/

















































Текст
самотека
КОНСТРУКТОРА
АВ ЕС ЕЛО ВС КИ Й
ОДЕЛЬ
полвсмпой
ОКИ
А. ВЕСЕЛОВСКИЙ
МОДЕЛЬ
ПОДВОДНОЙ
лодки
ИЗДАТЕЛЬСТВО ДОСААФ
МОСКВА —1964
scan
КРАТКИЙ ИСТОРИЧЕСКИЙ ОЧЕРК
РАЗВИТИЯ ПОДВОДНЫХ ЛОДОК
Подводными лодками называют корабли, способные
плавать под водой. Подводные лодки используются для
военных действий как на поверхности моря, так и для
атаки надводных кораблей в подводном положении.
Практика использования подводных лодок показала, что
основа их успеха заключается как раз во внезапном и
скрытном нанесении торпедных ударов из-под воды. Ос-
новная задача подводных лодок — нарушение морских
перевозок противника. Подводные лодки могут весьма
эффективно использоваться против боевых кораблей, а
также для ведения разведки и постановки мин.
Идея подводного плавания зародилась давно. С на-
чала своего возникновения подводные лодки были за-
думаны как средство борьбы с военными кораблями
противника.
Первая подводная лодка была построена в Лондоне
голландским ученым К. ван-Дреббелем в 1620 году.
В России идея использования подводного судна для
военных целей была впервые выдвинута русским изо-
бретателем-самоучкой Е. Никоновым, который в 1724 го-
ду построил «потаенное огневое судно». Лодка Е. Нико-
нова не была применена в военном деле и после смерти
изобретателя была забыта.
В 1776 году американец Д. Бушнелл сконструировал
3
подводную лодку «Черепаха», погружавшуюся при по-
мощи бака, заполняемого водой.
В 1801 году известный американский изобретатель
Р. Фультон построил подводную лодку «Наутилус».
В 1834 году инженер-генерал русской армии К. А.
Шильдер соорудил подводную лодку из железа водоиз-
мещением 16 тонн, вооруженную шестовой миной. Дви-
жение этой лодки осуществлялось особыми гребками от
ручного привода.
Попытка французского изобретателя О. Риу в 1861 г.
приводить подводную лодку в движение с помощью
электрического двигателя потерпела неудачу.
В 1866 году русский инженер И. Ф. Александровский
построил подводную лодку водоизмещением 355 тонн,
вооруженную двумя минами.
В начале XX века подводное кораблестроение вышло
из стадии опытов. В 1903—1915 годах по проектам вы-
дающихся русских конструкторов И. Г. Бубнова и М. П.
Налетова было создано несколько подводных лодок,
определивших тип русской подводной лодки. Под-
водные лодки типа «Барс» (водоизмещение 650 тони,
вооружение 12 торпедных аппаратов), постройка
которых была начата Бубновым в 1912 году, яв-
лялись самыми мощными в то время, а подводная лодка
типа «Краб», построенная Налетовым, была первым в
мире подводным минным заградителем. После 1917 го-
да подготовка личного состава подводников Советского
Военно-Морского Флота осуществлялась главным обра-
зом на подводных лодках типа «Барс».
К началу первой мировой войны 1914—1918 годов под-
водные лодки стали технически совершенными военны-
ми кораблями и были способны выполнять сложные
боевые задачи. Движение подводных лодок в надводном
положении осуществлялось двигателями внутреннего
сгорания, а в подводном — электрическими двигателями,
получающими электрическую энергию от батарей акку-
муляторов. При плавании в надводном положении элект-
рические двигатели вращались двигателями внутреннего
сгорания и, работая в генераторном режиме, использо-
вались для зарядки аккумуляторных батарей. Уже тогда
подводные лодки имели большую дальность плавания,
могли делать большие переходы со скоростью до 12 уз-
лов в надводном положении и до 7 узлов в подводном.
4
В первую мировую войну подводные лодки, как пра-
вило, курсировали на морских путях и топили транспор-
ты противника, использовались для постановки минных
заграждений на пути движения судов и у входов в пор-
ты противника.
Основным оружием подводных лодок были торпеды.
Кроме торпед, лодки имели одну-две пушки, которые по-
зволяли ей в надводном положении поражать артилле-
рийским огнем транспорты и мелкие корабли.
Опыт первой мировой войны 1914—1918 годов пока-
зал, что подводные лодки имеют большое значение в
войне на море. Это послужило толчком к дальнейшему
их развитию. За два десятка лет перед второй мировой
войной средства нападения подводных лодок были усо-
вершенствованы. Подводные лодки стали оснащаться
шумопеленгаторами, а затем и гидроакустическими ло-
каторами, которые позволяли вести поиск цели и выво-
дить лодку в атаку без подъема перископа. Новые лод-
ки строились большого водоизмещения и были рассчи-
таны на большую дальность плавания.
В наиболее развитых капиталистических государст-
вах к началу второй мировой войны 1939—1945 годов
имелось большое количество подводных лодок (напри-
мер, в Германии — 57, Великобритании — 65, Японии —
73, Франции — 96, США—116, Италии—133). Круп-
ные подводные лодки имели надводное водоизмещение
1200—1 800 тонн, подводное— 1 500—2 700 тонн, обла-
дали скоростью надводного хода до 20 узлов и в под-
водном положении — до 10 узлов. Вооружение подвод-
ных лодок состояло из 10—14 торпедных труб диамет-
ром 533 мм и одной — двух пушек калибром до 127 мил-
лиметров. Автономность лодок, т. е. способность нахо-
диться в море без пополнения запасов, доходила до
80 суток, а дальность плавания—до 15 000—20 000 миль.
Цели и задачи подводных лодок во второй мировой
войне остались в основном прежними, т. е. нарушение
морских перевозок противника, борьба с его военными
кораблями, скрытная постановка минных заграждений.
Кроме того, благодаря наличию новых технических
средств обнаружения противника стало возможным ата-
ковать в подводном положении лодку противника и уни-
чтожить ее. Во время войны на подводных лодках ста-
5
ли устанавливаться радиолокационные станции, что
значительно увеличило возможность обнаружения ко-
раблей противника при плавании лодки в надводном по-
ложении.
С первых дней Великой Отечественной войны с не-
мецко-фашистскими захватчиками образцы военного ма-
стерства и беспримерной храбрости показывали наши
моряки-подводники и прежде всего экипажи лодок под
командованием Героя Советского Союза Гаджиева, Фи-
сановича, Старикова, Колышкина, Лунина. Их смелые
и внезапные удары по конвойным судам, базам и над-
водным кораблям противника приводили в трепет гитле-
ровцев.
Успешность борьбы авиации и специальных противо-
лодочных кораблей с подводными лодками требовала
значительного повышения их подводных качеств — даль-
ности плавания и скорости хода. Еще накануне второй
мировой войны строились опытные образцы подводных
лодок с единым двигателем надводного и подводного хо-
да. Развитие атомной энергетики в послевоенный пери-
од привело к созданию принципиально нового типа под-
водной лодки — с атомным двигателем. Атомное горкь
чее в малом объеме и малом весе содержит очень боль-
шую энергию и поэтому подводная лодка с атомной си-
ловой установкой имеет практически неограниченную
дальность плавания.
Использование атомных реакторов, которые потребо-
вали установки массивной защиты от вредного излу-
чения, вызвало необходимость увеличить размеры под-
водных лодок. Кроме того, возросла численность эки-
пажа (за счет персонала, обслуживающего энергетиче-
ские установки), что потребовало увеличения площади
жилых помещений. В связи с этим размеры и водоиз-
мещение современных лодок значительно возросли. Так,
например, американская атомная подводная лодка
«Трэшер», погибшая в Атлантическом океане в апреле
1963 года, имела водоизмещение: надводное 3 750 тонн,
подводное 4 300 тонн. Длина этой лодки была 85,1 мет-
ра, ширина 9,8 метра, осадка 8,8 метра. Ядерный реак-
тор с водяным охлаждением позволял лодке двигаться
в надводном положении со скоростью 20 узлов, а в под-
водном — 35 узлов. «Трэшер» предназначалась для
борьбы с подводными лодками и была вооружена про-
6
тиволодочными торпедо-ракетами. Экипаж лодки со-
ставляли 114 человек.
Современные атомные подводные лодки вооружают
ракетами с ядерными боеголовками для стрельбы по на-
земным или морским целям. Эти ракеты имеют большую
дальность полета и могут выстреливаться с лодки, на-
ходящейся в подводном положении.
С первых дней своего существования подводные лод-
ки используются для военных целей. Но они могут вы-
полнять и другие задачи. Ярким примером тому служит,
о чем неоднократно писалось в нашей печати, первая в
мире советская научно-исследовательская подводная
лодка «Северянка». Она успешно изучает поведение и
повадки рыб под водой, направление движения их кося-
ков и оказывает советскому рыбопромысловому флоту
неоценимую помощь.
Применение атомного «горючего» на подводных лод-
ках позволит в недалеком будущем использовать их в
мирных целях для исследования морских глубин миро-
вого океана, изучения морских течений и теплообмена
водных масс и для других научных целей. Транспортные
лодки могут сделать коротким морской путь между ма-
териками через Северный полюс подо льдом океана.
Большое будущее имеют наливные подводные суда для
перевозки различных жидких грузов.
Большинство людей на земле верит в то, что мир по-
бедит войну, и если до нашего времени подводные лод-
ки служили только войне, то теперь атомные подводные
лодки делают целесообразным мирное освоение подвод-
ных дорог.
КРАТКАЯ ТЕОРИЯ ПОДВОДНЫХ ЛОДОК
Основное отличие подводной лодки от надводного ко-
рабля заключается в том, что подводная лодка может
плавать в нескольких положениях: надводном, проме-
жуточном и подводном.
Надводным, или крейсерским, положением
называется такое, в котором подводная лодка несет все
полагающиеся по ее спецификации грузы и имеет в ци-
стернах вспомогательного балласта дифферентовочную
воду. Крейсерскому положению соответствует надводное,
7
или крейсерское, водоизмещение; в соответствии с этим
и ватерлиния, определяющая это водоизмещение, назы-
вается крейсерской.
Позиционное положение, допускающее возмож-
ность хода с помощью надводных (дизельных) дви-
гателей и применение артиллерии, достигается палуб-
ными цистернами при закрытой вентиляции их, или
средней (оперативной) цистерной, или одной или не-
сколькими главными цистернами.
Переуглубленное надводное положение
подводная лодка имеет при увеличенных запасах топли-
ва, размещенных в бортовых балластных цистернах.
Подводное, или погруженное, положение
имеет место тогда, когда заполнены все главные балла-
стные цистерны, а если есть палубные, то и они.
И в надводном, и в подводном положениях подвод-
ные лодки должны обладать способностью маневриро-
вать и быть остойчивыми.
Рассмотрим основные мореходные качества подвод-
ной лодки.
Плавучестью, по определению в теории надвод-
ного корабля, называется способность корабля плавать
при заданной осадке, неся на себе назначенные по роду
его службы грузы. Для этого необходимо, чтобы вес ко-
рабля равнялся весу воды, вытесняемой им при задан-
ной осадке (согласно закону Архимеда).
Мерой плавучести служит объем подводной части ко-
рабля, или, что одно и то же, вес воды, заключенной в
этом объеме. Объем подводной части, измеряемый в ку-
бических метрах, называется объемным водоизме-
щением, а вес воды, заключенной в этом объеме, из-
меряемый в тоннах, называется весовым водоиз-
мещением. Весовое и объемное водоизмещения свя-
заны между собой формулой:
D=rV,
где у — плотность воды.
В то время как в теории надводного корабля плот-
ность воды рассматривается в зависимости от солености
воды, в теории подводного корабля она должна рас-
сматриваться, кроме солености, в зависимости от темпе-
ратуры воды и давления на глубине. При плавании под-
водной лодки на поверхности в пресной воде, плотность
8
которой у = 1, будем иметь: Vo = Do, т. е. объемное и
весовое водоизмещения при этом численно равны.
Запасом плавучести называется весь непро-
ницаемый объем лодки, лежащий выше крейсерской ва-
терлинии. По объему запас плавучести равен сумме не-
заполненных объемов всех главных балластных цистерн
и выражается в процентах от надводного водоизмеще-
ния.
При заполнении главных балластных цистерн запас
плавучести практически погашается обычно так, что у
подводной лодки остается еще запас плавучести в раз-
мере 0,01—0,015% от надводного водоизмещения (это
достигается соответствующим приемом воды в уравни-
тельную цистерну). Называется он остаточной пла-
вучестью, которая является положительной. Она ком-
пенсируется при подводном ходе действием горизонталь-
ных рулей. Таким образом, практически yVo—2?о = О»О1—
0,015 yV0. При yV0 = остаточная плавучесть равна
нулю, а при у Vo — = —К подводная лодка имеет от-
рицательную плавучесть в размере К тонн.
В зависимости от конструкции корпуса подводные
лодки имеют различные запасы плавучести. Нормальный
запас плавучести для однокорпусных подводных лодок
составляет 16—25% от надводного водоизмещения DQ,
для полуторакорпусных — 20—35% от DQi для двухкор-
пусных— 35—50%, а иногда и более.
Во время плавания подводной лодки в силу разных
причин величины D, V и у меняются, вследствие чего ме-
няется и плавучесть подводной лодки. В том случае,
если величина yV становится больше D, лодка получает
положительную плавучесть, если меньше — отрицатель-
ную.
От каких же причин изменяется плавучесть подвод-
ной лодки? Прежде всего от изменения плотности воды
по мере увеличения глубины. Можно считать, что с уве-
личением глубины на каждые 10 м плотность воды воз-
растает на 0,005%. Следовательно, если у поверхности
воды плавучесть погруженной подводной лодки будет
уУ, то при погружении ее на п метров плавучесть ста-
нет yi V. При этом
_ /1 I П 0,005 ч
Т1 — С1 + ‘ю X loo )• Т
и приобретенная плавучесть станет:
2 Зак. 624
9
т ту >. tzF/ii^xz 0,005 \ "I_ /1 v у 0,00э т т
Qi = Цт1“т) - +1бХ-юо~) • т “ т J io"X Ч0(Г^
Входящий в формулу объем v представляет собой
объем прочного корпуса и выступающих частей.
Плавучесть подводной лодки изменяется и от увели-
чения плотности воды вследствие изменения ее темпера-
туры. Можно считать с достаточной практической точ-
ностью, что при понижении температуры воды с +20°
до +10° ее плотность равномерно увеличивается на
0,014% на каждый градус, а при дальнейшем понижении
температуры с +10° до +4° плотность воды также рав-
номерно увеличивается на 0,003% на каждый градус.
Предположим, что подводная лодка, погрузившись в
воде плотности у, имеющей температуру +20°, попала в
слой воды с температурой +10°. Вследствие понижения
температуры на 10° у лодки увеличится плавучесть (от
увеличения плотности воды). Приобретенная плаву-
честь будет:
п 0,014x10
= -100—
Увеличение плавучести вследствие понижения тем-
пературы воды может быть значительно, что всегда ис-
пользуется на практике.
Изменение солености воды также влияет на измене-
ние плавучести подводной лодки. При переходе лодки
из воды одной солености (плотность у) в воду другой
солености (плотность yi) изменяется осадка лодки, ко-
торая может быть определена следующим путем.
Пусть весовое водоизмещение подводной лодки Do.
Тогда объемное водоизмещение в воде плотности у бу-
дет Vo = , а в воде плотности уь будет Vi= у2.Сле-
довательно, изменение объемного водоизмещения при
переходе из воды одной солености в другую будет:
Уо - Ц = Do (— - —= D I12ZI.
0 \ 7 71 / 0 771
Значит приблизительное изменение осадки может
быть определено по формуле:
t _ D« (7ГГ.7)
где 3 — площадь грузовой ватерлинии в л2.
10
Известно, что объемное крейсерское водоизмещение
равно всегда плавучему объему, а так как последний
остается при переходе подводной лодки в воду другой
солености неизменным, то необходимо, чтобы и объем-
ное крейсерское водоизмещение оставалось постоянным,
т. е. оставалась постоянной крейсерская ватерлиния.
Поэтому при переходе подводной лодки в воду другой
солености для ее погружения следует нагрузить или раз-
грузить лодку в зависимости от того, будет ли yi>y или
у>уь В первом случае, когда yi>y подводную лодку
требуется нагрузить на —ТОнн, во втором слу-
чае— разгрузить на-^-^—— тонн.
Так как обычно подводные лодки строят, принимая
у= 1, т. е. по пресной воде, то для поддержания посто-
янной, грузовой ватерлинии крейсерского положения при
изменении солености принимается вода в так называе-
мые заместительные цистерны солености.
Изменение плавучести подводной лодки из-за обжа-
тия корпуса вследствие давления воды на глубине в дан-
ной брошюре не рассматривается.
Рассмотрим остойчивость подводных лодок. В над-
водном положении подводную лодку в отношении попе-
речной начальной остойчивости (угол крена 10°—15°)
следует рассматривать как надводный корабль. Мета-
центрическая формула остойчивости в этом случае име-
ет вид:
М = Do (р—а) • sin 0,
где М — внешний кренящий момент;
Dq— надводное водоизмещение;
р — поперечный метацентрический радиус;
а —расстояние между центром величины (ЦВ) и
центром тяжести (ЦТ) подводной лодки;
0 — малый угол, в пределах которого метацентри-
ческая высота сохраняет постоянную величину.
У надводных кораблей ЦТ всегда лежит выше ЦВ. У
подводных лодок в надводном положении обычно то же
расположение ЦТ и ЦВ.
Накренив подводную лодку, находящуюся в надвод-
ном положении (рис. 1,а), на малый угол 0, в пределах
2*
11
Рис. 1. Остойчивость подводной лодки
которого метацентрическая высота остается постоянной,
получим выпрямляющую пару: Pz-sin0.
В подводном положении поперечный метацентриче-
ский радиус р вследствие исчезновения момента инерции
действующей ватерлинии обращается в нуль и мета-
центр М совпадает с ЦВ. Таким образом, в подводном
положении мерой остойчивости служит расстояние меж-
ду ЦТ и ЦВ, которое также называют метацентриче-
ской высотой. В подводном положении ЦВ должен обя-
зательно лежать выше ЦТ для того, чтобы при крене
появлялась выпрямляющая пара (рис. 1,6), момент ко-
торой будет:
М=PZ • sin©=D% • sin©.
Если же в подводном положении ЦТ и ЦВ совпадут,
при крене выпрямляющей пары не получится (рис. 1,в),
а если ЦТ окажется выше ЦВ, то создастся опрокиды-
вающая пара (рис. 1,г).
В то время как в надводном положении подводной
лодки величина метацентрической высоты изменяется
при конечном угле крена 0, как и у надводного корабля,
в подводном положении она остается постоянной, рав-
ной расстоянию между ЦТ и ЦВ. Это происходит оттого,
что в нагруженном положении при наклонах ЦВ сохра-
няет свое положение относительно подводной лодки не-
изменным, так как форма погруженного в воду объема
не изменяется. ЦТ также сохраняет свое положение не-
изменным, так как в лодке нет грузов, которые могли
бы при наклонах изменить свое положение. В этом слу-
12
чае, независимо от того, каковы будут наклоны — про-
дольные или поперечные, момент выпрямляющей пары
(обозначая угол крена или дифферента через 6) будет
выражаться формулой:
М =Z?asin0.
Рассматривая начальную остойчивость (при малых
углах 0) подводной лодки в процессе погружения, мож-
но сказать, что по мере того, как она будет увеличивать
свое водоизмещение и осадку, ЦВ будет повышаться.
ЦТ в начале погружения лодки будет понижаться вслед-
ствие того, что вода будет поступать в нижние части
объемов балластных цистерн. В результате изменения
этих точек наступит момент, когда ЦТ и ЦВ совпадут.
При этом величина а обратится в нуль (рис. 1,д) и ме-
тацентрическая формула остойчивости примет вид:
М = Dp sin 3.
При дальнейшем погружении подводной лодки ЦВ,
повышаясь, займет положение выше ЦТ. При этом вели-
чина а переменит свой знак и метацентрическая формула
остойчивости будет следующая (рис. 1,е):
М = D( p + a)sin 0.
ПРИНЦИП ДЕЙСТВИЯ
РУЛЕЙ подводной лодки
При плавании в надводном положении подводная
лодка управляется с помощью вертикального руля и
маневрирование лодки в этом случае ничем не отли-
чается от маневри-
рования надводного
корабля. Горизон-
тальные рули не ока-
зывают никакого
влияния на маневри-
рование подводной
лодки, так как они
установлены парал-
лельно поверхности
воды.
При подводном
Рис. 2. Действие руля подводной лод-
ки
13
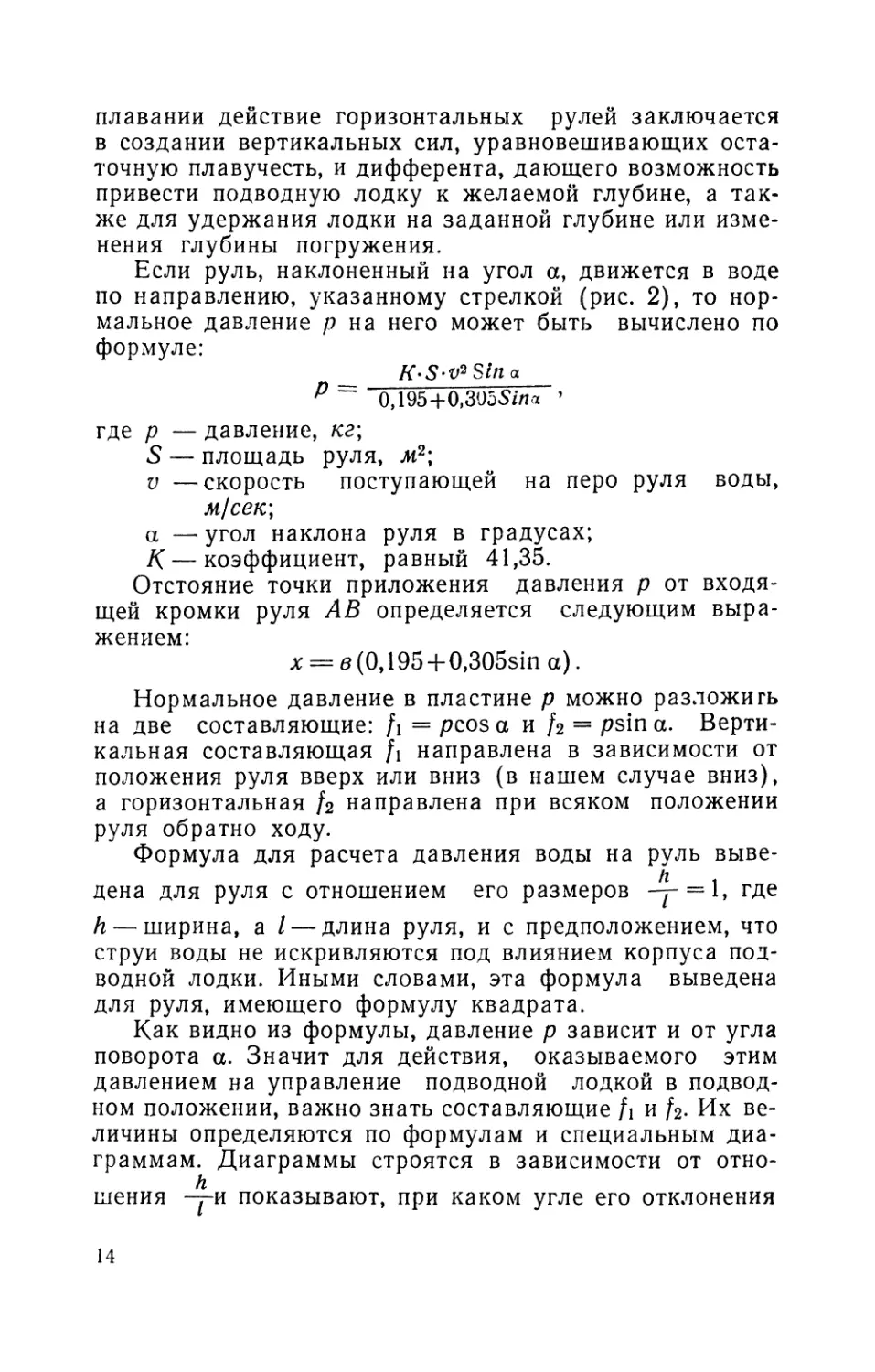
плавании действие горизонтальных рулей заключается
в создании вертикальных сил, уравновешивающих оста-
точную плавучесть, и дифферента, дающего возможность
привести подводную лодку к желаемой глубине, а так-
же для удержания лодки на заданной глубине или изме-
нения глубины погружения.
Если руль, наклоненный на угол а, движется в воде
по направлению, указанному стрелкой (рис. 2), то нор-
мальное давление р на него может быть вычислено по
формуле:
K-S-V2Sltla
где р — давление, к,г\
S — площадь руля, м2\
v —скорость поступающей на перо руля воды,
м1сек\
а —угол наклона руля в градусах;
К — коэффициент, равный 41,35.
Отстояние точки приложения давления р от входя-
щей кромки руля АВ определяется следующим выра-
жением:
х = в(0,195+0,305sin а).
Нормальное давление в пластине р можно разложить
на две составляющие: fi = pcosa и /2 = psina. Верти-
кальная составляющая fi направлена в зависимости от
положения руля вверх или вниз (в нашем случае вниз),
а горизонтальная /2 направлена при всяком положении
руля обратно ходу.
Формула для расчета давления воды на руль выве-
л .
дена для руля с отношением его размеров — = 1, где
h — ширина, а I — длина руля, и с предположением, что
струи воды не искривляются под влиянием корпуса под-
водной лодки. Иными словами, эта формула выведена
для руля, имеющего формулу квадрата.
Как видно из формулы, давление р зависит и от угла
поворота а. Значит для действия, оказываемого этим
давлением на управление подводной лодкой в подвод-
ном положении, важно знать составляющие f\ и /2. Их ве-
личины определяются по формулам и специальным диа-
граммам. Диаграммы строятся в зависимости от отно-
h
шения —и показывают, при каком угле его отклонения
14
давление воды на руль будет максимальным. Ниже при-
ведены данные для разных отношений, полученные опыт-
ным путем.
Отношение ~у~ • ........ 5 1 0,5 0,25 0,2
при отклонении руля
Р мах на угол (°) . ...» 16 33 35 40 42
Как видно, руль с отношением сторон-р = 5 (т. е.
когда ширина в пять раз больше длины) отличается от
руля с отношением сторон у- = 0,25 (узкий и длинный)
тем, что у первого максимальное давление оказывается
при 16° отклонения его, в то время как у узкого и длин-
ного руля оно оказывается при 40°.
Угол отклонения горизонтальных рулей подводных
лодок обычно не более 20—25°, вследствие чего короткие
и широкие рули (удлиненные поперек движения) явля-
ются более выгодными, чем узкие и длинные (удлинен-
ные вдоль движения), которые полностью не могут быть
использованы.
Для управления подводной лодкой при подводном
ходе горизонтальные рули устанавливаются в несколь-
ких комбинациях. Простейшей комбинацией является ус-
тановка одной пары кормовых горизонтальных рулей,
которые для повышения их эффективности выгоднее все-
го ставить непосредственно за гребными винтами. Такое
положение горизонтальных рулей имеет недостатки, так
как при установке рулей на погружение подводная лод-
ка вначале всплывает под действием подъемной силы,
создаваемой рулями, и только после этого уходит на глу-
бину. Поэтому такая установка горизонтальных рулей
практикуется обычно на подводных лодках небольшого
водоизмещения (около 100 т) и небольшой длины (20—
25 м).
Для подводных лодок большого водоизмещения,
как правило, устанавливается одна пара носовых и одна
пара кормовых горизонтальных рулей. Такие рули, дей-
ствующие независимо друг от друга, могут создавать, в
зависимости от их комбинации, следующие положения:
а) дифферент на нос или на корму;
б) топящую или подъемную силу;
в) дифферент на нос или на корму и топящую или
подъемную силу одновременно.
15
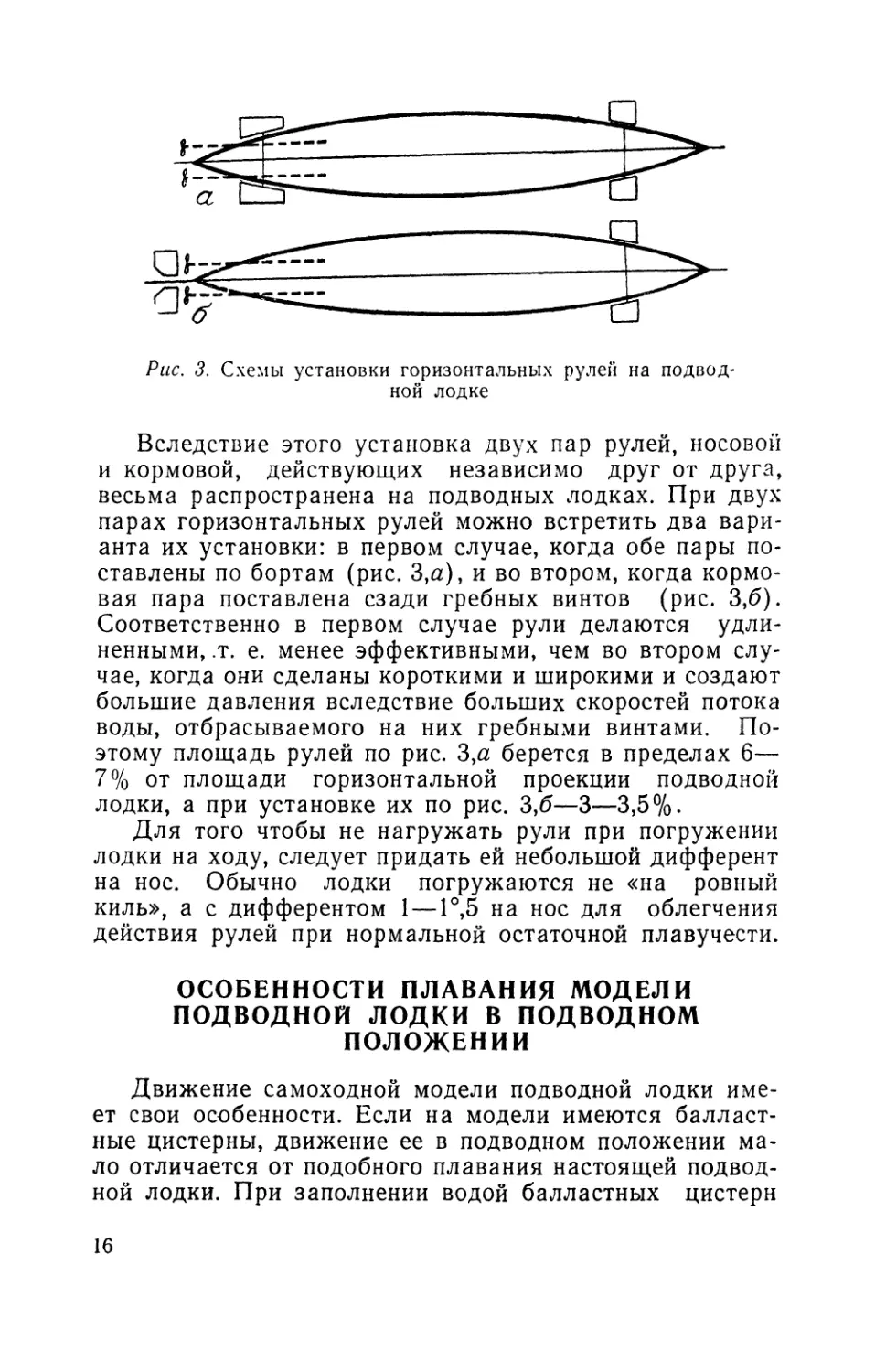
Рис. 3. Схемы установки горизонтальных рулей на подвод-
ной лодке
Вследствие этого установка двух пар рулей, носовой
и кормовой, действующих независимо друг от друга,
весьма распространена на подводных лодках. При двух
парах горизонтальных рулей можно встретить два вари-
анта их установки: в первом случае, когда обе пары по-
ставлены по бортам (рис. 3,я), и во втором, когда кормо-
вая пара поставлена сзади гребных винтов (рис. 3,6).
Соответственно в первом случае рули делаются удли-
ненными, .т. е. менее эффективными, чем во втором слу-
чае, когда они сделаны короткими и широкими и создают
большие давления вследствие больших скоростей потока
воды, отбрасываемого на них гребными винтами. По-
этому площадь рулей по рис. 3,я берется в пределах 6—
7% от площади горизонтальной проекции подводной
лодки, а при установке их по рис. 3,6—3—3,5%.
Для того чтобы не нагружать рули при погружении
лодки на ходу, следует придать ей небольшой дифферент
на нос. Обычно лодки погружаются не «на ровный
киль», а с дифферентом 1 —1°,5 на нос для облегчения
действия рулей при нормальной остаточной плавучести.
ОСОБЕННОСТИ ПЛАВАНИЯ МОДЕЛИ
ПОДВОДНОЙ лодки В ПОДВОДНОМ
ПОЛОЖЕНИИ
Движение самоходной модели подводной лодки име-
ет свои особенности. Если на модели имеются балласт-
ные цистерны, движение ее в подводном положении ма-
ло отличается от подобного плавания настоящей подвод-
ной лодки. При заполнении водой балластных цистерн
16
гасится запас плавучести, увеличивается тем самым вес,
ЦТ модели понижается, а ЦВ, наоборот, повышается
(ЦТ занимает положение ниже ЦВ). При таком распо-
ложении ЦТ и ЦВ остойчивость модели будет хорошей.
Остаточная плавучесть, как и на полноразмерной под-
водной лодке, компенсируется при подводном ходе топя-
щей силой горизонтальных рулей. В этом случае гори-
зонтальные рули устанавливаются на погружение на
очень небольшой угол (0°,7—0°,8), а иногда и меньше. В
противном случае модель будет все время погружаться
и в конце концов ударится о дно водоема.
Продувка балластных цистерн осуществляется в кон-
це дистанции сжатым воздухом от баллона, расположен-
ного внутри корпуса модели. Балластные цистерны в
нижней части корпуса расположены с обоих бортов,
симметрично ДП. Кингстоны, через которые вытесняется
вода из цистерн, должны быть расположены на одном
уровне по длине модели и симметрично ее ДП. Если это
требование не выполнено, при всплытии модель может
накрениться, а наличие крена всегда связано с отклоне-
нием модели от прямого курса. Вентиляционные трубы,
через которые выходит воздух при заполнении водой
балластных цистерн, должны быть автономными и не
сообщаться между собой, ибо это тоже способствует по-
явлению крена.
Практика показывает, что в большинстве случаев мо-
дели подводных лодок строятся без балластных цистерн,
т. е. с таким расчетом, чтобы с включенным двигателем
они плавали в надводном положении. Движение модели
под водой в этом случае значительно отличается от ус-
ловий плавания полноразмерной подводной лодки.
В надводном положении модель имеет определенный
вес Р и некоторый запас плавучести, которые при погру-
жении не изменяются. Модель уходит под воду только
вследствие топящей силы горизонтальных рулей. У таких
моделей ЦТ расположен всегда выше ЦВ и их взаим-
ное расположение не меняется с погружением. В над-
водном положении модели силы поддержания F равны
весу Р. При движении модели на ее рули действует сила
давления воды р, которую можно разложить на верти-
кальную /1 и горизонтальную /2 составляющие. Состав-
ляющая /2 всегда направлена против движения модели и
уменьшает ее скорость, составляющая Д при погружении
3 Зак 624
17
модели направлена вниз и совпадает с весом Р. Силу
/1 назовем топящей силой. Если сумма сил Р и окажет-
ся больше F, модель начнет погружаться и будет пере-
мещаться вниз до тех пор, пока сумма сил Р и не ста-
нет равной силе поддержания F. Когда Р + fi равно F,
модель перестанет погружаться и будет идти в подвод-
ном положении горизонтально.
Погружающая сила при движении модели равна раз-
ности между равнодействующей (суммой) сил Р и fi и
силой поддержания F, Значит:
/погр=(^ + А)-^=(Р-П +/>.
Сила поддержания F постепенно возрастает по мере по-
гружения модели, а затем становится постоянной, но
всегда больше веса модели Р. Поэтому разность
(Р—F) может быть только отрицательной величиной.
Эта разность представляет собой подъемную силу моде-
ли, которая направлена всегда вверх, стремится «вытолк-
нуть» модель на поверхность воды и численно равна
/под = Р— Р* Величина подъемной силы является по-
стоянной для данной модели. Следовательно, погружаю-
щая сила равна разности между топящей силой обоих
горизонтальных рулей и подъемной силой модели:
fnorp—-fl /под*
Для определения величины топящей силы fi можно
воспользоваться ранее приведенной формулой, по кото-
рой вычислялась сила нормального давления р на перо
руля:
— sina
Р~ 0,1954-0,305 sina
Этой формулой можно пользоваться потому, что го-
ризонтальные рули действуют на модель так же, как и
на подводную лодку. Нужно помнить, что этой формулой
можно пользоваться в том случае, когда перо руля име-
ет форму квадрата или близкую к нему.
При определении величины р площадь пера руля S
нужно выражать в см2, а скорость модели v— в см!сек;
сила р в этом случае будет выражена в г. Нужно пом-
нить еще одно: при определении величины р задаются
какой-нибудь определенной скоростью модели в подвод-
ном положении. Для этого можно выбрать скорость ка-
кой-либо известной модели, показавшей хорошие ре-
18
зультаты на соревнованиях, или задаваться своими дан-
ными. Практика говорит о том, что модели на соревно-
ваниях показывают скорость в подводном положении
равную 100—120 см1сек. Эти величины и нужно подстав-
лять в формулу при определении силы р.
Определив величину силы давления для одного пера
носовых горизонтальных рулей — рнос, находят таким же
образом величину силы давления и для одного пера кор-
мовых рулей — рксрм. Затем на бумаге вычерчивают от-
дельно положение одного пера горизонтальных рулей,
отклоненного на угол а (рис. 4). При этом угол а для
носовых и кормовых рулей может быть различным. В на-
шем случае си — угол отклонения носовых, а аг—кор-
мовых горизонтальных рулей. Перпендикулярно перу
руля наносится стрелка, обозначающая силу р. Прини-
мая эту силу за равнодействующую, разлагаем ее на вер-
тикальную и горизонтальную составляющие. Из тре-
угольников АВС и XiBiCi нетрудно определить величину
топящей силы. Она равна:
fi—Рнос cos 04 (для пера носового руля);
/^—РкормСОЗои (для пера кормового руля).
Удвоив эту силу для каждой пары рулей, а затем
сложив вместе, получим топящую силу в граммах всех
горизонтальных рулей модели:
f юбщ — ^Рнос COS0H ~|~2^КОрМ cosa2.
Таким же образом можно определить величину то-
пящей силы рулей Л при различных углах а и для раз-
личной скорости движения модели в подводном положе-
нии. Все эти данные необходимо занести в табл. 1.
Таблица 1
Величина топящей силы горизонтальных рулей
Носовые рули Кормовые рули
Скорость, V
al a2 a3 a5 «1 a2 «3 «5
£1
, £2
V3 I
и* 1
45 1 I-
19
Рис. 4. Определение топяшей силы горизонтальных рулей
модели подводной лодки
Зная величину топящей силы Д и определив (путем
взвешивания) вес модели Р со всеми положенными гру-
зами, можно определить все остальные силы, т. е. F,
fnorp и /под- Кроме того, из тех же треугольников
АВС и AiBiCi (рис. 4) можно определить величину го-
ризонтальной составляющей /2, которая тормозит движе-
ние модели. Общая тормозящая сила всех горизонталь-
ных рулей равна:
f2общ — 2рнос sinocj 2ркорм sina2.
Все эти величины необходимо определить до проб-
ных запусков модели, а во время запусков полезно про-
верить свои расчеты.
Практическое использование расчетных данных опи-
сывается в разделе «Запуски модели на воде и ее регу-
лировка».
ТЕОРЕТИЧЕСКИЙ ЧЕРТЕЖ
Теоретический чертеж корпуса позволяет изобразить
на бумаге обводы корпуса модели. Этот чертеж является
главным, необходимым для постройки корпуса.
На теоретическом чертеже (рис. 5) изображаются
три очертания корпуса:
1) очертание корпуса, каким оно видно, если смот-
реть на модель, проходящую слева направо;
2) очертание корпуса, если смотреть с кормы на ухо-
дящую модель;
3) очертание корпуса, если смотреть сверху на мо-
дель, проходящую слева направо.
20
БОК (кормовая часть) КОРПУС
БОК (носовая часть)
Расстояние от ОЛ до ВЛ1 ~ 50мм
от ВЛ1 до КВА -35мм
Рубка, условно опущена вник
Рис. 5. Теоретический чертеж модели
Расстояние от К ВЛ до ВАЗ-17мм,
пт ВАЗ до ЯМ -17мм
Эти очертания называются проекциями. Первая про-
екция называется «б о к», вторая — «к о р п у с», третья—
«полуширота». На каждой проекции изображается
не только одно очертание корпуса, но и очертания корпу-
са в различных его местах по длине, ширине и высоте.
Эти очертания (сечения) показывают контур корпуса в
том месте, где мысленно плоскостью разрезается кор-
пус.
Вычерчивание теоретического чертежа начинается с
нанесения сетки, т. е. линий, показывающих положение
плоскостей, которыми мысленно разрезается корпус мо-
дели. Вычерчивать эту сетку нужно очень тщательно и
после выполнения также тщательно проверить.
На проекции «бок» наносится продольный контур
вертикальной плоскости, которой можно мысленно раз-
делить корпус на две симметричные части. Эта плоскость
называется диаметральной плоскостью модели (ДП).
Кроме этого, на проекции «бок» показывают одно-два
продольных сечения, параллельных ДП; эти сечения на-
зываются батоксами. Места расположения батоксов
по ширине корпуса показываются прямыми линиями на
проекциях «корпус» и «полуширота».
На проекции «полуширота», кроме горизонтального
контура корпуса, изображаются три-пять сечений корпу-
са горизонтальными плоскостями; эти сечения называ-
ются теоретическими ватерлиниями (ВЛ). Их располо-
жение по высоте корпуса показывается горизонтальными
линиями на проекциях «бок» и «корпус». На проекции
«полуширота» изображается только левая половина кор-
пуса (по ширине), так как правая половина симметрич-
на левой. Плоскости, которыми мысленно разрезается
корпус для образования ВЛ, располагаются на равных
расстояниях друг от друга между основной линией и кон-
структивной ватерлинией (КВЛ). Основной линией (ОЛ)
называется самая нижняя горизонтальная линия на
проекциях «бок» и «корпус». Плоскости ВЛ выше кон-
структивной располагают на произвольной высоте, но
обязательно одну из них на высоте пересечения палубы
с бортами.
Сечения на проекции «корпус» называются теорети-
ческими шпангоутами. Шпангоут, расположенный по се-
редине корпуса по длине, называется мидель-шпангоу-
том, это самый широкий шпангоут на проекции «кор-
22
пус». Теоретические шпангоуты располагаются на рав-
ных расстояниях друг от друга, эти расстояния называ-
ются шпациями. Первый от носа шпангоут нумеруют ну-
левым, последний — в зависимости от количества шпан-
гоутов. Чтобы не загромождать теоретический чертеж,
на проекции «корпус» изображаются лишь половины
шпангоутов вправо от ДП — половины носовых шпан-
гоутов, влево — кормовые. Таким образом, полностью на
проекции «корпус» изображен лишь мидель-шпангоут.
После вычерчивания (построения) теоретического
чертежа производится согласование проекций, или, ина-
че, увязывание их друг с другом. Увязка заключается в
том, чтобы при вычерчивании проекций сохранять раз-
мер точно таким, каким он показан на другой проекции.
Если согласование произведено неточно, то на построен-
ном корпусе будут впадины и горбы и обводы корпуса
модели не будут плавными. Конечно, помимо согласован-
ности, все линии обводов, показанные на теоретическом
чертеже, должны быть плавными, так как чем плавнее
линии обводов, тем меньшее сопротивление воды будет
встречать корпус при движении модели.
Модель подводной лодки имеет следующие главные
размерения (при масштабе модели 1:75):
длина наибольшая (Ан)......................... 1 396 мм
длина по КВ Л (£Квл).......................... 1 378 »
ширина наибольшая (Вн)......................... 120 »
ширина по КВЛ (Вквл)............................ 90 »
высота борта в носу (Н н)...................... 133 »
высота борта в корме (Н^........................ НО »
высота борта на мидель-шпангоуте . 114 »
осадка носом (Тц}............................... 85 »
осадка кормой (Тк).............................. 32 »
Кроме того, модель имеет следующие данные:
— коэффициент общей полноты водоизмещения 6 =
0,742;
— водоизмещение D = 10430 г (при Т = 85 мм);
— шпация /=160 мм.
ИЗГОТОВЛЕНИЕ КОРПУСА МОДЕЛИ
Изготовление корпуса плавающей модели является
сложной и ответственной работой. Для того чтобы мо-
дель имела хорошие ходовые качества, нормально по-
23
гружалась и всплывала, была остойчива и устойчива на
курсе и обладала необходимым запасом плавучести, ее
корпус должен удовлетворять следующим требованиям:
— обводы должны точно соответствовать теоретиче-
скому чертежу;
— корпус должен быть водонепроницаемым;
— вес корпуса должен точно соответствовать весу,
определенному проектом;
— поверхность корпуса должна быть гладкой для
уменьшения трения о воду при движении модели.
Корпус модели с электрическим двигателем лучше
всего изготовлять из жести. Такой корпус имеет высо-
кую прочность. Кроме того, металлический корпус в от-
личие от деревянного сравнительно нетрудно сделать
герметичным. Еще одно преимущество металлического
корпуса: при монтаже электропроводки ее можно делать
однопроводной, роль второго провода в этом случае бу-
дет играть корпус.
Первым и необходимым условием постройки являет-
ся изготовление теоретического чертежа в масштабе 1:1.
Далее приступают к изготовлению деревянной бол-
ванки. Оно мало отличается от изготовления деревянной
болванки корпуса модели надводного корабля. Болван-
ку вырезают из цельного или склеенного из досок бруска.
По середине этого бруска, сверху и снизу, карандашом
наносят линию, изображающую ДП. На верхней и ниж-
ней гранях бруска проводят линии шпангоутов перпен-
дикулярно ДП и наносят контур наиболее полной ВЛ.
С боковых граней бруска до контура этой ВЛ ножовкой,
рубанком, а затем стамеской срезают лишнюю древеси-
ну. Затем на боковых поверхностях проводят линии
шпангоутов перпендикулярно ДП и ВЛ, соединяя их
концы на верхней и нижней гранях бруска. На боковые
поверхности наносят также очертания ДП модели, среза-
ют лишнюю древесину и восстанавливают разметку се-
чений шпангоутов.
Для дальнейшей обработки бруска изготавливаются
шаблоны шпангоутов. При этом переносят контур поло-
вины каждого шпангоута в масштабе 1:1с теоретиче-
ского чертежа на лист тонкой фанеры или картона и вы-
резают на поверхности этого листа площадь, занятую по-
ловиной данного шпангоута. Проверяя работу шаблона-
ми с обеих сторон, с бруска стамеской снимают лиш-
24
нюю древесину до тех пор, пока он не примет форму
корпуса модели. Для этого по необходимости несколько
раз нужно восстанавливать разметку ДП, ВЛ и шпан-
гоутов. Окончательная отделка болванки производится
драчевым напильником и шкуркой.
Известно, что устойчивость модели на курсе в значи-
тельной степени зависит от корпуса. Поэтому, изготав-
ливая болванку, а затем корпус, необходимо помнить,
что если при постройке будут допущены некоторые де-
фекты, модель не сможет ходить прямолинейно. К таким
дефектам относятся: несимметричность обводов корпуса
относительно ДП, несимметричность расположения
гребных винтов относительно ДП, несимметричная по
отношению к осям гребных винтов установка вертикаль-
ного и кормовых горизонтальных рулей, различные раз-
меры гребных винтов.
В готовой болванке, на ее наружной поверхности, де-
лают пропилы для шпангоутов пакетом ножовочных по-
лотен, причем среднее полотно должно выступать на 3 —
3,5 мм. Шпангоуты в этом случае имеют тавровое сече-
ние и создают, несмотря на свои небольшие размеры,
большую прочность корпуса. Стрингеров и киля в этой
конструкции не имеется и поэтому шпангоуты устанав-
ливают на болванке чаще.
Для заготовки шпангоутов на листе белой жести
штангенциркулем проводят риску на расстоянии 5 мм
от края и по этой линии сгибают жесть пополам. Полу-
ченную полосу отрезают и выравнивают на плите. На за-
готовленных в нужном количестве полосах проводят
вторую риску на расстоянии 2,5—3 мм от сгиба. Закре-
пив полосу в тисках на уровне этой риски, выступаю-
щие края отгибают отверткой в разные стороны и затем
молотком выравнивают.
Корпус модели изготавливают из двух половин.
Стык этих половин должен находиться на самой полной
ВЛ корпуса. Для этого заранее наносят положение ВЛ
и только после этого устанавливают шпангоуты.
Заготовки шпангоутов устанавливают на свои места
в пазы болванки, выравнивают легкими ударами молот-
ка и концы временно закрепляют гвоздями. Эти концы
должны выступать выше стыка половин корпуса (самой
полной ВЛ). Затем приступают к обшивке половины
корпуса. Листы обшивки заготавливают по выкройкам
25
из плотной бумаги. Куски бумаги накладывают на бол-
ванку так, чтобы каждый кусок перекрывал только два
шпангоута. Затем бумагу вдавливают вдоль по шпан-
гоутам и по оставленным следам вырезают выкройки.
Размер выкройки берется от одного места стыка поло-
вин корпуса по борту, через палубу или днище модели,
далее по другому борту до противоположного стыка. По
выкройкам вырезают листы жести, накладывают на бол-
ванку и временно закрепляют по краям мелкими гвоз-
дями. Если не удается вырезать лист обшивки между ка-
кими-либо двумя шпангоутами из одного куска, можно в
этом месте обшивку делать из двух кусков. Стыковать
их лучше всего в нижней или верхней части корпуса в
районе ДП модели. В этом случае края листов обшивки
должны обязательно перекрывать друг друга на 3—
4 мм. Это необходимо для прочного соединения шва, а
также для создания большей прочности корпуса.
Затем приступают к припаиванию листов обшивки
половины корпуса. Места прилегания листов обшивки к
шпангоутам обильно смачивают раствором хлористого
цинка («травленая паяльная кислота) и тщательно про-
паивают оловом. Все швы после этого хорошо зачищают
напильником и затем половину корпуса протирают ве-
тошью, смоченной в мыльной воде, удаляя остатки ки-
слоты, от которой обшивка может покрыться ржавчи-
ной. Далее гвозди вытаскивают, половину корпуса сни-
мают с болванки и запаивают оловом все отверстия от
гвоздей.
Таким же образом изготавливают вторую половину
корпуса. Соединение их между собой производится толь-
ко после установки внутри корпуса всех необходимых
деталей и механизмов модели.
Несколько слов необходимо сказать об устройстве
люка, через который возможен доступ внутрь корпуса
модели. Основание люка в верхней части корпуса нужно
изготавливать из стальных полос толщиной 3,5—4 мм и
шириной 15—18 мм. Эти полосы припаиваются оловом
к корпусу модели и образуют прямоугольную рамку. Из
таких же полос напаивается и окантовка люка, крышка
люка вырезается из жести. Эта крышка крепится к ос-
нованию винтами М3—М4 с расстоянием друг от друга
25—30 мм. Между крышкой люка и основанием прокла-
дывается листовая резина толщиной 1,5—2,0 мм.
26
ИЗГОТОВЛЕНИЕ АВТОМАТА
ДЛЯ УПРАВЛЕНИЯ МОДЕЛЬЮ
На модели подводной лодки необходимо установить
автоматическое устройство, которое в нужный момент
переложит горизонтальные рули на всплытие. Установка
рулей на погружение производится перед запуском мо-
дели и поэтому специальных устройств для управления
погружением модели не нужно. Известно, что всплытие
модели осуществляется с помощью носовых горизон-
тальных рулей, значит они и должны перекладываться
автоматическим устройством. Кормовые рули во время
погружения, подводного хода и всплытия постоянно ус-
тановлены на погружение.
Основными требованиями, предъявляемыми к автома-
тическим устройствам, являются:
— надежность действия;
— простота устройства;
— точная регулировка времени нахождения модели
под водой.
На рис. 6 показан электромеханический автомат для
управления всплытием модели. Он надежен в работе и
позволяет весьма точно регулировать время нахождения
модели под водой. Автомат не сложен по устройству и
состоит из основания /, изготовленного из изоляцион-
ного материала (органическое стекло, эбонит, фанера),
к которому винтами (тремя-четырьмя) крепится испол-
нительный электродвигатель 2. Для этой цели лучше все-
го использовать реверсивный электродвигатель постоян-
ного тока, рассчитанный на напряжение 6 в. Такой
электродвигатель целесообразно подключить к отдель-
ному небольшому источнику питания (аккумуляторная
батарея). Автономное питание в этом случае позволит со-
хранить постоянным число оборотов в минуту этого дви-
гателя, что очень важно для точной работы всего автома-
та. На оси электродвигателя насажен однозаходный чер-
вяк 5, который работает в паре с цилиндрической червяч-
ной шестерней 4. Шестерня туго насажена на оси ведуще-
го винта 5. Винт, вращаясь, перемещает поступательно
контактный ползун 6 (эбонит, текстолит), к которому кре-
пятся замыкающий нож 7, вырезанный из листовой ла-
туни толщиной 3—4 мм, и размыкающий нож 8 (гети-
27
18
эл£кгромеханическ°гс автомата
Puc. 6. Устройство элскгр
накс толщиной 0,8—1,0 мм). Сверху в ползун вставлен
указатель положения 9. На конце основания 1 располо-
жены три пары контактов 10, 11 и 12; контакты 10 всег-
да разомкнуты, а контакты 11 и 12 всегда замкнуты.
Все они изготавливаются из пружинной стали или упру-
гой латуни. В частности, для этого можно использовать
пружину от старого будильника. Контакты 10 и 11 при-
паиваются оловом к латунным стойкам, а эти стойки
приклепываются к пластине /5, выпиленной из органи-
ческого стекла (каждая пара контактов крепится к от-
дельной пластине). В пластине имеется отверстие с на-
резанной резьбой М3—М4; с помощью винтов 14 пласти-
ны крепятся к основанию, а благодаря прорезям 15 в
основании они могут передвигаться параллельно веду-
щему винту. Контакты 12 припаиваются оловом к ла-
тунным стойкам и заклепками или винтами неподвижно
крепятся к основанию.
При изготовлении автомата нужно сделать неболь-
шой расчет. Он зависит от числа оборотов в минуту ис-
полнительного электродвигателя. Червячная пара пони-
жает его обороты во столько раз, сколько зубьев имеет
шестерня 4. Значит, зная число оборотов электродвига-
теля и сосчитав число зубьев шестерни, будем знать чи-
сло оборотов в минуту ведущего винта 5. На конце его
нарезается резьба М4—М5. Известно, что за один обо-
рот ведущего винта ползун пройдет путь, равный шагу
винта. Резьба М4 имеет шаг 0,7 мм, а резьба М5—
0,8 мм. Следовательно, по числу оборотов ведущего вин-
та и шагу резьбы можно определить путь, который
пройдет ползун за определенный отрезок времени. Опыт-
ным путем установлено, что модели подводных лодок с
электродвигателем проходят дистанции за 40—60 сек.
Длина ведущего винта, а значит и основания, должна
быть такой, чтобы ползун имел возможность двигаться
в течение 60—80 сек. Этот запас времени нужен для
различных испытаний и регулировки модели на воде.
Электрическая схема автомата показана на рис. 7.
Автомат работает следующим образом. Перез запуском
модели носовые горизонтальные рули, которые подклю-
чены к контактам 10, устанавливаются на погружение.
Ползун отводится назад. С помощью выключателя
включается главный двигатель модели, вращающий ее
гребные винты. Затем выключателем Bk% включается
29
Рис. 7. Электрическая схема электромеханического автомата
исполнительный электродвигатель и ползун начинает
двигаться к контактам. Модель запускается и под дей-
ствием топящей силы горизонтальных рулей уходит под
воду. Нож 7 при движении ползуна, касаясь контак-
тов 10, замыкает цепь, и электрический ток от источника
питания поступает на обмотку соленоида. Сердечник со-
леноида втягивается внутрь и пружина за рычаг пере-
кладывает носовые горизонтальные рули на всплытие.
Модель быстро всплывает и продолжает двигаться в
надводном положении. Далее, размыкающий нож 8
подходит к контактам 11 и размыкает их. Модель оста-
навливается. В своем дальнейшем движении ползун до-
ходит до контактов 12, размыкает их и тем самым оста-
навливает исполнительный электродвигатель 2.
Такое устройство автомата имеет ряд преимуществ:
во-первых, модель всплывает на ходу, выигрывая тем са-
мым время; во-вторых, главный двигатель вскоре после
всплытия останавливается и не нужно догонять модель
на лодке; в-третьих, если почему-либо модель не всплы-
вет, исполнительный электродвигатель остановится и
не будет разряжать источники питания.
После прохождения дистанции ползун с помощью
исполнительного электродвигателя отводится назад. Ес-
ли же электродвигатель нереверсивный, то для приведе-
ния автомата в исходное положение приходится делать
специальное устройство. На оси ведущего винта 5 (см.
30
рис. 6), кроме цилиндрической шестерни 4, насаживает-
ся коническая шестерня 16, с которой зацепляется дру-
гая коническая шестерня 17. На оси шестерни 17 уста-
новлен штифт 18. Он нужен для того, чтобы можно
было на ось надеть ручку (типа патефонной) и вращать
эту ось. Цилиндрическая шестерня 4 в этом случае име-
ет на оси скользящую посадку. Стальная трехлепестко-
вая пружина 19 дает возможность вращать ведущий
винт через коническую пару в то время, как шестерня 4
остается неподвижной (такую пружину можно также по-
добрать в механизме старого будильника). Значит, на-
дев на ось конической шестерни 17 ручку и вращая ее,
можно отвести ползун назад.
Автомат устанавливается в корпусе модели и ее
средней части. Съемный люк для доступа к механизмам
модели расположен над автоматом. В люке делается
прорезь шириной 20—25 мм, которая герметически за-
крывается куском органического стекла. Длина этого ок-
на выбирается с таким расчетом, чтобы через него были
видны ведущий винт и ползун. Над осью конической ше-
стерни 17 в люке прорезается круглое отверстие, в него
вставляется стальная или латунная втулка с резьбой и
припаивается оловом к корпусу. Втулка закрывается ме-
таллической резьбовой пробкой с резиновой проклад-
кой. Отвернув эту пробку можно на вал конической ше-
стерни надеть ручку и, вращая ее, привести ползун в
исходное положение. Через окно по указателю видно, в
каком положении находится ползун. Такое устройство
позволит устанавливать ползун в нужное положение, не
снимая люка. Кроме того, можно на стекле окна снару-
жи нанести поперечные риски. Они покажут, сколько
времени ползун будет двигаться к контактам от той или
иной риски. Положение этих рисок находится опытным
путем.
РАСЧЕТ РУЛЕЙ,
ИХ ИЗГОТОВЛЕНИЕ И УСТАНОВКА
Движение модели в заданном направлении и в глуби-
ну осуществляется с помощью рулей, причем удержание
модели на прямом курсе производится действием верти-
кального руля, а определенное углубление от поверхно-
сти воды — горизонтальными рулями.
31
Рули являются ответственными деталями модели и
поэтому их расчету, изготовлению и установке нужно
уделить серьезное внимание.
При выборе площади вертикального руля ее нужно
рассчитывать по формуле:
S = KLT,
где S — площадь руля, см2}
L — наибольшая длина модели, см}
Т — осадка модели в крейсерском положении, см}
К — коэффициент (его значение берется в пределах
0,024—0,035).
Осадку в крейсерском положении можно принять
равной 60—80% от высоты борта на мидель-шпангоуте.
Чем больше длина модели, тем больше крейсерская
осадка в процентах от высоты борта.
Вертикальный руль обычно делается полубалансир-
ным, так как это диктуется формой кормового подзора
модели. Если имеется возможность, руль можно делать
и балансирным.
Коэффициент компенсации (отношение площади по-
лубалансирной или балансирной части руля,находящей-
ся впереди баллера, ко всей площади руля) составляет
0,25—0,30. Нужно помнить, что наиболее эффективным
является руль, у которого отношение высоты пера руля
к ширине является наибольшим. Однако нельзя перо
руля делать слишком высоким, так как оно будет вы-
ступать ниже киля модели.
Вертикальный руль (рис. 8) можно вырезать из фа-
неры, запилить кромки и обтянуть ее жестью или тонкой
листовой латунью. Стыки металла припаиваются оло-
вом. Поперечное сечение пера руля должно напоминать
профиль крыла самолета. Регулировка положения руля
относительно ДП модели производится с помощью вин-
та 5 (рис. 8), который находится снаружи корпуса. Та-
кое устройство позволяет точно и совершенно неподвиж-
но устанавливать перо руля под любым углом к ДП.
Суммарная площадь горизонтальных рулей опреде-
ляется по формуле:
^общ ~ *^нос 4" *$корм == K-^LB,
где 50бщ—суммарная площадь всех горизонтальных ру-
лей, СМ2}
SHoc—площадь носовых горизонтальных рулей, см2}
32
4
3
Рис. 8. Вертикальный руль модели: 1 — перо руля; 2 — бал-
лер; 3 — румпель; 4 — поворотная гайка; 5 — регулировочный
винт; 6 — обшивка корпуса
SKopM— площадь кормовых горизонтальных рулей,
см2;
L — наибольшая длина модели, см;
В — наибольшая ширина модели, см;
Ki —коэффициент (принимается в пределах
0,03—0,05).
На модели, в отличие от полноразмерной подводной
лодки, главными являются носовые рули и в основном
ими управляется модель. Поэтому площадь носовых го-
ризонтальных рулей должна быть больше площади кор-
мовых. Обычно принимают:
*^нос =* 0,55 — 0,65 50б1ц;
*^корм — 0,35 — 0,45 50бщ.
Кормовые горизонтальные рули желательно устанав-
ливать сзади гребных винтов для того, чтобы они рабо-
тали в отбрасываемой винтами струе. При таком рас-
положении эффективность рулей увеличивается, так как
скорость струи больше скорости модели. Кроме того, ру-
ли, установленные сзади винтов, препятствуют закручи-
ванию струи и повышают общий к. п. д. силовой ус-
тановки.
Для перекладки рулей устанавливается такой же ре-
гулировочный винт, как и у вертикального руля. Для
33
простоты изготовления кормовой отсек модели, в кото-
ром установлены вертикальный и кормовые горизон-
тальные рули, делается затопляемым во время хода мо-
дели. Это позволяет упростить установку рулей, так как
нет необходимости герметизировать места прохода бал-
леров вертикального и горизонтального рулей через об-
шивку корпуса.
Горизонтальные рули делаются балансирными. Ко-
эффициент компенсации составляет 0,25—0,30.
Для горизонтальных рулей наиболее выгодным явля-
ется перо, вытянутое по ширине. Во всех случаях надо
стремиться к тому, чтобы крайние точки горизонтальных
рулей не выступали за линии, ограничивающие наиболь-
шую ширину модели. Если же это требование выполнить
невозможно, допускаются носовые горизонтальные рули,
незначительно выступающие за габариты корпуса моде-
ли. Обычно перо горизонтального руля делается близким
к форме квадрата.
Носовые горизонтальные рули также изготавливают-
Рис. 9. Герметизация места прохода баллера горизонталь-
ных рулей через обшивку корпуса: 1 — баллер; 2 — об-
шивка корпуса; 3 — втулка; 4 — резиновая трубка
34
Рис. 10. Рычаг и соленоид носовых горизонтальных рулей
ся из фанеры и обтягиваются жестью или тонкой листо-
вой латунью. Одно перо крепится к баллеру наглухо,
другое имеет возможность сниматься и закрепляется на
баллере с помощью винтов. Это делается для удобства
установки и снятия носовых горизонтальных рулей.
Для герметичности места прохода баллера носовых
горизонтальных рулей через обшивку корпуса исполь-
зуется устройство, показанное на рис. 9. В качестве ре-
зиновой трубки может быть использована обычная со-
ска.
Установка носовых горизонтальных рулей на погру-
жение производится перед запуском модели. Каким же
образом рули перекладываются на всплытие? Для этого
на баллер 1 (рис. 10) надевается двуплечий рычаг 2, за-
крепляемый на баллере стопорным винтом. К сердечнику
соленоида 3 винтом прикреплена скоба 4 с двумя ото-
гнутыми ушками. Пружины 5 одним концом прикрепле-
ны за ушки скобы, а другим — за специальный крон-
штейн внутри корпуса модели. Таким образом, сердеч-
ник соленоида находится всегда в вытянутом положении.
Пружина 6 стремится повернуть рычаг 2, который своим
вторым плечом всегда прижат снизу к сердечнику соле-
ноида. В таком положении детали этого устройства на-
ходятся перед запуском модели.
После прохождения дистанции автомат, управляю-
щий всплытием модели, подает электрический ток на
обмотку соленоида и сердечник, преодолевая растяги-
вающие усилия пружин 5, втягивается внутрь. Двупле-
чий рычаг и связанный с ним баллер под действием пру-
35
Рис. 11. Устройство соленоида
жины 6 поворачиваются. Тем самым носовые горизон-
тальные рули перекладываются на всплытие и модель
всплывает.
Несколько слов необходимо сказать об устройстве
соленоида (рис. И). Он состоит из сердечника/, крыш-
ки 2, катушки 3 и стакана 4. Все размеры в миллимет-
рах указаны на рисунке. Детали соленоида вытачивают-
ся на токарном станке из обычной низкоуглеродистой
стали. На катушку наматывается виток к витку изоли-
рованный медный провод марки ПЭЛ или ПЭВ диамет-
ром 0,3—0,35 мм до заполнения всего пространства меж-
ду катушками.
ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ,
РЕДУКТОР И ГРЕБНЫЕ ВАЛЫ
Для установки на модели обычно используются элек-
трические двигатели постоянного тока напряжением 12
или 24 в, имеющие достаточную мощность.
Хорошо зарекомендовали себя отечественные элек-
трические двигатели постоянного тока типа МУ. Эти
двигатели выпускаются в нескольких вариантах. Так,
двигатель МУ-30 имеет мощность 40 вт и вес 550 г, дви-
гатель МУ-50 — мощность 75 в и вес 800 г, МУ-100 —
мощность 177 в и вес 1 150 г. Обороты этих двигателей
колеблются в больших пределах — от 4 000—5 000 до
10 000—13000 об!мин. Все двигатели рассчитаны на но-
минальное напряжение 27 в. Однако они хорошо рабо-
тают и при напряжении 24 в.
На описываемой модели рекомендуется устанавли-
вать электрический двигатель МУ-50, имеющий 7 000—
7 500 o6Jmuh. Он устанавливается на деревянной подуш-
ке, в которой вырезается выемка по форме двигателя, и
36
с помощью металлического хомута и шурупов укрепляет-
ся на ней. Для уменьшения шума во время работы реко-
мендуется под двигатель модели прокладывать листо-
вую резину толщиной 2,0—2,5 мм или обычный картон.
Подушка винтами с гайками крепится к кронштейнам,
припаянным к обшивке корпуса.
Для питания электрического двигателя лучше всего
иметь серебряно-цинковые аккумуляторы типа СЦС-5.
Они надежны в эксплуатации и имеют большую емкость.
Правила обращения с такими аккумуляторами подробно
изложены в брошюре «Радиоуправляемая модель кораб-
ля», выпущенной Издательством ДОСААФ в 1963 году.
На модели необходимо установить два гребных винта
по бортам. В этом случае улучшаются ее ходовые каче-
ства и особенно устойчивость на курсе. На правом боргу
устанавливается винт правого шага, а на левом — ле-
вого. Значит на модели нужно установить редуктор, ко-
торый будет передавать вращение от электрического дви-
гателя к двум гребным винтам и, кроме того, вращать
их в противоположные стороны.
Редуктор собран на четырех цилиндрических шестер-
нях с прямым зубом. Ведущая шестерня с одной из ве-
домых зацепляется непосредственно, а с другой — через
паразитную шестерню. Если имеется возможность исполь-
зовать в редукторе цилиндрические шестерни с косым
зубом, то его работа от этого улучшится. Передаточное
отношение редуктора i = 2. Значит ведомые шестерни бу-
дут вращаться в два раза медленнее оси электрического
двигателя. Во всех случаях нужно стремиться к тому,
чтобы гребные винты модели вращались со скоростью
3 000—3 200 об/мин.
Шестерни редуктора имеют модуль зацепления рав-
ный 1,0. Применение мелкомодульных шестерен в этом
случае уменьшает потери на трение и возможность зае-
дания, а также увеличивает плавность работы редуктора
и уменьшает его шум. Для повышения к.п.д. редуктора
оси всех шестерен установлены на шарикоподшипниках.
Целесообразно в редукторе применить шестерни из раз-
личных материалов, например стальные или латунные в
паре с текстолитовыми. Это также способствует умень-
шению шума редуктора во время работы.
Шестерни редуктора помещены в металлический кор-
пус, закрытый крышкой. Через нее заливается жидкая
37
Рис. 12. Устройство гребного вала и дейдвудной трубки
смазка, в которой и работают шестерни. Жидкая смазка
необходима для более плавной работы редуктора и по-
вышения его к.п.д.
Корпус редуктора также устанавливается на дере-
вянной подушке и крепится шурупами. Для уменьшения
шума и вибрации под него подкладывается листовая ре-
зина или картон.
Гребной вал 1 (рис. 12) лучше всего изготовить из
прутковой стали-серебрянки диаметром 3—5 мм. На од-
ном конце вала на резьбе крепится гребной винт с обте-
кателем, на другом — чашка для шарнирного соединения
с осью редуктора.
Для дейдвудной трубки гребного вала хорошим мате-
риалом является латунь, при ее отсутствии можно ис-
пользовать сталь или медь. Толщина стенок трубки 2
равна 0,8—1,0 мм, внутренний диаметр на 3—6 мм боль-
ше диаметра гребного вала. В одном конце трубки за-
прессовывается подшипник 5, выточенный на токарном
станке из бронзы. Внутренний диаметр его должен быть
больше диаметра гребного вала на 0,1—0,2 мм. На дру-
гом конце трубки нарезается внутренняя мелкая резьба.
Из бронзы вытачивается поджимная втулка-подшипник
4 с внутренним диаметром, как и у подшипника 3, и с
такой же мелкой резьбой. Чтобы ее было удобнее вра-
щать, на цилиндрической части заплечика имеется на-
катка. Между гребным валом / и трубкой 2 с небольшим
зазором может вращаться втулка-вкладыш 5. Она выта-
чивается из латуни или стали.
При сборке на гребной вал наматывается несколько
витков шпагата или толстой суровой нитки, затем они
обильно смазываются графитовой смазкой и вал встав-
ляется в трубку. Втулка-вкладыш находится внутри
трубки и поджимается втулкой-подшипником. Закручи-
38
вая эту втулку, можно добиться нужного уплотнения
набивки внутри трубки. Такой сальник будет работать
хорошо и не допустит проникания воды в корпус моде-
ли через дейдвудную трубку.
Устанавливая дейдвудные трубки в корпусе, нужно
помнить, что основное внимание уделяется их симмет-
ричному расположению относительно ДП модели. При
этом надо стремиться к тому, чтобы трубки были распо-
ложены параллельно ДП и КВЛ. Разнос трубок от ДП
в стороны должен быть по возможности большим, но
площади диска гребных винтов не должны выступать за
габариты корпуса модели. Иногда дейдвудные трубы
располагают под некоторым углом к КВЛ, т. е. от редук-
тора к гребному винту линия вала спускается сверху
вниз. Это нежелательно, так как в этом случае появляет-
ся вертикальная составляющая упора, направленная
вверх. Эта составляющая стремится приподнять вверх
корму модели, т. е. выталкивает ее при движении.
Установка дейдвудных трубок под некоторым углом
к ДП модели не оказывает влияния на устойчивость на
курсе. Горизонтальные составляющие упора каждого
гребного винта, появляющиеся в этом случае и направ-
ленные в сторону ДП при движении модели, взаимно
уничтожаются, так как их равнодействующая равна ну-
лю. Важно установить дейдвудные трубки симметрично
ДП, чтобы эти составляющие были равны по своей вели-
чине.
При установке дейдвудных трубок в обшивке проре-
заются эллипсные отверстия, в них вставляются трубки
и припаиваются к корпусу. Другие концы трубок удер-
живаются специальными кронштейнами к ближайшему
шпангоуту корпуса.
Соединение осей ведомых шестерен редуктора с ва-
лами гребных винтов можно осуществить с помощью
промежуточных шарнирных валиков. Для этого из стали
вытачивают на токарном станке четыре втулки, две из
которых насаживают на оси ведомых шестерен, а две —
на гребные валы. Втулки укрепляются на осях шпилька-
ми. На втулках делают продольные прорези шириной
3,5—4,0 мм. Промежуточный шарнирный валик имеет на
концах шаровые приливы, в которых запрессованы
штифты диаметром 3,0—3,5 мм. Эти штифты входят в
прорези втулок и передают вращение от редуктора к
39
гребным валам даже в том случае, если при установке
редуктора в корпусе модели будет допущен перекос.
ГРЕБНЫЕ ВИНТЫ
Гребной винт — это часть винтовой поверхности, раз-
деленной на несколько лопастей, которые укреплены по
радиусам на ступице (основании) винта на разных угло-
вых расстояниях. От качества выполнения гребных вин-
тов и правильно выбранных элементов зависит скорость
хода модели.
Гребной винт имеет следующие характеристики:
D — диаметр винта, т. е. диаметр окружности, опи-
санный крайними точками лопастей (D = 2/?);
Н — геометрический шаг винта, т. е. расстояние, ко-
торое винт прошел бы за один оборот, если бы он ввин-
чивался в твердое тело; в воде винт за один оборот про-
ходит меньший путь, называемый действительным ша-
гом винта; разность между геометрическим и действи-
тельным шагом винта называется скольжением и дости-
гает 15—30%;
И
р = -р — шаговое отношение, отношение геометриче-
ского шага к диаметру винта, является одной из самых
важных характеристик и от него в значительной мере
зависит к.п.д. гребного винта; наибольший к.п.д. винта
остается примерно постоянным при величине
Н 1 г
от 1,5 и выше;
А — площадь спрямленной поверхности всех лопастей
гребного винта; она составляет от 30 до 140% площади
круга, в которую вписан винт (для быстроходных моде-
лей эта площадь близка к 100%);
Ad — площадь диска винта, т. е. площадь круга, об-
разуемая крайней точкой лопасти винта за один полный
оборот вокруг оси;
А
в = •ду — дисковое отношение, величина которого ко-
леблется в пределах 0,3—1,4;
z— число лопастей;
d — диаметр ступицы (d = 2 г);
в — ширина лопасти в наиболее широкой части;
п— число оборотов винта;
/ —длина лопасти (I = R — г).
-40
Свободный конец лопасти называется краем, часть
лопасти в месте ее соединения со ступицей — корнем.
При вращении гребного винта на выпуклой, обращен-
ной к носу модели поверхности лопасти образуется раз-
режение, а на вогнутой — давление. Благодаря этому
вода подсасывается к лопастям винта и отбрасывается
ими за корму. Реакция отброшенной массы воды направ-
лена в противоположную сторону и передается на греб-
ной вал и двигатель. Эта сила называется упором, опа
преодолевает сопротивление воды и движет модель с
определенной скоростью.
Ступицы гребных винтов вытачивают на токарном
станке из латуни и нарезают в них такую же резьбу, как
и на гребных валах. При этом нужно помнить следую-
щее: в ступице гребного винта, имеющего правое враще-
ние, нарезается нормальная (правая) резьба, ступица же
левоходного гребного винта имеет левую резьбу. Кроме
резьбовой, установку винтов на гребных валах можно
рекомендовать и на шпонках. Диаметр ступицы (d) не
должен превышать 0,2 (D) диаметра гребного винта.
Далее из листовой латуни толщина 2 мм изготавли-
вают лопасти. Для получения одинаковой формы лопа-
стей их обрабатывают напильником, зажав вместе в
тиски или струбцинами. Чтобы лопасти имели одинако-
вую вогнутость, на бруске из твердого дерева вырезают
желоб радиусом 15—17 мм и на нем молотком выкола-
чивают все лопасти. После этого на ступице винта но-
жовкой делают прорези под углом около 45° к ее оси,
в них туго вставляют лопасти и припаивают оловом.
После припаивания лопасти закручивают, т. е. пово-
рачивают так, чтобы угол края лопасти к оси винта был
на 2—5° больше угла установки корня лопасти на сту-
пице. Профиль лопасти в поперечном сечении должен
иметь форму двойного сегмента, или, проще говоря, «че-
чевицы». В продольном сечении лопасть винта должна
постепенно суживаться от корня лопасти к ее краю и
толщина края должна быть 0,2—0,3 мм.
При изготовлении винтов нужно стремиться к отлич-
ной их отделке; чем лучше и тщательнее сделан гребной
винт, тем выше его к.п.д. Винт не должен иметь вмятин,
углублений, рисок и других повреждений. Поверхность
его следует отполировать. Для ступицы надо сделать об-
текатель, который является как бы ее продолжением.
41
Обтекатель навинчивает-
ся на резьбе и улучшает
работу гребного винта,
уменьшая вредные вихре-
образования водяного по-
тока в кормовой части
модели.
После изготовления
каждый гребной винт
нужно отбалансировать,
а затем обязательно оп-
ределить его геометриче-
ский шаг. Для этого нуж-
но на лопасти и на листе
плотной бумаги провести
циркулем дугу, равную
0,6 наибольшего радиуса
винта. Установить греб-
ной винт (рис. 13) на ли-
сте бумаги так, чтобы его
ось была вертикальной.
Угольниками измерить
расстояния от кромок ло-
Рис. 13. Определение геометри- пастей (в точках пересе-
ческого шага гребного винта чения их С проведенной
окружностью) до листа
бумаги. Карандашом отметить на бумаге перпендикуля-
ры, опущенные из этих точек- Убрав винт, провести пря-
мые, соединяющие точки перпендикуляров с осью вин-
та, и измерить полученный центральный угол.
После этого величина геометрического шага винта
может быть определена по формуле:
Н = А-^Х 360,
где А и Б — измеренные расстояния от кромок лопастей
до бумаги;
а — измеренный центральный угол.
Затем такая же операция производится со всеми ос-
тальными лопастями. Важно, чтобы геометрический шаг
каждой лопасти обоих винтов (правого и левого) был
одинаковым. Если это условие не будет соблюдено, мо-
дель не сможет двигаться прямолинейно, а будет ухо-
дить в сторону.
42
Гребные винты, устанавливаемые на модели (один
правого, другой левого вращения), имеют следующие
характеристики: D = 50 мм, Н = 97 мм, = 1,84,
d = 10 мм, в = 23—25 мм, z = 4.
Края лопастей поворачиваются на угол 50° к оси вин-
та.
При определенном значении диаметра гребного вин-
та Z), величина дискового отношения 0 будет зависеть от
величины А. Так, если А взять равным 90% от Ad, 0 бу-
дет равно 0,9; если А составляет 100% Ad(A =Ad), то
0 равняется единице, и т. д.
СБОРКА КОРПУСА, ОКРАСКА
И ОТДЕЛКА МОДЕЛИ
Обе половины корпуса соединяются вместе только
после установки всех механизмов и деталей внутри кор-
пуса. Половины тщательно пропаиваются оловом до пол-
ной герметичности. Источники питания устанавливаются
перед запуском через люк в средней части корпуса с обе-
их сторон электромеханического автомата.
Полностью собранный корпус покрывается двумя
слоями нитрогрунтовки, а затем шпаклюется нитрошпак-
левкой. Сначала густой шпаклевкой выравнивают все не-
ровности корпуса, а затем из пульверизатора жидкой
нитрошпаклевкой покрывают корпус три-четыре раза.
Мелкой наждачной бумагой, смоченной в керосине или
бензине, тщательно зачищают корпус, добиваясь ровной
поверхности после шпаклевания.
Окрашивать модель следует также из пульверизатора
нитрокрасками или нитроэмалями три-четыре раза. Каж-
дый слой после высыхания нужно обрабатывать мелкой
наждачной бумагой, смоченной в керосине или бензине.
Надводную часть модели следует окрасить в шаро-
вый или светло-шаровый цвет. Подводная часть окраши-
вается в красный, черный или зеленый цвет. Вдоль всей
ватерлинии нужно провести или наклеить из тонкого цел-
лулоида белую полоску.
После двух-трехкратного покрытия краской нужно
провести испытания модели на воде. Лицевой слой кра-
ски следует наносить после испытаний модели, исправле-
ния всех ее недостатков и по совершенно просохшим по-
верхностям.
43
НАЗНАЧЕНИЕ И УСТРОЙСТВО
СИГНАЛЬНОГО БУЯ
Сигнальный буй необходим для указания места моде-
ли, если она почему-либо не всплыла.
Проще всего изготовить сигнальный буй, удерживае-
мый в корпусе модели во время ее хода куском сахара.
Такой буй действует безотказно. Он изготавливается из
жести или тонкой листовой латуни (рис. 14). Диаметр
буя 50—60 мм, высота 100—115 мм. Вдоль буя делается
прямоугольная выемка 1, внутри которой припаяны лап-
ки 2. В корпусе для буя устанавливается шахта, которая
затопляется водой во время хода модели. Снаружи на
корпусе имеется движок 3. Ширина движка, вырезанного
из листовой латуни или стали толщиной 1 —1,5 мм, не-
много меньше расстояния между лапками 2. Между
движком и лапками вкладывается кусок сахара 4. К
днищу модели внутри шахты припаивается рым, а к
днищу буя — ушко. За рым и ушко обоими концами за-
вязывается прочный капроновый или шелковый шнур
длиной 5—6 м. Если глубина водоема, где запускается
модель, больше 5—6 м, то шнур должен быть длиннее.
В подводном положении модель проходит дистанцию
в течение одной минуты и меньше, за это время сахар не
успевает раствориться в воде и буй куском сахара удер-
живается на своем месте. Если модель не всплыла, то че-
Рис. 14. Устройство сигнального буя
44
рез 4—5 мин. сахар полностью растворится в воде и ни-
чем не удерживаемый буй всплывет, указывая место на-
хождения модели.
Сигнальный буй окрашивается желто-красными про-
дольными полосами. При такой расцветке буй далеко и
хорошо виден на воде.
ЗАПУСКИ МОДЕЛИ НА ВОДЕ
И РЕГУЛИРОВКА
Прежде чем запускать модель на воде, нужно про-
вести некоторые испытания и расчеты для определения
истинного водоизмещения (надводного и подводного),
подбора балласта, выверки дифферента модели и устра-
нения крена.
Лучше всего для этой цели иметь сосуд (большое
корыто, бак и пр.), в который можно было бы поме-
стить модель. Сосуд наполняется водой до краев и в не-
го осторожно погружают модель до КВЛ. При этом
часть воды из сосуда выльется. Измеряя количество ку-
бических сантиметров воды, которое потребуется для на-
полнения сосуда до краев, можно определить надводное
водоизмещение модели в граммах. После этого модель,
вытертая насухо, взвешивается на весах. Разность в
граммах между водоизмещением модели и весом даст
искомый вес балласта.
Затем заготовленные грузы (лучше всего свинцовые)
размещаются у днища модели для устранения крена и
дифферента. Модель, полностью загруженная балластом,
должна плавать «на ровный киль».
Погружая модель полностью в сосуд, можно таким
же образом определить подводное водоизмещение в
граммах. Разность между подводным и надводным водо-
измещением равна запасу плавучести модели.
Во время этих испытаний нужно внимательно прове-
рить герметичность корпуса, люков, дейдвудных труб и
осей рулей.
В то же время производится регулировка автомата,
управляющего всплытием модели. Модель устанавли-
вается на столе, носовые горизонтальные рули устанав-
ливаются на погружение. Передвигая контактный пол-
зун в разные положения и отмечая эти положения на ок-
не над ползуном, можно определить по секундомеру,
45
сколько времени движется ползун до того или иного по-
ложения. Зная время движения ползуна, можно регули-
ровать им время нахождения модели под водой.
После всех этих проверок можно запускать модель
на воде. Сначала модель запускают в надводном поло-
жении для проверки ее устойчивости на прямом курсе.
Горизонтальные рули устанавливают горизонтально, а
иногда чуть-чуть на всплытие. Изменяя установку вер-
тикального руля, можно добиться устойчивого движения
модели на прямом курсе. Первые запуски производятся
на привязи на тонком капроновом или шелковом шнуре,
закрепленном на корме модели. Если модель резко ухо-
дит в сторону, ее за шнур нужно возвращать назад и из-
менять положение вертикального угла. Полезно при за-
пусках изменять скорость движения модели, чтобы до-
биться хорошей устойчивости на прямом курсе при раз-
личных скоростях.
После этого можно приступить к запускам модели в
подводном положении. Перед этим необходимо произве-
сти небольшой расчет. На большинстве моделей угол по-
ворота горизонтальных рулей а после запуска не изме-
няется. Значит на старте, путем установки рулей, задает-
ся постоянной величина sina. Площадь рулей тоже не
изменяется. Отсюда, если скорость движения модели под
водой v во время запуска остается без изменений, то ве-
личина силы нормального давления р на горизонтальные
рули, а значит величина топящей силы fi является по-
стоянной. Выбрав из табл. 2 величину общей топящей
силы горизонтальных рулей и зная величину подъемной
силы (для модели /под всегда постоянна), нетрудно оп-
ределить погружающую силу:
/погр = f 1 f под*
Установив горизонтальные рули на погружение так,
чтобы сила /погп была минимальной, можно запускать
модель. Если это не дает успеха (модель не погружает-
ся или периодически всплывает на дистанции), угол
установки рулей нужно немного увеличить. Тем самым
увеличивается топящая сила рулей /1, а значит и погру-
жающая сила /погр* Во время этих опытов необходимо,
чтобы скорость модели оставалась постоянной, ибо с из-
менением скорости изменяется и величина погружающей
силы (чем больше скорость у, тем больше сила /погр).
46
Таким образом, изменяя величину /погр путем различной
установки горизонтальных рулей, можно добиться раз-
личной глубины погружения модели.
Если запускать модель, не определяя величины по-
гружающей силы, то может случиться так, что угол ус-
тановки рулей на погружение окажется слишком боль-
шим. В этом случае, особенно при большой постоянной
скорости, погружающая сила будет велика и постоянна
и модель начнет погружаться с ускорением, т. е. скорость
погружения будет возрастать. Модель резко пойдет вниз
и может удариться о дно водоема, что весьма нежела-
тельно.
Не нужно увлекаться и максимальными скоростями.
Следует помнить, что, увеличивая скорость модели в
подводном положении, необходимо уменьшать угол ус-
тановки рулей на погружение, чтобы как-то уменьшить
погружающую силу, которая возрастает при увеличении
скорости.
Еще один совет: при первых запусках модели для
плавания в подводном положении ее сначала целесооб-
разно также запускать на привязи. Если модель резко
уходит на глубину или, наоборот, не погружается на хо-
ду, не надо далеко отпускать ее, а пользуясь шнуром,
возвращать назад и выяснять причину такого хода.
СОДЕРЖАНИЕ
Стр.
Краткий исторический очерк развития подводных лодок 3
Краткая теория подводных лодок...................... 7
Принцип действия рулей подводной лодки ............ 13
Особенности плавания модели подводной лодки в под-
водном положении............................... 16
Теоретический чертеж............................... 20
Изготовление корпуса модели ....................... 23
Изготовление автомата для управления моделью ... 27
Расчет рулей, их изготовление и установка ......... 31
Электрический двигатель, редуктор и гребные валы . 36
Гребные винты...................................... 40
Сборка корпуса, окраска и отделка модели .......... 43
Назначение и устройство сигнального буя............ 44
Запуски модели на воде и регулировка............... 45
Александр Иванович ВЕСЕЛОВСКИЙ
МОДЕЛЬ ПОДВОДНОЙ лодки
1. Бельченко Техн, редактор .
Корректор Л. И. Померанцева
Г-13144 Подписано к печати 22.04.64 г. Изд. № 2/2821
Бумага 84Х1087з2 1,5 физ. п. л. = 2,46 усл. п. л. Уч.-изд, л. = 2,365
Цена 8 коп. Тираж 17 000 экз.
Издательство ДОСААФ, Москва, Б-66, Ново-Рязанская ул., 26
Типография издательства ДОСААФ. Зак. 624