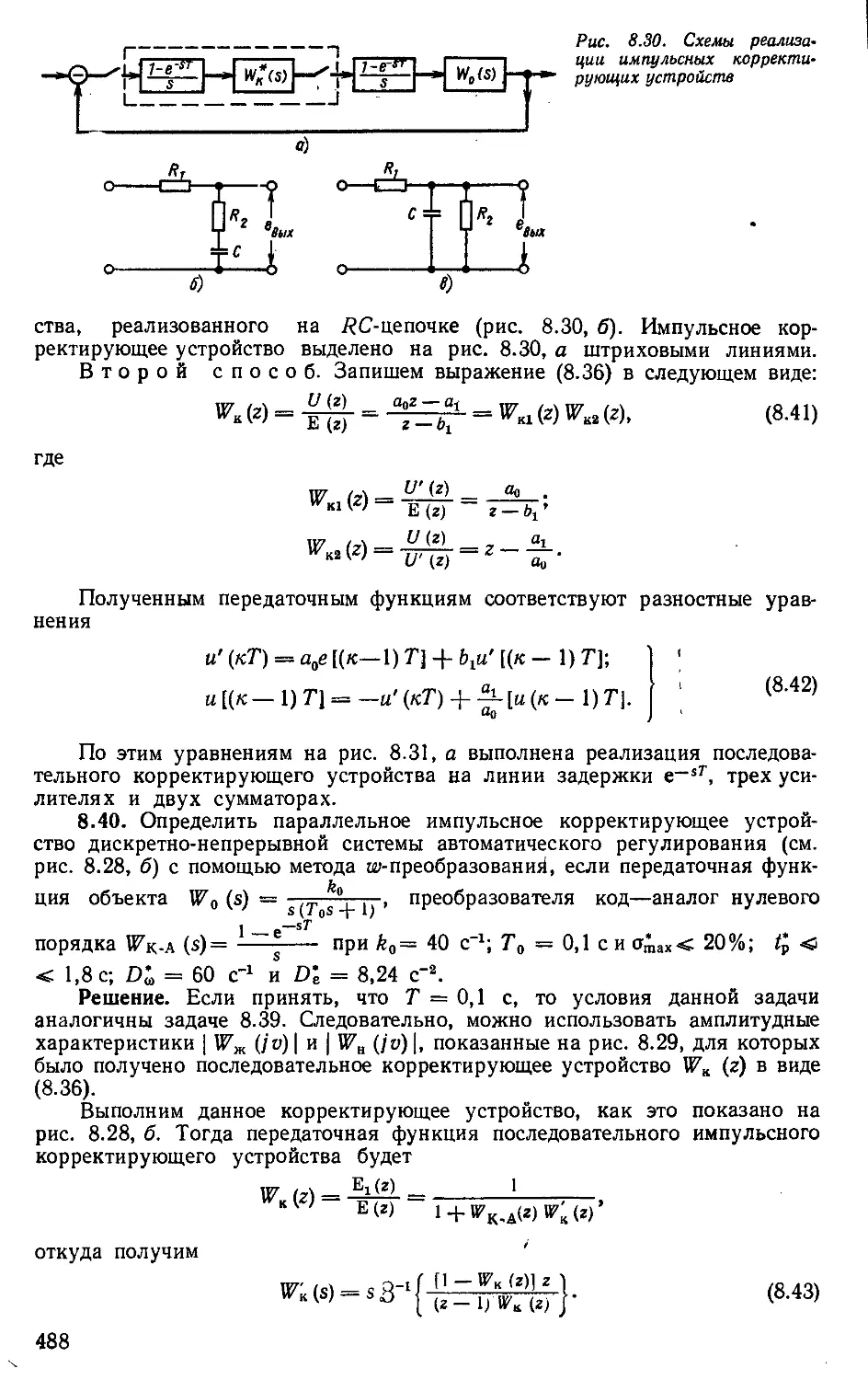
8.4. Синтез импульсных и цифровых систем автоматического регулирования .... 486
Глава 9. Оптимальные системы автоматического регулирования..................... 505
Приложение I. Преобразования структурных схем линейных частей систем авто-
матического регулирования..................................................... 516
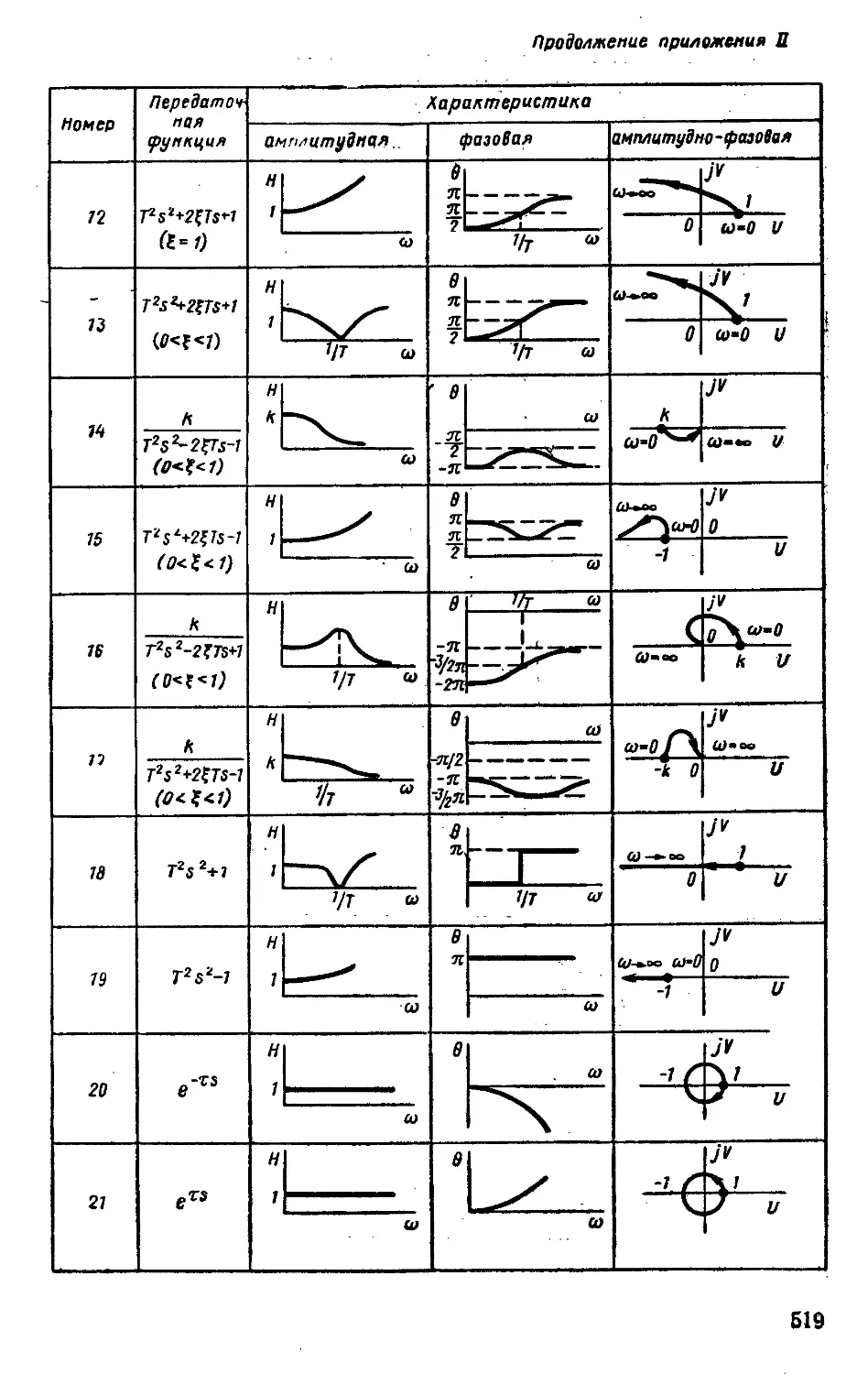
Приложение II. Амплитудно-фазовые частотные характеристики типовых динами-
ческих звеньев ............................................................... 517
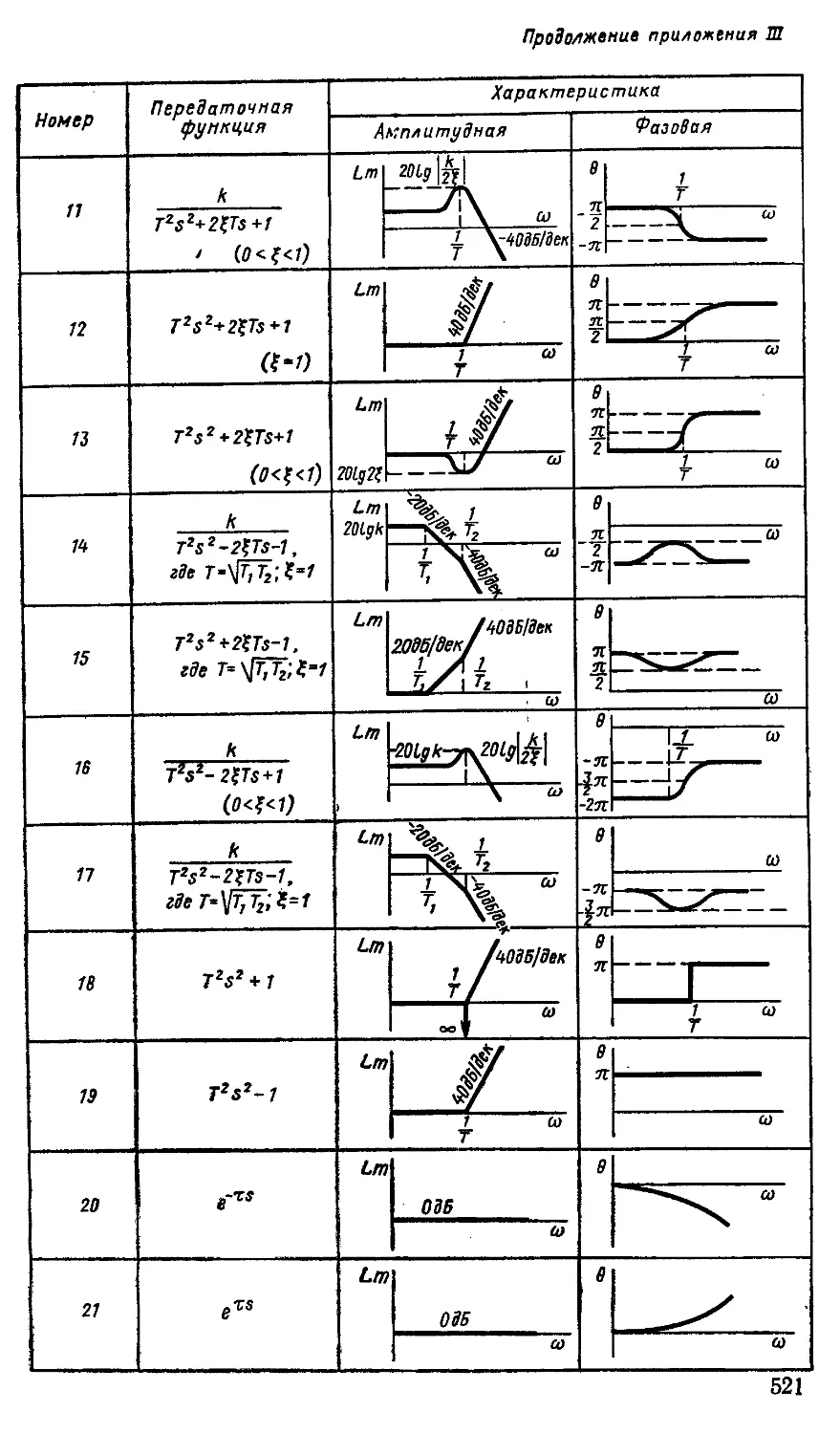
Приложение III. Логарифмические амплитудные и фазовые частотные характери-
стики типовых динамических звеньев ........................................... 520
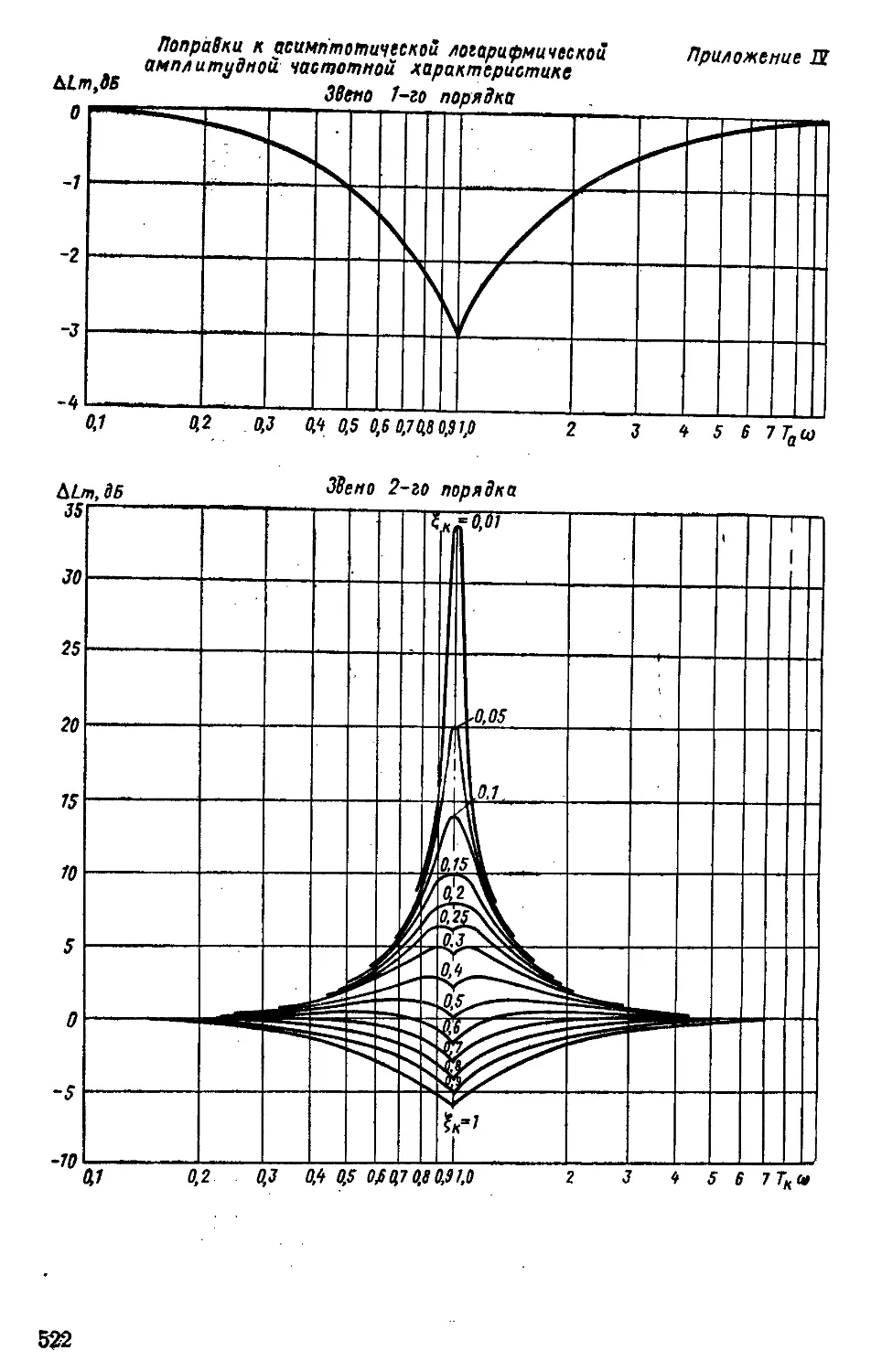
Приложение IV. Поправки к асимптотической логарифмической амплитудной ча-
стотной характеристике ....................................................... 522
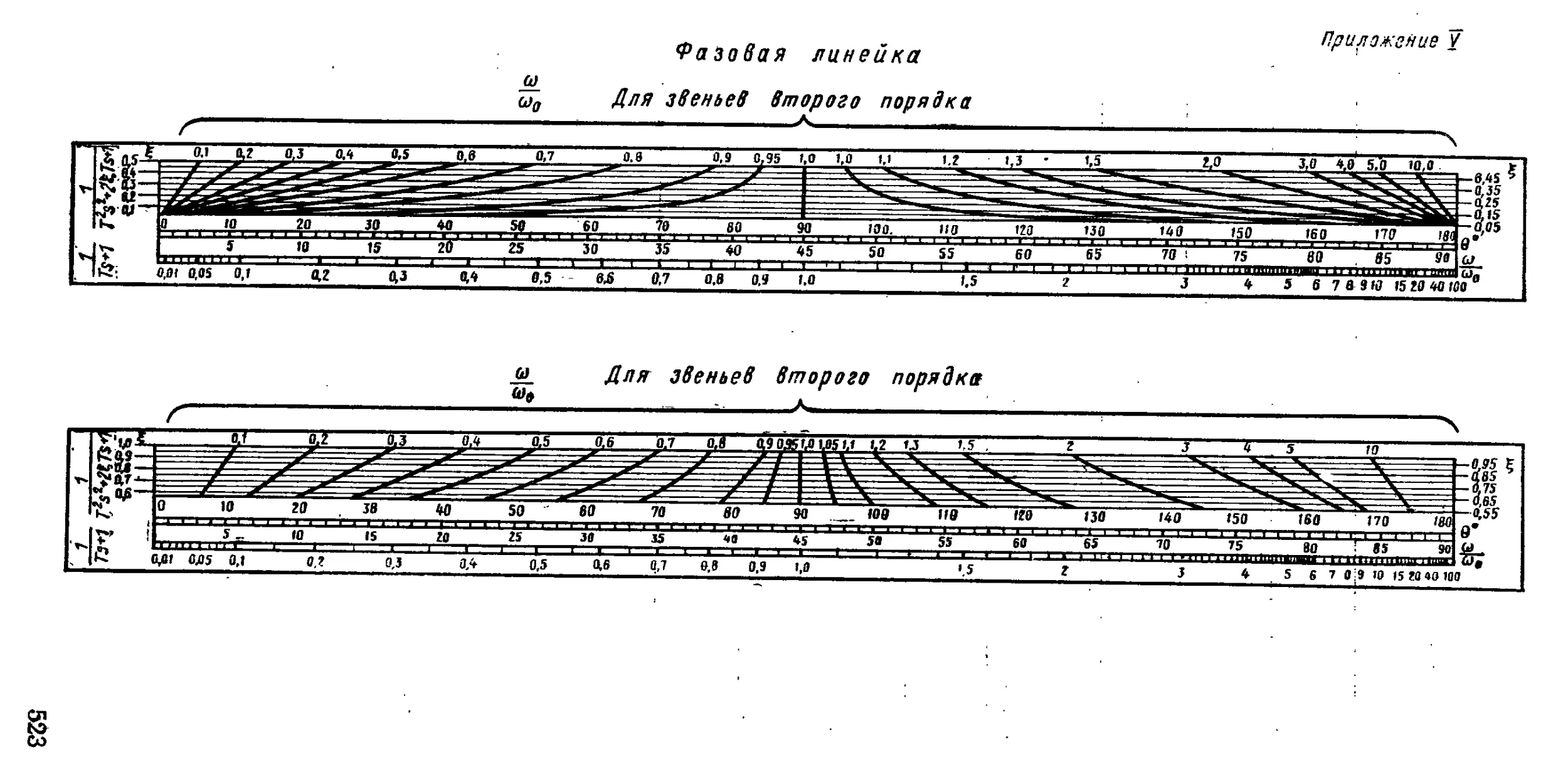
Приложение . V. Фазовая линейка ............................................... 523
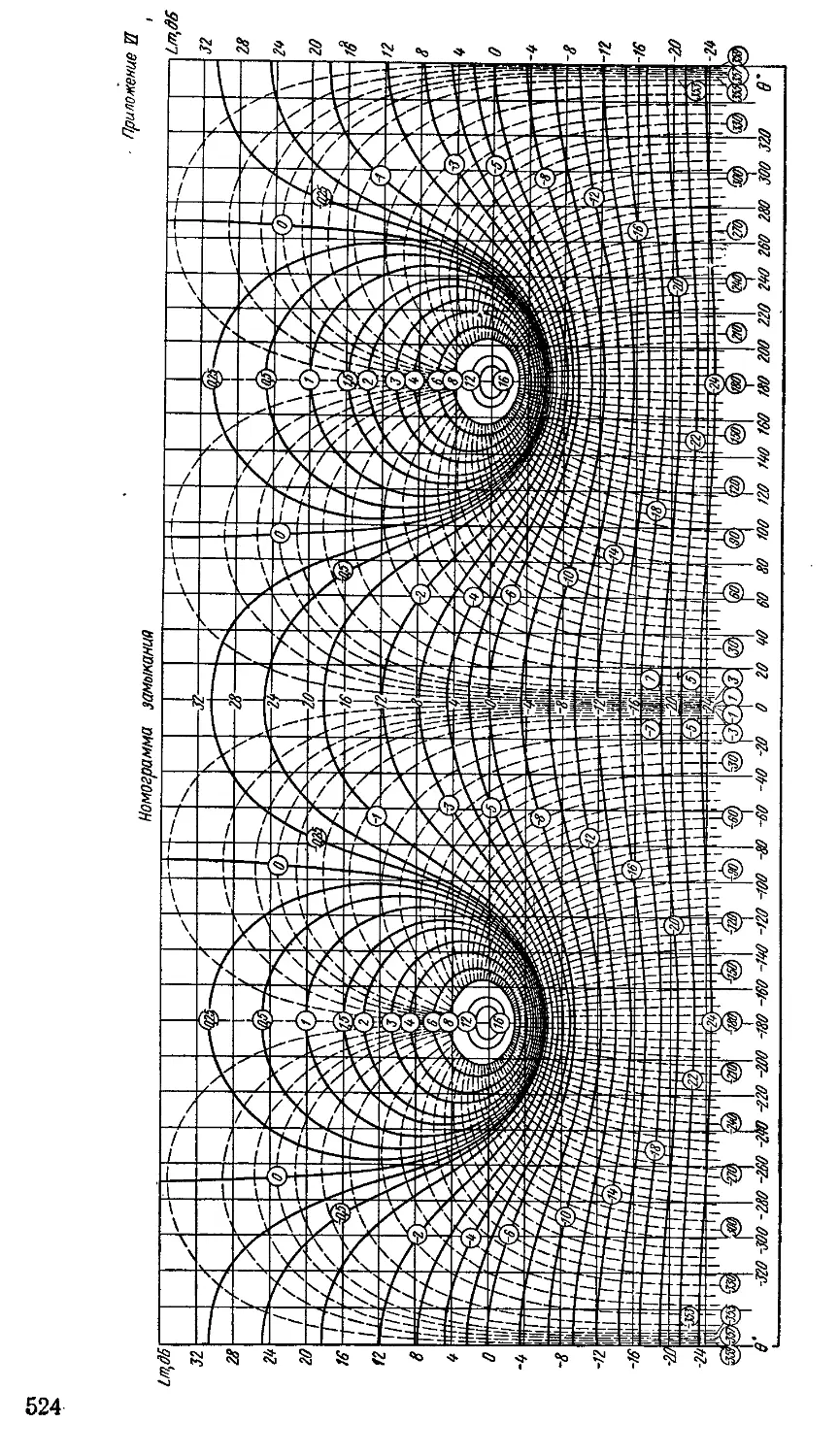
Приложение VI. Номограмма замыкания ........................................... 524
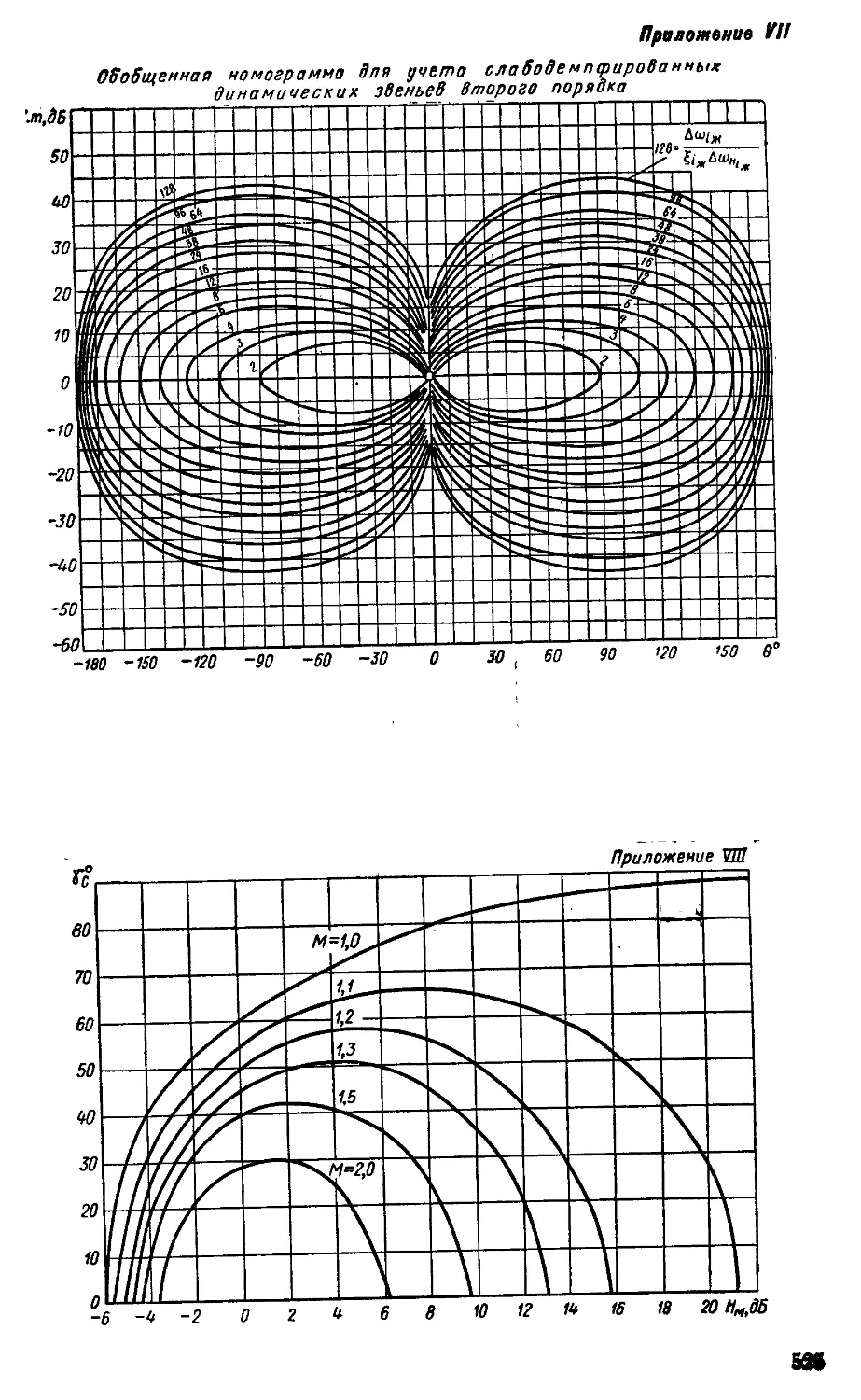
Приложение VII. Обобщенная номограмма для учета слабодемпфироваииых дина-
мических звеньев второго порядка .............................................. 525
Приложение VIII. Номограмма для определения показателя колебательности замкну-
тых систем регулирования....................................................... 525
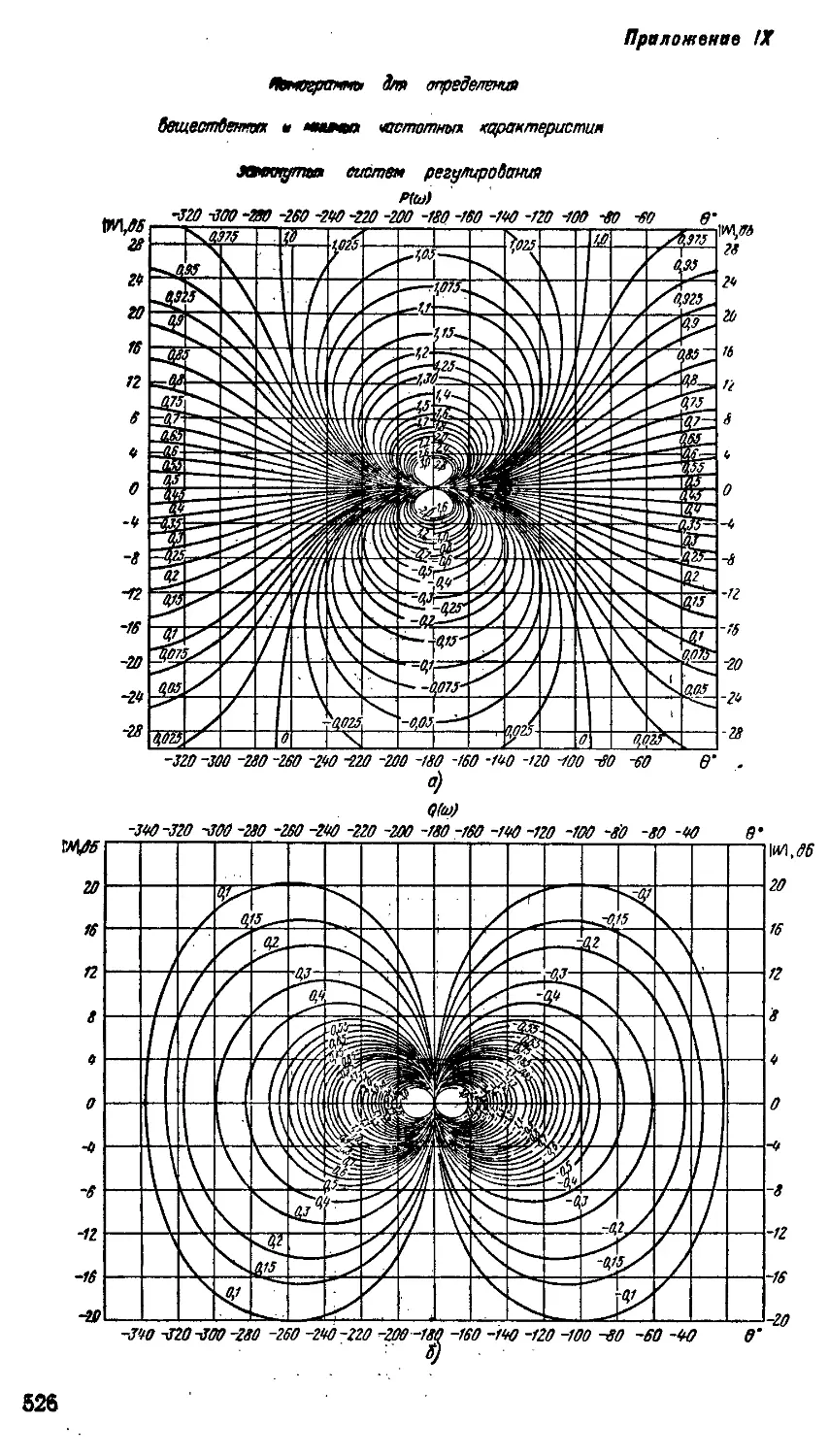
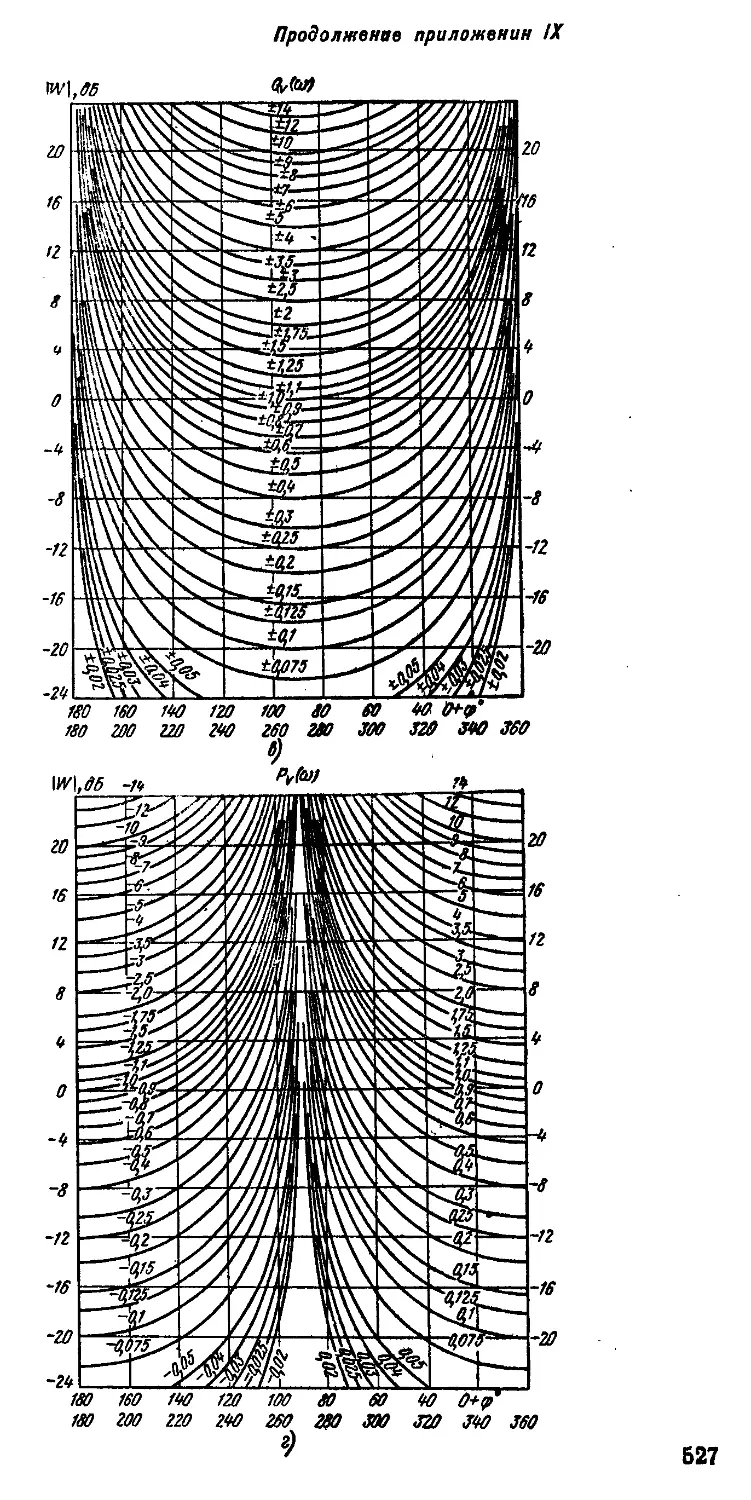
Приложение IX. Номограмма для определения вещественных и мнимых частотных
характеристик замкнутых систем регулирования:
Р (со), Q (со), Qv (<в) и Pv (®)............................................... 526
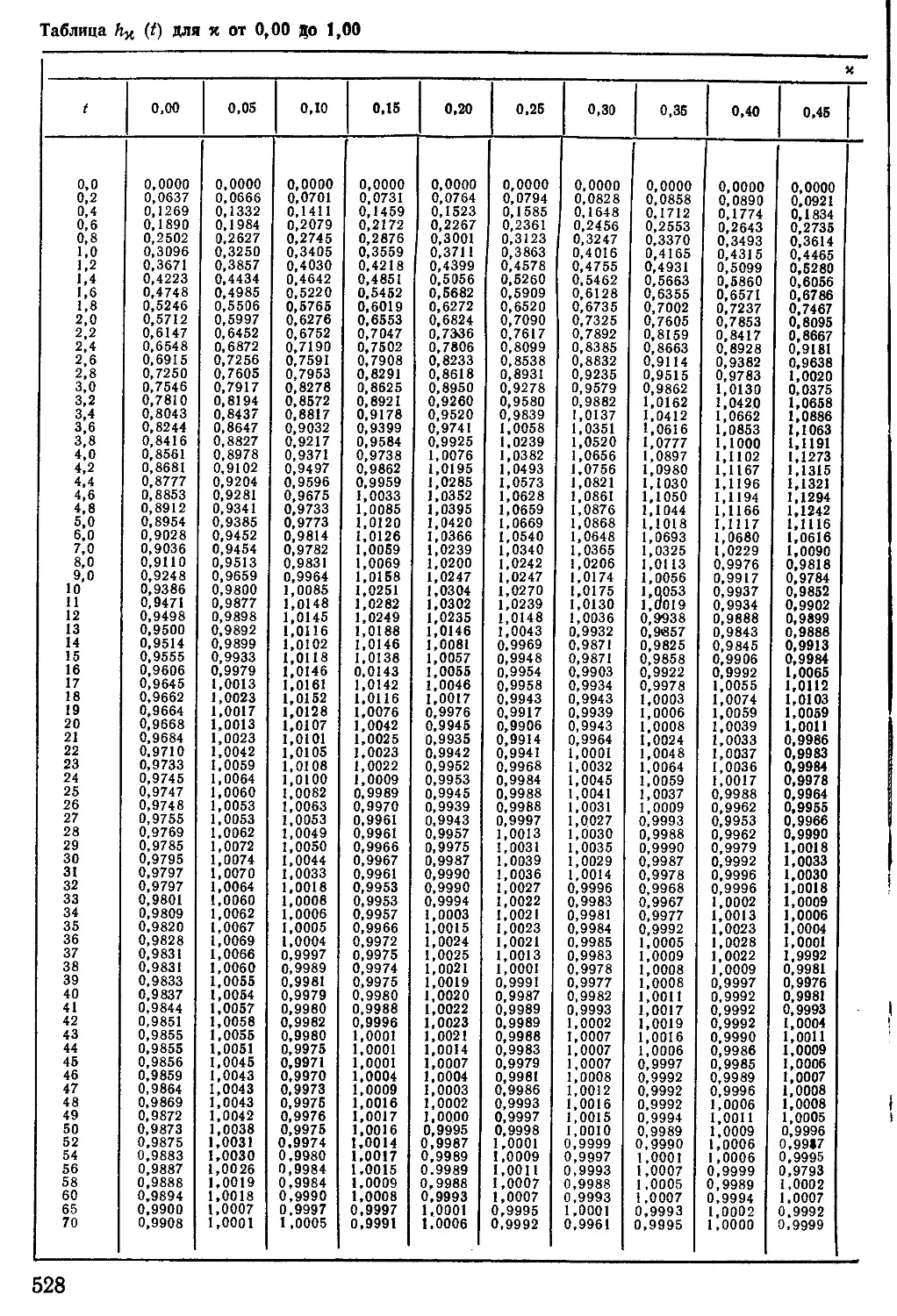
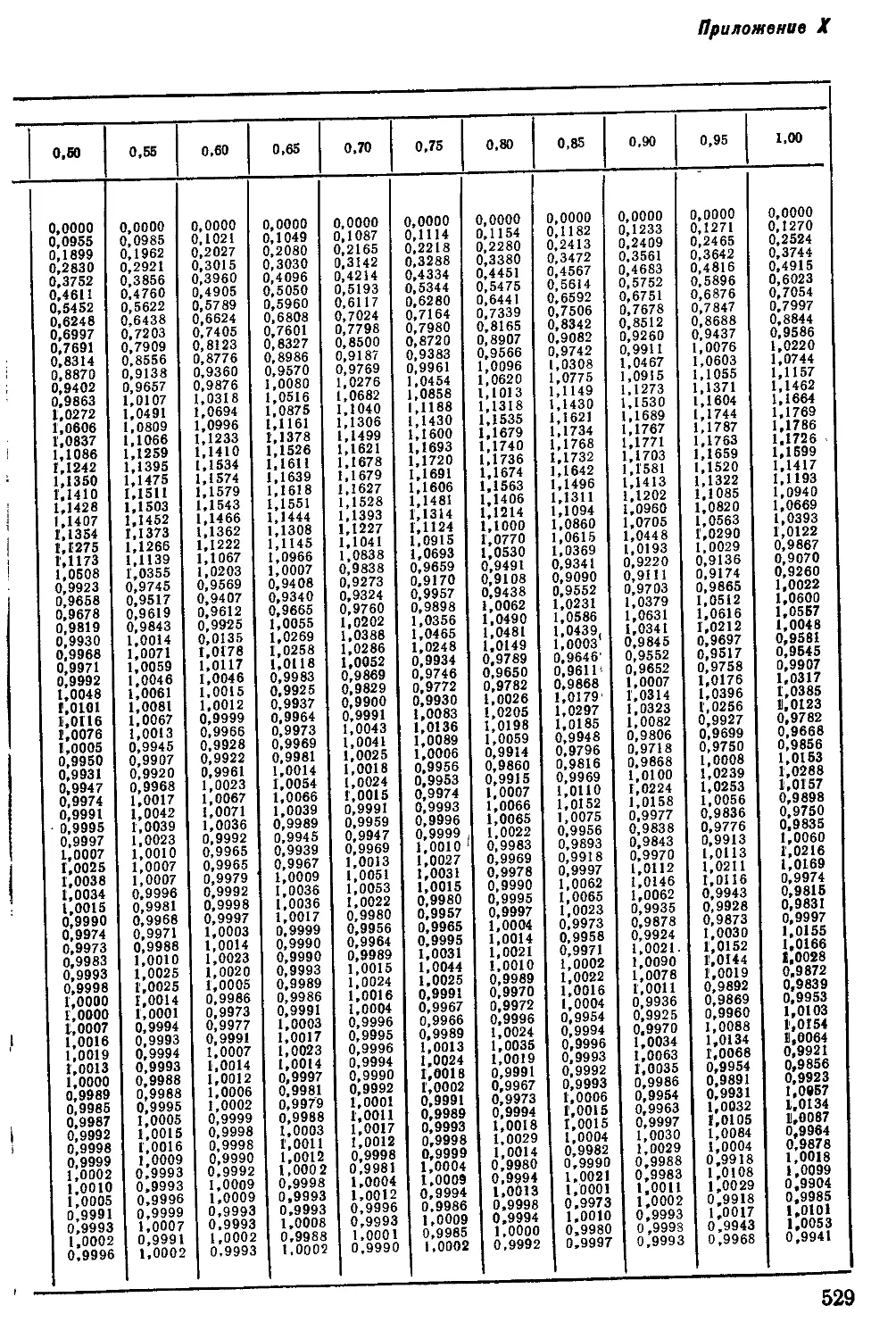
Приложение X. Таблица Лх (#) для х от 0,00 до 1,00 ......................... 528
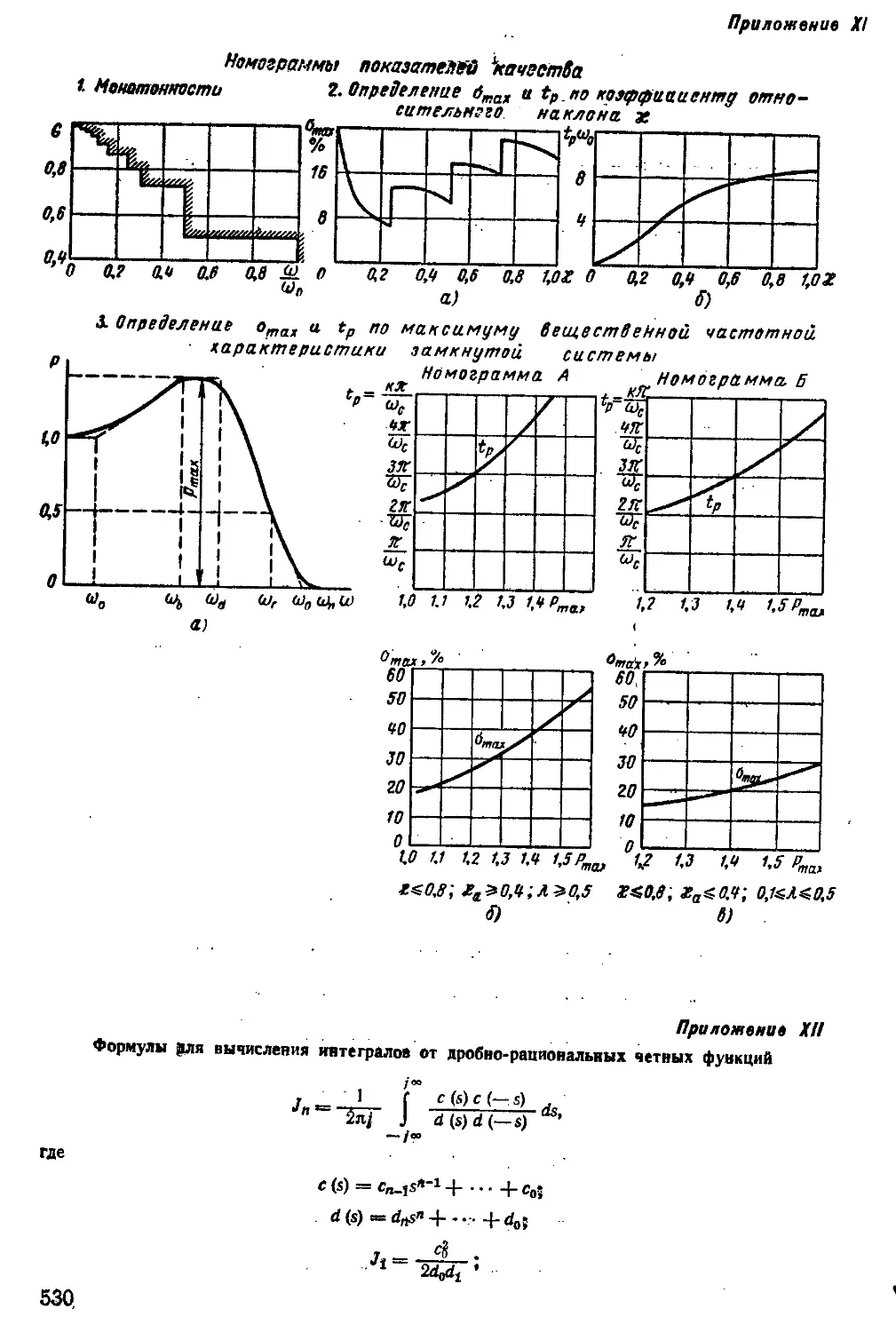
Приложение XI. Номограммы показателей качества В. В. Солодовникова .... 530
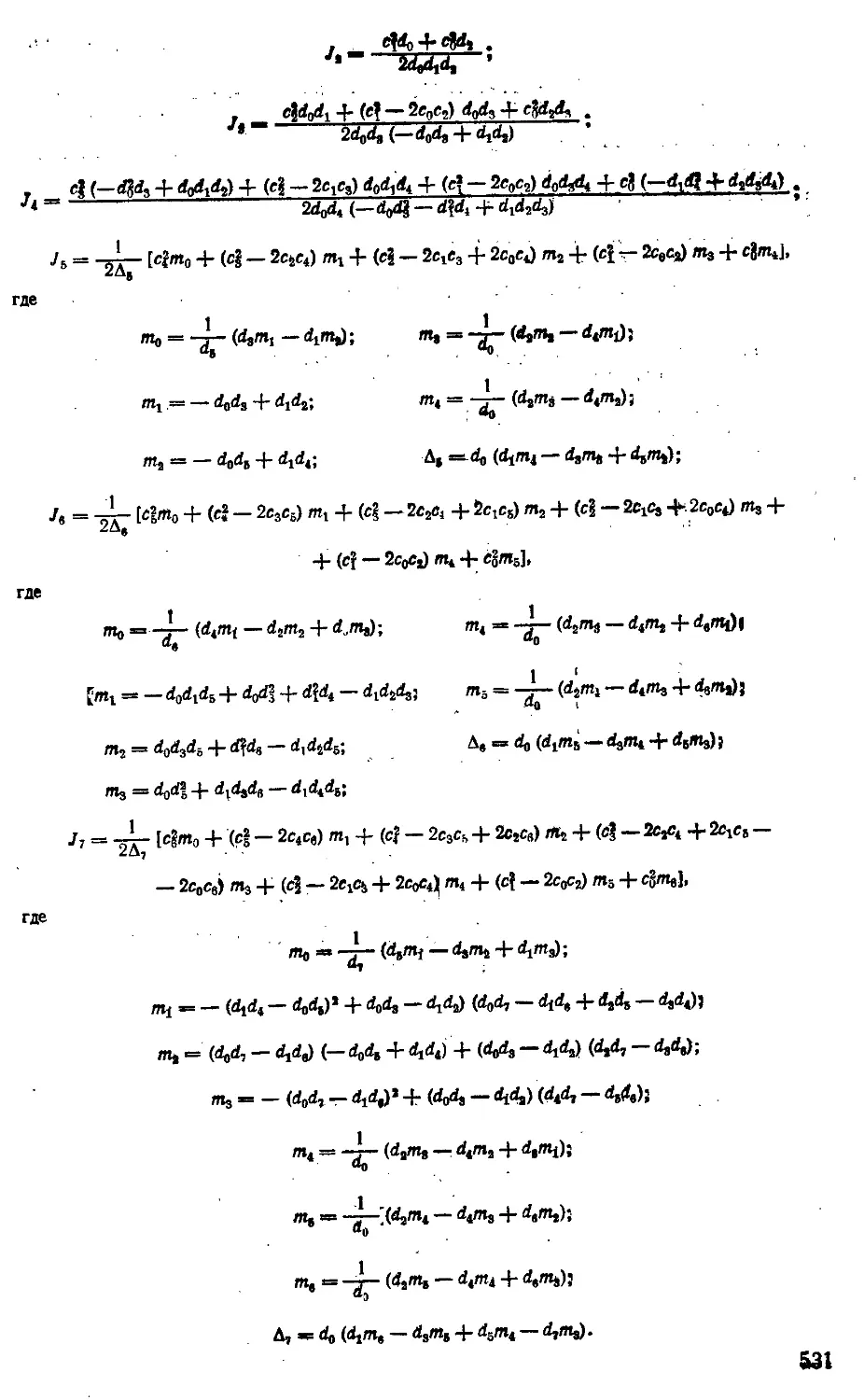
Приложение XII. Формулы для вычисления интегралов от дробно-рациональных чет-
ных функций.................................................................... 530
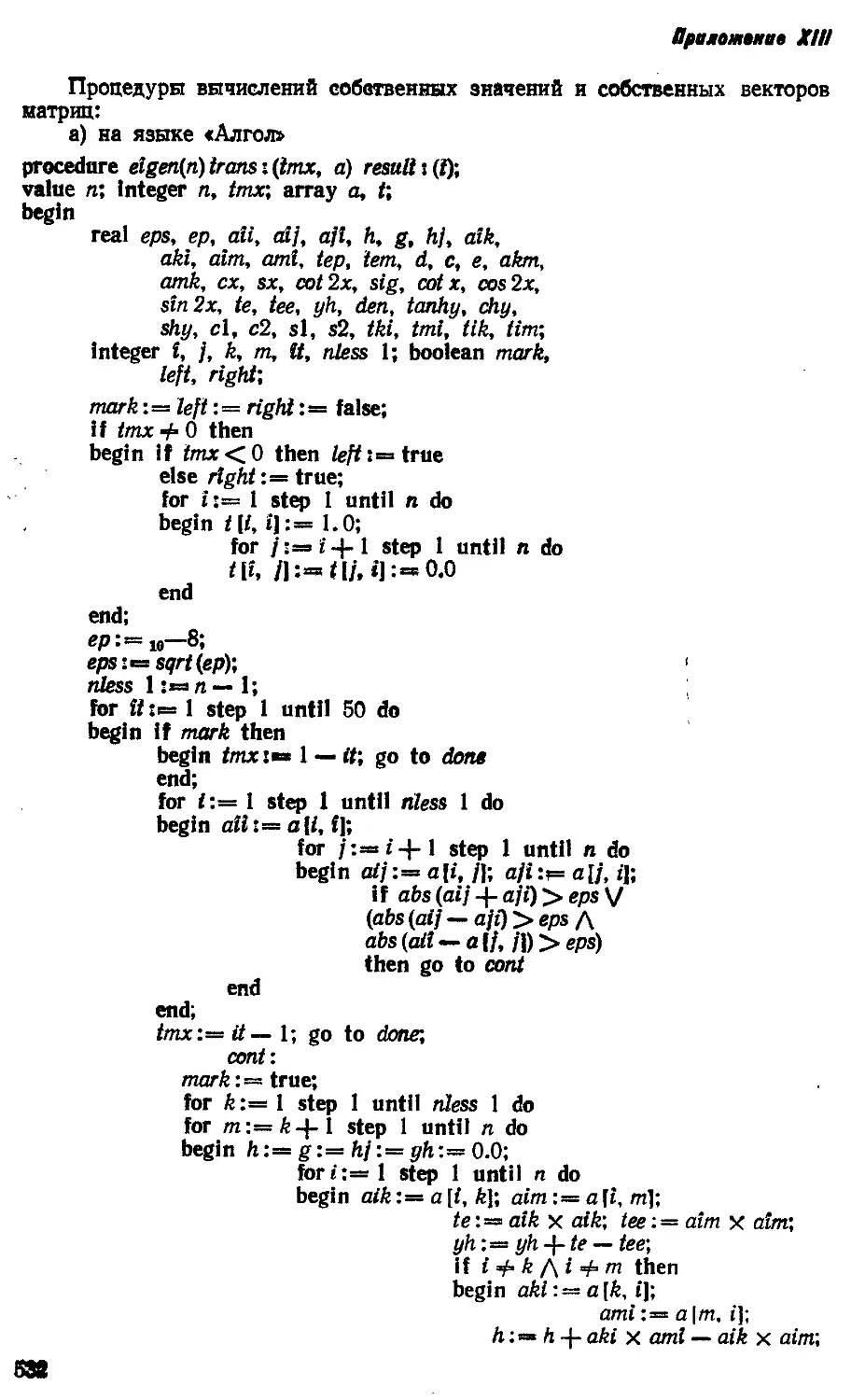
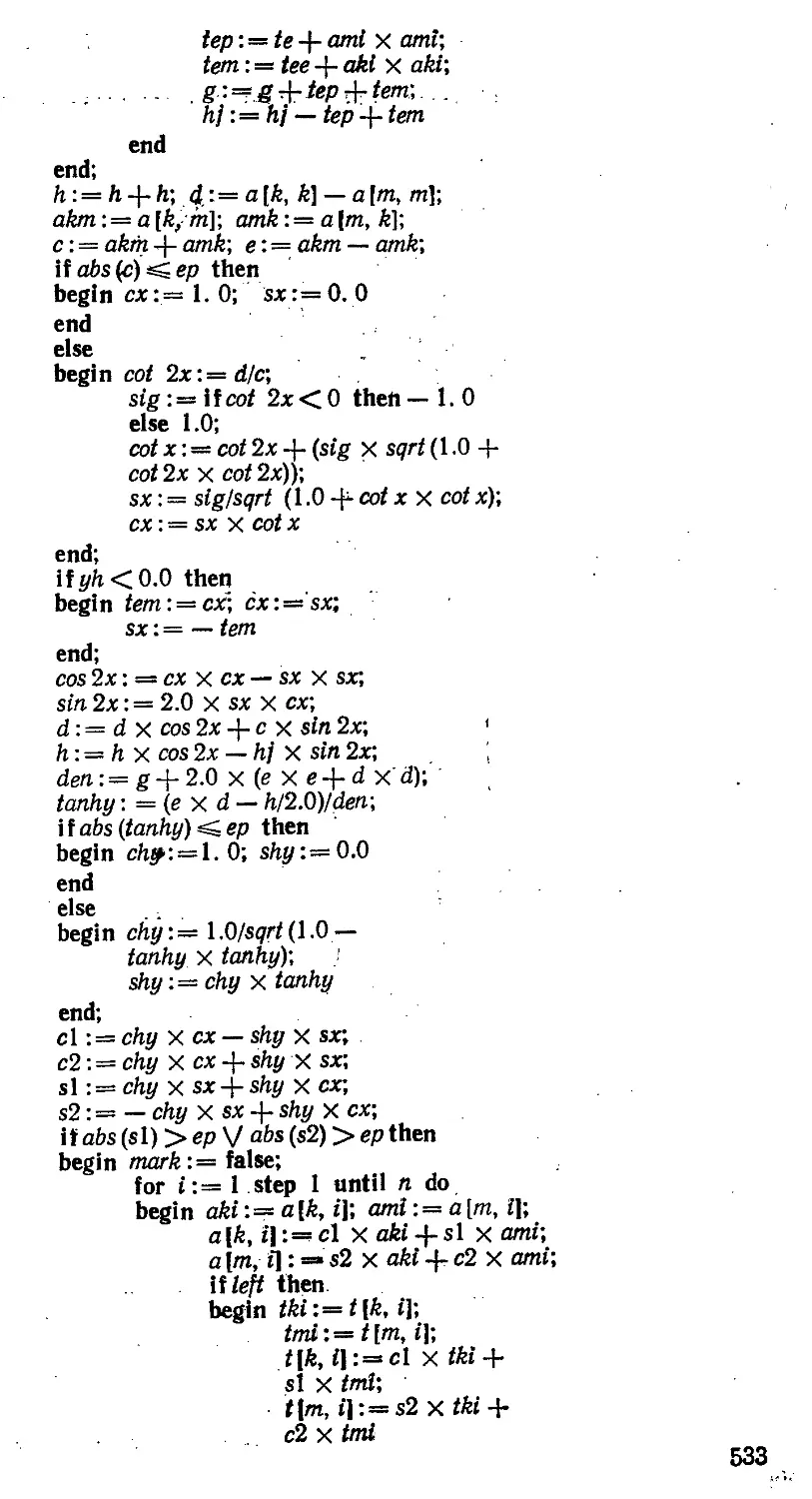
Приложение XIII. Процедуры вычислений собственных значений и собственных
векторов матриц:
а) на языке «АЛГОЛ» ........................................................... 532
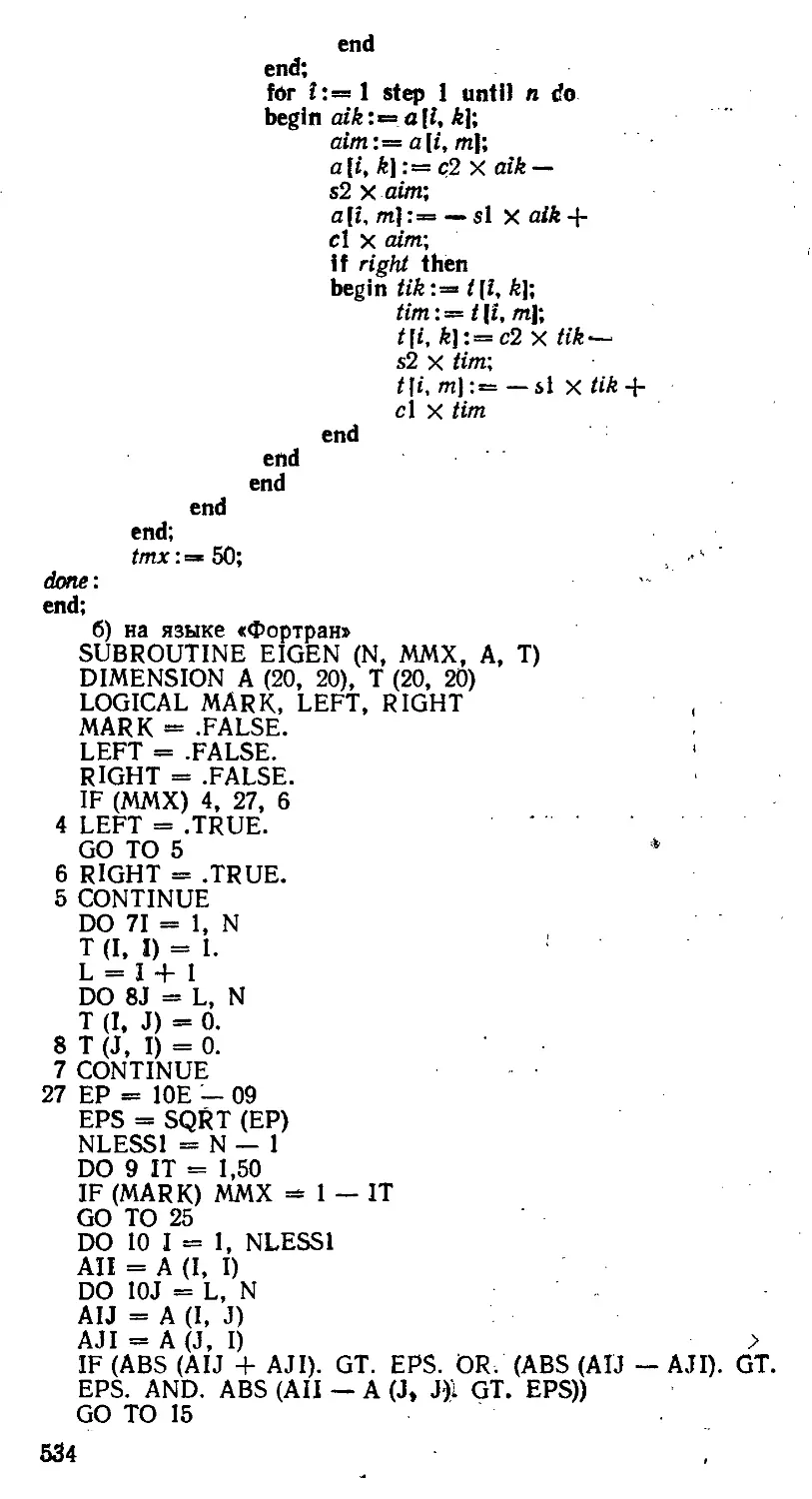
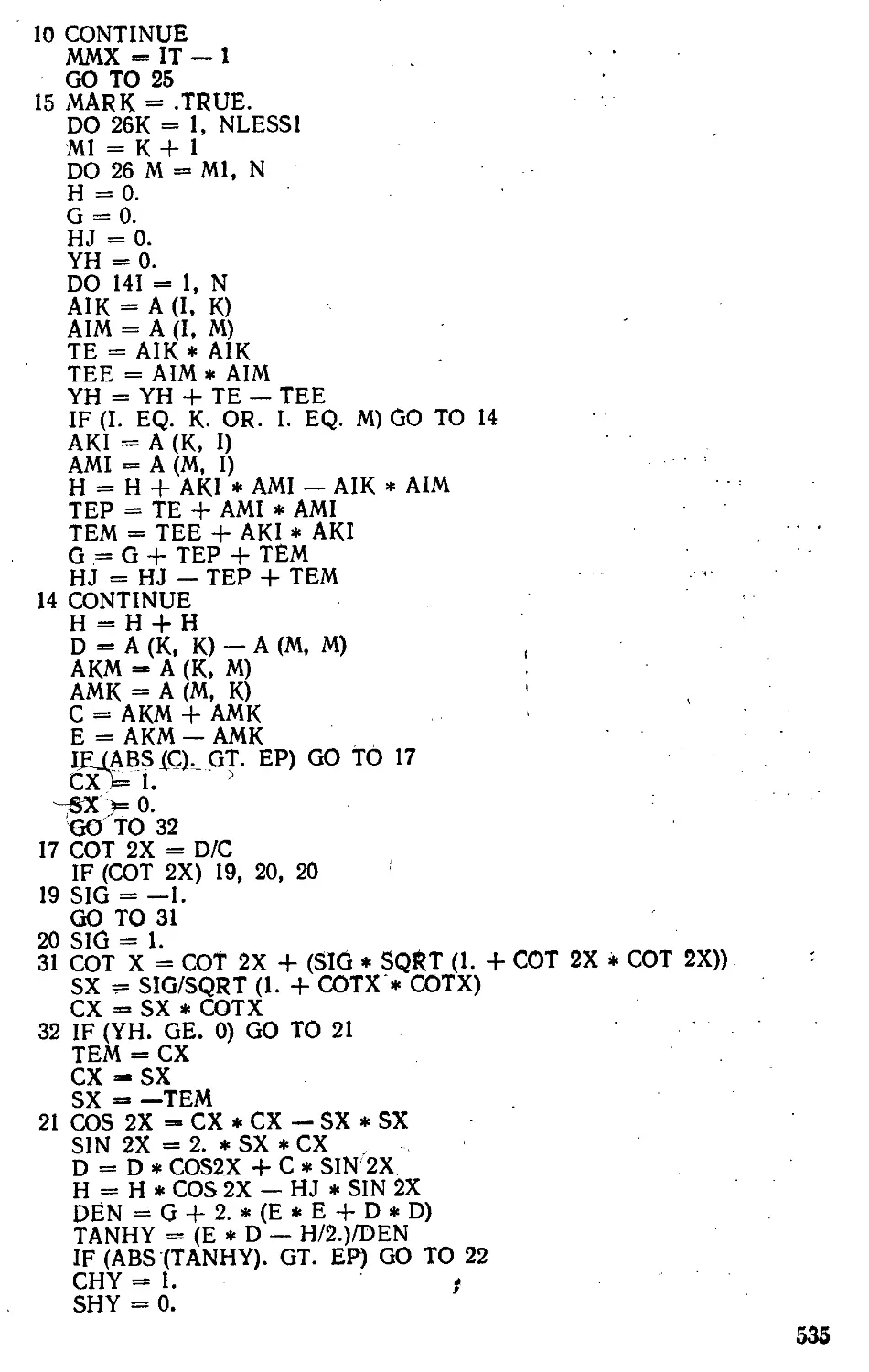
б) на языке «ФОРТРАН» ........................................ 534
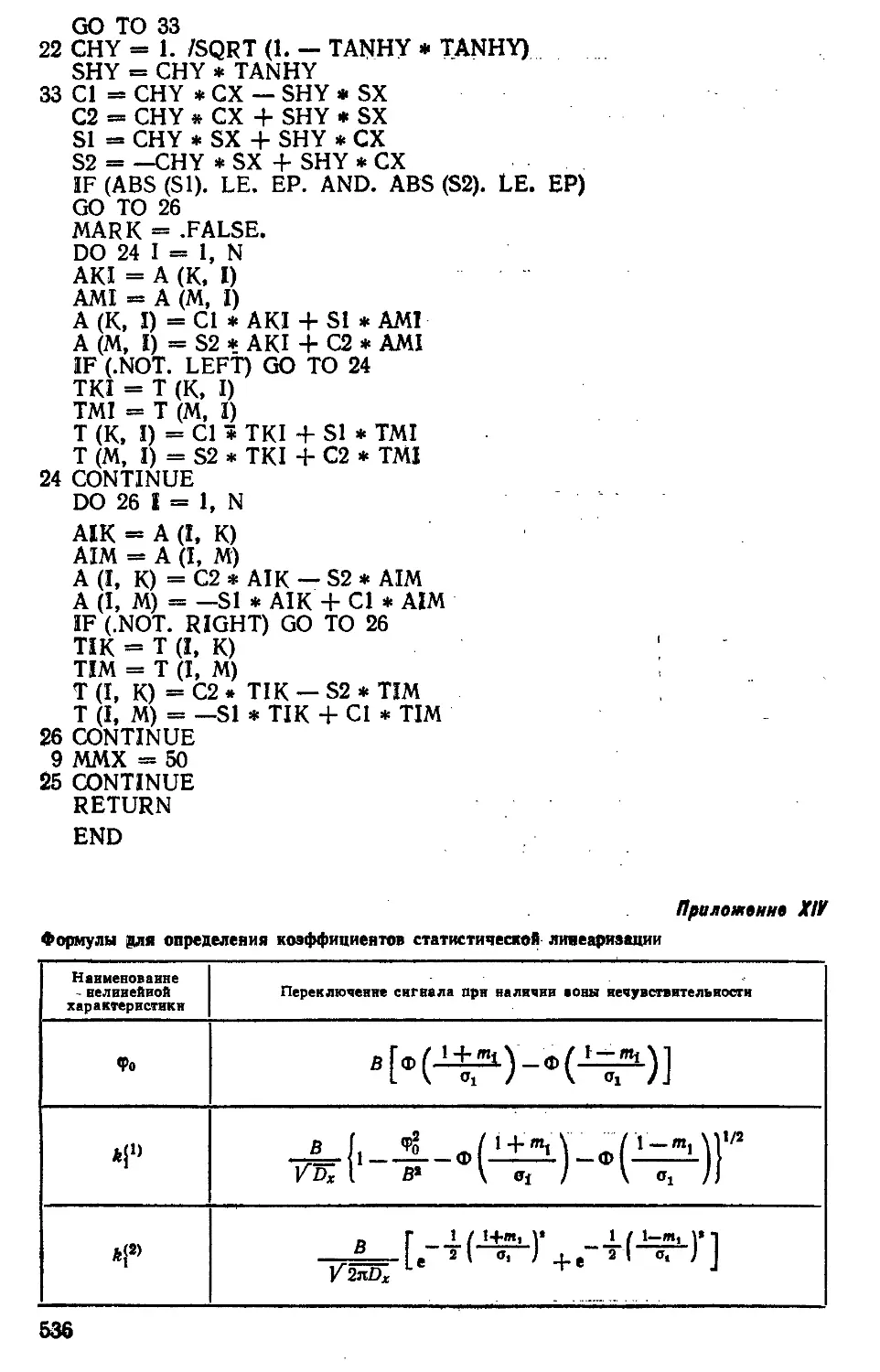
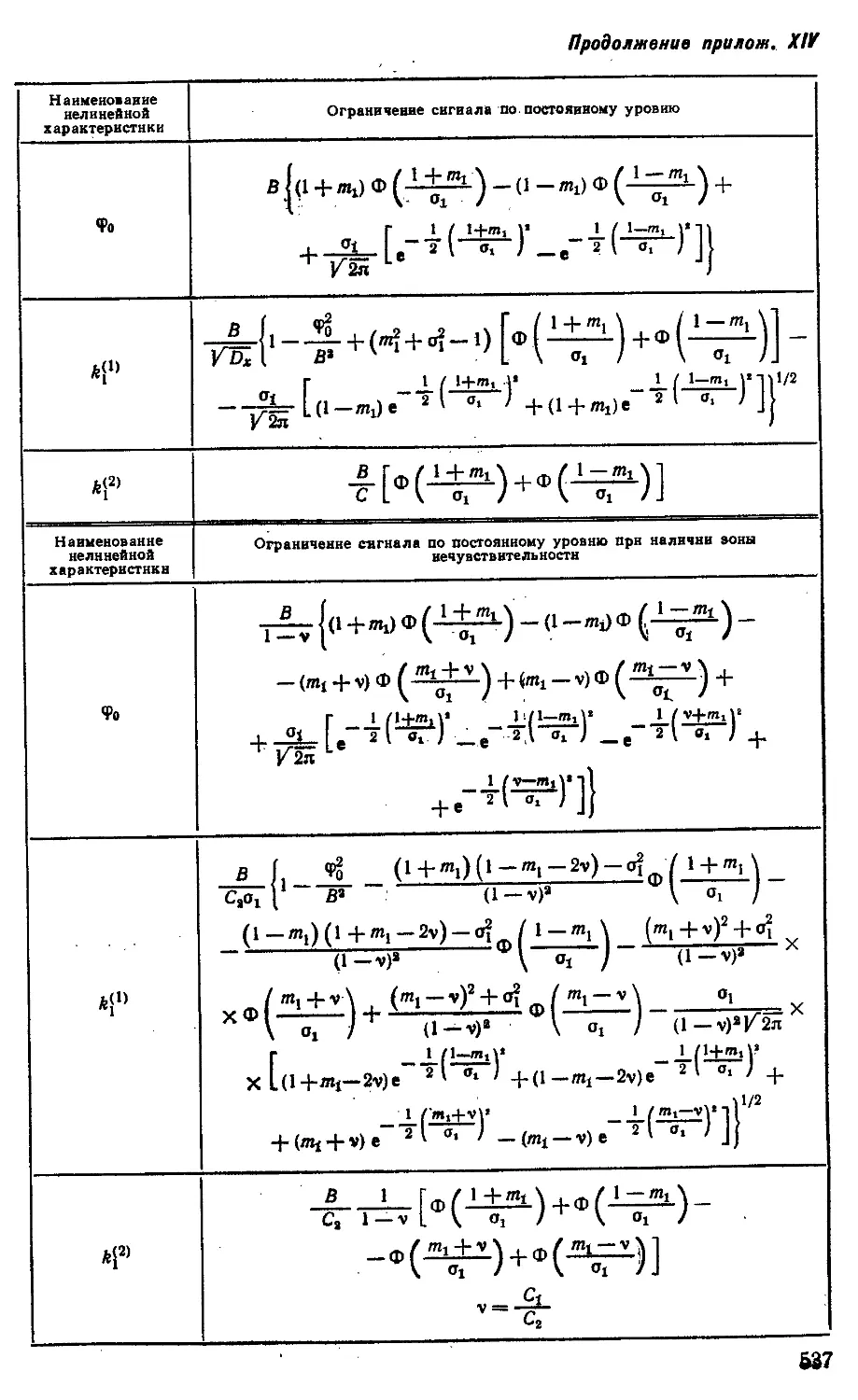
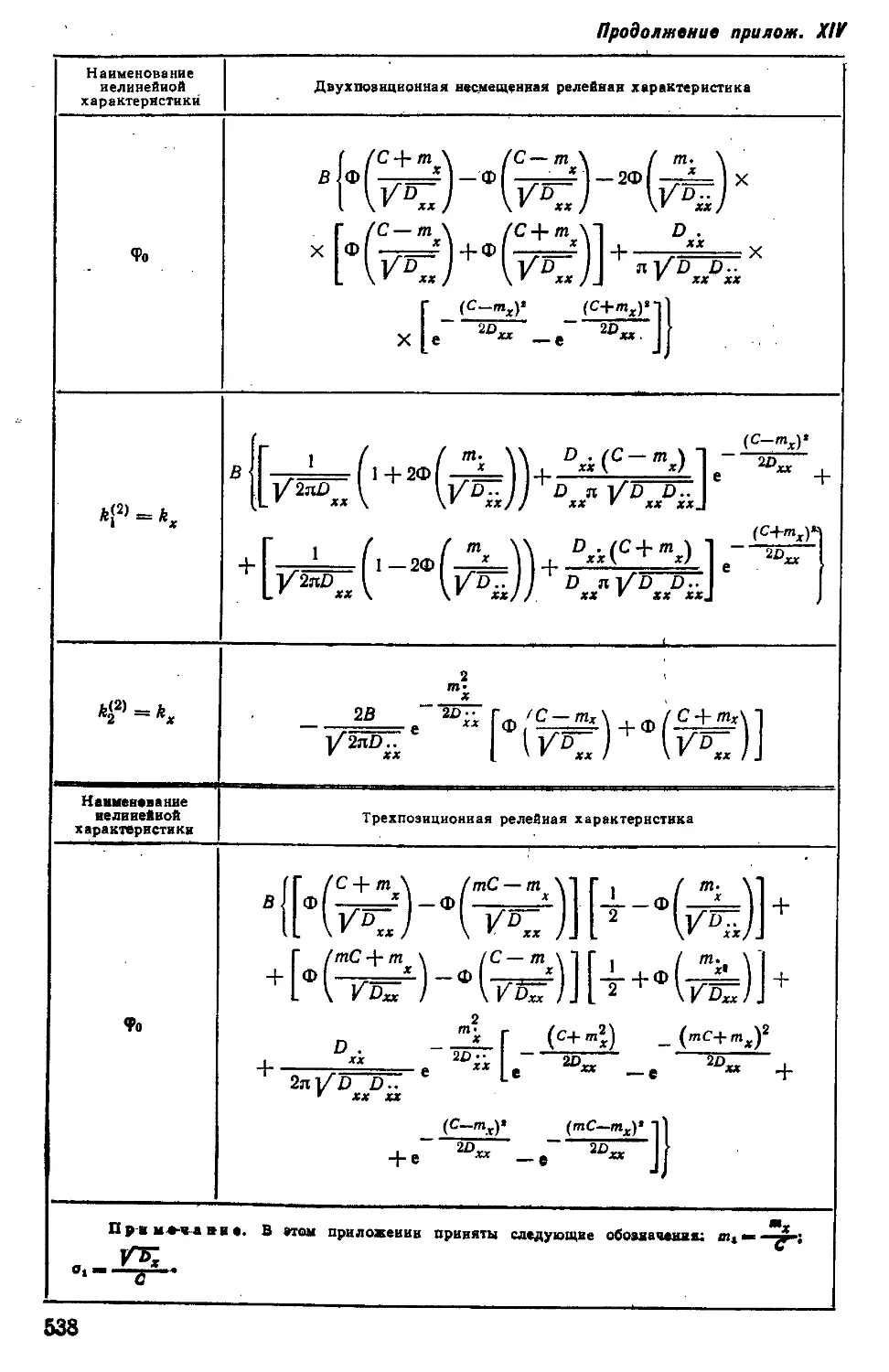
Приложение XIV, Формулы для определения коэффициентов статистической линеа-
ризации .................................................................. ... 536
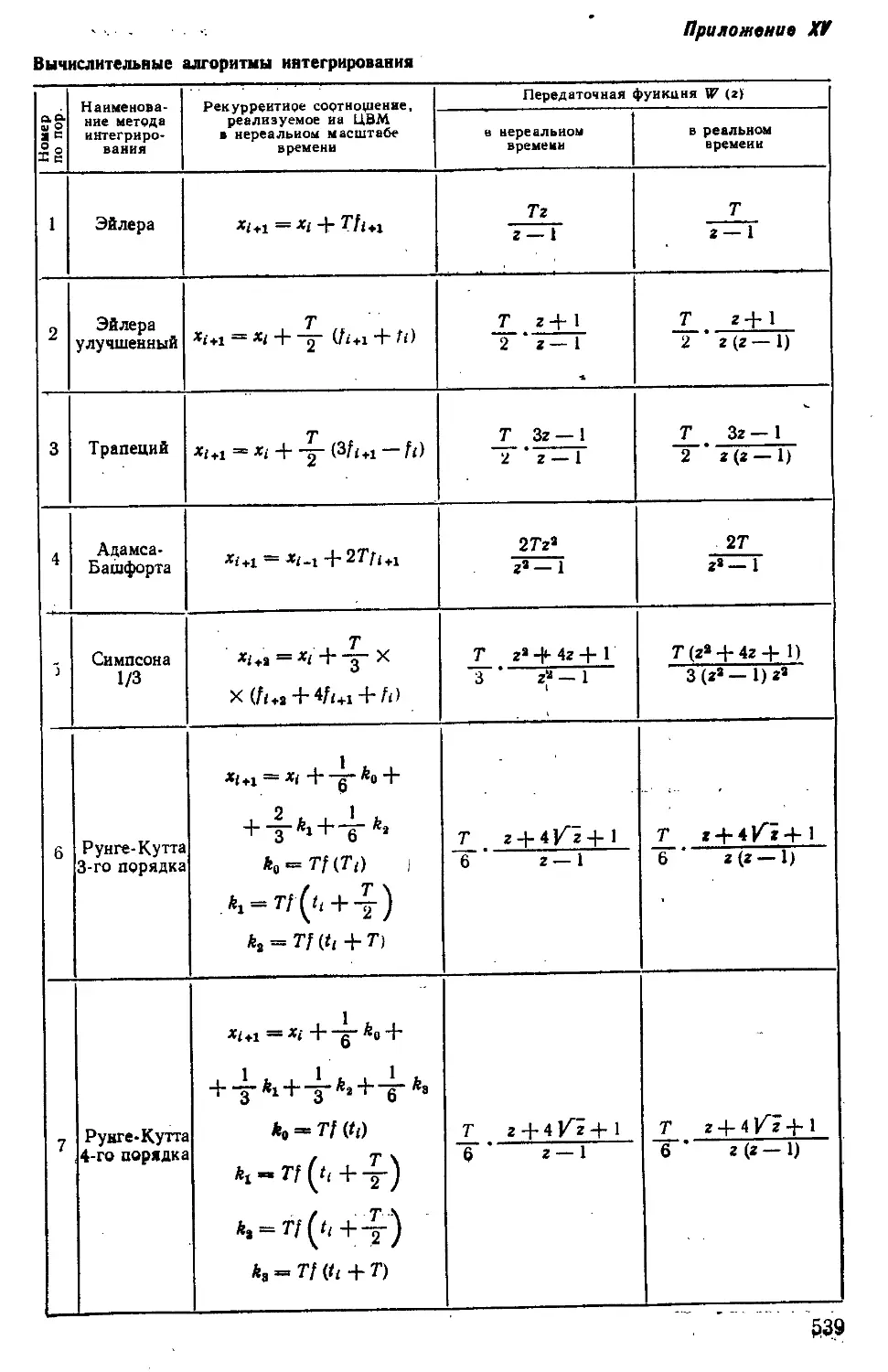
Приложение XV. Вычислительные алгоритмы интегрирования......................... 539
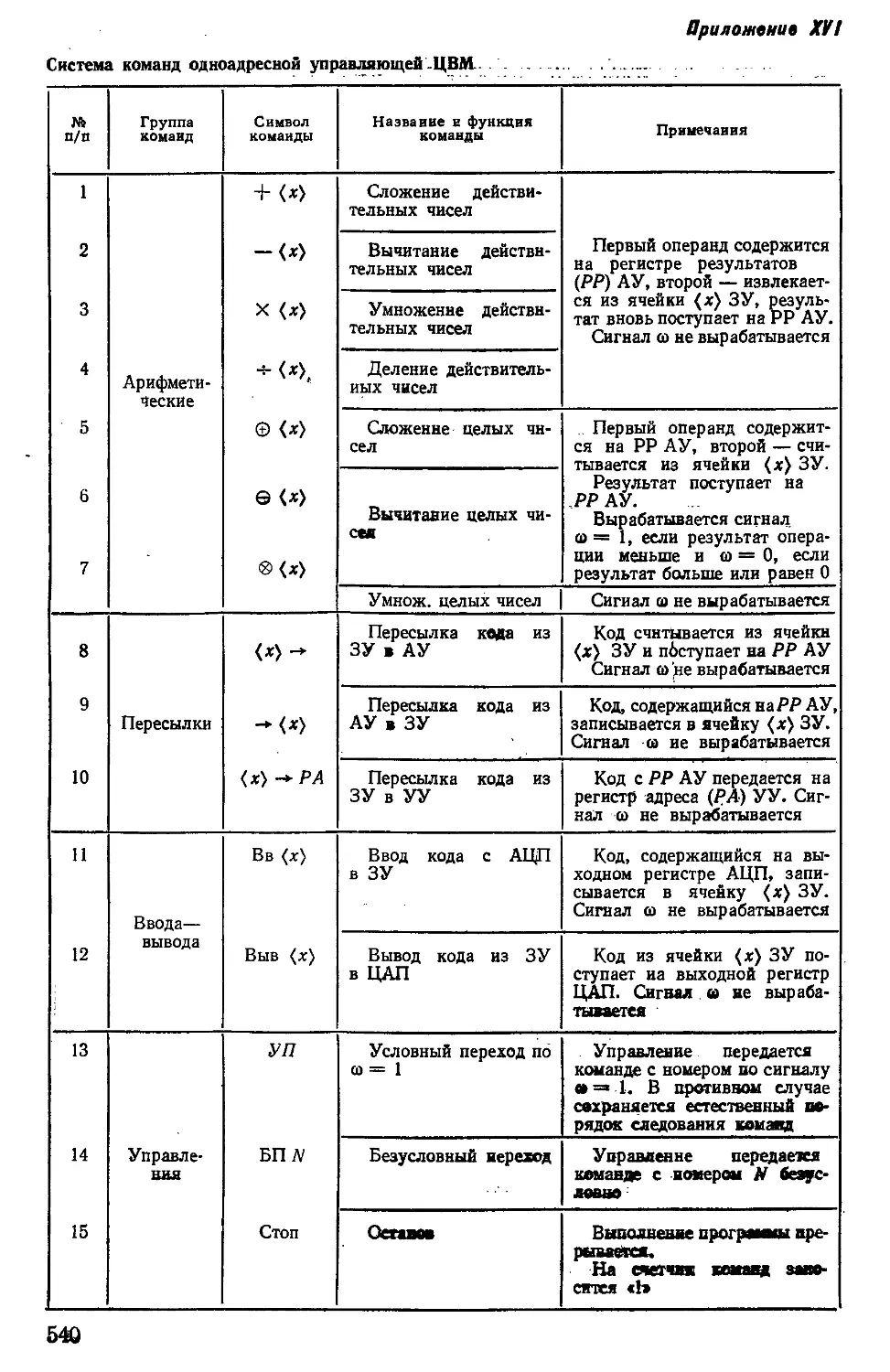
Приложение XVI. Система команд одноадресной управляющей ЦВМ.................... 540
Ответы к задачам .............................................................. 541
Список литературы..........................t................................... 591
Предисловие
В настоящее время теория автоматического регулирования стала одной
из основных научных дисциплин, изучаемых в высших технических учебных
заведениях и университетах. На ее основе на старших курсах излагаются:
теория автоматического управления, проектирование систем автоматического
управления, следящих систем и счетно-решающих приборов, теория автома-
тизированных систем управления технологическими процессами, теория
автоматизированных систем переработки информации и организационно-
экономического управления, а также целый ряд дисциплин по специальным
системам управления. Изучение теории автоматического регулирования,
несмотря на ее прикладной инженерный характер, встречает известные труд-
ности из-за сложности математического аппарата и необходимости хороших
знаний основных разделов высшей математики, классической механики, элек-
тротехники, электроники, электрических машин, вычислительной техники
и некоторых дисциплин, отражающих специфику объектов регулирования.
Глубокое понимание курса теории автоматического регулирования и
получение* практических навыков расчета и проектирования систем требует
решения студентами большого количества различных задач в пррцессе освое-
ния курса лекций. Поэтому авторы включили задачи, охватывающие почти
все разделы курса теории. Здесь приведены задачи на составление уравнений
движения, передаточных функций, структурных схем элементов, объектов
и систем автоматического регулирования, построение частотных, импульс-
ных переходных характеристик. Большое внимание уделено различным
способам исследования устойчивости линейных систем, основанных на при-
менении первого метода Ляпунова, алгебраических и частотных критериях.
Приведены задачи, где дана оценка трудоемкости и точности определения
запасов устойчивости по фазе и модулю. Алгебраические методы анализа
устойчивости доведены до рабочих алгоритмов, записанных на языках
«АЛГОЛ» и «ФОРТРАН».
Задачи по исследованию качества охватывают применение методов
построения переходных процессов по заданным передаточным функциям
замкнутых систем, трапецеидальным частотным характеристикам и /1х-функ-
циям. Рассмотрены также способы применения аналоговых и цифровых вы-
числительных машин для определения переходных процессов в стационар-
ных и нестационарных системах регулирования. Приведены задачи по оцен-
кам качества с помощью свойств вещественных частотных характеристик
замкнутых систем и корневых годографов.
При изложении задач на определение динамической точности систем
автоматического регулирования главное внимание уделено нахождению
основных статистических характеристик случайных процессов и вычислению
ошибок в системах при действии регулярных и случайных возмущений.
Рассмотрены способы повышения точности систем регулирования путем
увеличения порядка астатизма и применения надлежащих корректирующих
устройств.
6
В задачах, посвященных нелинейным системам, рассматриваются методы
анализа устойчивости, качества и точности систем с типовыми нелинейно-
стями на основе применения второго метода Ляпунова, фазовой плоскости,
гармонической и статистической линеаризаций. Несмотря на отсутствие стро-
гих методов анализа качества нелинейных систем автоматического регулиро-
вания, авторы включили несколько примеров и задач по определению частот-
ных характеристик замкнутых нелинейных систем и приближенных показа-
телей их качества.
Значительное внимание уделено задачам по расчету и проектированию
специальных систем регулирования, под которыми авторы понимают импульс-
ные, цифровые, экстремальные и самонастраивающиеся системы. Для ана-
лиза импульсных и цифровых систем использованы частотные методы и спо-
собы, базирующиеся на применении г и (г, //^-преобразований. Для возмож-
ности использования логарифмических частотных характеристик цифровых
систем применяется билинейное преобразование. В задачах по расчету экстре-
мальных систем рассматриваются методы поиска экстремума, способы орга-
низации движения к экстремуму, а также определения амплитуд и частот
автоколебаний регуляторов. Приведены задачи по простейшим видам само-
настраивающихся систем автоматического регулирования с аналоговыми и
цифровыми вычислительными машинами.
В конце задачника рассмотрены методы решения задач синтеза при регу-
лярных и случайных воздействиях. Основное внимание при этом уделено
задачам синтеза цифровых систем автоматического регулирования технологи-
ческими процессами с применением ЦВМ. При выборе законов, обеспечиваю-
щих оптимальные управления, использованы принцип максимума и метод
динамического программирования.
Предлагаемые вниманию читателя задачи расчетов систем автоматиче-
ского регулирования, как правило, относятся к конкретным промышленным
системам, а их математическое описание выполнено при помощи обычно
применяемых в инженерной практике способов идеализации. Все это позволит
студентам полнее осваивать методику проектирования систем, правильно
устанавливать допустимые значения запасов устойчивости, показателей каче-
ства или точности процессов регулирования.
При составлении задачника авторы руководствовались рядом учебников
и учебных пособий по курсу теории автоматического регулирования, список
которых приведен в конце книги. Однако построение задачника и типы рас-
сматриваемых задач наиболее полно соответствуют учебнику Н. Н. Ива-
щенко «Автоматическое регулирование», 4-е издание, «Машиностроение»,
1978 г. и учебнику А. В. Нетушила «Теория автоматического управления»,
«Высшая школа», 1976. При выполнении курсовых проектов и домашних
заданий, связанных с проектированием систем автоматического регулирова-
ния, следует пользоваться графиками и номограммами, убыстряющими про-
цесс расчета и выбора параметров систем, приведенными в справочном по-
собии.
При подготовке рукописи задачника к изданию большая помощь была
оказана сотрудниками кафедры «Управление комплексами» Московского
инженерно-физического института, за что авторы выражают им свою искрен-
нюю благодарность. Авторы будут признательны всем читателям за замеча-
ния, которые будут сделаны по данной книге.
Список принятых обозначений
ОБЩИЕ ОБОЗНАЧЕНИЯ
А — амплитуда;
Аа — амплитуда автоколебаний;
а,- (Л, а>) — коэффициент гармонической линеаризации
(синусная составляющая) по i-й гармонике;
В — максимальное значение сигнала на выходе
нелинейного элемента;
Ь{ (Л, со) -г коэффициент гармонической линеаризации по
i-й гармонике (косинусная составляющая);
Со; Сх; Са; ...; Сп — коэффициенты ошибок;
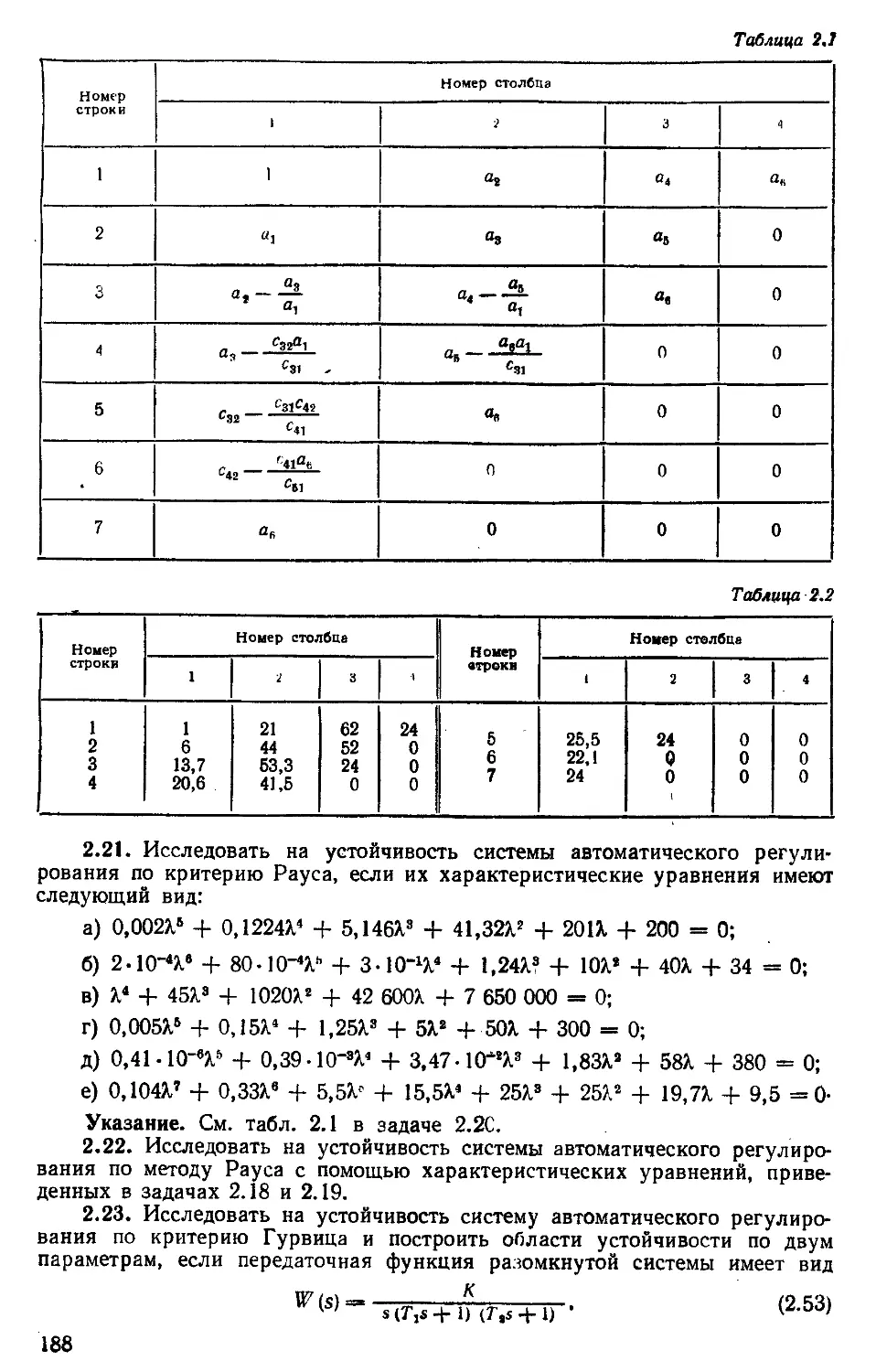
— коэффициенты Рауса;
С — ширина зоны нелинейной характеристики;
D — символ D-разбиения;
D I 1 — символ дисперсии случайной переменной;
D (s); D (г) — характеристический многочлен замкнутой
системы;
Dp (s); Dp (z) — характеристический многочлен разомкнутой
системы; 1
De — добротность системы регулирования по уско-
рению;
De' — добротность системы регулирования по про-
изводной ускорения;
Dq — добротность системы регулирования по ско-
рости;
d0 — логарифмический декремент затухания;
-& — р — символ дифференцирования;
F — нелинейная функция;
Fo — нелинейная функция смещения;
g (t), и (0 — управляющие воздействия в непрерывных си-
стемах;
g (кТ), и (кТ) — управляющие воздействия в дискретно-непре-
рывных системах;
HI ] — гамильтониан;
±ЯМ — запас устойчивости системы регулирования по
модулю;
Н (со) — амплитудная частотная характеристика;
h (f), h (кТ) — переходные характеристики;
J (Д); J (Д, /со) — эквивалентная передаточная функция нели-
нейного элемента;
J (и* (£)) — функционал качества;
К — передаточный коэффициент системы автомати-
ческого регулирования;
8
к{ — передаточный коэффициент динамического
элемента;
k (t) — импульсная переходная характеристика;
Lm — логарифмическая амплитудно-частотная харак-
теристика;
М [ 1 — символ математического ожидания;
т — число корней характеристического уравнения
в правой полуплоскости;
/пЛ, ту, тг — математические ожидания случайных перемен-
ных;
N — число колебаний в переходном процессе;
п — порядок характеристического многочлена;
Р (со) — вещественная характеристика замкнутой си-
стемы относительно управляющего воздействия;
Pf (со) — вещественная частотная характеристика воз-
мущающего воздействия;
Pv (со) — вещественная частотная характеристика замк-
нутой системы по возмущающему воздействию;
Q (со) — мнимая частотная характеристика замкнутой
системы относительно управляющего воздей-
ствия;
Qf (со) — мнимая частотная характеристика возмущаю-
щего воздействия;
Qv (со) — мнимая частотная характеристика замкнутой
системы по возмущающему воздействию;
q (Л); q (Л, со) — эквивалентная амплитудная характеристика
нелинейного элемента;
R (со) — обобщенная вещественная частотная характе-
ристика замкнутой системы регулирования;
Rx Ry (t); Rz (t) — корреляционные функции;
Ryx (t); Rgz (0 — взаимно-корреляционные функции;
Res I ] — вычет
S (co) — обобщенная мнимая частотная характеристика
замкнутой системы регулирования;
Sx (со); Sy (со); Sz (со) — спектральные плотности;
SJ (со); S* (со); S*z (со) — сопряженные спектральные плотности;
Sxy (со); Sxz (со); Syz (со) — взаимные спектральные плотности;
Sxy (со); Sxz (со); S*z (со) — сопряженные взаимные спектральные плот-
ности;
s — оператор Лапласа;
Т — период квантования;
<м — время наступления первого максимума в пере-
ходном процессе;
tp — время регулирования (протекания переходного
процесса);
U (со) — вещественная частотная характеристика ра-
зомкнутой системы;
и* — оптимальное управление;
v — псевдочастота;
V (со) — мнимая частотная характеристика разомкну-
той системы;
V (х, у) — функция Ляпунова;
W (s) — передаточная функция разомкнутой системы;
Wt (s) — передаточная функция динамического эле-
мента;
W* (s); Фе (s); Ф* (s) — соответствующие передаточные функции им-
пульсных систем;
9
w — оператор билинейного преобразования;
X (ty, Y (f); Z (0 — случайные переменные;
X (0; Y (ty, Z (0 — центрированные случайные переменные;
x (0 — регулируемая переменная непрерывной
системы;
х° — постоянная составляющая сигнала;
х (кТ) — регулируемая переменная дискретно-непре-
рывной системы;
х*; у*', г* — импульсные переменные;
Y (s) — передаточная функция замкнутой системы
относительно возмущающего воздействия;
z — оператор z-преобразования;
} — символ г-преобразования;
(г, лг) — оператор модифицированного г-преобразова-
нйя (z, m — преобразования);
у0 — запас устойчивости системы регулирования по
фазе;
ДЬ(? (Л, ш) — дополнительный коэффициент гармонической
линеаризации по i-й гармонике (косинусная
составляющая);
Да?/ (Л, со) — дополнительный коэффициент гармонической
линеаризации по i-й гармонике (синусная
составляющая);-
б (t — кТ) — дельта-функция;
е (0 — сигнал ошибки в непрерывной системе;
е (кТ) — сигнал ошибки в дискретно-непрерывной си-
стеме;
6 (со) — фазовая частотная характеристика;
х — степень наклона частотных характеристик зам-
кнутой системы регулирования;
—г корни характеристического уравнения;,
ц (Л); и (Л, со) — эквивалентная фазовая характеристика нели-
нейного элемента; ,
£ — коэффициент затухания;
рх; Ру> Рг — коэффициенты корреляции;
ох; аг — средние квадратические отклонения случай-
ной переменной;
ашах — максимум перерегулирования;
т — постоянная времени запаздывания;
Ф (s) — передаточная функция замкнутой системы от-
носительно управляющего воздействия;
(s) — передаточная функция замкнутой системы по
ошибке;
ф/; Ф/ — функции Понтрягина;
со — круговая частота;
— частота автоколебаний;
со0 — частота среза системы;
соо — собственная частота колебаний системы;
Ф — переходная матрица;
ОБОЗНАЧЕНИЯ ПЕРЕМЕННЫХ ВЕЛИЧИН
е (ty Е (s) — электродвижущая сила;
g (ty, G (s) — линейное ускорение;
h (t); H (s) — линейный размер по вертикали (высота);
i (t); / (s) — электрический ток;
I (ty, L (s) — линейный размер по горизонтали;
ГО
М (/); М (s) — момент сил;
п (i); N (s) — плотность нейтронного потока;
п (ty, N (з) — перегрузка летательного аппарата;
р (ty Р (з) — давление газа или жидкости;
<7 (ty Q (s) — расход газа или жидкости;
и (t)’, U (з) — напряжение, разность потенциалов;
v (ty, V (з) — линейная скорость;
х (ty, X (s) — линейное перемещение;
у (ty, Y (s) — гидравлический напор;
a (ty, a (s) — угол атаки летательного аппарата;
Р (ty, (s) — угол скольжения летательного аппарата;
У (0; У (s) — угол крена летательного аппарата;
6К (i)', §ке («) — реактивность;
6 (I); (з) — угол отклонения управляющих органов лета-
тельного аппарата;
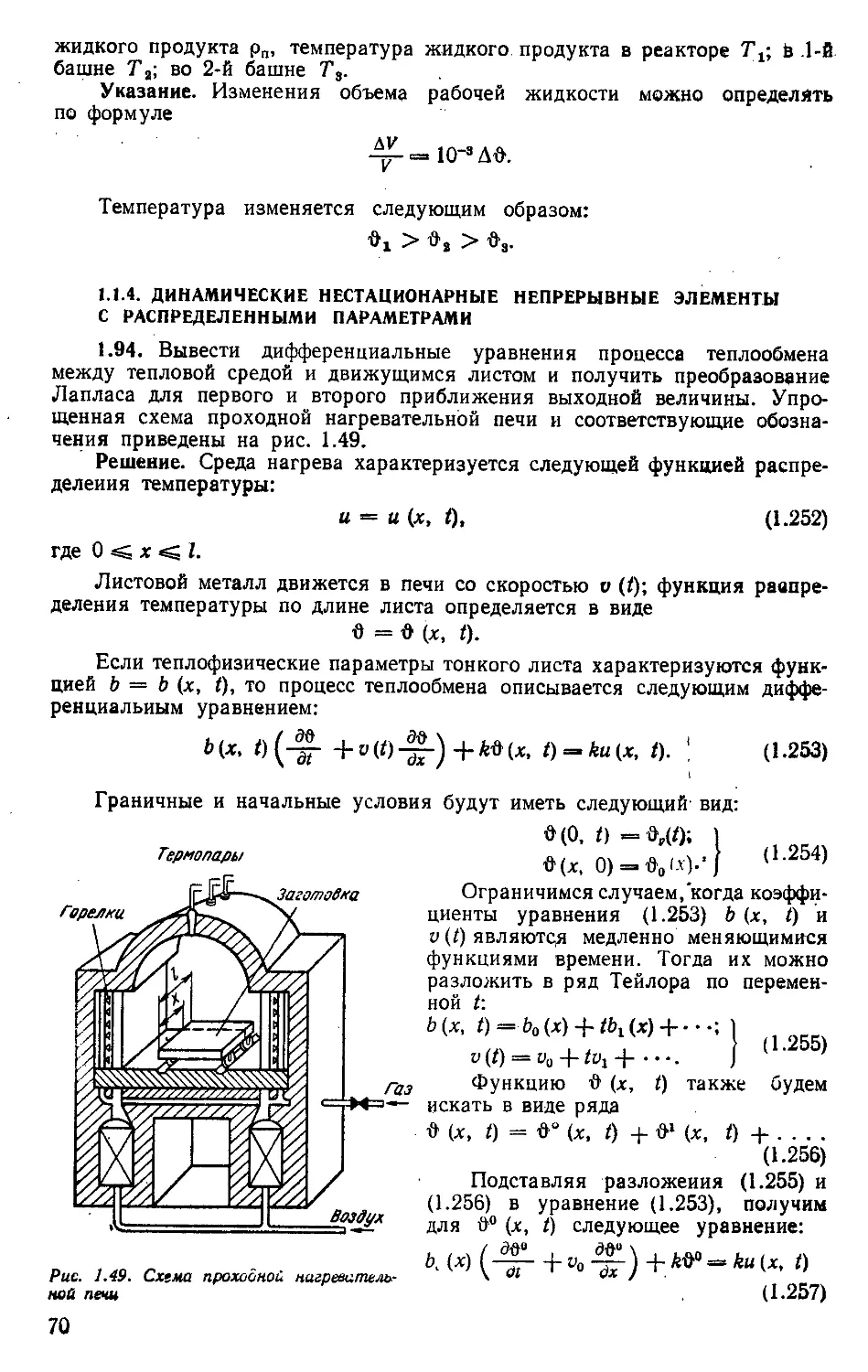
д (ty, Ъ (s) — температура;
0 (/); 0 (з) — угол поворота;
0 (i); & (s) — угол вектора скорости летательного аппарата
в продольной плоскости;
ц (ty р (з) — относительная угловая скорость, относитель-
ное перемещение;
б (ty, Ъ (з) — угол тангажа летательного аппарата;
v (ty v (s) — Относительная угловая скорость;
Т (t); Т (s) — угол вектора скорости летательного аппарата
в боковой плоскости;
ф (ty ф (s) — угол рыскания летательного аппарата;
® (t); а (з) — угловая скорость;
ОБОЗНАЧЕНИЯ ПАРАМЕТРОВ ЭЛЕМЕНТОВ
С — электрическая емкость;
с — теплоемкость; ,
Е — модуль упругости;
F, — сила;
F — площадь поперечного
сечения;
G — электрическая проводи-
мость;
g — ускорение силы тяжести;
ip — передаточное число ре-
дуктора;
J — момент инерции;
кг — коэффициент упругости
вала электродвигателя и
редуктора;
kz — коэффициент упругости
выходного вала;
ka — коэффициент усиления
второго каскада ЭМУ по
току;
ke — постоянная противо-
ЭДС;
kK — передаточный коэффици-
ент усиления первого
каскада ЭМУ по току;
И СИСТЕМ РЕГУЛИРОВАНИЯ
ku — моментная постоянная;
Ар — постоянная скоростного
трения;
Ар — коэффициент, учитываю-
щий действие реакции
якоря в ЭМУ;
L — индуктивность;
М — взаимоиндуктивность;
М — масса;
т — приведенная масса;
R — активное сопротивление;
S — крутизна характеристи-
ки электронной лампы;
Т„ — электромагнитная посто-
янная времени якоря
электродвигателя;
Тв — электромеханическая
постоянная электродви-
гателя, постоянная вре-
мени двигателя;
Тк — постоянная короткозам-
кнутой обмотки ЭМУ;
Та — постоянная главной
цепи ЭМУ;
11
TL — постоянная времени. у — коэффициент токорао-
учитывающая индуктив- ность якоря; V — объем газа или жидкости; а — коэффициент теплооб- пределения; р — плотность; р, — коэффициент усиления
электронной лампы по
мена; Р — коэффициент усиления напряжению; X — коэффициент темпера-
транзистора по току; ПРИНЯТЫЕ СОКРАЩЕНИЯ В ИНДЕКСАХ туропроводности. И ТЕКСТЕ
A.—к — преобразователь ана-
лог—код;
АВМ — аналоговая вычисли-
тельная машина;
Атг — асинхронный тахогене-
ратор;
АЭдв — асинхронный электро-
двигатель;
б — барабан; батарея (источ-
ник питания);
В — вентиль;
вх — входной;
вых — выходной;
в—ц — преобразователь вал—
цифра;
г — генератор, газ;
Гр — горелка;
гд, ГД — гидравлический двига-
тель;
ГН — гидравлический насос;
гп — гидравлический привод;
Дт; дт — датчик температуры;
ДвН — двигатель насоса;
дв — двигатель;
дг — гироскопический датчик
угловой скорости (демп-
фирующий гироскоп);
ду — датчик линейных уско-
рений;
ж — желаемая (частотная
характеристика), жид-
кость;
и — измерительное устрой-
ство;
иу — исполнительное устрой-
ство;
КГ — курсовой гироскоп;
КЛА — космический летатель-
ный аппарат;
к — клапан, корректирую-
щее (устройство);
к—а — преобразователь код—
аналог;
М — месдоза, мост;
МУ; му — магнитный усилитель;
НЦ; нц — преобразователь напря-
жение—цифра;
н — нагрузка, неизменяемая
(частотная характери-
стика), руль направле-
ния;
ОВ — обмотка возбуждения;
ос — обратная связь;
ПР; пр — продукция;
п — плунжер; подача;
пг — парогенератор;
пд — пневматический двига-
тель;
рк — ректификационная ко-
лонна;
Р — регулятор; ресивер;
Р — редуктор, реактор;
РП — реле поляризованное;
PC — реверсивный счетчик;
Рп — радиоприемник;
рд — реактивный двигатель;
рм — рулевая машинка;
С — соленоид, сырье, си-
стема;
СД — сельсин-датчик;
СП — сельсин-приемник;
СТ — стабилизирующий транс-
форматор;
сг — свободный гироскоп;
Тг; тг — тахогенератор;
Тр — трансформатор, трубо-
провод;
тп — термопара;
у — управление, усилитель;
ЦН; цн — преобразователь цифра-
напряжение;
ЦВМ — цифровая вычислитель-
ная машина;
ц — цилиндр;
э — элерон;
ЭУ; эу — электронный усилитель;
Эдв — электродвигатель по-
стоянного тока;
ЭдвП — электродвигатель пере-
менного тока;
1к> Пк,
Шк, IVK — соответственно I—IV
контур.
12
Глава 1
Уравнения движения, передаточные функции
и структурные схемы элементов
и систем автоматического регулирования
Система автоматического регулирования — замкнутая динамическая
система направленного действия, обеспечивающая определенную функцио-
нальную связь между регулируемыми и задающими переменными при подаче
на нее различных возмущающих воздействий. Функциональная связь при
этом может быть получена в виде пропорциональной зависимости, производ-
ной, интеграла между регулируемой и задающей переменными за счет исполь-
зования элементов: измерения регулируемой величины, усиления и преобра-
зования сигнала ошибки, формирования регулирующего воздействия объ-
ектом системы.
Все элементы систем автоматического регулирования являются динами-
ческими, и происходящие в них процессы описываются дифференциальными,
интегродифференциальными или разностными уравнениями. В механиче-
ских, гидравлических и пневматических элементах эти уравнения описы-
вают процесс движения масс, течение жидкостей и газов; в электрических
элементах — изменение токов или электромагнитных процессов; в ядерных
реакторах — увеличение и уменьшение плотности нейтронного потока от
реактивности. Существуют и такие динамические элементы, в которых диф-
ференциальное уравнение описывает ддновременно механическое движение
и электрические процессы (электрические двигатели постоянного и перемен-
ного тока, соленоиды, индукционные датчики перемещения и т. д.). Как
правило, динамические процессы, происходящие в таких элементах, описы-
ваются непрерывными дифференциальными или интегродифференциальными
уравнениями. Процессы, происходящие в цифровых вычислительных ма-
шинах и преобразователях сигналов из непрерывной формы в цифровую
и обратно, обычно описываются в виде разностных уравнений.
Динамические элементы систем в зависимости от их математического
описания подразделяются на два типа: стационарные и нестационарные.
К стационарным элементам относятся такие, которые описываются диффе-
ренциальными уравнениями с постоянными коэффициентами (генератор
постоянного тока, магнитный и электромашинный усилители, гидравличе-
ский насос и т. д.). К нестационарным элементам относятся элементы, ко-
эффициенты дифференциальных уравнений которых являются функциями
времени (летательные аппараты, намоточные машины, электрические дви-
гатели большой мощности). В свою очередь, стационарные и нестационарные
динамические элементы описываются дифференциальными уравнениями
в полных или в частных производных (с сосредоточенными или распределен-
ными параметрами). Тепловые и газодинамические объекты регулирования,
длинные линии передачи электроэнергии, жидкости и газа описываются диф-
ференциальными уравнениями в частных производных.
Дифференциальные, интегродифференциальные и разностные уравне-
ния образуют математическую модель физического элемента и выводятся
на основе различных упрощающих предположений. Подобного рода идеали-
13
зация значительно упрощает методику анализа и синтеза систем автомати-
ческого регулирования. В частности, линеаризация дифференциальных и
разностных уравнений приводит нас к линейным динамическим элементам
и линейным динамическим системам, математический аппарат которых раз-
работан наиболее полно. В результате решения таких уравнений получаются
характеристики переходного процесса, зависящие от времени и параметров
системы.
Применяя преобразование Лапласа к линейным дифференциальным
уравнениям при нулевых начальных условиях, получим передаточные
функции элементов или систем автоматического регулирования. Передаточ-
ной функцией линейного стационарного динамического элемента (системы)
называется отношение преобразования Лапласа выходного сигнала (регули-
руемого) к преобразованию Лапласа входного сигнала (задающего) при нуле-
вых начальных условиях.
Динамические характеристики элементов и систем автоматического регу-
лирования могут быть определены с помощью частотных характеристик
(амплитудной и фазовой), построенных в зависимости от круговой частоты.
В отличие от методов, основанных на решении дифференциальных уравне-
ний, частотный метод является не только расчетным, но и эксперименталь-
ным. Подавая на вход элемента системы синусоидальные сигналы с постоян-
ной амплитудой, находят относительную амплитуду выходного сигнала и
сдвиг фазы. Меняя частоту входного сигнала, определяют несколько значе-
ний относительных амплитуд (амплитудная; частотная характеристика) и
сдвигов фаз (фазовая частотная характеристика).
Амплитуду и диапазон изменения частоты синусоидального входного
сигнала выбирают в зависимости от динамических особенностей элемента
системы. Для того чтобы установить диапазон линейности элемента, необхо-
димо снимать частотные характеристики при различных амплитудах входного
сигнала. Независимость амплитудной и фазовой частотных характеристик
от амплитуды входного сигнала указывает на линейность рассматриваемого
элемента.
Определив реакцию элемента на дельта-функцию, получим импульсную
переходную функцию, которая также является его динамической 'характери-
стикой. Зная импульсную переходную функцию, можно с помощью преобра-
зования Фурье получить передаточную функцию элемента (или системы)
автоматического регулирования.
На основе передаточных функций элементов составляют структурные
схемы, позволяющие уточнить внутреннюю структуру элемента, оценить
влияние различных связей и действие возмущений. Применительно ко всей
системе автоматического регулирования структурная схема позволяет про-
ектировщику находить не только наилучшие места включения корректирую-
щих и усилительных устройств, но и устанавливать нх передаточные функ-
ции (7, 13, 34, 36, 441.
1.1. СОСТАВЛЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
И ИХ ЛИНЕАРИЗАЦИЯ.
ОПРЕДЕЛЕНИЕ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ
И СТРУКТУРНЫХ СХЕМ ДИНАМИЧЕСКИХ ЭЛЕМЕНТОВ
В соответствии с принятыми в теории регулирования способами идеали-
зации элементов регулирования предлагаются задачи на определение диф-
ференциальных и разностных уравнений, а также передаточных функций,
и составление структурных схем динамических элементов.
14
1.1.1. ДИНАМИЧЕСКИЕ СТАЦИОНАРНЫЕ НЕПРЕРЫВНЫЕ ЭЛЕМЕНТЫ
С СОСРЕДОТОЧЕННЫМИ ПАРАМЕТРАМИ
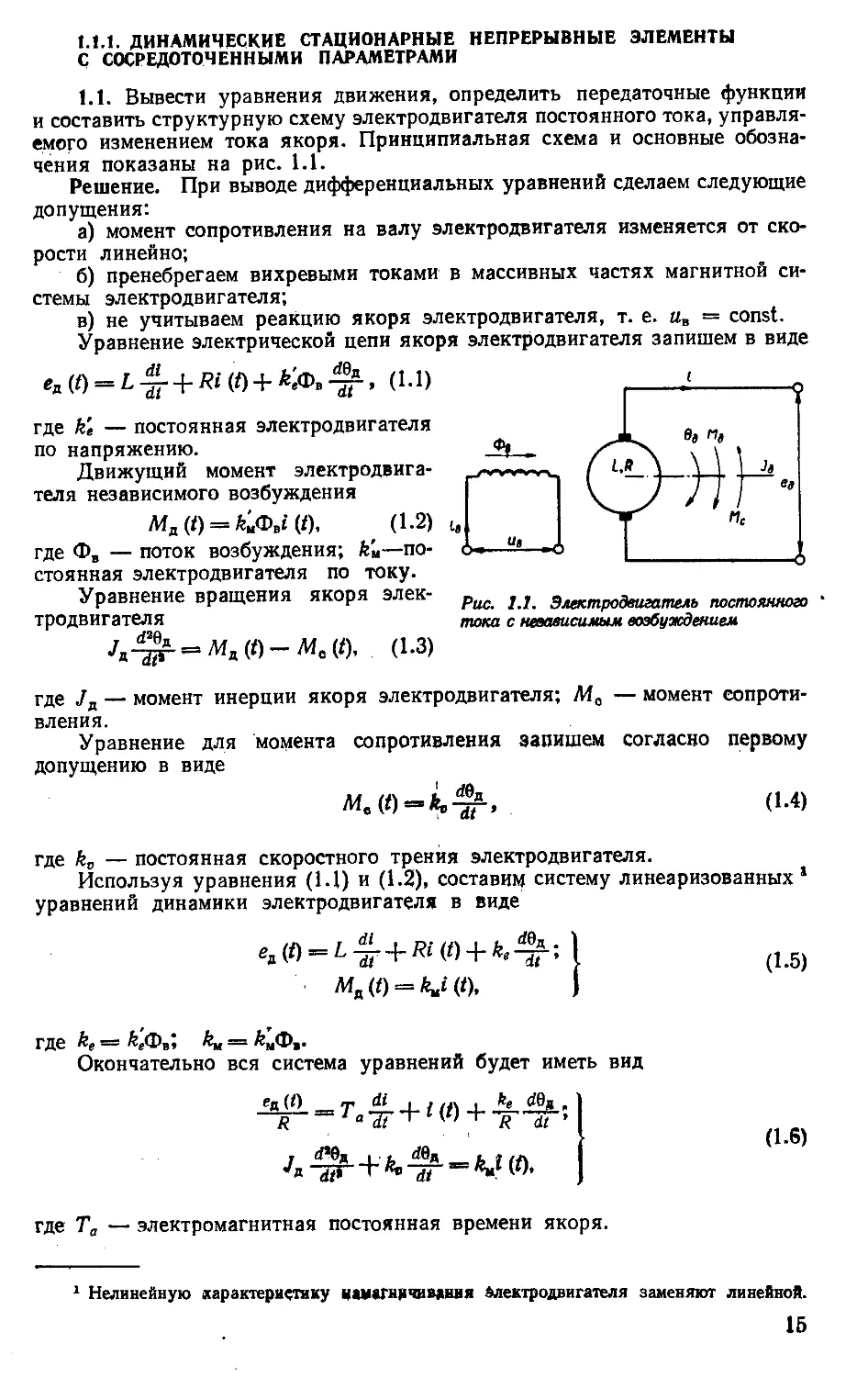
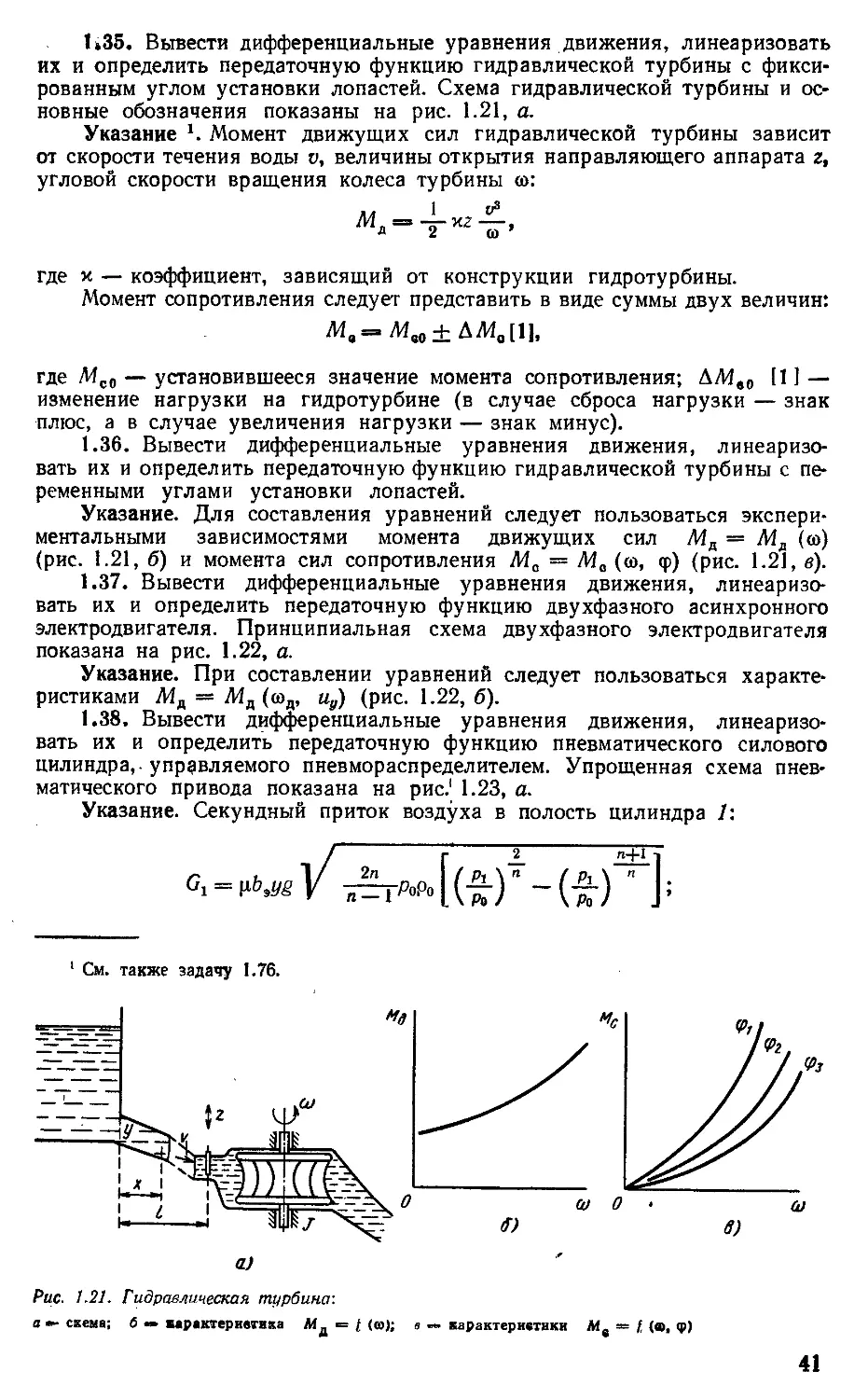
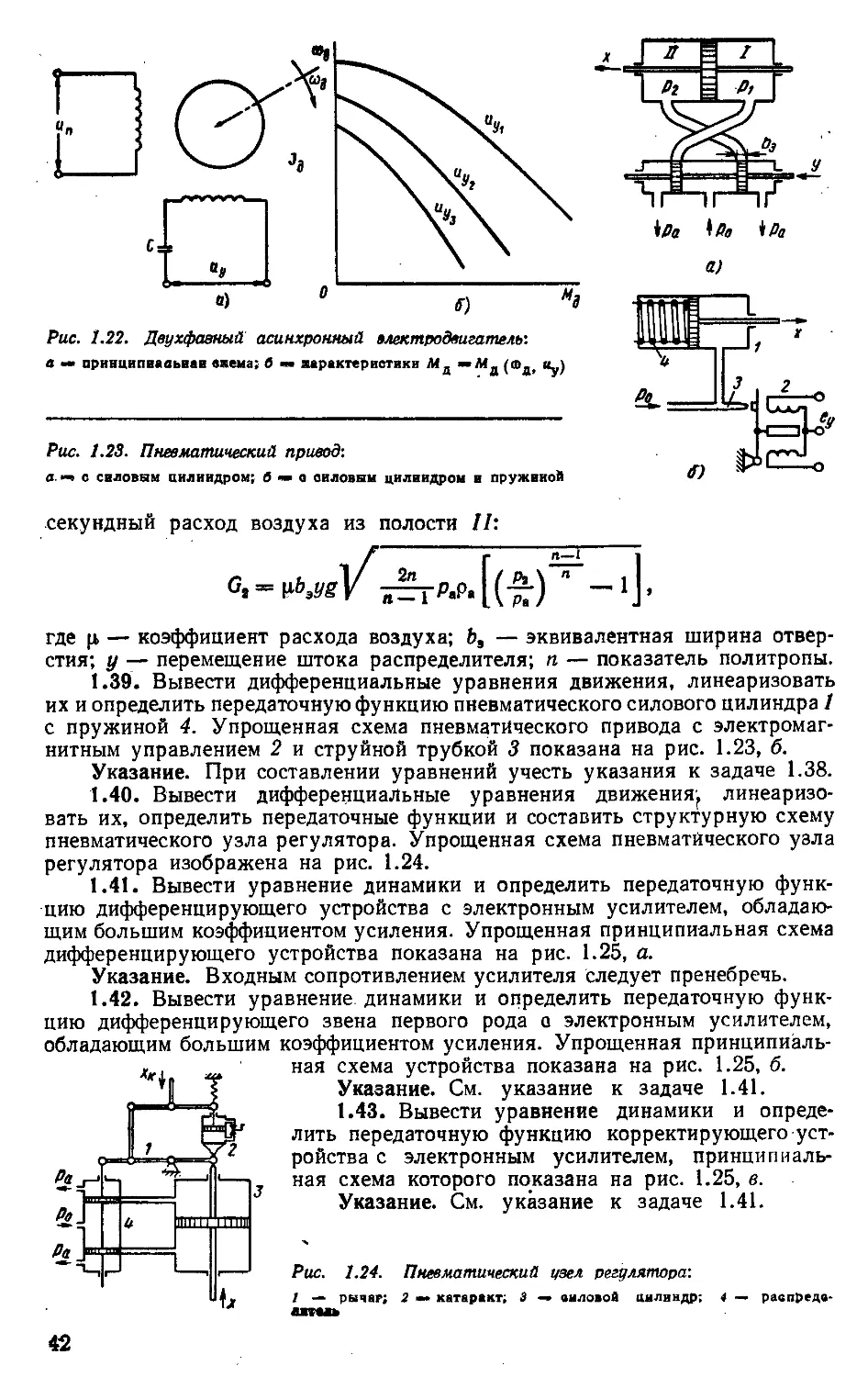
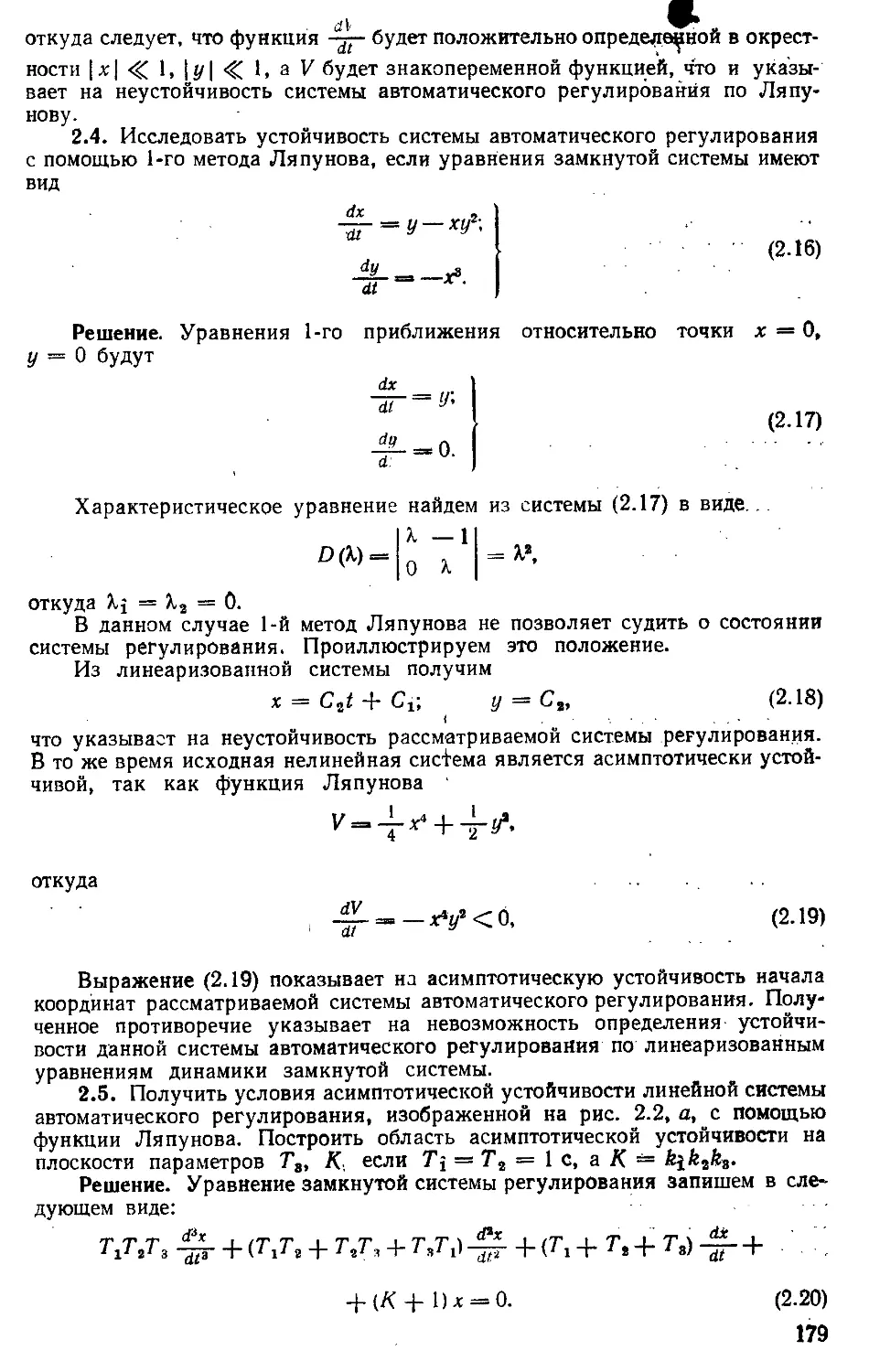
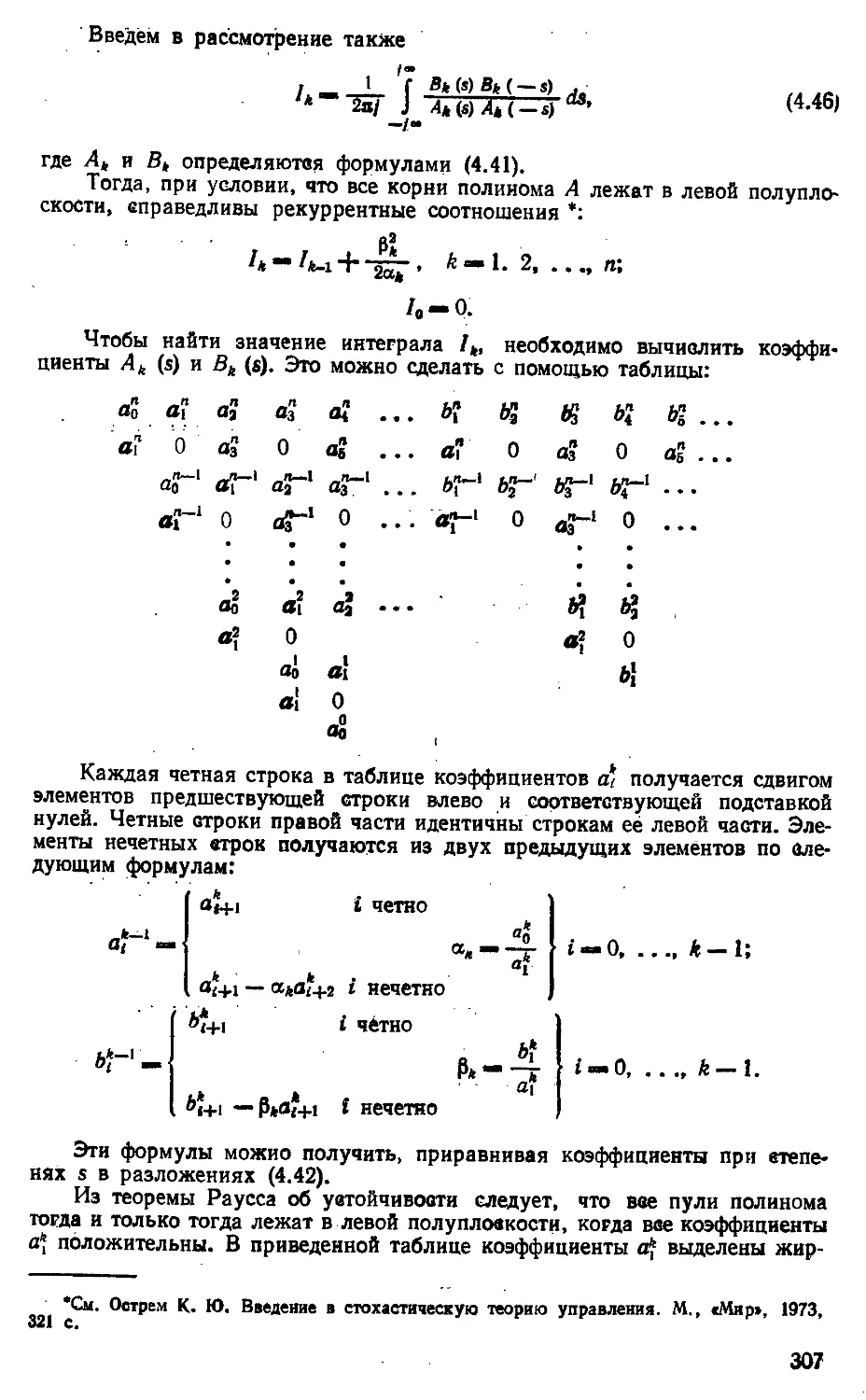
1.1. Вывести уравнения движения, определить передаточные функции
и составить структурную схему электродвигателя постоянного тока, управля-
емого изменением тока якоря. Принципиальная схема и основные обозна-
чения показаны на рис. 1.1.
Решение. При выводе дифференциальных уравнений сделаем следующие
допущения:
а) момент сопротивления на валу электродвигателя изменяется от ско-
рости линейно;
б) пренебрегаем вихревыми токами в массивных частях магнитной си-
стемы электродвигателя;
в) не учитываем реакцию якоря электродвигателя, т. е. «в = const.
Уравнение электрической цепи якоря электродвигателя запишем в виде
ед (П = L + Ri (t) + £фв , (1.1)
где ke — постоянная электродвигателя
по напряжению.
Движущий момент электродвига-
теля независимого возбуждения
Мд(/) = ^Фв/(/), (1.2)
где Фв — поток возбуждения; k'u—по-
стоянная электродвигателя по току.
Уравнение вращения якоря элек-
тродвигателя
Л-^=А1д(П-Л1е(0, (1.3)
Рис. 1.1. Электродвигатель постоянного ‘
тока с независимым возбуждением
где /д — момент инерции якоря электродвигателя; Мо — момент сопроти-
вления.
Уравнение для момента сопротивления запишем согласно первому
допущению в виде
Мо(0 = ^^-, (1.4)
где k0 — постоянная скоростного трения электродвигателя.
Используя уравнения (1.1) и (1.2), составим систему линеаризованных1
уравнений динамики электродвигателя в виде
+ I (1.6)
Л4„(0 = ^(0. J
ГДе — &еФв» — ^мФ>.
Окончательно вся система уравнений будет иметь вид
ед (О т Д', 4- Z ГЛ 4- Л
Я 1 а It + * + я dt ’
где Та — электромагнитная постоянная времени якоря.
1 Нелинейную характеристику намагничивания Электродвигателя заменяют линейной.
15
Воспользуемся нулевыми начальными условиями: при t — 0; 0Д = 0.
Применив к системе дифференциальных уравнений прямое преобразование
Лапласа, получим
-М- - (TaS + 1) z (S) + А 30д (8);
(Уд82 + М 0Д (8) = kJ (s).
Для определения передаточных функций первое уравнение системы
(1.7), перепишем в виде
Ea(s)=Ual(s) + Uat(s), (1.8)
где
^al(s) = /?(Tas+l)/(s);
U02 (8) = (S).
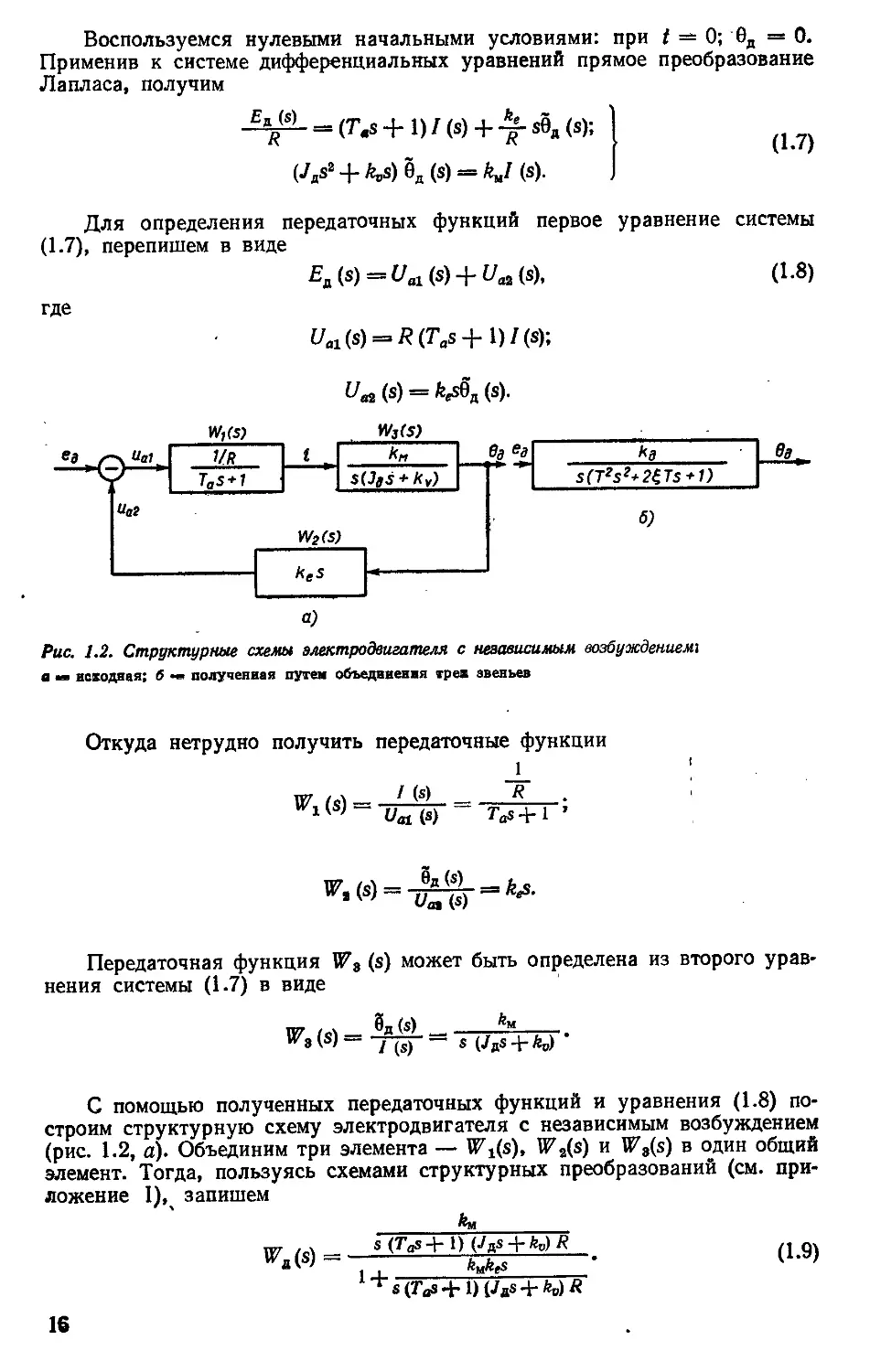
W,(S) W3(S)
а)
Рис. 1.2. Структурные схемы электродвигателя с независимым возбуждением-,
а исходная: б ч. полученная путем объединения треи звеньев
Откуда нетрудно получить передаточные функции
1
W, (s\ — -1 == R •
UM(s) Tas+l ’
Передаточная функция Ц78 (з) может быть определена из второго урав-
нения системы (1.7) в виде
s (7д«-|-Ао)
С помощью полученных передаточных функций и уравнения (1.8) по-
строим структурную схему электродвигателя с независимым возбуждением
(рис. 1.2, а). Объединим три элемента — W\(s), Wа(з) и IT8(s) в один общий
элемент. Тогда, пользуясь схемами структурных преобразований (см. при-
ложение I), запишем
__________________________________________________
W (s) = —s (7’aS+1^y«s±^J?. (1.9)
16
После ряда преобразований найдем
W (<л =________*3_______
s (T3s*4-2gTs4-1)’
(1.10)
где
b_______•
a~ Rkv+kuke ’
J uRT a *
Rky *
____4~ Rhy^ a____
2//дЯТв (Rkv+kM
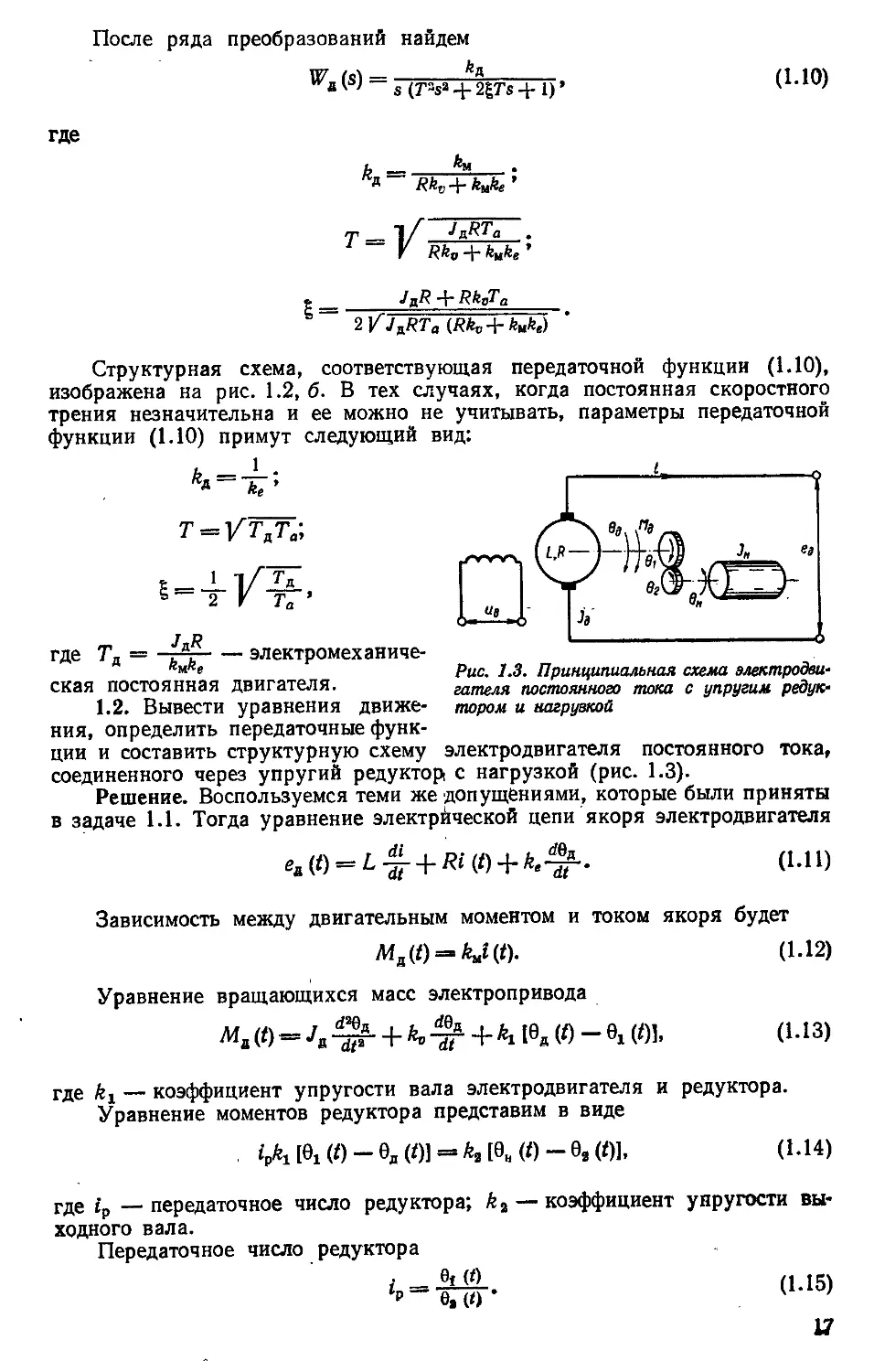
Структурная схема, соответствующая передаточной функции (1.10),
изображена на рис. 1.2, б. В тех случаях, когда постоянная скоростного
трения незначительна и ее можно не учитывать, параметры передаточной
функции (1.10) примут следующий вид:
7’ = /r„re;
Рис. 1.3. Принципиальная схема электродви-
гателя постоянного тока с упругим редук-
тором и нагрузкой
J R
где Тд = ----электромеханиче-
ская постоянная двигателя.
1.2. Вывести уравнения движе-
ния, определить передаточные функ-
ции и составить структурную схему электродвигателя постоянного тока,
соединенного через упругий редуктор с нагрузкой (рис. 1.3).
Решение. Воспользуемся теми же допущениями, которые были приняты
в задаче 1.1. Тогда уравнение электрической цепи якоря электродвигателя
ea{t} = L^- + Ri(t) + ke^-. (1.11)
Зависимость между двигательным моментом и током якоря будет
Ms(t) = W). (1.12)
Уравнение вращающихся масс электропривода
М. (0 « Л ЧГ + 10Д ® - 01 <1-13)
где kx — коэффициент упругости вала электродвигателя и редуктора.
Уравнение моментов редуктора представим в виде
‘Л[МО-0д(О]~М0н(О-МО1. (1.14)
где ip —передаточное число редуктора; k2 — коэффициент упругости вы-
ходного вала.
Передаточное число редуктора
. е,(0
1р “ е, (О ’
(1.15)
17
6)
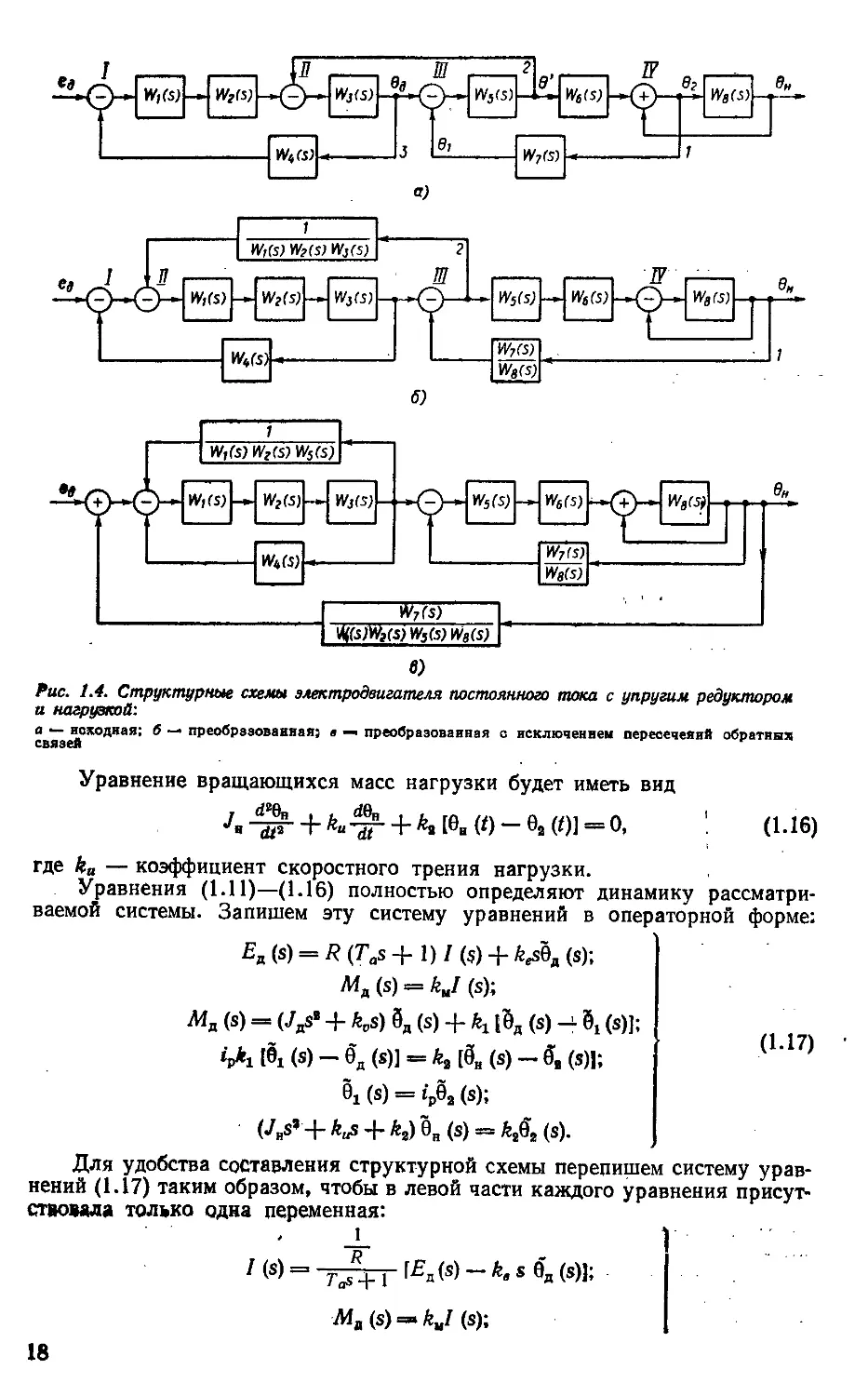
Рис. 1.4. Структурные схемы электродвигателя постоянного тока с упругим редуктором
и нагрузкой:
а — исходная; б —> преобразованная; в — преобразованная о исключением пересечений обратных
связей
Уравнение вращающихся масс нагрузки будет иметь вид
+ + = ' (1.16)
где ku — коэффициент скоростного трения нагрузки.
Уравнения (1.11)—(1.16) полностью определяют динамику рассматри-
ваемой системы. Запишем эту систему уравнений в операторной форме:
ЕД (s) = R (Tas + 1) I ($) + (s);
Мд (s) = kJ (s);
Мд (s) = (As* + kvS) 9Д (s) 4- kt |9Д (s) -J- (s)J;
»p*i (Qi (s) - (s)] = [gH (s) - (s)l;
®1 (S) = lp02 (S)»
(JHsJ + м 4- k2) 0H (s) =₽= k2Qt (s).
Для удобства составления структурной схемы перепишем систему урав-
нений (1.17) таким образом, чтобы в левой части каждого уравнения присут-
ствовала только одна переменная:
(s)= _|_ j 1^д (s) з 9Д (з)];
Мд (s) =» kJ (з);
18
s иBs + kv) Мд (s) [6д (s) §1 ($)] I;
Й, (s)=0x (s) + -^i- [e„(s)~ ex (s)];
®1 (s) = l'p®2 (S)»
(S) = JHs« + feus + ^ (S)‘
Для удобства построения введем новую переменную
(s) = kt [0Д (s) - 0, (s)].
(1-18)
(1.19)
Структурная схема системы приведена на рис. 1.4, а, где использованы
передаточные функции
ri(s) = -f^rr; ^ (*)=*•.;
(s) = s (JBs + fe0) ’ =
W6(s)^ki; HZe(s) = A;
яа
IF, (s) = tp; IF, (s) = + •
(1-20)
Преобразуем структурную схему (рис. 1.4, а) к расчетному виду, исклю-
чив пересечения обратных связей. Для этого перенесем линию связи 1 за
звено We (s); линию связи 2 — за звено IFB (s); сравнивающее устройство II —
за (s) и (Fa (s); сравнивающие устройства / и IV оставляем на том же
месте. Тогда с помощью таблицы структурных преобразований (см. при-
ложение I) получим структурную схему, изображенную на рис. 1.4, б.
Далее, переносим линию связи 2 (за сравнивающее устройство III
(рис. 1.4, в). При этом по правилам структурных преобразований добавляем
контур, соответствующий последовательному прохождению сигнала через
линии связи 1—2. В результате получим схему, приведенную на рис. 1.4, в,
где пересечения обратных связей отсутствуют.
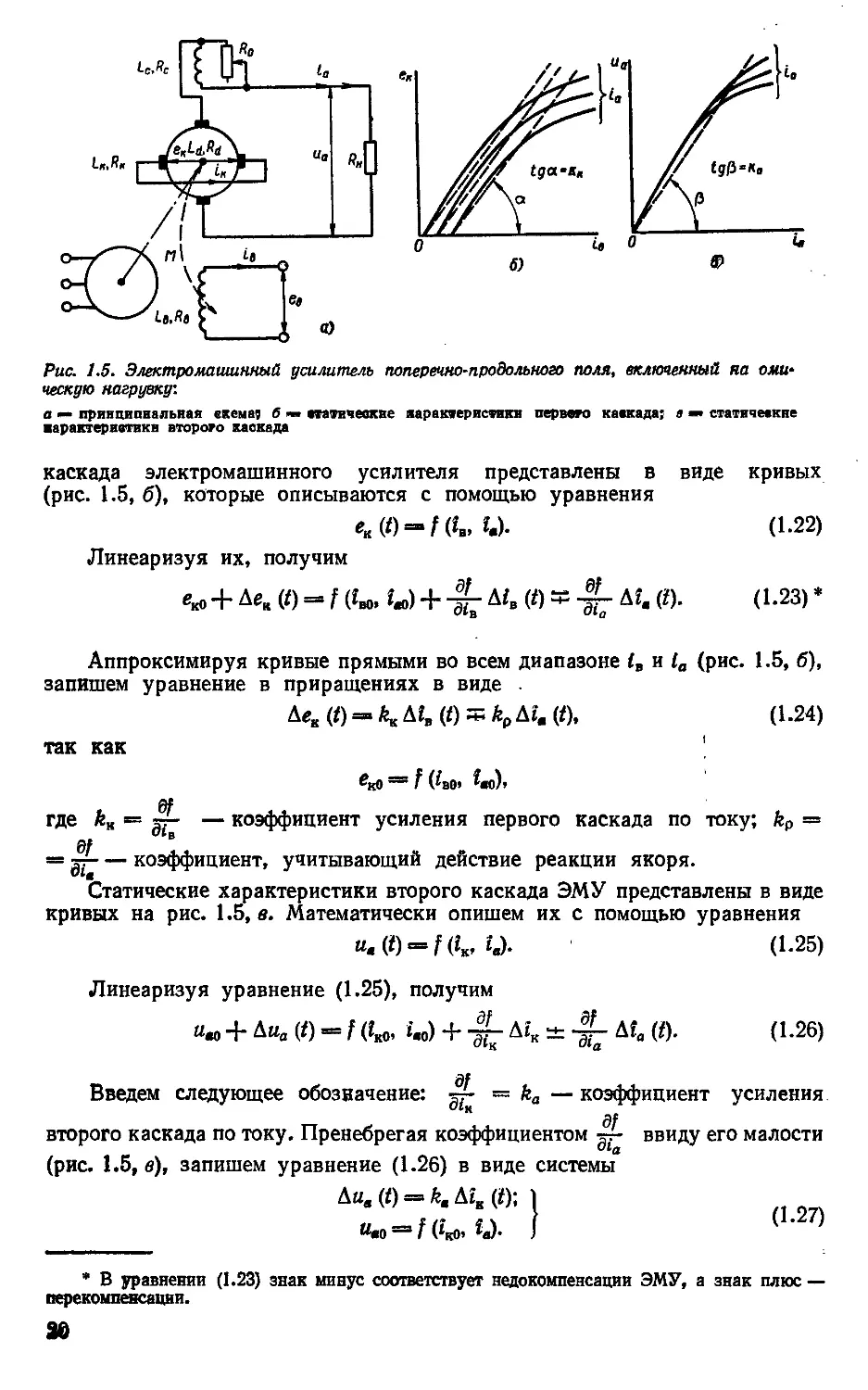
1.3. Вывести дифференциальные уравнения, определить передаточные
функции и составить структурную схему электромашинного усилителя попе-
речно-продольного поля, включенного на омическую нагрузку. Принци-
пиальная схема электромашинного усилителя (ЭМУ) показана на рис. 1.5, а.
Решение. При выводе дифференциальных уравнений воспользуемся
следующими допущениями:
а) электродвигатель ЭМУ сохраняет постоянную частоту вращения якоря
независимо от тока нагрузки i„;
б) вихревыми токами в массивных частях магнитной системы пренебре-
гаем.
Уравнение электрической цепи обмотки управления запишем в виде
ев(П = Ав-^ + ^в(П + М^-, (1.21)
где М — коэффициент взаимоиндуктивности обмотки якоря с управляющей
обмоткой.
Знак плюс перед коэффициентом взаимоиндуктивности М соответствует
ЭМУ, обладающему недокомпенсацией. При перекомпенсации ЭМУ знак
перед М следует заменить на минус. Статические характеристики первого
19
Рис. 1.5. Электромаишнный усилитель поперечно-продольного поля, включенный на оми-
ческую нагрузку.
а — принципиальная екемад б — «татические яараетеристики первого каскада; в ”• статичеекне
арактеривтикн второго каскада
каскада электромашинкою усилителя представлены в виде кривых
(рис. 1.5, б), которые описываются с помощью уравнения
U. (1-22)
Линеаризуя их, получим
«КО + Д«. (0 = f (Гво, и + Д(, (0 =? -J£- м. (I). (1.23) *
Аппроксимируя кривые прямыми во всем диапазоне tB и 1а (рис. 1.5, б),
запишем уравнение в приращениях в виде •
Дев (0 - Д(в (0 s kp ДГ. (0, (1.24)
так как '
^кО == f (fset ^«о)>
. df ,
где kK — sr- — коэффициент усиления первого каскада по току; kp =
wig
— — коэффициент, учитывающий действие реакции якоря.
Статические характеристики второго каскада ЭМУ представлены в виде
кривых на рис. 1.5, в. Математически опишем их с помощью уравнения
«.(?)-f(^U- (1-25)
Линеаризуя уравнение (1.25), получим
им + Д«а (0 « f (1в0, i.o) + Д1К -%- Д?а (0. (1.26)
Введем следующее обозначение: — ka — коэффициент усиления
OIr
п а . . df
второго каскада по току. Пренебрегая коэффициентом ввиду его малости
(рис. 1.5, в), запишем уравнение (1.26) в виде системы
Дав(О = ^Дгв(г); |
««o = f(UU / ( }
* В уравнении (1.23) знак минус соответствует недокомпенсации ЭМУ, а знак плюс —
перекомпенсации.
36
Опуская знаки приращения в уравнениях (1.24) и (1.27), получим
(0 ~ (0 -*• (Л: 1
«а (0 = ^(0- ( (Е ’
Уравнение цепи нагрузки ЭМУ представим в виде
“а(0 = (bd — ) -£ + {Rd 4- RB + 4-)ia (1,29^
Дифференциальные уравнения (1.21), (1.29) и соотношения (1.28) опре-
деляют динамику электромашинкою усилителя, работающего на активную
нагрузку. Перепишем эти уравнения в операторной форме:
Д, (8) = RB (TbS + 1) /в (s) ± Msla (s);
£«(s)-/?B(^ + i)z,(s);
Д (s) = (s) — kpIa (s); | (1.30)
^«(s) = ^(7’as + l)/a(s);
(s) = kJs. (s)>
где TB = -ф- — постоянная обмотки управления ЭМУ; Ти = -------------по-
Кв Кц
стоянная короткозамкнутой обмотки ЭМУ; Та~-------------- °-------по-
стоянная главной цепи ЭМУ; Ra = Rd4- Re 4- ^-2----омическое сопро-
К^ т" Ко
тивление главной цепи ЭМУ.
Для составления структурной схемы систему уравнений (1.30) предста-
вим в таком виде, чтобы в левой части каждого уравнения была только одна
переменная, т. е.
I
4 (s) —[£, (s) ± Msla (s)l;
1 '
Д (s)= 1 Ек (8);
Д («) = V» (8) - k0Ia (s);
Д,(«) = МИ 8>J
1
7° TaS + 1
(1.31)
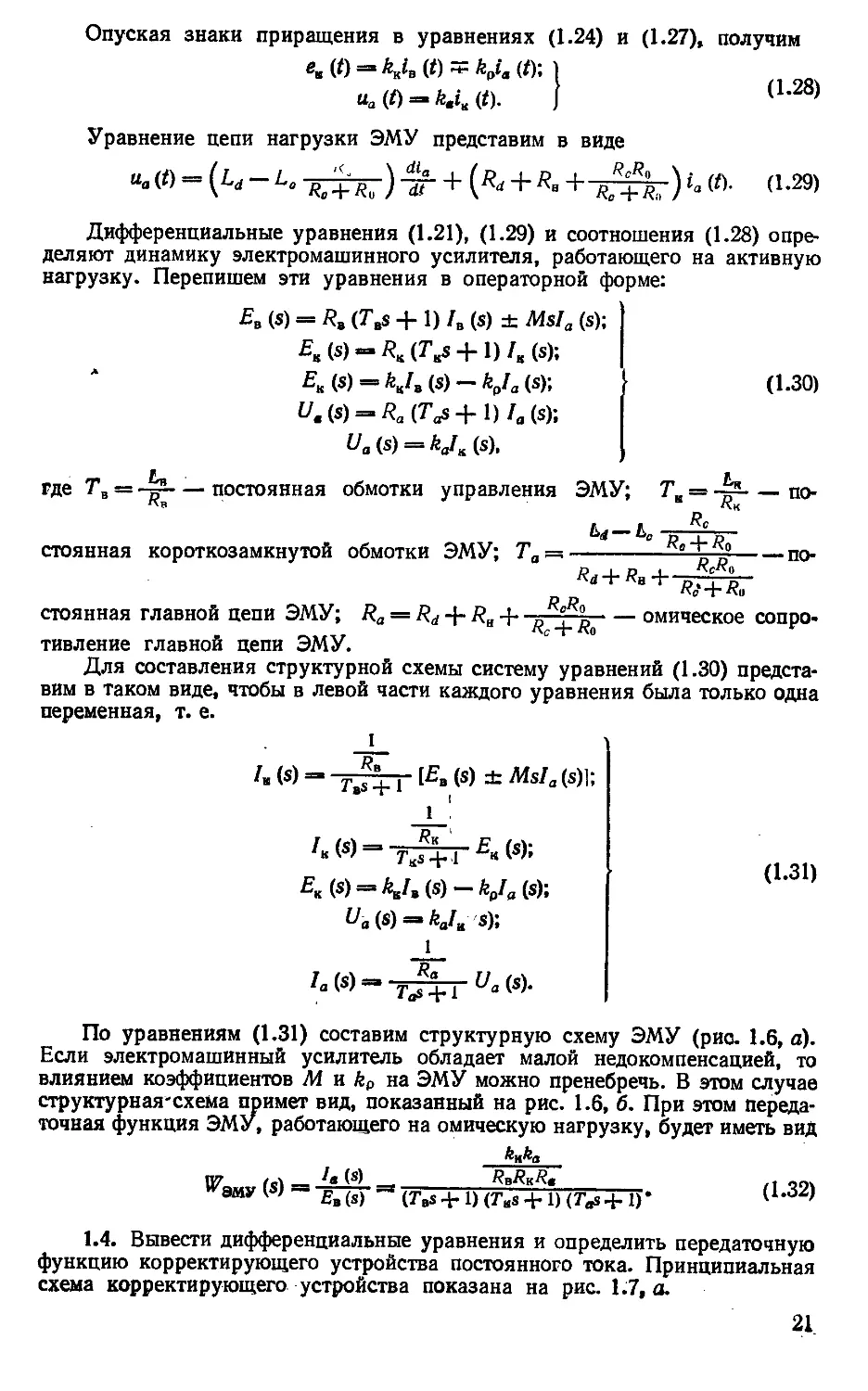
По уравнениям (1.31) составим структурную схему ЭМУ (рис. 1.6, а).
Если электромашинный усилитель обладает малой недокомпенсацией, то
влиянием коэффициентов М и /гр на ЭМУ можно пренебречь. В этом случае
структурная-схема примет вид, показанный на рис. 1.6, б. При этом переда-
точная функция ЭМУ, работающего на омическую нагрузку, будет иметь вид
Д&а
"'ЭМУ (8) £в(в) "(7,8+1) (Твв-Н) (Та* + О* (1,32)
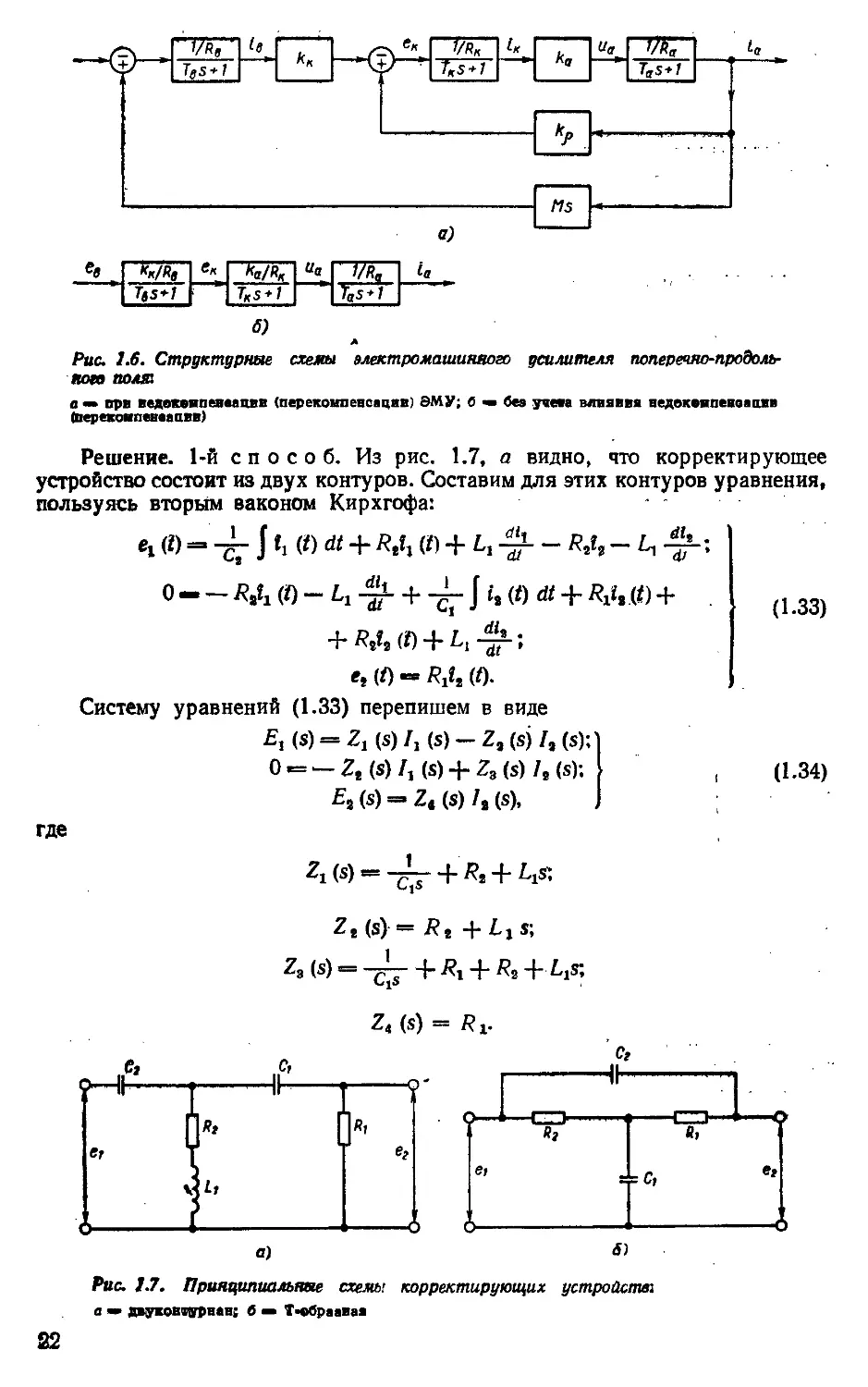
1.4. Вывести дифференциальные уравнения и определить передаточную
функцию корректирующего устройства постоянного тока. Принципиальная
схема корректирующего устройства показана на рис. 1.7, а.
21
6)
Рис. 1.6. Стрдктдрняе схемы электромашинного усилителя поперечно-продоль-
ного пома
а <» при ведекевпевеацвв (перекомпевсацвв) ЭМУ; б — без учева влвяввв ведекевпевоацвв
(перекомпевааавв)
Решение. 1-й способ. Из рис. 1.7, а видно, что корректирующее
устройство состоит из двух контуров. Составим для этих контуров уравнения,
пользуясь вторым законом Кирхгофа:
® —гН(0 dt + Rth (П + L1
4-/?sfa(?)4-L1->;
(7) Ri^t (0*
Систему уравнений (1.33) перепишем в виде
(s) ~ (s) Л (s) — Z, (sj 7а (s);
0 = -Z8(s)/1(s)4-Z3(s)7e(s);
£S (s) “ (s) 7S (s),
где
Z1 (S) «= ~7T— + T?8 + ^1S’-
(1.33)
(1.34)
t (s) = 7? { 4- L j s;
zs (s) = 4" 7?i 4" 7?a 4" 7-is;
Z4 (s) = 7?x.
в)
6)
Рис. 1.7. Прияципиальяяе схемы корректирующих устройств-,
а * двуковщурвав; б “ Т-обраавав
S2
Исключив из системы уравнений (1.34) переменные / х (s) и /3 (s), полу-
чим
IP /Л = ^8 (») — <s> Z9 (*) , < -e.
E1{s} Z1(S)Z3(S)_Z2(S) • (1-35)
Подставляя в соотношение (1.35) соответствующие значения Zt (s),
Z2 (s), Z8 (s) и Zt (s), найдем
H7(s)== , (1.36)
CaS + R» + Lis) + Ri + R2 + Lts J — (R2 4-
откуда нетрудно получить
де _____________________________ТУЧ (Т'з5 4~ 1) sa_______________
TiT^s’+fTx (t2 + Ts^-) + T2T8]s2+[t1 (1+-*2_J + Ts] s + 1 ’
(1-37)
где
___ DP, T D Г • T
1 — “x'-'l. ! i AjGg, 1 з = .
2-й способ. Представляем систему уравнений (1.33) в операторной
форме:
El (s) = ( 4" Т?2 + ^is) Л ($) — № 4" T-jS) /2 (s);
О-----№ + М Л (s) + (-^r + 7?1 + /?2 + L1S)/8(s); (L38>
Et ($)= *x7. ($)•
Исключив из системы уравнений (1.38) /х (s) и /а (s), получим
Ei (s) =
-4- + Ra + L1S) (-4- + R, + R2 + L1S\
—--------------------------------------1 - <« + «
откуда найдем
F(s) =
g2(s) ___________________Rj (Ri + L8s)_____________________
Ei (S) + 7?i+txs) (-^j- + Ri + R, + L1S) - (R2 + *
Полученная передаточная функция совпадает с выражением (1.36).
Как видно, оба способа имеют малое различие. Однако при сложных схемах
корректирующих устройств 1-й способ требует менее громоздких записей,
чем 2-й. И наоборот, при относительно несложных схемах лучше использо-
вать 2-й способ, чем 1-й.
1.5. Вывести передаточную функцию корректирующего устройства по-
стоянного ' тока, имеющего принципиальную схему, показанную на
рис. 1.7, б.
Решение. 1-й способ. Запишем следующую систему уравнений:
Ex (s) «= [Z, (s) + Z8 (s)] I (s);
(s) “ Z* (s) I (s),
(1.39)
где
Zj (s)»
Rt
1
23
Из системы уравнений (1.39) найдем
ПУ /<л (s) (s)
*' £i(s) Zi(s)+Zs(s)’
(1.40)
Подставив в выражение (1.40) соответствующие значения, получим
Г(8) =
ch-1-*1
^2____L I р
l + flacas Cts
После несложных преобразований передаточную функцию корректи-
рующего устройства запишем в виде
№(s) =-------TiT8sa + (Ti + 7\)s-H-----f (1.41)
+ [ 7\ (1 +-g-) + Ts] s + 1
где TJ = Tj =
2-й
способ. Система уравнений корректирующего
устройства
(1-42)
Разделив второе уравнение системы (1.42) на первое, получим
откуда после несложных преобразований найдем передаточную функцию
корректирующего устройства в виде выражения (1.41).
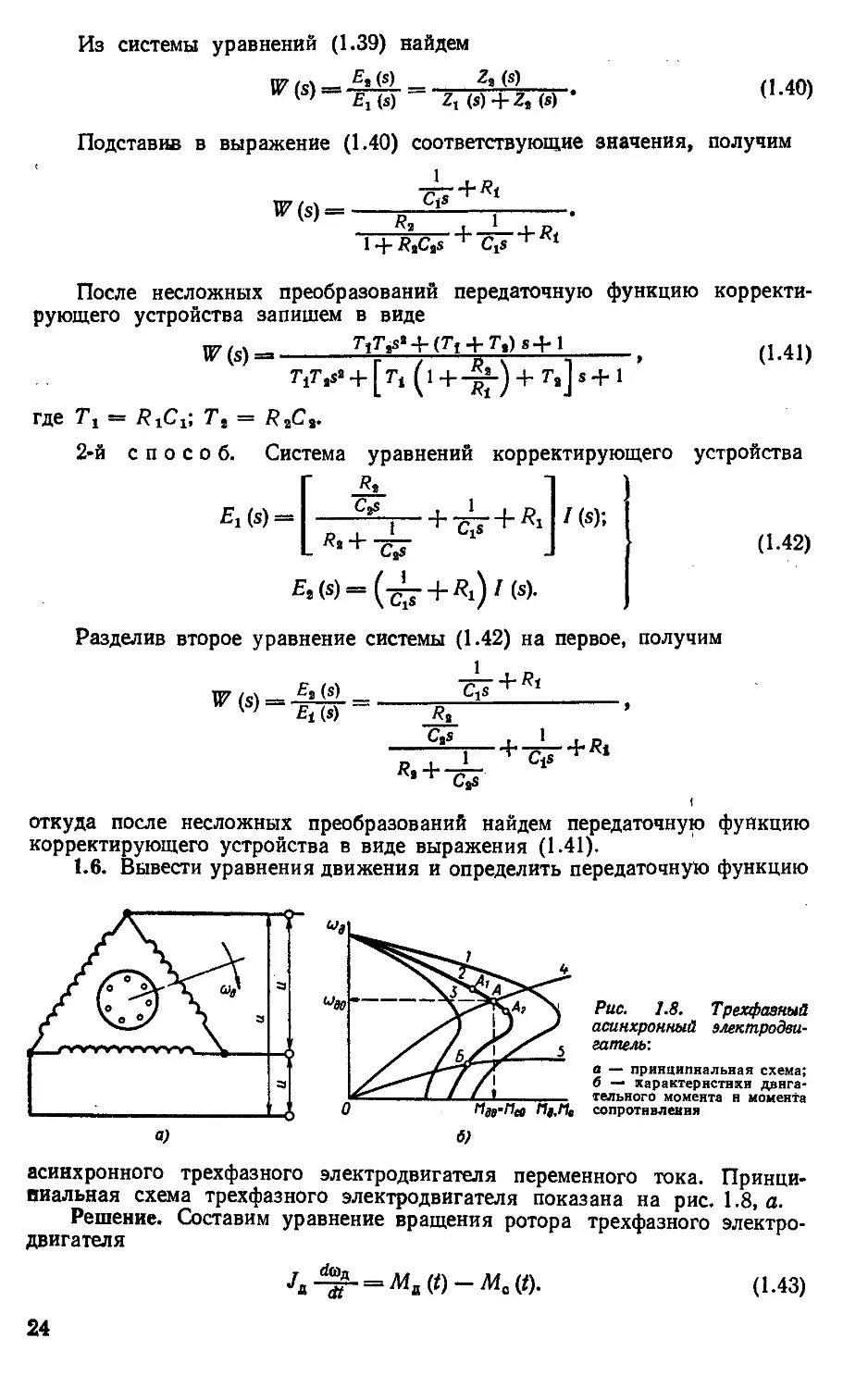
1.6. Вывести уравнения движения и определить передаточную функцию
Рис. 1.8. Трехфазный
асинхронный электродви-
гатель'.
а — принципиальная схема;
6 — характеристики двига-
тельного момента н момента
сопротивления
асинхронного трехфазного электродвигателя переменного тока. Принци-
пиальная схема трехфазного электродвигателя показана на рис. 1.8, а.
Решение. Составим уравнение вращения ротора трехфазного электро-
двигателя
^^Г = МЛ(!)-МаЦ). (1.43)
24
Момент движущих сил электродвигателя зависит от напряжения пита-
ния статора, угловой скорости якоря ©д (см. кривые 1—3 на рис. 1.8, б)
и характеризуется зависимостью
Мд (0 = Мд (сод, и), (1.44)
а момент сопротивления изменяется по кривой 4 (рис. 1.8, б) и определяется
в виде
Мс (0 = Мс (®д). (1.45)
Учитывая значительную нелинейность характеристик Мя (I) и Мс (0,
линеаризуем их в относительно небольшом диапазоне изменения угловой
скорости вращения электродвигателя Д©д (между точками А х и А 2). В точке А
имеем установившееся значение
Мд0 = Мео. (1.46)
Разлагая характеристики Мд (0 и Мс (0 в окрестности точки А в ряд
Тейлора, получим
мм- М* + (^)„ д», + -jL. д“5 +
+ • • • (т£-)» А“ + Т2 (т£), д“’ + <1л7>
где Мдр -г- двигательный момент при ©д0 и и0;
«.(O-Af-+(-^-),A»,+-j^(-^-) ДЧ+--+. (1-48)
\ А / О
где Мс0 — момент сопротивления при ©до.
Возьмем первые два члена ряда, т. е. ограничимся рассмотрением линей-
ной части характеристик Мд и Мс, и подставим полученные соотношения
(1.47) и (1.48) в уравнение (1.43):
А тг1 = + ($) *>. + (^). 4», (1.49)
Имея в виду соотношение (1.46), уравнение (1.49) можно записать в виде
j ]д©д = (^Ч Дм (1.50)
я dt 1 L \ да>л \ дшд /о J д \ ди /о ' '
или
d Дсэд
г Одо , Г7 дМс \ / дМя \ I Д©д Ир / дМя \ Ди .
я dt * L\ дшд Jo \ дш0 /oj ©до ©до \ ди )о щ '
откуда получим
^^ + ^(0 = ^(0, (1-52)
где
О’ __ 7д ,
J д ~ / ал^с \ ( дмя \ ’
\ дид /0 \ да>д /о
»о / дМя \
ь______(Одр \ ди /о .
R-/ дМс \ /.йМд \ ’
\ Лод /о \ дид /е
Дсод Да
®до ’ Р «о "
25
Применимых уравнению (1-52) преобразование Лапласа; тогда найдем
передаточную функцию трехфазного синхронного электродвигателя
W(s) = ^- = ^rT. (1.53)
р (s) ‘ д® т1
Передаточную функцию асинхронного трехфазного электродвигателя
относительно угла поворота якоря можно записать в виде
Ц7 /s\ ед <s>, —.-----*----- (1.54)
U(s) s(T«s + l) ’
„ , „ „ / дМс \ ,
В выбранной точке А наклон характеристики у0больше наклона
характеристики , поэтому в передаточных функциях (1.53), (1.54)
апериодическое звено у , . является устойчивым. Если точку А, относи-
тельно которой производится линеаризация, перенести в точку Ь (см. кри-
вую 5 на рис. 1.8, б), то
дЛ4с \ / дМя \
, д<Од /о^ \ да>я /о
и передаточная функция (1.53) примет вид
IF(s)=4^- = ^=T.
р (s) 1 Д5 1
(1.55)
В этом случае апериодическое звено является неустойчивым; соответ-
ственно изменяется и передаточная функция (1.54), т. е.
ги> _ ед Is) _ k
™ U (s) s(TAs—1)’
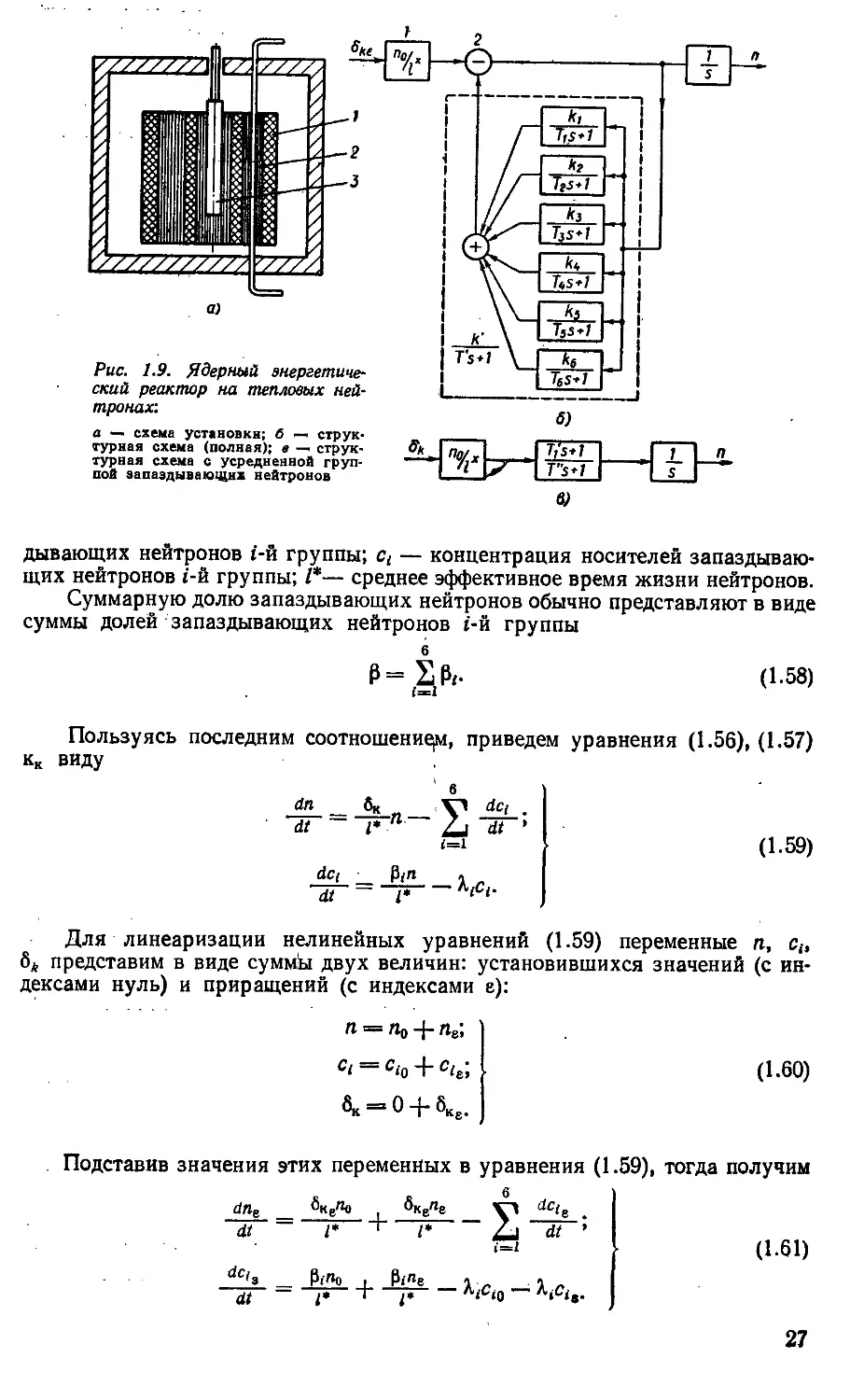
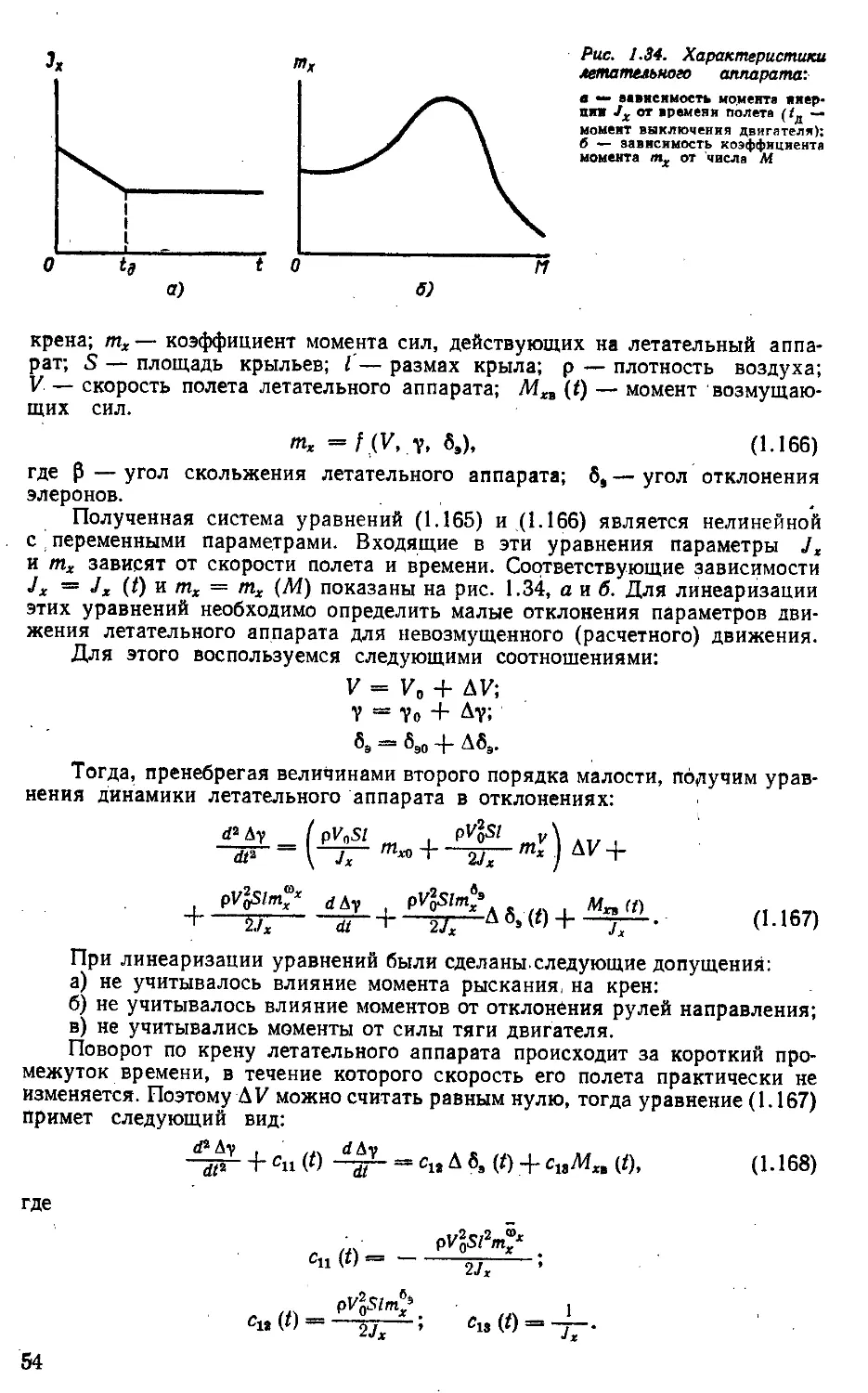
1.7. Определить передаточную функцию и составить структурную
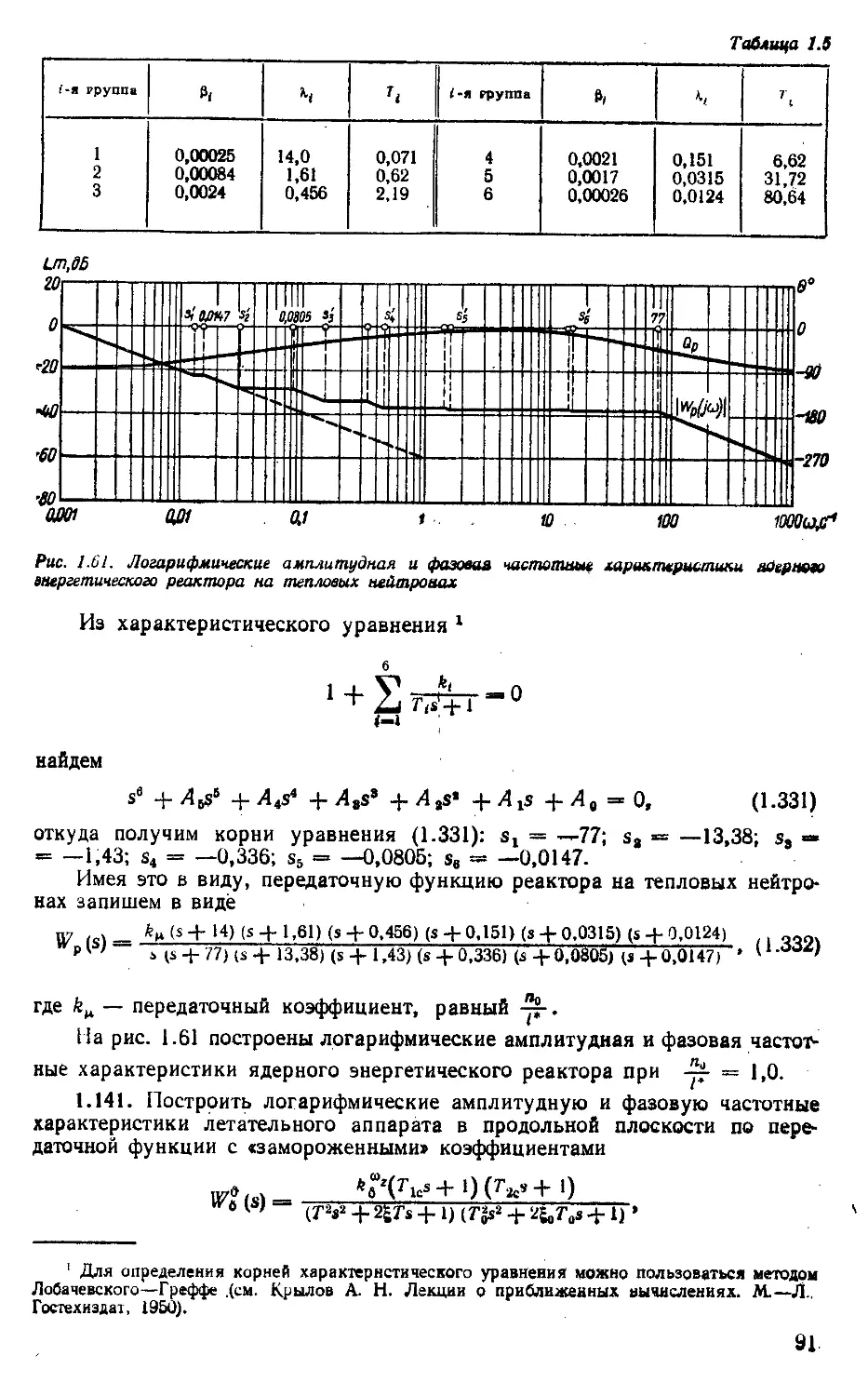
схему ядерного энергетического реактора на тепловых нейтронах по ней-
тронной мощности.
Решение. Рассмотрим упрощенную схему ядерного энергетического
реактора на тепловых нейтронах (рис. 1.9, а). Мощность ядерного реактора
пропорциональна количеству выделенных нейтронов в процессе деления.
После ввода в активную зону, состоящую из уранового топлива 1 и замедляю-
щего вещества (бериллия) 2, кадмиевого стержня 3, увеличивается число
поглощаемых нейтронов, что приводит к снижению уровня мощности, отда-
ваемой реактором. Для повышения мощности реактора необходимо выводить
кадмиевые стержни из активной зоны.
Уравнения кинетики реактора без учета влияния температуры и отра-
вления продуктами распада в форме, предложенной Д. М. Харрером [17],
могут быть представлены в виде двух зависимостей:
= (1-56)
•** *
и
= (1.57)
где п — плотность нейтронного потока; 6* — реактивность при линейном
перемещении стержней; 0,- — доля запаздывающих нейтронов i-й группы;
0 — суммарная доля запаздывающих нейтронов; ---------время жизни запаз-
Ж
\77777777\
2
3
5)
T"s*1
в)
Рис. 1.9. Я верный энергетиче-
ский реактор на тепловых ней-
тронах:
а — схема установки; б — струк-
турная схема (полная); в —• струк-
турная схема с усредненной груп-
пой запаздывающих нейтронов
*г
TjS*1
кз
T3s-1
~кГ
*?
кв
Tes*1
п
дывающих нейтронов i-й группы; ct — концентрация носителей запаздываю-
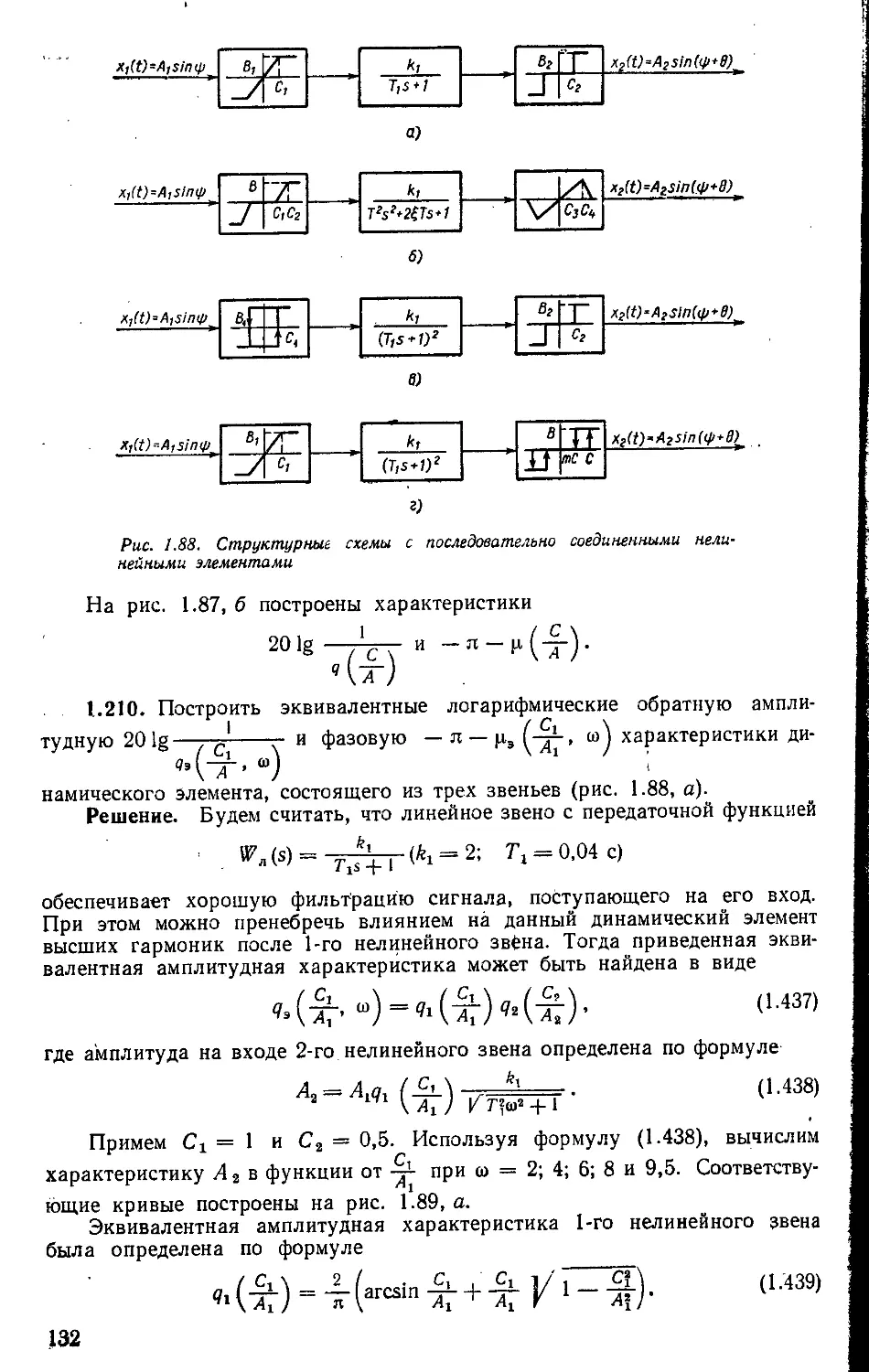
щих нейтронов i-й группы; I*— среднее эффективное время жизни нейтронов.
Суммарную долю запаздывающих нейтронов обычно представляют в виде
суммы долей запаздывающих нейтронов i-й группы
в
₽=SPz- (1-58)
;=1
Пользуясь последним соотношение^, приведем уравнения (1.56), (1-57)
Кк виду
dct _ $tn у
di - I* Л‘с‘-
(1.59)
Для линеаризации нелинейных уравнений (1.59) переменные п, с1г
6* представим в виде суммы двух величин: установившихся значений (с ин-
дексами нуль) и приращений (с индексами е):
п = По4-пе;
Ci ~ CiQ + cte‘,
8к = 04-6Ке.
(1.60)
Подставив значения этих переменных в уравнения (1.59), тогда получим
dne ^к8«о ( Ф<8лв V' dCie .
di ~ I* ' I* Zj di ’
(1.61)
27
Имея в виду, что установившиеся значения
I*
a ^ktne — величина второго порядка малости, систему уравнений можно
переписать так:
^8 »0 ЧП dCl* .
dt I* К« Zj dt ’
t=l
(1.62)
Дифференциальные уравнения (1.62) являются линейными и содержат
только постоянные коэффициенты. Поэтому, применив к ним преобразование
Лапласа, получим
sNe(s) = -$ t^-s^C^sy,
sCfe(s) = A^e{s)_xzC<e(s),
(1.63)
откуда нетрудно найти передаточную функцию реактора в виде
ПоП*
^р(«) =
(1-64)
Вводя обозначения в выражение (1.64):
у_________________________!_. ь
получим
По//*
(1.65)
По передаточной функции (1.65) нетрудно построить структурную схему
реактора на тепловых нейтронах (рис. 1.9, б). Как видно из рис. 1.9, б,
на вход реактора поступает сигнал 6Ке (s) — изменение реактивности, а с вы-
хода реактора снимается сигнал Ne (s) — плотность потока нейтронов-
Сигнал 6Ке (s), проходя через структурный элемент 1, поступает на эле-
мент сравнения 2, на который подаются также сигналы прямой и обратной
связи. Сигнал обратной связи представляет собой сумму шести параллельных
сигналов. Заменим все шесть параллельно соединенных звеньев на одно
усредненное звено (на рис. 1.9, б оно обведено штриховой линией), тогда
получим упрощенную передаточную функцию ядерного реактора по нейтрон-
ной мощности
(1-66)
Соответствующая этому случаю структурная схема показана на
рис. 1.9, в.
28
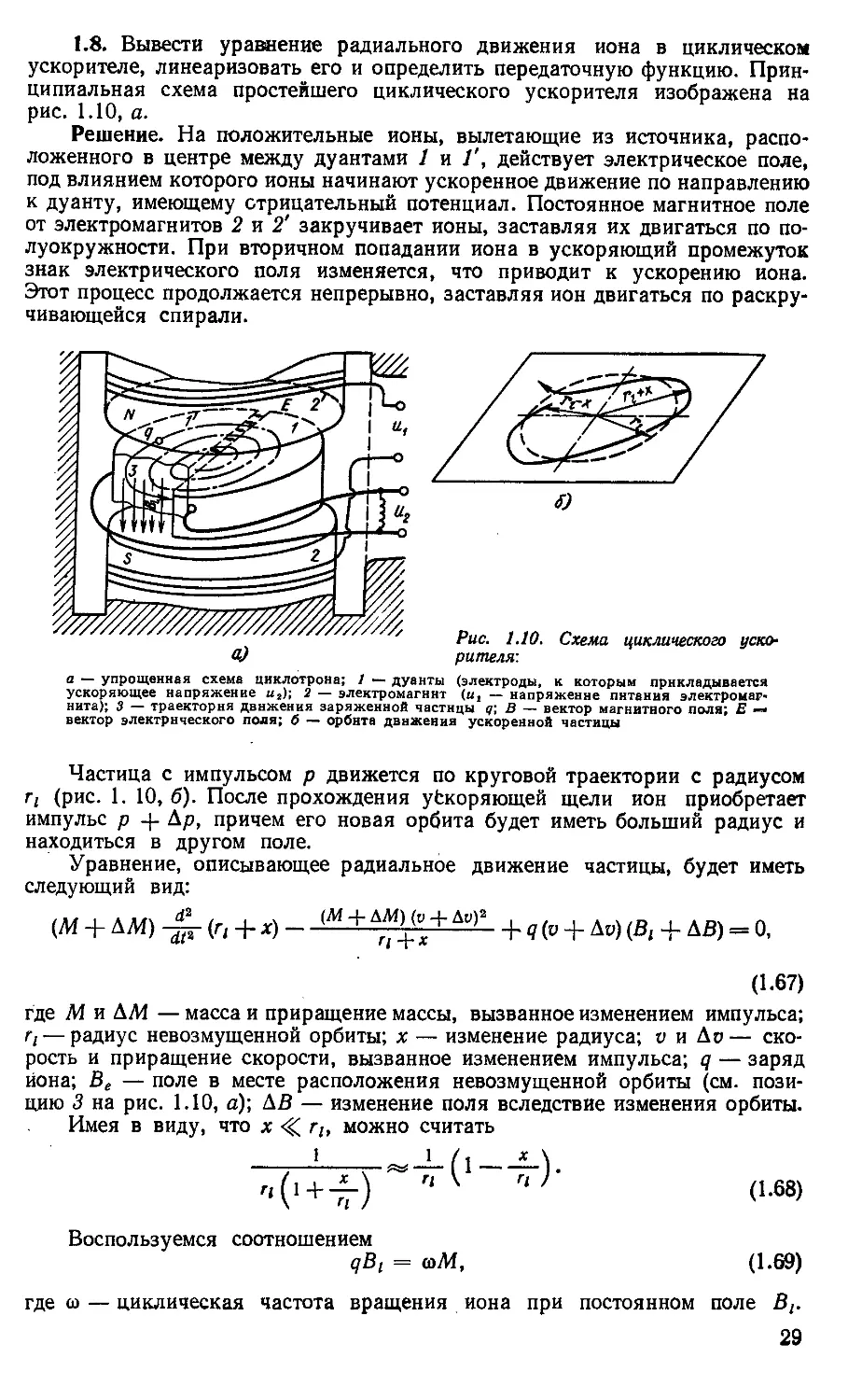
1.8. Вывести уравнение радиального движения иона в циклическом
ускорителе, линеаризовать его и определить передаточную функцию. Прин-
ципиальная схема простейшего циклического ускорителя изображена на
рис. 1.10, а.
Решение. На положительные ионы, вылетающие из источника, распо-
ложенного в центре между дуантами 1 и Г, действует электрическое поле,
под влиянием которого ионы начинают ускоренное движение по направлению
к дуанту, имеющему отрицательный потенциал. Постоянное магнитное поле
от электромагнитов 2 и 2' закручивает ионы, заставляя их двигаться по по-
луокружности. При вторичном попадании иона в ускоряющий промежуток
знак электрического поля изменяется, что приводит к ускорению иона.
Этот процесс продолжается непрерывно, заставляя ион двигаться по раскру-
чивающейся спирали.
а — упрощенная схема циклотрона; 1 — дуанты (электроды, к которым прикладывается
ускоряющее напряжение ыа); 2 — электромагнит (ы, — напряжение питания электромаг-
нита); 3 — траектория движения заряженной частицы д; В — вектор магнитного поля; Е
вектор электрического поля; б — орбита движения ускоренной частицы
Частица с импульсом р движется по круговой траектории с радиусом
rt (рис. 1. 10, б). После прохождения уёкоряющей щели ион приобретает
импульс р Др, причем его новая орбита будет иметь больший радиус и
находиться в другом поле.
Уравнение, описывающее радиальное движение частицы, будет иметь
следующий вид:
(Л* + Д М) (г, 4- х) - iy.+^HV + М2 + q {v + Др) (В/ + дВ) = 0)
(1.67)
где М и ДЛ4 — масса и приращение массы, вызванное изменением импульса;
Г[ — радиус невозмущенной орбиты; х — изменение радиуса; и и До — ско-
рость и приращение скорости, вызванное изменением импульса; q — заряд
иона; Ве — поле в месте расположения невозмущенной орбиты (см. пози-
цию 3 на рис. 1.10, а); ДВ — изменение поля вследствие изменения орбиты.
Имея в виду, что х < rt, можно считать
_____!_____^-L(i______i-V
r,(1+v) r‘k r‘ (L68)
Воспользуемся соотношением
qBt = aM, (1.69)
где а» — циклическая частота вращения иона при постоянном поле Bz.
29
Тогда
или (1.70)
Подставляя соотношения (1.69) и (1.70) в уравнение (1.67) и опуская
в нем все члены выше 1-го порядка по сравнению с х, До, ДМ а ДВ, получим
выражение
М Ль-----2М -^~Ди-----— ДЛ4 4- (И ~~ х + qv ДВ -}- qBt До = 0. (1.71)
ар Г[ q ч
Введем в уравнение (1.71) коэффициент, называемый показателем спада
поля. Обозначим его через п — • Тогда в наших обозначениях
ДВ = — nBi ^r[rt ----
Имея это в виду, получим
qv Д.В = — = — М&пх. (1.72)
Следовательно,
М-^£- -|- Afcoa(l — п)х = ЛГсо Дооса ДЛ4. (1-73)
Так как
= = ар = Мо,
V V ’ г
то
До Др ДМ
v р М '
Подставляя эти выражения в уравнение (1.73), получим '
_+(й2(1 -п)х = ^ (-2L------------------4-г^т,
или
^L + a>«(l_rt)x = r/(0*^.. (1.74)
Обозначим Др через у. Разделив все уравнение на <о2(1 — п), найдем
со® (1 — n) ~di*~ + Х (1 —п)р у' ,75^
Полученное нами выражение и является искомым дифференциальным
уравнением. С помощью преобразования Лапласа запишем
+ <L76>
Обозначив
1 _
<о’(1 — л)
Я
,, г‘ ' = к,
(1—п)р
ЭИ
получим T»s’ X (s) + X (s) = kY (s), откуда найдем передаточную функцию,
описывающую радиальные бетатронные колебания в циклотроне:
W = У (s) = W +1 ’ (1 -77)
Рис. 1.11. Схема центробежного
маятника гидравлической (паровой)
турбины
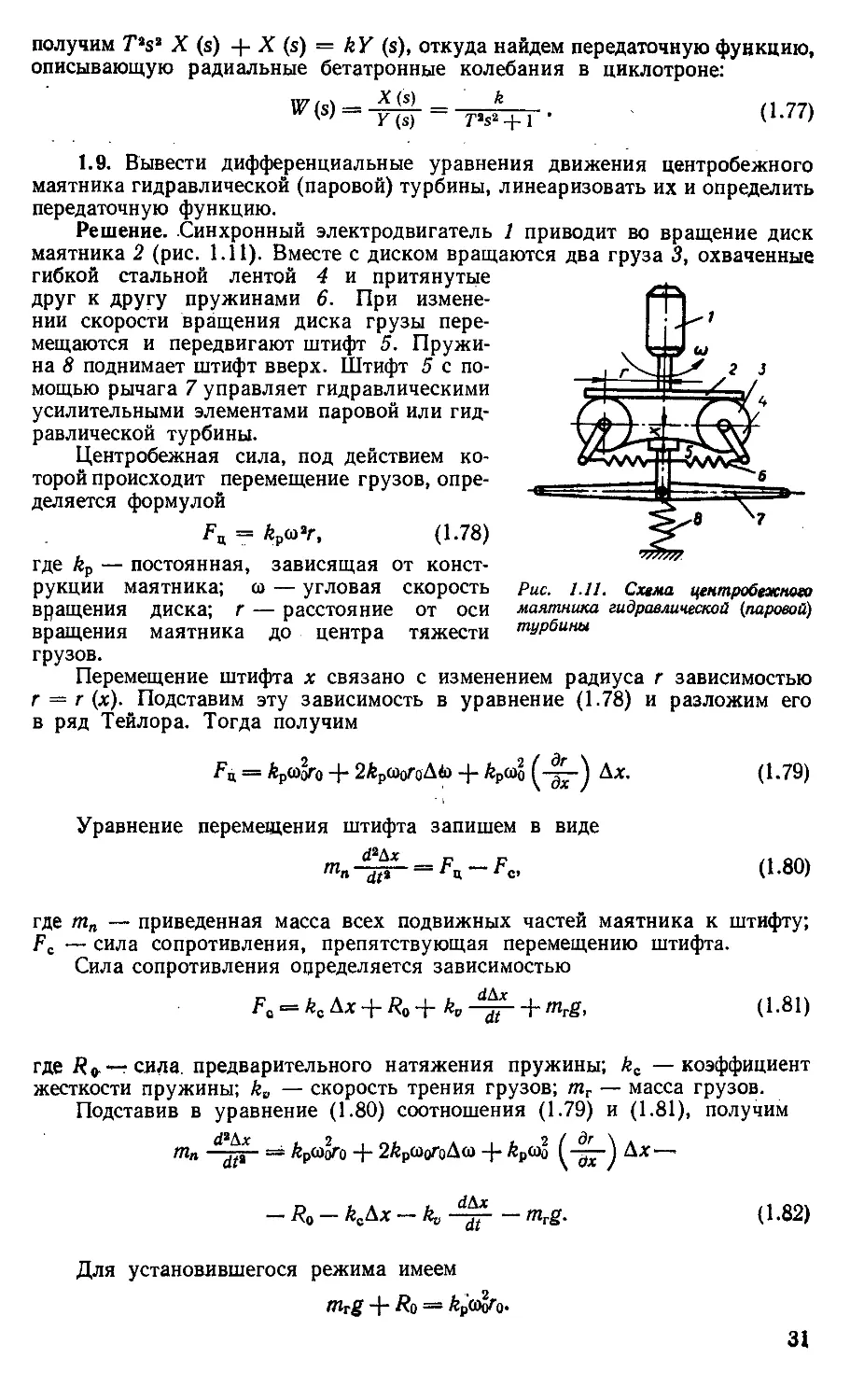
1.9. Вывести дифференциальные уравнения движения центробежного
маятника гидравлической (паровой) турбины, линеаризовать их и определить
передаточную функцию.
Решение. Синхронный электродвигатель 1 приводит во вращение диск
маятника 2 (рис. 1.11). Вместе с диском вращаются два груза 3, охваченные
гибкой стальной лентой 4 и притянутые
друг к другу пружинами 6. При измене-
нии скорости вращения диска грузы пере-
мещаются и передвигают штифт 5. Пружи-
на 8 поднимает штифт вверх. Штифт 5 с по-
мощью рычага 7 управляет гидравлическими
усилительными элементами паровой или гид-
равлической турбины.
Центробежная сила, под действием ко-
торой происходит перемещение грузов, опре-
деляется формулой
Fu = k^r, (1.78)
где kp — постоянная, зависящая от конст-
рукции маятника; со — угловая скорость
вращения диска; г — расстояние от оси
вращения маятника до центра тяжести
грузов.
Перемещение штифта х связано с изменением радиуса г зависимостью
г = г (х). Подставим эту зависимость в уравнение (1.78) и разложим его
в ряд Тейлора. Тогда получим
= АрСОоГо + 2Ар(ОоГоЛ<о + Лрсоо &х- (1-79)
Уравнение перемещения штифта запишем в виде
/n„-^- = Fu-Fc, (1.80)
где тп — приведенная масса всех подвижных частей маятника к штифту;
Fc — сила сопротивления, препятствующая перемещению штифта.
Сила сопротивления определяется зависимостью
Fa = k^x + R0+k0^ + tnrg, (1.81)
гдесила предварительного натяжения пружины; kc —коэффициент
жесткости пружины; kB — скорость трения грузов; тГ — масса грузов.
Подставив в уравнение (1.80) соотношения (1.79) и (1.81), получим
ffin =± ЛрШоГо + 2Хгр<1>оГоД<1> + ЛрШо Дх—-
-тгё. (1.82)
Для установившегося режима имеем
mTg + #0 = kp(S&Q.
31
В этом случае из уравнения (1.82) найдем
mn-^- + k0-^+ к-Ах = 2^рсо0г0Дсо. (1.83)
(ли (л( | у (JJv J |
Приведем полученное уравнение к виду
d2 — d —
тп —--------(- k0 —-----h [&с —
= 2-^. (1-84)
где хт — величина перемещения штифта, соответствующая угловой ско-
рости ®0.
Введем в уравнение (1.84) следующие переменные:
Рис. 1.12. Упрощенная схема
операционного усилителя
Тогда получим
Т2Р -g- + 2£рТр + ц (t) = k.v (t). (1.85)
Применив к последнему уравнению преобразование Лапласа, найдем
передаточную функцию центробежного маятника в виде
W (s) = -ДФ- = . (1.86)
v(s) TpS2 + 2gpTps +1 V
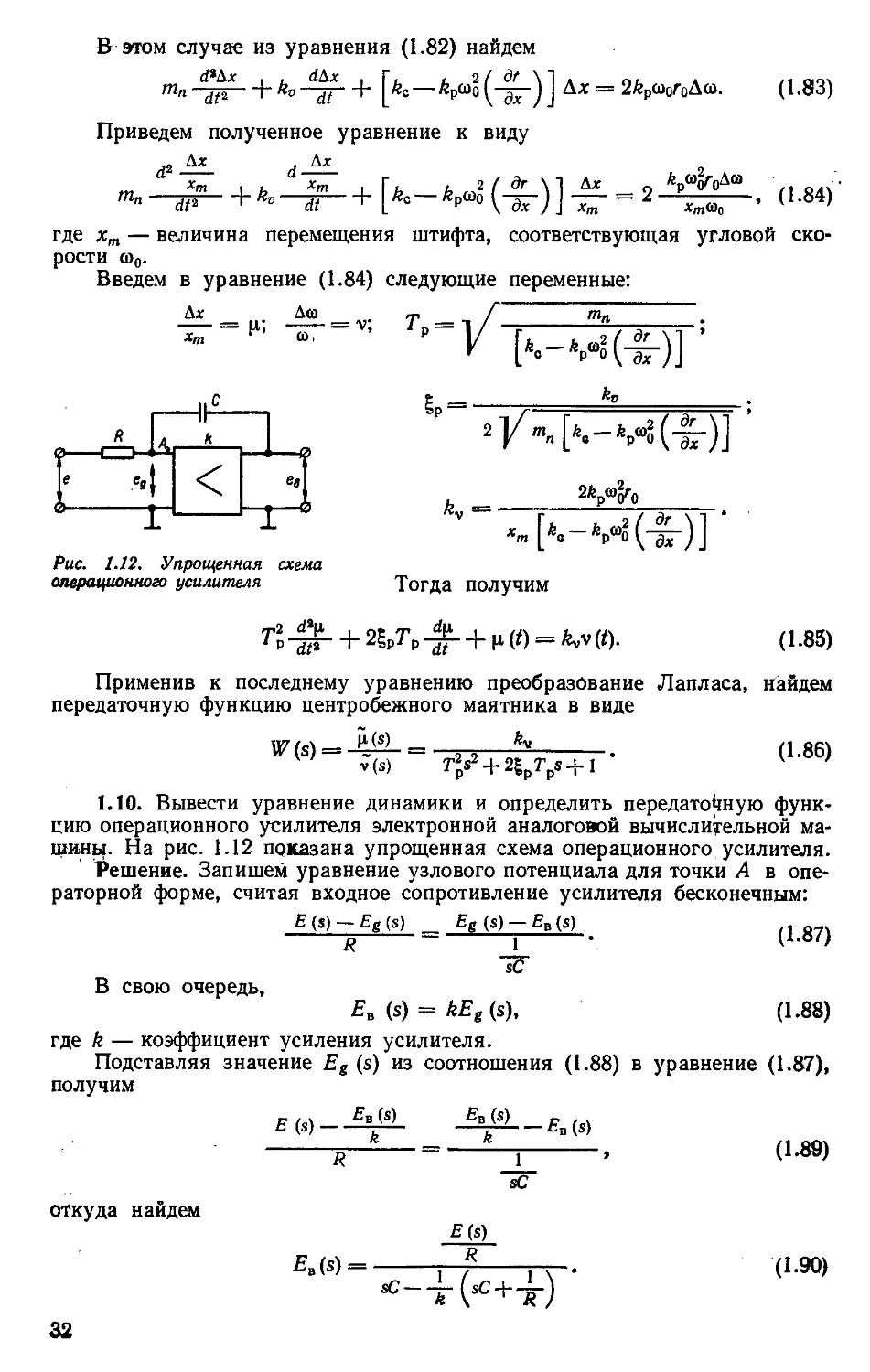
1.10. Вывести уравнение динамики и определить передатойную функ-
цию операционного усилителя электронной аналоговой вычислительной ма-
шины. На рис. 1.12 показана упрощенная схема операционного усилителя.
Решение. Запишем уравнение узлового потенциала для точки А в опе-
раторной форме, считая входное сопротивление усилителя бесконечным:
Е (s) — fg (s) _ Eg (s) — Ев (s) .
R ~ I ' (L°7)
sC
В свою очередь,
EB (s) = kEg(s), (1.88)
где k — коэффициент усиления усилителя.
Подставляя значение Eg (s) из соотношения (1.88) в уравнение (1.87),
получим
E(s)----------------------EB(s)
-------, (1.89)
sC
откуда найдем
£(s)
£B(s) =-------j-?------ту-. (1.90)
32
Считая k достаточно большим (порядка 105—=-10в), можно записать
<L91>
или, через оригинал функции,
(1.92)
Из этого выражения видно, что напряжение на выходе является инте-
гралом от входного напряжения.
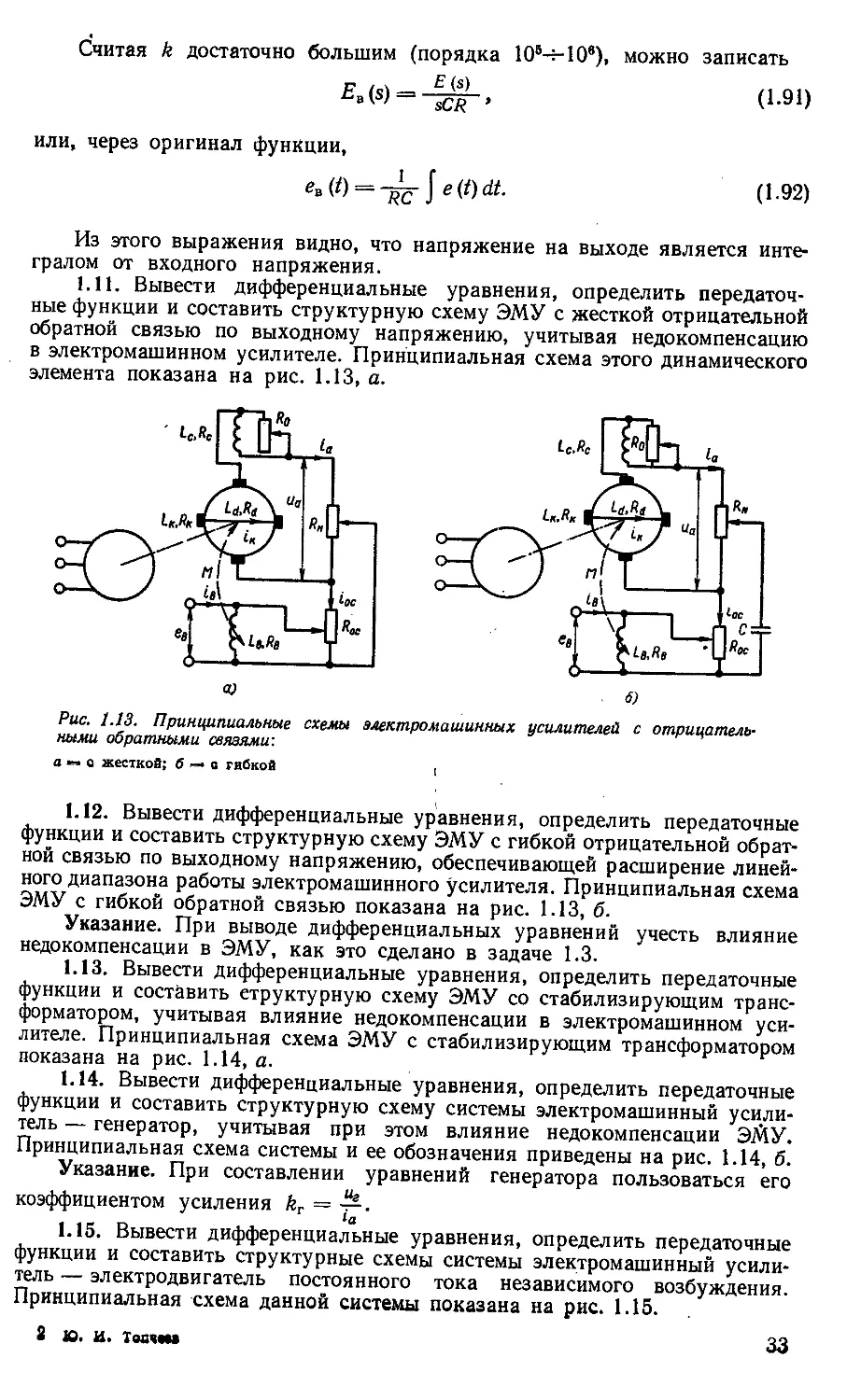
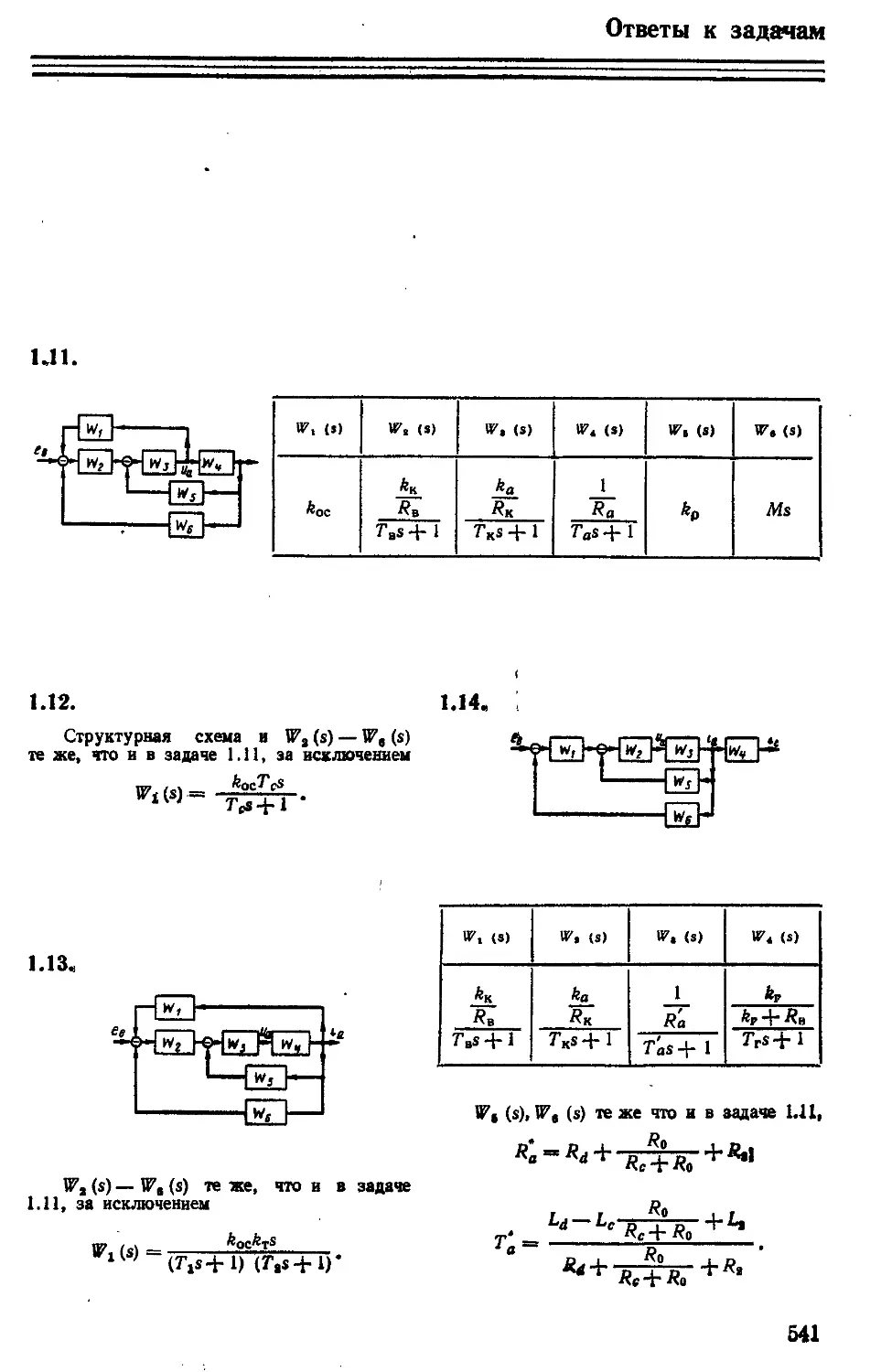
1.11. Вывести дифференциальные уравнения, определить передаточ-
ные функции и составить структурную схему ЭМУ с жесткой отрицательной
обратной связью по выходному напряжению, учитывая недокомпенсацию
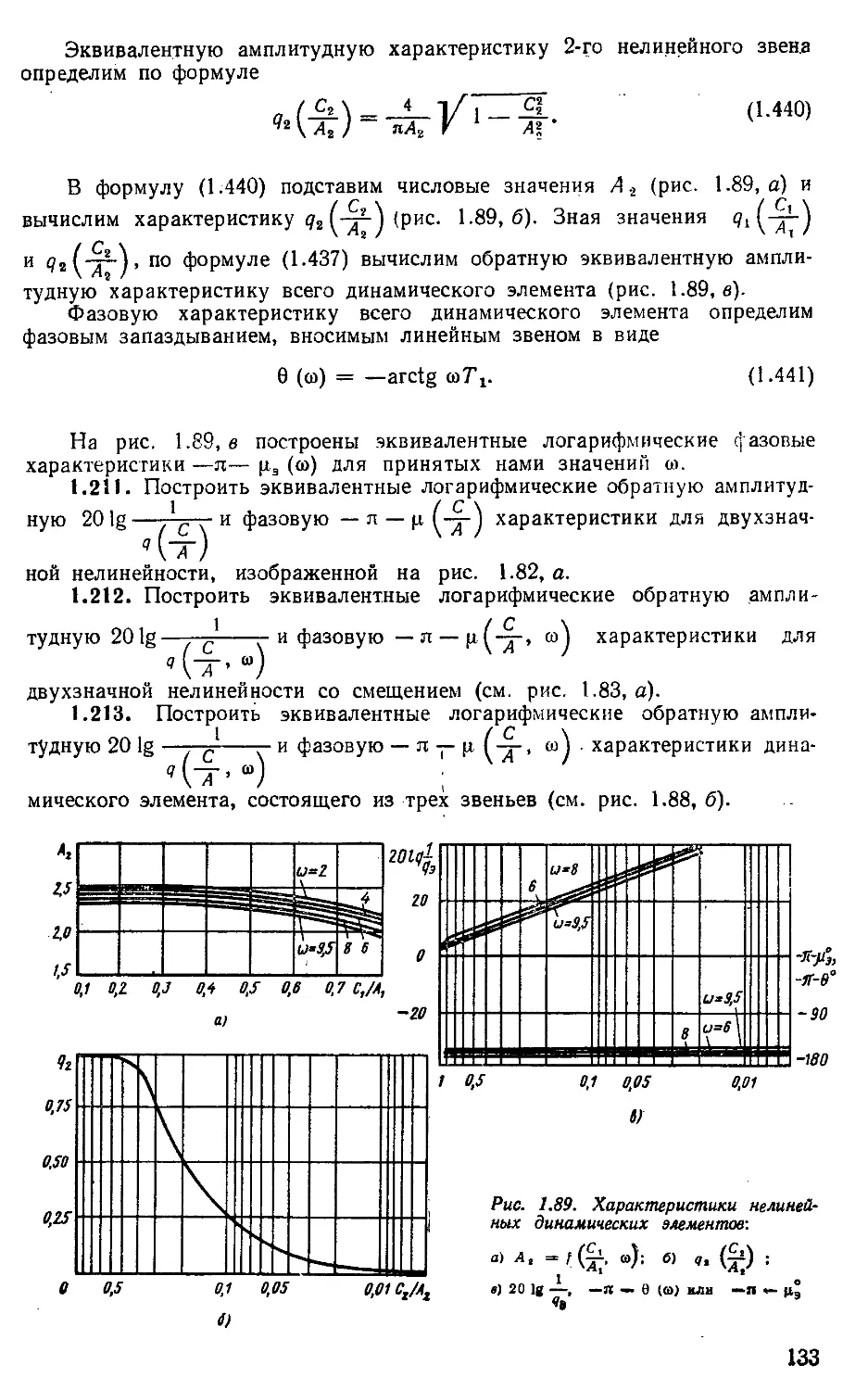
в электромашинном усилителе. Принципиальная схема этого динамического
элемента показана на рис. 1.13, а.
Рис. 1.13. Принципиальные схемы мектромаишнных усилителей с отрицатель-
ными обратными связями:
а •— с жесткой; б —• с гибкой ,
1.12. Вывести дифференциальные уравнения, определить передаточные
функции и составить структурную схему ЭМУ с гибкой отрицательной обрат-
ной связью по выходному напряжению, обеспечивающей расширение линей-
ного диапазона работы электромашинного усилителя. Принципиальная схема
ЭМУ с гибкой обратной связью показана на рис. 1.13, б.
Указание. При выводе дифференциальных уравнений учесть влияние
недокомпенсации в ЭМУ, как это сделано в задаче 1.3.
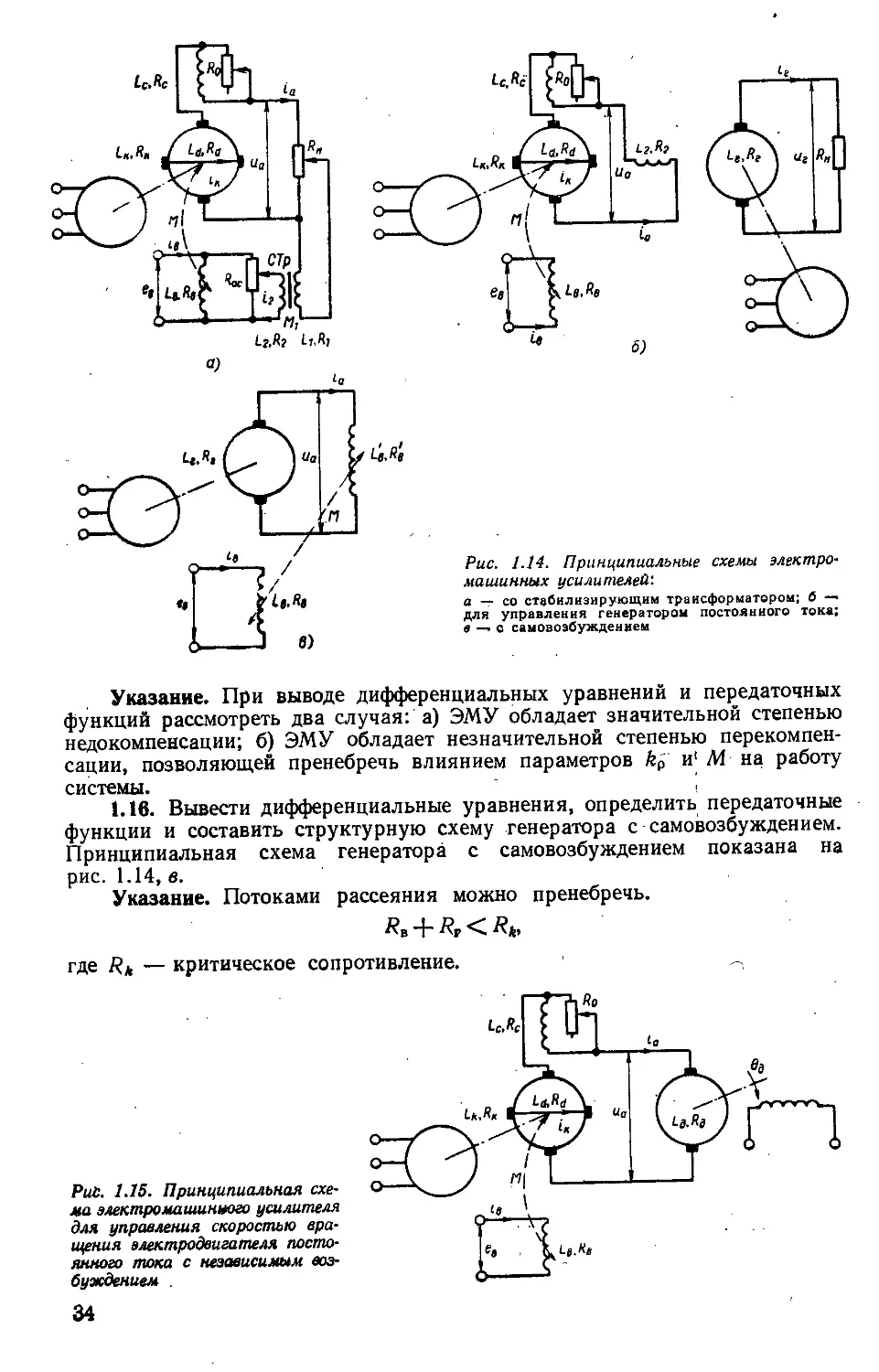
1.13. Вывести дифференциальные уравнения, определить передаточные
функции и составить структурную схему ЭМУ со стабилизирующим транс-
форматором, учитывая влияние недокомпенсации в электромашинном уси-
лителе. Принципиальная схема ЭМУ с стабилизирующим трансформатором
показана на рис. 1.14, а.
1.14. Вывести дифференциальные уравнения, определить передаточные
функции и составить структурную схему системы электромашинный усили-
тель — генератор, учитывая при этом влияние недокомпенсации ЭМУ.
Принципиальная схема системы и ее обозначения приведены на рис. 1.14, б.
Указание. При составлении уравнений генератора пользоваться его
коэффициентом усиления kr =
1а
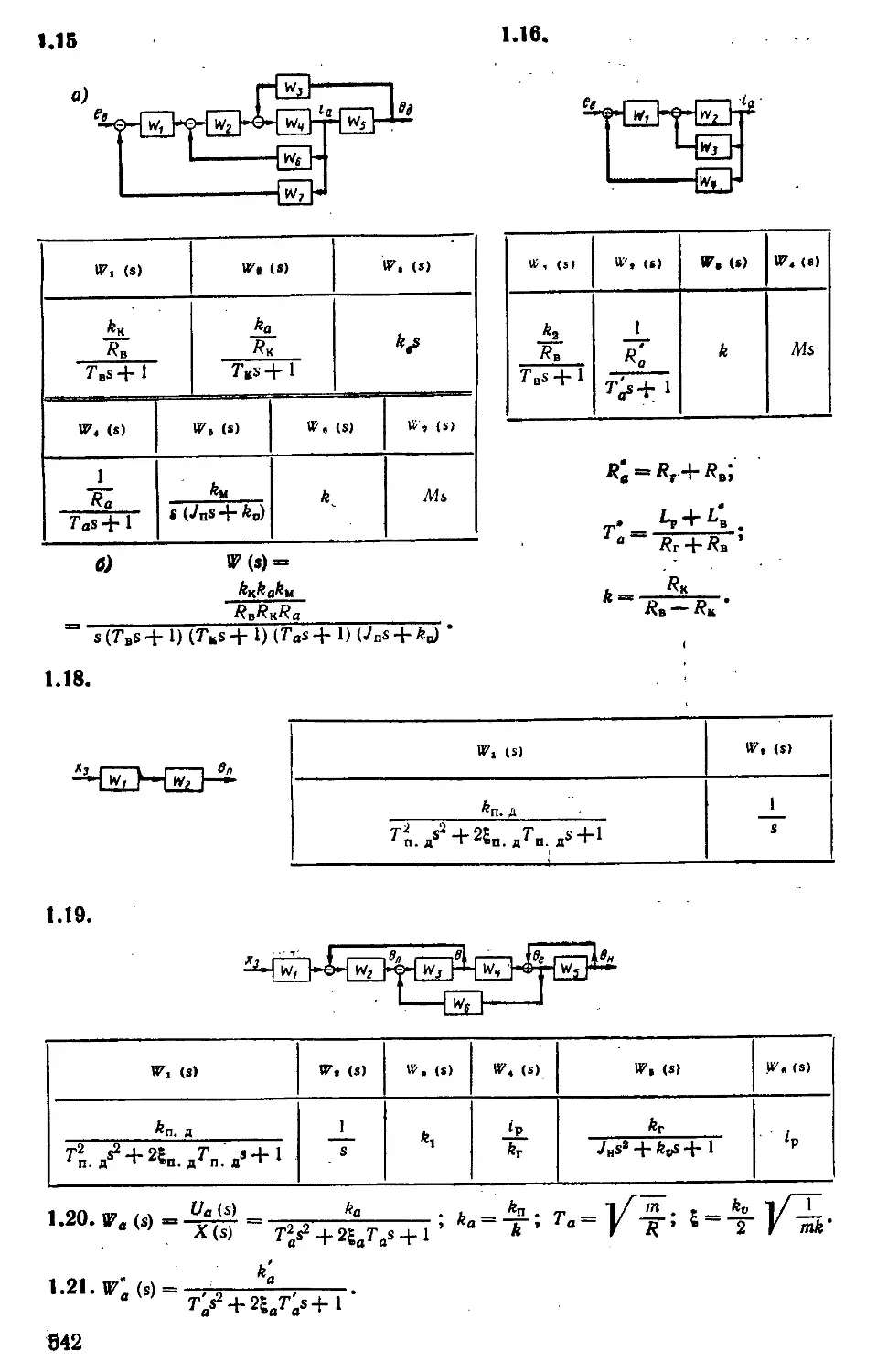
1.15. Вывести дифференциальные уравнения, определить передаточные
функции и составить структурные схемы системы электромашинный усили-
тель — электродвигатель постоянного тока независимого возбуждения.
Принципиальная схема данной системы показана на рис. 1.15.
2 Ю. И. Тоачм* 33
Рис. 1.14. Принципиальные схемы электро-
машинных усилителей:
а — со стабилизирующим трансформатором; б —
для управления генератором постоянного тока;
в —» с самовозбуждением
Указание. При выводе дифференциальных уравнений и передаточных
функций рассмотреть два случайна) ЭМУ обладает значительной степенью
недокомпенсации; б) ЭМУ обладает незначительной степенью перекомпен-
сации, позволяющей пренебречь влиянием параметров kp и1 ЛГ на работу
системы. ;
1.16. Вывести дифференциальные уравнения, определить передаточные
функции и составить структурную схему генератора с самовозбуждением.
Принципиальная схема генератора с самовозбуждением показана на
рис. 1.14, в.
Указание. Потоками рассеяния можно пренебречь.
Яв + Яр < Я*,
где — критическое сопротивление.
Рис. 1.15. Принципиальная схе-
ма электромашинмого усилителя
для управления скоростью вра-
щения электродвигателя посто-
янного тока с независимым воз-
буждением .
34
На саиб
От насоса
На слав
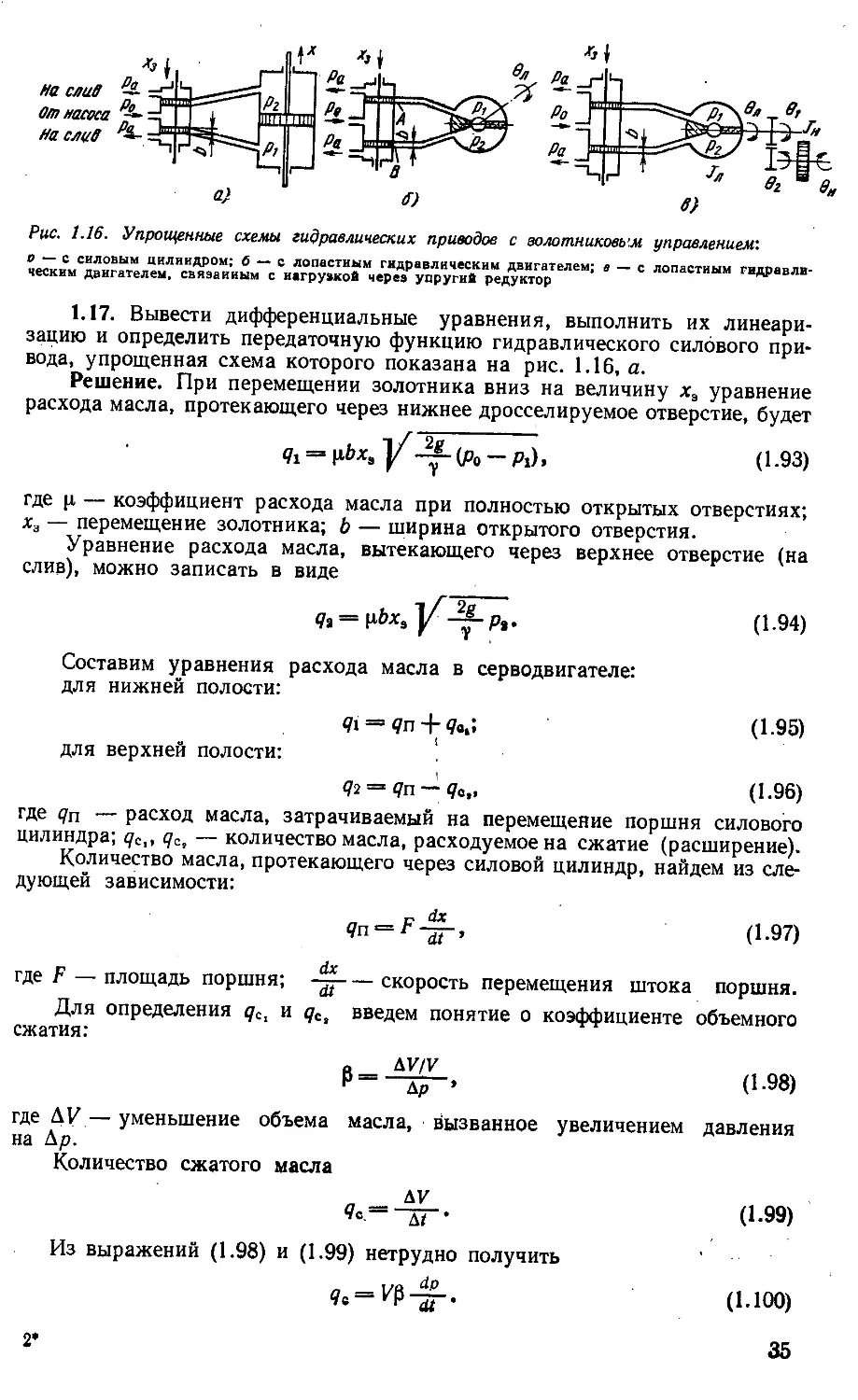
Рис. 1.16. Упрощенные схемы гидравлических приводов с золотниковым управлением:
0 — с силовым цилиндром; б — с лопастным гидравлическим двигателем; в — с лопастным гидравли-
ческим двигателем, связанным с нагрузкой через упругий редуктор
1.17. Вывести дифференциальные уравнения, выполнить их линеари-
зацию и определить передаточную функцию гидравлического силового при-
вода, упрощенная схема которого показана на рис. 1.16, а.
Решение. При перемещении золотника вниз на величину х3 уравнение
расхода масла, протекающего через нижнее дросселируемое отверстие, будет
91 “ pbxs J/J&-(р0 - Л), (1.93)
где р — коэффициент расхода масла при полностью открытых отверстиях;
х3 — перемещение золотника; b — ширина открытого отверстия.
Уравнение расхода масла, вытекающего через верхнее отверстие (на
слив), можно записать в виде
92 = Н^э (1-94)
Составим уравнения расхода масла в серводвигателе:
для нижней полости:
91 “ 9п + 9а,; (1-95)
для верхней полости:
92 =’<7п — 9с,. (1-96)
где qn — расход масла, затрачиваемый на перемещение поршня силового
цилиндра; рС1, 9с, — количество масла, расходуемое на сжатие (расширение).
Количество масла, протекающего через силовой цилиндр, найдем из сле-
дующей зависимости:
9n = F-g-> (1.97)
п dx
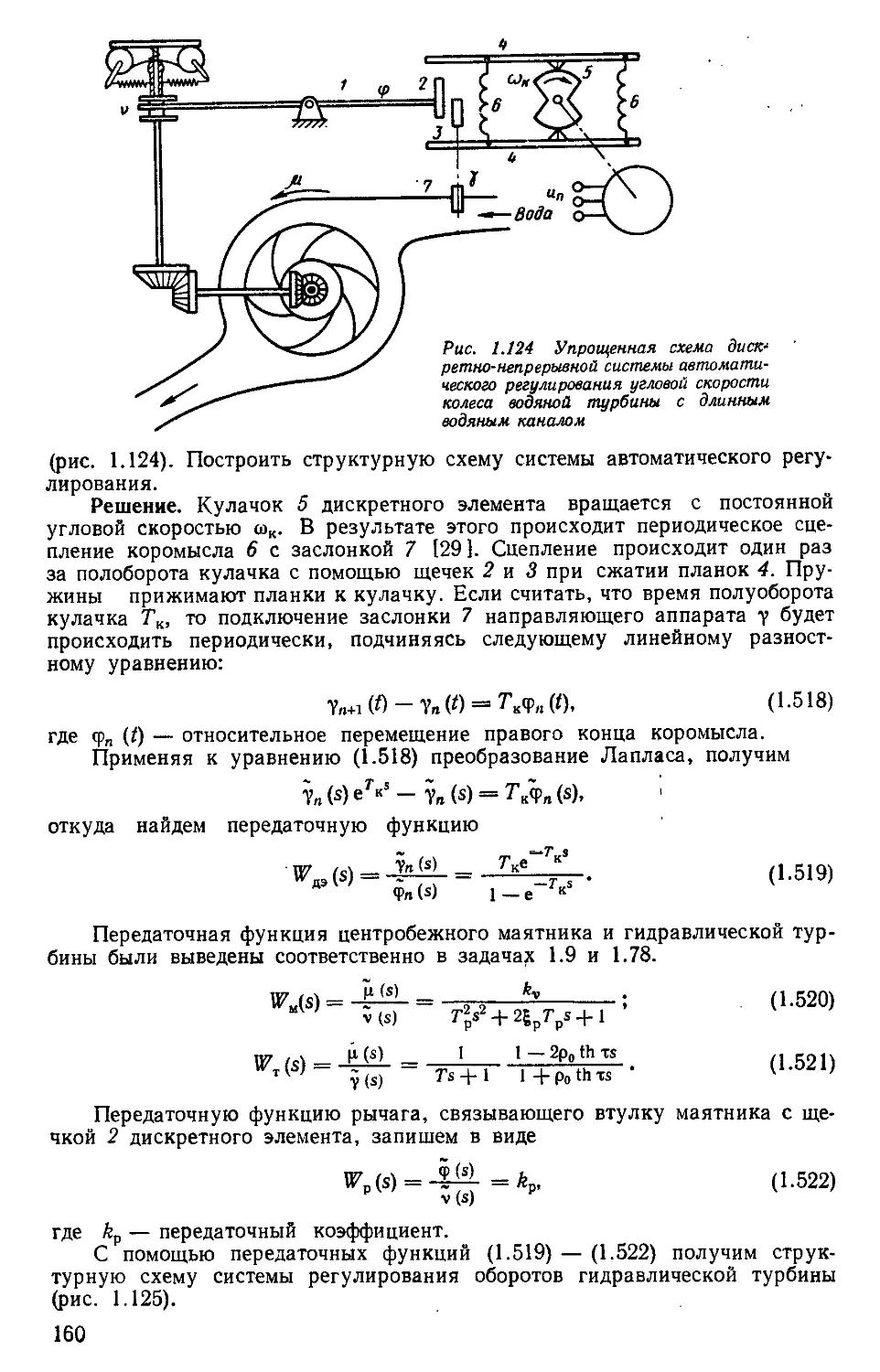
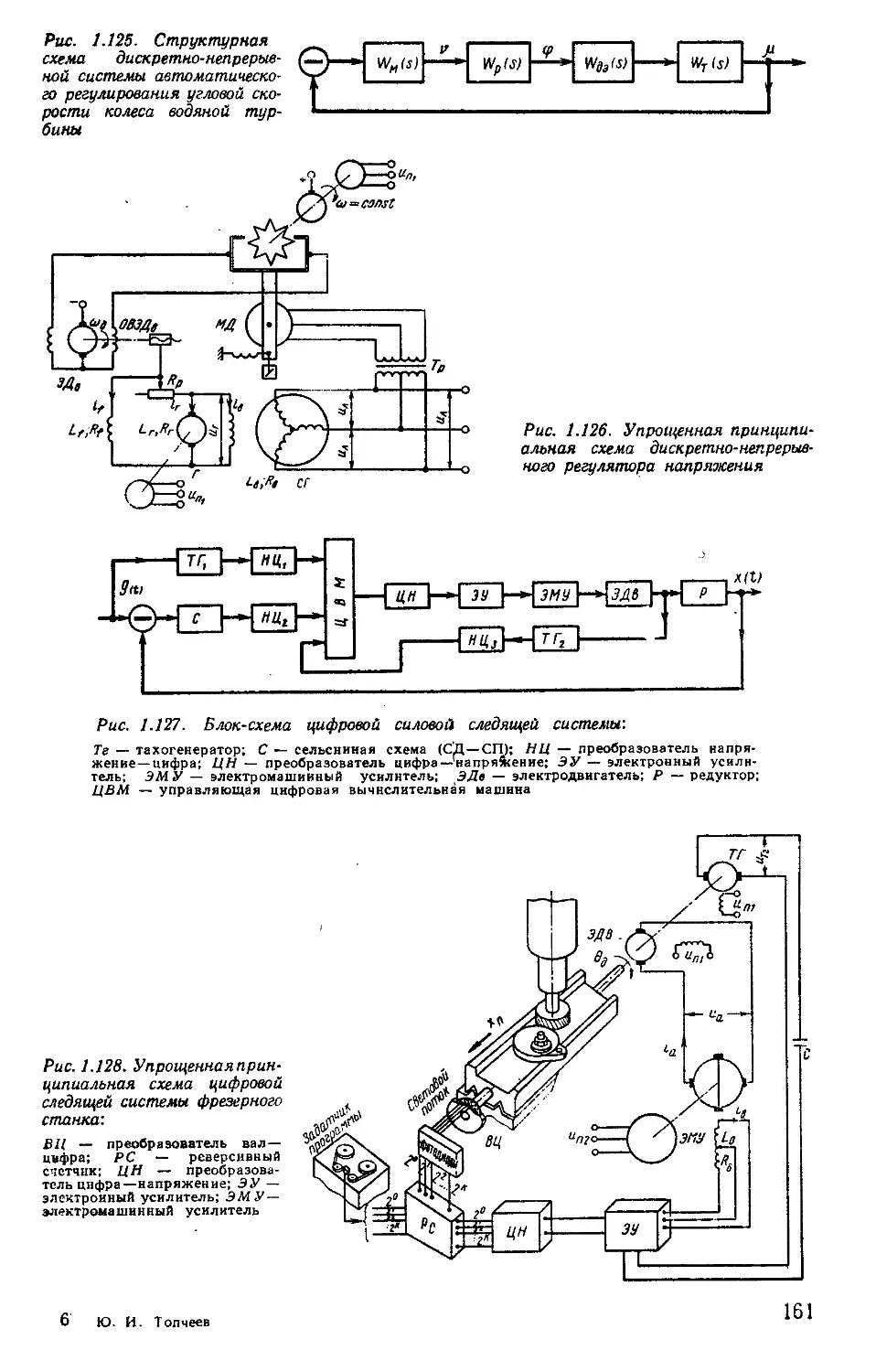
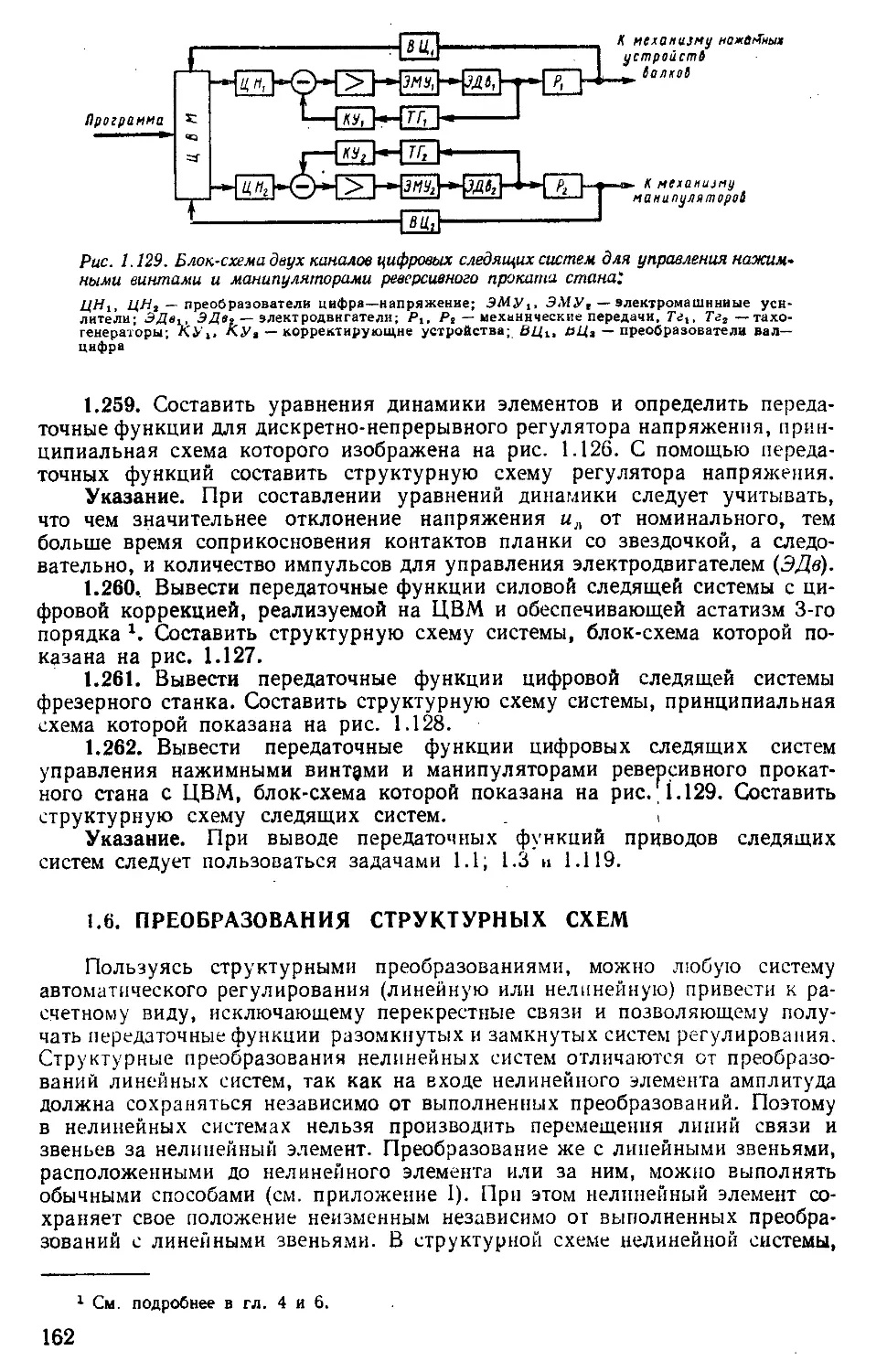
где г — площадь поршня; --------скорость перемещения штока поршня.
Для определения рС1 и введем понятие о коэффициенте объемного
сжатия:
<L98>
где AV— уменьшение объема масла, Вызванное увеличением давления
на Ар.
Количество сжатого масла
9о = ^-« (1-99)
Из выражений (1.98) и (1.99) нетрудно получить
^вК₽"ЗГ- (1ло°)
2*
35
На основании выражения (1.100) запишем
9. = ^^;
(1.101)
Подставив выражения (1.97) и (1.101) в формулы (1.95) и (1.96), получим
(1.102)
Уравнение перемещения штока запишем в обычной форме, т. е.
m-^. = F(p1-pa), (1.103)
где т — масса штока поршня.
Линеаризуя уравнения (1.93), (1.94), (1.102) и (1.103), положив при этом
х3 == Х3о Дх3,
Pi — Рю + ^Pi> 91 ~ 910 + д91!
Рг = Рго + ДР2‘> 9а = 9го + Д9г.
получим следующие уравнения в приращениях:
Д91 = рй Дх3 у (р0 - р10) — ць*з0 У -2
д9г = ¥>Ь Дх3 УРго + рЬ*зо У "у" -гр=
Г I » 4b У Р'
д91 = ^^+^^г-: д92 = ^т~^-^Г-;
т "4^ = F (ДЛ - Др2)-
Приравнивая выражения для Д^ и Др2, найдем
цЬ Дх3 У^-(р0- Рю) — рЬхз0 У
' • г • * У ро — Pio
lib Дх3 Ур20 + рЬхз0 У =
r f ' ' у ра0
с ,/ д 4Дра
^-аГ-^Р-ЗТ*
(1.104)
(1.105)
Для упрощения математических выкладок будем считать, что поршень
в гидравлическом силовом цилиндре находится вблизи среднего положения.
Тогда
= V2 = V. (1.106)
В этом случае
Рю ~ P2o'i 910 = 9го-
(1.107)
36
Имея это в виду, можно написать
Ра — Рю *Ь Рао»
„ _ „ _ Ро
Рю — Р20 2 *
(1.108)
Подставив полученные зависимости (1.106) и (1.108) в уравнение (1.105),
получим
m VP V2рп d3 Лх , mjibxso 1 /~2g d2 Лх .
Р di3 ’ F У у dt2 “г
4- 2F /2р0 (1.109)
Опустим знак приращения в уравнении (1.109) и применим прямое пре-
образование Лапласа при нулевых начальных условиях. В этом случае пере-
даточная функция гидропривода будет иметь вид
П7 (с) — х (5). ____________________________________________________*2____________________________,
(1.110)
где
gb l/Pbg.
F г у ’
т______1 1 /~ ”*ур.
1 гп— р у 2 ’
t _ 1 / 2mg
егп — 4F у WoVp
1.18. Вывести дифференциальные уравнения, линеаризовать их и опре-
делить передаточную функцию лопастного гидравлического силового дви-
гателя, управляемого от золотникового распределителя. Упрощенная схема
гидравлического привода с лопастным двигателем показана на рис. 1.16, б.
Указание. При линеаризации уравнений следует учитывать, что макси-
мальная величина углового поворота лопасти 6лт, а перемещение плунжера
гидравлического распределителя хзт (при хзт отверстия А или В гидравли-
ческого распределителя полностью открыты).
1.19. Вывести дифференциальные уравнения, линеаризовать их, опре-
делить передаточную функцию и составить структурную схему лопастного
гидравлического привода, связанного через упругий редуктор с нагрузкой.
Упрощенная схема гидравлических и механических элементов с основными
обозначениями показана на рис. 1.16, в.
Указание. При составлении уравнений механических элементов сле-
дует пользоваться зависимостями (1.14)—(1.16).
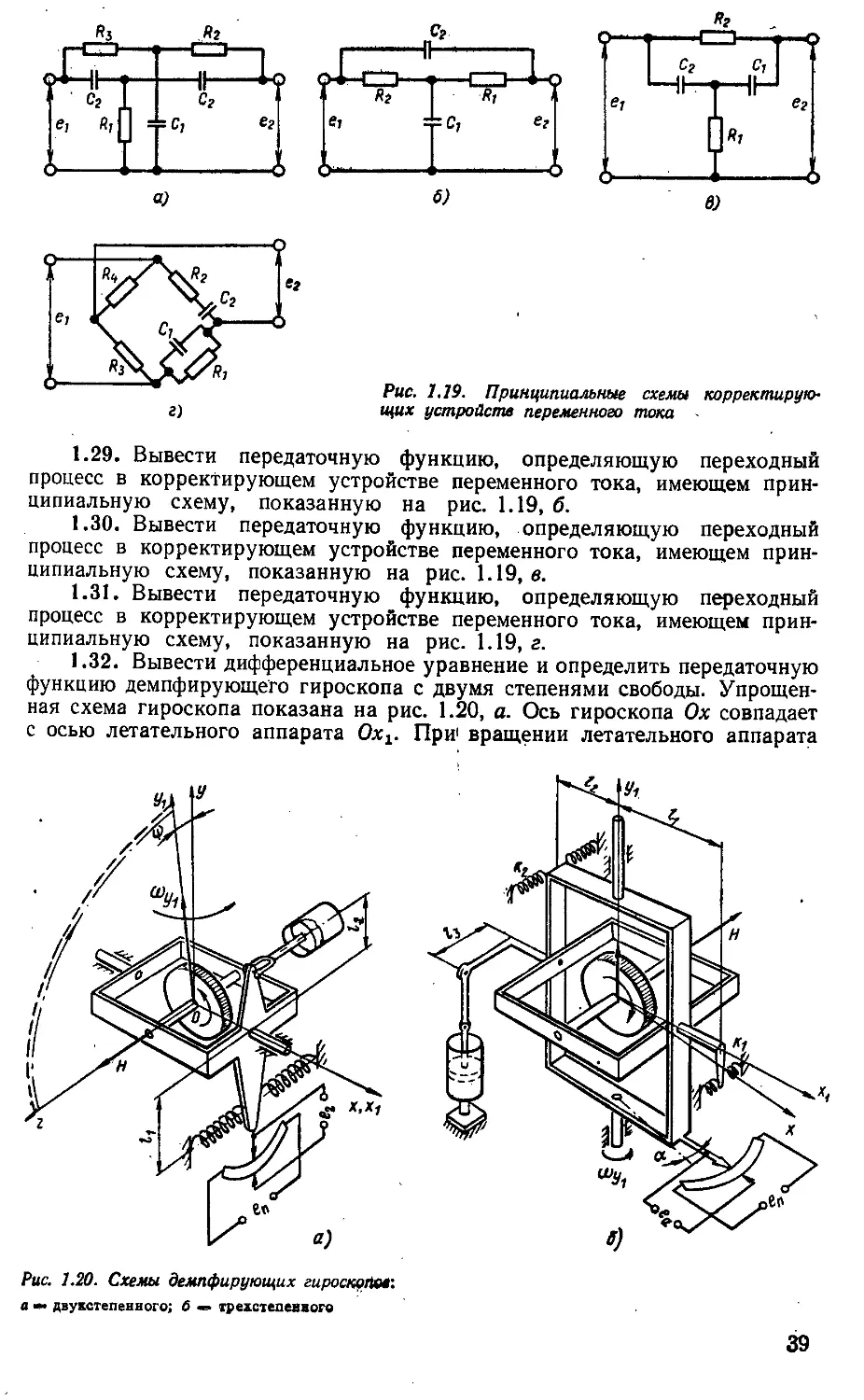
1.20. Вывести дифференциальные уравнения и определить передаточ-
ную функцию акселерометра, измеряющего линейные ускорения, упрощен-
ная схема которого приведена на рис. 1.17, а, где обозначено: т — сейсми-
ческая масса; k — жесткость пружины; k0 — постоянная скоростного тре-
ния демпферного устройства акселерометра; иа — напряжение, пропорци-
ональное перемещению сейсмической массы (ускорению); х — величина
перемещения сейсмической массы.
1.21. Вывести дифференциальные уравнения и определить передаточ-
ную функцию акселерометра, измеряющего угловые ускорения. Упрощен-
ная схема акселерометра показана на рис. 1.17, б.
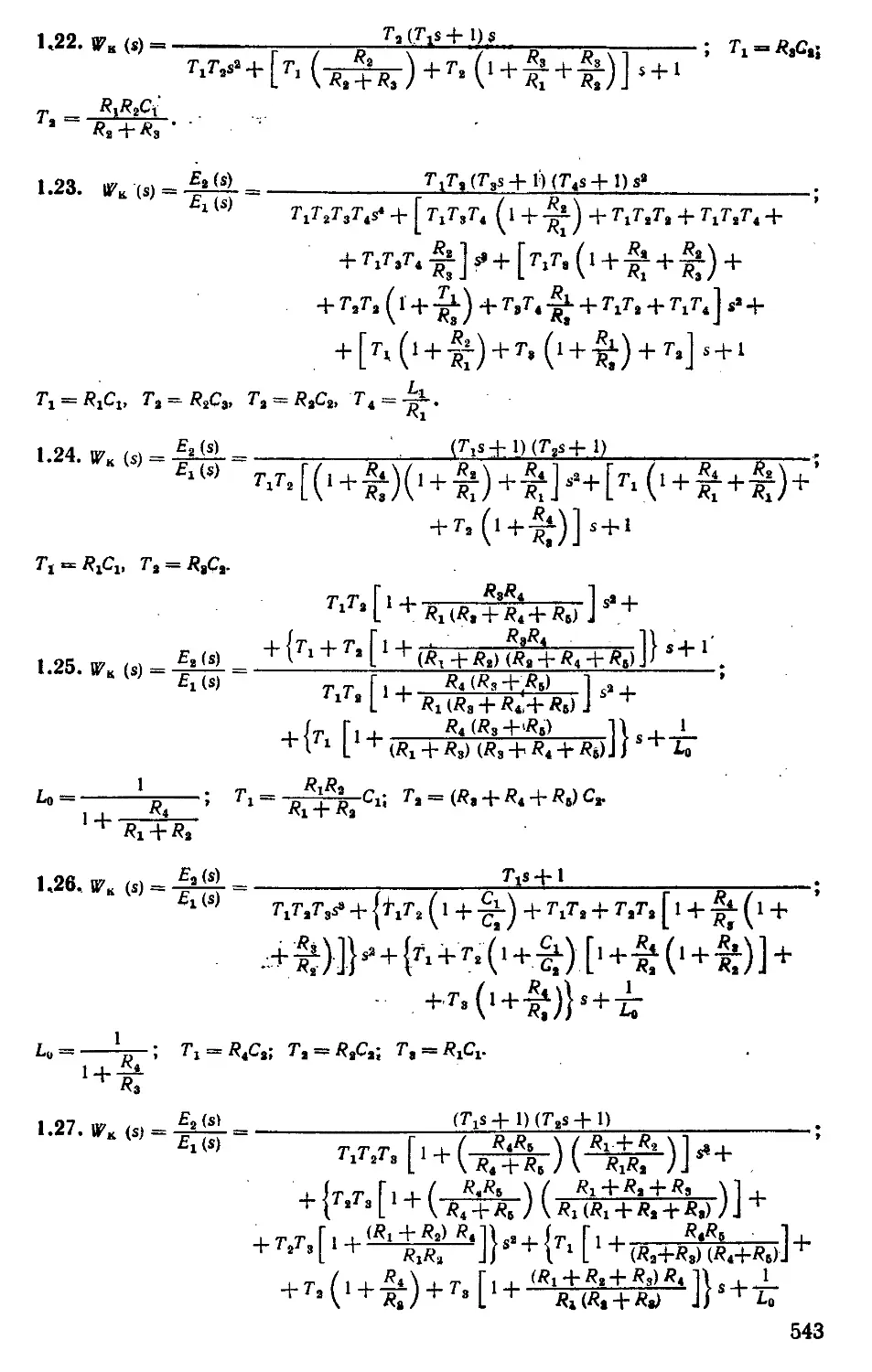
1.22. Вывести дифференциальные уравнения и определить передаточ-
ную функцию, описывающую переходные процессы в корректирующем
37
'У""",""""
О)
Рис. 1.17. Упрощенная схема
акселерометров:
а — для измерений линейных уско-
рений; б — для измерений угловых
ускорений; 1 — поворотная штанга;
2 — пружина, обеспечивающая ко-
эффициент пропорциональности Л;
3 — угловая трубка с жидкостью,
обеспечивающая скорость демпфи-
рования с коэффициентом k^; 4 —•
масса; 5 — потенциометр для съема
сигнала
устройстве постоянного тока. Принципиальная схема корректирующего
устройства показана на рис. 1.18, а.
1.23. Вывести дифференциальные уравнения и определить передаточ-
ную функцию, -описывающую' переходные процессы ' в корректирующем
устройстве постоянного тока. Принципиальная схема корректирующего
устройства показана на рис. 1.18, б.
1.24. Вывести дифференциальные уравнения и определить передаточ-
ную функцию, описывающую переходные процессы в корректирующем
устройстве постоянного тока. Принципиальная схема корректирующего
устройства показана на рис. 1.18, в.
1.25. Вывести дифференциальные уравнения и определить передаточ-
ную функцию, описывающую переходные процессы в корректирующем
устройстве постоянного тока. Принципиальная схема корректирующего
устройства показана на рис. 1.18, г.
1.26. Вывести дифференциальные уравнения и определить передаточ-
ную функцию, описывающую переходные процессы в корректирующем
устройстве постоянного тока. Принципиальная схема корректирующего
устройства показана на рис. 1.18, д.
1.27. Вывести дифференциальное уравнение и определить передаточ-
ную функцию, описывающую переходные процессы в корректирующем
устройстве постоянного тока. Принципиальная схема корректирующего
устройства показана на рис. 1.18, е.
1.28. Вывести передаточную функцию, определяющую' переходный
процесс в корректирующем устройстве переменного тока, имеющем прин-
ципиальную схему, показанную на рис. 1.19, а.
а) 6) в)
г)
д)
Рис. 1.18. Принципиальны* схемы корректирующих устройств постоянного тока
38
г)
Рис. 1.19. Принципиальные схемы корректирую-
щих устройств переменного тока
1.29. Вывести передаточную функцию, определяющую переходный
процесс в корректирующем устройстве переменного тока, имеющем прин-
ципиальную схему, показанную на рис. 1.19, б.
1.30. Вывести передаточную функцию, определяющую переходный
процесс в корректирующем устройстве переменного тока, имеющем прин-
ципиальную схему, показанную на рис. 1.19, в.
1.31. Вывести передаточную функцию, определяющую переходный
процесс в корректирующем устройстве переменного тока, имеющем прин-
ципиальную схему, показанную на рис. 1.19, г.
1.32. Вывести дифференциальное уравнение и определить передаточную
функцию демпфирующего гироскопа с двумя степенями свободы. Упрощен-
ная схема гироскопа показана на рис. 1.20, а. Ось гироскопа Ох совпадает
с осью летательного аппарата Охх. При1 вращении летательного аппарата
Рис. 1.20. Схемы демпфирующих гироскопов',
а ** двухстепенного; б трехстепенного
39
вокруг оси Oyi с угловой скоростью cOj,i появляется гироскопический мо-
мент Мг, стремящийся совместить вектор кинетического момента гироскопа
Н с вектором угловой скорости со^ (по штриховой линии). Демпфирующий
гироскоп, поворачиваясь, воздействует на пружину. При этом с потенцио-
метра снимается напряжение ег, пропорциональное углу его отклонения ф.
Решение. Величину гироскопического момента определим по формуле
Мт = Ныу1 cos ф. (1.Н1)
Уравнение моментов рамки гироскопа запишем в виде
Л1Р=Л^ + М1-^4-^ф. (1.112)
При установившемся состоянии
Мг = Мр.
Имея это в виду, для малых углов ф
Л-^ + М^ + ^ф==Я^1. (1.ПЗ)
Из уравнения (1.113) найдем передаточную функцию демпфирующего
гироскопа
*ДГ
W (S) = Ф (s) _______________________
7*/ + 2Тдг6д,5+1’
(1.U4)
где
,______Н_,
:®р — klj ’
kn
т = -L ]//*-• ? =_1_Л£1Л
др /1 V k ’ 2 kli V .
Снимая сигнал с потенциометрического датчика
ф
“ 2фт
(1.115)
где фт — полный угол намотки потенциометра; еп — напряжение питания,
найдем
^Дг
IF (SI = Ег — ___________________________
a₽U ^l(S) ф2 + Й'д15аг4'+1 ’
(1.116)
1.33. Вывести дифференциальные уравнения и определить передаточ-
ную функцию демпфирующего гироскопа с тремя степенями свободы. Упро-
щенная схема трехстепенного гироскопа показана на рис. 1.20, б.
Указание. Демпфирующий гироскоп измеряет угловую скорость и уг-
ловое ускорение летательного аппарата относительно оси Оух.
1.34. Вывести дифференциальные уравнения и определить передаточ-
ную функцию интегрирующего двухстепенного гироскопа.
Указание. При выводе дифференциальных уравнений интегрирующего
гироскопа пружина с коэффициентом упругости k (рис. 1.20, б) должна быть
отключена. Угол отклонения наружной рамки обозначим а.
40
1*35. Вывести дифференциальные уравнения движения, линеаризовать
их и определить передаточную функцию гидравлической турбины с фикси-
рованным углом установки лопастей. Схема гидравлической турбины и ос-
новные обозначения показаны на рис. 1.21, а.
Указание х. Момент движущих сил гидравлической турбины зависит
от скорости течения воды v, величины открытия направляющего аппарата г,
угловой скорости вращения колеса турбины <о:
. . 1
Мд 2~нг
где х — коэффициент, зависящий от конструкции гидротурбины.
Момент сопротивления следует представить в виде суммы двух величин:
М«=Мв0± ДЛ40[1|,
где Мс0 — установившееся значение момента сопротивления; ДЛ4в0 [11 —
изменение нагрузки на гидротурбине (в случае сброса нагрузки — знак
плюс, а в случае увеличения нагрузки — знак минус).
1.36. Вывести дифференциальные уравнения движения, линеаризо-
вать их и определить передаточную функцию гидравлической турбины с пе-
ременными углами установки лопастей.
Указание. Для составления уравнений следует пользоваться экспери-
ментальными зависимостями момента движущих сил Мп = Мд (<о)
(рис. 1.21, б) и момента сил сопротивления Мо — Мо (<о, <р) (рис. 1.21, в).
1.37. Вывести дифференциальные уравнения движения, линеаризо-
вать их и определить передаточную функцию двухфазного асинхронного
электродвигателя. Принципиальная схема двухфазного электродвигателя
показана на рис. 1.22, а.
Указание. При составлении уравнений следует пользоваться характе-
ристиками Мл — Ма (®д, ид) (рис. 1.22, б).
1.38. Вывести дифференциальные уравнения движения, линеаризо-
вать их и определить передаточную функцию пневматического силового
цилиндра,- управляемого пневмораспределителем. Упрощенная схема пнев-
матического привода показана на рис.1 1.23, а.
Указание. Секундный приток воздуха в полость цилиндра Г.
Г — "+11
Рис. 1.21. Гидравлическая турбина:
а схема; б «• варактериетика Мд = / (ш); s — характеристики Мв = f (а, ф)
41
Рис. 1.22. Двухфазный асинхронный влектродвигатель:
а принципиальней вкема; б — характеристики МД “Мд (®я, Иу)
Рис. 1.23. Пневматический привод:
в.—» с силовым цилиндром; б » о силовым цилиндром н пружиной
а)
секундный расход воздуха из полости //:
где р> — коэффициент расхода воздуха; Ь9 — эквивалентная ширина отвер-
стия; у — перемещение штока распределителя; п — показатель политропы.
1.39. Вывести дифференциальные уравнения движения, линеаризовать
их и определить передаточную функцию пневматического силового цилиндра /
с пружиной 4. Упрощенная схема пневматического привода с электромаг-
нитным управлением 2 и струйной трубкой 3 показана на рис. 1.23, б.
Указание. При составлении уравнений учесть указания к задаче 1.38.
1.40. Вывести дифференциальные уравнения движения^ линеаризо-
вать их, определить передаточные функции и составить структурную схему
пневматического узла регулятора. Упрощенная схема пневматического узла
регулятора изображена на рис. 1.24.
1.41. Вывести уравнение динамики и определить передаточную функ-
цию дифференцирующего устройства с электронным усилителем, обладаю-
щим большим коэффициентом усиления. Упрощенная принципиальная схема
дифференцирующего устройства показана на рис. 1.25, а.
Указание. Входным сопротивлением усилителя следует пренебречь.
1.42. Вывести уравнение динамики и определить передаточную функ-
цию дифференцирующего звена первого рода в электронным усилителем,
обладающим большим коэффициентом усиления. Упрощенная принципиаль-
ная схема устройства показана на рис. 1.25, б.
Указание. См. указание к задаче 1.41.
1.43. Вывести уравнение динамики и опреде-
лить передаточную функцию корректирующего уст-
ройства с электронным усилителем, принципиаль-
ная схема которого показана на рис. 1.25, в.
Указание. См. указание к задаче 1.41.
Рис. 1.24. Пневматический узел регулятора:
1 — рычаг; 2 ** катаракт; 3 — «иловой цилиндр; 4 — распреда-
алшь
42
У д)
Рис. 1.25. Упрощенные схемы операционных электронных усилителей, реализующих переда-
точные функции корректирующих устройств постоянного тока:
а — идеального дифференцирования; б — дифференцирующего звена первого рода; в звена реаль-
ного дифференцирования; г — интегроднфференцирующего звена; дколебательного звена (с двумя
отрицательными обратными связями)
1.44. Вывести уравнение динамики и определить передаточную функ-
цию корректирующего устройства с электронным усилителем, принципиаль-
ная схема которого показана на рис. 1.25, г.
Указание. См. указание к задаче 1.41.
1.45. Вывести уравнение динамики и определить передаточную функ-
цию электронного усилителя с двумя отрицательными обратными связями,
принципиальная схема которого показа'на на рис. 1.25, д.
Указание. См. указание к задаче 1.41.
1.46. Вывести уравнение динамики и определить передаточную функ-
цию электронного усилителя постоянного тока. Принципиальная схема
электронного усилителя показана на рис. 1.26, а.
1.47. Вывести уравнение динамики и определить передаточную функ-
цию электронного усилйтеля постоянного тока с отрицательной обратной
связью. Принципиальная, схема электронного усилителя показана на
рис. 1.26, б.
1.48. Вывести уравнение динамики и определить передаточную функ-
цию транзисторного усилителя с отрицательной обратной связью. Принци-
пиальная схема транзисторного усилителя показана на рис. 1.27, а.
а)
Рис. 1.26. Принципиальные схемы электронных усилителей постоянного тока:
а — без отрицательной обратной связи; б — с отрицательной обратной связью
43
Рис. 1.27. Принципиальные схемы тран-
зисторных усилителей постоянного
тока:
а — без обратных связей; б — с гибкой
отрицательной обратной связью; в с гиб-
кими обратными связями последователь-
ного и параллельного действия
6)
1.49. Вывести уравнение динамики и определить передаточную функ-
цию трехкаскадного транзисторного усилителя с частотной коррекцией.
Принципиальная схема транзисторного усилителя показана на рис. 1.27, б.
Указание. В схеме применены кремниевые транзисторы.
• 1.50. Вывести уравнение динамики и определить передаточную функ-
цию транзисторного усилителя с корректирующими устройствами последо-
вательного и параллельного действий. Принципиальная схема транзистор-
ного усилителя показана на рис. 1.27, в.
х° Рис. 1.28. Схемы управления дви-
жением космических летательных ап-
паратов вокруг центра масс.
а —* с одной парой реактивных двига-
телей; б — с одним поворотным реак-
тивным двигателем; в •— с двумя парами
реактивных двигателей
44
Указание. В схеме применены кремниевые транзисторы.
1.51. Вывести дифференциальное уравнение движения в одной пло-
скости и определить передаточную функцию космического летательного
аппарата с парой реактивных двигателей твердого топлива, жестко связан-
ных с корпусом (рис. 1.28, а) [2].
Решение. Так как движение космического летательного аппарата про-
исходит только вокруг оси Оу! связанной системы координат (совпадающей
с осью базовой системы Оу0), то
®*i®?i = (1-117)
где Jx, Jи, Jz — главные моменты инерции космического летательного ап-
парата; <ох1, ад1, <ог1 — проекции угловой скорости вращения космиче-
ского летательного аппарата на оси связанной системы координат; Mgi —
момент от тяги реактивного двигателя.
При движении аппарата в одной плоскости угловые скорости ®xj =
— <ог1 = 0. Из рис. 1.28, а видно, что
®„1 = Ф- (1.118)
Подставляя выражение (1.118) в формулу (1.117), получим
(1.119)
Будем считать, что сигнал управления ид (t) приводит к мгновенному
появлению тяги двигателя Р (/). Тогда соответствующий момент будет
Mei(t) = P(t)l^ks!iug(t)l, (1.120)
где йдв — коэффициент передачи системы управления двигателем.
Учитывая соотношение (1.120), запишем дифференциальное уравнение
движения космического летательного аппарата:
(1.121)
Применяя преобразование Лапласа при нулевых начальных условиях
к данному уравнению, получим
sV^(s) = ^B/t/9(s). (1.122)
При этом передаточная функция аппарата примет вид
где
где k =
1.52. Вывести дифференциальные уравнения движения космического
летательного аппарата с поворотным двигателем твердого топлива, сопло
которого вращается в плоскости Oy%zo (рис. 1.28, б). Определить передаточ-
ные функции и составить структурную схему космического летательного
аппарата как объекта регулирования.
Решение. Запишем уравнения движения
Лс®*1 + (Л — J у) ®ffl®zl = 0»
^g^gl + (^х Jг) ®х1®г! = ^gl’
*^z®21 “Н Уд ®х1®{П — Мл,
(1.123)
где Му1, Л1г£ — проекции момента от тяги двигателя на соответствующие
оси связанной системы координат.
Кинематические уравнения имеют вид
®» = ? + 4>sin^;
®я в Ф COS ft COS у + Ф Sin V-
юа =* >—гр cos ft sin у 4- $ sin у.
(1.124)
Положим углы у, гр и О, а также угловые скорости у, гр и ft малыми. По-
этому при линеаризации в уравнении (1.124) можно пренебречь членами
второго порядка малости, т. е.
соЛ = у;
©pi-ip;
<вй==£.
(1.125)
Подставив соотношения (1.125) в уравнения (1.123), получим следующую
систему:
Лу + (Л — JB) = 0;
Jд$ + (J* — а
/Л + (Jg — Л)Н = Мя.
Линеаризуя систему уравнений (1.126), найдем
Лу = 0;
/угр — М^;
(1.126)
(1.127)
= Ма.
Равенство нулю первого уравнения системы показывает на отсутствие
движения по крену для рассматриваемой схемы космического летательного
аппарата. Движение относительно двух других осей происходит под дей-
ствием управляющих моментов Му1 и Мг1.
В свою очередь, управляющие моменты определяются с помощью сле-
дующих соотношений:
Л4га(0-Р/8Шф,(0; 1
Л4г1 (/) = />/COS ф? (/). J '
Если считать, что сигнал управления и9 вызывает соответствующий
поворот реактивного двигателя на угол <р#, то уравнения (1.127) примут вид
ЛдЬ = Pl sin ф„; 1
} (1.129)
J,& = Pl cos Фг J
По данным уравнениям можно составить структурную схему
(рис. 1.29, а).
1.53. Вывести дифференциальные уравнения движения космического
летательного аппарата с двумя парами двигателей твердого топлива, жестко
связанными с корпусом (см. рис. 1.28, в). Базовая система отсчета Ох0у0г0
вращается вокруг оси Oz0 с постоянной угловой скоростью <о0 [2]. Опреде-
лить передаточные функции и составить структурную схему космического
летательного аппарата как объекта регулирования.
46
Решение. Запишем уравнения динамики космического летательного ап-
парата, характеризующие его движение в связанной системе координат:
+ (J? — Jg) Пд&а = О’>
Jy®yi + (Jx — Jz) юЛюг1 =
j z^zl 4" (Jу — J г) = Мл.
(1.130)
Согласно рис. . 1.28, в соответствующие кинематические уравнения
имеют вид
®xi = V 4- ф sin 0 4- «о sin ф;
©V1 = ф cos О cos у 4- fl sin у — ©0 sin у;
©г, = — ф cos 0 sin у 4- Ф cos у — ©о cos ф.
Линеаризуя систему уравнений (1.131), получим
“я = У 4" ®оф:
(1.131)
= Ф — ®оу:
©21 = А — ®0-
Подставим уравнения (1.132) в уравнения динамики (1.130):
Jх (У + ®оф) 4~ (Л — 4) (Ф — ®оУ) (А — ®о)=
Jy (Ф — ®оУ) + (JX — Jz) (У 4- ®оФ) (& — ®0) = Му1;
Jz$ 4- (Jy — Jг) (У 4- ®оф) (ф — ®оУ) = Ма.
Отбрасывая
получим
(1.132)
(1.133)
члены второго порядка малости, после преобразований
у + /х+2~/г + J’7xJs- =0;
Ф-®°V + 4ф = 4й-’
•*у Jy Jy
J 9
(1.134)
в)
двигателем; б - с двумя парами реак-
тивных двигателей
47
Рис. 1.30. Схемы управления движением космического летательного аппарата вок-
руг центра масс:
а — стабилизированного вращения вокруг оси Oxi с двумя парами реактивных двигателей;
б о вращающимся маховиком в качестве стабилизирующего устройства
Пусть сигналы управления реактивными двигателями uly (t) и uZy (t)
создают тягу
Pitt) = kKB1uly(t); 1
тогда управляющие моменты
M^(t) = kR3iluiy(t)-, 1
Мц (t) — kRB JUty [t). J
(1.136)
Подставляя уравнения (1.136) в систему (1.134), найдем уравнения дви-
жения космического летательного аппарата в виде
у 4- &1ЮОф + &2®оУ = 0;
ф ““ ^1©оУ 4~ ^2®оф —
Ф == tlQUtyi
(1.137)
где
fe2 = .A-Jg ;
Построенная по уравнениям (1.137) структурная схема космического
летательного аппарата как объекта регулирования изображена на рис. 1.29, б.
1.54. Вывести уравнения динамики вращающегося с угловой скоростью
й0 космического летательного аппарата с двумя парами реактивных двига-
телей (рис. 1.30, а). Определить передаточные функции и составить струк-
турную схему летательного аппарата как объекта регулирования.
1.55. Вывести дифференциальное уравнение движения космического
летательного 'аппарата в одной плоскости при использовании маховика
в качестве управляющего устройства (рис. 1.30, б). Определить передаточ-
ные функции и составить структурную схему летательного аппарата как
объекта регулирования.
48
1.1.2. ДИНАМИЧЕСКИЕ НЕСТАЦИОНАРНЫЕ НЕПРЕРЫВНЫЕ ЭЛЕМЕНТЫ
С СОСРЕДОТОЧЕННЫМИ ПАРАМЕТРАМИ
1.56. Вывести дифференциальное уравнение движения и определить
передаточную функцию электропривода переменного тока, используемого
для намотки ленты. Принципиальная схема двухфазного электродвигателя
привода намоточного станка показана на рис. 1.31, а. Изменение приведен-
ного момента инерции намоточного устройства станка на валу электродви-
гателя в зависимости от времени изображено на рис. 1.31, б.
Решение. Для составления дифференциальных уравнений воспользуемся
внешней характеристикой двухфазного электродвигателя. На рис. 1.31, в
сплошными линиями показаны характеристики электродвигателя, получен-
ные экспериментальным путем. Аппроксимируя эти характеристики штри-
ховыми линиями с постоянным наклоном, получим линейные зависимости
между двигательным моментом и угловой скоростью вращения барабана
намоточного станка во всем диапазоне изменения напряжений управления
и угловых скоростей.
Запишем уравнение вращения барабана в виде
(1.138)
где Jn (t) — приведенный к валу электродвигателя изменяющийся момент
инерции всех вращающихся частей намоточного устройства.
Как и обычно, момент сопротивления будем считать пропорциональным
угловой скорости вращения барабана:
М) = М>б(0. (Ы39)
где ka — коэффициент пропорциональности.
Будем считать, что двигательный момент (рис. 1.31, в) также пропор-
ционален напряжению управления uh т. е.
= 1 1, 2, 3,... (1.140)
Имея в виду соотношения (1.139) и (1.140), получим из уравнения (1.138)
4(fl^ + U(0»M<(0- (1-141)
<о
Рис. 1.31. Электропривод пере-
менного тока для барабана, на-
матывающего ленту:
а — принципиальная схема; б — ха>
рактеристики изменения приведенного
момента инерции; в — характеристики
двухфазного электродвигателя
49
Разделив правую и левую части уравнения (1.141) на kg,, п&лучим
Т(О-^ + <МО=»&МО. (1-142)
где
7(0 = 2^-; k-%-.
К(О к(д
Уравнение (1.142) представляет собой линейное дифференциальное
уравнение с изменяющейся постоянной времени. Наличие в этом уравнении
постоянной Т, зависящей от времени, затрудняет определение передаточной
функции динамического элемента из-за его нестационарности. Определим
передаточную функцию по уравнению (1.142) в форме Л. А. Заде.[34, 36].
Для этого введем следующее обозначение:
D (р, 0 = Т (0 р + 1,
d
где р = — символ дифференцирования.
Тогда уравнение (1.142) можно записать в виде
D (р, t) соб(0 = ku{ (0. (1.143)
Последнее выражение представим через импульсную переходную функ-
цию
D (р, 0 k (t, т) = fe6 (t — т), - (1.144)
где k ((, г) — импульсная переходная функция; б (t — т) — дельта-функ-
ция, приложенная в момент t = т.
Выполняя преобразование Фурье для уравнения (1.144) с переменной т,
получим
D (р, 0 W (s, 0 е5' = fee’', (1.145)
где передаточная функция нестационарной системы ,
W(s, t) = J k(t, т)е-»“-’>йт. 1 (1.146)
—co
Представим D (p, i) в виде многочлена по степеням р:
D(p,t)u (0 v (0 = и (0 D (р, 0 v (0 + ± v (0.
Полагая и (0 — W (s, 0 и о (0 = е’*, найдем
D (s, 0 W (s, t) es' = F (s, 0 D (p, 0 e» -f- ° —° e*'. (1.147)
Если коэффициенты --------- являются медленно изменяющимися функ-
циями времени, что соответствует медленному изменению коэффициента
7(0 уравнения (1.142), то для решения уравнения (1.147) можно исполь-
зовать метод итераций. В этом случае, пренебрегая производными F (s, 0,
получим решение в виде ряда
F(s, 0~F1(s, 0 + F2(s, 0+------[-F„(s, 0- (1-148)
Первое приближение Fx (s, 0 совпадает с передаточной функцией
уравнения (1.142), при «замороженном» коэффициенте 7 (0), который явля-
ется постоянным коэффициентом для момента времени tt [36]. Оценим точ-
ность метода «замороженных» коэффициентов для уравнения (1.142) с по-
50
мощью, уравнения (1.1.47). Для этого уравнение (1.142) запишем в следую-
щем виде:
a[T(f)8-Hl dW(s,t) + [Т (f)s + e (1.149)
os ai
откуда найдем
H7(S а — k_____________1110._W (s,J) (1 150)
T(t)s + 1 T(t)s+l dt • u ;
При первом приближении
W (s, t) - (s, 0 = T(t)ka^, (1.151)
где T — является постоянным коэффициентом для каждого момента вре-
мени tlt а при втором приближении
W (s л —_____. kT'
4 T(t)s + l 1Т(0« + 1р’
откуда
W”(s, 0 = (s. 0 + (s, 0 = T(t)s + l I1 + [Г (?) s +1]»} =
k ( л«)8» + Т(П[2 + Т'(ЛР+Н ,11=оч
= Т(1)« + Ц 1Т(0в + И* Г U }
Для оценки влияния второго приближения разделим передаточную
функцию. (1.151) на выражение (1.152); тогда получим
W(s,t) _ T»(<)s» + T (t) [2 +Г (f)Js-H
W'(s,t) lT(Os+ Ц» •
' dT
Из выражения (1.153) видно, что чем меньше производная Т'
тем ближе числитель передаточной функции к знаменателю и меньше по-
грешность от использования метода «замороженных» коэффициентов х.
Может быть найдено и третье приближение
W (s, t) = Wi (s, 0 + Г, (s, 0 + Wa (s, 0,
где
пт a 1 (d[T(f)s + 11 dWt(s, /))
(s, t)=-r- r(<)s + i | % I•
Третьим приближением следует пользоваться, когда коэффициент
7(0 дифференциального уравнения (1.142) не является медленно изменяю-
щейся функцией от времени.
1.57. Вывести дифференциальное уравнение движения и определить
передаточную функцию электропривода постоянного тока для намотки по-
лосы после холодной прокатки. Принципиальная схема и основные обозна-
чения показаны на рис. 1.32.
Решение. При составлении дифференциальных уравнений воспользуемся
следующими допущениями:
а) момент сопротивления на валу электродвигателя изменяется линейно
от скорости;
1 В п, 2 настоящей главы будут построены амплитудно-фазовые и логарифмические
частотные характеристики для динамических нестационарных мемеитов при некоторых кон-
кретных параметрах и -приведены оценки точности метода «замороженных» коэффициентов.
51
Рис. 3.32. Электропривод постоянного тока для намотки
полосы после холодной прокатки
б) вихревыми токами в массивных частях
железа и действием реакции якоря пренебре-
гаем.
Запишем уравнения электродвигателя по-
стоянного тока после их линеаризации в виде
(1.5), т. е.
= + + (1154)
МД = kai (0.
Уравнения вращения якоря электродвигателя запишем в виде
ЛО^Д.==уИд(0-Л4о(0, (1.155)
где J (0 — изменяющийся в функции времени момент инерции всех вращаю-
щихся частей намоточного устройства.
Момент сопротивления запишем в форме
Л4в(0 = Мд(0- (1.156)
Подставляя соотношения (1.154) и (1.156) в уравнение (1.155), получим
Д0^ + ^®а
откуда
(1.157)
Подставляя полученную зависимость в первое уравнение (1.154). найдем
ед (0 TJ (t) й»тЛ , [3(f) ,
R ~ ku di* T"L ku "Г
<1Л58>
ИЛИ
Т/(П₽ ^е>д
4“ di*
+ I + kekK 4- k„R J ~ЗГ + ®д = ек (1 • 159)
Введем в уравнение (1.159) следующие обозначения:
'г /f\ (0 . Tk0R гр/
k,ku + bvR ’ keku+k„R
Тогда получим
Т^д (0 + [Тд (0 + Г] + <ОЛ (0 = еД (0. (1.160)
Уравнение (1.160) приведем к обычному виду:
(0-^-4-25(0 Г (0-^- + ®л(0 = ед(0. (1.161)
62
По аналогии с уравнением (1.150) найдем
wz /с м_____________!_______________________т (О________(s> О
ч~ г2 (0 s*4-2g (0 т (0S4-1 т2 (0s24-2g(0T(0s4-i
_ 2IT ^s + ^(t)T(t)] dW (s, 0
Г2 (0 s«4-2g (0 Г (0 «4-1 dt >
откуда в первом приближении
W (S, t) = 1^1 (S, 0 = Г2 щ s2 + 2g (/) г w s + J.
Для второго приближения найдем
1Г2 (s, /) =
2 IT (0 s + S(O Т(0]
Т2 (0 s»4-2g (0 Т (0 s 4-1
2 [Г (0 т (0 4-у (0 т (0 4-g (О Т' (<)]
IT2 (0 s22g (0 Г (0 s 4-11"
, 2 [Г (0 Т (0 4- (Г (Q)2 4- Г (0 Т (Q 4- 2g (0 Г (0 4- g (0 Г (0[
+ 1Т2 (0 s2-f-2g (0 Г (0 s 4-I]2
Тогда
W (s, 0 — г2 (/) S2 + 2g (0 г (0 s 4-1 1 "Ь
2 [Г (0 S 4- g (0 т (0] {Т' (0 т (0 4-g' (0 т (0 + 1 (0 Т' (0 4- г (0 т (0 4-'
____________4- [Г (Q]2 4- Г (0 Т (0 4- 2g' (0 Т' (0 4- g (0 Г (0}______
LT2 (0 s*4-2g (0 Т (0 >44]’____________________________________________г
(1.163)
Итак, пользуясь методом «замораживания» коэффициентов, запишем
передаточную функцию электропривода намоточного устройства как первое
приближение, в виде
“ Т2 (О) s24-2g (0) Tt (0 «4-1 ’ (1-164)
где Т (0) и g (0) — соответствующие параметры динамического элемента
в момент времени 0.
1.58. Составить уравнения движения, линеаризовать их и вывести пе-
редаточную функцию летательного аппарата по крену- Упрощенная схема
летательного аппарата построена на рис.
1.33.
Решение. Движение летательного аппа-
рата по крену как абсолютно жесткого
тела описывается уравнением моментов отно-
сительно продольной оси [23, 44]
= (1-165)
где Jх — момент инерции летательного аппа-
рата относительно продольной оси; у—угол
Рис. 1.33. Схема сил, действующих на летательный
аппарат
Рис. 1.34. Характеристики
летательного аппарата:
а •— вавясимость момента инер-
ция Jx от времени полета (/д —
момент выключения двигателя);
б — зависимость коэффициента
момента тх от числа М
крена; тх— коэффициент момента сил, действующих на летательный аппа-
рат; S — площадь крыльев; Г— размах крыла; р — плотность воздуха;
V — скорость полета летательного аппарата; Мп (t) — момент возмущаю-
щих сил.
тх ~ f (V, у, 6»), (1.166)
где Р — угол скольжения летательного аппарата; 6, — угол отклонения
элеронов.
Полученная система уравнений (1.165) и (1.166) является нелинейной
с' переменными параметрами. Входящие в эти уравнения параметры Jx
и тх зависят от скорости полета и времени. Соответствующие зависимости
Jx = Jx (0 и mx = (М) показаны на рис. 1.34, а и б. Для линеаризации
этих уравнений необходимо определить малые отклонения параметров дви-
жения летательного аппарата для невозмущенного (расчетного) движения.
Для этого воспользуемся следующими соотношениями;
V = Vo + AV;
V = Vo + Ay;
6S = б9о 4* Абэ.
Тогда, пренебрегая величинами второго порядка малости, подучим урав-
нения динамики летательного аппарата в отклонениях:
dMy _ / PV„si рФ v\
~dF~~ \~77~ тх0 + 2Jx х ) +
рф/т“- d&y рфт> МпЧ)
4------гл dT + —Гх —& V) + ~Т7~ ’ •167)
При линеаризации уравнений были сделаны.следующие допущения:
а) не учитывалось влияние момента рыскания, на крен:
б) не учитывалось влияние моментов от отклонения рулей направления;
в) не учитывались моменты от силы тяги двигателя.
Поворот по крену летательного аппарата происходит за короткий про-
межуток времени, в течение которого скорость его полета практически не
изменяется. Поэтому А V можно считать равным нулю, тогда уравнение (1.167)
примет следующий вид:
+ си ® ~ Л (0 + ‘Л (0, (1.168)
где
си (0-----
pVl$l2mxx .
2Л
С12 (0 e
ZFx ’
с» (п=-£-
54
Полученное уравнение (1.168) является линейным с переменными ко-
эффициентами. Коэффициент ch (t) представляет собой приращение угло-
вого ускорения крена и является отрицательным, так как угловое ускорение
всегда направлено в сторону, противоположную угловой скорости. Полу-
ченные коэффициенты с1Х, с12 и с13 являются известными функциями вре-
мени. Для определения передаточной функции летательного аппарата по
крену воспользуемся методом «замораживания» коэффициентов; тогда по-
лучим
s Is + Сц (О] V (s) = Си (t() \ (s) J- с13 (tt) Мт (s), (1.163)
или
S (7> 4- 1) V (S) = k, 8, (s) 4- (s), (1.170)
где
______J’.. Cji W — Ь •
си (^i)_*’ Си (h)
с» «<) _ <
си tfl) *'
Из уравнения (1.170) нетрудно найти
м (S) в________6S (s) 4- • (1 17П
stTis + l) s ^s(T^ + l)’ U-i'U
здесь
и Ч(*)д s(7'J + b
^(«)-Т(Йттг-
передаточные функции летательного ,аппарата по крену.
Выразим возмущающий момент через эквивалентное отклонение элеро-
нов 8ЭВ (s) в виде 1
Л4ЯВ (s) = Л4>89В (s).
1.59. Составить уравнения движения, линеаризовать их и вывести
передаточную функцию самолета в продольной плоскости. Основные обоз-
начения показаны на рис. 1.35.
1.60. Вывести уравнения движения, линеаризовать их и определить
передаточную функцию самолета с «замороженными» коэффициентами в про-
дольной плоскости относительно угла вектора скорости lFeB(S).
Указание. При составлении уравнений пользоваться обозначениями,
приведенными на рис. 1.35.
1.61. Вывести уравнения движения, линеаризовать их и определить
передаточную функцию самолета с «замороженными» коэффициентами в про-
дольной плоскости относительно
угла атаки (s).
Указание. При составлении
уравнений пользоваться обозна-
чениями рис. 1.35.
Рис. 1.35. Схема сил, действующих на
самолет
1»62« Вывести уравнения движения, линеаризовать их и определить
передаточную функцию самолета с «замороженными» коэффициентами в про-
дольной плоскости по перегрузке
(s} > N
te(S) ’6B(s) *
Указание. При составлении уравнений и выводе передаточных функций
пользоваться обозначениями рис. 1.35.
1.63. Вывести передаточные функции и составить структурную схему
самолета с «замороженными» коэффициентами в продольной плоскости по
скорости полета V.
1.64. Вывести передаточную функцию самолета с «замороженными»
коэффициентами в продольной плоскости по высоте полета Н, т. е.
бв (S)
1.65. Вывести передаточные функции и составить структурную схему
осесимметричного летательного аппарата в вертикальной плоскости, поль-
зуясь методом «замороженных» коэффициентов:
(s) =• ^-(s^ ♦
вв SB (S)
Указание. При составлении передаточных функций пользоваться обоз-
начениями, приведенными на рис. 1.33.
1.66. Вывести передаточные функции и составить структурную схему
самолета в боковой плоскости, пользуясь методом «замороженных» коэффи-
циентов по углу рыскания (s) = .
6н (8)
Указание. Влиянием крена можно пренебречь.
1.67. Составить уравнения движения самолета в боковой плоскости
с креном, выполнить их линеаризацию, определить передаточное функции
по методу «замороженных» коэффициентов и построить структурную схему.
Указание. Входными сигналами считать 6Н = 6Н (t) и 6Э = 6Э (t),
а выходными ф = ф (/) и у = у (f).
1.68. Вывести уравнения движения, линеаризовать их и определить
передаточную функцию трехфазного электродвигателя переменного тока,
используемого для намотки бумажной ленты. Принципиальная схема элек-
тропривода приведена на рис. 1.8, а. Изменение приведенного момента инер-
ции намоточного устройства показано на рис. 1.36.
Указание. Передаточную функцию определить с помощью первого и
второго приближений.
1.69. Вывести уравнения движения, линеаризовать их и определить
передаточную функцию электродвигателя постоянного тока по первому и
второму приближениям с учетом изменения коэффициента индуктивности
L = L (i) (рис. 1.37, а). Кривая изменения тока в функции от времени изо-
бражена на рис. 1.37, б.
Указание. При составлении уравнений движения еледует учитывать
влияние потока размагничивания. Независимая обмотка возбуждения пи-
тается постоянным напряжением ив.
1.70. Вывести уравнения движения, линеаризовать их и определить
передаточную функцию электропривода постоянного тока по первому и вто-
рому приближениям, если момент инерции электропривода Jа — Jд (/),
а момент сопротивления Мс — kv (t) сод.
1.71. Вывести уравнения движения осесимметричного летательного
аппарата в боковой плоскости, линеаризовать их и определить передаточную
Б6
Рис. 1.36. Характеристика из- Рис. 1.37. Характеристики электродвигателя:
менения приведенного момента а) ь » L (<); б) Z — I (О
инерции намоточного устрой-
ства
функцию (s), пользуясь методом «замороженных» коэффициентов
(см. рис. 1.33).
1.72. Вывести уравнения движения осесимметричного летательного
аппарата в боковой плоскости, линеаризовать их и определить передаточную
функцию FgH (s) — JM—, пользуясь методом «замороженных» коэффици-
6Н (s)
ентов.
1.73. Вывести передаточную функцию самолета в боковой плоскости
(s) = (S> > ПОЛЬЗУЯСЬ методом «замороженных» коэффициентов.
(S)
1.1.3. ДИНАМИЧЕСКИЕ СТАЦИОНАРНЫЕ НЕПРЕРЫВНЫЕ ЭЛЕМЕНТЫ
С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ
1.74. Вывести дифференциальные уравнения и определить передаточ-
ную функцию длинной электрической линии, имеющей распределенные на
единицу длины индуктивность L, сопротивление R, емкость С и проводи-
мость G. Схема электрической длинной линии с датчиком Д на одном конце
и усилителем У на другом показана на рис. 1.38.
Решение. Рассматривая длинную; линию электрической передачи как
динамический элемент с распределенными параметрами, можно написать
два дифференциальных уравнения в частных производных:
L -g- + Ri (t) = 0;
дх 1 dt 1 v '
4-С -^-4-GU(0 = 0.
дх 1 dt 1 ' '
(1.172)
Применяя к обеим
получим
частям уравнений (1.172) преобразование Лапласа,
-^ = -l?/(S)-LsZ(S);
= (s) — Cst/ (s),
(1.173)
Рис. 1.38. Схема длинной электри-
ческой линии с распределенными па-
раметрами
57
где U (s) — изображение функции от оригинала и (/); I (s) — изображение
функции от оригинала i (0.
Продифференцировав первое уравнение системы (1.173) и подставив
в него второе уравнение, найдем
^^- = (/?+Ls)(G + Cs)(7(s). (1.174)
Продифференцировав второе уравнение системы (1.173) и подставив
в него первое уравнение, определим
_^M = (/?_|_LS)(G + Cs)/(S). (1'175)
В полученные зависимости (1.174) и (1.175) введем следующее обоз-
начение:
дг = (R + Ls)(G + Cs),
после чего получим систему уравнений
(1.176)
Решение этих уравнений можно записать в обычной форме:
U = -I-Cge-**; ]
/(S)_C^+C.e-. | <1177’
Продифференцировав второе соотношение системы (1.177), получим
= Csqeflx - С4?е-^. (1.178)
Подставляя второе уравнение системы (1.173) в выражение (1.178),
запишем <
VW------+ <1179’
Сравнивая первое соотношение системы (1.177) с выражением (1.179),
получим
— С —I— — С •
Us 6 + Cs -с1> х
с Q _____г
4 G + Cs “
откуда
с3----и С4 = -Ц^ с2.
Подставим полученные значения во второе соотношение (1.177); тогда
7(s)=—C1-^i$.^ + Ca-^±^.e-^. (1.180)
После этого систему соотношений можно записать в виде
U(s) = C^x + С2е~«; 1
I(s)---CjZts)]-1^ +C2lZ(s)r1e“’\ J (1,18I)
58
где
2(з)=И£££.
' ' Г u -f- Cs
Найдем передаточную функцию динамического элемента, пользуясь
соотношениями (1.181) и следующими краевыми условиями:
и (х, 0|*=Q = U
J(X, /)U=1 = (
Этот случай соответствует длинной линии, на вход которой, в момент
t = 0 подается напряжение и (t). Имея это в виду, получим
£7 (0, s) о Cj-|- С2;
0 = —'С1е’/ + Cge-9',
(1.182)
(1.183)
откуда
r U(P,s)e~4‘
, .-al
(1184)
U (x, s) ==• U (0, s)
(1.185)
но
(1.187)
(1.188)
Г _ U (°’ s>eW
е01+е-я1 ’
Подставляя полученное значение в первое соотношение (1..181), найдем
e-’z „ . е<1
——_J- .. -
Т е^ + е-*'
Из соотношения (1.184) можно получить передаточную функцию
W (X. S) - ц (0( s) - + ,
e*z e~*z = 2 ch ql\
еч (‘-*) е~ч <z~i> = 2 ch q (I — x).
Подставляя последние соотношения в выражение (1.185), запишем
W(x, s) = (1186)
При I = х выражение (1.186) примет вид
Г(/, 8) = -!^.
' ’ ch ql
Рассмотрим вывод передаточной функции длинной линии, если в момент
времени t = 0 к импедансу ZA (s) приложено напряжение и0 ((), а на входе
импеданса усилителя Zy (s) напряжение будет и (0|х=/- В этом случае кра-
евые условия запишем в виде
/(0, =
*Д Vs)
W-
Перепишем систему соотношений (1.181) следующим образом:
U (х, s) = Ci shgx Ci ch qx\
1 (x, s) « — [cl ch qx 4- Ci sh qx],
(1.189)
где
Ci = Ci — С2’,
Сг =** Ci 4" Сг-
59
Из первого выражения (1.188) и соотношений (1.189) определим
7ГХ (s) (s) Ci = Uo(s) — С2. х (1.190)
Используя второе выражение (1.183) и соотношение (1.189), получим
Z~l (s) Zy (s) [Cl ch ql + С2 sh ql\ = Cl sh ql + C2 ch ql. (1.191)
Из уравнений (1.185) и (1.186) найдем
[Z8 (s) ch ql — Z (s) Z9 (s) sh ql] Ua (s)
C1 = [Z (s) Zff (s) + Z (s) Zn (s)] chql - ]Zy (s) 2Я (s) - Z8 (s)J sh ql' ’
[Z (s) Zy (s) ch ql — Z8 (s) sh ql] Un (s)
— [Z (s) Zy (s) + Z (s) Z« (s)] ch ql — ]ZU (s) Za (s> 4- Z8 (s) j sh ql ’
Подставляя Ci и C2 в первое соотношение (1.189), запишем
Z (s) Zv (s) [ch ch <?х — sh <?/sh <?x(s) H1Q94
(7(X, S)— 12(s)Z{r(s) + Z(s)za(s)jch(?/ —(Z^slZa^^Z8^! shql *
Из выражения (1.192) нетрудно найти передаточную функцию в виде
f — "(х, s)__________________________Z(s)Zt,fs> cht?U—х)________________
(X, S) (/„ (s) [Z (s) Zv (s) 4- Z (s) Za (s)[ ch ql — ]ZV (s) ZA (s) 4- Z8 (s)[ sh ql
(1.1-93)
При I = x передаточная функция примет вид
Ц7(/ s)==______________________Z^ZjUs)___________________.
V’ > [Z (s) Zy (s) + Z (s> гл (s)J ch ql-\Zy(s)Za(s}-Z*(s)\shql '
Возможен и третий вид передаточной функции длинной электрической
линии, если считать, что
i(x, 0) = 0; |
и (х, 0) = 0. J
Тогда из соотношений (1.189) можно получить
U (I, s) — U (0, s) ch ql — Z (s) 1 (0, s) sh ql\
I {I- s) = — U^°(’S)S) sh ql 4- I (0, s) ch ql.
(1.195)
(1.196)
Из выражений (1.196) можно найти передаточную функцию длинной
линии. Если
ZiS]=
Z ( ) 1 (I, s) ’
то из соотношений (1.196), исключив I (0, s), найдем
Отсюда
W('1’ s) =’ётН)'= ch ~ sh (1.198)
или
W(l, s) = e-«i. (1.199)
В целом ряде практических задач можно считать R = G — 0; тогда
q =sVLC.
(1.200)
60
Рис. 1.39. Гидравлический при-
вод с насосом переменной произ-
водительности и длинными тру-
бопроводами
Подставляя соотношение (1.200) в формулу (1.199), получим
W(l, s) — e~si (1.201)
Обозначим время запаздывания через т = I LC. В этом случае пере-
даточная функция длинной линии примет вид
W(s) = e-™. (1.202)
Используя обратное преобразование Лапласа, запишем
и(0 = и(/ —т). (1.203)
1.75. Вывести дифференциальные уравнения и определить передаточ-
ную функцию длинного гидравлического трубопровода, учитывая его упру-
гую деформацию (рис. 1.39).
Решение. Уравнение движения элемента жидкости длиной AZ, выделен-
ного на рис. 1.39, можно записать в виде
+ 32р, - F (р' - р), (1.204)
где т — масса жидкости выделенного элемента; v — средняя скорость эле-
мента жидкости; р — коэффициент ^вязкости жидкости; F — внутреннее
сечение трубопровода; р'—р — разность давлений в сечениях /—1 и 2—2.
Изменение скорости в сечениях обозначим через Д/. Тогда средняя
скорость элемента жидкости
(к205)
Давление в сечении 1—1
р' = р--^-Ы.- (1.206)
Масса элемента
т = Fp Д/, (1.207)
где р — плотность жидкости.
Подставляя выражения (1.205)—(1.207) в уравнение (1.204), получим
д /___1 дД
—-----1 91 A/ + 32p^A/ = F[(p--g-A/)-p]. (1.208)
На основании закона Бернулли имеем
= (1.209)
61
Линеаризуем это уравнение:
откуда
Др=-^-. (1.210)
pv0
Подставляя это соотношение в уравнение (1.208), после дифференци-
рования найдем
о dv dM р А. og н А_______др_ /121П
P~t 2 dl dt 2 dldt^l^iZ D2p2w0 dl ’ I1--*11)
Пренебрегая членами второго порядка малости, получим
р_^. + 32-^-Др = —(Г.212)
r dt г D2pv0 dl '
Рассмотрим, какое влияние на элемент жидкости оказывает деформация
трубопровода. Суммарное изменение длины элемента жидкости определяется
сжатием жидкости Дх и увеличением объема трубопровода Д2, т. е.
Дх + Д2=(р-(1.213)
или
Дх + Д,»—^Д/Л.
По закону Гука определим сжатие жидкости в виде
Дх = -т?--^Д/Л, , (1.214)
х см at ’ '
где Еи модуль упругости жидкости.
Увеличение объема трубопровода будет
ДУ = л£>2 Д2, (1.215)
откуда
(1.216)
Но приращение внутреннего объема можно определить по формуле'
ДУ = nD ДК Д1, (1.217)
где ДЯ — удлинение радиуса трубопровода; £ — внутренний радиус трубо-
провода.
Удлинение радиуса тонкостенного трубопровода определяют с помощью
следующего соотношения:
Д/? = -^--^-Л, (1.218)
c& at ' '
где £а —г модуль упругости трубопровода.
Подставляя в выражение (1.216) зависимости (1.217) и (1.218), получим
Да = -^-^-Д/<Й. , (1.219)
62
Выражения (1.214) и (1.219) подставим в уравнение (1.213), откуда най-
дем
Т —(i + i-H- U-220)
Введем в уравнения (1.212) и (1.220) следующие обозначения:
= г 1 D 1 •
₽ L Ем + Et J
где а — скорость распространения гидравлического удара в трубопроводе.
Опустив знаки приращения, получим систему дифференциальных урав-
нений движения жидкости в трубопроводе
dv-__________I др
дх . ре2 dt ’
(1.221)
Применяя к системе (1.221) преобразование Лапласа, найдем
psV(s) = -^--2AP(s);
dV (в)
dx
-U- sP ($),
pa2 ' '
(1.222)
откуда
—4- 2А - -4- р (S) = 0.
dx* 1 dx а* к 1
(1.223)
Обозначим через q* = h* + найдем решение дифференциаль-
ного уравнения (1.223) в виде '
Р (s) == C1e<’~h> * + Cge~ <’+*>
Воспользуемся следующими краевыми условиями:
Р(х,о|«-о = ^(0,0;
Р(х, 0Ь=< = 0;
(1.224)
тогда
Сг =
Р(0, sJu-Ci + C,; |
0 = 1 + сае- w+h)'. J 1
Из уравнений (1.225) найдем
Р(0, s)e~ <?+*>/
е(?—h) I_е— (?+h) I ’
Р (0, S) е»**’1
I _е-(<?+*) I '
Подставляя полученные значения в выражение (1.224), запишем
Р (X $) =-----е—<1?+ * е(«—Л> х । f.(P> s)e.^ ’----е— (9+/>)х
* ’ > eW-h) ‘ _e(?+hH С e(?-h) ;_е-(«+м z С
(1.225)
=
63
откуда нетрудно определить передаточную функцию гидравлического тру-
бопровода
** (1.226)
Полученные выражения можно представить также в виде
W (х, s) = ----= e~hx (ch qx — ctbg/sh qx). (1.227)
При больших значениях ql выражение cth ql = 1, поэтому соотношение
(1.227) примет вид
№ (х, s) = e~hx [ch qx — sh qx] = e~hxe~‘ix (1.228)
или
W(x, s) = e-h*e V + “* ’
и при очень малых значениях h
W(x, s) = e“^’. (1.229)
Обозначим ~ — х (где т —время запаздывания); тогда передаточная
функция трубопровода будет
W (х, s) = e-xs. (1.230)
Последнее соотношение часто используют на практике, но оно полностью
справедливо лишь при h = 0 и ql = оо.
1.76. Вывести дифференциальные уравнения и определить передаточ-
ную функцию гидравлической турбины, к рабочему колесу которой поступает
вода через длинную трубу. Составить структурную схему этого объекта регу-
лирования. Упрощенная схема гидравлической турбины показана на
рис. 1.21, а.
Решение. Уравнения, описывающие динамические процессы,' протека-
ющие в трубе, запишем в виде >
ду 1 dv .
дх g dt ’
dv _ g ду
дх аг dt ’
(1.231)
где у — гидравлический напор; х — расстояние от водоема до интересую-
щего нас сечения (в данном случае направляющих гидротурбины); а — ско-
рость распространения гидравлического удара; g — ускорение силы тяжести.
Воспользуемся преобразованием Лапласа. Тогда систему
(1.231) можно записать в виде
4-
уравнений
(1.232)
Примем следующие граничные условия:
у = 0 при х = 0;
У = У о 1
? при х = I.
V == Уо J г
(1.233)
64
Тогда получим
У (/, s) — у0— (— е“ ° s + е° s) V(s);
У (/, s) — и0 == -^- (ё а s + е а *)
Введем следующие обозначения:
У(/, s)-/y0== ДУ(/. s); 1
V {I, s) —о0==ДУ(1, s). |
(1.234)
(1.235)
Используя их, запишем передаточную функцию трубы в виде
1У(/,
_ № (/, s)
6' ДУ (/, s)
е*_е-г> а
Х.(е« + е-та) 8
TS.
(1.236)
В относительных переменных уравнение расхода воды имеет вид
р(0 __ 2(0 1/ у (О
«о г» V у«
(1.237)
где v (0 и у (1) — соответственно скорость вода и ее напор у направляющих;
z (0 — отклонение направляющих.
Линеаризуя уравнение (1.237), получим
+ I (1.238)
Ри *0 * Ун
Применим к уравнению (1.238) преобразование Лапласа. Тогда
1 АГ S> /1 OQQA
р0 г0 + 2 уй • (1.239)
Подставим в уравнение (1.239)
ДУ (/, s) -----------ДУ (/, s) (1.240)
—— this
g
и найдем
/ 1 \ АГ (I, s) AZ(s) ,
\ av„ th is 2 / ya ~ 2U ’ (1.241,
Из уравнения (1.241) определим
АУ (/, Уч -^2-th ts 0 _ gy<> ii .к 1 + о " th w 2^в At 2o * (1.242)
Введем в выражение (1.242) следующие обозначения:
рпвв-^2_- дуУ> 5) у(3у
₽0 2gf,' у«
AZ (s) ”, .
Тогда получим
’<s>----:$&?<’)• >1-243J
3 Ю» И. Топчеев 65
Уравнение движения рабочего колеса турбины запишем в виде
7т-=4-х2^-м»° +<L244>*
Uf <Ь> Wff
где J — момент инерции рабочего колеса; со» — угловая скорость вращения
рабочего колера; х — коэффициент пропорциональности; Л1С() — установив-
шиеся значения момента сопротивления; ДЛ10 [1 ] — мгновенный сброс
нагрузки на гидротурбине.
Линеаризуя уравнение (1.244), получим
ж d До» 1 eg Г. ( Дг До» , 3 Ду 1
dt = 2 Ш(( [ ' г. о»„ + 2 у, j
- /ИСо + ДЛ10[1]. (1.245)
• Для установившегося состояния
Учитывая это выражение, уравнение (1.245) перепишем в виде
Да>^
/ш»(, О»о _ _ До» 3 Ду . Дг (1.246)
Мя0 dt Moo о»,, 2 у, "г г„
• Введем в последнее уравнение следующие обозначения:
Т =Е
/Ид, ’ о».,
АМС [ < ] С г...
MOJ “МЧ.
тогда получим 1
п-^-+у(п=м11+рю + 4-т ' (1-247)
Применяя к этому уравнению преобразование Лапласа, найдем
3
1 । “2“
= S (7’TS 4- D f ° 1\s 4- i I1 7\s 4-1 v (1,248)
Подставляя в последнее уравнение соотношение (1.243), запишем
+ (1.249)
ИЛИ
Y(s) = Yi (s) + Ya (s)- (1 -250)
Окончательная форма передаточных функций гидротурбины с длинной
трубой, подающей воду к рабочему колесу, будет иметь вид
(s) == ?»(s) =. 1 • ]
F0(s) s(T,s4-l; ’
_. „ .. n ? (1.251)
пр /c\_Ya _________1 Г 1 — 2po th ts 1 j
4 u (s) 7" ts -j- 1 L 1 4" ₽e th is J J
* См. указание к задаче 1.35.
66
Рис. 1.40. Структурная схема гидро-
турбины с длинным- трубопроводом
Рис. 1.41. Пневматический силовой ци-
линдр с пневмораспределителем и длинным
воздуховодом
По передаточным функциям (1.251) и уравнению (1.250) построена
структурная схема гидротурбины на рис. 1.40.
1.77. Вывести дифференциальные уравнения движения и определить
передаточную функцию гидравлического силового привода с насосом пе-
ременной производительности при длинных трубопроводах между насосом
и гидродвигателем. Схема и обозначения показаны на рис. 1.39.
1.78. Вывести дифференциальные уравнения движения и определить
передаточную функцию пневматического силового цилиндра с длинными воз-
духоводами между сопло-за слон кой и силовым цилиндром. Упрощенная
схема привода показана на рис. 1.23, а.
Указание. См. указание к задаче 1.38.
1.79. Вывести дифференциальные уравнения движения и определить
передаточную функцию пневматического силового цилиндра с пружиной
и длинным воздуховодом между пневмораспределителем 1 и цилиндром 2
(рис. 1.41).
1.80. Вывести дифференциальные уравнения и определить передаточ-
ную функцию химического реактора с паровым подогревом по температуре
воды в зависимости от расхода пара. Упрощенная схема установки показана
на рис. 1.42.
Указание. Уравнение между расходом пара и температурой воды в ре-
акторе составлять из условия тепловогб баланса. Потерями тепла через на-
ружную рубашку реактора можно пренебречь.
1.81. Вывести передаточную функцию изменения температуры ф слитка
в печи,, если его дифференциальное уравнение имеет вид
дь _
dt ~ а дх* •
где а — коэффициент температуропроводности, определяемый по формуле
а — — (здесь X — коэффициент теплопроводности; с—теплоемкость; р —
удельная плотность материала слитка); •& — й (х, t) — изменение темпе-
ратуры по длине слитка.
1.82. Вывести дифференциальные уравнения процесса нагрева листа
и определить передаточную функцию для упрощенной схемы печи, изобра-
женной на рис. 1.43.
Кинический
Рис. 1.42. Химический реактор Рис. 1.43. Печь для нагрева металлического листе
с паровым подогревом
67
Указание. Первоначальная температура листа О0, требуемая температура
нагрева листа Ок. >
1.83. Вывести дифференциальные уравнения движения гидравлической
турбины с переменными углами установки лопастей и длинным трубопрово-
дом для подачи воды, линеаризовать уравнения, определить передаточную
функцию и составить структурную схему.
Указание. См. указания к задачам 1.36 и 1.76.
1.84. Вывести дифференциальные уравнения движения паровой тур-
бины, учитывая
длину паро- и маслопроводов, линеаризовать их и опреде-
-___________________ лить передаточную функцию
С( * вида
у (s)
Х3 (S)
^пт(^) =
где у (s) — относительная угло-
вая скорость вращения колеса
турбины; Х3 (s) — перемещение
плунжера гидравлического рас-
пределителя.
Указание. При выводе урав-
нений необходимо учитывать,
к силовому цилиндру следует
Рис. 1.44. Паровая турбина с направляющим аппа-
ратом, управляемым от гидравлического привода
что трубопровод к турбине и гидропровод
рассматривать как длинную линию передачи. Упрощенная схема паровой
турбины и гидравлического привода изображена на рис. 1.44.
1.85. Вывести дифференциальное уравнение термопары, учитывая вли-
яние ее «бронировки», линеаризовать его и определить передаточную функ-
цию вида
Ц7(5) = -Ж,
О (s)
где U (s) — напряжение, снимаемое с выхода термопары; ft (s) — измеряе-
мая температура. '
1.86. Вывести дифференциальное уравнение термопары, учитывая вли-
яние ее «бронировки» и длину проводников термопары. Линеаризовать урав-
нение и определить передаточную функцию.
Указание. См. задачу 1.74.
1.87. Вывести дифференциальное уравнение и определить передаточ-
ные функции длинной электрической линии при воздействии распределен-
Е
ной электродвижущей силы у-. В качестве краевых условий следует принять
и(х, 0 U=o ==*(*. О|*=о£в;
и (х, Z)|i=z = 0.
Указание. См. задачу 1.74.
1.88. Вывести дифференциальные уравнения, линеаризовать их и опре-
делить передаточную функцию Системы измерения тока с учетом длины про-
водов от измерительного трансформатора до электронного усилителя. Блок-
схема системы измерений показана на рис. 1.45.
1.89. Вывести дифференциальные уравнения, линеаризовать их и опре-
делить передаточную функцию гидравлического привода с лопастным гидро-
двигателем и распределителем, соединенными длинными трубопроводами.
Указание. См. задачу 1.18.
1.90. Вывести дифференциальные уравнения, линеаризовать их и опре-
делить передаточную функцию ректификационной колонны по температуре
и расходу пара при длинном паропроводе. Схема ректификационной колонны
изображена на рис. 1.46.
68
Указание. Объем ректификационной колонны — w, ус — концентрация
поступающего сырья; угп — концентрация готового продукта; ис — расход
сырья; vrn —расход готового продукта; сга— теплоемкость готового про-
дукта; Фп Вх — температура пара на входе колонны; вых — температура
пара на выходе колонны; Огп — температура готового продукта; X — ко-
эффициент теплопередачи; QK— количество тепла, выделенного в колонне.
Рис. 1.45. Блок-схема системы
измерения тока
Рис. 1.46. Ректификационная колонна
с длинным паропроводом
При выводе уравнений принять среднюю температуру пара
А ВХ 4~ ВЫХ
ип ср 2 *
1.91. Вывести дифференциальные уравнения и определить передаточ-
ные функции ядерного энергетического реактора иа тепловых нейтронах,
парогенератора по первому контуру, усчитывая влияние длинных трубопро-
водов. Составить структурную схему первого контура энергетической уста-
новки по схеме, приведенной иа рис. 1.47.
Рис. 1.47. Схема первого контура атом-
ной электростанции
Рис. 1.48. Схема второго контура атом-
ной электростанции
Указание. См. задачу 1.7.
1.92. Вывести дифференциальные уравнения, определить передаточные
функции парогенератора ядерной энергетической установки по второму
контуру, паровой турбины и длинных трубопроводов между турбиной и па-
рогенератором (рис. 1.48). Составить структурную схему второго контура
энергетической установки.
1.93. Вывести дифференциальные уравнения, линеаризовать их и опре-
делить передаточную функцию объекта химического производства, состоя-
щего из одного реактора и двух каталитических башен. Удельная плотность
69
жидкого продукта рп, температура жидкого продукта в реакторе Тх; b .1-й
башне Т2; во 2-й башне Т3.
Указание. Изменения объема рабочей жидкости можно определять
по формуле
= IO’3 ДФ.
Температура изменяется следующим образом:
1.1.4. ДИНАМИЧЕСКИЕ НЕСТАЦИОНАРНЫЕ НЕПРЕРЫВНЫЕ ЭЛЕМЕНТЫ
С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ
1.94. Вывести дифференциальные уравнения процесса теплообмена
между тепловой средой и движущимся листом и получить преобразование
Лапласа для первого и второго приближения выходной величины. Упро-
щенная схема проходной нагревательной печи и соответствующие обозна-
чения приведены на рис. 1.49.
Решение. Среда нагрева характеризуется следующей функцией распре-
деления температуры:
и = и (х, 0, (1.252)
где 0 х I.
Листовой металл движется в печи со скоростью v (0; функция распре-
деления температуры по длине листа определяется в виде
6 = д (*. 0.
Если теплофизические параметры тонкого листа характеризуются функ-
цией b = b (х, 0, то процесс теплообмена описывается следующим диффе-
ренциальным уравнением:
*(*. 0(-f- +Н0-^-)+^(х, t)~ku(x, t). ; (1.253)
Граничные и начальные условия будут иметь следующий’ вид:
ft (0, 0 =flr(0;
Ф(х, 0) = Фо1л).’
(1.254)
Термопары
Рис. 1.49. Схема проходной нагреватель-
ной печи
Ограничимся случаем,"когда коэффи-
циенты уравнения (1.253) b (х, 1) и
v(t) являются медленно меняющимися
функциями времени. Тогда их можно
разложить в ряд Тейлора по перемен-
ной 1:
b (х, 0 = Ьо (х)-нм*Н—; 1
Функцию Ф (х, 0 также будем
искать в виде ряда
0 (х, 0 = (х, 0 + fl1 (X, 0 + . . . .
(1.256)
Подставляя разложения (1.255) и
(1.256) в уравнение (1.253), получим
для &° (х, 0 следующее уравнение:
Ь'(т+v° "7г) + k®° “ ku (х'
(1.257)
70
с- граничными и начальными условиями:
о*(<ь 0-М0;1 (1.258)
<>(*, 0) — #0(х). J
Для того чтобы получить нулевые начальные условия, введем вамеву
переменных
0" (х, f) - (х) + Т (х, 0. (1.2889
Тогда для Т (х, 0 получим следующее уравнение:
ЙЬ(ж)(^± + р^)+АТ-Аа(ж, 0 + <Р(Д (1.260)
где
Ф (х) =. — kft0 (х) — b0 (х) v0
Применяя к уравнению (1.260) преобразование Лапласа, получим для
Т (s, х) дифференциальное уравнение первого порядка
ах ^Г~ + а*Т & “ kU <5’ ’
где ах — v0b0 (х); а2 — b0 (х) s + k.
Решение уравнения (1.261) е учетом граничного условия
?(0, 3)=^ж(5)«^(8)--^
(1.261)
имеет вид
f (х, s)
г [«/(•) 4-2-W
Кл*)+ М-------7-^-
dx exp
. (1.262)
L о J \ о /
Используя выражения (1.259) и (1.262), определим первое приближение
для выходной величины: <
ь Г
р kU (в) -)
$°(s, £)-«(£)+ &, (s)-
<Md)
S '
dx
X
X exp
о
L
(1.263)
Уравнение для определения О'1 (х, 0 найдем, подставляя в формулы
(1.255) разложения (1.257) и (1.258) и учитывая в них члены первого порядка
малости, т. е.
Цт+^+^’-фМ-О,
(1.264)
где ф (х, 0 == —k (д° — и).
Граничные и начальные условия для будут нулевыми.
Применяя к уравнению (1.264) преобразование Лапласа, получим
а8 4- (s, х) = ф (s, х), (1.265)
где а3 = Ьо (х) о0; а4 = b0 (х) s 4- k.
Отсюда
fr(s. =
о 8
exp
(1.266)
71
1.95. Вывести передаточную функцию для процесса нагрева пластиды,
в нагревательной печи, если он описывается одномерным уравнением тепло-
проводности 17 = «(0-^-, (1-267)
где 0 = 0 (у, t), а граничные и начальные условия имеют вид = 0]; j», = 0. (1.268) dt/ |»=а О (у, 0) = 0.
Решение. Введем замену переменных t т =» a (/) dt.
Тогда уравнение (1.267), граничные и начальные условия (1.268) можно
представить в виде
ЗД d2fl .
dt dj/a ’
-4^-1 = а[ы(т) — & (Н, т)];
dy |j,=o v V > i (1.269)
-^-1 =0;
df/ |p=H
9 (у, 0) = 0.
Применяя к системе уравнений (1.269) преобразование Лацласа, получим
s§(s)=-^-O(s). (1.270)
Решая уравнение (1.270) с учетом начальных и граничных условий (1.269),
найдем:
& (s> У) — ~7=-7==^ ---7=- ch j/s у. (1.271)
' Kssh \fs Н-Yachts И *
Из выражения (1.271) окончательно получаем
W (с) =а ® (S| ------« ch Ks //___ . . 279ч
U (s) - уТзЬКГЯ + асЬКГя' ( }
1.96. Вывести в одномерном приближении дифференциальное уравне-
ние процесса нагрева пруткового тепловыделяющего элемента в реакторе
(см. рис. 1.9, а) и получить преобразование Лапласа для его выходной тем- .
пературы.
1.97. Вывести в одномерном приближении дифференциальное уравне-
ние процесса нагрева теплоносителя в реакторе и получить преобразование
Лапласа для температуры теплоносителя на выходе из реактора.
Указание. См. задачу 1.91.
1.98. Вывести передаточную функцию для процесса нагрева пруткового '
тепловыделяющего элемента, если его теплоемкость является функцией
времени с — с (t).
Указание. См. задачу 1.95.
72
1.99. Вывести передаточную функцию для процесса прохождения элек-
тромагнитной волны через слой проводящего вещества. В качестве входной
и выходной величин следует принять напряженность электрического поля
на поверхности слоя и на глубине L.
Указание. Процесс распространения электромагнитного поля в веще-
стве описывается уравнением
= (1-273)
с граничными условиями
при г — О Е = Ео (f),
при г — со Е = О
и начальным условием
при t = О Е (г, 0) = 0,
где Е (z, 1) — напряженность электрического поля; р, — магнитная прони-
цаемость; у (0 — проводимость.
1.100. Вывести дифференциальные уравнения продольного движения
летательного аппарата, учитывая изменение жесткости его корпуса и дей-
ствие сил внутреннего неупругого сопротивления, определить передаточные
функции и составить структурную схему.
Указание. При выводе уравнений следует считать, что силы внутреннего
неупругого сопротивления летательного аппарата пропорциональны ско-
ростям деформации.
,1.101. Вывести дифференциальные уравнения бокового движения ле-
тательного аппарата, учитывая изменение жесткости его корпуса и действие
сил внутреннего неупругого сопротивления, определить передаточные функ-
ции и составить структурную схему.
Указание. См. задачу 1.72. ,
1.102. Вывести дифференциальные- уравнения бокового движения не-
симметричного летательного аппарата, учитывая влияние крена, изменение
жесткости его корпуса и действие сил внутреннего неупругого сопротивле-
ния. Определить передаточные функции летательного аппарата и составить
структурную схему.
Указание. См. задачи 1.72, 1.73.
1.1.5. ДИНАМИЧЕСКИЕ ДИСКРЕТНЫЕ ЭЛЕМЕНТЫ
Динамические процессы в дискретных системах автоматического регу-
лирования описываются разностными уравнениями. При периодическом
процессе квантования по времени разностные уравнения имеют постоянные
коэффициенты.
Для упрощения математических зависимостей, применяемых при со-
ставлении уравнений динамики и передаточных функций дискретных эле-
ментов, применяют идеализированные модели, в которых последовательно-
сти импульсов имеют единичные интенсивности и могут быть записаны в виде
во
«* (0 = K=S (I — «Л. (1.274)*
где б (t — кТ) — дельта функция; Т — период квантования.
,.десь и далее, в тексте, посвященном дискретным и дискретно-непрерывным системам
|ровання, импульсные сигналы обозначаются звездочками.
73
Рис. 1.50. Преобразователь код—ана-
лог-.
а — упрощен»* прмиципяальяая схема;
б — входной оигнала « — выходной сиг-
нал
Ч(?Т) ез(ЗТ) е,(кТ)
ев(ВП e,f?D
О
JT
Тогда при подаче на вход дискретного элемента импульсного сигнала,
преобразующего непрерывный сигнал х (t), имеем
х* (0 = £ х (кТ) 6 {t - кТ). (1.275)
Применив к выражению (1.275) дискретное преобразование Лапласа,
получим
X*(s)=- 2 х(кТ)е—п.
(1.276)
С помощью выражений (1.275) и (1.276) описывают динамические про-
цессы и в цифровых управляющих вычислительных машинах.
1.103. Определить передаточную функцию преобразователя код-аналог
нулевого порядка, имеющего упрощенную принципиальную сх[ему, показан-
ную на рис. 1.50, а.
Решение. На вход преобразователя поступают импульсные сигналы
е0 (07’), в! (1Т), . . ., ек (кТ) в тактовые моменты времени (рис. 1.50, б).
Разряд конденсатора преобразователя происходит по экспоненциальной
кривой с постоянной времени То (рис. 1.50, в). Входной сигнал представим
в виде суммы входных импульсов, т. е.
е*(0 = ео(0Т) + е1(1Т) + еь(2Т) + .-.+ек(кТ); (1.277)
здесь
^(0Л-М©;
в1(1Т)=-М(^-Л; e2(2T)==feg6(if — 2Т); (1.278)
ек (кТ) = &к6 (t — кТ).
Подставляя выражения (1.278) в формулу (1.277), получим
e»(0-= S Ы(! — кТ). • (1.279)
К—0
Выходной сигнал представим в виде
е. (0 = (t) -j- еи (t) + ем (0 + • • • + е» (<); . ' (1.280)
74
здесь
_ t
ев0 (Л = ~Г° [и (!) — и (t — Т)];
f—T
е,0 (О = М [и (t - Т) — и (t — 2Т)];
t—2T
= т‘ [и(t - 27") - и{t - ЗТ)1;
f-кТ
e„(f)-M \и^~кТ)-и{1-(к+Х)Т\\.
Подставляя выражение (1.281) в формулу (1.280), получим
е,(П-S 57"{и(/-«Т)-и[<-(*+ ИГ]}.
к=0
(1.281)
(1.282)
Применяя преобразование Лапласа к выражениям (1.279) и (1.282),
найдем
£*(8) = к| V“rs;
_ i . 7 \ "
E,(s)--пйт'1-® Г’е /S b-KTs , (1.283)
1 Т ' 0s к«=0
откуда получим передаточную функцию преобразователя код—аналог в виде
«. т
^4 (S) = Ш = 1 + Ь ]~е 7е~П ‘ (1-284)
При большом значении постоянно!) времени То передаточная функция
йДеаЛйзироваиного преобразователя нулевого порядка
. 1 — e~Ts
WKA(s) = —s—. (1.285)
0
Характеристики выходных сигналов на выходе идеализированного пре-
образователя представляют собой прямоугольники (см. на рис. 1.50, в штри-
ховые линии).
1.104. Вывести разностные уравнения, определить передаточную функ-
цию программы интегрирования, реализуемую на цифровой управляющей
вычислительной машине по методу Эйлера, и составить структурную схему
программы.
Решение. Формулы численного интегрирования являются аппрокси-
мациями разностных уравнений, которые получаются с помощью ряда Тей-
лора. При решении дифференциального уравнения
$/(0) = 0
(1.286)
воспользуемся первым членом разложения функции у в ряд Тейлора. Тогда
Уп+1 = Уп+ Tf„ (1.287)
где" Т — величина шага интегрирования; п — индекс, обозначающий коли-
чество шагов.
75
Откуда получим разностное уравнение в виде
Уп+i - Уп = Tfn. (1.288)
Применяя к разностному уравнению (1.288) дискретное преобразование
Лапласа, получим
У* (s) - 1) = TF* (s). (1.289)
Из выражения (1.289) найдем передаточную функцию программы инте-
грирования по Эйлеру, реализуемую на управляющей ЦВМ в виде
^np. Р (S) = • (1 -290)
На рис. 1.51, а показана структурная схема данной программы, инте-
грирования.
1.105. Вывести разностные уравнения и определить передаточные функ-
ции программ интегрирования дифференциального уравнения
У(0) = 0,
реализуемых на управляющих ЦВМ по методам: а) трапеций, б) Рунге-
Кутта 4-го порядка. Составить структурные схемы данных программ.
Решение. Рассмотрим все численные методы на примере интегриро-
вания системы (1.291).
а. При интегрировании по методу трапеций воспользуемся двумя чле-
нами ряда Тейлора; тогда
Уп+i = Уп + Tfn-i—2~ In- (1.292)
Производную fn будем аппроксимировать следующим образом:
(1.293)
Подставляя формулу (1.293) в выражение (1.292), получим
У п+1 = Уп + ?ln + ~2~tfn ~ /«-lb (1.294)
76
или
Уп+i Уп — ~2~ fn-il’ (1.295)
Применив к выражению (1.295) дискретные преобразования Лапласа,
найдем
, 7» (я_е-“’Г\ е—sT
ir„p. р (s) = 4-(3 ДеДег , (1.296)
откуда нетрудно определить структурную схему программы (см. рис. 1.51, б).
б. При интегрировании по методу Рунге—Кутта 4-го порядка дифферен-
циального уравнения (1.291) будем использовать следующие рекуррентные
соотношения:
Уп+i = Уп + “g- 4” ~ ^2 4” "в- ^з. (1.297)
где
^0 ~ Tf (tn‘, Уп)’,
^=П(«я4-4Т; ^4--гМ;
^ = П(^4-4Г; +
^з — Tf (in 4* Уп 4*
В нашем случае правая часть f от у не зависит, поэтому
yn^~yn + ^Tfn + ±Ttn + ±-Tf х +±-Tf 1 4-
о о z «Т—2 ° « + -3-
+ 4-TfM^yn + ^-\fn + 4Tf +fM]. (1.298)
L п + — J
Применяя к полученному выражению прямое преобразование Лапласа,
получим 1
(“JF - О Y* («) = V f1 4- 4Т -Ь + F*(s). (1.299)
\е ] )
Отсюда
sT
-н. (1.зоо)
С помощью передаточной функции (1.300) нетрудно определить струк-
турную схему программы (рис. 1.51, в).
1.106. Вывести разностные уравнения и определить передаточные функ-
ции программ интегрирования дифференциального уравнения (1.291), реали-
зуемых на управляющих ЦВМ по методам: а) Эйлера (улучшенного) с двой-
ным шагом; б) Рунге—Кутта 3-го порядка. Составить структурные схемы
данных программ.
1.107. Вывести разностные уравнения и определить передаточные функ-
ции программ интегрирования дифференциального уравнения (1.291), реали-
зуемых на управляющих ЦВМ по методам: а) Симпсона 1/3; б) Штермера.
1.108. Вывести разностные уравнения и определить передаточные функ-
ции программ интегрирования дифференциального уравнения
Л4-^(0=»* (0 при y(Q) = y0, (1.301)
77
реализуемых на управляющих ЦВМ по методам: а) Эйлера; б) трапеций;
в) Рунге—Кутта 4-го порядка. Составить структурные схемы данных про-
грамм.
1.109. Вывести разностные уравнения и определить передаточные функ-
ции программ интегрирования дифференциального уравнения (1.301), реали-
зуемых на управляющих ЦВМ по методам: а) Эйлера (улучшенного);
б) Рунге—Кутта 3-го порядка/
1.110. Вывести разностные уравнения и определить передаточные функ-
ции программ интегрирования дифференциального уравнения
$ ==Х(П при //(0)=5о, (1.302)
реализуемых на управляющих ЦВМ по методам: а) Адамса—Башфорта;
б) Адамса—Мультона. Составить структурные схемы данных программ.
1.111. Вывести разностные уравнения и определить передаточные функ-
ции программы интегрирования дифференциального уравнения
Л -g- + + У W e х W (1 -3°3)
при0(О) = 0о; ^ = 0,
реализуемой на управляющей ЦВМ по методам: а) Эйлера; б) Рунге—Кутта
3-го порядка. Составить структурные схемы данных программ.
1.112. Вывести разностные уравнения и определить передаточные функ-
ции программы интегрирования дифференциального уравнения
Л-§- + ^(0“Х(П . (1-304)
при j(0) = 0;
реализуемой на управляющей ЦВМ по методам: а) Эйлера; б) трапеций.
1.113. Найти передаточную функцию преобразователя ' код — аналог
1-го порядка. ।
1.114. Вывести разностные уравнения и определить передаточные функ-
ции программ идеального дифференцирования, реализуемых на управляю-
щих ЦВМ по методам: а) первой, б) второй и в) третьей центральных раз-
ностей. Составить соответствующие структурные схемы программ.. .
Решение. Дифференциальное уравнение , .
-§ = ^(0 (1.305)
будет реализовано на управляющей ЦВМ. Для этого воспользуемся разност-
ным методом решения дифференциального уравнения (1.305) при нулевых
начальных условиях. Тогда
V
J У (1.306)
Заменим функцию у (t) интерполяционной формулой Стирлинга; т. е.
У (*) = /»+tf'n* + 4 fln+f 'к + £+•••; (1 -307)
здесь ft fn‘, fn, tn’ и f J — значения функций в точках yn+lt, Уп_л, где к =0, ,
78
При этом будем иметь
1п-И .
Х„+1 _ Хп = j [ ft tf> + 4 f'n + l} f?n + * ’ '' 0 -308)
‘n
ИЛИ
XW_«.=^ j [fi ++ ^_f, + + й + ...]л =
= «2 taofn 4~ cilfn' 4~ Cbfn 4“ Ct-dfn2 4* ^fn 4” ’)» (1.309)
где постоянные a0, au a2, ... не зависят от T.
Из выражения (1.309) найдем
1
Оо — J dt =* 2;
1
== J t dt == 0;
i
г t1 .. 1
a2= J -^=-5-;
—1
a8= J -^2-.U dt=*O-,
Имея это в виду, из выражения (L309) получим следующую зависимость
х„+1_х,=4(2/°+4-/‘•••)• (1.310)
Из последующего выражения выведем разностные уравнения программ:
дифференцирования:
а) для первой центральной разности
хп+1 хп~ ______L’ (1.311)
б) для второй центральной разности
Хп*Ь хп = 4 з" [(i/n+l ) ^'*+4' ~
= 4^+Ч+±+^): (L3I2>
в) для третьей центральной разности Хп+1 хя = -х- -|- о Г/z/ । уп 1 L\ "+v J 00 1 Уп+\ У j \ 3 / у । • у^ |Д п + ~2 J п + ~2 ) — (у УЛ. \ п~~^ J) ~(Уп-У i\ — \ п 77 I -]-3(Уп — У ( \ — к П-Т/ (1.313)
79
или
х„+1 — хп = Т5Н-Л— Уп+1 4-34# ! 4-114#„4-34# ( — #Я_Л. (1.314)
к п + “ )
Применив к формулам (1.311)—(1.314) преобразование Лапласа, найдем:
а) Для первой центральной разности
X'(1.315)
<L3I6)
Программа дифференцирования (1.316), реализуемая на управляю-
щей ЦВМ, приведена к реальному времени. Соответствующая этой фор-
муле схема изображена на рис. 1.52, а.
Реальный масштаб времени на этом рисунке учитывается обозначе-
ниями входного сигнала в виде хп и выходного сигнала в виде уп_х.
б) Для второй центральной разности
Х’(5)[-^Г + 4 + e~sr)r*(S)’ (L3I7)
откуда получим
. . Y*(s) 3 1- е-2sr /1 Ч1ЯЧ
(S) — х* {s) - т ! +4e-ST+e-2s7 • (1.318)
Структурная схема этой программы в реальном времени изображена
на рис. 1.52, б.
в) Для третьей центральной разности <
— — 1
+ 1144-34е 2-e~sr Y*(s), (1.319)
Рис. 1.52. Структурные схемы программ дифференцирования, реализуемые на управляющих
ЦВМ в реальном масштабе времени по методам:
а — йервой центральной разности; б второй центральной разности; в — третьей центральной раз>
ности
80
откуда получим
wt (s) = 22151 __ J80 ____________l-e"2^_______________ (1
"np Is/ X* (s) ~ Т _s£ 3s Г ‘
— 1 4- 34e 2 4- I I4e~s7 4- 34e 2 — e~2s:r
Структурная схема этой программы в реальном времени изображена на
рис. 1.52, в.
1.115. Вывести разностные уравнения и определить передаточные функ-
ции реализации дифференциального уравнения
l\^i + x(t) = y\t) при х(0) = хо
на управляющей ЦВМ по методам: а) первой, б) второй центральных разно-
стей. Составить соответствующие структурные схемы программ.
. 1.116. Вывести передаточные функции программ идеального дифферен-
цирования, реализуемых на управляющих ЦВМ, с помощью интерполяцион-
ных формул. Адамса по методам: а) первой, б) второй и в) третьей централь-
ных разностей.
Указание. Следует пользоваться интерполяционными формулами:
а) хп-и хп~ Туп+1;
т
б) Xn+1 — хп = -g- (у„+1 -I- уп);
т
'.1+1 Хп = и* (б^/n+l Уп-1)-
1.117. Вывести разностные уравнения и определить передаточные функ-
ции программ реального дифференцирования
7\-J- + *(0==l/(0 при х(О) = хо,
реализуемых на управляющих ЦВМ с помощью интерполяционных формул
Адамса по методам: а) первой и б) второй центральных разностей.
1.2. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ДИНАМИЧЕСКИХ
ЭЛЕМЕНТОВ
Частотные характеристики динамических элементов могут быть найдены
из передаточных функций, если в них положить s = /со. Передаточная функ-
ция динамического элемента может быть представлена в виде следующего
отношения полиномов:
(/со) == ь-‘^т+-::+ь^.±ьл.. (1.321)
ап Wn 4- • • • 4- а1/<о 4" ао
Отделив в числителе и знаменателе вещественную часть от мнимой,
получим
w дэ “ с (и) 4- id (<о) ’ ’
где а (со) = Ьо — 4- h4co4 — • • •;
b (со) = Ьхсо — bscos 4- b5co5 — . •
с (со) = а0 — 4- а*®4 — • ‘
d (со) = axco — д3со3 4- я6со5 — • • •.
81
Имея это в виду, выражение (1.322) можно разделить на действительную
и мнимую части; тогда
О) - U (®) + jV (©), (1.323)
где
г,. к а (®) с (®) + b (w) rf (©) .
У (<£>)= с»(ф)+с(а(Ю^
v , ч ь (и) с (®) — а (<о) d (<о)
У<®) =----’
Выражение (Е323) можно записать через амплитудную (со) и фазо-
вую 0ДЭ (со) частотные характеристики:
(/со) = Яд, (со) ‘°’, (1.324)
где
н 1/ а’(®) + й4 (®) . .
V > <L325)
e„(»)-arctg;757775;Trs?J73j. (1.326)
С помощью зависимости (1.323) в декартовой системе координат строится
амплитудно-фазовая частотная характеристика (годограф) динамического
элемента. При использовании формулы (1.324) годограф строится в полярной
системе координат (амплитуда—фаза). Наряду с амплитудно-фазовыми харак-
теристиками в инженерной практике часто пользуются амплитудной частот-
ной характеристикой Н (со) и фазовой частотной характеристикой 0 (со).
Обычно частотные характеристики динамических звеньев строятся на полу-
логарифмической сетке, когда по оси абсцисс откладывается частота в лога-
рифмическом масштабе, а по оси ординат амплитуда в децибелах (т. е.
20 1g Ню (со) — LmH (со)) и фаза 0 (со) в градусах. Получающиеся таким обра-
зом частотные характеристики называются логарифмическими;
1.2. 1. АМПЛИТУДНО-ФАЗОВЫЕ ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ
1.118. Построить амплитудно-фазовые частотные характеристики 6-ти
типовых звеньев, встречающихся в виде сомножителей в передаточных функ-
циях динамических элементов.
Решение. Передаточные функции типовых звеньев приведены во
2-м столбце таблицы приложения II, а вид амплитудно-фазовых частотных
характеристик при произвольном значении постоянных времени Т и степени
демпфирования $ и изменении со от 0 до о© — в 5-м столбце.
1.119. Построить амплитудно-фазовую частотную характеристику ди-
Тс -4- 1
иамического элемента, имеющего передаточную функцию №дэ (s) = ys_
при изменении со от 0 до 4-00.
Решение. Подставив в передаточную функцию s = /со, получим ам-
плитудно-фазовую характеристику, в виде полуокружности радиуса R = 1.
При со = 0 координаты амплитудно-фазовой характеристики (—1; /0), а при
со == о© (-|-1; /0). Соответствующее построение годографа показано на
рис. 1.53, а.
1.120. Построить амплитудно-фазовую частотную характеристику дина-
мического элемента, имеющего передаточную функцию (з) = ~ при
изменении © от 0 др 4-оо.............
82
Решение. Подставим в передаточную функцию s'«« /со; тогда ампли-
тудно-фазовая частотная характеристика примет вид, показанный на
рис. 1.53, б.
1.121. Построить амплитудно-фазовую частотную характеристику ди-
Т2г2 ' 1
намического элемента, имеющего передаточную функцию (s) =
при изменении со от 0 до 4-оо.
Решение. Преобразуем передаточную функцию к виду
V м- (T’s-iHT’s+.i)
w л* Is'-----------------------тМ 4-1
Амплитудно-фазовая частотная характеристика для этой передаточной
функции изображена на рис, 1.53, в. .
1.122. Построить амплитудно-фазовую частотную характеристику ди-
намического элемента, имеющего передаточную функцию W (s)„, (s) =
I д
—_________} при изменении co от 0 до -f-oo.
Решение. Амплитудно-фазовая частотная характеристика при s =
= /со приведена на рнс. 1.53, г.
1.123. Построить амплитудно-фазовую частотную характеристику дина-
мического элемента по передаточной функции
£s2
^4» = (Те — 1) (Th* + 2gTs + 1) ’
где Т < 1 с и k > 1.
Решение. Подставим в передаточную функцию s ==/со; тогда ампли-
тудно-фазовая частотная характеристика при изменении со от б до -|-оо при-
мет вид, показанный на рис. 1.53, д.
1.124. Построить амплитудно-фазовую частотную характеристику дина-
мического элемента по передаточной функции » s^s_ при k >
Рис. 1.53. Амплитудно-фазовые частотные характеристики динамических звеньев
83
Рис. 1.54. Амплитудно-фазовые
частотные характеристики дина-
мических звеньев
Решение. Подставим в:
передаточную функцию з =
= /со; тогда амплитудно-фа-;
зовая частотная характери-
стика при изменении со от О
до 4-оо примет вид, показан-
ный на рис. 1.53, е.
1.125. Построить ампли-
тудно-фазовую частотную
характеристику динамнче-
ского элемента по передаточной функции Й7ДЭ =,s^fs ц_ rnek > 1, Т<1 с.
Решение. Подставим в передаточную функцию s = /со; тогда ампли-
тудно-фазовая частотная характеристика при изменении со от 0 до 4-00 при-
мет вид, показанный на рис. 1.54, а.
1.126. Построить амплитудно-фазовую частотную характеристику ди-
намического элемента по передаточной функции
w /-> - № + 2№ 4-1) №-2^4-1)
да ' (Tfs2 - 2^3 4- 1)' + 2g2T2S 4- 1)
при Тг > Т2.
Решение. Подставим в передаточную функцию s = /со и определим,
как изменяется фазовая характеристика динамического элемента. При при-
нятых соотношениях 7\ > Тz фаза при со -* 0 стремится к нулю, при сред-
них частотах — к 4-З6О0 , а при со -> оо фаза снова падает до 0°. Амплитуда
во всем диапазоне частот постоянная и равна 1,0. Соответствующая этому
случаю амплнтудно-фазовая частотная характеристика построена на
рис. 1.54, б. 1
1.127. Построить амплитудно-фазовую частотную характеристику ле-
тательного аппарата по следующей передаточной функции:
W (S)- +
s (7’asJ4-2g7’s 4- 1)’
если параметры летательного аппарата после 90 с полета имеют следующие
значения [44]: kf = 4,0 1/с; Тс — 3,4 с; Т — 0,23 с; g = 0,06.
Решение. Подставим s = /со в передаточную функцию и после ряда
преобразований получим
и й ~ + ~ •
1 ' TW 4- — 2Т2) со» 4- со ’
V(co)
(Ta-2g7Te)coa-l h*
4- (4g»7’a — 2Т») со» 4- co 6 *
Введя числовые значения, получим
(со) =
— 0,1802со» 4-3,372©
0,0028со“ — 0,1О52со» 4- со ’
Т7/..Ч _ —3,128(0"—1
V 0,0028со‘-0,1052<о»4-ш ‘
Таблица 1.1
Частотная характе- ристика Круговая частота, со
0,1 0,8 1.0 2,0 4,0 4.5 5,0 10 20 50
и 3,37 3,42 3,56 1,23 1Й,2 — 15,1 —11,3 —0,8 —0,17 —0,03
V —10,3 —3,66 —4,60 — 10,8 —390 —800 —158 —1,7 —0,15 —0,009
Для построения амплитудно-фазовой частотной характеристики лета-
тельного аппарата составим табл. 1.1. С помощью табл. 1.1 на рис. 1.55
построена амплитудно-фазовая характеристика летательного аппарата.
1.128. Построить амплитудно-фазовую характеристику двухфазного
электродвигателя привода намоточного станка в двух диапазонах измене-
ния моментов инерции от /1=1,5Н-м2 до <7а = 20Н-м2 и от /3 = 50Н-м2
до <74 = 100 Н-м2 (рис. 1.56). Эти значения соответствуют точкам 1—4.
Остальные параметры электропривода примем следующими: kt — 1 Н-м/В;
Аш = 0,67 Н-мс; ip =10.
Решение. Передаточные функции первого приближения (1.151)
^э(/®. t)= т + J
и второго приближения (1.107)
_ k [7(/)/<о]2 + 2[Т'(О1Т(П/«+1
I)— T(t) ja+ J (Т <0/а»+Ip
С помощью этих передаточных функций на рис. 1.57, а построены
амплитудно-фазовые частотные характеристики электропривода намоточного
станка для первого приближения (кривые /, 2 — соответственно при Jx и J2,
а кривые 3, 4 при J3 и J4). На рис. 1.57, б приведены соответствующие
построения для второго приближения.
Из построенных на рис. 1.57 амплитудно-фазовых характеристик видно,
что для диапазона изменения J (t), заданного точками 3 и 4 (см. рис. 1.56),
характеристики второго приближения от-
личаются от характеристик первого при-
ближения больше, чем для диапазона
изменения J (t), заданного точками / и 2,
так как Тз_4 (i) > Т'1-2 (i).
Рис. 1.55. Амплитудно-
фазовая частотная харак-
теристика летательного
аппарата
Рис. 1.56. Изменение моментов
инерции намоточного станка для
двух-режимов работы
85
Pue. 1.S7. Амплитудно-фаяовыг
частотные характеристики
амктроприеода намоточного
станка:
а — для первого приближения;
б — для второго приближения; циф-
рами 1 и 2 обозначены характери-
стики для первого диапазона из-
менения моментов, а цифрами 3 я
4 — для второго
1.129. Построить амйлиту дно-фазовую частотную характеристику гид-
равлической турбины с постоянным углом установки лопасти и длинным тру-
бопроводом, если ее передаточная функция имеет вид
то — 1 Г 1 ~ 2P°tb TS1
Tts-H L l + 2PothTs]‘
Параметры турбины и трубопровода принять следующими: Тт = 10 с;
т а= 0,5 с; р0 = 0,125.
Решение. Подставим в передаточную функцию s = /о и представим
её в виде
(;t0) “ Гт/© 4-1
2р0(1 — е*~2т^ш) ~
1 —
,—2т/а>
1 _ е-2т/<о
1+₽т^
или
1-?Ро Г
1 + 2ро —2т/ш
1 — 2р0 е
Йвёдем следующие обозначения:
1 — 2р0 _ , 1 + 2ро < — ро__
1 4" Ро ’ 1 — 2р0 ’ 1 + Ро ~1"
тогда получим
ТГт (/©) =.--------------------blL+^la)---------,
(Гт/©4-1)(1 4-de—2t^*)
или
то ч & [1 4-с (cos 2то—/ sin 2т©)]
= (ТтМ + 1) [1 + (cos 2т© — j sin 5т©)] ’
откуда найдем
U to) = П + °* + (с + <0 cos 2тю 4- ТтЮ (d — с) sin 2т©] .
( “ (1 + Т2 <о2) (1 4- d2 4- 2d cos 2тю) ’
V to) ев b с) sin 2то> 4- Гтй) [ 1 4- cd 4- (с 4- d) cos 2тсо]}
e (14- Г2 со2) (1 4- d2 4- 2d cos 2то>) ’
86
Подставив соответствующие значения параметров и изменяя ® в пре-
делах от 0,01 до 50, будем вычислять значения U (to) и V (со). Построив
характеристики U (со) и V (to) в декартовой системе координат, получим
искомую амплитудно-фазовую характеристику (рис. 1.58).
1.130. Построить амплитудно-фазовую частотную характеристику ди-
намического элемента, имеющего передаточную функцию
(5) в
k (Ts + 1)
s*(Ts—1) ’
при изменении to от 0 до -|-оо. В передаточной функции k » 1,0; Т « 1,0 с.
1.131. Построить амплитудно-фазовую частотную характеристику ди-
намического элемента, имеющего передаточную функцию
П7 ft$^
дэ я (Ts — 1) (Ts + 1)’ ’
при изменении со от 0 до -|-оо. В передаточной функции k 1,0; Т 1,0 с.
1.132. Построить амплитудно-фазовую частотную характеристику ле-
тательного аппарата в продольной плоскости по функции
/со[(77шр4-2£77ш+ 1] ’ ...
пользуясь методом «замороженных» коэффициентов. Параметры летатель-
ного аппарата в зависимости от высоты и скорости его полета приведены
в табл. 1.2.
1.133. Построить амплитудно-фазовую частотную характеристику, лета-
тельного аппарата в продольной плоскости по функции
ka
(/») e + 2tf/<a + 1 •’
пользуясь методом «замороженных» коэффициентов. Параметры летатель-
ных аппаратов в зависимости от высоты .и скорости полета летательного
аппарата приведены в табл. 1.3.
1.134. Построить амплитудно-фазовую частотную характеристику ядер-
ного энергетического реактора по нейтронной мощности по функции
ftp (T'jw 4-1)
/о» (t'/co 4-1) ’
Wp(jto) =
где = 30 n0; T' = 14 с; Т* = 0,02 с.
1.135. Построить амплитудно-фазовую частотную характеристику хи-
мической установки с длинным трубопроводом, используя передаточную
функцию
^p(s)-
fepe~TS (^s — 1)
(T,s + 1) (T,s - 1) ’
где Tj = 40 с; Ta = 2 с; Т3 = 10 с; т = 5 с; k0 = 0,2.
1.136. Построить амплитудно-фазовую - частотную
динамического элемента, если его
передаточная функция имеет вид
И\э(8) =
&дэ (T'jS 1 )3 #
s(7\s —1)’ ’
здесь 6Дэ = 1,0; Тг = 10 с; Т2 =
= 0,5 с.
Рис. 1.58. Амплитудно-фазовая частотная'ха-
рактеристика гидротурбины с длинным тру-
бопроводом
характеристику
87
Таблица 1.2
Условия полета Параметры летательного аппарата
Скорость, м/с Высота км *6’ 1/0 70’ = Т. с 1
250 265 8 12 0,57 1,1 0,33 0,42 0,143 0,134 0,01 0,01
Таблица 1.3
Услов-тя полета Параметры летательно* аппарата
8 О. о Ж Высота, км Т с 5
250 8 0,78 0,143 0,01
265 12 1,52 0,134 0,01
1.2.2. ЛОГАРИФМИЧЕСКИЕ ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ
1.137. Построить логарифмические амплитудно-фазовые частотные ха-
рактеристики 6-ти типовых звеньев, встречающихся в виде сомножителей
в передаточных функциях динамических элементов.
Решение. Частотные функции типовых звеньев при s = /со приведены
во 2-м столбце приложения III, а виды логарифмических амплитудных ча-
стотных характеристик (столбец 3) и логарифмических фазовых частотных
характеристик (столбец 4).
1.138. Построить логарифмические амплитудную и фазовую частотные
характеристики динамического элемента, имеющего передаточную функцию
IF (s) ®_
s^s + lHTjs + l)*
при следующих параметрах: k — 0,13; = 5 с; Ts = 0,2 с; Т8 = 0,01 с.
Решение. Подставим в передаточную функцию s = /со и перепишем
ее в виде
201g | №вэ (/со) | =» 201g0,13 + 401g|77L7|-b201g|5jco+ 11 +
+ 20,е|-датг|+«1е|сда+т|. , П-327
Используя выражение (1.327), строим на полулогарифмической бумаге
логарифмическую амплитудную характеристику. Для этого на частоте, соот-
ветствующей со=1, откладываем значение 201g 0,13 = —18 дБ (точка А,
рис. 1.59). Через точку А проведем прямую с наклоном —40 дБ/дек, соот-
Рис. 1.59. Логарифмические амплитудная и фазовая частотные характеристики
88
ветствующую типовому звену ДО частоты ©j = — = 0,2 1/с (точка В,
рис. 1.59). От точки В проведем прямую с наклоном — 20 дБ/дек, соответ-
ствующую типовому звену 5 /со + 1, до частоты со2 = — 5 1/с (точка С,
рис. 1.59). От точки С проведем прямую с наклоном — 40 дБ/дек, соответ-
ствующую типовому звену 0 2/щ_[_ (> ДО частоты со3 = = 100 Vc (точка Д,
рис. 1.59). И, наконец, последнее звено ^характеризуется прямой
с наклоном — 80 дБ/дек (от точки Д до бесконечности). Для построения ло-
гарифмической фазовой частотной характеристики составим следующее вы-
ражение:
9дэ (®) = - 180° + arctg - arctg-y- - 2 arctg . (1.328)
Для вычисления фазовых углов в выражении (1.328) воспользуемся фа-
зовой линейкой (см. приложение V). Задаваясь значениями круговых частот,
будем находить соответствующие соотношения и заносить их в табл. 1.4.
Просуммировав фазовые углы для четырех типовых звеньев, получим резуль-
тирующие значения фазовых углов. Откладывая 0ДЭ на полулогарифмической
бумаге (рис. 1.59), получим логарифмическую фазовую частотную характери-
стику динамического звена.
1.139. Построить логарифмические амплитудную и фазовую частотные
характеристики динамического элемента, имеющего передаточную функцию
т /м_______fe (r2s 1) е T<s_
дэ W “ (TV +2^3 + 1) (T3s - 1) ’
Таблица 1.4
Типовое Круговая частота <о
звено 0,01 0,02 0.0S 0,1 (0.2 0.5 1 2 4 5
I/O)2 — 180 180 —180 —180 -.180 —180 —180 —180 —180 -180
5/ш+1 2 5,5 14 26,5 45 68 78,5 84,5 87 87,5
1 0 -0,5 —1,5 —2 —5,5 —11,5 —21,5 —38,5 -45
0,2/со + 1
1 0 о Э 0 0 —0,5 —1 —2 —4
0,01/<о+ 1
0ДЭ —178 175 -167 —155 —137 —118 —114 —119 —135,5 -142,5
Типовое Круговая частота о>
звено 10 20 50 100 200 500 1000 2000 5000 10000
1/(/а>2) —180 —180 180 -180 -180 -180 -180 • 180 —180 —180
5/а> 4- 1 88,5 89,5 )0 90 90 90 90 90 90 90
1 —63 —75,5 —84,5 87 -88 —89,5 90 -90 9С 90
0,2/а> 4- 1
1 —11 2< з ко -90 19А -157 -169 -175 1 77 —179
0,01/а>4~ *
0ДЭ —165,5 —189 —227,5 -267 -304 —336,5 -349 -355 —357 —359
89
Рис. 1,60. Логарифмические амплитудная и фазовая частотные
характеристики динамического элемента с ишстым» запаздыванием
при следующих параметрах: k = 100; Тг — 1 с; Тг == 0,2 с; Т3 = 0,02 с;
т4 = 0,02 си £i = 0,1.
Решение. Подставим в передаточную функцию з == /со и, пользуясь
кривыми приложения IV, а и добавочными значениями амплитуд Д//
для колебательного звена (приложение IV, б), построим логарифмические
амплитудные характеристики — Н8 (штрихпунктирные линии, рис. 1.60).
Сложив полученные характеристики и подняв их на 40 дБ вверх, получим
результирующую амплитудную характеристику динамического элемента Наа
(сплошная линия). Фазовые частотные характеристики будем строить с по-
мощью шаблонов или фазовой линейки (см. приложение V). На рис. 1.60
показаны штриховыми линиями положения шаблонов трех звеньев 0t—0S.
Как известно, фазовая характеристика звена «истого» запаздывания,
может быть вычислена с помощью следующей приближенной формулы:
04 (со) = —57,37>. (1.329)
По формуле (1.329) может быть определена фазовая характеристика 04
(штриховая линия, рнс. 1.60). Просуммировав фазовые характеристики
звеньев 0г—04, получим результирующую фазовую частотную характери-
стику динамического элемента 0ЛЭ (сплошная линия).
1.1-40. Построить логарифмические амплитудную и фазовую частотные
характеристики ядериого энергетического реактора на тепловых нейтро-
нах [см. задачу 1.7, формулу (1.65)1.
Решение. Перепишем передаточную функцию ядерного реактора
(s)« —<-------------Г • (1 -330)
В. передаточную функцию (1.330) подставим, параметры запаздывающих
нейтронов, испускаемых при делении (для реактора,- имеющего 1* =
= 10-4 с). Параметры реактора сведены в табл. 1.5.
90
Таблица 1.5
i-я группа h l-я группа 7
1 0,00025 14,0 0,071 4 0,0021 0,151 6,62
2 0,00084 1,61 0,62 5 0,0017 0,0315 31,72
3 0,0024 0,456 2,19 6 0,00026 0,0124 80,64
Рис. 1.61. Логарифмические амплитудная и фазовая частотные характеристики нРерного
енергетического реактора на тепловых нейтронах
Из характеристического уравнения 1
в
‘ + ЕгДт-°
<-» :
найдем
se 4- /4$$^ 4- A4s4 4* 4- AgS® 4- A 4s 4“ Aq s* О, (1.331)
откуда получим корни уравнения (1.331): зг = —77; sa »= —13,38; s3 —
= —1,43; s4 = —0,336; s5 =» —0,0805; se =» —0,0147.
Имея это в виду, передаточную функцию реактора на тепловых нейтро-
нах запишем в виде
(S + 14) (S 4-1,61) (s +0,456) (s 4-0,151) (з +0.0315) (s 4-0,0124) 332\
> W s (s 4- 77) (s 4- 13,38) (s4-l,43) («4-0,336) (6 4- 0,0805) («4-0,0147) ‘ 1 ’
где k* — передаточный коэффициент, равный
На рис. 1.61 построены логарифмические амплитудная и фазовая частот-
ные характеристики ядерного энергетического реактора при = 1,0.
1.141. Построить логарифмические амплитудную и фазовую частотные
характеристики летательного аппарата в продольной плоскости по пере-
даточной функции с «замороженными» коэффициентами
(<Л - *ЖсЗ+»)(Г2с»+1)
(Т2 *»2 4- 2£Ts 4-1) (7>2 4- 2ja7> 4-1) ’
1 Для определения корней характеристического уравнения можно пользоваться методом
Лобачевского—Греффе ,(см. Крылов А. Н. Лекции о приближенных вычислениях. М.— Л..
Гостехиздат, i960).
91
где параметры летательного аппарата, «замороженные» на высоте полета
Н = 12 000 м и скорости V — 800 км/ч, имеют следующие значения: =
= 0,7; Т1о = 1,76 с; Т = 0,55 с; £ = 0,35; Tta = 12,7 с; То = 72 с;
go = 0,07.
Решение. Для построения логарифмической амплитудной частотной
характеристики будем пользоваться шаблонами, а для вычисления фазовой
характеристики — линейкой. Соответствующие построения выполнены на
рис. 1.62.
1.142. Построить логарифмические частотные характеристики летатель-
ного аппарата в продольной плоскости с помощью метода «замороженных»
коэффициентов и передаточной функции
s (T2s2 4- 2$Ts + 1)
для параметров, приведенных в табл. 1.6.
1.143. Построить логарифмические частотные характеристики летатель-
ного аппарата по крену, если заданы передаточная функция
и ее параметры k3 = 4 1/с; Т3 = 0,13 с.
1.144. Построить логарифмические частотные характеристики летатель-
ного аппарата в продольной плоскости с рулевым гидравлическим приводом,
если задана передаточная функция
U7 /«л = _=__________(7cs + 1) e~r<s___
W 1/рп Is) s(TM + 25Ts+1)(Tps + 1) ’
Таблица 1.6
Условия полета Параметры летательного аппарата
Высота, км Скорость, м/с kf. 1/с т<- ‘ Т. с 5
Посадка 0 1,45 0,425 0,272 0,73
8 250 0,57 0,33 0,143 0,01
12 265 1.1 0,42 0,134 0,01
92
где (7рп —. напряжение управления распределительным гидравлическим
устройством, и параметры k = 1,0 1/с; Тс — 1,76 с; Т = 0,55 с; £ = 0,35;
Тр =0,1 с; 7\ = 0,05 с.
1.145. Построить логарифмические амплитудную и фазовую частотные
характеристики сушильной башни SOa, если ее передаточная функция имеет
вид
ГИ' __ ______(Т Is — 1)е TaS____
61; (^ + 1)(^2+2№+1) ’
где k6 = 4,0; 7\ = 0,5 с; Тб =* 100 с; Тг = 1,0 с; « = 0,5; Та = 5,0 с.
1.146. Построить логарифмические амплитудную и фазовую частотные
характеристики космического летательного аппарата, имеющего передаточ-
ную функцию вида
aS
W = *_______
где k — 1,0; 1\ — 0,5 с; Т2 = 0,1 с.
1.147. Построить логарифмические амплитудную и фазовую частотные
характеристики динамического элемента, имеющего передаточную функцию
вида
пу H71s2-2g3T8s-H)(T4~s-t-D
ins® + 2g1Tls + l)(T*s®-2g1I7'2S + l) ’
где k = 2,5; 7\ = 1,0 с; 7\ = 0,5 с; Та = 0,08 с; Та = 0,005 с; — 0,1;
|2 = 0,01; Ь = 0,2.
1.148. Построить логарифмические амплитудную и фазовую частотные
характеристики динамического элемента, имеющего передаточную функцию
вида
W (а) =« V
(T1S _ pa (7^ 4. ija »
где k — 25; 7\ = 10 с; Та — 2 с; Та — 0,2 с.
1.149. Построить логарифмические амплитудную и фазовую частотные
характеристики динамического элемента, обладающего сосредоточенными и
распределенными параметрами, если его передаточная функция имеет вид
^9(s) =
ь п Г1—eithTSl
д * 1 [ 14-a2thTsJ
(T.S 4-1) (T2s 4-1) (Tgs« + 2g3T3s 4- 1) ’
где kR3 = 2; 7\ = 50 c; Т.г = 1 c; Tt = 20 с; ar = 0,2; a2 = 0,1; т = 1,0 c;
Г8 = 0,5 c; g8 = 0,5.
1.150. Построить логарифмические амплитудную и фазовую частотные
характеристики динамического элемента с распределенными и сосредоточен-
ными параметрами, если его передаточная функция имеет вид
П7 Z<,\______________^ДЭ {TaS 4~ 1)____
дэ W — (71S _ 1} (Ttst + 2^TsS + ch д1 ,
где 1гяэ = 4,5; 7\ = 1,0 с; Т2 — 0,5 с; Та — 0,12 с; |8 = 0,1; ? = Y’
a = 2000 м/с; I = 500 м.
1.151. Построить логарифмические амплитудную и фазовую частотные
характеристики динамического элемента, имеющего передаточную функцию
вида
W (s) ____________________—________________
w w (T,s 4- 1) + 1) (Hs* + 4- 1)»
где k = 20; Tx = 0,2 с; Ta = 0,05 c; Ta = 0,01 c; g8 = 0,25.
S3
,1.3. ОПРЕДЕЛЕНИЕ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК
ЛИНЕЙНЫХ ЭЛЕМЕНТОВ ПО ЭКСПЕРИМЕНТАЛЬНЫМ
ДАННЫМ
Динамические характеристики элементов систем автоматического регу-
лирования не всегда могут быть определены аналитическим путем. В этих
случаях пользуются экспериментальными методами определения динамиче-
ских характеристик. Существующие методы достаточно полно разработаны
для линейных элементов, хотя на основе применения цифровых вычисли-
тельных машин предложены методы определения динамических характе-
ристик и нелинейных элементов.
В этом параграфе будут рассмотрены задачи определения динамических
характеристик только линейных элементов систем автоматического регули-
рования тремя методами, основанными на частотных характеристиках, им-
пульсных переходных характеристиках и регрессионном анализе.
1.3.1.ОПРЕДЕЛЕНИЕ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК
ЛИНЕЙНЫХ ЭЛЕМЕНТОВ МЕТОДОМ ЧАСТОТНЫХ ХАРАКТЕРИСТИК
Как известно [36], динамические характеристики объекта (амплитудная
и фазовая частотные характеристики) следует определять в полосе частот,
на две декады превышающей частотный спектр входного сигнала. Весьма же-
лательно определение частотных характеристик производить не только между
входом и выходом рассматриваемого элемента, но и во всех его промежуточ-
ных точках (если, конечно, с них можно снять выходной сигнал). В этом
случае упрощается получение передаточной функции динамического эле-
мента и исключается возможность ошибки.
Для убыстрения снятия частотных характеристик следует рекомендо-
вать пользоваться приборами, измеряющими соотношение амплитуд (вы-
хода ко входу) и сдвиг фаз между выходным и входным синусоидальными сиг-
налами. Существуют приборы, строящие амплитудно-фазовые частотные ха-
рактеристики испытуемого динамического элемента.
1.152. Определить передаточную функцию линейного динамического
элемента, если экспериментальные значения отношения амплитуд между вы-
ходом и входом в децибелах и сдвиги фаз в градусах приведены на рис. 1.63
в виде точек.
Решение. Соединим точки фазовой и амплитудной характеристик
штриховыми линиями и проведем через точки амплитудной характеристики-
прямые (штриховые линии) с типовыми наклонами ± 20 п дБ/дек, где п —
— 0, 1, 2, 3, ... (рис. 1.63), По точкам излома определим соответствующие
Рис. 1.63. Определение передаточной функции динамического эле-
мента по экспериментально найденным значениям соотношений ам-
плитуд и сдвигов фаз
94
сопрягающие частоты, а с помощью приложения IV, б по максимуму вы-
броса амплитудной характеристики, равному 20 дБ, найдем степень колеба-
тельности gj — 0,05. Имея это в виду, составим частотную функцию дина-
мического элемента в виде
Ц7 (Ы »-------------k(Ttje>+l)_________ (1333)
м ’ l(W + №* + ц (Г,/ш +1) * ц
откуда найдем формулу для вычисления фазовой частотной характеристики:
0ЯЭ (“) — — arctg ] 2~^>- + arctg 7> — arctg 7>. (1.334)
Пользуясь формулой (1.334), определим фазовую характеристику (сплош-
ная линия на рис. 1.63) и сравним ее с экспериментально найденной харак-
теристикой 6д, (штрихпункгирная линия). Из сравнения этих характеристик
видно, что они достаточно близко совпадают друг с другом (ошибка не пре-
вышает 4е).
Логарифмическая амплитудная характеристика Нла, вычисленная на
передаточной функции (1.333), показана на рис. 1.63 сплошной линией. Эта
кривая также совпадает с экспериментальными значениями Н\> (ошибка не
превышает — 3 дБ). Поэтому экспериментальным характеристикам дина-
мического элемента соответствует передаточная функция вида
W (s) —---------________________
(rjs» + 2&1r,s4-1)(Г3s +1) ’
где k = 3,18; 7\ = 2 с; = 0,05; Та = 0,25 с; Та = 0,1 с.
1.153. Определить передаточную функцию линейного динамического
элемента, если экспериментальные значения отношения амплитуд между
выходом и входом в децибелах и сдвиги фаз в градусах приведены на рис. 1.64
в виде точек. '
Решение. Аппроксимируем типовыми наклонами точки амплитудных
соотношений (штрихпунктирная линия, рис. 1.64). По максимумам выброса
амплитудных частотных характеристик с помощью приложения IV, б опре-
деляем Bi = 0,2 и В» = 0,05, а по точкам излома — постоянные времени
Т, = 0,1 с; 7\ = 0,8 с и Т3 = 5,0 с. Имея это в виду, предполагаемая частот-
ная функция будет описываться формулой
Wgs (7W) = ((Л/шр -|- 2^^/ш 4- I] KW' 4- 2е.Га/а> 4-1) (7^ 4-1) ’ <1 -335>
Пользуясь формулой (1.335), запишем
0д, (о>) - - -г - arctg - arctg соТ’, - arctg (1.336)
С помощью фазовой линейки (см. приложения V) вычислим 0« (ш) и
на рис. 1.64 штриховой линией построим эту характеристику. Из рис. 1.64
видно, что в области больших частот между расчетной 0дэ (ш) и эксперимен-
тальной 0ДЭ (со) фазовыми характеристиками наблюдается расхождение.
В этом случае следует предположить, что в динамическом элементе имеется
звено «чистого» запаздывания. Фазовая характеристика данного звена опре-
деляется по формуле
Д0 (со) в —57,3тш. (1.337)
Задаваясь тремя частотами со' « 0,4 1/с; со'«0,7 1/с и ==
= 1,0 1/с, по формуле (1.337) вычислим т* = 0,195 с, т” = 0,220 с, и
т'" — 0,195 с. Близкое совпадение постоянных т' — т'" указывает на спра-
т' + т -4- т'* А
ведливость нашего предположения. Примем т =» —-L—0,203 с;
95
Рис. 1.64. Определение передаточной функции динамического эле-
мента с звеном «.чистого-и запаздывания по экспериментально най-
денным значениям соотношений амплитуд и сдвигов фаз
тогда в окончательном виде получим передаточную функцию динамического
элемента
U7 =_________________________—________________________
’ s(t2? + 2|17’1£+ l)(T2s+l)(7’|s2 + 2g37’3s+l)’
(1.338)
где k = 0,09; 7\ = 1,0 С; = 0,2; Тг == 1,25 с; - 0,05; Та = 5 с;
т = 0,2 с.
Используя передаточную функцию (1.338), найдем логарифмические
амплитудную и фазовую частотные характеристики (сплошные линии,
рис. 1.64).
1.154. Определить передаточную функцию линейного динамического
элемента, если экспериментальные значения отношения амплитуд между
выходом и входом в децибелах и сдвиги фаз в градусах приведены на
рис. 1.65.
Решение. Соединим точки фазовой характеристики штрихпунктир-
ной линией и проведем через точки амплитудных соотношений прямые
с типовыми наклонами. Из рис. 1.65 видно, что в области малых частот при
наклоне логарифмической амплитудной частотной характеристики —
20 дБ/дек фазовая частотная характеристика стремится к —270°, а не к —90е,
как этого следовало бы ожидать, если в передаточной функции отсутствовали
члены с неустойчивыми звеньями. Разница в фазовых характеристиках на
—180° указывает на присутствие в передаточной функции одного неустой-
чивого апериодического звена. Имея это в виду, будем считать, что искомая
функция
(/®) =“ (Tt/a) _J2l)(T3/to+ 1) ’ ( 1 339)
где k = 2,0; 7\ == 25 c; Ta — 5 c; Ts = 0,25 c. Знак минус принят нами
у первого апериодического звена (с большей постоянной времени), так как
в области низких частот наблюдается более сильное изменение фазовой ха-
96
Рис. 1.65. Определение передаточной функции динамического эле-
мента с неустойчивым апериодическим звеном по экспериментально
найденным значениям соотношений амплитуд и сдвигов фаз
рактеристики и она подходит при <о -> оо к линии —180° сверху, а не снизу,
как это было, если бы функция имела вид
(/®) = (tJo — 1) * (1.340)
Фазовые частотные характеристики для передаточной функции (1.339)
вычисляют по формуле
е’э (со) ---5— л arctg ®7\ + arctg ®T2 — arctg <oTs. (1.341)
Соответствующие характеристики построены на рис. 1.65 (сплошные
линии). Как видно, расчетная 0дэ и экспериментальная 0дэ фазовые харак-
теристики достаточно близко совпадают друг с другом. Для доказательства
справедливости принятого решения о неустойчивости звена с постоянной
времени на рис. 1.65 построена амплитудная характеристика по функ-
ции (1.340). Она полностью тождественна ранее построенной характеристике
по функции (1.339) (рис. 1.65). Фазовая же характеристика в этом случае
строится по формуле
// ff
0Дэ (®) =-------g-----п ~ arctS + агс*£ 4- arctg ^3. (1.342)
Характеристика 0ДЭ (и) нанесена на рис. 1.65 штриховой линией. Как
видно из этого рисунка, экспериментальная 0ДЭ (со) и расчетная 0'дэ (со) фа-
зовые частотные характеристики значительно отличаются друг от друга, что
указывает на несправедливость принятия второго вида функции. Поэтому
искомая передаточная функция будет иметь следующий вид:
s(7\s— 1) (Tss + О ’
где k = 2,0; 7\ = 25 с; Т2 = 5 с; Т9 = 0,25 с.
1.155* . Определить передаточную функцию нагревательной печи, если
* Частотные характеристики в задачах 1.155—1.162 заимствованы из книги «Динами-
ческие характеристики промышленных объектов регулирования». Труды конференции Об-
щества приборостроителей, состоявшейся в Кембридже 4—6 апреля 1956 г.. М., ИЛ,
I960.
4 Ю. и. Томм»
97
экспериментальные значения отношения амплитуд и сдвигов фаз между
температурой печи и давлением на выходе регулятора расхода топлива по-
казаны точками на рис. 1.66, а.
1.156. Определить передаточную функцию кипятильника, если экспери-
ментальные значения отношения амплитуд и сдвигов фаз между расходом
греющего пара и давлением пара в кипятильнике при отсутствии дроссели-
рования пара на выходе показаны точками на рис. 1.66, б.
1.157. Определить передаточную функцию ректификационной колонны,
если экспериментальные значения отношения амплитуд и сдвигов фаз между
И
Рис. 1.66. Определение передаточной функции динамически* элемен-
тов по экспериментальным данным для:
а — нагревательной печи; б — кипятильника (О -• значения амплитуды;
• " значения фаз)
уровнем жидкости в кубе колонны и расходом пара в кипятильнике пока-
заны точками на рис. 1.67, а.
1.158. Определить передаточную функцию ректификационной колонны,
если экспериментальные значения отношения амплитуд и сдвигов фаз между
отбором пара сверху колонны и изменением расхода пара в кипятильнике
показаны точками на рис. 1.67, б.
1.159. Определить передаточную функцию ректификационной колонны,
если экспериментальные значения отношения амплитуд и сдвигов фаз между
температурой на 5-й тарелке колонны и изменением количества подаваемой
флегмы показаны на рис. 1.67, в.
1.160. Определить передаточную функцию ректификационной колонны,
если экспериментальные значения отношения амплитуд и сдвигов фаз между
температурой в колонне и расходом пара на ее входе показаны на рис. 1.67, г.
1.161. Определить передаточную функцию реактора, если эксперимен-
тальные значения отношения амплитуд и сдвигов фаз между входными и вы-
ходными сигналами показаны на рис. 1.68, а.
1.162. Определить передаточную функцию процесса нейтрализации
двухфазной среды (СО2—NaOH) в реакторе, если экспериментальные зна-
чения отношения амплитуд и сдвигов фаз между подачей смеси газов, содер-
98
Рис. 1.67.Определение передаточной функции ректификационной колонны по эксперимен-
тальным данным:
а ~ по уровню жидкости и расходу пара; б — по подаче и отбору пара сверху колонны; a — по из»
меиению количества флегмы; г — по температуре (О «• значения амплитуд; • » значения фаз)
I
а)
Рис. 1.68. Определение переда-
точной функции динамических
элементов по экспериментальным
данным:
а — реактора; б — гидравлического
привода (О — значения амплитуд;
• — значения фаз)
Al
100 и, 1/с
а
99
Рис. 1.69. Определение передаточной функции динамических элементов по
экспериментальным данным для процесса нейтрализации NaOH углекислым
газом:
а — при подаче 70% СО,; б = при подаче 30% СО, (О ” значения амплитуд;
• — значения фаз)
жащей 70% СО2, и выходом рабочего потока показаны на рис. 1.69, а. Харак-
теристике соответствует pH = 8,8.
1.163. Определить передаточную функцию процесса нейтрализации
двухфазной среды (СО2—NaOH) в реакторе, если экспериментальные зна-
чения отношения амплитуд и сдвигов фаз между подачей смеси газов, содер-
жащей 30% СО2, и выходом рабочего потока показаны на рис. 1.69, б. Ха-
рактеристике соответствует pH ~ 8,2.
Рис. 1.70. Определение пе-
редаточной функции ле-
тательного аппарата при
продольном движении-, для
5-й секунды полета (О —
значения амплитуд; * —
значения фаз); для 65-й
секунды полета (0 — зна-
чения амплитуд; 0 —
значения фаз)
100
1.164. Определить передаточную функцию летательного аппарата в про-
дольном движении для различных моментов времени, если эксперментальные
значения отношения амплитуд и сдвигов фаз между углами тангажей и уг-
лами отклонения рулей показаны на рис. 1.70 для 5-й и 65-й секунд полета.
1.165. Определить передаточную функцию гидравлического привода (на-
сос объемного регулирования — гидравлический двигатель с наклонной шай-
бой), если экспериментальные значения отношения амплитуд и сдвигов фаз
между углами поворота вала двигателя и углами поворота рычага помпы 1
показаны на рис. 1.68, б.
1.3.2. ОПРЕДЕЛЕНИЕ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК
ЛИНЕЙНЫХ ЭЛЕМЕНТОВ МЕТОДОМ ИМПУЛЬСНЫХ ПЕРЕХОДНЫХ
ФУНКЦИЙ
Во многих практических задачах приходится определять передаточную
функцию динамического элемента по импульсной переходной функции, ко-
торая может быть получена аналитически или экспериментально и задана
в виде формулы, графика и таблицы. Для чего используется известное соот-
ношение между этими функциями
W (/©) = j k (t) e~Jai dt. (1.343)
В действительной форме это эквивалентно следующим двум формулам:
Re W (ja>) = U (©) = \ k (t) cos a>t dt;
Im W (fa) — V (©) = —J k (t) sin at dt.
(1.344)
При численном расчете удобно применить прямолинейную аппроксима-
цию для k (t) и, таким образом, представить импульсную переходную функ-
цию в виде суммы элементарных трапецеидальных функций:
«==1
где
kOi при t < lt — Дг;
k(t)= ktii —- ПРИ 0 ~ <ti + 0 при t > ti + Д;.
Для каждой из трапецеидальных весовых функций легко найти следую-
щие выражения Ut (©) и Vz (©)
y,w = -^--(M,) «у у
(1.345)
(1.346)
Вычисления упрощаются при выборе шагов аппроксимации 2Д, рав-
ными или кратными для всех трапеций. При этом удобно воспользоваться
таблицами функций — ° * и с<^х , с помощью которых и вычисляются
функции Ut (©) и Vi (©) для каждой иа трапеций. Сложив-соответетвующие
1 Рычаг изменяет угол наклона блоков цилиндра насоса объемного, aferaijmpon»—.
101
характеристики, находим действительную и мнимую части частотной фуню
ции всей системы в виде
щ®)=£гЛ(®);
1=1
т
v(®)= S уд®),
1=1
(1.347)
а затем, если необходимо, годограф амплитудно-фазовой характеристики
на комплексной плоскости
W (/©) = U (©) + jV (©).
Однако для целей анализа и синтеза систем необходимо иметь логариф-
мические амплитудные И (©) и фазочастотные 0 (©) характеристики. По най-
денным U (а>) и V (©) эти характеристики вычисляют с помощью формул
| W (/©) | = VU* (©) + V2 (©);
//(©) = 20 lg | IF (/®)|
(1.348)
и
0(©) = arctg-^g-.
(1.349)
Построив данные функции в логарифмическом масштабе по оси частот,
получим искомые логарифмические характеристики. Если аппроксимировать
амплитудную характеристику Н (©) отрезками прямых с наклоном, крат-
ным ± 20 дБ/дек, то получим приближенное аналитическое представление
для W (s) в виде совокупности типовых динамических звеньев.
Соответствующие постоянные времени определяются по частотам сопря-
жения прямолинейных асимптот, аппроксимирующих логарифмическую ам-
плитудную характеристику 201g | № (/о)|. На вид сомножителей передаточ-
ной функции оказывают влияние и логарифмические фазовые частотные
характеристики, особенно, если определяется передаточная функция с не-
минимально-фазовыми звеньями (см. пп. 1.3 и 1.6). ,
Можно также отметить, что число звеньев в числителе и знаменателе
можно определять по виду амплитудно-фазовой частотной характери-
стики ST (/©).
1.166. Пусть импульсная переходная характеристика k (t) химического
полученная экспериментально, имеет вид, показанный на
рис. 1.71. Разбиваем ее на 6 трапеций, число-
вые значения параметров которых приведены в
табл. 1.7.
Вещественные и мнимые частотные харак-
теристики для каждой из трапецеидальных ве-
совых функций, вычисленные по формулам
(1.345), (1.346), приведены на рис. 1.72,а. Сум-
мируя вещественные
реактора,
к
1,0
45
- @
©
и мнимые частотные ха-
©
о
Рис. 1.71. Импульсная переходная характеристика
Рис. 1.72. Частотные характеристики химического реактора, оп-
ределенные по импульсной переходной характеристике
рактеристики по всем трапециям, получим вещественную U (со) и мни-
мую V (со) характеристики реактора (рис. 1,72, а и б).
С помощью полученных характеристик по формулам (1.348) и (1.349)
найдем логарифмические амплитудную и фазовую частотные характери-
стики динамического элемента. Логарифмическая амплитудная характери-
стика приведена на рис. 1,72, в, откуда видно, что логарифмическая ампли-
тудно-частотная характеристика с достаточной точностью может быть аппро-
ксимирована двумя прямыми с наклонами 0 и—20 дБ/дек, пересекающимися
при со — 0,92. Ход амплитудной Н (со) и фазовой 0 (со) частотных характери-
стик (рис. 1,72, в) показывает, что рассматриваемый реактор является динами-
ческим устойчивым элементом первого порядка с передаточной функцией вида
= ТТЛ ’
где Т » 1,08 с.
103
Таблица 1.7
Параметры трапеций Номера трапеций
! 3 4 5 6
> Г 2з* •• о п П> "* 0,393 0,25 0,25 0,237 0,25 0,75 0,145 0,25 1,25 0,095 0,25 1,75 0,08 0,5 2,5 0,05 0,5 3,5
Точность полученного решения составляет 8%.
1.167. По экспериментально найденным импульсным переходным функ-
циям k (/) динамических элементов, показанных на рис. 1.73, а—е, опреде-
лить их передаточные функции.
1.168. Определить уравнение динамики нестационарного динамиче-
ского элемента, если формула для вычисления импульсной переходной
функции будет
k (t, т) = при t > т.
Решение. Как известно [36], для любой линейной нестационарной си-
стемы
п
k (t, т) = У <р( (0 ф, (т), t > т. (1.350)
1=1
Зная k (/, т), можно определить дифференциальное уравнение
D (р, t)x(t) = М (р, t)f(t), (1.351)
d
где Р = -rt----символ дифференцирования.
Рис. 1.73. Импульсвые переходные характеристики для различных динамических элементов
104
Для определения левой части уравнения (1.351) воспользуемся опре-
делителем
D(p,0x(f)- МО МО Xt(t) Xi(t) ... х„(() x(i) ... xn(t) x(t) (1.352)
х1л,(0 x[n\t). ..x(nn> (t)x(n\t)
Правая часть уравнения определяется по формуле
J м т)/ (<г) ” (т)/(т)]dx + W “ °’1 я 1’2........................(1,353)
где А (0 — определитель Вронского для системы функций <рх (0, <ра (0......
—. фп (О,
A(0- Ф1(0 <Рг(Л ... <Рп(0 Ф1(0 Фа(0 ...Фп(*) ф^ЧОф^Ч?) ... ф^Чо »
(to) — определитель, получающийся из предыдущего при t = t0 в ре-
зультате замены i-го столбца на столбец начальных условий
х(ОЬ=г. —0;
х(О!^-*(Мо)/(*<>);
X(f)k=e.»2-^g^-| + Ш + Wf(4) и т.д.
Ql |fssX=^0 Uh
Для нашего влучая имеем ;
Ф1СОв1; <р1(0 = -т; Ф1(0в'-------(1.354)
Подставляя полученные значения в формулу (1.352) и приравняв опре-
делитель нулю, получим
D(p,f)x(f) =
1
t2
2
t*
X(t)
x(t)
«0,
откуда
D(p, l)x (i)^t £. + 2x(t)~0. (1.355)
Для рассматриваемого примера определители будут
А(0 = Ф(О; А1(0 = О.
Введем их в выражение (1.353); тогда получим
t
J [^7j М (Р. т) f (т) — ф (т) / (<п)J du = 0. (1.356)
о
Подставляя в выражение (1.356) значения <рх (/) и ф (<с) из сомножите-
лей (1.354), найдем
f I®2 М(р, г) — (г) dt =• 0.
105
При М (р,т) — это уравнение удовлетворяете» для любых f (т)
тождественно. Таким образом, порядок т полинома
м^-е^лор*
следует принять равным нулю: т — 0, и коэффициент Ьо =* Г*. Итак, пра-
вая часть уравнения (1.351) имеет вид
л«(р, 0/(0-4-/(0. (1-357)
Используя выражения (1.355) и (1.357) для подстановки в уравне-
ние (1.351), получим искомое линейное нестационарное дифференциальное
уравнение в виде
/-^ + 2х(0-/(0.
1.169. Определить уравнение динамики нестационарного динамиче-
ского элемента, если формула для импульсной переходной функции имеет
вид [341
—(sin to,«~eia га.ч) |
(1.358)
k(t, т) «в (1 -|~pcosco0T)e L
По этой зависимости найдем п — 1 и
(т) — 1 4* Р cos соо<с;
<Р1 (0 — е
Нетрудно показать, что
sin
Д(0 = е
Подставляя выражения (1.359) в определитель (1.352), подучим
(1.359)
(1.360)
„p+Jl.siaffl.A
е ' *
х(0
•=• 0.
— (1 4-pcos<o0T)e
х(0
Отсюда
D (р, I) х (t) --J- 4- (1 4- р cos (d0 fl x (0.
Для определения правой части уравнения (1.351) найдем
Д (0) - 1 и Д, (0) » 0.
(1.361)
(1.362)
Введем выражения (1.351). (1.359) и (1.360) в формулу (1.353), тогда
е' ’ '[Л4(р, «)/(0~(1 4-pcosa>o<®)/('®)]d’ —0
о
и
М (р, 0 — 1 + Р COS (O6t. (1.363)
С помощью выражений (1.361) и (1.363) получим дифференциальное урав-
нение динамики нестационарного элемента в виде
^- + (1 4-рСО8Шв0х(0 —(1 +рСО5ш00/(0.
106
1.170. Определить уравнение динамики нестационарного элемента, если
формула для импульсной переходной функции имеет вид
_-2*
*)в7+Т-
1.171. Определить уравнение динамики нестационарного элемента,
если формула для импульсной переходной функции имеет вид
1.172, По импульсной переходной функции
,.. . 6т 2 ,
k(t, т) = — -j- при t > <о
найти дифференциальные уравнения, описывающие динамику двух парал-
лельно соединенных нестационарных элементов.
1.173. Определить дифференциальное уравнение для динамического эле-
мента, если его импульсная переходная функция имеет вид
k (t, т) == е”0 ('"х) cos со0 (t — т).
Указание. При А (0 = соо е“2о< имеем
31пА(П 1 af_.„
—.—'-L ------e sin Шаг;
dxt (t) Wo
dltlA(/) 1 a, „ ,
---;-— — ----- e COS «(/•
Wo
1.3.3. ОПРЕДЕЛЕНИЕ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК
ЛИНЕЙНЫХ ЭЛЕМЕНТОВ МЕТОДОМ РЕГРЕССИОННОГО АНАЛИЗА
Регрессионный анализ позволяет по экспериментальным данным, обра-
ботанным по методу наименьших квадратов получать значения постоянных
времени и коэффициентов усиления для дифференциальных уравнений или
передаточных функций динамических элементов систем регулирования.
Y (s\
1.174. Определить параметры передаточной функции W (s) = в*
k
= ф t , описывающей процесс относительного изменения содержания СаО
в смесителе при производстве цемента, где х (f) — содержание СаО в вход-
ном потоке, а у (0 — содержание СаО в выходном потоке. Результаты из-
мерений приведены в табл. 1.8.
Таблица 1.8
t. в К t. о Я 9 • Я в
0 49,1 44,6 180 50,1 47,1 360 45,2 46,9
60 50,1 45,2 240 49,6 47,5 420 44,9 46,2
120 49,9 46,6 300 46,0 47,8 480 45,1 45,5
Решение. Дифференциальное уравнение, связывающее коорди-
наты х (t) и у (/) в соответствии с заданной передаточной функцией, запишем
в виде
-g- = (1.364)
тогда решение этого уравнения при начальных условиях х (tQ) и у (Ц будет
/ _*— (в
M*o)-Wtt>)e г°. (1.365)
107
Полагая t •» t0 4- &t, получим из выражения (1.365) соответствующее
разностное уравнение
Уп+i = Ауп + Вх„, (1.366)
где переменные х„ и уп соответствуют моменту времени t = t0 4- п At,
a i/n+1 — моменту времени t — t0 4- (n 4- 1) А/.
Коэффициенты А и В определим с помощью следующих зависимостей:
А/
А — е г°;
/ _ — \
B = /e0(l — е rJ.
(1.367)
В соответствии с формулой (1.366), описывающей динамику рассматри-
ваемого объекта, значение выходного потока найдем по величинам входного
и выходного потоков в предыдущий момент времени. Зная значения уп и
х„, определим предполагаемую величину уп+1\
У п+1 “ ДУп Н” Вхп.
Коэффициенты А и В подберем таким образом, чтобы предсказываемая
величина ум как можно меньше отличалась от измеренного значения уп+1.
Для этого запишем функцию ошибки Е в виде
n N
£ = S (Уп — Уп? “ S (?» “ ^Уп-1 - Bxn_t?,
где N — число измерений входа и выхода, произведенных через равные
промежутки времени АЛ
дЕ
Минимизируя Е надлежащим выбором А и В, из условий =0 и
Ц- = 0, получим систему уравнений
я
Sj 2 (уп — Ayn-i — Вх„_х) = 0;
N
S 2 (уп — Ау^ — хп_г — 0.
(1.368)
Запишем ее в матричной форме:
N N
2 Уп~1 2
N N
ЛСп=1Уп—1, S
/1=1 п=1
(1.369)
Из этого уравнения определим значения коэффициентов:
(1.370)
108
Используя выражения (1.366), (1.367) и (1.370), определим параметры
k0 и То исходной передаточной функции:
То =
. в .
м
In Л
(1.371)
Для этого вычислим по формулам (1.370) и заданным значениям yt и х(
(табл. 1.10) коэффициенты
--^-4=0.6»
в-<7-0’274-
В этом случае параметры передаточной функции (1.371)
. 0,274 _пОЬ Т ____ 60 _ |до
1 — 0,699 — у0— 1П0.699 —
Для упрощения вычислений по формулам (1.370) и повышения точности
определения коэффициентов k0 и То выполним преобразование координат:
У = У — Уо< х = х —х0, (1.372)
где
N N
£ Уп S хп
Уо — N » *0 — N •
Полагаем, что принятая нами модель элемента (1.366) в новых коорди-
натах имеет вид 1
£n+i “ 4-Вх„- (1.373)
Коэффициенты Л и S вычисляем по формулам, аналогичным (1.370).
Подставляя значения (1.372) в уравнение (1.373), получим
Уп+1 = Ауп + ^хп + £» (1.374)
где С — уа — Ау0 — Вха.
Из сравнения уравнений (1.366) и (1.374) видно, что при С & 0 справед-
ливы соотношения
Л = Л; В = В. (1.375)
Если С + 0, то необходимо изменить значения чисел у0 и (или) х0, входя-
щих в соотношения (1.372). При этом для новых уо и хо имеем
Уп+1 = А'уп 4- В хп -{- & , (1.376)
где С' = у'о — А'у’о — В'х'о.
Решая уравнения (1.374), (1.376) и (1.366) относительно величин А
и В, получим
. _ aS' — ’A'c .
У* “• л. /ч. ,
С' —с
. ~ ~ (1-377)
r л В'-В А'В-АВ' ' '
Ш9
Для рассматриваемого примера хв = 48,1; у0 = 46,4, а вычисленные
по формулам (1.370) коэффициенты уравнения (1.373)
Определим значение С по формуле (1.374):
С = 46,4 — 0,731 -46,4 — 0,264-48,1 = 0,2.
Если С < х0 и С < j/o- то с достаточной точностью можно положить,
что А = А = 0,731 и В = В = 0,264. Тогда по формулам (1.371) можно Вы-
числить уточненные параметры:
Го----ТОзГ=192= ^ = т=5к = °-98-
Итак, искомая нами передаточная функция
^)=--WTT-
Определение параметров передаточной функции по второму методу яв-
ляется более точным, так как линейная регрессионная модель элемента при-
вязывается к средним значениям.
1.175. Определить параметры передаточной функции летательного ап-
парата
№ , (s') = Y
дэ [S> X (s) s (Tos + 1)
по экспериментальным данным, приведенным в табл. 1.9.
1.176. Определить параметры передаточной функции динамического
элемента
тр _ Г ($_____________________
х T^ + ^Tos+l
по экспериментальным данным, приведенным в табл. 1.10. 1
1.177. Определить параметры передаточной функции динамического
элемента
as W “ X (s) “ (T0ls + 1) (TMs4-l)
по экспериментальным данным, приведенным в табл. 1.11.
1.178. Определить параметры передаточной функции динамического
элемента с звеном «чистого» запаздывания
^дэ (s) —
Y fs) _ feoe-*»s
X(s) “ Tos + 1
по экспериментальным данным, приведенным в табл. 1.12.
Таблица 1.9
Г, с X У t, с X У
0 1,0 0 1,4 1,0 1,49
0,2 1,0 0,058 1,6 1,0 1,80
0,4 1,0 0,2 1,8 1,0 2,10
0,6 1,0 0,41 2,0 —1,0 2,41
0,8 1,0 0,65 2,2 —1,0 2,61
1,0 1,0 0,92 2,4 —1,0 2,63
1,2 1,0 1,20 2,6 —1,0 2,53
Таблица 1.10
i, с X У t, о X У
0 1,0 0 1,4 1,0 1,85
0,2 1,0 0,053 1,6 1,0 2,23
0,4 1,0 0,20 1,8 1,0 2,59
0,6 1,0 0,44 2,0 —1,0 2,91
0,8 1,0 0,74 2,2 —1,0 3,08
1,0 1,0 1,09 2,4 —1,0 3,00
1,2 1,0 1,46 2,6 —1,0 2,70
110
Таблица 1.11
1. G К О X 9
0 1,0 о 0,6 1,0 0,45
0,1 1,0 0,08 0,7 1,0 0,47
0,2 1,0 0,20 У 0,8 1,0 0,48
0,3 1,0 0,30 0,9 1,0 0,49
0,4 1,0 0,37 1,0 1,0 0,493
0,5 1,0 0,42
Таблица 1.12
t, с X V t. с X
0 1,0 0 0,7 1,0 0,99
0,1 1,0 0,05 0,8 1,0 1,14
0,2 1,0 0,18 0,9 1,0 1,29
0,3 1,0 0,33 1,0 1,0 1,43
0,4 1,0 0,49 1,1 1,0 1,57
0,5 1,0 0,66 1,2 1,0 1,59
0,6 1,0 0,83
1.4. ТИПИЧНЫЕ НЕЛИНЕЙНЫЕ ЭЛЕМЕНТЫ
К типичным нелинейным элементам принято относить такие, для кото-
рых линеаризация по способам касательных и секущих невыполнима. Все
многообразие типичных нелинейных элементов можно разделить на два
типа: статические и динамические (однозначные и двузначные). Линеаризация
типичных нелинейностей производится по методу гармонической линеариза-
ции [24, 30, 36]. Если нелинейная функция не зависит от скорости изменения
входного сигнала, то формулы для вычисления коэффициентов гармониче-
ской линеаризации при симметричных колебаниях будут
2л
а (А) = —j- J F (A sin ф) sin ф </ф;
о
2л
Ь(Д) = —L-J F(Лsinф)cosф</ф,
о ;
(1.378)
где ф = at.
Для функции у ~ F (х, зависящей от скорости изменения вы-
ходного сигнала, получим
2л
а (Я, и) J F (A sin ф, Ди cos ф) sin ф йф;
о
2л
Ь (Л. и) = J F (A sin ф, Аа cos ф) cos ф <2ф.
о
Эти формулы при несимметричных колебаниях имеют вид
2л
а (Я, х°) = —J F (х® 4- Я sin ф) sin ф </ф;
о
2л
Ь (Я, х°) = —j F (х° -j- Я sin ф) cos ф йф;
о
2я
F° (А, х°) = J F (х° 4- A sin ф) <2ф
о
(1.379)
(1.380)
111
и
2я
а (Л, ®, х®) = j F (х® + Л sin гр, Л® cos гр) sin гр г/гр;
о
2л
Ь(Л, (о, х°) = -^4- j F (х® 4-Л sin гр, Лео cos гр) cos гр г/гр;
о
2л
F° (Л, ®, х®) = -7^- j F (х® + Л sin гр, Л® cos гр) г/гр,
о
(1.381)
где х® — величина смещения; F° — функция смещения.
С помощью коэффициентов гармонической линеаризации можно опре-
делить эквивалентную передаточную функцию нелинейного элемента:
У(Л) = С(Л) + /&(Л),
J (Л, ®) == а (Л, ®) jb (Л, ®),
(1.382)
откуда получим эквивалентную амплитудную характеристику нелинейного
элемента в виде
?(Л)-1Л?(Л) + НЛ); (
<7 (Л, ®) = 1/а2(Л, го) + &2(Л, го) J
или эквивалентную фазовую характеристику нелинейного элемента
р (Л> — arctg;
и(л.и)_аге«^. ,LM4)
' а (А, (О)
Для однозначных нелинейностей функции у, (Л), у (Л, го), b (а), b (Л, м)
равны нулю.
1.4.1. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ ТИПИЧНЫХ
НЕЛИНЕЙНЫХ ЭЛЕМЕНТОВ (
1.179. Составить математические зависимости для описания электрон-
ного усилителя, характеристика которого может быть представлена в виде
однозначного нелинейного элемента типа насыщения (рис. 1.74, а).
Решение. Пусть сигнал на входе нелинейного элемента х (/) =
= Л sin ®/ (рис. 1.74, б); тогда сигнал на выходе примет вид, изображенный
на рис. 1.74, в. Пользуясь этой характеристикой, симметричной относи-
тельно гр = л/2, составим следующую математическую зависимость:
Mslmp при О«^гр^грх;
У(!)=* I , „ (1.385)
кЛ81пгр1 при гр! < гр^-ту-,
где kA sin гр! = В — Ck.
1.180. Составить математическую зависимость для описания электрон-
ного усилителя, характеристика которого может быть представлена типич-
ным однозначным нелинейным элементом в виде трапеции (рис. 1.75, а).
Решение. При х (0 = Л sin гр (рис. 1.75, б) выходной сигнал будет
иметь вид, показанный на рис. 1.75, в. По этой характеристике при гр =s
найдем
kA sinip при О^гр^грх;
y(t) =
kA sinipi ПРИ
/гхС1 -- /га (Л sin гр — С8) при гр2 < гр sS грз;
(1.386)
Л»
О при грз < гр —»
112
Рио. 1.74. Нелинейная характеристика элек- Рис. 1.75. Нелинейные характеристики элек-
тронного усилителя типа насыщения тронного усилителя типа трапеции
1.181# Составить математическую зависимость для описания процесса
изменения напряжения на выходе вращающегося трансформатора
(рис. 1.76, а).
Решение. При х (0 — A sin ф (где ф = ®0 (рис. 1.76, б) выходной
сигнал у (f) = В sin (Я sin ф) (рис. 1.76, в).
1.182. Составить математическую зависимость для описания изменения
напряжения на выходе преобразующего устройства, имеющего статическую
нелинейную однозначную характеристику, показанную на рис. 1.77, а.
Решение. Для смещенного сигнала х (0 — х" 4- A sin ф (рис. 1.77, б)
найдем выходной сигнал в виде, показанном на рис. 1.77, в.
Имея это в виду, при ф = со/ получим
5(0 =
О При Ое^фе^фр 1
^[ЛэЩф — (Сл — X0)] При ф1<Ф=^ф2?
МС2 — Cj) — £а[Лз1пф — (С2 — х°)| при ф2<ф^ф3;
О при фз<ф«^л — фа;
(С, — — [Л sin ф - (Са - х0)]
при Л— фз<ф^Л — фя!
kt[A 81пф — (Сх — х°)1 при л — ф2<ф«3л — фл;
О при л — фл < ф «5 л 4- ф«;
— &л('—Лз1пф— (Cj — х0)] при лД-ф4 <ф=^л + ф6;
— ki (Са - Сл) -I— A sin ф - (Са + х°) j
при лф5 <фЛ+ Фв>
О при л Д- фз < ф fig 2л — ф$;
- (С8 - Сл) - /г2 [— A sin ф - (Са 4- х°)]
при 2л — фв < фа^ 2л — ф5;
— ki [— A sin ф — (Cj 4- х0)]
при 2л — ф8 < ф fig 2л — ф4;
О при 2л — ф4 < ф fig 2л.
(1.387)
1,183# Составить математические зависимости для описания процессов
изменения выходного сигнала следующих однозначных нелинейных харак-
теристик (при симметричном входном сигнале х (0 = A sin ф): а) релейной
113
Рис. 1.76. Нелинейные характеристики ера- Рис. 1.77. Нелинейная характеристика пре-
щающегося трансформатора образующего устройства при подаче на его
вход несимметричного синусоидального сиг-
нала
(рис. 1.78, а); б) с двумя значениями коэффициента усиления (рие. 1.78, <5)'.
в) с переключением и переменными коэффициентами усиления (рис. 1.78, в);
г) <з изменением коэффициента усиления по кубической параболе
(рис. 1.78, г); д) в изменением коэффициента усиления по закону у (<) =
= Вх — (рив. 1.78, д\, е) цифрового преобразователя (рис. 1.78, е).
1.184. Составить математические зависимости для описания процессов
изменения выходного сигнала следующих однозначных нелинейных харак-
Рис. 1.7S: Типовые однозначные нелинейные характеристики при подаче симметричного си-
нуеоидального сигнала
114
Рис. 1.79. Типовые нелинейные однозначные характеристики при подаче несим-
метричного синусоидального сигнала
теристик [при несимметричном входном сигнале х (/) — х° 4- A sin ф 1:
а) переключения сигнала по уровням 4-В и —В (рис. 1.79, а); б) изменения
сигнала по трапеции с зоной нечувствительности (рис. 1.79, б); в) кусочно-
линейной (рис. 1.79, е); г) одностороннего переключения с зоной нечувстви-
тельности (рис. 1.79, г); д) ограничения (рис. 1.79, б); е) изменения коэффи-
циента усиления по квадратичной параболе (рис. 1.79, е).
1.185. Составить математическую зависимость для описания процесса
изменения выходного сигнала реальной двухзначной релейной характери-
стики [при симметричном входном сигнале х (0 = A sin ф, ф= ®Г(см.
рис. 180, 6)1.
Решение. Сигнал на выходе двухзначной релейной характеристики
(рис. 1.80, а) имеет вид, показанный на рис. 1.80, в. Опишем этот сигнал
в виде следующей математической зависи-
мости:
х(0 =
В при фх < ф фа;
0 при фа<ф<л + фх;
— В при л + ф1<ф^
^2л — фа;
0 при 2л — фа < ф eg 2л.
1.186. Составить математическую
симость описания процесса изменения
Рис. 1.80. Нелинейная двухзначная релейная харак-
теристика при симметричном входном сигнале
Зави-
вы-
Н5
Рис. 1.81. Нелинейная
двухзначная характери-
стика типа петли гисте-
резиса с воной нечувстви-
тельности при несимме-
тричном входном сигнале
ходного сигнала нелинейной двухзначной характеристики (рис. 1.81, а)
при несимметричном входном сигнале (i|? = at)
х (0 = х° -J- A sin ф.
Решение. Представим сигнал на выходе нелинейного элемента в виде
характеристики, изображенной на рис. 1.81, б. Отсюда можно получить
О при О^ф^фх;
k [A sin ф — (С — х0)] при фх < ф sg ф2;
В при фа sg i|? л —• ф3;
k [Л sin ф — (тС — х0)] при л — ф8 «С ф.^ л — ф4;
0 при л — ф4 sg ф ==£ л 4- Ф8;
— k[—A sini]? — (С4- х0)] при л 4- ф8 Ф л 4" Фв‘>
— В при л 4* фв^ф «5 2л — ф7;
— k [— A sin ф — (тС 4* х°)1 при 2л — ф7 sg ф sg 2л —ф8;
0 при 2л — ф8 «С ф =sg 2л.
УИ) =
(1.389)
1.187. Составить математические зависимости для описания процессов
изменения выходного сигнала следующих нелинейных двухзначных харак-
теристик [при симметричной форме входного сигнала х (f) = A sin гр]:
а) релейной смещенной двухпозиционной характеристики (рис. 1.82, а);
б) петли гистерезиса (рис. 1.82, б); в) люфта (рис. 1.82, в); г) трапецеидаль-
ной опережающей петли (рис. 1.82, г).
1.188. Составить математические зависимости для описания процессов
изменения выходного сигнала следующих нелинейных двухзначных харак-
теристик [при несимметричной форме входного сигнала х (() = х° 4-
4- A sin гр): а) гистерезиса с прямоугольной петлей (рис. 1.83, а): б) поло-
винчатой релейной (рис. 1.83, б); в) гистерезиса с зоной нечувствительности
(рис. 1.83, е); г) релейной (рис. 1.83, г).
1.189. Составить математическую зависимость для описания нелиней-
ных механических характеристик двухфазных асинхронных электродвига-
телей (рис. 1.84, б).
Рис. 1.82. Типовые нелинейные двухзначные характеристики при подаче симметричного си-
нусоидального сигнала
116
Рис. 1.83. Типовые нели-
нейные двухзначные харак-
теристики при подаче не-
симметричного синусои-
дального сигнала
Рис. 1.84. Нелинейные ме-
ханические характерис-
тики двухфазного асин-
хронного электродвигате-
ля
Решение. Для описания нелинейных характеристик этого вида при-
меняют степенной полином
у (0 = kx2 sign xi,
под знаком которого содержится как входная величина xt = At sin (гр — q>)
(рис. 1.84, а), так и выходная величина х2 — Л2 sin гр (рис. 1.84, в). Резуль-
тирующая кривая у (/) изображена на рис. 1.84, г. Пользуясь этой харак-
теристикой, запишем
у (I) = k (А 2 sin гр)* signsin (гр — <р). (1.390)
1.190. Составить математические зависимости для описания процессов
на выходе нелинейной функции
у (1) = kx* sign Х2 sign Xi.
1.4.2. КОЭФФИЦИЕНТЫ ГАРМОНИЧЕСКОЙ ЛИНЕАРИЗАЦИИ
ТИПИЧНЫХ НЕЛИНЕЙНЫХ ЭЛЕМЕНТОВ
1.19L Определить формулы для вычисления коэффициентов гармони-
ческой линеаризации нелинейной характеристики электронного усилителя
(см. рис. 1.74, а).
Решение. Из рис. 1.74, в видно, что функция у = F (х) симметрична
относительно л/2, поэтому первая формула (1.378) примет вид
Л/2
а (Л) = j F (Л sin гр) sin гр Лр.
о
117
Подставляя в нее выражение (1.385), получим
ф, пП
а (Д) =« 1 kA sin* ф </ф + | Ck sin ф t/ф =»
о Ф<
(Ф, ф,\ я/S
ф 1 1 , о, I \ , 4Ck ,1
— I --8Ш2ф Н^СОВф I -
о о/ ф,
= (ф1 ~ sin ф, cos фг + 2 -j- COS ф,). (1.391)
£
Из рис. 1.74 следует, что sin Ф1 = С помощыб этого Выражения
и формулы (1.391) найдем коэффициент гармонической линеаризации
fl(4)--^(arcsin4+4 Z1—>)• <L392>
Очевидно, эта формула имеет смысл лишь при А С.
1.192. Определить формулы для вычисления коэффициента гармо-
нической линеаризации несимметричного преобразующего устройства
(рис. 1.77, а).
Решение. Подставляя в первую формулу (1.380) выражение (1.387),
получим
ф»
а (Л, х°)«J kx [A sin ф — (С,, — x°)J sin ф йф 4-
Ф»
Ф.
+ ТТ J № *” М «1в Ф — (Са — х®Ш sin фб( ф 4-
ф,
+ Г 1*х(С«~С1)~А»М81Пф-(С,-Х«)П81Пф<«ф4-
л«—фв
+ *553- J hi М sin ф — (Сх — х0)] sin ф <£ф —
л-ф, t
я+ф,
---яА J М— ДзЩф — (Ci 4-X0)] sin ф <2ф—
л+ф,
1 я+ф,
~ ~яа' J — Ь* [-" Д sin ф — (Са 4“ **)1| sin ф йф —
я+ф,
2я—ф,
nA J 1^1 — Ct) — fes[—Д&1пф—(С14-Х°)]}81ПфЙф —
2л ч*ф4
! *И-*Лз1пф— (С14-х°)]з1пфб/ф. (1.393)
2я—ф.
118
Выполнив интегрирование выражения (1.393) и подставив соотношения
— arcsin ; фа — arcsin —
. С, — х® . Сч 4- х°
фз — arcsin ; ф4 -»arcsin ;
. Cg Ц- X® . Са 4* X®
ф4 = arcsin —; ф4 = arcsin
найдем
а (Я, х°) » £ arcsin — arcsin + arcsin * —
_ arcsinl/j (С,-х®)а‘ _ C2~S
A * А У 1 Д2- ~ x
(C^x*)3 , C<+ x® -j/. (Cj+x®)® C« + x« -iГ (5; + x4)'*l
Л3 -* A V 1 ““ Д2 "" A V 1 Л®--------------------------------------J'
k„ Г» C3 — *° . C. — tfi . . Ся +Xй
—4- arcsin -4-5-----------arcsin —4----------к arcsin -2-?-------
n L A A • A
in + _
Cg+x0 1/, (C» + x°)a . Cr-x® т/“ (Ci-х3)*
А У • Л3 "г* А У Ai “
_£i+i yi_<£i+^ +^±i |А-!£ф2!] +
+%- /i-!a#2]+
I Г *~ X*) 1 I (Cj — X®)* I Cg — x® *1/* | (Ca ~~~ X^)2
*" л [ А У Аа ' A V A3
C3+x® 1Г. (d, + ^ Cg + x®' 1/': (Cg+x®)®] 2fet(Cg~Ct)
А У 1 Д3 t А Г A2 nA X
_ у i _ Ji+ZZ.]. (1.39S)
Формула (1.395) справедлива лишь при А С» + |х®| . Теперь, под-
ставив выражение (1.387) в третью формулу (1.380), получим:
Г°(Л,х°)=51- J /г1[Л81пф-(С1-х’)]^ +
+ 2JT J jfex (Са — — йд [Xslnxp — (С4 — х°)] -к
м>»
+ 2л~ J — ^1) — ^[Дsin ф — (Cj <•» х°)]| dif 4”
я-*ф,
+ 4г J feiHslnip —(Сг—x°)Jdip—
Я—♦»
119
-2iT J M-4 Sin +X»)] tty-
n-Hh
“2Г J +
л+М>»
2л—ф,
“2JT f IMCs-CiJ-M-^sinip-^ + x»)!}^-
2л—i$, 2л $
~4i J M^sln^ —(Cj + x0)]^. (1.396)
2n»$s
Проинтегрировав найденное выражение и подставив соотношение
(1.394), определим функцию смещения в виде
Г° (Д, х°)= £ (С4 — CJ (arcsin — a res in -—j— —
. Cg + ifi , . С,д-х°\] k< г.r / . C — x®
— arcsin -1- arcsin j J —1 (Cj — x°) (arcsin —-
— arcsin — (Cx 4- x°) (arcsin — arcsin +
+ (Ct + s") ( arcsin Й +— — arcsin C’ 4 ** )] +
+ -^[(Сг —a*) (arcsin C,7*9— arcsin—
-¥ - /1-*^ +
+ /i-!a+^]++
+ /1-!^- /ТТЕЕ2]. ' (1.397)
Формула (1.397) справедлива лишь при А С8 +1 х° |.
1.193. Определить формулы для вычисления коэффициентов гармони-
ческой линеаризации нелинейной механической характеристики двухфаз-
ного асинхронного электродвигателя (см. задачу 1.189).
Решение. Коэффициенты гармонической линеаризации будем вычис-
лять по формулам (1.379). Тогда, учитывая симметричность выходной харак-
теристики относительно л, получим
Л
a (At, со) == —^-5 J sin® ф sign sin (ф — <p) sin ф йф «=
о
в "~1Ла f — J slnS Ф с(ф + J sin3 Ф ^Ф^ — 2 (cos ” Т COs8 <₽) ’ (1-398)
\ 0 <р У
л
b(At, со)—--я-а- J sin® ф sign (ф — <р) cos ф йф =
о
~ ~^я? (— J sl°2 Ф cos Ф ^Ф 4* J si°2 Фcos Ф^ф') ~ —4дд2 sin® ср. (1.399)
\ о ф У
120
В формулах (1.398) и (1.399) <р = <р (<о).
1.194. Определить формулы для вычисления коэффициентов гармони-
ческой линеаризации реальной двухзначной релейной характеристики при
симметричном входном сигнале (см. задачу 1.185).
Решение. Выходной сигнал симметричен относительно л, поэтому,
подставив в первую формулу (1.378) выражение (1.388), получим
2 г” 2В
а И) = J В sin ip dip = (cos ipx - cos ip8). (1.400)
М>1
Из рис. 1.80 следует, что
ipj — arcsin-j- и ф8 = л — arcsin-^-. (1.401)
Подставив эти значения в формулу (1.400), найдем
о-402»
Формула (1.401) справедлива лишь при А 5= С. Подставив во вторую
формулу (1.378) выражение (1.388), получим
M’s
Ь (Л) = ~£а f В C0S =-------------S <Sin 'fl ~ Sin ’*'«)' 0 -403)
Используя формулу (1.403) и соотношение (1.401), найдем
Ь(А)-------ПРИ (1.404)
1.195. Определить формулы для вычисления коэффициентов гармони-
ческой линеаризации нелинейной двухзначной характеристики, приведен-
ной в задаче 1.186.
Решение. Подставив выражение (1.389) в первую формулу (1.380),
получим 1
а (Л, х°) = j k [A sin ip,— (С — х0)] sin ip dip +
Л—Ips Л—Ц>4
f В sin ip dip-|-f &[Hslnip — (mC — x0)] sin ip dip —
Jl/1 J • wi J
Ч>2 Л—Ip,
Л-ИР,
— j k[— A sin p — (C -|- x0)] sin ip dip —
л-t-ip.
2л—1р» 2л—Ip,
-4- f В sin Ip dip — —V f [—Hsinip —(/nC + x®)] Slnipdip. (1.405)
Jt/I J T jl/i J
n-j-lp, 2л—Ip,
Проинтегрировав выражение (1.405) и подставив соотношения
. С —х° , . B + k(C — х°) .
ip! = arcsin —-д—; ip2 = arcsin —1;
. В -+- k (тС — х°). . • тС — .
1р8 = arcsin ; ip4 = arcsin —;
. С + х° • В + МС + *0) .
ip5 = arcsin —; ipe = arcsin ———j—;
. B + ktmCA-x0) , • тС + хо
ip7 — arcsin kA '"—' ’ 'I’8 = arcsin —»
kA
(1.406)
kA
121
найдем
z л £ Г • £ + k(C — х®) , . В 4- k (тС — х®) ,
а (А, х°) = [ arcsin..+ arcsin --------------------------- 4
. . B-f-*(C+xb) . . B + k(mC + >fi) . С —х®
|-arcsin —' + arcsin — — arcsin ——
С 4- х® . тС — х® . тС4-х°1 •.
— arcsin —--------arcsin —---------arcsin —- 4-
А А ** J
4- 4 ]Л - '*+- /1 - +
к (С + х®) (1/‘ [В + Л(С + х«)]а ч/\ (С + х®)»!
F -----д—| у 1 - -------------------------у 1---------—j +
k (mC — xa).fi/'~t [В + k(mC — х°)\2 i/", (mC—xa}2] ,
Л — { У 1---------------------------------У 1---------Д2— J +
k (rriC + xojfi/'] [B 4- fe (mC -f- x®)]2 7/7 (»tC 4- x®)2) ,
л A I V 1 k^A2 V 1 X2 j +
, В /i/; [В 4-fe (C — x®)]2 , t/; [B4-fe (C4-x«)|2 ,
r nA I V 1 k2A2 V 1 feM2 r
। l/1 _ [B-FMmC-x®)]2 , 1/1 _ (B4-fe (mC4-x°)la
V k2A2 ir 1 k2A2
k f B4-fe(C —x®l 1/। (B4-fe (C —x®)]2 ,
2л I kA V 1 k2A‘ +
, В 4- k (mB - x®) 1 /; lB4-fe(mC-x®)]2 ,
+ M V 1-----------&A2--------+
, B4-*(C4-x®) 1/, [B4-fe(C4-x«)]2 ,
+ kA------------ V 1 ~ ----&A2-----+
, В +k(mC 4- X») 7 f lB4-fe(mC4-x®)]2 C — x® 7 f, (C — x®)2
kA у 1 feM® — V 1 ~ X
_C+xf> i/"t (C4-*°)a mC — xO t/~ (mC —x®)2
A V 1 A V -----
_ .?£± 1/ 1 _ . (1.407)
л* F A J
Формула (1.407) справедлива лишь при А _£+Al^+l^LD_. Под-
ставив выражение (1.389) во вторую формулу (1.380), найдем
Ь(А, х0)=±=— j А[Лбй1ф — (С — х0)]cosф4-
л—ф»
+ '^4’ J cos'ПФ + ^4- J Л[Лз1пф — (тС — х°)]С08ф(1ф —
J л-W. 2Я-Ч>,
^Ha J £Ь“Лз1пф —(С4-х°)]со5ф4ф —j Всо8ф(1ф —
л-Н>, л-Нр,
“яТ J *1— ЛзШф—(znC 4-х«)] cos ф^ф. (1.408)
; 2п~Ф,
122
Интегрируя выражение (1.408) и подставляя в него соотношения (1.406),
получим
Ь(А, ^-(1-/п). (1.409)
Эта формула справедлива при Л Д Подставив выра-
жение (1.389) 9 третью формулу (1.380), найдем
е»
F° (Л, х°) = ~ j k [A sin ф - (С - х°)] <1ф +
л—о, Л—Чч
+ 1Г J + f k[Лsinф — (тС — х°)]с!ф —
ф, л—ф,
я+ф, 2л—ф,
“"25Г f *[—Л sinф — (С + х0)] с!ф — j В(/ф —
n-f-if, л4"ф,
2л—
--J- ( м— ЛзШф—(Z71C +х°)1 <2ф. (1.410)
лЯ J
2л—ф,
Интегрируя выражение (1.410) и подставляя в него соотношение (1.406),
найдем функцию смещения в виде
F(Л, х°) = |(С -|-х°) [arcsin — arcsin j —
— (С — х°) [arcsin Д — arcsin ^-7—1 +
ц Kri A J
, z-> । un Г • В 4-fe (mC'-l-x0) . mC4-x°'|
- |- (mC x°) I arcsin ~ J — arcsin —j—1 —
. Г • B + k(mC — x°) . mC — x°l)
— (mC — x°) arcsin —2—r;—'—1 — arcsin —21 -r
L ЛА Л JI
В Г • B + k(C— x°) . . B + k(mC — X")
- -S’ [arcsln -*л------L + ram ----------------
in в + ,«±»<c.+ni _
tin fin J
kA
2л
I __ (B-f-fe(C — x0)]2
1 fcM2
— Xй)]2 _
[B-f-felC-f-x0)]2
Л2Л2
]B + fe(mC-f-x°j]2
_ у 1 _ис^*£ + у 1 _ .g£fr£g}. (1.411)
A /1 Л1 14 1 В + *(С4-|х°|)
Формула (1.411) также справедлива при Л >---------1--j-2-1——.
1.196. Определить коэффициенты гармонической линеаризации для
однозначных нелинейностей, математическое описание которых приведено
в задаче 1.183.
123
1.197* Определить коэффициенты гармонической- линеаризации для
однозначных нелинейностей, математическое описание которых приведено
в задаче 1.185.
1.198. Определить коэффициенты гармонической линеаризации для
двухзначных нелинейных характеристик, математическое описание которых
приведено в задаче 1.187.
1.199. Определить коэффициенты гармонической линеаризации для
двухзначных нелинейностей, математическое описание которых приведено
в задаче 1.188.
1.200. Определить коэффициенты гармонической линеаризации для
нелинейной функции у (t) = kxl sign хг sign xv
1.201. Определить коэффициенты гармонической линеаризации для
нелинейных характеристик, зависящих от двух функций:
а)ио = и-^;
б) y(t) = x^-,
в) y(t)~ х2~.
1.202. Определить основные коэффициенты гармонической линеариза-
ции no 1, 3 и 5-й гармоникам, а также дополнительные, учитывающие влия-
ние 3-й и 5-й гармоник на 1-ю [24], для нелинейной характеристики, мате-
матическое описание которой было дано в задаче 1.180.
Решение. Коэффициенты гармонической линеаризации по первой (ос-
новной) гармонике вычислим по формуле
Я/2
а1(Л) = -^г/ F(АsinФ)smФ^Ф- (1.412)
о
Подставляя в формулу (1.412) значение функции (1.386), получим
Ф, фг
ах(Л) = j ktA sin2 ф t/ф -f- j kxA sin фх sin ф Йф
о Ф1
Ф»
+ j [kjCj^ — k2 (Л sin ф — Cj)] sin ф с2ф —
Ф»
4fejCi ..
nA x
Фа
4kt sin Ф I
Л Y I
Фа
* COS ф = — [^1ф1 + (фа — фз) +
Фа
+ (COS фг — COS фз)------2^Сг (COS фз — COSifa) — 2fex (51Пф1СО5ф2 —
— Sin ф1СО8ф1) —• Sin фл COS Ф1 + ^2 (Sin Фз COS фз — sin Фз COS Фз)] =
= -j-arcsin+ ^2 (arcsin — arcsin-|-
124
(1.413)
Коэффициент гармонической линеаризации по 3-й гармонике имеет вид
Л/2
ам И) = f (Л sin ф) sin Зф dip = -^д- J кгА sin ф sin Зф dф 4-
о о
♦« ч>.
4- j k]A sin фг sin Зф dф 4* j [AsxCx — й2 (A sinф — С^] sin Зф dф =
4kf
= —*- Sin Зф. COS фх------g-l- (sin фх COS Зф2 — Sin фх COS Зфх) —
л * оЗТ
— "з^л" (^А "Ь kaC2> (cos 3^3 “ cos 3^ “ (sin 3^3 cos ~sin 3,h cos “
_4_ fexCt /
я [ ЗА \
сп 1/ 1 -£L-k (-£11/1 _ £1_ Я 1/711x1 _
А2) V 1 А2 3\А3 V 1 А2 А3 Г 1 А2)
&1Р1 ~Ь . j С3 \ i/” « Cjj
ЗА \1 * А») V 1 А2
(1.414)
Коэффициент гармонической линеаризации по 5-й гармонике будет
Я/2 ' Mh
4 f 4 Г
аи (Л) = J F (А зШф) sin 5ф с£ф = j kjA sin ф sin 5ф t/ф -f-
о о
M’s М>«
4- | ktA sin фх sin 5ф dф 4- J [fex<?x — (A sin ф — С2)J sin 5ф dф =
_ _ «1. (slnф,eos6ф, - smifccos6ф1) -
db у ** кл/ / <JJb
---5лД” "Ь ^2^а) (cos 5ф3 —• COS 5ф2)
4fea ( sin 4ф3 sin 6ф3 sin 4ф2 , sin 6ф2 \
л \ 4 12 4 "+ 12 ) ~
__ Г /с .4 Ci \ 1 /~ 1 Cf /. ig С? [
— "л-[ ЗЛ3 \5 3 Ла / г 1 А2 5Л \ 12 А» +
-T^A + ^O-l2^16-^)/ 1 -^1- (1-415)
125
Дополнительные коэффициенты гармонической линеаризации вычис-
ляют по формулам
Л/2
Да18 (Л) =» — j F (Л sin ф) sin Зф sin ф t/ф «
о
J 51п3ф81пфйф-------— J k3 Sin Зф Sin ф б/ф =»-
О М>«
(1.416)
Я/2
Да1Ь (Л) = -i- ( А (Л sin ф) sin 5ф sin ф б/ф —
4 'г*
— — J sin 5фsin ф (1ф —— J kt sin 5ф sin ф =
п о ф3
(1.417)
Л/2
Дд18 (Л) = J A (A sin ф) cos Зф dip =*
и
«= —J ^СОвЗфСОЗфб/ф-------—J ka COS Зф COS ф б/ф =
о м>»
Л/2
Д^1ь (Л) — J F (A sin ф) cos 5ф cos ф dip =
'Pi м>.
4 f 4 i
= — J А1соз5фсозфб(ф---------j &2соз5фсозфб1ф==
П о Я
-4('—£)(з~8-£)/1-М ’ о--»»
Формулы (1.413) г— (1.419) справедливы при Л 5s Са.
1.203. Определить основные коэффициенты гармонической линеари-
зации по 1, 3 и 5-й гармоникам и дополнительные коэффициенты, учитыва-
ющие влияние 3-й и 5-й гармоник на 1-ю [241 для двухзначной нелинейной
характеристики, изображенной на рис. 1.82, а.
126
Решение. Формулы для основных коэффициентов гармонической ли-
неаризации:
Для 1-й гармоники
2я
аг(Л)«j F (Л sin ф) sin ф dip •=•
в V в "V* в
Jsln^ + TT J 81пфс1ф--^ J
О ф, л+ф.
= ^r(C0Slfi+ cos4’a);
здесь
С
Ф1 = arcsin-^-;
ф, = arcsin -д-;
тогда
2л Ф1
Ьх(Л) =-^4-J ^(Лз1Пф)С08ф4ф- —Св8фс1ф4-
и о
+ -^Г J СОЗфЙф--^- J сЬ8ф4ф-lg.(l+|m[);
Ф. «+Ф« (
для 3-й гармоники
2Л
Oft (Л) j F (A sin ф) sin ЗфДф =и
Ф1 Я-Н>1
J: вшзф^ф-р-^ J $1пЗф4ф--
2л _ ------
=£[(-'+*-&) к*-^-+
+ (_1+-)/ТГ^:
(1.420)
(1.421)
(1.422)
Ь|»(Л) = -£4-^ /7(э1пф)собЗф4ф—— j созЗфйф +
+ ^Г I созЗфйф —-j- [ совЗф4ф-
ф, «+Фа
(1.423)
127
для 5-й гармоники
2л
ам(Л) = -^| F (Л sin 4) sin 54 4/4 =
О
= _"^rj slnЭДЭД + ~£a J 81П51|^4 — J sin644/4 =
о ф. Я-М>,
+ (- 1 + 12^-- 16-^-) У1 --^]; (1.424)
Ь“(Л) = ^ (^ sin 4) cos 54 4/4 = — cos 644/4 +
JI-Hh 2 л
+ £ J cos 54 4/4 —-^j- J cos 54 4/4 =
ipj я-НР.
—ЙгН-5+2°£-'6-£-)4+
+ lm + (-5 + 2oJT?--l6J^-)]- (1-42B>
Формулы для дополнительных коэффициентов гармонической линеа-
ризации
2л
Atz18 (Л) = -i- f F (Л sin4)sin345104 4/4 =
Ч>! «+Ф1
-J£- J sin З4 Sin 4 4/4 + -— J Sin 34 Sin 4 4/4 —
0 Vi ;
2л
*—— J sin З4 sin 44/4 =
я+Ф»
_ 2BC2 3 4 Л2 . t 3 4 Л2
- Зля.
2л
Д'4118 (Л) = — [ Л (Л sin 4) cos 34 sin 4 4/4 =
Л J
♦1 в п^Т'
----— J COS 34 Sin 4 4/4 + -Д- J cos З4 sin 4 4/4 —
0
2л
f cos34sin44/4 =
я-HN
= ^[0-<£)+и|(1-^)Ъ
(1.426)
(1.427)
2л
If* в f
A4i1B (Л) = — I F (Л sin 4) sin 54 sin 4 4/4 = --— I sin 54 sin 44/4 +
123
л+ф] 2л
4* — J sin 5ф sin ф dif —j sin 5ф sin ф dif =
Ф, я+фг
г С2 С4 т2С2
5-2°-12- + 16^г 5-2о22£~ + 16^И
- -------г-------------h m2....................
L
2л
Д'а16 (Д) = — j F (A sin ф) cos 5| sin ф dif =
я о
ф, л+ф,
- — f cos 5 ф sin ф dip + — f cos 5 ф sin ф rfip —
«ГС J «ГС J
О ф,
2л
В Г с , . , Л . 2ВС Г (. , о С2 . r С4 \
- J cos54-sin4d4=^ (1-12^-16^7-
л-Н>, L '
. . . / , , о m2C2 . , _ m4C4 \ I
4-|тЦ1 - 12 —да—4- 16—j J .
2л
Д'Ь13 (Д) = — f F (A sin ф) sin Зф cos ф dф =
я о
Ф, л+Ф,
= —J sin Зф- cos ф dф 4~ 4 J sin Зф cos •• dф —
о ф,
2л
---j sin 3 ф cos ф dф =
л+ф, ,
2ВС Г/о . С2 \ , . . /о . m2C2 \ 1
т*С* я
2ВС2
яД3
(1.428)
(1.429)
(1.430)
2л
дь13 И) = 4 J sin cos 3,fcos ’’Мф =
Ф1 ”+ф1
---J C0SЗфC0Sфdф4-— f COS34COS ;[diJ —
О ф,
2л
--— j cos Зф cos ф dф ==
Я+Ф,
. С2 \ -\Г. С2' . (. . т2С2 \ п^С2
-4^т) И 1--Д5-+к1-4—) V 1---------А^~
(1.431)
2л
Д'й1Ь (Д) = 4 J (Д sin ф) sin 5ф cos ф dф =
Ф1 л+ф,
—J sin 5ф cos ф dф 4-— f sin бфсоэ } dф—
"о я ф,
л+ф,
2ВС
л Д2
2л
—— j sin 5ф cos ф dф =
л+Ф«
С2 . 1С С4 \ . , 1. 1О т2С2
-дг+1644г) +тЦ1“’12Т
5 Ю. И. Толчеев
129
Рис. 1.85. Типовые одно-
значные нелинейные ха-
рактеристики:
а — преобразующего устрой-
ства; б — электронного уси-
лителя с зонами нечувстви-
тельности и насыщения
Рис. 1.86. Типовые двух-
значные нелинейные харак-
теристики релейных зле-
ментов
2л
ДЬх6 И) = V J sin C0S C0S Ф =
•= [(1 - 12-J- + 16-g-) +/па(1 - 12-^-+ 16-^gt)]. (1.432)
1.204. Определить основные коэффициенты гармонической линеари-
зации по 1-й и 3-й гармоникам, а также дополнительные коэффициенты,
учитывающие влияние 3-й гармоники на 1-ю, для однозначной нелинейной
характеристики, изображенной на рис. 1.85, а.
1.205. Определить основные коэффициенты гармонической линеариза-
ции по 1-й и 3-й гармоникам, а также дополнительные коэффициенты, учи-
тывающие влияние 3-й гармоники на 1-ю, для однозначной нелинейной
характеристики, изображенной на рис. 1.85, б. \
1.206. Определить основные коэффициенты гармонической линеариза-
ции по 1-й и 3-й гармоникам, а также дополнительные коэффициенты, учи-
тывающие влияние 3-й гармоники на 1-ю, для двухзначной нелинейной ха-
рактеристики, изображенной на рис. 1.86, а.
1.207. Определить основные коэффициенты гармонической линеари-
зации по 1-й и 3-й гармоникам, а также дополнительные коэффициенты,
учитывающие влияние 3-й гармоники на 1-ю, для двухзначной нелинейной
характеристики, изображенной на рис. 1.86,6.
1.4.3. ЭКВИВАЛЕНТНЫЕ АМПЛИТУДНЫЕ И ФАЗОВЫЕ ХАРАКТЕРИСТИКИ
ТИПИЧНЫХ НЕЛИНЕЙНЫХ ЭЛЕМЕНТОВ
Для определения областей устойчивых и неустойчивых состояний не-
линейных систем регулирования применяют эквивалентные логарифмичес-
кие амплитудные 20 1g q (Я), 20 1g (А, о») и эквивалентные фазовые р (А)
и р (А, со) характеристики.
1.208. Построить эквивалентные логарифмические обратную ампли-
тудную 201g — ' -,- и фазовую — л — р характеристики двухзначной
’(т) с
нелинейности типа люфта в зависимости от -j-.
130
.... Решение. Пользуясь формулами для коэффициентов гармонической
линеаризации для данной нелинейностих, определим
4/[l+arcsin(1-
С
А
+ 2arcsin
2С
(1.433)
А
А
и
С X , А V А ) _____
4/ ЭГ<; g л .Л 2С \ / 2С\-|/‘С-Л СТ
_ + агсМП(1---^+2^--^ у _
На полулогарифмической бумаге построим характеристики 20 1g
Q
(1.434)
/ с \
(кривая 1, рис. 1.87, а) и — л — р (1 (кривая 2).
1.209. Построить эквивалентные логарифмические обратную амплитуд-
ную 20 1g —/"ёи Фаг°вую — л — р характеристики для двухзначной
нелинейной характеристики, изображенной на рис. 1.82, а.
Решение. Пользуясь формулами для коэффициентов гармонической
линеаризации я(-д-) ио 1-j-l, определим
5*
131
Рис. 1.88. Структурные схемы с последовательно соединенными нели-
нейными элементами
На рис. 1.87, б построены характеристики
201g / ‘с \ и
чУа)
1.210. Построить эквивалентные логарифмические обратную ампли-
тудную 201g—-------г и фазовую — л — рэ (-А, ш) характеристики ди-
I '•'l \ \ **1 / ,
Ч—
намического элемента, состоящего из трех звеньев (рис. 1.88, а).
Решение. Будем считать, что линейное звено с передаточной функцией
Й7Л(5) = ТА-Г(Л1 = 2; Л = 0,04 с)
* “Г 1
обеспечивает хорошую филыфацйю сигнала, поступающего на его вход.
При этом можно пренебречь влиянием на данный динамический элемент
высших гармоник после 1-го нелинейного зв^на. Тогда приведенная экви-
валентная амплитудная характеристика может быть найдена в виде
<U37)
где амплитуда на входе 2-го нелинейного звена определена по формуле
А2 = Aiqi ( . (1.438)
2 \ Ar) + i 1 ’
Примем Сх = 1 и С2 = 0,5. Используя формулу (1.438), вычислим
характеристику А 2 в функции от при <й = 2; 4; 6; 8 и 9,5. Соответству-
ющие кривые построены на рис. 1.89, а.
Эквивалентная амплитудная характеристика 1-го нелинейного звена
была определена по формуле
Ш = 4(arcsin £+% V1 - Я’)- (1 439)
132
Эквивалентную амплитудную характеристику 2-го
определим по формуле
нелинейного звена
Cl
Л?
2_\ _ 4
2 /
(1.440)
В формулу (1.440) подставим числовые значения
вычислим характеристику (рис. 1.89,6). Зная
А г (рис. 1.89, а) и
значения
и по формуле (1.437) вычислим обратную эквивалентную ампли-
тудную характеристику всего динамического элемента (рис. 1.89, в).
Фазовую характеристику всего динамического элемента определим
фазовым запаздыванием, вносимым линейным звеном в виде
6 (со) = —arctg со Г х.
(1.441)
На рис. 1.89,в построены эквивалентные логарифмические фазовые
характеристики —л— рэ (со) для принятых нами значений со.
1.211. Построить эквивалентные логарифмические обратную амплитуд-
ную 201g— * - и фазовую — л — р характеристики для двухзнач-
ной нелинейности, изображенной на рис. 1.82, а.
1.212. Построить эквивалентные логарифмические обратную ампли-
1 / с \
тудную 201g—---------- и фазовую — л — р( со) характеристики для
двухзначной нелинейности со смещением (см. рис. 1.83, а).
1.213. Построить эквивалентные логарифмические обратную ампли-
133
для
Рис. 1.90. Эквивалентная логарифмическая
характеристика 20 1g J' в системе ко-
ординат 20 1g —— и — л — и
’(л)
нелинейности типа люфта
1.214. Построить эквивалент-
ные логарифмические обратную ам-
плитудную 20 1g —------— и фазе-
.’(т- “)
/С \
вую — л —col характеристи-
ки динамического элемента, состоя-
щего из трех звеньев (см. рис. 1.88,в).
1.215. Построить эквивалентные
логарифмические обратную ампли-
тудную 20 1g —— — и фазовую—
[С \
—л — р. (-д-, col характеристики ди-
намического элемента, состоящего из трех звеньев (см. рис. 1.88, г).
1.216. Построить эквивалентную логарифмическую характеристику
(С \
-^-1 для нелинейного звена типа люфта в системе координат ам-
плитуда — фаза.
Решение. Пользуясь значениями характеристик 20 1g —L и —л —
’(4)
— Р (т) (см‘ Рис> а)» построим характеристики 20 lg J' ("д")»
откладывая по оси ординат значения 20 1g —, а по оси абсцисс — л —
’ т)
(с \
-Д-)- Соответствующее построение выполнено на рис. 1.90.
1.217. Построить эквивалентные логарифмические обратную 201g —
ТО
и фазовую — л — р. (-д-) характеристики для нелинейного звена типа
гистерезиса с зоной нечувствительности (рис. 1.81, а) в системе координат
амплнтуда-фаза.
1.218. Построить эквивалентные логарифмические характеристики
201gJ'(-j-) в системе координат амплитуда—фаза для нелинейностей:
а — трапецеидальной опережающей петли (см. рис. 1.82, е); б — половин-
чатой релейной (см. рис. 1.83, б); в — гистерезиса с опережающей петлей.
1.5. СОСТАВЛЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ,
ПЕРЕДАТОЧНЫХ ФУНКЦИЙ И СТРУКТУРНЫХ СХЕМ
СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
Рассмотрим задачи на составление дифференциальных уравнений, пере-
даточных функций и структурных схем систем автоматического регулиро-
вания в соответствии с проведенной ранее классификацией динамических
элементов.
134
,.-.Если.. хотя бы один из динамических элементов системы является не-
стационарным; содержит распределенные параметры, или в систему входит
импульсный элемент, то ее следует рассматривать соответственно какнес-
.тационарную, с распределенными параметрами, дискретно-непрерывную
систему.
1.5.1. СИСТЕМЫ С ДИНАМИЧЕСКИМИ СТАЦИОНАРНЫМИ ЭЛЕМЕНТАМИ
И СОСРЕДОТОЧЕННЫМИ ПАРАМЕТРАМИ
Г.219. Составить дифференциальные уравнения динамических элемен-
тов и алгебраические уравнения устройств сравнения точного канала уп-
равления силовой следящей системы с электромашинным усилителем. Вы-
вести передаточные функции динамических элементов и составить структур-
ную схему следящей системы. Принципиальная схема силовой следящей
системы приведена на рнс. 1.91.
Решение. Запишем уравнения динамических элементов:
для сельсинного устройства
И/(0 = М(0. (1.442)
где kt — коэффициент усиления сельсинов; 6 (f) — угол рассогласования
сельсинов;
для электронного усилителя
еВ1(0 = ^и<«(П. (1-443)
Рис. 1.91. Принципиальная схема силовой следящей системы с ЭМУ
135
где ks — коэффициент усиления электронного усилителя; uw (t) — напря-
жение на входе точного канала электронного усилителя;
для электромашинного усилителя (см. задачу 1.15)
eK(i) = 6KiB (t) - kpia(t);
eAt} = RKiK(t) + LK^--,
uM(t) = kaiK (t),
(1.444)
где M — коэффициент взаимоиндуктивности обмотки якоря с управляющей
обмоткой; /гк — коэффициент усиления по току для 1-го каскада ЭМУ;
kp — коэффициент, учитывающий действие реакции якоря; ka — коэффи-
циент усиления по току для 2-го каскада ЭМУ;
для электродвигателя
ua(t) = ual (/) -ua2(t):
Ua(t)^Raia(t) + La^;
Наг =
(1.445)
где u2 (i) — напряжение противо-ЭДС электродвигателя; Ra и La — со-
противление и индуктивность продольной цепи якоря ЭМУ и электродви-
гателя привода; ke — постоянные противо-ЭДС; kv — коэффициент скорост-
ного трения электропривода; Jп — приведенный момент инерции привода;
ku — моментная постоянная электродвигателя;
для редуктора
МП
0Я(О ₽’
где ip — передаточное число редуктора;
для корректирующего устройства
2RC + «с (0 = 2RC
(1.446)
где Rt = R2 = R.
К этим уравнениям необходимо добавить уравнения сравнения в виде
6(i) = 0i(i)-e2(i);
(О = ев1 (0 ^в2 (О’
«ш (i) = ut (i) — uc (i);
eK(t) = eK1 (0 - eK2 (i),
(1.447)
136
что дает возможность составить передаточные функции динамических эле-
ментов системы:
(s) = = kt\
1 v б (s) *
^(s) =
£~В1 (s)
Uw («)
= *s;
Из(5) - £B(s) ~ TBs+l ’
I 8
•W7 iQ\ _ At <S)_1/#K_ .
£K(s) TKs+l ’
' к
П7 la(s) _ l/Ra
W- (S) - 7/^ ~ 7-as+l ’ ’
П7 zc\__ 6g(s) _ ___1гы .
^o^-ThJF” s(Jns + ku, ’
(1 448)'
Ms) _ J_.
ip '
TPs
Wl2 (S)----..
Од (S)
TP7 zA____ —
W 13(S) “ Ual(s) 7
где TB — в—/'ri— ; RBm — выходное сопротивление выходного каскада
АВ “Г ^-вых
электронного усилителя;
Тк = -^; Та = -^', Tc = 2RC.
Кк Ка
Пользуясь полученными передаточными функциями и уравнениями
сравнения, составим структурную схему силовой следящей системы (рис. 1.92).
1.220. Составить дифференциальные уравнения динамических элемен-
тов и алгебраические уравнения устройств сравнения системы автомати-
ческого регулирования температуры печи. Вывести передаточные функции
Рис. 1.92. Структурная схема силовой следящей системы с ЭМУ
137
Рис. 1.93. Принципиальная схема
системы автоматического регулиро-
вания температуры печи
динамических, элементов . и
составить структурную схему,
регулятора .температуры.
Принципиальная схема си-
стемы автоматического регу-
лирования температуры печи
приведена на рис. 1.93.
Решение. Рассмотрим
принцип действия системы
автоматического регулирова-
ния температуры. Термометр
изменяет свое сопроти-
вление в зависимости от тем-
пературы рабочей жидкости,
протекающей по трубоцро-.
воду через печь 1. Перемеще-
нием ползунка задатчика 2
нарушаем баланс моста1. На-
пряжение небаланса и$, пропорциональное температуре печи &, подается
на вход электронного усилителя ЭУг. Усиленное напряжение после второго
электронного усилителя ЭУ2 поступает на обмотку возбудителя ОВГ гене-
ратора постоянного тока Г, который питает электродвигатель ЭДв. Якорь
электродвигателя через редуктор Р поворачивает кран К, изменяя коли-
чество топлива, подаваемого в горелки Гр. При равновесии моста напряжение
а# = 0 и кран занимает вполне определенное положение, которое соответ-
ствует равенству температур задатчика Os и печи &„.
Составим линейные уравнения, описывающие переходные процессы
в элементах системы:
для моста и термометра сопротивления
.....................О(0 = о8(0-оп(*); 1
««(0 = М(0. J
где kM — коэффициент пропорциональности;
для первого электронного усилителя
uy (i) = (ty,
(1.449)
(1.450)
...для уравнения сравнения сигналов на входе второго электронного уси-
лителя
«У1(0 = «у(0-«с(0;
(1.451)
для второго электронного усилителя
ев(0 = Му1(0; (1-452)
где k2 — коэффициент усиления второго электронного усилителя;
1 При балансе моста имеем
*6 =
(/?а + гэ) Р»
Я1-+-Г1
При перемещении ползунка задатчика влево уменьшается, а г. возрастает, что при-
водит к увеличению Rc, и наоборот. Мост питается переменным током, поэтому амплитуда
напряжения небаланса зависит от величины отклонения температуры t)n от заданной д»,
а фаза — от знака этого отклонения.
138
для генератора
erl(0-M.(f),
(1.453)
где kT — коэффициент пропорциональности; k0 — коэффициент, учитыва-
ющий влияние размагничивания генератора током ia (t}\
для электродвигателя (без учета влияния потерь на индуктивность элек-
тродвигателя и генератора La и Lr)
М0~ег1(/)-ег2(0,
где
ма(0-*Л(0;
здесь Ra ~ R& *4* ₽г Ч” i ~Ь ^2»
для тахометрического моста
(Ъ + /?д) ia (0 + kt - (₽! + Л) 1е (П;
для редуктора и крана
МП I
ва(0 ‘р ’
(1.454)
(1.455)
(1.456)
где 9„ — угол поворота заслонки крана трубопровода, подающего топливо;
для горелки ;
+ (1.457)
где Трр — постоянная времени гОрелки; Агр — коэффициент пропорциональ-
ности;
для печи
тв^+еп(0-Мгр(0;
(1.458)
здесь Та — постоянная времени печи; ka — коэффициент пропорциональ-
ности.
Составим передаточные функции элементов системы в виде
IT4(s) =
/в (s) .
£bi (s)
I//?,
+1
№»(з) - 777§-ft
139
Ср I®' *'0
Ц7 (с) — ^Д — £дв
/о ($) S (J пь -|- ky!
U79(s) = Дк.
Од (s)
т , ч ___ кр <s' _
”10 (S’ — ~
Ьк (5)
Й711(5) = А^ =-7Л-
flrplSI Тп» +
Wl2(s) = = k..s.
Йл <s;
W^s}==!-fik^k^
la W
(1.459)
; г
р
ь
*гр
где Тв^.
Для определения передаточной функции тахометрической обратной связи
электродвигателя перепишем уравнения (1.455) в операторной форме:
(7?з -}- /?д) 1а (s) 4- /?езОд (s) = (А\ ф- А’а) Iс (s); 1
t/s(s) = /?2/;(s)-/?8/a(s). ) 14
Ток Ia (s) определим из уравнений (1.454), записанных также в оператор-
ной форме:
la(s) = (s). (1.451)
Ям **
Исключив из уравнений (1.460) и (1.461) переменные /0 (s) и /„($),
получим выражение для выходного напряжения тахометрического моста:
^(s) = v+«-^ + Фд^- <L462>
Если в последнем выражении пренебречь коэффициентом ke, то можно
записать
f/s(s) = A5s(TKs+ 1)ёд(х), (1.463)
где
гр __ Jn^a f R& \ .
К \ Ка ’
д __ Rjke
+ •
Отсюда найдем
= k^s (T«s + (1 -464)
Од 1 >
Используя полученные передаточные функции и уравнения сравнения,
построим структурную схему системы автоматического регулирования, тем-
пературы печи (рис. 1.94).
140
Рис. 1.94. Структурная схема системы автоматического регулирования температуры печи
1.221. Составить дифференциальные уравнения динамических элемен-
тов, входящих в систему автоматического регулирования ядерного энер-
гетического реактора, по нейтронной мощности. Вывести передаточные
функции элементов и составить структурную схему. Упрощенная принци-
пиальная схема системы автоматического регулирования ядерного реактора
показана на рис. 1.95.
Решение. Из рис. 1.95 видно, что в систему автоматического регули-
рования ядерного реактора по нейтронной мощности входят задатчик мощ-
ности, электронный усилитель, управляемый соленоид, гидравлический си-
ловой привод, реактор на тепловых нейтронах, ионизационная камера,
тахогенератор с четырехполюсником.
Допустим, что сигнал ионизационной камеры ик пропорционален выход-
ной мощности реактора /гпк; тогда и0 ~ kn0 (здесь п0 — устанавливаемая
оператором заданная мощность реактора). Обозначив перемещение ползунка
задающего потенциометра Rn через I, найдем
К1 + 1$аи«^ е<5’
(1.465)
и при ик = и о имеем
6(5“ Ri + lRn^
(1.466)
Подставляя выражение (1.466) в зависимость (1.465), получим
«,(*) = R^lRn (ик-«о) (1-467)
или
(1.468)
где принимаем в соответствии
с (1.467), что
Rj __ J6_
Ri + IRn «о
Рис. 1.95. Принципиальная схема си-
стемы автоматического регулирования
ядерного энергетического реактора
141
Выражение (1.468) можно записать через плотность нейтронного потока;
но п — п0 = пе, поэтому первое уравнение системы запишем в виде
«е = еб-£. (1.469)
Уравнение электронного усилителя
«b(0 = My(0. (1-470)
где fe„ — коэффициент усиления электронного усилителя.
На входе в электронном усилителе имеем следующее уравнение сравне-
«у (0 = «е (0 — (0«
где ис (0 — напряжение обратной связи.
Дифференциальное уравнение соленоида представим в виде
n^ + TK^--|-xs(/) = fe3uB(a (1-471)
где хв — перемещение золотника;
'Г ___ .
“ ~ С ’
cR •
fe3 = ’
4 cR ’
здесь zn3 — масса золотника; с — жесткость пружин соленоида; 7? оми-
ческое сопротивление катушки; ф — постоянная потокосцепления солено-
ида; ie — ток в катушке соленоида.
Дифференциальное уравнение1 гидравлического силового привода
запишем в виде
(1-472)
Для механической передачи имеем
x(t) =
^Тг (I) (м
(1.473)
где iu — передаточное отношение механической передачи; 0^ — угол по-
ворота ротора тахогенератора.
Пусть изменение реактивности пропорционально перемещению стержня;
тогда
(1.474)
бк (0 = kerx (ty,
в этом случае уравнение реактора гапишем в форме (1.62).
Математические зависимости переходных режимов для остальных ди-
намических элементов представим в виде:
для тахогенератора
• (1.475)
гдеЛТг— крутизна характеристики тахогенератора; ;
' 1 В этом уравнении было принято, что Т н k являются параметрами, не зависящими
от времени.
142
для четырехполюсника
(1.476)
гдё Те =» RC.
На основании выведенных уравнений составим передаточные функции
динамических элементов системы:
Wi “ ттНи =
= и, (S) — Т^4-2^э«+ 1 ’
. .. TV? /-1 X (s) _ k
Wa (s) S(Ts + j) ’
W’V -тта- = тйт>
(1.477)
где
Передаточную функцию реактора запишем в виде (см. выражение
(1.65)] •
-----у (1.478)
s(1 + St7Tt)
\ f=4 7
Применив преобразование Лапласа к выражений (1.469), найдём
(/.(з)=-£ЛГе(а). (1.479)
«о
Исключая из выражений (1.469) и (1.479) переменную Nt (s), получим
(з) - “ —7--------j---------у» (1.480)
откуда
П7 .. (T1S + 1) (Г28 + 1) (tas -1- 1) (T<s -1- 1) (Tss -1- 1) (Tts 4- П
W* ( s (T7s + 1) (Tts + 1) (7,s + 1) (TMs + I) li's + 1) (Tlts + 1)
(1.481)
где & = ^.
В этой Системе автоматического регулирования имеем два уравнения
для сравнивающих устройств:
и.(а«-^-[«к(0-Ий] (1.482)
<•0
143
и
Uy (t) = ue (i) - uc (0- (1.483)
Используя выведенные передаточные функции и уравнения сравниваю-
щих устройств, построим структурную схему системы автоматического ре-
гулирования ядерного энергетического реактора по нейтронной мощности
(рис. 1.96).
1.222. Составить дифференциальные уравнения динамических элемен-
тов и уравнения сравнивающих устройств силовой следящей системы нажим-
ного механизма прокатного стана, учитывая жесткость механической пе-
редачи. Вывести передаточные функции динамических элементов и привести
структурную схему силовой следящей системы, если ее принципиальная
схема показана на рис. 1.97.
Указания. 1. Корректирующее устройство системы обеспечивает по-
дачу напряжения отрицательной обратной связи на вход в электронный
усилитель пропорционально изменению скорости вращения электродвига-
теля через трансформатор Тр и пропорционально изменению скорости вра-
щения электродвигателя (от тахогенератора Тт).
2. При составлении уравнений и передаточных функций использовать
решения задач 1.2, 1.3, 1.14.
1.223. Составить дифференциальные уравнения динамических элемен-
тов и уравнения сравнивающих устройств силовой следящей системы с двух-
каскадным магнитным усилителем и ЭМУ. Определить передаточные функ-
ции динамических элементов и привести структурную схему, если считать,
что механическая передача является абсолютно жесткой, а ЭМУ выпол-
нен с неполной компенсацией. Принципиальная схема системы изображена
на рис. 1.98. Гибкая отрицательная обратная связь поступает на обмотки
смещения первого каскада магнитного усилителя (Л41Х и Л412).
Указание. См. задачу 1.220.
1.224. Составить дифференциальные уравнения динамических элемен-
тов и алгебраические уравнения сравнивающих устройств следящей системы
с управлением по скорости для поворотного стола моделирующей установки
с тахометрической обратной связью. Определить передатрчные функции
динамических элементов и привести структурную схему следящей системы.
Принципиальная схема следящей системы с управлением по скорости по-
казана на рис. 1.99.
1.225. Составить дифференциальные уравнения динамических элемен-
тов и алгебраические уравнения устройств сравнения следящей системы
с управлением по скорости при применении отрицательной обратной связи
по напряжению. Определить передаточную функцию динамических эле-
ментов и привести структурную схему следящей системы. Принци-
пиальная схема следящей системы с управлением по скорости показана на
рис. 1.100.
1.226. Составить дифференциальные уравнения динамических элемен-
тов и алгебраические уравнения сравнивающих устройств следящей системы
для управления угловой скоростью вращения барабана. Определить пере-
даточную функцию динамических элементов и привести структурную
схему следящей системы. Принципиальная схема следящей системы для
управления угловой скорости барабана показана на рис. 1.101.
1.227. Составить дифференциальные уравнения динамических элемен-
тов системы автоматического регулирования угловой скорости вращения
мощного трехфазного электродвигателя для подъемного механизма. Опре-
делить передаточные функции динамических элементов и привести структур-
ную схему системы автоматического регулирования подъемного механизма.
Принципиальная схема системы приведена на рис. 1.102.
1.228. Составить дифференциальные уравнения динамических эле-
ментов системы автоматического регулирования трехфазного асинхронного
144
Рис. 1.96. Структурная схема системы автоматического регулирова-
ния ядерного энергетического реактора
Рис. 1.97. Принципиальная схема силовой следящей
системы нажимного механизма прокатного стана
сл
Рис. 1.96. Принципиальная схема силовой следящей системы с двухкас-
кадным магнитным усилителем
Рис. 1.99. Принципиальная схема сле-
дящей системы с управлением по ско-
рости с тахометрической обратной
связью
Рис. 1.100. Принципиальная схема
следящей системы с управлением по
скорости и жесткой отрицательной
обратной связью для поворотном сто-
ла моделирующей установки
Рис. 1.102. Принципиальная схема
вращения трехфазного электродви-
гателя для подъемного механизма
।
Рис. 1.101. Принципиальная схема сле-
дящей системы угловой скорости вра-
щения барабана
146
Рис. 1.103. Принципиальная схе-
ма системы автоматического ре-
гулирования трехфазного асин-
хронного двигателя, управляемого
от синхронного генератора
Рис. 1.105. Принципиальная
схема приборной следящей си-
стемы с индукционными муф-
тами
АЗЛв
Рис. 1.104. Принципиальная схе-
ма приборной следящей системы
с двухфазным электродвигате-
лем
электродвигателя, управляемого от синхронного генератора. Определить
передаточные функции динамических элементов и составить структурную
схему системы. Принципиальная схема системы автоматического регули-
рования скоростью вращения трехфазного электродвигателя изображена
на рис. 1.103.
1.229. Составить дифференциальные уравнения динамических элемен-
тов приборной следящей системы с двухфазным электродвигателем перемен-
ного тока и полупроводниковым усилителем. Определить передаточные функ-
ции динамических элементов и составить структурную схему приборной сле-
дящей систёмы,'пользуясь принципиальной схемой системы (рис. 1.104).
147
Рис. 1.106. Принципи-
альная схема электрогид-
равлической следящей си-
стемы с насосом перемен-
ной производительности
Рис. 1.107. Принципи-
альная схема электропнев-
могидравлической следя?
щей системы
1.230. Составить дифференциальные уравнения динамических элемен-
тов приборной следящей системы с индукционными муфтами. Определить
передаточные функции линейных динамических и нелинейных эквивалент-
ных элементов и привести структурную схему следящей системы, принци-
пиальная схема которой показана на рис. 1.105.
1.231. Составить дифференциальные уравнения динамических элемен-
тов электрогидравлической следящей системой с насосом переменной произ-
водительности. Определить передаточные функции динамических элемен-
тов и составить структурную схему электрогидравлической следящей сис-
темы (рис. 1.106).
Указания. 1. При составлении дифференциальных уравнений необхо-
димо учитывать влияние трубопроводов на гидравлический привод.
148
2. Ротор внутреннего сельсин-датчика находится в заторможенном
состоянии.
1.232. Составить дифференциальные уравнения динамических элемен-
тов электропневмогидравлической следящей системы. Определить передаточ-
ные функции динамических элементов и привести структурную схему си-
стемы. Упрощенная принципиальная схема электропневмогидравлической
следящей системы показана на рис. 1.107.
Указания. 1. При составлении дифференциальных уравнений влиянием
гидравлических и воздушных трубопроводов следует пренебрегать.
2. Нелинейность струйной трубки следует учитывать.
1.233. Составить дифференциальные уравнения динамических элемен-
тов системы автоматического регулирования давления с электрическим
регулятором. Определить передаточные функции динамических элементов
и привести структурную схему системы. Принципиальная схема системы
автоматического регулирования давления в ресивере показана на рис. 1.108.
1.234. Составить дифференциальные уравнения динамических элемен-
тов системы автоматического регулирования соотношения двух газовых
потоков. Определить передаточные функции динамических элементов и
привести структурную схему системы, блок-схема которой показана на
рис. 1.109.
Указания. 1. Датчик Д измеряет соотношение двух газовых потоков.
2. Запаздывание в трубопроводах следует учитывать.
1.235. Определить дифференциальные уравнения динамических эле-
ментов систем автоматического регулирования химическим реактором по
давлению и температуре. Определить передаточные функции и составить
структурную схему системы автоматического регулирования, если ее упро-
щенная схема изображена на рис. 1.110.
Указание. Тепловые потери в реакторе не учитывать.
1.236. Составить дифференциальные уравнения динамических элемен-
тов систем автоматического регулировзниь химическим реактором по тем-
пературе, соотношению двух газовых< потоков и давлению (рис. 1.111).
Найти уравнения взаимной связи регулируемых процессов. Определить пе-
редаточные функции систем автоматического регулирования и собственно
химического реактора. Составить структурную схему всей системы, учи-
тывая взаимосвязанность объекта регулирования.
Указание. См. задачу 235.
1.237. Составить дифференциальные уравнения и определить переда-
точные функции для двух электрических регуляторов напряжения с уголь-
ным столбиком. Составить структурные схемы регуляторов напряжения.
Рис. 1.108. Принципиальная схема системы автоматического ре-
гулирования давления в ресивере
149
Рис. 1.109. Упрощенная схе-
ма система автоматического
регдлирования соотношения
двух головых потоков
Газ
Рис. 1.110. Упрощенная схема системы автома-
тического регулирования химическим реактором
по давлению и температуре
если первый регулятор напряжения (рис. 1.112, а) имеет демпфирующее
устройство, связанное с угольным столбиком через пружину, а второй —
стабилизирующий трансформатор (рис. 1.112, 6).
1.238. Вывести дифференциальные уравнения, определить передаточ-
ные функции и составить структурную схему системы автоматического ре-
гулирования для намотки бумажной ленты. Принципиальная схема системы
автоматического рагулирования показана на рис. 1.113.
Указание. Уравнение движения бумажной ленты запишем в виде
£ - (Ю1 - со2) + rk^ . (1.484)
где о — натяжение бумажной ленты; ka — коэффициент пропорциональ-
ности; 7\ — постоянная времени.
1Ъ0
. Уравнение движения вала электродвигателя ЭЦвх можно записать как
А^ + ^МО-Мд(О-Мо(0. (1.485)
где Ji — приведенный момент нагрузки подвижных частей к якорю 1-го
электродвигателя; k0 — коэффициент скоростного трения; Ма (0 — дви-
гательный момент; Ма (0 — момент сопротивления.
Двигательный момент будем считать пропорциональным току якоря:
Мл (0 = k„ia (t). (1.486)
Момент сопротивления
Ме (0 « k<j (0, (1.487)
где k — коэффициент пропорциональности.
Рис. 1.111. Упрощенная схема систем» автоматического регулирования химиче-
ским реактором по температуре и соотношению двух газовых потоков
Рис. 1.112. Принципиальные схемы электрических регуляторов на-
К1
Рис. 1.113. Принципиальная схема системы автоматического регули-
рования намотки бумажной ленты
Рис. 1.114. Структурная
схема объекта регулирова-
ния
Рис. 1.115. Блок-схема си-
стемы стабилизации кос-
мического летательного
аппарата с реактивным
двигателем, жестко зак-
репленным на его корпусе
В соответствии с уравнениями (1.484) — (1.487) нетрудно получить
структурную схему объекта регулирования (рис. 1.114). Для остальных
динамических элементов уравнения динамики и передаточные функции со-
ставляют обычным путем.
1.239. Составить уравнения динамики, определить передаточные функ-
ции проходной нагревательной печи. Привести структурную схему системы
автоматического регулирования проходной нагревательной печи.
Указание. См. задачи 1.94 и 1.100.
1.240. Составить передаточные функции системы автоматической ста-
билизации космического летательного аппарата в продольной плоскости
с демпфирующим и свободным гироскопами. Блок-схема этой системы пока-
зана на рис. 1.115. Привести структурную схему системы автоматической
стабилизации КЛА.
Решение. Из блок-схемы рис. 1.115 видно, что гидравлическая рулевая
машинка, перемещающая кран (на величину бк) подачи топлива в реактив-
ный двигатель, охвачена жесткой обратной связью.
В качестве измерительных средств приняты демпфирующий и свобод-
ный гироскопы, измеряющие соответственно угловую скорость и угол
тангажа.
152
Из задачи 1.51 воспользуемся передаточной функцией КЛА:
07 _ 'Р (s) _ *
wкла(») — > . . —
Ок (s) s
а из задачи 1.32 — передаточной функцией демпфирующего гироскопа
Передаточную функцию свободного гироскопа запишем в виде
IVcr(s) = ^И. = ЙСГ.
O(s)
Для определения передаточной функции гидравлической
шинки воспользуемся данными задачи 1.17; тогда
W (я) = $к (S) =____________________
s (Т^ + 2WW + 1) •
Передаточную функцию усилителя запишем в виде
Й7 (с) = ^у(51 = ь
W*(S) Ue(s) у
Уравнения для сравнивающих устройств будут
(s) = Uy (s) — t/oc (s); )
Ue (s) = (s) — (s) — U2 (s).J
(1.488)
(1.490)
рулевой ма-
(1.491)
(1.492)
(1.493)
По передаточным функциям (1.488) — (1.492) и уравнению (1.493)
составим, структурную схему системы'стабилизации КЛА в продольной
плоскости (рис. 1.116). J
1.241. Определить передаточные функции и составить структурную
схему системы автоматической стабилизации самолета с интегрирующим
гироскопом в продольной плоскости.
1.242. Определить передаточные функции и составить структурную
схему системы автоматической стабилизации самолета со свободным и демп-
фирующим гироскопом.
Указания. 1. В качестве последовательного корректирующего уст-
ройства воспользоваться изодромом.
2. Передаточную функцию изодрома реализовать на операционных
усилителях в виде
rH3(s) = ^ + 4’ (1.494)
где и k2 — коэффициенты усиления операционных усилителей.
Рис. 1.116. Структурная схе-
ма системы стабилизации
космического летательного
аппарата с реактивным дви-
гателем, жестко закреплен-
ным на его корпусе
Мцл» 1^1
153
Выражение (1.494) можно привести к виду
W\,3(s)= *из (T.h3s +1.)
(1.495)
s
где ku3 = k2, ТИЗ = k^ki.
1.243. Определить передаточные функции и составить структурную схему
системы стабилизации летательного аппарата по продольному каналу с
интегрирующим гироскопом и датчиком линейных ускорений.
1.244. Определить передаточные функции и составить структурную
схему системы стабилизации летательного аппарата по продольному каналу
с демпфирующим гироскопом и датчиком линейных ускорений.
1.245. Определить передаточные функции и составить структурную
схему системы стабилизации самолета в боковой плоскости с учетом вли-
яния канала крена.
Указание. В качестве гироскопических приборов в канале рыскания
и крена применять свободные и демпфирующие гироскопы.
1.246. Определить передаточные функции и составить структурную
схему системы стабилизации КЛА с поворотным двигателем.
Указание. В качестве гироскопических приборов применять свобод-
ные и демйфирующие гироскопы.
1.247. Определить передаточные функции и составить структурную
схему системы угловой стабилизации самолета по продольному каналу
с учетом влияния трех тонов упругих колебаний корпуса.
Решение. Передаточную функцию самолета определим с учетом влия-
ния трех тонов упругости колебаний в виде
Яг (s) __ (Гс5+ 1) kj .
& (s) «(ГМ + 2£Ts + 1) T s* + '
I______________&2 | &3
“T s2 _|_ 1“ s2 Qja ’
Часть структурной схемы, соответствующая этой передаточной функ-
ЦИ1., выделена на рис. 1.117 штриховыми линиями. Добавим к этой схеме
передаточные функции рулевой машинки
(s) = АДк — __________________
₽“W Uy(s) Т* s42LM7’pMs+l ’
(1.496)
(1.497)
Рис. 1.117. Структурная схема системы стабилизации продольного канала са-
молета при учете первых трех тонов колебаний его корпуса
154
демпфирующего
№дг (s) «= = -5-2 (1.498) t(s) + + l
и свободного ^cr(s)=-^7?-==^ (1-499) 'p(s)
гироскопов. Кроме того, включим два корректирующих устройства типа
ЯС-цепочек с передаточными функциями
TW ______ иКХ Is) ~Ь 1 .
141 Удг(з) 7V+1 ’
it? _____ Uкг Is) Т'зЗ 4~ 1
и'кяЧМ — t/cr(s) T4s + 1
(1.500)
и усилительное устройство с передаточной функцией
(1.501)
Тогда для замыкания всей системы следует воспользоваться уравнением
сравнения
Ut (s) == U3 (s) - UK1 (s) - 1/к2 (s), (1.502)
после чего структурная схема системы стабилизации примет следующий вид
(рис. 1.117).
1.248. Определить передаточные функции и составить структурную
схему системы стабилизации самолета по боковому каналу с учетом трех
тонов колебаний его корпуса и взаимного влияния канала крена.
Указание. См. указание к задачу 1.247.
1.249. Определить передаточные функции и составить структурную
схему системы стабилизации летательного аппарата с учетом первых трех
тонов колебаний.
Указание. В систему стабилизации должны входить демпфирующий
гироскоп и датчик линейных ускорений.
1.250. Определить передаточные функции и составить структурную
схему системы стабилизации летательного аппарата с учетом первых трех
тонов упругих колебаний.
Указание. В систему стабилизации должны входить интегрирующий
гироскоп и датчик линейных ускорений.
1.251. Определить передаточные функции и составить структурную
схему системы регулирования угловой скорости колеса водяной турбины
с длинным Каналом для подачи воды к направляющим.
Указания 1. В качестве устройств для перемещения направляющих
воспользоваться двумя каскадами последовательно соединенных гидравли-
ческих приводов.
2. В качестве измерителя угловой скорости воспользоваться центробеж-
ным маятником (см. задачу 1.9).
3. Для получения устойчивости системы включить гидравлическое
изодромное устройство.
1.252. Определить передаточные функции и составить структурную
схему систем регулирования угловой скорости и изменения угла лопасти
рабочего колеса гидравлической турбины. Подача воды к направляющим
турбины осуществляется через длинный водяной канал.
Указание. В качестве устройств управления направляющими и из-
менением угла лопасти рабочего колеса воспользоваться гидравлическими
приводами.
155
Напряжение «щ, пропорциональное
на обмотку поляризованного реле РП:
Рис. 1.118. Принципиальная схема релей-
ной следящей системы.....
1.253. Составить дифференци-
альные уравнения и вывести пере-
даточные функции релейной сле-
дящей системы, принципиальная
схема которой изображена на
рис. 1.118. Привести структур-
ную схему следящей системы.
Решение. Уравнение сравни-
вающего элемента запишем в виде
0 (0 = 0! (О — 02 (0. (1-503)
где 0 (0 — угол рассогласования
следящей системы.
углу рассогласования, поступает
«П1 (0 = kaQ (f),
(1.504)
где kn — коэффициент пропорциональности;
«П1 (0 = -^г + tfpi'ni (0; (1.505)
здесь Lpl и А?р1 соответственно индуктивное и омическое сопротивления
первичной обмотки реле РЛ. На вторичную обмотку реле Р/7 поступает на-
пряжение с выхода тахогенератора ТГ:
«п2 (/) = ' Р2^ + Л>2*П2 (0. (1 -506)
где
«п2(П = ^г-^-. ' (1.507)
Поляризованное реле срабатывает от разности токов
= (0-^(0- (1-508)
В соответствии с математической зависимостью (1.388) составим урав-
нение срабатывания поляризованного реле в виде
о, при 0^jn^ic;
«П. при ic < 4 ‘п > т!’С’>
«₽(/) = о. при (1.509)
при > 41 > < ППС»
о, при — mic «С in 0.
От действия тока ip срабатывает реле Ру или Р2, т. е.
un(t) = Lp^- + Rpip(t),
(1.510)
156
где Lp и Rp соответственно индуктивное и омическое сопротивления обмотки
силового реле (Рг или Р2). При замыкании контактов fcj или k2 образуется
ток
1’а(0 =
Для электродвигателя
задачу 1.1):
О, при 0^ip^ipc;
ua, при ip > ipc,
О, при ipc ?--- ip ; : ipc,
иа, при ipc <С ip,
О, при — ip<.<ipSgO.
(1.511)
запишем уравнения в обычной форме (см.
Л 4г = Ма (t) - Me (i);
Ma(t) = kuia (i);
0=4^-;
Ua (0 - Lu 4- Roia (/) + ke .
Уравнение для редуктора будет
Нд (Q
р “ 02 (i) ’
(1.512)
(1.513)
где ip — передаточное число редуктора механической передачи.
Применив к уравнениям (1.504) — (1.507) и (1.510) преобразование
Лапласа, получим передаточные функции линейных динамических элемен-
тов в виде
Г1(5) = -А^ = ^
b(s)
IF lei Ли ($)
w 2 — ^ni (s) 7pls 4- 1
IF lei ^П2 1/^P2
w з W — ^П2 7 P2$ 4“ 1
>/7?p .
iv 4 Un (s) 7 Ps 4~ 1
(1.514)
№s(s) = = fe s
eA(s)
Из системы уравнений (1.512) найдем передаточную функцию электоо-
двигателя ЭДв* в виде
k
IF Id — ®д --------------------
eV'~l/e(s) s(T2s2 + 2^Ts 4-1)
и для редуктора
W, (s) = = ip.
' ea (s) p
(1.515)
(1.516)
* См. задачу 1.1.
157
Применяя преобразование Лапласа к уравнениям ('1.504), (1.508),;
получим . ’/ . '
0(S)=~e1(S)-02(S); - -151?’
/п (8) = /П1 (S) - /п2(8)-
Пользуясь передаточными функциями (1.514) — (1.516) и уравнениями
(1.517) для сравнивающих элементов, найдем структурную схему релейной
следящей системы, которая показана на рис. 1.119.
Рис. 1.119. Структурная схема релейной следящей системы
1.254. Составить дифференциальные уравнения, вывести передаточные
функции динамических элементов и привести структурную схему нелиней-
ной системы автоматического регулирования температуры печи с изодромом.
Упрощенная принципиальная схема системы автоматического регулирова-
ния температуры изображена на рис. 1.120.
Рис. 1.120. Упрощенная принципиальная
схема релейной системы автоматического
регулирования температуры печи с изодро-
мом
Рис. 1.121. Упрощенная принципиальная
схема релейной системы автоматического
регулирования ресивера с нелинейной обрат-
ной связью
1.255. Составить дифференциальные уравнения, вывести передаточные
функции динамических элементов и привести структурную схему релейного
регулятора давления с нелинейной обратной связью, упрощенная прин-
ципиальная схема которого изображена на рис. 1.121.
1.256. Составить дифференциальные уравнения и передаточные функ-
ции динамических элементов курсового нелинейного автопилота самолета'
упрощенная принципиальная схема которого изображена на рис. 1.122.
При отклонении самолета от заданного курса на угол ф курсовой ги-
роскоп КГ сохранит свое направление, и контактная пластина 1, связанная
с корпусом самолета, сместится, замыкая через один из контактов цепь’элек-
тромагнита 3. Электромагнит через рычажный механизм будет перемещать
158
клапан 4, впуская масло от насоса в силовой цилиндр 5, который повернет
руль направления 7 на угол бн. В этом случае самолет парирует ошибку ф
в отклонении от курса. Одновременно с этим рычаг переместит корпус кла-
пана 4, закрывая доступ масла в силовой цилиндр. При этом редуктор 6
и уравнениям сравнения сос-
повернет сельсин-датчик СД на угол рд. Работающий с ним в паре в мотор-
ном режиме сельсин-приемник СП повернется на угол Р„, примерно равный
углу рд, и через редуктор 2 переместит пластину 1, отключив электрома-
гнит 3.
По выведенным передаточным функциям
тавить структурную схему автопилота.
1.257. Вывести передаточные функции
системы автоматического регулирования
угловой скорости вращения электродвига-
теля и составить структурную схему си-
стемы (рис. 1.123).
При увеличении угловой скорости вра-
щения якоря электродвигателя сод от номи-
нальной под действием центробежной силы,
воздействующей на массу пластины т, кон-
тактная пара К замыкается и в цепи элек-
тродвигателя отключается добавочное со-
противление R, вследствие
скорость электродвигателя
И, наоборот, при уменьшении угловой ско-
рости контакты размыкаются, добавочное
сопротивление включается. При этом элек-
тродвигатель увеличивает угловую скорость
вращения, доводя ее до номинальной. С по-
мощью винта 1 изменяется натяжение пружины 2, за счет чего меняется
величина номинальной угловой скорости вращения электродвигателя.
чего угловая
уменьшается.
6 ип 6
Рис. 1.123. Принципиальная схема
системы автоматического регули-
рования угловой скорости якоря
сериесного электродвигателя
I.B.S. ДИСКРЕТНО-НЕПРЕРЫВНЫЕ СИСТЕМЫ
1.258. Составить уравнения динамики элементов и определить соответ-
ствующие передаточные функции для дискретно-непрерывной системы авто-
матического регулирования угловой скорости гидравлической турбины
159
Вода
Рис. 1.124 Упрощенная схема диск-
ретно-непрерывной системы автомати-
ческого регулирования угловой скорости
колеса водяной турбины с длинным
водяным каналом
(рис. 1.124). Построить структурную схему системы автоматического регу-
лирования.
Решение. Кулачок 5 дискретного элемента вращается с постоянной
угловой скоростью ык. В результате этого происходит периодическое сце-
пление коромысла 6 с заслонкой 7 [29]. Сцепление происходит один раз
за полоборота кулачка с помощью щечек 2 и 3 при сжатии планок 4. Пру-
жины прижимают планки к кулачку. Если считать, что время полуоборота
кулачка Тк, то подключение заслонки 7 направляющего аппарата у будет
происходить периодически, подчиняясь следующему линейному разност-
ному уравнению:
Yn+i (0 - Уп (0 = Т’кФ,, (0, (1.518)
где фп (0 — относительное перемещение правого конца коромысла.
Применяя к уравнению (1.518) преобразование Лапласа, получим
yn(s)eT«s-yn (s) = 7’Kq>„(s),
откуда найдем передаточную функцию
^дэ (S) = "Нт = -Гке "Х--
фп (s) 1 _ е
(1.519)
Передаточная функция центробежного маятника и гидравлической тур-
бины были выведены соответственно в задачам 1.9 и 1.78.
ip = —_________^2________• Л К9(У>
“( v(s) ту + 2gpTps + 1 ’
IFT(s) = 4^- = r ' 'лУн™ • (1.521)
т' У (s) Ts -f-1 1 + р0 th TS ' '
Передаточную функцию рычага, связывающего втулку маятника с ще-
чкой 2 дискретного элемента, запишем в виде
rp(s) = 4^- =йр, (1.522)
V (S)
где Ар — передаточный коэффициент.
С помощью передаточных функций (1.519) — (1.522) получим струк-
турную схему системы регулирования оборотов гидравлической турбины
(рис. 1.125).
160
Рис. 1.125. Структурная
схема дискретно-непрерыв-
ной системы автоматическо-
го регулирования угловой ско-
рости колеса водяной тур-
бины
Рис. 1.126. Упрощенная принципи-
альная схема дискретно-непрерыв-
ного регулятора напряжения
Рис. 1.127. Блок-схема цифровой силовой следящей системы:
Те — тахогенератор; С — сельсинная схема (С'Д—СП); НЦ — преобразователь напря-
жение-цифра; ЦН — преобразователь цифра—’напряжение; ЗУ — электронный усили-
тель; ЭМУ — электромашииный усилитель; ЭДв — электродвигатель; Р — редуктор:
ЦВМ — управляющая цифровая вычислительная машина
Рис. 1.128. Упрощеннаяприн-
ципиальная схема цифровой
следящей системы фрезерного
станка:
ВЦ — преобразователь вал—
цифра; PC — реверсивный
счетчик; ЦН — преобразова-
тель цифра—напряжение; ЗУ —
электронный усилитель; ЭМУ—
электромашииный усилитель
6 Ю- И. Топчеев
161
Рис. 1.129. Блок-схема двух каналов цифровых следящих систем для управления нажим-
ными винтами и манипуляторами реверсивного проката стана!
ЦН,, ЦН, — преобразователи цифра—напряжение; ЭМУ,, ЭМУ, — электромашннные уси-
лители; ЭДв,, ЭДв, — электродвигатели; Р,, Р, — механические передачи, Тг,, Тг, —тахо-
генераторы; К.У „ Ку, — корректирующие устройства; ВЦ,, ВЦ, — преобразователи вал-
цифра
1.259. Составить уравнения динамики элементов и определить переда-
точные функции для дискретно-непрерывного регулятора напряжения, прин-
ципиальная схема которого изображена на рис. 1.126. С помощью переда-
точных функций составить структурную схему регулятора напряжения.
Указание. При составлении уравнений динамики следует учитывать,
что чем значительнее отклонение напряжения ип от номинального, тем
больше время соприкосновения контактов планки со звездочкой, а следо-
вательно, и количество импульсов для управления электродвигателем (ЭДв).
1.260, Вывести передаточные функции силовой следящей системы с ци-
фровой коррекцией, реализуемой на ЦВМ и обеспечивающей астатизм 3-го
порядка х. Составить структурную схему системы, блок-схема которой по-
казана на рис. 1.127.
1.261. Вывести передаточные функции цифровой следящей системы
фрезерного станка. Составить структурную схему системы, принципиальная
схема которой показана на рис. 1.128.
1.262. Вывести передаточные функции цифровых следящих систем
управления нажимными винтами и манипуляторами реверсивного прокат-
ного стана с ЦВМ, блок-схема которой показана на рис. 1.129. Составить
структурную схему следящих систем. ।
Указание. При выводе передаточных функций приводов следящих
систем следует пользоваться задачами 1.1; 1.3 и 1.119.
1.6. ПРЕОБРАЗОВАНИЯ СТРУКТУРНЫХ СХЕМ
Пользуясь структурными преобразованиями, можно любую систему
автоматического регулирования (линейную или нелинейную) привести к ра-
счетному виду, исключающему перекрестные связи и позволяющему полу-
чать передаточные функции разомкнутых и замкнутых систем регулирования.
Структурные преобразования нелинейных систем отличаются от преобразо-
ваний линейных систем, так как на входе нелинейного элемента амплитуда
должна сохраняться независимо от выполненных преобразований. Поэтому
в нелинейных системах нельзя производить перемещения линий связи и
звеньев за нелинейный элемент. Преобразование же с линейными звеньями,
расположенными до нелинейного элемента или за ним, можно выполнять
обычными способами (см. приложение 1). При этом нелинейный элемент со-
храняет свое положение неизменным независимо от выполненных преобра-
зований с линейными звеньями. В структурной схеме нелинейной системы,
х См. подробнее в гл. 4 и 6.
162
Рис. 1.130. Структурные
схемы нелинейных систем,
приведенные к расчетному
виду
приведенной к расчетному виду, нелинейный элемент должен быть выделен.
Тогда в окончательном виде эти схемы должны иметь вид, показанный на
рис. 1.130, а—в.
1.6.1. ПРЕОБРАЗОВАНИЕ СТРУКТУРНЫХ СХЕМ
ЛИНЕЙНЫХ СИСТЕМ РЕГУЛИРОВАНИЯ
1.263. С помощью структурных преобразований со схемой, изображен-
ной на рис. 1.96, получить передаточную функцию разомкнутой системы
автоматического регулирования по нейтронной мощности ядерного энерге-
тического реактора.
Решение. Динамические звенья внутреннего контура, заключенные
в штриховой прямоугольник, представим в виде передаточной функции
(s) —
IF, (s) W, (s)
1 4- IF, is) IF, (s) IFa (s) AF4 (s) IF, (s) IF, (S) •
(1.523)
Передаточную функцию разомкнутой системы без главной обратной
связи запишем в виде
W (s) = -%- WlK (s) U?5 (s)>8 (s). (1.524)
Пр
Отсюда видно, что по выражению (1.524) формируется расчетная струк-
турная схема системы регулирования ядерного энергетического реактора.
Подставляя выражение (1.524) в (1.523), получим
IF2 <s) Г3 (s) (s) IF, (s)
Г (S) = I + IF, (s) W2 (s) IF, (s) 1F4 (s) IF, (s) IF, (s) ’
(1.525)
после чего нетрудно найти окончательное выражение для передаточной функ-
ции разомкнутой системы, т. е.
kyk^kkQ^efj
F
s2 (Т2/ + 2l3T3s + 1) (Ts + 1) 11 + 2 )
W (s) — kyk3kiuk-xrTc ~ • (1-526)
(7>2 + 2l3T3 + 1) (Ts + 1) (T + 1)
1.264. Выполнить структурные преобразования co схемой, изображен-
ной на рис. 1.92 (см. задачу 1.220), привести ее к расчетному виду и написать
передаточную функцию разомкнутой силовой следящей системы.
Решение. Перенеся линии связи /и 2 (см. рис. 1.92) за звено с пере-
даточной функцией VF10 (s), получим структурную схему, изображенную
на рис. 1.131, а. Выделим в штриховой прямоугольник звенья W? (s),
U710 (s) и IFjj (s). В результате этого образуется I внутренний контур с пере-
даточной функцией
W7 i&\_ IF, (s) tF10 (s)____ ,, 5974
^1k(S)- 1 4-IF, (s) IF10 (s) IFu (s) *
163
6
Подставляя в выражение (1.527) соответствующие передаточные функ-
ции, получим
_______Ro
W ($)==. Ч (JnS -ф (TgS —1~ t ) _ _feg____
1K Ц . ~ s(r2/ + 2V\s+l)’
I -I----#2_________
(Jns 4" &u) (TaS -f- 1)
где
ь —
Д 4“
£м&е 4“ Rjkv
t 4' kVT g) Rg ~l Г______1_________
F TaJnRa {kekM 4“
После этого перенесем линию связи 3 за звено U7lK (s) и построим пре-
образованную структурную схему без перекрещивающихся связей
(рис. 1.131, 6). Передаточную функцию для II контура запишем в виде
«W) =-------------. (1.528)
1 + IV'5 (s) Г„ is, «71в (s) W. \ .
i)
Puc. 1.131, Преобразование структурной схемы следящей системы
164
Передаточную функцию III контура запишем через передаточную функ-
цию II контура, т. е.
Wu, к (s) ----------(s) ^ng. W----------------. (1.529)
1 + e?s (s) B% (s) IFiik (S) U% (s) - --Г
w to lsl
В результате этого получим структурную схему, изображенную на
рис. 1.131, в. С помощью этой схемы построим расчетную структурную схему
(рис. 1.131, е), где принято
Wjv к (s) =----------У.?-(ЛУ"»«1?)---------. (1.530)
1 + (ж) ^111 к <s) й%я (si -frr——
w 1к v /
После этого нетрудно найти передаточную функцию разомкнутой си-
ловой следящей системы в виде
W (s) = (S) W!VK (s) Wl2 (s). (1.531)
Подставляя в выражение (1.531) соответствующие передаточные функ-
ции (1.528) — (1.530), запишем
пр, X И% is)U%^U%(sitr4<sl«%(slU%isiU%i,/s)W’iK(s)
lS ~l_L. W'b S) (s) (s)W^ik(s) H%(siU%(si rslS)V,(S) <s. ,S! 1
^w(s) Ф W'k.(s)
+ Ws (6) 11% (s) W4 (s) 11% (s) (S) U%3 (s)
(1.532)
Затем в передаточную функцию (1.532) следует подставить передаточные
функции элементарных звеньев; тогда будет получено окончательное выра
жение для передаточной функции разомкнутой системы.
1.265. Определить передаточную функцию разомкнутой системы авто-
матического регулирования температуры печи (задача 1.220), пользуясь
ее структурной схемой (рис. 1.94).
1.266. Выполнить структурные преобразования для линейных систем
автоматического регулирования (рис. Д.132, а—в) и привести их к расчет
ному виду. Написать математическое выражение для передаточной функции
замкнутой системы.
1.267. Выполнить структурные преобразования для линейных систем
автоматического регулирования (рис. 1.133, а—в) и привести их к расчет-
ному виду. Написать передаточные функции для разомкнутой и замкнутой
систем регулирования.
165
в)
1.268. Выполнить структурные преобразования для системы боковой
стабилизации самолета, если ее структурная схема изображена на
рис. 1.134, а. Написать передаточную функцию разомкнутой системы по
каналу курса.
Решение. Заключим на исходной структурной схеме автомат ста-
билизации в штриховой прямоугольник. После этого нетрудно установить,
что сигнал курса одновременно поступает через передаточные функции
(s) и W2 (s) на самолет. Таким образом, для определения'передаточной
функции системы по курсу следует ее структурную схему разложить на две
(рис 1.134, б и в), где соответствующие сравнивающие элементы заменены
передаточными функциями — 1 и | -f- 11. Справедливость этого можно по-
казать с помощью следующего выражения:
Те (0 = Vs (0 — V (О-
Если в нем положить (t) — 0, то
Vs (0 = —V (0
и
№ (s) =«
Уе (s)
У (s)
Кроме того, сигнал фе (/) поступает через автомат стабилизации с пере-
даточной функции (s) (рис. 1.134,6) и через №а (s) (рис. 1.134, в).
Соответственно с этим структурные схемы рис. 1.134, бив нетрудно при-
вести к схемам рис. 1.134, г и д. С помощью последних получим разомкну-
тые передаточные функции вида
ir(S) = (4^Uw\(s)«7e(S)
I S’* (s) 1
W\(S)F,(S)1F4.S)
1 + (S) U/3 (sj
166
a)
Рис. 1.134 Преобразование структурной схемы системы боковой стабилизации самолета
6)
Рис. 1.135. Структурные схемы
систем автоматического регу-
лирования с несколькими вход-
ными или выходными сигналами
167
при поступлении сигнала через (s),
W" (s) = |Д--5' ) = №.. (s) (s) - fs)
[ ifetS) ) ' 1 -T *1 '.»> »;5 's-
при поступлении сигнала через W2 (s).
Так как система линейная и для нее справедлив принцип суперпозиции,
то результирующая разомкнутая передаточная функция системы боковой
стабилизации будет
IT ($) = W' (s) -ф Г" (s) - W, (s) W„ (s) + Г2 (s) W< (s) -
_ (s> lTg (s) _ IT, Cs) IT, (s) W3 (s) U7a (s)
1 + IV'2 (S) IV3 (S) 1 -p IV j (S) IV 5 (S)
1.269. Выполнить структурные преобразования для систем автомати-
ческого регулирования, имеющих исходные схемы, показанные на
рис. 1.135, а—в.
Определить по преобразованным структурным схемам передаточные
, X,- IS)
функции замкнутых систем вида - .
1.6.2. ПРЕОБРАЗОВАНИЕ СТРУКТУРНЫХ СХЕМ
НЕЛИНЕЙНЫХ СИСТЕМ РЕГУЛИРОВАНИЯ
1.270. Выполнить структурные преобразования нелинейной системы
автоматического регулирования с одной нелинейностью в прямой цепи и
привести ее к расчетному виду; исходная структурная схема показана на
рис. 1.136, а.
Решение. Перенесем сравнивающий элемент 1 за звено (s), а ли
нию связи 2 за звено W-o (s); тогда получим схему рис. 1.136, б. Объединим
две параллельные обратные связи с линейными элементами водну (рис. 1.136, я)
Далее выделим линейные звенья за сравнивающий элемент 3 и линию связи 4.
В результате этого получим расчетную структурную схему <(рис. 1.136, г).
1.271. Выполнить структурные преобразования нелинейной системы
автоматического регулирования с одной нелинейностью в цепи обратной
'вязи и привести ее к расчетному виду; исходная структурная схема показана
на рис. 1.137, а.
Решение. Перенесем сравнивающий элемент 1 за звено (s), а ли
нию связи 2 за звено (s), тогда получим схему, показанную на
рис. 1.137,6. Объединим линейные звенья в одно, как это показано на
рис. 137, в, после чего нетрудно выделить линейные звенья из цепи обрат-
ной связи и получить расчетную схему (рис. 1.137, г).
1.272. Выполнить структурные преобразования для нелинейных си-
стем автоматического регулирования, исходные структурные схемы которых
показаны на рис. 1.138, а—г, и привести их к расчетному виду.
1.273. Выполнить структурные преобразования для нелинейных си-
стем автоматического регулирования, исходные структурные схемы которых
показаны на рис. 1.139, а—в, и привести их к расчетному виду.
1.274. Выполнить структурные преобразования для нелинейных систем
автоматического регулирования, имеющих две нелинейности, и привести
их к расчетному виду: а) две нелинейности соединены параллельно
(рис. 1.140, а); б) две нелинейности разделены линейным динамическим эле-
ментом, хорошо фильтрующим гармоники (рис. 1.141, а).
Решение 1. Для параллельно соединенных двух нелинейностей можно
найти результирующую приведенную функцию по формуле
4И) = Л(А) + А(Л). (1.533)
168
a)
б)
в)
Рис. 1.136. Структурные преобразования нелинейной системы авто-
матического регулирования с одной нелинейностью в прямой цепи
в)
г)
Рис. 1.137. Структурные преобразования нелинейной системы
автоматического регулирования с одной нелинейностью в цепи
обратной связи
Рис. 1.138. Структурные схемы нелинейных систем регу-
лирования с неперекрещивающимися связями
a)
б)
в)
Рис. 1.139. Структурные схемы нелинейных систем
регулирования с перекрещивающимися связями
в)
Рис. 1.140. Структурные преобразования нелинейной системы автоматического регулиро-
вания с двумя параллельно соединенными нелинейностями
Рис. 1.141. Структурные преобразования нелинейной системы автоматического регулиро-
вания с двумя нелинейностями, разделенными линейным звеном
В этом случае получим схему, показанную на рис. 1.140, б. Далее
с помощью структурных преобразований найдем расчетную схему
рис. 1.140, в.
2. Объединим три звена в одно приведенное J„ (А, со), как это показано
на рис. 1.141, а [см. подробнее задачу (1.210)]. Пользуясь структурными
преобразованиями, получим расчетную схему (рис. 1.141,6).
1.275. Выполнить структурные преобразования для нелинейных систем
автоматического регулирования и привести к расчетному виду, если их
исходные схемы изображены на рис. 1.142, а—в.
1.276. Выполнить структурные преббразования для нелинейных систем
автоматического регулирования и привести к расчетному виду, если их
исходные схемы изображены на рис. 1.143, а—в.
1.7. ПРИБЛИЖЕННЫЕ МЕТОДЫ ОПРЕДЕЛЕНИЯ
ПЕРЕДАТОЧНЫХ ФУНКЦИЙ ЛИНЕЙНЫХ СИСТЕМ
ПО ВИДУ АМПЛИТУДНО-ФАЗОВЫХ ЧАСТОТНЫХ
ХАРАКТЕРИСТИК
При проектировании систем автоматического регулирования с помощью
ЦВМ расчетчики часто пользуются экспериментальными амплитудно-фазо-
выми частотными характеристиками сложных элементов или расчетными,
полученными на графическом построителе ЦВМ. В этих случаях для опре-
деления вида передаточных функций используют приближенные методы,
основанные на применении логарифмических частотных характеристик.
1.277. Определить вид передаточной функции динамического элемента
по амплитудно-фазовой частотной характеристике, приведенной на
рис. 1.144, а (конечный участок характеристики построен на рис. 1.144, б).
171
3
Рис. J.142. Структурные схемы нелинейных систем автоматиче-
ского регулирования с параллельно соединенными нелинейностями
Рис. 1.143. Структурные схемы нелинейных систем автоматиче-
ского регулирования с одной и двумя нелинейностями
JV Пл. W(Ju)
Рис. 1.145. Амплитудно-фазовые частотные характеристики
стем автоматического регулирования)
динамических элементов (си-
Рис. 1.146. Амплитудно-фазовые частотные характеристики слабодемпфи-
рованных динамических элементов
173
Решение. Задавая десять частот (от со — 0,50 1/с до со = 50,0 1/с)
(рис. 1.144, а, б), находим значения амплитуд Ht (со) и фаз 0( (со). Откла-
дываем эти значения амплитуд и фаз на полулогарифмической сетке (по оси
ординат в масштабе 201g Ht (со)). Соответствующее построение выполнено
на рис. 1.144, а. Проведя прямые с типовыми наклонами получим значения
Рис. 1.147. Амплитудно-фазовые частотные характеристики динамических
элементов с несколькими петлями
постоянных времени 7\ — 1,43 с; Т2 = 0,5 с; Т3 = 0,05 с и коэффициента
усиления k = 25 с-1. В результате этих построений найдем передаточную
функцию
W (s) = ———25 (0,5s+
w s (1,43s — b (0,05s + 1) ‘
(1.534)
1.278. Определить вид передаточной функции динамического эле-
мента, если ее амплитудно-фазовые частотные характеристики построены
на рис. 1.145, а—в.
Рис. 1.148. Амплитудно-фазовые частотные характеристики динамических элемен-
тов (систем автоматического регулирования)
1.279. Определить вид передаточной функции слабодемпфированных
динамических элементов, имеющих амплитудно-фазовые частотные харак-
теристики, показанные на рис. 1.146, а, б.
1.280. Определить вид передаточной функции динамических элемен-
тов, имеющих амплитудно-фазовые частотные характеристики, показанные
на рис. 1.147, а, б.
1.281. Определить вид передаточной функции динамических систем
автоматического регулирования по амплитудно-фазовым частотным харак-
теристикам (рис. 1.148, а, б).
174
Глава 2
Исследование устойчивости
непрерывных линейных систем
автоматического регулирования
Устойчивость линейных систем характеризует возможность нормальной
эксплуатации замкнутых систем автоматического регулирования. При опре-
делении устойчивости применяются различные критерии (алгебраические,
геометрические), позволяющие без решения уравнений динамики систем
регулирования оценивать их состояние: устойчивое, неустойчивое и на грани
устойчивости. В устойчивых системах переменные, характеризующие дина-
мические процессы при /—♦со, стремятся к состоянию равновесия. В неустой-
чивых системах переменные динамического процесса при t—*оо неограни-
ченно возрастают, и сам процесс является расходящимся. И наконец, в си-
стемах, находящихся на грани устойчивости, динамический процесс является
незатухающим.
В теории автоматического регулирования первое состояние системы
принято именовать асимптотически устойчивым, второе — неустойчивым
и третье — просто устойчивым [1, 7, 14, 36]. Для большинства линейных
систем автоматического регулирования второе и третье состояния являются
недопустимыми из-за нарушения нормального эксплуатационного режима
работы. Необходимо также отметить,! что способы оценки динамических
состояний системы при фиксированных параметрах не являются достаточ-
ными, так как в процессе нормальной эксплуатации происходит их измене-
ние, приводящее к перемене состояний, и система устойчивая может стать
неустойчивой и наоборот. Поэтому каждый из критериев должен позволять
получать области устойчивых и неустойчивых состояний линейной системы
в пространстве параметров. С целью уменьшения расчетов и построений
при оценке устойчивости линейных систем используются показатели устой-
чивости (запасы устойчивости по фазе и модулю), определяющие границы
изменения отдельных параметров.
2.1. АНАЛИЗ УСТОЙЧИВОСТИ СИСТЕМ
С ПОМОЩЬЮ 1-го МЕТОДА ЛЯПУНОВА
Первый метод Ляпунова позволяет определять устойчивость исходной
системы с помощью линеаризованных уравнений динамики. Анализ устой-
чивости по этому методу производится с помощью характеристического
уравнения замкнутой линеаризованной системы
+ aj.n~l + -|----1- а.п = 0.
Если все корни этого характеристического уравнения имеют отрица-
тельные вещественные части (X =» —а /р), то решение автономного урав-
нения динамики системы асимптотически устойчиво; если среди корней
имеется хотя бы один с положительной вещественной частью (X = +а i
=t /Р), то решение неустойчиво; если среди корней имеются корни с нуле-
вой вещественной частью (1 = =t /р), то может иметь место как неустойчи-
175
вость, так и простая устойчивость (не асий^тотическая). В последнем слу-
чае установить устойчивость замкнутой динамической системы по линеари-
зованным уравнениям не представляется возможным, и анализ устойчивости
следует производить по уравнениям исходной системы (нелинейным) *.
Для анализа устойчивости применяется функция Ляпунова V (х) (см. гл. 5).
2.1. Исследовать устойчивость системы автоматического регулирования
с помощью 1-го метода Ляпунова, если уравнения замкнутой системы имеют
следующий вид:
!dx .
т—« +
(2.1)
Решение. Линеаризуем систему уравнений (2.1) вблизи точки равнове-
сия х = 0, у = 0; тогда
dx
~di
— х\
(2.2)
dt
~ ~~ У-
Характеристическое уравнение системы линейного приближения будет
А.4- 1 О
о ь+1’(1 + 1Л
(2.3)
откуда
= Ц = -1. (2.4)
Таким образом, согласно линейному приближению невозмущенное
движение (точка равновесия х = 0; у = 0) является асимптотически устой-
чивым.
Решая исходные уравнения (2.1), получим 1
Х =; у =----------------------' (2.5)
1 — Уо + У<£ 1 — Уо + уе
Покажем, что при у0 < 1 решения асимптотически сходятся к точке
равновесия
На рис. 2.1, а построен переходный процесс в исходной нелинейной
системе, характеризующий асимптотическую устойчивость системы регу-
лирования.
Аналогичный результат можно получить, используя функцию Ляпу-
нова в виде V = х2 + у2.
Из уравнений (2.1) найдем
-^ = -(х2 + у2)4-х2г/ + ^, (2.6)
откуда видно, что по крайней мере при | х | С I и | у | С 1 -jjr будет отри-
цательно определенной функцией. Последнее свидетельствует об асимпто-
1 См. гл. 5.
176
тической устойчивости системы автоматического, регулирования Ч Итак,
с помощью 1-го метода Ляпунова была проанализирована устойчивость
системы регулирования при постоянных параметрах.
2.2. Исследовать устойчивость системы автоматического регулирова-
ния по 1-му методу Ляпунова, когда уравнения замкнутой системы имеют
следующий вид:
(2.7)
Решение. Уравнения системы линейного приближения около траекто-
рии равновесия z = 0, у = 0 будут
dx
, sr-y~z'
dt
(2-8)
dz
di
Из системы (2.8) найдем характеристическое уравнение системы
D (X) = X (X — I)2;
(2.9)
отсюда получим Xj = 0; Х2 = Х3 = 1.
Таким образом, согласно линейному приближению невозмущенное
движение (точка равновесия г = 0; у = 0) является неустойчивым.
1 См. подробнее в гл. 5.
177
Решение исходной нелинейной системы (2.7) можно записать в следу-
ющем виде:
х e Cj + С2ег;
У — di + (2CiC2( + Сз) е' + С^еи;
z — — Ci 4~ (2CiC2( 4“ Сз) е 4~ С2.
На рис. 2.1, б показаны переходные процессы, из которых следует,
что при t—» <*>х —♦ С2е^ у—»С1е2/; г —»С2е2/. Это свидетельствует о том,
чТо система автоматического регулирования неустойчива.
Аналогичный результат можно получить, используя функцию Ляпу-
нова V — у2 + г*. Найдем В силу уравнений (2.7) имеем
= 2у (хг 4- у) + 2г (г + х2) = 2уг 4- 2гг 4- 2 ух2 4- 2гхг.
dV
При |х|<1, |у|<1и|г|<1 как V, так и будут положительно
определенными функциями, что указывает на неустойчивость системы регу-
лирования. С помощью 1-го метода Ляпунова мы установили, что рассма-
триваемая система автоматического регулирования в замкнутом состоянии
при постоянных параметрах является неустойчивой.
2.3. Исследовать устойчивость системы автоматического регулирования
с помощью 1-го метода Ляпунова, если уравнения замкнутой системы имеют
вид
-у».
dt
(2.10)
-^-=-у4-ху.
Решение. Уравнения первого приближения вблизи точки равновесия
(х == 0; у = 0) будут
Корни характеристического уравнения
D (X) = X (X 4- 1) = 0 (2.12)
имеют следующие значения:
Хх = 0; Х2 = —lt (2.13)
откуда видно, что по уравнениям линейного приближения (1-й метод Ляпу-
нова) нельзя судить об устойчивости положения равновесия.
Рассмотрим справедливость полученного результата. Для этого вос-
пользуемся анализом решения исходной системы уравнений (2.10) в виде
1
'---гргг (2Л4>
Из формулы (2.14) имеем: при Сг < 0 x(t) —*оо при t —►—Сг и у (()—»оо
при t —»—С1( что свидетельствует о неустойчивости по Ляпунову
рассматриваемой точки равновесия. Аналогичный результат получим, ис-
пользуя для анализа функцию Ляпунова V = х — у2. Из уравнений (2.10)
найдем
4г=хг+2^-2^х’ (2-15)
178
откуда следует, что функция будет положительно определенной в окрест-
ности | х | 1, | у | «С 1. а V будет знакопеременной функцией, что и указы-
вает на неустойчивость системы автоматического регулирования по Ляпу-
нову.
2.4. Исследовать устойчивость системы автоматического регулирования
с помощью 1-го метода Ляпунова, если уравнения замкнутой системы имеют
вид
dx .
- = у-ХУЬ
ЛУ т, уз
dt
(2.16)
Решение. Уравнения 1-го приближения относительно точки х = О,
У = 0 будут
(2.17)
Характеристическое уравнение найдем из системы (2.17) в виде..
откуда Xi = Х2 = 0.
В данном случае 1-й метод Ляпунова не позволяет судить о состоянии
системы регулирования. Проиллюстрируем это положение.
Из линеаризованной системы получим
х = С2< + С1; у = С2, (2.18)
что указывает на неустойчивость рассматриваемой системы регулирования.
В то же время исходная нелинейная система является асимптотически устой-
чивой, так как функция Ляпунова
откуда
dV
dt
(2.19)
Выражение (2.19) показывает на асимптотическую устойчивость начала
координат рассматриваемой системы автоматического регулирования. Полу-
ченное противоречие указывает на невозможность определения устойчи-
вости данной системы автоматического регулирования по линеаризованным
уравнениям динамики замкнутой системы.
2.5. Получить условия асимптотической устойчивости линейной системы
автоматического регулирования, изображенной на рис. 2.2, а, с помощью
функции Ляпунова. Построить область асимптотической устойчивости на
плоскости параметров Т8, К, если 7'i = 7'2 = lc, аК — й|/г2й3.
Решение. Уравнение замкнутой системы регулирования запишем в сле-
дующем виде:
Т1ТгТ3 + (7'17'2 + ТЪТ3 4- Т3Т\)4- (Л + Г, + Т8) +
4-(Л 4- 1) х = 0.
(2.20)
179
Введем безразмерное время т =
V т\тат.
тогда получим
d3* , d*x 4-
Л3 у (7\ТаТа)2
+
(2.21)
Обозначая = а; = Ь- (К + 1) = с. за-
уЧЛАЛ.)2 /W>
а;
пишем
^+a^ + bjL + cx~0. (2.22)
d'r 1 d%‘ 'ат 1
Введем в рассмотрение систему уравне-
ний вида
S)
dx.
------ахг + ха,
---_CXl_bXt.
(2.23)
t)
Рис. 2.2. Структурные схемы си-
стем автоматического регулирова-
ния с отрицательными обратными
связями
Зададимся квадратичной формой ............
з
W = i wlkx(xk; wlk — ayw (2.24)
и будем искать функцию Ляпунова также в
виде квадратичной формы 1
з ।
V= 2 VikXtXk, vtk^vu,
i. *=i
удовлетворяющей . учетом системы (2.23) уравнению
V = 2IF.
(2.25)
Соответствующая система для определения1 коэффициентов будет иметь
вид
Al0!! 4“ й21°12 4“ ААз = А1’
Аз0!! 4” (Al 4* Аз) 4* Аа°13 4“ й21°22 4~ °Я°23 = 2И»1г;
Аз°и 4" АзАг 4- (<2ц 4- йзз) Аз 4- а21°» 4~ А|°зз = 2ю13; (2 26)
°12°12 4“ а22^22 4“ азгу23 = Аг’
^13^12 4“ а 12^13 4“ а23^22 4” (а224~°3з) У23 4“ ^ЗЗ^ЗЗ =
а13^13 4- fl23W23 4- а38И33 ~ ^33’
Где Дц — 0; ^12 — I; Аз — 0» ®21 — 0» Аа — —Аз — 1» ®31 — —
о» 2 ш —Ь; Аз “ 0»
180
Определитель этой системы имеет вид
а12 о» <2ц 4" <282 о» <2з2 0 <221 0 <2si 0 0
Д = ais а11 4“аЗЭ 0 <221 а31 = с (ab — с). (2.27)
0 Й12 0 Огг <*82 0
0 <218 а12 <2гз а22 4~ а33 <2зг
0 0 <218 0 <2зз
Удобно в качестве функции Ляпунова брать функцию V = ДУ; в этом
случае будем иметь
V = 2ДЦ7.
(2.28)
Пусть W = 4 т. е. все Wo, = 0 ПРИ scex i, k, за исключением 1 =«
= k = 2, а;аа = 1, тогда получим
0 х? 2XiXj 2xix3 х% 2хгхз х^
0 0 0 —с 0 0 0
0 1 —а — b 0 —с 0
V- 0 0 1 0 0 0 —с , (2.29)
1 0 1 0 —а —& 0
0 0 0 1 1 — а — b
0 0 0 0 0 1 0
откуда
V — — с (acxi + 2cxiX2 + Ьх% 4- *з)>
или
V«-y-*?4-cxi*24-4-x2 + -r^’ (2.30)
и
V “ (с — ab) х2 ’
Условием положительной определенности V по критерию Сильвестра
является ас > 0, с (ab — с</ >0, которое одновременно служит условием
отрицательной определенности W. Так как
TxTt + 7\Т„ + T3Ti
>0, ас=/( + 1.
то первое неравенство можно переписать в виде с > 0, или К + 1 > 0
(X > —1). Второе неравенство эквивалентно ab — с >0, или, подставляя
вместо а, b и с соответствующие выражения, получим окончательное ре-
шение
7\Tt + Т„Т8 + Г8Т1
Л + Л +_т8
V т^тя
(2.31)
-(К4-1)>0;
Я>-1.
Соответствующие области устойчивости и неустойчивости на плоскости
параметров Т8, К при 7\ = Tt = 1с показаны на рис. 2.3.
181
Область неустойчивости
Рис. 2.3. Области устойчивости и не-
устойчивости системы автоматиче-
ского регулирования по параметрам
К и ТЙ
2.6. Исследовать устойчи-
вость положения равновесия
системы автоматического регу-
лирования, если ее уравнения
динамики в замкнутом состоя-
нии имеют вид
-J- = -// + x(xs + i/2- 1);
Сравнить результаты исследований линейного приближения и исходной
системы уравнения по 2-му методу Ляпунова.
Указание. См. п. 5.2.
2.7. Исследовать устойчивость системы автоматического регулирова-
ния по 1-му методу Ляпунова, если ее уравнения динамики в замкнутом
состоянии имею! Вид
dr . .
-dT = -x + 4^;
о
— = _2_x + ^.
Сравнить результаты исследований уравнений линейного приближения
и исходной системы уравнений по 2-му методу Ляпунова. '
2.8. Исследовать устойчивость системы автоматического регулирова-
ния по 1-му методу Ляпунова, если ее уравнения динамики в замкнутом
состоянии имеют вид
dr
f(x) =
-4F = -2f/ + 3x-f(x);
4 при х> 1;
4х при — 1 1;
— 4 при х^ — 1.
Сравнить результаты исследований уравнений линейного приближения
и исходной системы уравнений по 2-му методу Ляпунова.
2.Й. Исследовать устойчивость системы автоматического регулирова-
ния по 1-му методу Ляпунова, если ее структурная схема приведена на
рис. 2.4, а. Передаточные функции системы имеют вид
r><s’“W+r= .Л+1> :
а параметры системы 7\ = 0,05 с; Т2 = 0,4 с; = 125; k2 = 140 Vc;
fe8 = 0,25 с. Сравнить результаты исследований уравнений линейного при-
ближения и исходной системы уравнений пс 2-му методу Ляпунова.
Указание. Линеаризацию функции F (х) можно выполнить, если счи-
тать, что х2 (t) = Хх (t'j (рис. 2.4. а).
182
Рис. 2.4. Структурные схемы нелинейных систем автоматического регулирования
2.10. Исследовать устойчивость системы автоматического регулирова-
ния по 1-му методу Ляпунова, если ее структурная схема приведена На
рис. 2.4, б. Передаточные функции системы имеют вид
r.W-A-; ГИЙ-Т&Т,
а параметры системы — 100; ka = 40 Vc; == 0,1; = 0,1 c; T3 =
= 0,5 c.
Сравнить результаты исследований уравнений линейного приближения
и исходной системы уравнений по 2-му методу Ляпунова.
Указание. Линеаризацию функции F (х) можно выполнить, если счи-
тать, что х2 (0 = хх (I).
2.11. Получить условие асимптотической устойчивости линейной си-
стемы автоматического регулирования с отрицательной обратной Связью,
структурная схема которой изображена на рис. 2.2, б, с помощью функции
Ляпунова. Построить области асимптотической устойчивости на плоскости
параметров К = и
Указание. См. задачу 2.5. (
2.12. Получить условие асимптотической устойчивости линейной си-
стемы автоматического регулирования 1 с отрицательной обратной связью,
структурная схема которой изображена, на рис. 2.2, в, с помощью функции
Ляпунова. Построить области асимптотической устойчивости на плоскости
параметров и Т3.
Указание. См. задачу 2.5.
2.13. Получить условия асимптотической устойчивости линейной системы
автоматического регулирования с неустойчивыми звеньями и положитель-
ными обратными связями, структурные схемы которых изображены на
рис. 2.5, а—в, с помощью функций Ляпунова. Построить области асимптоти-
ческой устойчивости на плоскости параметров: а) К и Т (рис. 2.5, а); б) klt
Т2 (рис. 2.5, б); в) k2 и Т (рис. 2.5, в).
Указание. См. задачу 2.5.
Рис. 2.5. Структурные схемы систем автоматического регулирования с положительными
обратными связями
183
2.2. ПРИМЕНЕНИЕ АЛГЕБРАИЧЕСКИХ КРИТЕРИЕВ
УСТОЙЧИВОСТИ
К алгебраическим критериям устойчивости относятся критерии Гур-
вица. Рауса, Льенара — Шипара и Ю. И. Неймарка [1, 13, 33J.
2.14. Исследовать на устойчивость с помощью критерия Гурвица
систему автоматического регулирования, характеристическое уравнение
которой имеет вид
V + 6Г + 21Х4 + 44XS + 62V + 52Х + 24 = 0. (2.32)
Решение. Первый способ. Так как характеристическое урав-
нение (2.32) имеет 6-й порядок, то
Д. = ав Д», (2.33)
где ав = 24 0.
Составим определитель Гурвица в
61 44 52 1 0 10
II 1 1 21 62 1 24 1 0 I 1
д5 = 0 6 44 ! 52 • 0
0 1 21 62)24
0 0 6 44 52
виде
i
= 972192 >0. ' (2.34)
Образуем по нему недостающие четыре минора:
Д1 = 6 6 44 >0;
д# 1 21 = 82 0;
6 44 52
Дз = 1 21 62 = 1688 >0;
0 6 44
0 44 52 0
1 21 62 24
Д4 = 0 6 44 52
0 1 21 62
= 43560 > 0.
Так как все миноры положительны, то система автоматического регу-
лирования устойчива.
Второй способ. Определитель (2.34) приведем к треугольному виду
следующим образом. Умножая элементы 1, 3 и 5-й строк определителя
(2.34) на Pi = -у, получим
3 22 26 0 0 1 *’“-3
1 21 62 24 0
А» == 0 3 22 26 0
0 1 21 62 24
0 0 3 22 26
(2.35)
184
Далее, умножая 1 и 3-ю строки определителя (2.35) на выбранный
коэффициент ц3 = и вычитая полученные результаты соответственно
из 2-й и 4-й строк, найдем 22 26 0 0 9 ц;( - —
2
0 11 3 160 3 24 0
Ль — 0 3 22 26 0
0 0 41 3 160 3 24
0 0 3 22 26
(2.36)
Затем, умножая 2-ю строку на коэффициент ц3 = -jp,
полученных значений 3-ю строку. После умножения 2-й и
вычитаем из
4-й строк на
щ = 3, а 3-й на = 1 —, имеем
1681
= “7ТГ 3 22 26 0 0 V
0 41 160 72 0 41
„ „ 211 425 „
Ла — ° ° Т 1Г ° ‘ (2'37)
0 0 41 160 72
0 0 3 22 26
_ , 1681 3 „ Следующими множителями будут рв = ^р- и ц, = -^р. Применяя
аналогичные процедуры к 3-й и 4-й, а ^гакже к 5-й строкам, найдем
3 22 26 0 0
0 41 160 72 0
Д6 — 0 0 211 425 16 335 0 (2.38)
0 0 0 211 72
0 0 0 211 425
2112
16 335
и проделав аналогичные про-
И,
наконец, взяв множитель р8 =
цедуры с 4-й и 5-й строками, получим окончательное выражение для гре-
угольного определителя в виде 3 22 26 0 0 0 41 160 72 0 0 0 211 425 0 0 0 0 72 3 736 863 (2.39)
0 0 0 0 16335
В определителе (2.39) диагональные элементы положительны; следо-
вательно, условия критерия Гурвица выполняются и система автоматиче-
ского регулирования устойчива.
185
2.15. Исследовать устойчивость системы автоматического регулирова-
ния по характеристическому уравнению, приведенному в задаче 2.14, по
критериям Льенара—Шипара и Ю. И. Неймарка [1].
Решение. Перепишем характеристическое уравнение (2.32) в общем
виде, т. е.
4дв_|_а1хь_|.а!Д4_{_Озх8 4_а4Хг4-а5Х + йв = 0, (2.40)
где а0 = 1; ах = 6; а2 = 21; а8 = 44; а4 = 62; ав = 52; dg — 24.
Для уравнения 6-го порядка применение условия устойчивости Лье-
нара—Шипара приводит к результату
а<, > 0 при i - 1, 2, ..., 6;
2 2
a^a-j + aiaa — aia4 — aA =* 1688 > 0;
а,а5 (OiOsttg 4* o4a6 4~ ^4a2a3 ~ a^g а4а4а4 — a^d^dg —
— as (оза4 -j- a| — ajOgOs — a^as) —- aAdg (aia2a,> 4- а&ь — aia4 — аз) 4*
4- aia6 (aia2a6 — ajae — a3a5) = 972 192 > 0,
(2.41)
что указывает на устойчивость системы автоматического регулирования.
Воспользуемся теперь критерием устойчивости Ю. И. Неймарка; тогда
уравнение (2.40) с помощью коэффициента щ = можно привести
к виду [11
— aiX64-(a»—4" аз*8 4“
4- (e.-|fl,)V4-^-|-fl,=.O. (2.42)
В этом случае порядок уравнения (2.42) понизится на единицу и оно
примет вид
4- о.т^ 4~ 4~ 4“ 4- ^6=я 0- (2.43)
Образуем снова коэффициент р2 = и, применив его к уравнению
<*1
(2.43), получим
(ас — 4^- яЛ X5 4- аД4 4- (a2 — Л?- аЛ X3 4- a3X2 4. (а4 — я5Ъ. 4- at = 0.
у Qf J У Oj j у dj j
Это уравнение перепишем в виде
4 3(Л4 4- axV 4- я2Х2 4-a3Z 4- a4 = 0. (2.44)
а.
Применив к уравнению (2.44) множитель u3 = найдем
°i
а0^.3 4- а-}-2 4- a2X 4“ = 0* (2.45)
При р4 = -з2- получим
“1
а0Хг 4- 4- а2 = 0, (2.46)
откуда
-а1 + /а2_4~д
\2 =---------. (2.47)
186
Система автоматического регулирования будет устойчивой, когда pj > 0;
jx2 >0; цз > 0, р,4 > 0 и вещественные части корней уравнения (2.74)
отрицательны. В нашем случае и уравнение (2.40) по выражению
(2.42) приводится к виду
6Ь5 4- 13,67V 4- 44V 4- 53,34V 4- 52b 4- 24 = 0; (2.48)
здесь р,а = -}у67~. поэтому уравнение (2.48) можно записать
13,67V 4- 20,6V 4- 53,34V 4- 41,45b 4- 24 = 0. (2.49)
Определим p3 = тогда из уравнения (2.49) получим
20,6V 4- 25,9V 4- 41,45b 4- 24 = 0. (2.50)
Из уравнения (2.50) находим р,4 = тогда
25,9V 4- 22,25b 4- 24 = 0. (2.51)
Система автоматического регулирования устойчива, так как все ее
коэффициенты
Pi > 0; р2 > 0; р3 > 0; р4 > 0
и корни квадратного уравнения (2.51)
. —22,5 ± /22,25а —9625,9
Ча = 5178
имеют отрицательные вещественные части.
2.16. Исследовать устойчивость системы автоматического регулирова-
ния по характеристическому уравнению
V 4- 103b3 4- 3065V 4- 149 250b 4- 1 081 500 => 0
с помощью критерия Гурвица. ,
2.17, Исследовать устойчивость системы автоматического регулирова-
ния по характеристическому уравнению!
V 4- 33,3V 4- 400V 4- 2666,7V 4- 13 333,3b 4- 333 333,3 « 0
e помощью критерия Гурвица.
2.18. Исследовать устойчивость системы автоматического регулирова-
ния по характеристическому уравнению
V 4- 2V 4- 3V 4- 4V 4- 5V 4- 6Ь 4- ЮО =« 0 И
с помощью критериев Льенара—Шипара и Ю. И. Неймарка.
2.19. Исследовать устойчивость системы автоматического регулирова-
ния по характеристическому уравнению
V 4- 16,4V 4- 107,4V 4-364,2V 4- 1146,5V 4-771,2b 4- 292,1 = 0
с помощью критериев Льенара—Шипара и Ю. И. Неймарка.
2.20. Исследовать устойчивость системы автоматического регулиро-
вания по характеристическому уравнению (2.40) с помощью критерия Рауса.
Решение. Для уравнения (2.40) составим таблицу коэффициентов Рауса,
пользуясь формулой
с = 1ск-г. 1-1 — ck-t,ick~j, . (£ 52)
‘ £Л-1.1
I
соответствующие значения запишем в табл. 2.1.
Подставив в нее соответствующие числовые значения, составим табл. 2.2.
Так как все элементы 1-го столбца табл. 2.2 положительны, следова-
тельно, система автоматического регулирования устойчива.
187
Таблица 2.1
Номер строки Номер столбца
1 2 3 4
1 1 а8
2 «1 «3 «В 0
3 а, а, г- а, — «« 0
4 а, С31 С31 0 0
5 С31С42 С32 г 41 в» 0 0
6 . f41ae С42 г С61 0 0 0
7 0 0 0
Таблица 2.2
Номер строки Номер столбца Номео Номер столбца
1 2 3 II «троки 1 1 1 2 3 4
1 2 3 4 1 6 13,7 20,6 21 44 63,3 41,5 62 52 24 0 24 5 0 I R 0 7 25,5 22,1 24 24 0 0 0 0 0 0 0 0
2.21. Исследовать на устойчивость системы автоматического регули-
рования по критерию Рауса, если их характеристические уравнения имеют
следующий вид:
а) 0,0021s + 0,12241* + 5,146Л3 + 41,32V + 2011 + 200 = 0;
б) 2-10~*V + 80- 10-*V + 3- IO"1!* + 1,24V + 101* + 401 + 34 = 0;
в) V + 451s + 1020V + 42 6001 + 7 650 000 = 0;
r) 0,005V + 0,151* + 1,251s + 5V + 501 + 300 = 0;
д) 0,41-10"eV + 0,39-10-sl* + 3,47-KHV + 1,83V + 581 + 380 = 0;
e) 0,104V + 0,33V + 5,5V + 15,51* + 251s + 25V + 19,71 + 9,5 =0-
Указание. См. табл. 2.1 в задаче 2.2С.
2.22. Исследовать на устойчивость системы автоматического регулиро-
вания по методу Рауса с помощью характеристических уравнений, приве-
денных в задачах 2.18 и 2.19.
2.23. Исследовать на устойчивость систему автоматического регулиро-
вания по критерию Гурвица и построить области устойчивости по двум
параметрам, если передаточная функция разомкнутой системы имеет вид
Г (s) = s + 1) (T,s +1) ’ (2,53)
188
Решение. Характеристическое уравнение найдем с помощью выраже-
ния (2.53) в виде
W (X) + 1 = W + (7\ + Т2) V + X + К = 0, (2.54)
откуда получим
г?+4^г' + 7??Г’- + ^-0- (2.55)
Из уравнения (2.55) найдем определители Гурвица.
д - г1 + тг .
Лг — ТЛТ, ’
Л + та
1
К
rtTt
1
да.
к
Отскэда условия устойчивости будут
1
К
TfTl
>0.
Так как 7\ > 0, Т2 > 0, К > 0, то остается одно условие устойчи-
вости
Tj + T,
Т\Тг
К>0,
которое сводится к неравенству
+ ~т\‘
(2.56)
С помощью неравенства (2.56) построим границу устойчивости системы
по параметрам К и 7\ при Т2 = 0,5 с (рис. 2.6, а) и К и Т2 при 7\ = 0,05 с
(рис. 2.6, б). На этих рисунках области устойчивости заштрихованы.
к, ik
чипа устой чийости
Область
неустойчибости
^Ъ&лмть^сгтйчивссти '//////у
О 0J tS 2.0 ZS Т„с
а)
Рис. 2.6. Области устойчивости
системы автоматического регу-
лирования по параметрам Л и
1\, К и Т2
189
<Й
Рис. 2.7. Структурные схемы систем автоматического регулирования
2.24. Исследовать на устойчивость системы автоматического регулиро-
вания по критерию Гурвица и построить области устойчивости по двум
параметрам, если структурная схема системы имеет вид, показанный на
рис. 2.2, а и в.
Указание. При построении областей устойчивости и неустойчивости
по параметрам:
а) К = /г1/г2/г3 и 7\ принять Т2 — 0,1 с и Т3 = 2 с;
б) К и Т2 принять 7\ = 0,01 си Т3 = 2 с;
в) К и Т3 принять 7\ = 0,01 с; Т2 = 0,1 с.
2.25. Исследовать устойчивость систем автоматического регулирования
по критерию Гурвица и построить области устойчивости по двум параметрам,
если их структурная схема изображена на рис. 2,7, а и б.
Указание. При построении областей устойчивости для системы
(рис. 2.7, а) по параметрам:
a) kjktkb = К и ki принять Т\ — 0,01 с; Тг — 0,05 с; Т3 = 0,2 с;
Л = 0,5 с;
б) для системы (рис. 2.7, б) по параметрам К = k1k2k3 и Т3 принять
Т\ = 0,01 с; Т2 = 0,2 с.
2.3. АНАЛИЗ УСТОЙЧИВОСТИ СИСТЕМ РЕГУЛИРОВАНИЯ
С ПОМОЩЬЮ ЦВМ
Для анализа устойчивости систем автоматического регулирования
с помощью ЦВМ применяют алгебраические критерии Гурвица, Рауса,
Льенара—Шипара и Неймарка. >
2.26. Составить программу анализа устойчивости систем автоматиче-
ского регулирования, имеющих характеристическое уравнение n-го порядка
на языках «АЛГОЛ» и «ФОРТРАН».
Решение. 1. Составим рабочую программу на языке «АЛГОЛ» для
определения знака диагональных миноров определителя Гурвица п-го
порядка в следующем виде:
begin integer п, i, j",
ввод (n);*
begin array a[0:((n-r-2) x 2 4- 1)], b[l :n — 1,
l:n— 1];
real procedure det (a, n);
value a, n\ integer n; array a;
begin real t, d, max',
integer i, j, k-, d:— 1;
for k:~ 1 step 1 until n do
* В существующих трансляторах с языка «АЛГОЛ» для ввода и вывода используются
различные процедуры, поэтому в приведенных в задачнике программах на языке «АЛГОЛ»
применяют обозначения «ВВОД» и «ПЕЧАТЬ».
190
begin max := 0;
for i := k step 1 until n do
begin t : = a li, k];
if abs (t) > abs (max) then
begin max : = t; j := i
end
end t;
if max — 0 then
begin d := 0; go to fin
end;
if j 4= k then
begin d := — d;
for i := k step 1 until n
do
begin t := a [/, i ];
a [j, i] a [£, i];
a [k, i] := t
end
end
for i :== k + 1 step 1 until n do
begin t := a (t, k\/max;
for j := k + 1 step 1 until n
do a [t, /] := a li, j] — t x a [fc, /]
end i;
d : — d X a Ife, k}
end k; '
fin : det := d '
end det;
ввод (a);
if a [1 ] < 0 V a [n ] < 0 then go to M;
if (п-т-2) X 2 = n then a tn + 1 ] := 0;
for i : = 1 step 1 until n — 1 do
for / := 1 step 1 until n — 1 do
b [i, /] := 0;
for i :== 1 step 1 until (n — l)-=-2 do
for j : = i step 1 until n-r-2 + i do
begin b [2 x i — 1, j 1 : = a [2 x (/ — i) + 1 ];
b 12 x i, j ] := a [2 x (/ — i) J
end;
if (n-i-2) x 2 = n then
for / := (n — l)-r-2 + 1 step 1 until n — 1 do
b In- 1, /1 := a [2 X (j — (n - 1)h-2 - 1) + 1 ];
for i := 2 step 1 until n — 1 do
if det (b, i) < 0 then go to M;
191
печать (система устойчива);
go to Ml;
М: печать, (система неустойчива);
Ml:
end
end
2. Составим рабочую программу на языке «ФОРТРАН» для определе-
ния знака диагональных миноров определителя Гурвица 6-го порядка
в виде
PROGRAM SIST 2
DIMENSION А (8), В (5, 5)
READ fBKl, 1) (A (I), I = 1, 8)
1 FORMAT' (Е 10. 3)
1F (А (2)) 5, 6, 6
6 IF (A (N + 1)) 5, 7, 7
7 IF (N/2 * 2.EQ.N)
A (N + 2) = 0.
К = N — 1
KI = К/2
К2 = N/2 + I
DO 81 = 1, К
DO 8J = 1, К
8 В (I, J) = 0.
DO 91 = 1, К1
DO 9J = 1, К2
В (2 * I — 1, J) = А (2 * (J — I) + 2)
9 В (2 * I, J) = А (2 * (J — I))
КЗ = К1 + 1
IF (N/2 * 2.EQ.N)
DO 10J = КЗ, К
10 В (N — 1, J) = А (2 * (J — (N — l)/2 — 1) + 2)
DO 11 I = 2, К
IF (DEI (В, I)) 5, 11, 11
11 CONTINUE
W-RITE (ПЧ1, 13) -
13 FORMAT (’система устойчива’)
GO TO 16
5 WRITE-(ПЧЕ 14)
14 FORMAT (’система неустойчива’)
16 STOP
END
FUNCTION DET (A, N)
DIMENSION A (5, 5)
D = 1.
DO IK = 1, N
TAX = 0.
DO 21 = K, N
T = A (I, K)
IF (ABS (T). LE.ABS (TAX) GO TO2
TAX = T
J = I
2 CONTINUE
IF (TAX.NE. 0) GOTO3
D = 0.
GO TO 4
3 CONTINUE
192
IF (J. EQ. K) GO TO 5
D = —D
DO 71 = K, N
T = A (J, I)
A (J, I) = А (К, I)
А (К, I) = T
M = K+ 1
7
5
8
9
DO 91 = M, N
T = A (I, K)/TAX
DO8J = M, N
A (J, I)= A (I, J)-r*A(K, J)
CONTINUE
1 D «= D * А (К, K)
4 DET = D
RETURN
END
2.27. Исследовать устойчивость систем автоматического регулирования
по критерию Гурвица, имеющих характеристические уравнения вида (2.40),
с помощью рабочей программы на языке «АЛГОЛ», если параметры системы
имеют следующие значения:
а) а0 = 1; = 6; а2 — 21; а8 == 44; а4 = 62; а6 = 52; ав = 24;
б) а0 = 1; й! = 24; ай — 35; а8 = 70; а4 ~ 21; а6 — 24; а8 — 100;
в) а0 — 10; ах = 4; аг = 9,99; а8 = 11,98; а4 = 7,98; а6 = 0; ав — 0;
г) а0 = 1; ai — 5,98; а2 = 20,88; а8 — 43,64; а4 = 61,37; а6 = 51,38;
а8 = 23,7;
д) а0 = 0; ai = 1; a2 — 920,2; а8 = 68 028,94; a6 = 7,59-10’; a4 =
= 3,129- 10е; ae = -9,182-108.
Указание. См. задачу 2.26.
2.28. Исследовать устойчивость систем автоматического регулирования
по критерию Гурвица с характеристическим уравнением
а02Л + + а8№ + а8Х2 + а4% + а6 = 0
с помощью рабочей программы на языке «ФОРТРАН», если параметры си-
стемы имеют следующие значения:
а) а0 = 0,414.10-®; аг = 0,388-10~3; а2 = 3,47-10”2; а8 = 1,83; а4 =
в= 58; а5 — 380;
б) а0 — 2-10"®; аг = 0,75-10“2; а3 = 4,1 -10-2; а8 = 2,5; а4 = 60; а8 =»
= 420;
в) а0 = 1; ai = 928,7; а2 = 7,5922.104; а8 = 3,775.10е; а4 = 1,08 X
X 108; а8 = 0;
г) а0 = 1; ai = 3,142; а2 = 2,758; а8 = 9,764; а4 = 0,285; а6 = 114,7.
Указание. См. задачу 2.26.
2.4. ЧАСТОТНЫЕ КРИТЕРИИ УСТОЙЧИВОСТИ МИХАЙЛОВА,
МИХАЙЛОВА—НАЙКВИСТА
2.29. Построить годографы Михайлова для системы автоматического
регулирования, имеющей характеристическое уравнение третьего порядка
(2.54) и проанализировать устойчивость, если ее параметры имеют следу-
ющие значения:
а) Тг = 0,05 с; Т8 = 0,5 м; К = 2,2 1/с;
б) Тг = 0,05 с; Т8 = 0,5 с; К = 22 1/с;
в) Тг = 0,05 с; Т8 = 0,5 с; К = 220 1/с.
Решение. Определим вещественную и мнимую части функции D (ja):
^(<о) = К-(Л + Т2)со2; 1
V> (со) = со - ЛТвСО3. J
7 Ю. И. Топчеет
193
Подставляя в выражение (2.57) числовое Значение параметров системы,
найдем:
a) Ui (со) =» 2,2 — 0,55со2; )
Vi (со) = со - О,О25со3; j ( '
б) ед=~22-0,55»2; )
У2(со)«со-0,025со3; J '
в) t/a (со) — 220 — 0,55со2; )
Уз (со) == со — 0,025со3. J
(2.60)
Задаваясь различными значениями со (рис. 2.8, кривая 1) в логарифми-
ческом масштабе, построим по формулам (2.58) годограф Михайлова. При
п — 3 годограф проходит последовательно три квадранта против часовой
стрелки. Это указывает на то, что данная система автоматического регули-
рования устойчива при К = 2,2.
На рис. 2.8 (кривая 2) в логарифмическом масштабе построен годограф
Михайлова по формулам (2.59). Как видно из рисунка, годограф проходит
через начало координат. Это указывает на то, что при К — 22 система авто-
матического регулирования находится на границе устойчивости.
При К == 220 годограф Михайлова (см. формулы (2.60)1 проходит два
квадранта (первый и четвертый см. рис. 2.8, кривая 3). При этом нару-
шается последовательность обхода, что указывает на неустойчивость си-
стемы автоматического регулирования.
2.30. Построить годограф Михайлова по характеристическому уравне-
нию 6-го порядка (2.40) и проанализировать устойчивость системы автомати-
ческого регулирования при двух значениях’параметра а6 = 24, ав — 240.
Остальные параметры системы взяты из задачи 2.15.
Решение. Из характеристического уравнения (2.40) найдем
U1 (со) = ай — а4со2 -f- а2со4 — со8;
У' (a) =a ata — а^ш3 -J- ахсо\
(2-61)
194
Подставляя соответствующие значения параметров системы, получим
две пары фбрму'л:’ ' ' ...........
U' (со) = 24 — 62со2 + 21со4 — со*; 1
V' (со) = 52со — 44со3 + бсо6; . j
V (со) == 240 - 62<о2 + 2 lco4 - co*; 1
V (co) = 52co — 44co? 6co5. J
(2.62)
(2.63)
На рис. 2.9 построены в логарифмическом масштабе годографы Михай-
лова [кривой 1 по формулам (2.62) и кривой 2—по формулам (2.63)1.
Кривая 1 проходит последовательно
шесть квадрантов против часовой стрел-
ки, что указывает на устойчивость си-
стемы автоматического регулирования.
При прохождении кривой 2 нарушается
последовательный обход квадрантов и си-
стема автоматического регулирования при
ав — 240 становится неустойчивой.
2.31. Построить годографы Михай-
лова и проанализировать устойчивость
системы автоматического регулирования,
имеющей характеристическое уравнение
а0Х5 + czjV + czaV + cz3V + а4Х + а6 =0
при следующих параметрах:
а) а0 = 0,414-10“*; ах = 0,388-Ю"3;
аа = 3,47-10“а; — 1,83; а4 = 58; а6=
= 380;
б) а0 = 0,528-10“5; ах = 0,42-10“3;
аа = 5,24-10“а; а8 = 2,21; а4 — 620;
аь = 380;
в) а0 = 0,414-10“*; ai = 0,388-10L3;
аа = 3.47-10"2; а8 = 1,83; а4 = 58; а6—
= 4200.
Указание. Кривые Михайлова строить
в логарифмическом масштабе от со= 1 1/с
до со = 1000 1/с.
2.32. Построить годографы Михайлова для четырех систем автомати-
ческого регулирования, имеющих следующие характеристические урав-
нения:
a) 0,104V + 0,33V + 5,5 V + 15,5V + 25V + 25V + 19,7X + 9,5 = 0;
6) 10V + 55V + 75V + 35V + 5Z + 45 - 0;
в) 3V + 13V + 7X + 11 = 0;
r) 1,25V + 10,25 V + 7X + 1 = 0.
Проанализировать устойчивость системы регулирования.
2.33. По виду годографа Михайлова, приведенного на рис. 2.10, а,
определить число корней характеристического уравнения 5-го порядка
в правой и левой полуплоскостях (пл. $).
Решение. Как известно, угол поворота вектора D (/со) при изменении
частоты от со = 0 до со = ©Q определяют по формуле
<р = п -5- — тя, ’ (2.64)
где п — порядок характеристического уравнения; т — число корней ха-
рактеристического уравнения в правой полуплоскости.
Г
195
Из рис. 2.10, а видно, что угол поворота годографа Михайлова при
0 со < со, ф = -?г будет п = 5. Подставив соответствующее значение
в формулу (2.64), получим
Л с л
У = 5 -g-— пт,
откуда т — 2.
Ряс. 2.10. Годографы Михайлова для систем автоматического регулирования с неустойчи-
выми звеньями
Следовательно, характеристическое уравнение имеет три корня в левой
полуплоскости и два корня в правой полуплоскости.
2.34. По виду годографов Михайлова, изображенных на рис. 2.10, б,
в, г, определить число корней в правой и
Рис. 2.11. Годограф Михайлова для передаточной
функции с двумя апериодическими звеньями — устой-
чивым и неустойчивым при трех значениях пара-
метра К= 10г 1 и 0,1
левой плоскостях, если порядки
характеристических уравнений
следующие: а) п — 8; б) п=9;
в) п = 9.
2.35. Исследовать на устой-
чивость с помощью годографов
Михайлова систему автоматиче-
ского регулирования, имеющую
передаточную функцию разомк-
нутой системь/
= (10s — 1) (0,1s 4-1) ’
Решение. Определим харак-
теристическое уравнение
D (1) = V + 9,91 +
+ к _ 1 = о. (2.65)
Из уравнения (2.65) полу-
чим
U' (со) = К. — 1 — со2;
V (со) = 9,9со.
(2.66)
Пусть К = 10, тогда годограф Михайлова будет соответствовать устой-
чивой системе (кривая 1, на рис. 2.11). При К = 1 годограф (кривая 2)
соответствует системе, находящейся на грани устойчивости (проходит через
начало координат), и при К. — 0,1 годограф (прямая 3) находится только
во втором квадранте, что соответствует неустойчивой системе.
2.36. Исследовать на устойчивость с помощью годографов Михайлова
(по параметру К) системы автоматического регулирования, имеющие пере-
даточные функции:
W ________________К(0,ЗЗв+1)
w ™ s (3,33s — 1) (0,04s -J-1) (0,01s + 1)
196
при К - 10 1/с; к -« ЮО 1/с;
б) W (s} = ____________________К (0,5s 4*I)8_______________
°' w <s' (25s — 1) (5s 4-1)1 2 (0,02s + 1) (0,025s 4-1)
при К ~ 1000 1/с; К = 40 000 1/c;
в) IF (s)
*(0.4s+l)
s (2,8s 4- 1) (0,05s 4- I)2
При Я = 50 1/с; К « 500 1/с;
г) W(s}________________5(bis4-0!___________
' w W s2 (3,33s 4-1) (0,04s 4-1) (0,01s 4-1)
при К = 1 1/с2 и К = 10 1/с2.
2.37. Пользуясь критерием устойчивости Михайлова—Найквиста, опре-
делить устойчивость одноконтурной системы автоматического регулирова-
ния, имеющей передаточную функцию системы в разомкнутом состоянии
вида
(25s 4-1) (0,1s 4-1) (0,01s 4-1) • (2‘67)
Решение. Из выражения (2.67) видно, что входящие в него типовые
звенья являются устойчивыми и тр = 0. В выражение (2.67) вместо s под-
ставим' j/co, тогда получим частотную характеристику
w . 50
</“) — (25/ш 4-1) (0,1/а> 4- 1) (0,01 /ш 4- 1) ’
Преобразуем ее к следующему виду:
= — 0,0025/й)8 — 2,751<о2 4- 25,11/(0 4- 1 ’
откуда с помощью формулы (1.323) найдем
и(ал__________________________________.
v ' (1 — 2,751а»2)2 4- (25,11ш — 0,025ш8)2 ’
V( . 50(25,11 —0,025а»2)
v (“/ — (1 — 2,751а»2)2 4- (25,11а» — 0,025а»8)2 '
(2.68)
Подставляя различные значения со в вещественную и мнимую частотные
характеристики разомкнутой системы, получим амплитудно-фазовую частот-
ную характеристику 1 (рис. 2.12, а), откуда видно, что годограф W (jco)
при изменении со от —со до 4-°° не охватывает точку с координатой (—1;
/0); следовательно, рассматриваемая система устойчива в замкнутом состоя-
нии 2. Пусть коэффициент усиления данной системы К = 5000; тогда кри-
вая W (ja) будет охватывать точку (—1; /0) против часовой стрелки два
раза (рис. 2.12, б). В этом случае система автоматического регулирования
неустойчива в замкнутом состоянии.
Точку пересечения кривой W (jco) с осью абсцисс можно найти, решив
уравнение
v. . 5000(25,11—0,025а)2) _п
И (со)— (1 —2,751а»2)2 4-(25,11(0 — 0,025а»8)2 ~ U’
тогда со0 => 31,7 1/с.
1 См. подробнее § 1.2.
2 Характеристика W (—/со) построена как зеркальное отображение кривой W (/со) от*
носительно вещественной оси.
197
Рис. 2.12. Амплитудно-фазовые частотные характеристики (кривые Михайлова—Найк-
виста) для одноконтурной системы автоматического регулирования при К =* 50 и 5000
Положив U (<вс) — —1, найдем значение коэффициента усиления си-
стемы К = 2762, при котором она находится на грани устойчивости.
2.38. По амплитудно-фазовым частотным характеристикам разомкну-
тых систем, приведенных на рис. 2.13, а—д, проанализировать устойчи-
вость замкнутых систем автоматического регулирования.
Решение. Если в передаточную функцию разомкнутой статической
системы (рис. 2.13, а) входят только устойчивые звенья (т. е. т? = 0),
то система регулирования в замкнутом состоянии будет устойчива, так как
при таком расположении кривой обеспечивается соотношение
И — v = , (2.69)
где р. — число положительных переходов кривой W (j/о) отрезка (—оо;
—1; /0); v — число отрицательных переходов кривой W (/со) отрезка (—оо;
-1, /0).
Из рис. 2.13, а видно, что 4-1 — 1 = 0 и система устойчива в замкнутом
состоянии. При измененном расположении кривых W (/’со) из рис. 2.13, б
имеем —1 Ф 0 и 4-1 — 1 — 1 4= 0 (рис. 2.13, в), что указывает на неустой-
чивость этих двух систем регулирования в замкнутом состоянии. На
рис. 2.13, г и ^приведены также кривые W (/со) для систем регулирования о
астатизмом 1-го порядка, имеющих тр = 0. Из рис. 2.13, г следует, что 0 —
— 0 = 0. Это указывает на устойчивость системы в замкнутом состоянии.
Так как —1 4> 0 (см. рис. 2.13, д), то система в замкнутом состоянии
неустойчива.
2.39. По амплитудно-фазовым частотным характеристикам разомкнутых
систем, приведенных на рис. 2.14, а—е, проанализировать устойчивость замк-
нутых систем регулирования.
Решение. Из рис. 2.14, а имеем 1-----------------система устойчива
в замкнутом состоянии. Из рис. 2.14,6 находим 1--------- — 1 4» что
указывает на неустойчивость замкнутой системы.
'1 3
По годографу W (рис. 2.14, в) найдем 1 4-1-------^- = -у, что указы-
вает на устойчивость системы в замкнутом состоянии.
I 2
По годографу W (/со) (рис. 2.14, г) определим 1 4* 1 — — ¥ у >
и, следовательно, замкнутая система является неустойчивой.
198
Рис. 2.14. Амплитудно-фазовые частотные характеристики для одноконтурных
систем автоматического регулирования с различным числом полюсов в правой полу-
плоскости у характеристического уравнения разомкнутой системы
199
Рис. 2.15. Амплитудно-
фазовые частотные харак-
теристики разомкнутых
внутренних контуров си-
стем регулирования
Рис. 2.16. Амплитудно-
фазовые частотные харак-
теристики разомкнутых
систем регулирования
200
1 5
На рис. 2.14, д найдем 4-— 4-1 4-1 4-1 —1 = -р следовательно,
система в замкнутом состоянии устойчива; так как -р — 1 -у, то система
регулирования неустойчива (рис. 2.14, е).
2.40. Проанализировать устойчивость замкнутых контуров (систем)
регулирования по амплитудно-фазовым частотным характеристикам разомк-
нутых контурор (систем) (рис. 2.15, а—з, 2.16, а—з).
2.41. Проанализировать устойчивость систем регулирования по ампли-
тудно-фазовым частотным характеристикам динамических элементов, охва-
ченных отрицательными обратными связями, изображенных на рис. 1.146, а
(при /Пр = 1), рис. 1.146, б (при Шр = 2), рис. 1.147, а (при гл? — 1),
рис. 1.147,6 (при trip = 0), рис. 1.148,а (nip = 0) и рив. 1.148, б (при
тр = 0).
2.5. ЛОГАРИФМИЧЕСКИЕ КРИТЕРИИ УСТОЙЧИВОСТИ
ОДНОКОНТУРНЫХ СИСТЕМ РЕГУЛИРОВАНИЯ
По логарифмическим критериям устойчивости можно определить не
только наличие устойчивости или неустойчивости системы автоматического
регулирования, но и запасы ее устойчивости по фазе
ус == ±л — 6 (®G), (2.70)
где О (®с) — значение фазы разомкнутой системы при частоте среза и мо-
дулю ±НМ — значения амплитуд разомкнутой системы, соответствующие
0 (м) = +л. (2.71)
Для обеспечения высокой стабильности систем автоматического регули-
рования задают нормы запасов устойчивости по фазе и модулю
у0 > 25е - 45е;
8 дБ < Нм'< 16 дБ;
-6 дБ > 14 дБ.
(2.72)
Если на системы налагают дополнительные требования к качеству про-
цессов регулирования, то нормы запасов устойчивости изменяются. Так,
например, для получения процессов, близких к апериодическим, необхо-
димо иметь у0 > 90° и большие запасы устойчивости по модулю — порядка
±30 дБ.
2.42. Исследовать устойчивость одноконтурной системы автоматиче-
ского регулирования в помощью логарифмических амплитудных и фазовых
частотных характеристик, если передаточная функция системы в разомкну-
том состоянии имеет вид
w _________________К (T8s 4-1)47^4-1)*____________ 73
w “ (7’1s 4-1) (7’2s 4-1)2 (T4s 4-1)2 (Tts 4-1) (7’fs 4-1) ’ °'
где 7\ = 30 000 c; T2 = 250 c; T3 = 28 e; 7\ = 2,88 e; T8 = 0,71 e; Te =
= 0,025 c; T7 = 0,01 c.
При построении частотных характеристик следует брать шесть значе-
ний передаточного коэффициента К (Кг = 1260-16е; Ка = 19,95- 10е; К8 =
= 1,78-10е; К4 = 0,13.16е; К6 = 1,42-Ю3 и Ке = 27).
Определить запасы устойчивости системы регулирования по фазе и
модулю.
Решение. На рис. 2.17, а построены логарифмические амплитудная (и)
(кривая 1) и фазовая 0 (со) (кривая F) частотные характеристики при К —
— К.! = 1260-10е с помощью передаточной функции (2.73) при s = /со.
Для анализа устойчивости воспользуемся формулой вида (2.69), т. е.
ГПп
у,' —V = —, (2.74)
201
Рис. 2.17. Логарифмические амплитудные и фазовые частотные характеристики для системы
автоматического регулирования (задача 2.42)
которая должна быть обеспечена при 201g] W (/со)] 5s 0 дБ. В формуле
(2.74) введем следующие обозначения: р' — число переходов логарифмиче-
ской фазовой частотной характеристики — оси — п — вверх (принимается
за положительное);
v- — число переходов логарифмической фазовой частотной характе-
ристики оси — л — вниз (принимается за отрицательное).
Из выражения (2.73) следует, что тр — 0 (все звенья устойчивые).
По рис. 2.17, а устанавливаем, что на участке, ограниченном слева
прямой VI—VI, где 20 lg | W (/со) | > 0 дБ, имеем р' = 1 4- 1 = 2 и v' =
= 1 -Н + 1 = 3.
Тогда по формуле (2.74) найдем 14-1 — 1 — 1 — 1^0. Последнее
указывает на неустойчивость системы автоматического регулирования
в замкнутом состоянии при принятом нами коэффициенте усиления
Справедливость этого утверждения можно установить по характеристике
(/©) (рис. 2.17, б).
Уменьшим коэффициент усиления системы К до К2 = 19,95-10®; тогда
на участке слева от прямой V— V (рис. 2.17, а) имеем р' — 1 1 = 2 и
v' = 1 + 1 = 4-2; следовательно, 2 — 2 = 0. В этом случае обеспечи-
вается устойчивость системы автоматического регулирования (см. также
Ц7а(/и) на рис. 2.17, в). Запасы ее устойчивости по фазе ус = 54° и модулю
Нм, = 16 дБ и —Нм, = —14 дБ обеспечивают высокую стабильность
системы даже при значительном диапазоне изменения параметров.
Снова уменьшим коэффициент усиления системы К. до К3 = 1,78-10®.
В этом случае логарифмическая амплитудная частотная характеристика
будет иметь вид кривой 3, и иа участке слева от прямой IV—IV найдем
р,4 =5 1, a v! =s 1 4-1 = 4-2; так как +1 — 2 + 0, то система автоматичё-
202
ского регулирования при этом коэффициенте усиления становится неустой-
чивой (рис. 2.17, г).
При дальнейшем уменьшении коэффициента усиления системы до Kt =»
= 0,13-10* система снова становится устойчивой (кривая 4), так как на
участке слева от прямой ///—III имеем 1 — 1=0 (см. рис. 2.17, д). Эта
система обладает запасами устойчивости по фазе ус< « 18° и модулем Нм, =*
= 18 дБ; —Нм, = —14 дБ, обеспечивающим и ее высокую стабильность.
Уменьшим коэффициент К до Кь = 1,42-10®. Это снова приводит к не-
устойчивости системы, так как условие (2.74) на участке слева от I/—II
не соблюдается и —1 4* 0 (кривая 5, рис. 2.17, е). При К» « 27 имеем устой-
чивую систему, Taic как на участке слева от I—I имеем 0 = 0 (кривая 6,
рис. 2.17, а) и ус = 64°; Нм, = оо дБ и —Нм, =» —18 дБ (рис. 2.17, ж).
2.43. Исследовать устойчивость одноконтурной системы автоматического
регулирования с помощью логарифмических амплитудных и фазовых частот-
ных характеристик, если передаточная функция разомкнутой системы
имеет вид
м____________*(7>-Н)8(ТУ + 1)_________
w “ s - 1)» (T2s - 1) (T5s + 1)’ (Tes + 1) ’
где Тj = 20 с; 7'2 — 2,5 с; 7'9 == 0,5 с; Т4 = 0,1 с; Т8 == 0,01 с; 7"в == 0,0025 в.
При построении частотных характеристик следует брать пять значе-
ний К (Кх = 0,0316 1/с; = 100 1/с; Кя = 4-10* 1/с; Ка = 2,5-10’ 1/с;
Кь = 2,5-10® 1/с). Определить запасы устойчивости системы регулирования
по фазе и модулю.
Решение. На рис. 2.18,о
построены логарифмиче-
ские амплитудная Нг (со)
(кривая /) и фазовая в (со)
(кривая 2) частотные ха-
рактеристики при К =
= Кх = 0,0316 1/с. На
этом рисунке четверть
окружности бесконечного
радиуса достроена штри-
ховой линией.
Выделим участок ам-
плитудной характеристики
Hlt где обеспечивается
условие 20 1g Н1(а) >0
(он находится на рис. 2.18^2
слева от линии /—/). Из
рисунка следует, что на
этом участке не выполняет-
ся соотношение (2.74), так
1 , з „
как----j- 4-- — . Следова-
тельно, система регулиро-
вания неустойчива в замк-
нутом состоянии при при-
Рис. 2.18. Логарифмические ам-
плитудные и фазовые частотные
характеристики для системы ав-
томатического регулирования
(задача 2.43)
203
пятом коэффициенте усиления = 0,0316 1/е. Справедливость этого
утверждения нетрудно установить и по рис. 2.18, б.
Увеличим значение коэффициента К до Ка= 100 1/с; тогда по кривой 3
при 201g На (и) > 0 (левее линии II — II) найдем 1---4= -у, что указы-
вает на неустойчивость системы регулирования. Соответствующий этому
случаю годограф Михайлова — Найквиста изображен на рис. 2.18, в.
При дальнейшем увеличении коэффициента К до К3 — 4-104 1/с получим
кривую 4 (рис. 2.18, а). Тогда на участке слева от прямой III—III имеем
1 3
1----2" =,4= -g-. Следовательно, система регулирования при К3 неустойчива
(см. также рис. 2.18, г). При К — — 2,5- 10е 1/с имеем кривую 5, для
1 3
которой на участке слева от прямой IV—IV найдем--------^--]-1-|-1 = —•
Система регулирования в этом случае устойчива в замкнутом состоянии.
Из рис. 2.18, а следует, что запас ее устойчивости по фазе уа = 35°, по
модулю Нм = 18 дБ и —Нм = —14 дБ. Соответствующая этому случаю
амплитудно-фазовая частотная характеристика изображена на рис. 2.18, д.
Если еще больше увеличить коэффициент К и довести его до — 2,5 • 108 1/с
1 3
(кривая 6), то на участке слева от V—V получим — — +1 + 1 — 1 4= у, и
система регулирования снова становится неустойчивой. Кривая W (j®)
для этого случая показана на рис. 2.18, е и также подтверждает наше за-
ключение.
2.44. Исследовать устойчивость одноконтурной системы автоматиче-
ского регулирования с помощью логарифмических амплитудных и фазовых
частотных характеристик, если передаточная функция разомкнутой системы
W (s) _____—К(^ + 1)а
W S2 (T1S + 1) (Tss + 1) (Tts + 1) ’
где 7\ = 3,33 c; Tt =« 1,1 с; T3 = 0,04 с; Т4 = 0,01 с.
Пусть коэффициент усиления имеет следующие значения: а) «
= 0,1 1/с?; б) — Ю 1/с?; в) К3 — 1000 1/с2. Определить запасы устой-
чивости системы регулирования по фазе и модулю.
2.45. Исследовать устойчивость одноконтурной системы автоматического
регулирования с помощью логарифмических амплитудных и фазовых частот-
ных характеристик, если передаточная функция
w (S) =____________K(T3s + ^___________
W W (T1S - 1) (T2s + I)2 (T4s + 1) (T6s + 1) ’
где Тг — 25 с; 7'a— 5 с; Т3 = 0,5; Т4 — 0,02 с; Т5 = 0,0025 с, а коэф-
фициенты усиления = 100; Ка = 40 000.
Определить запасы устойчивости системы регулирования по фазе и
модулю.
2.46. Исследовать устойчивость систем автоматического регулирования,
состоящих из одного динамического элемента, охваченного жесткой отри-
цательной обратной связью; передаточные функции элементов приведены
в задачах: 1.147, 1.148, 1.150 и 1.151. Определить запасы устойчивости по
фазе и модулю.
2.47. Исследовать устойчивость одноконтурной системы автоматиче-
ского регулирования, если передаточная функция разомкнутой системы
W s»(7’as4-l) (r3s 4-1)2 (r4s 4-1) ’
где a) 7\ = 0,5 c; T3 = 0,2 e; T3 = 0,01 c; T4 = 0,005 с; К — ~
- 100 1/g?; 6) 7\ = 2g; Ta « 0,2 g; Ts => 0,01 с; 7\ = 0,005 g; К = Ka —
= 10 000 1/c?.
204
2.48. Исследовать устойчивость одноконтурной системы автоматического
регулирования изменяя два параметра К и Та, если передаточная функция
разомкнутой системы
TJ7 /с\__________(T’aS + 1)_____
* 7 “ S (T1S - 1) (T3s + 1) (TiS + 1)« ’
где 7\ = 25 c; T3 = 0,02 c; T4 = 0,001 c.
2.49. Исследовать устойчивость одноконтурной системы автоматиче-
ского регулирования, изменяя три параметра: К, Т\ и Тл, если передаточ-
ная функция разомкнутой системы
___________K(r8s + l)»(T«s + Da
W ~ s (7\s + 1>® (Т3з + 1)» (TgS + 1) (Tes +1) ’
где Ti = 20 000 с; Т3 = 2,5 с; Т5 = 0,05 с; Тв = 0,005 с.
2.50. Исследовать устойчивость системы стабилизации летательного
аппарата с учетом собственных колебаний жидкости в двух баках, если пере-
даточная функция системы
п/ ____ ________________Кс (TjS -р 1) (7\s~|- 1)__________
(7’1s-1)(T3s-1)(7’4s+1)(7’6s+1)(T^+2677’7s + 1)
[s2 (1 — qt) + e,s + ®i] [sa (1 — <xj) 4- eas + <o%]
x + W2]ls2(l-aS-p«) + e2s + (o2] ’
В передаточной функции (2.75) 1-я группа сомножителей характеризует
динамику системы стабилизации летательного аппарата (как твердого тела),
а 2-я группа соответствует динамике колебаний жидкости [37 ]. Пусть пара-
метры системы стабилизации имеют значения 7\ = 43,5 с; Т2 = 1,9 с;
Т3 = 0,68 с; Т4 = 0,62 с; Т5 = 0,44 с; Тв = 0,033 с; Т7 = 0,019 с; |7 =
= 0,406; Кс = 30 1/с; ех = 0,251; е2 = 3,817; = 6,48 1/с; иа = 65,6 1/с;
ах = 0,0316; а2 = 0,0303; = 0,2018; р2 = 0,04479.
Решение. Вначале определим соотношения для нулей и полюсов во 2-й
группе сомножителей:
SH1
St j .
2(1 —ax). — ' /!_ai ’
e2 . <o2 ,
2 (1 — a2) — 1 '
i
Sh2
для полюсов
8}______ • в>1 .
2(1 — ai — Pi) /1 — а, — Pj ’
________еа :_________________
2(1 —а2 —р2) ~ ' К1 — а7 — р2
(2.76)
(2.77)
Формулы (2.76) и (2.77) справедливы при а, <£ 1; Pf 1; е, <=« 0 (здесь
i = 1,2).
Затем найдем коэффициенты демпфирования колебаний жидкости в ба-
ках
е_________е1
51ж — 2 (1— ajo)/
е _ «2 . (2.78)
?2ж—2 (1 —a2)co2’
и значения частот нулей и полюсов
®1 . ®2
нПк “ ’ “н2ж “ ГТ^Г2 ’
®1 . ®2
rr=^i -p; ’ Юп2ж“ /г-«г-р2 ‘
(2.79)
205
Будем считать, что
®П1Ж “ ®И1Ж + А®1ж^ 1
®п2ж === ®и2ж 4“ Д®8ж /
АЮ1ж _ с . А(О;Ж
61ж®н1ж 1 £аж®нгж
(2.80)
(2.81)
Тогда 2-ю группу сомножителей можно представить так:
П^ж (s) = lim
ТиОк*2 +-2&ж*'нСж8 + 1
-(Тн<ж8)2[Н<ж’2 + 26«ж* + 1]
(2.82)
где I — номер бака с жидкостью.
По выражению (2.82) строим номограмму (см. приложение VII), с по-
мощью которой находим добавочную часть логарифмической амплитудно-
Рис. 2.19. Логарифмические амплитудная и фазовая частотные характери-
стики системы стабилизации летательного аппарата (как твердого тела)
и
фазовой частотной характеристики системы стабилизации, учитывающей
колебания жидкости. Подставим в 1-ю группу сомножителей выражения
(2.75) s = /со и значения параметров. Тогда можно построить логарифмиче-
скую амплитудную и фазовую частотную характеристики системы стабили-
зации летательного аппарата как твердого тела (рис. 2.19, а), откуда видно,
что система устойчива. При этом она имеет следующие запасы устойчивости:
по фазе у0 = 55° и модулю Нм = 24 дБ и -гНм — —8 дБ. Справедливость
наших высказываний нетрудно установить из рис. 2.19,6 [кривая W (jm)
пересекает отрезок (—оо,—1, /0) один раз в положительном направлении],
«2
где при тр = 2 имеем -|-1 = —.
Располагая параметрами е(, со,, а, и р, (i = 1,2), по формулам (2.78)'—
(2.81) вычислим значения |1ж, |2ж, сон1ж, сои2ж, Дсо1ж, Дсо2ж, сх и с2.
В нашем случае имеем:
£1Ж = 0,02; £2ж = 0,03; <вн1ж = 6,38 с-1; сон2ж — 64,6 с-1; Дсо1ж = 1,021 с"1;
Д®2ж = 3,876 с-1; = 8 и с2 = 2.
Перенесем номограмму №(ж (/со) на шаблон из прозрачной бумаги.
Наложим его на кривую (рис. 2.20) IV (/<о) в координатах амплитуда—
фаза [кривая W (/со) снята с рис. 2.19, а] таким образом, чтобы точка но-
мограммы с координатой (0 дБ, 0°) совпала с собственной частотой коле-
баний жидкости сох = 64,8 1/с, нанесенной на логарифмическую амплитудно-
206
фазовую частотную характеристику. Затем к характеристике пристраиваем
замкнутую кривую номограмму с = 8 (жирная сплошная линия /).
Совместим номограмму с частотой ю2 = 65,6 1/с приса = 2 и получим
вторую замкнутую кривую (жирная сплошная линия 2). В результате этого
найдем результирующую логарифмическую амплитудно-фазовую частотную
характеристику системы стабилизации с учетом колебаний жидкости в баках
в координатах амплитуда—фаза. С помощью этой характеристики устана-
вливаем — система обладает на частоте среза сос запасом устойчивости по
фазе ус = 55° и модулю — Ям = —8 дБ. Кроме того, иа частоте колебаний
жидкости в первом баке «4 = 64,8 1/с имеем запас устойчивости по модулю
Ям, =—3,1 дБ, а на частоте колебаний во втором баке сов = 65,6 1/с запас
Рис. 2.20. Логарифмические амплитудная и фазовая частотные характеристики
системы стабилизации летательного аппарата с учетом колебаний жидкости
в баках '
устойчивости Ям2 *= —13,2 дБ (рис. 2.20). Система стабилизации обеспе-
чивает устойчивость полета летательного аппарата, хотя для улучшения
качества переходных процессов запас устойчивости по модулю в первом баке
целесообразно увеличить до —Ям= — 6-ь7 дБ (31]. Кривая W (/со), соответст-
вующая этому случаю в системе координат (Я, jV), построена на рис. 2.19, в,
откуда видно, что при одном положительном переходе характеристикой
U7 (/со) отрезка (—оо, —1/0) система устойчива. Кроме того, показаны зна-
чения запасов устойчивости ус, Ям, Ям, и Ям,.
Изменим параметры 2-й группы сомножителей передаточной функции
(2.75); тогда получим сг = 16 и с2 — 4. Наложим шаблон на логарифми-
ческую амплитудно-фазовую частотную характеристику летательного аппа-
рата как твердого тела и проведем соответствующие кривые (рис. 2.21, а).
При этом амплитудно-фазовая характеристика охватит точку с координа-
тами (0 дБ — 180°), что указывает на неустойчивость системы. На рис. 2.21, б
также построена характеристика W (/со). Рассматривая ее, можно заклю-
чить, что 4-1 — 1 =/= -|- и система стабилизации является неустойчивой
в замкнутом состоянии.
Указание. Левые кривые номограммы1 соответствуют случаю, когда
частота полюса больше частоты нуля (соп > со„), а правые, наоборот, когда
частота полюса меньше частоты нуля (соп < сон).
1 См. приложение VII.
207
Рис. 2.21. Логарифмические амплитудная и фазовая частотные харак-
теристики системы стабилизации летательного аппарата с учетом колеба-
ний жидкости и измененными параметрами баков
6)
2.51. Исследовать устойчивость системы стабилизации летательного
аппарата в зависимости от Кс в учетом собственных колебаний топлива в двух
баках по передаточной функции (2.75) и параметров 7\ = 43,5 с; Тг = 1,9 с;
Т3 = 0,68 с; Т4 = 0,62 с; 7\ = 0,44 с; Тв = 0,033 с; Т7 = 0,019 с; |7 =
= 0,406; ©j = 62,5 1/с; ®2 = 63,6 1/с; сх = 2 и с2 = 6 при условии, что
ии < ин.
Определить запасы устойчивости по фазе и модулю, в том числе и на
частотах колебаний жидкости в первом и втором баках в зависимости от Ко.
Указание 1. См. задачу 2.50. 2. Исследование устойчивости начать
« Кс = 30 На.
2.52. Исследовать устойчивость системы стабилизации летательного
аппарата с учетом собственных колебаний жидкости в двух баках по пере-
даточной функции (2.75) и параметров 7\ = 100 с; Т2 = 625 с; Т3 = 1,32 с;
Т4 = 1,38 с; Т-о = 0,2 с; Тв = 0,02 с; Т7 = 0,019 с; §7 = 0,406; иг =
— 5,8 1/с; ю2 = 6,6 1/с; сг = 6; с2 = 3; <вп£>сон при различных значе-
ниях коэффициентов Кс. Определить соответствующие запасы устойчи-
вости по фазе и модулю.
Указание. При исследовании устойчивости необходимо, чтобы выпол-
нялось неравенство 1 с-1 Ке 10 с-1.
2.53. Исследовать устойчивость системы стабилизации летательного
аппарата задачи 2.52 при ип < иа.
2.6. ЛОГАРИФМИЧЕСКИЙ КРИТЕРИЙ УСТОЙЧИВОСТИ
МНОГОКОНТУРНЫХ СИСТЕМ РЕГУЛИРОВАНИЯ
2.54. Проанализировать устойчивость двухконтурной электропневма-
тической следящей системы (рис. 2.22, а) методом логарифмических частот-
ных характеристик, если ее передаточная функция в разомкнутом состоянии
(2.83)
W7 = —ffft.fr*.
1+^(3)
где
W (s\ =---------------—---------------:
(Tas4-1) (Tss 4-1) (T’iS-h 1) ’
Wb (S) = s(Tis + l)(T*s + l)(7’es4-l) »
(2.84)
208
для принятых параметров системы Tt = 0,01 в; Та = 0,02 с; Т3 = 0,12 в;
Л = 0,4 в; Кв = k2k3T\ = 3,16 в; Кь = = 200 1/с.
Построить логарифмические частотные характеристики и определить
запасы устойчивости по фазе, модулю внутреннего контура и всей разомкну-
той системы.
Решение. В выражение (2.83) подставим з = /<в и, логарифмируя его,
запишем
201g [IF (7<о)1 == 201g\Wb (/ш)[ + 20 1g . (2.85)
Для получения логарифмических частотных характеристик 2-го сла-
гаемого выражение (2.85) представим в виде
1
l+W'al/®)
1
»М/®)
1
(2.86)
тогда по номограмме замыкания можно получить логарифмические частотные
характеристики
20 [ 1 +«7а(/ю) ] И аГб [ 1 +«7а(/ш) ]*
Построим на рис. 2.23 амплитудную | Wa (/со) | и фазовую arg [ Wa (/со)]
частотные характеристики. Откуда видно, что внутренний контур имеет
две частоты среза: низкую икн — 0,35 1/с и высокую икв = 200 1/с. На
этих частотах имеем запасы устойчивости контура по фазе ук„ = 100° и
Ткв = 44°. Полученные значения уКи и унв обеспечивают устойчивость
внутреннего контура в замкнутом состоянии.
Построим (рис. 2.23) зеркальные отображения характеристик
|ЯМ>)|, arg[IFa (/0)1, т. е/, , и arg [~^].
Перенесем значения амплитуд и фаз отраженных частотных характе-
ристик на номограмму замыкания и получим логарифмическую частотную
Рис. 2.22. Структурные схемы автоматического регулирования.
а ** двуякоятуряой следящей виатеявг; б * четнрехкоитуриой электроридравличеакой еледящей
отемы; в ядерноге эиерретичеакего реактора по мвщноети
209
Рис. 2.23. Логарифмические амплитудные и фановые частотные характеристики
внутреннего контура следящей системы
характеристику 20 1g (j®) (кривая 1 на рив. 2.24). Снимаем е нее число-
вые значения амплитуд и фаз и по ним на рив. 2.22 построим частотные
характеристики | и argf-f^^-].
На рис 2.25 приведены логарифмичеекие амплитудная | Wb (/со) | и
фазовая arg (/со)]] характеристики. Сложив их с соответствующими
частотными характеристиками (ем. выражение (2.85)1, получим логарифми-
ческие амплитудную | W (/со)| и фазовую arg [W (/®)1 частотные харак-
теристики всей разомкнутой системы. Из них найдем запасы устойчивости
по фазе у0 = 32° и модулю — Нм « —26 дБ, что гарантирует высокую
стабильность работы замкнутой следящей системы.
2.55. Проанализировать устойчивость двухканальной многоконтурной
следящей системы, структурная схема которой изображена на рис. 1.131
(см. задачу 1.264), а передаточные функции приведены в задаче 1.219. Опре-
делить запасы устойчивости контуров, если параметры системы имеют зна-
чения: Тв =* 0,008 с; Тк = 0,062 с; Тв = 0,4 с; ks = 4; kg = 0,24-10"3 Нс/рад;
k„ » 1,3-10-1 H/A; k* == 140 В/A; ka = 18 В/A; kp = 8-10~3 В/A; M =
= 8-10-4 Bc/A; L = 800; RB = 1500 В/A; RK = 0,4 В/A; Ra = 0,8 B/A;
kt - 1900 В/рад; kt = l,3.10~l Вс/рад; Jn = 2,63.10-8He^.
Решение. По передаточным функциям задачи 1.264 и формуле (1.527)
представим передаточную функцию I контура в виде
где Тд «= 2,22 • 10"® с; <= 2,78; 1гД — 7,6 рад/Вв.
При > 1
(s) “ члГнитТ+ТГ’
где 7\ = 0,00413 е; Т2 == 0,117 в.
Передаточную функцию II контура (1.528) запишем в виде
(2.87)
(2.88)
(2.89)
где
Ж, /<Л _ .
ьп W «(TiS+lXT^ + lXTKs+l) ’
пр М — ^аТТ (7*п^-f-1) .
• eIlW (TiS + J) (TJs4-l)(7'Ks4-l)’
здесь принято Ta «== — 10,95 e; КЬ11 340 рад/Be; КаП 0,006.
210
Рис. 2.24. Номограмма замыкания с построенными логарифмическими частотными характеристиками внутренних контуров:
кривая / а» к задаче 2.54, кривые 2*4 * к задаче 2.55
Рис. 2.25. Логарифмические амплитудные и фазовые частотные характеристики
всей разомкнутой системы
Подставим в выражение (2.89) s = /со и построим (рис. 2.26) логарифми-
ческие амплитудную | WaiJ (ja) | и фазовую arg [ №аП (/со) ] частотные
характеристики, а также обратные логарифмические частотные характе-
ристики и arg Г lv7 * . 1. С помощью этих характеристик
I а \lw) | L "'а J
и номограммы (кривая 2, рис. 2.24) нетрудно получить характеристики
I Т+^0п(/<о) I и arg [ I + ^ап (/<о) ]•Сложив их с характеристиками | №ftn(/co)|
и arg (/со) ], получим частотные характеристики Ц контура, т. е.
Рис. 2.26. Логарифмические амплитудные фазовые частотные характеристики
II контура следящей системы
212
Передаточную функцию III контура (1.529) запишем в виде
^пк(5)= . <2,90)
где
^П, ($) == (S)’
(*) “ r"K {s)-
При этом передаточные коэффициенты КЬш = 0,093 и Кат — 5,75 X
X 10-4. Подставляя в выражение ((2.90) s = jco, получим частотные харак-
теристики III контура. На рис. 2.27 они показаны кривыми |ТГаШ (/со)|
и arg [П7аШ (/со)], откуда видно, что III контур также устойчив в замкну-
том состоянии. На рис. 2.27 построены также обратные частотные характе-
РИСТИКИ I ~^in (>)" I и аг§ [ WatuUv) ПользУясь номограммой
кривая 3, рис. 2.24) и последними характеристиками, получим кривые
14-^iiiW I И arg [ l + rLi(/<o) Ь Сложив их ° соответствующими
кривыми 1Г6И1 (/со) и arg LIVftin (/со)], получим частотные характеристики
III контура 11ГН1к (/со)| и arg ПГ1|1к (/со)]. Соответствующее построение
выполнено также на рис. 2.27.
Передаточную функцию IV контура (1.530) запишем в виде
(s) = i 4-^Jiv(s) ’ <2,91)
где
^iv (s) я (s);
”eIV (S)---------(ToS 4. 1)---W ТПК (S)-
При Kaiv = 0,378 получим частотные характеристики IV контура
I Waiv (Jv>) I, arg [IFaiv (/co) ] (рис. 2.28).
Рис. 2.27. Логарифмические амплитудная и фазовая частотные
характеристики III контура следящей системы
213
Рис. 2.28. Логарифмические амплитудны и фазовые частотные характе-
ристики IV контура и всей следящей системы
Контур IV устойчив и имеет запас устойчивости уКв = 95°; укв = 50е.
С помощью обратных частотных характеристик | |>
arg и номограммы замыкания по кривой 4 (см. рис. 2.24)
найдем характеристики |-г-г-йг—I и arg [ ~т -----------1 • Складывая
I 1 Н-*aIV (/<»> I L 1 + walV J
их с частотными характеристиками | №Ы\(/со) | и arg lW%i\ (/со) 1 при
Kz>jv — 4, получим соответствующие частотные характеристики замк-
нутого IV контура [ IFivk (/<о)| и arg (IFivK (/со) 1, которые построены на
рис. 2.28.
С помощью выражения (1.531) найдем передаточную функцию всей разомк-
нутой системы в виде
IT(s)-4i-IV,v(s).
1Р
(2.92)
Подставляя s = /со в выражение (2.92). поЛучим результирующую ампли-
тудную частотную характеристику системы (рис. 2.28), которая проходит
на 7,5 дБ выше кривой | JF(v (/со) |. По частотным характеристикам | W (/со) |,
arg ПГ (/со)! = arg (/со)], найдем, что двухканальная следящая си-
стема устойчива в замкнутом состоянии и имеет следующие запасы устой-
чивости: по фазе у0 = 25s, модулю Нм = сю дБ и Нм — —14 дБ.
Полученные запасы устойчивости гарантируют надежную работу сле-
дящей системы при возможных изменениях ее параметров.
2.56. Исследовать на устойчивость многоконтурную систему автомати-
ческого регулированиHi структурная схема которой приведена на рис. 2.29, а.
Передаточные функции системы имеют следующий вид:
Wl ® e 1 ’
214
Рис. 2.29. Структурные схемы много-
контурных систем автоматического
регулирования:
а — е внутренним контуром в положитель-
ной обратной связью; б - с внутренним
контуром» имеющим неустойчивое аперио-
дическое звено; а — с двумя внутренними
контурами (I контур е отрицательной
обратной связью; II коитур е положи-
тельной обратной связью)
где kx = 0,1; fe2 — 100 с; ka — 1; fe4 = 0,5; kb = 5- 10~s; Tt = 0,025 c;
T2 = 1 c; T3 = 0,01 c; T4 = 10~s c; T5 = 0,1 c.
Решение, Из рис. 2.29, а видно, что внутренний контур имеет положи-
тельную обратную связь. Построим логарифмические амплитудную и фазо-
вую частотные характеристики внутреннего разомкнутого контура по пере-
даточной функции
Wa (s) - IF, (s) Ws (s) IF, (s).
Это построение выполнено на рис. 2.30, а — кривые | Wa (i<o) | и
arg [IFa (/со) 1. Так как кривая | Wa (/со)| лежит ниже оси 0 дБ на 5,6 дБ,
то внутренний контур устойчив и имеет /Ум = —5,6 дБ.
Передаточную функцию замкнутого контура запишем в виде
W fsl = 1
1-Fe(s) F,(s) ’
4
Частотную характеристику t построим с помощью номо-
граммы замыкания. Учитывая положительную обратную связь, значения
амплитуд и фаз разомкнутой системы будем снимать с кривых номограммы,
а значения амплитуд и фаз функции [ определять по осям орди-
нат и абсцисс. На рис. 2.30, а и б показано соответствующее построение
для со = 0,5. Значения | W (/0,5) | = —12 дБ, и arg [1Fa (/0,5)1 — 4-62,5°,
снятые с рис. 2.30, а, переносим на номограмму рис. 2.30, б. В результате
этого получим точку Л. Опустив из нее перпендикуляры на оси ординат
и абсцисс, соответственно найдем , ».• = —11,5 дБ и
* — *а (/0,0) I
arg Г "1 ] = 4-76°. Соответствующие, значения перенесем на
L I И' а (/*',о) J
зис. 2.30, а. Задаваясь различными значениями со, построим кривые
и arg [ 1 -HM/ci) ] (рис- 2-30’ в)’ а также частотные
характеристики | j и arg [ ]' эти характеристики,
получим частотные характеристики внутреннего замкнутого контура | WK (/со) |,
и arg [IFK (/со)] (рис. 2.30, в). Суммируя их с частотными характеристиками
W\ (/со) IF4 (/со), найдем результирующие кривые | W (/со) | и arg [W (/со) ].
При частоте среза сое имеем запас устойчивости по фазе у, = 48° и при 9 =<
•= —180° запас устойчивости по модулю — 19 дБ. Отсюда видно, что си-
215
216
етема автоматического регулирования с внутренней положительной обратной
связью является устойчивой в замкнутом состоянии, а ее запасы устой-
чивости по фазе и модулю обеспечивают высокую стабильность.
2.57. Исследовать на устойчивость многоконтурную систему автомати-
ческого регулирования с неустойчивым апериодическим звеном во внутрен-
нем контуре, структурная схема которой приведена на рис. 2.29, б, а пере-
даточные функции
Ц71(5) = й1; ^(s)»^; F8(s) = ^-;
W. /ч) « ki • W. (s> a
4 Tts + 1 ’ W° Tes -f-1 ’
где kr = 1,4; fe2 = 63; k3 = 0,316 1/c; fe4 = 3,56; T2 = 0,5 с; Т4 = 0,02 с;
Тв = 0,25 с; Тв = 0,05 с.
Решение. Рассмотрим разомкнутую передаточную функцию внутрен-
него контура Wa (s) = W 2 (s) Ws (s) (s). Логарифмические характе-
ристики | Wa (/co) | и arg lWa (/co) 1 построены на рис. 2.31, а. Так как Wa (/со)
имеет один полюс в правой части, то разность между числом .положительных
и отрицательных переходов должна быть равна +у, для того чтобы внут-
ренний контур был устойчивым. Учитывая отрицательный полупереход
при со -> 0, связанный с наличием одного интегрирующего звена, убеждаемся,
что сформулированное выше условие устойчивости для внутреннего контура
выполнено. Таким образом, внутренний контур устойчив в замкнутом состоя-
нии. Логарифмические характеристики, соответствующие передаточной функ-
ции замкнутого внутреннего контура WK (s) = \ 1BA по-
1 -Г w a \ S) "б Is?
строим, воспользовавшись номограммой замыкания, а также логарифмиче-
ской характеристикой для (s) = ^у.
Номограмму замыкания используют для построения логарифмических
характеристик передаточной функцир Соответствующая кривая
построена на номограмме замыкания (рис. 2.31, б).
При использовании номограммы, когда имеется переход фазовой харак-
теристики через —180° в положительном направлении, в фазовой харак-
теристике происходит скачок на +360°, если снимать фазовые углы непо-
средственно по кривым номограммы. Однако действительная фазовая харак-
теристика должна быть непрерывна, если строить ее, воспользовавшись не-
посредственно выражением для arg [U? (/со) 1 по точкам. Кажущееся проти-
воречие объясняется тем, что кривые на номограмме соответствуют п зна-
чениям фазы: 0 и 9 «360°, что следует из выражений, используемых при
построении номограмм. Поэтому при построении необходимо выбирать такое
значение фазы, которое обеспечивает непрерывность фазовой характеристики.
Логарифмические характеристики |ТГк(/со)| и arg [ U7K (/со) ] приве-
дены на рис. 2.31, а. Чтобы построить логарифмические частотные харак-
теристики системы с разомкнутой главной обратной связью | W (/со) | и
arg [ТГ(/со)1, необходимо сложить соответствующие характеристики |Й7К (/со) |
с | Wf (/со) (/со) | и arg ПГК (/со) 1 с arg i Wi (/со) U?4 (/со) 1 (рис. 2.31, е).
При этом запас устойчивости по фазе уа = 11® и = 3,5 дБ. Так как
Рис. 2.30. Логарифмические частотные характеристики системы автоматического регу-
лирования с внутренним контуром, имеющим положительную обратную свявь:
а — внутреннего контура; б — амшштудно-фааовая разомкнутого контура; в — влей разомкнутой
ан «темы
217
Рис. 2.31. Логарифмические частотные характеристики системы автоматического ре-
гулирования с неустойчивым апериодическим звеном во внутреннем контуре'.
а I— внутреннего контура; б — амплитудно-фазовая разомкнутого контура; а — acefi ра-
зомкнутой системы
в системе имеется одно неустойчивое апериодическое звено, то для того,
чтобы она была устойчива, необходимо иметь разность между числом
положительных и отрицательных переходов характеристик | Wa (/Со) |,
arg [Wa (/со)] и |№(/<о)|, arg [F(/со)], равной +-g-. При выполнении
этого условия данная многоконтурная система устойчива в замкнутом со-
стоянии.
218
2.58. Исследовать устойчивость многоконтурной системы автоматиче-
ского регулирования (см. рис. 2.29, б), имеющей внутренний контур с поло-
жительной обратной связью в случае:
У.0>- г‘«-т?+т:
где ki = 7,5; ka = 0,3 1/с; ka = 2,5; kt = 2; Та = 0,06 с; Та = 0,25 с;
Т4 = 0,0015 с; Т6 ~ 0,015 с; Та = 0,03 с;
6) U7X (s) == ( ; Wa (s) = + 2gTss +1 ’
В7*М“г&Т;
где ka = 0,015; ka — 6,4; kt — 100; ka = 0,45; Tx = 1,2 с; Ta = 0,05 c;
Ta = 0,046 c; S = 0,3; 7, = 0,1 c; T5 = 0,005 c.
2.59. Используя логарифмический критерий устойчивости многокон-
турных систем, построить области устойчивости в зависимости от параме-
тров ka и многоконтурный системы автоматического регулирования,
структурная схема которой приведена на рис. 2.29, в, а передаточные функ-
ции имеют следующий вид:
W1 4-1 * “ Tss4-1 ’
ад = Л6,
где = 2; ka = 104; Tx ~ 10"* с; g - 0,45; fe4 = 0,01; Тг = IO-5 с;
Ta = 10"4 с.
2.60. Построить логарифмические характеристики и исследовать на
устойчивость многоконтурную систему автоматического регулирования,
блок-схема которой приведена на рис. 2.29, в, для следующих значений
передаточных функций:
а)ад=л; ад-
г.<’>-гЛт’
где ki = 25; ka = 10; ka ~ 17,3; Л4 = 4; Та - 0,25 с; Та = 0,051 с; £ =
= 0,23; Т4 = 0,75 с; Т5 = 0,015 с.
Определить запасы устойчивости системы по фазе и модулю:
б) Wi (S) = T2S2 + 2JXT1S + 1 ’ W* + 1 ’
где ki = 2; ka = 7,8; ka == 12,8; Jfe4 = 2,8; ka = 0,5; 7\ = 2-10-8 c; =
= 0,4; Ta 0,015 c; g, = 1,2; Ta = 5-КГ3 с; T6 = 8-10"8 c.
Определить запасы устойчивости системы по фазе и модулю.
2.61. Исследовать устойчивость системы автоматического регулиро-
вания ядерного энергетического реактора по мощности при kb = 1; 10; 100.
219
Рис. 2.32. Структурные многоконтурные схемы
систем автоматического регулирования
Структурная схема системы изображена на рис. 2.22, в. Определить запасы
устойчивости по фазе и модулю при следующих параметрах системы *:
/* = Ю-* с; Те = 0,8 с; Т = 0,1 с; Та = 0,0112 с; g3 = 4,5; 7\ = 0,071 с;
Т2 = 0,62 с; Та = 2,91 с; Т4 = 6,62 с; Т6 = 31,75 с; Тв = 80,64 с; Т7 =
= 0,013 с; Т8 = 0,075 с; Т9 = 97 с; 7\0 = 2,975 с; ТХ1 = 12,420 с; Т12 =
= 68,027 с; Ka — kyk3kkjpTc = 2,5; kTV = 0,5 1/с;
iz _ kykakke3esT iT 3Т 3ТюТцТ
Л6 “ 2Т 3Т tT 3Т е
Указание. Коэффициент kb изменяется за счет различных значений еб.
2.62. Исследовать устойчивость системы автоматической стабилизации
летательного аппарата с интегрирующим гироскопом и датчиком линейных
ускорений по перегрузке, если структурная схема системы' имеет вид, пока-
занный на рис. 2.32, а. Определить запасы устойчивости по фазе и модулю
при следующих параметрах системы: ky = 20; km = 0,4 В/грйд; kpn = 1 град/В
kK = 1,8; kRy = 0,4 В; Трп = 0,1 с; Т„ = 1 с; 7\ = 0,31 с; g = 9,81 м-с'!;
Т2 = 0,031 с.
Параметры летательного аппарата имеют три группы «замороженных»
значений постоянных времени и коэффициентов:
а) Та = 0,65 с; Т = 0,25 с; kn — 85 1/град; V = 200 м/с; | = 0,32;
б) То = 0,37 с; Т = 0,1 с; kn = 180 1/град; V = 600 м/с; £ = 0,2;
в) Те = 0,75 с; Т = 0,15 с; kn = 60 1/град; V = 500 м/с; g = 0,1.
2.63. Исследовать устойчивость системы автоматической стабилизации
летательного аппарата с демпфирующим гироскопом и датчиком линейных
ускорений по перегрузке [371, если структурная схема системы имеет вид,
показанный на рис. 2.32, б. Определить запасы устойчивости системы по
фазе и модулю при следующих параметрах системы: ky = 2,65; £рп =
= 1 град/В; kK1 = 0,41; kw = 1 Вс/град; kKi = 700; kRy — 0,4 В; ==
= 0,071 с; Т2 = 0,029 с; Т3 = 0,056 с; Т4 = 0,001 с; Т№ = 0,01 с; =
= 0,6; g = 9,81 м-с"а.
Параметры летательного аппарата имеют три группы «замороженных»
значений постоянных времени и коэффициентов:
а) То = 0,65 с; Т = 0,25 с; kn = 85 1/град; V = 200 м/с; £ = 0,32;
б) Та = 0,37 с; Т = 0,1 с; kn = 180 1/град; V = 600 м/с; g = 0,2;
в) То = 0,75 с; Т = 0,15 с; kn = 60 1/град; V = 500 м/с; g = 0,1.
1 Gm. задачу 1.140.
220
Рис. 2.33. Структурные много-
контурные схемы систем авто-
матической стабилизации
2.64. Проанализиро-
вать устойчивость четы-
рехконтурной электрогид-
равлической следящей си-
стемы, структурная схема которой показана на рис. 2.22, б. Определить
запасы устойчивости по фазе и модулю, если параметры системы имеют следу-
ющие значения: = 3400 В/рад; /г2 = 85; k3 = 13,1 рад/Вс; kt = 1/2,65;
= 0,004 Вс2/рад; k3 = 580 1/с; k? — 55 В/рад; ks = 0,094 Вс2/рад;
/г9= = 0,05 с; Т3 = 0,13 с; Тъ = 0,15 с; Т9 = 0,0014с; Т3 = 0,3 с;
5=5.
2.65. Исследовать устойчивость электропневматической следящей си-
стемы, структурная схема которой изображена на рис. 2.32, в. Определить
запасы устойчивости системы по фазе и модулю, если ее параметры имеют
следующие значения: kt = 38,4 В/рад; kK1 = 0,1 ky = 0,64 рад/В; /гк2 =
= 0,32 Вс2/рад; 7\ = 0,05 с; Т2 = 0,005 с; То = 0,4 с; Т = 0,025 с; g = 1;
Ту = 0,1 с.
Указание. При расчетах следует принимать три значения коэффициента
усиления: К = 10; 25 и 100 1/с. (
2.66. Исследовать устойчивость электронного регулятора напряжения
при двух коэффициентах усилителя1 k2 — 100 и k3 = 150, структурная
схема которого изображена на рис. 2.32, г. Определить запасы устойчивости
электронного регулятора напряжения по фазе и модулю, если его пара-
метры имеют следующие значения: kr = 2,5; k3 = 0,2; k9 = 1; k-0 = 5;
7\ = 0,07 c; T2 = 0,25 c; T3 = 0,4 c; T4 = 0,4 c; g2 = 0,7.
2.67. Исследовать устойчивость системы автоматической стабилизации
самолета по углу тангажа, структурная схема которой изображена на
рис. 2.33, а. Определить запасы устойчивости системы по фазе и модулю,
если ее параметры имеют следующие значения: kn = 5 В/рад; koc — 2 В/рад;
k№ = 1 Вс/град; = 0,4; /гср = 1 В/рад; Тп = 0,1 с; Т№ = 0,01 с;
U = 0,6.
Параметры самолета имеют две группы «замороженных» постоянных
времени и коэффициентов усиления:
а) 7\ = 0,143 с; ТС1 = 0,33 с; = 0,01; /гй1 = 0,57;
б) Т2 = 0,134 с; Тс2 = 0,42 с; ?2 = 0,01; /гй2 = 1,1.
2.68. Исследовать устойчивость системы автоматической стабилизации
угловой скорости вращения гидротурбины (рис. 2.33, б). Определить запасы
устойчивости по фазе и модулю, если параметры системы следующие: kx — 3;
k3 = 1; k3 = 3,75; k9 = 0,97; Тг = 0,5 с; Т2 = 0,25 с; Т3 = 0,05 с; Т6 =
= 7 с; Тв = 8 с; = 1,025.
Указание. При расчетах использовать параметры:
а) Т4 = 20 с; k3 = 25;
б) Т4 = 40 с; k6 = 50;
в) Т4 - 25 с; &6 = 40.
221
2.7. АНАЛИЗ УСТОЙЧИВОСТИ СИСТЕМ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
С ТРАНСЦЕНДЕНТНЫМИ ЗВЕНЬЯМИ
Условия устойчивости систем автоматического регулирования с транс-
цендентными звеньями запишем в виде
Я(со)= 1;
0 (а) = — 57,3т«>— 2nv,
(2.93)
где v принимает числовое значение в зависимости от величины периода
трансцендентной функции.
Определим из первого уравнения системы (2.93) частоту, при которой
характеристика W (jot) пересечет окружность с радиусом, равным единице
(ш0 = шкр). Тогда из второго уравнения системы (2.93) можно найти значе-
ния времени т, разделяющие плоскость на области устойчивости и неустой-
чивости по этому параметру (ткр).
О (<оКр) . 2яу
(2.94)
Для звена «чистого» запаздывания период функции будет равен 2л
и v примет значение 0, 1, 2 ...
2.69. Найти математические зависимости для определения значений
критической частоты юкр и постоянной времени «чистого» запаздывания,
при которых система автоматического регулирования с передаточной функ-
цией
(2-95)
находится на грани устойчивости.
Решение. Из выражения (2.95) найдем
откуда
®кр = (2.96)
При s == /ш фазовый угол на критической частоте
arg [W (/<окр)] = — arctg Т 1сокр — 57,3та>кр -J- 2nv. (2.97)
Известно, что система регулирования находится на грани устойчивости,
когда
arg 0’<йкр)) = —л. (2.98)
Подставляя выражения (2.96), (2.97) при v = 0 в условие (2.98)., получим
<мр “ 57’3 fcrctg ~ 1 -л). (2.99)
2.70. Определить значения критической частоты юкр и постоянной
«чистого» запаздывания ткр для системы автоматического регулирования,
имеющей передаточную функцию вида
W (S) = (T1S -i- 1) (Tgs 4- 1) (TgS + 1) • <2-10°)
-222
Пусть параметры системы будут
7\ = 0,5 с; Та = 0,05 с; Т9 =* 0,0Г с; К - 10.
Решение. 1-й способ. Из выражения (2.100) найдем
И (ш) = -------------_
V [1 - {T.Ti + Т2Т3 + т^з) <^р]2 + [(Г! + т2 + г8) <окр -
(2.101)
Приравняв Н (со) единице, получим
ТiT2Тзй>Кр -j- [(УхУ2 -j- Т2Т3 -j- TiTa)2 — 2TiT2T8 (Tj -f- T2 4- Тз)] coip +
+ [(УI + т2 + T3)2 - 2 (TiT2 4- T2T3 + TiT3)] 4₽ + 1 - № = 0, (2.102)
откуда с помощью формул Кардана определим
“кР = У у7 —+. - с = 15,45, (2.103)
где
„ _ 1 ( 2[(ЛТа4-ТзТ84-т1Т8)«-2Т1Та78(Т14-Тз + Г»)1’
2 \ 27 T?TgT| ’
«Т3Т8 + ТаТ8 + Т^з)18 - 2Т17,Т8 (Tt + Т2 + Т3)]
ЗГ4Г4Г4
X [(Л 4- Т2 + Т8)’ - 2 (ТгТа 4- ТаТ8 4- УХУ8)] 4- Лт^-);
ЗГзГзТ2 [(Т1 + т2 + Т3)« - 2 (ТхТг 4- ТаТ3 4- ЛТз)] -
- [(ТгТ8 + Т3т9 + TtT,P - 2TXT3T3 (1\ + Т8 + 73)Р .
*
С =
(ТгТ2 4- Т8Т3 + Т^ - 2Т1Т8Т8 (Л + Та + Та)
ЗТ1ТЩ
Подставив в выражение (2.103). числовые значения, найдем шкр =
= 15,45 1/с. При этом фазовые соотношения можно записать в виде
arg [W (ХрВ == — arctg — arctg Ташкр —
— arctg Т зШцр — 57,3ткрсокр = 52е. (2.104)
Для принятых числовых значе-
ний имеем
ткр = 0,059 с.
2-й способ. Подставим в пе-
редаточную функцию (2.100) s =
= /ш и построим логарифмические
амплитудную и фазовую частотные
характеристики (рис. 2.34). Из рис.
2.34 найдем <ое— шкр = 15,4 1/с.
Запас устойчивости системы по
фазе ус должен быть сведен к нулю
значением фазы
ДО (<окр) — — 57,3ткрсокр.. (2.105)
Рис. 2.34. Логарифмические амплитудная
и фазовая частотные характеристики
системы регулирования со звеном с vw
стым» запаздыванием
Для нашего случая имеем ус = 52° и ткр ® 0,059 с. Значение ткр,
определенное графическим способом, совпадает с величиной, полученной
ранее аналитически.
Результирующая фазовая частотная характеристика при данном т
пересекает ось — 180“ при частоте ше = шкр.
2.71. Определить значения критической частоты ®кр и постоянной
«истого» запаздывания <гкр для системы автоматического регулирования,
имеющей передаточную функцию вида
W {S) s^is+lXTjs+l) ’
где К ~ 20 1/с; 7\ = 1 с; = 0,4 с; Т9 *=> 0,01 с.
2.72. Найти математические зависимости для определения значений
критической частоты сокр и коэффициента усиления К системы автомати-
ческого регулирования с передаточной функцией
W (s) ------------------?=-,
(T1S+l)(T2s+l)^s
находящейся на грани устойчивости.
Указание.
2+4.
2.73. Найти математические зависимости для определения критической
частоты сокр и коэффициента усиления К системы автоматического регули-
рования с передаточной функцией
W(s)---------TOs+2) ,
(T1S+l)(T8s+l)Ks
находящейся на грани устойчивости.
Указание. См. задачи 2.71 и 2.72.
2.74. Определить значения критической частоты и постоянной чи-
стого запаздывания <гкр с помощью логарифмических частотных характерис-
тик для системы автоматического регулирования, имеющей передаточную
функцию вида
(S) = (As + 1) (T2s + 1) (Т88 + 1) (T4s + 1) (T6s + 1) ’
где К = 2,5; 7\ = 100 с; Т2 = 24,4 с; Тэ = 14 с; Т4 = 8,1 с; ТБ = 0,05 с.
2.75. Проанализировать устойчивость системы автоматического регу-
лирования угловой скоростью вращения рабочего колеса гидротурбины с уче-
том длинного водяного канала (см. задачи 1.76 и 2.68). С помощью логариф-
мических частотных характеристик определить запасы устойчивости системы
по фазе и модулю.
Решение. Составим структурную схему системы регулирования
(рие. 2.35, а)
<21“>
где
m /„\ __ [ 1—2р0 th (ts)] ,
bU 8(Г^ + 2^Т15+1)(Тг5-|-1)(Т854-1)(Тв54-1)[14-р0Щ(т8)] ’
<2-108>
224
Примем следующие параметры системы регулирования: kx = 4; /г2 = 1;
k3 = 3,75; k, = 0,97; ke = 25; 7\ = 0,5 с;. Т2 = 0,25 с; Т3 = 0,05 с; 7\ =
= 20 с; Т5 = 7 с; Тв = 8 с; = 1,025; тр0 = 0,13 с.
Функцию th (ts) представим в виде
eTS — е—Ts
В полученное выражение подставим s = /со; тогда
е/™ _ е—/™
th = e/W , е-/ТО =
С "г с
При малых значениях тсо имеем
th (т/со) = тсо.
При этом передаточную функцию (2.107) можно переписать в виде
пу / \__________________k1k2k3ke (1 2ppTS)_____________ (П inq\
6 W “ s (T(s2 + 2^Т15 + 1) (T2s + 1) (T3s + 1) (T3s + 1) (1 + Pots) ’
С помощью передаточных функций (2.108), (2.109) и (2.106) получим
соответствующие логарифмические частотные характеристики (рис. 2.36
и рис. 2.37). Из рис. 2.37 видно, что система автоматического регулирования
устойчива в замкнутом состоянии и обладает запасами устойчивости по
фазе Ус = 43° и модулю Ям = оо дБ и —Ям = —12 дБ.
2.76. Исследовать устойчивость системы автоматического регулиро-
вания с помощью логарифмических частотных характеристик и определить
запасы устойчивости по фазе и модулю, если ее передаточная функция
w - K^+lMTV-bDe-15
w (T1S+l)(T4s+l)[Tes+l) ’
где К = 10; 7\ = 5 с; Т2 = 0,377 с; Т3 = 0,286 с; Т4 = 0,167 с; Т5 =
= 0,125 с.
Решение. Построим на рис. 2.38 логарифмические амплитудную (кри-
вая 1) и фазовую при т = 0,001 с (кривая 2) частотные характеристики.
С помощью этих кривых можно установить, что система является устойчи-
вой в замкнутом состоянии, а ее запасы устойчивости ус1 = 126° и Ям =
= оо дБ.
С увеличением времени «чистого» запаздывания до т = 0,209 с (кри-
вая 3) система становится неустойчивой. Дальнейшее увеличение т до 0,492 с
приводит систему к устойчивому состоянию (кривая 4) с запасами устойчи-
вости ус3 = 68° и Ям = 2,5 дБ. При достижении т значения 1,08 с система
вновь становится неустойчивой (кривая 5). Соответствующие всем этим слу-
Рис. 2.35. Структурные схемы систем автоматического регулирования с трансцендентными
звеньями
А
& Ю. И. Топвеев 225
Рис. 2.36. Логарифмические амплитудные и фазовые частотные характеристики
внутреннего контура системы
и arg [W (у'ш)] частотные характеристики системы
226
чаям амплитудно-фазовые частотные- характеристики построены на
рис. 2.38, б—д.
2.77. Проанализировать устойчивость системы автоматического регу-
лирования с звеном «чистого» запаздывания с помощью логарифмических
частотных характеристик и определить запасы устойчивости по фазе и мо-
дулю при различных т, если ее структурная схема изображена на рис. 2.35, б.
Указание. При построении частотных характеристик можно пользо-
ваться следующими параметрами системы: k1 — 20; /г2 = 5; /г3 = 0,1;
7\ = 0,5 с; Т2 == 0,2 с; = 100 с; |2 = 0,25.
2.78. Исследовать устойчивость системы автоматического регулирова-
ния с помощью логарифмических частотных характеристик при трех значе-
ниях т и определить запасы устойчивости по фазе и модулю, если ее переда-
точная функция
_______________________
W (s) = s ^is + 1) (^s 1) (T8s 1)
'*'tr2s4-l)(T8s4- 1)(T4s4-D
где Kb = 200 1/c; Ka = 10; 7\ = 0,1 c; T2 = 0,02 e; T. =» 0,005 с; T. =
= 0,4 c.
Указание, r = 0,01; 0,05; 0,1 e.
2.79. Определить запасы устойчивости системы автоматического ре-
гулирования с звеном «чистого» запаздывания с помощью логарифмических
частотных характеристик, если ее структурная схема изображена на
Указание. При построении частотных характеристик изменяют Та
и Т4, а остальные параметры имеют следующие значения: /гх = 20; /г2 = 1;
Рис. 2.38. Логарифмические амплитудные и фазовые частотные характеристики
систем регулирования {см. задачу 2.76}
8* 227
k3 == 3,75; k, = 0,5; 7\ = 0,5 c; T2 = 0,33 c; Ta = 7 c; 14 = 0,005 c;
T2p0 = 0,12 с; t3 = 0,01 c.
> 2.80. Определить запасы устойчивости по фазе и модулю'в четырех-
контурцой электрогидравлической следящей системе (задача 2.64), когда
гидравлический привод (на рис. 2.22, б он заключен в штриховой прямо-
угольник) имеет передаточную функцию вида
ь „-ts
rnl ; S(T^ + 25e7es+l) •
Указание. При построении частотных характеристик следует брать
т = 0,008 с, а остальные параметры берут из задачи 2.64.
2.81. Исследовать устрйчивость системы автоматического регулирова-
ния при различных /г2, Т2, Т3, kt, и Тъ с трансцендентными звеньями
с помощью логарифмических частотных характеристик, если ее структурная
схема изображена на рис. 2.35, г.
Указание. При построении частотных характеристик используют сле-
дующие параметры: = 20; k3 = 10 1/с; ks = 1; Т = 0,1 с; Т3 = 10 с;
= 0,01 с; т2 = 0,05 с.
2.82. Исследовать устойчивость системы автоматического регулирова-
ния в зависимости от параметров звена «чистого» запаздывания и определить
запасы ее устойчивости по фазе и модулю, если
__________К (T*8s 4-1)а (T4s-|-1)2е~Т8
( } (I\s + 1) (T2s + 1)» (TiS 4- 1)4 (Tes + l)a ’
где К = 1,78; 7\ = 66,7 с; T2 = 33,3 с; Т3 = 2 с; Т4 = 1 с; Т3 = 0,01 с;
Тв = 0,0033 с.
Значения постоянной времени «чистого» запаздывания выбирать таким
образом, чтобы в замкнутой системе обеспечивалось двукратное чередование
областей устойчивости и неустойчивости.
Указание. См. задачу 2.76.
2.8. ВЫДЕЛЕНИЕ ОБЛАСТЕЙ УСТОЙЧИВЫХ
И НЕУСТОЙЧИВЫХ состояний ПО ПАРАМЕТРАМ
С ПОМОЩЬЮ ЛОГАРИФМИЧЕСКИХ ЧАСТОТНЫХ
ХАРАКТЕРИСТИК
2.83. Исследовать устойчивость следящей системы по параметрам
и построить области устойчивых и неустойчивых состояний, если ее переда-
точная функция имеет вид
W (s) = s(T1S + l)(T2s+l) •
Решение. Для определения областей устойчивых и неустойчивых со-
стояний воспользуемся методом логарифмических частотных характеристик.
Примем Тг = 0,5 с; Т2 — 0,05 с и К = 1 1/с. На рис. 2.39, а построены
логарифмические амплитудная Нг (со) и фазовая 0 (со) частотные характе-
ристики. Система устойчива и ее запас устойчивости ус1 = 61°. Если коэф-
фициент К = 3,16 1/с [кривая Н2 (со)], то запас устойчивости системы по
фазе падает до ус2 = 27°. При К = 10 1/с [кривая Н3 (со) ] ус3 = 14°. Даль-
нейшее увеличение коэффициента усиления [кривые Я4 (со) и Н3 (со) ] при-
водят к неустойчивости системы, так как ус4 < 0 и ус5 < 0. Используя полу-
ченное семейство частотных характеристик (рис. 2.39, б), построим области
устойчивости и неустойчивости следящей системы в зависимости от пара-
метра К.
228
Рис. 2.39. Частотные характе-
ристики следящей системы при
Т 1=0,5 с и Т2= 0,05 с
Семейство логариф-
мических частотных ха-
рактеристик системы при
К = 10 1/с; Т2 = 0,05 с
и значениях 7\ = 1; 0,5;
0,25; 0,167; 0,1 и 0,05
построено на рис. 2.40, а.
По этим характеристикам
на рис. 2.40, б построены
области устойчивых и не-
устойчивых состояний си-
стемы регулирования.
Семейство логариф-
мических частотных ха-
рактеристик при /С =
= 3,16 1/с; Тх = 0,5 с и значениях Т\ = 0,33; 0,2; 0,143; 0,1 и 0,05 с по-
строено на рис. 2.41, а. При Т2 = 0,33 с система неустойчива и ус1 < 0;
при Тг = 0,2 с; ус2 = 15°; Т2 = 0,143; 0,1 и 0,05 с запасы устойчивости
соответственно возрастают, т. е. ус8 = 24°; = 29°; = 33,5°. По этим
данным на рис. 2.41, б построены области устойчивых и неустойчивых со-
стояний.
2.84. Определить области устойчивых и неустойчивых состояний для
системы автоматического регулирования (задача 2.42) по параметру К
с помощью логарифмических частотных характеристик.
Решение. По рис. 2.17, а находим, какие запасы устойчивости ус соот-
ветствуют коэффициентам усиления системы К. По этим данным на рис. 2.42
наносим границу устойчивости с выделением областей устойчивых и неустой-
чивых состояний.
2.85. Построить области устойчивых и неустойчивых состояний для
229
Рис. 2.42. Области устойчивых и неустойчивых состояний системы
автоматического регулирования по параметру К
2.86. Построить области устойчивых и неустойчивых состояний для
системы автоматической стабилизации летательного аппарата (задача 2.63)
по параметру ky для трех случаев с помощью логарифмических частотных
характеристик.
2.87. Построить области устойчивых и неустойчивых состояний для
следящей системы (задача 2.54) по параметру Т4 с помощью логарифмиче-
ских частотных характеристик.
2.88. Построить области устойчивых и неустойчивых состояний для
электронного регулятора напряжения по параметрам k2 и Т3 (задача 2.66)
с помощью логарифмических частотных । характеристик.
2.89. Построить области устойчивьГх и неустойчивых состояний для
регулятора оборотов гидротурбины (задача 2.68) по параметрам kb и Т4
с помощью логарифмических частотных характеристик.
Рис. 2.43. Области устой-
чивых и неустойчивых со-
стояний системы автома-
тического регулирования
по параметру т
230
2.90. Построить области устойчивых и неустойчивых состояний для
системы автоматического регулирования по времени «чистого» запаздыва-
ния, по данным задачр 2.76.
Решение. Пользуясь данными рис. 2.38, на рис. 2.43 построим границы
устойчивости системы по параметру <г.
2.91. Построить области устойчивых и неустойчивых состояний для
системы автоматического регулирования по времени «чистого» запаздывания,
используя передаточную функцию задачи 2.82.
2.9. ВЫДЕЛЕНИЕ ОБЛАСТЕЙ УСТОЙЧИВОСТИ
С ПОМОЩЬЮ D-РАЗБИЕНИЯ
Метод D-разбиения пространства по одному или двум параметрам позво-
ляет анализировать на плоскости устойчивость систем автоматического ре-
гулирования в зависимости от их изменения [1, 17]. При разбиении прост-
ранства по одному параметру характеристическое уравнение записывается
в виде
Q (X) wR (X) = 0,
откуда |
Приняв X = /о, найдем
(2.110)
(2.111)
(2.112)
Изменяя со от —-оо до оо, построим в плоскости w кривую, отображаю-
щую мнимую ось плоскости X на плоскость w.
Правило штриховки. При перемещении вдоль кривой D-разбиения от
точки со = —оо к точке со = оо ее следует всегда штриховать слева. В ре-
зультате этого можно получить области устойчивых и неустойчивых состоя-
ний системы автоматического регулирования. Например, установив, что
одна из областей имеет k корней в левой полуплоскости, можно найти их
число в других областях по переходам кривой D-разбиения.
Если происходит переход кривой с незаштрихованной стороны на
заштрихованную, то в этой области число корней в левой полуплоскости
увеличивается на единицу (k 4- 1). При переходе кривой с заштрихованной
стороны на незаштрихованную число корней уменьшается на единицу
(k - 1).
Таким образом устанавливается наличие корней в различных областях
полуплоскости. Затем, положив w = 0, найдем корни оставшегося уравне-
ния. Если их количество равно I и они имеют отрицательные вещественные
части, то k — I, а область устойчивости системы должна иметь порядок
I -j- i (где i — 1, 2, 3 ...), равный п (порядок исходного характеристического
уравнения).
При разбиении по двум параметрам уравнение (2.110) можно записать
в виде
piS (X) -}- vQ (X) 7? (X) = 0. (2.113)
При X = /ф уравнение (2.113) имеет вид
|xS (/©) 4- vQ (/©) 4- R (/©) = U (ф) 4- /V (®). (2.114)
231
Для того чтобы построить границы D-разбиения, необходимо определить
р и v для кажДого со, решая совместно два уравнения:
С/(со) = 0; 1
V (со) = 0. J
(2.115)
Если в каждом из этих уравнений выделить члены, содержащие ц и v,
то получим систему двух уравнений
U (со) = pSL(co) 4- yQi (со) 4- Rx (со) = 0; 1
V (co) = pS2 (co) 4- yQ2 (co) 4- R2 (co) = 0. J
Решив эту систему, найдем
и - Л’ — (со) — (W) Qi (со) 1 (СО) 1 . (9 117)
11 А «1 (со) Q1 (со) 1 ’ 11//
cS2 (to) Q2(co) 1
у =
S, (со) S2 (со) — Ri '<о) 1 — /?2 <®) 1
Si (со) (со) 1
S2 (со) <?2 (СО) 1
(2.118)
Правило штрихования. При перемещении вдоль кривой D-разбиения
от точки со = —оо к точке со = оо ее следует штриховать дважды слева,
если Л > 0, и дважды справа, если Л < 0. При переходе границы с двойной
штриховкой из заштрихованной зоны в незаштрихованную два корня ха-
рактеристического уравнения переходят из левой полуплоскости в правую,
и, наоборот, при переходе в заштрихованную область имеем переход двух
комплексно сопряженных корней в левую полуплоскость. Определив с по-
мощью любого способа в какой-то области число корней в левой полупло-
скости k = I, найдем область устойчивости, где I 4- i = п.
Если при некоторой частоте со = со0 уравнения (2.117) и (2.118) ста-
новятся линейно зависимыми и А = Aj = 0 или А = А2 = 0, то образуются
прямые линии. При перемещении по кривой D-разбиения их штрихуют
слева в тех точках, для которых А > 0, и справа — при А < 0. Если знак А
меняется в точке со == со0 (0 < со0 < оо), то через эту точку проходит «осо-
бая прямая», которую штрихуют двойной штриховкой (йри А > 0 слева и
при А < 0 справа). Если с ростом со в точке со = соо А = 0 знак не изменяется,
то проходящую через точку со = соо прямую не штрихуют.
2.92. Для системы автоматического регулирования с характеристи-
ческим уравнением
ТгТ2Т^ 4- (ЛЛ 4- Т2Т3 4- ЛТз) X2 4- (7'14- Т2 4- Т3) Z 4- К 4-1 = 0 (2.119)
построить кривую D-разбиения плоскости по параметру Т3, если К =
= 500 1/с; 7\ = 10 с; Г2 = 0,1 с.
Решение. Уравнение (2.119) приведем к виду
Т3 (Xs 4. 10, IX2 4- X) 4- (X2 4- 10, IX 4- 501) = 0. (2.120)
Подставляя в уравнение (2.120) X = /со, найдем
Т — 501 —“2+ Ю-1/® 5050 . . со4 —399,99со2 + 5О1 /9 ion
/со —/со3 —10,lw2 ~ 102,01ш2-Н1 —102)2 -г' 102,01со3 + со(1—w2)2’
Задаваясь различными значениями со, построим на рис. 2.44 кривую D-раз-
биения. Заштрихуем ее, пользуясь приведенными выше правилами. Тогда
вся комплексная полуплоскость разбивается на четыре области.
232
Рис. 2.44. Кривая D-разбиенця плоскости
по одному параметру
Положив Ts = 0, из оставшей-
ся части уравнения (2.120), найдем
. — 10,1 ± /10,12 —4-501
Ча--------------2 ’
т. е. корни и Х2 имеют отрица-
тельные вещественные части, и об-
ласть / имеет k = I = 2. Тогда в
соответствии с правилами перехода
получим в областях II и IV k 4- 1
корней, а в области III k— 1 корней.
Областями устойчивости рассматри-
ваемой системы являются II и IV,
так как в них имеем k 4- i = 2 4-
4-1=3 при третьем порядке ис-
ходного характеристического урав-
нения (2.119).
2.93. По характеристическому
уравнению замкнутой системы
(тд 4-1) (т|х2 4- 4-1)4- kxk2 = о
(2.122)
при Tg — 0,45 с, 7’3 = 5 си k2 =
=25 построить D-разбиение плоско-
сти по двум параметрам ц - Tj и
v = fex.
(2.122) и положив X. =
(2.123)
Решение. Подставляя эти значения в уравнение
= /(о, получим 1
—0,2р/(о8 — 5р(о2 4- р/ю — 0,2(о2 4- 50со 4- 1 4- 25v = 0.
Отделяя в уравнении (2.123) действительную часть от мнимой, найдем
— 5р.(о2 4- 25v 4- (1 — 0,2Ю2) = 0;
ухо (1 — 0,2(о2) 4- 5со = 0.
Отсюда
5
Д ~ 1— 0,2со2 ’
Д2 _ — 25(о2 4- (1 — 0,2и2)2
Д — 25(1—0,2<в2)
(2.124)
(2.125)
Задаваясь различными значениями (о, построим кривые 1 и 2 (рис. 2.45).
При о) = Ои (о = |/5 Л = 0, а при <в= ]/5 Дх =£ 0 и Д2=£ 0. Итак, при
перемещении от точки (о — 0 к точке (о = ]/ 5 имеем Л < 0. В этом случае
двойную штриховку наносим справа, а при (о >]/5 двойную штриховку
наносим слева (Д > 0).
Приравняв нулю свободный член и коэффициент при старшем члене
в характеристическом уравнении, получим уравнения двух прямых: для
(0 = 0 25v 4-1=0, а для (о = оа —0,2ц = 0 (т. е. р = 0). ।
На рис. 2.45 обе эти прямые выделены соответствующей штриховкой.
В этом случае мы получим пять областей I—V.
233
Рис. 2.4S. Кривая D-разбиения
плоскости по двум параметрам
ц и v
Положим р, — 0 и v = 0,2; тогда уравнение (2.123) примет вид
0,2Х2 + 51 + 6 = О,
где Хх = —1,3; Х2 = —23 — отрицательные корни.
Точки р = 0 и v = 0,2 лежат по прямой р — 0, соответствующей со —
— оо, т. е. I = 2. При переходе этой прямой в сторону штриховки число
корней с отрицательной действительной частью увеличивается на единицу.
Следовательно, в области / получим ft 1 = 2 4- 1 = 3, и при k = 3 эта
область является областью устойчивости. Пользуясь правилами перехода
кривых D-разбиения, на рис. 2.45 проставим соответствующие значения
(fe, k — 1, k — 2). Областью устойчивости является также и область IV.
2.94. По характеристическому уравнению (2.119) построить кривую
D-разбиения плоскости по параметру Т8, взяв при этом k = 50 1/с; Т —
= 1 с; Т2 = 0,1 с.
Указание. См. задачу 2.92. <
2.95. По характеристическому уравнению х
(X + 1) (0,01k2 + TJ&+ 1) + 40 = 0
построить кривую D-разбиения плоскости по параметру Т1.
2.96. По характеристическому уравнению задачи 2.23 [см. (2.54)]
построить кривую D-разбиения плоскости по параметру Т1г если Т2 = 0,05 с
и К = Ю 1/с.
2.97. По характеристическому уравнению
Т\Т^г + (7\ - 7\) X - 1 + К = 0
построить кривую D-разбиения плоскости по параметру 7\, если Т2 — 0,1 о
К = 10.
2.98. Пользуясь передаточной функцией разомкнутой системы автома-
тического регулирования
F(S)=
s(Txs4-l)» (T3s-f-l)2’
построить кривую D-разбиения плоскости по Т2, если К = 500 1/с; Тv =
= 2,8 с и Т3 = 0,01 с.
2.99. По характеристическому уравнению (2.119) построить кривую
D-разбиения плоскости по параметрам 7\ и К, если Тг = 1 с; Т3 = 10 с.
Указание. См. задачу 2.92.
234
2.100. Пользуясь передаточной функцией разомкнутой системы
fl77s) _______________________ К(Тг$+1)_________
W s(7\sH- l)(Tgs+ 1) (T<s + O’
построить кривую D-разбиения плоскости по параметрам 7\ и К, если Т2 =
— 0,4 с; Т3 = 0,01 с; Т\ — 0,005 с.
2.101. Пользуясь передаточной функцией разомкнутой системы
W <s}_________________________K(T2s+^
ss(T1s+l)(Tgs+l)(T<s+l) ’
построить кривую D-разбиения плоскости по параметрам Т2 и К, если Та =
= 1,2 с; Ts = 0,02 с; Г4 = 0,005 с.
2.102. Пользуясь передаточной функцией разомкнутой системы
__________
w w ~ s (T1S - 1)> (TgS + 1) (7> + 1) ’
построить кривую D-разбиения плоскости по параметрам 7\ и К, если Та =
= 1 с; Т8 = 0,04 с; Т4 = 0,01 с.
Г лава 3
Исследование качества
непрерывных линейных систем
автоматического регулирования
Для получения нормальных эксплуатационных характеристик систем
автоматического регулирования наряду с выполнением условий устойчиво-
сти требуется обеспечить определенные показатели качества процесса регу-
лирования. К основным показателям качества относятся: ошах — макси-
мум перерегулирования', tp — время протекания переходного процесса-, ш0 —
собственная частота колебаний', N — количество колебаний', d0 — логариф-
мический декремент затухания', хтах — максимальная скорость отработки
регулируемой величины.
По характеру протекания процессов регулирования их можно разде-
лить на апериодический, монотонный и колебательный.
3.1. ПОСТРОЕНИЕ ПЕРЕХОДНЫХ ПРОЦЕССОВ
ПО ЗАДАННЫМ ПЕРЕДАТОЧНЫМ ФУНКЦИЯМ
ЗАМКНУТЫХ СИСТЕМ АНАЛИТИЧЕСКИМИ СПОСОБАМИ
3.1. Пусть система автоматического регулирования (Описывается диф-
ференциальным уравнением вида
dnx . dn~lx , d.n~ 2х . . dx . ...
°о + а1 dtn_l + dtn-2 + • • • + ап-1 + dnX (t) =
= bi т~* + ' ' ' +Ьт-11и' -Ь
+ <<.-$• + + <31>
Примем следующие начальные условия. При t = 0 х (0) = х0; х (0) =
= Хр X (0) = х2; . . ., х*"-1’ (0) = Хп-р
Тогда уравнения (3.1) можно записать в виде
X(s)=^)+(s)+W- <3-2)
где
М (s) = b0 sm + 61sm-1 + b2sm~2 -|-J- bm_rs -I- bm;
(s) = aoxosn—1 -f* («ToXj 4* <2iX0) sn~2 4- ... 4- (aoxn_2 4* aixn-3 4- • • • 4-
+ «n-3^1 4- an-2xo) S 4- (Wm 4- aA-a 4--F an-2xi 4- an-iX0)',
(s) = dQsk 4- d^-14- d2sk~2 4-h d^s 4-
D (s) = OgSn 4- a^~l 4- a^1-2 4--1- a„_xs 4- an.
236
Если требуется исследовать влияние начальных условий на поведение
системы регулирования, то, положив f (f) — 0 и g (f) = 0, получим из урав-
нения (3.2) следующее выражение:
= <3-3>
При необходимости оценки влияния только управляющего воздействия
из выражения (3.2) получим
x(s)^-^G(s). (ЗЛ>
Если требуется исследовать влияние возмущающего воздействия, то
<3-5)
Определение переходного процесса х (f) с помощью выражений (3.3)—
(3.5) можно выполнить двумя или тремя способами: с помощью формул
Хевисайда (путем разложения на простые дроби), с помощью собственных
значений Х{ и собственных векторов матрицы. Представим, например, вы-
ражение (3.3) в виде
X (s)в 7--ГТ7---г/—?—я—п---------гт» (3-6)
(s — Xi) (s — Xj) . . . (s — ^n-i) (s — Xra)
где Xv X2, . . ., X,-, . . Xn_1( X„ — корни характеристического уравне-
ния замкнутой системы. Из выражения (3.6) можно получить оригинал функ-
ции в форме Хевисайда в зависимости от характера корней характеристи-
ческого уравнения.
I случай. Все корни X, — действительные; тогда
п
(ЗТ>
I
где ;
' ds J s=Kz
II с л у ч а й. Среди п корней есть s пар комплексно-сопряженных кор’
ней, остальные г корней действительные.
* (0 = 2 W77 eV + S cos <3-8)
где
Xf = а, ± /Р*; Л/ = P/J
(3.9)
Ш случай. В характеристическом уравнении р кратных корней; тогда
(3.10)
где р; — кратность l’-го корня.
237
В выражениях (3.4) и (3.5) функции G (s) и F is) необходимо представить
в виде дробно-рациональных функций вида тогда
У
Y"zc\ М (s) Us) (s) .п ...
X(S) = 4>(S)W = y^’ (3J1)
и снова можно пользоваться формулами (3.7), (3.8) (3.10).
Например, в полиноме Ь (s) имеется один нулевой корень, г — дей-
ствительных корней, s — пар комплексно-сопряженных и р — кратных
корней; тогда
х(0
= _|_ у -4Ж- ех'' 4- У 2AfiSti * х
Di (0) k(Di (Xi)
l — l (assl
xcos (p£f -I- <p£) 4-
(3.12)
где D (s) = sDj (s).
3.2. Найти зависимость для переходного процесса в системе автомати-
ческого регулирования, описываемой уравнением вида
(0,002s5 + 0,1224s4 4- 5,146s3 4- 41,32sa 4- 201s 4- 200) X (s) -
= 200 (s 4- 1) G (s), (3.13)
если управляющее воздействие g (f) — 1 (t).
Решение. Подставляя G (s) = в уравнение (3.13), получим
200 (s-b 1)
X ® s (0,002ss 4- 0,1224s4 -f- 5,146ss 4- 41,32s? 4- 201s 4- 200)'
(3-14)
Из полинома знаменателя выражения (3.14) определим корни
= 0; = —1,28; = —3,75 4- 4,88;; = —3,75—4,88/;
Х5 = —26,21 4- 37,13/; Хв = —26,21—37,13/.
При этом отметим, что кратных корней нет и формулу (3.12) можно
переписать в виде
* « - тШ + е>"' + j 24,е“-' cos (₽,< + Ф1). (3.15)
Для определения коэффициентов воспользуемся выражением
М„ (0) _________________200(^4-1) ‘_______________I . ,о 1
(0) О,О02Л?4-0,1224^4-5,146М4-41,32Л?4-2ои14-200|м=о’ ? '
м„ а,) ____________________200 4-1)___________________. /3 j 7)
(М 5.0,002Х*4-4-0,1224Х£ 4-3-5,146^4-2.41,32А,£ 4-201 ’ ’ ’
i = 2, 3, 4, 5 и 6.
Подставляя соответствующие значения в выражение (3.16) и
Ха, Х3, . . ., Хв в выражение (3.17), получим
Ю) . М„ (Х,4)
(0) D{ (Kj)
0,686 - 0,653;;
= 0,375; -^5- = —0,0023-0,016/;
U1 U1 \Л5/
- пн (М = — 0,686 4- 0,653/; = _ 0>0023 0,016/,
238
откуда по формулам (3.9) найдем
А! - 0,905; <Pi - 98° 11';
Лв = 0,0161; ф, = 146° 30'-.
Полученные значения подставим в формулу (3.15); тогда переходный
процесс может быть вычислен по следующей зависимости:
х (t) = 1 + 0,375е-’ •» 4- 1,8le”8-7» cos (4,88/ + 98° 11') +
+ 0,0322e~26’2V cos (37,13/ + 146°30').
3.3, Найти зависимость для вычисления переходного процесса в си-
стеме автоматической стабилизации самолета, описываемой уравнением
вида
(s6 + 16,4s8 4- 107,4s4 4- 364,2s8 4- 1146,5s2 4- 771,2s 4- 292,1) X (s) = 0
при следующих начальных условиях:
х (0) = 0; X (0) = 20°/с; х (0) = х (0) = x<TV> (0) = r(V) (0) = 0.
3.4. Определить зависимость для вычисления переходного процесса
в электрогидравлической следящей системе, используя выражение
„ . _ 0,0035s2 + o,37s + 10 . 1
Л ’ s4 4- 103? 4- 3G65sa 4- 149 250s 4- 1 000 000 s ’
> 3.5. Определить зависимости для вычислений переходных процессов
в системе автоматического регулирования, имеющей передаточную функцию
в разомкнутом состоянии i
._________180 000 (0,2s 4-1)__________________
и lS' “ s (7,2- 10~“sb 4- 0,0182s4 4- 3,85s3 -f- 308s2 4- 724s 4- 600)
при следующих видах управляющих воздействий:
1 р—2s 1 I р—s (,
a) Gi(s)==—; б) G2(s) = ——; в) G3(s) =—-—; г) G4(s)=J---------------—-.
о J ’ Э О
3.6. Определить зависимости для вычисления переходных процессов
в системе автоматического регулирования, имеющей передаточную функцию
в разомкнутом состоянии
гиг _я 500 (0,03s 4- 1)_____
W s (0,1s 4-1) (0,006s 4-1)
при управляющих воздействиях, показанных на рис. 3.1, а—г.
239
Рис. 3.2. Виды управляющих воздействий для задачи 3.7
3.7. Определить зависимости для вычисления переходных процессов
в системе автоматического регулирования, описываемой уравнением (3.13),
при следующих видах управляющих воздействий (рис. 3.2, а—г).
3.2. ПРИМЕНЕНИЕ АНАЛОГОВЫХ ВЫЧИСЛИТЕЛЬНЫХ
МАШИН ДЛЯ ОПРЕДЕЛЕНИЯ ПЕРЕХОДНЫХ ПРОЦЕССОВ
В СИСТЕМАХ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
В зависимости от способа описания отдельных элементов системы авто-
матического регулирования на АВМ можно моделировать их структурные
схемы или решать системы дифференциальных уравнений.
3.8. Составить схему моделирования системы, описываемой неоднород-
ным дифференциальным уравнением вида
d*x . (Рх . d2x . dx , . d2g , . dg , .
dt* 4" 03 dtP 4" dt2 "J" 01 ~dt I" 4“ |- bog,
I
где g (/) = 1 при t > 0; g (/) =* 0 при t < 0. j
Решение. Моделировать это уравнение на АВМ обычным методом по-
нижения порядка нецелесообразно, так как трудно сформировать произ-
водные от единичного воздействия g (t) в правой части. Поэтому составим
схему моделирования в общем виде, используя следующие два метода.
Первыйметод. Составление схемы моделирования с помощью вспо-
могательной переменной. Если исходное уравнение имеет постоянные коэф-
фициенты, то его можно представить в виде системы двух уравнений:
(Р4 + «зР? + «зР2 4- «1Р + «о) *1 = g (0;
(&2р2 4- Ьгр + &0) = х,
где zt — вспомогательная переменная.
Первое уравнение можно привести к системе уравнений 1-го порядка
р?! = г2;
pz2 = z3;
pz3 = z4;
pZi = g (i) — — a^3 — afa — a&x,
после чего второе уравнение запишем в виде
х ~ Ь%г3 -J- bjZ2 -j-
240
Схема моделирования имеет вид, показанный на рис. 3.3, а. Как видно
из схемы, применение данного преобразования освобождает от нахождения
производных от входного воздействия.
Второй метод. Составление схемы моделирования по методу пони-
жения порядка и эквивалентного преобразования. Сначала исходное уравне-
ние разрешают относительно старшей производной выходной величины х:
d*x d3x d2x dx . < a2g . , de . <
dt* ~ аз "dis a2 "3/2 ai -fa °oX 4* b2 -f- -f- bog.
Схема моделирования уравнения имеет вид, показанный на рис. 3.3, б.
Освободиться от дифференцирования входного воздействия можно,
применив эквивалентное преобразование, сущность которого заключается
в переносе дифференцирующего звена через один, два или большее число
интеграторов, в зависимости от вида правой части. При таком переносе
операция дифференцирования компенсируется интегрированием, однако
фактически осуществляется переход к новым промежуточным переменным,
начальные условия для которых нужно рассчитать на основании уравнений
эквивалентного преобразования.
После эквивалентного преобразования схема моделирования примет
вид, показанный на рис. 3.3, в.
Начальные условия в исходном уравнении равны нулю. В противном
же случае нужно с учетом появления новых промежуточных переменных гх
и га произвести пересчет начальных условий по координатам Хо3) и Xti2), т. е.
г10 = — bigoj
z2o = 42) — ^2g0*
Начальные условия по другим координатам не меняются.
3.9. Составить схему моделирования неоднородного уравнения
+ 1,03 • 102 + 3,065 -'103 + 1,4925.105 +
+ 1,08 • 108х = 0,35 • 10-2 4- 0,37 -J- -f- 9,5g,
и»
где g (0 = 1 при t > 0;
g (t) = 0 при t 0.
Решение. Схема моделирования такого уравнения в общем виде, в исполь-
зованием метода вспомогательной переменной, рассмотрена выше. В соответ-
ствии с этим исходное уравнение преобразуем к виду
P*i = га;
pza = zs>
pzs ® г4;
pz4 = g — 1,03 • 10аг4 — 3,065 • 10% — 1,4925 • 10% —
— 1,08-10%;
х = 9,5?! + 0,37га 4- 0,0035г8.
Для составления схемы моделирования нужно перейти к машинным
переменным
ut = т^; v = /пре; w = /ngg,
где mt, тх, mg — масштабные множители, которые выбирают по коэффи-
циентам исходного уравнения; пусть вначале масштаб времени mt = 1.
241
242
Рис. 3.3. Схемы моделирования системы автоматического регулирования, описываемой дифференциальным уравнением 4-го порядка
Коэффициенты решаемой системы уравнений запишем в виде матрицы
0 0 0 — ajnjnii b^njtr^ mjnii 0 0 tnjm^ 0 0 — a1tnjmi — a^njm3 bitnjms 0 0 Щз/Щ4 — Оз 0 0 0 0 mJ mg 0 •
Значения коэффициентов следующие: а0 = 1,08-10®; Ьо = 9,5; at = 1,4925-108; Ьг - 0,37; аа = 3,065-103; &а = 0,0035. а3 = 1,03-10^; Машинные переменные должны быть представлены в виде
иа = ffijZf, u4 ™ m4z4;
ма = m2z2; ux = mxx;
ua = m3z3; ug = mgg.
Выбор масштабов будем производить методом выравнивания коэффи-
циентов; тогда из условия равенства = ki3 получим mslmt — aamjm3,
откуда та1тх = 55. Из равенства ka3 = kia имеем mjm3 = 53, а из равен-
ства fela = fe41 получим m^/Па = 3,7.
Зададимся mv = 1; тогда та = 0,27; т8 = 0,5-10"а; mt = 10“*. При-
мем также тх — 1 и mg = 10-4.
С учетом масштабов матрица коэффициентов решаемых уравнении при-
мет вид
0 3,7 0 0 0
0 0 53 0 0
0 0 0 ‘ 55 0
- 108 — 56 -61 - 103 1
9,5 1,36 0,7 0 0
Уравнения в машинных переменных имеют вид
put = 3,7ыа;
риа = 53ws;
( . ри3 — 55м4;
ра4 « —108^! — 55м2 — 61 м3 — 103м4 -f- аг;
их — 9,5и1 4- l,36«a -f-0,7«g.
Как видно, диапазон изменения коэффициентов набора достаточно ве-
лик, а абсолютные значения коэффициентов затрудняют их непосредствен-
ную реализацию на АВМ. Поэтому целесообразно ввести масштаб времени
mt = 10. Изменение масштаба времени равнозначно делению всех коэффи-
циентов на величину /п<.
Окончательно уравнения, подлежащие реализации на вычислительной
машине, будут иметь вид
put = 0,37ма;
риа — 5,3мэ;
ри3 = 5,5м4;
ptii 5=5 — 10,8ai — 5,5оа ^—* 6,1 и3 10,3о4 4- 0,1о^;
их = 0,95о! 4- 0,136оа 4- 0,07и3.
243
Схема набора на АВМ приведена на рив. 3.3, г.
3.10. Составить схему моделирования для получения переходного
процесса в системе стабилизации, показанной на рис. 1.117.
Решение. Для составления схемы применим метод структурного моде-
лирования. Тогда все ее элементы можно представить в виде типовых звеньев
244
и их сочетаний. Применение такого метода целесообразно лишь при Модели-
ровании систем с постоянными параметрами и нулевыми начальными усло-
виями. Для данной схемы применим способ, при котором любое звено струк-
турной схемы системы представляется в виде комбинации простейших звеньев:
усилительного, интегрирующего и апериодического, причем последнее также
реализуется в виде интегратора, охваченного обратной связью.
Схема моделирования системы, показанной на рис. 1.117, приведена
на рис. 3.4. На схеме штриховыми линиями обведены участки, соответствую-
щие реализации каждого звена структурной схемы, и приведены выраже-
ния, позволяющие получать числовые значения коэффициентов звеньев
на АВМ.
Дадим описание процесса составления схемы моделирования. Элементы
структурной схемы представлены в виде блоков /—XI.
Блок I — усилитель-сумматор (на структурной схеме соответствует
(s) = ky, где ki = k2 = ka = ky).
Блок II — рулевой привод
(s) = .
r2pns2 + 2gpnrpns+i
Параметры этой передаточной функции связаны с параметрами схемы
моделирования соотношениями
. _ ^рп . с __2Ерп . ь ь _ * • ъ ___1
К1---’ *3 — ------> , К1 — * •
i рп 1 рп 1 рп
Блок III — часть объекта управления, описываемая колебательным
звеном
kt
^III (s) = T2S2 _|_ 2grs + ! >
ГДв '
I&1 “ j. 2 9 fe3 j1 > ^2^5 ~“ у 2 9 1 •
Блок IV — часть объекта, описываемая интегрирующим звеном
^v(s) =4-; 1.
Между блоками IV и V расположен сумматор, в котором складываются
сигналы от блоков IV, VII, VIII, IX. В соответствии со структурной схе-
мой k4 =г' ka == &3 === ^4 ==
Блок V — свободный Гироскоп, инерционность которого в данном слу-
чае не учитывается, т. е.
(s) == ^сг’ == ^сг*
Блок VI — корректирующее устройство
Для блока VI справедливы соотношения
“Й);Л8 = Т7; ^==kT4;
при k = 1
Ms = yr- (1 — 4) ’ = ^7’ = Л *
245
Блоки VII—IX пред-
ставляют собой часть объ-
екта, описываемую кон-
сервативными звеньями.*
Коэффициенты блоков,
реализующих эти звенья
на модели, выбирают из
соотношений
k —..-
ktk3 ’
J________k _ Г
<oa “ м* ’ s“
Блоки VII—IX пол-
ностью идентичны, поэтому
можно просто поставить
индексы, соответствующие
®1» ®2» ®3-
Блоки X и XI пред-
ставляют собой цепь об-
ратной связи по скорости.
Передаточная функ-
ция демпфирующего гиро-
скопа
&ДГ
ITX(S) = ----------------
представляет собой коле-
бательное звено, как и
блоки II и ПГ, поэтому
А . 7*2 ° Т
I 1 дг 1 дг
^2^5 ~ ’ ^4 “
1 ДГ
Блок XI — коррек-
тирующее звено с переда-
точной функцией
/с) — Z11+JL
Г2$+1-
По аналогии с бло-
ком VI соотношения будут
77O ~ т;);
1 7\
^2 === ~тг~ ’ ^3^4 == т *
<2 1 2
Блок XII предста-
вляет собой инвертирую-
щий элемент, введенный
в схему для реализации
отрицательной обратной
связи по управляемой ко-
ординате. В этом блоке
246
Лх =s 1. Таким образом, полученная схема моделирования полностью вос-
производит структурную схему системы стабилизации и позволяет полу-
чить и исследовать переходные процессы при любых значениях парамет-
ров передаточных функций и любых начальных условиях.
3.11. Составить схему моделирования системы самонаведения по ее
структурной схеме, приведенной на рис. 3.5, а, для получения переходного
процесса.
Решение. Структурная схема системы самонаведения состоит из соче-
таний типовых звеньев САР (81, которые можно моделировать по методике
задачи 3.4. Особенностью системы является наличие кинематического звена,
передаточная функция которого представляет собой неустойчивое апериоди-
ческое звено
Эта передаточная функция получена из линеаризованного кинемати-
ческого уравнения связи
De = V sin (0 —е)—Уц sin (0ц — 8Ц);1 _
£) = —Vcos(0 —е) +Уцсо5(0ц-ец),|
где D — дальность между ракетой и целью; V и 1/ц — скорости ракеты и
цели; 9 и 0ц — углы, определяющие положение векторов скорости ракеты и
цели; 8 и ец — угловые переменные ракеты и цели в принятой системе коор-
динат.
Выходом объекта управления считаем угол 0, а выходом кинематического
звена — угол 8. Последний определяет положение линии «ракета — цель».
Один из вариантов схемы моделирования системы самонаведения при-
веден на рис. 3.6. Схема составлена таким образом, что бортовой контур
управления ракетой, включая устройства самонаведения, моделируется
по передаточным функциям, входящим в структурную схему (см.
рис. 3.5, а). Кинематические связи набираются на модели непосредственно
по уравнениям.
Моделирование головки самонаведения осуществляется с помощью
четырех операционных блоков одного нелинейного блока (типа ограничения)
и одного блока постоянных коэффициентов. Динамика ракеты моделируется
на 14-и операционных усилителях и трех блоках постоянных коэффициентов.
Уравнения кинематики представляют собой нелинейные дифферен-
циальные уравнения, поэтому для их реализации на модели требуется восемь
блоков функциональных преобразований, два операционных блока и один
блок умножения. Включение блока умножения в обратную связь операцион-
ного усилителя позволяет реализовать операцию деления.
Для моделирования процессов самонаведения с флюктуациями отра-
женного сигнала от цели в схему моделирования включен генератор шумов,
с которого снимается случайная составляющая сигнала по угловой скорости
линии визирования.
Определение точности процессов самонаведения производится на осцил-
лографе, где записываются сигналы по угловой скорости линии визирова-
ния ё, дальности D и скорости сближения Ь. Взаимное положение ракеты и
цели в начале самонаведения задается параметрами D, 0, 8.
3.12. Составить схему моделирования нелинейной следящей системы,
структурная схема которой приведена на рис. 3.5, б, для получения пере-
ходных процессов. Принять, что значения коэффициентов усиления и по-
стоянных времени системы следующие:
ki = 2000; k'2 = 4; k'3 = 2,5; k'5 =• 10; = 0,01; T2 = 0,01 c;
Ta = 0,02 c; 7\ = 0,4 c; T5 = 0,12 c.
247
to
4^
Головка самонаведения
Динамика ракеть,
Рис. 3.6. Схема моделирования системы самонаведения
Решение. Так как зависимость kt обладает большим коэффициентом
усиления (наклон касательной) в начале координат (kt = 2000), то для вос-
произведения этой нелинейности методом линейной аппроксимаций целе-
сообразно изменить масштаб входного сигнала (и соответственно наклон
участков аппроксимации нелинейности), введя коэффициент усиления k0 =
= 100, который реализуется на двух первых операционных усилителях.
Вторая нелинейность (типа ограничения) моделируется по обычной схеме.
Остальные передаточные функции реализуются на модели методами, рас-
смотренными в предыдущих примерах.
Схема моделирования нелинейной следящей системы с учетом ее пара-
метров приведена на рис. 3.7. Коэффициенты усиления по входам операцион-
ных усилителей — ku) связаны с параметрами следящей системы (&
и Т) соотношениями:
kx = 10; ka = 10; *3 = ^=1;^ = -^-;
1 а
Ь______L- Ь — • Ь_______— • Ь ______Ь‘- ь________О.
к6 — j' > у » ““ ^10 — р
^11 --- у > &12 --- Ю» ^13 --- ^4» ^14^18 --- у- • ^15 ---- 1.
Операционный усилитель, на котором моделируется нелинейность
типа ограничения, должен иметь такие входные сопротивления /?вх, и /?вх„
чтобы выполнялись условия
Bq/ ВВХ] = /&• Во/ Вах, = kt.
Изменением соотношения Ro/BBK задается нужный наклон линейной
части характеристики с ограничением.
3.13. Составить схемы моделирования систем автоматического регули-
рования для получения переходных процессов, если их структурные схемы
имеют вид, изображенный на рис. 3.8, а—г.
3.14. Составить схему моделировайия четырехконтурной системы авто-
матического регулирования для получения переходных процессов, если ее
структурная схема имеет вид, изображенный на рис. 2.22, б.
Указание. Параметры системы взять из задачи 2.64.
3.15. Составить схему моделирования системы стабилизации самолета
для получения переходных процессов, если ее структурная схема имеет вид,
изображенный на рис. 2.32, б.
Указание. Параметры системы взять из задачи 2.63.
Рис. 3.7. Схема моделирования нелинейной следящей системы
249
a)
б)
в)
г)
Рис. 3.8. Структурные схемы линейных и нелинейных систем автоматического регулиро-
вания
3.3. МЕТОД КОРНЕВОГО ГОДОГРАФА
Метод корневого годографа представляет собой графоаналитический
способ расчета систем; он позволяет судить о свойствах замкнутой системы
по структуре и свойствам разомкнутой системы регулирования. Результа-
том графоаналитических расчетов по данному методу является картина
расположения полюсов и нулей замкнутой системы.
3.16. Найти расположение полюсов замкнутой системы (корневой
годограф системы) в зависимости от коэффициента усиления, если переда-
точная функция разомкнутой системы имеет вид
(s)«== К S(S_|_i)(s + 2)’ (3.19)
Решение. Для того чтобы упростить и систематизировать процедуру
графоаналитического расчета и построения корневого годографа, приведем
восемь основных правил, сформулированных в общем виде 1, для построения
1 См. Траксел Дж. Синтез систем автоматического регулирования. Пер. с англ., М.,
Машгиз, 1969. 614 с.
250
картины расположения полюсов замкнутой системы по передаточной функ-
ции (3.19).
Правило Г. Корневой годограф — геометрическое место точек, для ко-
торых выполняется условие
l. + KU7(S)=l +К ^ = 0,
(3.20)
т. е.
IМ (s) I 1 .
|ЛЦз) | К ’
аГ^=18°°-
(3.21)
Правило 2. Корневой годограф — совокупность непрерывных кривых
ветвей с параметром К, начинающихся в полюсах разомкнутой системы и
заканчивающихся при /С —> оо, в нулях разомкнутой системы или в беско-
нечности.
Поскольку комплексные полюсы всегда являются сопряженными, кор-
невые годографы будем строить только во втором квадранте Пл. s, не изобра-
жая ветвей годографа, симметричных относительно отрицательной части
действительной оси.
В рассматриваемом случае годограф начинается в точках 0, —1, —2,
имеет три ветви, заканчивающиеся в бесконечности.
Правило 3. Асимптоты годографа К —► оо расположены под углами
180° 360°
п — т ' п ' (3.22)
где п — число полюсов; пг — число нулей передаточной функции разомкну-
той системы. %
Все асимптоты пересекаются в точке действительной оси с координатой
п , т
S pi 2
s = 2=1— £=1..., (3,23)
где Pt — полюсы; z, — нули передаточной функции разомкнутой системы.
В рассматриваемом случае передаточной функции (3.19) п = 3; т = 0;
рх = 0; р2 = — 1; р3 = —2; нули отсутствуют. Поэтому асимптоты
расположены под углами 60, 180, 300° и пересекаются с действительной осью
в точке s0 = —g— = —1. После этого можно построить приближенно набро-
сок корневого годографа.
Для этого на рис. 3.9, а отметим полюсы передаточной функции (3.19)
и отметим асимптоты, выходящие из точки (—1, 0).
Правило 4. Годографы на действительной оси. Эти участки годографа
определяются только действительными нулями и полюсами, поскольку для
любой точки вещественной оси вклад комплексно-сопряженных полюсов
равен нулю, в то время как угол, обусловленный полюсом или нулем справа
от нее, равен 180°, а угол, обусловленный полюсом или нулем слева от нее,
равен 0°. Это означает, что участки годографа на действительной оси чере-
дуются.
В рассматриваемом случае годографу принадлежат интервалы ,
[—оо, —2) и [—1, 0], отмеченные на рис. 3.9, а штриховкой*
Правило 5. Точки отхода годографа от действительной оси можно опре-
делить следующим образом. Допустим, что эта точка имеет координату
(а, 0), и пусть точка s' есть некоторая точка с координатами (а, е), принадде-
251
Рис. 8.9. Корневые годографы
жащая корневому годографу и близкая к действительной оси (е —♦ 0). Тогда
сумма углов, обусловленных векторами, проведенными из полюсов в s',
должна удовлетворять условию
откуда
а2_2а + -|- = 0, (3.25)
и
04 — 0,422; а2 = 1,58.
Второе значение корня не принадлежит участку корневого годографа
на действительной оси, поэтому требуемое значение а = 0,422.
Правило 6. Пересечение годографа с мнимой осью. Характеристическое
уравнение замкнутой системы для передаточной функции (3.19) имеет вид
s3 + 3S2 4- 2s + 2/С == 0. ' (3.26)
Для чисто мнимых корней $, легко выписать систему совместных урав-
нений
s2 4- 2 |S=/<B = — со2 -j- 2 = 0;
3s2 4- 2К |S=/<B= - Зю2 4- 2/С = 0.
Решая эту систему, найдем со == j/2; К = 3.
Правило 7. Углы выхода годографа из комплексных полюсов и подхода
к комплексным нулям. Эти углы подсчитывают непосредственно по уравне-
нию (3.21) для точки, близкой к рассматриваемому нулю и полюсу. В данном
случае такие нули и полюсы отсутствуют.
Приведенные выше правила позволяют построить качественную картину
расположения нулей и полюсов и по существу решить те же задачи, которые
характерны для применения частотных методов. Для рассматриваемого при-
мера корневой годограф показан на рис. 3.9, б. Такое построение оказы-
вается достаточным для оценки качества системы и выбора структуры кор-
рекции.
Правило 8. Параметризация годографа. Годограф считают построенным
полностью, если на нем отмечены значения параметра, по которому он
строился. В общем случае для этого необходимо решить характеристиче-
252
ское уравнение системы на ЦВМ. В рассматриваемом случае данную задачу
можно решить без использования вычислительной машины. Действительно
сумма корней характеристического уравнения (3.26) постоянна и равна —3.
Отсюда следуют два положения:
а) поскольку один из полюсов замкнутой системы монотонно стремится
к —оо, то действительные части комплексно-сопряженных полюсов моно-
тонно возрастают;
б) если известно расположение комплексных полюсов, то достаточно
просто определить соответствующее значение оставшегося действительного
полюса.
Например, при отходе годографа от действительной оси, когда а —
= 0,422 [см. формулу (3.25)] соответствующий действительный полюс
удовлетворяет условию х — 0,844 = —3 и равен ра = —2,156. При пере-
сечении с мнимой осью Рз (К = 3) — —3. Если задавать значения действи-
тельного полюса замкнутой системы р3, то легко вычислить требуемое зна-
чение параметра К и соответствующую пару комплексно-сопряженных по-
люсов. Например, пусть р3 = —4; тогда исключая из характеристического
уравнения этот корень, получим
s3 + 3s2 + 2s + 2K|-^±A^
sб) * 8 4s2_
— s2 + 2s
— s2 — 4s
6s + 2K
6s 4-24
2K - 24
Поскольку остаток должен быть равен нулю, то /С = 12, а решение урав-
нения s2 — s 4- 6 = 0 определяет полюс 0,5 =t 2,5/. Таким образом можно
построить весь годограф, показанный на рис. 3.9, в.
3.17. Оценить показатели качеству по ^одографу замкнутой системы,
рассчитанной в предыдущей задаче. ।
Решение. Из рис. 3.9, в нетрудно увидеть, что при К > 0,4 замкнутая
система имеет пару преобладающих комплексно-сопряженных полюсов,
которые в основном и определяют качество процессов в системе. Такое рас-
положение полюсов и влияние дополнительных полюсов и нулей подробно
исследованы в работе [40].
Приведем лишь основные соотношения для оценки качества в системе
с преобладающими полюсами:
а) время наступления' первого максимума
tm = ш [л + Д arg (P1 ~ Pi) ~ arg ~ ZP ] > (3.27а)
где pi — полюсы; p1=Oi4-/co; г( — нули замкнутой системыФ(з)= . , 1/,
1 -р IP (SJ
для колебательного звена имеет место точное условие
(3.276)
б) максимальное перерегулирование определяется соотношением
_ _ I Pi I Т, I Pl г/ I at.
iPx-Pd Д |г/| (3.28а)
253
для пары комплексно-сопряженных полюсов
-я /- -хЬ
== е = е
(3.286)
в) время регулирования
IPzI £ iPi—г/1
l₽i- Р'1 12/1
3 + 1п П
(=3
(3.29а)
Рис. 3.10. Расположение полюсов Рис. 3.11. Переходный процесс
на плоскости комплексного пере- в системе регулирования
менного
Для рассматриваемого примера выберем значение коэффициента пере-
дачи разомкнутой системы /С = 0,45, при этом полюсы замкнутой системы
pi — —0,35 + /0,53; р2 = —0,35 — /0,53; р3 = —2,3.
Графически расположение полюсов показано на рис. 3.10. По форму-
лам (3.27)—(3.29) вычислим показатели качества процесса регулиро-
вания:
время наступления 1-го максимума
3,14 + 0,27 6
1т 0,53 ==u>zc> ।
максимальное перерегулирование
*пих = ^е-°-з-б.2 = 1,1.0,156= 0,17 = 17%;
время регулирования
i 3 +In 1,1 3t3 ,.
Р 0,3 0,3
По найденным показателям достаточно просто построить приближенную
характеристику переходного процесса, как это показано на рис. 3.11.
3.18. Построить корневой годограф при замыкании передаточной функ-
ции
W Is) = К 50 <s + 2)
' ' Л (s+ 10)(s2 + 2s + Ю)
жесткой обратной связью.
3.19. Определить в условиях предыдущей задачи максимально дости-
жимое значение коэффициента затухания пары преобладающих полюсов.
Оценить при gmjT показатели качества замкнутой системы. Построить при-
ближенную картину переходного процесса.
254
3.20. Используя метод корневого годографа, определить структуру
параллельной коррекции, которая обеспечивает коэффициент демпфиро-
вания § = 0,7, для замкнутой системы, если задана передаточная функция
разомкнутой системы -
Ц7 (S) = к_______121S..±J2____
w ' (s2 + s + 4)(s+ 10)
3.21. Построить корневой годограф, если заданы следующие передаточ-
ные функции разомкнутой системы:
a) W(s) = К S2(s+ i)(s+ Ц) ’
7
Q
3.22. Построить корневой годограф замкнутой системы при изменении
передаточного коэффициента К, если задана передаточная функция разомк-
нутой системы
W Is) = Л' —
W Л s (S* + 9) 4 •
3.23. Построить корневые годографы как
функцию коэффициента усиления для следую-
щих передаточных функций:
a) W (s) = — К (s2_ (S2+ и •
Рис. 3.12. Структурная
схема объекта регулиро-
вания
в) W (s) = 4К
' ' ’ ' <г* I ci _L ЛА
Проанализировать устойчивость замкнутых систем.
Построить частотные характеристики и сопоставить результаты анализа,
полученные двумя методами.
3.24. Найти передаточную функцию (s) и построить корневой го-
дограф в функции koa для системы, приведенной на рис. 3.12.
3.25. Оценить влияний дополнительных нулей и полюсов в передаточ-
ной функции разомкнутой системы на показатели качества замкнутой си-
стемы, если
(s + {У
2а*
s (s-f-1) (s-f-2) (sа) 2 р ’
где —а < —2; —2 < —р < —1.
3.4. ИНТЕГРАЛЬНЫЕ ОЦЕНКИ КАЧЕСТВА
Интегральные оценки характеризуют качество протекания переходных
процессов. Наибольшее применение получили две интегральные оценки
[20, 361:
Jo = J [х (0 — x(oo)f di (3.30)
’ 255
A = J {[x (0 - X (oo)Ja 4- T^)2]di. (3.31)
Первая интегральная оценка служит мерой быстродействия процессов
регулирования. Если выходной сигнал записывается в виде
aos”+ aisrt—1 + • • •+‘»n_is + an •*
(3.32)
то первая интегральная оценка будет
А = 2а2 д (Вот + Вт~1 &т-1 + • • • + В* Дй 4" • • • + ^0 ^0 ~ 2Ьт6т_1 Д),
где
(3.33)
an — On-2 an_4 * ^n-e ... 0
0 — an-s fln-5 ... о
д = 0 0 — an 0 1 & & ? V w KO ^П-4 ^a-8 ... 0 ... 0 (3.34)
• . • • •
0 0 • • ...
Вт — Ь^п', Вт—1 — Ь^п—I ~ 2Й/иЬ/и—2»
(3.35)
Bk = bk — 2bk—ibk+i 4- ... -)- 2(— 1)*ЬтЬ2/г;
Bo = 68;
(k — 0, 1, 2, . . ., m) — определитель, получающийся в результате
замены (т 4- 1 — /г)-го столбца столбцом вида (a^aifi ... 0).
Если Ьт — 0, то выражение (3.32) примет вид
В этом случае первая интегральная оценка будет иметь вид
А = 9 2 Л (&т 4~ • • • 4" Bft Aft 4" • • • 4“ ®1 Д1). (3.37)
zan д
Вторая интегральная оценка позволяет найти наилучшее приближение
исследуемого процесса к экспоненте с постоянной времени Т. При к (оо) =
== 0 из формулы (3.31) получим
« 00
А = J [^(0 4-Т2(^)2]л= J [х(04- T^dx + ТхЦО), (3.38)
о о
откуда следует, что min J± будет при
. -2.
х (0 4- Т = 0 или х (t) = хое т.
3.26. Определить значения постоянной времени Т\ и коэффициента
усиления К для системы автоматического регулирования, имеющей разомк-
нутую передаточную функцию
(s) “ s(T1S4-1)(7'2s + 1)
356
при отработке единичного ступенчатого воздействия g (t) = 1 [f|, соответ*
ствующие минимуму первой интегральной оценки при Т2 = 0,04 с.
При определении Дор1 следует брать 7\ = 0,2 с и при нахождении
Тюр, Д = 26 с"1.
Решение. Найдем передаточную функцию замкнутой системы
Ф <s) “ + + s* + s + K ’
откуда
Х s2-f-s4-K ] Т*
Первую интегральную оценку качества найдем по формуле (3.33)
в виде
~ 2д2д » где Gg = Д; а2 = 1; в Т2 4- Т2; о0»7'17’8; д0 =» Д;
Д “(Л + Л)
о
о
0
ЛТ,
+ Л
^(Л + Та-КЛТ2);
1
-к
-(Т. + Т^
1
-К :
о
-ЛТ2
Л+Л
Во=“&о = Д2.
Подставляя полученные значения в формулу для интегральной оценки,
найдем
J = ** 1^1 + + к (Tt + Га)2] _ J_ . 1 (Л+Тг)2 и опч
•'о л-Т__кт-тл 2К' 2 Тг + Т2 — КТЛТ2 ’
Ао =
Л 4- т2 - К1\т2 + к (Л 4-
Д =
1
Д
о
Для получения минимального значения интегральной оценки по Tt
и Д' воспользуемся следующими зависимостями:
dJ, _ 1_______, KTl + KTj^-T.-T, _ n.
dT, “ 7\4-Ta —KTiTa ’ 1 2 (7\ + 7^ - KT^a)2 ’
dJa _ 1 Г 1 ,
dK “ 2 [ № "’
TiT2(Tt + T^
(Ti + Tt-KT^^
Из последних двух выражений получим «
f _ ZiXLi/EZjI • к =а ____Z1±Z«____________
1 KT2-l ’ Г1Та + /т7'2(Л + 7’а)’
После подстановки параметров Т2 = 0,04 с и К = 26 1/с найдем
т « Q.04 + 0.0016K _ п 9
Jlopl 0.04Л—1 — и-^с-
При Т2 = 0,04 с и Тг == 0,2 с
KoPt =---------+ ---------— 26 1/с.
0,047\ + 0,2 (Л + 0,04)
3.27. Построить зависимости минимального значения J0 от параметров Д
и Тх для системы автоматического регулирования, имеющей передаточную
функцию в разомкнутом состоянии
«7 fs) =» X^is+D
w w s (T2s« + 2JTjS +1) (Tss +1) •
9 Ю. И. Toc«M>
257
когда на ее вход действует сигнал g (t) — 1 UI и система имеет следующие
параметры: Т2 — 0,1 с; £ = 0,75; Т9 = 0,1 с.
Решение. Определим через передаточную функцию замкнутой системы
значение выходного сигнала
X (<л________________К V______________________L (3 40)
W “ S (T*S* + 2$T2s + 1) (T3s + 1) 4- К. (Txs + 1) S ’ (,3 )
или
x /с) ________________________КТ^ + К________________________J_
W TST3s4 + (7’? + 25Ti(Ts)s3 + 1n4-267'jis» + (l+/(7’1)s + X s’
По формуле (3.33) найдем
;о = 4д & + В°Д° “ 2blb° Д>> <3-4
где
К - (П + 2^) т1т3 0
А 0 1 + КЛ — (Т1 + 2^Т2Тз) 0
0 -к Т3 + ПТ2 - т1т3
0 0 -(1 + КЛ) Т2 4- 2^Т2Т8
= к 10-® (5,25 - 0.625Х 4- 4,25X7; - К?Т1);
к КЛ + 1 т2т3 0
Ао — 0 0 к 0 -(Tl + 21T2T3) Т3^2^Т2 0 -TlTz = 10“8№(7,25 4- Х7\);
0 0 —ii+m Tl-\-2lT2T3 I
КТ14-1 -(Тз + 2£Т2) т22т3 0
Л к 1+ХЛ -(71+2£Т2Тз) 0
— 0 -X Тз4-2£Т2 — т1т3
0 0 -(l+KTi)
= 10“3(5,25 +9.5КЛ + 3,25К2Т? - К3Т? + 0,6875Х-0,875Х2Т1 - 0.025Х2);
Во = К2т1; Bi = X2; Ь0 = КЛ; bi = K.
Примем J0 = 0,18; 0,15; 0,5. Тогда получим (рис. 3.13) линии равных
значений функционала J0(K, Т), по которым находим его минимальное
значение, соответствующее оптимальным значениям параметров К и Tv
Из рис. 3.13 следует, что KOpt = 5,29 с-1 и T’jopt = 0,35 с. Подставляя по-
лученные значения в формулу (3.41), найдем jOmln = 0,148. Полученные
оптимальные значения параметров /С и 7\ подставим в выражение (3.40),
с помощью которого определим вещественную частотную характеристику
замкнутой системы Р (со) и соответствующий переходный процесс1 х (t)
(рис. 3.14), откуда видно, что максимум перерегулирования близок
к нулю, a tp =0,55 с.
1 Подробнее см. в п. 6 настоящей главы.
258
3\28. Определить коэффициент затухания колебательного звена при
7\ = 1 с, если передаточная функция замкнутой системы
ф = П5» + 2^тг$+ 1 '
Сигнал ошибки имеет следующий вид:
£ (s) = [ i __j - = _2h_!i__. (3.42)
Решение. Воспользуемся формулой (3.31) и, применив ее к выраже-
нию (3.42), найдем
(3-43)
Рис. 3.13. Зависимость интегральной квад-
ратичной оценки Jo от К и Т\ системы авто-
матического регулирования
Рис. 3.14. Кривая переходного процесса
системы автоматического регулирования
Для нахождения оптимального минимизируем выражение (3.43), т. е.
откуда
Ei = 0,707.
3.29. По передаточной функции разомкнутой системы
*<•)—Hr&iT
при Тг — 0,2 с определить оптимальное значение /Copt, соответствующее
минимуму интегральной оценки Jit если на вход замкнутой системы подано
единичное ступенчатое воздействие.
Решение. Найдем передаточную функцию замкнутой системы
Ф"* 7\s»4-s4-K ’
откуда
X(s)a ~a’
259
9»
Рис. 3.15. График оптимального
значения коэффициента усиле-
ния системы автоматического
регулирования
Используя формул у (3.38), найдем
, ЯЛ 4-1 КТ*
"Г 2 *
Для определения оптимального значения К
возьмем соотношение
ЁН1 = 0;
ЭК ’
тогда
:--J— + Г = 0,
Kopt
откуда
На рис. 3.15 построена зависимость
Kopt = / (Т).
3.30. Определить значение постоянной времени Т4 для системы авто-
матического регулирования, имеющей разомкнутую передаточную функцию
zs) _______________________
W S(71s» + 26Tas+l)(T,s+l) ’
при действии единичного ступенчатого воздействия
Я(0=1И,
соответствующее минимуму первой интегральной оценки при следующих
параметрах: Т2 = 0,1 с; Та = 0,1 с; £ = 0,75; К — 5,29 1/с.
3.31. Определить оптимальные значения Кор1 и 7\opt по минимуму
первой квадратичной интегральной оценки при действии единичного сту-
пенчатого воздействия g (/) = 1 [Л для системы автоматического регули-
рования, имеющей передаточную функцию разомкнутой системы
№(s) =--------K(Tis+ О2_________
W s2 (7as + 1) (Tas + 1) (7\s 4- 1) ’
если параметры системы имеют следующие значения:
а) Л =1,1 с; Т2 = 3,33 с; Т3 = 0,04 с; Т4 = 0,01 с;
б) К =10 1/с; Т2 = 3,33 с; 7*3 = 0,04 с; Т4 = 0,01 с.
3.32. Определить оптимальные значения Kopt, T’lopt, ^opt по мини-
муму первой квадратичной интегральной оценки при отработке единичного
ступенчатого воздействия g (/) = 1 1/1 для системы автоматического регу-
лирования, имеющей передаточную функцию вида
W /с) _ ______к (y2s+ О2________
w w s (T1S + l)2 (T3s 4-1) (T4s 4-1) ’
если параметры системы имеют следующие значения:
а) 7\ =. 2,88 с; Т2 == 0,2 с; Та =. 0,025 с; Т4 = 0,01 с;
б) К = 4000 1/с; Тг == 0,2 с; Та =. 0,025 с; Т4 = 0,01 с;
в) Х = 0,4 1/с; 7'1 = 2,88 с; Т3 = 0,025 с; Т4«0,01 е.
260
3.33. Построить зависимости значения Jo от параметров К и 7\ для
системы автоматического регулирования, имеющей передаточную функцию
разомкнутой системы
TT(s) =
/С (Tas-P 1) (Tgs4- 1)
s» (Fss-fr-1) (T4sH- 1) ’
при поступлении на ее вход единичного ступенчатого воздействия g (t) —
= 1 IЛ и наличии следующих параметров: Т3 = 0,5 с; = 0,1 с; Т2 =
= 12,5 с. Определить оптимальные значения параметров KOpt и Tiopt»
соответствующие минимуму J 0.
3.34. Построить зависимость значения Jo от параметров К и Тг для
системы автоматического регулирования с передаточной функцией в ра-
зомкнутом состоянии
K(7\s+1)
3471^4-2^+1)
при поступлении на ее вход единичного ступенчатого воздействия
g (i) = 1 ul и наличии следующих параметров: Т2 = 0,2 с и £ = 0,8.
Определить оптимальные значения параметров Kopt и Tiopt, соответствую-
щие минимуму J 0, и построить переходный процесс х (t).
3.35. Для системы автоматического регулирования, имеющей переда-
точную функцию в разомкнутом состоянии
w ™ ~~ s2 (Tfs2 + 2g2T2s + 1) (T3s + 1) ’
при g (t) — 1 IM и T2 = 1,2 c, Ts = 0,65 c, £a = 0,8, £2 = 0,5 построить
от К и Tt. Определить оптимальные значения параметров
зависимость Jo
Kopt и Tiopt и найти для них основные показатели качества.
3.36. Для системы автоматического регулирования с
W (s)__________
s(TH + 2^T2s+1)(T3s+1)
и g (t) — 1 [fl найти оптимальные параметры K0Pt и £гоР! из условия ми-
нимума Jo, если Та = 1,8 с; Т2 = 0,5 с; Т8 = 0,2 с, и построить соответству-
ющие переходные процессы.
Указание. Для определения оптимальных Kopt и £ppt следует построить
линии равных значений Jo от К и £ и найти JOmSa.
3.37. Для системы автоматического регулирования, имеющей
W) =
K(7’is+1)
s (T2s2 + 2^Г2з+ 1)
если g (t) — 1 Ши 7\ = 0,02 c, T2 = 0,5 с, найти оптимальные значения
Kopt и £2opt из условия JOml .
Указание. См. задачу 3.26.
3.38 По передаточной функции разомкнутой системы
4* ^as
s(T1S4-l)
при действии на вход импульсной функции g (f) = 6 (f) найти оптимальное
значение К2, соответствующее минимуму первой интегральной оценки, если
7\ - 0,1 е; Яа = 20 1/с.
261
3.39. Выбрать параметры £iopt и fe20₽t по первой интегральной оценке
для системы автоматического регулирования, имеющей замкнутую переда-
точную функцию вида
Ф (я) и 4~ 4* ^is ~Ь ьо____
' ' ess& -f- a4s* -f fl3s® 4- ajs’ 4- ai3 4- flo ’
где
Oq=* — 6,4/га; ax = 4 4- 134,6^ -f-
a3 = 90,8 + 4,9^ 4- 0,7£a; a8 = 30 4- 4,8^;
at — 3,5; a6 =1; b0 = 0; =» 134,6&x;
Ья = 4,9fef, b3 = 4,8^ при g(0 =» 1 [0
для Jo = 0,048; 0,098; 0,208 и 0,718.
Указание. См. задачу 3.27.
3.40. Определить коэффициент затухания Jjopt в системе автоматиче-
ского регулирования с передаточной функцией в замкнутом состоянии
Ф(5)~
2^ 4-1
гр+ВД* 4-1
из условия наилучшего приближения переходной функции к экспоненте
с постоянной времени Т = 1 с.
Указание. Принять 1\ — 1 с. Используя выражение J03 — J (0 —
— х (0]? dt, найти gopt-
3.41. Определить оптимальные значения параметра kt в системе авто-
матического регулирования с передаточной функцией в замкнутом состоянии
ф /с) » ---------------------------*!.+ &
w (Tls4-i)(ras4-i)
из условия наилучшего приближения переходной функции к экспоненте
с постоянной времени Т — 0,65 с, если Тг = 1 с; Т2 =* 0,312 в; — 1 1/с.
3.42. Для передаточной функции разомкнутой системы автоматического
регулирования
W(S) __________K(TiS-H)________
w ™ s (7>> 4- 2^ 4-1) (7> 4-1)
определить оптимальные значения параметров К и Тх, обеспечивающие наи-
лучшее приближение переходной функции к экспоненте с постоянной вре-
мени Т = 0,26 с, если ее параметры Та — 0,1 с; Т3 = 0,1 с; |а = 0,75.
3.5. ПРИБЛИЖЕННЫЕ МЕТОДЫ АНАЛИЗА КАЧЕСТВА
СИСТЕМ РЕГУЛИРОВАНИЯ ПО СВОЙСТВАМ
ВЕЩЕСТВЕННЫХ ЧАСТОТНЫХ ХАРАКТЕРИСТИК
Переходный процесс х (0 в системах автоматического регулирования
определяют с помощью ряда свойств вещественной частотной характерис-
тики замкнутой системы Р (со):
х(0-(3.44)
о
1-е свойство. Установившееся значение переходного процесса
определяют из соотношения х (оо) = Р (0).
262
2-е в в о й в т в о. Начальное значение переходного процесса опреде-
ляют из соотношения х (0) = Р (оо).
3-е свойство. Максимум перерегулирования при невозрастающей
частотной характеристике определяют по формуле
100% 18%. ' (3.45)
4-е свойетво. Максимум перерегулирования определяют по наи-
большему значению (со) и вычисляют с помощью формулы
Р (<й' 100 % ’ (3.46)
Время протекания переходного процесса оценивают по соотношению
(3.47)
5-е свойство. Монотонность переходного процесса определяют с по-
мощью:
необходимых у вдовий
а)
б)
в)
Р (0) > | Р (а>) |;
®оР (0) > 2 j IР (со) I dco;
G(co)>|P(co)|.
(3.48)
где G (со) ==« Р (0) cos-- определяют по кривым приложения XI. 1;
14- —
1 L J
достаточных у в л о в и й
(3.49)
11 • J
где Si (co0ii) = j —- dco — интегральный синус,
о
6-е ввойвтво. Время протекания переходного процесса ip и
для невозрастающих выпуклых вещественных частотных характеристик
Р (со) > 0 и 0 определяют по графику (приложение XI.2, а, б) в за-.
Шл
висимости ОТ X = —— .
<°о
7-е в в о й с т в о. Время протекания переходного процесса для невоз-
растающих вогнутых вещественных частотных характеристик определяют
по формуле
. (3-50)
8-е с в о й с т в о. Показатели качества от»у и tp определяют по веще-
ственным частотным характеристикам, имеющим максимум Ршах, по номо-
граммам В. В. Солодовникова (приложение XI.3, а, б и в) с помощью пара-
метров
х =
ш»
хв--31
с <°о
. «о
263
Рис. 3.16. Вещественные частотные характеристики замкнутых систем автоматического
регулирования для задач 3.43—3.46
9-е с в о й с т в о. Оценка ошибки в определении переходного процесса
при исключении части вещественной частотной характеристики произво-
дится по формулам:
в области высоких частот
(1-Ь*) п
Iе (01^9 f (3.51)
где &>—; р— погрешность в построении характеристики Р (со);
в области низких частот
2
Лй>0
J (со) — Ра (со)! dw
о
(3.52)
где Рх (со) — точное значение вещественной частотной характеристики;
Ра (со) — приближенное значение, приведенное на графике.
3.43. Определить по вещественной частотной характеристике замкну-
той системы, приведенной на рис. 3.16, а, показатели качества а„„ и (р,
пользуясь свойствами вещественной частотной характеристики.
Решение. Отбрасывая высокочастотную часть характеристики Р (со),
оценим G помощью 9-го свойства погрешность в построении переходного
процесса по формуле
1 (I sin .
le(0|< J |——|
Пользуясь таблицами интегрального синуса, найдем |е (f)| «5 0,01.
Полученная погрешность окажет лишь малое влияние на построение про-
цесса х (/) в области х (0) (см. 2-е свойство). Коэффициент наклона х = =я
® -ру «= 0,4. Применяя 6-е свойство, по рис. 2 приложения X найдем <р =»
= -^- = 0,55 и 0^=12%.
3.44. Определить по виду вещественной частотной характеристики,
приведенной на рис. 3.16, б, показатели качества tp и ат„.
Решение. С помощью 4-го свойства найдем
100% —11,8%.
Для данного примера соп = соо = 10, поэтому 0,314 с < fp < 1,26 в.
3.45. Определить по вещественной частотной характеристике, приве-
денной на рис. 3.16, е, показатели качества tp и ат„.
264
Решение. Используя 8-е свойство, определим
X==_^L= 6 06. к = ®l = 22L = o,39; Х = -^ = А.=,о,з.
<в„ 10 “ «6 3 ю
Из рис. 3.16, в определим Ршах — 1,4 и сос = 8,6 с-1. По номограмме Б
приложения XI.3 ошах = 20% и tp — = 3^g- = 1,1 с.
3.46. Определить по вещественной частотной характеристике
(рис. 3.16, г) время протекания переходного процесса.
Решение. С помощью 7-го свойства найдем
tp> — = -Ц22- = 1,26 с.
₽ <оо 10
3.47. Определить характер протекания переходного процесса по сле-
дующей передаточной функции разомкнутой системы:
0,16 Д'
W ~ s (0,088s 4- 1) (0,2222s2 + 2,067-0,222s + 1) ’
(3.53)
где К принимает два значения: 5 и 3.
Решение. Подставляя в выражение (3.45) s = ja>, построим логарифми-
ческие амплитудную Нг (со) (для К — 5), Нг (со) (для К — 3) и фазовую
0 (со) частотные характеристики (рис. 3.17). Перенесем их на номограмму
Р (со) (кривые 1 и 2 на рис. 3.18); тогда получим две вещественные частотные
характеристики Рг (со) и Ра (со) (рис. 3.19). Нанесем их на рис. 1 приложе-
ния X, получим рис. 3.20, а. Пользуясь 5-м свойством, установим, что кри-
вая Pt (со) удовлетворяет только условию монотонности а) и не удовлетво-
ряет условиям б) и в). Поэтому переходный процесс хг (t) для Рг (со) не
является монотонным. Кривая Ра (со) удовлетворяет всем условиям 5-го
свойства, и переходный процесс ха (t), соответствующий Ра при g (t) = 1 [i],
является монотонным (рис. 3.20, б). (
3.48. Оценить ошибку, вызванную погрешностью в построении харак-
теристики Р (со) в области низких частот [вместо Р г (со) построена кривая
Ра(со)] (рис. 3.21, а).
Решение. С помощью 9-го свойства вычислим
®0
I 8(П I = 4 f [Pl (®) - Ра (®)1 = °’0187-
О
3.49. Определить по вещественным частотным характеристикам Pi (со)
и Ра (со), приведенным на рис. 3.21, б, показатели качества и ошах.
3.50. Оценить время протекания переходных процессов для систем авто-
матического регулирования, имеющих вещественные частотные характерис-
тики Рг (со), Р2 (со), Р3 (со) и Р4 (со), изображенные на рис. 3.21, в.
3.51. Определить по вещественным частотным характеристикам Pi (со)
и Ра (со), представленным на рис. 3.21, г показатели качества ашах и £р.
3.52. Найти погрешности определения показателей качества tp и
для систем автоматического регулирования, имеющих вещественные ча-
стотные характеристики Pi (со) и Р2 (со) (рис. 3.22,а).
3.53. Оценить ошибку, вызванную погрешностью построения характе-
ристики Р (со) в области высоких частот [вместо Рг (со) построена кривая
Ра (со)] (рис. 3.22, б).
3.54. Определить по вещественным частотным характеристикам Pt (со),
Ра (со), Р8 (со) и Р4 (со), изображенным на рис. 3.22, в, показатели качества tp
я
265
Un,ОБ
га
го
го
ts
iz
s
4
О
-4
-в
-12
-IS
-2D
-24
-28
320 300 Z80 ZSO Z40 220 200 180 ISO 140 120 100 80 SO 40 9*
Un,OS
28
24
20
1S
12.
8
4
0
-4
-8
-12
-16
-20
-24
-28
-320 -SOO -280 -260 -240 -220 -ZOO -Я» -260 -140 -120 -100 -80 -SO -40 9°
Puc, 3.18. Номограмма P (®) с нанесенными характеристиками 20 1g (/ш) и 201g (jw)
«0О
Рис.[3.19. Вещественные частот- Рис. 3.20. Оценка качества процессов регулирования,
яые характеристики для двух а — иомвгрвмм» ионотвваосгн; б — переходный процем
систем автоматического регу-
лирования
регулирования
267
Рис. 3.23. Вещественные
частотные характери-
стики замкнутых систем
регулирования при g(t) —
( 0, < < 0;
“ ( 1, 0
3.55. Определить характер протекания переходного процесса по ве-
щественным частотным характеристикам Рг (и), Ра (со) и Р3 (со), изображен-
ным на рис. 3.22, г.
Указание. Следует использовать 7-е свойство.
3.56. Определить характер протекания переходного процесса по пере-
даточной функции разомкнутой системы
s (0,1s 4-1) (0,02s + l)2 ’
где К принимает значения 1,2; 6,4 и 0,6 с"1.
3.57. Оценить ошибки, вызванные погрешностями в построении харак-
теристик Р (со) [вместо Pi (и) построена характеристика Ра(со)]
(рис. 3.23, а и б).
3.6. ЧАСТОТНЫЙ МЕТОД ПОСТРОЕНИЯ ПЕРЕХОДНЫХ
ПРОЦЕССОВ С ПОМОЩЬЮ ТРАПЕЦЕИДАЛЬНЫХ
ХАРАКТЕРИСТИК И hK - ФУНКЦИЙ
(
Для построения переходных процессов используют математические
зависимости '
о
х (0 = — 4- J 1®S И] —У *о,
о
(3.54)
(3.55)
где R (со) — обобщенная вещественная частотная характеристика; S (со) —
обобщенная мнимая частотная характеристика.
В случае одновременного действия управляющего и возмущающего
воздействий имеем •
Я (со) — Р (со) Pg (со) — Q (со) Qs (со) Ц- Pv (со) Pf (со) — Qv (со) Qf (со); 1
S (со) == Р (со) Qg (со) + Q (со) Pg (со) + Pv (со) Qf (со) + (со) Pf (со). )
В выражениях (3.56) принято:
G (ja) = Pg (со) 4- jQg (со);
F (ja) = Pf (со) 4- jQf (со);
Фу (/со) — Ру (со) 4- iQv (со).
268
Цп.вб
Рис. 3.24. Номограммы для определения вещественных частотных характеристик замк-
нутых систем по логарифмическим амплитудной и фазовой частотным характеристи-
кам разомкнутых систем
3.58. Построить переходный процесс х (0 в следящей системе (ем.
задачу 2.55) при действии управляющего воздействия вида
f 0 при t < 0;
gW==to,l рад при £>0
и определить основные показатели качества.
Решение. На номограмму рис. 3.24 нанесем логарифмические ампли-
тудную и фазовую частотные характеристики разомкнутой системы, снятые
е рис. 2.28. Тогда получим вещественную частотную характеристику замкну-
той системы Р (со) (рис. 3.25). Разобьем ее на четыре трапеции, как это пока-
зано на рис. 3.25. Найдем коэффициенты наклона трапеций хг, их высоты
г0{ и наибольшее основание <»ог. С помощью таблиц /ix-функций (приложе-
ние X) определим следующие величины:
а) табличный интервал времени Д/Табл *• Заносим значения £табя
в табл. 3.1 для каждой из трапеций отдельно;
б) соответствующие значения hK. (0 в зависимости от xz и ^абл по таб-
лицам /1я-функций; найденные величины заносим в табл. 3.1;
* При больших значениях xz и меныпих <ooZ следует выбирать малый интервал Д/Табл<
однако при таких Л/Табл значительно возрастает объем расчетов, связанных с построением
переходного процесса.
269
в) истинный масштаб времени, используя формулу
Д/Вс, = -^а;
в” «Ы
полученные значения заносим также в таблицу.
Числовые значения /ц (0 умножаем на гы и записываем в последнюю
строку таблицы.
По полученным значениям х{ (t) в истинном масштабе времени на
рис. 3.26 наносим составляющие переходного процесса.
Для рассматриваемого нами случая имеем: х1г х2, х9 и х4. Складывая
ординаты этих кривых с учетом их знака, получим искомый переходный
процесс х (0 (рис. 3.26), откуда видно, что время протекание переходного
процесса /р, которое определяется до точки пересечения х (0 с линиями
±5% х (оо), составляет 1,135 в. Максимум перерегулирования =
— 65%; число колебаний N = 2; собственная частота <в0 = 12,6 с”1; лога-
рифмический декремент затухания d0 — 1,2; максимальная скорость отра-
ботки регулируемой величины хшгя = 0,91 рад/с. >
3.59. Построить переходный процесс в следящей системе х (0 при
действии управляющего воздействия g (0 сложной формы (рис. 3.27), поль-
Рис. 3.26. Переходной процесс х (1} и его состав- Рис. 3.27. Управляющее воздействие
лающие для следящей системы сложной формы
270
Таблица 3.1
Наименование параметрон Значения параметров трапеций и составляющих переходного процесса
Трапеция 1 kf (0) я 0,1; Xj = 0,25]
^табл 0,2 1 2 3 4 5 6 7 8 10 ... 20
Ч (П 0,0794 0,3863 0,7090 0,9278 1,0382 1,0669 1,0540 1,034 1,0242 1,0270 ... 0,9906
бгст 0,02 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 1.0 2,0
*1 (0 = rt (0) hKi (0 0,0079 0,0386 0,0709 0,0928 0,1038 0,1067 0,1054 0,1034 0,1024 0,1027 ... 0,0991
Трапеция 2 [г» (0) я 0,268; = 0,7]
^табл 0,4 0,8 1,2 1,6 2,0 2,4 2,8 3,2 3,6 ... 20
0,2165 0,4214 0,6117 | 0,7798 0,9187 1,0276 1,1040 1,1499 1,1678 1,0025
^нст 0,02759 0,05517 0,08276 0J103 0,1379 0,1655 0,1931 0,2206 0,2483 ... 1,379
х2 (0 = г2 (0) йк< (0 0,0580 0,1125 0,1639 0,2090 0,2462 0,2754 0,2959 0,3082 0,3130 ... 0,2687
Трапеция 3 [г3 (0) = 0,053; х, = 0,45]
^табл 0,4 1,2 2,0 2,8 3,6 4,4 5,0 6,0 7,0 ... 20
Ч (0 0,1834 0,5280 0,8095 1,0020 1,1063 1,1321 1,1166 1,0616 1,0090 ... 1,0011
^ист 0,0123 0,0369 0,0615 0,08615 0,1108 0,1354 0,1538 0,1845 0,215 ... 0,6154
х, (0 = Га (0) hK. (0 0,0097 0,0280 0,0430 0,0531 0,0586 0,0600 0,0592 0,0563 0,0535 ... 0,0531
Трапеция 4 к* (0) я 0,013) х4 « 0,35]
^табл 0,2 1 2 3 4 5 6 - 7 8 10 20
4 (о 1 0,0858 0,4165 0,7605 0,9862 1,0897 1,0180 1,0693 1,0325 1,0113 1,0053 1,0008
ЛтСт 0,0022 0,0111 0,0222 0,0384 0,0444 0,0555 0,0666 0,0778 0,0889 0,1111 ... 0,2222
*4 (0 = rt (0) ftK< (0 0,00129 0,00625 0,0114 0,0148 0,0164 0,01523 | 0,0160 0,0155 0,0152 | 0,0151 0,0150
Рис. 3.28. Вещественная а мнимая частотные характеристика си-
стемы регулирования а управляющего воздействия сложной формы
зуясь вещественной Р (со) и мнимой Q (со) частотными характеристиками
замкнутой системы (рис. 3.28, а, б).
Решение. Построим частотные характеристики для возмущающего воз-
действия по формулам
р.W - 2 и, (0) м (^-) (-5лг!-); <3.57)
<=1
й<«»—
—1
где
f + —
---2--’ Л'=------2--’
Разбиваем площадь, ограниченную кривой g (Q, на пять трапеций.
Пользуясь формулами (3.57)—(3.58), произведем вычисления для каждой
из трапеций, пользуясь таблицами —j— и —-—. Результаты вычислений
приведены в табл. 3.2, используя данные которой имеем:
для со = 5
6 5
Pg = S pei = 0,7395 - 10“s; Qf= Д Qgi = 0,1470-10"3;
для co = 10
Pg = 0,6719-ICT?; Qg = —0,6139-10"?;
для co = 15
Pg = 0,1151-10“?; Qg = —0,9054 10“?.
По этим данным на рис. 3.28, в, г построены характеристики Рг (со)
и Qg (со). Так как в рассматриваемом случае переходный процесс строится
по формулам (3.56), то для определения обобщенной мнимой частотной
характеристики
S (со) = Р (со) Qg (со) - Q (со) Pg (со) (3.59)
необходимо определить Р (со) и Q (со).
272
Таблица 8,2
Наименование параметров (0 t{a sin tta> sin Д(ш Д(0) Ptt «а) Si (0) (0 •os t{<>> ^<1) Qv (»)
Трапеция № 1
й«= —2,76.1(Г» 5 0,12 0,08 0,998 0,999 —0,068-10"» —0,55.10-3 8,27 0,0046-10-»
<!«= 0,024 10 0,24 0,16 0,990 0,996 —0,064.10-» —0,275.10-» 4,05 0,0089.10“»
Д, - 0,016 15 0,36 0,24 0,978 0,990 —0,064.10-» —0,18.10-» 2,6 0,014.10-»
Трапеция № 2
й= —2,02.10-» 5 0,41 0,09 0,972 0,999 —0,16.10-» —0,41.10-3 2,24 0,035.10-8
4= 0,082 10 0,82 0,18 0,892 0,995 —0,15.10-» —0,20.10-3 0,83 0,064.10-3
Д2 = 0,018 15 1,23 0,27 0,766 0,988 —0,12.10-» —0,14.10-s 0,27 0,090-10-3
— Трапеция № 3
3,19-10-» б 0,64 0,09 0,933 0,999 0,38.10'» 0,64.10'» 1,25 —0,12-10-3
<з= 0,128 10 1,28 0,18 0,748 0,995 0,30-10-» 0,32.10-» 0,22 —0,23.10-8
As — 0,018 15 1,92 0,27 0,489 0,988 0,19.10-» 0,21.10-» —0,18 —0,28.10-3
Трапеция № 4
g4= 7,25.10-» 5 1,13 0,21 0,800 0,992 1,305-10-» 1,45.10-» 0,37 0,83.10-s
/*= 0,227 10 2,26 0,42 0,341 0,969 0,53.10'» 0,725-10-» —0,28 —1,18.10-3
Д4 - 0,04 15 3,39 0,63 —0,072 0,932 —0,12-10-» 0,48- IO"3 —0,28 —0,91.10-3
Трапеция № 5
й«= —3,62.10-» б 1,64 0,155 0,608 0,996 —0,72-10-» -0,725-10-s —0,04 0,77.10-»
/» = 0,327 10 3,28 0,31 —0,042 0,984 0,05-10-» —0,36.10-» —0,3 0,72.10"»
Дв = 0,031 15 4,92 0,465 —0,199 0,964 0,23.10“» —0,24.10-3 0,04 0,19.10-»
Рис. S.29. Обобщенная
мнимая частотная харак-
теристика замкнутой си-
стемы и переходный про-
цесс от поступления слож-
ного воздействия
Соответствующие характеристики построены на рив. 3.28, а и б.
Перемножая ординаты характеристик Р (со) на Qg (со), Q (со) на Pt (со)
и беря их разность, получим обобщенную мнимую частотную характери-
стику S (со), которая построена на рис. 3.29, а штриховой линией. Здесь же
на рисунке построена сплошной линией характеристика {coS (<в)]. Разло-
жим ее на ряд трапеций и, пользуясь таблицами йх-ф^нкций, вычислим
и построим переходный процесс (рис. 3.29, б). Из него еледует, что время
протекания переходного процесса tp = 1 с.
N = 4,5; ®о=15,1 с"1; do =» 0,96: — 1.6-10~я рад/с.
3.60. Построить переходный процесс в динамической системе, описы-
ваемой уравнением вида
X (s) = у. &1) ----1 ~ e"’Tg , (3.60)
' ' s8 4- ajs2 + + a» s’ '
где
К — 90,8; af = 8,2; а3 « 157;
а3 = 231; Т = 0,15 в; = 1,47.
Подставляя в выражение (3.60) s = получим
xw-,—Kgta—
w 7 (Og — Oj©2) 4-1 (a2© — co8) J© *
ИЛИ
x (Ю- .цй,-”>)"+/u67.-»<)i К1 + / sin 0,15®). (3.81)
274
Перепишем это выражение в виде
X (/ш) = [Р (ш) +/Q (ш)] lPf (<в) +/Q, (ш)!,
где
Р (еЛ 90’8'1147 (231 ~ 8,2®2) + 90’8® (157® “®’) •
' ' — (231 — 8,2<о2)а 4- (157® — ®»)а ’
п (г-Л — 90,8® (231 — 8,2Ф2) 4-90,8-1,47 (157® —ш») .
4 1 ~ (231 — + (157® — <о8)а ’
Pf (со) = 1 — «os 0,15<в;
Qf (to) =« sin 0,15(0.
По этим выражениям на рив. 3.30, а—г построены соответствующие
частотные характеристики. Обобщенную вещественную частотную харак-
теристику получим в помощью формулы
R (to) = Р (to) Pf (to) — Q (co) Qf (co).
Соответствующая характеристика построена на рис. 3.31, а. Разбивая
ее на семь трапеций, с помощью /ix-функций построим переходный про-
цесс (рис. 3.31, б).
3.61. Построить переходный процесс в многоконтурной системе автома-
тического регулирования (см. задачу 2.56), логарифмические частотные
характеристики которой построены на рис. 2.30, в, при поступлении управ-
ляющего воздействия вида
( 0 при £<0;
v ’ I 1 рад при t > 0.
3.62, Построить переходный процесс * (0 в многоконтурной системе
автоматического регулирования (см. задачу 2.57), логарифмические частот-
275
Рас. 3.31. Обобщенная вещественная характеристика замкнутой системы и пе-
реходный процесс от воздействия g(t) = 1 — 1 (f — 0,15)
Рис. 3.32. Виды возмущающих и упра-
вляющих воздействий систем автома-
тического регулирования
ные характеристики которой
построены на рис. 2.31, в, при
поступлении управляющего
воздействия
| 0 при f<0;
(0 “ | । рад ПрИ
3.63. Построить переход-
ный процесс в системе автома-
тической стабилизации лета-
тельного аппарата (см. задачу
2.62, а), если действует управ-
ляющий сигнал в виде
f 0 при t < 0;
“(0 = | । ПрИ о.
3.64. Построить переходные процессы в Системах автоматического регу-
лирования угловой скорости гидротурбины (ем. задачу 2.68, а) при сбросе
нагрузки, заданном в виде графика на рис. 3.32, а.
3.65. Построить переходный процесс в электропневматической следя-
щей системе (см. задачу 2.65) при К. = 25 в"1 при различных видах управ-
ляющих и возмущающих воздействий, заданных графиками на рис. 3.32, б—г.
, 3.7. ПРИМЕНЕНИЕ ЦВМ ДЛЯ ПОЛУЧЕНИЯ ПЕРЕХОДНЫХ
ПРОЦЕССОВ В СИСТЕМАХ АВТОМАТИЧЕСКОГО
РЕГУЛИРОВАНИЯ
Получение переходных процессов в системах автоматического регули-
рования с помощью ЦВМ наиболее удобно осуществляется при записи урав-
нений замкнутой системы в матричной форме. Дифференциальные урав-
нения (3.1) запишем в виде
у = Ау 4- brg + bj;
х^с'у,
(3.62)
276
где
bi - (о, о, о, о, Z);
bt = (О, О, .... О, 1, О.О);
- СТ “ (Со. Ср 1).
Вычислительная процедура включает определение собственных век-
торов ю(, rt и собственных значений X/(i = 1, 2.п) матрицы А. После
нахождения rt, и, и X, формируется переходная матрица Ф в виде
Ф —(3.63)
и матрица передачи управления
f==S-4t— »'><Л. (3.64)
i=i
на основе которой и производится вычисление переходного процесса
Уа = фУа-х + Fbtg + РЬ£
-V = <3у, (3.65)
где Уо ~ У (0)'. Т — шаг интегрирования.
3.66. Составить программу определения переходного процесса в системе
автоматического регулирования, описываемой дифференциальным уравне-
нием (3.1) на языке «АЛГОЛ».
Решение.
begin real е, t, el, е2, со, si, add, sub, д;
integer i, j, k; boolean Q;
ввод (t, n, nl)',
begin array A, TL, TR, F, Ф[1:п, l:n],
Cl, X. XI, Bl II: nJ;
integer array В [1: nJ; 1
ввод (A, X, Bl, Cl);
eigen (n, 0, A, T)* **; g:=Q-,
for i: = l step 1 until n do
for /:= 1 step 1 until n do
F[i, /J:=«0;
for i: = 1 step 1 until n do
begin e: = exp(A[i, i] x ty, el :—(e~ 1)/A[i, i];
e2:= A[i, i] x A[i, i] -|- A[i, i + 1] x A(i, i + 1];
co := cos(A[i, i 1] x ty, si := sin(A[i, i-f-1] x t);
for j1 step 1 until n do
for k: = 1 step 1 until n do
begin if В [t] = 0 then
begin add:= TL[i, x TR[j, ij;
ФI/. ^) :== Ф I/, + e x add\
F[j, k]: = F[j, k]-\-el x add:
end
else begin Q:=true;
add: = TR [j, i] x TL [i, k] + TR [j, I + 1] x
TL[i+ 1, £]; sub:=TR\j, i-J- 1] x TL[i, k]
* Символ E><3 обозначает внешнее произведение, т. е. у — А, где ay == Xiyj.
** Описание процедуры eigen приведено в приложении XIII.
277
— TRU,t\x TL\l+ 1, ЛЦ
Ф(/» Л] Фfj, + e X (co x add-j-slx sub)’,
F [j, k\ :=F[j, fc] 4- ((Л (i, i] x e x co —
A (i, ij 4- Afi, i -j- И X e x si) x add —
(A [i, i] x e x si — A (i, i 4-1] x e X co 4-
A[i, i‘4-1]) x sub)/e2;
end
end k-,
if Q = true then i14-1; Q" false;
end i;
for i:— 1 step 1 until nl do
begin for i:= 1 step 1 until n do
for k:= 1 step 1 until n do
for /:= 1 step 1 until n do
X PM: = Ф [k, j] x X PM 4- F {k, /I x
В(&]4-Х1рМ;
for k: — 1 step 1 until n do
begin X fife] := XI [At]; у := у 4-
С1 pM X XI [&];
end;
печать (у); y:—0;
end
end
end
3.67. Составить программу определения переходного процесса в системе
автоматического регулирования, описываемой дифференциальным урав-
нением (3.1), но не выше 20-го порядка, на языке «ФОРТРАН».
Решение.
PROGRAM SIST 1 ' '
DIMENSION А (20, 20), TL (20, 20), TR (20, 20), ' «
F (20, 20),’Ф (20, 20), В1 (20), X (20), XI (20),
L (20), С1 (20)
LOGICAL Ю
READ (ВК1, 1) Т, Nl, ((Bl (I), I = 1,20), (Cl (I),
*1 = 1, 20), (X (I), I = 1,20), (A (I, J), I = 1,20) J = 1,20)
1 FORMAT (Е 10.3)
CALL EIGEN (20, 0, А, Т)1
У = V.
DO 21 = 1,20
DO 2J = 1,20
2 F (I, J) = Ф (I, J) = 0.
DO 31 = 1,20
E = EXP (A (I, I) * T)
El = (E — 1)/A (I, I)
E2 = A (I, I) * A (I, I) 4- A (I, I 4- 1) * A (I, I + 1)
CO = COS (A (I, I 4- 1) * T)
SI = SIN (A (I, I + 1) * T)
DO 4J = 1,20
DO 4K = 1,20
1ЕДВ. NE.O) GO TO 6
ADD = TL (I, K) * TR (J, I)
1 Описание процедуры EIGEN приведено в приложении XIII.
278
ф (J, К) = Ф (J, К) + Е * ADD
F (J, К) = F (J, К) + El * ADD
GO ТО 4
6 Ю = . TRUE.
ADD = TR (J, I) ♦ TL (I, K) + TR (J, I + 1) * TL (I + 1, K)
SUB = TR (J, I + 1) * TL (I, K) — TR (J, I) * TL (I +
* 1, K)
Ф (J, К) = ФЦ, К) + E * (CO * ADD + SI * SUB)
F (J, K) = F (J, К) + ((A (I, I) * E * CO — A (I, I) +
* A (I, I + 1) * E * SI) * ADD — (A (I, I) * E * SI — A (I,
* I + 1) * E * CO + A (I, I + 1)) ♦ SUB)/E2
4 CONTINUE
IF (Ю = .TRUE.) 1 = 1 + 1
3 Ю = .FALSE.
DO UK » 1, N1
DO 71 = 1,20
XI (I) = 0.
DO 81 = 1,20
DO 8J = 1,20
8 XI (I) = XI (I) + Ф (I, J) * X (J) + F (I, J) * Bl (J)
DO 91 = 1,20
X(I) = X1(I)
9 Y = Y + Cl (I) * XI (I)
WRITE (ПЧ1, 10) (Y)
10 FORMAT (E 10.3)
Y = 0.
11 CONTINUE
STOP
END '
3.68. Определить переходный процесс в системах автоматического регу-
лирования, описываемых дифференциальными уравнениями вида:
а) {
0 1 0 0 0
0 0 . 1 • 0 0
4 = 0 0 —1,57 1,57 0
0 0 0 0 \ 0,833
—0,00087 —0,06466 — 1,875 —0,833 ' —0,833
Ь = (0; 0; 0; 0; 0,00087); с = (1; 74,1; 2143,69; 0; 0),
б) !
0 1 0 0 0
—36 —4 10 0 0
4 = 0 -113,52 - -К ) 96,32 17,2
0 20 0 —20 0
—1,1 > 0 0 0 0
Ь = (0; 0; 0; 0; 1,1); с — (1; 0; 0; 0; 0)
в)
/ 0 7,5 0 0 \
'( 0 "+10 10 0
4 = 1 0 0 0 1
\ —100 —112,5 -100 —15/
Ь = (0; 0; 0; 100); с = (1; 0; 0; 0),
(0 1 о о \
О О 1 0 |
О 0 0—5 Г
—1,4 —14,56 —5 —8 /
b - (0; 0; 0; 1,4); с = (1; 10,4; 0; 0),
при нулевых начальных условиях с помощью ЦВМ.
Указание. При применении языка «АЛГОЛ» см. задачу 3.66, а языка
«ФОРТРАН» — задачу 3.67.
3.69. Определить переходный процесс в системах автоматического регу-
лирования, описываемых дифференциальными уравнениями вида:
а)
0 1 0 0 0
0 0 1 0 0
л- 0 0 0 1 0
0 0 0 —2 2
—0,04 —2,576 —0,257 0 —10
С « (1; 64,4; 64,4; 0; 0)
при начальных условиях *(0) = (0; 1; 1; 0; 0);
б)
0 1 0 0
0 0 10 0
Л = I 0 10 —12 0
\ —100 —120 0 —100
С - (1; 1,2; 0; 0)
при начальных условиях X (0) = в) = (I; 0; 0,5; 0);
0 1 0 0 '
0 —1,67 1,67 0
0 0 -0,833 0,833
—5 -0,45 0 —10 7
С - (1; 0,9; 0; 0)
при начальных условиях х (0) - (1; 0; 0; О).
Глава 4
Исследование динамической точности
линейных систем
автоматического регулирования
Динамическая точность вистам автоматического регулирования харак-
теризуется ошибками, возникающими от действия управляющих и возму-
щающих воздействий. При регулярных воздействиях динамическая точность
определяется значениями ошибок по положению, скорости, ускорению и
высшим производным от ускорения. При случайных воздействиях динами-
чевкая точность определяется значением средней квадратической ошибки.
4.1. ОПРЕДЕЛЕНИЕ ХАРАКТЕРИСТИК ТОЧНОСТИ СИСТЕМ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПРИ РЕГУЛЯРНЫХ
ВОЗДЕЙСТВИЯХ
Ошибки в системах регулирования пропорциональны коэффициентам
по положению Go, скорости Сь ускорению С2, первой производной по уско-
рению G8 и т. д. или коэффициентам добротностей по положению De, ско-
рости ускорению Da и т. д. Их определяют в установившемся состоя-
нии. При этом регулярные воздействия считаются медленно меняющимися
функциями времени по сравнению в переходным процессом.
Динамическая точновть в системе автоматического регулирования
•(0 - D-lg (f) + А. + D71 +
+ DT 'Ж "1--------b + • • • • (4.2)
Значения коэффициентов точности и добротности можно определить по
расположению нулей и полюсов замкнутых систем с помощью следующих
формул:
а) добротность по скорости
п т
;-1 /=1
где plt zt — соответственно полюсы и нули замкнутой системы, а при наличии
пары комплексно-сопряженных полюсов
1 2g .
~ l₽i’
(4.4)
281
б) добротность по ускорению
а при наличии комплексно-сопряженных полюсов
1 1- 4g2
De ~ |р|2 *
(4.5)
(4.6)
4.14 По передаточной функции разомкнутой системы автоматического
регулирования
W ® ~ *(Л«+1) (Tas+O
определить в установившемся состоянии коэффициенты ошибок Св> Сх,
С2иСа и значения добротности Dt и D-.
Решение. Находим передаточную функцию системы относительно
ошибки
Д) _ Е (s)________1________s (Tjs + 1) (r,s+ 1) ,.
G(s) - 14-JF(s) ~ s(Tis+l) (Tas+1)+K’ V '
Для определения коэффициентов ошибки разделим числитель выра-
жения (4.7) на знаменатель, т. е.
s+(t1 + t8) s2 + t1t2s8___
+^-+2421l,+ 2)ra-!‘ г+т(г'+г’-т)-+
+ -^[T,7’2—|-(Ti + T2) + -^-]s8+ —
( Л + - 4") s2 + ( тхта - s? _ 2Z*.
Сравнивая частное от деления с формулой (4.1), получим коэффициенты
ошибок
Со = О; С,—L, с; С,-+ ^). с8;
Значения добротностей системы будут следующими»
по скорости
Da = К, «Л
по ускорению
De =
К
Т1+т*-~Х-
с’8;
282
по производной от ускорения
D.a-----------------------г , с-.
тТ» ~ (^1 + T'i) 4" "у^а*
4.2* Определить числовые значения коэффициентов ошибок и мате-
матическую зависимость для определения ошибки в системе автоматического
регулирования, имеющей передаточную функцию в разомкнутом виде:
Ц7 /с) в_____122_______
w s (0.1s 4-1) (0,05s + 1)’
если скорость управляющего воздействия g (0 = 50 град-с-1.
Решение. Используя формулы для коэффициентов ошибок, полученных
в задаче 4.1, найдем
с*-!--®--0-0025 «
с, = (г, + Г,-4-) = (0.1 + 0,05 - Jj-) _ 7.38-10- с’;
—Иг[0.‘-0,05-^(Р,1 +0,05)—^] =6,37-10- Л
Установившуюся ошибку вычислим по формуле
8 - (f) 4- A- g (0 + A. ‘g (f) =» 0,0025 • 50 = 0,125е.
4.3. Построить характеристику точности следящей системы в устано-
вившемся состоянии, обладающей астатизмом второго порядка, если ее
передаточная функция в разомкнутом состоянии имеет вид
vn « 200 <°’126s +
w s» (0.01S+1) (0.005s 4-1) ’
а управляющее воздействие g (t) = 0,2^ рад.
Решение. Из передаточной функции следящей системы видно, что она
обладает астатизмом второго порядка, поэтому £>6 — К — 200 с--. Точность
следящей системы в установившемся состоянии можно определить по формуле
8—
Для нашего случая g (f) — 2*0,2 = 0,4 рад «с--, поэтому
6 e в 0,002 рад*
На рис. 4.1, а построена соответствующая характеристика точности.
4.4. Определить формулы для добротностей D^, De и D; следящих си-
стем, имеющих передаточные функции:
a) TF (з) —
К(7\« + 1)
s (T1S+ й (T.S4- О ’
б) «7(8)=,
___K(T8s+l)a
S(T1S4-1)8 (T3s4-1) ’
В) w (s) 1=5 sd’xs+.ifX+O* ’
О ^(8)^ >
283
Рис. 4.1. Характеристики точности следящая систем
4.5. По передаточной функции разомкнутых систем автоматического
регулирования определить в установившихся состояниях коэффициенты
ошибок Со, Сь С8, С8 и соответствующие значения добротностей De, Da,
De, D-e, если:
a) W (s) =
K(T8s-f-ir
8а(Л«+1) <Tss4-l)a’
6) W (s) =_______K (bs+??_______•
' w w (T1S +1) (T2s 4-1) lTiS +1) ’
вч w (S\ - к<г»*-Н) (T,s 4-1)
’ w s (Гй 4-1) (T2s 4-1) (T#s 4-1)
4.6. Построить характеристики точности разомкнутых систем автома-
тического регулирования, если передаточные функции и соответствующие
управляющие воздействия имеют вид:
я) /и _______________400 (0,3s 4-Р*
> ' s (2,88s 4-1)» (0,025s 4-1) (0,01s 4-1) »
g(i) = 1,51 рад;
6) W (s) =___________10 '
' w W S* (3,33s4-1) (0.04s+ 1) (0.01S4- 1)’
g (0 » 0,05^ рад;
вч П7/с) =___________40000 (0,5s 4-1)*_________
1 W (25s4- 1) (5s4- l)a (0,02s4- 1) (0,0025s 4-1) *
g (0 = 20^ M-G-2.
4.7. Определить формулы для вычислений точности систем автомати-
ческого регулирования в установившихся состояниях при наличии возму-
щающих воздействий f (t), если их структурные схемы имеют вид, показан-
ный на рис. 4.2, а—г.
Указание. Коэффициенты ошибок Со, Съ Сг, Сз определить в зави-
симости от действия f (0. При этом точность системы найти по формуле
6 (0 = Л £ ^Со —у (Оо 4—2^" — • • • j sin ©о? 4-
/ , Сз о \ 1
4- I Ci©o‘-g-©o+ • •• I COSC00/I при f (0 =» A sin®of.
Для практических расчетов можно ограничиться членами до Ся.
4.8. Построить характеристики точности следящей системы с помощью
логарифмической амплитудной частотной характеристики (рис. 4.3, в)
для значений g (0 = 0,2 рад-с”1 и g(f) = 0,1 рад«с"?.
284
Рис. 4.2. Структурные схемы систем автоматического регулирования
Рис. 4.3. Логарифмические
амплитудные частотные
характеристики следя-
щих систем
Решение. Продолжим низкочастотную часть логарифмической частот-
ной характеристики с наклонами — 20 дБ/дек и — 40 дБ/дек до пересечения
с осью абецисс (рис. 4.3, а). В результате этого получим
Da = со* = 100 с-1;
D, ——16 с"*.
Ошибку в следящей системе можно вычислить по скорости
ею (0 = “ 0,01 i (0 рад;
L'a>
по ускорению
е.(0 = == o,O625g (0 рад.
Da
С помощью этих формул на рив. 4.1, б и в построены соответствующие
характеристики точности.
4.9. Построить характеристики точности систем автоматического регу-
лирования g помощью логарифмических частотных характеристик, изобра-
женных на рис. 4.3, б и 4.4, а, б для значений g (Q = 0,4 рад-с"1 и g (0 ==
=«0,1 рад-с--.
Рис. 4.4. Логарифмические амплитудные частотные характери-
стики систем автоматического регулирования
286
4.10. Найта приближенное значение ошибки в заданный момент вре-
мени t = 11 с, если уравнение нестационарной системы автоматического
регулирования относительно ошибки
5*е + (2t -f- 20) ё -f- 137е = 2g (t),
где g (t) = 5 (/ — х), начиная с 10-й секунды.
Решение. Составим передаточную функцию системы в виде 143]
ф* (Л S) = 5s® 4-(s — р) (2/ 4- 20) 4-137 ’
откуда
Ф« = 5s® 4-(2/4-20) s 4-135 •
Для t ~ 11 о имеем
ф.(11, S) — 6js4.42s4.i35 •
Разделим числитель на знаменатель:
2 I 135 4-42s4-5s2
2 4- 0,62s 4- 0,074s® j 0,0148 — 0.0046s 4- 0,00088s®
_ —0,62s 4-0,074s® .............
— 0,62s — 0,193s® — 0,023s®
0,119s® 4- 0,023s’
~ 0,119s® 4- 0,0037s® 4- 0,0044s*
4- 0,0193s’ — 0,0044s4
В точке 0 — 1 имеем в (20,1) = 0,0148g (1) — 0,0046g (1). Положив
g (0) = 50, найдем для 0 = 1 g (1) = 5; g (1) — 5, откуда в (11,1)-'
= 0,0148-5 — 0,0046.5 = 0,051.
4.11. Найти приближенное значение ошибки в моменты времени:
a) t = 5 с при g (0 = 5 (t — х) и х = 4 с;
б) t = 10 о при g (0 = 2 (t — х) и х = 5 с;
в) t = 15 с при g (0 = 5 (t — х) и х=6 с,
если уравнение нестационарных систем имеет следующий вид:
(8 + ?) ё + lOi ае + (2 4- 30 е == g.
4.12. Определить значение добротности по скорости и ускорению для
задачи 3.16 при К — 0,45.
Решение. Найдем полюсы замкнутой системы рх — 0,35 4- /-0,53; р, =
= —0,35 — j .0,53; ра = —2,3, а затем с помощью формулы (4.4) определим
J_____________________2|_ 1 2.0,56 , _1_____9 9fi
А» “ |₽11 Р» ~ 0,61 Т 2,3 -z>zo’
откуда Da = 0,45 с-1.
По формуле (4.6) вычислим
1 .1—46® 1 1—4-0,56® 1 _
В, ~ Ipd® 2р| “ 0,61® 2-2,3» ~
откуда D, = —1,3 <Г*.
287
4.13, Оценить влияние дополнительных нулей и полюсов в передаточ-
ной функции разомкнутой системы на значение добротностей и £)в, если
U7 лл в *(* + Р)2 2Z1
W s(s4-l)(s-J-2)(s4-a)2 ₽a *
где —a < —2; —2 < 0 < —1.
4.14, По передаточной функции разомкнутой системы автоматического
регулирования
W(в)“ (Tis + lHTas+l)(7,5 + 1)
определить в установившемся состоянии коэффициенты ошибок Ge, Gx,
С2 и С3, а также значения коэффициентов добротностей De, De и D •.
Указание. Использовать методику, приведенную в задаче 4.1.
4.15. По передаточной функции разомкнутой системы автоматического
регулирования
W (si_________
W s2(Tjs + 1) (T,s+1) (T,s +1) ’
где Tx > Ta > T8 > T4, определить в установившемся состоянии значе-
ния коэффициентов ошибок Со, Ct, Съ Са и коэффициентов добротностей
^е» и Вg-
Указание. Использовать методику, приведенную в задаче 4.1.
4.16. По передаточной функции разомкнутой системы автоматического
регулирования
£Ei£+21
U4s) =
sa(T2s+l)(T8s+l)
где Т1>Т2>Т8, определить в установившемся состоянии значения
коэффициентов ошибок Со, Сх, Са, С8 и коэффициентов добротностей De,
De и Dl-
I
Указание. Использовать методику, приведенную, в задаче 4.1.
4.17, Пользуясь передаточной функцией разомкнутой системы
определить соотношение между добротностью по ускорению De = К и по-
стоянной времени Т, при котором затухание за один период будет не меньше
заданного значения d0 [33].
Решение. Из характеристического уравнения замкнутой системы
1 + W (s) = s- + KTs + К = О
находим корни
и—
откуда
а г 1 •
Используя соотношение между колебательностью и затуханием
Р = 2л
288
вяи
1Z 4 i — Зя
V Т*К2 ~ , 1
1—do
найдем
" (1П _L_V + 4
\ 1 — d0/
Из последнего выражения нетрудно установить, что
или
с2.
4.18. Пользуясь передаточной функцией разомкнутой системы
W(S) = (Tis+l/Us + l) ’
определить допустимое значение коэффициента усиления К, при котором
затухание за один период будет составлять не меньше чем 90%, если посто-
янные времени 7\ = 1 с; Т2 = 0,5 с.
4.19. Пользуясь передаточной функцией разомкнутой системы
w s(Ts + 1) ’
при Т = 0,1 с, определить допустимое значение добротности по скорости,
обеспечивающее получение следующих значений затухания за один период:
a) d0 = 90%; б) d0 = 100%.
4.20. По передаточной функции разомкнутой системы автоматического
регулирования
IF(s) =
K(T»s+D
s^s + DlTjs+l) ’
где К = 200 с-1; 7\ — 0,5 с; Т2 — 0,1 с; Та — 0,01 е, ^определить ампли-
туду сигнала ошибки, если на вход системы поступает сигнал
g (0 = 0,2 sin l,lf рад.
4.2. ПОВЫШЕНИЕ ТОЧНОСТИ СИСТЕМ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
С ИСПОЛЬЗОВАНИЕМ ТЕОРИИ ИНВАРИАНТНОСТИ
Повышение точности систем автоматического регулирования дости-
гается путем формирования сигналов, компенсирующих действие управля-
ющего • и возмущающего воздействий. Формирование сигналов осуще-
ствляется надлежащим выбором типа и параметров корректирующего устрой-
ства. За счет этого повышается порядок астатизма системы и она становится
инвариантной к изменению сигналов управления и возмущения.
10 Ю. И. Топчм*
289
Рис. 4.5. Структурные схемы комбинированных систем автоматического регулирования
с компенсацией ошибок от управляющего воздействия
4.21. Повысить точность следящей системы с последовательным кор-
ректирующим устройством путем увеличения порядка ее астатизма (до 2-го
и 3-го), структурная схема которой показана на рис. 4.5, а.
Пусть передаточные функции устройств системы имеют следующий вид:
= “ (Tjs-f- lHTss+ 0 ’
П7 /я\ я Мг*1$4- 1) . П7 (si = ka
7W+1 ’ s(T,s + ir
Решение. Найдем сначала выражение для определения динамической
ошибки в исходной структурной схеме следящей системы
Е /я\ __________(7\s 4* О (7*г5 4* I) lT8s + 1) (Tkts + 0_. „д /м /д е\
Ь W s (T1S + 1} {TtS + !) (TaS + i, (Tkt + 1) + kikak3kk {TklS + I)
Из последнего выражения видно, что в исходной системе отсутствует
коэффициент ошибки Со, поэтому она обладает астатизмом первого порядка.
Для увеличения порядка астатизма введем в исходную систему пере-
даточную функцию корректирующего устройства вида
ЪЮ-ММ (4.9)
как это показано на рис. 4.5, а. Если сомножитель s в передаточной функции
(4.9) реализован с помощью тахогенератора, то динамическую ошибку в си-
стеме находим с помощью выражения
Е e 1 — S^kl ^3 (s) (S) Q z_\ /Д 1Q\
Подставляя в выражение (4.10) соответствующие передаточные функции,
получим
. _______feafegfet (T*is 4-1(s)______
e (s)=—sffii+i) (YA1 f\s t 11(T**S -1"" Q (s) • <4;1 r)
. j *l*g*8** (* felS "T 1 I __
4- 4-1) {Tss + 1) (TS3.+ О (T*2 + 1)
Преобразуем выражение (4.11) к виду
Е, »ris 4- »+ 1) (T8s 4- 1) (Tk2s + 1) - k2k3kk (Tkls + 1) Wtl (s)] G , .
s(7’1s+l)(7’2s-i-l)(7’g5-blj(7’A8s+l) (7’^+1). V h
(4-12)
Для того чтобы коэффициент ошибки С2 в выражений (4.1) равнялся
нулю, необходимо в формулу (4.12) подставить такую передаточную функ-
цию корректирующего устройства (s), при которой в числителе выра-
жения (4.12) член у сомножителя s2G(s) станет равным нулю. Такое коррек-
тирующее устройство, очевидно, должно иметь передаточную функцию
мететпг- <4ЛЗ>
290
В результате следящая система будет обладать 2-м порядком аста-
тизма, а ее точность при отработке управляющего воздействия повысится.
Для дальнейшего увеличения порядка астатизма введем корректиру-
ющее устройство
п? s (7»as4- 1)
(4.14)
при
1 k3 =
^2^3^*
В этом случае следящая система будет обладать астатизмом 3-го порядка,
и коэффициент Са — 0.
4.22. Повысить точность следящей системы с параллельным коррек-
тирующим устройством, структурная схема которой показана на рис. 4.5, б,
путем увеличения порядка астатизма до 2-го и 3-го.
Решение. Пусть передаточные функции устройств системы имеют вид
^(s)-(7.is+1)fe(VaS+1);
vp (s) — kt • W. (s\ = kk (TklS 17
s(Tas+1) ’ (T*»s-|-1) *
Определим ошибку для исходной структурной схемы следящей системы:
Е (si = ИМ» +1) + (7»,s 4- 1) (1\s + 1) (T2s 1)] (T3s + 1)} sG (s)
1^2^* (Tkls -f- 1) + (7\as -J- 1) l)(7as 4* 1)] (7ss -f- 1) s + (Tk3s -J- 1) k3 ’
(4.15)
а затем примем
Wk(,s)^sWa(s).
При этом динамическая ошибка будет иметь следующий вид:
. sG(s) {[M*(7<els4-l)4-(7fcas4- l)(71s4-l)(7as+ l)](7es4-l) -
Е (s) = —H^iMs^^s 4~ 1)} /д im
W lM*(T*is4-l)4-tTft2s4-l)(7’1s+l)(raS+l)](T8s+l)+ 7
4* МЛ (Тkts 4* 1)
Для получения астатизма 2-го порядка необходимо подобрать такую
передаточную функцию дополнительного корректирующего устройства,
которая позволит записать числитель (4.16) в виде
s’D(s)G(s). (4.1-7)
В данном случае обеспечим выполнение условия (4.17), выбирая Wk (s)
в виде
F>(s)- ЧгЧАт- (4-18)
Мз 7*3 4-1 v
Для достижения астатизма 3-го порядка в числителе выражения (4.16)
необходимо получить сомножитель вида
saD'(s)G(s). (4.19)
Последнее достигается введением следующего корректирующего
устройства:
пт = 1 4- М* 4-1)
М» (Т*з4-1) ’
где
Т = М»7 ц -р 7\а 4-7\-ЬГа4~7з(1 4- feafe>)
1>л М.
10'
291
4.23. Повысить точность системы стабилизации при наличии последо-
вательного корректирующего устройства (рис. 4.5, а) путем увеличения
астатизма до 3-го порядка, если ее устройства имеют передаточные функции
(s) — (s) — (TiS + +
4.24. Повысить точность следящей системы при наличии последова-
тельного корректирующего устройства (рис. 4.5, а) путем увеличения порядка
астатизма до 4-го порядка, если устройства системы имеют передаточные
функции
W7 („\ (TkjS -{- 1) (Tfe3S + 1) . ny , .____k3_______
sW (Tk2s+ 1) (Tfcis+l) ’ s(T8s+l)(T4s+l) '
4.25. Повысить точность системы стабилизации при наличии парал-
лельного корректирующего устройства (рис. 4.5, б) путем увеличения аста-
тизма до 2-го и 3-го порядка, если устройства системы имеют передаточные
функции
IMs)- rjs« + 2S,r, + 1 : T./+1
4.26. Повысить точность следящей системы при наличии параллель-
ного и последовательного корректирующих устройств (рис. 4.6, а) путем
увеличения порядка астатизма до 4-го, если устройства системы имеют
передаточные функции
^(s) = ^;
П7 /с) _ _S..
(WMW)’
П/ zc\ _ ^ki (7ftis + 1) . ну /_л __. туг zc\______ ^fe2 (Tk3s -f- 1)
(Tkas+ 1) ’ (S> s(T3s+l) ' (Tkt+l) *
4.27. Повысить точность следящей системы при наличии последова-
тельного корректирующего устройства (рис;. 4.6, б) путем увеличения порядка
астатизма по отношению к возмущению до 3-го за счет введения дополнитель-
ного корректирующего устройства Wk (s), если ее устройства имеют переда-
точные функции W71(s)—W4(s), аналогичные задаче 4.21, a IF5(s) =» _, * ...
\ 4® Г 1 /
4.28. Повысить точность следящей системы при наличии последователь-
ного корректирующего устройства (рис. 4.6, б) путем увеличения порядка
астатизма по отношению к возмущению до 3-го за счет введения дополнитель-
ного корректирующего устройства Wk (s), если устройства системы имеют
k S
передаточные функции, аналогичные задаче 4.23, a (s) = */?;-♦
( ‘ 4s Т 1 /
4.29. Повысить точность следящей системы при наличии параллель-
ного корректирующего устройства (рис. 4.6, в) путем увеличения порядка
астатизма по отношению к возмущению до 3-го за счет введения дополни-
тельного корректирующего устройства Wk (s), если передаточные функции
(s)—Wt (s) аналогичны задаче 4.23, a H?6(s)= ,т sk* .
292
4.30. Повысить точность системы автоматического регулирования
(рис. 4.7, а) путем увеличения порядка астатизма по управляющему и воз-
мущающему воздействиям до 3-го за счет введения дополнительных коррек-
тирующих устройств №Й1 (s), Wk2 (s), если устройства имеют передаточные
функции
4.31. Повысить точность следящей системы (рис. 4.7, б) путем увели-
чения порядка астатизма по управляющему и возмущающему воздействиям
до 3-го за счет введения дополнительных корректирующих устройств Wkl (s)
и №*2 (s)> если устройства системы имеют передаточные функции
«’'.(s)-----ЙцГГ
1 5 s "Г 1
Рис. 4.7. Структурные схемы комбинированных систем автоматического регулирования
с компенсацией ошибок от действия управляющего и возмущающего воздействий
293
4.32. Повысить точность системы автоматического регулирования
(рис. 4.7, а) путем увеличения порядка астатизма по управляющему и воз-
мущающему воздействиям до 3-го за счет введения дополнительных коррек-
тирующих устройств (s) и Wk2 (s), если устройства системы имеют пере-
даточные функции
(s) » Wa (s) Д. ;
(s) “ s (Tss +1) ’ ® “ Т*в + 1. *
4.33. Повысить точность следящей системы (рис. 4.7, б) путем уве-
личения порядка астатизма по управляющему и возмущающему воздей-
ствиям до 3-го за счет введения дополнительных корректирующих устройств
($) и ^*2 (s)» если устройства системы имеют передаточные функции
(s) =» (s) =» (Г18+ ;
W* = (ТИ+1)»; w* <s> “ «(T^+^s + i) ;
4.34. Повысить точность следящей системы (рис. 4.7, в) путем увеличе-
ния порядка астатизма по управляющему и возмущающему воздействиям
до 4-го за счет введения дополнительных устройств Wkl (s) и Wka (s), если
устройства системы имеют передаточные функции
wi(s) =« ;
пр /<л fetCTgS-V I)
4.35. Повысить точность системы автоматическрго регулирования
(рис. 4.7, г) путем увеличения порядка астатизма по управляющему и воз-
мущающему воздействиям до 3-го за счет введения дополнительных устройств
Wkl (s) и Wki (s), если устройства системы имеют передаточные функции
*1
Fl (s', — 4,; F, (s) — (ГИ+Ц(ГИ4.,,
We(s) »
Tes4-1 •
4.36. Повысить точность системы автоматического регулирования
(рис. 4.7, г) путем увеличения порядка астатизма по управляющему и воз-
мущающему воздействиям до 3-го за счет введения дополнительных кор-
ректирующих устройств U7*! (s) и Wk2 (s), если устройства системы имеют
передаточные функции
в! 7x8 4-1 ’ e (TfS +1)? ’
“ S (Та®2+ 25738-4-1) ’ f
294
4.37. Повысить точность системы автоматического регулирования
(рис. 4.8, а) путем увеличения порядка астатизма по управляющему и воз-
мущающим воздействиям (/) и /8 (/) до 2-го за счет введения дополнитель-
ных корректирующих устройств Wkl (s), Wk2 (s), IF*, (s), если устройства
системы имеют передаточные функции
№x(s) — Ai; (7’1S+1)(Vas-f.1) »
= s(T»s+ 1)’(Г«»+1) * W* ® = ТвД-1 ’
4.38. Повысить точность системы автоматического регулирования
(рис., 4.8, б) путем увеличения порядка астатизма по управляющему и воз-
мущающим воздействиям (/) и ft (t) до 2-го за счет введения дополнитель-
ных корректирующих устройств Wkl (s), (s) и IF*, (s), если устройства
системы имеют передаточные функции
IFi (s) = IF, (s) — (r1S + 1)(r|S*+i)(7’,s + i) ’
“ t(ty + 0‘ ’ Я Tts+ 1
4.39. Повысить точность системы автоматического регулирования
(рис. 4.8, в) путем увеличения порядка астатизма по управляющему и воз-
мущающим воздействиям (t) и fs (0 до 2-го за счет введения дополнитель-
ных корректирующих устройств IF*X (s), IF*, (s) и IF*, (s), если устройства
системы имеют передаточные функции
iFx(s)=-Af, tF,(S) — (yiS+ (TjS + !> ;
*•<•>—ТЙП-:
295
4.3. СЛУЧАЙНЫЕ ПРОЦЕССЫ В СИСТЕМАХ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
Под случайным процессом понимают случайную функцию, зависящую
от времени t как от параметра. Если t может принимать значения из неко-
торого интервала [обычно (0, оо) или (—оо, оо) ], то случайный процесс назы-
вают процессом с непрерывным временем', если же множество значений t
счетно (обычно t = пТ, где п = 0, 1,2 ...), то — процессом с дискретным
временем.
Наиболее широко применяют простые вероятностные характеристики
случайных процессов:
тх (f) = М [X (01; (4.20)
ад, 4) = M[{^(G)H^a2)H; (4-21)
D [X (0] =- м (0}2] =. Rx (tb ta) (4.22)
ало=/"ад,
где тх — математическое ожидание; Rx (tlt ta) — корреляционная функ-
ция; D [X (0] — дисперсия; о — среднеквадратическое отклонение; X (0 »
= X (0 — тх — центрированный случайный процесс.
При рассмотрении стационарных случайных процессов, вероятностные
характеристики которых не зависят от начала отсчета времени, имеем
тх (0 = тх — const; ох (0 = ах = const;
Rx (0» У= (^s» 0)= Ъ (т).
У эргодических случайных процессов средние по времени характери-
стики определяют с помощью выражений
X«lim^=- [X(0dft (4.23)
1 ? -
Rx (<0 = lim -L- f [X (0—X] [X (t 4- т) - X] dt', (4.24)
r->~ 7 _jr ‘
они совпадают с соответствующими характеристиками, средними по мно-
жеству:
X =« М [X (01 = тх; (4.25)
Rx (т) = М [X (0 X (t 4- т) ]. (4.26)
Спектральной плотностью стационарного случайного процесса назы-
вается преобразование Фурье его корреляционной функции
Sx(co)« J Rx(?)e^di, (4.27)
ко ео
где
ео
pzWe^dco. (4.28)
«Ч»ОО
При прохождении стационарного случайного сигнала X (0 через устой-
чивую линейную систему с передаточной функцией Ф (jo) его спектральная
плотность преобразуется в соответствии с выражением
S,(co) = |Q(/co)|2Sx(co). (4.29)
296
4.40. Найти корреляционную функцию процесса X (0, если он может
принимать только одно из двух значений: (4-1) или (—1). Переход от одного
из этих значений к другому происходит скачком в случайные моменты вре-
мени, причем число таких переходов за время т распределено по закону Пуас-
сона, а среднее число переходов за единицу времени равно а, с-1.
Решение. Прежде всего заметим, что процесс является стационарным
и симметричным, поэтому тх = X = 0. Для определения корреляционной
функции рассмотрим выражение
(ф) = М [X (О X (t -|-ф)].
Произведение X (t) X (t 4- ф) может иметь также только два значе-
ния: (4-1) и (—1) в вероятностью р+ и р_ соответственно, поэтому
Rx (ф) = М IX (/) X 4- т)] == р+ (1) 4- р_ (-1) = р+ - р_.
Определим вероятности р+ и р_. Указанное произведение принимает
значение (-|-1) в том (и только том) случае, если на отрезке [£, t 4- т] будет
четное число перемен знака: 0, 2, ..., 2k, ... Как известно, вероятность этого
события для пуассоновского распределения будет
k*=0
Вероятность наличия нечетного числа перемен знака представим в виде
VI (ат)2*+1 -ат
Р- “ 2d (2^4-1)1е ’
В результате найдем
р V IW* _ <а*)2*+11 _
Т ~ L 2А| 1 <2* + i)iJe ~
_е—У(-1)‘^--(т>0).
k=Q
Ввиду четности корреляционной функции на интервале (—оо, оо) имеем
/?,(ф)-е’2в|”.
4.41, Найти дисперсию первой и второй производных случайного
процесса X (t), если
/?х(т)«о2е“в|’|(14-а|т|).
Решение. Для стационарного процесса формула, выражающая кор-
реляционную функцию производной, имеет вид
Ri («) - К; № - « - R. «2 - W-----£ R. Ю.
Последняя формула справедлива в том случае, когда не имеет
разрыва при ф = 0. В этом случае процесс X (0 является дифференцируемым.
Это условие для X (/) соблюдается, и
К’х (ф) — о2а2е~~“ 1 т 1 (1 — а | ф |), a Di = Ri (0) — а2<Л
297
Дисперсия же второй производной D у бесконечна, так как R'x (и) имеет
разрыв производной в точке « = 0:
~гг Ri & |т=+о* R;c L—o
и поэтому второй производной процесс X (t) не имеет.
4.42. Найти корреляционную функцию ₽- (0, ta) процесса Y (t),
представляющего собой приращение за время Т от случайного процесеа
X (0, т. е.
y (п = х а + т) - х (п,
если его корреляционная функция Rx (tt, ta).
4.43. Найти математическое ожидание и дисперсию случайного про-
цесса Y (0 = а (0 X (0 -{- b (0, где а (t) и b (t) — числовые (неслучайные)
функции, a mx (0 и Rx (0, t2) — известны.
4.44. Найти функцию корреляции случайного процесса модулирован-
ного по амплитуде:
Y (0 = АХ (0 (sin «>#£ -ф ф),
где X (0 — стационарный случайный процесс с корреляционной функцией
Rx (т); Л, <оо — постоянные величины; ф — равномерно распределенная
на отрезке [—л, л1 случайная величина, не зависящая от X (0.
Показать, что процесс Y (t) является стационарным.
4.45. Доказать, что для дифференцируемого стационарного случайного
процесса его значения в любой момент времени некоррелированы со значе-
нием его производной в тот же момент.
4.46. Пусть заданы математическое ожидание и корреляционная ма-
трица случайного вектора' •
*(0={ад. ха(о. ....хло)
в виде
тх (0 = {тя (0, «ха (0. . - 4 тхп (0|,
[^(0/Д-М [^(0)^(0)].
Найти математическое ожидание и корреляционную функцию скаляр-
ного произведения У = WX (t) вектора X (t) на неслучайный числовой век-
тор IV = (Wl, wa, ..., wn). Показать, что корреляционная функция суммы
некоррелированных (и тем более независимых слагаемых) равна сумме их
корреляционных функций.
Решение. Имеем У (0 = WX (0, где X (0 — я-мерный вектор с мате-
матическим ожиданием М [X (0 ] = тх (0 и корреляционной функцией —
матрицей
Ru (0» 0) Ria (0> 0) • ‘ • Rm (^i« ^a) Rnllb ta)- • • * •
_Rnl (0» tg) ...... R/u, (0, 0)_
Для рассматриваемого случая
М(У(01- Wmx(t)
и
= wtm [Х(0) % a,)j w- w1 иrx(0, /.j j w.
29fi
В частности, при IV = {1, 1, Ц, Х<(0
Ry (^i> ^i) “ X Rij
'=1 /-1
Для процесса с некоррелированными координатами R4 (tx, <a)U*f — О
корреляционная функция суммы координат равна сумме их корреляционных
функций
Ry Ы = S Rh (h, tj - Sp f| Rx (G, 4)11-
1=1
4.47. Найти дисперсию случайного процесса X (t), значения которого
изменяются скачками на случайные величины Д, в случайные моменты вре-
мени tt. Число скачков, происходящих в течение отрезка времени t, подчи-
няется закону Пуассона с параметром а с"1, величины скачков Д, взаимно
независимы, имеют одинаковые дисперсии о? и нулевое математическое ожи-
дание, а X (0) — неслучайная величина.
Решение. Значение случайного процесса в произвольный момент вре-
мени t представим
п
хй-Е^+КО),
/=1
и дисперсию
D [X (0J = D Г 2 Д, I « М [crW] — aid®,
L/—1 J
где N — число скачков за промежуток времени [0, Л.
Все Д/ независимы и имеют одинаковую дисперсию o’, a N — также
независимо от всех Д/ЛГ, то процеёс X (0 является нестационарным,
с линейно растущей во времени дисперсией. Его можно рассматривать как
допредельную модель винеровского процесса.
4.48. Случайный процесс может изменять свое значение только в так-
товые моменты времени пТ (п = 0, 1, 2, ...). Эти значения являются неза-
висимыми нормально распределенными случайными величинами со средними
значениями, равными нулю, и одинаковыми дисперсиями о®. Найти кор-
реляционную функцию описанного процесса.
Решение. Очевидно, что М [X (/)]== 0 и
Rx (т) = М (X (fl X (t +т)] = М [X (QI М IX (t + «с)],
если | т | > Т, поскольку значения X (0 на разных интервалах независимы
и равны нулю. При | т | < Т возможны два случая: либо оба конца интервала
длиной т попадут в один тактовый интервал Т, либо в соседние. Вероятность
второго события р2 = | т |/Т, так как начало интервала выбирают незави-
симо от тактовых моментов Tk. Однако, как и в случае | т | > Т,
М IX (0 X.(t -т) ] = 0 из-за независимости значений процесса на сосед-
них интервалах. Если же оба конца интервала длиной т попадут в один
тактовый интервал, что возможно с вероятностью р = (1 —| т |/Т), то
X (0 = X (t 4-т) и Rx (т) = (1 - |т|/Т) М [X2] = оа (1 — |т|/7"). Рас-
сматриваемый процесс может служить допредельной моделью белого шума,
имеющего нулевое время корреляции, который получается из него при
Т -» 0 и о2 = с/Т -* оо.
4.49. Корреляционная функция угла крена самолета у (f) имеет вид
Rx (т) — о? ехр а| тЦ cos ₽т. , В момент tx угол крена у (^) = 5°. Опре-
делить вероятность того, что в момент времени G = G +15 угол крена
299
у (Q 3s b—10°, если у (0 нормальный случайный процесс и М [у (01 = 0; w =
= 2 с; о£ = (/"ЗО5)2; а = 0,12 с"1; ₽ = 0,4 с"1.
Указание. Использовать формулу для определения условной плотности
вероятности
и выражения для плотностей нормального процесса.
4.50. Найти взаимную корреляционную функцию значения случайного
процесса, предсказываемого на время Т > 0, X (t 4- Т), и значения его
производной в текущий момент X (t), если корреляционная функция про-
цесса X (t) имеет вид
7?*(т) = о1е-“,т,(1+а|т|).
4.51. Показать, что вероятность производной гауссовского случайного
процесса будет иметь значение, не превышающее по абсолютной величине
b = 1,57с, если
Rx (т) = а*е~“1 т 1 (cos |3т 4- sin £ | т |),
где ох — 2,3°; а = 0,2 с-1; р = 0,64 с-1.
4.52. Стационарный случайный процесс X (t) имеет корреляционную
функцию Rx (0. Найти дисперсию его интеграла Y (t), где Y (t) =*
= j X (I) dl, если M [X (01 = 0.
4.53. Определить корреляционную функцию и спектральную плот-
ность производной случайного процесса X (0, если
Rx(r) = о*е~“1 х1'(1 4- а[ т|).
Показать, что этот процесс не является дважды дифференцируемым.
4.54. Найти спектральную плотность стационарного случайного про-
цесса X (0 с корреляционной функцией
fo,(l—|т|/Д) прит^Д;-
°* СО — п л
0 при т > Д. ,
4.55. Найти спектральную
функцией
плотность процесса с корреляционной
2
Ох
Я,СО =
2
Их
при 0 sg т sg тн;
при xHsgT<rB;
при т > тв.
4.56. Определить математическое ожидание и дисперсию установив-
шегося процесса Y (0 на выходе динамической системы, описываемой урав-
нением
Тв —т
тв Тн
о
Оо 4- O.Y (0 = ь0 -%- 4- М (0,
где X (0 — случайный процесс на ее входе, имеющий следующие харак-
теристики:
математическое ожидание
тх (0 — х0 sin Q0
корреляционную функцию
300
4.57. Найти дисперсию ошибки Y (0 гироинерционной системы через
t — 1 ч после ее включения, если У (/) определяется уравнением
^. + ^У(0 = Х(0,
где v <= 1,24 -Ю-8 'с-1 — частота маятника Шулера; X (О — стационарный
случайный процесс,
^ = 0; ЯДт) = а2е~°|т|;
ож = 0,01 м-с~2; а = 0,1 с-1.
4.58. Найти среднюю квадратическую ошибку в определении скорости
самолета через 10 ч полета, если последняя определяется гироскопическим
интегратором, который дает ошибку из-за ошибки стабилизации оси инте-
гратора 0 (f), являющейся случайным процессом с нулевым математическим
ожиданием и корреляционной функцией
Re (Т) = 4. Ю^е-0-081 ’' рад2 = 1Ч
Ошибку в скорости находят с помощью выражения
t
Ди (0 = g j sin 0 (/х) dti, g = 9,81 м-с~2.
о
4.59. Найти спектральную плотность процесса с корреляционной
функцией
в 2 ва’Т*
(т) —
и определить взаимные спектральные плотности
sxx (“) и Sxx (®).
4.60* Определить спектральную плотность произведения Z (f) двух
независимых случайных процессов X (/) и У (f), если известно, что тх = 0;
тв = 0, а 1
_ . . 2 “®v I х I ' г> г \ 2 I ’ I
Rx^) = oxe х ; 7?{,(т) = огге в .
4.61. Построить зависимость Sx (со) стационарного случайного про-
цесса, если Rx (т) (рис. 4.9, а).
Решение. Из формулы (4.27) при четности Rx (т) получим
ее
Зх((»)-= f Ях(<г)е~/,вЧ<г =
= 2 J Я (т) cos сот d<c. (4.30)
Для вычисления ин-
теграла по параметру вос-
пользуемся приближен-
ным графоаналитическим
методом 117]. Для этого
Рис. 4.9. Корреляционная функ-
ция Rx (т), разделенная на тра-
пеции
a) Q
301
Рис. 4.10. График зависимости ц (т)
разложим площадь под кривой Rx (т)
на трапеции. Представим Rx (т) в виде
(4.31)
где г( (т) (рис. 4.9, б).
Подставляя выражение (4.31) в формулу (4.30), получим
S,(®)- 2 2
£=i
во
J rt (т) cos шт du.
(4.32)
Выражение (4.32) показывает, что определение спектральной плотности
сводится к вычислению интегралов вида
S/ (ш) = 2 I г( (т) cos ют dt.
Из рис. 4.10 следует, что
.. rt (т)
, ri 4- А/ —i т
r°‘ —
о
(4.33)
(4.34)
Принимая во внимание соотношения (4.34), после интегрирования
получим
S, („> (JbB.) (-£•). (4.35)
, Подставляя выражение (4.35) в формулу (4.32), запишем
п
(4.35)
Для рис. 4.9, б получим три трапеции. Соответствующие им St (ш)
Рис. 4.11. Спектральная плот- Рис. 4.12. Корреляционные функции случайных стацио-
ность сигнала Sx (ш) нарных процессов
302
Таблица 4.1
«4 (0
0 10 20 30 40 so 70 90
0,0400 0,0394 0,0378 0,0354 0,0324 0,0284 0,0158 0,0074
s4 0,0312 0,0268 0,0171 0,0044 —0,0035 —0,0046 0,0004 0,0008
S3 0,0178 0,0169 0,0147 0,0114 0,0068 0,0030 —0,0021 —0,0030
Рис. 4.13. Взаимно-корреляцион-
ная функция
4.62. Построить зависи-
мость Sx (<о) для стацио-
нарного случайного процес-
са, имеющего Rx (т) (рис.
4.12, а).
Указание. Использовать
графоаналитический метод,
рассмотренный в задаче 4.61.
4.63. Построить зависимость Sx (со) для стационарного случайного
процесса имеющего 7?х(т) (рис. 4.12, б).
Указание. Использовать графоаналитический метод, рассмотренный
в задаче 4.61.
4.64. Определить k (/) — импульсную переходную характеристику
устойчивого динамического элемента, если #«(г) = е~<т|— корреляцион-
ная функция входного воздействия, a Rxg (г) — взаимно-корреляционная
функция, заданная графически на ‘рис. 4.13.
4.65. Определить k (t) — импульсную переходную характеристику
устойчивого динамического элемента, если Rg (т) = е~ । ’• cos 0,1т—кор-
реляционная функция входного воздействия, a Rxg (т) — взаимно-корре-
ляционная функция, заданная графически на рис. 4.13.
4.4. ОПРЕДЕЛЕНИЕ ХАРАКТЕРИСТИК ТОЧНОСТИ
СИСТЕМ РЕГУЛИРОВАНИЯ ПРИ СТАЦИОНАРНЫХ
СЛУЧАЙНЫХ ВОЗДЕЙСТВИЯХ
4.66. Найти величину средней квадратической ошибки в замкнутой
следящей системе, на вход которой поступает полезный случайный сигнал
со спектральной плотностью Sg (со) — > если К = 140 с*1; 7\ =»
= 1,0с; Т2 *= 0,15с; Т3 = 0,02 с; Т = =* 0,714-10"?с; а == 3,2 град/рад,
а т = 0,5 с. Передаточная функция системы в разомкнутом состоянии имеет
вид
W) =
K(Tas+l)
/Решение.-Воспользуемся выражением средней квадратической ошибки
303
где
Se(®) = |o8(/®)lase(®);
здесь Фе (/со) = . *-------передаточная функция по ошибке е (f);
1 w (/со)
Sg (®) — спектральная плотность входного сигнала.
Подставляя эти выражения в формулу для средней квадратической
ошибки, получим
ео
—ео
К(7<»Га +1)
/ш (/шТ 1 + 1) (/соТз + 1)
—2 fv-j-dco.
ш2т2 +1
Приведенный интеграл можно вычислить двумя способами: аналити-
ческим и графоаналитическим.
Аналитический способ основан на использовании таблиц
интегралов. Искомый интеграл следует преобразовать к табличному виду,
т. е.
_ а ” [Т2Т?Т| ш6 + Т2 (Т? + со4 + Т2ш2] Ло
е2^ = ЪГ J {^ТТ1Т3 (/со)4 + (/со)»(тТ (7\ + Т3) + TTjTj] + •
-» + (/со)2 [т(Т + Т3) + Т (т+ Т + Т3) + 1 }2
По таблицам интегралов (см. приложение XII) для п = 4 находим
*о (— a1ai + °2fl3) — + a<flib3 + (аса3 — а^)
j == а4________
4 2аО(ао4+^1а4~ а1а2аз)
где коэффициенты alt bt в нашей задаче имеют следующие значения:
а0 = т7Т1Т8 = 7,143 -Ю’6;
ах = [тТ (7\ + Т3) + TTiTg] = 3,78-10-»;
аг = h (Т + Тг) + 7’ (7’1 + Т3) 1 = 8,59 • КГ2;
as = т + 71 + Т 2 = 0,657;
а4 = 1; ;
7’ = Jr = 7,1428;
Л
60= 7’27’17’з = 2,05-Ю-8;
Ьг = T^Tl + 7’0 = 0,51 • ю-4;
Ьг = Т*- = 0,51-10’4;
Ь3 = 0.
Подставляя эти значения в приведенную выше формулу, получим
2,05-10-8 (— 3,78-10-3 + 8,59-10-2-0,657) — 7,14-10"5-0,657-0,51 х
о 9______________X 10-* +7,14-10-3-3,78-10-3-0,51-10-*_________________
2-7,14-10"^ (7,14-1О-^-О,6572 + 3,782-IO'6 —3,78-Ю-з X “ U,U°
X 8,59-10-2-0,657 — 21,65-10+
Среднее квадратическое отклонение ошибки составляет
J/"? =0,283° = 17'.
Графоаналитический способ - удобно использовать,
если предварительно проводился анализ устойчивости и качества дина-
мических процессов методом логарифмических частотных характеристик.
При этом исходной характеристикой является ЛАХ разомкнутой системы
304
Рис. 4.14. Логарифмиче-
ские амплитудные- ча-
стотные характеристики
следящей системы
| W (/со) [, построенная для рассматриваемой системы на рис. 4.14 (кривая /).
Пользуясь номограммой замыкания, находим логарифмическую характе-
ристику передаточной функции для ошибки
। Фе о®) ।=|!+w (;ш) | • | W(Ja)) |,
которую изобразим в виде кривой 3 (рис. 4.14).
Далее определим передаточную функцию фильтра, формирующего
входной случайный процесс из белого шума единичной интенсивности.
Для этого спектральную плотность процесса необходимо представить в виде
Sg (со) = ¥ (/со) V* (/со), где Т (/со) имеет особенности только в левой полу-
плоскости переменной s = /со. Для рассматриваемой задачи имеем
о ,.й______а ‘ _ I Уа 2
' tW -|- 1 I /шт -J- 1 ’
т. е. У (/со) — °шт (см. кривую 2 на рис. 4.14).
Из выражения для средней квадратической ошибки
62 W = ЪГ J । фе I2 Se (“) da> = 2Г J I Ф« О) I2 d<0
видно, что для ее вычисления достаточно перемножить частотные функции
фильтра и системы и возвести результат в квадрат, т. е. сложить соответ-
ствующие логарифмические амплитудные характеристики и удвоить их
сумму (кривая 4, рнс. 4.14). Перестроив полученную кривую в равномерном
масштабе по осям, получим график под-
ынтегрального выражения как функ-
цию частоты (рис. 4.15). Вычисляя пло-
щадь под этим графиком, находим
е (0 «=« 0,27°, что близко к аналити-
ческому решению.
Рис. 4.15. Спектральная плотность S (ш) в
линейном масштабе
305
4.67. Составить программу для вычисления средней квадратической
ошибки линейной системы при действии стационарного случайного воздей-
ствия на языке «ФОРТРАН».
Решение. Воспользуемся основным уравнением для вычисления средней
квадратической ошибки:
f |Ф«(М)195п МЛо.
(4-37)
При условии, что Sn (со) является рациональной функцией от со, ее можно
представить в виде
е («Л - В>(/<Р>В' ДО (Л ЧЯ'
= 4’ </®)4' (—ДО’ (4-38)
Учитывая, что
I Фе (/®) Г = Фе (/®) Фе (— /®)
и заменяя /со на s, представим интеграл I правой части уравнения (4.37)
в следующем виде:
/» .J ( В В Ле (Л дач
где
B(s) —. . . В (&)
Л(7Г==фе(5) лП5)-
=Фе(_ s) 0-4 •
’v ' А (—s)
В формуле (4.39) функции А и В являются полиномами с рациональными
коэффициентами , • .
4 (s) — а^п 4~ flis” an—is 4- ая» |
В (з) =» 613я 1 4- bn—is bn- J
Введем в рассмотрение полиномы 4* (s) и В* (S), степени которых не
превышают п, т. е.
Ak (s) = aos* 4- a*s*+14 f- a*; Bk (s)« bjs*-1 4- b2sk~2 4- • •4- bl, (4’4I)
коэффициенты которых определяются из рекуррентных уравнений 4t-i(S) — 4*(s) — a*s4*(s); | (s)e (s) — P*4* (s), J
где a» « aj [a*]—1; 1 J (4,43) Ak (s) - ± [ Ak (s) - (-!)» A (- «)]; (444)
(4.45)
4„(s) = 4(s); |
B„(s)-B(s): J
305
Введём в рассмотрение также
/ » ,1 7 g* ( —s)
* W J 4*(s)4*(-s)
ds,
(4.46)
где Л» и В„ определяются формулами (4.41).
Тогда, при условии, что все корни полинома А лежат в левой полупло-
скости, справедливы рекуррентные соотношения *:
в2
4 — 4-1 + . £ — 1.2,..., а;
/в-0.
Чтобы
циенты Ak
найти значение интеграла /*, необходимо вычислить коэффи-
(s) и Bk (s). Это можно сделать с помощью таблицы:
aS a" aS aS a? ... % ..
di 0 aS 0 og ... d! 0 a? 0 aS ...
GO <*1 02 03 • • - И °3 • • •
aST1 0 0 ... a»-1 0 0 ...
• • • • •
• • • • •
_2 2 9 l3 t2
Oq ai Oj • • • "i °з <
a2 0 a2 0
So el 6}
a! 0
Каждая четная строка в таблице коэффициентов а* получается сдвигом
элементов предшествующей строки влево и соответствующей подставкой
нулей. Четные строки правой части идентичны строкам её левой части. Эле-
менты нечетных строк получаются из двух предыдущих элемёнтов по сле-
дующим формулам:
1
Oi
a<4-i I четно
a*+i — a*a?+2 i нечетно
i — 0, ..., £ — 1;
i чётно
ftJ+i —0*0?+! i нечетно
Эти формулы можно получить, приравнивая коэффициенты при степе-
нях s в разложениях (4.42).
Из теоремы Раусса об устойчивости следует, что все пули полинома
тогда и только тогда лежат в левой полуплоскости, когда все коэффициенты
а\ положительны. В приведенной таблице коэффициенты а* выделены жир-
*См. Острем К. Ю. Введение в стохастическую теорию управления. М., «Мир», 1973,
321 с.
307
ным шрифтом. После нахождения значений ak и интеграл lk определим
по формуле
п п
и = S phw1 - S
i=i
Алгоритм вычисления записанный на языке «ФОРТРАН», приведен
ниже:
SUBROUTINE COLOSS (А, В, N, IERR, V, I, N)
"PROGRAM FOR EVALUATING THE INTEGRAL OF
THE RATIONAL
FUNCTION ? .
1/(2* PI*I) B (S)*B (—S)/(A (S)*A (—S))
ALONG THE IMAGINARY AXIS
A — VECTOR WITH THE COEFFICIENTS OF THE
POLYNOMIAL
A (1)*S**N + A (2)*S** (N — 1) + • • • + A (N + 1)
IT IS ASSUMED THAT A (1) IS POSITIVE
В — VECTOR WITH THE COEFFICIENTS OF
THE POLYNOMIAL
В (1)*S** (N — 1) + В (2)*S** (N — 2) + • • •+ В (N)
THE VECTORS A AND В ARE DESTROYED
N — ORDER OF THE POLYNOMINALS A AND В
IERR — WHEN RETURNING IERR - 1 IF ALL
ZEROS OF A ARE IN LEFT
HALF PLANE IERR = О IF THE POLYNOMIAL
A DOES NOT HAVE
ALL ZEROS IN LEFT HALF PLANE OR IF A (1) IS NOT
POSITIVE
V — THE RETURNED LOSS
IN — DIMENSION OF A AND В IN MAIN PROGRAM
SUBROUTINE REQUIRED
NO NE '
DIMENSION A (IN), В (IN)
IERR = 1
V = 0.
IF (A (1)) 70, 70, 10
10 DO 20K = 1, N
IF (A (K + 1)) 70, 70, 30
30 ALFA = A (K)/A (K + 1)
BETA = В (K)/A (K + 1)
V = V + BETA**2/ALFA
KI = К + 2
IF (KI — N) 50, 50, 20
50 DO 60 I = KI, N, 2
A (I) = A (I) — ALFA* A (I + 1)
60 В (I) = В (I) — BETA* A (I 4- 1)
20 CONTINUE
V = V/2.
RETURN
70 IERR = 0
RETURN
END
1 См. сноску на о. 307.
308
4.68. Найти среднюю квадратическую ошибку в следящей системе,
если на ее вход действуют случайные сигналы: полезный со спектральной
плотностью
где Р = 0,25 с-1; а == 0,05 рад, и помехи в виде белого шума
S„ (®) = с2,
где с2 = 0,002 рад2-с, а передаточная функция системы
^(s) =
(T2s+l)s ’
где К = 25 с"1; 7\ = 0,08 с; Тг = 0,12 с.
4.69. Найти величину средней квадратической ошибки в системе авто-
матического регулирования, если входной полезный сигнал имеет спектраль-
ную плотность
где тх = 15 с; а2 = 0,2 В2-с, а передаточная функция системы
Кг.—«
W(s) = s(T1S+ 1) (T2s + 1) ’
где К = Ю с-1; 7\ — 100 с; Тг = 0,5 с; г = 5 с.
Указание. Использовать для решения графоаналитический метод (см.
задачу 4.66).
4.70. Определить дисперсию сигнала ошибки £>е (0 в следящей системе
(рис. 4.16, а), если входной сигнал — стационарный случайный процесс
G (0 = Go (0 sin (а>0! -j- <р)
с корреляционной функцией
₽Go(T)=,4e ' '»
где А — 0,1 рад2; а — 0,035 с-1; соо == 30 с-1, а параметры системы имеют
следующие значения: К — 10 с-1; 7\ = 0,04 с; Т2 = 0,2 с.
Указание. См. задачу 4.44.
4.71. Определить среднюю квадратическую ошибку в системе автомати-
ческого регулирования (рис. 4.16, а), если на вход системы действуют сиг-
налы: полезный
g (t) = 0,2 sin 0 рад
и помехи со спектральной плотностью
Sn (®) = 0,01 рад2-с,
а параметры системы аналогичны задаче 4.70.
<» в)
Рис. 4.16. Структурные схемы следящих систем
309
4.72. Определить среднюю квадратическую ошибку в следящей системе
(см. задачу 4.66), если на ее вход поступают случайные сигналы: полезный
7?в(ф) «=
где А = 0,01 рада; а = 0,25 е"1, и помехи
’•’•>"Р+з#+и4’
где с8 = 0,05 рад’-е, шв = 10 с’1, а параметры системы аналогичны за-
даче 4.66.
Указание. Считать, что полезный сигнал и помехи не коррелированы.
4.73. Определить зависимость средней квадратической ошибки в ли-
нейной системе автоматического регулирования (рис. 4.17, а) от коэффициента
усиления при воздействии случайного стационарного процесса N (0
со спектральной плотностью
С у » 0,16
) = со» 4- 0,01 ’
если k2 = 0,5 с"1; = 0,05 с; Тг — 0,025 с.
Решение. Передаточную функцию ошибки (см. рис. 4.16, а) запишем
в виде
л ,-л_________0.5 (0,05s1)____ /л Л7х
Фп “ (0,05s 4-1) s (0,25s + 1) + 0,5fej ’ (4’47)
Спектральную плотность S„ (со) после замены /со —♦ s представим в виде
“ (s 4- 0,1) (д,1 — s) * (4Л8)
Используя выражения (4.47) и (4.48); можно записать
A (s) = 12,5-lO-’s4 + 0,301s’ 4- 1,05s? 4-
4-(0,1 4- 0,5&x) s 4- 5- lO-8^;
В (s) = 0,01s 4-0,2.
Таким образом, получим все исходные данные для программы расчета
дисперсии средней квадратической ошибки, приведенной в задаче 4.67.
Результаты расчета приведены в табл. 4.2. Диапазон изменения коэффи-
циента усиления kr ограничен условиями устойчивости рассматриваемой
системы. Как видно из табл. 4.2, в.8 (0 сначала уменьшается при увеличе-
нии kr, а в конце диапазона имеет тенденцию к возрастанию.
4.74. Найти зависимость величины средней квадратической ошибки
от параметра Тj в системе автоматического регулирования, приведенной
в задаче 4.73, если fe, = 40; fe. = 0,05; Т. ='0,025 с; S- (со) = .
310
Таблица 4.2
1 10 ао 2S ао 40 46 50
В4 (0 0,683 8,14-10-8 2,09-10“* 1,36-10-8 9,62-10“* 6,02-10“* 6,18-10-* Система неустой- чива
Указание. Использовать для решения программу, приведенную в за-
даче 4.67.
4.75. Определить значение постоянной времени последовательного кор-
ректирующего устройства Tkl, минимизирующее среднюю квадратическую
ошибку в следящей системе, если ее передаточная функция
т (с\ — 1) ktka
s(71s-|-l)(r*ts+1) ’
где kt » 100; k9 = 0,02 с-1-рад-В"х; ka = 4 В-рад"1; 7\ — 0,0012 в; Tk. ==»
= 0,075 e,
и
Sn (co) — c*.
где c2*^ 0,25 B^-c.-
4.76. Определить зависимость ошибки в = в„ + Звп в системе автома-
тического регулирования (рис. 4^ 17, б) от коэффициента усиления /гх, если
на нее действуют полезный детерминированный сигнал
gW — go + git + ^f-
и помеха со спектральной плотностью
Sn (<»Гв с’,
а параметры системы имеют следующие значения: ш0 = 10 с"1; ? = 0,3;
k0 — 0,9; 7\ = 0,1 с; » 0,04 м?-с; g0 =>60 м; g± = 9 м-с~х; g, =
= 4 м-с“?.
Указание. Использовать для расчетов программу в задаче 4.67.
4.77. Определить зависимость ошибки в системе автоматического регу-
лирования (рис. 4.17, в) от klt если на нее действуют полезный детермини-
рованный сигнал
g(*) — + +
и помеха со спектральной плотностью
S„ (о) - <*,
а параметры системы имеют следующие значения:
со о « 10 с-1; § =» 0,3; Т t => 0,5 с; 7'а => 2 с;
с- = 0,1 м?-с; k9 = 0,2; g0 = 60 м; gt — 9 м-с"х;
Й, = 4м-в1
Указание. Использовать для расчетов программу в задаче 4.67.
4.78. Определить зависимость ^ошибки в следящей системе (см.
рис. 4.16, 6) от К = kxk2ka и gt, если на нее действуют детерминированный
полезный сигнал
g<$=g9+gi.t
311
и помеха со спектральной плотностью
Sn (®) = 5-10~в рад®‘в,
а параметры системы имеют следующие значения: Т8 = 0,2 с; 7'4 — 0,04 с;
Т8 = 0,55 с.
4.79. Найти зависимость ошибки в комбинированной системе автомати-
ческого регулирования (см. рис. 4.5, а) от kt (В-рад-1), если на вход системы
действуют сигналы: j
полезный
g(t) = (0,02 + 0,0П?) рад
и помехи
= (^‘+1 »
где с? = 0,01 рад? «с; т = 0,0125 в, а параметры системы имеют следующие
значения: /г2 = 2; kk = 0,4; k3 = 0,2 рад «с"1-В"1; 7\ = 0,007 е; Тг =
= 0,04 с; Т9 = 0,1 с; Tkl = 0,05 с; Tki = 0,04 е.
Указание. Дополнительное корректирующее устройство обеспечи-
вает 2-й порядок астатизма по управляющему воздействию (см. задачу 4.21).
4.80. Найти зависимость ошибки в комбинированной системе автомати-
ческого регулирования (см. рис. 4.5, а) от Jfelt если на вход системы действуют
сигналы:
полезный
g (i) = (0,02 -j- 0,015f?) рад
и помехи
£»(“) в '5^4.1 »
где с = 0,005 рад?-с; ф » 0,0125 в.
При этом остальные параметры системы аналогичны задаче 4.79. Допол-
нительное корректирующее устройство Wk обеспечивает 3-й порядок аста-
тизма по управляющему воздействию.
Глава 5
Нелинейные системы
автоматического регулирования
Нелинейными системами автоматического регулирования называют
такие системы, которые имеют хотя бы один элемент, описываемый нелиней-
ным уравнением. Нелинейные элементы подразделяют на статические и
динамические. К первым относят элементы, представляемые кусочно-линей-
ными или степенными функциями (нелинейные статические характеристики),
а ко вторым — описываемые нелинейными , дифференциальными уравне-
ниями.
Исследование и проектирование нелинейных систем автоматического
регулирования можно вести точными и приближенными методами. Точные
методы обычно применяют в тех случаях, когда приближенные методы дают
неверные результаты или полученные с их помощью решения содержат
значительные погрешности.
Наибольшее применение в теории автоматического регулирования полу-
чили точные методы, основанные на рассмотрении фазовой плоскости и кар-
тины протекания переходных процессов во времени (припасовывания). Следует
отметить, что точные методы являются достаточно громоздкими и требуют
значительных затрат времени.
Приближенные методы отличаются большой универсальностью и про-
стотой. Однако имеются определенные ограничения при их применении,
которые необходимо учитывать, так1 как в противном случае возможен
неверный окончательный результат. К приближенным методам, получившим
наибольшее распространение, можно отнести 2-й метод Ляпунова, а также
методы гармонической и статистической линеаризации.
5.1. ПРИМЕНЕНИЕ МЕТОДА ФАЗОВОЙ ПЛОСКОСТИ
ДЛЯ АНАЛИЗА УСТОЙЧИВОСТИ И ОПРЕДЕЛЕНИЯ
ПОКАЗАТЕЛЕЙ КАЧЕСТВА НЕЛИНЕЙНЫХ СИСТЕМ
Метод фазовой плоскости применяют для анализа устойчивости про-
цессов регулирования систем, описываемых нелинейными дифференциаль-
ными уравнениями 2-го и вырожденными уравнениями 3-го порядков.
Для построения траекторий движения изображающей точки на фазовой
плоскости нашли применение четыре способа: аналитический (решение не-
линейных уравнений по участкам), изоклин, Льенара и с помощью ана-
логовых и цифровых вычислительных машин с графическими построи-
телями.
5.1. Построить фазовые траектории методом решения дифферен-
циальных уравнений по участкам и переходные процессы для релейной
системы автоматического регулирования температуры сушильного шкафа
(рис. 5.1, а) и оценить ее устойчивость при трех типах релейных характери-
313
Рис. 5.1. Релейная система автоматического регули-
рования температуры сушильного шкафа:
а — принципиальная схема; 1 — сушильный шкаф.; 2 — тер-
моеопротивленне; 3 — нагревательный элемент печи; 4 —•
мост; 5 ** поляризованное реле; 6 — соленоид; 7 — гид-
равлический золотник; 3 — силоврй цилиндр; 9 — механи-
ческий редуктор; 10 заслонка сушильного шкафа; '6,
аве* типы характеристик реле
стик (рие. 5.1, б—г), если установившаяся температура 0ус1 = 50е С. Урав-
нения динамики элементов системы имеют следующий вид:
сушильного шкафа
(5.1)
где То — постоянная времени сушильного шкафа; /г0 — коэффициент эффек-
тивности воздействия заслонки на температуру сушильного шкафа;
реле <
i (0 - k А (0; (5.2)
и (0 - F (0, (5.3)
где — коэффициент усиления измерительного элемента и моста; F (0 —
статическая нелинейная характеристика реле (см. рие. 5.1, б—г);
электрогидравлического привода
(5.4)
где fe2 — передаточный коэффициент электрогидравлического привода;
k3 — передаточный коэффициент механического редуктора;
сравнивающего элемента
о (0 = О, (0 - о. (0- (5.5)
Примем следующие параметры системы: Т9 — 10 с; k0 — 10 град/рад;
fei = 0,25 А/град; k, - 2-Ю-3 рад-с/В; ka = 1; В « 100 В; С = 0,5 А.
Решение. Для удобства построения фазовых портретов будем считать,
что (0 — 0; тогда О (/) = — Фп(/), и общее уравнение автоматической
системы примет вид
(5.6)
Рассмотрим релейные херактеристики трех типов.
314
Релейная характеристика первого типа
(рис. 5.1, б). В этом случае уравнения для трех участков релейной характе-
ристики будут
di “° ПрИ ’ (5-7)
+ ТГ ““ W при * > X; (5.8)
+ ПРИ *< “£. (5.9)
Уравнение фазовых траекторий по формуле (5.7) можно найти после
подстановки
т.е.
fl-х и
HF" У'
7- ^9
io~3t
У*
(5.10)
так как dt =? dxly, то уравнение (5.10) можно переписать в виде
Т.Л--------1. (5.11)
Решение уравнения (5.11) будет
Р— — 77* + С* (5.12)
где С1 — произвольная постоянная интегрирования. Для построения фа-
зовых траекторий подставим в уравнение (5.12) значения параметров системы;
тогда .получим
х —Юр Cj. (5.13)
Из уравнения (5.13) следует, что фазовые траектории на участке
—2’<j&<2я представляют собой прямые с коэффициентом наклона 0,1 при
различных значениях Сх. На прямых поставим стрелки в соответствии со
следующим правилом (рис. 5.2, а): в верхней половине плоскости, где у > 0,
изображающая точка всегда движется слева направо, а в нижней половине
плоскости, где у < 0, — справа налево. По уравнению (5.8) можно построить
фазовые траектории правее линии II—//.Для этого преобразуем уравнение
(5.8) к виду y-w, (5.14)
или тоУ ~ У ~ (5.15)
откуда (5.16) 315
Рис. 5. 2. Фазовые портреты для систе-
мы автоматического регулирования
температуры сушильного шкафа с раз-
личного типа релейными характери-
стиками
Для интегрирования выражение (5.16) перепишем в виде
откуда
х — То lkok^B In|у -j- k^k^B| — у] -f- C8. (5.18)
Подставляя в уравнение (5.18) соответствующие числовые значения,
получим
х == —Юг/ 221п| 2,2 Ц- у\ -f- Cs. (5.19)
По уравнению (5.19) на рис. 5.2, а построены фазовые траектории в виде
логарифмических кривых при х > 2°.
Перейдем к уравнению (5.9), которое приведем к виду
Тоу^-------If + W, (5.20)
или
откуда
X = —То 1/г0/гаВ1п\у — Л0/гвВ| + — С8. (5.22)
316
Подставляя в уравнение (5.22) соответствующее числовое значение,
запишем
х = —10г/ — 221п 12,2 — у | — С3. (5.23)
По уравнению (5.23) на рис. 5.2, а построены фазовые траектории в виде
логарифмических кривых при х < —2°. В результате получим семейство
траекторий, представляющих собой фазовый портрет нелинейной системы
автоматического регулирования. Выделим из этого семейства одну фазовую
траекторию при t = 0, Оо = 5,8° С жирной сплошной линией. Фазовая
траектория из точки Dt будет проходить последовательно через точки D2—
D9 с уменьшающимися амплитудами колебаний. Переходный процесс,
соответствующий выделенной траектории, построим на рис. 5.3, а, где
амплитуды колебаний обозначены через А 1( А 2, А 3. Он заканчивается в точке
De. При других начальных условиях переходный процесс может закончиться
в любой точке отрезка ОХО2 — приведенной зоны нечувствительности.
Отсюда следует вывод, что данная система автоматического регулирования
температуры сушильного шкафа асимптотически устойчива.
Релейная характеристика второго типа (см.
рис. 5.1, в). В этом случае уравнения для двух участков будут:
+ W при <>>-£- и О<-£-; (5.24)
"Ри (5,25)
Уравнение (5.24) совпадает с уравнением (5.8), а уравнение (5.25) о урав-
нением (5.9). Поэтому их решение можно представить соответственно в виде
(5.18) и (5.22), а после подстановки чисел получим
х ~ Юг/ -f- 221п | 2,2 +1/14- 1 gg\
х = —Kty — 221п|2,2 — у\ +С3. j '
Для построения фазовых траекторий на рис. 5.2, б проведем две линии
переключений: при d&ldt >0 — вправо от оси ординат на расстоянии Clk^,
и при dbtdt < 0 влево от оси ординат на расстоянии — С//гг. Переключение
гидравлического привода происходит на прямых I—I и II—II. Семейство
фазовых траекторий при различных начальных условиях построено на фазо-
вой плоскости (см. рис. 5.2, б). Выделим одну фазовую траекторию при t = 0,
Фр = 5,8° С жирной сплошной линией. Фазовая траектория будет последо-
вательно проходить точки —£>4, образуя на выходе предельный цикл с пе-
317
риодом Та = 2л/соа и амплитудой Д3 = Ав. Если начальные условия t = О,
&0 = 1,2° С, то траектория снова придет к предельному циклу.
Переходный процесс, соответствующий образованию предельного цикла,
построен на рис. 5.3, б, откуда видно, что система автоматического регули-
рования входит в режим автоколебаний при 5= 7,1 с.
Релейная характеристика третьего типа (см.
рис. 5.1, г). В этом случае уравнения для пяти участков будут
г«-£?-+^=ОприО<д<х; <5-27)
= при *>% и <5-28)
^+^=0 прн (5.29)
"Р” ^<-v и <5-30>
= ОпРи ^-<^<0- (5.31)
Уравнения (5.27)—(5.31) совпадают с уравнениями (5.7)—(5.9), поэтому
их решение можно записать в виде
№ —10^4-Cj-,
х » — 10# -f- 22 In 12,2 -f- у | -j- C3;
x == — 10# — 22 In 12,2 — у | — C3.
(5.32)
Фазовые траектории, построенные по этим формулам, приведены на
рис. 5.2, в. Выделим одну из них при t = 0, б-р = 5,8s С жирной линией.
Как и в первом случае системы автоматического регулирования, температура
сушильного шкафа асимптотически устойчива. Ее переходный процесс по-
строен на рис. 5.3, в.
5.2. Построить фазовые траектории нелинейной системы автоматического
регулирования давления в ресивере с нелинейностью типа насыщения для
начальных точек с координатами (1, 2), Р2 (—1, 1,2), Р3 (—1, 1,2),
используя метод Льенара.
Решение. Пользуясь принципиальной схемой системы, изображенной
на рис. 5.4, а, запишем уравнения системы:
цо-м»;
«»(П = *сфР(О;
«1 (0 = «»(Ь-и«(0;
«(П = Л«1(01,
(5.33)
где Тр — постоянная времени ресивера; kv — передаточный коэффициент
ресивера; k№ — коэффициент усиления электродвигателя; kc — коэффи-
циент усиления соленоида; &сф — коэффициент усиления сильфона;
f («J — kJ (kJ;
318
Рис. 5.4. Принципиальные схемы нелинейных' систем автоматическоео регулирования,
а *• давления в ресивере; б — релейной следящей системы
здесь ky — коэффициент усиления на линейном участке; С — ширина ли-
нейной зоны, т. е.
*—67 С;
аг > С;
цх —- С.
Преобразуем систему (5.33) к виду
+ cV«AWc*p) = 0
(5.34)
(5.35)
и, вводя безразмерные переменные х и т, х — р!рт, т = t/T9 при значении
коэффициента передачи системы
10’Па/с-В; 7^== 1с; ^.1; С=-0,1
получим окончательное уравнение системы в виде
^ + | + /W-0. (5-36)
где
/(*)==
х —1
I х>1;
—1 — 1.
На фазовой плоскости ^х, = у } рис. 5.5 построим две зависимости
у — f (х) (кривая /) и х — у (кривая 2). Далее необходимо определить наклон
фазовой траектории в начальной и последующих точках. В качестве началь-
ной точки выберем Р t (1,2). Из точки Рх на оси х и у соответственно опускают
перпендикуляры, пересекающие ось х в точке Q, а ось у в точке R. Продол-
жая перпендикуляр из точки Рг до пересечения с кривой^, получим точку Т.
Перпендикуляр PXQ пересекает кривую / в точке S. Затем от точки Q откла-
дываем абсциссу точки Т (влево, если она положительна, и вправо, если
отрицательна) и последовательно с ней ординату точки S (влево, если она
положительна, и вправо, если отрицательна). В результате получим отрезок
QF. Наклон прямой равен
= ?!
(5.37)
319
Рис. 5.5. Фазовые траектории в нели-
нейной системе регулирования давле-
ния в ресивере с нелинейностью типа
насыщения
Рис. 5.6. Фазовые траектории в нелиней-
ной системе регулирования давления в ре-
сивере с нелинейностью типа зоны нечув-
ствительности
где хг и ух — соответственно абсцисса и ордината точки Рг. Следовательно,
наклон прямой, проходящей через Р1г перпендикулярно к Р XF, определяют
по выражению
JL. = —‘./ . (5.38)
dx У1
Он совпадает с наклоном фазовой траектории в точке Plt поэтому из F,
как из центра, радиусом РРг с помощью циркуля проводят дугу окружности
3, проходящую через точку Рг. На дуге выбирают точку Pi и повторяют опи-
санное построение (рис. 5.5, точки Pi, Ri, Т, S', Q' и F'). Таким образом
строится вся’фазовая траектория Z. Плавность фазовой траектории зависит
от длины элемента окружности и может быть улучшена путем использования
более коротких дуг. Аналогично, выбирая в качестве начальных точки Р8
и Ра, получим решение задачи в виде траекторий 11 и 111, изображенных
на рис. 5.5. На основании выполненного построения можно сделать вывод
о том, что все фазовые траектории скручиваются к началу координат, кото-
рое является особой точкой типа устойчивого фокуса. Последнее доказы-
вает асимптотическую устойчивость данной нелинейной системы.
5.3. Построить фазовые траектории нелинейной системы автоматического
регулирования давления в ресивере с нелинейностью типа зоны нечувстви-
тельности для начальных точек с координатами Pr (1, 2), Р2 (—1, 1), исполь-
зуя метод Льенара (см. рис. 5.4, а).
Решение. Сначала аналогично задаче 5.2 получим уравнение системы
в безразмерном виде
$ + ^- + /M = 0. (6.38)
где
— 1 <х< 1;
х> 1;
х<— 1.
Затем строим на фазовой плоскости ^х, у = функции у = f (х)
(кривая /) и х = у (кривая 2). Используя описанную в задаче 5.2 методику
построения траекторий, получим фазовые траектории I и II (рис. 5.6).
320
На основании выполненного построения можно сделать выводы об асимпто-
тической устойчивости системы. Однако в данном случае уже имеется не одна
точка О, а целый отрезок (—1 1) устойчивых состояний.
5.4. Построить фазовые траектории нелинейной системы автоматического
регулирования — релейной следящей системы (рис. 5.4, б) с двухпозицион-
ным релейным элементом без гистерезиса для начальных точек с координатами
Рх (1, 2), Р2 (—1, 1), используя метод Льенара. Приведем, как и в предыду-
щих задачах, основное уравнение системы
^^_|__^)_==-^_/[0з(/)_0в(/)]( (5.40)
ui ui 1 ди
где0в — угол поворота выходного вала; Т№ — постоянная времени электро-
двигателя; ит — величина сигнала на выходе релейного устройства; k —
передаточный коэффициент электродвигателя и редуктора. Уравнение (5.40)
приведем к безразмерному виду с помощью новых переменных х — ,
дв Um.
<г = -у. Тогда получим
<5-41)
Строим на фазовой плоскости (х, у) функции у = f (х) (кривая /) и х = у
(кривая 2) и, используя описанную в задачах 5.1 и 5.2 методику построения,
получим искомые фазовые траектории / и II (рис. 5.7). Как и в случае задачи
5.1, на фазовой плоскости имеется одна особая точка — устойчивый фокус
(начало координат), что указывает на асимптотическую устойчивость данной
системы.
5.5. Построить фазовые траектории для нелинейной следящей системы
(рис. 5.8), имеющей люфт С — ±0,5 мм в механической передаче Р между
потенциометром обратной связи и выходным валом, по методу Льенара для
двух начальных точек Рх (—3; 0) и Р2 (—1,5; 0) (рис. 5.9).
Решение. Запишем уравнения динамики следящей системы в виде
= (5.42)
где Jn — приведенный к валу электродвигателя момент инерции; /г0 — коэф-
фициент скоростного трения; Мяв (0 — двигательный момент.
Рис. 5.7. Фазовые траектории в ре-
лейной следящей системе
Рис. 5.8. Принципиальная схема непре-
рывной следящей системы с люфтом в ме-
ханической передаче
Н 40. И. 1одчеев
321
Рис. 5.9. Фазовые траектории -в непрерывной следящей
системе с люфтом в механической передаче
Будем считать, что движущий момент
(5.43)
где k* — моментная постоянная электродви-
гателя; kp — передаточный коэффициент ме-
ханической передачи; iB — ток возбужде-
ния.
Тогда уравнение (5.42) примет вид
= (5-44)
Учитывая уравнение потенциометрической схемы
и(()-ММ)-Ш
электронного усилителя
»в (0 = kvu (I)
и механической передачи
e;(O = /[0»(OL
где 0'в — угол поворота потенциометра при отсутствии люфта в механической
передаче, выражение (5.44) приведем к виду
Jn = W АА (0 - / [0в (0П,
или при
09(/) = О;
A-
0B e x и dt =
получим
_L fep dx I f (x) — 0
+ Jno>a di u-
(5.46)
k
в уравнении (5.46) у — ,; , получим
Принимая
S + + = (5-47)
Введем переменную у = в уравнение (5.47):
+ (5.48)
dx у '
С помощью полученного выражения на фазовой плоскости построим
фазовые портреты по методу Льенара, имея в виду, что у = 0,25. На рис. 5.9
функция у = f (х) показана линиями 1, а функция х = (1/у)# — линией 2.
При этом видно, что в системе устанавливаются автоколебания с амплитудой
в пределах 1,5 < А < 2,5.
322
5.6* Построить фазовый портрет нелинейной системы автоматического
регулирования, используя метод изоклин, если структурная схема системы
имеет вид, показанный на рис. 5.10, а.
Решение. На основании структурной схемы получим уравнение, описы-
вающее свободные колебания системы в виде
& + х^ + х = 0- (5-49)
Вводя обозначения у — приводим уравнение (5.49) к виду
У^ + хУ + х = 0, (5.50)
или в преобразованном виде
dy _ ху + х
dx у
(5.51)
Если — N постоянная величина, то получим уравнения изоклины —
кривой, на которой-фазовые траектории имеют одинаковый угол наклона.
Используя выражение (5.51), запишем уравнение изоклины для нашей си-
стемы
X
У~ jV-f-x •
Задаваясь различными значениями N, построим для нашей системы на
фазовой плоскости семейство изоклин (рис. 5.11). Построение начнем с на-
чальной точки Р (0; 3,5), которая лежит на изоклине с N = 0. Для отыска-
ния следующей точки фазовой траектории проводим из точки Р две прямые
с наклоном последующей и собственной изоклины до пересечения с соседней
изоклиной. Конец отрезка этой изоклины, отсекаемый соответствующими
прямыми, и берется за искомую точку, .лежащую на данной фазовой траекто-
рии. Полученные точки соединяют плавной кривой. При этом заметим, что
изоклины симметричны относительно N. Точность построения зависит от
густоты изоклин.
5.7. Построить фазовые траектории методом решения дифференциальных
уравнений по участкам и переходные процессы для нелинейной системы
автоматического регулирования, структурная схема которой изображена
на рис. 5.10, б, если 7\ = 20 с; k — 4 1/с2.
5.8. Построить фазовые траектории методом решения дифференциальных
уравнений по участкам й переходные процессы для нелинейной системы
Рис. 5.10. Структурные
11*
323
вида
Рис. 5.1L Фазовый портрет не-
линейной системы автоматиче-
ского регулирования с нанесен-
ными изоклинами
автоматического регули-
рования, структурная схе-
ма которой изображена
на рис. 5.10, в, если
= 1 В/град; fe2 = 0,1 1/с2;
Сг=0,2 В; С2=0,1 град/с.
5.9. Построить фазо-
вые траектории по методу
изоклин, если структур-
ная схемы системы авто-
матического регулирова-
ния имеет вид, показан-
ный на рис. 5.10, г.
5.10. Построить фазовые траектории по методу изоклин, если система
автоматического регулирования описывается дифференциальным уравнением
#+*тг-Чг + 3»
где J — 2 г-см «с2; Н — 2 г «см-с; k = 1 г-см; В — 0,02 с"1.
5.11. Построить фазовые траектории и определить параметры автоколе-
баний для системы автоматического регулирования, имеющей структурную
схему, изображенную на рис. 5.10, д, если Тх = 0,2 с; Т2 = 0,4 с; fex в
= 10 1/в и k2 — 4.
5.12. Построить фазовые траектории по методу (изоклин для системы,
структурная схема которой изображена на рис. 5.10, е (при р =s 0,2 с),
и определить параметры предельного цикла.
Указание. Представить систему уравнений по структурной схеме
рис. 5.10, е в виде
хх = х2;
i2 = — р (х2! — 1} Х2 — Х1-
5.13. Построить фазовые траектории по методу Льенара для систем авто-
матического регулирования, описываемых следующими нелинейными диф-
ференциальными уравнениями:
а) 5 + 20х|^-| 4-20% = 0;
,, d2x . ( dx \2 . п
r)-^4-10(x2-l)-g- + x = 0.
5.14. Построить фазовые траектории по методу Льенара для систем
автоматического регулирования, структурные схемы которых показаны на
рис. 5.12, а—б, если = 10; 7\ = 1 с; = 0,5 с; В == 2; С » 1.
324
Рис. 5.12. Структурные схемы одноконтурных нелинейных систем автоматического регу-
лирования с типичными нелинейностями
Лннрт
Рис. 5.13. Структурные схемы двухконтурных
лирования с типичными нелинейностями
i)
нелинейных систем автоматического регу-
5.15. Построить фазовые траектории по методу Льенара для систем
автоматического регулирования, структурные схемы которых показаны на
рис. 5.13, а—б, если kx — 20; k2 = 10 с-1; 7\ = 0,2 с; kg = 0,5 с. Опреде-
лить амплитуды и частоты предельного цикла, а также время выхода на режим
автоколебаний.
5.2. ПРИМЕНЕНИЕ МЕТОДА ПРИПАСОВЫВАНИЯ
ДЛЯ АНАЛИЗА КАЧЕСТВА НЕЛИНЕЙНЫХ СИСТЕМ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
5.16. Для релейной системы автоматического регулирования сушиль-
ного шкафа (задача 5.1) с нелинейностью (см. рис. 5.1, б) построить переход-
ный процесс О = О (t) при следующих начальных условиях О (0) = 50° С,
О (0) — 0 и параметрах: То — 10 с; kgk2B = 2В; С = 0,5А; k± = 0,5 А/град.
Устанавливаемое задатчиком значение температуры примем 03 = 45° С.
Решение. Так как нелинейная функция F (х) имеет три значения:
В, 0, —В, то решение уравнений (5.7)—(5.9) запишем в виде
_ _ /-> O==Ci4-C2e т° — kJ^Bt при О > -г- — 1°С; (5.52)
t * -ft = С3 + + k^k^Bt при — ГС; (5.53)
-- с $ — Съ + Сйь г« при|О |<-£-= 1°С. (5.54)
Из уравнений (5.52)—(5.54) получим . 1 _ — с О = —^-С2е т° ~ kok^B при О >. — = 1°С; (5.55)
1 с • ^г- С4е г» -J- kJt2B при О —£- = 1 °C; (5.56)
1 — — с 0 = ^г-Све при |О] < = 1°С. (5.57)
325
Первый участок переходного процесса рассчитывают с учетом заданных
начальных условий по уравнениям (5.52) и (5.55). При этом из уравнения
(5.55) определим
С2 = — k0k2BT о = —20.
Подставляя полученное значение в уравнение (5.52), найдем
Cj = + й (0) - (С2е~ £ + kJ^Bt),
йли
Cj = 50 4-20 = 70.
Вводя значения Сх и С2 в выражения (5.52) и (5.55), получим
ft = 70 — 20е-°’п — 2t при ft > 45 + 1 == 46°; (5.58)
6 = 2е—°'u - 2 при ft > 45 + 1 = 46’. (5.59)
Время протекания переходного процесса tlt соответствующее ft = 46° С,
найдем из уравнения (5.58), т. е.
46 = 70 - 20е-0Д<> - 2*х,
или
= 12 - (5.60)
Уравнение (5.60) решим графически. Из рис. 5.14, а, где «,*« 10е*'0Дг«
и г2 = 12 — получим = 7 с. Значение b определим с помощью
уравнения (5.59), т. е.
ft(^)=»2e'0-7 —2 = —1.
Начальные значения функций ft (/) и ft (0 для второго участка переход*
ного процесса будут равны конечным значениям для 1-го участка. Для про-
стоты расчетов на 2-м участке отсчет времени будем снова вести от нуля.
Имея это в виду, из уравнения (5.57) найдем
Со = -То^ «О - Ю. ' (
326
Определим произвольную постоянную из уравнения (5.50:
С5 = 0 — С9 = 46 — 10 = 36.
Соответственно с этим уравнения (5.55) и (5.57) примут вид
0 = 36 4- lOe-^-K; (5.61)
0 = — е-°-« (5.62)
Определим теперь момент времени (соответствующий границе 2-го.
и 3-го участков). Для 0 — 44е С нз уравнения (5.61) найдем
44 = 36 4- 10е~°-и*,
или
е-о.и, =я од
Откуда ta = 2,25 с.
Значение 0 (<2) определяется из уравнения (5.62) в виде
0 (у = —e-^.i-2.25 в _ 0,798.
Начальные значения функций 0 (0 и 0 (f) для 3-го участка будут равны
конечным значениям для 2-го участка. На 3-м участке снова будем вести от-
счет времени от нуля; тогда из уравнения (о.56) получим
С4 = Т [k.k^B — 0 (i,) 1 = 27,98
и из уравнения (5.53) найдем
С8 = 0 (tj — Сл = 44 — 27,98.
Уравнения для 0 и 0* для 3-го участка после подстановки соответствую-
щих числовых значений будут
0 = 16,02 4- 27,98е'°-“ 4- 2/; (5.63)
0== —2,798е-°-«4-2. (5:64)
Подставив в уравнения (5.63) 0 = 44° С, определим момент времени
t3, который соответствует границе 3-го и 4-го участков
44 = 16,02 4- 27,98е-°-п- 4- 2ta
или
27,98е-0,1/» = 27,98 - 20. (5.65)
Уравнение (5.65) решаем графическим способом. Из рис. 5.14, б, где
z'i = 27,98e~u’u* и zz = 27,98 — 2ta, определяем ta = 7,1 с и
0 (0) = — 2,798е~0-71 4-2» 0,625.
Экстремальное значение 0 (t) на 3-м участке, соответствующее ta3,
при котором 0 (0 = 0, находим из уравнения (5.62), т. е.
О = — 2,798е-°-»э8 4" 2,
откуда ta3 = 3,25 с. Имея это в виду из уравнения (5.63) найдем
0 (Q = 16,02 4- 27,98е-°-325 4- 2-3,25 = 42,7.
Аналогично производят вычисление 0 (t) и 0 (t). Соответствующие чис-
ловые значения этих величин приведены в табл. 5.1.
На рис. 5.14, в по данным табл. 5.1 построен переходный процесс
0 = 0 (0 в нелинейной системе регулирования.
327
Таблица 5.1
Номер участка Время от начала участка» с Время от начала коорди- нат, с О, град ъ, град/а Номер участка Время от начала участка, с Время от начала коорди- нат, с град О. гр а д/с
1 0 0 50,00 0,00 3 4 13,25 42,77 0,13
2 2 49,40 —0,36 7,1 16,35 44,00 0,63
4 4 48,60 —0,66 4 2 18,35 45,13 0,51
7 7 46,00 —1,00 3,9 20,25 46,00 0,42
2 1 8 45,50 —0,91 5 1,9 22,15 46,40 0,00
2 9 44,17 —0,82 4 24,25 46,00 —0,37
2,25 9,25 44,00 —0,78 6 2 26,25 45,34 —0,30
3 2 11,25 42,97 —0,29 4 28,25 44,78 —0,25
3,25 12,5 42,70 0,00 7,8 32,05 44,00 —0,17
5.17. В системе автоматического регулирования, структурная схема
которой изображена на рис. 5.10, б, построить переходный процесс по
методу припасовывания. Параметры системы взять из задачи 5.7. Начальные
условия х (0) = 10; х (0) = 0.
5.18. В системе автоматического регулирования, структурная схема
которой изображена на рис. 5.12, а, построить переходный процесс по методу
припасовывания при следующих начальных условиях х2 (0) = 0; х2 (0) =
= 10.
а)
Рис. 5.15. Структурные схемы нелинейных систем автоматического регулирования с двух-
значными нелинейностями
5.19. Построить переходные процессы х2(0 по методу припасовывания
и определить частоты и амплитуды автоколебаний в системах автоматического
регулирования, имеющих следующие параметры и структурные схемы;
a) k = 2 1/с; В = 5; С = 0,5; х0 (0) = 0; х (0) = 2 (рис. 5.15, а); б) k =
= 0,5 с’1 ;7\ = 0,1 с; В = 20; С = 1;х2 (0) = 10; х2 (0) = 0 (рис. 5.15, б).
5.3. АНАЛИЗ УСТОЙЧИВОСТИ НЕЛИНЕЙНЫХ СИСТЕМ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
НА ОСНОВЕ 2-го МЕТОДА ЛЯПУНОВА
С помощью 2-го метода Ляпунова можно анализировать устойчивость
нелинейных систем автоматического регулирования в малом, в большом
и в целом. Сущность этого метода заключается в том, что сведения об устой-
чивости можно получить, анализируя знак производной от некоторой функ-
ции V (х). Данный метод дает лишь достаточные условия устойчивости для
стационарных и нестационарных систем регулирования и не определяет
328
общих принципов формирования функции V (х) и способов выбора знака
производной при нескольких переменных х (хг, х2, хп). Поэтому в этом
параграфе рассматривается применение 2-го метода Ляпунова в формах,
предложенных А. И. Лурье, Г. Сеге, Д. Шульцем {30, 36, 391 для определен-
ных классов задач.
5.20. Исследовать нелинейную систему автоматического регулирования
на устойчивость по 2-му методу Ляпунова, ерли ее структурная схема имеет
вид, изображенный на рис. 5.16, а.
Решение. С помощью структурной схемы составим дифференциальное
уравнение
&+4-+х3=0- <5-66)
Уравнение (5.66) приведем к виду
Xi — х2;
• з
х2 — — Х2 — Х1-
(5.67)
Первый способ. Воспользуемся методом Г. Сеге. Для этого запишем
функцию Ляпунова
V = ап (xi) Xi + 2а12 (xi) xiX2 + 022X2- (5.68)
Уравнение (5.66) 2-го порядка, поэтому а22 = 1; тогда
V = Оц (Х1) Х1 4- 2012 (Х1) Х1Х2 4- Х2, (5.69)
Рис. 5.16. Структурные схемы нелинейных систем автоматического регулирования
329
откуда получим
~3i~ “ “I” 2®н (*i) *1 + 2 Х1Х2Х14-
+ 20^ (Xj) 4- 20ц (xx) xix, 4- 2xgX,.
Подставляя в полученное выражение значения производных из уравне-
ний (5.67), найдем
« ~dxf~ 4~ ^Я11 Х1Х2 4* 4~
4- 2au (xi) х! — 2аи (xi) xixz — 2ац (xi) xj — 2xl — 2x2x1 (5.70)
В выражение (5.70) введем следующие обозначения:
xi 4- 2ац (xi) = 2а'и (xi);
Х1 4-Я12 (Х1) =» Я12 (Х1);
тогда получим
Х2 [2ai2 (Х1) — 2] 4- Х2 [2ан (xi) xi — 2ап (xi) xi — 2x?J —
— 2ai2(xt)xi. (5.71)
Пользуясь выражением (5.71), образуем функцию
ф (х) = xi [2ai2 (xi) — 2] 4- х2 [2аи (xi) xi — 2ou (xi) xi — 2xi] —
-2a«(xi)xt. (5.72)
dV
Функции и ф (x) можно представить в виде полинома 2-го порядка
относительно х2, т. е.
ф (х) = /4X2 4“ Вх2 4- С,
где
А =• 2a’a(xi) — 2;
В ; 2аи (xi) xi — 2аа (х2) xi — 2х\\
С = —2fli’2(xi)xi.
(5.73)
(5-74)
Для получения устойчивости во всей области (хх, ха) необходимо, чтобы
уравнение ф (х) = 0 имело кратные корни.t Соответственно этому дискрими-
нант уравнения должен быть равен нулю, т. е.
В2 — 4АС = 0.
Согласно методу Г. Сеге возьмем А = В = 0; тогда получим
ai2 (xi)» 1;
яп (xi) = 1 4*
(5.75)
Значения коэффициентов а1Х (хх) и alt (хх) получим из решения урав-
нений
-^-X!4-2an(xi) = 2(l 4-х?);
-^-Х14-0м(*1) “
330
В этом случае решение для an (xt) ищем в виде
an (xi) — axi + ₽,
т. е.
2a*? 2ax? 4- 2₽ = 2 2х?.
Приравняв коэффициенты при одинаковых степенях xt, найдем
«-4: ₽-*•
Решением второго уравнения является
*lt (Xi) = у и у = 1.
Для найденных нами значений an и alt запишем функцию Ляпунова
согласно выражению (5.69) в виде
V =. a*J 4- ₽х? 4- 2ухА 4- х2г, (5.76)
где а, ₽ и у — произвольные постоянные.
Подставляя а = £=1 и у = 1 в выражение (5.76), найдем
V - -j" xi + х’ + 2хЛ + х* (5.77)
и
_____2xt
di 1
(5.78)
Из последнего выражения следует, что при любых значениях xt < 0.
Это и указывает на устойчивость рассматриваемой системы автоматического
регулирования по Ляпунову.
Второй способ. Используя метод Д. Шульца, градиент функции V для
системы уравнений n-го порядка запишем в виде
W •==
а11х1-ра„*а + -
•4-а1ях„"
• 4- ®апхп •
(5.79)
4- апаха 4------1- а„„х„ J
Найдем производную от функции Ляпунова:
-g- - уГх, (5.80)
где VVr — транспонированный столбец (уУ).
Функция Ляпунова будет
X Х< X»
v« Jvrdx-JWiOi, 0,...,0)^ 4- J W2(Xn U 0,..., 0)dSa4--”4-
*n
4- ['VV„(^, xa,..., x„_n £„)<£„.
Для системы уравнений (5.67) имеем
а1Л 4" амХ«
аих14-аиха
(5.81)
(5.82)
аз1
W =
тогда
— (anxi 4" aia*a) •'jf' 4" («аЛ 4” ааа*а) ----------(®их1 4” aia*a) хг 4*
4- (021X1 4- 022X2) (— х2 — X®). (5.83)
Подставляя значения производных и считая, что alt = atl — const,
получим
== — 0^21X1 4- (ац — ai2 — 022X1) XjXj — (а22 — Oja) xi (5.84)
Примем als = аа1 = 2; тогда для выполнения условия 0 необ-
ходимо иметь ааа = 2 и an = 2 и градиент
W-Г 2хФ2^ + 2Х21- (5-85)
“•^1 11 “•^2 I
Подставляя выражение (5.85) в формулу (5.81), получим
(—xi 4~ 2xiX2 4“ (5.86)
и
dV
dt
2xt
Последнее выражение совпадает с ранее полученной формулой (5.78).
5.21. Исследовать нелинейную систему автоматического регулирования
на устойчивость по 2-му методу Ляпунова, если ее структурная схема имеет
вид, изображенный на рис. 5.16, б.
5.22. Исследовать нелинейную систему автоматического регулирования
на устойчивость по 2-му методу Ляпунова, если ее структурная схема имеет
вид, изображенный на рис. 5.16, в.
5.23. Исследовать нелинейную систему автоматического регулирования
на устойчивость по 2-му методу Ляпунова, если ее структурная схема имеет
вид, изображенный на рис. 5.16, г.
5.24. Исследовать нелинейную систему автоматического регулирования
на устойчивость по 2-му методу Ляпунова, если ее структурная схема имеет
вид, изображенный на рис. 5.16, д.
5.25. Исследовать нелинейную систему автоматического регулирования
на устойчивость по 2-му методу Ляпунова, если ее структурная схема имеет
вид, изображенный на рис. 5.16, е.
5.26. Исследовать нелинейную систему, динамика которой описывается
уравнениями вида
= ах? 4- 5х2;
—зд + ЛЬ
на устойчивость по 2-му методу Ляпунова, если а > 0; b > 0; с > 0 и d > 0.
5.27. Исследовать нелинейную систему, динамика которой описывается
уравнениями вида
-^- = х2 4- X! (х? 4- xl);
= — Xj 4* х2 (х? 4" Хг),
на устойчивость по 2-му методу Ляпунова.
332
5.28. Исследовать устойчивость нелинейной системы, динамика которой
описывается уравнениями
•^-=-Зх2-Г(х1)х1;
-^ = -2xs4-F(x1)x1
(5.87)
по 2-му методу Ляпунова.
Решение. Воспользуемся методом представления градиента функции
Ляпунова в форме Д. Шульца в виде
У Г 4"
[®21X1 4- OCggX^
Образуем производную от функции Ляпунова
а VVTx
dt Vk •*'
(5.88)
(5.89)
Подставляя в выражение (5.89) соответствующие значения из (5.88)
и (5.87), получим
— — х? [auF (xi) — anF (xi)] + xix2 [— Зац — anF (xi) — 2«2i -f-
+ a&F (xi)] ~ & |2“и + 3au|. (5.90)
Положим a12 •« a81 == 0; тогда из выражения (5.90) найдем
-тг-« — anF (xi) xi — 2a&>$ -f- xiX2 [— 3an -f- a^F (xi)], (5.91)
откуда видно, что отрицательно, если выражение в квадратных скоб-
ках равно нулю, или
В этом случае градиент
VV==
L .
Согласно формуле (5.81) получим функцию Ляпунова
о о
Примем а22 » 6; тогда
V-2jF©§d5 + 3j4.
о
(5.92)
(5.93)
(5.94)
(5.95)
(5.96)
Если xtF (хг) = у находится в первом и третьем квадрантах, то функ-
r, d.v
ция Ляпунова положительно определенна, а отрицательно определенна,
что указывает на устойчивость рассматриваемой системы. Можно также по-
казать, что эта система асимптотически устойчива в целом.
5.29. Исследовать устойчивость нелинейной системы автоматического
регулирования, структурная схема которой изображена на рис. 5.17, а,
в помощью 2-го метода Ляпунова.
333
О
Рис. 5.17. Структурные схемы одноконтурных нелинейных систем автоматического регу-
лирования
Решение. Пользуясь структурной схемой (рис. 5.17, а), напишем урав-
нение в виде
d*x , . dax , о dx , сп
&& 4~ "щГ 4* ,-f- F (х) х » 0
(5.97)
или
dr в х«’
~ЗГ “ **
— — Лх3 — Вх3 — F (Xi) xv
Градиент функции Ляпунова
'«1Л + а1Л + «1Л'
VV = «ai*i 4" <хягхг «аз*з .
_«3i*i 4“ «за*а 4“ аззХз_
Используя уравнения (5.80), (5.98) и (5.99), найдем
4^- — — “ai/7 (*i) Xi 4- X1X2 (au — Basi — F (xi) a32] 4-
4- *1*3 [®2i — Ла31 — аззГ (xt)] 4- xl [al2 — Sa32] 4-
4- X2X3 [ai3 4- «22 — Л0С32 — «ЗзВ) 4“ *3 I®23 — «33Л].
(5.98)
(5.99)
(5.100)
_ - dV ,
Для того чтобы было отрицательно, приравняем нулю выражения
в скобках при парных соотношениях; тогда
«и “ 5аи 4- F(Xj) аз,;
«si “ Ла314- F (хг) ам;
«31 4" ааа = -4«за 4” ®«зз-
Полагая а18 = а81 = 0 и а88 = 0, из уравнений (5.101) найдем
«ai = 2f(xi);
«и «за^7 (*1)1
(5.101)
(5 Л 02)
Так как в выражение (5.100) при принятых условиях не входит xlt
то функцию можно представить зависящей от xl или *з. Положив коэф,
фициент при хз равным нулю, имеем
«аз — 2Л = «38.
(5.103)
334
Коэффициент <х1а не постоянная величина и определяется из условия
дУ У, дУ V,
дхг dx,
Градиенты УУг и VVa получаются из выражений (5.99) и
(5.103) в виде
ГХТЯ Г 2AF (xj Xj 4- anxa 1
I wj = 12F (Xi) Xi 4- 2 (Л2 4- В) x, 4- 2Лх3 J
Имея в виду соотношения (5.104) и (5.105), получим
и'
5V V» ОГ I \ I о dF(x<)
-W’“2F(x1)4-2x1-iy-,
откуда
аи=2£(х1)4-2х1^.
В результате выражение (5.99) примет вид
~2AF (Х1) Х1 + [ 2F (xj + 2ха
2F (xt) хх 4- 2 (Ла -|- /3) ха -|- 2Лхз
_2Лха 4- 2х8 .
(5.104)
(5.101)—
(5.105)
(5.106)
(5.107)
(5.108)
(5.109)
W =
Пользуясь выражениями (5.109), (5.80) и (5.89), найдем
V - 2A J F (I) 1<£ 4- 2F (xj) Х1Х2 4- (Л2 4- В) 4 4- 2Лх2х3 4- & (5-1Ю)
и
----2xi f АВ - F (xt)] 4- 2xi [х, ^2] . (5.111)
Для несимметричных нелинейностей можно ввести упрощения:
а12 = «а82’_цр/ } <5112>
«и — Ваз1 + Р (*i) “st. J
а при а1а = аа1
ааа = Л с&81 = В с&82* (5.113)
В результате этого получим все постоянными за исключением а1а.
При условиях (5.112) и (5.113) имеем
-1К. -----аз2Х1 — 2F (Х1)Х!Х3 — (2Л — aM)xl; (5.114)
— отрицательно полуопределенна, если Л, В, F (ха) > 0 и [ЛВ —
— Р (xt)! >0. Это соответствует условиям устойчивости Рауеа или Гурвица.
Асимптотическая устойчивость обеспечивается для несимметричной одно-
значной нелинейности, если АВ > F (ха) для любых ха.
Б.30. Исследовать устойчивость нелинейной системы, динамика которой
описывается уравнением вида
+ (5.115)
Решение. Уравнение (5.115) перепишем в виде следующей системы:
Xi = ха;
ха = —xa4-|x1Jxa —Хр
(5.116)
335
С помощью метода градиента найдем
= Х1Х2 («11 — а21 4- 021 | Х11 — 2) 4- Х2 (012 — 2 4- 2 IХ11 ) — 021X1-
Рассмотрим выражение (5.117) как функцию от xi; тогда
а1а =* 2 — 21 хх |;
вл = 2 | хг |;
оц == 4 — 31 xi [ 4- xi.
В этом случае
—— х?(2 — |Xi|).
(5.117)
(5.118)
(5.119)
Из выражения (5.88) в соответствии с соотношениями (5.118) получим
4xi — 3xi | xi | 4- -xi 4- 2х2 — 21 xi | x2;
_2xt — | xx | Xi 4- 2x2
(5.120)
тогда
V = 2x? — IX11 xi 4- 4- 2xix2 — | Xi IX1X2 4- (5.121)
С помощью выражения (5.119) и (5.121) устанавливаем, что система устой-
чива по Ляпунову при —2 < хх <2. Если пользоваться методом фазовой
плоскости, то система устойчива при —1 < х < 1. Это указывает на то, что
применение 2-го метода Ляпунова позволяет получить более полное решение.
5.31. Исследовать устойчивость нелинейной динамической системы,
динамика которой описывается нестационарным нелинейным уравнением
вида
-§г + А + В <х’ х = °- (5-122)
Решение. Из выражения (5.122) получим
—j. в — Ахг — В (хх, 0 xv
”1“ а1?Х2
+ «22*2
Как и в ранее рассмотренных задачах 5.28—5.30, найдем
«цХ1
ааХ1
(5.123)
(5.124)
Принимая аа2 = 2, запишем
~ =. Х1Х2 [ац — Да21 — 2В (Х1, 0)4-4 (®и—2А)—апВ (xi, fix? • (5.125)
Так как В (хх, 0 зависит только от фазовой координаты хх, то
ахх = А а2Х 4- 2В (хх, 0 (5.126)
[Ла-.х, 4- 2В (хх, 0 х, 4-
«1 i-г v 1. it 12-2 (5.127)
аах1 + 2ха J
Сформируем функцию Ляпунова в виде
V = xl 4- 2 J В (I, t) 5 dl 4- 021^1X2 4- xl (5.128)
336
откуда
= — xl (2 Л — a2i) — txziB (xi, 0 *1 + 2 j -Jjr В (5, t) g d%. (5.129)
о
Примем
а21 = 2 (Л — в); (5.130)
тогда
Xl
У = (Л-8)Лх! + 2(Л-8)х1Х2 + х! + 2 Гв(£, Г)1<£ (5.131)
и о
= — 2 (Л - 8) В (хи 0 xl - 28x1 + 2 J дВ&’ ° g <£. (5.132)
о
Если интеграл в выражении (5.132) больше нуля и V больше положи-
тельно определенной функции
(*) = “ИЛ (Л - 8) + 2 (Л - 8) Х1Х2 + xl], (5.133)
, d\' ,
то для того, чтобы —было больше, чем зависящая от времени, положи-
тельно определенная функция, необходимо в функции В (хх, t) иметь ли-
нейный член малой величины, т. е.
В (Х1г 0 ~ Во 4" (Xl>
где В0 — как угодно мало; тогда
- = 2В0 (Л - в) xi + 28X2 + 2 (Л - 8) Bj (хь 0 xi - 2 j ° g dg. (5.134)
0
Если ,
xe
(A - 8) Bt (X!, 0 x? > J - g dg (5.135)
0
для всех xx и г, то--больше, чем независящая от времени положительно
определенная функция
W2 (X) = 4” С25» (Л - е) х? + exi] (5.136)
и <0. Если нелинейность не задана, то невозможно гарантировать
устойчивость системы. Так, например, если В (х1, 0 = Во -J-e^x?, то функ-
ция V не ограничена по хх и система будет неустойчива.
5.32. Исследовать устойчивость нелинейной системы автоматического
регулирования, структурная схема которой изображена на рис. 5.17, б,
с помощью 2-го метода Ляпунова.
5.33. Исследовать устойчивость нелинейной системы автоматического
регулирования, структурная схема которой изображена на рис. 5.17, в,
с помощью 2-го метода Ляпунова.
5.34. Исследовать устойчивость нелинейной системы автоматического
регулирования, структурная схема которой изображена на рис. 5.17, г,
с помощью 2-го метода Ляпунова.
5.35. Исследовать устойчивость нелинейной системы автоматического
регулирования, структурная схема которой изображена на рис. 5.18, а,
с помощью 2-го метода Ляпунова.
337
Рис. 5.18. Структурные схемы нелинейных систем автоматического регулирования
5.36. Исследовать устойчивость нелинейной системы автоматического
регулирования, структурная схема которой изображена на рис. 5.18, б,
с помощью 2-го метода Ляпунова.
5.37. Исследовать устойчивость нелинейной системы автоматического
регулирования, структурная схема которой изображена на рис. 5.19, а,
с помощью 2-го метода Ляпунова.
5.38. Исследовать устойчивость нелинейной системы автоматического
регулирования, структурная схема которой изображена на рис. 5.19, б,
с помощью 2-го метода Ляпунова.
5.39. Найти условия абсолютной устойчивости нелинейной системы
автоматического регулирования, структурная схема которой изображена
на рис. 5.20, а. На функцию нелинейного элемента накладываются условия
F (*1) > 0.
Решение. На основании структурной схемы запишем уравнение дина-
мики системы в виде
y^bF (xj;
JL. = сх _ pf (Х1).
Или, исключая у, получим следующие уравнения системы:
~ ах = bF (хх);
-^- = сх — pF (хх).
(5.137)
(5.138)
Функцию Ляпунова для системы (5.138) ищем в виде
V = ax2+jF(gX a>0.
о
Из уравнений (5.138) имеем
= — 2ааха -|- 2 dF (хх) х — pF*(xx),
где d = afe 4- -i- с.
a) И
Рис. 5.19. Структурные схемы нелинейных систем автоматического регулирования с неста-
ционарными нелинейностями
338
Условия отрицательной определенности функции запишем в виде
р > 0 и
(afe 4- -£-)2 — 2аар < 0. (5.139)
Для того чтобы неравенство (5.139) имело положительное решение а >
> 0, необходимо и достаточно выполнения неравенства ар > Ьс„
которое обеспечивает положительность обоих корней уравнения
a2fe2 -f- а (fee — 2ар) 4~ -у- — 0.
Таким образом, если ар > fee, то рассматриваемая еистема автоматиче-
ского регулирования абсолютно устойчива.
5.40. Найти условия абсолютной устойчивости нелинейной системы
автоматического регулирования, структурная схема которой изображена
на рис. 5.20, б. При этом функция нелинейного элемента удовлетворяет сле-
дующим условиям: F*(x1) = 0 при | xr| х*; xj7 (хх) > 0 при | хх | > xi,
где xi — некоторое фиксированное неотрицательное число, характеризующее
зону нечувствительности регулятора к изменениям хх. Для всех | хг | > х(
функция F* (хх) является непрерывной; в точках хх = ±хГ допускается
разрыв непрерывности F* (хх). Функции, удовлетворяющие этим условиям,
будем относить к классу разрывных.
Решение. Запишем уравнения системы в следующем виде:
7''4^ + "4г + ."-0;
где Та — инерционность объекта регулирования; U — естественное демпфи-
рование; а, Е, Ф, I —" постоянные регулятора.
Если ввести
+ =я1’ г “ г» ’ ” iT* *"
рх = а; ра=(£ — =
^iy,
339
то уравнения (5.140) можно привести к безразмерной форме:
jLeF(xj); 9-
(5.141)
Установившиеся состояния в данной системе определим, решая урав-
нения
л»=о;
ЬааПа + — О’»
IРГП1 4- P2T]s —
(5.142)
Поэтому, если F (xj есть такая функция, для которой хГ > 0, то полу-
чим континуум решений
^“°! ’’“°- <5,143)
Для построения канонического преобразования составим определитель
D (%) и его производную:
I X 0
D^)e|i ==Мь+М;
D,J (М = 2& + &яв.
Уравнение D (X) - 0 имеет корни = 0; Ц — —bit. Выбирая число 1» 1,
составим строку миноров Dik и по формулам
Na (Ч) “ S niPak (И
• feel
(a, s« 1, .... т)
строки величин JVe. Тогда для данной задачи получим <
Оц » % Ц- Ьаа, D 1а «= —1;
Согласно формуле
<*’ S= h ’ m)
(5.144)
получим коэффициенты прямого преобразования
cls)— &,(Л,4-Ы;
и само преобразование
xi=“ 9,
*2 а %2Г|2 -|- у.
(5.145)
Поскольку первая строка преобразования является вырожденной, то
коэффициенты обратного преобразования находим лишь для координаты г)а.
В результате этого имеем
_________ns (1})______________1_.
— 11 (21j + &2г) *
rj(2)____ (^2) _ 1
— (21g 4*
340
В соответствии с полученными выражениями находим
У = xi,
№ = — (х2 — Х1)-
(5.146)
Дифференцируя xv из уравнений (5.141) получим
= РхПа + Ра (Ма + ПцУ) — Р (*i)-
Если теперь воспользоваться формулами (5.146) и обозначить
Pi—Ра=Л-1ЛРа,
то окончательно имеем
~ — Р (*i).
—^X2 4-F(X1), I
4г = 0i*i4- 02X2 — г (Xt).
При Хх = 0 функция Ляпунова имеет вид
о
где А — положительное вещественное число; а2— вещевтвенное число; тогда
(5.147)
(5.148)
+ 3^-F (Xi) + FIX!) Йл + fjX;'] _ (F (x,)!2. (5.149)
Добавляя к правой части выражения (5.149) 2F (xj а^с2 — 2F (xjagxi.
получим
= _ [а2хг 4- F(xi)]2 4- xi [А 4- 01] F (xi) 4- x2F (xt) 102 4- 2о2 4- I- (5.150)
<** t •*! J
„ dV , т,
Производную противоположного знака функции V можно полу-
чить, если потребовать выполнения соотношений
' Л4-0Х-О;
(5.151)
0а4-2а.4-->«О.|
Поскольку 0х = —£*-< 0, то первое выражение в соотношениях (5.151)
л2
всегда может быть удовлетворено; из второго выражения находим
02 -----Xg ± ]/"— ^202.
Но Ха = —Ь22 — вещественное число; следовательно, а2 будет вещест-
венным, если параметры системы удовлетворяют неравенству
0е ^а-
Или, иначе,
1 ( U \з и / иа» \
i \ Т ) >а Т2 \Е Т* Г
341
После преобразования получим
Неравенство (5.152) и дает единственное условие абсолютной устойчи-
вости регулируемой системы.
5.41. Исследовать устойчивость системы автоматического регулирова-
ния с помощью 2-го метода Ляпунова, если ее уравнения имеют вид
~ = (3m — 1) хг — (m — 1) у* — (п — 1) z8 4- (Зп — 1) уг — 2mzx — 2hxy;
— у + х-j-(х — у-j-2z) (у-j-z - х);
JL. = — z -j- x — (x -j- 2y — z) (y 4- z — x),
где m и n — постоянные параметры систем.
5.42. Исследовать устойчивость системы автоматического регулирования
с помощью 2-го метода Ляпунова при различных значениях параметров а,
Ь, с, k, I, т, п, если уравнения системы имеют вид
= ах8 -j- bxy + су*‘, ~ уkx1хгтхдпу2.
5.43. Исследовать устойчивость системы автоматического регулирования
в целом с помощью 2-го метода Ляпунова, если ее уравнения имеют вид
_g_ = x4-^4-F(x);
Л.-------х + у,
где F (х) = е~2х (1 4-е~х)“1 при х2&1;
F (х) = е“2 (1 4- е-1)"-1 при х < 1.
5.44. Исследовать устойчивость положения равновесия системы авто-
матического регулирования с помощью 2-го метода Ляпунова, если уравне-
ние систем имеет вид
-~.=«x4-Хг(х, у, г)-,
-^-^—y — z-l-X^x, у, г);
ТГ = — z — х 4- *з (х, У, г).
Указание. X, — непрерывные функции; их разложения в ряды ие со-
держат членов ниже второй степени.
5.45. Исследовать устойчивость системы автоматического регулирования
с помощью 2-го метода Ляпунова, если системы имеют вид
-^-=--0,5x84-xzz4-0,lza;
—»4-^»(х,^г);
-^- = -z4-X8(x, y,z),
где функции Х2, Х3 — непрерывные функции х, у, г, не содержащие членов
ниже второго порядка для соответствующих переменных.
342
Указание. Использовать функцию Ляпунова V в виде
V х + Ux + W,
где С/ и W — соответствующие линейные и квадратичные формы от (у, г).
5.46. Исследовать устойчивость системы автоматического регулирования,
если ее структурная схема имеет вид, показанный на рис. 5.20, в, с помощью
2-го метода Ляпунова.
5.4. ПРИМЕНЕНИЕ МЕТОДА ГАРМОНИЧЕСКОЙ
ЛИНЕАРИЗАЦИИ ДЛЯ АНАЛИЗА
УСТОЙЧИВОСТИ НЕЛИНЕЙНЫХ СИСТЕМ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
Устойчивость нелинейных систем можно анализировать по методу гар-
монической линеаризации лишь для таких систем автоматического регули-
рования, у которых обеспечивается свойство обобщенного фильтра для ли-
нейной. части, т. е.
где k = 2, 3, ... .
Для определения устойчивости системы обычно применяют критерии
А. В. Михайлова и Михайлова—Найквиста в обычной или логарифмиче-
ской форме. С помощью способа структурных преобразований (см. п. 6,
гл. I) приведем нелинейную систему к такому виду, чтобы условие ее устой-
чивости можно было записать в виде
L (/ш) = 1 + Г (/со) J (А) - О,
или
L О, А) = 1 + [£7 (со) + /V (®)1 [а (А) + -^Л-)/(й ],
откуда ।
L (j(o, А) = X (и. А) -|- jY (со, А).
Условия устойчивости нелинейных систем по А. В. Михайлову [30]
можно записать в виде
( дХ \* / ЗУ \* , ( dX \* ( 3Y \*
\ дА ) \ да> ) \ да> ) \ дА )
(5.153)
при А = Аа и со == соа.
В нелинейной системе существуют незатухающие колебания, когда вы-
полняется условие (5.153), а годограф L (/со), проходя через начало коор-
динат, удовлетворяют критерию Михайлова. Последнее условие следует
проверять лишь для систем пятого и более высоких порядков, так как для
систем третьего и четвертого порядков оно сводится к требованию положи-
тельности всех коэффициентов выражения 1 + W (s) — 0.
Условие устойчивости нелинейных систем по Михайлову—Найквисту
в обычной форме запишем в виде
или в логарифмической форме
201g Я (со) = 201g L ;
’(4)
- п - 0(©) = p(-j-).
(5.154)
343
Рис. 5.21. Структурные схемы систем автоматического регулирования с однозначной
нелинейностью
5.47. Исследовать устойчивость состояния равновесия следящей системы,
структурная схема которой изображена на рис. 5.21, а, если ее параметры
В = 1 В; У, = 10 с"1; Тг = 10 с; 72 = 1 с.
Решение. По структурной схеме рис. 5.21, а запишем уравнение ли-
нейной части системы в виде
T1Ti^ + (7\ + ----(0. (5.155)
Для нелинейного элемента имеем
ui (О = Я (Л)« (0» । (5.156)
где
9(Л) = -^-. (5.157)
Подставляя выражения (5.156) и (5.157) в уравнение (5.155), получим
гр гр d3u । ..р . гр . d?u . du (t) .r «.л.
ЛЛ-37г+Г1+^а)-^2-+-зг =-----------Щ----• (5-158)
Применяя к уравнению (5.158) преобразование Лапласа при нулевых
начальных условиях, запишем
[ 7\Т^ + (Л + 7\) s’ + S + ] и (S) = 0. (5.159)
Из уравнений (5.159) найдем характеристическое уравнение
L (s, Л) = 7\TJ + (Тх + Та) s’ + s + = 0. (5.160)
Возможность существования периодического решения уравнения проана-
лизируем с помощью критерия устойчивости Михайлова. Для этого в урав-
нение (5.160) подставим s = /со; тогда найдем
L (]Ъ, А) = « - (7, + TJ со’ + > (1 - 717асо’) = 0, (5.161)
откуда
X (со, Л) = - (7Х 4- 7а) (О’ = 0;
У (со, Л)= 1-7178со’ = О.
(5.162)
344
Из системы уравнений (5.162) определим параметры периодического
движения:
частоту
®а = V TyTi = То = 0’314 с 1
и амплитуду
л 4kik2B_______4-10_____11 fi R
а «(Ti + Ts)<of ~ 3,14.-11-0,1 — 11,0 D’
Для исследования устойчивости найденного периодического решения
будем использовать формулу (5.153), т. е.
Ш=-2|7'+
= Ш-0
и
7 дХ \* 7 дУ К* 7 дХ у 7 SY у _ 12fe1^2B7’17’2(l)2 12-10-10-0,1 п
\ Ма ) \ до>а ) \ до>а ) \ дАа ) ~ л4« ~ 3,14 (11,6)» > U'
Коэффициенты характеристического уравнения третьей степени поло-
жительны и условие (5.153) удовлетворяется; следовательно, найденное
периодическое решение является устойчивым.
5.48. Исследовать устойчивость состояния равновесия в одноконтурной
системе автоматического регулирования (см. рис. 5.21, б) и определить па-
раметры периодических решений, если 7\ = 10 с; Т2 = 0,1 с; В — 25 В;
С = 0,01 В; kvk2 = 0,01 с’1.
Решение. Подставляя в уравнение (5.155) вместо (/) выражение
= приД>С,
получим '
гр ну tPu । .ну । ну. d2u । du t 4k^k2Bu (7) i Г« С» .. .
Л7а-^г + (Г1+ra)-^r4-~3f-------------^4 у 1--------дГ- (5.163)
Из выражения (5.163) найдем характеристическое уравнение
L(s, А) = 7\Т^ + (Л + Тя)s8 + s + /1--^--0. (5.164)
Анализ устойчивости системы автоматического регулирования выполним
тремя способами.
Первый способ. Подставим в уравнение (5.164) s = /ш; тогда получим
X (<в, А) - /1--$- - (Л + Т8) со»;
пл г л (5.165)
У(<о, Л)= 1-7\7>2,
откуда
“а = = V TcToJ == 1 с 1;
4W , Г х _ Tj + T2
пАа у TtT2 ’
или после подстановки числовых значений
4.0,01-25 Г~. 0^К .п .
3,144g у А2 -W3-
345
Решая это уравнение, получим
Да = 3-10-2 рад и Да — 1,07 -10~2 рад.
Исследуем, какие же из двух решений соответствуют устойчивым пе-
риодическим колебаниям. Для этого из выражений (5.165) определим
/ дХ \* _ 2С2 — 4 .
\ <*. ) яЛа >
«г)'"-2'7'.
Пользуясь условием устойчивости (5.153), найдем
(| _ >0 (5.166)
пЛа)/Я2а-С«
Подставляя в последнее выражение значения А'а = 3-10-2 рад или А'а =
= 1,07-10-2 рад, соответственно имеем
(2-10-* —9-10-*) (1—3) Q
3,14-27-10-* /9-10’*—10**
И
(2-10-*—1,14-10-*) (1—3) <0.
3,14-1,21-10-*/1,14-10-*— IO'* *1
отсюда следует, что лишь при А'а = 3-10"8 рад возможны устойчивые перио-
дические решения (автоколебания). Амплитуда автоколебаний на выходе
будет
» Д’а З.Ю-» „ пап
Лвв_ kj2 0,01 =3 рад'
Второй способ. Уравнение (5.163) перепишем в виде
ЛГа d3u Tt + Tt d3u__________1___du _ 4«(П т /. с3 , 1fi7.
kTk2B dta кгк2В dt3 kxk2B ~dT nA V Аг >
или после применения преобразования Лапласа
_ ТгТз ss — s8 — 1 s == 4 iZl — (5 168)
k&B s kik2B S kxk2B s nA V 1 A3 • (O.1DO)
При s = /ш из выражения (5.168) определим
с°а-/(тТя--^^-)== ЧТ V1— -S’- (5-169)
ktk2B ' \ ktk2B кхк2В / nA Т A3 v '
Из левой части уравнения (5.169) найдем значение амплитуды
<51ГО|
Построим годограф Михайлова (рис. 5.22), из которого определим соа =
= 1 с"1. Подставляя полученное значение в выражение (5.170), запишем
И (“а) = -л-/, бе- = 40 рад. По правой части уравнения 1
U|vl* ХО
<7(4) =
4-100
С3
дГ рад
1 В выражении для q (Ла) множитель 100 введен для приведения к размерности Ла.
346
Рис. 5.22. Годограф 'Лихой-
лова для задачи 5.48
в зависимости от ~ строим кривую 1 (рис. 5.23). Проведем на расстоянии
Я (<оа) — 40 рад прямую 2, параллельную оси абсцисс. В точках пересе-
чения получим значения у = 3и 1,07. При С = 0,01 рад А'а =
= 3-10~- рад и Аа = 1,07*10"® рад; тогда частота автоколебаний ша «
= 1 с'1 и амплитуда Аа = 3«10“® рад.
Третий способ. Построим на рис. 5.24, а и б логарифмические амплитуд-
ные и фазовые частотные характеристики разомкнутой системы. Условие
возникновения в системе периодического режима в соответствии с формулой
(5.154) запишем в виде
201g Я (ш) = 201g —
’(4)
0 (ш) ---Л.
(5.171)
Условие (5.171) обеспечивается, если точка (рис. 5.24, а), получен-
ная пересечением оси — 180° С с фазовой характеристикой 0 (со), лежит
на одной вертикали с точкой Ви образованной пересечением амплитудных
характеристик 20 1g Н (со) и 20 1g - Для определения амплитуд и частот
’(л)
автоколебаний воспользуемся методом шаблонов. Для этого на прозрачной
бумаге строим шаблон с характеристикой 20 1g а затем накладываем
•ы
его на характеристику 20 1g Н (со) так', чтобы ось относительных амплитуд
С
-г- совпала с осью частот со. Шаблон перемещаем вдоль оси частот до тех
Л
пор, пока характеристика 20 lg „ не пересечет в точке Вг амплитудную
»(х)
частотную характеристику линейной части системы. В результате этого
получим частоту периодического режима ыа = 1 с"1 и Д- = 0,33 или
А'а = 3-10"® рад. При дальнейшем пе-
ремещении шаблона получим точки В2
С
и D а, для которых СОа = 1 С-1 и -Т- =
Ла
= 0,94 или . Аа = 1,07-10“® рад.
Рис. 5.23. Определение амплитуд автоколеба-
ний в нелинейных системах регулирования по
частотной характеристике И (со) и эквивалент-
ной нелинейной характеристике - „
’(4)
347
Рис. 5.24. Логарифмические
частотные и обратные эквива-
лентные характеристики для
нелинейной системы
В соответствии с сущест-
вующим правилом уста-
навливаем, что Л? = 3 • 10~2
рад является амплитудой
автоколебаний.
5.49. Исследовать
устойчивость состояния
равновесия системы авто-
матического регулирова-
ния, структурная схема
которой изображена на
рис. 5.21, в, и опреде-
лить параметры автоко-
лебаний, если 7\ = 0,1 с;
Т2 = 1 с; = 20 В/рад;
k2 = 5 рад/В«с;С1 = 0,2В;
С2 = 1 В; В = 1 В.
5.50. Исследовать ус-
тойчивость состояния рав-
новесия, структурная схе-
ма которой изображена на
рис. 5.21', г, и определить
параметры автоколебаний,
если 7\ =т= 0,1 с; Т2 = 1 с;
Сх= 0,4 В; С2 = 1 В; В — 1 В; = 30 В/рад; k2 = 2 рад/В-с.
Указание. Использовать второй способ решения задачи 5.48.
5.51. Найти области устойчивых состояний равновесия и автоколебаний
в нелинейной системе автоматического регулирования от параметров k2 ,
Т2 и С, если ее структурная схема имеет вид, показанный на рис. 5.25, а.
Решение. Составим характеристическое уравнение гармонически линеа-
ризованной замкнутой системы автоматического регулирования в виде
W + (7\ + Т8) 8» + s + k&q (4) = 0;
<?(4)=4(arcsin4+4/1—S-) при л^с-
(5.172)
Из системы уравнений (5.172) определим мнимую и вещественную ха-
рактеристики при s = /со, т. е.
- ТгТ^ - (7\ + 7\) со2 + /со + (arcsin^ + -£ - -g.) =» °
или
“&(arcsln4+4/7T^)_(7-l + 7-,),„=_0; (5,173)
1 — TjTja)2 = 0.
Из второго уравнения систем (5.172) найдем формулу для определения
частоты автоколебаний
со. = Г
а К ТхТ,
(5.174)
348
Рис. 5.25. Структурные схемы систе-
мы автоматического регулирования с од-
нозначными нелинейностями
о
Подставляя полученное значение ыа в первое выражение системы урав-
нений (5.173), найдем формулу для определения амплитуды автоколебаний
в виде
h±b. = (arcsin с с У Jc*\ (5 175)
а \ АЛ 1 Aa Г А1/
С помощью соотношений (5.174) и (5.175) построим области устойчивых
состояний и автоколебаний рассматриваемой системы. Для этого примем
постоянными Тх = 0,1 с; = 2 В/рад; В = 1 В и переменными ka = 2,5-5-
-5-50 рад/В-с; Т3 = 0,05-5-1,5 с; С = 0-5-10 В.
Полученные по формуле (5.175) значения амплитуд автоколебаний Аа
необходимо привести к выходу системы с помощью соотношения
Л0В = k2A2. (5.176)
Соответствующие значения амплитуд и частот автоколебаний в зависи-
мости от параметров системы приведены на рис. 5.26, а—в.
5.52. Найти области устойчивых состояний равновесия и автоколебаний
в зависимости от параметров klt Т2н С для системы автоматического регули-
рования (см. рис. 5.25, б), если Т2 = 0,5 с; k2 = 4 с”1; В = 4 В.
Указание. Коэффициент = 2-5-200; постоянная времени Га = 0,2-8»
»i?2,0 в; G — 0,1-т-5 рад.
5.53. Найти области устойчивых состояний равновесия и автоколебаний
для системы автоматического регулирования (см. рис. 5.25, в) в зависимости
от параметров ,7\ и С, если Т2 = 2,5 в; Т8 = 1 с; k2 = 10; ka = 2 рад/В«в;
В = 25 В.
Указание. Коэффициент kt = 0,05-5-0,5 В/рад; постоянная времени
= 0,2-5-2,0 с; С = 0-5-1 В.
5.54. Построить зависимости частоты и амплитуды автоколебаний в ре-
лейной следящей системе с звеном «чистого» запаздывания (рис. 5.27, а) и
нелинейностью F (и) (рис. 5.27, б) от %, если Тх — 10 с; Та = 0,1 с; В =
= 25 В; С = 0,01 рад; К = ktk2 = 0,02 с"1.
о)
0 i0 20 30 40 кг
Рис. 5.26. Зависимости частот и амплитуд автоколебаний от параметров системы авто-
матического регулирования
349
Рис.. 5.27. Структурная
схема релейной следящей
системы
-в о
О
Решение. Запишем характеристическое уравнение гармонически лине-
аризованной системы в виде
W + (T1-|-T1)s4.s + -^Le-’’-0. (5.177)
Подставляя в последнее уравнение s = /<о, получим две зависимости
cos то - (Л + Т2) = 0;
АМЬ (5Л78)
- sin то + со - ЛЛш8 = 0.
Исключив из системы уравнений выражение 4, найдем
(Т, + Та) со tg «о = 1 — ЛТаСО*. (5.179)
При малых значениях то из выражения (5.179) можно вывести формулу
для вычисления частоты автоколебаний:
соа = -T===L==. ' (5.180)
И717’1 + т(Т1 + Т2)
Возведем в квадрат первое и второе уравнения системы (5.178) и, сложив
их, получим формулу для определения амплитуды автоколебаний
Аа =........................ ... . (5.181)
«соа V1 + {т\ + т22) <о2 +
Подставим в формулу (5.181) выражение (5.180) и, пренебрегая значением
<с2, получим !
+ (5-ад
Амплитуду автоколебаний приведем к выходному валу по формуле
^вв =
На рис. 5.28 построена зависимость частоты и амплитуды автоколебаний
по т при &а = 3,15 с-1.
5.55. Построить зависимости частоты и амплитуды автоколебаний в ре-
лейной следящей системе (см. рис. 5.26, а) с нелинейностью (см. рис. 5.27, в)
от т.
Указание. Параметры системы взять из задачи 5.54.
5.56. Построить зависимости частоты и амплитуды автоколебаний в ре-
лейной следящей системе (см. рис. 5.27, а) с нелинейностью (см. рис. 5.27, г)
от т, если Тх = 16 с; Та = 0,5 е; В = 30 В; Сг = 0,02 В; Са = 0,05 В и К =
= kik3 = 0,05 с-1.
5.57. Построить зависимости частоты и амплитуды автоколебаний
в релейной следящей системе с управлением от двухпозиционного поляризо-
ванного реле с гистерезисом (рис. 5.29, а) по К = k^k*, с-1.
350
Решение. Характеристическое уравнение гармонически линеаризован-
ной системы запишем в виде
+ (^*14* ^«)s<! 4“ (1 4—~)s 4- &х&гв(Л) j U(s) = 0. (5.183)
Для двухпозиционной релейной характеристики в гистерезисом
а(Л)«-^-/Л2-С2 при Л>С;
А/л\ 4 ВС
Ь(А)-----
(5.184)
Подставляя в уравнение (5.183) соотношения (5.184) и s = /со, получим
^-/Л2-Са-(Л4-П)“2 = 0;
ф«^с_да = й
Исключая из выражений (5.185) сомножитель 4ki^B г найдем
л в с i/E+WE+ЗЭ
V 1 — TjT^
Если из выражений (5.185) исключить Л2, тогда получим
. . к ДСШа 0+^а2)0 + Ф2а)
Л “ ^(l-T^CO2)
(5.185)
(5.187)
По формулам (5.186) и (5.187) строим кривые соа и Ла (рив. 5.30) при
7\ = 10 с; 7\ = 0,1 в; В = 25 В и С = 0,01 В.
5.58. Построить зависимости частоты и амплитуды автоколебаний в си-
стеме автоматического регулирования (см. рис. 5.29, б) с трехпозиционной
релейной характеристикой с гистерезисом по К, если 7\ = 10 с; Т4 = 0,1 с;
В == 30 В; Сх = 0,02 В; Са » 0,1 В.
5.59. Определить частоту и амплитуду автоколебаний в следящей системе
с люфтом в редукторе (см. рис. 5.29, в) с помощью логарифмических характе-
ристик, если К, = 40 с“1; Т = 0,1 с; с = 0,1 рад.
Решение. На рис. 5.31 строим логарифмические амплитудную и фазовую
частотные характеристики линейной части системы. На прозрачную бумагу
Рис. 5.28. Зависимости частот и
амплитуд автоколебаний от времени
гчистого» запаздывания в системе
автоматического регулирования
Рис. 5.29. Структурные схемы сле-
дящих систем с различными нели-
нейными характеристиками
351
Рис. 5.30. Зависимости частот и ам-
плитуд автоколебаний от передаточ-
ного коэффициента релейной следящей
системы
(см. рис. 1.87) наносим характеристику 20 1g /'с\' и —
ч\~а)
Наложим полученный шаблон на характеристику линейной части системы и,
перемещая его, найдем точки и Dlt В2 и О2, удовлетворяющие
условию (5.154). В результате этого получим ша = 14 с"1; ша — 2,52 с-1;
А'а = 2,32 рад и Ла = 1,05 рад. По существующему правилу устанавливаем,
что ©а = 14 с-1 и Аа — 2,32 рад соответствуют режиму автоколебаний.
5.60. Определить зависимость частоты ша и амплитуды Аа автоколебаний
от передаточного коэффициента К для системы автоматического регулирова-
ния (рис. 5.32, а) е нелинейностью типа зоны насыщения, если 7\ = 2,8 с;
Т2 = 0,5 с; Т3 = 0,01 е; С = 0,001 рад и
В = 20 В.
Решение. Построим на рис. 5.33 лога-
рифмические амплитудные и фазовые ха-
рактеристики линейной части системы при
К = 500; 90; 10 рад/В-с. Для К = 315;
215; 160 рад/В-с соответствующие кривые
на рис. 5.33 не приведены, чтобы не загро-
мождать построения. Покажем на рис.5.33
два положения шаблонов для нелинейности
типа зона насыщения. В результате этого
находим амплитуды и частоты автоколеба-
ний, числовые значения которых приве-
дены в табл. 5.2, причем Дв = рад.
По данным табл. 5.2 строим зависи-
мости Ла=Да (К) и ша=(ра(Л) (рис. 5.34).
5.61. Найти области устойчивых состояний равновесия , и автоколебаний
в нелинейной системе автоматического регулирования (рис. 5.35, a) по
и 71, если Т2 — 0,05 с; Т3 — 0,2 с; k2 = 4; k3 = 2 с-1.
Указание. Использовать метод шаблонов.
5.62. Найти области устойчивых состояний равновесия и автоколебаний
в нелинейной системе автоматического регулирования (рис. 5.35, 6) по и klt
если т2 = 0,001 с; Тг = 0,01 с; Т2~ 0,1 с; Т3 = 5 с; k2 — 0,5; k3 = 4 с-1;
В = 1 В; Cj = 0,02 В; С2 = 0,2 В.
Указание. Использовать метод шаблонов.
5.63. Найти области устойчивых состояни’й равновесия и автоколебаний
в нелинейной системе автоматического регулирования (рис. 5.35, в) по ky =
— 5-2-40 и Т2 = 0,2-г-0,4 с, если 7\ = 5 с; Т3 = 0,005 с; Т4 = 0,02 с; k2 — 4;
k3 = 2,5 с-1; С = 0,1 рад.
5.64. Найти области устойчивых состояний равновесия и автоколебаний
для нелинейной системы автоматического регулирования (рис. 5.32, б) в за-
висимости от К рад/В-с, если Т\ = 25 с; Т2 = 5 с; Т3 = 0,5 с; Т4 = 0,02 с;
= 0,0025 с; С - 0,01 рад; В = 100 В.
Указание. Передаточный коэффициент системы К изменять от 2000 с-1
до 80 000 е-1.
Таблица 5.2
Параметры автоколеба- ний Значение пер-даточных коэффициентов системы
К, = 500 К, = 315 К, =215 К4 = 160 Ks=90 К,= 10
<оа> с'1 Ав, рад 0,5 0,200 0,5 0,142 0,5 0,100 0,5 0,067 0,5 0,040 0,5 0,004
352
Lm,S5
Рис. 5.31. Логарифмические амплитудные и фазовые частотные ха-
рактеристики следящей системы с двумя положениями шаблонов
(нелинейность — типа люфта)
/t/T2s+iP,.
5(Т,з^)г(Т3^1)2
К(Т33+1)г
(TiS+1HTts*1)zir&1)ITsS*1>
а)
з(Т,з^1> fys*}) ‘(Т3с+ 1)(Т^1)
и I
Рие. 5.32. Структурные схемы си-
стем автоматического регулирования
с однозначными нелинейностями
Рис. 5.33. Логарифмические амплитудные и фазовые частотные характеристики ли-
нейной части системы с различными положениями шаблонов для нелинейности типа
насыщения
12 ю. И. Топчеев
353
Рис. 5.34. Зависимости
амплитуды и частоты
автоколебаний в нелиней-
ной системе автомати-
ческого регулирования от
передаточного коэффици-
ента К
5.65. Найти область устойчивых состояний равновесия и автоколебаний
для нелинейной системы автоматического регулирования (см. рис. 5.32, в)
в зависимости от параметров К рад/В-с, 7\ и Т3, если Ti = 20 000 с; Т3 =
— 2,5 с; Т6 = 0,05 с; Тв = 0,005 с; = 0,1 рад; С2 = 0,5 рад; В — 100 В и
Ti>T3>T3~>'T\'^>T3.
5.66. Определить амплитуды и частоты автоколебаний в релейной следя-
щей системе (рис. 5.36, а), если Т = 0,01 с; £ = 0,4; К — 0,5 рад/В-с;
В — 27 В; Ci = 0,035 рад; С2 = 0,07 рад.
5.67. Найти области устойчивых состояний равновесия и автоколебаний
в релейной следящей системе (рис. 5.36, а) и определить значейия передаточ-
ного коэффициента /Спр, при котором в системе не возникают автоколебания.
Указание. Параметры системы взять из задачи 5.66.
5.68. Подобрать параметры фазоопережающего линейного корректирую-
щего устройства 7"к1, Тк2 и коэффициента усиления дополнительного усили-
теля £д релейной системы автоматического регулирования (рис. 5.36, б),
исключающие появления автоколебаний.
Указание. Параметры системы взять из задачи 5.66.
5.69. Подобрать параметры фазоопережающего корректирующего уст-
ройства Тк1, Тк2 и коэффициент усиления дополнительного усилителя ka
в релейной следящей системе (рис. 5.36, в), исключающие появление автоко-
лебаний, если /С = 2000 с"1; Tt = 0,8 с; Тг = 0,1 с; Т3 ~ 0,033 с; 7\ —
= 0,0025 с; Т& = 0,0014 с; Тв = 0,0005 с; В = 0,5; В = 100 В; С = 0,01 рад.
5.70. Определить зависимость параметров фазоопережающих корректи-
рующих устройств Та, Тк2, Тк3, Тк4 и коэффициента усиления дополни-
тельного усилителя £д от передаточного коэффициента К, исключающих
появление автоколебаний в системе автоматического регулирования (см.
Рис. 5.35. Структурные
схемы нелинейных систем
автоматического регули-
рования с однозначными и
двузначными нелинейно-
стями
354
рис. 5.32, б), если Т} = 25 с; Тг - 5 с; Т9 = 0,5 с; Т4 = 0,02 с; Т& =
= 0,0025 с; С = 0,2 В; В = 100 В.
Указание. Передаточный коэффициент К изменять от 10 000 до 100 000.
5.71. Найти области устойчивых состояний равновесия и автоколебаний
для двухконтурной следящей системы (рис. 5.37, а) с нелинейностью
(рис. 5.37, б) в зависимости от коэффициента усиления kJt если 7\ «= 0,005 с;
= 0,4 с; /г2 = 100 В>рад/с; k3 — 0,5 В>с/рад; С = 1 В; В = 1 В.
Решение. С помощью структурной схемы составим характеристическое
уравнение в виде
-------___________а (—\
1 + + » \_ о (5.188)
или <
1 <5-IS9>
Из выражения (5.189) найдем
~7(^У = ~^+У^+.) [2VS'-QS+1]- <5190?
Рис. 5.37. Структурная схема двухконтурной следящей системы
с нелинейностью во внутреннем контуре Я
12*
Рис. 5.38. Логарифмические амплитудные и фазовые частотные характе-
ристики разомкнутой двухконтурной системы при kY = 125; 140; 200 и 250
и различных положениях шаблонов для нелинейности типа насыщения
Введем в выражение (5.190) следующие обозначения:
и? м = _____________________|
s (7'1s+1) (Г25 4-1) ’ I
^1(5) = ^52+-^ + 1; j
(5.191)
тогда получим
’4
(5.192)
На основании выражения (5.192) запишем условие гармонического
баланса
201g [^(ш) Hn(a>)] = 201g—
?(-
(5.193)
®1 (Ш) 4* (®) — —
Построим на рис. 5.38 логарифмические амплитудные HY-Hn и фазовые
0j, 0П частотные характеристики линейной части системы при четырех значе-
ниях kY = 125; 140; 200 и 250 В/рад. При этом видно, что фазовые характери-
стики + 0П пересекают линию — 180° в точках DY — D-a, т. е. удовлетво-
ряют второму уравнению системы (5.193). Наложив шаблон с характеристи-
кой 20 1g —получим семейство прямых, пересекающих амплитудные
характеристики в точках Вг — В6, удовлетворяющих первому уравнению
системы (5.193). При kY = 140 В/рад вертикали B±DX и BSDS определяют па-
356
Рис. 5.39. Области устойчивых состояний равновесия и автоколебаний в двухконтур-
ной нелинейной следящей системе в зависимости от k, -
а » по частоте; б по амплитуде
раметры колебаний. В точке Dx <0. Следовательно, точка пересечения
вертикали BiDj с осью со определит частоту автоколебаний соа, а пересече-
ние с осью -j- — амплитуду автоколебаний Ав. В точке Da > 0. По-
этому пересечение вертикали B3D3 с соответствующими осями позволит найти
частоту и амплитуду неустойчивых колебаний. Аналогичным образом опре-
делим области устойчивых состояний и автоколебаний и при других значе-
ниях ki (рис. 5.39). На рис. 5.39 расходящимися стрелками показаны кривые
неустойчивых колебаний, а сходящимися — кривые автоколебаний.
5.72. Найти области устойчивых состояний и автоколебаний в двухкон-
турной следящей системе (рис. 5.37, а) с нелинейностью (рис. 5.37, б) по ча-
стоте <ва в зависимости от постоянной времени Тг и коэффициента усилителя
fej и построить график зависимости амцлитуды автоколебаний Аа для kr —
— 125 В/рад при различных значениях Т1У если k3 = 100 В-рад/с; k3 =
= 0,5 В-с/рад; Т2 = 0,4 с.
Решение. По аналогии с решением задачи 5.71 построим семейство лога-
рифмических амплитудных и фазовых частотных характеристик Н}Нп-,
0j +0п и при Вг = 1 В; С! = 1 В; 7\ = 0,05; 0,01; 0,005; 0,0025 с;
’(я)
= 15; 25; 50; 100; 125; 150; 200 и 250 В/рад. По условиям (5.193) определим
частоты и амплитуды колебаний и по полученным значениям построим кривые
соа =с£>а (&i) при четырех значениях Тг (рис. 5.40, а) и Аа=Аа (7\), если
kj =125 В/рад и С = 1 В (рис. 5.40, б). Из рис. 5.40, а видно, что с увеличё-
Рис. 5.40. Области устойчивых состояний равновесия и автоколебаний в двухкон-
турной нелинейной следящей системе в зависимости от Т
а — по частоте; б по амплитуде
357
Рис. 5.41. Структурные
схемы двухконтурных сле-
дящих систем с однознач-
ными нелинейностями во
внутренних контурах
нием Ту область устойчивых состояний равновесия в нелинейной двухкон-
турной системе сокращается. С возрастанием Ту амплитуда автоколебаний
увеличивается (рис. 5.40, б).
5.73. Найти области устойчивых состояний равновесия и автоколебаний
в двухконтурной следящей системе (см. рис. 5.37, а) с нелинейностью (см.
рис. 5.37, в) в зависимости от Ту и ky.
Указание. Остальные параметры системы взять из задачи 5.71.
5.74. Найти области устойчивых состояний равновесия и автоколебаний
для двухкоитурной следящей системы (см. рис. 5.37, а), с нелинейностью
(см. рис. 5.37, б) в зависимости от коэффициента усиления ky при следующих
значениях Су и С2:
а) Су = 0,1 В; С2 = 1 В;
б) Су = 0,25 В; С2 = 1 В;
в) Су = 0,5 В; С2 = 1 В.
Указание. Остальные параметры системы взять из задачи 5.71.
5.75. Определить зависимости частоты <оа и амплитуды Да от коэффи-
циента усиления ky для двухконтурной следящей системы с нелинейностью
типа насыщения, расположенной в прямой цепи внутреннего контура
(рис. 5.41, а), если А2 — 1; ka 2; kt = 0,8; ka = 0,025 рад/В-с; Ту == 0,01 с;
Т2 = 0,02 с; Та = 0,12 с; Т4 = 0,4 с; С = 1 В; В = 4 В.
Указание. Использовать метод решения задачи 5.71. Построение начи-
нать с ky = 1000 В/рад.
5.76. Определить зависимости частоты соа и амплитуды Аа от коэффи-
циента усиления ky и постоянной времени Т4 для двухконтурной следящей
системы с нелинейностью типа зоны нечувствительности, расположенной
в цепи обратной связи внутреннего контура (рис. 5.41, б), если k2 = 5; ka — 2;
k4 = 4 рад/В-с; k& = 0,0025; ke = 0,625 В-с/рад; Ту =» 0,005 с; Т2 = 0,01 с;
Та = 0,1 с; С — 0,001 рад.
Указание. Использовать метод решения задачи 5.71. Построение начи-
нать с Т4 = 0,4 с.
5.77. Найти области устойчивых состояний равновесия и автоколебаний
в нелинейной следящей системе (рис. 5.41, a) по ky и Та. Остальные пара-
метры взять из задачи 5.75.
5.78. Найти области устойчивых состояний равновесия и автоколебаний
в нелинейной следящей системе (рис. 5.41, б) по ky и С. Остальные параметры
взять из задачи 5.76.
351
Рис. 5.42. Структурные
схемы двухконтурных сле-
дящих систем с двузначны-
ми нелинейностями во
внутренних контурах
5.79. Найти области устойчивых состояний равновесия в нелинейной сле-
дящей системе (рис. 5.41, в) по kx и Ci или С., если kt = 2; k9 = 2; fe4 = 0,75;
k& -= 0,025 рад/В-с; Г, = 0,005 с; Тг = 0,01 с; Т3 = 0,8 с; Т4 = 0,1 с.
Указание. За начальные параметры принять Сх = 0,1 В; С2 — 1 В.
5.80. Определить зависимости частоты соа и амплитуды Аа от kr и С для
двухконтурной следящей системы с нелинейностью типа люфта, расположен-
ной в цепи обратной связи (внутреннего контура) (рис. 5.42, а). Остальные
параметры взять из задачи 5.76.
5.81. Найти области устойчивых состояний равновесия и автоколебаний
в нелинейной следящей системе (рис. 5.42, б) по kt, Сг и С2, если kj =
= 1000 В/рад; k2 = 2; Л3 = 5; == 0,002 рад/В-с; = 0,01 с; Гг =
= 0,025 с; Т„ = 0,5 с; Т4 = 0,12 с; Сх = (0,1 1) В; С2 = (1-J-5) В; В = 1 В.
5.82. Определить частоты и амплитуды автоколебаний в одноконтурной
системе автоматического регулирования с двумя нелинейностями (рис. 5.43, а)
если = 1; 2,25; 3,5 В/рад; k2 = 2; k9 — 0,8 В-с/рад; Т\ — 0,04 с; Тг —
= 0,4 с; Cj == 1 В; С2 = 0,5 В; Вх = 1 В; В2 = 25 В.
Решение. Воспользуемся приведенными эквивалентными амплитудными
и фазовыми ©У характеристиками для объединенной
нелинейности, которая заключена в штриховой прямоугольник (рис. 5.43, а).
Формулы для их вычисления приведены в решении задачи 1.210. Там же, на
рис. 1.89, в, приведен шаблон с характеристиками 20 1g--------------—и
«)
—180° — . Перенесем этот шаблон на прозрачную бумагу и нало-
жим его на логарифмические амплитудные и фазовые частотные характери-
стики линейной части системы, построенные по передаточной функции
<5.194)
для К = kik^ = 40 с-1, как это показано на рис. 5.44, а.
I) и
Рис, 5.43. Структурные схемы одноконтурных систем автоматического регулирования с двумя
нелинейностями
359
tm,S5
Рис. 5.44. Логарифмические амплитудные и фазовые частотные характеристики разомкну-
той системы при К — 40\ 90\ 140 с~1 с различными положениями шаблонов
Условия гармонического баланса для двух нелинейностей, разделенных
линейным динамическим звеном, запишем в виде
201g Я (со,) = 201g —
Цд?’ , (5.195)
0(со,) = —180°-рэ 0g-, со,). ;
Как видно из рис. 5.44, а, амплитудные характеристики шаблона 20 1g —
Чэ
пересекают кривые 20 1g Я в точках Вп В2 и В3, а характеристика —180° —
— рэ фазовую кривую 0 в точках Dlt D2 и D3. На одной вертикали лежат
лишь точки В2 и Da. Вертикаль пересекает ось частот лишь в точке £ при со =
— 8 с-1 и соответствует прямым 20 1g — и —180 Q — рэ, полученным для
Чэ
со = 8 с-1. Эти точки и удовлетворяют условиям гармонического баланса
(5.195). В результате этого имеем частоту соа = 8 с-х и амплитуду Ла1 = 1,15 В
автоколебаний.
На рис. 5.44, б построены логарифмические частотные характеристики
линейной части системы при К = 90 и 140 с-1 и даны положения шаблонов
при со = 8 с”1; тогда при К = 90 с-1 Ла2 — 2,4 В, а при К = 140 с-1 Ла8 —
= 3,6 В.
5.83. Построить зависимости амплитуд и частот автоколебаний в одно-
контурной системе автоматического регулирования с двумя нелинейностями
(рис. 5.43, б) по klt если k2 = 4; k3 = 0,5 В-с/рад; = 0,05 с; Т2 = 0,4 с;
Bi = 0,5; Сх = 0,15 В; С2 = 0,4 В; С8 = 0,5 В; С4 = 1 В; Вх = 1 В; В2 =
= 28 В.
Указание. Использовать методику решения задачи 5.82.
5.84. Построить зависимости амплитуд и частот автоколебаний в одно-
контурной системе автоматического регулирования с двумя нелинейностями
(рис. 5.43, в) по и Сх, если k2 = 5; fe8 = 0,4 В-с/рад; 7\ — 0,04 с; Т2 =
= 0,4 с; Вх = 4 В; В2 = 10 В; С2 = 0,5 В.
Указание. Использовать методику решения задачи 5.82.
5.85. Построить зависимости амплитуд и частот автоколебаний в одно-
контурной системе автоматического регулирования с двумя нелинейностями
360
(рис. 5.43, г) по и Сг, если k2 = 10; ks — 0,15 В-с/рад; Тг — 0,04 с;
Т2 = 0,5 с; Вг = 1 В; В2 = 25 В; С2 = 0,5 В; С3 = 1 В.
Указание. Использовать методику решения задачи 5.82.
5.86. Определить частоту и амплитуду автоколебаний в двухконтурной
системе автоматического регулирования с двумя нелинейностями (одна —
в прямой цепи, а другая в цепи обратной связи) (рис. 5.45, а), если кг =
= 1250 В/рад; k2 = 0,032 рад/В-с; fes = 0,25 В-с/рад; = 0,1 с; Т2 =
= 0,01 с; Cj = 0,004 рад; С2 = 0,25 В; В = 200 В.
Решение. Условие устойчивости системы запишем в виде
(/со) W, (/со) Л (-^0
1 + V, (/со) W2 (/®) W8 (j®) Jt
(5.196)
Из уравнения (5.196) получим
(5.197)
Введем в уравнения (5.197) следующие обозначения:
«М/®)А (%)
Jn (Л1, /®) ----~ (5-198)
'&)
J’n(А. /®) = 1 + АИь 7®)-
(5.199)
Для применения логарифмических частотных характеристик выражение
(5.199) перепишем в виде
(5.200)
ja) —
i j-----------!______
L Jn(Ai, i<°) J
6)
Puc. 5.45. Структурные схемы двух-
контурных систем автоматического
регулирования с двумя нелинейно-
стями
361
Рис. 5.46. Эквивалентные логарифмические характеристики для приведенной нелинейности
Подставляя соответствующие значения передаточных функций в выра-
жение (5.200), получим формулы для вычисления амплитудной
SfesT2®4 (Ь-)
q’n (Ль (о) = -..>7^- (5.201)
и фазовой
р„ (Ль м) = 180’ — arctgcoT2 ~ Н (^) (5.202)
характеристик.
Здесь амплитуда
Л __ А1ЬвТа<°*
9 VrW +1 '
(5.203)
С помощью формул (5.201) — (5.203) построим на рис. 5.46, а семейство
логарифмических амплитудных и фазовых частотных характеристик
q„ (Л,, со) и р„ (Лг, м), а также семейство характеристик обратных функций
77^—” Р" (А (штриховые линии). Перенесем полученные значения
обратных функций на номограмму замыкания (рис. 5.47) и найдем значение
амплитуд q'n (Л, и) и фаз рА (Лх, <а). Нанесем их на рис. 5.46, б.
Условия гармонического баланса запишем в виде
201g Н(a)q'n(Au и) = 20 1g г -;
’(£)
0 (<й) 4- [i’n (Ль ®) — — 180’ — р .
(5.204)
В соответствии с полученными выражениями строим на рис. 5.48 семей-
ство характеристик 20 lg Н (a)-q'n (Лг, <о) и 0 (и) 4-р* (Лх, и). Наклады-
вая иа иих шаблон с характеристиками ’201g-yg-y и —180° —р(-^),
.362
Рис. 5.47. Номограмма замыкания нелинейной логарифмической
характеристики 20 1g j
Рис. 5.48. Логарифмические амплитудные
частотные характеристики с различными
положениями шаблонов для нелинейности
типа люфта
363
найдем значения частоты <ма = 12 с-1 и амплитуды Аа1 = 0,007 рад автоколе-
баний.
5.87. Построить зависимости амплитуд и частот автоколебаний в двух-
контурной релейной следящей системе с нелинейным корректирующим уст-
ройством J2 (рис. 5.45, б) от k3 и Т3, если кг = 500 В/рад; k2 — 0,02 рад/В-с;
7\ = 0,01 с; Т2 = 0,1 с; Т4 = 0,5 с; Вг = 4 В; В2 = 200 В; Сг = 0,05 рад;
С2 — 0,1 рад; С3 = 0,5 В.
Указание. Использовать методику решения задачи 5.86.
5.88. Построить зависимости амплитуд и частот автоколебаний в двух-
контурной релейной следящей системе с нелинейным корректирующим уст-
ройством J2 (рис. 5.45, е)отВ2 и Т3, если kr — 1000 В/рад; k2 = 0,03 рад/В-с;
k3 = 0,25 В-с/рад; Тг = 0,01 с; Т2 = 0,08 с; Т4 = 0,25 с; В4 = 1 В; Сх =
= 0,01 рад; С2 = 0,4 В.
Указание. Использовать методику решения задачи 5.86.
5.5. ВЛИЯНИЕ ВЫСШИХ ГАРМОНИК НА ОБЛАСТИ
УСТОЙЧИВЫХ СОСТОЯНИЙ И АВТОКОЛЕБАНИЙ
5.89. Построить зависимость амплитуд и частот автоколебаний в нели-
нейной системе автоматического регулирования (рис. 5.49, а) от передаточ-
ного коэффициента К с учетом влияния 3-й гармоники, если Т = 0,2 с;
т = 0,1 с; С4 = 1 рад; С2 = 2 рад; С3 = 3 рад.
Решение. Для выбранных параметров при четырех значениях передаточ-
ного коэффициента К = 52,5; 75; 90; 110 с-1 построим логарифмические ча-
стотные характеристики линейной части системы (рис. 5.50, а). Накладывая
шаблон (рис. 5.51, а) на логарифмические частотные характеристики, получим
первые приближения для частот иа1 и амплитуд Аа1 автоколебаний
(рис. 5.53, а). С помощью формул (1.414), (1.416) и (1.418) на рис. 5.52, а, б
построим зависимости а33 (А), Аа13 (А) и Дб13 (А). Относительные значения
амплитуд и фаз определим с помощью соотношений б3 =* Н (3«>al) а33 (Аг)
и ф3 — л -|- 0 (3<йг), пользуясь рис. 5.50, а и 5.52. Располагая числовыми
значениями б3 и ф3, по формулам
Q Иа2) = / tel (Лв1) + б3 cos ф3 Да13 (Аа1)]3 + [63 sin ф3 Дб13 (Аа1)]2 (5.205)
и
р(Аа2) = — arctg - -7.63sinHat) (5.206)
a2' 6 (Ла1) + 6g cos <p3 Aaia (Яад) v
строим кривые шаблона при тех же значениях К (см. рис. 5.51, б). Наклады-
вая шаблон на рис. 5.50, б, получим 2-е приближение для частот <йа2 и ампли-
туд Аа2 автоколебаний. Подставляя полученные значения в формулы (5.205)
и (5.206), найдем уточненные значения q (Аа3) и ц (Аа3), по которым строим
кривые шаблона, а затем определим 3-е приближение для частот иа3 и ампли-
туд Аа3 автоколебаний.
На рис. 5.53, а и б построены зависимости частот и амплитуд автоколеба-
ний для 2-го и 3-го приближений, откуда видно, что 2-е приближение оказы-
вает существенное влияние порядка 20—30% на значение частот и амплитуд
автоколебаний. Третье же приближение мало влияет на частоту автоколеба-
ний, и его можно не определять.
Итак, в данной системе 3-я гармоника имеет большое влияние на значе-
ние частот и амплитуд автоколебаний.
5.90. Построить области устойчивых состояний равновесия и автоколе-
баний для следящей системы (см. рис. 5.49, б) по К и Т с учетом влияния 3-й
гармоники при С — 0,004 рад.
Решение. На рис. 5.54, а строим логарифмические амплитудную и фазо-
вую частотные характеристики линейной части системы при Т = 0,1 си
364
Рис. 5.49 Структурные схемы нелинейных
систем автоматического регулирования
Рис. 5.50. Логарифмические амплитудные и фазовые частотные характеристики при че-
тырех значениях передаточного коэффициента К и различных положениях шаблонов для
нелинейности типа трапеции
Рис. 5.51. Шаблоны с эк-
вивалентными логарифми-
ческими характеристика-
ми-.
а) 20 1g — 5
О (Ла1)
б) 20 1 с —4-
<МЛа2)
и 18О’-ц(Ли)
Рис. 5.52. Графики для основных aj (Л)
й8з (Л) и добавочных Дс13 (Л) и Д618(Л)
коэффициентов гармонической линеариза-
ции нелинейности типа трапеции
365
Рис. 5.53. Зависимости амплитуд и частот автоколебаний для 1-го и 2-го приближений
от передаточного коэффициента
Кг = 40 с-1. Накладывая на рис. 5.54, а шаблон 20 1g и —180 —
— р (,4л) (см. рис. 1.87, а), построенный для первого приближения, получим
амплитуды и частоты колебаний а>а, аь, Аа и Аа при К — 40 с-1 (соответ-
ственно точки £>i и В2, £)j), откуда нетрудно установить, что ®а и Аа соот-
ветствуют частоте и амплитуде автоколебаний. Поступая аналогичным обра-
зом и для других значений коэффициентов К, получим области устойчивых
состояний равновесия и автоколебаний в следящей системе. Эти области на
рис. 5.55, а обозначены штриховыми линиями.
На рис. 5.56, а построены кривые ass(^')» а на рис. 5.56, б
и в кривые Ла13 А'а13 и и (“j)« Для опре-
деления относительных значений амплитуд и фаз воспользуемся формулами
бз
(5.207)
Фз — л 0 (3®а1) arctg -
Зная числовые значения 6, и ф8, по формулам
q (XT) = V+6зС05фаЛа1з(-£-) + б8з1пф!!Д'а18(-^-)]Ч
+ [б(^) + б3С03ф3Д,Ь1з^) — бзЗШфзДблз(^-)]2; (5.208)
6 (~Г~ ) + бзСовфзД'&ц (-т— ) — 53 sin Ф3Д&1а (-т—)
-= arctg (5.209)
я + б3 C0S ФяДо13 ^7^-) + 6S S1D ФзД'013
определим уточненные эквивалентные значения амплитуд и фаз для нелиней-
ности типа люфта.
366
Рис. 5.54. Логарифмические амплитудные и фазовые частотные характеристики при раз-
личных положениях шаблонов для нелинейности типа люфта
Рис. 5.55. Области устойчивых состояний равновесия
и автоколебаний в следящей системе с люфтом в меха-
нической передаче от параметров:
а) о » ® (К) при Т « 0,1 о—1; б) © m (7) при К «* 40 с-1;
в) А в А (К) пря Т ОЛ с; е) А *= А (Т) при К в 40 ст1
367
0,3 0,4 0,5 0,7 0,9
Рис. 5.57. Шаблон с эквивалентными логарифмическими
импульсной и фазовой характеристиками для нелиней-
ности типа люфта при учете 1-й и 3-й гармоник
Условия гармонического баланса для 2-го
приближения запишем в виде
201g Я (о) = 201g- ~
’Ш
0(G))---180° -р (-£-).
(5.210)
С помощью формул (5.208)—(5.210) не
рис. 5.57 построены шаблоны для нелинейности
типа люфта при четырех значениях коэффици-
ента К = 20; 23, 7; 40; 10 с'1.
Накладывая шаблон рис. 5.57 на логариф-
мические частотные характеристики линейной
5.54, б), получим уточненные значения ампли-
части системы (см. рис.
туд и частот автоколебаний. Соответствующие значения перенесены на
рис. 5.55, а. В результате получим новые области устойчивых состояний
равновесия и автоколебаний (сплошные линии на рис. 5.55, а). Как видно из
рис. 5.55, а, область устойчивых состояний равновесия сокращается. При
учете только одной 1-й гармоники область автоколебаний начинается от
Кпр = 23,7 с-1 до К — оо, а при 1-й гармонике с поправкой на 3-ю гармонику
область автоколебаний увеличивается от Кпр = 20,0 с-1 до X = оо.
На рис. 5.55, б построены области устойчивых состояний равновесия и ав-
токолебаний от постоянной времени Т (штриховыми линиями, при учете только
одной 1-й гармоники и сплошными линиями — при учете 1-й с поправкой на
3-ю гармонику). В последнем случае области устойчивых состояний равно-
весия при учете добавочных коэффициентов гармонической линеаризации
от действия 3-й гармоники сокращаются.
5.91. Определить предельные значения коэффициента felnp в двухкон-
турной следящей системе (задача5.71), при которых возникают автоколебания,
если Tt — 0,05 с, а коэффициенты гармонийеской линеаризации опреде-
ляются: а) по 1-й гармонике; б) пр 1-й и 3-й гармоникам.
Указание. Использовать методику решения задачи 5.89.
5.92. Построить области устойчивых состояний равновесия и автоколе-
баний для системы автоматического регулирования от k2, Т2 и С, структур-
ная схема которой и параметры приведены в задаче 5.51, учитывая влияние
3-й гармоники при вычислении коэффициентов гармонической линеаризации
и построении шаблона.
5.93. Построить области устойчивых состояний равновесия и автоколеба-
ний по К для системы автоматического регулирования, структурная схема
которой и параметры приведены в задаче 5.58, учитывая влияние 3-й гармо-
ники при вычислении коэффициентов гармонической линеаризации и построе-
нии шаблонов.
5.94. Построить области устойчивых состояний равновесия и автоколе-
баний по&1 и7\ для системы автоматического регулирования, структурная
схема которой и параметры приведены в задаче 5.61, учитывая влияние
3-й гармоники при вычислении коэффициентов гармонической линеаризации
и построении шаблонов.
5.95. Построить области устойчивых состояний равновесия и автоколе-
баний по 1гг и Т2 для системы автоматического регулирования, структурная
схема которой и параметры приведены в задаче 5.63, учитывая влияние 3-й
368
Рис. 5.58. Структурная схема релейной
следящей системы
гармоники при вычислении коэффициентов гармоничеекой линеаризации и
построении шаблонов.
5.96. Построить области устойчивых состояний равновесия и автоколе-
баний по kx и 7\ для системы автоматического регулирования, структурная
схема которой и параметры приведены в задаче 5.73, учитывая влияние 3-й
гармоники при вычислении коэффициентов гармонической линеаризации и
построении шаблонов.
5.97. Построить области устойчивых состояний равновесия и автоколе-
баний по fe1( Сг и С2 для системы автоматического регулирования, структур-
ная схема которой и параметры приведены в задачах 5.74 и 5.71, учитывая
влияние 3-й гармоники при вычислении коэффициентов гармонической лине-
аризации и построении шаблонов.
5.98. Определить влияние 3-й гармоники на частоту автоколебаний в ре-
лейной следящей системе (рис. 5.58), если ее параметры 7\ = 0,1 с; Т2 —
= 0,2 с; kik2 = 20 с"1; В = 1 В, а ширина зоны нечувствительности реле
может принимать следующие значения: а) С = 0,25 В; б) С = 0,5 В; в) С =
= 0,75 В.
5.99. Построить зависимости амплитуд и частот автоколебаний по К
в релейной следящей системе, структурная схема которой и параметры при-
ведены в задаче 5.57, учитывая влияние 3-й и 5-й гармоник.
5.6. НЕСИММЕТРИЧНЫЕ И ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
В НЕЛИНЕЙНЫХ СИСТЕМАХ АВТОМАТИЧЕСКОГО
РЕГУЛИРОВАНИЯ
5.100. Исследовать зависимость автоколебаний в нелинейной системе
автоматического регулирования от величины внешнего воздействия
(рис. 5.59, а) с нелинейностью (рис. 5'59, б), если = 40; k2 = 1; k3 = 0,1 с;
ki — 1 с*1; Ti = 0,05 с; Т2 = 0,1 с. Будем считать, что внешнее воздействие
g (t) = a go изменяется в пределах от 10 до 30 с-1.
Решение. Уравнение системы запишем в следующем виде:
k3kt (Тгр + 1) (Т2р + 1) pUi -Н&1 + k3p) F (и) = (Tip + 1) pg. (5.211)
Так как внешнее воздействие изменяется с постоянной скоростью, то
pg (f) = g0> поэтому уравнение (5.211) будет иметь вид
(Тip 4" 1) (Т2р 4" 0 Ри 4- (^i 4" *зР) Т (и)
= (Т1Р 4- 1)£о- (5-212)
Решение для и находим в виде
u = и0 4- «*,
где и* — Aa sin coai.
Рис. 5.59. Структурная схема нелинейной системы автоматического регулирования
и характеристика нелинейности
369
О 0,8 it
Л)
Рис. 5.60, Коэффициенты гармонической линеаризации для нелинейности типа насыщения
a) Jt <«•, 4) и б) JB. с (Л, и")
Сигнал на выходе нелинейности запишем в виде
«1 (0 = J 0 (и°. >1) + Jn. о М» “°) «*»
где
J.<*. Л)-±р/т!+^_+
-Ь (1 4- и0) arcsin -1 ~Ь“-(1 — и0) arcsin ;
, А А
J„ с (Л, м°) = — Г arcsin —+ arcsin +
ш. л L А А '
(5.213)
(5.214)
Кривые Jo и JH C приведены на рис. 5.60, а и б. Подставляя выражение
(5.213) в уравнение (5.212), получим систему для определения ы° и и* в виде
J0 (и0, А) — g0‘,
{7\Пр3 + (Л + Л)р2 +
+ П + Ми.е (Л, «»)] р + Ми.0 (А, и»)) 11* = 0.
Из системы (5.215) находим уравнения
» о (и°« А) = g0',
kJ*. с (Л, и°) - (Л + Т2) а* « 0:
1 + с (Л, м°) — Тгтга1 >== 0.
Из 2-го и 3-го уравнений (5.216) имеем
®а “ ktT, Т2 - 4 (Г, + Т3) ’
(5.215)
(5.216)
Подставляя это выражение в систему трансцендентных уравнений (5.216),
получим
V°(«°. A) = gb\
J (А и°)______ZxiZ*_____
-• °' ’ ' “ W\T2 - ks (Тх + r3) •
(5.217)
Пользуясь рис. 5.60, решим графически систему уравнений (5.217).
Первое уравнение этой системы при§0 = 10 с”1 изобразим на рис. 5.61 в виде
370
кривой /, а втброе уравнение — в виде кривой 2. Точка пересечения кривых
определит и® = 0,34 и Ла = 1,2. Меняя величину воздействия g0, аналогич-
ным способом найдем целый ряд значений и° и Аа.
На рис. 5.62 построены зависимости Аа = Аа (g0), и® = и® (g0) и юа =
= юа (go). Как видно из этого рисунка, параметры внешнего воздействия су-
щественно влияют на процессы в исследуемой нелинейной системе. Например,
амплитуда автоколебаний Аа быстро уменьшается при увеличении скорости
изменения входного воздействия, а величина смещения ы® возрастает.
5.101. Построить области устойчивых состояний равновесия и автоколе-
баний для нелинейной системы автоматического регулирования в зависимости
от передаточного коэффициента К и различных скоростей изменения воздей-
ствия g0, если структурная схема системы, ее параметры, диапазон изменения
К те же, что и в задаче 5.60. Пусть управляющее воздействие меняется по
закону g (t) = gat, где§0 принимает следующие значения: 0; 0,005; 0,02 рад/с.
Решение. Запишем уравнения нелинейной системы в виде
К(Т2р+1)аГ(«) = р(Т1р+1Г(Т8р+1)гх; |
. . , 1 (5.218)
(g-x)^ = u. J
Из уравнений (5.218) при g (i) = goi получим
k (Ttp + 1)’ F (и) » -p (Tp + I)2 (T3p + 1) и ^gokx. (5.219)
После гармонической линеаризации с учетом постоянной составляющей
найдем
KJ0 («°. Ла) “ 1
К(Л/®а + 1)VH. e(Аа, и®) - - /®а(Т^а + 1)»(Т8/®3 + 1)’. I (5'220)
Воспользовавшись свойством независимости юа от постоянной составляю-
щей и®, систему (5.220) можно привести к виду
KJ0(u®, ла) = ^0; 1
Л. с (Ла, ul)=*J(Aa), )
(5.221)
где J (Ла) — коэффициент гармонической реализации при симметричных ко-
лебаниях; Ла — амплитуда симметричных автоколебаний при данной
частоте юа.
Решая графически систему уравнений (5.221), как это было выполнено
в задаче 5.100, при разных значениях К и go построим области устойчивых со-
стояний системы автоколебаний (рис. 5.63), откуда видно, что с ростом g0
увеличивается область устойчивости и сужается область автоколебаний.
5.102. Определить области устойчивых состояний равновесия и автоко-
лебаний для нелинейной системы автоматического регулирования (рис. 5.64, в)
Рис. 5,62. График для определе-
ния Аа,'иа и <оа'в зависимости
от go
371
Рас. 5.63. Области устой-
чивых состояний равнове-
сия и автоколебаний при
различных величинах внеш-
него воздействия вида
g (0 = go (О
в зависимости от величины воздействия g (/) = g0 и коэффициента усиления
k2, если /гг = 5; Тг — 0,015 с; Та = 0,5 с; Е = 0,2; В — 50 В; С = 0,5 В.
5.103. Построить области устойчивых состояний и автоколебаний для
нелинейной системы автоматического регулирования (рис. 5.64, в) в зависи-
мости от передаточного коэффициента К — kxk2 и величины входного воз-
действия g0 при К = Ю-е-100 и g0 = 0,1-4-1 В.
Указание. Остальные параметры взять из задачи 5.102.
5.104. Построить области устойчивых состояний и автоколебаний для
нелинейной системы автоматического регулирования (см. рис. 5.35, а) в за-
висимости от передаточного коэффициента К и постоянной времени Тг от воз-
действия g (0 = g0(. Величину скорости g0 следует изменять в пределах от
0,1 до 0,01 рад/с, К в пределах от 10 до 150 и 7\ в пределах от 0,025 до 0,1 с-1.
Указание. Остальные параметры взять из задачи 5.61.
5.105. Построить кривые зависимостей амплитуды и фазы одночастотных
симметричных вынужденных колебаний от амплитуды внешнего воздействия
g (/) = g0 sin юв/ в нелинейной системе автоматического регулирования
(рис. 5.64, а), если К ~ k,k2 = 150 рад/В-с; = 75 В/рад; 7\ = 0,2 с;
Т2 = 0,05 с; В = 2 В.
Решение. Первый способ. На основании структурной схемы запишем
уравнение системы в виде
(Tip + 1) (7\р + 1) ри + KF (и) =
= Р (Т1Р + 1) (7\р + 1) Aig. . (5.222)
372
Предположим, что при g = g0 sin (oBt,u — AB sin (®B/ 4- срв); тогда,
используя гармоническую линеаризацию уравнения (5.222), получим
Лв{! + [т1/Шв + 1] [тХ + 1] /<ов } = £оеГ'ф. (5.223)
где =
Подставим в уравнение (5.223) соответствующие значения параметров и,
задаваясь со = 10 с-1, найдем
Ав — 0,66 — 0,6/ = goe~i* . (5.224)
Для определения Ав и ср используем графический метод. Для этого на
комплексной плоскости (рис. 5.65) проведем окружность радиусом g0, изобра-
жающую правую часть уравнения (5.224), и, задаваясь разными значениями
Ав, построим прямую Z (Лв), соответствующую левой части уравнения.
Точка пересечения окружности радиуса g^ = 1 и прямой Z (Ль) дает решение:
Ав = 1,46 В; ср = 38°. Таким же способом определим для различных значений
g0 зависимости Ав = Ав (g0) и ср = ср (g0). Они показаны на рис. 5.66, откуда
можно найти такие значения Л в ПОр и g0 пор, при которых нелинейная система
не будет захватывать колебания внешнего возмущения с данной амплитудой
и частотой.
Второй способ. Запишем уравнение (5.223) в следующем виде:
1 + J (Лв) W (/сов) = е-/<₽, (5.225)
где W (/со) = /ш (Г1/'ш+1)(Г2/ш+1) •
Введем обозначения: 1 -f- J (Лв) W (/сов) — Z (Лв, /сон);
80 ~аГ'
Из уравнения (5.225) найдем
2 (-^в» /®в) = (
[/(Лв)Г(/сов)]-* )-1
4“ (Л в) W (/СОв)]-1 J
Положим ®в — Юс’, задаваясь различными значениями Лв, с помощью
логарифмической характеристики W~x (]<£>)
Рис. 5.65. Годограф функции Z (Ав, шв)
Рис. 5.66. Кривые зависимостей An(gn)
и <p(gt)
373
Рие. 5.67. График ваеиеимости Z (Лв, №в)
на плоскости 20 lg Z(At, шв) и arg. Z (Л„
©в)
20 lg U (Ав) W(j, 10)1” и
arg [J (Ав) W (j, 10)1”. Применив
номограмму замыкания, получим
9П j а Г R Мв) W (/, 10)1-1 ]
8 L1 + и (л,) w а, юл” J
и
Р(Л)1Г(/, 10)1-1 ]
8 [ 1 + [У (Я) uz (/, 10)]-* J ’
Пользуясь амплитудными характеристиками, при постоянной частоте
на плоскости 1201g Z (Ав), arg Z (Ав)| построим кривую Z (Лв) (рис. 5.67),
соответствующую левой части уравнения (5.225). Правую часть уравнения
можно изобразить в виде прямой 20 lg g0 = const. Точка пересечения этих
кривых дает искомое решение: при g0 = 1 Лв — 1,46 и <рв = 38°. Выполняя
подобные построения для различных значений амплитуды вынужденных коле-
баний, найдем кривые Лв = Лв (g0) и <р = <p (g0), которые совпадают с ранее
приведенными кривыми на рис. 5.66.
5.106. Построить кривые зависимостей амплитуды и фазы одночастотных
симметричных вынужденных колебаний от амплитуды и частоты внешнего
воздействия g(t) = g0 sin ®в t в нелинейной системе автоматического регули-
рования (см. рис. 5.64, б), если kr = 100; k2 = 0,25 рад/с-В; Тх = 0,027 с;
Т2 = 0,15 с; В — 5 В; С = 10” рад; т = 0,01 с.
5.107. Построить зависимости амплитуды и фазы одночастотных симме-
тричных вынужденных колебаний от амплитуды и частоты йнешмего воздей-
ствия g (t) = g0 sin <вв/ в нелинейной системе автоматического регулирова-
ния (см. рис. 5.64, в), если использовать параметры задачи 5.103 за исключе-
нием kx = 4-4-40; k2 = 2,5.
5.108. Построить кривые зависимостей амплитуды и фазы одночастотных
симметричных вынужденных колебаний от амплитуды и частоты внешнего
воздействия g (i) = go sin (oBt в нелинейной системе автоматического регули-
рования (см. рис. 5.64, а), если = 3; k2 = 100; k3 = 0,4 рад/В-с; k4 =
= 10 В/рад; 7\ = 0,08 с; Т2 = 0,1 с; Cj = 0,05 В; С2 = 0,2 В; В = 4 В.
5.109. Построить графики зависимостей амплитуды одночастотных сим-
метричных вынужденных колебаний в зависимости от Тх и для нелинейной
системы автоматического регулирования (см. рис. 5.64, в), если g (t) —
= 2,5 sin 10/, а остальные параметры использовать из задачи 5.107.
5.7. ОПРЕДЕЛЕНИЕ ЧАСТОТНЫХ ХАРАКТЕРИСТИК
ЗАМКНУТЫХ НЕЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО
РЕГУЛИРОВАНИЯ
5.110. Найти частотные характеристики замкнутой нелинейной системы
автоматического регулирования с передаточной функцией линейной части
^(s) =
K(T2s+W
®(т15+1)2(т^4-1) ’
последовательно соединенной с однозначной нелинейностью типа насыщения
J (-£) , если К = 500 с”; 7\ = 2,88 с; Т2 = 0,4 с; Т, = 0,025 с; С = 1 В;
В = 1 В.
374
Решение. Для определения передаточной функции замкнутой системы
используем формулу
Ф(Л, /®) = —Ц/------------
1+7("т)'Г(/й>)
(5.226)
или
Ф(Л, /®) =------------------(/й>)-----------------
- /тт, - + IT (/со)
(5.227)
На шаблоне из прозрачной бумаги в одном масштабе с номограммой
замыкания строим логарифмические амплитудно-фазовую частотную харак-
теристику линейной части системы 20 1g | IF (/со) | и обратную эквивалентную
характеристику нелинейности 20 1g
(рис. 5.68, а).
Наложим шаблон на номограмму замыкания таким образом, чтобы точка
на характеристике 20 1g —; * — с интересующей нас амплитудой Л f совпала
с началом координат номограммы (0 дБ, —180°). В результате этого точки
пересечения логарифмической амплитудно-фазовой частотной характеристики
линейной части системы со сплошными линиями номограммы определяют зна-
чения амплитуд замкнутой нелинейной системы 20^|Ф(Л, /<о) |, а точки
пересечения характеристики 20 1g W (/со) со штриховыми линиями номо-
граммы-значения фаз замкнутой нелинейной системы arg [Ф (Л, /®)].
На рис. 5.69 показана номограмма замыкания с нанесенными двумя значе-
ниями логарифмических частотных характеристик линейной части системы
при С/А х—0,1 и С/Л 2 = 0,5. Пользуясь данным методом, получим семейство
логарифмических амплитудных и фазовых частотных характеристик нели-
нейных замкнутых систем. На рис. 5.70, а и б построены семейства этих
характеристик при С/Л = 0,1; 0,2; 0,3; 0,4; 0,5.
3.111. Найти частотные характеристики замкнутой нелинейной системы
автоматического регулирования с передаточной функцией линейной части
s (Ts + 1)
последовательно соединенной с двухзначной нелинейностью типа люфта
, если К = 40 с”1; Т = 0,1 с и С = 1 рад.
Рис. 5.68. Логарифмичес-
кие амплитудно-фазовые
и обратные эквивалентные
характеристики нелиней-
ностей: а — типа насыще-
ния: б — типа люфта
<*)
375
Рис. 5.69. Номограмма замыкания
с двумя логарифмическими амплитуд-
но-фазовыми частотными характери-
стиками линейной части системы при
С!А = О,Г, 0,5
Решение. Из рис. 5.69 найдем значе
С!А. Тогда точкам касания амплитудно-i
Решение. На шаблоне (см.
рис. 5.68, б) строим логарифми-
ческие амплитудно-фазовые ча-
стотные характеристики линей-
ной части системы | 20 lgU?(/co) I
и обратную эквивалентную ха-
рактеристику нелинейности
201g . Накладывая шаб-
Ля)
лон на номограмму замыка-
ния, построенную при С/А =
= 0,2; 0,4; 0,5; 0,8, получим
четыре логарифмические ампли-
тудно-фазовые частотные харак-
теристики (рис. 5.71), с по-
мощью которых находим семей-
ство логарифмических ампли-
тудных и фазовых частотных
характеристик замкнутых нели-
нейных систем (рис. 5.72, а и б).
5.112. Определить характе-
ристики максимальных значе-
ний амплитуды М и соответ-
ствующих им частот <ом в зави-
симости от С/А для замкнутой
нелинейной системы регулиро-
вания, рассмотренной в за-
даче 5.110 (см. приложение VIII).
Я I Фщах I = М ДЛЯ различных
ювых характеристик со сплош-
ными кривыми номограммы соответствуют определенные значения частот <ом.
На рис. 5.73 построены кривые М = М и сом = <вм по которым
оценивают качество нелинейной системы автоматического регулиро-
вания.
5.113. Найти зависимость частоты автоколебаний от kx и определить
предельное значение й1пр, при котором нарушается устойчивость состояния
равновесия двухконтурной следящей системы, используя номограмму замы-
кания.
Указание. Параметры системы взять из задачи 5.71.
Решение. С помощью структурной схемы рис. 5.37, а определим переда-
точную функцию разомкнутой системы в виде
Г (Л, s) =
(-j)
stTis + DCGsTi)
:2fesg
Т^ +
(5.228)
376
Рис. 5.70. Семейство логарифмических амплитудных и фазовых характеристик нелинейной
замкнутой системы (задача 5.110) при пяти различных значениях С/А
Рис. 5.71. Номограмма замыкания с четырьмя логарифмическими амплитудно-
фазовыми частотными характеристиками линейной части системы при С/А =
= 0,2; 0,4; 0,5; 0,8
377
Рис. 5.72. Семейство логарифмических амплитудных и фазовых характеристик нелиней-
ной замкнутой системы (задача 5.111) при различных значениях С/А
Приведем выражение (5.228) к форме (5.227); тогда
.
W(A, s) =-f-S±1Tk
44)
A.
^3____
s(7> + l) ‘
(5.229)
Подставляя в выражение (5.229) s — /со, получим
№(Л, /со) =
ГIk (/CO)ks
+ W'1K ('ш) /ш (Tli<a + °
’(4-)
(5.230)
где
На рис. 5.74 построены логарифмические амплитудная | №1к (/со) | (кри-
вая /) и фазовая arg [№|к (/со) ] (кривая 2) частотные характеристики линей-
ной части разомкнутого внутреннего контура. Для построения частотных
характеристик замкнутого контура нанесем на номограмму рис. 5.75 семей-
ство частотных характеристик (/со) при А « 1; 2; 5; 10 и 25 по методике,
рассмотренной в задаче 5.110. По снятым с номограммы амплитудам и фазам
при со = 40; 50; 90 и 130 с-1 строим шаблон (рис. 5.76) для функции
Лк (Л, /со) =---, (5.231)
----rrrv + W'uU»)
&
где
Лк (Л, /со) = ?1К (Л, со) (Л' ,
Рис. 5.73. Характеристики максимальных значений ампли-
А
туды М. и частоты сом в зависимости от —
378
Im,ВБ
Рис. 5.74. Логарифмические амплитуд-
ные и фазовые частотные характери-
стики при еначениях передаточного ко-
ь
еффициента К = = 400\ 300',
«3
250 с-1 и пяти различных положениях
шаблонов
45
IfOfiOfi 0,2 Ц1Ц/№ Ofii ЦК OfilC
Рис. 5.76. Шаблон с оквивалентными
логарифмическими характеристиками
20 1g — и — 180° —
^1к
201^,96
Рис. 5.75. Номограмма замыкания с ло-
гарифмическими частотными характе-
w ристиками 20 1g W'u (/ы), построен-
Ф ными при шипи различных еначениях А
2 и=1
-гео -i№ -ш> -но -ш -т -во -во « -20 е°
Рис. 5.77. Зависимость частоты автоколебаний
от передаточного коэффициента k
В виде
2Olss<h5" -18°° - »,«и.»).
Для определения частот и амплитуд
автоколебаний в двухконтурной системе
используем уравнение
1 + Лк(Л, /со) =0, <5-232)
откуда достаточно просто получить условия гармонического баланса
201g
______^3_____
jai(T1ia>+ 1)
Л
/ш(7’1/(о+ 1)
= 201g--------;
s <?1к (А co)
(5.233)
arg
Наложив шаблон (рис. 5.76) на кривые для амплитуд4 (при -у- —
= 400 с-1), 5 (при = 300 с-1) и 6 (при|^- — 250 с-1) и для фаз <3 (рис. 5.74),
получим точки пересечения Bt и Dlt расположенные на одной вертикали и
соответствующие фиксированным частотам ю. Например, кривая с характе-
ристикой 20 1g построенная для со = 30 с”1, пересекает логарифмическую
амплитудную характеристику 4 в точке В1г а кривая с характеристикой
—180” — р1к, также построенная для со = 30 с-1, пересекает характеристику
в точке Di. Вертикаль, проведенная через точки Вг и Du пересекает ось ча-
стот в точке Е также при со = 30 с-1. Следовательно, ® = 30 с-1 соответствует
периодическому решению. В нашем случае при k3 = 0,5 с kx = 200. Отло-
жим на рис. 5.77 kr = 200 и со = 30 с-1. Определим таким же способом для
точек В2 и D2 со = 40 с-1 и /гг = 150 с и отложим их на рис. 5.77. Поступая
аналогичным образом, получим зависимость частоты автоколебаний от коэф-
фициента усиления Ах. Из рис. 5.77 видно, что&1пр = 122. На рис. 5.77
штриховой линией изображена также зависимость соа = <оа (йг), полученная
при решении задачи 5.71 другим способом. Как видно, оба способа построения
кривой соа = соа (kx) дают практически одни и те же результаты.
5.114. Исследовать явление скачкообразного резонанса в нелинейной си-
стеме автоматического регулирования (рис. 5.78, а) при подаче на ее вход
периодического сигнала g (t) — Ао sin (o0t. Пусть передаточная функция ли-
нейной части системы
W(S)___________
W s(T,s + 1) (Tss+ 1) (T4s+ 1) ’
Рис. 5.78. Структурные схемы нелинейных
систем автоматического регулирования
380
где К = 1 с*1; 7\ = 2 с; Т\ = 1 с; Та = 0,5 с; 7\ = 0,1 с. При этом пара-
метры нелинейной части системы В — 20 В; С = 2 В.
Решение. Из рис. 5.78, а найдем
{/(Л,ш0) =-----. (5.234)
1+Jwr(/COo)
Приведем выражение (5.234) к виду
х'тг."---G (ja>a)
и (Л, соо) = -3------j-----, (5.235)
J ("г)W (/Шо)
или
U (Л, соо) = ФЕ (Л, /соо) G (ja0),
где
1
Фе (Л, /со) =.Гс .Г(/(Оа) .----• (5.236)
Из выражения (5.236) следует, что для использования номограммы замы-
кания необходимо построить на прозрачном шаблоне обратную логарифми-
ческую амплитудно-фазовую частотную 'характеристику линейной части
системы и прямую амплитудную эквивалентную характеристику для нели-
нейности. На эквивалентной амплитудной характеристике указываются соот-
ношения С/Л и значения 201g —- = р. 1
?1q I
Накладывая шаблон с соответствующими кривыми на номограмму замы-
кания (рис. 5.79), по точкам пересечения кривых будем определять амплитуды
замкнутой системы относительно ошибки | Фе|. На рис. 5.79 жирной линией
показано | Фе| = п = 6 дБ. Ординаты считываем с номограммы, т. е.
1
201g
j('t) F('Wo)
= d = 4 дБ,
откуда нетрудно получить
д
2О^|Ф(Ло, j(o0)| = n-d = 201g-J-,
^*0
(5.237)
где Лв — амплитуда сигнала на выходе системы автоматического регулиро,-
вания.
На рис. 5.80 построено семейство амплитудных характеристик 20 1g Лв,
полученных с помощью номограммы рис. 5.79 при С/Л =0,1; 0,2; 0,3; 0,4;
0,42; 0,45; 0,5; 0,8. С помощью семейства логарифмических амплитудных
характеристик и формулы (5.237) при Л 0 = 1,85 (или 5,4 дБ) получим точки,
соединяя которые, найдем амплитудную характеристику нелинейного резо-
нанса (выделена на рис. 5.80 жирной линией). Проводя через точки М и L
прямые до оси частот, получим ш1 = 1,3 с-1; и2 = 1,45 с-1. В этом диапазоне
частот наблюдается скачкообразный амплитудный резонанс 124] и каждой
из частот соответствуют два различных значения амплитуд. С уменьшением
частоты в точке М происходит мгновенное изменение амплитуды. При повы-
шении частоты от точки К до точки L также наблюдается мгновенное изме-
нение амплитуды.
5.115. Найти частотные характеристики замкнутой нелинейной системы
автоматического регулирования, структурная схема которой и параметры
приведены в задаче 5.49.
381
Рис. 5.79. Номограмма замыкания с логарифмическими эквивалентными характеристиками
5.116. Найти частотные характеристики замкнутой нелинейной системы
автоматического регулирования, структурная схема которой и параметры
приведены в задаче 5.50.
5.117. Найти частотные характеристики замкнутой нелинейной системы
автоматического регулирования, структурная схема которой и параметры
приведены в задаче 5.54.
Указание. Принять т = 0,1 с.
5.118» Найти частотные характеристики замкнутой нелинейной системы
автоматического регулирования, структурная схема которой и параметры
приведены в задаче 5.63 при т = 0,1 с, kx= 10, Т2 = 0,4 с.
5.119. Определить характеристику максимальных значений амплитуды
М и соответствующих им частот сом в зависимости от С/А для замкнутой нели-
нейной системы автоматического регулирования, рассмотренной в задаче 5.111.
5.120. Определить характеристики максимальных значений амплитуд М
и соответствующих им частот сом в зависимости от С/А для нелинейной
системы автоматического регулирования, рассмотренной в задаче 5.50.
5.121. Определить характеристики максимальных значений амплитуды
М и соответствующих им частот шм в зависимости от С/А для нелинейной
системы автоматического регулирования, рассмотренной в задаче 5.62 при
т = 0,1 с, Ах = 40, Т2 — 0,2 с.
5.122. Найти области устойчивых состояний равновесия и автоколеба-
ний с помощью номограммы замыканий в двухконтурной нелинейной системе
382
автоматического регулирования, структурная схема которой и параметры
приведены в задаче 5.75.
Указание. Использовать методику решения задачи 5.113 и принять
~ 1000 В/рад.
5.123. Найти области устойчивых состояний равновесия и автоколебаний
с помощью номограмм замыкания в двухконтурной нелинейной системе
автоматического регулирования, структурная схема которой и параметры
приведены в задаче 5.79.
Указание. Использовать методику решения задачи 5.113 и принять
= 500 В/рад.
5.124. Исследовать явление скачкообразного резонанса в нелинейной
системе автоматического регулирования (ри£. 5.78, б), если Л — 140; 7\ =
= 25 с; У2 = 1 с; Та = 0,04 с; В — 2; С = ,2, а на вход системы поступает
периодический сигнал
g (0 = 40 sin соо^
5.125. Исследовать явление скачкообразного резонанса в нелинейной си-
стеме автоматического регулирования (рис. 5.78, в), если К = 20 с-1; 7\ =»
== 1 с; В = 2; С = 2, а на вход системы поступает периодический сигнал
g (0 = Л о sin ®ot. Определить значения амплитуды До, при которых возни-
кают простой и скачкообразный резонансы.
5.8. ОПРЕДЕЛЕНИЕ АБСОЛЮТНОЙ УСТОЙЧИВОСТИ
НЕЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО
РЕГУЛИРОВАНИЯ
При исследовании абсолютной устойчивости рассматривают нелинейные
элементы, характеристики которых F (х) обладают следующими с?ойотвами:
F (х) — непрерывная функция;
xF (х) > 0; при х 0;
Е(0) = 0;
±«
J F (х) dx = ± оо.
(5.238)
Критерий абсолютной устойчивости применяют для исследования как
устойчивости положения равновесия, так и устойчивости динамических про-
цессов. Для абсолютной устойчивости динамических процессов, протекающих
в системе автоматического регулирования с одной нелинейностью, достаточно,
383
характеристика 1^90 (/со, д0)
чтобы производная от этой характеристики принадлежала полосе (г, k),
а характеристика линейной части системы W удовлетворяя частотному
критерию Михайлова—Найквиста, не пересекала соответствующей JV-й
окружности, где N = klr.
Для абсолютной устойчивости положения равновесия нелинейной системы
автоматического регулирования с одной нелинейностью с характеристикой
F (х), расположенной внутри сектора, ограниченного лучами kx и гх
(рис. 5.81, а), достаточно, чтобы существовало такое действительное число q
(положительное или отрицательное), при котором для всех со 0 частотная
ла расположена правее вертикальной прямой,
проходящей через точку (—1, jO), где
^чо <7о) = (1 + Йо“) (/“)• (5-
Приведенные выше определения доста-
точно просто сформулировать и с помощью
логарифмических частотных характеристик.
5.126. Исследовать абсолютную устой-
чивость процессов в нелинейной системе
автоматического регулирования (рис. 5.81,6),
если характеристика нелинейного элемента
n , dF(x) . .
удовлетворяет условию 0 < <1, а
передаточная функция линейной части си-
стемы
W (S) = (T1«4-l)(7,>S + )(7’ss+l) ’
где 7\ — 2,5 с; Т2 = 0,5 с и Т31 = 0,125 с.
Определить предельный передаточный
коэффициент системы fenp.
Решение. Построим логарифмические
амплитудную и фазовую частотные характе-
ристики линейной части системы при К = 1
(рис. 5.82). Перенесем полученные характе-
ристики на номограмму для определения
Р (со) в виде кривой 1 (рис. 5.83). При N — оо полученная кривая 1 сме-
щается вверх до касания с кривой 2 номограммы, соответствующей зна-
чению Р (со) = 1. Точку касания смещенной кривой 3 с Р (со) — 1 обозна-
чим буквой В. В этом случае величина смещения по оси ординат определит
значение передаточного коэффициента Кпр— 21 дБ (или 11,2). При всех зна-
чениях К < КПр исследуемая система удовлетворяет критерию абсолют-
ной устойчивости динамических процессов. Сравним Кпр с соответствующим
предельным коэффициентом линеаризованной системы, который равен 230
(см. рис. 5.82).
5.127. Исследовать абсолютную устойчивость процессов в нелинейной
системе автоматического регулирования, если структурная схема системы
аналогична задаче 5.126. При этом нелинейность имеет характеристику типа
насыщения, а передаточная функция линейной части
W (S) = s (Tfs* + 2^+ 1) (Tas+ 1) ’
Рис. 5.81. Структурная схема не-
линейной системы автоматического
регулирования и характеристика не-
линейности
где = 0,05 с; = 0,2; Та = 0,00125 с.
Определить КПР при N = оо; N — 41; N — 11.
5.128. Построить области абсолютной устойчивости процессов в плоско-
сти параметров КПР и Т\ для нелинейной системы автоматического регулиро-
вания, структурная схема которой приведена в задаче 5.126. При этом нели-
384
Рис. 5.82. Логарифмические амплитудная и фазовая частотные ха-
рактеристики линейной части системы
-200 -180 -160 -140 -ПО -100 -80 -60 -40 0°
Рис. 5.83. Номограмма Р (со) с нанесенной амплитудно-
фазовой логарифмической частотной характеристикой для
определения Кар
13 ю. и. Тев«м>
385
Рис. 5.84. Логарифмические амплитудные и фазовые частотные
характеристики линейной части системы для q = 10; 0,5', 0,25; О
и К= 1
нейность имеет характеристику типа насыщения, а передаточная функция
линейной части
W (S) = s (T1S +1) (TJs» + 2g,T2s + 1) »
где Т2 = 0,02 с; g8 == 0,35; Ту = 0,025; 0,05; 0,075; 0,1; 0,125 с.
5.129. Построить области абсолютной устойчивости процессов в зависи-
мости от параметров Кпр и т для нелинейной системы автоматического регу-
лирования, структурная схема которой показана на рис. 5.8), б. При этом
нелинейность имеет характеристику типа насыщения, а передаточная функ-
ция линейной части 1
tj
где Ту = 0,05 с; т = 0,005; 0,0075; 0,01; 0,02 с.
5.130. Исследовать асболютную устойчивость положения равновесия
нелинейной системы автоматического регулирования, если ее структурная
схема приведена на рис. 5.81, б. Характеристику нелинейного элемента при
г — 0 изображена на рис. 5.81, а, а передаточная функция линейной части
имеет вид
W(S) “ + ’
где Ту = 0,5 с; Та = 0,125 с.
Решение. Для анализа абсолютной устойчивости положения равновесия
строим логарифмические амплитудно-частотные 1 и фазочастотные характе-
ристики 2, соответствующие линейной части системы при К. = 1 (рис,- 5.84).
Затем, принимая == 10; <?2 = 0,5; q3 = 0,25, строим соответственно кри-
вые 3 и 4 (при qy), 5 и 6 (при q2), 7 и 8 (при д3).
В соответствии с формулировкой критерия об абсолютной устойчивости
положения равновесия Lmqi = Lm# 201g ]/1 -f- q2tco2, a f)qi = 0O + arctg <7,<a.
Перенесем кривые /—8 на номограмму Р (со) при /< = 1 (рис. 5.85), где
кривые 1—4 построены соответственно при q0, qlt q2, q3. Смещая эти кривые
до касания с Р = 1, определим различные значения Лпр. После этого строим
кривую /Спр = /<пр (-у-) (Рис- 5.86), с помощью которой определим макси-
мальное значение /Спршах = 20 дБ. Как видно, оно совпадает с предельным
386
-240 -220 -200 -180 -160 -140 -120 -100 -80 -60 -40 в°
Рис. 5.85. Номограмма Р (со) с нанесенными логарифмическими ампли-
тудно-фазовыми частотными1 характеристиками при а = 10; 0,5; 0,25; О
при К = 1
Рис. 5.87. Характеристика F (х) Оля не-
линейности задачи 5.133
13*
387
значением коэффициента усиления рассматриваемой линеаризованной си-
стемы.
5.131. Исследовать абсолютную устойчивость положения равновесия
нелинейной системы автоматического регулирования и определить Кпртах,
если ее структурная схема и характеристика нелинейности имеют тот же вид,
что и в задаче 5.126, а передаточная функция линейной части
W(S) =_________XIM:1.)_________,
W S (Tls* + 2gT2s + 1) (Tss 4- 1) ’
где 7\ = 0,023 c; T2 = 0,012 c; Ts = 0,008 c.
5.132. Исследовать абсолютную устойчивость положения равновесия
нелинейной системы автоматического регулирования и определить К„р
При N — 11, а также построить зависимость Кпр = Кпр (</), если ее структур-
ная схема (рис. 5.81, б), характеристики нелинейности приведены на
рис. 5.37, б и в, а передаточная функция линейной части
К (7\s-f- 1) e-TS
~ s(T«S» + 25sTss+l) ’
где Ti = 0,35 с; Т2 = 0,12 с; т = 0,072 с; |2 = 0,04.
5.133. Исследовать абсолютную устойчивость положения равновесия
нелинейной системы автоматического регулирования и определить Кпргаах,
если ее структурная схема приведена на рис. 5.81, б, нелинейная характери-
стика дана на рис. 5.87, а передаточная функция линейной части
K(s2 —0,5)
(s2+ 1)(s + 1) *
5.134. Построить кривые Попова при следующих передаточных функ-
циях разомкнутых систем:
а) „ ; б) ^(s)=- i)(T,s+1) ’
в) «'И- ,(г„+1и^+1)
5.135. Исследовать абсолютную устойчивость положения равновесия
в нелинейной системе автоматического регулирования и определить КПр> если
структурная схема системы аналогична задаче 5.126, а нелинейность имеет
„характеристику идеального реле, а линейная часть системы имеет передаточ-
ную функцию
W(S) = s(T1S+l)(T2s+l) ’
где 7\ = 0,18 с; Т2 = 0,027 с.
Указание. Распространить критерий Попова на системы с релейными
характеристиками: Re 1/’соИ7 (/со)] > 0 или Im [И? (/со)] <0.
5.9. ПРИМЕНЕНИЕ МЕТОДА СТАТИСТИЧЕСКОЙ
ЛИНЕАРИЗАЦИИ К РАСЧЕТУ НЕЛИНЕЙНЫХ СИСТЕМ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
При использовании метода статистической линеаризаций нелинейных
систем, на вход которых подано случайное воздействие (рис. 5.88, а), нелиней-
ную характеристику F (х) заменяют линеаризованной, эквивалентной исход-
388
ному нелинейному преобразованию (рис. 5.88, б) с коэффициентами стати-
стической линеаризации. В этом случае процесс У (() заменяется
где
mff = ko(mx, ах)тх;
V = (fnx, ох)% (t)‘,
(5.240)
(5.241)
(5.242)
здесь fe0 (тх, ах) — эквивалентный коэффициент статистической линеариза-
ции по математическому ожиданию; kr (тх, ах) — эквивалентный коэффи-
циент линеаризации по центрированной случайной составляющей.
V б)
Рис, 5.88. Структурная схема нелинейной система автоматического регулирования:
а — при случайных воэдействиях; б при замене нелинейности коэффициентами статистической
линеаризации
Для определения этих коэффициентов можно пользоваться следующими
зависимостями (см. приложение XIV) [181:
^0 (тхг °х) ~ т ’
/Идс
Ki(mx, стх)== ±-^-;
, сх
ЪЧ • \ . (5.243)
ki(mx, ох)=* ;
b (m „ч kl(mx, °x) + k2(mx, °x)
\mx9 °x) ™ 2 ' *
Характеристики точности систем автоматического регулирования опре-
деляют по формулам [18]
= l + k„ (mx, ax)W0 т” (5,244)
е»
сгх=-Д- [ I . 7—-—: .«FT- , ГSn(со) dco. (5.245)
2л J | 1 + fej (тх, 0х) й7 (/<»>) I "v '
Систему уравнений (5.244) и (5.245) можно приближенно решить числен-
ным или графоаналитическим методом.
5.136. Определить дисперсию сигнала на входе нелинейности в релейной
системе автоматического регулирования (рис. 5.89, а), если т„ — 0,9 и
Sn (®) = 1 4-Ш2-
Решение. Примем К = 2 и Т = 1 с. Выполняя статистическую линеари-
зацию реле, получим
(5.246)
389
Определим передаточную функцию замкнутой системы в виде
(5.247)
Найдем спектральную плотность ошибки:
S, (Ю) _ IФ (/») |«S.(») _ | Г
Используя последнее выражение, найдем дисперсию сигнала на входе
нелинейности:
ео
J |2А1(о*)-<о» + /<о|» = 4^(a,) * (5.248)
— 00
чии случайных воздействий
Подставляя в выражение (5.248) зависимость (5.246), получим
1 lfn
°х 4В V Т'
5.137. Определить среднее значение и дисперсию сигнала на выходе
нелинейности в системе автоматического регулирования (рис. 5.89, б), если
внешнее воздействие N (t) является [стационарным случайным процессом
с тп = 0,5,
ГТ2 t
а параметры системы имеют следующие значения: К — 1; Т = 1 с; В — 1;
С = 0,5; оп = 1; а = 0,5 с-1.
Решение. Из рис. 5.89, б достаточно просто установить, что данная си-
стема регулирования является устойчивой независимо, от величины коэффи-
циента усиления нелинейности. Выполняя статистическую линеаризацию,
нелинейности, найдем
[(1+m, )« (1—т,)г '
е 2°1 _ е 20.
V х»
(5.249)
__ тх ах
где а1 = -Л_.
390
Для математического ожидания сигнала на выходе линейной части имеем
К
1+Л0И1. ojK т”
а для дисперсии
2 1 f К*
°х = 2л J {со2Та + [1 + Kkt (тъ aJH
л (а2 4- со2)
da.
После вычисления интеграла получим
, *
О1= С- ll + KfeHrnj, O1)][l +Kk1(m1, а,) + Та] ' (5.250)
Подставляя числовые значения, найдем систему уравнений для определе-
ния ох и т1 в виде
_________________________1_________.
7711 в 1 + Л» (mlt Gi) ’
___________________________________<Gn_
[1 4-Aj («!, aJJ [1,6 + fei (mx, cx)J
(5.251)
Для ее решения воспользуемся методом последовательных приближений.
В качестве первого приближения выберем А81’ и АР’ равными их значению для
линейной системы, т. е. АР* = АР* = 2. Тогда из системы уравнений (5.251)
определим 0,333 и оР* «= 0,616. Подставляя эти значения в формулы
(5.249), находим АР* = 1,8; АР* = 1,6. После этого вычислим второе прибли-
жение тР’= 0,356 и о)” = 0,704. Подставляя их в формулы (5.249), найдем
АР' и А13*, а из системы (5.251) — третье приближение ml3’ = 0,356 и а)3* =
— 0,704. Так как третье приближение дает такой же результат, как и второе,
будем пользоваться числовыми значениями второго приближения. Поэтому
окончательно имеем 1
тх = т£ = 0,356-0,5 = 0,178;
= (О1С)2 = (0,704 -0,5)2 = 0,124.
5.138. Определить дисперсию сигнала угла отклонения элеронов в системе
автоматической стабилизации угла крена самолета (рис. 5.89, в), если возму-
щающее воздействие М (£) является стационарным случайным процессом
в единицах углового ускорения с тп = 0 и Sn (со) = с2.
Решение. Пусть система имеет следующие параметры:
А9=10г1; 'А» = 5; 7\ = 0,25 с; 7\ = 0,4 с;
Та = 0,05 с; В =10°; С = 10°; с2 = 1,256 с~3.
Дисперсию угла отклонения рулей определим по формуле
2 с2 7 |ЫЛ (%) (Л/юЧ-!) |’Ло
% “ 2л J~ | Т,Та (/со)2 + (Тэ + Та) №)* + [ 1 + *лМх (%) Tjv + А*М1 (ав8) |2 ’
откуда
о?_______________,5 252)
"s (авэ) {(Тэ + Л) [ 1 + МА (%) 7\] - W, (авэ)} ‘
Коэффициент статистической линеаризации Определим по формуле
К (0, %) = Ф . (5.253)
391
В результате этого выражения (5.252) и (5.253) образуют нелинейную
систему уравнений, в которую входит среднее квадратическое отклонение эле-
ронов. Подставляя числовые значения в выражение (5.252), получим
0,0039 13-4-6,4Ф I ——- j I
L \ % /1
1,2 4-4.6Ф / —)
\ % л \ % /
(5.254)
введем следующие обозначения:
Для решения уравнения (5.254)
Рис. 5.90. Зависимости zj (а^э) и
Z2 (Ойэ), необходимые для определе-
ния адэ
7 .
21 — ствэ,
Г1,2 4- 4.6Ф (——'ll Ф (—
L \ % /J \ %)
(5.255)
Построим на рис. 5.90 кривые
21 = Z1 (°6э) И 22 ~ 2а По
точке пересечения этих кривых найдем
среднее квадратическое отклонение
элеронов овэ = 7,5°, подставляя кото-
рое в выражение (5.253), найдем
ki (0, <тх) = 0,823.
Для определения дисперсии угла крена воспользуемся выражением
„2______с2 f_______________________1Л/Ш-1- l|a<to_______________1 /е 0^61
? 2л J |T2TS (/со)3 + (Тэ + Та) (/®)s + [1 + Ш (%) Л] I2’ '
Рис. 5.91. Структурные схемы не-
линейных систем автоматического
регулирования при наличии случай-
ных воздействий
откуда после соответствующих операций получим
г ^[гэ+т2+ад(%) л]
°* = 2Asfe (а6э) {(Тэ + Tt) [ 1 + МА (адэ) Л] - Ш1 (а6э)) ’
(5.257)
Подставляя числовые значения, найдем
ст$ = (1,27’)2.
5.139. Определить среднее значение та и дисперсию угловой скорости
вала двигателя в скоростной следящей системе (рис. 5.91, а), если = 600;
392
k2 — 10,5 1/B-c; T — 0,04 с; В = 0,1 В; С = 314 с-1 [331, а управляющее
воздействие М (?) является стационарным случайным процессом с Шп = О
и корреляционной функцией /?„ (т) = (2,5-10**2)2 е”12’5т.
5.140. Определить среднее значение тг и дисперсию af в релейной сле-
дящей системе (рис. 5.91, б), если К = 2,5 с-1; Т = 1 с; В — 1 В; С = 1 рад;
их = 0,2 рад и на вход действуют управляющее воздействие g (t) — gn -f-
и помеха в виде стационарного случайного процесса с корреляцион-
ной функцией Rx(x) = c2xe~at т| и спектральной плотностью Sx(co) = х
X_________1.
Л аа + ®2
5.141. Определить диапазон изменения дисперсии температуры су-
шильного шкафа Се в зависимости от зоны нечувствительности реле, если
К == = 0,011/В-с; Т = 10 с; В = 25 В; = (10° С)2; а = 0,1 с"1,
а для поддержания температуры на заданном уровне применен релейный
регулятор (рис. 5.91, в). При этом на вход системы действует стационарный
Q2 1
случайный процесс с тп = 0 и Srt(co) = к2^.ша •
Глава 6
Импульсные и цифровые системы
автоматического регулирования
Импульсными и цифровыми системами автоматического регулирования
называются такие динамические системы, в которых изменения сигнала про-
исходят в дискретные моменты времени. Устройства, преобразующие не-
прерывный сигнал в дискретные моменты времени, называются импульс-
ными. В настоящее время получили распространение три способа образова-
ния таких сигналов с помощью различных видов модуляции: амплитудно-
импульсной (АИМ), широтно-импульсной (ШИМ) и частотно-импульсной
(ЧИМ). При амплитудно-импульсной модуляции происходит периодическая
выборка импульсного сигнала х* (i)1 * малой шириной в тактовые моменты
времени Т, что представляет собой процесс квантования по времени. Этот
процесс описывается обычно линейными разностными уравнениями. При
широтно-импульсной и частотно-импульсной модуляциях процесс выборки
сигнала описывается нелинейными уравнениями (см. ,гл. 5).
Расчет импульсных и цифровых систем регулирования основан на при-
менении г-преобразования, которое осуществляется с помощью подстановки
z = esZ. (6.1)
Применив соотношение (6.1) к выражению (1.276), получим значение сиг-
нала
X(z)= S x(kT)z-*, (6.2)
*=о
записанное в виде z-преобразования или при отсутствии кратных полюсов
х (2) == S 1 -Tv* Res х (6-3)
(к)
где % = sK (к — число полюсов).
При наличии кратных полюсов г-преобразование
,_ХД„ . (6.4)
где вычеты находят для точек х = sK, равных полюсам изображения сиг-
нала X (s).
Вычет для функции f (а) в точке а, являющейся полюсом данной функции
кратности ш, определяют по формуле
Res f = -(^ПГГ f W1) • <6-5)
1 Знак * обозначает операцию квантования по времени.
394
6.1. ПРИМЕНЕНИЕ «-ПРЕОБРАЗОВАНИЯ
К ИМПУЛЬСНЫМ ПЕРЕДАТОЧНЫМ ФУНКЦИЯМ
6.1. Вычислить г-преобразование для импульсной функции
х* (0 = t.
Решение. При t = кТ имеем
X(z) = 2 (кТ) z~K == Т (z^1-j-2z~2-j-----|-kz-«4- •• •) =
к=0
T,-l
= (1-^)" приИК 1-
6.2. Вычислить z-преобразование для импульсной функции
х*(() = (е-Ч
Указание. Использовать формулу (6.2).
6.3. Вычислить z-преобразование для импульсной функции
х* (0 = e~a< sin coot
6.4. Вычислить z-преобразование для импульсной функции
х* (t) — e~aZ cos (Dot.
6.5. Вычислить z-преобразование для импульсной функции
х* (0 = |sin <|1 (0.
6.6. Вычислить z-преобразование ' функции W (s) =
при величине периода квантования file.
Решение. Подставим в формулу (6.3) значения вг = 0; sa = —1; s3 =
= —2 и, учитывая, что вычет функции W (s) в точке s{ простой, найдем
К8 — si) W (S)l |s=sp
откуда получим
TV7 \ Ю t Ю I
W (Z> = (l-4-eoz_i) i-2 + (1 — e-iz-1) (— 1) 1
, 10 _ 5 10 . 5
+ (l+e-’z-1)!— 2) (— 1) ~ 1 —z’1 1 —0,368г'1 + 1—0,135г'1 =
0,400г-1+ 0.731Z-2
~ (1 —z-1)(l — 0.368-1) (1 — 0,135г-1) ‘ ( '
6.7. Вычислить z-преобразование функции W (s) = , Л , ,2 при ne-
риоде квантования, равном Т.
Решение. Определяя полюсы заданной функции W (s), равные корням
уравнен ия s2 + 2as + (flS + ^2) = 0, sb а = — а ± j/a2 — а4 — Ь2 = — а ± jb,
по формуле (6.3) получим
1Г(2) = 3{ [s_(_a + /7,)[s_(_a_/b)] } =
__ Ь ь ___
[ 1 — e(-o+'l!’, гг~{] (— а + jb +а + jb) + (1 — е*-0-'4” тг~'1] (—а — /5 + а — /4>)
=_____________I_________+____________L________
2 [1 — е(-а+/'6) тг~4 Т 2[1—Гг-1)
395
Используя формулу Эйлера, после ряда преобразований найдем
w (г) ________________________е~*аГ sin ЬТг~~1____
™ 1 - 2е-а т cos ЬТг~1 + '
6.8. Определить слагаемое г-преобразования передаточной функции,
соответствующее простым комплексно-сопряженным полюсам.
Указание. Следует представить непрерывную передаточную функцию
в виде w (s) = я, ,? .2 год.1; тогда комплексно-сопряженные полюсы
о (S) [(S -г СС) “Г Р 1,
Si. 2 = —а — /₽• Вычеты в этих полюсах обозначим (а 4- jb).
6.9. Вычислить z-преобразование функции
«'W- гдел-27с-‘;л = о,782 с;
Tt = 1,3 с; = 0,832, при Т = 0,1 с.
Указание. Использовать результат задачи 6.8.
6.10. Вычислить г-преобразование передаточной функции F(s) =
— I ? па ПРИ = 0,5 С.
s(s4-l)a г
Решение. Искомое z-преобразование находим по формуле (6.4), где
вычеты полюсов данной функции sx = 0 и s2 = —1.
Определим по соотношениям (6.4) и (6.6)
W(2) = (l-z-W-l)2 +ЬГ (l-z-V’6*) ]|х«_Г
1 (1 — z-’e0,5*) 4- xe0,Sz0,5z-1 | 1
l-г’1 (1 — z_’1e°’s*)a |x-1“ 1 —г-*
(1 — 0,610г-1) — 0,305г-1 0,695г'1 — 0,544г'2
(1—0,610г-1)2 “ (1— г-1)(1— 0,610г'1)2 * ,
6.11. Вычислить z-преобразование передаточной функции W (s) =
12,5 „„„ ,
~s»(l,32s2 4-2-1,3-0,832s 4-1) ПрИ 1 1 с-
6.12. Вычислить z-преобразование передаточной функции W (s) =
~ (s 4- 0,1) (s 4- 0,4) (s2 4- 0,024s 4- 0,4) ПрИ Т = 1 С#
6.13. Найти z-преобразование для системы автоматического регулиро-
вания (рис. 6.1, а) при Т — 0,1 с.
6.14. Определить z-преобразование функции
™ . 20 (s2 4- 2s 4- 2) - .
(s) — (s4-i)2(s4.0,5)(s24-4s4-5) при Т С‘
6.15. Вычислить z-преобразование передаточной функции
m /п______________ ____________& ~Ь 1)_____________
WV>>~ s®(T2s4-l)(T3s4-l)(ns2 + 27’4£s4-l) ’
где К = 1,985-10*; 7\ = 0,2 с; Т2 = 0,6 с;
Т3 = 0,12 с; = 0,09 с; g = 0,655, при Т = 0,06 с.
6.16. Найти z-преобразование для системы автоматического регулиро-
вания, изображенной на рис. 6.1, б, при Т = 0,8 с.
6.17. Найти z-преобразование для системы автоматического регулиро-
вания с ЦВМ, структурная схема которой изображена на рис. 6.2, а. На
ЦВМ реализуется программа дифференцирования по методу второй цен-
тральной разности. Параметры системы:
К = 2; 7\ = 0,1 с; Т2 = 0,05 с; Т = 0,2 с.
396
а) О
Рис. 6.1. Структурные схемы разомкнутых импульсных систем автоматического регули-
рования
Решение. Программу дифференцирования по методу второй централь-
ной разности запишем с помощью формулы (1.318) в виде
П7 м 3 1 — г-2
W'nptZJ— Т 1+4г-1_|_г-а •
По таблице ^-преобразований найдем [17, 381
и - 3 [s.</s+0(^+1)} - tS - * (Л + Л) -
КП (1-2-1) , KTld-г-1)
/ т \ "Г / __т \ ’
(П-ТОМ-г'^е Г>/ (Т4 —Tj) \1 — z"Je"” Г* /
или после подстановки параметров
nz^-0'42'1 03 4-°'4(1-rl) 0,1(1 —г-»)
(2) - x_z.v - U.d + - i_ 0,01852-1 s
0,152г-1(1 4-0,05г"1) (1 4- 1,0652'1)!
“ (1 — г-1) (1 — 0,135г-1) (1 — 0,0)852-1’) *
Передаточная функция всей системы
w м _ п/ м м _ 2,28г-1 (1 4~ г"*) (1 + 0,05г"1) (1 4- 1.065г-»)
wnp(Z)w0(Z}— (j _ о, 135г-1) (1_о,О185г-1) (14-42-14-г"а) '
6.18. Найти z-преобразование для системы автоматического регулиро-
вания с ЦВМ, структурная схема которой изображена на рис. 6.2, б. На
ЦВМ реализуется программа интегрирования по методу трапеций.
Указание. См. задачу 1.105.
6.19. Найти z-преобразование для системы автоматического регулиро-
вания с ЦВМ, структурная схема которой изображена на рис. 6.2, в. На
ЦВМ реализуется программа дифференцирования по методу третьей цен-
тральной разности.
Указание. См. задачу 1.114.
Рис. 6.2. Структурные схемы разомкнутых цифровых систем автоматического регулиро-
вания
397
6.20. Найти z-преобразование для системы автоматического регулиро-
вания с ЦВМ, структурная схема которой изображена на рис. 6.2, г. На
ЦВМ реализуется программа интегрирования по методу Рунге—Кутта
3-го порядка.
Указание. См. задачу 1.108.
6.2. ПЕРЕДАТОЧНЫЕ ФУНКЦИИ ЗАМКНУТЫХ
ИМПУЛЬСНЫХ И ЦИФРОВЫХ СИСТЕМ АВТОМАТИЧЕСКОГО
РЕГУЛИРОВАНИЯ
6.21. Для импульсной системы автоматического регулирования, изо-
браженной на рис. 6.3, а, определить преобразование Лапласа выходной
величины X (s), а также передаточные функции Ф (s); Ф* (s) и Ф (z).
Решение. Рассмотрим вначале внутренний контур, выделенный штри-
ховой линией на рис. 6.3, а. Для него справедливо соотношение
Х2(8) = ЕГ(8)Г2(8)№з(8). (6.7)
С учетом выражения
Ei (s) = [Ei (s)] ,
где Ех (s) — Хх (s) — X2 (s), имеем
Ei’ (s) = ХГ (s) - X2* (s). (6.8)
Подставляя выражение (6.8) в (6.7), получим
х; (s) =» [е; (s) w2 (s) u73 (s)]’«[х; (s) - х; (S)i w3’ (s),
откуда ।
*?<»> (о®
Так как X (s) = [ХГ (s) — Х2 (s)l VtZ2 (s), то с
(6.9) получим
учетом соотношения
398
Таким образом, передаточная функция внутреннего контура
Wk = (s) = 1 + 1Г2117* (s) * (6-1 °)
Теперь запишем выражение для изображения ошибки системы Е (s) =
= G (s) — Е* (s) Wi (s) VF* (s) (s); тогда E* (s) = G* (s) — E’ (s)TFj (s)IF»IFl (s),
откуда,
E* (s) -------r-!----r— G* (s). (6.11)
1 + Wj (s) WkVf4 (s)
Так как изображение выходной величины
X(s)=E’(s) Was)Wk(s),
то с учетом выражений (6.10) и (6.11) окончательно имеем
V /М _________Is) (5)____________ /С 1 04
W 14- (s) + ITJ (s) Г2Г4‘ (s) • [ )
Соответствующая дискретная передаточная функция замкнутой си-
стемы
Ф* _ у> (а)____________ГС'* <s) (s)_____ /с 131
G*(s) ~ 1 + Г2Г3* (sl + VI (s)W2Wt (s)- '
Применяя к полученному выражению z-преобразование, найдем
Ф (г) =-------. (6.14)
( > 1 + WtWa (г) + W4 .(г) «78в74 (г)
6.22. Для импульсной системы автоматического регулирования, изо-
браженной на рис. 6.3, б, определить выходные сигналы X (s) и X (г),
а также передаточные функции разомкнутой системы Ц7* (s) и W {г).
Решение. Для удобства нахождения передаточных функций преоб-
разуем исходную структурную схему системы к виду, показанному на
рис. 6.3, в.
В соответствии со схемой запишем
Х2 ($) = [Gi (4 - Xi (s)] Wi (s) W2 (s) W3 (s), (6.15)
где Gi (s) = G (s)lW3 (s), откуда
Xi (s) =b GWffii (s) - Xi (s) (s),
или
у» (s) ...
^2 (S) — J + U71W'SW'.; (s) • (6‘ 6)
Подставляя выражение (6.16) в соотношение (6.15), найдем
Xt (s) = G (s) W, (s) W2 (s) .
Так как
окончательно получим
Х(5) = С(5)1ГИ5)--2^Ж^Ь^. (6.17)
399
г)
Согласно выражению (6.17) имеем
X’ - 6П7? _ GW^ (s) fs)
X (s) — GITi(s) 14-(S)
поэтому
V ____лпр /?х GWtU^2 (г) (г)
Л (г) - ^(z)-. 1 + w,iW(z) •
Передаточные функции разомкнутой системы
Ijf (s) = Г1Г2Г3‘(5)
и
(6.18)
(6.19)
W (z) = V^W, (z).
(6.20)
6.23. Определить передаточные функции W (z) и Ф (г) для импульсной
системы автоматического регулирования, структурная схема которой изобра-
жена на рис. 6.3, г.
6.24. Для импульсной системы автоматического регулирования, струк-
турная схема которой изображена на рис. 6.4, а, определить выходной сиг-
нал X (s) и передаточные функции V7 (г), Ф (г).
6.25. Для импульсной системы автоматического регулирования, струк-
турная схема которой показана на рис. 6.4, б, определить изображение вы-
ходного сигнала X (s), а также передаточные функции разомкнутой си-
стемы W* (s) и W (г).
6.26. Определить передаточную функцию Ф* (s) относительно управ-
ляющего воздействия для импульсной системы автоматического регулиро-
400
вания, структурная схема которой изображена на рис. 6.4, в. Найти изобра-
жение выходной величины X (s).
6.27. Определить выходной сигнал X (z) в импульсной системе автома-
тического регулирования, структурная схема которой изображена на
рис. 6.4, г.
6.3. АНАЛИЗ УСТОЙЧИВОСТИ ИМПУЛЬСНЫХ
И ЦИФРОВЫХ СИСТЕМ АВТОМАТИЧЕСКОГО
РЕГУЛИРОВАНИЯ
При определении устойчивости импульсных и цифровых систем авто-
матического регулирования применяют алгебраические и геометрические
критерии устойчивости, которые используют в зависимости от формы пред-
ставления уравнений динамики или передаточной функции разомкнутой
системы.
В форме г-преобразования. Алгебраический критерий
Шур-Кона по характеристическому уравнению замкнутой системы D (г) = О
позволяет судить о расположении корней на плоскости г. Корни характе-
ристического уравнения
D (z) = z" 4- aiz"-1 4- а2гп“2 4* • • • + cin-iz 4- an = 0 (6.21)
будут лежать внутри единичной окружности (что указывает на устойчивость
системы), если коэффициенты уравнения (6.21) удовлетворяют следующим
условиям:
Aft> 0 для четных k, j (6.22)
где — определитель Шур-Кона вида 1
ап 0 0 . 0 1 <4. «2 • • • <4-1
ап-1 ап 0 . 0 0 1 <н • • • <4-2
an-i ап-1 ап . о 0 0 1 • • • a*-s
an-k+l аП-Ь*2 an-k*3 . а» 0 0 0 ... 1
Д* = 1 0 0 . 0 ап ал-2 • • • > (6.23)
а' 1 0 . 0 0 <4-1 • • • <4—ft+2
а2 «1 1 . 0 0 0 ап • • • an-.ft+3
ak-,l aft—2 aft—3 . 1 0 0 0 • • • ап
где k = 1, 2, 3, . . ., п;
al, al, ... ап — сопряженные значения коэффициентов уравнения (6.21).
Для характеристического уравнения 2-го порядка
D (z) = z2 4- az 4- b = 0 (6.24)
условия устойчивости Шур-Кона будут:
a) |D(0)| < 1;
б) 0(1) >0;
в) О(— 1)>0.
(6.25)
Геометрический критерий устойчивости Михайлова—Найквиста по рас-
положению годографа функции W (z) относительно точки с координатами
(—1; /0) позволяет судить об устойчивости и неустойчивости импульсных
или цифровых систем регулирования (17, 38].
401
6.28. Исследовать устойчивость импульсной системы автоматического
регулирования, характеристическое уравнение которой имеет вид
z® — 1,014456г2 + 0,302017z — 0,00506 « 0,
используя критерий Шур-Кона.
Решение. С помощью определителя (6.23) найдем нечетные и четные
определители Шур-Кона:
Ag — — О Й ОС W ОЙО со » О — II а3 1 «1 1 ая ая 1 — 0.00506 1 1
а3 — 1 3,00506 ),302017 1,014456 — 0,00506 1 = — 1,000025 < 0; — 1,014456 = 0,970;
0 — 0,00506 0 1 1 0 — 0, 0
00506 1 0,302017 0,00506
ах 1 0
О , 0 0 1 01 - 0,00506 0 0 1 — 1,014456 0,302017
а е а» 0 0 1 а 1 0,302017 — 0,00506 0 0 1 = 1,014456
Qi О« а, 0 0 — 1,014456 0,302017 — 0,00506 0 0 1
А.- 0 0 а. 21 а 1 1 0 0 — 0,00506 0,302017 - - 1,014456 в
а 1 1 0 0 at at — 1,014456 1 0 0 = 0,00506 0,302017
at I 0 0 а* 0,302017 — 1,014456 1 0 0 -0,00506
= — 0,6 < 0,
рассматривая которые делаем вывод — импульсная система устойчива.
6.29. Исследовать устойчивость импульсных систем автоматического
регулирования с помощью критерия Шур-Кона, если их характеристические
уравнения имеют следующий вид: ;
а) г® — 1,03г* — 1,32г + 0,0044 = 0;
б) г* 4- г* г -f-1 = 0;
в) г4 — 2,8г3 4- 3,4г* — 2,24г 4- 0,64 = 0;
г) г3 — 1,545г2 4- 0,607г — 0,0613 = 0;
д) г2 4- 2г 4- 3 = 0;
е) г3 — 2,221г2 4- 1,695г — 0,474 = 0.
6.30. Исследовать устойчивость импульсных систем автоматического
регулирования с помощью критерия Шур-Кона, если их разомкнутые пере-
даточные функции имеют вид:
. 0>636г (г — 0,0185) (г — 0,135) .
а' w ~ (га — 1) (г 4- 0,05) (г 4- 0,516) ’
, , 0,0013 (г—0,983) (г+ 0,861) .
W'(z) (г—1) (г — 0,997) (г — 0,51) ’
к) П7 лл . 0,15г (г + 0,05) (г + 1,065)
' (г—1) (г— 0,135) (г — 0,0185) *
6.31. Определить, при каких значениях коэффициента К импульсная
система автоматического регулирования с передаточной функцией
W (г) =» ________
17 г2— 1,368г + 0,36«
устойчива в замкнутом состоянии.
Решение. Характеристическое уравнение замкнутой системы
г, / , , , 0,632Дг .
О(г)=14- 2а_ 1)368г + 0 368 — 0,
откуда
D (г) = г* 4- (0.632К - 1,368) г 4- 0,368 = 0.
402
Запишем условие устойчивости Шур-Кона в виде неравенств (6.25);
тогда
|D (0)| = 0,368 < 1;
D (1) - 0.632К > 0;
D (—1) =» 2,736 — 0.632К > 0.
Первые два условия удовлетворяются для любых положительных зна-
чений К, третье же условие выполняется лишь при К. < 4,32. Поэтому рас-
сматриваемая импульсная система автоматического регулирования является
устойчивой лишь при К < 4,32.
6.32. Построить области устойчивых и неустойчивых состояний на
К
плоскости параметров аТ; ~ для импульсной системы автоматического
регулирования, если ее передаточная функция в разомкнутом состоянии
v , а j -— (2_1)(г_е-аТ) J
Решение. Из полученного выражения найдем характеристическое урав-
нение
D(z) = (z- l)(z — е-оГ)4--у-(е-°г4-аГ-
+ А (1 — е~аГ — аТе-°г) = 0,
откуда
z2 + [Л(e-ет аТ - 1) - 1 —e-«t] z + е-аГ +
+ А-(1 — е.~аТ—аТе~аТ)ж 0.
Условие Шур-Койа для этого уравнения представим в виде:
а) |е-°г + -А(1 —•егаТ — аТе~“г)|<1;
б) АаТ(1-е~аГ)>0;
в) 2(1+ е“°г)--(е~аГ + аТ - 1) + А (1 _ _ аТе-*7) > 0.
Условие б) выполняется для всех аТ > 0, поэтому перейдем к рассмо-
трению лишь условий а) и в), т. е.
(— 1 - е~аГ) < А (1-_ - аТе.~аТ) < (1 - е~аТУ,
-^-(2-аТ- 2е~аГ — аТе~°т) > - (2е~аГ + 2),
или
0<Л<_________СДГ~-!_____;
а е~аТ — 1 +аТе~аТ
К < 1
а аТ , е~'аГ — 1
2 +е-аГ+1
С помощью последнего неравенства на рис. 6.5 построены границы об-
ласти устойчивости.
403
Рис. 6.5. Области устойчивых и не-
устойчивых состояний импульсной
системы регулирования в зависимо-
к
сти от параметров — и аТ
6.33. Определить, при каких значениях
передаточного коэффициента К импульсная
система автоматического регулирования,
имеющая передаточную функцию
_ К (г + 0.05) (г+ 1,065)
w W ~ (z — 1) (z — О,135) (г — 0,0185) ’
устойчива в замкнутом состоянии.
6.34. Определить, при каких значениях
передаточного коэффициента К импульсная
система автоматического регулирования,
имеющая передаточную функцию
_ К (z — 0,983) (г+ 0,861)
(Z) (г— 1) (2 — 0,997) (г — 0,51) ’
устойчива в замкнутом состоянии.
6.35. Определить, при каких значениях
передаточного коэффициента К импульсная
система автоматического регулирования,
имеющая передаточную функцию
К(г~ 0,934)(г + °,922)
w (Z' (z —l)(z— 1,0067)(г —0,51)’
устойчива в замкнутом состоянии.
6.36. Построить области устойчивых и неустойчивых состояний на
К
плоскости параметров аТ, — для импульсной системы автоматического
регулирования, структурная схема которой показана на рис. 6.6, а.
6.37. Построить области устойчивых и неустойчивых состояний на
К
плоскости параметров аТ, — для импульсной системы автоматического
регулирования, структурная схема которой приведена на рие. 6.6, б.
Геометрический критерий Михайлова-Най-
квиста для импульсных систем автоматического регулирования позволяет
судить об их устойчивости по расположению годографа на плоскости W (г).
Применяемая при этом функция z = esT отображает мнимую ось
плоскости s в единичную окружность на плоскости z. Следовательно, если
прй анализе устойчивости непрерывных систем годограф W (/о) получается
путем замены з на /со (мнимая ось), то для импульсных систем годограф W (z)
находится путем подстановки z = а + bj (где а и b — абсциссы и ординаты
точек, расположенных на единичной окружности) в передаточную функцию
разомкнутой системы W (z).
Импульсная система автоматического регулирования будет устойчива .
в замкнутом состоянии, если разность между положительными и отрицатель-
ными переходами годографа разомкнутой системы через отрезок оси (—оо,
—1, /0) равна -^2- (где тр — число полюсов в передаточной функции разомк-
нутой системы).
Рис. 6.6. Структурные схемы замкнутых импульсных систем регулиро-
вания:
а — к задаче 6.36; б — к задаче 6.37
404
Рис. 6.7. Структурные схемы замкнутых импульсных систем регулирования
6.38. Построить годограф W (г) и проанализировать устойчивость им-
пульсной системы автоматического регулирования по критерию Михайлова—
Найквиста, имеющей структурную схему, показанную на рис. 6.7, а.
Решение. На основании структурной схемы определим передаточную
функцию разомкнутой системы:
2(1— e“sr) ] z — 1 п/ 2 0,3 . 0,4 0,1 ]
sa (0,1s 4-1) (0,05s + 1) J— г sa s “’“s-f-lO s 4- 20J
__ 0,4 0,4(z—1) 0,1(г—1) 0,15г (г 4-0,05) (z 4-1,065)
“ г—1 ' г —0,135 г —0,0185 “ (г—1)(г —0,135) (г —0,0185) *
№(г) = 3{
Из полученной передаточной функции следует, что полюсы вне единич-
ной окружности отсутствуют, т. е. /Пр = 0 (рис. 6.8, а). Поэтому годо-
граф W (г), изображенный на рис. 6.8, б кривей 1, не будет пересекать от-
резок оси (—оо, —1, /0), что указывает на устойчивость импульсной системы
в замкнутом состоянии. При увеличении коэффициента усиления системы
с 2 с-1 до 267 с"1 передаточная функция разомкнутой системы примет вид
w (,\ _ б8г <г + °>05) <г + 1.065)
& - (г — 1) (г — 0,135) (г — 0,0185) ’
г)
Рис. 6.8. Годографы характеристик W (г) и
расположение нулей и полюсов в разомкнутых им-
пульсных системах автоматического регулиро-
вания
405
а ее годограф изображен кривой 2 (рис. 6.8, а). При trip — 0 годограф полу-
охватывает точку (или полупересекаёт отрезок оси в отрицательном направ-
лении), что указывает на неустойчивость импульсной системы.
6.39. По передаточной функции разомкнутой импульсной системы
те,. . 0,0013 (г — 0,934) (г + 0,922)
(г _ 1) (г — 1,00167) (г — 0,51)
построить годограф и проанализировать ее устойчивость с помощью кри-
терия Михайлова—Найквиста.
Решение. Из приведенной передаточной функции W (г) видно, что в ней
имеется один полюс вне единичной окружности тр — 1 (рис. 6.8, в). На
рис. 6.8, г построен годограф W (z) (кривая /), который пересекает отрезок
оси (—оо, —1, /0) Va раза в отрицательном и один раз в положительном на-
правлении. Отсюда следует----4- 1 = Последнее указывает на устой-
чивость рассматриваемой системы в замкнутом состоянии.
Изменив числовое значение передаточного коэффициента, получим но-
вую функцию
w . . 0,0002 (г — 0,934) (г + 0,922)
— (г—1) (г— 1,00167) (г — 0,51) *
В этом случае годограф (кривая 2 на рис. 6.8, г) пересекает отрезок оси
(—оо, —1, /0) */а раза в отрицательном направлении, т. е.----
что указывает на неустойчивость рассматриваемой системы в замкнутом
состоянии. 1
6.40. Построить годограф W (z) и проанализировать устойчивость им-
пульсной системы автоматического регулирования с помощью критерия
Михайлова—Найквиста, если структурная схема системы имеет вид, пока-
занный на рис. 6.7, б.
6.41. Построить годографы W (г) при трех значениях передаточного
коэффициента: Ki — 1,5 с-1, Ка = 2 с-1 и К3 = 10 с-1 и проанализировать
устойчивость импульсной системы автоматического регулирования с помощью
критерия Михайлова—Найквиста. Структурная схема системы показана
на рис. 6.7, в; Т = 0,2 с.
6.42. Построить годограф й? (z) при двух значениях передаточного
коэффициента: Ki = 0,5 с-1 и К2 = 10 с-1 и проанализировать устойчивость
импульсной системы автоматического регулирования с помощью критерия
устойчивости Михайлова—Найквиста. Структурная схема системы изобра-
жена на рис. 6.7, г.
6.43. Проанализировать устойчивость импульсных систем автоматиче-
ского регулирования с помощью критерия Михайлова—Найквиста в зави-
симости от коэффициента усиления К, если расположение нулей и полюсов
в разомкнутых передаточных функциях показано на рис. 6.9, а—е.
В ф о р м е и>-п реобразования. Для приведения передаточных
функций разомкнутых систем W (z) и характеристических уравнений зам-
кнутых систем D (z) к w-форме пользуются билинейным преобразованием
Z = -S- (6-26)
Билинейное преобразование отображает единичный круг плоскости г
в левую полуплоскость ш. Поэтому методы анализа устойчивости непрерыв-
ных систем можно применять для импульсных и цифровых систем регули-
рования на плоскостях w н W (w) (где w = jv, и — псевдочастота) [17].
406
Рис. 6.9. Расположение нулей и полюсов в передаточных функциях разомкнутых импульс-
ных систем автоматического регулирования
6.44. Исследовать устойчивость импульсной системы автоматического
регулирования, характеристическое уравнение которой
D (г) = 5г8 4- 2г9 4- 3z 4-1 = 0.
Решение. Подставляя соотношение (6.26) ₽ последнее уравнение, полу-
чим
5(1-{- w)s 4- 2 (1 4- а>)9 (1 — w) 4- 3 (1 4- w) (1 — w)* 4- (1 — w)3 — 0,
или
5a)8 4- 13a)9 4-Ив) 4-H e 0*
Для анализа устойчивости этого уравнения используем критерий Лье-
нара-Шипара
— aa >0.
Подставив соответствующие числовые значения, найдем
13-11 -5-11 = 88 >0.
Следовательно, рассматриваемая импульсная система автоматического регу-
лирования устойчива.
6.45. Проанализировать устойчивовть импульсной системы автомати-
ческого регулирования в зависимости от передаточного коэффициента К,
если ее передаточная функция в разомкнутом еостоянии имеет вид
Кг
“ (г— 1) (г 4-2)
Решение. Применяя билинейное преобразование, найдем
откуда нетрудно получить характеристическое уравнение
D (w) = 1 4- W (w) = 0,
или
£>(«)) = 4а) 4- К (1 4- а)) (1 — ш) = 0.
407
После преобразований, имеем
—Kw* 4- 4w 4- К = О
и
_ 4 ± /16 4-4№
w~ 2К
откуда видно, что при любых К > 0 имеются корни с положительными веще-
ственными частями и система регулирования является неустойчивой.
6.46. Исследовать устойчивость импульсных систем автоматического
регулирования с помощью критериев Гурвица и Рауса.
a) D (z) = z3 — 1,014456г2 4- 0,302017г — 0,00506 = 0;
б) D (z) = г3 — 2,51037г2 — 2,0225г — 0,51197 = 0;
в) D (г) = г2 + г — 0,5 = 0;
г) D (г) = г3 — 1,03z® — 1,32г 4- 0,0044 = 0;
д) D (г) = г2 — 1,5г 4- 1,5 = 0.
Рас. 6.10. Годографа характеристик W (]о) для разомкнутых систем автоматиче-
ского регулирования
6.47. Исследовать устойчивость импульсной системы автоматического
регулирования на плоскости W (jv) в помощью критерия Михайлова—
Найквиста, если
28з
(г- 1) (г4- 1) ’
Решение. Применяя билинейное преобразование, получим
В последнее выражение подставим w = jv, тогда найдем
W (jv) = — /.
Задаваясь различными значениями псевдочастоты о (от 0 до оо), полу-
чим годограф W (jv), изображенный на рис. 6.10, а. Как видно из рисунка,
годограф полуохватывает точку (—1; /0) в отрицательном направлении V2
раза, что указывает на неустойчивость импульсной системы автоматического
регулирования в замкнутом состоянии.
6.48. Исследовать на устойчивость систему автоматического регулиро-
вания на плоскости W (jv) в зависимости от передаточного коэффициента
с помощью критерия Михайлова—Найквиста, если
«8
Решение. Применив билинейное преобразование, получим
F(te-) (!-«>)
За» (0,33а» 4-1) '
Подставляя в последнее выражение w = jv, запишем
W (iv) ~ — O+Md-M
3 /0(0,33^4-1) ’
или
П(П\- К 0.330(1 4-о2).
3 1,12ц’4-у ’
у (и) _____£_____:12+_1__
W 3 1,120’4-ц-
(6.27)
С помощью выражений (6.27) можно построить годографы W (jv) при
различных значениях передаточных коэффициентов К. Возьмем сначала
К = 0,1 в"1. Соответствующий этому значению К годограф W (jv) построен
на рив. 6.10, б (кривая 1). Из данного построения видно, что импульсная
система регулирования устойчива.
Увеличивая значение коэффициента К до 1 в"1, получим годограф 2.
Как видно из рис. 6.10, б, годограф проходит черёз точку (—1; /0), что ука-
зывает на нахождение импульсной системы на грани устойчивости, и при
К = 3 с-1 годограф 3 охватывает точки (—1; /0) в отрицательном направле-
нии, что соответствует неустойчивости системы.
6.49. Исследовать на устойчивость импульсные системы автоматического
регулирования на плоскости W (jv) в зависимости от параметра К с помощью
критерия Михайлова—Найквиста, если их разомкнутые передаточные функ-
ции имеют следующий вид:
К(г 4-0.5) .
(г— 1)(г4-1) ’
a) W(z) =
б) W(z) =
К (г — 0,5)
(г — 1) (г 4-0,5) ’ !
в) W (z) =
Кг
г2 — 1,368г 4-0,368’
К (1,26г4 + 0,643г8 — 0,227г2 — 0,102г — 0,02)
г) ^(z)— 2z^ —3,50г4 4- 1,127г8 4-0,247г2 4-0,126г—0,005 *
6.50. Исследовать устойчивость импульсной системы автоматического
регулирования с помощью логарифмических характеристик и определить
запасы ее устойчивости по фазе и модулю, если передаточная функция си-
стемы в разомкнутом состоянии
w . 0,0013(г —0,934) (z 4-0,922)
(z—1) (г— 1,0067) (г —0,51) •
Решение. Используя билинейное преобразование, получим
_ 2,1(29,За»4-1)(0,04а»4-1)(1-а»)
W ~ а» (1195а» — 1) (3,08а» 4- 1)
.409
Рис. 6.11. Логарифмические амплитудные и фазовые характеристики импульсной системы
автоматического регулирования
Подставим в последнюю формулу w == jv и построим логарифмическую
амплитудную характеристику Н (о) (кривая 1 на рис. 6.11). Фазовую ха-
рактеристику будем вычислять по формуле
0 (v) ----1- л -j- arctg 1195» -j- arctg 29,3» — arctg 3,08t> -f-
(
+ arctg 0,04v — arctg v.
Задаваясь различными значениями псевдочастоты, получим фазовую
характеристику (кривая 2). Учитывая сомножитель-Л- в передаточной функ-
ции системы, необходимо в фазовой кривой добавить дугу бесконечного ра-
диуса, которая показана на рис. 6.11 штриховой линией. При этом число
переходов фазовой характеристики оси —л при /7 (о) >0 будет 1--------=
= -g-- Так как в передаточной функции системы имеется один полюс вне
окружности единичного радиуса, то ~ = -у- и рассматриваемая импульс-
ная система устойчива в замкнутом состоянии.
Данная система регулирования на псевдочастоте среза vc = 0,022 обла-
дает запасом устойчивости по фазе у0 = 75°. Запасы устойчивости системы
по модулю показаны на рис. 6.11 и составляют /7М = 28 дБ и /7М = —34 дБ.
6.51. Исследовать устойчивость импульсной системы автоматического
регулирования с помощью логарифмических характеристик и определить
их запасы устойчивости по фазам и модулю, если передаточные функции
систем в разомкнутом состоянии имеют следующий вид:
я\ 0,00137 (г-0,977) (г 4-0,803) .
7 ' ' ~ (г — 1) (г — 0,999) (г — 0,51) ’
0,00123(2 — 0,996) (г 4-0,966) .
°' (2— 1) (2— 1,0033) (2 — 0,51) ’
в) W = 0’ 152 (г 4* 0>05) (г 1,065) .
’ ' ' (г-l) (г — 0,135) (2 — 0,0186) ’
410
г) W (z) =
Д) W(z) —
8,5 (г 4-1)
(«4-0,303) (г — 1,65) ’
0,0465 (г 4- 5,83) (г 4- 0,17) (г — 0,66)
(г — 1)2(«4-0,25)
Определить запасы устойчивости систем по фазам и модулям.
6.52. Построить области устойчивых и неустойчивых состояний для
импульсной системы автоматического регулирования по параметру К с по-
мощью метода логарифмических характеристик, если ее передаточная функ-
ция в разомкнутом состоянии
ту , } _ К (14-0.05г) (г 4- 1.065)
( ' (г — 1) (г — 0,135) (г — 0,0185) *
6.53. Построить области устойчивых и неустойчивых состояний для
импульсной системы автоматического регулирования по параметру К с по-
мощью метода логарифмических характеристик, если ее передаточная функ-
ция в разомкнутом состоянии
тиг / ч К (г — 0,984) (г 4- 0,808)
W'Z’ (г—1) (г—1,001) (z —0,51) *
6.54. Построить области устойчивых и неустойчивых состояний по
параметру К для импульсных систем автоматического регулирования, поль-
зуясь методом логарифмических характеристик. Структурные схемы им-
пульсных систем показаны на рис. 6.7, в и г.
6.55. Построить области устойчивых и неустойчивых состояний по пара-
метру 7\ для импульсной системы автоматическогЬ регулирования с по-
мощью логарифмических характеристик. Структурная схема импульсной
системы изображена на рис. 6.12, а.
6.56. Построить области устойчивых и неустойчивых состояний по пара-
метру 7\ для импульсной системы автоматического регулирования с по-
мощью логарифмических характеристик. Структурная схема системы изобра-
жена на рис. 6.12, б.
6.57. Построить области устойчивых и неустойчивых состояний по пара-
метрам К и 7\ для импульсной системы автоматического регулирования
с помощью логарифмических характеристик, выдерживая запасы устойчи-
вости по фазе ус — 30° и модулю Нк «С —10 дБ. Структурная схема системы
изображена на рис. 6.12, в.
6.58. Построить области устойчивых и неустойчивых состояний в циф-
ровой системе управления с помощью логарифмических частотных характе-
ристик в зависимости от параметров К и Т. На ЦВМ реализуется программа
дифференцирования по методу второй центральной разности. Структурная
схема системы изображена на рис. 6.13, а.
в)
а)
К____________
(Tts*!X0,Q5s->1)(Q,0ls*f)
Рис. 6.12 Структурные схемы замк-
нутых импульсных систем регулиро-
вания
S)
411
Рис. 6.13.
замкнутых
гулирования
Структурная схема системы изображена
Структурные схема
цифровых систем ре-
6.59.
Построить области
устойчивых и неустойчивых
состояний в цифровой си-
стеме управления с помощью
логарифмических частотных
характеристик в зависимости
от параметров К и 7\. На
ЦВМ реализуется дифферен-
цирующее звено первого
рода с передаточной функ-
цией 7\s + 1 по методу пер-
вой центральной разности.
' 1 на рис. 6.13, б.
6.60. Построить области устойчивых и неустойчивых состояний в циф-
ровой системе управления с помощью логарифмических частотных характе-
ристик в зависимости от параметров К и Тг или К и Т2. На ЦВМ реализуется
Т s 4-1
динамическое звено с передаточной функцией ' . по методу Эйлера (см.
приложение XV). Структурная схема системы изображена на рис. 6.13, в.
6.4. АНАЛИЗ КАЧЕСТВА ИМПУЛЬСНЫХ
И ЦИФРОВЫХ СИСТЕМ АВТОМАТИЧЕСКОГО
РЕГУЛИРОВАНИЯ ,
Показатели качества импульсных и цифровых систем автоматического
регулирования определяют с помощью передаточных функций замкнутых
систем
(6-28)
по соотношению
X (г) = Ф (z) G (г). (6.29)
При этом пользуются формулой обратного z-преобразования
х (кТ) — (£ X (z) zK~! dz. (6.30)
ZJl/ J
На практике применяют четыре способа вычисления обратного z-пре-
образования:
1-й с п о с о б. По теореме вычетов Коши значение интеграла (6.30)
определяют как сумму всех вычетов внутри контура Г, т. е.
х(кТ)=2 Res X(z)zK-!. (6.31)
по всем v 4
полюсам z^
X (г)
2-й способ. Функцию —разлагают на простые множители, чтобы
обратное z-преобразование каждого члена, умноженного на г, можно было
найти из таблицы обратных z-преобразований [17, 38].
3-й способ. С помощью разложения Ф (z) в ряд по степеням г' (i =
= 0, 1, . . ., п), получаемого путем последовательного деления.
412
4-й способ. По номограммам приложения VIII определяют веще-
ственную или мнимую S* (<о) частотные характеристики замкнутой
импульсной системы автоматического регулирования. Эти характеристики
разбивают на трапеции и с помощью формул
и 2Т V' / Sin r(i>iT' \ ( Sin r^>T \
pad
ИЛИ
w 2“< - <6-33>
i=l
и таблиц функций и находят значения дискретной весовой функ-
ции h (гТ) замкнутой системы. Реакцию системы регулирования на единич-
ное ступенчатое воздействие вычисляют по формуле
х(к7’)= 2й(гТ). (6.34)
г=0
6.61. Построить переходный процесс в импульсной системе автомати-
ческого регулирования, имеющей
в °’6з2г__________• т = О 1 с
w \z> га — 1,368г + 0,368 ’ ’
при действии управляющего сигнала g (/) = [11 и определить основные
показатели качества.
Решение. Определим замкнутую передаточную функцию импульсной
системы:
m W (г) °.632г ir
ф(2)— 1+и7(г) ~ га — 0,736г + 0,368 ’ (6.35)
Найдем z-преобразование от управляющего сигнала:
3[т]~1=Т- (6'36)
С помощью выражений (6.35)! и (6.36) получим
Х № = га —0,736г+ 0,368 г— 1 * (6.37)
Пользуясь выражением (6.37), можно определить переходный процесс
в импульсной системе в тактовые моменты времени и основные показатели
качества четырьмя способами.
1-й способ. Перепишем выражение (6.37) в следующем виде:
Л “ (г — 1) [г — (0,368 + 0,482/)] [г — (0,368 — 0,482/)] ’ 1 '
и вычислим вычеты по всем полюсам выражения (6.38), т. е.
Res X (z) zK-1 = 1;
Res X (г) zK~' = — 0,5 (0,606)к e/-0-92»;
гг=0.368+/-0.482
Res X (z) г15-1 = — 0,5 (0,606) e-r0-92*.
z,=0,368^/-0,482
413
Рис. 6.14. Характеристика пере-
ходного пооцесса в импульсной си-
стеме автоматического регулиро-
вания
X
1,5r
Пользуясь формулой
(6.31), найдем
х (кТ) = 1 —
— (0,606)” cos 0,92 к. (6.39)
Подставляя значения
к — 0, 1, 2, ... в выраже-
ние (6.39), будем вычислять
значение х (кТ) в тактовые
моменты времени. Соответ-
показано на рис. 6.14, откуда
видно, что время регулирования переходного процесса
/р = 4Т = 0,4 с;
максимум перерегулирования o^ax = 21%; | =.6,3 с-1 —макси-
мальная скорость отработки входного сигнала;
логарифмический декремент затухания d* = 1,74.
2-й с п о с о б. С помощью выражения (6.37) образуем функцию
и разложим ее на поостые множители. ,
Х(г) 0,632 А ,
г ~ (г — 1) (га — 0,736г+ 0,368) ~ г—1 “*
+ г —0,368 —0,482/ + г — 0,368 + 0,482/’
откуда А = 1; В = —0,5; С = 0,5.
Выражение (6.40) перепишем в виде
*(г) = • (6.41)
Применим к членам выражения (6.41) обратное z-преобразование;
тогда
х (кТ) = 1 — 0,5 [е- (0.5+0.92/) к _j_ е- <о.в—о.эа/)«] = 1 _ е-о.5« cos 0,92к. (6.42)
Выражение (6.42) полностью совпадает с зависимостью (6.39), поэтому
переходный процесс имеет вид, изображенный на рис. 6.14.
3-й способ. Разложим выражение (6.37) в ряд по степеням z‘.
414
0,632zz ______________________
' 0,6322^4,4972+0,6977-0,2326Z'1
2 3-1, 736Z г+1,109z-0,368___________________
0,6J2z'+1,09 7zz+1,207z}+1,116z*+1,009z3+0,97902s ♦
+ 0,987z'1
_ 1,097z-0,6977+0,2326Z
1,097Z—1,9099 +1,2111z*~0,9037z'2
_ 1,2067 -0,9785z’+0,9037z'2
~ 1,2067-2,0998z,+1,3322Z~l-0,9991z'3
_ 1,1163z1-0,9285z~z+0,9991z3
1,1163z1-1,9379zz+1,2329z3-0,9108z*
_ 1,0099zz-0,7883z3+0,9108z*
~ 1,00992*-1,7523z3+1,1199Z*- 0,3 715zs
0,9790z3-0,70362*+ 0,3715zs
~ 0.9790Z3-1,6909Z*+1,0753z5-0,35892s
_ 0,9873Z*-0,7038z's+0,3589ze
~ 0,98731*-1, 719ZS+ 1,09Z s-0,3633Z 2
1,0102z3-0.7316ZS+O,3633">
Итак, частное от деления
X (г) = 0,632г-1 + 1,097г-а + 1,207г-3 4- 1,116г-1 -f-
+ 1,009г"6 + 0,974г-3 + 0,987?"* ....
Поэтому
X (к7) = 0,6326 (t — Т) + 1,0976 (t — 2Т) 4-
4- 1,2076 (t — 37) + 1,1166 (t — 4Т) 4- 1,0096 (i — 57) 4-
4- 0,9746 (t — 67) -j- 0,9876 (t — 77). . .
С помощью этого выражения на рис. 6.14 построен переходный процесв
в импульсной системе, который совпадает с результатами, полученными 1-м
и 2-м способами.
4-й способ. С помощью передаточной функции разомкнутой системы
0,632г
“ 'г2 — 1,368z 4-0,368
и билинейного преобразования получим
IF(до) =
0,5 (1 4- и>) (1 — w)
ti> (2,16ttt 4" О
Вводя подстановку до = jv, построим на рив. 6.15, а, логарифмические
амплитудную и фазовую характеристики. Затем по номограмме веществен-
ной характеристики (рис. 6.15, б) определим функцию Р (о), которую пере-
считываем с. помощью формулы
со = -^-arctg у.
В результате этого получим вещественную частотную характеристику
замкнутой системы Р* (со) (рис. 6.16, а, б). Разобьем ее на две трапеции и
с помощью формул (6.32) и (6.34) найдем характеристику переходного про-
цесса х (кТ). Практически она совпадает с ранее построенной кривой пере-
ходного процесса на рис. 6.14.
415
Рис. 6.15. Характеристики Н (о),
0 (о), W (jv) для импульсной системы
автоматического регулирования
6.62. Вычислить различными способами х (кТ) и построить кривую
переходного процесса в импульсной системе автоматического регулирова-
ния, имеющей передаточную функцию замкнутой системы
1,264г
г4—0,104г 4-0,368
Ф(2)
при действии единичной ступенчатой функции и Т = 0,1 в.
6.63. Вычислить различными способами ,х (кТ) и построить кривую
переходного процесса в импульсной системе автоматического регулирова-
ния, имеющей передаточную функцию замкнутой системы
ф (2) ---------L2 + ?.+J------
w (г —0,8) (га —г 4-0,8)
при действии единичной ступенчатой функции.
416
6.64. Определить математическое выражение для вычисления переход-
ного процесса в импульсной системе автоматического регулирования с по-
мощью вычетоЬ, если
V/^ 0,02z 4-0,017 г
Л(г>~ (г— 1) (г2— 1,8г 4*0,337) (2 — 1)
и Т — 0,2 с.
6.65. Построить кривую переходного процесса в импульсной системе
автоматического регулирования по методу разложения выражения
v ________________911?__________
(г — 1)(г2 — 1,3г 4-44)
в ряд по степеням г-1' (г — 0, 1, 2, . . .), если Т = 1 в.
6.66. Построить кривую переходного процесса в импульсной системе
автоматического регулирования по методу разложения выражения
v 0,147г2 4- 0,106г
гъ_ 2,221г» 4- 1,695г — 0,474
в ряд по степеням г~г (г =0, I, 2, . . .), если Т = 0,1 е.
6-67. Построить кривую переходного процесса в импульсной системе
автоматического регулирования по методу разложения выражения
1,25г2 4- 0,5г — 0,75
г8 —г2
(
в ряд по степеням z~l (i = 0, 1, 2, . . .), если Г = 1 в.
6.68. Построить кривую переходного процесса в импульсной системе
автоматического регулирования с помощью формулы (6.32), если
0,76г8 4- 1,24г2 4- 0,478г 4-0,0209
л(г>— г4— 1,1535г8 4-0,15г2 —0,0025г ’
6.69. Построить кривую переходного процесса в импульсной системе
автоматического регулирования с помощью формулы (6.32), если
Х(2) =
0,4842 4-0,516
г2 — г
6.70. Построить кривые процессов в замкнутых импульсных системах
автоматического регулирования, имеющих передаточные функции в разом-
кнутом состоянии следующего вида:
. иг,. 0,152 (г 4-0,05) (2 4- 1,065) „ Г . Тг -г л о
а) ^(г) (г—1) (г —0,135) (г —0,0185) При G — (г — I)8 И Т 0,2 С‘
тег/ \ 0,0013(2 — 0,983) (2 4-0,861) . г „ п ,
б> ^(г)--(^1)(г-0^Дб,51) При ^ = 7=1 и ? = °’1 «
. . 0,013 (г —0,934) (г 4-0,922) „ г п .
в) ^(2) (г—1)(г—1,0067)(г —0,51) ПрИ ^(г) —г_ 1 и —0,1с;
г) HZ (z) = при G (г) = -^~Г)5 и т = 0,2 с.
14 Ю. И. Топчеев
417
t)
Рис. 6.17. Структурные схемы систем автоматического регулирования с раз-
личными программами последовательной коррекции, реализованными на ЦВМ
6.71. Построить кривые переходных процессов в замкнутых импульсных
системах автоматического регулирования, структурные схемы которых
изображены на рис. 6.7, б—г и 6.17, б, если К=2с~1
£(0 -ЦО-
6.72. Построить кривые переходного процесса в цифровых системах
автоматического регулирования, структурные схемы которых изображены
на рис. 6.6, а, б, если g (!) =1 (1) и параметры систем'имеют следующие
значения: К — 10; а — 5; Т — 0,1 с.
6.73. Построить и сравнить кривые переходных процессов в цифровой
системе автоматического регулирования, структурная схема которой изо-
бражена на рис. 6.17, а, если g (t) = 0,51 и k9 = 10; kt = 4; k9 = 2; T =
= 0,1 с.
6.74. Построить и сравнить кривые переходных процессов в цифровой
системе автоматического регулирования, структурная схема которой изобра-
жена на рис. 6.17, а, если g (t) — 2и g (1) = 1 (1), = 5; k9 = 4; k9 —
» 0; Т в 0,1 в.
6.5. АНАЛИЗ ДИНАМИЧЕСКОЙ ТОЧНОСТИ ИМПУЛЬСНЫХ
И ЦИФРОВЫХ СИСТЕМ АВТОМАТИЧЕСКОГО
РЕГУЛИРОВАНИЯ
6.75. Определить формулы для нахождения коэффициентов ошибок
в цифровой системе автоматического регулирования, имеющей передаточную
функцию замкнутой системы относительно ошибки Фе (z).
Решение. Ошибку системы определяют по формуле
8* (0 = с0 + с, 4Р- + Ti g* (0 + Й Ю +
+ ^-g’(,V)(0+---+ £’(п> (*)+•••
Применив к ней прямое дискретное преобразование Лапласа, найдем
b*(s)=-(C0 + ^ + ^-sa + ^s3+---+^s^+...)G*(s). (6.43)
418
Выражение, стоящее в скобках, равно (s), поэтому, приравнивая
соответствующие члены ряда (6.43) при s —»О, имеем
Со = Ф;(0);
с = (S)
1 ds
d^(s)
s=^0
а?
s=0
(6.44)
_d"®e(S)l
ds» 1^'
Перепишем найденное выражение в z-форме, т. е.
Св = Фв (г) | г=ь
C1 = Tz d®°(z) I ;
1 dz 12=1
8 L dz2 1 dz J | г=1 .
C = t»z Гга<РФе (г) 1 Зг4афе(г) I аФе (г) 11
8 L dz*- "r dz* dz J 12-=i
(6.45)
и т. д.
6.76. Определить коэффициенты ошибок по скорости, ускорению и про-
изводной ускорения для цифровой системы автрматического регулирова-
ния, имеющей передаточную функцию в разомкнутом состоянии в виде
W(zx— 0,39г (г —0,840) (z-^0,486)
(Z' (г — 1) (г — 0,905) (г — 0,135) ’
где Т = 0,05 с.
Решение. Найдем передаточную функцию системы в замкнутом со-
стоянии относительно ошибки
Фе 1 + IF (2) ’
или
ф г»-2,р40г»+1,1522-0,122
6 W “ 1,39г* — 2,18г» +1,00г — 0,122'
По формулам (6.45) определим
С 0 = 0; Cj = 0,05-0,9 = 0,045 с;
С2 == (0,05)8-6,313 = 0,022 ся;
Са = (0,05)8 •(—408) = —0,051 с3.
6.77. Построить характеристики точности цифровой системы автомати-
ческого регулирования, исходные данные которой приведены в задачах
6.76, если g (t) = 2f* град.
Решение. Подставляя в передаточную функцию W(z) соотношение
1 + W
г = —, получим
0,39 L+fL/Lt^ — 0,840 ) +0,486 )
W(W)_ 1-w \l~w__________) =
(I+«L_ Л _ o,905\(*±^-0,135)
\1—w ) \1—w ) \1—w )
_ 5,7(1+ш)(1 + 11,5а»)(1 +0.346Ш)
м>(1 +20,2w)(l + 1,31и>)
419
Рис. 6.18. Логарифмическая
амплитудная характеристи-
ка цифровой системы авто-
матического регулирования
Переходя к псевдочастоте w = jv, построим логарифмическую ампли-
тудную характеристику (рис. 6.18). Продолжая низкочастотную часть
характеристики с наклонами — 20 дБ/дек и —40 дБ/дек до пересечения с осью
псевдочастот, получим соответственно в точках пересечения значения доброт-
ностей, системы по скорости и ускорению ик = 0,72; vt = 0,20. Пересчитаем
полученные значения по формулам1:
Щ = -у- arctg vk = 24 1 /с;
De = -у- arctg vt = 64 1/с2.
Ошибка системы
^8
ИЛИ
е(/сТ) = ± = 0,0625 + 0,17/сТ.
По этому выражению на рис. 6.19 построена характеристика точности
системы.
6.78. На вход цифровой системы автоматического регулирования по-
ступает полезный сигнал в виде дискретного белого шума со спектральной
1 Погрешность в определении значения D*e возникает вследствие неучета в формуле
высокочастотной части логарифмической характеристики.
420
плотностью Sm (z) = Передаточная функция системы в разомкнутом
состоянии
те, , . __ 0,363 (г — 0,840) (г + 0,486)
w (г — 1) (z— 0,905) (г— 0,135) ’
где Т = 0,05 с.
Определить дисперсию ошибки при воспроизведении входного сигнала.
Решение. Дисперсию дискретного сигнала ошибки определяют по
формуле
= $ |Oe(z)|aSm(z)z-ldZ,
|г| = 1
где Sm (z) — спектральная плотность полезной составляющей входного
сигнала; ФЕ (г) — передаточная функция замкнутой системы относительно
ошибки.
Для вычисления интеграла в формуле перейдем к ^-преобразованию:
4-00
®2=i 11ф* W I2 s- зг-рт dv>
здесь
ф (Й.Л - 1 - 26,4(/0)» + 21,5(/0)« + (/0)
е 1 + W (jv) 46,5 (jv)* + 104,8 (/v)« + 68,6 (jv) + 5,26 ’
Приведем подынтегральное выражение к дробно-рациональной функции
по степеням v вида
_____бап-2 (/о)__I _
Нп (jv) Нп (— jv) |и«=4
____________ьв (jv)* + bj (jv)* + b2 (jv)* + ь3_
l “о (/»)* + ai (jv)s + «а (P)* + аз (jv) + a4J H (— jv)
Для рассматриваемой задачи коэффициенты
&о = —696; а0 = 46,5;
= 409; ch = 151;
b2 == —1; а2 = 173,4;
Og = 73,9;
Ьа = 0; а4 = 5,26.
С помощью таблицы коэффициентов (см. приложение XII) находим зна-
чение данного интеграла. Таким образом, искомая дисперсия
8» __ -|- ааа3) — gpOgfet + яряА + (арД» — Ог0!)0^/^ q g j с*
т 2а0 (аоа| + a$at — а^а,)
6.79. Определить коэффициенты ошибок по положению, скорости,
ускорению н производной ускорения в цифровой системе автоматического
регулирования, передаточная функция которой в разомкнутом состоянии
я) W (г)________0,52 (z -f- 0,45)
' (z —0,135) (z —0,67) ’
где Т = 0,2 с;
б) W(?)- °'49(* + °»72)
°) w (2) — (z_ 1)(г_ 0135) >
где Т = 0,2 с.
421.
6.80. Определить коэффициенты добротности по скорости и ускорению
цифровой системы автоматического регулирования, имеющей передаточную
функцию в разомкнутом состоянии
» 0.656 (г 4- 0>523)
(г — 1) (z + 0,343) ’
6.81. Построить характеристики точности цифровой системы автомати-
ческого регулирования, изображенной на рис. 6.17, б. Входное воздействие
g (I) = 1 + 3t.
6.82. Определить дисперсию ошибки цифровой системы автоматического
регулирования, изображенной на рис. 6.7, в, на вход которой поступает
помеха, имеющая корреляционную функцию Rx (т) = е-51х|.
6.83. Определить дисперсию ошибки цифровой системы автоматического
регулирования, изображенной на рис. 6.17, б, если на ее вход поступает
помеха в виде дискретного белого шума со спектральной плотностью Sa (г) =
с»
= Т '
6.6. ПРИМЕНЕНИЕ МОДИФИЦИРОВАННОГО
(Z, ///^ПРЕОБРАЗОВАНИЯ К АНАЛИЗУ УСТОЙЧИВОСТИ,
КАЧЕСТВА И ТОЧНОСТИ ИМПУЛЬСНЫХ СИСТЕМ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
Обычное z-преобразование позволяет получить информацию о качестве
и точности процессов регулирования в импульсных системах лишь в такто-
вые моменты времени, что ограничивает применение этого метода. Действи-
тельно существуют такие импульсные системы, в которых показатели ка-
чества процессов регулирования, снимаемые в тактовые моменты времени,
являются хорошими, а сама система является неустойчивой [36]. Поэтому
для определения значений показателей качества и точности в межтактовые
моменты времени применяется модифицированное (z, /^-преобразование
[36, 381.
Для описания сигналов в межтактовые моменты времени образуем
функцию
х* (t, m) = 2 х [(« + m) Т - Т\ 6 (f г- кТ), (6.46)
к=0
где параметр m принимает значение в интервале 0 «S m ==g 1. В частном слу-
чае, при m = 1, получим обычную дискретную выборку непрерывного сиг-
нала
х* (t) = i\x(KT)6(t-KT).
Таким образом, меняя значение m в указанном интервале, получим ди-
скретные значения сигнала х (t) в любые межтактовые моменты времени.
Применим к выражению (6.46) дискретное преобразование Лапласа и исполь-
зуем подстановку (6.1). Тогда z-преобразование уравнения (6.46)
X (z, /и) = z-1 2 х (кТ + т) г~“* (6.47)
к=0
называют модифицированным z-преобразованием сигнала или, кратко,
(z, //^-преобразованием. Формула для вычисления модифицированного
z-преобразования аналогична формуле (6.3) и имеет вид
X (z, т)~ Z-12 Res * ЫI х-ж, . (6.48)
(К)
422
Рис. 6.20. Структурная схема сомкну-
той импульсной системы автоматиче-
ского регулирования
где вычеты % — sK находятся по всем полюсам изображения сигнала X (s).
Рассмотрим применение (г, т)-преобразования к передаточным функциям
импульсных систем.
6.84. Определить модифицированное z-преобразование передаточной
функции
W s (0,1s+1)’
при Т — 0,1 с.
Решение. Полюсы данной передаточной функции sx = 0 и s2 = —10.
Пользуясь формулой (6.48), получим
W(z,m) — z _г-х 2-f- j _0>368.
(—2)] =
2 (1 — е-m) г 4- (2е~т — 0,736)
(г — 1) (г —0,368)
6.85. Для внутреннего контура импульсной системы автоматического
регулирования, изображенной на рис. 6.3, а, определить (z, /п)-преобразо-
вания выходной величины X (z, m) и передаточной функции замкнутого кон-
тура Ф (z, т).
Решение. Пользуясь решением задачи 6.21, перепишем преобразова-
ние Лапласа выходного сигнала в виде ,
(S) =» j + *s) yi (s) X* (s).
Применив к данному выражению модифицированное z-преобразова-
ние, получим
X (z т\ = (г>
л (z, т) j ,
откуда
Ф (г т) - --Уа^г’
т) = j + (г)
6.86. Построить переходный процесс х (t) в импульсной системе авто-
матического регулирования, изображенной на рис. 6.20. Для построения
процесса использовать метод модифицированного z-преобразования. На
вход системы поступает сигнал
g (0 = 1 (О-
Решение. Определим передаточ-
ную функцию замкнутой системы
Ф (z tn) = W ^г’ =
' ’ > 1 -f- W (г, т)
_ 2 (1 — е~т) г + [Ыт — 0,736)
г2 —0,104г 4-0,368
Рис. 6.21. Переходный процесс в импульсной
системе автоматического регулирования, по-
строенный с помощью (г, т)-преобраэования
423
Так как
X (г, т) = Ф (г, т) G (г), где G (z) = Y—i’
получим
Л (Z, т) — (г — 1) (г2 — 0,104г + 0,368) ‘ (Ь'49’
С помощью формулы обратного модифицированного z-преобразования
находим значение выходного сигнала в любые моменты времени
х (кТ, т) = (j) X (z, т) zK-1 dz. (6.50)
Вычисление обратного преобразования выполняют по формуле (6.50)
одним из четырех способов, рассмотренных в п. 6.4. Раскладывая выраже-
ние (6.49) в степенной ряд по z-1, получим
X (z, т) = (2 — 2e-'n)z-1 + (1,472 - 0,208e~m)z-2 4- (0,683 +
4-0,712e-'n)z-3 + (0,796 4-0,15e-m)z-4 + (1,1 — 0,248e-m)z-^ +
+ (1,07 — 0,062e_,n) z-6 -j----------------.
При m = 1 имеем значения переходного процесса в тактовые моменты
времени. Задавая т = 0,8; 0,6 и т. д. до 0,2, находим значения процесса
в межтактовые моменты. Построенный таким образом переходный процесс
изображен на рис. 6.21, откуда видно, что в данной импульсной системе
автоматического регулирования отсутствуют колебания в межтактовые
моменты времени. <
6.87. Найти модифицированные z-преобразования непрерывной части
импульсных систем автоматического регулирования, изображенных на
рис. 6.7, а—г.
6.88. Найти модифицированное z-преобразование для системы автома-
тического регулирования с ЦВМ, структурная схема которой приведена
на рис. 6.2, а. На ЦВМ реализуется программа дифференцирования по ме-
тоду второй центральной разности. Параметры системы имеют следующие
значения: = 4 с-1; 7\ = 0,3 с; Т2 =0,1 с; Т — 0,05 с.
6.89. Для импульсной системы автоматического регулирования, изо-
браженной на рис. 6.4, а, определить изображение выходного сигнала
X (г, ш), а также передаточные функции W (z, tri), Ф (z, tri) и Фе (z, т).
6.90. Построить переходный процесс х (кТ) в импульсной системе авто-
матического регулирования, показанной на рис. 6.7, б, при g Ц) = 2t.
Глава 7
Экстремальные и самонастраивающиеся
системы автоматического регулирования
Экстремальные и самонастраивающиеся системы автоматического регу-
лирования принято разделять на три группы: экстремальные системы,
системы с перестраивающимися устройствами и аналитические самонастраи-
вающиеся системы [17, 261. Все эти системы не требуют полной начальной
информации о процессе регулирования и поэтому относятся к адаптивным
системам автоматического регулирования (или системам с неполной инфор-
мацией).
В большинстве экстремальных систем автоматического регулирования
обеспечивается поддержание регулируемой величины в области максималь-
ного или минимального значения путем подачи поискового сигнала. Само-
настраивающиеся системы автоматического регулирования с перестраиваю-
щимися устройствами позволяют получать необходимое качество процессов
регулирования не только при изменении в широких пределах управляющих
и возмущающих воздействий, но и при изменении собственных параметров
объектов регулирования. Перестройка аналитических самонастраивающихся
систем осуществляется на основе определения динамических характеристик
объектов регулирования в процессе нормальной эксплуатации с помощью
вычислительных устройств, включенных в систему регулирования. В послед-
нее время в качестве вычислительных устройств стали применять цифровые
вычислительные машины.
7.1. ЭКСТРЕМАЛЬНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО
РЕГУЛИРОВАНИЯ
Экстремальные системы регулирования обеспечивают автоматическое
получение заданных значений регулируемых величин в соответствии с мак-
симумом или минимумом (экстремумом) некоторой функции объекта у =
= F (xlt х2, . . ., хп), изменяющейся не только от переменных хи хе, . . ., хп,
но и от времени t, причем характер изменения функции F от времени зара-
нее неизвестен. Условием экстремума функции F (хи х2, .... хп) является
равенство нулю в точке экстремума частных производных, т. е.
^ = 0; -^ = 0..... ^ = 0.
oxj дх2 ’ дхп
Функция F (*!, х2, . . ., хп) обладает градиентом, представляющим со-
бой следующую векторную величину
7^=^ + ^+...+^-^-,
C/*j (7*2 ОХп
где klt k2, . . ., kn — единичные векторы осей, по которым отсчитывают ве-
личины X}, х2, . . ., хп. В точке экстремума имеем
VF = 0.
425
Задача поиска экстремума состоит из двух частей: определения гра-
диента и организации движения к точке экстремума.
Для определения градиента используют следующие метода: Гаусса—
Зейделя, градиента и наискорейшего спуска. В ряде случаев возможно одно-
временное применение двух методов. Например, на начальном участке
применение метода Гаусса—Зейделя, а на участке подхода к точке экстре-
мума — метода градиента и т. п.
7.1. Определить процесс выхода координаты у к экстремуму при орга-
низации движения по методу градиента для экстремальной системы автома-
тического регулирования, если объект регулирования и исполнительные
устройства описываются уравнениями вида
ф-М*1+*з);
где То = 20 с; kx = 1,0; k2 = 0,8; ks = ki = 0,01 рад/о.
Пусть зона нечувствительности релейного и логического блоков С —
= 0,25 рад, а начальные условия х10 = 2 рад, х20 — 1 рад. Упрощенная
блок-схема экстремальной системы изображена на рис. 7.1, а, а ее структур-
ная схема —на рис. 7.1, б. Как видно из структурной схемы, экстремаль-
ная система отыскивает экстремум по двум координатам хг и х2 таким обра-
зом, чтобы сигнал управления U был пропорционален проекциям градиента.
Решение. Проекции градиента определяют в виде
-Г" = 2^л;
дхг 2 1
= 2&аха.
dx2
(7.1)
Так как движение совершается в сторону убывания градиента, то под-
ставив выражения (7.1) в дифференциальные уравнения исполнительного
устройства с обратным знаком, найдем
dxi
dt “
2&2&2Xi,
(7.2)
-%Г--2МЛ-
Рис. 7.1. Экстремальная система автоматического регулирования:
а — блок-схема; б — структурная схема
426
Рис.. 7.2. Процесс входа системы регулирования в
область экстремума при организации движения по
методу градиента
Решая данные уравнения, получим
xi= x10e-2fc‘ft«z; 1
х2 = xl0e“2fe‘fc‘#, )
(7.3)
где х10, х20 — соответствующие началь-
ные условия.
Подставляя эти выражения в урав-
нения для объекта регулирования, найдем
1г+тг«/ = "т7’[‘ое + J- <7-4)
Решая дифференциальные уравнения (7.4), получим
у (() = е“ 77 if*- j l^vfi~ik,k,‘ + 4)е“4*,м] е77 di + С • —
i
Ма (*1о+ *8о) p—Гс“*“77 (7.5)
Для нахождения постоянной С воспользуемся следующими начальными
условиями: t = 0, у = у0, тогда
+ , (7.6)
откуда
Г — k^kt (Х|0 + Х?в) W4
С %-------1-4Т.ЛА • (7' ’
Имея в виду выражения (7.7) и (7.5), запишем
+ ]е"^' <7'8)
Если в выражении (7.8) положить
У о = kik2 (х?о + *2о)
и подставить соответствующие значения параметров системы, то найдем
О (А = °>8 (4 + 1) е-4-о,8-0,0» ц_ Г о о (4 П____0,8 (4 + 1 е~ ’2° в
«W 1_ 4.20.0,8-0,01 е Т-[0,6(4 + 1) 1 — 4.20.0,01.0,8 Jе
= l.le-0’03» - 7,1е*°-05\ (7.9)
Задаваясь значениями t от Одо 120с, с помощью выражения (7.9) опре-
делим переходный процесс входа системы в область экстремума (рис. 7.2).
Для определения времени входа системы в область экстремума необходимо
найти зону нечувствительности Ду. Для параболоида вращения зону не-
чувствительности определяют по формуле
Ду = М>2 Ц2С)‘+ (2С)*1. (7.10)
Подставив соответствующие числовые значения в формулу (7.10), най-
дем
Ду = 2,0* 1 *0,8*0,25 = 0,4 рад.
Откладывая на рис. 7.2 значения Ду = 0,4 рад, получим = 109,5 в.
427
7.2. По условиям задачи 7.1 определить процесс выхода системы к экстре-
муму, если поиск производить по методу наискорейшего спуска.
Решение. Как известно (171, при поиске по методу наискорейшего
спуска перемещения по координатам Xj и х2 осуществляются с постоянной
скоростью, равной значению градиента в начальной точке. В этом случае
проекции градиента определяют в виде
дф
д*!
— 2&2х10;
dq>
— 2/tjXgg,
(7.U)
а скорости отработки исполнительных устройств
— 2£2&3х10; (7.12)
откуда
xi = 2#2£3х10/; 1 ]
Х2=2^4Х^. ) 1 ’
Используя выражения (7.12) и (7.13), дифференциальное уравнение
системы запишем в виде
у = [(х10 - 2WioO2 + (*2о - г^ЛхЛ (7.14)
или
• ± + ^y = Cl-C^ + CA (7.15)
где
Ct--—%- (4 + 4»);
Сз = (k3x'1Q -|- £4X20);
С3 = -^ (Ф1о + 44>).
I о
Решая дифференциальное уравнение (7.15), получим
!/ (О = T’o (Ci — 7’0 (—С2 — 2СаТ0) ] + Т0 (—Сг — 2С37'0) t 4-
+ T0C3t* +С. (7.16)
Постоянную времени С определим из следующих начальных условий:
t == 0; у = у9. Имея это в виду, из выражения (7.16) найдем
С — Уо~ 7'0(С1 - То (—С2 — 2С3Т0)1. (7.17)
Используя выражения (7.16) и (7.17), получим
У (0 = (—С2 — 2Cs7’o) t T’oCs^2 4- Уо- (7-18)
Как и в задаче 7.1, примем уо — (х?о 4-*20). В этом случае выра-
жение (7.18) будет иметь следующий вид:
У (0 = ^1^2 (*io 4“ 4<) -j- I—4fe 4~ &Ло) — 8^То (&з4) 4~
4- ^4>)] * 4- 4Л1 (tt 4- klx?2o)2?. (7.19)
428
Рис. 7.3. Процесс входа системы регулирования в
область экстремума при организации движения по
методу наискорейшего спуска
Подставляя в выражение (7.19) пара-
метры системы, найдем
y(t) = 1-0,8 (2® 4-1®) +
+ [—4-0,8 (0,01-2® 4-0,01-1®) —
—8-0,8®-20 (0,01®-2® + 0,01®-1®)1 t +
+ 4-0,8® (0,01®-2® 4-0,01®-1®) i® =
= — 0,2112* 4- 0,00128/® 4- 4. (7.20)
Задаваясь значениями t от 0 до 20 с и подставляя их в выражение (7.20),
определим переходный процесс входа системы в область экстремума
(рис. 7.3).
Для определения времени входа системы в эту область отложим на
рис. 7.3 значение Ду = 0,4 рад; тогда /реЖ = 19,2 с.
7.3. Определить процесс выхода координаты у к экстремуму по методу
Гаусса—Зейделя для экстремальной системы автоматического регулиро-
вания, уравнение динамики и параметры которой приведены в задаче 7.1.
Указание. При нахождении экстремума по методу Гаусса—Зейделя
система автоматического регулирования осуществляет поиск экстремума
по первой координате (при фиксированном значении второй), а затем экстре-
мум определяется по второй координате.
7.4. Сравнить процессы выхода координаты у к экстремуму (по методам
Гаусса—Зейделя, градиента и наискорейшегй спуска), если объект регулиро-
вания и исполнительные устройства описываются уравнениями вида
П 4- У =
ф = &2 (*? *2)»
= k.U
dt —W,
где То = 100 с; kx = 2; fe2 = 0,5; ks = k4 = 0,01 рад7с; зона нечувстви-
тельности релейного и логического блоков С ~ 0,5 рад; начальные усло-
вия х10 = 4 рад; х20 = 2 рад.
7.5. Определить процесс выхода координаты у к экстремуму при орга-
низации движения на начальном участке до ук = 1 рад по методу наискорей-
шего спуска, а на участке подхода к точке экстремума — по методу градиента
для экстремальной системы, имеющей уравнения динамики и параметры
задачи 7.1.
7.6. Определить процесс выхода координаты у к экстремуму при орга-
низации движения на начальном участке до ук = 1 рад по методу Гаусса—
Зейделя, а на участке подхода к точке экстремума — по методу градиента
для экстремальной системы, имеющей уравнения динамики и параметры,
приведенные в задаче 7.4.
7.7. Сравнить процессы выхода координаты у к экстремуму при раз-
личных способах организации движения к экстремуму, если объект
429
регулирования и исполнительные устройства описываются уравнениями
вида
ф=л2(х? + ^);
~ЗГ~~йГ~~ **и'
где То ==1000 с; Лх=5; k2 = 2,5; &8=0,00005 рад/с; зона нечувствительности
релейного и логического блоков С =0,05 рад; начальные условия х10 = 5 рад;
х20 = 3 рад.
Способы организации движения к экстремуму:
а) на начальном участке до ук = 1 рад по методу Гаусса—Зейделя,
а на конечном участке по методу градиента;
б) на начальном участке до г/к = 1 рад по методу Гаусса—Зейделя,
а на конечном участке по методу наискорейшего спуска;
в) на начальном участке до ук = 1 рад по методу градиента, а на конеч-
ном участке по методу наискорейшего спуска.
7.8. Построить фазовый портрет и переходный процесс поиска экстре-
мума системы, состоящей из камеры сгорания, экстремального регулятора
с запоминающим устройством и поляризованного реле (рис. 7.4, а, б).
Определить амплитуду и частоту предельного цикла, если известны переда-
точные функции системы [26]
1' ’ U (s) s
П7
Y&~ Т7+Т
и их параметры V = k-JJ = 0,5 кг/с; k2 = 1; Т = 10 с, а зона нечувстви-
тельности термопары А = 30° С. Статическая характеристика камеры сго-
рания приведена на рис. 7.5, а.
Решение. По передаточной функции камеры сгорания составим
некие в приращениях вида
То^-+А?1-М?>
урав-
(7.21)
Рис. 7.4. Экстремальная си-
стема автоматического регулиро-
вания с запоминающим устрой-
ством:
а — принципиальная схема; 1 —
камера егорания; 2 — горелка;
3 — заслонка, регулирующая по-
дачу воздуха; 4 — гидравлический
привод: J — соленоид; б — усилитель мощности; 7 — поляризованное реле; 8 — запоминающее
устройство; 9 — генератор шаговых импульсов с периодом Г; 10 — термопара; 6 — структурная
схема
430
откуда
Ayi А?.
kf, бу — &yr Т
(7.22)
По выражению (7.22) найдем масштаб для построения фазовой характе-
ристики при Д£ = 1 с. Тогда наклон луча для построения фазовой характе-
ристики
tga = -y = -jy, или a=5.
Принимая за начальное состояние системы точку 1 (рис. 7.5, а), полу-
чим х0 = 6 кг/с и у0 =1760° С. Приращение количества воздуха, поступаю-
щего в камеру, определим по формуле
Ах = у At = 0,5-1 = 0,5 кг. (7.23)
На рис. 7.5, б проведем прямую уг — характеризующую установив-
шееся значение процессов в камере сгорания. Из точки 1 на рис. 7.5, а
проведем прямую, параллельную оси абсцисс, до пересечения с прямой
Ух — (точка Аг на рис. 7.5, б). От точки х0 отложим приращение подачи
воздуха Ах = 0,5 кг и получим на статической характеристике точку 2,
для которой имеем приращение температуры Аг/. Из точки Аг (рис. 7.5, б)
проведем луч / под углом а и на нем отложим отрезок Аг/j = Ay'. В резуль-
тате этого найдем точку Л2. Далее из точки Л2 проведем прямую, параллель-
ную оси абсцисс, до пересечения с прямой уг = k^y (точка Вг].
На кривой рис. 7.5, а отложим еще одно значение Ах; тогда получим
точку 3, определяющую приращение температуры Ау”. Зная, что Ау* —
= Аг/2, на луче //, проведенном из точки Bt под углом а, отложим отрезок
Ауг (точка Л8). Данное построение будем повторять столько раз, пока ие
получим точку А12. Через точки Лъ Л2, ..., А^ проведем с помощью
лекала плавную кривую, которая и определяет начальный участок фазовой
траектории.
Из рис. 7.5, б видно, что в точке Л12 происходит изменение направления
управляющего сигнала, так как отклонение от экстремума становится рав-
ным зоне нечувствительности. При этом происходит срабатывание логиче-
ского блока, и направление движения фазовой траектории изменяется на
обратное. Откладывая на луче значение А'у и = А'у', получим точку А13.
а) 6)
Рис. 7,5. Характеристики камеры сгорания как объекта регулирования и всей экстре-
мальной системы
431
Будем делать построения несколько раз до начала нового изменения направ-
ления движения. В результате'найдем следующий участок фазовой траек-
тории. Выполняя указанные действия и дальше, получим фазовую траекто-
рию в виде предельного цикла.
Перестроим данную кривую в прямоугольной системе координат, откла-
дывая по оси абсцисс Д/£, а по оси ординат Д«/ь как показано на риа. 7.6.
При этом видно, что автоколебания в данной системе являются несимметрич-
ными. Предельный цикл характеризуется амплитудой колебаний на выходе
системы Аа = 32° С и периодом Тв = 9 с, откуда найдем частоту
2л 6,28 Л
—т7 = —==0-7с
7.9. Построить фазовый портрет и переходный процесс поиска экстре-
мума системы автоматического регулирования напряжения, состоящей из
«г
Рис. 7.6. Переходный процесс в экстре-
мальной системе регулирования
объекта регулирования и исполнительного устройства, описываемых урав-
нениями
П-^-4-У1 = М;
у = — k0x2;
Определить параметры предельного цикла Ав и ®а, если экстремальная
система с запоминанием экстремума имеет следующие параметры То = 1 с;
= 1; kr = 1; U = 1 В/с.
При t = 0 имеем х0 = —2; у0 = —4; зона нечувствительности Дг/ =
= 0,2 В.
7.10. Построить фазовый портрет и определить параметры предельного
цикла в экстремальной системе автоматического регулирования с запомина-
нием экстремума, если уравнения:
объекта
П 4~ У1=
. е 00 , 635 + 4,6х
при х^ 5,28 кг/с У=7о->ь + х,о,2—»
~ _ 00 . 3356-]- 4,6х
а при х > 5,28 кг/с у = (0,5 4-х) о,23~;
исполнительного устройства
-^ = 1/.
<и
Параметры экстремальной системы: То = 100 с; k0 = 1: U = 1 кг/с;
зона нечувствительности измерительных средств С = 40° С; начальное со-
стояние системы по координате х0 — 6 кг/с.
432
7.11. Построить фазовый портрет, определить параметры предельного
цикла и величину зоны потерь на поиск в экстремальной системе автомати-
ческого регулирования давления а запоминанием экстремума, если уравне-
ния объекта и исполнительного устройства имеют следующий вид.
То^г + У1 = Ьу,
у = kx2-,
Параметры экстремальной системы: То = 2 с; k = 0,5; U — 0,1 рад/с;
зона нечувствительности измерительных средств С = 0,5 кг/см2; начальное
состояние системы х0 — 2 рад.
7.12. Определить амплитуду, частоту предельного цикла, время выхода
к экстремуму и величину зоны потерь на поиск с помощью фазового порт-
рета шаговой экстремальной системы
автоматического регулирования с за-
поминающим устройством (рис. 7.7),
когда объект регулирования описы-
вается уравнениями
То ~ 4- х =
dt [ (7.24)
у = — ^0*1»
а уравнение исполнительного устрой-
ства имеет вид
= W (7.25)
с вапоминающим устройством
где U — сигнал на выходе реле.
Параметры экстремальной системы имеют следующие значения: То =
= 2 с; С = 0,05 рад; k0 = 1; kx — 1; k2 = 0,1 рад/с; Т = 4 с; начальные
значения х0 = 2 рад; уа = 0. Будем также считать, что закон формирования
управляющего сигнала на п-м шаге представляется в виде
Un =* sign (уп т- уп_г 2С) (7.26)
Решение. Для определения параметров предельного цикла восполь-
зуемся методом разностной фазовой плоскости. Будем считать, что управляю-
щий сигнал представляет собой последовательность б-функций, а включение
исполнительного устройства происходит с определенным тактом Т.
Пользуясь г-преобразованием, передаточную функцию системы
ТО (с) —, kik»
s(Tos + l)
представим в виде
fef fea (1 — е Г|> ) 2
(г— 1) (z— е г" )
(7.27)
На управляющее устройство действует единичный скачкообразный сиг-
нал U = [11, поэтому
X (г) =
г2
(7.28)
(г — 1)г V — е
433
С помощью обратного г-преобразования (см. [17, 381) из выражения
(7.28) найдем
-4- -4-<к+1>
х (кТ) = (кТ)-----М;С у- + ---Ц—, (7.29)
1 — е г" 1— • т*
откуда определим первую разность выходного сигнала в виде
Г ------£-(к+1)1
Axk==M2L1 —е 0 Г (7.30)
Для нахождения уравнений фазовых траекторий необходимо из формулы
(7.29) исключить параметр кТ. Для этого составим из выражения (7.30)
следующее соотношение:
__т_
е т.К = -^=^_, (7.31)
откуда
кТ^Т01п--.^\ -Г. (7132)
Подставляя выражение (7.32) в формулу (7.29) и принимая
[ —4 <к+1> ]
Дхк=-6Л1-1 - е " 1==/, (7.33)
найдем
In 11 - 1 - + С. Р-34)
Пусть начальные условия х = х0, у' = pj; тогда
C^x0 + ^ln|l -^-| +--------
1 I «1*8 I 1______е ' °
Подставляя соотношение (7.35) в выражение (7.34), запишем
х = Хо-----------Ц^10!1 ~i-| +
(7.35)
+ £££1п|1__й.|. (7.36)
При выбранных начальных условиях и числовых значениях параметров
выражение (7.36) примет вид
х=2-l,2/ + -±-ln|l + 10J|. (7.37)
Для определения уравнения линии переключения подставим в соотно-
шение (7.26) следующие выражения:
Уп = — fei^;
Уп—1 = — k\X^_ i;
(7.38)
тогда
Uа ~ — sign — 2С)
(7.39)
434
Имея в виду, что
хп = xrt_i 4- Дх„ — хп_г + у'.
получим
ki (4 — 4-1) = (xn_i + у)2 - k^i = 2kiXny kiV2.
Положив Un — 0, из соотношения (7.39) найдем
^х,^ 4- kitf2 — 2С = О,
откуда
У , - 2С-М,а
2^'
(7.40)
(7.41)
(7.42)
Пользуясь выражением (7.42), запишем уравнение линии переключе-
ния в виде
.. . 0.1
2!/'
(7.43)
Задаваясь различными значениями х по выражению (7.43), построим кри-
вые 1, 6 (рис. 7.8), которые и представляют собой линии переключения.
Фазовые траектории можно пост-
роить по участкам для иЛ < 0 с помо-
щью уравнения
х=2-1,2/4-4-1п|14-10/| (7.44)
Рис. 7.8. Фазовый портрет вкстремаль-
ной одноканальной системы регулирова-
ния с запоминающим устройством
и для Un > 0 по уравнению
х = 2 4- 1,2/ - 4- In | 1 - Ю/ |.(7.45)
*AJ
Ha рис. 7.8 по уравнениям (7.44) и
(7.45) строим фазовые траектории —
кривые 2 и 3. Затем находим участки
фазового портрета 4 и 5. В результате
получают замкнутую кривую (предельный цикл). Для нанесения соответст-
вующих отметок времени на фазовую траекторию необходимо определить
величину разности входного сигнала. Воспользуемся формулой’ (7.30);
тогда
Дх= 1-0,1 [1 -е“ 2 ] =0,0985 рад.
Разобьем ось абсцисс на отрезки Дх, начиная от точки х0= 2 (точка А
на рис. 7.8). Окончание 1-го шага (точка В) совпадает с точкой пересечения
перпендикуляра, опущенного из конца отрезка Дх до пересечения с фазовой
траекторией (точка /'), и т. д. Пересечение фазовой траектории с линией
переключения происходит на 26-м шаге в точке С. Поэтому время выхода
системы в точку экстремума будет
= 26Т = 26-4 = 104 с.
Амплитуду автоколебаний Ад на выходе также определим по рис. 7.8.
Пользуясь цифровой разметкой шагов, нанесенной внутри замкнутой кривой,
находим количество шагов, соответствующее амплитуде автоколебаний.
Количество шагов равно 6. Следовательно,
. 0,1-12 п с
Л =—— = 0,6 рад.
435
Полное число шагов предельного цикла также найдем из рис. 7.8. Оно
равно 26, поэтому период автоколебаний системы
Та = 26-4 = 104 с,
или
2л 6,28 Л ___________«
®а — Га — 104 = 0.06 С •
При малой величине шага (примерно равной 0,1 рад) зону потерь на
поиск можно определить по формуле
р = Д = -^- = 0,2 рад.
7.13. Определить амплитуду, частоту предельного цикла, время выхода
к экстремуму и величину зоны потерь на поиск в экстремальной системе
Рис. 7.9. Структурная схема экстремальной двухканаль-
ной системы регулирования с запоминающим устройством
автоматического регу-
лирования с запоми-
нающим устройством
(рис. 7.9), когда урав-
нения статики и дина-
мики имеют следующий
вид:
Т о —ц- -f- х' = feoXi’,
y==k^ + k^
где То = 100 с; k0 = 1; k{ = 0,1; k[ = 0,4; k2 = 0,4 рад/с; U = 1 рад/с.
Точность поиска С = 2%, Т = 50 с; начальные условия хг0 = 10 рад;
х" = 50 рад.
7.14. Определить амплитуду, частоту предельного цикла, время выхода
к экстремуму и величину зоны потерь на поиск в экстремальной системе
автоматического регулирования температуры с запоминающим устройством
(рис. 7.7), когда уравнения статики и динамики имеют следующий вид:
у^-^}х)1лз при х^5-28 «г/с;
при *>5’28 кг/с;
4=^
где То = 10 с; k0 = 1; С = 30° С.
Начальное состояние объекта регулирования х0 = 6 кг/с; у0 = 1760° С.
Указание. После вычислений статической характеристики объекта ре-
гулирования необходимо определить интерполирующий полином второго
порядка для экстремальной функции с помощью формулы Лагранжа.
7.15. Определить амплитуду, частоту предельного цикла, время выхода
к экстремуму и величину зоны потерь на поиск в экстремальной системе авто-
436
матического регулирования с запоминающим устройством (рис. 7.7), если
ее уравнения статики и динамики имеют следующий вид:
То —ц И х =* kox'.
у = —
где То — 0,5 с; k0 = 1; = 2; Т = 0,05 с; U — 1 рад/с; С = 0,1; х0 — 1;
Уо = 2.
7.16. Построить фазовый портрет для экстремальной системы автомати-
ческого регулирования с запоминанием и определить время выхода к экстре-
муму и параметры пре-
дельного цикла, если
объект и устройства регу-
лирования описываются
следующими уравнениями:
Рис. 7.10. Структурная схема экстремальной системы ре-
T’o-J-4-JC = V>
у = — М2; dxi ji dt (7.46)
где То = 100 с; k0 = 1;
= 0,1; U = 0,4 рад/с;
С = 2%; х0 = Ю; период срабатывания шагового искателя Т = 50 с.
7.17. Построить фазовый портрет для экстремальной системы автома-
тического регулирования с запоминанием, определить время выхода к экстре-
муму и параметры предельного цикла, если система описывается уравнениями
(7.46), а ее параметры будут То = 100 с; fe0 = 1; kx = 0,4; U = 0,4 рад/с;
С = 2%; х0 = 50; Т = 50 с.
7.18. Определить методом логарифмических эквивалентных частотных
характеристик амплитуду, частоту автоколебаний и величину потери на
поиск в экстремальной системе автоматического регулирования, структур-
ная схема которой изображена на рис. 7.10. Передаточные функции системы
имеют вид
^(3) = ^-;
(7-47)
U7s(s) =
Tgs+1
где ki = 0,001 1/с; k2 = 1; ka = 1; Ta = 100 c; Ta = 10 с; С = 0,5 рад;
U = 100.
Решение. Выделим в экстремальной системе автоматического регулиро-
вания две части: линейную — с передаточной функцией
.<7-2+ > (7-48’
и нелинейную — с эквивалентной передаточной функцией
</» s)-
437
Линейное звено VF8 (s) обеспечивает хорошую фильтрацию сигнала у,
поэтому можно считать, что
<7п( А. <й) — <71 (А О qt , (7.49)
где С — зона нечувствительности реле.
Амплитуда на входе второго нелинейного элемента Л2 связана с ам-
плитудой на входе первого нелинейного элемента зависимостью
(7'50)
В полученном выражении было принято, что частота колебаний на входе
объекта в 2 раза меньше частоты колебаний на выходе. Это соответствует
нормальному режиму работы экстремальной системы в области экстремума.
Поэтому при определении коэффициентов гармонической линеаризации сле-
дует пользоваться формулами
2л
“ -йН F W sln <7-51)
*0
2л
61 (Лт) = j F (х) COS ф </ф. (7.52)
о
Для нелинейности имеем
F (х) = (7.53)
где ;
х = Л1 sin ф. 1 (7.54)
Подставляя эти выражения в формулы (7.51) и (7.52), получим
ах (Л1) = — J sin2 ф sin 2 ф ^ф = 0; (7.55)
о
6Х (Лх)_ — J sin2 ф cos 2ф <*ф =. . (7.56)
о
При k0 = 1 найдем значения эквивалентных амплитудной и фазовой
характеристик:
qi (Л0 - /аКЛО + бКЛ) =» 4“ 5 (7.57)
Pi (Л*) = arctg . (7.58)
В экстремальной системе регулирования нелинейный элемент Ja состо-
ит из последовательного соединения идеального реле с зоной .нечувстви-
тельности С и нелинейного логического элемента. На вход первого эле-
мента Ji поступает сигнал х (/) = Аг sin a>t, а на выходе образуется сигнал
y(t)== Л1 sin . Соответствующие виды сигналов в системе изо-
бражены на рис. 7.11, а и б. Величина фазового смещения щ на рис. 7.11, б
отложена относительно принятой точки отсчета О влево. Сигнал y(t) посту-
438
Рис. 7.11. Виды входного и выходного сигналов в экстремальной системе
(задача 7.18}
пает на линейное звено с передаточнэй функцией (s), которое вызывает
фазовый сдвиг 08 (со)— —arctg 2ю7’3 и изменяет амплитуду в -у.-_
раз. В результате этого образуется сигнал z (t) (рис. 7.11, в), который и
поступает на нелинейный элемент J2 (рис. 7. 11, г). Так как сигнал на вы-
ходе J2 смещается на угол а, то формулы для коэффициентов линеариза-
ции относительно точки Ох имеют следующий вид (см; рис. 7.11, д):
я+а а я+а
а(Л2) — J F (z) sin ф dip — J sin ip dip — J sin ip dip =*
—я-Н» «wi+а а
я+а
-% 1 (7.59)
а .
л-Н» а л+а
Ь(А) = -^- I F (z) cos ip dip «=«J cos ip dip — J cosipdip =
—л-Hz —«4-а а
—л-ha
2i/ f . j , 41/ sin а cm
J COS ip dip--------. (7.60)
a
С помощью выражений (7.57)—(7.60) можно определить эквивалентные
амплитудную и фазовую характеристики второго нелинейного элемента:
,М4)‘------arctg [-££-]-----a. (7.62)
439
Таким образом, общий фазовый сдвиг, вносимый нелинейным элементом
Jn (Л 1«), определяют по формуле
-к- — arctg 2оТ3
p„(A, ©) = -i--------2---------а, (7.63)
где
а = -------J- arcsln Л’~С . (7.64)
Подставив соотношение (7.64) в формулу (7.63), получим
(Лх, со) ------14- -у- arcsm . (7.65)
Условия гармонического баланса запишем в логарифмической форме
в виде
201gН.(®)Нй(®)-201g '
Я» И1. <») (7.66)
01 (®) + 02 (®) =—п — Рп (А» ®).
где qn (Лъ со) определяют по формуле (7.49), а (А ь а) — по формуле
(7.65).
На рис. 7.12 построен шаблон с характеристиками 20 lg~-^t и
—л — цп (Лц со) для значений со = 0,018; 0,02; 0,05 и 0,1 с-1.
На рис. 7.13 построены логарифмические амплитудная и фазовая частот-
ные характеристики линейной части системы (кривые 1 и 2). Для определения
амплитуд и частот автоколебаний воспользуемся шаблоном (см. рис. 7.12),
построенным на прозрачной бумаге. Накладываем шаблон на рис. 7.13
таким образом, чтобы ось шаблона //Л j совпала с осью частот и. Перемещаем
шаблон вдоль совмещенных осей до тех пор, пока точки В и D при со =
= 0,018 с-1 не окажутся на одной вертикали (рис. 7.13). Последнее и указы-
вает на то, что частота со = 0,018 с-1 является частотой автоколебаний (соа).
Из рис. 7.13 также найдем амплитуду автоколебаний А{л — 3,6 рад.
440
Величину потери на поиск определяют по формуле
Р = Аа</ (Аа) | (/(Оа) IFj (/(Ва) | ?1 (Аа) =
= 6,9-18,4-0,054-1,8= 11,4 рад. (7.67)
7.19. Определить методом логарифмических эквивалентных частотных
характеристик амплитуду, частоту автоколебаний и величину потерь на
поиск в экстремальной системе автоматического регулирования, имеющей
следующие передаточные функции и уравнения (см. рис. 7.10):
Здесь fej = 0,1 рад/с; ka — k3 = 0,74; kQ = 0,46; T3 = T3 = 90 e;
C = 0,5 рад; U = 10.
7.20. Определить методом логарифмических эквивалентных частотных
характеристик амплитуду, частоту автоколебаний и величину потерь на
поиск в экстремальной системе автоматического регулирования (рис. 7.10),
имеющей следующие передаточные функции и уравнения:
W1 e s (Tis +1) ’ = TJ+T ’
ki (7.68)
(«) = (7-aS+иа; */==—м2-
Здесь = 0,2 рад/с; &2 = 0,5; k3 = 4; k0 = 1; 7\ = 0,4 с; Т3 = 5 с;
Т3==> 100 с; С = 0,5 рад; U = 10 рад/с.
7.21. Исследовать влияние скорости исполнительного механизма
0,001 с-1 1 с-1 на параметры предельного цикла и величины потерь
на поиск для экстремальной системы автоматического регулирования (см.
рис. 7.10) с помощью метода эквивалентных логарифмических характеристик,
если передаточные функции ее элементов можно записать в виде
kt (7.69)
^<5-^ У----------------*о*2-
Здесь k3 = 0,75; k3 = 0,5; Т2 = Т3 = 100 с; С = 0,5 в; U = 10 рад/с.
Рас. 7.13. Логарифмические амплитудная и фазовая частотные характеристики линейной
части экстремальной системы задачи 7.18 с наложенным шаблоном для приведенной не-
линейности в виде 20 1g — и —18(7 — р,л
4п
441
Указание. Исследование влияния параметров экстремальной системы
на амплитуду, частоту автоколебаний и величины потерь на поиск следует
производить методом логарифмических эквивалентных характеристик. Для
определенных этим методом значений Аа, <оа, р (см. задачу 7.18) строят
соответствующие зависимости по заданному параметру.
7.22. Исследовать влияние постоянной времени объекта регулиро*
вания 10 с < Та < 1000 с при = 1 с-1 на параметры предельного цикла
и величины потерь на поиск для экстремальной системы автоматического
регулирования (см. рис. 7.10) с помощью метода эквивалентных логарифми-
ческих характеристик, если передаточные функции н уравнения ее элементов
можно записать в виде (7.69).
7.2. САМОНАСТРАИВАЮЩИЕСЯ СИСТЕМЫ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
7.23. В системе автоматического регулирования (рис. 7.14) коэффициент
усиления fej изменяется от напряжения иг, т. е. = fej (uj) (рис. 7Л5, а).
Для компенсации влияния переменности коэффициента kx вводят усилитель
с изменяющимся коэффициентом k2 от напряжения иг.
Определить зависимость ka = fe2 («Д, обеспечивающую минимальное
искажение входного сигнала а3, если параметры системы имеют следую-
щие значения: fc9y = 500; feMy = 40; k№ = 6 рад/В-с, = 1,31 • 10"4;
Т’иу - 0,025 е; Тю = 0,05 с.
Решение. Задаваясь значениями k2 = 1, = 4 В, из рис. 7.15, a
имеем — 1,5. Построим логарифмические амплитудную (кривая 1,
рис. 7.16) и фазовую (кривая 6) частотные характеристики. Из рис. 7.16
видно, что самонастраивающаяся система регулирования при этих парамет-
рах является устойчивой и имеет запасы устойчивости по фазе ус1 = 85°
и модулю Нм =—23 дБ. Амплитудная характеристика замкнутой системы
|Ф(/<в)| при значениях параметров 6г&2 = 1,5 показана на рис. 7.15,6
кривой 1. Оставляя постоянной величину fe2 — 1, изменяем значения
В точке 2 при иг = 8 имеем kv =3. Соответствующая амплитудная частотная
характеристика (кривая 2) построена иа рис. 7.16. Характеристики, пока-
занные кривыми 3, 4 и 5, построены соответственно при = 5; 8 и 15.
Замкнутые амплитудные частотные характеристики систем регулиро-
вания при принятых значениях построены на рис. 7.15, б в виде кривых
2—5. При этом видно, что наименьшее искажение воспроизведения входного
сигнала а3 (/) будет при kx = 5 (кривая 3). Следовательно, для получения
минимальных искажений при всех значениях их от 2 до 20 необходимо обес-
печить &!&2 = 5, что может быть получено, если fe2 k2 (uj будет иметь
внд кривой, изображенной на рис. 7.15, в.
7.24. В системе автоматического регулирования (рис. 7.17, а) обеспе-
чить постоянную полосу пропускания сигнала g (/) с |Фшах | <1,1 незави-
симо от изменения параметра объекта регулирования То = То (ит)
(рис. 7.18) путем введения перестраиваемого корректирующего устройства
от сигнала
^k(s)—•
1 на5 *
Рис. 7.14. Структурная схема системы регулирования с перестройкой коэффи-
циента усиления
442
i)
Рис. 7.15. Характеристики системы регулирования
с перестройкой коэффициента усиления;
а — статическая kt = (и,); б — амплитудные частот-
ные характеристики замкнутой системы; • —- статиче-
ская к, = k, (и О
Определить зависимости \ («г), ТК1 = ТК1 («х) и = Тк2 (Ui),
если параметры системы регулирования имеют следующие значения: k9 =
= 2; kp = 2; = 100; Тр = 0,1 с.
7.25. В системе автоматического регулирования (рис. 7.17, б) обеспе-
чить постоянство переходных процессов по /р, и N независимо от из-
менения коэффициента усиления kr = ki (их) путем введения перестраивае-
мого коэффициента усиления k2 = ka (Ux).
Определить зависимость ka — ka (uj), если характеристика “ ^х (их)
приведена на рис. 7.15, а, а параметры системы регулирования имеют
следующие значения: k9y = 500; kMy — 40; k№ — брад/В-о; k9 — 1,ЗЫ0ч;
Тму = 0,025 с; Тдв = 0,05 с.
7.26. В системе автоматического регулирования (7.17, в) обеспечить
постоянство переходных процессов по ip, и /V независимо от изменения
параметра путем введения перестраиваемого корректирующего устрой-
ства, описываемого передаточной функцией
те- zsi _ ^к (7*kxS + 1)
к(' TK2s + l
Определить зависимости Хк = !« («х). («х)> Т’кх = Т’кх (нх) и
Тк2 = Тк2 («х), если параметры системы регулирования имеют следующие
значения: k3y ~ 500; kMy = 40; kAB =6 рад/В-с; kp = 1,31-10“*. Коэффи-
циент kx изменяется в зависимости от иг в соответствии с кривой, показанной
на рис. 7.15, а.
443
Рис. 7.16. Логарифмические амплитудные и фазовые частотные ха-
рактеристики разомкнутой системы с различными значениями коэф-
фициента ki
6) г)
Рис. 7.17. Структурные схемы систем автоматического регулирования с перестройкой па-
раметров
Рис. 7.18. Зависимость
изменения постоянной
времени объекта регу-
лирования То от на-
пряжения U1
Рис. 7.19. Структурная схема самонастраивающейся системы
автоматического регулирования с эталонной моделью и сигналь-
ной компенсацией для задачи 7.28
444
7.27. В системе автоматического регулирования (рис. 7.17, г) обеспе-
чить динамическую ошибку ед = 30', если g (t) — 2t рад, а коэффициент
усиления kr изменяется от сигнала иг в соответствии с кривой, изображенной
на рис. 7.15, а. Параметры системы регулирования имеют следующие зна-
чения: k3y = 500; kMy = 40; kaa = 6 рад/В-с; = 1,31-IO"4; T„y —
= 0,025 с; Тлв = 0,05 c; T3y = 0,001 c.
Указание. В систему регулирования необходимо ввести усилитель с пе-
рестраиваемым коэффициентом усиления от иг.
7.28. Для приведенной на рис. 7.19 самонастраивающейся системы
с эталонной моделью и сигнальной компенсацией определить закон управ-
ления, обеспечивающий переходные процессы без перерегулирования,
инвариантные к изменению параметров объекта регулирования k3 и Т3.
Значения параметров объекта для различных режимов приведены в табл. 7.1.
Величины k и &дг являются коэффициентами передачи корректирующих
устройств и определяются требованиями к качеству переходного процесса
эталонной модели. Постоянная времени исполнительного механизма Тт —
= 0,05. с. При определении закона управления необходимо использовать
2-й метод Ляпунова.
Решение. Запишем уравнение динамики системы в векторно-матричной
форме:
1
______1_
т3
___ ^дг
Т’им
где хг = у; х2 = у; х8 = бэ. '
Уравнение динамики эталонной модели представим в виде
0
Тм
(7-71)
(7.72)
“ 0 “
о
Т им
В качестве параметров модели выберем средние значения k3 и Т3, поль-
зуясь данными, приведенными в табл. 7.1, т. е. Т№ = 0,5, a kM = 2,25.
Требуемое качество переходного процесса в эталонной модели обеспечива-
ется за счет выбора коэффициентов передачи kw и k.
Характеристическое уравнение внутреннего контура при выбранных
параметрах Тм и kM имеет вид
X2 -j- 22Х + 40 (1 + 2,25&дг) = 0.
(7.73)
Траектория корней уравнения (7.73) при увеличении коэффициента кДР
показана на рис. 7.20, а. Выберем коэффициент k№ таким образом, чтобы
корни уравнения (7.73) сблизились друг с другом, оставаясь на действитель-
ной оси. Это требование обеспечи-
вается при kw = 0,89 Вс/рад и кор-
нях Xj = —11,95 и Х2 = —10,05.
Для внешнего контура характе-
ристическое уравнение имеет вид
X3 + 22%® + 120,IX + 90/г = 0. (7.74)
На рис. 7.20, б показаны траек-
тории корней уравнения (7.74) при
росте k. Выбором величины k обес-
Таблица 7.1
Наименование параметров объекта Режимы
1 2 3 4
о . -г® 0,8 0,15 1 0,9 5,0 0,8 2,2 0,2
445
Пл.$
Im
Пл$ , 1т
Кдг-0,89_
-20 Л,*-77,15
Пе
Kt--10,05
К-2,15
Л^-П.75
г и/Г
Л^-3,75^15
Пе
О
а)
6)
Рис. 7.20. Корневые годографы для внутреннего и внешнего контуров системы ре-
гулирования
печим максимальную удаленность преобладающего полюса X, от мнимой оси
плоскости s. Для k = 2,15 полюсы эталонной модели
= —14,75; = —3,75; Х8 = —3,5.
Переходные процессы /—4 в эталонной модели и системе управления
без самонастройки для приведенных режимов при подаче единичного ступен-
чатого воздействия показаны на рис. 7.21, а.
Формирование закона управления ил проведем с помощью метода Ля-
пунова. Для этого составим уравнение системы регулирования с эталонной
моделью относительно ошибки. Вычитая уравнение (7.71) из уравнения
(7.72), имеем
8 = Ле - ДЛж — Ьуиа, (7.75)
где
АЛ — А — Лм;
Л — матрица нестационарной системы; Лм — матрица эталонной модели;
bi — вектор, определяющий точку приложения дополнительного управ-
ления «д;
е = у — X.
Выберем функцию Ляпунова в виде положительно определенной квад-
ратичной формы
V = 8тРв. (7.76)
Рис. 7.21. Переходные процессы при отработке единичного воздействия
системой регулирования:
а без самонастройки; б — с самонастройкой
446
Тогда производная функции Ляпунова, взятая в соответствии с уравне-
нием (7.75), будет
. V = — е (ДТР 4- РА) 8 - 2 е'Р[АД 4- ^uj. (7.77)
Условие отрицательности производной запишем в следующем виде:
етР [ ДАх + г>!«д] > 0. (7.78)
Выражение (7.78) служит основой для формирования дополнительного
управления
п
ил =-- Е (бе* I е* | + Я* I I sign о),
fessl
П { П f П \ \ П
где о « &РЬХ = S I S ( S РцЬи I )• — E P^f,
\/—l \1=1 / / /—1
(7.79)
дл = шах
S ptain
_______
n
/-1
S Pl
/sal
П
(7.80)
(7.81)
Матрица Р связана с выбором функции Ляпунова, о помощью которой
обеспечивают условия асимптотической устойчивости и минимального вре-
мени сходимости переходного процесса в системе к реакции модели. Ее
определяют следующим образом:
Р =<?/<?>. (7.82)
где Qj — матрица, приведенная к жордановой канонической форме, столбцы
которой — собственные векторы матрицы А*.
Собственные векторы матрицы Ди для нашего случая будут:
Г2,92‘
1,17 ;
1
11.48'1
3,61 ;
_ 1
15,81'
3,67 .
1
для
\ = — 14,75 Л, =
ДЛЯ
Аа=—3,75 Л.2 =
ДЛЯ
X,------3,5 *8 =
бел “
;-1
Определим уравнение линии переключения:
о = ^Pbi = 10,07ег 2,82s, 4- е8 = 0:
тогда в соответствии с выражениями (7.80), (7.81) получим
qBl = 3,02; qSi = 0,96; да„ = 0,53; gX1 == 0; gXt = 0,95; gXi « 0,4.
Подставляя полученные значения в формулу (7.79), найдем аналити-
ческую запись закона управления в виде
«д «(0.95| х»|4-0.4 |х314-3.02 |ei|4-0,96|8t|4-
4- 0.531 е81) -sign (10,078! 4- 2,82е, 4- ej. (7.83)
447
Используя зависимость (7.83)
и структурную схему системы (см.:
рис. 7.19), с помощью ЦВМ найдем
переходные процессы на режимах,
которые приведены в табл. 7.1
(рис. 7.21, б). Из сравнения рис.
7.21, а и 7.21, б видно, что введение
самонастройки обеспечивает улучше-
ние показателей качества и делает
систему регулирования практически
независимой от режимов работы.
7.29. Для самонастраивающейся системы (см. рис. 7.19) с эталонной
моделью и сигнальной компенсацией определить закон управления, обеспе-
чивающий переходные процессы, инвариантные к изменению параметров
объекта регулирования, если = 0,1 с. Значения параметров объекта
приведены в табл. 7.2.
Для модели следует принять ku = 0,54; Ты = 0,16.
Указания 1. В самонастраивающейся системе допускается перерегулирова-
ние динамического процесса не более чем на 5%.
2. Коэффициенты йдг и k выбирают по корневому годографу (см. задачу
7.28).
7.30. Для самонастраивающейся системы автоматического регулиро-
вания (рис. 7.22) с эталонной моделью и сигнальной компенсацией опреде-
лить закон управления, обеспечивающий малую чувствительность процессов
регулирования к изменению собственных параметров объекта. Параметры
объекта регулирования при различных режимах эксплуатации приведены
в табл. 7.3. (
Решение. Параметры эталонной модели выбираем следующие: kM =
= 1,03; Тм = 0,16; Ем = 0,2, а коэффициенты k и системы устанавливаем
с помощью метода корневого годографа. При выбранных коэффициентах пере-
ходный процесс в эталонной модели должен протекать без перерегулиро-
вания за /р < 2,5 с. На рис. 7.23, а приведены траектории корней внутрен-
него контура в зависимости от коэффициента 1гг. Для нашей задачи выбираем
kr = 0,25. На рис. 7.23, б показаны траектории корней внешнего контура
от коэффициента k. При k = 0,89 эталонная модель имеет следующие по-
люсы:
= —8,44; Ха = —2,12; &3 =• —2,0.
Характерной особенностью приведенной системы является зависимость
коэффициентов вектора управления от режима эксплуатации. Это приводит
448
Рис. 7.23. Корневые годографы для внутрен-
него и внешнего контуров системы регули-
рования
к необходимости ввести в закон управления дополнительный член, пропор-
циональный величине входного сигнала.
Закон управления примет вид
' п 1
S,(^eAl6Al + ^l^l4-aog|g| sign (а),
_&=1 J
(7-84)
—
где
qq = max
Методика вычисления коэффициентов qek, qx^, и линии переключения а
изложена в решении задачи 7.28. >
Для приведенных данных получим
а = 0,546ег + 0,056еа — е3 = 0. (7.85)
Значения коэффициентов представим в виде
3,28
0,394
5,88
qXk =
1
1,03
0,47
1,70
<7 = 8,2.
Переходные процессы 1—4 в исходной системе (без самонастройки)
и в системе с самонастройкой показаны соответственно на рис. 7.24, а, б.
7.31. Определить закон управления в самонастраивающейся автомати-
ческой системе, обеспечивающей переходные процессы без перерегулиро-
вания, если исходная схема имеет вид, изображенный на рис. 7.22. Пара-
метры объекта регулирования имеют значения, приведенные в табл. 7.4.
Указание. Параметры модели kK, Тм, £м выбирать как средние ариф-
метические значения соответствующих строк табл. 7.4.
7.32. Определить закон управления в самонастраивающейся автомати-
ческой системе, обеспечивающей малую чувствительность к изменению
параметров объекта регулирования, если исходная схема имеет вид, изоб-
раженный на рис. 7.22. Параметры объекта регулирования приведены
в табл. 7.5.
Указание. Параметры модели feM, Тм, £м выбирать как средние ариф-
метические значения соответствующих строк табл. 7.5.
7.33. Определить закон управления в самонастраивающейся автомати-
ческой системе, обеспечивающей малую чувствительность к изменению
параметров, если ее исходная схема имеет вид, изображенный на рис. 7.19.
Параметры объекта регулирования имеют значения, приведенные
в табл. 7.6.
15 Ю. И. Топчеев
449
Рис. 7.24. Переходные процессы при отработке единичного воздействия
системой регулирования:
а «ч. без самонастройки; б — с самонастройкой
Указание. Параметры модели kM и Ты выбирать как средние арифмети-
ческие значения соответствующих строк табл. 7.6. Постоянная времени
Т’им = 0,1 с.
7.34. Определить закон управления для самонастраивающейся системы
(рис. 7.25, а) с эталонной моделью и сигнальной компенсацией, обеспечиваю-
щий переходные процессы, малочувствительные к изменению параметров
k0 и То. Значения параметров объекта регулирования приведены в табл. 7.7.
7.35. Определить закон управления для самонастраивающейся системы
(рис. 7.25, б) с эталонной моделью и сигнальной компенсацией, обеспечи-
вающий переходные процессы, малочувствительные к изменению.параметров
k0 и То. Параметры объекта регулирования при различных режимах эксплу-
атации приведены в табл. 7.8.
Таблица 7.5
Наименование параметров объекта - — ' ' I- ... Режимы
1 2 3 4 б 6 7 8 9 10
k9 0,4 0,7 0,9 2,5 2,8 3,6 4,2 4,5 1,7 1,9
TQ 0,1 0,3 0,7 0,8 0,5 0,4 0,9 1,1 0,4 0,6
So 0,10 0,05 0,03 0,06 0,15 0,22 0,27 0,06 0,09 0,40
Таблица 7.6
Наиме- нование пара- метров объекта Режимы
1 2 3 4 5 6
ks 0,5 0,6 0,9 1,2 2,5 1,8
Т3 0,4 0,1 0,02 0,08 0,5 0,3
Таблица 7.7
Наименова- ние параме- тров объекта Режимы
1 2 3 4 8
*0 тй 1 10 0.5 15 0,8 20 2,5 25 4 30
450
Рис. 7.25. Структурные схемы самонастраивающихся систем автоматического
регулирования с эталонными моделями и сигнальной компенсацией
Указание. Параметры эталонной модели ku, Ты выбирать как среднее
арифметическое значение k0 и То (табл. 7.8).
7.36. Найти алгоритм перестройки коэффициента усиления kc из усло-
вия устойчивости процессов в системе с эталлонной моделью для компенса-
ции изменения во времени коэффициента передачи объекта k (t). Структур-
ная схема системы показана на рис. 7.26, а.
Решение. Основная система и эталонная модель (рис. 7.26, а) описы-
ваются дифференциальными уравнениями 2-го порядка
х 4- ахх -|- kjt (t) g, (7.86)
У + а1У 4- аоу =, kMg. (7.87)
Вычитая уравнение (7.86) из выражейия (7.87) и вводя обозначение
е(п) = yW _ XW (n = 0, 1, 2), (7.88)
составим уравнение ошибки
ё 4- ахё 4- аде == [k* — kck (0) g (7.89)
или ё4-а1е4-а0е = у£ (7.90)
где V = kM — kck (0- (7.91)
Выберем функцию Ляпунова в виде квадратичной положительно опре-
деленной формы фазовых координат и разности коэффициентов усиления
V = ё2 4- Оое2 4- Ау8, (7.92)
где А — положительная постоянная.
Рис. 7.26. Структурные
схемы самонастраиваю-
щихся систем автомати-
ческого регулирования с мо-
делью и перестройкой ко-
эффициента ka
15*
451
Таблица 7.8
Наименова- ние параме- тров объекта Режимы
1 2 3 4 5
*0 То 2,5 0,60 4,0 1,30 8,0 0,25 3,2 0,40 7,2 0,55
Полная производная по времени
функции (7.92) имеет вид
= 2е е—}- 2а08Е -}- 2А.уу. (7.93)
Из уравнения (7.90) найдем выра-
жение для второй производной ошибки
и, подставив ее в формулу (7.93), по-
лучим
— 2egy — 2axe2 4~ 2Zyy. (7.94)
Так как второй член в правой части выражения (7.94) всегда отрица-
телен, то для обеспечения неположительности производной функции Ляпу-
нова, т. е. для достижения устойчивости процесса перестройки, достаточно
выполнить условие
2egy -f- 2Хуу < 0,
откуда следует
(7-95)
Предполагая квазистационарность изменения коэффициента k, из фор-
мулы (7.91) получим
у = — kzk. (7.96)
С помощью двух последних выражений определим алгоритм перестройки
eg- ,
Структурная схема синтезированной системы управления показана на
рис. 7.26, б.
7.37. Определить структуру закона управления и алгоритм перестройки
его коэффициентов, обеспечивающих компенсацию нестационарности пара-
метров объекта управления, если объект управления и эталонная модель
описываются дифференциальными уравнениями второго порядка:
х + ах (/) X + а0 (t)x = k (t)g\ (7.97)
У + ьгУ 4- boy = kKg, (7.98)
где k (t), аг (/), a0 (t) — переменные во времени коэффициенты объекта
управления; kM, blt b0 — постоянные коэффициенты модели; g — входной
сигнал: х — выходной сигнал объекта; у — выходной сигнал модели.
Решение. Составим уравнение относительно ошибки между эталонной
моделью и объектом управления:
ё’+ М + feoe = fax — bi)x + (Оо — Ьо) х + g[k* — k (01, (7.99)
где e(n) = г/(п) — x(n) (n = 0, 1, 2).
Свойство самонастройки в приведенной системе с моделью может быть
достигнуто с помощью перестраиваемых коэффициентов &с, с0 и ct. В этом
случае выражения (7.97) и (7.99) соответственно принимают вид
х + (°1 + Cl) X 4- (По + Со) X = kz k (0 g\ (7.100)
ё 4- bgi +b0 = y3g — y3x — y2x, (7.101)
где
71 — Ь3 [йо 4- (0 Со 1;
Та = — tei 4- k (OcJ; Тз = ka — kc k (t). (7.102)
452
Вводя обозначения
е(л) = Zn+1,
представим выражение (7.101)
в виде векторно-матричного уравнения
z = Az + U,
(7.103)
где
г =
21
22
2з
0
О
—
0
— ь
Л =
В качестве функции Ляпунова
квадратичную форму
0
0
О
Ysg —Тг*
£/ =
--^2
выберем положительно определенную
3
v = &Pz+ Б М»
г=1
где Х(— положительные постоянные.
Полную производную функции Ляпунова найдем следующим образом:
3
S' = z1 (АТР + РА) z + 2z'PU + 2 =
(7.104)
(7.105)
(7.106)
3
= — z?Qz 4" 2z?PU + s
<=i
где — Z^Qz = Z^A^P^ PA)z.
1
Известно, что для положительно определенной матрицы Р и неособой
матрицы А матрица Q является также положительно определенной.
Таким образом, для обеспечения устойчивости процессов перенастройки
коэффициентов системы необходимо выполнить условие
з
2zyPU У 2Xiyi-v/ < 0.
1=1
Раскрывая это выражение, перепишем условие устойчивости в виде
’ 3
2 (Рз121 4~ Рзг2г + Рзз2з) (?з£ — Тг* — Ti*) 4" 2^ < 0»
Соотношение (7.107) удовлетворяется, если выбрать
Т1= (Psi2i 4- Рзг?а 4- Рз£з) *>
7 2 — (Psi2i 4" Рзз?з 4* Рзз?з) Х>
Т з = (Psi2i 4- PssZt 4* Рз&з) S'
Из уравнений (7.108) и (7.102) находим алгоритм перестройки при ква-
зистационарности изменения коэффициента k в виде
= j&8 Psse Рззе) S'
с° = лх, 4” Рме 4” Рззе)х'
С1 = Ь1_ (Ра6 4” Рз2е 4" РвЗе) х‘
(7.107)
(7.108)
(7.109)
453
Значения коэффициентов psl, ps2, pss выбираем из условия обеспечения
положительности матриц Р и Q. Структурная схема синтезируемой само-
настраивающейся системы с эталонной моделью показана на рис. 7.27.
7.38. Определить алгоритмы перестройки, при которых достигается ра-
венство коэффициентов уси-
ления
fe (/) fec = feM,
если объект управления и
эталлонная модель описы-
ваются уравнениями 3-го по-
рядка:
Рис. 7.27. Структурная схема самонастраивающейся
системы автоматического регулирования с моделью
и перестройкой параметров kc, с0 и сг
х 4- а2х + OjX 4- OqX = kck (0 g;
у + ь2у 4- ь1У 4- ьоу = k*g,
где
at = bi (i = 0, 1, 2).
7.39. Определить алго-
ритмы перестройки, осуще-
ствляющие компенсацию не-
стационарности параметров
объекта управления, если
объект управления и эталон-
ная модель задаются уравнениями, аналогичными задаче 7.38, но коэф-
фициенты а( зависят от времени и не равны соответствующим коэффици-
ентам модели.
7.40. Определить зависимость коэффициента усиления усилителя kx
в самонастраивающейся следящей системе с передатйчной функцией
U7 (S) = —обеспечивающую минимум суммы квадратов динамиче-
ской и случайной ошибки, если на ее разделенные входы поступает сигнал
Рис.7.28.Исходные струк-
турные схемы систем ав-
томатического регулиро-
вания с сигналами g (t)
и Sa (со)
помехи в виде белого шума с уровнем спектральной плоскости S„ (со) == с2
и полезный сигнал g (t) = A t.
Составить структурную схему самонастраивающейся системы из усло-
вия min [е2 4-е21, если уровень шума и коэффициент А медленно изменя-
ются от времени и обеспечиваются большие интервалы времени наблюдения.
Построить зависимость е2 4-е2 от коэффициента при k0 = 10 с-1,
То = 0,1 с и трех значениях коэффициентов с2 и А:
а) А = 1 рад с"1; с* — Ы0"* рад2-с;
б) А = 1 рад с-1; с2 = 4-Ю-6 рад2-с;
в) А = 2 рад с-1; с2 = 16-10“® рад2-с.
Решение. Определим передаточную функцию замкнутой системы
454
Положив в ней s = /со, найдем значение сред-
ней квадратической ошибки
(kxkoc)a
(— То<ва -j- /со + ЛхЛо)2
dco. (7.111)
Пользуясь формулами для вычисления инте-
гралов [17, 34], запишем
Од — Т д', Gj = 1; О2 = k^kg', Ьд e Oj
bl = k\k^',
i. i
j _ ° a2 _ ToAJAJc’ kikgc*
2a^ 2ktkgTg = 2 •
Зная J 2, определим en= 1Л k-%~- •
Puc. 7.29. Зависимости
eg + в» от коэффициента
усиления k.
Найдем динамическую ошибку следящей системы по формуле
Da Dg
Для нашего случая имеем (
g (0 =• A; g (/) = 0 и kfa
Тогда
А
е«—МГ’
Сумма квадратов динамической и случайной ошибок будет
ei+sJ“^-+-b^L- <7Л12>
Минимизируя выражение (7.112) по klt запишем
д(ед+ еп)2____•>_ Л* । _!»£_ - О
dfej feg fef 4л ’
откуда
-8лА2+£Ж = 0. (7.113)
Из формулы (7.113) найдем оптимальное значение коэффициента усиле-
ния усилителя
. 8Л Л2 _ . -УД5' /7 1 14Л
ki opt= у с2 г с2 ’ (7-114)
где k — постоянная величина.
На рис. 7.29 построена зависимость в| е„ от коэффициента усиления
для случая а (кривая /), для случаев бив соответственно кривые 2 и 3.
Из рис. 7.29 видно, что для каждой из кривой имеется свое вполне определен-
ное значение &lopt.
Структурная схема самонастраивающейся системы приведена на
рис. 7.30, б. В качестве измерителя А применен тахогенератор, а в качестве
455
измерителя с2 — квадратор (реализован на схеме в устройстве подстройки).
Коэффициент изменяется в соответствии с формулой (7.114).
7.41. Составить структурную схему самонастраивающейся следящей
системы (рис. 7.30, а), обеспечивающей минимум суммы квадратов дина-
мической и случайной ошибок, если на ее разделенные входы поступают
сигнал помехи в виде белого шума с медленно изменяющейся спектральной
плотностью S„ (со) = с3 и полезный сигнал g (t) = At, где параметр А
также медленно изменяется со временем.
Определить законы для подстройки коэффициентов К и kv в самонастраи-
вающейся следящей системе при £ = в зависимости от отношения Л/с.
Решение. По аналогии с задачей 7.40 определим Ф ($) в виде
Ф Js3 + kvs + K ’
или
Ф(з) =
1____
<-4s+*
Вводя в выражение (7.115) обозначения
Т—1/— £ — -k-
V к ’ 5 2кт ’
получим
Ф — Г2з2 4- 2ZTs + 1 ’
(7.115)
(7.116)
(7.117)
1
С помощью выражений
(7.111) и (7.117) найдем
2 Кс2
е« = -4Г‘
Квадрат динамической ошибки определим, пользуясь структурной
схемой рис. 7.28, т. е.
— А‘
е«~ № '
Условие минимума суммы квадратов динамической и случайной ошибок
запишем в виде
д(еД-Ь-еД) 2А2 , с2 п
ЗЛ — К* ‘ 4л — и’
а) б)
Рис. 7.30. Структурные схемы самонастраивающихся систем автоматического регулиро-
вания, обеспечивающих минимум суммы квадратов динамической и случайной ошибок
456
откуда
______ 2
К=/8л^ = £'(4)3 . (7-118)
1
где k' = (8л) 3.
Из соотношения (7.116) найдем
21V7K.
При | и J = const из выражения (7.118) имеем
kv = (8«F (4) 3 = k" (4) 3 ’ (7-119)
1 1
где k" = 23/2£0J 2 л e .
Формулы (7.118) и (7.119) представляют собой законы, по которым про-
изводится подстройка параметров К и kv в следящей системе (рис. 7.30, а).
7.42. Определить законы подстройки параметров kx и kv в самонастра-
ивающейся системе автоматического регулирования (рис. 7.30, а), обеспе-
чивающей минимум суммы квадратов динамической и случайной ошибок,
если на ее раздельные входы поступают медленно изменяющийся сигнал
помехи в виде белого шума с уровнем спектральной плотности Sn (со) = с2
и управления g (t) = At1. Построить зависимости 8д е2 от коэффициентов
kT и kv при значениях: k0 = 1000 с-1; J = 0,1 кгм2; А = 5 рад; с2 =
= 4-10“в рад2с; |0 = 0,5*.
7.43. Составить структурную схему и найти законы для подстройки
коэффициентов К и kv по минимуму суммы Квадратов динамической и слу-
чайной ошибок в самонастраивающейся следящей системе с астатизмом
второго порядка, если ее первоначальная схема имеет вид, показанный
на рис. 7.28, а, а на раздельные входы поступают сигналы, медленно изме-
няющиеся от времени:
Sn (со) = с2 и g(t) = -^-.
7.44. Составить структурную схему и найти законы для подстройки
параметров системы регулирования К и Тг по минимуму суммы квадратов
динамической и случайной ошибок, если первоначальная схема имеет вид,
показанный на рис. 7.28, б, а на раздельные входы поступают медленно
изменяющиеся сигналы:
S„ (со) = с1 и g(t) = At.
7.45. Составить структурную схему и найти законы для подстройки
параметров К. и Т по минимуму суммы квадратов динамической и случай-
ной ошибок, если первоначальная схема системы имеет вид, изображенный
на рис. 7.28,в, а на раздельные входы поступают сигналы S„ (со) = с2
At1
и g(0 = —2“-
* В исходных данных задачи 7.42 принято К = k^ka и =
ky
Глава 8
Синтез непрерывных и цифровых систем
автоматического регулирования
при регулярных и случайных воздействиях
Задача синтеза при регулярных воздействиях заключается в выборе
такой структуры и параметров системы автоматического регулирования,
которые обеспечивают заданные показатели качества и точности процессов
системы. Если параметры объекта и регулятора (неизменяемая часть системы)
известны, то задача синтеза сводится к определению типов и параметров по-
следовательных, параллельных или последовательно-параллельных коррек-
тирующих устройств.
Задача синтеза при регулярных и случайных воздействиях заключа-
ется в выборе такой структуры и параметров системы автоматического регу-
лирования, которая обеспечивает минимум средней квадратической ошибки
от сигнала помехи при заданной точности воспроизведения полезного сигнала
за заданное время протекания переходного процесса. Обеспечение требований
по точности и качеству в обеих задачах синтеза сводится к построению
желаемых логарифмической амплитудной и фазовой частотных характерис-
тик, на форму которых большое влияние оказывает неизменяемая часть
системы [6, 17, 36, 371.
8.1. ПОСТРОЕНИЕ ЖЕЛАЕМОЙ ЛОГАРИФМИЧЕСКОЙ
АМПЛИТУДНОЙ ЧАСТОТНОЙ ХАРАКТЕРИСТИКИ
СИНТЕЗИРУЕМОЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО
РЕГУЛИРОВАНИЯ ПРИ РЕГУЛЯРНЫХ И СЛУЧАЙНЫХ
ВОЗДЕЙСТВИЯХ
8.1. Построить желаемые логарифмические амплитудную и фазовую
частотные характеристики синтезируемой системы автоматического регу-
лирования, если она должна иметь добротности по скорости Dw — 400 с-1,
по ускорению £>е = 64 с“а; максимум перерегулирования отах 35%;
время протекания переходного процесса tp 0,5 с; передаточную функцию
неизменяемой части
“ s(6,01 Is + 1) (0,002s4-1) •
Решение. Из точки со* — Da — 400 с"1 проведем прямую с наклоном —
20 дБ/дек (рис. 8.1, а). По формуле
=• V в»
ы&я&л
= ]/"б4 = 8 с-1.
Из точки coz проведем прямую с наклоном — 40 дБ/дек до пересечения
с прямой, имеющей наклон — 20 дБ/дек. Точка пересечения этих прямых
будет соответствовать частоте сох = 0,16 с"1.
458
Из точки А, равной атах = 35% (рис. 8.1, б), проведем прямую, парал-
лельную оси абсцисс, до пересечения с кривой отах = отах (Ртах). В ре-
зультате получим точку В, через которую проведем прямую, параллельную
оси ординат, до пересечения с кривой tp = tp (Pmax) (точка С). Из точки С
проведем прямую, параллельную оси абсцисс, до пересечения с осью ординат
в точке D. Для этой точки имеем
4,1л
откуда получим
Проведем через точку сос прямую с наклоном — 20 дБ/дек до пересе-
чения с прямой —40 дБ/дек. Получим вторую точку излома на частоте соа =
= 2,4 с"1.
Для построения высокочастотной части желаемой амплитудной частот-
ной характеристики через ю = 1 с"1 построим логарифмическую амплитуд-
ную характеристику неизменяемой части системы | Wn (/со) | (рис. 8.1, а).
Наклоны высокочастотной части характеристики примем равными1 наклонам
характеристики | WB (/со) |. При этом отрезки желаемой характеристики
следует провести параллельно отрезкам неизменяемой характеристики
(рис. 8.1, а). В результате получим со3 = 90 с”1 и со4 = 500 с-1. По найден-
ным частотам составим формулу для вычисления фазовой частотной характе-
ристики в виде
9ж (®) = — 90° - arctg + arctg - arctg - arctg .
Подставляя различные значения со в последнюю формулу, вычислим фа-
зовые углы, по которым на рис. 8.1, а построена желаемая логарифмиче-
Рис. 8.1. Построение желаемых логарифмических амплитудной и
фазовой частотных характеристик для задачи 8.1
1 При этом достигается наиболее простая реализация последовательного корректирую-
щего устройства.
459
ская фазовая частотная характеристика 0Ж. По ней найдем запасы устой-
чивости у0 = 70° и = ±оо. Для проверки правильности решения задачи
синтеза построим по характеристикам | №ж (jco) | и 0Ж (со) вещественную
частотную характеристику замкнутой системы Р (со). Далее, разбивая пло-
щадь под этой кривой на трапеции и пользуясь Лх-функциями, построим
переходный процесс х (t). Из него видно, что отах = 34% и tp = 0,49 с,
что соответствует заданным показателям качества системы.
8.2. Построить желаемые логарифмические амплитудную и фазовую
частотные характеристики синтезируемой системы, если она должна иметь
добротности по скорости £)и = 1000 с-1, по ускорению De = 175 с-2; мак-
симум перерегулирования отах 45%; время протекания переходного
процесса tp «С 0,7 с; передаточную функцию неизменяемой части
W (s) = s (0,25s + 1) (0,01s + 1) (0,002s+ ) '
Определить коэффициент усиления электронного усилителя и составить
структурную схему синтезированной системы.
Решение. Построим желаемую логарифмическую характеристику,
пользуясь частотами соА — 1000 с-1:
-|3/ 4De J5/ 4(175)2
~ у Ош ~ V 1000
5 с-1.
и сос = 28 с-1, а также частотами неизменяемой амплитудной характеристики
со3 = 4 с-1; со4 = 100 с-1; <о5 = 500 с-1 (рис. 8.2). Коэффициент усиления
электронного усилителя получим из следующего соотношения:
В рассматриваемой задаче kx — 1000, a ka = 10; следовательно, k3y =
= 100.
Рис. 8.2. Построение желаемых логарифмических амплитудной и
фазовой частотных характеристик для задачи 8.2
460
Рис. 8.3. Структурная
схема синтезируемой си-
стемы автоматического
регулирования
Пользуясь амплитудной характеристикой синтезированной системы,
составим ее структурную схему 1 (рис. 8.3). Система регулирования имеет
запасы устойчивости по фазе -ус = 68° и модулям = 35 дБ, Нк = —11 дБ.
8.3. Построить желаемые логарифмические амплитудную и фазовую
частотные характеристики синтезируемой системы автоматического регули-
рования, если она должна иметь ошибку слежения ъ < 18' при g3max =
= 20 град-с"1 и g3nMX = 20 град-с"2; ошах 35%, tp 0,6 с и
га =_________________122_______________
aW s(0,0143s4-l)(0,005s+l)(0,00125s+1) *
Решение. Ошибку в следящей системе определим по формуле
_ а\ Ss max । Sa max
-----+
Зададимся составляющими ошибки по скорости 8О = 3' и ускорению
е8 = 15'; тогда
= 400 с"1;
£е = 22_22_ = 80 c-2J
ю
По методике, изложенной в задаче 8.1, построим на рис. 8.4 желаемую
амплитудную частотную характеристику. По типовым наклонам характери-
фазовой частотных характеристик для задачи 8.3
1 См. п. 8.2.
461
tm,n
Рис. 8.5. Построение желаемых логарифмических амплитудной и фа-
зовой частотных характеристик для задачи 8.4
стики и точкам ее излома найдем соответствующие частоты, а с их помощью
выражение для определения фазовой частотной характеристики:
0» (“) = — 90 — arctg -^5- + arctg -у — arctg —
U, О t V (
-агс‘е-йГ~агс1еж-
Эту характеристику также строим на рис. 8.4. По логарифмическим
амплитудным и фазовым частотным характеристикам находим запас устой-
чивости по фазе ус — 65°, по модулям Нк — оо и Нк = —18 дБ. Получен-
ные запасы устойчивости по фазе и модулю обеспечивают заданные показа-
тели качества системы.
8.4. Построить желаемые логарифмические амплитудную и фазовую
частотные характеристики, если синтезируемая система автоматического
регулирования должна иметь ошибку слежения ъ«512' npng3 шах= 10 град-1 -с-1
И gs max = 25 град •с-8; omax =< 30%; tp < 0,35 с и
tw /_, _ 200
“ W — s (0,66s — 1) (0,005s + 1) *
Решение. Ошибку в системе автоматического регулирования предста-
вим в виде двух составляющих: по скорости 8Ш = 3' и ускорению еЕ = 9'.
Тогда = 200 с-1; De = 175 с-8. Определим соо = 20 с-1. Затем по ча-
стотам ©j = 0,7 с-1; со2 = 1,5 с-1; <в3 = 3 с-1; со4 = 100 с-1; cos = 200 с-1
построим на рис. 8.5 желаемую логарифмическую амплитудную характерис-
тику системы | Ц7Ж (/со) |. Значения фаз логарифмической частотной харак-
теристики вычислим по формуле
0ж (со)« — 270° — arctg + arctg + 2 arctg -у —
-arctS-l^--arctg-25or-
462
По найденным значениям 0Ж на рис. 8.5 строим 0Ж (со). Из этих характе-
ристик видно, что синтезированная система автоматического регулирования
является устойчивой, так как имеет---1 переходов фазовой характе-
ристикой линии — 180° на участке, где характеристика 20 1g] Ц7Ж (/со) | >
> 0 дБ при тр — 1 и ус = 40°, Нк — 18 дБ, Нм — —12 дБ.
8.5. Построить желаемые логарифмические амплитудную и фазовую
частотные характеристики синтезируемой системы, если она должна иметь
Da = 200 с-1; De = 36 с-2; crmax eg 30%; tp eg 0,8 с; передаточную функцию
неизменяемой части
П/ (с") ________________________------------------------.
s(0,ls+ 1) (0,02s + 1) (0,01s + 1) (0,005s + 1)
8.6. Построить желаемые логарифмические амплитудную и фазовую
частотные характеристики синтезируемой системы, если она должна иметь
ошибку слежения 8 eg 20' при g3 = 40 град-с-2; ошах 45%; tp eg 0,0425 с;
tw _____ 120
н w “ s2 (0,0005s + 1) (0,0001s + 1)» •
8.7. Построить желаемые логарифмические амплитудную и фазовую
частотные характеристики синтезируемой системы, если она должна иметь
ошибку слежения г eg 30' при g3 = 30 град-с-1 и g3 = 30 град-с-2; eg
eg 40%; tp =g 0,7 с;
TW 300
н ' ' s (0,01678s + 1) (0,005s + 1) (0,001s + 1) *
8.8. Построить желаемые логарифмические амплитудную и фазовую
частотные характеристики синтезируемой системы, если она должна иметь
= 2000 с’1; De = 1170 с’’; стшах^40%; fp< 0,175 с;
wr ls\ =__________________-______________.
' s (0,25s 4- 1) (0,0025s + 1) (0,001s + I)2
Определить коэффициент усиления электронного усилителя и составить
структурную схему системы.
8.9. Построить желаемые логарифмические амплитудную и фазовую ча-
стотные характеристики синтезируемой системы, если она должна иметь
== 125 с"1; De = 120 с“2; ошах<30%; /р<0,55 с;
125
(s) = s (0,66s— 1) (0,005s+1) •
8.10. Построить желаемые логарифмические амплитудную и фазовую
частотные характеристики синтезируемой системы, если она должна иметь
коэффициент статизма 0,01; eg 20%; Zp eg 0,4 с;
nrr / \ _ 100
H * ' (5s + 1) (0,0125s + 1) (0,005s + 1) '
8.11. Построить желаемые амплитудную и фазовую частотные харак-
теристики синтезируемой следящей системы, которая обеспечивает минимум
средней квадратической ошибки от действия сигнала помехи со спектральной
плотностью S (со) = с2 = 0,6-10“® рад2-с при заданной точности воспроиз-
ведения полезного сигнала g (0 = 2 4- 0,2( 4- 0,П2 рад; Da = 200 с-1;
De = 100 с-2; ошах =g 40%; tp < 1 с.
463
Решение. Для рассматриваемой задачи импульсная переходная функ-
ция замкнутой системы имеет вид [17 J
k (0 = Ао + Аг1 + AS,
(8-1)
где
л 9 36 у-» 30 /-> .
Ло л 7Г~ Ь1 /Г- и2>
fp fp rp
_ 36 192 r 180 r
ч------z-+-^3-b1 + -3-c2;
p p p
. _ 30 180 r 180 r
,з 7Г~ Gi 3s-g2-
p p p
(8.2)
Для заданных значений и £)е найдем
С - 1 - 1 1 200 => 0,005 с;
С 2 DB ~ 100 = 0,02 с2.
Подставляя значения и C2 в формулы (8.2) и полагая tp = 1 с,
получим
Ао = -р - 0,005--Y" °>02 = 8>22:
Д1 = —-у-+0,005 +—у—-0,02 =—31,44;
4=-^------0,005-----^-0,02 = 25,5,
Определим вещественную и мнимую частотные характеристики замкнутой
системы в виде [17[
Р(со) = (А. + Л4----2^ sinco/P +
4 ' \ (О (О (О3 й) / Р 1
। ( । 2^4о^п \ j ^4 <
+ {—-------У—) cos cot, — —i-;
' \ (О2 ' СО2 J Р (О2
(8.3)
Q(®)=-(4-+-^)sln^p+
। f -4 о । _4£р_2Ла . 2 р \
' \ со со со3 "т" ш у "
Подставляя в формулы (8.3) соответствующие значения, получим
19,56 , 31,44
COS со-]----------•
П / ч ( 2.28 51
Г ~ ш 1--------co* ~ 1-----’
Г, , ч 19,56 , . / 2,28 51 \ 8,22 , 51
О (со) =-----------5 Sin СО + ( —!-----------------5- ) COS СО---------------------7
' со2 1 \ со со3 ) со 1 со3
(8.4)
С помощью формул (8.4) на рис. 8.6 построены вещественная и мнимая
частотные характеристики замкнутой системы.
464
Для определения желаемых логарифмических амплитудной и фазовой
частотных характеристик разомкнутой системы воспользуемся формулами
20 lg Н (со) = 101g
{[1 -Р (со)] Р (со) - Q2 «й)}а + Qa (<о)
{[1-Р (со)]2+ Q2(a>)}a
0 (со) - arctg (j _ р (fflJ р( _ Q2 (ш) .
(8.5)
По формулам (8.5) вычислим значения 20 1g Я (со) и 0 (со) разомкнутой
следящей системы. Нанесем их на рис. 8.7. Тогда получим логарифмические
амплитудную и фазовую частотные характеристики синтезируемой следящей
системы. Аппроксимируем амплитудную характеристику прямыми линиями
с типовыми наклонами —20, —40 и —60 дБ/дек, что показано на рис. 8.7
штриховой линией. По изломам этой характеристики найдем передаточную
функцию разомкнутой следящей системы в виде
пр (с\_______К (ras + 1) (T»s + О__ /о
s(TlS+ 1)2(T4s+ i)(Tss+ 1) ’ * '
где K=200 с"1; 7\=1 с; 7\ = 0,59 с; 7’3 = 0,134 с; Т4 = 0,025 с; Т’8 =
= 0,01 с.
Учитывая выражение (8.6), запишем формулу для определения значе-
ний частотной характеристики
0Ж (и) = —ЭО9 — 2arctg со + arctg О,59со + arctg 0,134со — arctg О,О25со —
— arctg 0,01 со. (8.7)
Построим ее на рис. 8.7 штрихо-
вой линией. При этом видно, что син-
тезированные логарифмические ампли-
тудная и фазовая частотные характе-
ристики обеспечивают устойчивость
замкнутой системы автоматического ре-
гулирования и имеют запасы устой-
чивости по ’ фазе у0 = 55° и модулю
Ям = -20 дБ.
Определим среднюю квадратиче-
скую ошибку следящей системы от
действия случайного сигнала. Для
этого воспользуемся следующей зави-
симостью:
Й = (9^ _ 72С/Р - 60С4 +
4- 192С1^ + 360С1С2?р + 180С1)-£-.
(8.8)
Подставляя в выражение (8.8)
соответствующие числовые значения,
получим
Рис. 8.6. Мнимая и вещественная частотные ха-
рактеристики замкнутой синтезируемой сле-
дящей системы
t
1.25
1.0
0,75
0,5
0,25
О
-0,5
-1,0
а
О
50
75
100 и, 1/с
465
Рис. 8.7. Построение логарифмических амплитудной и фазовой частотных ха-
рактеристик синтезируемой разомкнутой следящей системы
8» = (9-1 -72 -0,005-1 -60.0,02-1 + 192.0,005® -1 +
+360-0,005-0,02-1 + 180-0,022)= 0,0186 рад, или 64',
откуда = 8'.
Для проверки правильности решения задачи синтёза определим по
характеристикам | Ц7Ж (/со) | и 0Ж (со) вещественную частотную характе-
ристику замкнутой системы Р (со) (рис. 8.8, а). С помощью трапецеидальных
характеристик и йх-функций на рис. 8.8, б построен переходный процесс
х (t), из которого видно, что 1 с и о-щах 38%. Полученные значения
близко совпадают с заданными числовыми величинами.
8.12. Построить желаемую амплитудную и фазовую частотные харак-
теристики синтезируемой системы автоматического регулирования, которая
обеспечивает минимум средней квадратической ошибки от действия сигнала
помехи со спектральной плотностью
при заданной точности воспроизведения полезного сигнала g (0 s 2 +
+ 0,И рад, е < 24', если стшах 30%; L < 1 с; а = 2 с-1; с2 = 1 X
X 10"’ рад2-с.
466
Указание. Использовать импульсную переходную функцию
k (0 = Ао + Att + Ео8 (0 + Do (t — tp); O^t^tp.
8.13. Построить желаемую амплитудную и фазовую частотные харак-
теристики синтезируемой системы, которая обеспечивает минимум средней
квадратической ошибки от действия сигнала помехи со спектральной плот-
ностью Sn (со) = с2 = 1,2- 10-в рад2-с при заданной точности воспроизве-
дения входного сигнала g (t) = 2 4- 0,П рад и следующих значениях доброт-
ностей: = 500 с-1; De = 64 с-2 и показателях качества ат„ sg 35 %;
tp sg 1,2 с.
8.14. Найти оптимальную передаточную функцию замкнутой системы
автоматического регулирования, обеспечивающей минимальную среднюю
квадратическую ошибку от действия сигнала помехи с (с) = е~“1х| и
воспроизводящей полезный сигнал вида g (t) = g0 + git, когда g0, gx
неизвестны, а < 1 с и a = 2c'1.
8.2. СИНТЕЗ ПОСЛЕДОВАТЕЛЬНЫХ И ПАРАЛЛЕЛЬНЫХ
КОРРЕКТИРУЮЩИХ УСТРОЙСТВ
Задача синтеза последовательных корректирующих устройств заклю-
чается в выполнении следующих этапов: а) определение вида логарифмиче-
ской амплитудной частотной характеристики корректирующего устройства
по формуле
201g) WK (/со) | = 201g | Гя (/со)| - 201g | WB (/co) |; (8.9)
б) нахождение по характеристике 201g | 1FK (/co) | передаточной функ-
ции 1FK (s); '
в) определение структурной схемы и параметров синтезированного
корректирующего устройства.
Синтез параллельных корректирующих устройств состоит из следу-
ющих этапов:
а) определение существенного интервала частот со, со sS соп;
б) проверка условия обеспечения заданного порядка астатизма;
в) определение по формуле
20l8-rWiwT-20ls|r-<wl (810)
логарифмической амплитудной частотной характеристики корректирующего
устройства;
г) нахождение по характеристике 20 1g | П7К (/’со) | передаточной функ-
ции (s);
д) определение структурной схемы и параметров синтезированного
корректирующего устройства.
8.15. Определить последовательное корректирующее устройство для
системы автоматического регулирования, желаемая амплитудная частотная
характеристика которой синтезирована в задаче 8.3.
Решение. Поднимем неизменяемую логарифмическую амплитудную
частотную характеристику рис. 8.4 на уровень желаемой в низкочастотной
области. Получим характеристику W» (рис. 8.9) и, вычитая из желаемой
логарифмической амплитудной частотной характеристики 20 1g| Wa (/со)|,
определим характеристику 201g | (/со) |. По этой характеристике найдем
где Ti = 7,15 с; Т3 = 0,33 с.
467
Рис. 8.9. Синтез последовательного корректирующего устройства си-
стемы автоматического регулирования
С помощью таблиц корректирующих устройств [17] определим струк-
турную схему корректирующего устройства (рис. 8.10, а), откуда
(s) — Lq
7jS+l
Tas+1 ’
где
£0 —---------—; 7’j — CjR^,
^=[1 +
^1^8 1 T
Rt(Ri+Rt) J *
При этом видно, что Lo < 1. Следовательно, для сохранения полученной
точности в синтезированную систему необходимо ввести промежуточный
D
электронный усилитель с /гэу = 1 +
8.16. Определить параллельное корректирующее устройство для сле-
дящей системы, желаемая амплитудная частотная характеристика которой
синтезирована в задаче 8.11.
Решение. Определим существенный интервал частот от со, до соп при
Ltn = ±25 дБ. Далее через со = 1 построим характеристику
где | (/со) | выбирают в существенном интервале частот.
Распространим приведенную выше характеристику на всю область
частот, как это показано на рис. 8.11.
Пусть передаточная функция неизменяемой части системы
25
= s (0,08s 4- 1) (0,01s + 1 )(0,002s + 1) ‘ 11)
При s = /со получим логарифмическую амплитудную частотную харак-
теристику (штрихпунктирная линия, рис. 8.11). Сложим амплитудные ха-
рактеристики | И7Н (/со) | и | Ц7К (/со) |. В результате получим логарифмиче-
скую амплитудную характеристику | Я7Н (/со) И7К (/со) | при передаточном
коэффициенте k = 1, по которой находим фазовую характеристику
468
I
Рис.' 8.10. Структурные схемы
последовательных и параллельных
корректирующих устройств
469
arg [1ГК (/co) (/co)] (рис. 8.11). Поднимем логарифмическую амплитудную
характеристику вверх, до уровня, при котором во внутреннем контуре си-
стемы будет получен запас устойчивости по фазе усв = 45°. После этого
проверим по | П7Н (/со) П7К (/со) | и arg [ 1FK (/со) WH (jco) ] условия соблюде-
ния существенного интервала:
а) при 201g | (/со) №к (/со) | «£ 8 дБ фаза должна удовлетворять нера-
венствам •— 135° < arg [1ГНК] с — 90° и 90° arg [ Ц7НК ] 135°;
б) при 11 дБ 201g | ^нк I 8 дБ фаза должна удовлетворять неравен-
ству —135° С arg [U7m] ==£ 135°;
в) при 201g | IFHK | >11 дБ фаза может быть любой.
Для нашей задачи эти условия полностью выполняются. Следовательно,
задача выбора характеристики 201g | И7К (/со) | решена правильно.
По виду логарифмической амплитудной характеристики найдем пере-
даточную функцию
^к^)=-Ук/-йг (8Л2)
U kis “Г Ч
Из выражения (8.12) видно, что порядок нуля в начале координат в пере-
даточной функции П7К (s) выше, чем порядок соответствующего полюса
в передаточной функции неизменяемой части системы (s) [выражение
(8.11)]. Это означает, что после включения синтезированного параллельного
корректирующего устройства порядок астатизма в следящей системе не по-
нижается.
Для практической реализации выражение (8.12) перепишем в виде
Wk ® я (TK1s + ini + 1)» ’ <8,13)
где Тх — малая постоянная времени. «
Корректирующее устройство 1Гк (s) реализуем в виде:
тахометрического моста с передаточной функцией
U ki5 "Г 1/ W х5 -j-
электронного усилителя с коэффициентом усиления
^эу = 1тг7\ <8‘15)
и /?С-четырехполюсника с передаточной функцией
^ = -гЙт- (8-18)
Принципиальная схема параллельного корректирующего устройства
изображена на рис. 8.10, б.
В рассматриваемой задаче были найдены следующие параметры коррек-
тирующего устройства: = 0,134 с; Тка = 0,025 с; Тх = 0,0001 с; k1V =
= 0,2 В-с/рад; k3y — 5-104.
8.17. Определить принципиальную схему и соотношения между пара-
метрами для последовательного корректирующего устройства следящей
системы, если ошах «S 25%; fpsSO,8c; е 1,5° при g3max = 30 град*с-1
и£зш« = 8 град*с"в, а ее неизменяемая часть имеет передаточную функцию
(8) —__________________*5__________________
" s (7\s + 1) (TjS2 + 2£7у + l)(T3s + 1) {7\s + 1) *
Решение. На рис. 8.12, а кривой 1 построена логарифмическая ампли-
тудная частотная характеристика неизменяемой части системы при следу-
ющих параметрах: k„ = 1 с-1; 7\ — 0,2 с; Т2 = 0,04 с; Т3 — 0,02 с;
470
Рис. 8.12. Синтез последовательного корректирующего устройства
системы автоматического регулирования
7\ = 0,005 с; § = 0,75. По требованиям точности найдем Da = 30 с"’
и DB = 16 с-2, откуда <ок = 30 с-1 и ш( = 4 с-1. С помощью номограммы
(рис. 8.12, б) определим toe =-Q-g* = 12 с-1? Используя полученные зна-
чения частот1, построим на рис. 8.12, а по ранее изложенной методике желае-
мые логарифмические амплитудную и фазовую частотные характеристики
синтезированной системы (соответственно кривые 2 и 5).
Поднимем логарифмическую амплитудную частотную характеристику
неизменяемой части на уровень желаемой (кривая 3) и, вычитая ее из желае-
мой, получим логарифмическую амплитудную частотную характеристику
корректирующего устройства (кривая 4), по точкам излома которой найдем
W (s)» I7**8 Ч ^TiS (8 17)
к 1) (Ъ +1) ’ 1 ’
где ТК1 — 2 с; Тк2 = 0,8 с; 7\ = 0,2 с; 7\ = 0,005 с.
Реализуем полученное устройство в виде фазозапаздывающей /?С-це-
почки о передаточной функцией
Wa(s) = Ln-^^- (8.18)
при £01 = ; 7*! = Са/?я; 7’»=“ [1 + + ] Т1’
+ Ri
электронного усилителя о коэффициентом усиления
1 Высокочастотную часть желаемой характеристики получим из | WB (j<o) ] путем изме-
нения наклона на — 20 дБ/дек до частоты ш “ l/T*.
471
Рас. 8.13. Структурные схемы си-
стем автоматического регулирования
синтезированными последовательны-
ми или параллельными корректирую-
щими устройствами
фазоопережающей 7?С-цепочки с передаточной функцией
при
Принципиальная схема последовательного корректирующего устрой-
ства изображена на рис. 8.10, в.
8.18. Определить передаточную функцию, принципиальную схему и
соотношения между параметрами для последовательного корректирующего
устройства в системе с астатизмом 2-го порядка, если от,т аф 35%; tp
0,6 с; De 120 с-2, а ее неизменяемая часть имеет передаточную функ-
цию
W Н W S2 (T1S + 1) + 1) (TgS + 1) •
где 7\ = 0,04 с; Т2 = 0,01 с; Т3 = 0,002 с.
8.19. Определить передаточную функцию, принципиальную схему и
соотношения между параметрами для параллельного корректирующего
устройства системы автоматического регулирования, если ошах «С 35%;
/р 0,6 с; Da = 400 с-1; DB = 81 с-2, а ее неизменяемая часть имеет пере-
даточную функцию ч
П/ /с) =________________________
s(T1S+l)(T8s+l)(Tss + l) ’
где = 20; Tj = 0,0143; с; Т2 = 0,005 с; Т3 = 0,00125 с.
8.20. Определить передаточную функцию, принципиальную схему и
соотношения между параметрами для параллельного корректирующего
устройства системы автоматического регулирования (рис. 8.13, а), в неизме-
няемую часть которой входят передаточные функции
где = 2,5; k2 = 100; k3 =1; Tr — 0,07 с; T2 = 0,25 с; Т3 = 0,4 с;
§ = 0,7, если ошах =С 18 %; (р<0,9 с; /( = 250.
8.21. Определить передаточную функцию, принципиальную схему и
соотношения между параметрами для параллельного корректирующего
472
устройства системы автоматического регулирования (рис. 8.13, б), в неизме-
няемую часть которой входят передаточные функции
IF = _______________________ • IF fe'l __ ________^2__________
1U (^iS+l)(^s’ + 2gT2s + l) ’ aU s (T»s + 1) (T4s + 1) (Tjs + 1) ’
где = 40; k2 = 25 c-1; 7\ = 0,013 c; T2 = 0,01 c; T3 = 0,002 c; Tt =
= 0,02 c; T5 = 0,11 c; £ = 0,35 и ошах < 40%; tp < 1 c; Da = 200 c"1;
De = 64 c"a.
8.22. Определить передаточную функцию, принципиальную схему и
соотношения между параметрами для параллельного корректирующего
устройства следящей системы (рис. 8.13, б), в неизменяемую часть которой
входят передаточные функции
(s) = W2(s) = s(riS+1)(?2S2+1) {t8s + 1) ’
где = 30; k2 = 12 c-1; 7\ = 0,1 c; T2 = 0,003 c; T3 — 0,001 с и omax <
< 20%; tp < 0,25 c; Da = 360 c"1; £>e = 16 c"2.
8.23. Определить передаточную функцию, принципиальную схему и
соотношения между параметрами для последовательного корректирующего
устройства системы автоматического регулирования, рассмотренной в за-
даче 8.4.
8.24. Определить передаточную функцию, принципиальную схему и
соотношения между параметрами для последовательного корректирующего
устройства системы автоматического регулирования, рассмотренной в за-
даче 8.5.
8.25. Определить передаточную функцию,, принципиальную схему и
соотношения между параметрами для последовательного корректирующего
устройства системы автоматического регулирования, рассмотренной в за-
даче 8.6.
8.26. Определить передаточную функцию, принципиальную схему и
соотношения между параметрами для параллельного корректирующего
устройства системы автоматического регулирования, рассмотренной в за-
даче 8.7.
8.27. Определить передаточную функцию, принципиальную схему и
соотношения между параметрам^ для параллельного корректирующего
устройства системы автоматического регулирования, рассмотренной в за-
даче 8.8.
8.3'. СИНТЕЗ ПОСЛЕДОВАТЕЛЬНО-ПАРАЛЛЕЛЬНЫХ
КОРРЕКТИРУЮЩИХ УСТРОЙСТВ
8.28. Определить передаточные функции последовательного и парал-
лельного корректирующих устройств, их принципиальные схемы и соот-
ношения между параметрами для следящей системы (рис. 8.13, в), имеющей
передаточные функции неизменяемой части
W1 (s) = (7’1s+1)(T8s84-I)(7’,s + 1) ’ ^2 (s) = v ’
где Тг = 0,3с; Т2 = 0,125с; Т3 = 0,04с; feH=2,l и ошах <30%; /р<1,5 с;
Da = 80 с"1; £>е = 16 с’2.
Решение. Преобразуем исходную структурную схему (рис. 8.13, в),
перенеся линию связи 1 за звено (s). В результате этого получим неизме-
няемую часть с передаточной функцией
(s) - Г,(s) Г,(s) -
473
д* Рис. 8.14. Синтез последователь-
ного и параллельного корректирую-
щих устройств следящей системы
180
30 и передаточную функцию
параллельного корректиру-
g ющего устройства в виде
_90 ^(S) = s1Fk2(s).
На рис. 8.14 построена
-180 по ранее приведенной мето-
_2jg Л&ух. желаемая логарифми-
’ ческая амплитудная харак-
теристика | 1ГЖ (/со) I. Здесь
же построена амплитудная характеристика неизменяемой части | 1ГН (/<о)|.
Для синтеза параллельного корректирующего устройства найдем суще-
ственный интервал частот (во,, <оп) и амплитудно-частотную характеристику
| ^к2 (/<») I, совпадающую в интервале (ш,, <оп) характеристикой обратной
I 1ГЖ (/<о)|, но имеющую передаточный коэффициент k = 1. Распространяем
характеристику | 1Г'К2 (/со) | на весь интервал частот. Складывая кривые
I №к2 (/<о) | и | Ц7Н (/со) |, получим логарифмическую амплитудную харак-
теристику разомкнутого контура | 1ГН (/со) (/со) |, по которой строим
фазовую характеристику 0^ (со). Из условий устойчивости замкнутого вну-
треннего контура укн = 95° и укв = 40° находим передаточный коэффи-
циент k — 2. Полученные нами частотные характеристики | 1ГВ 1Гк2 | удовле-
творяют условиям соблюдения существенного интервала частот (см. за-
дачу 8.16).
Из передаточной функции
K2(s) = -^r^tn (8-19)
1 Kls "Г 1
находим передаточную функцию корректирующего устройства в виде
R7k2(s) = -H^P-, (8.20)
* кр "Г 1
где kK = 2,5; ТК1 = 0,6 с; Тка = 0,04 с.
Выражение (8.19) показывает, что порядок его нуля в начале координат
выше, чем порядок соответствующего полюса в передаточной функции
1FH (s), т. е. в следящей системе с выбранным корректирующим устройством
не произойдет понижения порядка астатизма.
Для замыкания внутреннего контура запишем
Ц7 (s) =--------------------------------
1 4- Уя (s) ^к2 (s)
(S) Кг <S>
1 + U7B (s) <2 (S)
1
«4 («) '
(8.21)
Логарифмическую амплитудно-фазовую частотную характеристику для
выражения в квадратных скобках получим с помощью номограммы замы-
кания рис. 8.15. Перестроим ее в координатах амплитуда—частота и фаза—
частота и, вычитая из нее амплитудную | WK2 | и фазовую 0К2 частотные
характеристики, получим кривые 20 1g | 1F1K | и 01к (штриховые линии на
рис. 8.14). Из сравнения характеристик 201g | U7IK | и 201g | 1ГЖ | видно,
что для их полного совмещения последовательное корректирующее устрой-
ство должно быть выбрано в виде электронного усилителя с коэффициентом
усиления fej = 4. В результате передаточная функция последовательного
корректирующего устройства
(s) — ^1-
474
На рис. 8.10, гид показаны принципиальные схемы синтезированных
последовательного и параллельного корректирующих устройств.
8.29. Определить передаточные функции последовательного и парал-
лельного корректирующих устройств, их принципиальные схемы и соотно-
шения между параметрами для системы автоматического регулирования
(рис. 8.16, а), если оши < 30%; tp < 3 с; Dw — 300 с-1; De = 5,85 с-а,
а ее передаточные функции неизменяемой части
(s) = ki, Wa (S) = {т15+1)(твД1нт8з + 1) ’ ^3 (S) = 5(Т45 4-1)'(Л8-Ь1) ’
где £а = 194; k3 = 2,55- lO’V1; 7\ =- 0,69 с; 7\ = 0,0525 с; Т3 == 0,002 с;
Tt = 0,00805 с; Т6 = 0,00608 с.
Решение. Преобразуя исходную схему, как это показано штриховыми
линиями на рис. 8.16, а, получим
ур ($) — (s) (s) 1FK1 (s) ,g 22)
а при s = /co.
201g|IFM(/(o)H
= 20 lg | W, (/co) 1FK1 (/co) I 4- 20 lg I-ЦМ/<а)^з (M- < (8.23)
SI IV Kiv /l-Г S| 1+В72(/ш)^3(/т)Ц7к2(/ш)
Puc. 8.15. Номограмма замыкания
475
е)
Lmt06
Рис. 8.17. Построение желаемых логарифмических амплитудной и фазовой час-
тотных характеристик и синтез параллельного корректирующего устройства
(задача 8.29}
476
Будем сначала считать, что | (/и) 1FK1 (/со) | = 1. Так как все по-
строения выполнены относительно <о = 1 при Lm = 0 дБ, то по аналогии
с предыдущей задачей для существенного интервала частот имеем | Й72 (/со) X
X 1F3 (/со) 1Гк2 (/со) | i> 1, откуда
(8.24)
В результате этого передаточную функцию параллельного корректи-
рующего устройства можно получить, пользуясь выражением
201g | Гк2 (/(о)| = 201g | K2 (/co) | + 201g | W3 (/co) |. (8.25)
Передаточную функцию последовательного корректирующего устройства
найдем по формуле
= 201g|tFM(/(o)|-201g
201g|IFKl(/(o)| =
W-t (ja>) Ws (ja>)_____
1+F2 (/co) 1F3 (/co) (/<»)
-201g|ri(/co)|. (8.26)
На рис. 8.17, а построены логарифмические амплитудные частотные
характеристики неизменяемой части системы | WH (/со) 1 = | 1Г2 (/со) 1FS (j(o)\
при k2k3 = 1, желаемые логарифмическая амплитудная ] (/со) | и фазо-
вая 0Ж (ш) частотные характеристики. Выделив существенный интервал
частот (со1э (оп), с помощью формулы (8.24) найдем | 1Г«2 (/со) [ (рис. 8.17, б).
Складывая логарифмическую характеристику | 1Гк2 (/со) | с логарифми-
ческой характеристикой | W3 (j со) |, получим амплитудную характеристику
(рис. 8.17,6) параллельного корректирующего устройства I IFK2 (/со) |.
Аппроксимируя участки амплитудной характеристики | 1Гк2 (/со) I и заменяя
их усредненным значением, получим характеристику | (/<о) |, которую
строим штриховой линией1 на рис. 8.17,6, а по ней находим
(8-27)
где — 0,75; Тк2 — 1,18 с.
Реализуем параллельное корректирующее устройство в виде стабили-
зирующего трансформатора (см. рис. 8.10, е), т. е.
^М = (Г,'+7П)- + Р (8'28)
где 7'ст — постоянная времени, определяемая взаимоиндуктивностью в ста-
билизирующем трансформаторе; 7\, Тп — постоянные времени соответ-
ственно первичной и вторичной обмоток.
Для выбора последовательного корректирующего устройства восполь-
зуемся формулой (8.26).
На рис. 8.18 построена характеристика | (/а>) W3 (/со) |. Сложив
ее с характеристикой | 1Гк2 (/ш) |, получим амплитудную характеристику
| (/со) 1F3 (/со) 1Г'к2 (/со) |. Построим для последней фазовую частотную
характеристику 02зк2 (со). При запасе устойчивости внутреннего контура
ука = 40° амплитудную характеристику | 1Г2 (/со) 1F3 (/со) WK2 (/со)| можно
поднять на 30 дБ (рис. 8.18). С помощью номограммы замыкания (рис. 8.19)
найдем амплитудную характеристику
___________1__________
1 + W 2 ^3 (/“>) W
1 Так как найденное корректирующее устройство является фильтром низких частот,
можно пренебречь апериодическим звеном с постоянной времени Тй.
477
Lm.iS
Рис. 8.18. Логарифмические амплитудные и фазовые частотные ха-
рактеристики внутреннего контура системы регулирования
Рис. 8.19. Номограмма замыкания с нанесенной логарифмической амплитудно-фа-
вовой частотной характеристикой разомкнутого внутреннего контура
478
Рис. 8.20. Логарифмические амплитудные частотные характеристи-
ки замкнутого внутреннего контура
Сложив ее с характеристикой | U7a (/со) №8 (/®) |. получим амплитудную
характеристику (рис. 8.20) внутреннего замкнутого контура
(jay) <F3 (/m)
1+^2 (/<>) U73 (j®) (j®)
Из рис. 8.20 следует, что из амплитудной характеристики | (/®) [
следует вычесть характеристику
У, (Ю У, W
i+ir2 (/®) uz3 (/®)Г^(/«)
В результате этого получим логарифмическую амплитудную частотную
характеристику последовательного корректирующего устройства | Ц7К1 (/») |
(рис. 8.21).
Аппроксимируя ее криволинейную часть прямыми линиями с типовыми
наклонами (штриховые линии), получим синтезированную логарифмическую
характеристику, по точкам излома которой найдем
' lfeKl (rKlS+1)2
(т;3з + 1)’
(8.29)
где Mki *= 61,5; Ki = 0,07 с; Гк2 = 0,0077 с; 7^з = 0,002 с.
Реализуем.данное последовательное корректирующее устройство с по-
мощью двух тахогенераторов: Тгг, связанного с задающим устройством
Тг2, приводимого во вращение от вала электродвигателя, электронного
усилителя и двух 2?С-цепочек (см. рис. 8.10, ж). На основании полученной
479
1
где 1Рф = k ф =----w
Ф Ф 1+*2
«1
Если принять, что
Рис. 8.21. Синтез последователь-
ного корректирующего устройства
схемы можно определить пе-
редаточную функцию после-
довательного корректирую-
щего устройства в виде
WK1(s)^^[TTsW^s)+
«р
+"^ <8-3°>
Т’ф — RiPi-
k$T тТф — Т к', kK1 — kjiy
Тт -j- Тк = 2Тк,
то получим формулу (8.29). Последнее апериодическое звено можно реализо-
вать с помощью электронного усилителя и /?С-цепочки (Т?2С2).
8.30. Определить передаточные функции последовательного и парал-
лельного корректирующих устройств, их принципиальные схёмы и соотно-
шения между параметрами для следящей системы (см. рис. )8.16, б), если
ошах < 40%; tp = 1,5 с; Da — 240 с-1; De = 10 с-8, а передаточные функ-
ции неизменяемой части
где = 1200; fe2 = 20; k3 = 0,01 с’1; 7\ = 0,167 с; Т2 = 0,5 с.
8.31. Определить передаточные функции последовательного и парал-
лельного корректирующих устройств, их принципиальные схемы и соотно-
шения между параметрами для системы автоматического регулирования
(см. рис. 8.16, б), если <тшах < 40%; tp < 0,4 с; Da = 400 с-1; De = 50 с-2,
а передаточные функции.неизменяемой части
^2
^(5) = ^; =
где = 2000; k2 = 20; k3 = 0,01 с"1; 7\ = 0,15 с; Т2 = 0,05 с; Т3 =
= 0,08 с.
8.32. Определить передаточные функции последовательного и парал-
лельного корректирующих устройств, их принципиальные схемы и соотно-
шения между параметрами для системы автоматического регулирования
(см. рис. 8.16, б), если <тшах < 35%; с 0,5 с; = 320 с-1; De = 50 с-2,
а передаточные функции неизменяемой части
-т^т- = г'И = -,1Ги+,^+„
где kx = 2000; k2 = 16; k3 = 0,01 с"1; 7\ = 0,001 с; Т2 = 0,08 с; Т3 =
= 0,1 с; Т4 = 0,008 с.
8.33. Определить передаточные функции последовательного и парал-
лельного корректирующих устройств, их принципиальные схемы и соотно-
480
V
Рис. 8.22. Структурные схемы системы автоматического регулирования лета-
тельного аппарата с перестройкой параметров корректирующего устройства от
высоты и скорости полета
шения между параметрами для системы автоматического регулирования
(см. рис. 8.16, в), если стшах <35%; tp < 0,3 с; Dw = 500 с"1; De = 80 с"®,
а передаточные функции неизменяемой части
^) = тДт-; =
= s (TgS + I)3(T^s-j- 1) ’ ^4 = ^4’
где kx — 2500; k3 — 10; k3 = 2 с х; Л4 = 0,01; = 0,009 с; Т2 = 0,01 с;
Т8 = 2,5 с; Т4 = 0,05 с.
8.34. Определить передаточные функции последовательного и парал-
лельного корректирующих устройств, их принципиальные схемы и соотно-
шения между параметрами для системы автоматического регулирования
(см. рис. 8.16, в), если отах < 38%; tp < 0,4 с; Da — 300 с-1; De = 50 с"®,
а передаточные функции неизменяемой части
Wi (s) —
^(s) (T1S+ i)(Tas+ 1);
if /ci ______a_______•
s(T|s*+2^+1) ’
где kr = 1500; k2 = 15; &3 = 10c x; kt = 0,001; Тг — 0,05 c; 7\=0,002 c;
T3 = 0,06 с; I = 0,7.
8.35. Определить тип и зависимости параметров последовательного
перестраиваемого корректирующего устройства системы управления пере-
грузкой летательного аппарата от высоты и скорости полета, обеспечива-
ющего показатели качества, точности и устойчивости (ошах <10%; tp <
< 2,3 с; Da = 50 с-1, ус > 50°) в различных режимах полета. Структурная
схема системы и ее передаточные функции приведены на рис. 8.22, а; значе-
ния параметров системы в зависимости от скорости и высоты полета даны
в табл. 8.1.
16 Ю. И. Топче»в
481
Таблица 8.1
Режимы полета Н, км м яо Т, с Гс. с
1 0 0,2 0,067 0,555 0,741 0,388 2,76
2 6 0,6 0,298 0,882 0,378 0,301 1,89
3 10,5 1,2 0,274 0,432 0,182 0,160 1,80
4 13,5 1,8 0,229 0,242 0,178 0,094 2,59
Решение. Структурную схему системы преобразуем в одноконтурную
(рис. 8.22, б), для чего определим передаточную функцию WH (s):
П7 /<а = 7^ + 2Tgs+ 1 kn _
“ 1 , M?(Tcs+l) ^(Tcs+1)
-f T2S2 + 2T^s + 1
= ТЧ + (2П + kwk*Tc] S + (1 + фдг) = (7\s+ l) (Tas+ 1> ’ (8,31)
где
l+k^k' ; Л=(п+-^4^) + р/Г(^ + -^£т^)-7’а;
л= (n + kflrk2Tc) - ]/ (n +
Выбирая глубину обратной связи по угловой скорости тангажа /гдг =
= 0,8, получим параметры передаточной функции WH (s) (табл. 8.2).
Для 3-го режима, рас-
положенного около середины
области полетов (табл. 8.1),
по требованиям качества и
точности строим желаемую
логарифмическую амплитуд-
ную частотную характери-
стику и определяем с ее по-
Таблица 8.2
Режимы полета *н> 71. с Т„ с
1 0,0463 2,02 0,068
2 0,175 1,78 0,081
3 0,204 0,63 0,050
4 0,191 0,96 0,068
Рис. 8.23. Логарифмические ампли-
тудные и фазовые частотные ха-
рактеристики системы управления
летательными аппаратами по пе-
зегрузке
482
Таблица 8.3
Режимы полета <р> с о. % О Vo
1 8,0 30 30
2 2,0 10 45
3 2,2 10 75
4 1,5 5 100
Таблица 8.4
Режимы полета Гкг с ГК2’ С С
1 2 3 4 108 28 25 26 2,02 1,78 0,63 0,46 1,о 2,0
мощью передаточную функцию последовательного корректирующего устрой-
ства
1) *
где kK = 25 с-1; ТК1 = 0,63 с; Тк2 = 1,0; с; Тк3 ~ 2,0 с.
Далее для 4—х режимов полета строим на рис. 8.23, а частотные харак-
теристики системы управления по перегрузке при выбранной неизменной
коррекции, где кривыми 1—4 обозначены амплитудные характеристики для
четырех режимов полета, а кривыми 5—8 соответствующие им фазовые
частотные характеристики.
Из анализа частотных характеристик следует, что запасы устойчивости
систем по фазам значительно изменяются от режима к режиму (табл. 8.3).
При этом на 1-м и 2-м режимах полета они не удовлетворяют условиям
задачи, а показатели качества не соответствуют заданным.
Это объясняется большим влиянием динамических параметров лета-
тельного аппарата на полосу пропускания системой управления сигнала
АИзад'
Действительно, замыкая всю систему управления, по номограмме полу-
чим амплитудные частотные характеристики замкнутой системы |Ф (/со) |
(рис. 8.24, а, кривые 1—4). Из приведенных графиков видно, что в рас-
сматриваемых режимах полета полоса пропускания соп системы по уровню 1,0
изменяется более чем в 2 раза. Следовательно, для получения практически
постоянных на всех режимах полета показателей устойчивости и качества
Необходимо перестраивать параметры корректирующего устройствах.
Соответствующие числовые значения перестраиваемых параметров после-
довательного корректирующего устройства приведены в табл. 8.4.
В результате использования в системе устройств для перестройки пара-
метров удается получить показатели качества
ашя < 10%; /р < 2,2 с.
Рцс. 8.24. Амплитудные характеристики замкнутой системы управления летательным
аппаратом по перегрузке с последовательным корректирующим устройством
* См. гл. 7.
16*
483
Рис. 8.25. Структурная схема системы, управления летательным аппа-
ратом по перегрузке
Логарифмические амплитудная и фазовая частотные характеристики
системы с перестройкой параметров приведены на рис. 8.23, б. Из них видно,
что изменение режимов полета летательного аппарата относительно мало
влияет на амплитудные и фазовые характеристики. На рис. 8.24, б по-
строены для этого случая характеристики | Ф (/со) |. Полоса замкнутой
системы не изменяется для всех четырех рассматриваемых режимов полета.
Полученное корректирующее устройство с U7K (s) может быть реализовано
в виде аналоговых элементов, изображенных на рис. 8.25, откуда видно, что
на операционном усилителе и резисторах и /?а набирается коэффи-
циент коррекции kK, ана остальных элементах — функция ,т- । ,v — •
Пусть = 50 кОм; тогда остальные параметры корректирующего
устройства будут = 100 кОм; С2 = 10 мкФ.
Значения резисторов /?а и конденсатора Сх должны изменяться в зави-
симости от режимов полета по данным табл. 8.5. ,
В самонастраивающейся системе управления перегрузкой летательного
аппарата значения резистора меняются в зависимости от высоты, а кон-
денсатора Cj — от скорости полета (см. рис. 8.25). Эти' параметры можно
вводить в систему в виде кусочно-постоянной функции (рис. 8.26, а, б).
8.36. Определить вид кусочно-постоянной функции, компенсирующей
изменение параметров последовательного корректирующего устройства си-
стемы управления летательного аппарата по перегрузке в зависимости от
высоты и скорости полета (рис. 8.27, а), если tp < 2 с; ошах <10%; ус
40°.
Параметры летательного аппарата в зависимости от скорости и высоты
полета приведены в табл. 8.6 [38]; параметры системы = 0,5; k2 —
= 1 град/В; kw = 1 В-с/град; 7\ = 0,1 с.
8.37. Определить вид кусочно-постоянной функции, компенсирующей
изменение параметров последовательного корректирующего устройства си-
стемы управления летательного аппарата по углу тангажа в зависимости
484
Рис. 8.27. Структурные схемы систем управления летательными аппаратами
с последовательными и параллельными перестраиваемыми корректирующими
устройствами
от высоты и скорости полета (рис. 8.27, б), если tp с 4 с; ошах с 10%;
ус 40°. Параметры летательного аппарата приведены в табл. 8.6; пара-
метры системы = 0,6; k2 = 1 град/В; kw ~ 1 В-с/град; Тг = 0,1 с.
8.38. Определить вид кусочно-постоянной функции, компенсирующей
изменение параметров последовательного и параллельного корректирующих
устройств системы управления летательного аппарата по углу тангажа
в зависимости от высоты и скорости полета (рис. 8.27, в), если tp с 1,2 с;
Таблица 8.6
Режимы полета Н, км м % Т. с - тс> с
1 2,0 0,60 90 5,0 0,22 0,32 0,70
2 5,0 0,93 150 4,0 0,15 0,25 0,35
3 7,5 1,14 160 2,8 0,12 0,21 0,34
4 9,5 1,50 180 2,5 0,10 0,20 0,37
5 10 1,35 70 1,5 0,15 0.14 0,75
485
WH(S)
Рис. 8.28. Структурные схе-
мы дискретно-непрерывных
систем автоматического ре-
гулирования с последователь-
ными и параллельными кор-
ректирующими устройства-
ми
°шах < 5%; ус += 40°. Параметры летательного аппарата приведены
в табл. 8.6; параметры системы = 2,5; k2 = 1 град/В; &дг = 1 В-с/град;
Л = 0,1 с; Тк4 = 0,056 с; Тк5 = 0,001 с; k3 = 0,018.
8.4. СИНТЕЗ ИМПУЛЬСНЫХ И ЦИФРОВЫХ СИСТЕМ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
8.39. Определить последовательное импульсное корректирующее устрой-
ство дискретно-непрерывной системы автоматического регулирования
(рис. 8.28, а) с помощью метода ^-преобразования, если передаточные функ-
fen
ции объекта 1У0 (s) = ° . , преобразователя код—аналог нулевого
s (1 о-s -г 1) *
1 е~*Т
порядка №ка (s) = --------- при /г0= 40 с-1; То = 0,1 с; о^ах< 20%; tp <
< 1,8 с; = 60 с 1 и Dl = 8,24 с 2. Реализовать синтезированное кор-
ректирующее устройство на /?С-цепочках или аналоговых элементах с ли-
ниями задержек.
Решение. Примем, что период квантования по времени Т = 0,1 си
определим z-преобразование непрерывной части в виде
г м _ n p-e-sr. 40 1 . _ ! of 40 1 _ 4 (0,368г+ 0,264)
s s(O,ls+l)J v sa(0,ls+ 1)J (г —1) (г —0,368) '
С помощью подстановки z = * найдем
IT to) — 2(°-165ffi,+ 1)(» /8 321
W(2,16tc<+1) '
Подставив w = jv в выражение (8.32), получим амплитудную частотную
характеристику | Wa (jv) |, которая построена на рис. 8.29.
Далее, по параметрам и D*& с помощью выражений
(8.33)
и
(8-34)
найдем значение добротности по скорости
DPW = v* = -^-60 = 3
486
и
0,=
|/ 8,24-0,01
0,144.
По номограммам для Стах <20% и /р < 1,8 с определим
COq 4 С ,
откуда.
о, ~tg-^f- = tg-^- = 0,2.
По полученным псевдочастотам vk, vt, vc, vlt va и u3=l построим желае-
мую логарифмическую амплитудную характеристику | №ж (jv) | (рис. 8.29).
Поднимем логарифмическую частотную характеристику неизменяемой части
системы до уровня желаемой и, вычитая из характеристики 201g | И7Ж (jv) |
характеристику 201g | 1ГН (jv) |, найдем логарифмическую амплитудную ха-
рактеристику последовательного корректирующего устройства 201g | Н7К (jv) |
(рис. 8.29), откуда определим
. . 1,5 (12,5» + 1) /о окч
= —^+1 <8-35)
Подставив в выражение (8.35) w = , получим
.. 0,Ю1г —0,086 /о
^(г) =------г —0,99 <8’36)
В заключение рассмотрим два способа реализации данного корректи-
рующего устройства: в виде импульсной /?С-цепочки или в виде линий за-
держки.
Первый способ. Из выражения
(1 »“sT 1
(z) = 3 (s)] (8-37)
с помощью соотношения
1ГК (s) = s
0—1Г (г) 1
<q [ 1 _ г-1 J
(8.38)
найдем передаточную функцию последовательного корректирующего устрой-
ства.
Для рассматриваемой задачи
^K(S) = S3’1{
(8.39)
откуда
IFK(S) = --^.^+...1l.(8.40)
На рис. 8.30, а показана
структурная схема включе-
ния данного импульсного
корректирующего устрой-
Рис. 8.29. Логарифмические ампли-
тудные характеристики дискрет-
но-непрерывной системы регулиро-
вания в зависимости от псевдоча-
стоты (задача 8.39)
г (0,101г —0,086) )
(г — 0,99) (г — 1) )
487
Рис. 8.30. Схемы реализа-
ции импульсных корректи-
рующих устройств
ства, реализованного на 2?С-цепочке (рис. 8.30, б). Импульсное кор-
ректирующее устройство выделено на рис. 8.30, а штриховыми линиями.
Второй способ. Запишем выражение (8.36) в следующем виде:
(*) = (г) (г), (8.41)
где
Е(г) г — Ь,
П7 (?)___ U , 1
(?) — у, — г
Полученным передаточным функциям соответствуют разностные урав-
нения
и' (кТ) = аое [(к—1) Т] + Ь^' [(к — 1) Т];
и [(к - 1) Т] = -и' (кТ) + £ [и (к - 1) Т].
С*0
По этим уравнениям на рис. 8.31, а выполнена реализация последова-
тельного корректирующего устройства на линии задержки e~sT, трех уси-
лителях и двух сумматорах.
8.40. Определить параллельное импульсное корректирующее устрой-
ство дискретно-непрерывной системы автоматического регулирования (см.
рис. 8.28, б) с помощью метода ил преобразования, если передаточная функ-
ция объекта Ц70 (s) = ij > преобразователя код—аналог нулевого
1 <-~sT
порядка №к-а ($) =------- при k0= 40 с \ То = 0,1 с и ОтахС 20%; «5
< 1,8 с; О* = 60 с"1 и О; = 8,24 с'2.
Решение. Если принять, что Т = 0,1 с, то условия данной задачи
аналогичны задаче 8.39. Следовательно, можно использовать амплитудные
характеристики 1(jv) | и | (jv) |, показанные на рис. 8.29, для которых
было получено последовательное корректирующее устройство (г) в виде
(8.36).
Выполним данное корректирующее устройство, как это показано на
рис. 8.28, б. Тогда передаточная функция последовательного импульсного
корректирующего устройства будет
W (г) = А1£1. =____________________
кН Е (z) 1 + «Гк.д(г)«г; (г)’
откуда получим
U7K(s) = s3-^
fl - (г)] г ]
(г — 1) (г) /'
(8.43)
488
Рис. 8.31. Структурные схемы дискретно-непрерывных систем авто-
матического регулирования с последовательным и параллельным кор-
ректирующими устройствами, реализованными на линиях задержки
Из выражения (8.36) найдем
W (2) = - ~ '
’ г —0,99 ’ ,
передаточный коэффициент 0,101 выносим за внутренний контур системы.
Поставив WK (z) в формулу (8.43), найдем
и/' /м _ , Q f О.!**'1 * 1 _ _ 0.94
г"1)(1 —0,85г-1)/ 0,625s4-l’
Реализуем данное корректирующее устройство в виде /?С-цепочки
(см. рис. 8.30, в). Отрицательный знак в полученном выражении приводит
к появлению положительной обратной связи во внутреннем контуре.
8.41. Определить параллельное корректирующее устройство дискретно-
непрерывной системы автоматического регулирования (см. рис. 8.28, в)
и реализовать его на аналоговых элементах с линиями задержки или в виде
программы на трехадресной управляющей цифровой вычислительной машине,
если
V 1 _«—sf
W° <s>= s(7’1s-4-1) (74s 4-1) : W1 ® “ k1'’ Wka = S ’
где kt = 1; Л = 3,16 c"1; 7\ = 0,14 c; T2 = 0,02 с; T = 0,002 c; D* =
= 60 c"1; De = 16 c-2; o„ax « 35%; t*p < 0 9 c.
Решение. По требованиям точности и качества определяем vk, vt, vz
желаемой логарифмической амплитудной характеристики (рис. 8.32). Нахо-
дим существенный интервал частот у,—уп и строим логарифмическую ампли-
тудную характеристику параллельного корректирующего устройства! 1Гк(/у)|
через псевдочастоту среза х. С помощью этой характеристики находим
W (о..)_ 1.6-103^(20^4-1)
' (900tc 4-1) (5w 4-1) (2ау 4-1) ’
1 Построение | | через ус связано с малыми значениями псевдочастот излома харак-
теристик | 1ГЖ | и | 1ГН |.
489
2 |
Подставив в нее w = получим
4,14(z — 1)а (z —0,905)
<8.45)
W (2} = ч-и —ц.эио, ..V
K v ' (г — 0,9999) (z — 0,667) (z — 0,333) ’ 1 ’
Рассмотрим два способа реализации корректирующего устройства:
в виде линий задержки или программы на трехадресной управляющей ЦВМ.
Первый способ. Используя представление передаточной функ-
ции параллельного корректирующего устройства в виде
tr* (s) = Y* = 4'14 0 - 2.905e~sr + 2,81e-2sr— 0,905e-3sr)
K ' x* (s) 1 — 1,9999e~sr + 1,2225e~2sr — 0,2223e-3sr ’
составим его структурную схему на аналоговых элементах с линиями за-
держки. На рис. 8.31, б это устройство заключено в штриховой прямоуголь-
ник. Добавив к нему передаточные функции преобразователя ,код—аналог,
неизменяемой части U70 (s) и усилителя с коэффициентом усиления kt,
получим структурную схему всей системы.
Второй способ. Выражение (8.45) перепишем в' виде
Г (г) _ 4,14(1 —2,905г-1—2,81г-3 —0,905г-’) 4fi,
X (г) ~ 1 — 1,9999г-1 + 1,2225г-’ — 0,2223г-’ ’ (»ЛО)
Из этого выражения найдем разностное уравнение в реальном мас-
штабе времени
у (кТ) = 1,9999г/ ((к — 1) Т] — 1,225г/ [(к — 2) Г] + 0,2223г/ [(к — 3) X
X Т] 4- 4,14х [(к — 1)Т] — 12х 1(к — 2) 74 + 11,6л: [(к — 3) 74 —
— 3,74 х [(к — 4) 74.
Для удобства написания программы перепишем последнее уравнение
в следующем виде:
у (кТ) — агх [(к — 1) 74 4- а2х [(к — 2) 74 4- а3* ((к — 3) 74 4-
4- atx [(к — 4) 74 4- Ь1У [(к - 1) 74 4- Ь2у [(« —2) 74 4- Ь3у [(к — 3) Т].
Составленная по этому уравнению программа в кодах команд трехадрес-
ной ЦВМ приведена в табл. 8.7.
Распределение памяти дано в табл. 8.8.
8.42. Определить параллельное импульсное корректирующее устрой-
ство дискретно-непрерывной системы автоматического регулирования (см.
рис. 8.28, в) с помощью иг-преобразования, если 8* < 10' при gmax —
= 20 град-с-1; g* = 20 град-с~2; Отах <35%; tp < 0,5 с, а ее неизменяе-
мая часть
feH(l—e~*sr)
r“(S) s2(T1s+1) (T»s4-1) ’
где kB = 10 c"1; 7\ = 0,01 c; Ta = 0,005 с; T = 0,005 c.
490
Таблица 8.7
Номер ячейки Наименование операции Адреса Примечание
А, А, А,
-| п + 17 | Пересылка по адресу п+ И п+ 12 х[(к — 2) 7]-х[(к-3) 7]
п + 20 Пересылка по адресу п 10 п + 11 х[(п — 1)7]-*х[(к — 2)7]
п + 21 Пересылка по адресу п+7 п+ 10 х[кГ]-*х((к— 1) Г]
п + 22 Пересылка по адресу п+ 15 п+ 16 !/[(«- 2) 7]- И(к — 3) 7]
п + 23 Пересылка по адресу п+ 14 п+ 15 И(к- 1)Т)]-У К*-2)7]
п + 24 Пересылка по адресу п ~t- 13 п + 14 У [х7] - у [(к - 1) 7]
п+25 Считывание х [к7] и запись в ячейку п + 7
п + 26 Умножение п п+7 п+ 45 агх ]к7]
п+27 Умножение п 4" 1 п 4~ 10 п + 46 а2х [(к — 1) 7]
п+ 30 Сложение п+ 45 п + 46 п + 45 агх [к7] + а2х [(к — 1) 7]
п+ 31 Умножение п+2 п 4~ 11 п + 46 а3х [(к — 2) 7]
п+ 32 Сложение п+ 45 п + 46 п+ 45 1 агх [к7] + а2х [(ж — 1) 7] + + atx ](п - 2) 7]
п + 33 Умножение л 4~ 3 п+ 12 п + 46 atx [(к — 3) 7]
п + 34 Сложение п + 45 п + 46 п+ 45 а1х[кТ] + а2х[(к— 1) 7] + + а8х [(к — 2) 7) + + atx ((it — 3) 7]
п + 35 Умножение п + 4 п + 14 п + 46 Ь1У [(Л - 1) 7]
п + 36 Вычитание п+45 п + 46 п+ 45 агх [к7] + а2х [(к —1)7] + + а8х [(к - 2) 7] + + й4х [(к — 1) 7] — - Ь1У ](к - 1) 7]
п + 37 Умножение п + 5 п+ 15 п + 46 Ь2у [(« — 2) 7]
п + 40 Вычитание п+ 45 п + 46 п+ 45 atx [к7] + а2х[(к — 1)7] + + а3х ](х - 2) 7] + + а4х [(к — 3)7] — ~Ь1У[(к- 1) 7]- - Ь2у [(к - 2) 7]
п + 41 Умножение п + 6 и + 16 п + 46 bsy ((« — 3) 7]
п + 42 Вычитание п+ 45 п + 46 п 4“ 13 atx [к7] + а2х [(к —1)7] + + а3х [(к - 2) 7] + + а4х [(к — 3) 7] — - Ь^Кк- 1) 7]- - Ь2у [(к - 2) 7] - - Ь„у [(к - 3) 7]
п + 43 Выдача у (кТ) иа управление
п+ 44 | Безусловная передача, управления п + 17
491
Таблица 8.8
Номер ячейки Содержимое ячейки памяти Номер ячейки Содержимое ячейки памяти Номер ячейки Содержимое ячейки памяти
п = 4,414 «4-6 bs = —0,2223 «4-14 у [(К - 1) П
п+ 1 а2 = —12 «4-7 х(«Т) «4-15 у [(« - 2) Т]
п 4- 2 ая= 11,6 «4-10 х [(к - 1) Г] «-(-16 У [(« - 3) Т]
«4-3 а4 = —3,74 «4-11 х [(к - 2) Т]
п-)-45 Рабочая ячейка
п -)- 4 />!= —1,9999 «4-12 х [(к — 3) Т]
«4-46 Рабочая ячейка
«4-5 62 = 1,2225 «4-13 у [КТ]
8.43. Определить параллельное импульсное корректирующее устрой-
ство дискретно-непрерывной системы автоматического регулирования (см.
рис. 8.28, в) с помощью ^-преобразования, если DZ — 100 с-1; Ус 50°,
а ее неизменяемая часть
пу ________&н(1 -с S^) (Т'з8 4~ 1)_
^W'S2(T?s2+2E1T1s+1)(7’3S + 1)’
где ka = 0,25 с"1; 7\ = 0,7 с; = 0,71; Тг = 0,33 с; Т3 = 0,67 с, Т =
= 0,5 с.
8.44. Определить последовательное импульсное корректирующее ус-
тройство дискретно-непрерывной системы автоматического регулирования,
если
1 — e-sr
Ги(5)= ’
где 7\ = 2,5 с; Т = 0,2 с, обеспечивая установившуюся ошибку от дей-
ствия постоянного единичного входного сигнала g (t) = 0,05 [1]. Реализо-
вать полученное корректирующее устройство в виде импульсной 7?С-цепочки
или линии задержек. t
8.45. Определить последовательное импульсное корректирующее устрой-
ство дискретно-непрерывной системы автоматического регулирования, если
Di = 60 с’1; D‘e = 9 с’2; о^аХ < 30%; tp < 0,6 с, а
W ($) =________(1 — ^~sT)________
s2(T1S+l)(TaS+l)(r3S+l) ’
где k* = 10 с-1; Т1 = 0,1 с; Т2 = 0,05 с; Т3 = 0,001 с; Т = 0,05 с.
8.46. Определить последовательное импульсное корректирующее устрой-
ство дискретно-непрерывной системы автоматического регулирования (см.
рис. 8.28, а), если ус 3s 50°; отах «£ 25%; tp 5,5 с, а
к 1__sT
H70(s)= /" ; ITKA(s) = -—5-----,
где k„ = 0,695 с-1; T = 2 c.
Реализовать полученное корректирующее устройство в виде программы
на трехадресной управляющей ЦВМ.
8.47. По передаточной функции
™ . U (г) 0,944г’1 (1— 1,502г-14-0,698г-2)
MZk Е (г) “ (1—0,435г-1) (1 — 1,504г-1 + 0,831г-2)
492
реализовать последовательное корректирующее устройство в виде: а) им-
пульсной 7?С-цепочки; б) линии задержек; в) программы на трехадресной
управляющей ЦВМ.
Указание. При составлении программы учитывать сомножитель реаль-
ного масштаба времени.
8.48. По передаточной функции
™ _ U (г} _ 1,565 (1 — 1,473г-1 + 0,256г-2 + 0,312г-8 —0,094г-4)
~~ Е (г) 1 — 0,944г'1 — 0,348г-2 + 0,191г‘8 + 0,106г’4
реализовать последовательное корректирующее устройство в виде: а) им-
пульсной 7?С-цепочки; б) линии задержек; в) программы на трехадресной
управляющей ЦВМ (см. указание к задаче 8.47).
8.49. По передаточной функции
W /г\ _ ЛШ. _
Е(г)
0,5107 + 0,4252г"1 — 0,1887г"2 — 0,5914г-8 — 0,2279г’4 + 0,0202г’8 + 0,0518г’8
~ 1 + 0,5577г’1 — 0,588г-2 — 0,8798г-8 — 0,2581г'4 + 0,1381г's 6 * + 0,0478г-"
реализовать последовательное корректирующее устройство в виде: а) им-
пульсной 7?С-цепочки; б) линии задержек; в) программы на трехадресной
управляющей ЦВМ (см. указание к задаче 8.47).
8.50. По передаточной функции
П7 U(z} г-1 (1-2г’1-2г’2)
к{' Е (г) (1— г'1)!!— 0,9г’1) (1 — 2г'1)
реализовать последовательное корректирующее устройство в виде: а) им-
пульсной 7?С-цепочки; б) линии задержек; в) программы на трехадресной
управляющей ЦВМ (см. указание к задаче 8.47);
8.51. По передаточной функции
W (z) = Y =_____________________________
Х(г) (1+а±г~1-+агг-*)(.1 — г"1)
z"1 (1 — Дз2'1)
реализовать параллельное корректирующее устройство в виде: а) импульс-
ной /?С-цепочки; б) линии задержек; в) программы на трехадресной ЦВМ.
8.52. По передаточной функции
™ . Y (г) 0,0384 + 0,17г'1 + 0,108г-*
и (г) (1,786+ 1,378г"1) (1 —г’1)
реализовать параллельное корректирующее устройство в виде: а) импульс-
ной 7?С-цепочки; б) линии задержек; в) программы на трехадресной ЦВМ
(см. указание к задаче 8.47).
8.53. По передаточной функции
№к (г) = = 2450 (1 - 0,182г"1 - 0,493г"2 + 0,0288г"3 -f- 0,112г"4) (1 - г"1)
реализовать последовательное корректирующее устройство в виде: а) линии
задержек; б) программы на управляющей трехадресной ЦВМ (см. указание
к задаче 8.47).
8.54. Определить последовательное корректирующее устройство ди-
скретно-непрерывной системы
рис. 8.28, а) и реализовать его
ющей ЦВМ, если
автоматического регулирования (см.
виде программы одноадресной управля-
В
feH(l-e"sr)
1FH(s) =
sa(7\s+1) (T2s+1) ’
где = 2 с-1; 7\ — 0,1 с; 0,05 с; Т = 0,2 с по заданной логариф-
мической амплитудной характеристике (рис. 8.33).
493
Решение. Определяем z-преобразование передаточной функции неизме-
няемой части системы
0,15г (г 4-0,05) (г+ 1,065)
(г — 1) (г — 0,135) (г —0,0185) ’
После подстановки z = —получим
W7 (W\ _ °-1915 (ш + !) (1/1.105® + 1) (1/31,769® — 1)
w (1/0,762® + 1) (1/0,964® + 1)
Логарифмическую амплитудную характеристику неизменяемой части
201g 11FH (jv) | строим на рис. 8.33, а. Поднимаем характеристику неизменяе-
мой части до уровня желаемой в области низких псевдочастот. Затем находим
логарифмическую амплитудную характеристику корректирующего устрой-
ства 201g | №к (jv) | (рис. 8.33, б), с помощью которой получим
W М - 52,18 (1,312®+1)(® 4-1)»
’ (2,5® 4-1) (1,037® 4-1) (0,905® 4-1) ’
z — 1
или, после подстановки w = —-г-,
™ 482,56г» — 65,12г»
Wк (Z’ 13,582г3 — 6,398г2 — 0,408г — 0,005 '
Последнее выражение преобразуем к виду, удобному для составления
разностного уравнения, т. е.
гр м Х(г) 35,54 — 0,479г-»
wk(z>— и(г} 1 — 0,47г'1 — 0,03г~2 — 0,0004г-3 '
Вводя множитель г-1, обеспечивающий выполнение программы коррек-
ции на ЦВМ в реальном масштабе времени, получим ,
Хр(г) _ 35,54г-1 —0,479г-»
f/p(z) 1 — 0,47г'1 — 0,03г'2 — 0,0004г-1» '
С помощью последнего выражения запишем разностное уравнение кор-
рекции
х (кТ) = 0,47х [(к — 1) Т1 4- 0,03х [(к — 2) Т] 4-
4- 0,0004х [(к — 3) TI 4- 35,54и [(к — 1) Т] — 0,479 и (к — 2) Т|.
Реализуем это уравнение в виде рабочей программы одноадресной ЦВМ
(табл. 8.9) в системе команд, которые приведены в приложении XVI.
Распределение памяти приведено в табл. 8.10.
8.55. Определить последовательное корректирующее устройство ди-
скретно-непрерывной системы автоматического регулирования (см.рис. 8.28,а)
и реализовать его в виде программы одноадресной управляющей ЦВМ,
если 60 с-1; Dg=9 с-а;
tp «5 2,0 с; ©max = 20%, а
ее передаточная функция не-
изменяемой части
ц/ , х Ml —е sT)
s»(7\s4-l)’
где k„ = 2 с-1; 7\ =0,5 с;
Т = 0,5 с.
Рис. 8.33. Логарифмические ампли-
тудные характеристики дискрет-
но-непрерывной системы регулирова-
ния в зависимости от псевдочас-
тоты (задача 8.54)
494
Таблица 8.9
№ п/г Я Символ комаиды (мнемокод) Примечания
1 2 3 4 ё 6 7 8 9 10 11 12 Подготовка к вычислению нового значения х(кТ) Пересылка х [(к — 2)] -* - X |(к - 3) Т] х((к— I)]-* - X 10с - 2) 7] х(кТ)- - 1(к - 1) Т] Ввод нового значения о [(к-1)7] Заиулеиие ячеек (а!) и (хк)
-»[ ^<хЗ> (Х1>- -*<х2) <хх> - -*<*!> <*4>-* -*(х5> Вв <х4) (0)-* — <хк> -<Я1>
№ п/г п Символ команды (мнемокод) Примечания
13 14 15 16 17 18 19 20 —I 1 (Х1> X (с1> + (хк) -*<хк) <«1>- ® <0 е<4> Получение 6 <=1 В ячейке <хк> Счетчик по i от 1 до 5
21 22 23 УП N+12| Зыв. (хк) БПЛГ-h 1| Вывод нового значения х (кТ) на ЦАП
Таблица 8.10
№ п/п Ячейки Содержимое ячейки памяти № п/п Ячейки Содержимое ячейки фамяти № п/п Ячейки Содержимое ячейки памяти
1 <хк> х(кТ) 6 <хб> a [(fc- 2)7] 11 <с5> —0,479
2 <Х1> х[(к- 1)7] 7 <С1> 0,47 12 <1> 1 (целое)
3 (х2> х[(ж—2)TJ 8 <с2) 0,0300 13 <4> 4 (целое)
4 <хЗ> х[(к—3)7] 9 (сЗ) 0,0004
14 <а1) Рабочая ячейка
5 (х4) и [(к- 1)7] 10 ( (с4> 35,54
8.56. Определить последовательное корректирующее устройство диск-
ретно-непрерывной системы автоматического регулирования (см. рис. 8.28,а)
и реализовать его в виде программы одноадресной управляющей ЦВМ,
если Щ — 24 с-1; D*s = 64 с-2; Т = 0,05 с; Отах < 25%; t? ==£ 1,2 с,
а передаточная функция неизменяемой части
$7 rs\______(1 — e~~sr)___
s*(Tts+l)(Tts+l) ’
где kn — 2 c-1; 7\ = 0,15 c; Ta == 0,05 c.
8.57. Определить последовательное корректирующее устройство ди-
скретно-непрерывной системы автоматического регулирования (см. рис. 8.28, а)
и реализовать его в виде программы одноадресной управляющей ЦВМ,
если передаточная функция неизменяемой части
W (д) — *н ~e~sf^
н1' s2(Tis4-l) ’
где k„ = 4 в-1; ?i = 0,l с; Т — 0,2 с, по заданной логарифмической
амплитудной характеристике разомкнутой системы | W3 (jv)\ (рис. 8.34, а).
495
Рис. 8.34. Заданные логарифмические амплитудные характеристики дис-
кретно-непрерывных систем автоматического регулирования в зависимости
от псевдочастоты
8.58. Определить последовательное корректирующее устройство
дискретно-непрерывной системы автоматического регулирования (см.
рис. 8.28, а) и реализовать его в виде программы одноадресной управляющей
ЦВМ, если передаточная функция неизменяемой части
П7 feH(l —e~sr)
^h(s)— s2(r1S4-i)
где kn — 10 с-1; 7\ = 30 с; T = 0,1 с, по заданной логарифмической ампли-
тудной характеристике разомкнутой системы | П73 (jv) | (кривая / на
рис. 8.34, б).
8.59. Определить последовательное корректирующее устройство ди-
скретно-непрерывной системы автоматического регулирования (см.
496
рив. 8.28, а) и реализовать его в виде программы одноадресной управля-
ющей ЦВМ, если передаточная функция неизменяемой части
Ц7 / г feH(l—e-sr)
и'' s2(Tis—1) ’
где ka = 10 с"1; 7\ = 100 с; Т = 0,1 с, по заданной логарифмической
амплитудной характеристике разомкнутой системы | VT3(/u)| (кривая 2
на рис. 8.34, б).
8.60. Определить последовательное корректирующее устройство ди-
екретно-непрерывной системы автоматического регулирования (см.
рис. 8.28, а) и реализовать его в виде программы одноадресной управляющей
ЦВМ, если передаточная функция неизменяемой части
W (s) = - H ^ ~e~S^
sa(T1s-+-l) ’
где kB = 8 с"1; Тг — 100 с; Т — 0,1 в, по заданной логарифмической
амплитудной характеристике разомкнутой системы | IF3 (jv)\ (кривая 3
на рис. 8.34, б).
8.61. Определить параллельное корректирующее устройство дискретно-
непрерывной системы автоматического регулирования (см. рис. 8.28, в)
и реализовать его в виде программы одноадресной управляющей ЦВМ, если
передаточная функция неизменяемой части
Ь 1
где kg = 0,2 с-1; 7\ = 2,86 с; Тг = 0,77 в; Т = 0,2 с; kr = 10, по задан-
ной логарифмической амплитудной характеристике разомкнутой системы
| IF3(/o)| (кривая 1 на рис. 8.34, в). ,
8.62. Определить параллельное корректирующее устройство дискретно-
непрерывной системы автоматического регулирования (см. рис. 2.28, в)
и реализовать его в виде программы одноадресной управляющей ЦВМ, если
передаточная функция неизменяемой части
(8) = S(7’1S+p(7’liS+i) > (s) = k^, W\-A (s) = - ,
где k0 = 0,313 c-1; Tr = 2,86 c; T2 — 0,04 с; T = 0,1 c; kt — 5, по за-
данной логарифмической амплитудной характеристике разомкнутой системы
I ^з(/п)1 (кривая 2 на рис. 8.34, в).
8.63. Определить параллельное корректирующее устройство дискретно-
непрерывной системы автоматического регулирования (см. рис. 2.28, в)
и реализовать его в виде программы одноадресной управляющей ЦВМ, если
передаточная функция неизменяемой части
------+ „ ад-».;
где k0 = 0,21 с-1; 7\ = 4 с; Т2 = 0,132 с; Т= 0,05 с; = 20, по задан-
ной логарифмической амплитудной характеристике разомкнутой системы
I 1Г3(/о)| (кривая 3 на рис. 8.34, в).
8.64. Определить параллельное корректирующее устройство дискретно-
непрерывной системы автоматического регулирования (см. рис. 8.28, в)
и реализовать его в виде программы одноадресной управляющей ЦВМ,
если передаточная функция неизменяемой части
ь I__--"ST
= s (T1s 4- 1) (T2s + 1) (TgS 4- 1> ’ = &1’ ^К'А (s) = s ’
где k0 = 0,01 с-1; Т\ = 20 с; Тг = 0,156 с; Т3 = 0,05 с; Т = 0,05 в;
kt = 100, по заданной логарифмической амплитудной характеристике ра-
зомкнутой системы | Wa (jv)j (кривая 4 на рис. 8.34, в).
497
Рис. 8.35. Структурные схе-
мы систем автоматического
регулирования с управляю-
щими ЦВМ
Упра1ляющая ЦВМ
8.65. Определить для дискретно-непрерывной системы автоматического
регулирования (рис. 8.35, а) программу последовательной коррекции, реали-
зуемую на трехадресной управляющей ЦВМ, если в неизменяемую часть
системы входят программа операции интегрирования по методу Эйлера
(улучшенному) и передаточные функции объекта регулирования 1FO (s) =
= » преобразователя код—аналог нулевого порядка ITk-a (s) =
1 — е
=------—, измерительных устройств №„(«) = kT. Желаемая логарифмическая
амплитудная характеристика разомкнутой системы относительно псевдоча-
стоты задана в виде
0,601
^ж(/п)
(8.47)
0,462
Решение. Пусть параметры неизменяемой части системы имеют следу-
ющие числовые значения: k0 = 0,4 с-1; kr = 200; То = 0,1 с; Т = 0,1 с.
Передаточную функцию программы интегрирования по методу Эйлера
(улучшенному) в реальном масштабе времени (см. задачу 1.106) запишем
в виде
^пр.р (s) в
Т (1+e“sT)e“sr
l-e~sr *
(8.48)
Найдем z-преобразование для непрерывной части системы в виде
lFB(z) = W(z)
или
^н(2) = 3
-f-e“sT) e“s7>
2S*(T0s+l)
и при заданных параметрах
W (z) = (1 4- Z"1) Z-1 Ч ( 4 ! = 4(г+ d (0,368г+ 0,264) ,g ,g,
)Z <O)S2 (Ob+г (г—1)2(2 — 0,368) • (б’4У'
Подставив в выражение (8.49)
2= Г-1,
1 — W ’
498
получим
И))1
TFH(ay)
2 \* + 0,607 ) ____
w2 (1 + ‘ofe") (1 + w) ’
а при w = jv
ТГН (jv) = ;-----------
^2(1 + -бж)(1+^)
Передаточную функцию корректирующей программы определим с по-
мощью следующего соотношения:
IIF (jv) I == 1 1
IH'kVVII |В7н(/р)|
Подставив в соотношение (8.51) выражения (8.49) и (8.50), найдем
(8.50)
(8.51)
l^K(MI =
,('+-w)<1+W
(+-&
(8.52)
Р)
Выражение (8.52) перепишем в виде
таг)<'+">
W
= -
0,01 ) u ’
После подстановки в выражение (8.53) соотношения
1—г-* ’
W=> . ,
получим
™. У (г) 1,35—11,5г-1
w^z>~ иг(г) ~ 101г'1 —99г’2 '
(8.53)
(8.54)
Для согласования программ П7К (z) и №пр, р (z) в реальном времени
в передаточную функцию (8.54) вводим сомножитель г-®; тогда получим
1/(2) 0,134г-1—0,114г-2 /о
=—~о;э8^—• <8-55)
С помощью выражения (8.55) запишем разностное уравнение
и (кТ) = 0,134ит [(к — 1) Г] — 0,114Ui [(к - 2) Т] + 0,98а [(к - 1) Т). (8.56)
Составленная по уравнению (8.56) программа в кодах команд трехадрес-
ной управляющей ЦВМ приведена в табл. 8.11.
Распределение памяти приведено в табл. 8.12.
8.66. Определить для дискретно-непрерывной системы автоматического
регулирования (рис. 8.35, а) последовательную программу коррекции, реали-
зуемую на трехадресной управляющей ЦВМ, если в неизменяемую часть
системы входят программа операции интегрирования по методу трапеций и
передаточные функции объекта регулирования U70(s) = ————г—,
U is -И 1) (/ 2s -г О
1 — e“sT
преобразователя код—аналог нулевого порядка U^k-a (s) —--------, измери-
тельных устройств VTH(s) = kr. Параметры неизменяемой части kb = 0,2;
= 10; 7\ = 0,1 с; Tt = 0,05 с; Т = 0,2 с.
499
Таблица 8.11
Номер ячейки Наименование операции Адреса Примечание
At А8 Аг
— п -|- 11 Пересылка по адресу п + 3 п+4 и (кТ) -+и[(к— 1) 7]
п+ 12 п+ 13 Пересылка по адресу п -|- 5 п + 6 (кТ) -* Uf [(к — 1) 74 Считывание иг (кТ) и запись в ячейку п + 5
п+ 14 Умножение п я + 5 п+7 0,134 м, (кТ)
п+ 15 Умножение п+1 п 4“ 6 я+ 10 0,114ttj [(к — 1) Т]
я 4- 16 Вычитание п+2 я 4- 10 п+ 10 0,134zzj (кТ) — — 0,114й1 [(« — 1)7]
п + 17 Умножение я+ 2 п + 4 п+7 0,98й [(ж — 1) Г]
— я+ 20 п + 21 п+ 22 | Сложение Безусловная передача управления п+7 я 4- 10 п 4- 3 0,134м (к7) — — 0,114^ [(к-1) Т] + + 0,98й[(п— 1)7] Выдача и (кТ) на управ- ление
Таблица 8.12
Номер ячейки Содержание ячейки памяти Номер ячейки Содержание ячейки памяти
«++++ е в е« 0,134 0,114 0,98 и (кТ) и [(к—1) 7] п + 5 п + 6 п + 7 я+ 10 U1 (к7) “i — О Т] j Рабочая ячейка
Желаемая логарифмическая характеристика разомкнутой системы отно-
сительно псевдочастоты задана в виде
0.188<1-м(1+т^-)(|-Д)
,0(| +'ofc') (' + o3Ss")
8.67. Определить для дискретно-непрерывной системы автоматического
регулирования (рис. 8.35, а) последовательную программу коррекции,
реализуемую на одноадресной управляющей ЦВМ, если в неизменяемую
часть системы входят программа операции интегрирования по методу Симп-
сона 1/3 и передаточные функции объекта регулирования W0(s) =
1 е—sT
преобразователя код—аналог нулевого порядка 1Гк.д (s) —-----, измери-
тельных устройств П7И(s) = у 1 . Параметры неизменяемой части сис-
темы k0 = 0,2 с"1; ki = 400; Vo = 0,1 с; 7\ = 0,05 с; Т = 0,1 с.
500
Желаемая логарифмическая характеристика разомкнутой системы отно-
сительно псевдочастоты задана в виде
2(1 1°) ( 1 * * * + 0,607 ) (1 + 0^08 )
/0(1+ олёг) О+'о^г)
8.68. Определить для дискретно-непрерывной системы автоматического
регулирования (рис. 8.35, а) последовательную программу коррекции,
реализуемую на одноадресной управляющей ЦВМ, если в неизменяемую часть
системы входят программа операции интегрирования по методу Адамса—
Мультона и передаточные функции объекта регулирования Wo (s) =
= , преобразователя код—аналог нулевого порядка
1__е—sT
№k-a(s) =--------, измерительных устройств Н7И (s) = kt. Параметры
неизменяемой части системы k0 = 0,017; kx = 10; 7\ = 30 с; Т2 —
= 8,83 с; Ts = 0,15 с; Т = 0,1 с.
Желаемая логарифмическая характеристика разомкнутой системы отно-
сительно псевдочастоты задана в виде
0,0183(1-/О)(1+-5Д-)(1+1^з)
/ /о \ / jv \
iv \1 + 0,00115 Д1 + 0,325)
8.69. Определить для дискретно-непрерывной системы автоматического
регулирования (рис. 8.35, а) последовательную программу коррекции,
реализуемую на одноадресной управляющей ЦЦМ, если в неизменяемую
часть системы входят программа операции интегрирования по методу Штер-
мера и передаточные функции объекта регулирования
TW _______(TpS + 1)
^°^“(7’1s+l)(7’3s + l)’
преобразователя код—аналог нулевого порядка H7k-a(s) =--------, изме-
рительных устройств 1ГИ (s) = ki Параметры неизменяемой части системы
k0 = 0,045; kx = 10; 7\ = 100 с; 7\ = 11,1 с; Т3 = 0,15 с; Т = 0,1 с.
Желаемая логарифмическая характеристика разомкнутой системы отно-
сительно псевдочастоты задана в виде
^ж(Р) =
0,059(1 —/р)(1+o pt i4) (1+ 9>2 )
8.70. Определить для дискретно-непрерывной системы автоматического
регулирования (рис. 8.35, а) последовательную программу коррекции, реа-
лизуемую на одноадресной управляющей ЦВМ, если в неизменяемую часть
системы входят программа операции интегрирования по методу Эйлера и
передаточные функции объекта регулирования Ц70 (s) ~ ,т ^.zS.1 > . >
(/1$ О (/ j® т *)
1 — е—sT
преобразователя код—аналог нулевого порядка 1Гк-а=-------------, измери-
тельных устройств 1ГИ (s) = kr. Параметры неизменяемой части системы
k0 = 0,0017; kx = 100; 7\ = 30 с; Т2 = 8,83 с; Ъ = 0,15 с; Т = 0,1 с.
501
Желаемая логарифмическая характеристика разомкнутой системы отно-
сительно псевдочастоты задана в виде
0,00Й(1-/О)(1+5^)(1+^-)
iv (о,00162 — 1) ( 1 + 0325 )
8.71. Определить для дискретно-непрерывной системы автоматического
регулирования (рис. 8.35, а) последовательную программу коррекции на
трехадресной управляющей ЦВМ, если в неизменяемую часть входят про-
грамма реализации звена TKs + 1 по методу первой центральной разности
и передаточные функции объекта регулирования
п? /О —__________________________
о{> s(T1S+ 1)(Т^+ l)(Tss+ 1) ’
j__e“"sr
преобразователя код—аналог нулевого порядка H7K-a(s) =---------, изме-
рительных устройств П?и (s) = kr. Параметры неизменяемой части k0 —
= 0,2 с’1; kr = 10; Тг =0,1 с; Тг = 0,05 с; Ts = 0,015 с; Тк = 0,5 с;
Т = 0,2 с.
Желаемая логарифмическая характеристика разомкнутой системы отно-
сительно псевдочастоты задана в виде
^ж (/») =
°»2(1 —/°) (1+ Тибб) (1 — зТД})
iv О +0J64) 0 +о^бб)
Указание. См. задачу 1.115. '
8.72. Определить для дискретно-непрерывной системы, автоматического
регулирования (рис. 8.35, а) последовательную программу коррекции на
трехадресной управляющей ЦВМ, если в неизменяемую часть входят про-
грамма реализации звена „ 1 , . по методу Эйлера (улучшенному) и переда-
1 М$ “Г 1
kn
точные функции объекта регулирования ТГ0 (s) — _ in ’ преобразо-
S ( / 0s “Г 1)
]__е—
вателя код—аналог нулевого порядка IFk.a(s) =-------, измерительных
устройств 1ГИ (s) = ftp Параметры неизменяемой части системы k0 = 0,1 с1;
fe, = 20; То = 100 с; Тм = 0,15 с; Т = 0,1 с.
Желаемая логарифмическая характеристика разомкнутой системы отно-
сительно псевдочастоты
,.-.л °’059 (] ~ И1 + ода) (’+&)
м'ж \ ( iv \
+ 0,0005/ V + 0,325/
8.73. Определить для дискретно-непрерывной системы автоматического
регулирования (рис. 8.35, а) последовательную программу коррекции на
одноадресной управляющей ЦВМ, если в неизменяемую часть входят про-
грамма реализации звена -5-5---!------- по методу Эйлера и передаточ-
Т'м5 + + 1
ные функции объекта регулирования («) = 0 У-, преобразователя
(1 — e-sr)2
код—аналог первого порядка IFk.a(s) = -------—измерительных ус-
тройств W7,, (s) = kr. Параметры неизменяемой части системы Ао = 0,00015 с"1;
kt = 100; Го = 30 с; То = 8,33 с; Ты = 0,384 с; = 0,7; Т = 0,1 с.
502
Желаемая логарифмическая амплитудная характеристика разомкнутой
системы относительно псевдочастоты
W*(Jv) =
/0(1 * * * + О,СИЛ 15 ) 0 + 0,32б)
8.74. Определить для дискретно-непрерывной системы автоматического
регулирования (рис. 8.35, б) параллельную программу коррекции на одно-
адресной управляющей ЦВМ, если в неизменяемую часть входят программа
реализации звена -1 , по методу трапеций и передаточные функции объ-
екта регулирования U70 (s) = ~» преобразователя код—аналог
(i-e-W
первого порядка 1Fk.a(s) =---j—измерительных устройств Н7И (s) =
= kj. Параметры неизменяемой части системы k0 = 0,0015 о-1; = 10;
То = 0,15 с; 7\ = 8,5 с; Тм = 30 с; Т = 0,1 с.
Желаемая логарифмическая амплитудная характеристика разомкнутой
системы изображена на рис. 8.34, а.
8.75. Определить для дискретно-непрерывной системы автоматического
регулирования (рис. 8.35, б) параллельную программу коррекции на одно-
адресной ЦВМ, если в неизменяемую часть входят программа реализации
звена t по методу трапеций и передаточные функции объекта регули-
рования Wo (s) = -./7-. । n > преобразователя код—аналог первого
5 u Xs "Г М U 8s “Г М
(1
порядка 1Гк.а(5)=- -—измерительных устройств 11^(5) = ^. Пара-
метры неизменяемой части системы k0 = 0,316 с-1, ki = 10; 7\ = 0,02 с;
Тг = 0,002 с; Тм = 0,14 с; Т = 0,002 с.
Желаемая логарифмическая амплитудная характеристика разомкнутой
системы изображена на рис. 8.34, а.
8.76. Определить для дискретно-непрерывной системы автоматического
регулирования (рис. 8.35, б) параллельную программу коррекции на одно-
адресной управляющей ЦВМ, если в неизменяемую часть входят программа
реализации звена j по методу трапеций и передаточные функции
объекта регулирования UZ0 (s) =ч гпт"» преобразователя код—аналог
S (1 9S -г 1 )
1 — e~sT
нулевого порядка ITk-a(s)==--j--, измерительных устройств We(s) =* kt.
Параметры неизменяемой части системы k0 = 0,01 с"1; kr = 10; То — 100 с;
7\ = 10 с; Ты = 0,2 с; Т — 0,2 с. Желаемая логарифмическая амплитудная
характеристика разомкнутой системы изображена на рис. 8.34, б кривой 1.
8.77. Определить для дискретно-непрерывной системы автоматического
регулирования (рис. 8.35, б) параллельную программу коррекции на трех-
адресной управляющей ЦВМ, если в неизменяемую часть входят программа
реализации звена =—г по методу Симпсона 1/3 и передаточные функции
объекта регулирования Wo (s) = 0, . , преобразователя код—аналог
S ( / S 1/
1 е—«т*
нулевого порядка W'k-a(s) =--j---, измерительных устройств ITH(s) = ku
Параметры неизменяемой части системы k0 = 0,04 с-1; = 100; То =
— 0,02 с; Тк = 0,14 с; Т = 0,02 с. Желаемая логарифмическая амплитудная
характеристика разомкнутой системы изображена на рис. 8.34, а.
8.78. Определить для дискретно-непрерывной системы автоматического
регулирования (рис. 8.35, а) последовательную программу коррекции на
503
трехадресной управляющей ЦВМ, если в неизменяемую часть входят про-
грамма операции интегрирования по методу Рунге—Кутта 4-го порядка и
передаточные функции объекта регулирования
(s) “ (Tos + 1) (T1S +1) ’
преобразователя код—аналог нулевого порядка U7K.A(s) =--------, изме-
рительных устройств W„ (s) = kt. Параметры неизменяемой части системы
k0 = 0,02; fej = 100; То = 100 с; 7\ = 0,15 с; Т = 0,1 с.
Желаемая логарифмическая амплитудная характеристика разомкнутой
системы изображена на рис. 8.34, в кривой 1.
Указание. При реализации привести программу интегрирования по
методу Рунге—Кутта 4-го порядка к такту Т.
8.79. Определить для дискретно-непрерывной системы автоматического
регулирования (рис. 8.35, а) последовательную программу коррекции на
трехадресной управляющей ЦВМ, если в неизменяемую часть входят про-
грамма реализации звена j~ * по методам Эйлера (улучшенного) и
первой центральной разности, передаточные функции объекта регулирова-
ния Wo (s) = jjP , преобразователя код—аналог нулевого порядка
s (1 os -f" 1)
1 ~ ~
1^k-a(s) =-------, измерительных устройств 1FH (s) — kx. Параметры
неизменяемой части системы k0 = 0,01 с-1; = 20; То = 30 с; 7\ =
= 0,15 с; ТМ1 = 10 с; Тм2 = 0,4 с; Т = 0,1 с. Желаемая логарифмическая
амплитудная характеристика разомкнутой системы изображена на рис. 8.34, в
кривой 3. ।
8.80. Определить для дискретно-непрерывной системы автоматического
регулирования (рис. 8.35, а) последовательную программ^ коррекции на
одноадресной управляющей ЦВМ, если в неизменяемую часть входят про-
грамма реализации звена ^М1$ + * Тио методам Симпсона 1/3 и второй централь-
ной разности, передаточные функции объекта регулирования H70(s) = / i >
]__е—sT
преобразователя код—аналог нулевого порядка IFk-a (s) =---, изме-
рительных устройств 1ГИ (s) =
системы fe0 = 0,1; = 0,5; То = 60 с; 7\ = 0,15 с; Т,
— 0,2 с; Т = 0,1 с. Желаемая логарифмическая амплитудная характе-
ристика разомкнутой системы изображена на рис. 8.34, в кривой 4.
s ’
1 . Параметры неизменяемой части
mi = 9>2 с; ТЫ2 —
Глава 9
Оптимальные системы автоматического
регулирования
Оптимальные системы автоматического регулирования — это такие
системы, законы управления которыми обеспечивают экстремальный харак-
тер протекания переходного процесса в соответствии с принятым критерием.
Определение законов управления относится к задачам синтеза, реализация
которых осуществляется с помощью аналоговых или цифровых вычисли-
тельных машин, включаемых в обратные связи систем. Эти задачи могут
быть решены с использованием принципа максимума Понтрягина или
метода динамического программирования Беллмана.
9.1. Синтезировать оптимальный по квадратичному критерию
СО
[»2(о + ё2(о+“(0] dt
автомат стабилизации крена летательного аппарата, блок-схема которого
приведена на рис. 9.1.
Решение. Составим дифференциальное уравнение, описывающее замк-
нутую систему стабилизации, в виде
Т (0 в *8ф“ (0;
е(0-?ад(0-?(0;
(9.1)
Относительно в (t) еистема уравнений (9.1) будет
ё(0 = ~Аф«(0.
(9.2)
гг е (0 е (I)
Положив х, =-------А2— и х2 -------т—L,
1 «эф 2 «эф
уравнение системы относительно ошибки
запишем дифференциальное
х, = х»; ]
• (9.3)
х2 = и. J
Пусть &Эф = 1; тогда критерий оптимальности примет вид
J (X, и)-±[ (х\ (0 + х22 (0 + и (0) dt. (9.4)
Найдем оптимальный относительно этого критерия закон управления 1
‘и* — оптимальное управление.
505
Рис. 9.1. Блок-схема оптимальной системы
стабилизации летательного аппарата по
углу крена
в форме обратной связи и * (xlt х2). Для этого составим уравнение Веллмана,
которое для рассматриваемой задачи имеет вид
0J (х*. и*) . Г I z 2 . 2 2\ I
at ~ «но I 1 2 + +
, dj(x*, о») . , 6J (х*, и*) . ) /п
+-------------Х1 +----------Х2 J • 0.5)
Подставляя в уравнение (9.5) значение производных хг (t) и х2 (/),
получим
dj (Л*, И*) * Г 1 / п 2 2\ I
------di-----= W + ^ + «) +
6J (х*, и*) dJ^,u>)_ u 1' (9 6)
‘ дхг * * ox2 J
Минимизируя правую часть уравнения по и, найдем
. (9.7)
иХ2
Подставляя и* в уравнение (9.6), получим соотношение
------di----= — fa 4-х2)-т------------------г *2’ (У,°'
решая которое, найдем
J (х, и) = ~ 2pxix2 4- ^9-9)
где а, р, у — некоторые вещественные числа.
Подставляя
р-н»
в уравнение (9.8), получим
4 х?(1 - р2) + хЦ4-----¥" + Р) + ХМ (« ~ V₽) - 0. (9.11)
Поскольку последнее соотношение должно выполняться для любых
хг и х2, то 1 - р2 = 0; 1-у24-2р = 0; (9.12) а — ур = 0.
Выделяя решения этой системы уравнений, для которых а, р и у веще-
ственные числа, имеем
1) р= 1, у = /3, а = /з;
2) р= 1, у==—/3, а-— /3.
508
Тогда
u* (xi, х2) = — xi - /3 х2;
Un (Xi, х2) = XL + /3 х2,
или
и1(е1ё) = е4-/з’ё; 1
Ип (eiв) = — в —У 3 в.)
Подставляя уравнения (9.14) в уравнение движения (9.1), заметим, что
в первом случае движение системы асимптотически устойчиво, а во втором —
неустойчиво. Поэтому
и*(в, ё) == в + Уз в, (9.15)
а структурная схема оптимальной системы стабилизации имеет вид, показан-
ный на рис. 9.2.
9.2. Для объекта регулирования х = —ах 4- Ьи найти оптимальное
управление вида
и (0 = —q (0 х (t), (9.16)
минимизирующее квадратичный функционал качества
т
J = \ (С1х2с2и2) dt. (9.17)
о
Конечное состояние движения не задано. ।
Решение. Уравнение Веллмана для рассматриваемой задачи имеет вид
— = min [qx2 + qu2 + (—ах 4- du)]. (9.18)
Приравнивая производную правой части уравнения (9.18)
получим
* b dJ*
“ “ . 2са дх *
по и нулю,
(9.19)
Подставляя выражение (9.19) в уравнение (9.18), найдем
dJ* , dJ* ( й2 dJ* \ , Г 2 . / b dJ* \2]
T + ~dx~ \~ax - -2^- ~дГ) + [c'x + Ci J = °- (9'20)
2с2 дх
Будем искать решение в виде
J* (х, 0 = р (0 г (х).
(9.21)
Из соотношения (9.19) и условия, при котором управление ы (0 имеет
форму q (0 х (0, находим, что функция г (х) имеет вид х2. Подставляя J* —
= р (0 х2 (0 в уравнение (9.20), получим
х2 2хр ах---------2хр^ 4- [qx2 4- q 2хр^ j = 0 • (9.22)
Рис. 9.2. Структурная схема опти-
мальной системы стабилизации лета-
тельного аппарата по углу крена
507
Далее находим, что р (t) удовлетворяет нелинейному дифференциаль-
ному уравнению
-%---2ар--^-4-С1 = 0 (9.23)
и* <*2
е граничными условиями
lim J* (t, х) = Пт р (t) х3 = О,
г-» г
откуда следует, что
р (Т) = 0. (9.24)
Уравнение (9.23) — дифференциальное уравнение Рикатти. Для его решения
используем метод разделения переменных
_______^!bild.P = dt. (9.25)
р2 + (2с2а/62; р — с^Ь2________________________'
Если рг и р2 — корни многочлена
р2 + (2с2а/Ь2) р — = 0, (9.26)
то общее решение для уравнения (9.25) имеет вид
= *ехр [4- (Р1 - р2) Л , (9.27)
Р \‘)-Pi L <» X / J
ИЛИ
п/а — PafeexpfC^/CjHpi — р2)П+Р1 /о ой\
р (0------1—*еХрк^/са)(Р1—р2)п • ; (a-26J
Используя граничное условие р (Г) = 0, находим
Ь _ ____________Pi________ (Q 2Q\
р2 exp I(i>2/C2) (Pl — p3)T]’ v '
Таким образом с помощью соотношения J* (х, f) = р (0 х3 и выраже-
ния (9.19) получим
-•<о—£-£-—-Т*- р-30»
Структурная схема оптимальной системы, соответствующей выбранному
закону управления, показана на рис. 9.3.
9.3. Для объекта регулирования, заданного передаточной функцией
г <’> = -> = К’ <931>
выделить область управляемости и синтезировать оптимальный по быстро-
действию закон при следующих ограничениях на функцию управления:
|и (OKI-
Решение. По передаточной функции объекта составим дифференциаль-
ные уравнения, описывающие его динамику:
У® +y{t) = u{t) (9.32)
Рис. 9.3. Структурная схема системы оптимального управления
объектом 1-го порядка
508
(9.33)
(9.34)
(9.35)
или
У1 = У* (О'.
0а = —0а(04-й(0, .
где
У1 = у (ty, y^y(t).
Заменой переменных
хг (t) = УЛ) + уг (0 -utfY,
ХаФ=*ули) — и(!)
исходную систему уравнений приводим к виду
хх = 0; |
х2 =—xa(t) — u(t). J
Согласно необходимым условиям принципа максимума для определения
оптимального управления составим в первую очередь гамильтониан
Н (х, и, ф) = —1 — ф2 (0 х2 (0 — ф2 (0 и (0. (9.36)
Максимизируя эту функцию по и, найдем
«* (0 = _ sign ф2 (0. (9.37)
Функция ф2 (0 согласно тем же условиям удовлетворяет дифферен-
циальному уравнению
Фа-----дН<х’и’® = - ф2 (0 . (9.38)
0*2
Подставляя решение этого уравнения в функци*ю управления, получим
и* (0 = assign е“‘р2, 1 (9.39)
где р2 — постоянная интегрирования.
Заметим, что и* (0 постоянная по t функция и* не меняет знака на всем
интервале управления. Пусть и* = Д = ^=1; в этом случае решение системы
уравнений (9.35) имеет вид
хх(0 = с1;
х2 (0 = с2е~' — Д (1 — е_<).
Семейство экстремальных траекторий, соответствующих этим уравне-
ниям, показано на рис. 9.4, а.
Выделим на фазовом пространстве переменных хх и х2 множество точек,
для которых у = у = 0. Согласно уравнениям связи (9.34) в точках этой
области х2 = хг. Следовательно, синтезируемое управление постоянно и
(9.40)
Рис. 9.4. Фазовые траектории:
а экстремали; б оптимальные траектории; в — области управления
509
цию W (s) =
Рис. 9.5. Структурная схема системы оптимального
управления объектом, имеющим передаточную функ-
s
(s+ 1)S
должно обеспечивать попадания фазовых траекторий на прямую х2 =
Как видно из рис. 9.4, б, не все точки фазового пространства (х1г х2) удов-
летворяют этому условию. Точки, для которых эти условия выполняются,
входят в область управляемости. Для рассматриваемой задачи областью
управляемости является множество вида
Gynp-GxUGaUG». (9.41)
где
Gi={(xb х2):|х2|^Ц;
G2 === {(х^, х2).х2 1, х± х2|,
Gs = {(х*, х2): х2 ^5 •— 1, х^ > х2|.
Взаимное расположение управляемых и неуправляемых областей си-
стемы показано на рис. 9.4, в.
Для управляемых областей оптимальный по быстродействию закон
имеет вид
и (*1Х2) = sign (х2 — хх). (9.42)
После подстановки выражений (9.34) в формулу (9.42) оптимальный закон
управления объектом относительно выходных координат примет вид
и (У. У) = — sign г/. ( (9.43)
Структурная схема оптимальной системы показана на рцс. 9.5.
9.4. Синтезировать оптимальный по минимуму энергии з^кон управле-
ния объектом регулирования, описываемым уравнениями вида
Решение. Если t — произвольный момент времени из интервала (0, Tf),
то оптимальное управление в этот момент времени должно удовлетворять
следующему условию:
Tf
J (и* (0) = min -4- Г и2 (т) dx. (9.45)
“(I) Z t
Для определения и* (0 воспользуемся необходимыми условиями прин-
ципа максимума.
Составим гамильтониан, который для рассматриваемой задачи имеет вид
Н (х, и, ф) = -4- и2 ifjXa 4~ фан. (9.46)
Максимизируя гамильтониан по и, найдем
«* (0 = -ф2 (0. (9.47)
Функции ф1 (т) и ф2 (т) для т 5= t должны удовлетворять дифферен-
циальным уравнениям
--------------------------------
♦W— -----(9Л8)
510
Решая эту систему уравнений, получим
Фх (т) = (/);
Фг (т) = (i — т) фх (/) + ф2 (t).
(9.49)
Подставляя ip2 (т) в функцию управления (9.47) и интегрируя затем
систему (9.44) на интервале (t, Tf), с начальными условиями xt (t), х2 (t),
найдем
Х1 (-г) = X! (О + (Т - О Х2 (t) + ч?! (О + ф2(0 4
+ (т - О [ф! (О + Фа (О а - *)];
Ха (т) = х2 (О + фх (О # ~ т)* +l|)2 (0 (t - т).
(9.50)
Используя граничные условия xt (Tf) = 0; х2 (Tf) = 0, получим
Хх (О + Фх (О + (0 (L ПУ = 0;
*а (0 + Ф1 (0 + Фа (0 (t ~ Tt) = 0.
(9.51)
Решая последнюю систему уравнений относительно хр2 (t), найдем
fi 4
Фа (0 = *1 V + ТТГ=й Х* <9-52)
Подставляя выражение (9.52) в соотношение (9.47), получим закон
управления в виде
и* (Хх, х2) = — (Т-^ 0-а Хх - (9,53)
Коэффициенты закона управления нестационарны, так как при t -+Tf
они неограниченно возрастают. Следовательно, в таком виде оптимальный
закон реализовать нельзя. Его можнЬ осуществить лишь в виде квазиопти-
мального закона (рис. 9.6).
9.5. Синтезировать оптимальную по быстродействию систему управле-
ния полетом космического летательного аппарата, имеющую следующие
параметры: k = 10 м/с2; kaK — 0,1 с/м; =0,1 м-1; | пх | «С 0,6; uV3 =
— const; ut3 = const. Блок-схема контура управления скоростью и даль-
ностью полета летательного аппарата показана на рис. 9.7.
Рис. 9.7. Структурная схема системы уп-
равления полетом летательного аппарата
Рис. 9.6. Структурная схема
оптимальной системы регулиро-
вания
511
Решение. Составим дифференциальные уравнения, описывающие дина-
мику системы, приведенной на рис. 9.7:
/ = у (/);
v = knx (/);
Дц; = ul3 — ktl (ty,
= и03 — k3Kv (ty,
пх = <р (Д«/, Ды0).
(9.54)
Пусть координаты переменных состояния
xt =—Aut; ха =— -Д Д«о; (9.55)
«ак
тогда система уравнений (9.54) примет вид
Х2 = Ха 4~ т Ura,
Как
Xg " k^kflrjc*
Обозначим w,, = 6 и kiknx = и (t). В этом случае задача опти-
мального синтеза сводится к определению закона управления и = и (xn Xg),
который переводит вектор состояния (хг, х2) системы
хх=х2 (04-6;
ха = и (0
(9.56)
в начало координат за минимальное время. ;
Для решения задачи воспользуемся необходимыми условиями принципа
максимума, согласно которому оптимальные управления находят с помощью
максимизации гамильтониана
Н (х, ф, «) = -1 4- Ф1 (0 хг (0 4- Ф1 (0 6 4- Фг (0 и (t).
При этом экстремальные траектории должны являться решениями сле-
дующей системы уравнений:
дН (х, и, ф) _
дфа U
дН (х, и, ф)
дх!
, дН (х, и, ф)
х2 =
’h
0;
(9.57)
—’Pi-
Решая два последних уравнения системы, иайдем
ф>1 (0 = nj; ф2 (t) = —~nj 4- ла,
а максимизируя гамильтониан по и, получим
«* (0 = «шах sign (—nJ 4- Л2). (9.58)
Отсюда видно, что оптимальное управление кусочно-постоянно и меняет
знак не более одного раза. Пусть и* = Д = ±ишах- Интегрируя первые
два уравнения системы (9.57), предварительно поделив первое уравнение
на второе, получим
J dx2 = | 2 dxa 4~
512
или
xi — (ха + б)8 + са,
(9.59)
где Ci и Са — постоянные интегрирования.
Из уравнения (9.59) видно, что оптимальные траектории являются
параболами с вершинами в точках xt = —6. Вид этих траекторий и харак-
тер движения вдоль них для каждого из двух управлений Д = —Umax
показан на рис. 9.8.
Выделим множество у* начальных состояний системы (9.56), которые
могут быть переведены в начало координат управлением + ишах. Из
рис. 9.8 следует, что
Т+ = {&, х2); Х1 = -gA- (х2 + б)а - , Х2 < О}. (9.60)
Аналогично, для у" найдем
Т" = {(Xi, х2): х2 = — (х2 + 6)2 + —, х2 =- о|. (9.61)
( ^шах /«шах )
Объединение у+ (J у" определяет в пространстве переменных (xlt х2)
линию переключения
т-{(х„ ----+ (9.62)
которая разделяет все фазовое пространство на две области: Г* в управле-
нием +«шах и Г~ с управлением— ишах. Расположение областей Г* и Г~ отно-
сительно линии переключения у показано на 'рис. 9.9, откуда видно, что
множества Г+ и Г~ определяются следующими соотношениями:
г* - {(х„ xj: „ < - 5^ (й + 6)> - *1}; (9.63)
Г- = {(*1, *.):*!>- «Л + «Г - 8’1} • <9.64)
Учитывая выражения (9.60),! (9.61), (9.63) и (9.64), оптимальный по
быстродействию алгоритм управления можно записать в виде
( + «тахх€т+иг*;
I — «ПИХ X С у" U Г-.
Рис. 9.8. Фазовые траектории
системы
Рис. 9.9. Линия переключения
оптимальной системы
17 ю. И. Топят
п* = —пх sign |хх -j-
Рис. 9.10. Реализация оптимального
закона управления
При реализации данного алго-
ритма на идеальном реле струк-
тура оптимального управляющего
устройства определяется выраже-
нием
___х»
2ищах I ха I
([х2 + 6]а-62)}.
Подставляя в последнее выражение значения х1( х2 и 6 из соотношений
(9.55) и производя преобразования, получим закон управления относительно
переменных состояния Ди, и Ди0 в виде
м „гпах ? । ।
пх — —пх signal -f
x8 | хг | + 26 | хг |
__„rslgn[_Au, +_^Г|Д„,|| =
= n“axsign JAuj
feflAut,! (kuv
2Л* ta”ax \ 2
eh X
Подставляя в последнее выражение числовые значения параметров
системы, найдем 1
n( = 0,2sign{4 Ди,+| Д«о1 (9.65)
Структурная схема управляющего устройства, соответствующего закону
(9.65), показана на рис. 9.10.
9.6. Синтезировать оптимальный закон управления объектом, описы-
ваемым уравнениями
хх(0=»х2(0; ;
xa (t) — и (0,
минимизируя функционал
J = j(k + \и (01) at, £>0
при ограничении на управление | u(0| 1.
9.7. Синтезировать оптимальный закон управления объектом, описы-
ваемым уравнениями
Xi(0*“X2(0;
х2 (^) = —ox, (f) + и (0. |и(0|<1,.
минимизируя функционал
J - J(*-H«(OD<#-
514
9.8. Синтезировать оптимальную по быстродействию систему стабили-
зации ракеты по углу крена, если управление удовлетворяет ограничению
|«|^ 1, а объект управления описывается передаточной функцией
9.9. Синтезировать оптимальный по быстродействию закон управления
объектом, описываемым передаточной функцией
117 (s) = (Тхз4-1) (Т,з+1) ’
при ограничении на управление | и | 1.
9.10. Для объекта управления 1/s* и области пели, заданной в виде
S — {(Хь Х2):х2 = 0. —ОО<Х!<ОО|, <
необходимо найти управление и (х), удовлетворяющее ограничению | и (х) | «£
1, которое переводит произвольное состояние в S за минимальное время.
9.11. Для объекта управления 1/s2 и области цели S, определенной
для а > 0 соотношением
S=={(x1, х2):х2 = 0, —asgXjsga},
иайти управление и (х), удовлетворяющее ограничению \ и (х)|^1, которое
переводит произвольное начальное состояние в $ за минимальное время.
9.12. Синтезировать оптимальный по быстродействию закон управле-
ния объектом, описываемым яередаточной функцией
при ограничении на управление | и (/) | 1.
. Приложение I
Преобразования структурных схем линейных частей
систем автоматического регулирования
Номер Наименование структурного преобразования Исходная структурная схема Преобразованная структурная схема Формула для пре- образованной пере- даточной функции или выходного cuzhoai
1 Перестановка звеньев х |У * IV, (5) W2fS) • X. Y • W2(s) W,(S) —* У(3) —=W,(S)W2(s) A \<JJ
2 Объединение по- следовательно соединенных звеньев в одно звено X И/, (И) W2(S) Y * X —<• У V,(S)IV2K MS) = W,(S) W2fS)
3 Перенос линии связи до звена X MS) У X Y W(S) f W(S) У y(S)=W(5)Z(S)
У Перенос линии связи за звено X W(S) У X W(S) У y(S) = W(S)X(S) xfs)-^yf5)
X X “Г” WC5)
Перемена,
мест линии
связи
Перестановка
сравнивающих
устройств
Y(s)=w,(S)X(S)
Z(S)=W2(S)Y(S}
V(S)=X(S)~Y(S)+Z(S]
7 Перестройка схемы Сравнивающих устройств 0П У X р. Х-Уг р. V Ту 1 z V(S)-X(S)-y(S)-Z(S)
Перенос линии связи до срав- нивающего устройства £ 2 Z(S)-X1S)-Y(S)
6 J Zf Q X 1 J Ту
9 Перенос линии связи за срав- нивающее устройство „ * п г2 Уп 2 г Z(S)~X(S)-Y(S) X(S)‘Z(S)-bY(S)
d ?У 1
Л 1 у
JO Перенос срав- нивающего устройства до звена X У V -j Ms; [-*€>—— 1 z ^»€>—Н w(s) |—^ Г 1 , 2 V(3)-W(S)X($)-Z(S)
VHS) '
11 Перенос срав- нивающего устройства за звено X ^х у I2 —*<9r—* wis) * У Т *1 z-s Z • Вд) —*0—* У н 1У($) Z(SJ-W(S)\X(S)-YIS)]
516
Продолжение приложения!
Номер Наименование структурного преобразования Исходная структурная схема Преобразованная структурная схема Формила для преоб- разованной переда- точной функции ми выходного сигнала
>72 * Объединение параллельно со- единенных звеньев в одно звено X | W,(S)\ W2(S) Z-^V у I - X - 14 V K^=ivjf5)-w2(s) j л <.0>
13 Перестройка схемы двух "параллельно соединенных X L W,(s) y| X 1 Itfefsjrl m)4tycs)-w2cs)]x(s)
j звеньев W2(W I- - 1
74 Перестройка схемы парал- лельно соеди- ненных звена и линии связи 1 X w,fs) 1 V Wj(S) T W/s) — И - W,(S) <2fS)|— o* *, v(s)= (w,fs)-iyx(s)
1
15 Объединение контура с жесткой об- ратной связью X г Wt(S) V rf rW- у ' V(s\ w’(s) X($Pj + W,(S)
1
1S Перестройка схемы конту- ра с\жесткой . обратной связью X Wj(3) V * «,(5) zr - Wj(S f
1 — V 72(S)“
77 Объединение 1 контура с гиб кой обратной 1 связью в одно ; звено W,(S) w2(s) V 1' X IV, fS) _ r-t-lVgCSJ у vis) _ w, (s) X(s) i+wt($)w2(s)
18 i Перестройка схемы конту- ра с гибкой обратной i связью Wjl w2 5) (S) У J jiv2fs) 1 M£CS) - Wj(S) V V(s)=№^ 1-bWt(S)W2(S)
7Р Объединение контура с пере даточной фун- кцией в цепи об ратной связи в Г бона звено X* ~ 1 Wt(S> IV |T 7 V V{s) _ 1 X(s) 1 + WtfS)
20 Перестройка контура с пере- даточной функ- цией^ цепи об- ратной,фвязи Хдх- I ' W,(S) у iZE 2Г > и — v
I 21 Замена Одного звена контуром с передаточной функцией в прямой) цеп и х г W(5) Y . W(S) П7- MS) У Y(S) = W(S)X(S)
22 Замена одного звена контуром с передаточной функцией В цепи обратной связи X I W(S) Y -t -J--, Ws) ' Y p- 1 Y(S)~W(S)X(S)
517
^Приложение И
Амплитудно-фазовые частотные характеристики
типоВых^динамических звеньев
Номер Передаточ- ноя функция Характеристика
амплитудная фазовая амплитудно-фазовая
1 к Н к в JV л U
ш и
2 К Ts+1 Н к t । ^т jv I ol к
Щ
3. TS+1 Н 1 в эт ас JV Г к С0++О /1 (о-О U
ш Г 7/т ш
4 _к_ Ts-1 Н к * 1 ’ Ут jv к (о*0 0 Щ*О© У
1 ш
со
5 k S W1 «*9 JV 0 (о-О и '’СО^ол
и
6 S со в Л 2 jv 0^ , Cd»oo со-О и
ш
7 Ts-1 н 1 в 3/чя UT й Ш-*оо А co=0f -1 JV £ и
со
8 k н к л i 1 1 Ча Ч> 1/Т 1(4, jV 0 к JT со’-О*"^ /
t2s2+i _| 0)
7/Г ю
9 k Н к в -Л со jv к со-0 Ul“oo U
T2s2-1
со
1Q к Тг$г+2?ТЗ+1 ач) со 1 ! 3 ЧЭ <ь УТ со JV CU* OQ 0 а-О
11 к T2S2+2tJs+l (о<;<1) Н к t ' ЭЧЭ <ь % Ш JV йМоо 0 к , Ja*4 U
— ““
7/Т W
518
Продолжение приложения П
Номер Передаточ- ная функция Характеристика
амплитудная.. фазовая амплитудно-фазовая
72 Т*5г+2Цз*1 ft-7) Н 1 6 л л ? W*G© 7 jv ‘*><7 Ш-0 и
0>
13 T2s^2?TS+1 н 1 ао -ча а «ь 1/7 СО 67*ео 0 \JV ; со~0 U
74 К Т2$г-2КГ5~1 (0<f<7) н к ш «> Kh* а 1 1 W К а>-0*^^ JV Ш—о V
15 T2s^7s-1 (0<t< 1) н 1 ао 8 л л 2 со -1 л 0 и
16 К T2S2-2?TS4 (0<!<1) н —X. 7/7 W » <*» 1 ]fr to I.J. <У«оо JV "о\ш-О к V
77 Л н к У; ы в -л!2 -л -з/гл Э 11\! ULl ш-оГ\ -к 0 JV и
T2S2+2fTS-1 &<*<1)
18 Т2Зг+1 н 1 7/Г ш 8 л 7/7 cw СО-^-ао 0 JV 1 и
19 T2s2-1 н 7 си сь к со CU-лл^ U)*0 -1 JV 0 и
20 e'vs н 1 в ш -1 < |Л и
21 eTS н 1 S| ш -1 /• JV Ч 7
519
Приложение III
Логарифмические амплитудные и фазовые частотные
характеристики типовых динамических звеньев
Номер Передаточная функция Характеристика
амплитудная фазовая
1 К Lm 20Lgk Ю 9 ш
2 Т Тз+1 Lm 20Lgk в 7Г 2 2 Т
\\^20дБ/дек 1_ ш T > ——ш
3 Ts+ 1 Lm z 2 ш T 8 п ~2 2L 4 1 Ш Т .
4 К Ts-1 Lm 20Lgk s ’Д» 1 т I со
Nk co T N
5 Л. S Lm 20bgfr& l\. co 9 7Г ~ 2 I ф
6 S Lm S'] Ш В ТС 2 а
7 TS-1 Lm 1 ш T 8 •к Т 1 ""со Т
8 К Lm 20Lgk t °° 8 ТС 1 Т | со
T2S2+1 £ \МдБ/дек
9 к Lm 20lgk 8 -ТС —
Т2ег-1 \ Ы У^^ОдБ/Век
10 к Lm 20Lgk 8 ТС -т J ш
Т2$2+2%Тз+1 (^1) Ш Y \~Ы)дБ/Век
-п
520
Продолжение приложения Ш
Номер Передаточная функция Характеристика
Амплитудная Фазовая
fl к T2s2+ZZTs+1 ' (Ж<<7) Lm 1жИй1 9 2L ~ 2 -7C 7 T 2^ ~CO
L \г40дБ/дек
12 Г252+2?Г5 + 7 a-D Lm 7 CO T в Tt 3t 2 j 7
73 T2S2+ 2%Ts+1 (0<!<1) Lm 20lg2t " \J J CO 8 at S. 2 £ co
74 к T2S2-2^TS~1, где Т-\^Т2;^=1 Lm 20lgk L_^a> 1 8 Л 2 -at
i X'%, ш T' \4
15 T2s2+2tT$-1, где Т= \|т, Тг; £=7 Lm /ЬОдб/дек 20дб1дек/ L Al zZ \ Tz < to 8 7Г at 2 co
16 к T2S2- 2fTs + 1 Lm i\ 8 -at -2at IZ W \T^
17 к Т2зг-2?Гз-1, gdeT=]pjT2;i=1 Lm 1 — 8 -at ^at to
J- ш r->
1В T2S2 +1 Lm /чОдБ/дек 7 / i To oo * 8 at 7 to 7
19 T2s2-1 Lm ^7 r w 8 at —
20 6-тз Lm Ode co 8 '"" ш”
21 е™ Lm ode Ct) 6 to
521
522
Приложение V
Фазовая линейка
о)
ыд Для звеньев второго порядка
Г
Для звеньев второго порядка
524
Проложение /J
Зля определения
бещестбетт • «ммю частотны* ларактеристин
звютдти» систем регулирования
Яш)
-320-300 -2Й0 ~260 -ZW -220 -200 -160 -160 -140 -1Z0 -100 -60 -60 е‘ .
°)
526
Продолжение приложении IX
W\,ff6
180 160 190 120 100 80 60 90 О+ф
180 200 220 290 260 230 300 320 390 360
180 160 190 120 100 80 60 90 О+ф
180 200 220 290 260 280 300 320 390 360
г)
527
Таблица (/) для « от 0,00 до 1,00
и
t 0,00 0,05 0,10 0,15 0,20 0.25 0,30 0,35 0,40 0,45
0,0 0,2 0,4 0,6 0,8 1.0 1,2 1,4 1,6 1,8 2,0 2,2 2,4 2,6 2,8 3,0 3,2 3,4 3,6 3,8 4,0 4,2 4,4 4,6 4,8 5,0 6,0 7,0 8,0 9,0 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 52 54 56 58 60 65 70 0,0000 0,0637 0,1269 0,1890 0,2502 0,3096 0,3671 0,4223 0,4748 0,5246 0,5712 0,6147 0,6548 0,6915 0,7250 0,7546 0,7810 0,8043 0,8244 0,8416 0,8561 0,8681 0,8777 0,8853 0,8912 0,8954 0,9028 0,9036 0,9110 0,9248 0,9386 0,9471 0,9498 0,9500 0,9514 0,9555 0,9606 0,9645 0,9662 0,9664 0,9668 0,9684 0,9710 0,9733 0,9745 0,9747 0,9748 0,9755 0,9769 0,9785 0,9795 0,9797 0,9797 0,9801 0,9809 0,9820 0,9828 0,9831 0,9831 0,9833 0,9837 0,9844 0,9851 0,9855 0,9855 0,9856 0,9859 0,9864 0,9869 0,9872 0,9873 0,9875 0,9883 0,9887 0,9888 0,9894 0,9900 0,9908 0,0000 0,0666 0,1332 0,1984 0,2627 0,3250 0,3857 0,4434 0,4985 0,5506 0,5997 0,6452 0,6872 0,7256 0,7605 0,7917 0,8194 0,8437 0,8647 0,8827 0,8978 0,9102 0,9204 0,9281 0,9341 0,9385 0,9452 0,9454 0,9513 0,9659 0,9800 0,9877 0,9898 0,9892 0,9899 0,9933 0,9979 1,0013 1,0023 1,0017 1,0013 1,0023 1,0042 1,0059 1,0064 1,0060 1,0053 1,0053 1,0062 1,0072 1,0074 1,0070 1,0064 1,0060 1,0062 1,0067 1,0069 1,0066 1,0060 1,0055 1,0054 1,0057 1,0058 1,0055 1,0051 1,0045 1,0043 1,0043 1,0043 1,0042 1,0038 1,0031 1,0030 1,0026 1,0019 1,0018 1,0007 1,0001 0,0000 0,0701 0,1411 0,2079 0,2745 0,3405 0,4030 0,4642 0,5220 0,5765 0,6276 0,6752 0,7190 0,7591 0,7953 0,8278 0,8572 0,8817 0,9032 0,9217 0,9371 0,9497 0,9596 0,9675 0,9733 0,9773 0,9814 0,9782 0,9831 0,9964 1,0085 1,0148 1,0145 1,0116 1,0102 1,0118 1,0146 1,0161 1,0152 1,0128 1,0107 1,0101 1,0105 1,0108 1,0100 1,0082 1,0063 1,0053 1,0049 1,0050 1,0044 1,0033 1,0018 1,0008 1,0006 1,0005 1,0004 0,9997 0,9989 0,9981 0,9979 0,9980 0,9982 0,9980 0,9975 0,9971 0,9970 0,9973 0,9975 0,9976 0,9975 0,9974 0,9980 0,9984 0,9984 0,9990 0,9997 1,0005 0,0000 0,0731 0,1459 0,2172 0,2876 0,3559 0,4218 0,4851 0,5452 0,6019 0,6553 0,7047 0,7502 0,7908 0,8291 0,8625 0,8921 0,9178 0,9399 0,9584 0,9738 0,9862 0,9959 1,0033 1,0085 1,0120 1,0126 1,0059 1,0069 1,0158 1,0251 1,0282 1,0249 1,0188 1,0146 1,0138 0,0143 1,0142 1,0116 1,0076 1,0042 1,0025 1,0023 1,0022 1,0009 0,9989 0,9970 0,9961 0,9961 0,9966 0,9967 0,9961 0,9953 0,9953 0,9957 0,9966 0,9972 0,9975 0,9974 0,9975 0,9980 0,9988 0,9996 1,0001 1,0001 1,0001 1,0004 1,0009 1,0016 1,0017 1,0016 1,0014 1,0017 1,0015 1,0009 1,0008 0,9997 0,9991 0,0000 0,0764 0,1523 0,2267 0,3001 0,3711 0,4399 0,5056 0,5682 0,6272 0,6824 0,7336 0,7806 0,8233 0,8618 0,8950 0,9260 0,9520 0,9741 0,9925 1,0076 1,0195 1,0285 1,0352 1,0395 1,0420 1,0366 1,0239 1,0200 1,0247 1,0304 1,0302 1,0235 1,0146 1,0081 1,0057 1,0055 1,0046 1,0017 0,9976 0,9945 0,9935 0.9942 0,9952 0,9953 0,9945 0,9939 0,9943 0,9957 0,9975 0,9987 0,9990 0,9990 0,9994 1,0003 1,0015 1,0024 1,0025 1,0021 1,0019 1,0020 1,0022 1,0023 1,0021 1,0014 1,0007 1,0004 1,0003 1,0002 1,0000 0,9995 0,9987 0,9989 0.9989 0,9988 0,9993 1,0001 1.0006 0,0000 0,0794 0,1585 0,2361 0,3123 0,3863 0,4578 0,5260 0,5909 0,6520 0,7090 0,7617 0,8099 0,8538 0,8931 0,9278 0,9580 0,9839 1,0058 1,0239 1,0382 1,0493 1,0573 1,0628 1,0659 1,0669 1,0540 1,0340 1,0242 1,0247 1,0270 1,0239 1,0148 1,0043 0,9969 0,9948 0,9954 0,9958 0,9943 0,9917 0,9906 0,9914 0,9941 0,9968 0,9984 0,9988 0,9988 0,9997 1,0013 1,0031 1,0039 1,0036 1,0027 1,0022 1,0021 1,0023 1,0021 1,0013 1,0001 0,9991 0,9987 0,9989 0,9989 0,9988 0,9983 0,9979 0,9981 0,9986 0,9993 0,9997 0,9998 1,0001 1,0009 1,0011 1,0007 1,0007 0,9995 0,9992 0,0000 0,0828 0,1648 0,2456 0,3247 0,4016 0,4755 0,5462 0,6128 0,6735 0,7325 0,7892 0,8385 0,8832 0,9235 0,9579 0,9882 1,0137 1,0351 1,0520 1,0656 1,0756 1,0821 1,0861 1,0876 1,0868 1,0648 1,0365 1,0206 1,0174 1,0175 1,0130 1,0036 0,9932 0,9871 0,9871 0,9903 0,9934 0,9943 0,9939 0,9943 0,9964 1,0001 1,0032 1,0045 1,0041 1,0031 1,0027 1,0030 1,0035 1,0029 1,0014 0,9996 0,9983 0,9981 0,9984 0,9985 0,9983 0,9978 0,9977 0,9982 0,9993 1,0002 1,0007 1,0007 1,0007 1,0008 1,0012 1,0016 1,0015 1,0010 0,9999 0,9997 0,9993 0,9988 0,9993 1,0001 0,9961 0,0000 0,0858 0,1712 0,2553 0,3370 0,4165 0,4931 0,5663 0,6355 0,7002 0,7605 0,8159 0,8663 0,9114 0,9515 0,9862 1,0162 1,0412 1,0616 1,0777 1,0897 1,0980 1,1030 1,1050 1,1044 1,1018 1,0693 1,0325 1,0113 1,0056 1,0053 1,0019 0,9938 0,9857 0,9825 0,9858 0,9922 0,9978 1,0003 1,0006 1,0008 1,0024 1,0048 1,0064 1,0059 1,0037 1,0009 0,9993 0,9988 0,9990 0,9987 0,9978 0,9968 0,9967 0,9977 0,9992 1,0005 1,0009 1,0008 1,0008 1,0011 1,0017 1,0019 1,0016 1,0006 0,9997 0,9992 0,9992 0,9992 0,9994 0,9989 0,9990 1,0001 1,0007 1,0005 1.0007 0,9993 0,9995 0,0000 0,0890 0,1774 0,2643 0,3493 0,4315 0,5099 0,5860 0,6571 0,7237 0,7853 0,8417 0,8928 0,9382 0,9783 1,0130 1,0420 1,0662 1,0853 1,1000 1,1102 1,1167 1,1196 1,1194 1,1166 1,1117 1,0680 1,0229 0,9976 0,9917 0,9937 0,9934 0,9888 0,9843 0,9845 0,9906 0,9992 1,0055 1,0074 1,0059 1,0039 1,0033 1,0037 1,0036 1,0017 0,9988 0,9962 0,9953 0,9962 0,9979 0,9992 0,9996 0,9996 1,0002 1,0013 1,0023 1,0028 1,0022 1,0009 0,9997 0,9992 0,9992 0,9992 0,9990 0,9986 0,9985 0,9989 0,9996 1,0006 1,0011 1,0009 1,0006 1,0006 0,9999 0,9989 0,9994 1,0002 1,0000 0,0000 0,0921 0,1834 0,2735 0,3614 0,4465 0,5280 0,6056 0,6786 0,7467 0,8095 0,8667 0,9181 0,9638 1,0020 0,0375 1,0658 1,0886 1,1063 1,1191 1,1273 1,1315 1,1321 1,1294 1,1242 1,1116 1,0616 1,0090 0,9818 0,9784 0,9852 0,9902 0,9899 0,9888 0,9913 0,9984 1,0065 1,0112 1,0103 1,0059 1,0011 0,9986 0,9983 0,9984 0,9978 0,9964 0,9955 0,9966 0,9990 1,0018 1,0033 1,0030 1,0018 1,0009 1,0006 1,0004 1,0001 1,9992 0,9981 0,9976 0,9981 0,9993 1,0004 1,0011 1,0009 1,0006 1,0007 1,0008 1,0008 1,0005 0,9996 0,9987 0,9995 0,9793 1,0002 1,0007 0.9992 0,9999
528
Приложение X
0.60 0,55 0,60 0,65 0,70 0,75 0.80 0,85 0,90 0,95 1,00
0,0000 0,0955 0,1899 0,2830 0,3752 0,4611 0,5452 0,6248 0,6997 0,7691 0,8314 0,8870 0,9402 0,9863 1,0272 1,0606 1,0837 1,1086 1,1242 1,1350 1,1410 1,1428 1,1407 1,1354 1,1275 1,1173 1,0508 0,9923 0,9658 0,9678 0,9819 0,9930 0,9968 0,9971 0,9992 1,0048 1,0101 1,0116 1,0076 1,0005 0,9950 0,9931 0,9947 0,9974 0,9991 0,9995 0,9997 1,0007 1,0025 1,0038 1,0034 1,0015 0,9990 0,9974 0,9973 0,9983 0,9993 0,9998 1,0000 1,0000 1,0007 1,0016 1,0019 1,0013 1,0000 0,9989 0,9985 0,9987 0,9992 0,9998 0,9999 1,0002 1,0010 1,0005 0,9991 0,9993 1.0002 0,9996 0,0000 0,0985 0,1962 0,2921 0,3856 0,4760 0,5622 0,6438 0,7203 0,7909 0,8556 0,9138 0,9657 1,0107 1,0491 1,0809 1,1066 1,1259 1,1395 1,1475 1,1511 1,1503 1,1452 1,1373 1,1266 1,1139 1,0355 0,9745 0,9517 0,9619 0,9843 1,0014 1,0071 1,0059 1,0046 1,0061 1,0081 1,0067 1,0013 0,9945 0,9907 0,9920 0,9968 1,0017 1,0042 1,0039 1,0023 1,0010 1,0007 1,0007 0,9996 0,9981 0,9968 0,9971 0,9988 1,0010 1,0025 1,0025 1,0014 1,0001 0,9994 0,9993 0,9994 0,9993 0,9988 0,9988 0,9995 1,0005 1,0015 1,0016 1,0009 0,9993 0,9993 0,9996 0,9999 1,0007 0,9991 1,0002 0,0000 0,1021 0,2027 0,3015 0,3960 0,4905 0,5789 0,6624 0,7405 0,8123 0,8776 0,9360 0,9876 1,0318 1,0694 1,0996 1,1233 1,1410 1,1534 1,1574 1,1579 1,1543 1,1466 1,1362 1,1222 1,1067 1,0203 0,9569 0,9407 0,9612 0,9925 0,0135 1,0178 1,0117 1,0046 1,0015 1,0012 0,9999 0,9966 0,9928 0,9922 0,9961 1,0023 1,0067 1,0071 1,0036 0,9992 0,9965 0,9965 0,9979 0,9992 0,9998 0,9997 1,0003 1,0014 1,0023 1,0020 1,0005 0,9986 0,9973 0,9977 0,9991 1,0007 1,0014 1,0012 1,0006 1,0002 0,9999 0,9998 0,9998 0,9990 0,9992 1,0009 1,0009 0,9993 0,9993 1,0002 0.9993 0,0000 0,1049 0,2080 0,3030 0,4096 0,5050 0,5960 0,6808 0,7601 0,8327 0,8986 0,9570 1,0080 1,0516 1,0875 1,1161 1,1378 1,1526 1,1611 1,1639 1,1618 1,1551 1,1444 1,1308 1,1145 1,0966 1,0007 0,9408 0,9340 0,9665 1,0055 1,0269 1,0258 1,0118 0,9983 0,9925 0,9937 0,9964 0,9973 0,9969 0,9981 1,0014 1,0054 1,0066 1,0039 0,9989 0,9945 0,9939 0,9967 1,0009 1,0036 1,0036 1,0017 0,9999 0,9990 0,9990 0,9993 0,9989 0,9986 0,9991 1,0003 1,0017 1,0023 1,0014 0,9997 0,9981 0,9979 0,9988 1,0003 1,0011 1,0012 1,000 2 0,9998 0,9993 0,9993 1,0008 0,9988 1,0002 0,0000 0,1087 0,2165 0,3142 0,4214 0,5193 0,6117 0,7024 0,7798 0,8500 0,9187 0,9769 1,0276 1,0682 1,1040 1,1306 1,1499 1,1621 1,1678 1,1679 1,1627 1,1528 1,1393 1,1227 1,1041 1,0838 0,9838 0,9273 0,9324 0,9760 1,0202 1,0388 1,0286 1,0052 0,9869 0,9829 0,9900 0,9991 1,0043 1,0041 1,0025 1,0018 1,0024 1,0015 0,9991 0,9959 0,9947 0,9969 1,0013 1,0051 1,0053 1,0022 0,9980 0,9956 0,9964 0,9989 1,0015 1,0024 1,0016 1,0004 0,9996 0,9995 0,9996 0,9994 0,9990 0,9992 1,0001 1,0011 1,0017 1,0012 0,9998 0,9981 1,0004 1,0012 0,9996 0,9993 1,0001 0.9990 0,0000 0,1114 0,2218 0,3288 0,4334 0,5344 0,6280 0,7164 0,7980 0,8720 0,9383 0,9961 1,0454 1,0858 1,1188 1,1430 1,1600 1,1693 1,1720 1,1691 1,1606 1,1481 1,1314 1,1124 1,0915 1,0693 0,9659 0,9170 0,9957 0,9898 1,0356 1,0465 1,0248 0,9934 0,9746 0,9772 0,9930 1,0083 1,0136 1,0089 1,0006 0,9956 0,9953 0,9974 0,9993 0,9996 0,9999 , 1,0010 1 1,0027 1,0031 1,0015 0,9980 0,9957 0,9965 0,9995 1,0031 1,0044 1,0025 0,9991 0,9967 0,9966 0,9989 1,0013 1,0024 1,0018 1,0002 0,9991 0,9989 0,9993 0,9998 0,9999 1,0004 1,0009 0,9994 0,9986 1,0009 0,9985 1,0002 0,0000 0,1154 0,2280 0,3380 0,4451 0,5475 0,6441 0,7339 0,8165 0,8907 0,9566 1,0096 1,0620 1,1013 1,1318 1,1535 1,1679 1,1740 1,1736 1,1674 1,1563 1,1406 1,1214 1,1000 1,0770 1,0530 0,9491 0,9108 0,9438 1,0062 1,0490 1,0481 1,0149 0,9789 0,9650 0,9782 1,0026 1,0205 1,0198 1,0059 0,9914 0,9860 0,9915 1,0007 1,0066 1,0065 1,0022 0,9983 0,9969 0,9978 0,9990 0,9995 0,9997 1,0004 1,0014 1,0021 1,0010 0,9989 0,9970 0,9972 0,9996 1,0024 1,0035 1,0019 0,9991 0,9967 0,9973 0,9994 1,0018 1,0029 1,0014 0,9980 0,9994 1,0013 0,9998 0,9994 1,0000 0,9992 0,0000 0,1182 0,2413 0,3472 0,4567 0,5614 0,6592 0,7506 0,8342 0,9082 0,9742 1,0308 1,0775 1,1149 1,1430 1,1621 1,1734 1,1768 1,1732 1,1642 1,1496 1,1311 1,1094 1,0860 1,0615 1,0369 0,9341 0,9090 0,9552 1,0231 1,0586 1,0439, 1,0003' 0,9646' 0,9611' 0,9868 1,0179' 1,0297 1,0185 0,9948 0,9796 0,9816 0,9969 1,0110 1,0152 1,0075 0,9956 0,9893 0,9918 0,9997 1,0062 1,0065 1,0023 0,9973 0,9958 0,9971 1,0002 1,0022 1,0016 1,0004 0,9954 0,9994 0,9996 0,9993 0,9992 0,9993 1,0006 1,0015 1,0015 1,0004 0,9982 0,9990 1.0021 1,0001 0,9973 1,0010 0,9980 0,9997 0,0000 0,1233 0,2409 0,3561 0,4683 0,5752 0,6751 0,7678 0,8512 0,9260 0,9911 1,0467 1,0915 1,1273 1,1530 1,1689 1,1767 1,1771 1,1703 1,1581 1,1413 1,1202 1,0960 1,0705 1,0448 1,0193 0,9220 0,9111 0,9703 1,0379 1,0631 1,0341 0,9845 0,9552 0,9652 1,0007 1,0314 1,0323 1,0082 0,9806 0,9718 0,9868 1,0100 1,0224 1,0158 0,9977 0,9838 0,9843 0,9970 1,0112 1,0146 1,0062 0,9935 0,9878 0,9924 1,0021. 1,0090 1,0078 1,0011 0,9936 0,9925 0,9970 1,0034 1,0063 1,0035 0,9986 0,9954 0,9963 0,9997 1,0030 1,0029 0,9988 0,9983 1,0011 1,0002 0,9993 0 ,9998 0,9993 0,0000 0,1271 0,2465 0,3642 0,4816 0,5896 0,6876 0,7847 0,8688 0,9437 1,0076 1,0603 1,1055 1,1371 1,1604 1,1744 1,1787 1,1763 1,1659 1,1520 1,1322 1,1085 1,0820 1,0563 1,0290 1,0029 0,9136 0,9174 0,9865 1,0512 1,0616 1,0212 0,9697 0,9517 0,9758 1,0176 1,0396 1,0256 0,9927 0,9699 0,9750 1,0008 1,0239 1,0253 1,0056 0,9836 0,9776 0,9913 1,0113 1,0211 1,0116 0,9943 0,9928 0,9873 1,0030 1,0152 1,0144 1,0019 0,9892 0,9869 0,9960 1,0088 1,0134 1,0068 0,9954 0,9891 0,9931 1,0032 1,0105 1,0084 1,0004 0,9918 1,0108 1,0029 0,9918 1,0017 0,9943 0,9968 0,0000 0,1270 0,2524 0,3744 0,4915 0,6023 0,7054 0,7997 0,8844 0,9586 1,0220 1,0744 1,1157 1,1462 1,1664 1,1769 1,1786 1,1726 1,1599 1,1417 1,1193 1,0940 1,0669 1,0393 1,0122 0,9867 0,9070 0,9260 1,0022 1,0600 1,0557 1,0048 0,9581 0,9545 0,9907 1,0317 1,0385 11,0123 0,9782 0,9668 0,9856 1,0153 1,0288 1,0157 0,9898 0,9750 0,9835 1,0060 1,0216 1,0169 0,9974 0,9815 0,9831 0,9997 1,0155 1,0166 1,0028 0,9872 0,9839 0,9953 1,0103 1,0154 1,0064 0,9921 0,9856 0,9923 1,0957 1,0134 1,0087 0,9964 0,9878 1,0018 1,0099 0,9904 0,9985 1,0101 1,0053 0,9941
529
Приложение X!
Номограммы показателей itavscmSa
3. Определение о„аг a. tp по максимуму Вещественной, частотной.
а.)
Р^0,8\ ;Л >0,5 Z^0,8, Ха$0,4; 0,КЛ^0,5
f) б)
Приложение ХП
Формулы рля вычисления интегралов от дробно-рациональных четных функций
а=_Д_ Г c(5)c(~s) &
n ini J d(s)d(— s) '
~ja>
где
c (S) = Cn.jS"*1-!--|-COJ
d (s) = drtS" + - + d05
71 2d^ ’
530,
efeo4»e^ ,
Zd^d, ’
(cf ~ ScqCj) dr^t2 4- cld^d^
2dods(-dod!1 + d1da) “
J —d$d2 4~ 4~ — ^cigs) ^o'M* 4~ (gf — 2CqC2) dgdrfi} 4~g? (—<M? 4~ .
4 Zdgd.l-d^-d^ + d^ . .
J I, = -g^- tg?«o 4- (eg — 2c4c4) mi 4- (cl — 2ctc3 4- 2cacJ m2 4- (cj т- 2свс,) ms 4- c|jm4],
где •
m0 = -^—(d3m1 — ^mj); — d^n^
ml — — dods 4- М2; mi = -7- (Ms — Ms) 5
mB — — d^df 4" ^1^4»
Д» ==d0 (кт} — d3mi 4" M*»);
/« = 2Д^- кИо 4- & — 2csc5) mi 4- (c| — 2c2Cj 4- 5cT c3) m2 + (cl — 2CjCa 4- 2coC4) m3 4-
4-(c? — 2coCs) m* 4-ejm5],
где
mo = -J— (d}tnt — dtm2 4- d.m,);
fmi = — dgdids 4- 4" d[d4 — did2dg;
m2 = dgd3d5 4” d^da dyd^d^
m3 = dod? 4- did^d^ — didtdt;
mt = —s— (dsm} — d^mt 4- demOj
“o
1 '
m5 = -7— (d4mt — d}ms 4-
«в i
Л, = do (dtms — dsm* 4- dsms) j
J7 = [clm0 4- ($, — 2c4ce) mi 4- (c| — 2c3cs 4- 2csce) rtts 4- («1 — 2«A 4“ —
— 2c0ce) m3 4- (cl — 21^ 4- 2coc4) m< 4- (c{ — 2с<р^) ms 4- Фъ],
где
mo»
(dBm, — 4зт24-Мз);
mi = — (dtd4 — dads)* 4~ Ms — d1di) (dg/i, — d}dt 4- djds — M«)?
mj = (d^di — djdo) (— d2dt 4" d^d^ 4" (4o^s “ (dtdj dgdg);
n*s = — (dgd2 — dfdf)*4- (Ms ~ djds) (d}dj — Ms)>
m4 = (djmg — d4ma 4- d,/^);
/п» = — dtms 4- dtms);
«0
m. ±= -4— (4ат» — d4m4 4- M«s)5
at>
Aj*=<MM*s — Mts4_M*4 — d,m^.
531
Оралояааа» XIU
Процедуры вычислений собственных значений и собственных векторов
патриц:
а) на языке «Алгол»
procedure eigenfn) trans: {tmx, a) result s(t);
value n; integer n, tmx; array a, t;
begin
real eps, ep, ail, cd], aft, h, g, hj, aik,
aki, aim, ami, tep, tern, d, c, e, akm,
amk, ex, sx, cot2x, sig, cotx, cos2x,
sin2x, te, tee, yh, den, tanhy, chy,
shy, cl, c2, si, s2, tki, tmi, tik, tim;
integer i, j, k, m, it, nless 1; boolean mark,
left, right;
mark:= left := right := false;
if tmx -h 0 then
begin if tmx<Q then te/?:=true
else right := true;
for it— 1 step 1 until n do
begin t [t, i] := 1.0;
for / : = г —1 step 1 until n do
t ji, /]11/, ij:« 0.0
end
end;
ep: =io—8;
eps:**sqrt{ep); 1
nless 1 :=n— 1;
for it := I step 1 until 50 do
begin if mark then
begin tmxi*» 1 — it; go to done
end;
for i:— 1 step 1 until nless 1 do
begin aiit= a[l, f];
for /:=i4-l step 1 until n do
begin aij:— a[i, j]; ajitf= a[f, i];
if abs (aij -f- aft) > eps V
(abs (aif — aft) > eps Д
abs (ail — a (/, /|) > eps)
then go to cont
end
end;
tmx:—it — 1; go to done;
cont:
mark:— true;
for k:= 1 step 1 until nless 1 do
for /n:=fe4-l step 1 until n do
begin h:= g:= hf:= yh:— 0.0;
fori:= 1 step 1 until n do
begin aik:= a[i, k]; aim:= a[t, mJ;
te := aik x aik; tee:— aim x aim;
yh:— yh-}-te — tee;
if i 4- k /\i 4- m then
begin aki: — a[k, <];
ami : = a\m, i];
h :== h aki x ami — aik x aim;
838
tep:—te-\-ami x ami-,
tem := teeaki x aki-,
. g: — g ^j-iep 4- tern;...
hi-=hj— tep-^-tem
end
end;
h := h-^-h', d.:= a[k, k] — a[m, mJ;
akm: — a(k, m]-, amk: = a[m, k]’,
c: = akm + amk\ e: = akm — amk\
if abs (c)^ ep then
begin cx: = 1. 0; sx:=0. 0
end
else
begin cot 2x:=d/c-,
sig := if cot 2x<0 theft—1.0
else 1.0;
cot x: = cot 2x (sig x sqrt (1.0 +
cot 2x x cot 2x));
sx: — sig/sqrt (1.0 + cot x x cot x);
ex: — sx x cot x
end;
ifi//i<0.0 then
begin £em:=cx'; cx:—sx;
sx: = — tem
end;
cos 2x: = ex x ex — sx x sx;
sin 2x := 2.0 x sx x ex;
d: = d x cos 2x + c x sin 2x; '
h: — h x cos2x — hj x sin 2x; ,
den :=g +2.0 X (e x e-j-d x d);
tanhy: = (e x d — h/2.0)/den:
if abs (tanhy) sS ep then
begin ch#: —1.0; shy := 0.0
end
else
begin chy: — i.Ojsqrt(1.0 —
tanhy x tanhy)’, '
shy := chy x tanhy
end;
cl := chy x ex — shy x sx;
c2: = chy x ex + shy x sx;
si: = chy x sx + shy x ex;
s2: — — chy x sx + shy x ex;
i f abs (s 1) > ер V abs (s2) > ep then
begin mark:= false;
for i:= 1 step 1 until n do
begin aki := a\k, ij; amt -.— a[m, t);
a\k, i’lcl x aki _+sl x ami-,
a [m, П: =* s2 x aki + c2 x ami-,
if left then.
begin tki:=t[k, i];
tmi:=* t[m, i];
t[k, f]:=cl x tki +
si X tmi-,
t{m, i]:=s2 x tki +
. c2 x tmi
533
end
end;
fdr i:= 1 step 1 until n do
begin aik: =a (i, £];
aim:— a[i, m|;
a[i, k]:=c2 X aik —
s2 x aim;
a[i, m]: = — si X aik +
cl x aim;
if right then
begin tik:=* t\i, &];
tim:=t[i,m\;
t[i, fej := c2 x tik —
s2 x tim;
t\i, —si x tik +
cl x tim
end
end
end
end
end;
tmx: = 50; , '
done:
end;
б) на языке «Фортран»
SUBROUTINE EIGEN (N, MMX, A, T)
DIMENSION A (20, 20), T (20, 20)
LOGICAL MARK, LEFT, RIGHT ,
MARK = .FALSE.
LEFT = .FALSE.
RIGHT = .FALSE.
IF (MMX) 4, 27, 6
4 LEFT = .TRUE. ................
GO TO 5 *
6 RIGHT = .TRUE.
5 CONTINUE
DO 71 = 1, N
T (I, I) = 1.
L = I + 1
DO 8J = L, N
T (I, J) = 0.
8 T(J, 1) = 0.
7 CONTINUE
27 ЕР = 10E — 09
EPS = SQRT (EP)
NLESS1 = N — 1
DO 9 IT = 1,50
IF (MARK) MMX - 1 — IT
GO TO 25
DO 10 I = I, NLESS1
AH = A (I, I)
DO 10J = L, N
AIJ = A (I, J)
AJI = A (J, I) >
IF (ABS (AIJ 4- AJI). GT. EPS. OR. (ABS (AIJ — AJI). GT.
EPS. AND. ABS (AH — A (J» J). GT. EPS))
GO TO 15
534
10 CONTINUE
MMX = IT — 1
GO TO 25
15 MARK = .TRUE.
DO 26K = 1, NLESS1
Ml = К + I
DO 26 M = Ml, N
H = 0.
G = 0.
HJ = 0.
YH = 0.
DO 141 = 1, N
AIK = A (I, K)
AIM = A (I, M)
ТЕ = AIK * AIK
TEE = AIM * AIM
YH = YH 4- ТЕ — TEE
IF (I. EQ. K. OR. I. EQ. M) GO TO 14
AKI = А (К, I)
AMI = A (M, I)
H = H 4- AKI * AMI — AIK * AIM
ТЕР = ТЕ + AMI * AMI
ТЕМ = TEE 4- AKI * AKI
G = G 4- TEP 4- ТЕМ
HJ = HJ — ТЕР 4-ТЕМ
14 CONTINUE
н = н + н
D = А (К, К) — A (M, M)
AKM « А (К, M)
AMK = A (M, K)
C = AKM 4- AMK
E = AKM — AMK
IF (ABS (C). GT. EP) GO TO 17
CX = I. -
SX *= 0.
GO TO 32
17 СОТ 2X = D/C
IF (СОТ 2X) 19, 20, 20
19 SIG = —1.
GO TO 31
20 SIG = 1.
31 СОТ X = СОТ 2X 4- (SIG * SQfcT (1. 4- СОТ 2X * СОТ 2X))
SX - SIG/SQRT (1. 4- COTX * COTX)
CX « SX * COTX
32 IF (YH. GE. 0) GO TO 21
ТЕМ = CX
CX - SX
SX = —ТЕМ
21 COS 2X - CX * CX — SX * SX
SIN 2X « 2. * SX * CX ,
D = D* COS2X 4- C * SIN 2X
H = H * COS 2X — HJ * SIN 2X
DEN — G4-2. *(E*E4-D*D)
TANHY == (E * D — H/2.)/DEN
IF (ABS (TANHY). GT. EP) GO TO 22
CHY = 1. ।
SHY = 0.
535
GO TO 33
22 CHY - 1. /SQRT (1. — TANHY * TANHY)
SHY = CHY * TANHY
33 Cl = CHY * CX — SHY * SX
C2 = CHY * CX + SHY * SX
SI = CHY * SX + SHY * CX
S2 = —CHY * SX + SHY * CX
IF (ABS (SI). LE. EP. AND. ABS (S2). LE. EP)
GO TO 26
MARK = .FALSE.
DO 24 I == 1, N
AKI = А (К, I)
AMI = A (M, I)
А (К, I) = Cl * AKI + SI * AMI
A (M, I) = S2 * AKI + C2 * AMI
IF (.NOT. LEFT) GO TO 24
TKI = T (K, I)
TMI = T (M, I)
T (K. I) = Cl * TKI + SI * TMI
T (M, I) = S2 * TKI + C2 * TMI
24 CONTINUE
DO 26 I = 1, N
AIK = A (I. K)
AIM = A (I, M)
A (I, К) = C2 * AIK — S2 * AIM
A (I, M) = —SI * AIK + Cl * AIM
IF (.NOT. RIGHT) GO TO 26
TIK = T (I, K)
TIM = T (I, M)
T (I, К) = C2 * TIK — S2 * TIM
T (I, M) = —SI * TIK + Cl * TIM
26 CONTINUE
9 MMX = 50
25 CONTINUE
RETURN
END
Приложение XIV
Формулы для определения коэффициентов статистической линеаризации
Наименование - нелинейной характеристики Переключение сигнала прн наличии аоны нечувствительности
Фо
М” _4, (1 - А _ ® (2±2е)_ф V Dx 1 В* \ \ «1 /)
Гм; Le +е J
536
Продолжение прилож. XIV
Наименование нелинейной характеристики Ограничение сигнала по постоянному уровню
Фо В |<1 + /Их) Ф ) - (1 - «1) Ф (-Ц^) + Г 1 / )* 1 ( 1—т, 4—^.[е И )_е И
лр « {._A+w+^_0L(l±i)+o(^i)]_ У U% I о* L \ / \ / Г 1 ( Нт> V 1 / 1—m, Р 1)1/2 1-(!—«!)' 2' °* ' +(1+«1)е 2' 01 ' ]|
4[Ф(^)+Ф(.1^)]
Наименование нелинейной характеристики Ограничение сигнала по постоянному уровню при наличии воны нечувствительности
Фо 11,{о+'"‘)ф(1Х’") « „Г) — (mx + v)®^ *о+ )+И1 v)®( ) + Г 1 П+и»1У 1 /1-Л11Р 1 Zv+miV + -2Lr I е~ 2 ' ®‘ / 2 ' ' — е 2 V °* ' 4- fan 1 /V—m« V ll + е“ 2 ' °* > Jj
x о x © о о to 5 + ° + + 5 С: ° 'S^o 1 •, 2 + 11 1 I “I- 1 э 1 Ч-с”( + “ + "Тт 1 i 7 -3 । 4- ’ -я» Т ' э о © >- i -3 1 । ‘"“7 । “ • е 9 „9 з w ч- I _ I •—-X <Р . г—-ч А Э 1 1 S О - 1 М1 С 4- _ 1 । ' Г 1 —< ?а i О < “ а —< Js 4 + - К> * Л + £1 - 1 X X
*Р _Ф(Л±Л) + Ф(^=Х)] Сх v= С ь2
637
Продолжение прилож. XIV
Наименование
нелинейной
характеристики
Двух позиционная несмещенная релейная характеристика
В 1 ( / /п. 1 +2Ф ~-^= < \VDxxh D , (С — т \ ' | . XX V х) е (С-тх)« К>хх +
У 2nDxx 1 £) л VD D.. XX г XX хх^
\ . °.-Лс+’п.) (С+тх)«^
+ 1 / f tn \ । 1 —2Ф е
1/2л£> . ' XX \ \ Г XX J 1 D nVD D- / XX Г XX XX.
= kx
х
2В
_ е хх
l/2nD..
’ XX
Наименование
нелинейной
характеристики
Трехпозициониая релейная характеристика
Фо
(С—mr)« (тС—тху
। Wxx ~ wxx
+ е ** — е **
гг Ж»
Iip BaevABHi, в этом приложении приняты следующие обозначения; —, ।«•
ГК
538
Приложение XV
Вычислительные алгоритмы интегрирования
I Номер по пор. Наименова- ние метода интегриро- вания Рекуррентное соотношение, реализуемое иа ЦВМ в нереальном масштабе времени Передаточная функция W (г}
в нереальном времени в реальном времени
1 Эйлера *i+i = */ + Tfi*i Тг г —1 Г г — 1
2 Эйлера улучшенный т xi+l ~ xi ~2~ (Л+1 + /<) Г г+ 1 2 г— 1 Т г-|-1 2 г (г — 1)
3 Трапеций */+1=^ + -у (ЗЛ+1 — fl) Г Зг —1 2 г —1 Т Зг—1 2 г (г — 1)
4 Адамса- Башфорта *(♦1 — xi-i + 2Т/7+1 2Тга га — 1 2Т га—1
5 Симпсона 1/3 Т */+» = Х1 + -у X х (f<+s + 4/«+i + fi) Т га -К 4г + Г 3 га—-1 Т(га4-4г4- 1) 3 (га — 1) га
6 Рунге-Кутта 3-го порядка л* л? II + .Л || Ч w| to II 1 I * г 1 3 + t । ( Ч 1 <3>( —* + . J? о — 1 «г ч—" “ + Т г+4/г+1 6 г— 1 Т »4-4Кг4- 1 6 г (г — 1)
7 Рунге-Кутта 4-го порядка *i+l =*»+_g'^o + + т*1+"ГЛа+4'k* Ь = Tf (ti) kt - Tf + у) k3 - Tf (tt + T) Т г + 4 Кг + 1 6 г-1 Т г 4- 4 Уг 4-1 6 ’ г(г-1)
539
Приложение XVI
Система команд одноадресной управляющей -ЦВМ.. . .
№ п/п Группа команд Символ команды Название и функция команды Примечания
1 + <*> Сложение действи- тельных чисел
2 -<Х> Вычитание действи- тельных чисел Первый операнд содержится на регистре результатов (РР) АУ, второй — извлекает-
3 х <х> Умножение действи- тельных чисел ся из ячейки <х) ЗУ, резуль- тат вновь поступает на РР АУ. Сигнал со не вырабатывается
4 Арифмети- ческие ^<4 Деление действитель- ных чисел
5 © <*> Сложение целых чи- сел Первый операнд содержит- ся на РР АУ, второй — счи- тывается из ячейки (х) ЗУ. Результат поступает на РР АУ. Вырабатывается сигнал ш = 1, если результат опера- ции меньше и со = 0, если результат больше или равен 0
6 7 е <*> ® <х> Вычитание целых чи- сел
Умнож. целых чисел Сигнал со не вырабатывается
8 <*>-* Пересылка кода из ЗУ в АУ Код считывается из ячейки (х) ЗУ и поступает на РР АУ Сигнал со ре вырабатывается
9 Пересылки •*<*> Пересылка кода из АУ в ЗУ Код, содержащийся наРР АУ, записывается в ячейку (х) ЗУ. Сигнал со ие вырабатывается
10 <х) -+ РА Пересылка кода из ЗУ в УУ Код с РР АУ передается на регистр адреса (РА) УУ. Сиг- нал со не вырабатывается
11 Ввода— Вв <х) Ввод кода с АЦП в ЗУ Код, содержащийся на вы- ходном регистре АЦП, запи- сывается в ячейку (х) ЗУ. Сигнал со не вырабатывается
12 вывода Выв (х) Вывод кода из ЗУ в ЦАП Код из ячейки (х) ЗУ по- ступает иа выходной регистр ЦАП. Сигнал со не выраба- тывается
13 УП Условный переход по со = 1 Управление передается команде с номером по сигналу с*=» 1. В противном случае сохраняется естественный по- рядок следования команд
14 Управле- ния БПА Безусловный нереход Управление передается команде с номером N безус- ловно
15 Стоп Оставив Выполнение программы пре- рывается. На сметчик команд зано- сятся «!>
540
Ы1.
1.12.
Ответы к задачам
Wt <s) (S) w, <s) IF, <s) W. (s) W> (s)
^ос Х>|л- W «з| к •А» [ft; 1 Ra ftp Ms
TbS + 1 TKs+l Tas+l
1.14.
Структурная схема и Wt (s) — Wt (s)
те же, что и в задаче 1.11, за исключением
fcs+i '
Wt (s) — Wt (s) те же, что и в задаче
1.11, за исключением
W’i(s)
(Txs+ 1) (Tts + О*
W, (s) W, (s) w, (s) W, <s>
feK ha 1
R* Rk Ra £r4"l?B
Tbs + 1 rKs+l TaS -f- 1 Trs+ 1
V't (s)> (s) те же что и в задаче 1.11,
Hc + Ro +/?ri
т‘ Ld~Lc'R^~R7+Lt
* Д в D •
^+-п"Гп-+^
*ХС Т АО
541
1.15
1.16.
w, (s) (S) W, (s>
Tbs+I Rk TBs4-l kf
Wt (s) W, (») (s) », (S)
_L Ra TaS-t- 1 k' Ms
S (JnS-Mo)
6) r(s) =
fexfeafeM
RbRkRci
s (Tas + 1) (TKs 4- 1) (Tas + 1) (Jns + kJ *
(S) W'. (S) W, (s) Wt (8)
kt Rb TBs +1 1 Ra r>+ 1 k Ms
Ra e Rr + Rb>
T*_ ^+L’b .
° Rr + RB ’
k=Z_______
Rb—R*
1.18.
W'l (SJ IF, IS)
kn. Д 1
7’п.д«2+26в.д7’11.ж5 4-1 —— 1 s
1.19.
IF, (s) Г, (s) lt>. <S) IF. (s) IF, <s) F. <s)
кп. д 1 s kj h> kf kf {P
7’2n./ + 2&nVn.?+1 J^ + k„s+l
*a
1.20. Wa (s) = -------; ka = 4-; T,
. X(s) 4-2£в7>4-1 к
fe, }/_L
2 V mk
1.21. r; (s) =
S42
1.22. у» (s) - —__________________________•
w+[r-(^T«7)+7'-(l+t+^)]s+' '
т _ RyRjC\
* ~ Rt + R* •
1\-R£*
7\ 71a — RgCg-
_1________------------1 sa
#i (#» +/?4 +/?e) J
1.25. (») = ^ =
*-l (3/
l\Tt [ 1
_x_________ft A____-
(R\ 4* fla) (^a 4* Rj
। Rt (Rs 4~ .#o) 1 sa
Ri (Rs 4* #4>4" Rs) J
/?«(/?, 4-*») 11 s . _L
(^4-Яз) (tfs + «4 4-«5)JJ io
1 4-——
Ф Я14-Яа
л== *гЙгС1; г» = (/?»+/г‘+/г»>с«>
(Tts 4- 1) (T8S 4-1)
'.ат.по,-^--
£1 (s)
R4R5 \ / Я1-4~ Rs
Ra~i~ Rs ) \ RiRa
R.Rs \ ( «14-^4
/?«4-Я» ) \RARt + Ra
(Rt 4-Яг) [,□_____
8
RiRs
^s
a
rVx L T(W(Rt+Rs).
(Ki4-Rs4-R3) Rs 11 . . JL
Rs (Rs 4" Rs) J / io
543
!
£•" ———5----5 T3 "° (R4 +
‘+^7
т'—1$ьс'> T‘-RA'
1.28.: fk (s) = ; ®O - -5Z---A-? “* - ®° <R&* + RiC* - R^
S2 + A2»os + ®б К&Ч AjCj
%s = «80 (/?iCs + RtCa + R»Ci + Ra^t)<
1.29.
z 1 Т^ТаЗ* -J- (Tj + Ta) s-|-l , _ PC, T ___ffC<, T_____R C
(S)~ 7’iTas24-(7’i + T,4-7’,)S+l ’ Ti-R'C*' тз~^Сг
t\ T^TtS1 4“ (Ti 4“ Tg) s -f- 1 # „ PC, T ___P C-* Т»_____RCi
(S) ~ TiTaS* 4- (Ti + Л 4- Ts) s 4^1 ’ Ti-R™
Wk
1.30.
1.31.
(S) “ (Я. + «4) ITiTaS» + (Л + Ta + Tt) S + 1]; Ti = T* RiCi‘ Ti
= RiCr
'33.^W= ^+^-+-r;
Едр ~ 2 kli
1.34. Fw (s) =
йдг (Tys4~* 1)
-5-- k Г
kjii!' w ktii.li ’ lj.lt
Ty =
yf 1 . _ 1 + *г4)
x V йд’ 6₽- 2
1.35. Ft « = -y J, . .
|Л (s) ' OS T 1
1жгтм-4^-
1.38. w (s> = % _____________
aW Y (s) s (T2ss + 2£Ts+ 1)’
йд
k
Pie^i
k —-------
+ Pao^a
WPio 1 nPao
x0 L — xe
f _ _______mxp — Xp) . . _ ftp VПР10 (L — Xg) + n^Xy
F [npi0 (£ — x0) + np2Oxo] ’ 6 2 VFmxg (L — xa)
1.39. Fv (s) = ____________-______
yW £y(s) s (T2s2 + 2g7’s+1)
1.40.
w, (s) wt (s) W, (s)
£д s^ + ^s+l) Йос fe(T1S4-l) (Tas4-1)
544
1.41. W (s) = ---T1S; Tt = R&.
1.42. IF (S)= = _ *1 (T,s+1); 7, = ^,.
1.43. = =
1.44. ^(s)--^g- = rfiS+1ff^+1); T^RlCl.,T2 = RtC2; T3 = R^
1.45. W'(S)= ——^A__; T = VR2R2plC2, 5 = —
1.46. V(s) = blg.==—L_; T=(R1-{- Rt) || RsCi; k = y. prt „ , p , VY g -
C (s) 1 s “1“ 1 2 (A; 4- Kl) Al 4“ Л2 + A3
при условии, что R± < Rt + R»
1.47. V(s)=-^J
k
1 + fey
тг-гхг «+1
14-fcy
Rt
ГДе k HRi+Ri)Ri + Rt + RARt Rt + Rt'
y = ^; T = (R1 + Rs)|R,|RaXCI.
1.48. Г(5)=-4тт
t (s)
P?rW
_____(T’gs-b П ^4S k ______________________
(T]S+l)(T3s+1) (T4s+1)’ г6+(гэ + Я4)(1 + Руа>)’
„ гкР
Л“гк₽+«з11«.
'K
k₽----1 p > 71} = C2 (/?з +/?н)5 т2 = (Ri + Re) Cs; T3 —
_r г RtRt 0 + fr*) + (^4 + RJ Г'б + s (»+ P?r)] '
4 гб+(гэ + Т?4)(1+₽УЛ) ']
Tt = RCf, R^R^R*
J ДО wz ,.i W'j (s’) . m , , 22 (s) __ (C2^?ss+1) Rt . 7
L49- Wa (s)==z^T’ Zl(s)~c\(«;+«,)s+i’Zi(s) =
= 1 + CiRis ; Vt (s) = < s) V4 (s) V» (s);
SGt
Pl^KEl^Kl II (гб2 ~Ь ЛЭ2 (' *^ Ра'Уква)) Z8 (s)
Щ (S) tZ2 («) II Z1 + r6! + Si С + ₽1W W <S> + Z!
IF — Р^КБ2^к2 Д (гбЗ S Рз^КЕз)) . w , . Рз^КБЗ^кЗ Ц Z2
r62 "b r6i 0 + Рг^ког) гбз + гэз О -Ь Рз^коз)
l.SO.VC^Vi^^^Vif^^-^^ ^ = TTM; T’ =
T{
1+ M
•P__________7*з
2 1 + M
где T{, T'v k2 — соответствующие параметры
усилителя без обратной связи.
1.54. Для малых f, яр и JX=JS имеему — feQ0’j’ = ^совйоЬи^ — fe,j. sin йп/-а2»; +
+ = 6? sin ЯоЬп^ + ^совйоЬизд, где k=^- = —^.
Jx Jg
w. <S) Wj (s) V, (s> w, (s)
^ф 1 s ~kCk
18 к>. И. Толчеев
545
1.55. 7 = klQ, где fei = - ; а = F (s) = .
U„ I-----
-H *is.'
__л Sis) £б_ (Tcs4-1) А п.г„ — п„г.
1.59. lVeB («) = = s (r»s^4-2gTs4-l)’ где \ = - - - ; Т
no —п»гл
, _ о a о
c лАг^ — n„zK
co? cz о cc a о
4- п„гл
о a 1 aft
• ? =s 2 a •
co,
V
z.
PoX» sb2 • n_______
2 "a — j *
PqVq c,
X —2~ SbA-, n6
m*B
J*}
Polls. „
2 S’ n<
m? PoVo %2.
~j— — ^Ai
«0
a
1 X НОУ о e ______
m 2 5 6 ~
C*B v
^y PqVq c
~ m 2 *•
1.60. (s) = 4^-
B 6B(s)
a \ 1 1 =>лд» r л •
s (T2s2 4- 2lTs 4- 1) ’ Где «0 - Ba4-«<0 2<
6 a‘ aS
, . ft a co,
T‘=V ^Фт7е;
ответа задачи 1.59.
zfi
-----j------, остальные
°6га + «£*в
гв
обозначения из
1 fil П7“ 06 fea(7’aS4"D „„ ь Ятг2в П6 . —
'•6'- "V-y^-w+^+p Где‘““»т+^-т'
остальные обозначения из ответа задачи 1.59.
1.62. (s) =
бв 6B(S) 7^4-2§П4-1
г6
%г4-«в
V flftZg —• WgZft
57,3g Па + яШгга
Tn =
------2: остальные обозначения из
nftZa4-«aZft
ответа задачи 1.59.
1.63. Й7» (S) = JC<£L
6» 6b(s)
(S8 + BjS -f- Bp)
Y^g cos 90m“
0
Bi — sin 00 - z Sp , P \ meB г°в
тУа\^—2ИГ+Ш^)тгВ
PoVg , P \/PH cxSV§ я\ y
2m mVt / \ m____2m /
pa ‘SPqVq I P „
x 2m + m о
PHao .
tn ’
Vo
Bs= —
CgSVopH
2m
А, = —
ж m
-$- sin 0O 4-
"o
x[(m2o)M + ao(m'
$4.];
a± =
g
m“a
т6в '
2m "T" m a° trft
^r)^cos0»
p
— a0
m
Povo , P
/pa SpoVp ।
\Ly 2m **
Рн
Vo
pa SpoVjj
G* 2m
CxSVl B
2m D
(c?M4-Pa0)^B
1 / pa SpoVp , P
\x 2m
m
/(-a. SPoVg . _Р_ а
V* 2m + m “о
546
, , ,.лЛ Л sin 00 f Spo („ , нл Мо \ , Р*М0 ~
+ «оЮ +Ы М)-й^-1“2ЛГк^ + С’°
—(^^г+тпт) [(”•>“+“. (“?)м+(‘в\1}»1+
+ C,SVt pH + Pl + A (р._ ,/) ;
Т 2т Н т т\ 2 ’
+ тгао) [(^of + “о «)M + H)4j} ~ V(-^f^PH+-^)cos0o~
Ур (пв CxSVo ,Л f *Spo (р < рМ Мо \_1 /Р<х -Spo^o
~т\ 2 РД2Л1\?“Г? 2 ) таа\в Ъп
Z
^г)К”->“ +
+«оКГ + (mt)4.]}+
%g (рв
mV0 V
C,SV* '
—2—Рн
sin е0
1.65.
Vi (s) Vt (s> V, <s> IF. (s)
Ро^о^ 2m и 2^m\ 2JZ г 1 s 2J2 г
V, (s) V, (s) Vi (s)
(cx + c^poyos 2m ' PoKoS^ 2A m* Ро^д 2J2 z
1.66.
V, (s) V, (s) v, (s)
‘SpoV'o 2m 2. s SpoVjj CB P P sin q0 tg 00 , SpoVoCOS'&o r 2m 2 mVa 1 mV0 1 2m !>•
Vt (s) V, (s) V, (s)
у 9 Ыу № 2Jj, « 2J„ 3 2JV
,18«
547
1.67.
Wt<s) Wt (g) IT. (s)
ZWS mB 2/, * 1 1 s
/Spo^o to S-’ 2JTm-
wt (s) wt (s) 'f, <S)
'Wo 6H 2Л /Wo mP 2Jk x ZSpflVo rn
4JX
(s) <s> W, (S)
P sto a0 cos Op , mK0cosec 1 , SpoKpCosfro 1 m cos 0O ?o 0 2m 2 SPoVo rp _ P . 2m z mV0 1 P sin a0 tg e0 SpoVotg9o 1 mV0 1 m ffo
^10 (s) W'p <s>
ZWo eH^ ZWo^H 24 V-1 24 S J ZSpoVj m s " 24 m9
(s> W„ (s)
/Wo2 mP 24 У ZSpov£m£ /Sp0Vgm“g 24 “ 24
1.73.
(s) =
H
(7'^s2 -f- 2^T!« + 1)
s(T*s* + 21-Ts+ 1)
где =
zVf) + ZP%
яв "Ь Пгг$ грпц
л=
1/____________
V %яв + гвпвв’
t = — 1 f 28h
2' V
ЯВ + «'Zg — Zgrtg >
2 V r^+n^-z^'
/aSpo^o “>•
*'=^4
<Wo P
V-----2ТГ"1?’
5
1
ZSP0V0m>, - _ Wo cp.
' ’ ZS----2^~C«
_ <Spo4 _6H
Z«h ~ 2m C* '
24
548
1.77.
W»n (s) —
*1
a + k2______________________
•l)e“W]e[T’/ + 2gTPns+l] ’
kt— коэффициент связи между расходом помпы и углом отклонения рычага 0j; k2—
постоянная, зависящая от конструктивных параметров серводвигателя; k? — коэффици-
26 ' с v4R ,
ент утечки масла; йтр = , ; 6 = ——; он, оав — скорость масла в трубопроводе;
6 -г * Р'н
L L Г 1
’1тр--о7(6~+'1) 5 Т!тр~171м:
1 ; L—длина трубопровода;
T’tn =
VJ
V
-f-
г 6-1
Jk^ Vkji
1 k2 Ek9
2 / и/ /
у ЖГ'1 W
1.78.
IV,
W4
IV i (s)
(s)
/г^тре Ttp1S
s[l + (ferp— l)e-MI
W, (s)
W't (S>
IV j (s)
{(Л.Р - 1) e-^PJs + s [ 1 + (йтр1 - 1) e ’’И5.]}
k<
s(Tts+ 1)
fe,'
W’2(s)
IV3 (S)
Мтре P1__________
{(*TP1 - 1) e_TwS +
[l + (6Tp- l)e“’*₽»s]}
W]
{(^- l)e“Vis +
£Tpe~W
wt (s) = Z53—---5 k{
T^ + rZ+l
сти пружины.
- . т2- т
~ kn ‘ 4~ ka
• kv
Т4 = fen — коэффициент жестко-
549
е'
,,8,. = е^+е-еКГ
«3 (S) ee V* (1 |<s + aj — [1 J<s —
X — коэффициент теплопроводности; at — коэффициент теплообмена.
______________i
t, „ bo
e * = e S
1.82. Wt (s) = (f’-s)..
ft(0, s)
= Ts4-i'~; T = b-
= ke^
#3(s)
1.83. W(s) = l-^
H(s)
1 — 2р0 th xs
1 + р» th ts
т =
£
v
1
UZ, (S) Wt <s) W, (S)
^rn s(T^ + ^rnTrnS+l) e-is kf TTs + 1
1.85. (s) = Wi (s) kTB; kTn — передаточный коэффициент термопары.
r2, rj — внутренний и внешний радиусы цилиндрического кожуха; f/Cj, К», /», |/j—функ-
ции Бесселя мнимого аргумента нулевого и яервого порядков; л — коэффициент темпера-
туропроводности; a — коэффициент теплообмена; X — коэффициент теилонроводности.
1.86. W (s) = Wot (s) W3 (s), где (s) см. 1.85,
(S) — ________ZOOZjJs)_________
’ Z(s)Zi/(s)ch9/+Z2(s)sh9Z ’
cm. 1.76.
1.87. V(S)=-^-----------— * ,= j/-(sCo+G»)(sLo4-tf.)s Z=
Sh9/+£ch9i Г (sC0+G0)
^0
i RR П7 /л - Ms Z°(s} e-?z|M-p;(sM в л _ Z, (s) - ZH (s)
Ts-f-l Zo (s) + ZK (s) i—p0 (s) pi (s) e—° 2o(s)+ZH(sj
7 , . _ sR^L j,______ L ________ Z$ (s) Zi{s)
Zb(S) ~ sL + R„ ; ~ RB 1 Pi Z0(s) + Zi(s) •
1.89. Структурная схема см. 1.81.
^1(«)= ki =цЬ |/Г^-(Ро— ₽i») ; ®’i(s) = H6
[ feTPe~^Pis - k3s (1 — е~Ттр4] [ 1 + (feTP - 1) e~TTP*S] ,
4e~ ('l’tP^“'IтP1, * * 4 S {e^’P^irpfco — k3s [1 + (feTp — 1) e~T’P»’]} — ’
-k*~^plS {Мч> 0 -e”W) _ [1 + (felp - 1) e ~ W]J
550
где и см. 1.815 = Ц-L 5 k*Tp = ЦЦ 5 k0 = hWo X
x 1/ ----?£----- . kj = VjP; ₽ — коэффициент объемного расширения. W'a(s) имеем тот
г 4? (р„ — р10)
же вид, что и Г2 (s), но k’Q = цЬфього - 5
{sfes [k 4-р(1 -е-Х’Р4 + 1 +(ferp- l)e“W] х
b’ _ v » гр м = ________________X [1 +(feTP- l)e~W]}_______________
3 3 ^ре-^’-^’te-^fe^feo-fe3s (1 + ^-1) е V]}-’
~ {Mip G ~ - [ 1 -НЧ ~ e“ Wl}
Ц7' (s) имеем тот же вид, что и 1F3 (s), но с коэффициентами для U72 (s);
^4(8)“45 *4 = “Ц.
Wt (s) W, (s) W, <s) Wt (s)
e-sr, &к»л TltonS 4* ' k« e-st,
где Tj и т2 — время «чистого» запаздывания соответственно в паропроводе и колонне;
Лкол — передаточный коэффициент колонны; Ткол — постоянная времени; k$ — температур-
ный коэффициент.
V, <s) W'.ts)
I kT См. задачу 1.7 2B
(T1S+1)(T2S+1)4- 4*4 2 (T’i® +1) — 1
W, (s) Wt (s) W, <s) w, (s)
1 4- A* (T1S 4-1) - —(T2s4-l)(Tfs4-1) (TjS 4- 1) (T2s 4- 1) 4* 4-42(T1S4-i)- 1 (Mg — Д1) 7\s 4- 43i 1(T1S4-1) (T2s4- 1)4- 4* 42 (Trs 4- 1) — 1] — Tas e 3 1 Tn S 4-1
uz, (s) W, (s) W„ (S)
Cm. We (s) Cm. IF5 (s) (B2 — Bs) T3s 4- B2 4- B6 (B2 — B3) (B, 4- 0,5) T,s 4- Bj 4- B5 (Bj 4- 0,5)
Wl„ (S) W41 (S)
B4 (Bf - 0,5) TgS 4- Bg (Bi - 0,5) 4- Bl
(Sj 4* 0>5) TgS 4- Bj 4- B5 itBj 4- 0,5) (Bj 4- 0,5) T2s 4- B] 4- B6 |(ВХ -j- 0,5)
551
я Л
В =----я— 5
OoFT 1
< __ CtVtYt m Т1
1 a./, ’ 's“ aoF, :
я = apFT (^TO frcpo)
1 = a^Ff ’
я _ 9 Cl°io
2 ~ 04/ T
i — 1 • T — T1,,n ?
4-—, Tn- Gw ;
о _ QGfo .
Bi—kJ’
C1 (^20 ~ »io)
fl» =----------kJ--------
(^cpO—^io) D _ Go-Go о <n CtVrt„
kJ ’ Di~ kJ ' D'~ kJ ; i3~ kJ
где feT—температурный коэффициент реактивности; a0—коэффициент теплопередачи между
тепловыделяющими элементами и теплоносителями; FT — эффективная площадь теплопере-
дачи топлива; А — коэффициент связи между п — нейтронным потоком и Q — количеством
тепла, выделяющегося в реакторе; Ct—удельная теплоемкость теплоносителя первого кон-
тура; О1в — расход теплоносителя первого контура; Ст, ут, Ут — удельная теплоемкость,
плотность и объем горючего; Vlt — объем и плотность теплоносителя 1-го контура; I —
длина трубопровода; v — скорость перемещения теплоносителя; Уп— объем перемешива-
ния; k3 — эффективный коэффициент теплоотдачи в парогенераторе; F — эффективная пло-
щадь теплопередачи в парогенераторе; С2, у2, V2—теплоемкость, плотность и объем паро-
проводящей смеси в испарителе парогенератора; i — теплосодержание пара; О' — темпера-
тура в парогенераторе.
(s) w, (s)
в* 1
^SS + fi5 + 1 2(Tss + B6 + l) f
w, (s) wt (s) w, (s) w, (s)
1 2 (T3s B6 1> B3 T*s + b3+ 1 —v e 8 1 7’nS + 1
U7T (S) w, (S) W, (S) Wi. (s)
*2 T + 1
где В4, Т3, В3, т3, Та имеют те же значения, что и в задаче 1,91,а;
. дрт I ь _ дМ I ь _ дМ I
1= дОг !%.₽«, : а~ dPv |pw.«w *
L100. ft 1—। —rj w, и»— (») (s)
£<> (7*cs 4~ 1) s(7’2s24-2g7’s+ 1) fey s2 + + o>i
552
где fey =
L
f F (x, s) , . .
J “STisT <₽1(*’<01)dx
о
L
J ц (x) <pi (x, atj) dx
о
[dq> (x, <0j) 1
dx J ‘
25л2 -j f EJ (x)
V W!
EJ (x) — изгибная жесткость корпуса летательного аппарата; ц (х) — масса единицы длины
корпуса летательного аппарата; <р, (х, ©J — собственная функция, определяющая первую
гармонику оси деформируемого корпуса; ©j — частота первой гармоники свободных коле-
баний корпуса; F (х, s) — внешняя нагрузка, приложенная к корпусу и отнесенная к еди-
нице его длины. Остальные обозначения те же, что и в задаче 1.59.
1.101.
Wt (s) W„ (s)
k$(Ts 4-1) ky
s (T2s2 4- 2g7s 4-1) s2 4“ ^5 Ч-
Формулы для fey и ©j даны в 1.95.
1.106.
a) »„+i =9„
6) Рп+1 = Уп + £ |7„ + «7 ± + f „+1 j; (S) =
I ** ”1” о I
T e-2s7'*4-4e-sJ” 4-1
6 1 -e-sT
где T' = 7/2. В реальном масштабе времени lFnp (s)
T (e~2sr' 4-4e-sr* 4- 1)e~sT
= 6 l-e-sr
553
1.107.,
(l+4e“sT +
, 4- e~2sT) e“sT
») 9»+l = ₽n-l + TI3 [f„ 4- 4f^j + Wnp ® = 7/3 ।
1.108.
a) »n+i = (1 - TjTt) gn + T/TiXai
v e~sT
Гдр(^7/71Т_(12г/г-е^-.
6) »n*i = (1 - 37/271) gn + 7/271^! 4- 37/271Xn - T/2TiXn_u
(s) = 7/27i
,-^(3 е-»Г)
T 2s7 1
27i
2Tje
7*2 J’S 7*4
77+-27| 67f+ 2474
X prt 1 c'p хя+1 1 o'r x 14-
bl 1 d7I n + “
7
67< Xn‘
В реальном масштабе времени gn+l = I 1
27j
73 , 74 \ ,
а 4" _ . _,д I 9/1 *"
67J 247j /
7 . 27 , 7
67i Xn+ 37i 67j
l^np (s) 6
7
где 7' = -^-.
e-^'+4e-sT- + i
____7 7a 73 74 \ _sT
Ti + 27i 6T1 + 2471 ) *
В реальном масштабе времени
«7пр(а) = 4
(е^&т 4- 4e'sT'4-1)e-sT
у1 'рп т&
+ 2Т2~ 67| + 247f
554
М09.
В реальном масштабе времени
+ ЬТ1Хп~1'
Т (е~2^ + 4е-зТ’ + 1)е-*Т
6 __________ZL\e^‘
Л+272 67* j
1.110.
В реальном масштабе времени
1.111.
а) Уп+i — Уп~\~ Туп;
У п+1 = Уп~}~ ~~2 Iх» — Уп];
Т1
555
» Г2
Гпр (’) = ~т2 ----
1 — 2
e—2гТ
7? /
т,
б) Ря+i — а19п 4* ТЪ^уп'
• • т
9n+i = ai9n + b^n + —j Г Хп + 4х
&2
где а! = 1
2 , Т . (4g2—1) Г2
3 1 Л + 67? ’
, Г2 137 , 3g7s , 8g72
02 27? 37! + гз + T2
8g273
/тчЗ
1 I
8 ta Ti
3 ~ 7? 8
— [i
7?
^пр(«) Т
gr , (4g2-l)72
Ъ + 67?
Tb^~sT. (e~2sT 4-
5
+ D
6 1 — (flj 4- а2) e~sT + (ага2 — ТЬгЬ2) е"”2®7
«1 = — («14-«»)j eg = <Ча» — Ws-
1.112.
а) ffn+i — 9п Л~Т9п*
Т
9n+i---~2 1хп — 9п1 4* Рп5
11
я* , v Т2 e-2sT
* Пр (®) — „2 ' 7 Т2 \ _2вГ 8
Tl 1 —2e~sT 4- / 1 4- j—\ e~2sr
I Ti I
xts)
те^-е^
2(t-e-ST)
/ т
' 6) 9n+1 = 9n 4- —- [3»n — 0n_i]5
y*(s)
• • т
9п+1 ~ J/n 4* {3 [хп — уп] — l*n-i — 9п-1!}5
2/ >
72 9e-2sr — бе-3®7- 4- e-4’7,
n₽(S) “ 47? 972 . 372 _3sr 72 _4sT
+ '47f ~ 27? +17?
1.113
*(®) =
Тза
556
1.115.
Ы’О,
567
1.142
1.143.
1.144.
1.145.
1.146., 1.147.
1.149.
558
6SS
o^*0=°2 Si-°ZS*I=0? ‘SIl’l
•&)/[»+ -у ] = (;)*[§® + г(»+“-)] *82Г!
•0)/s — = ’*+-^-; ;(Ше = lx+-^-'y WJ *0)”*+ (/)’* = (;)* 'Ш'1
5(x—;)9 = r(;S‘o+1) + -^- *12.1*1 5(;)7 = « [(i +;) г +1] + ^-d+/) *0ZI*I
. тЧ-(®/»*0)8*0-2 + г(®/»*0) t l + (w/)S,0-g + t(w/) (lr « к(т + ®/0*1) (л
(l + ®fS2*l)2 ' 01 * <o/0.x^aj‘i '
<l + m/gS‘o)(i+«/o*T) « e(l+®/O*l) ln «B(I + ®/lO*O) /„ Wl
OS ( ’ (I +®/s‘O)01 W 02 ( .onn.n_s, ho71.n_lr t (l+s32)(l+s\Z)s
*S9l*l
° HU 0 d. аэ So I U •“" AA_ "^Iza
.(l + sjfe + sW) s _ M Wl
*891*1
’uOT’SO-j; bB0T'6O=2 •'(i-s\l)110lS‘l " (“ "°
*Z9I“I
» г01 1 = S 1 ’ (l — s\£) sOl-2 ”
*091*1
^(i + ^s’e '1911 ° , 2 °001 1 ’ si-a2O‘o G zl1
, *э 01 = r2 b 02 = s2 b гО1 = Z1 ь ei-K-O-U » 9-* iJ'+^-Yyt' + ^’s (,U (l + «23г + s44 si-aeU)I -S‘o *F0=3
*6SI*I
•o 801-2*0 = 2 b S = x i —= (s)ztt sx^^e о *8SI‘I
•3f!0I-fr‘0 = r2 b „01 = E2
«э-Л1=^ <.ji±(<-+ sZ^n+s^s = (s)-zsll
b «01-2*0 = 8J b t01-s*0 = j2 • <l+s-gj)(L±.^)^+?I^). =(5)л -9Spi
"° sOI’2*0 = г2 btoi.g*o=IJ i+ *1 ^2) = (s) Ztt 'SSl’l
isri
osri
ty, = arcsin > tye = arcsin —;
/П /1
/ £1(*° + Л Sinty) при — tyisgty=g л+ tyj;
I M~*° — A sinty) при n + tyi^ty^2n — tyj,
Xе
где tyj = arc sin —,
0 в при при OsgtyCtyu tyj<ty<n —tyj; Q x( где tyj = arcsin —1—^—
Г) ИО- 0 при Я— tyj <ty<n + tyaj
—в при л + ty, <ty< 2л — ty2; i 1 C2—*° tya = arcsin —;
0 ври 2я — ty,<ty^2n,
Д) y(0 =
e) у (t) =
0 k[A sinty — (Cj— *•)] при при tyi^ty^tya; гДе “Ф1 = arcsin
*(C2-Cj) при tya<tysg л — tya;
k[A sin ty — (Cj — X0)] при л — ty2=gtysg«-tyi; ty2==arcsin ;
0 при я — tyi ty =£ л,
— В (—x° — A sin ty)2 при tyi<ty<0;
В (x° A sin ty)2 при 0 < ty < л;
— В (x° — A sin ty)2 при где tyj = arcsin -т- л < ty < Л — tyj; А
В ( — x° — A sin ty)2 при л — tyi < ty < 2л + tyj,
— В при 0^ ty < tyj;
1.187. a) y(t) =
В при tyi < ty < rr 4~ tyi;
где tyx = arc sin
— В при лtyj < ty 2л,
б) и в) у (t) =
k (A sin ty — С) при о /А А ►о] а V •
В при -—CtysStyj;
где tyj = л — arcsin
k (A sinty -f- С) при tyj<ty^n,
r) »(0 =
kA sin ty при Os^tyfCtyll
kC при tyr < ty < —— 1 Ti т 2 где tyj = arcsin
0 при л -g- < tysgn,
k(A sin ty-j-x0) — В при 0<^ty<tyi;
1.188. a) y(t) =
k(A sin ty + x°) + В при tyi < ty < л + ty2j
k (Л sin ty -f- *°)—В при n + tya<ty^2n,
где tyi = arcsin c- “*° . A ’ ty, = arcsin A
0 при O^ty A k>| a
6) F(0 = В при Л 2 < u- 3 ty<y ”1
0 при 3 2 < tysg2nj
19 ю. И. Топчеев
56t
в) g(t) =
О
ft [Л sin i|> — (С — х0)]
В
k (Л sin Я? — (тС — х°)|
О
— k [ — Л sin ф — (С + х®)]
— В
— 4[ —Л sin Я? —\тС +х°)]
при О-^ф-^ф^
при Фх^ф^Фа;
при Фа«£Ф«£ я~’Рз!
при л — Я?3 ф sg л —ф4;
при л — ф4 ф л + ф4;
при л 4~ Ф3=^ Ф =^я 4" Ф»1
при л + Яэ„ Eg ф 2л — ф,;
при 2л —ф;^ф^2п —ф,;
при 2л —ф8^ф^2я|
_ С — **. и < B + k(C — х°) . . . B + k(mC— х»)
фх = arcsin —2—» фа = агсsin —-----------» ф3 = arcsin —~ к*л-------
, mC — ifi , . С+х°. „ , В + *(С + х») .
ф4= arcsin ---д—; ф4 = arcsin -—j—; ф8= areata —!!
А л Ял
к > & 4~ £ (тС 4~ х®) . . tnC 4“ х®
ф, = arcsin -1—т-т—1——; ф« = arcsin -4---;
кА А
при
г) F(O =
k [Л sin ф — (С — х°)] при
В при
k [A sin ф — (тС — х°)] пра
О при
О^Ф^Фъ
Фх^Ф^Фа;
Фа^Ф^л — ф8;
" —Фз^Ф^л:—ф4;
л — ф4^ф^2я,
, С — х« . , , B + k(C — х») . , , B + k(mC — х°).
где фх = arcsin ---%--; фа = arcsin ,—; ф8 = arcsin ———
А ЛА ЛА
. , тС—х®
ф4 = arcsin ---з---. ,
1.190. При Хх (0 = Аг sin (<о'/ — <р); у (t) = k (Л8 sin ^J’sign (sin ф) sign fsin (ф — <p));
xa (t) = Аг sin a>'t; ф = a>t.
1.196. а) а(Л) =15.|Л1—£! при Л>С;
б) а(Л)=й2----(*2 — kj) (arcsin 4- j/1 +
при Л С; в) а (Л) =
- *2-------(*2 — *1) arcsin 4- + 1/ 1 + 4г + S при! А > С« г) а (Л) = "Г" Л’;
*Ь /1 /1 г ft «LZi it
д) а (Л) = В
при Cv^X^Cv+j.
А -
1.197. 1_£1 + ]Л 1-^); »(Л)--^£(1-т)при ла,с.
1.198.
X (1 + |т|) при A>Ci
«х /лч k ( • в+kc , , в—kc , в+kc-if, (вч-ада ,
+ ^«±*£1
.) .и> - А [1+1Кж (1 Л)+Ч‘ -т) /Ю)Т=
•<л>—^гО-т) "”л>с>
fl «М)“4(агс sln4+4|—5):
. . .. 2kC I, С \ . _
Ь(Л^1а^—2А) при А^с-
4 4 А А а • . 4fe^4e f 1 а \ . . л *. 4Л^4л • * -
1.199. а (Л2,®') = ( coscp у- cos3<pj; Ь (Л2, ®') = ——2 sta’^P» где ф = ф («^
1.200. а (Л2, в') = -1- Ф + sin 2ф —8Ш 4ф^ ; ь (А* «') =
*Aj
л
sin‘<p, где <р = <р («).
1.201. а) а (А, <о) = 0; Ъ (Л, ш! — -г— I
□Л
б) а (А,«) = 0; b (Л, ш) = —^—;
в) а (А, ш) = 0; Ь (А, ш) = 0.
1.204. «, <И) -4 [(», +У (arc аш У>
- - 4 [<*
_ *>4' V' ~ ~ 4 [“'+i,i 4 0 ”4)*
* У"^ - -5) /ЯП »р“л лс-
1.205. »1M)„4-(.„!tt4_.rc!to4+4j/?Tj_4j/r^); .
°.<л> -4{‘$ /ЯМ1 /^1+^ ('-<%) /^1]};
а-<л)°4-(4/'-#-4/>-4); “.<л>-4{‘кх
*('-4)/£-£(-4)/ '-4]}-»^с,.
1.200
-И>-+4-S-)/'-4+ ( +^) :
к !Л\ 2Д Г С Л t Ca\ , тС t т*с* \1 . 2ВС*
Ь*^ ) ЗиЛ I А (3 4 Л«)+ Л V 4 /J 5 Дои(л) 51л»“х
г , . с* . . mSC8 т
663
ач,,л)_2£ [(,_,£)+„(,_4.
а’““ 1‘4) - ТяН (3 -4 4?) +
т»С*1 , .
—42-1 при А^С.
. ол7 k Г B + kC . . B + mkC С , тС ,
1.207 а, (Л) = — arcsin -------------|- arcsin г-;--------arcsin—; arcsin—;—f-
Л [ kA kA A A
, B + fcC-]/’, (B + kC)3 , timkC (B + mkC)3 C ~\f\ C3 mC „
+ kA У k3A3 + kA У k3A3 А У A3 A X
x]/T
m2Cal
A3 ] ’
2BC(l-m) „ ,л, 2k (B + kC)9l^, (B + kC)3 , 2(B + kC)
nA3 ’ з( ' tt k3A3 У .k3A3 3nA
X
1/ (B-j-ftC)2 Г (В + ЙС)21 2kC3 C3 2kC
У k3A3 L k3A3 J лЛ3 А3 ЗлЛ
C3
A3
X
( C3\ 2(B + kmC) 1Л (B-\-kmC)3 Г (B + mkC)3 1 2k
X\ А3) ЗпА У k3A3 L ft8>l2 J л X
1
(B + mkC)3 1/" [B + mkC)3 2k trfiC3 -if' mPC3 , 2mkC\i f\ mtC3
X k*A3 У 1 k3A3 + л А3 У A3 + ЗяЛ У 1 A3 X
. 2k Г(В + йС)3-1/, (B + kC)3 C3 -if, C3 , m3C3 -ifm3C3
(fi + mkC)3 i /" (B + mkC)3 ।
k3A3 У 1 k3A3 ’
2k f(B+kC) Г
A}~ n [ kA L1
_ (B—kC}311Д _ (B + feC)2
k3A3 J У k3A3
, mC (, m3C3\-i/~, m3C3 (B + mkC)3 f, (B + mkCm/~~
+ A V A3 ) У A3 k3A3 L k2A3 J У
(B+kC)3
k3A3
(B + *C)2] C3
k3A3 J A3
m^C3
A3
(B + mkC)3
k3A3
(B + mkC)3
k3A3
{В + mkC)3 1
й8Л2 J :
1_ (g + feC)2
k3A3
<3 C
A
C3
A3
A3 + A V
г n Л J
564
m3C3
A3
m^C3 В + mkC
A3 kA
(B+mkC)3
k3A3
(Л) = ~
X
1.222
Wt (s) W2 <s) W, (s) w, (S) W, (s> W, (s) W, (s) W, (SI
ky Хз|»- 03 Iя J * 1 R’a ftp Ms kfS TTs+ 1
TbS-H TKs+l r>4-i 7>+ 1
W, (s) ^io (3) Wit (s) w12 (S) UZi, (S) U>\. (s) W’11 (S) W„ (s' W,, (s)
Ra ke$ 1 ^TpS & 1 « -I* ip feg
Ta$ + 1 S (JaS + kv) JHS2 + ftus + ft‘->
1.123.
Wi (s) W, (s) wt (s> wt (s) w, (s) w, (S)
kt ktn 7*mis 4~ 1 &M2 M2S 4" 1 ft« Rb TBs+l ftg RK 4“ 1 Tcs Tcs+ 1
w, (s) w, (s) w, (s) Wit, (S) Wil (s) w„ (s)
1 Ra T aS + 1 ftp Ms few s(/„s + ft0) kes 1 ‘p
1.224.
Wt (s) wt (S) U7, (s) (S)
ftMV ftp ftfl ftTr 1 *P
T mvs +1 Trs+1 T’s2 + 2%Ts + 1
565
W'l (S) U7, (S) и7. (»> U7, (s) U7. (s) W. (si
*МУ1 ^МУ2 *г Tcs Йд 1
T’mviS + 1 71 му2« + 1 Trs+1 Tcs+ 1 T2sa + 2578 + 1 ‘p
1.226.
1.227.
1.228.
iyt (») v. <») v, (I)
fer 7>4-l ^СГ T’cr5 4* 1 ^oc Toes +1
Wt (*) V, (•» W'. (0
r««+i *T> 1 h>
Wt U) W, (» w. <sj
*v fer Th+1 &СГ Tcrs+1
V, (s) V, («)
566
1.229
1.230.
667
1.233
UZi (S) IF. (s) IF, (s) IF. (s) <S) W, (s) w, 4»)
*с ky Tys+1 Tps+1 kr Trs -j-1 *д s(T2s8 + 2gTs+ 1) kKs2 TkS + 1 T nS p
. 2Р0 - Р
^Р=2(Л,-Р)-
1.234.
IF, (s) IF. (s) W, (s) IF. (s) W, (s) IF, (s) W, (s) w, (S)
&yj Tcs 1 e-rs kr‘ Йуа
Tcs+l s (7'2s2 4-2g7’s+ 1) T os + 1 Trs-H
(7'Bs+l)(TKs+l)
1.235.
IF, (s) wt (s) W4 (s) w, (s) w, (S) w, (J)
T' ciS TMs+l ^Д1 s(^s2 + 25T1s+1) 1 V ^1 T1S-H ^П2 ^кг^аг ^B2^K2
(71 bi® + 1) (Tk2s -|- 1)
W, M v„ (♦) W'm (») W.. w W'.I (*) IF., (s) IF.. W IF,. (S)
^ca® £д» 1 ^01 &oa Tts+l T4s + 1
Гса*4-1 s (7\s2 +2g2TaS + 1) *P2 T2s+1 JW+i Tats + 1 T’ojS + 1 To«s4- 1
568
692
I + ^°2 <л —> 1 + ф <4 О о l + S*> J, e0? I + s802 so^
(s) “Л (S) ”41 (s> ”A i (s) ”41 (s) ”41
I + st02 I +5°°^ 00^ 1+^2 s«l-3^ I +^32 s’32
(s) ”41 («) «л (S) "Ml <») ”41 (s) ”41 (») ”41
(l +^^ + ^2)5 ^г/ I + s^J^Z + gS832 83^ Л 8A^ I +se2 S>1-3^ I +sU2 S4-’Q?
(») ”41 (S) ”41 (s> ”41 <s> *41 (s) ‘41 (s) ‘41
I + sI32 suJ, sIJl^ (l + sIg2lg3z + gS1” j) s lir^ 1 + sI32I3?Z + zslj2 IU^
13^
<«) ’zn (s) ’41 (S) ’41 (») ‘41 (S) ‘41 <s> ‘41
983’1
F, (») W, (j) wt (s)
*Oe~^ ^МУ 7'му«+ 1 • s(T2s2 + 2g7’s+ 1)
1Л41.
W, (s) W, (s) W, (s) F. (s) U7, (s)
fefl ^ИГ (^«rS +0 ^/4-2^^®+ 1 ^Pn Tpns 4"i fen 7’sa + 2£Ts + 1 (7*cS *4“ 1)
1.242.
W'. <S) Ft (!) V, (») W« (») ( . F. (s) W, (s)
fe» fe«» (l*ms 4- 1) s fepn тpns 4"1 fe?B(Tes4-l) Tas2 + 2gTs H- 1 Лдг 1 s
1.243.
ГН») V. <•) F. (1) F. (!) W’, (s) W, <s) F,(s)
fe> fey fe^^+l) &pn 7'pns+ 1 fen T’sa + 2gTs4-l (^cS *4“ 1) fe>y
^ + ^„«+1
670
1.244
V' (*» ' Wt <s) w, (s) W. (s> V, (s) W, (S> U7- (S) W. (s>
Йд &Vl fey, kpr. kn fee (7'es+ 1' ^пг
T’pnS + 1 TW + 2£Ts + 1
1.245.
T4s» + 2£Ts +1
(s) Wt w W. (») IT4 (s) (S) 1 V, (I) IF, (!)
feyl fepnt T pnls + 1 fe» T 3S 1 1 s fe»l PqSVqI <d„ 4Jx x PqVqSI a>x 4Jy V
w, (S) V, (s) «4. («) W.1 (S) Vt, (S) («)
fey2 fepnz ^pn2s+ 1 T»s2 + 2£Ts+l fefl|-2 1 s ^СГ2 трч-г^ч-!
V (t)
Программа разворота реалвзуется в виде уэ (/) = arctg——— 1рэ(/).
1.246. । F71- 1 1 уН534КЙКР*г | Ч^ТЪП^г! ^jpFt— 1 Г^Ъ— 1 U7, (S) V, (S) W, (s) V, (s)
ky fepn Т'ряаЧ" 1 Sin фу
W, (!) w. (S) V, (s) (s) iF, (I) IFio (s) (s|
My, J yS 1 s fecr COS (pgj МЛ JgS 1 s fee»
TtZ+z^T^+i V + Vc^+l
57.1
1.248. (s) + Fls(s) те же, что и в задаче 1.245
S3
vu (S) (s) W" («)
*2 *3
S2+®1'2 ^+®;2 s24-®?
Vn (S) t.
T^ + ^s» 4-1 1 s*
—(1Л
Т1== 24 (AV)4 ’
т_____Я*
г~ 12 (kV)2 ’
Е}
1.249. U7t (s) If, (s)
1 "5 r*~1 Г~1 । 1 i 1 -i 1 । iy \ —-FTT-7/ i 4^71- n ky 3 ^pn V+Vpis+‘
— -T*g |— If, (S)
* । Vy I
i *n r*~—I wio F I u/ L 4^ feo (Tcs 4-11
L-2zJ T’s» 4- 2£Ts 4-1
w, (si W, (s; (S> W, (s) w, (S) W, (s)
Лдг 7x8 4-1 T2s4-1 1 s fei feg fej
V + Vv* 4-1 s2 4-®i s24-<4 ^+«3
47,0 (s> B^ti (s) Wi, (S) Ifi, (S) WI, (s)
fecF 7gs 4-1 7«s 4" 1 fen fe# (7cs 4-1) fefly T8s4-1 Tes4-1
572
£2S
l+s°2 4 (I + s‘2) s 9^ I +s”2
(t) <») ’41 (») *41
I9!*I
(s) ’41 » («) *41 "<»> ’41 ‘(») *41 *(») ’41 ‘ («) ‘41
вм
‘J
г/
жмшЯн
мни
-updiodu
2224
I 4-s°X 0^ (SI) q;od-)~ t (si) q; °dg — j
1») ’41 (») ‘41
I +Л£ 1 + s^1^ + zs'2
(»> ’41 («) ‘41
'2
(I 4-s8J)s
(I 4-s*x) 4
(sX’41
м
IS2*1
8^
1 + sg2 I 4-^2 f”+gS 8^ im+?s 2^ zm + zs (I +sd2)s
(s) ”41 (s) «41 (s) ’41 (s> ‘41 <s> ’41 (s) ’41
1 +s2^ + gsg (I + sdX) 1+8ли2аи?г4-/“2
ud^ (l+<j)
l«) ’41 <») ’41 (’) ‘41 <s> '.J
0S2‘I
1.254.
И-
W, (s) IF, (s) W, (si W. (O w, <a) W. (s) W, (s) W, (s)
fey fey Tbs + 1 fefl S (TrS 4“ 11 I V fern S (TrnS 11 (T'ki5 4~ 1) T'kjS + 1 7"nS + 1 feoe~TS T#s + 1
1.255.
if, (g) IF, <«) IF. (s) IF. (s, IF, (s> IF, (g> IF, (s)
fen > fey TBs 4“ 1 ___fea S (Тд5 4“ H fe(C (TKls 4* 1 ) ^k?5 4"' 1 V fept TpS + pp fee
1.255.
IF, (S) IF, (s> IF, (s) IF, (s) IF. (Ы
&КГ fee fepn 4(T>+1) kt
T^ + i TcS+1 4rpns2+2Wprts+1) s(Tts2+2W + i) Tts + l
1.257.
IF, (s> IF, (g) IF, (s)
fe® feg T2s+1 fel Т^+253Тз8 + »
674
1.259
I7t (S) W. (») IF, (S) IF, (S) W, (s) V, <»> w, (s) IF, («)
7’m*2 + 2W’mS+1 1 T fra s iTas + l> 1 V frr (Trs+ 1) (Tbs+ 1) feOc Tcts + 1
1.260.
v, (S) ^2 <” w, (S) U74 (S) w, (s) IF, (S) W, (s) W. <s)
frTrS Te“’r l-e“sr fry frsi^y fra 1 [p feTr2S
l-e~sr s Tys+1 (7’1Эму«+ 1) (Т2эму«+ 1) s (T as + 1)
.575
1.262.
Передаточные функции IF4 (s) — IFlg (s) приведены в задаче 1.261.
Wit (а) = Vt (s) IF14 (s) = IF. (s) ^ig (s) — (s) Vle (s) = IF4 (s)
В7„ (s) = Wt (s) Vit (s) = IF. (s; (S) = V7 (8) ^20 (s) ± Wt (s)
^21 (s) = (s) IF., (s) = IF10 (s) IF., (s) = Wh (s)
1.266. а) Ф(«)=1-^_у(8) ; (S) = (S) B7, (S) B7, (S);
П7 (s) Wo <s> - <s> + & W* W •
n ’ l + IFg(S)IF.(S)IF.(S) ’ I
б) Ф (S) = {[^7 (S) Г, (s) IF, (s) 4- 1] П + B7g((s) B72((s) W7 (s)] + Wt (s) Ws (s)} ;
B) ф(5)= .....К^Г ; W(8) = W1(8)W,(8)Wl(s); B7I(S) = ^.=
B7g (s) IF4 (s) IF, (s) - IF. (s) IF, (s) .
“ 1 + W'e (s) Wt (s) + W, (s) IF4 (s) We (s) ’
1 2R7 al W (s\ =____________________________________________•
* ’ ’ i+We(S)Wl(s)W,(s)-Wi(s)Ws(s)Wt(s) ’
ф ,g) =____________________IFg(3)IF7(s)[IFt (s) + IF. (S)]___________________.
' ’ 1 + (s) Wf (s) W7 (s) - W„ (s) IF, (S) IF, (S) + Wj (s) IF. (s) IF, (s) IF, (s) ’
6) W (s) = Wi (s) BZ2 (S) [1 + B7g (g) BZ4 (s)] + B74 (S) + U7, (S); Ф (s) = . J
* “Г "
B) U7 = Vi <s) B7» (*) (s) + w» W w» (s) Wi (s) (s) (») + (s) (s) Wt (s)
l+2^< (s) Wi (s) Ws (s) + IF, (s) W7 (s) IF. (s)-Wt (s) Wt (s) Wt (s) IF, (s)-lFe (s) Wt (s) ’
576
1.269. а) IFj (а) = =
01 (s)
___________________________F;(s)F9(s)[r4(s)4-F,(s)]________________________________.
1 + Wi (s) IF, (s) [1F4 (s) IF, (S) + IF, (a) IF, (s)] + П7; (a) IF, (s) IF, (a) [IF, (s) + IF, (a)] ’
if; (s) =____• if; (s) = • if„ (s) = =
1W 1 + IF4 (s) ’ 2(S) 1 + IF, (s) ’ 11 W G,(s)
=_________________________(s) IF, (s) [IF, (s) + IF, (s)]______________________.
1 + if; (a) IF, (a) IF, (a) [IF, (a) + IF, (s)J + IF't (a) IF, (s) IF, (a) [IF, (a) + IF, (s)J ’
П7 (_\______ (s 6 *) _ IF, (s) IF, (a) IF13 (a)_____. ™ _ X, (a) _____
’ G,(s) 1 4" IFi (a) IF, (a) IFlg (a) IF, (a) ’ 2-2W G,(a) ~
^(s)[IF,(s)+IF,(s)]IF14(s)
1 + Wt (a) [IF, (a) + IF, (s)J IF14 (a) IF, (a) ’
IF i'll = Хз Is) __________4^3 (s) H^io (s) 4^15 (s)_.
G,(a) 1 + IF, (a) IF10 (s) IF16 (a) JFlg (a) ’
m j ._____ (s) ___________IF,_, (a) IF, (s) IF,., (s)__.
И<1-2 1») - Ga (s) - [W,g (s) + (s)] (s) (s) (s) ,
IF fal - All - —— <*) <s> ^з-з W .
{S> G, (a) “ [IF, (s) + IF, (a)] IFM (a) IF, (a) IF10 (a) ’
IF,., (a) = IF,., (s) = IF,.! (a) = IF,., (a) = 0.
’27S- ’ ” M - (Л,+ 1)(^+?|Г„+1>(Г..Ч-|- ?>
6) IF (s) = (Ti3 ~Ь I)2 jv > у .
' s3(7,a+l)2’
B) W (S) ~ a (T1S-\f [T3s + 1) ; Ti > Tt > T*-
. fe(Tis+ 1) (7?a2 + 25575a + О
1.279. a) IF (a) =-----L_l——LA_®-----1®------L------
(T2s - 1) (73s + 1) (T4s + 1) (72a2 + 2g676a + 1)
7j >7,>7g>
>74>7g>7,;
fil IF f«i - fe (7,5 + 1) (П*2 + 2g,Tss + 1) + 2B7T,s + 1) .
' W (T3s - 1) (T3s+ 1) (7> + 1) (T№ + 2^5 + 1) (TJS3 + 2^r,S + 1) ’
Ti > 7, > 7, > T4 > 7, > 7, > 7, > 7,.
1.280.
k (71S + 1) (7b2 + 2gs75s + 1) (7?s2 + 2|,7,s + 1) X
__________X (7js2 + 2|979s + 1) (7us + 1)_________.
(T3s- 1) (7,s+ 1) (74s+ 1) (7,2s2 4-25,7,8+ 1) X ’
X (7?s2 + 2|,7,s + 1) (7?os2 + 25l0710s + 1) (7las + 1)
Tt > 7, > Tt > Tt > 7, > 7, > 7, > 7, > 7, > 710 > 7И > 7la;
61 IF I,I = k (T*S + (T*S + (Г^8 + 2^T*S + П (T*°st + 2^°ri°s + (Tns + •
’ (7iS+1)(74S+1)(7,S+1)(7,s+1)(7,s+1)X
X (7?S3 + 25,79s + 1) (712s + 1) (7l3s + 1)
7t > 7, > 7, > 74 > 7, > 7, > 7, > 7, > 7, > 710 > Тц > 7t, > 7lg.
1.281. a) IF (s) = 1} J > 7,;
w _________________k (T^ + 2|474s + 1) (7gs2 + 2|673s + 1) (7,s + 1)________.
1 {S) (7is+l)(7,s+l)(733s2 + 25373s + l)(76s+l)(7?s3 + 2577,s+l)(7,s + l)’
Ti > 7, > 7, > 74 > 7, > 7, > 7, > 7, > 7,.
2.6. Состояние равновесия (0; 0) — устойчиво. 2.7. Состояние равновесия (0; 0; 0) —
устойчиво. 2.8. Состояние равновесия (0; 0)—неустойчиво. 2.9. Неустойчива. 2.10. Не-
устойчива. 2.16. Устойчива. 2.17. Неустойчива. 2.18. Неустойчива. 2.19. Устойчива.
2.21: а — устойчива; б — устойчива; в — неустойчива; г—неустойчива; д — устойчива;
е — устойчива. 2.22. Неустойчива (для 2.18); устойчива (для 2.19). 2.27: ха — устойчива;
577
б — неустойчива; в — на грани устойчивости; г — устойчива; д—неустойчива. 2.28: а —
устойчива; б — неустойчива; в — на грани устойчивости; г — неустойчива. 2.31: а—устой-
чива; б — неустойчива; в — неустойчива. 2.32: а — неустойчива; б — неустойчива: в —
устойчива; г — устойчива. 2.34: а — в левой полуплоскости 6 корией, в правой — 2 корня;
б — в левой полуплоскости 8 корней, в правой —1; в — в левой полуплоскости 7 корней,
в правой — 2. 2.36: а — при К = 10 с*х неустойчива, при К » 100 с"* — устойчива; б —
прн К = 1000 с-1 устойчива, при К = 40 000 с-1 — неустойчива; в — при К = 50 с-1
устойчива, при К = 500 с"1 — неустойчива; г — при К=1 с-1 — неустойчива; при Л =
— ю с"а — устойчива. 2.40. Для рис. 2.15: а —устойчива; б — неустойчива; в — неустой-
чива; е — неустойчива; д — неустойчива; е — неустойчива; ж — устойчива; а — неустойчива;
для рис 2.16: а — неустойчива; б — устойчива; в—устойчива; г — устойчива; д—не-
устойчива; е—устойчива; ж — устойчива; з — неустойчива; 2.41. Для рис. 1,146: а —
устойчива; б — неустойчива; для рис. 1.147: а — устойчива; б — устойчива; для рис.
1.148: а — устойчива; б —неустойчива. 2.44: а — неустойчива; б — устойчива, ус =
= 60°, Ни = 30 дБ, Нм = — 26 дБ; в —неустойчива. 2.45: прн К = 100 с'1 —не-
устойчива; при К = 40 000 с-1 устойчива, То = 56°, Ны =оо, Ни = —40 дБ. 2.46: Для
задачи 1.147 — неустойчива; для задачи 1.148 — неустойчива; для задача 1.150—не-
устойчива; для задачи 1.151—устойчива, Тс = 36°. 2.47: в — неустойчива; б — устой-
чива, ус = 10°, Нм = 22 дБ, Ни = — Ю дБ. 2.58: а—устойчива; б — неустойчива.
2.60: а — неустойчива; б — устойчива. 2.61: при feB=l—устойчива, ус=46°, Ни =
= 36 дБ, Ни = — 19 дБ; при kB = 10 — устойчива, ус = 42°, Ни = 42 дБ, Ня = — 13 дБ;
= 100 — неустойчива. 2.62: а — устойчива, Ни= — 27 дБ; б — устойчива, ус = 34е,
Ни = —5,5 дБ; в — устойчива, ?с = 152°, Я„ = — 10,5 дБ. 2.63: а — устойчива, ус =
= 105°, Нк = — 16,5 дБ; б — устойчива, ус = 32°, На=—8 дБ; в — устойчива, То = 125°,
Ни = — 13,5 дБ. 2.64. Устойчива ус = 60°, Н„ = —8,7 дБ. 2.65: при К - 10 с'х
устойчива, То = 65°, Ни — — 20 дБ; при К = 25 с-1 устойчива То = 62°, Ни — — 8,5 дБ;
при К = 180 с-1 неустойчива. 2.66. при А2 = 100 — устойчива, ?в = 58°, Нм = — 8 дБ;
при Ар = 150 устойчива, То = 29,5°, Ни = — 4,5 дБ. 2.67: д — устойчива, т« = 60°,
Ни = — И Дб; б — устойчива, т« = 55°, Ни = — 9 дБ. 2.68: а — устойчива, То = 45°,
Ни = — 10 дБ; б — устойчива, ув=25°=//и = — 4 дБ; в — устойчива, Уе=30в,Ям = —6 дБ.
2.71. 8 с-*, ТЖр = 0,173с.
2.72. arete — — — } = _я ________________= ,
— СО2Т1Г2—TjO)—Т2ы+1 ’ + 1 j/'7’2t02 4-11/'<1)
2 73 ККТУ+I 1
‘ Кт!<о»4-1 Кт>2+1 Iх®
arctg шТ, — arctg mTf — arctg <оТ3 = — 2.74. <ПкР = 0,025 с, ткр = 36 с.
2.77: при т = 0,1 с — устойчива, ус = 90°, Нм = — 30 дБ; при т = 1 с — устойчива, ус =
= 85°, Ны = — 20 дБ; при т = 20 с — неустойчива. 2.78: прн т = 0,01 с — неустойчива;
при т = 0,05 с — неустойчива; при т = 0,1 с — неустойчива. 2.79: при Т3 — 25 с и Т4 =
= 6,25 с — устойчива, ус = 45°, Ни = — Ю дБ; при Т3 = 40 с и Т4 = 8 с — устойчива,
Тс = 50°, Ни = — 12 дБ. 2.80. Устойчива, Тс = 40°, Ни = — 7 дБ.
3.3. x(t) = 0,164е-7,1Б< cos (3,35/ + 0,732) — 1,232е~0>648< cos (3,741 — 1,312) +
+ 59,6е~°-377< cos (0,428/ + 1,57).
3.4. * (Г) - ГО- КГ6 — 6,85- Ю“6е“-8-3' + 0,065- Iff-’e*-35'9* — 2,2- ю“ве-4,42/ х
X sin (38,7»+0,913).
» р—2s < s
3.5. а —Х(а)=Ф (s) —; б — X (s) = Ф (s)-Sy-; в — X(s) = O(s) -—-—;
r-X(s) = O(s)-V— 2-1,
фп 36 000s + 180 000
Де (S' 7,2.Й'-»з» + 0,0182s5 + 3,85s4 + 308s3 + 724s2 — 36 600s + 180 ООО '
678
З.б. а — X(s) =Ф (s)——; б — X(s) = Ф (s)*- —-L; в—Х(5>=Ф(а)Х
— e“2s
X------------
г — X (s) - Ф (s) ,le~2S se 3S*2.,
где Ф (s) =__________, Т1_____________________
да ' ’ 0,0006s» 4- 0,136s4 + 16s + 506 ‘
3.7. а—X(s)=®(s)
1 _ е-ГО’
б — X (s) = Ф (s) —L-—Г—-
s (1 — e-s
в—X(s) —Ф($)Х
л 200s + 200
ГД (S'= 0,002s8 + 0,1224s4+ 5,146s3 + 41,328s2 + 201s+ 200 ’
3.30. Ti opt = 0,345 с. 3.31. а — feopt = 92,3 с“25 б — Tt opt = 3,45 с.
3.32. a —feopt =0,28 с-1! 6 — Т, opt = 10~в с; в — Tt opt = 4,35 с. 3.38. £, = 0,73.
3.39
Коэффициенты усиления J 0
0,048 0,098 0,208 0.718
opt 8,5 4,3 2,3 1.2
opt 39 37 31 22
3.40. ^=1. 3.41. fe,Opt = 0,61 с. 3.42. При Л = 1 с'1 7\opt = 0,62 е; при Т1Я-
= 0,8 с КOpt = 0,62 с"* 3.49. Для Pj — tp = i,5 с, оШах = 25%, для Р,— tp — 1,75 с,
Отах = 21%. 3.50. Для Р] —/р = 0,8 с; для Ра!—/р=1,2с; для ₽|-/р>4,2с; для
Р,— tp >7,9 с. 3.51. ДляР—tp = 0,95 с, отах = 25%, для Ра — tp = 0,45 с, стах = 14%.
3.52. ед* 55% 3.53. е.^4%. 3.54. Для Р,—tp = 0,85 с; Стах = 25%; для Р2 — <р =
= 0,77 с, Отах = 16%; для P3 — tp= 1,08 С, Птах = 20%; ДЛЯ Р4 — *р = 4,2 с, Отах — 0%.
3.55. Для Р, — /р = 0,07 С, Отах = 14%; для Р,—7р = 0,22 с, Отах =10%; для Pg —
— tp = 0,35 с, Стах = 0%. 3.56. При К=1,2с-1— монотонный; при К = 6,4 с"1 — не-
монотонный, при К = 0,6 с-1 — монотонный. 3.57: а—е«»30%; б — ел^20%. 3.68: а—
—/р = 5,65 с; аШах = 23%: 7V = 11; б — Гр = 5 с; cmax = 0%, N = 0; в-1р = 1с;
Отах = 16%; N — 1; г — tp = 3 с; отах = 38%; N = 1,5. 3.69: а — расходящийся процесс;
б — сходящийся процесс; в — расходящийся процесс.
4.4. a— DW = K, с-*; De =
с'»;
б — Dw = К. с-\ £>j -----^+=7--------, с-»|
2Tj (1 — 1/ —) + Т,--Ь
\ г А / А
± [п + гТгТ, - Л (27\ + Tg) - 2Tt (2Л + Tg) У in (х) +
679
в —= К, с“1;
D _________К
^(1—^) + 2Т,
D ' 4 [ + 2TlTs ~ Т (Т' + 2Тя) ~ 2T1 (if) ” 2Т1 (т) (Ts “ Ti) ~ Т’ ]
r-D& = K, с-1с
D . = — ----------------------*-------------------—— , с-?.
1[т? + П + 4ЛТ3-4 (Т, + Т,) + ЗП Ст)+4(т) у +
+ -±--4Т1(Т1 + Т3) У
4вб« а — С® = 0;
Ci = 0; С2 = -^, С»; C8 = 4-(7’i+2’'3-2T2), С*?
Л л
Q = ~j”_p^)2 <7’1 + 7’2 + ^4 — Ts), с! С2= (7’17’г + T\Tt + Тг1\) +
2К
+ (1±К)Г |Т’Г8 + ТзГз + тзг‘ - И - И - П - 2 (Т,Т2 + т2т4)]4т
+ 71^К)У {Гз - тхт3 - Т2Т, - Т3Т4), с«5 Сз = (1^К)2 TtTtTt + '
+ -(сУхуз- [2 (Л + т2 + Л) (Т1Т2 + Т,Т4 + TtTi) - 2 (X - 1) Т, {TtT, + ЛТ4 +
+ WJ + (I+JCF(Л + т»+т* ~ (Г1 + т2+т*+кт^ с"5
D>—k’ “--ST-'-*' О.-А, е-, D1_i,e-.-Co_0;C1—1-,
с. - (Ti + Tt + Т, - Т3 - Т4) —Я-., сз.
c*=-^-+-^- (7’з + Л-л-т2-т5) + 4- (Л7’2 + Л7’5 + т2тв-т2т4) +
+ 4- (тз + П + 2Т3Т4 - ТХТ3 - ТгТ3 - Т3ТБ -ТХТ\- Т2Т4 - Т4ТБ), с®|
Рш=<,с-1{ De = -^-,c-5 Z>e=-^, с-8.
4»7. а — е(0» А (с'о — -^-<»о) sin ®о< + (с;<о0— •^_<D?) cos®o f> W С'о = -^-
С’__кГГ. fl+WoX] св с,~ 2 СТ# + Л + 2Г4 1+ВД
1 *t 1Г‘ к fe2fe2 ) J ’ С’ Са “ к? I kfc + X
fei^a
fi+Wj п л
M2 JJ’C|
с _ 6 /ГП + ^ + ДТа , 1 + kik2Tt Г(1 + МЛ) 11(1 + feife2T2)
8 kx Ц feife2 "r kxk2 L * kxk2 JJ kxk2
Н73 + Т1)2Т44-П4-т3т4 , т. + л + гт. г_ (1 + МаЛ) П\
I Мз + м; из м; 1/л
680
б—e(o = а (с;—у-00?) 8to ®ог + (ci®o—^'<а“) сов<п»г« где со =
__ () 4~ ^з^з 4~ ^з^1У«) 1
Mt J’ !
^=тг[(2Г1+Г4)
г'__—$Г(2ТТ 4-Т?\ (fegfegSTj 4-Тг4-Т34-2Т{) I (1 -f-k2kg + kATi)
* kt Ц1 1 4 v kA J kA x
X [(2?! + T4) - (1 + + kikiTi} ]} , C9;
r'__ 6 /(^2^ [^з^зУ? + (T2 + T3) 2?! 4- 1\ 4- У»У8]1 |(fe2£327\ 4~ Уз + Уз 4“ 274)
Сз“ ki Ц14 kA-------------J-j------------kA---------x
X Г(2T! 4- T4) - J.1 +Мз+М1Л) 'll (14-Мз+М1Л) f Г(2Tlr4 4- Tf) -
L #2*1 j) «2*1 IL
_ Akg2Tt4- Tg 4" Уз + 2У1) 1 Гiryr t т \ (1 + k2k3 4- k2kjT1) j,
M, J - [ U?, + у4) j J, c%
(C' \ / C' \
C'o--®o ) sln w0Z + ( C'i®o---®o ] cos &at.
rae C« = "ь l~fe~ ’
*1 “Г ^3
«- vU{,r'+TJ
[14-М»(Л + Л)1 1 c,
k3 A 4- k3) j ’
2 kj + k3
(МзЛ^3 + 2^2 + (71! + Уз)]'
k2 A 4- k3)
(T ' T > 4~ ~ЬУг)1 1 * -^-kgkg (Tt 4-T2) \
1 1-г 2> k2A + ks) f k.A+kg) )’ ’
- _ 6 (42(T1 + T2) + TI + TJ2 ,(lT , TA _ [1+Мз (Т1 + Л)Р
*!4-*3 4 ktA + kg) -r^ it kgA + kg)
М3Т1Т24-2^У2 + (У1 + Г2) 1 , [1+Мз(Л + Уз)1 v
M*i+*s) J"’’ ^(^4-M
v It t _ [МзЛУз + 2Е2Л4-(Т1 + Тг)П hr ,т\ - И + М3(Л + У2)])
I 1 2 M*i4-*8) / jU14-/*) Л,(*14-*з) J
У [1 + ^3 (У1 + Уз)] \ -3 I
x ^(^+*3) ) ’ ’ ;
г —8(0 = A R---W*) sin a>,t! 4- (-^-coAcosawl,
гле c’- c___Гу +У 4-1+МИ c3
гдес2- ,c,C3-----------—c.
4.14. С» = (У1 + Уз + У8). с; Сз = w (Ti + гз + Уз) -
~ (1+\)3- (У1 + У3 + У3)2. с»; 1
Сз = u+K)8'T1T2Ts + (14-%"(Л + т* + Тз) (TiT1 + Т1Т*+т*Тз)’ De=Z7;
D — * с-1, D = с-2. D’ =-^- с"9.
“ Ci ’ ’ 9 С2 ’ ’ е С? '
4.15. Со = О; Ci = O; С2 = -^-, с9; С8 = ~ (Tt 4- Уз + У4 ~2Уз), С«5 D, =
D • = с*9.
4.16. Со = О; Ci=O; С2 = -1, с-9; С9 = -^(У24-У3-У1). c'9j
DB = -1-, с"9; £>;= -L, с'3. 4.18. К<8,5.
С2 Gs
4.19: a—DQ=30, c-i; б—Ош = 2,5, с-Ч
581
4.20» в (0 = 0,2 ^—-^-1,1^ sin l.U + (cTt,l - 1,1’) cos 1,If j 5 Ct ==0,005, c|
Ct = 0,0041, ca| Cs = 0,00007, c’; emax = 0,0012 рад.
+ 7з + Л + Лй + Т'кЪ Тк\'Тк2^‘ (Т1 + 72)(7'з + + Т1Т2~Ь Т3Т4 4" (У 1 + Т2 +
Уз 4* Уt) (Укг 4" Тк1) 4"ТкзУк4.
4.25.
W'k (з) =
*к (rK2s4- 1)
^4-1
Условия астатизма 1-го порядка k’K = -—I—; 2-го порядка Т'к2 = Т2 4- k2kK 4-
4- 25з^з 4" Укв 3"г0 порядка Тк1Тк2 = Тя1Т2 4- У3 + (Ук1 4- Т2 4- Мн) ^Т3 4- Ун1 X
х (2£3Уэ 4- Ук! 4- Л 4- ^з^к)-
4.26. FK(s)= fen- ? С+^)(ТК1 + Тк4 + Т'к2) =
= Тк1 4-Л 4-У2 4- УК4 4-Мк2(7’кз4-Ук14-Уз4-Ук2); (7’к4-7’з4-У||^)(Л4-Т24-7’к4) =
= [Т’ктТ’з + (гк14-Уз) Т’кг] С1 4-Мкг) 4- УЛ 4- У«4 (Л + га).
. _ ^»(Ук154-0 ь.
4.27. F„(s) = -.^._i /-; Л’к=-^-; УК14-Т’к1 4-У4 = 4-П 4-7^4-
+ Гк2‘» Т4 (гк1 + Гк1) 4- Ук1У'к! = (Уд 4- Уг) (7К2 4- Укг) + Т1Т2 + Тк2Тк2-
4.28. Г.И-^; ’.-Л + Л + ’'.1+Г1.
4,30. r.,W-Agj.g.|.^.; 7-и_71 + Л + Г,+Г„,
(TrK2s 4-1) ъ и
гкг^----Х/4-'~ '? 734-У'к1 = У14-У24-У^; Тз+Т'к1^
в Т1 4- У 2 4- У кг! Уз^к! = TlT2 4" Т1Тк2 4- Т2Т'к2-
4.3l.lrMW-lr..w- rH+r,-r1+r.+
+ У» + Тв + Тка+Ук»4‘МзМ
4.32. ги(Л_тЛгп.; 4.-^;
Ti = УК14- у2+ Ts 4- у4 4- У5; Л “ К1 + 72 4-У34- 7S.
4.33. rKj (s) = Fk, (s) = (Т *tS + !)" ; feK=—L-; УК1 = У14-У«4-
(* К25 +*)(•* ОД5 Т V
4- 2Уз 4- 2£1У4 4“ УК2 4“ Укз 4“
Б82
4.34. vKiW^vKI(s)^~kK-(^+ll)s ; TKi + Ts - r, + r4 + rKi)
^^-(Т. + Т^Ти+ТЛ.
4.35. r.,(,)-r>,(,)--.A^-+J;i| ; 7И_Г. + Г,+
4~ T4 4~ Ткг 4~ Укз 4* 4"
4.35. ; (1+W,)x
X TKi -f" kik2ktTt — W2 4" 4- (1 4- (Tкг 4- Укз) 4" ^2^4 4* 5.
4.37. iFK1(S) = W'KS(S) = feKS; feK = yK, (S) » Др1* * l) ; fe' = Д;
«2«3«4 7k2S4-1 «2
7kI“7i4-Ts4‘7m-
4.38. Frf^-b^sfs); Лк1 = -Г7-; Лк.--^
ft2fe8 7 Kgs + 1 «»
4" Ук2 = 714-7,24-Уз4'У54'7’к8 4' ^4-
4.39. Ум(в) = Гм(в) = -/^ ; feKI-4r’
^K2 = “I » У4 4" У*К2 = У14-7’24-У44-Укз4- ^2^4-
B2
4.42. Ry (tb i2) = Rx (t, 4- T, t2 + T)-Rx(t1 + T, t^-R^tti, t2 + T)+Rx(ti, t2)}
при X (0 стационарном Ry (x) =* 2RX (x) — Rx (x 4- T) — Rx (x — T).
4.43. my(t) = a(t)mx{t)+b(t)-, Ry(tlt ts) =а(1г) a(t2) Rx(tlf t2); Dy(i)-a*(t) Dx(t).
42
4.44. Rg (x) = —g- Rx (X) COS шох.
4.45. Необходимым и достаточным условием дифференцируемости (в среднем квадрати-
ческом) является наличие производной у корреляционной функции при х = 0, а посколь-
ку эта функция является четной, то ~^~RX (т) 1х=о = Так как R*. (х) = —~ Rx (х), то
X (0 ил (0 иекоррелированы между собой. (
4.49. Р = 0,5 — Ф ( = °.°5. где «// ч= pv; ои^а /1 — р2; р = д (0)~‘
4.50. м [х(/4-т) 2LI£>_] =_L ^x(t-a)-rx(T)] =
= --^-Rx W|x=r = — ffxe~“T K— a) (1 4- ax) 4- a] = a2a2Te““r.
C/T
4.51. У (0 = X (0 — распределена по нормальному закону, когда т9 = 0, а <J9 =
= о /а2 4- в2; Р = 2Ф (----7-РД----= 0,6695е.
\ а^а24-₽2 /
4.52. Ry(t, т)=М[Г(0Г«4-0]
g) dXdg; £>H0=| J Rx&-l)dMl
0 0
«=2 j (t—x)Rx(x)dx.
о
4.53.
; Z?. (х) = <т2а2е"“а1 т 1 (1 — а | х |); S.(<o)=-^-X
00
J S-. (ш) dm *я
X . a.—g-j-. Процесс X (t) не имеет второй производной, так как
(й) 4"аа)Л
00
J co2S. (to) dm.
—00
583
4.54.
4.55.
4.56.
4.57.
4.58.
sln г sm [ ю^-тн)
Sx (со) = о2 (Тв + тя) ш(тв4-тн) <о(тв —тн)
2 2
а* а^а 4-
mv (t) = | Ф (/й) | Хо sto ® (/ОЬ ' •
2
да —----—----— Г at 4-------------— sin vt 4--я- cos vt 1 = 1500 м.
» v2 (а2 + v2) L 2 (а2 + v2) v 2 J
i / 2ра| г j -|
ас= у [*--£- (1 -e-a<)J = Ь86 м/с.
4.59. Sx (co) = q e-“a'4“; Sx. (co) = -S .x (co) = ja>Sx (®).
4.60. Rz (t) — Rx (t) Ry(t); Rz(x) — а^е ( ; Sx(a) л [co2 4-(ax 4-ay)2]'
4.68. e=0,6-10-3 рад. 4.70. De = 0,0396 рад. 4.71. e=0,0815 рад. 4.72. e= 0,01823 рад.
4.75. TKlopt = 0,34 c.
5.21 V = -|-x[ + -i- x‘ > 0: — — x^x‘ < 0 — устойчива.
5.22. V = -Lxl + -Lxl>0-, = — xjxf — x$ < 0 — устойчива.
dV dV
5.23. -g- > 0 — неустойчива. 5.24. > 0 — неустойчива'.
dV
5.25. >0 — неустойчива.
dV
5.26. —jy- = axf + bx%— x2 (—cxs4-dx?); тогда в области ограниченной кривой Xj =
= х% определяется знаком функции axj 4- oi%.
5.27. V = -£-xf 4- — х2 > 0; = (xf 4- х|) (xf 4- х|) > 0 — неустойчива.
5.32. Для *i = 2,5c-’; ^ = 0,5 с; Т^О.гс; 4^-= —6 (xj х2 4--i-[(1 —
— F (Xi)] хгх, 4- xj] и при < F (xj)< 4 — устойчива.
с ов гт dxt dXa 1 —. . dXb 1 1
5.33. При -5Х = х2; —X24-x2F(x8); = — -yr- xg — х2 — xt
v-гЗт+тг+^ + Гтт'’®6'4 " т—^(77-^7)-
о
- /?(Жз)х$. Функция V положительно определена, если >0 и ---— > О,
11 T2Tf 18 12
а < 0, если у---------------> 0 и > 0.
ш 1 а 1 г с j
gn. dV / kk-l , kk, \ . 'kl
б'34' 1Г = ~ ("г2- + “Н" х7 < 0 — Устойчива п₽и —xi < •
584
5.35. При -^-=х2; =х8 имеем V= — х|4-2х2х3+*2х|+-1-(xi +
-^Г* = — 2xf ------1 — устойчива, если > 1.
5.41. При 5т — 7т =/= 0 — неустойчива; при 5т = 7п — неустойчива, если т>0 ил >
>0, и устойчива, если «1^0 и д^О.
5.42. При a -\-bk }-ck2^ 0 — неустойчива; при а 4- bk 4- ck2 = 0 и (I 4- mk J- nk2)(b 4-
4- 2ck) >0 — неустойчива; при а 4- bk + ck2 = 0 и (/ + mk + nk2) (i 4- 2ck) < 0 — устойчи-
ва; прн а — ck2, Ь = — 2cfe, с г 0 и I mk 4- nk2 z О — неустойчива; при а 4- bk 4- ck2 ~
= 0 и / 4 = О — устойчива; при а ~ b = с = 0 — устойчива.
5.43. Неустойчива. 5.44. Устойчива. 5.45. Неустойчива. 5.46. Неустойчива.
5.49. ®а = 3,2 с"1, Ла=2,1 рад. 5.50. ®а = 3,2 с*1, Ла = 1,8 рад.
5.66. Wa-96 с-1, Ла = 0,11 рад. 5.67. kap= 11 с*1. 5.68. 1ГК (s) =
2 vUUOOS“4” 1 j
5.69. IFK (s) = ± 9, rae тк1 = o,2 c; TK2 = 0,04 с; k^ = 5. 5.91. ftlnp =
= 20 В/рад при учете 1-й гармоники; й1пр = 15 В/рад — при учете 1-й и 3-й гармоник.
5.98. а — ша1 = 6,95 с*1, <оа2 = 6,94 с-1; б — ша1 = 7,02 с-1, ша2 = 6,95 с-1; в — соа] =
= 6,20 с*1, ша2 = 6,14 с"1. 5.125.
= 6,15 — не зависит от Л. 5.131.
а — Ло > 27,3; б —27,3^ Ло >0,48. 5.127. kap =
&пр шах = 89,5. 5.133. Неустойчива. 5.135. та =
= 105 с-*; <та=48,9 с"1. 5.140. тг (t) = 0,721 -|- i, рад; а2 = 0,01 рад2. 5.141. При
с = оо av = 50 (°C)2; при с = 0 av = 0,0025 (°C)2.
6.2. Х(г)= Г“^-- 6.3. Х{г) = —2 (г — е^2 )2 г2 — 2ге ai cos w0T 4- е 2аГ
6.4. у ,,, ? — г~аТ cos co07 istoT Х( )- г2-2ге-“Гсо5<о()Т4-е-2“Т ’ 6'5' ' г2 - 2г sin Г 4-1
14-z*~*
1—z~* '
где Т = с.
Я
кя &Р~* + С0* рт +ае~аГ Sta рт)
’ • W (2) --------1-2г-1е-“гсо8рт-г-2е-’2“г *
в9 Г(г)_ 1,249г-1—1,091г-2_______
о.». w w (1 _г-1) (1 _ 1,874г-1 —0,880г*2) ’
«11 П7 (,\ _ 0.897г*1 + 2,604г*2 + 0,472г-2
о.и. (1_2-1)(1_0>959z-i +о,278г-2) ‘
„ ™,. 0,262г*1-0,047г-2 —0,215г-2
0.1Z. w (г; (1 _ 0>923г-Х) (1 _ 0,727г*1) (1 — 1,806г*1 + 0,553г*2) ’
«14 0,01777г-1 + 0,00795г-2—0,00941г-2
0.10. W(Z)_ {l_z-l)(i_l3g3z-l + 0t5i9z-2} •
д . . 0,180г-1 — 0,163г*2 — 0,111г*2 + 0,106г-*
0.14. М7(г)= (1— 0,820г-1) (1 — 0,929г*1) (1 — 1,462г-14-0,546г-2) *
1 _ О.ОЗбг"14- 0,744г*2 4- 1,034г"2 — 0,688г"* — 0,369г"2 — 0,012г"2
Ь.1&. М7(г)_ (1 — г*1) (1 — 0,905г"1) (1 — 0,607г*1) (1 — 1,134г"14-0,418г"2) ’
д 1Д . 0,90 4-1,30г"1 —0,33г*2 4-0,43г"8 —0,03г-«
0.10. (г) - (1 _г-4) —0,091г*1) (1 — 0,89г*14- 0,2г"2) ’
Л «, Тг-ЧЗ-г"2) Г ЯГг*1 „ ч КП(1-г-2)
6-18. -2"(1-г-1)-[-ПГ7^-Л(Г1 + Г2)- {Tt_Ti~^-z^
, ^7^(l-г-1) 1
+ (7’2-Т1)(1-г-1е-777'‘) ]’
585
180K(l—z~«)
6,19. W (г) ---7---;----.1— 1---------575---г- X
T (— 1 + 34z-1/2 + 1 Hz-1 + 34z-a/2—Г"*
(l-z-i) |\_г-*е" г,8есуС”
1 — 2z-lt~^T/Tl cos (T/T1 + z~2e-^T/r*
где <p = arctg
- XfTi + T,)]
6 \ « 90. r (z) «221. d+4z-x/» + z-») г Т2-»
ГТ=ТГ euOw ()—Г (1-z-1) [l-r>
КП(1—г-1)________,_______/CTjd—z~x) _
(T, - П) (1 - z“1e-7’/r*) + (Г,-Г*)(1-г-1е'2’/г«) '
6.23. Г (z) = WiW. (z);
6.24. X(s)-------1 + (*)~ °* U); Г (2) “ Г| (z) Г»(г) Г»(z)s Ф(г)“
Wi (г) Wt (z)
“ 14-Г1(г)Г.(г)17,(г) ’
6.25. X (s) = Wt (s) IF4 (s) G* (s) 4- (S) (s} (S) Q> (S)1 ’
IF* (s) = IF2IF; (a); IF (z) = IF2tFs (z).
6.26. Передаточная функция Ф* (s) не существует.
X м - ° <s> <*) г« <*> . ri (») v* <s> v
t ? 1 + W's (s) Wt (s) IF, (s) l + tf»(s)1F«(s)tFB(s) x
v_____________{G (s)/[l + (s) IF4 (s) IF, (s)]}*_____
* 1 + {Vi (s) IF2 (s) IF, (s) W„ (s)/L 1 + IF, (s) IF. (s) IF, (s)J} •'
(
6.27. X (z) = tF,IF4G (z) + 1-X^2)(^C^'(Zj C^0 (Z) “ ^5И74° (г)] * '
6.29. a — устойчива, б — неустойчива, в — неустойчива, г— устойчива, д — неустойчива,
е — устойчива. 6.30. а — неустойчива, б — устойчива, в — устойчива.
6.33. К <0,39. 6.34. К <0,30. 6.35. 0,51 <К <0,27.
6.46. а — устойчива, б — устойчива, в — неустойчива, г — устойчива, д — неустойчива.
6.49. а — неустойчива при любых положительных Л, б — устойчива при К < 0,606,
в — устойчива при К < 2,37, г — устойчива при 0,0032 < К < 1,37.
6.51. а — устойчива, ус = 29°, Ни = —50 дБ; б — устойчива, ус = 30°, Нк = 5 дБ,
Нм = — 50 дБ; в — устойчива, ус = 65°, Ны ~ 13,6 дБ; г — устойчива, ус = 35°,
Нц == — 26 дБ; д — устойчива, ус = 30°, Ни — — 6 дБ.
6.62« х(кТ) = 1 — е-BkT(cos 14,87x7—0,53 sin 14,87x7); х(кТ) = 1,2645 (t — Т) 4-
+ 1,396 6 (t — 2Т) 4-0,9455 (t — ЗТ) 4- 0,8515 (t — 4Т) 4-1,0085 (t — 5Т) 4-
4-1,055 (t — 6Г) 4- 1,005 (t — 7Т) 4- 0,9765 (t — 8Т) 4- • • •
0,22t 0,12r
6.63. X» (/)= 18,75 — 15,35е Т -е Т [2,4cos4-2 stay-] ;
X* (0=14- 3,85 (t — Т) 4- 8,25 (t — 2Т) 4- 12,46 (t — ЗТ) 4-14,686 (/ — 4Т) 4-
+ 16,626(/— 5Г)4- •••
6.64. х 1кТ) = 1 — (0,915)к {0,48 [ sin (k• 10) — cos (k-10)]}.
6.65. x (кТ) = 0,16 (/ — 2T) 4- 0,236(t — ЗТ) 4- 0,365 (t — 47’) 4- 0,486 (t — 5T) 4- • •.
6.66. x (кТ) = 0,1476 (t — T) + 0,4326 (t — 2T) 4- 0,7116 (t — ЗТ) 4- 0,926 (/ — 47’) 4-
4- 1,046 (t — 57’) 4-1,1076 (t — 6T) 4- 1,1256 (/ — 7T) 4-1,1136 (t — 87’) 4-1,1095 (t — 9T) 4-
4-1,1056 (t — 107’) 4-1,1026 (t — 117’) + - ••
6.67. x (кТ) = 1,256 (t — T) 4-1,756 (t — 27’) 4-16 (/ — 3T) 4-16 (< — 4T) 4- • • •
Б86
6.68. х (кТ) = 0,766 (t — T)+ 2,416 (t — 2Т) Д- 4,0646 (t — ЗТ) 4- 5,906 (t — 4Т) +
+ 8,4576 (t — 5Т) 4- 12,116 (Z — 6Т) + - • •
6.69. х (кТ) = 0,4846 (t — Т) + 16 (t — 2Т) 4- 16 (t — ЗТ) 4- Id (Z — 4Т) 4- • • •
6.70. а) х (кТ) = 0,046 (t — 2Т) 4- 0,1526 (t — ЗТ) 4- 0,3136 (t — 4Т) 4- 0,506 (t — 5Т) 4.
4- 0,76 (Z — 6Т) 4- 0,906 (t — 7Г) 4- • • •
6.79. а) 0,275; 0,139; —0,00825; —0,0122. б) 0; 0,205; 0,00397; —0,0495.
6.80. 1.344Т; — 2.033Т2. '6.81. е (кТ) = 0,8646 (t — кТ). 6.82. е(кТ)=0,113 при
k =1,5. 6.83. в (кТ) = 0,373 при с = 0,4.
6-87' « «, = И-2) (>+.->;
а2 = 4,84 — 1,368m — г.ЗбЗе-'” (т — 2); аг = 1,594 — 0,601т 4- 1,736е-т (т — 2);
а0 = 0,773 4- 0,233т — e~m (m — 2).
сел G (z) IF. (г) W, (г, т)
6.89. X (г, m) = j (г) m) W (г, т) = (z) 1Г2 (г) W3 (z, т);
mr - Wj (z) TF2 (z, т) . 1
Ф (г, m) - । (z) (г) {Zi m}, <De (z, m) - j + (г) {z)Wa (Zi m} •
7.3» *реж=25с’ 7.4. По Гауссу-Зейделю ZpeJKi =30 с, го градиенту ZpeM> =50,8 с,
. . оо г₽еж2 , о ?Ре«3 л —
ио наискорейшему спуску Zpea£3 = 23 с, -----=1,7; --------= 0,77.
* *реж1 гРеж1
7,5. ^реж — 85 С. 7.6. ^реж “ 82 С.
7.7. а) 1^=3000 с; б) ZpejK,=2500 с; в) (РеЖз=8850 с; -^2- =0,83; -^2-= 2,95.
и гре«1 *Реж|
7.9. Д, = 1,15 В; Та = 2,3 с. 7.13. Да1 = 0,7 рад; ша1 = 0,02 с'\ 1Реж1 = 2200 с;
Pt = 0,23 рад; Ааз = 0,55 рад; шаа = 0,025 с"1; 1Рвж 2 = 7400 с; Р, = 0,18 рад.
7.16. = 2200 q Л, = 0,7 рад; «а = 0,02 с"1. ’
7.17. Zp^ = 7400 ч Л, - 0,55 рад; ша = 0,025 о"».
7.29. Лда = 0,1; k = 2,34; ut = (2,03 | et | 4- 0,041 е2 | 4- 0,47 | е3 | 4- 4,12| * 14.
4- 0,131 xg | 4- 1,071 х81) sign (9,154?! 4- 1,35еа 4. е,);
7.31. fej= 1,11{ k = 0,095; ug = (311 xj 4- 18,3 |х»| 4-86,0 |х3| 4- 13,6 i«i| 4- 3,1 les|4-
4-4,381 е31 4- 86,01 g I) sign (0,47ei 4-0,57^ — e,).
7.32. = 0,43; * = 0,11; ue = (16,81 xt | 4-2,78 |x21 4-5,78 |x31 4-0,341ex| 4.
4- 0,191 ea 14-1,2 I e81 4- 5,781 g I) sign (0,26ex 4- 0,1 le8 — e8).
7.33. k„ = 0,147; fe-1,01; иг = (2,041 ex | 4- 0,51 e31 4- 0,94 | et | 4-8,63 |x^| 4"
4- 7,481x81) sign (3,25ex 4"«» 4r l,04e»).
7.34. k — 0,007; ng = (0,021 x, I 4- 0,0181 x, I 4- 0,0104 | ex 14.0,03561 e81) alfn X
X (0,288ex —e,).
7Л5. k = 0,219; ut = (0,851 xx| 4-8,58|x8| 4" 1.99|«d 4-3,8|e.|) algn (0,536ex 4-<bX
7.38. kt = -j- [pue 4. pMe 4- pMe] g.
где Pm. Pu, Рп — коэффициенты функции Ляпунова, выбранные в виде
s
у= У, +М*.
687
7.39. kc = (p41e + p42e + p4S’e + p44e) f; ct = — (pue + p^-b p4^e + p44e}xj
(P«e 4- p42e 4- p4Se 4- p44 ej x; cs = —(p41e 4* p42e 4- p43e 4- p44e) x.
Коэффициенты рц определяются, как и в задаче 7.37.
1
2
7.42 к = 2,92 8 ; *о=0,54(-^-)3;
•х + ел= 4- 0.13Д,)
рад*.
8,8. kar= Ю00. 8.14 <D0Pt (s)= -2121(1— е s/p)4-0,85 (-1 — -S-yl
1 в/
—/ре р 4-0,69 4-0,25е ₽.
w (TKis+l)(TKsS+l) .
Kt ' (TK2s4- D(TK4s4- П ’
r«=/?icis г« = 14-тЬ«;
Ткз — Тщ~ j > *эу = (1 4- Ri/Ri) (14*
8.19.
Tk2 = Rs^ii Т'кз —
Ш" (si = s2(7’k2S4‘0 1 .
(TK1s4-i)(Tws4ii) ’
Т кт — RyC^’
Т'ка . , 1 4~ Rj/Rs
1 + RjR, йэу~ ЛтгТкх
TK — RCt
8.21.
IJ7 _ ^kS3(7’k2s4- 1) (7’k4s4“ 1)
kU (TK1S4-1) (7^4-I)2 (7^3 4-1) *
5*ki — T?SC2-----4-/?s ^'K1 "I” ^Ka — 1 "I—j
__ (T’kis 4~ В (7*kss 4~ О .
(Т'кг5 4" 1) (TK4S + 1) ’
1 4------21____
С2 -{ Сз
4. С» %2~ T’kiT’ks! + Ук! — RiC1 + _|_£ Я2; Тк2Тк* = ЬОТЛ1ТЛ;
ГК2 + = RtCt 4- Rt (С3 4- Ci) = R& + C2R2 2з±^1 ф
L2 4" “3 С2 4~ ^3
8.25.
ЬкТ К1
Тм
T'ki = RiCi-
'fa»
^4 । ^4 ’
*! Яз
Йг с
1FK(S) = ^-^S+1);
UK2S+ 1)
kK~ La —---—
1+t+^
8.26.
Чи
k S
(s) = у ; передаточная функция, охватываемая
20
обратной связью WB (s) = -^OSs 4-1 j'(0,001s 4-D J
^доп = 1>5; kK = R^C^ TK1 = ^1+ ^k-
3
К2
8.27.
& Cl ^2
7ЫЛ
П7 (с\ - ---------------
kU (rK1s+l)(TK3s+l) ’
передаточная функция, охваченная обратной связью
Гв = (0,0025s+ 1) (0,001s 4-1) ' квоа = 1000i
= R1S+R3 Сй Гк2 = : ТкзГк1 =ЛкГ1 (1 + "S’) ;
T'ks-----p _l."d _l p K1J (s)----------------------T s X 1 ’ Tu — — k*?'
Kl 4" 7'2 4" 7'3 4 Ks 4-1
(s) = Al
Г KjS ~Ь 1 .
TK2s+l’
14-A.A
+ «1 + *1
T<j = (4g -{• Л4) C|
__ 1 ~^~ * *l~ ^2 4* у . w (s\ _________Гн?___________•
Ri + Rt + Rs МЪ “ ТыТж^ЧЧТад + Т,^!+-&-)]«+!
T»t = R-^C^' Tщ — RiPfi кц
9.6. и* - — Men {sign {xt 4- -5- x= I x« 1} + si8“{*1 + T^T ** I x‘ l}}‘
•J. u* «= — sign {sign (xt + sign {x2j log (1 4- a | x24-
+sign 4- si№ w log (14- t£Lx;L2i)}} •
9.8. u* = — sign {e 4- Те — ktT- (sign {e}) In {1 4- » где p <f>l = TW — V (Л-
9.9. u* = sign{—x2 4-{(1 4-|XiI)-®— 1]|, где xt =• — •'i
(91 + b)T! .
T1TJ1 ’
21.
r2 ’
g-i, gt — переменные состояния объекта управленяя.
a =
9.10. u»™ — sign {к,}.
9.11. «• = sign |xt 4. -2- x, I x21 4- a sign (Xj) j.
9.12. «• = sign {x, 4- (x2 — sign {xx}) J x2 — sign {xi) |J, где x, = у (/))
Xg-p (<)—«(<).
Список литературы
1. Айзерман М. А. Теория автоматиче-
ского регулирования. М., «Наука», 1966.
152 с.
2. Алексеев К. Б., Бебенин Г. Г. Управ-
ление космическими летательными аппара-
тами. Изд. 2-е, М., «Машиностроение», 1974.
341 с.
3. Анисимов В. И., Вавилов А. А., Фа-
еев А. В. Сборник примеров и задач по
1инейной теории автоматического регули-
рования, М.—Л., Госэнергоиздат, 1959. 256 с.
4. Атанс М., Фалб П. Оптимальное уп-
равление. М., «Машиностроение», 1968. 764 с.
5. Беллмав Р. Динамическое программн-
эвание. М., Изд-во иностр, лит., 1960.
400 с.
6. Бесекерский В. А. Динамический син-
тез систем автоматического регулирования.
М., «Наука», 1970. 575 с.
7. Бесекерский В. А., Попов Е. П. Теория
систем автоматического регулирования. Изд.
2-е, М., «Наука», 1972. 767 с.
8. Бодиер В. А. Системы управления ле-
тательными аппаратами. М., «Машинострое-
ние», 1973. 504 с.
9. Болтянский В. Г. Математические ме-
тоды оптимального управления. Изд. 2-е,
М, «Наука», 1969. 408 с.
10. Вавилов А. А. Частотные методы рас-
чета нелинейных систем. Л., «Энергия»,
1970. 322 с.
11. Васильев Д. В., Чунч В. Г. Системы
автоматического управления. М., «Высшая
школа», 1967. 418 с.
12. Васильев Ф. П. Лекции по методам
решения экстремальных задач. Изд. МГУ,
1974. 374 с.
13. Воронов А. А. Основы теории авто-
матического управления. М.—Л., «Энер-
гия», ч. I, 1965. 396 с; ч. II, 1966. 372 с;
ч. III, 1970. 328 с.
14. Гноенский Л. С., Каменский Г. А.,
Эльсгольц Л. Э. Математические основы тео-
рии управляемых систем. М., «Наука»,
1969. 512 с.
15. Джеймс X., Никольс Н., Филлипс Р.
Теория следящих систем. Изд-во иностр,
лит., 1953. 484 с.
16. Задачник по теории автоматического
управления. Под общ. ред. А. С. Шаталова,
М., «Энергия», 1971. 496 с.
17. Иващенко Н. И. Автоматическое ре-
гулирование. Теория и элементы систем.
Изд. 3-е, М., «Машиностроение», 1973. 606 с.
18. Казаков И. Е. Статические методы
проектирования систем управления. М., «Ма-
шиностроение», 1969. 262 с.
19. Колесников К. С., Сухов В. Н. Уп-
ругий летательный аппарат как объект
автоматического управления. М., «Машино-
строение», 1974. 267 с.
20. Красовский А. А., Поспелов Г. С.
Основы автоматики и технической кибер-
нетики. М.—Л., Госэнергоиздат, 1962. 600 с.
21. Кузин Л. Т. Расчет и проектирова-
ние дискретных систем управления. М.,
Машгиз, 1962. 683 с.
22. Кузовков Н. Т. Динамика систем ав-
томатического управления. М., «Машино-
строение», 1968. 428 с.
23. Лебедев А. А., Чернобровкин Л. С.
Динамика полета беспилотных летательных
аппаратов. Изд. 2-е, М., «Машиностроение»,
1973. 616 с.
24 .1 Методы гармонической линеаризации
в проектировании нелинейных систем авто-
матического управления. Под общ. ред.
Е. П. Попова. М., «Машиностроение», 1970.
567 с.
25. Нелинейные корректирующие устрой-
ства в системах автоматического управления.
Под общ. ред. Е. П. Попова. М., «Маши-
ностроение», 1972. 466 с.
26. Олейников В. А., Зотов Н. С., Приш-
вин А. М. Основы оптимального в экстре-
мального управления. М., «Высшая шко-
ла», 1969. 296 с.
27. Олейников В. А., Зотов Н. С., Приш-
вин А. М-, Соловьев Н. В. Сборник задач
и примеров по теории автоматического уп-
равления. М., «Высшая школа», 1969.
199 с.
28. Петров Б. Н., Рутковский В. Ю.,
Крутова И. Н., Земляков С. Д. Принципы
построения и проектирования самонастраи-
вающихся систем управления. М., «Маши-
ностроение», 1972. 260 с.
29. Попов Е. П. Автоматическое регули-
рование и управление. Изд. 2-е, М., «Наука»,
1966. 388 с.
30. Попов Е. П. Прикладная теория про-
цессов управления в нелинейных системах.
М., «Наука», 1973. 584 с.
31. Пугачев В. С. Теория случайных функ-
ций н ее применение к задачам автоматиче-
ского управления. Изд. 3-е, М., Физмат-
гиз, 1962. 884 с.
591
32. Пугачев В. С., Казаков И. Е., Ев-
ланов Л. Г. Основы статистической теории
автоматических систем. М., «Машинострое-
ние!, 1974. 400 с.
33. Сборник задач по теории автоматиче-
ского регулирования и управления. Под
ред. Бесекерского В. А. Изд. 4-е, М., «Нау-
ка», 1972. 609 с.
34. Солодовников В. В. Статистическая ди-
намика линейных систем автоматического
управления. М., Физматгнз, 1960. 666 с.
35. Солодовников В. В., Топчеев Ю. И.,
Крутикова Г. В. Частотный метод построе-
ния переходных процессов с приложением
таблиц и номограмм. Справочное пособие.
М., Гостехтеоретиздат, 1955. 195 с.
36. Техническая кибернетика. Теория ав-
томатического регулирования. Под ред.
В. В. Солодовникова. Кн. 1, 768 с., кн. 2,
680 с.; М., 1967; кн. 3, ч. I, 608 с., ч. II,
366 с., М., 1969, «Машиностроение».
37. Тоичеев Ю. И., Потемкин В. Г., Ива-
ненко В. Г. Системы стабилизации. М.,
з
i*
«Машиностроение», 1974. 248 с. £
38. Ту Ю. Т. Цифровые и импульсные F
системы автоматического управления. М.,
«Машиностроение», 1964. 704 с.
39. Талер Дж. и Пестель М. Анализ и
расчет нелинейных систем автоматического
управления. М.—Л., «Энергия», 1964. 488 с.
40. Удерман Э. Г. Метод корневого годо-
графа в теории автоматических систем. £
М., «Наука», 1972. 448 с. *
41. Цыпкнн Я. 3. Теория линейных им- j'
пульсных систем. М., Физматгнз, 1968.
968 с. s
42. Цыпкии Я- 3. Релейные автоматнче- |
ские системы. М., «Наука», 1974. 576 с. g
43. Шаталов А. С. Структурные методы . М
в теории управления н электроавтоматике. ' *
М.—Л., Госэнергонздат, 1962. 408 с. ;
44. Шаталов А. С., Топчеев Ю. И., Кои- I
дратьев В. С. Летательные аппараты как [
объекты управлении. М., «Машиностроение»,
1972. 240 с.
I-
ИБ № 33
Юрий Иванович ТОПЧЕЕВ
Александр Павлович ЦЫПЛЯКОВ
ЗАДАЧНИК ПО ТЕОРИИ
АВТОМАТИЧЕСКОГО
РЕГУЛИРОВАНИЯ
Учебное пособие для вузов
Редактор издательства
инж. Л. П. Строганов
Технический редактор
Е. П. Смирнова
Корректоры
А. П. Озерова и А. А. Снастила
Переплет художника
А. Л- Михайлова
Сдано в набор 23.06.77 г.
Подписано в печать 21.10.77 г.
Т-15337 Формат 70X 108/16
Бумага типографская № I.
Литературная гарнитура. Печать высокая.
Усл.'печ. л. 51,8. Уч.-иэд. л. 46,2.
Тираж 28 500 эка. Зак. № 275. Цена 2 р.
Издательство «Машиностроение»
107885, Москва, Б-78, I-й Басманный пер., 3
Ленинградская типография № 6
Союзполиграфпрома
при Государственном комитете
Совета Министров СССР
по делам издательств, полиграфии
и книжной торговли
193144, Ленинград, С-144,
ул. Моисеенко, 10