/





























































































































































































































































































Текст
Академик
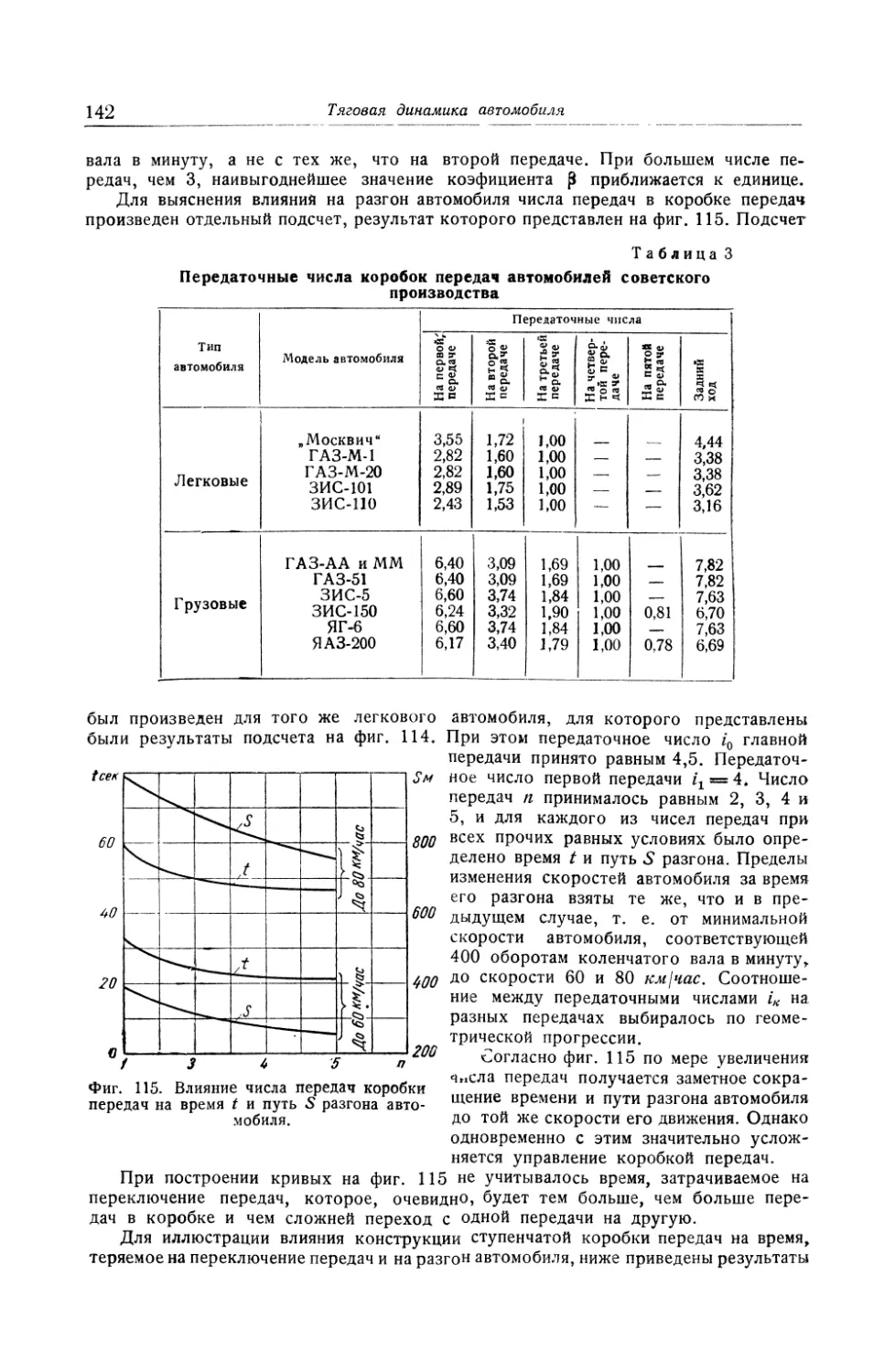
Е. А. ЧУДАКОВ
ТЕОРИЯ АВТОМОБИЛЯ
Допущено Министерством высшего образования СССР
в качестве учебника
для высших технических учебных заведений
ТРЕТЬЕ ПЕРЕРАБОТАННОЕ
И ДОПОЛНЕННОЕ ИЗДАНИЕ
ГОСУДАРСТВЕННОЕ НАУЧНО-ТЕХНИЧЕСКОЕ ИЗДАТЕЛЬСТВО
МАШИНОСТРОИТЕЛЬНОЙ ЛИТЕРАТУРЫ
Москва 1950
В книге рассматривается теория тяговых и
экономических расчетов автомобиля, а также подробно
освещены вопросы его управляемости и устойчивости.
Книга предназначена для студентов автомеханических
факультетов, а также для инженеров, связанных с
проектированием, расчетом и испытанием автомобиля.
Рецензенты: кафедра «Автомобили и двигатели" Военнотранспортной
Академии им. Л. М. Кагановича, лауреат Сталинской
премии А. А. Липгарт, проф. Б. С. Фалькевич
Редактор канд. техн. наук N. В. Давакоз
Редакция литературы по автотракторной промышленности
Зав. редакцией инж. В. В. БРОКШ
ОТ АВТОРА
Со времени выхода второго издания учебника „Теория автомобиля** прошло
десять лет. За это время в научно-исследовательских организациях
(Автомобильная лаборатория АН СССР, Научный автомоторный институт Министерства
автомобильной и тракторной промышленности), а также в высших учебных заведениях
проведена была большая работа по дальнейшему развитию этой учебной дисциплины,
что и было использовано автором при переработке учебника.
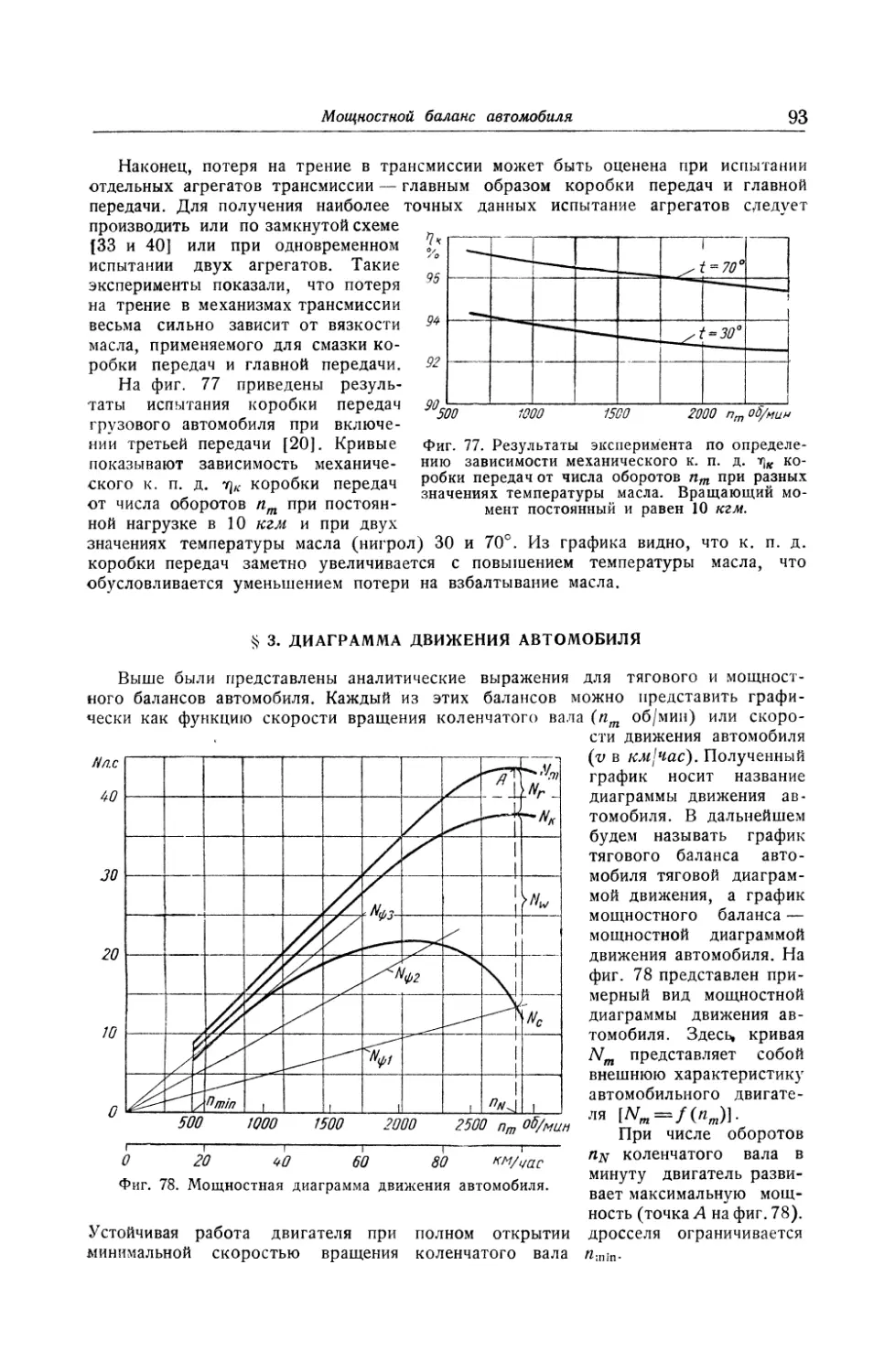
Прежде всего было проведено более подробное исследование качения
автомобильного колеса с учетом деформации шины в радиальном, боковом и
тангенциальном направлениях. Это дало возможность дать более детальное и более
точное объяснение потерь на качение автомобильного колеса, а также ввести
в учебник совершенно новые разделы: влияние эластичности колес на движение
автомобиля, на стабилизацию его управляемых колес и на устойчивость против
заноса.
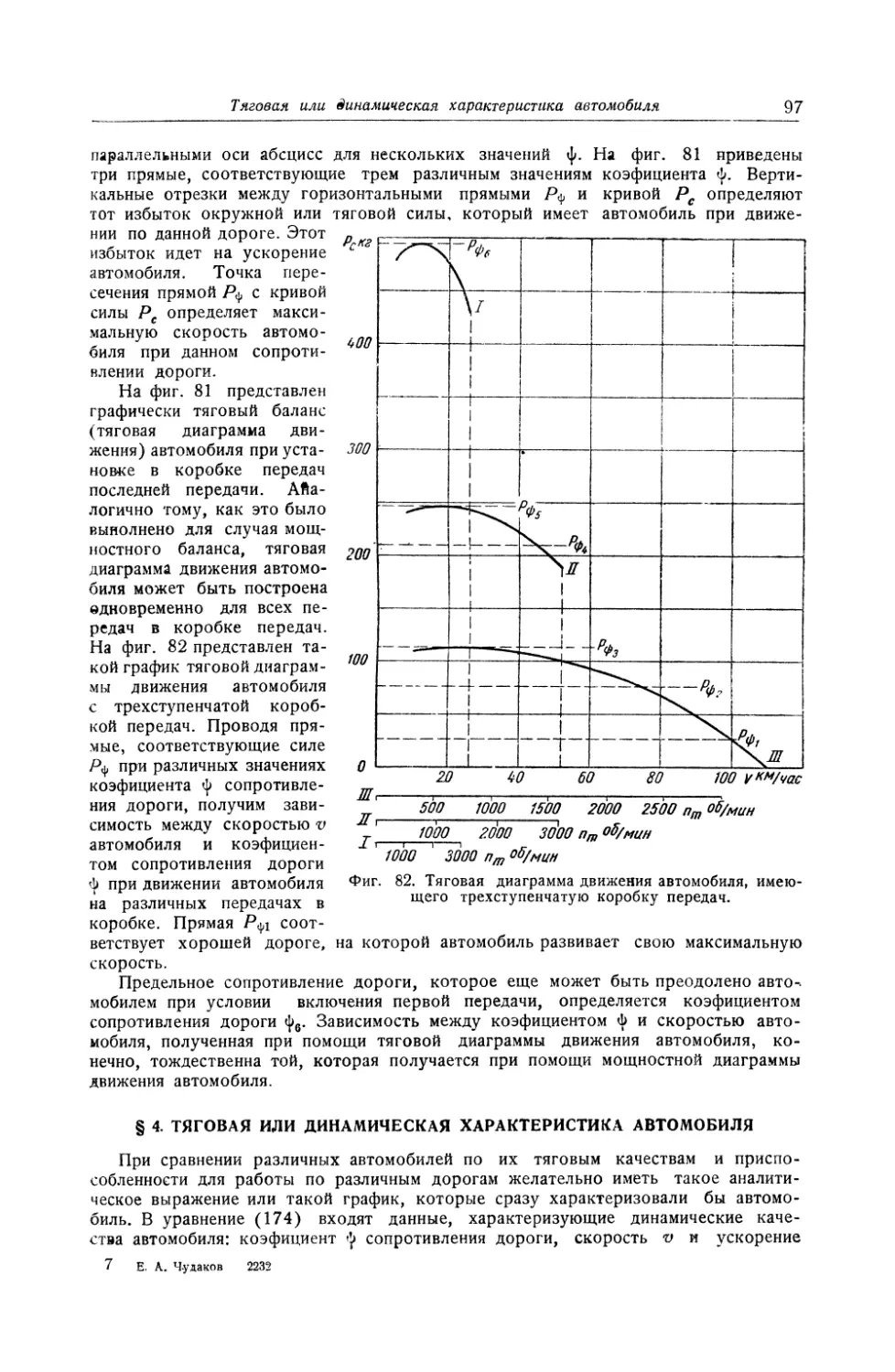
В учебник введен новый раздел, касающийся плавности движения автомобиля
и влияния жесткости шин передних и задних колес, а также распределения массы
по длине автомобиля на колебание последнего при переезде его через единичное
препятствие. Введен также заново раздел о циркуляции паразитной мощности
в трансмиссии автомобиля с несколькими ведущими осями при блокированном
приводе.
Впервые введен в учебник раздел по устойчивости автомобиля против заноса
при торможении с учетом различного распределения тормозной силы между
передними и задними колесами.
Основные разделы учебника по динамике и экономичности автомобиля
значительно переработаны и дополнены рассмотрением вопросов с учетом влияния
неустановившегося движения автомобиля на характеристику двигателя. Точно так же
подвергся переработке и раздел, в котором рассматривается вопрос
определения реакций — вертикальных, тангенциальных и боковых, действующих на колеса
автомобиля.
В подготовке данной работы к изданию мне оказал большую помощь В» М, Клен-
ников, которому приношу благодарность.
ПРЕДИСЛОВИЕ
В дореволюционной России отсутствовала автомобильная промышленность, а
автомобильный транспорт не имел практически никакого значения в хозяйственной
жизни страны. Однако это отнюдь не значит, что в России не было попыток
создания автомобилей. Целый ряд исключительно ценных предложений по
автомобильной технике сделан был впервые именно в России.
Еще в 1741 г. крестьянин Нижегородской губ. Леонтий Шамшуренков
предложил „самобеглую коляску", приводимую в движение силой двух человек, находя-
щихся на этой коляске. Такая коляска была изготовлена и успешно прошла
испытание. В 1784—1791 гг. знаменитый русский изобретатель механик И. П. Кулибин
предложил коляску аналогичного типа, но значительно усовершенствовал ее
конструкцию. Он впервые ввел в нее ряд механизмов, получивших в дальнейшем
широкое использование в конструкции автомобиля. В частности, И. П. Кулибин
впервые применил механизм, при помощи которого можно было изменять скорость
коляски, не изменяя скорости движения педалей, приводящихся в движение
человеком. Такой механизм хотя в другом конструктивном выполнении под названием
коробки передач применяется во всех современных автомобилях. Кроме того, для
той же коляски И. П. Кулибин впервые создал механизм свободного хода,
применяющийся в настоящее время во всех велосипедах, а иногда и в автомобилях.
Первая паровая машина (огнедействующая машина) с механическим приводом
к клапанам также была построена в России механиком И. И. Ползуновым. Такая
паровая машина была установлена в 1764 ге на Барнаульском заводе для.
приведения в действие воздуходувок.
Паровая машина для приведения в действие самоходного экипажа неоднократно
использовалась русскими изобретателями. В 1830 г. механик К. Янкевич разработал
проект парового „быстроката".
В России раньше, чем в других странах, был разработан проект бензинового
двигателя внутреннего сгорания, получившего в дальнейшем почти исключительное
применение для автомобилей. В середине 80-х годов моряк русского флота
О. С. Костович построил шестицилиндровый бензиновый двигатель мощностью 80 л. с.
для изобретенного им дирижабля; двигатель обладал очень малым весом,
Точно так же впервые в России был применен для автомобилей гусеничный
ход.
И все же, несмотря на блестящие достижения отдельных лиц в области созда-
ния и развития конструкций автомобилей, производство автомобилей так и не было
начато в дореволюционной России; ни один из предложенных проектов
автомобилей не был реализован в масштабе, заслуживающем сколько-нибудь серьезного
внимания.
В 1908 г. на Русско-Балтийском заводе в Риге был начат выпуск легковых
автомобилей, причем к 1916 г., когда производство было прекращено,,
выпущено было лишь 450 автомобилей. В 1909 г. в г. Орле на заводе М. М. Хрущева
было выпущено пять автомобилей. Примерно в это же время в Петербурге на
заводе И. П. Пузырева было изготовлено 10 автомобилей. Только в 1924 г.'было
начато на заводе АМО, ныне Московском автозаводе имени Сталина, производстве
полуторатонных автомобилей АМО-Ф—15 и 7 ноября 1924 г, 10 таких машин
участвовали в демонстрации на Красной площади.
6. Предисловие
В 1925 г. был также начат небольшой выпуск трехтонных автомобилей Я-3
на Ярославском автомобильном заводе.
Коренной перелом в развитии автомобильной промышленности произошел в годы
первой сталинской пятилетки. В 1929 г. товарищем Сталиным было выдвинуто
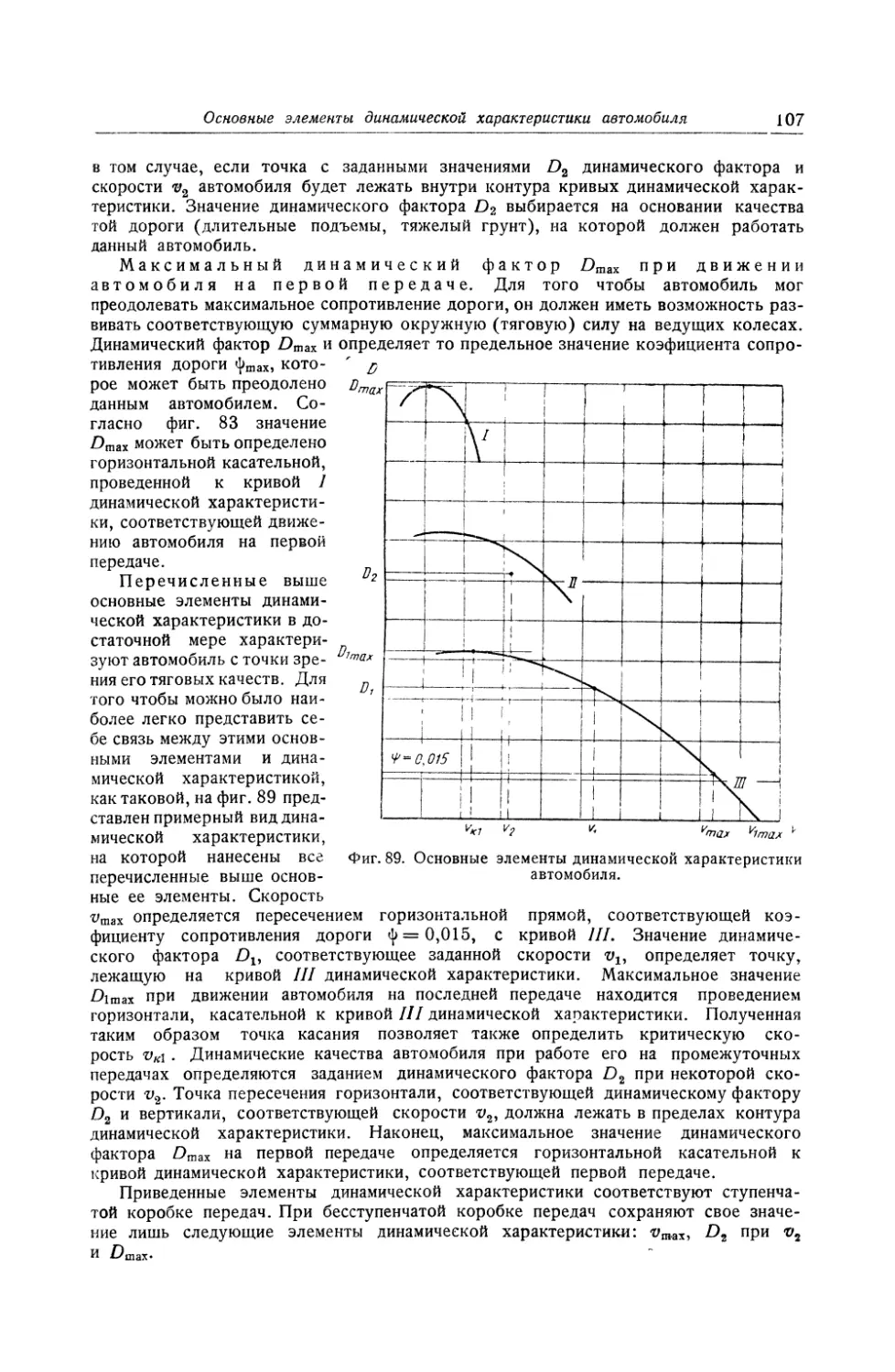
предложение о развитии в Советском Союзе массового производства автомобилей. Согласно
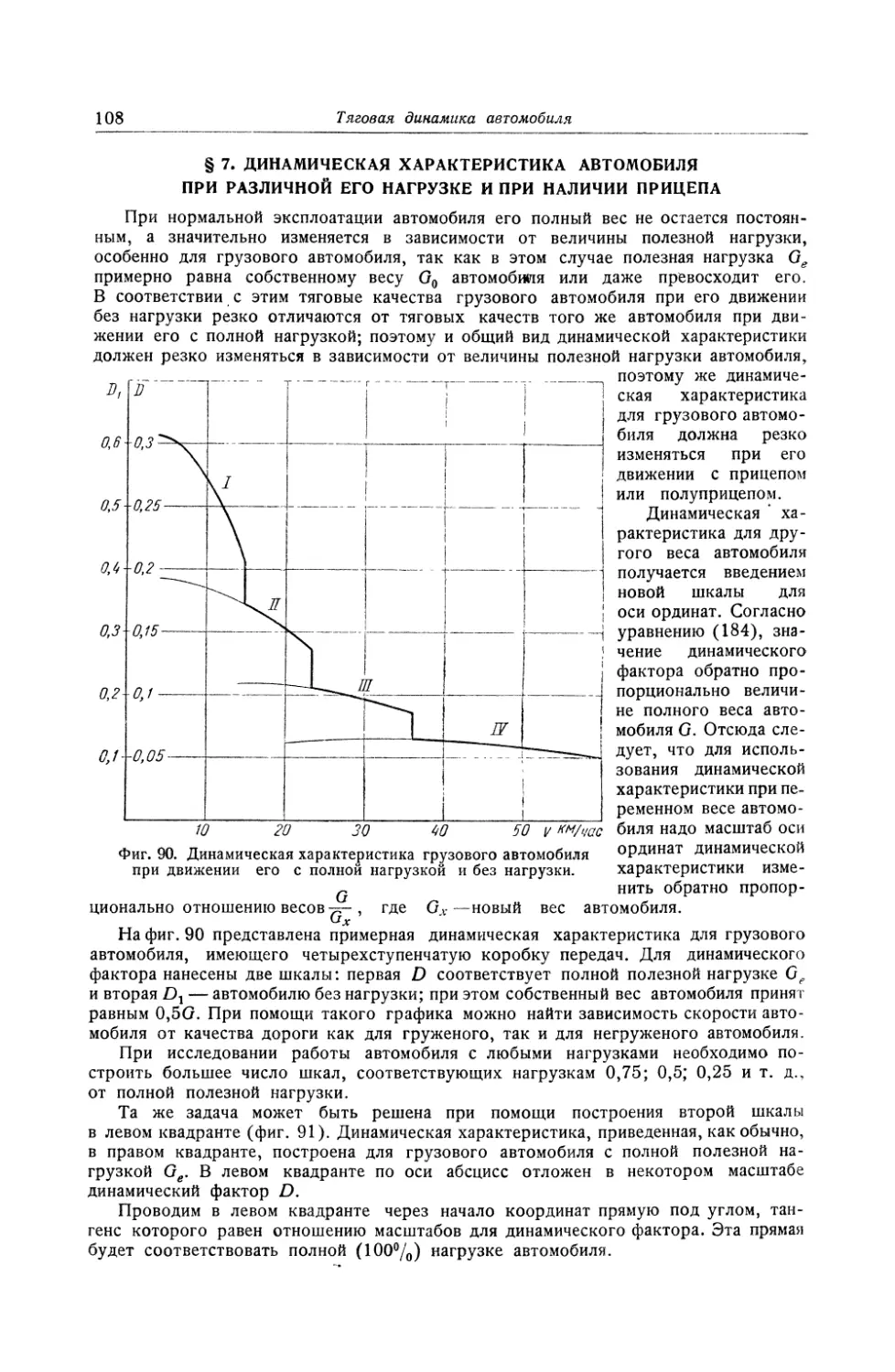
этому предложению было начато строительство автомобильных заводов в г. Горьком
и в г. Москве. Уже в 1932 г., т. е. через 3 года после правительственного
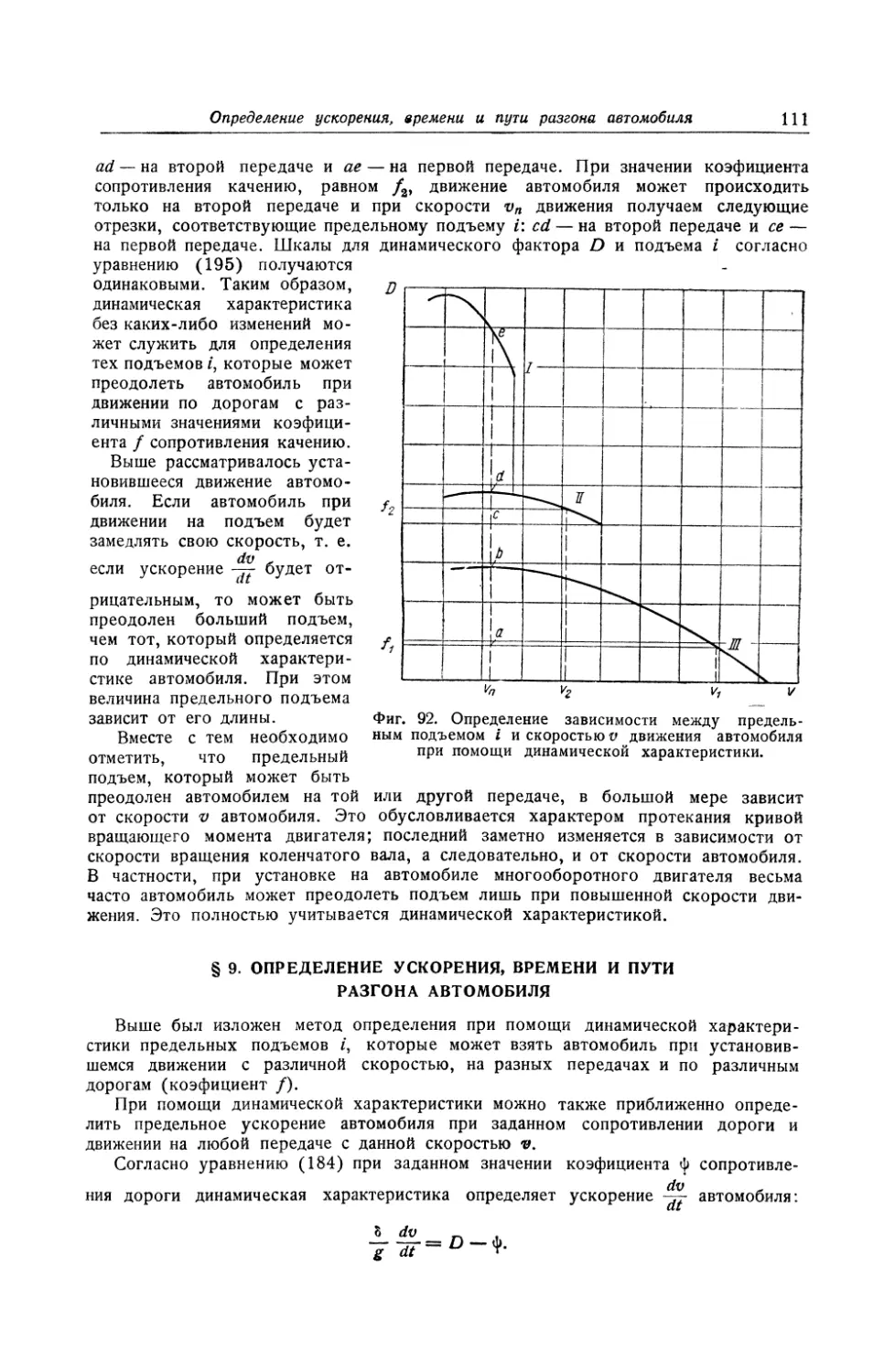
решения, автомобильные заводы СССР выпустили более 25 000 автомобилей.
В январе 1933 г. товарищ Сталин, подводя итоги первой пятилетки, сказал:
„У нас не было автомобильной промышленности. У нас она есть теперь" г.
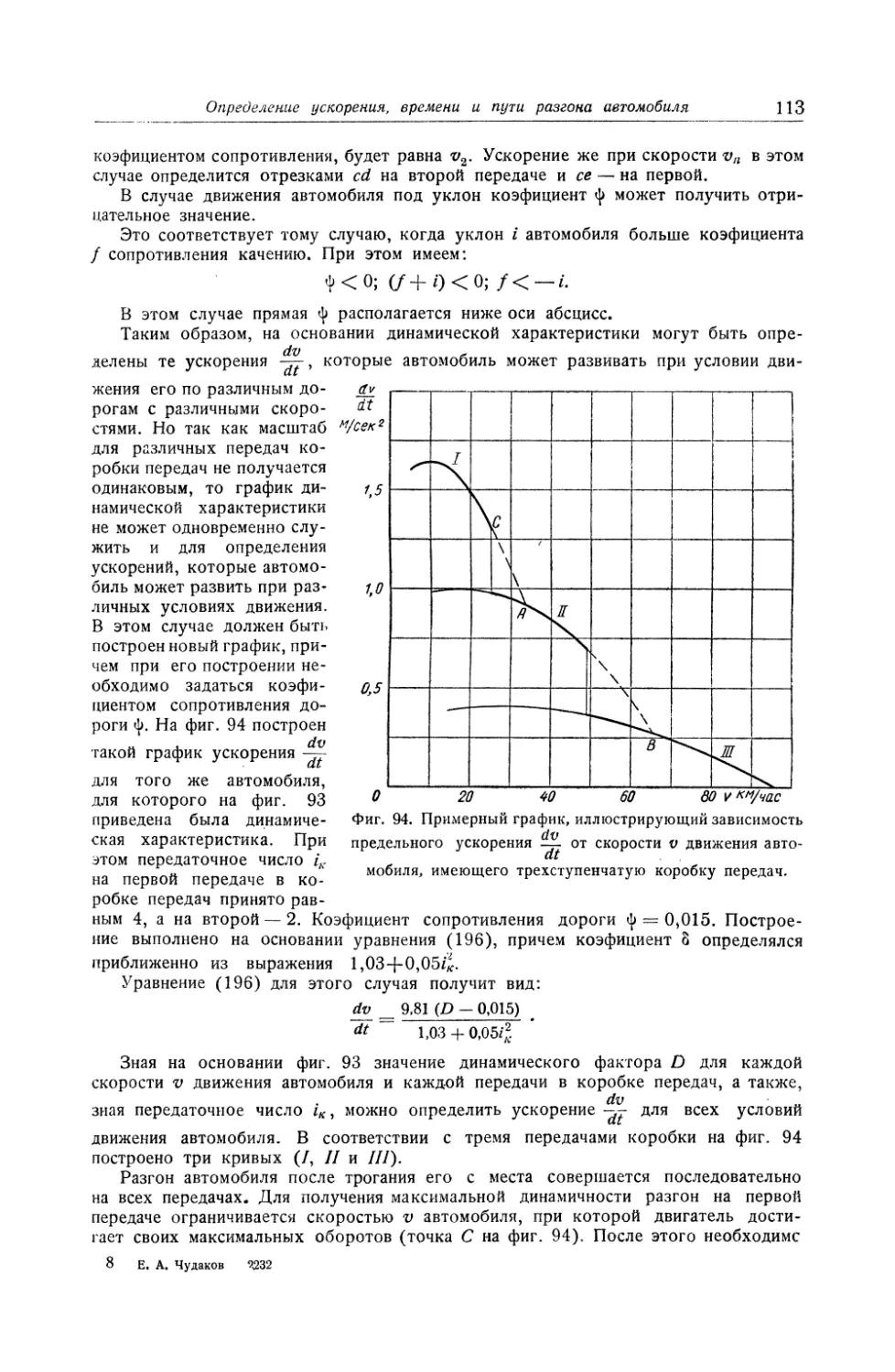
В 1933 г. автомобильные заводы СССР выпустили уже 49 613 автомобилей,
а в 1937 г. — более 180 000. При этом Советский Союз по выпуску грузовых
автомобилей занял второе место в мире.
Во время Отечественной войны автомобильная промышленность продолжала
разбиваться. За это время был построен новый автомобильный завод на Урале,
выпускающий трехтонные автомобили.
Исключительно большое внимание уделено автомобильной промышленности
в пятилетнем плане восстановления и развития народного хозяйства СССР на
1946—1950 гг. Согласно этому плану в 1950 г. должно быть выпущено 500 000
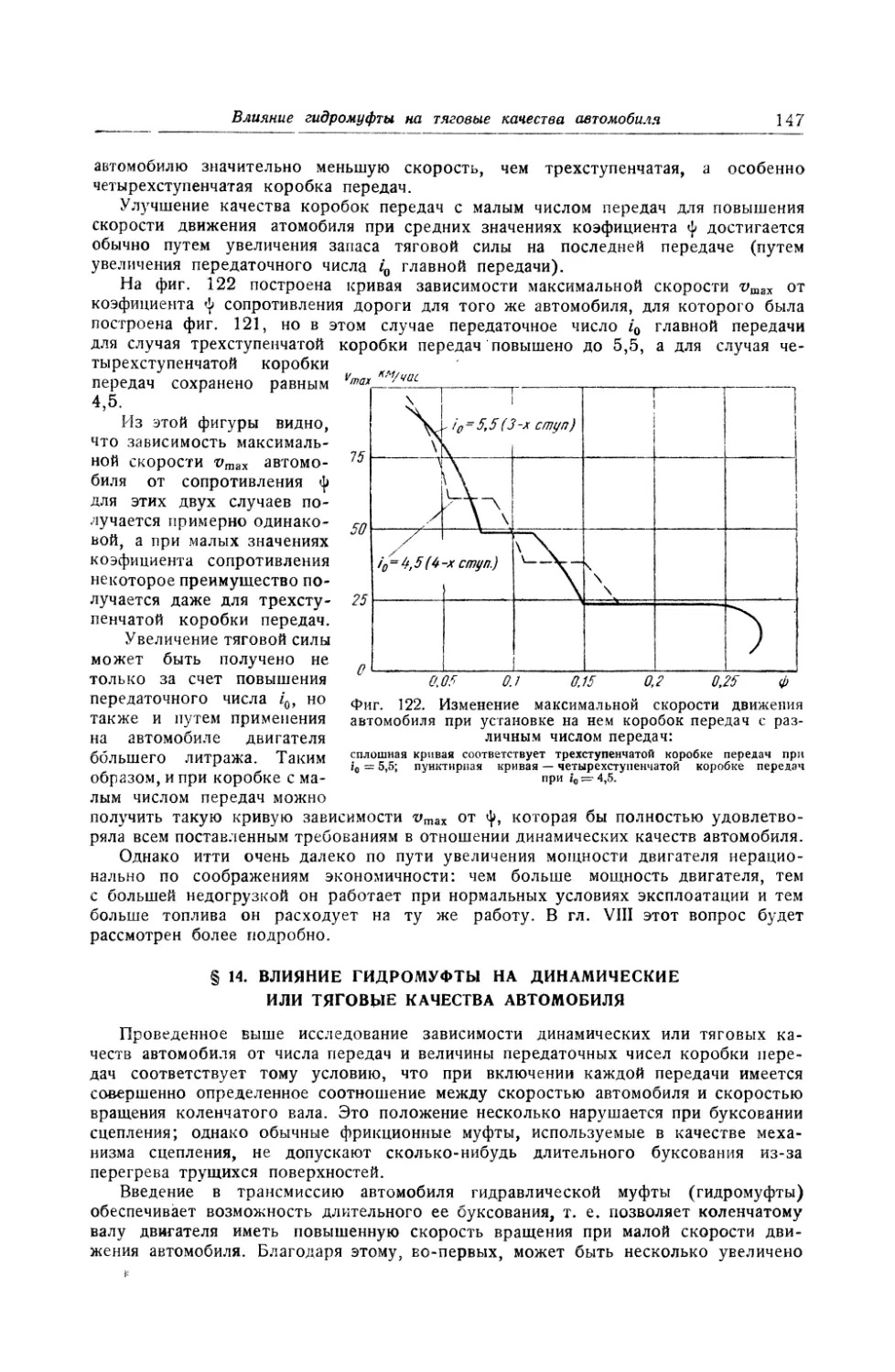
автомобилей, из них свыше 400 000 грузовых.
На протяжении всего периода строительства автомобильных заводов и
организации автомобильной промышленности в процессе освоения новой сложной техники
работники автомобильной промышленности всегда ощущали постоянную заботу и
руководящую роль товарища Сталина.
Параллельно с ростом производства автомобилей шло развитие науки об
автомобиле и, в частности, развитие теории автомобиля. Создание теории автомобиля
решило большинство вопросов, вставших перед автомобильными конструкторами
по влиянию конструкции автомобиля на его эксплоатационные качества. В первых
работах по теории автомобиля были освещены вопросы о зависимости динамики
автомобиля или его тяговых качеств от конструкции автомобиля (мощность
двигателя, передаточное число механизмов силовой передачи, радиус ведущих
колес, вес и форма автомобиля и т. д.). Далее было произведено исследование
зависимости топливной экономичности автомобиля от его конструкции. Указанные
два вопроса — динамика и экономичность автомобиля — были впервые подробно
исследованы в работе автора „Динамическое и экономическое исследование
автомобиля ", вышедшей в 1928 г. Эта работа послужила основой для создания первых
учебников по теории автомобиля.
Несколько позднее была развита научно-исследовательская работа по боковой
устойчивости автомобиля, по его управляемости и, наконец, по проходимости.
Огромную роль в этом деле сыграла научная автомобильная лаборатория,
созданная при научно-техническом отделе Высшего Совета Народного Хозяйства еще
в 1918, а в 1921 г. преобразованная в Научный автомоторный институт (НАМИ).
В автомобильной лаборатории, а далее в НАМИ было проведено большое
количество испытаний автомобилей и их механизмов; в этих же организациях проведен
был ряд теоретических работ, что послужило основанием для создания новой
учебной дисциплины „Теория автомобиля".
Первая работа по испытанию автомобилей была опубликована в „Трудах НАМИ*
в 1923 г. („Испытание автомобилей на тормозном стенде" Е. А. Чудакова).
В 1931 г. был издан первый учебник по теории автомобиля „Тяговый расчет
автомобиляи Е. А. Чудакова.
1 Доклад товарища Сталина на объединенном пленуме ЦК и ЦК К ВКП (б) 1 января
1933 г. Вопросы ленинизма, изд. 11-е, стр. 373.
ПРИНЯТЫЕ ОБОЗНАЧЕНИЯ
Силы и реакции
Z — радиальная реакция в кг;
X—тангенциальная реакция в кг;
Y—боковая сила и боковая реакция в кг\
Zx — суммарная радиальная реакция, действующая на колеса передней оси
автомобиля, в кг;
Z2 — суммарная радиальная реакция, действующая на колеса задней оси
автомобиля, в кг;
Хг— суммарная тангенциальная реакция, действующая на колеса передней оси
автомобиля, в кг;
Х2— суммарная тангенциальная реакция, действующая на колеса задней оси
автомобиля, в кг\
Yx — суммарная боковая реакция, действующая на колеса передней оси
автомобиля, В К2\
Y2 — суммарная боковая реакция, действующая на колеса задней оси автомобиля.
в кг;
ZK— радиальная реакция, действующая на колесо, в кг\
Z\ —~ радиальная реакция, действующая на внутреннее колесо передней оси
автомобиля, в кг;
Zx — радиальная реакция, действующая на внешнее колесо передней оси
автомобиля, в кг;
Z*2 — радиальная реакция, действующая на внутреннее колесо задней оси автомо
биля в кг;
Z*2 — радиальная реакция, действующая на внешнее колесо задней оси автомобиля,
в кг;
AZ —- изменение радиальных реакций в кг;
Хк — тангенциальная реакция, действующая на колесо, в кг;
Х[ — тангенциальная реакция, действующая на внутреннее колесо передней оси-
автомобиля, в кг;
Х*х — тангенциальная реакция, действующая на внешнее колесо передней оси авто
мобиля, в кг;
я£ — тангенциальная реакция, действующая на внутреннее колесо задней оси
автомобиля, в кг;
Х2 — тангенциальная реакция, действующая на внешнее колесо задней оси автомо
биля, в кг;
YK — боковая реакция, действующая на колесо, в кг;
Y\ — боковая реакция, действующая на внутреннее колесо передней оси
автомобиля, в кг;
Fj—боковая реакция, действующая на внешнее колесо передней оси автомобиля.
в кг;
1^2 -боковая реакция, действующая на внутреннее колесо задней оси автомобиля,
в кг;
Y"2 — боковая реакция, действующая на внешнее колесо задней оси автомобиля
в кг;
Yop — боковая реакция, возникающая из-за неравномерного распределения полной
суммарной окружной силы по колесам ведущей оси, в кг;
^оо>~~ боковая реакция при наличии инерционного момента, возникающего при
неравномерном движении автомобиля по криволинейной траектории, в кг%
Принятые обозначения
G' — полный вес автомобиля в кг;
Gt — вес автомобиля, приходящийся на колеса передней оси, в кг\
Сг2 ~~ вес автомобиля, приходящийся на колеса задней оси, в кг;
QK — вес автомобиля, приходящийся на колесо, в кг;
Gq— собственный вес автомобиля в кг;
Gg — полная полезная нагрузка на автомобиль в кг;
G' —- полный вес прицепа или полуприцепа в кг;
Осц — сцепной вес автомобиля в кг;
Рко — полная окружная сила, приложенная к колесу, в кг;
Рк — свободная окружная сила, передаваемая от колеса к оси автомобиля, в кг;
Рр — полная суммарная окружная (тяговая) сила на ведущих колесах автомобиля
в кг;
Рр— полная окружная сила, действующая на внутреннее колесо ведущей оси, в кг;
Рр — полная окружная сила, действующая на внешнее колесо ведущей оси, в кг:
Ра— свободная суммарная окружная сила в кг;
Ррш — суммарная окружная сила с учетом потери на ускоренное вращение ведущих
колес в кг;
Рг — сила, затрачиваемая на трение в механизмах силовой передачи автомобиля
в кг;
Рф — сила, затрачиваемая на преодоление сопротивления дороги, в кг;
Рь — сила сопротивления движению автомобиля в кг;
Pf — сила сопротивления качению колес в кг;
Pfx — сила сопротивления качению колес передней оси в кг;
Руг — сила сопротивления качению колес задней оси в кг;
Pw — сила сопротивления воздуха движению автомобиля в кг;
Pi — сила сопротивления подъему в кг;
Pj — сила инерции автомобиля в кг;
PjQ — сила инерции поступательно движущейся массы автомобиля в кг;
Ptf •—сила, идущая на преодоление сопротивления дороги и разгон автомобиля, в кг;
N —- нормальная сила инерции, приложенная к центру тяжести автомобиля, в кг;
Т — тангенциальная сила инерции, приложенная к центру тяжести автомобиля, в кг;
Sw — результирующая сила сопротивления воздуха (при наличии бокового ветра)
в кг;
Nw — боковая сила, возникающая при действии на автомобиль бокового ветра, в кг;
Рт—полная тормозная сила в кг;
РмТ — тормозная сила, действующая на колесо, в кг;
R% — результирующая реакция, действующая на внутреннее колесо задней оси
автомобиля, в кг;
R'2 — результирующая реакция, действующая на внешнее колесо задней оси
автомобиля, в кг;
r^ — суммарная результирующая реакция, действующая на колеса передней оси,
в кг;
^—-суммарная результирующая реакция, действующая на колеса задней оси, в кг
Мощности и моменты
$т _ эффективная мощность двигателя в кгм/сек или л. с;
Ык — мощность, подведенная от двигателя к ведущим колесам автомобиля, в кгм/сек
или л. с;
Nr — мощность, затрачиваемая на трение в механизмах силовой передачи
автомобиля, в кгм/сек или л. с;
Mf — мощность, затрачиваемая на качение колес, в кгм/сек или л. с;
Nw — мощность, затрачиваемая на преодоление сопротивления воздуха, в кгм/сек
или л. с;
Mi—мощность, затрачиваемая на преодоление сопротивления подъему, в кгм/сек
или л. с;
Nj — мощкос!ь, затрачиваемая на преодоление сопротивления инерции автомобиля»
в кгм/сек или л. с.
Мс — мощность, идущая на преодоление сопротивления дороги и разгон
автомобиля, в кгм/сек или л. с;
Д/ф — мощность, затрачиваемая на преодоление сопротивления дороги, в кгм!сен
или л. с;
Nq —- паразитная мощность в кгм/сек или л. с;
Мт — вращающий момент двигателя в кгм;
Принятые обозначения
Мнп — момент, подведенный от двигателя к коробке передач, в кгм;
Ме — вращающий момент на карданном валу в кгм;
Мр — вращающий момент, подведенный к ведущим колесам автомобиля, в кгм;
М'р — момент, подведенный к внутреннему колесу ведущей оси, в кгм;
Мр — момент, подведенный к внешнему колесу ведущей оси, в кгм;
My — момент, действующий на автомобиль и обусловленный неравномерным
распределением полной суммарной окружной силы по колесам ведущей оси,
в кгм\
Mj — инерционный момент, возникающий при неравномерном вращении автомобиля,
в кгм;
Мг — реактивный момент, передаваемый на кузов и раму автомобиля, в кгм\
Мх — момент, передаваемый от рамы на переднюю ось, в кгм;
М2 — момент, передаваемый от рамы на заднюю ось, в кгм;
Mf — момент сопротивления качению колеса в кгм;
Mf — момент сопротивления качению колес передней оси в кгм;
момент сопротивления качению колес задней оси в кгм;
вращающий момент, действующий на колесо, в кгм;
Мт — тормозной момент в кгм;
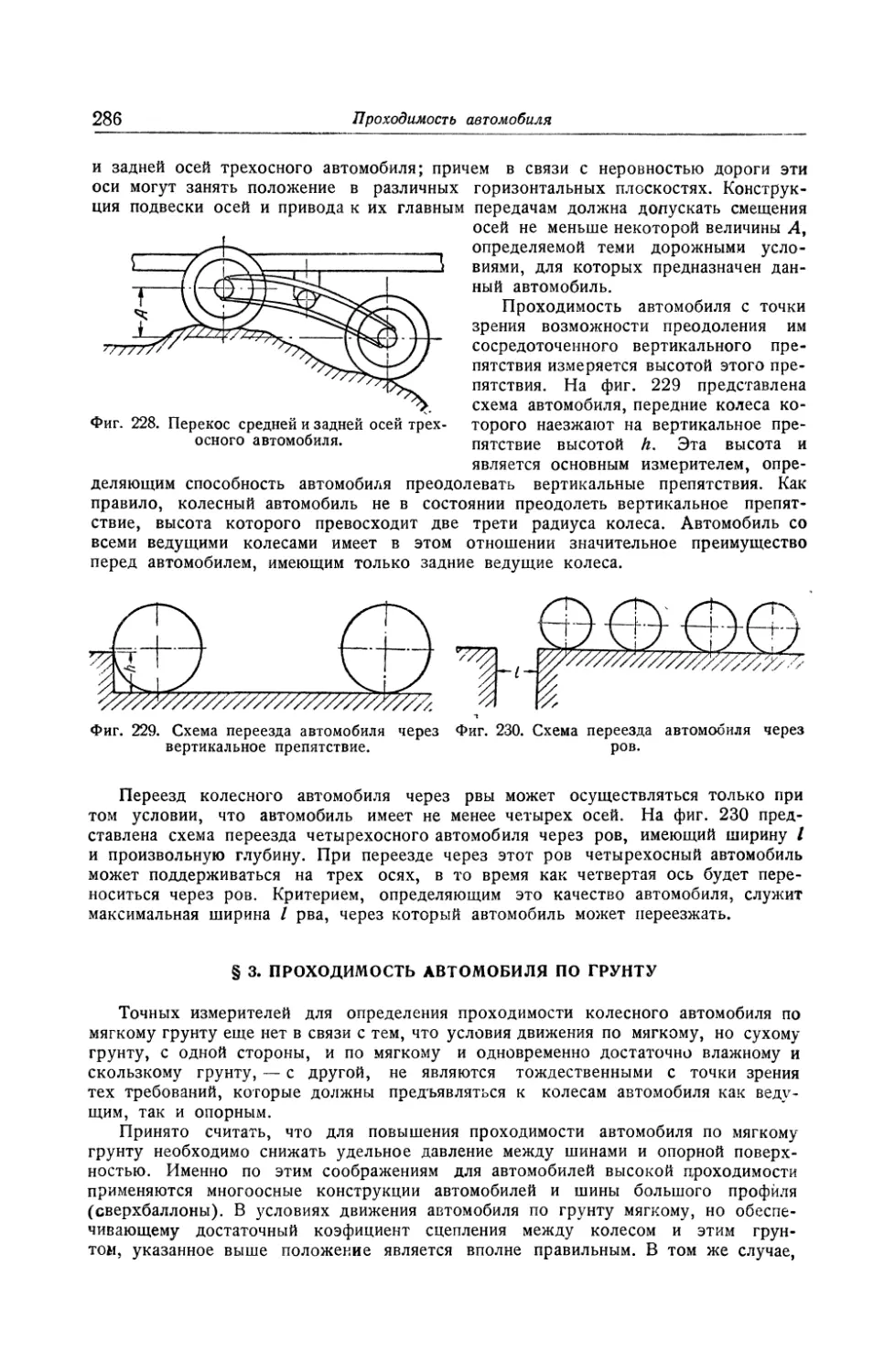
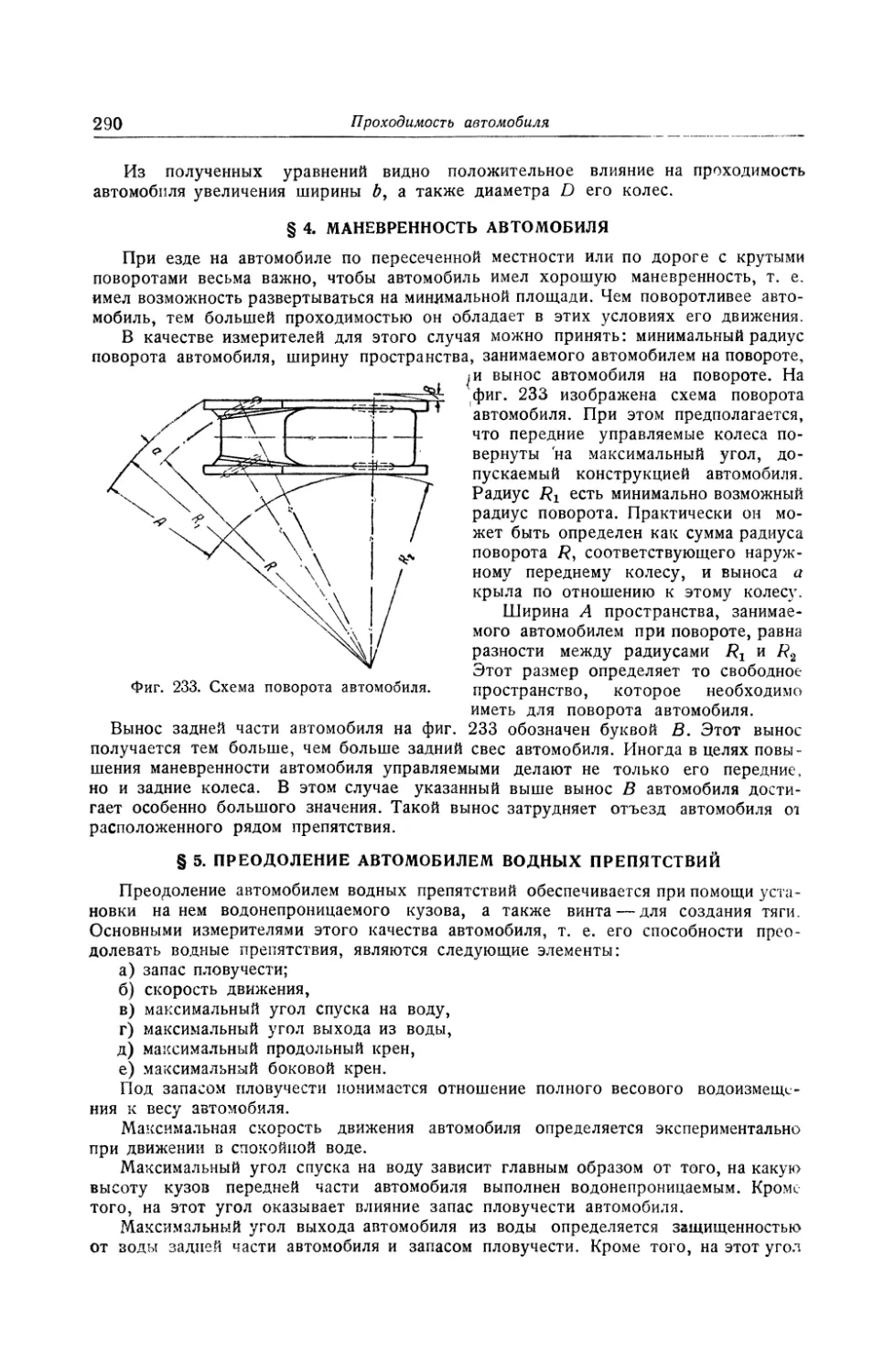
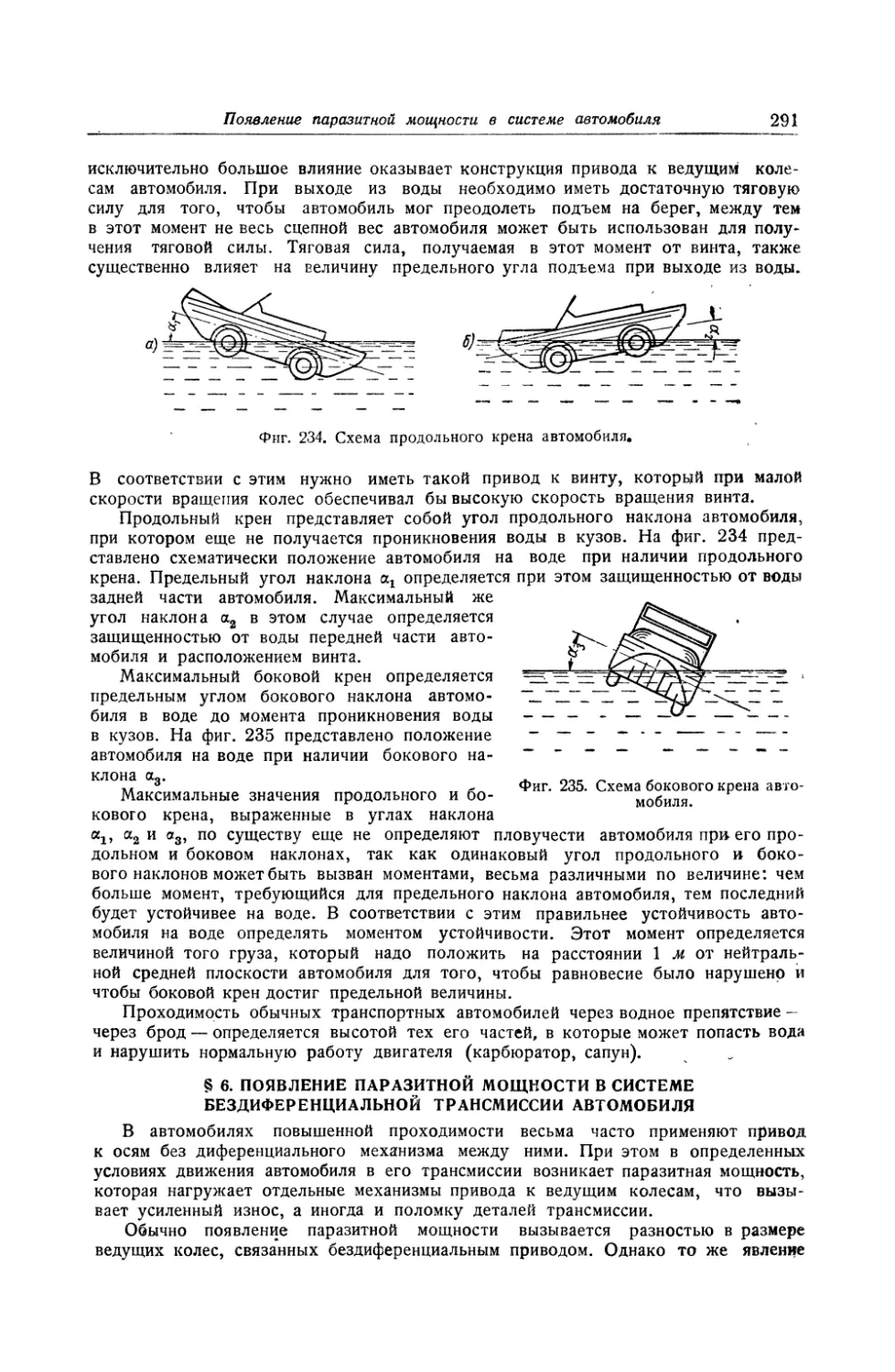
МкТ—тормозной момент на колесе в кгм.
М^ —
Мк —
Масса и моменты инерции
М—масса автомобиля, равная — , в кг* сек* 1м;
М' — подрессоренная масса автомобиля в кг-сек2/м;
J — момент инерции массы автомобиля по отношению к вертикальной оси,
проходящей через центр тяжести автомобиля, в кгм-сек2;
JK — момент инерции колеса в кгм-сек2;
JK —момент инерции переднего колеса автомобиля в кгм*сек2;
JK —момент инерции заднего колеса автомобиля в кгм-сек2;
Jm — момент инерции вращающихся деталей двигателя и сцепления в кгм-сек\
Размеры
L — база автомобиля в м;
а — расстояние (по горизонтали) от центра тяжести до передней оси автомобиля в м;
I) — расстояние (по горизонтали) от центра тяжести до задней оси автомобиля в л
hg— высота расположения центра тяжести автомобиля в м\
hw — высота приложения силы сопротивления воздуха движению автомобиля в м\
В — колея автомобиля в м;
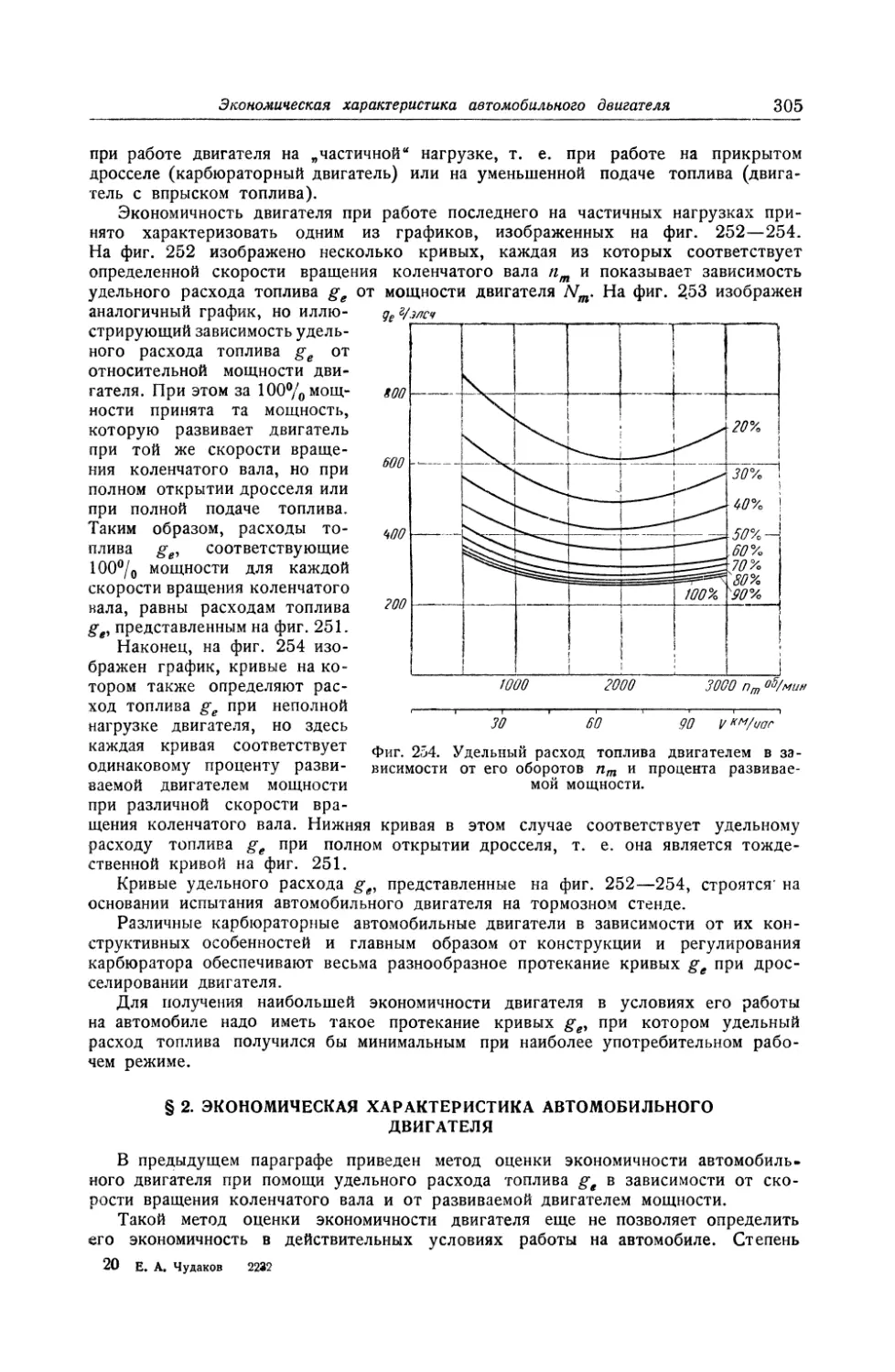
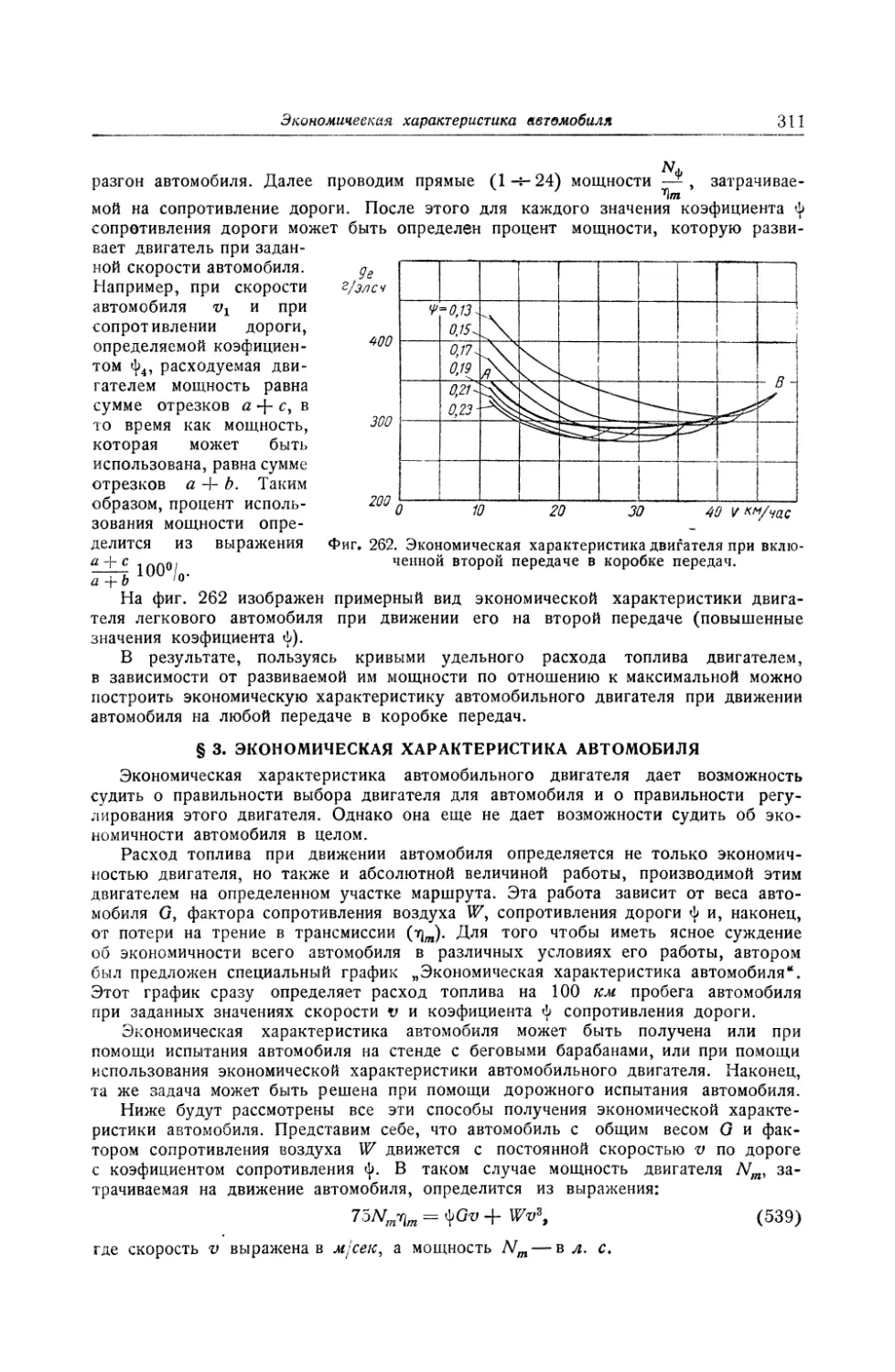
р — радиус инерции массы автомобиля относительно вертикальной оси, проходящей
через центр тяжести автомобиля, в м\
pt — радиус инерции массы автомобиля относительно горизонтальной оси,
проходящей через центр тяжести автомобиля и перпендикулярно его плоскости
симметрии, в м\
гн _ номинальный радиус колеса в м или мм;
Го — свободный радиус колеса в м или мм;
гс — статический радиус колеса в м или мм;
Гд — динамический радиус колеса в м или мм;
гк —• радиус качения колеса в м или мм;
гк — радиус свободного качения колеса в м или мм\
Гнб — радиус качения, соответствующий началу пробуксовывания колеса, в м или мм,
Гкс — радиус качения, соответствующий началу проскальзывания колеса, в м или мм\
а — смещение радиальной реакции по отношению к вертикали, проходящей черес*
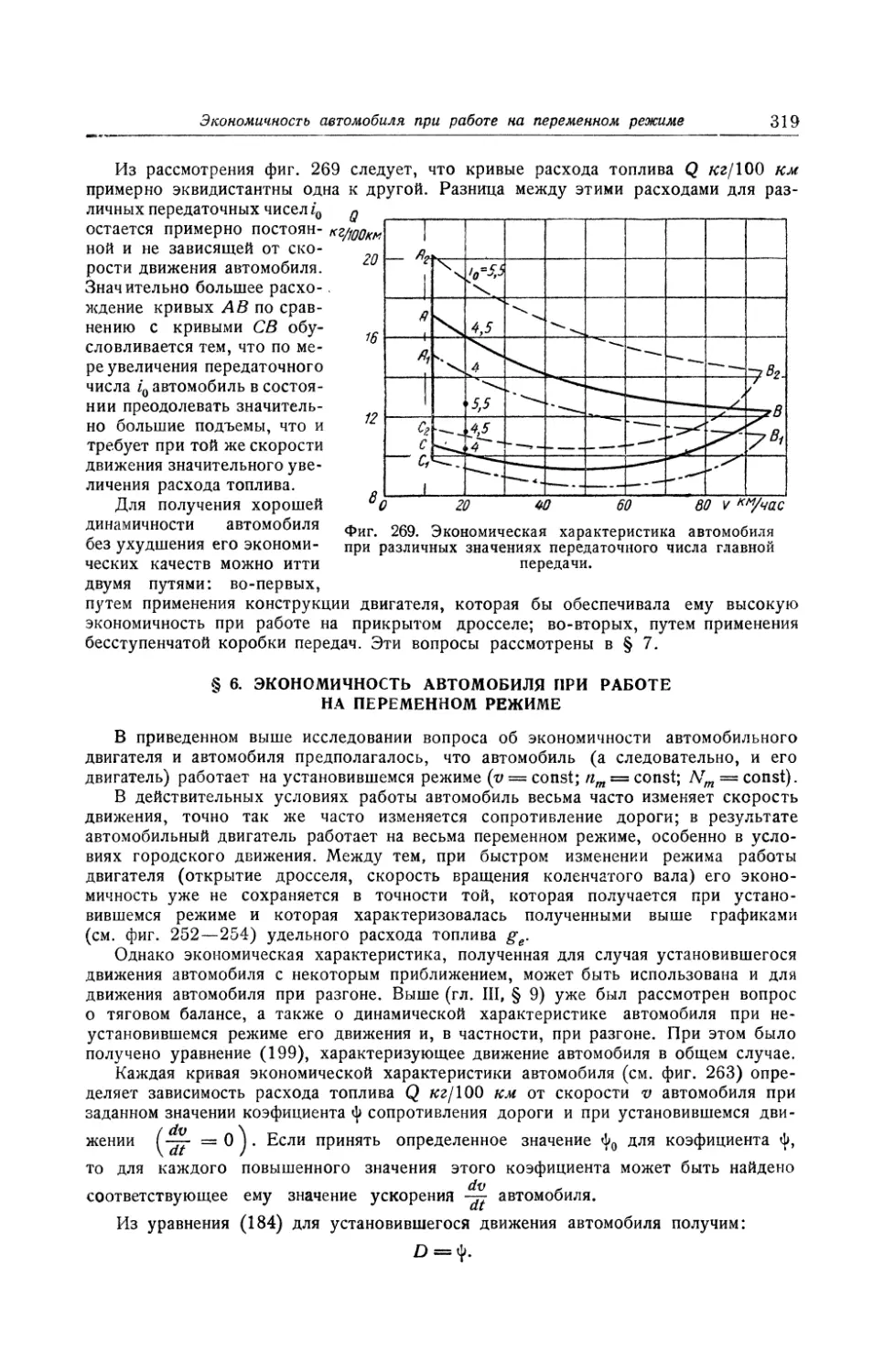
центр колеса, в мм;
h и д —отрезки, учитывающие влияние вращающего момента на карданном валу на
изменение радиальных реакций, в м;
$1^ и /j — отрезки, учитывающие влияние неравномерного распределения полной сум-
марной окружной силы по колесам ведущей оси, в м;
fi и fi — отрезки, учитывающие влияние инерционного момента, возникающего при
неравномерном движении автомобиля по криволинейной траектории, в м;
d - расстояние между центром тяжести и метацентром автомобиля в м или мм;
R - радиус поворота автомобиля в м\
Ro - радиус поворота при установившемся движении автомобиля, а также
начальное значение радиуса поворота автомобиля, в м;
10 Принятые обозначения
#0min ~~ радиус поворота автомобиля, соответствующий началу бокового скольжения
задней ведущей оси при одновременном начале пробуксовывания ее
внутреннего колеса — для случая жестких колес — и при бесконечно большой
скорости пробуксовывания ее внутреннего колеса — для случая колес,
обладающих боковой эластичностью, в м\
F—лобовая площадь автомобиля в м2;
/а — расстояние между рессорами передней оси в м;
/2 — расстояние между рессорами задней оси в м;
fem — статическая стрела прогиба в см;
fj и г2 — радиусы поперечной проходимости автомобиля в м;
г8 — радиус продольной проходимости автомобиля в м.
Углы
0 —угол поворота управляемых колес в радианах;
а — угол подъема дороги в градусах или радианах;
а0 — начальное значение угла поворота управляемых колес, а также значение того
же угла при установившемся движении автомобиля, в радианах:
«j — значение угла поворота управляемых колес, соответствующее моменту
перехода автомобиля с первой переходной кривой на участок постоянного
радиуса, в радианах;
а2 — значение угла поворота управляемых колес, соответствующее моменту
перехода автомобиля с участка постоянного радиуса на вторую переходную
кривую, в радианах;
а?> — значение угла поворота управляемых колес, соответствующее концу второй
переходной кривой (выходу автомобиля на прямую), в радианах;
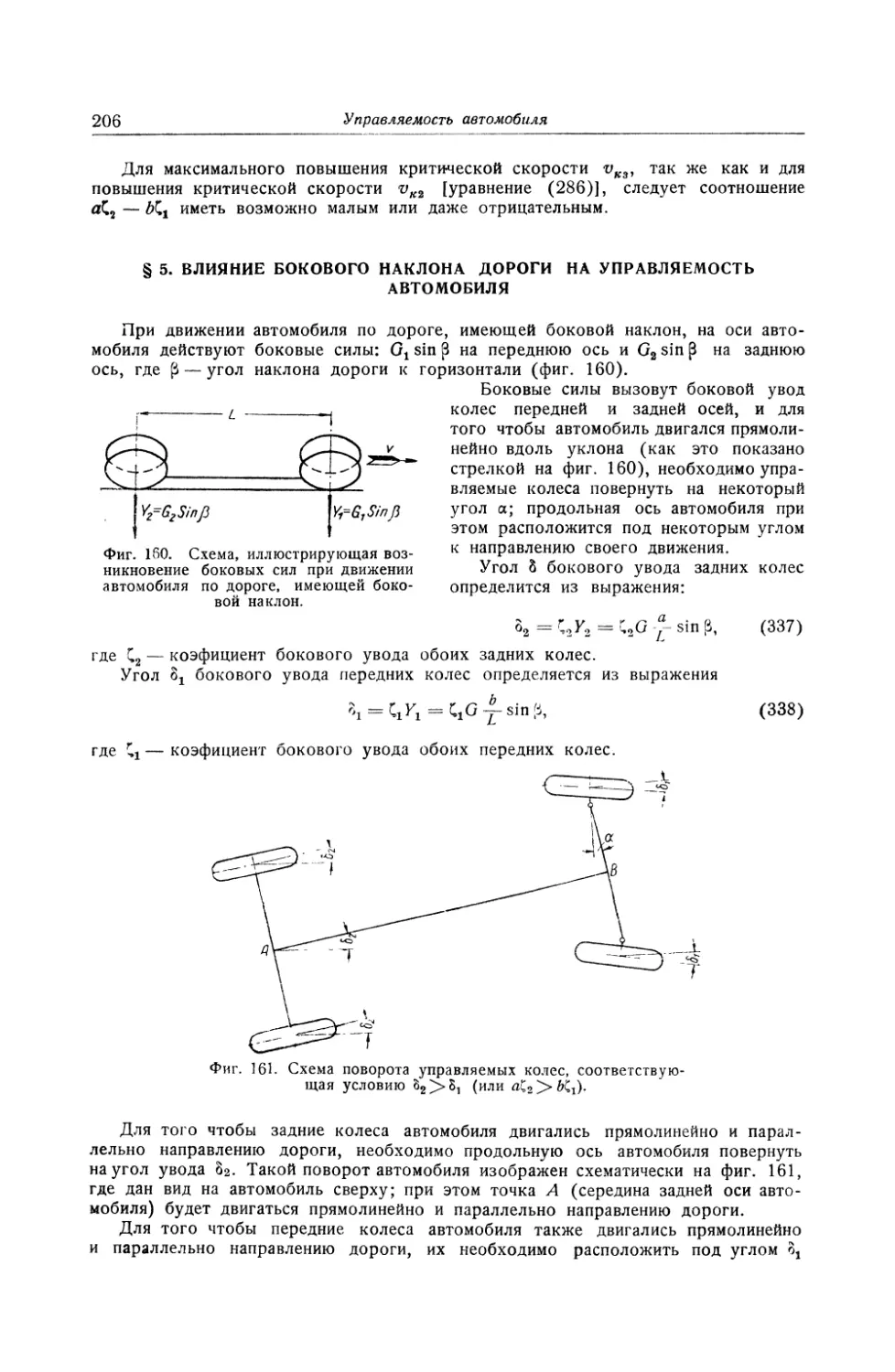
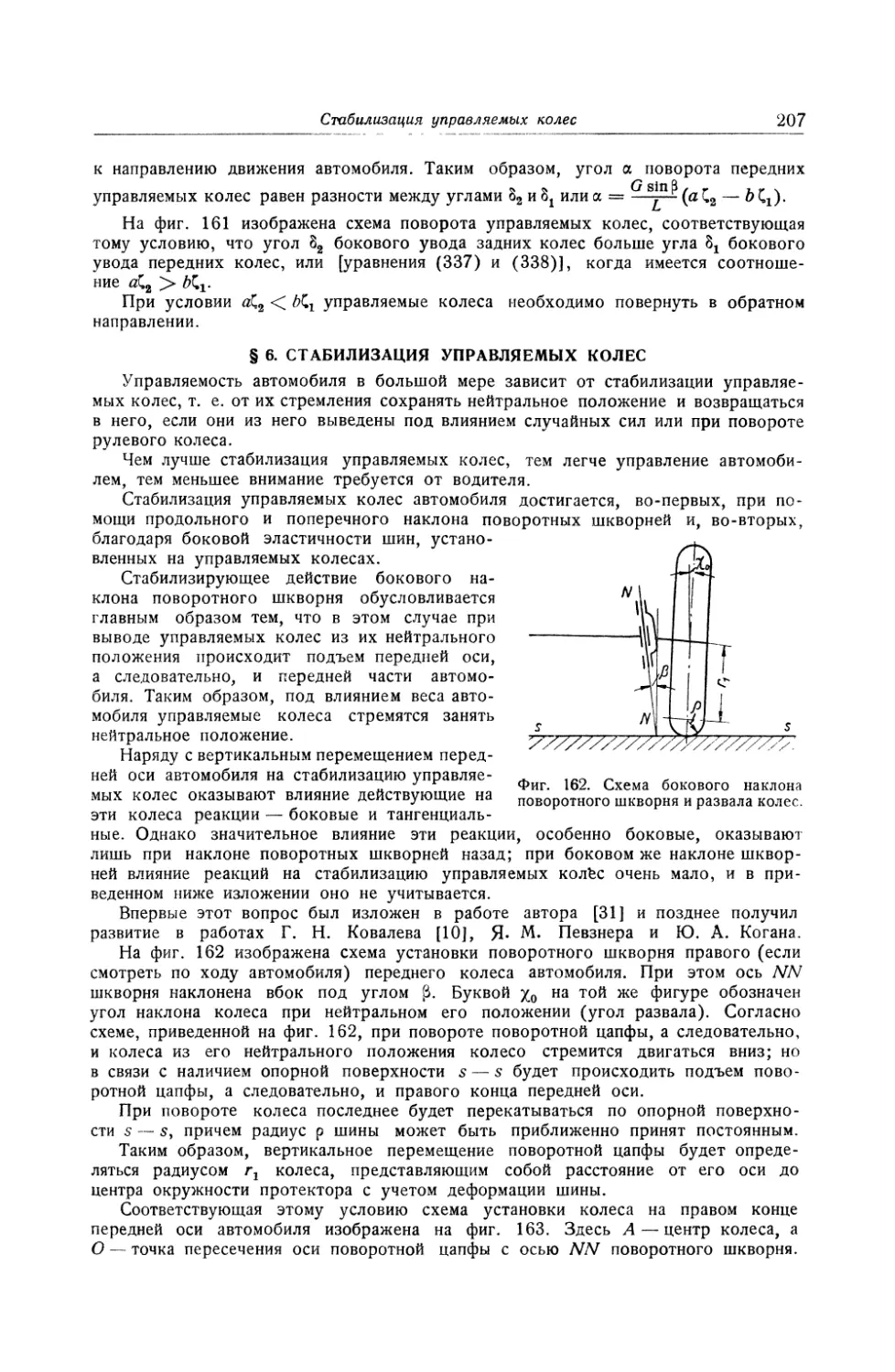
р — Зтол бокового наклона дороги в градусах или радианах;
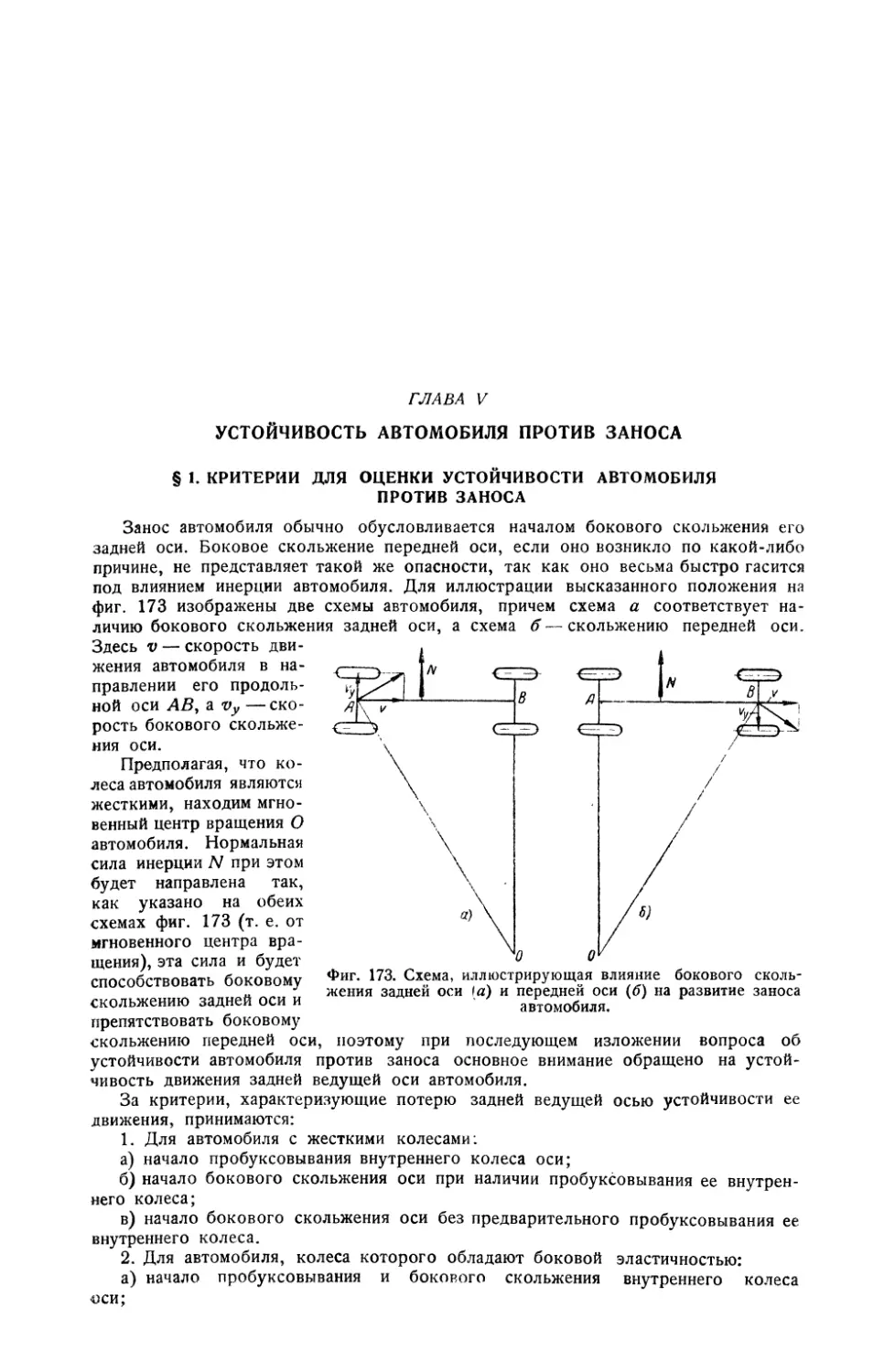
р— угол бокового наклона поворотного шкворня в градусах;
7 — угол наклона поворотного шкворня назад в градусах;
Ъ и 72— передний и задний углы проходимости автомобиля в градусах;
X — угол развала колес в градусах;
Ьк — угол бокового увода колеса в радианах;
Ъ' — угол бокового увода внутреннего колеса в радианах;
Ъ" — угол бокового увода внешнего колеса в радианах:
hi — угол бокового увода передней оси автомобиля в радианах;
Ь2 — угол бокового увода задней оси автомобиля в радианах;
Ь[ — угол бокового увода внутреннего колеса передней оси в радианах;
fct — угол бокового увода внешнего колеса передней оси в радианах;
$2 — угол бокового увода внутреннего колеса задней оси в радианах;
Sg — угол бокового увода внешнего колеса задней оси в радианах,
Коэфициенты
<р — коэфициент сцепления;
/ — коэфициеит сопротивления качению;
к — коэфициент распределения полной суммарной окружной силы по колесам
задней ведущей оси автомобиля;
1 — коэфициент сопротивления подъему;
ф — коэфициент сопротивления дороги;
К—коэфициент сопротивления воздуха в кг-сек^/м^;
тц — идеальный или термический к. п. д. двигателя;
тц — индикаторный к. п. д. двигателя;
г\е — эффективный к. п. д. двигателя;
а — коэфициеит избытка воздуха;
t\K — механический к. п. д. коробки передач;
1)0 — механический к. п. д. главной передачи;
t\m — механический к. п. д. силовой передачи или трансмиссии автомобиля;
р0 — коэфициент распределения приводной силы между передними и задними тор-
мозами;
ml — коэфициент перераспределения веса автомобиля для передней оси;
щ — коэфициент перераспределения веса автомобиля для задней оси;
т2Т~~ коэфициент перераспределения веса автомобиля при торможении задних колес;
С^ — коэфициент бокового увода (или боковой эластичности) автомобильного
колеса в рад/кг;
Cv —коэфициент бокового увода (или боковой эластичности) переднего колеса
автомобиля в рад/кг;
Принятые обозначения \)
Сд. — коэфициент бокового увода (или боковой эластичности) заднего колеса
автомобиля в рад/кг;
Cv — коэфициент бокового увода (или боковой эластичности) внутреннего колеса
передней оси в рад!кг\
ZK -—коэфициент бокового увода (или боковой эластичности) внешнего колеса пе
редней оси в рад /кг;
±к — коэфициент бокового увода (или боковой эластичности) внутреннего колеса
задней оси в рад/кг;
?,"к — коэфициент бокового уводз (или боковой эластичности) внешнего колеса
задней оси в рад/кг;
С — коэфициент бокового увода оси автомобиля в рад/кг;
£i — коэфициент бокового увода передней оси автомобиля в pad/кг;
ьз — коэфициент бокового увода задней оси автомобиля в рад/кг;
л —коэфициент тангенциальной эластичности шины в мм/кг;
Ь — коэфициент, учитывающий влияние вращающихся масс автомобиля;
v — коэфициент жесткости системы рама — кузов в кгм~\рад\
Nj — коэфициент жесткости передних рессор в кг/см:
*'х — коэфициент жесткости задних рессор в кг!см;
v2 — коэфициент жесткости шин передних колес в кг/см;
^2 — коэфициент жесткости шин задних колес в кг/см;
1 и кп — приведенные коэфициенты жесткости передней и задней подвесок в кг/см;
S — коэфициент угловой жесткости подвески в кгсм/рад;
Aj и Х2 — коэфициенты жесткости амортизаторов передней и задней подвесок в кгсек/см;
Чр — коэфициент суммарной окружной силы;
Tfpmax — максимальное значение коэфициента суммарной окружной силы, достижимое
по условию сцепления ведущих колес с опорной поверхностью;
1-р —коэфициент суммарной окружной силы, соответствующий началу бокового
скольжения задней ведущей оси при одновременном начале пробуксовывания
ее внутреннего колеса — для случая жестких колес и при бесконечно большой
скорости пробуксовывания ее внутреннего колеса — для случая колес,
обладающих боковой эластичностью;
Чт—коэфициент удельной тормозной силы;
7 —максимальное значение коэфициента удельной тормозной силы при торможении
Г9тах
задних колес автомобиля;
1 — максимальное значение коэфициеита удельной тормозной силы при торможении
Г4шах
всех колес автомобиля;
i)2 — коэфициент боковой устойчивости задней оси;
т^ — кеэфициент боковой устойчивости задней ведущей оси автомобиля по началу
пробуксовывания ее внутреннего колеса;
tk — коэфициент боковой устойчивости задней ведущей оси автомобиля по началу
бокового скольжения оси;
if]2e — коэфициент боковой устойчивости задней ведущей оси автомобиля,
соответствующий началу бокового скольжения задней ведущей оси при
одновременном начале пробуксовывания ее внутреннего колеса — для случая жестких
колес и при бесконечно большой скорости пробуксовывания ее внутреннего
колеса — для случая колес, обладающих боковой эластичностью;
% — коэфициент многооборотности двигателя в оборотах в минуту на км/час;
пт0 ~~ коэфициент многооборотности двигателя в оборотах в минуту на 100 м пути;
е — коэфициент распределения массы автомобиля.
Скорости и ускорения
S — путь, проходимый автомобилем, в м;
t—время в секундах;
# — скорость движения автомобиля в направлении продольной оси последнего с
м/сек или в KMjnac;
ST — путь торможения в м;
ST2 — путь торможения при расположении тормозов на задних колесах в м;
ST4 — путь торможения при расположении тормозов на всех колесах в м;
Vq — скорость движения автомобиля, соответствующая началу бокового скольжения
задней ведущей оси при одновременном начале пробуксовывания ее внутрен-
12 Принятые обозначения
него колеса — для случая жестких колес и бесконечно большой скорости
пробуксовывания ее внутреннего колеса — для случая колес, обладающих боковой
эластичностью, в м/сек;
dv
-Jt — ускорение автомобиля в направлении продольной оси последнего в м/сек*\
g — ускорение силы тяжести, равное 9,81 м/сек2;
vA — полная скорость середины задней оси автомобиля в м/сек;
Удп — скорость середины задней оси в направлении, перпендикулярном продольной
оси автомобиля, в м/сек;
vB — полная скорость середины передней оси автомобиля в м/сек;
vBn - скорость середины передней оси в направлении, перпендикулярном
продольной оси автомобиля, в м/сек;
Vq — полная скорость центра тяжести автомобиля в м/сек;
Vcn — скорость центра тяжести автомобиля в направлении, перпендикулярном
продольной оси автомобиля, в м/сек;
vCn
jj. ускорение центра тяжести автомобиля в направлении, перпендикулярном
продольной оси автомобиля, в м/сек2;
dvBn
Bn
~тг — ускорение бокового скольжения передней оси в м/сек2;
ускорение бокового скольжения задней оси в м/сек2;
скорость поворота управляемых колес автомобиля в рад/сек*,
—АЦ _ ускорение бокового скольжения задней оси в м/сек2;
dt
da
dt
о — угловая скорость вращения автомобиля в рад/сек',
угловое ускорение автомобиля в рад/сек2;
о>о — начальное значение угловой скорости вращения автомобиля в рад/сек\
(-jr) —начальное значение углового ускорения автомобиля в рад/сек2;
dt /о
cdj — значение угловой скорости вращения автомобиля, соответствующее
установившемуся движению последнего, в рад/сек;
ш/и — угловая скорость вращения вала двигателя в рад/сек-.
-—— — угловое ускорение коленчатого вала двигателя в рад/сек2;
<*>к — угловая скорость вращения колеса в рад/сек;
—~- — угловое ускорение колеса в рад/сек2;
пт — число оборотов коленчатого вала двигателя в минуту;
nN — число оборотов вала двигателя, соответствующее максимальной мощности
в минуту;
nmin ~~ числ0 оборотов вала двигателя, соответствующее минимально устойчивым
оборотам при полном открытии дросселя, в минуту;
пк — число оборотов колеса в минуту;
Jen — нормальное ускорение центра тяжести автомобиля в м/сек2]
>Ct — тангенциальное ускорение центра тяжести автомобиля в м/сек^
vk — критическая скорость автомобиля в м/сек или в км/час;
vy — скорость бокового перемещения колеса и оси автомобиля в м/сек:
vc — скорость проскальзывания колеса в м\сек;
vyc — скорость бокового скольжения колеса в м/сек;
V6 — скорость пробуксовывания колеса в м/сек;
V6 — скорость пробуксовывания внутреннего колеса задней ведущей оси в MjcetcX
V6 — скорость пробуксовывания внешнего колеса задней ведущей оси в м/сек;
vyc2 — скорость бокового скольжения внутреннего колеса задней ведущей оси в м\сек\
v8 — скорость бокового увода колеса в м/сек;
tfg2 — скорость бокового увода внутреннего колеса задней оси в м/сек\
#S2 — скорость бокового увода внешнего колеса задней оси в м/сек;
ve — результирующая скорость скольжения колеса по опорной поверхносш в ж (сек
ve<y — результирующая скорость скольжения внутреннего колеса оси в м/сек;
v"e2 - результирующая скорость скольжения внешнего колеса задней оси в и/сен.
Принятые обозначения 13
Разные
iK — передаточное число коробки передач;
£0 — передаточное число главной передачи;
1р — передаточное число редуктора;
V — предельное (по условиям сцепления) передаточное число между двигателем
и ведущими колесами для случая прицепа и полуприцепа;
W—фактор сопротивления воздуха в кг-сек2/м2;
pw — давление воздуха в шинах в апги;
D — динамический или тяговой фактор в кг/кг;
Dq — динамический фактор на последней передаче в кг/кг\
DK — динамический фактор на промежуточной передаче в кг/кг;
L>i — динамический фактор при заданной скорости vx автомобиля при движении на
последней передаче в кг/кг\
£>1Шах — максимальное значение динамического фактора при движении автомобиля на
последней передаче в кг/кг;
D2 — динамический фактор при заданной скорости v2 автомобиля при движении ни
промежуточных передачах в кг/кг;
Атах — максимальное значение динамического фактора при движении автомобиля шв
первой передаче в кг/кг;
Пи — низшая теплотворная способность топлива в кал/кг;
gg — удельный расход топлииа в кг/л. с. ч. или г\л. с. ч.;
Q — часовой расход топлива в кг\час\
0/100— расход топлива в кг на 100 км пробега автомобиля;
8j — степень сжатия;
е2 — степень полного расширения;
Су—теплоемкость газа при постоянном объеме в кал/\°;
ср — теплоемкость газа при постоянном давлении в кал/\°\
i^ и <а2 — парциальные частоты колебаний в рад/сек;
п — число колебаний в секунду или минуту;
\ и Q2 ■"" частоты главных колебаний в рад/сек.
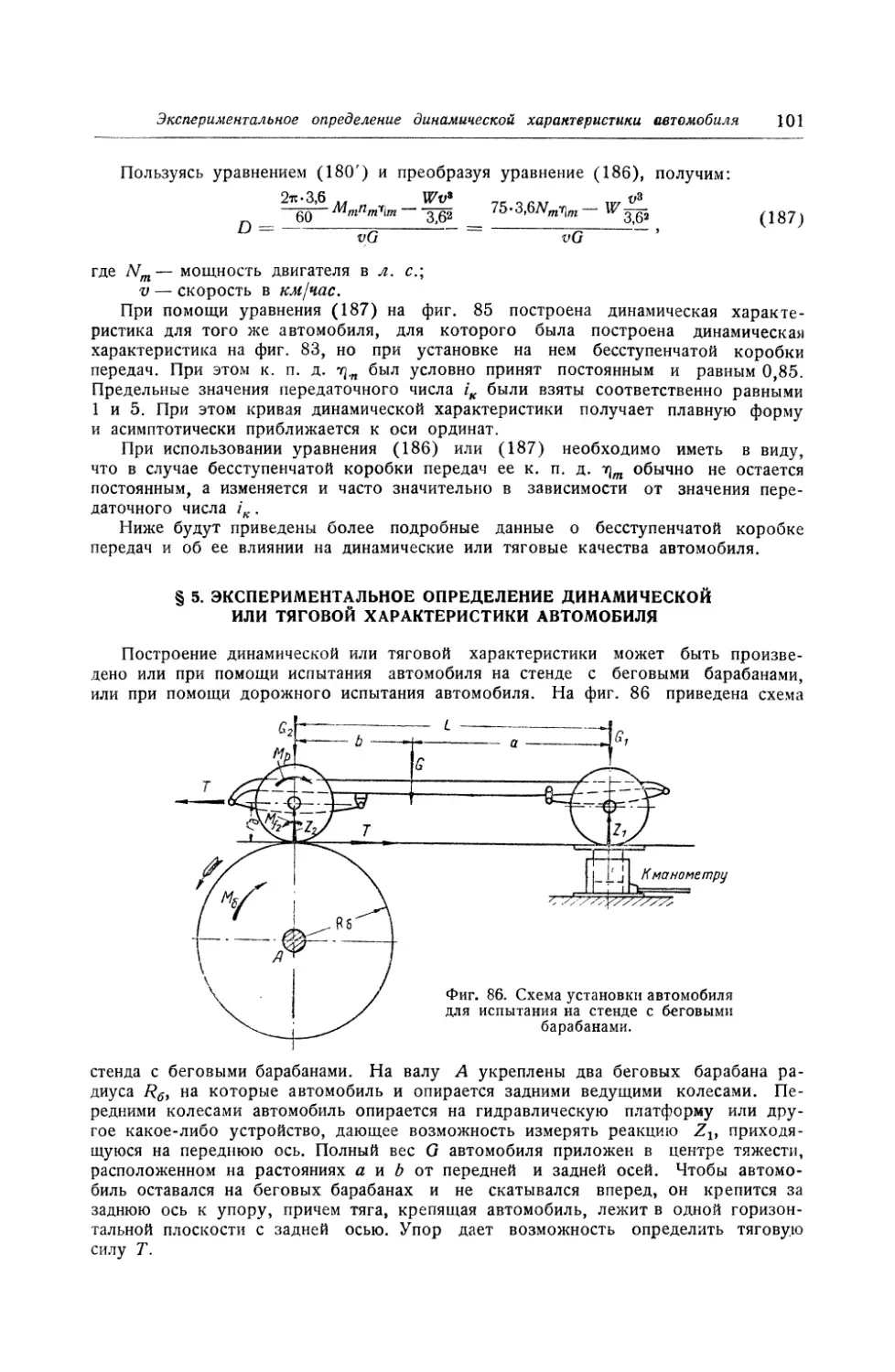
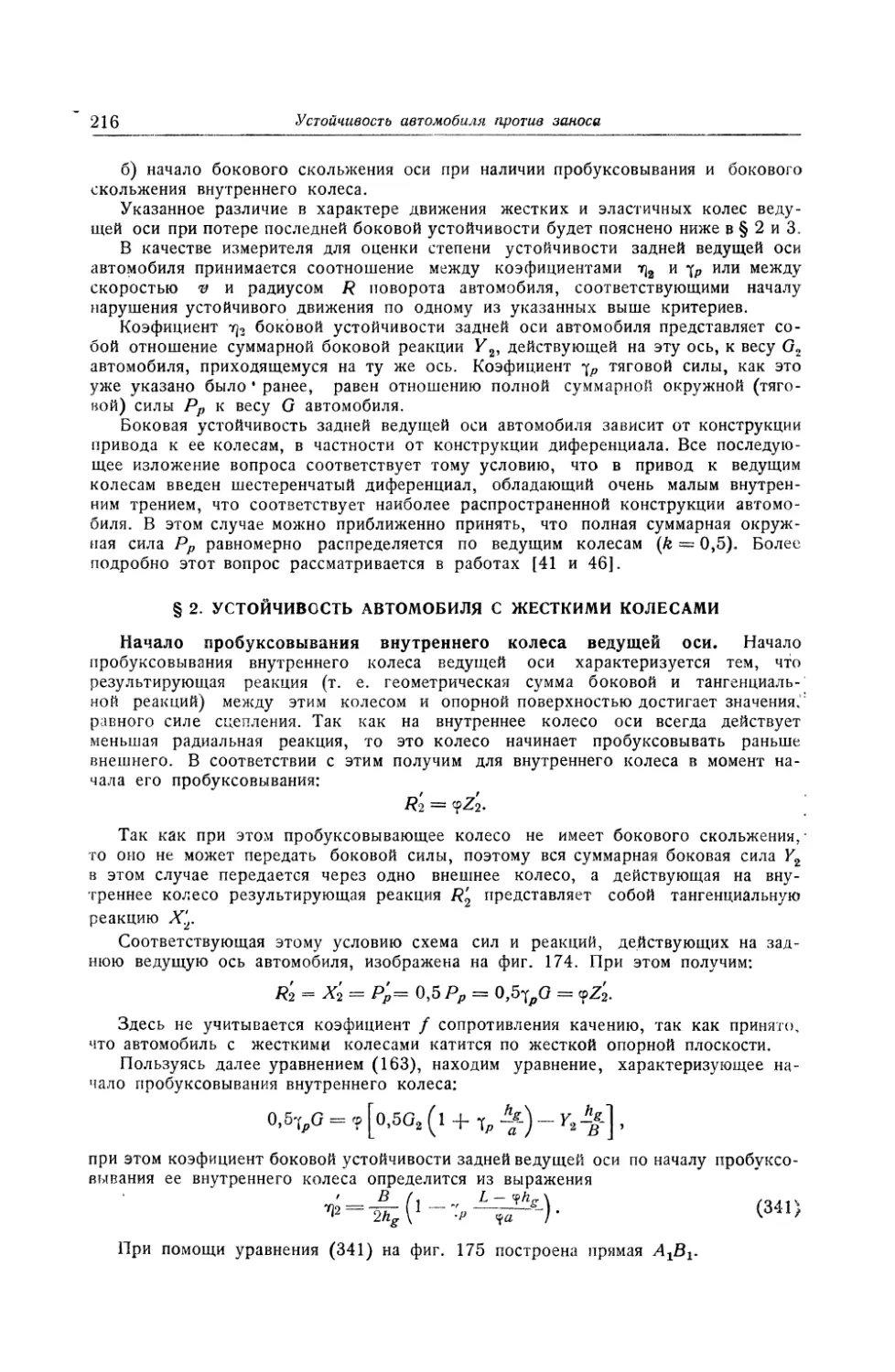
ГЛАВА I
КАЧЕНИЕ АВТОМОБИЛЬНОГО КОЛЕСА1
§ I. РАДИУС АВТОМОБИЛЬНОГО КОЛЕСА
Колеса современных автомобилей снабжаются пневматическими шинами,
обеспечивающими колесам большую эластичность во всех направлениях: радиальном,
тангенциальном и боковом. Поэтому радиус автомобильного колеса уже не является
постоянным, а изменяется под влиянием действующих на колесо сил, и понятие
о радиусе такого колеса не получается однозначным.
В дальнейшем приняты следующие определения для радиуса автомобильного
колеса, представляющие наибольший практический интерес.
Номинальный радиус колеса гм, или радиус, подсчитанный по
номинальным размерам шины.
Свободный радиус колеса г0, или радиус его беговой дорожки при
отсутствии радиальной, боковой или окружной сил, действующих на колесо, и при
отсутствии его вращения.
Статический радиус колеса гс, или расстояние от оси колеса до
опорной плоскости; колесо при этом неподвижно и нагружено лишь одной
радиальной силой.
Динамический радиус колеса гд л или расстояние от оси колеса до
плоскости, по которой оно катится. При этом предполагается, что колесо помимо
радиальной может быть нагружено также окружной (тяговой или тормозной), а
также и боковой силами.
Радиус качения колеса гк, или радиус такого фиктивного жесткого
(недеформирующегося) колеса, которое при отсутствии пробуксовывания и
проскальзывания, имея с действительным колесом одинаковую скорость вращения,
одновременно имеет одинаковую с ним скорость качения (скорость перемещения
оси колеса); отсюда имеем:
где v — скорость перемещения оси колеса;
<% — угловая скорость вращения колеса.
Свободный радиус (г0) колеса определяется измерением максимальной
окружности шины. Статический (гс) и динамический (/*<?) радиусы колеса определяются
измерением расстояния от оси колеса до опорной плоскости или плоскости качения
и, наконец, радиус качения колеса гк определяется измерением пути, пройденного
колесом за определенное число его оборотов:
2шк
где S — путь, пройденный колесом;
пк — число оборотов колеса.
1 Более подробные сведения по тому же вопросу приведены в работах [42 и 44J
(см. список литературы, помещенный в конце книги).
16
Качение автомобильного колеса
Динамический радиус tq качения колеса зависит от величины действующей на
колесо вертикальной нагрузки GK, от эластичности шины, от значения
передаваемой через колесо окружной силы и, наконец, в небольшой мере от скорости v
вращения колеса (вздутие шины вследствие влияния центробежной силы).
На фиг. 1 приведен один из результатов определения динамического радиуса гд
колеса при испытании последнего на барабанном стенде (см. ниже). Свободный
радиус шины был равен 420 мм; радиальная нагрузка — 600 кг\ окружная
скорость барабана — 20 км\нас. Полученная линия, весьма близкая к прямой,
иллюстрирует зависимость динамического радиуса гд от вращающего момента Мк,
приложенного к колесу.
Согласно этому графику,
а также другим
экспериментальным данным,
динамический радиус колеса
изменяется сравнительно
мало при весьма большом
изменении момента Мк,
Радиус качения гк
колеса также зависит от
перечисленных выше
факторов, влияющих на
динамический радиус,
причем особенно большое
влияние оказывает вращающий момент Мк или передаваемая через колесо
окружная сила. При этом в случае передачи через колесо тяговой силы радиус гк
уменьшается, а при передаче тормозной силы увеличивается. Это объясняется тем, что
> —»Н
»—— -
__. ..
-,
394 — -
393
392
10 20 30 40 50 Мнкгм
Фиг. 1. Результаты эксперимента по определению
зависимости динамического радиуса гд автомобильного колеса от
передаваемого через него вращающего момента Мк.
Фиг. 2. Схема, иллюстрирующая изменение радиуса качения
автомобильного колеса при передаче через него тяговой (а) или
тормозной (б) окружных сил.
при передаче через колесо тяговой силы в соприкосновение с опорной
поверхностью подходят сжатые элементы шины, а при передаче через колесо тормозной
силы — растянутые.
Для иллюстрации высказанного положения на фиг. 2 изображены схемы
передачи через эластичное колесо вращающего момента Мк в направлении качения —
ведущее колесо (схема а) и в направлении, противоположном качению —
тормозящее колесо (схема б). При этом условно предположено, что обод колеса обладает
особенно высокой тангенциальной эластичностью.
Согласно схеме а, приведенной на фиг. 2, к опорной поверхности подходят
сжатые элементы шины, поэтому путь, проходимый ведущим колесом за один его
оборот, уменьшается по мере увеличения тангенциальной деформации шины, а,
следовательно, по мере увеличения тяговой силы. Согласно схеме б, приведенной
на фиг. 2 и соответствующей тормозящему колесу, происходит обратное явление:
к опорной поверхности подходят растянутые элементы шины, и путь, проходимый
Радиус автомобильного колеса
17
396
392
388
колесом за один его оборот, возрастает по мере увеличения тангенциальной
деформации, а, следовательно, по мере увеличения тормозной силы.
Если бы протектор покрышки автомобильной шины был абсолютно
несжимаемым, т. е. если бы он при передаче окружной силы не изменял своего размера
в тангенциальном направлении, то радиус гк качения колеса также оставался бы
постоянным вне
зависимости от величины окруж- гкмм
ной силы (тяговой или
тормозной) и вне
зависимости от радиальной
деформации шины.
Статический и динамический
радиусы колеса при этом
изменялись бы в
соответствии с величиной
радиальной деформации
шины.
Покрышка
автомобильной шины обладает
значительной эластично -
стью не только в
радиальном, но также и в
1
^1
W
20
30
Мх кгм
Фиг. 3. Результаты эксперимента по определению
зависимости радиуса качения гк автомобильного колеса от
передаваемого через него вращающего момента Мк.
тангенциальном направлении, поэтому передача тяговой и тормозной сил заметно
изменяет радиус гк качения автомобильного колеса.
Определение радиуса гк качения автомобильного колеса производится при
помощи его испытания на дороге (буксировка тележки), на барабанном стенде и на
карусельном стенде.Описание стендов приведено ниже.
гнмм
364 -
350 --
355
352
■—
i
i
i
10
20
30
Мк кгм
Фиг. 4. Результаты эксперимента по определению зависимости радиуса
качения гк автомобильного колеса от передаваемого через него
вращающего момента Мн.
На фиг. 3 приведен один из результатов испытания шины на барабанном
стенде в целях установления зависимости радиуса гк качения колеса от
приложенного к нему момента Мк. На фиг. 4 приведен результат аналогичного опыта
по определению радиуса гк качения при помощи испытания шин на карусельном
стенде. Прямая на фиг. 4 соответствует испытанию семи шин одного размера и
иллюстрирует зависимость радиуса гк качения от момента МКУ приложенного к
колесу при постоянном давлении воздуха pw = 2 amu. Согласно приведенным
экспериментальным данным можно принять, что радиус гк качения находится в
2 Е А. Чудаков 2232
18
Качение автомобильного колеса
прямолинейной зависимости от момента Мк, приложенного к колесу. В
дальнейшем вводим определение:
где Рко — полная окружная сила, приложенная к колесу на расстоянии радиуса гк
от его оси; отсюда, пользуясь полученными экспериментальными данными/ можно
определить зависимость между радиусом гк качения колеса и полной окружной
силой Рко. Эта зависимость также
получается приблизительно
прямолинейной и может быть выражена
уравнением
Рк„ (2)
/
/
/
у^
где гко — радиус качения колеса при
отсутствии окружной силы Рко или
момента Мк, приложенного к колесу,
и X — коэфициент тангенциальной
эластичности шины, представляющий
собой изменение радиуса качения колеса
в мм, соответствующее изменению
полной окружной силы Рк0 на 1 кг. '
Радиус качения колеса (так же как
статический и динамический радиусы
колеса) при всех прочих равных
условиях зависит от давления воздуха
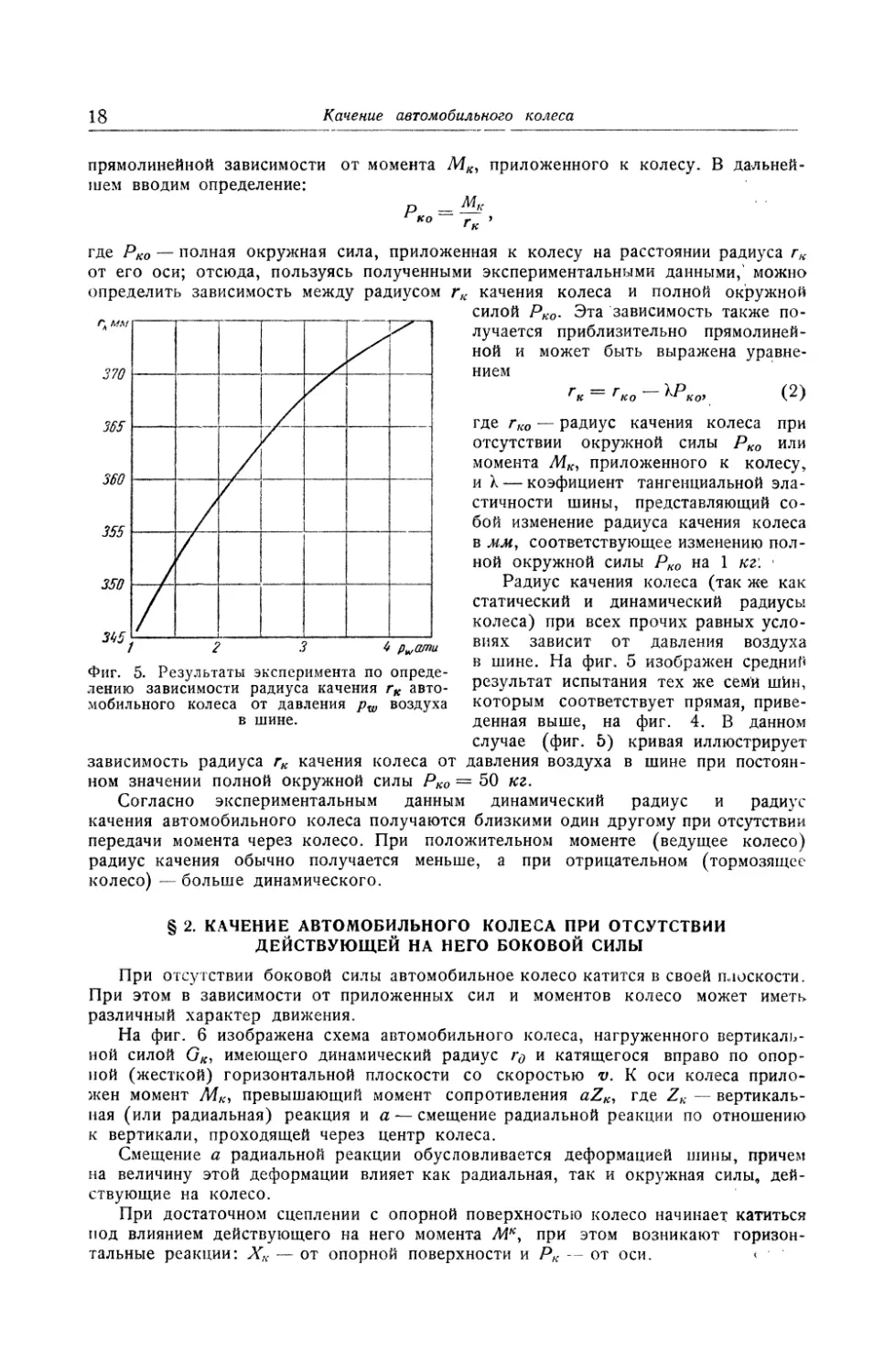
в шине. На фиг. 5 изображен средний
результат испытания тех же семи шин,
которым соответствует прямая,
приведенная выше, на фиг. 4. В данном
случае (фиг. 5) кривая иллюстрирует
зависимость радиуса гк качения колеса от давления воздуха в шине при
постоянном значении полной окружной силы Рко = 50 кг.
Согласно экспериментальным данным динамический радиус и радиус
качения автомобильного колеса получаются близкими один другому при отсутствии
передачи момента через колесо. При положительном моменте (ведущее колесо)
радиус качения обычно получается меньше, а при отрицательном (тормозящее
колесо) — больше динамического.
365
360
355
350
/ 2 3 4 р„шпи
Фиг. 5. Результаты эксперимента по
определению зависимости радиуса качения гк
автомобильного колеса от давления pw воздуха
в шине.
§ 2. КАЧЕНИЕ АВТОМОБИЛЬНОГО КОЛЕСА ПРИ ОТСУТСТВИИ
ДЕЙСТВУЮЩЕЙ НА НЕГО БОКОВОЙ СИЛЫ
При отсутствии боковой силы автомобильное колесо катится в своей плоскости.
При этом в зависимости от приложенных сил и моментов колесо может иметь
различный характер движения.
На фиг. 6 изображена схема автомобильного колеса, нагруженного
вертикальной силой GK, имеющего динамический радиус гд и катящегося вправо по
опорной (жесткой) горизонтальной плоскости со скоростью v. К оси колеса
приложен момент Мк, превышающий момент сопротивления aZK, где ZK —
вертикальная (или радиальная) реакция и а ■— смещение радиальной реакции по отношению
к вертикали, проходящей через центр колеса.
Смещение а радиальной реакции обусловливается деформацией шины, причем
на величину этой деформации влияет как радиальная, так и окружная силы,
действующие на колесо.
При достаточном сцеплении с опорной поверхностью колесо начинает катиться
под влиянием действующего на него момента Мк, при этом возникают
горизонтальные реакции: Хк — от опорной поверхности и Рк — от оси. <
Качение автомобильного колеса при отсутствии действующей боковой силы J9
Инерционный момент Mj сопротивления ускоренному вращению колеса и
инерционная сила Pj сопротивления его ускоренному поступательному перемещению
определяются из выражений:
г d(dK _ ~ ч/г dv
где JK — момент инерции колеса по отношению к его оси;
-^~- — угловое ускорение вращения колеса;
М — масса колеса;
— — линейное ускорение оси колеса.
Кроме перечисленных сил и моментов, на колесо действуют: момент Mw
сопротивления воздуха вращению колеса и сила Pw сопротивления воздуха его
поступательному перемещению. В
результате, пользуясь фиг. 6 jлучим из
условия равновесия системы:
Мк = ZKa + Хкгд
M
Момент Mw и сила Pw обычно весьма
малы. Если пренебречь этими величинами,
а кроме того, принять движение колеса
rdioK dv \ Г~
установившимся i — = 0; ^ — У)* то
получим:
или
Р = X
1 к *хк
Мк=
(3)
Фиг. 6. Схема сил, моментов и реакций,
действующих на ведущее автомобильное
колесо при качении его по горизонтальной
жесткой плоскости.
В рассмотренном случае качения
колеса тангенциальная реакция Хк действует
в направлении его движения; такое
колесо является ведущим. По мере
уменьшения момента Мк реакция Хк также
уменьшается, а при значении момента Мк,
меньшем момента aZK, изменяет свое
направление на обратное. При этом соответственно изменяется характер
движения колеса. Вводим следующие определения.
Ведущее колесо; момент Мк превосходит момент сопротивления aZKy a
тангенциальная реакция Хк имеет положительное значение.
Свободное колесо; момент Мк равен моменту сопротивления aZK\
согласно уравнению (3) тангенциальная реакция Хк при этом равна нулю.
Нейтральное колесо; качение колеса осуществляется и моментом Мк
(по своей величине меньшем aZK) и силой Рн, подведенной к колесу от оси.
Ведомое колесо; момент Мк равен нулю; качение колеса осуществляется
силой Рк, равной силе Pf сопротивления качению колеса. Последнюю силу
принято выражать как произведение fZK, где /— коэфициент сопротивления качению
колеса.
Тормозящее колесо; момент Мк имеет направление, обратное вращению
колеса.
Схема, приведенная на фиг. 6, соответствует ведущему колесу; при этом
момент Мк может изменяться от минимального значения, равного aZK (свободное
колесо), и до максимального, соответствующего началу пробуксовывания колеса.
В последнем случае тангенциальная реакция Хк достигает значения силы
сцепления cpZ,,;, где ф — коэфициент сцепления между колесом и опорной поверхностью.
20
Качение автомобильного колеса
В результате при ведущем колесе тангенциальная реакция Хк может изменяться
в следующих пределах:
vZK > Хк > 0.
Пользуясь схемой на фиг. 6 и уравнением (3), определяем соответствующие
т ому*.же условию движения колеса предельные значения момента Мк:
= XKtnaxrd + aZK = <?ZKrd + aZK = (vrd + a) ZK ;
+ aZK = aZK ;
(9d + )KK>K
На фиг. 7 изображена схема качения свободного колеса, при этом имеем:
Хк = 0; Мк = aZK .
-I.L
Фиг. 7. Схема сил, моментов и реакций,
действующих на свободное автомобильное
колесо при качении его по горизонтальной
жесткой плоскости.
Фиг. 8. Схема сил, моментов и реакций,
действующих на нейтральное
автомобильное колесо при качении его по
горизонтальной жесткой плоскости.
На фиг. 8 изображена схема качения нейтрального колеса; при этом реакция Хк
и момент Мк могут изменяться в следующих пределах:
0 > Хк > -fZK ; aZK >MK > 0.
На фиг. 9 изображена схема качения ведомого колеса; при этом момент Мк
отсутствует, а реакция Хк, имея отрицательное значение, по своей абсолютной
величине равна силе /Z* сопротивления качению колеса:
На фиг. 10 изображена схема качения тормозящего колеса. В этом случае
момент Мк имеет направление, противоположное качению колеса. Этот момент
может изменяться от нуля и до минимального (отрицательного) значения,
соответствующего началу проскальзывания колеса. При этом тангенциальная реакция Хк
отрицательна, а по своему абсолютному значению достигает силы сцепления ®ZK.
В результате при тормозящем колесе тангенциальная реакция Хк и момент Мк
могут изменяться в следующих пределах:
—fZK >XK> -*ZK ; 0 > Мк > -ZK (Vd - a).
При качании абсолютно жесткого колеса по абсолютно жесткой поверхности
смещение а радиальной реакции отсутствует так же, как отсутствует сила
сопротивления качению колеса (/^—0; /=0). В этом случае колесо может быть ве-
Качение автомобильного колеса при отсутствии действуюи^ей боковой силы
21
дущим, свободным (или ведомым) и тормозящим. Пределы изменения
тангенциальной реакции Хк и момента Мк в этом случае (жесткое колесо) определяются из
выражений:
для ведущего колеса
*ZK >XK>0; *rZK >MK>0,
где г — постоянный радиус жесткого колеса;
для свободного или ведомого колеса
для тормозящего колеса
О > Хк > -<
0 > Мк)> -
Смещение а радиальной' реакции при эластичном колесе изменяется в
зависимости от величины и направления момента Мк, действующего на колесо. На
Фиг. 9. Схема сил, моментов и реакций,
действующих на ведомое автомобильное
колесо при качении его по
горизонтальной жесткой плоскости.
Фиг. 10. Схема сил, ^моментов и реакций
действующих на тормозящее
автомобильное колесо при качении его по
горизонтальной жесткой плоскости^
фиг. 6—10 это смещение расположено по направлению качения колеса, что "имеет
место для всех случаев, за исключением качения тормозящего колеса. В
последнем случае (см. фиг. 10) реакция Хк направлена в сторону, противоположную
направлению качения колеса, и при большом значении этой реакции и
повышенной эластичности шины ее тангенциальная деформация может получиться столь
большой, что радиальная реакция ZK будет смещена уже не вперед (в
направлении качения колеса), а назад.
Для определения смещения а радиальной реакции при торможении
автомобильного колеса в автомобильной лаборатории Академии наук автором был проведем
специальный эксперимент, результат которого излагается ниже.
На фиг. 11 изображена схема установки, применявшейся при опыте. Колесо 2
при помощи троса 5, приводимого в движение от электродвигателя (не
показанного на схеме), прокатывалось по плоской опоре /; для этой цели на оси колеса
свободно установлен рычаг 3, конец 4 которого расположен в опорной плоскости.
Колесо имело обычную тормозную систему, причем тормозной момент
воспринимался рычагом 3. Вертикальная нагрузка QK создавалась грузом, помещенным на
штанге 6, свободно установленной на оси колеса.
В результате при протягивании колеса возникает радиальная реакция ZK,
смещенная на некоторую величину а по отношению к вертикали, проходящей через
99
Качение автомобильного колеса •
ось колеса, а также тангенциальная реакция Хк, направленная противоположно
приводной силе Рк.
Для того чтобы конец 4 рычага 3 оставался в опорной плоскости колеса,
к нему прилагалась некоторая сила S, которая измерялась динамометром (с
датчиком сопротивления).
На основании приведенной схемы получим из условия равновесия системы:
ZKa = 5/,
1К Фиг- П. Схема установки для определения
смещения а радиальной реакции при
торможении автомобильного колеса.
где /—расстояние от точки приложения силы S до вертикали, проходящей через
ось колеса. Пользуясь этим выражением, получим:
— 1L
При помощи описанного приема было
произведено определение смещения а
радиальной реакции ZK для тормозящего колеса
при различной * интенсивности его
затормаживания вплоть до полной блокировки.
Результат одного из таких экспериментов
(колесо автомобиля ГАЗ-АА) изображен на
фиг. 12. При ведомом колесе (тормоз
отпущен) смещение а получается
положительным и равным около 7 мм; при
значении тормозной силы, равным около 200 кг,
смещение а равно нулю, т. е. радиальная
реакция ZK совпадает с вертикалью,
проходящей через центр колеса. Наконец, при
максимальном торможении колеса
(блокировка колеса) смещение а радиальной
реакции получается отрицательным и равным
примерно 4 мм.
Рассмотренное выше качение
эластичного колеса и, в частности, понятие о
радиусе его качения можно наглядно
проиллюстрировать изменением мгновенного
центра вращения этого колеса. На фиг. 13 изображена схема качения
ведущего колеса: Предполагаем, что радиус качения гк меньше динамического
4
2
и
50
1 j
о
\
/00
—
—
\
°\
_____
150
\
200 \
j
j
i
1
!
j
Ркнг
\
V
\
-а мм
Фиг* 12. Результат эксперимента по
определению смещения а радиальной реакции
для тормозящего колеса.
Качение автомобильного колеса при отсутствии действующей боковой силы
23
радиуса-•/*<? (колесо ведущее); при этом мгновенный центр вращения колеса
располагается в некоторой точке А линии ОВ> на расстоянии гк от точки О. При
увеличении действующего на колесо вращающего момента Мк мгновенный центр
вращения колеса приближается к центру О, располагаясь тем выше, чем
интенсивнее пробуксовывание колеса. При буксовании же колеса на месте он совпадает
с центром О колеса.
При тормозящем колесе, когда радиус качения гк больше динамического
радиуса г$, мгновенный центр А вращения располагается ниже точки В, как это
показано на фиг. 14.
При наличии скольжения тормозящего колеса мгновенный центр вращения
опускается еще ниже и при полностью блокированном колесе располагается
бесконечно далеко от оси колеса О.
При установившемся качении колеса действующие на него реакции ZK и Хк
проходят через мгновенный центр его вращения Л, как показано на фиг. 13 и 14.
При этом сопротивление качению колеса определяется моментом М*.
Фиг. 13. Схема сил, моментов и
реакций, действующих на ведущее
автомобильное колесо при качении его по
горизонтальной жесткой плоскости.
Т
Фиг. 14. Схема сил, моментов и
реакций, действующих на
тормозящее автомобильное колесо при
качении его по горизонтальной
жесткой плоскости.
При качении автомобильного колеса всегда происходит частичное и
разновременное проскальзывание отдельных элементов шины по опорной плоскости.
Это проскальзывание обусловливается значительной деформацией шины при
переходе элементов ее протектора от свободного состояния в контакт с опорной
плоскостью; при этом деформация получается различной для разных элементов
шины, а возникающие между отдельными ее элементами и опорной плоскостью
силы превосходят силу сцепления, в результате чего и получается частичное
проскальзывание. Такое частичное проскальзывание отдельных элементов шины
происходит как поперек, так и вдоль отпечатка шины — вперед и назад, что было
подтверждено экспериментально также и для шины, не нагруженной вращающим
моментом Мк. Этим между прочим объясняется, что коэфициент сцепления ср
между шиной и жесткой опорной поверхностью получается очень малым при
скольжении шины с очень малой скоростью. Более подробно этот вопрос освещен
з работах [33, 36 и 41].
Согласно сказанному, лишь условно можно принять, что автомобильное колесо
имеет чистое качение вплоть до того момента, когда тангенциальная реакция Хк
достигает своей максимальной (yZK) или минимальной (—yZK) величины. При
достижении же тангенциальной реакцией указанных значений начинается уже
одновременное проскальзывание элементов шины по опорной поверхности.
Если обозначить буквой гКб радиус качения колеса, соответствующий началу
его пробуксовывания (Х,с = yZK), то скорость перемещения колеса в этот момент
24
Качение автомобильного колеса
определится как произведение о>кгк^. При наличии пробуксовывания колеса
скорость v его перемещения равна разности между скоростью ®кгКб и скоростью v0
пробуксовывания колеса. В результате получим:
или
V = ЫКГК =
= фк (Гкб — Гк).
(4)
Аналогично этому, обозначая буквой гкс радиус качения колеса,
соответствующий началу его проскальзывания (Хк = —<?ZK), получим, что в этот момент
скорость v перемещения колеса равна произведению <окгкс . При наличии
проскальзывания колеса скорость v его перемещения равна сумме скоростей <оЛгАГ
и vc проскальзывания колеса. В результате получим для этого случая:
V =
= (ЛКГК
или
(5)
Для жесткого колеса уравнения (4) и (5) соответственно изменяются; при
этом, принимая радиусы гк(у и гкс равными постоянному радиусу г жесткого
колеса, получим:
(6)
§ 3. КАЧЕНИЕ АВТОМОБИЛЬНОГО КОЛЕСА ПРИ НАЛИЧИИ
ДЕЙСТВУЮЩЕЙ НА НЕГО БОКОВОЙ СИЛЫ
В § 2 были рассмотрены различные случаи качения автомобильного колеса,
соответствующие, однако, тому общему условию, что все действующие на колесо силы
и реакции располагались в
средней плоскости его вращения.
Часто же, например,при
повороте автомобиля на колеса
последнего действуют боковые силы,
т. е. силы, направленные
перпендикулярно плоскости колес.
При наличии боковой силы
колесо, обладающее боковой
эластичностью, ведет себя иначе, чем
жесткое колесо. В то время как
жесткое колесо при этом катится
в плоскости своего вращения
вплоть до того момента, когда
результирующая реакция,
действующая от опорной
поверхности на колесо, достигнет силы
сцепления yZK, эластичное колесо
начинает катиться под углом к
плоскости своего вращения даже при
самом малом значении боковой
силы. Это явление носит
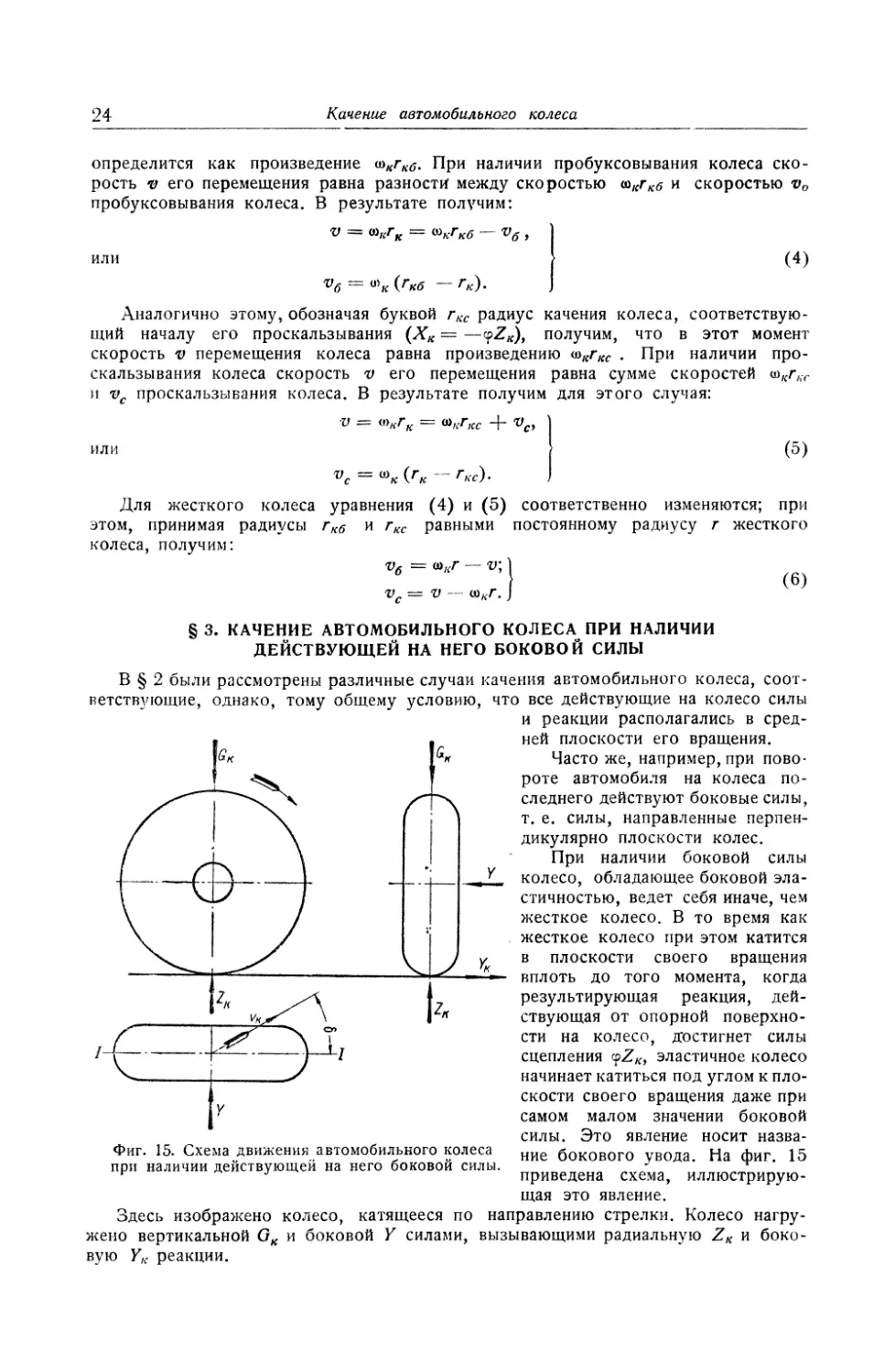
название бокового увода. На фиг. 15
приведена схема,
иллюстрирующая это явление.
Здесь изображено колесо, катящееся по направлению стрелки. Колесо
нагружено вертикальной GK и боковой Y силами, вызывающими радиальную ZK и
боковую YK реакции.
Фиг. 15. Схема движения автомобильного колеса
при наличии действующей на него боковой силы.
Качение автомобильного колеса при наличии действующей боковой силы
25
Вследствие получающейся при этом боковой деформации шины колесо катится
не в своей плоскости / — /, а под некоторым углом 5 к этой плоскости. \Угол 8
получается тем больше, чем больше боковая реакция YK и чем эластичнее шина
в боковом направлении. Этот угол называется углом бокового увода.
Y 5)
Фиг. 16. Схема деформации шины при наличии действующей
на колесо боковой силы.
Для более наглядной иллюстрации влияния эластичности шины на явление
бокового увода автомобильного колеса на фиг. 16 приведены две схемы (а и б)
колеса, снабженного пневматической шиной. В обоих случаях колесо нагружено
вертикальной силой GK, схема а
соответствует отсутствию, а схема б—наличию
боковой силы Y.
Внизу на схеме а изображен
схематически отпечаток шины на опорной
поверхности и проведена прямая / — /,
соответствующая среднему сечению обода колеса.
При отсутствии боковой силы, чему и
соответствует схема а фиг. 16, сечение /—/
совпадает с большой осью АВ отпечатка
шины, которая и определяет направление
качения колеса.
Если же к колесу приложена
боковая сила Y (фиг. 16, б), то средняя
плоскость обода / — / сместится по отно- ?иг> 17* Схема> иллюстрирующая явление
бокового увода автомобильного колеса.
шению к отпечатку шины на некоторую Пунктир-отпечаток шины и линия/-/,
величину. Одновременно с этим некото- соответствующие отсутствию боковой
сирое смещение (п на фиг. 16, d") получит лы У; тонкая линия — действие боковой си-
и сам отпечаток шины (за счет перекаты- лы Y ПРИ неподвижном колесе; толстая
, ч v ^ линия — примерное расположение отпечатка
вания профиля шины). той же шины при действии боковой силы Y
Если одновременно с этим, т. е. при и при качении колеса,
наличии боковой силы К, колесо катится
вправо, то к опорной поверхности будут подходить элементы шины, не
расположенные симметрично по отношению оси АВ, а несколько сдвинутые по
направлению действия боковой силы Y. В результате отпечаток шины на опорной
поверхности повернется по отношению к плоскости / — /, как это показано на
фиг. 17, а.
Угол о (фиг. 17) между большой осью этого отпечатка шины и средней
плоскостью колеса, повидимому, близок углу между направлением движения колеся
и средней плоскостью обода.
26
Качение автомобильного колеса
Изображенная на фиг. 17, а схема поворота отпечатка шины при воздействии
на катящееся колесо боковой силы Y иллюстрирует указанное явление лишь очень
приближенно.
В действательности, если и можно принять, что отпечаток шины имеет
эллиптическую форму при неподвижном колесе или при качении его в плоскости своего
вращения, то при наличии боковой силы Y, действующей на катящееся колесо,
тот же отпечаток уже не сохраняет этой формы. В результате отпечаток шины
на плоскости качения получит некоторую сложную форму, приближающуюся
7 8
Фиг. 18. Схема установки для определения угла бокового увода
автомобильного колеса.
к бобовидной, как это схематически изображено на фиг. 17, б. При этом ось
симметрии АВ у отпечатка отсутствует, внутри отпечатка, очевидно, появляются
зоны скольжения, а угол о бокового увода колеса определяется уже
совокупностью воздействия сил трения между отдельными элементами шины и опорной
плоскостью.
Произведено большое число экспериментов по определению угла Ь бокового
увода автомобильного колеса, снабженного пневматической шиной. Обычно
применялся метод испытания колеса на беговом барабане. При этом колесо
устанавливалось под углом к плоскости вращения барабана и определялась та боковая
сила, которая возникала при вращении барабана и колеса.
Ниже приведены результаты такого эксперимента, проведенного мл. научным
сотрудником Г. А. Гаспарянц под руководством автора в автомобильной
лаборатории Академии наук.
На фиг. 18 изображена схема установки, применявшейся при данном
эксперименте. Рама 2 закреплена при помощи универсального шарнира 1 и имеет
возможность колебаться вокруг него как в вертикальной, так и в горизонтальной
плоскостях. На раме 2 установлена рама 3, которая может повертываться по
Качение автомобильного колеса при наличии действующей боковой силы
отношению к раме 2 и закрепляться на ней в необходимом положении. На раме 3
в двух опорах 6 закреплен вал 5, на котором с помощью вертикального
шкворня 7 шарнирно установлена втулка 8 со ступицей 4 (установленной на
шариковых подшипниках) испытываемого колеса. Колесо приводится во вращение при
помощи бегового барабана 18. При испытании колеса на боковой увод оно
устанавливается под углом к плоскости вращения барабана. Возникающая при этом
боковая сила Ук стремится повернуть раму 2 относительно вертикальной оси
шарнира 7, а получающийся момент определяется силой Т, измеряемой при
помощи гидравлического динамометра 9:
где т — расстояние от оси шарнира 1 до оси динамометра 9;
п — расстояние от оси шарнира 1 до оси колеса.
Установка колеса под углом к плоскости вращения бегового барабана
достигается поворотом подвижной рамы 3 вокруг болта 16. Измерение же угла
производится при помощи светового луча (от осветителя 11) на экране 10.
Затормаживание колеса производится механическим тормозом 14, а тормозной
момент измеряется при помощи гидравлического динамометра 13. Затяжка тормоза
осуществляется рукояткой 15. Вертикальная нагрузка на колесо создается при
помощи грузов 17, устанавливаемых на раме 2; при этом величина нагрузки
определялась при помощи вывешивания рамы 2 на определенном плече.
На описанной установке производилось также определение стабилизирующего
момента, действующего на управляемое колесо и обусловленного эластичностью
шины. Для этой цели служит датчик 12. Результаты эксперимента, проведенного для
определения величины стабилизирующего момента, будут приведены ниже—в гл. IV.
Перед началом испытания колеса (по определению зависимости между углом 8
бокового увода и боковой силой Ук) последнее устанавливалось в нейтральное
положение, за которое принималось такое, при котором отсутствовала боковая
сила. В качестве переменных факторов принимались: а) вертикальная нагрузка,
б) давление воздуха в шине, в) ширина обода и г) угол наклона корда в
каркасе покрышки.
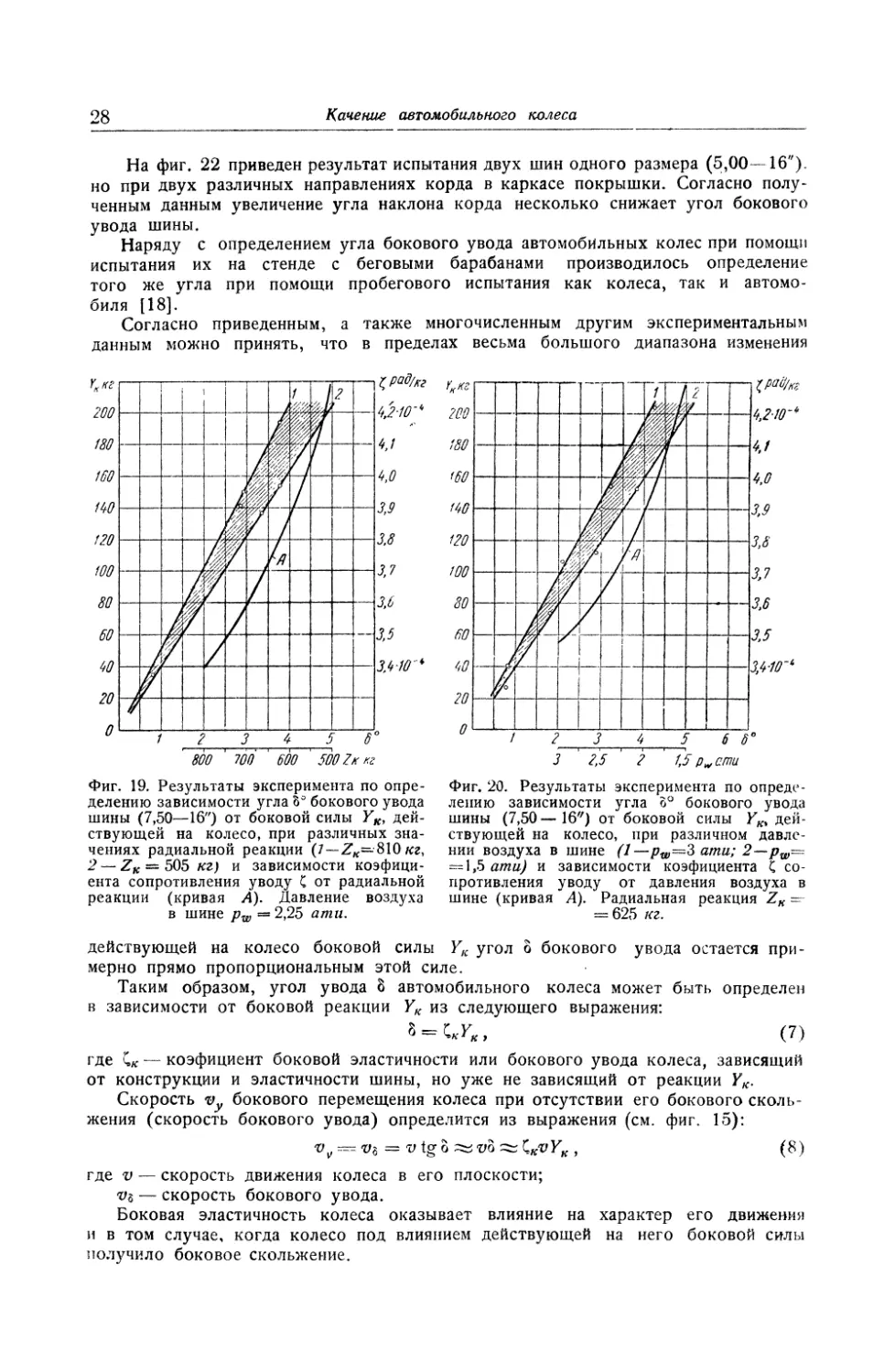
На фиг. 19 приведены результаты испытания колеса с шиной размером 7,50--16".
Линии / и 2, соответствующие вертикальным нагрузкам 810 и 505 кг,
практически являются прямыми, т. е. угол 8 бокового увода изменяется почти прямо
пропорционально боковой силе Ук. При увеличении вертикальной нагрузки ZK вели-
чина отношения у соответственно изменяется. Это отношение у будем в даль-
нейшем называть коэфициентом бокового увода и обозначать буквой С.
На фиг. 19 приведена также кривая А, которая иллюстрирует полученную
экспериментально зависимость между коэфициентом С бокового увода (- ]
и вертикальной реакцией (или нагрузкой) ZK.
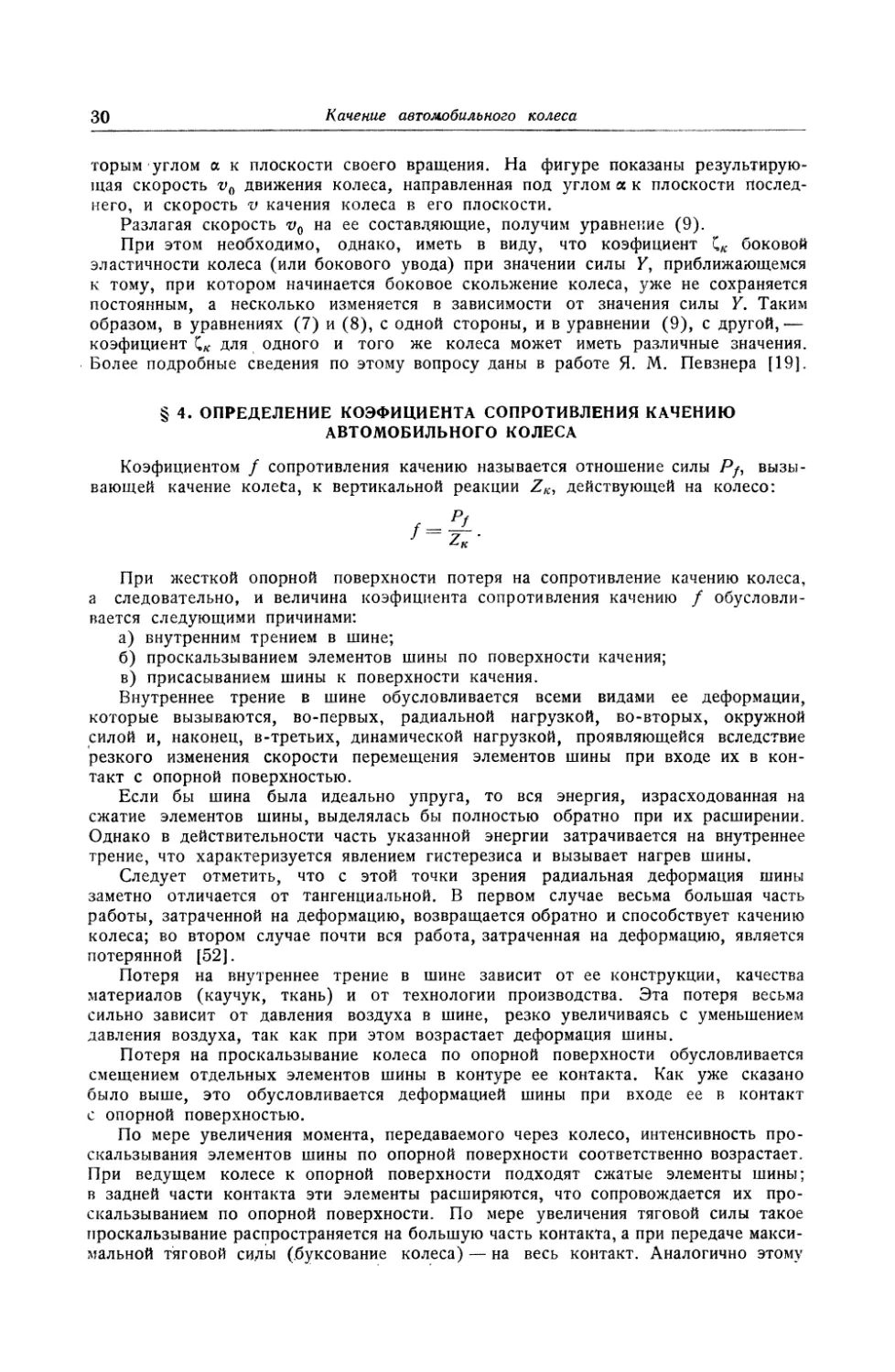
На фиг. 20 приведен результат аналогичного испытания той же шины; но
в этом случае в качестве переменного параметра было принято давление воздуха
в шине (pw). Прямая 1 соответствует давлению воздуха в шине 3 ати, а
прямая 2 — давлению 1,5 ати. Согласно полученным данным угол о бокового увода
шины заметно увеличивается при уменьшении давления воздуха в шине;
соответственно увеличивается и коэфициент бокового увода С (кривая А).
На фиг. 21 приведены результаты испытания шины 6,00—16" при установке
ее на три обода, имеющих различную ширину. Обод с этой точки зрения
характеризовался отношением ^-^т—, где D—наружный диаметр шины; ^ — диаметр
обода; & —ширина обода (см. схему на фиг. 21).
Согласно полученным данным угол 6 бокового увода при всех прочих
постоянных условиях уменьшается по мере увеличения ширины обода, что и следует
учитывать при конструировании автомобильных шин.
28
Качение автомобильного колеса
На фиг. 22 приведен результат испытания двух шин одного размера (5,00—16").
но при двух различных направлениях корда в каркасе покрышки. Согласно
полученным данным увеличение угла наклона корда несколько снижает угол бокового
увода шины.
Наряду с определением угла бокового увода автомобильных колес при помощи
испытания их на стенде с беговыми барабанами производилось определение
того же угла при помощи пробегового испытания как колеса, так и
автомобиля [18].
Согласно приведенным, а также многочисленным другим экспериментальным
данным можно принять, что в пределах весьма большого диапазона изменения
800
Фиг. 19. Результаты эксперимента по
определению зависимости угла 5° бокового увода
шины (7,50—16") от боковой силы YK,
действующей на колесо, при различных
значениях радиальной реакции (7—ZK=-S\0кг,
2 — ZK = 505 кг) и зависимости коэфици-
ента сопротивления уводу С от радиальной
реакции (кривая А). Давление воздуха
в шине pw » 2,25 ати.
1,5 Р* сш
Фиг. 20. Результаты эксперимента по
определению зависимости угла о° бокового увода
шины (7,50—16") от боковой силы YKS
действующей на колесо, при различном
давлении воздуха в шине (1—pw~3 amu; 2—pw~
= 1,5 ати) и зависимости коэфициента С
сопротивления уводу от давления воздуха в
шине (кривая А). Радиальная реакция ZK —
= 625 кг.
действующей на колесо боковой силы YK угол 8 бокового увода остается
примерно прямо пропорциональным этой силе.
Таким образом, угол увода 8 автомобильного колеса может быть определен
в зависимости от боковой реакции Ук из следующего выражения:
где Сл: — коэфициент боковой эластичности или бокового увода колеса, зависящий
от конструкции и эластичности шины, но уже не зависящий от реакции Ук.
Скорость vy бокового перемещения колеса при отсутствии его бокового
скольжения (скорость бокового увода) определится из выражения (см. фиг. 15):
где v — скорость движения колеса в его плоскости;
v§ — скорость бокового увода.
Боковая эластичность колеса оказывает влияние на характер его движения
и в том случае, когда колесо под влиянием действующей на него боковой силы
получило боковое скольжение.
Качение автомобильного колеса при наличии действующей боковой силы
29
При наличии бокового скольжения эластичного колеса скорость vy его
бокового перемещения равна сумме скорости vs бокового увода и скорости vyc
бокового скольжения, т. е.
vv = vb +vyc = lKvYK + vyc . (9)
4,810"*
4,7
4,6
4,5
4,4
4,3
4,2
4,1
4,0-10~4
У „кг
160
Ш
120
100
80
60
40
20
0
Фиг. 21. Результаты эксперимента по
определению зависимости угла Ь° бокового увода
шины 6,00—16" от боковой силы YK,
действующей на колесо, при различной ширине обода
(1 — Ь = \27 мм, 2—Ь — 101,6 мм, <?—6 =
= 76^2 мм) и зависимости коэфициента С
сопротивления уводу от размеров шины
(кривая А). Давление воздуха в шине pw—2fi amu,
радиальная реакция Zh = 475 кг.
—
\
t
}
w
f
Ф
f
й
$
m
1
//>
1 2 3 4 5 6
Фиг. 22. Результаты эксперимента по
определению зависимости угла Ь°
бокового увода шины 5,00—16" от боковой
силы YKy действующей на колесо, при
различных углах (7 —59°30', 2 — 44° 00')
наклона нити корда в покрышке.
Давление в шине pw = 2 amu, радиальная
реакция ZK = 280 кг.
Для пояснения этого^ уравнения на фиг. 23 изображена схема колеса (вид
сверху), которое катится и скользит вбок, перемещаясь в результате под неко-
Фиг. 23. Схема автомобильного колеса, которое одновременно катится
и скользит вбок под влиянием действующей на него боковой силы У.
30 Качение автомобильного колеса
торым углом а к плоскости своего вращения. На фигуре показаны
результирующая скорость v0 движения колеса, направленная под углом а к плоскости
последнего, и скорость v качения колеса в его плоскости.
Разлагая скорость v0 на ее составдяющие, получим уравнение (9).
При этом необходимо, однако, иметь в виду, что коэфициент ^к боковой
эластичности колеса (или бокового увода) при значении силы F, приближающемся
к тому, при котором начинается боковое скольжение колеса, уже не сохраняется
постоянным, а несколько изменяется в зависимости от значения силы У. Таким
образом, в уравнениях (7) и (8), с одной стороны, и в уравнении (9), с другой,—
коэфициент Сл: для одного и того же колеса может иметь различные значения.
Более подробные сведения по этому вопросу даны в работе Я. М. Певзнера [19].
§ 4. ОПРЕДЕЛЕНИЕ КОЭФИЦИЕНТА СОПРОТИВЛЕНИЯ КАЧЕНИЮ
АВТОМОБИЛЬНОГО КОЛЕСА
Коэфициентом / сопротивления качению называется отношение силы Ру,
вызывающей качение колеса, к вертикальной реакции ZK, действующей на колесо:
При жесткой опорной поверхности потеря на сопротивление качению колеса,
а следовательно, и величина коэфициента сопротивления качению /
обусловливается следующими причинами:
а) внутренним трением в шине;
б) проскальзыванием элементов шины по поверхности качения;
в) присасыванием шины к поверхности качения.
Внутреннее трение в шине обусловливается всеми видами ее деформации,
которые вызываются, во-первых, радиальной нагрузкой, во-вторых, окружной
силой и, наконец, в-третьих, динамической нагрузкой, проявляющейся вследствие
резкого изменения скорости перемещения элементов шины при входе их в
контакт с опорной поверхностью.
Если бы шина была идеально упруга, то вся энергия, израсходованная на
сжатие элементов шины, выделялась бы полностью обратно при их расширении.
Однако в действительности часть указанной энергии затрачивается на внутреннее
трение, что характеризуется явлением гистерезиса и вызывает нагрев шины.
Следует отметить, что с этой точки зрения радиальная деформация шины
заметно отличается от тангенциальной. В первом случае весьма большая часть
работы, затраченной на деформацию, возвращается обратно и способствует качению
колеса; во втором случае почти вся работа, затраченная на деформацию, является
потерянной [52].
Потеря на внутреннее трение в шине зависит от ее конструкции, качества
материалов (каучук, ткань) и от технологии производства. Эта потеря весьма
сильно зависит от давления воздуха в шине, резко увеличиваясь с уменьшением
давления воздуха, так как при этом возрастает деформация шины.
Потеря на проскальзывание колеса по опорной поверхности обусловливается
смещением отдельных элементов шины в контуре ее контакта. Как уже сказано
было выше, это обусловливается деформацией шины при входе ее в контакт
с опорной поверхностью.
По мере увеличения момента, передаваемого через колесо, интенсивность
проскальзывания элементов шины по опорной поверхности соответственно возрастает.
При ведущем колесе к опорной поверхности подходят сжатые элементы шины;
в задней части контакта эти элементы расширяются, что сопровождается их
проскальзыванием по опорной поверхности. По мере увеличения тяговой силы такое
проскальзывание распространяется на большую часть контакта, а при передаче
максимальной тяговой силы (буксование колеса) — на весь контакт. Аналогично этому
Определение коэфициента сопротивления качению автомобильного колеса 31
протекает явление и в случае тормозящего колеса. Более подробно этот вопрос
рассмотрен в работе автора [44].
Потеря на присасывание шины к опорной поверхности зависит от рисунка
протектора. При наличии замкнутых контуров рисунка протектора воздух
выжимается из них в момент соприкосновения соответствующего участка протектора
с опорной поверхностью; в результате требуется затрата дополнительной силы на
отрыв шины от дороги в момент выхода этого участка протектора из контакта
с опорной поверхностью.
Было сделано несколько попыток получения аналитической зависимости между
коэфициентом f сопротивления качению автомобильного колеса, с одной стороны,
конструкцией шины и условием движения колеса, — с другой. Однако до
недавнего времени в этом направлении не было получено удовлетворительного
результата, и наибольшее распространение имело уравнение, приближенно справедливое
лишь для жесткого колеса, катящегося по слабо деформируемой поверхности:
где а — смещение радиальной реакции;
г — радиус колеса (для автомобильного колеса — динамический радиус г о ).
Ниже дан вывод уравнения для коэфициента /, предложенного автором и
устанавливающего зависимость этого коэфициента от эластичности, определяемой
радиусами Гд и гк и смещением а, а также от условий нагружения колеса (момент Мк
или тангенциальная реакция Хк ).
Для этой цели в дополнение к полученному выше уравнению (3) равновесия
колеса воспользуемся мощностным балансом для него. В применении к ведущему
колесу (см. фиг. 6), имеющему чистое качение (без пробуксовывания), мощностной
баланс определится выражением:
где Ne — мощность, подведенная к колесу от трансмиссии;
Na — мощность, отведенная от колеса к автомобилю;
Nf — мощность, затраченная на качение колеса.
Эти мощности определяются из выражений:
Ne = Мк<*>к ; Na = PKv = XKv; Nf = Pfv = fZKv*
Отсюда, пользуясь мощностным балансом, получим:
MK*K = XKv + fZKv. (11)
Пользуясь далее этим уравнением и уравнениями (1) и (3), получим
f
J rK ZK rK rd ZK rKrd
При свободном колесе тангенциальная реакция Хк отсутствует; при этом
получим уравнение, аналогичное уравнению (10):
/-Т-. (12')
ГК
При ведомом колесе отсутствует момент Мк , и в этом случае уравнение (12)
примет вид:
f=±. (12")
Уравнение (12) действительно и для тормозящего колеса; при этом лишь надо
иметь в виду, что тангенциальная реакция Хк и момент Мк в этом случае имеют
отрицательные значения, поэтому в обоих случаях — как при ведущем, так и при
тормозящем колесе — коэфициент / сопротивления качению, определяемый по
уравнению (12), возрастает по мере увеличения абсолютного значения приложенного
32 Качение автомобильного колеса
к колесу момента Мк, а, следовательно, и тангенциальной реакции Хк . Для
ведущего колеса это подтверждается многочисленными экспериментами.
Уравнение (12) для коэфициента / сопротивления качению колес может быть
также получено при помощи использования схемы, приведенной на фиг. 13.
Изображенный на этой схеме момент Mj определяет потери на качение, поэтому:
Mf (*>„ = Nf = Pfv = fZK<*KrK,
или
Mf^fZKrK. (13)
Пользуясь далее схемой, приведенной на фиг. 13, получим из условия
равновесия:
Решая далее это уравнение совместно с уравнением (3) и определяя коэфи-
циент /, получим уравнение (12).
Выше было введено понятие о полной окружной силе Рко, равной отношению
момента Мк к радиусу качения гк. Пользуясь уравнением (11), находим
выражение для этой силы:
Рко = у5 = Х* + fZ« = Р« + РР (15)
' К J
т. е. полная окружная сила Рко равна сумме тангенциальной реакции Хк и силы
fZK (или Pj) сопротивления качению колеса.
Предельные значения тангенциальной реакции Хк для ведущего и тормозящего
колеса равны соответственно <%ZK и —<&ZK. Отсюда, пользуясь уравнением (15),
определяем предельные значения полной окружной силы для ведущего и
тормозящего колес:
для ведущего колеса
для тормозящего колеса
\1п = -(т-Л4. (17)
Эти выражения для полной окружной силы соответствуют случаю качения
колеса по жесткой опорной поверхности; при мягкой дороге происходит
соответствующее смещение результирующей реакции, действующей на колесо, и
уравнения (16) и (17) так же, как и схемы, приведенные на фиг. 6—10, уже не
являются правильными для этого случая.
Кроме того, при использовании уравнений (16) и (17) следует иметь в виду,
что коэфициенты ср и / в действительности не являются в точности одинаковыми
для ведущего и тормозящего колес.
Для определения коэфициента / сопротивления качению автомобильного колеса
было произведено весьма много экспериментов с применением динамометрических
тележек (испытание на дороге) и специальных стендов (лабораторное испытание).
Лабораторное испытание автомобильных шин (в целях определения коэфициента /)
производится преимущественно на стендах: барабанном и карусельном.
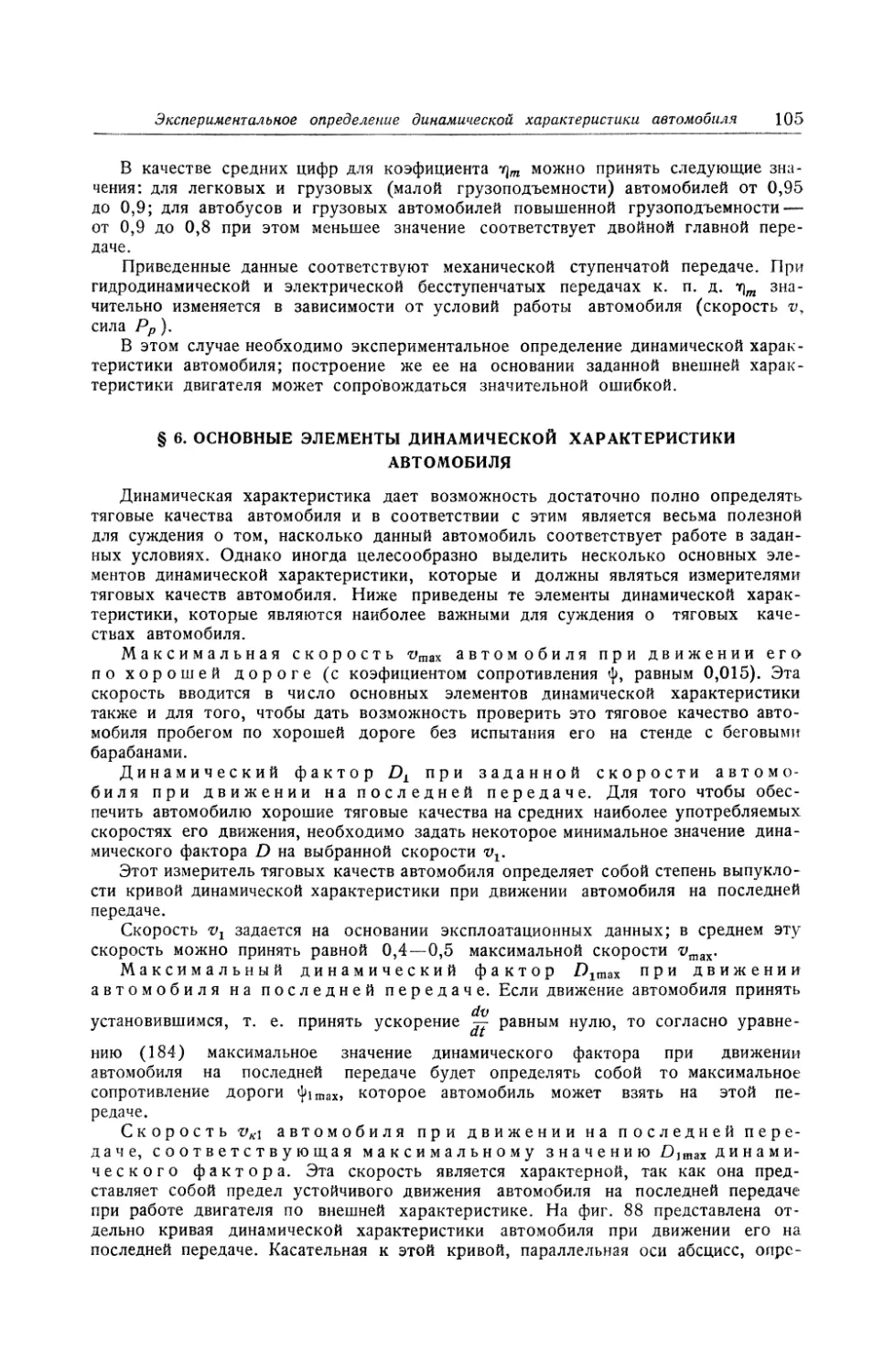
Схема одного из барабанных стендов изображена на фиг. 24. Балансирная
электрическая машина / соединена посредством карданного привода с беговым
барабаном 3, а балансирная электрическая машина 2 — с осью колеса 4, на
котором монтируется испытываемая шина. При помощи рычажной системы (не
показанной на фигуре) можно изменять действующую на колесо радиальную силу GK , а
нагружая в большей или меньшей мере электрические машины, можно изменять
момент Мк, передаваемый через колесо.
Схема карусельного стенда для испытания автомобильных шин изображена на
фиг. 25.
Беговой диск 2 закреплен на валу 4 и опирается на ролики 3. Колесо 5
с испытываемой шиной опирается на диск 2 и приводит его во вращение. Мощ-
Определение коэфициента сопротивления качению автомобильного колеса
33
ность, передаваемая таким образом на диск 2, поглощается механическим
тормозом 7, установленным на валу 4.
Ось колеса 5 установлена в подшипниках рамы б, на которую передается
(через рессоры) вертикальная нагрузка GK.
Колесо 5 приводится во вращение при помощи электродвигателя 8, который
вместе с редуктором 7 установлен на балансирной раме, что дает возможность
измерять момент Мк,
подведенный к колесу.
Одновременно с этим
установка дает возможность
определять силу Рк,
освобождающуюся на оси колеса. Схема
измерения этой силы
изображена на фиг. 25, справа.
Колесо 5, стремясь катиться по
беговому диску 2, перемещает
влево раму 6 с силой, равной
Рк . Эта сила замеряется при
помощи гидравлического пресса 9
и ртутного манометра 10.
В результате можно
определить силу Pj сопротивления
качению колеса, а
следовательно, и коэфициент /.
Согласно приведенным выше дан- Фиг. 24. Схема барабанного стенда для испытания
ным [уравнение (15)], имеем: автомобильных шин.
р — ^*_ р
f гк к
Таким образом, для определения силы Рр кроме Мк и Рк, необходимо
определить еще радиус гк качения колеса. Последний определяется при помощи отсчета
3 2 1
ш
Фиг. 25. Схема карусельного стенда для испытания автомобильных шин.
за одинаковый промежуток времени: числа пн оборотов колеса и числа
ротов бегового диска. При этом получим:
обо»
г __ г) пд
пк
где R — радиус бегового диска, или расстояние от оси бегового диска до
средней плоскости колеса.
3 Е. А. Чудаков 2232
34
Качение автомобильного колеса
Ниже приводятся данные по испытанию нескольких автомобильных шин на
карусельном стенде1. При этом в качестве основных факторов, влияющих на
коэфициент /, были приняты: скорость v качения колеса, давление pw воздуха
в шине и полная окружная сила Рко.
На фиг. 26 представлены результаты испытания шин 7,00—16" :Н-66 (а)
и Н-65 (б) при различной скорости v движения колеса и при разных значениях
давления воздуха pw. Радиальная нагрузка GK при всех опытах оставалась
одинаковой и равной 540 кг; таким образом, полученные на фиг. 26 линии,
определяющие силу Ру сопротивления качения колеса, определяют также в соответ-
20
15 -
10
~ 4 С~
1,5 J
2 -
25
3 -
1
i
a)
20
15
W
-/,5-
2 ■
2,5;3'
!
!
1
- - \—i
!
to
15
5)
20
25
30
35
Фиг. 26. Результаты испытания автомобильных шин 7,00—16" на
карусельном стенде в целях определения зависимости силы Pf
сопротивления качению колеса от скорости v его качения и от давления pw
воздуха в шине (цифры у линий соответствуют давлению воздуха в ати.
Нагрузка на колесо йк = 540 кг).
ствующем масштабе и коэфициент / сопротивления качению. Передаваемый .через
колесо вращающий момент был минимальным и равнялся 17—20 кгму т. е.
испытание проводилось примерно при свободном качении колеса.
Аналогичные кривые были получены и при испытании других шин.
Согласно полученным данным в пределах изменения скорости v качения колеса
от 5 до 45 км/час сила Pf, а. следовательно, и коэфициент / сопротивления
качению сохранились практически постоянными. Для ряда других испытанных шин
наблюдалось повышение коэфициента / с увеличением скорости качения. К
сожалению, конструкция установки, на которой производилось определение силы Pf
сопротивления качению, не позволяла вести испытание шин при более высоких
скоростях, когда надо ожидать повышения силы Pf (или коэфициента /) хотя бы
вследствие значительного вздутия шин.
1 Опыты проведены в автомобильной лаборатории Московского высшего технического
училища.
Определение коэфициента сопротивления качению автомобильного колеса
35
■ i
32.5
65,0
850 пк об/мин
км/час
Фиг. 27. Результаты испытания автомобильных
шин 6,00 — 16" на карусельном стенде в целях
определения зависимости силы Pf сопротивления
качению колеса от скорости v его качения и от
давления воздуха в шине (цифры у линий
соответствуют давлению воздуха в ати).
Фиг. 28. Результаты испытания автомобильных шин 7,00—16" на
карусельном стенде в целях определения зависимости силы Pf
сопротивления качению колеса от полной окружной силы Рко\
l-VS\2- Н-65; 3 - Н-бб; 4 - Н-72; 5 - Н-77; 6 - В-41; 7-В-42.
36 Качение автомобильного колеса
Для проверки этого положения в Автомобильной лаборатории МВТУ (по
предложению И. Н. Чернышева) была сделана установка, в которой в качестве
бегового барабана использовалась также шина. В результате одновременно испы-
тывались две одинаковые шины. На такой установке скорость колеса можно было
доводить до 140 км/час. На фиг. 27 приведены результаты испытания шин
6,00—16" на этой установке при трех значениях давления воздуха. Радиальная
нагрузка сохранялась постоянной и равной 430 кг. Число оборотов колеса в
минуту изменялось от 150 до 1000, что соответствует изменению скорости ~ от
20 до 130 км Iчас.
Согласно полученным данным при таком диапазоне изменения скорости v коэ-
фициент / сопротивления качению изменяется весьма заметно — больше чем 1г/2 раза.
Давление воздуха pw в шинах согласно фиг. 26 оказывает на силу Pf весьма
большое Елиямие.
На фиг. 28 приведены результаты испытания семи шин (различных марок, но
одного размера 7,00—16") по определению зависимости силы Ру сопротивления
качению от полной окружной силы Рко. Для всех остальных параметров,
характеризующих работу колеса, были приняты постоянные значения: радиальная нагрузка
QK = 540 кг; давление воздуха pw=2 amu, скорость v качения колеса — 30 км/час.
Согласно фиг. 28 для всех испытанных шин наблюдается весьма заметный рост
силы Pf сопротивления качению колеса при увеличении окружной силы Р,-о. Такой
же результат был получен при многих других экспериментах по испытанию
автомобильных шин, что хорошо согласуется с уравнением (12), которое было
выведено выше для коэфициента / сопротивления качению эластичного колеса.
Более подробные сведения по определению коэфициента / сопротивления
качению автомобильного колеса приведены в работе автора [44].
§ 5. ОПРЕДЕЛЕНИЕ КОЭФИЦИЕНТА СЦЕПЛЕНИЯ
МЕЖДУ АВТОМОБИЛЬНЫМ КОЛЕСОМ И ДОРОГОЙ
Коэфициентом сцепления ср между колесом автомобиля и опорной поверхностью
называется такое отношение результирующей реакции (действующей на колесо
в опорной плоскости) к радиальной реакции, при котором начинается или
происходит буксование (или скольжение) колеса. При отсутствии боковой силы,
действующей на колесо, результирующая реакция равна тангенциальной реакции Хк,
и в этом случае коэфициент сцепления ср определяется как отношение
максимальной тангенциальной реакции Хк к радиальной реакции ZK .
Понятие о коэфициенте сцепления ср не остается постоянным для различных
случаев движения колеса, в связи с чем рассмотрим следующие понятия о
коэфициенте сцепления.
1. Коэфициент сцепления, соответствующий началу пробуксовывания или
проскальзывания колеса при качении его в плоскости вращения (при отсутствии
боковой силы).
2. Коэфициент сцепления, соответствующий качению колеса в плоскости
вращения, но при наличии пробуксовывания или проскальзывания.
3. Коэфициент сцепления при движении колеса под углом к плоскости
вращения (наличие бокового увода или бокового увода при одновременном боковом
скольжении).
4. Коэфициент сцепления, соответствующий боковому перемещению колеса
(скольжение вбок без качения).
Коэфициент сцепления между автомобильным колесом и опорной поверхностью
(дорогой) наряду с указанными выше различными случаями движения
автомобильного колеса зависит от характера покрытия дороги (материал, неровность,
наличие загрязнения и влаги и т. д.), конструкции шины (качество резины, рисунок
протектора), давления воздуха в шине, скорости движения, а также скорости
пробуксовывания или проскальзывания колеса.
Ниже приводятся некоторые экспериментальные данные по этому вопросу.
Коэфициент сцепления между автомобильным колесом и дорогой
37
Определение коэфициента сцепления ср, соответствующего началу
пробуксовывания колеса, производилось на установке, схема которой изображена на фиг. 29.
На кронштейне 6 установлена в подшипниках балка 4. На правом конце этой
балки монтируется колесо 8 с испытываемой шиной, а на левом конце помещается
груз 5, служащий для вывешивания колеса. Кронштейн 6 допускает
перемещение балки 4 по высоте в соответствии с размером колеса.
Колесо 8 опирается на поверхность 7, которую можно изменять в соответствии
с заданием эксперимента.
12
Фиг. 29. Схема установки,
применявшейся для определения коэфи-
циента сцепления и
тангенциальной эластичности автомобильных
шин.
Нагружение колеса вертикальной силой производится при помощи показанной
на фигуре рычажной системы. Балка / укреплена шарнирно на кронштейне 10.
Передвижной груз 2 создает определенную вертикальную силу, которая через
рессору 9 передается на балку 4 и далее на колесо 8. Винт 3 служит для
установки балки / в положение равновесия.
Вал испытываемого колеса 8 при помощи промежуточного карданного вала И
соединен с храповым колесом 12. На оси этого колеса свободно установлен
сектор 16 с собачкой 13. При помощи винта 15 и троса сектор 16 поворачивается,
одновременно с чем при помощи храпового механизма поворачивается и карданный
вал 11, нагружая колесо вращающим моментом Мк. Вращающий момент измеряется
при помощи динамометра 14 (при заданном плече с).
При проведении опыта этот момент доводился до такого значения, при котором
М
начиналось проскальзывание (пробуксовывание) колеса. При этом отношение —~
принималось равным коэфициенту сцепления ср.
38
Качение автомобильного колеса
При помощи описанного опыта выяснялось влияние на коэфициент сцепления ср
вертикальной нагрузки GK и давления воздуха pw в шинах. Для опорной поверх-
Ч>
1,0
0.9
0,8
0,7
1
1
/
2
3
1,0 1,25
1,5
1,75 2,0 2,25 pw «г/см*
1,1
1,0
0,9
0,8.
U
ко
0.9
п я
'300 350 400 450 500 550 Ок
'Фиг. 30. Результат испытания
автомобильной шины в целях определения
влияния «вертикальной нагрузки GK и
давления pw воздуха в шине на
коэфициент сцепления <р с асфальтовой
поверхностью при различной степени
влажности последней.
I
1.0 1,25 1,5 1,75 2,0 2.25 р
1
3
1,1
1.0
0,9
0,8,
1
3
300 350
400
450 500 550Gkkz
Фиг. 31. Результат испытания
автомобильной шины в целях определения влияния
вертикальной нагрузки GK и давления pw
воздуха в шине на коэфициент сцепления ©
с асфальтовой поверхностью при
различной степени влажности последней.
1,0
0,9
1
2
3
ности применялись дерево (ель), бетон и асфальт; причем в последнем случае
изменялась степень влажности покрытия, и опыт производился при сухом, влажном
и мокром асфальте. На фиг. 30—32 приведены результаты испытания шин
Ярославского резинового комбината 7,00 —
16" Н-66 (фиг. 30), Н-65 (фиг. 31) и
Н-77 (фиг. 32) на асфальте при сухом
(/), мокром (2) и влажном (3) его
состояниях.
Верхний график каждой фигуры
соответствует испытанию шины при
постоянном значении вертикальной
нагрузки GK = 535 кг и при
переменном давлении воздуха pw. Нижний
график соответствует обратному условию
испытания: давление воздуха pw в
шине оставалось постоянным и
равным 2 кг/см2, а изменялась
вертикальная (или радиальная) нагрузка GK.
Для получения мокрой поверхности
на асфальтовую площадку, по которой
проскальзывает шина, наливалась вода.
Влажная поверхность достигалась об-
1,0 1,25 1,5 1,75 2,0 2,25ру*<*/см2
t,0
0,9
0,8,
1
2
300 350 400 Ш 500 550
Фиг. 32. Результат испытания автомобильной
шины в целях определения влияния
вертикальной нагрузки GK и давления pw воздуха
в шине на коэфициент сцепления у с
асфальтовой поверхностью при различной степени
влажности последней.
тиркой предварительно смоченной опор-
ной поверхности.
Из рассмотрения фиг. 30—32
следует, что в условиях проведения опыта
Коэфициент сцепления между автомобильным колесом и дорогой 39
коэфициент сцепления ср сохранялся практически постоянным и почти не зависящим
ни от давления воздуха в шине, ни от величины вертикальной нагрузки GK. При
этом и для различных шин он изменялся сравнительно мало. Несколько
пониженное значение для коэфициента <р получено при испытании шины Н-77 по сухому
асфальту, что объясняется исключительно высокой влажностью воздуха во время
проведения этого опыта.
Одновременно с этим весьма большое влияние на коэфициент сцепления ср ока^-
зывает влажность поверхности асфальта, причем влажная поверхность вызывает
даже большее снижение коэфициента сцепления, нежели мокрая. Это, повидимому>
следует объяснить тем, что на поверхности асфальта все же оставались частицы
пыли, или же в процессе проскальзывания шины на поверхности появлялись частицы
резины. При мокрой поверхности эти частицы смывались водой, а при
влажной— служили своеобразной смазкой между шиной и асфальтом.
На фиг. 33 и 34 приведены кривые, соответствующие другой серии опытов.
В этом случае также определялось влияние давления воздуха pw и радиальной
нагрузки GK на коэфициент сцепления ср, но опыт производился при различном
характере опорной поверхности: бетон, дерево, асфальт. Испытание шин
производилось при сухом состоянии опорной поверхности.
Верхние графики на фиг. 33 и 34 соответствуют испытанию шин при
постоянной вертикальной (радиальной) нагрузке GK = 280 кг и при переменном давлении
воздуха pw. Нижние графики соответствуют постоянному значению давления
воздуха pw~\fi amu и переменному значению вертикальной нагрузки GK.
Из рассмотрения фиг. 33 и 34 находим, что и при этом опыте на коэфициент
сцепления ср сравнительно мало влияет изменение в весьма широких пределах
давления воздуха pw и вертикальной нагрузки GK.
Материал опорной поверхности оказывает исключительно большое влияние на
коэфициент сцепления ср, причем это влияние в очень большой мере зависит от
состава резины и рисунка протектора. При влажной или мокрой опорной поверхности
влияние последнего фактора получается особенно большим; в этом случае на
коэфициент сцепления оказывает весьма большое влияние также и скорость качения
колеса. При повышенной скорости качения колеса и неблагоприятном рисунке
протектора влага с поверхности дороги не успевает выдавливаться и, образуя
прослойку между шиной и дорогой, резко снижает коэфициент сцепления.
Согласно экспериментальным данным это особенно ярко проявляется при деревянном
и асфальтовом покрытии и значительно меньше — при бетонном.
На фиг. 35 приведены результаты эксперимента по определению
коэфициента сцепления ср для шин с различным рисунком протектора при качении
автомобильного колеса с различной скоростью. Испытание производилось при помощи
динамометрической тележки по бетонной и асфальтовой дороге при различном
состоянии ее поверхности.
На фиг. 35 вверху представлены результаты опытов, произведенных на бетонной
дороге, а внизу — по асфальту. По оси ординат на фигуре отложена величина
коэфициента сцепления ср, а по оси абсцисс — скорость движения v.
Из фиг. 35 следует, что при бетонной дороге коэфициент сцепления
сравнительно мало изменяется в зависимости от скорости автомобиля. В общем здесь
наблюдается некоторое понижение коэфициента сцепления с повышением скорости
движения. При асфальтовой же дороге коэфициент сцепления ср резко
уменьшается при повышении скорости движения; это падение коэфициента ср получается
различным для шин, имеющих протектор разного рисунка.
На фиг. 36 приведены отпечатки испытывавшихся шин.
Из рассмотрения фиг. 35 и 36 следует, что при движении автомобиля с
большой скоростью по мокрой или сырой дороге коэфициент сцепления ср может
снизиться весьма сильно, особенно при шине с большой и притом сплошной опорной
поверхностью.
Это явление в очень большой мере способствует началу пробуксовывания
колес и возникновению заноса автомобиля (боковое скольжение задней оси).
40
Качение автомобильного колеса
0,8
0,7
0,6
1 / :
3
—2
!,25 1,5 1,75 2,0 2,25 р„
<р
0,8
0.7
0,6
°'515О ?00 250 300 350 в,кг
Фиг. 33. Результат испытания
автомобильной шины (МОШЗ; 5,00—16") в
целях определения влияния вертикальной
нагрузки GK и давления pw воздуха
в шине на коэфициент сцепления <р при
разном характере покрытия опорной
поверхности: / — бетон, 2 — асфальт,
3— дерево.
———
1
I
1
—г
2
0,8
0,7
0,6
-
-,
—2
3
1—
' 1,25 1,5 1,75 2,0 2,25 р„«*/см*
0.8
0,7
0,6
' ■
—■
/
3
150 200 250 ЗПО 350 Q, кг
Фиг. 34. Результат испытания
автомобильной шины(Главшинпром; 5,00—
16") в целях определения влияния
вертикальной нагрузки GK и давления pw
воздуха в шине на коэфициент
сцепления <р при разном характере
покрытия опорной поверхности:
/—бетон, 2— асфальт, 3 — дерево.
f » » »
О 5 10 15 20 25 30 у*м/час
Фиг. 35. Зависимость коэфициента сцепления Фиг. 36. Отпечатки шин, подвергну-
от скорости движения автомобиля по дороге , тых испытанию (см. фиг. 35).
с бетонным покрытием (вверху) и с
асфальтовым покрытием (внизу): пунктирные
кривые—сухая дорога; сплошные кривые—мокрая
дорога.
Коэфициент сцепления между автомобильным колесом и дорогой
41
При загрязненной дороге снижение коэфициента сцепления ср в очень большой
мере зависит от консистенции грязи и от степени разжижения ее водой. При этом
минимальное значение коэфициента сцепления ср для той же шины получается при
определенной влажности грязи; дальнейшее
увеличение содержания воды вызовет уже
не уменьшение, а повышение коэфициента 0,6
сцепления ср.
На фиг. 37 приведены результаты
лабораторного испытания шины при различном о,4
состоянии опорной поверхности [7].
Наихудший результат (минимальное зна- °>3
чение коэфициента ср) получается при по- ^
крытии, состоящем из 9 частей уличной
грязи и 7 частей воды.
Коэфициент сцепления ср между
автомобильной шиной и опорной поверхностью при
наличии буксования или скольжения колеса
весьма сильно зависит от состояния
поверхности дороги. Указанное выше влияние
рисунка протектора, загрязнения и влаги на
дороге в этом случае проявляется особенно
заметно. При сухой дороге пробуксовывание
или скольжение колеса оказывает влияние
на коэфициент сцепления 9 лишь при очень
малой скорости буксования или скольжения колеса. Ниже по этому вопросу
будут приведены экспериментальные данные, соответствующие боковому
скольжению колеса.
0.1
\
\
\
\
N
\/
Y
"1
\
1
1
f
Фиг. 37. Зависимость коэфициента
сцепления ср от состояния поверхности
дорожного покрытия (асфальт):
а — сухая поверхность; Ь — мокрая поверхность;
с — замасленная поверхность; а — покрытие — 9
частей уличной грязи и 7 частей воды; е —
покрытие — 9 частей уличной грязи и 12 частей
воды; / — покрытие — 9 частей уличной грязи и
17 частей воды; k — покрытие — 9 частей уличной
грязи и 22 части воды.
Фиг. 38. Схема установки, применявшейся при определении
коэфициента сцепления <р при боковом скольжении
автомобильного колеса
Испытание шин при качении колеса под углом к плоскости его вращения
(наличие бокового увода и бокового скольжения) производилось как при
помощи барабанного стенда (установка колеса под углом к плоскости
бегового барабана), так и при помощи динамометрических тележек. Согласно
полученным при этом экспериментальным данным соответствующий этому условию
движения колеса коэфициент сцепления примерно на 20°/0 ниже коэфициента
сцепления ср, соответствующего чистому качению колеса. Это, повидимому,
следует объяснить тем, что при боковом уводе колеса (см. фиг. 15—17) увеличивается
42
Качение автомобильного колеса
количество отдельных элементов шины, имеющих скольжение по опорной поверх»
ности, что сопровождается ухудшением использования вертикальной нагрузки G%
для обеспечения сцепления между колесом и дорогой.
Определение коэфициента сцепления ср при боковом скольжении шины
производилось на установке, схема которой изображена на фиг. 38 [36].
Вал 2 жестко закреплен на раме 7, которая шарнирно установлена на оси 8.
На валу 2 свободно — на скользящих подшипниках — посажена труба 5, на
которой закреплено испытываемое колесо 5. На трубе 3 на шариковых подшипниках
установлена рама 4; на эту раму
укладываются грузы для создания
вертикальной нагрузки GK на
колесо.
Нагружение колеса боковой
силой У осуществляется при
помощи троса 6, укрепленного к
раме 4. Трос 6 перекинут через блок,
и на его конце подвешен груз,
создающий боковую
горизонтальную силу Y, действующую весьма
близко к плоскости опоры
колеса, что необходимо для
устранения момента, возникающего от
приложения боковой силы К,
опро0,9
0,8
0,7
0,6
/
(А
W
7
1
1
. ■
500
—
—■—
- —
—-J
.—-
...
200
л-——
500
300
s
332
ш
100
200
300
400
Фиг. 39. Результаты опыта по определению
зависимости коэфициента сцепления ср от скорости vy
бокового скольжения шины по дереву (бук) (цифры
у кривых соответствуют вертикальной нагрузке GH
на колесо).
кидывающего колесо и
нагружающего подшипники рамы 4 и
вала 2.
Для записи осевого
перемещения колеса введен самопишущий
механизм, состоящий из
равномерно вращающегося барабана 7 и карандаша, связанного с подвижной рамой 4.
Для того чтобы максимально уменьшить трение между валом 2 и трубой 3
(при скольжении последней по валу) рама / и вал 2 вывешены при помощи
коромысла 9 и груза, как это показано на фиг. 38.
р
0,9
0,8
1
/
200^
^300
—-—
-—-
^—-
^-—-
<
0,8
0J
0,6
у
—я. '—
.— -
200
—1
i ■"
300
—(.
400
ЬОО-
50
100
Vy-10"
О
50
100
150
Фиг. 40. Результаты опыта по
определению зависимости коэфициента
сцепления ср от скорости vy бокового
скольжения шины по асфальту
(цифры у кривых соответствуют
вертикальной нагрузке GK на колесо).
Фиг. 41. Результаты опыта по
определению зависимости коэфициента
сцепления ср от скорости Vy бокового
скольжения шины по бетону (цифры у
кривых соответствуют вертикальной
нагрузке GK на колесо).
Результаты испытания шины (29 X 5,5") на описанной установке приведены
на фиг. 39 (опорная плоскость деревянная), фиг. 40 (асфальт) и фиг. 41 (бетон).
Здесь по оси ординат отложен коэфициент сцепления, а по оси абсцисс —
скорость vy бокового скольжения шины. Кривые соответствуют различным значениям
вертикальной нагрузки GH, действующей на колесо.
Коэфициент сцепления между автомобильным колесом и дорогой 43
Согласно полученным данным коэфициент сцепления получается минимальным
при начале скольжения колеса по опорной поверхности. Это явление,
противоположное тому, которое обычно наблюдается для случая трения жестких тел,
обусловливается влиянием эластичности шины [37].
Вследствие эластичности шины (резина протектора) ее элементы, находящиеся
в контакте с опорной поверхностью, проскальзывают по последней неодновременно,
в результате чего вертикальная нагрузка GK не используется полностью для
сцепления шины с опорной поверхностью. По мере повышения скорости скольжения
шины увеличивается количество одновременно проскальзывающих отдельных ее
элементов по опорной поверхности; в связи с этим улучшается использование
вертикальной нагрузки GK, и возрастает коэфициент сцепления ср.
Такой же результат получен был и для случая скольжения колеса в его
плоскости.
Однако в обоих случаях рост коэфициента ср сцепления наблюдается лишь при
сухой опорной поверхности и обычно в пределах весьма малого изменения
скорости скольжения шины. При дальнейшем увеличении этой скорости коэфициент
сцепления сохраняет примерно постоянное значение, если шина не блокирована
полностью и если^ в связи с этим участок шины, находящийся в соприкосновении
с опорной поверхностью, не получил значительного нагрева.
При значительном же нагреве шины, что наблюдается при блокировке колеса,
имеет место не увеличение, а уменьшение коэфициента сцепления, который в этом
случае определяется уже не только трением между протектором шины и опорной
поверхностью, но главным образом прочностью резины при нагретом ее состоянии.
На основании данных, полученных при испытаниях шин, для коэфициента
сцепления ср можно принять следующие средние расчетные значения при условии
работы автомобиля по твердой сухой дороге (бетон, асфальт): шины низкого
давления— 0,8—0,9 и шины высокого давления—0,6—0,7.
При влажной или особенно при грязной или обледенелой дороге коэфициент
сцепления резко снижается и может быть меньше 0,1.
При движении автомобиля по мягкому грунту, когда пробуксовывание колес
сопровождается срезанием грунта, коэфициент сцепления определяется уже не
трением между шиной и опорной поверхностью, а прочностью грунта на сдвиг»
Заметное снижение коэфициента сцепления ср в действительных условиях
движения автомобиля часто обусловливается как разновременным проскальзыванием
элементов шины по опорной поверхности, так и уменьшением радиальной реакции
из-за вертикальных колебаний оси, поэтому при движении автомобиля по неровной
дороге коэфициент сцепления ср зависит также и от качества подвески автомобиля.
Более подробные сведения по определению коэфициента о сцепления между
автомобильным колесом и дорогой приведены в работах [36, 37 и 44].
ГЛАВА II
СИЛЫ И РЕАКЦИИ, ДЕЙСТВУЮЩИЕ НА АВТОМОБИЛЬ
ПРИ ЕГО ДВИЖЕНИИ ПО ЖЕСТКОЙ ОПОРНОЙ ПОВЕРХНОСТИ
§ 1. СИЛЫ СОПРОТИВЛЕНИЯ ДВИЖЕНИЮ АВТОМОБИЛЯ
Полная суммарная окружная (тяговая) сила Р , развиваемая на ведущих колесах
автомобиля, равна сумме полных окружных сил Рко [см. уравнение (15)1,
отдельных колес; она затрачивается на преодоление сил сопротивления движению
автомобиля. При ускоренном движении автомобиля на подъем (общий случай движения)
имеются следующие силы сопротивления: сила сопротивления качению колес Pf;
сила сопротивления воздуха Pw; сила сопротивления подъему Р. и сила инерции
автомобиля Pj.
Сила Ра сопротивления качению и сила Pw сопротивления воздуха всегда
действуют на автомобиль при его движении, а силы P-t сопротивления подъему и Pj
инерции автомобиля могут отсутствовать (равномерное движение автомобиля по
горизонтальной дороге) или изменять свой знак на обратный (движение под гору,
замедленное движение).
Сила Р* сопротивления качению. Эта сила вызывается
деформацией шин и дороги. При движении же по жесткой дороге она определяется
потерей на трение в шинах, что уже было выяснено выше, в § 4 гл. 1. Сила Pf
сопротивления качению автомобиля определяется по выражению
где *y.ZK — сумма радиальных реакций, действующих на колеса автомобиля.
При движении автомобиля по горизонтальной плоскости сумма радиальных
реакций ^ZK равна весу G автомобиля. При этом получим:
Pf = fG. (18)
При движении автомобиля в гору или под гору сумма радиальных реакций J\ZK
равна весу G автомобиля, умноженному на cos а, где а — угол наклона дороги
к горизонтали. При этом получим:
Pf = /G cos a. (18')
Методы экспериментального определения коэфициента / сопротивления
качению автомобильного колеса были описаны выше (§ 4, гл. 1).
Сила Pw сопротивления воздуха. Сила сопротивления воздуха,
получающаяся при движении автомобиля, обусловливается следующими причинами:
во-первых, встречные частицы воздуха давят на переднюю часть автомобиля; во-
вторых, при движении автомобиля сзади него образуется некоторое разрежение;
наконец, в-третьих, частицы воздуха трутся о поверхность автомобиля, тем самым
создавая также некоторую силу сопротивления движению.
На основании многочисленных опытов, проведенных для определения силы
сопротивления воздуха движению в нем какого-либо тела, сила Pw может быть
выражена при помощи следующего уравнения:
Силы сопротивления движению автомобиля 45
где v — скорость движения тела;
F—площадь проекции тела на плоскость, перпендикулярную направлению его
движения, или лобовая площадь сопротивления;
р — плотность воздуха;
с — коэфициент, зависящий от формы тела и качества поверхности.
Так как в средних условиях эксплоатации автомобиля плотность воздуха р
может быть принята постоянной (если не учитывать работы автомобиля в горных
местностях), то произведение ср обычно объединяется одним коэфициентом К.
Таким образом, получаем
Pw = KFv\ (19)
где v — скорость движения автомобиля, выраженная в м/сек;
F—площадь проекции автомобиля в направлении его движения,
выраженная в м2;
К — коэфициент сопротивления воздуха.
Согласно уравнению (19), коэфициент К сопротивления воздуха представляет
собой силу, выраженную в килограммах и приходящуюся на квадратный
метр площади F лобового сопротивления при скорости движения автомобиля,
равной 1 м/сек.
Так как скорость v входит в уравнение (19) в квадрате, то коэфициент К
кг/сек2
имеет размерность в ——^— .
Примем KF = W, при этом получим
Pw = Wv*, (19')
где W—фактор сопротивления воздуха, зависящий как от абсолютного размера
автомобиля (площадь лобового сопротивления), так и от формы (коэфициент К).
Коэфициент К сопротивления воздуха в основном зависит от формы
автомобиля и ее обтекаемости. Автомобили обтекаемой формы имеют меньшее
сопротивление воздуха движению, чем автомобили с кузовом, имеющим резкие углы.
Площадь проекции автомобиля в направлении его движения (лобовая площадь)
приближенно может быть принята равной произведению колеи и высоты
автомобиля. Получающаяся при этом ошибка не превосходит 3—5%-
Кроме сопротивления поступательному движению автомобиля, воздух
оказывает еще сопротивление вращению колес. Эта величина является сравнительно
малой по отношению к сопротивлению воздуха поступательному движению автомобиля
и поэтому может быть учтена небольшим увеличением коэфициента К
сопротивления воздуха в уравнении (19).
Выше предполагалось, что автомобиль движется в, спокойной среде. При
наличии ветра в уравнение (19) должна быть введена относительная скорость
автомобиля. При встречном ветре скорость v> входящая в уравнение (19), определяется
как сумма v-{~vv при попутном ветре — как разность v — vv где v±—скорость
ветра.
Коэфициент сопротивления воздуха К для заданной формы автомобиля
определяется экспериментально — чаще всего при помощи продувки небольшой модели
этого автомобиля в аэродинамической трубе.
При продувке в трубе модели автомобиля с точки зрения соответствия опыта
действительным условиям работы автомобиля получается следующая неточность.
При своем движении по дороге автомобиль имеет снизу неподвижную твердую
поверхность — дорогу. Очевидно, это же условие необходимо сохранить и при
продувке модели автомобиля в аэродинамической трубе. Если установить модель
автомобиля непосредственно в середине трубы таким образом, чтобы свободное
пространство окружало ее со всех сторон, то образование воздушных вихрей
будет не тождественно тому, которое имеет место в условиях движения
автомобиля по дороге. Для получения условий, более соответствующих
действительности, в аэродинамической трубе обычно устанавливаются две совершенно
одинаковые модели, причем одна из них опрокидывается относительно другой, как это
46
Силы и реакции, действующие на автомобиль при его движении
изображено на фиг. 42. Благодаря этому одинаковые воздушные вихри,
возникающие от каждой модели, дают между ними как бы плоскость раздела,
соответствующую плоскости дороги. Однако вполне точных результатов здесь все же
получиться не может, так как не будет полного единообразия вихрей от верхней и
нижней моделей.
Для современных легковых автомобилей нормального типа коэфициент
сопротивления воздуха К колеблется примерно в пределах от 0,025 до 0,04, а для грузовых
автомобилей — в пределах от 0,05 до 0,07. Фактор же W—сопротивления
воздуха для легковых автомобилей может быть
принят в среднем равным 0,05—0,1, а для
грузовых — 0,15—0,3.
Сила сопротивления воздуха,
представляющая собой равнодействующую
элементарных сил, действующих на отдельные
элементы поверхности автомобиля, приложена
к последнему на определенной высоте от
опорной плоскости. На фиг. 43 представлена
схема действия силы Pw сопротивления
воздуха на автомобиль. Точка приложения этой
силы часто называется центром парусности.
Ввиду того что автомобиль имеет
симметричную форму, центр парусности расположен в плоскости симметрии
автомобиля. Высота hw приложения силы Pw имеет определенное значение в
отношении устойчивости автомобиля на высоких скоростях движения. Чем выше
расположен центр парусности, т. е. чем больше отрезок hWJ тем на большую величину
облегчается передняя часть автомобиля
при большой скорости его движения,
что может в отдельных случаях
повести к потере автомобилем управления.
Кроме того, повышение расположения
центра парусности при боковом ветре
Фиг. 42. Схема продувки модели
автомобиля в аэродинамической трубе.
t
Фиг. 43.
Схема действия силы сопротивления
воздуха.
заметно снижает устойчивость
автомобиля против бокового заноса (см. гл. V).
Высота h*w приложения силы Pw
сопротивления воздуха определяется при
помощи продувки модели автомобиля в аэродинамической трубе (фиг. 42). При этом
определяется момент М, поворачивающий одну из моделей автомобиля около оси,
проходящей через точки опоры задних колес. Высота hw равна отношению этого
момента к силе Pw.
Весьма большое влияние на сопротивление воздуха оказывает форма
автомобиля.
Наилучшая (с точки зрения сопротивления воздуха) форма автомобиля
отличается от формы воздухоплавательного аппарата — симметричная сигарообразная
форма (дирижабль). Это объясняется тем, что условия воздухоплавательного
аппарата с одной стороны, и автомобиля, — с другой, не являются тождественными.
В то время как первый движется в однородной среде, последний движется по
твердой неподвижной поверхности — дороге. Воздух, попадая в пространство
между кузовом автомобиля и дорогой и не имея возможности расширяться в
сторону дороги, приобретает значительные вихревые движения и вызывает большое
дополнительное сопротивление.
Поэтому в целях максимального уменьшения сопротивления воздуха
целесообразно перекрывать всю переднюю часть автомобиля кожухом так, чтобы зазор
между ним и землей был минимальным. Все выступающие части, как, например,
колеса и крылья, создают очень большое дополнительное сопротивление и
вызывают значительное завихривание воздуха; поэтому целесообразно и их также
перекрывать одним общим кожухом. При этом определяется специальная наивыгоднейшая
Силы сопротивления движению автомобиля 47
в смысле сопротивления воздуха „автомобильнаяи форма, которая с нижней
стороны должна быть ограничена плоскостью, возможно близко подходящей к земле.
Сила Pt — сопротивления подъему. Сила Рг сопротивления подъему
зависит от веса автомобиля и от угла подъема (фиг. 44). Она определяется из
выражения
P/=Gsina, (20)
где G — вес автомобиля и a — угол подъема.
Принимая sin a = is получим
Pt = Gi. (21)
Суммарная сила Р/+/, затрачиваемая на преодоление сопротивления качению
и подъема, определится из выражения
Pf+i = Pf -f- P. = G/cos a + G sin a = G (/cos a -f- sin a).
Если пренебречь влиянием изменения реакции, нормальной к дороге, на силу
сопротивления качению, т. е. принять cos a равным единице, то выражение для
суммарной силы Pf + i примет вид .—^ $s//?
P/+/=G(/+sina). (22)
Такое выражение для суммарной силы
сопротивления качению и подъему мы
будем использовать в дальнейшем.
Результаты подсчета по упрощенному и
полному выражениям мало различаются
между собой.
Приняв сумму /+ sin а = ф, получим
F/4-i = Н^ = фС/, (22 ) фиг 44. Схема движения автомобиля
где ф — коэфициент сопротивления до- на подъем,
роги, учитывающий силу,
затрачиваемую на преодоление сопротивления качению и подъема (ф =/+ sin a).
Сила Pj—инерции автомобиля. Эта сила затрачивается на ускорение
поступательно движущейся массы М автомобиля, равной — , где g — ускорение
силы тяжести, равное 9,81 м'сек2, и на ускорение вращательного движения
свободных (ведомых) колес автомобиля.
Обозначая ускорение автомобиля производной— , получим следующее
выражение для силы PjQ , затрачиваемой на ускорение поступательно движущейся массы
автомобиля:
Р — м — — G dv
Момент, затрачиваемый на ускорение вращения деталей двигателя, трансмиссии
и ведущих колес автомобиля, учитывается соответствующим уменьшением (см.
ниже) величины вращающего момента на ведущих колесах, в связи с чем полная
суммарная окружная сила Рр, развиваемая на ведущих колесах автомобиля, расходуется
лишь на ускорение вращения ведомых колес и на ускорение поступательно
движущейся массы автомобиля.
Момент, затрачиваемый на ускорение ведомых колес автомобиля,
определяется из выражения 2JKl —"- , где JKl — момент инерции колеса относительно
его оси и -—■ — угловое ускорение колеса.
Окружная сила, необходимая для создания этого момента, равна 2 — JK\-^ ? r#e
rH at
rH — радиус качения колес.
48
Силы и реакции, действующие на автомобиль при его движении
Угловое ускорение колеса -~ может быть выражено через линейное
ускорение -зг- автомобиля. Принимая радиус качения гк примерно постоянным, получаем
du>K I dv
В результате сила Pj инерции автомобиля определится из следующего
выражения (без учета влияния вращающихся деталей двигателя и трансмиссии автомобиля):
§ 2. ОПРЕДЕЛЕНИЕ ТАНГЕНЦИАЛЬНЫХ РЕАКЦИЙ, ДЕЙСТВУЮЩИХ
НА КОЛЕСА АВТОМОБИЛЯ
В общем случае движения автомобиля на каждое из его колес могут
действовать три реакции: радиальная Z, направленная перпендикулярно опорной
поверхности, тангенциальная X, лежащая одновременно в плоскости вращения и
опорной плоскости колеса, и боковая У, лежащая в опорной плоскости и
направленная перпендикулярно средней плоскости колеса. Вводим обозначения:
ZJ; Х'х и FJ—радиальная, тангенциальная и боковая реакции, действующие
на внутреннее колесо передней оси;
Zj'; Х'[ и Y"x — радиальная, тангенциальная и боковая реакции,
на внешнее колесо передней оси;
радиальная, тангенциальная и боковая реакции,
на внутреннее колесо задней оси;
Z'2, Х'2 и
У2
ур
Z2; Х"2 и У"2 — радиальная, тангенциальная и боковая реакции,
действующие
действующие
действующие
на внешнее колесо задней оси.
Так как весь вопрос рассматривается применительно к двухосному автомобилю
с задней ведущей осью, то колеса передней оси являются ведомыми, поэтому
действующие на них тангенциальные реакции Х[ и Х'[ направлены против качения
колес, а согласно изложенному выше о качении автомобильного колеса при
ускоренном движении автомобиля эти реакции (их абсолютные значения) определятся
из выражений
(24)
"__ , 1 dv
где /—коэфициент сопротивления качению;
1 dv
JH1 —у — — сила, затрачиваемая на ускорение вращения переднего колеса
гк
{см. уравнение (23)].
Уравнения (24) не учитывают лишь влияния весьма малых моментов Mw
сопротивления воздуха вращению колес и Мг трения в подшипниках колес.
При равномерном движении автомобиля |^- = 0 ) уравнения (24) имеют вид:
Тангенциальные реакции Х2 и Х'^у действующие на задние ведущие колеса
автомобиля, зависят от вращающего момента двигателя МтУ передаточных чисел
Определение тангенциальных реакций, действующих на колеса автомобиля
49
механизмов трансмиссии, конструкции диференциала, радиуса ведущих колес и
других конструктивных параметров автомобиля.
На фиг. 45 изображена схема передачи вращающего момента от двигателя
к задним ведущим колесам автомобиля. Вращающий момент Мт от коленчатого
вала двигателя через сцепление подводится к коробке передач. Если пренебречь
сопротивлением воздуха вращению маховика и деталей сцепления, то при
установившемся движении (ot)m = const) момент Мкп, подведенный к коробке
передач, равен моменту Мт. Если же принять вращение ускоренным, то часть
момента Мт затратится на разгон вращающихся деталей двигателя и сцепления; при
этом получим:
Мкп =Mm-Jmd^, (25)
где Jт — момент инерции вращающихся деталей двигателя и сцепления;
——■ — угловое ускорение вращения этих деталей.
Фиг. 45. Схема передачи
вращающего момента от коленчатого
вала двигателя к ведущим
колесам автомобиля.
При определении максимальных тангенциальных реакций момент Мт в
уравнении (25) обычно принимается равным вращающему моменту, соответствующему
внешней характеристике двигателя. Однако при этом получается некоторая
неточность, заключающаяся в том, что при разгоне автомобиля, а следовательно,
и его двигателя, вращающий момент Мт не остается таким же, как при
установившемся рабочем режиме, чему соответствует внешняя характеристика
двигателя. Это изменение вращающего момента объясняется тем, что при разгоне
двигателя его тепловое состояние не соответствует тепловому состоянию при работе
двигателя на установившемся рабочем режиме из-за тепловой инерции; кроме того,
при этом может происходить некоторое обеднение горючей смеси, что зависит
от конструкции и регулирования карбюратора.
При неустановившемся движении автомобиля вращающий момент двигателя
может быть больше или меньше его величины при установившемся рабочем
режиме двигателя. Однако согласно опытным данным при разгоне двигателя
обычно происходит некоторое уменьшение вращающего момента (по
сравнению с установившимся рабочим режимом) и тем больше, чем больше ускорение —~ ,
поэтому в уравнении (25) целесообразно момент Мт принимать равным
действительному вращающему моменту, развиваемому двигателем при заданном его
рабочем режиме.
Момент Мкп [уравнение (25)J, подведенный к коробке передач,, изменяется
в ней в соответствии с передаточным отношением iK включенной передачи и
к. п. д. v\K механизма. В соответствии с этим получим выражение для
вращающего момента Ме на карданном валу:
Ме = Мкп iK. т),, = (Мт - Jm d-%f\ щ. (26)
Е. А Чудаков
2232
50 Силы и реакции, действующие на автомобиль при его движении
Этот момент подводится к главной передаче автомобиля, где изменяется
в соответствии с передаточным числом /0 этой передачи и ее к. п. д. т|0. Таким
образом, для вращающего момента Мру подведенного через полуоси к обоим
ведущим колесам автомобиля, получаем выражение
Wm, (27)
где т\т = т\к yj0 — к. п. д. трансмиссии автомобиля.
Необходимо отметить, что при этом мы не учитываем влияния инерции
вращающихся деталей механизмов трансмиссии. Однако все они обладают весьма
малым моментом инерции, и поэтому принятое допущение не вызывает заметной
ошибки.
Распределение вращающего момента Мр по колесам — внутреннему и
внешнему — ведущей оси зависит от конструкции диференциала, введенного в привод
к этим колесам и от условий движения автомобиля. Вводим понятие о коэфи-
циенте k распределения момента Мр по ведущим колесам. При этом имеем:
М'
k~~-JLy или Мр = kMp, Мр = (1—k)Mp, (28)
Мр
где М — момент, подведенный к внутреннему колесу ведущей оси и
ЛГ — момент, подведенный к внешнему колесу ведущей оси.
Согласно экспериментальным данным, полученным при испытании диференциа-
лов различной конструкции [41], можно принять, что при отсутствии
пробуксовывания внутреннего колеса задней оси автомобиля коэфициент k остается
постоянным для диференциалов каждого вида. При этом простому шестеренчатому
диференциалу, обладающему малым внутренним трением, соответствует
коэфициент k, изменяющийся в пределах 0,55—0,6 в зависимости от качества
изготовления, конструкции и состояния механизма. При кулачковых диферекциалах
повышенного трения коэфициент k может достичь значения, равного 0,85. При
самоблокирующемся диференциале (и отсутствии пробуксовывания внутреннего
колеса) коэфициент k равен единице.
При бездиференциальной оси коэфициент k уже не остается постоянным и
зависит от вращающего момента Мр (или от полной суммарной окружной силы Рр).
На основании уравнений (15) и (28), а также учитывая инерцию задних
ведущих колес, получаем выражения для полных окружных сил Р' и Р'\
соответствующих внутреннему и внешнему колесам ведущей оси:
Д/f / К L 1 Я I К
1VL JK2 ,, ктр — JK2 ~JT
r\ r III III
rK
d(
[P ~~ Jk2 ~~df {L ~ К}ШР ~~ JfC2 ~~dF
(29)
K-J«2^fr <1-*)A*p-
Pp= ^- = — ^-, (30)
1к 'к
где JK2 — момент инерции;
-^—угловое ускорение;
rK—радиус качения заднего колеса автомобиля.
Угловое ускорение -~- так же, как и радиус гк качения для внутреннего и
внешнего колес задней оси могут быть приближенно приняты равными между
собой.
Согласно приведенным выше данным [уравнение (15)] о качении эластичного
колеса, тангенциальные реакции, действующие на ведущие колеса, равны полным
окружным силам, уменьшенным на силу сопротивления качению. При этом
получим:
Определение тангенциальных реакций, действующих на колеса автомобиля 51
Пользуясь этими уравнениями, а также уравнениями (27), (29) и (30), получим:
х'2-\{мт- jm **)имш-Л.d-w]-h~f^- (31)
-f&. (32)
Угловые ускорения -—? и -^~- можно выразить через линейное ускорение ~тт-
автомобиля.
Принимая приближенно радиус гк качения постоянным, получим:
da» I dv
= ;
к Ку dt rK at '
. ioiK dv
dt dt о* ~~ rK dt '
После этого уравнения (31) и (32) можно переписать в следующем виде:
)~--fZ2; (33)
1 r
(o4)
к
Сумма тангенциальных реакций Х'о + Х% пРеДСтавляет собой свободную
суммарную окружную силу Ра на задних ведущих колесах автомобиля. Таким
образом, получим
Гк гк
Полная суммарная окружная сила Рру равная сумме полных окружных сил Р1
и Р", превышает силу Ра на величину, затраченную на качение обоих колес
задней ведущей оси f{Z'2 + Z"2):
ро = ра + /(Z2 + Zl) - Мт l-^f^ - -L Цт%/к\т + 2JJ ~ . (36)
При установивш емся движении автомобиля (-J = 0 ) получим:
' f Zl); (37)
(38)
Полученные выше уравнения для тангенциальных реакций Х'2 и X"v а также
для свободной суммарной окружной силы Ра соответствуют тому условию, что
колеса автомобиля обладают элестичностью и что при качений их по жесткой
опорной поверхности имеет место потеря, определяемая коэфициентом /. При
качении жестких колес по жесткой опорной поверхности коэфициент /
равен нулю, и тангенциальные реакции в случае ускоренного движения
автомобиля определятся из выражений:
Х2 = Мт *Уй1_.^.(Ув|йй*Чщ+^) * ; (33<)
XI = Мт (1 -k)if°Tm - ±r [fJttV - k) ^ +JK2] f . (34')
52 Силы и реакции, действующие на автомобиль при его движении
Для свободной суммарной окружной силы Ра при этом получим то же
уравнение, что и для полной суммарной окружной силы Рр\
Ра = Рр= Mjj^s- - jf VjAnn. + 2УК2) % . (35')
При установившемся движении автомобиля эти уравнения примут вид:
Х\ = Мт Ык1«Тт ; (33")
Xl = Мт <1~*W»r"»; (34")
Рр = Ра = МтЩ^. (35")
Приведенное выше определение тангенциальных реакций Лг и х\, так же как
и моментов Мр и Мр, передаваемых через ведущие колеса, соответствует тому
условию, что в привод к ведущим колесам введен диференциал. При
блокированном приводе (при отсутствии диференциала) характер передачи вращающихся
моментов к ведущим колесам значительно изменяется. В этом случае моменты Мр
и Мр , нагружающие колеса и приводные валы, могут достигать весьма больших
значений даже при весьма малой суммарной окружной силе Рр.
Этот вопрос рассмотрен вкратце в § 6 гл. VII.
§ 3. ОПРЕДЕЛЕНИЕ СУММАРНЫХ БОКОВЫХ РЕАКЦИЙ, ДЕЙСТВУЮЩИХ
НА ЗАДНЮЮ И ПЕРЕДНЮЮ ОСИ АВТОМОБИЛЯ
Суммарными боковыми реакциями называются суммы боковых реакций,
действующих на оба колеса каждой оси автомобиля. Вводя для суммарных боковых
реакций обозначения Уг (для передней оси) и У2 (для задней оси), получим:
При прямолинейном движении автомобиля по горизонтальной дороге и при
отсутствии бокового ветра, а также при равномерном распределении полной
суммарной окружной силы Рр по ведущим колесам боковые реакции Yx и У2
отсутствуют.
Определяем суммарные боковые реакции Yt и Yv возникающие при повороте
автомобиля, в наиболее общем случае, когда колеса автомобиля обладают
значительной боковой эластичностью и когда сила Рр неравномерно распределяется по
ведущим колесам.
На фиг. 46 изображена схема движения автомобиля на повороте с учетом
бокового увода его колес. Так как при повороте автомобиля на его колеса
действуют боковые реакции, то колеса будут катиться под некоторым углом к
плоскости вращения, как это изображено на фиг. 46. Вследствие наличия бокового
увода передних (oj и Ьх) и задних (^ и о2) колес автомобиля скорость Va
точки А (середина задней оси) направлена по отношению к продольной оси АВ
автомобиля под некоторым углом о2, а скорость Vb точки В (середина передней
оси)—под некоторым углом 8j по отношению к средней плоскости передних колес,
повернутых на некоторый угол а, принятый приближенно одинаковым для обоих колес.
Если бы колеса автомобиля не обладали эластичностью в боковом
направлении и если бы в связи с этим боковой увод колес отсутствовал, то каждое из
колес катилось бы в плоскости своего вращения, и мгновенный центр вращения
автомобиля располагался бы в точке О'. Благодаря же наличию бокового увода
колес мгновенный центр вращения автомобиля располагается в некоторой точке Ог
положение которой зависит не только от угла а поворота управляемых колес, но
Определение тангенциальных реакций, действующих на колеса автомобиля
53
также и от боковой эластичности передних и задних колес автомобиля, а в связи
с этим от скорости v автомобиля и радиуса его поворота.
Отрезок OD (перпендикуляр из точки О на ось АВ на фиг. 46) принимаем за
радиус R поворота автомобиля.
Так как обычно радиус R поворота значительно больше колеи В автомобиля,
то углы §2 и $2 бокового увода задних колес могут быть приняты
приближенно равными между собой и углу о2 бокового увода задней оси.
Пользуясь фиг. 46, получим:
AD A *' AD A ^ AD
При малом значении отношения
В
можно принять:
х * AD
Аналогично этому могут быть приняты приближенно равными между собой и
углу ох бокового увода передней оси углы Si и о" бокового увода передних
колес. ,
Однако если это справедливо |
для передней оси автомобиля, не
нагруженной окружной силой, то
для задней ведущей оси
автомобиля это положение может быть
принято лишь при условии
передачи через ось такой полной
суммарной окружной силы Рр, при
которой еще не начинается
пробуксовывание внутреннего колеса
оси. При буксовании
внутреннего колеса ведущей оси оно
одновременно начинает
скользить вбок (благодаря боковой
эластичности колеса), в
результате чего угол &2 бокового
увода этого колеса получается
меньше угла о2 бокового увода
внешнего колеса. Этот вопрос
будет рассмотрен более подробно
в гл. V.
Для определения суммарных
боковых реакций Yx и F2,
действующих соответственно на колеса передней и задней осей автомобиля, на
фиг. 47 изображена схема сил, моментов и реакций, действующих в
горизонтальной плоскости на автомобиль при его повороте.
Для того чтобы можно было рассматривать автомобиль как бы находящимся в
равновесии, к его центру тяжести приложены силы инерции Т—тангенциальная
и N—нормальная. Кроме того, приложен еще инерционный момент Мр который
определяется из выражения:
Af=y£=Afp«£, (39)
где М — масса автомобиля;
J—момент инерции массы М автомобиля относительно вертикальной оси,
проходящей через центр тяжести;
Фиг. 46. Схема
движения автомобиля
на повороте с
учетом бокового
увода его колес.
54
Силы и реакции, действующие на автомобиль при его движении
р— радиус инерции массы М автомобиля относительно той же оси;
на фиг. 47 принято соответствующим
плоскости
dm ^
-7i— угловое ускорение автомобиля.
Направление инерционного момента А
ускоренному вращению автомобиля (-^- ;
Суммарные боковые реакции Уг и У2 действуют перпендикулярно
передних и задних колес.
Тангенциальные реакции Х[ и Х\, действующие на передние колеса,
определяются из уравнений (24) или приближенно из уравнения (24'); действующие на
задние колеса реакции Х2
и Х2 определяются из
уравнений (33) и (34).
Если учесть трение в
диференциале силовой
передачи автомобиля, то при
повороте последнего
действующие на его ведущие
задние колеса
тангенциальные реакции Х2 и Х<2 не
равны между собой,
поэтому они образуют момент
Му, стремящийся
повернуть автомобиль в горизон-
Фиг. 47. Схема сил,моментов и реакций, действующих на тальной плоскости и опре-
автомобиль при движении его на повороте: деляемый из выражения:
Р — сила сопротивления воздуха; а и Ь — расстояния (по горизонтали) п „ «
от центра тяжести С автомобиля до его осей; L — база автомобиля.
или
В
где В — колея автомобиля.
Полные окружные силы Рр и Р"р могут быть выражены через полную
суммарную окружную силу Рр и коэфициент k распределения этой силы по ведущим
колесам. Пользуясь уравнениями (28) —(30), получим приближенно:
р •
Пользуясь этими, а также предыдущими уравнениями, находим выражение для
момента Mv
= [(2k-l)Pp+f(Zl-Z'2)} -f- .
p+f(Zl-Z2)} -f- . (40)
В случае жестких колес коэфициент / равен нулю, в связи с чем получим:
My = (2k-l)Pp-%-. (41)
При выводе уравнения (40) было предположено, что действующая на
внутреннее колесо тангенциальная реакция Х2 больше тангенциальной реакции х!2,
действующей на внешнее колесо. Это всегда имеет место (при наличии диференциала),
если только внутреннее колесо не пробуксовывает.
На основании полученных данных действие тангенциальных реакций Х2 и Х2
можно заменить действием полной суммарной окружной силы, приложенной в
направлении продольной оси АВ автомобиля и момента Mv. При этом лишь
необходимо дополнительно учесть силу / (Z2 +Z2) сопротивления качению задних колес,
которую объединяем с силой Pw сопротивления воздуха и тангенциальными реак-
Определение тангенциальных реакций, действующих на колеса автомобиля
55
циям Х[ и Хи действующими на передние колеса. При малых значениях угла а
можно принять, что сила Pw и реакции Х\ и Х\ действуют также в направлении
продольной оси АВ автомобиля. Обозначая указанную сумму сил буквой Рь ,
получим:
где /—коэфициент сопротивления качению и
G — полный вес автомобиля.
Тогда схему, изображенную на фиг. 47, можно заменить схемой, приведенной
на фиг. 48.
Силы инерции — нормальная N и тангенциальная Т — равны соответственно
произведениям массы М автомобиля на ускорение центра тяжести — нормальное jCn
и тангенциальное jet-
^ Mv
Фиг. 48. Упрощенная схема сил, моментов и реакций,
действующих 'на автомобиль при движении его на повороте.
Для определения этих ускорений рассматриваем движение автомобиля (его
продольной оси АВ) по отношению к неподвижной системе координат х и у, как
это показано на фиг. 49.
В соответствии с фигурой имеем:
da di
dt
= /«,=
где а) — угловая скорость вращения;
о — угол между осями АВ и х;
-^2 угловое ускорение автомобиля.
Пользуясь фиг. 49, определяем проекции vx и vy полной скорости Vq центра
тяжести С автомобиля на оси х и у. Считая положительным направление этих
скоростей от начала координат и разлагая скорость vc на скорости v и vcn,
получим:
vx = v cos a -{- vcn sin а;
Vy = ^с п cos а — v sin а.
Диференцируя эти уравнения, получим выражения для проекций ускорения
центра тяжести автомобиля:
dvx dv dvr
Jcx =
= —г- cos a — V(o sin a -f-
dt
sin a
cos a,
dvv
"at
dv,
Cn
dt
■ cos a —
со sin a
dv
dt
sin a
55
Силы и реакции, действующие на автомобиль при его движении
Одновременно с этим ускорения jcx и jcy центра тяжести автомобиля,
направленные вдоль координатных осей, могут быть определены непосредственно как
проекции ускорений jCt и jcn- Если скорость vq уменьшается, то
/ex —jet cos a— y'c sin а;
jcy = —jcn cos а—у а sin а.
Решая эги уравнения совместно с предыдущими, получаем окончательные
выражения для ускорений центра тяжести автомобиля:
/Сп ^«я,-^^; (42)
fa =
dv ,
-77 + Men
(43)
Фиг. 49. Схема движения автомобиля на повороте.
Отсюда получаем уравнения для сил инерции 7V и Г, которые необходимо
приложить к центру тяжести автомобиля для того, чтобы рассматривать автомобиль
как бы находящимся в равновесии:
N=M
т = м
law —
dv
Сп
dt
(44)-
(45)
Пользуясь фиг. 48, получим из условия равновесия системы по отношению к
вертикальной оси, проходящей через точку В:
Y2L = Na
My.
(46)
Из условий равновесия системы по отношению к вертикальной оси,
проходящей через точку Л, находим:
YXL cos a = Nb + Mj + My.
(47)
Определение тангенциальных реакций, действующих на колеса автомобиля 57
Пользуясь уравнениями (46) и (47), а также (44) и (39), находим выражения
для суммарных боковых реакций К2 и YA в самом общем случае движения
автомобиля
dvc
(48)
Входящее в эти уравнения ускорение ^-j2- может быть определено в
зависимости от характера движения автомобиля и боковой эластичности его колес.
Как уже было указано, согласно многочисленным экспериментам углы 8^ бокового
увода колес можно принять пропорциональными действующим на эти колеса
боковым реакциям YK . То же относится и к оси, если радиус R поворота
автомобиля достаточно велик и если ни одно из колес этой оси еще не получило
бокового скольжения. В результате углы 82 и 8Х бокового увода задней и
передней осей автомобиля могут быть выражены через суммарные боковые реакции
К2 и
Здесь С2 и d — коэфициенты бокового увода передней и задней осей
автомобиля, численно равные углу бокового увода (в радианах), получающемуся при
действии на ось боковой реакции, равной 1 кг.
Кроме того, углы 82 и о1 могут быть определены при помощи схемы,
приведенной на фиг. 49. Пользуясь этой схемой, получим:
vA -АО'
ИЛИ
VAn = "Г?
BD
BO
ИЛИ
vBn = —- BD = <»BD = <ьа — (uCD — «мг — vcn * (52)
На основании той же схемы (фиг. 49) находим:
В результате получаем:
tg32 = *Ь + V°l ; (53)
„(._y_J^a-. (54,
Углы 82 и 8j бокового увода задней и передней осей автомобиля обычно
весьма невелики. Если принять также небольшим и угол а поворота управляемых
колес, то приближенно получим:
*\\ tgCa-S^a-S,.
58 Силы и реакции, действующие на автомобиль при его двиокении
Тогда уравнения (53) и (54) примут вид:
vCn +■
V
(55)
vCn -^-Ь^
V
Пользуясь этими выражениями для углов увода и уравнениями (50), получим:
v Сп - °>а + va
(56)
Одновременно с этим из условия равновесия системы получим (пользуясь
фиг. 48 и принимая cos a = 1):
(^^) (57)
Подставляя в это уравнение выражения для реакций У2 и Yx из уравнений (56)
и решая его относительно ускорения —~ центра тяжести автомобиля, получим
окончательно:
Таким образом, уравнения (48) и (49) совместно с уравнением (58) определяют
суммарные боковые реакции Y2 и Yx для автомобиля с эластичными колесами
в самом общем случае его движения.
Уравнения (48) и (49) соответствуют общему случаю движения автомобиля при
наличии колес, обладающих боковой эластичностью. Если принять, что колеса
автомобиля обладают эластичностью лишь в радиальном и тангенциальном
направлениях, а что в боковом направлении они являются жесткими, то мгновенный
центр вращения автомобиля всегда будет располагаться на продолжении задней
оси, как это, в частности, изображено на схеме фиг. 46, где точка О'
представляет собой 'мгновенный центр вращения автомобиля с жесткими (в боковом
направлении) колесами.
В этом случае уравнение (58), устанавливающее зависимость между нормальным
ускорением 9.п- центра тяжести автомобиля и угловой скоростью ш, значительно
упрощается.
Согласно фиг. 49 скорость vn любой точки продольной оси АВ автомобиля
в направлении, перпендикулярном этой оси, характеризуется прямой FF. Величина
этой скорости vn равна произведению угловой скорости ш вращения автомобиля
на расстояние от рассматриваемой точки до точки D. В частности, скорость Vcn
точки С—центра тяжести автомобиля равна произведению o>CD. При движении
автомобиля, колеса которого обладают боковой эластичностью, оба множителя
(си и CD) являются переменными, чем и обусловливается сложная зависимость
dvCn
ускорения —7т- от влияющих на него факторов. При колесах, жестких в боковом
направлении, мгновенный центр вращения всегда располагается на продолжении
задней оси, а поэтому точка D (основание перпендикуляра, опущенного из
мгновенного центра вращения на продольную ось АВ автомобиля) сохраняет свое
положение постоянным (точка А). В этом случае отрезок CD = —£, скорость
, dvcn , rf«>
— #<», а ускорение , = — о — ,,
Определение тангенциальных реакций, действующих на колеса автомобиля 59
dvc
Пользуясь этими выражениями для скорости vCn и ускорения ——, получим
уравнения для нормального jcn и тангенциального jet ускорений центра тяжести
[см. уравнения (42) и (43)]:
icn = <ю + * ^ , (59)
let = $ ~ *"а. (60)
Нормальная /V и тангенциальная Т силы инерции в этом случае определятся из
выражений:
( + b^y, (61)
Т=М(~ — Аю«). (62)
В соответствии с этим преобразуются уравнения (48) и (49) для суммарных
боковых реакций:
«га + (о*-р*)-£ м
г2 = м 2 ---/; (63)
Гх cos а = Ж z — + ~y • (64)
Если принять движение установившимся, т. е. принять постоянными скорость v
автомобиля, радиус R его поворота, а также положение управляемых колес
, v dvCn d<&
(угол а), то ускорения —тт- и -^ получаются равными нулю.
В этом случае как при жестких, так и при эластичных колесах автомобиля
суммарные боковые реакции F2 и Yx определятся из уравнений:
П Мл, П *|2 Мл,
Уг=М-£-*о—£=М-2--1---£; (65)
U Мл, h T|2 Мл,
Y1cosa = M^<»v+-£==M-?:.^- + -^. (66)
Входящий в эти уравнения момент Му определится из уравнений (40) или (41).
Полная суммарная окружная сила Рр, входящая в уравнения (40) и (41),
в дальнейшем определяется через коэфициент fp, представляющий собой отношение
этой силы к полному весу G автомобиля:
т -^
W ~~ G '
При этом уравнения (40) и (41) примут вид (G — Mg):
для эластичных колес
Му = [(2ft - 1) yPMg + f(zl — Z2)) \ ; (67)
для жестких колес
My = (2k-l)bMg^. (68)
В результате, используя полученные ранее уравнения для суммарных боковых
реакций, находим окончательно следующие выражения для реакций Y2 и Ylf
соответствующие различным условиям.
60 Силы и реакции, действующие на автомобиль при его движении
Общий случай движения автомобиля с колесами, эластичными во всех
направлениях — радиальном, тангенциальном и боковом [уравнения (48) и (49)J:
-Z;)]|-; (69)
+ [lpMg (2k - 1) + f{Zl - Z*)] £. . (70)
Общий случай движения автомобиля с колесами, эластичными в радиальном
и тангенциальном направлениях [уравнения (63) и (64)]:
^:; (71)
^: ' (72)
Общий случай движения автомобиля с жесткими колесами:
К, = Ж-£-[«*+(*--£)■£] -lpMg(2k-\) ^; (73)
Yx cos a = М ± [«*>+ {ь + -£) J] + ypMg (2k - 1) -g-. (74)
Случай установившегося движения автомобиля с эластичными колесами
[уравнения (65) и (66)]:
у2 = м ±_ w _ [Т/?уИ^ (2* _ 1) + / (Z2 — Z2)] ~ ; (75)
w+hAf(2Ai) +/(4Z)]^ (76)
Случай установившегося движения автомобиля с жесткими колесами:
l)^-; (77)
Y1cosa=AfJj[-wv + ^ Mg(2k — 1) ^- . (78)
При наличии в приводе к ведущим колесам простого шестеренчатого диферен-
циала, обладающего очень малым внутренним трением, полная суммарная окружная
сила Рр распределяется примерно равномерно по ведущим колесам. В этом случае
коэфициент k может быть принят равным 0,5, и второй член в правой части
уравнений (69) — (78) или значительно упрощается или даже отпадает (для случая
установившегося движения автомобиля).
Величина боковой реакции К2, действующей на заднюю ось автомобиля,
оказывает большое влияние на его устойчивость, так как начало бокового
скольжения задней оси представляет наибольшую опасность: при этом начавшийся
занос автомобиля весьма быстро увеличивается, если только водителем не приняты
своевременно меры к его прекращению.
Согласно полученным уравнениям боковая реакция Y7y действующая на заднюю
ось автомобиля в общем случае его движения, зависит от следующих основных
факторов:
1. Скорость v движения автомобиля и радиус R его поворота; в приведенных
уравнениях влияние этих факторов устанавливается выражением М у <&v = М -у- • -jr ,
Определение тангенциальных реакций, действующих на колеса автомобиля 61
определяющим силу инерции, приходящуюся на заднюю ось при движении
автомобиля с постоянной скоростью по кривой постоянного радиуса.
2. Угловое ускорение автомобиля —гг ; в приведенных уравнениях влияние этого
фактора определяется выражением М -у- (b )af-
Согласно полученным ниже данным угловое ускорение ~^~ автомобиля нахо-
дится в прямолинейной зависимости от скорости —т- поворота передних
управляемых колес и имеет положительное значение при повороте управляемых колес
в направлении центра поворота автомобиля (уменьшение радиуса R поворота)
и отрицательное — при повороте управляемых колес в противоположном
направлении. Этим объясняется то, что автомобиль особенно склонен к заносу при
входе в кривую (уменьшение радиуса R). При выходе же автомобиля на прямую
его боковая устойчивость заметно возрастает [35].
Согласно приведенному выше выражению угловое ускорение ~ автомобиля
р2
вызывает увеличение боковой реакции К2 лишь в том случае, когда разность b — —
является положительной {ab > р2), что и имеет место при современной конструкции
автомобилей. При ab=p2 угловое ускорение -^- автомобиля уже не влияет на
боковые реакции У2 и Уг.
3. Неравномерность распределения тяговой силы по ведущим колесам и
величина тяговой силы; в приведенных уравнениях влияние этого фактора определяется
выражением ^г Y/> Mg (2k — 1).
В приводе к ведущим колесам наиболее распространен простой диференциал,
при котором коэфициент k весьма близок к 0,5, поэтому влияние указанного
фактора на величину боковой реакции Y2 сравнительно невелико.
4. Разность между сопротивлением качению внутреннего и внешнего ведущих
колес. Влияние этого фактора определяется выражением -^rfi^l — ^)-
Этот фактор в связи с малым значением коэфициента / также оказывает весьма
небольшое влияние на величину боковой реакции У2.
§ 4. ОПРЕДЕЛЕНИЕ СУММАРНЫХ РАДИАЛЬНЫХ РЕАКЦИЙ,
ДЕЙСТВУЮЩИХ НА ЗАДНЮЮ И ПЕРЕДНЮЮ ОСИ АВТОМОБИЛЯ
Под суммарными радиальными реакциями Z разумеются суммы реакций,
действующих соответственно на оба колеса каждой из осей автомобиля
перпендикулярно опорной поверхности, или что то же по направлению радиуса каждого
из колес.
Ниже выводятся уравнения для определения суммарных радиальных реакций для
двухосного и трехосного автомобилей, а также для тягача с прицепом.
Двухосный автомобиль. На фиг. 50 изображена схема сил, моментов и
реакций, действующих на двухосный автомобиль в общем случае прямолинейного его
движения на подъем.
При этом не учтено лишь влияние момента, затрачиваемого на ускорение
вращения передних колес автомобиля [уравнение (24)], которым в данном случае можно
пренебречь.
Пользуясь фиг. 50 и исходя из условия равновесия системы около оси,
проходящей через точки опоры колес передней оси автомобиля, получим:
Z2L — Mfl — Mp — Pjhg — Pwhw — Ga cos a — Ghg sin a = 0. (79)
Моменты сопротивления М^и Ж/2 согласно схемам, приведенным на фиг. 6—10,
равны произведению радиальных реакций Zt и Z2 на смещение а этих реакций
62
Силы и реакции, дейсгвующие на автомобиль при его двшясении
по отношению к вертикальной оси, проходящей через центры колес. Принимая
приближенно эти моменты равными моментам сопротивления качению колес,
определяемым уравнением (13), получим:
= /OrK cos a.
(80)
Из условия равновесия системы по отношению к продольной оси A3
автомобиля (фиг. 50) получим:
или
= fGcosa+Pw
G sin a.
(81)
Пользуясь уравнениями (79), (80) и (81) и принимая hg= hw, что близко
соответствует действительности, получим:
Z2L = G [a cos a + ^ph — f(h — rlc) cos a]. (82)
Фиг. 50. Схема сил, моментов и реакций, действующих на автомобиль в случае
его ускоренного движения на подъем.
Вводя понятие о коэфициентах перераспределения веса автомобиля для задней
его оси (т2) и для передней (wx), получим:
G а
G * Ь
(83)
где G2—вес автомобиля, приходящийся на колеса задней оси;
G} — вес автомобиля, приходящийся на колеса передней оси.
Пользуясь выражением для коэфициента ш2 и уравнением (82), получим:
ХР а
cosa.
(84)
При том же значении угла а подъема коэфициент гп2 возрастает по мере
увеличения коэфициента ^р • Максимальное значение коэфициента *[р определяется
Определение тангенциальных реакций, действующих на колеса автомобиля 63
сцеплением ведущих колес с опорной поверхностью. Для автомобиля с двумя
задними ведущими колесами получим:
__Ppmax _(?+/)Z2_ (? + /)m2G2 _ ( f а
t/?max — gp— —- q — q — Vе? T" J) -£- Щ-
Входящая в эти уравнения максимальная окружная сила Рр тах определяется как
сумма максимальных значений полных окружных сил, развиваемых всеми ведущими
колесами автомобиля [см. уравнение (16)].
Решая это уравнение совместно с уравнением (84), получим общие выражения
для максимальных значений коэфициентов т2 и *{р '
__L\a —f{hs - rK)] cos a ^ Lcosa .
~ tT7 ~ L=(i+fjTb ' ( }
^ (y
Согласно уравнениям (85) и (86) максимального значения коэфициенты т3
и ^ достигают при движении автомобиля по горизонтальной плоскости (а = 0);
при этом получим:
[a— f(hg-rK)] _ (
WT7T -
Максимальный подъем, который может преодолеть автомобиль по условиям
сцепления его ведущих колес с опорной поверхностью, определится из
следующих соображений. Принимая при этом движение установившимся (-Jr= 0; Pj = 0]
и в связи с малым значением скорости автохмобиля, пренебрегая сопротивлением
воздуха (Pw = 0), получим [см. уравнение (81)]:
Рр max = (<р + f)w>iG2 = /G cos a + G sin a.
Пользуясь этим уравнением и определяя из него коэфициент т29 получим
(имея G, = ~ О) :
Л / COS a + Sin а
Решая далее это уравнение совместно с уравнением (85), получим выражение
для определения максимального значения угла а подъема:
~ L - (? + /) hg ■
Зная угол amax и пользуясь уравнениями (85) и (86), можно определить
значения коэфициентов т2 и ^р, соответствующие максимальному подъему.
На фиг. 51 приведены кривые изменения максимальных значений коэфициентов тг
и -\р [уравнения (87) и (88)] для движения автомобиля по горизонтальной дороге (а=0)
и на максимально допустимый по сцеплению подъем, а также значения tgaraiiX
[уравнение (89)] в зависимости от значения коэфициента ср сцепления между ведущими
колесами автомобиля и опорной поверхностью.
При этом для отрезков а и hgy характеризующих расположение центра тяжести
автомобиля, были приняты значения: -^- =0,5; -~ = 0,3, а коэфициент /
сопротивления качению был принят равным 0,015.
Если в полученных выше уравнениях для коэфициентов т2 и -\р, а также для
угла атах принять / ~ 0, то получим уравнения, соответствующие автомобилю
с жесткими колесами.
64
Силы и реакции, действующие на автомобиль при его движении
Движение автомобиля на максимально допустимый по сцеплению подъем атах:
L cos «max |
__ <?a CQS «max . 1
(90)
Движение автомобиля по горизонтальной плоскости (а=0):
Z, ]
;
(91)
Аналогично изложенному находится выражение для коэфициента wx
перераспределения веса для передней оси автомобиля. Пользуясь фиг. 50, получим из
2 max
1,3
12
f.l
- n я
-0,6-
0,4-
-П ?
У
|
-
У
Лда
Vp (Of
/
/У
max
>
m?(a=O)
i
max)
/
/ /
/
1 у
7
У
7p (<*тах)
1
i
V
0,7
0,6
0,5
0,3
0,2
0,t
0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 <p
Фиг. 51. Изменение максимальных значений коэфициентов
m2 и ip (при движении автомобиля по горизонтальной
дороге), максимального угла а подъема и соответствующих
ему значений коэфициентов т2 и \р в зависимости от коэ-
фициента сцепления ср.
условия равновесия автомобиля относительно оси, проходящей через точки опоры
задних колес:
ZXL.+ Mfl + Mfi + Pjhg + Pwhw + Ghg sin a — Gb cos a = 0. (92)
Пользуясь этим уравнением и уравнениями (80) и (81), получим (принимая
= G \b cos a — ~(phg + /(A — rK) cos a];
(93)
Определение суммарных радиальных реакций, действующих на оси автомобиля 65
или
= cos a —
+ f
— rK
-£—* cosa.
(94)
Подставляя в уравнение (94) выражение для коэфициента ур из уравнения (86),
получим выражение для минимального значения коэфициента тх\
_ L [Ь - (у -f /)hg +f(hg - rK)\ cosamax L[b - (<? + /)hg) cosamax
lmin"~ H^ —(<?+/) ^] ~ &[L_(cp+n/,i ' VyD>>
При движении по горизонтальной плоскости (а = 0) получим:
(96)
При помощи уравнений (89), (95) и (96) на фиг. 52 построены кривые
изменения минимального значения коэфициента т1 при преодолении автомобилем ма-
m*
/
0)
*mia
0,9
0,8
0,7
0,6
0,5
0,2 "0,3 ОЛ 0,5 0,6 0,7 0,8 0,9 ср
Фиг. 52. Изменение минимального значения коэфициента т-^ и
значения того же коэфициента, соответствующего максимальному
углу а подъема в зависимости от коэфициента сцепления ср-
ксимального подъема а и при движении его по горизонтальной плоскости в
зависимости от коэфициента <р сцепления между колесами автомобиля и опорной
поверхностью.
При построении этих кривых для отрезка b принято значение, равное 0,51,
а для остальных величин, входящих в уравнение (95) и (96), взяты те же значе-
чения, что и при построении кривых на фиг. 51.
Если в полученных выше уравнениях (95) и (96) для коэфициента т1 принять
/=0, то получим уравнения, соответствующие автомобилю с жесткими колесами.
Движение автомобиля на максимально допустимый по сцеплению подъем ашах:
/.(fr-cp/^COSa
mi min = ии _uh \ > (97)
движение автомобиля по горизонтальной плоскости (а = 0):
(98)
Пренебрегая последними членами в уравнениях (84) и (94), получим
приближенные уравнения для суммарных радиальных реакций Z2 и ZA:
Z2 = G2m2 = G21 cos a -j- yp-£-) = G (~ cos a + Тр-т^); \
V\ \ (99)
Zx = G1ml = G1(cosa~~yp-f-)= G (-y-cosa — ^ -^t) .
5 E. А. Чудаков 2232
66
Силы и реакции, действующие на автомобиль при его движении
При движении автомобиля в горизонтальной плоскости эти уравнения примут вид:
(100)
Эти уравнения используются в дальнейшем при исследовании динамики
автомобиля.
Трехосный автомобиль. Величина суммарных радиальных реакций,
действующих на колеса средней и задней ведущих осей трехосного автомобиля, зависит от
Фиг. 53. Схема сил, моментов и реакций, действующих на трехосный
автомобиль в случае его ускоренного движения на подъем.
конструкции подвески этих осей. Ниже рассмотрен указанный вопрос
применительно к балансирной рессорной подвеске, которая в настоящее время имеет
наибольшее распространение.
На фиг. 53 изображена схема сил, моментов и реакций, действующих на
трехосный автомибиль в случае его ускоренного движения на подъеме. Эта схема
аналогична схеме, приведенной на фиг. 50 для двухосного автомобиля.
Из условия равновесия системы относительно оси ЛВ и оси,
перпендикулярной опорной поверхности, получим:
Pwi-Pj+Gsina+fZ1+fZ1+fZ9 = Ppt + Rp9; (101)
G cos a =Z1 + Z2 + Z3, (102)
где Z2, Z3, РР2 и РРз — нормальные реакции и тяговые силы для второй и третьей
осей автомобиля.
Из условия равновесия системы по отношению к оси балансирной подвески
ведущих осей получим:
Zx{a + Ь) + Pwhw + Pjhg+ Ghgsin a - (Z3 — Z2) -£- +
+ Mfl + Mu + Mfz = Gb cos a,
(103)
где n — расстояние между ведущими осями;
а и b — расстояние от центра тяжести до передней оси и до шарнирного
крепления подвески ведущих осей.
Определение суммарных радиальных реакций, действующих на оси автомобиля 67
Сумма окружных сил РР2 -f РРз равна полной суммарной окружности силе Р
т. е.
Сила Рр определяется из того же уравнения (36), что и для двухосного
автомобиля, при этом лишь необходимо учесть момент инерции JK не для двух, а для
четырех ведущих колес.
Сумма сил сопротивления качению всех колес равна силе Рр а сумма
моментов Mf — моменту Р/к.
Подставляя полученные выражения в уравнение (103), получим:
Zx (а + Ь) + Pwhw + P/ig + Ghg sin a + PfrK — (Z3 - Z2) -y = Gb cos a. (105)
Из уравнения (105) следует, что значение радиальной реакции Zx зависит от
разности реакций (Z3 — Z2).
Если реакции Zs и Z2 равны между собой, то для реакции Zx получим тоже
выражение, которое было уже получено для двухосного автомобиля [уравнение (93)], При
положительном значении разности реакций (Z3 — Z2) реакция увеличивается
и, наоборот, при отрицательном значении разности реакций (Z3 — Z2) реакция Zx
уменьшается.
Исключая из уравнения (105) силу Pj [на основании уравнений (101) и (104)J,
получим:
Zl(a + b)+Pw(hw-hg) +
+ Pphg - Qf{h - rK) cos a - (Z3 - Z2) 4- = Gb cos a.
(106)
Разность реакций (Z3 — Z2) зависит от конструкции подвески средней и задней
ведущих осей трехосного автомобиля. В частности, эта разность зависит от того,
как передаются реактивные
моменты от этих осей на
раму автомобиля.
На фиг. 54
представлена схема наиболее
употребительной подвески двух
ведущих осей трехосного
автомобиля. Ведущая
тележка установлена на раме
автомобиля на одной общей
оси U. Рессоры укреплены
жестко на башмаке,
который свободно посажен на
эту ось. Ведущие оси
крепятся к концам рессор, как Фиг. 54. Схема сил, моментов и реакций, действующих на
это представлено на фигуре. задние ведущие оси трехосного автомобиля.
Никаких других соединений,
передающих усилия между осями и рамой автомобиля, не имеется. В этом случае
обе ведущие оси связаны между собой таким образом, что они могут совместно
воспринимать реактивный момент.
На фиг. 54 нанесены силы, моменты и реакции, действующие на обе ведущие оси.
Реакция 5 тяговой силы, передаваемой от ведущих колес к раме автомобиля,
равна полной окружной силе Рр или сумме сил (РР2 + РРз) за вычетом сил
сопротивления качению колес (Р^2 + Я/з), т. е.
Рассмотрим равновесие тележки относительно оси U. При конструкции, которой
соответствует схема, представленная на фиг. 54, равнодействующая всех сил,
действующих на обе оси автомобиля, очевидно, должна пройти через ось (/, относительно
68 Силы и реакции, действующие на автомобиль при его движении
которой тележка может поворачиваться, т. е. момент всех сил относительно этой
оси должен быть равен нулю. На основании этого получаем:
(Z3 - Z%)\ = (Pp2+PP3 — Pf2-Ph)rc + Mfi + Mh , (107)
где к — расстояние от центра оси U до опорной плоскости. Заменяя сумму сил
(РР2 + РРз) равной ей силой Рр, а моменты Mf2 и Mfz равными им
величинами РрГк и PfZrKi получим:
(Z3 — ZJ \ = РРк — (Р/2 + Pfb)(ic - rK). (108)
Сумма сопротивлений качению двух ведущих осей (Р^2 + Pf3) равна
вертикальной нагрузке на те же оси, умноженной на коэфициент сопротивления
качению; сумма же реакций Z2 + Z3 может быть выражена через реакцию Zv
Поэтому преобразуя уравнение (108), получаем:
(Z3 — Z2)-^^=PpK — (Gcosa~Z1)(K — rK)f. (109)
Подставляя полученное выражение для разности реакций (Z3 — Z2) в
уравнение (106) и решая его по отношению к реакции Zl9 получаем окончательное
выражение для этой реакции:
Gb cos ol — Pw (hw — hs) — Pp (hg — K) + Gf (hg — к) cos a
Zl = a~W~~f(K - rK) •
Сравнивая это выражение с выражением для реакции передней оси двухосного
автомобиля [уравнение (93)], находим, что при конструкции трехосного
автомобиля, представленной на фиг. 53, облегчение его нередка при передаче тяговой
силы через ведущие колеса получается значительно меньше, чем для двухосного
автомобиля (так как коэфициент при силе Рр в этом случае получается примерно
вдвое меньше, чем для двухосного автомобиля).
Отсюда следует, что и сумма реакций (Z2 + Z3) также получает весьма малое
изменение. Если допустить для данной конструкции постоянство суммы реакций
(Z2 + Z3), то для коэфициента ш2 изменения радиальной реакции, действующей
на среднюю ведущую ось трехосного автомобиля, получим следующее выражение:
Z.% -f- ZzZ§ — 2Го
Z
~ " z
где коэфициент m2 — отношение реакций на среднюю ось при движущемся
автомобиле и при автомобиле, стоящем неподвижно на горизонтальной плоскости.
Пользуясь уравнением (109) и имея в виду, что максимальное значение
суммарной окружной силы Рр равно силе сцепления ср (Z2+ Z3), получим:
(Z3 — Z^\= <?k(Z2 + Z3) - (Z2 + Zz){K — rK)f.
При помощи этого уравнения и уравнения (111) находим выражение для
минимального значения коэфициента т.;.
Коэфициент т2 получается значительно меньше единицы, но так как общая
сумма реакций (Z2 + Z3) остается почти неизменной, то отсюда следует, что при
данной конструкции подвески и при наличии максимально возможной тяговой силы
средняя ось автомобиля весьма сильно разгружается, а следовательно, получается
значительная дополнительная нагрузка на заднюю ведущую ось. При этом
разгрузка средней оси и нагрузка задней получается тем больше, чем выше уста-
Определение суммарных радиальных реакций, действующих на оси автомобиля 69
новлеиа точка подвеса ведущих осей, т. е. чем больше расстояние к. Для
примера примем следующее соотношение между величинами /г, гк и к:
п = 2,5гк = 2к.
В этом случае, принимая для коэфициента сцепления ср значение, равное 0,5,
и принимая (при условии очень хорошей дороги) коэфициент сопротивления
качению / равным нулю,
получаем коэфициент т2
около 0,5, т. е облегчение
средней оси достигает 50%-
На ту же величину
увеличится нагрузка на заднюю
ось.
Такое
перераспределение нагрузок
обусловливается тем обстоятельством,
что реактивный
скручивающий момент воспринимается
осями и нагружает заднюю
ось автомобиля, разгружая
среднюю. Это
неблагоприятно отражается на
проходимость трехосного
автомобиля, так как при этом
увеличивается давление колес задней оси на дорогу. Для избежания указанного
недостатка обычно средняя и задняя оси снабжаются специальными реактивными
штангами, которые воспринимают реактивный момент и передают его
непосредственно от каждой оси к
раме автомобиля. На
фигуре 55 схематически
представлено расположение двух
ведущих осей трехосного
автомобиля, причем каждая
из осей снабжена
реактивной штангой D, шарнирно
укрепленной к раме
автомобиля и к картеру главной
передачи каждой оси.
Схема сил, моментов и
реакций, действующих при
этом на ведущую тележку
трехоснога автомобиля,
изображена на фиг. 56.
Фиг. 55. Схема балансирной подвески задних ведущих осей
трехосного автомобиля, снабженного реактивными
штангами.
Фиг. 56. Схема сил, моментов и реакций, действующих на
задние ведущие оси трехосного автомобиля, снабженного
реактивными штангами.
Из условия равновесия системы относительно оси U получим
или
(Z, - Z2) -2- = Ррк - (Р^ + Ph) {к - rK) - (Т2 + Г3)(/ + rK — к), (113)
где 72 и 73 — реакции, действующие на реактивные штанги средней и задней
осей автомобиля.
Реакции 72 и Тъ определяются из выражений:
Т р Jji. • т
* 2 — * Р2 1 щ 1 **
г3 =
70 Силы и реакции, действующие на автомобиль при его движении
Подставляя эти выражения в уравнение (113), получим:
(Z3 - Zj\ = PPic-(Pf2 + Р/з) (к - rK) -Ppr-f{l + гк-к). (114)
Из сравнения уравнения (114) с уравнением (108) находим, что разность между
нормальными реакциями Z3 и Z2 в случае наличия реактивных штанг получается
значительно меньше. При этом разность Z3 — Za получается тем меньше, чем
меньше разность между высотой к расположения оси U и радиусом колеса гк.
Если принять к — гк, то согласно уравнению (114) реакции Z3 и Z2
получаются равными между собой. Разность (к — гк) для большинства конструкций
современных трехосных автомобилей является величиной очень малой, а для
некоторых конструкций она почти равна нулю. Таким образом, вследствие
применения реактивных штанг нагрузки на среднюю и заднюю оси трехосного
автомобиля могут быть сохранены равными между собой независимо от условий
движения автомобиля.
При наличии реактивных штанг на ведущих осях трехосного автомобиля
передняя ось значительно больше разгружается, чем это имело место при
конструкции подвески ведущей тележки, представленной на фиг. 54. При наличии
реактивных штанг, принимая радиальные реакции, действующие на среднюю и
заднюю оси автомобиля, равными между собой, получим, пользуясь уравнением (106),
(115)
гг = —ь
Gb cos о — Pphg + Gf (lig — rK) cos a
_____
Таким образом, в этом случае реакция Zx изменяется совершенно по тому же
закону, по которому она изменялась и для случая двухосного автомобиля
[уравнение (93)].
Наличие реактивных штанг, помимо уравнивания давления на среднюю
и заднюю оси трехосного автомобиля, оказывает весьма положительное действие
еще в том отношении, что по мере увеличения тяговой силы на ведущих осях
нагрузка на эти оси увеличивается, т. е. в этом случае по мере увеличения
тяговой силы увеличивается суммарная реакция (Z2 + Z%), поэтому повышается
и максимальное значение той окружной силы, которая может быть передана через
ведущие колеса средней и задней осей автомобиля при том же значении коэфи-
циента ср сцепления между колесами и дорогой.
Автомобиль-тягач. На фиг. 57 изображена схема сил, моментов и реакций,
действующих на автомобиль-тягач с прицепом, при движении на подъем под углом а.
Наибольший практический интерес представляет определение реакции Z2 между
дорогой и задними ведущими колесами автомобиля, так как величиной этой
реакции определяется максимальное значение тяговой силы Рр, а следовательно,
и общий вес прицепа G', который может быть допущен при работе автомобиля
на заданной дороге.
Так как максимальное изменение реакции Z2 будет происходить при
максимальной силе Рр и при очень малой скорости движения, то силой сопротивления
воздуха Pw в этом случае можно пренебречь.
Для того чтобы можно было определить величины реакций Zx и Z2,
рассмотрим отдельно равновесие автомобиля-тягача. Схема сил, моментов и реакций,
действующих на автомобиль-тягач, представлена на фиг. 58. Из условия равновесия
системы относительно оси, проходящей через точки опоры задних ведущих колес
автомобиля, определяем реакцию Zx:
Zx (a+b)= Gb cos <x — (Pj+Q sin a) hg — GrKf cos a — P'hp, (116)
где P' — реакция прицепа на автомобиль;
hp — высота приложения силы Р'.
Определение еуммарных радиальных реакций, действующих на оси автомобиля 71
Из условия равновесия системы относительно оси ЛВ находим:
I \
РА + Ph + Р' = \*Ыа + ~ + /cosa)G+P'. (117)
Фиг. 57. Схема сил, моментов и реакций, действующих на автомобиль-тягач с прицепом.
Если взять отдельно равновесие прицепа, то можно определить тяговую
'= G'sina
L
Л P/2 = G' ( sina+ -у +/cos aj .
(118)
Фиг. 58. Схема сил, моментов и реакций, действующих на автомобиль-тягач.
Из сравнения уравнений (117) и (118) находим, что силы, затрачиваемые на
движение самого автомобиля и на движение прицепа, пропорциональны общему
весу этих агрегатов; сила же Рр равна сумме этих сил. В дальнейшем обозначим
отношение полного веса прицепа к полному весу автомобиля-тягача буквой к:
72 Силы и реакции, действующие на автомобиль при его движении
В таком случае получим соотношение между тяговыми силами Рр и Р'\
р р' Ь + * . р' __ р &
р k ' ~~ *> Л +1 *
На основании этого, преобразуя уравнение (116), получим:
(119)
Так как сумма реакций Zj + Z2 равна G cos a, то для реакции Z2 получаем
выражение:
Z2(a + *) = Gacosa + pphfd^L __ о/(А* - г* ) cosa. (120)
Если сравнить уравнения (119) и (120) с уравнениями (82) и (93),
выведенными для двухосного автомобиля без прицепа, то увидим, что в случае
автомобиля с прицепом при суммарной окружной силе Рр вместо коэфициента hg стоит
коэфициент sh . р . Определение коэфициентов щ и т2 в этом случае произ-
вс цится совершенно тождественно тому, как это было выполнено для двухосного
автомобиля. Окончательно получаем:
£ г Р ) O + L (Л rK)fC0Sa
(122)
Тяга, соединяющая автомобиль-тягач с прицепом, обычно располагается ниже
центра тяжести автомобиля, т. е. hp < kg. Вследствие этого изменение
реакций Zx и Z2 для автомобиля с прицепом получается меньше, чем для
автомобиля без прицепа во всех тех случаях, когда тяговая сила затрачивается на
преодоление подъема или на ускорение автомобиля. Это уменьшение изменения
реакций получается тем значительнее, чем больше общий вес прицепа по
отношению к общему весу автомобиля.
В соответствии с этим для практических целей при определении
максимального веса прицепа, допустимого по сцепному весу автомобиля, можно пренебречь
изменением реакции Z2 и принять величину этой реакции постоянной и равной
G -J- cos а. Это допущение повышает надежность расчета.
Схема действия сил, реакций и моментов на автомобиль-тягач с полуприцепом
показана на фиг. 59. На ведущие колеса автомобиля действует реакция,
нормальная к плоскости опоры и равная сумме реакций Z2-{-Zi, где Z2 — реакция,
обусловленная весом самого тягача, a Z\ — представляет собой реакцию от веса
передка прицепа. На фиг. 60 представлена схема автомобиля-тягача с указанием
всех действующих на него сил и реакций. Из условия равновесия системы
относительно оси, проходящей через точки опоры передних колес, получим выражение
для определения реакции Z2: '
Za (a + b)= Ga cos a -f (Pj + G sin a) hg -f
+ (Gcosa + Z[) frK+ P'hp9 (123)
где величина G cos a + z[ представляет собой суммарную радиальную реакцию,
действующую на обе оси автомобиля. Все выражение (Gcosa + ^i) frK
представляет собой момент, затрачиваемый на сопротивление качению автомобиля и равный
сумме моментов Му± -}- Му2.
Определение суммарных радиальных реакций, действующих на оси автомобиля 73
В предыдущее уравнение, помимо реакций Z\> входит еще тяговая сила Р\
действующая между автомобилем-тягачом и полуприцепом. Для определения этой
Фиг. 59. Схема сил, моментов и реакций, действующих на автомобиль-тягач
с полуприцепом.
силы на фиг. 61 представлена схема полуприцепа с указанием всех действующих
на него моментов, сил и реакций. При этом получим:
Р' = Р'. + G'sin a + P'h = Р'. + G' sin а + (G'cos а — Z[)f;
Z\{a' + V) = Q'b' cos а — (PJ + G'sin a) h'g — (Gr cos а - Z[)frK +P'hp.
Фиг. 60. Схема сил, моментов и реакций, действующих
на автомобиль-тягач.
Здесь выражение G'cos a — Z[ подставляет собой реакцию Z'2. Все выражение
(G'cosa — Z\) frK представляет собой момент сопротивления качению оси полу-
74
Силы и реакции, действующие на автомобиль при его движении
прицепа. Решая совместно эти уравнения, находим выражения для реакции Z\
и для тяговой силы Я':
Z\ [a1 +b'+ f(hp - rK )] = G' cos a [b' + f(hP- rK)]
-(P'.+ G'sma)(h'g~hp);
Р' [a' +b'+ f{hp - гк)\ = О'fa'cos а + (Я; +
+ G' sin а) {а' + *' + Щ — гк)].
(124)
(125)
Для определения реакции Z2 необходимо в полученное выше для этой реакции
выражение [уравнение (123)] подставить выражение для тяговой силы Р'.
В результате получаем:
Z2 (а + Ь) = Ga cos a -f- (Р. + G sin a) hg + (G cos а + Z\)frK +
+ (Pj + Gr sin a) hp+ (G' cos а — Z[)fhp. (126)
Фиг. 61. Схема сил, моментов и реакций, действующих на полуприцеп.
Таким образом, имеются два уравнения (124) и (126), из которых
определяются реакции Z\ и Z2, действующие на задние ведущие колеса автомобиля-
тягача.
Полная суммарная окружная сила Рр определяется на основании фиг. 60 из
выражения:
Рр = Р. + Pj + (G+ G')sin a + (G + G')f cos a.
Это выражение может быть преобразовано следующим образом:
fdv \
G') l^y + sina + /cosaj .
(127)
Эта сила не должна превосходить максимального сцепления ведущих колес
с дорогой, т. е.
Пробные подсчеты показали, что суммарная реакция (Z2 + Z\) весьма мало
отличается от реакции, действующей на задние ведущие колеса тягача, стоящего
на горизонтальной дороге. Это объясняется тем обстоятельством, что изменения
Определение радиальных реакций, действующих на колеса автомобиля 75
реакций Z2, с одной стороны, и Zb — с другой, под влиянием передаваемой через
ведущие колеса силы Рр получаются противоположными. В то время как
реакция Z2 согласно уравнению (126) увеличивается по мере увеличения тяговой
силы автомобиля, реакция Z\ согласно уравнению (124) уменьшается. При этом
сумма этих реакций (Z2 + Z\) изменяется весьма мало. Таким образом, для
практических целей можно пренебречь изменением реакции на ведущие колеса тягача
и полагать эту реакцию постоянной и равной сумме G -^+G' jt , где L и V—
базы тягача и полуприцепа; а — расстояние от передней оси до центра тяжести
тягача и Ь' — расстояние от задней оси до центра тяжести полуприцепа.
§ 5. ОПРЕДЕЛЕНИЕ РАДИАЛЬНЫХ РЕАКЦИЙ, ДЕЙСТВУЮЩИХ
НА КОЛЕСА АВТОМОБИЛЯ
Выше были получены уравнения (99) и (100), служащие для определения
суммарных радиальных реакций Z2 и Zly действующих на оба колеса задней
и передней осей двухосного автомобиля. Между тем для исследования боковой
устойчивости автомобиля необходимо знать радиальные реакции, действующие на
каждое из его колес. Особенно необходимо это в отношении колес задней оси
автомобиля, боковое скольжение которой представляет большую опасность по
сравнению с боковым скольжением передней оси.
Получение точных уравнений для определения радиальных реакций Z^ и Z2,
действующих соответственно на внутреннее и внешнее колеса задней оси
автомобиля, весьма затруднительно (если только возможно) по той причине, что в
данном случае реакции Z2 и z!^ зависят от весьма большого числа влияющих на них
факторов, некоторые из которых не поддаются точному учету. В частности, эти
реакции зависят не только от величины суммарной боковой реакции У2,
действующей на заднюю ось автомобиля, и от расположения центра тяжести последнего,
но также и от жесткости кузова и рамы, от жесткости передней и задней
подвесок, от передаваемого момента через карданный вал и т. д.
Поэтому в целях получения хотя бы приближенных уравнений, учитывающих
влияние основных факторов на величину радиальных реакций Z2 и Z2, под
руководством автора была проведена соответствующая экспериментальная работа;
результаты таких экспериментов излагаются ниже.
Величина радиальных реакций Z<i и Z2 при всех прочих равных условиях
изменяется в зависимости от следующих основных факторов:
а) боковой силы N, появляющейся при движении автомобиля по криволинейной
траектории;
б) момента Ме, передаваемого через карданный вал автомобиля к его задней
ведущей оси;
в) неравномерного распределения полной суммарной окружной силы Рр по
колесам ведущей оси (РР^РР)',
г) инерционного момента Mj, возникающего при неустановившемся движении
автомобиля на повороте.
Ниже рассматривается отдельно влияние каждого из указанных факторов на
радиальные реакции Z2 и Z2.
Влияние на радиальные реакции боковой силы при повороте автомобиля.
Для определения влияния боковой силы N на величину радиальных реакций Z'i
и Z2 был проведен эксперимент на установке, схема которой изображена на
фиг. 62.
Испытанию был подвергнут легковой автомобиль; при этом одновременно
измерялись как радиальные, так и боковые реакции, действующие на задние
колеса этого автомобиля.
76
Силы и реакции, действующие на автомобиль при его движении
К автомобилю при помощи троса 6 приложена боковая сила N так, что
ее направление проходит через центр тяжести автомобиля. Эта сила
аналогична боковой или нормальной силе инерции N (см. фиг. 47). При помощи
упора 8 специальной конструкции и динамометра 7 можно изменять эту боковую
силу N и определять ее величину.
Левое заднее колесо автомобиля установлено на пластине 4, которая передает
приходящийся на это колесо вес автомобиля на платформу весов 5. Между пла-
Фиг. 62. Схема установки для определения влияния боковой силы на радиальные реакции,
действующие на колеса автомобиля.
стиной 4 и платформой весов 5 введены шарики, которые дают возможность
пластине 4 иметь любое перемещение по отношению к платформе весов. С точки
зрения распределения вертикальной нагрузки по колесам автомобиля левые колеса
последнего в данном случае представляют собой как бы внешние колеса при
повороте автомобиля, а правые — внутренние. Боковая сила Y\, действующая
на внешнее (левое) заднее колесо автомобиля от пластины 4 через трос 3,
передается к упору /. Для измерения этой силы в систему был введен динамометр 2.
Упор / позволял производить натяг системы и поддерживать пластину 4 в
постоянном положении, что необходимо для создания жесткой опоры под обоими
колесами задней оси автомобиля.
Таким образом, суммарная боковая сила А/", приложенная к центру тяжести
ft
автомобиля, измерялась динамометром 7, вертикальная (радиальная) реакция Z^i
приходящаяся на внешнее заднее колесо автомобиля — при помощи весов 5,
а боковая реакция У\ — динамометром 2.
Ниже приводятся результаты испытания легкового автомобиля, причем для
него предварительно было определено расположение центра тяжести как по
длине а и Ь, так и по высоте /и.
Определение радиальных реакций, действующих на колеса автомобиля 77
Чтобы определить влияние жесткости шин на изменение радиальных и
боковых реакций, действующих на колеса автомобиля, испытание велось при
различных давлениях воздуха в шинах и при шинах различного размера (шины 28 X
Х4,75", давление воздуха 1,8 и 2,2 ати, шины 29x5,50", давление воздуха
2,0 ати).
На фиг. 63 приведены кривые, иллюстрирующие результаты опытов по
определению зависимости радиальной реакции Z" от боковой силы N.
Согласно полученным экспериментальным данным изменение давления воздуха
8 шинах и их размера (в указанных пределах) не оказывает сколько-нибудь
заметного влияния на распределение суммарных радиальных реакций по колесам оси.
Прямая 4 на обоих графиках фиг. 63 дает аналитическую зависимость между
радиальной реакцией Z<i и боковой силой N. Эта прямая построена в предполо-
500 "
<tQO
4
2
— В -
Фиг. 63. Результаты эксперимента по
определению влияния боковой силы N на
радиальную реакцию Z^ действующую на внешнее
колесо задней оси автомобиля:
1 — шины 28X4,75", давление воздуха 1,8 ати; 2—шины
"", давление воздуха 2,2 ати; 3 — шины 29x5,50",
Фиг. 64. Схема сил и реакций,
действующих на заднюю ось автомобиля,
служащая для определения радиальных реакций.
жении, что воздействие боковой си-
iOA^i'^'i давление ииздули &,& иши, о — шины zt7A«J>£>U", » г ,-»
давление воздуха 2,0 ати; 4-аналитическая зависимость ЛЫ N На радиальные реакции Z СООТВвТ-
между радиальной реакцией Z^' и боковой силой N. СТВувТ ДеЙСТВИЮ ДВух ее Слагающих,
обратно пропорциональных
расстояниям а и b от центра тяжести до осей
автомобиля и приложенных к передней и задней осям на высоте расположения
центра тяжести автомобиля. При этом на переднюю и заднюю оси автомобиля
действовали бы соответственно силы Уг и У2, каждая из которых была бы
приложена на высоте hg.
На фиг. 64 приведена схема, иллюстрирующая высказанное положение. Здесь
сила F2, приложенная к оси на высоте hgi представляет собой слагаемую боковой
силы N, приходящуюся на заднюю ось.
В соответствии с условиями проведения эксперимента сила К, равна суммарной
боковой реакции, действующей на заднюю ось автомобиля при отсутствии
углового ускорения -^ автомобиля (установившееся движение: v = const; R ~ const)
и при отсутствии момента Му, обусловленного неравномерным распределением
силы Рр по колесам ведущей оси, поэтому сила Г2 в данном случае определяется
из приведенного ранее уравнения (75), если в правой части этого уравнения
отбросить второй член, обусловленный неравномерным распределением полной
суммарной окружной силы Рр по колесам ведущей оси.
78
Силы и реакции, действующие на автомобиль при его движении
В результате, пользуясь фиг. 64 и определяя радиальные реакции Z2 и Z2,
получим:
2 == ^>*^^2 * 2 ~7?~ == о * ~R~ '
7» __
z2 =
(128)
(129)
Входящая в эти уравнения суммарная боковая реакция У% согласно условию
эксперимента равна N -у-, где N—боковая или нормальная сила инерции, прило-
женная к центру тяжести автомобиля (см. фиг. 47 и 48),
400-
100 "200 300 Ш 500 600 700 800 900 Мкг
Фиг. 65. График, иллюстрирующий результаты эксперимента по
определению влияния боковой силы на радиальную реакцию,
действующую на внешнее колесо задней оси автомобиля при учете
происходящего при этом изменения колеи и расположения центра
тяжести автомобиля.
Аналитическое определение радиальной реакции Z2' (прямая 4 на фиг. 63) при
указанном выше допущении дает несколько меньшие значения этой реакции по
сравнению с ее действительным значением. Это расхождение в значении реакции Z2
может объясняться как неправильностью принятого допущения о влиянии силы N на
реакцию Z2, так и влиянием перемещения центра тяжести автомобиля и изменения
колеи 5, происходящими при воздействии на автомобиль боковой силы N.
Проведенный по этому вопросу специальный эксперимент подтвердил второе
положение [41].
Для этой цели при помощи испытания автомобиля на описанной выше
установке (фиг. 62) наряду с определением радиальной реакции были также
замерены изменение колеи задней оси и смещение центра тяжести автомобиля,
происходящие при нагружении последнего боковой силой N.
На фиг. 65 приведены кривые, построенные на основании такого
эксперимента. Кривые /—3 тождественны одноименным кривым на фиг. 63 и
соответствуют радиальной реакции Z2, найденной при помощи измерения; кривые же Г—
3' на фиг. 65 построены при помощи аналитического определения той же
реакции, но с учетом изменения колеи и смещения центра тяжести автомобиля. В этом
случае получается уже лучшее совпадение экспериментальных данных с
расчетными, что подтверждает правильность принятого характера влияния боковой
силы N на радиальные реакции.
Определение радиальных реакций, действующих на колеса автомобиля
79
Поэтому при дальнейшем исследовании боковой устойчивости автомобиля
принимается это допущение. Это допущение удобно потому, что оно дает
возможность рассматривать равновесие, а также и боковую устойчивость для каждой из
осей — передней и задней — отдельно.
Выше были получены уравнения (128) и (129), учитывающие влияние
суммарной боковой реакции Г2 на радиальные реакции Z2 и Z2, действующие на колеса
задней оси автомобиля. Таким же образом могут быть найдены аналогичные
уравнения для радиальных реакций, действующих на колеса передней оси
автомобиля. При этом получаем:
Zk
1 —
в
v ^8
Yx -g- =
tii\G\
-g-
(131)
Входящая в эти уравнения суммарная боковая реакция Y1 равна N у-, где
N—боковая или нормальная сила инерции, приложенная к центру тяжести
автомобиля (см. фиг. 47 и 48).
Влияние на радиальные реакции вращающего момента, подведенного к ведущей
оси от карданного вала. Уравнения (128) —(131) определяют радиальные реакции,
действующие на колеса передней [уравнения (130) и (131)] и задней [уравнения (128) и (129)]
Фиг. 66. Схема
передачи вращающего момента от карданного вала к задней
ведущей оси автомобиля.
осей автомобиля при движении последнего на повороте. При выводе этих уравнений учгтен
лишь один фактор, влияющий на величину радиальных реакций Z, а именно суммарные
боковые реакции Ух и Y2, возникающие при повороте автомобиля. В связи с этим при
прямолинейном движении автомобиля, когда реакции Y\ и У2 отсутствуют, радиальные реакции,
действующие на правые и левые колеса каждой оси, согласно уравнениям (128) — (131)
получаются равными.
Однако если учесть влияние вращающего момента, подведенного от карданного вала
к задней ведущей оси автомобиля, то радиальные реакции Z, действующие соответственно
на правые и левые колеса осей автомобиля, не получаются равными даже в случае
прямолинейного движения автомобиля по горизонтальной плоскости.
Ниже рассмотрен этот вопрос, а также изложены результаты эксперимента.
На фиг. 66 изображена схема передачи вращающего момента Ме от карданного вала
к задней ведущей оси автомобиля; при этом одновременно с активным -моментом Ме на
систему рама — кузов автомобиля передается реактивный момент Мп по своей абсолютной
величине равный моменту Ме. Реактивный момент Мг через рессоры — передние и задние —
распределяется далее по осям.
При этом имеем:
M1 + M2 = Mr^Met (132)
где Mi — момент, передаваемый от рамы на переднюю ось;
Af2 —момент, передаваемый от рамы на заднюю ось.
Силы и реакции, действующие на автомобиль при его движении
Помимо момента М2, подведенного от рамы, к задней оси автомобиля подводится еще
непосредственно момент Ме от карданного вала. Эти моменты противоположно направлены,
в результате чего заднюю ось нагружает момент, по абсолютной величине равный моменту
Мь но направленный противоположно действующему на переднюю ось.
Таким образом, изменения AZ радиальных реакций, действующих на колеса передней
и задней осей автомобиля, обусловленные действием момента Ме согласно фиг. 66,
определятся из выражений:
в2
где ZiA — радиальная реакция, действующая на левое переднее колесо;
Zln—радиальная реакция, действующая на правое переднее колесо;
%2л—радиальная реакция, действующая на левое заднее колесо;
Z2n — радиальная реакция, действующая на правое заднее колесо;
Bi — колея передней оси;
В2 — колея задней оси.
(133)
ft —
Фиг. 67. Схема деформации рессор и шин
передней оси автомобиля при передаче
вращающего момента от карданного вала к
задней ведущей оси.
Фиг. 68. Схема деформации рессор и шин
задней оси автомобиля при передаче к ней
вращающего момента от карданного вала.
Схема на фиг. 66, а также и уравнения (133) соответствуют случаю, когда колеи
передней Bi и задней В2 осей автомобиля не равны; при их равенстве все изменения AZ
радиальных реакций получаются равными по абсолютной величине.
Согласно уравнениям (133) для определения зависимости изменения AZ радиальных
реакций от момента Ме, развиваемого на карданном валу автомобиля, необходимо найти
момент Мь приведенный от системы рама — кузов автомобиля к передней оси.
Распределение реактивного момента Мг на переднюю Mi и заднюю М2 оси автомобиля
зависит от жесткости на скручивание v системы рама — кузов, равной отношению
скручивающего момента к углу а скручивания системы на 1 м ее длины, от жесткости передней \[
и задней v" подвесок и, наконец, от жесткости v'2
шин — передних и задних.
Коэфициенты жесткости подвесок и шин представляют собой отношение силы,
действующей на подвеску или шину, к прогибу соответствующей детали.
На фиг. 67 изображена схема передней оси автомобиля. Линия АЛ здесь условно
изображает раму автомобиля, которая под влиянием передаваемого через нее момента Mi
повернулась на некоторый угол о^.
Рама соединяется с осью при помощи рессор, расположенных на расстоянии 1г одна от
другой. Момент Мг от рамы через рессоры передается на переднюю ось, которая
вследствие деформации шин также повернулась на некоторый угол а[.
Предположим, что система рама — кузов автомобиля в плоскости действия реактивного
момента Мг (см. фиг. 66) повернулась на некоторый угол а0. В таком случае угол скручива-
Определение радиальных реакций, действующих на колеса автомобиля 81
ния передней части рамы и кузова получится равным разности (а0 — ах), а передаваемый
через эту часть рамы и кузова скручивающий момент Мх определится из выражения:
Мг = К — *i) —,
где V — жесткость системы рама — кузов на ее длине п (см. фиг. 66).
Этот же момент Мх воспринимается и рессорами передней оси, при этом, пользуясь
фиг. 67, находим:
Mi = vi («I — ai) "2" •
Тот же момент Мх передается также через шины передней оси; при этом получим:
Пользуясь найденными уравнениями и исключая из них углы ах и а[, получим:
Мх = L - 2МХ(-4-^ + -TV)! ^ • (134)
На фиг. 68 изображена схема задней оси автомобиля. Так же как и на фиг. 67, прямая
АА здесь условно характеризует раму автомобиля, которая под влиянием передаваемого
через нее момента М2 повернулась на некоторый угол а2- Момент М2 через рессоры
(расположенные на расстоянии /2 одна от другой) передается на заднюю ось автомобиля. Однако
к той же оси от карданного вала передается момент Ме, направленный противоположно
моменту М% и по своей абсолютной величине равный сумме моментов Мх -f- M2. В
результате на заднюю ось автомобиля действует момент Mlt как это показано на фигуре, и этот
момент вызывает изменение радиальных реакций, действующих на колеса задней оси.
Аналогично тому, как это было сделано по отношению к передней оси автомобиля,
пользуясь фиг. 68, находим последовательно:
М2 = («о — сс2) — ;
= (а2
JL
В2
Ъ 4 ~y
где v* — жесткость системы рама — кузов на ее длине т.
Исключая из этих уравнений углы <*% и а'2 , получим:
Исключая из уравнений (134) и (135) угол а0, находим зависимость между моментами
Мх и М2:
Пользуясь далее этим уравнением и уравнением (132), находим уравнение для момента М#
т 2
Мх = Ж, о о- о ~ — . (137)
V
2
vi 'i
r +
to
I
>2 •
4
2
V252
2
После этого на основании уравнения (133) могут быть найдены изменения радиальных
реакций, обусловленные передачей вращающего момента Ме от карданного вала к ведущей
оси автомобиля.
Момент Ме может быть "выражен через полную суммарную окружную силу Рр или
через коэфициент чр этой силы. Согласно изложенному в § 2 данной главы получим, пре-
& Е. А. Чудаков 2232
82 Силы и реакции, действующие на автомобиль при его движении
небрегая инерционным^ моментом ( 2JK2 ^ ) или принимая движение автомобиля
установившимся:
TZ-. (138>
В случае прямолинейного движения автомобиля и без учета влияния момента Ме~
на величину радиальных реакций последние согласно уравнениям (99) и (100) определяются
из уравнений:
Z2 = Z, = 0,5 Gs 1 + ъ "Г" И (I39>
Как показано было выше [уравнение (133)], передача момента Ме к задней ведущей
оси вызывает изменение радиальных реакций Z, причем характер изменения этих реакций
для внутренних и внешних колес автомобиля зависит от направления поворота последнего-
Боковая устойчивость задней ведущей оси при повороте автомобиля (большая
предрасположенность внутреннего колеса этой оси к пробуксовыванию) ухудшается, когда в связи
с передачей момента Ме уменьшается радиальная реакция, действующая на внутреннее
колесо оси. Это происходит при повороте автомобиля вправо; такой случай и рассматривается
ниже. В этом случае правые колеса автомобиля будут внутренними, а левые — внешними,.
и, пользуясь уравнениями (137) — (140), получим следующие выражения для радиальных
реакций Z с учетом влияния на них вращающего момента Ме, подведенного от карданного
вала к задней оси автомобиля.
Для задней оси автомобиля:
tip tin
Для передней оси автомобиля:
( Hg ~~hml ^ ]
(142)
—f—- ).
В этих уравнениях влияние вращающего момента Ме на радиальные реакции
(пропорциональное коэфициенту ^р) учитывается при помощи отрезков hmb и /гш, которые как бы
изменяют высоту расположения центра тяжести автомобиля. Величина этих отрезков
зависит от конструкции автомобиля и может быть определена на основании приведенных
выше данных.
Пользуясь уравнениями (133), (137), (138), (141) и (142), находим выражения для
отрезков hm2 и hml\
m 2
or» м ч. It.
(Ш>
П
V
2 +—'i- 4- Ш 4- 2
_LJ_ ^_ . (144)
/J v2^x v2^2 v Vj /2
Если колеи передней Вх и задней В2 оеей автомобиля равны, то для отрезков hm2 и
получается одно уравнение.
Определение радиальных реакций, действующих на колеса автомобиля
83
Если принять систему рама — кузов очень жесткой по сравнению с рессорной
подвеской и шинами, т. е. принять коэфициенты V и V жесткости кузова в уравнениях (143)
и (144) бесконечно большими, то получим (при равенстве Вг = В2 = В):
7LrK
l(irl0B
_2_
;в2
(145>
V
Если передняя часть рамы шарнирно крепится к рессоре (трехточечная подвеска), то
в этом случае коэфициент жесткости V получается равным нулю, в соответствии с чем
согласно уравнениям (143) и (144) получаются равными нулю и отрезки hm2 и hml, т. е»
в этом случае передача вращающего момента Ме не вызывает изменения радиальных
реакций Z.
Фиг. 69. Схема установки, применявшейся для определения зависимости
радиальных реакций от момента, подведенного к задней ведущей оси автомобиля.
Если пренебречь эластичностью шин по сравнению с эластичностью рессор, т. е. если
принять коэфициенты жесткости шин>2 и v£ равными бесконечности, то уравнения (143) и (144)
примут вид (при равенстве Вх = В2 *= В):
JL + .
iQri0B
(146>
Если, наконец, условно принять, что система рама кузов автомобиля обладает очень
большой эластичностью, значительно большей, чем рессоры, т. е. если принять коэфициенты
V и v" равными нулю, то, пользуясь уравнениями (143) и (144), получим (при равенстве
B В)'
2LrK т
iorioB * п ~\- т
(147)
Во всех случаях [уравнения (143) —(147)] отрезок Нщ зависит лишь от конструкции
автомобиля; для заданного автомобиля он является величиной постоянной и не зависящей от
величины вращающего момента Ме.
Для проверки полученных выводов относительно влияния момента Ме, передаваемого
от карданного вала к задней ведущей оси автомобиля, на радиальные реакции Z и, в
частности, для установления независимости отрезка hm от момента Ме был проведен
эксперимент на установке, схема которой изображена на фиг. 69. Передние колеса автомобиля
устанавливались на весах / и 2, а к задним колесам при помощи нагрузочных рычагов 3
и 4 подводился вращающий момент Мр. Для этой цели нагружающие рычаги 3 и 4 были
закреплены на валах, которые при помощи карданных передач 5 и 6 соединялись со
ступицами колес. Одновременно с этим в коробке передач автомобиля устанавливались сразу
две ступени, что блокировало трансмиссию.
В результате автомобиль оказывался нагруженным так же, как и при подведении
момента от карданного вала, создающего момент Мр на ведущих колесах. Из сопоставления
схем на фиг. 69 и 66 находим, что при этом лишь изменяется направление действия момента
Ме) подведенного к задней оси, и реактивного момента Мг.
84 Силы и реакции, действующие на автомобиль при его движении
Измеренные при помощи весов 1 и 2 радиальные реакции Z[ и Z'{ (или Z^ и Z^
возможность определить изменение этих реакций AZ в зависимости от величины момента
Мр. На основании фиг. 69 получим выражения для определения изменений радиальных
реакций
0,5 (ог-
где G2 — вес автомобиля, приходящийся на переднюю ось,
— — I — определяет изменение суммарной радиальной реакции, обусловленное
действием момента Мр.
р
Согласно изложенному ранее [уравнение (15)] между моментом Мр и полной суммарной
окружной силой Рр имеется соотношение (без учета влияния моментов инерции JK2 "Jfj :
(148)
Пользуясь уравнениями (140) и (142), определяем изменение радиальной реакции ДZ1
в зависимости от коэфициента ^р:
AZ; = 0,5-fpG %-. (149)
Определяя из уравнений (148) и (149) отрезок hm (исключая коэфициент -\р), получим
h -2Lr AZl' (l50)
Так как при проведении эксперимента колесо не перекатывалось, то вместо радиуса
качения гк в уравнении (150) следует брать динамический радиус колеса, т. е. расстояние
от оси колеса до опорной поверхности.
При помощи указанного выше эксперимента (фиг. 69) можно было определить
изменение AZ радиальных реакций, действующих на колеса передней оси, а следовательно, можно
было определить и отрезок hm. Полученные результаты эксперимента приведены на фиг. 70—72.
На этих фигурах даны изменения радиальных реакций LZ[ и AZ" в зависимости от
момента Мр для автомобилей: ЗИС-101 (фиг. 70), ЗИС-5 (фиг. 71) и ГАЗ-АА (фиг. 72). Для
каждого автомобиля опыт производился три раза, чему и соответствуют различные
обозначения для экспериментальных точек на фиг. 70—72. При некоторых значениях момента Мр
получается заметный разбег экспериментальных точек, что, повидимому, объясняется
переменной жесткостью на скручивание системы рама — кузов автомобиля. Однако на основании
полученных экспериментальных данных во всех случаях с достаточной для практики точ-
ностыо можно принять, что отношение]^- сохраняется примерно постоянным при
чрезвычайно широком диапазоне изменения момента Мр. Отсюда следует согласно уравнению
(150), что и отрезок hm для каждого автомобиля также может быть принят постоянным.
При подсчете экспериментальных данных [по уравнению (150)] для этого отрезка были
получены следующие значения:
hm
Модель автомобиля hm м —j-
ЗИС-101
ЗИС-5
ГАЗ-АА
Очень малое значение отрезка htn для автомобиля ГАЗ-АА объясняется конструкцией
передней подвески этого автомобиля; имеющаяся здесь поперечная рессора оказывает
малое сопротивление повороту рамы. Как было уже указано выше, при шарнирном креплении
передней части рамы момент Мр совсем не оказывает влияния на изменение AZ
радиальных реакций, т. е. при этом отрезок hm равен нулю. Поперечная рессора, оказывающая
малое сопротивление при скручивании рамы, дает примерно тот же результат.
Из сопоставления данных для отрезка hm, полученных при помощи эксперимента и при
помощи теоретического их определения по уравнениям (143) —(147), следует, что систему
рама — кузова автомобиля нельзя принимать абсолютно жесткой, так как это приводит
к значительной ошибке.
0,21
0,29
0,08
0,07
0,077
0,023
Определение радиальных реакций, действующих на колеса автомобиля
85
Фиг. 70.
Результаты испытания
автомобиля
ЗИС-101 для
определения
влияния
момента МрУ
подведенного к
задней оси, на
радиальные реак-
ции Za и Zv
Щкг
Фиг. 71.
Результаты испытания
автомобиля
ЗИС-5 для
определения
влияния
момента Мр, подве-'
денного к
задней оси, на
радиальные реак-
ции
и Z
v
50 100 150 200 250 300 350 Мр кем
Фиг. 72.
Результаты испытания
автомобиля
ГАЗ-АА для
определения
влияния
момента Мру
подведенного к
задней оси, на
радиальные реак-
/Л?
ции Z1 и Z
v
Силы и реакции, действующие на автомобиль при его движении
В результате для каждого автомобиля могут быть найдены экспериментально или
аналитически отрезки hml и hm2, а, следовательно, уравнения (141) и (142) могут быть
использованы для определения радиальных реакций Z при учете влияния на эти реакции
вращающего момента Ме, подведенного от карданного вала к задней ведущей оси автомобиля.
Влияние на радиальные реакции неравномерного распределения полной
суммарной окружной силы по колесам ведущей оси. Полученные выше уравнения (128) — (1,31)
для радиальных реакций Z согласно условиям эксперимента (фиг. 62) соответствуют
установившемуся движению автомобиля по кривой постоянного радиуса и равномерному
распределению полной суммарной окружной силы по колесам задней ведущей оси автомобиля.
При неравномерном распределении этой силы по ведущим колесам появляется момент Му,
повертывающий автомобиль в горизонтальной плоскости, как это схематически показано
на фиг. 48.
Направление этого момента на фиг. 48 сответствует тому условию, что окружная сила
Р' , приложенная к внутреннему колесу задней оси, больше окружной силы Р"р, приложенной
к^внешнему колесу той же оси. Это всегда имеет место при повороте автомобиля с дифе-
ренциалом и при отсутствии пробуксовывания внутреннего колеса ведущей оси.
Фиг. 73. Схема сил и моментов, Фиг. 74. Схема установки для исследования влия-
возникающих при неравномерном ния на радиальные реакции неравномерного рас-
распределений полной суммарной пределения полной суммарной окружной силы по
окружной силы по колесам веду- ведущим колесам,
mefi оси.
Наличие момента Му вызывает изменение суммарных боковых реакций на величину Уор,
которая определится при помощи уравнения (40) (для эластичных колес):
А4«, . , ч, В
Боковая реакция, действующая на заднюю ось автомобиля, уменьшается на величину
Y «, а боковая реакция, действующая на переднюю ось, увеличивается. В результате
действие момента Му можно иллюстрировать схемой, приведенной на фиг. 73.
Таким образом, благодаря действию момента Му возникает пара сил, которая
скручивает автомобиль по отношению к его продольной оси, что вызывает изменение радиальных
реакций Z, действующих соответственно на внутренние и внешние его колеса.
Изменения AZ радиальных реакций в этом случае, так же как и при передаче момента
М , зависят от конструкции автомобиля, в частности, от жесткости системы рама — кузов,
а также от жесткости рессор и шин. При этом они получаются прямо пропорциональными
боковой реакции Yop или моменту Му\
Л7'^ Л 7'1 = /'« К__: I
(152)
где е2 и ev — коэфициенты пропорциональности, соответствующие задней и передней осям
автомобиля.
Для проверки этого положения и определения коэфициентов пропорциональности сг
и ел был проведен эксперимент, результат которого описан ниже.
На фиг. 74 изображена схема установки. К передней 3 и задней / осям автомобиля
прилагались силы Я, которые поддерживались равными и определялись при помощи
включенных в тяги динамометров о. В результате создавался момент PBV повертывающий
автомобиль в горизонтальной плоскости, и возникали боковые реакции Yop, определяемые из
выражения:
Определение радиальных реакций, действующих на колеса автомобиля
87
Правое колесо задней оси и левое колесо передней оси опирались на площадки весов
2 и 4, что давало возможность измерить действующие на эти колеса радиальные реакции Z
На фиг. 75 приведены кривые изменения радиальных реакций z!2 (правое колесо заднеС
оси) и Z\ (левое колесо передней оси) в зависимости от силы Р, или от изменения боковой
реакции Уор. Экспериментальные точки весьма хорошо укладываются на прямых, что
подтверждает постоянство коэфициентов е1 и е2 в уравнении (152).
В результате влияние на радиальные реакции Z неравномерного распределения полной
суммарной окружности силы Рр по колесам ведущей оси можно учесть точно так же, как
и влияние момента Ме, а именно введением отрезков hp2 и крл в уравнениях (139) и (140).
При этом получим:
her •+• h.
Z2 = 0,5 Gt I 1 +
I hg - hp*
0,5
Z\ == 0,5 Gx\\-
(154)
(155)
Входящне в эти уравнения отрезки Л^2 и hpx учитывают влияние неравномерного
распределения полной суммарной окружной силы Рр по колесам ведущей оси; для каждого
автомобиля они являются величинами постоянными и могут быть определены
экспериментально. При всех прочих
равных условиях эти отрезки
получаются тем больше, чем
^больше коэфициент k рас-
£>
шестеренчатом дифе-
пределения силы Рр по
ведущим колесам. При
340
50
100
200 Ркг
Фиг. 75. Изменение радиальных реакций Zx и Z2 в
зависимости от силы Р, определяющей неравномерное распределение
полной суммарной окружной силы по ведущим колесам.
стом
ренциале (&язО,5) боковая
реакция Уор [см. уравнение
<151)] и отрезки Нрч и hpx
получаются близкими к
нул ю.
Влияние на
радиальные реакции инерционного
момента, возникающего
при неравномерном
движении автомобиля по
криволинейной траектории.
Выше были получены
уравнения (128)—(131) для
радиальных реакций; однако
по условию эксперимента
учитывалась лишь нормальная или боковая сила инерции N и не был учтен инерционный
момент Mj. Если радиус кривизны R и скорость v автомобиля не сохраняются постоянными,
то изменяется угловая скорость <& вращения автомобиля, что отражается на суммарных
боковых реакциях, а также на радиальных реакциях, действующих на внутренние и внешние
«олеса автомобиля.
На фиг. 47 и 48 был показан инерционный момент Mj, который при этом необходимо
приложить для того, чтобы можно было рассматривать автомобиль как бы находящимся
ъ равновесии. Этот момент определяется из уравнения (39). При направлении момента Mj,
показанном на фиг. 47 и 48, угловое ускорение автомобиля -^ имеет положительное
значение, и в этом случае согласно уравнениям (48) и (49) суммарная боковая реакция У2
уменьшается, а суммарная боковая реакция Ул увеличивается на одинаковую величину У0(о у
-определяемую из выражения:
dt
(156)
В результате получается пара сил, которая скручивает автомобиль относительно его
продольной оси, как это схематически показано на фиг. 76.
Таким образом, происходит явление, аналогичное неравномерному распределению пол-
шй суммарной силы Рр по колесам ведущей оси, поэтому влияние инерционного момента
88
Силы и реакции, действующие на автомобиль при его движении
Mj может быть также учтено (как и влияние момента Му) при помощи введения в уравне-
нения (139) и (140) отрезков hw2 и Ь:
^2 ==
"71?
■*):)
7[= 0,50,(1 —-
(157)
(158)
Однако введенные в эти уравнения отрезки A»2 и
hm\ принципиально отличаются от отрезков hmn hpy
учитывающих влияние момента Ме и неравномерного
распределения силы Рр по ведущим колесам. Отрезки
hP2 и hp\ так же, как и hm2 и hm\y зависят только от
конструкции автомобиля и не зависят от характера
движения автомобиля, а отрезки Лш2 и к<»\ прямо»
пропорциональны инерционному моменту Мр а
следовательно, угловому ускорению автомобиля.
Объединяя в одном уравнении влияние всех факторов на радиальные реакции,,
получим для последних следующие уравнения:
Фиг. 76. Схема сил и моментов,
возникающих при повороте авто-
мобиля.
Zr2 =
I1-
L
hg-hmX+h
L В '
hp\
(159)
(160)
(161)
(162)
В приведенных уравнениях учитывается влияние различных факторов на
радиальные реакции Z.
Отрезок hg учитывает влияние суммарной окружной силы на ведущих колесах,,
отрезок hm — влияние момента, передаваемого через карданный вал; отрезок hp —
влияние неравномерного распределения момента по задним ведущим колесам
автомобиля; отрезок hl0 — влияние инерционного момента, возникающего при повороте
автомобиля; силы N *L JL и N —Л учитывают влияние суммарных боковых реак-
L В L В
ций, действующих на оси автомобиля.
Однако, как показали эксперименты и пробные подсчеты для нескольких
автомобилей, при значении коэфициента k распределения полной суммарной
окружной силы Рр по колесам ведущей оси, близком к 0,5, достаточно точные
результаты дают уравнения:
(164)
Входящие в эти уравнения суммарные боковые реакции Уг и У2 определяются
из уравнений (69)—(78).
Уравнения (163) и (164) используются в дальнейшем при изучении боковой
устойчивости автомобиля.
ГЛАВА III
ТЯГОВАЯ ДИНАМИКА АВТОМОБИЛЯ
§ 1. ТЯГОВЫЙ БАЛАНС АВТОМОБИЛЯ
Выше были приведены выражения для полной суммарной окружной (тяговой)
силы, развиваемой на ведущих колесах и для сил сопротивления движению
автомобиля. Распределение полной суммарной окружной силы Рр [см. уравнение (36)},
по отдельным видам сопротивления движению представляет собой тяговой баланс
автомобиля. В общем случае движения автомобиля получим:
Pp = Pf+Pw + Pi+Pp (165)
где Рр Pw, Рг и Р,— силы сопротивления, определяемые из уравнений (18), (19),
(20) и (23).
Силы Pf и Pw всегда являются положительными, сила Pi положительна при
движении автомобила на подъем и отрицательна при движении под уклон; сила Pj,
положительна при ускоренном движении автомобиля и отрицательна при
замедленном его движении.
Подставляя в уравнение (165) выражения для сил Рр, Рр Pw, Pi и Рр
получим для случая ускоренного движения автомобиля на подъем:
-/Ocosa+ Wv2 + Gsina + (—
При постоянной скорости движения автомобиля (v = const; —- =0) полная
суммарная окружная сила Рр определяется из уравнения (38). При этом тяговый баланс
[уравнение (166)] определится уравнением:
-=fG cos а -Ь Wv2+G sin а. (167)
Если, кроме того, принять, что автомобиль движется по горизонтальной
плоскости (а=^0), то получим:
М hctpm, ^ fQ + Wv2 (Шу
f к
Пользуясь уравнением (166) и объединяя выражения для сил, затраченных на
ускорение поступательно движущихся масс автомобиля и вращающихся его частей,
получим общее выражение для силы, затрачиваемой на ускорение автомобиля:
где YJk — сумма моментов инерции всех колес автомобиля.
Из этого выражения следует, что влияние вращающихся частей автомобили при
неравномерном движении последнего можно учесть увеличением поступательно»
90
Тяговая динамика автомобиля
движущейся массы автомобиля. Для этого автором был предложен коэфициент 8,
который учитывает влияние вращающихся масс автомобиля и определяется из
выражения [41]:
*-1+тг—т- + ^
(171).
Согласно уравнению (171) коэфициент 8 зависит от передаточного числа iK
в коробке передач, увеличиваясь на первой передаче и уменьшаясь на последней.
Для современных грузовых автомобилей на первой передаче в коробке передач
коэфициент 8 равен примерно 2,5—3,0, а на последней около 1,06—1,08.
Для легковых автомобилей, особенно для имеющих многоцилиндровые
двигатели с малым моментом инерции вращающихся деталей, этот коэфициент
получается меньшим; в среднем его можно принять равным 1,6 —1,8 на первой
передаче и 1,05—1,06 на последней.
Принимая
G
GrK
получим:
й= 1 -fa^-f-^. (172)
Коэфициенты ах и а2 зависят от конструкции автомобиля и прямо
пропорциональны моментам инерции вращающихся частей двигателя Jm и колес JK
автомобиля. В табл. 1 приведены значения моментов инерции Jm и JK , а также
значения коэфициентов ах и а2 для нескольких автомобилей.
Таблица 1
Моменты инерции вращающихся частей автомобиля
Модель
втомобиля
ГАЗ-М-!
ЗИС-101
ГАЗ-АА
ЗИС-5
Момент
инерции
вращающихся частей
двигателя Jm
в кгМ'Секг
0,0673
0,1634
0,0673
0,149
Момент
инерции колес
v. кгМ'сек'1
0,8452
1,156
1,998
4,974
Коэфициенг
0,0518
0,0619
0,0465
0,0448
Коэфициент
0,0368
0,0255
0,0374
0,0465
В выражение для силы инерции Pj [уравнение (170)] включены все ее
составляющие и, в частности, те силы, которые затрачиваются на ускоренное вращение
деталей двигателя Jm и колес JK . Между тем сила инерции, затрачиваемая на разгон
вращающихся деталей двигателя, а также задних ведущих колес автомобиля, не
передается за счет сцепления между ведущими колесами и опорной поверхностью,
что следует из уравнений (36) и (166).
Действительная величина силы инерции, затраченной на ускорение автомобиля
я являющейся частью полной окружной силы Pp<i определяется уравнением (23).
Используя уравнения (170) для силы инерции, преобразуем уравнение (166);
при этом получим:
(173)
Мощностной баланс автомобиля 91
Первый член в правой части этого уравнения представляет собой суммарное
сопротивление качению и подъему, т. е. он представляет собой сопротивление,
обусловливаемое главным образом качеством шин и дорогой. Величина суммы
/cosa-fsina в этом выражении весьма близка к сумме /+*•
Сумма козфициентов /4-/ = ф определяет дорожные условия и качество шин.
Подставляя этот коэфициент в уравнение (173), получим приближенно:
МпМкЧм в ф0 + Wv2 + iJL.*Lm (174)
г к * g dt
Это уравнение представляет собой аналитическое выражение тягового баланса
в общем случае движения автомобиля.
, § 2. МОЩНОСТНОЙ БАЛАНС АВТОМОБИЛЯ
Распределение тяговой силы по отдельным видам сопротивления движению
называется тяговым балансом автомобиля. Аналогично этому может быть
распределена по отдельным видам сопротивления движению автомобиля и развиваемая
двигателем мощность Nm. Такое распределение мощности двигателя по отдельным
видам сопротивления мы будем называть в дальнейшем мощностным балансом
автомобиля. Мощность двигателя Nm затрачивается на преодоление следующих
сопротивлений, имеющих место при движении автомобиля:
1) сопротивление трения в механизмах силовой передачи от двигателя до
ведущих колес (Nr)\
2) сопротивление качению колес автомобиля (Nf)y
3) сопротивление воздуха (Nw);
4) сопротивление подъема (Л/.);
5) сопротивление инерции (Nj).
На основании равенства мощности двигателя сумме мощностей, затрачиваемых
на все виды сопротивления, имеем:
Nm = Nr + Nf -!- Nw + Nt + Nj. (175)
Выражение для мощностного баланса получается аналогичным выражению для
тягового баланса. Мощности Nn Nf и Nw> затрачиваемые на трение в механизмах
силовой передачи, на деформацию шин и дороги и, наконец, на сопротивление
воздуха, превращаются в тепло, идущее на нагрев частей автомобиля, дороги
и воздуха. Таким образом, эти мощности, будучи затрачены, не могут быть
возвращены обратно.
Мощность Л/j-, расходуемая при движении автомобиля на подъем, идет на
приращение потенциальной энергии автомобиля и при спуске последнего возвращается.
Мощность Nj, затрачиваемая на ускорение движения автомобиля, идет на
приращение кинетической энергии автомобиля и возвращается обратно при его
замедленном движении.
В этом заключается одно из основных различий между мощностями Nn Nf
и Nw с одной стороны и Nt и NJf — с другой. Кроме того, при равномерном
движении автомобиля по горизонтальному участку пути мощность двигателя не
расходуется на преодоление сопротивлений подъему и разгону. В этом случае
уравнение мощностного баланса принимает вид:
Nm = Nr + Nf+N9. (176)
Мощность Nn затрачиваемая на трение в механизмах силовой передачи
автомобиля, может быть выражена в зависимости от мощности Nm9 развиваемой
двигателем:
N, = O—nJNm, (177)
где Yjm — механический к. п. д. трансмиссии.
Подставляя это выражение в уравнение (175), получим:
AU» = W/+^-W; + W,, (178)
92 Тяговая динамика автомобиля
В тяговом балансе [уравнение (174)] дано аналитическое выражение для всех
сил сопротивления. Если же силы сопротивления умножить на скорость v
автомобиля, то получим мощности, затрачиваемые на все виды сопротивления. Таким
образом, пользуясь уравнением (174), преобразуем уравнение (178) и получим
окончательное выражение для мощностного баланса:
Л/Л = 4Qv+Wv> + *-£v%-, (179)
где мощность Nm выражена в кгм/сек. Если выразить ее в л. с, то левую часть
уравнения необходимо помножить на 75, т. е.
75NmiA.c.}rim = ^Gv + Wv* -Ь 8-^- v^L . (179')
В тяговой так же, как и в мощностной баланс автомобиля, входит
механический к. п. д. t\m силовой передачи или трансмиссии автомобиля.
Экспериментальное определение этого коэфициента может быть произведено различными
способами. Наиболее точное его определение при любых значениях передаваемого через
трансмиссию вращающего момента может быть произведено при помощи установки
вместо автомобильного двигателя балансирного электродвигателя с одновременной
установкой тормозных устройств на полуосях. При этом механический к. п. д.
7]т транссмиссии определится из выражения:
im MmiKi0 '
где М — момент на полуосях;
Мт — момент на валу электродвигателя;
iK и /0 — передаточные числа коробки передач и главной передачи.
Коэфициент т|да может быть также определен (хотя и с неколько меньшей
точностью) при помощи испытания автомобиля на стенде с беговыми барабанами.
Схема этого стенда приведена ниже (см. § 5). При помощи такого испытания
автомобиля можно определить полную суммарную окружную силу Рр9 развиваемую
на ведущих колесах. Так как при испытании автомобиля на стенде с беговыми
барабанами скорость вращения ведущих колес сохраняется постоянной, то сила Рр
[см. уравнение (36)] определится из уравнения:
Если предварительно произвести стендовое испытание двигателя, то можно
определить его вращающий момент, соответствующий заданным условиям его работы
при испытании автомобиля (открытие дросселя, скорость вращения коленчатого
вала). В результате из приведенного выше уравнения определяется к. п. д. т]ш
трансмиссии автомобиля.
Для получения достаточно точных результатов в этом случае необходимо, чтобы
рабочий режим двигателя (в том числе и тепловой) при испытании автомобиля на
стенде с беговыми барабанами полностью соответствовал тому режиму, который
двигатель имел при его отдельном стендовом испытании.
Согласно экспериментальным данным в значительном диапазоне изменения
скорости вращения коленчатого вала механический к. п. д. ч\т трансмиссии
автомобиля сохраняется примерно постоянным вне зависимости от установленной
передачи в коробке передач.
При увеличенных скоростях вращения коленчатого вала большие потери в
трансмиссии получаются при движении автомобиля на последней — прямой передаче.
Такое явление объясняется тем, что при включении низших передач значительно
уменьшается потеря на взбалтывание масла в коробке передач и в главной
передаче в связи со снижением скорости вращения шестерен, что и обеспечивает общее
уменьшение потери на трение в трансмиссии.
Мощностной баланс автомобиля
93
Наконец, потеря на трение в трансмиссии может быть оценена при испытании
отдельных агрегатов трансмиссии — главным образом коробки передач и главной
передачи. Для получения наиболее точных данных испытание агрегатов следует
производить или по замкнутой схеме
(33 и 40] или при одновременном
испытании двух агрегатов. Такие
эксперименты показали, что потеря
на трение в механизмах трансмиссии
весьма сильно зависит от вязкости
масла, применяемого для смазки
коробки передач и главной передачи.
На фиг. 77 приведены
результаты испытания коробки передач
грузового автомобиля при
включении третьей передачи [20]. Кривые
показывают зависимость механиче-
95
92
90,
■—
—" ^
^-—ч
—
_ /\
' = 70°
' = 30°
-
— —
500
1000
1500
2000 пт об/мин
Фиг. 77. Результаты эксперимента по
определению зависимости механического к. п. д. г\к
коробки передач от числа оборотов пт при разных
значениях температуры масла. Вращающий
момент постоянный и равен 10 кгм.
ского к. п. д. 7]к коробки передач
от числа оборотов пт при
постоянной нагрузке в 10 кгм и при двух
значениях температуры масла (нигрол) 30 и 70°. Из графика видно, что к. п. д.
коробки передач заметно увеличивается с повышением температуры масла, что
обусловливается уменьшением потери на взбалтывание масла.
40
§ 3. ДИАГРАММА ДВИЖЕНИЯ АВТОМОБИЛЯ
Выше были представлены аналитические выражения для тягового и мощност-
ного балансов автомобиля. Каждый из этих балансов можно представить
графически как функцию скорости вращения коленчатого вала (пт об/мин) или
скорости движения автомобиля
(v B км\час). Полученный
график носит название
диаграммы движения
автомобиля. В дальнейшем
будем называть график
тягового баланса авто-
мобиля тяговой
диаграммой движения, а график
мощностного баланса —
мощностной диаграммой
движения автомобиля. На
фиг. 78 представлен
примерный вид мощностной
диаграммы движения ав-
томобиля. Здесь, кривая
Nm представляет собой
внешнюю характеристику
автомобильного двигате-
1/1Я [IV фут —— / I / L ffj В \ •
При числе оборотов
Пн коленчатого вала в
минуту двигатель
разви20
W
**
А
V
/
А
У
у
i
г
//
I
л
/
1
—'
!
i
-*
|
500
WOO 1500 2000 2500 nm o6/MUh
0 20 <+Q 60 80
Фиг. 78. Мощностная диаграмма движения автомобиля.
вает максимальную
мощность (точка Л на фиг. 78).
Устойчивая работа двигателя при полном открытии дросселя ограничивается
минимальной скоростью вращения коленчатого вала пт-т-
94 Тяговая динамика автомобиля
Между числом оборотов коленчатого вала пт в минуту и скоростью
автомобиля v имеется определенная прямолинейная зависимость, которая выражается
уравнением:
v = 2тГкПт , (180)
где rK— радиус качения колеса, который принимается приближенно постоянным;
пт — число оборотов коленчатого вала в минуту;
1к и i0 — передаточные числа коробки передач и главной передачи.
В этом уравнении скорость v автомобиля • выражена в мсек. Если выразить
ее в кмIчас, то соответственно получим:
bOi0iK
Таким образом, при заданной конструкции автомобиля и установке
определенной передачи в коробке передач каждому числу оборотов коленчатого вала пт
в минуту соответствует приближенно определенная скорость автомобиля v кмчас.
Благодаря этому для той же характеристики двигателя Nm9 представленной на
фиг. 78, можно на оси абцисс нанести шкалу скорости v. Фиг. 78 соответствует
движению автомобиля на последней — прямой передаче (/*= 1); передаточное числа
главной передачи принято равным 4,5, а радиус качения колеса г^==0,4 м.
Если от кривой, выражающей мощность двигателя Nm, отложить вниз отрезки Nn
выражающие в том же масштабе мощность (1—ч}т) Nm, теряемую на трение
в механизмах силовой передачи, то получим некоторую кривую NK,
представляющую собой мощность, подводимую к ведущим колесам автомобиля при
установившемся движении последнего.
Далее от мощности NK откладываем вниз мощность Nw, равную ч 6з _- и
теряемую на сопротивление воздуха. В результате получаем новую кривую,
изображающую собой некоторую мощность Nc, которой автомобиль располагает для
преодоления сопротивления качению, для взятия подъема и для разгона. Для
первых двух мощностей Л^ и Nt мы имеем соответственно следующие выражения:
Принимая Nf + Nt = N^ получаем:
Так как эта мощность прямо пропорциональна скорости v автомобиля, то при
заданном значении коэфициента ф она на фиг. 78 изображается прямой, проходящей
через начало координат. На фиг. 78 для мощности N& представлены три прямые,
соответствующие трем различным значениям коэфициента ф. Каждая из этих прямых
пересекает кривую Nc в точке, соответствующей максимальной скорости
автомобиля при дороге, обладающей заданным коэфициентом сопротивления ty.
Отрезки ординат, расположенные между кривой Nc и прямой Л^ определяют
избыточную мощность автомобиля или запас его мощности, идущий на сообщение
автомобилю ускорения — . По мере увеличения значения коэфициента ']>
возможная максимальная скорость автомобиля уменьшается, и запас мощности для
разгона также уменьшается. Наконец, при некотором значении коэфициента &
прямая для мощности Л/ф будет касательна кривой Nc и запас мощности равен нулю.
Коэфициент <1> в этом случае представляет собой то максимальное сопротивление
дороги, которое автомобиль может преодолеть на соответствующей (в данном
случае -- последней) передаче в коробке передач (при установившемся движении).
Таким образом, при помощи мощностной диаграммы движения автомобиля
можно определить те максимальные скорости, которых автомобиль достигает на
заданной передаче при различных значениях коэфициента ф сопротивления дороги.
Диаграмма движения автомобиля
95
SO v км/час
На фиг. 78 представлена мощностная диаграмма движения автомобиля в
случае установки в коробке передач последней, прямой передачи. Совершенно
аналогично этому может быть построен график мощностного баланса автомобиля
для всех передач в коробке передач.
На фиг. 79 представлен конечный результат такого построения для
автомобиля, имеющего трехступенчатую коробку передач. При этом коэфициент ч\т
был принят постоянным и равным 0,9. Здесь для каждой передачи в коробке
проведена кривая мощности Л^, т. е. кривая мощности на ведущих колесах
автомобиля за вычетом мощности Nw, идущей на сопротивление воздуха.
Аналогично фиг. 78
здесь проведен ряд прямых ^с
мощности Щ, соответствую- лс
щих различным значениям
коэфициента ф. Коэфициент
фх соответствует очень
хорошей дороге, и в этом
случае автомобиль
развивает максимальную скорость
движения. При коэфициенте
ф2 сопротивление дороги
увеличивается, в
соответствии с чем понижается
максимальная скорость
автомобиля на последней
передаче, и уменьшается запас
мощности. При значении
коэфициента ф, равном ф3,
автомобиль еще может дви- Ж
гаться на последней пере- „
даче, однако, с очень
малой скоростью и без вся- Т
кого запаса мощности для
разгона. Согласно фиг. 79 Фиг. 79. Мощностная диаграмма движения автомобиля,
это же сопротивление до- имеющего трехступенчатую коробку передач (кривые /,
роги автомобиль значитель- и и ///-соответствуют разным передачам).
но легче преодолевает на
второй передаче, развивая при этом большую скорость движения и имея больший запас
мощности для разгона. На дороге, сопротивление которой определяется
коэфициентом ф4, автомобиль уже не может двигаться на третьей передаче. При этом
обязательно должна быть установлена вторая передача. На дороге,
сопротивление которой определяется коэфициентом ф5, автомобиль еще может двигаться на
второй передаче, но без всякого запаса мощности для разгона. Наконец, на
первой передаче автомобиль может преодолеть максимальное сопротивление дороги,
определяемое коэфициентом ф6.
На фиг. 79 для всех трех передач коробки передач нанесена одна шкала
скорости v движения автомобиля. Так как при переключении шестерен в коробке
передач соотношение между скоростью вращения коленчатого вала и ведущих
колес соответственно изменяется, то для каждой передачи в коробке передач на
фиг. 79 нанесена своя шкала для скорости вращения (пт) коленчатого вала
двигателя.
Пользуясь графиком мощностного баланса на всех передачах в коробке
передач, можно определить зависимость скорости движения автомобиля от
различного сопротивления дороги в пределах от наименьшего значения коэфициента ф,
соответствующего самой хорошей дороге, вплоть до максимального его значения,
определяющего самую плохую дорогу, по которой еще может проходить
автомобиль при включении первой передачи в коробке передач. Эта зависимость ско-
500
1000
1500
2000 2500 пто5/мин-
1000
2000 3000 пт об/мин
1000 2000 3000 Пт °б/мин.
Тяговая динамика автомобиля
0,24
0.20
0,16
0,12
о. од
0,04
V
I
I
j
■ i
!
_1
)
и/ ..
'5
ь
ъ
рости v движения автомобиля от коэфициента ф сопротивления дороги может
быть представлена графически. На фиг. 80 приведены кривые, построенные на
основании фиг. 79. При этом
скорость автомобиля
предполагается равномерной и
изменяющейся на каждой передаче
в коробке передач в
пределах изменения оборотов
коленчатого вала двигателя от
минимальных и до тех, которые
соответствуют максимальной
мощности двигателя, поэтому
кривые движения
автомобиля на первой и второй
передачах на фиг. 80
ограничены указанными значениями
мощности и оборотов
двигателя.
Аналогично мощностному
балансу может быть
графически изображен тяговый
баланс автомобиля; при этом
получается график, называемый
тяговой диаграммой движения
О 20 40 60 во v «"/час автомобиля. На фиг. 81 пред-
*Фиг. 80. Зависимость между коэфициентом ф сопроти- ставлен такой график, соответ-
вления дороги и скоростью v автомобиля, достижимой ствующий движению автомо-
при установке различных передач в коробке передач. биля на прямой передаче.
График построен для того же
.автомобиля, для которого на фиг. 78 был изображен графически мощностной
баланс. Кривая Рр соответствует полной суммарной окружной силе, определяемой
Ркг
160
120-
80—,
40
О 20 40 60 80 130 vкм/час
Фиг. 81. Тяговая диаграмма движения автомобиля.
уравнением (36). Откладывая вниз от кривой Рр отрезки, равновеликие силе Pwy
затрачиваемой на сопротивление воздуха, получим кривую, соответствующую силе
Рс, необходимой для преодоления сопротивления дороги ф и создания уско-
рения (* ) .
Сила Р<1> , необходимая для преодоления сопротивления дороги [уравнение (22')J,
не зависит от скорости движения автомобиля и изображается прямыми линиями,
IV
Рш -
——• =
•-*■—
—
■**—
\
У
Рр
Рс
Тяговая или динамическая характеристика автомобиля
97
300
200
100
параллельными оси абсцисс для нескольких значений ф. На фиг. 81 приведены
три прямые, соответствующие трем различным значениям коэфициента ф.
Вертикальные отрезки между горизонтальными прямыми Рф и кривой Рс определяют
тот избыток окружной или тяговой силы, который имеет автомобиль при
движении по данной дороге. Этот р Kg
избыток идет на ускорение с
автомобиля. Точка
пересечения прямой Рф с кривой
силы Рс определяет
максимальную скорость
автомобиля при данном
сопротивлении дороги.
На фиг. 81 представлен
графически тяговый баланс
(тяговая диаграмма
движения) автомобиля при
установке в коробке передач
последней передачи. Afta-
логично тому, как это было
выполнено для случая мощ-
ностного баланса, тяговая
диаграмма движения
автомобиля может быть построена
одновременно для всех
передач в коробке передач.
На фиг. 82 представлен
такой график тяговой
диаграммы движения автомобиля
с трехступенчатой
коробкой передач. Проводя
прямые, соответствующие силе
Рф при различных значениях
коэфициента ф
сопротивления дороги, получим
зависимость между скоростью v
автомобиля и
коэфициентом сопротивления дороги
ф при движении автомобиля
на различных передачах в
коробке. Прямая Рф1
соответствует хорошей дороге, на которой автомобиль развивает свою максимальную
скорость.
Предельное сопротивление дороги, которое еще может быть преодолено авто-,
мобилем при условии включения первой передачи, определяется коэфициентом
сопротивления дороги ф6. Зависимость между коэфициентом <1> и скоростью
автомобиля, полученная при помощи тяговой диаграммы движения автомобиля,
конечно, тождественна той, которая получается при помощи мощностной диаграммы
движения автомобиля.
§ 4. ТЯГОВАЯ ИЛИ ДИНАМИЧЕСКАЯ ХАРАКТЕРИСТИКА АВТОМОБИЛЯ
При сравнении различных автомобилей по их тяговым качествам и
приспособленности для работы по различным дорогам желательно иметь такое
аналитическое выражение или такой график, которые сразу характеризовали бы
автомобиль. В уравнение (174) входят данные, характеризующие динамические
качества автомобиля: коэфициент <J> сопротивления дороги, скорость v и ускорение
7 Е. А. Чудаков 2232
\'
\
__^^
«=^
°Фв
V
1
1
1
i—
1
1
1
Т "
i
Рфз
^ф.
\ ш
20
60
80
100 vKM/час
Шг-
Лг
Ir-
2000 2500 nm о6/мин
1000 2000 3000 пт об/мин
1оЬо~т~~здоо пт
Фиг. 82. Тяговая диаграмма движения автомобиля,
имеющего трехступенчатую коробку передач.
98 Тяговая динамика автомобиля
^ автомобиля. Однако в это же выражение входит одновременно ряд конструк-
тивных параметров автомобиля, в частности, — момент Мт двигателя, вес G
автомобиля, фактор W сопротивления воздуха и т. д., в соответствии с чем это
уравнение не является удобным для сравнения различных моделей автомобилей.
Очевидно, тяговый баланс надо представить в таком виде, чтобы параметры,
характеризующие конструкцию автомобиля, были, по возможности, исключены,
и сразу определялись бы элементы, характеризующие динамические качества
автомобиля.
Если из правой части уравнения (174) перенести в левую часть член Wv2,
равный Pw, то получим выражение:
MMo-tbn _/^а=фа + 8_С_, jfo. (182)
Если разделить обе части этого уравнения на полный вес G автомобиля, то
получим удельный тяговый баланс, отнесенный к единице веса автомобиля.
Выражение —™г1к1{^т представляет собой полную суммарную окружную силу Р
гк И
на ведущих колесах при установившемся движении автомобиля, отсюда получаем:
В правую часть этого уравнения входят величины, наиболее наглядно и полно
характеризующие динамические качества автомобиля. Это выражение, названное
„динамическим или тяговым фактором", и предложено было автором в качестве
основного измерителя для оценки тяговых качеств, или динамичности автомобиля.
В дальнейшем динамический фактор обозначается буквой D. Таким образом:
(184)
Динамический фактор D представляет собой полную суммарную окружную
(или тяговую) силу Рр на ведущих колесах, уменьшенную на силу Pw
сопротивления воздуха и деленную на полный вес G автомобиля. Окружная сила Рр и
сила сопротивления воздуха Pw при заданных конструктивных параметрах
автомобиля могут быть определены опытным путем в зависимости от скорости
движения автомобиля. Это дает возможность построить график, представляющий
зависимость динамического фактора D от скорости v движения автомобиля.
Такой график, названный динамической или тяговой характеристикой автомобиля,
в настоящее время применяется в Союзе как основной измеритель для оценки
тяговых или динамических качеств автомобиля.
На фиг. 82 был изображен график тягового баланса автомобиля, причем по
оси ординат отложена была сила Рс = Рр — Pw. Таким образом, если силу Рс
разделить на вес G автомобиля, то получим динамический фактор D.
Следовательно, для получения динамической характеристики необходимо лишь произвести
перестройку графика тягового баланса, представленного на фиг. 82, или
соответствующим образом изменить масштаб ординат.
На фиг. 83 изображен примерный вид динамической характеристики
автомобиля с четырехступенчатой коробкой передач. Здесь по оси ординат отложено
значение динамического фактора D, а по оси абсцисс — скорость v движения
автомобиля в км/нас. Предположим, что движение автомобиля совершается по
дороге с коэфициентом фх сопротивления дороги. Проводя горизонтальную
линию, параллельную оси абсцисс на расстоянии фх от начала координат,
определяем ту скорость vx автомобиля, которую он может иметь при заданном значении
коэфициента ф, и ту передачу, на которой это сопротивление может быть
преодолено автомобилем. Одновременно с этим при любой другой скорости v,
меньшей максимальной, может быть приближенно определено то ускорение, которое
Диаграмма движения автомобиля
99
способен развить автомобиль при данных условиях движения. Например, при
некоторой скорости v2 избыток тяговой силы, необходимой для разгона
автомобиля (при движении его по дороге с коэфициентом сопротивления $г)
определяется отрезком е. Таким образом, согласно уравнению (184) ускорение
автомобиля при этих условиях движения определится из выражения:
dv
где отрезок е выражен в том же масштабе, что и динамический фактор D,
Некоторая неточность, получаемая при этом, объясняется тем, что при
ускоренном движении автомобиля не- ^
сколько изменяется внешняя ха- о,4
рактеристика двигателя. Этот
вопрос будет в дальнейшем
рассмотрен более подробно.
Из уравнения (184) следует,
что предельное значение
динамического фактора в каждом случае 0,3
приближенно определяется
максимальным значением суммарной
окружной силы Рр. Таким
образом, для максимального значения
динамического фактора £>тах
получаем приближенное выражение: 0,2
G
(185)
— Yp max
o.i
S
\
\
-.1
h
I
ч
\
—^-
__
1
I ,
л
г
—1--.
1
1
1
41
|S
1
1
1
1
1
!
1
ч
\
20 vz 40
v1 60
Фиг. 83. Динамическая или тяговая характеристика
автомобиля.
Выше приведены были
уравнения (86) и (88), определяющие
максимальные (допустимые по
условию сцепления ведущих
колес с дорогой) значения коэфи-
циента ^р, а следовательно, и
динамического фактора D.
На фиг. 84 изображена
динамическая характеристика (та же,
что на фиг. 83); кроме того, на этом же графике нанесены линии [по уравнениям
(86) и (88)], соответствующие максимальным значениям динамического фактора D
при различных значениях коэфициента сцепления <р, изменяющихся от 0,1 до 0,6.
Эти кривые ограничивают динамическую характеристику автомобиля, и вся ее
часть, лежащая выше соответствующей кривой £шах, уже не имеет
практического значения, так как при данном значении коэфициента сцепления ср между
колесами автомобиля и дорогой дальнейшее увеличение силы Рр невозможно
из-за пробуксовывания ведущих колес.
Выше на фиг. 83 и 84 представлены были примеры динамической
характеристики для автомобиля со ступенчатой коробкой передач. В случае
бесступенчатой коробки передач динамическая характеристика изображается плавной кривой.
Согласно уравнениям (182) и (183) динамический фактор D определяется из
выражения:
£> =
G
(186)
100
Тяговая динамика автомобиля
0,3
0,2
0,1
*-—
и
**-——
f 2t
\
,
|„
7 31
^
1 Н
(У =0,6
(w=*0 5
)
\[~~-'г—i
В max
:\
1 51
^\^
{<Р~0,3)
7 6L
7 76
0,2)
-X
86
i
■—
Фиг. 84. Предельная динамическая или тяговая характеристика
автомобиля.
D
0,3
0,2
0,1
1
л
ч
\
\
\
II
\
ч
——,
—^.
^^
!
20
60
80
Фиг. 85. Динамическая характеристика
автомобиля при установке на нем бесступенчатой
коробки передач.
Экспериментальное определение динамической характеристики автомобиля 101
Пользуясь уравнением (180') и преобразуя уравнение (186), получим:
-г,3
60
Wv*
- Мтптг[т — -^ 75 • 3,6Nmi\m -
3,62
(187)
vG
vG
где Nm— мощность двигателя в л. с.\
v — скорость в км/час.
При помощи уравнения (187) на фиг. 85 построена динамическая
характеристика для того же автомобиля, для которого была построена динамическая
характеристика на фиг. 83, но при установке на нем бесступенчатой коробки
передач. При этом к. п. д. г\,п был условно принят постоянным и равным 0,85.
Предельные значения передаточного числа iK были взяты соответственно равными
1 и 5. При этом кривая динамической характеристики получает плавную форму
и асимптотически приближается к оси ординат.
При использовании уравнения (186) или (187) необходимо иметь в виду,
что в случае бесступенчатой коробки передач ее к. п. д. т}ш обычно не остается
постоянным, а изменяется и часто значительно в зависимости от значения
передаточного числа iK.
Ниже будут приведены более подробные данные о бесступенчатой коробке
передач и об ее влиянии на динамические или тяговые качества автомобиля.
§ 5. ЭКСПЕРИМЕНТАЛЬНОЕ ОПРЕДЕЛЕНИЕ ДИНАМИЧЕСКОЙ
ИЛИ ТЯГОВОЙ ХАРАКТЕРИСТИКИ АВТОМОБИЛЯ
Построение динамической или тяговой характеристики может быть
произведено или при помощи испытания автомобиля на стенде с беговыми барабанами,
или при помощи дорожного испытания автомобиля. На фиг. 86 приведена схема
Кманомегпру
Фиг. 86. Схема установки автомобиля
для испытания на стенде с беговыми
барабанами.
стенда с беговыми барабанами. На валу А укреплены два беговых барабана
радиуса R6, на которые автомобиль и опирается задними ведущими колесами.
Передними колесами автомобиль опирается на гидравлическую платформу или
другое какое-либо устройство, дающее возможность измерять реакцию Zl9
приходящуюся на переднюю ось. Полный вес G автомобиля приложен в центре тяжести,
расположенном на растояниях а и b от передней и задней осей. Чтобы
автомобиль оставался на беговых барабанах и не скатывался вперед, он крепится за
заднюю ось к упору, причем тяга, крепящая автомобиль, лежит в одной
горизонтальной плоскости с задней осью. Упор дает возможность определить тяговую
силу Т.
102
Тяговая динамика автомобиля
При работе автомобиля на стенде с беговыми барабанами вал А вращается
против часовой стрелки, как это изображено на фиг. 86. При этом мощность
на задних ведущих колесах автомобиля затрачивается на работу трения в
тормозе, установленном на валу А.
Для того чтобы определить динамический фактор D при различной скорости
движения автомобиля, необходимо согласно уравнению (184) найти силу Рр, для
чего требуется измерить момент Мр, подведенный к ведущим колесам. Момент Мр
на ведущих колесах определяется, если только измерена реакция Zx на передних
колесах по выражению: MD= (G± — ZX)L\ отсюда определяется полная суммарная
Л/Т
окружная сила Р равная —р- [см. уравнение (15)].
При таком методе определения силы Рр измерения силы Т и тормозного
момента Мб (на валу Л) не требуется. Однако динамометрическая опора под
передние колеса автомобиля, обеспечивающая возможность получения точного
отсчета, конструктивно является довольно сложной, в связи с чем стенды с
беговыми барабанами весьма часто не имеют таких приспособлений и не дают
возможности определять реакцию Zx. В этом случае полная суммарная окружная
сила Рр определяется или на основании измерения тормозного момента Мб и
силы Г, или на основании определения одного момента Мб, но в последнем
случае необходимо знать силу Pf2, теряемую на качение задних колес автомобиля.
В первом случае сила Р определяется на основании следующих соображений.
б)
Фиг. 87. Схемы сил, моментов и реакций, действующих на ведущие
колеса автомобиля {а) при испытании его на стенде с беговыми барабанами
и на беговые барабаны (б).
На фиг. 87 изображены схемы сил моментов и реакций, действующих на
ведущие колеса автомобиля при испытании его на стенде с беговыми барабанами
(схема а) и на беговые барабаны (схема б).
Из условия равновесия ведущих колес по отношению к их оси получим
(фиг. 87, а):
где Т—тяговая сила, измеренная динамометром и равная (при точной установке
задней оси автомобиля над осью беговых, барабанов) окружной силе Р;
М — момент сопротивления перекатыванию колес по барабанам.
Из условия равновесия беговых барабанов по отношению к их оси получим
(фиг. 87,6):
Экспериментальное определение динамической характеристики автомобиля ЮЗ
Входящий в это уравнение момент Мб учитывает все потери, в том числе
трение в подшипниках и сопротивление воздуха.
Определяя из полученных уравнений суммарную полную окружную силу Рр9
получим:
Рр^г^Г г Г"* '188)
у гк г к 'к
Сила Р может быть, кроме того, определена из выражения:
Таким образом, при последнем методе определения силы Рр необходимо или
аналитически, или опытным путем определить силу Р^\ но при этом не требуется
высокой точности установки задней оси автомобиля над осью беговых барабанов,
как при определении силы Т. Таким образом, наилучшим методом определения
полной суммарной окружной силы Р а следовательно, и динамической
характеристики автомобиля является метод, при котором измеряется реакция на
передние колеса автомобиля при испытании последнего на стенде с беговыми
барабанами. Если такое приспособление отсутствует, то силу Рр можно определять
при помощи измерения силы Т и тормозного момента на беговых барабанах [по
уравнению (188)] или, наконец, при помощи измерения одного тормозного
момента [уравнение (189)].
Для получения динамического фактора D, помимо полной суммарной
окружной силы Рр, необходимо знать силу сопротивления воздуха Pw. Эту силу
определяют или при помощи пробега автомобиля, или же подсчитывают аналитически,
задаваясь соответствующим коэфициентом сопротивления воздуха К на основании
имеющихся данных. Сила Рр и сила Pw сопротивления воздуха определяются как
функции окружной скорости беговых барабанов, или^ что то же, как функции
скорости v движения автомобиля. В результате получаются все данные,
необходимые для построения динамической характеристики.
Динамическая характеристика автомобиля может быть построена также и при
помощи пробегового испытания автомобиля. Для этой цели необходимо знать
сопротивление ф дороги, на которой производится испытание. Если по дороге
с заданным коэфициентом сопротивления ф автомобиль на полном открытии
дросселя достигает установившегося движения [~ = 0 ) , то согласно уравнению (184)
динамический фактор D при этом получается равным коэфициенту ф
сопротивления дороги. Таким образом, определяя максимальную скорость движения
автомобиля на разных дорогах, можно найти зависимость динамического фактора D от
скорости v движения автомобиля, а следовательно, можно построить
динамическую характеристику. Недостатком этого метода построения динамической
характеристики является то, что определение коэфициента ф сопротивления дороги
является весьма затруднительным. Кроме того, весьма трудно подобрать дороги
с требуемыми значениями коэфициента ф, остающимися постоянными на достаточно
большом участке дороги, поэтому лучшим методом определения динамической
характеристики автомобиля является испытание последнего на стенде с беговыми
барабанами.
Испытание автомобиля на стенде с беговыми барабанами для получения его
динамической характеристики часто невозможно на первой передаче в коробке
ввиду малой скорости вращения барабана и большой величины окружной силы
Рр. Тормозные приспособления при этом весьма часто оказываются недостаточно
мощными, поэтому для приближенного построения динамической характеристики на
всех передачах в коробке можно воспользоваться динамической характеристикой,
полученной опытным путем лишь для последней передачи; кривые же динамической
104 Тяговая динамика автомобиля
характеристики для других передач можно подсчитать аналитически на основании
приведенных ниже соображений.
Динамические факторы Do на последней передаче и DK на промежуточной
передаче определяются из следующих выражений:
rJL—Q (191)
При одинаковой скорости вращения коленчатого вала двигателя и полном
открытии дросселя вращающий момент Мт на коленчатом валу остается
постоянным на любой передаче. Скорость vKn автомобиля при этом приближенно (из-за
изменения радиуса качения ведущих колес) изменяется в зависимости от переда-
1 очного числа iK , т. е.
v
1к
Полагая, что механический к. п. д. силовой передачи ч\т при одинаковой
скорости вращения коленчатого вала также остается примерно постоянным при всех
передачах в коробке, заменяем в уравнении (191) величину ——- /0 соответству-
ющим ей значением из уравнения (190). После необходимых преобразований
получим:
D = О i -f- -— v2 K • (192)
о
Величина iK значительно больше единицы, поэтому, пренебрегая единицей в
числителе, можно для упрощения подсчета пользоваться уравнением:
W
DK = DQiK + -g- v4K. (193)
Для сравнительно тихоходных грузовых автомобилей ввиду их значительного
веса G можно совсем пренебречь вторым членом в правой части уравнения (193),
и в этом случае достаточно точным является уравнение:
DK = DoiK. (194)
Выше были приведены методы экспериментального определения динамической
характеристики автомобиля. Кроме того, динамическая характеристика автомобиля
может быть подсчитана на основании результатов стендового испытания его
двигателя. При помощи этого испытания находится зависимость вращающего момента Мт
двигателя от скорости вращения коленчатого вала (пт об/мин). Динамический
фактор D определяется в зависимости от этого момента на основании
следующего выражения:
При заданных передаточных числах iK и i0 между скоростью v автомобиля и
скоростью вращения коленчатого вала имеется прямолинейная зависимость,
определяемая уравнением (180) или (180'). Таким образом, задаваясь механическим
к. п. д. г\т трансмиссии автомобиля и фактором W сопротивления воздуха, можно
подсчитать значение динамического фактора D для любой скорости автомобиля
при любой передаче в коробке передач.
Некоторая неточность такого подсчета по сравнению с экспериментальным
методом построения динамической характеристики обусловливается лишь
возможностью ошибки в принятом значении коэфициента yj .
Экспериментальное определение динамической характеристики автомобиля 105
В качестве средних цифр для коэфициента r\m можно принять следующие
значения: для легковых и грузовых (малой грузоподъемности) автомобилей от 0,95
до 0,9; для автобусов и грузовых автомобилей повышенной грузоподъемности —
от 0,9 до 0,8 при этом меньшее значение соответствует двойной главной
передаче.
Приведенные данные соответствуют механической ступенчатой передаче. При
гидродинамической и электрической бесступенчатых передачах к. п. д. ч\т
значительно изменяется в зависимости от условий работы автомобиля (скорость vy
сила Рр).
В этом случае необходимо экспериментальное определение динамической
характеристики автомобиля; построение же ее на основании заданной внешней
характеристики двигателя может сопровождаться значительной ошибкой.
§ 6. ОСНОВНЫЕ ЭЛЕМЕНТЫ ДИНАМИЧЕСКОЙ ХАРАКТЕРИСТИКИ
АВТОМОБИЛЯ
Динамическая характеристика дает возможность достаточно полно определять
тяговые качества автомобиля и в соответствии с этим является весьма полезной
для суждения о том, насколько данный автомобиль соответствует работе в
заданных условиях. Однако иногда целесообразно выделить несколько основных
элементов динамической характеристики, которые и должны являться измерителями
тяговых качеств автомобиля. Ниже приведены те элементы динамической
характеристики, которые являются наиболее важными для суждения о тяговых
качествах автомобиля.
Максимальная скорость vmuX автомобиля при движении его
по хорошей дороге (с коэфициентом сопротивления ф, равным 0,015). Эта
скорость вводится в число основных элементов динамической характеристики
также и для того, чтобы дать возможность проверить это тяговое качество
автомобиля пробегом по хорошей дороге без испытания его на стенде с беговыми
барабанами.
Динамический фактор DL при заданной скорости
автомобиля при движении на последней передаче. Для того чтобы
обеспечить автомобилю хорошие тяговые качества на средних наиболее употребляемых
скоростях его движения, необходимо задать некоторое минимальное значение
динамического фактора D на выбранной скорости vv
Этот измеритель тяговых качеств автомобиля определяет собой степень
выпуклости кривой динамической характеристики при движении автомобиля на последней
передаче.
Скорость vx задается на основании эксплоатационных данных; в среднем эту
скорость можно принять равной 0,4—0,5 максимальной скорости vmax.
Максимальный динамический фактор Dimax при движении
автомобиля на последней передаче. Если движение автомобиля принять
dv
установившимся, т. е. принять ускорение -г- равным нулю, то согласно
уравнению (184) максимальное значение динамического фактора при движении
автомобиля на последней передаче будет определять собой то максимальное
сопротивление дороги tyimax, которое автомобиль может взять на этой
передаче.
Скорость vK\ автомобиля при движении на последней
передаче, соответствующая максимальному значению £)шах
динамического фактора. Эта скорость является характерной, так как она
представляет собой предел устойчивого движения автомобиля на последней передаче
при работе двигателя по внешней характеристике. На фиг. 88 представлена
отдельно кривая динамической характеристики автомобиля при движении его на
последней передаче. Касательная к этой кривой, параллельная оси абсцисс, опрс-
106
Тяговая динамика автомобиля
ulmax
Ж
деляет собой максимальное значение D± динамического фактора, что соответствует
максимальному сопротивлению дороги tymax, которое автомобиль может преодолеть
на последней передаче. Если из получившейся таким образом точки касания
провести вертикаль вниз, то точка пересечения этой вертикали с осью абсцисс
определит скорость vK\, соответствующую максимальному значению динамического
фактора.
Пусть автомобиль движется по дороге с некоторым сопротивлением, определяемым
коэфициентом фх несколько меньшим фтах. При условии работы двигателя по
внешней характеристике автомобиль на дороге с этим
сопротивлением может иметь две скорости: vx и
v2, которые определяются пересечением прямой ф2
с кривой динамической характеристики.
Предположим, что автомобиль движется со
скоростью гг1э т. е. со сквростью, большей, чем
скорость vK\. Если при этом из-за
кратковременного увеличения
сопротивления дороги ф скорость v
несколько уменьшится, то
появится избыточная сила тяги,
которая способствует преодолению
повышенного сопротивления, т. е.
в этом случае происходит как
бы автоматическое
саморегулирование движения автомобиля.
Это явление будет иметь место
для всех значений скорости v
движения автомобиля, больших,
чем скорость vK\,
соответствующая максимальному значению Dt
динамического фактора. При
скорости, меньшей vK\, явление протекает иначе. Предположим, например, что
автомобиль на дороге с сопротивлением фх имеет скорость v2. Если предположим
далее, что из-за кратковременного увеличения сопротивления дороги скорость
автомобиля снизилась, то сейчас же произойдет уменьшение тяговой силы на ведущих
колесах и динамического фактора. В силу этого произойдет дальнейшее
замедление движения автомобиля и дальнейшее падение динамического фактора.
В результате автомобиль остановится, если в коробке передач не будет
включена низшая передача.
Таким образом, при скорости движения автомобиля, меньшей vK\, и при
работе двигателя по внешней характеристике имеет место неустойчивое движение
автомобиля. Скорость vK\, отделяющая область устойчивого движения автомобиля
от области неустойчивого его движения, названа критической скоростью
автомобиля. Так же, как и максимальное значение динамического фактора Dimax, она
является величиной, характеризующей автомобиль с точки зрения его тяговых
качеств при движении на последней передаче; она определяет способность
автомобиля к движению с небольшой скоростью на последней передаче по тяжелой
дороге. Желательно, чтобы критическая скорость автомобиля при всех прочих
равных условиях была по возможности мала.
Динамический фактор D2 при заданной скорости v2
автомобиля при движении на промежуточных передачах. Для того
чтобы установить правильность выбранного числа передач в коробке передач и
их соотношения, необходимо задаться элементами динамической характеристики
автомобиля при движении его по тяжелой дороге, на которой движение может
осуществляться лишь на промежуточных передачах. Для этой цели может быть
задана некоторая минимальная скорость v2, которую автомобиль в состоянии
разбивать пои повышенном сопротивлении дороги ф2. Последнее осуществляется
Фиг.
8. Динамическая характеристика автомобиля
на последней передаче.
Основные элементы динамической характеристики автомобиля
107
в том случае, если точка с заданными значениями D2 динамического фактора и
скорости v2 автомобиля будет лежать внутри контура кривых динамической
характеристики. Значение динамического фактора D2 выбирается на основании качества
той дороги (длительные подъемы, тяжелый грунт), на которой должен работать
данный автомобиль.
Максимальный динамический фактор Dmax при движении
автомобиля на первой передаче. Для того чтобы автомобиль мог
преодолевать максимальное сопротивление дороги, он должен иметь возможность
развивать соответствующую суммарную окружную (тяговую) силу на ведущих колесах.
Динамический фактор Dmax и определяет то предельное значение коэфициента
сопротивления ДОрОГИ фшах, КОТО- " £
рое может быть преодолено Dmax\—т^-^чг
данным автомобилем.
Согласно фиг. 83 значение
Dmax может быть определено
горизонтальной касательной,
проведенной к кривой /
динамической
характеристики, соответствующей
движению автомобиля на первой
передаче.
Перечисленные выше
основные элементы
динамической характеристики в
достаточной мере
характеризуют автомобиль с точки
зрения его тяговых качеств. Для
того чтобы можно было
наиболее легко представить
себе связь между этими
основными элементами и
динамической характеристикой,
как таковой, на фиг. 89
представлен примерный вид
динамической характеристики,
на которой нанесены все
перечисленные выше
основные ее элементы. Скорость
^тах определяется пересечением горизонтальной прямой, соответствующей коэ-
фициенту сопротивления дороги ф = 0,015, с кривой///. Значение
динамического фактора £>!, соответствующее заданной скорости
лежащую на кривой /// динамической характеристики.
Ашах при движении автомобиля на последней передаче находится проведением
горизонтали, касательной к кривой///динамической характеристики. Полученная
таким образом точка касания позволяет также определить критическую
скорость V/ci. Динамические качества автомобиля при работе его на промежуточных
передачах определяются заданием динамического фактора D2 при некоторой
скорости v%. Точка пересечения горизонтали, соответствующей динамическому фактору
D2 и вертикали, соответствующей скорости v2, должна лежать в пределах контура
динамической характеристики. Наконец, максимальное значение динамического
фактора Dmax на первой передаче определяется горизонтальной касательной к
кривой динамической характеристики, соответствующей первой передаче.
Приведенные элементы динамической характеристики соответствуют
ступенчатой коробке передач. При бесступенчатой коробке передач сохраняют свое
значей D при tf
max
*J 1
——-
I
V
I
I
i
У =0,015
j
!
I
I
I
I
1
1
1
4
\
f
N
и
i
\
Фиг. 89. Основные элементы динамической характеристики
автомобиля.
vx, определяет точку,
Максимальное значение
ние
И D
коро рд р у р р
лишь следующие элементы динамической характеристики: vmSLX, D2 при
108
Тяговая динамика автомобиля
§ 7. ДИНАМИЧЕСКАЯ ХАРАКТЕРИСТИКА АВТОМОБИЛЯ
ПРИ РАЗЛИЧНОЙ ЕГО НАГРУЗКЕ И ПРИ НАЛИЧИИ ПРИЦЕПА
При нормальной эксплоатации автомобиля его полный вес не остается
постоянным, а значительно изменяется в зависимости от величины полезной нагрузки,
особенно для грузового автомобиля, так как в этом случае полезная нагрузка Ge
примерно равна собственному весу Go автомобиля или даже превосходит его.
В соответствии с этим тяговые качества грузового автомобиля при его движении
без нагрузки резко отличаются от тяговых качеств того же автомобиля при
движении его с полной нагрузкой; поэтому и общий вид динамической характеристики
должен резко изменяться в зависимости от величины полезной нагрузки автомобиля,
поэтому же
динамическая характеристика
для грузового
автомобиля должна резко
изменяться при его
движении с прицепом
или полуприцепом.
Динамическая '
характеристика для
другого веса автомобиля
получается введением
новой шкалы для
оси ординат. Согласно
уравнению (184),
значение динамического
фактора обратно
пропорционально
величине полного веса
автомобиля G. Отсюда
следует, что для
использования динамической
характеристики при
переменном весе автомо-
50 v км/иас биля надо масштаб оси
ординат динамической
характеристики
изменить обратно пропор-
Gx —новый вес автомобиля.
0,6-
0,5-
0,4-
0,3-
0?
0,1-
I)
■0,3^—
\
п 0/г
/7 о
П 15
П 1
П П5
к
\
!
г - -
I
Г" " "
Т " " ""
т
—L-^5
—-^
ш
—,
.. _ I
I
i
I
I
ю
20
30
Фиг. 90. Динамическая характеристика грузового автомобиля
при движении его с полной нагрузкой и без нагрузки.
ционально отношению весов
Gx
где
На фиг. 90 представлена примерная динамическая характеристика для грузового
автомобиля, имеющего четырехступенчатую коробку передач. Для динамического
фактора нанесены две шкалы: первая D соответствует полной полезной нагрузке Ge
и вторая £>! — автомобилю без нагрузки; при этом собственный вес автомобиля принят
равным 0,5G. При помощи такого графика можно найти зависимость скорости
автомобиля от качества дороги как для груженого, так и для негруженого автомобиля.
При исследовании работы автомобиля с любыми нагрузками необходимо
построить большее число шкал, соответствующих нагрузкам 0,75; 0,5; 0,25 и т. д.,
от полной полезной нагрузки.
Та же задача может быть решена при помощи построения второй шкалы
в левом квадранте (фиг. 91). Динамическая характеристика, приведенная, как обычно,
в правом квадранте, построена для грузового автомобиля с полной полезной
нагрузкой Ge. В левом квадранте по оси абсцисс отложен в некотором масштабе
динамический фактор D.
Проводим в левом квадранте через начало координат прямую под углом,
тангенс которого равен отношению масштабов для динамического фактора. Эта прямая
будет соответствовать полной (100%) нагрузке автомобиля.
Динамическая характеристика автомобиля
109
Далее проводим ряд прямых под углами, тангенс которых равен соответственно
отношению -—■, где Gx — новый полный вес автомобиля, соответствующий
различным значениям полезной нагрузки. Этими прямыми можно пользоваться для опре-
ления значения динамического фактора при различной полезной нагрузке Ge
автомобиля. На фиг. 91 проведено всего восемь прямых, причем цифры около каждой
прямой указывают процент полезной нагрузки автомобиля:
100
где Go — собственный вес автомобиля. При построении отношение нормальной
полезной нагрузки Ge к собственному весу Go автомобиля было принято
равным единице.
о
Фиг. 91. Динамическая характеристика автомобиля при переменной нагрузке.
Определение динамического фактора при заданной полезной нагрузке
автомобиля производится следующим образом.
Например, требуется определить значение динамического фактора автомобиля
при некоторой скорости vx для третьей передачи в коробке передач и нагрузке,
равной 8О°/о от полной. В правом квадранте (фиг. 91) через точку,
соответствующую скорости т/15 проводим вертикаль до пересечения с кривой динамической
характеристики, соответствующей движению автомобиля на третьей передаче
в коробке. Из полученной точки В проведем горизонталь до пересечения ее
в левом квадранте с лучом, соответствующим 80% нагрузки автомобиля. Из
полученной точки пересечения опускаем вертикаль вниз и находим точку Dl5 которая
определяет величину динамического фактора при заданном условии работы
автомобиля. Аналогичное построение выполнено для скорости v0, но для второй
передачи в коробке.
При помощи этого графика решается ряд других задач. Например, можно
определить: какое сопротивление дороги при различных полезных нагрузках может
преодолеть автомобиль на данной передаче. Для этой цели необходимо провести
горизонтальную прямую, касательную к кривой динамической характеристики на
соответствующей передаче. Такая касательная на фиг. 91 проведена к кривой //.
Точки пересечения этой прямой с соответствующими лучами в левом квадранте
определяют те сопротивления дороги <J> (равные динамическому фактору D),
которые автомобиль может преодолеть на второй передаче при различной полезной
110 Тяговая динамика автомобиля
нагрузке. Например, при нагрузке, равной 80% от полной, максимальное
сопротивление дороги определяется динамическим фактором D2.
Если, наоборот, задаться некоторым значением ф0, или, что то же, некоторым
динамическим фактором Do, то можно определить, какую скорость, при какой
нагрузке и на какой передаче может иметь автомобиль при движении по данной
дороге. Для этого в точке Do необходимо восставить перпендикуляр и из точек
пересечения этой линии с лучами в левом квадранте провести горизонтали до
пересечения их с кривыми динамической характеристики. Например, при заданном
коэфициенте сопротивления дороги и при полезной нагрузке в 80°/0 автомобиль
может двигаться на второй передаче с максимальной скоростью vQ.
При наличии прицепов и полуприцепов необходимо учитывать полный вес
всего состава G-\-G\ и в уравнении (184) в знаменатель необходимо ввести
именно эту величину. Кроме того, сила сопротивления воздуха Pw в этом случае
должна быть определена с учетом сопротивления прицепов. После этого можно
построить динамическую характеристику.
Такое распространение динамической характеристики автомобиля и на случай
наличия прицепов вносит некоторую неточность. Во-первых, при этом недостаточно
точно учитывается дополнительное сопротивление воздуха, получающееся от
прицепов. В связи с тем, что прицепы движутся за автомобилем, коэфициент
сопротивления воздуха К для них не является тем же, что и для автомобиля.
Во-вторых, коэфициент сопротивления качению / для прицепа не всегда равен коэфи-
циенту сопротивления качению автомобиля. Однако ввиду малой скорости
движения автомобиля или трактора с прицепом сопротивление воздуха очень невелико;
поэтому можно как для автомобиля, так и для прицепов задаваться одним
значением коэфициента сопротивления воздуха; получающаяся при этом ошибка, пови-
димому, невелика.
Коэфициент сопротивления качению / или коэфициент сопротивления дороги <1>
надо выбирать средним для всего поезда и уже по нему, пользуясь динамической
характеристикой, определять зависимость динамического фактора от скорости
движения автомобиля.
§ 8. ОПРЕДЕЛЕНИЕ МАКСИМАЛЬНОГО ПОДЪЕМА, КОТОРЫЙ МОЖЕТ БЫТЬ
ПРЕОДОЛЕН АВТОМОБИЛЕМ НА РАЗЛИЧНЫХ ПЕРЕДАЧАХ
И СКОРОСТИ ДВИЖЕНИЯ
Динамическая характеристика автомобиля определяет зависимость между
динамическим фактором D и скоростью v автомобиля. Одновременно с этим при
установившемся движении автомобиля 1-~т- = 0) и при заданном значении коэфициента/
сопротивления качению динамическая характеристика дает зависимость предельного
подъема / от скорости v автомобиля при движении его на различных передачах.
Согласно уравнению (184) получим, принимая ускорение "зг = ^:
*=D — /. (195)
Таким образом, если движение автомобиля является установившимся /-~ = 0)
то динамическая характеристика при данном коэфициенте сопротивления качению /
определяет те величины подъема /, которые автомобиль может преодолеть при
различной скорости v движения и при разных передачах в коробке. На фиг. 92
представлена примерная динамическая характеристика легкового автомобиля,
имеющего трехступенчатую коробку передач. Если провести линию параллельно оси
абсцисс на расстоянии от нее, равном коэфициенту сопротивления качению /, то
получим новую ось абсцисс, по отношению к которой кривые динамической
характеристики определяют значение предельного подъема /. При значении коэфициента
сопротивления качению /' = /г подъем / при некоторой скорости vn движения
автомобиля определяется соответственно отрезками: аЬ — на третьей передаче,
Определение ускорения, времени и пути разгона автомобиля
111
ad — на второй передаче и ае — на первой передаче. При значении коэфициента
сопротивления качению, равном /2, движение автомобиля может происходить
только на второй передаче и при скорости vn движения получаем следующие
отрезки, соответствующие предельному подъему i\ cd — на второй передаче и се —
на первой передаче. Шкалы для динамического фактора D и подъема i согласно
уравнению (195) получаются
одинаковыми. Таким образом, р
динамическая характеристика
без каких-либо изменений
может служить для определения
тех подъемов /, которые может
преодолеть автомобиль при
движении по дорогам с
различными значениями
коэфициента / сопротивления качению.
Выше рассматривалось
установившееся движение
автомобиля. Если автомобиль при f2
движении на подъем будет
замедлять свою скорость, т. е.
dv ^
если ускорение -т- будет
отрицательным, то может быть
преодолен больший подъем,
чем тот, который определяется fi
по динамической
характеристике автомобиля. При этом
величина предельного подъема
зависит от его длины.
Вместе с тем необходимо
———■
-
\
с
р
—
а
т
L
I
I
г
I
I
Фиг. 92. Определение зависимости между
предельным подъемом i и скоростью v движения автомобиля
при помощи динамической характеристики.
отметить, что предельный
подъем, который может быть
преодолен автомобилем на той или другой передаче, в большой мере зависит
от скорости v автомобиля. Это обусловливается характером протекания кривой
вращающего момента двигателя; последний заметно изменяется в зависимости от
скорости вращения коленчатого вала, а следовательно, и от скорости автомобиля.
В частности, при установке на автомобиле многооборотного двигателя весьма
часто автомобиль может преодолеть подъем лишь при повышенной скорости
движения. Это полностью учитывается динамической характеристикой.
§ 9. ОПРЕДЕЛЕНИЕ УСКОРЕНИЯ, ВРЕМЕНИ И ПУТИ
РАЗГОНА АВТОМОБИЛЯ
Выше был изложен метод определения при помощи динамической
характеристики предельных подъемов /, которые может взять автомобиль при
установившемся движении с различной скоростью, на разных передачах и по различным
дорогам (коэфициент /).
При помощи динамической характеристики можно также приближенно
определить предельное ускорение автомобиля при заданном сопротивлении дороги и
движении на любой передаче с данной скоростью v.
Согласно уравнению (184) при заданном значении коэфициента ф сопротивле-
dv .
ния дороги динамическая характеристика определяет ускорение -^- автомобиля:
Ь dv
112
Тяговая динамика автомобиля
D Г
0,3
Если на графике динамической характеристики провести прямую, параллельную
оси абсцисс и отстоящую от нее на расстоянии заданного значения ф2 коэфициента
сопротивления дороги, то получим новую ось абсцисс. Кривые динамической
характеристики по отношению к этой оси абсцисс в соответствующем масштабе
(различном для каждой передачи) определяют то максимальное ускорение -£-, которое
может иметь автомобиль при различных значениях скорости v движения. На
фиг. 93 представлена
динамическая
характеристика автомобиля,
имеющего трехступенчатую
коробку передач. На
расстоянии фх от оси абсцисс
проведена
горизонтальная прямая. Точка
пересечения этой прямой
с кривой /// определяет
ту максимальную скорость
v автомобиля, которую
последний может
достигнуть на заданной
дороге. Вертикальные
отрезки между кривыми /,
// и /// и новой осью
абсцисс фх определяют
ускорение автомобиля
d
0.2
0,1
"Л
е
й
—
1
1
1
т
с
s
i
1
1
i ,
в
dv
di
скорости
зависимости от
автомобиля
о 20 vn v? во во ViWOvKH/час на различных передачах.
Фиг. 93. Определение зависимости между предельным уско- На"РимеР> ПРИ некото-
dv Рой скорости vn
ускорением -Гц? и скоростью v автомобиля при помощи дина- рение автомобиля будет
мической характеристики. измеряться отрезками:
аЬ — на третьей передаче,
ad—на второй передаче и ае—на первой передаче. Однако шкала для ускорения -~ не
остается одинаковой для всех передач в коробке передач, а изменяется вследствие
влияния вращающихся масс автомобиля. Влияние этих вращающихся масс в
уравнении (184) учитывается коэфициентом 8, зависящим от величины передаточного
числа в коробке передач. Пользуясь этим уравнением, получим:
^-(D-^)-^i. (196)
Коэфициент В подсчитывается по уравнению (171).
Отрезки ab, ad и ае на фиг. 93 дают в соответствующем масштабе значение
разности (/> —фх); таким образом, на основании уравнения (196), зная
передаточные числа для различных передач в коробке передач и пользуясь фиг. 93,
dv
можно определить, величину ускорения — для каждой передачи.
Таким же образом может быть установлено максимальное ускорение
автомобиля —у- при любом значении коэфициента сопротивления дороги ф. Например,
при сопротивлении дороги, измеряемом коэфициентом фа (фиг. 93), автомобиль
не может двигаться на третьей передаче в коробке передач. Максимальная
скорость на второй передаче при движении по дороге, определяемой этим новым
Определение ускорения, времени и пути разгона автомобиля
ИЗ
коэфициентом сопротивлении, будет равна v2. Ускорение же при скорости vn в этом
случае определится отрезками ей на второй передаче и се — на первой.
В случае движения автомобиля под уклон коэфициент ф может получить
отрицательное значение.
Это соответствует тому случаю, когда уклон / автомобиля больше коэфициента
/ сопротивления качению. При этом имеем:
В этом случае прямая ф располагается ниже оси абсцисс.
Таким образом, на основании динамической характеристики могут быть
определены те ускорения -—-, которые автомобиль может развивать при условии
движения его по различным до- <tv_
рогам с различными скоро- dt
стями. Но так как масштаб м/сек2
для различных передач
коробки передач не получается
одинаковым, то график
динамической характеристики
не может одновременно
служить и для определения
ускорений, которые
автомобиль может развить при раз*
личных условиях движения.
В этом случае должен быть
построен новый график,
причем при его построении
необходимо задаться
коэфициентом сопротивления
дороги ф. На фиг. 94 построен
такой график ускорения —гг
для того же автомобиля,
для которого на фиг. 93
приведена была
динамическая характеристика. При
этом передаточное число iK
на первой передаче в
коробке передач принято
равным 4, а на второй —2. Коэфициент сопротивления дороги ф = 0>015.
Построение выполнено на основании уравнения (196), причем коэфициент 8 определялся
приближенно из выражения 1,03+0,054.
Уравнение (196) для этого случая получит вид:
dv ^ 9,81 (D - 0,015) #
1,5
1,0
0,5
\
£
\
\
\
\,
ж
N
4——д
\
\
\
ч
в
20
60
60 v к*/час
Фиг. 94. Примерный график, иллюстрирующий зависимость
предельного ускорения — от скорости v движения
автола . ,
мобиля, имеющего трехступенчатую коробку передач.
Зная на основании фиг. 93 значение динамического фактора D для каждой
скорости v движения автомобиля и каждой передачи в коробке передач, а также,
dv
зная передаточное число iK, можно определить ускорение -уг для всех условий
движения автомобиля. В соответствии с тремя передачами коробки на фиг. 94
построено три кривых (/, // и ///).
Разгон автомобиля после трогания его с места совершается последовательно
на всех передачах* Для получения максимальной динамичности разгон на первой
передаче ограничивается скоростью v автомобиля, при которой двигатель
достигает своих максимальных оборотов (точка С на фиг. 94). После этого необходимо
8 Е. А. Чудаков 9,232
114 Тяговая динамика автомобиля
перейти на вторую передачу. Этот переход, как видно из фиг. 94, сопровождается
уменьшением величины ускорения. Лучше продолжать разгон на первой передаче
до точки А, соответствующей пересечению кривых ускорений / и //. Аналогично
этому при разгоне на второй передаче выгоднее было бы продолжать разгон до
точки В. Однако при этом коленчатый вал двигателя получает слишком высокую
скорость вращения. Точка пересечения кривой /// с осью абсцисс определяет
максимальную скорость движения автомобиля по заданной дороге (ф = 0,015); при
dv
этом ускорение ~-т- = 0.
Для грузовых автомобилей весьма часто кривая ускорения автомобиля щ>ш
движении его на первой передаче в коробке передач располагается ниже, чем на
второй передаче, т. е. точка А (пересечения кривых I и II) в этом случае
соответствует скорости вращения коленчатого вала, меньшей максимальной.
Указанное выше явление — слишком резкое уменьшение предельного
ускорения -Т7 автомобиля при движении его на первой передаче в коробке передач,
объясняется влиянием инерции маховика. При наличии маховика с большим
моментом инерции и при введении большого передаточного числа iKi0 большая
часть вращающего момента двигателя расходуется на ускорение маховика. При
переходе на вторую передачу (когда передаточное число iKi0 значительно
уменьшается) влияние момента инерции маховика резко снижается, и в соответствии
с этим при определенной скорости автомобиля ускорение на второй передаче
получается больше, чем на первой»
Кривые ускорения автомобиля (фиг. 94), построенные при помощи
динамической характеристики по описанному выше методу, не являются вполне точными.
При разгоне автомобиля его двигатель при той же скорости вращения
коленчатого вала развивает вращающий момент Мт, несколько отличающийся от того,
который соответствует установившемуся рабочему режиму, т. е. работе двигателя
при постоянной скорости вращения коленчатого вала. Между тем динамическая
характеристика автомобиля при указанном выше методе ее построения
соответствует установившемуся рабочему режиму двигателя.
Изменение вращающего момента Мт при разгоне двигателя обусловливается
главным образом тем, что в этом случае тепловой режим двигателя при некоторой
скорости вращения коленчатого вала (пт) не соответствует тепловому режиму,
который соответствует той же скорости вращения коленчатого вала, но
установившемуся режиму двигателя.
Кроме того, при этом проявляется влияние большей инерции топлива по
сравнению с инерцией воздуха, что вызывает обеднение горючей смеси; однако, как
показали эксперименты, влияние этого обстоятельства сравнительно невелико.
В результате при разгоне двигателя проявляются два основных фактора,
оказывающих влияние на вращающий момент Мт двигателя вследствие отставания его
теплового режима. Во-первых, вследствие более низкой температуры двигателя
(впускной трубопровод, впускные клапаны, поверхность головки блока цилиндров, поршней
и цилиндров) увеличивается коэфициент наполнения t\v двигателя, что должно
вызвать увеличение момента Мт, и, во-вторых, ухудшается испарение тяжелых
фракций бензина, а следовательно, и процесс горения (замедление горения,
уменьшение полноты сгорания), что вызывает уменьшение момента Мт. Кроме того, при
этом увеличивается количество бензина, оседающего на стенках впускного
трубопровода, что вызывает обеднение горючей смеси за период разгона двигателя.
Результат, очевидно, зависит как от качества бензина (от его летучести), так и от
регулирования карбюратора. При легко испаряющемся бензине и также при богатой
горючей смеси решающим является первый фактор, при трудно испаряющемся
бензине и также при бедной смеси — второй. Таким образом, при разгоне
двигателя его вращающий момент Мт, соответствующий определенной скорости
вращения коленчатого вала, может быть больше или меньше вращающего момента Л4ш0,
соответствующего той же скорости вращения коленчатого вала и установившемуся
Определение ускорения, времени и пути разгона автомобиля
115
рабочему режиму двигателя. Это положение было подтверждено работами
Д. А. Рубец и Б. С. Фалькевича.
На фиг. 95 приведен один из графиков, иллюстрирующих результат стендового
испытания двигателя М-1 при переменном рабочем режиме. Двигатель при его
испытании (на установке с гидравлическим тормозом) быстро растормаживался
и начинал разгоняться; при этом измерялись как момент на тормозе, так и время,
соответствующее определенному увеличению скорости вращения коленчатого вала.
Затем подсчетом определялось угловое ускорение —^ коленчатого вала, что да-
вало возможность установить зависимость тормозного момента от ускорения ~~
при заданной скорости пт вращения коленчатого вала. Нанесенные на фиг. 95
линии иллюстрируют зави-
симость тормозного момента
от ускорения -~
коленчатого вала при нескольких
значениях его скорости
вращения. Зависимость
получилась весьма близкой к
прямолинейной; при этом
угол наклона прямых к оси
абсцисс сохраняется
постоянным независимо от
величины пт. Аналогичный
результат был получен и при
таком же испытании других
карбюраторных
автомобильных двигателей.
Экспериментальные точки
и проведенные через них
линии на фиг. 95
определяют зависимость
тормозного момента Мт от угло-
d&m
вого ускорения —~-. Для
О 2 4 6 ~ .-.-...„ „ ^ .
dt "сёк*
б. График, иллюстрирующий зависимость тормозного
момента Мт от углового ускорения ?^£? коленчатого вала
автомобильного двигателя.
того чтобы по тормозному
моменту определить момент
Мт на коленчатом валу
двигателя, в данном случае
(ускоренное вращение коленчатого вала) следует к тормозному моменту
добавить инерционный момент J -^ , где J—момент инерции всех вращающихся
частей, соединенных с коленчатым валом (включая детали тормоза).
Перестроенные таким образом графики, полученные при стендовом испытании
двигателя М-1 [23], приведены на фиг. 96, где верхний пучок кривых
соответствует богатой смеси, а нижний — бедной. Полученные результаты подтверждают
высказанное выше предположение о влиянии состава горючей смеси на изменение
момента Мт при ускоренном вращении коленчатого вала двигателя и
целесообразность включения в конструкцию карбюратора насоса ускорителя, обогащающего
горючую смесь при резком открытии дросселя. При этом необходимо действие
такого насоса ускорителя, во-первых, продлить, а во-вторых, сделать зависимым
от углового ускорения коленчатого вала.
Вместе с тем необходимо отметить, что методика стендового испытания
двигателя, использованная при получении приведенных выше данных (фиг. 95), не
полностью соответствует условиям работы двигателя в процессе разгона
автомобиля, так как в последнем случае перед открытием дросселя для разгона дви-
116
Тяговая динамика автомобиля
гатель работает на пониженном мощностном и скоростном, а следовательно,, и
тепловом режиме; при стендовом же испытании двигатель перед разгоном работал
на полном дросселе. Таким образом, в условиях работы двигателя на автомобиле
влияние запаздывания прогрева двигателя должно, казалось бы, проявиться еще резче.
Согласно полученным данным при разгоне двигателя вращающий момент Мт
при том же числе оборотов коленчатого вала пт в минуту изменяется примерно
• ■ прямолинейно в зависимости от
углового ускорения -^ коленчатого
вала. При этом в случае обычного
регулирования карбюратора момент
Мт уменьшается по мере увеличе-
-. В даль-
кгм
ния углового ускорения
нейшем примем:
(197)
где Мт — вращающий момент
двигателя при
установившемся рабочем режиме и
X — коэфициент
пропорциональности, равный
тангенсу угла наклона
прямых на фиг. 96 и
учитывающий влияние угло-
вого ускорения —~
на
dt
Фиг. 96. График, иллюстрирующий зависимость
вращающего момента от углового ускорения
d<um
коленчатого вала автомобильного двигателя
при различном составе горючей смеси.
dt
баланса автохмобиля при ускоренном
вращающий момент Мт.
Согласно уравнению (197)
коэфициент X имеет размерность
момента инерции. При положительном
значении коэфициента X момент Мт
уменьшается, что, как показали экс-
1/сек2 перименты, и имеет обычно место
при существующем регулировании
карбюратора и применяемых сортах
автомобильного бензина.
Пользуясь уравнением (197),
получим выражение для тягового
движении последнего:
лт0~
т dt
dt)'
Чт }
G_ dv^
Я dt
dt
или
а<ат
, заменяя угловые ускорения коленчатого вала -~~ и колес ~~- линейным
ускорением — автомобиля, получим:
[_ 6 гк гк J
(198)
Таким образом, несоответствие теплового режима при разгоне двигателя
(коэфициент X) аналогично увеличению (или уменьшению) момента инерции
вращающихся частей двигателя и сцепления.
Определение ускорения, времени и пути разгона автомобиля
117
Выделяя отдельно коэфициенты ot и 8а, учитывающие влияние ускоренного
вращения деталей автомобиля и несоответствие теплового режима двигателя, получим
М„
А)
dv
dt
(199)
Входящий в это уравнение коэфициент о2 определяется из уравнения (171).
Для коэфициента 82 получим выражение:
/2 ,2
1к 10
Gri
(200)
Описанный метод определения влияния ускорения на величину вращающего
момента при неустановившемся рабочем процессе двигателя был предложен Б. С. Фаль-
кевичем в 1947 г.
Если известен коэфициент X, то ^
на основании полученных уравнений
можно построить кривые ускорений
—■ = / (v) , аналогичные
приведенным на фиг. 94, но учитывающие 2,5
изменение вращающего момента
двигателя при его разгоне.
На фиг. 97 построен такой гра-
фик. При этом ускорение —т-
автомобиля определялось из уравнения
(199), для коэфициента X,
входящего в уравнение (200), было
принято значение, равное 0,1 кем-сек2,
а коэфициент ф=0,015. Для других
параметров автомобиля были
приняты следующие значения:
передаточное число главной передачи /0 =
= 4,5, механический к. п. д.
трансмиссии т]/л = 0,9, радиус качения
колеса гк = 0,4 м и вес автомобиля
О = 1600 кг.
Кривые,построенные по
уравнению (199), изображены на фиг. 97
пунктиром с точкой. Сплошные же
кривые на фиг. 97 перенесены с
фигуры 94. Наконец, пунктиром с двумя
точками на фиг. 97 изображены
кривые, построенные без учета влия-
ния вращающихся масс автомобиля
и несоответствия теплового режима
7,0
15
КО
0,5
0
■\
\
\
\
J
\
л--
r
—
f
\
N.
4^?
^
^
фиг- 97« ГРаФик> иллюстрирующий зависимость
ускорения автомобиля ^ от скорости v дви-
жения автомобиля, имеющего трехступенчатую
двигателя (Ъх = о2 = 0). коробку передач.
Согласно фиг. 97 вращающиеся
массы автомобиля, а также
отставание теплового режима двигателя оказывают весьма большое влияние на
ускорение автомобиля, особенно на первой и второй передачах.
Приведенные на фиг. 94 и 97 кривые ускорения автомобиля, определяя
dv
с некоторым приближением зависимость между ускорением -^ и скоростью v
автомобиля, не учитывают потери времени на переключение передач в коробке
передач. Между тем это время составляет значительную часть от времени,
затрачиваемого на разгон автомобиля; оно зависит от конструкции коробки передач
(наличие и тип синхронизаторов, коробка с автоматическим переключением передач).
118
Тяговая динамика автомобиля
dt
Поэтому для точного определения приемистости автомобиля, т. е. его способности
быстро разгоняться, необходимо иметь кривые, полученные непосредственно при
помощи пробегового испытания.
Ниже (см. § 10) будет описан метод построения таких кривых при помощи
дорожного испытания автомобиля.
Предварительно же приводится определение скорости разгона автомобиля при
помощи динамической характеристики и без учета потери времени на
переключение передач. Для этой цели приведено построение кривых v =f(t) и v=f(S), где
v — скорость автомобиля в процессе разгона, a t и S время и путь разгона,
соответствующие этой скорости. Вторая
кривая дает особенно наглядное
представление о приемистости автомобиля.
Приемистость автомобиля
представляет собой один из основных
факторов, влияющих на динамику
автомобиля. Чем большим ускорением
обладает автомобиль, тем лучше он
разгоняется на последней передаче. В
условиях городской езды и при движении
по плохим дорогам, где часто имеет
место вынужденное уменьшение
скорости движения, это качество автомобиля
особенно важно, так как позволяет
легче маневрировать, обгонять медленно
)
1
\
\
\
\
-В
\
едущие автомобили, разгоняться и т. д.
Фиг. 98. Примерные кривые ускорения
одинаковых автомобилей при различных значе- ^
ниях передаточного числа главной передачи. в таких условиях движения автомобиль,
имеющий большее ускорение, обеспечит
в результате большую среднюю скорость движения, чем автомобиль с большей
максимальной скоростью, но с меньшим ускорением при малых скоростях движения.
Для иллюстрации этого на фиг. 98 приведены две примерные кривые А иВ ускорений
двух автомобилей при движении их на прямой передаче. Первая кривая соответствует
автомобилю, обладающему меньшей максимальной скоростью, но большим
ускорением на малых скоростях движения. Второй автомобиль, наоборот, обладает
меньшим максимальным ускорением, но зато большей максимальной скоростью на
хорошей дороге. Обе кривые, иллюстрирующие изменения ускорения -^- в
зависимости от скорости v автомобиля, могут быть получены при наличии на
автомобиле двигателя одинакового литража лишь за счет соответствующего подбора фаз
распределения двигателя и передаточного числа в главной передаче.
Кривая ускорения В обеспечит хорошие результаты лишь для автомобиля,
предназначенного к эксплоатации по хорошей дороге с высокими скоростями
движения. В условиях же городского движения, а также при среднем качестве
дороги (неровная дорога, плохая обзорность) преимущество более высокой
максимальной скорости не может быть использовано, и автомобиль, имеющий кривую
ускорения Л, даст более высокую среднюю скорость, так как при средних
значениях скорости движения этот автомобиль обладает лучшими динамическими
качествами, чем автомобиль, характеризуемый кривой В.
При помощи динамической характеристики может быть определено приближенно
не только предельное значение ускорения автомобиля, но также время и путь
его разгона в пределах заданного изменения скорости ч) движения.
Ускорение —тг представляет собой первую производную пути по времени;
отсюда диференциал времени t определится из выражения:
Определение ускорения, времени и пути разгона автомобиля 119
На основании этого полное время t разгона в пределах изменения скорости
движения от vx до vo определяется из выражения:
Этот интеграл не может быть решен аналитически, так как не имеется точной
dv
аналитической зависимости ме5кду ускорением автомобиля -т? и скоростью v его
движения. Но его можно решить графически при помощи динамической
характеристики или также при помощи фиг. 97, иллюстрирующей зависимость ускорения -тг
-от скорости v автомобиля.
Если построить кривую величины -^ как функцию скорости v, выраженной
17
в м\сек, то площадь, ограниченная этой кривой, осью абсцисс и двумя
соответствующими ординатами v1 и т>2, определяет в известном масштабе время,
затраченное на разгон. На фиг. 99, а построена примерная кривая, представляющая
собой обратную величину ускорения -т- при движении автомобиля на последней
передаче. Выделим некоторую элементарную площадку, соответствующую
изменению скорости v движения автомобиля на бесконечно малую величину dv.
В результате получим прямоугольник, высота которого равна -г-, а ширина
lit
равна dv. Площадь этого элементарного прямоугольника получается равной -у- dv,
~~di
т. е. она равновелика диференциалу времени dt. Отсюда следует, что время
разгона автомобиля от скорости vx до скорости v2 определяется площадью,
ограниченной кривой —, осью абсцисс и двумя ординатами, соответствующими ско-
. (XX)
~di
ростям vx и v2. Например, для повышения скорости движения автомобиля с 10
до 20 м\сек потребуется время, измеряемое площадью abed.
По мере приближения скорости v автомобиля к ее максимальному значению
ускорение автомобиля падает до нуля. В соответствии с этим отношение -г- стре-
. ~di
мится к бесконечности. На фиг. 99, а кривая -т- с приближением скорости авто-
~ai.
мобиля к ее максимуму поднимается вверх и асимптотически приближается к
вертикали, соответствующей максимальной скорости г;тах автомобиля, поэтому при
определении времени разгона автомобиля следует рассматривать разгон до
некоторой определенной скорости движения, примерно на 5—Ю°/о не достигающей его
максимальной расчетной скорости.
При определении времени разгона на основании указанного выше графического
способа необходимо знать масштаб шкал, т. е. знать соотношение между
площадью полученной диаграммы, выраженной в квадратных миллиметрах, и временем,
выраженным в секундах. Этот масштаб определяется следующим образом. Пусть
для величины— имеется масштаб, при котором 100 мм соответствуют 1 сек21м.
~dt
Для скорости v принят масштаб, при котором 10 мм соответствуют 1 м\сек.
В таком случае секунда соответствует площади, равной 100x10=1000 мм2.
120
Тяговая динамика автомобиля
Если бы масштаб скорости был задан не в метрах в секунду, а в километрах
в час, например, 10 мм = 1 км\час, то этот масштаб, а вместе с ним и масштаб
времени, надо было бы умножить на коэфициент 3,6. Таким образом,
окончательно получаем масштаб для времени t:
мм
где М
( l \
\di)
, dt,
есть число миллиметров, соответствующее 1 сек2{м\
dv
dt
12
10
M(v) ~ число миллиметров, соответствующее скорости 1 м\сек.
t сек
60
50
30
20
10
о
г
1
1
1/ 1
vmin ^j
b
а
—J
,dy
d
1
/
/
/
-
Углах
,C
4
—fZ—
/
/
/
/
b
/
/
/
/
У/пах I
5 W 15 20 25 vv/сеи ' 5 W 15 20 25 t/M/ce*
a) 6)
Фиг. 99. Определение времени (а) и пути разгона {б) автомобиля по заданной кривой ускорения.
На фиг. 99,а приведен пример определения времени разгона автомобиля в случае
движения его на последней передаче. Подобно этому может быть определено
время разгона автомобиля и на других передачах. Для этой цели необходимо
лишь построить обратную величину ускорения -г- для всех передач автомобиля.
Ж
Имея зависимость времени разгона от скорости движения автомобиля, можно
определить тот путь, который проходит автомобиль за время разгона, или, как
его называют, путь разгона. Так как скорость v автомобиля есть первая
производная пути по времени, то:
dS_
dt
V =
Отсюда диференциал пути dS определяется из выражения:
dS = vdt,
а путь 5 разгона в пределах изменения скорости движения автомобиля от vt
до v2 определяется из выражения
S = \ vdt.
(201')
Этот интеграл также не может быть решен аналитически, так как отсутствует
точная аналитическая зависимость между скоростью v автомобиля и временем t.
Но так как указанная зависимость определяется кривой, то решение интеграла
1может быть осуществлено графически.
Экспериментальное определение времени и пути разгона автомобиля 121
На фиг. 99,б представлена примерная кривая, дающая зависимость времени
разгона t от скорости v движения автомобиля на последней передаче. Проведя
две абсциссы на расстоянии, соответствующем бесконечно малому изменению
времени dt, получаем четыреуголышк, ограниченный сверху и снизу двумя
абсциссами, соответствующими изменению времени dt, справа — кривой t =f(v) и слева —
осью ординат. Бесконечно малая площадка этого четыреугольника равна vdtr
т. е. согласно уравнению (20Г) эта площадка равновелика диференциалу пути dS.
Отсюда площадь, ограниченная кривой t=f(v), осью ординат и двумя
абсциссами, соответствующими двум заданным значениям скорости автомобиля, дает
путь разгона за время изменения скорости движения автомобиля в указанных
пределах. Например, путь, проходимый автомобилем при изменении скорости его
движения с 10 до 20 м\сек, выражается площадью abed. Масштаб для пути 5"
разгона определится так же, как выше определялся масштаб для времени
разгона, т. е.
М (S) = М (0 М (v) мм*.
Таким образом, пользуясь фиг. 99,tf, можно построить кривую зависимости пути
разгона автомобиля до заданной скорости его движения. В том случае, когда
разгон автомобиля рассматривается на всех передачах в коробке передач,
необходимо использовать кривую времени разгона, соответствующую также разгону на
всех передачах.
По мере разгона автомобиля его ускорение соответственно уменьшается,
стремясь в пределе к нулю. Для того чтобы автомобиль достиг своей расчетной
максимальной скорости, потребовалось бы бесконечно большое время; точно так
же для достижения автомобилем его максимальной расчетной скорости потребуется
бесконечно большой путь, поэтому при определении пути разгона автомобиля
следует ограничиться некоторой скоростью, меньшей чем максимальная.
Однако необходимо отметить, что определение времени и пути разгона
автомобиля, так же как и ускорения —^, при помощи динамической характеристики
дает лишь приближенный результат. Причиной неточности здесь служит изменение
момента Мт двигателя при неустановившемся режиме по сравнению с установившимся
и неточность учета этого фактора при помощи коэфициента X [уравнение (197)].
При определении же времени и пути разгона автомобиля на передачах к этому
добавляется неточность, возникшая из-за неучета времени, теряемого на
переключение передач, поэтому желательно указанную зависимость [t=-f(v)\ S = f(v)\
определять непосредственно при помощи дорожного испытания автомобиля.
§ 10. ЭКСПЕРИМЕНТАЛЬНОЕ ОПРЕДЕЛЕНИЕ ВРЕМЕНИ
И ПУТИ РАЗГОНА АВТОМОБИЛЯ
Для этой цели чаще всего используется прибор с отдельным (пятым) колесом,,
крепящийся к подножке, буферу или раме автомобиля и снабженный самописцем^
регистрирующим путь, проходимый автомобилем за определенный отрезок
времени.
На фиг. 100 изображена схема одного из таких приборов, использовавшегося
в автомобильной лаборатории АН. При проведении испытаний голесо / прибора
катится по дороге. Его вращение через коническую передачу 2 и гибкий вал 3
передается к самописцу, отсчитывающему и записывающему путь, проходимый
автомобилем в единицу времени. Этот самописец помещается в кабине автомобиля.
В привод введен механизм 4, допускающий возможность верхнему концу гибкого
вала занимать различные положения по отношению к прибору.
От приводного механизма вращение через две пары цилиндрических шестерен
передается к конической передаче 5, установленной на валу 6 и обеспечивающей
постоянное направление вращения этого вала пои обоих направлениях вращения
„пятого" колеса.
122
Тяговая динамика автомобиля
Фиг. 100. Схема прибора с пятым колесом, применявшегося
при пробеговых испытаниях автомобилей.
Экспериментальное определение времени и пути разгона автомобиля 123
От вала 6 через шестеренчатую и червячную передачи вращение передается
к валу 7, а от последнего — к валику 10, обеспечивающему перемещение
бумажной ленты 35, на которой регистрируется скорость движения автомобиля. При
помощи рычажка 9 и кулачковой муфты 8 можно выключить из привода валик 10,
останавливая тем самым ленту 35.
В соответствии с конструкцией привода к валику 10 угол поворота этого
валика, а следовательно, и перемещение ленты 35, прямо пропорциональны пути
автомобиля. Карандаш 33, записывающий на ленте 35 скорость движения
автомобиля, также связан через привод с валом 6, но включение и выключение этого
привода осуществляется при помощи механизма, основной частью которого является
валик 15, имеющий равномерную скорость вращения.
Привод к валику/5 осуществляется от пружинного механизма 14 через
шестерню 13 и дополнительную шестеренчатую передачу. Равномерное же
вращение валика 15 обеспечивается включением в систему анкерного колеса 16,
анкерной вилки 77 и баланса 18 часового типа.
Завод пружинного механизма 14 производится от вала 6 при помощи
цилиндрических шестерен, расположенных справа на фиг. 100. От этой передачи
приводится во вращение храповое колесо 19, которое при помощи собачки 12
передает вращение к валу пружинного механизма 14 и далее к барабану левой
пружины. От барабана усилие передается последовательно к левой пружине,
к втулке, на которой закреплены обе пружины, к правой пружине, к правому
барабану и, наконец, к шестерне 13, от которой и приводится во вращение
валик 15.
Для того чтобы при движении автомобиля не вызвать перекручивания
пружины, в привод введен механизм, который при определенной деформации
пружины выключает (при помощи рычажка, движущегося в спиральной прорези
шестерни 13) собачку 12, и завод прекращается.
Для предотвращения возможности обратного раскручивания пружины в
конструкцию введен храповой механизм 20, обеспечивающий одностороннее вращение
вала пружинного механизма 14.
На равномерно вращающемся валике 15 установлены шайбы с торцевыми
кулачками, при помощи которых производится включение и выключение привода
к карандашу 33 от вала 6. Для этой цели на валу 11, приводимом в движение
от вала 6 и вращающемся со скоростью, прямо пропорциональной скорости
движения автомобиля, установлены свободно три муфты 21 и закреплены три муфты 23.
Муфты 21 имеют шестерни, находящиеся в постоянном зацеплении с
шестернями 22, установленными свободно на том же валу, на котором может качаться
скоба 29. Кроме того, муфты 21 могут иметь движение вдоль вала; это
перемещение муфт производится при помощи рычажков 25, которые поворачиваются
кулачковыми шайбами 26, укрепленными на валу 15. При перемещении
одной из муфт 21 влево зубцы этой муфты входят в зацепление с зубцами
муфты 23, благодаря чему муфта поворачивается (со скоростью вращения вала 11),
поворачивая в том же направлении соответствующую шестерню 22. Последняя при
помощи штифта поворачивает скобу 29. Скоба 29 при помощи пальца 30
поворачивает на определенный угол систему шестерен и связанную с ними стрелку 31,
показывающую скорость движения автомобиля, и перемещает зубчатую рейку 32,
с которой скреплен карандаш 33, регистрирующий скорость автомобиля на ленте 35.
Когда одна из муфт 21 поворачивает соответствующую шестерню 22, другие
муфты 21 остаются неподвижными и задерживаются в этом положении при
помощи прижимающихся к ним зубчатых секторов 24. Перемещение этих секторов
производится рычажками 27, управляемыми кулачковыми шайбами 28,
закрепленными на валу 75.
Таким образом, поочередно вступает в действие одна из муфт 21 и за
определенный отрезок времени поворачивает шестерню 22 на угол, пропорциональный
пути, пройденному автомобилем. Так как при этом одна из муфт остановлена в своем
крайнем положении, то в этом же положении задержаны соответствующая ше-
124
Тяговая динамика автомобиля
стерня 22, скоба 29, стрелка 31 и карандаш 33. Если одна из муфт
поворачивается на угол, больший угла поворота предыдущей муфты, то она передвинет
стрелку 31 и карандаш 33 на некоторую величину, что соответствует
ускоренному движению автомобиля. Если муфта поворачивается на угол, меньший по
сравнению с предыдущим, то при освобождении муфты, повернувшейся на
больший угол, пружина переместит скобу 29, стрелку 31 и карандаш 33 в обратном
направлении, что соответствует замедленному движению автомобиля.
В описываемом приборе продолжительность включения каждой муфты 21
составляет 1 сек. В результате карандаш 33 на бумажной ленте 35 вычерчивает
диаграмму движения, примерный вид которой (для ускоренного движения
автомобиля) изображен на фиг. 101.
Фиг. 101. Примерный вид диаграммы, полученной при помоши
прибора с пятым колесом при пробеговом испытании автомобиля.
Перемещение ленты осуществляется (при помощи валика 10 на фиг. 100) со
скоростью, прямо пропорциональной скорости движения автомобиля. При этом
на ленте накалываются отверстия, находящиеся одно от другого на расстоянии
3 мм, что соответствует расстоянию 3 м, пройденному автомобилем. Это дает
возможность определить с достаточной точностью путь, пройденный автомобилем
до любой скорости v.
Средняя скорость автомобиля за период замера (1 сек.) определится точками,
соответствующими концам замеров, т. е. точками: Б, D, F, Н и т. д. (фиг. 101).
При первом замере была включена одна из муфт 21 (фиг. 100); при этом
автомобиль за время, равное 1 сек., прошел путь, измеряемый отрезком АВ\
а карандаш прибора зарегистрировал скорость, измеряемую отрезком ВВ'.
В момент окончания первого замера действовавшая муфта 21 выключается и
при помощи зубчатого сектора 24 задерживается в крайнем положении
(задерживая также стрелку 31 и карандаш 33). Одновременно с этим- включается вторая
муфта 2/, которая в течение второй секунды поворачивает шестерню 22 и скобу 29
(фиг. 100). Горизонталь ВС на фиг. 101 соответствует времени (или
перемещению автомобиля), в течение которого вторая муфта поворачивает скобу 29 до ее
положения в конце первого замера, после чего поворот скобы увеличится (линия CD).
Точка D соответствует концу второго замера.
В следующую (третью) секунду вторая муфта 21 закрепляется в крайнем
положении, и включается третья муфта; первая же муфта освобождается от нажатия
Экспериментальное определение времени и пути разгона автомобиля.
125
зубчатого сектора {24, фиг. 100) и под действием пружины возвращается в
исходное положение. В результате карандаш вычерчивает ступенчатую
линию ABCDEFGH.
Ступенчатая линия, получаемая при использовании прибора с пятым колесом
и изображенная на фиг. 101, еще не определяет с достаточной точностью
зависимости скорости v автомобиля от пройденного им пути S. Так как за время
отсчета (в течение секунды) прибор замеряет путь, пройденный автомобилем, то
точки В> Dy /% Н и т. д. на фиг. 101 определяют не действительную скорость,
развиваемую автомобилем в этот момент, а среднюю скорость за время замера,
т. е. за секунду. Очевидно, при ускоренном движении автомобиля действительная его
скорость будет больше определяемой точками В, D, F, Н и т. д., а при
замедленном движении — меньше.
Для того чтобы найти соотношение между действительной скоростью
автомобиля и скоростью, определяемой точками В, D, F, Ни т. д., необходимо
соответствующим образом обработать полученную диаграмму.
1сек
I \/сек\/сек\ /сек 1сен
fce/r
Фиг. 102. Метод обработки диаграммы, получаемой при помощи прибора с
пятым колесом при пробеговом испытании автомобиля: /—разгон автомобиля; II-
равномерное движение и ///—замедленное движение.
На фиг. 102 изображен примерный вид диаграммы движения автомобиля,
получаемой при помощи описанного прибора. Выбираем на участке / разгона
автомобиля три участка: п, п -\- 1 и п -J- 2, и предполагаем, что за два
участка разгона (например, п -\- 1 и п + 2) ускорение -~г- автомобиля
сохранялось постоянным. При этом действительные скорости, соответствующие
окончанию замера, определятся из выражений (имея в виду, что отсчет занимает
dv\
1 сек. и что, следовательно, прирост скорости за отсчет равен ускорению — I:
Vn + i = Vn + ~ ; Vn + 2 = *&п + 2 ^~ ;
_]_ l dv
- vn~r 2 dt 5
~ vn l 2 dt >
где v'n v'nJirl и v'n + 2 — скорости, определяемые на диаграмме и соответствующие
концу замера.
Определяя из этих уравнений скорость vn + 2 в зависимости от скоростей v'n + х
и -v 2 получим окончательно:
: + 2
2
126 Тяговая динамика автомобиля
Таким образом, при разгоне автомобиля его действительная скорость в конце
любого замера превышает скорость, определяемую по диаграмме на половину
разности между скоростями, также определяемыми по диаграмме для данного и
предыдущего замеров.
На фиг. 102 приведена построенная при помощи указанного приема
примерная кривая (пунктирная), иллюстрирующая зависимость между скоростью v
автомобиля и пройденным им расстоянием 5 в процессе разгона.
Аналогично изложенному определяется соотношение между значениями
действительной скорости автомобиля и скорости, определяемой по диаграмме при
замедленном движении автомобиля.
На фиг. 102 отмечены участки к, к+ I и к+2 трех замеров, произведенных
прибором при торможении автомобиля.
Действительные скорости, соответствующие концам каждого замера,
определяются из выражений:
do
v v
3 dv
где v' v' и v' 0 — значения скорости, определяемые по диаграмме в конце
каждого замера.
Из этих уравнений находим выражение, устанавливающее зависимость
действительной скорости vK + 2 автомобиля от скоростей v'K + 1 и v'K + 2 определяемых по
диаграмме:
ик + 2 — ик + 2
Таким образом, при торможении автомобиля его действительная скорость в
конце любого замера меньше соответствующего значения скорости, определенной
по диаграмме на половину разности между скоростями, также замеренными по
диаграмме и соответствующие предыдущему и данному замерам.
На фиг. 102 проведена примерная пунктирная линия, иллюстрирующая
зависимость между скоростью и пройденным путем для автомобиля при его
торможении.
Так как каждая ступень ломаной линии на диаграмме соответствует
прохождению определенного времени (1 сек.), то в результате определяется зависимость
трех величин: скорости v, пройденного пути 5 и времени t
Для определения момента начала торможения, а также и других моментов,
которые желательно фиксировать на диаграмме движения, в приборе
предусмотрено электромагнитное устройство (36 на фиг. 100), при помощи которого и
карандаша 34 можно отмечать на ленте 35 начало и конец какого-либо процесса —
в том числе торможения автомобиля, переключения передач и т. д.
При помощи описанного прибора в автомобильной лаборатории Академии Наук
было произведено дорожное испытание1 большого числа автомобилей. Некоторые
автомобили были испытаны в дорожных условиях и на стенде с беговыми
барабанами. На фиг. 103 изображены кривые, иллюстрирующие результат такого
испытания легкового автомобиля. Каждая из кривых иллюстрирует зависимость
Эксперименты проводились канд. техн. наук Н. В. Диваковым под руководством автора.
Экспериментальное определение времени и пути разгона автомобиля
127
2,2
2,0
1,8
1,6
1А
1,2
ио
0,8
0,6
ОА
—-—
\
//
j \\
1/1 ь
Т \
-—-—
\
\
I
J
!
10
20
30
60
70'уЩ'час
Фиг. 103. Результат
пробегового и
стендового испытания
легкового автомобиля в
целях определения
зависимости его уско-
dv
рения -^ от скорости
v движения на
различных передачах.
Фиг. 104. Результат
пробегового
испытания автомобиля
ЗИС-5 для
определения зависимости его
do
ускорения -д£ от
скорости v движения на
различных передачах,
а также
аналитического определения той
же зависимости по
внешней
характеристике двигателя.
1,0
0:9
0,8
0,7
0,6
0,5
О А
0,3
0,2
0,1
О
—_
\
х
1
1
ш
—1
N
ш
\
\
г
\
Л
ч
^1
н
о
10
го
30
128 Тяговая динамика авюмобиля
ускорения -Т7- от скорости автомобиля. При этом верхние кривые для каждой
передачи построены при помощи динамической характеристики, полученной при
испытании автомобиля на стенде с беговыми барабанами, а нижние кривые
получены при дорожных испытаниях автомобиля.
Действительные значения ускорения получились заметно меньше подсчитанных
по динамической характеристике, что, как это указывалось ранее, объясняется в
основном несоответствием теплового режима двигателя при разгоне автомобиля
тому, который соответствует установившемуся рабочему режиму.
На фиг. 104 представлены аналогичные кривые, построенные на основании
испытания грузового автомобиля (ЗИС-5). Верхние кривые подсчитаны по
внешней характеристике двигателя, полученной при помощи предварительного
стендового испытания двигателя (при этом механический к. п. д. был принят
равным 0,9). Нижние кривые получены при помощи дорожного испытания. И в этом
•случае действительное ускорение получилось значительно меньше подсчитанного.
Особенно большая разница наблюдается при низших передачах, когда угловое
ускорение коленчатого вала двигателя получается особенно высоким.
§ И.ВЛИЯНИЕ ПЕРЕДАТОЧНОГО ЧИСЛА ГЛАВНОЙ ПЕРЕДАЧИ
НА ТЯГОВЫЕ КАЧЕСТВА АВТОМОБИЛЯ
Если известны вес и размеры автомобиля, а также радиус его колес, то
тяговые качества автомобиля определяются следующими факторами:
1) внешней характеристикой двигателя;
2) числом передач в коробке передач и их соотношением;
3) передаточным числом /0 главной передачи.
Первый и третий факторы определяют тяговые качества автомобиля при его
движении на прямой передаче, а именно: максимальную скорость на
горизонтальном участке, минимальную устойчивую скорость (критическую скорость vK\),
максимальный подъем на прямой передаче и быстроту разгона в пределах
возможного изменения скорости автомобиля на этой передаче.
Второй фактор — число передач в коробке передач и их соотношение —
определяет максимальное сопротивление дороги, которое может быть преодолено
автомобилем на различных передачах в коробке передач, скорость разгона
автомобиля от состояния покоя до заданной скорости и, наконец, скорость на тех
подъемах, где необходимо бывает включать промежуточные передачи.
В этом параграфе рассмотрено влияние третьего фактора, а именно —
передаточного числа /0 главной передачи на следующие тяговые качества автомобиля
при движении его на прямой передаче: максимальную скорость vmax, ускорение -£-
автомобиля, максимальное сопротивление дороги фтах, критическую скорость vKU
время разгона t и, наконец, путь разгона S.
Для решения поставленной задачи необходимо найти запас мощности, которым
обладает автомобиль при различных передаточных числах /0 и при различной
скорости своего движения. На фиг. 105 приведены кривые, дающие возможность
определить этот запас мощности. Кривая N^JrNw дает зависимость суммарной
мощности, теряемой на сопротивление качению и сопротивление воздуха, от
скорости движения легкового автомобиля, принятого для примерного подсчета. При
этом фактор сопротивления воздуха W принят равным 0,095 кг-сек2\м2, а коэ-
фициент сопротивления качению /—0,015. Так как скорость v определяется из
уравнения.
?Г3'6 км1час'
а передаточное число /0 принято переменным, то на фиг. 105 для мощности
проведено всего пять кривых, соответствующих принятым значениям передаточного
числа 10 = 3,5; 4; 4,5; 5 и 5,5.
Точки пересечения кривой суммарной мощности (A^-f-A/^), с одаой стороны,
и кривых мощности iVm7]OT, — с другой, определяют ту максимальную'скорость дви-
Влияние передаточного числа главной передачи
129
жения автомобиля, которую он может достигнуть при данном сопротивлении дороги
и при соответствующем значении передаточного числа /0, а также ту мощность
mi которая затрачивается на движение автомобиля с этой скоростью.
ЬО
30
to
n
у
/
/
7/,
ft*
У/
у
n
У/
/
—*?]
i/
A
г
■— .
->
w
75
WO
125
Фиг. 105. Определение запаса мощности па ведущих колесят
автомобиля при различных передаточных числах главной передачи.
jm
Максимальная скорость #тах автомобиля получается различной. Наивысшая
скорость автомобиля соответствует такому передаточному числу /0, при котором
пересечение кривой суммарной мощности (Nj-\-Nw) с кривой мощности Nmr\m
произойдет в точке,
соответствующей максимальному
значению мощности A/m'^m-
На фиг. 106 (при помощи
фиг. 105) построена кривая
зависимости максимальной
скорости vmSLX автомобиля от
передаточного числа /0. Ма-
ксимальная скорость
движения автомобиля получается
в данном случае при
передаточном числе /0 = 4,75.
Однако при небольших
колебаниях этого передаточного
числа в ту или другую
сторону изменение максимальной
скорости получается весьма
небольшим, и, таким
образом, передаточное число i0
не оказывает большого
влияния на максимальную
скорость Фтах автомобиля. Это
справедливо практически для всех автомобилей и имеет большое значение, так как
дает возможность при выборе передаточного числа i0 руководствоваться другими
параметрами, характеризующими динамичность автомобиля.
Если определение передаточного числа г0 производится для получения возможно
высокой максимальной скорости автомобиля, без учета других требований к
9 Е. А. Чудаков 2232
2400
1600 t
V
км/ча
on
ои
СП
ои
с
.
У*
Утй
1
1
>**
—
— —
4,2
4,6
Фиг. 106. Зависимость максимальной скорости vmax авто-
мооиля и максимального числа оборотов птах коленчатого
вала двигателя от передаточного числа /0 главной
передачи.
130 Тяговая динамика автомобиля
тяговым качествам автомобиля (разгон, преодоление подъема) и не принимая во
внимание срока службы двигателя (максимальное число оборотов /zmax), то при
данной характеристике двигателя требуемое значение передаточного числа /0 и
величина получающейся максимальной скорости г>тах могут быть определены
следующим аналитическим путем.
Так как движение автомобиля рассматривается з^становившимся и по
горизонтальной дороге, то из рабочего баланса имеем:
где Мпах — максимальное значение мощности двигателя.
Задаваясь величинами v\m, /, G и W, можно из этого уравнения определить
скорость vmax B м\сек. Зная же скорость г>тах, можно определить передаточное
число /0 из следующего выражения:
2nrK nN
где /zyv — число оборотов в минуту коленчатого вала, соответствующее
максимальной мощности двигателя.
Та же задача, очевидно, может быть решена не аналитически, а графически —
при помощи фиг. 106.
Однако значение передаточного числа /0, выбранное по максимальной мощности
двигателя, обеспечивает хороший результат лишь для гоночных автомобилей.
Получение возможно высокой скорости на хорошей горизонтальной дороге для
транспортного автомобиля не обеспечивает еще ему наилучших тяговых качеств
и наибольшей средней скорости движения. Из фиг. 106 следует, что в пределах
значительного колебания передаточного числа /0 (от 3,8 до 5,4) максимальная
скорость автомобиля изменяется не очень сильно: это изменение не превосходит
3—4%. Между тем запас мощности автомобиля, как это видно из фиг. 105,
изменяется при этом весьма значительно. При увеличении передаточного числа /0
против такого его значения, которое соответствует максимальной скорости
автомобиля, можно за счет небольшого ее снижения весьма заметно выиграть в
приемистости автомобиля (скорость разгона) и в его способности преодолевать
большой подъем на последней передаче. В сумме это дает лучшие тяговые качества,,
чем при передаточном числе /0, выбранном по максимальной скорости.
Выбирать передаточное число /0 меньшим, чем то, которое соответствует
максимально возможной скорости автомобиля, с точки зрения динамики автомобиля
неправильно. При этом получается как уменьшение максимальной скорости
(фиг. 106), так и уменьшение запаса мощности автомобиля (фиг. 105), т. е. по-
dv
лучается значительное снижение ускорения -г и предельного подъема ь дороги,
которое автомобиль может преодолеть на последней передаче.
Отрезки ординат между кривыми Nmt\m и NfJrNw на фиг. 105 определяют
запас мощности автомобиля, получающийся при заданном передаточном числе
главной передачи /0 и заданной скорости движения автомобиля v и идущий на разгон
автомобиля и на преодоление подъема /. Согласно фиг. 105 запас мощности при
всех скоростях движения автомобиля резко уменьшается при снижении
передаточного числа /0.
Для выяснения влияния передаточного числа главной передачи на ускорение
автомобиля -г: можно, пользуясь фиг. 105, т. е. имея запас мощности при
каждой скорости автомобиля, найти те ускорения, которые автомобиль будет иметь
при различных передаточных числах /0.
Так как весь вопрос рассматривается при условии движения автомобиля на
прямой передаче, то передаточное число iK в коробке передач остается,
постоянным и равным единице.
Влияние передаточного числа главной передачи
131
На основании данных, приведенных на фиг. 105, на фиг. 107 построены кривые
(сплошные) для максимального значения ускорения ~, которое легковой
автомобиль, принятый для примерного подсчета, может иметь при различных
значениях передаточного числа /0. Построение кривых на фиг. 107 произведено при
помощи уравнения (199), т. е. с учетом несоответствия теплового режима
двигателя. При этом для коэфициента X было принято значение, равное 0,1. Коэфи-
циент / сопротивления качению
был принят равным 0,015. | j 1 т^—\ \ j j Г~у%
На фиг. 107, кроме того,
построены кривые (пунктирные),
иллюстрирующие зависимость
подъема i от скорости v автомобиля
при различных передаточных
числах /0. Построение выполнено по
уравнению (195) для
установившегося движения автомобиля. На
фиг. 107 представлено всего по
пять кривых, соответствующих
значениям передаточного числа
/0 = 3,5, 4,0, 4,5, 5,0 и 5,5. Из
фиг. 107 следует, что с точки
зрения получения максимального
ускорения, или обеспечения
автомобилю возможности езды по
наиболее плохой дороге, выгодно
выбирать значение передаточного
числа /0 возможно большим. При
этом максимальное значение уско-
dv
рения— и подъема i растет
почти прямо пропорционально
передаточному числу /0. На фиг. 108
по данным фиг. 107 построена
кривая, дающая зависимость
между максимальным подъемом /тах,
который автомобиль может
преодолеть на последней передаче,
и передаточным числом /0.
Однако итти излишне далеко
в направлении увеличения
передаточного числа /0 также
нерационально. Во-первых, при этом
получается некоторое уменьшение максимальной скорости автомобиля, а
во-вторых, при одинаковой скорости автомобиля прямо пропорционально передаточному
числу /0 повышается скорость вращения коленчатого вала двигателя пт, что плохо
отражается на износостойкости двигателя. На фиг. 106 вместе с кривой vmax
построена еще кривая ятах. Эта кривая определяет ту скорость вращения
коленчатого вала (пт об/мин) двигателя, которая соответствует максимальной
скорости г>тах автомобиля при различных значениях передаточного числа /0. Согласно
этой кривой скорость вращения коленчатого вала весьма быстро возрастает
вместе с увеличением передаточного числа /0.
В результате наиболее рациональным для легковых автомобилей является
такое передаточное число /0, при котором двигатель на максимальной скорости
автомобиля при его движении по хорошей горизонтальной дороге (/=0,015)
имел бы скорость вращения коленчатого вала на 20 — 25°/0 выше той, которая
dth
0,5
ОЛ
0.3
0.2
0,1
n
</сек2
С i
0,1
5,
.—
—
0 —
4,5^
^3,5'
—<
00"'
-3,5
■^^^
ч
ч
\
\
\
ч
ч
\
\
\
\
\
\^
\
s
\
\
\
\
ч \
\\
V
ч \
NN
чЛ
ч\
\
А
20
60
80 У Щчас
Фиг. 107. Влияние передаточного числа /0 главной
dv
передачи на ускорение -^j автомобиля (сплошные
кривые) и на максимальный подъем £°/0
(пунктирные кривые) (цифры у кривых соответствуют
различным передаточным числам главной передачи).
132
Тяговая динамика автомобиля
«"Me
24
20
16
12
у
/
•
*—*.
<
У
6,0
5,0
4,0
3,0
соответствует его максимальной мощности. Тот же результат, очевидно,
получится, если принять, что при максимальной мощности двигателя автомобиль
достигает своей максимальной скорости при некотором повышенном сопротивлении
дороги (ф = 0,03 -f- 0,035).
r \. Указанное правило остается в силе и в том случае, если по соображениям
долговечности двигателя повышение максимальной скорости вращения коленчатого
вала нежелательно. В этом случае, оставляя передаточное число /0 неизменным,
надо изменить характеристику двигателя таким образом, чтобы максимум ее
соответствовал скорости вращения коленчатого вала на 20 — 25% меньшей той,
при которой автомобиль на хорошей горизонтальной дороге достигает своей
максимальной скорости. Последнее
требование может быть
выполнено подбором соответствующих
фаз распределения двигателя.
На критическую скорость vKi
движения автомобиля
передаточное число /0 главной передачи
оказывает сравнительно малое
влияние. Критическая скорость
vK\ может быть определена из
фиг. 107. Из рассмотрения этой
фигуры видно, что критическая
скорость vK\ остается примерно
постоянной для всех кривых, т. е.
она почти не зависит от переда-
__ точного числа /0. Небольшое
3,5 4,0 4,5 5,0 /0 уменьшение критической
скорости vK\ наблюдается лишь при
значительном увеличении
передаточного числа /0.
На фиг. 108 отдельно
изображена линия, иллюстрирующая
изменение критической скорости vK\ в зависимости от передаточного числа /0.
Изменение передаточного числа /0, естественно, должно оказывать сильное
влияние на время / и на путь 6" разгона автомобиля. Так как обе эти величины
уменьшаются по мере увеличения ускорения автомобиля ~ то согласно фиг. 107
увеличение передаточного числа 10 должно вызывать резкое снижение времени t
и пути S разгона. Для того чтобы дать более наглядное представление о
влиянии передаточного числа i0 на разгон автомобиля, на фиг, 109 представлена
зависимость времени t и пути 5 разгона от передаточного числа /0. Построение
кривых выполнено на основании фиг. 107, где приведены кривые ускорения при
различных передаточных числах. Разгон автомобиля при этом предусматривается
на прямой передаче в пределах изменения скорости v движения от 20 до 80 км/час.
Время t и путь vS разгона резко уменьшаются по мере увеличения передаточного
числа /0.
*В приведенном выше исследовании вопроса о влиянии передаточного числа i0
главной передачи на динамические качества автомобиля все рассуждение велось
для легкового автомобиля или такого, двигатель которого не снабжен
регулятором. Ниже рассматривается влияние передаточного числа /0 на качества грузового
автомобиля, двигатель которого снабжен регулятором.
Если принять, как для легкового автомобиля, что заданы вес и размеры
грузового автомобиля и что, кроме того, задана характеристика его двигателя,
то можно определить влияние изменения передаточного числа /е на основные
показатели динамики автомобиля: #max, -^, /Шах» ^ь ^и^
Фиг. 108. Влияние передаточного числа /0 главной
передачи на критическую скорость vKl автомобиля
и на максимальный подъем /тах.
Влияние передаточного числа главной передачи
133
и
1400
1000
600
\
л
,—
V
.— о
ч
\
ч-~—
\
--—
I
t
сек
120
80
40
3,5
4,0
4,5
5,0
Фиг. 109. Влияние передаточного числа /0
главной передачи на время t и путь «S разгона
автомобиля.
Так как при наличии регулятора число птах оборотов коленчатого вала в
минуту остается примерно постоянным, то изменение передаточного числа /0
главной передачи будет вызывать
обратно пропорциональное изменение
максимальной скорости автомобиля
^тах [см. уравнение (202)]. Если
будем изменять не только
передаточное число /0, но одновременно
с этим и число пт оборотов
коленчатого вала в минуту,
устанавливаемое регулятором, то
скорость vmax движения автомобиля
может быть получена произвольной
в пределах ее максимальных
значений, при которых двигатель еще
обеспечивает достаточную мощность.
На фиг. ПО представлены
кривые для грузового автомобиля,
аналогичные изображенным на фиг. 105.
Здесь изображена кривая для
суммарной мощности Nf-\-Nw,
теряемой на сопротивление качению и
сопротивление воздуха.
Соответственно числу различных
передаточных чисел /0 проведено шесть
кривых для мощности автомобиля
Nmrim. Благодаря наличию регулятора
используемая мощность двигателя,
а следовательно, и мощность Nm*f\m ограничиваются почти вертикальной линией.
Если скорость вращения коленчатого вала двигателя, которую поддерживает
регулятор, принять примерно постоянной, то в пределах изменения передаточного
числа от 4,7 до 11,7 скорость автомобиля vmax будет изменяться обратно
пропорционально передаточному
числу 10. При передаточных
числах /0, меньших 4,7,
например, при передаточном числе /0,
равном 3,7, вращающий
момент двигателя является
недостаточным для того, чтобы
коленчатый вал достиг той
скорости вращения, на которую
установлен регулятор. На этом
участке характеристики
зависимость скорости v движения
автомобиля от передаточного
числа /0 определяется таким же
образом, как и для легкового
автомобиля.
Для определения влияния
передаточного числа /0 на уско-
dv
рение ,- грузового автомобиля
Фиг. 110. Изменение запаса мощности грузового авто- и преодолеваемый им подъем
мобиля (двигатель которого снабжен регулятором) в ПГ|Г|Г|1,„ „л^„л ™ „ г„„, л,
зависимости от передаточного числа /0 главной пере- Д0Р0ГИ можно, пользуясь фи.
дачи (цифры у кривых соответствуют различным пере- гурой 110, определить запас
фр у р у р
даточным числам главной передачи).
мощности автомобиля на ка„
134
Тяговая динамика автомобиля
ждой передаче. На основании этого могут быть построены кривые для ускорения
-£ автомобиля и для подъема дороги /тах аналогично тому, как это было
выполнено для легкового автомобиля на фиг, 107. На фиг. 111 представлена
полученная зависимость ускорения -т- (сплошные кривые), а также подъема i
dv
It
0,8
OJ
0,6
0,5
0,3
0,2
0,1
11,7
7,7—
—
h=11J
\
\
\
\
\
\
^\ I
\l
r
4,7
x^
3.7
X
\7.7
ll IV-
*—u
Tit
ii у,
\
\
t'%
7.0
6,0
5,0
3,0
2,0
1,0
10
20
30
4/7
50 v «"/час
Фиг. 111. Влияние передаточного числа /0 главной
передачи на ускорение -^ автомобиля (сплошные
кривые) и подъем г<>/0 (пунктирные кривые) (цифры у
кривых соответствуют разным значениям
передаточных чисел).
(пунктирные кривые) от передаточного числа /0 для грузового автомобиля,
двигатель которого снабжен регулятором. Как и для легкового автомобиля, макси-
dv
мальные значения ускорения -тг весьма быстро возрастают с увеличением
передаточного числа /0. Однако в отличие от легкового автомобиля (см. фиг. 107)
вместе с изменением передаточного числа *0 весьма резко меняется
максимальная скорость г>тах движения автомобиля.
Значение критической скорости vK\ остается примерно постоянным вне
зависимости от передаточного числа /0.
Влияние передаточного числа главной передачи 135
Пользуясь фиг. 111 (для ускорения-^t-J , можно построить кривые разгона
автомобиля t=f (v) и S==f(v), как было это выполнено на фиг. 109 для легкового
автомобиля. В обоих случаях увеличение передаточного числа /0 вызывает резкое
снижение времени t и пути 5 разгона автомобиля до заданной скорости v его
движения.
Передаточное число /0 главной передачи для грузового автомобиля (двигатель
которого снабжен регулятором) следует выбирать на основании того условия, что
автомобиль при движении на последней передаче должен иметь запас тяговой
силы, достаточный для преодоления заданного сопротивления ф дороги (порядка
О,04—0,06). Более подробные сведения по этому вопросу будут приведены в § 16
гл. 111.
Согласно изложенному выше увеличение передаточного числа /0 главной
передачи весьма значительно улучшает приемистость автомобиля (способность
разгоняться) и способность преодолевать подъем, сравнительно мало влияя на его
максимальную скорость.
Таким образом, с точки зрения улучшения динамики автомобиля повышение
передаточного числа 10 желательно. Однако при чрезмерном его увеличении
автомобиль получает следующие два недостатка. Во-первых, при этом снижается
топливная экономичность автомобиля: при очень большом запасе тяговой силы
автомобиля двигатель последнего работает с большой недогрузкой, а потому и
неэкономично (этот вопрос будет подробно рассмотрен в гл. V11I „Топливная
экономичность автомобиля"); во-вторых, при этом увеличивается скорость вращения
коленчатого вала, что сопровождается повышением износа двигателя.
Для того чтобы иметь возможность сравнивать различные автомобили по
многооборотности их двигателей, вводим понятие о коэфициенте многооборотности
автомобильного двигателя. Между числом пт оборотов коленчатого вала
двигателя в минуту и скоростью движения автомобиля на последней передаче имеется
соотношение:
где v — скорость в км/нас
Принимаем
60 ft -^
где г]п — коэфициент многооборотности двигателя, определяющий число оборотов
коленчатого вала в минуту при скорости движения автомобиля 1 км/нас. Имея
этот коэфициент, можно легко найти число оборотов коленчатого вала в минуту
при любой скорости автомобиля по выражению:
nm = W* (203>
Кроме того, в качестве коэфициента, характеризующего многооборотность
двигателя, часто применяют число оборотов коленчатого вала, соответствующее
определенному расстоянию (например 1000 м), пройденному автомобилем.
Соотношение между расстоянием S и числом пт оборотов коленчатого вала
определяется из выражения:
S = 2±
Отсюда получаем, принимая путь S= 1000 м:
Для грузовых автомобилей, двигатель которых снабжен регулятором,
многооборотность двигателя определяется тем числом оборотов пттлх коленчатого вала
в минуту, на которое установлен регулятор.
136
Тяговая динамика автомобиля
В табл. 2 приведены данные по значению коэфициентов многооборотности
для ряда легковых и грузовых автомобилей отечественного производства.
Значения коэфициентов многооборотности двигателей
Т а б л и ца 2
Тип
автомобиля
Легковые
Грузовые
Модель
автомобиля
„Москвич"
ГАЗ-М-1
ГАЗ-М-20
ЗИС-101
ЗИС-110
ГАЗ-ММ
ГАЗ-51
ЗИС-5
ЗИС-150
ЯГ-6
ЯАЗ-200
Передаточное
число главной
передачи /0
5,14
4,44
5,125
4,36
4,36
6,6
6,67
6,41
7,63
10,9
8,21
Размер шин
в дюймах
4,50—16
7,00-16
6,00—16
7,50-17
7,50—16
6,50-20
7,50—20
34X7
9,00—20
40X8
12,00-20
Коэфициент
многооборотности
двигателя т]п
45,4
32,6
40,4
30,1
31,0
44,1
42,1
41,1
44,3
60,0
45,1
Число оборотов
коленчатого вала
двигателя
на 1000 м пути
автомобиля пто*
2730
1960
2420
1810
1870
2660
2538
2478
2660
3620
2718
* При подсчете коэфициентов ч}п и пт0 многооборотности радиус качения колеса
принят равным 0,95 номинального радиуса.
Необходимо отметить, что коэфициент многооборотности не дает полной
оценки износостойкости двигателя. При той же средней скорости вращения
коленчатого вала двигатели с малым ходом поршня более износостойки. С этой точки
зрения представляет интерес отношение средней скорости поршня vs к скорости
v автомобиля. При этом получим:
Vo 2 Snm 60 и Si<\
где 5 — ход поршня в м.
Конечно, действительная износостойкость автомобильного двигателя зависит не
только от приведенных выше измерителей, но в очень большой мере зависит также
и от условий работы автомобиля. В частности, при том же значении коэфициента
многооборотности двигатель будет тем более напряжен, чем выше средняя
скорость автомобиля.
§ 12. ВЛИЯНИЕ КРИВИЗНЫ ХАРАКТЕРИСТИКИ ДВИГАТЕЛЯ
НА ТЯГОВЫЕ КАЧЕСТВА АВТОМОБИЛЯ
В предыдущем параграфе был рассмотрен вопрос о влиянии передаточного»
числа /0 главной передачи на тяговые качества автомобиля. При этом
предполагалось, что характеристика двигателя является заданной и известны вес
автомобиля, его размеры и радиус ведущих колес. Представим себе теперь, что
передаточное число /0, так же как и вес и форма автомобиля, а также и радиус
ведущих колес, являются заданными, а переменной величиной является характеристика
двигателя. Тяговые качества автомобиля, очевидно, также будут при этом
изменяться.
Влияние кривизны характеристики двигателя
137
Мощность Nm, расходуемая на все сопротивления при установившемся
движении автомобиля по горизонтальной дороге, определяется из выражения:
где Nr — мощность, затрачиваемая на трение в механизмах силовой передачи;
А/у—мощность, затрачиваемая на сопротивление качению;
Nw — мощность, затрачиваемая на сопротивление воздуха.
На фиг. 112 представлена примерная кривая суммарной мощности A^-f-АЛ-}- Nw
Внешняя характеристика двигателя даже при постоянном его рабочем объеме
может протекать различно в зависимости от фаз распределения, сечения органов
распределения, регулирования карбюратора и употребляемого топлива. Для тога
чтобы иметь возможность сравнивать между собой характеристики двигателя,
различные с точки зрения их протека- Nnc
ния, мы предполагаем, что литраж
двигателя и употребляемое топливо
остаются постоянными и что
изменение вида характеристик
обусловливается только распределением и
карбюрацией. Пусть под влиянием
этих факторов характеристика
двигателя изменяется таким образом,
что дает два вида кривых Л и С,
изображенных на фиг. 112.
Характеристика А соответствует
тихоходному двигателю с малыми фазами
распределения, характеристика С— f0
быстроходному двигателю с
большими фазами распределения.
Характеристики подбираются такими, что
кривая мощности Nr-\-Nj-\- Nw,
затрачиваемой на движение
автомобиля, пересекает кривые А и С
в одной точке, общей для обеих
кривых. Это значит, что при
одинаковой максимальной скорости автомобиля
30
20
/
/
//
/
'Л
/
\/
/
/
К/
/
1
I
j
С
/
в
Tn
i
WOO 2000 3000 пт об/ми*
Фиг. 112. Влияние кривизны внешней
характеристики двигателя на запас мощности автомобиля.
валы обоих двигателей
делают одинаковое число пт оборотов в
коленчатые
минуту.
Из фиг. 112 следует, что при данном передаточном числе /0 характеристика А
дает значительно лучшие результаты, чем характеристика С. В действительных
условиях работы автомобиля скорость вращения коленчатого вала не будет
превосходить значения пг; между тем только после этой скорости может быть
использована увеличенная мощность при характеристике С. Поэтому характеристика А
при той же максимальной скорости автомобиля обеспечит последнему значительно
лучшие тяговые качества (максимальное ускорение —гг и максимальный подъем i)r
чем характеристика С. Для того чтобы использовать увеличенную мощность
характеристики С, необходимо изменить передаточное число /0 главной передачи.
Если предположить, что характеристика С должна быть использована таким
образом, чтобы при максимальной скорости автомобиля на данной дороге двигатель
работал на мощности, определяемой точкой В, соответствующей числу п2
оборотов коленчатого вала в минуту, то необходимо выбрать новое и соответственна
большее передаточное число /0. Из фиг. 112 следует, что для получения хороших
тяговых качеств автомобиля необходимо характеристику двигателя иметь по
возможности более выпуклой на участке, начиная с минимальных оборотов двигателя
и кончая точкой ее пересечения с кривой суммарной мощности Nr-{-Nf-\-Nw. Эта
обеспечит преодоление больших подъемов на прямой передаче, более высокие
ускорения и невысокую критическую скорость vK\. В отношении последнего ка-
138 Тяговая динамика автомобиля
яества протекание характеристики на участке малой скорости автомобиля особенно
важно. Как было уже указано в предыдущем разделе, увеличение передаточного
числа /0 весьма слабо влияет на критическую скорость vK\, и последняя зависит
■почти исключительно от вида характеристики двигателя.
Другими словами, характеристика двигателя должна быть такой, чтобы при
максимальной скорости автомобиля на хорошей горизонтальной дороге двигатель
работал на оборотах более высоких, чем те, которые соответствуют его
максимальной мощности. Это положение было уже установлено ранее при рассмотрении
влияния передаточного числа iQ на динамику автомобиля. Оно остается в силе как
по отношению к тихоходному, так и по отношению к быстроходному двигателю.
Высказанное выше положение о влиянии характеристики двигателя на
динамические качества автомобиля целиком распространяется и на случай грузового
автомобиля, двигатель которого снабжен регулятором.
И в этом случае следует иметь характеристику настолько выпуклую, чтобы ее
максимум соответствовал меньшим оборотам, чем те, на которые установлен
регулятор.
§ 13. ВЛИЯНИЕ ЧИСЛА ПЕРЕДАЧ И ВЕЛИЧИНЫ ПЕРЕДАТОЧНЫХ ЧИСЕЛ
КОРОБКИ ПЕРЕДАЧ НА ТЯГОВЫЕ КАЧЕСТВА АВТОМОБИЛЯ
В практических условиях работы автомобиля, особенно при езде в городских
условиях, а также по горным и плохим дорогам, весьма часто приходится
переходить на промежуточные передачи в коробке передач, в соответствии с чем
число этих промежуточных передач, а также величина их передаточных чисел
оказывают большое влияние на тяговые качества автомобиля и на его среднюю
скорость движения.
Следующие тяговые качества автомобиля при всех прочих равных условиях
•определяются количеством передач в коробке передач и значением их
передаточных отношений:
1) способность автомобиля преодолевать максимальное сопротивление дороги
Т max»
2) способность автомобиля быстро разгоняться;
3) способность автомобиля иметь возможно высокую скорость движения на
плохой дороге и на подъемах.
Ниже эти три вопроса рассматриваются отдельно.
Влияние передаточного числа iK в коробке передач на величину фтах.
Коробка передач вводится в трансмиссию автомобиля для обеспечения возможности
преодолевать сопротивления пути, превосходящие те, на которые рассчитан
двигатель и для которых подобрано передаточное число /0 главной передачи.
Повышенные сопротивления, увеличенные против нормальных, создаются обычно
подъемом, плохой дорогой и инерцией автомобиля при разгоне; при этом
сопротивления, обусловливаемые подъемом и плохой дорогой, определяются коэфициентом
сопротивления дороги ф. Первая передача в коробке служит для того, чтобы
автомобиль мог преодолеть максимальное сопротивление дороги (фтах). Нормально
требуется, чтобы автомобиль мог преодолеть сопротивление дороги, значение коэ-
фициента ф для которой не ниже 0,3—0,35. На основании этого требования
обычно и определяется передаточное число ix в коробке передач. Таким
образом, определение этой передачи совсем не связано с числом передач в коробке
передач и их соотношением.
Для того чтобы автомобиль мог преодолеть сопротивление дороги фгаах,
необходимо, чтобы на ведущих колесах была развита тяговая сила:
Рр = Офшах.
В этом выражении не учитывается сила сопротивления воздуха Wv2, которая
*три весьма медленном движении автомобиля на первой передаче очень мала. Сила
Рр на ведущих колесах определяется из выражения, которое уже было приведено
Влияние числа передач и величины передаточных чисел коробки передач 139
ранее [уравнение (38)]. Отсюда получаем выражение для того максимального
значения коэфициента сопротивления дороги, которое автомобиль может
преодолеть при данном двигателе и передаточном числе it в коробке передач:
. (204)
Фиг. 113. Примерная внешняя
характеристика двигателя.
GrK
Таким образом, из этого уравнения следует, что максимальное сопротивление
1*тах прямо пропорционально передаточному числу /ь и при всяком значении
заданных величин Мт&1, 10 и iK можно найти такое значение передаточного числа на
первой передаче iv при котором автомобиль мог бы преодолеть требуемое
сопротивление фтах. Однако передаточное число 1Х нельзя выбирать больше того
предельного значения, после которого начнется буксование ведущих колес даже на
хорошей и не скользкой дороге.
Выражение для предельного значения Nm
передаточного числа ix будет дано ниже,
в § 16. |
Влияние числа передач и их
соотношения на разгон автомобиля. Быстрота
разгона автомобиля может быть оценена
временем t или длиной пути S, которые
требуются для достижения автомобилем
некоторой заданной скорости v движения.
Выше уже были указаны те приемы, при
помощи которых можно подсчитать
величины t и S. Ниже выясняется влияние
на эти величины числа передач в
коробке передач и соотношения
передаточных чисел.
Для того чтобы разгон автомобиля
можно было произвести в возможно
короткое время, необходимо, чтобы
двигатель за время разгона работал в среднем
на возможно большей мощности. На фиг. 113 представлена примерная
характеристика двигателя Nm. Пусть автомобиль достигнет своей максимальной скорости
при некотором числе п2 оборотов коленчатого вала в минуту, переходить
которое при разгоне автомобиля на промежуточных передачах нежелательно по
соображениям долговечности двигателя. Таким образом, при разгоне автомобиля на
одной какой-нибудь передаче скорость вращения коленчатого вала изменяется от
некоторого значения пг об/мин, с которого начинается разгон, и до значения я2.
В соответствии с этим изменяется и мощность двигателя от Nx до N2. После того
как при разгоне автомобиля мощность двигателя достигла величины jV2,
производится переключение шестерен в коробке передач на следующую передачу, и в этот
момент скорость вращения коленчатого вала вновь снижается до величины,
определяемой соотношением между передаточными числами переключаемых
шестерен. Для того чтобы средняя мощность двигателя за время всех переключений
была по возможности большой, необходимо, чтобы при переходе на следующую
передачу скорость вращения коленчатого вала снижалась как можно меньше, т. е.
необходимо, чтобы скорость вращения пх коленчатого вала, с которой начинается
разгон на какой-либо передаче, была близка к скорости, соответствующей
максимальной мощности двигателя. Это достигается при соблюдении двух условий:
во-первых, число передач должно быть возможно большим и, во-вторых, скорость
вращения коленчатого вала, с которой начинается разгон, должна быть
одинаковой для всех передач.
По мере увеличения числа передач в коробке передач разница между
оборотами пх и п2 будет все меньше и меньше, и, наконец, при бесконечном числе
передач двигатель за все время разгона автомобиля может работать при постоян-
140 Тяговая динамика автомобиля
ной скорости вращения коленчатого вала, соответствующей максимальной
мощности. При этом, конечно, обеспечится наиболее быстрый разгон автомобиля.
Начало разгона на каждой передаче с одинаковой скорости вращения
коленчатого вала обеспечивает одинаковую среднюю мощность двигателя при разгоне
на каждой передаче. Если начало разгона на каждой передаче в коробке
осуществляется с тех же оборотов пг коленчатого вала в минуту и заканчивается
также одинаковыми для всех передач оборотами п2, то зависимость между
передаточными числами /1? /2, /3 и т. д. должна выразиться геометрической
прогрессией:
i\ to /•>
-у1 = -f = -f- И Т. Д.
h h h
Это соотношение получается на основании слеюдущих соображений. Скорость
автомобиля при скорости вращения коленчатого вала, равной /г2, на некоторой
передаче in определится из выражения:
л^-=^. (205)
При переключении на следующую передачу in+1 число оборотов коленчатого
вала в минуту должно получиться равным п1у а скорость автомобиля в связи
с быстрым переключением передач может быть принята неизменной и равной vn.
Отсюда получаем:
Va + 1 = vn = A-j^-. (206)
Сопоставляя уравнения (205) и (206), получим:
-J^— = const = -^- . (207)
т. е. получаем, что отношение предыдущих передач к последующим должно быть
величиной постоянной.
В действительности скорость автомобиля за время переключения передач не
сохраняется в точности постоянной, а несколько уменьшается за счет
сопротивления качению и сопротивления воздуха. В соответствии с этим скорость
автомобиля после переключения на следующую передачу должна получиться меньше той
скорости, которую имел автомобиль в конце разгона на предыдущей передаче,
т. е. vn+i Ол.
Отсюда, пользуясь уравнениями (205) и (206), получим:
п\ <- п2
или
Чем выше скорость движения автомобиля во время переключения передач5
тем значительнее получится уменьшение скорости vn+\ по сравнению со скоростью
vn, а следовательно, тем меньше должно получиться отношение передаточных
чисел . 1п . Отсюда следует, что для наилучшего использования мощности двига-
1п+\
теля в быстроходных автомобилях соотношение передач не должно в точности
следовать геометрической прогрессии, определяемой уравнением (207), а более
высокие передачи (близкие к прямой) должны быть несколько сближены.
Это необходимо также в связи с тем, что за время разгона автомобиля
желательно использовать максимально высокую мощность двигателя. При начале разгона
каждый раз с тех же оборотов двигателя пх и при окончании разгона на каждой
Влияние числа передач и величины передаточных чисел коробки передач
141
передаче при одинаковых оборотах двигателя п2 получается одинаковая средняя
мощность двигателя на каждой передаче. Однако продолжительность работы
двигателя получается различной для каждой передачи и тем большей, чем ближе
передача к последней; поэтому для лучшего использования мощности двигателя при
разгоне автомобиля выгоднее, чтобы двигатель работал на большей мощности при
включении высоких передач.
Если принять отношение передаточных чисел в коробке передач в точности по
геометрической прогрессии, то на основании уравнения (207) при заданных
значениях первой и последней передач могут быть легко определены все
промежуточные передачи.
Метод определения передаточных чисел для этого случая изложен в § 16 гл. III.
В табл. 3 приведены данные по передаточным числам коробок передач
советских автомобилей.
Для иллюстрации того,
в какой мере число передач
и их соотношение влияют
на разгон автомобиля, были
подсчитаны время и путь
разгона на различных
передачах для того же
легкового автомобиля, для
которого выше на фиг. 105,
107 и 109 было приведено
исследование влияния
переt сек
30
динамические качества. При
исследовании влияния
передаточных чисел iK на разгон
автомобиля необходимо
задаться определенным и
постоянным передаточным
числом /0 главной передачи;
0г
'—-^_
t
S
t
s
\
ч
l!
До 60
Sm
1000
800
600
20 —— - —
10 -
400
ZOO
0,6
0,8
ш Влияние соотношения передаточных чисел iK
коробки передач на время t и путь 5 разгона автомобиля.
это передаточное число в
данном случае было взято
равным 4,5.
На фиг. 114 приведен
результат подсчета зависимости времени t и пути S разгона автомобиля от
соотношения передаточных чисел iK в коробке передач. Число передач при
этом было принято равным 3, и для первой передачи ^ = 4. Время и
путь разгона определялись во ! всех случаях со скорости автомобиля на
первой передаче при числе оборотов коленчатого вала 400 в минуту, т. е. начиная
с минимальной устойчивой и кончая скоростью, равной 60 и SO^KMJHac. Время на
переключение передач в коробке передач не учитывалось. Отношение -.- = (3 опре-
h
деляет собой изменение соотношения передаточных чисел iK. Это отношение
выбиралось различным в пределах от 0,4 до 1,4, и для каждого из
промежуточных значений этого отношения определялись время t и путь 5 разгона в
указанных пределах скорости. При подсчете ускорения автомобиля для коэфициента \
принималось значение, равное 0,1 (то же, что на фиг. 109).
Из фиг. 114 следует, что изменение времени t и пути 5 разгона в пределах
изменения коэфициента р от 0,6 до 1,4 получается малым и практического
значения не имеет. Минимальные значения t и S получаются при величине
коэфициента р, примерно равной 0,85—0,9. Отклонение величины коэфициента от его
наивыгоднейшего теоретического значения, равного единице, получается здесь
потому, что на первой передаче разгон начинается с 400 оборотов коленчатого
142
Тяговая динамика автомобиля
вала в минуту, а не с тех же, что на второй передаче. При большем числе
передач, чем 3, наивыгоднейшее значение коэфициента {J приближается к единице.
Для выяснения влияний на разгон автомобиля числа передач в коробке передач
произведен отдельный подсчет, результат которого представлен на фиг. 115. Подсчет
Таблица 3
Передаточные числа коробок передач автомобилей советского
производства
Тип
автомобиля
Легковые
I рузовые
Модель автомобиля
„МОСКВИЧ"
ГАЗ-М-1
ГАЗ-М-20
ЗИС-101
ЗИС-110
ГАЗ-АА и ММ
ГАЗ-51
ЗИС-5
ЗИС-150
ЯГ-6
ЯАЗ-200
Передаточные числа
На первой;
передаче
3,55
2,82
2,82
2,89
2,43
6,40
6,40
6,60
6,24
6,60
6,17
На второй
передаче
1,72
1,60
1,60
1,75
1,53
3,09
3,09
3,74
3,32
3,74
3,40
На третьей
передаче
1,00
1,00
1,00
1,00
1,00
1,69
1,69
1,84
1,90
1,84
1,79
На
четвертой
передаче
—
—
1,00
1,00
1,00
1,00
1,00
1,00
На пятой
передаче
—
—
0,81
0,78
Задний
ход
4,44
3,38
3,38
3,62
3,16
7,82
7,82
7,63
6,70
7,63
6,69
60
был произведен для того же
были результаты подсчета на
tcex
легкового автомобиля, для которого представлены
фиг. 114. При этом передаточное число /0 главной
передачи принято равным 4,5. Передаточ-
ное число первой передачи i± = 4* Число
передач п принималось равным 2, 3, 4 и
5, и для каждого из чисел передач при
всех прочих равных условиях было
определено время t и путь 5 разгона. Пределы
изменения скоростей автомобиля за время
его разгона взяты те же, что и в
предыдущем случае, т. е. от минимальной
скорости автомобиля, соответствующей
400 оборотам коленчатого вала в минуту»
до скорости 60 и 80 км\час.
Соотношение между передаточными числами iK на
разных передачах выбиралось по
геометрической прогрессии.
Согласно фиг. 115 по мере увеличения
«ысла передач получается заметное
сокращение времени и пути разгона автомобиля
до той же скорости его движения. Однако
одновременно с этим значительно
усложняется управление коробкой передач.
При построении кривых на фиг. 115 не учитывалось время, затрачиваемое на
переключение передач, которое, очевидно, будет тем больше, чем больше
передач в коробке и чем сложней переход с одной передачи на другую.
Для иллюстрации влияния конструкции ступенчатой коробки передач на время,
теряемое на переключение передач и на разгон автомобиля, ниже приведены результаты
20
** II»
,t
—' —.
— .I
«о
\t
s
ч
800
600
400
3
5
200
Фиг. 115. Влияние числа передач коробки
передач на время t и путь «S разгона
автомобиля.
Влияние числа передач и величины передаточных чисел коробки передач
экспериментов *, произведенных в автомобильной лаборатории Академии Наук па
испытанию одного и того же автомобиля при установке на нем трех разных
коробок передач: а) простой без синхронизаторов; б) с синхронизаторами; в) с
приспособлением для автоматического переключения передач.
На фиг. 116 изображен результат испытания автомобиля (при помощи прибора
с пятым колесом) при установке на нем коробки передач без синхронизаторов.
Пробег совершался дважды в каждом из направлений движения, и приведенная
кривая характеризует средний результат. Согласно полученным данным на
переключение передач затрачивается значительное время.
На фиг. 117 изображены три кривые, иллюстрирующие результаты испытания
того же автомобиля в трех случаях: с коробкой передач без синхронизаторов
(кривая а), с синхронизаторами для второй и третьей передач (кривая б) и с при-
tCEK
18
16
12
10
О
у.
7
У
'сек
16
12
А
'/
/
1
))
/
/
•/
/
/
/
10
20 30 ЬО 50 60vKM/m
Фиг. 116. Результат пробегового испытания
на разгон автомобиля с коробкой передач
без синхронизаторов.
10 20 30 40 50 v «"/час
Фиг. 117. Результат пробегового
испытания на разгон автомобиля с
коробкой передач:
а — без синхронизаторов; — с
синхронизаторами; в — с автоматическим переключением
передач.
способлением для автоматического переключения передач без разрыва потока
мощности (кривая в). Введение синхронизаторов весьма резко снизило потерю
времени на переключение передач. Применение приспособления для
автоматического переключения передач без разрыва потока мощности еще больше уменьшило
указанную потерю времени, сведя ее практически к нулю.
При этом одновременно с уменьшением времени лучше используется
кинетическая энергия быстро вращающихся масс двигателя за процесс переключения
с низшей передачи на более высокую.
С точки зрения обеспечения автомобилю наиболее высоких динамических
качеств при той же мощности двигателя наилучших результатов можно добиться
при помощи применения так называемой бесступенчатой коробки передач; при
этом для каждого сопротивления дороги и каждой скорости автомобиля может
быть подобрано наиболее выгодное передаточное число.
Такие коробки передач — гидравлические, электрические и механические — уже
получили некоторое применение и, надо думать, в дальнейшем получат значительно
большее распространение не столько в связи с необходимостью повышения дина-
Эксперимент проводился канд. техн. наук. Н. В. Диваковым под руководством автора
144
Тяговая динамика автомобиля
мичности автомобиля, сколько в связи с требованием улучшения его топливной
экономичности (последний вопрос рассмотрен в гл. VIII).
Ниже дается примерный анализ тяговых или динамических качеств автомобиля
при установке на нем бесступенчатой автоматической коробки передач.
На фиг. 118 построена динамическая характеристика для грузового автомобиля
с четырехступенчатой (/г = 4,64; /2=2,78; is=l,67 и /4 = 1) и бесступенчатой
коробками передач. В первом случае динамическая характеристика имеет вид
ступенчатой линии, во втором случае получается огибающая кривая СС [см.
уравнение (187)]. При этом предположено, что к. п. д. для обеих коробок сохраняется
.одинаковым; между тем в действительности при электрической или гидравлической
бесступенчатых коробках передач к. п. д. значительно ниже, чем при
механической коробке передач.
На фиг. 119 при помощи полученной динамической характеристики (фиг. 118)
^построены кривые зависимости ускорения ^ от скорости v автомобиля.
2.5
2,0
1,0
0.5
О
0,1
о
60'уЩ'час
or
'Л
\
\
\
. £
10 20 30 40 50 60vкм/час
чФиг. 118. Динамическая характеристика
автомобиля с бесступенчатой и
четырехступенчатой коробками передач.
Фиг. 119. График ускорений для
автомобиля с бесступенчатой и
четырехступенчатой коробками передач.
Так как при бесступенчатой коробке передач скорость вращения коленчатого
вала при разгоне автомобиля после достижения двигателем режима максимальной
мощности может сохраняться постоянной, то мощность, необходимая для
ускорения вращающихся частей двигателя и сцепления, будет использована для
дополнительного увеличения ускорения автомобиля по сравнению со ступенчатой
коробкой передач. Кроме того, при бесступенчатой автоматической коробке передач
отсутствует потеря времени на переключение передач. Однако на ряду с
преимуществами бесступенчатая коробка передач имеет и недостатки. В частности,
действительное превышение ускорения при бесступенчатой коробке передач по
сравнению со ступенчатой получается несколько меньше указанного на фиг. 119 из-за
меньшего к. п. д. этой коробки передач.
Влияния числа передач и их соотношения на скорость движения
автомобиля при различном сопротивлении дороги. Чем больше передач имеет коробка
передач, тем легче для каждого сопротивления дороги ф подобрать такую передачу,
при которой двигатель развивал бы мощность, близкую по возможности к
максимальной. Между тем это условие (работа двигателя на максимальной мощности)
обеспечивает автомобилю максимальную скорость при данном сопротивлении дороги.
Таким образом, чем больше будет передач в коробке передач, тем выше может быть
скорость движения автомобиля на отдельных участках дороги и тем выше должна
получиться его средняя скорость.
Наилучшие результаты в этом отношении получаются при коробке передач
с бесконечным числом передач. В этом случае при всяком сопротивлении дороги ф
Влияние числа передач а величины передаточных чисел коробки передач 145
может быть подобрана такая передача iKy при которой двигатель работал бы на
полной мощности; т. е. при коробке этого типа автомобиль все время может
двигаться с возможно высокой скоростью. При этом, конечно, управление такой
коробкой должно производиться автоматически.
Для исследования вопроса о том, как влияет число передач в коробке на
скорость v автомобиля при различных сопротивлениях дороги ф, на фиг. 120
изображены две динамические характеристики. Обе динамические характеристики
соответствуют одному и тому же автомобилю с двигателем одинаковой мощности,
но при том условии, что на этих автомобилях установлены различные коробки
передач. Слева дана динамическая характеристика при наличии на автомобиле
трехступенчатой коробки передач, а справа — при наличии четырехступенчатой
коробки передач. Как уже было выяснено выше, первая передача в коробке должна
быть такой, чтобы автомобиль мог преодолеть максимальное сопротивление
дороги фшах. Это сопротивление дороги, очевидно, будет одинаковым для обоих
^—
Фз _
\
•■■■
Ртах
I
и————
—-~
20
60
80
Фиг. 120. Сравнение динамических качеств автомобиля при установке
на нем трех- и четырехступенчатой коробки передач.
автомобилей независимо от числа передач в коробке передач; поэтому для
обоих автомобилей кривые / динамической характеристики являются одинаковыми.
Кроме того, принято, что передаточное число i0 главной передачи в обоих
случаях также остается одинаковым. Поэтому кривая ///, соответствующая последней
передаче при трехступенчатой коробке, тождественна кривой IV, соответствующей
последней передаче четырехступенчатой коробки. Дорога с коэфициентом
сопротивления ф вплоть до значения ф3 будет преодолеваться обоими автомобилями на
последней передаче; при повышении же сопротивления до величины ф4 необходимо
перейти на вторую передачу в случае трехступенчатой коробки и на третью
передачу в случае четырехступенчатой. Из фиг. 120 видно, что это
сопротивление дороги автомобиль преодолеет с большей скоростью при
наличии четырехступенчатой коробки, так как при трехступенчатой коробке, несмотря
на большой запас тяговой силы, скорость автомобиля ограничивается величиной,
соответствующей максимальному числу оборотов коленчатого вала в минуту.
На основании динамических характеристик, представленных на фиг. 120, можно
построить кривые зависимости между максимальной скоростью автомобиля и
сопротивлением ф дороги. Такое построение выполнено на фиг. 121. Проследим
переключение передач при четырехступенчатой коробке. В точке а происходит
переключение передач с четвертой на третью. В пределах значений коэфициента
сопротивления дороги от точки а до точки b скорость автомобиля остается
постоянной, так как она определяется при этом максимальными оборотами колен-
10 Е. А. Чудаков 2232
146 Влияние числа передач и величины передаточных чисел коробки передач
чатого вала #msx. Переключение с третьей передачи на вторую происходит
в точке су после чего опять на участке с—d скорость остается постоянной.
Наконец, переключение со второй передачи на первую происходит в точке е.
В случае трехступенчатой коробки передач переключение с третьей передачи на
вторую происходит в точке g. После этого до точки h скорость остается
постоянной, переключение же со второй передачи на первую происходит в точке k.
Для того чтобы дать наиболее полное представление о влиянии числа передач
в коробке передач на тяговые качества автомобиля, на той же фиг. 121 нанесена
линия (пунктир с точкой), определяющая зависимость максимальной скорости г>шах
автомобиля от коэфициента ф сопротивления дороги при условии исключения
промежуточной передачи в трехступенчатой коробке, т. е. при условии установки
двухступенчатой коробки. Передаточные числа ix и /0 при этом оставлены
неизменными. Переключение со второй передачи на первую происходит в точке р.
хм/час
75
SO
?5
./77
\
\
а
\
Ч
Г
'г
р
)
\
к
\~
с
|
- /77 -
О 0,05 01 0,15 0,2 0,25 V
Фиг. 121. Зависимость максимальной скорости автомобиля от
коэфициента сопротивления дороги при коробках передач с различным
числом передач:
пунктирные линии с точкой соответствуют двухступенчатой коробке передач;
пунктирные — трехступенчатой коробке передач; сплошные толстые —
четырехступенчатой коробке передач; сплошная тонкая — бесступенчатой коробке передач.
На той же фигуре сплошной тонкой линией mm представлено соотношение между
^тах и 4* для случая коробки с бесконечным числом передач. При наличии такой
коробки скорость v автомобиля при различных сопротивлениях дороги ф
определяется максимальной мощностью двигателя Л/^. Для определения скорости
автомобиля v при различных значениях коэфициента ф сопротивления дороги служит
выражение:
75Nmy]m = const = ^Gv + Wv's.
Принимая в этом выражении мощность Nm постоянной и давая различные
значения коэфициенту ф сопротивления дороги, можно найти зависимость между
^тах И ф.
Из рассмотрения фиг. 121 находим, что наибольшая скорость при всех
значениях коэфицнента ф сопротивления дороги обеспечивается коробкой передач
с бесконечным числом передач. Далее идет четырехступенчатая коробка.
Трехступенчатая коробка на дороге с сопротивлением, соответствующим участкам
кривой al и пе, дает меньшую скорость движения, чем четырехступенчатая коробка,
а на коротком участке In трехступенчатая коробка передач дает лучшие
результаты. Наихудшие результаты дает коробка передач с двумя передачами, которая
при сопротивлении дороги, соответствующем всему участку ае, обеспечивает
Влияние гидромуфты на тяговые качества автомобиля
147
сохранено равным
автомобилю значительно меньшую скорость, чем трехступенчатая, а особенно
четырехступенчатая коробка передач.
Улучшение качества коробок передач с малым числом передач для повышения
скорости движения атомобиля при средних значениях коэфициента ф достигается
обычно путем увеличения запаса тяговой силы на последней передаче (путем
увеличения передаточного числа /0 главной передачи).
На фиг. 122 построена кривая зависимости максимальной скорости vmax от
коэфициента ф сопротивления дороги для того же автомобиля, для которого была
построена фиг. 121, но в этом случае передаточное число /0 главной передачи
для случая трехступенчатой коробки передач повышено до 5,5, а для случая
четырехступенчатой коробки
передач
4,5.
Из этой фигуры видно,
что зависимость
максимальной скорости vmax
автомобиля от сопротивления ф
для этих двух случаев по-
лучается примерно
одинаковой, а при малых значениях
коэфициента сопротивления
некоторое преимущество
получается даже для
трехступенчатой коробки передач.
Увеличение тяговой силы
может быть получено не
только за счет повышения
75
50
25
О
\
^iо=5,5(3
\
1'сГЬ,5(4
\ 1
-х ступ.)
'-л ступ.)
ч
\
\
t
i
0,05
0.1
0,15
0,2 0,25 ф
Фиг. 122. Изменение максимальной скорости движения
автомобиля при установке на нем коробок передач с
различным числом передач:
сплошная кривая соответствует трехступенчатой коробке передач при
i0 = 5,5; пунктирная кривая — четырехступенчатой коробке передач
при i0 —4,5.
также и путем применения
на автомобиле двигателя
большего литража. Таким
образом, и при коробке с
малым числом передач можно
получить такую кривую зависимости vmax от ^, которая бы полностью
удовлетворяла всем поставленным требованиям в отношении динамических качеств автомобиля.
Однако итти очень далеко по пути увеличения мощности двигателя
нерационально по соображениям экономичности: чем больше мощность двигателя, тем
с большей недогрузкой он работает при нормальных условиях эксплоатации и тем
больше топлива он расходует на ту же работу. В гл. VIII этот вопрос будет
рассмотрен более подробно.
§ 14. ВЛИЯНИЕ ГИДРОМУФТЫ НА ДИНАМИЧЕСКИЕ
ИЛИ ТЯГОВЫЕ КАЧЕСТВА АВТОМОБИЛЯ
Проведенное выше исследование зависимости динамических или тяговых
качеств автомобиля от числа передач и величины передаточных чисел коробки
передач соответствует тому условию, что при включении каждой передачи имеется
совершенно определенное соотношение между скоростью автомобиля и скоростью
вращения коленчатого вала. Это положение несколько нарушается при буксовании
сцепления; однако обычные фрикционные муфты, используемые в качестве
механизма сцепления, не допускают сколько-нибудь длительного буксования из-за
перегрева трущихся поверхностей.
Введение в трансмиссию автомобиля гидравлической муфты (гидромуфты)
обеспечивает возможность длительного ее буксования, т. е. позволяет коленчатому
валу двигателя иметь повышенную скорость вращения при малой скорости
движения автомобиля. Благодаря этому, во-первых, может быть несколько увеличено
148
Тяговая динамика автомобиля
Р*г
ускорение -т автомобиля, а во-вторых сохраняется устойчивая работа двигателя
даже при очень малой скорости движения автомобиля на последней передаче.
Увеличение ускорения -тг при разгоне автомобиля достигается благодаря тому,
что в этом случае (при наличии гидромуфты) начало разгона автомобиля может
происходить при повышенном значении вращающего момента двигателя. В связи с этим
положительное влияние
гидромуфты на разгон
автомобиля проявляется тем
больше, чем быстроходнее
двигатель, т. е. чем большей
скорости вращения
коленчатого вала соответствует
максимальное значение
вращающего момента.
На фиг. 123 построен
примерный график тягового
баланса для автомобиля,
имеющего быстроходный
двигатель; последнее
характеризуется тем, что
максимальное значение полной
суммарной окружной силы
Рр соответствует повышен-
Фиг. 123. Примерный график тягового баланса для
автомобиля, имеющего быстроходный двигатель, при
отсутствии (сплошные линии) и наличии (пунктирные линии)
гидромуфты.
ной скорости v автомобиля.
Разность сил (Рр — Pf)
затрачивается на сопротивление воздуха Pw и на разгон автомобиля или на
преодоление подъема. Пунктиром на фиг. 123 проведены горизонтали,
соответствующие максимальным значениям вращающего момента, которые могут быть
реализованы при наличии гидромуфты. Согласно фиг. 123, при малой скорости движения
автомобиля получается заметное ^ KgM
увеличение тяговой силы, идущей m
на ускорение автомобиля (или на
преодоление подъема). ?
На фиг. 124 приведен
результат испытания двигателя ЗИС-110
при наличии (пунктирная кривая) 20
и отсутствии (сплошная кривая)
гидромуфты [24].
Согласно этим данным основ-
1000
2000
3000 4000 п?об/мин
Фиг. 124. Результат испытания двигателя ЗИС-110
ПРИ наличии (пунктирная кривая) и отсутствии
, (сплошная кривая) гидромуфты,
ное преимущество гидромуфты * ' ^ J^
заключается в сохранении большого значения вращающего момента двигателя,
а следовательно, и ускорения при самой малой скорости автомобиля на последней
передаче.
Как это следует из сказанного выше, положительное действие гидромуфты
в отношении разгона автомобиля проявляется лишь при ступенчатой коробке
передач. В случае установки на автомобиле бесступенчатой коробки передач это
положительное качество гидромуфты уже не проявляется, так как при наличии
такой коробки передач разгон автомобиля можно осуществить при максимальной
мощности двигателя Nm, а не при максимальном его моменте Мт, что обеспечит
значительно большее ускорение автомобиля.
Следует отметить, что положительное действие гидромуфты проявляется не
столько в том, что при этом несколько повышается ускорение автомобиля, а
главным образом в значительном облегчении управления автомобилем (уменьшение
числа переключений и облегчение процесса переключения передач).
Влияние собственного веса на тяговые качества автомобиля 149
§ 15. ВЛИЯНИЕ СОБСТВЕННОГО ВЕСА АВТОМОБИЛЯ И ФАКТОРА
СОПРОТИВЛЕНИЯ ВОЗДУХА НА ТЯГОВЫЕ КАЧЕСТВА АВТОМОБИЛЯ
Полная суммарная окружная сила Рру развиваемая на ведущих колесах
автомобиля при установившемся движении последнего, затрачивается на преодоление
сопротивления качению Рр подъема Р- и сопротивления воздуха Pw. Сила,
затрачиваемая на преодоление первого и второго сопротивлений, прямо пропорциональна
полному весу G автомобиля (/V-|-/^=<]>G). Сила, затрачиваемая на преодоление
сопротивления воздуха, прямо пропорциональна значению фактора W, поэтому при.
заданной силе Рр обе величины — G и W — оказывают большое влияние на
тяговые качества автомобиля. Чем меньше G и W, тем выше тяговые, или
динамические качества автомобиля.
Конечно, если мощность двигателя, установленного на автомобиле, ничем не
ограничена, то можно при любом значении собственного веса Go автомобиля и при
любом значении фактора W, определяющего сопротивление воздуха, получить
заданные тяговые качества автомобиля. Однако при этом потребуется повышение
мощности^ следовательно, увеличение веса двигателя, что повысит стоимость всего
автомобиля и вызовет значительный перерасход топлива и увеличение всех эксплоа-
тационных расходов. В соответствии с этим целесообразно максимально снижать
собственный вес Go автомобиля до предела, ограничиваемого достаточной
надежностью конструкции последнего.
Если принять, что мощность двигателя остается постоянной, а также что не
меняется и величина фактора W сопротивления воздуха, то влияние изменения
веса Go автомобиля на тяговые качества автомобиля можно определить, пользуясь
графиком динамической характеристики. Для этой цели согласно фиг. 90 и 91
необходимо лишь дать новый масштаб ординат, соответствующий другому весу
автомобиля.
Увеличение динамического фактора D обратно пропорционально полному весу G
автомобиля. В соответствии с этим одинаковое уменьшение веса Go для различных
типов автомобилей вызовет неодинаковое увеличение динамического фактора D,
а следовательно, неодинаковое повышение тяговых качеств автомобиля.
Предположим, что вес автомобиля снижен с G'Q до Go без изменения
мощности двигателя и передаточных чисел /0 и iK. В этом случае находим:
П" Gf Gn 4- Go
*У = -g. = ; ^ , (209)
где D' — динамический фактор, соответствующий весу G ;
D" — динамический фактор, соответствующий весу G ;
G' — полный вес автомобиля при собственном весе Go;
G" — полный вес автомобиля при собственном весе G"Q ;
Ge — полезная нагрузка автомобиля.
Если разделить числитель и знаменатель правой части уравнения на G' , то
получим:
Go G'o
Чем меньше отношение —f , т. е. чем меньше полезная нагрузка по сравнению
Со
с собственным весом, тем значительнее будет увеличение тяговых качеств авто-
GQ
мобиля при том же уменьшении его веса, определяемом отношением —Г, поэтому
150
Тяговая динамика автомобиля
v
км/час
100 -
93
уменьшение собственного веса для легковых автомобилей дает значительно больший
прирост тяговых качеств автомобиля, чем такое же уменьшение веса грузовых
автомобилей.
Для грузовых автомобилей имеет место резкое изменение общего веса G
в случае движения этих автомобилей с полной нагрузкой или без груза. В среднем
собственный вес грузового автомобиля приближенно равен 0,5 полного веса
груженого автомобиля. Отсюда следует, что динамический фактор для порожнего
автомобиля получается примерно вдвое большим, чем для груженого.
Практической необходимости в таком большом запасе тяговой силы нет. Между тем
излишний ее запас вызывает понижение экономичности работы двигателя, поэтому
в грузовых автомобилях особенно целесообразно применять коробки передач
с ускоряющей передачей.
Для того чтобы дать более наглядное представление о влиянии изменения
собственного веса Go автомобиля на основные показатели динамичности последнего,
ниже приведены результаты под-
У счета для того же легкового
автомобиля, для которого на фиг. 94
0,07 были приведены кривые
ускорений. В данном случае
предполагаем, что характеристика двига-
0,06 теля и фактор W сопротивления
воздуха остаются неизменными.
Передаточные числа iQ и iK также
96 | ' 1 1—:Чс 1 1 1 •~^\0,05 приняты неизменными. Изменяя
собственный вес О0 автомобиля
и пользуясь динамической харак-
94 \ 1 1 1 1 1 Г^Ч^—\0>04 теристикой, находим
максимальную скорость vmtLX автомобиля и
максимальное значение
коэфициента ф сопротивления дороги,
которое может преодолеть
автомобиль на последней передаче.
Результат подсчета представлен
на фиг. 125. По оси абсцисс
отложен процент изменения
собственного веса автомобиля Go, а по оси ординат — максимальная скорость vm3LX
и максимальное значение коэфициента ф сопротивления дороги.
При определении максимальной скорости tfmax движения автомобиля коэфициент
сопротивления ф принимался равным 0,015, т. е. предусматривалось движение
автомобиля по очень хорошей дороге.
Из рассмотрения этой фигуры находим, что изменение веса автомобиля влияет
главным образом на максимальное значение коэфициента ф сопротивления дороги,
а следовательно, и на максимальное значение ускорения автомобиля ~ . Что
касается максимальной скорости vmax автомобиля/то она изменяется сравнительно мало.
Для грузовых автомобилей влияние изменения веса Go на максимальную
скорость t>max получается еще меньше.
Изменение фактора W сопротивления воздуха влияет главным образом на
максимальную скорость автомобиля, оказывая сравнительно малое влияние на
другие показатели, определяющие тяговые качества автомобиля, поэтому для
грузовых тихоходных автомобилей этот фактор существенного значения не имеет.
Однако для быстроходных грузовых автомобилей, и особенно для автобусов, и
легковых автомобилей влияние фактора W на динамические качества и на экономику
уже весьма заметно. Влияние фактора W сопротивления воздуха на тяговые
качества автомобиля можно легко выяснить при помощи или динамической
характеристики, или тягового баланса автомобиля.
70
\
\
^тах
Г
—^
■
65
100
115
Фиг. 125. Изменение максимального сопротивления
дороги и максимальной скорости автомобиля в за-
висимости от его веса.
Влияние собственного веса на тяговые качества автомобиля
151
—•
**>
.-—-
mm '■
—
Д. и -
■-—»-
-^
■ ■
—-^
———.
\
" .
\
*-—
\
\
У>
\
20
80
80
100 V *м/час
Предположим, например, что на фиг. 126 представлен тяговый баланс
автомобиля на последней передаче. Все рассуждения останутся теми же и для
промежуточных передач, но вследствие малой скорости автомобиля на этих передачах
фактор W уже не будет оказывать значительного влияния на динамические качества
автомобиля. На фиг. 126 верхняя кривая Рр представляет собой полную
суммарную окружную (или тяговую) силу на ведущих колесах. Вычитая из этой силы
силу Рф> затрачиваемую на
преодоление сопротивления Ркг
дороги, находим силу РСУ J2Q
которая затрачивается на
сопротивление воздуха и
на сообщение автомобилю
ускорения. 80
Берем несколько
различных значений фактора W М
сопротивления воздуха (Wu
W2 и W2) и, вычитая из
силы Рс силу Pw сопроти- 20
вления воздуха, проводим
кривые, соответствующие о
различным значениям
фактора W. Точки пересечения
кривых W с осью абсцисс
определяют максимальные
скорости vv v2n v3, которые автомобиль получит при соответствующем значении
фактора W. Отрезки же ординат между осью абсцисс и соответствующей кривой W
определяют собой тот запас тяговой силы, который имеется при данной
скорости v автомобиля и при заданном значении фактора W. Этот запас тяговой
силы может затрачиваться науско-
dv
рение автомобиля j •*
Для того чтобы дать более
наглядное представление о том,
как изменяются тяговые качества
автомобиля с изменением
фактора W сопротивления воздуха,
на фиг. 127 представлен подсчет
основных тяговых качеств для
того же легкового автомобиля,
для которого на фиг. 125 было
приведено исследование влияния
собственного веса Go на динами-
Фиг. 126. Влияние обтекаемости автомобиля на его
тяговый баланс.
120
119
100
90
ЯП
Vmax
Фгпах
^^
'—■—.
ф%
0.055
0,075
0,095
1.115W кгсек2/м2
Фиг. 127. Изменение максимального сопротивления
дороги и максимальной скорости автомобиля в
зависимости от его обтекаемости.
ческие качества. Значение
фактора W изменялось в пределах
от 0,055 до 0,135, нормальное же значение этого фактора для того же
автомобиля равно 0,095. На фиг. 127 представлено изменение двух
основных параметров, определяющих тяговые качества автомобиля: максимальной
скорости 'Ушах автомобиля и максимального сопротивления дороги ф. При
нормальном значении фактора W, равном 0,095, максимальная скорость автомобиля
•Угаах = 98 км/нас. При уменьшении фактора W до 0,055 эта скорость
увеличивается до 122 км/час, а при увеличении фактора W до 0,135 скорость vmaK
уменьшается до 84 км/час. Таким образом, при уменьшении фактора W на 42° 0
увеличение скорости vmux достигнет 25°/0.
Максимальное значение коэфициента ф сопротивления дороги, которое может
преодолеть автомобиль на последней передаче согласно фиг. 127, осталось почти:
неизменным, т. е. эта величина практически не зависит от фактора W сопроти-
152 Тяговая динамика автомобиля
вления воздуха. Следовательно, и максимальное ускорение автомобиля -%-• ша1 также
практически не зависит от величины фактора W.
Однако это относится лишь к максимальному значению ускорения автомобиля,
соответствующему малой скорости движения последнего. При более высоких
скоростях движения автомобиля согласно фиг. 126 запас тяговой силы резко
меняется в зависимости от значения фактора W. Например, согласно этой фигуре
при скорости автомобиля, равной 80 км\час, запас тяговой силы, затрачиваемой
на ускорение автомобиля, при факторе W2 получается вдвое большим, чем при
факторе Ws, а следовательно, и ускорение автомобиля -^- в первом случае будет
вдвое большим, чем во втором.
§ 16. ТЯГОВЫЙ РАСЧЕТ АВТОМОБИЛЯ
Тяговый расчет автомобиля проводится для определения параметров его
основных механизмов, которые обеспечили бы автомобилю заданную скорость движения
по соответствующей дороге. Одной из основных задач тягового расчета
автомобиля является определение мощности двигателя и значений передаточных чисел
механизмов трансмиссии, обеспечивающих автомобилю заданные тяговые качества.
Кроме того, с помощью тягового расчета может быть разрешен ряд задач,
возникающих при эксплоатации автомобиля и в дорожностроительном деле. При
эксплоатации автомобиля бывает необходимо определить среднюю скорость
движения, время пробега, допустимую нагрузку на автомобиль при данных
дорожных условиях, возможность работы автомобиля с прицепами, и т. д,
В дорожностроительном деле требуется выбирать профиль дорог, величину и
характер уклонов в соответствии с заданными тяговыми качествами автомобиля
и т. д. Все эти вопросы также разрешаются при помощи тягового расчета
автомобиля.
В число заданных тяговых качеств автомобиля должны входить все основные
элементы динамической характеристики, а именно:
vmax — максимальная скорость движения автомобиля при заданном значении
коэфициента ф, соответствующем хорошей дороге;
Dimax — максимальное значение динамического фактора на последней передаче;
Dx — значение динамического фактора при некоторой средней заданной
эксплоатационной скорости v1 и при условии движения автомобиля на
последней передаче;
v,a — критическая скорость автомобиля на последней передаче;
D2 — значение динамического фактора при некоторой заданной
эксплоатационной скорости т/2 и при движении автомобиля на промежуточных
передачах;
Dmax — максимальное значение динамического фактора на первой передаче.
Кроме того, для проведения тягового расчета должны быть заданы некоторые
конструктивные данные по проектируемому автомобилю:
1. Собственный вес Со автомобиля. Вместе с заданной полезной
нагрузкой Ge собственный вес автомобиля определяет его полный вес G, на
который и должен вестись тяговый расчет. Собственный вес Go автомобиля
задается на основании опытных данных по моделям автомобилей, которые по
своей конструкции соответствуют проектируемому.
2. Радиус гк качения ведущих колес. Этот размер выбирается на
основании существующего стандарта шин, причем основными данными является
нагрузка на одно колесо и качество дороги, для которой предназначается
автомобиль.
3. Обтекаемость автомобиля, определяемая фактором W сопротивления
воздуха. Эта величина выбирается на основании опытных данных для автомобилей
того же типа, что и проектируемый.
Тяговый расчет автомобиля
4. Механический к. п. д. т\т силовой передачи. Этот коэфициент
определяет потерю на трение в механизмах силовой передачи и выбирается на
основании имеющихся опытных данных.
На основании заданных выше тяговых и конструктивных данных для
проектируемого автомобиля при помощи тягового расчета могут быть определены
следующие элементы:
а) внешняя характеристика автомобильного двигателя Мт=/(пт);
б) передаточное число i0 главной передачи;
в) число передач в коробке передач и соотношение передаточных чисел 1К,
Ниже будет рассмотрен способ определения каждого из перечисленных выше
элементов конструкции автомобиля.
Определение характеристики автомобильного двигателя. При
проектировании автомобиля согласно установленным выше требованиям к его тяговым
качествам строится динамическая характеристика автомобиля на последней пере-
Фиг. 128. Построение динамической характе- Фиг. 129. Построение внешней характери
ристики автомобиля по заданным ее эле- стики автомобильного двигателя по за-
ментам. данным тяговым качествам автомобиля.
даче. Это построение выполнено на фиг. 128. Здесь по оси абсцисс отложена
скорость v автомобиля, а по оси ординат — динамический фактор D. На оси
абсцисс откладываем точку, соответствующую максимальной скорости vmax, а на
перпендикуляре, восставленном в этой точке к оси абсцисс, отмечаем точку С,
соответствующую значению динамического фактора, равного заданному значению
коэфициента ф (хорошая дорога). Далее в точке, соответствующей скорости vu
восставляем перпендикуляр к оси абсцисс и откладываем на нем отрезок,
соответствующий значению D± динамического фактора, в результате чего получаем
точку В. Наконец, восставляем перпендикуляр к оси абсцисс в точке,
соответствующей критической скорости vkU и на высоте, соответствующей значению Dimax>
находим точку А. Динамическая характеристика автомобиля, очевидно, должна
проходить через полученные таким образом три точки —Л, В и С. При этом
горизонталь, проведенная через точку А, должна быть касательной к этой кривой.
На фиг. 128 проведена кривая динамической характеристики через указанные
выше три точки.
Полученная таким образом динамическая характеристика автомобиля ABC
р Wxfi
иллюстрирует изменение удельной тяги автомобиля —^-д или динамического
фактора D в зависимости от скорости автомобиля. Отсюда определяется тяговая?
сила Рр\
t54 ' Тяговая динамика автомобиля
Тяговая сила Рр на ведущих колесах может быть выражена через мощность
автомобильного двигателя Nm с учетом механических потерь в механизмах
силовой передачи. При установившемся движении автомобиля имеем:
75Nmrm
где мощность Nm выражена в л. с, а скорость v — в м/сек.
Определяя из последнего выражения мощность Nm и выражая скорость
v в кмIчас, получим:
DGv + Wv* з
В этом выражении известны все величины, и из него можно определить ту
мощность Nm, которую должен развивать двигатель на любой скорости v
автомобиля для того, чтобы динамический фактор D соответствовал кривой,
представленной на фиг. 128. Таким образом, пользуясь фиг. 128 и уравнением (211),
можно построить кривую мощности Nm автомобильного двигателя как функцию
скорости движения автомобиля. Примерный вид такой кривой в пределах
изменения скорости автомобиля на последней передаче от ее минимального
значения vmln до максимального vmax представлен на фиг. 129. Здесь по оси абсцисс
отложена скорость *v автомобиля, а по оси ординат — мощность Л^.
Для того чтобы от этой кривой перейти к характеристике двигателя,
необходимо на оси абсцисс нанести шкалу не скорости v автомобиля, а скорости
вращения коленчатого вала (пт об/мин). Для этого необходимо найти
соотношение между скоростью v автомобиля и числом пт оборотов коленчатого вала
в минуту. Определение этого масштаба может быть произведено по данному
значению коэфициента многооборотности у\п или заданной связи между
максимальной скоростью вращения коленчатого вала и максимальной скоростью
автомобиля.
Задаваясь коэфициентом многооборотности ч\п двигателя и пользуясь
уравнением (203), находим отношение —- , т. е. находим новый масштаб для оси
абсцисс (фиг. 129).
Если же пользоваться не коэфициентом многооборотности Yjrt, а максимальным
числом оборотов коленчатого вала лтах в минуту, то переводной коэфициент для
получения нового масштаба получится как частное от деления максимальных
оборотов Яшах на заданную максимальную скорость автомобиля vmax. Построив
на фиг. 129 второй масштаб — оборотов двигателя пт, получим внешнюю
характеристику двигателя.
Пользуясь полученной таким образом внешней характеристикой, определяем
необходимый рабочий объем двигателя Vh из уравнения:
ШМгп_у (212)
Н РеПт К }
где ре — среднее эффективное давление при соответствующей скорости вращения
коленчатого вала.
Уравнение (212) соответствует четырехтактному двигателю.
Зная мощность Nm, скорость вращения коленчатого вала пт об/мин и
задаваясь средним эффективным давлением ре, можно определить литраж двигателя Vh
и построить новую кривую мощности. При этом новая кривая мощности NmJ
конечно, не полностью совпадает с той кривой, которая представлена на фиг. 129
и получена расчетным путем. Но для получения данных тяговых качеств
автомобиля действительная характеристика должна во всех точках располагаться выше
расчетной кривой.
При тяговом расчете грузового автомобиля, когда на последнем
устанавливается двигатель, снабженный регулятором, определение характеристики двига-
Тяговый расчет автомобиля
155
в
теля Nm — f(nm) производится тем же методом, который приведен выше для
легкового автомобиля. В этом случае при заданной максимальной скорости
движения автомобиль еще должен обладать некоторым запасом тяговой силы,
который может быть определен соответствующим значением динамического
фактора Do. Это необходимо для того, чтобы грузовой автомобиль, двигатель
которого имеет регулятор, мог на скорости, устанавливаемой регулятором,
преодолевать повышенные сопротивления дороги. Таким образом, динамическая
характеристика грузового автомобиля на последней передаче может быть
представлена кривой, изображенной на фиг. 130. Здесь точка С соответствует
расчетной максимальной скорости автомобиля vmax, которую поддерживает
регулятор и на которой автомобиль имеет
еще тяговый запас, измеряемый
динамическим фактором Do. В случае
установившегося движения Do = ^o, т. е. для
задания расчетного значения
динамического фактора Do надо взять коэфициент
сопротивления дороги ф, при котором
грузовой автомобиль еще может итти
с заданной максимальной скоростью ч^тах-
Затем на перпендикуляре к оси абсцисс,
соответствующем скорости vt,
откладывается значение Dx динамического фактора,
в результате чего получается точка В.
На перпендикуляре, соответствующем'
критической скорости vK\, откладывается
значение динамического фактора Dimax ^ 1Ол п
. Тт Фиг- !3а Построение динамической харак-
и получается точка А. Через эти три теристики для автомобиля, двигатель ко-
точки проводится динамическая харак- торого снабжен регулятором,
теристика ЛВС. Дальнейшее
построение внешней характеристики двигателя на основании полученной динамической
характеристики автомобиля производится так же, как это было выполнено для
случая легкового автомобиля.
Определение передаточного числа /0 главной передачи. Согласно
предыдущему при определении внешней характеристики двигателя Nm =f(nm)
необходимо задаться или коэфициентом т\п многооборотности двигателя или
максимальным числом «щах оборотов коленчатого вала в минуту, соответствующим
максимальной скорости fmax движения автомобиля.
Принятое значение коэфициента г\п многооборотности или максимальных
оборотов яшах определяет также и передаточное число i0 главной передачи. Между
числом пт оборотов коленчатого вала в минуту и скоростью v автомобиля имеется
соотношение, которое представлено было выше уравнением (180). Определяя из
этого уравнения передаточное число /0, получим:
'о^^Г3'6' (213>
или, вводя сюда из уравнения (203) значение коэфициента многооборотности г\пУ
получим
io = —^~^-Зу6 ^ 0,377v\nrK (214)
Если же задано максимальное число птах оборотов коленчатого вала,в минуту,
соответствующее максимальной скорости vm&x автомобиля, то передаточное
число /q определим из уравнения (213).
Полученное значение передаточного числа /0 следует проверить по
динамической характеристике автомобиля на основании данных, приведенных в § 11 этой
главы.
156 Тяговая динамика автомобиля
Выбор числа передач и передаточных чисел iK в коробке передач. Выбор
числа передач в коробке передач производится одновременно с определением
числовых значений этих передач. Влияние числа передач на тяговые качества
автомобиля было уже выяснено выше (в § 13, гл. III), где было установлено,
что при одинаковом тяговом запасе на последней передаче увеличение числа
передач повышает скорость движения автомобиля по тяжелой дороге с большим
коэфициентом сопротивления 6- Одновременно с этим уменьшение числа передач
может быть полностью компенсировано увеличением тягового запаса автомобиля
на последней передаче, что, однако, вызывает ухудшение экономичности
автомобиля.
Большинство современных автомобилей имеет коробку передач с тремя или
четырьмя передачами. В тяжелых грузовых автомобилях широкое применение
получили коробки с пятью передачами, одна из которых обычно является
ускоряющей. Три передачи следует принимать в том случае, когда максимальное
значение динамического фактора D автомобиля на последней передаче не меньше
0,1—0,105. При меньшем значении динамического фактора D следует брать
четырехступенчатую коробку передач, иначе автомобиль будет обладать плохими
тяговыми качествами при движении по дороге повышенного сопротивления.
Большинство современных легковых автомобилей имеет сравнительно высокие значения
максимального динамического фактора на последней передаче, поэтому они обычно
снабжаются трехступенчатой коробкой передач.
Выше (§ 13, гл. III) было уже рассмотрено влияние соотношения передаточных
чисел в коробке передач на динамические качества автомобиля. При этом было
установлено, что зависимость между передаточными числами должна выражаться
примерно геометрической прогрессией.
Передаточное число ix коробки передач определяется независимо от числа
передач и соотношения передаточных чисел iK по тому максимальному
сопротивлению дороги 6тах, которое автомобиль должен преодолевать на первой передаче.
Если для случая движения автомобиля на первой передаче пренебречь
сопротивлением воздуха, то вся тяговая сила Р = —^Ъп^^ на ведущих колесах (при
р гк
гк
установившемся движении автомобиля) затрачивается на преодоление
сопротивления дороги. В результате получаем:
или
(215)
Так как характеристика двигателя Nm =• f(nm) уже определена, то вращающий
момент двигателя Мт также известен как функция числа оборотов пт коленчатого
вала в минуту. В уравнение (215) для момента Мт следует принимать
максимальное его значение.
На основании уравнения (215) определяется то требуемое передаточное число il9
при котором автомобиль сможет преодолеть сопротивление дороги Фтах- Однако
это передаточное число не должно вызывать буксование ведущих колес на
дороге, обеспечивающей хорошее сцепление с шинами. Максимальная тяговая
сила Рртах» которая может быть передана через ведущие колеса без их
буксования, определяется из выражения:
(216)
де йсц — вес, приходящийся на ведущие колеса, или сцепной вес автомобиля;
т — коэфициент, учитывающий изменение сцепного веса;
<р — коэфициент сцепления;
/— коэфициент сопротивления качению.
Тяговый расчет автомобиля 157
Так как при движении автомобиля по хорошей дороге коэфициент / очень
мал, то, пренебрегая им, получим:
или, решая это неравенство по отношению к передаточному числу ьъ получим:
к < "У" ■
Х^ Mmvimi0
При помощи уравнения (215) определяется значение передаточного числа iu
которое затем проверяется по выражению (217). Значение коэфициента ср>
вводящего в уравнение (217), выбирается на основании приведенных выше данных
(§ 5 гл. I). Обычно при определении передаточного числа it принимают коэфициент
сцепления <р == 0,7-~-0,8.
В случае трехосного автомобиля за коробкой передач устанавливается обычно
еще редуктор, при помощи которого передаточное число ix может быть
дополнительно повышено. Общее передаточное число при условии движения автомобиля
на первой передаче получится равным 1\Ц1р, где ip — передаточное число
редуктора.
Это новое передаточное число может быть определено на основании тех же
уравнений, какие приведены были выше для определения передаточного числа /ь
но при этом берется более высокое значение коэфициента сопротивления
дороги фшах- Для трехосных автомобилей, предназначенных для работы по
особенно плохим дорогам, общее передаточное число t\i^p выбирается часто
особенно высоким не только потому, что автомобиль должен преодолевать
максимальное сопротивление движению, но и для снижения скорости движения
автомобиля. При движении по особенно плохой дороге часто бывает необходимо
дать возможность автомобилю двигаться особенно медленно, чтобы преодолеть
без буксования топкое место, или проехать через значительную неровность дороги
при неполной нагрузке двигателя; поэтому неравенство [уравнение (217)],
ограничивающее значение максимального передаточного числа /ь уже не является
применимым для этого случая, так как первая передача в коробке передач не
служит для разгона и преодоления особенно больших сопротивлений дороги,
а вводится лишь для получения минимальной скорости движения автомобиля при
особенно трудной дороге. Разгон же автомобиля при этом целесообразнее
производить, начиная со второй передачи в коробке передач, или на первой передаче,
но при выключенном редукторе.
Соотношение передаточных чисел в коробке передач (§13 гл. III) желательно
иметь по возможности ближе к геометрической прогрессии, так как при этом
обеспечивается максимально быстрый разгон автомобиля.
Если принять, что передаточные числа для отдельных передач коробки
передач удовлетворяют этому требованию, то получим:
i = A. = A. = il = =Л
/2 i3 /4 /5
где А— постоянный коэфициент.
Пользуясь этим выражением, находим уравнения для определения передаточных
чисел:
1 . . 1 . 1 . . 1 . . 1 .
h = -д- h> h = ~Х h = ^42" £i» h = "дз lv h ~~ ~д\ h и т- д-
Для определения коэфициента А необходимо наряду с передаточным числом 1г
знать передаточное число для какой-либо другой передачи коробки передач,
например, надо знать, какая из передач является прямой.
158
Тяговая динамика автомобиля
При этом получим для различных случаев:
а) трехступенчатая коробка с третьей прямой передачей:
А*
б) четырехступенчатая коробка с четвертой прямой передачей:
1 • .
(219>
в) пятиступенчатая коробка с четвертой прямой передачей.
При этом коэфициент Л, а также передаточные числа /2 и i9 определятся
из уравнения (219); для пятой же — ускоряющей — передачи получим:
' Г-=-1гЬ-- (220)
В действительности передаточные числа для различных передач в коробке
передач лишь приближенно следуют указанному правилу. Выше в табл. 3 приведены
были передаточные числа iK для коробок передач ряда советских автомобилей. При этом
были также приведены и значения передаточных чисел для ускоряющих передач
пятиступенчатых коробок передач, установленных на грузовых автомобилях ЗИС-150
и ЯАЗ-200.
Тяговый расчет автомобиля с прицепом или полуприцепом. Тяговый расчет
автомобиля с прицепом или полуприцепом производится на основании тех же
уравнений, которые приведены были выше для случая тягового расчета
двухосного автомобиля.
Так как динамическая характеристика для случая автомобиля с прицепом
или полуприцепом отличается от таковой же для двухосного автомобиля только
масштабом, то, очевидно, выводы, полученные выше для двухосного автомобиля, остаются
справедливыми и для автомобиля с прицепом или с полуприцепом. Необходимо
лишь во все уравнения вместо веса автомобиля G вставить полный вес всего агрегата
G + О\ где G' — вес прицепа или полуприцепа. Однако при тяговом расчете
автомобиля с прицепом или полуприцепом могут быть поставлены новые вопросыу
которые требуют дополнительного решения. К таким вопросам надо отнести:
а) определение максимального полного веса прицепа или полуприцепа G',
который допустим при заданном автомобиле-тягаче;
б) определение нового передаточного числа в главной передаче (*о) или в
редукторе (ip), которое надо выбрать для того, чтобы имеющийся автомобиль можн©
было снабдить прицепом или полуприцепом.
Предельное значение допустимого веса G' прицепа или полуприцепа определяется
той максимальной тяговой силой, которая может быть получена на ведущих
колесах автомобиля-тягача. Так как всегда можно подобрать необходимое передаточ-
Тяговый расчет автомобиля
159<
ное число, обеспечивающее должную тягу на ведущих колесах при том же
вращающем моменте двигателя Мту то максимальное значение веса G' прицепа или;
полуприцепа ограничивается величиной сцепления ведущих колес с дорогой.
Для упрощения задачи пренебрегаем изменением радиальных реакций,
происходящим при передаче через автомобиль-тягач тяговой силы. При этом весь подсчет
резко упрощается, а ошибка получается весьма небольшой (см. § 4 гл. II).
На фиг. 131 представлена схема автомобиля, снабженного прицепом.
Предельное значение тяговой силы Рртах на задних ведущих колесах
автомобиля-тягача определяется из выражения:
р max
~ cpG2 = cpG -j-
(221>
где G — общий вес автомобиля.
Фиг. 131. Схема автомобиля-тягача с прицепом.
Принимая во внимание, что при установке первой передачи скорость автомобил»
очень мала, и пренебрегая поэтому сопротивлением воздуха, получаем:
где G' — полный вес прицепа.
Принимая — = л:, получим:
(222),
(223)
Отсюда определится то значение коэфициента сопротивления дороги ф,
которое может быть преодолено автомобилем-тягачом с прицепом при соотношении
их весов, равном к\
(224)
%а
К = -±-
На основании этого уравнения на фиг. 132 построены кривые,
иллюстрирующие зависимость между коэфициентом сопротивления дороги <J> и коэфициентом к
при различных значениях козфициента <р сцепления.
Отношение j- (см. фиг. 131) при этом было принято равным 0,7.
Из рассмотрения фиг. 132 видно, что даже при наличии достаточно высокого
коэфициента сцепления ср и при достаточно высокой нагрузке на задние ведущие
колеса автомобиля-тягача (j- = 0,7J, все же значение коэфициента к получается
сравнительно малым, если только автомобиль должен преодолевать достаточно
большое сопротивление дороги, определяемое коэфициентом ф. В связи с этим-
все большее распространение получают автомобили-тягачи с полуприцепами.
160
Тяговая динамика автомобиля
Схема автомобиля-тягача с полуприцепом представлена на фиг. 133.
Максимальная тяговая сила Ррты которая может быть получена на задних ведущих
колесах тягача, определится из выражения:
где Ь'
0,25
аго
0,15 -
0.10
0,05
\
г ■ j
1
=*.—в
расстояние от центра тяжести
полуприцепа до его оси;
V — база полуприцепа.
Если, как и ранее, принять
соотношение между весом полуприцепа и весом
автомобиля тягача равным к [уравнение (223)],
то для максимальной силы Рр тах получим
выражение (пренебрегая изменением
реакции Z2):
(225)
Пренебрегая силой сопротивления
воздуха, получим на основании этого выражения:
ИЛИ
(226)
+к
0.5
1.0
Фиг. 132. Определение общего веса
прицепа при заданных значениях
коэфицисцепления <р и коэфициента
сопротивления дороги ф.
Из этого уравнения следует, что коэ-
фициент к зависит от величины Ь'', т. е.
от расстояния от центра тяжести полуприцепа до его оси. Чем больше это
расстояние, тем больше значение коэфициента к, т. е. тем больше может быть вес
полуприцепа при том же значении коэфициента сцепления ср. На фиг. 134 изображены
кривые, иллюстрирующие
зависимость между коэфициентом
сопротивления дороги $ и
коэфициентом к для двух значений коэфи-
Г
Фиг. 133. Схема автомобиля-тягача с полуприцепом.
циента ср и при различных
значениях отношения -р-. При
построении этих кривых отношение
~ принято постоянным и равным
0,5. Из рассмотрения фиг. 134
находим, что в случае
полуприцепа снижение коэфициента сцепления ср может быть в известной мере компенсировано
изменением расположения центра тяжести полуприцепа. Для того чтобы увеличить
сцепной вес и максимальную тяговую силу тягача, необходимо располагать центр
тяжести полуприцепа по возможности ближе к автомобилю-тягачу, т. е. выбирать
расстояние Ъ9 возможно большим. По конструктивным соображениям отношение -jr
редко бывает более 0,5.
Торможение автомобиля
161
Ф
Из рассмотрения фиг. 134 находим, что при отношении р- = 0,5 и при
значении коэфициента сцепления ф = 0,5 автомобиль с полуприцепом может
преодолевать сопротивление дороги, определяемое коэфициентом Ф = 0,25. При этом
коэфициент к может иметь произвольную величину, что и является основным
преимуществом тягача с полуприцепом по сравнению с автомобилем, имеющим прицеп;
поэтому целесообразно использовать „активные" или ведущие прицепы, при
которых с точки зрения тяги вес автопоезда ничем не ограничивается.
Для того чтобы можно было в действительности получить тяговую силу,
обеспечивающую соотношение между коэфициентами <]>, к и <р, определяемое
уравнениями (224) и (226), необходимо иметь соот*
ветствующее передаточное число между
двигателем и ведущими колесами автомобиля-
тягача. 0,20
Весьма часто автомобили, не
предназначенные для работы с прицепом или
полуприцепом, не могут развить требующейся 0,25-
тяговой силы на ведущих колесах, и для
зтого необходимо изменять передаточное
число или в главной передаче i0% или в
коробке передач iK . Эта же задача может
быть решена введением дополнительного 0J5-
редуктора.
Предельное (по условиям сцепления)
передаточное число /' между двигателем и
ведущими колесами для случая прицепа и
полуприцепа можно определить, пользуясь
уравнениями (221) и (225). Для случая
прицепа получаем:
0JO
ft
,.—-—
г—-—*
$=0,5
j
V
/и °-'J i
$-0.25
Рр max —
а
-r-
L
0,5
1,0
1.5
ИЛИ
-rz
Mmr[m
(227)
Фиг. 134. Определение веса полуприцепа
в зависимости от значения коэфициента
сцепления <р и коэфициента
сопротивления дороги Ф.
Аналогично этому для случая полуприцепа получаем окончательное выражение
для предельного значения передаточного числа / :
£- ■ (228)
Передаточное число /' равно произведению всех передаточных чисел при
условии включения первой передачи в коробке передач, т. е.
Для получения необходимого значения передаточного числа /' может быть
изменено каждое из передаточных чисел, представленных в правой части
уравнения (229). Обычно для этой цели или меняют передаточное число /0, или
устанавливают редуктор с требуемым передаточным числом ip , оставляя в этом случае
как главную передачу, так и коробку передач неизменными.
§ 17. ТОРМОЖЕНИЕ АВТОМОБИЛЯ
Чем быстрее может быть произведено торможение автомобиля, т. е. чем на
меньшем расстоянии он может быть остановлен, тем выше безопасная
максимальная скорость движения и тем выше, следовательно, получается его средняя
скорость; поэтому быстрота (или скорость) торможения автомобиля также должна
11 Е. А. Чудаков
2232
162
Тяговая динамика автомобиля
быть отнесена к динамическим, или тяговым его качествам. Для торможения
автомобиля необходимо иметь опору, внешнюю по отношению к автомобилю;
к этой опоре и должна быть приложена тормозная сила сопротивления движению
автомобиля. Такую опору в процессе торможения представляет собой дорога,
а тормозной силой является сила трения между колесами и дорогой.
Второй опорой при торможении автомобиля является воздух. Однако сила
сопротивления воздуха значительно меньше, чем та максимальная сила трения,
которая может быть получена между колесами автомобиля и дорогой. В
соответствии с этим сила сопротивления воздуха мало влияет на процесс торможриия.
На фиг. 135 представлена схема автомобильного колеса, на котором
установлен тормоз. Тормозной барабан 2 укреплен на колесе 3. Тормозные колодки 4
установлены на оси 5, жестко укрепленной во фланце задней или передней оси
автомобиля. Колодки 4 разводятся посредством тормозного кулака /.
При повороте кулака / колодки 4
раздвигаются и прижимаются к
барабану 2. Вследствие этого на
тормозном барабане создается момент трения
или тормозной момент Мкт, а между
колесом и дорогой возникает
реакция Ркт- Кроме того, от поверхности
качения на колесо действует момент
Мр обусловленный потерей на качение
колеса. Для того чтобы найти точное
соотношение между тормозной силой
Ркт и тормозным моментом Мкт, для
случая ведущей оси необходимо учесть
еще момент Мк , подводимый к
колесу через полуось. При торможении
автомобиля дроссель всегда
прикрывается, в соответствии с чем момент
Мт двигателя имеет весьма малое
значение. Но одновременно с этим на
процесс торможения оказывают влияние,
во-первых, трение в отдельных механизмах автомобиля, в частности, в двигателе
и замедленное движение вращающихся частей двигателя, что в результате создает
определенный инерционный момент на полуосях. Если учесть этот инерционный
момент и момент трения Мг, то в результате для момента МКу передаваемого от
полуоси к тормозному колесу, получим выражение:
Фиг. 135. Схема тормозящего колеса
автомобиля.
мк
= >л
dt
■Mr.
Первый член в правой части уравнения представляет собой инерционный
момент всех вращающихся частей, связанных с полуосью колеса. Этот момент
действует в направлении вращения колеса. Второй член в правой части уравнения
представляет собой момент трения отдельных механизмов автомобиля (главным
образом двигателя), приведенный к полуоси. Этот момент действует против
направления вращения колеса. Пользуясь фиг, 135, получаем выражение для
момента РктГа\
РкТгд = МкТ —
< = MKT+Mf-2jJ-jf
(230)
Влияние момента инерции всех вращающихся частей силовой передачи
сравнительно мало и проявляется лишь при очень резком торможении автомобиля.
Наибольшее значение имеет инерция маховика, которую и надо учитывать в том
случае, когда торможение производится с невыключенным сцеплением. Момент
трения Мг обусловливается главным образом трением двигателя. В автомобилях
Торможение автомобиля 163
современной конструкции (особенно при многоцилиндровых двигателях) при плавном
и не очень резком их торможении момент трения Мг получается больше
инерционного момента 2jJ-jjf » поэтому плавное торможение автомобиля
(притормаживание) следует производить без выключения сцепления. Это же следует делать
при торможении автомобиля на скользкой дороге, так как торможение без
выключения сцепления, во-первых, обеспечивает более равномерное распределение
приводного усилия к тормозам, расположенным на правых и левых колесах (что,
правда, важно лишь при механическом приводе к тормозам) и, во-вторых,
предотвращает резкое возрастание приводного усилия. Кроме того, в этом случае
не получается блокировки колес, что при пользовании тормозами на скользкой
дороге почти неизбежно.
Однако при очень интенсивном торможении автомобиля инерционный мо-
мент V J—г- может быть больше момента трения /Wr, и в этом случае при
торможении автомобиля целесообразно сцепление выключить. Его, конечно, следует
выключать также при торможении автомобиля до полной остановки. Если
рассматривать этот случай торможения автомобиля, то уравнение (230) упрощается,
принимая вид:
Рктгд = МкТ + Mf= МкТ +/ZK гд. (231)
Максимальное значение тормозной силы Ркт определится из выражения:
Ркт = <fZK, (232)
где ZK — радиальная реакция, приходящаяся на данное колесо;
ср — коэфициент сцепления.
Помимо тормозной силы РкТ, получающейся на радиусе колеса гд, на скорость
торможения автомобиля влияет уклон дороги, определяемый величиной /.
Наконец, на быстроту торможения автомобиля влияет еще сила сопротивления
воздуха Pw, равная Wv2.
В дальнейшем при исследовании процесса торможения автомобиля вводим
коэфициент 7Г удельной тормозной силы, определяющий собой отношение
тормозной силы на ободе всех тормозных колес к полному весу G автомобиля,
т. е. имеем:
v—<« Я/Г
кТ
Так как 2 Мкт прямо пропорциональна приводному усилию, то коэфициент fT
определяет интенсивность торможения автомобиля водителем. Этот коэфициент
аналогичен коэфициенту *\р тяговой силы.
Если дополнительно учесть силу сопротивления качению колес, силу
сопротивления подъему, а также силу сопротивления воздуха, то получим выражение
для полной тормозной силы Рт:
iQ + Wv2. (234)
Под влиянием полной тормозной силы Рт автомобиль получает отрицательное
ускорение -^, которое приближенно (без учета влияния вращающихся масс) может
быть определено из следующего уравнения:
Сила Wv2 сопротивления воздуха при торможении автомобиля со средних
скоростей движения является весьма малой. Коэфициент сопротивления качению /
точно так же является малой величиной, если движение автомобиля происходит
164 Тяговая динамика автомобиля
по хорошей дороге. Если пренебречь указанными выше величинами, то получим
выражение для отрицательного ускорения при торможении автомобиля:
$- = (Тг±О£-. (236)
Коэфициент 1Г в уравнении (236) определяется величиной полной
тормозной силы на тормозных колесах автомобиля. Выражение для этой силы в случае
одного колеса и с учетом коэфициента / приведено выше [уравнение (232)].
Выражение для максимального значения коэфициента ^Г (без учета коэфициента /)
имеет вид:
mGru
у/пзах= —^Ъ - (237)
Тде 0Сц — вес автохмобиля, приходящийся на тормозные колеса;
m — коэфициент изменения веса автомобиля, приходящегося на тормозные
колеса.
В современных двухосных автомобилях тормозными выполняются все четыре
колеса. Однако для более подробного исследования вопроса о торможении
автомобиля ниже рассмотрен вопрос и для того случая, когда тормоза установлены
'только на задних колесах автомобиля.
Если тормоза расположены на двух задних колесах автомобиля, то сцепной
вес G равен О2, и максимальное значение коэфициента ^ определится из
уравнения:
*»Г2тах ~ Q ~~£~ П1ЯТ.
Выражение для коэфициента niu может быть определено из уравнения (84),
если в этом уравнении заменить коэфициент ур на коэфициент fj ; при этом
получим, пренебрегая членами, содержащими коэфициент /:
тот = cos a — г?- -g- '
Решая это уравнение совместно с уравнением (238), получим:
ца cos a
В случае установки тормозов на все четыре колеса, коэфициент ^гтах
определится из уравнения (237), если величину тОСц в числителе принять равной Gcosa,
т е. в этом случае получаем:
(240)
На основании уравнений (239) и (240) определяются максимальные значения
отрицательных ускорений автомобиля в случае расположения тормозов только на
задних колесах, или на всех четырех колесах. Обозначая соответственно: \-тА
\ at
максимальное отрицательное ускорение в первом случае и -~гг — максимальное
\ /2тах
/ dv\
и -~гг — м
\ at 4max
отрицательное ускорение во втором случае, получаем на основании уравнений (236),
(239) и (240):
(w) 4zrVcosa±<V> (241)
аг /2 max \ь "Т- ^Cn }
) -(«cosa + O^. (242)
i /4тах
При определении максимальных значений тормозной силы РТ и максимальных
значений отрицательного ускорения -тг [уравнения (241) и (242)] предполагалось,
Торможение автомобиля
165
что все тормозные колеса автомобиля достигают предельного сцепления с дорогой.
При задних тормозных колесах (и прямолинейном движении автомобиля) оба
колеса одновременно достигают предельного сцепления с дорогой, если только
тормозной привод равномерно распределяет приводную силу между правыми и
левыми колесами и если для обоих этих колес коэфициент сцепления 9 имеет
одинаковое значение.
При всех тормозных колесах для одновременной блокировки передних и
задних колес необходимо соответственно распределить приводную силу к этим
колесам. Конечно, после того как блокированы колеса одной оси, можно при
дальнейшем нажатии на тормозную педаль вызвать блокировку и колес другой оси.
Но это будет сопровождаться нарушением устойчивого движения автомобиля,
поэтому при торможении автомобиля рекомендуется не доводить колеса передней
и задней осей до блокировки.
Поэтому же максимальная тормозная сила Рт, допустимая по условию
устойчивости автомобиля, зависит от распределения приводной силы между передними
и задними тормозами и достигает своего максимального значения в том случае,
когда блокировка передних и задних колес происходит одновременно.
Распределение полной тормозной , ^_
силы Рт между передними и задними
тормозами будем характеризовать
коэфициентом ji0, т. е.
Фиг. 136. Схема сил и реакций, действующих
на автомобиль при торможении его обеих осей.
где PTl — тормозная сила,
развиваемая на передних колесах;
Рт, — тормозная сила,
развиваемая на задних колесах.
Приводная сила распределяется
между передними и задними коле-
сами в отношении «—^—.
1 ро
Для определения такого значения коэфициента $0, при котором бы передние
и задние колеса блокировались одновременно, на фиг. 136 изображена схема сил
и реакций, действующих на автомобиль при его торможении. При этом не
учитывается сопротивление воздуха и сопротивление качению колес.
Из условий равновесия системы по отношению к оси, проходящей через точки
опоры задних колес, получим:
Gb+PThg
Аналогично этому получим:
Ga — PThg
Предельные значения тормозных сил Рп и РГ2 определяются из выражений
(при этом Pt = <?G):
О 7
Пользуясь этими уравнениями, получим:
п
— в0 а-
166
Тяговая динамика автомобиля
Из этого уравнения находим отимальное значение коэфициента
(243)
При помощи уравнения (243) на фиг. 137 построены прямые,
иллюстрирующие зависимость коэфициента |30 от коэфициента <р для нескольких значений (0,21;
0,3£ и 0,4L) отрезка hg при
заданном значении (0,5£)
отрезка Ь, а также для
нескольких значений (0,51, 0,4£ и
0,3£) отрезка b при заданном
значении (0,3/,) отрезка hg.
В табл. 4 приведены
диаметры тормозных цилиндров
(гидравлический привод) для
нескольких советских
автомобилей. Соотношение между
площадями тормозных
цилиндров характеризует
распределение приводной силы между
передними и задними
тормозами. В табл. 4 приведены
также значения коэфициента
ср, при которых для каждого
0,8~
0,6
0,2
"г
С
\b=0,5L
щ
b=0,3L,
г^
i
1
^*
^*
-^
3
II
0/i
0,6
0,8
1,0
Фиг. 137. Зависимость коэфициента распределения
приводной тормозной силы между передними и задними
колесами от коэфициента сцепления при различном
расположении центра тяжести автомобиля.
из автомобилей коэфициент
привода к тормозам получается
оптимальным.
Максимальное значение
отрицательного ускорения при торможении автомобиля является измерителем быстроты
торможения автомобиля, однако этот измеритель не дает достаточно полного
представления о скорости торможения автомобиля, поэтому дополнительно
приняты следующие измерители:
Таблица 4
Данные по определению значений коэфициента сцепления <р, при которых
для каждого из автомобилей коэфициент р0 распределения полной тормозной
силы между передними и задними тормозами получается оптимальным
Модель
автомобиля
„Москвич*
ГАЗ-М-20
ЗИС-110
ГАЗ-51
Диаметр тормозных
цилиндров колес
в мм
передних
27
32
27
35
задних
25
30
24
38
0,539
0,532
0,559
0,460
ь
L
0,509
0,474
0,506
0,470
0,494
0,461
0,480
0,299
hg
L
0,238
0,273
0,229
0,234
0,173
0,189
0,253
0,318
0,126
0,238
0,114
0,222
0,376
0,520
<о
0,508
Примечание
Без пассажиров
С полной
нагрузкой
Без пассажиров
С полной
нагрузкой
Без пассажиров
С полной
нагрузкой
Без груза
С грузом
Торможение автомобиля 167
а) время торможения автомобиля от некоторой скорости v до полной
остановки;
б) путь торможения автомобиля от некоторой скорости v до полной
остановки.
Определение быстроты торможения автомобиля длиной пути, необходимой
для остановки автомобиля, а не временем, является практически более удобным и
заслуживает наибольшего внимания, так как при торможении автомобиля водителю
обычно приходится соразмерять интенсивность торможения с имеющимися перед
автомобилем свободным расстоянием.
Произведение пути Sr торможения на тормозное усилие Рт определяет работу
торможения. Эта работа примерно равна живой силе, затраченной
автомобилем за процесс торможения. Живая сила автомобиля при некоторой скорости v
равна —— , где коэфициент о учитывает влияние вращающихся масс автомобиля.
Если торможение происходит при включенном сцеплении, то для коэфициента о
сохраняется то же выражение, которое было приведено выше в уравнении (172).
Если же торможение происходит при выключенном сцеплении, то коэфициент 6
согласно уравнению (172) определится из выражения:
8 = 1 + аг
В этом случае коэфициент & может быть приближенно принят равным единице.
В дальнейшем рассматривается этот случай.
Приравнивая работу торможения потерянной живой силе автомобиля, получим
для случая движения автомобиля по горизонтальной дороге:
или
2о
(244)
где vt — скорость автомобиля в момент начала торможения;
v2 — скорость автомобиля в конце торможения.
Если принять, что торможение производится до полной остановки автомобиля,
то скорость vz = 0. В этом случае получим выражение для пути торможения:
^ (245)
где скорость v выражена в м\сек.
Уравнения (244) и (245) определяют путь торможения без учета подъема
дороги и При учете сопротивления подъема дороги, но без учета сопротивления
воздуха вместо коэфициента ^г в уравнение (245) необходимо подставить сумму
Y^ i/# ^Ри этом получаем:
*-WI5- (246)
Это уравнение дает общее выражение для определения пути торможения без
учета сопротивления воздуха, которое оказывает весьма малое влияние на путь
торможения, если только торможение автомобиля не производится с очень
высокой скорости. Перед / следует брать знак плюс в том случае, когда автомобиль
движется на подъем, и минус — в том случае, когда автомобиль движется под уклон.
В том случае, когда тормозами снабжены только задние колеса автомобиля,
коэфициент чг следует определять из уравнения (239).
В случае установки тормозов на все четыре колеса максимальное значение
коэфициента ^т тормозной силы определяется из уравнения (240).
168
Тяговая динамика автомобиля
Пользуясь этими данными, находим уравнения для минимального пути Sr
торможения автомобиля.
Для автомобиля с задними тормозными колесами:
(247)
Для автомобиля со всеми тормозными колесами:
2g <p cos a ± i
(248)
При движении автомобиля под уклон путь Sr торможения автомобиля
увеличивается. Пользуясь уравнением (247) и принимая перед / знак минус, получим:
t;2 L -f- yhf.
2g ya cosa-(Z, + vhg) sin a
(249)
Для случая расположения тормозов на всех четырех колесах, пользуясь
уравнением (248), получим:
(250)
1
UHram~ 2g ^cosa-sina*
При помощи полученных уравнений может быть найдена зависимость между
путем торможения Sr и скоростью v автомобиля при различных уклонах дороги.
Кроме того, при помощи
этих же уравнений можно
определить величину уклона
дороги /, на котором
автомобиль уже не может быть
заторможен, и значение
начальной скорости
автомобиля, при которой на
заданном уклоне дороги он
может остановиться на
определенном расстоянии.
Для определения
величины уклона дороги /, на
котором автомобиль уже не
может быть заторможен,
необходимо путь Sr
торможения принять равным
бесконечности. Это значит, что
знаменатель в уравнениях
(247) и (248) должен быть
равен нулю. Отсюда,
пользуясь уравнениями (247) и
(248), получаем предельные
значения для углов а2 и а4:
(251)
Sr
М
125
100
75
50
25
1 •■»'гО
.—-"
—■
/
/
у
^—-
/ ,
1
1
/
/
у
__——■
/ i
/ §
/
/
/
/
/
7
/
1
/1
/
/
+OL°
15
0
Фиг. 138. Влияние уклона дороги и скорости движения
автомобиля на путь торможения при наличии тормозов на
задних колесах.
= ?. (252)
Для того чтобы дать представление о соотношении между скоростью v
автомобиля, длиной пути Sr торможения и уклоном дороги а, на фиг. 138 построены
кривые, иллюстрирующие зависимость между этими величинами при условии при..
(a hrr \
-£ = 0,6 и -у- = 0,31 и при условии, что
коэфициент сцепления ср = 0,5. Положительные значения угла а соответствуют
Торможение автомобиля
169
движению автомобиля на подъем, а отрицательные — движению под уклон.
Определение зависимости пути St торможения от угла а произведено для различных
значений начальной скорости v автомобиля, причем для каждой этой скорости1
построена отдельная кривая.
Фиг. 138 соответствует наличию тормозов только на двух задних колесах
[уравнение (247)]. Для случая расположения тормозов на всех четырех колесах
на основании уравнения (248) построены аналогичные кривые на фиг. 139. Каждая
из кривых на фиг. 138 и 139 асимптотически приближается к вертикали,
соответствующей предельному значению угла торможения, т. е. такому значению угла
наклона дороги, при котором автомобиль уже не может остановиться. Для случая
и
125
№
75
50
or
Zb
h—
Л 40
——-
—.
У
У
__——-
1
/
/
У
—a*
/
/
10
0
10
Фиг. 139. Влияние уклона дороги и скорости движения
автомобиля на путь торможения при наличии тормозов
на всех колесах.
расположения тормозов только на задних колесах и при условии принятых
данных (a, hgt cp) этот угол, равный 14,5°, определяет асимптоту для всех кривых,
представленных на фиг. 138.
Фиг. 138 и 139 дают зависимость пути торможения St от скорости v
автомобиля и от угла а дороги в том предположении, что отсутствуют
сопротивления воздуха (Pw = 0) и сопротивление качению (Ру = 0).
Как уже сказано было выше, воздух оказывает заметное тормозящее действие
лишь при высоких скоростях движения. Ниже приведено исследование вопроса
о том, какое дополнительное влияние оказывает воздух на торможение
автомобиля. Полная сила торможения Р? с учетом сопротивления воздуха, но при
условии движения автомобиля по хорошей горизонтальной дороге (/^^0 и а—0>
определится из следующего выражения:
Рг = Р'т + Р„,
где'Ру- — тормозная сила на ободе колес;
Pw — сила сопротивления воздуха, определяемая из выражения:
Pw =
170 Тяговая динамика автомобиля
Работа тормозной силы Рт за бесконечно малое перемещение автомобиля
Отравна PrdSr. Эта работа равна бесконечно малой живой силе d -^— v2. В
соответствии с этим имеем:
Подставляя сюда значение силы Рт и диференцируя, получаем:
(Р'7 + Wv2) dST = — vdv,
&
ШЛИ
,о G vdv
g P'T +
•откуда
G Г vdv
Интегрируя это выражение, получим
G t_P'T+Wv\
где i>x — скорость автомобиля перед началом торможения;
v2 — скорость автомобиля в рассматриваемый момент.
Если принять торможение автомобиля до полной остановки, т. е. принять,
что скорость v2 = 0, то получим полный путь торможения
Имея выражения для пути торможения Sr как с учетом сопротивления
воздуха, так и без учета этого сопротивления, можно установить его влияние на
быстроту торможения автомобиля. На фиг. 140 построены кривые,
иллюстрирующие зависимость пути торможения Sr автомобиля от начальной скорости его
движения. Здесь по оси абсцисс отложена скорость v автомобиля в км/час, а по
оси ординат — путь Sr торможения в м. Кривые А и В соответствуют
расположению тормозов на задних колесах, а кривые Си D — на всех колесах.
При построении фиг. 140 значение тормозной силы Рт взято максимальным,
а следовательно, путь торможения получен минимальным. Расположение центра
тяжести принято таким же, как и ранее. Коэфициент ср сцепления между шинами
и дорогой принят равным 0,5. Фактор W сопротивления воздуха — 0,1, а вес
автомобиля с полной нагрузкой — 1600 кг.
Из рассмотрения фиг. 140 находим, что до скорости 50—60 км/нас
сопротивление воздуха значительного влияния на скорость торможения не оказывает;
лишь со скорости 80—90 км/час сопротивление воздуха начинает заметно влиять
на быстроту торможения автомобиля, особенно в том случае, когда тормоза
расположены только на задних колесах.
Полученные выше уравнения для определения пути Sr торможения относятся
как к автомобилю, так и к другим экипажам (паровоз, трактор, мотоцикл и т. д.),
снабженным тормозами, установленными на колесах. В случае же наличия
прицепов полученные уравнения должны быть несколько преобразованы.
Торможение автомобиля
171
Пусть основной агрегат — автомобиль или трактор — имеет полный вес G кг.
Кроме того, имеется п прицепов весом G' каждый. В таком случае живая сила
м G + nG' о
всего поезда получится равной —^ v .
Сила сопротивления движению всего поезда без учета сопротивления воздуха
и сопротивления качению, но с учетом сопротивления подъема дороги, получится
равной (G + nG')i.
В случае движения на подъем перед
коэфициентом / должен быть поставлен
знак плюс, а при движении под уклон —
знак минус.
Тормозная сила создается как при
торможении главного агрегата, так и при
торможении прицепов. Предполагая, что на nL
прицепов установлены тормоза, получим
выражение для тормозной силы
Stm
140
120
WO
Р'т =
-f nxmGCvft ,
где
GC4 и GCUi — веса
главного агрегата и
прицепов, приходящиеся на
тормозные колеса;
шиш' — коэфициенты изменения
веса, приходящегося на
тормозные колеса при
торможении.
Коэфициент сцепления ср принят
одинаковым как для главного агрегата, так и для
прицепов. Суммарная сила торможения с
учетом сопротивления подъема получается
равной:
80
60
40
20
/
0
If
/
V 1
/
/
11
г
/
У
20
60
80 v км/час
Pf = (G -f- tlG ) /
~\~ ft\fll'
p. (255)
Работа тормозной силы Рт на
некотором пути торможения Sr равна затрачен-
НОЙ ЖИВОЙ СИЛе агрегата. Отсюда ПОЛуЧИМ: на всех четырех колесах; сопротивление воздуха
учитывается.
Фиг. 140. Влияние сопротивления
воздуха на путь торможения автомобиля:
А — тормоза установлены на задних колесах;
сопротивление воздуха не учитывается; В —
тормоза установлены на задних колесах;
сопротивление воздуха учитывается; С — тормоза
установлены на всех четырех колесах; сопротивление
воздуха не учитывается; D — тормоза установлены
пО') i
Sr.
(256)
Из этого выражения при заданных значениях весов главного агрегата G и
прицепов G' и при заданном расположении центра тяжести как для ведущего
агрегата, так и для прицепов, можно найти зависимость между длиной пути
торможения St и скоростью v автомобиля. Деля обе части уравнения (256) на
величину G-{-nG', получим:
(257)
1
±1\St
где
представляет собой максимальное значение коэфициента удель-
п 4- С
НОЙ ТОрМОЗНОЙ СИЛЫ *(Г-
Определяя длину пути торможения St, получим окончательно:
т. е. получаем уравнение (246).
172
Тяговая динамика автомобиля
Из уравнения (257) при заданном пути торможения St с первоначальной
скорости движения v можно определить необходимое число пх тормозных прицепов:
пл =
-1)(G+nQ/) ™
(258)
Если принять, что тормоза действуют на все колеса поезда, то получим:
ОсцШ = G; гп'всц = С; п = пг.
При этом уравнение (257) примет вид
т. е. при условии расположения тормозов на всех колесах поезда путь
торможения остается одинаковым независимо от числа прицепов.
Фиг. 141. Диаграмма, иллюстрирующая нарастание
тормозной силы (или отрицательного ускорения) за время
торможения автомобиля.
Выше приведено аналитическое определение быстроты торможения автомобиля.
Быстрота торможения автомобиля, кроме того, может определяться
непосредственно при помощи дорожного испытания автомобиля или испытания его на
специальном стенде. При этом определяется или отрицательное ускорение, которое
автомобиль испытывает при торможении, или замеряется путь торможения, или,
наконец, вычерчивается кривая изменения скорости по пути или времени за
процесс торможения.
При дорожных испытаниях автомобиля на торможение большое применение
получил прибор с пятым колесом, схема которого была описана выше (§ 10
данной главы).
В результате такого испытания получается кривая, иллюстрирующая
зависимость скорости v от времени t или от пройденного пути St за процесс
торможения автомобиля.
Полученные выше уравнения для пути St торможения автомобиля, а также
кривые (фиг. 138 —140), построенные при помощи этих уравнений, соответствуют
тому условию, что все тормоза на автомобиле уже включены полностью. С точки
зрения безопасного движения автомобиля практическое значение имеет тормозной
путь, соответствующий не только полностью включенным тормозам, но также
учитывающий все время от получения водителем сигнала „тормозить" до
остановки автомобиля. Этот путь автомобиля состоит из нескольких участков,
показанных на фиг. 141, где изображено изменение тормозной силы Рт или
отрицательного ускорения -т? за время торможения автомобиля. На фигуре отмечены
следующие участки времени.
Торможение автомобиля
173
100
О
1. Время tx реакции водителя от момента получения им сигнала „тормозить"
и до начала нажима на тормозную педаль. Это время в зависимости от быстроты
реакции водителя изменяется в пределах от 0,3 до 1 сек.
2. Время Ых запаздывания действия тормозного привода, считая от начала
рабочего хода тормозной педали (после выборки свободного хода) до начала
действительного торможения
автомобиля (появление отрицательного
ускорения). Согласно
экспериментальным данным это время
запаздывания действия тормозного привода
изменяется в пределах от 0,03 сек.
<(гидравлический привод) до 0,3 сек.
(пневматический привод).
3. Время t2 нарастания
тормозной силы Рг, а следовательно, и
dv
отрицательного ускорения -^-
автомобиля. При очень быстром
нажатии на тормозную педаль это время
составляет от 0,2 сек.
(гидравлический привод) до 0,4—1 сек.
(пневматический привод).
4. Время t3 интенсивного
торможения при максимальном
значении тормозной силы Рг.
5. Время tA оттормаживания и
уменьшения тормозной силы Рг до
нуля. Это время колеблется от
0,3 сек. (гидравлический привод)
до 1,5 — 2 сек. (пневматический
привод). При полной остановке
автомобиля это время не оказывает
влияния на минимальный путь
торможения.
Н. А. Бухаринымг предложено
уравнение для определения
тормозного пути, учитывающее время,
затрачиваемое на отдельные операции
при торможении автомобиля:
|_
i
—
1
i
J
i/
/
/
/
1
ч /
о» /
*7
/
/
-—
/
/
//
1
/
/
/
{А
J
/
/
V
/
/
■р/
щ
f
—■—■
20
Фиг. 142. Зависимость полного пути торможения
ST от начальной скорости vx автомобиля при
разных значениях коэфициента сцепления <f:
прямая S— — величина тормозного пути S- за вредтя
*о *
(260)
где vx — начальная скорость движения автомобиля в км/час;
<р — коэфициент сцепления.
При помощи этого уравнения на фиг. 142 построены кривые, иллюстрирующие
зависимость полного пути Sr торможения автомобиля от начальной скорости vt
при нескольких значениях коэфициента сцепления ср. Нижняя прямая определяет
путь 5^0, пройденный автомобилем за время t1 + М\ , т. е. до начала
фактического торможения.
Из сопоставления фиг. 139 и 142 находим, что действительный путь
торможения получается значительно больше теоретического. Например, при начальной
скорости автомобиля, равной 100 км j нас, и при значении коэфициента сцепления,
равном 0,5, теоретический путь торможения (см. фиг. 139) равен примерно 84 м.
Действительный путь торможения автомобиля при тех же условиях (фиг. 142)
1 Бухарин Н. А., Тормозные системы автомобилей, Машгиз, 1950.
174
Тяговая динамика автомобиля
равен 105 м. При уменьшении начальной скорости v1 автомобиля эта разность
в тормозных путях уменьшается; например, при скорости, равной 40 км\час,
соответственно имеем примерно 14 и 22 м. Абсолютная разность путей
торможения значительно уменьшилась, а относительная возросла.
Выше были исследованы теоретический и действительный пути торможения
для случая двухосного автомобиля. Еще больше получается разница между
тормозными путями для случая автомобиля-тягача с полуприцепом, особенно с
несколькими прицепами. В этом случае значительно увеличивается время t2 (см. фиг. 141)
нарастания тормозной силы.
На фиг. 143 показана примерная диаграмма зависимости тормозной силы Рт от
времени /, полученная при помощи непосредственного испытания автомобиля-тягача
с двумя прицепами. Тормозной привод — пневматический; тормоза тягача, первого
и второго прицепов включались с некоторым отставанием один от другого. Это
привело к тому, что время включения тормозов t2 для всего агрегата в этом
случае получается особенно большим и определяется линией ABCD.
Фиг. 143. Диаграмма, иллюстрирующая
зависимость тормозной силы от времени торможения
для автомобиля-тягача с двумя прицепами:
кривая ABF — тормозят один тягач; кривая А ВСЕ—-тормозит
тягач и первый прицеп; кривая ABCD — тормозит тягач
и оба прицепа.
Выше (§ 2 данной главы) был рассмотрен мощностной баланс автомобиля при
наличии на его колесах тяговой силы. Аналогично этому может быть составлен
энергетический баланс автомобиля при его торможении.
Кинетическая энергия автомобиля Ra, движущегося по горизонтальной дороге
при торможении без блокировки колес, расходуется на:
1) работу трения колодок о тормозные барабаны R? ;
2) работу сопротивления воздуха поступательному движению автомобиля и
вращению его колес Rw;
3) работу сопротивления качению колес Ra
4) работу трения в трансмиссии Rr;
5) работу скольжения шин по дороге R? .
В результате энергетический баланс заторможенного автомобиля представляется
в следующем виде:
D .. D^ _1_ D _L D _L. D _!_ Е>
*\А — *\Т "Г* *^w I *v • ^г "Т" *\ф»
При малой интенсивности торможения автомобиля (слабое нажатие на
тормозную педаль) большая часть энергии поглощается на качение колес Rf и на
сопротивление" воздуха Rw. По мере повышения силы нажатия на тормозную педаль
резко возрастает энергия Rr, затрачиваемая в тормозах. Однако при блокировке
колес в тормозах энергия уже не затрачивается, а резко возрастает трение между
колесами и дорогой R9.
Тяговые или динамические качества автомобилей
175*
В табл. 5 приведены данные по энергетическому балансу, полученному при.
ходовом испытании автомобиля при различной силе нажатия на тормозную
педаль. В данном случае блокировка колес (задних) наступала при силе нажатия
на педаль, несколько превышающей 60 кг. Таблица иллюстрирует вред
блокировки колес при торможении автомобиля, так как при этом происходит
интенсивный нагрев шин и их усиленный износ.
Таблица 5
Энергетический баланс при торможении автомобиля в %
Кинетическая энергия
поглощается за счет:
Трения в тормозах
Сопротивления
качению (включая потери
в трансмиссии)
Сопротивления
воздушной среды
Скольжения шин
Всего
0
0
87
13
0
100
Давление на педаль в кг
10
61
32
7
0
100
30
81
14
3,2
1,8
100
40
84
и
3
2
100
60
86
8
2
4
100
Блокировка
двух
колес
(задних)
49
4
2
45
100
всех
колес
0
0
2
98
100
Более подробные сведения по торможению автомобиля имеются в указанной
выше работе д-ра техн. наук Н. А. Бухарина.
С точки зрения рационального использования кинетической энергии
автомобиля, поглощаемой тормозами при его торможении, было бы весьма целесообразно
аккумулировать эту энергию в виде механической энергии (разгон маховика)
с последующим использованием ее при движении автомобиля.
§ 18. ТЯГОВЫЕ ИЛИ ДИНАМИЧЕСКИЕ КАЧЕСТВА АВТОМОБИЛЕЙ
СОВЕТСКОГО ПРОИЗВОДСТВА
Для первых автомобилей, выпущенных в СССР: АМО-Ф-15 (1924 г.) и Я-3<
(1925 г.) динамические характеристики были приведены в работе автора [30].
В табл. 6 приведены данные, характеризующие динамичность автомобилей
советского производства последующих выпусков. В качестве параметров или
измерителей, определяющих динамичность автомобилей, приняты:
а) отношение максимальной мощности NmmiiX двигателя к полному весу G
автомобиля;
б) максимальная скорость t>max автомобиля по хорошей горизонтальной
дороге и
в) максимальное значение динамического (или тягового) фактора Dmax на
последней передаче.
Динамический фактор подсчитан аналитически по максимальному вращающему
моменту двигателя, при этом механический к. п. д. трансмиссии был принят
равным 0,9 для легковых и 0,85 — для грузовых автомобилей. Вес одного пассажира
принят равным 70 кг. Для автомобилей высокой проходимости взята меньшая
норма нагрузки. Значение фактора W сопротивления воздуха, принятое для
различных автомобилей, указано в табл. 6.
На основании сведений, изложенных выше в гл. III, можно наметить основные
конструктивные мероприятия по дальнейшему повышению динамичности советских
автомобилей.
176
Тяговая динамика автомобиля
Данные, характеризующие динамичность
Тип
автомобиля
Легковые
Грузовые
i
Повышенной
проходимости
Модель
автомобиля
„Москвич"
ГАЗ-М-1
ГАЗ-М-20
ЗИС-101
ЗИС-110
ГАЗ-АА
ГАЗ-ММ
ГАЗ-51
ЗИС-5
ЗИС-150
ЯГ-6
ЯАЗ-200
ГАЗ-67-Б
ГАЗ-бЗ
ГАЗ-ААА
ЗИС-6
Максимальная
мощность
двигателя
^m max
в л, с.
23
50
50
90*-
ПО
140
40
50
70***
73
90**»
73
1Ю***
50
70***
50
73
Полный
вес
автомобиля
G в кг
1 125
1720
1700
2 970
2915
3 310
3 310
5 210
6 100
7 900
9 930
13170
1655
4 780
4500
8 230
iV m max
G
в л. с. 1кг
0,0204
0,0291
0,0294
0,0303**
0,037
0,048
0,0127
0,0151
0,0134
0,012
0,0114
0,0081
0,0084
0,0302
0,0146
0,0111
0,0097
Максимальная
скорость
автомобиля vmax
в км {час
90
1С0
110*
105
120
140
70
70
60
75***
40
60** *
90
65***
65
55
Максимальный
момент
двигателя
Mm max
в кгм
5,5
17,0
12,5
33**
40
15,5
17,0
20,5
28,5
30,5
28,5
48,0
17,0
20,5
17,0
28,5
* При передаточном числе главной передачи: в числителе—4,7, в знаменателе—5,125.
** В числителе для двигателя с чугунными поршнями; в знаменателе—с алюминиевыми.
*** С регулятором.
***** в числителе без понижающей передачи, в знаменателе—с понижающей передачей.
Тяговые или динамические качества автомобилей
177
Таблица 6
автомобилей советского производства
Число
оборотов
коленчатого
вала при
Mm max
в минуту
1800
1450
1800
1200
2000
1100
J450
1600
900
1150
900
1000
1450
1600
1450
900
Радиус
колеса
0,302
0,362
0,338
0,386
0,374
0,398
0,398
0,421
0,415
0,459
0,482
0,485
0,362
0,476
0,398
0,415
Передаточное
число главной
передачи
5,14
4,44
4,7
5,125
4,36
4,36
6,6
6,6
6,67
6,41
7,63
10,9
8,21
4,44
14,9
10,7
7 4****
11,3
Фактор
сопротивления
воздуха W
в кг • сек21м*
0,061
0,102
0,0535
0,112
0,0755
0,194
0,194
0,203
0,234
0,222
0,318
0,332
0,148
0,203
0,194
0,234
Максимальный
динамический фактор Dmax в кг (кг
на прямой передаче
без учета
сопротивления
воздуха
0,0750
0,1090
0,0923*
0,100
0,1125**
0,119 "
0,144
0,0660
0,0724
0,0530
0,0615
0,0545
0,0553
0,0525
0,113
0,058****
0,114
0,060****
0,0895
0,0526****
0,080
с учетом
сопротивления
воздуха
0,0680
0,1000
0,0865*
"0095
0,1080**
0,1145
0,136
0,0625
0,0675
0,0485
0,0600
0,0530
0,0549
0,0515
0,113
0,057****
0,088
0,0517***»
0,0795
0,0995
0,0533****
12 Е. А. Чудаков
2232
178 Тяговая динамика автомобиля
Наиболее простым способом повышения динамичности автомобиля является
увеличение мощности двигателя Г т. е. увеличение измерителя —т^'*-), а также
увеличение передаточного числа /0 в главной передаче.
Однако увеличение мощности Nmmax вызывает снижение экономичности
автомобиля, а потому такой путь целесообразен лишь при необходимости
увеличения максимальной скорости автомобиля.
Увеличение передаточного числа /0 обеспечит повышение приемистости
автомобиля, а тем самым — средней скорости его движения в городских условиях
и-по дорогам среднего качества. Для ряда советских автомобилей (например,
„Москвич") увеличение передаточного числа i0 повысило бы их динамичность.
Во всяком случае необходимо выпускать автомобили с двумя передаточными
числами /0, что позволит лучше использовать автомобили в различных условиях
эксплоатации. В грузовых автомобилях это передаточное число следует сделать
переменным, что облегчит использование автомобилей как без прицепа, так и
с прицепом.
Как показало приведенное выше исследование (§ 15 этой главы), улучшение
обтекаемости автомобиля, а особенно уменьшение его собственного веса оказывает
заметное влияние на динамичность. Автомобили последних выпусков показали
улучшение как их обтекаемости (автомобиль ГАЗ-М-20), так и использования
веса. Отношение полезной нагрузки Ge к собственному весу Go для автомобилей
последних выпусков возрастает. Например, это отношение для автомобиля ГАЗ-ММ
составляет 0,829, а для автомобиля ГАЗ-51 — 0,92; для автомобиля ЗИС-5
и ЗИС-150 соответственно имеем 0,96 и 0,99, для автомобилей ЯГ-6 и ЯАЗ-200
имеем 1,03 и 1,13. Это достигнуто при помощи совершенствования конструкции
всех механизмов автомобиля и, в частности, благодаря повышению литровой
и удельной мощности автомобильных двигателей.
На фиг. 144 и 145 приведены внешние характеристики литровой мощности
двигателей легковых (фиг. 144) и грузовых (фиг. 145) автомобилей.
Эти фигуры наглядно иллюстрируют последовательный рост литровой мощности
для каждого двигателя более позднего выпуска. Например, если для двигателя
ГАЗ-А максимальная литровая мощность была равна 13 л. с, то для двигателя
ГАЗ-М-1 она увеличилась до 15,5 л. с, а для двигателя ГАЗ-М-20 достигла 25 л. с.
Литровая мощность двигателя ЗИС-110 (23,5 л. с.) значительно превосходит
литровую мощность двигателя ЗИС-101 (19 л. с).
Аналогично возрастает литровая мощность и для двигателей грузовых
автомобилей: литровая мощность двигателя ГАЗ-АА равна 13 л. £., двигателя
ГАЗ-ММ—15,5 л. с. и двигателя ГАЗ-51—21 л. с. Для двигателей АМО-Ф-15,
АМО-3, ЗИС-5 и ЗИС-150 получаем соответственно возрастающие значения
литровой мощности: 9,5, 12,5, 13 и 16 л. с.
Повышение литровой мощности двигателя достигнуто главным образом путем
повышения степени сжатия и скорости вращения коленчатого вала двигателя,
а также улучшения системы питания двигателя. Повышенное значение литровой
мощности для двигателя автомобиля ЯАЗ-200 (фиг. 145) объясняется тем, что этот
двигатель (с воспламенением от сжатия) работает по двухтактному циклу.
Снижение веса Go автомобиля при той же грузоподъемности и надежности
последнего требует совершенствования конструкции автомобиля, внедрения новых,
более легких и прочных материалов. Все это, как правило, увеличивает затрату
рабочей силы на производство автомобиля и повышает его стоимость. Однако до
определенных пределов повышение затрат компенсируется повышением эксплоа-
тационных качеств автомобиля и удешевлением его работы. Необходимо, например,
применять легкие металлы для картеров отдельных механизмов автомобилей и для
кузова. Из имеющихся экспериментальных данных следует, что при применении
легких металлов (алюминиевые и магниевые сплавы) и пластмассы можно снизить
собственный вес легковых автомобилей на 25—30°/0, автобусов — на 30—35°/О
и грузовых автомобилей — на 20—25°/0.
Тяговые или динамические качества автомобилей
179
180 Тяговая динамика автомобиля
Следует отметить, что снижение веса автомобиля при той же его вместимости
обеспечивает повышение не только его динамичности, но также и экономичности.
Согласно приведенным выше данным (см. § 13 этой главы) динамичность
автомобиля при всех прочих равных условиях может быть повышена увеличением
числа передач в коробке передач, а также автоматизацией их переключения
в соответствии с условиями движения автомобиля. Увеличение числа передач
в коробке передач повышает не только динамичность, но также и экономичность
автомобилей. В грузовых советских автомобилях повышенной грузоподъемности
(ЗИС-150 и ЯАЗ-200) введены пятиступенчатые коробки передач, причем пятая
передача является ускоряющей (передаточное число iK меньше единицы).
Целесообразно пятиступенчатую коробку передач (с ускоряющей передачей) установить
и на автомобиле ГАЗ-51. Ускоряющая передача должна быть введена в
трансмиссию мощных легковых автомобилей (например ЗИС-110) не только для повышения
их динамичности, но и для повышения экономичности и уменьшения износа
двигателя.
Необходимо широко развернуть работу по созданию ступенчатой коробки
передач с автоматическим переключением передач: это не только повысит
динамичность автомобилей, но также облегчит управление им.
Одним из лучших способов повышения динамичности автомобиля является
улучшение его трансмиссии применением бесступенчатой коробки передач (см. § 13
этой главы). Как будет выяснено ниже (см. гл. VIII), такая коробка передач
наряду с повышением динамичности автомобиля обеспечивает также особенно
большое повышение его экономичности.
Наибольшее распространение за последнее время начинает получать
гидродинамическая передача, которая, обеспечивая улучшение динамичности автомобиля,
значительно экономичнее электрической передачи. Наилучший результат должна
дать механическая бесступенчатая фрикционная коробка передач.
Наконец, динамичность автомобиля при той же мощности двигателя зависит от
приемистости последнего, которая определяется конструкцией (и регулированием)
карбюратора и формой впускного трубопровода. В нашей автомобильной
промышленности получает широкое распространение карбюратор с переменным
сечением диффузора, который должен дать весьма хороший результат.
Как это указано было выше, возможность интенсивного торможения
автомобиля также определяет динамические качества автомобиля. В советских
автомобилях тормоза устанавливаются на всех колесах, при этом вместо механического
привода введены гидравлический и пневматический, что обеспечивает возможность
весьма интенсивного торможения автомобиля без нарушения боковой устойчивости.
Максимально допустимая скорость автомобиля на дороге соответствующего
качества зависит также и от подвески автомобиля, влияющей как на колебания
автомобиля, так и на его боковую устойчивость.
Современные советские легковые автомобили среднего и высокого класса
(ГАЗ-М-20; ЗИС-110) имеют особенно хорошую подвеску, не ограничивающую
скорость автомобилей даже при движении их по дорогам не особенно высокого
качества.
ГЛАВА IV
УПРАВЛЯЕМОСТЬ АВТОМОБИЛЯ
§ 1. ОСНОВНЫЕ ФАКТОРЫ, ВЛИЯЮЩИЕ НА УПРАВЛЯЕМОСТЬ
АВТОМОБИЛЯ
Под управляемостью автомобиля разумеется его способность при движении
точно следовать повороту управляемых колес. Плохая управляемость автомобиля
характеризуется стремлением автомобиля самопроизвольно изменять направление
движения (вилянье), а при повороте рулевого колеса двигаться по кривой, не
точно соответствующей повороту управляемых колес.
Плохая управляембсть автомобиля наряду с увеличением мускульной работы
требует от водителя значительно большего внимания, что вызывает его быстрое
утомление.
Управляемость автомобиля зависит от следующих факторов:
а) боковой эластичности передних и задних колес;
б) бокового ветра и бокового уклона дороги;
в) стабилизации управляемых колес;
г) кинематической схемы подвески передних колес и привода к ним от
рулевого механизма (колебательное движение управляемых колес относительно
поворотных шкворней).
Все эти факторы влияют на управляемость автомобиля, а следовательно, и на
утомляемость водителя главным образом вследствие того, что при этом повышаются
напряженность внимания водителя, так как даже небольшое опоздание в повороте
рулевого колеса или излишний его поворот могут привести к заносу
автомобиля.
Кроме того, имеется еще несколько факторов, зависящих от конструкции
автомобиля и также характеризующих его управляемость и влияющих на
утомляемость водителя, главным образом вследствие затраты им значительной мускульной
силы. Сюда относятся: система тормозов, тип рулевого механизма, механизм
переключения передач. Пневматические тормоза обеспечивают наиболее легкое
торможение автомобиля, среднее положение занимают гидравлические и наибольшую работу
от водителя при торможении автомобиля требуют механические тормоза.
Усилие на рулевом колесе, требующееся от водителя для поворота автомобиля,
зависит как от конструкции рулевого механизма, так и от веса автомобиля.
В тяжелых автомобилях для облегчения управления вводятся сервомеханизмы.
Конструкция силовой передачи также оказывает большое влияние на легкость
управления автомобилем. Наилучший результат получается в случае применения
автоматической бесступенчатой коробки передач. При ступенчатой коробке передач
управление автомобилем значительно облегчается при автоматическом
переключении передач, при введении синхронизаторов, а особенно гидромуфты. Вопрос
о влиянии конструкции автомобиля на его управляемость рассмотрен в курсе
„Конструирование и расчет автомобиля".
182 Управляемость автомобиля
§ 2. ВЛИЯНИЕ БОКОВОЙ ЭЛАСТИЧНОСТИ КОЛЕС НА ДВИЖЕНИЕ
АВТОМОБИЛЯ
Понятие о боковой эластичности колес было дано в гл. I, где были описаны
также и методы ее определения.
Вследствие боковой эластичности колеса автомобиля при наличии действующих
на них боковых сил катятся уже не в своей плоскости, а под некоторым углом
к ней, который называется углом бокового увода. Схема движения автомобиля
с учетом бокового увода его колес и осей изображена была выше на фиг. 46.
На фиг. 48 изображена была схема сил и реакций, действующих на автомобиль
при его повороте.
На основании этой схемы было получено уравнение (58) для производной
dvCn
dt '
Это уравнение устанавливает первую зависимость между угловой скоростью ш
вращения автомобиля и скоростью vcn бокового перемещения его центра тяжести.
Для исключения из уравнения (58) скорости Vqu, а также ускорения —у,—
находим вторую зависимость между теми же величинами.
Пользуясь фиг. 48 и принимая момент Мр = 0 (равномерное распределение
суммарной окружной силы по колесам задней ведущей оси автомобиля), a cos а = 1,
получим:
Y2b= Yxa — J ^ . (261)
Подставляя в это уравнение вместо боковых реакций У2 и Уг выражения для
них из уравнений (56), получим:
do> (л Ъ \ v Qn I (ft b2 \ ti> сих
"dt ~~ \Tl Ci/ ~~v~ \ Ci ' "СГ/ ~v~ "^" ТГ '
Определяем из этого уравнения скорость vqu\
r da) / Ф . № \ aav
„ _ * 1ь с2; d
Ci С2
Производная —^~ при этом определится из выражения:
dvCn
, d<a dv . rf2o) t / а2 , b2 \ da av da t aa dv
dvcn __ dt dt
dt ~
Подставляя в уравнение (58) выражения для скорости vcn [уравнение (262)]
dv
и ускорения 9? [уравнение (263)], получаем уравнение, характеризующее дви-
dt
жение автомобиля, колеса которого обладают значительной боковой эластичностью:
d£^ ''" dt
Входящие в это уравнение коэфициенты В, С и D определяются из
выражений:
(264")
(264")
Влияние боковой эластичности колес на движение автомобиля 183
Входящие в уравнения (264) параметры: угол а поворота управляемых колес
и скорость -£т поворота, а также скорость v и ускорение ~-тг движения
автомобиля являются независимыми переменными, и их изменение по времени может
быть различным в зависимости от действия водителя.
Таким образом, для определения угловой скорости го вращения автомобиля
получаем линейное уравнение второго порядка с переменными коэфициентами;
это уравнение не может быть решено в общем виде, и для его решения
необходимо задаться определенным законом изменения параметров а, -^-, v и —т- по
времени.
Если принять, что автомобиль имеет постоянную скорость v движения
at~j' то ПОЛУЧИМ °ДИН из простейших частных случаев движения автомобиля.
При этом коэфициенты В, С и D в уравнении (264) определятся из выражений:
[да-(■*•-«■>]: <265">
) (265">
Коэфициенты В и С [уравнения (265') и (265")] в этом случае зависят только
от конструкции автомобиля. Коэфициент же D [уравнение (265'")] все же зависит
от условий движения, и для решения уравнения (264) необходимо знать
изменена
ние по времени угла а и скорости -^- поворота управляемых колес, что
определяется характером кривой, по которой движется автомобиль. Уравнение (264)
может быть решено при любой заданной зависимости между углом а и скоростью
-^г, с одной стороны, и временем t — с другой. Сначала рассматривается вопрос
da
в том предположении, что скорость —г- поворота колес остается постоянной.
В этом случае для угла а получаем выражение:
Преобразуя после этого уравнение (264) и заменяя соответственно коэфициент D
[уравнение (265'")] через коэфициенты Е и F, получим:
-£ + *.£ + <*-£/-/>-0. (266)
Коэфициенты В и С в этом уравнении определяются из полученных ранее
уравнений (265') и (265"); коэфициенты же Е и F определяются из выражений:
Е = CCAUtr * ~dt ;
Общий интеграл уравнения (266) при наличии действительных корней
характеристического уравнения имеет вид:
ш = сге*1' 4- С2е** + ^ -f ?' (269)
184 Управляемость автомобиля
Входящие в это уравнение коэфициенты kx и k2 определяются из
характеристического уравнения:
/5s + Bk + С = 0.
Отсюда получаем:
k2-~ 2 ' V IT C'
Коэфициенты р и q частного интеграла определяются из выражений:
(271)
Для определения постоянных СЛ и С2> входящих в уравнение (269), необходимо
задаться начальными условиями движения автомобиля. В качестве параметров,
характеризующих эти условия, можно взять угловую скорость вращения
автомобиля о>0 и угловое ускорение автомобиля (~^г)о-
Если в уравнении (269) принять время t = 0, то получим:
щ=о = «>о = Сг + С2 + q-A
Ci + Ca = o>0-^ J l }
Диференцируя уравнение (269) по времени /, получим:
^ = C1ft/'+C2VV + /'. (273)
Принимая в этом уравнении время t = 0, получим:
(ж),=0=(^)0=СЛ + СЛ^р- (274)
Из уравнений (272) и (273) находим выражения для постоянных Сх и С2:
_ \ dt /О
Задание определенного начального значения о)0 угловой скорости автомобиля
при заданной скорости v автомобиля в направлении его продольной оси
равнозначно заданию первоначального значения Ro радиуса поворота автомобиля:
а>0
Таким образом, в уравнении (269) все коэфициенты известны, и при помощи
этого уравнения можно найти изменение по времени скорости ш вращения
автомобиля. Уравнением (273) аналогичная зависимость устанавливается между
угловым ускорением -jt- вращения автомобиля и временем t.
Влияние боковой эластичности колес на движение автомобиля 185
Полученное выше решение уравнений (264) и (266) является справедливым
лишь для того случая, когда, как это указано было выше, корни
характеристического уравнения (270) являются действительными, т. е. когда В2>4С.
В том же случае, когда корни характеристического уравнения (270) являются
комплексными, общий интеграл диференциального уравнения (266) имеет вид:
ш = emt (C3 cos р/ + С* sin р/) + pt -f q.
Входящие в это уравнение коэфициенты /пир определяются из выражений:
В .
(278)
Коэфициенты рад частного интеграла в уравнении (277) определяются из
полученных ранее уравнений (27J).
Постоянные С3 и С4, входящие в уравнение (277), как и ранее, определяются
из начальных условий. Принимая в уравнении (277) время £—0, получим:
% = сз + Ч<>
или
С3=ш0-9 = <о0 -^-. (279)
Диференцируя уравнение (277) по времени, находим:
^L = memt (q cos ^ _|_ q sin £/) + fa** (c4 cos §t — С3 sin p/) + p. (280)
Принимая в этом уравнении время t = 0, получим:
Пользуясь далее уравнением (279), находим выражение для коэфициента С,
4,
/ F в£\
С ^LZo =1^2 " \ ~ —I — (281)
С 4
Уравнение (269) справедливо до такой скорости ^ автомобиля, при которой разность
-j- — С сохраняет положительное значение (корни действительные).
Пользуясь уравнениями (265') и (265"), находим условие применения
уравнения (269):
1 dK b C y 1 12
или
J ~*~ М ) '
Таким образом, предельное значение скорости v0, до которого корни
уравнения (269) имеют действительные значения, определяется из уравнения:
V2 &J
Значение v0 скорости автомобиля в очень большой мере зависит от разности
аС2 — Ki- При положительном значении этой разности и при средних значениях
186 Управляемость автомобиля
всех других параметров, характеризующих конструкцию автомобиля, правая
часть уравнения (282) получается отрицательной, т. е. при всех значениях
скорости v имеется условие В2 > 4С, и поэтому следует пользоваться уравнением
{269). При отрицательном же значении разности аС2 — ^ уравнение (282) дает
обычно положительное решение, и в этом случае в зависимости от значения
скорости автомобиля следует пользоваться или уравнением (269) или (277).
Частный интеграл уравнения (266) в обоих случаях имеет вид:
»=pt+q9 (283)
причем входящие в это уравнение коэфициенты р и q определяются из
уравнений (271).
da
Если скорость -зт поворота управляемых колес равна нулю, т. е. если угол а
поворота этих колес сохраняется постоянным, то коэфициент Е [уравнение (267)],
а следовательно, и коэфициент р получаются равными нулю. При этом уравнение
(283) примет вид:
1 Ч\
или
Так как о> = ^", то получаем соответствующее значение для радиуса Rx
поворота автомобиля:
** = ц; ■ (285)
Если бы колеса автомобиля не обладали боковой эластичностью, то
мгновенный центр вращения автомобиля (см. фиг. 46) располагался бы в точке О',
а радиус R был бы равен отношению — (точнее, yIT). Согласно уравнению (285)
вследствие боковой эластичности шин радиус Rx поворота автомобиля при поло-
жительном значении разности а£2 — Ы.г уменьшается на величину ±-у*—— .
Если разность aQ2 — b£k отрицательна, то радиус Rx поворота автомобиля
увеличивается на ту же величину. Наконец, если разность аС2 — Ь£г = 0, то радиус Rt
не изменяется по величине в зависимости от боковой эластичности шин. Однако
расположение центра вращения автомобиля по отношению к центру тяжести
последнего при этом все же изменяется.
Уравнения (284) и (285) соответствуют установившемуся движению автомобиля;
при этом угловая скорость ш, радиус R поворота автомобиля и угол а поворота
управляемых колес сохраняются постоянными, так же как и реакции У2 и Уъ
я следовательно, и углы бокового увода осей 82 и Ъх.
Однако такое установившееся движение автомобиля может быть достигнуто
не при всех условиях. В некоторых случаях при скорости v автомобиля,
превышающей определенное ее значение, угловая скорость <о вращения непрерывно
возрастает, а радиус R поворота уменьшается, и если не будет принято должных
мер (поворот управляемых колес, уменьшение скорости движения), то указанный
процесс будет продолжаться вплоть до начала бокового заноса автомобиля.
Для исследования этого явления рассмотрим уравнение (269). Согласно этому
уравнению при положительном значении хотя бы одного из коэфициентов кг или
k2 угловая скорость а> вращения автомобиля с течением времени / беспрерывно
возрастает и теоретически может получиться сколь-угодно большой.
Во избежание этого оба коэфициента kx и к2 в уравнении (269) должны быть
отрицательны. Согласно уравнению (270) для этого необходимо, чтобы
коэфициент С, входящий в подкоренное выражение, имел положительное значение.
Влияние боковой эластичности колес на движение автомобиля 187
Пользуясь уравнением (265"), получаем необходимое для этого условие:
I2 ЖчцРк
ИЛИ
■ М (#£
Когда это неравенство превращается в равенство, скорость автомобиля
становится равной критической, т. е.
Обозначение vK<> для критической скорости здесь принято в отличие от
критической скорости vK\ автомобиля на последней передаче (см. § 16 гл. III).
При скорости автомобиля, превышающей ее значение, определяемое
уравнением (286), и при положительном значении (dQ2 — b^x) начавшееся увеличение
угловой скорости о вращения автомобиля и уменьшение радиуса /? его поворота
непрерывно возрастает за счет бокового увода эластичных колес, и для
прекращения этого процесса потребуется поворот управляемых колес.
В уравнение (286) не входит угол а поворота управляемых колес, т. е. оно
справедливо также и для случая движения автомобиля при нейтральном
расположении управляемых колес (а=0).
Согласно уравнению (286) критическая скорость vKo в очень большой мере
зависит от боковой эластичности колес — передних (Сх) и задних (С2) и от
расположения центра тяжести автомобиля (а и Ь).
Для иллюстрации влияния боковой эластичности колес и расположения центра
тяжести автомобиля на движение последнего при повороте управляемых колес
ниже приведены графики, иллюстрирующие изменение угловой скорости вращения ш
и радиуса R поворота автомобиля в зависимости от времени при постоянном зна-
чении скорости—, но при различных значениях разности ац—Ыл.
Для примерного подсчета принят был автомобиль, характеризуемый
следующими данными:
Вес автомобиля G = 2500 кг.
База автомобиля L = 3 м.
Радиус инерции массы автомобиля по отношению к вертикальной оси,
проходящей через центр тяжести автомобиля р = 0,9 м.
Момент инерции массы автомобиля по отношению к вертикальной оси,
проходящей через центр тяжести автомобиля, У= 206,5 кгм»сек2.
Коэфициенты бокового увода для передней и задней осей автомобиля
d = С2 = 2 . 10~4 рад/'кг.
Для отрезков а и Ьу характеризующих расположение центра тяжести
автомобиля, приняты были два значения: а = 0,6; Z. = 1,8 м и Ь— 0,4; L = 1,2 му или
а = 0,4; L = 1,2 м и b = 0,6; L = 1,8 м.
В соответствии с этим для разности аС2— £'Ci было получено также два
значения: + 1,2 • 10~4 радIкг. Для обоих случаев на фиг. 146 и 147 построены кривые,
иллюстрирующие зависимость между величинами о>, /? и t; кроме того, на тех же
фигурах построены аналогичные кривые для автомобиля с жесткими колесами.
Фиг. 146 соответствует постоянной скорости движения автомобиля (г>=30 лс/сек)
и постоянной скорости поворота управляемых колес f--^- = 0,01 рад/сек).
Сплошные кривые соответствуют жестким колесам; пунктирные кривые
соответствуют условию а£2 > #Ci и кривые, изображенные пунктиром с точкой, —
условию аС2 < M.v х
Особенно быстрое возрастание угловой скорости <о вращения автомобиля и
уменьшение радиуса R поворота получается при положительном значении раз-
188
Управляемость автомобиля
/#5 1,751сек
Фиг. 146. Изменение по времени угловой скорости <о и радиуса
R поворота автомобиля при постоянной скорости поворота
управа
вляемых колес ^ «0,01 рад/се/с, а также при постоянной
скорости движения автомобиля v = 30 км/час при положительном
(пунктирные кривые) и отрицательном (кривые пунктир с
точкой) значении разности аС2 — Ь^х и при d—Сз (сплошные кривые).
и Рад/сек
0,30
0,25
0:20
0,15
0,10
0,05
f
1
X
'R
\
>
V
ч
1
/ _
к/
А ,
у
ч^ /
.4
/
/
/
/
—/
ч
/
А
/
—~
ч
ч
ч
R-600
—
А
1
|
с/
2500
2000
1500
1000
500
0,25 0,5 0J5 1}0 1,25 1,5 1,75 fees
Фиг. 147. Изменение по времени угловой скорости о> и радиуса
R поворота автомобиля после прекращения поворота
управляемых колес при постоянной скорости движения автомобиля
t> = 30 км/час и при положительном (пунктирные кривые)
и отрицательном (кривые пунктир с точкой) значении разности
аС2 — Kv а также при аСг = bt,2 (сплошные кривые).
Влияние боковой эластичности колес на движение автомобиля
189
ности яС2 — &£i; при этом скорость ш стремится к бесконечности, а радиус R —
к нулю. При отрицательном значении разности аС2 — ££г поворот автомобиля
происходит значительно медленнее, нежели при жестких колесах (или при
условии аС2 — #Сх > 0).
Фиг. 146 соответствует беспрерывному повороту управляемых колес с данной
скоростью -jr. В действительных условиях движения автомобиля управляемые
колеса после их поворота на некоторый угол сохраняются в этом положении.
Однако благодаря боковой эластичности колес и в этом случае продолжается
изменение поворота автомобиля. Фиг. 147 иллюстрирует изменение по времени
скорости а) и радиуса R поворота автомобиля в том случае, когда управляемые
колеса после их поворота в
течение 0,5 сек. со скоростью
0,01 рад/сек сохраняются в
постоянном положении.
При жестких колесах \ i
(сплошные линии) скорость о> L—-ч \
и радиус R при этом сохра- ^~Л~~~^\ \
няются постоянными. При
эластичных колесах и при
условии яС2^> #Сх скорость а)
продолжает расти, а радиус R
уменьшаться, что затрудняет
управление автомобилем. При
эластичных колесах и при
условии #С2 < Ь1г скорость о) и
радиус JR стремятся к
предельным значениям, сравнительно
мало изменяясь относительно
первоначальной величины.
Влияние боковой эластичности колес на движение автомобиля как при
прямолинейном движении, так и на повороте, более подробно рассмотрено в работе
автора [43].
Указанное выше влияние разности аС2 — #СХ на управляемость автомобилем и
на устойчивость его движения может быть пояснено на основании более простых
соображений без использования полученного уравнения (266) для общего случая
движения автомобиля с эластичными колесами.
На фиг. 148 изображена схема автомобиля, который под влиянием
действующих на него каких-либо случайных внешних сил повернулся на некоторый угол о
относительно направления своего движения. Движение автомобиля при этом
сохраняется устойчивым в том случае, если возникающие боковые реакции Yx и К2
вызывают момент, стремящийся уменьшить угол 8. Наоборот, движение
автомобиля будет неустойчивым, если реакции Y1 и У2 вызывают момент, стремящийся
увеличить угол 8.
Боковые реакции, возникающие вследствие качения колес под углом к их
средней плоскости, могут быть определены через угол 8, который в данном случае
представляет собой угол увода. Согласно уравнению (50) получим:
Момент относительно вертикали, проходящей через центр тяжести автомобиля,
определяется из выражения:
Фиг. 148. Схема автомобиле повернувшегося под
действием случайных пнчлних сил на угол 3.
М=аУг — ЬУ2, или М — р-.
190
Управляемость автомобиля
Если этот момент положителен, то движение автомобиля неустойчиво, если же
момент отрицателен, то движение автомобиля устойчиво. В результате устойчивое
движение автомобиля определяется условием:
т. е. получаем то же условие устойчивости движения автомобиля, которое
было найдено ранее на основании уравнения (266).
§ 3. ВЛИЯНИЕ БОКОВОЙ ЭЛАСТИЧНОСТИ КОЛЕС НА УПРАВЛЕНИЕ
АВТОМОБИЛЕМ ПРИ ДВИЖЕНИИ ЕГО НА ПОВОРОТЕ
Траектория движения центра тяжести автомобиля при повороте последнего
слагается из трех участков: двух переходных кривых и одной кривой
постоянного радиуса. Ма фиг. 149 представлена такая примерная траектория; здесь АВ —
прямолинейный участок пути, ВС— первая
переходная кривая, CD — участок пути постоянного радиуса
i?0, DE — вторая переходная кривая и
EF—прямолинейный участок пути.
При жестких колесах автомобиля каждой точке
траектории соответствует определенный угол а
поворота управляемых колес автомобиля.
На фиг. 150 изображена схема поворота
автомобиля с жесткими колесами. Для того чтобы оба
управляемых колеса при повороте автомобиля имели чи-
Фиг. 149. Схема траектории, стое качение, а не скользили по опорной поверх-
описываемой автомобилем ности, необходимо чтобы имелось определенное
сопри повороте. отношение между углами поворота внешнего колеса
бх и внутреннего колеса 02. Пользуясь схемой,
приведенной на фиг. 150, получим исходя из того условия, что для чистого
качения обоих управляемых колес (жестких) автомобиля продолжения осей этих
колес должны пересекаться на
продолжении задней оси автомобиля (точка О):
^^, (287)
где L — база автомобиля и Б —
расстояние между осями поворотных цапф его
управляемых колес или приближенно
колея автомобиля.
Для удовлетворения этого условия
в механизм рулевого привода введена
рулевая трапеция. При этом хотя и не
осуществляется точно требование
уравнения (287) для разных радиусов jR
поворота автомобиля, но все же
соотношение между углами б2 и 0Х получается
довольно близкими к требуемому.
Учет боковой эластичности колес
автомобиля вносит существенную поправку в
уравнение (287) и в требуемую форму
рулевой трапеции. В этом случае (при
эластичных колесах) при небольшой
разнице между требующимися и
действительными значениями углов Ьх и 62 колеса не
будут скользить по опорной
поверхности, а будет иметь место боковой увод колес. В результате в зависимости от
действительных значений углов 0Х и 62 действующая на переднюю ось суммарная
Фиг. 150. Схема поворота автомобиля
с жесткими колесами.
Влияние боковой эластичности колес на управление автомобилем 191
боковая реакция Yx будет по-разному распределяться между внутренними и
внешним колесами оси, что отзывается на боковой устойчивости этой оси и на износе
шин. По мнению автора, исходя из указанных соображений, надо угол б2
поворота внутреннего колеса иметь больше, чем это следует из уравнения (287).
Работа по этому вопросу ведется в Автомобильной лаборатории Академии Наук.
Разница между углами 02 и 6Х поворота управляемых колес получается
сравнительно не велика, особенно при средних и больших значениях радиуса R поворота
автомобиля; поэтому в дальнейшем мы их будем принимать равными среднему
значению, соответствующему точке А — середине передней оси. Пользуясь фиг. 150
(или. фиг. 46), получим:
или, приближенно
а=А, (288>
где а — средний угол поворота управляемых колес.
Таким образом, при жестких колесах угол а определяется только радиусом R
кривизны траектории.
При колесах, обладающих боковой эластичностью, угол а в каждой точке
пути зависит не только от радиуса R кривизны траектории, но также и от
конструкции автомобиля (в частности, от значения разности а£2— #d), от формы
кривой на предыдущих участках траектории и от скорости движения автомобиля.
Пользуясь фиг. 49, находим:
или, пользуясь уравнением (50), получим:
W-
Если принять движение автомобиля установившимся (а = const; v = const), то,
пользуясь уравнениями (289), (77) и (78), находим [принимая в уравнениях (77)
и (78) коэфициент k = 0,5]:
а° ~ Т LR '
При положительном значении разности (а£2 — #Ci) угол а0 поворота
управляемых колес при эластичных колесах меньше, чем при жестких. При
отрицательном значении разности (аС2—■ #п) угол а0 больше при эластичных колесах.
В первом случае получим автомобиль с „избыточной поворачиваемостью*,
а во втором случае — с „недостаточной поворачиваемостью".
Ниже рассматривается изменение угла а и скорости -^ поворота управляемых
колес автомобиля для обоих этих случаев при движении автомобиля по трем
указанным выше участкам поворота. При этом принимаем, что первая и вторая
переходные кривые имеют такую форму, при которой в случае постоянной скорости v
автомобиля угловое ускорение -^- также остается постоянным. Такая форма
переходных кривых обеспечивает последним наименьшую длину при той же боковой
устойчивости автомобиля с жесткими колесами [38 и 39].
Результаты подсчета для угла а показаны на фиг. 151. Здесь по оси абсцисс
отложен путь S автомобиля; при этом отрезок S2S3 соответствует первой
переходной кривой, отрезок SSS± — кривой постоянного радиуса и отрезок S±Sb —
второй переходной кривой. Отрезки 5Х52 и SbS6 соответствуют прямолинейным
участкам пути.
192
Управляемость автомобиля
При жестких колесах получаем ломаную линию MPQT, иллюстрирующую
зависимость от времени t или от пройденного пути 5 (так как v = const) угловой
скорости ш автомобиля и угла а поворота управляемых колес:
При этом для угла а линия MPQT в этом случае остается действительной
при любой скорости v автомобиля.
а род
0.03
0.02-
0М1
0,02-
-а рад
20^
К
s, i
■~
зч,
20-41
ш
1 /
'-&
^
/
[_Ж_
0 60 8
г*-
\ ^
\
30__
20
0 10
^—
=
'~Ж
\
\
\
Ог \
\
\ \
чо\
0 f2?^\
ч
>*.
\
-Л—
/
/
/
/
/
/
/
/
I
!
._.^ J
/
/
i
!
с
I
^/?/ —
Фиг. 151. Изменение угла а поворота управляемых колес в зависимости от пути S,
пройденного автомобилем с эластичными (пунктирные кривые) и жесткими
(сплошные) колесами при движении его с разной скоростью v = 10, 20, 30 и 40 м\сек на
повороте постоянного радиуса #0 = 600 м при положительном (пунктир) и
отрицательном (пунктир с точкой) значении разности а£2 — Ki-
Скорость -jr поворота управляемых колес при движении автомооиля по
переходным кривым в этом случае (при жестких колесах и -» = const] получается
постоянной:
da
L dm
~v ' ~dt щ
На фиг. 152 построен график, иллюстрирующий изменение скорости ~
поворота управляемых колес при движении автомобиля на повороте. Горизонтали МР
и QT соответствуют жестким колесам. При этом чем выше скорость v автомо-
da
оиля, тем выше скорость —, но для каждого заданного значения скорости v
da
скорость -г: сохраняется постоянной.
Влияние боковой эластичности колес на управление автомобилем
193
В том же случае, когда колеса автомобиля обладают значительной боковой
da
эластичностью, соотношение между скоростью -г- поворота управляемых колес
и пройденным отрезком пути на повороте уже зависит от скорости v
автомобиля.
Ниже будет пояснен метод построения кривых a=f(S) и -г =/(5) для того
случая, когда колеса автомобиля обладают боковой эластичностью.
da рад
dt сек
140 160 180 200 220 240 Sm\
ad
Фиг. 152. Изменение скорости ^ поворота управляемых колес в зависимости от
пути S, пройденного автомобилем с эластичными (пунктирные кривые) и жесткими
(сплошные) колесами при движении его с разной скоростью v = 10, 20, 30
и 40 м!сек на повороте постоянного радиуса Ro = 600 м и при условии аС2 ^
Согласно принятому условию при движении автомобиля по переходным
кривым угловое ускорение -т~ остается постоянным. В соответствии с этим вторая
производная —-| = 0, и уравнение (264) примет вид:
В
IF
Ceo + D = 0.
(291)
Коэфициенты Б, С и D в этом уравнении определяются из выражений (265'),
(265") и (265"г).
Обозначая, как и на фиг. 49, угол между продольной осью АВ автомобиля
и некоторой постоянной координатной осью знаком а, получим:
da d*£ d2 з
03 =1~dt'f ~dt= dt*'
Производная-r^ (где dS — диференциал пути) характеризует кривизну пути.
Так как dS = vdt, то получим:
ttu) n Li 5 . 1 UQ U U
~аТ =^V dS* ' ~v ' IF ' It '
13 E. А. Чудаков. 2232.
194 • Управляемость автомобиля
или при постоянной скорости v получим
= V2
ао* '
(292)
dt ~ " dS* '
= const = Н; -гг =
Угловая скорость ш вращения автомобиля при движении его по переходным
кривым определится из выражения f —г- = const)
где <о0 — первоначальное значение угловой скорости автомобиля.
Пользуясь приведенными данными и, в частности, уравнениями (265Г), (265")
и (265'"), преобразуя уравнение (291), получим:
*L + Ра - Qt - Т - 0. (293)
Входящие в это уравнение коэфициенты Р, Q и Т определяются из
выражений:
я. (293")
7 = Г^W, + Ц+ЬЩ Hv_ (293'")
Общий интеграл диференциального уравнения (293) имеет вид:
а = Cxekt + pt + q. (294)
Входящие- в это уравнение коэфициенты k, р и q определяются из выражений
(295)
Коэфициент Сг в уравнении (294) определяется из начальных условий
движения автомобиля. При / = 0 угол а = 0. В результате получим:
(296)
В уравнении (294) угол а определяется в зависимости от времени t. Так как
скорость v автомобиля принята постоянной, то можно выразить угол а в
зависимости от пути S:
а = С^ v +P±+q. (297)
При помощи уравнения (297) на фиг. 151 построены кривые МРг и ЖР2 дл$
того случая, когда колеса автомобиля обладают значительной боковой
эластичностью. При этом приняты прежние значения коэфициентов С2 = Сх = 2-10~4,
для скорости же v автомобиля приняты четыре значения: 10, 20, 30 и 40 м/сек;
радиус /?0 поворота принят равным 600 м\ для отрезков а и Ь приняты два зна-
Влияние боковой эластичности колес на управление автомобилем 195
чения: а = 1,8 л* и b=l,2 м (кривые МРХ), или я = 1,2 мм & = 1,8 м
(кривые МР2).
Для коэфициента Н принято значение, равное 12 000 —^ . Для остальных
параметров, характеризующих конструкцию автомобиля, приняты те же значения,
что и при построении фиг. 146 и 147.
Согласно полученным кривым при движении автомобиля по первой переходной
кривой и при условии аС2 > Кшг угол а при эластичных колесах меньше угла а
при жестких колесах. При условии же аС2 <С Ь^г имеется противоположное
соотношение.
Аналогично изложенному может быть найдено и соотношение между
скоростью ~ поворота управляемых колес и путем *S, пройденным автомобилем.
at
Диференцируя уравнение (297) по времени, получим
ks_
-J- = kCxe v +p. (298)
Коэфициенты k, p и Сх в этом уравнении определяются из уравнений (295)
и (296).
При помощи уравнения (298) на фиг. 152 и 153 построены кривые,
иллюстрирующие соотношение между -г- и 5 для тех же условий движения автомобиля
по первой переходной кривой, которые были приняты при построении фиг. 151.
На фиг. 153, кроме того, нанесены горизонтали МР и QT, тождественные
одноименным горизонталям на фиг. 152 и соответствующие жестким колесам.
При условии яС2 > #Ci (Фиг- 152) скорость -jt ПРИ эластичных колесах (и при
движении автомобиля по первой переходной кривой) весьма быстро уменьшается
и даже становится отрицательной.
При условии #С2 <С ^ч (фиг. 153) та же скорость -- весьма быстро
увеличивается. При жестких колесах скорость — остается постоянной.
При движении автомобиля по участку постоянного радиуса /?0 угловая
скорость <о автомобиля, равная — , остается постоянной (v = const), а угловое
"о
ускорение -тт — 0.
В этом случае при жестких колесах угол а поворота управляемых колес
остается постоянным (горизонталь PQ на фиг. 151), а ускорение -^ = 0 (отрезок
S3S4 оси абсцисс на фиг. 152 и 153). При колесах же, обладающих брковой
эластичностью, угол а и ускорение -г получаются переменными.
Пользуясь уравнением (264), получим для этого случая: * ^;I •INt*>
Коэфициенты С и D в этом уравнении определяются из выражений (265")
и (265'"). Пользуясь этими уравнениями, получим: а •лшшго/.Н
jg-+P'a-r = 0. (300)
Коэфициенты Р' и Т в этом уравнении определяются из выражений:
^2 ' *^0^
^длсчуи'птаятооэ tJc бет/
196
Управляемость автомобиля
Интеграл диференциального уравнения (300) имеет вид:
(303)
0,035
0,030
0,025
0,020
0,015
0,010
0,005
О
0,005
0,010
0,015
0,021?
0,025
0,030
0,035
м2
м
/
j
i
i-40
i
I /
I /
i 1-30
/
' "40
"30
0^20
s, s2 s;
\
\
fi \
\
\
A
\
ч
\
^-
40 40 60 80 1С
-- ч
10 120
Q
fii S5 160 180 200 220 2W Sm
's* JO
,30
, АО
\ \
h\-N
\
V
\itO
r/
7
/
20 ,^-
■■^30
_
6
da
Фиг. 153. Изменение скорости^ поворота управляемых колес в зависимости от пути S,
пройденного автомобилем с эластичными (пунктирные кривые) и жесткими (сплошные)
колёсами при движении его с разной скоростью v = 10, 20, 30 и 40 м/сек на повороте
постоянного радиуса RQ = 600 м и при условии #С2 < Кг.
Входящие в это уравнение коэфициенты k и q определяются из выражений:
(00!,)
(Ш\
(304)
($>ЛрЯ определения коэфициента с[ задаемся начальными условиями. Значение
угла аь соответствующее началу движения автомобиля по кривой постоянного
Влияние боковой эластичности колес на управление автомобилем 197
радиуса /?0, определяется или из уравнения (297) или непосредственно по
фиг. 151. Таким образом,
С; = а1-?=а1--р. (305)
Уравнение (303) может быть представлено также в виде (v = const):
а=с[е v +q. (306)
При помощи уравнения (306) на фиг. 151 построены кривые PXQX (для
аС2 > #Ci) и кривые P2Q2 (для аС2 < #Ci), иллюстрирующие изменение угла а
поворота управляемых эластичных колес за время движения автомобиля по кривой
постоянного радиуса. Согласно фиг. 151 при движении автомобиля с эластичными
колесами по кривой постоянного радиуса Ro угол а изменяется тем интенсивнее,
чем выше скорость v, и стремится к значению, определяемому уравнением (290).
da
Для определения скорости -.- поворота управляемых колес при движении
автомобиля по кривой постоянного радиуса можно использовать уравнение (303).
Диференцируя это уравнение по времени, получим:
^.= kC[ekt = kC[e v . (307)
При помощи уравнения (307) на фиг. 152 и 153 построены кривые,
иллюстрирующие изменение скорости ~ при движении автомобиля по участку
постоянного радиуса Ro.
В обоих случаях (aC2>&Ci и #С2 < ££i) скорость ^ (ее абсолютное значение)
уменьшается по мере движения автомобиля, стремясь в пределе к нулю.
При жестких колесах скорость -г равна нулю (участок 536"4 оси абсцисс).
После движения по кривой постоянного радиуса автомобиль переходит на
вторую переходную кривую. Согласно принятому условию при движении автомобиля
d<s>
по этой кривой угловое ускорение -тт остается постоянным по своей абсолютной
величине и имеет отрицательное значение.
Пользуясь уравнением (292), находим для этого случая:
± I
dt ~
и ! (308)
, dd) . тт 9.J. \
ш == со° + It t= ш° "" Hv ^ I
где ш0 — угловая скорость, соответствующая концу участка постоянного радиуса.
В результате, пользуясь уравнением (291) и подставляя в него выражения для
скорости (о и ускорения -=- из уравнений (308), получим
*L + pia — Qlt-Tl = O. (309)
Входящие в это уравнение коэфициенты Рх, Qt и Тг определяются из
выражений:
р =^L_; (309)
1 £2aMv ' v /
Q _ ( f _ <** ~ ЬСг\ Qr
^x V Z%A4av2 ^a / ' \ /
198 Управляемость автомобиля
Общий интеграл этого уравнения имеет вид:
o. = C1ekt^rpt+q. (310)
Входящие в это уравнение коэффициенты ky р и q определяются из
выражений:
ь — р .
Коэфициент Сх в уравнение (310) определяется из начальных условий движения.
Принимая при этом угол поворота управляемых колес при начале движения
автомобиля по второй переходной кривой (t = 0) равным о^ и пользуясь
уравнением (310), находим:
Сг=а,-? = а, р^-- (312)
Угол а., может быть определен из уравнения (306) или при помощи
фиг. 151.
Уравнение (310) определяет зависимость угла а от времени t\ наряду с этим
можно определить зависимость угла а от пути 5, пройденного автомобилем по
второй переходной кривой (v ~ const):
а = Сге v +p± + q. (313)
При помощи уравнения (313) на фиг. 151 построены кривые, иллюстрирующие
изменение угла а при движении автомобиля по второй переходной кривой'при
условии аС2 > 6Ci (кривые Q^) и при условии аС2 < Кх (кривые Q2r2).
При наличии у автомобиля эластичных колес его управляемые колеса при
окончании второй переходной кривой (точка £5) не находятся в нейтральном
положении, как при жестких колесах, а отклоняются от него: при аС2 > £СХ от центра, а
при #С2 < &Сх к центру поворота на тем больший угол, чем выше скорость
движения автомобиля.
Таким образом, при выходе автомобиля с эластичными колесами со второй
переходной на прямую (отрезок SbS6 на фиг. 151) необходимо продолжать
поворот управляемых колес. Соответствующая этому условию зависимость между
углом а поворота колес и временем / или путем S может быть найдена при
помощи уравнения (264). Так как при этом условии угловая скорость а) равна
du> d2ca
нулю, а следовательно, равны нулю производные — и -— , то, пользуясь
уравнениями (264) и (265"'), получим:
+ 0
Интеграл этого уравнения определяется из выражения:
а=С2ем. (315)
Входящий в это уравнение коэфициент k определяется из выражения:
4 (316)
а постоянная С2 определяется из начальных условий движения автомобиля по
прямолинейному участку. Принимая соответствующее этому моменту значение
угла а = а3, получим С2 -— а3.
Влияние боковой эластичности колес на управление автомобилем 199
Угол сс3 может быть определен при помощи уравнения (313) или
непосредственно по фиг. 151.
В результате уравнение (315) примет вид:
а = а8еЛГ=а3е . (317)
При помощи уравнения (317) на фиг. 151 построены кривые Тгиг (при
аС3 > Кх) и кривые Г2£/9 (при аС2 < Ь^х).
Для определения зависимости между скоростью ■£ поворота управляемых
колес и путем S, проходимым автомобилем с эластичными колесами при движении
его пб второй переходной кривой, пользуемся уравнением (310). Диференцируя
это уравнение по времени, получим:
~ == kCxekt + р = kCxe v + р. (318)
Входящие в это уравнение коэфициенты &, р и Сг определяются из
уравнений (311) и (312).
При помощи уравнения (318) на фиг. 152 и 153 построены кривые Q1T1
(при аС2 > Кх) и Q2T2 (при аС2 < &Cl), иллюстрирующие изменение скорости —а-
поворота управляемых колес при движении автомобиля по второй переходной
кривой.
При дальнейшем движении автомобиля по прямолинейному участку пути
управляемые колеса должны поворачиваться. Соответствующую этому условию
скорость -j можно определить из уравнений (317); диференцируя его по времени, получим:
£=kaae*t=ktiae v . (319)
При помощи уравнения (319) на фиг. 152 и 153 построены кривые T1U1
(при аС2 > &Ci) и T2U2 (при а£2 < #Ci).
Из рассмотрения фиг. 151 —153 следует, что боковая эластичность колес
значительно усложняет управление автомобилем.
Особенно неудовлетворительный результат получается при условии а С2 > b ^x
и при повышенной скорости движения автомобиля. В этом случае характер
поворота управляемых колес (фиг. 151 и 152) получается особенно сложным.
С точки зрения облегчения управления автомобилем лучший результат
получается при условии а£2 = ^Ci- В этом случае кривые М^^Т^^ на фиг. 151 и
152 приближаются к ломаной линии MPQT, соответствующей жестким колесам
автомобиля.
На фиг. 154 и 155 приведены графики для угла а (фиг. 154) и скорости
-^ (фиг. 155) поворота управляемых колес, соответствующие условию (аС2 — Ь£г).
Построение кривых (пунктирных) на этих графиках произведено при помощи
полученных выше уравнений, причем разность аС2 — Ь^г принята равной нулю.
На фиг. 154 и 155 также нанесены прямые MP.PQ и QT, соответствующие жестким
колесам. Протекание кривых, соответствующих жестким и эластичным колесам,
получилось весьма близким, т. е. при этом значительно облегчается управление
автомобилем с эластичными колесами.
Из приведенных выше данных о влиянии боковой эластичности шин на
управляемость автомобиля следует, что при наличии большой радиальной
эластичности шин необходимо стремиться к уменьшению их боковой эластичности.
Однако уменьшение боковой эластичности шин до нуля также нецелесообразно
по следующим двум причинам. Во-первых, благодаря боковой эластичности шин оба
управляемых колеса при повороте автомобиля получают чистое качение (благо-
200
Управляемость автомобиля
даря боковому уводу) даже в том случае, если рулевая трапеция не обеспечивает
точного поворота каждого из колес. Во-вторых, боковая эластичность шин
снижает то усилие, которое необходимо приложить к рулевому колесу при
повороте автомобиля, особенно при движении последнего с малой скоростью.
арад
0,005
Sm
0,005
20\А
on X-zS
my
<
20
h
20
4t
SIAo
1 6
0
8
0
.10
0
С
Q
120
wo
7
$6
40
Фиг. 154. Изменение угла а поворота управляемых колес в зависимости от п)ти S,
пройденного автомобилем с эластичными (пунктирные кривые) и жесткими (сплошные) колесами
при движении его с разной скоростью v = 10, 20, 30 и 40 м/сек на повороте постоянного
радиуса Ro~ 600 м и при условии яС2 = Kv
Хорошо известно, что при автомобиле, стоящем неподвижно, повернуть
управляемые колеса очень трудно, так как при этом необходимо преодолеть трение
между этими колесами и опорной поверхностью. При движении автомобиля по-
^г рад/сек
0,015
0,010
0,005-
0
0,005-
0,010
0,015х-
м
м
у*
J30
0
s s s
п
п
р7
Р
20 40 60 80 100 120 *"
10^20
кзо \о
0
о;
10 Si
^^20
^30
Л —
\о
10 20
30 40 \
IU-L-A
140 160 180 £р 5
Т
■ъ
;
м
. da. pad/сек
da
Фиг. 155. Изменение скорости -г, поворота управляемых колес в завиашости от пути S,
пройденного автомобилем с эластичными (пунктирные кривые) и жесткими (сплошные)
колесами при движении его с различной скоростью v = 10, 20, 30 и 40 м/сек на повороте
постоянного радиуса Ro = 600 м и при условии яС2 = Кг.
ворот колес требует значительно меньшей силы, что обусловливается влиянием
боковой эластичности колес; в этом случае обод колеса под влиянием силы,
приложенной к рулевому колесу, поворачивается относительно отпечатка шины на
опорной поверхности, и колеса катятся вбок, т. е. получается явление,
аналогичное боковому уводу управляемых колес.
При увеличении радиальной эластичности шин, что весьма желательно для
увеличения плавности движения автомобиля, возрастает и боковая эластичность
шин, что нежелательно. Для уменьшения боковой эластичности шин при сохра-
Влияние бокового ветра на управляемость автомобиля 201
нении их радиальной эластичности следует делать шину более плоской и
увеличивать ширину обода колес; поэтому на новых отечественных автомобилях
применяются колеса с весьма широким ободом.
§ 4. ВЛИЯНИЕ БОКОВОГО ВЕТРА НА УПРАВЛЯЕМОСТЬ АВТОМОБИЛЯ
Во всем предыдущем исследовании вопроса об управляемости автомобиля не
принималось во внимание влияние бокового ветра. При колесах, жестких в
боковом направлении, влияние этого фактора на движение автомобиля весьма
невелико, так как для того чтобы вызвать начало бокового скольжения одной из
осей автомобиля, необходим ветер исключительно большой силы. Некоторое
исключение представляет лишь тот случай, когда боковой ветер дует на
заторможенный автомобиль, колеса которого уже близки к началу проскальзывания
и когда в соответствии с этим требуется очень малая боковая сила для потери
автомобилем его устойчивого движения.
Иное явление получается в том случае, что колеса автомобиля обладают
значительной боковой эластичностью. В этом случае боковой ветер вызывает
боковой увод колес, а следовательно, и осей автомобиля, что может вызвать
значительное отклонение траектории его движения от той, которой соответствует
положение его управляемых колес. В этом случае может начаться поворот
автомобиля при нейтральном положении его управляемых колес, что может привести
к съезду автомобиля с дороги.
Таким образом, боковая эластичность шин значительно затрудняет
управление автомобилем при боковом ветре, особенно при порывистом ветре, когда
обусловленная им боковая сила очень быстро изменяется по величине.
Ниже рассмотрено влияние бокового ветра на устойчивость автомобиля для
случая прямолинейного движения последнего.
Подробное исследование этого же вопроса приведено в работе д-ра техн.
наук Я- М. Певзнера [19].
На фиг. 156 изображена схема автомобиля, движущегося прямолинейно и
в направлении своей продольной оси АВ со скоростью v. При возникновении
бокового ветра на автомобиль начинает действовать результирующая сила Sw
сопротивления воздуха, направленная под некоторым углом р по отношению
к оси АВ. Абсолютное значение силы Sw, а также угла £$, характеризующего
ее направление, зависит от скорости и направления ветра, от скорости движения
автомобиля и, наконец, от размеров и формы автомобиля. При этом, как
показали эксперименты (продувка моделей автомобилей в аэродинамических трубах),
угол р не определяется точно в результате сложения скорости автомобиля и
скорости ветра, а зависит также и от формы автомобиля.
Сила Sw пересекает продольную ось АВ автомобиля в некоторой
точке D (называемой метацентром), расположение которой находится в
зависимости от перечисленных выше факторов, особенно же от формы кузова
автомобиля. Расположение метацентра D на продольной оси автомобиля оказывает
исключительно большое влияние на устойчивость автомобиля при наличии
бокового ветра, так как в зависимости от расположения этой точки при всех прочих
равных условиях изменяется распределение боковой слагающей этой силы по
осям автомобиля, а следовательно, изменяется соотношение между углами
бокового увода передней и задней осей; в результате же этого изменяется угловая
скорость со вращения автомобиля.
Результирующая сила Sw сопротивления воздуха может быть разложена на две
составляющие: силу Pw, направленную вдоль оси АВ, и силу Nw,
направленную перпендикулярно этой оси, как это изображено на фиг. 157. Сила Pw
преодолевается тяговой силой, развиваемой на ведущих колесах автомобиля, и
практически не оказывает влияния на боковую устойчивость автомобиля. Сила Nw
вызывает появление боковых реакций, действующих на переднюю и заднюю оси
автомобиля, и поэтому снижает боковую устойчивость последнего. Эта сила за-
202
Управляемость автомобиля
висит от скорости ветра и направления его по отношению к продольной оси АВ
автомобиля. В соответствии с этим при повороте автомобиля, вызываемом
действием бокового ветра (боковой увод передней и задней осей), сила Nw
изменяется, увеличиваясь или уменьшаясь вместе с увеличением угла а поворота
автомобиля, обусловленного эластичностью шин (при нейтральном расположении
управляемых колес).
Если при указанном на фиг. 157 расположении силы Nw по отношению
к автомобилю последний начинает повертываться таким образом, что передняя
ось перемещается в направлении действия этой силы на большую величину, чем
задняя, т е. если автомобиль начинает поворачиваться по часовой стрелке (если
смотреть на него сверху), то угол р при этом увеличивается, в соответствии
с чем увеличивается и сила Nw. При обратном направлении вращения автомобиля
сила Nw уменьшается. Согласно экспериментальным данным зависимость боковой
силы Nw от различных влияющих на нее факторов получается весьма сложной.
Фиг. 156. Схема, иллюстрирующая дей-
ствие на автомобиль бокового ветра.
Фиг. 157. Схема сил, действующих на авто-
мобиль под влиянием бокового ветра.
Однако при малых значениях угла а поворота автомобиля силу N^ можно принять
изменяющейся прямолинейно в зависимости от угла а, т. е.
Nw^Nm+ko, (320)
где Nw0 — значение силы Nw при о = 0;
k — постоянный коэфициент пропорциональности.
При малых значениях угла а положение точки D пересечения силы Sw с осью АВ
(фиг. 156) может быть принято постоянным. В результате при указанных
допущениях можно найти уравнения, характеризующие движение автомобиля и,
в частности, его угловую скорость вращения ш в зависимости от
первоначального значения силы Nw и конструкции автомобиля.
На фиг. 158 изображена схема сил, моментов и реакций, действующих на
автомобиль при движении его с нейтрально расположенными передними
управляемыми колесами и при воздействии на пего бокового ветра (сила Nw).
Направление момента инерции Mj принято соответствующим ускоренному вращению
автомобиля.
Схема движения автомобиля, изображенная на фиг. 158, является аналогичной
схеме, приведенной на фиг. 49. В соответствии с этим полученные ранее
уравнения (42) и (43) для нормального (jcn) и тангенциального (JCt) ускорений центра
тяжести автомобиля применимы и для рассматриваемого случая. Точно так же
сохраняют свою силу и уравнения (44) и (45) для нормальной N и
тангенциальной Т сил инерции, которые следует приложить к центру тяжести автомобиля
для того, чтобы рассматривать последний как бы находящимся в равновесии.
Пользуясь фиг. 158 и уравнениями (44) и (320), находим:
N^—ka. (321)
Реакции F5 и Y1 могут быть определены через углы о2 и ох [уравнение (50)]
бокового увода, которые определяются из уравнения (55). Однако в связи с тем,
что в данном случае рассматривается движение автомобиля с нейтральным распо-
Влияние бокового ветра на управляемость автомобиля
203
ложением управляемых колес, следует в уравнении (55) для угла
принять
угол а = 0. Таким образом, реакции Y2 и Уг определяются из уравнения (56),
если принять в них угол а = 0.
В результате, пользуясь уравнениями (56) и (321), получим уравнение для нор-
dvCn
мального ускорения центра тяжести автомобиля:
dt
Это уравнение
является аналогичным
уравнению (58), но в нем
отсутствует член,
зависящий от угла а поворота
управляемых колес, и
имеется член,
учитывающий влияние бокового
ветра.
Уравнение (322)
устанавливает первую
зависимость между ускорением
dvA
Сп
dt
центра тяжести
автомобиля и угловой
скоростью о) вращения
автомобиля. Для получения
второго уравнения,
устанавливающего зависимость
между теми же
величинами, рассматриваем
равновесие системы по
отношению к вертикальной
оси, проходящей через
центр тяжести С
автомобиля. При этом,
пользуясь фиг. 158 и
уравнением (320), получим:
м
(322)
Фиг. 158. Схема сил, реакций и моментов, действующих на
автомобиль при движении его с нейтрально
расположенными управляемыми колесами и при воздействии на него
бокового ветра.
Уф = Yxa —
(Nwo + ka) d.
(323)
Подставляя в это уравнение выражения для боковых реакций У2 и Уг из
уравнения (56) и принимая угол а = 0, получим:
dt С1С0 V CiCo V
Определяя из этого уравнения скорость vqu , находим:
ka) (K^u
(324)
Беря производную от скорости vcn по времени t и принимая при этом
скорость v движения автомобиля постоянной (v = const), находим:
A
_
dt
(325)
204 Управляемость автомобиля
dvCn
Исключая из уравнений (322), (324) и (325) скорость vcn и ускорение—~
и заменяя угловую скорость со вращения автомобиля ее значением ~ , получим
уравнение, характеризующее изменение угла а вращения автомобиля при
рассматриваемых условиях его движения:
AL —- ~\~ В1 —■ + С2 — + D+p -±-Е1= 0. (326)
Входящие в это уравнение коэфициенты А1У Въ CXJ Dx и Ех определяются
из выражений:
Ai =C1CaiWp2f; (326')
+ ЬКг) + (d + С2) р2; (326")
Д^;-^Л _ ^dC^; (326 ")
С2 + С,) й] 4-; (326"")
, ^Ci) (Сх -, ^2/ "*J Д|
Общий интеграл этого уравнения имеет вид:
а = Cxe*J + Сге*4 + Czek* + qy (327)
где С\, С2 и С3 — постоянные, определяемые начальными условиями движения
автомобиля;
&!, /г2 и /г3 — корни характеристического уравнения.
Частный интеграл уравнения (326) определяется из выражения:
J = 67 = — ТГ = г-2" • V^528^
Подставляя это выражение для q в уравнение (327), получим:
(329)
Если один из корней kv k2 или k3 характеристического уравнения имеет
положительное значение, то угол о стремится к бесконечности, т. е. движение
автомобиля получается неустойчивым.
Если все корни &l5 k2 и k3 имеют отрицательное значение, то угол а
стремится к некоторому постоянному значению, равному — -~ , или, пользуясь
уравнением (320), получим, что при этом сила Nw = 0, т. е. что направление
движения автомобиля стремится совпасть с направлением ветра.
Если принять, что в уравнении (326) коэфициент Dx — 0, а следовательно
[см. уравнение (З26'г/")], и коэфициент Ег = 0, то уравнение примет вид:
A d*a -L.R — 4- С — - 0
или
А + в
Общий интеграл этого диференциального уравнения имеет вид:
ш= C^'V+C^V. (331)
Влияние бокового ветра на управляемость автомобиля
205
При этом корни характеристического уравнения определяются из выражений:
(332)
Для того чтобы угловая скорость to стремилась к нулю, а угол а — к
некоторому конечному значению, необходимо, чтобы коэфициент Су в уравнении (330)
имел положительное значение. Таким образом, для того чтобы автомобиль при
воздействии на него бокового ветра стремился к устойчивому положению,
необходимо выполнение двух условий:
x = 0, или аС2 — ^ = (С2 + С2) d;
С, > 0, или (аК2 + ЬК,) |^- -
_ (аСз _
(
_ ЫС^ > 0.
Пользуясь уравнением (333), получим:
— d
= -~-, или а =
(333)
(334)
(335)
Отсюда следует, что для обеспечения устойчивого движения автомобиля
в этом случае необходимо, чтобы равнодействующая сила ветра пересекала
продольную ось АВ автомобиля в точке (метацентр), отстоящей от осей автомобиля
на расстояниях, прямо пропорциональных коэфициентам бокового увода осей.
Пользуясь уравнением (334), получим:
или
М
- Ki) 4-
(336)
Это выражение весьма близко к выражению для критической скорости vK2
[уравнение (286)]. Если принять в уравнении (336) коэфициент k = О, то
получим уравнение (286).
Таким образом, действие бокового ветра понижает критическую скорость
автомобиля, после превышения которой начинается неустойчивое движение
автомобиля.
В автомобилях обычной формы
уравнение (335) обычно не соблюдается; точка
пересечения силы Nw с продольной осью
автомобиля (или метацентр) обычно
располагается значительно ближе к передней
оси по сравнению с тем, как это требуется
для соблюдения уравнения (335).
Несоблюдение указанного требования особенно
сильно проявляется при обтекаемой форме
автомобиля. Для уничтожения этого
дефекта иногда устанавливают в задней
смещает назад точку приложения силы Nw, хотя одновременно с этим и несколько
увеличивает силу Nw. На фиг. 159 показана схема такого кузова.
Фиг. 159. Схема автомобиля с
установкой стабилизатора в задней части
кузова.
части кузова стабилизатор, который
206
Управляемость автомобиля
Для максимального повышения критической скорости vK3J так же как и для
повышения критической скорости vK2 [уравнение (286)], следует соотношение
аС2 — 6Ci иметь возможно малым или даже отрицательным.
§ 5. ВЛИЯНИЕ БОКОВОГО НАКЛОНА ДОРОГИ НА УПРАВЛЯЕМОСТЬ
АВТОМОБИЛЯ
• L -
При движении автомобиля по дороге, имеющей боковой наклон, на оси
автомобиля действуют боковые силы: Gx sin (3 на переднюю ось и G2 sin (S на заднюю
ось, где $ — угол наклона дороги к горизонтали (фиг. 160).
Боковые силы вызовут боковой увод
колес передней и задней осей, и для
того чтобы автомобиль двигался
прямолинейно вдоль уклона (как это показано
стрелкой на фиг. 160), необходимо
управляемые колеса повернуть на некоторый
угол а; продольная ось автомобиля при
этом расположится под некоторым углом
к направлению своего движения.
Угол Ь бокового увода задних колес
определится из выражения:
Фиг. 160. Схема, иллюстрирующая
возникновение боковых сил при движении
автомобиля по дороге, имеющей
боковой наклон.
82 = С2к2 = C2G -*- sin p,
где С2 — коэфициент бокового увода обоих задних колес.
Угол 8Х бокового увода передних колес определяется из выражения
= ^i^i = ^G^ sin [
где Ci—коэфициент бокового увода обоих передних колес.
Фиг. 161. Схема поворота управляемых колес,
соответствующая условию &2>&i (или C>K)
(337)
(338)
Для того чтобы задние колеса автомобиля двигались прямолинейно и
параллельно направлению дороги, необходимо продольную ось автомобиля повернуть
на угол увода §2. Такой поворот автомобиля изображен схематически на фиг. 161,
где дан вид на автомобиль сверху; при этом точка А (середина задней оси
автомобиля) будет двигаться прямолинейно и параллельно направлению дороги.
Для того чтобы передние колеса автомобиля также двигались прямолинейно
и параллельно направлению дороги, их необходимо расположить под углом Ьг
Стабилизация управляемых колес 207
к направлению движения автомобиля. Таким образом, угол а поворота передних
управляемых колес равен разности между углами 82 и ^ или а = —j-± (а С2 — & Сх).
На фиг. 161 изображена схема поворота управляемых колес, соответствующая
тому условию, что угол 82 бокового увода задних колес больше угла 8Х бокового
увода передних колес, или [уравнения (337) и (338)], когда имеется
соотношение аС2 > £СГ
При условии аС2 < КшХ управляемые колеса необходимо повернуть в обратном
направлении.
§ 6. СТАБИЛИЗАЦИЯ УПРАВЛЯЕМЫХ КОЛЕС
Управляемость автомобиля в большой мере зависит от стабилизации
управляемых колес, т. е. от их стремления сохранять нейтральное положение и возвращаться
в него, если они из него выведены под влиянием случайных сил или при повороте
рулевого колеса.
Чем лучше стабилизация управляемых колес, тем легче управление
автомобилем, тем меньшее внимание требуется от водителя.
Стабилизация управляемых колес автомобиля достигается, во-первых, при
помощи продольного и поперечного наклона поворотных шкворней и, во-вторых,
благодаря боковой эластичности шин,
установленных на управляемых колесах.
Стабилизирующее действие бокового
наклона поворотного шкворня обусловливается
главным образом тем, что в этом случае при
выводе управляемых колес из их нейтрального
положения происходит подъем передней оси,
а следовательно, и передней части
автомобиля. Таким образом, под влиянием веса
автомобиля управляемые колеса стремятся занять
нейтральное положение.
Наряду с вертикальным перемещением
передней оси автомобиля на стабилизацию управляе- , Л„п ~ .
„ Фиг. 162. Схема бокового наклона
мых колес оказывают влияние действующие на поворотного шкворня и развала колес,
эти колеса реакции — боковые и
тангенциальные. Однако значительное влияние эти реакции, особенно боковые, оказывают
лишь при наклоне поворотных шкворней назад; при боковом же наклоне
шкворней влияние реакций на стабилизацию управляемых колес очень мало, и в
приведенном ниже изложении оно не учитывается.
Впервые этот вопрос был изложен в работе автора [31] и позднее получил
развитие в работах Г. Н. Ковалева [10], Я« М. Певзнера и Ю. А. Когана.
На фиг. 162 изображена схема установки поворотного шкворня правого (если
смотреть по ходу автомобиля) переднего колеса автомобиля. При этом ось NN
шкворня наклонена вбок под углом (3. Буквой Хо на той же ФигУРе обозначен
угол наклона колеса при нейтральном его положении (угол развала). Согласно
схеме, приведенной на фиг. 162, при повороте поворотной цапфы, а следовательно,
и колеса из его нейтрального положения колесо стремится двигаться вниз; но
в связи с наличием опорной поверхности 5 — s будет происходить подъем
поворотной цапфы, а следовательно, и правого конца передней оси.
При повороте колеса последнее будет перекатываться по опорной
поверхности s — s, причем радиус р шины может быть приближенно принят постоянным.
Таким образом, вертикальное перемещение поворотной цапфы будет
определяться радиусом гг колеса, представляющим собой расстояние от его оси до
центра окружности протектора с учетом деформации шины.
Соответствующая этому условию схема установки колеса на правом конце
передней оси автомобиля изображена на фиг. 163. Здесь А — центр колеса, а
О — точка пересечения оси поворотной цапфы с осью NN поворотного шкворня.
208
Управляемость автомобиля
Пунктирными линиями на фиг. 163 показано положение системы после поворота
цапфы на 180°. Нижняя линия на фиг. 163 располагается выше опорной плоскости
на величину р.
Предположим, что цапфа повернута на некоторый угол ср, после чего центр
колеса занял положение G. Более наглядно это показано на фиг. 164, где
конус OAU показан в перспективе.
L В
~\
Те
Фиг. 163. Схема, иллюстрирующая поворот управляемого колеса при наличии
углов бокового наклона поворотного шкворня (р) и развала колес (•/.)•
Согласно схеме, приведенной на фиг. 163, вертикальное перемещение центра А
колеса при этом получается равным отрезку т, или величине bc-\-ce — bd.
Пользуясь фиг. 163 и 164, находим:
be = AG sin $ = (AF — GF) sin 4tt = [a cos (х0 + j3) — a cos (х0 + Р) cos ср] sin (3 =
— coscp).
Отрезки bdn се согласно фиг. 163
определятся из выражений:
bd = АВ cos Хо -= гг cos x0;
се — GL cos X —
cos
где х — угол развала колеса,
соответствующий повороту цапфы на
угол ср.
Для определения этого угла на
фиг. 164 через точку А проведена
горизонтальная плоскость, которая
выделяет сечение конуса ART. Из
точки О опущен перпендикуляр ОР
Фиг. 164. Схема, иллюстрирующая положение оси на горизонтальную плоскость ART.
поворотной цапфы, при наличии углов бокового на- £сли далее соединить точку Р с
клона шкворня (В) и развала колес (у) и при пово- „ _. „ у г»п^
роте цапфы на угол ср точкой #> то полученный угол PRO
равен углу х- Пользуясь далее
фиг. 163 и 164, находим окончательное выражение для угла х:
sin х = sin (x0 + $) cos $ — cos (x0 + Р) sin p cos ср.
Отсюда получаем выражение для отрезка се:
се =
- гг V'\ - [sin (xo + P) cos fp
— sin2x ==
cos (Xo + W sin [i cos cp]2.
Стабилизация управляемых колес
209
В результате отрезок т9 характеризующий подъем поворотной цапфы при
повороте колеса на угол <р, определим из выражения:
т = be -f- се — bd = a cos (Xo + (*) sin р (1 — cos cp) -}-
+ rx Vl — [sin (Zo + P) cos p — cos (Xo + W sin (3 cos ?]2 — rx cos Xo. (339)
В этом выражении угол ср представляет собой угол поворота цапфы в
плоскости, перпендикулярной оси NN поворотного шкворня (фиг. 163); он несколько
12
10
8
6
2
—
к6-го
f
|
1
/
7/1
it
и
/ /
10 20 30 в г
39 55J8?' 7l Ъ 19 55,5в,°
Фиг. 165. Подъем Мср середины передней оси автомобиля при повороте
управляемых колес на углы, соответственно равные 6Х и б2 и при
различных значениях углов (J бокового наклона шкворня (см. цифры у кривых)
и развала колес 70 = 0; хо— 1° и *h — 2° {а= 100 мм; гк = 500 мм).
отличается от угла 6 поворота колеса в горизонтальной плоское ги.
углами имеется соотношение:
tg 6 = —Ц~ tg ф.
" rnc ft о *
COS
этими
(340)
При помощи уравнений (339) и (340) может быть определен подъем конца
передней оси, происходящий при повороте одного из ее колес. Соотношение между
углами 0 поворота внутреннего и внешнего передних колес автомобиля
определяется из уравнения (287).
В результате при помощи уравнений (287), (339) и (340) может быть
подсчитан подъем середины передней оси или передней части автомобиля,
соответствующий заданному углу поворота одного из управляемых колес автомобиля. На
фиг. 165 изображены такие графики для трех значений угла Хо Развала колес
и для шести значений угла р бокового наклона шкворня. При этом перемещение
середины передней оси Мср определялось как среднее арифметическое из
вертикальных перемещений обоих колес.
Стабилизация управляемых колес автомобиля при боковом наклоне поворотных
шкворней достигается за счет некоторого увеличения силы, требующейся для
поворота рулевого колеса; это увеличение силы на рулевом колесе, а также значение
стабилизирующего момента легко определяются по работе, совершаемой при пово-
Н Е. А. Чудаков, 2232
210
Управляемость автомобиля
Тип
автомобиля
Легковые
Гоузо-
вые
Модель
автомобиля
„Москвич"
ГАЗ-М-1
ГАЗ-М-20
ЗИС-101
ЗИС-110
ГАЗ-АА и
ГАЗ-ММ
ГАЗ-51
ЗИС-5
ЗИС-150
ЯГ-6
ЯАЗ-200
Угол бокового
наклона
поворотного
шкворня ф) в
градусах
7
8
6
8
2,5
7
8
7,5
8
0
8
Угол развала
колес (Xq)
в градусах
• *,7
1
0
1,5
0—1,0
2
1
1,5
1
2,283
1
Угол наклона
поворотного
шкворня
назад (y) в
градусах
0
3
0
1,5
1,25
3,5
2,5
1,5
1,5
0
2,5
роте колес, из выражения: ^—G1, где ш' и т" — вертикальные перемещения
концов передней оси [уравнение (339)], a Gt —суммарный вес автомобиля,
приходящийся на переднюю ось.
В современных автомобилях угол ^ бокового наклона поворотного шкворня
принимается сравнительно малым. В табл. 7 приведены значения угла (J для
автомобилей советского про-
Таблица 7 изводства — грузовых и
Углы установки передних колес автомобилей легковых, а также
значения угла io развала колес.
При наличии
бокового наклона поворотных
шкворней на
стабилизацию управляемых колес
оказывают некоторое
влияние также и
боковые реакции У[ и Y"
действующие на эти
колеса при выходе их из
нейтрального положения.
Однако влияние боковых
реакций в этом случае
получается весьма малым,
так как они создают
моменты, действующие на
поворотные цапфы
внутреннего и внешнего
колес в противоположных
направлениях.
При наклоне поворотных шкворней назад боковые реакции V и У",
возникающие при выходе управляемых колес из нейтрального положения, действуют
на поворотные цапфы в одном направлении, что обеспечивает интенсивную
стабилизацию управляемых колес.
На фиг. 166 изображена схема
установки поворотного шкворня NN с
наклоном назад под углом f к вертикали.
Согласно приведенным выше данным на
каждое из передних колес автомобиля от
опорной поверхности действует боковая реакция Y
в направлении к центру поворота
автомобиля; эти реакции стремятся повернуть
колеса в направлении их нейтрального
положения, что и обусловливает
стабилизирующее действие наклона назад поворотного
шкворня.
Схема, изображенная на фиг. 166, не
учитывает эластичности шины, поэтому точка
опоры шины принята расположенной на одной вертикали с центром колеса.
Стабилизирующий момент при этом для одного колеса получается равным YKcf
где с — плечо приложения реакции Ук но отношению к оси шкворня NN.
В действительности, благодаря эластичности шины при повороте колеса точка
опоры колеса (точнее точка приложения равнодействующей боковой реакции)
несколько сдвигается назад, что вызывает увеличение отрезка с, а следовательно,
увеличение стабилизирующего действия боковой реакции YK.
Поэтому даже при отсутствии угла *у наклона поворотного шкворня назад
боковая реакция обеспечивает появление значительного стабилизирующего момента.
Фиг. 166.,, Схема наклона назад
поворотного шкворня.
Стабилизация управляемых колес 211
По этой же причине по мере повышения эластичности автомобильных шин
угол f наклона назад поворотного шкворня уменьшали, и в современных
автомобилях он имеет сравнительно малое значение. В табл. 7 приведены значения
угла -у для автомобилей советского производства.
Чрезмерно большое значение угла -у, повышая стабилизацию управляемых
колес автомобиля, одновременно с этим увеличивает силу, которую необходимо
приложить к рулевому колесу для поворота автомобиля. Кроме того, автомобиль
в этом случае при движении по дороге с поперечным наклоном особенно сильно
стремится двигаться под уклон.
Значение боковой реакции YK, входящей в приведенное выше выражение Укс
для стабилизирующего момента, определяется на основании уравнения (70). При
эластичных колесах реакцию YK можно приближенно принять равной 0,5 Уг. Таким
образом, при том же положении управляемых колес и при заданном значении
радиуса R поворота автомобиля стабилизирующий момент зависит от скорости v
автомобиля, а также от скорости и от направления поворота управляемых колес.
При наклоне поворотных шкворней назад на стабилизацию управляемых колес
оказывает также некоторое влияние и вертикальное перемещение передней части
автомобиля, вызываемое поворотом управляемых колес. Однако этот фактор
в данном случае (в противоположность боковому наклону шкворней) не оказывает
сколько-нибудь заметного влияния на стабилизацию управляемых колес. Это
объясняется тем, что при наклоне шкворней назад и при повороте управляемых
колес один конец передней оси (соответствующий внутреннему колесу)
поднимается, а другой конец (соответствующий внешнему колесу) опускается. Как
показали расчет и эксперимент, центр оси при этом сохраняет примерно неизменное
положение в пределах поворота колес на 15—20°.
Влияние боковой эластичности шины на стабилизацию управляемого колеса
может быть объяснено на основании приведенных выше данных о качении
эластичного колеса. При повороте управляемых колес возникают боковые реакции,
которые вызывают боковой увод колес. В результате каждое из управляемых колес
катится под некоторым углом 8 к своей плоскости, а отпечаток шины принимает
вид, изображенный на фиг. 17. Элементы шины, соответствующие задней (по
отношению к направлению качения колеса) части отпечатка, получают значительно
большую боковую деформацию и воспринимают значительно большую часть боко-
ной реакции, нежели элементы шины, соответствующие передней части отпечатка.
В результате равнодействующая боковая, реакция Ук сдвигается назад по
отношению к оси колеса. Благодаря этому создается стабилизирующий момент аналогично
тому, как он создается при наклоне поворотного шкворня назад.
Для определения возникающего при этом стабилизирующего момента в
автомобильной лаборатории Академии Наук был проведен специальный эксперимент.
Схема использовавшейся при этом установки изображена была на фиг. 18.
Колесо, установленное шарнирно при помощи поворотного шкворня 7,
расположенного вертикально в его средней плоскости, опирается на беговой барабан 18,
приводимый во вращение электродвигателем. Шкворень 7 закреплен на валу 5У
связанном с рамой 3. Эта рама может повертываться по отношению к раме 2,
шарнирно закрепленной в опоре /.
Стабилизирующий момент определяется при помощи гидравлических
динамометров 12. Угол поворота колеса по отношению к плоскости вращения барабана
измеряется с высокой точностью, для чего использовано световое устройство 11,
связанное непосредственно с колесом.
Результаты эксперимента изображены графически на фиг. 167 и 168. Здесь
по оси абсцисс отложен угол поворота колеса по отношению к плоскости
вращения бегового барабана, т. е. угол бокового увода (в градусах), а по оси ординат —
стабилизирующий момент Мстп в кгм.
Согласно полученным данным по мере повышения угла 8 бокового увода
колеса весьма быстро возрастает стабилизирующий момент M(fn. При этом
стабилизирующий момент увеличивается при повышении действующей на колесо радиаль-
212
Управляемость автомобиля
ной нагрузки ZK и при уменьшении давления воздуха в шине, т. е. при
увеличении эластичности последней.
. Для объяснения характера изменения стабилизирующего момента Мст в
зависимости от угла увода о на фиг. 169 изображена примерная схема,
иллюстрирующая качение шины по беговому барабану. От барабана к колесу передается сила,
которая может быть разложена на две: 7^, действующую в плоскости колеса и
Ук — перпендикулярно этой плоскости. По отношению к оси О поворотного
шкворня эти силы создают момент Мст, который согласно фиг. 169 определится
?vr Игм из выражения:
12
10
i
■
/
/
A
/
—
/
z
^*-
*•*
___
■г*
r
I
——f—ht
u
Г1
^—.
j
A—.
-
!
|
где с и /—плечи сил YK и Тк но
отношению к оси О.
Мткгм
n \ i \ \ \ i i x \ t / j' 4 5
° 1 J f 4 5 6""
!Фиг. 167.' Результаты эксперимента по опре- Фиг. 168. Результаты эксперимента по
определению величины стабилизирующего мо- делению величины стабилизирующего ^
момента Мстг возникающего при наличии
бокового увода 5 управляемых колес, снаб-
оо у ур ,
женных шипой 7,00—16" и при давлении
й 1 В
д ру
мента Мст, возникающего при наличии
бокового увода о управляемых колес, снабженных
шиной 7,00—16" и при давлении воздуха в ней
' 2 В
воздуха в ней pw == 1 amu. Вертикальная pw'« 2 amu. Вертикальная нагрузка на колесо:
нагрузка на колесо равнялась:
4 —
-ZK = 35Q кг; 3-ZK^
424 кг; 5~ Z := 507 кг.
кг;
__ZK-= 302 кг; 2-ZK^ 350 кг. 3 - ZK~ 389 кг;
4— г„-=^ 424 кг; 5 — Zu~ 507 кг.
При очень малых углах 8 сила Тк весьма мала; при увеличении же угла о
сопротивление качению колеса возрастает весьма быстро, и момент TJ,
направленный противоположно моменту YKc, а следовательно, противоположно
стабилизирующему моменту Мстп, начинает заметно уменьшать последний.
Фиг. 167 и, 168 соответствуют испытанию ведомого колеса. Экспериментальная
установка (см. фиг. 18) допускала также проведение испытания при
затормаживании колеса. Для этого колесо было снабжено механическим тормозом.
На фиг. 170 приведен результат испытания колеса (с той же шиной
размером 7,00—16") при его торможении. По оси абсцисс отложен тормозной момент Мт,
а по оси ординат — стабилизирующий момент Мст-
На фиг. 171 приведен результат аналогичного испытания колеса (шины), но
при этом было принято несколько постоянных значений для тормозного момента Mr,
а изменялся угол о.
, Согласно фиг. 170 и 171 тормозной момент Мт, передаваемый через
управляемые колеса автомобиля, значительно уменьшает положительное влияние боковой
эластичности шины на стабилизацию управляемого колеса. Такое отрицательное
влияние тормозного момента проявляется не только при повышенных углах 8
бокового увода, .но также и при малых его значениях. В обоих случаях при
значительном тормозном моменте (выше 25—30 кгм) стабилизирующий момент
уменьшается, до нуля, и далее становится отрицательным.
.-Такое действие тормозного момента объясняется возрастанием силы Тк (см.
фиг. 469), которая выводит колесо из равновесия.
Стабилизация управляемых колес
213
с2 и /2
Для пояснения происходящего при этом явления при двух управляемых колесах
автомобиля на фиг. 172 изображена схема передней оси, движущейся при пЬвер-
нутых вправо колесах. Благодаря боковой эластичности колес площадки
соприкосновения их шин с опорной плоскостью будут сдвинуты,
как это утрированно показано на схеме жирными
линиями. При этом суммарный стабилизующий момент
относительно поворотных шкворней обоих колес определился
из выражения:
Мст = Ук\сх — Тк\1г + Ук2с2 + Тк2 /2>
где УК1 и ТК1 — реакции, действующие на колесо 1;
Укъ и ТК2 — реакции, действующие на колесо 2;
и 1Х — плечи реакций Ук1 и ТК1 для колеса /;
плечи реакций УК2 и ТК2 для колеса 2.
Так "как "площадки соприкосновения шин с опорной
плоскостью сдвигаются для обоих колес в одну сторону,
то плечо 1Х силы ТК1 по отношению к оси поворотного
шкворня колеса / больше плеча /2, соответствующего силе
ТК2 (колесо 2), поэтому результирующий момент от
сил ТК1 и ТК2 является отрицательным и может привести
к нарушению устойчивого движения автомобиля. Чем
больше тормозной момент на передних колесах, тем
больше отрицательный момент от сил ТК1 и ТК2 и тем Фиг. 169. Схема сил, ил-
хуже стабилизация управляемых колес.
Поэтому при интенсивном использовании передних
колес как тормозных, т. е. при значении коэфициента $0
распределения приводной силы по тормозам, близком
к оптимальному [уравнение (243)], необходимо давать поворотным шкворням
наклон, обеспечивающий хорошую стабилизацию управляемых колес.
люстрирующая
изменение стабилизирующего
момента в зависимости
от угла бокового увода.
1
и
Si
5
"44
—
30
f | ;
■—
35 ?
1
I
I
!
г —
Фиг. 170. Зависимость стабилизирующего
момента Мст автомобильного колеса от
тормозного момента МТ, нагружающего
колесо при трех значениях угла бокового
увода: i-S = 3,26°; 2 — & = 5ДГ и 3 —
Ь = 7,88°, давление воздуха в шине — pw~
- 1,5 amu, нагрузка на колесо ZK = 350 кг.
Фкг. 171. Зависимость стабилизирующего
момента Мст автомобильного колеса от
угла бокового увода 5 при четырех значе
ниях тормозного момента: 1—Mj = 0 кгли
2 — Мт=\Ъ кгм\ 3 — Af7 = 25 кгм и 4-
Mj = 35 игл, нагружающего колесо;
давление воздуха в шине—pw-=l,5 amu,
нагрузка на колесо ZK = 350 кг.
Стабилизация управляемых колес иногда нарушается из-за неудачной
конструкции подвески передних колес и привода к ним от рулевого управления.
214
Управляемость автомобиля
Наиболее часто это проявляется в следующем:
а) изменение углов наклона поворотных шкворней при движении по неровной
дороге и при повороте автомобиля;
Фиг. 172. Схема, иллюстрирующая снижение положительного влияния боковой эластичности
шины на стабилизацию управляемых колес при их торможении.
б) поворот управляемых колес при деформации передней подвески;
в) периодическое колебание управляемых колес около поворотных шкворней
(„шимми").
Эти вопросы рассматриваются в курсе „Конструирование и расчет автомобиля".
ГЛАВА V
УСТОЙЧИВОСТЬ АВТОМОБИЛЯ ПРОТИВ ЗАНОСА
§ 1. КРИТЕРИИ ДЛЯ ОЦЕНКИ УСТОЙЧИВОСТИ АВТОМОБИЛЯ
ПРОТИВ ЗАНОСА
Занос автомобиля обычно обусловливается началом бокового скольжения его
задней оси. Боковое скольжение передней оси, если оно возникло по какой-либо
причине, не представляет такой же опасности, так как оно весьма быстро гасится
под влиянием инерции автомобиля. Для иллюстрации высказанного положения на
фиг. 173 изображены две схемы автомобиля, причем схема а соответствует
наличию бокового скольжения задней оси, а схема б — скольжению передней оси.
Здесь V — скорость
движения автомобиля в
направлении его
продольной оси АВ, a vy
—скорость бокового
скольжения оси.
Предполагая, что
колеса автомобиля являются
жесткими, находим
мгновенный центр вращения О
автомобиля. Нормальная
сила инерции N при этом
будет направлена так,
как указано на обеих
схемах фиг. 173 (т. е. от
мгновенного центра
вращения), эта сила и будет
способствовать боковому ^>иг- 173. Схема, иллюстрирующая влияние бокового сколь-
/^птткжрншо чяпней оги и жения заДней оси !«) и передней оси (б) на развитие заноса
скольжению задней оси и автомобиля.
препятствовать боковому
скольжению передней оси, поэтому при последующем изложении вопроса об
устойчивости автомобиля против заноса основное внимание обращено на
устойчивость движения задней ведущей оси автомобиля.
За критерии, характеризующие потерю задней ведущей осью устойчивости ее
движения, принимаются:
1. Для автомобиля с жесткими колесами:
а) начало пробуксовывания внутреннего колеса оси;
б) начало бокового скольжения оси при наличии пробуксовывания ее
внутреннего колеса;
в) начало бокового скольжения оси без предварительного пробуксовывания ее
внутреннего колеса.
2. Для автомобиля, колеса которого обладают боковой эластичностью:
а) начало пробуксовывания и бокового скольжения внутреннего колеса
оси;
216 Устойчивость автомобиля против заноса
б) начало бокового скольжения оси при наличии пробуксовывания и бокового
скольжения внутреннего колеса.
Указанное различие в характере движения жесткик и эластичных колес
ведущей оси при потере последней боковой устойчивости будет пояснено ниже в § 2 и 3.
В качестве измерителя для оценки степени устойчивости задней ведущей оси
автомобиля принимается соотношение между коэфициентами yj2 и ур или между
скоростью v и радиусом R поворота автомобиля, соответствующими началу
нарушения устойчивого движения по одному из указанных выше критериев.
Коэфициент т]2 боковой устойчивости задней оси автомобиля представляет
собой отношение суммарной боковой реакции F2, действующей на эту ось, к весу G2
автомобиля, приходящемуся на ту же ось. Коэфициент ^р тяговой силы, как это
уже указано было • ранее, равен отношению полной суммарной окружной
(тяговой) силы Рр к весу G автомобиля.
Боковая устойчивость задней ведущей оси автомобиля зависит от конструкции
привода к ее колесам, в частности от конструкции диференциала. Все
последующее изложение вопроса соответствует тому условию, что в привод к ведущим
колесам введен шестеренчатый диференциал, обладающий очень малым
внутренним трением, что соответствует наиболее распространенной конструкции
автомобиля. В этом случае можно приближенно принять, что полная суммарная
окружная сила Рр равномерно распределяется по ведущим колесам (k = 0,5)* Более
подробно этот вопрос рассматривается в работах [41 и 46].
§ 2. УСТОЙЧИВОСТЬ АВТОМОБИЛЯ С ЖЕСТКИМИ КОЛЕСАМИ
Начало пробуксовывания внутреннего колеса ведущей оси. Начало
пробуксовывания внутреннего колеса ведущей оси характеризуется тем, что
результирующая реакция (т. е. геометрическая сумма боковой и
тангенциальной реакций) между этим колесом и опорной поверхностью достигает значения,'1
равного силе сцепления. Так как на внутреннее колесо оси всегда действует
меньшая радиальная реакция, то это колесо начинает пробуксовывать раньше
внешнего. В соответствии с этим получим для внутреннего колеса в момент
начала его пробуксовывания:
R2 = <pz£. ;
Так как при этом пробуксовывающее колесо не имеет бокового скольжения, •
то оно не может передать боковой силы, поэтому вся суммарная боковая сила К2
в этом случае передается через одно внешнее колесо, а действующая на
внутреннее колесо результирующая реакция R'2 представляет собой тангенциальную
реакцию Х'г
Соответствующая этому условию схема сил и реакций, действующих на
заднюю ведущую ось автомобиля, изображена на фиг. 174. При этом получим:
/?2 = Х'2 = Рр= 0,5 Рр = 0,5Т/} = cp
Здесь не учитывается коэфициент / сопротивления качению, так как принято,
что автомобиль с жесткими колесами катится по жесткой опорной плоскости.
Пользуясь далее уравнением (163), находим уравнение, характеризующее
начало пробуксовывания внутреннего колеса:
0,5T,G = ? [0,5G2 (l + Ь **)
при этом коэфициент боковой устойчивости задней ведущей оси по началу
пробуксовывания ее внутреннего колеса определится из выражения
При помощи уравнения (341) на фиг. 175 построена прямая AXBV
Устойчивость автомобиля с жесткими колесами
I 1
j
f "
j
,
\
1
i
\
\
\
\
\
i
i
i
! *
!£•
...,
§3u
>мч О
^
^
5$
I
s
I*
а о
1 S.«
4 « в-
0^
s
я
8 Sl||
о 3
о s
8 °
«5Г
Q^4
« 5 ^
w sl«
«=c 6
со о
со «
-I"
5
las
Hi
С 9.
218 Устойчивость автомобиля против заноса
Эта прямая пересекает ось ординат в точке, для которой значение
коэфициента т]'2 определяется из уравнения (341), если в нем принять коэфициент fp =0.
При этом получим:
4=-£г> (342)
Л, it <г
что соответствует началу опрокидывания автомобиля, так как согласно
уравнению (163) при ур = 0 и при указанном значении отношения ^ радиальная
реакция Zr0 = 0.
Приравнивая в уравнении (341) нулю коэфициент т^, определяем значение
коэфициента ^/» соответствующее точке Вх пересечения прямой Л1В1 на фиг. 175
с осью абсцисс:
ъ = т=щ- (343)
При построении фиг. 175 для всех величин, входящих в уравнение (341) и
характеризующих конструкцию автомобиля и условия его движения, приняты
следующие значения:
База автомобиля L — 3 м;
Расстояние от центра тяжести до передней оси автомобиля а = 0,5 L;
Колея автомобиля В = 0,5 L;
Высота расположения центра тяжести автомобиля hg = 0,3 L;
Коэфициент сцепления <р = 0,5.
Эти же значения для указанных величин приняты и при последующих
построениях, иллюстрирующих устойчивость автомобиля.
Согласно фиг. 175 пробуксовывание внутреннего колеса ведущей оси
начинается при определенном значении коэфициента fp окружной силы; при этом чем
больше действующая на ось суммарная боковая реакция Г2 (или коэфициент т]2),
тем этот коэфициент меньше.
Начало бокового скольжения оси при наличии пробуксовывания ее
внутреннего колеса. Приведенная на фиг. 175 прямая А1В1 имеет смысл лишь
между осью абсцисс и определенным значением коэфициентов *\р и Ч^ так как ПРИ
некотором значении последних начинается боковое скольжение оси, после чего
уравнение (341) становится недействительным.
Для определения зависимости между коэфициентами т]2 и fp,
соответствующей началу бокового скольжения оси при наличии пробуксовывания ее
внутреннего колеса, пользуемся схемой, приведенной на фиг. 174.
В момент начала бокового скольжения оси результирующая реакция #£,
действующая на внешнее колесо оси, достигнет значения, равного силе
сцепления cpZg'. Отсюда, пользуясь фиг. 174, определяем условия начала бокового
скольжения оси при наличии пробуксовывания ее внутреннего колеса:
(344)
Так как окружные силы Р' и Р' приняты равными между собой, то,
пользуясь уравнениями (344), получим:
Y\ = cp2 i£ - Za) (Zl + Za). (345)
Пользуясь этим уравнением, а также уравнениями (163) и (164), находим
уравнение, устанавливающее зависимость между коэфициентами тг]20 и f^0, coot-
Устойчивость автомобиля с жесткими колесами 219
ветствующими началу бокового скольжения оси при наличии пробуксовывания ее
внутреннего колеса:
,,ao=2(p«(l+Ypo-£)**-. (346)
Решая совместно уравнения (341) и (346), получаем выражения для коэфици-
ентов 7)20 и Чро> соответствующих началу бокового скольжения задней ведущей
оси автомобиля при наличии пробуксовывания ее внутреннего колеса:
Эти значения коэфициентов т)2 и ^р соответствуют точке Dx на фиг. 175.
Начало бокового скольжения оси без предварительного пробуксовывания
ее внутреннего колеса. Выше получены были уравнения, устанавливающие
соотношение между коэфициентами т]2 и ^р при начале пробуксовывания
внутреннего колеса [уравнение (341)] и начале ее бокового скольжения при наличии
пробуксовывания внутреннего колеса [уравнение (346)]. При значениях
коэфициента fp, меньших чро (точка Dx на фиг. 175) боковое скольжение задней оси
автомобиля с жесткими колесами начинается без предварительного
пробуксовывания ее внутреннего колеса. Схема сил и реакций, действующих при этом на
заднюю ведущую ось автомобиля, изображена на фиг. 176.
Скольжение оси вбок без предварительного пробуксовывания ее внутреннего
колеса характеризуется тем, что обе результирующие реакции R'2 и Я'^у
действующие соответственно на внутреннее и внешнее колеса оси, одновременно
достигают значения сил сцепления cpZg и yZ'^. Пользуясь фиг. 176, получим:
Так как силы Р' и Р* равны между собой, то, пользуясь уравнениями (349),
получим:
( УЪ + Уа) ( Уа - U) = <Р2 ОЙ + Z'2) (4 - Z'2). (350)
Решая эти уравнения, получим для коэфициента ^ боковой устойчивости оси
по началу ее бокового скольжения без предварительного пробуксовывания
внутреннего колеса следующее выражение:
~ш /
(351)
а*
При помощи уравнения (351) на фиг. 177 построена кривая ADX (прямая DXBX
перенесена с фиг. 175).
График на фиг. 177 характеризует устойчивость задней ведущей оси
автомобиля (а следовательно, и всего автомобиля) против бокового заноса, поэтому
в дальнейшем он называется „характеристикой боковой устойчивости автомобиля".
Если принять в уравнении (351) коэфициент ур = 0, то получим значение
ординаты для точки А пересечения кривой AD± с осью ординат. При этом
коэфициент 7)2 = 9, что и соответствует ведомой оси. Если в уравнении (351) для
коэфициента fp принять значение, определяемое уравнением (348), то для
коэфициента тг^ получим уравнение (347).
220
Устойчивость автомобиля против заноса
ГТх
Соотношение между предельными значениями радиуса R поворота и
скорости v движения автомобиля. Выше устойчивость задней ведущей оси
автомобиля оценивалась соотношением
— —-_?— между коэфициентом ri2 боковой
устойчивости оси и
коэфициентом-[/? суммарной окружной силы.
Одновременно с этим
устойчивость задней ведущей оси
автомобиля может быть оценена
соотношением между предельными
(по устойчивости оси) значениями
радиуса R поворота автомобиля
и скорости v установившегося
(v = const) движения последнего.
Для этой цели необходимо лишь
в полученных выше уравнениях,
характеризующих начало
нарушения устойчивого движения оси,
выразить коэфициенты т]2 и ^р
через скорость v и радиус R по-»
ворота автомобиля.
При движении автомобиля е
жесткими; колесами по жесткой
поверхности сила Pf
сопротивления качению отсутствует; а так
как движение автомобиля
рассматривается- установившимся и в
горизонтальной плоскости, то
вся полная суммарная окружная
L
Фиг. 176. Схема сил и реакций, действующих на
заднюю ведущую ось автомобиля при начале
бокового скольжения последней без предварительного
пробуксовывания ее внутреннего колеса.
сила Рр затрачивается на сопротивление воздуха.
При этом получим:
или:
-■?-
(352)
Коэфициент yj2 боковой
устойчивости оси представляет собой
отношение суммарной боковой реакции У2 к
весу G2, приходящемуся на заднюю
ось автомобиля. При этом, пользуясь
уравнением (77) и принимая
коэфициент k = 0,5, получим:
-7
Согласно уравнению (353) при том
же значении коэфициента т}2
соотношение между радиусом R поворота и
скоростью v движения автомобиля
может быть различным в зависимости
\ * • ■
!
I
i
0,1
О
Фиг. 177. Характеристика боковой
устойчивости автомобиля [0Q2 = /(7p); ¥=0,5;/ = 0].
от значения углового ускорения -^. При установившемся ' движении автомобили
(R = const; v = const) угловое ускорение ~ = 0,ив этом случае уравнение(353)
Устойчивость автомобиля с жесткими колесами
221
имеет вид:
~R
Решая совместно уравнения (341), (352) и (354), получим:
Oh *i2
(354)
(355)
Это уравнение соответствует началу пробуксовывания внутреннего колеса.
Решая совместно уравнения (351), (352) и (354), получим:
Htnin —
/
(356)
; '/ФПсг\2
1500 —
Это уравнение соответствует pniaM
началу бокового скольжения
оси без предварительного
пробуксовывания ее внутреннего
колеса.
Такое tже исследование
может быть проведено с
помощью фигур, иллюстрирукь
щих соотношение между
предельными значениями коэфи-
циентов т]2 и чр (Фиг- 177).
Для этой цели, задавшись
скоростью v автомобиля,
можно при помощи
уравнения (352) определить
соответствующее этой скорости
значение коэфициента ^р. Далее
при помощи фиг. 177 по
линии, соответствующей тому
или другому критерию
боковой устойчивости оси, нахо-
1200
900
600
300
1
{
1
1
—
!
i
1
а'
-f
-L
1 /'
L.
!
i
i
I
i
i
\
I*
10
20
30
50
дится значение коэфициента т)2. Фиг. 178. Характеристика боковой устойчивости авто-
б [(R f() 0 / 0]
рр
мобиля
у
= f(v); <р = 0; / = 0].
После этого при помощи урав-
нения (354) находится радиус R
поворота автомобиля, соответствующий заданной скорости v движения последнего.
При помощи указанного приема на фиг. 178 построена характеристика боковой
устойчивости автомобиля Rm\n = f(v) для случая установившегося движения
последнего. Построение произведено для того же автомобиля (принятого для
примерного подсчета), для которого был построен график на фиг. 177. При этом
фактор W сопротивления воздуха [входящий в уравнение (352)] был принят
равным 0,167 кг-сек21м2.
Кривая DjZ^ на фиг. 178 соответствует началу пробуксовывания внутреннего
колеса ведущей оси; она асимптотически приближается к вертикали, пересекающей
ось абсцисс при такой скорости v автомобиля, которая соответствует значению
коэфициента ~[р-> определяемому точкой Вг на фиг. 177.
Кривая АП>г на фиг. 178 соответствует началу бокового скольжения оси без
предварительного пробуксовывания ее внутреннего колеса. Эта кривая проходит
через начало координат и ограничивается точкой Dx пересечения с кривой D^Bx
аналогично тому, как это имеет место и на фиг. 177.
222
Устойчивость автомобиля против заноса
Значения Ro и vQy соответствующие этой точке, могут быть определены или
при совместном решении уравнений (355) и (356) или при помощи подстановки
в уравнения (347) и (348) выражений для коэфициентов ^ в и tj20 из уравнений
(352) и (354). При этом получим:
2/7
G
e W
G
a\l
,a
~(!
4g
1-
W
(357)
(358)
Влияние конструкции автомобиля на его устойчивость против заноса.
Согласно полученным выше данным устойчивость автомобиля против бокового
заноса зависит от ряда
параметров, характеризующих
конструкцию автомобиля.
Ниже рассматривается
влияние расположения центра
тяжести автомобиля (a, hg),
размера колеи В и величины
радиуса инерции р на боковую
устойчивость задней ведущей
оси. Кроме того, дополнительно
рассмотрен вопрос о боковой
устойчивости автомобиля не
с задней, а с передней
ведущей осью.
Для иллюстрации влияния
относительного размера
отрезков а и hg (характеризующих
расположение центра тяжести
по длине и по высоте
автомобиля) на устойчивость
автомобиля против заноса на
фиг. 179 и 180 построены
NX
Л4\а£
V\
\
\
\
\0,6
\ \
V
\ \
Л
Я/Л
\
\
\
\
i
s<0,6
\
\
0.4-
0,3
0,2
0,1
0 0,06 0,12 0.18 0,24 0,30
Фиг. 179. Характеристика боковой устойчивости
автоб
мобидя при различном по длине расположении центра
тяжести (цифры у кривых показывают отношение-?]*
характеристики боковой
устойчивости для автомобиля, взятого для примерного подсчета, но при этом в
каждом случае принимались различные значения для отрезков а и hg.
График на фиг. 179 построен для трех значений отношения -у-,
соответственно равных 0,4, 0,5 и 0,6. Согласно полученным данным увеличение отрезка а,
т. е. приближение центра тяжести автомобиля (с жесткими колесами) к его задней
оси повышает устойчивость автомобиля против бокового заноса: при том же
значении коэфициента *(р коэфициент т]2 при этом увеличивается.
График на фиг. 180 построен для трех значений отношения -£-,
соответственно равных 0,2, 0,3 и 0,4. Согласно полученным данным увеличение отрезка hg,
т. е. повышение расположения центра тяжести автомобиля, несколько снижает
боковую устойчивость автомобиля.
На фиг. 181 построена характеристика боковой устойчивости автомобиля для
различных значений колеи В автомобиля, причем для отношения -у
значения 0,4, 0,5 и 0,6.
приняты
Устойчивость автомобиля с жесткими колесами
223
Согласно полученным данным увеличение колеи В автомобиля при том же
значении его базы L несколько повышает боковую устойчивость автомобиля,
особенно при средних значениях коэфициента ^р.
(a h В\
Наряду с указанными параметрами ( у-; -у-; -у-), характеризующими
конструкцию автомобиля, на боковую устойчивость последнего влияет также
распределение массы по длине автомобиля, т. е. радиус инерции р.
d(*>
Согласно уравнению (73) влияние углового ускорения -j- на величину
суммарной боковой реакции F2, а следовательно, и на боковую устойчивость авто-
0,3
0.2
0,1
\
of
V
\
t '■
\
ч\
олог^
■0,2
V
0,06 0,1? 0,18 0&
0,30 ур
вых показывают отношение
его колеи
Фиг. 1Р0. Характеристика боковой устойчи- Фиг. 181. Характеристика боковой
устойчивости автомобиля при различном по высоте вости автомобиля при различной величине
расположении центра тяжести (цифры у кри- / .
р F v ^- J F —««-лтга» ( цифры у кривых показывают
В\
отношение -£\.
р2
мобиля зависит от величины разности b — . Чем меньше эта разность, тем
меньше влияние углового ускорения ~ на боковую устойчивость автомобиля.
Угловое ускорение -^ совсем не влияет на боковую устойчивость автомобиля,
если
ab = р2. (359)
В современных автомобилях разность b — обычно имеет положительное
хотя и не очень большое значение. Таким образом, при том же расположении
центра тяжести автомобиля (-^- = constJ увеличение радиуса р инерции
(распределение масс автомобиля) благоприятно действует на устойчивость автомобиля
против заноса.
Выше было указано, что боковая устойчивость автомобиля изменяется в
зависимости от того, какие колеса являются ведущими — задние или передние.
Все изложенное ранее относится к автомобилю, имеющему задние ведущие
колеса, ниже даются краткие сведения об устойчивости против бокового заноса
для автомобиля, имеющего передние ведущие колеса.
На фиг. 182 изображена схема сил, моментов и реакций, действующих на
такой автомобиль при движении его на повороте. Эта схема является аналогичной
схеме, приведенной выше на фиг. 47 для автомобиля с задними ведущими коле-
224
Устойчивость автомобиля против заноса
сами. Разница между указанными схемами заключается лишь в том, что схема
на фиг. 182 соответствует не задним, а передним ведущим колесам автомобиля.
Кроме того, в данном случае в связи с тем, что вопрос рассматривается для авто-
•
•i
У
- —,
8
'4
Фиг. 182. Схема сил, моментов и реакций, действующих на
автомобиль с передними ведущими колесами при движении его на
повороте.
мобиля с жесткими колесами, не учитывается сила сопротивления качению этих
колес по опорной поверхности (/ = 0). Так как колеса приняты жесткими в
боковом направлении, то точка
В —середина передней оси—
движется под углом а к
продольной оси АВ
автомобиля.
Сумма тангенциальных
реакций Х[ и Х"х,
действующих соответственно на
внутреннее и внешнее колеса
передней оси автомобиля,
равна полной суммарной
окружной силе Р . Прилагая
эту силу к точке В —
середине передней оси, получим
схему, изображенную на
фиг. 183. Эта схема является
аналогичной схеме,
приведенной ранее на фиг. 48.
Фиг. 183. Схема сил, моментов и реакций, действующих
на автомобиль с передними ведущими колесами при
движении его на повороте.
Момент Mv в данном
случае (фиг. 183) отсутствует,
так как принято, что сила Рр равномерно распределяется по ведущим колесам.
В результате суммарная реакция К2 для рассматриваемого случая определяется из
уравнения (73) при k = 0,5, а уравнение (74) для суммарной боковой реакции Уг
Устойчивость автомобиля с жесткими колесами 225
несколько изменится. При этом получим из условия равновесия системы (фиг. 183)
по отношению к вертикальной оси, проходящей через точку Л:
М \<»vb + (b2 + р2) ^-1 - PPL sin а
Yx cos a == ь j- J . (360)
Из рассмотрения полученных результатов находим, что при том же характере
движения автомобиля суммарная боковая реакция Ка, действующая на задние
колеса автомобиля, не зависит от того, какая ось является ведущей. Однако при
передней ведущей оси колеса задней оси разгружаются от окружных сил, что
резко повышает боковую устойчивость этой оси.
Суммарная боковая реакция У1У действующая на колеса передней оси, несколько
уменьшается, если эти колеса являются ведущими. В результате при этом боковая
устойчивость передней оси не нарушается. Кроме того, боковое скольжение
передней оси неГЯдгак опасно, как скольжение задней оси (см. фиг. 173); поэтому
при всех прочих равных условиях автомобиль с передними ведущими колесами
обладает большей устойчивостью против заноса, нежели автомобиль с задними
ведущими колесами.
Устойчивость автомобиля при торможении. Боковая устойчивость автомобиля
при торможении также определяется устойчивостью его задней оси по началу
проскальзывания ее внутреннего колеса и по началу ее бокового скольжения.
Для нахождения уравнений, характеризующих каждое из указанных явлений,
необходимо иметь выражения для радиальных, тангенциальных и боковых реакций,
действующих на задние колеса автомобиля. Радиальные реакции определим из
уравнений (163), заменяя лишь коэфициент ^ тяговой силы отрицательным
коэфициентом уг тормозной силы; при этом получим:
4 = 0,5O2(l -Tr%) - Г,**-; (361)
Z; = 0,5О2 (l - Тг£j + Г2 %- . (362)
Тангенциальные реакции Х'Т2 и Х"^, действующие соответственно на
внутреннее и внешнее колеса задней оси равны между собой (обеспечивается
конструкцией привода) до того момента, когда одно из колес начинает проскальзывать;
до этого момента коэфициент кто распределения приводной силы по правым и
левым тормозам равен 0,5. Одновременно с этим принимаем, что распределение
приводной силы между задними и передними колесами характеризуется
коэфициентом ро.
Начало проскальзывания внутреннего колеса задней тормозящей оси.
При этом тангенциальные реакции, действующие на задние тормозные колеса
автомобиля вплоть до начала проскальзывания внутреннего колеса, определяются
из уравнений:
X'T2=kTo(1-Vo)tT°-' (363)
Po)Yr°- <364)
В момент начала проскальзывания внутреннего колеса реакция Х'Т2 достигает
значения силы сцепления cpZ^. Отсюда получим:
Определяя из этого уравнения коэфициент тг£2,.равный отношению -~ , находим:
15 Е. А. Чуваков. 2232.
226
Устойчивость автомобиля против заноса
Если согласно сказанному ранее принять коэфициент кто = 0,5, то получим:
Если в уравнении (366) принять коэфициент (30 = 0 (вся тормозная сила
передается через одну заднюю ось) и изменить знак перед членом yhg (что
соответствует переходу от тормозящего автомобиля к „тяговому", то уравнение (366)
преобразуется в уравнение (341).
При помощи уравнения (366) на фиг. 184 построены прямые, иллюстрирующие
соотношение между коэфициентами г{12 и fT для четырех значений коэфициента %,
0.06
уг 0,60 0,54 0.48 0,42 0,36 0,30 f 0,24 0,18 0,12
фиг. 184. Характеристика боковой устойчивости автомобиля [r\Ta*=f(*(T)] при торможении;
цифры у кривых показывают величину коэфициента ро (<р = 0,5*; /~ Щ
равных 0; 0,25; 0,5 и 0,75. График построен для автомобиля, характеризуемого
теми же данными, которые были приняты при построении графика (см. фиг. 177)
для „тягового" автомобиля. Коэфициент сцепления ср при построении фиг. 184
был принят равным 0,5.
Каждая из прямых BD на фиг. 184 пересекает ось абсцисс при значении
коэфициента тл соответствующем отсутствию боковой силы (т]у2=0):
Прямые BD имеют смысл от этих значений коэфициентов у\п и -цу
[уравнения (366) и (367)] и до таких их значений, при которых начинается одновременно
и проскальзывание внутреннего колеса и боковое скольжение всей оси. Этот
момент на фиг. 184 определяется точками D. Значения г\Т20 и ^о коэфициентов
т\Т2 и fy,, соответствующие этому условию, определяются на том основании, что
в этот момент результирующая реакция, действующая на внешнее колесо задней
оси, достигает значения силы сцепления <pZ£. Так как при проскальзывающем
внутреннем колесе вся боковая сила Y2 передается через внешнее колесо, то
получим:
(368)
или, пользуясь уравнениями (362) и (364), находим:
Устойчивость автомобиля с жесткими колесами 227
Принимая ^7-о==О,5, получим:
К|+ [0,5(1 -Ъ)1пО\* = ?]0,!>О%[\ -Т„^ + Г,^р. (368')
Пользуясь этим уравнением, а также уравнением (366), получим:
_ _ 2*»*, (1 —ро)Л . „ .
71Г2О — ~е i /2ФЙЛ2 1 ' * ° '
(lp)L ^|l(£g£)]
(370)
Этими уравнениями определяются значения коэфициентов ч\п и fp
соответствующие точкам D на фиг. 184. При совместном решении уравнений (368')
и (366), исключая из них коэфициент ро, получим:
Это уравнение соответствует прямой, проходящей через точки Z)4, D3> D2
и Di на фиг. 184.
Начало бокового скольжения задней тормозящей оси при заблокированном
внутреннем колесе.Прямые BD на фиг. 184 соответствуют началу
проскальзывания внутреннего колеса задней тормозящей оси автомобиля. При каком-либо
значении коэфициента *r\TV соответствующем этой прямой (за исключением крайних
значений — точки В и D) коэфициент ту может быть увеличен вплоть до того
момента, пока не начнет скользить вбок вся ось. Это получается возможным
потому, что при начале проскальзывания внутреннего колеса оси внешнее ее
колесо не скользит по опорной поверхности. Таким образом, даже при
блокировании колеса приводное усилие к тормозам может быть увеличено вплоть до того
момента, пока не начнется боковое скольжение оси. Начало бокового скольжения
оси при блокированном колесе также характеризуется уравнениями (365) и (368).
Однако в этом случае коэфициенты кто и ^0 уже не остаются постоянными, а
изменяются. Это объясняется тем, что увеличение силы, приложенной к
тормозной педали, в этом случае вызывает соответствующие увеличения тормозной силы
для неблокированного колеса, не изменяя ее для блокированного колеса.
Таким образом, для определения соотношения между коэфициеитами г\Т2 и ту,
соответствующими началу скольжения задней тормозящей оси автомобиля при
блокированном ее внутреннем колесе, мы имеем два уравнения (365) и (368)
с четырьмя неизвестными. Для получения дополнительно еще одного уравнения
используется то, что соотношение между тангенциальными реакциями Х"тх и Х'^2%
действующими на внешние колеса передней и задней осей, при блокированном
внутреннем заднем колесе тормозящей оси остается неизменным и определяется
коэфициентом р0. В соответствии с этим имеем:
Суммарная тангенциальная реакция Хти действующая на оба передних колеса,
равна pTfCJ, а так как согласно условию ни одно из передних колес не
блокировано, то эта реакция распределяется по колесам равномерно (кто = 0,5). В
результате реакция Х"п определится из выражения:
. (373)
228 Устойчивость автомобиля против заноса
Соотношение между тангенциальными реакциями Х"п и Х'Т2 определится из
выражения:
Х"12 _ \~kT
Y* Ь *
но так как реакция Х'Т2 (колесо заблокировано и скользит) равна силе сцепления
cpZ^, то получим [см. уравнение (361)]:
fC-p L \ ** / J
В результате, пользуясь уравнениями (372)—(374), получим:
Пользуясь далее уравнениями (365) и (368) и принимая в них коэфициенты кто
и ро переменными, а также уравнением (375), находим уравнение, устанавливающее
соотношение между коэфициентами т]^ и fT для данного условия движения
автомобиля — начало бокового скольжения задней тормозящей оси при
блокировании ее внутреннего колеса:
A2rfr2+B2rir2 + C2 = 0. (376)
Входящие в это уравнение коэфициенты Л2, В2 и С2 определяются из
следующих выражений:
(^/ (376')
(376")
_T7,^j2j. (376'")
При помощи уравнения (376) на фиг. 184 построены кривые для различных
начальных значений [30 коэфициента р. Коэфициент кт0 принят равным 0,5.
Начало бокового скольжения задней тормозящей оси автомобиля без
предварительного проскальзывания ее внутреннего колеса. Так же как и
при аналогичном случае движения тягового автомобиля, при этом
результирующие реакции, действующие на оба колеса оси, одновременно достигают значения сил
сцепления, т. е. при этом получим:
(377)
Пользуясь приведенными ранее уравнениями для реакций Z и^Т(361)—(364),
и принимая коэфициент кто = 0,5, а коэфициент р = ро, решаем уравнение (377);
при этом получим
(378)
При помощи уравнения (378) на фиг. 184 построены кривые AD>
соответствующие различным принятым значениям коэфициента р0.
Если в уравнения (378) для коэфициента fr подставить выражение из
уравнения (370), то для коэфициента Y]r2 получим уравнение (369). Это значит, что
Устойчивость автомобиля с жесткими колесами
229
кривые AD проходят через точки D, которыми заканчиваются прямые BD на
фиг. 184.
Если в уравнении (378) принять коэфициент fT = О, то коэфициент убудет
равен коэфициенту сцепления ср:
? = =р, (379)
т. е. все кривые AD пересекают ось ординат в одной точке, соответствующей
принятому значению коэфициента сцепления ср.
Согласно фиг. 184 увеличение коэфициента {20 распределения приводной силы
на передние и задние колеса автомобиля оказывает весьма большое влияние на
устойчивость задней оси автомобиля против ее бокового скольжения. Увеличение
этого коэфициента способствует повышению устойчивости оси.
Фиг. J85. Характеристика боковой устойчивости автомобиля, соответствующая полному
диапазону изменения окружной силы на колесах задней оси как тяговой, так и тормозной
[цифры у кривых показывают величину %; (ср = 0,5;/== 0)].
При построении фиг. 184 для коэфициента ро было принято несколько
значений, а максимальное его значение было принято равным 0,75. Однако реальная
область графика ограничивается таким значением коэфициента [30, при котором
сначала нарушается устойчивое движение уже не задней оси, а передней. Такое
оптимальное значение коэфициента р0 определяется уравнением (243), и для
автомобиля, принятого для примерного подсчета, получается ($)Опт = 0,65.
Поэтому линия BDA на фиг. 184, соответствующая значению коэфициента
р0 = 0,75, уже не имеет смысла и проведена пунктиром.
Если фиг. 184 объединить с фиг. 177 для тягового автомобиля, то получим
наиболее полную характеристику боковой устойчивости автомобиля против
заноса, соответствующую полному диапазону изменения окружной силы на колесах
задней оси как тяговой, так и тормозной. На фиг. 185 изображена такая
характеристика.
Если в уравнении (378) принять коэфициент ро = О и изменить знак перед
коэфициентом уг, то получим уравнение (351), т. е. кривая ADX на фиг. 184
является продолжением кривой AD. Прямая D4D3D2D1 проходит через точку D,
соответствующую тяговому автомобилю.
Выше было рассмотрено явление начала заноса автомобиля при движении его
на повороте, однако устойчивое движение может быть нарушено и при
прямолинейном движении автомобиля.
Это происходит в тех случаях, когда окружные силы на колесах автомобиля
приближаются к силе сцепления между колесами и дорогой. При этом
коэфициент 7] боковой устойчивости оси стремится к нулю, и достаточно наличия
230
Устойчивость автомобиля против заноса
очень малой боковой силы У для того, чтобы начался занос автомобиля. Это
может произойти при трогании автомобиля с места (при резком открытии
дросселя), но чаще всего это происходит при резком торможении.
Наличие тормозов на передних колесах автомобиля при том же значении
отрицательного ускорения автомобиля дает возможность снизить интенсивность
торможения задних колес и, таким образом, повысить устойчивость автомобиля при
торможении. Однако и в этом случае при достаточно резком торможении,
особенно при скользкой дороге, довольно часто получается занос какой-либо одной
оси или даже одновременно обеих осей автомобиля.
Наибольшая возможность заноса получится в том случае, когда тормоза
с одной и другой сторон автомобиля будут тормозить неодинаково.
Фиг. 186. Схема сил, моментов и
реакций, действующих на
автомобиль при заносе его передней оси,
колеса которой заблокированы.
О
При этом возникают боковые реакции Y, которые действуют на колеса осей
а определяются из выражения.
> = (/У, — р'т) — 5
где Р*т и Р"т — тормозные силы соответственно правых и левых колес
автомобиля.
В приводном механизме к тормозам автомобиля всегда имеется
приспособление, обеспечивающее возможность регулирования тормозов для получения
одинаковой интенсивности торможения правыми и левыми колесами. При тормозах
с гидравлическим или пневматическим приводом это достигается особенно полно,
поэтому ниже рассматривается вопрос о заносе передней и задней осей
автомобиля в том предположении, что тормозные силы, действующие на его правые
и левые колеса, равны между собой.
На фиг. 186 изображена схема сил, реакций и моментов, действующих на
заторможенный автомобиль в момент начала заноса его передней оси. Передняя
ось получила некоторую боковую скорость скольжения vyy в результате чего
автомобиль в данный момент поворачивается около некоторого мгновенного центра
р.ращения О, а между колесами передней оси и дорогой возникает реакция Rx,
Устойчивость автомобиля с жесткими колесами
231
направленная противоположно результирующей скорости ve скольжения колес
и определяемая из уравнения:
^(p> (380)
где т1 — коэфициент перераспределения веса для передней оси автомобиля при
его торможении.
Так как автомобиль имеет замедленное движение, то тангенциальная сила
инерции Т на фиг. 186 направлена от точки С к точке В.
Фиг. 187. Схема сил, моментов и реакций,
действующих на автомобиль при заносе его
задней оси, колеса которой заблокированы.
В результате получаем схе"му, аналогичную приведенной на фиг. 48, а для
суммарной боковой реакции У2 получаем уравнение (73) без второго члена в
правой части (& = 0,5):
(381)
Из условия равновесия системы по отношению к вертикальной оси,
проходящей через центр тяжести автомобиля С, получим (фиг. 186):
Уф + Rxa sin а + .
= 0.
(382)
Решая уравнения (380) — (382) относительно углового ускорения
биля, получим (принимая sina = tg а = —) :
щ
автомо~dt
(383)
Согласно этому уравнению угловое ускорение - ^ получается отрицательным,
dt
т. е. начавшийся занос передней оси весьма быстро и автоматически прекра-
щается, причем это происходит тем быстрее, чем больше скорость v автомобиля.
Другое явление происходит при начале заноса задней оси. На фиг. 187 изо-
бра>нена схема сил, реакций и моментов, действующих на автомобиль в случае
закоса его задней заторможенной оси. Задняя ось получила некоторую боковую
232 Устойчивость автомобиля против заноса
скорость скольжения v при нейтральном положении передних управляемых
колес. В результате автомобиль в рассматриваемый момент поворачивается около
мгновенного центра вращения О, а между задними колесами оси и дорогой
возникает реакция /?2, которая может быть определена из выражения:
R*=m%Mg^-<t, (384)
где т2 — коэфициент перераспределения веса для задней оси автомобиля при его
торможении.
Силы инерции — нормальная N и тангенциальная Г, которые необходимо
приложить в этом случае к центру тяжести автомобиля (для того чтобы
рассматривать его в состоянии равновесия), можно определить на основании
рассмотренного выше общего случая движения автомобиля. При этом ускорения jcn
(нормальное) и jct (тангенциальное) определяются из уравнений (42) и (43), причем
скорость <&сп центра тяжести равна произведению <oCD, где CD — отрезок
(см. фиг. 49), равный расстоянию от центра тяжести автомобиля до основания
перпендикуляра, опущенного из мгновенного центра вращения на продольную ось АВ
автомобиля. В рассматриваемом случае (фиг. 187) отрезок CD представляет собой
постоянную величину и равен отрезку СВ или отрезку а, В результате получаем:
После этого уравнения (42) и (43) примут вид:
d<» . dv
1cn^«>V-a-cu\ Jct=-dt
Таким образом, уравнения для сил инерции N и Т имеют вид:
N =м(м-а^); (385)
(386)
Исходя из условий равновесия системы по отношению к вертикальной оси,
проходящей через центр тяжести С автомобиля, получаем (фиг. 187):
Уха — RJ) sin a — Жр2 ^ = 0. (387)
Для определения реакции Кх, входящей в это уравнение, рассматриваем
равновесие системы по отношению к вертикальной оси, проходящей через точку А-
(388)
Подставляя в уравнение (387) выражения для реакций /?2 [уравнение (384) ]
и Уг [уравнение (388)] и решая это уравнение относительно углового ускорени я
da> { L \
-г; , получим ( принимая sin a = tg a = -^ j :
Согласно уравнению (389) угловое ускорение -^ автомобиля в этом случае
может иметь как положительное, так и отрицательное значение. В
противоположность тому, как это имело место в случае заноса передней оси [уравнение
(383)], при увеличении скорости *о движения автомобиля в данном случае увели-
d(u si
чивается положительное значение ускорения -^ . Скорость vf при которой начав-
Устойчивость автомобиля с жесткими колесами 233
шийся занос автоматически прекращается согласно уравнению (389), определится
из выражения:
v2<gm2yL. (390)
При средних значениях величин, входящих в правую часть уравнения (390),
эта скорость получается очень малой, т. е. боковое скольжение задней оси
автомобиля, начавшееся при торможении автомобиля, автоматически не прекращается,
а возрастает.
Полученный вывод о влиянии торможения передних и задних колес
автомобиля на устойчивость последнего против заноса хорошо согласуется как с
данными практики, так и с результатами специальных экспериментов.
Гашение начавшегося заноса автомобиля. Занос автомобиля весьма опасен
и довольно часто приводит к катастрофе. В соответствии с этим большой
интерес представляет рассмотрение тех мероприятий, при помощи которых можно
производить прекращение начавшегося заноса. В связи с тем, что наибольшую
опасность представляет боковое скольжение задней оси, ниже исследуется
только этот случай.
К числу способов, применяемых для прекращения начавшегося заноса и
зависящих от водителя, можно отнести:
а) освобождение колес задней оси от окружной силы (герикрытие дросселя,
прекращение торможения);
б) торможение колес передней оси;
в) поворот управляемых колес в сторону бокового скольжения задней оси.
Влияние освобождения колес задней оси от окружных сил на уменьшение
интенсивности бокового скольжения этой оси понятно на основании изложенного
выше материала; при этом возрастают боковая устойчивость колес этой оси и та
боковая реакция, которая может быть воспринята колесами без их бокового
скольжения.
Для иллюстрации этого положения обратимся к схеме, приведенной на фиг.
187. Если принять, что колеса задней оси, получившей боковое скольжение,
расторможены, то реакция /?2 будет направлена перпендикулярно плоскости колес,
или, что то же, перпендикулярно продольной оси АВ автомобиля. Кроме того,
при этом коэфициент т2 ( в связи со свободным качением автомобиля)
получится равным единице. В результате, пользуясь уравнениями (387) и (384),
получим для этого случая:
Реакция Уъ как и ранее, определится из уравнения (388).
Определяя далее угловое ускорение -гг, получим:
Предельная скорость <v, до которой происходит еще автоматическое
прекращение начавшегося заноса, в этом случае определится из выражения:
*>2 < ?£#. (392)
Сравнивая уравнения (389) и (391), находим, что при расторможенных
колесах оси, получившей боковое скольжение, угловое ускорение ~ автомобиля в
процессе заноса получается значительно меньше (так как R > L), чем при
заторможенных. Точно так же согласно уравнениям (390) и (392) предельная скорость
автомобиля, при которой происходит автоматическое прекращение начавшегося
заноса при расторможенных колесах, получается значительно выше, чем при
заторможенных.
234
Устойчивость автомобиля против заноса
Для объяснения положительного влияния торможения передних колес
автомобиля на прекращение начавшегося бокового скольжения задней оси на фиг. 188
изображена схема движения автомобиля при наличии скольжения задней оси вбок
со скоростью VAn, в связи с чем точка А движется со скоростью Va под углом (38
к продольной оси АВ автомобиля. Так как задние колеса предполагаются оттор-
моженными, то суммарная боковая реакция F2 действует перпендикулярно
продольной оси АВ автомобиля.
Предположим далее, что передние колеса автомобиля заторможены полностью,
вследствие чего на эти колеса от опорной поверхности действует реакция Rv
Фиг. 188. Схема сил, моментов и реакций, дей- •
ствующих на автомобиль при наличии
бокового скольжения свободной задней оси и
заторможенной передней.
направленная под углом ^ (противоположно скорости <Ов точки В) по отношению
к продольной оси автомобиля и определяемая из уравнения (380); точка же В
оси получает боковое скольжение со скоростью vBn. В результате автомобиль
поворачивается, вращаясь в данный момент около мгновенного центра вращения О.
Нормальное ускорение Jen центра тяжести автомобиля в этом случае
определяется из общего уравнения (42). Входящее в это уравнение ускорение
dvt
'Сп
можно выразить через ускорение ■
dv
dt
'Вп
dt
Пользуясь полученными выше данными [уравнение (52)] и имея в виду, что
в данном случае (фиг. 188) передняя ось имеет боковое движение в направлении,
противоположном показанному на фиг. 49, находим:
dvCn dvF
иВп
После этого получаем выражение для нормальной силы инерции:
На основании фиг. 188 получаем из условия равновесия системы относительно
вертикальной оси, проходящей через точку В:
Устойчивость автомобиля с жесткими колесами 235
Суммарная боковая реакция У2 в этом случае (скольжение оси) определяется
из уравнения (384). В результате, преобразуя уравнение (394), получим:
Ma (cot; — -~- - а ^) + Мр2 — = 0.
Определяя из этого уравнения угловое ускорение — > получим:
dt ш
at
а2 + р2 dm - —" dVBn (395)
dvBn
Так как в момент начала бокового скольжения передней оси ускорение —-^—
всегда положительно, то согласно уравнению (395) возникновение заноса
передней оси, вызванное торможением ее колес, способствует уменьшению углового
ускорения — автомобиля.
При большом же значении ускорения ——~ угловое ускорение -~
автомобиля может получить даже отрицательное значение, что способствует быстрому
прекращению заноса автомобиля.
Повидимому, в связи с некоторой трудностью торможения одних передних
колес при заносе задней оси этот прием прекращения начавшегося заноса
автомобиля на практике никакого применения пока еще не получил. Кроме того,
некоторым недостатком такого приема прекращения заноса является iо, что при
блокировке передних колес нарушается управляемость автомобиля.
Поэтому в настоящее время при начале заноса одной из осей автомобиля
обычно прекращают торможение обеих осей, что способствует если не
прекращению заноса, то во всяком случае снижению интенсивности его развития. Для
прекращения же заноса задней оси автомобиля применяют поворот управляемых
колес в сторону начавшегося скольжения этой оси.
Поворот управляемых колес автомобиля в сторону бокового скольжения
задней оси прекращает начавшийся занос по двум причинам: во-первых, при этом
изменяется расположение мгновенного центра вращения автомобиля, в
соответствии с чем происходит уменьшение силы инерции, способствующей заносу, и,
во-вторых, при этом возникает момент, стремящийся повернуть автомобиль в
сторону, противоположную направлению заноса.
Для иллюстрации первого явления на фиг. 189 изображена схема движения
автомобиля, задняя ось которого скользит вбок со скоростью Vau. Если
управляемые колеса автомобиля находятся в нейтральном положении, то мгновенный
центр вращения располагается в точке О, причем мгновенный радиус вращения R
равен отрезку ОВ. Если передние управляемые колеса автомобиля повернуты на
угол аг в сторону, противоположную заносу задней оси, то мгновенный центр
вращения располагается в точке 019 а мгновенный радиус R вращения равен
отрезку OXD> т. е. радиус вращения при этом уменьшается. В обоих этих
случаях нормальная сила инерции АА, приложенная в центру тяжести С автомобиля,
направлена в сторону заноса задней оси, т. е. способствует заносу. Эта сила
получается тем больше, чем меньше радиус R вращения автомобиля, или, что то
же, чем больше угол ах поворота управляемых колес в сторону;
противоположную заносу задней оси.
Таким образом, поворот управляемых колес в сторону, противоположную
направлению скольжения задней оси, вызывает повышение интенсивности заноса
этой оси.
Если управляемые колеса автомобиля повернуты в сторону скольжения задней
оси, то мгновенный центр вращения автомобиля удаляется дальше от автомобиля,
а радиус R вращения автомобиля соответственно увеличивается. Вследствие этого
сила инерции N уменьшается, что сопровождается снижением интенсивности
заноса. Если управляемые колеса автомобиля повернуты в направлении заноса зад-
236
Устойчивость автомобиля против заноса
ней оси на угол а2, равный углу ($2 (фиг. 189), т. е. повернуты на такой угол,
при котором скорость vb точки В параллельна результирующей скорости vA
точки Л, то автомобиль перестает вращаться (со = 0) и получает
поступательное движение. В этом случае нормальная сила инерции N уменьшается до нуля.
Если, наконец, управляемые колеса повернуты на некоторый угол а, больший
угла ра, то мгновенный центр вращения О автомобиля перемещается и
располагается с другой стороны последнего. Нормальная сила инерции N в этом случае
будет направлена в сторону, противоположную заносу оси (см. фиг. 189), что
соответствует интенсивному
прекращению начавшегося заноса
задней оси.
Таким образом, при помощи
поворота управляемых колес
на значительный угол в
сторону бокового скольжения
задней оси можно прекратить
начавшийся занос. Однако и этот
способ прекращения заноса
автомобиля является иногда
неудобным, так как при
большом угле а поворота
управляемых колес в сторону
бокового скольжения задней оси
автомобиль получает
значительное перемещение в
направлении начавшегося заноса, что
во многих случаях недопустимо
по дорожным условиям:
автомобиль при этом может или
съехать с полотна дороги или
наехать на какое-либо
препятствие, поэтому наряду с этим
приемом для той же цели, т. е. для прекращения начавшегося заноса задней оси
автомобиля, целесообразно использовать другой фактор, а именно скорость-
поворота управляемых колес.
Схема движения автомобиля с использованием такого метода прекращения
заноса изображена на фиг. 190. Колеса обеих осей разгружены от окружных сил;
задняя ось имеет боковое скольжение со скоростью ъ&п\ передние колеса
поверка
нуты на угол а и продолжают поворачиваться со скоростью — •
Скорость *&вп бокового перемещения передних колес при этом определится из
выражения:
Фиг. 189. Схема,
иллюстрирующая влияние поворота
передних управляемых
колес автомобиля на
расположение его мгновенного
центра вращения при заносе
задней оси.
v
Вп
= v tg a,
или при малом значении угла а:
vBn = да.
Отсюда определяем производную:
dvBn
dt '
dt
Подставляя это выражение для производной
dt
dv
Вп
dt
(396)
в уравнение (395),
получим:
а2
dt
— а
dv
da
dt
(307)
Устойчивость автомобиля с жесткими колесами
237
da
т, е. увеличение скорости *-?? поворота управляемых колес в направлении скольжения
задней оси автомобиля значительно уменьшает угловое ускорение -^ автомобиля,
da dm
и уже при сравнительно невысокой скорости -т- угловое ускорение —
становится отрицательным, что обеспечивает быстрое прекращение начавшегося заноса
автомобиля.
Фиг. 190. Схема сил, моментов и реакций, действующих на
автомобиль при наличии бокового скольжения задней свободной оси и при
повороте передних управляемых колес.
Для пояснения влияния скорости — поворота управляемых колес на пре-
dv
кращение заноса автомобиля найдем выражение для ускорения ,
скольжения задней оси. Пользуясь фиг. 49, находим:
vBn + L со.
An
бокового
vAn =
Диференцируя это уравнение, получим:
d«An r d* , av.
dt dt "•" dt
Bn
На основании уравнения (396) (принимая <v — const) заменяем ускорение
dv
Вп
da
dt
равной ему величиной ^-~гг\ в результате находим:
dv
An
dto
da
dt
Подставляя в это уравнение выражение для углового ускорения — из
уравнения (397), получим:
La (<av —
ab
dt
v
da
(398)
238 Устойчивость автомобиля против заноса
dvAn
Согласно этому уравнению ускорение ——— бокового скольжения задней
da
оси уменьшается по мере увеличения скорости — поворота управляемых колес в
сторону скольжения задней оси. При значении этой скорости, равном
La,
v ab — р2 v
ускорение п = 0, а при большем значении скорости — оно становится
отрицательным, т. е. происходит прекращение заноса. Кроме того, в том же
направлении действует уменьшение угловой скорости а> автомобиля или увеличение
радиуса R поворота автомобиля (/? = —) .
Из приведенных выше уравнений (389), (391) и (395) следует, что при всех
прочих равных условиях величина углового ускорения —~ при гашении
начавшегося бокового скольжения задней оси зависит от величины отрезков а
и р. При этом коэфициент при ускорении -^- увеличивается при увеличении
отрезка а. Поэтому приближение центра тяжести автомобиля к задней оси
затрудняет прекращение начавшегося заноса поворотом управляемых колес. Также
влияет и увеличение радиуса инерции р автомобиля.
Этим, в частности, объясняется то, что начавшийся занос автомобиля с
задним расположением двигателя обычно труднее прекратить, чем автомобиля с
передним расположением двигателя.
Согласно уравнению (398) при значении радиуса инерции р, равном ab> ско-
da
рость — поворота управляемых колес уже не действует непосредственно на
dvAn
ускорение бокового скольжения оси. Однако в этом случае сохраняется по-
da .
ложительное влияние повышения скорости -^т- > так как при этом быстрее *
произойдет увеличение радиуса R поворота автомобиля или даже вращение
последнего в обратную сторону (см. фиг. 189).
§ 3. ВЛИЯНИЕ БОКОВОЙ ЭЛАСТИЧНОСТИ КОЛЕС НА УСТОЙЧИВОСТЬ
АВТОМОБИЛЯ ПРОТИВ ЗАНОСАi
Выше при исследовании вопроса о боковой устойчивости задней ведущей оси
автомобиля с жесткими колесами были приняты три критерия для оценки потери
осью ее устойчивого движения:
а) начало пробуксовывания внутреннего колеса;
б) начало бокового скольжения оси при наличии пробуксовывания внутреннего
колеса;
в) начало бокового скольжения оси без предварительного пробуксовывания ее
внутреннего колеса.
Этому соответствуют построенные выше (на фиг. 177 и 178) характеристики
боковой устойчивости автомобиля.
В том случае, когда колеса автомобиля обладают значительной боковой
эластичностью, все явление протекает иначе.
Во-первых, в этом случае при равномерном распределении полной суммарной
окружной (тяговой) силы по ведущим колесам (k = 0,5) пробуксовывание
внутреннего колеса всегда предшествует боковому скольжению оси, и таким образом,
указанный выше третий критерий нарушения устойчивого движения оси не имеет
1 Более подробное изложение рассматриваемого вопроса приведено в работах [46 и 49].
Влияние боковой эластичности колес на устойчивость автомобиля против заноса 239
2
г
места. Это объясняется тем, что вплоть до начала пробуксовывания внутреннего
колеса ведущей оси с эластичными (в боковом направлении) колесами суммарная
боковая реакция У2 распределяется примерно равномерно по ее
колесам—внутреннему и внешнему (см. фиг. 46). При больших значениях радиуса R поворота
автомобиля углы бокового увода Ь2 и 82 могут быть приняты приближенно равными между
собой; при одинаковой же боковой эластичности колес (Сг = "2) получаются
приближенно равными между собой и боковые реакции Y2 и V2: • Если, кроме того, принять
равномерным и распределение полной суммарной окружной силы Рр по колесам
ведущей оси, т. е. принять коэфи-
циент к = 0,5, то
результирующие реакции R2 и R2t
действующие на колеса оси при
отсутствии пробуксовывания ее
внутреннего колеса, получаются
также равными между собой.
Между тем радиальная реакция
Z2, действующая на
внутреннее колесо, всегда меньше
радиальной реакции Z",
действующей на внешнее колесо;
поэтому внутреннее колесо
ведущей оси с эластичными
колесами должно начать
пробуксовывать, когда внешнее
колесо еще имеет запас
сцепления с опорной
поверхностью, т. е. внутреннее колесо
всегда должно начать
пробуксовывать до начала бокового
скольжения оси.
Во-вторых, при ведущей
оси,с колесами, обладающими
боковой эластичностью, начало
-8-
У'
2
Уг
Фиг. 191. Схема сил и реакций, действующих на
заднюю ведущую ось автомобиля с эластичными
колесами при наличии пробуксовывания и бокового
скольжения внутреннего колеса оси.
пробуксовывания внутреннего
колеса всегда сопровождается одновременным началом его бокового скольжения
(см. фиг. 23), так как пробуксовывающее колесо не может передавать боковой
силы, если оно одновременно с пробуксовыванием не имеет бокового скольжения.
В результате нарушение устойчивого движения ведущей оси с колесами,
обладающими боковой эластичностью, характеризуется двумя критериями:
а) началом пробуксовывания и бокового скольжения внутреннего колеса оси;
б) началом бокового скольжения оси при наличии пробуксовывания и
бокового скольжения внутреннего колеса.
Начало пробуксовывания (и бокового скольжения) внутреннего колеса
ведущей оси с эластичными колесами, так же как и с жесткими колесами,
определяется тем условием, что действующая на внутреннее колесо результирующая
реакция R'2 достигает значения, равного силе сцепления cpZ^ с опорной поверхностью.
На фиг. 191 изображена схема сил и реакций, действующих на колеса
ведущей оси (обладающие боковой эластичностью) при том условии, что внутреннее
колесо этой оси пробуксовывает, а следовательно, и скользит вбок.
Реакция R'2 направлена противоположно равнодействующей скорости v'e2
скольжения колеса. В результате, пользуясь схемой, приведенной на фиг. 191,
получим:
—fZ2
(399)
240 Устойчивость автомобиля против заноса
где v'6 — скорость пробуксовывания внутреннего колеса / по опорной
поверхности;
v' — скорость бокового скольжения этого колеса.
Кроме того, так как результирующая реакция R2 равна силе сцепления yZ'2
(внутреннее колесо пробуксовывает и скользит вбок), то получим:
(Y'2)2+ (0.5P, -fZ'2)*= {R2)*= {<?£)* ■ (400)
Пользуясь этим уравнением и уравнением (163) для радиальной реакции Z2,
а также выражая полную суммарную окружную силу Рр через коэфициент ip,
получим выражение для боковой реакции Y2:
У, - /[0,5,0,(1 + „i) - У, Щ- {о*, О -/[0^(1 + т,*) -Г. ф
или, пренебрегая весьма малыми членами, содержащими/2, получим окончательно:
. (402)
Как уже сказано было выше, в момент начала пробуксовывания внутреннего
колеса оси боковая реакция Y'2, действующая на это колесо, может быть принята
равной половине суммарной боковой реакции У2. В результате находим,
пользуясь уравнением (402):
Л, [0,5 (-i
Определяя отсюда отношение ^~ > представляющее собой коэфициент у\2
боковой устойчивости оси по началу пробуксовывания (и бокового скольжения) ее
внутреннего колеса, получим:
0. (403)
Входящие в это уравнение коэфициенты Л3, В3 и С3 определяются из
выражений:
(1^)2; (403')
При помощи уравнения (403) на фиг. 192 построена кривая А'ВХ для
автомобиля, принятого для расчета. Эта кривая определяет соотношение между коэ-
фициентами тг^ и fPt соответствующее началу пробуксовывания (и бокового
скольжения) внутреннего колеса ведущей оси с эластичными колесами.
Точка Вг пересечения кривой AfBl с осью абсцисс на фиг. 192 определяет
максимальное значение коэфициента *{р, достижимое по условию сцепления колес
ведущей оси с опорной поверхностью при прямолинейном (У2 = 0) движении
автомобиля. Так как при этом боковая реакция Y2 = 0, то, пользуясь
уравнением (400), получим:
0,5Рр = (? + f) Z'2.
Влияние боковой эластичности колес на устойчивость автомобиля против ваноса 241
Определяя радиальную реакцию Z'2 из уравнения (163) (принимая в нем
Y2 = 0) и выражая полную суммарную окружную силу Рр через коэфициент *\Рч
получим
т. е. получим выражение для максимального значения коэфициента ^Ру достижимого
по условию сцепления колес ведущей оси с опорной поверхностью [уравнение (88)].
0,5,
Л
0,4
0,3
0,2
0,1
\
/0
>
f
1
\
\
\\
\
)ро
' М
0,06
0,12
0,18
0,24
р
Фиг. 192. Характеристика боковой устойчивости автомобиля [Yjg =
= /(?#)] с эластичными колесами при равномерном распределении
полной суммарной окружной силы по колесам задней ведущей оси
(цифры у кривых показывают отношение
vyc2
<р = 0,5, /=0,015),
Приведенное выражение для максимального значения коэфициента f> не
получается непосредственно из уравнения (403), если принять в последнем
коэфициент 7J2 = 0. Это объясняется тем, что при выводе уравнения (403) было
использовано уравнение (402), которое является лишь приближенным, так как при его
выводе были не приняты во внимание члены, содержащие /2. Если же при
выводе использовать точное уравнение для боковой реакции Y' [уравнение (401)],
то, приравнивая нулю коэфициент С3 в уравнении (403), получим для
коэфициента *{р уравнение (88).
Точка А' пересечения кривой А'ВХ с осью ординат на фиг. 192 соответствует
нулевому значению коэфициента ^Ру т. е. ведомой оси. Однако внутреннее колесо
ведущей оси перестает быть ведущим и в соответствии с этим не может
пробуксовывать при некотором положительном, хотя и небольшом значении коэфициента ур.
Это минимальное значение коэфициента ур определяется из того условия, что колесо
16 Е. А. Чудакев, 2232.
242 Устойчивость автомобиля против заноса
получает свободное качение. При этом действующая на внутреннее колесо
тангенциальная реакция Х'2 уменьшается до нуля. Отсюда получаем:
v" „ г\ кр f7' —- О ^\f (~т f7r О
или, пользуясь этим выражением и уравнением (163) для радиальной реакции Z',
получим:
2h<r
v-j L
Пренебрегая весьма малым членом f-^. в этом уравнении, получим прибли-
женно:
При помощи этого уравнения на фиг. 192 нанесена прямая MA[AV Точка
пересечения этой прямой с кривой А'ВХ ограничивает ее участок А[Вг,
иллюстрирующий зависимость между коэфициентами ч\2 и ^р при начале пробуксовывания
(и бокового скольжения) внутреннего колеса задней ведущей оси автомобиля
с эластичными колесами.
Точка А'х на кривой А'Вг соответствует нулевому значению тангенциальной
реакции Х'2 и одновременно с этим равенству боковых реакций Y'2, и К^, поэтому
имеем:
Отсюда получим:
Решая это уравнение совместно с уравнением (405), находим выражения для
коэфициентов т{2 и "iPt соответствующих точке А[ на фиг. 192:
/
1+ В
Кривая А[Вг на фиг. 192 иллюстрирует соотношение между коэфициентами^
и *\р при начале пробуксовывания внутреннего колеса ведущей оси; при этом
скорость v'6 пробуксовывания внутреннего колеса равна нулю. По мере
повышения скорости v'6 коэфициент *[р возрастает при том же значении коэфициента ч\2,
и при бесконечно большом значении скорости v'6 коэфициент ^р достигает своего
максимума, соответствующего заданному значению коэфициента т^
Согласно уравнению (399) при бесконечно большом значении скорости v'6
пробуксовывания внутреннего колеса действующая на это колесо боковая
реакция У'2 уменьшается до нуля, поэтому соотношение между коэфициентом т]2 и
предельным значением коэфициента ^р можно определить из уравнения (402),
Влияние боковой эластичности колес на устойчивость автомобиля против заноса 243
принимая в последнем боковую реакцию Y'2 = 0. Определяя при этом
отношение -^ ' равное коэфициенту тг)2, получим окончательно:
—J
При помощи уравнения (409) на фиг. 192 построена прямая DxBly которая
получается аналогичной прямой ОгВъ построенной на фиг. 177, где изображена
была характеристика боковой устойчивости автомобиля с жесткими колесами.
Различие между этими прямыми на фиг. 192 и 177, так же как и между
уравнениями (409) и (341), при помощи которых они построены, заключается лишь
в том, что при эластичных колесах дополнительно учтен коэфициент /
сопротивления качению.
В обоих случаях боковая реакция Y'2, действующая на внутреннее колесо
ведущей оси, отсутствует (Y'2~Q\ а действующая на то же колесо
тангенциальная реакция равна силе сцепления cpZ^, и если в уравнении (409) принять /= 0,
то получим уравнение (341).
Для нахождения уравнения, устанавливающего зависимость между коэфициен-
тами т]2 и fp при начале бокового скольжения ведущей оси, колеса которой
обладают боковой эластичностью, исходим из того положения, что при этом
равнодействующие реакции jR^ и R2 (фиг. 191) достигают соответственно
значений сил сцепления cpZg и yZ"2. В результате, пользуясь фиг. 191, находим для
этого случая:
(ry'yy
ИЛИ
Решая полученные уравнения относительно коэфициента т]2, равного отноше-
нию -— > получим окончательно:
hpY r ( hg.\ /2hg- \a
r£) +2ViH1+^-fУН)
Если пренебречь малой величиной /2 в этом уравнении, то оно несколько
упростится:
\~B~J
При этом получаем уравнение, аналогичное )фавнению (351), выведенному
ранее для автомобиля с жесткими колесами. Разница между уравнениями (411)
и (351) [так же как и между уравнениями (409) и (341)] заключается лишь
в том, что при эластичных колесах учитывается коэфициент / сопротивления
качению. Если в уравнении (411) принять коэфициент /= 0, то получим
уравнение (351).
При помощи уравнения (411) на фиг. 192 построена кривая /4DX, которая
получается аналогичной кривой ADX на фиг. 177, где изображена характеристика
боковой устойчивости задней ведущей оси для автомобиля с жесткими колесами.
Однако в то время как на фиг. 177 кривая ADX соответствует началу бокового
244 Устойчивость автомобиля против заноса
скольжения оси без предварительного пробуксовывания внутреннего колеса, на
фиг. 192 кривая ADX соответствует началу бокового скольжения оси при наличии
пробуксовывания и бокового скольжения внутреннего колеса.
Точка А пересечения кривой ADX с осью ординат соответствует ведомой оси
{^р = 0). При этом коэфициент ^ согласно уравнению (410) получается
равным |Лр2—р Если же пренебречь весьма малой величиной/2, то коэфициент т£
получится равным коэфициенту сцепления ср, что следует непосредственно из
уравнения (411).
Кривая ADi со стороны минимальных значений коэфициента чр ограничивается
точкой Аг ее пересечения с прямой МА'1А1 [уравнение (405)], соответствующей
нулевому значению скорости v'6 пробуксовывания внутреннего колеса ведущей оси,
а со стороны максимальных значений коэфициента fp точкой Dl9 принадлежащей
также и прямой D1B1 и соответствующей (как это указано было выше)
бесконечно большому значению скорости v'6 пробуксовывания внутреннего колеса ведущей
оси.
Точке Dx соответствуют определенные значения коэфициентов ^р и т]2,
уравнения для которых могут быть получены при помощи совместного решения
уравнений (409) и (410). Пренебрегая весьма малой величиной /2, получим окончательно:
Ч» =
(413)
Получение уравнений (412) и (413) при помощи совместного решения
уравнений (409) и (410) представляет некоторые трудности. Для упрощения вывода
уравнений (412) и (413) можно предварительно упростить уравнение (410) на
основании следующих соображений.
Точка Dx кривой ADX (фиг. 192) соответствует бесконечно большому значе-
v6
нию отношения скоростей —,—; в соответствии. с этим боковая реакция Y2 =0»
Vyc2
а боковая реакция F2 == Y2> поэтому исходное уравнение, на основании которого
было получено уравнение (410), примет вид:
Отсюда получаем для точки Dx кривой ADX на фиг. 192:
Решая это уравнение совместно с уравнением (409), получим уравнения (412)
и (413).
Если в уравнениях (412) и (413) пренебречь коэфициентом / сопротивления
качению, то получим уравнения (347) и (348), выведенные для аналогичных
значений коэфициентов yj2 и fp > н° Для автомобиля с жесткими колесами.
В результате на фиг. 192 построена характеристика боковой устойчивости
автомобиля с эластичными колесами. Полученный контур B1a[a1D1B1
соответствует равномерному распределению полной суммарной окружной силы Рр по
ведущим колесам (k = 0,5).
Влияние боковой эластичности колес на устойчивость автомобиля против заноса 245
Кривая А\ВХ на фиг. 192 иллюстрирует соотношение между коэфициентами т]2
и Чр ПРИ начале пробуксовывания внутреннего колеса ведущей оси, т. е. при этом
скорость v'6 = 0. Прямая D1B1 иллюстрирует соотношение между теми же
коэфициентами при скорости v'6 пробуксовывания внутреннего колеса, равной
бесконечности.
Кривая AXDX соответствует изменяющемуся значению скорости
^пробуксовывания внутреннего колеса от нуля и до бесконечности. Таким образом, площадь
графика, заключенная между линиями л[л, AtDu DXBX и ВгА\, соответствует
переменному значению скорости v'6 пробуксовывания внутреннего колеса и
переменному значению отношения этой скорости к скорости v c2 бокового скольжения
того же колеса. Можно построить на фиг. 192 прямые, иллюстрирующие
соотношение между коэфициентами у\2 и ^р при любом заданном соотношении между
скоростями *&'б и у'2л
Пользуясь уравнениями (399) и (163) и выражая в первом из этих уравнений
силу Рр через коэфициент ^, находим:
/■Hi)
у
Определяя отсюда отношение -т^-, равное козфициенту т]2, получим:
L В 1
« V6
т. е. для каждого заданного значения отношения скоростей —;— получаем пря~
V2
мую, определяющую зависимость между коэфициентами т)2 и ^р.
При помощи уравнения (414) на фиг. 192 построены две прямые D2B2 и D3B8,
соответствующие отношениям скоростей —,— , равным 2,0 и 0,5.
vyc2
v6
Если для отношения скоростей —,— взять значение, равное бесконечности, то
уравнение (414) преобразуется в уравнение (409), соответствующее прямой D1Bt
на фиг. 192.
Если в том же уравнении (414) принять отношение скоростей —Д-~ =г 0, то
vyc2
оно может быть преобразовано в уравнение (404) или приближенно в
уравнение (405), соответствующее прямой А\Аг на фиг. 192.
Таким образом, определяется область графика, ограниченная на фиг. 192
линиями ЛХОХ; DiB^ ВгА[ и А\А1У соответствующая движению автомобиля при
наличии пробуксовывания и бокового скольжения внутреннего колеса его задней
ведущей оси. При этом отношение скоростей —-,— в пределах обозначенного кон-
vyc2
тура изменяется от нуля (прямая А'хАг) и до бесконечности (прямая D3
246 Устойчивость автомобиля против заноса
Кривые А\ВХ и AlD1 соответствуют переменному значению отношения ско-
ростей ,б •»
V2
v6 v6
Более подробные сведения по изменению отношения скоростей —-,—, —
V2 . V
vvc2
и —-— для разных линий характеристики боковой устойчивости автомобиля с
эластичными колесами приведены в работе автора [46].
В приведенном выше исследовании вопроса о боковой устойчивости задней
ведущей оси автомобиля с эластичными колесами устойчивость оси
характеризовалась соотношением между коэфициентами т]2 и *{р > или> что то же> между
суммарной боковой силой Y2 и полной суммарной окружной силой Рр .
•Одновременно с этим боковую устойчивость автомобиля можно
характеризовать соотношением между такими предельными значениями скорости v его
движения и радиуса R его поворота, при которых начинается или пробуксовывание
внутреннего колеса или боковое скольжение оси. При этом получим график,
аналогичный приведенному выше на фиг. 178 для автомобиля с жесткими колесами.
Ниже произведено построение такого графика характеристики боковой устойчивости
автомобиля с эластичными колесами.
Кривая А\ВХ на фиг. 192, иллюстрирующая соотношение можду
коэфициентами т)2 и Чр пРи начале пробуксовывания и бокового скольжения внутреннего
колеса ведущей оси (с эластичными колесами), определяется уравнением (403).
Если принять движение автомобиля установившимся (v = const; R = const), то
входящий в уравнение (403) коэфициент г{2 определяется из уравнения (354).
Коэфициент чр пРи установившемся движении автомобиля определяется из
уравнения (352) с учетом коэфициента f сопротивления качению колес
(эластичных):
W
Подставляя эти выражения для коэфициентов т]2 и ^р в уравнение ("403),
получим окончательно:
AiRlm + ВДиш + С4 = 0. (416)
Входящие в это уравнение коэфициенты Л4, В4 и С4 определяются из
выражений:
При помощи уравнения (416) на фиг. 193 построена кривая АВг,
иллюстрирующая (для автомобиля, взятого для расчета) искомую зависимость между
скоростью v движения и радиусом Rmin поворота автомобиля с эластичными
колесами в момент начала пробуксовывания (и бокового скольжения) внутреннего
колеса его задней ведущей оси.
Эта кривая характеризует то же качество автомобиля, что и кривая А']В1 на
фиг. 192, но при помощи соотношения между другими параметрами и притом
для установившегося движения автомобиля.
Влияние боковой эластичности колес на устойчивость автомобиля против заноса 247
При некотором соотношении между скоростью v и радиусом R поворота
автомобиля начинается боковое скольжение внешнего колеса, а, следовательно, и всей
оси. Соответствующее этому условию соотношение между коэфициеитами r\t и ур
определяется уравнениями (410) или (411).
Подставляя в уравнение (411) выражения для коэфициентов г\2 и ^р [см.
уравнения (354) и (415)], получим уравнение, которое при установившемся движении
автомобиля (v «= const; R = const) с достаточной точностью определяет начало
бокового скольжения задней ведущей оси автомобиля:
*vmin —
g
Р2(1
JLV
(417)
1500
U00
900
600
300
О
Это уравнение получается аналогичным уравнению (356), полученному для
таких же условий (начало бокового скольжения ведущей оси) для автомобиля
с жесткими колесами. Если в
уравнении (417) принять коэ- ^
фициент / сопротивления
качению, равным нулю, то это
уравнение преобразуется в
уравнение (356).
При помощи уравнения
(417) на фиг. 193 построена
кривая AD-L) аналогичная
одноименной кривой на фиг. 178.
Построение кривой AD± может
быть произведено также и без
использования уравнения (417),
а при помощи способа,
указанного ранее при построении
графика боковой устойчивости
автомобиля на фиг. 178. Для
этой цели, задавшись
скоростью v автомобиля, можно при
помощи уравнения (415)
определить соответствующее этой
скорости значение коэфициента
1Р. Далее при помощи
кривой A1D1 на фиг. 192
нахо\
1
д
1 у, s
г
/
/ ч
/д. ,
/X
/ \
if
Г;
vo\
ю
W
50
Фиг. 193. Характеристика боковой устойчивости
автомобиля [R = f(v)\ с эластичными колесами при
равномерном распределении полной суммарной окружной
силы по колесам задней ведущей оси (<р = 0,5;/— 0,015).
1
дится значение коэфициента г\2
боковой устойчивости. После
этого при помощи уравнения (354) находится радиус Rmin поворота автомобиля,
соответствующий заданной скорости v движения последнего.
Наконец, на фиг. 193 построена кривая ОгВ1У соответствующая прямой D1B1
на фиг. 192, т.е. соответствующая бесконечно большому значению отношения
скорости v'6 пробуксовывания внутреннего колеса ведущей оси и скорости v' 0
бокового скольжения того же колеса. Построение этой кривой может быть
произведено при помощи уравнения (409), если в это уравнение вместо коэфициентов т]2
и 1Р подставить выражение для них из уравнений (354) и (415). При этом
получим:
gB\\-
(418)
248 Устойчивость автомобиля против заноса
т. е. получим уравнение, аналогичное уравнению (355), соответствующему началу
пробуксовывания внутреннего колеса задней ведущей оси автомобиля с жесткими
колесами. Если принять в уравнении (418) коэфициент / равным нулю, то
получим уравнение (355).
При помощи уравнения (418) на фиг. 193 построена кривая DtBly которая,
так же как и кривая АВг, асимптотически приближается к вертикали,
соответствующей максимальной скорости автомобиля, определяемой из выражения [см.
уравнение (415)]:
"Ртах = у (Т/> max — /) "^ -
Входящее в это уравнение максимальное значение коэфициента *{р определяется
из уравнения (88).
В результате из сопоставления фиг. 178 и 193, а также фиг. 177 и 192
следует, что отрицательное действие боковой эластичности колес на устойчивость
задней ведущей оси автомобиля против заноса проявляется в большей
предрасположенности внутреннего колеса этой оси к пробуксовыванию. Согласно фиг. 193
при том же радиусе R поворота это явление начинается при значительно
меньшей скорости, чем боковое скольжение оси, что особенно проявляется при малых
радиусах R поворота автомобиля.
Между тем при буксовании одного из колес ведущей оси далеко не всегда
остается неизменным коэфициент ср сцепления между этим колесом и опорной
поверхностью. Это постоянство коэфициента ср может быть принято лишь
приближенно справедливым при сухой дороге. При мокрой же дороге, а особенно при
наличии загрязнения или при неудачном рисунке протектора шин коэфициент
сцепления ср может весьма резко уменьшаться при повышении скорости v'6
пробуксовывания колеса. В этом случае пробуксовывание внутреннего колеса задней оси
значительно повышает склонность последней к боковому скольжению, т. е.
повышает склонность автомобиля к заносу. Это еще раз подтверждает необходимость
по возможности ограничить боковую эластичность шин (плоский профиль
покрышки, большая ширина обода колеса).
Более подробные сведения об устойчивости автомобиля с эластичными колесами
против бокового заноса изложены в работе автора [46].
§ 4. ВЛИЯНИЕ БОКОВОГО НАКЛОНА ДОРОГИ НА УСТОЙЧИВОСТЬ
АВТОМОБИЛЯ ПРОТИВ ЗАНОСА
Выше было рассмотрено влияние конструкции автомобиля на его устойчивость
против заноса; при этом предполагалось, что автомобиль движется по
горизонтальной и притом совершенно гладкой дороге, поэтому в полученные уравнения
для определения устойчивости автомобиля входил лишь один параметр,
характеризующий качество дороги, а именно коэфициент сцепления ср. При этом, естественно,
чем меньше коэфициент сцепления ср, тем хуже устойчивость автомобиля против
заноса.
Наряду с характером поверхности дороги, который определяет значение
коэфициента сцепления ср, на устойчивость автомобиля влияют боковой наклон дороги
по отношению к горизонтальной плоскости, а также неровности, имеющиеся на
ее поверхности.
В случае прямолинейного движения автомобиля по дороге, имеющей
поперечный уклон, появляется боковая сила, стремящаяся сдвинуть автомобиль вбок,
что может вызвать боковое скольжение ведущей оси, а следовательно, и занос
автомобиля.
При этом вследствие боковой эластичности колес автомобиля возникает
боковой увод его передней и задней осей, и для прямолинейного движения по
наклонной дороге продольная ось АВ автомобиля должна быть расположена под
некоторым углом к направлению его движения; передние же колеса автомобиля прш
Влияние бокового наклона дороги на устойчивость автомобиля против заноса 249
этом должны быть повернуты на некоторый угол, как это изображено на фиг. 161 ?
где приведена схема движения автомобиля по наклонной плоскости.
На фиг. 194 изображена схема сил и реакций, действующих на заднюю ось
автомобиля при движении его по плоскости, наклоненной под углом (3 к
горизонту. Слагающая веса G2, приходящегося на заднюю ось автомобиля,
направленная параллельно наклону дороги и равная Gssin(3, вызывает появление боковых
реакций Y<i и Кг, действующих соответственно на правое и левое колеса задней
оси автомобиля.
Суммарная радиальная реакция Z2+Z2, действующая на колеса задней оси,
равна сумме слагающей G2cos(i веса автомобиля и дополнительной реакции,
обусловленной передачей окружной силы р
через ведущие колеса. Согласно урав- &г^'°
нению (99), это увеличение
суммарной радиальной реакции может
быть принято равным ^рО2—-
В результате суммарная радиальная
реакция Z2 определится из
выражения:
(419)
При помощи этого уравнения Г
и схемы, приведенной на фиг. 194, . 1Л. _ о
г > Фиг. 194. Схема сил и реакции, действующих на
находим выражение для реакций Z2 заднюю ось автомобиля при его прямолинейном
и Z2', действующих на правое и движении по поперечному уклону,
левое задние колеса автомобиля при
прямолинейном его движении по дороге с поперечным уклоном:
z'2 = 0,5Z2 — 4f Go sin p,
или
(420)
или
zl = o.
(421)
Суммарная %боковая реакция К2, действующая на заднюю ось автомобиля при
движении последнего по дороге с боковым наклоном, может быть (аналогично
предыдущему) приближенно определена на основании схемы, приведенной на
фиг. 194:
К2 = <?а sin p. (422)
При эластичных колесах, имеющих чистое качение по дороге, эта сила
примерно равномерно распределяется по колесам задней оси (вследствие равенства
углов бокового увода колес).
Тангенциальные реакции, действующие на колеса задней ведущей оси автомог
биля, при равномерном распределении силы Рр по этим колесам определяются из
выражений:
250
Устойчивость автомобиля против заноса
В результате, пользуясь полученными уравнениями, определяем условие начала
пробуксовывания правого (расположенного выше) колеса задней ведущей оси
автомобиля:
ИЛИ
[о,5 (cos р + Ь *jfj - OjL sin p]2 = (0,5 sin p)
°'5ъ 4- -ф5 (
(cos
--в-sin
16
12
А—
г
W
\
—^*
V
\
^ оо
4
0,08 0,12 0,16 0,20 0,2Ь 0,28
Фиг. 195. График, иллюстрирующий зависимость между углом р
бокового наклона дороги и коэфициентом суммарной окружной силы
при потере задней осью автомобиля ее боковой устойчивости.
Решая это уравнение ftp =
получим:
(424)
(425)
Входящие в это уравнение коэфициенты Л5, Вь и Сь определяются из выра-
-кений:
А.о = 0,25
■ = — | 0,5 cos 3 — sin В -rf
\ Ь
С5 = 0,25 sin2 p — <р2 /0,5 cos p — sin p -^)
(425')
(425")
(425'")
Влияние бокового наклона дороги на устойчивость автомобиля против заноса 251
При помощи уравнения (425) на фиг. 195 построена кривая А'ВЪ
иллюстрирующая зависимость между коэфициентом ур и углом (3 наклона дороги при
указанном условии движения автомобиля.
Если в уравнении (425) принять угол р* = 0, то для коэфициента ^р получим
уравнение, соответствующее его максимальному значению (точка Вх на фиг. 195).
При значении коэфициента ^р = О уравнение (425) определяет значение угла р,
соответствующее началу бокового скольжения колеса (верхнего) задней ведомой
оси (точка Л' на фиг. 195) при движении автомобиля по наклонной плоскости:
(426)
Уравнение (425) определяет соотношение между коэфициентом *[р и углом (3
бокового наклона дороги в момент начала пробуксовывания одного из колес
задней ведущей оси автомобиля при прямолинейном его движении. В момент начала
бокового скольжения оси результирующие реакции для обоих колес становятся
равными силам сцепления cpZ^ и cpZ2, т. е. при этом получим:
(427)
В этом случае боковые реакции Уг и Уг уже не равны между собой, а сумма
их, как и ранее, определяется уравнением (422).
Пользуясь уравнением (427), находим уравнение, устанавливающее
соотношение между коэфициентом fp и углом (3 в момент начала бокового скольжения оси:
А*?Р + ВЛ1р + Св = 0. (428)
Входящие в это уравнение коэфициенты Л6, В6 и С6 определяются из
выражений (после отбрасывания малых членов, содержащих f2):
Л - L*-(Vhg + 2fL)hg (2hg\2(i*hg+fLPu , ,
Л6 - ^ ^-g-j ^ > С428 )
в. = [i - (-£*-)*] т <*2А*+fL) cos ^; (428">
С6 - [l - (^)21 (?2 cos2 р - sin2 р). (428'")
При помощи этого уравнения на фиг. 195 построена кривая ADi,
иллюстрирующая указанную зависимость.
Уравнение (428) и кривая .dDj имеют смысл до значения коэфициента ^ру
соответствующего точке Dly так как при этом скорость v'6 буксования верхнего
колеса (фиг. 194) должна быть равна бесконечности.
По мере уменьшения коэфициента *[р от указанного значения скорость v'6
соответственно уменьшается.
При значении скорости v'6, равном бесконечности, верхнее колесо не передает
боковой реакции, и в этом случае начало бокового скольжения оси соответствует
тому условию, что боковая реакция Y2 [уравнение (422)] передается через одно
нижнее колесо» т. е. при этом имеем, согласно фиг. 194:
Пользуясь этим уравнением и уравнением (420), получим:
252 Устойчивость автомобиля против заноса
Если в этом уравнении принять угол р = 0, получим:
т. е. при этом получим уравнение (88), соответствующее точке BL на оси
абсцисс фиг. 195.
При помощи уравнения (429) на фиг. 195 построена кривая DXBX (весьма
близкая к прямой), иллюстрирующая зависимость между коэфициентом у и
углом р наклона дороги для предельно возможного случая движения автомобиля
(^=00).
Полученный на фиг. 195 контур является аналогичным контуру графика
боковой устойчивости автомобиля, построенному выше на фиг. 192.
В этом случае (фиг. 195) также каждая точка внутри указанного контура
соответствует определенному значению отношения скоростей v'6 и v'c2
пробуксовывания и проскальзывания колеса, нагруженного меньшей радиальной реакцией.
Пользуясь уравнениями (399), (420) и (422), находим уравнение, устанавли-
v *
вающее зависимость между ^р и р и заданным отношением -у— :
v
у
vyc2
(430)
При помощи этого уравнения па фиг. 195 построены кривые для значений
ошения——, равных 0, 0,5, 2 и оо. Если п
V2
(кривая Ах'Аг)Л то уравнение (430) примет вид:
отношения——, равных 0, 0,5, 2 и оо. Если принять отношение —j- равным О
V V
При —у— = оо (кривая DiB^ уравнение (430) преобразуется в уравнение (429).
Vyc2
Если в полученных уравнениях принять угол Р = 0, то они преобразуются
в уравнения, полученные выше для случая движения автомобиля по
горизонтальной плоскости.
При значении коэфициента ур = 0 уравнение (428) дает:
tg pmax = 0. »о. (430")
При некотором значении коэфициента сцепления ср опрокидывание автомобиля
может начаться раньше бокового скольжения его осей. Начало опрокидыванля
автомобиля характеризуется тем, что радиальные реакции, действующие на его
правые (фиг. 194) колеса, уменьшаются- до нуля. Пользуясь уравнением (420),
получим:
Ц. sin р - 0,5 cos р = 0,5Тр Ц-. (431)
Если принять коэфициент f = 0, то получим:
Влияние бокового наклона дороги на устойчивость автомобиля против заноса 253
Согласно уравнениям (430") и (431') для того чтобы боковое скольжение
автомобиля началось раньше опрокидывания, должно быть удовлетворено
соотношение:
(432)
Выше рассмотрен был случай прямолинейного движения автомобиля по дороге,
имеющей поперечный наклон. При этом было показано, что угол наклона дороги
отрицательно влияет на боковую устойчивость автомобиля. В случае движения
автомобиля по криволинейной траектории боковой наклон дороги может оказать
положительное влияние на боковую устойчивость автомобиля.
На фиг. 196 изображена схема сил и реакций, действующих на автомобиль
при равномерном (v = const) движении по дороге, имеющей боковой наклон р
и постоянный радиус /?0 поворота.
Центробежная сила РЦр возникаю- ^^
щая при движении автомобиля по окруж-
G v*
ности, равна — • -~- -
Пользуясь фиг. 196, находим
выражение для суммы боковых реакций:
или
у -}- Y* = — ~ cos В—G sin p.(433)
При некотором соотношении между
скоростью v автомобиля и углом р
наклона дороги боковая реакция Y ~f- У"
уменьшается до нуля. Пользуясь урав- фиГ« 196« Схема сил> действующих на авто-
/ioo\ мобиль при движении его по дороге, имею-
нением (433), получим для этого слу- щей пою!речный уклон р и постоянный ра-
чая:
диус кривизны.
(434)
Таким образом, в данном случае при движении автомобиля на повороте наклон
дороги р в сторону центра поворота (фиг. 196) обеспечивает уменьшение боковых
реакций, а следовательно, повышение боковой устойчивости автомобиля.
В данной главе рассмотрено влияние следующих факторов на устойчивость
автомобиля против заноса: а) расположения центра тяжести автомобиля, б)
распределения его массы (р), в) значения тяговой силы, г) скорости v и
ускорения -г- автомобиля, д) радиуса R поворота автомобиля, е) скорости ~
поворота управляемых колес, и наконец, ж) наклона дороги. При этом во всех случаях
дорога предполагалась совершенно ровной, в соответствии с чем не учитывалось
влияния качества подвески автомобиля на его боковую устойчивость. Между тем
при движении автомобиля с большой скоростью по неровной дороге радиальные
реакции, действующие на его колеса, могут значительно уменьшаться по величине,
а это, очевидно, резко снижает устойчивость автомобиля против заноса в реальных
условиях движения автомобиля; поэтому мягкая, эластичная подвеска,
уменьшающая влияние неровности дороги на радиальные реакции, повышает устойчивость
автомобиля против бокового заноса. В этом же направлении действует уменьшение
массы неподрессоренных частей автомобиля (облегчение осей и колес). Наличие
стабилизаторов, уменьшая боковой наклон кузова при движении автомобиля
на повороте также повышает его боковую устойчивость.
254
Устойчивость автомобиля против заноса
Таблица 8
Данные по расположению центра тяжести советских автомобилей
Тип
автомобиля
Легковые
Грузовые
Модель
автомобиля
„Москвич"
ГАЗ-М-1
ГАЗ-М-20
ЗИС-101
ЗИС-110
ГАЗ-АА
ГАЗ-51
ЗИС-5
ЗИС-150
Расположение центра
тяжести по длине
автомобиля
Расстояние
от передней
оси л в мм
1150
1230
1540
1680
1330
1439
1809
1950
1906
2028
1910
2540
1655
2312
2292
2910
2150
3000
Расстояние
от задней
оси b в мм
1190
1110
1305
1165
1370
1261
1796
1655
1855
1732
1430
800
1645
.98»
1518
900
1830
980
|
| Высота распо-
i ложения
центра
тяжести hg
в мм
557*
| ~640**
!
685***
784***
-660**
_
«50***
650*
-710**
695***
835*
800****
7Ю****
* Данные НАМИ.
** Получено вычислением по положению центра
*** данные Б. С. Фалькевича [28].
**** По данным заводов (ГАЗ и ЗИС).
База
автомобиля
L в мм
2340
2845
2700
3605
3760
3340
3300
3810
3980
тяжести
Примечание
Без пассажиров
С полной нагрузкой
Без пассажиров
С полной нагрузкой
Без пассажиров
С полной нагрузкой
Без пассажиров
С полной нагрузкой
Без пассажиров
С полной нагрузкой
Без груза
С грузом
Без груза
С грузом
Без груза
С грузом
Без груза
С грузом
автомобиля без нагрузки.
Улучшение управляемости и повышение устойчивости против заноса 255
§ 5. УЛУЧШЕНИЕ УПРАВЛЯЕМОСТИ И ПОВЫШЕНИЕ УСТОЙЧИВОСТИ
ПРОТИВ ЗАНОСА СОВЕТСКИХ АВТОМОБИЛЕЙ
Управляемость и устойчивость автомобиля рассмотрены в двух гл. IV и V*
Но так как эти вопросы находятся в очень тесной связи между собой, то выводы
целесообразно объединить.
Как управляемость автомобиля, так и его устойчивость против заноса в
значительной мере зависят от расположения центра тяжести автомобиля по его длине.
При этом, однако, приближение центра тяжести к передней оси повышает
управляемость автомобиля (уменьшает разность аС2 — £Сг), но ухудшает устойчивость
задней оси против бокового заноса (см. фиг. 179). Согласно табл. 8 центр тяжести
последних моделей советских автомобилей несколько сдвинут вперед, что улучшает
управляемость автомобилей. Однако при этом несколько снижается устойчивость
задней оси автомобиля против бокового скольжения, что вредно отражается на
устойчивости автомобиля при движении по скользкой дороге, особенно без
нагрузки.
Для одновременного решения обеих задач следует коэфициент С боковой
эластичности для передних колес иметь выше, чем для задних (меньшее давление
воздуха). Было бы очень хорошо иметь возможность легко (даже при движении
автомобиля) изменять давление воздуха в шинах, приспосабливая его к качеству
дороги; это одновременно обеспечило бы хороший контроль за состоянием
шин.
Увеличение высоты hg расположения центра тяжести снижает боковую
устойчивость автомобиля (см. фиг. 180). Согласно табл. 8 для новых легковых
автомобилей величина hg несколько уменьшена.
Размер колеи В автомобиля также оказывает влияние на боковую устойчивость
последнего (см. фиг. 181). С этой точки зрения увеличение колеи автомобиля
является желательным.
На боковую устойчивость автомобиля оказывает влияние распределение массы
по длине автомобиля, определяемое радиусом инерции р. Желательно радиус
инерции иметь возможно более близким к величине \^ад.
В автомобиле ГАЗ-М-20, имеющем почти такой же общий вес, как
автомобиль М-1, радиус инерции р значительно увеличен.
Исключительно большое влияние на боковую устойчивость автомобиля имеет
конструкция тормозного привода. На всех современных советских автомобилях
применен или гидравлический или пневматический привод, что обеспечивает
равномерное распределение приводного усилия по тормозам, расположенным на правых
и левых колесах автомобиля.
Благодаря этому пропадает одна из основных причин возникновения бокового
заноса автомобиля.
Серьезное влияние на боковую устойчивость автомобиля оказывает
распределение приводной силы между тормозами, установленными на задних и передних
колесах автомобиля (см. фиг. 184). В табл. 4 были приведены диаметры
гидравлических тормозных цилиндров для нескольких советских автомобилей. Согласно
приведенным данным для легковых автомобилей большая приводная сила соответствует
передним тормозам; это указывает на их интенсивное использование, что
благоприятно отражается на боковой устойчивости задней оси автомобиля. При помощи
данных, приведенных в табл. 4, и пользуясь уравнением (243), можно определить,
при каком значении коэфициента сцепления <р коэфициент ^0 распределения
приводной силы будет иметь оптимальное значение. Такие значения для нескольких
автомобилей приведены в табл. 4.
В конструкцию всех последних моделей легковых автомобилей советского
производства (за исключением автомобиля „Москвич") введены стабилизаторы
поперечных колебаний, что наряду с повышением комфортабельности автомобиля
повышает также их боковую устойчивость (уменьшает боковое смещение центра
тяжести).
256 Устойчивость автомобиля против заноса
Наконец, значительное увеличение мягкости подвески, осуществленное в ряде
легковых автомобилей (ГАЗ-М-20; ЗИС-110), также обеспечило заметное
повышение устойчивости движения автомобилей.
Стабилизация управляемых колес автомобиля и желательное значение углов
наклона поворотного шкворня еще не исследованы достаточно подробно. Согласно
табл. 7 в некоторых автомобилях эти углы уменьшены, что сделано в расчете
на увеличенную эластичность шин. Такое положение совершенно справедливо для
ведомых, но не для тормозных управляемых колес (см. фиг. 170 и 171).
ГЛАВА VI
ПЛАВНОСТЬ ДВИЖЕНИЯ АВТОМОБИЛЯ
§ 1. ОСНОВНЫЕ ФАКТОРЫ, ХАРАКТЕРИЗУЮЩИЕ КОМФОРТАБЕЛЬНОСТЬ
АВТОМОБИЛЕЙ
Под комфортабельностью разумеется такое качество автомобиля, которое
обеспечивает его движение с большой скоростью по дороге среднего качества без
сильного утомления пассажиров.
Комфортабельность автомобиля зависит от большого числа факторов:
а) плавности движения автомобиля;
б) мягкости сидений для пассажиров;
в) удобства посадки;
г) чистоты и температуры воздуха в кузове;
д) отсутствия шума.
Большая часть этих факторов рассматривается в курсе „Конструирование и
расчет автомобиля". В данном же курсе будут приведены л*ишь основные сведения
о плавности движения или о колебании автомобиля.
При заданных дорожных условиях и скорости движения автомобиля его
колебания как вертикальные, так и угловые зависят от конструкции подвески, а также
от распределения массы автомобиля по отношению к его центру тяжести.
В настоящее время расчет подвески автомобиля еще недостаточно разработан.
При подборе жесткостей упругих элементов подвески, амортизаторов и
стабилизаторов все еще большое значение имеют эксперимент и статистические данные.
Весьма большое разнообразие конструкций подвесок для автомобилей различных
марок как по типу, так и по размерам отдельных элементов также показывает,
что точные теоретические критерии оценки качества подвески автомобиля еще не
установлены.
Основная трудность общего решения задачи обусловливается тем, что до
настоящего времени все еще не установлены критерии или измерители
колебательного движения автомобиля с точки зрения влияния его на организм человека.
Кроме того, решение задачи значительно усложняется как неопределенностью
воздействия внешних сил (неровности дороги), так и тем, что автомобиль
представляет собой систему, обладающую очень большим числом степеней свободы.
Поэтому ниже рассмотрены лишь простые, частные случаи колебательного
движения автомобиля, что, однако, должно дать учащемуся представление об
изучаемом явлении и помочь ему правильно оценить основные параметры,
характеризующие конструкцию подвески автомобиля.
§ 2. СВОБОДНОЕ КОЛЕБАНИЕ ТЕЛА С ОДНОЙ СТЕПЕНЬЮ
СВОБОДЫ
На фиг. 197 изображено тело 7, опирающееся на пружину 2. При свободном
состоянии пружины тело занимает положение /. При равновесии системы тело
занимает положение //. Цифрой /// обозначено некоторое положение тела при
его колебании. Согласно схеме тело / имеет одну степень свободы.
17 Е А, Чудаков 2232
258
Плавность движения автомобиля
При положении /// тела на него действует вверх сила пружины
где Р
к
fan —
fan
z
вес тела в кг;
коэфициент жесткости пружины в кгм или кгсм\
статическая стрела прогиба пружины под действием веса тела в м или см;
текущая переменная координата положения тела по отношению к его
нейтральному положению в м
или см.
Эта сила равна сумме силы Р
и силы инерции Pj. Принимая
движение замедленным, получим
диференциальное уравнение,
характеризующее движение тела:
(435)
где М — масса тела.
Интегрируя это уравнение,
находим:
Фиг. 197. Схема,
иллюстрирующая свободное колебание тела
с одной степенью свободы.
Входящая в это уравнение величина
тела. Принимая 1/ — = со, получим
характеризует частоту колебаний
z = А1 cos Ы -\- В7 sin a>t
При этом частота ш колебания определится из выражения:
(436)
а коэфициенты Л7 и В7 определятся на основании начальных условий движения.
Если начальные условия (t = 0) соответствуют нулевому значению z, то,
пользуясь уравнением (436), получим:
Л7 = 0. (438)
Максимальная амплитуда колебаний zQ (считая от нейтрального положения тела)
равна коэфициенту Б7:
z = B1 sin at) zQ = B7. (439)
При диференцировании уравнения (436) получим выражение для максимального
значения скорости v0 тела при прохождении его через нейтральное положение:
= — = В о> = юг
dt
(440)
В результате уравнение (436) может быть выражено через максимальные
значения перемещения z0 и скорость v0 колебания тела:
— ——sin at.
z =
sin
(441)
Колебательное движение тела / получается аналогичным изменению отрезка АВ
на правой схеме фиг. 197. При этом угол а = ш/, где а> — угловая скорость
вращения вектора ОА.
Свободное колебание тела с одной степенью свободы
259
Пользуясь уравнением (441), находим выражения для скорости ^-,
ускорения -г-! и третьей производной (пути по времени) -^ перемещения тела:
-JL = z0<o cos Ы = v0 cos о>£; (442)
—? = _ ^о)2 sin ш/1 == — v0o> si n <of; (443)
= — vo<*>2 cos o)^. (444)
На фиг. 198 изображен примерный график, иллюстрирующий изменение
величин z\ ^ -г ; -Tjg и j^- B зависимости от времени t при данном значении частоты о),
а также максимальной скорости v0 (или максимальной амплитз^ды z0).
При заданной частоте со
колебания тела определяется число
колебаний в секунду или в
минуту:
(445)
Время Г, соответствующее
одному периоду колебания тела,
определится из выражения:
(446)
Фиг. 198. Примерный график, иллюстрирующий
изменение перемещения, скорости, ускорения и третьей
производной пути по времени свободно
колеблющегося тела в зависимости от времени t
Фиг. 199. Схема для
определения приведенного коэ-
фициента жесткости.
Схема, изображенная на фиг. 197, соответствует свободному колебанию тела /
при наличии одной массы и одной пружины. Если наряду с массой кузова,
подвешенной на упругих звеньях подвески, учесть массу осей, сила от которых
передается на опорную поверхность через вторую упругую связь — шины, то
все явление колебания весьма осложняется. Однако если масса осей
невелика по сравнению с массой кузова и если жесткость шин значительно выше
жесткости подвески, то неподрессоренной массой осей можно пренебречь без:
серьезной ошибки. Коэфициенты же жесткости подвески и шин при этом
объединяются в один „приведенный" коэфициент жесткости.
260
Плавность движения автомобиля
На фиг. 199 изображена схема, иллюстрирующая высказанное положение. Эта
схема аналогична приведенной на фиг. 197, но в данном случае имеются два
упругих элемента, обладающих жесткостями кг и к2.
Результирующий или приведенный коэфициент жесткости к, равный
отношению силы Р к суммарной стреле прогиба Л+/2, определится из
выражения:
Каждая из стрел прогиба определится на основании заданной жесткости
и /е2:
Р Р
В результате получаем выражение для приведенного коэфициента же£ткости
Р клкъ
(447)
к —
*1 л
-!- к2 '
Частота колебаний ш в этом случае также определяется из уравнения (437),
а число колебаний в единицу времени и период Т— из уравнений (445) и (446).
Входящая в эти уравнения статическая стрела прогиба /ст^/
§ 3. КОЛЕБАНИЕ ТЕЛА С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ПРИ НАЛИЧИИ ТРЕНИЯ
Выше был рассмотрен простейший случай свободного колебания тела, при
этом характеристика пружины была принята прямолинейной и не учитывалось
трение, возникающее в системе при колебании тела.
Первое положение является более или менее справедливым и для
автомобильной подвески, а второе в большинстве случаев конструктивного
выполнения подвески не удовлетворяется. Подвеска
современных пассажирских автомобилей, а часто и
грузовых, снабжается амортизаторами, которые
весьма быстро гасят колебания автомобиля.
На фиг. 200 изображена схема колебания
гела '' аналогичная изображенной на фиг. 197, но
в последнем случае предположено, что в систему
введен амортизатор.
При наличии амортизатора в системе возникает
дополнительная сила Ра, препятствующая
перемещению тела. В результате, пользуясь схемой
фиг. 200, получим (при замедленном движении
тела вниз):
"77777
'//•
Фиг. 200. Схема,
иллюстрирующая колебание тела при нали- М
чии амортизатора.
Для возможности интегрирования этого
силу Ра как функцию перемещения тела 7.
уравнения необходимо выразить
При механических амортизаторах
а
силу Ря можно принять постоянной, а при гидравлических, имеющих в настоящее
время наибольшее распространение, силу Ра можно принять приближенно прямо
пропорциональной скорости -^-:
Р ~Х *.
(448)
где \а — коэфициент жесткости амортизатора, представляющий собой силу,
передаваемую через амортизатор при скорости, принятой за единицу.
Колебание тела с одной степенью свободы при наличии трения 261
При этом движение тела 1 на схеме фиг. 200 определится уравнением:
или, принимая ~ ~- 2а и имея тт = °>2> получим:
_Л «J. 2$ — -f- <ь*г == 0. (449)
При принятых на практике соотношениях между коэфициентами к и \а корни
характеристического диференциального уравнения (449) получаются комплексными,
поэтому общий интеграл уравнения (449) определится из уравнения:
z = emt (A8 cos (3/ + В8 sin $t). (450)
Входящие в это уравнение коэфициенты т и $ определятся из выражений:
т = — о;
(451)
где ш — частота колебаний тела при отсутствии амортизатора.
Согласно уравнению (451) при наличии амортизатора частота колебания
тела ("j/o)2 — о2) уменьшается при увеличении коэфициента а или коэфициента \а
жесткости амортизатора. Соответственно уменьшается число колебаний тела в
единицу времени и возрастает период Т колебания.
Пользуясь уравнениями (445), (446) и (451), получим:
J.TZ J
(452)
Коэфициенты А8 и В8 в уравнении (450) определяются начальными условиями
движения. Предполагая, что отсчет времени начинается при нейтральном
положении тела (/ = 0; 2 = 0), получим А8 = 0.
При этом уравнение (450) примет вид:
z = emtB8 sin р/ = e~otB8 sin t [/'ш2 —аг . (453)
Максимальная амплитуда z0 в этом случае (при наличии амортизатора) уже
Т
не сохраняется постоянной. Принимая величину первой амплитуды (через ~ после
начала колебания) равной zOi и пользуясь уравнением (453), найдем выражение
для постоянной В8:
В8 = —V- = *Oli, " > (454)
после чего уравнение (453) примет вид:
sin ty <ц8 — о2. (455)
262
Плавность движения автомобиля
Пользуясь уравнением (455), получаем уравнения для первой, второй и третьей
производных пути z по времени t, аналогичные уравнениям (442) — (444):
4
,(,-.
(456)
]; (457)
'*-**' [с (3 — о2) sin t /со2 — а2 + (Зо2 —
— oa]. (458)
п 1,8 2,0 2,2 2/i teen
■80
'Жз см/сек3
Фиг. 201. Изменение перемещения z (сплошная толстая линия), скорости ^ (сплошная тон-
(Pz
кая линия), ускорения -т^ (пунктирная линия) и третьей производной пути по времени
d%z
■jig (пунктир с точкой) в зависимости от времени t при наличии амортизатора.
График на фиг. 201 иллюстрирует изменение величин z\ -~; — и -^ при
заданных значениях частоты ш, коэфициента \а — жесткости амортизатора и zo\ —
первой амплитуды колебания.
При построении фиг. 201 для отдельных величин, входящих в уравнения
(455) — (458), были приняты следующие значения: 2oi = 5 см; о> = 7,75 рад/сек;
з = 2,52 рад]сек; 1а = 4,25 кг - секjсм.
Измерители для оценки плавности движения автомобиля 263
§ 4. ИЗМЕРИТЕЛИ ДЛЯ ОЦЕНКИ ПЛАВНОСТИ ДВИЖЕНИЯ АВТОМОБИЛЯ
Основное затруднение при исследовании воздействия колебаний автомобиля
на организм человека и при выборе измерителей для оценки плавности движения
автомобиля заключается в разнообразии колебаний, которые испытывает человек
при езде на автомобиле по неровной дороге.
Проведено большое число опытов по влиянию на человека различных видов
колебаний. Некоторые из этих опытов описаны были еще в работе автора [33].
Согласно приведенным выше данным при периодическом колебании системы
следующие величины характеризуют это колебание, а следовательно, и плавность
движения автомобиля:
а) частота колебаний;
б) максимальная амплитуда колебаний;
в) максимальная скорость вертикального перемещения;
г) максимальное ускорение вертикального перемещения;
д) максимальное изменение ускорения по времени или максимальное значение
третьей производной пути по времени.
Частота колебаний согласно уравнению (445) определяется числом колебаний
системы в секунду или минуту и зависит от статической стрелы прогиба fcm.
Частота колебаний кузова автомобиля при всех прочих данных,
характеризующих эти колебания (амплитуда, скорость, ускорение и т. д.), важна с точки
зрения обеспечения плавности движения автомобиля. Очень высокая частота
колебания даже при малом значении амплитуды (вибрация кузова) вызывает весьма
неприятные ощущения; но точно так же очень малая частота колебаний у ыногих
пассажиров вызывает явление морской болезни.
Повидимому, наиболее легко переносимой должна быть привычная частота
колебаний, соответствующая ходьбе человека со средней скоростью, что
соответствует примерно 50—80 колебаниям в минуту.
Максимальная амплитуда zQ колебания зависит как от подвески автомобиля,
так и от условий его движения (скорость автомобиля; неровности дороги). Этот
параметр хотя и характеризует колебательное движение автомобиля, но сам по
себе не может служить критерием для оценки плавности движения с точки
зрения воздействия на организм человека; поэтому амплитуда колебания учитывается
обычно вместе с другими показателями (в частности с частотой колебания).
Максимальная скорость (-£■) согласно уравнению (442) при гармоническом
колебательном движении и при отсутствии амортизаторов определится из
выражения:
(§) - (459)
Однако и максимальная скорость колебательного движения также едва ли может
служить надежным измерителем плавности движения автомобиля, так как скорость,
если она остается постоянной, не ощущается организмом человека.
Максимальное ускорение -^ при указанном характере колебательного
движения согласно уравнению (443) определяется из выражения:
а~\ =(2Я)»*оя«. (460)
Ul /max
Этот измеритель имеет большое значение для оценки воздействия
колебательного движения на организм человека. Это ускорение, в частности, определяет
те максимальные силы, которые вызываются в организме человека при его
колебательном движении. Эксперимент показал, что при некотором значении ускорения
возникает сильная головная боль, а далее обморочное состояние.
Максимальное значение третьей производной пути по времени [-пЛ ПРИ
264 Плавность движения автомобиля
гармоническом колебательном движении согласно уравнению (444) определится
из выражения:
Третья производная пути по времени при колебательном движении кузова
должна особенно хорошо характеризовать плавность движения автомобиля.
Постоянная сила, воздействующая на организм человека, все же не должна оказать
такого вредного воздействия, как ее быстрое изменение, что и характеризуется
третьей производной пути во времени. Это влияние в известной мере напоминает
воздействие давления воды на организм водолаза. Хорошо известно, что особенно
вредным является не столько абсолютное значение давления воды, сколько быстрота
изменения этого давления, поэтому, в частности, погружение и подъем водолаза
производятся очень медленно. Автор еще в 1931 г. [33] указывал на важность
этого измерителя плавности движения автомобиля.
Наряду с приведенными выше измерителями для оценки плавности движения
автомобиля, которые полностью определяются характером колебательного движения
автомобиля, предложено было для той же цели еще несколько измерителей.
В качестве такого измерителя неоднократно предлагалось произведение
максимальной амплитуды z0 на число колебаний в секунду я, т. е. zQn. Опыты показали
некоторую связь между этой величиной и ощущениями человека при
колебательном движении. В частности, опыты на вибрационном столе по влиянию величины zon
на ощущение пальцев дали следующие результаты:
zon = 0,005 см/сек — на границе ощущения;
zon = 0,01 „ — неприятно;
zQn = 0,05 „ — начало тягостного ощущения;
z0tf~0,l „ —граница переносимости.
Однако нам кажется, этот измеритель не может быть рекомендован для оценки
плавности движения автомобиля. Приведенный выше экспериментальный результат
соответствует лишь заданным условиям опыта; при том же значении
произведения zon воздействие колебательного движения на организм человека, очевидно,
в очень большой мере зависит от абсолютных значений каждого из множителей.
Из сопоставления выражения zon с уравнением (459), находим, что предложенный
измеритель в точности эквивалентен максимальной скорости движения тела при
гармоническом колебательном движении.
Были сделаны попытки улучшения предложенного измерителя zQn при помощи
введения показателя (большего единицы) для числа колебаний п, тогда измеритель
равен &опк.
Для коэфициента к предлагались значения от 1,3 до 2,3.
Значительное распространение имеет измеритель воздействия колебательного
движения на организм человека, пропорциональный удельной энергии колебаний.
Этот измеритель определяется из выражения:
e^lOlg-f-, (462)
где Е — энергия колебания, отнесенная к единице массы колеблющегося тела
и к одному периоду колебания, и
Ео — соответствующая энергия колебания на пределе ощущения человеком.
Энергия Ео на пределе ощутимости колебания человеком определяется
величиной 0,5 см2/сек9; при этом уравнение (462) примет вид:
e=101g2£. (463)
Максимальная энергия колеблющегося тела равна максимальной живой
силе
Колебание автомобиля как системы с двумя степенями свободы 265
Для получения удельной энергии В необходимо разделить живую силу на массу М
тела и на период Т колебания. При этом получим:
2Г ~~ 2T
Пользуясь далее уравнениями (442), (445) и (446), получим окончательно:
Е = в** = 2тс2^/г3. (464)
Из сопоставления полученного уравнения с уравнениями (459) — (461),
находим, что этот измеритель наиболее близко подходит к третьей производной пути
по времени [уравнение (46!)]. Разница заключается лишь в том, что в этом
случае амплитуда колебания учитывается не в первой, а во второй степени.
Рассмотренные выше измерители плавности движения автомобиля соответствуют
гармоническому колебанию последнего. В действительных условиях движения
автомобиля по дорогам среднего качества происходят вынужденные колебания,
обусловленные отдельными неровностями дороги. Интенсивность воздействия их
на человека, очевидно, определяется как „жесткостью* неровностей, так и
частотой их чередования, поэтому практическое значение имеет измеритель плавности
движения автомобиля, представляющий собой сумму толчков разной интенсивности
на определенном пути движения автомобиля по данной дороге. Такое испытание
производится при помощи приборов, позволяющих изменять предельные величины
ускорений колебания; будучи проведено для разных автомобилей на одном участке
дороги, оно должно дать хорошие данные для сравнительной оценки плавности
движения.
Несмотря на наличие некоторого экспериментального материала, еще нельзя
остановиться на одном каком-либо из всех приведенных выше измерителей для
оценки плавности движения автомобиля.
Все приведенные выше измерители характеризуют вертикальное прямолинейное
колебательное движение автомобиля. Кроме того, могут происходить угловые —
продольные и поперечные — колебательные движения. Продольные угловые
колебания автомобиля (галопирование) зависят от соотношения жесткостей передней
и задней подвесок и от распределения массы автомобиля. Этот вопрос будет
рассмотрен в следующем разделе при исследовании колебательного движения
автомобиля как системы с двумя степенями свободы.
Поперечные колебания автомобиля возникают при воздействии на него боковых
сил или вертикальных нагрузок, не совпадающих с плоскостью симметрии. Для
уменьшения этих колебаний в систему подвески вводят так называемые
стабилизаторы; некоторые результаты испытания таких стабилизаторов будут приведены
в § 7 этой главы.
§ 5. КОЛЕБАНИЕ АВТОМОБИЛЯ КАК СИСТЕМЫ
С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ
Выше было исследовано вертикальное колебание тела, т. е. при одной степени
свободы. Автомобиль, как это указано было выше, представляет собой систему
со многими степенями свободы. Однако полное исследование колебания тела
со многими степенями свободы получается весьма сложным, и при расчете
подвески принято учитывать лишь два основных вида колебания автомобиля:
вертикальное и продольное угловое. При этом условии схема автомобиля будет иметь
вид, изображенный на фиг. 202.
Вес G' подрессоренной части автомобиля приложен в центре тяжести С?
расположенном на расстояниях (по горизонтали) а и b от передней и задней
осей.
266
Плавность движения автомобиля
На схеме, изображенной на фиг. 202, неподрессоренная масса не учитывается,
и коэфициенты К/ и Кц представляют собой приведенные коэфициенты жесткости,
учитывающие влияние как подвески, так и шин [уравнение (447)].
Кроме того, также не учитывается действие амортизаторов.
В результате согласно фиг. 202 колебания автомобиля можно иллюстрировать
движением отрезка АВ, проходящего через центр тяжести С автомобиля, причем точки
А и В расположены над опорами передних
и задних колес. На фиг. 203 изображена
схема колебания такого отрезка АВ.
Предполагается, что этот отрезок переместился из
положения А0В0 в положение АхВг\ при этом
] х центр тяжести С передвинулся вверх на не-
"Ig/fr Щкл которую величину г, а отрезок АВ повернулся
I ГГ на угол а.
(L i J Вертикальные перемещения zx и z2 точек А
и В согласно фиг. 203 определятся из вы-
a tg a « z — аа;
Фиг. 202. Схема автомобиля, имею- пяжрний.
щего вертикальное и продольное ряжении.
угловые колебания zx
Силы Рх и Р2, действующие от упругих элементов на подрессоренную
автомобиля, не равны суммарным радиальным реакциям Zx и Z2, так как
случае не учитываются неподрессоренные массы автомобиля.
Эти силы определяются |
по деформации упругих
элементов автомобиля. При
этом согласно фиг. 203
получим:
массу М.'
в данном
Рг = О[ — ЩХХ ;
Р2 = G2 — tf//22>
(466)
Фиг. 203. Схема колебания автомобиля.
где GJ и G2 — веса
подрессоренной части
автомобиля, приходящиеся соответственно на переднюю и заднюю его оси.
Вертикальное ускорение -^ центра тяжести автомобиля определится из
уравнения:
или, пользуясь уравнением (466), получим:
(467)
Момент Me, вращающий автомобиль около его горизонтальной оси, проходящей
через центр тяжести С и перпендикулярной плоскости симметрии (плоскость
чертежа), согласно фиг. 203 определится из выражения:
Этот момент вызывает угловое ускорение -^ автомобиля:
Колебание автомобиля как системы с двумя степенями свободы 267
или
M'p?-|;+*«/*-***=о, (468)
где М'—масса подрессоренной части автомобиля;
рх — радиус инерции массы автомобиля относительно оси, проходящей через
центр тяжести автомобиля и перпендикулярной плоскости симметрии.
Уравнения (467) и (468) характеризуют колебательные движения автомобиля
как вертикальные, так и угловые (в продольной плоскости). При помощи этих
уравнений можно найти также выражения для ускорений -£~ и —^ точек А и В
автомобиля (расположенных над передней и задней осями) при вертикальном
их колебании.
Диференцируя дважды уравнения (465), получим:
***=#*+ b ~ - (470)
dt2 dp d&
d2z d2a
Подставляя в эти уравнения выражения для производных -^ и -^ из
уравнений (467) и (468), получим:
- f)=0;
^
+f\+ *Ъ Л ~ j \ = 0. (472)
Если определить из уравнения (472) перемещение z2 и подставить выражение
для него и уравнение (471), то получим:
4F+ пЬ*~?ь2 * ^№ + м' K*L2 » Zl = °' ^473^
Если аналогично этому определить из уравнения (471) перемещение zt и
подставить выражение для него в уравнение (472), то получим:
аЬ — ?\
dt* ' р2 + ф dt* ^ М> (р2
■^2 = 0. (474)
Коэфициенты перед перемещениями zx и z2 в уравнениях (473) и (474)
представляют собой квадраты частот колебаний точек автомобиля (А и В),
расположенных над передней и задней осями. Эти частоты щ и а>2 называются
парциальными.
Преобразуя уравнения (473) и (474), получим:
£££$* (475)
Согласно полученным уравнениям вертикальное колебание (ускорение и частота)
каждой из указанных точек автомобиля (А и В) зависит от колебания другой
точки, т. е. при возбуждении колебания одной из них сейчас же возникают
колебания другой точки.
268
Плавность движения автомобиля
Для того чтобы каждая из точек А я В колебалась независимо от другой,
необходимо чтобы в каждое из уравнений (475) и (476) входило лишь одно
перемещение гг или
условиии:
ад = о~.
2. Согласно уравнениям (475) и (476) это достигается при
(477)
При этом уравнения (475) и (476) примут вид:
(478)
(479)
Фиг. 204. Схемы колебания передней части автомобиля при неподвижной задней
опоре (я) и колебания задней части автомобиля при неподвижной передней
опоре (б).
Частоты щ и о)2 колебаний точек А и В, входящие в уравнения (475)
и (476) в общем виде, определяются из выражений [см. уравнения (473) и (474)]
t' (р? + ft»)
(480)
М'
При условии р? = аЪ эти уравнения несколько упрощаются:
(Oi "" ~Wb ;
М'а *
(481)
Эти частоты входят в уравнения (478) и (479).
Колебание автомобиля, соответствующее уравнениям (478) и (479), может
быть иллюстрировано схемами, приведенными на фиг. 204.
На схеме а изображено колебание передней части автомобиля (с частотой а^)
при неподвижной задней опоре. На схеме б изображено колебание задней части
автомобиля (с частотой о>2) при неподвижной передней опоре.
Из сопоставления уравнения (481) и уравнения (437) находим, что в данном
случае массы —у- и —^Д , входящие в эти уравнения для частоты колебания,
соответствуют действительным значениям подрессоренной массы автомобиля при
расВ
пределении ее по осям. В общем же случае соотношения между величинами р-
отклоняются от дей-
и аЪ [см. уравнение (480)] массы ——^ и
_i._ L и —~~
ствительного значения и называются „приведенными". Значение соотношения
между величинами ^ и аЬ весьма сильно влияет на плавность движения автомобиля.
Колебание автомобиля как системы с двумя степенями свободы
269
Pi
В современных автомобилях отношение —т- обычно несколько меньше единицы.
Ниже будут приведены значения этого отношения для ряда автомобилей.
Принимая —г- = е (коэфициент распределения масс) и используя уравнение
(480), получим:
"т- т-+1т
Hi
(482)
Уравнения (475) и (476) характеризуют свободные колебания автомобиля как
системы с двумя степенями свободы в общем случае распределения масс.
Принимаем:
оЬ — р? 1 __ ©
(483)
Эти выражения принято называть „коэфициентами связи". Таким образом,
уравнения (475) и (476) примут вид:
=0; (484)
=0. (485)
А
аЬ
А
-А
-f а2
е -
1
8
— е
+ т
Характеристическое уравнение для системы уравнений (484) и (485)
получается биквадратным и имеет вид:
2 2 Q2 "ч0^
Q4 _ ^Ш1 _j_ Ш2) ^^ ^ ^^ ^^ _ q (486)
Решая это уравнение, получим два уравнения для частоты Q2:
И + Ю2-/H-^)
[0>?+ Ш
(487)
(488)
Таким образом, свободное колебание кузова автомобиля слагается из двух
главных гармонических колебаний, в общем случае имеющих различные частоты Q?
и &2 • Для того чтобы частоты главных колебаний были равны, необходимо
согласно уравнениям (487) и (488) соблюдение следующих условий:
СхСъ = 0 и о)! = со2.
Первое условие (С±С2 = 0) согласно уравнениям (483) соответствует тому, что
коэфициент s = l или р] = ab.
Второе условие согласно уравнениям (482) приводит к равенству:
Кц a a -f sb *
270
Плавность движения автомобиля
но при условии е=1, при этом получим:
Ь_
а
(489)
т. е. приведенные жесткости передней и задней подвесок должны быть
пропорциональны нагрузкам, приходящимся на эти оси.
При указанных условиях
уравнения (487) и (488)
могут быть преобразованы
следующим образом:
п 1/мин
90
80
70
60
50
а !/мин
90
80
70
60
50
nf/MUH
100
90
80
70
60
50
кж=50
——«те
кг/см
-а?=.
к„
0,5
0,75
1,25
-4-
(490)
J.
=45
i
■""—1— !
0,5
0,75
1,25
У*
L
!
~~~~~~\~~~~~
tit '
I
При равномерном
распределении веса
автомобиля по его осям (а = Ь —
= 0,5L) жесткости к} и ки
передней и задней подвесок
должны быть одинаковыми,
а радиус рг инерции
автомобиля должен быть равен
Если принять только
первое условие, а именно,
что СгС2 = 0, т. е. [см.
уравнение (483)] принять,
что коэфициент
распределения массы s =1 , то
получим, пользуясь
уравнениями (487) и (488):
q2 2 л \
0,5
0,75
1,0
1,25
Фиг. 205. Зависимость числа колебаний автомобиля в
минуту пх и п2 от коэфициента распределения массы е при
различных значениях коэфициентов жесткости передней
Kj и задней ки подвесок и различном расположении
центра тяжести. Сплошные линии получены при а ^
= 0,5 L, пунктирные — при а = 0,6 L.
т. е. частоты главных
колебаний равны
соответственно парциальным
частотам.
Частоты Qi и Q2
главных колебаний кузова
автомобиля (так же, как и
парциальные частоты о)2 и о2,) полностью определяются конструкцией автомобиля.
Согласно уравнениям (482), (487) и (488) они зависят главным образом от рас-
(а Ь \
коэфициент е; отношения -j- и -j-J, а также от
приведенных жесткостей передней ks и задней ки подвесок автомобиля.
При помощи уравнений (487) и (488) на фиг. 205 построены кривые,
иллюстрирующие зависимость частот 2Г и 22 (выраженных через числа пх и п2
колебаний в минуту) от коэфициента е распределения массы автомобиля. При построении
Колебание автомобиля как системы с двумя степенями свободы
271
этих кривых для отношения -у- (характеризующего расположение центра тяжести
JLt
по длине автомобиля) были взяты значения 0,5 (сплошные линии) и 0,6
(пунктирные линии); коэфициенты жесткости кг и кп были приняты как равными между
собой (Kj = кп = 45 кг/см), так
и различными. Подрессоренная п Умин
масса автомобиля принята равной
2 кг-сек2/см.
В табл. 9 помещены данные
по приведенной жесткости
передней и задней подвесок для ряда
автомобилей советского
производства.
На фиг. 206 построены
кривые, иллюстрирующие
зависи90
80
W
60
■
—^
п"ОМ
-j
I
j
^-—J
I
мость частот п± и п2 от
соотношения между жесткостями
подвесок Kj И Кп. ПрИ ЭТОМ ДЛЯ ОТНО-
а
шения -у- взяты
50
п 1/мин
80
0,5
0,75
10
60
50
1
——
-,—=====
a=0,6L
—-
———
—
0,5
0J5
значения 0,5 и
0,6. Для коэфициента е
распределения массы автомобиля взяты
значения 0,8 и 1, причем кривые,
соответствующие первому
значению коэфициента е, изображены
пунктиром, авторому значению—
сплошными линиями. Наконец,
для суммы приведенных коэфи-
циентов жесткости к г + Кц
принято значение, равное 90 кг\см\
это дает возможность определять
значение каждого из коэфициен-
тов жесткости при любом
заданном их соотношении.
Согласно сказанному выше сложное колебание кузова автомобиля можно
представить состоящим из двух гармонических колебаний около двух центров
колебания. На фиг. 207 изображена схема, иллюстрирующая это положение.
Принимая, что центры Ох и О2 главных
гармонических колебаний располагаются на
прямой АВ, или на ее продолжении, получим, что
кузов колеблется около центра Ол с частотой
Фиг. 205. Зависимость числа колебаний
автомобиля л в минуту от соотношения между жесткостями
подвесок Kj и Kjj при двух значениях коэфициента е
распределения массы и различном расположении
центра тяжести. Кривые построены при Kj -f к1Г =
= 90 kzjcm, причем сплошные линии соответствуют
s = 1, а пунктирные — е = 0,8.
Таблица 9
Жесткости подвесок советских
автомобилей *
Модель
автомобиля
„Москвич*
ГАЗ-М-1
ГАЗ-М-20
ЗИС-101
ЗИС-110
Приведенный коэфициент
жесткости
передней
подвески в кг\см
34
92
40
140
46
задней
подвески в кг\см
46
54
54
74
56
* По экспериментам, проведенным
Н. Д. Мазаловым.
и около центра О2
I-
а
2
с частотой й2
Фиг. 207. Гармонические колебания автомобиля
около двух центров колебания.
Расположение центров колебания кузова автомобиля может быть различным
в зависимости от конструкции автомобиля. Ниже приведен метод определения
положения центров главных колебаний автомобильного кузова.
272
Плавность движения автомобиля
Диференциальные уравнения (484) и (485) характеризуют изменение
координат zx и £3 точек А и Б кузова автомобиля, лежащих над передней и задней
осями. После интегрирования этих диференциальных уравнений получим [22]:
= Dx sin
z2 = DB sin
t sin Q%f;
4 sin Q2t
(492)
(493)
Входящие в эти уравнения коэфициенты D зависят от конструкции автомобиля
и могут быть определены следующим образом для каждого из главных
колебательных движений автомобиля.
Вторые производные
перемещений zx и z2J
определяемые из уравнений (492)
и (493), имеют вид:
(494)
Фиг. 208. Схема колебания кузова автомобиля около
центра Ох.
dfl 3 A
— D&\ sin 22/.
Подставляя полученные выражения для zly
(495)] в уравнения (484) и (485), находим:
(495)
Ж и ^Ш [уравнения (492) —
2 =. 0;
± = 0.
(496)
(497)
Если рассматривать главное колебательное движение с частотой 21? то в
уравнениях (496) и (497) коэфициенты D2 и Di следует принять равными нулю. При
этом получим, пользуясь уравнениями (492),
(493), (496) и (497):
«2-0?
■Of
(498)
Аналогично этому получим для главного
колебательного движения с частотой 22 фиг- 20а Схема ко^бания кузова авто-
[принимая в уравнениях (496) и (497)
коэфициенты Dx и Dz равными нулю]:
мобиля около центра О2.
£*
(499)
Пользуясь полученными данными и исходя из принятой схемы колебания
кузова автомобиля, изображенной на фиг. 207, можно найти расположение
центров Ох и О2 главных колебаний кузова и определить расстояние ОХС и О%С от
центров колебаний до центра тяжести автомобиля.
На фиг. 208 изображена схема колебания кузова автомобиля около центра Оъ
т. е. схема соответствует первому главному гармоническому колебанию кузова
с частотой 2j. Предположим, что прямая АВ из своего положения А0В0
повернулась в положение АХВ1У вращаясь около точки Ov Пользуясь фиг. 208, нахо-
Колебание автомобиля как системы € двумя степенями свободы
273
дим соотношение между перемещениями zt и z2 точек Л и В и радиусом Яг —
расстоянием от центра тяжести автомобиля до центра колебания
(500)
Далее, пользуясь уравнением (498), определяем радиус Rx:
1 —
(501)
На фиг. 209 изображена схема колебания кузова около центра О2 с частотой &2.
Прямая АВ переместилась из положения А0В0 в положение АгВг. При этом
соотношение между перемещениями zx и z2 точек А и В согласно фиг. 209
определится из выражения:
(502)
— #2
-
\
\
к
\
>
/
/
^—.
0J
0,75
10
125
Фиг. 210. Зависимость радиусов/?! и /?2
колебаний автомобиля от коэфициента
е распределения массы (а = 0,6/,;
Kj = кП = 45 кг/см).
<■
\
■—
———
*-—.
— ».
0,5
0,75
1.0
125
Фиг. 211. Зависимость радиусов /?х
и /?2 колебаний автомобиля от
соотношения между коэфициентами же«
сткости передней rcf и задней кп
подвесок (a=Q,6L; е = 0,8; Kj-\-
-\-Kjj = 90 кг/см).
Пользуясь уравнениями (502) и (499), находим выражение для радиуса /?2:
a -f Ь
(503)
Согласно полученным данным положение центров главных колебаний кузова
автомобиля очень сильно зависит от конструкции автомобиля и в частности от
коэфициектов Сг и С2 или от распределения массы по его длине (коэфициент е).
При помощи уравнений (501) и (503) на фиг. 210 и 211 построены кривые,
иллюстрирующие зависимость радиусов Rx и /?2 от коэфициента е распределения
18 Е. А. Чудаков
2232
274
Плавность движения автомобиля
массы автомобиля при равенстве коэфициентов жесткости Kj и кп (фиг. 210) и от
соотношения между приведенными коэфициентами жесткости #/ и Кц при
значении коэфициента е, равном 0,8 (фиг. 211).
Та же зависимость между радиусами Rly R2 и коэфициентом е при равенстве
коэфициентов жесткости к2 и кп в более наглядной форме иллюстрируется
графиком на фиг. 212.
Согласно полученным данным (фиг. 210 и 212) при равенстве жесткостей Kj и Кц
и при коэфициенте е = 1 радиусы Rx и R2 получаются равными соответственно а
0,75 -
0,50
Фиг. 212. Зависимость радиусов R± и /?2
колебаний автомобиля от коэфициента е распределения
массы (л = 0,61; кт = л?// = 45 kzJcm2).
и #, т. е. центры Ох и О2 главных колебаний располагаются над осями. При
меньшем значении коэфициента е (что обычно имеет место на практике) центр Ol9
соответствующий колебанию с меньшей частотой 2Х, располагается перед
автомобилем, а центр О2 —внутри базы
автомобиля. При значении коэфициента в,
большем единицы, центр О±
располагается внутри базы автомобиля, а центр
О2 — сзади автомобиля.
Согласно фиг. 211 при некотором
соотношении между жесткостями щ и кц
радиус Rx стремится к бесконечности,
т. е. угловое колебание автомобиля
происходит лишь с частотой 22, при этом
Фиг. 213. Общая схема колебания
автомобиля в продольной плоскости (при
наличии амортизаторов и неподрессоренных
масс).
радиусов Rx и /?2, а также
центр О2 лежит внутри базы
автомобиля.
В табл. 10 приведены для некоторых
легковых автомобилей данные по зна-
по тем конструктивным параметрам автомо-
от которых зависит расположение центров колебания Ох и О«
2*
чениям
билей,
Согласно табл. 10 автомобилю ГАЗ-М-20 соответствует особенно высокое
значение коэфициента е, что в значительной мере помогло получить очень хорошую
плавность движения.
В приведенном выше исследовании колебания автомобиля последний
рассматривался как система с двумя степенями свободы, в частности, при этом не
учитывалось влияние неподрессоренных масс автомобиля. Кроме того, не учитывалось
также влияние амортизаторов, а колебание принималось свободным — без учета
вынужденных колебаний, вызываемых неровностями дороги.
Колебание автомобиля как системы с двумя степенями свободы
275
Имеется ряд попыток решения той же задачи в более общем виде [2,3, 17,
21, 26]. Недостатком этих решений является их большая сложность и трудность
практического использования. Ниже приводятся уравнения, полученные сотрудником
НАМИ Д. В. Гельфгат [3].
Таблица 10
Данные по подвескам автомобилей *
Характеризующие данные
Расстояние от точек крепления Г а
передних (а) и задних (Ь) рессор |
до центра тяжести в м I b
Коэфициент распределения
массы е
Радиус р инерции кузова
относительно поперечной оси,
проходящей через центр тяжести, в м
Масса М' подрессоренных частей
автомобиля в кг*секшем
Приведенные коэфициенты жест- ( к
кости подвесок передней к1 и зад- | 1
ней кп в кг/см 1 ки
( Сг
Коэфициенты связи {
\ с2
( <°i
Парциальные частоты в раЬ\сек \
\ ^2
Частоты главных колебаний f г
в рад/сек | Q^
Радиусы центров главных ко- ( 1
лебаний в м \ R
Модель автомобиля
„Москвич"
0,98
1,16
0,775
0,94
1,015
34
46
0,113
0,137
8,23
9,47
8,4
10,55
1,71
0,502
i
ГАЗ-М-20
1,4
1,3
1,05
1,38
1,575
40
54
—0,0252
—0,0235
7,17
8,03
7,36
7,84
0,465
1,15
ГАЗ-М-1
1,688
1,162
0,49
0,98 •'
1,425
92
54
0,433
0,263
15,1
9,0
8,75
16;50
2,48
0,40
* Данные ГАЗ им. Молотова [17].
Общая схема колебания автомобиля в продольной плоскости симметрии
изображена на фиг. 213.
На основании принятой схемы получены уравнения, характеризующие колебания
автомобиля:
Af,
£- + ■
(504)
276 Плавность движения автомобиля
Ц-Л1 <ч / U.Zi (*Х-\ \ I / \ | ' ' 1 / Л
2 2
(504)
где Мь М2 и Ж3 — приведенные массы подрессоренной части автомобиля;
тг и т2 — неподрессоренные массы передней и задней осей;
X, и Х2 — коэфициенты сопротивления амортизаторов;
vi и vi — коэфициенты жесткости подвески;
V2 и V2 — коэфициенты жесткости шин;
hx и /г2 — высота дорожных препятствий для передней и задней осей.
Приведенные массы подрессоренной части автомобиля определяются из
выражения:
При решении уравнений (504) получается характеристическое уравнение
восьмой степени, весьма трудное для точного решения.
При помощи приближенного решения предложенных уравнений Д. В. Гельфгат
получил ряд зависимостей между колебанием автомобиля и его конструктивными
параметрами, а также неровностью дороги (высота и чередование неровностей)1.
§ 6. ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ ПОДВЕСКИ АВТОМОБИЛЯ
Применяется большое количество разнообразных методов испытания подвески
автомобиля и отдельных ее элементов (жесткость упругих элементов, жесткость
амортизаторов), так и в совокупности — оценка плавности движения. Методы
испытания отдельных элементов подвески и конструктивных параметров
автомобиля, характеризующих его подвеску (например, расположение центра тяжести,
моменты инерции автомобиля, парциальная частота передней и задней подвески
и т. д.), достаточно полно изучены.
Методы испытания автомобиля на плавность движения изучены значительно
меньше. Они распадаются на две основные группы:
а) лабораторное испытание, при котором автомобиль устанавливается на
испытательном стенде, и
б) дорожное испытание автомобиля.
Испытание автомобиля на стенде имеет значительные преимущества перед
дорожным в том отношении, что в этом случае имеется неподвижная система для
отсчета всех колебаний автомобиля, а следовательно, можно записать с большой
точностью абсолютные колебания всех интересующих нас точек автомобиля.
При пробеговом испытании можно точно записать лишь перемещения
отдельных элементов автомобиля по отношению к другим; абсолютные же колебания
могут быть записаны при помощи приборов, записывающих ускорения:
вибрографов, комфортометров лишь с определенным приближением. Было сделано несколько
попыток избежать этого недостатка дорожного испытания, которое с других точек
зрения является наиболее показательным. В частности, проводились эксперименты
при движении автомобиля около вертикальной плоскости, на которой (при помощи
струи краски или фотографированием) наносились линии перемещения в
пространстве той или другой точки кузова автомобиля. Однако такой прием
испытания автомобиля на плавность движения не получил распространения. Для той же
1 Для более подробного ознакомления с вопросами о плавности движения автомобиля
могут быть рекомендованы работы [2, 3, 5, 17, 21, 22, 25 и 26].
Стабилизация поперечного колебания кузова
277-
цели используется пятое колесо, катящееся рядом с автомобилем по возможно,
гладкой дороге.
Из стендов, предназначенных для испытания автомобиля на плавность
движения, наибольшего внимания заслуживает стенд, построенный в Горьковском
индустриальном институте по проекту канд. техн. наук Б. В. Цимбалина.
На фиг. 214 изображена схема этого стенда.
На фундаменте закреплена рама /, на которой попарно установлены шесть
барабанов; две пары из них — 5 и 7 являются установочными, а одна 3—
натяжной. Барабаны охватываются бесконечными прорезиненными лентами 6> натяжение
которых и регулируется натяжными барабанами 3 при помощи приспособления 2.
Автомобиль устанавливается передними и задними колесами соответственно на.
12 3&56 7 8 9 Ю
Фиг. 214. Схема стенда для испытания автомобиля на колебания.
барабаны 5 и 7. Барабаны 7, а следовательно, и ленты 6 приводятся в движение
при помощи двигателя 10, двух коробок передач 8 и 9 и главной передачи,
установленной между барабанами 7. Скорость вращения барабанов 7 определяется
при помощи тахометра 12.
Неровности устанавливаются на ленте перед колесами, а затем удаляются
с помощью сбрасывателя 4.
Запись колебания всех элементов автомобиля, а также пассажиров,
расположенных на сиденьях, производится на лентах //, которые перематываются
электродвигателем 10 с заданной скоростью. На той же ленте производится отметка
времени (через 0,03 сек.) и скорости вращения барабанов при помощи
электрического прибора.
В результате на ленте отмечаются колебания всех точек автомобиля, имеющих
наибольшее значение с точки зрения плавности его движения. Обработкой
полученных записей перемещений этих точек определяются скорость и ускорение их
перемещений. Стенд позволяет производить испытание автомобиля при переезде
каждой из его осей или обеих осей как через единичную неровность, так и через
регулярно чередующиеся неровности, в пределах допустимого расстояния между ними.
Данные о методе и результатах испытания элементов подвески автомобиля
и автомобиля в целом на плавность движения имеются в ряде работ *.
§ 7. СТАБИЛИЗАЦИЯ ПОПЕРЕЧНОГО КОЛЕБАНИЯ КУЗОВА
При движении автомобиля на повороте и вообще при наличии боковой силы,
действующей на кузов, последний получает угловое смещение, величина которого
зависит от конструкции подвески автомобиля. Это угловое колебание кузова
вызывает неприятное ощущение у пассажиров и затрудняет управление автомоби-
1 Труды совещания по подвеске автомобиля, проведенного в автомобильной
лаборатории Академии Наук СССР [26].
278
Плавность движения автомобиля
лем. Кроме того, при этом происходит боковое смещение центра тяжести
автомобиля, что вызывает дополнительное изменение радиальных реакций, действующих
на внутренние и внешние колеса, а это вызывает снижение устойчивости
автомобиля против заноса.
Угловое смещение кузова, очевидно, получается тем больше, чем мягче
подвеска автомобиля. Согласно данным, приведенным в табл. 9, в современных
легковых автомобилях жесткость подвески значительно снижена (суммарная жесткость
для обеих осей снижена на 20—50%), Это вызывает весьма заметное повышение
углового' колебания кузова, поэтому появилась потребность в уменьшении
бокового' колебания кузова; для этой цели и применяются стабилизаторы поперечной
устойчивости.
Ниже дано краткое исследование действия таких стабилизаторов и их
влияние на поперечное колебание кузова. Более подробно этот вопрос освещен
в работе Н. Д. Мазалова [26].
Фиг. 215. Схема, иллюстрирующая
наклон кузова автомобиля и
смещение центра тяжести его
подрессоренной части при движении
автомобиля на повороте.
Фиг. 216. Схема, иллюстрирующая
наклон кузова автомобиля и смещение
центра тяжести его подрессоренной
части при прямолинейном движении
автомобиля по наклонной плоскости.
В гл. II было рассмотрено движение автомобиля на повороте, и при этом
была определена боковая сила инерции N, которую необходимо приложить в центре
тяжести автомобиля для того, чтобы рассматривать его как бы находящимся
в равновесии. Аналогично определяется сила N и в данном случае, однако ранее
было предположено, что центр тяжести всего автомобиля, так же как и центр
тяжести его подрессоренной части, не изменяет положения по отношению к осям;
в данном же случае рассматривается смещение центра тяжести подрессоренной
его части.
На фиг. 215 изображена схема, иллюстрирующая это явление.
Здесь сила инерции К', соответствующая подрессоренной массе автомобиля,
приложена на высоте h от оси колебания этой массы (положение этой оси
может быть определено экспериментально). В результате момент, стремящийся
повернуть кузов, равен произведению Y'h. Момент сопротивления повороту кузова
обусловливается инерцией У кузова и сопротивлением упругих элементов подвески.
Момент сопротивления подвески Мт определяется из полученных ранее уравнений
(134) и (135).
Таким образом, получим:
dt2
(505)
где а — угол поворота кузова.
Стабилизация поперечного колебания кузова
279
При установившемся движении автомобиля по окружности угол ос получается
постоянным и определится из выражения:
a = 2F = W"' <506)
где Е — коэфициент угловой жесткости подвески автомобиля, равный отношению
момента, приложенного к кузову, к углу поворота кузова.
Это выражение позволяет определить угол а поворота кузова по отношению
к осям автомобиля. Кроме того, сами оси также получают некоторый поворот
на угол а' вследствие эластичности шин (см. фиг. 67 и 68), что еще
увеличивает поворот кузова. В результате суммарный угол поворота кузова получится
равным сумме a + a'.
В случае прямолинейного движения автомобиля по наклонной плоскости
угловое смещение кузова обусловливается весом подрессоренной части автомобиля.
На фиг. 216 показана схема, иллюстрирующая это явление.
Момент, поворачивающий кузов, в этом случае равен произведению G'/zsin (a+fO-
Момент сопротивления повороту Мг, обусловленный жесткостью подвески, равен
произведению угловой жесткости подвески £ на угол а. В результате получим:
G'h sin (a + Р) = £a,
или приближенно:
. _ G'h sin p
a^tga- g_G.Acosp.
Полный угол поворота кузова превышает определяемый приведенным выше
уравнением на угол поворота осей, обусловленный эластичностью шин.
Для уменьшения угла поворота кузова автомобиля в указанных условиях
движения последнего в конструкцию подвески вводят стабилизаторы (один или два)
поперечной устойчивости.
Наибольшее распространение имеет стабилизатор, представляющий собой
изогнутый стержень, который средней частью устанавливается в опорах на раме
автомобиля, а концами шарнирно крепится к соответствующей оси. Такой
стабилизатор, работая на изгиб и на скручивание, несколько повышает жесткость
подвески и снижает угловое колебание кузова автомобиля, не влияя на эластичность
подвески в вертикальном направлении.
На фиг. 217 приведены результаты испытания * двух автомобилей в целях
определения влияния стабилизаторов на изменение угла наклона кузова
автомобиля в зависимости от прилагаемого чк нему момента.
При этом же эксперименте производилась запись кривых перемещения
выбранных точек автомобиля, при помощи чего определяется продольная ось колебания
кузова на подвеске (точка О на фиг. 215 и 216).
Согласно приведенным данным стабилизаторы поперечной устойчивости для
разных автомобилей снижают угол колебания кузова (при том же приложенном
к нему моменте) на 15—50%,
Таблица 11
Угловые жесткости (в кг-см/рад) подвески и стабилизаторов
для двух легковых автомобилей
Марка
автомобиля
ЗИС-110
Линкольн
Передняя
подвеска
195 000
134 000
Задняя
подвеска
185 000
178 000
Суммарная
жесткость
подвески
380 000
312 000
Передний
стабилизатор
120 000
216 0С0
Задний
стабилизатор
74 000
Нет
Суммарная
жесткость
стабилизаторов
194 000
216 000
Суммарная
жесткость
подвески и
стабилизаторов
574 000
528 000
1 По экспериментам Н. Д. Мазалова.
280
Плавность движения автомобиля
2 -
1
/
и
У
/
/
/
А
/
/
/
/
/ *
//
У
г
/
у\
/
•
1
У
у
у
У
12
36
60
72 Мкгм
Фиг. 217. Зависимость угла наклона кузова автомобиля от приложенного
к нему момента:
/ — ЗИС-110; 2 — Линкольн; сплошные линии соответствуют испытанию без стабилизаторов,
пунктирные — со стабилизаторами.
^^
>«•■«»,
-*У^
у
\^У
•
^"—
.
а)
^—
, — 1- *»
■
Л
0)
Фиг. 218. Угол наклона кузова автомобиля ЗИС-110 при движении
по кривой (R = 12 м) со скоростью 20 км/час:
а — со стабилизаторами; б — без стабилизаторов.
Стабилизация поперечного колебания кузова
281
В табл. 11 для тех же автомобилей приведены значения для угловой жесткости
передней и задней подвесок и для стабилизаторов, а также для суммарной угловой
жесткости. Автомобиль ЗИС-110 дает в этом отношении лучшие результаты.
у1*
\
Ч,
■^—
а)
S e У г круга
s
*>—/
\
"U,
VJ
\
6) S = 1/2 круга
Фиг. 219. Угол наклона кузова автомобиля Линкольн при движении
по кривой (R = 12 м) со скоростью 20 км/час:
а — со стабилизаторами; б — без стабилизаторов.
Наряду со статическим испытанием стабилизаторов было проведено также
ходовое испытание автомобилей. При этом для определения наклона кузова
применялся прибор с жироскопом.
На фиг. 218 приведены результаты испытания автомобиля ЗИС-110, а на
фиг. 219 — автомобиля Линкольн. В обоих случаях нижняя кривая соответствует
Г
1
J
\ ,
/\
X.
j
. d
а
2
0
i
1
1
1 >
WfJ
\
\
-у—
1
а)
0(0
2
0
Л
L-/—v
Л
г—^
a
2
0
)
f\—U
\
\ 1
\
5)
Фиг. 220. Колебания кузова
автомобиля ЗИС-110 при переезде через
одностороннее препятствие со
скоростью 15 км\час\
а — со стабилизаторами; б — без
стабилизаторов.
6)
Фиг. 221. Колебания кузова автомобиля
Линкольн при переезде через
одностороннее препятствие со скоростью
15 км/час:
а — со стабилизаторами; б — без стабилизаторов.
испытанию автомобиля без стабилизаторов, а верхняя — со стабилизаторами.
Движение автомобиля осуществлялось по окружности радиуса 12 м со скоростью
20 км/час. После въезда на кривую автомобиль описывал половину окружности,
после чего вновь выходил на прямую. Введение стабилизаторов заметно
уменьшило угол наклона кузова.
282 Плавность движения автомобиля
Стабилизаторы поперечной устойчивости, оказывая положительное влияние на
колебание кузова в рассмотренных выше случаях движения автомобиля,
оказывают некоторое отрицательное влияние на колебание кузова при переезде
автомобиля через одностороннее препятствие.
На фиг. 220 и 221 приведены результаты соответствующего эксперимента
с автомобилями ЗИС-110 (фиг. 220) и Линкольн (фиг. 221). В каждом случае
автомобиль двигался прямолинейно со скоростью 15 км/час, переезжая колесами
одной стороны препятствие высотой 12 см. Нижние кривые соответствуют
отсутствию, верхние — наличию стабилизаторов.
Так как такие препятствия встречаются сравнительно редко, то положительное
влияние стабилизаторов на подвеску автомобиля оказывается более существенным,
и почти все современные легковые автомобили снабжаются стабилизаторами
поперечной устойчивости.
ГЛАВА VII
ПРОХОДИМОСТЬ АВТОМОБИЛЯ
§ I. ОСНОВНЫЕ ТРЕБОВАНИЯ К АВТОМОБИЛЮ ПОВЫШЕННОЙ
ПРОХОДИМОСТИ
Под проходимостью автомобиля разумеется такое качество последнего,
которое обеспечивает ему возможность работать по плохим дорогам и бездорожью.
В этом отношении к автомобилю может быть предъявлено несколько требований
в соответствии с различными дорожными условиями. Эти требования можно
разбить на две группы:
а) способность автомобиля работать по дорогам с твердой, но неровной
поверхностью;
б) способность автомобиля проходить через мягкие или топкие места (грязь,
заболоченная местность, песок, снег).
Кроме того, для автомобилей специального назначения могут быть поставлены
еще дополнительные требования в отношении их проходимости, а именно:
а) преодоление вертикальных препятствий;
б) преодоление рвов произвольной глубины и заданной ширины;
в) преодоление водных препятствий.
Автомобиль высокой проходимости должен не только иметь возможность
проходить по указанным выше дорогам, но должен при этом иметь достаточно
высокую среднюю скорость движения, так как только при таком условии он может
выполнять свои функции. Некоторые отклонения от этого требования могут быть
допущены только в отношении преодоления водных преград и отчасти рвов и
вертикальных препятствий, составляющих относительно малую часть общего пути.
Ниже приводятся краткие сведения по проходимости автомобилей.
§ 2. ПРОХОДИМОСТЬ АВТОМОБИЛЯ ПО ДОРОГАМ
С ТВЕРДЫМ ПОКРЫТИЕМ
При движении автомобиля по дороге с твердой, но неровной поверхностью
требования к конструкции автомобиля сводятся главным образом к тому, чтобы
автомобиль имел достаточно большую тяговую силу на ведущих колесах, во-вторых,
чтобы автомобиль не задевал своими отдельными частями за выступы дороги,, и
наконец, в-третьих, чтобы тряска при движении автомобиля по такой дороге была
по возможности небольшой.
Максимальная тяговая сила, играющая исключительно большую роль при
движении автомобиля по плохой дороге, определяется, во-первых, весом,
приходящимся на ведущие колеса, и, во-вторых, коэфициентом сцепления между колесами
и дорогой. При этом предусматривается, что передача между двигателем и
ведущими колесами обеспечивает возможность получения такой тяговой силы.
При движении по тяжелой дороге желательно иметь максимально высоким
отношение наибольшей тяговой силы к полному весу автомобиля; это отношение
может служить измерителем для оценки проходимости автомобиля.
Выполнение всех колес автомобиля ведущими значительно повышает
проходимость автомобиля. Наличие передних ведущих колес при этом не только повы-
284
Проходимость автомобиля
шает суммарную тяговую силу благодаря увеличению сцепного веса автомобиля,
но, кроме того, дает возможность автомобилю легче преодолевать встречающиеся
на дороге препятствия: в этом случае передние колеса стремятся переехать через
препятствие, что и способствует более легкому его преодолению. Для
иллюстрации сказанного на фиг. 222
схематически представлен момент
переезда автомобиля через
препятствие. Схема / соответствует
автомобилю с двумя задними
ведущими колесами, схема // —
автомобилю с четырьмя ведущими
колесами. В первом случае
передние колеса только давят на
препятствие, и если это препятствие
достаточно высоко и
расположено под большим углом к гори-
///// ////////////////////// /
Фиг. 222. Схема переезда автомобиля через препят- зонту, то любая тяговая сила на
ствие при двух и четырех ведущих колесах. задних колесах не поднимет
передние колеса вверх, и автомобиль
не преодолеет это препятствие. При наличии же четырех ведущих колес (схема //)
передние колеса приводятся в движение от двигателя и стремятся преодолеть
препятствие. Момент, вращающий передние колеса, вызывает дополнительную
реакцию /?, направленную вверх, как это
показано на схеме //. Эта сила
поднимает передние колеса, и автомобиль
преодолевает препятствие. Таким образом,
наличие передних ведущих колес с точки
зрения проходимости автомобиля по
неровной дороге является весьма
желательным.
Для того чтобы при езде по неровной
дороге отдельные ее выступы не
задевали за низко расположенные части
автомобиля, необходимо, чтобы между этими
частями автомобиля и опорной
плоскостью было достаточно большое
расстояние. Для оценки этого качества
автомобиля принимаются следующие измерители:
а) радиус поперечной проходимости,
б) радиус продольной проходимости,
в) минимальные расстояния между
низшими точками автомобиля и опорной
плоскостью (просвет),
г) углы проходимости (передний и
задний),
д) углы перекоса осей.
На фиг. 223 схематически представлен
общий вид передней и задней осей автомобиля. Для определения радиусов гг и г2,
называемых радиусами поперечной проходимости, на фигуре приведены две
окружности, касающиеся одновременно колес и низшей точки передней и задней
осей.
На фиг. 224 представлена схема автомобиля, на которой нанесена окружность,
касающаяся одновременно передних и задних колес и низшей точки в средней
части автомобиля. Радиус г3 этой окружности определяет очертание выступа, через
который автомобиль может пройти, не задевая дороги своими низшими точками.
Чем меньше этот радиус, тем большей проходимостью обладает автомобиль.
Фиг. 223. Радиусы поперечной
проходимости автомобиля для передней и задней
осей.
Проходимость автомобиля во дорогам с твердым гшкрытием
285
Указанные выше радиусы кривизны гх, г2 и г3 дороги, по которой еще может
проходить автомобиль, соответствуют плавному изменению неровностей дороги.
Кроме того, на дороге часто могут встречаться неровности, за которые могут
задевать отдельные точки автомобиля, поэтому наряду с указанными выше
радиусами для оценки
проходимости автомобиля
рассматривают еще расстояния Н
между низшими точками
автомобиля и опорной
плоскостью (фиг. 225).
При езде по неровной
дороге, главным образом в
момент въезда на
возвышение или съезда с этого
возвышения, возможны случаи
задевания передним или
задним концом автомобиля за
дорогу. Вероятность этого получается тем большей, чем резче угол изгиба и чем
больше выступает автомобиль за передние или задние колеса; при этом автомобиль
задней или передней частью своей рамы
может задевать за дорогу в тот момент,
когда колесо находится в самой низшей
точке. Для того чтобы ограничить воз-
ШИ -t щ | л , можность таких ударов, устанавливается
j | I ~ ~м предельная величина свеса автомобиля как
^"^—— '' спереди, так и сзади. Это
ограничение определяется углами проходимости,
которые схематически представлены на
фиг. 226. Здесь проведены две линии:
Фиг. 224. Радиус продольной проходимости автомобиля.
Фиг. 225. Схема определения
минимального расстояния между задней осью
автомобиля и опорной плоскостью.
одна из них касается заднего колеса и
наиболее отдаленной точки задней части
автомобиля, вторая касается переднего
колеса и проходит через наиболее удаленную точку передней части
автомобиля. Получающиеся при этом углы
ходимости) определяют то пространство,
в котором автомобиль не задевает дороги.
и Тг (передний и задний углы
проФиг. 226. Углы проходимости автомобиля.
Фиг. 227. Перекос средней и задней осей
трехосного автомобиля.
При езде автомобиля по неровной дороге весьма важно, чтобы подвеска осей
автомобиля давала последним возможность хорошо приспосабливаться к рельефу
пути. Это свойство двухосного автомобиля может быть оценено максимальным
углом перекоса передней оси по отношению к задней.
В случае трехосного автомобиля возможность значительного перекоса требуется
от средней и задней осей автомобиля. Угол о максимального перекоса (фиг. 227)
оценивает это качество автомобиля.
Кроме того, при езде по неровной дороге предъявляется еще одно
дополнительное требование. На фиг. 228 схематически представлено расположение средней
286
Проходимость автомобиля
и задней осей трехосного автомобиля; причем в связи с неровностью дороги эти
оси могут занять положение в различных горизонтальных плоскостях.
Конструкция подвески осей и привода к их главным передачам должна допускать смещения
осей не меньше некоторой величины Л,
определяемой теми дорожными
условиями, для которых предназначен
данный автомобиль.
Проходимость автомобиля с точки
зрения возможности преодоления им
сосредоточенного вертикального
препятствия измеряется высотой этого
препятствия. На фиг. 229 представлена
схема автомобиля, передние колеса ко-
Фиг. 228. Перекос средней и задней осей трех- торого наезжают на вертикальное пре-
осного автомобиля. пятствие высотой h. Эта высота и
является основным измерителем,
определяющим способность автомобиля преодолевать вертикальные препятствия. Как
правило, колесный автомобиль не в состоянии преодолеть вертикальное
препятствие, высота которого превосходит две трети радиуса колеса. Автомобиль со
всеми ведущими колесами имеет в этом отношении значительное преимущество
перед автомобилем, имеющим только задние ведущие колеса.
Фиг. 229. Схема переезда автомобиля через Фиг. 230. Схема переезда автомобиля через
вертикальное препятствие. ров.
Переезд колесного автомобиля через рвы может осуществляться только при
том условии, что автомобиль имеет не менее четырех осей. На фиг. 230
представлена схема переезда четырехосного автомобиля через ров, имеющий ширину /
и произвольную глубину. При переезде через этот ров четырехосный автомобиль
может поддерживаться на трех осях, в то время как четвертая ось будет
переноситься через ров. Критерием, определяющим это качество автомобиля, служит
максимальная ширина / рва, через который автомобиль может переезжать.
§ 3. ПРОХОДИМОСТЬ АВТОМОБИЛЯ ПО ГРУНТУ
Точных измерителей для определения проходимости колесного автомобиля по
мягкому грунту еще нет в связи с тем, что условия движения по мягкому, но сухому
грунту, с одной стороны, и по мягкому и одновременно достаточно влажному и
скользкому грунту, — с другой, не являются тождественными с точки зрения
тех требований, которые должны предъявляться к колесам автомобиля как
ведущим, так и опорным.
Принято считать, что для повышения проходимости автомобиля по мягкому
грунту необходимо снижать удельное давление между шинами и опорной
поверхностью. Именно по этим соображениям для автомобилей высокой проходимости
применяются многоосные конструкции автомобилей и шины большого профиля
(сверхбаллоны). В условиях движения автомобиля по грунту мягкому, но
обеспечивающему достаточный коэфициент сцепления между колесом и этим
грунтом, указанное выше положение является вполне правильным. В том же случае,
Проходимость автомобиля по грунту
287
когда грунт мягкий и скользкий (например, снежная дорога или дорога, покрытая
жидкой грязью), снижение удельного давления между шинами и дорогой влияет
отрицательно. В этом случае при недостаточном удельном давлении может
начаться пробуксовывание ведущих колес, сопровождающееся дальнейшим
погружением их в грунт.
Решающим фактором при движении автомобиля по мягкому грунту является
соотношение между предельной тяговой силой, которая может быть передана
через ведущие колеса, и силой сопротивления движению автомобиля. Для лучшей
проходимости автомобиля это> соотношение должно быть возможно высоким. Однако
получение большой тяговой силы на ведущих колесах при условии движения
автомобиля по мягкому грунту является исключительно трудным; это обычно и
служит основной причиной малой проходимости колесных машин при таких
условиях движения. Практика показывает, что свободно катящееся колесо легко
проходит по такому грунту, на котором
ведущее колесо немедленно погружается
в грунт. Например, аэромобиль или
буксируемый колесный автомобиль
легко проходят по песку и снегу, между
тем автомобиль с ведущими колесами
по такой же дороге пройти не в
состоянии. Это объясняется тем, что
ведущее колесо при наличии на нем
значительной тяговой силы начинает
пробуксовывать.
Пробуксовывание ведущего колеса
может обусловливаться двумя
причинами: или скольжением этого колеса
по поверхности дороги, или срезанием грунта, на который опирается колесо.
Фиг. 231 иллюстрирует оба эти случая. На схеме а представлено колесо,
буксующее вследствие его проскальзывания по дороге. Между колесом и дорогой
возникает реакция Рк, максимальное значение которой определяется из выражения:
Фиг. 231. Схема буксования ведущего колеса
автомобиля.
где GK — вертикальная нагрузка, приходящаяся на колесо;
ср — коэфициент сцепления между колесом и дорогой в момент буксования.
Как показывает опыт, при движении по скользкой дороге максимальная
реакция Рк получается тем меньше, чем меньше удельное давление между колесом
и дорогой, так как чем меньше это удельное давление, тем хуже выдавливается
влага между колесом и дорогой и тем легче колесо начинает буксовать.
На схеме б (фиг. 231) представлен случай буксования колеса из-за срезания
грунта. Максимальная реакция PKma^ возникающая в этом случае между колесом
и дорогой, может быть определена приближенно из следующего выражения:
где а — коэфициент, определяющий напряжение на срез в грунте, на который
опирается колесо;
F — общая поверхность соприкосновения колеса с грунтом.
Чем больше поверхность F, т. е. чем больше опорная поверхность шин
ведущих колес, тем, очевидно, больше будет реакция Рк при том же грунте, т. е.
в этом случае снижение удельного давления колеса на дорогу весьма желательно.
Таким образом, для получения наилучшей проходимости автомобиля по скользким
и одновременно с этим мягким грунтам, следует иметь удельное давление
достаточно высоким, но вместе с тем напряжение на срез в грунте возможно малым.
Эти противоречивые требования могут быть частично удовлетворены
соответствующей конструкцией шины. Примером может служить применение шин со специаль-
288
Проходимость автомобиля
ным протектором — с большими выступами (грунтозацепы), при которых до момента
погружения в грунт колесо имеет сравнительно малую опорную поверхность,
а, следовательно, высокое удельное давление, обеспечивающее отсутствие
проскальзывания колеса; при погружении же колеса в грунт общая поверхность среза
грунта резко увеличивается, что обеспечивает малое напряжение на срез грунта.
В настоящее время в качестве основного измерителя для проходимости
автомобиля применяется удельное давление колес на дорогу. Определение удельного
давления между колесом и дорогой представляется довольно трудным, так как
действительное удельное давление зависит в значительной мере от деформации шины
и от погружения ее в грунт. Это удельное давление может быть определено
экспериментально при помощи измерения отпечатка между шиной и дорогой.
Кроме того, для той же цели может быть принята величина условного
удельного давления, которое определяется как частное от деления веса автомобиля,
приходящегося на соответствующие шины,
на проекцию этих шин: , , где /—число
колес; D — диаметр колеса и d
—диаметр профиля шины.
Удельное давление различных колес
автомобиля на дорогу неодинаково и
зависит от распределения веса по его осям.
Для повышения прохо 1имости
автомобиля, особенно при наличии всех
ведущих колес, необходимо распределять
нагрузку так, чтобы удельное давление
повышалось для задних колес по сравнению
с передними. Это весьма важно также
потому, что каждое последующее колесо
при этом будет двигаться по более
уплотненной колее и будет в состоянии
передать большую тяговую силу. Перегрузка
же передней части, наоборот, чрезвычайно
невыгодно влияет на проходимость, так
как передние колеса могут при этом легко закапываться, в соответствии с чем
сопротивление движению автомобиля резко повышается.
Для выяснения влияния размера колес на проходимость автомобиля по мягкому
грунту ниже рассмотрен случай качения ведомого автомобильного колеса. При
качении колеса по мягкому грунту шины деформируются очень мало, и можно
принять, что колесо является жестким. Соответствующая этому случаю схема
качения ведомого колеса изображена на фиг. 232. Реакция dN, действующая на
колесо от грунта по длине дуги dS и расположенная под углом 6 к вертикали,
может быть определена из выражения:
Фиг. 232. Схема качения ведомого колеса
по мягкому грунту.
JM = qbdS,
(507)
где q — удельное давление грунта на площадку колеса, имеющую длину dS и
ширину b (ширина шины).
Из условия равновесия колеса (фиг. 232) получим выражения для
вертикальной силы, действующей от колеса на грунт
GK=$qbdS cos 6,
и для реакции оси, действующей на колесо
sin
(508)
(509)
Проходимость автомобиля по грунту 289
Пользуясь фиг. 232, находим:
dScosb=dx;
dS sin 6 = dy9
где х и у — переменные координаты.
Удельное давление q согласно экспериментальным данным [1,9 14] может
быть определено из выражений:
yf, (510)
где разность h — у равна глубине погружения;
С и ji — коэфициенты, характеризующие свойства грунта. i
Пользуясь приведенными данными, преобразуем уравнения (508) и (509):
GK=Cbf(h—yfdx; (5П)
(512)
где а — проекция на горизонталь окружности колеса, находящейся в
соприкосновении с грунтом, и h — максимальное погружение колеса.
Интегрируя уравнение (512), получим:
(513>
Для интегрирования уравнения (511) выражаем глубину погружения А—у колеса
в различных точках через отрезки а и х.
Пользуясь фиг. 232, получим:
где D — диаметр колеса.
Подставляя выражение для h—у в уравнение (511), получим:
-^dx. (514)
Разлагая функцию 1 ^ в Ряд и используя два первых члена, получим
окончательно:
GK = Cb/f(l — £)1/Ж. (515)
Из этого уравнения определяем глубину колеи
Р
Отношение -~ (ведомое колесо) представляет собой коэфициент сопротивления
к
качению колеса /. В результате, пользуясь уравнениями (513) и (515), получим:
У (517)
Если принять для коэфициента (* среднее значение 0,5, то получим:
19 R А. Чудаков 2232
290
Проходимость автомобиля
Фиг. 233. Схема поворота автомобиля.
Из полученных уравнений видно положительное влияние на проходимость
автомобиля увеличения ширины Ьу а также диаметра D его колес.
§ 4. МАНЕВРЕННОСТЬ АВТОМОБИЛЯ
При езде на автомобиле по пересеченной местности или по дороге с крутыми
поворотами весьма важно, чтобы автомобиль имел хорошую маневренность, т. е.
имел возможность развертываться на минимальной площади. Чем поворотливее
автомобиль, тем большей проходимостью он обладает в этих условиях его движения.
В качестве измерителей для этого случая можно принять: минимальный радиус
поворота автомобиля, ширину пространства, занимаемого автомобилем на повороте,
]И вынос автомобиля на повороте. На
фиг. 233 изображена схема поворота
автомобиля. При этом предполагается,
что передние управляемые колеса
повернуты на максимальный угол,
допускаемый конструкцией автомобиля.
Радиус /?! есть минимально возможный
радиус поворота. Практически он
может быть определен как сумма радиуса
поворота /?, соответствующего
наружному переднему колесу, и выноса а
крыла по отношению к этому колесу.
Ширина А пространства,
занимаемого автомобилем при повороте, равна
разности между радиусами Rx и /?2
Этот размер определяет то свободное
пространство, которое необходимо
иметь для поворота автомобиля.
Вынос задней части автомобиля на фиг. 233 обозначен буквой В. Этот вынос
получается тем больше, чем больше задний свес автомобиля. Иногда в целях
повышения маневренности автомобиля управляемыми делают не только его передние,
но и задние колеса. В этом случае указанный выше вынос В автомобиля
достигает особенно большого значения. Такой вынос затрудняет отъезд автомобиля от
расположенного рядом препятствия.
§ 5. ПРЕОДОЛЕНИЕ АВТОМОБИЛЕМ ВОДНЫХ ПРЕПЯТСТВИЙ
Преодоление автомобилем водных препятствий обеспечивается при помощи
установки на нем водонепроницаемого кузова, а также винта — для создания тяги.
Основными измерителями этого качества автомобиля, т. е. его способности
преодолевать водные препятствия, являются следующие элементы:
а) запас пловучести;
б) скорость движения,
в) максимальный угол спуска на воду,
г) максимальный угол выхода из воды,
д) максимальный продольный крен,
е) максимальный боковой крен.
Под запасом пловучести понимается отношение полного весового
водоизмещения к весу автомобиля.
Максимальная скорость движения автомобиля определяется экспериментально
при движении в спокойной воде.
Максимальный угол спуска на воду зависит главным образом от того, на какую
высоту кузов передней части автомобиля выполнен водонепроницаемым. Кроме
того, на этот угол оказывает влияние запас пловучести автомобиля.
Максимальный угол выхода автомобиля из воды определяется защищенностью
от зоды задней части автомобиля и запасом пловучести. Кроме того, на этот угол
Появление паразитной мощности в системе автомобиля
291
исключительно большое влияние оказывает конструкция привода к ведущим
колесам автомобиля. При выходе из воды необходимо иметь достаточную тяговую
силу для того, чтобы автомобиль мог преодолеть подъем на берег, между тем
в этот момент не весь сцепной вес автомобиля может быть использован для полу-
чения тяговой силы. Тяговая сила, получаемая в этот момент от винта, также
существенно влияет на величину предельного угла подъема при выходе из воды.
Фиг. 235. Схема бокового крена
автомобиля.
Фиг. 234. Схема продольного крена автомобиля,
В соответствии с этим нужно иметь такой привод к винту, который при малой
скорости вращения колес обеспечивал бы высокую скорость вращения винта.
Продольный крен представляет собой угол продольного наклона автомобиля,
при котором еще не получается проникновения воды в кузов. На фиг. 234
представлено схематически положение автомобиля на воде при наличии продольного
крена. Предельный угол наклона ах определяется при этом защищенностью от воды
задней части автомобиля. Максимальный же
угол наклона <х2 в этом случае определяется
защищенностью от воды передней части
автомобиля и расположением винта.
Максимальный боковой крен определяется
предельным углом бокового наклона
автомобиля в воде до момента проникновения воды
в кузов. На фиг. 235 представлено положение
автомобиля на воде при наличии бокового
наклона а3.
Максимальные значения продольного и
бокового крена, выраженные в углах наклона
аг, а2 и «з, по существу еще не определяют пловучести автомобиля пр» его
продольном и боковом наклонах, так как одинаковый угол продольного и
бокового наклонов может быть вызван моментами, весьма различными по величине: чем
больше момент, требующийся для предельного наклона автомобиля, тем последний
будет устойчивее на воде. В соответствии с этим правильнее устойчивость
автомобиля на воде определять моментом устойчивости. Этот момент определяется
величиной того груза, который надо положить на расстоянии 1 м от
нейтральной средней плоскости автомобиля для того, чтобы равновесие было нарушено и
чтобы боковой крен достиг предельной величины.
Проходимость обычных транспортных автомобилей через водное препятствие —
через брод — определяется высотой тех его частей, в которые может попасть вода
и нарушить нормальную работу двигателя (карбюратор, сапун).
§ 6. ПОЯВЛЕНИЕ ПАРАЗИТНОЙ МОЩНОСТИ В СИСТЕМЕ
БЕЗДИФЕРЕНЦИАЛЬНОЙ ТРАНСМИССИИ АВТОМОБИЛЯ
В автомобилях повышенной проходимости весьма часто применяют привод
к осям без диференциального механизма между ними. При этом в определенных
условиях движения автомобиля в его трансмиссии возникает паразитная мощность,
которая нагружает отдельные механизмы привода к ведущим колесам, что
вызывает усиленный износ, а иногда и поломку деталей трансмиссии.
Обычно появление паразитной мощности вызывается разностью в размере
ведущих колес, связанных бездиференциальным приводом. Однако то же явление
292
Проходимость автомобиля
также возникает и при одинаковых ведущих колесах, но при таком движении
автомобиля, при котором ведущие колеса за тот же отрезок времени проходят
различный путь (неровная дорога, движение автомобиля по кривой).
Для иллюстрации указанного явления на фигГ 236 изображена ведомая ось
железнодорожного вагона, причем колесо / больше колеса 2 (гх > г2).
Дри одинаковом значении коэфициента сцепления <р между обоими колесами
и опорной поверхностью и при одинаковом распределении веса по обоим колесам
оси колесо большего радиуса может передать больший момент до начала своего
буксования, нежели колесо меньшего радиуса до начала своего скольжения, поэтому
при прямолинейном движении оси (фиг. 236) первым начинает проскальзывать по
опорной поверхности меньшее колесо 2. 7
В результате меньшее колесо изнашивается интен-
сиБнее большего, т. е. процесс идет не в направлении
уменьшения дефекта, а, наоборот, в направлении его
усиления. Рассмотрим сначала характер движения колес
такой оси по отношению к рельсам.
Скорость vc2 проскальзывания меньшего колеса 2
определится из выражения:
0)Га = V
(520)
Фиг. 236. Бездиференциальная ведомая ось
железнодорожного вагона.
Фиг. 237. Движение
бездиференциальной оси на
повороте.
где <о — угловая скорость вращения оси;
v — скорость перемещения оси;
гх и г2 — радиусы колес / и 2.
При движении бездиференциальной оси на повороте относительно некоторого
центра О (фиг. 237) и при равенстве радиусов обоих колес внутреннее колесо /
будет пробуксовывать на опорной поверхности. При этом скорость
пробуксовывания v6 определится из выражения:
где R — радиус поворота, отнесенный к центру оси;
v — скорость перемещения оси, отнесенная к той же точке;
% — угловая скорость вращения автомобиля.
При движении оси с автомобильными колесами, обладающими значительной
тангенциальной эластичностью, явление протекает иначе.
.При той тангенциальной эластичности, которой обладают автомобильные колеса,
требуется иметь весьма большую разницу между размерами этих колес (связанных
жесткой осью), для того чтобы получить пробуксовывание большего или
проскальзывание меньшего из колес. Эластичность колес компенсирует разницу в их
-размере - и обеспечивает чистое качение обоих колес*
Появление паразитной мощности в системе автомобиля 293
Вопрос о качении эластичного колеса уже был рассмотрен ранее (гл. I, § 1),
при этом было введено понятие о радиусе качения автомобильного колеса [см.
уравнение (2)].
Обращаясь к бездиференциальной оси (фиг. 236) и предполагая, что колеса
этой оси обладают тангенциальной эластичностью, получим для условия чистого
качения обоих колес [уравнение (2)]:
гк\ = гк2 , или гкЮ— 1Ркг = гк20 ~ \Рк2 , (522)
где гк\ и гк2 — радиусы качения колес / и 2;
Рк\ и Рк2 — окружные силы, соответствующие тем же колесам
Пользуясь этим уравнением, находим:
Рк\ — РК2 = 1 = — , (523)
где с — постоянная величина, равная разности между радиусами свободного
качения Гк\0 — ГП2О-
Таким образом, для того чтобы оба колеса (обладающие тангенциальной
эластичностью) бездиференциальной оси при условии прямолинейного движения
последней имели чистое качение, необходимо, чтобы разность окружных сил,)
действующих соответственно на большее и меньшее колеса, не превосходила
отношения 4-. Чем больше разность между радиусами колес с, тем больше
получается разность между окружными силами Рк\ и Рк2\ разность между силами Рк\
и РК2 также возрастает при уменьшении эластичности шин (коэфициент X).
При колесах одинакового размера (с = 0) получаются равными и окружные
силы; при жестких колесах (к = 0) разность РК\ и Рк2 согласно уравнению (523)
стремится к бесконечности. В действительности разность сил Рк\ и Рк2
ограничивается такими значениями указанных сил, при которых одно из колес начинает
или пробуксовывать или проскальзывать. Таким образом, в этом случае колеса
разного размера, будучи соединены жесткой осью, не могут одновременно иметь
чистое качение даже в случае прямолинейного движения оси. То же явление получается
и для оси с эластичными колесами, но при разности между радиусами колес,
превосходящей определенное значение. Этот вопрос будет ниже рассмотрен более
подробно. Уравнение (523) справедливо до начала буксования большего колеса
или до начала скольжения меньшего колеса.
В случае эластичных колес их чистое качение происходит также и при
движении бездиференциальиой оси на повороте и при одинаковом размере колес.
В этом случае внутреннее колесо оси является как бы большим (/), а внешнее
колесо — как бы меньшим (2). При этом, пользуясь уравнением (522) и принимая
гк\о = гк20 =» /vo, получим:
или
PKi-PK2= Гк1~Гк2 • (524)
Пользуясь фиг. 237, можно определить соотношение между радиусами г^
и rKi, при котором еще получается чистое качение обоих колес:
К 2
или
r«2-rKl=H|, (525)
где ш — угловая скорость вращения оси.
294
Проходимость автомобиля
Выше приведены краткие сведения по вопросу о характере движения колес
бездиференциальной оси — жестких и эластичных. Ниже рассмотрен вопрос о
возникновении паразитной мощности, передаваемой через колеса такой оси при
различных размерах колес и прямолинейном движении оси или при одинаковом их
размере, но при движении оси на повороте.
Предположим, что вертикальная нагрузка Z равномерно распределяется по
жестким колесам бездиференциальной оси (см. фиг. 236). Так как при прямоли-
йейном движении оси меньшее колесо 2 проскальзывает, то действующая на это
колесо тангенциальная реакция имеет направление, противоположное направлению
качения колеса и равна силе сцепления 0,5 cpZ; к колесу же при этом приложен
момент, равный произведению этой силы на радиус колеса г2. В результате к оси
от колеса 2 передается мощность, равная произведению момента 0,5 oZr2 на
угловую скорость о> вращения оси.
(р\
(IV
N.
Фиг. 238. Условная схема, иллюстрирую- Фиг. 239. Условная схема распределения
щая появление паразитной мощности в си- мощности для ведущей оси (Ра > 0).
стеме ведомой оси с жесткими колесами.
Таким образом, от меньшего колеса к бездиференциальной оси передается
весьма большая мощность; далее эта мощность передается к большему колесу /.
В результате этого в оси появляется паразитная мощность, нагружающая как
ось, так и колеса.
Угловая скорость <о вращения оси может быть выражена через скорость <®
движения оси. Согласно сказанному ранее имеем (чистое качение колеса /):
v
а) = — .
гг
При этом паразитная мощность NQ, циркулирующая в системе оси, определится
из выражения:
No = 0,u(pZv —— . (526)
На фиг. 238 изображена условная схема циркуляции мощности No для случая
ведомой оси с жесткими колесами.
Мощность No% циркулирующая в системе бездиференциальной оси, зависит от
величины и направления передаваемого через ось момента. Этот вопрос
рассматривается ниже применительно к автомобильной оси, колеса которой обладают
значительной тангенциальной эластичностью.
Согласно уравнению (523) при чистом качении обоих колес разность между
окружными силами Рк\ и РК2 равна отношению у > сумма тех же реакций
равняется полной суммарной окружной силе Рр, или сумме сил — свободной Ра
я затрачиваемой на качение колес /Z. В результате имеем:
(527)
+ Рк2 = Рр = Pa+fZ.
Появление паразитной мощности в системе автомобиля 295
Пользуясь уравнениями (527), находим выражения для окружных сил
На основании этих уравнений можно найти распределение мощности по
элементам оси и, в частности, можно определить паразитную мощность No для всех
случаев движения оси.
На фиг. 239 изображена условная схема распределения мощности по
элементам ведущей оси (Pfl>0).
Мощность Ne, подведенная к оси от двигателя, затрачивается на создание
свободной суммарной окружной силы Ра и на преодоление сопротивления качению:
Мощность Л/j, развиваемая на колесе 1, равна произведению окружной силы РКх
на скорость v:
На качение каждого из колес затрачивается мощность
Nr = 0,5/Ztr.
К автомобилю от оси передается мощность Na, равная произведению свободной
суммарной окружной силы Ра на скорость v:
В результате от колеса 2 передается к колесу / паразитная мощность NQi
равная разности N± — Ne. При этом получим
No = 0,5 (j-Pa- fZy, (528')
Эта мощность и циркулирует в замкнутом контуре оси.
На фиг. 240 изображена та же схема, что и на фиг. 239, но мощность No
выделена отдельным контуром,
Мощность NQ зависит от значения силы Ра. При значении силы Ра=— —/Z
паразитная мощность уже не возникает.
Схемы на фиг. 239 и 240 соответствуют ведущей оси; на фиг. 241
изображена аналогичная схема, соответствующая свободной оси (Ра = 0). В этом
случае мощность No получится равной 0,5 (^ fZ)v.
На фиг. 242 изображена схема, соответствующая ведомой оси (Р = Ра +
-f- fZ = 0); в последнем случае мощность Na подводится от тележки к оси
и затрачивается на качение колес. Эта мощность, равная fZv, подводится к коле-
лесу 2 оси (меньшему), а от него уже поступает к колесу 7, т. е. противоположно
тому, как это имело место в предыдущих случаях (фиг. 240). Для получения
уравнения для мощности NQ уже нельзя воспользоваться общим уравнением (528'),
принимая в нем силу Ра = —/Z. В данном случае паразитная мощность No не
равна мощности N2 на колесе 2, а меньше ее на мощность Nrl, передаваемую к
колесу /.
Пользуясь уравнением (528'), находим мощность Af2, передаваемую через
колесо 2 в рассматриваемом случае (Ра = —/Z):
-0,5 4,.
А
<529)
296
Проходимость автомобиля
После этого определяется мощность No:
дго =7V2 — Л/>1 = 0,5 (-? /z)t/. (530)
На фиг. 243 изображена схема, соответствующая тормозящей оси. Мощность Ne
в этом случае от оси передается к карданной передаче (и центральному тормозу),
а от тележки к оси подводится мощность Na = Pav.
■рз
и
Л
JV;
Фиг. 240. Условная схема распределения Фиг. 241. Условная схема распределения
мощности для ведущей оси (Ра>0). мощности для свободной оси (Ра = 0).
Мощности Л/i и Л/"2 и в этом случае определяются при помощи уравнения (528);
принимая для мощностей положительные значения, получим:
fti
(531)
m
мг2
Фиг. 242. Условная схема распределения
мощности для ведомой оси (Рр = 0).
Фиг. 243. Условная схема распределения
мощности для тормозящей оси.
Однако сила Ра в этих уравнениях имеет отрицательное значение. Для
определения паразитной мощности No необходимо согласно схеме фиг. 243 вычесть
из мощности Л^ Мощность Nn; при этом получим:
Л/о = Л^ — Nrx = 0,5 (Ра + -j-J v. (532)
Сила РЛ в этом уравнении также имеет отрицательное значение.
Мощность Ne равна разности между мощностями iV2 и Л^:
(533)
Согласно полученным данным при всех прочих равных условиях паразитная
мощность No получается тем больше, чем больше разность с между радиусами
свободного качения колес, и тем меньше, чем больше тангенциальная эластичность
колес (коэфициент X).
Появление паразитной мощности в системе автомобиля
297
Кроме того, мощность No получается тем больше, чем меньше окружная сила
на ведущих колесах; при повышенном значений этой силы — положительном или
отрицательном — мощность Л/о уменьшается.
При ведущей оси (фиг. 240) мощность No уменьшается до нуля при
значении силы Ра = -^ /Z. При тормозящей оси (фиг. 243) мощность iV0
уменьшается до нуля при значении силы Ра = г-.
Таким образом, увеличение мощности NQ получается при малом значении
свободной суммарной окружной силы РаУ т. е. при легких условиях движения
автомобиля. Благодаря этому допустимо в случае блокированного (бездиференциального)
привода к нескольким осям автомобиля в легких дорожных условиях (когда
требуется малая тяговая сила) производить выключение одной ведущей оси*
прекращая тем самым
возникновение паразитной
мощности.
Выше были рассмотрены
случаи появления
циркулирующей паразитной
мощности в системе бездиферен-
циальной оси. Аналогично
этому задача решается и для
автомобиля, имеющего
несколько ведущих осей.
На фиг. 244 изображена Фиг. 244. Условная схема распределения мощности для
условная схема распреде- двухосного автомобиля с двумя ведущими осями,
ления мощности для
двухосного автомобиля с двумя ведущими осями. При этом схема соответствует тому
условию, что колеса задней оси 2 меньше колес передней оси / и что свободная
суммарная окружная сила является положительной.
Эта схема является аналогичной приведенной на фиг. 239, но в этом случае
радиальные нагрузки Zx и Z2, действующие соответственно на переднюю и заднюю
оси автомобиля, приняты не одинаковыми. Кроме того, при построении схемы т
фиг. 244 учтены потери на трение в главных передачах; при этом их к. п. д
обозначены буквами: t]m — при передаче мощности от привода к колесам и i\m — при
обратном направлении передачи мощности.
В связи с вышесказанным получаем следующие выражения для мощностей:
t = 0,5
Z2) + -f-] v;
0,5rifm[{--Pa-f(Z1 + Z2)\v;
"a =
298
Проходимость автомобиля
На фиг. 245 изображена аналогичная схема для двухосной ведущей тележки
трехосного автомобиля. При этом предположено, что колеса оси 2 больше колес
оси 3 и что сила Ра имеет положительное значение; поэтому схема на фиг. 245
соответствует схеме на фиг. 239.
В связи с вышесказанным получаем следующие выражения для мощностей:
= 0,5 [Ра + f(Z2 + Z3)+
- 0,5 [-f -Pa-f(Z2 + Z3)jv;
0,57^ [-f - Pa - /(Z2 + Z3)] v;
В обоих случаях (фиг. 244 и 245) имеется паразитная мощность iV0, которая
так же, как и в случае бездиференциальной оси, увеличивается по мере
уменьшения свободной суммарной
окружной силы Ра, по мере
увеличения разности между
радиусами колес с и по мере
уменьшения тангенциальной
эластичности шин (коэфициентХ).
-Фиг. 245. Условная схема
распределения мощности для ведущей тележки
трехосного автомобиля.
Фиг. 246. Схема установки для испытания
трехосного автомобиля в целях обнаружения
паразитной мощности, появляющейся в системе
его двухосной ведущей тележки.
Для доказательства наличия паразитной мощности в замкнутом контуре
двухосной ведущей тележки трехосного автомобиля автором было проведено специальное
испытание трехосного автомобиля ГАЗ-ААА на стенде с беговыми барабанами.
Схема установки ведущих осей автомобиля при его испытании изображена на
фиг. 246. Автомобиль своими ведущими колесами (оси 2 и 3) устанавливался на
барабаны 7, которые и приводил во вращение. Барабаны были укреплены на одном
валу, соединенном с тормозным генератором, что давало возможность изменять
условия движения автомобиля. Колеса оси 2 были снабжены шинами, радиус
которых был на 2—2,5 мм больше радиуса шин, установленных на колесах оси 3.
Этим обеспечивалась разница в радиусах свободного качения колес осей 2 и 3.
Появление паразитной мощности в системе автомобиля
299
М
Для того чтобы обнаружить появление паразитной мощности, упорные
подшипники червяка главной передачи оси 3 были отрегулированы так, что червяк получил
возможность небольшого осевого перемещения. Это и было использовано для
замыкания и размыкания электрического контакта 4, что служило показателем
наличия или отсутствия паразитной мощности в системе ведущей тележки.
При передаче мощности от червяка к червячной шестерне червяк перемещается
назад, при передаче мощности от червячной шестерни к червяку последний
перемещается вперед.
При испытании автомобиля по описанной схеме было обнаружено, что при малой
и средней нагрузках двигателя червяк главной передачи оси 3 перемещается вперед
(размыкание контактов), а при повышенной нагрузке двигателя и при включении
низших передач в
трансмиссии червяк переме- 5 4 5 5 4
щался назад. Таким
образом, при малых и
средних значениях свободной
суммарной окружной силы,
развиваемой на ведущих
колесах автомобиля,
наблюдалась передача
мощности от колес к главной
передаче, т. е.
происходило появление
паразитной мощности.
В дальнейшем было
произведено более точное
определение паразитной
мощности No,
появляющейся в системе
ведущей (двухосной) тележки
трехосного автомобиля.
Для этой цели была
применена установка,
изображенная схематически на фиг. 247. Автомобиль устанавливался своими
осями 2 и 3 на барабаны 7, которые и приводил во вращение.
Тангенциальные силы Р2 и Я3, получающиеся на колесах осей 2 и о,
определялись при помощи измерения реактивных моментов, для чего служили рычаги 4
и динамометры 5.
Таким образом, можно было определять тангенциальные силы Р2 и Ps при
различных рабочих режимах автомобиля, а следовательно, можно было измерять
паразитную мощность No.
Один из результатов такого испытания автомобиля приведен на фиг. 248.
Для каждого комплекта шин, устанавливавшихся на колесах ведущей оси, на
фигуре нанесены две линии: одна, идущая выше оси абсцисс и характеризующая
изменение тангенциальной силы Р2 в зависимости от суммарной тангенциальной
силы Р2 + Р& и другая, пересекающая ось абсцисс и характеризующая изменение
тангенциальной силы Ps в зависимости от той же силы Р2 ~\- Р3.
Согласно фиг. 248 все точки, полученные при помощи эксперимента и
определяющие значения тангенциальных сил Р2 и Р3 при различных значениях
суммарной тангенциальной силы, расположились так, что через них можно провести
прямые линии. Таким образом, между этими силами получаем прямолинейную
зависимость, что вполне соответствует принятому допущению о постоянстве
(независимости от тангенциальной силы) коэфициента X тангенциальной эластичности
шин [уравнение (2)].
Все прямые на фиг. 248 расположены примерно под одинаковым углом по
отношению к оси абсцисс, и тангенс этого угла равен приблизительно 0,25, что
Фиг. 247. Схема установки для испытания трехосного
автомобиля в целях определения тангенциальных сил,
приложенных к колесам ведущей тележки.
ведущими
300
Проходимость автомобиля
справедливо, если коэфициент X эластичности шин есть величина постоянная
и если масштаб для сил Р2 и Р3 принят вдвое меньше масштаба для силы Р2 + Р3-
Наибольшее расхождение между тангенциальными силами Р2 и Р3 достигает
значения, примерно равного 220—240 кг (пятый случай испытания автомобиля).
В этом случае даже при повышенном значении суммарной тангенциальной силы
Р2 -\- Р3 тангенциальная сила Р3 все еще получается отрицательной, что указывает
на наличие паразитной мощности в системе ведущей тележки автомобиля.
Максимальное значение отрицательной силы Р3 при нулевом значении
суммарной силы Р2 + Р3 (движение автомобиля по инерции) при этом достигает 120 кг.
0 20 40 60 80 100 120 140 160 180 200 Рг+Р3кг
Фиг. 248. Результаты опыта по определению тангенциальных
сил, приложенных к колесам ведущей тележки трехосного
автомобиля:
/ — разность между свободными радиусами колес осей 2 и 3 равна 3 ммл
давление воздуха в шинах обеих осей равно 3 ати; 2 — разность между
свободными радиусами осей 2 и 3 равна 7 мм, давление воздуха в шинах обеих осей
3 ати; 3 — разность между свободными радиусами колес осей2 пЗ равна 3 мм,
давление воздуха в шинах оси 3 равно 1,5 ати; 4 —«разность между свободными
радиусами колес осей 2 и 3 равна 7 мм, давление воздуха в шинах оси 3 равно
1.5 ати; 5 — разность между свободными радиусами колес осей 2 и 3 равна 9 мм,
давление воздуха в шинах оси 3 равно 3 ати.
Паразитная мощность No приближенно может быть определена как произведение
силы Р3 на скорость v автомобиля:
А^о = Р*°-
При скорости автомобиля, равной 20 м/сек, мощность NQ = 120-20 кгм/сек =
= 32 л. с.
Такое относительно небольшое значение паразитной мощности 7Vft даже при
значительной разнице в размере шин, установленных на колесах, объясняется
большой тангенциальной эластичностью пневматических шин. При жестких колесах
в тех же условиях мощность No получилась бы гораздо больше. Однако и
полученная мощность весьма заметно (примерно в 1,5—2 раза) увеличивает среднюю
нагрузку на главные передачи, что весьма нежелательно.
Экспериментальное определение паразитной мощности, появляющейся в
трансмиссии автомобиля с несколькими ведущими осями и блокированным приводом,
было проведено также Н. И. Коротоношко [11] при пробеговом испытании
автомобиля.
Появление паразитной мощности в системе автомобиля
301
На фиг. 249 приведены экономические характеристики, полученные при
испытании трехосного грузового автомобиля.
В обоих случаях испытания ведущими являлись средняя и задняя оси
автомобиля. При этом давление воздуха в колесах средней оси составляло 2,1 ати
и в колесах задней оси — 4,5 ати\ а статический радиус колес средней оси был
равен 442 мм и колес задней оси — 454 мм.
Кривая 7 соответствует существующей конструкции привода к главным
передачам средней и задней оси (без промежуточного диференциала). Кривая 2
соответствует введению промежуточного дифе- (/л/юокм
ренциала в привод к ведущим осям. Со-
гласно полученным данным промежуточный
диференциал значительно снижает расход
бензина при всех скоростях движения
автомобиля.
Весьма наглядная иллюстрация
возникновения паразитной мощности в трансмиссии
автомобиля получена была в эксперименте,
проведенном под руководством автора инж.
И. А. Левиным. Один из результатов этого
эксперимента изображен на фиг. 250.
Автомобиль ГАЗ-67 с обеими ведущими осями
испытывали на хорошей дороге с твердым
покрытием; при этом замерялись реактивные
моменты для каждой из ведущих осей
(аналогично тому, как это показано было на
фиг. 247).
При повороте автомобиля его передние
колеса проходят больший путь, нежели
задние колеса; с точки зрения качения ведущих
колес по опорной поверхности это
аналогично тому, что передние колеса имеют
радиус, меньший нежели задние колеса,
поэтому при повороте автомобиля с обеими ведущими осями и при отсутствии
промежуточного диференциала между осями в системе трансмиссии должна
возникнуть паразитная мощность. Это и было подтверждено опытом.
V
/
2
/
/
/
Ч
/
38
36
32
30
28
26
20 30 40
Фиг. 249. Экономические характеристики,
полученные испытанием трехосного
автомобиля, при наличии и отсутствии
промежуточного диференциала в
приводе к ведущим осям.
1 2 3 4 5. 11 12 13 /4 15 t сен
Фиг. 250. Результаты испытания автомобиля ГАЗ-67 при движении его по кривой.
Согласно фиг. 250 при движении автомобиля по прямой (/? = со) окружные
силы на колесах передней оси (верхняя кривая) и задней оси (нижняя кривая)
получаются положительными и очень малыми (см. масштаб для момента по оси
ординат). При повороте автомобиля окружная сила на передних колесах становится
отрицательной (тормозящие колеса), а окружная сила на задних колесах, оставаясь
302 Проходимость автомобиля
положительной, резко возрастает; при этом она затрачивается на преодоление не
только сопротивления движению автомобиля, но также и тормозной силы,
возникающей на передних колесах. Это обстоятельство резко ухудшает проходимость
автомобиля.
Возникновение паразитной мощности в системе трансмиссии автомобиля можно
устранить введением диференциала в привод к ведущим осям. В частности, это
наглядно иллюстрируется данными эксперимента, приведенными на фиг. 249.
Для той же цели может служить более простой механизм включения одной из
ведущих осей. Так как паразитная мощность достигает больших значений при
высокой скорости движения автомобиля и при хорошей дороге, то выключение
одной ведущей оси в этих условиях движения автомобиля вполне осуществимо
без понижения динамичности и проходимости автомобиля.
Вопрос о возникновении циркуляции паразитной мощности в трансмиссии
автомобиля более подробно рассмотрен в работе автора [51].
ГЛАВА VIII
ТОПЛИВНАЯ ЭКОНОМИЧНОСТЬ АВТОМОБИЛЯ
§ 1. ЭКОНОМИЧНОСТЬ АВТОМОБИЛЬНОГО ДВИГАТЕЛЯ
Топливная экономичность автомобиля измеряется расходом топлива на тонно-
километр работы автомобиля (для грузовых автомобилей) и на километр пути
(для легковых автомобилей). Несколько чаще применяется определение
экономичности автомобиля расходом топлива на 100 ткм или на 100 км. Расход топлива при
прохождении автомобилем определенного пути зависит, во-первых, от той работы,
которая затрачивается автомобильным двигателем на преодоление всех видов
сопротивления движению автомобиля, и, во-вторых, от экономичности работы
двигателя.
Экономичность двигателя определяется или эффективным к. п. д. ч\е или
удельным расходом (расход топлива на силу-час) ge. При этом между к. п. д. ч\е
и удельным расходом топлива ge имеется следующее соотношение:
632 ,_оп
^ (534)
где ha — низшая теплотворная способность топлива, отнесенная к той же весовой
единице, в которой дана величина ge.
В числителе уравнения (534) цифра 632 определяет число калорий,
эквивалентное работе, равной 1 л. с. ч.; в знаменателе произведение huge—количество
калорий, которое затрачивается на 1 л. с. ч.
Если двигатель автомобиля развивает мощность Nm л, с, и имеет при этом
удельный расход топлива ge, то расход топлива Q в час определится из
выражения:
Q Ф
Удельный расход топлива ge определяется в граммах на эффективную
лошадиную силу в час. Таким образом, часовой расход Q в этом уравнении также
определяется в граммах. Часовой расход топлива Q в килограммах определится
из уравнения:
м (535)
Если имеется часовой расход топлива Q кг/час, то расход топлива на 100 км
пробега автомобиля Q кг/100 км определяется из выражения:
Q кг/100 км = Q кг\час . ^ = 8^£ , (536)
где скорость v автомобиля выражена в км/час. Таким образом, расход топлива
на 100 км пути зависит от экономичности автомобильного двигателя,
определяемой удельным расходом топлива ge, от мощности Nm двигателя и, наконец, от
скорости v движения автомобиля.
Мощность, которую развивает двигатель при различных дорожных условиях
и скорости движения автомобиля, изменяется в больших пределах, причем на
максимальной мощности двигатель работает очень редко.
304
Топливная экономичность автомобиля
Удельный расход топлива ge меняется как в зависимости от скорости v
движения автомобиля (или числа пт оборотов коленчатого вала в минуту), так и
в зависимости от того, насколько развиваемая двигателем мощность Nm
приближается к той максимальной
мощности, которая соответствует
заданной скорости вращения коленчатого
вала.
На фиг. 251 представлена
примерная внешняя характеристика
автомобильного двигателя Nm. На этой
л. с
40
30
20
ю
V
/
/
/
///77
9е
600
1600
300
200
2400 3200птоо/мин
Фиг. 251. Внешние характеристики мощности Nm
и удельного расхода топлива ge двигателя.
же фигуре представлена кривая
удельного расхода топлива ge,
соответствующая внешней характеристике.
Минимальное значение удельного
расхода топлива ge обычно
наблюдается при скорости вращения
коленчатого вала несколько меньшей,
чем та, при которой получается
максимальная мощность двигателя.
При снижении скорости вращения
коленчатого вала и при ее
повышении удельный расход топлива ge
возрастает. Кривая на фиг. 251
соответствует работе двигателя при полном открытии дросселя. При дросселировании
двигателя удельный расход топлива ge при той же скорости вращения коленчатого
вала изменяется, и характер этого изменения оказывает исключительно большое
де г/элсч
800
600
ьоо
гоо
1
V
\
500
\
%
\
900'
•2900
ой/мин
^500
2000-
-
800
20
30
W А/тлс
Фиг. 252. Удельный расход топлива двигателем в за- Фиг. 253. Удельный расход топлива
висимости от его оборотов пт и мощности Nm. двигателем в зависимости от его
оборотов пт и процента развиваемой
мощности.
влияние на экономичность двигателя в действительных условиях работы
автомобиля. Как было указано ранее, в нормальных условиях эксплоатации автомобиля
его двигатель весьма? редко работает 'на максимальной мощности или на полном
открытии дросселя (для карбюраторного двигателя); наоборот, обычно мощность,
развиваемая двигателем, не достигает своего максимума на 50—70°/0. При этом
чем выше тяговые, или динамические, качества автомобиля, тем меньшую среднюю
мощность развивает двигатель по сравнению с его максимальной мощностью при
данной скорости вращения коленчатого вала. Таким образом, в этих условиях
работы двигателя исключительно большое значение имеет удельный расход топлива g".
Экономическая характеристика автомобильного двигателя
305
при работе двигателя на „частичной" нагрузке, т. е. при работе на прикрытом
дросселе (карбюраторный двигатель) или на уменьшенной подаче топлива
(двигатель с впрыском топлива).
Экономичность двигателя при работе последнего на частичных нагрузках
принято характеризовать одним из графиков, изображенных на фиг. 252—254.
На фиг. 252 изображено несколько кривых, каждая из которых соответствует
определенной скорости вращения коленчатого вала пп и показывает зависимость
удельного расхода топлива ge от мощности двигателя Nm. На фиг. 253 изображен
аналогичный график, но иллю-
стрирующий зависимость удель-
ного расхода топлива ge от
относительной мощности
двигателя. При этом за 100%
мощности принята та мощность,
которую развивает двигатель
при той же скорости
вращения коленчатого вала, но при
полном открытии дросселя или
при полной подаче топлива.
Таким образом, расходы
топлива ge, соответствующие
100°/0 мощности для каждой
скорости вращения коленчатого
нала, равны расходам топлива
ge, представленным на фиг. 251.
Наконец, на фиг. 254
изображен график, кривые на
котором также определяют
расход топлива ge при неполной
нагрузке двигателя, но здесь
каждая кривая соответствует
200
W00
30
60
90 V «"/час.
Фиг. 254. Удельный расход топлива двигателем в
зависимости от его оборотов пт и процента
развиваемой мощности.
одинаковому проценту
развиваемой двигателем мощности
при различной скорости
вращения коленчатого вала. Нижняя кривая в этом случае соответствует удельному
расходу топлива ge при полном открытии дросселя, т. е. она является
тождественной кривой на фиг. 251.
Кривые удельного расхода ge, представленные на фиг. 252—254, строятся* на
основании испытания автомобильного двигателя на тормозном стенде.
Различные карбюраторные автомобильные двигатели в зависимости от их
конструктивных особенностей и главным образом от конструкции и регулирования
карбюратора обеспечивают весьма разнообразное протекание кривых ge при
дросселировании двигателя.
Для получения наибольшей экономичности двигателя в условиях его работы
на автомобиле надо иметь такое протекание кривых ge, при котором удельный
расход топлива получился бы минимальным при наиболее употребительном
рабочем режиме.
§ 2. ЭКОНОМИЧЕСКАЯ ХАРАКТЕРИСТИКА АВТОМОБИЛЬНОГО
ДВИГАТЕЛЯ
В предыдущем параграфе приведен метод оценки экономичности автомобиль»
ного двигателя при помощи удельного расхода топлива ge в зависимости от
скорости вращения коленчатого вала и от развиваемой двигателем мощности.
Такой метод оценки экономичности двигателя еще не позволяет определить
его экономичность в действительных условиях работы на автомобиле. Степень
20 Е. А. Чудаков 2232
306
Топливная экономичность автомобиля
Nm Л с
использования мощности двигателя зависит от того, на какой автомобиль этот
двигатель установлен и при каких дорожных условиях происходит работа
автомобиля. Для полного и правильного определения экономичности двигателя
необходимо рассматривать его совместно с автомобилем, а также в зависимости от
скорости v движения автомобиля и от коэфициента ty сопротивления дороги.
В соответствии с этим для оценки экономичности автомобильного двигателя автором
предложен был специальный график „Экономическая характеристика автомобильного
двигателя". Этот график определяет удельный расход топлива ge в зависимости
от скорости v движения автомобиля и от коэфициента <]> сопротивления дороги.
Способ построения этого
графика описан ниже.
Из рабочего баланса
автомобиля следует, что при
его установившемся
движении мощность двигателя Nm
при исключении потерь на
трение Nr в механизмах
силовой передачи затрачивается
на преодоление
сопротивления воздуха Nw и
сопротивления дороги УУф, т. е.
Деля обе части этого
уравнения на механический к. п. д„
т]^, получим:
80 vKM/4ac
400 /200 2000 2800 nmo6/MUff
Фиг. 255. Рабочий баланс автомобиля, необходимый для
построения экономической характеристики автомобильного
двигателя.
чивает автомобиль на сопротивление воздуха
в трансмиссии), т. е. если отложить величину
NM Wv*
(с
На фиг. 255 представлена
примерная внешняя
характеристика автомобильного
двигателя Nm. Если от этой
кривой отложить вниз ту
мощность, которую затра-
учетом механических потерь
3,62.270^
'Ю получим кривую мощности Nc, затрачиваемой на преодоление сопротивления
дороги и на разгон автомобиля, включая и мощность, затрачиваемую на трение
в механизмах силовой передачи. Мощность, расходуемая на преодоление
сопротивления дороги и на трение в трансмиссии, определится из следующего выражения:
(538)
Здесь мощность N^ выражена в л. с, а скорость v — в км/час. На основании
этого уравнения проводим из начала координат на фиг. 255 ряд прямых,
соответствующих различным значениям коэфициента сопротивления ty.
При помощи полученного графика для каждой скорости v автомобиля и для
любого значения коэфициента ф сопротивления дороги может быть определена
величина мощности, развиваемой в это время двигателем, в процентах от
максимальной.
Например, для движения автомобиля со скоростью vx но дороге с коэфи-
циеитом сопротивления ф2 необходима мощность, равная сумме отрезков (а -+- с)„
Экономическая характеристика автомобильного двигателя
307
Максимальная мощность, развиваемая двигателем при этой скорости движения на
последней передаче, измеряется суммой отрезков (а + Ь)\ отсюда развиваемая
двигателем мощность в процентах от максимальной определится из выражения
Ш10°°/о-
Таким образом, при заданных условиях работы автомобиля, пользуясь кривыми
удельного расхода топлива ge при различных открытиях дросселя (фиг, 254),
можно определить расход топлива для любой скорости v движения автомобиля м
для каждого заданного значения коэфициента ф сопротивления дороги.
На фиг. 256 построены такие кривые, образующие экономическую
характеристику автомобильного двигателя. Каждая из представленных здесь кривых
иллюстрирует зависимость
удельного расхода топлива де
ge от скорости v
автомобиля при заданном коэфи-
циенте ф сопротивления
дороги.
Кривая ВС соответствует
значению коэфициента ^ =
=0,015. Каждая из
последующих кривых
соответствует большему значению
коэфициента ty.
Кривая АВ
соответствует наиболее трудной
дороге, по которой
автомобиль может двигаться при
том условии, что его
двигатель работает при полном
открытии дросселя или при
максимальной подаче
топлива.
График, представленный
на фиг. 256, дает
возможность оценить соответствие
двигателя автомобилю и
правильность его регулирования.
Задаваясь определенными условиями работы автомобиля и пользуясь
экономической характеристикой двигателя (фиг. 256), можно установить, с какой средней
экономичностью будет работать двигатель. Например, предположим, что
автомобиль, для которого на фиг. 256 представлена экономическая характеристика
двигателя, должен работать в городских условиях при скорости движения 30 км/час
и при дороге, определяемой средним значением коэфициента ф = 0,02. На
основании фиг. 256 получим, что в этих условиях двигатель будет работать, расходуя
на 1 э. л. с. ч 460 г бензина.
Если же автомобиль с тем же двигателем предназначен для движения за
городом со скоростью в 60 км/час при дороге, которую можно оценить коэфи-
циентом <Ь = 0,025, то в этом случае получим расход топлива ge = 295 г, т. е.
в 1,5 раза меньше, чем в предыдущем случае.
Для получения наилучшей экономичности двигателя и автомобиля необхолимо
стремиться к тому, чтобы двигатель давал возможно меньший расход ge при
наиболее употребительном рабочем режиме автомобиля.
Выше приведена экономическая характеристика автомобильного двигателя,
наибольшая скорость вращения коленчатого вала которого определяется лишь
сопротивлением движению автомобиля. Для двигателя, снабженного регулятором,
экономическая характеристика с правой стороны ограничивается линией, соответ-
200
"у
0,02-±
. 0025^—
-ЦОЗ-^кг
0,035-*,
" 0,04-^
0,045-^к
\
k \
— -рч§
1
I
1
\
к
Я I
О \
600
500
400 -
300 j г
20
40
60
80 V км/час
Фиг. 256. Экономическая характеристика автомобильного
двигателя.
308
Топливная экономичность автомобиля
ствующей определенной скорости движения автомобиля. На фиг. 257 представлен
примерный вид экономической характеристики автомобильного двигателя, снаб-
t женного регулятором.
9е ' ' k
Щэпсч
200
20 40
Фиг. 257. Экономическая характеристика
автомобильного двигателя при наличии регулятора.
Приведенные выше
экономические характеристики
автомобильного двигателя
ограничиваются снизу предельной
кривой, соответствующей
работе двигателя при полном
открытии дросселя или при
полной подаче топлива. Сверху
же эти графики ограничиваются
кривой удельного расхода
топлива ge, соответствующей
движению автомобиля по очень
хорошей дороге. Минимальное
значение коэфициента ф при
этом было принято таким,
которое соответствует
сопротивлению горизонтальной и очень
хорошей дороги. При
движении под уклон коэфициент ф
может быть равным нулю и
даже отрицательным. Это
произойдет тогда, когда уклон
дороги / равен или больше
коэфициента сопротивления ка-
характеристики автомобильного
который был
чению /. Построение этой части экономической
двигателя может быть выполнено на основании того же графика,
представлен на фиг. 255. mm/imC.
Но в этом случае
мощность Щ получает
отрицательное значение и
должна быть отложена не
вверх, а вниз по
отношению к оси абсцисс. На
фиг. 258 представлено
примерное построение
графика для этого случая.
Прямая <]>2 соответствует
мощности, приобретаемой
автомобилем при
движении его под уклон с
учетом получающихся при
этом механических потерь,
т. е. здесь так же, как
и в случае построения
графика на фиг. 255, от-
20
ложена величина
но. в данном случае эта
величина отложена не
вверх, а вниз. При
некоторой скорости Vx мощность Л
мощность, затрачиваемая на
W
v км/час
Фиг. 258. Рабочий баланс автомобиля
при движении последнего под уклон.
определяется отрезком с, а отрезку а соответствует
сопротивление воздуха. Процент используемой
мощности определится из выражения ^~т\ Ю0%-
Экономическая характеристика автомобильного двигателя
309
Разница между этим и предыдущим выражением для определения процента
используемой мощности заключается в том, что в последнем случае в числителе
отрезок с введен со знаком минус. При движении автомобиля под уклон мощность
автомобильного двигателя используется особенно мало, а следовательно, имеет
место большой удельный расход топлива ge. На фиг. 259 приведена та же
примерная экономическая характеристика автомобильного двигателя, которая была
дана выше на фиг. 256. Но
здесь добавлены две новые Se ^э^—
кривые, соответствующие
значениям коэфициента ф
сопротивления дороги, равным
соответственно 0 и —0,015.
При движении под
уклон и работе двигателя с
полным открытием дросселя
автомобиль может развивать
скорость, более высокую,
чем при движении по
горизонтальной дороге, даже при
очень хорошей ее
поверхности. Если принять
последнюю скорость за
максимальную и считать, что по
соображениям надежности
двигателя она не должна
быть больше, то
экономическая характеристика
автомобильного двигателя на
фиг. 259 должна быть
ограничена справа вертикальной
линией, соответствующей
максимальной скорости
автомобиля при коэфициенте ф
сопротивления дороги,
равном 0,015. В таком
случае участок экономической
характеристики,
изображенный пунктиром, является
нерабочим.
Приведенные выше эко-
800
700
600
300
-0,015 \
\
°\
0,015^
0,02 к
п nor:
■ UjUZu \:
0,03 N
0,035K
ооь \
0.045^
0,055j
В'
\
\
\
20
60
80
100 v км/час
Фиг. 259. Экономическая характеристика автомобильного
двигателя при движении автомобиля под уклон.
номические характеристики автомобильного двигателя дают зависимость удельного
расхода топлива ge от скорости v автомобиля и от сопротивления дороги ф, но
не характеризуют его термодинамической экономичности. Для определения
термодинамической экономичности двигателя необходимо учитывать также теплотворную
способность топлива.
При этом следует пользоваться в качестве единицы для определения
экономичности двигателя не удельным расходом топлива ge, а эффективным к. п. д. ч\е.
Выше [уравнение (534)] было дано соотношение между этими величинами; таким
образом, если известна теплотворная способность топлива ha, то полученную
выше экономическую характеристику двигателя можно перестроить, введя вместо
удельного расхода топлива ge эффективный к. п. д. г\е. На фиг. 260 представлен
общий вид экономической характеристики, которая получена при такой перестройке
характеристики, изображенной на фиг. 256.
Приведенные выше экономические характеристики автомобильного двигателя
соответствуют работе автомобиля на последней передаче, которая имеет наибольшее
практическое значение с точки зрения расхода топлива. Однако в особенно пло-
310
Топливная экономичность автомобиля
хйх дорожных условиях автомобилю приходится работать более или менее
длительное время на промежуточных передачах. В соответствии с этим желательно
иметь экономические
характеристики автомобильного
двигателя также и на этих
передачах.
Построение
экономической характеристики
двигателя на любой
промежуточной передаче осуществляется
аналогично тому, как это
было выполнено для
последней передачи (см. фиг. 255).
На фиг. 261 представлены
три кривые внешней
характеристики двигателя Nm,
каждая из которых
соответствует определенной
передаче в коробке передач.
В соответствии с этим для
каждой из этих кривых
имеется свой масштаб для
скорости вращения пт
коленчатого вала двигателя, а
масштаб скорости v автомобиля взят общим для всех трех кривых. От каждой кривой Nm
отложены вниз отрезки, равные —&-. Полученные пунктирные кривые определяют
собой мощность^ которая может быть использована на преодоление подъема и на
гь 20 и 15 13
22 18 16 1Ь 1211 10 9 8 7
Че
0.20
8.16
0,12
0,08
0,055 -
0,05 ^
0,045
0,035
- 0,025 •
0,015
f
***
Г/
У
7,
/
/
1
i
20
40
60
80 V км/час
Фиг. 260* Экономическая характеристика автомобильного
\ двигателя, выраженная через эффективный к. п. д.
50
60 у^/час
Фиг. 261. Метод построения экономической характеристики
автомобильного двигателя на промежуточных передачах коробки
передач.
Экономическая характеристика автомобиля
311
разгон автомобиля. Далее проводим прямые (1-5-24) мощности — ,
затрачиваемой на сопротивление дороги. После этого для каждого значения коэфициента <|>
сопротивления дороги может быть определен процент мощности, которую
развивает двигатель при
заданной скорости автомобиля.
Например, при скорости
автомобиля vx и при
сопрот ивлении дороги,
определяемой коэфициен-
том 4>4> расходуемая
двигателем мощность равна
сумме отрезков а + с, в
то время как мощность,
которая может быть
использована, равна сумме
отрезков а 4- Ь. Таким
образом, процент
использования мощности опре-
9е
2/ЭЛСЧ
400
300
?пп
~0,13~
0,15^
0,17^
0,19
0,23-
-\
'
L_ R
О
10
20
30
40 V км/час
делится из выражения
Фиг, 262. Экономическая характеристика двигателя при
включенной второй передаче в коробке передач.
На фиг. 262 изображен примерный вид экономической характеристики
двигателя легкового автомобиля при движении его на второй передаче (повышенные
значения коэфициента <Ь).
В результате, пользуясь кривыми удельного расхода топлива двигателем,
в зависимости от развиваемой им мощности по отношению к максимальной можно
построить экономическую характеристику автомобильного двигателя при движении
автомобиля на любой передаче в коробке передач.
§ 3. ЭКОНОМИЧЕСКАЯ ХАРАКТЕРИСТИКА АВТОМОБИЛЯ
Экономическая характеристика автомобильного двигателя дает возможность
судить о правильности выбора двигателя для автомобиля и о правильности
регулирования этого двигателя. Однако она еще не дает возможности судить об
экономичности автомобиля в целом.
Расход топлива при движении автомобиля определяется не только
экономичностью двигателя, но также и абсолютной величиной работы, производимой этим
двигателем на определенном участке маршрута. Эта работа зависит от веса
автомобиля О, фактора сопротивления воздуха W, сопротивления дороги ф и, наконец,
от потери на трение в трансмиссии (у\т). Для того чтобы иметь ясное суждение
об экономичности всего автомобиля в различных условиях его работы, автором
был предложен специальный график „Экономическая характеристика автомобиля*.
Этот график сразу определяет расход топлива на 100 км пробега автомобиля
при заданных значениях скорости v и коэфициента ф сопротивления дороги.
Экономическая характеристика автомобиля может быть получена или при
помощи испытания автомобиля на стенде с беговыми барабанами, или при помощи
использования экономической характеристики автомобильного двигателя. Наконец,
та же задача может быть решена при помощи дорожного испытания автомобиля.
Ниже будут рассмотрены все эти способы получения экономической
характеристики автомобиля. Представим себе, что автомобиль с общим весом G и
фактором сопротивления воздуха W движется с постоянной скоростью v по дороге
с коэфициентом сопротивления ф. В таком случае мощность двигателя Nm,
затрачиваемая на движение автомобиля, определится из выражения:
75Nmrim = фОо + Wv\ (539)
где скорость v выражена в MJceic, а мощность Nm — в л. с.
312
Топливная экономичность автомобиля
Если же выразить скорость движения v в kmjhuc, to получим выражение дли
мощности
На основании экономической характеристики автомобильного двигателя
определяем тот удельный расход топлива geJ который соответствует движению
автомобиля с заданной скоростью v при заданном коэфициенте ф сопротивления дороги.
Часовой расход топлива Q при этом в заданных условиях движения автомобиля
определится из выражения:
U
0 м/100 км
2700007]OT
Зная часовой расход топлива Q, на основании уравнения (536) определяем
расход топлива Q на 100 км пути. Таким образом, пользуясь экономической
характеристикой автомобильного
двигателя, можно для каждой
скорости v автомобиля и каждого
сопротивления дороги ф найти расход
топлива Q кг/100 км и построить
экономическую характеристику
автомобиля. На фиг. 263 представлен
примерный вид такой экономической
характеристики автомобиля. Здесь
каждая кривая представляет собой
зависимость расхода топлива Q кг/100км
от скорости v автомобиля при
заданном коэфициенте
сопротивления дороги ф. Кривая АВ
соответствует аналогичной кривой АВ
экономической характеристики
автомобильного двигателя,
представленной на фиг. 256, т. е. она
определяет максимальный расход
80 v *м7час топлива Q кг/100 км при работе
. лоо ~ автомобиля на последней передаче.
Фиг. 263. Экономическая характеристика автомо- ^ д. ,
биля. По мере уменьшения коэфициента ф
сопротивления дороги расход топлива
Q кг1100 км при той же скорости v автомобиля снижается.
График экономической характеристики автомобиля ограничивается снизу
кривой ВСУ которая определяет расход топлива на 100 км пробега автомобиля по
дороге с коэфициентом сопротивления ф = 0,015. Проходящая через точку В
вертикальная линия определяет максимальную скорость автомобиля vmRX при
заданном сопротивлении дороги (ф = 0,015). При коэфициентах сопротивления ф,
меньших этой величины, скорость автомобиля может получиться более высокой,
но при этом скорость вращения коленчатого вала двигателя превысит допустимую.
Линия АС соответствует минимальной скорости автомобиля на последней передаче
и минимальному числу оборотов коленчатого вала в минуту, при которых еще
получается устойчивая работа двигателя.
Характер изменения расхода топлива Q кг/100 км в зависимости от скорости v-
автомобиля при различных значениях коэфициента сопротивления ф имеет весьма
существенное практическое значение и указывает на качество регулирования
двигателя и, в частности, его карбюратора. Кривые расхода топлива, соответствующие
различным значениям коэфициента ф сопротивления дороги, при «некотором
значении скорости v автомобиля имеют минимум. Желательно, чтобы этот минимум
60
Экономическая характеристика автомобиля
313
совпадал с той средней скоростью, которую автомобиль имеет в условиях его
эксплоатации. Если через точки, соответствующие минимальному расходу топлива
Q кг/100 км для каждого значения коэфициента ф сопротивления, провести
кривую FF, то получим линию, определяющую наиболее экономичный режим
автомобиля при движении его по дорогам с различным значением коэфициента ф.
Желательно иметь такое регулирование двигателя и его карбюратора, чтобы
кривая FF при переходе к меньшим значениям коэфициента $ смещалась в сторону
больших скоростей, т. е. чтобы при меньшем сопротивлении дороги происходило
повышение экономической скорости, так как это будет совпадать с
действительным изменением скорости движения автомобиля.
Согласно фиг. 263 расход топлива Q кг) 100 км при движении автомобиля по
дороге постоянного сопротивления (ф = const) получается минимальным для
определенной скорости v. При увели- Q «г/wo км
чении скорости v, а также и при
ее уменьшении расход Qkz\ 100 км
соответственно возрастает. Это
обусловливается влиянием двух
факторов, зависящих от скорости
движения автомобиля.
Экономичность работы двигателя при
возрастании скорости v повышается,
так как при этом (при
постоянном значении ty) увеличивается
наполнение двигателя и в
соответствии с этим растет его к. п. д.
Наоборот, работа, затрачиваемая
двигателем на перемещение
автомобиля, увеличивается по мере
увеличения скорости v, так как
при этом значительно возрастает
сила Pw сопротивления воздуха.
На фиг. 263 была
представлена примерная экономическая
характеристика для легкового
автомобиля. Аналогичный вид
имеет экономическая характери-
80
70
60
50
30
20,
Г
%
^^
===—=
-—
1 —
я—
в '
О
10
15 20
25 30 V*m/4<ji:
Фиг. 264. Экономическая характеристика
автомобиля, двигатель которого снабжен регулятором.
стика для грузового автомобиля, двигатель которого снабжен регулятором. На фиг. 264
представлен примерный вид такой характеристики. При этом график справа
ограничен вертикальной линией #В, соответствующей той скорости автомобиля, на
которую установлен регулятор.
В связи с тем, что регулятор не действует мгновенно, точка Н отодвигается
несколько влево на большую или меньшую величину в соответствии с
чувствительностью регулятора.
Нижняя кривая ВС, ограничивающая экономическую характеристику (фиг. 263
и 264), выбирается соответствующей некоторому заданному значению коэфициента ф,
при этом для указанного коэфициента может быть принято и отрицательное
значение, что соответствует движению автомобиля под уклон. На фиг. 265
представлена та же экономическая характеристика автомобиля, которая была дана на
фиг. 263, но здесь добавлены две кривые, соответствующие значениям
коэфициента ф, равным 0 и — 0,015. Построение этих двух кривых выполнено на
основании графика экономической характеристики автомобильного двигателя, который
был приведен на фиг. 259.
Выше был рассмотрен метод построения экономической характеристики
автомобиля при движении его на последней передаче коробки передач. Аналогичным
образом может быть произведено построение экономической характеристики при
условии работы автомобиля на промежуточных передачах коробки передач. Проще
314
Топливная экономичность автомобиля
всего для этой цели пользоваться экономической характеристикой автомобильного
двигателя, построенной для соответствующей передачи коробки передач. На фиг. 262
во
ЮО v км/час
Фиг. 265. Экономическая характеристика автомобиля при движении
под уклон.
О кг/ЮОкм
10
Фиг. 266. Экономическая характеристика автомобиля при движении
его на второй и третьей передачах в коробке передач.
приведена была примерная экономическая характеристика двигателя легкового
автомобиля при включении в коробке второй передачи. При помощи этого графика
на фиг. 266 построена экономическая характеристика автомобиля для этого случая;
Построение экономической характеристики «ятомобиля 315
на этой же фигуре для сравнения приведена и экономическая характеристика того
же автомобиля при движении его на третьей прямой передаче.
Экономическая характеристика дает возможность определить тот расход топлива
Q лгг/100 км, который автомобиль имеет при движении с определенной скоростью
v по дороге с заданным значением коэфициента сопротивления.
Так как в практических условиях работы автомобиля его скорость v не
является постоянной, а колеблется около некоторого своего среднего значения, то
желательно, чтобы кривые расхода Q кг 1100 км были по возможности пологими,
чтобы расход Q кг/100 км не возрастал резко при отклонении скорости
автомобиля от ее наивыгоднейшего значения.
§ 4. ПОСТРОЕНИЕ ЭКОНОМИЧЕСКОЙ ХАРАКТЕРИСТИКИ АВТОМОБИЛЯ
ПРИ ПОМОЩИ ИСПЫТАНИЯ ЕГО НА ТОРМОЗНОМ СТЕНДЕ
В предыдущем параграфе был изложен метод построения экономической
характеристики автомобиля на основании заданной экономической характеристики
двигателя; при этом построение базировалось на результатах испытания двигателя
на тормозном стенде. Так как это представляется довольно сложным, то
целесообразнее получать экономическую характеристику автомобиля при помощи
непосредственного испытания автомобиля или на дороге, или на специальном
тормозном стенде с беговыми барабанами, схема которого была представлена выше
(см. фиг. 86).
Получение экономической характеристики при помощи пробегового испытания
автомобиля осуществляется следующим образом: выбираются участки дороги с
различными значениями коэфициента сопротивления ф, и на каждом из этих участков
при помощи пробега определяется расход топлива Q кг 1100 км при различных
значениях скорости v автомобиля. Основным затруднением при таком испытании
автомобиля являются подбор дороги с определенным коэфициентом
сопротивления ф и поддержание этого коэфициента постоянным при испытании автомобилей
в разное время года; с некоторым приближением испытание при различных коэфи-
циентах ф можно заменить испытанием при эквивалентном изменении нагрузки [28].
На практике обычно ограничиваются получением одной кривой экономической
характеристики автомобиля, соответствующей хорошему горизонтальному участку
дороги.
Испытание автомобиля на стенде с беговыми барабанами для получения его
экономической характеристики осуществляется следующим образом:
1. Для нескольких скоростей v автомобиля определяется зависимость часового
расхода топлива Q от суммарной окружной силы Рр на ведущих колесах. В
левом нижнем квадранте фиг. 267 представлен примерный результат такого
испытания. Каждая кривая иллюстрирует соотношение между часовым расходом топлива Q
и суммарной окружной силой Рр на ведущих колесах. При каждом испытании
скорость автомобиля поддерживается постоянной, открытие же дросселя изменяется,
в соответствии с чем изменяется сила Рр\ при этом на каждом открытии дросселя
замеряется часовой расход топлива Q. Этот расход топлива устанавливается обычно
при помощи измерения времени, соответствующего расходованию определенного
количества топлива, после чего пересчетом определяется часовой расход
топлива Q.
2. Задаваясь определенным значением коэфициента сопротивления ф, а также
фактора W сопротивления воздуха, определяют силу Рр, которая необходима для
движения по дороге с этим коэфициентом сопротивления и с данной скоростью у.
Такие кривые построены в правом нижнем квадранте фиг. 267 для нескольких
значений коэфициента ф.
3. После этого подсчитывают расход топлива Q кг!'100 мм при различных
значениях коэфициента ф сопротивления дороги и различных значениях скорости v
движения автомобиля, что и необходимо для построения экономической
характеристики.
316
Топливная экономичность автомобиля
Весь подсчет и построение целесообразно производить с помощью фиг. 267.
Как уже указано было выше, здесь в правом нижнем квадранте нанесены кривые,
дающие зависимость суммарной окружной силы Рр (равной сумме сил Pw и Р<р)
от скорости v автомобиля, а в левом нижнем квадранте представлена зависимость
часового расхода топлива Q от силы Рр.
Построенные кривые дают возможность определить часовой расход топлива Q
при заданной скорости автомобиля и при различных коэфициентах сопротивления
Q кг/100 км
км/час
Фиг. 267. Метод построения экономической характеристики автомобиля
при испытании последнего на стенде с беговыми барабанами.
дороги. Например, если взять на оси абцисс в правом квадранте точку,
соответствующую скорости движения 30 км/час и восставить перпендикуляр до
пересечения с кривой Рр, соответствующей ф = 0,05, то получим точку М и определим
силу Рр, необходимую для движения автомобиля в заданных условиях.
Продолжая далее горизонталь до пересечения с кривой, соответствующей скорости
30 км/час в левом нижнем квадранте, получаем точку TV, определяющую часовой
расход топлива Q, соответствующий заданным условиям движения автомобиля.
В левом верхнем квадранте построены прямые, дающие зависимость между
расходами Q кг/100 км и Q кг/час при заданной скорости v движения автомобиля.
Эти кривые строятся на основании уравнения (536).
Проводя вертикаль через точку N до пересечения с прямой, соответствующей
скорости 30 км/час в левом верхнем квадранте, получаем точку S, которая
соответствует точке N в левом нижнем квадранте, т. е. соответствует движению
автомобиля со скоростью 30 км\час по дороге с коэфициентом сопротивления ф—0,05.
Если из точки, полученной в левом верхнем квадранте, провести далее горизон-
Влияние динамики автомобиля на его экономичное! ь 317
таль до пересечения ее с вертикалью, проведенной в правом верхнем квадранте
через точку, соответствующую выбранной скорости, то получим точку
экономической характеристики автомобиля, которая лежит на кривой, соответствующей
коэфициенту сопротивления дороги ф = 0,05. Например, полученная таким образом
точка О соответствует скорости v = 30 км/час и коэфициенту ф = 0,05. Таким
образом, для каждого значения коэфициента <J> сопротивления дороги может быть
построена кривая зависимости расхода топлива Q кг)100 км от скорости v
движения автомобиля.
Линия АВ, ограничивающая сверху контур экономической характеристики,
соответствует максимальному расходу топлива на 100 км при соответствующей
скорости автомобиля, т. е. соответствует работе двигателя по внешней
характеристике. В левом нижнем квадранте каждая кривая ограничивается снизу точкой,
соответствующей максимальному значению силы Рр при данной скорости
автомобиля. Если через точки кривой EF провести горизонтали вправо до пересечения
их в правом квадранте с вертикалями, соответствующими той же скорости, то
получаем кривую ОН, Эта кривая дает зависимость силы Р от скорости автомобиля
при работе двигателя по внешней характеристике.
Для построения кривой АВ экономической характеристики автомобиля надо из
каждой конечной точки кривых расхода топлива в левом нижнем квадранте
провести вертикали до пересечения с лучами соответствующих скоростей в левом
верхнем квадранте. Далее из полученных точек надо провести горизонтали до
пересечения их с вертикалями, соответствующими тем же скоростям v в правом
верхнем квадранте. Точки пересечения и определяют кривую АВ.
Вертикальная линия АС экономической характеристики соответствует
минимальной устойчивой скорости движения автомобиля на заданной передаче. Нижняя
кривая CD, ограничивающая экономическую характеристику, соответствует
движению автомобиля по дороге с заданным минимальным значением коэфициента <|*
сопротивления дороги.
Приведенная экономическая характеристика построена для того случая, когда
на автомобиле установлен карбюраторный автомобильный двигатель. Аналогичным
образом производится построение экономической характеристики для автомобиля,
имеющего двигатель с впрыском топлива,
§ 5. ВЛИЯНИЕ ДИНАМИКИ АВТОМОБИЛЯ НА ЕГО ЭКОНОМИЧНОСТЬ
Как это было уже выяснено, экономичность автомобильного двигателя зависит
от его нагрузки. При малом использовании мощности двигателя удельный расход
топлива ge заметно повышается. Так как степень использования двигателя
определяется запасом его мощности, то отсюда следует, что автомобиль, снабженный
чрезмерно мощным двигателем, должен быть менее экономичным в отношении
расхода топлива, чем автомобиль, снабженный двигателем меньшей мощности.
Больший запас мощности двигателя обеспечивает автомобилю более высокие
динамические качества; таким образом, повышение динамических качеств автомобиля
увеличением мощности его двигателя должно вызвать некоторое снижение
экономичности автомобиля.
Это справедливо лишь в том случае, когда динамические качества автомобиля
не ниже некоторого минимума, определяющегося конструкцией автомобиля и
регулированием двигателя. Если же динамические качества автомобиля особенно плохи,
то экономичность при их снижении будет уже не возрастать, а падать. Прямая
передача окажется слишком слабой даже для нормальных условий движения, и
придется часто применять более сильные передачи, на которых экономичность
автомобиля резко ухудшится.
При исследовании вопроса о том, как влияет динамичность автомобиля на его
экономичность, в качестве примера рассматриваем легковой автомобиль, для
которого уже было проведено исследование влияния конструкции на динамику. На
фиг. 105 были представлены для этого автомобиля кривые мощности Nmi\m на
318
Топливная экономичность автомобиля
задних ведущих колесах при различных передаточных числах /0. Здесь же имеется
кривая мощности Ny-\-Nw, затрачиваемой на преодоление сопротивления
движению. При различных передаточных числах /0 запас мощности, идущей на
ускорение, получается различными и тем большим, чем больше передаточное число /0;
поэтому увеличение передаточного числа /0, как это показало приведенное выше
исследование (см. фиг. 105 и 109), резко повышает динамические качества
автомобиля и особенно его способность к разгону и к преодолению повышенных
сопротивлений дороги.
Для исследования
вопроса о том, как при этом
изменяется экономичность
автомобиля, были построены
экономические
характеристики автомобильного
двигателя при различных
значениях передаточного числа
/0: 4; 4,5 и 5,5. На фиг. 268
представлены контуры этих
экономических
характеристик автомобильного
двигателя, соответствующие
указанным выше трем
значениям передаточного числа /0,
Контур А1В1СХ
соответствует меньшему значению
/0, а контур А2В2С2
соответствует большему его
значению. Контур ABC
экономической характеристики
двигателя соответствует
передаточному числу /0 = 4,5.
При работе двигателя на
полном открытии дросселя
(кривые АВ, АХВ1 и Л2Б2)
разница в экономичности
двигателя при различных i0 по-
9е
У эле я
700
600
500
400
300
200
г,
с
%
\
\
\
Л
\
\
\
1 ->
\
\
-'$
-'#
''0
\
\
\
\
-5,5
=4,5
"4
\
у \
\ \
\\
\\
\
j
1
\
\
\
\
-—^ в2
^ 1
о
20
40
60
80 V км/час
Фиг. 268. Экономическая характеристика автомобильного
двигателя при различных значениях передаточного числа
главной передачи.
лучается не очень большой.
Расхождение кривых имеет
место лишь при высоких скоростях движения. По мере же уменьшения нагрузки,
т. е. по мере уменьшения степени использования мощности двигателя, получается
заметное повышение его экономичности для меньших значений передаточных
чисел /0. Максимальное расхождение кривых получается при минимальной нагрузке
(кривые ВС, ВхСг и В2С2); эти верхние граничные кривые соответствуют
движению автомобиля по дороге с коэфициентом сопротивления ф =*
= 0,015.
Имея экономические характеристики автомобильного двигателя, можно
построить экономические характеристики автомобиля. Построение таких характеристик
выполнено на фиг. 269. Здесь даны контуры экономической характеристики
автомобиля при условии трех различных значений передаточного числа /0 главной
передачи, как это и показано на фигуре.
Отдельно расположенные точки на фиг. 269 соответствуют расходу топлива
Q кг1100 км при движении автомобиля со скоростью 20 км/час и при значении
коэфициента сопротивления ^ = 0,03.
При увеличении передаточного числа i0 резко повышаются динамические
качества автомобиля, но одновременно с этим (фиг. 268 и 269) ухудшается его
экономичность.
Экономичность автомобиля при работе на переменном режиме
319
20
12
Сг
С
— с,
1
ч
ч
ч^
4
'5,5
*"——
«мша
-
— -
-уд.
'/
20
60
80 v км/час
Фиг. 269. Экономическая характеристика автомобиля
при различных значениях передаточного числа главной
передачи.
Из рассмотрения фиг. 269 следует, что кривые расхода топлива Q кг/100 км
примерно эквидистантны одна к другой. Разница между этими расходами для
различных передаточных чисел /0
остается примерно
постоянной и не зависящей от
скорости движения автомобиля.
Значительно большее расхо-.
ждение кривых А В по
сравнению с кривыми СВ
обусловливается тем, что по
мере увеличения передаточного
числа /0 автомобиль в
состоянии преодолевать
значительно большие подъемы, что и
требует при той же скорости
движения значительного
увеличения расхода топлива.
Для получения хорошей
динамичности автомобиля
без ухудшения его
экономических качеств можно итти
двумя путями: во-первых,
путем применения конструкции двигателя, которая бы обеспечивала ему высокую
экономичность при работе на прикрытом дросселе; во-вторых, путем применения
бесступенчатой коробки передач. Эти вопросы рассмотрены в § 7.
§ 6. ЭКОНОМИЧНОСТЬ АВТОМОБИЛЯ ПРИ РАБОТЕ
НА ПЕРЕМЕННОМ РЕЖИМЕ
В приведенном выше исследовании вопроса об экономичности автомобильного
двигателя и автомобиля предполагалось, что автомобиль (а следовательно, и его
двигатель) работает на установившемся режиме (v = const; nm = const; Nm = const).
В действительных условиях работы автомобиль весьма часто изменяет скорость
движения, точно так же часто изменяется сопротивление дороги; в результате
автомобильный двигатель работает на весьма переменном режиме, особенно в
условиях городского движения. Между тем, при быстром изменении режима работы
двигателя (открытие дросселя, скорость вращения коленчатого вала) его
экономичность уже не сохраняется в точности той, которая получается при
установившемся режиме и которая характеризовалась полученными выше графиками
(см. фиг. 252—254) удельного расхода топлива ge.
Однако экономическая характеристика, полученная для случая установившегося
движения автомобиля с некоторым приближением, может быть использована и для
движения автомобиля при разгоне. Выше (гл. III, § 9) уже был рассмотрен вопрос
о тяговом балансе, а также о динамической характеристике автомобиля при
неустановившемся режиме его движения и, в частности, при разгоне. При этом было
получено уравнение (199), характеризующее движение автомобиля в общем случае.
Каждая кривая экономической характеристики автомобиля (см. фиг. 263)
определяет зависимость расхода топлива Q /сг/100 км от скорости v автомобиля при
заданном значении коэфициента ф сопротивления дороги и при установившемся
движении (-— = 0 J . Если принять определенное значение <]>0 для коэфициента Ф,
то для каждого повышенного значения этого коэфициента может быть найдено
dv ,
соответствующее ему значение ускорения -~тт автомобиля.
Из уравнения (184) для установившегося движения автомобиля получим:
320
Топливная экономичность автомобиля
При ускоренном движении автомобиля и при коэфициенте
получим:
dt
Пользуясь этими выражениями, находим:
__ ] + h + ;
(542)
На основании этого уравнения для каждой кривой, имеющейся на графике
экономической характеристики автомобиля при установившемся его движении, может
dv
быть найдено значение ускорения
Q кгf4ac
dt
10
R
/
/у*
'у/
Q (разг.) ^
Ту
I
А
I (устам.
дбиж.)
1000 1200 1400 1600 1800 2000 пто°/мин
Фиг. 270. Результаты эксперимента по
определению расхода топлива при разгоне двигателя и
автоб
; для этого необходимо лишь задаться
значением ф0 коэфициента сопротивления
дороги.
Однако масштаб для расхода
топлива Q кг/100 км при этом не
сохраняется прежним; это
объясняется тем, что часовой расход
топлива при том же открытии
дросселя и той же скорости автомобиля,
но при ускоренном движении
последнего, получается несколько
больше, чем при установившемся
его движении.
Выше (гл. III, § 9) было указано,
что при разгоне мощность двигателя
несколько изменяется по сравнению
с той, которую он развивает при том
же открытии дросселя и той же
скорости вращения коленчатого вала,
но при установившемся режиме. При
этом было дано и объяснение этого
мобиля с учетом понижения уровня топлива в явления — несоответствие теплового
поплавковой камере. режима рабочему режиму двигателя.
По той же причине при разгоне
автомобиля несколько повышается часовой расход топлива и снижается
экономичность двигателя.
Экспериментальное определение расхода топлива в единицу времени или
пройденного пути при ускоренном движении автомобиля весьма сложно, так как в этом
случае помимо быстроты изменения расхода топлива по времени через жиклеры
карбюратора в дополнение к топливу, поступившему к карбюратору из бака,
расходуется еще часть топлива из поплавковой камеры за счет снижения в ней уровня.
Так как все время замера расхода топлива весьма мало, то ошибка по указанной
причине получается довольно большой. В этом случае следовало бы измерять
расход топлива на участке между поплавковой камерой и жиклерами.
Было проведено несколько экспериментов по определению расхода топлива при
разгоне двигателя и автомобиля с учетом понижения уровня топлива (бензина)
в поплавковой камере. На фиг. 270 приведен результат одного из таких
экспериментов.
На основании таких экспериментов было показано, что часовой расход топлива
Q кг/час при том же положении дросселя и значении скорости вращения
коленчатого вала возрастает при ускоренном вращении вала двигателя. Согласно
опытам, проведенным Д. А. Рубец и Б. С. Фалькевичем, это увеличение часового
расхода топлива можно принять приближенно изменяющимся прямолинейно в
зависимости от углового ускорения
dt
коленчатого вала.
Экономичность автомобиля при работе на переменном режиме
321
При этом расход топлива Qp при разгоне определится из выражения:
dt
где Qy — расход топлива при установившемся движении;
а — некоторый постоянный коэфициент пропорциональности.
Выражая ускорение —^~- вращения коленчатого вала через ускорение -^
автомобиля, получим:
(543)
dv
или, принимая а— iKu = o3, получим:
гк
(544)
Таким образом, для каждой точки экономической характеристики
установившегося движения автомобиля при заданном значении ф0 коэфициента сопротисле-
^=0,055;^=ЗА
-ф.
\ф=0,025; ^=0,852
\
Л
Qm/10Qkm 16 12 8 </ О 20 ЬО 6Q
Фиг. 271. Экономическая характеристика автомобиля.
ния дороги можно найти как значение действительного ускорения —г- , которое
при этом может развить автомобиль [уравнение (542)], так и расход топлива
Q лгг/100 км, соответствующий этому ускорению [уравнение (544)].
Аналогично графикам экономической характеристики, приведенным на фиг. 263
и др. и соответствующим установившемуся движению автомобиля 1-тт = О J, но
различным значениям коэфициента ф, можно построить графики экономической
характеристики, соответствующие различным значениям ускорения -^
автомобиля, но постоянному значению ф0 коэфициента сопротивления дороги.
Построение такого графика приведено на фиг. 271, причем в основу его
положена экономическая характеристика для легкового автомобиля, изображенная
на фиг. 263. Кривая, соответствующая значению коэфициента % = 0,015
на фиг. 263, аналогична кривой на фиг. 271, при которой ускорение автомобиля
-£- = 0. Значение ускорений -^ автомобиля дгля других кривых экономической
характеристики (фиг. 271) определено при помощи уравнения (542) и указано на
графике. Масштаб ординат (расход топлива Q #г/100 км) должен быть
перестроен на основании уравнения (544). При этом в левом квадранте для каждого
21 Е. А. Чудаков 2232
322 Топливная экономичность автомобиля
dv
значения ускорения —т- построена прямая под углом к оси ординат, тангенс
которого согласно уравнению (544) определяется из выражения |1 -[-о3 -~гг)-
При построении фиг. 271 принято: ох=0,08, о2 = 0,07 и о3 = 0,04.
Пунктирная линия DEFG показывает пример пользования экономической
характеристикой.
Граничная кривая АВ на фиг. 271 определяет зависимость расхода топлива
Q лг/100 км от скорости v автомобиля при работе двигателя при полном
открытии дросселя.
Построение экономической характеристики для разгона автомобиля (фиг. 271)
произведено при двух допущениях: во-первых, что при угловом ускорении —~-
коленчатого вала двигателя вращающий момент Мт уменьшается по закону,
определяемому уравнением (197), и во-вторых, что часовой расход топлива Q
увеличивается по закону, определяемому уравнением (543).
Уравнения (197) и (543) не являются точными для всех случаев движения
автомобиля, кроме того, они приняты на основании сравнительно ограниченного
числа экспериментов. Наконец, значения коэфициентов 81? 82 и о3, которые
входят в уравнения (199) и (543) и от которых в очень большой мере зависит
экономическая характеристика автомобиля при неустановившемся его движении, для
разных автомобилей могут иметь весьма различные значения.
Поэтому, так же как и в случае нахождения ускорения автомобиля,
определение его экономичности при разгоне желательно производить при помощи
непосредственного эксперимента.
Зта задача легко решается для случая разгона автомобиля при полном или при
каком-либо другом, но постоянном открытии дросселя; при этом получим
зависимость между расходом топлива Q лгг/100 км и скоростью v автомобиля,
аналогичную кривой АВ на графике энономической характеристики (фиг. 271).
Методика определения экономичности автомобиля при постоянном значении
ускорения ~-v7 еще не разработана, хотя вполне возможно создать такой автомат,
который открывал бы дроссель в соответствии с заданным ускорением. Однако
можно получить ряд кривых Q лгг/100 км — f(v) при разгоне автомобиля на
нескольких (каждый раз постоянных) открытиях дросселя с одновременным
измени г-,
рением ускорения —гг. Пользуясь этими кривыми, можно построить
экономическую характеристику, аналогичную изображенной на фиг. 271. При этом, конечно,
для оси ординат (расход топлива Q кг j100 км) может быть дан один общий
масштаб.
§ 7. ПУТИ ПОВЫШЕНИЯ ЭКОНОМИЧНОСТИ АВТОМОБИЛЯ
В связи с резким увеличением автомобильного парка вопрос об
экономичности автомобиля по расходу топлива пробретает все большее значение.
Повышение экономичности автомобиля по расходу топлива может быть
достигнуто различными способами.
Первое направление — это изыскание новых ресурсов более дешевого и менее
дефицитного топлива (газ, твердое топливо, синтетическое жидкое топливо и др.).
Второе направление — это повышение экономичности автомобильного двигателя
путем совершенствования его рабочего процесса.
Третье направление — это улучшение регулирования мощности автомобильного
двигателя, обеспечивающее более продолжительную его работу на наиболее
экономичном режиме. Это может быть достигнуто как совершенствованием
конструкции двигателя, так и механизмов силовой передачи автомобиля.
Четвертое направление заключается в использовании кинетической энергии
автомобиля при его торможении и потенциальной энергии при движении под уклон.
Пути повышения экономичности автомобиля 323
Пятое направление работ по повышению экономичности автомобиля заключается
в уменьшении потерь на сопротивление движению автомобиля (снижение веса,
улучшение шин, улучшение обтекаемости автомобиля, уменьшение потерь на
трение в двигателе и в механизмах силовой передачи и т. д.).
Изыскание новых ресурсов топлива должно вестись в направлении расширения
ассортимента местных топлив, которые можно использовать для газогенераторных
и газобаллонных автомобилей.
Весьма эффективным топливом для газогенераторных автомобилей будет
полукокс, получающийся как один из продуктов при переработке торфа, сланцев, угля.
В качестве газогенераторного топлива можно использовать также каменный уголь,
для которого уже имеются конструкции газогенераторов, а также торф. Такое
расширение видов топлива (наряду с древесной чуркой) для газогенераторных
автомобилей действительно обеспечит наиболее рациональное использование местных
топливных ресурсов и сделает применение газогенераторных автомобилей более
рентабельным.
Весьма важным является использование для автомобилей газового топлива
(сжатый и сжиженный газ). Советский Союз располагает исключительно богатыми
ресурсами газа (природный или естественный газ, нефтяной газ, коксовый газ, газ,
получающийся при переработке нефти, торфа, сланцев и т. д.), пригодного для
автомобильных двигателей. По примерному подсчету можно перевести на газовое топливо,
используя его как местное, не менее 10—12°/0 грузового автомобильного парка.
При этом необходимо учесть то, что газ как топливо для автомобильных
двигателей по ряду своих качеств лучше бензина. Например, в связи с высоким
октановым числом газового топлива можно значительно увеличить степень сжатия в
двигателях без появления детонации. Отсутствие в газовом топливе тяжелых жидких
фракций (имеющихся в автомобильном бензине) обеспечивает значительное —
примерно в 2 раза — снижение износа двигателя.
Весьма существенным направлением в повышении экономичности
автомобильного транспорта является применение двигателей с воспламенением от сжатия,
работающих более экономично, чем двигатели с электрическим зажиганием, а также
на более дешевом и менее дефицитном топливе. Проведенные испытания показали,
что при применении двигателей с воспламенением от сжатия достигается
уменьшение расхода топлива на 25—35°/о-
В настоящее время в Советском Союзе такие двигатели устанавливаются на
грузовых автомобилях большой грузоподъемности (7 m и выше) и на автобусах.
Повышение экономичности автомобильного двигателя с электрическим
зажиганием может быть достигнуто при помощи большого числа изменений в
конструкции: улучшение рабочего цикла двигателя, повышение степени сжатия, улучшение
формы камеры сгорания, улучшение конструкции впускного трубопровода и
карбюратора, улучшение системы зажигания. Некоторые из этих приемов повышения
экономичности карбюраторного автомобильного двигателя будут описаны ниже.
Более подробные сведения по тому же вопросу приведены и работах [45 и 47].
Влияние рабочего цикла на экономичность двигателя. На фиг. 272 изображена
диаграмма идеального рабочего процесса двигателя внутреннего сгорания в общем случае.
Примем, что сжатие (линия /—2) и расширение (линия 4—5) газа происходят по адиа-
6ате. В этом случае термический к. п. д. рассматриваемого цикла определится из
уравнения:
_ Q1 + Q2-QB-Q4 _ Q* + Q4
Значения тепла Qx и Q2, подведенного к газу, и Q3 и Q4, отведенного от газа,
отнесенные к единице веса газа, определятся из выражений:
Q (TT)
где Tyr 7-i., TZi 74, Тъ и Т6 — температуры газа, соответствующие точкам 1, 2, 3, 4, 5 и 6)
Су -теплоемкость газа при постоянном объеме и
с.р — теплоемкость газа при постоянном давлении.
324
Топливная экономичность автомобиля
Подставляя эти выражения в уравнение (545) и имея в виду, что отношение теплоем-
костей —— = k — показателю адиабаты, получим:
(546)
В дальнейшем вводим обозначения
где г2 =
5-6
степень полного расширения;
у4
- •— коэфициент, характеризующий увеличение объема газа за процесс сооб-
щения тепла при постоянном давлении.
£х = у. 1 степень сжатия;
Зх = — коэфициент, характеризующий увеличение давления газа за процесс сооб-
Р2
щения тепла при постоянном объеме.
Выражая далее все температуры через температуру 7\, получим:
si
Ръ
Va
i—\
Фиг. 272. Диаграмма идеального рабо- т — Т ^6 Т —
чего процесса двигателя внутреннего 6 г ~у^ 1 ~^ *
сгорания.
Подставляя эти выражения для температур в уравнение (546), получаем уравнение для
термического к. п. д. i\t:
(547)
г—1
I)]
Это уравнение соответствует наиболее общему случаю протекания рабочего процесса
двигателя внутреннего сгорания. Если принять р2 = 1» ei = е2> то получим выражение для
термического к. п. д., соответствующего циклу быстрого горения (или выделению тепла при
постоянном объеме) при одинаковых степенях сжатия и расширения:
(548)
Если в уравнении (547) принять рх=1; ех = е2, то получим выражение для
термического к. п. д., соответствующего циклу с горением при постоянном давлении и при
одинаковых степенях сжатия и расширения:
Если в уравнение (547) принять g2 = 1, то получим уравнение для цикла быстрого
горения при разных степенях сжатия и расширения:
rlt = 1 — .
(550)
Пути повышения экономичности автомобиля
325
Наконец, если в том же уравнении (547) принять ^ = 1, то получим уравнение для
цикла с горением при постоянном давлении и при разных степенях сжатия и расширения:
Г/ = 1
(551)
Уравнения (550) и (551) определяют термический к. п. д. чц для различных циклов при
том условии, что степень расширения газа е2 больше степени сжатия газа гг. Однако это
увеличение коэфициента ч\{, очевидно, получается лишь до такого максимального значения
степени расширения е2, при котором давление газа в конце расширения (точка 5 на фиг. 272)
не уменьшается до давления рг (точки 1 и 6 на фиг. 272).
Пользуясь фиг. 272, находим такое предельное значение отношения коэфициентов
—— , которое соответствует максимальному значению коэфициента t\t.
Давления в различных точках цикла
определяются из выражений:
в точке 2:
в точке 3:
в точке 4:
в точке 5:
X
£о .
-г '
1.5
1
|
U- «
f РГ3
0.55
0,50
0Л5
= Pi
?2 '
S2
от соотношения — при
При равенстве рг,=р1 получим:
При цикле быстрого горения (f*2 = 1) имеем:
Фиг. 273. График, иллюстрирующий зависимость
термического к. п. д. r\t цикла быстрого горения
различных значениях
С. |
коэфициента ^ и при постоянном значении
степени сжатия (ег = 5)
(552)
При цикле с горением при постоянном давлении
1) имеем
(552')
(552")
В настоящее время для автомобилей используются двигатели, имеющие равные степени
сжатия и расширения ех и е2. Между тем, согласно полученным уравнениям (55 М и (551)
при увеличении степени расширения по сравнению со степенью сжатия термический к. п. д.
цикла несколько повышается. При помощи уравнения (550) на фиг. 273 построен график,
S2
иллюстрирующий зависимость термического к. п. д. -f\t от соотношения ^— для цикла
быстрого горения при различных значениях коэфициента ^ и при постоянном значении степени
£2
сжатия гг = 5. Каждая из кривых построена до значения отношения — ,
соответствующего максимуму коэфициента rit [уравнение (552')]. Согласно полученному графику коэфи-
е2
циент rlt заметно возрастает по мере увеличения отношения —. При этом (при s2>ei)
увеличение коэфициента [Jj, т. е. увеличение количества тепла, сообщенного газу (или
увеличение теплосодержания газа), также способствует повышению термического к. п. д., в то
время как при равенстве степеней сжатия и расширения (гх = s2) [уравнение (548)]
количество тепла, сообщенного газу (коэфициент ^) не оказывает влияния на термический
к. п. д.
На фиг. 274 построены аналогичные кривые, но при помощи уравнения (551), т. е. для
рабочего цикла с горением при постоянном давлении. В этом случае для коэфициента ех
(степень сжатия) принято постоянное значение, уавное 15, а для коэфициента р2 — несколько
326
Топливная экономичность автомобиля
значений. Каждая кривая ограничивается значением отношения -^— , определяемым из
уравнения (552").
Как известно из курса „Теория двигателей внутреннего сгорания", уменьшение
коэфициента р2 выделения тепла в этом случае вызывает не снижение, а повышение термического
к. п. д.
При построении графиков на фиг. 273 и 274 для коэфициента k показателя адиабаты
было принято значение, равное 1,41.
Получение различных значений для степени сжатия &г и для степени расширения е2
может быть обеспечено при помощи простого конструктивного устройства, в частности,
при помощи обратного перепуска свежей смеси или воздуха во впускной трубопровод
благодаря позднему закрытию впускного клапана.
Рост эффективного к. п. д. при этом, повидимому, значительно меньше роста
термического к. п. д., так как при указанном устройстве двигателя его механический к. п. д.
должен уменьшаться по мере увеличения степени расширения е2 вследствие увеличения потери
на трение.
rh
0.65
0.60
0,55
. ■
fi,-t
£,-'5
1
1.5
Фиг. 274. График, иллюстрирующий зависимость
термического к. п. д. t[t цикла с горением при
постоянном давлении от соотношения — при раз-
личных значениях коэфициента £2 и при
постоянном значении степени сжатия (а2 == 15).
Такие двигатели еще не получили
практического применения, однако
испытание нескольких
экспериментальных двигателей такого типа дало
положительный результат.
Экономичность двигателя несколько увеличилась,
однако, при одновременном повышении
удельного веса двигателя.
Повышение степени сжатия
карбюраторного автомобильного
двигателя. Согласно полученным выше
уравнениям при всех прочих равных
условиях термический к. п. д. r\t идеального
цикла быстро повышается по мере
увеличения степени сжатия.
На фиг. 275 построены кривые,
иллюстрирующие зависимость
коэфициента т^ от степени сжатия е. Здесь А—
кривая, построенная по уравнению (548)
при значении коэфициента k, равном
1,41 (воздушный цикл); В — кривая, построенная по тому же уравнению, но при значении
коэфициннта k, равном 1,295.
На фиг. 275 приведены также кривые, иллюстрирующие один из результатов
многочисленных экспериментов по влиянию степени сжатия е на индикаторный к. п. д.
карбюраторного автомобильного двигателя: одноцилиндрового (кривая С) и шестицилиндрового
(кривая D).
История развития конструкции автомобильного двигателя показывает непрерывный рост
степени сжатия е. Однако это повышение степени сжатия, во-первых, требует улучшения
антидетонационного качества бензина (повышение октанового числа), а, кроме того, при
этом значительно увеличивается давление газа в цилиндре двигателя, что требует
повышения прочности и жесткости конструкции двигателя.
Повышение степени сжатия двигателей отечественных автомобилей иллюстрируется
следующими данными:
Модель автомобиля Степень сжатия
ГАЗ-М-1 4,6
4,8*
ЗИС-101 -gV
ГАЗ-М-20 „Победа" . . . б',2
„Москвич" 5,8
Модель автомобиля Степень сжатия
ЗИС-110 6,85
ГАЗ-АА 4,2
ГАЗ-ММ 4,6
ЗИС-5 4,6
ГАЗ-51 6,2
ЗИС-150 6,0
Весьма целесообразно иметь у двигателя переменную степень сжатия е, повышающуюся
по мере уменьшения наполнения двигателя. При этом давление не будет достигать особенно
больших значений в цилиндрах двигателя, а повышение экономичности двигателя будет
получаться при частичных нагрузках двигателя, когда в этом имеется особенно большая
необходимость. Автомобильные двигатели с переменной степенью сжатия еще не получили
практического применения; однако несколько экспериментальных образцов таких двигателей
испытано. На фиг. 276 изображен график, иллюстрирующий результат испытания в автомо-
:: В числителе для двигателей с чугунными поршнями, в знаменателе — с алюминиевыми
поршнями.
Пути повышения экономичности автомобиля
327
бильной лаборатории АН автомобиля ГАЗ-ММ при установке на нем двигателя с
переменной степенью сжатия (по предложению д-ра техн. наук В. В Махалдиани).
Изображенные на фиг. 276 экономические характеристики получены при пробеговом
испытании автомобиля. Верхняя кривая соответствует заводской конструкции двигателя;
нижняя — установке на двигателе головки с переменной степенью сжатия. На графике
приведены также значения степени сжатия, соответствующие различной скорости движения
автомобиля.
Согласно экспериментальным данным экономия бензина при средней и малой скорости
движения автомобиля достигала 20%.
U «г/100 км
W
Г8
16
14
12
8
1
е= const (4,6)
^onst
—<
7,75
1
>
5 6 7 в 9 Юь
Фиг. 275. Влияние степени сжатия на
термический и индикаторный к. п. д. двигателя,
работающего по циклу быстрого горения.
Кривая А соответствует &=1,4I; кривая В
соответствует &:= 1,295; кривая С соответствует
т]/, полученному при испытании
одноцилиндрового двигателя; кривая D соответствует та-,
полученному при испытании шестицилиндро-
вого двигателя.
/^
20
30
50 60 V км/час
Фиг. 276. Результаты ходового испытания
автомобиля ГАЗ-ММ в целях получения
экономических характеристик при обычной
конструкции двигателя и при установке на
нем головки с автоматическим
регулированием степени сжатия.
Опережение зажигания рабочей смеси. Приближение действительного рабочего процесса
к идеальному наряду с другими факторами зависит в значительной мере от
своевременности воспламенения рабочей смеси. Между тем, наивыгоднейший момент воспламенения
рабочей смеси изменяется в зависимости от большого числа факторов, в частности, от
нагрузки двигателя, от скорости вращения его коленчатого вала, от состава смеси и, наконец,
от ее температуры. В современных автомобильных двигателях применяется система
автоматического опережения зажигания, которая учитывает два первых фактора (центро-
бежно-вакуумные автоматы). Однако, как показали эксперименты, они все же не
обеспечивают автомобилю наибольшей экономичности при различных условиях его работы.
На фиг. 277 приведены кривые, иллюстрирующие результаты испытания шесгицилиндро-
вого автомобильного двигателя при работе его на полном открытии дросселя. Сплошные
кривые соответствуют опережению зажигания, устанавливаемому центробежно-вакуумным
автоматом, а пунктирные кривые — наивыгоднейшему опережению зажигания,
устанавливаемому от руки.
На фиг. 278 приведены кривые, иллюстрирующие аналогичные результаты стендового
испытания другого автомобильного двигателя при работе с постоянной скоростью вращения
коленчатого вала (1000 об/мин), но при переменном открытии дросселя. На графике
приведены кривые, иллюстрирующие изменение угла опережения 3 при установке этого
угла автоматом (сплошная кривая) и от руки (пунктирная кривая).
В обоих случаях установка наивыгоднейшего зажигания (от руки) при установившихся
режимах работы двигателя обеспечивает заметную экономию топлива, что указывает на
недостаточную точность работы автомата опережения зажигания. Повидимому, наилучший
результат дал бы автомат опережения зажигания, реагирующий на такие параметры
горения' рабочей смеси, которые характеризуют приближение горения к детонационному
(скорость нарастания давления, неслышимая детонация).
Экономайзер рабочего режима. Двигатель с переменной степенью сжатия
обеспечивает автоматически значительное повышение топливной экономичности при сохранении
высокой динамики. Та же задача, хотя и с меньшим количественным эффектом решается
при помощи введения в конструкцию карбюратора экономайзера рабочего режима, ©бес-
328
Топливная экономичность автомобиля
печивающего работу двигателя на рабочей смеси состава „максимальной мощности" при
полном открытии дросселя и на рабочей смеси состава .максимальной экономичности" при
прикрытом дросселе.
Л.С.
100
SO
80
70
60
50
40
30
20.
4
/
/
У
У
/,
/ /
Л
г/
/
600
2200
3000
9е
г/элсч
325
300
275
250
225
200
дЙ г/элея
000
800
700
600
500
400
300
гоо
1
!
!
1
\ \
\\
\
\\
\\
\ \
-Г
30
20
10
О
25
50
75 %Nm
Фиг. 277. Результаты испытания шести-
цилиндрового автомобильного двигателя по
определению влияния наивыгоднейшего
опережения зажигания на его мощность
и экономичность.
Фиг. 278. Результаты испытания шестици-
линдрового автомобильного двигателя по
определению влияния наивыгоднейшего
опережения зажигания на его мощность и
экономичность (пт = 1000 об/мин).
Впервые предложение о введении такого приспособления в карбюратор автомобильного
двигателя было сделано в Советском Союзе автором в 1926 г. [30]. В настоящее время
экономайзер рабочего режима применяется во всех автомобильных карбюраторах.
Фиг. 279. Схема карбюратора МКЗ-6 с экономайзером
рабочего режима, имеющим механический привод.
Однако проведенные по этому вопросу эксперименты в автомобильной лаборатории
Академии Наук показали, что применяемые в настоящее время конструкции
экономайзеров рабочего режима не обеспечивают максимального повышения экономичности
автомобиля и что при улучшении их конструкции может быть дополнительно получена
значительная экономия топлива. Ниже приведены некоторые результаты испытания эконом.-1-
зеров с механическим и пневматическим приводом.
Пути повышения экономичности автомобиля
329
На фиг. 279 изображена схема карбюратора МКЗ-б с экономайзером рабочего режима,
имеющим механический привод. Когда дроссель приближается к своему полному открытию,
шток 2 при помощи рычажка 1 перемещается вниз и наконечник 3 плунжера насоса
ускорителя открывает клапан 5 экономайзера. В результате этого дополнительное топливо
поступает через жиклер 4 в смеситель- д кг/woкм
ную камеру, чем обеспечивается
обогащение горючей смеси.
На фиг. 280 приведены
экономические характеристики, полученные
пои помощи ходового испытания
автомобиля ЗИС-5 при
установившемся его движении; кривая AAA-t
соответствует включенному, а
кривая ААА2 — выключенному
экономайзеру рабочего режима. Уже при
скорости движения автомобиля к
25—30 км/час начинается увеличение
расхода топлива, обусловленное
ранними, хотя и кратковременными
включениями обогатителя горючей смеси.
При стендовом испытании двигателе
и автомобиля такое преждевременное
обогащение горючей смеси
отсутствует, так как при этом дроссель
каждый раз устанавливается в
определенное положение, которое, он и
сохраняет неизменным.
Для избежания этого перерасхода 18
22
20
\
\
\
\
/
У
/
/
к
/--
w го зо
Фиг. 280. Экономические характеристики
автомобиля ЗИС-5 при наличии и отсутствии
экономайзера рабочего режима, полученные при ходовом
испытании автомобиля при установившемся
движении последнего.
топлива можно или ввести систему >и *-и ^и ^0 ^ ^ v /wac
принудительного включения
экономайзера (аналогично „подсосу") или
ввести в привод к дросселю
достаточно сильную пружину,
включающуюся в момент начала обогащения
горючей смеси. Оба эти
приспособления были проверены, и в средних условиях эксплоатации автомобилей ЗИС-5 они
обеспечили экономию 4—5% бензина.
Наряду с механическим приводом в автомобильных карбюраторах широкое применение
получили экономайзеры рабочего режима с пневматическим управлением. На фиг. 281
изображена схема карбюратора К-49 с
экономайзером такого типа. В этом
случае поршенек 1 штоком 3 соединен с
плунжером насоса ускорителя, который
в зависимости от своего положения
посредством клапана 4 дополнительно
соединяет (нижнее положение)
поплавковую камеру с каналом 6 или
разъединяет их (верхнее положение плунжера),
увеличивая, таким образом, или
уменьшая количество топлива, проходящего к
распылителю главного жиклера по
каналу 6. Полость над поршеньком 1
соединена (при помощи канала 5) с за-
дроссельным пространством. Пружина 2
всегда стремится передвинуть
поршенек 7, а следовательно, и плунжер
насоса ускорителя в нижнее положение.
В результате при достаточно высоком
разрежении в задроссельном
пространстве поршенек 1, сжимая пружину 2,
занимает верхнее положение; при этом
клапан 4 закрыт, и обогащения горючей
смеси не происходит. При уменьшении
Фиг. 281. Схема карбюратора К-49 с
экономайзером рабочего режима, имеющим
пневматический привод.
разрежения в задроссельном
пространстве до некоторого его значения
пружина 2 отжимает поршенек / вниз, в результате чего открывается клапан 4 экономайзера,
и смесь обогащается.
Пневматическое управление экономайзером рабочего режима имеет некоторое
преимущество перед механическим в том, что оно обеспечивает включение обогатителя не в
зависимости от положения дросселя, а в зависимости от разрежения во впускном трубопро-
330
Топливная экономичность автомобиля
воде, что сравнительно хорошо обеспечивает открытие клапана экономайзера при
постоянном проценте мощности при различных открытиях дросселя.
На фиг. 282 приведены результаты испытания двигателя ГАЗ-51 с карбюратором К-49.
На графике а представлена зависимость удельного расхода топлива ge от абсолютного
значения мощности двигателя, а на графике б— от процента мощности, развиваемой
двигателем по отношению к
9е г/злсч $е ^ЭЛ v
J
300
200
600
500
400
300
|
V
г
1
\\-nm=W00 ой/мин
\
-2000
-300
j
0
60 Итл.с 0 20 40 60 80 % Nm
Фиг. 282. Дроссельные кривые удельного расхода топлива для
двигателя ГАЗ-51, полученные на трех скоростях вращения
коленчатого вала (1000, 2000 и 3000 об/мин).
его максимальной
мощности, соответствующей
полному открытию
дросселя при той же
скорости вращения
коленчатого вала.
Согласно полученным
данным открытие клапана
экономайзера и
соответствующее обогащение
горючей смеси
происходит при мощности,
равной 78—880/,, от
максимальной, т. е. примерно
при постоянном проценте
максимальной мощности,
что, как указано было
выше, является
характерным для экономайзеров
рабочего режима с
пневматическим
управлением. Кроме того,
экономайзер с
пневматическим управлением имеет
то преимущество перед
экономайзером с
механическим управлением,
что он согласно
экспериментальным данным не имеет присущего последнему недостатка — обогащения горючей
смеси в связи со случайными кратковременными открытиями дросселя. Однако, как
показали многочисленные испытания экономайзеров с пневматическим управлением, они
вследствие износа не
обеспечивают достаточной
стабильности момента
включения обогатителя: во
многих случаях
наблюдалось преждевременное
включение обогатителя,
что вызывало
значительный перерасход топлива.
Обеспечение
должного момента включения
обогатителя и
соблюдение должного состава
горючей смеси при
работе двигателя при
включенном и выключенном
обогатителе являются
основными задачами
совершенствования
конструкции экономайзера
рабочего режима *.
Эффективность
использования
экономайзера рабочего режима,
очевидно, в очень
большой мере определяется
тем, насколько может
0,10
Фиг. 283. Результат эксперимента по определению зависимости
экономичности работы двигателя ГАЗ-51 в зависимости от
состава горючей смеси (лт=2000 об/мин). Кривые 1 соответствуют
работе на бензине; кривые 2—то же на сжиженном газе; кривые
3— то же на метановом газе.
быть обеднена горючая смесь при сохранении должного протекания рабочего процесса
двигателя. Это зависит как от свойств применяемого топлива, так и от ряда других
факторов, характеризующих конструкцию двигателя, в частности, от системы и интенсивности
зажигания, от формы камеры сгорания и др.
1 Более подробное исследование приведено в работе автора [50].
Пути повышения экономичности автомобиля
331
\С
Попладиобая
камера
На фиг. 283 приведены результаты экспериментов, проведенных в автомобильной
лаборатории АН [48], иллюстрирующие экономичность работы двигателя ГАЗ-51
(индикаторный yj/ и эффективный ч\е к. п. д.) в зависимости от применяемого топлива (бензин и газ —
сжатый и сжиженный) и от состава горючей смеси.
На кривых отмечены (уголками) максимальные значения индикаторного и эффективного
к. п. д. При работе двигателя на метановом газе величина коэфициента а избытка воздуха,
соответствующая максимальным значениям к. п. д., значительно превосходит аналогичную
величину коэфициента а при работе двигателя на бензине и сжиженном газе.
К новым способам зажигания горючей смеси, обеспечивающим возможность ее
дальнейшего обеднения, относятся: предкамерное зажигание, многоискровое и многосвечевое
зажигание, воспламенение жидкостное и т. д. Этот вопрос более подробно освещен в „Трудах
совещания по вопросам горения в автомобильных двигателях" [27].
Экономайзер холостого хода. Экономайзером холостого хода называется такое
приспособление, которое вводится в конструкцию автомобильного карбюратора и обеспечивает
прекращение расхода топлива при работе двигателя на принудительном холостом ходу, т. е.
когда двигатель работает на повышенных
оборотах при прикрытом дросселе. Такой рабочий
режим двигателя имеет место, когда
автомобиль движется по инерции с прикрытым
дросселем, но при невыключенной передаче. В этом
случае двигатель принудительно
проворачивается от колес автомобиля, и топливо
расходуется непроизводительно. Кроме того, так
как при принудительном холостом ходе
двигателя смесь получается очень богатой, то
смазка разжижается, а износ двигателя
увеличивается.
Первое испытание двигателя при работе
его на принудительном холостом ходу было
произведено в автомобильной лаборатории АН.
Для этой цели при установке дросселя в
положение, соответствующее холостому ходу
двигателя, коленчатый вал последнего
проворачивался от электродвигателя с
повышенной скоростью.
Согласно полученным экспериментальным
данным при этих условиях работы двигателя
(принудительный холостой ход) часовые
расходы воздуха и топлива сохраняются постоянными вне зависимости от скорости вращения
коленчатого вала для соответствующего открытия дросселя. В связи с этим сохраняется
постоянным и состав горючей смеси (коэфициент а); в цилиндры двигателя при этом
поступает очень богатая смесь (а — 0,5~-0,6).
На фиг. 284 изображена схема одного из экономайзеров холостого хода, введенного
в конструкцию карбюратора двигателя ЗИС-5, подвергавшегося испытанию.
При работе жиклера холостого хода 11 (дроссель прикрыт) богатая рабочая смесь
по каналу 10 поступает во впускной трубопровод карбюратора. Канал 7 и винт 8 служат,
как и обычно, для регулирования состава горючей смеси при холостом ходе
двигателя.
В карбюраторе имеется канал 4% в котором помещен плунжер 5. Полость над
плунжером 5 при помощи отверстия 2 сообщается с задроссельным пространством; полость под
тем же плунжером при помощи отверстия 6 сообщена с окружающим пространством. На
нижнем конце плунжера 5 имеется клапан 9, который в зависимости от положения
плунжера или сообщает канал 7 с окружающим пространством или отъединяет от него.
Плунжер 5 удерживается в нижнем положении пружиной 3> натяжение которой можно
изменять при помощи регулировочного винта 1.
При большой скорости вращения коленчатого вала на принудительном холостом ходу
двигателя разрежение во впускном трубопроводе двигателя, а следовательно, и в задрос-
сельном пространстве карбюратора соответственно увеличивается; вследствие этого
плунжер 5, преодолевая силу пружины 3, поднимается вверх, сообщая при этом канал 7 с
окружающим пространством и выключая тем самым жиклер холостого хода.
Момент начала выключения жиклера холостого хода, а также перепад числа оборотов
коленчатого вала, соответствующие полному выключению этого жиклера, определяются
силой натяжения и жесткостью пружины 3.
На фиг. 285 приведен результат одного из стендовых испытаний двигателя на
принудительном холостом ходу при условии включения в конструкцию карбюратора приспособления,
схематически изображенного на фиг. 284. Дроссель карбюратора был установлен в
положение, обеспечивающее коленчатому валу скорость вращения, равную 300 об/мин на холостом
ходу двигателя.
На фигуре приведены кривые, иллюстрирующие изменение часового расхода топливе
Q кг/члс и коэфициента а избытка воздуха при принудительном повышении скорвсш вра-
Фиг. 284. Схема
экономайзера
хода.
холостого
332
Топливная экономичность автомобиля
щения коленчатого вала. Эксперимент был проведен при двух различных натяжениях
пружины 3 (фиг. 284).
Перепад оборотов коленчатого вала, соответствующий началу действия экономайзера и
полному выключению жиклера холостого хода, равен около 200 в минуту. При пружине 3
(фиг. 284), имеющей меньшую жесткость, можно еще уменьшить этот перепад оборотов
коленчатого вала и тем самым сделать экономайзер холостого хода еще более
чувствительным.
Таким образом осуществляются автоматическое выключение жиклера холостого хода
при закрытии дросселя на высокой скорости автомобиля и обратное его включение, когда
скорость вращения коленчатого вала двигателя снизилась до определенного значения.
При установившемся движении автомобиля экономайзер холостого хода, очевидно, совсем
не действует. Наибольшее влияние на экономичность автомобиля он оказывает при
движении последнего с регулярным накатом, когда автомобильный двигатель очень часто
переводится на холостой ход.
При движении автомобиля с регулярным
накатом экономия бензина, получающаяся
благодаря применению экономайзера
холостого хода, достигала 8—10°/0. При
испытании автобусов и грузовых автомобилей
в условиях нормальной городской экспло-
атации была получена экономия бензина в
пределах 4—6%.
Целесообразность включения в
конструкцию карбюратора экономайзера
холостого хода обусловливается не только
получающейся при этом экономией топлива,
но также и тем, что при этом должен
заметно снизиться износ двигателя в связи
с уменьшением времени работы двигателя
на переобогащенной смеси.
Диффузор переменного сечения.
Применение диффузора переменного сечения,
повидимому, является весьма
перспективным; при этом обеспечивается возмож-
1,1
0.9
0,7
0,5
0,3
0,1
I
Л
ч/
Л
•
\
А
\
\
1,2
_1 о,8
U0 430 520 560 Ькммрт.ст.
Фиг. 285. Результат стендового испытания
двигателя ЗИС-5 по определению часового
расхода бензина и коэфициента избытка воздуха
при работе двигателя на принудительном
холостом ходу при наличии экономайзера
холостого хода (пт0 = 300 об/мин).
ность иметь большое сечение диффузора
для получения хорошего наполнения
цилиндров двигателя при работе на полном
открытии дросселя и одновременно с этим —
хорошее распыливание бензина при работе
двигателя на прикрытом дросселе.
Последнее же обеспечивает лучшее испарение
бензина, а в соответствии с этим лучшее
его использование.
Пример применения диффузора
переменного сечения был показан выше (фиг. 281). Здесь упругие пластинки 7, образующие
диффузор, изменяют свое положение в зависимости от скорости воздуха, чем и
обеспечивается изменение сечения диффузора. В настоящее время Московским карбюраторным
заводом выпускаются карбюраторы (для автомобиля ЗИС-150), где та же идея реализована в
более законченном виде.
Регулирование мощности автомобильного двигателя при помощи выключения
отдельных цилиндров. Как уже говорилось выше при уменьшении мощности
карбюраторного автомобильного двигателя, из-за уменьшения наполнения одновременно весьма быстро
снижается экономичность, поэтому регулирование мощности такого двигателя при помощи
дросселирования горючей смеси, поступающей в цилиндры, является неудовлетворительным
с точки зрения экономичности двигателя. Качественное регулирование, в известной мере
осуществляемое при помощи экономайзера рабочего режима, при работе двигателя на
бензине соответствует сравнительно малому изменению мощности. Метод регулирования
мощности двигателя — выключением отдельных цилиндров обеспечивает работу остающихся
цилиндров с хорошим наполнением, а следовательно, и с достаточно высоким к. п. д.
Для исследования влияния этого приема повышения экономичности автомобиля были
построены графики экономических характеристик автомобиля. При регулировании мощности
двигателя выключением работающих цилиндров введение в конструкцию карбюратора
экономайзера рабочего режима является нерациональным, так как при этом двигатель работал
бы на богатой смеси также и в том случае, когда от него не требуется максимальной
мощности; поэтому при исследовании различных методов повышения экономичности автомобиля
и при сопоставлении его экономических характеристик при обычной и новой системе
регулирования мощности двигателя предполагалось, что экономайзер рабочего режима в
карбюраторе отсутствует.
На фиг. 286 изображен график (полученный подсчетом), иллюстрирующий экономлю
топлива в зависимости от скорости v автомобиля, получающуюся благодаря применению
Пути повышения экономичности автомобиля
333
регулирования мощности автомобильного двигателя выключением цилиндров. Кривые
построены для двух значений коэфициента ф сопротивления дороги: 0,02 и 0,04. График
соответствует легковому автомобилю, принятому для примерного подсчета, при этом
экономическая характеристика двигателя была принята постоянной и не зависящей от числа
работающих цилиндров.
При создании двигателя с регулированием мощности выключением цилиндров
необходимо добиться сохранения хорошей работы карбюратора и всей системы образования
горючей смеси и распределения ее по цилиндрам, так как выключение части цилиндров, т. е.
прекращение подачи к этим цилиндрам горючей смеси, значительно нарушает работу
карбюратора и распределение смеси по работающим цилиндрам.
20
О
1
\
4
\
20
60
80
100 v км/час
Фиг. 286. Экономия о бензина, получающаяся благодаря
применению регулирования мощности двигателя
выключением цилиндров.
Ряд экспериментов подтверждает полную целесообразность применения метода
регулирования мощности автомобильного двигателя выключением цилиндров.
Экспериментальная работа по применению регулирования мощности двигателя
выключением цилиндров была проведена под руководством инж. М. Меламеда [15] в автобазе
Челябметаллургстроя. При этом было получено, что в тех же условиях эксплоатации
автомобиль ЗИС-5 благодаря указанному способу дает около 21°/0 экономии бензина
при движении без груза и около 10% -- при движении с грузом.
Влияние числа передач в коробке передач на экономичность автомобиля.
Коробка передач вводится в трансмиссию автомобиля для того, чтобы обеспечить
возможность автомобилю преодолеть значительные сопротивления (подъем, плохая
дорога, разгон). Это же может быть осуществлено и при отсутствии коробки
передач при установке на автомобиле двигателя большей мощности. Но такой
двигатель в обычных и наиболее употребительных условиях движения автомобиля
работал бы с особенно большой недогрузкой, а следовательно, и неэкономично;
поэтому чем больше передач имеет коробка передач, тем легче подобрать такую
передачу, которая обеспечивала бы наиболее экономичную работу двигателя, т. е.
тем экономичнее автомобиль. Этим, в частности, объясняется широкое внедрение
в трансмиссию автомобиля так называемых „ускоряющих" передач.
В ряде автомобилей отечественного производства (ЗИС-150, ЯАЗ-200) в
трансмиссию введены пятиступенчатые коробки передач, в которых последняя, пятая
передача, — ускоряющая.
Наилучший результат, очевидно, должна дать бесступенчатая коробка передач,
обладающая бесконечно большим числом ступеней.
Бесступенчатая коробка перэдач, введенная в трансмиссию автомобиля,
обеспечивает возможность получения любого передаточного числа (в пределах
максимального диапазона его изменения) между коленчатым валом двигателя и
ведущими колесами автомобиля. Благодаря этому для различных условий движения
автомобиля (скорость v, коэфициент 6) может быть найдено такое передаточное
число между двигателем и ведущими колесами, при котором двигатель, развивая
требуемую мощность, работал бы на максимально экономичном режиме.
Таким образом, предполагается, что двигатель работает всегда или большую
часть времени на режиме максимальной экономичности, а мощность двигателя,
334
Топливная экономичность автомобиля
определяющая скорость движения, регулируется водителем при помощи
принудительного изменения передаточного числа коробки передач.
Для каждой мощности имеется вполне определенный рабочий режим двигателя
(определяемый открытием дросселя и скоростью вращения коленчатого вала),
при котором получается минимальный удельный расход топлива ge
(характеристика минимального расхода).
При отсутствии в карбюраторе двигателя экономайзера рабочего режима
внешняя характеристика двигателя обычно совпадает с характеристикой минимального
расхода топлива, а так как введение в трансмиссию автомобиля бесступенчатой
коробки передач обеспечивает автомобилю весьма хорошую динамичность, то
в этом случае нет необходимости в экономайзере рабочего режима.
На фиг. 287 построены кривые, полученные подсчетами и иллюстрирующие
экономию бензина, получающуюся при введении бесступенчатой коробки передач
по сравнению со ступенчатой при
значениях коэфициента Ф
сопротивления дороги, соответственно
равных 0,01, 0,02, 0,03 и 0,04. Фигура
соответствует легковому автомобилю,
принятому для примерного подсчета.
При построении кривых было
предположено, что двигатель работает
на минимальных расходах и что
механический к. п. д. коробки
передач остается постоянным как для
бесступенчатой, так и для
ступенчатой коробок передач. Более
подробные сведения по этому вопросу
приведены в работе автора [47].
Аккумулирование излишней
энергии автомобильного двигателя.
Этот метод повышения экономичности
•—
-—-
— —
-"■ II.
■ 11
1
20
° 20 40 60 80 100 1'*м'час
Фиг. 287. Экономия 8 бензина в °Д,,
получающаяся благодаря применению бесступенчатой
коробки передач при работе двигателя по
внешней характеристике и при отсутствии
экономайзера рабочего режима.
автомобиля заключается в том, что автомобильный двигатель все время работает на
наиболее экономичном режиме, развивая мощность, близкую к максимальной.
При этом избыток мощности, получающейся при легких условиях движения
автомобиля, аккумулируется тем или другим образом и используется далее при более
трудных условиях движения автомобиля. Таким образом, в этом случае при
сохранении той же динамики автомобиля можно установить двигатель меньшей хмощности.
При такой системе повышения экономичности автомобиля целесообразно также
аккумулировать кинетическую энергию автомобиля, выделяющуюся при
торможении последнего.
В частности, излишняя мощность двигателя может аккумулироваться в виде
электрической или механической или химической энергии. В случае
аккумулирования электрической энергии схема получается весьма близкой к топ, которая
соответствует электрической бесступенчатой передаче, но двигатель при этом
устанавливается меньшей мощности и вводится буферная батарея аккумуляторов.
Наиболее простой, повидимому, должна быть механическая схема аккумулирования
энергии при наличии бесступенчатой коробки передач (разгон маховика).
Аккумулирование энергии двигателя в указанном выше виде до настоящего
времени не применялось. Но этот способ используется при движении автомобиля
с накатом. В этом случае разгон автомобиля производится на полном (или
близком к полному) открытии дросселя, т. е. на режиме двигателя, близком к
максимально экономичному. При движении же автомобиля по инерции топливо
расходуется лишь на холостой ход двигателя. >
Экономичность такого движения автомобиля зависит от следующих факторов:
1) от метода осуществления наката или движения автомобиля по инерции
(выключение передачи, выключение зажигания, выключение двигателя).
Пути повышения экономичности автомобиля
335
W 20
Q м/100 км
/7
13
60 ум/час
2) от экономичности двигателя при разгоне автомобиля;
3) от расхода топлива на холостом ходу двигателя и, в частности, на
принудительном его холостом ходу;
4) от величины потерь при движении автомобиля по инерции (применение
жидкой смазки при сухих картерах для коробки передач и главной передачи).
Наконец, экономия то-
плива при использовании
наката в очень большой мере
зависит от условий
движения автомобиля (дорога и
скорость); чем лучше
условия движения автомобиля,
тем, очевидно, больше
экономия топлива, которая
может быть получена
благодаря применению движения
с регулярным накатом.
Как показали опыты,
проведенные в
автомобильной лаборатории АН,
применение наката не во всех
случаях обеспечивает
положительный результат.
Большая экономия топлива
получается при движении
автомобиля накатом (по
инерции) с выключенной
передачей в коробке и с
выключенным зажиганием.
Наиболее широкое применение
получил накат с
выключенной передачей, но при
включенном зажигании.
Экономия топлива от
применения движения
автомобиля с накатом
значительно повышается в том
случае, когда в карбюраторе
выключен экономайзер
рабочего режима, но включен
экономайзер холостого хода. При этом разгон автомобиля осуществляется на
экономической смеси, а также несколько сокращается расход топлива при работе
двигателя на холостом ходу. Кроме того, при этом уменьшается износ
двигателя, который в противном случае при движении автомобиля с регулярным
накатом значительно возрастает.
На фиг. 288 приведены результаты пробегового испытания с регулярным
накатом автомобилей ЗИС-5 (вверху) и ГАЗ-ММ (внизу). Эксперимент был
проведен в автомобильной лаборатории АН. Пробег производился по
асфальтированному шоссе; интервал скоростей при движении с накатом равнялся
25 км/час.
Кривые АЛ на фиг. 288 иллюстрируют зависимость расхода бензина Q д:г/1ОО км
от скорости v автомобиля при установившемся движении (v = const) и при
стандартной конструкции карбюратора. Другие кривые соответствуют движению
с регулярным накатом, причем на оси абсцисс откладывается средняя скорость
движения автомобиля. Условия эксперимента для каждой из приведенных кривых
указаны в подписи под фигурой.
/ ^
Г}
2 ^v
. 2 —
? ^
л
А
,Г
и
л
10
20
30
50
60 V км/час
Фиг. 288. Результаты пробегового испытания с регулярным
накатом автомобилей ЗИС-5 с полезной нагрузкой 3000 кг
(/) и ГАЗ-ММ с полезной нагрузкой 1500 кг (II):
а — накат без выключения передачи; б — накат с выключением
передачи; в —- накат с выключением передачи и зажигания; 1 ■— стандартный
карбюратор; 2— в карбюраторе выключен экономайзер рабочего режима.
336
Топливная экономичность автомобиля
Фиг. 289 иллюстрирует результаты аналогичного испытания тех же
автомобилей, но в этом случае карбюратор снабжался экономайзером холостого хода
(кривые 3).
Согласно полученным данным движение автомобиля с регулярным накатом
при невыключенной передаче сопровождается значительным перерасходом бензина.
Выключение передачи и зажигания обеспечивает значительную экономию бензина.
Выключение экономайзера рабочего режима и включение экономайзера холостого
О «г/100 км
25
21
17
Ю
Фиг. 289. Графики, иллюстрирующие результаты пробего-
вого испытания автомобилей ЗИС-5 с нагрузкой 3000 кг (/)
и ГАЗ-ММ с нагрузкой 1500 кг (II) в целях выяснения
влияния включения в конструкцию карбюратора
экономайзера холостого хода на экономичность автомобиля при
движении его с регулярным накатом.
хода во всех случаях
обеспечивает дополнительную
экономию бензина.
Одновременное применение этих двух
изменений карбюраторов
обеспечило максимальную
экономию бензина.
Аккумулирование
энергии автомобиля при
торможении и при движении
под уклон. В этих случаях
энергия поглощается
главным образом тормозами.
Производятся попытки
аккумулирования энергии в виде
механической
(раскручивание маховых масс) или
электрической (зарядка
аккумуляторов) с последующим
использованием этой
энергии для движения
автомобиля. Успешное решение
этой задачи позволит
значительно повысить
экономичность астомобиля.
Уменьшение веса и
улучшение обтекаемости
автомобиля. Мощность,
развиваемая двигателем при
установившемся движении
автомобиля, затрачивается
на преодоление
сопротивлеф). В соответствии с этим
автомобиля
обеспения воздуха и сопротивления дороги (коэфициент ф
уменьшение сопротивления дороги и улучшение обтекаемости
чивают уменьшение расхода топлива Q кг/100 км.
Работа, затрачиваемая на преодоление сопротивления дороги, прямо
циональна весу автомобиля. Эта работа Щ при пробеге автомобиля на
ние 100 км определяется из выражения:
расстоя= ^G-100-1000 кгм,
(553)
где G — вес автомобиля в кг.
Снижение общего веса автомобиля G обеспечивает соответствующее
уменьшение этой работы, а следовательно, и уменьшение мощности, затрачиваемой
двигателем на движение автомобиля.
Улучшение формы автомобиля с точки зрения его обтекаемости определяется
уменьшением фактора W сопротивления воздуха движению автомобиля. Если
принять, что скорость автомобиля остается постоянной, то работа, идущая на сопро-
Пути повышений, экономичности^ автомобиля
тивление воздуха Rw за пробег автомобиля в 100 км, определится из
выражения:
Rw= U^2100-1000 кгм, (554)
где v — скорость автомобиля в м/сек.
Для того чтобы можно было выяснить влияние веса и обтекаемости
автомобиля на его экономичность, необходимо принять, что в соответствии с изменением
веса G автомобиля и фактора W сопротивления воздуха экономическая
характеристика автомобиля не остается постоянной.
В соответствии со сказанным в дальнейшем предполагается, что при
изменении веса G автомобиля или фактора W сопротивления воздуха литраж двигателя
изменяется так, что динамические качества автомобиля остаются постоянными,
так же как и экономическая характеристика двигателя. В таком случае расход
топлива Q кг/100 км будет изменяться прямо пропорционально затрачиваемой
мощности двигателя, т. е.
где Q' — расход топлива в /^г/100 км при новом значении веса G автомобиля и
новом значении фактора W;
N'm — мощность двигателя, затрачиваемая на движение автомобиля при новых
значениях G и W\
Nm — мощность, затрачиваемая на движение автомобиля прежней конструкции.
N*
Отношение мощностей TL при одинаковом механическом к. п. д., при той же
передаче к ведущим колесам и одинаковой скорости движения v автомобиля
определится из выражения:
Это выражение соответствует тому случаю, когда изменяется как вес G
автомобиля, так и фактор W сопротивления воздуха.
В дальнейшем исследование по вопросу о влиянии веса автомобиля и его
обтекаемости на экономичность проведено для того же легкового автомобиля, для
которого было проведено исследование в отношении влияния веса и обтекаемости
на динамические качества (гл. III, § 15). Подезная нагрузка этого автомобиля
принималась равной 300 кг. Собственный вес автомобиля нормальной конструкции
принят равным 1550 кг. Если теперь принять, что новое значение собственного веса
автомобиля равно некоторой величине G'o и что полезная нагрузка Ge остается
равной 300 кг, то согласно уравнениям (555) и (556) получаем выражение для
соотношения расходов топлива Q' и Q кг/100 км:
Q' <KGp +300)+ 0.095Р»
Q 185U<p-f 0,09ои8 * (&&О
Фактор W сопротивления воздуха при этом принят неизменным и равным
0,095 кг-сек-/м2. Скорость v в этом уравнении выражена в м/сек. На основании
уравнения (557), имея экономическую характеристику автомобиля для нормального
его веса, можно получить экономические характеристики при условии различного
веса G'Q. На фиг. 290 построены контуры трех экономических характеристик
автомобиля, соответствующих трем значениям собственного веса G'o автомобиля: 950,
1550 и 2150 кг. Снижение расхода топлива Q кг/100 км при уменьшении
собственного веса G'o автомобиля получается весьма заметным, особенно при малых
скоростях движения автомобиля. При этом экономия в расходе топлива при любой
заданной скорости v движения автомобиля прямо пропорциональна разности
(1550 —Gq), т. е. прямо пропорциональна снижению веса G автомобиля.
22 Е. А. Чудаков 2232
338
Топливн%я экономичность автомобиля
Если представим себе теперь, что вес G автомобиля остается постоянным,
а уменьшается фактор W сопротивления воздуха, то расход топлива на
100 км также будет уменьшаться, причем особенно значительная экономия в
расходе топлива получается при движении автомобиля на высоких скоростях.
Q
кг/100км
2150
/Ь о = 1 550
^--
/
Полный дроссель
■*■ ,
-—\
■ ч
1
—~—■—-
k
V=0,015
I
I
20
60
80
Фиг. 290. Экономические характеристики автомобиля
при различных значениях его собственного веса.
Экономия в расходе топлива за счет улучшения обтекаемости автомобиля
прямо пропорциональна уменьшению фактора W сопротивления воздуха и квадрату
скорости v движения автомобиля.
вО V КЧ/'jfrr
Фиг, 291. Экономические характеристики аз:о:'.ю#иля
при различной его обтекаемееги.
На фиг. 291 приведены три контура экономических характеристик автомобиля,
построенных для того же легкового автомобиля, что и на фиг. 290. Но в
последнем случае (фиг. 291) вес автомобиля оставался постоянным, а значение фактора W
сопротивления воздуха бралось соответственно равным: 0,065, 0,095 и 0,125. Из
рассмотрения этого графика видим, что уменьшение расхода топлива получается
заметным уже при средних скоростях движения автомобиля, а на высоких
скоростях движения экономия топлива получается особенно ощутительной.
Пути повышения экономичности автомобиля
339
Экономичность советских автомобилей. Совершенствование конструкции
автомобильных двигателей и автомобилей обеспечило возможность значительного
повышения экономичности новых моделей автомобилей. В табл. 12 приведены
нормы расхода топлива, принятые для этих автомобилей.
Согласно приведенным в табл. 12 данным новые модели советских автомобилей
обеспечивают значительную экономию топлива. В частности, норма расхода бензина
Таблица 12
Нормы расхода топлива для автомобилей
Модель
автомобиля
ГАЗ-М-1
ГАЗ-М-20
ЗИС-101
ЗИС-110
ГАЗ-ММ
ГАЗ-51
ЗИС-5
ЗИС-150
ЯГ-6
Я А 3-200
Грузоподъемность в m
или число
мест
5 мест
5 мест
б мест
7 мест
1,5 m
2,5 m
3 m
4 m
5 m
7 m
Собственный
вес в кг
1370
1350
2550
2420
1810
2710
3100
4045
4930
6170
Число
ступеней в коробке
передач
3
3
3
3
4
4
4
5
4
5
Эксплоата-
ционная норма
расхода
топлива в л/100 км
14,5
13,5
25,5
27
20,5
26,5
34
38
43,5
35
Эксплоа-
тационная
норма расхода
топлива
в л/100 тпкм
—
13,7
10,6
11,3
9,5
8,7
5
для автомобилей ГАЗ-М-20 на 7°/0 меньше нормы для автомобилей ГАЗ-М-1.
Действительная экономия бензина получается еще выше. Автомобиль ГАЗ-51
расходует бензин на тоннокилометр работы примерно на 30% меньше, нежели
автомобиль ГАЗ-ММ. Около 20°/0 экономии бензина дает автомобиль ЗИС-150
по сравнению с автомобилем ЗИС-5. Особенно большую экономию топлива дают
автомобили ЯАЗ-200 по сравнению с автомобилем ЯГ-6 (свыше 40°/0, считая на
тоннокилометр), что объясняется установкой на автомобили ЯАЗ-200 двигателя
с воспламенением от сжатия.
Автомобиль ЗИС-110 расходует на 100 км пробега несколько больше бензина,
нежели автомобиль ЗИС-101, из-за его особенно высокой динамичности.
Введение в трансмиссию этого автомобиля ускоряющей передачи значительно повысило
бы его топливную экономичность.
ЛИТЕРАТУРА
1. Бируля А. К., Эксплоатационные показатели грунтовых дорог, Гостранстехиздат
1937.
2. Волков П. М., Колебания автомобиля, .Вестник инженеров и техников* №11, 1937.
3. Гельфгат Д. В., Аналитическое определение плавности хода автомобиля,
„Автомобильная промышленность" № 3, 1949.
4. Гиттис В. Ю., Автомобили. Теория и конструкция, Гострансиздат, 1931.
5. Глух Б. А., Влияние способа установки поперечной рессоры на упругую
характеристику подвески, „Труды НАТИа, вып. 39, Машгиз, 1941.
6. Жуковский Н. Е., К динамике автомобиля, „Мотор" № 1, 1923.
7. 3 и м е л е в Г. В., Теория автомобиля. Энциклопедический справочник,
„Машиностроениев, т. 11, Машгиз, 1948.
8. Зим ел ев Г. В., Лабораторные испытания автомобилей, Гострансиздат, 1931.
9. Иванов Н., Богданов Г., Проезжаемость грунтовых дорог и несущая
способность грунтов в зависимости от влажности, „Строительство дорог" № 6, 1942.
10. Ковалев Г. Н., Стабилизация управляемых колес автомобиля. Серия диссертаций
по автотракторостроению, вып. 9, Машгиз, 1940.
11. Коротоношко И. И., Автомобили с блокированным и диференциальным
приводом, Машгиз, 1948.
12. Л а нин В. И., Качение автошины, ОНТИ, 1937.
13. Львов Е. Д., Теория трактора, Машгиз, 1946.
14. Л е т о ш н е в М. Н., Взаимодействие конной повозки и дороги, Транспечать НКПС,
1929.
15. М е л а м е д М., Экономия бензина путем выключения цилиндров, „Автомобиль" № 3,
1949.
16. Никитин А. И., Исследование обтекаемости автомобиля, ОНТИ, 1936.
17. Пархиловский И. Г., Аналитические критерии оценки плавности хода,
„Автомобильная промышленность" № 12, 1947.
18. П е в з н е р Я. М., Испытание устойчивости автомобиля, Машгиз, 1946.
19. Певзнер Я. М., Теория устойчивости автомобиля, Машгиз, 1947.
20. Пицхелаури М. М., Лабораторные испытания коробок передач, „Автомобильная
промышленность" № 10, 1947.
21. Ротенберг Р. В., Колебания автомобиля и проектирование подвески,
„Автомобильная промышленность" № 10, 1947.
22. Ротенберг Р. В., О расчете на колебания подвески автомобиля, „Автомобильный
мотор", сб. 4, изд. Наркомхоза РСФСР, 1939.
23. Р у б е ц Д. А., Смесеобразование в автомобильном двигателе при переменных
режимах, Машгиз, 1948.
24. Родионов В. Ф., Влияние гидромуфты и повышающей передачи на свойства
автомобиля ЗИС-110, „Автомобильная промышленность" № 3, 1948.
25. Т а р у т и н А. А., Пути улучшения подвески автомобиля М-1, „Автотракторное дело"
№ 4, 1937.
26. Труды совещания по подвеске автомобиля, изд. АН, 1950.
27. Труды совещания по вопросам горения в автомобильных двигателях, изд. АН СССР,
1950.
28. Ф а л ь к е в и ч Б. С, Динамические и экономические испытания автомобилей,
Машгиз, 1944.
29. Чудаков Е. А., Испытание автомобилей на тормозном станке, „Бюлл. НАМИ"
№ 4, 1923.
30. Чудаков Е. А., Динамическое и экономическое исследование автомобиля, изд.
НТУ ВСНХ, 1928.
31. Ч уд а ков Е. А., О стабилизации автомобиля, „Вестник металлопромышленности"
.№ 5—6, 1927.
32. Чудаков Е. А., Тяговый расчет автомобиля, Гострансиздат, 1931.
33. Чудаков Е. А., Испытание автомобиля и его механизмов, Гострансиздат, 1931.
34. Чудаков Е. А., Теория автомобиля, ОНТИ, 1935.
Литература 341
35. Чудаков Е. А., К вопросу об устойчивости автомобиля на повороте, „Изв. АН
СССР", отделение технических наук, изд. АН СССР, № 6, 1937.
36. Чудаков Е. А., Коэфициент сцепления между автомобильной шиной и дорогой,
„Изв. АН СССР", отделение технических наук, изд. АН СССР, № 5, 1938.
37. Чудаков Е. А., Коэфициент сцепления между автомобильной шиной и дорогой,
„Изв. АН СССР", отделение технических наук, изд. АН СССР, № 10, 193^.
38. Чудаков Е. А., Переходные кривые для автомагистралей, „Изв. АН СССР",
отделение технических наук, изд. АН СССР, № 2, 1939.
39. Чудаков Е. А., Переходные кривые для автомагистралей, „Изв. АН СССР",
отделение технических наук., изд. АН СССР, № 3, 1939.
40. Чудаков Е. А., Теория автомобиля, Машгиз, 1940.
41. Чудаков Е. А., Теория автомобиля, том 1 (Устойчивость автомобиля против
заноса), изд. АН СССР, 1944.
42. Чудаков Е. А., Качение автомобильного колеса, Машгиз, 1947.
43. Чудаков Е. А., Влияние боковой эластичности колес на движение автомобиля,
„Труды автомобильной лаборатории института Машиноведения АН СССР", вып. 10, изд.
АН СССР, 1947.
44. Чудаков Е. А., Качение автомобильного колеса, „Труды автомобильной
лаборатории института Машиноведения АН СССР", вып. 9, изд. АН СССР, 1948.
45. Чудаков Е. А., Пути повышения экономичности карбюраторного автомобильного
двигателя, „Труды автомобильной лаборатории института Машиноведения АН СССР", вып. И,
изд. АН СССР, 1948.
46. Чудаков Е. А., Влияние боковой эластичности колес на устойчивость автомобиля
против заноса, „Труды автомобильной лаборатории института Машиноведения АН СССР",
вып. 13, изд. АН СССР, 1948.
47. Чудаков Е. А., Пути повышения экономичности автомобиля, „Труды
автомобильной лаборатории института Машиноведения АН СССР", вып. 12, изд. АН СССР, 1948.
48. Чудаков Е, А., Оптимальная регулировка мощности карбюраторного
автомобильного двигателя, „Изв. ОТН АН СССР- № 5, 1949.
49. Чудаков Е. А., Устойчивость автомобиля против заноса, Машгиз, 1949.
50. Чудаков Е. А., Экономайзеры автомобильных карбюраторов, Машгиз, 1949.
51. Чудаков Е. А., Циркуляция паразитной мощности в механизмах бездиференциаль-
ного автомобиля, Машгиз, 1950.
52. Яковлев Н. А., Теория автомобиля, часть 1—4, ОНТИ, 1933—^934.
53. Яковлев Н. А., Теория и расчет автомобиля, Машгиз, 1949.
ОГЛАВЛЕНИЕ
От автора .... . .... 3
Предисловие . . . . 5
Принятые обозначения 7
Глава I. Качение автомобильного колеса
§ 1. Радиус автомобильного колеса ..,.., 15
§ 2. Качение автомобильного колеса при отсутствии действующей
на него боковой силы 18
§ 3. Качение автомобильного колеса при наличии действующей на
него боковой силы 24
§ 4. Определение коэфициента сопротивления качению
автомобильного колеса 30
§ 5. Определение коэфициента сцепления между автомобильным
колесом и дорогой 36
Глава II. Силы и реакции, действующие на автомобиль при его
движении по жесткой опорной поверхности
§ 1. Силы сопротивления движению автомобиля . 44
§ 2. Определение тангенциальных реакций, действующих на колеса
автомобиля . , 48
§ 3. Определение суммарных боковых реакций, действующих на
заднюю и переднюю оси автомобиля 52
§ 4. Определение суммарных радиальных реакций, действующих на
заднюю и переднюю оси автомобиля 61
§ 5. Определение радиальных реакций, действующих на колеса
автомобиля 75
Глава III. Тяговая динамика автомобиля
§ 1. Тяговый баланс автомобиля 89
§ ?. Мощностной баланс автомобиля 91
§ 3. Диаграмма движения автомобиля 93
§ 4. Тяговая или динамическая характеристика автомобиля .... 97
§ 5. Экспериментальное определение динамической или тяговой
характеристики автомобиля 101
§ (\ Основные элементы динамической характеристики автомобиля 105
§ 7. Динамическая характеристика автомобиля при различной его
нагрузке и при наличии прицепа 108
§ 9. Определение максимального подъема, который может быть
преодолен автомобилем на различных передачах и скорости
движения НО
§ 9. Определение ускорения, времени и пути разгона автомобиля . 111
§ 10. Экспериментальное определение времени и пути разгона
автомобиля 121
§ 11. Влияние передаточного числа главной передачи на тяговые
качества автомобиля .... . 128
§ 12. Влияние кривизны характеристики двигателя на тяговые
качества автомобиля 136
§ 13. Влияние числа передач и величины передаточных чисел коробки
передач на тяговые качества автомобиля 138
§ 14. Влияние гидромуфты на динамические или тяговые качества
автомобиля 147
§ 15. Влияние собственного веса и фактора сопротивления воздуха на
тяговые качества автомобиля 149
Оглавление 343
§ 16. Тяговый расчет автомобили 152
§ 17. Торможение автомобиля . . 161
§ 18. Тяговые или динамические качества автомобилей советского
производства 175
Глава IV. Управляемость автомобиля
§ 1. Основные факторы, влияющие на управляемость автомобиля 181
§ 2. Влияние боковой эластичности колес на движение автомобиля 182
§ 3. Влияние боковой эластичности колес на управление
автомобилем при движении его на повороте 19!)
§ 4. Влияние бокового ветра на управление автомобилем ..... 201
§ д. Влияние бокового наклона дороги на управление автомобилем 206
§ 6. Стабилизация управляемых колес 207
Глава V. Устойчивость автомобиля против заноса
§ 1. Критерий для оценки устойчивости автомобиля против заноса . 215
§ 2. Устойчивость автомобиля с жесткими колесами 216
§ 3. Влияние боковой эластичности колес на устойчивость
автомобиля против заноса 238
§ 4. Влияние бокового наклона дороги на устойчивость автомобиля
против заноса 248
§ 5. Улучшение управляемости и повышение устойчивости против
заноса советских автомобилей 255
Глава VI. Плавность движения автомобиля
§ 1. Основные факторы, характеризующие комфортабельность
автомобиля 257
§ 2. Свободное колебание тела с одной степенью свободы ... . 257
§ 3. Колебание тела с одной степенью свободы при наличии трения 260
§ 4. Измерители для оценки плавности движения автомобиля . . 263
§ 5. Колебание автомобиля как системы с двумя степенями
свободы 265
§ 6. Экспериментальное исследование подвески автомобиля .... 276
§ 7. Стабилизация поперечного колебания кузова 277
Глава VII. Проходимость автомобиля
§ 1. Основные требования к автомобилю повышенной проходимости 283
§ 2. Проходимость автомобиля по дорогам с твердым покрытием . 283
§ 3. Проходимость автомобиля по грунту 286
§ 4. Маневренность автомобиля 290
§ 5. Преодоление автомобилем водных препятствий 290
§ 6. Появление паразитной мощности в системе бездиференциаль-
ной трансмиссии автомобиля 291
Глава VIII. Топливная экономичность автомобиля
§ 1. Экономичность автомобильного двигателя 303
§ 2. Экономическая характеристика автомобильного двигателя . . . 305
§ 3. Экономическая характеристика автомобиля 311
§ 4. Построение экономической характеристики автомобиля при
помощи испытания его на тормозном стенде 315
§ 5. Влияние динамики автомобиля на его экономичность . . . . 317
§ 6. Экономичность автомобиля при работе на переменном режиме 319
§ 7. Пути повышения экономичности автомобиля 322
Литература... . , . « . . . . 340
Технический редактор В. /7. Дульнев
Корректор О. И. Семенова
Сдано в произв. 13/V 1950 г.
Подпис. к печати 24/VII 1950 г.
Т-05816. Тираж 20000 экз.
Печ. л. 29,4. Уч.-изд. л. 33,
Формат 70Xl08Vi6. Бум. л. 10,75.
Заказ № 2232
1-я типография Машгиза
Ленинград, ул. Моисеенко, 10
ЗАМЕЧЕННЫЕ ОПЕЧАТКИ
Страница
8
35
62
62
94
193
187
229
230
272
Строка
1-я сверху
Подпись под
фиг. 27,
2-я сверху
7-я сверху
9-я сверху
4-я сверху
Подпись
к фиг. 152
12 и 13
снизу
9-я снизу
На фиг. 186
Ур-ние 496
Напечатано
G'
на карусельном
+ Р+ Gsma
-f P + G sin a
27с гкпт
v —
Тг1к10
ad
~di
а = 0,6; L = 1,8 м и Ь == 0,4;
L = 1,2 м, или а = 0,4;
L = 1,2 м и b = 0,6; Z, = 1,8 и/.
184
Следует читать
G
колесном
Pj+G sin a
Pj + G sin a
2кгкпт
60*V0
da
It
я = 0,61 = 1,8 м и b =
=0,4L=1,2m или а=0,41=
= 1,2 л/ и fc=0,6L = 1,8 л*.
185
вверху справа отсутствует часть выносной линии с
обозначением силы Р'Т
- D&\ — D2Q2-
По
чьей
вине
Тип.
Авт.
Тип.
Тип.
Тип.
Тип.
Тип.
Авт.
Тип.
Тип.
Е. А. Чудаков, Теория автомобиля.