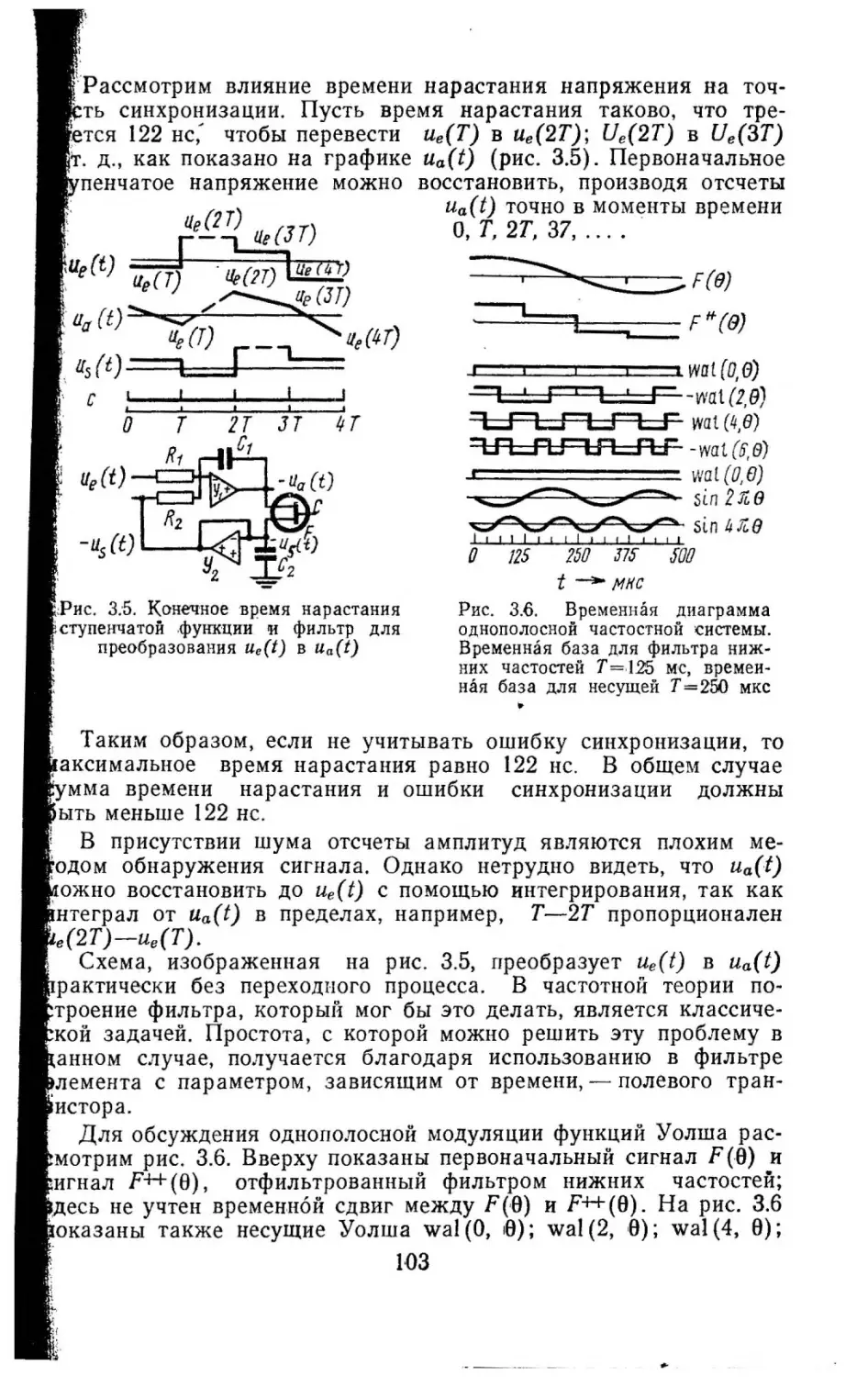
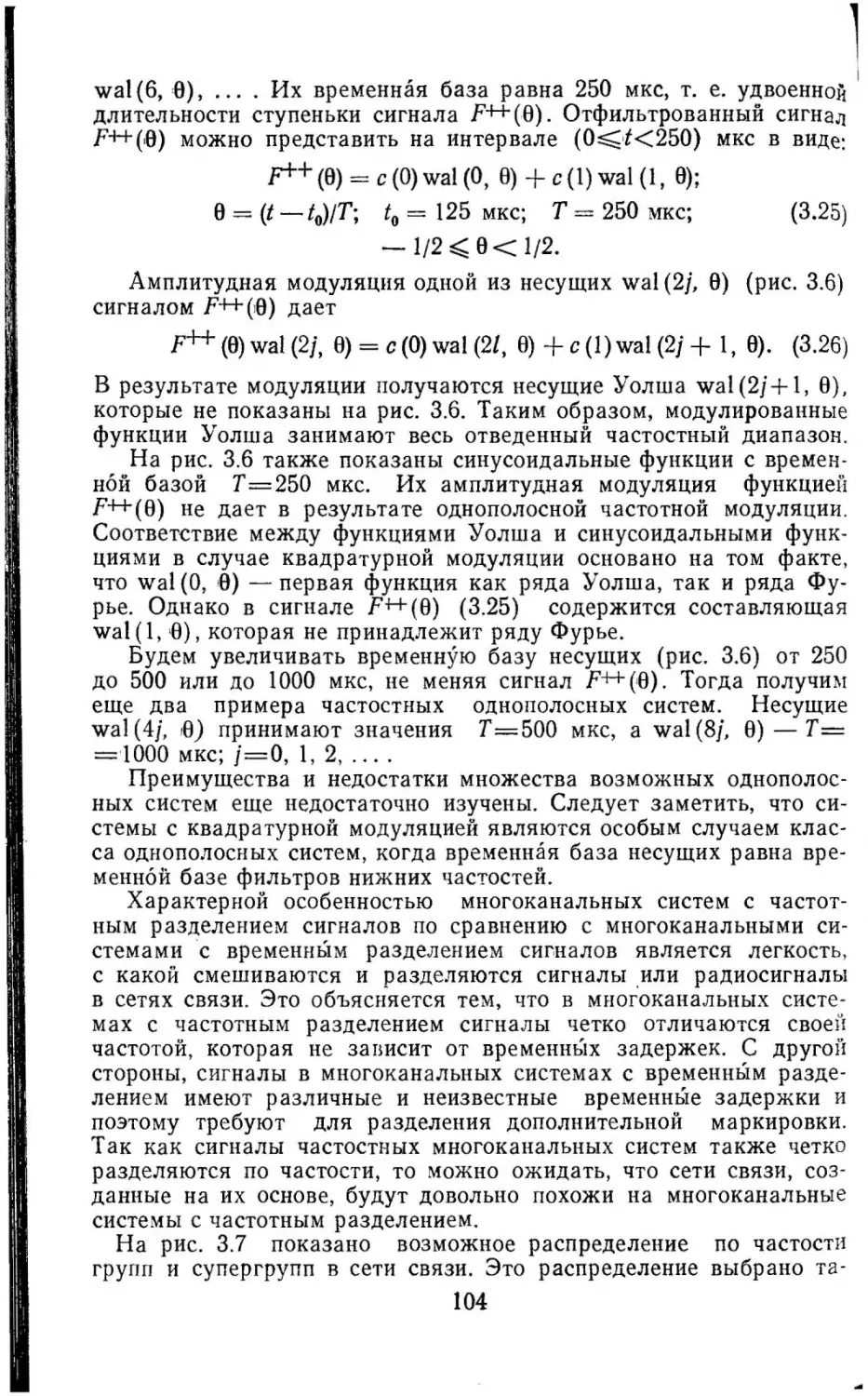
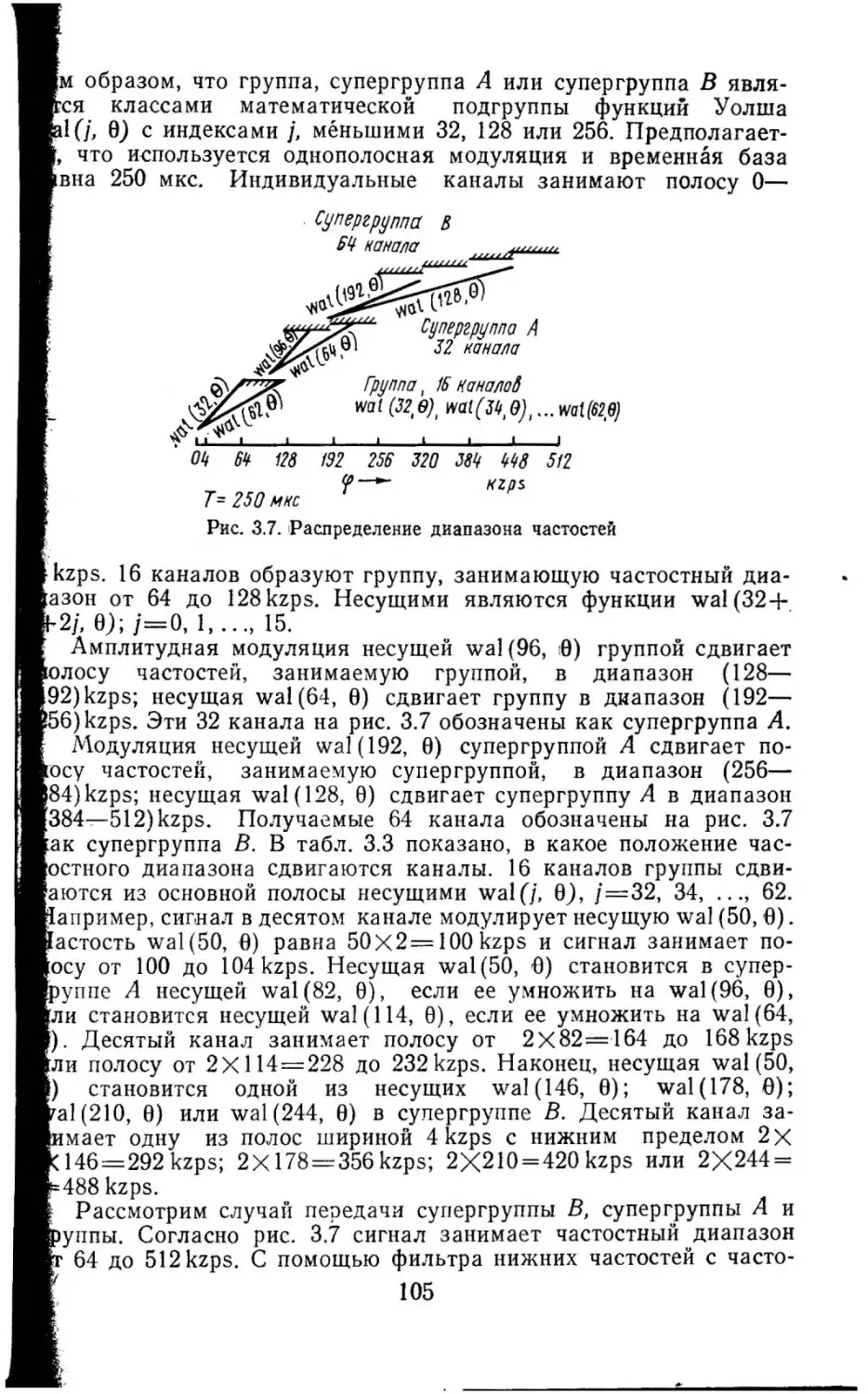
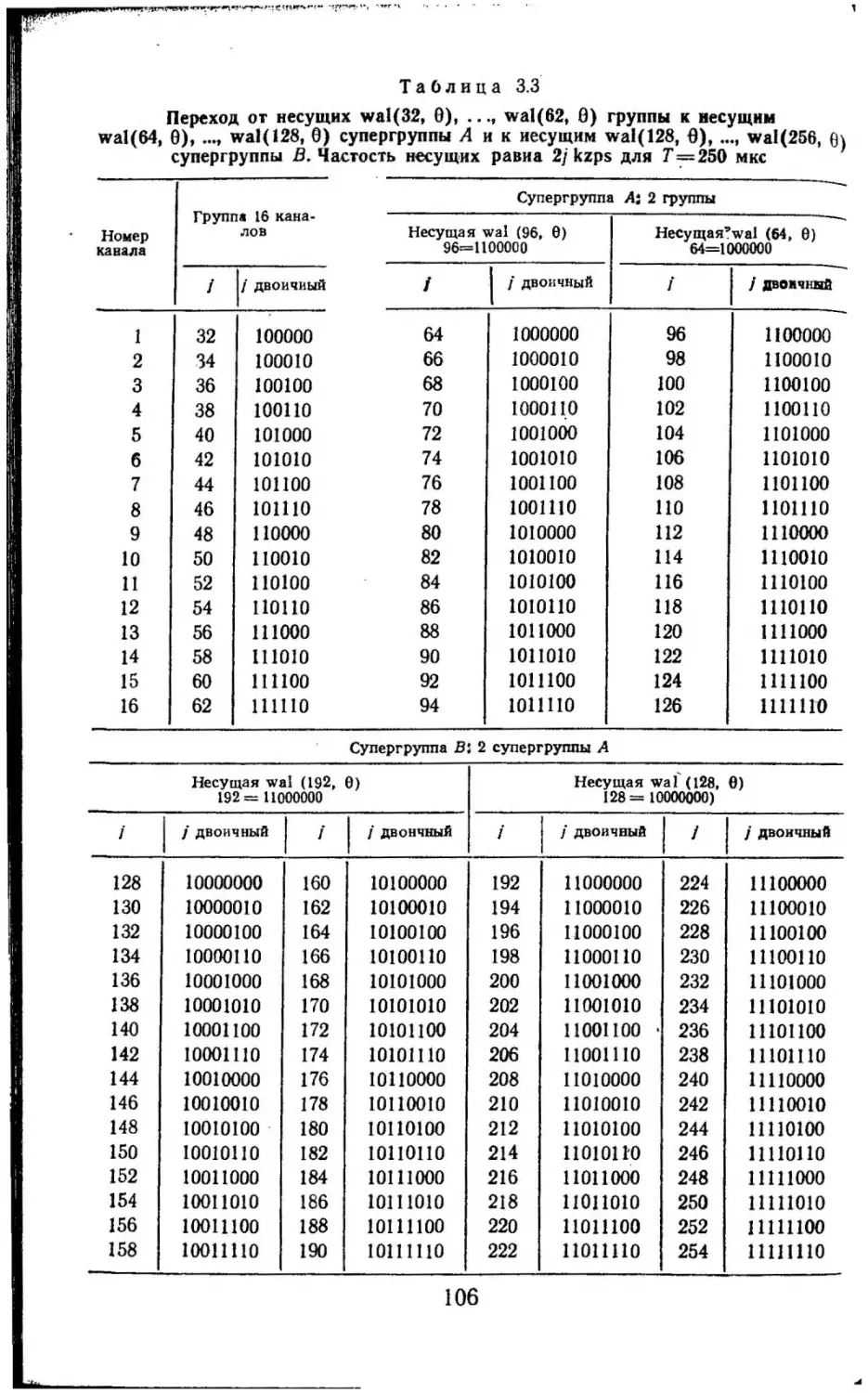
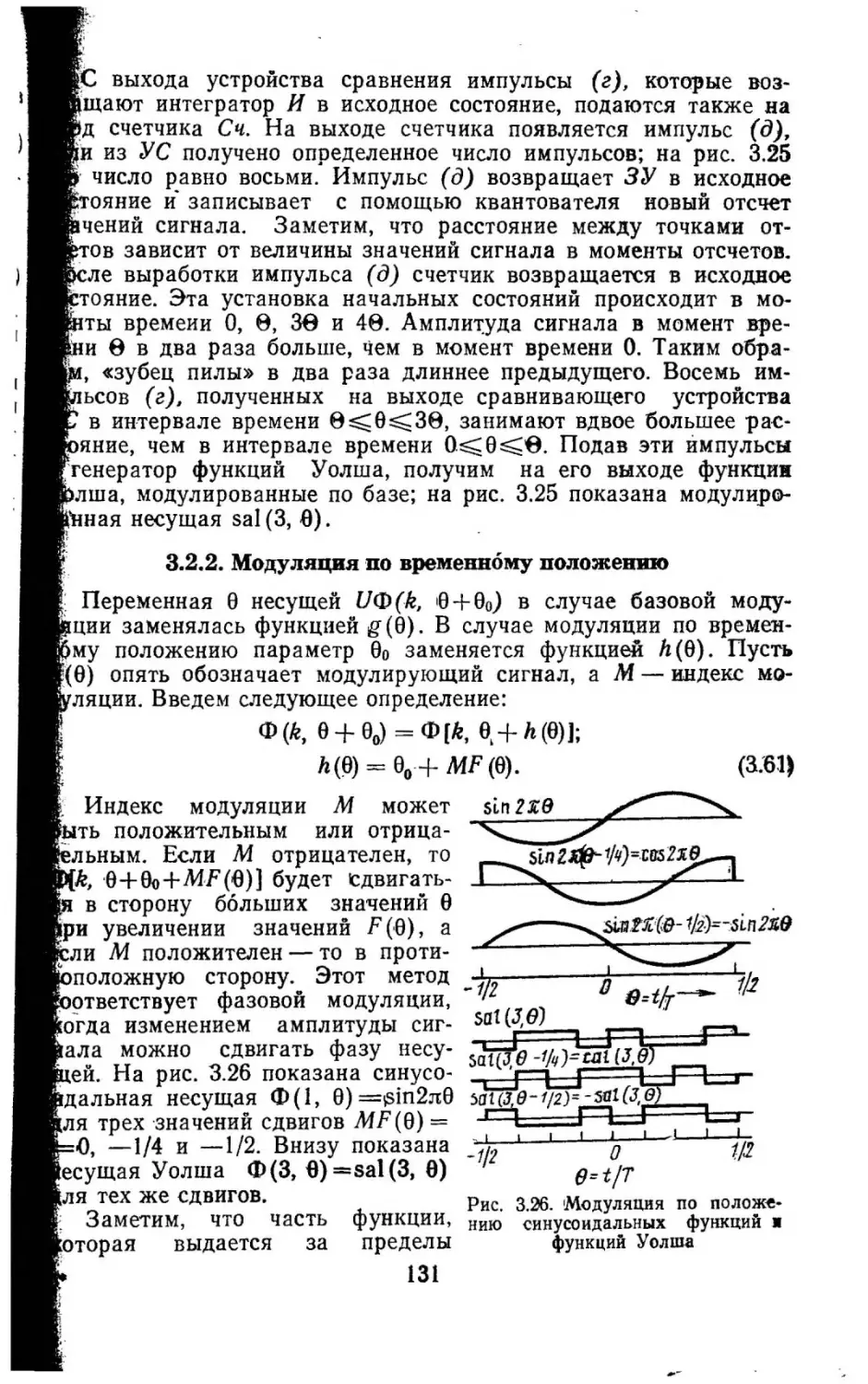
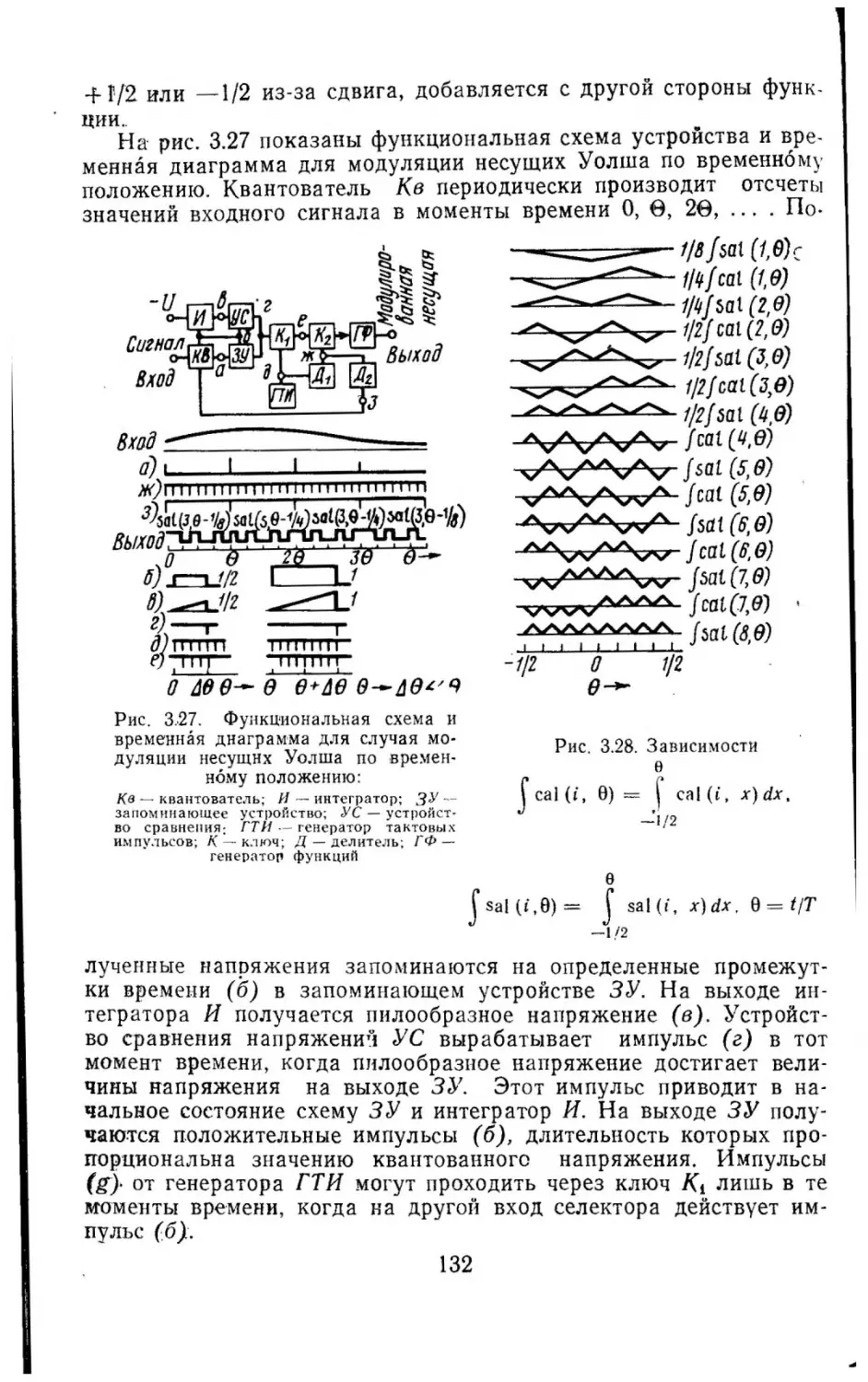
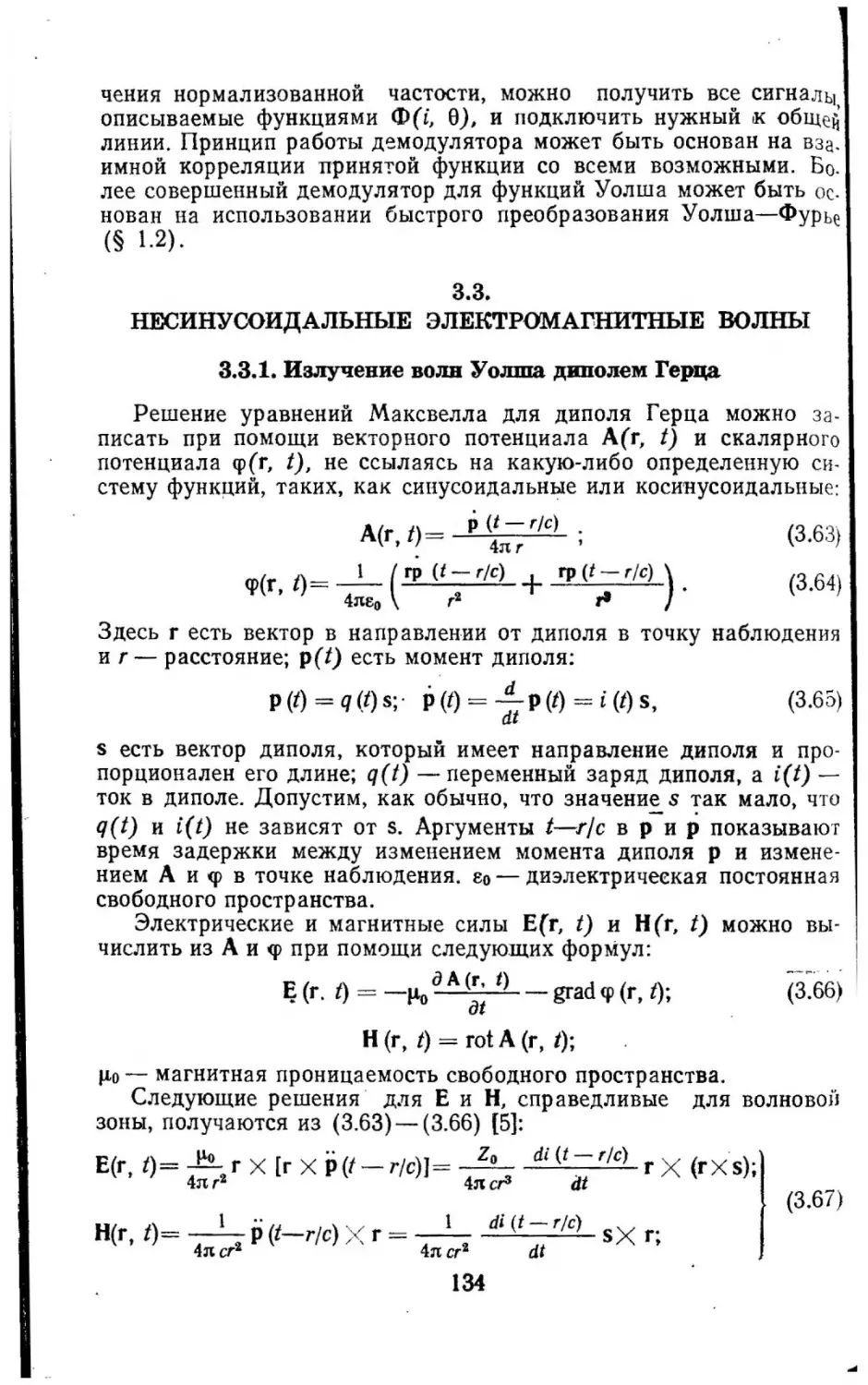
/


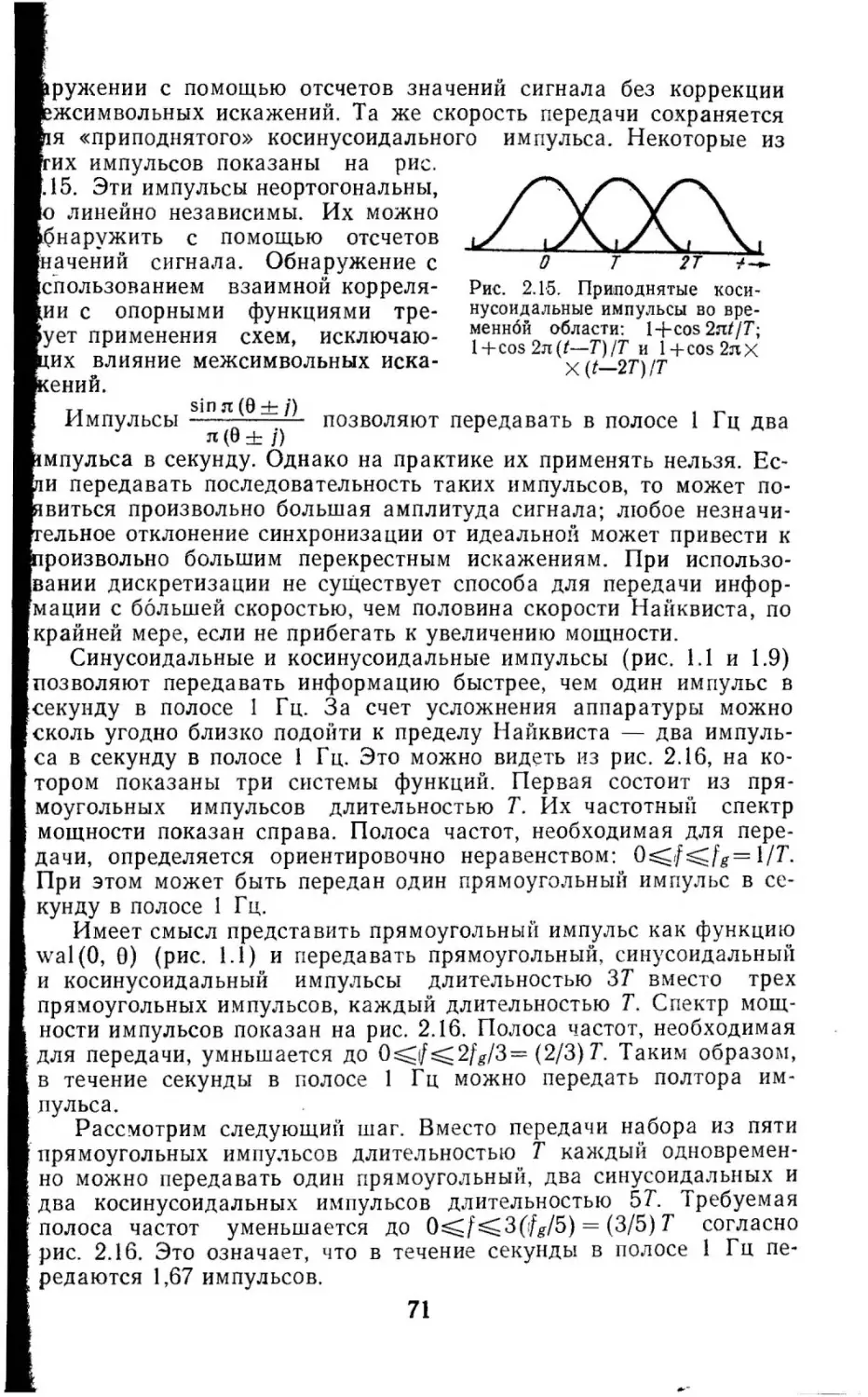

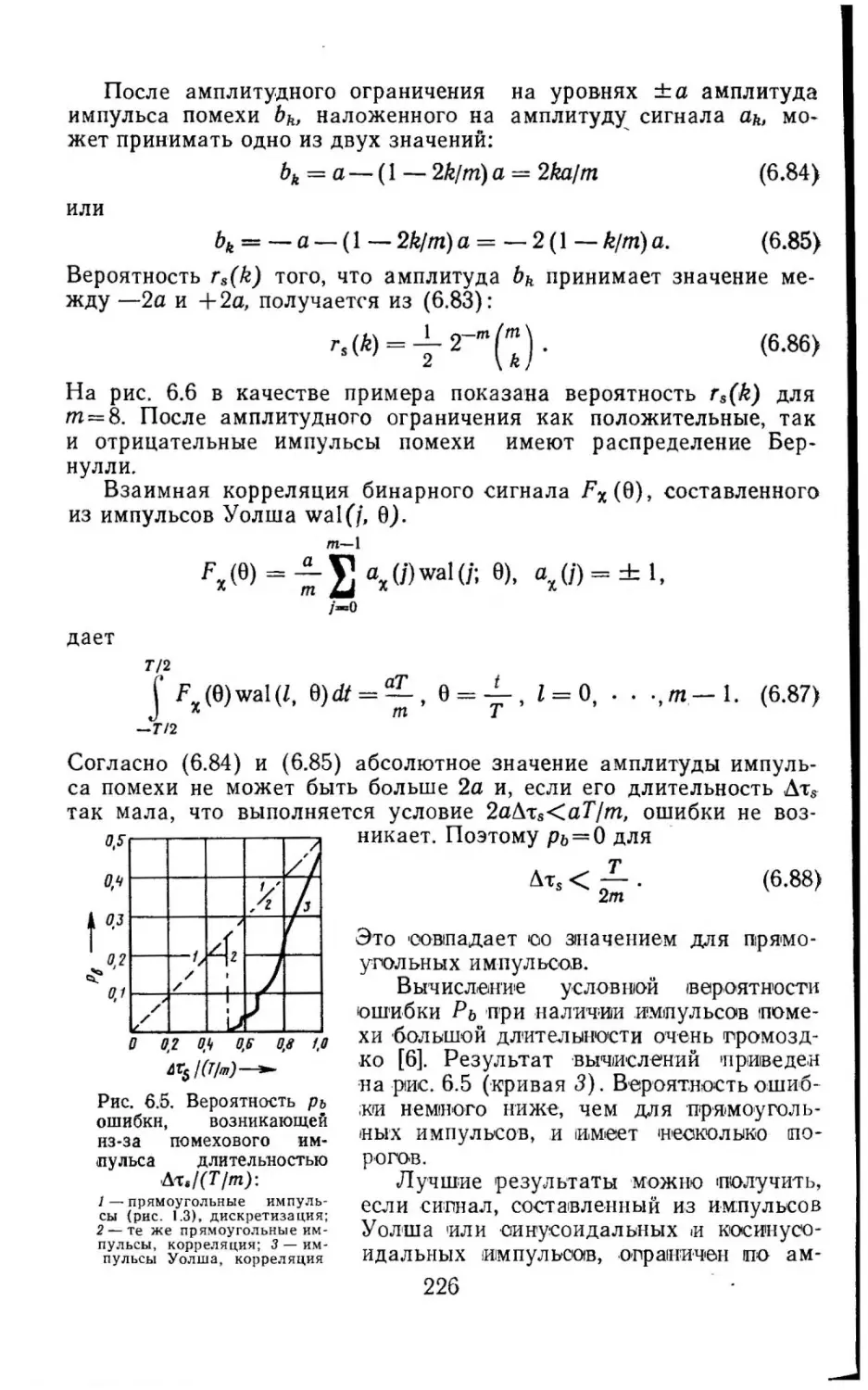
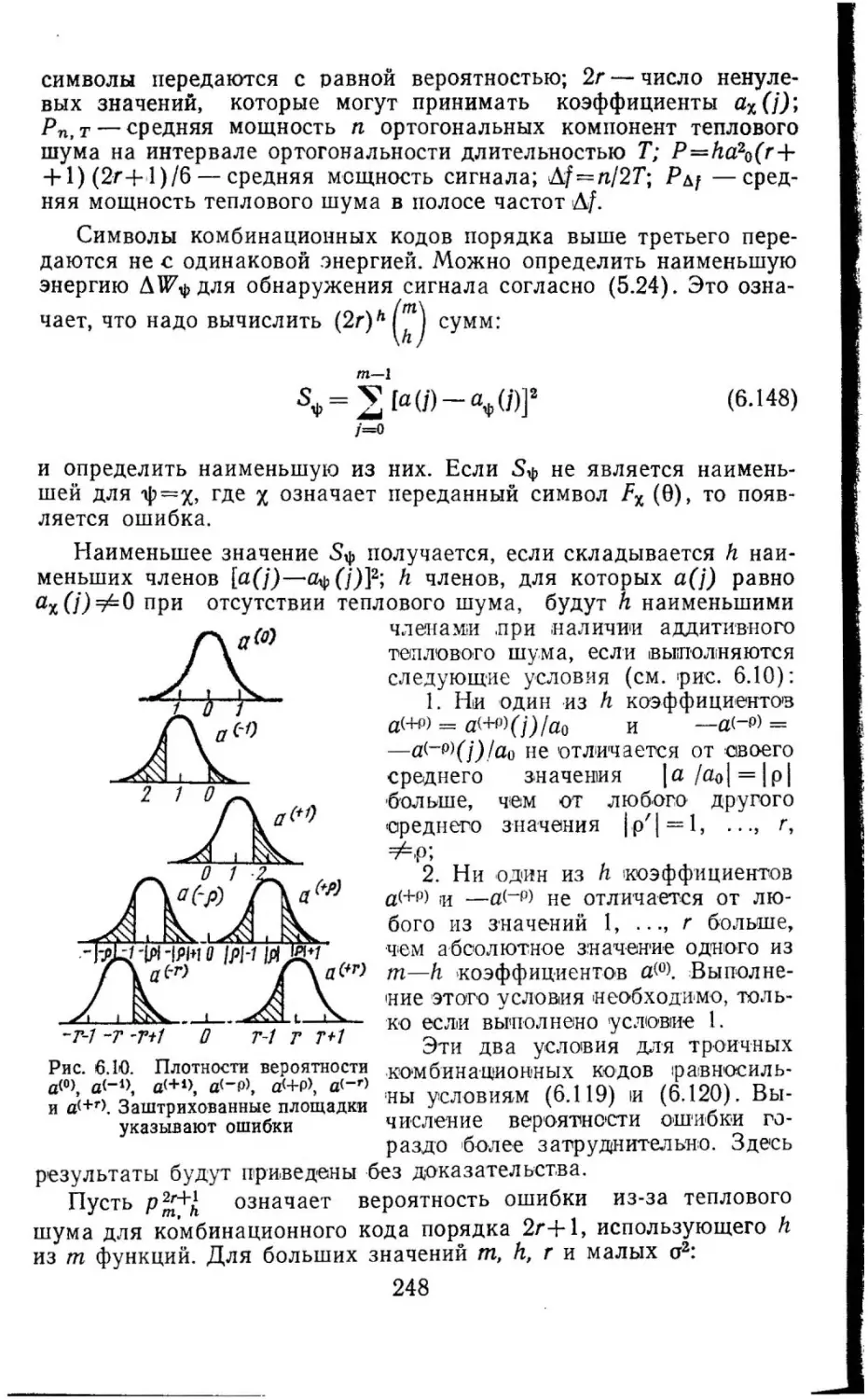




Текст
ГХ.Ф.ХАРМУТ ИЯ
ПЕРЕДАЧА I
ИНФОРМАЦИИ
ОРТОГОНАЛЬНЫМИ
_ Функциями _
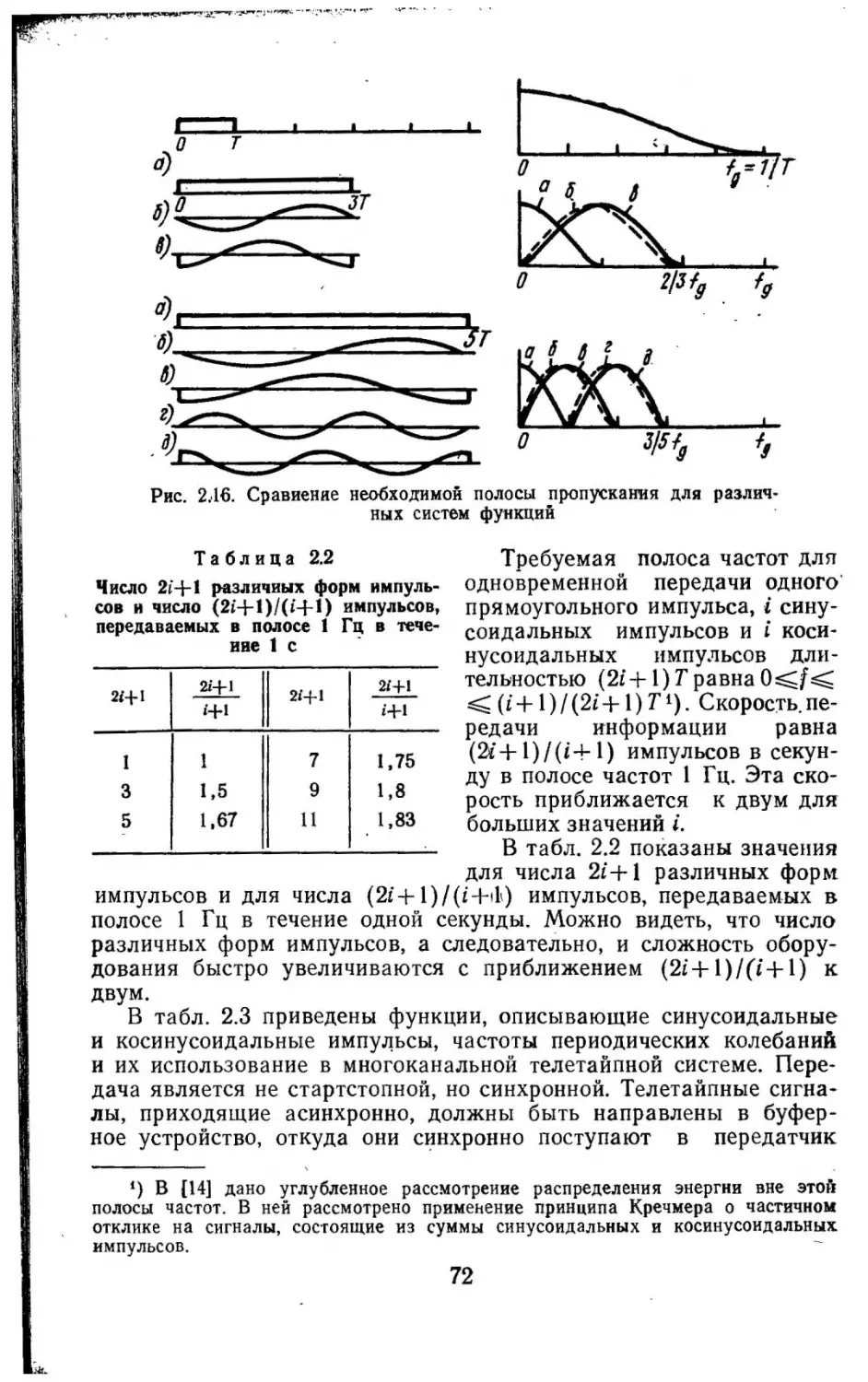
УДК 621.395.4
Х20
6Ф1
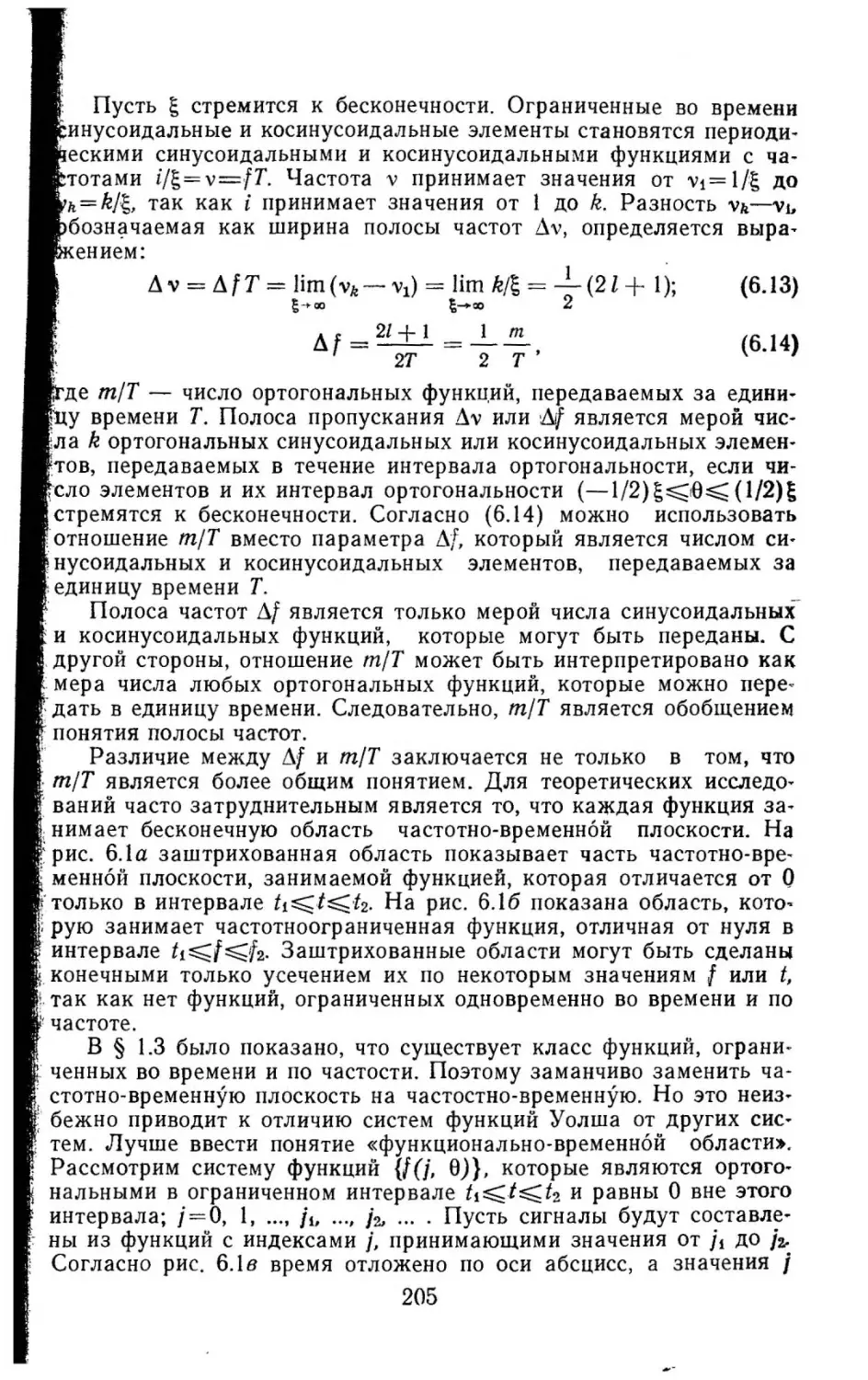
X. Ф. Хармут
Х20 Передача информации ортогональными функциями.
Пер. с англ. Дядюнова Н. Г. и Сенина А. И. М., «Связь»,
1975.
272 с. с ил., табл., библ.
Книга посвящена вопросам общей теории связи. В доступной форме
излагаются вопросы применения системы функций Уолша в технике связи.
В частности, рассматриваются разложение сигналов по функциям Уолша, по-
строение фильтров и многоканальных систем связи на основе функций
Уолша, излучение волн Уолша. Большая часть книги оригинальна и мало-
известна.
Книга представляет большой интерес для научных работников, аспиран-
тов и инженеров, которые по роду своей деятельности связаны с проектиро-
ванием и построением систем связи.
X
30401—049
-----------2
045(01)—75
6Ф1
Henning F. Harmuth
TRANSMISSION OF INFORMATION
BY ORTHOGONAL FUNCTIONS
Berlin. Heidelberg. New York 1970
30401—049
045(01)—75
-27—75
© Перевод па русский язык, «Связь», 1975.
ПРЕДИСЛОВИЕ К РУССКОМУ ПЕРЕВОДУ
Как известно, современная теория связи основана на системе сину-
соидальных и косинусоидальных функций. Объясняется это рядом
причин. Одной из них является простота получения гармонических
колебаний. Другой не менее важной причиной является то, что
гармонические сигналы проходят без искажений через линейные
инвариантные во времени системы. Синусоидальные функции вы-
ражаются через комплексные экспоненциальные функции, что по- '
зволило использовать операторный метод при изучении вопросов
прохождения сигналов через различные устройства.
Однако теория связи может быть построена и на основе дру-
гих систем функций. В частности, в последнее время большое вни-
мание уделяется системе функций Уолша. Эта система является
полной ортогональной системой функций. Ее можно использовать
для разложения сигналов, введя понятия ряда Уолша—Фурье и
преобразования Уолша—Фурье, аналогичные обычному ряду
Фурье и преобразованию Фурье. На основе системы функций Уол-
ша можно построить теорию фильтров, для реализации которых
нет необходимости использовать индуктивности, что является
очень важным их преимуществом перед обычными частотными
фильтрами. В настоящее время в ряде стран построены и успешно
работают многоканальные системы на основе функций Уолша.
Изложению вопросов, связанных с применением функций Уол-
ша в технике связи, и посвящена книга X. Ф. Хармута «Передача
информации ортогональными функциями».
Книга представляет большой интерес для научных работников,
аспирантов и инженеров, по роду своей деятельности связанных с
проектированием и построением систем связи.
Н. Г. Дядюнов,
А. И. Сенин
ПРЕДИСЛОВИЕ АВТОРА
Свойство ортогональности функций использовалось в технике
связи с момента ее зарождения. Оно широко использовалось Ко-
тельниковым в его теоретической работе, написанной в 1947 г.
Десятью годами позже в этой области независимо работали уже
многие исследователи. Однако до появления интегральных схем из
полученных теоретических результатов вряд ли можно было полу-
чить какой-либо практический выход.
Теория связи, основанная на ортогональных функциях, могла
бы быть разработана еще много лет назад. Однако в то время из
систем ортогональных функций были известны только синусои-
дальные функции и прямоугольные импульсы и это делало слож-
ным описание известных результатов. Благодаря развитию полу-
проводниковой технологии появились новые примеры систем орто-
гональных функций: малоизвестные функции Уолша. В этой кни-
ге основное внимание уделено функциям Уолша, так как синусои-
дальным функциям, прямоугольным импульсам и импульсам, по-
строенным из них, посвящена обширная литература.
Существует две причины, по которым в системах связи в дан-
ное время применяется столь ограниченное число систем ортого-
нальных функций. Во-первых, кроме свойства ортогональности,
эти системы должны обладать еще целым рядом свойств, такими,
как полнота или «хорошие» теоремы сдвига и умножения. Второй
причиной является то, что сигналы, описываемые функциями, дол-
жны легко генерироваться. Важность этого второго требования
легко оценить, если представить себе задачу получения миллиона
или более таких сигналов в одной системе.
До 1960 г. именно свойство ортогональности привлекало вни-
мание исследователей при изучении проблем передачи цифровых
сообщений в присутствии шума. Но раньше или позже должен
был возникнуть вопрос, чем, в принципе, отличаются системы си-
нусоидальных функций от других ортогональных систем. Этот во-
прос привел к обобщению понятия частоты и таких понятий, свя-
занных с ним, как частотный спектр мощности, амплитудно- и фа-
зо-частотные характеристики. Функции Уолша позволили по-
строить практически реализуемые фильтры и устройства уплотне-
ния каналов, основанные на этом обобщенном понятии частоты.
Любая инженерная теория должна внести не только новые ас-
пекты в понимание какого-либо вопроса, но и позволять созда-
вать новое, экономически выгодное оборудование. Было разрабо-
тано большее число приборов, использующих системы ортогональ-
ных функций, но вопросы их экономической эффективности ос-
таются до сих пор нерешенными.
X. Ф. Хармут
ВВЕДЕНИЕ
В системах связи широкое применение имеют синусоидальные
.. и косинусоидальные функции.
Имеется много причин для этого. Одна из них заключается в
том, что на заре развития связи было трудно генерировать сигна-
лы, описываемые другими функциями. Электронные лампы и
транзисторы сделали возможным получать такие элементарные
.несинусоидальные колебания, как последовательности импульсов
и линейно изменяющиеся напряжения. Однако до появления ин-
тегральных схем производить такие сигналы было неэкономично.
Другим фактором предпочтительного использования синусоидаль-
ных сигналов было то, что линейные инвариантные во времени
цепи только ослабляют и задерживают их, не изменяя формы.
Поэтому система синусоидальных и косинусоидальных функций
имела большие преимущества перед другими полными системами
ортогональных функций до тех пор, пока сопротивления, емкости
и индуктивности были основными элементами электрических це-
пей. Теория линейных инвариантных во времени цепей демонстри-
рует преимущества синусоидальных функций. Успехи полупровод-
никовой электроники коренным образом изменили такое представ-
ление. Нет особых причин, почему цифровые фильтры, например,
фильтры, анализирующие тонкую структуру сигналов РЛС, долж-
ны выполняться на основе синусоидальных и косинусоидальных
функций. Оказывается, что цифровые фильтры, основанные на так
называемых функциях Уолша, являются более простыми и надеж-
£ ными.
Для распространения электромагнитных волн в свободном про-
странстве или по проводникам синусоидальность функций также
не является необходимым условием. Решение волнового уравне-
ния Даламбера и общее решение телеграфного уравнения показы-
вают, что большой класс сигналов может передаваться без иска-
жений или восстанавливаться. Аналогично диполь Герца может
излучать несинусоидальные колебания. Преобладание синусои-
дальных колебаний в радиосвязи может быть частично объяснено
инвариантностью их ортогональности в условиях изменяющихся
временных задержек. В то же время существовавшие ранее кабели
и открытые проводные линии применялись для передачи информа-
ции без использования синусоидальных колебаний. Такими линия-
ми были телеграфные линии XIX столетия, которые использовали
в качестве усилителя электромеханическое реле.
Одной из наиболее важных особенностей синусоидальных и ко-
синусоидальных колебаний является то, что почти все сигналы,
используемые в связи, могут быть представлены совокупностью
синусоидальных и косинусоидальных колебаний, для чего исполь-
зуется аппарат анализа Фурье. Результатом этого является пере-
ход от временных к частотным функциям. Однако представление
временной функции синусоидальными и косинусоидальными функ-
циями является только одним из многих возможных представле-
5
ний. Любая полная система ортогональных функций может быть
применена для разложения в ряды, которые соответствуют рядам
Фурье. Например, в связи.часто используется разложение в ряды
по функциям Бесселя. Для многих систем функций имеется также
преобразование, подобное преобразованию Фурье.
В этой книге для представления сигналов и характеристик
линий и цепей вместо частной системы синусоидальных и косину-
соидальных функций будет использована обобщенная полная си-
стема ортогональных функций. Последовательная теория должна
включать применение ортогональных функций в качестве перенос-
чика информации, так как синусоидальные и косинусоидальные
функции используются не только для теоретического анализа, но
также в качестве переносчиков в многоканальных системах и ра-
диосистемах. Здесь будет показано, что для них существуют ме-
тоды модуляции, которые соответствуют амплитудной, частотной и
фазовой модуляции. Кроме того, можно построить достаточно эф-
фективные антенны для излучения несинусоидальных колебаний.
Переход от системы синусоидально-косинусоидальных функ-
ций к обобщенной системе ортогональных функций приводит как
к упрощению, так и к усложнению математической теории связи.
Можно, например, избежать той трудности, что любой сигнал
занимает бесконечную часть частотно-временной плоскости путем
замены последней функционально-временной плоскостью. Любой
ограниченный во времени сигнал, состоящий из ограниченного
числа ортогональных функций, занимает конечную часть этой
функционально-временной плоскости.
Обобщение понятия частоты, которое дало много теоретичес-
ких результатов для теории связи, основано на ортогональных
функциях. Частота является параметром синусоидальных и коси-
нусоидальных функций и определяется как число периодов за еди-
ницу времени. В ряде работ [1—3] показано, что частоту можно
интерпретировать как половину числа пересечений нулевого уровня
за единицу времени. Например, синусоидальная функция со 100
периодами в секунду имеет 200 пересечений нулевого уровня или
изменений знака за секунду. Пересечения нулевого уровня можно
• определить и для непериодических функций. В этом случае полез-
но ввести более общее понятие — «половина среднего числа пере-
сечений нулевого уровня за единицу времени». Для этого обобще-
ния частоты вводится новый термин «частость». Таким образом,
частость и частота идентичны для синусоидальных и косинусои-
дальных функций. Термин частость позволяет заменить такие важ-
ные понятия, как спектральная плотность мощности и амплитудно-
частотная характеристика, па частостный спектр мощности и амп-
плитудно-частостную характеристику.
Понятия периода колебаний Т—1/f и длины волны k = v/f свя-
заны с частотой. Замена частоты f частостью qp приводит к сле-
дующим более общим определениям: средний период колебаний
Г=1/ф (среднее расстояние между нулевыми пересечениями во
времени, умноженное на 2); средняя длина волны k=v/q (среднее
6
^расстояние в пространстве между двумя нулями, умноженное на
"§/2, где v — скорость распространения нулевых пересечений).
Ж Проверкой любой инженерной теории связи является ее прак-
тическое применение. Известно несколько таких применений, и все
Жрни тесно связаны с полупроводниковой техникой. Появившаяся
Жмало известная система функций Уолша будет такой же идеаль-
ной для линейных неинвариантных во времени схем, построенных
на основе бинарных цифровых элементах, как и системы сину-
М'соидальных и косинусоидальных функций для линейных инвари-
антных во времени цепей, выполненных на резисторах, конденса-
Й торах и катушках индуктивностей. На базе функций Уолша уже
созданы очень простые частостные фильтры. Кроме того, разрабо-
Ттана экспериментальная час.тостная многоканальная систехма, ис-
пользующая функции Уолша в качестве переносчиков, причем опа
• имеет преимущество перед многоканальными системами с частот-
< ным и временным разделением в определенных приложениях.
Цифровые фильтры и цифровые устройства уплотнения являются
^наиболее предпочтительными для применений в будущем. По-
строенные на основе функций Уолша, они более просты и надеж-
ны, чем фильтры, построенные па основе синусоидальных и коси-
нусоидальных функций. Однако для их практического применения
требуется значительный прогресс в разработке интегральных схем.
Применение несинусоидальных электромагнитных волн нахо-
дился пока на этапе теоретических исследований. Только совсем
недавно были разработаны излучающие антенны, которые могут
найти практическое применение для излучения сигналов, описы-
ваемых функциями Уолша. Большинство проблем, связанных с
волнами Уолша, в настоящее время могут быть разрешимы толь-
ко в терминах геометрической оптики, так как волновая оптика
применима только к синусоидальным волнам. С другой стороны,
нет оснований сохмневаться, чго несинусоидальные электромагнит-
ные волны являются областью фундаментальных исследований.
Генерация несинусоидальных радиоволн предполагает, что такие
волны могут быть получены в диапазоне света, а это приводит в
конечном счете к вопросу, почему белый свет должен расклады-
ваться на синусоидальные колебания.
Функции Уолша, которым в этой книге придается большое
• значение, в настоящее время являются наиболее важным приме-
ром несинусоидальных функций в связи. Эти функции почти неиз-
вестны инженерам-связистам, хотя они использовались более
60 лет назад для размещения проводников в открытых проводных
линиях. До конца XIX столетия для этих целей также использова-
лись функции Радемахера [4], которые являются подсистемой
ФункциВ' Уолша Полная система функций Уолша была найдена в
1901) гГЪарреттом 1). В 1923 г., когда эта система функций была
описана математически Уолшем (9J, размещения проводников в со-
ответствии со схемой Баретта уже вошли в обычную практику [6, 7].
*) Барретт упоминался Фовлом [5] в 1905 г. как изобретатель способа раз-
мещения проводников согласно функциям Уолша (см., в частности, с. 675 {5]).
1.
МАТЕМАТИЧЕСКИЕ ОСНОВЫ
ПЕРЕДАЧИ СИГНАЛОВ
1.1.
ОРТОГОНАЛЬНЫЕ ФУНКЦИИ
1.1.1. Ортогональность и линейная независимость
Система {f(j, х)} действительных и ненулевых функций /(0, х).
f(\, х)... называется ортогональной на интервале xo^x^xi, если
выполняются следующие условия:
р(/, x)f(k, x)dx = Xjbjk, (1.1)
Функции называются ортогональными и нормированными, если
константа Xj равна 1. Оба термина обычно объединяют в один
термин «ортонормальный» или «ортонормированный».
Ненормированную систему ортогональных функций можно
всегда пронормировать. Например, если константа Xj не равна 1,
то система {X~ljf(jf х)} является нормированной. Системы орто-
гональных функций являются частными случаями систем линейно
независимых функций. Система {/(/, х)} из т функций называет-
ся линейно зависимой, если уравнение
т—1
2 c(/)/(j, х) = 0 (1.2)
/=о
удовлетворяется для всех значений х при условии, что не все
коэффициенты c(j) равны нулю. Функции называются линейно не-
зависимыми, если (1.2) не выполняется. Функции ортогональной
системы всегда являются линейно независимыми, так как умноже-
ние (1.2) на f(j, х) и интегрирование произведений на интервале
x0^x^xt дают c(j) = O для всех /.
Система {q(j, х)} из т линейно независимых функций всегда
может быть преобразована в систему {/(/, х)} из т ортогональных
функций. Можно записать следующие уравнения:
/(°, x) = cwq(0, х);
8
/0. *) = <W7(0, x) + Сц<7(1, x); (1.3)
f (2, x) = c20q (0, x) + c21q (1, x) + c22q (2, x)
и т. д. )
Подстановка f(j, x) в (1.1) дает необходимое количество урав-
нений для определения коэффициентов срд:
j f(0, x)dx = Хо;
х.
J/2(2, x)dx= Х2;
х.
j/2(l, x)dx = Xx; Jf(0, х)/(1, x)dx = 0;
х. (1.4)
j/(0, х)/(2, x)dx=0; f/(l, х)/(2, x)dx=0
Xq Xq
И T. Д.
Коэффициенты Xq, Xi... явля-
ются произвольными. Для норми-
рованных систем они равны 1.
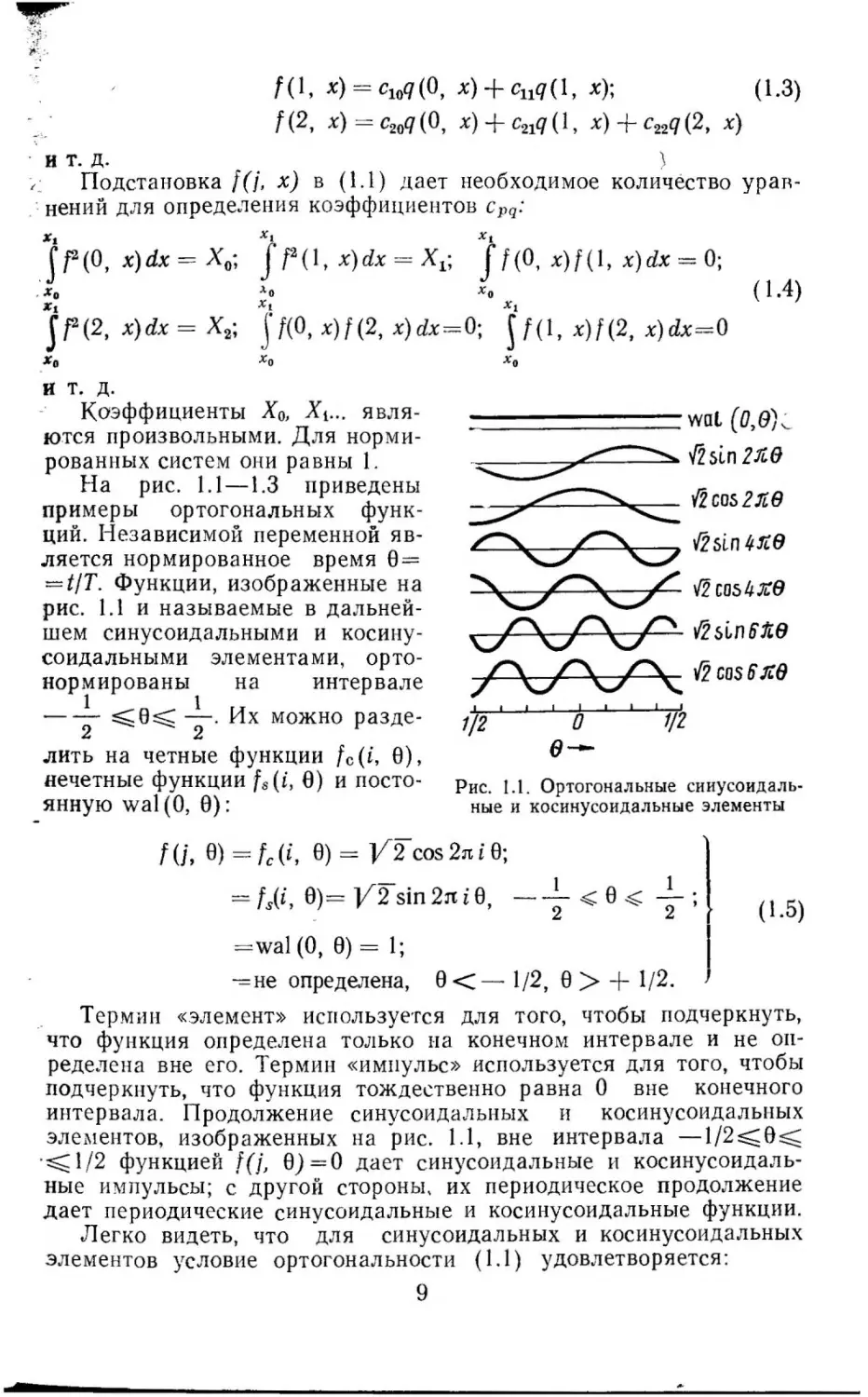
На рис. 1.1 —1.3 приведены
примеры ортогональных функ-
ций. Независимой переменной яв-
ляется нормированное время 0 =
— t/T. Функции, изображенные на
рис. 1.1 и называемые в дальней-
шем синусоидальными и косину-
соидальными элементами, орто-
нормированы на интервале
---F ~2~"’ можно РазДе*
лить на четные функции fc(i, 0),
нечетные функции fs(i, 0) и посто-
янную wal(0, 0):
Рис. 1.1. Ортогональные синусоидаль-
ные и косинусоидальные элементы
f (jf 0) — fc 0) = cos 2л i 0;
= /,(«, 0)=/2’sin2лi0, _-±-<0<±;
Л £
(1.5)
—wal (0, 0) = 1;
-=не определена,
0<— 1/2, 0> + 1/2.
Термин «элемент» используется для того, чтобы подчеркнуть,
что функция определена только на конечном интервале и не оп-
ределена вне его. Термин «импульс» используется для того, чтобы
подчеркнуть, что функция тождественно равна 0 вне конечного
интервала. Продолжение синусоидальных и косинусоидальных
элементов, изображенных на рис. 1.1, вне интервала —1/2^0^
•з^1/2 функцией /(/, 0) = О дает синусоидальные и косинусоидаль-
ные импульсы; с другой стороны, их периодическое продолжение
дает периодические синусоидальные и косинусоидальные функции.
Легко видеть, что для синусоидальных и косинусоидальных
элементов условие ортогональности (1.1) удовлетворяется:
9
1/2 _ 1/2
J 1 )/'2sin2ni0d0 = J 1 )/2 cos 2л 10 dt0-- 0;
—1/2 —1/2
1/2 _ _ 1/2 _ _
f j/2sin2лi0j/2 sin 2л &0d0= j V 2cos2лi0 }/<2cos2n/s0d0 —6ik;
-i/2 -i/2
1/2 _
j \r2 \sin 2л i 0J^2 cos 2л k 0 d 0 = 0;
-i/2
1/2
J 1 • ld0 = 1.
-i/2
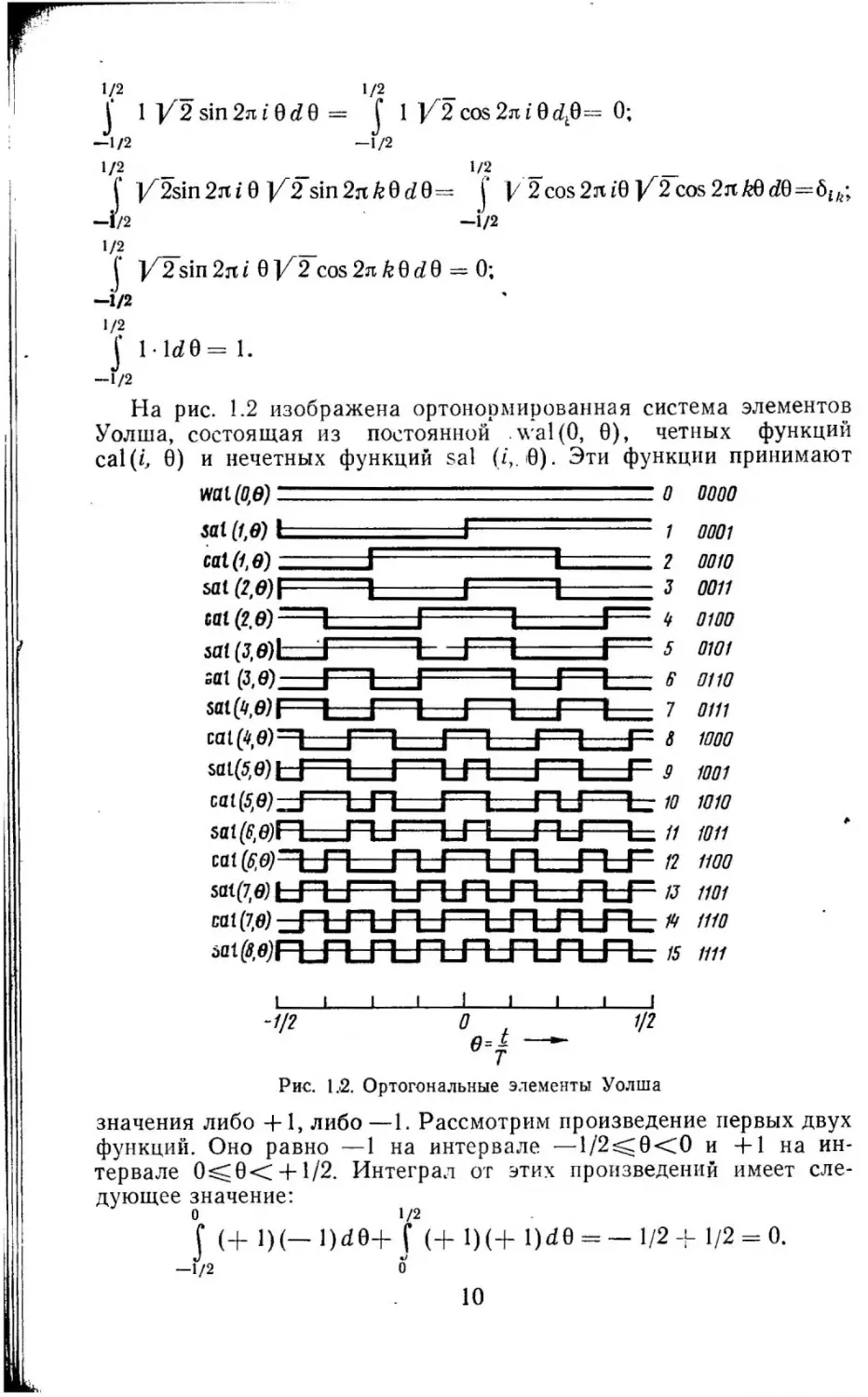
На рис. 1.2 изображена ортонормированная система элементов
Уолша, состоящая из постоянной wal(0, 0), четных функций
cal (Л 0) и нечетных функций sal (i, 0). Эти функции принимают
Рис. 1.2. Ортогональные элементы Уолша
значения либо 4-1, либо —1. Рассмотрим произведение первых двух
функций. Оно равно —1 на интервале -—1/2^0<О и 4-1 на ин-
тервале О^0< 4-1/2. Интеграл от этих произведений имеет сле-
дующее значение:
О 1/2
J (+ 1)(- 1 )de+ J (+ 1)(+ l)d0 = - 1/2 + 1/2 = 0.
—1/2 0
10
&
T
W Произведение второго и третьего элементов равно +1 на интер-
Салах —l/2sg6<—1/4 и 0^0< + 1/4 и —1 на интервалах —1/4^
<;0 и +1/4^0 < +1/2. Интеграл от этих произведений снова
’Jia вен нулю:
-1/4 о 1/4
f (-!)(- I)d0+ J (-1)(+I)d0 + J (+!)(+ I)d0 +
—1/2 —1/4 0
1/2
+ j (+l)(-l)d0 = O.
1/4
Можно легко проверить, что интеграл от произведения любых
двух других функций равен 0. Функция, умноженная сама на се-
бя, дает произведения ( + 1)( + 1) или (—4)(—.1), равные 1 на
всем интервале —d/2^0^-Н/2.
Следовательно, интеграл от квад-
рата любой функции равен 1. Та-
ким образом, функции Уолша яв-
ляются ортонормированными.
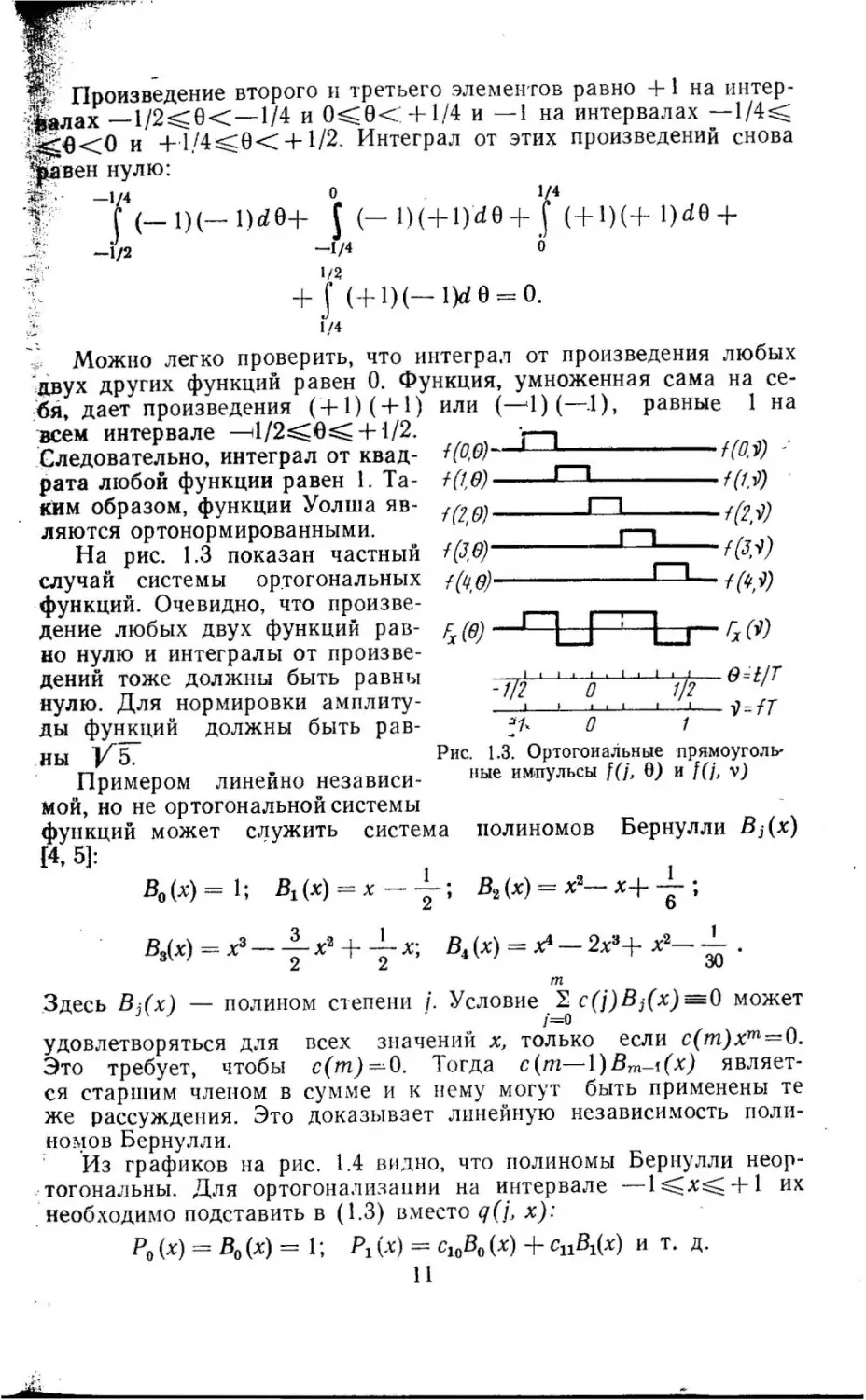
На рис. 1.3 показан частный
случай системы ортогональных
функций. Очевидно, что произве-
дение любых двух функций рав-
но нулю и интегралы от произве-
дений тоже должны быть равны
нулю. Для нормировки амплиту-
ды функций должны быть рав-
f(O.H) '
<(2$
/(У)
{(0,0)-
+0.8)
+(3.8)'
.0.1/г
*
1.3. Ортогональные прямоуголь-
Рис. 1 .
ные импульсы f(jt 0) и f(j, v)
Примером линейно независи-
мой, но не ортогональной системы
функций может служить система полиномов Бернулли ВДх)
(4, 5]:
В0(х)=1; В1(х) = х-4-; В2(х) = ха-х+4-;
Z о
В3(х) = х3 —-^-xa + -i-x; В4(х) = х4 —2х»+ ха— .
Z Z OU
т
Здесь В/х) — полином степени /. Условие 2 c(j)Bj(x)=O может
/==о
удовлетворяться для всех значений х, только если с(т)хт — 0.
Это требует, чтобы с(т)—0. Тогда с(т—l)Bm-i(x) являет-
ся старшим членом в сумме и к нему могут быть применены те
же рассуждения. Это доказывает линейную независимость поли-
номов Бернулли.
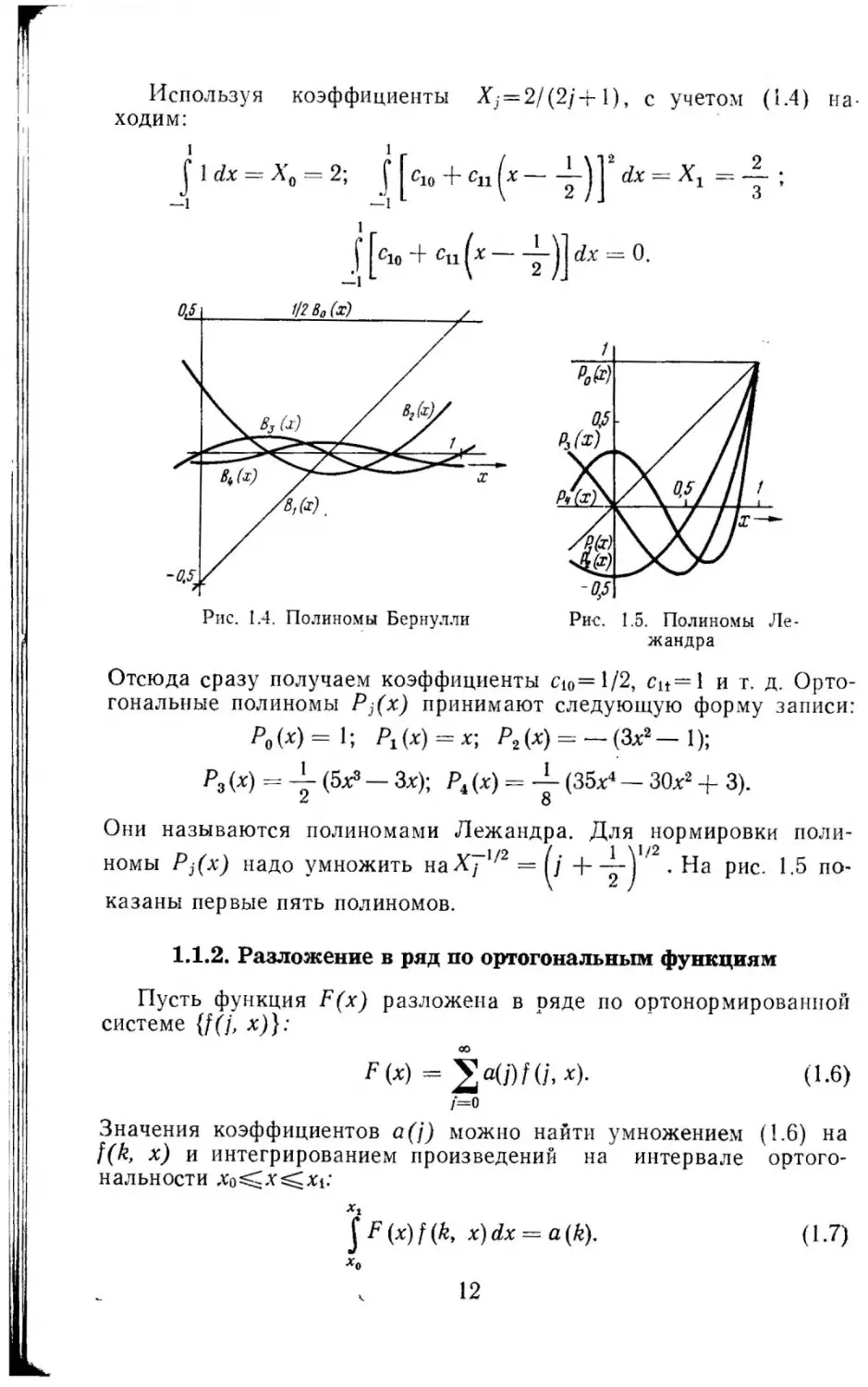
Из графиков на рис. 1.4 видно, что полиномы Бернулли неор-
тогональны. Для ортогонализации на интервале —1 +1 их
необходимо подставить в (1.3) вместо q(j, х):
PQ (х) = Во (х) = 1; ?! (х) = С10В0 (х) + сМх) и т. д.
11
Используя коэффициенты Х> = 2/(2/+1), с учетом (1.4) на-
ходим:
Отсюда сразу получаем коэффициенты сю=1/2, си=1 и т. д. Орто-
гональные полиномы Pj(x) принимают следующую форму записи:
Ро(^)= 1; = Л(^) = -(Зх2-1);
Р3 (X) = -L (5х« — Зх); Р4 (х) = у (35х4 — ЗОх2 + 3).
Они называются полиномами Лежандра. Для нормировки поли-
номы Pj(x) надо умножить наХ/",/2 = + -у) ? ♦ На рис. 1.5 по-
казаны первые пять полиномов.
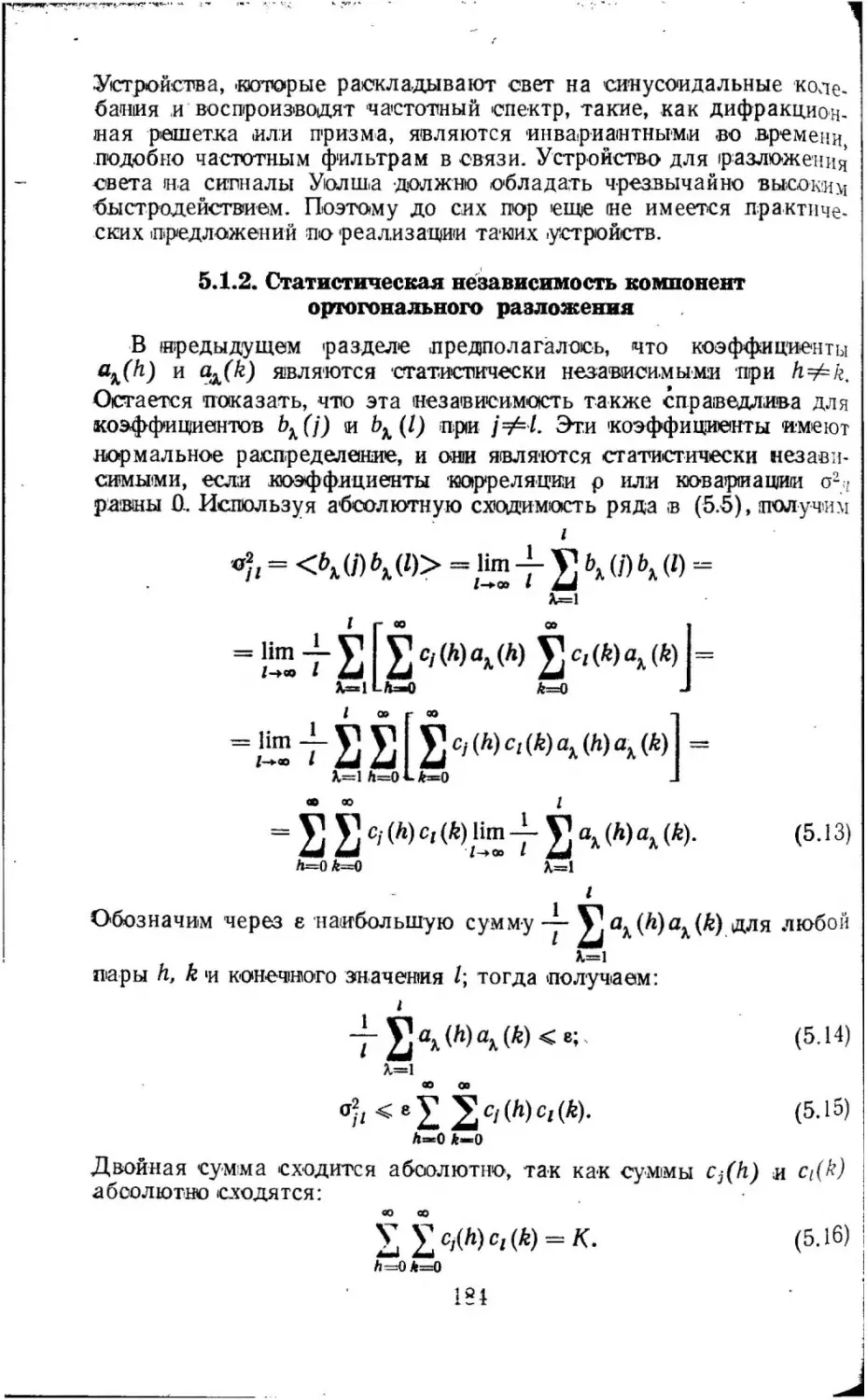
1.1.2. Разложение в ряд по ортогональным функциям
Пусть функция F(x) разложена в ряде по ортонормированпой
системе {f(j, х)}:
F(x) = 2a(j)f(j,x). (1.6)
/=0
Значения коэффициентов a(j) можно найти умножением (1.6) на
f(k, х) и интегрированием произведений на интервале ортого-
нальности хо^х^хь
J F (х) f (k, x)dx = a (k). (1.7)
*0
12
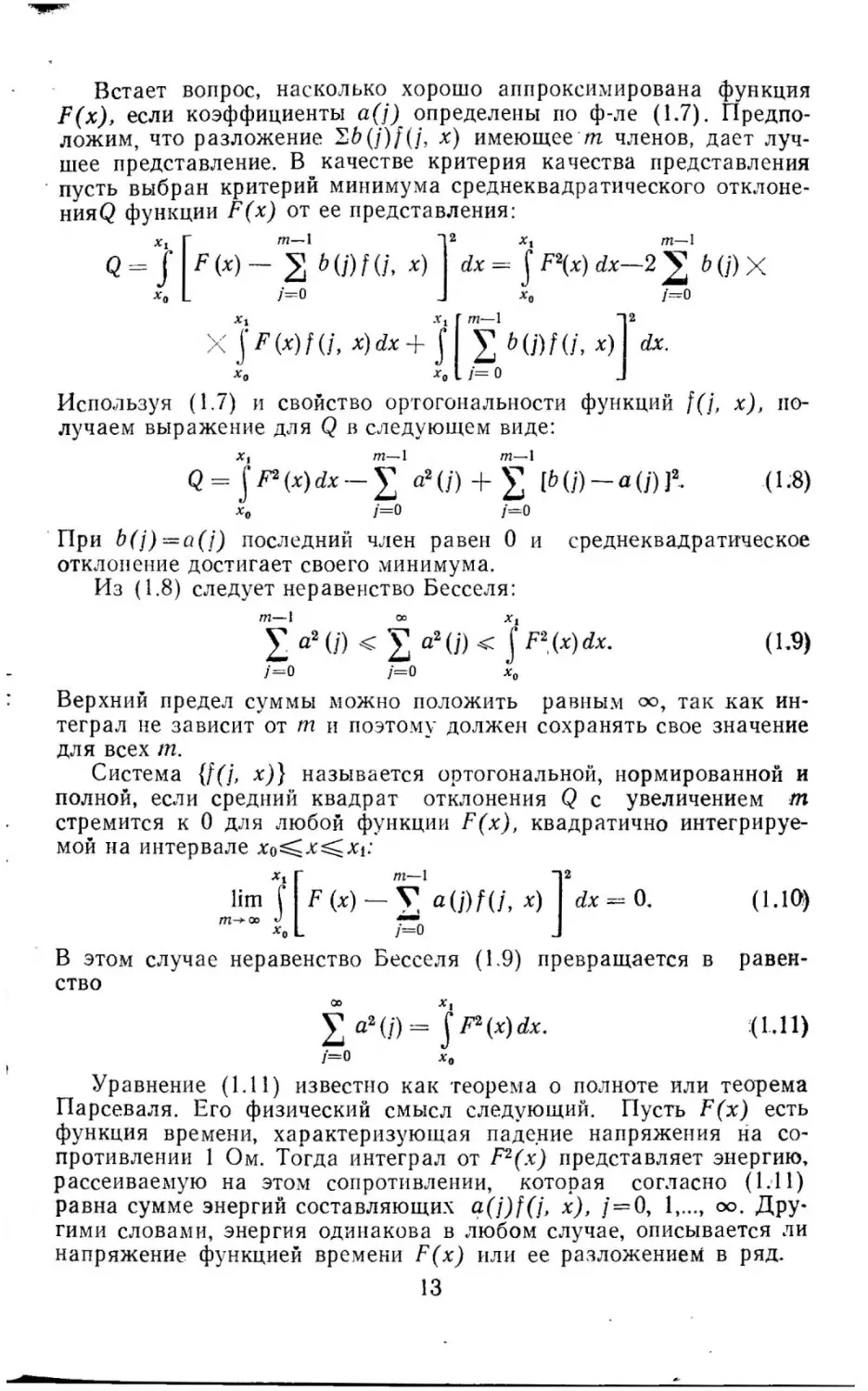
Встает вопрос, насколько хорошо аппроксимирована функция
F(x), если коэффициенты a(j) определены по ф-ле (1.7). Предпо-
ложим, что разложение х) имеющее т членов, дает луч-
шее представление. В качестве критерия качества представления
пусть выбран критерий минимума среднеквадратического отклоне-
huhQ функции F(x) от ее представления:
Лх)~ 2 х> rfx = J F2(x) rfx—2b(j)X
/=0 J x0 /=0
X $F(x)f(j, x)dx+ J
X0 xo
m—1 "12
£ x)
1=0
dx.
Используя (1.7) и свойство ортогональности функций f(j, х), по-
лучаем выражение для Q в следующем виде:
Q = j Р (х) dx — £ а2 (/) 4- £ [6 (/) — а (j) ]2.
ХО /=0 /—0
(1.8)
При b(j)=a(j) последний член равен 0 и среднеквадратическое
отклонение достигает своего минимума.
Из (1.8) следует неравенство Бесселя:
т— 1 оо х,
£ a2(i) < F2 (x)dx. (1.9)
/=о /=0 х0
Верхний предел суммы можно положить равным оо, так как ин-
теграл не зависит от т и поэтому должен сохранять свое значение
для всех т.
Система {/(/, х)} называется ортогональной, нормированной и
полной, если средний квадрат отклонения Q с увеличением т
стремится к 0 для любой функции F(x), квадратично интегрируе-
мой па интервале хо^х^хь
lim
т-юо
xt Г т— 1
f Р У х)
*о L /=о
2
dx = 0.
(1.10)
В этом случае неравенство Бесселя (1.9) превращается в равен-
ство
f a2(j) = (1.11)
1=0 х„
Уравнение (1.11) известно как теорема о полноте или теорема
Парсеваля. Его физический смысл следующий. Пусть F(x) есть
функция времени, характеризующая падение напряжения на со-
противлении 1 Ом. Тогда интеграл от ^(х) представляет энергию,
рассеиваемую на этом сопротивлении, которая согласно (1.11)
равна сумме энергий составляющих a(j)f(j, х), j=0, 1,..., оо. Дру-
гими словами, энергия одинакова в любом случае, описывается ли
напряжение функцией времени F(x) или ее разложением в ряд.
13
Система {f(j, х)} называется замкнутой1), если не существует
квадратично интегрируемой функции F(x):
Х1
J F2 (х) dx
(1-12)
(1.13)
для которой уравнение
x)dx = O
*0
удовлетворяется для всех значений /.
Неполные системы ортогональных функций не дают сходимости
разложения в ряд для всех квадратично интегрируемых функций.
Несмотря на это, они имеют большой практический интерес. На-
пример, выходное напряжение идеального фильтра нижних час-
тот может быть точно представлено путем разложения в ряд по
неполной ортогональной системе функций sinx/x.
Во всяком случае по таким простым свойствам функции F(x)>
как ее непрерывность и ограниченность, нельзя сказать, можно ли
ее разложить в ряд по определенной ортогональной системе
{f(b k)} (5-7J2).
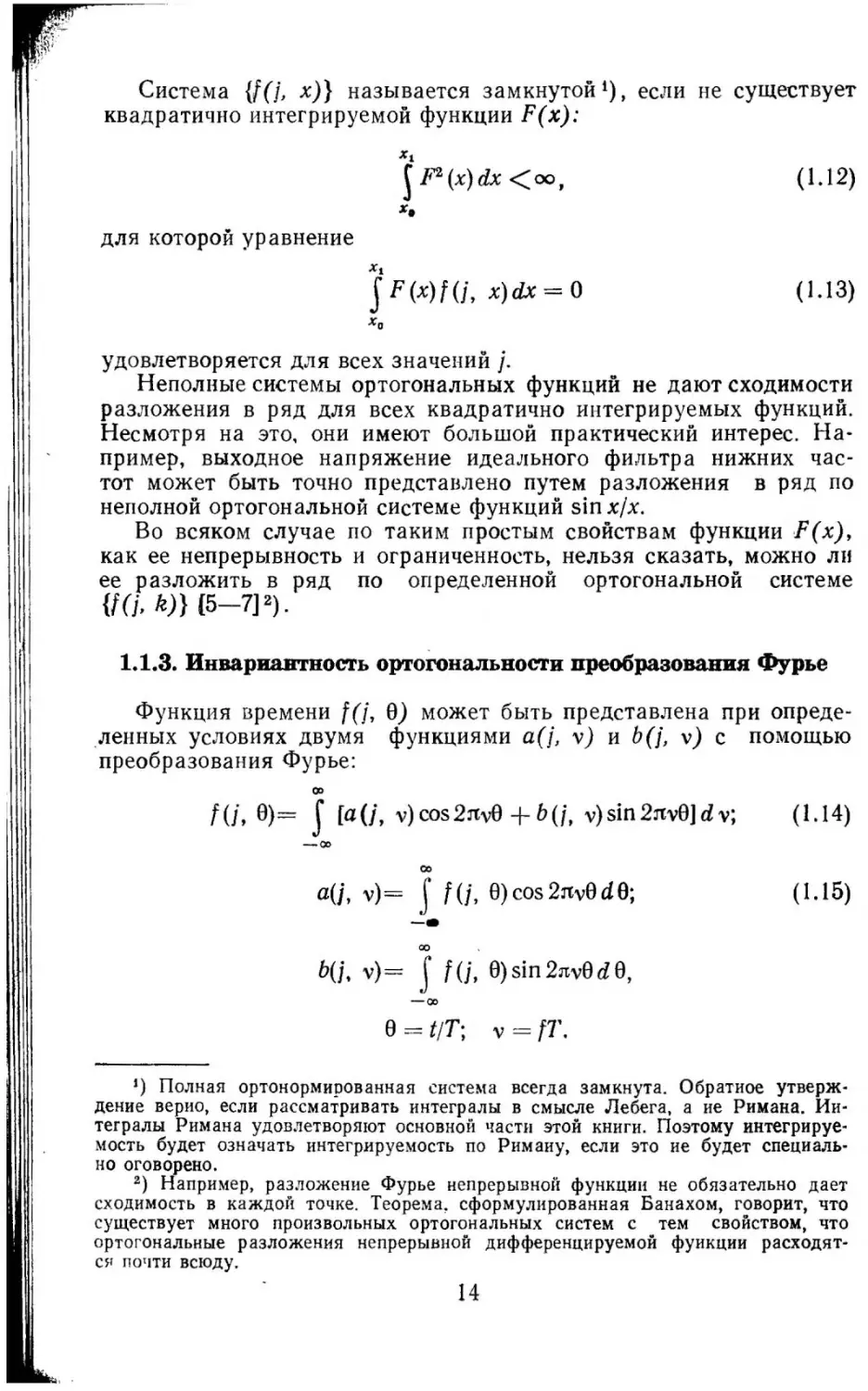
1.1.3. Инвариантность ортогональности преобразования Фурье
Функция времени f(j, 0) может быть представлена при опреде-
ленных условиях двумя функциями a(j, v) и b(j, v) с помощью
преобразования Фурье:
f(j, 0)= J (7. v)cos2nv0 + b(j, v) sin 2nv0] d v; (1-14)
----------00
a(j, v)= J 7(j, 0)cos2nv0d0; (1.15)
—•
b(j, v)= J 7(7, 0)sin2nv0rf0,
0 = t/T-, V = /7’.
*) Полная ортонормированная система всегда замкнута. Обратное утверж-
дение верно, если рассматривать интегралы в смысле Лебега, а ие Римана. Ин-
тегралы Римана удовлетворяют основной части этой книги. Поэтому интегрируе-
мость будет означать интегрируемость по Риману, если это ие будет специаль-
но оговорено.
2) Например, разложение Фурье непрерывной функции не обязательно дает
сходимость в каждой точке. Теорема, сформулированная Банахом, говорит, что
существует много произвольных ортогональных систем с тем свойством, что
ортогональные разложения непрерывной дифференцируемой функции расходят-
ся почти всюду.
14
Для определенных применений удобно заменить функции
a(j, v) и b(j, v) одной функцией *)
а(Л v) = a(j, v)-f-6(/, v). (1.16)
Из (1.15) следует, что a(j, \) является четной и b(j, у) нечет-
ной функциями v:
«(/, v) = a(/, — v); b(j, v) = — b(j, — v). (1.17)
Поэтому
<7(7. —v) = a(j, — v) + b(j, —y) = a(j, v) — b(j, v). (1.18)
Функции a(j, v) и b(j, v) можно выразить через q(j, v):
aU, v)=y[?(j. v) + q(j, — v)J; ig^
b(j, v)==y[<7(/, v) — q(j, — v)J.
Используя функцию q(j, v), выражения (1.14) и (1.15)
^писать в более симметричной форме:
f(j, 9)= J <7(7. v)(cos2nv0+ sin2nv0)dv;
можно
(1.20)
q(j, v)= J f(j, 0)(cos2nv0 + sin2nv0)rf0.
— 00
Интегралы от b(j, v)cos2nv0 и a(j, v)sin2jtv0 в (1.20)
$гак как a(j, у) — четная и b(j, v) — нечетная функции v.
Пусть {f(j, 0)} есть ортонормированная система, заданная на
Интервале (—1/2)0^0^ ( + 1/2)0. Переменная О может быть ко-
нечной или бесконечной. Функции /(/, 0) являются преобразуемы-
ми по Фурье2). С учетом (1.20) интеграл ортогональности
/•
(1-21)
равны 0,
J7(7, Q)f(k, tydO = 6Jk
(1.22)
Сможет быть переписан в виде3): .
ОО Г СО
[ /(/,6) [ <7(^, v)(cos2nv0-f-sin2nv0)rfv с?0= bJk-,
j q(k, v) | f(j, 0) (cos 2nv0 + sin 2nv0) d 0 dv= b/k; (1.23)
Ж Данное замечание используется для преобразования Фурье, чтобы облег-
йечнть сравнение с формулами обобщенного преобразования Фурье, выведенными
щпозже.
ж 2) Ортонормальность предполагает существование прямого и обратного пре-
образований Фурье (теорема Плаишереля).
Ж 3) Здесь можно изменить порядок интегрирования, так как подынтеграль-
ные функции абсолютно интегрируемы.
Ж 15
J QU, v)q(k, v)dv = t>ik-
—00
Таким образом, преобразование Фурье от ортонормированной
системы {f(j, 0)} дает оргонормированную систему {<?(/, v)}.
Подставляя q(j, v)=a(j, v) + b(j, v); q(k, v)=a(k, v)+b(k, v)
в (1.23), получаем выражение (1.22) в системе обозначения a(j, у),
b(j, v):
f <?(/, v)q(k, v)dv= I' [a(f, v) + b(j, v)][a(k, v) + b(k, v)]dv=
co
J [«(/, v)a(k, v) + b(j, v)b(k, v)]dv — bJk.
--00
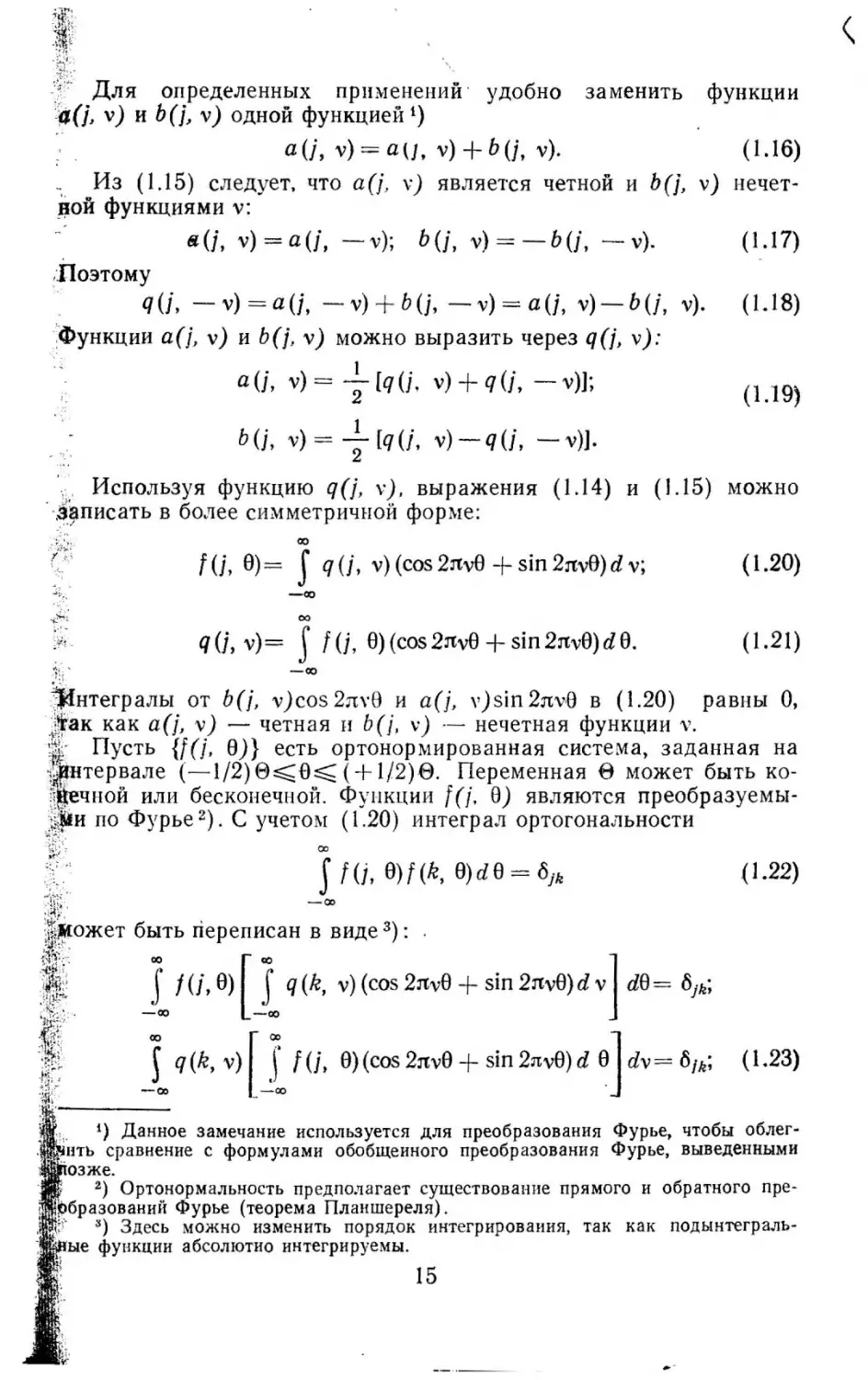
Рис. 1.6. Преобразование Фурье синусоидальных и косинусоидальных
импульсов рис. 1.1:
a) wal(0, 9); б) У 2 sin 2л9; в) V 2cos2n9; г) V 2sin4n9; д) )Л2Х
Xcos 4л9
На рис. 1.6 показаны в качестве примера преобразования
Фурье синусоидальных и косинусоидальных импульсов, получен-
ных из элементов (см. рис. 1.1):
<7 (°,
v) =
1/2
1 (cos 2ttv0 + sin 2 rtv0) dQ
sin nv ,
ЛУ
!/2 _
v) = f ]/2 cos 2л/0(cos2rtv0 + sin 2.4v0)d9 =
-1/2
— 1 1/ sinjl (v^ 0 . sinn (v+ О .
2 \ n(v —0 ’ n(v+0 /
(1.24)
16
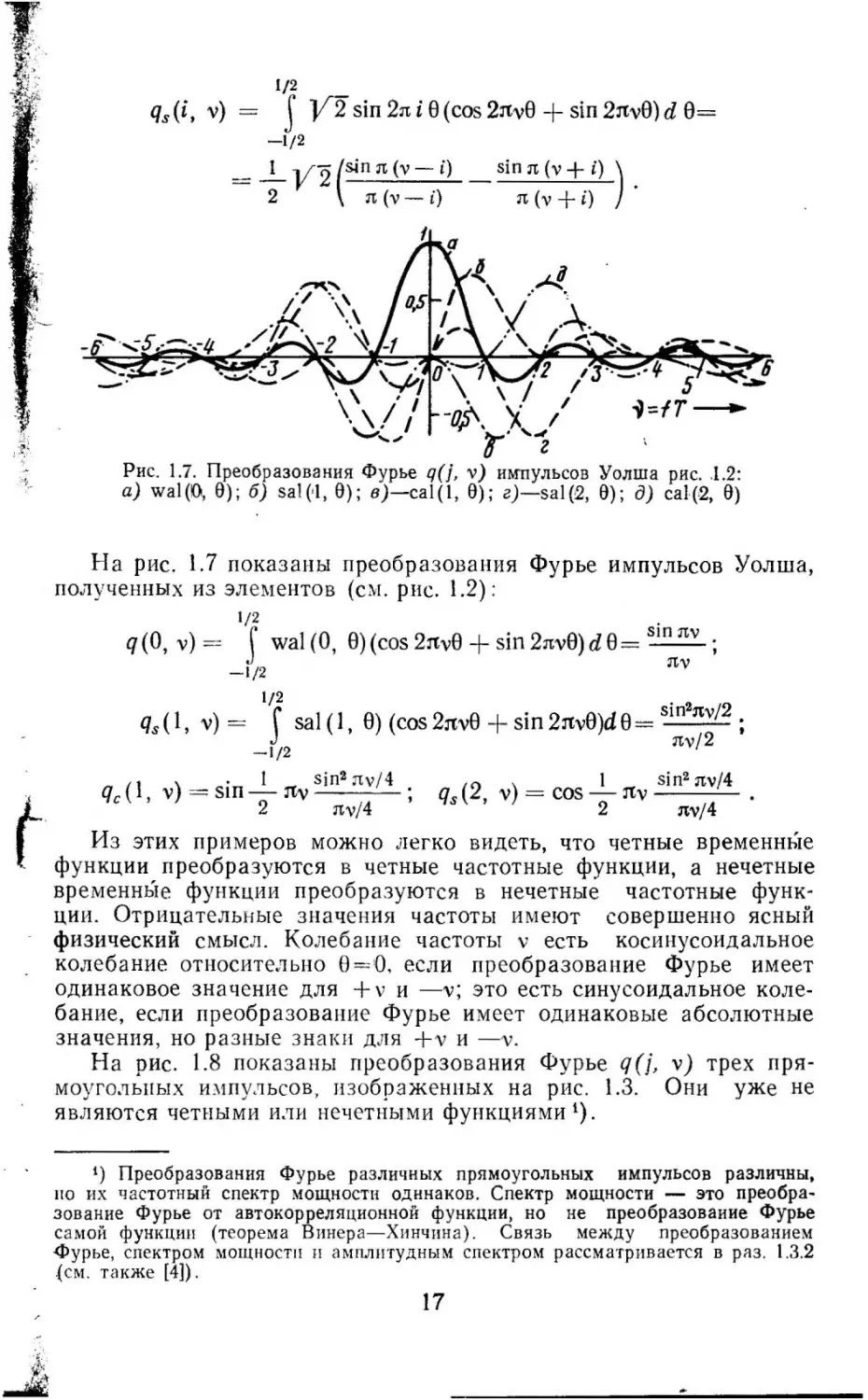
Рис. 1.7. Преобразования Фурье q(j, v) импульсов Уолша рис. .1.2:
a) wal(O, 0); б) sa1(-l, 0); в)—cal (1, 0); г)— sal (2, 0); д) cal (2, 0)
На рис. 1.7 показаны преобразования Фурье импульсов Уолша,
полученных из элементов (см. рис. 1.2):
1/2
q (0, v) = i wal (0, 6) (cos 2nv0 + sin 2nv0) d 0 = ;
-Г/2 nv
1/2 so
qs(\, v)= f sal(l, 0)(cos2nv0 4-sin2nv0)d0=s-i^^;
J nv/2
*/z
Л zt \ ~ sin2nv/4 /n \ 1 _ sin2nv/4
gc(l, v)=sm —; ^(2, v) = cos — nv---------------------.
2 nv/4 2 jiv/4
Из этих примеров можно легко видеть, что четные временные
функции преобразуются в четные частотные функции, а нечетные
временные функции преобразуются в нечетные частотные функ-
ции. Отрицательные значения частоты имеют совершенно ясный
физический смысл. Колебание частоты v есть косинусоидальное
колебание относительно 0=0, если преобразование Фурье имеет
одинаковое значение для +v и —v; это есть синусоидальное коле-
бание, если преобразование Фурье имеет одинаковые абсолютные
значения, но разные знаки для Ч-v и —у.
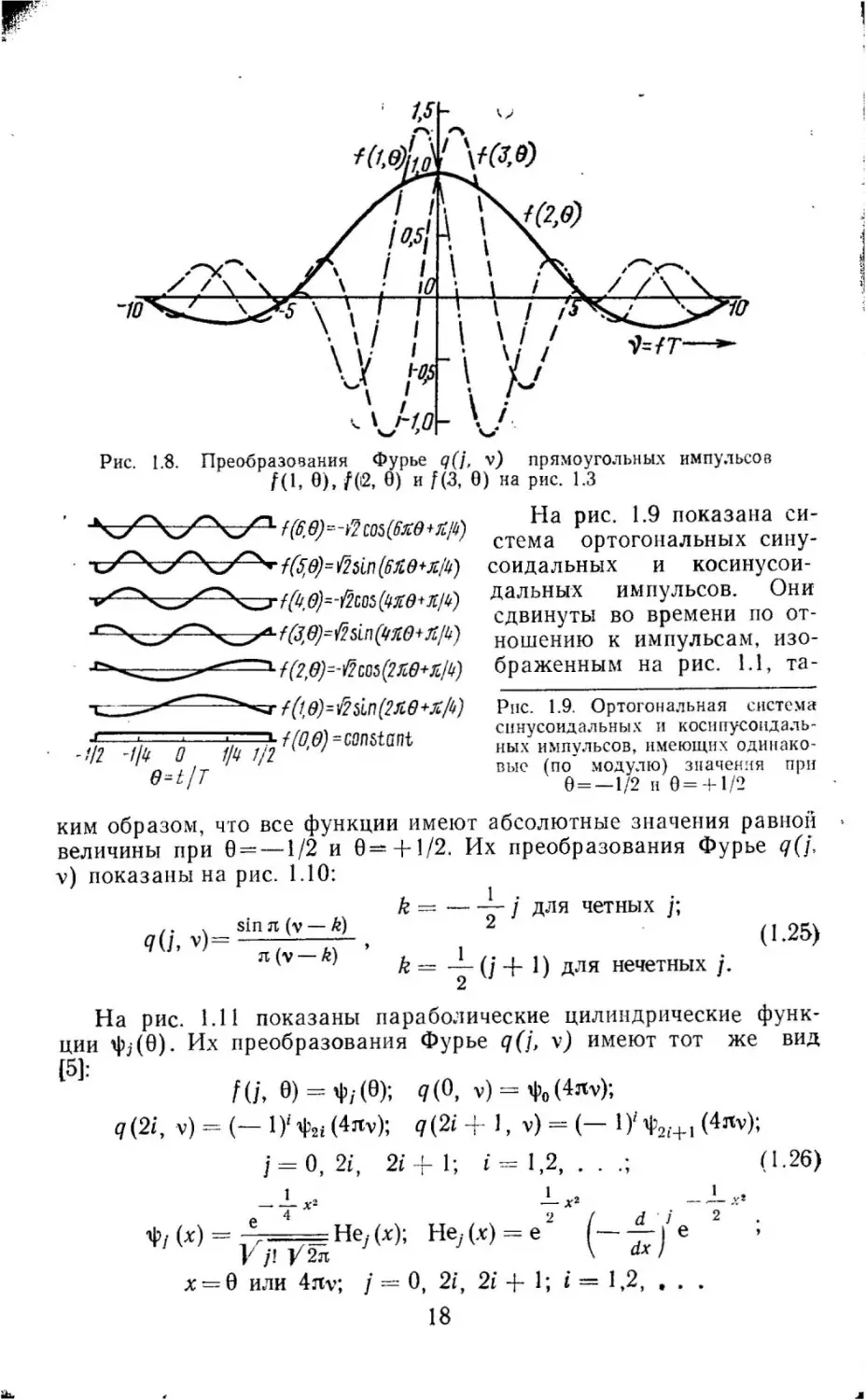
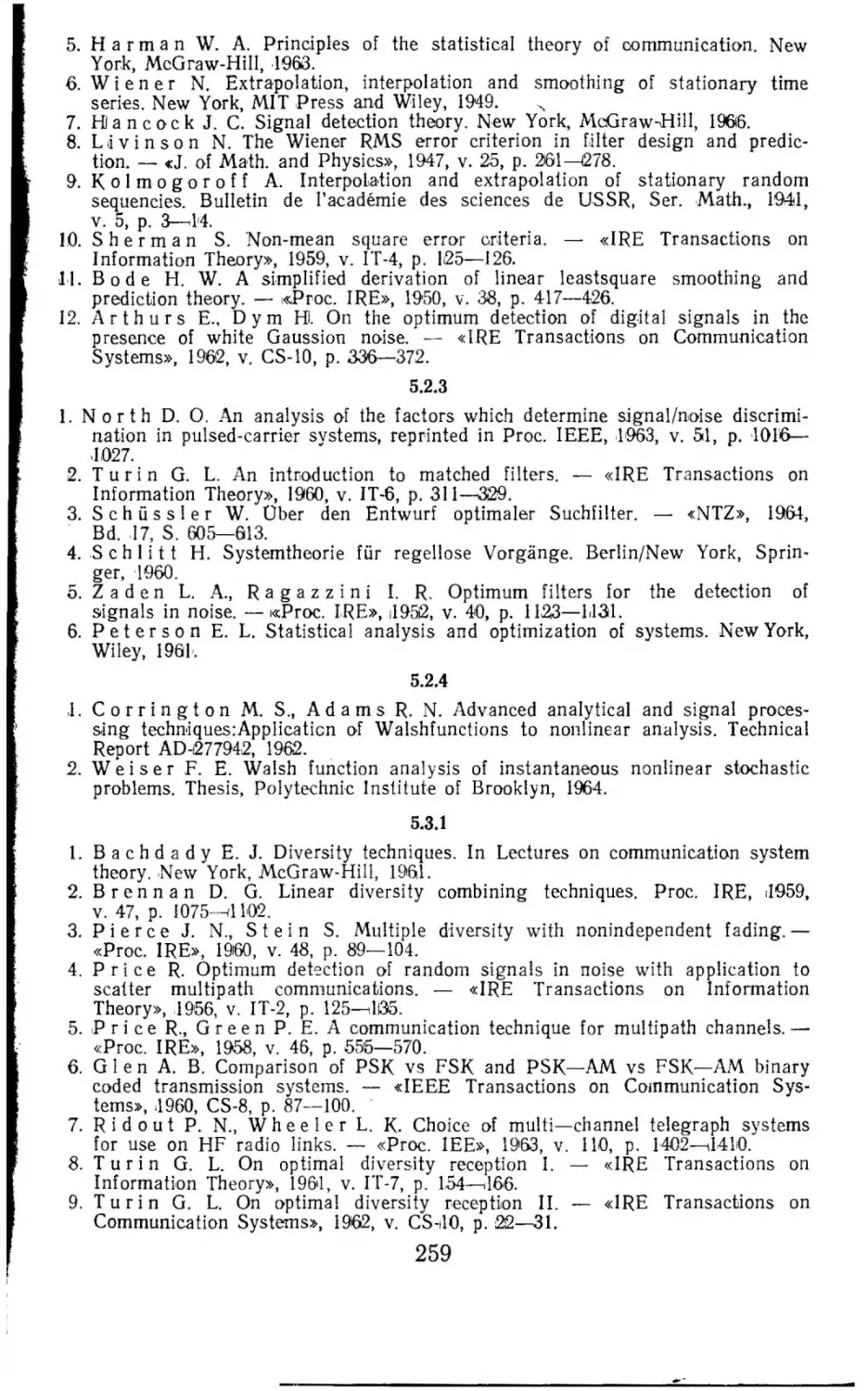
На рис. 1.8 показаны преобразования Фурье q(j, у) трех пря-
моугольных импульсов, изображенных на рис. 1.3. Они уже не
являются четными или нечетными функциями1).
1) Преобразования Фурье различных прямоугольных импульсов различны,
по их частотный спектр мощности одинаков. Спектр мощности — это преобра-
зование Фурье от автокорреляционной функции, но не преобразование Фурье
самой функции (теорема Винера—Хинчина). Связь между преобразованием
Фурье, спектром мощности и амплитудным спектром рассматривается в раз. 1.3.2
{см. также [4]).
17
Рис. 1.8. Преобразования Фурье qtf, v) прямоугольных импульсов
)(1, 0), f(&, 0) и f(3, 0) на рис. 1.3
f(5,e)=r2iin(sr^xii>')
f(li.0)=-f2t,O5 (‘Ui.O-'TijU')
-g~X^X~X^x/1
-----1 f(2,O)=-ftua(2Jie<-Jilif)
f(t,e)=fi&n(2xe+X/t/)
м Л—„х—jr *- W.0) =constant
• -t!2 -lilt О 1/4 1/2 ’ 7
e-tfT
На рис. 1.9 показана си-
стема ортогональных сину-
соидальных и косинусои-
дальных импульсов. Они
сдвинуты во времени по от-
ношению к импульсам, изо-
браженным на рис. 1.1, та-
Рис. 1.9. Ортогональная система
синусоидальных и косинусоидаль-
ных импульсов, имеющих одинако-
вые (по модулю) значения при
0 = —1/2 и 0 = 4-1/2
ким образом, что все функции имеют абсолютные значения равной •
величины при 0=—1/2 и 9= + 1/2. Их преобразования Фурье q(j,
v) показаны на рис. 1.10:
k =----— / для четных j;
... sinn (v —Л) 2 .. Q-,
<?0, v)= м-» i (L25>
,v ’ k = —- (j + 1) для нечетных /.
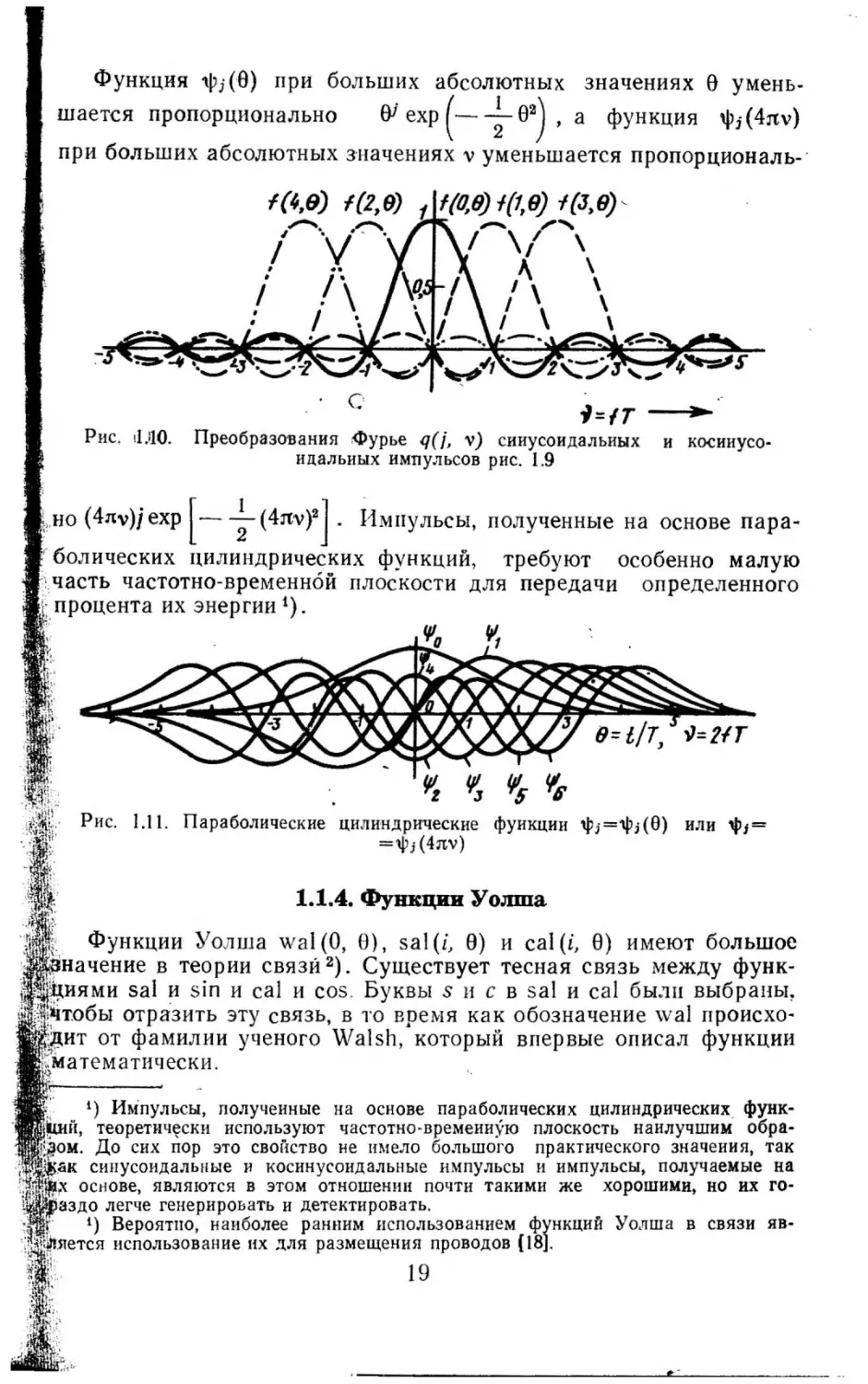
На рис. 1.11 показаны параболические цилиндрические функ-
ции фДО). Их преобразования Фурье q(j, v) имеют тот же вид
[5]:
f(j, 0) = Ф/(9); <7 (°, v) = ty0(4nv);
q(2i, v) = (— 1)' ф'2е (4nv); g(2i + 1, v) = (— !)' ф2(-+1 (4nv);
j = 0, 2i, 2i+ 1; i= 1,2, . . .; (1.26)
.-4- 7'\ .,-7+
’*’,(l) = F77aHe'W; He/W = e
x = 0 или 4nv; / — 0, 2i, 2i + 1; i = 1,2, , . .
18
Функция фД0) при больших абсолютных значениях 0 умень-
шается пропорционально О7 ехр (----~02j , а функция ф>(4лг)
при больших абсолютных значениях v уменьшается пропорциональ-
Рис. ilJlO. Преобразования -Фурье q(j, у) синусоидальных и косинусо-
идальных импульсов рис. 1.9
но (4nv)/exp J---~(4nv)2
. Импульсы, полученные на основе пара-
болических цилиндрических функций, требуют особенно малую
4 часть частотно-временной плоскости для передачи определенного
Я. процента их энергии х).
Ж
м
г, г, ъ ъ
Рис. 1.11. Параболические цилиндрические функции Ф;=ФДО) или =
=tpj(4nv)
1.1.4. Функции Уолша
Функции Уолша wal(0, 0), sal (z, 0) и cal (i, 0) имеют большое
Жзначение в теории связи2). Существует тесная связь между функ-
^циями sal и sin и cal и cos Буквы s и с в sal и cal были выбраны.
3^чтобы отразить эту связь, в то время как обозначение wal происхо-
дит от фамилии ученого Walsh, который впервые описал функции
математически.
4) Импульсы, полученные на основе параболических цилиндрических функ-
ций, теоретически используют частотно-временную плоскость наилучшим обра-
!^ом. До сих пор это свойство не имело большого практического значения, так
синусоидальные и косинусоидальные импульсы и импульсы, получаемые на
Slp-x основе, являются в этом отношении почти такими же хорошими, но их го-
раздо легче генерировать и детектировать.
*) Вероятно, наиболее ранним использованием функций Уолша в связи яв-
^Ляется использование их для размещения проводов (18].
Ж 19
Для вычислительных целей иногда более удобно использовать
синусоидальные и косинусоидальные функции, в то время как в
других случаях более удобны экспоненциальные функции. Схожая
двойственность записи существует и для функций Уолша. Вместо
трех функций wal (О, 0), sal (г, 0) и cal(z, 0) можно ввести одну
функцию wal (/, 0):
wal(2i, 0) = cal(i, 0); wal(2i — 1, 0) = sal (i, 0); i=l,2, . . .. (1.27)
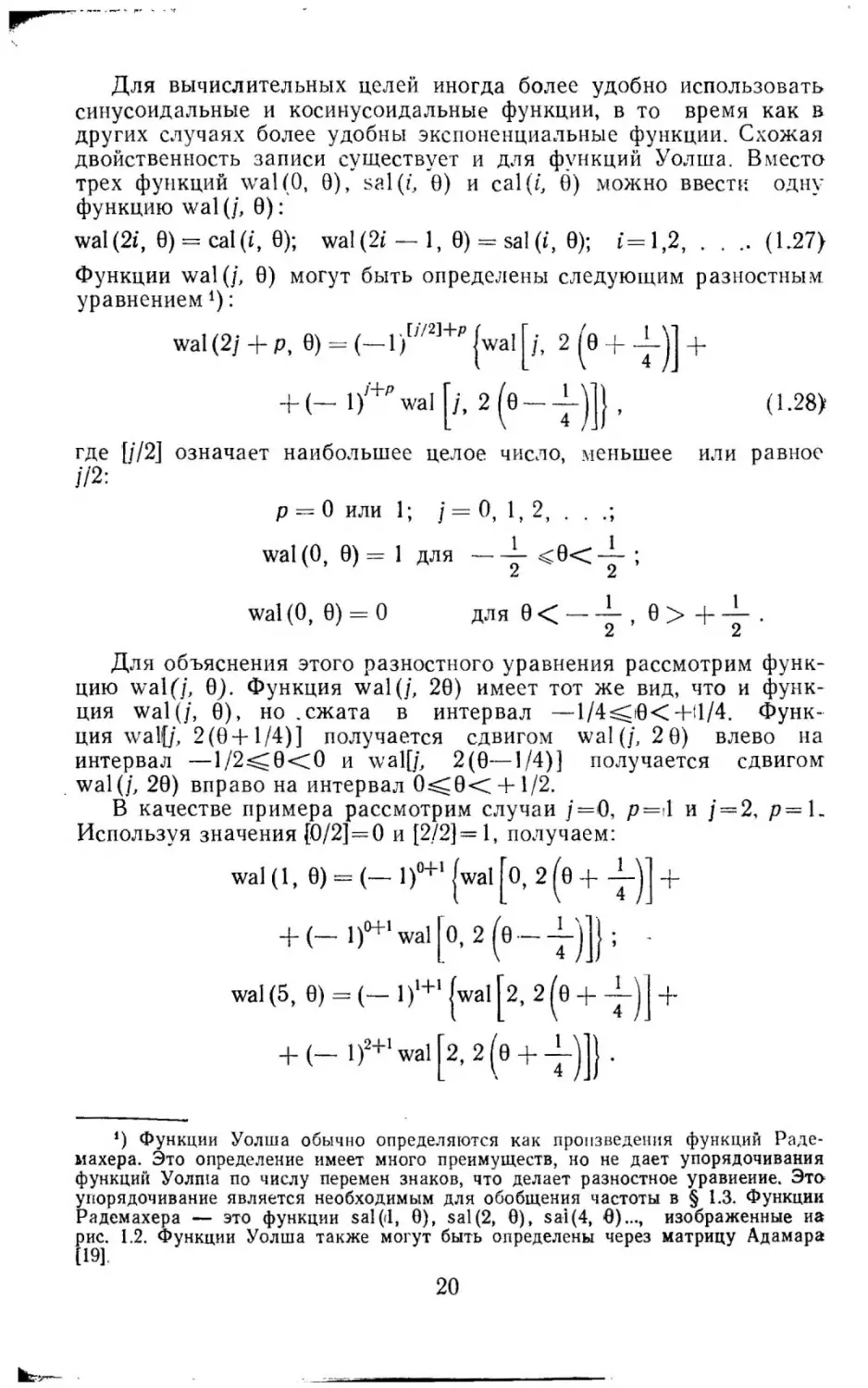
Функции wal(/, 0) могут быть определены следующим разностным
уравнением :
wal(2j 4-р, 0) = (— r/7/2J+p(wal /, 2(9 + — Yl +
l L \ 4 /J
(1.28>
где [Ц2] означает наибольшее целое число, меньшее или равное
/72:
р = 0 или 1; j = 0, 1, 2, . .
wal(0, 9) = 1 для----;
+ (— 1)/+Pwal [/, 2(0 ——
[ \ 4
wal(0, 0) = 0 для 0<----------, 0 > + .
Для объяснения этого разностного уравнения рассмотрим функ-
цию waif/, 0). Функция wal(j, 20) имеет тот же вид, что и функ-
ция wal(j, 0), но .сжата в интервал —1/4^i0< +11/4. Функ-
ция wal(/‘, 2(0 +1/4)] получается сдвигом wal (/, 2 0) влево на
интервал —1/2^0<О и wal[/, 2(0—1/4)] получается сдвигом
wal(j, 20) вправо на интервал О^0< + 1/2.
В качестве примера рассмотрим случаи /=0, p=il и / = 2, р=1.
Используя значения [0/2]=0 и [2/2]= 1, получаем:
*) Функции Уолша обычно определяются как произведения функций Раде-
махера. Это определение имеет много преимуществ, но не дает упорядочивания
функций Уолша по числу перемен знаков, что делает разностное уравнение. Это
упорядочивание является необходимым для обобщения частоты в § 1.3. Функции
Радемахера — это функции sal (4, 0), sal (2, 0), sai(4, 0)..., изображенные иа
рис. 1.2. Функции Уолша также могут быть определены через матрицу Адамара
[19]
20
1 Из рис. 1.2 можно видеть, что функция wal(l, 0)=sal(l, 0) по-
лучена из wal (О, 0) сжатием в два раза и умножением функции
«сдвинутой влево, на —1 и функции, сдвинутой вправо, на +1.
«Функция wal (5, 0)=sal(3, 0) получается сжатием wal (2, 0) =
Ж=са1(1, 0) в два раза и умножением функции, сдвинутой влево,
г на +1 и функции, сдвинутой вправо, на —1.
Умножение двух функций Уолша дает другую функцию Уол-
®:ша: wal(A, 0)wal(A, 0)=wal(r, 0). Это соотношение может быть
«легко проверено, если записать разностное уравнение для
«wal (А, 0) и wal (А, 0) и умножить их друг на друга. Оказывается,
что произведение wal (A, 0)wal(A, 0) удовлетворяет разностному
* уравнению вида, аналогичного (1.28).
fc. Определение значений г из разностного уравнения несколько
^ громоздко. Однако результат получается простой: г равно сумме
А и k по mod 2:
$ wal (A, 0) wal (A, 0) = wal (A © k, 0). (1.29)
’&,• Знак © указывает на сложение по mod 2. Величины k и h за-
.писываются в виде двоичных чисел и складываются согласно пра-
$вилу: 0 ©1 = 1 ф 0=1,0ф0=1 ф 1=0 (без переноса). Сложение
h по mod 2 — это та операция, которую осуществляет полусумматор
в двоичных ЦВМ. В качестве примера рассмотрим перемножение
•wal (6, 0) и wal (12, 9). Используя двоичную запись для чисел 6
и 12, получаем, что сумма 6 Ф 12 равна 10:
0110 .... 6
1100 ... . 12
1010 .... Ю
Из рис. 1.2 можно видеть, что произведение wal (6, 0) wal (12, 0)
равно wal (10, 0).
Умножение функции Уолша самой на себя дает wal (0, 0), так
как в результате получаются только произведения: (+1)( + 1) и
(-!)(-!):
wal(j, 0)wal(/, 0) = wal(O, 0); (1.30)
/ Ф j = 0
Умножение wal(/, 0) па wal(0, 0) не изменяет wal(j, 0):
wal(J, 0)wal(O, 0) = wal(/, 0); (1-31)
j©0 = /-
Так как сложение no mod 2 асссоциативно, умножение функ-
ций Уолша также должно быть ассоциативным:
[wal (A, 0)wal(/‘, 0)]wal(A, 0) = wal (А, 0) [wal (/, 0)wal(A, 0)]. (1.32)
Функции Уолша образуют мультипликативную группу. Урав-
нение (1.29) показывает, что умножение двух функций дает снова
21
функцию Уолша; обратный элемент определяется по ф-ле (1.30);
единичным элементом согласно (1.31) является wal(0, 0); ассо-
циативный закон выполняется согласно (1.32). Группа функций
Уолша является абелевой (коммутативной) группой, так как сомно-
жители в (1.29), (1.30) и (1.31) могут быть переставлены. В ма-
тематическом смысле группа функций Уолша изоморфна дискрет-
ной двоичной группе.
Для определения числа элементов в группе и ее подгруппах
рассмотрим, какие числа могут появиться, если два числа k и А,
меньшие или равные 2s—1, складываются по mod 2. Запишем k и
h в виде двоичных чисел:
h = ps_( 2s"1 + ps_2 2s-2 + . . . + P1V + p02« < 2' - 1;
k = gs_, 2s"1 + qs_2 2s-2 + . . . + 912» + q02° < 2s - 1; (1.33)
Po...........Ps-p <7o. • • •. ?s—1 = 0 «ли 1.
Сумма no mod 2 чисел h и k равна
A@A = (ps_1©gs_1)2s-,+ . . . +(р0Ф<70)2°. (1.34)
Она принимает наименьшее значение (0), когда все коэффициен-
ты перед степенями 2 равны 0, это имеет место при h—k, и макси-
мальное значение 2s-1+ 2s~2+... +2*4-2°=2*—1, когда все коэф-
фициенты перед степенями 2 в (1.34) равны 1, т. е. когда h—
= (2s—1)@ k. Это означает, что в двоичной записи число k имеет
нули там, где А имеет единицы и наоборот. Полученная таким об-
разом группа содержит функции Уолша от wal (0, 0) до wal (2s—
—1, 0). Подгруппы содержат функции от wal(0, 0) до wal(2r—1,
0), 0^r<s. Так как подгруппа содержит 2Г элементов, то она
имеет 2s/2r=2s-r классов.
Используя (1.27), можно переписать теорему умножения функ-
ций Уолша (1.29) в следующем виде:
cal (i, 0) cal (k, 0) = cal (i © k, 0); sal (t, 0) cal (k, 0) =
= sal{[A®(t-1)1+1, 0); (1.35)
cal(i, 0)sal (k, 0) = sal {[/©(A — 1)] + 1, 0); sal (t, 0)sal(A, 0) =
= cal [(i — 1) © (k — 1), 0]; cal (0, 0) = wal (0, 0).
Функции sin 2ш'0 и cos2ni0 ортогональны на интервале —1/2^
^0sj +1/2. Эта система применяется для разложения в ряд
Фурье. Преобразование Фурье требует, чтобы система {sin2nv0,
cos2nv0} была ортогональной на всем интервале —оо<0< + оо.
Система функций Уолша, ортогональная и полная на всем ин-
тервале —оо<0<оо, обозначается {sal (ц, 0), cal (pt, 0)}, где
р. — действительное число. Позже будет показано, что эта систе-
ма может быть получена растяжением sal (i, 0) и cal (i, 0) так же,
как система {sin 2nv0, cos 2nv0} может быть получена растяжени-
22
ем sin2m‘0 и cos2ni0. Другое определение, данное Пихлером1),
начинается с периодического продолжения функций sal(l, 0) и
cal (1, 0). Из них можно определить подкласс функций Уолша,
известных как функции Радемахера [8, 9]:
cal(2*, 0) = са1(1, 2*0); sal(2*. 0) = sal(l, 2*0); (1.36)
Запишем и в двоичной форме
И = £ H_s 2 s = . . . |Х222 + m21 + Цо2° + 2“‘+ Н_2 2~2. .
де равно либо 1, либо 0. Число ц называется двоично-рацио-
альным, если сумма имеет конечное число членов. Это означает,
[то должно быть, по крайней мере, конечное число двоичных сим-
юлов справа от нулевого разряда. Функции са!(ц, 0) и sal(ц, 0)
ожно определить следующим образом:
|(р. 0) = П Са1 (h_s 2 s, 0), —оо<8
Ц(и, 0) = I ~ са1 (И, 0>, -оо<0<О,
(1.37)
и—двоично-иррацио-
нальное число;
0 < оо,
— оо
|(р, 0) =cal ( g-2~M, 0) sal ( 2~Л1, 0),
eq — четное число; р = <?+1/2дг — двоично-рациональное число.
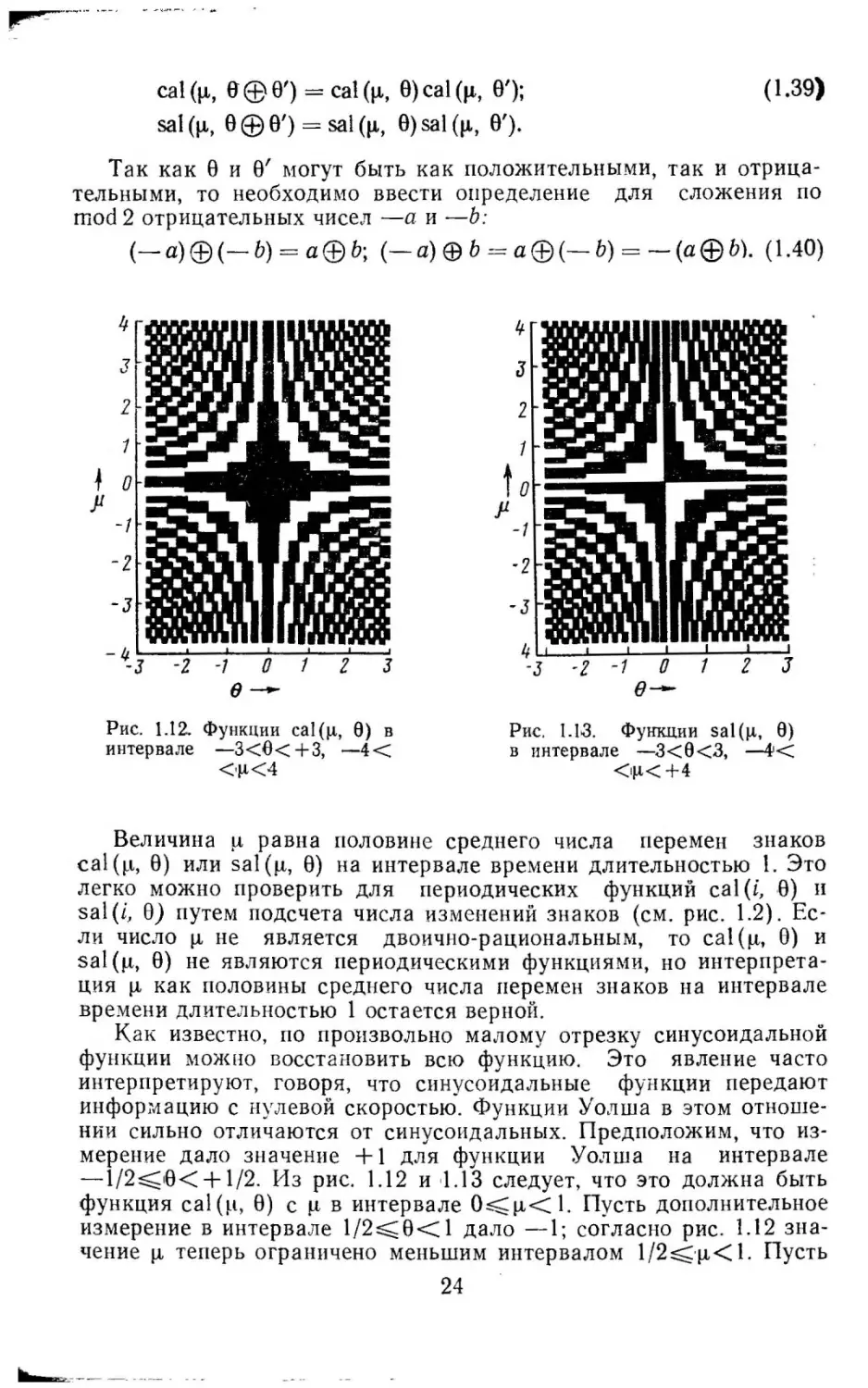
Функции са1(ц, 0) и sal(p, 0) для интервалов — 4<ц<+4 и
<0+3 можно получить из рис. 1.12 и 1.13. Черные площади
ответствуют значению +1, белые площади — значению —1.
Доведя линию, параллельную оси 0, получаем са1(ц, 0) или
0) как функции 0 для определенного значения р. Наоборот,
гния, параллельная оси ц, определяет значения са1(ц, 0) или
0) как функции ц для определенного значения 0.
^Следующие дополнительные формулы важны при вычислениях
функциями Уолша:
wal (р, 0) = wal (0, 0), 0 < р < 1;
са1(р, 0) = cal(i, 0), i
2
1 .
2 ’
sal (|i, 0) = sal (i, 0), i — 1 < p. < i; (1.38)
4) Несчетная система функций Уолша, необходимая для преобразования
№^Уолша—Фурье, была введена впервые Файном (12], который также впервые ука-
‘Йл на существование такого преобразования. Точная математическая теория
феобразования Уолша—Фурье, использующая функции sal и cal, которые от-
аются от системы, использованной Файном, разработана Пихлером (9]. Такой
фмнн как «преобразование Файна или Пихлера» появился из-за того, что он
Ераздо короче более громоздкого термина «преобразование Уолша—Фурье»,
тематики используют этот термин потому, что преобразование Уолша—
&Урье является частным случаем обобщенного преобразования Фурье на топо-
ических группах (22].
23
cal (и, 0 © 0') = cal (н, 0) cal (ц, O'): (1 -39)
sal(p., 0©0') = sal(|i, 0)sal(p., 0').
Так как 0 и 0' могут быть как положительными, так и отрица-
тельными, то необходимо ввести определение для сложения по
mod 2 отрицательных чисел —а и —Ь:
(-a)©(-b) = a@b; (-a)®b===a©(-b) = -(a©b). (1.40)
Рис. 1.12. Функции са!(ц, 0) в
интервале —3<О<+3, —4<
<Ц<4
Рис. 1.13. Функции sal(n, 0)
в интервале —3<0<3, —4<
<ц<+4
Величина ц равна половине среднего числа перемен знаков
cal(p, 0) или sal(p, 0) на интервале времени длительностью 1. Это
легко можно проверить для периодических функций cal (/, 0) и
sal(z, 0) путем подсчета числа изменений знаков (см. рис. 1.2). Ес-
ли число ц не является двоично-рациональным, то са1(ц, 0) и
sal(p, 0) не являются периодическими функциями, но интерпрета-
ция ц как половины среднего числа перемен знаков на интервале
времени длительностью 1 остается верной.
Как известно, по произвольно малому отрезку синусоидальной
функции можно восстановить всю функцию. Это явление часто
интерпретируют, говоря, что синусоидальные функции передают
информацию с нулевой скоростью. Функции Уолша в этом отноше-
нии сильно отличаются от синусоидальных. Предположим, что из-
мерение дало значение +1 для функции Уолша на интервале
—1/2^'0< + 1/2. Из рис. 1.12 и 1.13 следует, что это должна быть
функция cal (и, 0) с ц в интервале Пусть дополнительное
измерение в интервале 1/2^0< 1 дало —1; согласно рис. 1.12 зна-
чение ц теперь ограничено меньшим интервалом 1/2^ц< 1. Пусть
24
Следующее измерение дает, например, —1 для интервала 1^0<
Як: 1,5 и +1 для интервала 1,5^0<2; это ограничивает ц до еще
йеньшего интервала 0,5^ц<0,75. Удвоение временного интервала
УдО, на котором происходит измерение, уменьшает вдвое интервал
внутри которого частость р остается неопределенной. Произ-
Ц^едение Д0Дц остается постоянным и может быть интерпретирова-
' дно как соотношение неопределенности для функций Уолша. Ско-
рость передачи информации не равна 0, так как с увеличением ин-
тервала наблюдения Д0 получают больше информации о точном
^значении ц.
у Несколько слов можно добавить для математически подготов-
Сленного читателя о связи между системами {wal (0, 0), cal(i, 0),
^sal(i, 0)} и {1,J/ 2sin2n/0, V 2 cos2tu0}. Обе они являются ор-
Стонормирова иными системами в гильбертовом пространстве
^£а(0, 1) и на их основе можно построить очень близкие теории
^разложения Фурье и преобразования Фурье. Основанием для
этого является то, что обе они могут быть получены из характе-
ристических групп. Система круговых функции {cos&x, sin kx} по-
ручается из группы которая является характеристической
группой топологической группы действительных чисел. Система
функций Уолша может быть получена из характеристической груп-
пы двоичной группы; двоичная группа является топологической
группой, полученной из последовательности двоичных представле-
ний действительных чисел. Наиболее существенное отличие меж-
ду этими функциями — непрерывность круговых функций и раз-
рывность функций Уолша — вызвано различной топологией дейст-
вительных чисел и двоичных групп [8, 11, 12, 20].
1.2.
ПРЕОБРАЗОВАНИЕ ФУРЬЕ И ЕГО ОБОБЩЕНИЕ
1.2.1. Переход от ряда Фурье к преобразованию Фурье
Знание преобразования Фурье необходимо для каждого инже-
нера-связиста. Здесь приведен его вывод из ряда Фурье для част-
ного случая, что облегчает понимание более общего перехода от
разложения по ортогональным функциям к ортогональному пре-
образованию 9-
Рассмотрим ортонормированную систему {f(j, 0)}, состоящую
из синусоидальных и косинусоидальных элементов, часть которых
, приведена на рис. 1.1. Элементы f(j, 0) разделяются на четные
. элементы fc(i> 0), нечетные элементы fs(i, 0) и постоянную f(0, 0)
*) Переход от ряда Фурье к преобразованию Фурье имеет в основном мето-
дологическое значение. Строго математический переход без дополнительных пред-
положений невозможен, так как ряд Фурье использует систему счетных функций,
а преобразование Фурье — систему несчетных функций. Соответствующее за-
мечание учитывается ниже при переходе от ортогональных рядов к обобщенно-
му преобразованию Фурье.
25
f(i, 0)= •;
i.
f(0, 0) = wa!(O, 0)= 1,---1^0<+-L;
fc(i, 0)= У 2 cos 2л i 0;
fs(i, 0)= |/ 2 sin 2л i 0;
неопределена, 0<-----— , 0 > + — ;
Q = t/T- i = 1, 2, . . . 2
(1-41)
Чтобы получить периодические синусоидальные и косинусои-
дальные функции, соответствующие элементы должны быть перио-
дически продолжены вне интервала —1/2^0< + 1/2:
• f (0, 0) = 1 —оо < 0 <+ оо;
/(/, 0)= fc(it 0)= у 2 cos 2л /0;
(1.42)
f^it 0)= у2 sin 2л 10.
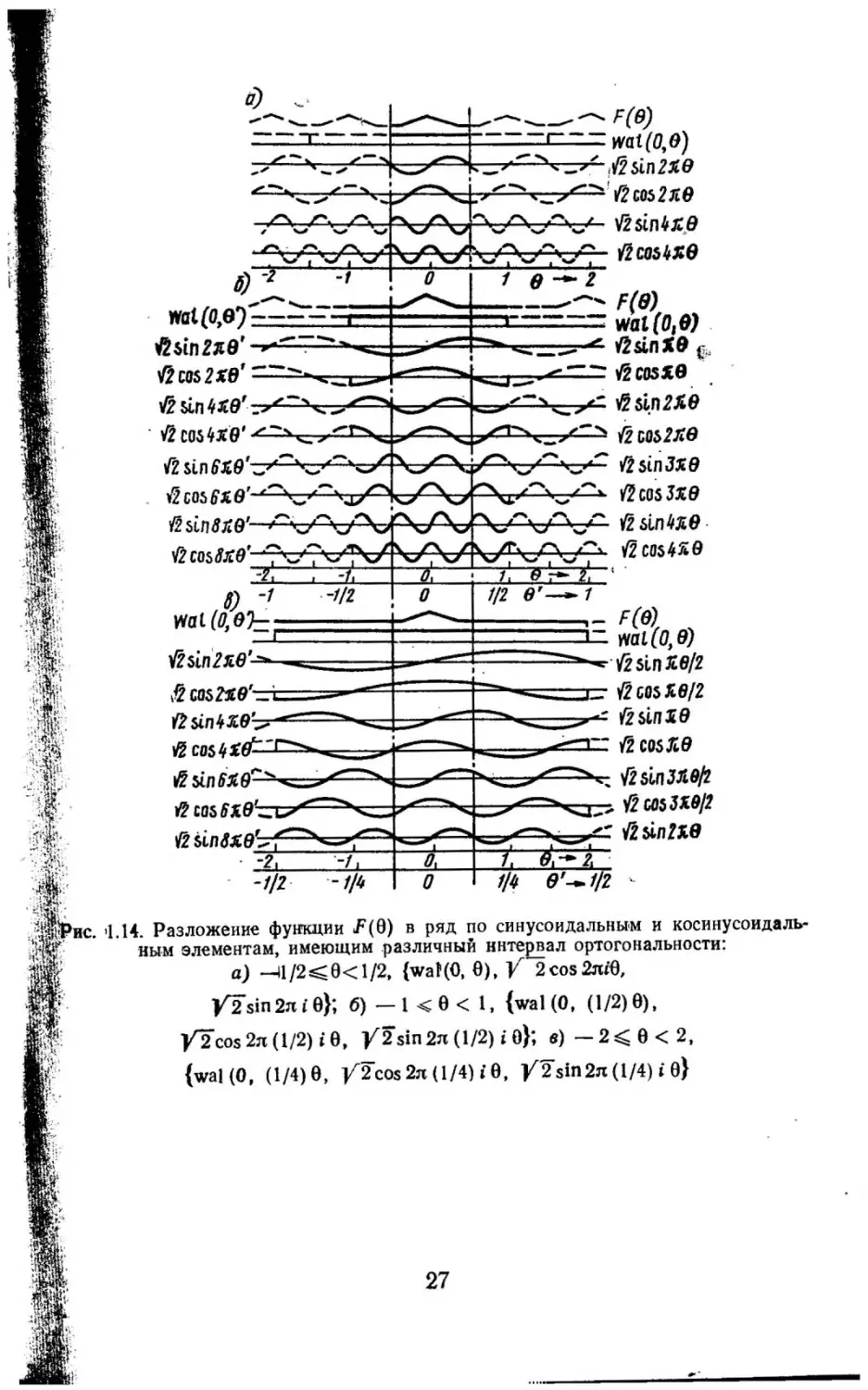
Периодическое продолжение функции на конечном интервале
является частным способом расширения интервала определения.
Рассмотрим функцию F(Q), определенную на интервале —1/2^
г^0<1/2. Примером может служить треугольная функция, пока-
занная в верхней части рис. 1.14а. Если выполнены условия схо-
димости, то Е(0) можно разложить в ряд по ортонормированной
системе {f(j, 0)}, определенной на том же интервале, что и F(0).
Треугольная функция, изображенная на рис. 1.14а, раскладывает-
ся в ряд на синусоидальные и косинусоидальные элементы. Если
треугольную функцию продолжить вне ее интервала определения,
то синусоидальные и косинусоидальные элементы необходимо про-
должить таким же способом. Особенно важны следующие два слу-
чая. Периодическое продолжение треугольной функции требует
периодического продолжения отдельных элементов. Поэтому пе-
риодическая треугольная функция на рис. 1.14а раскладывается в
ряд по периодическим синусоидальным и косинусоидальным
функциям. С другой стороны, если треугольную функцию продол-
жить вне интервала —1/2^0<1/2 функцией F(0)=O, то ее мож-
но разложить в ряд по импульсам, которые равны нулю вне этого
интервала.
Пусть F(i0) разложена в ряд по синусоидальным и косинусои-
дальным элементам:
00
F (0) = а (0) f (0, 0) + У2 V [ас (/) cos 2л i 0 + as (t) sin 2л i 0J;
i=i
1/2 1/2
a(0) = j F(0)/(O, 0)d0= J F(0)d0;
—1/2 —1/2
1/2
ac(i) = У2 J F(0)cos2jti0d0; (1.43)
-1/2
V?
as(i) = V 2 j F(0)sin 2л i Qd 0.
26
^F(O)
— wat (0,0')
~,fisin2X0
f2 cos 2яе
ftcoslKQ
P
wal (0,e7
i/2sin2x0'
V? cos 2X0'
sin 4X0'г
^COS4X0'-^^
/ZsinfXO'^^KZ
»2cosfx0'-
ft sine ко'-
V2cos3X0'
2l
8) -1
wat(O,0t'
V?sin2x0’-^-
5cos2X0'-=i
ft Sin W—
ftcosi/iff^
ft sin 6X9^
»?CO5fX0'—
fzsinSxeh^
-1/2 -1/0
F(e)
wal (0,0)
/2sinX0
— /2 005 X0
sin 2X0
f2 0052X0
ftslnsxe
/2 cos 3x0
V2sin4x0
/2С0$45©
L 1
i/г e'— 1
- F(el .
— wal (0,0)
•* i/25inX0/2
— f2 005 X0/2
-s /2sinX0
— /2cosX0
“c; VZsirtJXe/?
/2 0053X0/?
—)/2sin2X0
t gj-TLi
1/i (FZiJz >
»ис. '1.14. Разложение функции -F(0) в ряд по синусоидальным и косинусоидаль-
ным элементам, имеющим различный интервал ортогональности:
а) —il/2^0<l/2, {wal(0, 0), V 2cos2ni0,
Уг^оглЮ); 6)—1<0<1, {wal(0, (1/2)0),
/2cos 2я (1/2) i 0, /2 sin 2л (1/2) i О}; «)-2<0<2,
{wal (0, (1/4)0, /2cos2n (1/4) i0, У2$1п2л(1/4) i 0}
27
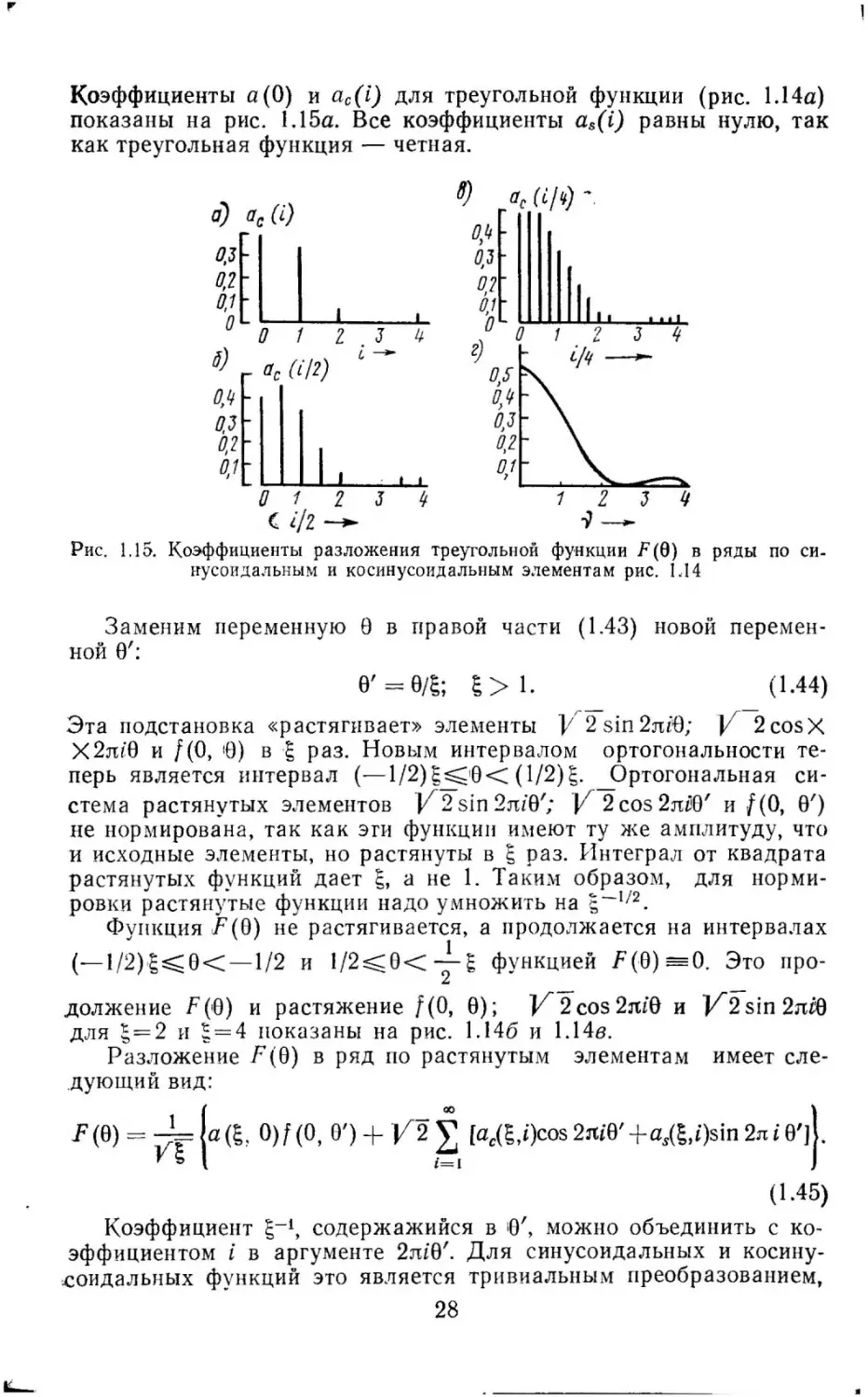
Коэффициенты «(0) и ac(i) для треугольной функции (рис. 1.14а)
показаны на рис. 1.15а. Все коэффициенты as(i) равны нулю, так
как треугольная функция — четная.
a) ac(i)
0 1
С i/2
о.з-
0,2-
0.1
° 0 1
S) г ас (i/2)
0,Ц
0J
0,2
0,1
Рис. 1.15. Коэффициенты разложения треугольной функции ^(Э) в ряды по си-
нусоидальным и косинусоидальным элементам рис. IЛ4
Заменим переменную 0 в правой части (1.43) новой перемен-
ной 0':
0' = 0/В; £>1. (1.44)
Эта подстановка «растягивает» элементы } 2sin2m0; J/ 2cosX
Х2ш0 и /(0, !0) в £ раз. Новым интервалом ортогональности те-
перь является интервал (—1/2)5_^0< (1/2)£. -Ортогональная си-
стема растянутых элементов pr2sin2nz0'; V 2cos2n£0' и /(0, 0')
не нормирована, так как эги функции имеют ту же амплитуду, что
и исходные элементы, но растянуты в 5 раз. Интеграл от квадрата
растянутых функций дает 5, а не 1. Таким образом, для норми-
ровки растянутые функции надо умножить на 5~1/2-
Функция F(0) не растягивается, а продолжается на интервалах
(— 1/2)с^0< —1/2 и 1/2^0< функцией F(0)==O. Это про-
должение F (0) и растяжение /(0, 0); V 2cos2m0 и 1^2 sin 2лг0
для 5=2 и 5=4 показаны на рис. 1.146 и 1.14в.
Разложение F(Q) в ряд по растянутым элементам имеет сле-
дующий вид:
F(6) = -±= а (&, 0)f (0, О') + /2 £ [аД,i)cos 2ш0' +c^.»)sin 2л i 0'J..
' * I Ь=1
(1-45)
Коэффициент g-1, содержащийся в О', можно объединить с ко-
эффициентом i в аргументе 2ш0'. Для синусоидальных и косину-
соидальных функций это является тривиальным преобразованием,
28
Жо оно может быть использовано как отправной пункт для обоб-
щения преобразования Фурье:
cos 2л i 0' = cos 2 л i (0/£) = cos 2л (i/£) 0;
Ж sin 2л i 0' — sin 2л i (0/g) = sin 2л (i/%) 0; (1.46)
I f(0, 0') = f(0, 0/Ю = /(О/^. 0).
Ж Запись f (0/1, 0) является чисто формальной.
* Разложение F(0) в ряд принимает следующий вид:
S F(0) = р=(а(6, 0)/(0/£, 0)4- /2 V k(g, i)cos2n-t-0 +
Ж F 6 1 '/==1Д L 6
< + as (5, *) sin 2л -у 0]); (1.47)
гЖ _ V2
f аД, 0=/2/fc J /’(0)cos2n-L0d0; as& i) =
“4/2 *
t --9- 6/2
;J = )/ — f F(0)sin2n— 0d0;
-5/2
f " r-- V2
«(В, 0)= У-L J F(Q)dQ.
Введение новых коэффициентов
= VWt, 0; asm = Vla^, i)- a(O/g) = Vla& 0) (1.48)
дает
/?(0) =
sin2n — oil
6 JJ
cos 2л 0 4-
(1-49)
Коэффициенты a (-j-
для случая |=2 и | = 4 показаны па
рис. 1.156 и в; они соответствуют разложению F (0) в ряд по си
:Яусоидальным и косинусоидальным элементам, показанным на
|рис. 1.146 и в.
IC Устремим 5 к бесконечности и пусть j/g будет оставаться кон-
|стантой:
• limас(-Ц = ас(v); limas (-Ц = as(v); = v^fT\ (1.50)
1Л-00 \ 6 / \ 5 /
i может быть любым целым числом, ill так же, как и i, — счетное
число. С другой стороны, v должно быть неотрицательным дейст-
вительным числом, а следовательно, несчетным, иначе некоторые
29
последующие интегралы обратятся в нуль. Таким образом, ряд
Фурье содержит счетное множество ортогональных функций, а
преобразование Фурье — несчетное множество их.
Пределы ac(v) и as(v) легко получаются из (1.46), (1.47):
_ V?
ас(у)= lim/2 f F(0)cos2n — 0d0= J/T f F(O)cos2«v0dO;
-t/2 5 Л
e/2 . _ о.
a,(v)= lim F(9)sin2rt-£-6d9= j/2 f F(0)sin2«v0d 0.
2 * -«
(1-51)
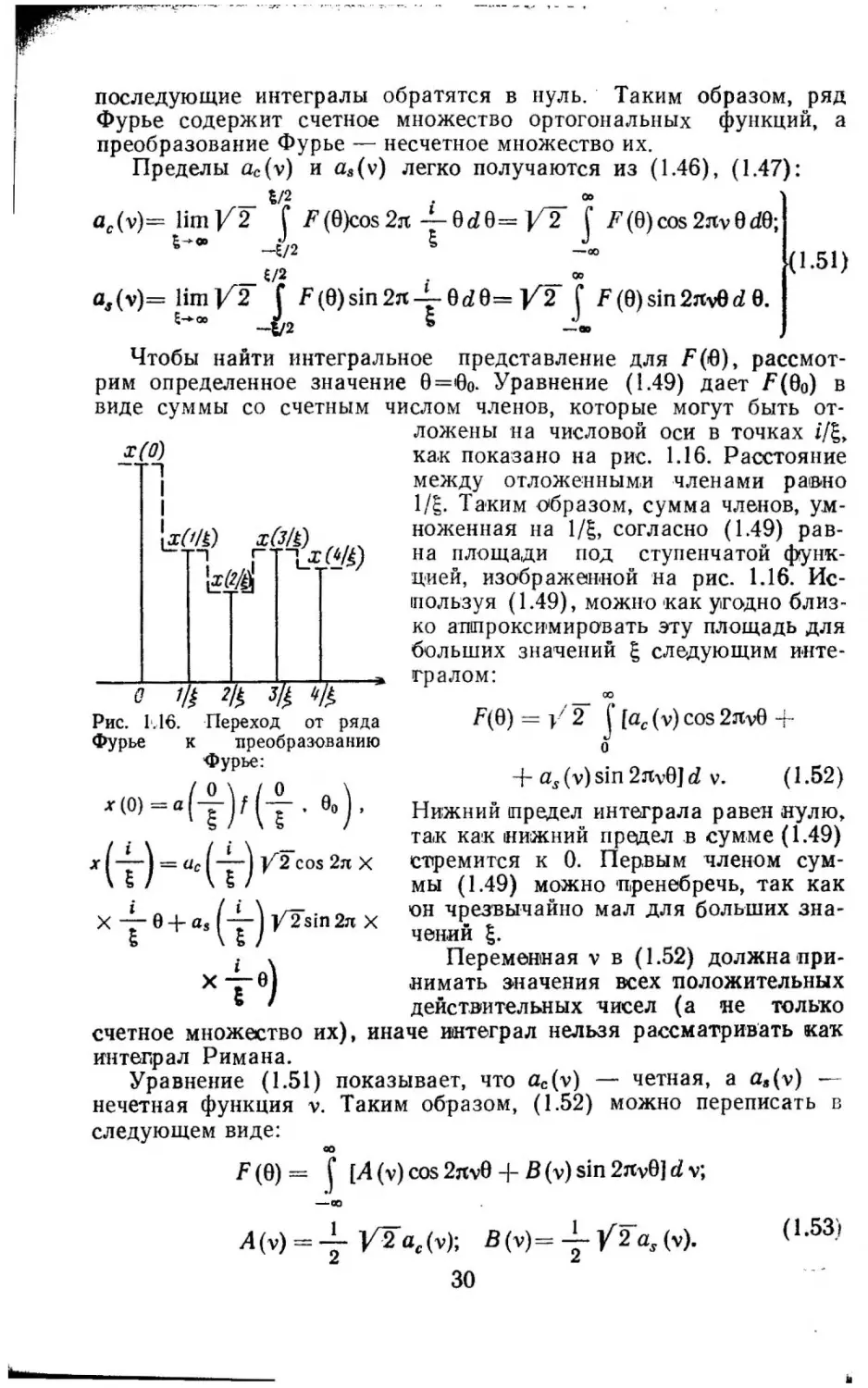
Чтобы найти интегральное представление для F(0), рассмот-
рим определенное значение 0=<0о. Уравнение (1.49) дает F(0O) в
виде суммы со счетным
числом членов, которые могут быть от-
ложены на числовой оси в точках i/g,
как показано на рис. 1.16. Расстояние
между отложенными членами равно
1/g. Таким образом, сумма членов, ум-
ноженная на 1/g, согласно (1.49) рав-
на площади под ступенчатой функ-
цией, изображенной на рис. 1.16. Ис-
пользуя (1.49), можно как угодно близ-
ко аппроксимировать эту площадь для
больших значений £ следующим инте-
, тралом:
F(0) = / 2 J [ас (v) cos 2лу0 +
о
+ as(v)sin 2Jiv0]d v. (1-52)
Нижний предел интеграла равен нулю,
так как нижний предел в сумме (1.49)
стремится к 0. Первым членом сум-
мы (1.49) можно пренебречь, так как
он чрезвычайно мал для больших зна-
чений £.
Переменная v в (1.52) должна при-
нимать значения всех положительных
действительных чисел (а не только
счетное множество их), иначе интеграл нельзя рассматривать как
интеграл Римана.
Уравнение (1.51) показывает, что ac(v) — четная, a ae(v) —
нечетная функция v. Таким образом, (1.52) можно переписать в
следующем виде:
F (0) = j* [Л (v) cos 2jtv0 + В (v) sin 2nv0] d v;
Рис. 1.16. Переход от ряда
Фурье к преобразованию
Фурье:
X (0) = a
X
cos 2л X
X 0 + Os j yTsin 2л X
X
A(y) —ac(y)-, B(v)=4-/2<Uv).
2. 2.
30
Для треугольной функции (рис. 1.14) as(v) тождественно рав-
ia нулю; ac(v) изображена на рис. 1.15г в соответствии со следую-
щей формулой:
3/8
ае(у) = 2/Т С(1 — —e)cos2jtv0de = — |/2~(—?-яу/8У.
М ' J\ з j 8 \ 3nv/8 }
о
Г 1.2.2. Обобщенное преобразование Фурье 9
Рассмотрим систему функций {/(О, 0), /с(г, 0), fs(i, 0)}, орто-
юрхмированную на интервале (—1/2)0^О< (1/2)0. Индекс с ука-
ывает на четную функцию, а индекс s — на нечетную. Величина
) может быть конечной или бесконечной. Таким образом, резуль-
аты могут быть применимы к функциям, имеющим бесконечный
[нтервал ортогональности, например, к параболическим цилипд-
1ическим функциям. Пусть все функции fc(i, 0) будут пеотрица-
ельными для 0 = 0 и пусть все функции fs(i, 0) переходят от отри-
цательного к положительному значению при 0 = 0. Функции необя-
ательно должны быть непрерывными или дифференцируемыми,
'огда функция /’(О), определенная на интервале (—1/2)0^0<
<(1/2)0, разлагается в ряд:
F(0) = a(O)f(O, 0)+£ [ac(i)fc(i, 0) + as(i)fs(i, 0)1?
/=1
0/2
аА0= J F(Q)fc(i, 0)d0;
—0/2
0/2
М0 = f F(0)^(i, 0)d0;
-e/2
0/2
a(0)= f F(0)/(O, 0)d0.
-0/2
Заменим 0 в функциях /(0, 0); fc(i, 0) и /,(i, 0) на 0'* 2):
0' =в/У, {/ = {/©> 1; limу(£) = оо. (1.55)
Е-»0О
Разложение F(0) в ряд по растянутым функциям получается
аналогии с (1.45):
(1-54)
ю
F(0) = 0)f (0, 0')+V [аЛ, 0/с(Ч 0')+<U, »Ж 0')1|.
/=’ (1.56)
к большому классу систем функций,
без использования сложного математи-
только для частных случаев. Например,
‘) Другие обобщения даиы в [1, 2].
2) Используемый метод применим
Строгие математические доказательства
еского аппарата могут быть получены
езультаты этого параграфа кажутся применимыми для функций Уолша с дво-
[чно-рациональными значениями = практически они применимы для всех
действительных значений i/£.
31
Растянутые функции ортонормированы на интервале
(—1/2)у0^0< (1/2)//0. Функция F(0) продолжена функцией
F(0)=O на интервалах (—1/2) г/0^0< (—1/2)0 и (1/2)0^0<
< (1/2)у0.
Коэффициент 1/у объединяется с i так, что в правой части
(1.56) вместо 0' можно записать 0. В (1.46) 2ш(0/£) было триви-
ально заменено на 2л(//£) 0. Так как i и 0 необязательно входят в
fc(if 0) и fs(i, 0) в качестве произведения, следующие замены надо
рассматривать как чисто формальные до тех пор, пока не будет
доказано обратное. В частности, r/g следует скорее рассматривать
как символ, а не как дробь:
fc(i, &) ~fc(i,tyy) = fc№, 0);
Q/y) = fs(HZ, 0);
f(0, 0') = f(O, 0/{/) = f(O/g, 0).
(1-57)
Разложение Г(0) в ряд принимает следующий вид:
?’(0) =
</6=1 А
+ <*Л. 0Л(у. 9)
&е/2
ac(|,t>-L f F(Q)fc
Vy J
-A/6/2
ye/2
= f F(0)£
V У J
-£0/2
i/0/2
a(g,O)=-z7= f
V У J
—1/0/2
</0;
<70;
(1.58)
Здесь введены новые коэффициенты:
ас (-г) = а' & 0? а4“г) = (5. 0; а(-^-] = Ууа (I, 0).
(1.59)
Чтобы выражения (1.58) и (1.59) не были простой формальной
записью, необходимо потребовать, чтобы коэффициенты ac(i/^)
или as(i/l) имели одно и то же значение для всех I и g, при кото-
рых величина = р постоянна или чтобы они сходились к опре-
деленному пределу для больших значений / и g1):
Нтас(4-1 = ас(и); Ита7-4-) = аЛ|*); 4" = Н- О-60)
/,6->“ \ S / \ S / 5
4) Если предел слева не равен пределу справа, берется предел слева.
32
стре-
.нова надо постулировать, что ц — неотрицательное действитель-
ое число и поэтому несчетное, в то время как i или — счетное.
Пределы (1.60) существуют, если
[ятся к предельным функциям fc(u, 6) и f5(p, О)1),определяемым:
\ £
У 6'2 уе/2
lim f F(0) , 0^d 0 = lim C F(Q)fc(n, 0)d0;
t. J \ £ ) 6 -00 J
—4/6/2 -4,6/2
Z/0/2 i/0
lim f 0A.d0 = lim f F (0) fs(ji, 0)d0; (1.61)
l, 6-00 J \ £ ) 6-00 J
—1/0/2 —i/0
у = sc(B)
Функции /Ц— , 0j и js , 0j сходятся на интервале
l/2)t/0^0< (1/2)у0 к предельным функциям /с(ц, 0) и fs(n, 0).
>т вид сходимости называется «слабой сходимостью» [3].
Из (1.51) — (1.61) следует, что
4/6/2 , . .
ас(р)= lim f F(0)/£U-, 0]d0; (1.62).
- * -1/6/2 b '
1/0/2
<Mh)= lim f e)d-9-
| ye/2 ' * '
fc Пусть функция F(Q) равна нулю вне конечного интервала,
уравнения (1.62) приводятся к следующему виду:
| oc(H)= j F(0)/c(p,0)d0;as(p)= j Г(0)/,(ц, 0)d0. (1.63)
гобы найти интегральное представление для F(0), рассмотрим
феделенное значение 0 = 0О. Уравнение (1.58) дает F(0O) в виде
гммы со счетным множеством членов, которые можно отложить
щль числовой оси в точках ily—ily(X) вместо i/£, как изображе-
> на рис. 1.16. Расстояние между отложенными членами равно
у. Таким образом, сумма членов, умноженная на \/у, как это
|но в ф-ле (1.58), равна площади под ступенчатой функцией,
га площадь может быть представлена в виде интеграла, если
следовательно, и у(£) будут неограниченно возрастать:
F(0) = рас(ц)Ш 0)+аДИ)Ш 0)]dp. (1.64)
О
вункции ас(ц) и as(p) называются обобщенным преобразованием
рурье F(Q) ino функциям /с(щ 0) и Д(р, 0). Уравнение (1.64) яв-
‘) Интегралы будут представлять собой главное значение по Коши. Они
рлжмы существовать для всех квадратично интегрируемых функций.
ляется интегральным представлением функции F(0) или ее обоб-
щенным обратным преобразованием Фурье. Без более тщатель-
ного изучения fc(p, 0) и /Др, 0) нельзя сказать, существуют ли эти
интегралы. Переменная ц играет ту же роль, что и переменная v
в обычном преобразовании Фурье. Поэтому ц называют обобщен-
ной нормированной частотой.
Функции fc(i, 0) и f*(i, 0) определены только для положитель-
ных целых чисел i. Поэтому fc(p, 0) и f$(p, 0) определены только
для неотрицательных действительных ц. Можно расширить опре-
деления функций на отрицательные действительные числа:
fc^, 0)=/е(-н. 6); /Ли, 0) = -М-н, 0), (1-65)
/с(р, 0) — четная функция как 0, так и ц, и /Др, 0) — нечетная
функция как 0, так и р.
Уравнения (1.62) и (1.63) показывают, что ас(р) — четная и
аДр) — нечетная функции р. Поэтому (1.64) можно записать в
виде (1.53):
F(0)= J ь4(И)ш 0) + £(н)Ш 0)Ин; (1-66)
— 00
А (и) = у ас (и); в (и) = у as (и)-
1.2.3. Инвариантность ортогональности обобщенного
преобразования Фурье
Рассмотрим функцию G(p):
G (И) = V2 [А (р) + В (р)]= /2 [ас(р) + a, (p)J. (1.67)
Так как Л(р) — четная, а В(р) — нечетная функции, для G(—р)
получаем
G (- Р) = /2 [Л (- р) + В (- р)]= V2 [Л (р) - В (р)] .
Л(р) и В(р) можно выразить через G(p):
А(р) = Л- /2 [G(р) + G (- р)]; В(р)= Л_ ^2 [G(р) - G(-p)]. (1.68)
4 4
Используя G(p), можно привести (1.63) и (1.64) к виду (1.20)
и (1.21):
в(0) = J с (и) [/Ли. 0) +Ш W (1-69)
—00
G(p)=4/2" J B(O)tfc(p, 0)4Ч(Р, 0)М0. С1-70)
—ОО
В (1.69) интегралы от Л(р)/в(р, 0) и В(р)/С(р, 0) равны
вулю.
34
Рассмотрим систему ортонормированных функций {f(j, 0)}, ко
вторые равны нулю вне конечного интервала:
'j f(j, Q)f(k, 0)d0 = dM. (1.71)
А
Обозначим через q(j, ji) обобщенное преобразование Фурье от
0). Из (1.70) следует, что
9(/»=4-Г2 J /а. 0)[/с(Н. 0) + Л(н. 0)^0- (1-72)
в
Уравнение (1.71) можно привести к виду:
f $ f(/t 0) т J g {k' [fc (и' 0) + f, (н, 0)]dн р0= бл; (1.73)
t --00 —00 /
f q (k, И) Ц- У 2 j/ (j, 0) lfc (|х, 0) + fs (И> 0)]d ol d
—00
J p.) <7 (/, p)rf,u = 6rt.
1
Ортогональная система {f(j, 0)}, заданная на конечном интерва-
ле, преобразуется обобщенным преобразованием Фурье в ортого-
х нальную систему {q(j, р.)}.
1.2.4. Примеры обобщенного преобразования Фурье
Рассмотрим обобщенное преобразование Фурье треугольной
функции, показанной на рис. 1.17, по полиномам Лежандра (I):
_Ро(х) = \, Р^(х)=х, Рг(х) = — (Зх2—1) и т. д. Интервал ортого-
нальности равен —1 +1. Произведем подстановку х=2 0 и
сделаем следующие преобразования:
/(0, 0) = Ро (20);
fc(i, 0) = РЛ 9) = (- ’У (4i + 1)1/2Р« (20); (1-74)
fs(i, 9) = Ps(i, 9) = (- О' (4i- l)I/2P2i_, (20);
i = 1,2, . . ..
Система {/(0, 0), Pc(i, 0), Ps (i, 0)} является ортоиормирован-
ной на интервале —1/2^0^ +1/2. Все функции Pc(i, 0) положи-
тельны при 0=0, а все функции Ps(i, 0) имеют положительную
производную в той же точке. В точной записи несколько первых
полиномов выглядят следующим образом:
/(0, 0) = 1; Ps(l, 0) = 2 КЗО; Рс(1,0) = - ^-/5 (I202— 1);
Ps (2, 0) = — VT(2О03 — 30); Рс(2, 6)= 4" /9 (56О04— 12002 + 3).
(1-75)
^2* 35
a)
Рис. 1.17. Разложение функции /’’(О) в ряды по полино-
мам Лежандра, имеющим различный интервал ортого-
нальности:
а) -1/2<Э< 1/2, {wal (0, 0), Pc(i, 0), Ps(i, 0)};
б) -1^0< 1, {wal (0, 0), Pc(i/2, 0), Ps(i/2, 0)};
в) —2^0 <2, {wal (0, 0), Pc(i/4. 0), Ps(i/4, 0)}
36
Коэффициенты
ac(i)
и as(i) для рис.
1.17а можно легко вычис-
1/2 3/8 о \
МО = J F(0)Pe(i, 0) dQ= 2 f 1 — —0 Pc(i, 0)d0;
—1/2 0 ' '
1/2
MO- J Р(0)РД/, 0)d0 = O;
-1/2
3/8 / я \
a(0) = f [i — -2-e) de.
3 J
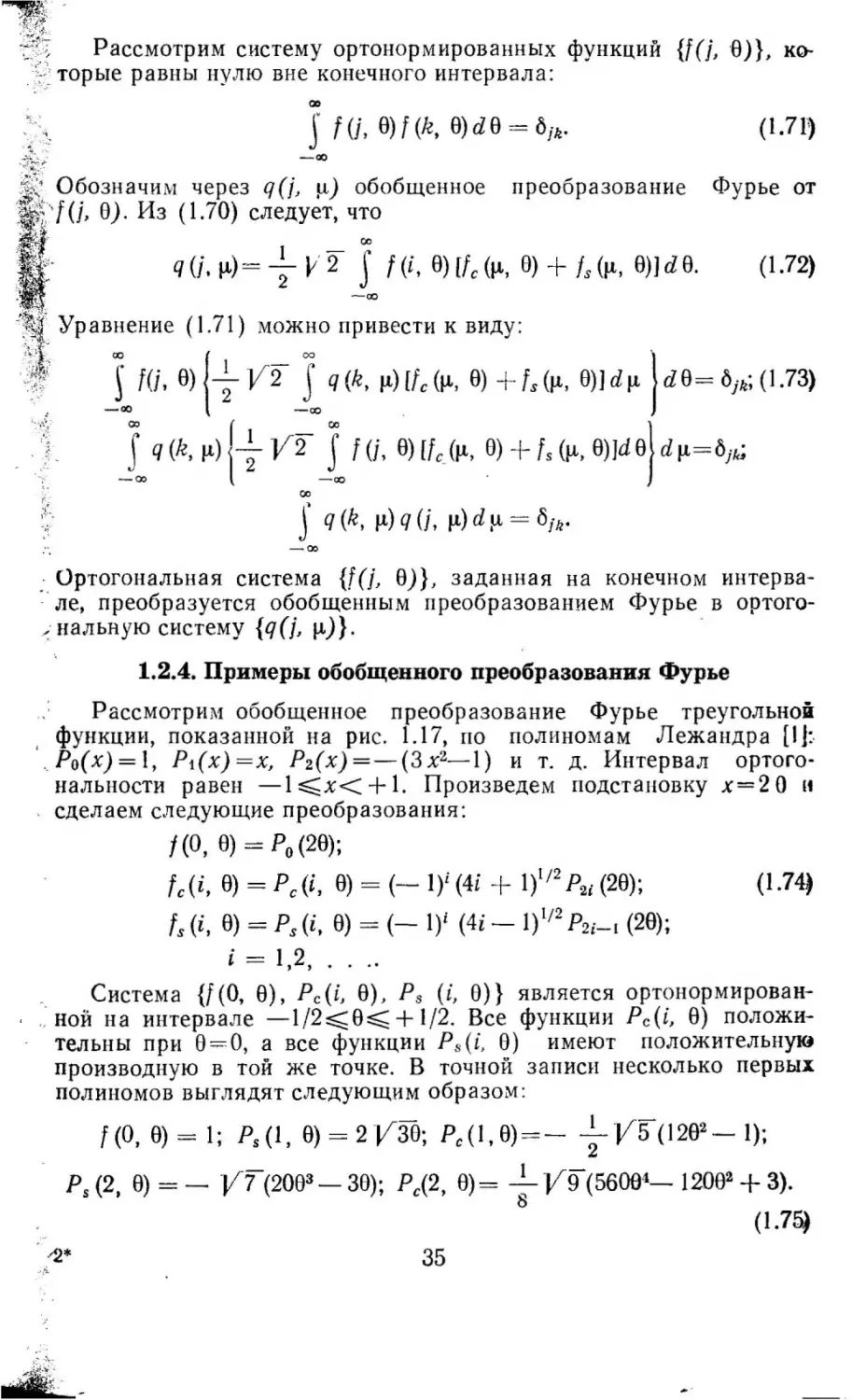
'ффициенты ac(i) и a(0) показаны на рис. 1.18a.
(1.76)
Рис. 1.18. Коэффициенты разложения треугольной функции
Г(9) в ряды по полиномам Лежандра рис. 1.17
этом
1.176.
Заменим в (1.75) 0 на G'=Q/y, где t/=//(e) ==|=2. При
i, 0) и Ps(i, 0) растягиваются вдвое, как показано на рис.
<еним функции (1.75) растянутыми функциями Рс(1!2, 0) и
i/2, 0);
1/2, 0) = Ps(1, 0/2) = 2/3 (— 0) ;
, 0) = РС(1, 0/2)-----
1 ;
(1.77)
—0) ;
Коэффициенты ac(i/2) определяются выражением
1 3/8 / я \
ас (i/2) = f F (0) Рс(i/2, 0) d 0 =2 f [ 1 — — 01 Pc (i/2, 0) d 0. (1.78)
значения представлены на рис. 1.186. Они не равны коэффици-
ам ac(i), показанным на
2/2, 0).не равна Рс (1, 0).
рис. 1.18a, так как, например,
37
Растянем функции (1.75) в четыре раза подстановкой Q'=G/y,
где у=у(1) =£=4, как показано на рис. 1.17в;
Р*(1/4,0) = ps(1,е/4) = 2 /з (4-ер
РД1/4, 0) = Ре(1, 9/4)= - 4 /И 12(-40f- 1
2 L \ 4 /
Ps (2/4, 0) = Ps (2, 0/4) = — /7 20
(1.79)
’ I \4 / I \2 1
— 0) —120(— 0 + 3 .
4 ) \ 4 / J
Рс (2/4, 0) = РД2, 0/4) = —/9 [560
8
Некоторые коэффициенты ac(i/4) изображены на рис. 1.18в:
2
ас ({74) = У F (0) Pc (i/4. 9) d 0=
2
1 —-lo)Pc(i/4, 0)cZ0. (1.80)
Чтобы вычислить предел ac(i/l) для больших значений i и %,
необходимо знать Рс(//В, 0) =Pc(i, 0/S) для больших значений i и
малых значений 0/£. Известно асимптотическое разложение поли-
номов Лежандра Pj(x), которое справедливо для больших значе-
ний j и малых значений х:
Р,(х) ~ = ---II 1-—sin [// -f- —arccosx + — л
М' И 4/ [V 2 / 4 J
----* cos [/ j -f- —arc cos х + — л
8/ /1 — х2 [\ 2 / 4
(1-81)
Используя (1.74), получаем:
Pc(i, 0/^)^ 2 cos4-^0.
Vn I
Предельные функции Рс(ц, 0) и ас(ц) получаются при
Рс (ц, 0) = -U cos 4р,0; (1.82)
У л
оо
ас(р)= j Р(?)Рс(р, 0)d0 =
—оо
3/8
= (1 —— 0^cos4|i0d0=—j=/sin3t*/4 Г. (1.83)
/я Л 3 ) Г 4/я ( Зц/4 ) ' '
Функция ас(ц) есть обобщенное преобразование Фурье треуголь-
ной функции, изображенной на рис. 1.17, по полиномам Лежандра.
Она изображена на рис. 1.18а—в. Из рисунка наглядно видно, как
коэффициенты ac(i), ac(i/2) и ac(ilb) сходятся к аДц). Функции
ac(v) (рис. 1.15) и ас(ц) (рис. 1.18) равны с точностью до постоян-
ного множителя. Можно легко проверить по дифференциальному
уравнению полиномов Лежандра, что это выполняется и в общем
случае:
(1 — x)z" — 2xz' +j(j+ l)z = 0; / = 0,1,2,.... (1.84)
38
Шля малых значений х и больших j это уравнение вырождается в
-Жавнение для синусоидальных и косинусоидальных функций:
> z" + fz = 0. (1.85)
Ж Таким образом, обобщение преобразования Фурье представ-
ляет в основном интерес для таких систем ортогональных функ-
Ший, которые не определяются дифференциальными уравнениями,
^Приводящимися путем растяжения к уравнениям синусоидальных
Жш косинусоидальных функций. Так как функции Уолша опреде-
ляются разностным, а не дифференциальным уравнением, можно
ожидать, что они дадут лучший результат, чем полиномы Ле-
жандра. Обобщение преобразования Фурье на преобразование
'жолша—Фурье принадлежит Файну. Однако он не делал разли-
чия между четными и нечетными функциями, что является полез-
ным для применений анализа Уолша—Фурье в теории связи. Ма-
тематически строгая теория функций Уолша, разделенных на чет-
ные и нечетные функции (cal и sal функции), принадлежит Пихле-
h [2].
| Пусть функции /(0, 0), fe(i, 9), fs(i, '0) представляют собой
функции Уолша:
’> f (0, 9) = wal (0, 9); fc(i, 9) = cal (i, 9); /s (i, 9) = sal (i, 9). (1.86)
Треугольная функция (рис. 1.19a) дает коэффициенты:
1/2 3/8
а(0) = J F(0)wal(O, 9)d9 = 2j (1 — у9)^9;
Л —1/2 0
3/8
; oc(0 = 2j (l--|-0)cal(i, 9)d9; as(i) = 0.
о
На рис. 1.20a показано несколько значений a(0) и ac(i).
Положив z/(g)=£, получим cal(//|, 9)=cal(i, 0/g) и sal(i/£, 0) =
= sal(t, 9/g). Из рис. 19a—в видно, что cal (2t/2, 0) и cal(4i/4, 0)
равны функции cal (i, 0), периодически продолженной соответствен-
но на два и четыре исходных интервала определения. Этот резуль-
тат можно также легко получить из разностного ур-ния (1.28).
Таким образом, на интервале —1/2^0<1/2 выполняются соотно-
шения:
cal (i, 9) = cal (gi, 9/|) = cal (gi/g, 9); £ = 2r; r = 1, 2,...; -1 <9< X
Z z
Из рис. 1.19a—в видно также, что на том же интервале спра-
ведливы следующие соотношения:
' -с cal (i, 9) = cal (2i/2, 0) = cal £(2t + l)/2, 0] =
= cal (4i/4, 0) = cal [(4i + l)/4, 0] = cal [(4i + 2)/4, 0] =
= cal [(4i + 3)/4, 0] = cal [(£» + T])/g, 0], (1.87)
П = 0, 1..........&-1; В = 2'.
39
sai(f,o)
sat (2,d)
sal(3.cf)
f(o)
wal (0.0)
sat (В,
4J7
salfc
sat(№.
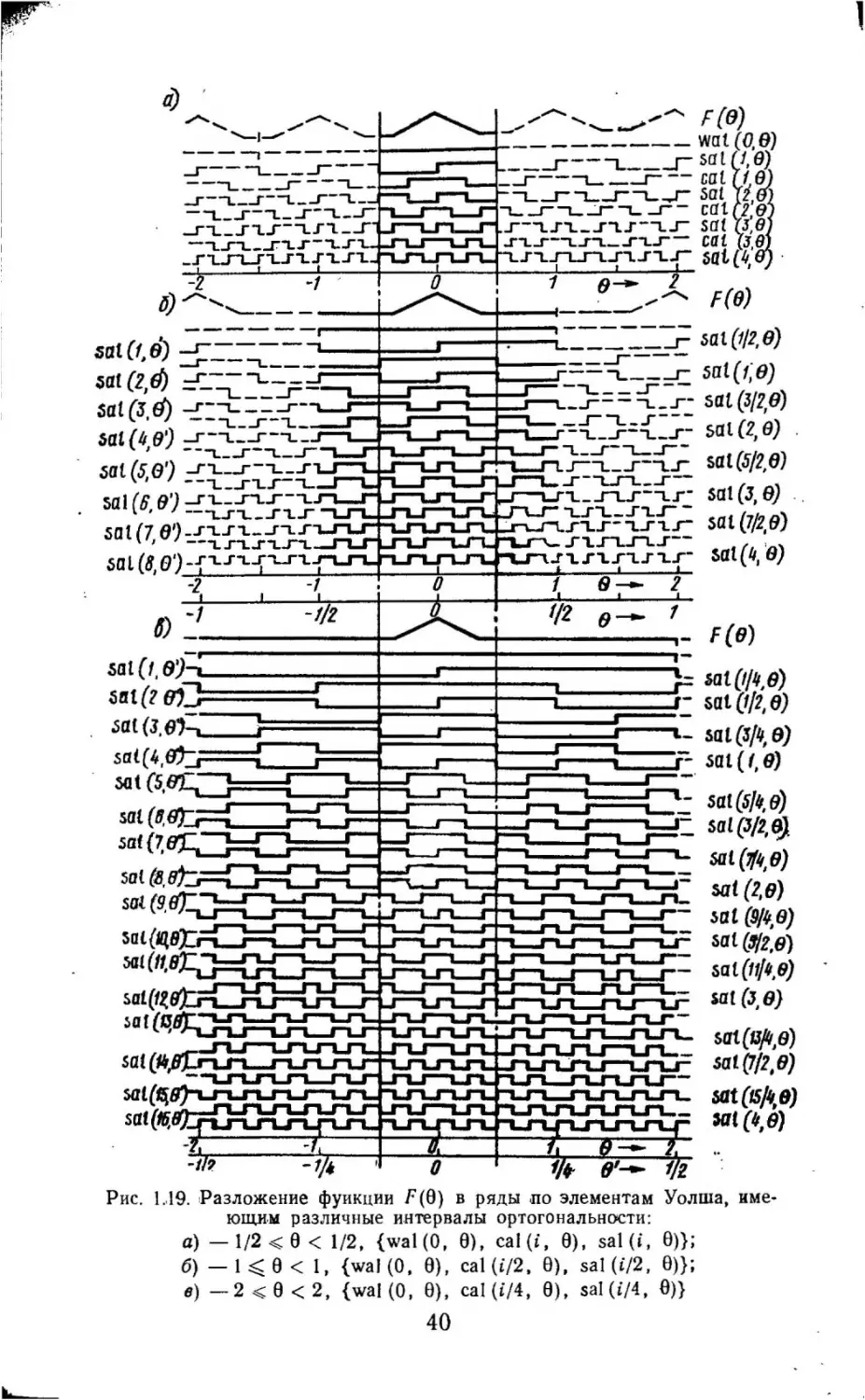
Рис. 1.19. Разложение функции ^(O) в ряды по элементам Уолша, име-
юшим различные интервалы ортогональности:
а) — 1/2 < 9 < 1/2, {wal (0, 0), cal(i, 0), sal (i, 0)};
б) —1^0 < 1, {wal (0, 0), cal (i/2, 0), sal (i/2, 0)};
в) — 2<0<2, {wal (0, 0), cal(i/4, 0), sal(i/4, 0)}
40
-2
6) '1
sal(l.O')-{
sat(?e£J
sat (J. 07^
sal(/,.oy^
sat (5,
sat (7,
sal (8, в)
sal (9.&.
501(481:
sal (11,i
F(0)
_r sat (1/2,0)
_r 501(1,0)
sal (3/2,0)
sat (2,e)
sat (5/2,0)
sal (3,0)
sal (7/2,0)
sat (9,0)
F(O)
sal(t/9,0)
sat (1/2,0)
sat(J/«,6)
sat (1,0)
sal (5/9,0)
sal (3/2,0)
sal (7/9,0)
sat (2,e)
sal (9/9,0)
sal (9/2,0)
sat (11/9,e)
sat (3,0)
sat (13/9,0)
sat (7/2,0)
sat (15/9,0)
9Ot(9,0)
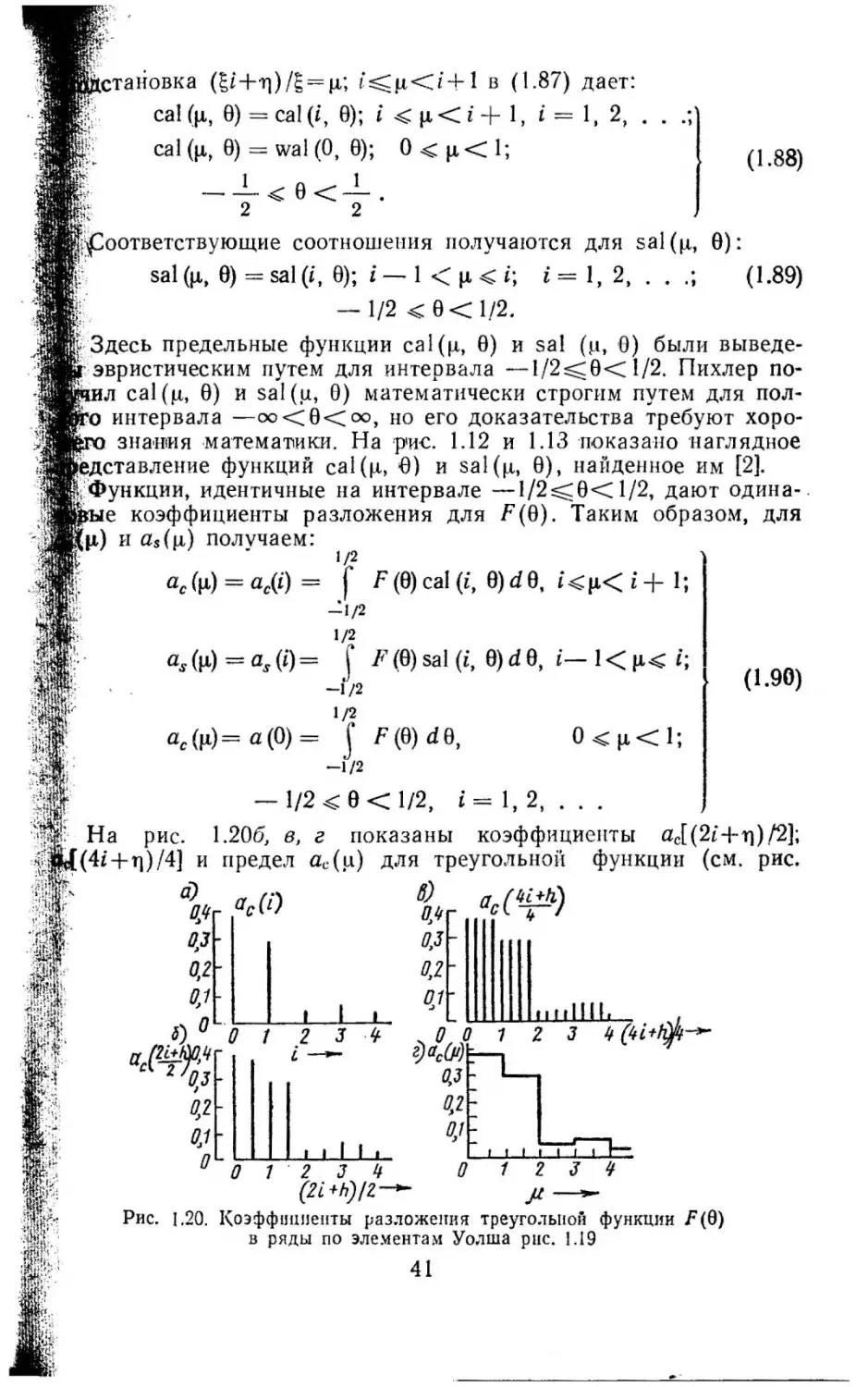
Остановка = р; i^g<j'+l в (1.87) дает:
cal (р, 0) = cal (i, 0); t < р < i + 1, i = 1, 2, . .
cal (p, 0) = wal (0, 0); 0 < p < 1;
(1.88)
Соответствующие соотношения получаются для sal (р, 0):
sal (р, 0) = sal (t, 0); i — 1 < р < t; i=l, 2, (1.89)
—1/2 <0<l/2.
Здесь предельные функции cal(p, 0) и sal (ц, 0) были выведе-
I эвристическим путем для интервала —1/2^0< 1/2. Пихлер по-
чил са!(р, 0) и sal (и, 0) математически строгим путем для пол-
Го интервала —оо<0<оо, но его доказательства требуют хоро-
)го знания математики. На рис. 1.12 и 1.13 показано наглядное
ёдставление функций са!(р, 0) и sal (р, 0), найденное им [2].
Функции, идентичные па интервале —1/2^0<1/2, дают одина-
рые коэффициенты разложения для F(0). Таким образом, для
!р) и as(p) получаем:
1/2
ас (р) = ac(i) = [ F (0) cal (i, 0) d 0, i < p< i + 1;
—1/2
1/2
(p) = as (i) = f F(0) sal (i, 0) d 0, i— 1 < p< t;
1/2
ac(p)=a(0) = J F(0)d0, 0<p<l;
—1/2
— 1/2 c 0 < 1/2, i= 1,2, . . .
На рис. 1.206, в, г показаны коэффициенты ac[(2t"+i))/2];
(4i+T])/4] и предел ас(р) для треугольной функции (см. рис.
Рис. 1.20. Коэффициенты разложения треугольной функции F(0)
в ряды по элементам Уолша рис. 1.19
41
1.19). Вычисление ас(р) и as(p) для функций Уолша является
очень простым. Для этого необходимо вычислить коэффициенты
а(0), ac(i) и as(i) и нанести эти значения от 0 до 1, от i до i+1
или от i до i—1. В результате получим ас(ц) и а«(р) на интерва-
лах Os£|i< 1; +1 или i—1 <ц^1.
1.2.5. Быстрое преобразование Уолша—Фурье
Время, необходимое для получения преобразования Фурье,
можно существенно уменьшить, применяя метод, известный под
названием быстрого преобразования Фурье. Соответствующее
быстрое преобразование Уолша—Фурье было найдено Грином fl]
и обобщено Вэлчем [2, 3]. Кан, Андрюс и Пратт использовали дву-
мерное быстрое преобразование Уолша—Фурье для сжатия ин-
формации изображения (4]. Вэлчел и Гвинн использовали его для
классификации сигналов [5]. Здесь форма представления функций
учитывает четность и нечетность функций и классифицирует их
согласно числу перемен знаков, как на рис. 1.2.
Рассмотрим функцию F(0) на некотором интервале. Разделим
этот интервал на 2П равных по ширине подынтервалов. Для иллю-
страции будет рассмотрен случай 23=8. Обозначим средние значе-
ния Г(0) на восьми подынтервалах через А, В,..., Н. Таким обра-
зом, F(0) представляется ступенчатой функцией с минимальной
среднеквадратической ошибкой для данного числа интервалов.
Преобразование Уолша—Фурье ас(ц) и as(p) этой ступенчатой
функции можно получить из средних значений А, В,..., Н с по-
мощью рис. 1.2:
+A4-B4-C-4-D-|-£4-/:' +б-|-Я=а(0)—ае(р),
—А—В—С—D+E+F+G+H=as(l)=as(u),
-A-B+C+D+E+F-G~H=ac(\)^ac^),
+A+B-C~D+E+F-G~H=as(2)=as(iJL),
+A~B-C+D+E-F-G+H=at{2)=ac(ii),
—A+B+C~D+E—F—G+H=as(3)=as(ii),
—A+B— C+D+E— F+G— H =ac(3)=ac(p),
4-Л—B+C— D-}-E—F+G—H=as(4:)=as(p),
0<p<l;
l<p<2;
1<H<2;
2<p<3;
2<p<3;
3<p<4;
3<p<4.
Чтобы получить 2n коэффициентов ac(|i) и as(p), в общем слу-
чае необходимо произвести 2П(2"—1) операций сложения. Быст-
рое преобразование Уолша—Фурье требует только 2пп сложений.
Заметим, что преобразование Уолша—Фурье не требует выполне-
ния операций умножения, которые занимают много времени в слу-
чае быстрого преобразования Фурье1).
1) Можно получить преобразование Хаара—Фурье для полных ортогональ-
ных систем функций Хаара {6]. Это преобразование может быть еще лучше ис-
пользовано для цифровых вычислений, чем быстрое преобразование Уолша—
Фурье (сообщено лично Андрюсом).
42
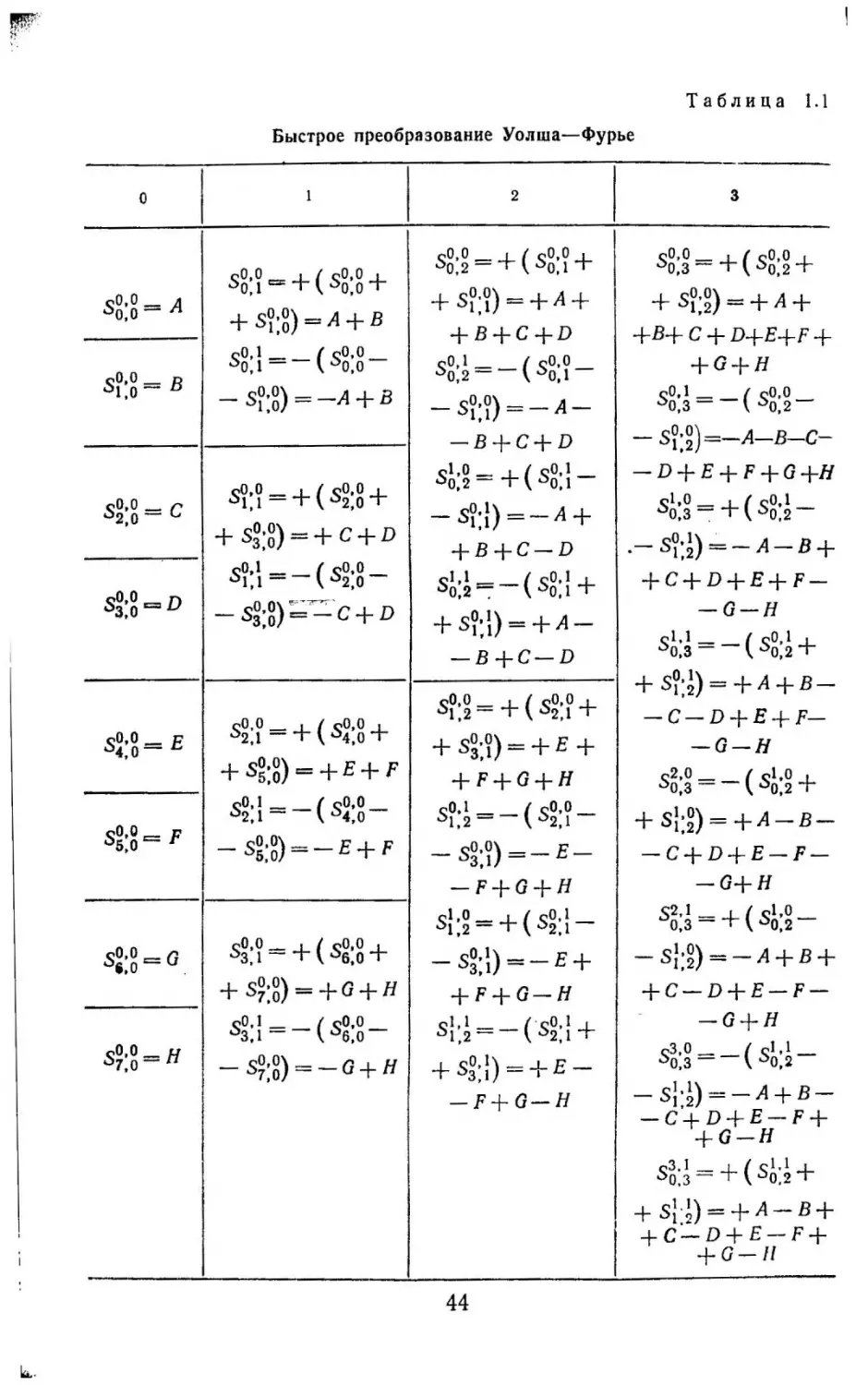
Для объяснения быстрого преобразования Уолша—Фурье об-
тимся к табл. 1.1. В столбце 0 указаны восемь дискретных ам-
штуд А, В,..., Н и их более общая запись S °£<0 . В столбце 1 ука-
ны суммы и разности каждой пары дискретных амплитуд и их
лее общая запись. Суммы и разности членов столбцов 1 пока-
ны в столбце 2, а в столбце 3 показаны суммы и разности чле-
в столбца 2. Общее обозначение 5^ £ указывает в каждом слу-
е, какие члены предыдущего столбца складываются или вычи-
тся. Третий столбец дает коэффициенты Уолша—Фурье а(0),
ИО и as(i).
Быстрое преобразование Уолша—Фурье можно представить
^куррентной формулой или разностным уравнением, которое вы-
»кает из разностного уравнения функций Уолша (1.29):
sfa = (- 1)[//2]+₽+ (- j)z+pS^’*+1] ,
(1-91)
е [//2] — наибольшее целое число, меньшее или равное-^- /;
для четных J, х=1 для нечетных /; £=0,1 2n-m—1; т=0,
п; р=0 или 1; /=0, 1,..., т; 2П равно числу отсчетов амплитуд.
Для примера рассмотрим член для /=3, р=1, £ = 0, т=3. От-
да (//2] =(3/2}=1 их=1:
s?:3=(-i)a[Sw + (-i)45U].
Найденное выражение совпадает с выражением, находящимся в
правом нижнем углу табл. 1.1.
| Значения [//2] и х можно вычислить в двоичных вычислитель-
ных устройствах следующим образом. Пусть / записано в двоич-
йой форме. Деление на два соответствует сдвигу всех разрядов на
Дину позицию в сторону младших разрядов. Число слева от
Дапятой равно [//2]. Число справа равно х. Например: / = 23=
- |=10111, -^-/=11,5=1011.1, [//2]=11 = 1011, х=1.
I Вычисление начинается с определения 2” членов SJ-g, £=0,1,
Д, 2П—1. Из [//2]=[0/2]=0 следует, что можно вычислить члены
, £=0,1, .... 2п-‘—1. Они приведены во второй колонке табл.
1.1. Дальнейшие члены с [//2]=[1/2]=0 нельзя вычислить, так как
Для этого требуются члены S* о, в то время как известны только
' %лены с х=0.
Члены позволяют вычислить 2П~‘ членов и 2П~* членов
, так как х может принимать значения 0 или 1 и, следователь-
Йо, / может принимать значения 0 или 1, что дает [//2]=0.
Быстрое обратное преобразование Уолша—Фурье получается
иутем вычисления коэффициентов А, В, ..., Н из коэффициентов
4(0), а3(1), .... а3(4). Это можно сделать, инвертируя рекуррент-
к 43
Таблица 1.1
Быстрое преобразование Уолша—Фурье
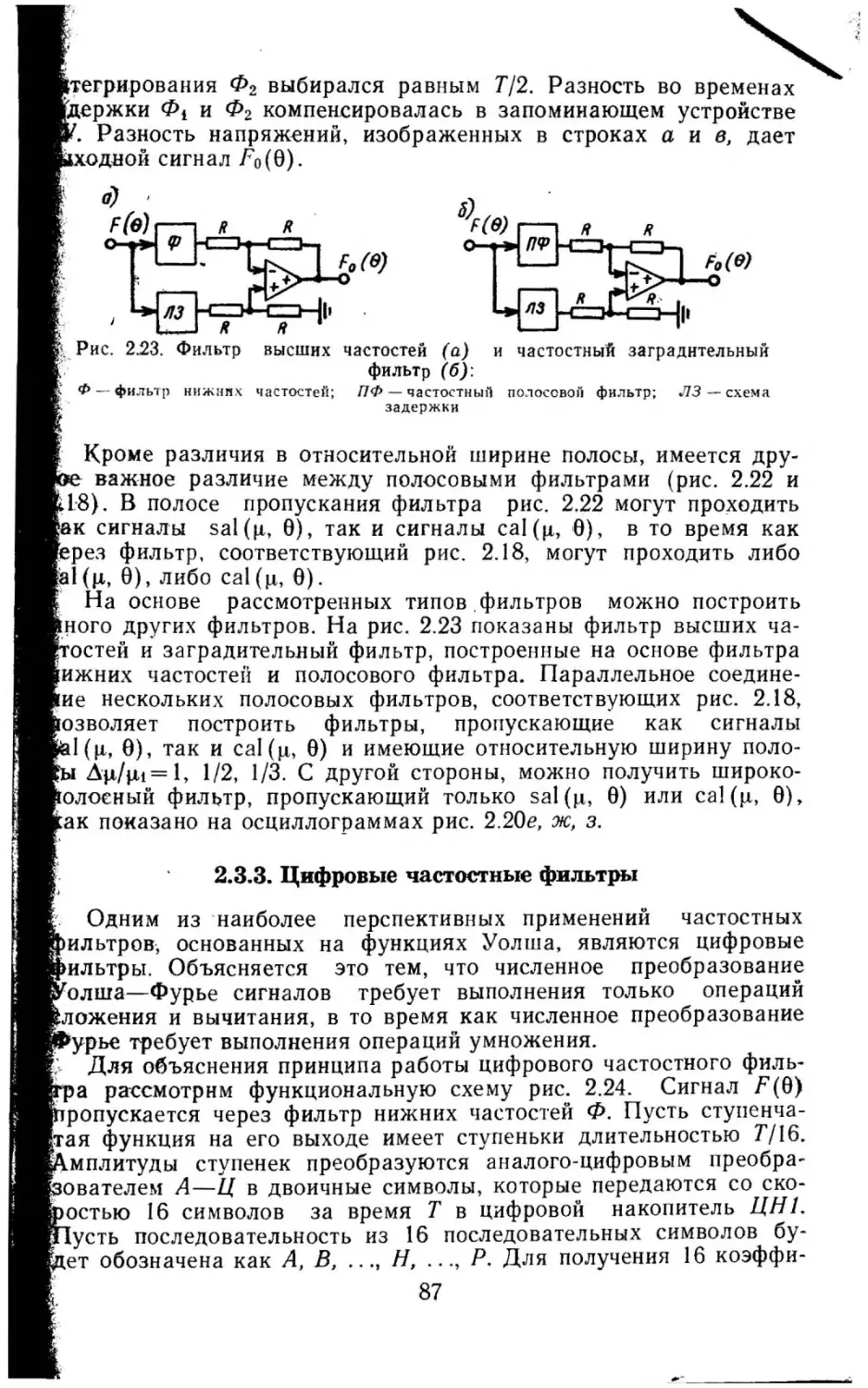
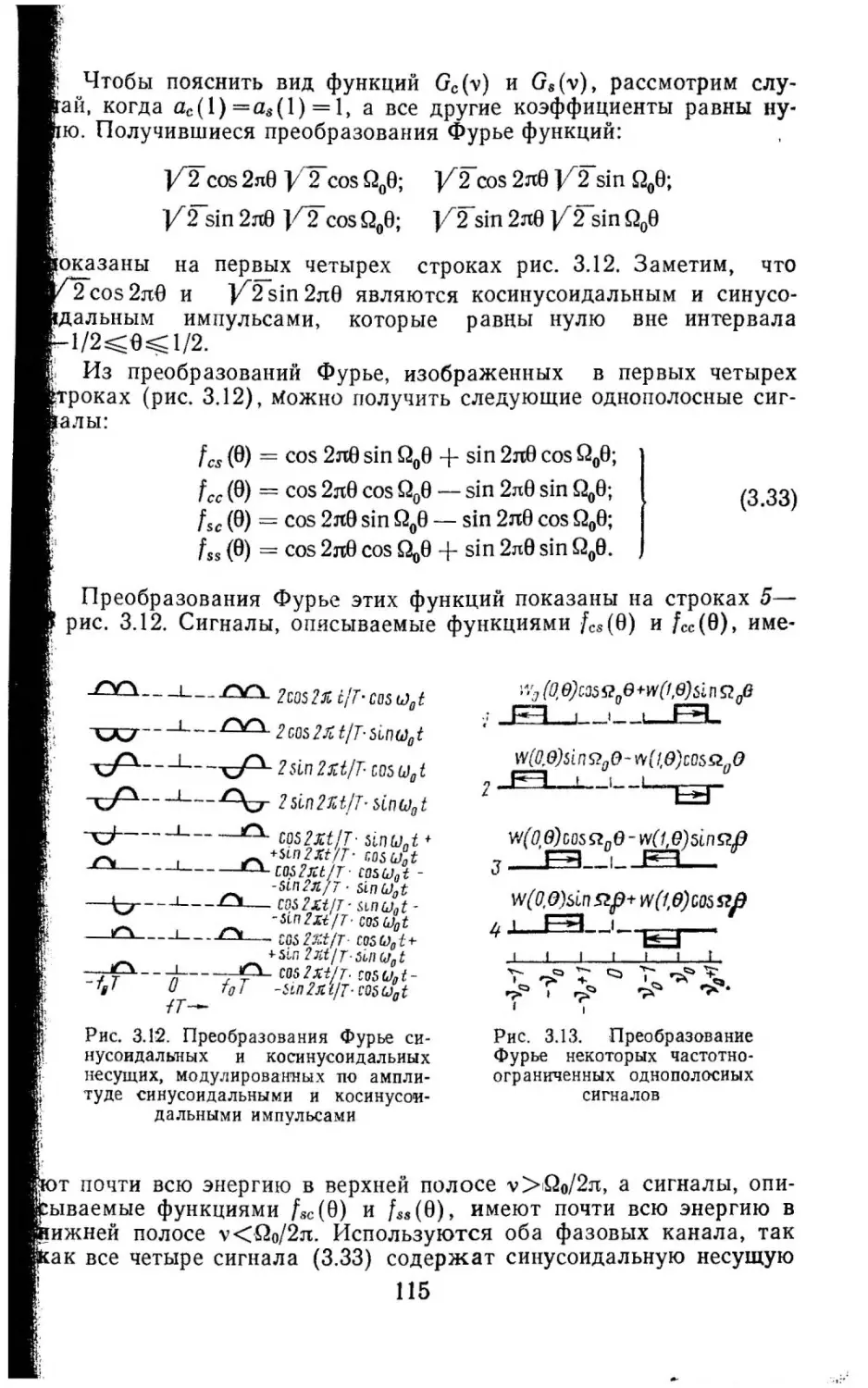
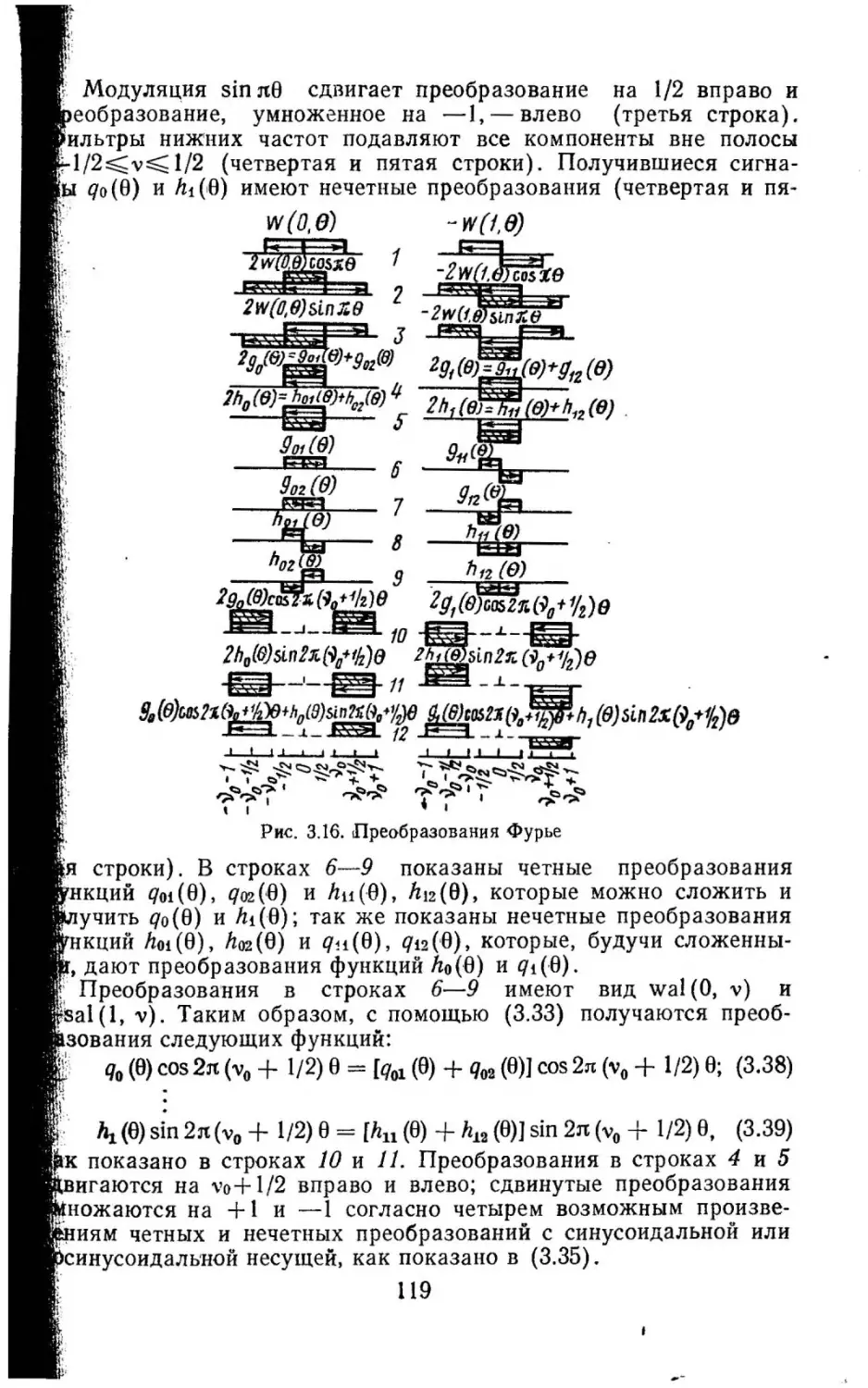
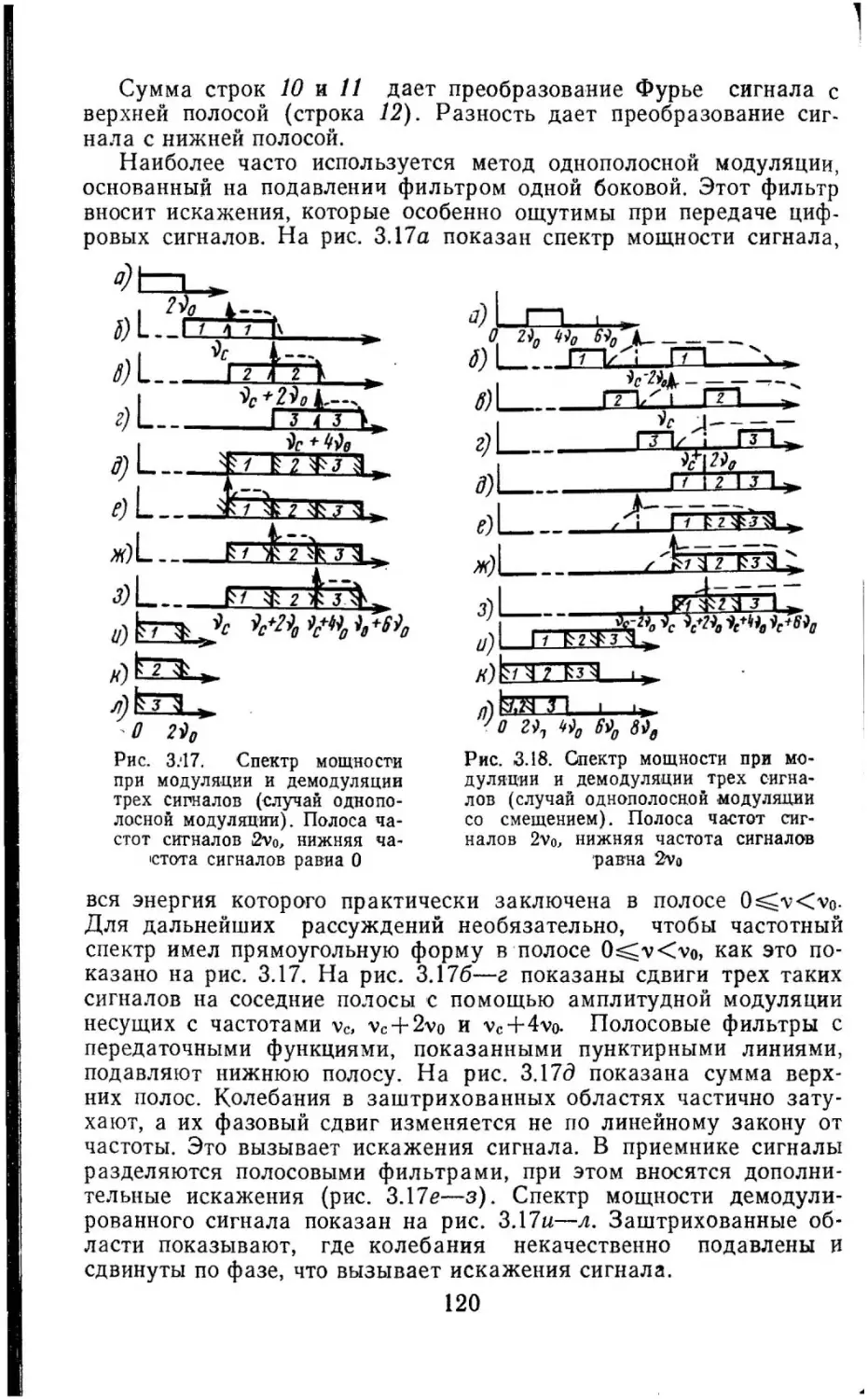
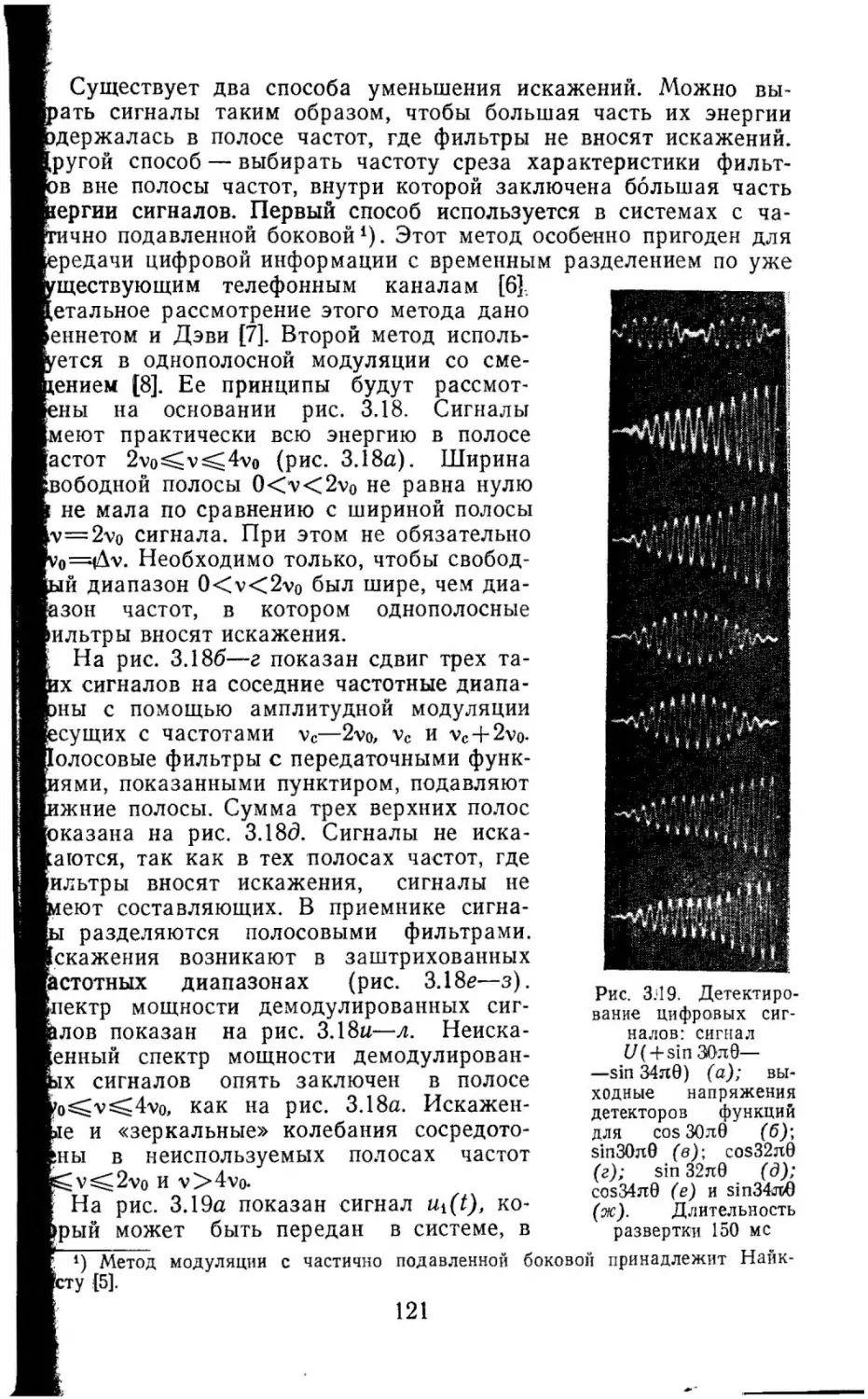
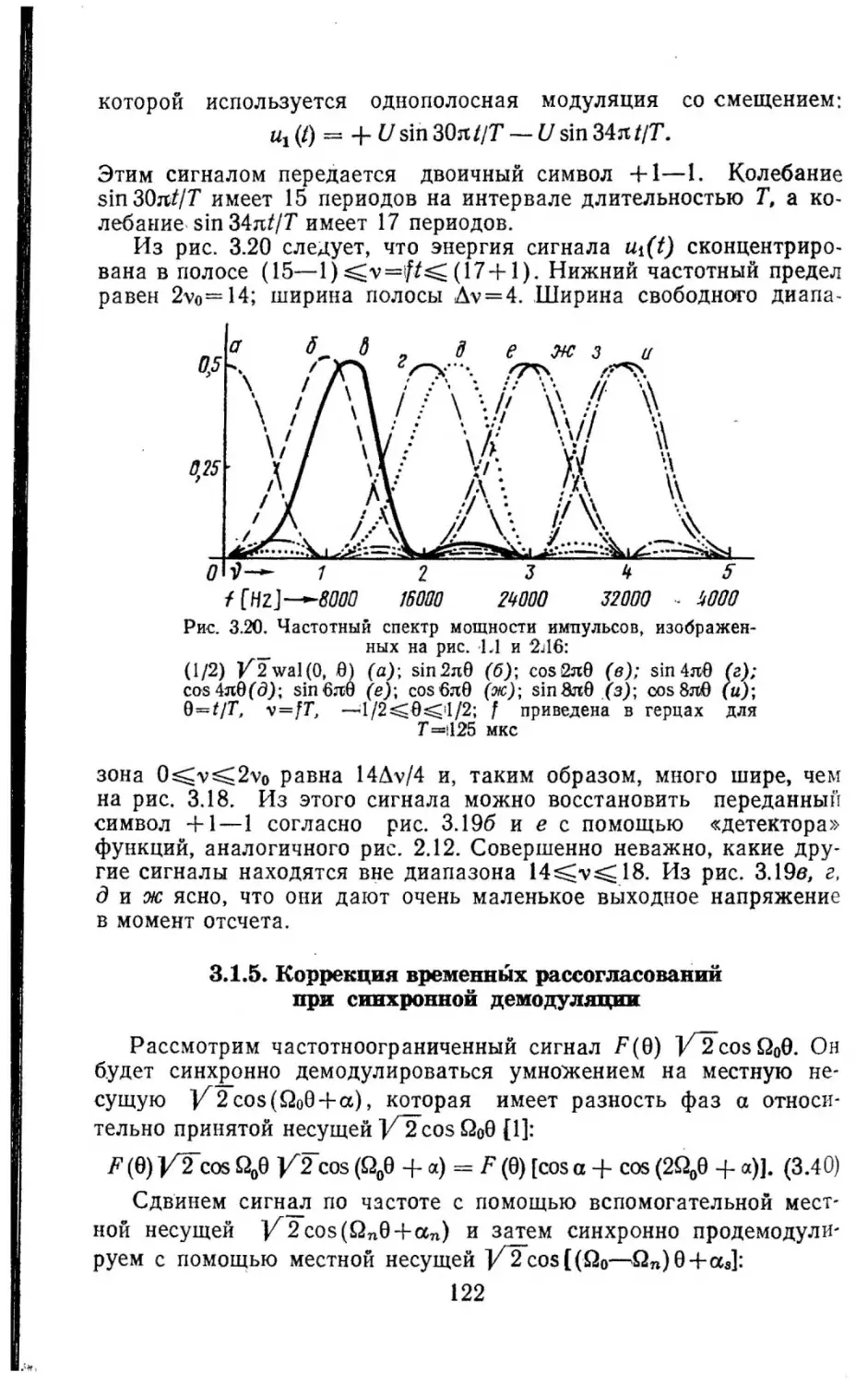
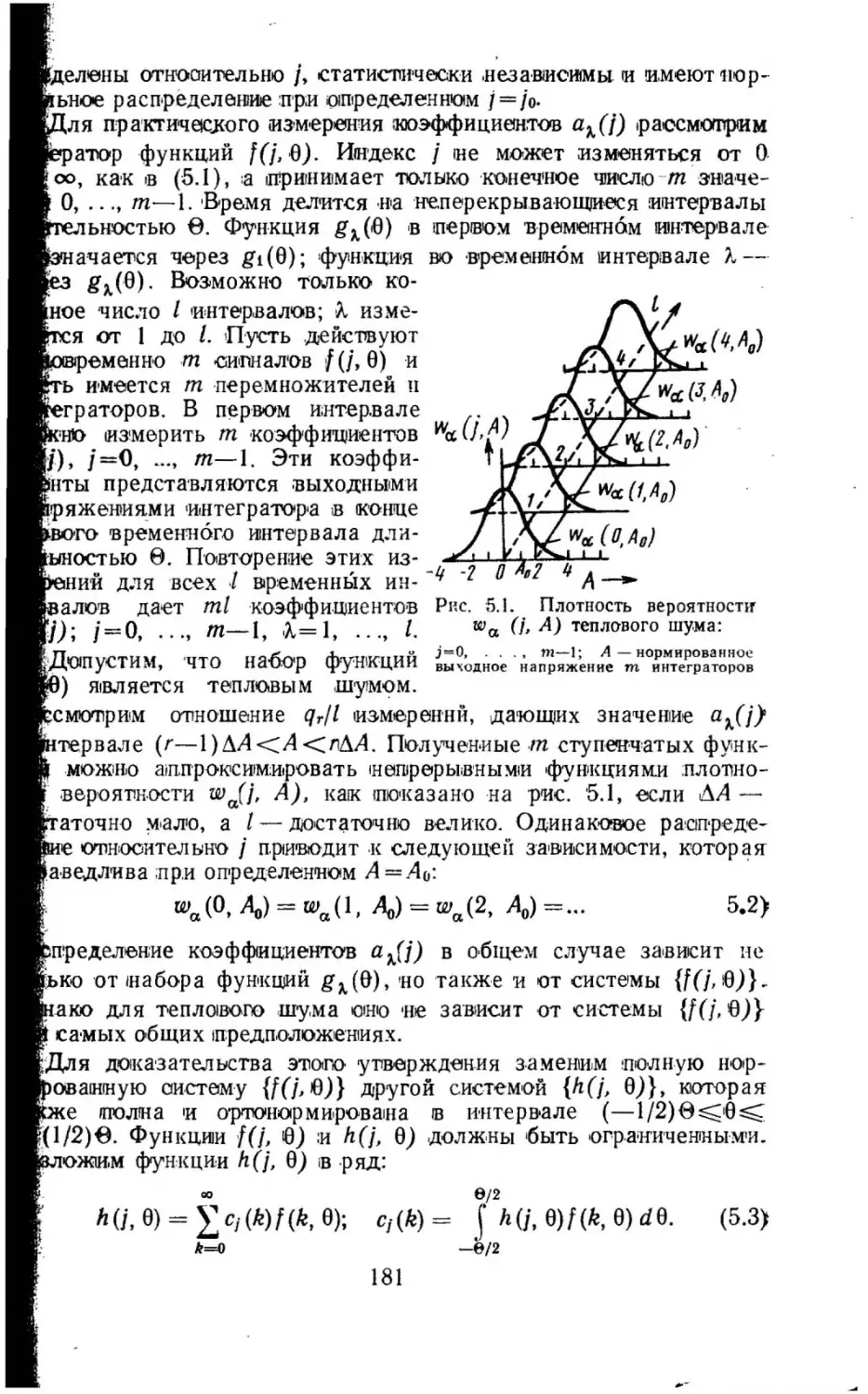
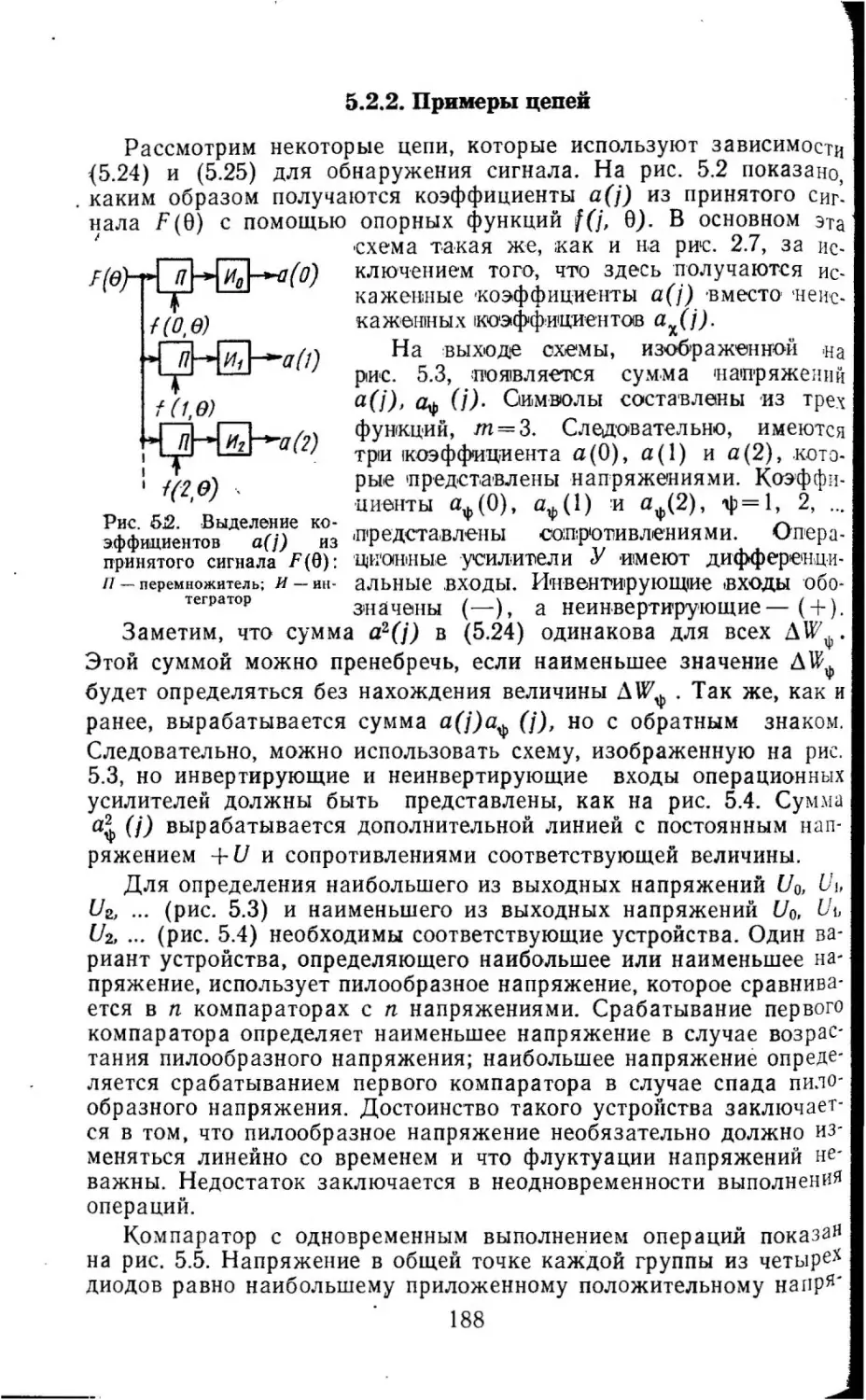
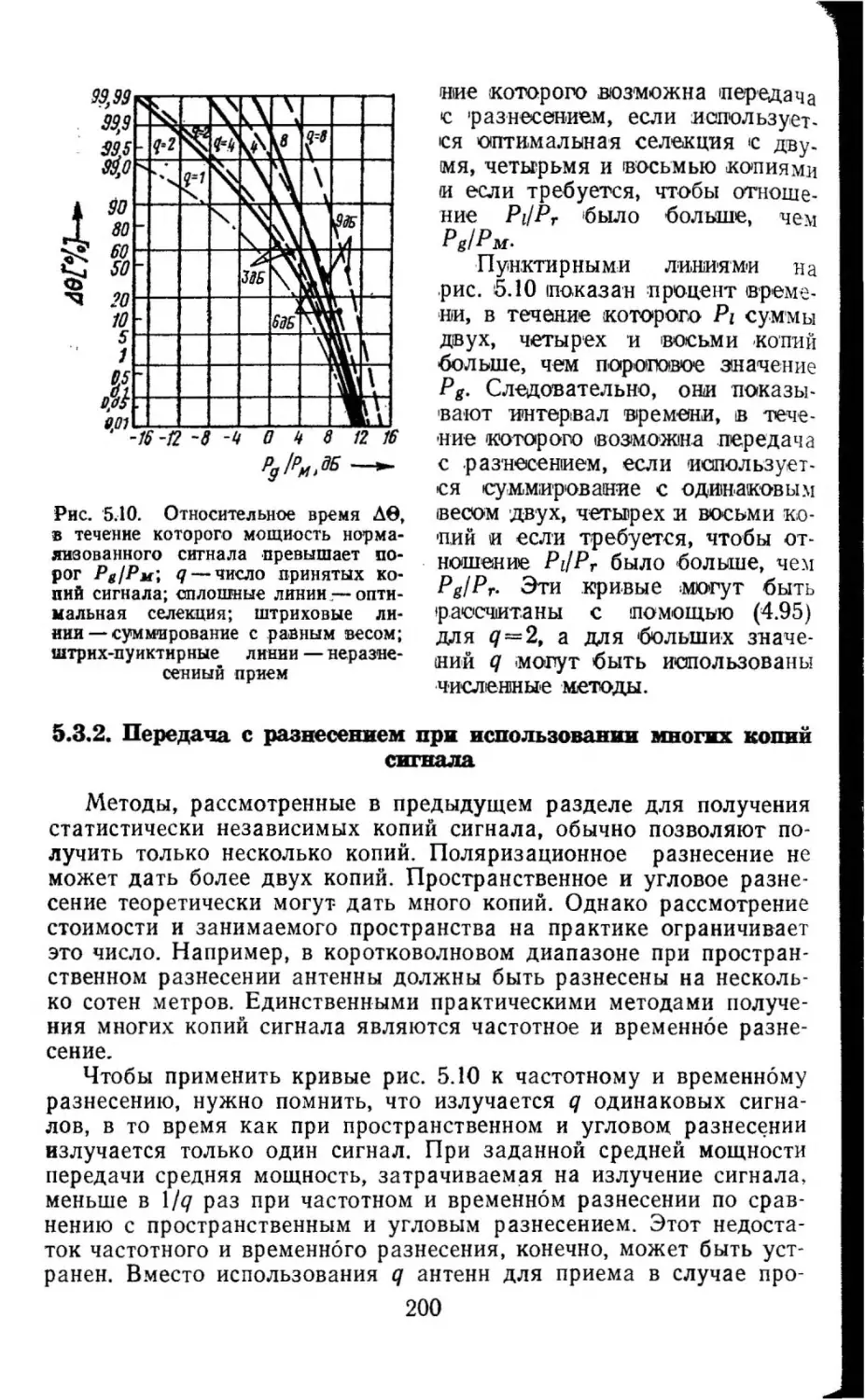
0 1 2 3
оО.О л ^0,0 Л + аз 1 X о.о. I °. °. ‘ оо * о’о СО <О | 7 А 7 и в и =° ° - ъ ОО 1 оо J СО “Г СО | + Co | Co | Co "f" Co 1 c- . ' с— I 1 oo 1 po 1 Co Ъ’— “1 Co мо 1 CO ьэ — “Г Co MO eo 7:. и се и to Съ и c-ь и £ТЛ£'Т + £7д + 7 + I + Co | 1 Co + 1 Co + + Co to °° 2° о °’o t> -° 1 + + । 1 | + + з?:з°=+(5?:Н + ^1,2)—++ 4-B+ C + D+E+F + + <? + H cO, 1 _ / qO.O •^0,3 — V ^0,2 — Sij)=—A—B-C- —D+E+F+G+H сЬо » / 0O.1 °0,3 — -Г к ^0,2 . — Sj’J) = — A — В + +C+D+E+F- — G — H S03 = — ( so;2 + + S?^) = 4-4 + B- — C— D + E + F— — G — H ^0,3 = ~ ( Gq*2 + + з1:2°) =+л-в- —C+D+E—F— — G+H S21 — j_ ( cl.o 0.3 —г (. 60,2 -з‘:§)=-л+в+ +C—D+E—F— -G + H c3,0__ /cM — •^0,3 — \ °0,2 -51’2) = -Л + в- — C+D4-E — F + + G-H Sq^ = + ( Вод + + 5;>) = + л_в + +C-D+E-F+ + G-H
С>0,0 D
с 0,0 ° 2,0 — ° s?:?=+(sS:?+ + s°;°)=+c+D q0,1 / с0»0 ^1,1 — ~\d2,0~ -s£8) = -C4-D
$з:о=£
s40:°0=£ 1 I а. ot + o'o + S + S 7 7 в T и II co II oo ООЮ o'in' o’ CS O* 04 1 + + 1 1 1 + + 1 1? 14 1 °* 14 ’r 14 o-«- 4 53 'O 4- + co |+<O | 1 co | + A + 7 A 7 7 ii X н it 1«- “ и o-z- “ il S- P01. CO —.СЧ co | CO _|_ '-.et CO | To* | To- _|_
s°:o=F
<0-°. .... Co “b Co Co • -° Co —° MO — — NO •-O oo || CO || 11 Л 11 X 1 Co + Co Q PP Q> pp । oo । oo t 1 t + з: to
5?:?=я
к.
44
^Вую формулу для SJk'^ . Из суммы и разности SJk'Qm и полу-
^Каем следующие рекуррентные формулы:
S^’V,= j- (- l)/+t//21 («£0 +SL1„);
I ® = у (“ 1)[//21
Эти формулы можно объединить в одну:
В = у (- 1 )₽/+[//2] М°т + (-!)₽ S'k-'m) , (1.92)
^жде р = 0 или 1; х = 0 для / — четных, х=1 для / — нечетных;
]И^/2] — наибольшее целое число, меньшее или равное (1/2)/.
Ж 1.2.6. Обобщенное преобразование Лапласа
Яг Преобразование Лапласа Х(о, v) временной функции F(0) иоб-
Ддратное преобразование можно записать в следующем виде:
X (о, v) = J F(Q) е-00 e“/2,rv0 d 0; (1.93)
ж? °
"I F(0) = е°° J Х(с, v)e+'2w0dv. (1.94)
«Вэт —00
W Очевидно, что преобразование Лапласа от функции F(0) мож-
Я|но рассматривать как преобразование Фурье от F(0)e~aO. Множи-
Жжель е""а0 делает функции F(0) преобразуемыми по Фурье, да-
3|юке если они квадратично неинтегрируемы. С учетом этого заме-
Жяания из (1.93) и (1.94) получаем обобщенное преобразование
ДЕЛ а пл аса:
| as(o,v)= [F(0)e-c0fs(v, 0)dO; (1.95),
ДИ о
Ц ajo,v) = jF(0)e-a0/c(v, 0)d0;
f F(0)= е°° f [ас(о, v)/c(v, 0) + as(a, v)/s(v, 0)}dv. (1.96)
Жм?- Как и в случае обобщенного преобразования Фурье, нижний
редел интегралов (1.9э) не равен —ос. так как множитель е
Ирюжет сделать эти интегралы расходящимися. Функция F(0) дол-
Ж’ Жна достаточно быстро стремиться к нулю при больших отрица-
Ий-тельных значениях 0. Здесь используется обычное предположение
Ж'^(0)=Одля 0<О.
45
1.3.
ОБОБЩЕННАЯ ЧАСТОТА
1.3.1. Физическая интерпретация обобщенной частоты
Частота — это параметр, по которому различаются отдельные
функции системы {cos 2л//} или {sin 2nft}. Обычно физически ее
интерпретируют как число периодов за единицу времени. Нор-
мированная частота v=fT интерпретируется как число периодов
за временной интервал, равный Т.
Обобщенную частоту можно интерпретировать как половину
среднего числа пересечений нулевого уровня за единицу времени
или как половину среднего числа перемен знаков за единицу вре-
мени. Нормированную обобщенную частоту ц можно интерпрети-
ровать как половину среднего числа пересечений нулевого уров-
ня за отрезок времени, равный Т. Обобщенная частота имеет раз-
мерность [с-1]:
р, = фТ; ф = рЛ’ [с”1]- (1-97)
Определение обобщенной частоты было выбрано таким образом,
чтобы оно совпадало с определением частоты, если его применить
к синусоидальным и косинусоидальным функциям. Например,
синусоидальное колебание с частотой 100 Гц имеет 100 периодов
в секунду или 200 пересечений нулевого уровня в секунду. Поло-
вина числа пересечений нулевого уровня равна 100, что равно по
величине и по размерности частоте1).
Точки пересечения нулевого уровня синусоидальных и косину-
соидальных функций расположены равномерно во времени, одна-
ко определение обобщенной частоты применимо и к функциям с
неравномерным расположением точек пересечения и даже к не-
периодическим функциям.
Для обобщенной частоты <р полезно ввести термин «частость».
Одной из причин этого является то, что термин «обобщенная ча-
стота» уже использовался в теории затухающих колебаний; вто-
рой причиной является то, что волны в трехмерном пространстве
характеризуются как частотой, так и частостью. Частость опреде-
ляется как половина среднего числа пересечений нулевого уровня
в секунду; для нее можно использовать сокращение «zps»2).
Рассмотрим функции Уолша cal (i, 9) и sal (г, 0) (рис. 1.2). Ве-
личина i равна половине числа перемен знаков на интервале
!/2^0<1/2, a (p=i/T есть частость периодически продолженных
функций. Если растянуть функции в £ раз, то они будут иметь 2i
перемен знаков на интервале — 1/2£^0<1/2£; будет рав-
*) Число перемен знаков в единицу времени было использовано для опре-
деления мгновенной частоты частотномодулированного синусоидального колеба-
ния {1, 2, 3].
2) Произошло от number гего crossings per second — число пересечений
нулевого уровня в секунду. (Прим, ред.)
46
о половине среднего1) числа перемен знаков на интервале дли-
ельностью 1.
Рассмотрим в качестве примера периодически продолженные
полиномы Лежандра Pc(i, 0) и Ps(i, 0) (рис. 1.17a). Они имеют
2/ перемен знаков на интервале —1/2^0< + 1/2. Их растяжение
в £ раз приводит к тому, что интервал становится равным | и
<71= ц становится равным половине среднего числа перемен зна-
ков за временной интервал длительностью 1.
Заменим нормированные переменные v и 0 в функции sin 2nv0
(ненормированными переменными f=v/T и t—'OT:
sin2jtv0 = sin 2л (fT) t/T = sin 2л ft. (1.98)
Параметр T в (1.98) пропадает. Синусоидальные и косинусоидаль-
ые функции содержат три параметра: амплитуду, частоту и фа-
нзовый угол. Это несправедливо для полных систем ортогональных
функций, у которых частость и временная база не связаны зна-
чком умножения. У функций Уолша sal (ц, 0) или полиномов Ле-
жандра Ps(ji, 0) между ц и 0 стоит запятая. Таким образом, под-
^етановки <р=ц/Т и t=QT дают:
salfp, 0) = sal(<pT, t/T)- Ps(n, 0) = Р,(<рТ, t/T). (1.99)
Эти функции содержат в своем общем виде четыре параметра:
амплитуду V, частость <р, задержку t0 и временную базу Т:
V sal (<р Т, j; VPS (<р Т, .
.3.2. Спектр мощности, спектр амплитуд, фильтрация сигналов
Частотную функцию a2c(v) +a2s(v) можно получить из преоб-
азований Фурье ac(v) и as(y) (1.51) и интерпретировать ее как
|§£1астотный спектр мощности. По аналогии частостную функцию
t2c(|x) +a2s(p), полученную из обобщенных преобразований Фу-
рье ас(ц) и а,(ц) (1.62) и (1.63), можно интерпретировать как ча-
'стостный спектр мощности. Возведем (1.58) в квадрат и проинтег-
ируем, использовав соотношение для коэффициентов (1.59) :
<75=1/5
de.
^Интегралы от произведений различных функций равны нулю в си-
у ортогональности этих функций. Интегралы от /2(0/£, 0),
1с(Щ, 0),/М<7|, 0), умноженные на у~1, дают 1:
Ш 00 / СО \
a2
UJ * *
Ж
-= //5=1/5
*) Частость периодической функции равна половине числа перемен знаков
,£&за период, частость непериодической функции равна пределу половины числа
^жперемен знаков за единицу времени, если этот предел существует.
S 47
Эта сумма имеет тот же вид, что и (1.58). Таким образом, ее мо-
жно интерпретировать как площадь под ступенчатой функцией и
для больших значений g и y=y(t>') заменить интегралом
Оо оо оо
j /'2(O)d0= С1-100)
— aO О О
Используя ненормированную запись, получаем
J Р(//Т)А= Т f[a2(<p, ТН-^(<РП]^(фТ)- (1.Ю1)
— 00 6
Величина T[a2c(p)+a2s(u,)]dp — есть энергия компонент от
ac(g)fc(n, 9) до ас(|i+dp)/c(p+dp, 0) и от as(p)fs(p, 0) до
as(p+dp)f5(n + dp, 0), если интеграл от F-(t/T) рассматривать как
энергию сигнала В(0). Таким образом, a2c(|x) +a2s(ji) имеет раз-
мерность мощности и ее можно интерпретировать как частостный
спектр плотности мощности.
Используя функцию G (v) =Л (v) +В (v) = (1/2) ]/2(ac(v) +
+as(v)], можно переписать частотный спектр мощности a2c(v) +
+a2s(v) в следующем виде:
(v) + «2 (v) = 2 [Л2 (v) + В2 (v)] = (Р (v) + G2 (— v). (1.102)
Здесь использованы соотношения (1.16), (1.19) и (1.52). Частост-
ный спектр мощности можно записать в виде
а2 (р) + а2 (|А) = 4 [Л2 (р) + В2 (p)J = G2 (р) + G2 (- р). (1.103)
Квадратный корень [a2(v) + o2(v)]1/2 можно интерпретировать
как частотный спектр амплитуд. Такая интерпретация невозмож-
на для корня из частостного спектра мощности [a?(p)+a»]1/2,
так как для этого необходимы специфические свойства синусои-
дальных и косинусоидальных функций1).
Используя соотношение
Лзшх + Всозх = (Л2 -f- B2)l/2 cos (х — аге tg — , (1.104)
\ в
(1.52) можно переписать в следующем виде:
В(0) =
[ (v) + a2 (v) ]1/2 cos 2nv0 — аге tg d v.
(1.105)
Множитель [ a?(v)+as(v)]1/2 можно интерпретировать как частот-
ный спектр амплитуд, так как он представляет собой амплитуду
Для вывода теоремы Винера—Хинчина в обычной форме записи требуют-
ся теоремы сложения синуса и косинуса. Поэтому другие системы функций не
имеют прямого аналога теоремы Винера—Хинчина. У функций Уолша имеется
абстрактный аналог этой теоремы, основанный на двоичной корреляционной
функции J F(0)G(0 ф т)б/О
48
колебаний с частотой v без учета фазового углаагс tg °s . Ес-
ЯК ас (v)
Цми функции не удовлетворяют теореме сложения (1.104), то такая
интерпретация для квадратного корня [ а2с (Н) (н)]1/2 невоз-
ЯЬожна. Однако ас(н) и а4й) аналогично ac(v) и as(v) можно рас-
Ирматривать как амплитудные спектры четной и нечетной части
дфункции F(0).
Д&-- Фильтры или, в более общем случае, системы, которые преоб-
Жразуют входной сигнал F(0) в выходной fo(0), можно описать
Императорами. В связи с применением полных систем ортогональ-
Дрых функций особенно важным является понятие линейных опе-
ваторов, которые используются для описания линейных систем.
Дубозначим через Q оператор и через {f(j, 6)}—полную систему
ортогональных функций. Применение Q к определенной функции
Или входному сигналу f(j, 0) дает на выходе сигнал q(j, Q):
й/а. 0)=?(/, 0). .(моб)
Оператор Q называется линейным, если для всех функций си-
ЯЬемы {f(j, 0)} выполняются законы пропорциональности и супер-
йозиции соответственно:
Йа(/Ж 0) = «(/)□/(/, 9); (1.107)
00 00
» я £ а(/Ж 0) - £ йа0Ж 0). (1.108)
В. /=°
Оператор Q может быть функцией / и 0. Если Q зависит от 0,
оператор и система, которую он описывает, являются линейны-
В'и и зависимыми от времени; в противном случае они линейны и
Инвариантны во времени. Примером линейной системы с перемен-
вкыми во времени параметрами может служить амплитудный мо-
Икулятор. Пусть входной сигнал F(Q) представлен в виде суммы
0), а несущая представлена в виде h(k, 0)=Q. Сигнал
0) может б^1ть, например, синусоидальной несущей
MK2sin2tt&0 или несущей Уолша wal(£, 0). Амплитудно-модулиро-
Дуанный сигнал с подавленной несущей запишется в виде:
^Еееп: г со оо
Ж F(9)h(k, 9) = QF(9) = £>y 0) = ^афд(], 0); (1.109)
В: W /=0
Ж 9(/, 0) = Л(й, 0)П/. 0).
Если h(kt 0) является несущей Уолша wal(7e, 0), то для функ-
Дции f(j, 0) лучше использовать функции Уолша wal (/, 0). Для
о) получаем: q(j, 0)==wal(A, 0) wal(7, 0) = wal(7e©/, 0). Если
0) является синусоидальной несущей ]/”2 sin 2л&0, то в ка-
местве функций системы {/(/, 0)} лучше использовать функции f(0,
В),]/2 sin 2ш0 и 1^2 cos 2л/0. Тогда функции q(j, 0) равны:
В q (0, 0) = ]/2 sin 2л k 0;
К 49
q (2i, 0) = cos 2л (k — i) 0 — cos 2л (k +1) 0;
q (2t — 1, 0) = sin 2л (k — i) 0 + sin 2л (k + i) 0;
/ = 0, 2i; 2i — 1; i = 1,2, . . .
С развитием теории связи определение линейности менялось.
Первоначально оно относилось только к дифференциальным опе-
раторам, затем к операторам, независимым от времени, но необя-
зательно дифференциальным. Используемое здесь определение не
требует, чтобы й был дифференциальным или независимым от
времени оператором. Такое определение давно использовалось ма-
тематиками; его внедрение в связь часто приписывают Вуншу (1].
Если система описывается линейным оператором й и если
имеется свобода выбора системы функций {f(j, 0)}, то можно вы-
брать систему собственных функций Й. Уравнение (1.106) в этом
случае записывается в виде
Qf(j, O) = b(j)f(j, 0). (1.110)
Удобно называть f(j, 0) собственной функцией й даже в том слу-
чае, если f(j, 0) в правой части (1.110) будет заменена сдвинутой
во времени функцией f[j, 0—0(/)].
В частотной теории связи характеристики фильтра можно опи-
сать затуханием и фазовым сдвигом. Это описание предполагает,
что ко входу фильтра приложено напряжение U cos 2nft. На вы-
ходе фильтра появляется установившееся напряжение Uc(f)X
Xcos[2n//+ac(f)]. Частотные функции — 2\ogUc(f)/U=
=—2log Ue(y)l'U и ac(/).=-ac(v) называются соответственно ча-
стотным затуханием и фазовым сдвигом. Пусть входной сигнал
F(0) имеет преобразование Фурье ac(v) и as(v). Тогда выходной
сигнал получаем из (1.52):
Fe(0) = /2" ( (Mv)Kc(v)cos[2nv0+ac(v)]4-a^v)Fc(v) sin [2nv04-«c(v))}dv.
oJ (1.111)
Kc(v) = C/c(v)/t/; v = /T; 0 = t/T.
Описание фильтров с помощью частотного затухания и фазо-
вого сдвига особенно удобно для телефонных фильтров. Согласо-
ванные фильтры, с другой стороны, обычно описываются с помо-
щью импульсной переходной функции. В этом случае ко входу
фильтра прикладывается импульс напряжения в виде функции
Дирака й(0 и определяется напряжение на выходе р(0). Таким об-
разом, нет необходимости обращаться к синусоидальным и коси-
нусоидальным функциям. Выбор системы функций для описания
фильтров определяется только соображениями удобства.
Пусть на вход фильтра вместо U cos 2nft поданы напряжения
0) и Vft(n, 0). Функции fc(g, 0) и /s(p, 0) — те же, что и
в обобщенном преобразовании Фурье (1.63). Тогда на выходе
фильтра будут появляться установившиеся напряжения Uc(ц)/с[ц,
0—0с(р)1 и 0—0s(n)]. Назовем —2 log Uc(ii)IUu—
50
2logUs(ii)/U коэффициентами затухания. Функции 0с(ц) и 0s(|a)
зовем задержками, так как термин «фазовый сдвигэ неприме-
м к функциям, отличным от синусоидальной и косинусоидаль-
й. Если /с(ц, 0) и 0) являются синусоидальной и косинусо-
альной функциями, то эти простые соотношения справедливы
я фильтров, содержащих емкости и индуктивности. Однако мо-
ю построить фильтры, содержащие перемножители, интеграто-
I, накопители, резисторы и переключатели, которые не бу-
т искажать функции Уолша, но будут искажать синусоидальные
косинусоидальные функции. Такие фильтры лучше описывают-
Функциями Уолша.
Пусть сигнал F(0) имеет обобщенные преобразования Фурье
Гд) и as(|x). Пусть затухания и задержки будут —2\ogUc([i)/U,
zlogUs(ix)/U и 0с(ц), 9s(jx)- Из (1.64) получим выходной сиг-
л:
/ оо
:'Р0 (9) = f W+ а,(И) КДИ) Мн.в ~ МОП * р;
oJ (1.U2)
кс (н) = и с (н)/^; к, (н) = *4 W/U-
)авнение (МП) и (1.112) показывает, что (МП) содержит
лько Кс(у) и ac(v), но не содержит Ks(v) и as(v). Последние
ены появятся, если частотные фильтры будут иметь разные ха-
«теристики для синусоидальной и косинусоидальной функций од-
>й и той же частоты. Тогда входное напряжение Usin2nft пре-
разуется в выходное напряжение Us(f) sin[2nff+««(!)], а не в
,(f) sin{2™^+ac(/)]. Такое различие между синусоидальной и ко-
нусоидальной функциями может иметь место только при нали-
и в цепи зависимого от времени элемента и поэтому не может
зникнуть в линейных и инвариантных во времени частотных
/льтрах.
1.3.3. Примеры преобразований Уолша—Фурье
' и спектров мощности
На рис. 1.21 показаны функции времени Г(0), их преобразова-
я Уолша—Фурье G(u), ac(p), Ml1) и частостный спектр мощ-
юти a2c(p) +a2s(p):
(р) = -L }/2" J F (9) [cal (р, 9) + sal (р, 9)] d 9;
• . __ !(1.113)
GO - -Ьут [G(p)+ G (- р)]; as (р) = -Lp^[G(p)-G(-p)];
«с (н) +<% (и) = G2 (р) + G2 (— р). ]
Можно видеть, что сжатие первого импульса в два раза при-
шит к пропорциональному растяжению преобразования G(p). В
»еделе получается 6-функция. Ее преобразование G(p) имеет по-
оянное значение во всем интервале —оо<р<оо.
51
Далее можно видеть, что преобразование G(p) импульсов Уол-
ша (строки 1, 4, 5, 8) ограничено по частости. Это существенно
отличается от хорошо известного результата анализа Фурье, за-
ключающегося в том, что функция, ограниченная во времени, не
может иметь ограниченного по частоте преобразования Фурье.
Рис. L21. Некоторые временные функции, их преобразования Уолша—Фурье
G(p), Мн), МН) и частостный спектр мощности а2с(ц) +а2в(ц) —
+<?2(“Н)
Преобразование Фурье для синусоидальных и косинусоидальных
импульсов (см. рис. 1.1), показанное на рис. 1.6, является беско-
нечным по оси частот. Преобразование Уолша—Фурье устраняет
это неудобное свойство обычного преобразования Фурье; ширина
полосы в случае преобразования Уолша-Фурье, конечно, относит-
ся к полосе частостей.
Класс временных функций, ограниченных как по времени, так и
по частости, можно установить, исходя из рис. 1.21. Импульсы
Уолша cal(7, 0J и sal(7, 0) равны нулю вне временного интервала
—1/2^0<1/2. Их преобразования Уолша—Фурье равны нулю вне
частотных интервалов —(/ +1) 1) или —Та-
ким образом, любая функция времени F(0), состоящая из конеч-
ного числа импульсов Уолша, ограничена как по времени, так и
по частости.
i
F (0) = а (0) wal (0, 0) + £ ас (Z)cal (г, 0) + as (t) sal (i, 0); (1.114)
z=i
wal (0, 0) === cal (z, 0) = sal (z, 0)^0 для 101 > 1/2.
52 J
Пусть F(0) имеет преобразование Уолша—Фурье 6(ц). Тогда вы-
голняются следующие соотношения:
F(6)==0 для |9|>1/2; (1.115)
6 (р.) = 0 для | р | > 14- 1.
Ортогональность системы функций инвариантна по отношению
с обобщенному преобразованию Фурье, а последнее включает в
:ебя преобразование Уолша—Фурье. Таким образом, G(p) мож-
ю записать в простой форме, если известны коэффициенты а(0),
ic(i) и as(i) разложения (1.114). Пусть q(0, p), qc(i, р) и qs(i, р)
(бозначают преобразование Уолша—Фурье функций wal (О, 0),
:al (i, 9) и sal (i, 9). Находим преобразование 6(р) от F(0):
i
G (и) = «(°) q (0. и) + V [ас (0 qc (i, р) + as (i) qs (i, p)J. (1.116)
i=0
Функции q(0, ji), ?s(l, ц), <7c(l, p), ...» ^(3, ц) показаны во второй
колонке рис. 1.21 в строках 1, 4, 5, 8. Нетрудно получить функ-
ции qc(i, ц) и qs(it ц) для больших значений i.
На рис. 1.22 показаны преобразования Уолша—Фурье для си-
нусоидальных и косинусоидальных
импульсов, равных нулю вне
| wat (о,е)
: 12 sin 2ЛО
п П .1/12 П 1 1П Г1_ ,1-1
/М: п ~ П :П t^sin4X0
л п! г "LT "u' “t/_ 1/12 . П сопле II П С R.
15 -10 S
1JJ 1 I I 1 1 I 1 1 1 11 1 > 1
0 5 10 15
Рис. 1.22. Преобразования
Уолша—Фурье б(ц) синусо-
идальных и косинусоидальных
импульсов, полученных из эле-
ментов рис. 1.1
r
+*№
I [
/Д7
, ।
-15 -10 -5 О
I -
wai(o.e)
Ш2
I V2cOS4£0
10 15
Рис. 1.23. Коэффициенты раз-
ложения периодически продол-
женных синусоидальных и ко-
синусоидальных элементов,
изображенных на рис. 1.1, в
ряды по периодическим функ-
циям Уолша са!(7,0) и salfC 0}
интервала —1/2^0<1/2. Можно видеть, что ортогональность по-
лученных функций сохраняется. На рис. 1.23 показаны коэффи-
циенты а(0), as(i) и ас(1) разложения периодических синусои-
53
дальних и косинусоидальных функций в ряд по периодическим
функциям Уолша. Сплошной спектр (рис. 1.22) здесь трансформи-
ровался в линейчатый. Нетрудно видеть аналогию преобразования
Фурье импульса и разложения в ряд Фурье соответствующей пе-
риодической функции.
На рис. 1.24 показан частотный спектр мощности a2c(v) +
-|-a2s(v) _+G2(—v) для первых пяти синусоидальных и коси-
Рис. 1.24. Частотный спектр мощности a2c(v)+a2«(v) = G2(v) + G2(—v) синусои-
дальных и косинусоидальных импульсов, изображенных на рис. .1.9:
a) f(0, 9); б) /(1, 9); f(2, 9); в) f(3, 9), f(4, 9); г) частотный спектр мощности
прямоугольных импульсов рис. 4.3 при условии, что они имеют в пять раз боль-
шую энергию импульсов рис. 1.9
нусоидальных импульсов, показанных на рис. 1.9, и прямоуголь-
ных импульсов, показанных на рис. 1.3. Площадь под кривыми,
будучи умноженная на Т, дает энергию сигналов. Частотный
спектр мощности на полном интервале —оо<0<оо получается
зеркальным отображением кривых (рис. 1.24) относительно оси
ординат.
2.
НЕПОСРЕДСТВЕННАЯ ПЕРЕДАЧА СИГНАЛОВ
2.1.
ОРТОГОНАЛЬНОЕ РАЗДЕЛЕНИЕ КАК ОБОБЩЕНИЕ
ВРЕМЕННОГО И ЧАСТОТНОГО РАЗДЕЛЕНИЙ
2.1.1. Представление сигналов
Рассмотрим телеграфный алфавит, состоящий из конечного чис-
па символов. Примером такого алфавита может служить телетайп-
ный алфавит, состоящий из 32 символов. Обычно эти символы
зредставляются комбинациями из пяти коэффициентов, принимаю-
щих значения +1 или —1:
символ 1: +14-1 + 1 + 1 + 1
символ 2: +1 + 1+ 1 + 1—1
и т. д.
В общем случае символы могут состоять из набора т коэффи-
циентов, принимающих произвольные значения. При этом любой-
символ х можно записать в виде
ах(0), ax(D.....\(j)........ах(/п-1). (2.1>
Другим важным способом представления символов является
представление их с помощью временных функций. Рассмотрим т
временных функций f(j, 0). Умножим функции на коэффициенты
ax(j) и сложим произведения. Тогда получим представление х-го-
символа временной функцией Fх (0):
т— 1
^(0)= £ «хо)/а. в).
/-о
Если система функций {f(j, 0Д линейно
(2.2).
Если система функций {/(/, 0Д линейно независима, то по
функции Гх(0) можно восстановить каждый из коэффициентов
ах(7_). Этот процесс особенно прост в том случае, если функции ор-
тогональны. Пусть функции ортогональны и нормированы на ин-
тервале —1/2^0<1/2. Коэффициент a (k) можно получить ум-
ножением f (0) на f(k, 0) и интегрированием произведения. Для
этой операции обычно используют название «корреляция Гх(0) с
f(k, 0)»:
1/2 т—1 1/2
J Fx(0)f(Zi0)d0 = 2 ах® J М» 0W. Q)dQ = ax{k). (2.3>
—1/2 /=0 —1/2
55
Пусть m = 5, ах (0), a* (2), ах(3) равны +1 и ах(1), «х(4) рав-
ны — 1. Если функции f(j, 0) представляют собой прямоугольные
импульсы, показанные на рис. 1.3, то Fх(0) имеет вид функции,
показанной на том же рисунке. F* (0) представляет собой напря-
жение или ток обычного телетайпного сигнала как функцию вре-
мени.
Значения коэффициентов ах (/), передаваемых сигналом Гх(0)
(рис. 1.3), также можно получить с помощью отсчетов значений
сигнала в соответствующие моменты времени. При этом способ
передачи называют временным уплотнением или временным раз-
делением.
Прямоугольные импульсы (рис. 1.3) можно рассматривать как
частотные функции /(/, v). Тогда х-п символ представляется ча-
стотной функцией ^x(v). Если приложить сигнал F% (v) к пяти
соответствующим полосовым частотным фильтрам, то можно вос-
становить коэффициенты квантованием выходных напряжений
этих фильтров. Способ передачи обычно называют либо частотным
уплотнением, либо частотным разделением.
Для большинства систем ортогональных функций невозможно
определить переданные коэффициенты по одному отсчету во вре-
менной или частотной областях без последующего вычисления 9-
Свойство ортогональности согласно (2.3) позволяет всегда восста-
новить эти коэффициенты. В этом случае применим термин «орто-
гональное разделение» или «ортогональное уплотнение». Преиму-
ществом ортогонального разделения является то, что число при-
годных систем функций гораздо больше, чем число систем функ-
ций для временного или частотного разделения. Таким образом,
существует большая свобода выбора оптимальной системы для
конкретного применения.
В теоретических работах символы часто представляют в виде
векторов в пространстве сигналов. Возникает вопрос, как это век-
торное представление связано с представлением ортогональными
функциями? Рассмотрим m-мерную прямоугольную декартову си-
стему координат с единичными векторами е;-. Длины этих векторов
равны интегралу от квадрата ортонормированных функций /(/, 0):
>/2
| /»(/,0)4е«е/е/ = 1. (2.4)
-1/2
Скалярное произведение векторов ej и eft, j=/=k равно 0, так как
они перпендикулярны друг к другу. Таким образом, связь между
представлением ортогональными функциями и векторным пред-
*) Для вычисления коэффициентов необходим более чем один отсчет зна-
чений сигнала. Таким методом является метод вычисления интеграла (2.3), од-
нако он не подходит под обычное понимание временного или частотного разде-
ления.
56
гвлением можно выразить уравнением ортогональности:
1/2
J /(/, Q)f(k, 0)d0 = e,e* = 6,ft. (2.5)
—1/2
Символ х в пространстве сигналов представляется вектором
F% = x'a%0’)e/- <2-6*
/-0
Вместо т ортогональных векторов можно использовать т ли-
гно независимых векторов. Это представление получается, ког-
функции f(j, Q) неортогональны, но линейно независимы.
В качестве практического примера рассмотрим телетайпный
[вол F* (0), состоящий из пяти синусоидальных и косинусои-
льных элементов, показанных на рис. 1.1:
Fх (0) = ах (0) f (0, 0) + ах (1) /2sin 4 л0 + а*(2) /Г X
X cos 4л0 4- ах (3) У2 sin 6л0 + ах (4) У 2 cos 4л0; (2.7}
— 1/2 < 0< 1/2; 0 = ЦТ.
и принять длительность телетайпного сим-
а равной 150 мс, что чаще всего исполь-
ется, то
Т равно
150 мс. Коэффициенты
(j) равны +1 и —1 для системы с актив-
й паузой и +1 и 0 для системы с пассивной
узой. Пусть на приемном конце сигнал
(0) непрерывно подается на пять перемно-
ителей, где он перемножается с пятью функ-
ции от /(0,0) до K~2cos6«0. Полученные
апряжения интегрируются в течение времен-
бго интервала — 1/2^0<1/2. Тогда выход-
ые напряжения интеграторов в момент вре-
ени 0=1/2 представляют собой значения ко-
ффициентов ax(j) в ф-ле (2.7). На рис. 2.1
оказаны осциллограммы выходных напря-
ге. 2.1. Обнаружение коэффициентов +1 и —1 путем
вхождения взаимокорреляционной функции 32 различ-
ых телетайпных сигналов, составленных из синусои-
дальных и косинусоидальных импульсов
<ений пяти интеграторов на интервале —1/2^0<1/2. Для
:аждого из пяти выходных напряжений существуют 32 раз-
[ичные реализации, соответствующие 32 буквам телетайп-
ого алфавита. 16 реализаций приводят к значению +1 и 16 реа-
57
.лизаций — к значению —1. Это указывает на то, что использует-
ся телетайпная система с активной паузой. В системе с пассивной
паузой 16 реализаций приводят к значению 0 вместо значения —1.
Некоторая асимметрия между реализациями, ведущими к +1, и
реализациями, ведущими к —1, вызвана присутствием дополни-
тельного сигнала У 2 sin 2л0, который добавлен для синхрониза-
ции. По этой причине в ф-ле (2.7) не содержатся элементы
У2 sin 2я0 и У~2 cos 2л0.
Все три рассмотренных представления сигналов содержат ко-
эффициенты ах (j). Векторы е, позволяют представить т коэффи-
циентов одним вектором F%, а временные функции f(j, 0) — одной
временной функцией F%(0). Некоторые сигналы, например выход-
ное напряжение микрофона, удобнее всего представлять в виде
временных функций. Их представление с помощью коэффициентов
-будет изложено ниже.
2.1.2. Примеры сигналов
На рис. 2.2а показаны два символа Fo=e0 и Fi=—ео в прост-
ранстве сигналов. Те же символы показаны внизу как временные
функции для прямоугольного импульса /(0, 0) или для импульса
Уолша sal (1, 0):
Fo(0) = +f(O, 0)); Fi(9) = -/(0,0)
или
Fo (0) = — sal (1, 0); Fx (0) = + sal (1, 0).
На рис. 2.2г, д и е показаны символы, построенные из векто-
ров ео и в! или из двух функций. Символы, изображенные на
рис. 2.2г, имеют следующий вид:
Fo = eo + ei; Fi = e0 — ef, Fa = — e0 + ef, F3= — e0— ex
или .sT J
F0(9) =f(0, 0) + f(1, 0); Л(9) = /(0, 0)—f(l. 0);
F2(0) = -f(O, 0) + f(l, 0); F3(0) = -f(O, 0)-f(l, 0),
или
Fo(0) = wal (0, 0)— sal (1, 0); Fx(0) = wal (0, 0) + sal (1, 0);
Fa (0) = — wal (0, 0) — sal (1, 0); F3 (0) = — wal (0, 0) + sal (1, 0).
Функции f(0, 0), f(l, 0), wal(0, 0) и sal(l, 0) показаны под
рис. 2.2г; символы от F0(O) до F3(0), составленные из этих функ-
ций, показаны над ними.
К символам, изображенным на рис. 2.2, можно применить тер-
мины «двоичный», «троичный» и «четверичный», так как отдель-
ные векторы или функции умножаются на коэффициенты, кото-
рые принимают два, три или четыре различных значения.
58
Рисунок 2.3 показывает, что термины типа «двоичный символ»
ре всегда применимы, если символ состоит более чем из одного век-
тора или функции. На рис. 2.3а приведены три символа так назы-
£12^—L wal (О,д)
’1!г~оуг ^[z
Рис. 2.2. Символы, представленные Рис. 2.3. Символы, представленные
точками в одномерном и двумерном точками в двумерном сигнальном
сигнальном пространстве и времен- пространстве и временными функ-
ными функциями киями
ваемого трансортогонального алфавита. В векторной интерпрета-
ции символы записываются следующим образом:
ро = Т^Ге° + “Н; Fi = Oeo-lei; Fs = - 2-/3 е0 + 2- ev
Вектор е0 умножается на один из трех коэффициентов: (1/2) /3
О или (—1/2)/ 3; ei — на один из двух коэффициентов: 1/2 или
— 1. Если векторы во и ej вращать относительно сигнальных то-
чек, то получим представления сигналов, имеющие три различ-
ных коэффициента для каждого вектора или два различных ко-
эффициента для е0 и три для et. Сигналы, составленные из функ-
ций /(0, 0) и /(1, 0) или wal(0, 0) и —sal(1, 0), показаны внизу
векторной диаграммы:
^о(0)=~/з’Г(О.0)+ Л(0)=-/(1,0);
^(0) = -4-/3f(O,0)+ 2-/(1, 0);
59
Fo(9) = —]/3wal(0, 0)— A_Sal(l, 9); 2^(9) = +sal (1, 9);
F2 (9) = — /3 wal (9, 9)— -j-sal (1, 9).
На рис. 2.36 показаны четыре символа так называемого биор-
тогонального алфавита: F0=eo; Fi=ei/ F2=—ei; F3=—eo. Эти сим-
волы очень похожи на символы, изображенные на рис. 2.2г. Сход-
ство исчезает, если символы составляются из более чем двух век-
торов или функций.
Пунктирные линии на рис. 2.3 показывают расстояние между
сигнальными точками. Все сигнальные точки трансортогонального
алфавита (рис. 2.3а) отстоят друг от друга на одинаковом рас-
стоянии. Разности Fi—Fo; F2—Fj и Fo—F2 — векторы, соединяю-
щие сигнальные точки 0 и 1, 1 и 2, 2 и 0 соответственно. Квадрат
их длины равен 3:
с*- ’’•>*= (~г - т=т+т=3;
(F.- FJ-= (А /3 е, + А е,у = А + А = 3;
(Fo- рз)2= (/Зе0)2=3.
Если символы представлены функциями, а не векторами, то
скалярные произведения необходимо заменить интегралами от
произведений соответствующих функций, как показано в ф-ле
(2.5). Отсюда следует:
1/2
J [^(0)-Fo(9)fd9=
—1/2
d0= 3;
—1/2
IЯ
j‘[F2(9)-F1(9)N9= $ Г±]/3/(О, 9)-Af(ii0)pe = 3;
-1/2 -1/2 L
1/2
-1/2
[F0(9)-F2(9)pd9=
[/ЗД0, 9)]2d9 =
3.
Л(0)—Fo(O) есть функция, которую необходимо сложить с симво-
1/2
лом Fo(O) для того, чтобы получить символ Fi(Q). Если J F^(Q)d9
-1/2
1/2
есть энергия сигнала Fx(0), то [Л (9)—Fo(0)]ad9 есть энергия,
“1/2
необходимая для преобразования символа Л>(0) в символ Л(й).
Квадрат расстояния между сигнальной точкой и началом коорди-
нат представляет собой энергию этого сигнала.
На рис. 2.4 показаны символы, составленные из трех векторов.
Вершины представляют собой сигнальные точки. Ребра между ни-
60
представляют расстояния между близлежащими точками. Еди-
ные векторы ео, ei и е2 не показаны. Нормировка в данном слу-
Lотличается от нормировки на рис. 2.2 и 2.3. Она выбрана та-
j образом, чтобы расстояния между соседними сигнальными
^ками на рис. 2.4а,
и
бив были равны. Значения коэффициентов
2)
S)
Рис. 2.4. Символы,
представленные точками в трехмерном сиг-
нальном пространстве
6)
2
екторном пространстве зависят от ориентации единичных век-
1>в е;. Например, четыре символа трансортогонального алфави-
йоказанные на рис. 2.4, могут быть записаны следующим обра-
= + ф % + ф/З е, --1 /2/3
F1 = 0ео - А УУех/ГУУе,;
= - ф е„ + 2- /зе1 - ± угг У;
О 1Л
F3 = 0 ео + 0 е1+4-/ Л/Те,.
4
; з
Йгия всех символов одинакова: F£= F?= F2= F? = —.
Г о 1 2 з 8
ртояния между четырьмя сигнальными точками тоже равны:
^FJ8=(F0—F8)8=...b=(F,—Fj)8=l.
И;а рис. 2.5а показано представление этих четырех символов
йя прямоугольными импульсами f(0, 0); f(l, 0) и f(2, 0), а так-
г^ремя импульсами Уолша wal (0, 0); —sal (1, 0) и —cal (1, 0).
В случае биортогонального алфавита (рис. 2.46) разумно так
рнтировать систему координат, чтобы на каждой оси были
Положены точки двух противоположных сигналов. При этом по-
дается следующее простое векторное представление: Fo=eo; Fi =
F2=e2; F3=—е2; F4=—et; F5=—e0.
Символы, составленные из трех прямоугольных импульсов или
рех функций Уолша, показаны на рис. 2.56.
Символы алфавита, показанные на рис. 2.4в, можно записать в
простой форме, если оси системы координат пересекают гра-
уба в их центрах:
61
F0 = во + ei + ®2>
Fi = во + в! —
F2 = ®О ®1 ~Ь ®2»
Fs = ео—ei
f4 = —е» + ei + ег;
Fe = ®о + е1 ®2»
F« = — ео—ei + e2;
F7 ~ ~~ ®О е1 ®2-
На рис. 2.5в показаны эти символы, составленные из трех пря-
моугольных импульсов и из трех импульсов Уолша.
---ГтзП Р
-------------L №11(0,&)
iiZslt=L п__р - cat ft е)
Рис. 2.5. Символы рис. 2.4, представленные временными функ-
циями
Если символы состоят из более чем трех векторов, то нагляд-
ность векторного представления теряется. Символы некоторых ал-
фавитов можно легко поставить в соответствие с четырьмя и более
векторами или функциями. Это справедливо, например, для сим-
волов биортогонального и двоичного алфавитов (рис. 2.56 и в).
Однако уже трансортогональные алфавиты требуют существенных
вычислений. В общем случае из т функций можно построить
(т+1) символов трансортогонального алфавита. Эти т+1 сим-
волы определяются m(m + l) коэффициентами a%(j); 1, ..<
т—1; х=0, 1, ..., т. Для их вычисления используются следующие
условия:
а) энергия всех т+1 символов одинакова. Это утверждение
дает т условий;
б) расстояния между каждой парой из т+1 символов равны
Существует т+ (т—1) + (т—2) + ... + 1=-~-т(т+1) таких рас-
стояний. Итак, для определения m(m+l) коэффициентов имеется
— m(m+3) уравнений. Значительное число коэффициентов мож-
но выбрать произвольно или определить их из дополнительных ус-
ловий.
62
2.1.3. Дискретизация и ортогональное разложение
Теорема отсчетов из анализа Фурье гласит, что сигнал, состоя-
щ из суперпозиции периодических синусоидальных и косинусои-
Льных функций sin 2nft и cos 2nft с частотами в интервале
^/^А/, можно полностью определить 2А/ отсчетами его значе-
<й в секунду, если А/ измерена в герцах [1—6]. Эта теорема бы-
i обобщена Клуванеком для других полных систем ортогональ-
jx функций (7]. В сущности, теорема отсчетов Клуванека гласит,
о сигнал, состоящий из суперпозиции функций fc(q>T, t/T) и
ГчрТ, t/T) с частостями в интервале О^ф^Аф, полностью опре-
йяется 2Аф отсчетами его значений в секунду, где Дф измерена
gjps. В этом параграфе будет показано, что дискретизация ча-
пноограниченного сигнала математически эквивалентна его
L . „ sinn (0 4-/)
рюжению по неполной ортогональной системе —Я(0-р •) ’
D, ±1, ±2.....Соответствующий результат для частостноогра-
^енного сигнала, составленного из функций Уолша, будет рас-
йгрен позже.
Частотноограниченный сигнал F(Q), не имеющий составляющих
армированной частотой v=fT>l/2, можно разложить в ряд по
гогональным функциям, значения v которых лежат в интерва-
/—l/2^v^l/2. Для этого пригодны синусоидальные и косину-
(дальные импульсы, импульсы Уолша, полиномы Лежандра
£ д. Ниже будет использована следующая система синусоидаль-
к и косинусоидальных импульсов, причем для упрощения вы-
;лений введен фазовый угол 1/4 л:
r?(0, v)= 1;
Я (j, v)= q (21, v) = yr2”cos(2n i v 4- л/4);
q (2i — 1, v) = У 2 sin (2л i v4-J^4),
q(j, v) = 0 для v> 1/2 и v<— 1/2;
J = 0, 2i, 2i—1, i = l, 2......
j Разложим преобразование Фурье G(v) сигнала F(i0) в
Им импульсам:
G (v) = а (0) 4- 2 ° (2‘ — 0 /2sin (:
i=l '
4- a (2i) У 2 cos ^2л / v 4~ -
1/2 1/2 _ , ,
а (0)= j G(v) d v; a (2t) = J G (v) У2 cos(2niv 4-rt
—1/2 -i/2 ' 4 ‘
a(2i —
2л t v — л) 4-
4 /
л
V.
(2.8)
ряд по
(2.9)
5ратное преобразование Фурье дает F(0)= J [G(v)(cos 2лу9 4*
63
4- sin 2rtv0)]dv. Подставим в полученное выражение вместо G(v)
сумму (2.9). Имея в виду, что функция G(v) равна нулю вне ин-
тервала —l/2^v^l/2, получаем
Л0)=а(О)^- + у
a(2i— 1) sinn(e~° + а (2г) sinn<e + ») 7 (2.10)
я (0 — i) я (0 + z) J
t=l
Таким образом, частотноограниченный сигнал F(0) можно пред-
ставить рядом по неполной ортогональной системе функций вида
sinx/x. Из § 1.1 следует, что эти функции ортогональны. Это мо-
жно проверить, оценив интеграл
sinn (0 + Л) sin л (0 + /)
л (0 + А) л (0 + /)
(2.11)
k, /= 0; ± 1, ±2, . . .
Коэффициенты а(0); а (2г— 1) и а(2г) в ф-ле (2.10) можно по-
лучить путем отсчетов значений сигнала F(0) в моменты време-
ни 0=//7'=О, ±1, ±2, ... . Например, при 0 = 0 все функции
sin л (0 — i) sin я (0 + i) sin л0 . _
----а — и х—L-£- равны нулю, а —— равна 1. Та-
я(0—о------------л (0 + 0 Л0
ким образом, находим F(0)=a(0).
Из выражения (2.11) следует, что коэффициенты а(0), а(2г) и
а (2г—1) также можно получить при помощи ортогонального раз-
ложения F(0) по функциям вида :
F /0^i"H(O + /) dQ =
Л(0 + /)
Г а (0) = F (0),
а (2г) =F(-0,
. а (2i—1)= F (г),
/ = 0;
/ = г; (2-12)
j=—г.
Эквивалентность дискретизации и ортогонального разложения
свойственна не только частотноограниченным сигналам. Сложим
сигнал F(0) с конечным числом дискретных колебаний ^nsin2nvn0
и Bncos 2nvn0 с vn>l/2. Идеальный фильтр нижних частот с ча-
стотой среза v=l/2 будет подавлять эти дополнительные колеба-
ния. Применяя дискретизацию, можно получить коэффициенты
а(0), а(2г) и а(2г—1). Ортогональное разложение нового сигна-
ла F(0) +Ansin 2лтп'0 + ^п cos 2nvn0 позволяет получить те же ко-
эффициенты, так как функции Ап sin 2nvn0 и Вп cos 2nvn0 не влия-
ют на их образование:
f [F(e)+41sin2«vn0+B„ cos2nvn0]sin ^(Q+/)d0 = С F(0)^®-U1 X
J л (0 + J) J я (0 + /)
Xd0; (2.13)
64
у’, fn> 1/2Т- 0 = //Т.
Ьтается показать, что добавление к сигналу F(8) сигнала со
Елошным спектром также не влияет на величину коэффициентов.
F Прибавим к JF(8) сигнал £>(©), причем £>(0) не содержит коле-
|ний с частотами | v| < 1/2. Тогда преобразование Фурье от £)(0)
влжно быть равно 0 в интервале — l/2^-v^l/2. С другой сто-
вны, преобразование Фурье от функций 81ПЯ(е + /) равно q вне
г я (0 + /)
кого интервала. Таким образом, оба преобразования Фурье орто-
рнальны друг к другу; поэтому должны быть ортогональны и вре-
Ьнные функции:
si.n?<e + /) = о
Л(0 + /)
(2.14)
2.1.4. Схемы для ортогонального разделения1)
? На рис. 2.6 показана функциональная схема системы для пере-
учи пяти коэффициентов a*(j) с использованием ортогонального
|зделения. На передающем конце генератор функций ГФ гене-
Рис. 2.6. Функциональ-
ная схема системы для
Ьередачи сигнала орто-
тональными функциями
KL 0):
|£Ф — генератор функций;
Й7 — перемножитель; И —
«интегратор; У — усилитель
рирует пять функций /(0, 0), ...» /(4, ’GJ, которые ортогональны на
интервале (—4/2) T^t< (1/2) Т. Пять коэффициентов а* (0), ...»
Ь (4) представлены в виде уровней напряжений, имеющих посто-
янное значение в течение интервала времени (—1/2) (1/2) Т.
В перемножителях функции f(j, 0) умножаются на коэффициенты
Пять произведений a*(j)f(j, 0) суммируются с помощью ре-
зисторов R и 'операционного усилителя У. Полученный сигнал
[передается по линии связи. На приемной стороне принятый сигнал
Поступает через усилитель У на пять перемножителей, где одно-
временно перемножается с каждой из пяти функций f(j, 0), ис-
пользуемых в передатчике в качестве переносчика коэффициентов.
Генераторы функций ГФ в передатчике и приемнике должны быть
R' f) См. более детальное рассмотрение схем в (1—5).
В—322 65
синхронизированы. Сигналы, полученные на выходах перемножи-
телей, интегрируются в интеграторах в течение интервала времени
(—1/2)7^/<(1/2)7.
Выходные напряжения интеграторов в момент времени t— (1/2) Т
представляют собой коэффициенты ах(0), ах(4).
Другой набор из пяти коэффициентов ах(0)... ах(4) переда-
ется в течение интервала времени (1/2)7^/<(3/2)7. Здесь снова
требуются функции /(О, 0)../(4, 0) от ГФ на приемном и пере-
дающем концах. Таким образом, эти функции являются перио-
дическими с периодом Т. Напряжения, соответствующие в пере-
датчике коэффициентам ax(j) на интервале времени (—1/2)7^
<;/< (1/2)7, мгновенно меняются в момент времени /=(1/2)7 и
соответствуют коэффициентам ax(j) на интервале (1/2)7^/<
<(3/2)7. Интеграторы в приемнике в момент времени /=(1/2)7
возвращаются в исходное состояние и начинают интегрировать на-
пряжения, получаемые от перемножителей на интервале (1/2)7<:
^/<(3/2)7.
Для практического применения функциональная схема, изобра-
кенная на рис. 2.6, должна быть дополнена цепью синхронизации.
£роме того, для преобразования в желаемый вид коэффициентов
ax(j), вводимых в передатчик, и коэффициентов, получаемых в
приемнике, необходимы модуляторы и демодуляторы.
На рис. 2.7 показана схема для генерирования периодически
повторяющихся функций Уолша wal(j, 0) или cal (/, 0) и sal(7, 0).
Эта схема основана на тео-
реме умножения функций
wal (/, 0) (1.29).
Триггеры 71—74 дают на
выходе функции wal (1, 0) =
= sal (1, 0), wal (3, 0) =
= sal (2,-0), wal (7,0) = sal (4,0)
иwal(15,0) =sal(8,0). Пере-
множители, показанные на
рис. 2.7, образуют из этих
функций Радемахера пол-
ную систему функций Уол-
ша sal (1, 0), cal (1, 0), . .
sal (8,0). В качестве функ-
ции wal (0,0) используется
постоянное положительное
напряжение. Перемножите-
ли представляют собой пе-
реключатели, действующие
согласно табл. 2.1а, так как
функции Уолша принимают
только значения ±1. Срав-
нение табл. 2.1а с таблицей
wal (1,6)
wal (ff,0)
wal (0,0)
sat (/, в)
cat (7,0)
- sat (2,0)
cat (2,0)
sal (J, 0)
cal fj,0’
sat (4,0;
cat (>/,O)
sat (5,6)
cat (5,0)
sat (8,0)
cat (6,0)
sat (7,0)
cat (7,0)
sal (8,0)
7м>.„0
—
8
Рис. 2.7. Генератор периодических функций
Уолша:
Т — триггер; П — перемножитель
66
с большими зна-
вызывает труд-
генератор функ-
а
+11
+1
—1
— 1
о
1
0
1
1
О
—1
ртинности полусумматора (табл. 2.16) показывает, что в качестве
ремножителей на рис. 2.7 можно использовать полусумматоры,
ли условиться принимать положительное напряжение +V за (У,
отрицательное напряжение —U
1. Обобщение схемы для гене-
ации функций
ениями i не
гостей.
Рассмотрим
(ий Уолша, имеющий 20 счетных
риггеров, а не четыре, как пока-
1ано на рис. 2.7. В этом случае
ожно получить 220= 1 048 576
азличных функций Уолша. Для
енерации любой из этих функций
ребуется 19 полусумматоров,
очность их частости будет зависеть от стабильности генератора
актовых импульсов, управляющего триггерами. Здесь не возника-
т проблем дрейфа или ухода параметров. Полезно сравнить слож-
ость такого генератора со сложностью частотного синтезатора, ге-
ерирующего миллион отдельных синусных функций. С другой
тороны, время переключения самых быстродействующих импуль-
ных схем заключено между 0,1 и 10 нс. Это ограничивает в на-
тоящее время высшую частость функций Уолша величинами по-
ядка 108zps = lOOMzps—1010=10 Gzps. Синусоидальные коле-
ания с частотами 100 МГц—10 ГГц были получены десятки лет
азад.
На рис. 2.8 показан генератор синусоидальных и косинусои-
дальных колебаний стабильной фазы для импульсов, изображен-
ных на рис. 1.1 и 1.9. Триггеры А и Т2 производят на выходе функ-
и Радемахера, из которых фильтрами выделяются основные си-
нусоидальные функции. Первая гармоника имеет втрое большую
астоту, чем основное колебание. На практике лучше не ставить
фильтры, а добиваться хорошей аппроксимации гармонических
функций суперпозицией функций Радемахера.
Существуют три основных типа перемножителей. Первый пере-
ножает два напряжения, принимающих только два значения, ска-
ем, +1 и —1. Этот вид перемножителя реализуется логическими
схемами. Второй тип перемножителя перемножает напряжение Ui,
принимающее произвольные значения, и напряжение прини-
мающее конечное число значений. На рис. 2.9а показан пример
акого перемножителя. Напряжение V2 принимает только значе-
ния + 1 или —1. Выходное напряжение равно Н- или —Uif где
может принимать любое значение внутри диапазона выходных
напряжений операционного усилителя У. Схема работает следую-
щим образом: неинвертирующий вход ( + ) усилителя заземлен,
если полевой транзистор насыщен. Напряжение U3 должно быть
равно —(71, чтобы инвертирующий вход (—) также имел потен-
циал «земли». Пусть полевой транзистор закрыт. Тогда неинвер-
3* 67
Таблица 2.1
Таблицы истинности для перемножи-
теля двух функций Уолша (а) и по-
лусумматора (б)
б ~
~j i~
тирующий вход будет находиться под напряжением Щ и инверти-
рующий вход также должен быть под напряжением Vi. Из этого
следует, что U3 должно быть равно Ui. Разновидность такого пе-
ремиожителя показана на рис. 2.96.
Рис. 2.8. Генератор стабиль-
ных по фазе синусоидаль-
ных и косинусоидальных
функций:
Т — триггер; Ф — фильтр
cat (1,0)
—* и, cal(i,O)
- cal(t,0)
sat (i, 0)
—- IL sat (i, в)
Рис. 2.9. Перемножитель для перемножения
произвольной функции с функциями Уолша:
а) простое перемножение; б) параллельное
саЛ(к,О)
cal (к, 0)
перемножение
Перемножитель третьего типа перемножает два произвольных
напряжения. В принципе, эти перемножители могут быть построе-
ны на эффекте Холла, на -полевых транзисторах или на логариф-
мических элементах. Однако обычно они мало пригодны для прак-
тического использования из-за их низкого входного и выходного
сопротивлений, температурного дрейфа, стоимости и т. д. Очень
удобен перемножитель с диод-
ным мостом. Его схема показана
на рис. 2.Ю. Перемножитель от-
личается от обычных отсутствием
трансформаторов.
Рис. 2.10. Перемножитель, использу-
Рис. 2.11. Интегратор
ющий диодный мост
Напряжение U2 на рис. 2.9a принимает только значение +1
или —1, поэтому его можно представить одним двоичным симво-
лом. Четырьмя двоичными символами можно представить напря-
68
Рис. 2Л2. Детектор синусо-
идальных и косинусоидаль-
ных импульсов sin2ni//T и
cos initjT, изображенных
на рис. 1.1
ение, имеющее 16 возможных значений. Соответствующий пере-
южитель содержит четыре полевых транзистора, а не один, как
казано на рис. 2.9а, и более сложную схему резисторов. Такой
ремножитель был предложен Р. Шмидом. Он дает хорошие ре-
гльтаты, но одно из напряжений долж-
Э быть представлено в цифровой форме.
На рис. 2.11 показан интегратор. Бла-1
5даря емкостной обратной связи в опе-
чционном усилителе выходное напряже-
ie пропорционально интегралу входного
очень большой степенью точности,
люч К возвращает интегратор в исход-
ов состояние, разряжая конденсатор. В
рактических схемах роль этого ключа
выполняет полевой транзистор.
i. С помощью перемножителя, интегра-
ра и генератора функций можно, в
инципе, выделить любую функцию.
1я специальных функций необходимо
здавать более сложные схемы. На рис.
2 показан детектор для синусоидальных и косинусоидальных им-
иьсов (рис. 1.1). Для выделения сигналов в этой схеме использует-
тот факт, что синусоидальные и косинусоидальные импульсы
\2ni(tlT) и cos2n/(7/T) являются собственными функциями сле-
ющего дифференциального уравнения:
у"4-4л212Т-2у = 0; у(-Х-т\^и[—Т\\
\ 2 / \ 2 /
«/' r7W(v7’)- (2-15)
\ “ / \ £ /
ходное напряжение и3(7) усилителя (рис. 2.12) равно
“а (0 = (7?jCx) J Uj (0 Л — № ^i) J (0«//. (2.16)
модное напряжение uk(t) =—u2(t) усилителя У2 равно
(0 = - (/?< Q-* J u,(0 dt = (/?1C&CJ-1 J J И1 (/') dtdt' +
+ (₽aCi₽4C2) 1 J J u^(t')dtdt' — —Оа(0- (2.17)
важды продифференцировав выражение (2.17) и собрав члены,
>лучаем
и2(0 4* (^a^i^V-a) ua (0 = «1(0- (2.18)
озьмем R2CiRiC2= (Т/2л1)2. Тогда левые части выражений (2.15)
(2.18) будут одинаковыми. Неоднородный член ut(t) равен
cos 2nkt/T или Uk sin 2nkt/T для (—1/2) (1/2) Т. Вид Ui(t)
не этого интервала нас не интересует, так как ключи и К2 за-
ыкаются в момент времени /=(±1/2)7’. Напряжения и.з(Т12) и
к(Т12) равны нулю, если i=£k и Rt = niR2; Ui sin 2xitlT дает
69
и3(Т/2)=с> и iii(T/2) = (—1)Ф». На рис. 2.13 показаны напряже-
ния u3(t) и «4(0 для i=k=l. На рис. 2.14 показаны огибаю-
щие м3(0 Для i=128 и выходных напряжений Ukcos 2nkt/T с
fc=128, 129, 130. Это означает, что схема настроена на выделение
косинусоидального импульса с часто-
той 128 Гц и что ко входу приложены
косинусоидальные импульсы с часто-
тами 128. 129, 130 Гц.
Рис. 2.13. Типичные на-
пряжения в схеме
рис. 2Л2:
а) входное напряжение
Ui(t) = Usin2nt/T; б) и
в) напряжения uz(t) и
г) входное напря-
жение Ui(t) = Ucos 2nt/T;
д) и е) напряжения
И Ui(t)
Рис. 2Л4, Типичные напряже-
ния в схеме рис. 2.12. Схема
построена на обнаружение си-
нусоидальных и косинусои-
дальных импульсов с /=128.
Показанные выходные напря-
жения из(1) соответствуют
входным напряжениям u^(t) с
/=428 (а)\ /=129 (б) и /=180
(в). Длительность развертки
Г=78 мс
Потери в схеме, показанной на рис. 2.12, сравнимы с потеря-
ми в механических резонаторах. На частоте 100 Гц без использо-
вания регенерации достигаются добротности в несколько тысяч.
Схема применяется на частотах от 1 Гц до 100 кГц. Нижний пре-
дел определяется потерями, а верхний — предельной частотой опе-
рационного усилителя [6].
2.1.5. Передача цифровых сигналов синусоидальными
и косинусоидальными импульсами !)
Через идеальный фильтр нижних частот с полосой 1 Гц пря-
моугольный импульс можно передать в течение секунды. Это есть
предел скорости передачи прямоугольных импульсов при их об-
1) В [1—11] приведено несколько примеров систем передачи информации с
использованиехМ ортогональных функций.
70
Рис. 2.15. Приподнятые коси-
нусоидальные импульсы во вре-
меннбй области: I+cos 2я//Т;
14-cos 2л (t—Т)/Т и 1 И-cos 2л X
ружении с помощью отсчетов значении сигнала без коррекции
^символьных искажений. Та же скорость передачи сохраняется
[Я «приподнятого» косинусоидального импульса. Некоторые из
их импульсов показаны на рис.
15. Эти импульсы неортогональны,
) линейно независимы. Их можно
бнаружить с помощью отсчетов
начений сигнала. Обнаружение с
^пользованием взаимной корреля-
ии с опорными функциями тре-
ует применения схем, исключаю-
щих влияние межсимвольных иска-
<ений.
тл Sin я (0 ±/) , _
Импульсы-------—-— позволяют передавать в полосе 1 Гц два
я (9 ± /)
мпульса в секунду. Однако на практике их применять нельзя. Ес-
и передавать последовательность таких импульсов, то может по-
виться произвольно большая амплитуда сигнала; любое незначи-
ельное отклонение синхронизации от идеальной может привести к
[роизвольно большим перекрестным искажениям. При использо-
вании дискретизации не существует способа для передачи инфор-
мации с большей скоростью, чем половина скорости Найквиста, по
крайней мере, если не прибегать к увеличению мощности.
Синусоидальные и косинусоидальные импульсы (рис. 1.1 и 1.9)
позволяют передавать информацию быстрее, чем один импульс в
секунду в полосе 1 Гц. За счет усложнения аппаратуры можно
сколь угодно близко подойти к пределу Найквиста — два импуль-
са в секунду в полосе 1 Гц. Это можно видеть из рис. 2.16, на ко-
тором показаны три системы функций. Первая состоит из пря-
моугольных импульсов длительностью Т. Их частотный спектр
мощности показан справа. Полоса частот, необходимая для пере-
дачи, определяется ориентировочно неравенством: O^f^.fg=\/T.
При этом может быть передан один прямоугольный импульс в се-
кунду в полосе 1 Гц.
Имеет смысл представить прямоугольный импульс как функцию
wal (0, 0) (рис. 1.1) и передавать прямоугольный, синусоидальный
и косинусоидальный импульсы длительностью ЗТ вместо трех
прямоугольных импульсов, каждый длительностью Г. Спектр мощ-
ности импульсов показан на рис. 2.16. Полоса частот, необходимая
для передачи, умньшается до 0^i/^2fg/3 = (2/3)Т. Таким образом,
в течение секунды в полосе 1 Гц можно передать полтора им-
пульса.
Рассмотрим следующий шаг. Вместо передачи набора из пяти
прямоугольных импульсов длительностью Т каждый одновремен-
но можно передавать один прямоугольный, два синусоидальных и
два косинусоидальных импульсов длительностью ЬТ. Требуемая
полоса частот уменьшается до 0^/^3(/g/5) = (3/5) Т согласно
рис. 2.16. Это означает, что в течение секунды в полосе 1 Гц пе-
редаются 1,67 импульсов.
71
Рис. 2.16. Сравнение необходимой полосы пропускания для различ-
ных систем функций
Таблица 2.2
Число 2*4-1 различных форм импуль-
сов и число (2*+1)/(Н-1) импульсов,
передаваемых в полосе 1 Гц в тече-
ние 1 с
24-1 24-1 Ж 2/4-1 24-1 »+!
1 1 7 1,75
3 1,5 9 1,8
5 1,67 11 1,83
Требуемая полоса частот для
одновременной передачи одного
прямоугольного импульса, i сину-
соидальных импульсов и i коси-
нусоидальных импульсов дли-
тельностью (2/ 4-1) Т равна
(i +1) / (2j +1) Г *). Скорость пе-
редачи информации равна
(2«+ !)/(/+1) импульсов в секун-
ду в полосе частот 1 Гц. Эта ско-
рость приближается к двум для
больших значений i.
В табл. 2.2 показаны значения
для числа 2i-M различных форм
импульсов и для числа (2i’+ l)/(i+4) импульсов, передаваемых в
полосе 1 Гц в течение одной секунды. Можно видеть, что число
различных форм импульсов, а следовательно, и сложность обору-
дования быстро увеличиваются с приближением (2i+1)/(7+1) к
двум.
В табл. 2.3 приведены функции, описывающие синусоидальные
и косинусоидальные импульсы, частоты периодических колебаний
и их использование в многоканальной телетайпной системе. Пере-
дача является не стартстопной, но синхронной. Телетайпные сигна-
лы, приходящие асинхронно, должны быть направлены в буфер-
ное устройство, откуда они синхронно поступают в передатчик
f) В [14] дано углубленное рассмотрение распределения энергии вне этой
полосы частот. В ней рассмотрено применение принципа Кречмера о частичном
отклике на сигналы, состоящие из суммы синусоидальных и косинусоидальных
импульсов.
72
Таблица 2.3
Использование синусоидальных и косинусоидальных функций
в многоканальной телетайпной системе
Ьункция f. Гц Номер канала Номер символа Функция f, ГЦ Номер канала Номер символа
Ь(0, 0) 0 синхронизация sin 18 л 0 60 3 5
Е несущей cos 18 л 0 60 4 1
Ел 2 я 0 6,67 синхронизации sin 20 л 0 66,67 4 2
символов
|os2 л 0 6,67 cos 20 л 0 66,67 4 3
tin 4 л в 13,33 1 1 sin 22 л 0 73,33 4 4
EOS 4 л 0 13,33 1 2 cos 22 л 0 73,33 4 5
«in 6 л0 20 1 3 sin 24 л 0 80 5 1
EOS 6 Л 0 20 1 4 cos 24 л 0 80 5 2
bin 8 л0 26,67 1 5 sin 26 л 0 86,67 5 3
ко$8л0 26,67 2 1 cos 26 л0 86,67 5 4
Bin 10 л 0 33,33 2 2 sin 28 л 0 93,33 5 5
cos Юл0 33,33 2 3 cos 28 л 0 93,33 6 1
^1л12л0 40 2 4 sin 30 л 0 100 6 2
jcos 12 л 0 40 2 5 cos 30 л 0 100 6 3
Bin 14 л 0 46,67 3 1 sin 32 л 0 106,67 6 4
cos 14 л 0 46,67 3 2 cos 32 л 0 106,67 6 5
sin 16 л 0 53,33 3 3 sin 34 л 0 113,33
cos 16 л 0 53,33 3 4 cos 34 л 0 113,33
ис. 2.6). Для того чтобы можно было использовать обычное те-
:тайпное оборудование, на приемной стороне в сигналы нужно
сбавить стартстопные импульсы. Длительность телетайпных сиг-
алов предполагается равной 150 мс. Периодический сигнал
1п2л//Г с Г=150 мс и 1/7’=6,66 Гц пересекает нулевой уровень в
ачале и конце посылки с отрицательной производной и исполь-
уется в качестве сигнала синхронизации.
Согласно табл. 2.3 телетайпная система может работать с 100—•
00 телетайпными каналами в полосе телефонного канала в за-
исимости от качества последнего. При таком большом числе ка-
налов становится важным вопрос нагрузки по мощности. Иссле-
.ования показали, что вероятность ошибки, равную 10-7 и ме-
:ее, можно достигнуть без превышения допустимой нагрузки по
ющности. Это справедливо для передачи между двумя абонен-
ами телетайпа, т. е. для условий гораздо более жестких, чем пе-
редача между двумя телефонными станциями. При этом не ис-
ользовлись ни кодирование, ни другие методы уменьшения ве-
роятности ошибок. Для сравнения широко используемая система
‘ЕЛЕКС имеет 24 телетайпных канала в одном телефонном, но
73
J
превышает допустимую нагрузку по мощности в три раза. Превы-
шение нагрузки по мощности — обычное явление для систем высо-
коскоростной передачи информации. Существует, по крайней мере,
система, которая занимает полосу частот, равную полосе частот
телефонного канала, но которая потребляет энергию восьми кана-
лов при скорости передачи 2400 —— - . Необходимо указать, что
С
синхронная система очень чувствительна к скачкам фазы, которые
появляются в переключаемых телефонных сетях, работающих на
большие расстояния. Вероятность ошибки может достигнуть 10~3
и более в зависимости от того, насколько быстро восстанавливав
ется синхронизация.
Одной из причин, по которой синусоидальные и косинусоидаль-
ные импульсы обеспечивают надежную передачу, является то, что
телефонные каналы разрабатываются для передачи без помех пе-
риодических синусоидальных и косинусоидальных сигналов. Сину-
соидальные и косинусоидальные импульсы, содержащие очень мно-
го периодов, по своим свойствам приближаются к периодическим
сигналам и претерпевают малое запаздывание и затухание. Дру-
гая причина заключается в том, что ошибки в телефонных кана-
лах вызываются в основном импульсными помехами, а не тепло-
вым шумом. Ниже будет показано, что тепловой шум воздейству-
ет на ортогональные импульсы всех форм одинаково. Импульсные
помехи, однако, эффективнее всего воздействуют на прямоуголь-
ные импульсы при условии, что для их обнаружения используется
дискретизация сигнала.
2.2а
ХАРАКТЕРИСТИКА КАНАЛОВ СВЯЗИ
2.2.1. Частотное затухание и фазовый сдвиг канала связи
Каналы связи обычно характеризуются затуханием и фазовым
сдвигом гармонических колебаний как функциями их частоты. Ко
входу прикладывается напряжение U cos cot а на выходе измеря-
ется установившееся напряжение 14 (со) cosсо![/—4(со)]. Функции ча-
стоты lg U/Uc(to) =ас(<о) и со/с(<о) =&с(<о) являются затуханием и
фазовым сдвигом. Индекс с можно опустить, если затухание и фа-
зовые сдвиги колебаний [7 cos со/ и U sin со/ одинаковы. Так как хо-
рошо известно, что периодические синусоидальные и косинусои-
дальные функции передают информацию с нулевой скоростью, то
интересно выяснить, почему же они используются для описания
каналов связи.
Разделим канал связи на линию связи и аппаратуру на концах
этой линии. Линия описывается дифференциальным уравнением в
частных производных. Оконечная аппаратура описывается обык-
новенными дифференциальными уравнениями, если только их по-
рядок не очень высок. В частности, она будет описываться диф-
74
унциальным уравнением с постоянными коэффициентами, если
менты схемы являются инвариантными во времени, такими, как
гушки индуктивности, конденсаторы и резисторы. Синусои-
гьное напряжение, приложенное ко входу такой схемы, появля-
я на выходе как напряжение с меньшей амплитудой и со сдви-
[ фазы; синусоидальная форма и частота сохраняются. Таким
>азом, схему можно описать частотными характеристиками за-
дняя и фазового сдвига. Описание другими функциями, напри-
р функциями Уолша, вполне возможно, но оно затруднено тем,
Э форма этих функций изменяется.
” Рассмотрим линию передачи, описываемую телеграфным урав-
нием [1—3]:
— _ LC— — (LA + /?С) — — RAw =0,
дх2 dt2 v ' dt
(2.19)
e L, C, R и A — индуктивность, емкость, сопротивление и прово-
гмость на единицу длины. Линия не вносит искажений, если
l=RC. В этом случае общее решение запишется в виде:
w (X, t) = е-* If (X — d) 4- q (х Д- d)J,
a = (LA + RC)/2LC, с=1/l^LC, LA- RC = 0. (2.20)
к—ct) и q(x—ct) — произвольные функции, определяемые на-
льными и граничными условиями. Во время передачи сигналы,
исываемые этими функциями, претерпевают только затухание и
держку. Это свойство сохраняется и для линий, не свободных о г
кажений, если они являются «электрически короткими». Соглас-
К. В. Вагнеру (1] линия длиной х является электрически корот-
й, если для х выполняется следующее соотношение (2]:
‘<4/4-^=/?- (*•*>
В качестве примера рассмотрим открытую проводную линию.
;ва проводника представляют собой медные провода диаметром
мм, находящиеся на расстоянии 18 см. Выберем следующие ти-
ичные величины: А = 2,01-10~3 Гн/км; С = 5,910”9 Ф/км; R —
-4,95 Ом/км; Л = 0. Получаем Z = 540 Ом и 2Z/R=225 км. Эта ли-
ня может рассматриваться как свободная от искажений для рас-
стояний, меньших, чем 225 км. Поставив регенеративные усилители
ia расстояниях, меньших чем 225 км друг от друга, можно переда-
вать сигналы без искажений на любое расстояние.
В качестве другого примера рассмотрим телефонный кабель
ежду центральной телефонной станцией и абонентом. Проводин-
ами являются медные провода диаметром 0,8 мм в изоляции из
ропитанной бумаги. Выберем следующие типичные величины:
, = 7-10~4 Гн/км; С=3’3*10-» Ф/км; /?=70 Ом/км; 2=145 Ом;
ZjR — Ь км. Эта линия будет электрически короткой для ряда або-
юнтов, но не для всех.
Обычные коаксиальные кабели имеют волновое сопротивление
Z между 50—100 Ом. Пусть погонное сопротивление равно
75
10 Ом/км. Тогда 2Z/7? будет равно 10—20 км. Это есть порядок ве-
личины обычного расстояния между усилителями. Однако надо учи-
тывать, что телеграфное уравнение не учитывает скин-эффект. Ис-
следования скин-эффекта для функций, отличных от синусоидаль-
ных и косинусоидальных, очевидно, отсутствуют1).
Несмотря на эти результаты, синусоидальные и косинусоидаль-
ные функции играют значительную роль в теории передающих ли-
ний. Одной из важных причин этого является метод Бернулли для
решения дифференциальных уравнений в частных производных с
постоянными во времени коэффициентами. Предположим, что ш(х,
t) в (2.19) можно представить в виде произведения пространствен-
ной переменной и(х) и временной переменной v(t):
w (х, t) = и (х) v (t). (2.22)
Подстановка u(x)v(t) в (2.19) дает два обыкновенных дифферен-
циальных уравнения:
^ + (Х — 7?Л)и = 0;
dX\ а (2-23)
LC — + (LA + /?С) — +о= 0.
dt* v т dt
Их собственными функциями являются cos}/ (X—RA)x\ sin)/ (X—RA) x
и e?< , где у определяется следующим образом:
,, _ _ М + ГС , 1 \!LA + RC V____1_Г/2 /9 9Л\
У 2LC ± 4 Ц LC J £с] ' ’ '
Метод Бернулли имеет большое значение для нахождения ре-
шений телеграфного уравнения и других дифференциальных урав-
нений в частных производных, которые удовлетворяют определен-
ным начальным и граничным условиям. Однако этот метод реше-
ния пригоден перимущественно для синусоидальных и косинусои-
дальных функций. Линии с параметрами, зависящими от времени,
естественно, не допускают разделения переменных на пространст-
венную и временную.
Распространение электромагнитных радиоволн описывается вол-
новым уравнением, которое для одномерного случая можно полу-
, чить из телеграфного уравнения, если положить R=A = 0. Его об-
щее решение определяется выражением
w(х, /) = f (х — с/) 4- q(x + ct). (2.25)
Это решение имеет тот же вид, что (2.20), если не учитывать коэф-
фициент затухания е-"1. Таким образом, радиолиния ведет себя как
линия, не вносящая искажений. Радиоволны необязательно должны
быть синусоидальными или описываться синусоидальными функ-
циями. Соответственно радиоканалы необязательно должны раз-
личаться по частоте; они могут различаться по частости. Сущест-
*) Практически свободная от искажений линия на полупроводниках была
описана Мичэмом (3].
76
вуют важные практические аргументы в пользу разделения радио-
каналов по частоте, но эти аргументы связаны в основном с про-
стотой реализации приемников и передатчиков, а не с законами
1природы. Позже будет показано, что мобильная радиосвязь теоре-
тически возможна на основе волн Уолша.
Рассмотрим характеристики каналов связи под другим углом
зрения. Разумно описывать свойства канала с помощью функций,
которые определяются передаваемыми сигналами. Для передачи
цифровой информации было предложено так много форм импуль-
сов, что трудно выбрать одну из них и назвать только ее удобной
для описания канала. Это не распространяется иа телефонный ка-
нал. Обычно телефонный сигнал рассматривают как совокупность
синусоидальных и косинусоидальных колебаний. Следовательно, си-
нусоидальные и косинусоидальные функции оказываются наиболее
приемлемыми для описания телефонного канала. Трудность заклю-
чается в том, что не существует серьезной причины для того, что-
бы считать телефонный сигнал совокупностью синусоидальных и
косинусоидальных колебаний.
Рассмотрим речевой сигнал, представленный выходным напря-
жением микрофона. Продолжительный гласный звук дает напря-
жение, которое хорошо можно аппроксимировать суммой несколь-
ких синусоидальных колебаний. Система, производящая гласный
звук, инвариантна во времени и приводится в движение голосовы-
ми связками по закону синусоидальной функции. Такая система
описывается дифференциальным уравнением в частных производ-
ных с коэффициентами, не зависящими от времени, и синусоидаль-
ной возмущающей функцией. Но это не так для глухих согласных,
особенно звуков типов р, t или k. Система, производящая эти зву-
ки, описывается дифференциальным уравнением в частных произ-
водных с переменными во времени коэффициентами, а синусои-
дальная возмущающая функция отсутствует. Нет особой причины
рассматривать эти звуки как совокупность синусоидальных и коси-
нусоидальных колебаний, а не сигналов, описываемых функциями
другой полной ортогональной системы.
Экспериментальные исследования, проделанные Клайном, Бес-
веттером, Тасто, Люке, Мейлом и другими, показали, что речевые
сигналы вне сомнения можно рассматривать как совокупность сиг-
налов Уолша. Люке и Мейле создали телефонную многоканальную
систему, использующую фильтры, которые пропускают сигналы
Уолша до частости 4000 zps, а не синусоидальные и косинусоидаль-
ные колебания до частоты 4000 Гц. Заметных различий в характе-
ристиках систем не было обнаружено. Бесветтер построил анали-
затор и синтезатор для вокодера, использующего 16 фильтров, филь-
трующих согласно частостям функций Уолша, а не частотам сину-
соидальных функций. Клайн показал на некоторых примерах, что
ролос, разложенный по функциям Уолша, содержит «частостные со-
ставляющие» так же, как голос, разложенный на синусоидальные
и косинусоидальные функции, содержит «частотные составляющие»;
кги исследования продолжаются. Теоретические обоснования, объ-
5 77
ясняющие эти результаты, приведены в гл. 5. Сэнди уж в 1962 г.
использовал функции Уолша в теоретической работе по анализу
речи.
2.2.2. Описание канала связи параметрами
перекрестных помех
Ранее было показано, что каналы связи можно описать не толь-
ко синусоидальными и косинусоидальными функциями. Возникает
вопрос, как их еще можно характеризовать. Стройная теория свя-
зи, основанная на ортогональных функциях, требует метода описа-
ния каналов, который был бы применим ко всем или хотя бы ко
многим системам ортогональных функций. Заметим, что это более
общее описание упростит рассмотрение пропускной способности ка-
нала в гл. 6.
Рассмотрим полную систему ортогональных функций {f(j, 0)}.
Разделим ее на четные функции fc(i, 0), нечетные функции ft(i, Q)
и постоянную f(0, 0). Ко входу канала приложим напряжение
Ufc(i, 99 вместо iUccosat. Пусть в данный момент времени канал
имеет такие параметры, что на выходе появляется установившееся
напряжение 0—0c(i)]. Это будет справедливо для большо-
го класса систем функций {/(/, 0)} при условии, что используется
линия без искажений. Функция Uc(i)/U = Kc(i) или \gUIUc(i) =
—ac(i) есть обобщенное затухание канала связи. Функция Qc(i) =
=bc(i) есть обобщенная задержка, так как термин «фазовый
сдвиг» применим только для синусоидальных и косинусоидальных
функций.
Входное напряжение 'Ufs(i, 0) производит выходное напряжение
{ЛбО/Д 9—W1- Затухание и задержка определяются как
Us(i)fU = Ka(i); }gU/Us(i) = as(i) и Qs(i)=bs(i). Постоянная Uf(O,
0) дает U(0)f(0, 0-0(0)]; U(0)/U=K(0); lg U/>U(0) =a(0) и 0(0) =
Подстановкой растянем функции системы {/(0, 0); fc(i,
0); fs(i, 0)}. Будем безгранично увеличивать i и Как показано
в гл. 1, в этом случае получается система {/с(ц, 0); f3(p, 0)}. Функ-
ции Kc(i); Ks(i); ac(i); as(i); bc(i); bs(i) переходят в Кс(ц).
bs(n). В частности, для функций /с(ц. 0) = К2 соз2лц0=фг2 cosw/
и Д-(ц, 0) = V2 sin 2л|10= У~2 sin at получаем частотные функции
Кс(о>), .... bs(a). Индексы с и s можно опустить, если синусоидаль-
ные и косинусоидальные колебания одной частоты претерпевают
одинаковое затухание и задержку; получаются функции: К(ш);
а(ы) и Ь(а). Таким образом, описание каналов связи с помощью
частотных характеристик затухания и фазового сдвига является
частным случаем.
В общем случае сигналы 0) не только затухают и запаз-
дывают, но и искажаются. Вместо Uc(i)fc[i, 0—0c(i)] получается
выходной сигнал Uqc(i, 0). Разложим функцию qc(i, В) в ряд по
системе {ДО, 0—0С(7)]; fc[k, 0—0с(7)]; fj[k, 0—0С(7)]}. Значение за-
держки 0с(0 будет определено позже. Переменной теперь является
78
a i является константой (я=1, 2, i, .
qc(i, 0) = K(ci, 0)/[0, 8-0c(i)J + V {K(ci, ck)fc[k, Q-Qc(i)] +
+ K(ci, Sk)fs[k, o-0c (/)]};
К (ci, 0)= J qc (i, 0) /[0,0 — 0C (i)J d 0; (2.26)
--00
K(ci,ck)= J qc(i, Q)fc[k, 0-0f(i)]d0;
К (ci, sk)= J qc(i, Q)f$[k, 0- 0ДОМ0-
?ассмотрим интеграл K(ci, ck) для i=k. Его значение зависит от
ic(i)- Выберем 0c(i) таким образом, чтобы коэффициент К (ci, ci)
:тал максимальным. Тогда обобщенные задержки Qc(i)=bc(i)
1 Qs(i) = bs(i) определяются так, что с уменьшением искажений
)ни приближаются к значениям задержек для линии, не вносящей
щкажений.
Коэффициенты К (ci, 0); К (ci, ck) и K(ci, sk) являются обоб-
щениями затухания Kc(i) для канала связи с искажениями. Kc(i)
1меет одну переменную i и может быть представлен вектором.
К (ci, 0); К (ci, ck) и К (ci, sk) имеют две переменные i и k и могут
5ыть представлены матрицей K(ci):
К (cl, 0)1 К (cl, cl) K(cl, si)
К(с2, 0) К(с2, cl) К(с2, si)
К(сЗ, 0) К(сЗ, cl) К(сЗ, si)
К (cl, c2) . .
К (c2, c2) , .
К (c3, c2) . .
K(ci) =
. (2.27)
Если вместо напряжения Ufc(i, 0) приложить Ufs(i, 0), то по-
являются выходные напряжения Uqs(i, 0). Коэффициенты К (si, 0),
К (si, ck) и К (si, sk) получаются аналогично (2.26). Матрица К (si)
имеет вид матрицы (2.27), но ci заменяется на si.
Передача U.f(O, 0) дает Uq(0, .0) и коэффициенты К(0, 0),
К(0, ck) и К(0, sk), которые можно записать в виде матрицы-стро-
ки К(О) = ЦК(О, 0)К(0, cl)K(0, sl)K(0, с2)К(0, s2)...||.
Три матрицы K(ci); K(si) и К(0) можно объединить в одну:
К(0, 0) К(0, si)
K(sl,0) K(sl,sl)
K(cl.O) K(cl,sl)
K(s2,0) K(s2, si)
K(c2,0) K(c2~sl)
K(0, cl) K(0, s2) K(0, c2) . . .
К (si, cl) К (si, s2) K(sl, c2) . . .
K(cl, cl) K(cl, s2) K(cl,c2) . . .
K(s2, cl) K(s2, s2) K(s2, c2) . . .
K(c2, cl) K(c2, s2) K(c2, c2) . . .
79
Если функции f(j, в) не искажены, то все члены матрицы (2.28),
кроме членов, лежащих на главной диагонали, равны нулю. По-
следние становятся одномерным набором коэффициентов затуха-
ния /<(0)=К(0, 0); Kc(i)=K(oi, ci) и Ks(i)=K(si, si).
Время задержки 0c(i) в (2.26) и соответствующие времена за-
держек Qs(i) и 0(0) для функций U.fs(i, 0) и Uf(O, 0) также можно
записать в виде матрицы:
0(0) 0 0 0 . . .
0 0С(1) 0 0 . . .
0 = о 0 0S(1) 0 . . . (2.29)
0 0 0 0f(2) . . .
Матрицы К и 0 характеризуют канал связи для системы функ-
ций {f(j, 0)}. При многоканальной связи искажения в канале соз-
дают перекрестные помехи. Одним из применений матриц К яв-
ляется использование их для коррекции этих перекрестных искаже-
ний. Таким образом, матрице К можно присвоить название матри-
цы перекрестных искажений, в то время как О можно назвать мат-
рицей задержки.
2.3.
ЧАСТОТНЫЕ ФИЛЬТРЫ, ОСНОВАННЫЕ
НА ФУНКЦИЯХ УОЛША
2.3.1. Фильтры нижних частостей
В гл. 1 было показано, что фильтр можно характеризовать си-
стемой функций {/с(|л, 0); fs(n, 0)} вместо синусоидальных и коси-
нусоидальных функций [1—7]. Было получено ур-ние (1.112), кото-
рое позволяет найти сигнал Fo(0) на выходе фильтра, если на вход
подан сигнал F(0). Подстановка системы функций Уолша
{cal (р, 0); sal (р, 0)} в ф-лу (1.112) дает
Fo (0) = J К(Н) (И)0310 — еЛн)1 + as(p)Ks(n)sal In.0 — 0j (Р-)1П
Для дальнейшего рассмотрения нужны следующие соотноше-
ния § 1.2:
cal (р, 0) = wal (0, 0); 0 < р < 1; )
cal (р, 0) = cal (i, 0); t<p<i4-l; (2.31)
sal (p, 0) = sal (i, 0); i —1 < p < i;
— 1/2 <0< 1/2; i = 1,2, ...
Разобъем сигнал G(0) на отрезки —1/2^0<1/2; 1/2^0<3/2, ... .
F(0) представляет отрезок сигнала на интервале —1/2^0<1/2.
80
акое разбиение не накладывает никаких ограничений на сигнал
(в), но при этом требуется сигнал синхронизации, чтобы фикси-
авать начало и конец интервалов. Коэффициенты ас(р) и а8(р)
(2.30) для F(0) можно вычислить с помощью (2.31):
1/2
ас(р)= ас(0) = j F(0) wal (0, 0) d0; 0 < р< 1;
—i/2
1/2
ас(р)=ас(0 = J F (0) cal (i, 0) d 0; i<p<i+ 1;
-i/2
1/2
as(p) = as (i) = J F (0) sal (i, 0) d 0; i— 1 <pc i.
-i/2
(2.32)
f Специфические особенности функций Уолша делают возмож-
ным преобразовать интегральное представление ограниченной во
^времени функции F(0) в представление ее суммой:
F (0) = [ 1ас (и) cal (р, 0) + as (р) sal (р, 0)] d 0 =
о
= а (0) wal(0, 0) -J- У ас(0 cal (/, 0) + as (i) sal(i, 0). (2.33)
i=i
Коэффициенты затухания Ko(p) и К8(р) и задержки 0с(р) и
|0,(ц) в (2.30) определяют фильтр. Их можно свободно выбирать
гв пределах физической реализуемости. Чтобы представить выход-
ной сигнал в виде суммы, а не интеграла, сделан следующий
выбор:
КС(Р) = К(О); 0с(р)=0(О); 0<р<1;
Kf(p) = *c(0; Мр) = М0; i<P<i+l;
К8(р) = к8(0; е5(н) = Ш i-’<p<ij
равнение (2.30) принимает следующую форму:
Fo (0) = а (0) К (0) wal [0, 0 - 0 (0)] +
+ £ {ас(0адса1[/, 0-0X01-MX0*s(0sal[i, 0-0s(O}.
(2.34)
(2.35)
Рассмотрим фильтр, для которого удовлетворяются следующие
гсловия:
К(0)=1; 0(0)= 1; Kc(0 = Ks(i) = 0; (2.36)
о(0) получается из ф-л (2.30) — (2.35):
Fo(0) = jae(p, 0-l)dp = a(O)wal(O, 0-1). (2.37)
о
81
и
F*(0) ‘
b) F(O)
G(oy-------L
Шл F№(ek
О
* И)
F(0)
Вид этого интеграла наводит
___----на мысль назвать схему фильт-
jy ----~F0(9) ром нижних частостей, чтобы от-
личать от обычного фильтра ниж-
них частот. Его функциональная
схема показана на рис. 2.17а, а
временная диаграмма — на рис.
2.176. Интегратор определяет
а(0) согласно (2.32). Значение
а(0) можно считывать на выходе
интегратора с помощью переклю-
чателя S2 в конце интервала
—1/^0<1/2. После этого интег-
ратор возвращается в исходное
состояние переключателем S|. Ко-
эффициент а(0) для отрезка G(0)
в интервале 1/2^0<3/2 получа-
ется интегрированием G(0) в те-
~FO(0)' чение интервала времени l/2s$
^0<3/2 и т. д. Согласно (2.37)
а(0) должно быть умножено на
wal(0, 0—1), постоянную величи-
ну, равную 1. Таким образом,
a(0)wal(0, 0—1) есть напряжение
а(0), получаемое в конце интер-
вала —1/2^0<1/2 и запоминае-
мое в течение интервала 1/2^’
^0^3/2. Устройство запомина-
ния ЗУ показано на рис. 2.17а.
нижних частостей показана на
F0(9)
20—~
250.-^,375
7
725
S1
0Уг
ffi
Рис. 2.17. Фильтр
нижних частостей:
а) функциональная схема; б) времен-
ная диаграмма; в) практическая
схема:
ЗУ — запоминающее
операционный усилитель
Ci
™is.
И — интегратор;
устройство; ОУ —
Практическая схема фильтра
рис. 2.17в.
Для определенности рассмотрим фильтр нижних частот с ча-
стотою среза 4 кГц. Согласно теореме отсчетов сигнал на выходе
этого фильтра имеет 8000 независимых значений в секунду. Вы-
ходной сигнал фильтра нижних частостей (рис. 2.17) будет иметь
ту же информационную ценность, что и в предыдущем случае,
если будет иметь также 8000 независимых значений в секунду.
Таким образом, длительность Т ступенек Go(0) на рис. 2.17 дол-
жна быть равна 1/8000=125 мкс; соответственно частость среза <р
равна 1/27 = 4000 zps. Здесь использована теорема отсчетов ана-
лиза Уолша—Фурье, которая оказывается тривиально простой
для фильтра нижних частостей [8—10].
2.3.2. Частостные полосовые фильтры
Найдем выражения для простых частостных полосовых филь-
тров. Для этого требуется теорема умножения функций Уолша,
полученная в § 1.4:
/
82
(2.38)
cal (z, 0) cal (k, 0) = cal (z © k, 0);
sal (i. 0) cal (k, 0) = sal{[£© (z — 1)J+ 1, 0};
sal(z, 0)sal(Jfc, 0) =cal[(z— !)©(£— 1), 0];
cal (0, 0) = wal (0, 0).
еоремы умножения (2.38) очень похожи на теоремы умножения
шусоидальных и косинусоидальных функций, за исключением
>го, что в правой части стоит только один член вместо двух чле-
•в для суммы и разности частот. Следствием этого является тот
акт, что модуляция несущей Уолша дает однополосную (по ча-
ости) модуляцию. Это делает возможным использовать часто-
ные полосовые фильтры, построенные по принципу, хорошо из-
стному, но мало используемому для частотных полосовых филь-
ов.
«Сдвинем по частости» сигнал F(0) в (2.33), умножив его на
l(k, 0). Используя (2.38), получаем
F (0) cal (k, 0) = а (0) cal (k, 0) + (ас (0 cal (i © k, 0) +
i=l
i^=k
+ as\i) sal {(*© (z - 1)] + 1, 0}) + ac (*) wal (0, 0) +
+ as (k) sal {{£©(£- 1)1+1, 0}.
Пропустив этот сигнал через фильтр нижних частостей, опи-
раемый ф-лой (2.36), получим по аналогии с (2.37) выходной
[гнал
(2.41)
(fl) = ac (k) wal (0, 0 — I) = j* ac (p) cal (p, 0) cal (k, 0 — 1)d p; (2.40)
k
cal (A, 0—• 1)Enseal (k, 0).
Умножение FOi(0) на cal(£, 0—1) сдвигает отфильтрованный
[гнал на первоначальную полосу в частостном диапазоне:
(в) = F01 (в) cal (£, 0- 1) = ас(Л) cal (Л, 0-1) =
*-н
= j ас (р) cal (р, 0) d р;
k
wal(0, 0— 1)са1(Л, 0—1) = са1(£, 0—1); cal2(Л, 0—1)= 1.
оследний интеграл определяет название частостного полосового
ультра. Для практической реализации необходимо перед фильт-
>м нижних частостей (рис. 2.17) поставить персмножитель, что-
ы выполнить перемножение (2.41). На рис. 2.18 показан такой
итоговой фильтр. К обоим перемножителям П подводится один
тот же сигнал са1(£, 0), так как cal (k, 0) имеет период 1 и, та*
гм образом, идентичен са1(£, 0—1). Пригодные для этого пере-
сожители показаны на рис. 2.9. Заметим, что умножение на
83
функцию Уолша означает умножение только на 4-1 или —1; умно,
жение на 4-1 не меняет знак сигнала; умножение на —1 меняет
его знак на противоположный.
Рис. 2.18. Частостиый полосо-
вой фильтр:
П — перемножитель для функций
Уолша; Ф — фильтр нижних час*
тостеЙ
На рис. 2.19 показаны графики затухания и задержки как
функций частости для фильтра нижних частостей с /С(0)=1 и не-
скольких полосовых фильтров. Коэффициенты Kc(i) и K.t(i) равны
1
* * а «
Q UM 80W НМО с'1
fISMXc '> W''
____
125 мкс
L— 1 ।
9 iUO 8090
Ъ125.мкс Т- 125 мкс 125 мкс Г~ 125 мкс
?—* ?-* ?—* р—* .
Рис. 2.19. Затухание и задержка частостных фильтров
нулю, кроме тех значений I, для которых они, как показано на
рисунке, равны 1. Очерченные площади на границах полосы p = i
показывают, что функции calf/, 0) или sal(t, 0) проходят через
фильтр; заштрихованные площади показывают, что соответствую-
щие им функции не проходят.
Для всех фильтров рис. 2.19 нормализованная полоса пропу-
скания |12—<щ=«2—/1=Др равна 1. Назовем частное от деления ши-
рины полосы пропускания на нижнюю границу полосы Др/щ от-
носительной полосой пропускания. С учетом рис. 2.19 для ДрДц
можно получить следующие соотношения:
Дц/Р1= 1 для Кс(1) = 1 или К,(1) = 1;
Др/щ = 1/2 для Кс(2)= 1 или К,(2)= 1;
Др/Ця = l/k для Ke(k) = 1 или K,(k) = 1.
Сигналы cal (Л, 0) или sal (k, 0), которые проходят частостный
полосовой фильтр (рис. 2.18), определяют относительную полосу
84
ропускания. Приведенная на рисунке схема позволяет получить
гносительную полосу пропускания, меньшую или равную 1. Нор-
ализованная частость ц так же, как и ненормализованная час-
ость <p=ip/T при Г=125 мкс, нанесена на рис. 2.19.
Частостная зависимость задержки и затухания, показанная на
нс. 2.19, является идеализированной. В практических фильтрах
орень из среднего квадратического отклонения выходного напря-
жения фильтра лежит в диапазоне 0,01—0,001. Среднее квадрати-
еское отклонение, таким образом, лежит в диапазоне 10-4—lO-6^
то обеспечивает затухание в полосе заграждаемых частостей
—404—60) дБ (рис. 2.19).
Бесконечно крутые характеристики,
[оказанные на рис. 2.19, также спра-
едливы для практических фильтров,
“акой результат поражает инженеров,
которые привыкли к частотным фильт-
рам. Однако частостные фильтры ис-
дользуют переключатели, которые про-
изводят временное квантование сигна-
ла. Учитывая это, можно объяснить
дискретное изменение затухания сиг-
нала. Дискретность исчезает, если ис-
пользовать функции Уолша, опреде-
ленные на полном интервале —оо<
Ci0< + oo, а не на интервале —1/2^
<6<1/2.
Согласно рис. 2.19 затухание и за-
держка частостного фильтра постоян-
ны в полосе пропускания. Следователь-
но, отсутствуют амплитудные и фазо-
фые искажения. Задержка в области
заграждения для идеальных фильтров
не рассматривается, поскольку часто-
стные составляющие в этой области не
проходят. Реальные фильтры пропус-
кают составляющие в области заграж-
дения. Задержка в области загражде-
ния показана на рис. 2.19 штриховой
линией.
Рис. 2.20. Аппроксимация си-
нусоидальных функций функ-
циями Уолша:
а) синусоидальное колебание с
частотой 250 Гц; б) a(0)wal(0>
в); в) at(l)sal(l, 9); г) ае(1)Х
Хса1(1, 9); д) a,(2)sal(2, 9);
е) сумма б и в; ж) сумма б, в
и г; з) сумма б, в, г, д; времен-
ная база Г=11 мс; горизонталь-
ный масштаб 0,5 мс/дел.; вре-
мя развертки 1 мс
На рис. 2.20 показаны синусоидаль-
ное колебание с частотой 250 Гц на
входе нескольких частостных фильтров
^(строка а) и результирующие выход-
ные сигналы: в строке б показан сиг-
нал на выходе фильтра нижних час-
остей с Лс(0) = 1, в строках в, г и д
оказаны сигналы на выходах полосо-
ых фильтров с /(»(!) = !; Кс(1) = 1 и
'8(2) = 1, в строках е, ж и з показаны
85
фильтров с Кс(0) =Ks(l) = 1 (X); #Сс(0)
^(0)=^(D=Kc(l)=Ks(2) = l(3).
сигналы на выходах
= Л'Д1) = 1(ж);
На рис. 2.21 показан частот-
ный спектр синусоидальных фун-
кций (а) с равными частотами и
амплитудами, но различными фа-
зами. Амплитудные спектры
дс(ц) =ас(<рТ) показаны на рис.
2.215; амплитудные спектры
д$(ц) =as((pT) — на рис. 2.21в.
Рис. 2j21. Преобразования Уол-
ша—Фурье синусоидальных коле-
баний:
а) синусоидальные колебания с
частотой 1 кГц и различной фа-
зой; горизонтальный масштаб
0,1 мс/дел; б) не) преобразова-
ния Уолша—Фурье ас(<рТ) и
а/фТ) колебаний (а); временная
база Т=1,6 мс; горизонтальный
масштаб —бйбгрз/дел
Рис. 2.22. Частостный широкополос-
ный фильтр:
Ф — фильтр нижних частостей; ЗУ — запо-
минающее устройство
Осциллограммы бив получаются с помощью отсчетов выходных
напряжений 16 частостных фильтров. Возведя в квадрат и сумми-
руя графики на рис. 2.216 и в, получаем частостный спектр мощ-
ности.
Полосовые фильтры, соответствующие рис. 2.18, имеют отно-
сительную ширину полосы А|1/ц1=1, 1/2, 1/3.На рис. 2.22 по-
казан полосовой фильтр с относительной шириной полосы Дц/ц =
= 1, 2, 3. В этой схеме используется фильтр нижних частостей Ф4,
соответствующий рис. 2.17. Он интегрирует входной сигнал на вре-
менных интервалах длительностью Т. Следующий фильтр нижних
частостей Ф2 интегрирует входной сигнал на временных интерва-
лах длительностью Т/2 или Г/3, или Т/4, . Выходные напряже-
ния обоих фильтров показаны в строках а и б рис. 2.22. Период
86
тегрирования Ф2 выбирался равным Т/2. Разность во временах
Кдержки и Ф2 компенсировалась в запоминающем устройстве
р. Разность напряжений, изображенных в строках айв, дает
входной сигнал До(0).
f Рис. 2.23. Фильтр
и частостный
заградительный
высших
[ Ф — фильтр нижних
частостей;
частостей (а)
фильтр (б):
ПФ — частостный полосовой фильтр; ЛЗ — схема
задержки
I Кроме различия в относительной ширине полосы, имеется дру-
юе важное различие между полосовыми фильтрами (рис. 2.22 и
Ь18). В полосе пропускания фильтра рис. 2.22 могут проходить
как сигналы sal(p, 0), так и сигналы cal(р, 0), в то время как
1ерез фильтр, соответствующий рис. 2.18, могут проходить либо
|а1 (р, 0), либо cal (ц, 0).
I На основе рассмотренных типов фильтров можно построить
ного других фильтров. На рис. 2.23 показаны фильтр высших ча-
стостей и заградительный фильтр, построенные на основе фильтра
1ИЖНИХ частостей и полосового фильтра. Параллельное соедине-
ние нескольких полосовых фильтров, соответствующих рис. 2.18,
[юзволяет построить фильтры, пропускающие как сигналы
fal(p, 0), так и са!(ц, 0) и имеющие относительную ширину поло-
сы Дц/р1=1, 1/2, 1/3. С другой стороны, можно получить широко-
полосный фильтр, пропускающий только sal(p, 0) или са1(ц, 0),
£ак показано на осциллограммах рис. 2.20е, ж, з.
2.3.3. Цифровые частосгные фильтры
Одним из наиболее перспективных применений частостных
фильтров, основанных на функциях Уолша, являются цифровые
фильтры. Объясняется это тем, что численное преобразование
1^олша—Фурье сигналов требует выполнения только операций
:ложения и вычитания, в то время как численное преобразование
^урье требует выполнения операций умножения.
Для объяснения принципа работы цифрового частостного филь-
тра рассмотрим функциональную схему рис. 2.24. Сигнал F(0)
тропускается через фильтр нижних частостей Ф. Пусть ступснча-
гая функция на его выходе имеет ступеньки длительностью 7/16.
Амплитуды ступенек преобразуются аналого-цифровым преобра-
ювателем А—Ц в двоичные символы, которые передаются со ско-
юстью 16 символов за время Т в цифровой накопитель ЦН1.
"[усть последовательность из 16 последовательных символов бу-
1ет обозначена как А, В, ..., Н, Р. Для получения 16 коэффи-
87
циентов а(0), as(l), ас(1). .... as(8) из 16 символов можно исполь-
зовать быстрое преобразование Уолша—Фурье (§ 1.2). Для вы-
числения одного, нескольких или всех этих коэффициентов ариф-
метическое устройство АУ должно производить только операции
сложения и вычитания. Предположим, что вычисляется коэффи-
циент Ос (5), как показано на рис. 2.24. Шестнадцать коэффициен-
ту
Рис. 2д24. Функциональная схема цифрового частостного фильтра:
Ф — фильтр нижних частостей; А—Ц— преобразователь аналог—цифра; Ц—А—
преобразователь цифра—аналог; ЦН — цифровой накопитель; АУ — арифмети-
ческое устройство
ЦН2 -* Ц-А -*’Fg(e)
тов —ас(5), +ас(5), + пс(5), —ас(5), ... со знаками, соответству-
ющими знакам cal (5, 0) (рис. 1.2), передаются в цифровой нако-
питель ЦН2. Обработка этих коэффициентов в преобразователе
цифра — аналог Ц—А дает непрерывный выходной сигнал /^(б).
Связь между входным сигналом /•’(б) и выходным /'о(О) следует
из (2.32) и (2.41):
1/2
ас(5) = f F(0)cal{5, 0)d0 = ас(р); 5<ц<6;
-1/2
Л>(9)= ас (5) cal (5, 0 — I) = j ас (р.) cal (р, 0) d 0.
5
(2.42)
Пусть /•о(б) получается путем прохождения cal (5, 0) через ча-
-стостный фильтр (рис. 2.18). Пусть Го(0) отклоняется от своего
номинального значения в соответствии с распределением Гаусса
со среднеквадратичным отклонением, отнесенным к единичному
напряжению, равным 10-6. Перекрестное затухание коэффициен-
тов ac(i), i¥=5 и as(i) равно тогда —60 дБ. Более высокое пере-
крестное затухание может быть получено при использовании циф-
рового фильтра. Пусть Л(0) (рис. 2.24) имеет среднеквадратичное
отклонение, отнесенное к единичному напряжению, равное 10~*.
Если для вычисления ас(5) используется 2П отсчетов Л(0) и если
преобразователь аналог—цифра дает незначительную ошибку, то
получается среднеквадратичное отклонение ас(5), отнесенное к
единичному напряжению, равное 10~®/2п. Перекрестное затухание
в дБ равно 101ogl0~®/2n =—(60+10nlog2). Для 2П = 16, что ис-
пользовано на рис. 2.20, получается перекрестное затухание
— (60+40 Iog2)«—72 дБ.
3.
ПЕРЕДАЧА СИГНАЛОВ НА НЕСУЩЕЙ
3.1.
АМПЛИТУДНАЯ МОДУЛЯЦИЯ (AM)
| 3.1.1. Модуляция и синхронная демодуляция
[ предыдущей главе была рассмотрена передача коэффициентов
Щ) с помощью системы ортогональных функций {f(j, 6Д. Те-
|рь будет рассмотрена передача временных функций F(Q) или
1(6) с помощью временных функций {Ф(к, б)}. Эти функции
р[7г, 6) будем называть несущими. Г(6) обозначает произволь-
|ю функцию времени, например, выходное напряжение микро-
рна. Обозначение F (6) принято для того, чтобы подчеркнуть,
|о функция времени содержит конечное число коэффициентов
3/), как и телетайпные сигналы: F%(0) = 0J.
Г
Г В настоящее время в качестве несущих Ф(7< 0) используются в
|новном синусоидальные и косинусоидальные функции. Однако
|т ни физического, ни математического обоснования того, почему
|льзя применять сигналы, описываемые другими функциями для
|редачи сообщений по проводным линиям, по волноводам, радио-
иниям и т. д. В некоторой степени в кабельной связи используют*
К в качестве несущих периодические последовательности прямо-
гол иных импульсов.
В' Особенно удобны для использования в качестве несущих функ-
йи, образующие группу относительно операции умножения. Ам-
йитудная модуляция несущих, описываемых такими функциями,
Ьет однополосную модуляцию. Многоканальные системы, исполь-
гющие такие несущие, не требуют фильтров, выделяющих одну
рлосу. Здесь термин «однополосная модуляция» используется в
Ьлее широком смысле, чем обычно. Точное значение этого и дру-
га терминов, используемых в обобщенном смысле, лучше всего
Бъяснить на примере.
Г Рассмотрим амплитудную модуляцию косинусоидальной фуню
ри сигналом F(0). Разложим F(0) в ряд Фурье на интервале
|1/2<0<1/2:
I F (0) = а (0) + ]/2~ [ас (i) cos 2i л0 -f* as(i) sin 2i Л0]. (3.1)
89
Пусть сигнал f(0) пропущен через фильтр нижних частот, подав-
ляющий все члены суммы с индексом i>k. Такие фильтры можно
выполнить похожими на частостные фильтры, описанные в § 2.3.
Отфильтрованный сигнал Е+(0) имеет верхний предел в сумме
(3.1) i=k, а не t=oo. Амплитудная модуляция несущей
У 2 cosQo0 сигналом Л+(0) дает
k
F+ (0) У 2 cos Qo 0 = lac (0 cos (&o — 2л i) 0 — as (i) sin (Qo — 2л i) 0] 4-
z=i
k
4- a (0) У2 cos Qo0 -|- V [ac (i) cos (Q04-2n i) 0+as (t) sin (Qo 4- 2л i) 0].
fei (3.2)
Первая сумма описывает нижнюю боковую полосу. Затем следует
составляющая с частотой несущей Qo, которая соответствует со-
ставляющей Г+(0) на нулевой частоте. Вторая сумма описывает
верхнюю боковую полосу.
Разложим Е(0) в ряд Уолша:
F (0) = а (0) + У [ас (i) cal (i, 0) -f- as (i) sal (i, 0)J =
I—1
= a (0) + [ac (i) wal (2i, 0) 4- as (i) wal (2i — 1, 0)J; (3.3)
i=i
— l/2<0<l/2.
Пропустим F(0) через фильтр нижних частостей, который подав-
ляет все члены с i>k. Отфильтрованный сигнал F++(0) имеет
верхний предел суммы i = k. Таким образом, разложения в ряд
Е+(0) и F++(0) имеют одинаковое число членов. Амплитудная мо-
дуляция несущей Уолша waif/, 0) сигналом /?++(0) дает
k
F++ (0) wal (/, 0) = а (0) wal (/, 0) + 2 & (!) waI (2‘ © /. 0) +
ы
+ as(i) wal ((2i-l)©/, 0)]}. (3.4)
Если сравнить (3.4) и (3.2), то можно видеть, что компонента,
соответствующая постоянной составляющей а(0), в обоих случаях
передается самой несущей. Однако в (3.4) содержится только од-
на сумма. В зависимости от значения j эта сумма может описы-
вать «верхнюю», «нижнюю» или частично верхнюю и частично
нижнюю боковые полосы. Рассмотрим, например, число 2k, име-
ющее ц разрядов в двоичной записи. Пусть / больше 2k и пусть j
имеет нули в ц наименьших разрядах. Тогда справедливы следую-
щие соотношения:
2i©/ = / + 2, /4*4, . . ., / + 2fe>j;
(2i — 1) ©’/ = / + 1, / + 3, . . ., jJr2k—1>/;
i = 1, 2, . . ., 2fe</.
(3.5)
90
’ Для такого выбора / все индексы 21ф/ и (21—1)ф / суммы
1.4) больше, чем индекс / несущей wal(/, 0). Это соответствует
>дуляции с одной верхней боковой полосой.
В качестве следующего примера рассмотрим случай, когда /
«еет единицы в т] наименьших разрядах. В этом случае получаем:
2«ф/ = / —2, / — 4, . . ., /—2Л</;
(2i—1)©/= j—1, / —3, . . .. j-2k+ 1</. (3.6)
Теперь индексы 21® / и (2i— 1)ф/ в сумме (3.4) меньше, чем
деке несущей waif/, 0). Это соответствует модуляции с одной
жней полосой.
Если двоичное представление числа / имеет в Г| младших раз-
дах как единицы, так и нули, то числа 2i ф j и (21—1)ф/ для
ределенных значений i будут больше j, а для других значений
еньше j. Это соответствует модуляции с частично верхней и ча-
гично нижней полосой.
Почему амплитудная модуляция синусоидальных и косинусои-
.альных несущих дает две полосы, а амплитудная модуляция не-
ущих Уолша—только одну полосу? Чтобы найти ответ на этот
юпрос, рассмотрим теоремы умножения синусоидальных и косину-
оидальных функций:
2cos i 0 cos k 0 — + cos (i — k) 0 + cos (i + k) 0;
2sin i 0 cos k 0 = + sin (i — k) 0 + sin (i + k) 0;.
2cos i 0sin k 0 = — sin (i — k) 0 + sin (i + k) 0;
2sin i 0 sin k 0 = + cos (i — k) 0 — cos (i + k) 0.
(3.7)
В правой части этих уравнений стоит сумма двух синусоидаль-
ых или косинусоидальных функций. Пусть cos#0 или sin&0 будут
есущими, a cosi0 или sini0— компонентами сигнала, модулирую-
хего несущие по амплитуде. В результате этого получаются верх-
1ие и нижние полосы. Таким образом, двухполосная модуляция
инусоидальных и косинусоидальных несущих является следстви-
:м теорем умножения (3.7).
Рассмотрим еще раз теоремы умножения функций Уолша;
cal (г, 0) cal (k, 0) = cal (г, 0); г = i © k;
sal (i, 0)cal (k, 0) = sal (r, 0); r = (fe©(i — 1)1+1;
cal (i, 0) sal (k, 0) = sal (r, 0); r — [i © (k— 1)] + 1; (3.8)
sal (i, 0)sal (k, 0) = cal (r, 0); r = (i—!)©(&—!)•
В правой части (3.8) стоит только одна функция Уолша. Пусть
al(k, 0) или salffe, 0) будут несущими, а calfi, 0) или sal(7, 0) —
омпонентами сигнала, который модулирует по амплитуде несу-
1ие. Больше нет «нижней боковой» и «верхней боковой», а есть
олько одна функция. По этой причине амплитудная модуляция
функций Уолша дает однополосную модуляцию. Схема для осу-
хествлевия амплитудной модуляции несущей Уолша показана на
ис. 3.1а.
91
Косинусоидальную несущую y^cosQoG, модулированную
£+(0), можно демодулировать умножением на У~2 cos £2<у0:
[F+ (0) /2 cos £2О0] /Feos Ц,0 = F* (0) (1 + cos 2QO0). (3.9)
Рис. вЛ. Амплитудный
модулятор (а) и демо-
дулятор (б) для несу-
щих Уолша:
Ф — фильтр нижних часто-
стей; П — перемножитель
Первый член в правой части представляет собой демодулиро-
ванный сигнал. Второй член должен подавляться фильтром. В
«реднем половина мощности сигнала теряется в процессе филь-
трации. Эта потеря энергии несущественна, если_ сигнал F+(0) X
X У 2 cos Qo0 можно перед умножением на У 2 cos Qo0 усилить.
Пусть сигнал £>+(0) передается на несущей У 2cosQi0. В ре-
зультате синхронной демодуляции с помощью колебания /~2Х
Xcos £2О0 получаем
1о+ (0) У2 cos Йх0] У2 cos Qo0= D+ (0) [cos (Qo— £2J 0 4- cos (Qo 4- QJ 0]
(3.10)
Пусть сигналы F+(0) и £>+(0) содержат колебания с частотами
в интервале O^v^vrp и пусть демодулированные сигналы прохо-
дят через частотный фильтр с частотой среза Vrp. Сигнал Ё+(0)
будет принят без помех со стороны сигнала £>+(0), если частоты
«есущих У 2 cos Qo0 и У 2 cos £^0 удовлетворяют следующему
условию:
(£20 — Qj)/2n — v > vrp; 0Cv<vrp. (3.11)
Умножим сначала сигнал F+(0) V~2cosQo0 на вспомогатель-
ную несущую )/~2cosQn0, а затем на 2cos(£20—£2П)0:
{[F+(0)/FcosOo0] У~2 cos£2„0 }2cos(Q0 — Q„)0=
=F+(0)[1 4-cos2(Q0 — Qn)0 4-cos2Q„0 4-cos2Qo0]. (3.12)
В результате получаем нужный член F+(0). Три нежелательных
члена должны быть отфильтрованы.
Пусть принят сигнал £>+(0) У~2со&(Оь—2£2П)0. Прямая син-
хронная модуляция согласно (3.9) дает
[D+ (0)/Гcos (Qo — 2Й„) 0]/Fcos Ц0= Z)+(0)[cos 2Q„04-cos 2(Ц>—£2„)0]
(3.13)
Если частотный диапазон сигнала £>+(0) достаточно мал, то сиг-
нал (3.13) можно отфильтровать. Таким образом, между сигнала-
ми Л+(0) и £^(0) нет взаимного влияния. Однако это не выпол-
няется, если сигнал D+(0) /~2cos(Qo—2Qn)0 сначала умножает-
92
в вспомогательную несущую у 2 cos Qn0, а потом демоду-
ется умножением на 2 cos (й0—Йп) 0:
{[£>+ (0) |/Тcos (Ц, — 2Й„) 0 ] ]/2cos Q„0 } 2cos (Qo — Q„) 0 =
= D+ (0) (cos 2Q„0 + cos 2(Q0—2QJ0+1 + cos 2 (Ц, — Q„) 0]. (3.14)
>авой части (3.14) появляется член £>+(0), который искажает
). Из. (3.7) и (3.14) можно видеть, что особенности приема
алов вытекают из теорем умножения синуса и косинуса. Вза-
>го влияния не было, если бы в правой части (3.7) было не
члена,а один.
’ассмотрим те же самые процессы в случае применения функ-
Уолша в качестве несущих. Умножим сигнал F++(0)wal(j, 0)
3.4) на wal (/, 0):
£++ (0) wal (/, 0) wal (j, 0) = F++ (0) wal (0, 0) = f++ (0); (3.15)
i Ф i = o.
отличие от синхронной демодуляции синусоидальных несу-
здесь уже нет высокочастостного члена, который нужно от-
ьтровывать.
Однако это отличие обычно
не имеет большого
чения, так как в многоканальной системе фильтрация все рав-
необходима для разделения сигналов различных каналов. Что-
это показать, рассмотрим передачу сигнала £>++(0) на второй
ущей wal (I, 0):
(0)=д(0) + £ ОДО cal (», 0) + МО sal(t,0)]= ]L(r)wal(r,0).(3.16)
1=1 r=0
результате синхронной демодуляции £>++(0)wal(7, 0) путем ум-
ения на waif/, 6) получаем
[£>++ (0) wal (/, 0)] wal (/, 9) = D++ (0) wal (I ф j, 0) =
2k
= £ c(r)wal(/ ф j@r, 0) (3.17)
r=0
Пусть F++(0) и £>++(0) содержат только функции wal(0, 0);
((, 0) и sal (i, 0) c или wal (г, 0) c r^2k. Пусть далее де-
дулированные сигналы проходят через фильтр нижних часто-
>й с частостью среза ц=/г. Через этот фильтр не пройдет ни
на из составляющих сигнала (3.17), описываемых функциями
дша walf/ф/фгб), если будет выполнено следующее условие:
l®j®r>2k', г = 0, 1...................2k. (3.18)
Рассмотрим только два из многих возможных способов выпол-
1ия условия (3.18). Пусть число 2k имеет г| двоичных цифр,
сть j и I будут больше 2k и имеют нули только в т] наименьших
грядах. Тогда получаем:
/фг=/, 1+ 1, / + 2 . . ., l + 2k\
= i®j4-1, . . ., i®i + 2k.
93
(3.19)
1
Чтобы выполнить условие (3.18)., надо удовлетворить условию
l®\i>2k. (3.20)
Прибавив по mod 2 число j к обеим частям (3.20), получаем
l>2k®j = 2k + j. (3.21)
В последнем преобразовании были использованы соотношение
/ф /=0 и тот факт, что 2k имеет т) разрядов, в то время как /
имеет нули в т/ наименьших разрядах. Прибавив по mod 2/ к обеим
частям (3.20), получим второй способ выполнения условия (3.18):
j>2k@l = 2k + l. (3.22)
Условия типа (3.21) и (3.22) разделяют частостный спектр на
частостные каналы аналогично тому, как частотный спектр раз-
деляется на частотные каналы в соответствии с требованиями оп-
ределенной ширины полосы каналов. Позже будет рассмотрен бо-
лее общий метод распределения частостных каналов для несущих
Уолша, основанный на теории групп.
Сигнал /?++(0)walf/, 0) можно умножить сначала на вспомо-
гательную несущую wal (7г, 0), а потом демодулировать его умно-
жением на несущую wal(j©/i, 0):
{[£++ (6) wal (/, 0)] wal(A, 0)} wal (j © h, 0) =
= [F++(0) wal (/ф A, 0) ]wal(/©/i, 0) = F++(0). (3.23)
Таким образом, при использовании несущих Уолша перекрест-
ных помех не возникает. Чтобы показать это, умножим принятый
сигнал £>++(0)wal(7, 0) сначала на walf/i, 0), а потом на waif/ ф
®h, 0):
{[D^ftywalfZ, 9)1 wal (h, 0) }wal (/ © h, 0) = Z>++(0)wal(/®ft®/©A,0) =
2k
= D++ (0) wal (/ © j, 0) = V c (r) wal (I © j © r, 0). (3.24)
r=0
Сигнал Z>++(0) wal(7 ©/, 0) не содержит компонент, которые
могли бы пройти через фильтр нижних частостей с частостью сре-
за ц = так как выполняется условие (3.18). Отсутствие «зер-
кального» сигнала можно отнести за счет наличия только одной
функции Уолша в правой части (3.8) и (1.29).
На рис. 3.16 показана функциональная схема синхронного де-
модулятора несущих Уолша.
Амплитудная модуляция функций других полных ортогональ-
ных систем может быть рассмотрена аналогичным образом. Пока
ни одна из них не дает ощутимых практических преимуществ, но
это может быть следствием недостаточно энергичных исследова-
ний в данной области. Большинство хороню известных функций в
результате перемножения имеет не один или два члена, как в слу-
чае функций Уолша или синусоидальных функций, а бесконечное
94
ело членов. Несущие, основанные на последовательности перио-
ческих прямоугольных импульсов, образуют ортогональную, но
полную систему. Амплитудная модуляция их сильно отличается
амплитудной модуляции синусоидальных функций или функций
шла.
3.1.2. Многоканальные системы
Одним из наиболее важных применений амплитудной модуля-
ми является ее применение в многоканальных системах связи,
ассмотрим частотную многоканальную систему для телефонии,
овокупность т телефонных сигналов проходит через фильтры
ижних частот и модулирует по амплитуде т синусоидальных или
^синусоидальных несущих. В принципе, промодулированные не-
ущие можно сложить и затем передать по общей линии связи.
£ля подавления одной боковой после модулятора ставятся поло-
овые фильтры.
Существует несколько способов разделения сигналов в п.рием-
[ике. Одним из них является синхронная демодуляция, которую
южно применять и для несинусоидальных несущих. Принятый
рупповой сигнал перемножается в т модуляторах с т несущими,
акими же, как и несущие, используемые в передатчике. Несущие
приемника и передатчика должны быть синхронизированы. Это
Означает, что частоты должны совпадать, а фазовый сдвиг дол-
жен быть очень мал. Демодулированные сигналы проходят через
1 фильтров нижних частот, подавляющих гармоники сигналов
.ругих каналов.
Используемые на практике частотные многоканальные системы,
монечно, отличаются от вышеописанной, так как в них использу-
ется характерные свойства синусоидальных и косинусоидальных
еункций. Здесь особое значение имеют те свойства, которые яв-
[яются общими для всех полных систем ортогональных функций.
В теории частотных многоканальных систем известны два ме-
юда: квадратурная модуляция и однополосная модуляция. В слу-
чае квадратурной модуляции две несущие с одинаковой частотой,
но сдвинутые относительно друг друга по фазе на 90°, модулиру-
ются по амплитуде двумя независимыми сигналами, лежащими в
Одном и том же частотном диапазоне. Получаются два сигнала,
Каждый из которых занимает полосу, равную удвоенной полосе
Частот передаваемого сообщения. Полоса частот, занимаемая
обоими сигналами, не превышает полосы частот, занимаемой од-
ним сигналом, так как оба сигнала расположены в общей полосе.
При однополосной модуляции по амплитуде модулируется одна
Несущая определенной частоты и одна из боковых полос подав-
ляется. Имеется несколько методов для этого подавления.
Соответствующие методы модуляции существуют и для часто-
тных многоканальных систем [11]. За отсутствием лучших терми-
юв их тоже можно назвать квадратурной модуляцией и однопо-
лосной модуляцией. Для каждой частости i существует две функ-
ции Уолша cal (7, 0) и sal (7, 0). Квадратурная модуляция означает,
; 95
1
что как cal (7, 0), так и sal (i, 0) модулируются по амплитуде дву-
мя независимыми сигналами. Однополосная модуляция означает,
что модулируется либо са1(7, 0), либо sal(7, 0). В обоих случаях
генерируется лишь одна частостная полоса.
Для пояснения принципа частостного уплотнения с помощью
несущих Уолша обратимся к рис. 3.2. Выходные напряжения двух
Рис. 3j2. Принцип построения
частостнон многоканальной си-
стемы:
Ф — фильтр нижних частостей; П —
перемножитель; С — сумматор
микрофонов прикладываются к точкам а и а'. Они проходят
фильтры нижних частостей Ф. На их выходах б и б' появляются
ступенчатые напряжения, которые подаются на перемножители 77,
где они модулируют по амплитуде две периодические несущие
Уолша, подведенные к точкам в и в'. Промодулированные несу-
щие гиг' складываются в сумматоре С. В результате получается
выходное напряжение д. Это напряжение умножается в приемни-
ке на те же несущие, что использовались в передатчике. Напря-
жения, появляющиеся на выходах ж и ж' перемножителей, про-
пускаются через фильтры нижних частостей, которые аналогичны
фильтрам, используемым в приемнике. Ступенчатые напряжения
на выходах з и з' аналогичны напряжениям в точках б и б'. Их
можно сразу подавать к потребителю. Фильтры нижних частостей
приемника и передатчика создают задержку по 125 мкс. Пунк-
тирные линии на временных диаграммах (рис. 3.2) показывают
эти задержки.
На рис. 3.3 показана многоканальная система с 1024 каналами
связи для передачи сообщений в одном направлении. Будем рас-
сматривать уплотнение аналоговых сигналов. Не представляет
96
гда видоизменить входные и выходные схемы для других типов
налов. Например, для передачи двоичной цифровой информа-
и ко входу канала прикладываются напряжения либо 4- U, либо
U. Для передачи обычного КИМ телефонного сигнала необхо-
мо иметь семь каналов. Такие детали будут выпускаться из рас-
Рис. 3.3. Частостная многоканальная система с 1024 телефонными канала-
ми для передачи в одном направлении:
Ф — фильтр нижних частостей; П — перемножитель: С — сумматор; ГТИ — генератор
тактовых импульсов; ГФ — генератор функций; ГСИ — генератор синхроимпульсов
мотрсния, так как они для принципа частостного уплотнения не
олее важны, чем для принципа временного или частотного уплот-
ения.
Двухпроводная линия, идущая от абонента, с помощью гиб-
идной схемы разделяется на передающую и приемную ветви.
,игнал на передающей ветви при-
ладывается к одному из 1024 вхо-
дов передатчика. Он проходит
•ильтр нижних частостей Ф с ча-
тостью среза 4kzps. Переключате-
и в фильтрах нижних частостей
правляются генератором синхро-
мпульсов ГСИ. Входной сигнал
'(0) преобразуется в ступенчатую
функцию F++(0); /7(0) и г++(6) по-
азаны на рис. 3.4 без временной
адержки на 125 мкс.
После фильтрации сигнал моду-
лирует по амплитуде одну из 32 не-
ущих Уолша Л—Гзг на одном из
еремножителей П. Первые четыре
есущие wal (0, 0)—wal(3, 0) пока-
аны на рис. 3.4. Длительность Т и
-322 97
mil ft,Д)»~ - г । । —।
- wot |—| |—| FT- ।
’ r~LJ~~LJ~~L_r
wal (3,6) Пи~и~иЪПТ1П-Г1-1
WQtft91Е.Д l _ L - .1
sin 2Лв
COS
sin
1.1 1 i H-l.ll L. 1 L 1Д H .
0 125 250 375 500
t мкс —
Рис. 3.4. Временные диаграм-
мы для многоканальной систе-
мы рис. 3.3
положение их интервала ортогональности совпадают с длительно-
стью и положением ступенек сигнала /?-н’(0).
32 промодулированных несущих суммируются в сумматорах
G—С32 в одну группу. В результате получаются 32 группы по
32 канала в каждой, как это и показано на рис. 3.3. Число 32 вы-
брано для примера; принципы оптимального выбора размера
групп и подгрупп будут рассмотрены позже.
В перемножителях П выходные напряжения сумматоров моду-
лируют по амплитуде несущие Уолша Тзз—Т^. Сумматор С33 сум-
мирует получающиеся 32 напряжения. На выходе С33 появляется
ступенчатое напряжение. Длительность ступеньки равна 32~2Х
Х125 мкс—122 нс. Амплитуда этого выходного сигнала принимает
8000X (32)2= 8 192 000 независимых значений в секунду. Сигнал
занимает частостный диапазон 0^<p^4,096Mzps. Этот групповой
сигнал можно передавать либо прямо к приемнику, либо исполь-
зовать его для модуляции синусоидальной несущей или несущей
Уолша.
В приемнике сигнал сначала умножается в 32 перемножителях
П на несущие —Т^у а потом каждый из полученных сигналов
умножается в 32 перемножителях на несущие Ti—Т&. Демодули-
рованный сигнал проходит через фильтры нижних частостей Ф,
которые аналогичны фильтрам, используемым в передатчике.
Функциональная схема, изображенная на рис. 3.3, пригодна
как для квадратурной модуляции, так и для однополосной моду-
ляции. Эти методы отличаются только используемыми несущими.
Для несущих Л—Г32 лучше использовать функции Уолша
wal(0, 9)—wal (31, 0). Их генерирование на основе теоремы ум-
ножения (1.29) из функций Радемахера wal(l, 9); wal(3, 9);
wal(7, 9), wal(2n—1, 9) показано в табл. 3.1. Функции Раде-
махера генерируются двоичными делителями, как показано на
рис. 2.7.
Несущие Г3з—Т&к нужно выбирать таким образом, чтобы не
было перекрестных помех и в то же время чтобы максимально
использовался частостный диапазон. В табл. 3.2 показан возмож-
ный выбор этих несущих. В этой таблице функции Уолша обозна-
чаются как wal(/, 0), так cal(7, 9) и sal (7, 0). Можно заметить,
что последние пять цифр нормализованной частости, записанной в
двоичной системе, всегда равны нулю. 32 несущих Ti—Т32 можно
разместить между любыми двумя несущими из Тзз—Т^. Отведен-
ный диапазон частостей используется полностью, нет потерь диа-
пазона частостей между соседними каналами.
Чтобы выбирать несущие не эмпирическим путем, можно вос-
пользоваться теорией групп. Функции Уолша wal(0, 9)—wal (1023,
0) образуют группу G с 210 элементами. Функции wal(0, 0) —
wal (31, 0) являются подгруппой Н с 25 элементами. Существуют
210/25 = 32 класса группы G по подгруппе Н. Это в точности равно
числу несущих Т33—Т^. Функции Уолша, полученные модуляцией
несущих Г33—Г64 функциями wal(0, 0), wal(31, 0), являются
элементами 32 классов. Все возможные функции wal(/, 0), ис-
98
Таблица 3.1
(ерирование несущих Л—Т32 с помощью умножения wal(£, 0)wal(/, 6) =
*а1(/, 0) и несущих T33—T6i с помощью умножения wal(&, 0)wal(/. 0)х
______ Xwal(31, 0)=wal(/\ 0) '
Ийссу ща я Индекс Несущая Индекс
k_ 7 1 k 1
Л 0 0 0 Тзз 0 0 0
т2 1 1 0 Тз. 32 63 0
т3 2 3 1 т33 64 127 32
| Т. 3 3 0 Тз. 96 127 0
Т. 4 7 3 Тз? 128 255 96
| г’ 5 7 2 Тз. 160 255 64
1 г’ 6 7 1 Т39 192 255 32
| Тй 7 7 0 Т.о 224 255 0
к Та 8 15 7 т41 256 511 224
1 Ло 9 15 6 Ti2 288 511 192
1 ТН 10 15 5 Лз 320 511 160
В Лг 11 15 4 Т 44 352 511 128
| Т13 12 15 3 Т4Ь 384 511 96
1 Гм 13 15 2 Л. 416 511 64
1 Т1Ъ 14 15 1 Т„ 448 511 32
1 Л. 15 15 0 т4в 480 511 0
1 г» 16 31 15 Т« 512 1023 480
1 Г1в 17 31 14 Т50 544 1023 448
1 Т19 18 31 13 Т„ 576 1023 416
1 7*20 19 31 12 тм 608 1023 384
Г ?21 20 31 11 Т53 640 1023 352
1 7* 22 21 31 10 т,4 672 1023 320
г 7\з 22 31 9 T3i 704 1023 288
?24 23 31 8 Л, 736 1023 256
I Т*> 24 31 7 ^57 768 1023 224
| ^28 25 31 6 Л, 800 1023 192
| 7*27 26 31 5 Т м 832 1023 160
l Т*28 27 31 4 Т.о 864 1023 128
1- ^29 28 31 3 тв1 896 1023 96
1 ^3° 29 31 2 Тез 928 1023 64
1 ’ ^31 30 31 1 Т«з 960 1023 32
С ^32 31 31 0 Т.4 992 1023 0
4*
99
Таблица 3.2
2x32 несущих частотной многоканальной системы (рис. 3.3)
Несущая Функция
cal (i9 0), sal (I, 0) 6)
c, s I /
десятичный двоичный десятичный двоичный
Л — 0 00000 0 00000
Т2 S 1 00001 1 00001
Т3 c 1 00001 2 00010
Тз s 2 00010 3 00011
т6 c 2 00010 4 00100
Тв s 3 00011 5 00101
Л c 3 00011 6 00H0
тв s 4 00100 7 00111
Г, c 4 00100 8 01000
7\о s 5 00101 9 01001
Тц c 5 00101 10 01010
7*12 s 6 00110 11 01011
ТЧз c 6 00110 12 01100
Л< s 7 00111 13 01101
Ль c 7 00111 14 OHIO
7*и s 8 01000 15 01111
Л7 c 8 01000 16 10000
7*18 s 9 01001 17 10001
Л» c 9 01001 18 10010
Т2о s 10 01010 19 10011
7*21 c 10 01010 20 10100
7*22 s 11 01011 21 10101
72з c 11 01011 22 10110
Ти s 12 01100 23 10111
Т’г» c 12 01100 24 11000
72« s 13 01101 25 11001
Тц c 13 01101 26 11010
7*28 s 14 OHIO 27 11011
7*28 c U OHIO 28 11100
7 зо s 15 01111 29 11101
7з1 c 15 01111 30 11110
7з2 s 16 10000 31 11111
100
Продолжение
Несущая Функция
cal, (i, 0), sal (i. 0) wal (/, 0)
c, s 1 i
десятичный двоичный десятичный | двоичный
Т'зз — 0 000000000 0 0000000000
^34 С 16 000010000 32 0000100000
Т'зб С 32 000100000 64 0001000000
с 48 000110000 96 0001100000
Т»7 с 64 001000000 128 0010000000
^38 с 80 001010000 160 0010100000
^39 с 96 001100000 192 0011000000
Ло с 112 001110000 224 0011100000
Г« с 128 010000000 256 0100000000
ТЮ с 144 010010000 288 0100100000
Та с 160 010100000 320 0101000000
Та с 176 010110000 352 0101100000
?45 с 192 011000000 384 0110000000
Та с 208 011010000 416 0110100000
Та с 224 011100000 448 0111000000
Тм с 240 011110000 480 0111100000
^49 с 256 100000000 512 1000000000
50 с 272 100010000 544 1000100000
Л1 с 288 100100000 576 1001000000
Т» с 304 100110000 608 1001100000
Т6з с 320 101000000 640 1010000000
Ги с 336 101010000 672 1010100000
Т’бв с 352 101100000 704 1011000000
7\в с 368 10111000 736 1011100000
т57 с 384 110000000 768 1100000000
Т’ьв с 400 110010000 800 1100100000
7* 59 с 416 110100000 832 1101000000
Т’во с 432 110110000 864 1101100000
Л1 с 448 111000000 896 1110000000
62 с 462 111010000 928 1110100000
Т'вз с 480 111100000 960 1111000000
Тм с 496 111110000 992 1111100000
101
пользуемые в качестве несущих Тзз—Ты, получаются перемноже-
нием каждой из функций wal(0, 9); wal(32, 9), wal(992, 9)
(табл. 3.2) на любую из функций wal(0, 9); wal(l, 9), .... wal(31,
9). Такое перемножение означает лишь перестановку элементов
каждого класса. Можно умножить wal (0, 9) на одну из 32 функ-
ций wal(О, О); wal(l, 9), ..., wal(31, 9). Далее можно умножить
wal (32, 9) на эти 32 функции, затем wal (64, 9) и т. д. Всего су-
ществует 3232=2160 таких произведений. Это означает, что сущест-
вует 21в0 возможных способов выбора несущих Т33—Ты, причем
при использовании любого из них частостный диапазон будет ис-
пользоваться без потерь и не будет перекрестных помех.
На рис. 3.4 под несущими Уолша wal (0, 9) и wal(3, 9) показаны
синусоидальные и косинусоидальные несущие. Их можно исполь-
зовать как несущие 7\—Т32 (рис. 3.3). В этом случае придется ис-
пользовать более сложные перемножители. 32 промодулирован-
ные несущие можно сложить без пропускания их через фильтр,
выделяющий одну полосу. Этот вид квадратурной модуляции по-
казывает тесную связь между частотным и частостным уплотне-
нием.
Из рис. 3.4 можно видеть, что любую систему функций, орто-
гональных на конечном интервале, можно использовать в каче-
стве несущих Л—Т32 (рис. 3.3), если входные сигналы пропуще-
ны через фильтр нижних частостей. Однако это утверждение не-
справедливо для несущих Тзз—Ты- В качестве их можно выбирать
только сигналы, описываемые функциями, для которых справед-
ливы теоремы умножения, сходные с теоремами умножения сину-
соидальных и косинусоидальных функций или функций Уолша.
На рис. 3.3 показана дополнительная линия синхронизации ме-
жду передатчиком и приемником. На практике для передачи сиг-
нала синхронизации можно использовать один или несколько из
1024 каналов. Если к 2п-каналу приложено постоянное напряже-
ние, то передается функция wal(2n—1, 9), которая является функ-
цией Радемахера. Ортогональность функций Радемахера инвари-
антна к сдвигу. Поэтому относительно легко можно выполнить
фильтры, следящие за ними. Модулированные функции Уолша об-
разуют помеховый фон, который можно подавить выбором боль-
шого времени усреднения следящих фильтров.
Требования к синхронизации и времени нарастания фронтов
импульсов можно оценить, используя рис. 3.5. Пусть сигнал ue(t)
представляет собой выходное напряжение телефонной многока-
нальной системы с 1024 каналами. Длительность ступеньки равна
122 нс. Информация о сигнале полностью заключена в амплиту-
дах ступенек. Если передан сигнал ue(t), то при отсутствии шума
для получения информации достаточно производить отсчеты ам-
плитуд ступенек. Отсчеты можно производить в любом месте ин-
тервала длительностью 122 нс при условии, что фронты ступенек
напряжения бесконечно крутые. Это и определяет точность син-
хронизации.
102
i Рассмотрим влияние времени нарастания напряжения на точ-
сть синхронизации. Пусть время нарастания таково, что гре-
ется 122 нс/ чтобы перевести ие(Т) в ие(2Т); Ue(2T) в Ue(3T)
it. д., как показано на графике ua(t) (рис. 3.5). Первоначальное
пенчатое напряжение можно
Рис. 3.5. Конечное время нарастания
ступенчатой функции и фильтр для
преобразования ue(t) в ua(t)
восстановить, производя отсчеты
точно в моменты времени
О, Т, 2Т, 37, ... .
а . । 1 —L 1 wal (О,0)
~Т—!—Г~Г~1_2_Г~ - wal (2, 0)
T—J L—l l_! L-F wat(4,0)
~U~1__rLF~U~L_n_r - wa l (5,0)
J= wal (0,0)
sin 2 ft. в
1.1JI I 1J.1.1 -1.J 1J U I 1
0 125 250 575 500
t мне
Рис. 3.6. Временная диаграмма
однополосной частостной системы.
Временная база для фильтра ниж-
них частостей 7=125 мс, времен-
ная база для несущей 7=250 мкс
Таким образом, если ие учитывать ошибку синхронизации, то
аксимальное время нарастания равно 122 нс. В общем случае
умма времени нарастания и ошибки синхронизации должны
ыть меньше 122 нс.
В присутствии шума отсчеты амплитуд являются плохим ме-
одом обнаружения сигнала. Однако нетрудно видеть, что ua(t)
гожно восстановить до ue(t) с помощью интегрирования, так как
нтеграл от ua(t) в пределах, например, Т—2Т пропорционален
е(2Т)-ие(Т).
Схема, изображенная на рис. 3.5, преобразует ue(t) в ua(t)
рактически без переходного процесса. В частотной теории по-
троение фильтра, который мог бы это делать, является классиче-
кой задачей. Простота, с которой можно решить эту проблему в
анном случае, получается благодаря использованию в фильтре
лемента с параметром, зависящим от времени, — полевого трап-
истора.
Для обсуждения однополосной модуляции функций Уолша рас-
мотрим рис. 3.6. Вверху показаны первоначальный сигнал F(0) и
игнал F++(0), отфильтрованный фильтром нижних частостей;
десь не учтен временной сдвиг между F(0) и F++(0). На рис. 3.6
[оказаны также несущие Уолша wal (0, i0); wal (2, 0); wal (4, 0);
ЮЗ
wal (6, 9)..Их временная база равна 250 мкс, т. е. удвоенной
длительности ступеньки сигнала F++(0). Отфильтрованный сигнал
/++(0) можно представить на интервале (0^/<250) мкс в виде:
F++ (0) = с (0) wal (0, 0) + с (1) wal (1, 0);
0 = (t —t0)lT-, tQ= 125 мкс; T = 250 мкс; (3.25)
—1/2<9<1/2.
Амплитудная модуляция одной из несущих wal (2/, 9) (рис. 3.6)
сигналом F++(0) дает
Г++ (9) wal (2/, 9) = с (0) wal (21, 9) + с (1) wal (2/ +1,9). (3.26)
В результате модуляции получаются несущие Уолша wal(2j + l, 0),
которые не показаны на рис. 3.6. Таким образом, модулированные
функции Уолша занимают весь отведенный частостный диапазон.
На рис. 3.6 также показаны синусоидальные функции с времен-
ной базой Т=250 мкс. Их амплитудная модуляция функцией
Г++(0) не дает в результате однополосной частотной модуляции.
Соответствие между функциями Уолша и синусоидальными функ-
циями в случае квадратурной модуляции основано на том факте,
что wal(0, 0) —первая функция как ряда Уолша, так и ряда Фу-
рье. Однако в сигнале F++(9) (3.25) содержится составляющая
wal(l, 0), которая не принадлежит ряду Фурье.
Будем увеличивать временную базу несущих (рис. 3.6) от 250
до 500 или до 1000 мкс, не меняя сигнал F++(0). Тогда получим
еще два примера частостных однополосных систем. Несущие
wal (4/, 0J принимают значения Т=500 мкс, a wal (8/, 0) — Т—
= 1000 мкс; /=0, 1, 2, ....
Преимущества и недостатки множества возможных однополос-
ных систем еще недостаточно изучены. Следует заметить, что си-
стемы с квадратурной модуляцией являются особым случаем клас-
са однополосных систем, когда временная база несущих равна вре-
менной базе фильтров нижних частостей.
Характерной особенностью многоканальных систем с частот-
ным разделением сигналов по сравнению с многоканальными си-
стемами с временным разделением сигналов является легкость,
с какой смешиваются и разделяются сигналы или радиосигналы
в сетях связи. Это объясняется тем, что в многоканальных систе-
мах с частотным разделением сигналы четко отличаются своей
частотой, которая не зависит от временных задержек. С другой
стороны, сигналы в многоканальных системах с временным разде-
лением имеют различные и неизвестные временные задержки и
поэтому требуют для разделения дополнительной маркировки.
Так как сигналы частостных многоканальных систем также четко
разделяются по частости, то можно ожидать, что сети связи, соз-
данные на их основе, будут довольно похожи на многоканальные
системы с частотным разделением.
На рис. 3.7 показано возможное распределение по частости
групп и супергрупп в сети связи. Это распределение выбрано та-
104
1м образом, что группа, супергруппа А или супергруппа В явля-
гся классами математической подгруппы функций Уолша
alfj, 9) с индексами /, меньшими 32, 128 или 256. Предполагает-
что используется однополосная модуляция и временная база
1вна 250 мкс. Индивидуальные каналы занимают полосу 0—
Супергруппа в
6Р канала
Супергруппа А
Л канала
Группа, fb каналоб
(V 6)t wat(Mt 0)t... wat(626)
Av*
OP 6P 128 192 256 520 58P PP8 512
, <f—*• Kips
T= 250 мне
Рис. 3.7. Распределение диапазона частостей
fkzps. 16 каналов образуют группу, занимающую частостный диа-
[азон от 64 до 128kzps. Несущими являются функции wal (32+
1-2/, 0); /=0, 1,..., 15.
Амплитудная модуляция несущей wal (96, 0) группой сдвигает
юлосу частостей, занимаемую группой, в диапазон (128—
92)kzps; несущая wal(64, 0) сдвигает группу в диапазон (192—
!56)kzps. Эти 32 канала на рис. 3.7 обозначены как супергруппа А.
Модуляция несущей wal (192, 0) супергруппой А сдвигает по-
юсу частостей, занимаемую супергруппой, в диапазон (256—
|84)kzps; несущая wal (128, 0) сдвигает супергруппу А в диапазон
[384—512)kzps. Получаемые 64 канала обозначены на рис. 3.7
щк супергруппа В. В табл. 3.3 показано, в какое положение час-
[остного диапазона сдвигаются каналы. 16 каналов группы сдви-
аются из основной полосы несущими waif/, 0), /=32, 34, ..., 62.
например, сигнал в десятом канале модулирует несущую wal (50,0).
Йастость wal (50, 0) равна 50x2= 100 kzps и сигнал занимает no-
joey от 100 до 104 kzps. Несущая wal(50, 0) становится в супер-
группе А несущей wal (82, 0), если ее умножить на wal (96, 0),
[ли становится несущей wal (114, 0), если ее умножить на wal (64,
I). Десятый канал занимает полосу от 2x82=164 до 168 kzps
[ли полосу от 2X114=228 до 232 kzps. Наконец, несущая wal (50,
I) становится одной из несущих wal (146, 0); wal (178, 0);
pal (210, 0) или wal (244, 0) в супергруппе В. Десятый канал за-
нимает одну из полос шириной 4 kzps с нижним пределом 2х
К 146=292 kzps; 2X178=356 kzps; 2X210=420 kzps или 2X244 =
р=488 kzps.
I Рассмотрим случай передачи супергруппы В, супергруппы А и
[руппы. Согласно рис. 3.7 сигнал занимает частостный диапазон
|г 64 до 512 kzps. С помощью фильтра нижних частостей с часто-
I 105
Таблица 3.3
Переход от несущих wal(32, 0), ..wal(62, 0) группы к несущим
wal(64, 0), ...» wal(128, 0) супергруппы Дик несущим wal(128, 0), ...» wal(256, 0\
супергруппы В. Частость несущих равна 2j kzps для Т=250 мкс
Номер канала ————————— _
Группа 16 кана- лов Супергруппа А: 2 группы
Несущая wal (96, 0) 96=1100000 Hecyman’wal (64, 0) 64=1000000
/ / двоичный / / двоичный / j двоичный
1 32 100000 64 1000000 96 1100000
2 34 100010 66 1000010 98 1100010
3 36 100100 68 1000100 100 1100100
4 38 100110 70 1000110 102 1100110
5 40 101000 72 1001000 104 1101000
б 42 101010 74 1001010 106 1101010
7 44 101100 76 1001100 108 1101100
8 46 101110 78 1001110 ПО 1101110
9 48 110000 80 1010000 112 1110000
10 50 110010 82 1010010 114 1110010
11 52 110100 84 1010100 116 1110100
12 54 110110 86 1010110 118 1110110
13 56 111000 88 1011000 120 1111000
14 58 111010 90 юною 122 1111010
15 60 111100 92 1011100 124 1111100
16 62 111110 94 1011110 126 1111110
Супергруппа Bi 2 супергруппы А
Несущая wal (192, 0) Несущая wal (128, 0)
192= 11000000 128= 10000000)
/ / двоичный / / двоичный / / двоичный / j двоичный
128 10000000 160 10100000 192 11000000 224 11100000
130 10000010 162 10100010 194 11000010 226 11100010
132 10000100 164 10100100 196 11000100 228 11100100
134 10000110 166 10100110 198 11000110 230 11100110
136 10001000 168 10101000 200 11001000 232 11101000
138 10001010 170 10101010 202 11001010 234 11101010
140 10001100 172 10101100 204 11001100 • 236 11101100
142 10001110 174 10101110 206 11001110 238 11101110
144 10010000 176 10110000 208 11010000 240 11110000
146 10010010 178 10110010 210 11010010 242 11110010
148 10010100 180 10110100 212 11010100 244 11110100
150 10010110 182 10110110 214 11010110 246 11110110
152 10011000 184 10111000 216 11011000 248 11111000
154 10011010 186 10111010 218 попою 250 11111010
156 10011100 188 10111100 220 11011100 252 11111100
158 10011110 190 10111110 222 11011110 254 11111110
106
>ю отсечки 128 kzps можно выделить группу. Фильтр нижних
Ьтостей с частостью отсечки 256 kzps будет выделять группу и
ieprpynny А. Эта простая фильтрация возможна только тогда,
»гда частость отсечки равна 2rX4 = 2r+2kzps; r=0, 1, 2, ....
; Рассмотрим следующий пример передачи супергруппы В. Вы-
лим 32 канала либо в полосе (256—384) kzps, либо в полосе
84—512)kzps. Умножим супергруппу В на несущую wal (128, 0).
табл. 3.3 показано, что полоса (256<<р<384) kzps (/=
128, 190) преобразуется в полосу (0<кр< 128)kzps (/=0, ...
.,62); полоса (384<<p<512)kzps (/=192, ..., 254) преобразуется
полосу (128<<р<256)kzps (/ = 64, ..., 126). Фильтр нижних ча-
остей с частостью отсечки 128 kzps может выделить полосу
|<<р<128) kzps. Умножением на wal (64, 0) можно сдвинуть ее в
гапазон (128<<р<256)kzps, который является диапазоном супер-
уппы А.
Умножим супергруппу В на wal (192, 0). Полоса (256<<р<
;384)kzps (/=128, 190) преобразуется в полосу (128<<р<
^256)kzps (/=64, ..., 126), полоса (384<<p<512)kzps (/ = 192, ...
г., 254) в полосу (0<<р< 128)kzps (/=0, ..., 62). Фильтр нижних
астостей может выделить полосу (0<<р< 128)kzps, которая те-
ерь содержит другие каналы супергруппы В.
Сигнал любого отдельного канала в полосе (2/<<р<2/+4) kzps
южет быть выделен умножением входного сигнала на wal(j, 0) с
последующей фильтрацией с помощью фильтра нижних частостей
t частостью отсечки 4 kzps. Отфильтрованный сигнал затем можно
двинуть в любую полосу частостного спектра умножением на со-
ответствующую несущую Уолша. Выделение отдельных каналов
|ли групп каналов без требования демодуляции всех каналов мо-
кет быть использовано для распределения каналов по переклю-
чаемым сетям связи [14].
> Ранее предполагалось, что каналы и группы, собранные в су-
пергруппу А или В, синхронизированы. Это предположение спра-
ведливо, если все каналы комбинируются в группы и супергруппы
1а одной и той же центральной телефонной станции. Рассмотрим
случай, когда каналы комбинируются в группы на различных цен-
тральных телефонных станциях, и эти группы комбинируются в
Супергруппы на центральной телефонной станции более высокого
уровня. Теперь уже нельзя предполагать, что эти группы синхро-
низированы, но можно допустить, что они имеют одинаковую вре-
менную базу Т=250 мкс.
Компоновка несинхронизированных групп с одинаковой вре-
менной базой будет рассмотрена с учетом рис. 3.8. На этом рисун-
е сверху показаны функции Радемахера wal (31, 0) и wal (127, 0)
а интервале O^i0<1/8. Умножение
wal (127, 0) wal (63, 0) = wal (64, 0);
wal (127, 0) wal (31, 0) = wal(96, 0)
кает функции wal (64, 0) и wal (96, 0). Согласно рис. 3.7 они яв-
107
ляются несущими, необходимыми для перевода двух групп в одну
супергруппу А.
На рис. 3.8 (строки а) символически показаны сигналы двух
несинхроиизированных групп. Согласно рис. 3.6 и 3.7 эти сигналы
состоят из сумм функций wal(32, 0); wal(33, 0), ..., wal(63, 0);
J I------1 I------- Aflt {31, в)
“|_J—LJ~L_I—l—Г wat («,69
~| П п I—LTL-TLT
с) I/ |2 fcz^ группа!
\ I z p группа 2
p) ।—।—i—i—।—।—।—।—
/UK группа Г
Я sxjs МП Л» ®
2 .ГU' группа 1
/1 г 117 группа 2
I -I I ..J па I (32, о}
< 1 A i 1 1 1 1—1 1 1 1 1 А 1 А 1
0 О32 1/16 3/з2 Ов 0—~
О 1,6125 15,625 23-1375 31.25 мкс
Т= 250 мкс
i -*
Рис. 3.8. Принципы объединения
двух несинхроиизированных групп
в подгруппу А согласно рис. 3.7
амплитуды этих функций зависят
от особенностей передаваемых
сигналов. Из рис. 3.9 видно, что
сигнал, состоящий из составляю-
щих wal(32, 0); wal (33, 0), ...
..., wal(63, 0), является ступенчатой
функцией с шириной ступеньки,
равной 1/64. Нечетные функции
wal (33, 0); wal (35, 0), ..., wal (63,
0) на рис; 3.9 не показаны, так
как они отличаются от четных
функций wal(32, 0); wal(34, 0, ...
..., wal (62, 0) только коэффициен-
том —1, на интервале —1/2^0<
<0. Сигналы на рис. 3.8 (строки
а) разделены на интервалы ши-
риной 1/64. На этих интервалах
их амплитуды постоянны. Отдель-
ные интервалы обозначены 1,2.....
Далее из рис. 3.9 можно ви-
деть, что сигнал, состоящий из функций wal(32, 0), ..., wal(63, 0)
и имеющий амплитуду U на интервале —1/2^0<(—1/2) + (1/64),
должен иметь амплитуду —U на интервале (—1/2) + (1/64) ^0<
<(—1/2)+ (2/64). Этот результат справедлив в общем случае:
амплитуды имеют одно и то же абсолютное значение и противо-
положный знак на любых двух интервалах (26/64) ^0< (26/64) +
+ (1/64) и (26/64) + (1/64)s£0==S(26/64) + (2/64). На рис. 3.8 (стро-
ки а) показаны интервалы одинаковых абсолютных значений. На
интервалах 1 и 2, 3 и 4, 5 и 6 и т. д. амплитуды имеют одинаковое
абсолютное значение и противоположный знак.
Производя отсчеты значений сигналов (строки а) в моменты
времени, задаваемые тактовыми импульсами (строка б), и запо-
миная отчеты напряжений в течение интервала длительностью
1/64, получаем сигналы строки в. Они синхронизированы с несу-
щими wal (64, 0) и wal (96, 0). Но этой синхронизации еще недо-
статочно. Группа 2 в строке в начинается в момент времени 0 = 0
с интервалов 1 и 2, в которых амплитуды имеют одинаковые аб-
солютные значения. Группа 1 начинается с интервалов, для кото-
рых это несправедливо. Сдвигая группу с помощью схем, осуще-
ствляющих отсчеты и запоминание значений сигналов, получаем
сигналы строки г. Теперь точно засинхронизирована группа 1, а
группа 2 не засинхронизирована. Для модуляции несущих
wal (64, 0) и wal (96, 0) надо взять сигналы группы 1 из строки г
и сигналы группы 2 из строки в.
108
Заметим, что синхронизация здесь отличается от синхрониза-
1и при временном разделении, так как группы 1 и 2 могут быть
.винуты относительно друг друга на любую величину, кратную
—Г“1—П—П—ГХ—П—Г“1—TXJ---1_гхз-х_гт_гх_гх-гх_гх_ J/7
Т—ГТ—1-J-1—ГТ-ГТ—ГТ—ГТ—ГТ—ГХ-ГТ—ГТ—ГТ—TT—TTJ*
_гх_гхги-х_г1гхл-хп_гхд-х_гт_пгт_гтгкл-хихгх_гх J<y
Т_ГкГТ_ГХГШП_ГЕГХЛ"Т71_ГТ_ГиП_ГТЛ_ГХЛТ.ГТ_ГТиТ_Г
-TTTLJ-LHJTJT—TLTT—I-LTLJ-LTLTT—ГТ_П—П-ГХП_ГТ—TLTT. 42
Х_лигтзхихгх_ГТихгкГХП_ГТ_Г1ГТГихгх_ГХП_Г1ГТ-Г1—Г 44
иплиггигдгтггплхггп-гтлггкп-лгтллггл-гит.^
тл_ги"тд1_гипд1_г1гтд1_пгтп1_гьгтгЕитлтзт_гьгтлт_^
ЛГ1Л_Г1Г1ШиЪЛГи1_ПГТЛ_ПГ1Л_ЛЛПГ1Л_ПГТЛЛ7
Т71_ЛЛПГТЛ-ПГТШи1ДгГТЛ_Ги1ПГТЛ_ПГТПЛЛ_ПГ^
лгтллгихллгхгшлиггтл_пп1ггитплигплггп.л
ХЛГШ-ПЛЛиПЛЛЛ-ЛПЛЛЛПЛ-ПЛДи-итЛ-ПЛЛГ^
_штлллппплл_плпгхплл_плгтшигг1шт.лг
4nrinjxnnn_rumruuxnjnjinnjinnnjiJUinnrLnr 60
лллгигпллАштлллщпллллщтшиитллллл-Л?
L ,1 I I 1 1 I 1 I J 1-1 I -I 1-1 1—1 J—1 I 1 1 U I. I 1 I I I I 1 I
-1/2 '3/8 -1/4 -1/8 0 1/8 1/0 3/8 1/2
0-*-
Рис. 3.9. Функции Уолша
32. Такой произвольный сдвиг при временном разделении при-
!л бык перекрестным помехам.
В символической записи сигнал супергруппы А имеет следую-
щий вид: (группа 1) wal (64, 0) + (группа 2) wal (96, 0).
Демодуляция супергруппы А с помощью wal (64, 0) или
al (96, 0) дает следующие два сигнала:
[(группа 1) wal (64,0) 4- (группа 2) wal (96, 0)]wal(64, 0) =
= (группа 1) + (группа 2) wal (32, 0);
[ (группа 1) wal (64, 0) + (группа 2) wal (96, 0) ]wal (96, 0) =
= (группа 2) + (группа 1) wal (32, 0).
Один из членов правой части необходимо подавить, чтобы по-
учить в чистом виде группу 1 или группу 2. Члены (группа 1)
109
или (группа 2) легче подавить, чем остальные. Практического зна-
чения это не имеет, так как получаются члены (группа 2) wal (32, 0)
и (группа 1)wal(32, 0), которые можно демодулировать с по-
мощью wal (32, 0):
{(группа 2)wal(32, 0)]wal(32, 0) = (группа 2);
((группа l)wal(32, 9)]wal(32, 0) = (группа 1).
Члены (группа •) и (группа 2) можно подавить фильтром ниж-
них частостей, осуществляющим интегрирование на интервалах
О<0<1/32; 1/32<0<2/32 и т. д. Эти интервалы интегрирования
показаны в последней строке рис. 3.8. Для телефонной системы с
1024 каналами их ненормированная длительность равна 7,8125 мкс.
Эти интервалы интегрирования равны двум интервалам группы 2
в строке в и группы 1 в строке г, в ко-
Рис. 3.10. Осциллограммы ча-
стостного уплотнения телефон-
ных сигналов:
а) входной сигнал ^(0); б)
сигнал на выходе фильтра
нижних частостей F++(0);
в) несущая wal(5, 0); г) пер-
вичная модуляция F++(0)X
Xwal(5, 0); д) несущая wal (9,
0); е) вторичная модуля-
ция F++(0)wal(5> 0)wal(9, 0);
масштаб по горизонтали
50 мкс/дел
торых амплитуды сигналов имеют оди-
наковое абсолютное значение и про-
тивоположный знак. Таким образом,
интегрирование дает нуль и сигналы
подавляются.
Умножение группы 2 в строке в и
группы 1 в строке г на wal (32, 0)
приводит к тому, что знаки на интер-
валах 1 и 2, 3 и 4 и т. д. становятся
одинаковыми. Интеграл уже не равен
нулю и сигналы (группа 2) wal(32, 0)
или (группа 1) wal (32, 0) проходят
через фильтр нижних частостей.
На рис. 3.10 показаны некоторые
осциллограммы частостной многока-
нальной системы, полученные Люке и
Мэйлом. Для ясности вместо несущих
wal (32, 0), ..., wal (62, 0) (рис. 3.7)
показана несущая wal (5, 0). По той
же причине для вторичной модуляции
использована несущая wal (9, 0), а не
wal (96, 0) или wal (64, 0) (рис. 3.7).
Ослабление перекрестных помех в
этой аппаратуре составляет порядка
—55 дБ при использовании отдельной
линии синхронизации и падает до
—53 дБ, если сигнал синхронизации
передается вместе с телефонным сиг-
налом и выделяется фильтром, отсле-
живающим функцию Уолша. При ис-
пользовании сжимателей динамическо-
го диапазона (компандеров) такое
ослабление вполне удовлетворяет те-
лефонным стандартам. Однако в на-
110
I
МЬящее время частостное уплотнение имеет особый интерес для
Цифровых сигналов с ограниченной пиковой мощностью, а в этом
Иучае ослабление перекрестных помех —53 дБ более чем доста-
ршо.
К. 3.1.3. Цифровое уплотнение
К Ранее было указано, что частостные фильтры, основанные на
ункциях Уолша, можно легко реализовать как цифровые фильт-
Дк Так как полосовые фильтры требуют частостного сдвига сиг-
Крта так же, как и многоканальные системы, можно ожидать, что
ктостные многоканальные системы легко можно реализовать с
«мощью цифрового оборудования. Рассмотрим для примера уп-
Ьтнения двух телефонных сигналов согласно рис. 3.2.
К Необходимо уплотнить два сигнала Г2(0) и Эти сигналы
Кедставлены на рис. 3.2 кривыми а и а'. Амплитуды на опреде-
Инном интервале, например, 125 мкс</<250 мкс преобразуются в
Кфровую форму преобразователем аналог—цифра. В табл. 3.4
Киведены цифровые представления: +110110 для Ff+(8) и
Ю11010 для F/+(0). Уплотнение этих сигналов будет рассмотрено
(Использованием табл. 3.4. Предполагается, что F2(Q) и Г7(0)
«ляются сигналами восьмиканальной системы. В качестве несу-
Инх используются восемь функций Уолша от wal (0, 0) до sal (4, 0).
игналы идут только по двум каналам. Это соответствует коэф-
«циенту загрузки, равному 0,25. Эта величина коэффициента за-
узки характерна для телефонной многоканальной системы в пе-
од максимальной загруженности.
В Несущие —sal (1, 0) и —sal (3, 0) можно представить восьмью
Йфрами +1 и —h как показано в столбцах вив' табл. 3.4. Отри-
Втельный знак несущих здесь несущественен. Несущие —sal (1, 0)
В—sal(3, 0), промодулированные по амплитуде сигналами Г2++(0)
КЛ++(0), дают восемь раз числа +110110 и —011010, умножен-
ие на коэффициенты +1 и —1, как показано в столбцах г и г'.
Врупповой сигнал —Г(0) в столбце д получается суммированием
вух чисел из одной строки в столбцах г и г'.
В Групповой сигнал представляется числом, имеющим на одну
Йфру больше, чем Г2++(0) или Г7++(0).
К Совокупность 8x8 цифр, включая знак сигнала —F(0), мож-
но передать многими способами. Например, можно использовать
В4 прямоугольных импульсов с амплитудами +1 или —1. В этом
йучае для образования группового сигнала будет использовано
Вастостное разделение, а для передачи — временное разделение.
Получившееся число импульсов 64 равно числу импульсов при
временном уплотнении восьми каналов с добавлением одной циф-
ры к семи цифрам в каждом канале для проверки на четность.
Добавление одной цифры позволяет обнаруживать одиночные
Ьшибки, но не позволяет их исправлять.
й Демодуляция —F(0) достигается умножением —Г(0) на
sal(l, 0) и —sal(3, 0). Полученные двоичные числа показаны
В столбцах ж и ж'. Интегрирование F(0)sal(1, 0) и F(0)sal(3, 0)
111
г
Таблица 3.4 .
Цифровое частостное уплотнение двух сигналов: (0) и
согласно рис. 3.2
Ц фровые представления сигналов в различных точках рис. 3.2
в в' г г' а ж 1
ф ф
—4 со ф
га ф
ф ф со Ф оо Ф "га СО со*
*
<2* + + £ Ф V)
"га со 8 tr +Ь. U, ц. Ь. ф
1 1 1 1 1 +
+1 + 1 +110110 —011010 +0011100 +0011100 +0011100
+1 —1 + 110110 +011010 + 1010000 + 1010000 —1010000
+1 —1 + 110110 +011010 + 1010000 +1010000 —1010000
+1 + 1 + 110110 —011010 +0011100 +0011100 +0011100
—1 — 1 —110110 +011010 —0011100 +0011100 +0011100
—1 +1 —110110 —011010 -1010000 +1010000 —1010000
— 1 +1 —110110 —011010 — 1010000 +1010000 —1010000
— 1 -1 —110110 +011010 —0011100 +0011100 +0011100
s=+l 10110000 S=—011010000
S/8=+110110 S/8=—011010
означает сложение восьми чисел в колонках ж и ж', что дает
+ 110110000 и —011010000. Деление на восемь дает первоначаль-
ные значения F2++(0) и Fq++(fi). На практике для получения этих
чисел лучше применить к групповому сигналу —F(0) быстрое
преобразование Уолша—Фурье из § 1.2. Однако включение опи-
сания этого метода, позволяющего экономить время, затруднит
пояснение принципа.
Сигнал —F(0) содержит только числа с абсолютными значени-
ями 0011100 и 1010000; два из них имеют отрицательные знаки и
два — положительные. Это характерно для работы системы с дву-
мя активными каналами. Таким образом, если из-за действия
помех одна цифра изменится, то ее можно исправить, сравнив с
тремя неизменившимися. В большинстве случаев можно исправить
две ошибки и во многих случаях — больше двух. Поэтому здесь
имеется определенное преимущество по сравнению с методом вре-
менного разделения. Это объясняется тем, что при использовании
временного разделения и при коэффициенте загрузки 0,25 в те-
чение 3/4 времени не передается никакой полезной информации.
112
| Было исследовано большое число разновидностей схем часто-
гстно-цифрового уплотнения. Однако их возможное число настоль-
ко велико, что не было сделано определенных выводов об их от-
носительных преимуществах.
3.1.4. Методы однополосной модуляции
Амплитудная модуляция синусоидальных и косинусоидальных
^несущих согласно теоремам об умножении этих функций дает
двухполосную модуляцию. Существует ряд методов для устране-
ния одной боковой полосы, которые можно хорошо проанализиро-
вать с помощью ортогональных функций.
| Рассмотрим два передатчика, которые излучают синусоидаль-
ные колебания с частотой Йо, имеющие фазовый сдвиг (1/2) л. Не-
сущие, модулированные временными функциями £+(0) и £)+(0),
Сбудут иметь вид F+(0) K2cosQo0 и £>+(0) У2sin Qo0. Предпола-
гается, что частота Йо может быть точно воспроизведена в при-
емнике и что существует фазовый сдвиг а между принятыми несу-
щими }£2cosQo0 и К2sin<o90 и опорными несущими ]/2Х
I S (0) = F+ (0) У2 cos Йо0 + D+ (0) У 2 sin Qo0 (3.27)
на pr2cos(Q00 + a) и У 2sin(Q09 + a) дает:
| S (0) У2 cos (йо0 + a) = F+ (0) cos а +О+ (0) sin а 4-
I Ч-£+ (0) cos (2ЙО0 4- а) + D+ (0) sin (2ЙО0 4- а); (3.28)
I S (0) У 2 sin (Йо0 + а) = — F+ (0) sin а-}-£)+ (0) cos а +
I 4-F+ (0) sin (2QO0 + а) — £>+ (0) cos (2QO0 4- a). (3.29)
К Члены в правой части (3.28) и (3.29), содержащие множители
3os(2Qo0+a) или sin(2S2o0+a), имеют только высокочастотные
компоненты; они будут подавлены фильтрами. Если фазовый
сдвиг очень мал, то в правых частях (3.28) и (3.29) останутся
только сигналы £+(0) и £>+(0). Таким образом, используя две не-
|.сущие равной частоты, но со сдвигом фаз, равным л/2, можно без
^взаимных помех передавать два независимых сигнала £+(0) и
|£>+(0). Иначе говоря, каждый частотный канал может быть раз-
делен на два фазовых канала, которые будут здесь называться
|синусоидальным и косинусоидальным каналами. Синхронная де-
гмодуляция позволяет использовать оба фазовых канала. Напри-
|мер, можно в (3.29) заменить £+(0) на 14-Г+(0) и потребовать,
[чтобы сигналы £+(0) и £)+(0) практически не имели составляю-
[щих на частоте ниже определенной. Тогда сигнал S(0) можно де-
| модулировать схемой, изображенной на рис. 3.11. На выходе 1 по-
ручается сигнал [1 +AlF+(0)](14-cos2Qo0), а на выходе 2 —
р+(0) (l+cos2Qo0).
Однополосная модуляция — отличный способ передачи по си-
[нусоидальному и косинусоидальному каналам. Чтобы показать
113
это, разложим сигнал F(0) в ряд по синусоидальным и косинусои
дальним импульсам согласно рис. 1.1:
F (0) = а(0) f (0, 0)+ У2 У [ас (t) cos 2л i 0 + as(i) sin 2ni0J; (3.30)
<=i
—1/2<0<1/2.
[since
1----'Бы ход 2
7—i o Выход /
----l^fY0)](/*CO5ZS?o0)
Рис. 3jI»1. Коррекция фа-
зовых различий между
принятой и ^опорной
функциями У2 cos Q06
и У 2 cos (Q&04-a)
Л — перемножитель; Ф —
фильтр нижних частот:
1ВЧ — генератор ВЧ; УФВ —
управляемый фазовраща-
тель; ФВ — фазовращатель
на 90°
Преобразования Фурье <7(0, v); qc(i, v) и qs(i, v) этих импульсов
можно получить согласно (1.24). Первые пять преобразований по-
казаны на рис. 1.6.
Обозначим произведения /(0, 0) У^соэЙоб; f(0, 9) VTsinQo©;
2cos 2лг0cos QoO; 2cos 2лё0 sin Qo0; 2sin2ni0cos Qo0 и 2sin2n£0X
XsinQo0 через </о,с(0); do,>(&)', cfci,c(0); ^ci«(0); <4i,c(0) и <f8i,8(0).
Преобразования Фурье этих произведений обозначим через
Ао, с (v),..Asl, 8 (v):
Ao,c(v)= Y [? (°> v — voX—) Я (°, V 4- Ve)];
Aci.c (v)= У У2 V — v0) (—)qc(i, v + VO)];
A8i,t(v) = (—) у K2 (<?s(i, v— va)4- q,(i, v + v0)];
__
V° ~ 2л ‘
(3.31)
Знаки в круглых скобках справедливы для преобразований Фурье
Ao,«(v); Aci,6(v) и Asi, 8(v).
Преобразования Фурье Gc(v) и Gs(v) от функций F(0)X
X]/r2cosQo0 и F(B) И2$1ПЙо0 можно получить из (3.30) и
(3.31):
Gc (v) = а (0) hO c (v)+ WO Aci c(v) + as(i)hs. s (v)];
i=l
G, (v) = a (0) hQ s (v) + V K(i) hci s (v)+ as(i) fts| s (v)J.
z=i
(3.32)
114
! Чтобы пояснить вид функций Gc(v) и Ge(v), рассмотрим слу-
ай, когда ас(1) =а«(1) = 1, а все другие коэффициенты равны ну-
га. Получившиеся преобразования Фурье функций:
У~2 cos2л0 р 2 cos йо0; )/2 cos 2л0 У2 sin Qo0;
У2 sin 2л0 уТГcos Qo0; У 2sin 2л0 У 2 sin Qo0
оказаны на первых четырех строках рис. 3.12. Заметим, что
2cos2n0 и pr2sin2n0 являются косинусоидальным и синусо-
дальным импульсами, которые равны нулю вне интервала
1/2^05^1/2.
: Из преобразований Фурье, изображенных в первых четырех
троках (рис. 3.12), Можно получить следующие однополосные сиг-
алы:
(3.33)
fcs (9) = COS 2n0 sin Qo0 + sin 2л0 cos Qo0;
fcc (0) = cos 2л0 cos Qo0 — sin 2л0 sin
fsc (9) = cos 2«0 sin Qo0 — sin 2n0 cos Qo0;
fss (9) = cos 2n0 cos 0^0 + sin 2л0 sin Qo0.
Преобразования Фурье этих функций показаны на строках 5—
1 рис. 3.12. Сигналы, описываемые функциями fcs(0) и /Сс(0), име-
--------*- - - 2 cos 2 л i/Г- cos 1
клу--------------1—2из2Хt/T-sinOgt
---1---2sin2Xt/T- COSUgt
--------1—2sin2Kt/T-sinOgt
xJ------1-----cps2xt/T- sinOgt *
z-v , -*Sin2Xt/T- cosu00t
J-Jl----1-----cos 2Kt T COSUgt -
-Sin2K/T • SinUgt
---Ьт---1---— cos2Kt,IT- scnugt -
X 'Sir,2xt/T- COSUgt
—10-----1---—- cos2xt/T cosu.t+
<-Sin2xt/TSinu„t
У7т^--^-----7^- ^2Kt/T- COSUgt-
h' toT -Sin2&llT-NS(Jot
Рис. 3.12. Преобразования Фурье си-
нусоидальных и косинусоидальных
несущих, модулированных по ампли-
туде синусоидальными и косинусои-
дальными импульсами
'3 (0,е)ск q06+wCп я дв
W(O.O)iin9o0-1, OjcBSSlgO
2 JFH—1___I—I—ryp
w(0,0)созяо0 - w(t,e)5inszp
з—ЕЗ__Ь_ЕЗ—
w(o,o)sin w(f,e)cosnft
4 |.-Р1-Ста—
Рис. 3.13. Преобразование
Фурье некоторых частотно-
ограниченных однополосных
сигналов
jot почти всю энергию в верхней полосе v>Qo/2n, а сигналы, опи-
ываемые функциями /8С(0) и f8J(0), имеют почти всю энергию в
(ижней полосе v<Qo/2n. Используются оба фазовых канала, так
ак все четыре сигнала (3.33) содержат синусоидальную несущую
115
sin Q»0 и косинусоидальную несущую cos Qo0. Практическое вопло-
щение однополосной модуляции согласно (3.33) обычно называет-
ся вторым методом однополосной модуляции или методом сдвига
фаз [2]: сигнал F(0) модулирует несущую sinQo0 и аналогичный
сигнал со сдвигом фаз на 90° модулирует несущую cos Qo0; сумма
или разность модулированных несущих дает однополосный сиг-
нал. Первый метод однополосной модуляции дает тот же резуль-
тат путем подавления одной боковой полосы с помощью фильтров.
Из девятой строки рис. 3.12 можно понять, почему не следует
пренебрегать отрицательными частотами. Это преобразование
очень похоже на преобразования, изображенные на строках 5 и 6
для положительных значений v=/T; тем не менее оно не соответст-
вует однополосному сигналу.
Однополосная и двухполосная модуляция позволяют разме-
стить одинаковое число каналов в определенном диапазоне ча-
стот, если используются два фазовых канала для каждого частот-
ного канала. Использование двухполосной модуляции, обычно на-
зываемой квадратурной модуляцией, сопровождается в случае
телефонной передачи большими перекрестными помехами. С дру-
гой стороны, однополосная модуляция вызывает большие искаже-
ния при передаче цифровой информации, если используются
фильтры для подавления одной боковой полосы. Двухполосный
передатчик передает всю энергию по синусоидальному или косину-
соидальному каналу в определенной полосе частот; однополосный
передатчик передает всю энергию как по синусоидальному, так и
по косинусоидальному каналу, но в полосе частот, которая в два
раза уже. Тепловой шум оказывает на оба метода одинаковое
воздействие, если для двухполосных сигналов используется фазо-
чувствительная фильтрация; иначе сигнал будет приниматься из
одного фазового канала, а шум из обоих.
Исследование амплитудной модуляции с помощью синусои-
дальных и косинусоидальных импульсов затруднено тем, что эти
функции не ограничены по частоте и сложны в начертании. Лег-
че получить результаты с помощью функций Уолша.
Рассмотрим функции Уолша (рис. 1.2) как функции частоты
wal (0, v); cal (i, v)=wal(2z, v) и salfi, y)=wal(2i—1, v), а не как
функции времени. С помощью преобразования Фурье получаем
следующие функции времени:
w (2Л, 0) = ( wal (2k, v) cos 2.nv0d v;
— oo
w (2^+1, 0) = f wal (2^4-1, v) sin 2nv0d v;
fc=0,*l, 2.......
(3.34)
Функции w(j, 0)cosQo0 и w(j, 0)sinQo0, j=2k или 26+1 имеют
следующие преобразования Фурье:
116
I 2 J w (2k, 0) cos Qo0 cos 2nv0 d 0=wal (2k, v—v0)-|- wal (2k, v-f- v0);
I —«О
I 2 J w(2k, 0) sin Qo0 sin 2nv0 d 0=wal (2k, v—v0)— wal (2k, v 4- v0);
[ — oo
2 f w(2k 4-1,0) cos Qo0 sin 2nv0 d 0 = wal (2k 4-1,
i -® v — v0) 4- wal (2k 4- 1, v 4- v0);
' 2 f w(2k 4- 1, 0)sinQo0cos 2nv0d0 = —wal (26 4- 1,
-« v — v0) 4- wal (2k 4- 1, v 4- v0).
j (3.35)
Из временных функций (3.34) можно получить следующие сиг-
илы, имеющие всю энергию в верхней или нижней боковой по-
юсе:
> (0, 0) cos йо04-щ (1,0) sin Qo0; w (0, 0) cos Qo0—w( 1,0) sin Qo0;
»(0, 0) sin Qo0 — w (1, O)cos Qo0; w (0, 0) sin Qo04-^(1, 0) cos Qo0;
»(2, 0) cos Qo04~ay (3, 0) sin Qo0; w (2, 0) cos йо0—ш(3,0) sin Qo0;
•(2, 0) sin Qo0—w(3, 0) cos Qo0; w (2, 0) sin Qo04-tt» (3, 0) cos Qo0.
(3.36)
На рис. 3.13 показаны четыре преобразования Фурье функций
[3.36). Стрелки показывают, в каком направлении возрастает аб-
юлютное значение частоты wal(2&, у) и wal (2&4-1, v). Направле-
гие стрелок не изменяется для верхней полосы и меняется для
1ижней.
! Функциональная схема второго метода однополосной модуля-
ции показана на рис. 3.14. Частотноограниченный сигнал F(0)
’ис. 3.14. Метод сдвига фаз (а) и четвертый метод Сарага (б) однополосной
модуляции несущей с частотой Vo частотноограниченным сигналом Г(0):
ФВ— фазовращатель; П— перемножитель; С — сумматор; ПФ — полосовой фильтр;
F'(0) — однополосный сигнал
проходит через две фазосдвигающие цепи. На их выходах появ-
ряются два сигнала, компоненты колебаний которых имеют фа-
вовый сдвиг 90°. В других отношениях сигналы одинаковы. Несу-
щие cos2nvo0 и sin2nvo0 модулируются по амплитуде. Сумма про-
изведений дает сигнал с верхней полосой, а разность — сигнал с
нижней полосой.
117
Очень похожий метод принадлежит Сарагу [3]. Несущие
cos2nvo0 и sin2nvo0 суммируются со сдвинутыми по фазе сигнала-
ми согласно рис. 3.146. Затем суммы перемножаются. Получается
сигнал с верхней полосой, кроме него получаются сигналы в основ-
ной полосе частот и сигналы
Рис. 3.15. Третий метод Уивера однополос-
ной модуляции несущей с частотой v0+
+ (1/2) частотноограниченным сигналом
F(6):
Г — генератор; П — перемножитель; Ф — фильтр
нижних частот
с удвоенной частотой несу-
щей 2v0. Эти нежелательные
сигналы подавляются прос-
тым полосовым фильтром.
Следующий метод одно-
полосной модуляции при-
надлежит Уиверу [4]. На
рис. 3.15 показана функци-
ональная схема для реали-
зации этого метода. Сигнал
F(Q), не содержащий энер-
гии вне полосы
или O^v=/T^ + 1, моду-
лирует несущие sinjtQ и
cos л0 с частотой vt=fiT=
= 1/2 или /1=1/27. Частота
несущей находится в сере-
дине используемой полосы.
Модулированные несущие
проходят через фильтры
нижних частот с частотами
отсечки vg=fgT=\/2. От-
фильтрованные сигналы мо-
дулируют высокочастотные
несущие sin2л(v0+ 1/2)0 и cos 2л(vo+1/2)0. Сумма дает сигнал с
верхней полосой, а разность — сигнал с нижней полосой.
Для объяснения метода Уивера разложим частотноограничен-
ный входной сигнал Г(0) в ряд по функциям и) (2k, '0) и »(2&+1,
0), полученным преобразованием Фурье (3.34) из функций Уолша:
F (0) = V [a (2k) w (2k, 0) + a (2k + 1) w (2k+ 1, 0)]- (3.37)
k—0
На вход схемы (рис. 3.15) достаточно подать одну четную и одну
нечетную составляющие сигнала (3.37), а не сам сигнал F(0).
Используются простейшие функции к>(0, 0) и —о>(1, 0). Их пре-
образования Фурье wal(0, v) и —sal(l, v) показаны в первой
строке рис. 3.16. Стрелки показывают направление возрастания
абсолютного значения v. Модуляция соэл0 сдвигает преобразова-
ние Фурье в первой строке на 1/2 вправо и влево (вторая строка).
Для большей ясности преобразование, сдвинутое влево, заштрихо-
вано. Два сдвинутых преобразования показаны наложенными там,
где они перекрываются и имеют одинаковые знаки.
118
J
[ Модуляция sinn0 сдвигает преобразование на 1/2 вправо и
(реобразование, умноженное на —1, — влево (третья строка),
рильтры нижних частот подавляют все компоненты вне полосы
f*-l/2^v^l/2 (четвертая и пятая строки). Получившиеся сигна-
лы <7о(0) и hi (0) имеют нечетные преобразования (четвертая и пя-
<7о(0) и hi (0) имеют нечетные преобразования (четвертая и пя-
-w(i,O)
W(Q0)
1
2
__________' J
2w(o,e)s>inZ9
Sai (0)
—I" nrL—
9,г(0)
-2w(i.dTcKte
6
7
8
м 9
ZthOfaSz.s
10
2Щб^1п2х. (i0+ %)0
—1—ЕЙЙ- // •
hi2 (О)
-----ТуЧ * I
zfft(0)ioszxC9gty2)e
*hi(6)sin2X(fy%)6
Рис. 3.16. Преобразования Фурье
ш
|я строки). В строках 6—9 показаны четные преобразования
функций <7oi(0), <7ог(0) и Ли(0), Л]2(0), которые можно сложить и
Блучить <?о(0) и Ai(0); так же показаны нечетные преобразования
Йгнкций Aoi(0), Aoz(0) и ?и(0), <?12(0), которые, будучи сложенны-
«, дают преобразования функций Ло(0) и <?i (0).
I Преобразования в строках 6—9 имеют вид wal (0, v) и
|sal(l, v). Таким образом, с помощью (3.33) получаются преоб-
рзования следующих функций:
| q0 (0) cos 2л (v0 + 1/2) 0 = [%1 (0) + <?02 (0)] cos 2л (v0 + 1/2) 0; (3.38)
i \ (0) sin 2л (v0 + 1/2) 0 = [An (0) + Л12 (0)] sin 2л (v0 + 1/2) 0, (3.39)
ак показано в строках 10 и 11. Преобразования в строках 4 и 5
Двигаются на vo+1/2 вправо и влево; сдвинутые преобразования
Йножаются на +1 и —1 согласно четырем возможным произве-
£ниям четных и нечетных преобразований с синусоидальной или
^синусоидальной несущей, как показано в (3.35).
119
I
Сумма строк 10 и 11 дает преобразование Фурье сигнала с
верхней полосой (строка 12). Разность дает преобразование сиг-
нала с нижней полосой.
Наиболее часто используется метод однополосной модуляции,
основанный на подавлении фильтром одной боковой. Этот фильтр
вносит искажения, которые особенно ощутимы при передаче циф-
ровых сигналов. На рис. 3.17а показан спектр мощности сигнала,
Рис. 3.47. Спектр мощности
при модуляции и демодуляции
трех сигналов (случай однопо-
лосной модуляции). Полоса ча-
стот сигналов 2vo, нижняя ча-
стота сигналов равна О
дуляции и демодуляции трех сигна-
лов (случай однополосной модуляции
со смещением). Полоса частот сиг-
налов 2vo, нижняя частота сигналов
равна 2vo
вся энергия которого практически заключена в полосе O^v<vo.
Для дальнейших рассуждений необязательно, чтобы частотный
спектр имел прямоугольную форму в полосе 00<vo, как это по-
казано на рис. 3.17. На рис. 3.176—г показаны сдвиги трех таких
сигналов на соседние полосы с помощью амплитудной модуляции
несущих с частотами vc, vc + 2vo и vc+4vo. Полосовые фильтры с
передаточными функциями, показанными пунктирными линиями,
подавляют нижнюю полосу. На рис. 3.176 показана сумма верх-
них полос. Колебания в заштрихованных областях частично зату-
хают, а их фазовый сдвиг изменяется не по линейному закону от
частоты. Это вызывает искажения сигнала. В приемнике сигналы
разделяются полосовыми фильтрами, при этом вносятся дополни-
тельные искажения (рис. 3.17е—з). Спектр мощности демодули-
рованного сигнала показан на рис. 3.17и—л. Заштрихованные об-
ласти показывают, где колебания некачественно подавлены и
сдвинуты по фазе, что вызывает искажения сигнала.
120
Существует два способа уменьшения искажений. Можно вы-
>ать сигналы таким образом, чтобы большая часть их энергии
►держалась в полосе частот, где фильтры не вносят искажений.
ругой способ — выбирать частоту среза характеристики фильт-
>в вне полосы частот, внутри которой заключена большая часть
:ергии сигналов. Первый способ используется в системах с ча-
ично подавленной боковой1). Этот метод особенно пригоден для
^редачи цифровой информации с временным
ществующим телефонным каналам [6J.
,етальное рассмотрение этого метода дано
еннетом и Дэви [7]. Второй метод исполн-
яется в однополосной модуляции со сме-
.ением [8]. Ее принципы будут рассмот-
жы на основании рис. 3.18. Сигналы
иеют практически всю энергию в полосе
астот 2vo^v^4vo (рис. 3.18а). Ширина
вободной полосы O<v<2vo не равна нулю
I не мала по сравнению с шириной полосы
v=2v0 сигнала. При этом не обязательно
>0=(Av. Необходимо только, чтобы свобод-
ам диапазон 0<v<2v0 был шире, чем диа-
1зон частот, в котором однополосные
ильтры вносят искажения.
На рис. 3.186—г показан сдвиг трех та-
IX сигналов на соседние частотные диапа-
ны с помощью амплитудной модуляции
:сущих с частотами vc—2vo, vc и vc + 2vo-
олосовые фильтры с передаточными функ-
[ями, показанными пунктиром, подавляют
[жние полосы. Сумма трех верхних полос
►казана на рис. 3.186. Сигналы не иска-
аются, так как в тех полосах частот, где
ильтры вносят искажения, сигналы не
иеют составляющих. В приемнике сигна-
ы разделяются полосовыми фильтрами,
[скажения возникают в заштрихованных
Частотных диапазонах (рис. 3.18е—з).
пектр мощности демодулированных сиг-
олов показан на рис. 3.18и—л. Неиска-
енный спектр мощности демодулирован-
IX сигналов опять заключен в полосе
o^v^4vo, как на рис. 3.18а. Искажен-
ie и «зеркальные» колебания сосредото-
ны в неиспользуемых полосах частот
^v^2vo и v>4vq.
На рис. 3.19а показан сигнал Ut(t), ко-
рый может быть передан в системе, в
разделением по уже
Рис. 3.49. Детектиро-
вание цифровых сиг-
налов: сигнал
U(+sin 30.10—
—sin 34л0) (а); вы-
ходные напряжения
детекторов функций
для cos 30лО (б);
э’шЗОлО (в); cos32n0
(г); sin 32л0 (д);
cos34n0 (е) и sin34j&0
(ж). Длительность
развертки 150 мс
Метод модуляции с частично подавленной боковой принадлежит Найк-
15].
121
которой используется однополосная модуляция со смещением:
и, (/) = -|- U sin 30л ЦТ — U sin 34л t/T.
Этим сигналом передается двоичный символ +1—1. Колебание
втЗОл^/Т имеет 15 периодов на интервале длительностью Т, а ко-
лебание sin34n//T имеет 17 периодов.
Из рис. 3.20 следует, что энергия сигнала ui(i) сконцентриро-
вана в полосе (15—l)^v=f/^(17+l). Нижний частотный предел
равен 2vo=14; ширина полосы Av = 4. Ширина свободного диапа-
/[Hzj—<-8000 /6000 26000 32000 - 6000
Рис. 3.20. Частотный спектр мощности импульсов, изображен-
ных на рис. 1.1 и 2Л6:
(1/2) pr2wal(0, 0) (a); sin2n0 (б); cos2«0 (в); sin4n0 (г);
cos4n0(<3); sin6.-10 (е)\ созбяО (ж); sin&tO (з); cos 8л0 (и);
Q=t/T, v=fT, —1/2 ^0^1/2; f приведена в герцах для
Г=1125 мкс
зона 0^v^2vo равна 14Av/4 и, таким образом, много шире, чем
на рис. 3.18. Из этого сигнала можно восстановить переданный
символ +1—1 согласно рис. 3.196 и е с помощью «детектора»
функций, аналогичного рис. 2.12. Совершенно неважно, какие дру-
гие сигналы находятся вне диапазона 14^v^l8. Из рис. 3.19в, г.
д и ж ясно, что они дают очень маленькое выходное напряжение
в момент отсчета.
3.1.5. Коррекция временных рассогласований
при синхронной демодуляции
Рассмотрим частотноограниченный сигнал F(0) /FcosQo0- Он
будет синхронно демодулироваться умножением на местную не-
сущую yr2cos(Qo0+a), которая имеет разность фаз а относи-
тельно принятой несущей /Feos Qo0 [1]:
F(0) /Feos Ц>0 /Feos (Qo0 + а) = F (0) [cos а + cos (2QO0 + a)]. (3.40)
Сдвинем сигнал по частоте с помощью вспомогательной мест-
ной несущей /2cos(S2n0 + an) и затем синхронно продемодули-
руем с помощью местной несущей /2cos[(Q0—Qn)0+as]:
122
{[F (0) /2 cos Йо0 ] V2 cos (Q„0 + <x„) } 2cos [(Qo - Q„)0 + as) =
F (0) {cos a 4- cos [2 (Qo — Q„) 0 — a0) 4- cos (2Q„04-ao) 4-cos (2Qo04-a)};
(3.41)
a = a„ 4- as; a0 = a„ — as.
Уравнения (3.40) и (3.41) содержат требуемый сигнал F(0),
[неженный на cos а, и высокочастотные составляющие, которые
>жно подавить фильтрами. Существует несколько методов устра-
нил вредного влияния cos<r_ Например, можно из косинусои-
льной местной несущей 1^2 cos(QoO + a) получить синусоидаль-
е колебание p<2sin(Qa0+a). Умножение принятого сигнала на
р синусоидальное колебание дает
(0) У2 cos Йо0 У2 sin (ОдО 4- а) = F (0)'[sin a4-sin (2Йд0 4- a)J. (3.42)
t
Предположим, что F(9) можно записать в виде суммы F(Q) —
14-jWF+(0), где F+(0) —сигнал, который практически не содер-
1т составляющих с частотой ниже определенной, a М — индекс
дуляции. Правая часть (3.42) примет вид
sin a 4- MF* (0) sin a 4- [ 1 4- MF + (0)] sin (2QO0 4- a). (3.43)
Составляющие, описываемые вторым и третьим членами, мож-
подавить фильтром нижних частот. Остается составляющая
а. Ее можно использовать в цепи обратной связи для сдвига
:тной несущей ]/lTcos(Qo0 + a), а следовательно, и У2х
>in(Qo0 + a) таким образом, чтобы sin а стремился к 0. Тогда а
щовится либо равным 0, либо числом, кратным л, а cos а ста-
вится равным ±1. Пусть цепь обратной связи будет устойчивой
я а = 0, ±2л, ±4л, ... и неустойчивой для а=±л, ±3л, ....
Гда значения cosa= — 1 являются неустойчивыми. На рис. 3.11
казана функциональная схема приемника, корректирующего
Юность фаз этим методом. Предполагается, что а равно нулю вез-
! кроме цепи обратной связи, где указаны значения при а=/=0.
щь тщательное исследование синхронной демодуляции синусо-
льных несущих дано Витерби (2].
Рассмотрим коррекцию временных рассогласований при ис-
ьзовании несущих Уолша. Сигнал F++(0)wal(/, 0) (3.15) будет
одулироваться умножением на местную несущую waif/, 0—0V ).
:ущие wal (/, 0) и wal (j, 0—0V) являются периодическими
[кциями и не равны нулю вне интервала —1/2^0^ 1/2. Демо-
ированный сигнал имеет следующий вид:
F44* (0) wal (/, 0) wal (j, 0 — 0V). ' (3.44)
tecTHO, чему равно произведение wal(/, 0)wal(j, 0), по неиз-
гно, чему равно произведение wal(/, 0)wal(/, 0—0v). На
дение последнего сходно с нахождением произведения У2Х
>sQo0 и K^cos(Qo0 + a) в (3.40). Это произведение нельзя
123
получить только с помощью теоремы умножения (3.7); в допол-
нение необходимо воспользоваться теоремами сдвига синусои-
дальных и косинусоидальных функций:
cos (а — fJ) — cos а cos р + sin а sin р и т. д. (3.45)
С помощью этой теоремы сдвига надо разложить
Xcos(Qo0+ia), и тогда можно применить теоремы умножения
(3.7). Теоремы сдвига и умножения для синусоидальных и коси-
нусоидальных функций, в сущности, одинаковы, так как (3.7) яв- i
ляется теоремой умножения, если читать слева направо, и теоре-
мой сдвига, если читать справа налево. Функции Уолша имеют
очень простую двоичную теорему сдвига (1.39): walfj, 0®0V )==
= wal(/, Gjwalf/, 0V), но (3.44) содержит обычный знак вычита-
ния, а не сложения или вычитания по mod 2.
Для функций Уолша можно легко вывести определенные част-
ные случаи теоремы сдвига. На рис. 1.2 показано, что периодиче-
ски продолженные функции sal (1, 0) и cal (1, 0) преобразуются
одна в другую сдвигом на (±1/4) или (±1/4)7 в ненормирован-
ной записи; функции sal (2, 0) и cal (2, 0) преобразуются одна в
Т а б л и ц а 3.5 ।
Некоторые значения Йо и 0( для частной теоремы сдвига периодических функций
Уолша са!(1, 0) и sal(j, 0)
i
десятичный двоичный во 01 десятичный двоичный 00 0.
1 000001 —1/4* -1/2 17 010001 -1/4 -1/2
2 000010 —1/8* -1/4 18 010010 -1/8 -1/4
3 000011 + 1/4 -1/2 19 010011 + 1/4 -1/2
4 000100 —1/16* -1/8 20 010100 —1/16 -1/8
5 000101 -1/4 -1/2 21 010101 -1/4 -1/2
6 000110 +1/8 -1/4 22 010110 + 1/8 -1/4
7 000111 + 1/4 -1/2 23 010111 + 1/4 -1/2
8 001000 —1/32* —1/16 24 011000 + 1/32 —1/16
9 001001 -1/4 -1/2 25 011001 -1/4 -1/2
10 001010 -1/8 -1/4 26 011010 -1/8 -1/4
И 001011 + 1/4 -1/2 27 011011 + 1/4 -1/2
12 001100 +1/16 -1/8 28 011100 +1/16 -1/8
13 001101 -1/4 -1/2 29 011101 -1/4 -1/2
14 001110 +1/8 -1/4 30 011110 + 1/8 -1/4
15 001111 +1/4 -1/2 31 011111 +1/4 -1/2
16 010000 —1/64* —1/32 32 100000 *-1/128 —1/64
124
ругую сдвигом на ±1/8, a sal (3, 0) и са!(3, 0) —сдвигом на
1/4 и т. д. Пусть i будет степенью 2; тогда справедлива следую-
ая общая формула:
cal (2*, 0— 2-*“2) = sal(2*, 0), k = 0,1,2..... (3.46)
Рассмотрим случай, справедливый для любого целого i:
cal (f, 0 + 0o) = sal(Z, 0). (3.47)
ля i=l, 2, 32 в табл. 3.5 приведены значения 0О. Для i = 2k
начения 0О определяются из (3.46). Эти значения в табл. 3.5 от-
ечены звездочкой. Можно видеть, что значение 0о=’1/4 для /=3
1вно значению 0о=—1/4 для i=l, если изменить знак. Поэтому
для i=3 можно назвать «зеркальным» к 0О для i=i относитель-
) линии i=2=21. Можно легко видеть, что 0о для /=5, 6, 7 яв-
гется зеркальным к 0О для 4=3, 2, 1 относительно линии /=4 =
22. Этот закон отображений можно записать следующим обра-
>м:
cal (2* + j, 0 + 0O) = sal (2* 4 j, 0); '
cal (2* — j, 0 — 0O) = sal (2* — j, 0);
k= 1, 2, , , /=1, 2, . . 2ft — 1.,
(3.48)
эавнения (3.46) и (3.48) являются частной теоремой сдвига для
ункций Уолша. Они соответствуют соотношению sinx=cos(x—
1 \ , . '
— л! для синусоидальных и косинусоидальных функции.
Для функций sal вместо (3.46) (3.48) выполняются
отношения:
следующие
sal (2*. 0 — 2-ft-2) = — cal (2*, 0);
sal (2* + j, 0Д- 0O) = — cal (2* 4 /, 0);
sal (2* —j, 0 4 0O) = — cal (2* — /, 0);
k = 1,2, . . /=1,2. . , „ 2*—1.
авнения (3.48) — (3.50) дают:
cal (i, 0 4 0O) = — cal (i, 0 — 0O); 1
sal (i, 0 4%) = — sal (i, 0 — %) i
(3.49)
(3.50)
(3.51)
*
и
cal (i, 0 4 9i) = — cal (i, 0); sal (i, 0 4 0X) = — sal (1, 0); (3.52)
0i = -2|0J.
ичения 0i приведены в табл. 3.5.
Затруднительно получить 0О и 01 для больших значений i расш-
ирением табл. 3.5. 01 можно получить значительно проще, запи-
в i в двоичной форме. 04 равно —1/2, если в младшем разряде
оит 1. Изучение табл. 3.5 показывает, что 01=—1/2 для всех не-
125
четных i. 0i равно —1/4, сели в младшем разряде стоит 0, а в сле-
дующем— 1. В общем случае справедливо 01 =—2-*-1, если в k
младших разрядах стоят нули.
Абсолютное значение 0о получается аналогичным образом из
двоичного представления I. Значение 10о| равно 2~ft~2, если в k
младших разрядах стоят нули, причем 0О=—|0о|, если в £+2-м
разряде стоит 0, и 0о= + |0о|, если в £+2-м разряде стоит 1. Рас-
смотрим в качестве примера числа 1 = 20 и 1=28 табл. 3.5. В двух
младших разрядах (k = 2) стоят нули; это дает |0О| =2~2-2= 1/16,
В четвертом разряде (£ + 2 = 4) стоит 0 для * = 20 и 0о=—1/16;
для i = 28 в четвертом разряде стоит 1 и 0о= + 1/16. Доказательство
правил определения 0о и 0( дано Пихлером [3].
Схема для исправления временных рассогласований между
принятой и местной несущей может быть построена на основе тео-
ремы сдвига функций Уолша (рис. 3.21). Предположим, что при-
и1(/,69м?йНГ| и
i0( е<)
вход
Ой г
УУ
< cal(i,e)sal(i,e-O>>
cat(t,G-fti)
I ГР
cal (i, в)
1<МГ*(в)
— Выход
Рис. 3.21. Коррекция
временного рассогласова-
ния между принятой и
местной несущими са!(«,
0) и calft, 0+Ov ); i рав-
няется степени 2:
П — перемножитель; ГФ —
генератор функций; СПЗ —
схема переменной задержки;
ЛЗ —линия задержки на 0С;
И — интегратор; Кв — кван-
тователь; У У — устройство
усреднения
П
п
нят сигнал {1 +Af/’++(O)}cal (i, 0), где F++(0) является сигналом,
прошедшим через фильтр нижних частостей. Местная несущая
са1(7, 0—0v) генерируется генератором функций ГФ. Она прохо-
дит через схему переменной задержки СПЗ. На выходе СПЗ по-
лучается несущая cal (7, 0). Схема фиксированной задержки дает
несущую cal ft, 0—0V +О9) = sal(7, 0—0V). Принятый сигнал умно-
жается на sal (7, 0—0v), и произведение интегрируется на интер-
вале ортогональности (—1/2) +0V ^0^ (1/2) +0V функции
sal (i, 0—0V). Выходное напряжение интегратора И счи-
тывается в моменты времени (l/2)+0v; (3/2)+0v, (5/2)+0v, ...
квантователем Кв и подается на устройство усреднения УУ. Схема
производит усреднение по многим отсчетам амплитуд. На выходе
УУ получается второе усреднение, так как интегратор усредняет
сигнал на интервалах (—l/2)£ + 0v^0^ (l/2)£ + 0v :
<[ 1 + MF++ (0) J cal (i, 0) sal (i, 0 — 0V )>. (3.53)
Предположим, что среднее значение второго члена
<A4F++ (0) cal (i, 0) sal (i, 0 — 0V )> (3.54)
126
Увеличением времени усреднения увеличивается медленнее, чем
еднее значение первого члена:
<са1 ({, 0) sal (i, 0 — 0V )>. (3.55)
тда в выходном напряжении устройства усреднения будет пре-
лировать член (3.55). Его можно использовать для сдвига мест-
й несущей са1(7, 0—0V) и, следовательно, sal (7, 0—0V) таким об-
зом, что средние значения (3.55) и (3.54) будут стремиться к
дю. Значения 0V, для которых (3.54) и (3.55) стремятся к нулю,
[жно получить из следующего интеграла:
I; 1/2
Ccal (i, 0) sal (t, 0—0V )> — f cal (i, 0) sal (i, 0—0V ) d 0=Fci. si (0V )•
—1/2 (3.56)
‘На рис. 3.22 (главная диагональ) показано несколько функций
ici(9v) и Ем,el(0V); функции Fcl.si(0v) изображены под главной
агональю, a FBi>ci(0v)—над ней. Показан интервал O^0V^1;
йкции надо периодически продолжить вне этого интервала. На
J. 3.23 функции Fcj,si(0v) показаны увеличенными. Пунктирные
аии поясняют некоторые особенности структуры функций. Бо-
! детальное рассмотрение корреляционных функций Уолша тре-
!т привлечения слишком сложного математического аппарата,
нако из рис. 3.23 можно видеть, что функция Fci,si(0v) равна
по для 7=1, 2, 4, 8, ..., 2\ если 0v=iO или целому числу, крат-
<у ±20o=±l/2t. Этот результат также можно получить из
16) и (3.52). Цепь обратной связи (рис. 3.21) можно сделать
ойчивой для 0V=O, ±2/27, ±4/2i, ... и неустойчивой для 0V =
fc l/2t, ±3/2i, ....
Рассмотрим графики функций Уолша (рис. 1.2), продолжен-
5 периодически влево и вправо. Сдвиг sal (7, 0), i=2ft на 0 =
i, ±2/2i, ±4/27, ... опять дает периодическую функцию sal(7, 0).
жнее получается, если i не равно степени 2. Функция FCi,si(0v )
на нулю для определенных значений 0V=0^, но sal (7, 0—0(,) в
1ем случае неидентична salfi, 0). Таким образом, функции
[2\ 0) и sal(2ft, 0) наиболее удобны для синхронизации. Этот
ультат уже был использован при рассмотрении телефонной
токанальной системы (рис. 3.3).
Существует несколько способов обобщить, улучшить и упро-
гь изложенный метод коррекции временных рассогласований.
Пример, можно Передавать сигнал [cal (г, 0)+M/?++(0)]cal (i, 0)
сто сигнала [1+МЕ++(0)]са1 (2\ 0), если r©i равно степени 2.
! функциональных узла И, Кв и УУ (рис. 3.21) могут быть объ-
нены в один. Напряжение обратной связи sin а (рис. 3.11) и
al(7, 0)salfi, 0—0V)> (рис. 3.21) можно подвести к генератору
/соидальных колебаний или генератору функций, а не к фазо-
щателю УФВ или схеме задержки СПЗ.
127
cat(7ft) sat (7,0) A A 4 4 1 A 4- \ A 4 4 A 4 a/ Tqyvvyr VvvYV^f . t 4 i A 4 4 aAaJLJL^A— vVFV“ . kj^L_4_A_jL_ <JL4-A4JLA_ ————— - т’тттту т»ТТг’' •
cat (Bft) — VWA
sat(6',0) -A 4 4 A 4 A \ AA i 4 a/ - - ivywy vyXVf ч
cat (5ft) 4.4 A A 44 -A A A AA 4 tyv’mt* ’уППГТ
sal(Sft) AAMV- AVVA
cal (4ft) \ААА/ VVVv
sat (4ft)
cal (30) A/VAA ArvAAV ——
sat(3ft) 44 4 4 ♦ 4 4 A A >/*VwA AhA-
cat (2ft)
sat(2ft)-
cat(tft)-
sal(lft)-
wal^‘ehat(dft) cal(7ft)
sat(7,9) cat(eft) satfift) cal (5,0) sat (5ft) latfrft)
Рис. 3.22. Корреляционные функции
Рис. 3.23. Взаимокорреляционные
функции Fci si (6V ) некоторых функ-
ций Уолша
Рис. 3^24. Модуляция по вре-
менной базе синусоидальных
функций и функций Уолша
128
itfte) cal(3,0i) 301(3,6) cat(2,9) sat(2,0) cat(l,e) sat(l,9) watfO.G)
Шодических функций Уолша
1 3.2.
S МОДУЛЯЦИЯ ПО ВРЕМЕННОЙ БАЗЕ,
I МОДУЛЯЦИЯ ПО ВРЕМЕННОМУ ПОЛОЖЕНИЮ
? И КОДОВАЯ МОДУЛЯЦИЯ
3.2.1. Модуляция по временной базе (МВБ)
г Любую несущую можно модулировать по амплитуде, если ее
Писать как функцию времени (/Ф(&, 0+,0о) = (/Ф(Д ЦТ+1й1Т).
невидно, что существует еще три метода модуляции, так как эта
[сущая характеризуется, кроме амплитуды U, нормализованной
ктостью k, базой Т и задержкой /0. Модуляция Т называется мо-
<ляцией по временной базе.
Основной идеей здесь является замена 0 функцией g(0). Суще-
'вует несколько способов такой замены. Пусть F(0) будет моду-
»рующим сигналом и М — индексом модуляции. Можно исполь-
>вать определение:
Ф(£, 0) = Ф[6, g(0)]; (3.57)
g(0) = J [1 + MF(0)Jd0 = у J(1 + MF(tlT)]dt. (3.58)
Так поступают при частотной модуляции синусоидальных не-
гщих. Однако преимущества этого метода для синусоидальных
-322 129
J_______L
функций связаны с тем, что частота и время входят в функцию й
виде произведения
Ф(6, 0) = sin/гб. (3.59)
Так как в общем случае между k и 0 стоит запятая, следующее оц.
ределение g(0) более выгодно:
g(0) = 0[1 + A4F(0)] = t 1+у (^- ;
| MF (0) | < 1. (3.60)
Теперь очевидно, что модулируемым параметром является база Т.
На рис. 3.24 показано, как меняются синусоидальная функция и
функция Уолша, если базу Т изменить до ЗТ/4 и Т/2.
Индекс модуляции М может быть как положительным, так и
отрицательным. Большие значения F(0) уменьшают базу для
М>0 и увеличивают базу для Л4<0. Это весьма схоже с частот-
ной модуляцией, где увеличение модулирующего напряжения мо-
жет как увеличивать, так и уменьшать частоту несущей.
На рис. 3.24 показано, что с увеличением индекса модуляции
М требуемая полоса расширяется. Наименьшая база, показанная
на рис. 3.24, в два раза меньше,
наибольшей. Полоса частот или ча-|
|г стостей, занимаемая «короткими»
функциями sin2n0" или sal (3, 0").
в два раза больше, чем полоса, за-
нимаемая «длинными» функциями
sin2n0 или sal (3, 0). Точного ана-
лиза распределения энергии как
функции частости для различных
значений М и сигналов F(0) еще
нет.
На рис. 3.25 показана одна
из возможных схем модуляции
функций Уолша по временной ба-
зе. Пусть сигнал имеет вид, по-
казанный на первой строке вре-
менной диаграммы. В момент вре-
мени 0=0 квантователь Кв про-
изводит отсчет значения сигнала
(а). Полученное напряжение запо-
минается в запоминающем уст-
ройстве ЗУ (б). На выходе инте-
гратора И получаем линейно на-
растающее напряжение. Устройст-
во сравнения УС сравнивает это
апряжение с напряжением на выходе ЗУ и возвращает интегра-
тор в исходное состояние, когда напряжения оказываются одина-
ковыми. В результате на выходе интегратора получаем пилообраз-
ное напряжение (в). Амплитуда и длительность зубцов этой пилы
пропорциональны напряжению на выходе ЗУ.
a) J_
. f)=L
, 2)1---Г |---1
1ЯПДГ~1П пппп
а в го зв <4в
в — •
Рис. 3.25. Функциональная схема
устройства для модуляции по вре-
менной базе несущих Уолша:
Кв — квантователь; И — интегратор;
УС — устройство сравнения; ЗУ — за-
поминающее устройство; Сч — счетчик;
ГФ — генератор функций
130
С выхода устройства сравнения импульсы (г), которые воз-
щают интегратор И в исходное состояние, подаются также на
)д счетчика Сч. На выходе счетчика появляется импульс (д),
1и из УС получено определенное число импульсов; на рис. 3.25
число равно восьми. Импульс (д) возвращает ЗУ в исходное
ояние и записывает с помощью квантователя новый отсчет
чений сигнала. Заметим, что расстояние между точками от-
ов зависит от величины значений сигнала в моменты отсчетов,
ле выработки импульса (д) счетчик возвращается в исходное
ртояние. Эта установка начальных состояний происходит в мо-
нты времени 0, 0, 30 и 40. Амплитуда сигнала в момент вре-
1ни 0 в два раза больше, чем в момент времени 0. Таким обра-
ти, «зубец пилы» в два раза длиннее предыдущего. Восемь им-
yibcoB (г), полученных на выходе сравнивающего устройства
7 в интервале времени 0^0^30, занимают вдвое большее рас-
ряние, чем в интервале времени О^0^0. Подав эти импульсы
"генератор функций Уолша, получим на его выходе функции
лша, модулированные по базе; на рис. 3.25 показана модулиро-
Щная несущая sal (3, 0).
3.2.2. Модуляция по временному положению
Переменная 0 несущей U<D(k, 0 + 0о) в случае базовой моду-
рции заменялась функцией g(0). В случае модуляции по времен-
&му положению параметр 0О заменяется функцией й(0). Пусть
(0) опять обозначает модулирующий сигнал, а М — индекс мо-
ляции. Введем следующее определение:
Ф (k, 0 4- 0О) = Ф [*, 0 4- h (0)];
Л(0) = 0О4-МГ(0).
sin 2X0
(3.61)
Индекс модуляции M может
ть положительным или отрица-
ельным. Если М отрицателен, то
k, 04-0о4-Л4Е(0)] будет сдвигать-
в сторону больших значений 0
ри увеличении значений Е(0), а
ели М положителен — то в проти-
воположную сторону. Этот метод
ответствует фазовой модуляции,
огда изменением амплитуды сиг-
ала можно сдвигать фазу несу-
щей. На рис. 3.26 показана синусо-
дальная несущая Ф(1, 0)=fsin2n0
ля трех значений сдвигов MF(Q) =
О, —1/4 и —1/2. Внизу показана
Несущая Уолша Ф(3, 0)=sal(3, 0)
ля тех же сдвигов.
Заметим, что часть функции,
оторая выдается за
sin 2 Я&- i/4)=uis2xfL—
siatX(&-1/2^-sin2se
27 tht/r
$а!Ц0)
sattfG
J____L
-//2
0
5at(j,0-r/2)=—501(3,0
/X?
Рис. 3.26. Модуляция по положо-
нию синусоидальных функций и
функций Уолша
пределы
131
+ Г/2 или —1/2 из-за сдвига, добавляется с другой стороны функ-
ции.
На рис. 3.27 показаны функциональная схема устройства и вре-
менная диаграмма для модуляции несущих Уолша по временнбму
положению. Квантователь Кв периодически производит отсчеты
значений входного сигнала в моменты времени 0, 0, 20, .... По-
1/&fsal (1,6)г
1/iffcal (1,6)
1Щьа1(2,б)
1/Zf cal (2,0)
i/2fsat (3,6)
1/2feat (з,0)
1/2fsal (4,0)
f cat (4.0)
ч/VAA/ /Sat (5,0)
v~X/4/v^ /cat (5,6)
вход
а) ।_____I-----1------1-----
X)ll 111111I ITI111I I111111111ITTI1 п
.> 6 20 ‘за
б) jmJ/z I U
—г ------г
<?) iri'lin ТПТПТП-
<7 п и Г ,11111111
О Д6 0— в 6+ДО в—Двх'Ч
fsal (50)
f cat (5.0)
fsat (7,0)
J cat (7,0)
ЛАЛЛАЛЛЛ f sat f8 0-)
I t I I t I I I I J 4 *
Рис. 3.28. Зависимости
e
cal (t, 0) = ( cal (t, x)dx,
-1/2
0 1/2
Рис. 3.27. Функциональная схема и
временная диаграмма для случая мо-
дуляции несущих Уолша по времен-
ному положению:
Кв — квантователь; И — интегратор; ЗУ —
запоминающее устройство; УС — устройст-
во сравнения: ГТ И генератор тактовых
импульсов; К — ключ; Д — делитель; ГФ —
генератор функций
e
sal (i,0) = J sal(i, x}dx. Q = t/T
-1/2
лученные напряжения запоминаются на определенные промежут-
ки времени (б) в запоминающем устройстве ЗУ. На выходе ин-
тегратора И получается пилообразное напряжение (в). Устройст-
во сравнения напряжений УС вырабатывает импульс (г) в тот
момент времени, когда пилообразное напряжение достигает вели-
чины напряжения на выходе ЗУ. Этот импульс приводит в на-
чальное состояние схему ЗУ и интегратор И. На выходе ЗУ полу-
чаются положительные импульсы (б), длительность которых про-
порциональна значению квантованного напряжения. Импульсы
(gf от генератора ГТ И могут проходить через ключ Ki лишь в те
моменты времени, когда на другой вход селектора действует им-
пульс (б).
132
Делитель образует из импульсов (д) импульсы (ac), имею-
е гораздо больший период по сравнению с периодом импульсов
. Они идут через ключ К2 на генератор функций ГФ, генери-
эщий периодические функции Уолша, например, sal (3, 0). Им-
[ьсы (е) через ключ К2 добавляются к импульсам (ж) сразу
ле моментов времени 0, 0, 20, .... Если период импульсов (д)
аздо меньше, чем период импульсов (ж), то па выходе гене-
ора функций ГФ получается функция Уолша с модуляцией по
менному положению. Делитель Д2 образует из импульсов (ж)
1ульсы (з), которые запускают схему квантователя Кв в момен-
времени 0, 0, 20 ....
Были разработаны демодулирующие схемы для случаев моду-
Гии по временной базе и модуляции несущих Уолша по времен-
iy положению. Их работа основана на тех же принципах, что
хемы модуляции, но сильно зависит от используемой линии
зи.
3.2.3. Кодовая модуляция (КМ)
Модуляция нормализованной частости k несущей Ucb(k, 0 + Оо)
ывается кодовой модуляцией по следующей причине: k опре-
яет функции системы. Это становится понятным, если ®(k, 0)
дставить в виде определенной системы функций, например,
(k, 0), где & = 0, 1, 2.. 128 сигналов, которые можно по-
бить из семи двоичных прямоугольных импульсов,
тему с k = 0, 1, ..., 127. Эти сигналы используются для переда-
телефонных сигналов путем импульсно-кодовой модуляции. Это
юдит па мысль рассматривать модуляцию нормализованной
тости как обобщение импульсно-кодовой модуляции.
Кодовая модуляция функций, таких, как sal (7, 0) и calf/', 0),
ачает дискретное изменение функций, так как i может приня-
ть только целые значения. В этом отличие кодовой модуляции
амплитудной, базовой и от модуляции по положению, позволя-
1их передавать непрерывные изменения сигнала. Однако функ-
и sal(p, 0) и cal(р, 0) определены для всех действительных зна-
ти р, исключая sal (0, 0). Таким образом, кодовая модуляция
жет быть непрерывной, по крайней мере, теоретически.
Не существует большого различия между кодовой модуляцией
базовой модуляцией синусоидальных функций, так как / и 0 вхо-
т в аргумент в виде произведения, а не разделяются запятой,
к для функций Уолша и других функций. Выполняется соотно-
:ние
sin i 0 = sin — t. (3.62)
T
здуляцию i можно интерпретировать как модуляцию 1/Г и на-
орот.
Существует много возможных вариантов модуляторов и демо-
ляторов для кодовой модуляции. Используя только целые зна-
133
чения нормализованной частости, можно получить все сигналы,
описываемые функциями Ф(1, 9), и подключить нужный к общ^’
линии. Принцип работы демодулятора может быть основан на вза-
имной корреляции принятой функции со всеми возможными. Бо.
лее совершенный демодулятор для функций Уолша может быть ос.
нован на использовании быстрого преобразования Уолша—Фурь?
(§ 1-2).
3.3.
НЕСИНУСОИДАЛЬНЫЕ ЭЛЕКТРОМАГНИТНЫЕ ВОЛНЫ
3.3.1. Излучение волн Уолша диполем Герца
Решение уравнений Максвелла для диполя Герца можно за-
писать при помощи векторного потенциала А(г, t) и скалярного
потенциала <p(r, t), не ссылаясь на какую-либо определенную си-
стему функций, таких, как синусоидальные или косинусоидальные:
А(г,/)= <3-63>
<р(г, /)= + . (3.64)
4ле0 \ гг г* /
Здесь г есть вектор в направлении от диполя в точку наблюдения
иг— расстояние; р(7) есть момент диполя:
P(O = <?(Os; P(0 = 4pW==t’Ws’ <3-65>
at
s есть вектор диполя, который имеет направление диполя и про-
порционален его длине; q(t) —переменный заряд диполя, a i(t) —
ток в диполе. Допустим, как обычно, что значение s так мало, что
q(t) и i(t) не зависят от s. Аргументы t—г/с в р и р показывают
время задержки между изменением момента диполя р и измене-
нием А и <р в точке наблюдения, ео — диэлектрическая постоянная
свободного пространства.
Электрические и магнитные силы E(r, t) и H(r, t) можно вы-
числить из А и <р при помощи следующих формул:
Е(г. 0 = -Ро^^---------grad<p(r,O; (З’бб)
at
Н (г, /) = rot А (г, /);
ро — магнитная проницаемость свободного пространства.
Следующие решения для Е и Н, справедливые для волновой
зоны, получаются из (3.63) —(3.66) [5]:
Е(г- Sг х 1г х ь ~ '•'с)|= тй? da,7,'M г х <гх s);
Н(г, 0= —J— р(/—г/с)хг - —Ц sx г;
4л сг2 4л сг2 dt
(3.67)
Z = 1/£«. « 377 Ом; с = 1-74=«ЗХ10«м/с. (3.68)
° г «О V 8оЦо
Волновая зона определяется как область, где г достаточно ве-
ко. Более четкое определение будет дано ниже. Обычное опре-
пение, что г должно быть большим по сравнению с длиной вол-
, предполагает синусоидальный ток i(t).
Ближней зоной называется область, где г существенно мало,
[едующие выражения для Е и Н можно получить из (3.63) —
.66) для ближней зоны (5]:
i(t — r/c)dt
(r' '>=
3(рг)г1
г2 I
4л г3
i (t — r/c)
4л r3 $
Волновую зону можно определить теперь из
из (3.67) и (3.68) много больше, чем Е и Н
противном случае — это ближняя зона. Можно получить
пне условия:
н (г, о = ?('7'S)Xr
v * ' 4л г3
3(sr)r j .
г3 J ’
(3.69)
(3.70)
условия, что Е и
в (3.69) и
(3.70).
следу-
2 „ , Г «'(<)<«
r'br ------
di (0
dt
r»c|W
I dt
, волновая зона для Е(г, /);
, волновая зона для Н (г, /).
(3.71)
(3.72)
Г
Рассмотрим синусоидальный ток i(t) = /cos 2nft. Интеграл ра-
:н —-sin 2 л//, а производная равна —2nflsin2nft. Условия для
2л I
юлновой зоны для Е и Н в этом случае идентичны: г2»сг/(2л/)2=
₽/.’-/( 2л)2; г>с/2л/=Х/2л.
Из (3.67) — (3.70) очевидно, что синусоидальный ток i(t) соз-
(ает синусоидальное изменение Е и Н во времени как в волновой.
)ак и в ближней зоне. Это происходит благодаря своеобразной
(собенности синусоидальных функций оставаться синусоидальны-
ми как при интегрировании, так и при дифференцировании. Для
(ругих функций i(t) это несправедливо. В соответствии с (3.67) и
[3.68) Е и Н изменяются в волновой зоне пропорционально dijdt.
Эднако в ближней зоне Е будет изменяться пропорционально
) i(t)dt, а Н — пропорционально i(t). Временная зависимость Е и
1 является, таким образом, функцией расстояния между диполем
। точкой наблюдения или между передатчиком и приемником.
Дожно предвидеть применение этого эффекта для предотвращения
:толкновений самолетов. Заметим, что i(t) должна иметь малую
135 /
J
производную, если переход из ближней зоны в волновую нахо-
дится далеко от передатчика.
Энергия, распространяющаяся в волновой зоне через поверх-
ность сферы радиусом г, определяется интегрированием вектора
Пойтинга по поверхности сферы:
P(r, t) = (£ Е(г, /)ХН(г, /)</0 =
I2?, s2= (ss). (3.73)
dHt-rfc)
dt
Введение эффективного значения тока
^эфф=<^(0>; t' = t-nc (3.74)
позволяет получить сопротивление излучения Rs из средней мощ-
ности излучения Р:
6 л сг 6л с2
(3.75)
Рассмотрим в качестве примера излучение волн Уолша. Суще-
ствуют два различных случая. Можно подавать в диполь Герца
токи:
i(0 = / J sal (k, t'/T) dt'- i(t) = I j cal (6, t'/T)dt'. (3.76)
—T/2 —7/2
Тогда согласно (3.67) и (3.68) в определенной точке волновой зо-
ны Е и Н будут изменяться пропорционально salffe, t/T) или
cal(k, t/T). Можно подавать в диполи токи, имеющие форму функ-
ций Уолша:
i (/) = / sal (k, t/T)-, i (0 = / cal (k, t/T). (3.77)
Тогда согласно (3.70) в определенной точке ближней зоны Н бу-
дет изменяться пропорционально salffe, t/T) или calf&, t/T). В
дальней зоне Е и Н будут изменяться пропорционально производ-
ным функций Уолша; интегрирование принятого напряжения бу-
дет давать напряжение формы функций Уолша. Во втором случае
необходимо принимать во внимание отклонение формы функций
Уолша от идеальной.
На рис. 3.28 показаны интегралы от функций Уолша согласно
(3.76). В табл. 3.6 приведены значения пикового тока /, эффектив-
ного тока /эфф и сопротивления излучения Rs Для диполя Герца, в
котором токи изменяются согласно рис. 3.28.
Для сравнения также показаны величины, справедливые для
синусоидальных токов. Предполагалось, что средняя излучаемая
мощность во всех случаях одинакова. Можно видеть, что /, /Эфф и
Rs приблизительно одинаковы для синусоидальных функций и
136
Таблица 3.6
Пиковый ток /, эффективный ток /Эфф и сопротивление излучения R8
____________________для диполя Герца___________________
выражения, описывают; е ток в диполе Герца 1/” — j V 6 л P cT t/ z° * / V 6л P cT эфф 6л с» Г* _ Z9 s* s
, Jsal (1, 0)Д0 1/2 = 0,5 1/2/3 = 0,289 4X3= 12
sin 2 л 0 /2/2.4=0,225 1/2 л = 0,159 4л2 = 39,5
(1(1, 0)d0, jsal(2, 0)d0 1/4 = 0,25 1/4/3= 0,144 16X3 = 48
sin 4 л 0 /2/4л = 0,112 1/4 я = 0,079 16 л2 = 158
11(2, 0)d0... jsal(4, 0)d0 1/8 = 0,125 1/8/3"= 0,072 64x3= 192
j. sin 8 л 0 /2/8л = 0,056 1/8 л = 0,040 64 л2 = 631
U(4, 0) d0... Jsal (8, 0)d0 1/16 = 0,063 1/16/3 = 0,034 256X3 = 768
I sin 16 л 0 /2/16.4 = 0,033 1/16 л = 0,020 256 л2 = 2520
кций Уолша равных частостей. Далее видно, что /, /эфф и
R,
>чности одинаковы для функций Уолша:
al (2*, 0); sal (2* Н- 1, 0); cal (2* + 1, 0), . . sal (2*+', 0). (3.7 8)
В случае синусоидальных функций /, /Эфф и Rs зависят от ча-
гы. В то время как диполь Герца не является широкополосной
енной (в смысле частоты) для синусоидальных токов, он я в-
тся широкополосной антенной
:мысле частости) для токов, име-
их форму проинтегрируемых
кций Уолша. Ширина полосы
тостей определяется выбором k.
Рассмотрим теперь случай, ког-
диполь Герца возбуждается
ом, закон изменения во време-
которого описывается функ-
й Уолша. На рис. 3.29 по-
аны идеализированный ток
1(3, t/T) и внизу ток i(t) с ко-
НЫМ временем нарастания At. Рис. 3.29. Излучение волн Уолша
смотрим общий случай, когда диполем Герца
описывается функцией Уол-
Zcal(k, t/T) или /sal (б, t/T)-, будем использовать ту же аппрок-
ацию, которая показана на рис. 3.29, для i(t). Получим следу-
,ие средние:
= 41*-Ч-t <f=k/T
т м
t/2
(3.79)
(3.80)
]2 I | фД t
\ 6 ,
о
137
Излучаемую мощность и сопротивление излучения можно опреде.
лить из (3.75):
р — 2/2 - _ о/2 •
T&t Зле2 Д/ Зле2 ’
(3.81)
/?= 2 — (1 — —') ‘ = 2—
Д<\ 6Г ) Зле2?2 дг
I___<рД Л"1 Zqs2
6. / Зле2
. (3.82)
Синусоидальный ток /cos InktfT или /sin 2nktlT дает следую-
щие величины для излучаемой мощности и сопротивления излу.
чения:
Р= лЧ2 — ^- = п212Р — , f=klT\
Тг Зле2 Зле2
/?,= 2л2 — = 2л2/2
Тг Зле2 Зле2
(3.83)
(3-84)
Для синусоидального тока соотношения (3.83) и (3.84) зави-
сят только от его частоты f, в то время как соотношения (3.81) и
(3.82) для тока Уолша зависят от частости <р и времени переклю-
чения Л/. Теоретически для данной частости и данной антенны ве-
личины Р и Ps можно сделать произвольно большими уменьше-
нием Д/. В табл. 3.7 приведены значения отношения (3.81) и (3.83),
Таблица 3.7
Отношение мощностей Puti/Ptm н отношение сопротивлений излучения
/?., sai//?«, sin. для диполя Герца /=1 ГГц, <p=lGzps
Д t, нс ^sal 2 ^s, sal 1
^sin л2 f Д t Rs> sin
100 2 1,03
10 20 10,0
1 200 100,0
обозначенного Psai/Psm, и отношения (3.82) и (3.84), обозначенно-
го sai/7?s.sin, для частоты f=l гГц и частости<р= 1 Gzps.Излуча-
емая мощность и сопротивление излучения приблизительно равны
для времени переключения Д/=100нс. Уменьшение времени пере-
ключения до 10 нс, которое в настоящее время является предель-
ным, позволяет получить излучаемую мощность и сопротивление
излучения для функций Уолша на порядок выше, чем для синусо-
идальных функций.
Предположим, что время переключения Д/ (рис. 3.29) очень
мало по сравнению со средним периодом колебания т=1/<р. Рас-
смотрим стробирующую схему, которая открыта только в момен-
ты нарастания и спада импульса. Большое число независимых пе-
редатчиков может излучать волны Уолша, имеющие одну и ту же
временную базу, но различные нормированные частости В
138
мнике импульсы di/dt, не приходящие в определенное время,
гт подавлены стробирующей схемой. Синхронизация строби-
щей схемы должна быть точной, так же как должна быть точ-
фаза местной несущей при синхронной демодуляции синусои-
-ных несущих. Желаемый передатчик распознается по образцу
жительных и отрицательных импульсов так же, как передат-
при синхронной демодуляции синусоидальных несущих распо-
йся по соответствующей частоте. Приемник для несущих Уол-
не различает сигналы sal и cal одной частости так же, как и
мник для синусоидальных несущих не различает синусоидаль-
и косинусоидальные колебания, если не используется синхро-
рующий сигнал. Следовательно, функции Уолша можно ис-
зовать, по крайней мере, теоретически, как несущие для по-
лной радиостанции. Это первый пример возможной несущей
подвижной радиостанции (в отличие от передачи от точки до
;и, как в СВЧ линиях) с момента введения синусоидальных не-
их. Еще рано говорить о каком-либо практическом примене-
несинусоидальных электромагнитных волн для подвижной ра-
:танции. Однако, прежде чем отрицать возможность какого-
> их применения, нужно вспомнить, что 20 лет прошло между
етическим предсказанием электромагнитных волн Максвеллом
: экспериментальным подтверждением Герцем, прошло еще
ет до той поры, когда внедрение электронной лампы позволи-
юпользовать синусоидальные волны для связи в большом мас-
бе.
Распространение волн Уолша, антенны, эффект Допплера
Т
рдним из наиболее важных достоинств синусоидальных волн
‘яется инвариантность их ортогональности к временным сдм-
I Для примера рассмотрим синусоидальную несущую И2Х
п2лп0, модулированную по амплитуде сигналом Fn(0). Сиг-
Fn(0) практически постоянен на интервале некоторого числа п
подов несущей у 2 sin 2лп0. Синхронную демодуляцию моду-
оваиной несущей можно представить следующим интегралом:
0'4-1/2 _ _
С Fn (0) 2 sin 2лп 0 К 2 sin 2л т 0 d 0 =
О'-1/2
0'4-1/г. _
j, =F„(0') f KTsin2nn0/2sin2nm0d0-F„(0')6nm. (3.85)
0-—1/2
,В случае подвижной радиостанции принимается сумма многих
1улированных несущих с различными временными задержками.
;им образом, Fn(0)]/2sin2nn0 заменяется на V Fn(0) V 2Х
139
Xsin 2лп(0—0П) и (3.85) записывается в следующем виде:
в'+1/2 г / _
J £ F„(0)/2 Sin2.-xn(0-0n)
)/ 2 sin 2л т 0 d 0
= (О') COS 2^0^.
(3.86)
Временные сдвиги Оп приводят к уменьшению амплитуды, но
не к перекрестным помехам. Ортогональность синусоидальных ц
косинусоидальных функций одной и той же частоты нарушается
из-за временных сдвигов, но ортогональность функций разных ча-
стот сохраняется. Подмножества функций { V 2sin£(0—0h)} или
( V^cos^O—0й)} ортогональны для любых значений 0ь Это спра-
ведливо согласно теоремам сдвига синусоидальных и косинусои-
дальных функций:
sin k (0 -j- 0А) = sin k 0 cos k 0A + cos k 0 sin k 0A;
cos k (0 + 0*) = cos k 0 cos k 0ft — sin k 0 sin k Qk.
(3.87)
Функции Уолша имеют очень сходные теоремы сдвига:
sal (&, 0©0А) = sal (£, 0) sal (А, 0А); |
cal (fe, 0 ф 0J = cal (k, 0) cal (k, 0Л). j
Основное различие заключается в том, что обычное сложение
заменяется сложением по mod 2.
Рассмотрим теперь одномерное уравнение
~дР ~ С "Л?
(3.89)
и его основное решение
и (х, t) = g(t — х/с) + h(t + х/с). (3.90)
Ввиду того что в аргументах t+x/c и t—х/с имеют место знаки
обычного суммирования и вычитания, ортогональность функций
Уолша в общем случае не сохраняется. Однако система (sal(k, 0--
+ 0h), cal (ft, 0 + 0s)} является линейно независимой, за исключе-
нием единичных случаев. Разделение линейно независимых функ-
ций возможно, но более сложно, чем разделение ортогональных
функций. Системы продифференцированных функций sal или cal.
с другой стороны, остаются ортогональными при временном
сдвиге.
Сигналы Уолша (рис. 1.2) можно рассматривать как линейно
поляризованные волны Уолша. Первые пять из них показаны так-
же в первом столбце рис. 3.30. Волны с круговой поляризацией
(второй столбец) получаются из них путем закрепления «левых
концов» функций и вращением их правых концов на 360° по пра-
вилу правого винта. Третий столбец получается поворотом функ-
ций второго столбца на 90° вправо. Четвертый столбец получается
скручиванием функций первого столбца на 2 X 360° по правилу
правого винта.
140
[ Функции, изображенные в первой строке (рис. 3.30), соответ-
руют обычным правополяризовапным волнам, имеющим норми-
рованные частоты (обороты в единицу времени) 0, 1, 1 и 2. Эти
Рис. 3.30. Волны Уолша с круговой поляризацией
®лны являются частным случаем правополяризованных волн
рлша с частостью 0. Функции во второй строке все имеют нор-
мализованные частости 1 и частоты 0, 1, 1 и 2, то же самое спра-
Вдливо и для функций в строке 3. Частости функций в строках
и 5 равны 2, частоты снова равны 0, 1, 1 и 2.
К Диполь Герца широко применяется в теории антенн синусои-
Ьльных волн. Хорошо известно, что четвертьволновые или полу-
В>л новые диполи более эффективно излучают синусоидальные
влны собственной частоты. Следовательно, для функций Уолша
«жно искать лучшие излучатели, основанные на диполе Герца,
рассмотрим диполь длиной L. Пусть он возбуждается волной
кп 2nf(t—х/с). Образуется отраженная волна sin 2nf (t+х/с).
I Если пренебречь потерями, то сумма обеих волн дает стоячую
|олну:
* sin 2л f (t — х/с) + sin 2л ft (t + х/с) = 2sin 2л ft cos 2л fx/c; (3.91)
I c/f = 1 = 4L.
I Этот диполь можно рассматривать состоящим из многих дипо-
|ей Герца, но для их питания требуется только один мощный уси-
литель вследствие преобразования волны sin2nf(/—х/с) в стоя-
щую волну. Из (3.91) и (3.87) следует, что это преобразование
обусловлено теоремами сдвига синусоидальных и косинусоидаль-
ных функций.
I Для функций Уолша вместо (3.91) и (3.88) получается следую-
щее уравнение:
hl (ф Т, ЦТ Q х/сТ) + sal (ф Т, t/T @ х/сТ) = sal (ф Т, t/T) sal (ф Т, х/сТ)-
(3-92)
141
Снова образуется стоячая волна. Однако волны Уолша, рас-
пространяясь вдоль металлического проводника, описываются
скорее функциями заЦфГ, t/T-xIcT) или sal^T, tlT+xlcT), а не
выражениями sal (фГ, tjTQxIcT) или за1(фТ, t/t © xjcT). Извест-
но, как передать колебания Уолша в соответствии с аргументом
tlT@xlcT, но линия передачи получается гораздо более сложной,
чем металлический проводник. Следовательно, антенны, основан-
ные на принципе стоячей волны, не являются перспективными. Так
как усилитель мощности для сигналов Уолша представляет собой
переключатель, который подает в антенну либо положительный,
либо отрицательный ток, лучше использовать много диполей Гер-
ца, каждый из которых возбуждается такими усилителями. Реа-
лизация антенн со ста диполями является вполне реальной, если
переключатели выполнить на транзисторах. При использовании
интегральных схем вполне реально выполнить антенну с тысячью
и более такими диполями. Исследование излучения волн Уолша
приводит к активным антеннам так же естественно, как иссле-
дование излучения синусоидальных волн приводит к резонансным
антеннам. Множество индивидуально возбуждаемых диполей Гер-
ца необязательно располагать вдоль линии, их можно располо-
жить на плоскости. Поэтому длинную одномерную антенну можно
заменить небольшой двумерной антенной.
Были вычислены диаграммы направленности некоторых ан-
тенн для простой волны Уолша. Рассмотрим, например, параболи-
ческий отражатель. Ширина его диаграммы направленности зави-
сит от отношения X/Z> в случае синусоидальных волн, где Л— дли-
на волны; D — диаметр отражателя. В случае функций Уолша по-
являются два отношения Л/D и c\t/D, где Л— средняя длина вол-
ны v/ф; Л/—время переключения (рис. 3.29); с — скорость света.
Ширина луча уменьшается до 0 с уменьшением времени переклю-
чения V, в то время как отношение Л/D может оставаться постоян-
ным. Для фиксированного отношения Л/D можно получить узкий
луч или для фиксированной ширины луча можно получить малый
диаметр D. Фактически параболический отражатель может быть
заменен круглым диском диаметром D, который покрыт множест-
вом диполей Герца, излучающих одну и ту же волну Уолша.
Пусть такая антенна используется для облучения Земли из
космоса. Почти свободное пространство не оказывает вредного
влияния на волны. Прн прохождении атмосферы импульсы рас-
ширяются, а ширина луча увеличивается. Этот эффект несущест-
венен, так как происходит на последнем, относительно коротком
участке пути распространения радиоволн. С другой стороны, когда
зондируют космическое пространство с Земли, расширение луча
происходит в начале пути передачи. Это очень вредное явление.
Для получения такого же узкого луча при данном диаметре D от-
ражателя синусоидальные волны должны были бы иметь очень
высокую частоту и поэтому поглощались бы полностью облаками.
Таким образом, электромагнитные волны Уолша достаточно при-
влекательны для определенных областей применения, но вновь
142
кно напомнить, что не было проведено экспериментальных ис-
Дований, подтверждающих эти выводы.
Из-за эффекта Допплера синусоидальная электромагнитная
яа £sin 2nf(t—x/c) преобразуется в волну £sin 2jtf'(i'—x'/c).
нутая частота имеет значение
f — f 1 — р/с
' ' V 1 — о2/с2
v — относительная скорость перемещения передатчика и при-
ка.
Волна Уолша
£ (х, f) = £ sal (ф Т, ЦТ — х/cT)
относительной
х' -|-
К1 — о»/с2
лучим
(3.93)
(3.94)
механики
образуется при помощи уравнений
, __ Г + рх7с2 . _
/Г^?7с2 ’
(3.95)
Г — x'/c
ледующий вид:
Е (х', t'} = £ sal /ф 7, ______
I т У 1 — t^/c2
\ 1 — о/с
записи (3.96) в виде (3.94) нужно определить преобразован-
Ь частость ф' и базу Т по формулам:
, l—v/c
ф = ф---------L-
(3.96)
(3.97)
/1—v2/c2 ’
Т'-Т Kl-v’/c2
~ \—v/c
(3.98)
E (x', t') = £ sal (ф'Т', t'/T' + x’/cT).
(3.99)
? Уравнения (3.97) и (3.93) показывают, что частость ф и часто-
J изменяются одинаково из-за эффекта Допплера. Дополнитель-
е изменение базы Т согласно (3.98) основано на инвариантно- .
I эффекта Допплера или преобразовании Лоренца: T'<f'=T<p.
Синусоидальная волна с частотой /, излучаемая передатчиком
тносительной скоростью v, не может быть разрешена от другой
Частотой получаемой передатчиком с относительной скоростью
;Это несправедливо для функций Уолша. Из рис. 1.2 легко мож-
> видеть, что уменьшение частости ф=8/Г в sal (8, 0) до ф'=
(3/4)ф даёт ф' = 6/7 но результирующая волна Уолша отличает-
от sal (6, 0).
Были попытки обнаружить сигналы, переданные с других нла-
т. Эти попытки основывались на допущении, что такие сигналы
?лжны быть синусоидальными волнами. Исследование эффекта
опплера волн Уолша позволяет поднять вопрос, почему волны
лша не являются более подходящими для данных целей. Сину-
мдальные волны от передатчика, расположенного на планете,
143
будут приниматься с разной частотой для разных направлений в
пространстве, и эта частота также будет зависеть от положения
планеты на ее орбите. Волна Уолша, с другой стороны, может
быть всегда распознана как одна н та же волна независимо от
направления прихода. К тому же волна Уолша имеет вдвое ббль-
шую среднюю мощность, чем синусоидальная при одинаковой ам-
плитуде, что важно для слабых сигналов.
3.3.3. Интерферометрия, распознавание образа
На рис. 3.31а показан принцип интерференционного измерения
углов. Два приемника в точках А и В принимают волны от дале-
ко расположенного передатчика, который движется практически
параллельно лучам а и Ь.
4ип I ic (t 'X<A?/Vyw
WW
в)
J
^^мин
~3т
Рис. 3.31. Интерферометрическое измерение угла:
а) геометрические соотношения для двух приемников А и В, распо-
ложенных на данном меридиане; б) разрешающая способность по
дальности синусоидальных волн; в) разрешающая способность по
дальности волн Уолша
Измерение^ времени запаздывания \Т=АС/с дает угол р =
= arc sin сД Т/АВ. Наименьшее измеримое время запаздывания
АТ'мин зависит от градиента нулевых пересечений как для синусои-
дальных функций, так и для функций Уолша. Таким образом, ве-
личина ДТмин пропорциональна \/f для синусоидальных функций и
1/<р для функций Уолша; коэффициент пропорциональности обо-
значен на рис. 3.316, в через е. Разрешающая способность (т. е.
минимально возможное измеряемое время АТМНН или минималь-
ный измеряемый угол Д₽ ^с\Тм„н/АВ), приблизительно одинакова
для синусоидальных функций н функций Уолша. Однако область
разрешения совершенно различна. Наибольшая возможная вели-
чина ДТ должна лежать между —Т/2 и + Т/2, где Г —период
волны. Это объясняется тем, что волна, задержанная на величину,
кратную Т, не отличается от незадержанной волны. Следователь-
но, ДГМакс равна Т. Так как Т равна 1/f в случае синусоидальных
функций, ДТмакс равняется ДТмин/е. Определенные функции Уол-
ша sal(7, 0) имеют наименьший период T=ifa> и ДТмакс равна тог-
144
(а гДТмин/е. Такая функция Уолша показана для i=3 на рис. 3.31в.
другими используемыми значениями согласно табл. 3.5 являются
= 2Й—1. Большое значение i увеличивает область разрешения
17макс без увеличения наименьшей измеримой временной разности
^мин-
Из рис. 3.31а можно вычислить следующие величины. Пусть А
I В будут двумя точками с а=52° северной___и южной широты и
федположим, что ДТм1га= 10-9с. Расстояние АВ около 10 000 км и
гспользуемый угол наблюдения 180°—2а=76°. Разрешающая спо-
(обность Др = 3-10-8 или Др = 0,05". Величина i получается из сле-
дующего соотношения:
i > еД ТмаКс/А Тм„„ = е cos а/Д£ = 2,5• 10~8 е = 10®. (3.101)
Угол 0,05" соответствует расстоянию около 11 м на поверхно-
сти Луны и около 3 км на поверхности Марса, когда он близок к
)емле. Для сравнения заметим, что наименьший разрешаемый
(гол 0,05" является величиной на порядок меньшей, чем величина,
Случаемая астрономическими телескопами.
Этот метод измерения угла является привлекательным для на-
вигации космических зондов. Точное знание расстояния АВ часто
(е требуется. Одним из таких случаев является наведение косми-
ческого зонда в окрестность другого зонда или в окрестность пе-
гедатчика маяка. Для этого требуется значительное количество
юорудования, обрабатывающего информацию. Ранее приведенная
величина /=10® означает, <-то необходимо сравнивать две функции
|олша, каждая из которых состоит из 106 прямоугольных импуль-
юв. Тогда минимальная емкость накопительного устройства, не-
обходимого для сравнения, равна 2X10® дв. ед. Кроме этого, по-
ребуется дополнительная емкость накопительного устройства для
величения отношения сигнал/шум посредством усреднения по
Многим массивам из 10® импульсов. Например, усреднение по
*3
Ю массивам потребует суммарную емкость накопительного уст-
йства 12Х 10® дв. ед.
На рис. 3.32 показаны радиолокационная станция R и две то-
чные цели Bt и В2, расположенные близко друг от друга. В стро-
х а и б показаны синусоидальные волны, отраженные от Bi и
, В строке в показана сумма этих двух синусоидальных волн,
)инятых радиолокатором. Периодическая синусоидальная волна
глядит одинаково как при отражении от двух близко располо-
!енных целей, так и при отражении от одной, обладающей ббль-
й отражающей поверхностью. Синусоидальная волна, показан-
ия в строке в, искажена на начальном и конечном участках. Если
ительность импульса 1 мкс, а несущая частота 1 ГГц, то из
30 периодов только два будут искажены. Таким образом, энер-
я, характеризующая наличие двух целей, равна всего 0,1% от
щей энергии импульса и является незначительной.
i Рассмотрим отражение волн Уолша. В строках гид показаны
лны, отраженные от В( и В2, а в строке е показана их сумма,
зличие между волнами, отраженными от одной и двух целей.
145
13
•) АЛЛА/
в АААЛ
MWW
*-чшиъ
« WUb
’WWf
Рис. 3.32. Отражение си-
нусоидальных волн и
волн Уолша двумя то-
чечными целями
теперь видно не только в начале и конце
импульса. Периодическая волна Уолша
также сохраняет информацию о количестве
целен и о разности их расстояний, хотя по
виду отраженного сигнала нельзя устано-
вить абсолютное значение дальности. Так
как на основании строк г и е (рис. 3.32)
сумма нескольких волн Уолша одинаковой
формы, но с различными временными
сдвигами может иметь разную форму, не-
обходимо исследовать отражение от радио-
локационного зеркала. Для этого следует
решить волновое уравнение для определен-
ных начальных и граничных условий. Это-
го до сих пор не было сделано. Синусои-
дальные и косинусоидальные функции при-
менялись более широко в волновой оптике,
чем в связи. Не существует теории для
волн Уолша или для полных систем орто-
гональных волн. Было бы неправильно
рассматривать волны Уолша как суперпо
зицию синусоидальных и косинусоидальных
волн и использовать для них известные
результаты волновой оптики. Частостные
фильтры, частостное уплотнение и антенны для волн Уолша ни-
когда не были бы найдены, если бы функции Уолша рассматри-
вались как суперпозиция синусоидальных и косинусоидальных
функций.
Из-за отсутствия волновой теории в качестве первого прибли-
жения можно использовать геометрическую оптику. На рис. 3.33а
Рис. 3.33. Отражение волны согласно геометрической оптике па-
раболическим зеркалом (а) и двумя перпендикулярными зерка-
лами (б)
показан разрез параболического отражателя. Расстояния г2 и
равны. Следовательно, волна Уолша, излученная из фокуса D, бу-
дет иметь одинаковую задержку независимо от того, в точке В
146
И С она отражается, и будет складываться без временного сдви-
, Наоборот, сигнал, отраженный параболическим зеркалом в на-
делении фокуса D, не будет искажен, даже если он несинусои-
лен.
Другим примером неискажающих отражателей является отра-
»тель из двух перпендикулярных зеркал, показанный на рис.
136. Из геометрических соотношений, показанных на этом рисун-
, следует, что пути распространения а и b равны. Таким обра-
м, временного сдвига между волнами Уолша, отраженными от
зных точек рефлектора, не будет, и волны Уолша отразятся без
кажений. Можно показать, что результат справедлив также и
я трехмерного уголкового отражателя.
В общем случае волна Уолша, отраженная целью с ограничен-
1ми размерами, больше не будет волной Уолша. Форма стра-
шной волны дает информацию о геометрических размерах и фор-
! цели. Рассмотрим отражение ступеньки, как, например, сту-
ньки sal (1, 0) в момент 0=0 (см. рис. 1.2) от сферы, показанной
рис. 3.34а. Правильнее было бы потребовать решения волново-
уравнения. Однако можно получить первое приближение, пред-
ложив, что из каждой точки поверхности сферы, освещаемой
дающей волной, излучается сферическая волна. Отраженная
упеиька, вычисленная при этих предположениях, показана спра-
(рис. 3.34а). Сначала волна отражается только точками сферы,
холящимися вблизи плоскости S. После того как пройдет время
2R
—(1—sinp), волна будет отражаться от всех точек сферы,
С
[еющих расстояние до плоскости S, меньшее — ct. При этом
дет отражаться гораздо больше энергии. В момент времени /=
2R/c все точки освещенной части сферы отражают энергию и
1я больших значений t увеличения отраженной энергии не про-
водит. Так как все функции Уолша можно представить в виде
ъокупности ступенчатых функций с положительной или отрица-
льной амплитудой, на основании рис. 3.34а можно получить вид
траженной волны Уолша.
Форму отраженной ступенчатой волны можно вычислить сле-
ующим образом. Амплитуда волны, отраженной от кольцеобраз-
ой поверхности, находящейся на расстоянии l/2(ct) от плоскости S
рис. 3.34а), пропорциональна площади этой поверхности 2 л/? X
(cos p/?dp, но только часть sinp этой площади отражает волну в
аправлении падения. Тогда напряжение и, наблюдаемое на ос-
циллографе, как функция угла р будет иметь вид
Л/2—р
и(р)=2л/?2К f cosp'sinp'dp'= Кл/?2(1 — sin2p); (3.102)
6
1де К — коэффициент, учитывающий масштаб, а также затухание,
усиление, коэффициент отражения и т. д.
147
Так как на осциллографе напряжение и наблюдается как функ-
ция времени, а не угла р, то в (3.102) можно сделать подстановку
ct—2R( 1—sin Р) из рис. 3.34а:
и (ct) = К л R2
ct < 2R; и (с t) — К xR2 ; ct >» 2R,
Вид кривой u(ct) представлен на рис. 3.34а.
На рис. 3.34 для различных углов падения а показан вид сту-
пенчатой волны, отраженной: 1) стержнем длиной L н диаметром
Рис. 3.34. Вид ступенчатой волны, отраженной от
идеальных рассеивателей различной формы;
а) сфера; б) стержень длины L и диаметра d<&L;
в) цилиндр; г) круглый диск диаметром 2R;
д) радиолокационный отражатель (три перпенди-
кулярных зеркала)
148
<L (б); 2) цилиндром при его облучении перпендикулярно оси
в); 3) круглым диском диаметра 2R (г); 4) радиолокационным
тражателем, состоящим из трех перпендикулярных зеркал (д).
Встает вопрос, какая функция Уолша предпочтительнее для
аспознавания формы отражающей поверхности. Рассмотрим
>ункцию sal (8, 0) из рис. 1.2. Сигнал, описываемый этой функ-
,ией, легко фильтровать и обрабатывать. Однако его период равен
= 1/8 или /=(1/8) Т. Отсюда неоднозначность возникает, если раз-
[еры цели превосходят (1/8)сТ или если имеются несколько це-
ей на расстояниях больших, чем (1/8)сТ. Сигнал, описываемый
пункцией sal (7, 0), труднее фильтровать и обрабатывать, однако
го период 0=1 или t — Т и неоднозначность возникает только для
елей, имеющих размеры больше сТ.
Сигнал, описываемый функцией sal (1, 0), так же легко обра-
атывать и фильтровать, как и сигнал sal (8, 0), и он тоже имеет
ериод Т. Однако sal(l, 0) имеет только две ступеньки, a sal(7, 0)
меет 14 ступенек и эти ступеньки, а не постоянные участки функ-
,ий, несут информацию о форме цели. Таким образом, более слож-
ые функции Уолша с теоретической точки зрения предпочти-
ельнее.
Интерферометрическое сопровождение космических зондов и
адиолокационных целей можно проводить и проводят, используя
инусоидальные волны. Здесь важно отметить, что волны Уолша
меют свойства, существенно отличающиеся от свойств синусои-
альных волн, и поэтому могут обеспечить возможность получения
олее высокой разрешающей способности и более высокого отно-
шения сигнал/шум, чем это можно получить современными мето-
дами.
В этом параграфе рассматривались только волны Уолша, хотя
дифференцированные волны Уолша (рис. 3.29) оказываются го-
раздо более предпочтительными. Однако при использовании этих
волн появляется дополнительный параметр — время переключе-
ния, что существенно усложняет рассмотрение.
4.
СЛУЧАЙНЫЕ ВЕЛИЧИНЫ
4.1.
. " ОДИНОЧНЫЕ ВЕЛИЧИНЫ
4.1.1. Определения
Рассмотрим разложение в ряд сигнала F(Q):
Е(6) = £ 0).
/=о
Существуют три основные операции, которые могут быть разли-
чимы с помощью этого разложения: фильтрация, смещение и син-
тез сигнала. Фильтрованный сигнал F/(0) получается умножением
a(j) на функцию K(j), описывающую затухание, и на функцию
f(j, 0), сдвинутую во времени на 0(/J:
= f e-O(/)L
. 7=0
Смещение F (0) получается подстановкой функции k(j) вместо
переменной /, причем должна существовать обратная функция
Л (в) 0].
/=о
Для частостного смещения посредством амплитудной модуляции
несущей Уолша wal(&, 0) функция k(j) равна Лф/; для частот-
ного смещения посредством односторонней амплитудной модуля-
ции синусоидальной несущей sin2n&0 функция k(j) равна k+j
или k—j. В первом случае в качестве системы {/(/, 0)} использу-
ется система функций Уолша, а во втором случае — система сину-
соидальных и косинусоидальных функций.
Синтез сигнала является более общим процессом. Коэффици-
енты a(j) заменяются новыми коэффициентами 4а(7)]=с(7); сно-
ва должна существовать обратная функция Далее
система {f(j, 0)} заменяется новой системой {g(j, 0)}: F</(0) =
•о
= У, c(i)g(i> в). Преобразование a(j)-+c(j) называется кодиро-
/=0
150
нием. Примеры кодирования приведены на рис. 2.2—2.4. Заме»
м, что один коэффициент a(j) может быть преобразован в ряд
эффициентов c(j).
Фильтрация и смещение рассмотрены в гл. 2, 3. Для распро-
ранения теории передачи информации ортогональными сигнала-
I на область синтеза сигналов необходимы знания методов ма-
матической статистики. Краткое изложение этих методов облег-
[т понимание их применений в последующих двух главах. Со-
именное математическое рассмотрение необходимо начать с по-
дтип о-алгебры. Для того чтобы избежать чрезмерного математи-
ского абстрагирования, здесь лишь частично используется со-
еменнын подход. Однако степень требуемой абстракции должна
ггь удовлетворительной.
Вероятность определена математиками XVIII столетия как от-
•шение числа благоприятных исходов к числу возможных исхо-
де, если все исходы равновероятны. Такое определение легко мо-
ет быть применено к игре в карты. Вероятность вытащить опре-
!ленную карту из колоды, содержащей 52 карты, равна 1/52,
ли каждая карта представлена в колоде в единственном числе,
словие «если все исходы равновероятны» соответствует условию
если каждая карта представлена в единственном числе». Такое
пределение вероятности неудовлетворительно для связи, посколь-
у условие «если все исходы равновероятны» часто не выпол-
яется.
Колмогоров создал аксиоматическую теорию вероятности, ос-
ованную на теории множеств (I, 2]. Рассмотрим большое число
змерений, в результате которых получаем совокупность числовых
анных g=gi, g2, ... . Примерами таких измерений являются ча-
тота появления «орел» и «решка» при бросании монет или под-
пет букв в словах текста. Величина g=gi, g2, ... называется ста-
истической или случайной.
В приведенных примерах g=g являлась одномерной величиной.
>ассмотрим в качестве следующего примера шар, который броса-
>т на неровную поверхность. Допустим, что д и т] означают коор-
инаты точек, где шар останавливается. Каждое измерение дает
ва значения и g—g(g, h) является двумерной величиной, а в об-
хем случае — Л-мерной величиной.
Пусть S означает множество всех возможных результатов из-
[ерения g, a Sj и Sk обозначают подмножества S. Сумма Sj+S*
пределяется как множество всех элементов, принадлежащих к
fj и (или) к Произведение или пересечение SjS/t является мно-
жеством всех элементов, принадлежащих как к Sj, так и к S&.
*азность Sj—Sb является множеством всех элементов, принадле-
жащих к Sj, но не принадлежащих к S&.
, Рассмотрим пример, где длина слов в тексте измеряется коли-
чеством букв. Наиболее короткое возможное слово имеет длину,
равную 1, наиболее длинное — 25. Множество всех длин от 1 до 25
£сть S. Допустим, что Sj — это подмножество слов с длинами 9,
1'10, 11 и 12; Sk — это подмножество слов с длинами 11, 12, 13, 14
; 151
и 15. Сумма Sj+S/t является множеством слов с длинами 9, 10, ...
..., 15. Произведение SjSk — это множество слов с длинами 11 и
12. Разность (Sj—S3Sk) —это множество слов с длинами 9 и 10.
Множества можно легко определить интервалами. Например,
множество действительных чисел g между 1 и 2 определяется ин-
тервалом l^g^2. Множество комплексных чисел g=u + /y мож-
но определить двумя интервалами а^и^Ь и c^v^d. В евкли-
довом 6-мерном пространстве Rh множества можно определить k
интервалами. Сложение, вычитание н умножение этих множеств
дают другие множества. Пусть эти действия выполняются конеч-
ное нли счетное бесконечное число раз. Полученный класс мно-
жеств называется классом борелевских множеств в R/t. В после-
дующем анализе используются борелевские множества.
Функция множества назначает число каждому элементу g
множества S. Обозначение g^S показывает, что элемент принад-
лежит множеству S, a S<=S показывает, что S является подмно-
жеством S. Определим функцию множества p(S)=p(geS) с до-
полнительными характеристиками p(S)>0 и p(S) = l. Величина
p(S) называется вероятностью того, что g принадлежит множест-
ву S. Величина p(S) = l означает достоверность, так как каждый
результат измерения g должен принадлежать множеству S всех
измерений. Пусть g = g является результатом измерения длины слов
и пусть S; означает множество слов с длинами 9, 10, 11 и 12. Ве-
личина p(Sj) =p(c^Sj) = p(9^g^ 12) является вероятностью то-
го, что g принимает одно из значений 9, 10, И или 12. Говорят,
что p(S) определяет распределение случайной переменной g.
Рассмотрим подмножество S множества S, не имеющее значе-
ния g, меньшего, чем k, или большего, чем х:
p(S)=p(6<£<x). (4.1)
Вероятность двумерной величины g=g(g, ц) определяется следую-
щим образом:
Р ($) = р (kY < z < X, k2 < Т) < у). (4.2)
Примером является вероятность того, что слово с 10, 11 или 12
буквами встретится в предложении с 100, 101, ..., 125 буквами:
p(S)=p(10^g^l2, 100^т]^125).
Если нижний предел k в (4.1) равен —оо, то можно определить
функцию распределения
Ц7(х)=р(-оо<£<х). (4.3)
Первая аксиома гласит: любой случайной величине g в евкли-
довом fc-мерном пространстве R/t соответствует функция множе-
ства p(S), однозначно определенная для всех борелевских мно-
жеств S в Ra. такая, что p(S) представляет вероятность результа-
та или события g, принадлежащего S.
152
Свойства p(S) определяются второй аксиомой: функция p(S)
ляется неотрицательной и вполне аддитивной функцией в R*.
кой, что p(Rk) = 1.
Эти аксиомы можно выразить следующими формулами:
P(S)>0;
Р ($1 + ^2 + . . .) = Р (Sj) + р (S2) + . . . при SjSk = 0; (4.4)г
0 <№(%)< 1; №(— оо) = 0; Г(+оо)+ 1.
Равенство SjSa=O означает, что подмножества Sj и S& не имеют
щего элемента; другими словами, результат измерения не дол-
ги принадлежать одновременно Sj и S^.
Рассмотрим несколько серий измерений. Первая дает резуль-
|ты g, вторая — т] и т. д. Утверждаем, что любая комбинация
случайных величин g, т] будет также являться случайной вели-
ной. Эта третья аксиома может быть сформулирована следую-
им образом: если gi, gr— случайные величины, то любая ком-
[нированная величина (gi, gr) также является случайной вели-
[НОЙ.
Например, рассмотрим серию измерений длин g слов в тексте
серию измерений длинц предложений. Комбинированная величина
разуется объединением пар: длина первого слова и длина пер-
го 'предложения, длина второго слова и длина второго предло-
ания и т. д. Другим примером является пример, приведенный
нес, после ф-лы (4.2), где длина каждого слова предложения
ъединяется с длиной предложения. Согласно третьей аксиоме
существует различия между комбинацией двух одномерных
учайных величин и одной двумерной случайной величиной.
Рассмотрим объединенное или совместное распределение (g, ц)
ух величин g и т]. Распределение g, независимое от т), называется
сдельным распределением совместного распределения (g, rj)
носительно g. Оно идентично распределению g. Аналогично пре-
льное распределение относительно т] идентично распределению тр
Две величины g и т) имеют две вероятностные функции:
S)=p(g&S) и P(Q) =p(t]eQ). Вероятностная функция
g^S, Q) представляет вероятность того, что измерение дает
зультат g множества S и результат ц множества Q. Можно опре-
лить две новые функции:
P(4GQ/c6S) =
P(:€<S/ig6Q) =
p(g eS, tqgQ)
P(ceS)
p(;eS, e Q) .
p (4 g Q)
(4.5)-
p(^S)>0; p(ij€Q)>0.
Функция p(i]eQ/g65') 'называется условной вероятностью слу-
йной величины г], принадлежащей множеству Q, при условии.
0 g принадлежит S. Растределение p(r]eQ/geS) называется
ловным распределением ц при условии, что geS.
! 153
Например, пусть g ’представляет длины слов; г|—длины пред-
ложений, содержащих эти слова. Рассмотрим пары д, т). Среди
всех возможных слов выберем слова с длиной д>/. Это мно-
жество содержит все пары д>/, тр Рассмотрим теперь пары, для
которых длина предложений лежит между Ц и L2f
Частота появлений предложений с такой длиной в тексте зависит
от /, так как самое длинное слово может появиться только в до-
статочно длинном предложении. Условная -вероятность того, что
случайная величина л примет значение между Ц и L2 при усло-
вии, что g больше /, обычно отличается от безусловной вероятно-
сти того, что т| примет значение между М и L2.
Пусть, с другой стороны, пара д, т| означает длину &-го слова
и &-го предложения в тексте. Условная вероятность того, что дли-
на &-го предложения заключена в интервале rjЬ2 при усло-
вии, что д>/, обычно равна безусловной вероятности того, что
эта длина заключена в интервале так как длина Л-го
слова обычно не связана с длиной £-го предложения.
Этот пример приводит к важному частному случаю системы
случайных величин: системе статистически независимых величин.
Пусть для множеств S и Q справедливо следующее выражение:
/>(-€-$, 4€Q) = P(ce5)p(4CQ). (4-6)
Из (4.5) и (4.6) получаем:
p(4€Q/c€5) = p(46Q); p(:GS)>0;j
p(:6S/4eQ)=p(ces); p(ikQ)>oJ ('
Условное распределение g в этом случае не зависит от т] и -наобо-
рот. Величины g и н называются статистически неза-висимым-и бе-
ременными, а вероятности p(geS) и p(i]£Q) называются стати-
сти-чески 1незавжи-мы'ми.
Предположим, что (4.7) более справедливо, чем (4.6). Под- i
становна (4.7) в (4.5) дает (4.6). Следовательно, ур-ния (4.7) или.
более точно, каждое из уравнений являются необходимым и до-
статочным условием для статистической независимости.
Введем функцию распределения W вместо -вероятностной функ-
ции р согласно (4.3):
Гх(ж) = р(С<х); Г,(0-р(П<й]
W(x, y) = P(t<x, Т]<^). |
Уравнение (4.6) примет в-ид
W(x, y) = W1(x)W2(y), (4.9)
Это уравнение является необходимым и достаточным условном
статистической независимости переменных д и т], если множества
S и Q определяются интервалами согласно (4.1). Однако можно
показать, что это ограничение излишне жесткое и что S и Q мо-
гут быть борелевскими множествами.
154
в Пусть снова измеряется длина слов числом g букв. Рассмотрим
Вместо g функцию ц = ц(<;) =fG2. Она называется функцией случай-
к>й переменной g. Пусть основная функция т)(g) будет В-изме-
ргмой 1>, действительной, ограниченной во времени и однозначно
тределенной для всех действительных g. Функция т] (g) является
ютда случайной величиной с функцией распределения, опреде-
[яемой случайной переменной g.
|. Обозначим через Q множество, содержащее ц, а через S —мно-
жество, содержащее g. Случайная величина ц будет принадлежать
b тогда и только тогда, когда g принадлежит S. Пусть pi(S) озна-
иет вероятность того, что g принадлежит S, a pz(Q) — вероят-
вЬсть того, что ц принадлежит Q. Тогда имеем
; pi(S) = p2(Q). (4.Ю)
использование функции распределения согласно (4.3) дает
[ (4.11)
ре — множество всех g, для которых rj(g)
[. 4.1.2. Плотность вероятности, функция случайной величины,
математическое ожидание
( В (4.3) функция распределения W(x) была определена как
F(x) = p(g^x). Предположим, что для всех точек х существует
Ьоизводная W'(x). Производная ’называется 'плотностью распре-
деления или плотностью вероятности:
г w(x) = W'(x). (4.12)
|называется в этом случае непрерывной случайной величиной.
I Пусть случайная величина g, имеющая функцию распределе-
Бя Wt(x), преобразуется в новую случайную 'величину r) = ag + b.
ргда функция распределения W2(y) случайной величины ц полу-
ется следующим образом. Условие ц^у соответствует
К (у—Ь)/а при а>0 и g^ (y—b)/а при а<0. Функция раюпре-
Бления W2(y) получается из (4.11):
I Ь а>0-
w2(y) =
(4.13)
1— W.
fra формула справедлива для a<0 в том случае, когда W\(x)
ргь непрерывная функция переменной х=(у—Ь)/а, В точках раз-'
^ва Wi(x) будет определена как функция непрерывная справа.
f *) Функция g(x), определенная для всех элементов у множества S, являет-
^измеримой по Борелю или В-измеримой в S, если подмножество S всех эле-
Ьтов х, для которых справедливо g(x)^K, является борелевским множеством
1х действительных К. Следовательно, значения переменной п Должны быть
вментами борелевского множества.
155
Если Wt(x) дифференцируема для всех значений х. то плот-
ность вероятности w2(y) получается из (4.3):
= <414)
ЬУ1(Х) =г;(х).
Рассмотрим теперь функцию r] = g2', 1 = 1, 2, .... Величина г] не
принимает отрицательных значений «и W2(y) равна нулю 'При
у<0. Для у^О неравенство т]^У дает: —у*'2‘^е^ +у1/2‘. Функ-
ция распределения W2(y) для ц запишется:
(У) = [г’( у1/2'’ - Г, (- у'/2'), у > Q- (4Л5)
Wt(x) должна быть непрерывной функцией переменной х=—у12‘.
Если Wt(x) дифференцируема для всех значений х, то плотность
вероятности w2(y) находится как
О, . у<0;
^2 (у) = ИЭД =
~s'+ г‘ [»,(»'«)
2t
(4.16)
Неравенство д^у для V?21'1, i=l, 2, ... дает g^yI/(2i-1). Таким
образом, справедливо
№2(y) = iri(y1/(2i-,,)> - оо<у<°о;|
= <4-171
2i — 1
Пусть W(x) будет функцией распределения случайной -вели-
чины g и g(g)—определенная функция. Будет существовать сле-
дующий интеграл Лебега:
£[g(£)] = jg(x)dF(x).
(4.18)
Величина £(g(g)]— математическое ожидание случайной вели-
чины g(g). Уравнение (4.18) становится интегралом Римана, если
W(x)—дифференцируема для всех х\ W'(x) = w(x) и если g(x)
имеет конечное число разрывов:
оо
E[g(£)] = ^g(x)w(x)dx. (4.19)
— 00
На рис. 4.1 в качестве примера дискретных распределений
представлено распределение Бернулли. Вероятность того что g
равна х = 0, 1, ... /, определяется уравнением
p^^x) = qx(\-q)l-x( 1 \ 0<у«1. (4.20)
\ X /
156
я любого множества о, не содержащего ни одной из точек
О, 1, .... /, справедливо: p(geS)=0. Функция распределения
(х) 'получается из (4.3):
Рис. 4Л. Плотность ве-
роятности и функция
распределения величины,
распределенной по зако-
ну Бернулли; <7=1/2, /=
(4.21)
г"
О 2
ц
И И 8 10
6 8 Ю
тематическое ожидание
представляется суммой:
f[g(S)] = yg(x)r(i-g/“x(z'|;
~ \ X /
V-—I * *
(4.22)
I.
J должна быть определена только в точках х=0,
На рис. 4.2 представлен пример непрерывного распределения,
ределясмого модифицированной функцией Ганкеля Ко(х):
W(x) = р(’ <х) =
(4.23)
. 4.2. Плотность ве-
тности и функция
[ределения произве-
я двух ‘ гауссовых
величин
1
зже будет показано, что это распределение ’получается для про-
едения двух переменных с гауссовым распределением. Вели-
ia W(x) является дифференцируемой. Плотность вероятности
еделяется выражением
ш(х) = —К0(х). (4.24)
Л
и х=0 Ко(х) стремится к + оо, так как касательная W(x) в этой
ке перпендикулярна к оси х.
Для непрерывных распределений вероятность того, что g имеет
оделенное значение, равна 0: р(д = х) =0. Математическое сжи-
ме £(g(g)] получается из (4.19):
ОО
£{g(£)] = Y ^g(x)K0(x)dx. t (4.25)
—оо
157
4.1.3. Моменты и характеристическая функция
Пусть g(g) в (4.18) будет степенью g, g(g)=sft. Математичс-
ское ожидание Е (gh) (Называется моментом порядка k:
£(£*) = Jx* </№(*)• (4-2б)
--GO
Для распределения Бернулли (4.22) получаем
Е( £*) =£ хк qx (1 - q)l~x ( lx ). (4.27)
Х=0
Моменты для непрерывных распределений следуют из (4.19):
£(£*)= jxAu)(x)dx. (4.28)
--00
Момент первого порядка также называется средним значе-
нием т:
Е(^ = т. (4.29)
Моменты
Е [(£ - с)‘] = j (х - c)kdW (X) (4.30)
—00
называются моментами относительно точки с. Моменты относи-
тельно точки с=т называются центральными и для них исполь-
зуют обозначение рл:
р* = E(g — m)* = J(x-m)kdW(x). (4.31)
--00
Разложив (х—m)h, получим из (4.26):
Ро=
Рз = £ (£3) — 3m Е (£2) 4-2m3.
Момент второго порядка относительно точки с
Е ((£ — с)2] = Е [(£ — т + т — с)2) = J (х — m)2 d W +
—00
4- 2 (tn — с) J (х — т) d W + (tn—с)2 dW = рз 4- 0 4- (т — с)2 > рг
—00 —
(4.33
принимает минимальное значение при с=т.
158
Для дискретных распределений записываются уравнения, со-
ржащие интегралы Лебега. Пусть рх означают вероятность того,
о с принимает значение х. Вместо (4.20), (4.21), (4.22) и (4.27)
лучаются следующие основные уравнения:
; = х) = рх; ।
E(g^)]= £<^=
(4.34)
•а'внения (4.29) и (4.31) дают:
™ = £ хрх-, pk =
(4.35)
Моментами часто удобно описывать распределение. Особенно
р относится к случаю, когда распределение получается путем
мерения, а не задается простой аналитической функцией. Мо-
нт первого порядка т характеризует положение распределения,
к как момент второго порядка имеет минимальное значение от-
сительно точки т согласно (4.33). Момент второго порядка ц2
растеризует концентрацию (Случайной переменной около сред-
го т, Момент второго порядка называется также дисперсией
и среднеквадратическим отклонением и обозначается
Р2 = а2;
называется стандартным отклонением.
Если распределение симметрично относительно среднего т, то
е моменты нечетного порядка равны нулю. Следовательно, ц3
рактеризует отклонение от симметрии. Коэффициент
У1 = Нз/о2
зывается коэффициентом асимметрии.
Математическое ожидание функции exp(jvg) называется харак-
ристической функцией случайной величины g; v — действнтель-
е число:
(4.36)
(4.37)
ф (v) = Е [ехр (/ V 0J = fexp (j v х) d W (x).
— 8
Пусть W(x) будет дифференцируемой функцией,
гь преобразование Фурье w(x):
(4.38)
Тогда <p(v)
Ф (v) == J>ехР (/ v x) w (x) dx.
(4.39)
Между функцией распределения W(x) и се характеристической
{акцией <p(v) имеется взаимооднозначное соответствие. Две идеи-
иные функции распределения дают две идентичные характера-
гческие функции и наоборот. Вычисления с характер истическн-
159
ми функциями 'могут быть сделаны быстрее, чем с функциями рас-
пределения; иногда они проще. Здесь полпая аналогия с исполь-
зованием преобразования Фурье в теории связи.
4.2.
СИСТЕМЫ ВЕЛИЧИН
4.2.1. Сложение независимых величин
Рассмотрим две случайные величины g .и т), имеющие диффе-
ренцируемые функции распределения Wt(x) и УЩу). Математи-
ческие ожидания функций gi(g) и £г(л) определяются с помощью
следующих интегралов:
£tei(£)]= (4.40)
— оо
£(&(n)J = ^gz(y)w2(y)dy. (4.41)
— со
Пусть е и 1] будут статистически независимыми величинами.
Из (4.9) следует
~ = w (*, У) = w2 (х) u»2 (у). (4.42)
dxdy
Функция
*(С,П)-Л(С) + &(п) (4.43)
дает математическое ожидание
£[£(£. т)Н= J ^g(x,y)w(x,y)dxdy =
-------------00 —со
= J Jtei(*) + &(l/)>i(x)ai2(y)dxdy =
—00 —00
= faWwtixjdx j®2(y)dy+ Jg2(y)w2(y)dy Jw!(x)dx =
—OO —00 --00 —00
= £(gl(?)] + £(g2(r|)J. (4-44)
Математическое ожидание суммы случайных величин gi(g) в
^г(т|) равно сумме математических ожиданий gi(g) и g2(n). Этот
результат также справедлив, если допущение статистической неза-
висимости, сделанное здесь, не удовлетворяется.
Функция
(4.45)
160
математическое ожидание
£[*(£, ПМ = ^§h(x,y)w(x,y)dxdy =
= J JglWft(!/Hi(x)>2(l/)dX(ty =
Jgi W W dx Jg2 (y) o>2 (y)"dy = E (£)J E [g2 rj)]. (4.46)
^магическое ожидание тгроизведенмя случайных 1вел'ич1ин gi(g)
£(т)) равно произведению математических ожиданий gi(g)
п)-
льтаты, относящиеся к суммам и произведениям случайных
, полученные здесь для двух непрерывных величин, также
денимы к более чем двум величинам и к дискретным распре-
ия'М. Математические ожидания для дискретных распреде-
й должны вычисляться согласно (4.34).
1усть <j>i (v), <p2(v) и <p(v) означают характеристические функ-
переменных g, т] и g+r). Подстановка gi(g) =exp(jvg) и
) =ехр (/vt|) в (4.46) дает
ф (v) = Е {exp [j v (С + П)1} = [exp (j v rj) exp (/ v £)J =
= £[exp(/vr|)]E[exp(/v£)] = pi(v)<p2(v). (4.47)
актеристическая функция суммы статистически независимых
гайных величин равна произведению характеристических функ-
величин.
Йз анализа Фурье известно, что обратное преобразование
9) равно следующему интегралу:
= JexP(~/vx)<p(v)dv.
(4.48)
Л
значим функции распределения величин д+т|, д и т] через
►h Wi(x) и 1Г2(y)t а плотности вероятности—через w(z)y w^(x)
(у)- Для простых функций интегралы в (4.38), (4.39) и (4.48)
fr быть вычислены. В результате получается плотность вероят-
w(z). Это преобразование характеристической функции
17) в функцию распределения можно сделать в общем виде.
£зультате получаем
U7(z)= ]wi(z-y)dW2(y)= ^W2(z-x)dWl(x). (4.49)
Йля дифференцируемых функций из (4.49) получаем следую-
b интегралы Римана:
161
w2(z—x)wl(x)dx.
U7(z)= JIFi(z — y)wt(y)dy = \U/2(z — x)wl(x)dx-,
---------00
w(z)= Jw1(z — y)wi(y)dy =
---------00
Обозначим математические ожидания, дисперсии и моменты
третьего 'порядка функций распределения W(e), Wt(x) и W2(y)
через т, mit т2, о2, <j2i, оЧ цз, рз(1) и цз(2). Для gi(s)=S « £2(14) =т)
ур-ние (4.44) дает
т — т1 + т2. (4.51)
Уравнения (4.32), (4.36) и (4.47) дают
а2,+ a2 = Е (С1) - т* + Е (П2) - /и2 = Е (£2) - £* (О + Е (n2) - Е1 (п) =
= Е [(£ + t|)2J - 2Е (Z rib (0 - Е1 (т|) = Е + т|)2] — Д2 (£ + т|) = с2
Аналогичным образом 'получается следующая зависимость:
Рз = + ^2). (4-53)
Рассмотрим в качестве примера две 'величины g и т], имеющие
гауссово распределение:
«4 (х) = -^=—ехр [— (х — тх)2/2 о2];
“>*(У) = /2~L, еХр 1“(У ~ ГП2)2/2а22]’
U7x(x) = —[1 +erf(--~CTl Л] ;
2 L \ /2ах /] ’
Гг (у) = — [ 1 + erf (Y ,
2W 2 [ \ /2а, /J
где erf(u) —табулированная функция ошибок:
erf (и) = ~^=. I е~х’ dx 1-т=е““*;
' V^nuj /я
(4.54)
(4.55)
erf (— и) = — erf (u); erf (оо) = 1.
Характеристическая функция <pi(x) функции wt(x) получается
из (4.39):
00
Ф1 = /2?tax JeXP [/ v x ~ (x ~ mi)2/2^2] dx.
Подстановка y= (jo2t+'^m)l]/r 2<т, дает
00
Ф1 = exP (/ V OT1 — у О2 V2) jexp [— (x//2 ax — y)2] dx.
162
скюльзуя (4.55) и подстановку (х/K2ai—у)2=г, находим
Оо
(v) = exp (j V ту-Y о2 v2j -L- J e~*‘ dz = exp (j v my-у o2v2j •
— 00
(4.56)
зрактеристическая функция <p(v) величины (g + n) получается
i (4.47):
Ф (v) = Ф1 (v) фг (v) = exp [/ v (my + m2)-+ a2) v2. (4.57)
равнение (4.57) и (4.56) показывает, что сумма g + rj должна
1еть гауссово распределение, так как имеется взаимооднознач-
1Я зависимость между функцией распределения и характеристи-
ской функцией. Плотность .вероятности w(x) и функция распре-
ления №(х) раины Шу(х) и W'y(x) из (4.54), если mt заменить
i 7n=.mi + m2, a a2i — на o2=o2i+o22. Суммируя I независимых
уссовых величин, снова получаем 1вел1ичину с гауссовым распре-
лением, имеющим среднее
/п =
ы
дисперсию
(4.58)
В дальнейшем будет показано, что распределение 'Суммы I не-
висимых величин для больших значений I стрем'ится к гауссово-
г распределению, даже если сами величины не являются гауссо-
гми. Это 'центральная предельная теорема математической ста-
спиии. Она справедлива при более 'общих допущениях. Среднее
дисперсия распределения равны суммам средних и дисперсии
личин согласно (4.51) и (4.52).
4.2.2. Совместные распределения независимых величин
В качестве более сложного примера распределения суммы двух
учайных величин рассмотрим следующую задачу, которая встре-
тся в гл. 6. Величина g имеет гауссово распределение со средним
= 1 и дисперсией о2, а вторая величина т| также имеет гауссово
определение со средним т=0 и дисперсией о2. Нужно о проде-
ть функцию распределения g—|rj|- Плотности вероятности
t(x) и Wz(y) величин g и |т]| имеют вид:
Wy (х) = —=— ехр [— (х — 1 )2/2о2], —оох< оо;
у 2я a
и>2(у) = —^=—ехр(—у’/го2), 0 < у < оо;
у 2п а
“'»(!/) = °, У<°-
163
♦
(4.59)
Пусть разность х—у 'равна г. Тогда для всех значений у спра-
веддива следующая зависимость:
x = z + y. (4.60)
Плотность вероятности w(z) и функция распределения W(z) ве-
личины g—1
определяются следующими уравнениями:
°° *
и> (z) = —-1 exp [— (z + у— 1 )2/2о2] exp (— у2/2 о2) dy=
лая j
о
— оо < z < оо
z
z
е “* du =
(4.61)
= -А-[1 +erf(z)] + -J-[l-erf2(z)J;
— 1
w =-------.
2а ।
Вычислим далее плотность вероятности д—|т]|, есл»и выпол-
няется условие д^О. Функция Wi(x) определяется следующим
образом:
(х) = -.уД ~ ехр (— (х — 1JW], х > 0;
} хл а с
ц>1(х) = 0,
(4.62)
1 -Jexp(-(х- l)2/2a2]dx == -^-[1 + erf (1//2о)].
о
для z^O.
с — —~т—
V2no
Для неотрицательных значений с,— | т| | величина g не может
быть меньше нуля, следовательно, для z^O справедливо выраже-
ние (4.61), однако последнее надо умножить на 1/С.
С учетом (4.60) и того, что х^О, наименьшее допустимое зна-
чение у для z<0 равно —г, а не !
Вместо (4.61) получаем
00
w (z> = ~7^Т Г ехР (г + У ~ 1 )2/2а21 ехР (— У*12а*) dy =
л С ол J
—Z
= 2“Й^еХ1>[_(г_ [' ~еГ' (
—Z—-Y|, z<0. (4.63)
2а /]
Различие между (4.61) и (4.63) заключается только в знаке аргу-
мента функции ошибок z. Это чрезвычайно затрудняет вычисление
функции распределения W(z). .Вследствие этого будем вычислять
только вероятность того, что разность g—|т)|, g^O меньше нуля.
Для этого нужно произвести интегрирование ov(z) от —оо до fl-
164
— г— 1
2g
dz =
Так как (4.61) справедливо только для z^O, достаточно 'проинте-
грировать (4.63):
Й7(О) =---’---
2VnCa
1 + 2erf(l//2g) — 2erf (1/2<г) — erfa (1/2<т)
(4.64)
2(1 4- erf (1/1Л2 or)]
Интегрирование (4.64) — очень трудоемкий процесс. Оно может
быть выполнено методом параметрического интегрирования. Сна-
чала заменяют W(0) = W(Q, s) ; s = l/2a, тогда u = — (z—l)s. Затем
выполняется дифференцирование dW(0,s)/ds, подстановка w =
2(u—s) и интегрирование no s.
Рассмотрим -распределение 'произведения gq двух статистичес-
ки .независимых непрерывных величин, имеющих плотность вероят-
ности u>i(x) и w2(y). Плотность совместного распределения полу-
1чается из (4.42): w(x, y)—wi(x)a>2(y). Вероятность того, что точка
с координатами g и т] лежит на элементе dxdy, равна
w (х, у) dx dy = uij (х) wt (у) dx dy. (4.65)
«Произведение gr] будет .иметь определенное значение z, если произ-
ведение ху равно г:
ху = Z. (4.66)
.Определенное значение z может быть получено двумя способами
из соотношения
xy = (-x)(-!/) = z. (4.67)
Преобразование дифференциала dy становится двузначным. Для
(того чтобы оно стало однозначным, можно рассмотреть два случая:
х^О и х<0. При фиксированном значении г величина х может
принимать любое значение между 0 и оо или —оо -и 0 при усло-
вии, что у принимает значение
Z
г
(4.68)
У = —
Дифференциал dy преобразуется в
dy = —, х>0; dy =
dz
(4.69)
Вероятность того, что лежит между z и z + dzinpH условии, что
\с, находится между х и x+dx, a q — между У — — и у + dy —
z+dy
,определяется следующими произведениями:
wY(x}dxw2
z
w1(x)dxu>2 , x<0.
(4.70)
165
Кажется 'разумным интегрировать первое произведение от О
до +оо, а второе от —оо до 0, так как х может принимать все
значения между —оо и +оо. Несмотря на это, интегралы при
х=0 могут не сходиться из-за сомножителя 1/х. Поэтому около точки
х—0 вырезается определенный интервал шириной 2s и в каждом
случае рассматривается предел w(z) при 8->0:
— 8 оо
w(z)dz =— f (x)w21 —— dxdz + I (x) w2 (—— dx dz. (4.71)
J \ x j x J \ x j x
— 00 £
Для четных функций ур-ние (4.71) заменяется на
—8
w(z)dz = 2 С шх(х)ш2^—1 —dxdz.
J \ x ) x
—co
(4.72)
Пусть g и Ц имеют гауссово распределение co средними =
=7n2 = 0 и дисперсиями од и о22. Уравнение (4.72) дает
w (z) = -—----------- ( exp (— х3/2о2) exp — {— ? / 2а2] — dx.
2 л сд о2 J L \ х / / J к
8
(4.73)
Делается подстановка s = x2/a2i:
W (z) =---------!----
2л ст। 02 _
e»/a?
J eXP ~ lT^2/S°‘CT2 + 1
— ds.
s
(4.74)
Интеграл
Jexp
0
- v (— + S)1 — ds = in U u> = 2
Z \ s /J s
(4.75)
где и — действительное, табулирован. Функция H0W(iu) является
функцией Гаккеля, а Ко(и) — модифицированной функцией Ган-
келя. При е->0 ур-ния (4.74) и (4.75) дают
«'(Z) =--!---Ktt|—М- (4.76)
Л (Ji (J2 \ 01 /
Из (4.74) следует, что w(z) — четная функция:
ш(—z) = tt/(z).
(4.77)
Поэтому w(z) определяется
Функцию распределения
для всех действительных значений z.
Г (г)
(4-78)
166
нельзя привести к табулированным функциям. На рис. 4.2 пока-
заны W(z) и w(z) при замене
г
х =-----
О1 аа
(479)
z
(4.80)
= a2 w
w
\ (Ji Gg / \ /
Для задач, связанных с замираниями и узкополосным шумом,
редставляет интерес распределение Релея. Плотность вероятно-
и и функция распределения величины g с релеевским распреде-
лением определяются следующим образом:
(х) = ехр (— x2/6f), х > 0;
W1 (*) = °. X < 0;
Wt (х) = 1 — ехр (— x2/6f), х > 0,
Среднее значение раюно
(4.81)
£(0 = ^1 = J
О
(4.82)
-а момент второго 'порядка равен
(4.83)
(4.84)
(4.85)
Е (С2) — Jx2 w1 (х) dx = tf.
о
Дисперсия a2i следует из (4.29), (4.32) и (4.36):
of = £(Н - Р(£) = бф - -L л).
Пусть величина q ме зависит от g и имеет релеевское распре-
деление с плотностью вероятности ш2(у):
(у) = ехр (— у2/62), у > 0,
°2
Вычислим ’плотность вероятности w(z) произведения gq. Лучше
использовать ур-ние (4.71), чем (4.72), так как функция плотно-
! сти релеевюкого 'распределения -не симметрична относительно х=0.
[ Используя (4.81) и (4.85), получим
w (z) = — (
№ J
Это уравнение аналогично ур-нию (4.73), если подставить 2о22=62г
167
x2/6f) — ехр (— z2/x2 б2) у- dx. (4.86)
и 2<r2i=62i в (4.73) и умножить на---------. Плотность вероятности
62 62 л <?! <т2
произведения sq следует >из (4.86) с учетом (4.76):
w (г) = - 4г / 2г ’ 62 62 Ч 616, ; j, z > 0. (4.87)
Функцию распределения W(z) = f “Ко ( б?б2 .) Ч ——— ]du 6i 62 / (4.88)
можно привести к табулированном функциям. Подстановка
х=2и/б|бг дает 2Z/6.6, W(z) — j* xK0(x)dx 0 22/6хб, = у/я (* (ix)H^(jx)d(ix). 0 (4.89)
Интеграл
J У11о(У) + j N0(y)]dy — \yHp(y)dy = уН^(у) (4.90)
известен. Функции !0(у) и No(y) есть функции Бесселя первого
и второго рода (функции Неймана). Уравнение (4.89) запишется
в виде
2Z/6.6,
U7(z) = АлхМ'^/х) | = л
е
_1_ „(1)
61 6, \ 6, 6, 2
(4.91)
Пусть е->0. Используя уравнение
«О)(/е) = —2/лв; 0<8<£ 1, (4.92)
получаем
lime//P(/e) = —2/п (4.93)
Е-*0
И
W (z) = 1 - I _ н < О . (4.94)
Di о2 L \ *4 02 /
При действительных положительных значениях г выражение в
скобках является неотрицательным.
Исследуем, равно ли (4.94) 1нулю при z=0 и 1 при z=oo.
С учетом (4.92) при z = 0 получаем
lim [-ЯР (АА\1 = А = 1.
z—о 6j 62 L \ 61 62 / J 616, л 2г
При больших значениях х справедливо асимптотическое прибли-
жение: _ /у<‘> (/х) ~ „X е“х .
168
торой член в (4.94) при больших значениях z равен нулю, поэто-
му получаем Ц7(оо) = 1. На рис. 4.3 показаны функции (4.87) и
(4.94) для 61 = 62= 1.
изведения двух величин, распределенных по закону Релея
: Функция распределения суммы двух независимых величин g + г|
с релеевским распределением следует из (4.60):
~ f { 1 — ехр (— (z"— х)2/62] } х ехр (— х^б2) dx. (4.95)
распределения
заменена на
функция
быть
Нижний предел интеграла равен 0, так как плотность вероятно-
сти w(x)=xехр(—х2/62г) должна быть заменена на w(x) = 0 при
ix<0. Верхний предел равен г, так как
W(z—х) = 1—ехр(—(z—x)2/62i] должна
W(z—х)==0 при z—х<0. Подстановка
(«?+«'« S.
у = х —Г2-------------------Z —----
1
(4.96)
61 62
учетом интепрала
ye y'dy = -±-e yi
после громоздких преобразований дает:
- — \ 4- б2ехр(——
62/ - И
— 6*
z»6|
W (z) = 1 — ехр
k4l
&
Z* 62
2 / k 6j L \ k 62 ) \k 6!
IT(z) = 0 для z<0; Jfe2 = 62 + d2.
При 61 = 62= 1 получается простая формула:
IV'(z) = 1—e
(4.98)
Рассмотрим распределение отношения rj/g двух 'Независимых
непрерывных величин с, и г), имеющих плотности вероятности
169
wt(x) и w2(y). Снова используется плотность вероятности (4.68),
умноженная на dx и dy. Должно быть справедливо отношение
y/x=z, если T)/g принимает определенное значение г. Это значение
можно получить двумя путями тан же, как в случае произведения
nS= ylx=—yl—x=z.
Чтобы устранить неоднозначность, (возникающую при диффе-
ренцировании, рассмотрим отдельно случаи х^О и х<0. Для
определенного значения z величина х может принимать все значе-
ния между 0 и -t-оо или —оо и 0 при условии, что у имеет сле-
дующее значение:
y — zx, х > 0; у = — zx, х<0. (4.99)
Дифференциал преобразуется в
dy = xdz, х > 0; dy = — xdz, x < 0. (4.100)
Вероятность того, что значение отношения q/g заключено между z
и z+dz, при условии, что g находится между х и x+dx, а г]—
между y=xz и y + dy—x(z + dz), определяется следующими произ-
ведениями:
(х)dxц’2(zx)xdz, х> 0;
ay (х) dx w2 (zx) (— х) dz, х < 0.
Вероятность того, что т|/д расположено 'между z н z + dz при произ-
вольных значениях х, получается путем интегрирования от х=—оо
до х=оо;
О оо
w(z)dz =— j* m|1(x)a.’2(zx)xdx Jz + ^w1(x)wi(zx)xdxdz. (4.101)
—00 0
Для симметричных функций вместо (4.101) можмо записать
00
w(z).dz — 2 ^w1(,x)w2(zx)xdxdz. (4.102)
о
Как и в первом примере, пусть g и п имеют гауссово распреде-
ление с плотностями вероятности wt(x) и w2(y) = w2(x) из (4.54)
и со средними значениями пц = т2=0. Тогда получим
00
W = л<т"о. JeXP (— *2/2<J]) ехр (— z2 x2/2<j2) х dx.
CT1 О2 о
Подстановка в это выражение и = — х2 (— -ф —дает
2 I °? а2 /
СО
w(z) = - 1 Ге~“ du = — --------------j----. (4.103)
л 02 Ф z2af л я а2 (z0,/g2)s + 1
Распределение, определенное этой функцией плотности, назы-
вается распределением Коши или распределением Стьюдента с од-
170
нон степенью свободы. Функцией распределения является функция
(4.104)
Рис. 4.4. Плотность вероятности и функция распределения
отношения двух гауссовых величин
t Далее в качестве .примера рассмотрим распределение частного
irj/g двух величин с релеевским распределением g и т). Уравнения
|(4.81), (4.85) и (4.101) дают
w (г) = —-—Сх
Подставляя сюда и = х2
Z2 Х2/62) xdx.
получаем
»
2 z 62 62 7
u>z) =------!_2—
[Функция распределения W(z) получается
[интеграла
2 А.
«2
261/62
-------- . (4.105)
KzMi)2*!!2
из (4.105) с .помощью
f__L_dx = _ ' 1
I J (x2+ I)2
ze./e.
• W(z)=2 J
j 0
г На рис. 4.5 показаны функции w(z) -и W(z), соответствующие
ryp-ниям (4.105) и (4.106).
Рассчитаем совместное распределение величины g с релеевским
[ распределением и величины г] с гауссовым распределением. Плот-
F ности вероятности запишутся в виде:
w1 (х) = 2 б-2 х ехр (— х2/62)
[ чи1(х) = 0,
I w2(y) = (2л)-1/2ст-1 ехр(—у2/2а2),
| 171
2 х2 + 1 ’
(4.106
—-----dx =1
(х2+1)2
(z6!/62)2+1
(для С);
х< 0
— оо < у оо (для Г|).
(4.107)
Для вычисления распределения частного (релеевская величи-
на/гауссова величина) будем полагать, что плотность вероятности
гауссовой величины равна 0 при у<0. Плотность вероятности
Рис. 4.5. Плотность вероятности и функция распределения
отношения двух величин, распределенных по закону Релея
частного $/т|, вычисленная для этого усеченного распределения,
справедлива для всех положительных значений xfy = z. Плотность
вероятности для отрицательных значений получается зеркальным
отражением относительно оси ординат. Находим
w (z) =-----------fexp (— х®/2 a2) z х е,хр (— z* х2/62) х dx.
2 л а б2 .)
о
z2 J/2
— даст
Подстановка У — х
w(z)_ 1./2» y^!fS
2 s (2a2z2/62+1)3/2
Полная плотность вероятности определяется по формуле
шЮ-АЦ». , _„<г<0О.
2 в (2а2г2/б2+1)3/2
(4.108)
(4.109)
Значение П^(0) должно равняться 1/2 из-за симметрии w(z). Сле-
довательно, W(z) определяется как
W(z) = — + — ДЦ----------^2ха/6-----dx =
2 2 6 J (2a2x2/62+ 1)3/2
(4.110)
На 'рис. 4.6 показаны графики функций (4.109) и (4.110).
Плотность вероятности и функция распределения частного (га-
уссова величина/релеевская величина), показанные на рис. 4.7,
получаются аналогичным образом:
172
w (z) — Ix exP exp (—z2x2/2n2) X dx =
2 л a o2 J
о
_ 1 6 Л I _^z2_\~3/2
2 /2 a \ + 2a2 )
(4.1И)
(4.112)
Phc. 4,6. Плотность вероятности и функция распределе-
ния отношения релеевской величины к гауссовой
Рис. 4.7. Плотность вероятности и функция распределе-
ния соотношения гауссовой и релеевской величин
При вычислении (плотности вероятности 'произведения гауссо-
г •величины и релеевской допустим, что плотность вероятности
юсовой величины равна 0 при у<0. Вычислив плотность вероят-
ии при этом предположении и .отобразив ее 'относительно оси
инат, получим плотность вероятности для положительных и
ицательных значений случайной (величины:
__ 00
о» (z) = —— fexp (— z2/2x2 о2) x exp (— x2/62) — dx.
У л a 62 J r
e
цстаиовка сюда у = %2 2о = дает
oz ’ z
/ \ 11/ 2 1 C I 1 + \ du
«W’tFaS? _ j »p(-----------------
/2 £2 a/(6z)
Используя табулированный интеграл, ’получаем
о
1 +с?
2qv
откуда
w(z).--1_^е-/2"/ба, z>0.
v ’ /2а6
Плотность вероятности, действительная для положительных и от-
рицательных значений г, следует из требования симметрии отно-
сительно z=0:
Ш(г) = —1 e-/2-n/ea _oo<z<oo. (4.113)
v ' /2а6
Функция распределения определяется следующим образом:
г „
’7М=1+-^Й“Г'Г"'"Л =
о
(1--1-е-/2"г/ва z>0;’
2
= . _ (4.114)
±е~/2|г|/еа z<0.
2
На рис. 4.8 .показаны графики функций (4.113) и (4.114).
Рис. 4.8. Плотность вероятности и функция распределения
произведения гауссовой и релеевской величин
Плотность вероятности суммы гауссовой величины и релеев-
ской величины дана в качестве .последнего примера:
°°
u> (Z) = —1Д— Сехр [— (х —z)2/2o2] х exp (— х2/62) dx =
/л аб2 J
' о
р2 ( г2\Г. . / г262 \1 , ,/— . / гб \
= —7^ 7=—ехР I--г I 1 + ехР I--------1 + V п erf | ———।;
2/2/яа \ р2/ Д 2a2p2/J (/2рст/
р2 = 624-2<т2; <72 = 62 —2а2.
(4.115)
174
4.3. \
СТАТИСТИЧЕСКАЯ ЗАВИСИМОСТИ
4.3.1. Ковариация и корреляция
t Ранее (предполагалось, что случайные величины статистически
^зависимы. Некоторые определения § 4.1 нужно обобщить, что-
bi можно было опустить условие статистической независимости,
j Рассмотрим функцию распределения W(x, у) двух переменных
Ей г]. Математическое ожидание функции g(g, т]) определяется ин-
Ьгралом:
E[g&, t])J J Jg(x, y)dW(x, у). (4.116)
k — oo —о»
^усть W(x, у) будет дифференцируемой для всех х и у, ~
I пусть g(x, у) будет «елрерывной, за исключением конечного чис-
р точек. Тогда ур-ние (4.116) можно заменить интегралом Ри-
йна:
E[g(t, л)1 = J Jg(x, У)и>(х, y)dxdy. (4.117)
Г —00 -00
Е Пусть g(c„ т|) будет 1произведен1ием целых степеней g и т):
( g(U) = C‘A'. (4.118)
величина F(g'iT];) называется моментом порядка k + l. Моменты
'(g°i]z) и Е(g*r)°) идентичны моментам одномерного предельного
аспределения т] и с. Они определяются аналогично (4.29):
[• Е(^0) = /л1; £(?°л) = /п2. (4.119)
рчка с координатами g=/ni, т]=Уп2 называется средним двумер-
рго распределения. Моменты относительно среднего называются
Антральными моментами и обозначаются через
' Рн = Е[(£ — Щ1)*(т) — т2)‘]= [ J(x — mJ* (у — tn2)1 d W (х, у).
— 00 —00
Г (4.120)
Разложение членов (х—т1)к(у—т2)1 по степеням х и у с уче-
эм (4.116), (4.118) и (4.119) дает:
Ноо = 1 • Hoi = Ню = Н20 ~ Е (S2 т|°) — Ор (4.121)
Ног = Е (^° п2) — т22 = а|; ци = Е (S, л) — w2 = ^2-
Величины (А и а2г являются дисперсиями предельных распре-
еленмй переменных g и г]. Момент р.ц называется смешанным
оментом или ковариацией g и т]. Из теоремы умножения (4.46)
175
и (4.121) следует, что он равен 0 для статистически независимых
величин:
Hu = £(O£(i]) — m1m2 = 0. (4.122)
Математическое ожидание z
Е {[С1 (5 — >1) + С2 (Т| — mJ]2} = Над с1 + 2 Н11 ^2 + Рог <1 (4.123)
является интефалам функции, которая неотрицательна, и поэтому
оно должно быть тоже неотрицательным. Следовательно, правая
часть (4.123) должна быть неотрицательной. Допустим, что, по
крайней мере, момент цго или рог не равен 0. Правую часть (4.123)
можно переписать в виде
Р20 4" 2 рн с2 + ро2 с? = [(Рго 4" Ни 4~ (Рго Рог Ни) ~
Иго
= — [(Но2 сг + Ни (rf + (Нзд Но2 — Н11) 4 ]• (4-124)
Р02
Моменты р2о и рог — неотрицательны по той же причине, что
и (4.123). Члены в скобках (4.124) будут неотрицательны при лю-
бых значениях Ci и Сг» если выполняется следующее условие:
РгоРог Hii ^0- - (4.125)
Коэффициент корреляции р определяется следующим уравне-
нием:
р = (4.126)
V Иго рог 01 аз
Из (4.125) следует соотношение р2^ 1 или —1^р^ + 1.
Из (4.122) и (4.126) следует, что для статистически независи-
мых величин s и т] коэффициент р=0. Обратное утверждение в об-
щем случае несправедливо. Статистическая независимость не мо-
жет быть выведена из условия р = 0. Допустим, что между g и л
существует линейная зависимость: g=<xoil+i₽o=а(т)—т2) + ₽. Тогда
получаем:
Нго = Е (£ — mJ2 = Е [а2 (т] — mJ2 + 2а (0 — mJ (т] — mJ + (0 — mJ2] =
= «2 Ног + 2« (0 — mJ mi + (0 — mJ2 = а2 р02 + (0 — т,)2; (4.127)
Hu = Е КС — /П1)(п — mJ] = Е [а (г) — т2)2 + (0 — mJ (т) — mJ] =
= а Ног + (0 — mJ Ио1 = <» Рог’.
Величина р2 ранна 1 три 0 = /^. Результат может быть обратимым.
Сначала рассмотрим случвй, когда и рог, и рго равмы 0. Это озна-
чает, что предельные распределения величин $ и т] сосредоточены
в точках rrii и тг. Следовательно, двумерное распределение скон-
центрироваио в точке х=т^ и */ = ^2. Как следствие, ковариация
ри = а212 должна быть равна 0. С другой стороны, зависимость
176
|*о2= Ц2о=Ци=О "следует из распределения, сконцентрированного в
йючке x=mi й у=т2. В этом случае определен1ие\4.126) не может
рыть применено к р. \
I Если один из моментов рог или цго не равен 0, то, по крайней
мере, должно быть справедливым одно из ур-ний (4.124). Пусть
te (4.125) имеет место знак равенства. Согласно (4.124) правая
[часть (4.123) будет равна нулю, если удовлетворяется одно из
^условий:
| Нга ci 4" Ни ^2 — Що =5^= 0; Ног с2 сг = 0; р.о2 0. (4.128)
[Пусть правая часть (4.123) равна 0. Тогда должно выполняться
^условие
I c1(^ — m1) + c2(f\ — m2) = 0, (4.129)
как как математическое ожидание неотрицательной функции рав-
ено нулю только в случае, если функции равны нулю всюду. Из
М4.128) и (4.129) получаем:
Г t = —(П —ш2) + ть Н20=/=0;
g Ни
I + 1W°- (4.130)
I ^°2
|Эти уравнения для цго^О и цо2=#О идентичны на основании ЗАВИ-
СИМОСТИ: Ц20Ц02 — р2н-
[ Следовательно, из р2=1 всегда (Следует линейная зависимость
[между g и т]. С другой стороны, согласно (4.127) из линейной за-
писи мости следует в общем только р2=#0, а не р2=1.
| Из всего этого можно заключить, что коэффициент корреляции
[является мерой линейной независимости двух величин. Считается,
[что две величины коррелирован^ при р=#0 и 1некоррелирова1ны при
|р —0.
|_ В качестве примера рассмотрим плотность вероятности двум ер-
мюпо гауссова распределения:
W уУ> = 9------------------Л=Г еХР
2 л gj аг у 1 — р2
I / *2
2(1—р2)
2Р*У
01 02
(4.131)
(4.132)
При р=0 и 01025^=0 получаем
1 / Х^ \ 1 / 1/^ \
w(x, у) = —=— ехр (------------|--------ехр (-----|
У^2лох 2 0j ) У 2л а2 у 2о| /'
Статистическая независимость величин в этом случае следует из
р = 0, из-за (4.9) и соотношения d2Wi(x)W2(y)ldxdy=wl(x)w2(y).
Этот результат справедлив для всех двумерных плотностей вероят-
I ности, которые 'представляются в виде произведения двух одно-
| мерных плотностей вероятности при р = 0. Например, в (4.131)
гв.место 2рху могло стоять tpf(x,y) и все выражение могло быть
F умножено на 1 -Hpgfx, у).
177
4.3.2. Взаимо- и автокорреляционная функции
До сих пор индексы величин g = gi, ••• и т|=т]1, р2, ... мс-
пользовались только для обозначения отдельных результатов ’из-
мерений. Они не представляли собой упорядоченную последова-
тельность. Например, необязательно', чтобы £2 измерялось после gb
Предположим теперь, что индексы указывают на последователь-
ность измерений. Пусть измерение в момент времени /1 дает gb t)i;
измерение в момент времени t2 будет давать g2, ф и т. д. Последо-
вательность необязательно должна быть временной. Как пример,
величины gi, с2, ... могут представлять уровни воды вдоль течения
реки или температуру в определенных участках.
При вычислении среднего значения <g> множества резуль-
татов £1, . . ., £д,
R
= (4,133)
i=l
нет разницы, указывает ли индекс i на .последовательность или нет,
так как члены суммы могут меняться местами. То же самое спра-
ведливо для среднеквадратического отклонения
R
<(£-<С»2> = у <с»2. (4.134)
1=1
Если заданы две величины g «и ц, то можно написать выражение
R
<«- <х»(п-<п»> = ± £& - <С»(г)г - <П». (4.135)
1=1
Для величины (4.135) важно, чтобы gi умножалось на т|г-, а не
на Г] ж или Г] г-Ь
Уравнения (4.133) и (4.134) идентичны с (4.35) при J? = oo, если
этот предел существует. Пусть gi равно х в г измерениях из обще-
го числа R измерений. Тогда справедливо:
рх = lim r/R.
г, R-*<x>
Пусть пара $=х, г] = «/ встречается q раз в R измерениях и пусть
существует предел рху = lim q{R. Тогда (4.135) 'можно записать
q, R^-<x>
в виде (4.35):
со
Ни = 2 <х — m^k (у ~ т^1 Рх«' (4-136)
X, —сю
Пусть временная посл'вдо®ательность gi, g2, ... заменяется вре-
менной функцией f('9?)> в которой значения gj рассматриваются
в моменты времени 0j; / = 0, 1, ... . Для непрерывной последова-
тельности вместо ifCeJ записывается f(0). Пусть все значения этой
178
иоследовательности расположены в интервале (—1/2) 0^0^
|^( 1/2)0, где 0 может -быть конечным или бесконечным. Выраже-
ния (4.133) и (4.134) можно переписать следующим образом (все
интегралы берутся от (—11/2)0 до ( + 1/2)0, для упрощения записи
пор-мул пределы не указаны):
' Wi = <tf (0)> = 0~‘ J/ (6) d 0;
Г а? = <[/ (0) - <f (0)>]2> = 0-1 Jtf (0) - mJ2 d 6 =
I = 0-1 Jf2 (0) d 0 — mi. (4.137)
Ваменяя далее .последовательность т)|, т]2. ••• ©ременной функцией
₽(0), получаем:
[ m2=<g(0)>=0-1 Jg(0)d0;
J о2 = <[g (0) - < g.(0)>l2> = Jig (0) -
I —m2]2d0 = 0-1 Jg2(0)d0— m2;
<T?2 = <(g(0)-<g(0)>Hf(0)-<f(0)>]> = 138)
= О"1 J/(9) - mJ [g (0) - tn2] d 0 =
[ = ®~l Jtf (0) g (0) d 0 — mx
I 0-1 f/(0)g(6)de —
[ p = ------------------------------------- .
it0-1 J/2(0h0—mi] [e~‘ Jg2 (0)4 0—«!]}1/2
Интепрал в числителе называется взаимюкорреляционной функ-
цией X/g(0v ) при 0v =0, если 0 стремится к бесконечности:
K/g(0v) = lim0-1 p(0)g(0 + 0v)d0. (4.139)
5 e^°° -e/2
r Автокорреляционная функция A//(0V) получается при /(0) =
^(0):
Кя(0у) = Птв-‘ f f(0)/(0 + 0v)d0. (4.140)
Л/2
( Если величина 0 конечна, то используется кратковременная
Ьзаимокорреляционная или автокорреляционная функция.
179
5.
ПРИМЕНЕНИЕ ОРТОГОНАЛЬНЫХ ФУНКЦИЙ
В СТАТИСТИЧЕСКИХ ЗАДАЧАХ
5.1.
РАЗЛОЖЕНИЕ СТОХАСТИЧЕСКИХ ФУНКЦИЙ В РЯД
5.1.1. Тепловой шум
Рассмотрим совокупность временных функций gx(0), Х=1, 2, ...,
необязательно ортогональных. Разложим каждую функцию в ряд,
используя полную ортонормированную систему {f(j, 0)}, заданную
на интервале (—1/2)0^0^ (1/2)0:
^(0) = 2^(/)/(/.0); (5.1)
/=0
в/2
М/)= J 0)^0.
-0/2
Для фиксированного значения переменной Л коэффициенты
a (j) имеют определенные значения. Совокупность I функций
gx(0) дают I коэффициентов aK(j). Пусть qi из них заключены
в интервале 0<Л<ДЛ; q2— в интервале АЛ<Л<2АЛ и т. д.
Величины qjl, qzll, ... будут нанесены ib интервалах от 0 д о АЛ,
от АЛ до 2ДЛ и т. д. Результатом является ступенчатая функция.
Допустим, что при малых значениях АЛ она может быть аппрок-
симирована плотностью вероятности. Для разных значений / эта
плотность 'вероятности .различна. Если плотности вероятности оди-
наковы для всех значений /, то a (j) называется равномерно рас-
пределенной относительно /. Кроме того, пусть коэффициенты
aK(j) ,и aK(k) являются статистически независимыми при /=/=&.
Совокупность временных функций gK (0) называется выборкой бе-
лого шума по отношению <к ортогональной системе {f(j, 0)}.
Коэффициент а//о) называется нормально распределенным,
если его плотность вероятности является производной функции
ошибок. Совокупность функций £Х(Ю) называется белым нормаль-
ным шумом или тепловым шумом1), если aK(j) равномерно рас-
*) Использование этих терминов не является общепринятым в литературе.
Тепловой шум часто называют шумом Джонсона fl 2] или шумом сопротивления.
180
делены относительно /, статистически .независимы и имеют нор-
иьное распределение при определен ном /=/о-
Для практического измерения коэффициентов aK(j) рассмотрим
оратор функций f(j>G). Индекс j не может изменяться от О
|оо, как >в (5.1), а принимает только конечное число т значе-
|0, т—1. Время делится на неперекрывающиеся интервалы
ительностью в. Функция gx(0) в первом временном интервале
эначается через gi(9); функция во временном интервале X —
|ез gx(0). Возможно только ко-
ное число I интервалов; Л изме-
рен от 1 до I. Пусть действуют
Ьоиременно т сигналов f(j,Q) и
гть имеется т перемножителей и
«еграторов. В первом интервале
окно измерить т коэффициентов
17), 7=о, т— 1. Эти коэффи-
Ьиты представляются -выходными
йряжен»иями 'интегратора в конце
рвого -временного интервала дли-
|ьностью 8. Повторение этих из-
Ьений для всех I временных ин-
овалов дает ml коэффициентов Ркс. 5.1. Плотность вероятности
/ = 0, /71—1, Х=1, I. wa (i> А) теплового шума:
ЕДопуСТИМ, ЧТО Набор функций выходное напряжение т интеграторов
|0) является тепловым шумом.
ксмютрим отношение qrll измерений, дающих значение aK(j)
интервале (г—1)ДЛ<Л<лДЛ. Полученные т ступенчатых функ-
м можно аппроксимировать 1непреры;вным!И функциями плотно-
| вероятности ша(/, Л), как (показано на рис. 5.1, если ДЛ —
ггаточно мало, а I — достаточно велико. Одинаковое раапреде-
рис относительно j приводит к следующей зависимости, которая
ваведл-ива при определенном Л =Л0:
\ ^o(0, 4) = И'а(1, А>) = “'а(2, А))=- 5.2)
определение коэффициентов aK(j) в общем случае зависит не
|ько от табора функций gx(0), но также и от системы {f(j, в)},
внако для теплового шума оно we зависит от системы {7(7,0)}
и самых общих 1предположенмях.
[Для доказательства этого утверждения заменим ’полную нор-
юованную систему {7(7,0)} другой системой {h(j, 0)}, которая
кже птолна и ортонормирована в интервале (—1/2)0^0^
}(1/2)в. Функции f(j, 0) и h(j, 0) должны быть ограниченными,
(вложим функции h(j, 0) в ряд:
ь 00 в/2
A(/,0) = ^f/Wf(*,0); Ci(k)= f h(j, Q)f(k, Q) dG. (5.3)
*=0 —0/2
181
Сумма Scj(k) будет абсолютно сходиться. Тогда ряд (5.3) одно-
родно сходится.
Функция gK (0) раскладывается в ряд по системе {&(/, 0)}:
оо 0/2
1М0)=рЖ0); М) = J gx(0)A(/,e)de. (5.4)
/=о -е/2
Подставляя (5.1) и (5.3), получаем
0/2 оо оо 0/2
М/) = ( ^(0)Sc/^)H^0) = ^C/(fe) f gJ0)/(*,0)d0 =
—0/2 /t=0 k=0 —0/2
00
= £c/(fc)ax(fc). (5.5)
k=0
Последняя сумма сходится абсолютно, если все aK(k) ограничены.
Сумма статистически независимых величин с нормальным рас-
пределением есть также величина с нормальным распределением.
Следовательно, bK (j) имеет нормальное (распределение, если аЛ(7г)
статистически независимы. Средние значения величин aK(k) и
t>K(j) равны 0.
Плотность вероятности wa(k, А) величины aK(k) для теплового
шума записывается следующим образом:
WaА)= 7= Д----------’еХР (~ Л2/20Га)' (5-6)
У 2 у л т аа
И|нтепр:и1рован'ие по А дает l/m, wa(k)= j и»а(й, A)dA — \/т,а сум-
— 00
т
ма т членов w^(k) дает 1 :^^а(^) = I. Дисперсия в (5.6)
определяется следующим образом:
i
СТа = ПгПт5дах(П <5'7)
(-*90 (
1=1
Плотность вероятности величины Cj(k)aK(k) равна:
ы>с [6> ci (^) Л = —Г-Н--ехр [— с\ (k) A2ft <у2 ];
l I
=Й “Г 2 ci(&) {k) = ci W 1Й.7" S (fe) = (fe) а“-
Х=1 1=1
(5.8)
Плотность вероятности величины t\(j) 'следует из (5.5), (5.7)
и (5.8):
182
1=1 л=о
[ Л|(/, 0)40=1 = [ VC/(Z!)f(fe,9)
—8/2 —ё/2 |_fe=0
™ь (j, A) = — 1------exp (— Л2/2 о2); (5.9)
У 2 ) л tn oh
/71—1
°: J] сж (5-io>
*=0
следиий шаг «в (5.10) сделан яга основании (первоначального до-
цения, что распределение aK(k), а поэтому и дисперсия не
кИ’СЯТ от k.
Если удовлетворяется теорема Парсеваля (1.11) или, другими
>вами, если функции h(j, 0) можно представить с любой точ-
ные в смысле минимума среднеквадратического отклонения си-
мой {f(j, 0)},’то из (5.3) .получим
2 оо
dQ = ^c](k). (5.11)
*=0
1з (5.10) и (5.11) следует, что условие
о2 = 02(1+е) (5.12)
Ьовлетворяется и что е стремится к нулю при достаточно боль-
их значениях т. Тогда переменные bK(j) и aK(j) имеют одина-
Ьвые дисперсии. Плотности вероятности на рис. 5.1 остаются не-
рменнымн, если функцию £Х('О), описывающую реализацию теп-
Ьво’го шума, представить в виде ряда <по системе {h(j, 0В вместо
к/, ел-
к В литературе обычно тепловой шум представляется рядом
|урье, а не общим ортогональным рядом (5.1). Можно подставить
Г(5.1) синусоидальные и косинусоидальные функции, которые для
ктемы {f(j. 0)} равны 0 вне интервала (—1/2)0^>0^ (1/2)0.
ргласно результатам этого раздела различия между тепловым
кмом, представленным рядом Фурье или рядом функций
9)}» которые можно разложить в ряды Фурье, как показано
М5.3), не существует.
I В § 2.2 было установлено, что видеосигналы можно предста-
ггь в частостной форме, разложив их по сигналам Уолша, или
|частотной форме, разложив их на синусоидальные и косинусо-
|альные колебания. Кроме того, если передается одинаковая ин-
ррмация, то видеосигналы, отфильтрованные частостными филь-
мами, с трудом можно отличить от сигналов, отфильтрованных
ктотными фильтрами. Если видеосигналы имели бы распреде-
рние теплового шума и если бы ухо могло разложить эти сигна-
ы на бесконечный ряд составляющих согласно (5.1) или (5.4),
ржиго было бы ожидать одинаковых результатов.
г Результаты этого раздела можно также применить к шуму,
Йдставляющему собой электромагнитное излучение, такое, как
|ет. В настоящее время нет устройства, которое могло бы раз-
кжмть свет на сигналы Уолша и воспроизвести частостный спектр.
I 183
Устройства, .которые раскладывают свет на синусоидальные коле-
бания и воспроизводят частотный спектр, такие, как дифракцион-
ная решетка или призма, являются инвариантными .во времени,
подобно частотным фильтрам в связи. Устройство для разложения
света на сигналы Уолша должно обладать чрезвычайно высоким
быстродействием. Поэтому до сих пор еще не имеется практиче-
ских предложений по реализации таких устройств.
5.1.2. Статистическая независимость компонент
ортогонального разложения
В предыдущем разделе предполагалось, что коэффициенты
ax(h) и ал(к) я)вляются статистически независимыми при
Остается показать, что эта независимость также справедлива для
коэффициентов bK(j) и Ьк(1) при j=£l. Эти коэффициенты имеют
нормальное распределение, и они являются статистически незави-
симыми, если коэффициенты корреляции р или ковариации о2.;
равны 0.. Используя абсолютную сходимость ряда в (5.5), получим
i
Л = <\ (Г) \ (0> = lim Y V (/) \ W =
К=1
I р ОО 00 •
= Нт у £ £ С/(Л)ах(Л) cz(fc)ax (k) =
-ЛавО fc=0
I 09 00
K==l h=0 » k^O
«©оо I
= 2 S Hm-L J aK(h)aK(k). (5.13)
h=0 Л=0 A=1
I
Обозначим через e наибольшую сумму -у для любой
Х=1
пары h, k «и конечного значения /; тогда «получаем:
gax(ft)ax(A)<B; (5.14)
Х=1
(5.15)
Л-0 *-0
Двойная сумма сходится абсолютно, так как суммы Cj(h) и ci(b)
абсолютно сходятся:
V £c;(/i)C|(£) = K. (5.16)
Л-=0 k=0
1«1
внешня (5.15) ih (5.16) дают
^<еК. (5.17)
I больших значениях I е стремится к 0 по определению н кова-
ния огц равна 0.
5.2.
АДДИТИВНЫЕ ПОМЕХИ
5.2.1. Наименьшее среднеквадратическое отклонение
принятого сигнала от эталонных сигналов
Пусть временная функция F 'в) составлена из первых функ-
ортогональной системы {f(j, 0)}:
fx(0) = S' 9); (-1/2)0 < 0 < W2)0- (5.18>
/=0
|кция F*(Q) 'называется символом алфавита. Имеется конечное
ю таких символов, если коэффициенты ахС) принимают кю-
ioe число значений. Например, телетайпный алфавит содержит
iyKiBbi; т равно 5, а коэффициенты ax(j) могут принимать два
гения.
Пусть передается /^(О). В процессе передачи помеха <7^(6)
1дывается с сигналом и принимаемый сигнал можно записать
|де
/(0) = Fx(0) + gx(0). (5.19):
дположим, что Е(0) можно 1Предста1В'Ить в виде ряда:
f(0) = в) = 2K(J) + aK(j)]f(j, 0); (5.20)
j =*0 /=0
0/2
= J F(0) f (j, 0)d0; ах(/)=0для j>m,j меняется от 0 до oo,.
—в/2
> от 0 до (m—1). Коэффициент акО) определяется с по-
1ью (5.1).
1а приемной стороне нужно решить, какому оим)волу /^(б),
I, ..., % ... наиболее вероятно соответствует сигнал Е(0). Ве-
рность преобразования F^(Q) в сигнал Е(0) зависит от вероят-
и того, что F^{Q) был передан. Предположим, что все симво-
передаются с одинаковой вероятностью. Тогда решение зави-
голько от помехи gx(0). Если о множестве gK ?0) ничего неиз-
но, то по одному символу нельзя принять решение. Однако
Многих случаях известно, что помеха gx(0) с большей энергией
(имается менее часто, чем помеха с малой энергией. Другими
185
словами, вероятность приема помехи gx(0) с энергией между зна-
чениями W и IV 4-ДIV уменьшается монотонно с увеличением IV.
Сигнал Г(0) наиболее вероятно соответствует символу F^(f)), ко.
торый может быть преобразован в сигнал F(Q) с наименьшими
затратами энергии. Энергия AIV^, необходимая для такого пре-
образования, определяется интегралом
0/2 0/2
АВ7Г J рг(0)-^(0)]М0 = f p(0)-2F(0)F*(0) + F2(0)]d0.
-0/2 -0/2
(5.21)
Интеграл от Fa(0) .представляет энергию принятого сигнала,
интеграл от F£ (0) — энергию символа F^(0), с которым сравни-
вается сигнал. Интеграл от F(0)F^(0) есть корреляционный инте-
грал или корреляция сигнала F(0) и символа 7^(0). Значение
Fa(0) является одним и тем же для всех символов F^(0) и им
можно .пренебречь. Если, кроме того, энергия у всех символов оди-
накова
0/2
J ^(0)^0 = 117, (5.22)
—0/2
то можно также пренебречь/7^ (0). Наименьшее значение ДИ^
определяется в этом случае только корреляционным интегралом;
0/2
AIV = min при J F(0)F^(0)d0 = max. (5.23)
—0/2
Переданный символ F* (0) будет правильно принят, если ДИ?^
имеет минимум при ф = %.
Алгоритм обнаружения сигнала (5.21) и (5.23) называется об-
наружением по критерию наименьшего среднеквадратического от-
клонения. В случае теплового шума такое обнаружение является
наилучшим. Имеется (много видов аддитивных помех, для которых
это неверно. К ним относятся такие помехи, как импульсные или
так называемые организованные помехи.
Используя сум'маторы, умножители и интеграторы, в принци-
пе, -можно определить наиболее вероятный переданный символ
[из (5.21) или (5.23)]. Однако реализация такого алгоритма яв-
ляется обычно весьма трудоемкой. Пусть алфавит имеет п симво-
лов. В соответствии с (5.21) и (5.23) нужно вычислить п энергий
ДТГф. Эти вычисления должны проводиться одновременно. Следо-
вательно, потребуется п или п/2 сумматоров, умножителей и инте-
граторов.
Менее громоздкие алгоритмы можно получить путем подста-
новки (5.18) и (5.20) в (5.21):
л i «2 (/) - 2 v a (j) S (/) + 2 (j) =
/ ==-0 j=o j =о
186
= 21° (/) -°* (/)i2+i °2 № &-24>
j*=0 j^m
m--I
A^ = min при V [a(/) —a+(j)]2 = min
к m— 1 m—1
i Ди7ф = пнп при 2 £а(/)аф(/) — £ a2(/) = max. Суммами
i /=0 /=0
co
аф(/) -или 2 q2 (/) можно пренебречь, так как они принимают
1 /=о
инаковые значения для каждого ф Для символов с равной энер-
;й из (5.24) получаем
m—1
A^ = min при £а(/)аф(/) = тах. (5.25)
i=o
Уравнения (5.20), (5.24) показывают, что только коэффициен-
\aK(j), j<Zm, реализации шума £л(0) оказывают влияние на ре-
йне, какой из символов F^(Q) является наиболее вероятным в.
ин я том сигнале F(0).
: Для практического применения (5.24) и (5.25) требуется т пе-
юножителей и интеграторов, а не п или п/2. В случае телетайл-
го алфавита это означает уменьшение числа перемножителей и
пеграторов с 32 или 16 до 5.
Подставим в (5.24) вместо a(j) сумму ах(/)+ох(/) из (5.20):
т— 1 m—1
‘ А = min при 2 V [ a* (j) + ак (j)] a2 (j) -Vo2 (j) = max.
/=о /=о
Влияние помехи gx (6) на обнаружение сигнала определяется
m—1
гмой 2 у aK(j)a^ (/).
> /-о
Зероятность неправильного решения зависит только от статис-
е/2
5ских свойств коэффициентов ак(/) = J gK(tyf(h ® Пусть-
-0/2
0) есть выборка теплового шумя. Статистические свойства ко-
Ьициентов ak(j) являются тогда при самых общих условиях
№иси'мыми от используемой ортогональной системы. Передан-
сигнал F х(0) составляется из этих функций согласно (5.18).
довательно, совсем неважно для вероятности неправильного
ения, какие функции f(j, Q) используются для составления сиг-
1, если помеха представляет собой аддитивный тепловой шум.
' 187
5.2.2. Примеры цепей
с помощью
нала
V
Рис. &2. Выделение ко-
эффициентов a(j) из
принятого сигнала F(0):
II — перемножитель; И — ин-
тегратор
цо.е)
Рассмотрим некоторые цепи, которые используют зависимости
(5.24) и (5.25) для обнаружения сигнала. На рис. 5.2 показано,
каким образом получаются коэффициенты a(j) из принятого сиг'
опорных функций f(j, 0). В основном эта
схема такая же, как и на рис. 2.7, за ис-
ключением того, что здесь получаются ис-
каженные 'коэффициенты a(j) вместо неис-
каженных коэффициентов «Х(/Л
На выходе схемы, изображенной на
рис. 5.3, появляется сумма иапряжений
a(j), Цф (j). Символы составлены из трех
функций, т = 3. Следовательно, имеются
три коэффициента а(0), а(1) и а(2), кото-
рые 'представлены напряжениями. Коэффи-
циенты аф(0), аф(1) и аф(2), ф=1, 2, ...
представлены сопротивлениями. Опера-
ционные усилители У имеют дифференци-
альные входы. И'пвентирующие входы обо-
значены (—), а неинвертирующие— ( + ).
Заметим, что сумма a2(j) в (5.24) одинакова для всех Д1Гф.
Этой суммой можно пренебречь, если наименьшее значение Д$ф
будет определяться без нахождения величины Дй^ . Так же, как и
ранее, вырабатывается сумма a(j)a^ (j), но с обратным знаком.
Следовательно, можно использовать схему, изображенную на рис.
5.3, но инвертирующие и неинвертирующие входы операционных
усилителей должны быть представлены, как на рис. 5.4. Сумма
аф (j) вырабатывается дополнительной линией с постоянным нап-
ряжением + U и сопротивлениями соответствующей величины.
Для определения наибольшего из выходных напряжений Uq, Ui,
Uz, ... (рис. 5.3) и наименьшего из выходных напряжений Uo, Ut,
U2, ... (рис. 5.4) необходимы соответствующие устройства. Один ва-
риант устройства, определяющего наибольшее или наименьшее на-
пряжение, использует пилообразное напряжение, которое сравнива-
ется в п компараторах с п напряжениями. Срабатывание первого
компаратора определяет наименьшее напряжение в случае возрас-
тания пилообразного напряжения; наибольшее напряжение опреде-
ляется срабатыванием первого компаратора в случае спада пило-
образного напряжения. Достоинство такого устройства заключает-
ся в том, что пилообразное напряжение необязательно должно из-
меняться линейно со временем и что флуктуации напряжений не-
важны. Недостаток заключается в неодновременное™ выполнения
операций.
Компаратор с одновременным выполнением операций показа»
на рис. 5.5. Напряжение в общей точке каждой группы из четырех
диодов равно наибольшему приложенному положительному напря‘
188
i'll
iiii
Рис. 5.3. Обнаружение сигна-
ла методом наибольшей сум-
мы. Все символы имеют оди- •
маковую энергию:
£/0==Ща(0)ао(О) —
— e(l)«o(l) —a(2)Oo(2)J;
С/i =6/ [а(0) а, (0)+а(1)а1(1)-
— а(2)ах(2)]; 6/2 = 6/[а(О) X
Ха2 (0) + а(1)а2(1)-
— а (2)^ (2)]
<ению. Пусть U3 — .наибольшее
апряжение. Напряжение .на ин-
ентирующем входе (—) уоилите-
я У1 больше, чем «а иеинверб-
ующем входе ( + ). Считая уои-
ение достаточ1ны.м, выходное на-
ряжение t/выи будет принимать
качение, соответствующее режи-
гу отсечки. Будем обозначать его
ерез (7Вых1 = — 1. Усилители Уг и
189
Рис. 5.4. Обнаружение сигнала
методом наименьших сумм,
символы должны иметь одина-
ковую энергию:
t/o = 6/ [ Oq (0) + Qq (1) +
+ «2(2)-a(O)ao(O) +
+ а(1)а0(1) + а(2)а0(2)];
^1=^[а1(0)+а1(1) +
4-Я[(2) — а(0)а1(0) —
[ — а(1)о1(1)4-а(2)а1 (2)|;
U» = U [ а2 (0) + а2 (1) +
+ о* (2)-0(0)0, (0)-
-а(1)о,(1)+а(2)а2(2)];
Я,=/?/[ а2 (0)4-о2(1) +
4-^(2)]; / = 0, 1, 2
Уз имеют большее напряжение на неинвертирующем входе ( + ). Их
выходные 1наигряжения соответствуют режиму насыщения и обозна-
чаются через <7вых2=^выхз=+ 1. Напряжения i/выхь ^вых2 и t/выхг
Рис. 6.5. Обнаружение наибольшего поло-
жительного напряжения UQ—Ui. Наиболь-
шее напряжение определяется значениями
UвыхЬ ^вых2 И ^/выхЗ.’
указывают наибольшее напряжение Uj> j=0, 1, 7, ’Представляя j
в двоичной форме. Для получения хороших результатов характе-
ристики диода должны быть одинаковыми. Для сравнения 2Г на-
пряжений требуется г усилителей. Схему можно изменить таким
образом, что она будет обнаруживать, -какое из напряжений имеет
наибольшую или наименьшую величину.
На рис. 5.6 показана другая схема для определения наибольше-
го напряжения. В зависимости от разностей трех напряжений Uo,
Ui и U2 три усилителя Уь У2 и У3 могут находиться либо в режиме
насыщения, либо в режиме отсечки. Количество возможных пере-
становок выходных напряжений 3! = 6 показано в таблице рис. 5.6.
Схема указывает не только наибольшее, но также и второе, и
190
третье по величине напряжения. Напряжения Uo, Ut и U2 могут
быть положительными и отрицательными. Эта схема значительно
более чувствительна к входному сигналу по сравнению со схемой
рис. 5.5, так как напряжение проходит прямо к усилителям, а не
через диоды. Ее недостатком является требование большого коли-
чества усилителей. Сравнение п напряжений требует измерения
;(п—1)4-(п—2) +... +1 =-^-п(п—1) разностей напряжений. Следо-
звательно, нужно — п(п—1) дифференциальных усилителей. Схе-
ма на рис. 5.5, с другой стороны, требует для п=2г напряжений
только log и дифференциальных усилителей.
5.2.3. Согласованные фильтры
До сих пор предполагалось, что коэффициенты a(j) получаются
путем перемножения сигнала F(0) с f(j, 0) и интегрирования это-
го произведения. Математически эквивалентный, но технически от-
личный метод использует согласованные фильтры. Для описания
согласованных фильтров обычно используют импульсную характе-
ристику, а не передаточную функцию. Рассмотрим узкий прямо-
угольный импульс £>(«0) с амплитудой 1/е внутри интервала
(—1/2)е^0^(1/2)е и амплитудой 0 вне этого интервала. Этот им-
пульс стремится к дельта-функции 6(0) при уменьшении значения
е. Рассмотрим далее набор фильтров. Пусть ко входу фильтра j в
момент времени 0=—1/2 приложен импульс 6(0 + 1/2). Пусть бу-
дет получена выходная функция f(j, 0), (—1/2) ^0^ (1/2) из
(5.18) и (5.20). Функция f(j, 0) есть импульсная характеристика
фильтра j.
Временную функцию F* (0) из (5.18) можно получить путем
подачи импульсов а% (7)6(04-1/2) на входы т фильтров с импульс-
ными характеристиками /(/, 0) и суммированием выходных сиг-
налов. Эти фильтры называются формирующими.
Приемные фильтры осуществляют обратное преобразование.
Функции (0) или Е(0) прикладываются к их входам в течение
нтервала времени (—1/2) ^0^1/2, а коэффициенты a* (j) или
(j) в (5.20) получаются на выходе фильтра / в момент 0=4-1/2.
1усть функции f(j, 0) представлены ортогональной системой им-
[ульсов D(0—ke); & = 0, ±1, ±2, ...:
а (/) f (j, 0) « а (/)2 di (*)D (9 ~ k ®);
k
di(k) = p(j, 0)D(0-ke)d0 = J f(j, 0)d0 &f(j, kt)e,
—1/2 k&—e/2
k = 0, ± 1,... ± l/2e.
(5.26)
191
Функции f(j, В) в общем случае точно не представляются сис-
темой {DfO—ke)}, так как сумма в (5.26) представляет собой сту-
пенчатую функцию. Однако если е становится достаточно малым,
то среднеквадратическое отклонение между f(j, 0) и ступенчатой
функцией становится произвольно малым для тех функций, кото-
рые можно генерировать.
Пусть при подаче на вход приемного фильтра j сигнала 6(0 +
+ у) появляется выходной сигнал h(j, 6), —1/2^0^1/2, а при
подаче на его вход сигнала D(Q—ke)=D(Q'+l/2) появляется вы-
ходной сигнал h(j, 0') —h(j, 0—1/2—Ле), если е — достаточно ма-
ло. Тогда при входном сигнале a(j)f(j, 0) появляется следующий
выходной сигнал:
а(/)^/(Л)л(/, 0 —-А- —Ле), Л = 0, ± 1,...±1/2е. (5.27)
к
Этот сигнал имеет величину
a(/)Sd/(A)A(/, — Ае) (5.28)
k
в момент времени 0= 4-1/2. Подставим f(j, k&)e из (5.26) в (5.28)
вместо dj(k). Сумма дает площадь полос шириной е и высотой
f(j, ke)h(j, —k&). Эта сумма может быть заменена на интеграл,
если значение е достаточно мало:
а
(/) Jf(/,0)A(/,-O)d0; 0 =
-1/2
lim Ле;
ft—*0*
8-*0
dQ — lim е.
е-*0
(5.29)
Этот интеграл равен 1 при
А(/> 0) = f(/,-O).
(5.30)
Коэффициент a(j) получается на выходе приемного фильтра в
момент времени 0=1/2. С другой стороны, на выходе получается 0,
если ко входу приемного фильтра j приложен сигнал a(l)f(l, 0).
/=#/:
1/2 1/2
а (Г) С /(/, 0)Л(/, — O)dO = a(Z) J f(l, 0)d0 = 0, j^l. (5.31)
-1/2 -1/2
Импульсная характеристика приемного фильтра j должна быть
равна f(j, —Q), если импульсная характеристика передающего
фильтра / равна f(j, Q). Передающий и приемный фильтры иден-
тичны для четных функций /(/, 0) =/(/’, —0) и для нечетных функ-
ций /(/, 0) =—/(/, —0).
Согласованные фильтры не требуют умножителей для определе-
ния коэффициента a(j) в (5.20). Это часто является преимущест-
вом по сравнению с коррелятором. В общем, нельзя сказать, кор-
реляторы или согласованные фильтры имеют преимущества. Ум-
ножители для функций Уолша очень точны. Согласованные филь-
192
|i, с другой стороны, не требуют для их конструирования индук-
шостей и емкостей, а могут быть похожи на схемы, показанные
Грис. 2.13.
№
5.2.4. Компандеры для частостных сигналов
' Хорошо известно, что одновременное сжатие частотноограничен-
Го сигнала дает сигнал, который уже не является частотноогра-
ченным. Причиной этого является то, что сжатие синусоидальных
кций всегда создает гармоники,
не имеет места для частостно-ог-
ченных функций, составленных из
щкций Уолша. На рис. 5.7а в каче-
ве примера показаны символы FK(Q)
х
(0) = wal(0, 0) + £(--1/sal(i, 0)-
м
4 7
— 2са1(‘, 0) + 2са,(».0);
Z-1 1-5
Ex (О)
-E k
k
ti®
Ые)
f я (0) = — wal (0, 0) +
0
Рис. 5.7. Сжатие частостного
группового сигнала:
а) первичный сигнал; б) ха-
рактеристика компрессора; в)
сжатый сигнал
+ £(-iysal(i, 0) + £cal(i, 0).
fil Ь=1
При прохождении этих симво-
через .компрессор, имеющий
р актер истину, показанную на
. 5.76, вырабатываются сигма-
li JF\(0) и F'x (0), показанные на рис. 5.7в. Эти сигналы содержат
1но такие же функции Уолша, как и символы FK (0) и F X(Q), но
лько они умножаются на различные коэффициенты. Рассмотрим
рактеристику компрессора T|=£erf(£/ У~2о). Пусть Ц7|(х) =
ЭД7,(—оо<^^х) будет функцией распределения амплитуд сиг-
ла перед сжатием. Функция ^2(у) = ^2(—°°<т1^у) получает-
гиз (4.11):
£ ’
Грл2оег1-1
£
2оегГ*4
W,(y)= НЦ-ОО
(у) = у 2л ехр (erf-1 wt ( ]/2 оегГ1
Далее рассмотрим сигнал, составленный из 16 функций Уолша,
жазанных на рис. 1.2. Все 16 функций равны +1 в интервале
>0< 1/16. Среди 21® двоичных символов, которые могут быть по-
322 193
лучены из 16 функций, в этом интервале имеются: 1=^*®j сим.
вол с амплитудой 16( + 1) = 16; 16= символов с амплитудой
15(4-1)4-1 (—1) = 14; 120= символов с амплитудой 14(4-1) +
4-2(—1) = 12 и т. д. Такой же результат получается и для друго-
го временного интервала. Следовательно, двоичные символы, сос-
тавленные из функций Уолша, имеют распределение амплитуд ц0
закону Бернулли. Пусть символ составлен из т функций Уолша с
амплитудой +а или —а. Вероятность р^(т—2h)a] выборки с ам-
плитудой (т—2h)a равна: рв[т—2h)a]— (—Y” f7”) , h=0, 1, ...
\ 2 / 'ft )
т; функция распределения равна WB(x):
а)
-ЧЕ
-ЧЕ
05Е
7,5
1,5Е ЧЕ
^^Eerf^/fa)
-Е
Чх Ее
~%5Е 0 1,5Е
где [х] означает наибольшее целое
число, меньшее или равное х.
Функцию W в(х) можно аппрок-
симировать при больших значениях
т функцией ошибок: WB(x)zz
' = W1(x), Е*=та\
V2E
Производная Wt(x) показана на
/ -хг12Ег рис. 5.86. Характеристики сжатия
q=£erf(g/ К2о) для о=0,5£, £, 2£
показаны на рис. 5.8а. Соответст-
вующие функции плотности вероят-
ности 'показаны на рис. 5.8з:
^)=-2 £
°2) ferf ’4
I
I
НЕ
'\2Е
Й\,
Оу Е<
Рис. 5.8. Сжатие частостного груп-
пового сигнала:
а) характеристика компрессора;
б) плотность вероятности случай-
ной переменной д; в) плотность
вероятности процесса
сжатия
после
o&ti 1 —
Е
Отметим, что нормальное (распреде-
ление на 'рис. 5.86 для о=Е пере-
ходит в •равномерное распределение.
На рис. 5.8а и в также показа-
ны линии с обозначением «13%»-
Они относятся к необратимому ком-
прессору с характеристикой т] = ?
при [g|^l,5£ и г) —±1,5 £ при
| g | ;> 1,5 £. Этот компрессор отсе-
кает все амплитуды, большие 1,5 Е,
194
рторые составляют 13% от амплитуд в случае нормального рас-
|ределения. Этот ограничитель более подробно будет рассмотрен
§ 6.2.
5.3.
МУЛЬТИПЛИКАТИВНЫЕ ПОМЕХИ
5.3.1. Интерференционные замирания
Пусть радиосигнал передается по нескольким путям. На прием*
ом конце принятые сигналы влияют друг на друга. Рассмотрим в
ачестве примера синусоидальную волну, передаваемую по двум
утям. Принимаются сигналы Aicos2nvo9 и A2cos2nvo(0—0V) с
азностью в задержке 0V. Их сумму можно записать двумя спосо-
ами:
Ах cos 2 я v0 0 4- Л cos 2 л v0 (0 — 0v) =
= (Д 4- А2 cos 2jiv0 0V) cos 2nv0 0 4- A2 sin 2 nv0 0 sin 2 nv0 0V =
= [A? 4- 2 Aj A2 cos 2 nv0 0V + A|]1/2 cos (2 nv0 0 — a). (5.32)
>азочувствительный приемник принимает одну из составляющих
игнала, записанного во второй строке. Амплитуда принятого сиг-
нала изменяется между Aj+A2 и At—А2 или между А2 и —Аг. Фа-
зонечувствительный приемник определяет амплитуду колебания,
записанного в третьей строке (5.32). Она изменяется между А(4-
4-А2 и 0.
С точки зрения математики, причиной изменения амплитуд яв-
ляется то, что временной сдвиг 0v=n колебания cos2nvo0 облада-
ет таким же эффектом, что и амплитуда с противоположным зна-
ком cos2nvo(0—л) =—cos2nvo0. Вероятно, лучше использовать
другие функции, у которых не существует эквивалентности между
временным сдвигом и инвертированием амплитуды, или это явле-
ние наблюдается только при больших значениях 0V. Общее теоре-
тическое исследование таких функций является математически
очень сложным. Однако очевидно, что суперпозиция сдвинутых во
времени продифференцированных функций Уолша согласно рис.
2.29 не вызывает интерференции.
Более простое применение ортогональных функций для переда-
чи через среду с замираниями следует из узкополосности системы,
рассмотренной в § 2.1, для телетайпной передачи. Сущность заклю-
чается в следующем: разнесение по частоте — хорошо известный
метод для улучшения передачи при наличии замираний. Сигналы
модулируют несколько несущих. Из-за ограничений полосы частот
в основном можно применять не более двух-трех несущих. Узкая
Полоса, необходимая для системы, рассмотренной в § 2.1, дает воз-
можность использовать десять и более несущих вместо двух или
трех без особых требований к полосе. Вопрос заключается в том,
целесообразно ли распределять фиксированную мощность на не-
сколько несущих.
7*
195
Нужно сделать короткое замечание об известных результатах
передачи с разнесением, прежде чем ответить на вышепоставлен-
иый вопрос. Пусть излучается гармоническое колебание с частотой
vo. Используя модель релеевских замираний, получим на входе при-
емника напряжение е(0):
e(0) = u(0)cos[2nvo0 4-a(0)]; (5.33)
«(0) есть медленно изменяющаяся огибающая, которая практиче-
ски постоянна на интервале 0о—(1/2)0*^0^0о+ (1/2)0* и которая
имеет распределение Релея с плотностью вероятности:
, « > 0;
(5.34)
и < 0;
2и (и1
—— ехр (---
в» Ч б*
w(u) =
0
б2 равно математическому ожиданию Е(1г) согласно (4.83):
б2 = <t?> = <u2 (0)>. (5.35)
Фазовый угол а(0) также медленно меняется; он будет иметь рав-
номерную плотность вероятности:
щ(а) =
1
2л ’
0
—л с а < + л;
(5.36)
а < — л, а > + я.
Для повышения надежности передачи нужно, чтобы принимались
две или более статистически независимых копий сигнала. Следо-
вательно, совместная плотность вероятности амплитуд будет равна
произведению плотностей вероятности (5.34).
Известно несколько методов получения статистически независи-
мых «копий» сигнала. Метод пространственного разнесения исполь-
зует несколько антенн, отстоящих друг от друга на достаточно
большом расстоянии. При методе углового разнесения копии сигна-
ла получают с помощью направленных антенн с узким лучом. Две
антенны, распознающие волны с правой и левой круговой поляри-
зацией, дают независимые копии сигнала в диапазоне коротких
волн. Метод частотного разнесения использует несколько синусои-
дальных несущих, а при временном разнесении сигнал передается
повторно.
После того как получено несколько независимых копий сигнала,
встает задача наилучшего их использования. Существуют три ме-
тода:
а) используется копия, которая имеет наибольшую среднюю
мощность в течение временного интервала 0* (оптимальная селек-
ция);
б) все копии складываются (суммирование с одинаковым ве-
сом);
в) все копии перед суммированием умножаются на коэффици-
енты, которые зависят от средней мощности в интервале 0* (сум-
мирование с максимальным отношением).
196
Для сравнения этих трех методов предположим, что используется
статистически независимых копий сигнала Г(0). Пусть за счет
мирания копия I из F(0) преобразуется в бг(0). Выборка £Л(0)
ялового шума складывается с G/(0). Поэтому в качестве копии
[ринимается
//<(0)=G,(0) + g)l(0). (5.37)
(0) в течение короткого промежутка времени 0а можно предста-
ть следующим уравнением согласно (5.33):
l(0) = u/(0o)cos[2nvo0-ha<(0)]; 0О----J-0* < 0 < 0О + -1-0*. (5.38)
Л л
еличины Ui и аг считаем постоянными в интервале 0о—(1/2)0*^
:0<0o+(l/2)0ft.
Вероятность p(ui<ug) того, что меньше, чем порог ug, или,
ругими словами, промежуток времени, на котором Ui меньше, чем
?, следует из (5.34):
(««) = J -J-ехр du = 1 — ехр (— и2/б2). (5.39)
О
Пусть принимаются q статистически независимых копий сигна-
а, имеющих одинаковые распределения. Величина pq(u,i<ug) есть
ероятность того, что амплитуды щ всех q копий меньше, чем ug:
pq(Ui< ut) = Wq (ug) = [ 1 — exp (— u*/&)]«. (5.40)
федняя мощность копии Gi(Q) за временной интервал длительно-
гью 0а, который является кратным I/vo, находится из (5.38):
е.+е*/2
J- f G2(0)d0 = l-u2(0<>)^P/(0obl-u2 = P/. (5.41)
оа J * ‘
0,-е*/2
Пусть Рг означает среднюю мощность шума, принятого вместе
копией I. Отношение сигнал/шум
Pz/Pr = u2/2Pr (5.42)
шределяется величиной, которая изменяется только вследствие за-
шраний. Вероятность того, что Рг будет ниже порогового значения
’g, можно получить из (5.39) и (5.42):
Р,/Рг = 4^/2 Pr < PglP, = 442/2Рг;
w (Pg) = P (PilPr < Pt/Pr) = P(ut<ug)=W (ug)- ;
«7 (Pg) == 1 — exp (— UgK?) = 1 — exp (— 2 Pg/d2). .
(5.43)
Пусть копия с наибольшим значением Pi/Pr будет выбрана из
- возможных копий. Вероятность того, что Pt/Pr меньше, чем Pg/Pr
,ля всех копий, находится из (5.40), если все копии статистически
<езависимы:
^(Р<) = П-ехр(-2Рв/д2)р.
(5.44)
197
Математическое ожидание этого распределения вычислено Брэц.
наном:
\= JdWq(Pl) =]qy^~ = E"Г’ (5,45>
0 0 /=1
у = 2PJ&.
Обозначим среднее значение отношения сигнал/шум каждой ко-
пии через PJPr = <Pi/Pr> = <Pi>/Pr-
Среднее значение отношения сигнал/шум лучшей копии получа-
ется с помощью зависимости <PZ> = — 6® = Ps:
2
(5j6)
Z=1
На рис. 5.9 (кривая а) показано отношение (PeqlPr)l(PJPr)- Из
рисунка видно, что среднее значение отношения сигнал/шум возра-
стает незначительно, если для оптимальной селекции используется
более чем три или четыре копии.
Замена оптимальной селекции суммированием с одинаковым ве-
сом q копий дает согласно Брэннану следующую зависимость:
PMlPr = (PJPr)[1 + 4“ *(<7- ’)]. (5.47)
Отношение Р$ч/Рг становится теперь средним отношением сиг-
нал/шум суммы всех q копий сигнала.
Отношение (PsqIPr)l(PJPr) показано на рис. 5.9 (кривая б).
Оптимальная селекция и суммирование с одинаковым весом незна-
Рис. 5.9. Увеличение среднего отношения сиг-
нал/шум при разнесенном приеме по методу Брэн-
нана:
q— число принятых копий сигнала; (PiqlPr)'X
X(Pe/Pr) — среднее отношение (сигнал/шум q
копий)/(среднее отношение сигнал/шум одной ко-
пии); а) оптимальная селекция; б) суммирование
с равным весом; в) суммирование с максималь-
ным отношением
чительно отличаются, если используются две копии (q=2). Одна-
ко суммирование с одинаковым весом дает улучшение отношения
сигнал/шум на 4,5 дБ по сравнению с оптимальной селекцией, если
q= 10 копиям.
198
В случае метода суммирования с максимальным отношением
мплитуда копии I на временном интервале 0л умножается на весо-
Ьй коэффициент, который пропорционален среднеквадратичному
Иачению копии сигнала I и обратно пропорционален среднеквад-
атичному значению шума этой копии. Брэннан получил следую-
iee выражение вместо (5.46) и (5.47):
Ps4/Pr = (PslPr)q, (5.48)
tte Psq/Pr теперь означает среднее отношение сигнал/шум взвешен-
ой суммы q копий сигнала.
Отношение (PSqlPr)l(PsIPr) показано на рис. 5.9 (кривая в).
уммирование при максимальном отношении отчасти лучше, чем
^ммирование с одинаковым весом. Для указанных на рис. 5.9 зна-
ений q разница между ними меньше 1 дБ и приближается к
,05 дБ для бесконечного числа q.
Среднее отношение сигнал/шум позволяет сравнивать различ-
ие методы использования копий сигнала. Однако временной ин-
ервал, в течение которого возможна передача, является лучшей
ерой надежности линии связи. Уравнения (5.39) и (5.43) позво-
яют получить эту меру. Первое уравнение дает временной интер-
ал, в течение которого напряжение Ui ниже порогового уровня ug,
торое — временной интервал, в течение которого среднее отноше-
ие сигнал/шум Pi/Pr ниже порогового Pg!PT- Перепишем (5.43) с
четом введения медианы Р8=Рм, для которой W(Pg) = l/2:
[-1-еЧ>(-2РЛ
W(PM) =
тсюда следует:
(5.49)
2PM/62 = In2«0,693;
2Pg/62 = (Pg/PM) In 2 « 0,693 Pg/PM.
равнение (5.43) можно переписать:
№(Pg)«l- exp (- 0,693 Pg/PM).
ероятность того, что PilPr больше PgIPT, равна
p(P»/Pr > Pg/Pr) = 1 - W (Pg)« exp (-0,693 Pg/PM).
(5.50)
(5.51)
(5.52)
[еравенству p(PilPT>Pg/Pr) соответствует на рис. 5.10 кривая
= 1. Ордината показывает процент времени, в течение которого
г больше, чем порог Pg. Здесь Pi и Pg для нормировки разделены
а медианное значение Рм-
Если принимается q копий, то из (5.44) получаем вероятность
ого, что PilPr больше, чем Pg!Pr, по крайней мере, для одной ко-
ни: pq(PilPr>PgIPr) ~1—fl—ехр (—2 Pg/62)]«. Используя (5.50),
го уравнение можно переписать в виде
pq (Pt/Pr > Pg/Pr)« 1 - [ 1 - exp (- 0,693 PgiPM)y. (5.53)
вероятность Pq(PilPr>PgIPr) показана на рис. 5.10 сплошными ли-
нями для <7=2,4 и 8. Эти кривые дают процент времени, в тече-
199
Рис. 5.10. Относительное время Д0,
в течение которого мощность норма-
лизованного сигнала превышает по-
рог PgfPM\ q — число принятых ко-
пий сигнала; сплошные линии — опти-
мальная селекция; штриховые ли-
нии — суммирование с равным весом;
штрнх-пуиктирные линии—неразне-
сениый прием
ине которого возможна 'передача
о ’разнесением, если использует-
ся оптимальная селекция ю дву-
мя, четырьмя и восьмью копиями
<и если требуется, чтобы отноше-
ние PilPr было больше, чем
Pg/Рм.
Пунктирными линиями на
рис. 5.10 показан процент време-
ни, в течение которого Pi суммы
двух, четырех и 'восьми копий
больше, чем пороговое значение
Pg. Следовательно, они показы-
вают интервал времени, в тече-
ние которого возможна передача
с разнесением, если использует-
ся суммирование с одинаковым
весом двух, четырех и восьми ко-
пий и если требуется, чтобы от-
ношение Pi/Pr было больше, чем
Pg/Pr. Эти кривые могут быть
рассчитаны с помощью (4.95)
для q = 2, а для больших значе-
ний q могут быть использованы
численные методы.
5.3.2. Передача с разнесением при использовании многих копий
сигнала
Методы, рассмотренные в предыдущем разделе для получения
статистически независимых копий сигнала, обычно позволяют по-
лучить только несколько копий. Поляризационное разнесение нс
может дать более двух копий. Пространственное и угловое разне-
сение теоретически могут дать много копий. Однако рассмотрение
стоимости и занимаемого пространства на практике ограничивает
это число. Например, в коротковолновом диапазоне при простран-
ственном разнесении антенны должны быть разнесены на несколь-
ко сотен метров. Единственными практическими методами получе-
ния многих копий сигнала являются частотное и временное разне-
сение.
Чтобы применить кривые рис. 5.10 к частотному и временному
разнесению, нужно помнить, что излучается q одинаковых сигна-
лов, в то время как при пространственном и угловом разнесении
излучается только один сигнал. При заданной средней мощности
передачи средняя мощность, затрачиваемая на излучение сигнала,
меньше в \/q раз при частотном и временном разнесении по срав-
нению с пространственным и угловым разнесением. Этот недоста-
ток частотного и временного разнесения, конечно, может быть уст-
ранен. Вместо использования q антенн для приема в случае про-
200
действенного и углового разнесения можно использовать антен-
• с усилением, равным q. Это устраняет уменьшение мощности
гнала каждой копии.
; Пусть мощность передатчика и усиление приемной антенны фи-
лированы. Замена обычной передачи (7=1) на «/-частотное раз-
сение дает улучшение, только если среднее значение отношения
гнал/шум на входе приемника увеличивается, несмотря на умень-
еиие этого отношения для каждой копии в \lq раз. Уменьшение
едней мощности сигнала на копию в l/q раз уменьшает медиану
на рис. 5.10 до PmIQ- При заданном пороге Pg отношение
/Рм становится равным qPgIPM.
При использовании «/-частотного разнесения временной интер-
зл, в течение которого средняя мощность сигнала превышает
Pg/Рм, должен быть больше, чем временной интервал, в течение
второго средняя мощность сигнала превышает Р^Рм при обычной
ередаче. Рассмотрим пример: кривая q— 1 на рис. 5.10 дает Д0=
= 95% при 10 log Pg!PM=—11 дБ, а кривые для q—2 при 10 log
Рв1Рм=—8 дБ дают Дв=99 и 99,3%. Следовательно, двойное разне-
ение увеличивает время, в течение которого средняя мощность сиг-
нала больше, чем Pg, от 95 до 99 или 99,3%. Можно видеть, что
‘акое улучшение возможно, если кривые 7=1 и q=2 отстоят друг
it друга на расстоянии по горизонтали, по крайней мере, равном
0 log </=10 log 2«3 дБ. Точками, обозначенными «3 дБ», пока-
дено, где это расстояние равно 3 дБ. Очевидно, что двойное разне-
:ение при суммировании с одинаковым весом заслуживает внима-
1ия, если удовлетворительная работа возможна при более чем 40%
ремени, в то время как оптимальная селекция заслуживает вни-
кания только, если удовлетворительная работа возможна при бо-
iee чем 55% времени.
На основании тех же рассуждений расстояние между кривыми
/=1 и 7=4 должно быть, по крайней мере, равно 10 log 4«6 дБ,
। между 7=1 и 7=8 должно быть равно 10 log 8«9 дБ для то-
го, чтобы сделать разнесение с 7 = 4 и 7=8, заслуживающим вни-
мания. На рис. 5.10 точками с обозначением «6 дБ» и «9 дБ» по-
казано, где эти расстояния равны 6 и 9 дБ. Оптимальная селекция
аредставляет интерес только в том случае, если удовлетворитель-
1ая работа возможна, по крайней мере, при 70 или 80% времени.
При суммировании с одинаковым весом все три точки «3 дБ»,
кб дБ» и «9 дБ» расположены на линии Д0 = 4О%. Частотное раз-
аесение при суммировании с одинаковым весом представляет инте-
рес, если удовлетворительная работа возможна, по крайней ме-
ре, при 40% времени и является наилучшим с наибольшим числом
копий.
। В § 2.1 рассматривалось, что определенная полоса частот мо-
>кет быть хорошо использована при передаче синусоидальных и
косинусоидальных импульсов. Согласно табл. 2.3 для шести теле-
тайпных схем нужна полоса около 120 Гц, для двенадцати схем—
240 Гц. Для передачи с частотным разнесением с 7=10 для этих
последних схем нужна полоса 2400 Гц.
6.
СИНТЕЗ СИГНАЛА ДЛЯ ПОВЫШЕНИЯ
НАДЕЖНОСТИ СИСТЕМ СВЯЗИ
6.1.
ПРОПУСКНАЯ СПОСОБНОСТЬ КАНАЛА
6.1.1. Способы измерения ширины полосы пропускания
В самом начале развития теории связи было обнаружено, что воз-
можная скорость передачи символов по каналу связи звисит от его
передаточной функции. Например, известные теоремы Найквиста
[1] и Кюпфмюллера [2,3] показывают, что через идеальный фильтр
нижних частот с полосой пропускания Af за интервал времени т
можно передать только один независимый символ, где
т=1/2Д/. (6.1)
Скорость передачи символов в этом случае определяется числом
1/т независимых символов, передаваемых в единицу времени [4,5].
Шеннон принял во внимание, что возможная скорость передачи ин-
формации зависит не только от передаточной функции канала, но
также и от статистических характеристик помех [6, 7]. Он получил
формулу для возможной скорости передачи информации через иде-
альный фильтр нижних частот при действии аддитивного теплового
шума:
С = Д/1ё(1+Р/РдД (6.2)
где С — пропускная способность канала, например, в двоичных еди-
ницах в секунду; Д/ — ширина полосы пропускания идеального
фильтра нижних частот; Р1Р^ —отношение (средняя мощность
сигнала)/(средняя мощность шума в полосе
Для данного рассмотрения важно, что в выражение (6.1) так
же, как и в выражение (6.2), входит полоса пропускания частот
Д/. Последовательная теория связи, основанная на полной системе
ортогональных функций, требует определения пропускной способ-
ности канала связи, которое не было бы связано с понятием ча-
стоты.
Во-первых, частота исключается из средней мощности шума Р дг
в полосе частот 0^/^ДД Допустим, что шум, представленный нап-
ряжением, подается через входное сопротивление Ra к интеграто*
ру, который интегрирует это напряжение на временном интервале
Д/. Всего выполняется I интегрирований. Будем обозначать выход-
202
>е напряжение интегратора в конце л-го интегрирования через
х. Для теплового шума среднее напряжение <lh > равно ну-
э. Среднее квадратичное отклонение от 0, умноженное на 1/J?e,
ть средняя мощность и может характеризовать шум так же, как
= Jim у У (6'3)
Z->oo I had
;.=i
Используя § 5.1, этот результат можно обобщить. Пусть g\ (0)
(5.1) есть напряжение, вызванное тепловым шумом на сопротив-
;нии Ra. Будем использовать обозначение (t) вместо gi (0).
ункции f(j, 0) в этом уравнении заменим нормализованными на-
ряжениями U(j, t)/U, где U определяется из следующего выра-
ения:
0/2 Т'/2
J = = = (6.4)
—0/2 —Г72
Используя обозначение (j), коэффициенты (5.1) предста-
им нормализованными напряжениями. Тогда ур-ние (5.1) прини-
1ает следующий вид:
gJ0) = U-1 UK(t) = £ (/)/(/, 0) = U-2 £ UK(j)U(j, ty,
/=0 /=0
0/2 Г'/2
aK(j) = U~l J gK^f(j,B)dQ = -^- J
-0/2 —T72
(6.5)
Пусть напряжение U~4J(t)U(j, t) прикладывается к интегра-
ору и интегрируется от (—1/2)7' до ( + 1/2)7'. Если постоянная
ремени интегратора выбирается равной Т, то выходное напряже-
ние в момент (1/2) Т' равно —Ut.(j). Величину U2x,(j)IRa с раз-
(ерностью мощности можно получить из выходного напряжения,
возведем из (6.5) в квадрат, разделим на TRa и затем про-
интегрируем от (—1/2)7'до
Г /2 оо
I j (в-6)
—Г/2 /==0
Так как левая часть есть средняя мощность выборки шума
ft (0), то правая часть должна иметь то же значение. Определен-
ней член l)\ (j)/Ra в сумме представляет среднюю мощность ком-
поненты j (или /(/,0)] шумовой выборки gK (0). Усредняя (i)IRa
по I реализациям шума gi. (0),
Р, = <4 (й= I™ Т S Ч(i) Ra'
Х=1
(6.7)
203
получаем среднюю мощность Р, компоненты / шумовой выборки
или шума. В случае теплового шума распределение UK (]) одина-
ково для любого j. Следовательно, безразлично, какую компоненту
усреднять. В этом случае среднее по Л можно заменить1) средним
по /. Более того, среднее т компонент в пг раз больше среднего
значения одной компоненты:
Значение Pj совершенно не зависит от ортогональной системы
{f(j, 99}- Умножение выборки шума gx (0) на функции ортогональ-
ной системы {h(j, 0)}, которые имеют такой же интервал ортого-
нальности, как функции f(j, В), и которые можно разложить в ряд
согласно (5.3), дает напряжение U\(j) вместо Ux(j). Однако из
(5.4)—(5.12) следует
<^(/)^‘> = (6.9)
На этом заканчивается исследование, касающееся замены Рщ в
(6.2). Вернемся к замене Д/ в том же уравнении другим парамет-
ром, который не зависел бы от синусоидальных и косинусоидаль-
ных функций. Предположим, что от=2/+1 ортогональных функций
/(О, 0), /с(1, 0), /8(1, 0), .... 09» fs(l, 0) можно передать по ка-
налу связи в течение интервала ортогональности — 1/2^0^ 1/2.
Рассмотрим в качестве частного случая функции ряда Фурье:
/(О, 0) = 1; fc(i, 0) =)/2cos2ni0; fs(i, 0) = /2 sin 2 ni 0; (6.10)
— — <0<—; i=l........Z; 0 = Z/T.
2 2
Эти синусоидальные и косинусоидальные элементы являются орто-
нормированными в интервале —1/2^0^ 1/2 и не определены вне
этого интервала. Произведем подстановку 0'=0/£, как в § 1.2:
/(0,0') = /(О/|,0)
/е (Z, 0') = /2 cos 2 я i (0/g) = V2 cos 2 л (i/|) 0 = fe(Z/g, 0);
/, (Z, O') = V2 sin 2 л i (0/£) = V2sin 2 я (Z/g) 0 = fs (Z& 0);
2 2 2
(6.П)
2
При этом длительность интервала ортогональности увеличива-
ется от 1 до Число функций, передаваемых в единицу времени,
будет оставаться постоянным. В £ раз большем интервале долж-
но передаваться g(2Z+1) функций. Индекс i пробегает значения от
1 до k, 'cjye. k определяется уравнением
(2Z+ l)| = 21fe+ 1;
fe = |(z+-^-+ 1/2^.
(6.12)
9 Это изменение во времени и усреднение по множеству требует, чтобы
удовлетворялась эргодическая гипотеза.
204
К Пусть £ стремится к бесконечности. Ограниченные во времени
Синусоидальные и косинусоидальные элементы становятся периоди-
ческими синусоидальными и косинусоидальными функциями с ча-
стотами i!1- = v=fT. Частота v принимает значения от vi=l/| до
= так как i принимает значения от 1 до k. Разность Vk—ть
Обозначаемая как ширина полосы частот Av, определяется выра-
Ькением:
I Av = AfT = lim(v* —v,) = lim £/£ = —(2/+ 1); (6.13)
? £*оо £-*оо 2
> = J- — , (6.14)
E 2T 2 T
[где m/T — число ортогональных функций, передаваемых за едини-
Гцу времени Т. Полоса пропускания Av или Л/ является мерой чис-
1ла k ортогональных синусоидальных или косинусоидальных элемен-
тов, передаваемых в течение интервала ортогональности, если чи-
йСло элементов и их интервал ортогональности (—1 /2) £^9^ (1/2) £
стремятся к бесконечности. Согласно (6.14) можно использовать
^отношение m/Т вместо параметра А/, который является числом си-
нусоидальных и косинусоидальных элементов, передаваемых за
^единицу времени Т.
Полоса частот А/ является только мерой числа синусоидальных
и косинусоидальных функций, которые могут быть переданы. С
другой стороны, отношение m/Т может быть интерпретировано как
мера числа любых ортогональных функций, которые можно пере-
дать в единицу времени. Следовательно, т/Т является обобщением
понятия полосы частот.
Различие между А/ и гп/Т заключается не только в том, что
пг/Т является более общим понятием. Для теоретических исследо-
ваний часто затруднительным является то, что каждая функция за-
нимает бесконечную область частотно-временной плоскости. На
рис. 6.1а заштрихованная область показывает часть частотно-вре-
менной плоскости, занимаемой функцией, которая отличается от О
только в интервале На рис. 6.16 показана область, кото-
рую занимает частотноограниченная функция, отличная от нуля в
интервале Заштрихованные области могут быть сделаны
конечными только усечением их по некоторым значениям / или t,
так как нет функций, ограниченных одновременно во времени и по
частоте.
В § 1.3 было показано, что существует класс функций, ограни-
ченных во времени и по частости. Поэтому заманчиво заменить ча-
стотно-временную плоскость на частостно-временную. Но это неиз-
бежно приводит к отличию систем функций Уолша от других сис-
тем. Лучше ввести понятие «функционально-временной области».
Рассмотрим систему функций (/(/, 9)), которые являются ортого-
нальными в ограниченном интервале и равны 0 вне этого
интервала; / = 0, 1, ..., /ь ..., /ь ... . Пусть сигналы будут составле-
ны из функций с индексами /, принимающими значения от ji до Д-
Согласно рис. 6.1 в время отложено по оси абсцисс, а значения j
205
или j/T=j/(t2—h) —по оси ординат декартовой системы координат.
Рассмотренные сигналы занимают заштрихованную область этой
функционально-временной плоскости. Соответственно сигналы яв-
ляются «функционально» и по времени ограниченными.
Рис. 6.1. Частотно-временная область и функционально-временная область:
а) часть частотно-временной области, занимаемой ограниченным во времени
сигналом; б) часть частотно-временной области, занимаемой частотно-ограничен-
ным сигналом; в) часть функционально-временной области, занимаемой сигна-
лом, ограниченным функционально и во времени fz—tz—ti = T; —(ji—
—A) = m
Исследуем связь между полосой частот Д<р и т/Т. Система
функций
V(0. О), fc(i, 0), fs(i, 0)}. i = 1.Z; -у < 0 c ~ (6.15)
будет ортогональной, и число 2i будет равно числу пересечений ну-
левого уровня на интервале ортогональности. Применим те же рас-
суждения, что для синусоидальных и косинусоидальных элементов.
Снова получаем ур-ния (6.13) и (6.14), но нормализованную часто-
ту v нужно заменить на нормализованную частость р. Далее Av
заменим на Др.:
Ap = iim(p* —p1) = limM = —(2Z+1); (6.16)
£-*эо £-*ао 2
Ди, А 21 + 1 1m /с i-7\
—Е- = Дф =------!— =---------. (6.17)
Т 2Т 2 Т
Из сравнения (6.13) и (6.14) с (6.16) и (6.17) следует:
а) нормализованная полоса частот Av — это мера числа функ-
ций системы { 'К 2 cos 2nv9, V~2 sin 2nv0}, которые можно пере-
дать в течение интервала времени длительностью Т;
б) нормализованная полоса частостей Ар — это мера числа
функций более общей системы {jfc(p, 9), /Др, 9)}, которые можно
передать в течение интервала времени длительностью Т;
в) полоса частот A/=Av/T есть частный случай частостной по-
лосы Аф = Др/Т, a m/2 Т есть еще более общая мера полосы пропу-
скания, так как она применима ко всем полным системам ортого-
нальных функций, включая те, для которых неприменимо понятие
частости. Величина т/2Т равна половине среднего числа функций,
передаваемых в единицу времени Т.
206
6.1.2. Пропускная способность канала связи
Рассмотрим сигналы ^(0), составленные из функций системы
[/(0. 0), fc(i, 0), fs(i, 0)}, ортогональных на интервале —1/2^6^
$1/2:
\(0) = ax(O)f(0, 0) + 2 [аех(0Ш 0) + asx(i)fs(i, 0)],
1=1
(6.18)
= 1, 2, ...
[усть Fx (0) передается по каналу связи. Предположим, что компо-
ненты сигнала f(0, G),fc(i, 0) и fs(i, 0) при передаче претерпевают
только затухание и запаздывание на время 0(0). Используя коэф-
фициенты затухания К(0), Kc(i) и K.s(i) из § 1.3, для сигнала на
входе приемника получим:
f х £ (0) = М°) П°. 0 - 9 (°)1 + i { МО Mi. 0-0 (0)1+
1=1
+ bsx(i)fs[i, 0-0(0)]};
(6.19)
6x(0) = K(0)ax(0); bc% (i) = Kc (i) ac% (i); 6sx(i) =
= /<s(i)asx(i)-
Приемник будет определять, какой из возможных символов;
F^ (0) был передан. Для решения будем использовать критерий
минимума среднеквадратичного отклонения. Опорные сигналы
F^m (0) вырабатываются в приемнике. Они должны быть подобны
принятым сигналам Fxe (0). Это необходимо для определения то-
го, какой из интегралов /(ф, х) является наименьшим:
во+1/2
Wx) = j [Fx£(0)-FVAf(0)]2d0, (6.20)
во-1/2
4f= 1,2,... X,...; х=1.2,...
Предположим, что опорные функции Fxm (0) будут точно равны
принятым сигналам:
^m(0) = ^x£<0) ПРИ ЧГ = Х- <6-21)
Тогда интеграл 1 (ф, ф) равен нулю. Интеграл /(ф, х) при ф#=х
должен отличаться от 0, по крайней мере, на Д/. Минимальная ве-
личина Д/ не может быть как угодно малой, так как только она
определяет различие. Из (6.19) и (6.20) вследствие ортонормаль-
ности системы {/(0, 0), /с(|, 0), fs(i, 0)} получаем
/ (Ф, X) = [ Ь, (0) - Ьх (0)]2 + £ {[ ьс, (0 - < +
1=1
207
(6.22)
Рассмотрим те сигналы Fxe(0), которые отличаются от F$E
только одним из коэффициентов а% (0), (i) или тогда
должно выполняться одно из следующих условий:
г ft (0) — & (О)]2 > Д/; 1
1 х J I (6.23)
Минимальные величины Да(0), Дас(0 и Aas(i), на которые дол-
жны отличаться коэффициенты двух передаваемых сигналов, нахо-
дятся из (6.19) и (6.23):
| S (0) - (0)| > Д а (0) = (А /)1/2/К (0);
|%<1')-^(0| > АаДО = (A/)vX(0;
(6.24)
Пусть ах(0), acx(i) и а^(1) будут ограничены значениями 4-4 и
—А. Число возможных коэффициентов тогда определяется величи-
нами Го, г а и Га-
г0 < 2 4К (0)/(Д /)1/2 +1; гci < 2АК (()/(Д /),/2 + 1;
г„<24К,(0/(Д/),/2+1. (6.25)
Единицы в правых частях учитывают возможность того, что коэф-
фициенты могут иметь значения, равные нулю. В качестве го, Га и
rsi нужно выбирать наибольшие целые числа, удовлетворяющие не-
равенствам (6.25). Если г® является нечетным, то допустимые зна-
чения коэффициента ах(0) равны 0, ±Да(0), ±2Да(0), ...; при чет-
ном г0 они равны ±-^-Да(0), — ~ Да(0), - •
Пусть Kc(i) при 1>/с и Ks(i) при i>ls так малы, что справед-
ливы следующие соотношения:
тсj = 1 при i > lc\ гsi = 1 при i > ls. (6.26)
Информация не может быть передана одной функцией fc(i, 0) при
1>1С или fs(i, 0) при i>ls. Для упрощения положим
1с = Is = I, (6.27)
где I — граница полосы. Информация может быть передана за гра-
ницей полосы, но другим способом. Для получения различных сиг-
налов коэффициенты, по крайней мере, двух функций fc(i, 0) и
(или) f,(i, 0), i>l должны быть изменены. Этот вид передачи не-
возможен, если затухание вне границы полосы пропускания увели-
чивается так быстро, что условие
2 {[^(о-ьсх(о]2+[bs+(o-^(O]2}<д/
i=z+l
удовлетворяется для любой пары х и ф.
208
(6.28)
Число различимых сигналов, которые можно передать в тече-
ние временного интервала длительностью Т, тогда определяется
произведением гоП г^г^.
1=1
Количество информации, передаваемой в единицу времени, или
пропускная способность канала есть логарифм от этого произве-
дения, деленный на Т:
lg r0 + JJ(lg rcl -f- lgrsi)
i=i
(6.29)
Рассмотрим частный случай (6.29). Из выражения (6.25) при
r0=rCi=rSi = r следует: К(0) =Kc(i) = K»(i), i=l, .... I. Все функции
f(0, 0), fc(i, 9) и fs(i, 9), затухают одинаково. Из (6.29) сле-
дует
С = - t.l. |gr. (6.30)
Если используемая система функций является системой перио-
дических синусоидальных и косинусоидальных функций, то можно
подставить Д/ из (6.14) и получить
С = 2 Af Igr = Д/Igr2. (6.31)
Эта формула имеет вид формулы Шеннона (6.2), хотя она введе-
на из других предположений. В конце этого параграфа будет по-
казано, что если сделать подобные предположения, что и при вы-
воде (6.2), то г в (6.30) и (6.31) заменяется на (1 + Р/Рд/)1/2.
Рассмотрим сигналы FX(Q), составленные из г функций f(j, 0).
Интервалом ортогональности является интервал —1/2^20^1/2 или
(—1/2) 7^^ (1/2) Г
fx(0) = 2ax(t’)/(/’ 0)1
/=о
{f(/,0)} = {f(O,O)Jc(i,O),fs(i,e)}; r = 2*+ 1. (6.32)
Интеграл от Р2 (0) дает среднюю мощность сигнала:
1/2 Г/2
jp2(0)d0 = _L J F2(//T)d/ = Px =
—1/2 —Т/2
Т/2 г-1 г-1
= у J $]ах(/)Га//Г)Л==Еах{/)-
—Т/2 /=0 /=0
(6.33)
Вместо представления сигнала временной функцией Рх (0) мож-
но использовть представление сигнала точкой в г-мерном декарто-
вом сигнальном пространстве согласно § 2.1. Пусть единичные век-
торы tj, j=Q, ..., г—1 указывают направления г координатных осей.
209
Квадрат длины этих единичных векторов равен интегралу от квад-
рата f(j, 9):
1/2 T/2
jf(/,9)d0 = ^.= l; f f(/,r/T) = r = Te2. (6.34)
—1/2 —Г/2
Сигнал представляется следующей суммой:
FX = S
/=0
(6.35)
Сигнал Fx записан в векторной форме и представляет определен-
ную точку в r-мерном пространстве. Ее расстояние до начала коор-
динат равно Dx:
(6.36)
Выборку теплового шума
= 0) <6.37)
/=0
можно также представить вектором
i-o
(6.38)
Согласно (5.24) и (5.25) в выражениях (6.37) и (6.38) важны толь-
ко г компонент f(j, 9) или ej, которые содержатся в сигнале. Сле-
довательно, gx (9) делится на две составляющие:
(9) и gx(9); составляющей gx(9) можно пренебречь:
^(9) = 2^(/)f(/,0); g; = 2
/=0 /=0
£ (0) = £ а>. (/) f 0)’. h = £ ак (j) е,.
i=r i=r
Расстояние от точки g до начала координат равно D'x.
(6.39)
г 2
/==о
(6.40)
Средняя мощность многих выборок шума g^ обозначается Рг,т; ин-
дексы г и Т указывают число ортогональных составляющих выбор-
ки шума и длительность интервала ортогональности:
I г-1
₽-.г = !™тЕЕ“‘(/)- (6Л1)
"* Х=1 /=0
210
В § 5.1 при очень общих предположениях было показано, что
распределение коэффициентов a^(j) одинаково для всех j, если
gx (0) есть выборка теплового шума. Уравнение (6.41), таким об-
разом, можно переписать в следующем виде:
i
/«=1
Среднее значение по л при фиксированном j можно заменить сред-
ним значением по / при фиксированном л:
Рг.Т = ^-тУ}^ (6.43)
/-►оо I
/=1
Подстановка 1 = г дает
limPr г = lim У <%(])• (6.44)
Сравнение (6.40) и (6.44) показывает, что при больших значениях
г расстояния от всех точек gx до начала координат стремятся
к (ТРГгТ)1,2‘ Точки, представляющие тепловой шум, размещаются
произвольно в сигнальном пространстве вблизи поверхности г-мер-
ной сферы с радиусом (ТРг,т)1/2-
Средняя мощность I сигналов Fx получается из (6.33):
р-±т2₽<=!1га.тЕЕ“1®- <м5>
Х=1 Х=1 /=о
Если коэффициенты (j) имеют одинаковое распределение для
всех j и если они статистически независимы, то это уравнение мож-
но переписать:
i i
Р = Нт -у- = Т ах (Я- (6-46)
”” /=1
Подстановка 1=г дает
limР = lim Уа?(/). (6.47)
Г-*ао г->ао
/=1
Сравнение с (6.36) показывает, что для больших значений г все
точки Fx произвольно располагаются вблизи поверхности г-мер-
ной сферы с радиусом (ТР) 1/2.
Сигнал, смешанный с аддитивной выборкой шума gx, представ-
f—I
ляется точкой 4- g, = [ ах(/) -f- ак(/)] е,-. Для больших
/=о
211
значений г точки Fx+£/ ' x=l, 2, ... произвольно располагаются
вблизи поверхности сферы с радиусом (Р + Рг г)1/2:
( 1/2 г-1
= lim Т^[а2(/) + а2(/)]
= lim УТ(Р + РГ^/2.
Hm TV (ax(/) + ax(/)]2
Г—♦ QO I л
I M
1=0
1/2
(6.48)
Можно однозначно решить, какой сигнал Fx содержится в ис-
каженном сигнале Fx+gx> если расстояние между двумя любыми
сигнальными точками, по крайней мере, равно 2(ТРГ1Т)^2 Возмож-
ное число точек, имеющих это минимальное расстояние от других
точек, равно возможному числу сигналов. Чтобы определить это
число, рассмотрим объем V r-мерной сферы с радиусом Р [6, 7]:
V = -т-г^—х Rr. (6.49)
г(тг+1)
Объем Vк между двумя концентрическими сферами с радиусами
Р и Р—в при больших значениях г стремится к объему V:
Следовательно, большая часть объема r-мерной сферы сосредото-
чена вблизи ее поверхности. Хорошая оценка возможного числа
сигнальных точек получается делением объема сферы с радиусом
У Т(Р+Рг,т) объем сферы с радиусом (ТРг>т)[/2>
Тг'2 (Р + Рг т)г'2
(ТРг.т)'12
= (Ц-Р/РгГ)г/2.
(6.51)
Каждый сигнал F% (0) имеет длительность Т. Таким образом,
предел скорости безошибочной передачи становится равным
С = lim 4 lg (1 + Р!Рг.т)г'2 = lim (1+ P/Pr.T). (6.52)
r->oo 1 21
Можно видеть, что г, которое является числом ортогональных
функций в сигнале (0), должно стремиться к бесконечности. Ин-
тервал ортогональности (—1/2)Г^/^(1/2)Т может быть конеч-
ным или бесконечным. Отношение средней мощности сигнала к
средней мощности шума Р)РГ, т может быть также конечным или
бесконечным. Уравнение (6.44) показывает, что средняя мощность
шума Рг,т бесконечна при конечном Т; согласно (6.47) это также
верно для средней мощности сигнала Р. Если Т конечно и Р/Рт/г
не равно нулю, то пропускная способность канала безгранично воз-
растает.
212
Рассмотрим два частных случая ур-ния (6.52), для которых ин-
тервал ортогональности стремится к бесконечности. Для первого
примера пусть используется система т ортогональных функций
{ц/, 9)}, которые равны нулю вне интервала (—
—\/2) kT' + Т', где k=TIT' — целое число. Далее рассмотрим
систему т ортогональных функций (f(j, 0—1)}, которые смещены
на —1 и имеют такую же форму, как функции f(j, 0). Эти функ-
ции равны нулю вне интервала (—\/2)kT'+T'^.t^ (—i/2)kT' +
+ 2Т'. Продолжим этот процесс до тех пор, пока не получим сис-
тему функций {f(j, 0—fe+l)}, которые равны нулю вне интервала
(—l/2)kT'—T'^t^(\l2)kT'. Тогда общее число полученных орто-
гональных функций равно:
mk = г; m,k,r — целые числа. (6.53)
Множитель г/2Т в (6.52) становится равным mk!2kT' = т[2Т.
Средняя мощность шума Рг, т становится равной Рт, т>, так как
только m функций не равны 0 в любом из k временных интерва-
лов и так как Т' равно длительности интервала ортогональности.
Из выражения (6.52) получаем
С - limip ‘8 (1 + plp^r) - тр 18(I + P/P„.r)- (6.54)
Вывод этой формулы показывает, что нет необходимости беско-
нечно долго ждать, чтобы получить информацию о сигнале FX(G)-
Часть информации имеется в конце каждого из k временных ин-
тервалов.
В качестве второго примера рассмотрим /п = 2/+1 синусоидаль-
ных и косинусоидальных элементов в интервале (—1/2)
(1/2) Т. Произведем растяжение этих элементов с помощью мно-
жителя |>1, как в § 1.2. Согласно (6.12) необходимо подставить
k = I + -у- -ф 1/2 вместо I для того, чтобы поддерживать посто-
янным число функций, передаваемых в единицу времени. Число ор-
тогональных функций в интервале (—1/2)^Т^/^ (1/2)|7' опреде-
ляется выражением
r = 2k+ 1 =(2Z+ l)£ = /n£. (6.55)
Из (6.14) следует, что множитель г/2Т в (6.52) заменяется на мно-
житель nrtJ2i,T=m/2T=&f. Средняя мощность шума Рг, т заме-
няется на Pmi.iT Та'к как сигналы занимают полосу частот 0^
и все синусоидальные и косинусоидальные составляющие
выборок шума принимаются с частотами, расположенными в этой
полосе, то Ртыт =Рц- Таким образом, из (6.52) получается фор-
мула Шеннона:
£
с=,lim TFFle (1 + Р1Р-*. г г) = д f 'в (1 + Р/₽4,); (6-56)
A f — — — • Р — Р
~ 2 Т ’ Ы
213
Некоторое внимание должно быть уделено интерпретации ф-л
(6.30), (6.31), (6.52), (6.54) и (6.56). Они справедливы для пере-
дачи ортогональных функций с одной независимой временной пе-
ременной. Это соответствует передаче сигналов, представляемых
напряжениями или токами. Электромагнитные волны, распростра-
няющиеся в свободном пространстве в направлении z, также име-
ют только одну независимую переменную t, но имеют два ортого-
нальных направления для вектора поляризации, причем формулы
применимы к каждому из них. Однако при распространении волны
в волноводе в направлении z могут появляться в дополнение к t
независимые переменные х и у. Эти дополнительные степени сво-
боды определяют тип колебаний и к каждому из них применимы
указанные выше формулы. Следовательно, формула Шеннона пока-
зывает не только предел скорости, с которой можно передавать ин-
формцию по каналу связи, но является средством поиска лучших
каналов. Уравнения (6.30) и (6.52) показывают, что число пере-
даваемых ортогональных функций является главным фактором оп-
ределения пропускной способности канала. Возможным способом
увеличения этого числа является использование каналов, передаю-
щих сигналы, которые зависят от времени и пространственных ко-
ординат. Для этих целей применяются оптические телескопы.
6.1.3. Задержка и искажение сигнала
Для вывода формулы пропускной способности канала (6.29)
было сделано несколько предположений. В этом параграфе будет
исследовано влияние этих предложений.
Пусть компоненты .fc(i, 0) и fs(i, 0) в ф-ле (6.19) будут задер-
живаться на время 0С(7) и 0s(i), а не на общее время задержки
0(0). Тогда функции в (6.19) не будут больше ортогональными и
0(0) не будет временной задержкой сигнала. Для более общего
определения временной задержки сигнала положим, что f(0, 0),
fc(i, 0) и fs(i, 0) будут передаваться отдельно друг от друга. Соот-
ветственно будут приниматься сигналы К(0)Д0, 0—0(0)],
0—0с(0] и 0—0s(i)]. Пусть они будут коррелироваться с
опорными сигналами /(0, 0),/с(7, 0) и fs(i, 0). Временные разности ме-
жду 0 = 0 и абсолютными максимумами взаимокорреляционных
функций дают задержки 0(0), Qc(i) и 0S(O- Величины максимумов
дают коэффициенты ослабления К(0), Kc(i) и Ks(i)- Используя
эти коэффициенты, можно построить опорную функцию ГхЛ1(0) из
Fx(0) в выражении (6.18):
f Х М (0) = К (°) (°) f (°. 0) + У [Кс (0 «с х <0 е> +
S
+ Ks(0asx(0fs(b9)b (6-57)
Принятый сигнал (0) имеет такой же вид, но 0 в правой части
уравнения должно быть заменено на 0—0(0), 0—0С(О или
0—0з(7). Пусть взаимокорреляционная функция
214
(6.58)
принимает абсолютный максимум при определенном значении
0 =0Х. Это значение определяется как временная задержка или
как время распространения сигнала Гх(0). Так как на приемной
стороне неизвестно, какой сигнал приходит, то важно определить
время распространения независимо от %. Например, если имеется
R различных сигналов Fx (0), то можно усреднить значения 0Х, что-
бы определить время распространения 0Ь'
R
e‘“iS9»- (6-59>
х=1
Время распространения сигнала, несущего информацию, есть слу-
чайная величина, которую в первом приближении можно сравнить
только с понятием групповой или сигнальной задержки, впервые
определенной в оптике [2].
Принятый сигнал Fxe(Q) имеет вид (6.57), если в правой части
уравнения 0 заменить на 0—0(0), 0—Qc(i) и 0—Qs(i). Опорная
функция F%m (0) имеет такой же вид, но 0 в правой части уравне-
ния нужно заменить на 0—0ь. Пусть функции ДО, 0—0(0)], fji,
0—0С(7)] и f^i, 0—0S(7)] разложены в ряды по системе {/(0, 0—0ь),
fc(i, 0—®L)' fs(i, 0—0ьЛ-По аналогии с (2.26) получаются следую-
щие выражения, в которых о = 0—0l, fo=flO, 0—0(0)],
fc = fcli, 0-0с(0] и fs = fsb',0-es(O]:
/о = К(0, 0)f(0, V) + 2 [К(0, ck)fe(fe, v) + К(0, sk)f$ (k, 0];
fc= F(ci, 0)f(0, v) + V [/((ci, ck)fc(&, «)+K(ci, sk)fs(&, 0];
A=1
(6.60)
f, = F(si, 0)f(0, 0 + J} [K (si, ck)M*,0 4- К (si, sb)fs(k, 0].
*=1
Пусть эти ряды будут подставлены в формулу для F%e (0). Пер-
вый член F%e (0) имеет следующий вид:
К(0)а (О)Х(О, 0) + V (О) а (0 Л (ci, 0) +
л а*
1=1
+ Ks(Oasx(i)K(si,O)]b(O,0-0£).
(6.61)
Между коэффициентами существуют перекрестные искажения. В
принципе, возможно построение корректирующих цепей, которые
215
компенсируют перекрестные искажения с точностью до измерения,
так что вместо (6.61) получается К(0)ах (0)/(0, 0—0б). Тогда
Fxe (0) и F?m (0) тождественны.
В дальнейшем предположим, что f(0, 0), fc(i, 0) и fs(i, 0) не
только ослабляются и задерживаются при передаче, но также пре-
терпевают линейные инвариантные во времени искажения. Функ-
ции /(0, 0), fc(i, 0) и fs(i, 0) согласно § 2.2 трансформируются в
g(0, 0), gc(i, 0) и gs(i, 0). Пусть сигналы /(О,- 0), ifc(i, О) и fs(i, 0)
передаются отдельно друг от друга. Вырабатываются функции кор-
реляции принятых сигналов g(0, 0), gc(i, 0) и gs(i, 0) с опорными
сигналами [(О, 0), /с(0, 6) и fs(0, 0). Временной сдвиг между их
абсолютными максимумами и 0=0 дает задержки 0(0), Qc(i) и
Qs(i). Значения максимума определяют коэффициенты ослабления
К(0)=К(0, 0) Kc(i) = К. (ci, ci) и Ks(i) =K(si, si). С помощью этих
коэффициентов можно построить опорные функции F^M('d) из вы-
ражения (6.57). Уравнение (6.58) дает 0Х, а (6.59) определяет вре-
мя распространения 0L. Теперь пусть искаженные функции g(0, 0),
gc(i, 0) и gs(i, 0) разложены в ряды по системе {/(0, 0—0ь), fc(i,
0—0l), f$(i, 0—0ь)}. Получающиеся выражения формально такие
же, как и ур-ния (6.60), и к ним применимы те же выводы.
6.2.
ВЕРОЯТНОСТЬ ОШИБКИ
6.2.1. Вероятность ошибки при воздействии теплового шума
Рассмотрим передачу телетайпных символов при наличии теп-
лового шума. Будет вычислена вероятность ошибки для несколь-
ких методов передачи и обнаружения. Общий вид этих символов
представлен временными функциями:
/=0
Функции f(j, 0) ортонормированы на интервале —1/2^0^21/2.
Т — длительность телетайпного символа, которая равна обычно
100, 150 или 167 мс. Коэффициенты a%(j) имеют значения +1 и
—1 или + п и —а для системы с активной паузой; для системы с
пассивной паузой они равны -hl, 0. Выборка аддитивного тепло-
вого шума gx (0) преобразует символ F% (0) в сигнал F(0):
F(0) = Fx(0)-gx(0);
00 1/2 ?х(0)= ох(/)= j gJ9)f(/,9)d9; /=0 —1/2 . (6.63)
f (0) = X а (Л f 0); а = ах (Л + ак ОТ '
/-о
216
Все символы в системе с активной паузой имеют одинаковую энер-
гию. Используя критерий минимума среднеквадратичного откло-
нения от опорной функции Ftp (0):
^(9) = S^(/)f(/,0), (6.64)
/=о
можно согласно (5.25) решить, при каком значении ф сумма
4
£ (6.65)
>0
принимает максимальное значение. Если максимум имеет место
ПРИ ф=%, то все коэффициенты a(j) должны иметь такой же знак,
как коэффициенты ах (])• Тогда сумма (6.65) имеет следующее
4
значение: д |а(7)|, °х(/) = +о или —а> Х='Ф- Если, например,
/=о
Д(0) имеет знак, противоположный дх(0), то сумма (6.65) будет
больше для символа (0) с коэффициентами дп(0) =—дх (0),
aXi(k) = ax (k), k=l,..., 4, чем для Fx(0):
_L Va(i)a (i) = (+|a(0)l + + la(2)l+ la(3)> + la(4)l> * == *
° * l-|a(0)| + |a(l)| + |a(2)| + (a(3)| + |a(4)|, ф = Х.
Чтобы у a(j) и a^ti) были разные знаки согласно (6.63), необхо-
димо выполнить следующие условия:
а) sign ax (/) #= sign ак (j)-, (6.66)
б) |ax (J)| < |ax (j)|, что эквивалентно
«»,(/) i M/) i
—------> 1 или -----------< — 1.
|«xW| lax(/)|
Здесь signax (j) означает «знак ax (j)».
В случае теплового шума вероятность того, что величина ак (j)
положительна, равна 1/2 и вероятность того, что она отрицательна,
равна 1/2. Таким образом, вероятность выполнения условия а
равна 1/2 независимо от знака ах (j).
Для вычисления вероятности выполнения условия б необходи-
мо знать распределение х=ак (j)/\a% (j) |. Так как коэффициент
а* (/) может быть равен либо + а, либо —а, то |ах (j) |—величина
постоянная. Поэтому х имеет такое же распределение, как и ак (/).
Функция плотности вероятности wa (k, х) получается из (5.6) под-
становкой х вместо Д. Из Wa (Й, х) можно получить условную плот-
ность вероятности w(x) при условии, что ,k=j. Вероятность того,
что k примет значение одного из т=5 значений j, равна \/т, так
как в случае теплового шума коэффициенты ак (j) имеют одинако-
217
вое распределение для всех /. Таким образом, функцию плотности
вероятности w(x) можно получить из (5.6) и (4.5):
(&, х) 1 „
ш (х) = —-— --------= — ехр (— х2/2 о£) =
I 2 / л 1
= lim -L V - а-г lim — У <й 0);
I U lav(/)|2 I К
1 Л 1 А.=1
(6.67)
X = ax(/)/|ax(/j| = aJ/)/a,
Каждый коэффициент ax(j) в (6.62) передается сигналом с оди-
наковой энергией. Таким образом, средняя мощность сигнала Р
равна
T/2 4
Р = т j ^(^ =£<**(/) = 5a2.
—Г/2 /=0
Этот результат можно обобщить и решить относительно а2:
а2 = Р/т. (6.68)
Уравнение (6.42) для г=£=1 принимает вид
i
lim 4-Vfl2(/)=<a2(/)>Pi r. (6.69)
/—*00 I Лвш
Л=1
Среднеквадратичное отклонение становится равным
о2 = тР. Т/Р = Рт Т/Р- Рт Т = тР. г, (6.70)
где Рт, т — средняя мощность т ортогональных компонент тепло-
вого шума на интервале ортогональности длительностью Т.
Используя (6.56), выражение для M0®H0 переписать в виде:
о2а = Р^/Р-, М = т/27\ (6.71)
где Pt,f — средняя мощность теплового шума в полосе частот ши-
риной Д/.
Вероятность р(х>\) +р(х<—1) того, что х больше +1 или
меньше—1, получается из (6.67) интегрированием:
р(х> 1) + р(х<— 1) = —_2 _ Сехр(— x2/2q2 \dx =
/2y'naeJ
= 1 -erf(l//2aa) = 1 -er((/W^). (6 72)
Вероятность p( того, что условия a и б из (6.66) выполняются,
становится равной
P1 = ^[l-erf(/W;)]. (6.73)
218
Вероятность того, что условия (6.66) не выполняются, равна 1—ръ
вероятность того, что они не выполняются ни для одного из т=5
коэффициентов a%(j), равна fl—вероятность того, что они
выполняются хотя бы для одного из т коэффициентов, равна рт:
рт= = +erf(/p^)f. (6.74)
Вероятность ошибки рт не зависит от используемой системы функ-
ций {/(/, 0)}, если эти функции удовлетворяют условиям § 5Л.
Для наиболее широко используемого телетайпного стандарта
с длительностью символа 150 мс применяют числовые значения
т=Ь и Д/ = — = — =16,6 Гц. На рис. 6.2 (кривая а) для этих
21 U, о
Рис. 6.2. Вероятность ошибки р при приеме
телетайпных сигналов, подверженных дей-
ствию аддитивного теплового шума:
Р/Р —(средняя мощность сигнала)/(сред-
няя мощность шума в полосе частот
16,67 Гц); а) система с активной паузой,
детектирование производится путем вычис-
ления взаимной корреляции; б) система с
активной паузой, фильтрация с помощью
идеального фильтра нижних частот с ча-
стотой отсечки 120 Гц, детектирование с
помощью квантования, в) то же, что и (б),
но система с пассивной паузой; г) то же,
что и (в), но при наличии стартстопной
синхронизации, подверженной влиянию шу-
мов
значений т и Af показана зависимость рт = ръ (6.74) от отношения
Р/Р у- Экспериментальные точки а были получены для раннего
варианта оборудования, показанного на рис. 2.7, с системой
{/(/, 0)}, состоящей из синусоидальных и косинусоидальных им-
пульсов согласно рис. 1.1.
Пусть система {/(/, 0)} состоит из функций
t /-• g\ _ sin п(тfl — j) _ sin л (6 /) ,g
Ч’ — ‘ '
/=0,1,2,..., m=5, O=t/T, O'=t/(T/m).
Уравнение (6.74) также применимо к этой системе. Энергия этих
функций концентрируется в частотном диапазоне —l/2^-v =
=/77msgl/2 с шириной полосы Д/=т/2Г= 16,6 Гц.
Согласно § 2.1 значения коэффициентов a(j) получаются оди-
наковыми как в случае, когда Г(0) умножается на функции (6.75)
и произведение интегрируется, так и в случае, когда Г(0) пропу-
скается через идеальный фильтр нижних частот с полосой 16,6 Гц
и подвергается дискретизации. Таким образом, (6.74) выполняется
и для фильтрации, и для дискретизации импульсов (6.75). Приме-
нение фильтра нижних частот с полосой 120 Гц увеличивает сред-
нюю мощность шума в (6.74) в 120/16,6 яз 7,2 раза. Это означает
219
сдвиг кривой а (рис. 6.2) на 10 log 7,2«8,58 дБ: сдвинутая кривая
обозначена буквой б.
Рассмотрим систему с пассивной паузой. Коэффициенты ax (j)
могут принимать значения +Ь или 0 вместо +а или —а. Чтобы
для коэффициента ax(j) получить значение b вместо 0 или 0 вме-
сто Ь, должны выполняться следующие условия:
a) sign [ ах (/)-^] =/= sign (/); (6.76)
б) |ах(/)-уб|<|ах(/)|
или, что то же самое,
М/) (>+1;
|ах(/)-6/2| (<—1.
ая(/)—может быть равным 1/26 или —1/26, так как
может принимать значения + 6 или 0. Поэтому условия
и (6.67) являются одинаковыми, но +а и —а надо заме-
Член
(6-66)
нить на ( + 1/2)6 и (—1/2)6. Средняя мощность сигнала, состояще-
го из т коэффициентов со значениями +Ь и 0, равна Р=-^-тЬ2 и,
следовательно,
’ 1 \2
-Lb} =Р/2т.
(6.77)
Сравнение (6.68) и (6.77) показывает, что для получения урав-
нений, справедливых для системы с пассивной паузой, необходи-
мо в уравнениях, справедливых для системы с активной паузой,
Р заменить на (1/2) Р. Это означает сдвиг кривых а и б (рис. 6.2)
на 10log2 = 3 дБ. Сдвинутая кривая б обозначена через 6. Резуль-
таты измерений 6 получены добавлением теплового шума к пря-
моугольным импульсам телетайпных символов, после чего иска-
женные сигналы были пропущены через фильтр нижних частот с
шириной полосы 120 Гц и поданы на вход телетайпного приемни-
ка. Экспериментальные точки достаточно хорошо согласуются с
кривой 6, несмотря на то, что прямоугольные импульсы не имели
вид (6.79), фильтр нижних частот не был идеальным и магнит те-
летайпного приемника лишь очень грубо можно считать квантова-
телем амплитуды. Экспериментальные точки г относятся к той же
телетайпной передаче, но по каналу с шумами передавались старт-
стопные импульсы для синхронизации. Положение точек виг
сильно зависит от обслуживания телетайпного приемника.
6.2.2. Сигналы с ограниченной пиковой мощностью
Ранее предполагалось, что средняя мощность сигнала является
определяющим фактором вероятности ошибки. Однако обычно уси-
лители мощности ограничивают пиковую мощность, а не среднюю
220
мощность. Рассмотрим усилитель, ограничивающий амплитуду на
уровне ±Е и развивающий пиковую мощность РЕ. Средняя мощ-
ность Р и пиковая мощность РЕ сигнала, состоящего из двоичных
прямоугольных импульсов с положительной и отрицательной ам-
плитудами, равны. Вероятность ошибки из (6.73) для одного
символа (рис. 6.3) показана как функция Р/Р^=РЕ1Рд; и обозна-
чена «Теоретический предел».
Пусть эти импульсы модулируют по амплитуде несущую. Кри-
вая «Теоретический предел» справедлива и при использовании не-
Рис. 6.3. Вероятность ошибки
: р как функции Ре)Р^ = (пи-
ковая мощность сигнала)/(сре-
дняя мощность шума в полосе
шириной &f—m/2T). Сплош-
► ные линии: временное разделе-
« ние, синусоидальная несущая,
; коэффициент активности 1;
0,25; 0,05; пунктирные линии:
четыре синусных и четыре ко-
синусных импульса, показан
процент ограничения ампли-
туды
Рис. 6.4. Вероятность ^(О)} амплитуд
512 сигналов Fx (0) попасть в интер-
вал шириной 0,1. Для сравнения пока-
зана гауссова плотность вероятности с
тем же средним и дисперсией:
«х(0), ax(i); \(«) = ±1; fx(0) =
4
= “х (0) + V 2 2 [ “х cos 2я ‘ 0 +
i=l
+ (i) sin 2л i 0]
сущей Уолша. Чтобы обеспечить такую же среднюю мощность,
^пиковая мощность синусоидальной несущей должна быть на 3 дБ
больше; кривая т/п=\ (см. рис. 6.3) соответствует синусоидаль-
ной несущей, модулированной по амплитуде двоичными прямо-
угольными импульсами.
Только около четверти каналов телефонной многоканальной си-
стемы занято в часы «пик». При использовании прямоугольных
импульсов с КИМ усилители загружены только в течение 1/4 вре-
мени, в то время как в течение 3/4 времени либо не передается ни-
221
каких сигналов, либо передаются не очень нужные сигналы. Что-
бы получить среднюю мощность сигнала такой же величины, ка-
кую мог бы обеспечить усилитель, если бы он усиливал сигналы
в течение всего времени, необходимо увеличить пиковую мощность
на 10log4^6 дБ. Кривая для этого случая на рис. 6.3 обозначе-
на пг/п = 0,25. Отношение mln называется коэффициентом активно-
сти, где т — число занятых каналов, ап — общее число каналов.
В наземных многоканальных станциях спутниковой связи ко-
эффициенты активности очень малы, так как сумма коэффициен-
тов активности наземных станций равна коэффициенту активности
ретранслятора спутника. Кривая для этого случая на рис. 6.3 обо-
значена nz/n = 0,05.
Рассмотрим передачу двоичной информации синусоидальными
и косинусоидальными импульсами или импульсами Уолша. Ре-
зультирующие сигналы F(0) имеют очень большие пики, несмотря
на то, что все амплитуды имеют гораздо меньшие значения, чем
пики. На рис. 6.4 показана вероятность того, что такой сигнал
имеет амплитуду в интервале шириной 0,1. Там же показана гаус-
сова плотность вероятности, имеющая то же среднее и среднеква-
дратическое отклонение.
Согласно результатам, полученным в § 5.24, эта функция
плотности вероятности очень точно аппроксимирует функцию ве-
роятности амплитуд сигналов, состоящих из суммы импульсов
Уолша. Для отрицательных значений F(0) график, изображенный
на рис. 6.4, продолжается симметрично.
Если передаются большие, но редкие пики, то средняя мощ-
ность сигналов будет очень мала. Чтобы увеличить среднюю мощ-
ность сигнала, большие пики надо ограничить. На рис. 6.3 пунк-
тирными линиями показан результат ограничения амплитуды для
синусоидальных и косинусоидальных импульсов при наличии ад-
дитивного теплового шума. Параметры 0,64; 4,6; 13 и 32% пока-
зывают ограничение амплитуды в процентах. Кривые справедливы
для передачи без несущей или для передачи на несущей Уолша.
Они приблизительно справедливы также и для отнополосной мо-
дуляции синусоидальных несущих. Для импульсов Уолша полу-
чаются очень похожие кривые (1]. В результате ограничения сум-
мы синусоидальных и косинусоидальных импульсов небольшая
часть энергии переходит в соседние частотные диапазоны [2], в то
время как в результате ограничения сумм импульсов Уолша энер-
гия не переходит в соседние частостные диапазоны.
Из рис. 6.3 можно сделать следующие выводы: последователь-
ная передача двоичных прямоугольных импульсов дает наимень-
шую вероятность ошибок, если коэффициент активности близок
к 1. Параллельная передача синусоидальных и косинусоидальных
импульсов или импульсов Уолша приводит к наименьшей вероят-
ности ошибок, если коэффициент активности равен 0,5 или меньше.
Точное значение процента ограничения амплитуды некритично. На
рис. 5.8 показаны характеристики ограничителя и плотность веро-
ятности ограниченных амплитуд с гауссовым распределением для
222
13% ограничения. Заметим, что уменьшение коэффициента актив-
ности не изменяет энергию импульса в случае последовательной
передачи, в то время как в случае параллельной передачи средняя
энергия не будет изменяться и энергия импульса будет увеличи-
ваться, если используется усилитель с автоматической регулиров-
кой усиления.
Рут из Technische Hochschule Aachen показал, что рассмотрен-
ные в § 5.2 компандеры с характеристикой, описываемой функци-
ей ошибок, позволяют получить лучшие результаты, чем при огра-
ничении, если вероятность ошибки ниже 10~5.
Если прямоугольные импульсы заменить другими импульсами,
то при использовании последовательной передачи необходимо для
получения равной вероятности ошибки увеличить пиковую мощ-
ность. В табл. 6.1 показано увеличение &Ре> требуемое для неко-
Таблица 6.1
Увеличение пиковой мощности \РЕ сигнала по сравнению с пиковой мощностью
прямоугольного импульса для получения одинаковой вероятности ошибки
Форма импульса Д Ре ,дб
Прямоугольный импульс при прямой передаче (без несущей), Е для 0 < i < Т/п, 0 — вне интервала 0
Приподнятый косинусоидальный импульс в частотной области коэффициент крутизны характеристики фильтра г = 1 1,8
То же, г = 0,75 2,7
» г = 0,5 4,1
Приподнятый косинусоидальный импульс во временной облас- ти, рис. 2,15 1,2
Треугольный импульс, Е(1 -J-nf/T), —Т/п< t < 0
E(l — nt/T), 0 <t <Т/п 1,8
торых типичных форм импульсов. Для получения кривых, соответ-
ствующих этим формам импульсов, сплошные кривые (рис. 6.3)
надо сдвинуть вправо на АРе- «Приподнятый косинусоидальный
импульс» в частотной области определяется уравнением
г /^ / sin л nt/T cos л rnt/T
~ л nt/T \ — (2rnt,/T)* ’
г—есть так называемый коэффициент крутизны характеристики
фильтра нижних частот, используемого для образования импуль-
са [3]; п — число каналов и Т/п — длительность прямоугольного
импульса, если п таких импульсов надо передать в течение вре-
мени Т.
223
6.2.3. Импульсные помехи
Вероятность ошибки цифровых сигналов не зависит от вида си-
стемы ортогональных функций, используемых для передачи, если
помехи вызваны аддитивным тепловым шумом. Для импульсных
помех, которые более важны при использовании телефонных ли-
ний, чем тепловой шум, это утверждение неверно.
Предположим, что амплитуда импульса помехи много больше
наибольшей амплитуды неискаженного сигнала. Пусть эти им-
пульсы проходят амплитудный ограничитель. Если время нара-
стания и время спада импульсов достаточно малы, то на выходе
получим прямоугольные импульсы разной длительности, но с оди-
наковой амплитудой. Будем наблюдать эти импульсы за 7? времен-
ных интервалов длительностью Т; пусть в г интервалах будет по
одному импульсу. Если г и R достаточно велики, то ir//? есть веро-
ятность появления импульса в течение интервала длительностью
Т. При стремлении г и R к бесконечности для r/R можно записать
Wi(T), где Wt(T) — функция распределения появления импульса.
Будем определять длительность импульсов Ат» и пусть q из Q
импульсов имеют длительность Ат»^т». Предел отношения q/Q
при стремлении q и Q к бесконечности обозначим через U72(ts).
Это есть функция распределения длин импульсов.
. Предположим, что моменты появления и длительность импуль-
сов статистически независимы. Функцию совместного распределе-
ния W(T, rs) тогда можно представить в виде произведения
Г(Т, T,) = r1(T)UZ2(Tj). (6.78)
Если не выполняется условие статистической независимости, то
W(T, ts) нельзя определить путем раздельного измерения Wt(T) и
U72(ts). В этом случае требуется не R + Q, a RQ измерений.
Функция распределения W(T, rs) применяется, когда на интер-
вале длительностью Т появляется один импульс. Если появляется
большее число импульсов, вычисления сильно усложняются. По-
этому далее предполагается, что появление более одного импуль-
са в течение этого интервала происходит очень редко.
Обозначим через р вероятность того, что сигнал длительно-
стью Т искажается импульсом длительностью Ats^ts до такой
степени, что происходит ошибка. Вероятность ошибки при усло-
вии, что принят импульс длительностью Дт8^тв, равна:
Рь = Ч тЛ ч Р < Т> = W ь). (6.79)
р [t < Г, Дт$ 5^ т5)
Условную вероятность рь можно вычислить для различных
форм импульсов и методов обнаружения. Если W(T, ts) известна
из измерений, то р можно вычислить. Знание рь достаточно для
сравнения помехоустойчивости различных форм импульсов и ме-
тодов обнаружения.
Предположим, что передаваемый символ состоит из m прямо-
угольных импульсов, как показано на рис. 1.3 для zn = 5. Каждый
224
•, импульс имеет длительность Tim. Положительное или отрицатель-
ное значение амплитуды определяется с помощью отсчетов значе-
ний сигнала. Импульс помехи длительностью кх^Т/т вызывает
ошибку с вероятностью 1/2, так как половина помеховых им-
пульсов меняет знак, по крайней мере, одной из т квантованных
амплитуд. С возрастанием Дт« в интервале 0^Дхв^Т/т вероят-
ность рь линейно возрастает, как это показано на рис. 6.5 (кри-
вая /).
Пусть теперь знак амплитуды прямоугольного импульса опре-
деляется взаимной корреляцией. Это означает, что дискретизации
подвергается напряжение на выходе интегратора. Если неискажен-
ный сигнал имеет амплитуду +а или —а, то амплитуды принято-
го сигнала можно ограничить на уровне +а и —а. Импульс по-
мехи с положительной амплитудой, наложенный на сигнальный
импульс с амплитудой +а, будет подавлен полностью. С другой
стороны, амплитуда отрицательного импульса помехи будет огра-
ничена на уровне —2а, так как а—2а=—а. Это есть наименьшая
амплитуда, которую пропустит ограничитель. В среднем половина
импульсов помехи имеет амплитуду + 2а, а половина-------2а, в
противном случае на выходе будет нулевая амплитуда. Если дли-
тельность импульса помехи Дт5 так мала, что выполняются следу-
ющие соотношения:
2а Дт5 <.аТ/т',
Дх$<.Т/2т,
то ошибки не произойдет.
При выполнении условия
aTltn < 2aArs < 2aTlm или Tj2m < Дт5 <Т/т
(6.80)
(6.81)
условная вероятность рь зависит от времени появления импульса
помехи. При Axs = TI2m рь скачком увеличивается от 0 до 1/4 и
линейно растет до 1/2 для больших значений Дт5, как показано на
рис. 6.5 (кривая 2). При Дт=Т/2т существует сильный пороговый
эффект.
Рассмотрим передачу символов, составленных из т функций
Уолша. Пусть каждая функция имеет амплитуду +а!т или —а/т.
Наибольшая и наименьшая амплитуды суммы т таких функций
равны +а и —а. Поэтому амплитудный ограничитель может иметь
порог ограничения на уровне +а и —а, не изменяя неискаженный
сигнал.
Пусть т будет степенью 2. Если в некоторый момент т—k
функций Уолша имеют амплитуду +а/т и k функций имеют ам-
плитуду —atm, то сигнал имеет амплитуду а&:
ак = (1 — 2k!m)a, k = 0, 1, • • -,т.
(6.82)
Вероятность появления ак обозначим через r(k):
r(k) = 2~mlm\.
\ k /
(6.83)
8—322
225
После амплитудного ограничения на уровнях ±а амплитуда
импульса помехи bkf наложенного на амплитуду сигнала ап, мо-
жет принимать одно из двух значений;
bk = а — (1 — 2k/т) а = 2ka/m (6.84)
или
bk = — а — (1 —2k/m)a = —2(1 — k/tri)a. (6.85)
Вероятность rs(k) того, что амплитуда bh принимает значение ме-
жду —2а и +2а, получается из (6.83):
(6.86)
На рис. 6.6 в качестве примера показана вероятность rs(k) для
т = 8. После амплитудного ограничения как положительные, так
и отрицательные импульсы помехи имеют распределение Бер-
нулли.
Взаимная корреляция бинарного сигнала Гх(0), составленного
из импульсов Уолша waif/, 0).
m—1
Гх(9) = ax(/)wal(/; 0), а%(/) = ± 1,
/-о
rs(k) = — 2-m[m
' ' 2 U
дает
Т/2
f F (0)wal(Z, 0)Л = — , 0 = — , Z = 0, • • .,/n—1. (6.87)
J х т Т
—т/2
Согласно (6.84) и (6.85) абсолютное значение амплитуды импуль-
са помехи не может быть больше 2а и, если его длительность Ats
так мала, что выполняется условие 2a\xs<aT/m, ошибки не воз-
Рис. 6.5. Вероятность рь
ошибки, возникающей
нз-за помехового им-
пу л ьса длительностью
1 — прямоугольные импуль-
сы (рис. 1.3), дискретизация;
2 —те же прямоугольные им-
пульсы, корреляция; 3 — им-
пульсы Уолша, корреляция
никает. Поэтому рь = О для
л Т
2m
(6.88)
Это совпадает ©о значением для прямо-
угольных импульсов.
В ыч ис лед гие ус лов i «ой ® ер оятности
ошибки Рь при наличии импульсов -поме-
хи большой длительности очень громозд-
ко [6]. Результат вычислений 'приведен
на рис. 6.5 (кривая 3), Вероятность ошиб-
ки немного ниже, чем для прямоуголь-
ных импульсов, и имеет несколько по-
рогов.
Лучшие результаты можно получить,
если сигнал, составленный из импульсов
Уолша или синусоидальных и косинусо-
идальных импульсов, ограничен по ам-
226
шлитуде в передатчике, как это рассмотрено в § 6.2, так как ам-
плитудный ограничитель в -приемнике может работать по более
низким уровням.
6.3.
КОДИРОВАНИЕ
6.3.1. Кодирование двоичными элементами
В § 2.1 был рассмотрен вопрос о представлении сигнала функ-
цией времени Fx(0), вектором Fx или набором коэффициентов
ax(j). Набор из R различных сигналов называется алфавитом. Оп-
ределенная функция fx (0) называется символом алфавита. Здесь
будут рассмотрены некоторые задачи построения символов, для
которых ортогональность можно использовать как преимущество.
Воздействие помехи на символ может привести к неправиль-
ному распознаванию символа. На приемной стороне для опреде-
ленного типа помех вероятность этого события можно уменьшить
с помощью соответствующего выбора R символов алфавита. Ниже
будут исследованы некоторые методы правильного выбора. Пусть
R символов представлены т коэффициентами:
ах(0), а%(1), • • Х= 1, . . (6.89)
Такие алфавиты называются блочными кодами. Используя систе-
му функций {/(/, 0)}, ортогональных на интервале —1/2^05^1/2,
получим представление с помощью временных функций:
fx(0) = 0). (6.90)
/=о
В общем случае сигнал на входе приемника может быть пере-
менной во времени напряженностью электрического или магнитно-
го поля, либо переменным во времени напряжением или током.
При отыскании алфавитов, обеспечивающих низкую вероятность
ошибки, предпочтительнее использовать временное представление.
Однако в § 5.1 было показано, что функция f(j, 0) несущественны
и только коэффициенты ax(j) определяют вероятность ошибки при
наличии аддитивного теплового шума. Разные системы функций
{/(/, 0)} требуют для передачи разные полосы частот, различны
также и трудности генерирования и распознавания, но они не вли-
яют на вероятность ошибки. В этом частном случае символы мож-
но представлять коэффициентами ах (j).
Дальнейшего упрощения можно добиться ограничением коли-
чества значений коэффициентов ax(j) до двух, которые обычно
обозначаются 4-1 и —1 или 1 и 0. Часто делают дополнительное
предположение, что помеха либо не изменяет коэффициент, либо
меняет его значение на другое разрешенное. Это означает, что
символ с коэффициентами ах(0) = + 1 и ах(1) = +1, записанный в
краткой форме как +14-1, может быть изменен помехой только в
одну из четырех форм +1 + 1, +1 — 1, —1 + 1 или —1—1, а не, на-
8* 227
пример, в 4-1/4+1/2. В § 5.2 было показано, что коэффициент
a*(j) изменяется помехой в коэффициент a(j), который может
принимать любое значение, даже если а% (j) принимает только
значения +1 или —1. Есть целый ряд причин, по которым часто
для a(j) являются разрешенными только значения +1 или —1.
В начале развития теории кодирования обычно предполагалось,
что функциями f(j, 0) являются прямоугольные импульсы, декоди-
рование которых производится квантованием по амплитуде. Поло-
жительная амплитуда принималась за +1, а отрицательная за —1.
Это квантование изменяет суммы в (5.24) и (5.25) и в общем слу-
чае увеличивает вероятность ошибки.
Помехи, отличные от аддитивного теплового шума, требуют, в
принципе, исследования их влияния на функции времени Fx(0), а
не на коэффициенты ax(j). В предыдущем параграфе было пока-
зано, что влияние импульсных помех зависит от вида функций
f(j, 0) и от порога ограничения. Несмотря на эти результаты, обыч-
но рассматривают только коэффициенты кодовых алфавитов, ко-
торые выбираются с учетом устойчивости к импульсным помехам,
и различают только положительные и отрицательные значения
коэффициентов. Это объясняется требованиями к простоте обору-
дования и совместимости с существующей аппаратурой.
Теория кодирования двоичными элементами основана на пред-
положении, что неискаженные коэффициенты ax(j) так же, как и
искаженные коэффициенты a(j), могут принимать значения только
+ 1 и —1 или 1 и 0. В этом случае коэффициенты ax(j) и a(j)
обычно называют элементами. Алфавиты, состоящие из символов
с равным числом элементов, называются двоичными блочными ал-
фавитами или двоичными блочными кодами. Так как неискажен-
ные и искаженные символы содержат только элементы +1 и —1,
то их можно считать двоичными числами. Тогда для решения за-
дач кодирования можно использовать теорию чисел в применении
к двоичным числам. Бинарное кодирование рассматривалось в
большом числе работ, начиная с Хэмминга [1—5]. Хорошее обоб-
щение дано в книге Питерсона {6, 7]. Небинарные алфавиты так-
же рассматривались с применением теории чисел (8, 9].
Значение кодового алфавита для связи зависит от той вероят-
ности ошибки, которая может быть достигнута. Очень часто вы-
числение этой вероятности ошибки затруднено. Поэтому для оцен-
ки качества алфавита в теории кодирования двоичными элемен-
тами обычно используют понятие «хэммипгово расстояние». Оно
обозначает число двоичных элементов, в которых различаются два
символа. Например, символы + 1 + 1 + 1 + 1 + 1 и +1 + 1+ 1 + 1 — 1
или 11111 и 11110 имеют хэммингово расстояние 1. Вероятность
декодирования искаженного символа % в символ ф обычно умень-
шается с увеличением хэммингова расстояния между этими сим-
волами. Рассмотрим, например, символы, состоящие из последо-
вательности прямоугольных импульсов. Чем больше число импуль-
сов, в которых символы различаются, тем большим может быть
число импульсов, подвергнутых искажению, без возникновения
228
шибки. Особенно полезно хэммингово расстояние, когда ограни-
ена пиковая мощность, а не энергия сигнала.
Следующий пример показывает, что большое хэммингово рас-
тояние необязательно означает низкую вероятность ошибки. Из
i элементов +1 или —1 можно составить 2”1 символов. Мини-
[альное хэммингово расстояние d между двумя символами рав-
о 1. Можно увеличить d, составляя 2т символов из т'>т эле-
ментов. Если количество энергии, приходящейся на один элемент,
ставлять постоянным, то энергия каждого переданного символа
величится в m'ltn раз. Уменьшение вероятности ошибки частично
остигается выбором символов и частично за счет увеличения их
нергии. Часто удобно сравнивать два алфавита при равной энер-
ии символов или при равной их средней энергии. Тогда символ
т'>т элементами содержит в т/т' раз меньшую энергию, при-
одящуюся на один элемент. Таким образом, хэммингово расстоя-
ие увеличивается, но вероятность ошибки на один элемент так-
<е увеличивается, если, например, ошибки вызваны аддитивным
епловым шумом. Поэтому нельзя без вычислений сказать, какой
ффект превалирует.
Примером уменьшения вероятности ошибки при действии ад-
.итивного теплового шума путем увеличения наименьшего рас-
тояния Хэмминга могут служить алфавиты с одной проверкой на
етность. Рассмотрим 2”*=32
1.
2.
3.
4.
символа телетайпного алфавита:
111’—1
(6.91)
: т. д.
Минимальное хэммингово
ять ко всем символам, имеющим нечетное число единиц, прове-
ючную цифру +1 и —1 ко
ю единиц:
расстояние равно 1. Будем добав-
всем символам, имеющим четное чис-
1.
2.
3.
4.
111111
1111—1—1
111—11—1
111—1 — 11
(6.92)
и т. д.
Таким образом, минимальное хэммингово расстояние увеличе-
ю до двух. Энергию на один элемент надо уменьшить в 5/6 раза
(ли в общем случае в m/m+1 раз. При больших значениях т ко-
эффициент т/т+1 стремится к единице, в то время как хэммйн-
гово расстояние удваивается.
Наименьшее хэммингово расстояние между символами алфа-
вита может быть сделано равным 3, 4, ..., в общем случае d до-
бавлением произвольного количества проверочных цифр. Эти ал-
229
Т а б л и ц a 6.2
Коэффициенты a (j) символов алфавита (16,5) согласно Риду—Мюллеру,
х=1, ..., 32, /—О, ...» 15
№ пп 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
4-1 +1 +1 +1 +1 +1 +1 +1 +1 +1 +1 +1 +1 +1 +1 +1
—1 —1 —1 —1 -1 —1 —1 —1 +1 4-1 4-1 4-1 4-1 +1 +1 4-1
—1 —1 —1 -1 4-1 4-1 +1 4-1 +1 +1 +1 4-1 —1 —1 —1 -1
4-1 4-1 4-1 4-1 -1 -1 -1 -1 4-1 +1 -Ы 4-1 -1 ~1 -1 -1
4-1 4-1 —1 —1 -1 —1 4-1 4-1 4-1 4-1 —1 —1 —1 —1 4-1 4-1
—1 —1 4-1 4-1 4-1 4-1 —1 —1 4-1 4-1 -1 —1 —1 -1 4-1 4-1
—1 —1 4-1 4-1 —I —1 4-1 4-1 4-1 4-1 —I —1 4-1 +1 —1 -1
4-1 4-1 -1 -1 4-1 4-1 -1 -1 4-1 4-1 -1 -1 4-1 4-1 —1 -I
4-1 —1 —1 4-1 4-1 —1 —1 4-1 4-1 -1 —1 4-1 4-1 —1 —1 4-1
—1 4-1 4-1 —1 —1 4-1 4-1 —1 4-1 —1 —1 4-1 4-1 -1 —1 4-1
—1 4-1 4-1 —1 4-1 —1 —1 4-1 4-1 —1 —1 4-1 —1 4-1 4-1 -1
4-1 —1 —1 4-1 —1 4-1 4-1 -1 4-1 —1 —1 4-1 —1 4-1 -|-1 —1
4-1 —1 4-1 —1 —1 4-1 —1 4-1 4-1 —1 4-1 —1 —1 4-1 -1 4-1
-1 4-1 —1 4-1 4-1 —1 4-1 -1 4-1 -1 4-1 —1 -1 4-1 -1 4-1
-1 4-1 —1 4-1 -1 4-1 —1 4-1 4-1 -1 4-1 -1 4-1 -1 4-1-1
4-1 —1 4-1 —1 4-1 -1 4-1 —1 4-1 —1 —1 —1 4-1 — 1 4-1 — 1
-1 4-1 -1 4-1 -1 4-1 —1 4-1 -1 4-1 -1 4-1 -1 4-1 -1 4-1
4-1 -1 4-1 -1 4-1 -1 4-1 -1 _i 4.1 -1 +1 -1 +i +1
4-1 -1 4-1 -1 -1 4-1 -1 4-1 -1 4-1 -1 4-1 4-1 -1 4-1 -1
-1 4-1 —1 4-1 4-1 —1 4-1 -1 -1 4-1 -1 4-1 4-1 -1 4-1 -1
-1 4-1 4-1 —1 4-1 -1 -1 4-1 -1 4-1 4-1 -1 4-1 -1 -1 4-1
4-1 —1 —1 4-1 —1 4-1 4-1 -1 —1 4-1 4-1 —1 4-1 —1 —1 4-1
4-1 —1 —1 4-1 4-1 —1 —1 4-1 -1 4-1 4-1 -1 —1 4-1 4-1 -1
—1 4-1 4-1 —1 -1 4-1 4-1 -1 -1 4-1 4-1 -1 -1 4-1 4-1 -1
—1 —1 4-1 4-1 —1 —1 4-1 4-1 —1 —1 4-1 4-1 —1 —1 4-1 4-1
4-1 4.1 -1 -1 4-| 4-1 -1 _i _! _i 4-1 4.1 -1 _1 +1 44
4-1 4-1 -1 -1 -1 -1 4-1 4-1 -1 -1 4-1 4-1 4-1 4-1 -1 -1
—1 —1 4-1 4-1 4-1 4-1 —1 —1 —1 -I 4-1 4-1 4-1 -fl _j —1
—1 —1 -1 —1 4-1 4-1 4-1 4-1 -1 —1 -1 -1 4-1 4-1 4-1 4-1
4-1 4-1 4-1 4-1 —1 —1 —1 —1 —1 —1 —1 —1 4-1 4-1 4-1 4-1
4-1 4-1 4-1 4-1 4-1 4-1 4-1 4-1 -1 -1 -1 -1 -1 -1 —i -1
— 1 —1 —1 —1 —1 —1 —1 —1 —1 —i —1 —1 —i —i —i -1
230
Ot!O
фавиты называются систематическими алфавитами. При d = 2Z+l
\ можно правильно декодировать все символы, если помехами ис-
кажено не более I элементов. При d = 2Z +1 можно исправить I—1
ошибок и обнаруживать без исправления I ошибок. Таким обра-
зом, различают алфавиты, исправляющие I ошибок, и алфавиты,
обнаруживающие I ошибок. Такое разделение необходимо только
в том случае, если искаженные коэф-
фициенты a,j) могут (принимать толь-
ко значения + 1 и —1.
1 2т символов, состоящих из т би-
нарных элементов 1 и 0, образуют
группу по отношению к сложению по
модулю 2. Заметим, что функции
Уолша имеют такое же свойство [11].
Алфавит называется двоичным груп-
повым алфавитом или двоичным груп-
повым кодом, если его символы обра-
зуют подгруппу этой группы. Систе-
матический групповой код — это си-
стематический код, символы которого
образуют группу.
Специальным классом бинарных групповых кодов являются
коды Рида—Мюллера {5, 10]. Их символы содержат т элементов,
где т — степень 2. Количество проверочных элементов равно т—
—k\ число символов равно 2й, k равно
005~
0 -16 42 -8 4f 0 4 8 12 16
тб* fa-----------► ь;
Рис. 6.6. Вероятность rt(k) ам-
плитуд bk помеховых импуль-
сов после амплитудного огра-
ничения; сигналы содержат
т=8 импульсов Уолша
(6.93)
Минимальное хэммингово расстояние равно d = 2m~r.
Рассмотрим пример, где т=24= 16 и г=1 (алфавит Рида—
Мюллера первого порядка). Следовательно, d = 24~1=8 и £=1 +
+ 4=5. Этот алфавит содержит 25 = 32 символа, содержащих по
16 элементов, 16—5=11 из которых — проверочные. Этот алфа-
вит обозначают как (16, 5) или в общем случае как (т, k). В
табл. 6.2 показаны символы этого алфавита (16, 5), элементы в
котором обозначены +1, —1. Сравним знаки элементов первых
16 символов с функциями Уолша (рис. 1.2). Знаки соответствуют
положительным и отрицательным амплитудам функций Уолша.
Знаки элементов символов 17+32 получаются изменением знаков
элементов символов 16+1. Поэтому алфавит Рида—Мюллера
можно составить следующим образом: 1 /2т функций Уолша
wal (/, 0/ /=0, ..., -~2- , представленных в виде т положи-
тельных и отрицательных знаков, дают первую половину символов,
вторая половина символов представляется функциями —wal(/, 0).
Таким образом, алфавиты Рида—Мюллера принадлежат к клас-
су ортогональных алфавитов.
231
6.3.2. Ортогональные, трансортогональные и биортогональные
коды
Для простоты рассмотрим алфавит (4, 3), а не алфавит (16.-5)/
Он содержит 23=8 символов. Первые четыре из них — это первые
четыре функции Уолша (рис. 1.2): >
1. 1. 1 1 1
2. —1—11 1
3. —1 11 —1
4. 1—11 —1
(6.94)
Можно считать,
меняв строки и
матрицу X*:
что элементы (6.94) образуют матрицу1) X. По-
столбцы местами, получим транспонированную
1—1—1 1
X* = 1—1 1—1 1111 (6.95)
1 1—1—1
Произведение XX* равно единичной матрице, умноженной на 4:
1111
— 1—11 1
—1 11—1
1—11—1
1—1—1 1
1—1 1—1
1111
1 1 —1 —1
10 0 0
0 10 0
0 0 10
0 0 0 1
(6.96)
Матрица называется ортогональной, если умножение матрицы
на транспонированную дает единичную матрицу, умноженную на
некоторый коэффициент. Алфавит называется ортогональным, если
его элементы могут быть записаны как элементы ортогональной
матрицы. Алфавит (6.94) есть ортогональный алфавит; символы
1—16 из табл. 6.2 образуют ортогональный алфавит, как и сим-
волы 17—32.
Опустим во всех символах (6.94) третий элемент. Получится
алфавит с тремя элементами и четырьмя символами:
1. + 1 + 1 4-1
2. — 1 — 1 4-1
3. — 1 4-1 — 1
4 + 1 —1 —1
(6.97)
Умножение матрицы Y на транспонированную матрицу Y*:
1 1 1
— 1 —1 1
— 1 1 —1
1 —1 —1
]) Эта матрица — матрица Адамара (7—9].
232
дает
YY* =
4-1 —1/3 —1/3 —1/3
— 1/3 4-1 —1/3 —1/3
— 1/3 —1/3 4-1 —1/3
— 1/3 —1/3 —1/3 4-1
(6.98>
У матрицы (6.98) разность между элементами главной диаго-
нали и другими элементами больше, чем у единичной матрицы
(6.96). Поэтому алфавит (6.97) называют трансортогональным.
На примере алфавитов (6.94) и (6.97) очевидно практическое
значение трансортогональности. Оба содержат четыре символа,,
и хэммингово расстояние между любыми двумя элементами равно
двум. Однако алфавит (6.94) требует четыре элемента, а алфавит
(6.97) — только три.
Пусть символы алфавита (6.97) представлены векторами:
1. Fo = 4-е0 4-ej 4-е2. 3. Fa = — е,, 4- <4 — <4.
2. F1 = —е0 —е14-е1. 4. F3 = 4-е^ — ej — е,.
Концы этих четырех векторов являются вершинами тетраэдра, по-
казанного на рис. 2.4а, если начало системы координат располо-
жено в центре тетраэдра и система координат повернута соответ-
ствующим образом.
У трансортогональных алфавитов с более чем четырьмя симво-
лами члены вне главной диагонали матрицы YY* близки к нулю.
Добавим к ортогональному алфавиту (6.94) символы, получен-
ные изменением знаков элементов:
5. —1 4-1 —L 4-1
6. 4-1 —1 —1 4-1
7. 4-1 4-1 —1 —1
8. —1 —1 -1 —1
(6.99>
Алфавит (4, 3), состоящий из символов (6.94) и (6.99), называется
биортогональным. Алфавит (16, 5) (табл. 6.2) является также би-
ортогональным. Любой символ биортогонального алфавита имеет
хэммингово расстояние от любого другого символа, равное d, кро-
ме одного символа, который имеет расстояние 2d. Примером би-
ортогонального алфавита, не являющегося алфавитом Рида—Мюл-
лера, является алфавит, показанный на рис. 2.46 в виде октаэдра.
Перейдем от представления символов элементами или коэффи-
циентами к представлению в виде временных функций. Рассмот-
рим систему из 16 ортогональных функций f(j, 0). Каждую функ-
цию умножим на один из 16 коэффициентов символа табл. 6.2 и
произведения сложим. Если функции f(j, 0) представляют собой
прямоугольные импульсы, то первые 16 символов будут совпадать
с функциями Уолша (рис. 1.2), а остальные 16 символов — с теми
же функциями Уолша, но умноженными на —4.
233
Таблица 6.3
Коэффициенты а (/) символов троичного биортогонального алфавита,
__________________и—1.....32, / = 0, .... 15
№ пп 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
1 +1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
2 0 +1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
3 0 0 +1 0 0 0 0 0 0 0 0 0 0 0 0 0
4 0 0 0 +1 0 0 0 0 0 0 0 0 0 0 0 0
5 0 0 0 0 +1 0 0 0 0 0 0 0 0 0 0 0
6 0 0 0 0 0 +1 0 0 0 0 0 0 0 0 0 0
7 0 0 0 0 0 0 +1 0 0 0 0 0 0 0 0 0
<8 0 0 0 0 0 0 0 +1 0 0 0 0 0 0 0 0
9 0 0 0 0 0 0 0 0 +1 0 0 0 0 0 0 0
10 0 0 0 0 0 0 0 0 0 +1 0 0 0 0 0 0
11 0 0 0 0 0 0 0 0 0 0 +1 0 0 0 0 0
12 0 0 0 0 0 0 0 0 0 0 0 +1 0 0 0 0
13 0 0 0 0 0 0 0 0 0 0 0 0 +1 0 0 0
14 0 0 0 0 0 0 0 0 0 0 0 0 0 +1 0 0
15 0 0 0 0 0 0 0 0 0 0 0 0 0 0 + 1 0
16 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 4-1
17 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -1
18 0 0 0 0 0 0 0 0 0 0 0 0 0 0 —1 0
19 0 0 0 0 0 0 0 0 0 0 0 0 0 —1 0 0
20 0 0 0 0 0 0 0 0 0 0 0 0 — 1 0 0 0
21 0 0 0 0 0 0 0 0 0 0 0 —1 0 0 0 0
22 0 0 0 0 0 0 0 0 0 0 — 1 0 0 0 0 0
23 0 0 0 0 0 0 0 0 0 —1 0 0 0 0 0 0
24 0 0 0 0 0 0 0 0 —1 0 0 0 0 0 0 0
25 0 0 0 0 0 0 0 -1 0 0 0 0 0 0 0 0
26 0 0 0 0 0 0 —1 0 0 0 0 0 0 0 0 0
27 0 0 0 0 0 —1 0 0 0 0 0 0 0 0 0 0
28 0 0 0 0 —1 0 0 0 0 0 0 0 0 0 0 0
29 0 0 0 —1 0 0 0 0 0 0 0 0 0 0 0 0
30 0 0 —1 0 0 0 0 0 0 0 0 0 0 0 0 0
31 0 —1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
32 —1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 . 0
234
Вместо умножения 16 прямоугольных импульсов на +1 или
— 1 и сложения произведений можно с тем же успехом умножить
одну функцию Уолша на +1 или —1, а другие пятнадцать — на О
и произведения сложить. Тогда символы представляются коэффи-
циентами + 1, —1 и 0, как показано в табл. 6.3, где в первой
отроке показан индекс j функции wal(/, 0), а в первом столбце —
номер символа %. Функции wal(/, 0) умножаются на коэффициен-
ты + 1,—1 или 0. Суммирование произведений осуществляется
тривиально, так как только одно произведение отлично от нуля
для каждого символа.
Интересно, что троичный алфавит табл. 6.3 и бинарный алфа-
вит табл. 6.2 дают одни и те же сигналы. Оба алфавита должны
давать одинаковую вероятность ошибки при воздействии любых
типов помех.
Вместо того, чтобы представлять символы троичного алфавита
(табл. 6.3) 16 функциями Уолша, можно использовать константу
f(0, 0), восемь синусоидальных и семь косинусоидальных импуль-
сов согласно рис. 1.9. Частотный спектр мощности первых пяти
импульсов представлен на рис. 1.24 кривыми а, б и в. Шестнадца-
тый символ будет равен Лб(0) = K2sin(16n0+ (1/4)л). Частот-
ный спектр мощности этого символа будет сконцентрирован около
v = 8 (рис. 1.24). Выбрав Г=150 мс, что является наиболее часто
используемым стандартом для телетайпных сигналов, получим
указанные на рис. 1.24 ненормализованные частоты. Сигнал F16(0)
будет иметь энергию, сконцентрированную около частоты 53,33 Гц,
и практически не будет иметь энергии на частотах выше 60 Гц.
Однако на основе того, что сигналы, рассмотренные выше, зани-
мают узкую полосу частот, нельзя делать вывод, что алфавит
табл. 6.3 лучше алфавита табл. 6.2. Можно умножить импульсы
согласно рис. 1.9 на коэффициенты +1 и —1 табл. 6.2 и просум-
мировать произведения. Получившиеся 32 сигнала почти не име-
ют энергии на частотах выше 60 Гц.
Из 16 двоичных коэффициентов можно составить 216 символов.
Алфавит (16.5) табл. 6.2 использует из них 25. Обычно говорят,
что этот алфавит содержит пять информационных цифр и 11 про-
верочных или что каждый символ содержит 5 дв. ед. информации
и 11 дв. ед. избыточности. Из 16 коэффициентов троичного алфа-
вита можно построить З16 символов. В алфавите (табл. 6.3) ис-
пользуется из них 25; на каждый символ приходится 5 дв. ед. ин-
формации. Однако не стоит считать, что при этом будет log2(316—
—25) избыточных цифр. Понятие избыточности применимо только
в том случае, если рассматриваются алфавиты одного порядка.
Если не наложить этого ограничения, можно предположить, что
алфавит (16, 5) получен из г16 символов алфавита порядка г, а не
из 216 символов алфавита второго порядка.
Понятие расстояния оказалось полезным и в общей теории ко-
дирования, не ограничивающейся двоичными элементами. Для то-
го чтобы обобщить понятие хэммингова расстояния, рассмотрим
235
два символа, представленных на интервале —1/2^0^ 1/2 функ-
циями времени (0) и Гф(0). Энергия, необходимая для преобра-
зования (0) в F^(0), равна
1/2
f [F^~WWdQ-
—1/2
Энергия символа Fx(0) равна Wx *
1/2
W = f F2(0)dO.
A J А
-1/2
Средняя энергия всех R символов алфавита равна W:
R
Х=1
где рх — вероятность передачи символа х-
Энергетическое расстояние *) dXM> символов Гх (0) и Fq (0) опре-
деляется нормализацией энергии
d» = Wx*lW-
Пусть Гх(0) и Гф(0) образованы из т ортогональных
га.е,:
^х(е)=2 е); M>=S ’>•
/»=0 /з=0
Для №хЧ> и получаем:
т— 1 т— 1
/«о /«о
Пусть все символы имеют одинаковую энергию W=WX. Тогда по-
лучаем
т—1
У, вх(/)вф(/)
1 — -------. (6.106)
(6.100)
(6.101)
(6.102)
(6.103)
функций
(6.104)
(6.105)
_ W хМ> _ 1
— — - , .. __ j •
2 2W
1/2
-1/2
т— 1
Для всех символов табл. 6.3 выполняются
тения:
/«о
следующие соотно-
т— 1
15
2 ахо')%(/) = Е ах <л°ф</>=
/=0 /=О
i=o
’ — 1 для Х = 32 —ф4- 1;
4-1 для х = Ф;
0 для х=/=Ф, 32 — ф 4- 1.
!) В случае бесконечного интервала интегрирования используется термин
«нормализованная несхожесть» {10].
236
Тогда для символов табл. 6.3 получаются следующие энергетиче-
ские расстояния:
для
для
для
Х = 32-ф+1;
% — 'Pi
х=/=ф, 32 — яр -I- 1.
(6.107)
’4
О
2
. Для символов табл. 6.2:
т—1
(Л-|в;
m-1 15
2 ах (/)%(/)= £ ах(/) (/)={+ 16 для х = Ф;
/«=0 /=о
15
(6.108)
/«О
16 для х = 32 — 4- 4- 1;
(6.109)
0 для х =/='!’, 32 — vp + 1;
dX4> -
4 для X = 32 — ф + 1;
о для х « ф;
2 для X ¥= Ф, 32 —ф + 1.
Если в (6.103) разделить не на W, а на U7/log2w = W/4, то
расстояния dxy символов табл. 6.2 будут иметь значения 16, 0 или
8. Это есть числа элементов, в которых символы отличаются друг
от друга, т. е. их хэмминговы расстояния.
Энергетическое расстояние dx^ между двумя символами равно
квадрату вектора, соединяющего сигнальные точки в сигнальном
пространстве. Эти векторы на рис. 2.4 обозначены линиями между
сигнальными точками. Термин «расстояние» при векторном пред-
ставлении имеет очевидный смысл. Из-за нормализации dxq для
векторного представления необходимо потребовать, чтобы сиг-
нальные точки имели среднее расстояние от общего центра тяже-
сти, равное 1.
Пусть R символов биортогонального алфавита записаны в та-
кой последовательности, что выполняется соотношение
/„(0)(6).
(6.110)
Следовательно,
i/2 1 1 для х = ф;
J Fx(0)^(0)d0= -1 для х = Я-ф+ 1,
-1/2 1 0 для Х#=Ф, Ф + 1-
(6.111)
Из (6.106) следует, что символ х биортогонального алфавита име-
ет энергетическое расстояние от символа R—х+Ь равное 4, и энер-
гетическое расстояние, равное 2, от всех других символов, х=
= 1,..., R.
6.3.3. Кодирование для безошибочной передачи
Формула Шеннона для пропускной способности канала связи
доказывает, что в предельном случае возможна безошибочная пе-
237
редача. Из вывода этой формулы в § 6.1 видно, как можно полу-
чить коды, позволяющие приблизиться к пропускной способности
канала и обеспечивающие вероятность ошибки, близкую к нулю,
при наличии аддитивного теплового шума.
Рассмотрим систему ортогональных функций f(j, 0), разложи-
мых по Фурье на интервале —1/2^0^ 1/2. Из таблицы выбирают
случайные числа cio(j) с гауссовым распределением и строят сим-
вол Fo(0) (1—3]:
m = (Mti, (6.112)
/=о
Можно предположить, что числа ao(j) представляют напряжения.
Тогда Fo(0) является изменяющимся во времени напряжением.
Если т бесконечно, то Fq(0) нельзя отличить от выборки теплово-
го шума.
Используя другой набор из т случайных чисел ai(j)> можно
построить второй символ Fi(0). В общем случае, используя т слу-
чайных чисел ах (j) с гауссовым распределением, можно построить
символ Ех(0). Ненормированная длительность этих символов рав-
на Т. Пропускная способность канала (6.54) зависит от т, Т и
среднего отношения сигнал/шум Р1Рт,т-
C = ^-log,(l+P/P„ г). (6.113)
Пусть п — наибольшее целое число, меньшее 2СГ, и пусть будет
построено п символов Гх (0):
х = 0, 1, . . п— 1. (6.114)
Эти п символов образуют первый алфавит. Пусть, таким образом,
построим L алфавитов с п символами каждый и выберем случай-
но один алфавит. Если п и L стремятся к бесконечности, то веро-
ятность того, что этот алфавит обеспечивает вероятность ошибки,
стремящуюся к нулю, сколь угодно близка к единице.
Эти «случайные алфавиты» очень хороши с теоретической
точки зрения. Однако существуют практические трудности. Инте-
ресно не только знать, насколько хорош алфавит в пределе, но и
какова вероятность ошибки для конечного количества информации
на один символ. Элайс нашел первый неслучайный алфавит, обес-
печивающий сколь угодно малую вероятность ошибки при ограни-
ченной энергии, затрачиваемой на передачу одной двоичной еди-
ницы информации (4, 5]. Однако скорость передачи информации
была много меньше, чем предел Шеннона. Так называемые ком-
бинационные коды также дают очень малую вероятность ошибки
и обеспечивают скорость передачи, близкую к пределу Шеннона.
6.3.4. Троичные комбинационные коды
Совокупность т ортогональных функций f(j, 0) может переда-
вать т коэффициентов ax(j). Если a*(j) принимает три значения
238
+1, 0 и —1, то можно построить R = 3m символов. Записав (1 +2)"*
вместо Зт, получим следующее выражение:
Я = (1 4-2)'п = 2°('”) + 21('п')+ • . •+2h(/n'j + • • •+2nt//n'j.
символ, не содержащий ни одной функции, так
(6.115)
Это разложение делит множество R символов на подмножества
символов, содержащих одинаковое число функций f(j, 0). Суще-
ствует 1
как все коэффициенты а%(]) равны нулю. Кроме того, существует
2* — символов, состоящих из одной функции каждый, так
как только один коэффициент ax(j) равен +1 или —1. Эти сим-
волы образуют биортогональный код. В общем существует
2h (j символов, каждый из которых содержит h функций ах (j)X
Xf(j, 0), гДе ax(i) равен +1 или
комбинаций по h функций из т, то эти коды называются троич-
ными комбинационными кодами при /г=/=0,1 или т. Таблица 6.4
показывает число 2
есть число
символов в таких алфавитах.
Таблица 6.4
Число символов в троичных комбинационных кодах. Согласно [2] числа
над линией характеризуют хорошие коды
Уравнение (6.115) дает для h=m 2т I 1=2”* символов, кото-
рые содержат все т функций a%(j)f(j, 0) с a* (j), равным +1 или
— 1. Они являются символами двоичных алфавитов.
239
Рассмотрим код с символами, содержащими h функций f(j, Q).
Каждый символ содержит h коэффициентов ах (j), равных +оо
или —ао и т—h коэффициентов, равных 0. Пусть эти символы пе-
редаются. Взаимокорреляционная функция принятого сигнала с
функцией 0) дает коэффициенты ax(j). Пусть на сигнал дей-
ствует аддитивный тепловой шум. Тогда получаются коэффициен-
ты a(j), которые имеют гауссово распределение со средними зна-
чениями +flo, 0 или —ао, обозначаемыми a^(j) и а(-1)(7):
/а(+1)0)\„ xJ+Ds „|1./ °( П(/)\ _
Оо/ \ а0 /
(6.116)
Оо
Дисперсия о2 этих распределений получается из (6.60), (6.70) и
(6.71):
, а? (/) \ Р, т Ph т ЛРА.
а2 z— _LZ. — Jb-L = —Д. (6.117)
\ a2 / P/h P nP ’ v
0
h — число коэффициентов ax(j) co значениями +a0 или —Oo; n=
=log?2h^j —информация, приходящаяся на символ, в дв. ед.,
если все символы передаются с равной вероятностью; Рп,т—
средняя мощность п ортогональных компонент теплового шума на
интервале ортогональности длительностью Т; P=ha^—средняя
мощность сигнала; &f=n!2T'y Рщ—средняя мощность теплового
шума в полосе частот А/. Чтобы облегчить сравнение между двоич-
ными и троичными кодами, используют чаще среднюю мощность
шума Рп,т> а не Рн,т или Рт,т-
Для декодирования согласно (5.25) необходимо из m принятых
коэффициентов a(j) получить 2m^j
сумм:
5Ф=2а(/)ач>(/)
/—о
(6.118)
и определить наибольшую из них. tn—h коэффициентов a$(j) рав-
ны 0 для любого ip. Рассмотрим те суммы, для которых опреде-
ленные коэффициенты a^(j) равны нулю, например, те, для кото-
рых /=0, ..., пг—h—1. Оставшиеся h коэффициентов равны +flo
или —и дают 2h различных сумм . Наибольшая из этих 2h
сумм будет содержать h положительных членов a(j)aq (j), в то
время как оставшиеся m—h членов равны 0. Наибольшей из всех
U /сумм
будет сумма, в которой не равные нулю члены со-
держат п коэффициентов a(j) с наибольшими значениями. Сумма
будет наибольшей для передаваемого символа Fx(0), когда абсо-
лютная величина h коэффициентов a^(j) и a^(j) больше, чем
240
абсолютная величина т—h коэффи-
циентов ao(j), и если к тому же
p(+l>(j) больше нуля и a(~t}(j) меньше
нуля. Следовательно, для безошибоч-
ного декодирования должны выпол-
няться следующие два условия (см.
рис. 6.7):
1) все коэффициенты а<+1>=
==а<+‘>(/)/ао и ——а(-1)(/)/а0 не-
ртрицательны:
0<a(+I), — a(-|)<oc; (6.119)
2) любой из !г коэффициентов
4-а(+1) и —at-V не 'меньше абсолютной
величины любого из т—h коэффи-
циентов a^ = a<°)(/)/a0. Выполнение это-
го условия необходимо, если только
в ы полн я етс я уел ови е 1:
+ a(+,) —|а<°)| >0 1
— —>0 J
при 0<а(+1),— а(-1)<оо. (6.120)
Функции плотности вероятности Wt(x)
для а<+‘) и №г(у) для |а(й)| определя-
ются (4.59).
Вероятность p(a<+1><0) = IFi(0) тог
выполняется, равна
о
р (а+‘ < 0) = (0) = —У— f exp [— (х — 1 ) W] dx =
/2л a J
— 00
= y[l-erf(l//2a)]. (6.121)
Вероятность р(—а(“1><0) имеет то же значение:
р (— а(_| ’ < 0) = [ 1 — erf (!lV~2 а)], (6.122)
р№ означает вероятность того, что условие (6.119) не выполняет-
ся, по крайней мере, для одного из h коэффициентов а<+,1 и
= 1 — [1 — |Г1(0)]А = 1 — 2А[ 1 + erf (1/V 2а)]А. (6.123)
Рассмотрим распределение a<+1)—| а<°)|» 0<а(+1)<оо. Плотность
вероятности этой функции определяется (4.61) — (4.63). Вероят-
ность того, что условие (6.120) не выполняется для одной из
h(m—h) разностей —|а<°>| и ——|а(0>|» равна
P(fl(+1)-|fl(0)|<0) = IF (0) = f w (z) dz. (6.124)
p(n(+*> >0) Д
Этот интеграл был вычислен в (4.64).
9—322 241
-—_________________
-/ 0 1
Рис. 6.7. Плотности вероятно-
сти a<+1\ at-1), аР\ | а<°> | и
д<+1)_|д(0)| для троичного ком-
бинационного кода. Заштрихо-
ванная площадь указывает
ошибки
, что условие (6.119) не
p№h,m-h означает вероятность того, что условие (6.120) не вы-
полняется для всех h(m—h) разностей —| а<°) | и —дС-О— |а<°>|:
P^m_h = 1 —[1 — UZ(O)]A (т-Л). (6.125)
Уравнения (6.123) и (6.125) дают вероятность ошибки р(3)тл для
троичных комбинационных, биортогональных и бинарных (т, т)-
кодов:
pS!, » I -(I —₽“) (1 -P1V.) - 1-2-* [1 +ert (1/Г 2<Х
X f — о._Лрч/„р, ,6.126)
12 1 +ert(l/)'2o)l '
Уравнение (6.126) дает при h=m вероятность ошибки для двоич-
ного кода с т коэффициентами ax(j) и 2т символами:
« . = 1 - (1 - <«’) (1 - P'S.) - 1 - (ф)" 11 + ert (1//2 с)Г;
о2 = тР^/пР = P^f/P; п = log2 2m j = tn.
(6.127)
Вероятность ошибки биортогонального кода получается при Л=1:
р%»•-»- О -Р{3’) 0 -PiVi) = 1 - т[! + erf 0/^ 2°)! X
х Г 1 (1 +ert(l/2o)la )m-i#
I 2 1 + erf(l//2o) J
аг = Р, r/P = PSf/nP; n = log2 21 ) = log2 2m.
(6.128)
На рис. 6.8 показана вероятность ошибки для некоторых биор-
тогональных кодов. Для сравнения показана вероятность ошибки
двоичного кода (5, 5) (кривая п=5, т=Ь) и кода (16,16) (кри-
вая n=16, т=16). График для случая п=5, т=5 аналогичен
графику а на рис. 6.2.
Выбор средних отношений сигнал/шум, отложенных по оси абс-
цисс, требует объяснения. Смысл средней мощности сигнала Р
очевиден. Средняя мощность шума Pi, т ортогональной компонен-
ты теплового шума на интервале ортогональности длительностью Т
используется как эталон. Р/Р^.т дает неправильное представление,
так как символы различных кодов передают различное количест-
во информации. Лучше использовать Р/п, т. е. среднюю мощность
сигнала на один бит информации, а не Р. В результате получим
отношение Р/Рд/, которое используется на рис. 6.8:
(Р/п)/Р, т = Р/лР, т = Р/Р„ т = Р/Рд,; Д/ = Ш2Т. (6.129)
Рассмотрим передачу символов с п = 5 дв. ед. информации на
символ с вероятностью ошибки 10-3. Согласно рис. 6.8 двоичный
242
код (п = 5, т = 5) требует отношение Р/Рд/ порядка 11 дБ, а би-
ортогональный код (п=5, т= 16) — только 8 дБ. Следовательно,
биортогональный код требует мощности сигнала на 11—8 = 3 дБ
меньше. Этот выигрыш достигается ценой увеличения числа орто-
гональных функций с т = 5 до /и=16 и увеличением в 16/5 раз
функционально-временной области, занимаемой сигналом, или,
Рнс. 6.8. Вероятность ошибки р
биортогонального кода:
Р — средняя мощность сигнала;
Рд^—средняя мощность теплового
шума в полосе шириной Д/=л,/2Т;
п — количество информации в би-
гах, содержащееся в символе; Т —
длительность символа: т — число
ортогональных функций в коде.
Сплошные линии — биоргогональ-
ный код; пунктирные — бинарный
код (5,5) н (16,16)
другими словами, увеличением в II
смотрим далее передачу символов с
Рис. 6.9. Вероятность ошибки р
троичного комбинационного ко-
на; Р, Рщ , п и иг определены
в надписи к рис. 6.8; h — чис-
ло ортогональных функций в
символе. Пунктирные линии
показывают вероятности оши-
бок бинарных кодов (5,5) и
(16, 16)
5 раз полосы частот. Рас-
1=16 дв. ед. информации на
символ с вероятностью ошибки 10~3. Согласно рис. 6.8 бинарный
код (п=16, т = 16) требует отношения = 11,7 дБ; биорто-
тональный код требует только 5,8 дБ. Таким образом, биортого-
нальный код требует только около четверти мощности сигнала
бинарного кода ((11,7—5,8) =5,9 дБ). Однако число функций не-
обходимо увеличить с 16 до 32 768.
Чем меньше требуемая вероятность ошибки, тем более оправ-
дано использование биортогонального кода. Например, для веро-
ятности ошибки 10~7 (кривая n = 5, т=16 на рис. 6.8) требуется
отношение P/P^f = 11,2 дБ, в то время как для двоичного кода
(п = 5, т=16) требуется отношение 14,8 дБ; мощность сигнала
при этом можно уменьшить на 14,8—11,2 = 3,6 дБ. Эта разность
мощностей увеличивается более чем на 7 дБ для кодов п=16,
т = 32 768 и п=16, т=16 при вероятности ошибки 10~7.
9* 243
На рис. 6.9 показана вероятность ошибки для троичных комби-
национных кодов согласно (6.126). Сравнение с рис. 6.8 показы-
вает, что троичные комбинационные коды требуют большего от-
ношения Р/Рц, чем биортогональные коды, но меньшего, чем дво-
ичные коды типа (т, т). Например, биортогональный код п=10,
т=512 для отношения P/P^f =8 дБ дает вероятность ошибки
10-5; сравнимый по вероятности ошибки комбинационный код п=
=9,9, т = 8, Л = 3 требует, чтобы это отношение было равно около
10,5 дБ.
Из рис. 6.9 видно, что существуют коды, которые передают
больше информации п с тем же числом функций т, что и бинар-
ный код (т, т), и тем не менее дают более низкую вероятность
ошибки. Механизм действия этих кодов более сложен, чем обмен
«увеличение числа функций на уменьшение мощности сигнала».
Рассмотрим кривую для n=8,8, m=8, h = 3. Символ двоичного
кода (8,8) передает восьмью функциями информацию, равную
8 дв. ед., что меньше, чем 8,8 дв. ед. у троичного комбинационного
кода, который также требует т=8 функций. Вероятность ошибки
двоичного кода (8,8) представлена кривой, которая находится
между кривыми для л=5, т=5 и п=16, ш=16 (рис. 6.9). Для
вероятностей ошибок между 10~4 и 10-7 эта кривая почти на 3 дБ
правее кривой n = 8,8, т = 8, h=3.
Рассмотрим вероятность ошибки р(3)т, л (6.126) для больших
значений т и п. Используя аппроксимацию
erf (х) ~ 1---X-е~х‘, х > 1 и 1—у те~у , у < 1,
У ях
можно получить
Pm* h — 1 — е~5е"т’; т 1;
г т, п " *
____ . _ ттз
9 f Р\ t_1 Г 1 Р
' = W V-Р ’Ч|П .*-<”-*>V т]-5^7• <6.130)
Пусть пит стремятся к бесконечности:
lim Pm* ft = 1 при Т] > 0;
’ (6.131)
lim р£> л = 0 при т) < 0.
/П-*ОО ’
Таким образом, безошибочная передача достигается в пределе при
п = оо для т] <0. Используя соотношение
h log2 y ,
п = log2 2h
(6.132)
можно преобразовать условие ^<0 в следующее условие, справед-
ливое для постоянного значения /г:
Р/Рд/>41п2. (6.133)
Отношение Р1Рц, большее чем 41п2, обеспечивает безошибоч-
ную передачу для бесконечно больших типи ограниченного h\
244
вероятность ошибки равна 1, если PlP&f меньше 41п2. Предель-
ная функция lirnp’m, л для т-^-оо, п-+оо показана на рис. 6.8 и 6.9.
Этот предел одинаков для биортогональных кодов (h = \) и ком-
бинационных кодов Л>1. Следовательно, комбинационные коды
Являются предпочтительными только с точки зрения функций или
Требуемой полосы, так как увеличение числа функций пропорцио-
нально 2П для биортогонального кода, но пропорционально только
2n/h/i для комбинационного кода.
Пусть при стремлении т и п к бесконечности h не остается по-
стоянной, а увеличивается пропорционально та, 0^а<1. Условие
(6.132) остается справедливым для больших т. Тогда усло-
вие т| <0 дает вместо (6.133) следующее условие:
: р/рд/>4Т±^1п2; Л = тв; 0<а<1. (6-134)
Безошибочная передача возможна, если а<1.
’ Рассмотрим теперь, насколько применим предел Шеннона для
пропускной способности в форме (6.54) к троичным комбинацион-
. ным кодам. Средняя мощность шума P&f должна быть заменена
в (6.130) на Рт, т- Отсюда
’.. = Рп Т — Г = ~Рт Т •
Д/ л, Т 1, Т m m, Т
(6.135)
Условие т)<0 превращается в условие
пг
(6.136)
Используя аппроксимацию n=log22( i =/zlog2—m^h в левой
\п / h
части и производя перестановку членов, получаем:
. ш
п <-----
4Ш2
?т, Т
1 / m
\ntnh — — In Uog2 —
(6.137)
Выражение в скобках становится равным 1, когда m становится
бесконечным, a h остается конечной; для h — ma, 0^а<1 оно ста-
новится равным (1—а)/(1+а).
Информация, передаваемая безошибочно за единицу времени,
равна п/Т, так как п есть информация, приходящаяся на каждый
символ, передаваемый в течение интервала ортогональности дли-
тельностью Т:
и < 1 /И 1
Т 2 2Т 1п2
п 1 1 — a m
Т 1 1 +а 2Т
—-----9 h = const;
Т
1 Р
1п2 Рт,т'
h = ща, 0 < а < 1.
(6.138)
(6.139)
245
Если пропускная способность получается в битах на единицу вре-
мени, то в (6.54) должен быть использован логарифм по основа-
нию 2:
с = — log2(l +Р/Рт « 1. (6.140)
2Т S V "*• Т> 2Т 1п2 Pm, Т Рт.Т ' 7
Правая часть (6.140) в два или в 2(1 +а)/(1—а) раз больше, чем
правая часть (6.138) и (6.139). Следовательно, при малых отно-
шениях сигнал/шум троичный комбинационный код с ft=const по-
зволяет безошибочно передать в два раза меньше информации,
чем это определяет предел Шеннона.
Физический смысл условия Р/Рт,т<^\ очевиден; коэффициенты
троичного кода имеют только значения +1, 0, —1. Увеличение
среднего отношения сигнал/шум Р/Рт,т, когда достигнута нулевая
вероятность ошибки, бессмысленно. Отношение сигнал/шум Р/Рт,т
имеет смысл увеличивать только, если коэффициенты принимают
большее количество значений, чем три: +1, 0, —1. Троичные ком-
бинационные коды должны быть заменены кодами более высокого
порядка.
Более детальное исследование троичных комбинационных ко-
дов проведено Касаком (2].
6.3.5. Комбинационные коды порядка 2г+1
Пусть символы Fx (0) образованы m-ортогональными функ-
циями f(j, 0), —1/2^0^ 1/2, умноженными на коэффициенты
ах (j). Эти коэффициенты могут принимать 2r +1 значений, а не 3,
как в случае троичных кодов. В общем может быть получено (1 +
+ 2r)m символов. Разложим (1 +2r)m в биномиальный ряд:
(1 + 2r)m= 1 +2гН+ • • •+(2г)л(/")+ • •+ (2r)m(m);
\ 1 / \ П / !
(6.141)
<2Н”)
— число символов в коде, содержащих h из m функций
f(j, 0). Это значит, что h коэффициентов а% (j) не равны нулю;
X изменяется от 1 до
(2г)'‘(;)
\л /
. Эти символы образуют комбина-
ционный код порядка 2г +1. Пусть все эти символы передаются с
одинаковой вероятностью. Количество информации на символ в
битах равно
n = loga(2r)ft~ , m^h.
\ п ) п
(6.142)
Каждый из h коэффициентов ЯхОЭт^О может принимать 2г
значений. Они обозначены яр, р=±1 ... ±г. Вероятность того, что
коэффициент ax(j) примет значение ар, обозначим р(р). Пусть
246
р(р) не зависит от j. Средняя мощность сигналов f(j, 0) равна Pj'.
+r Т/2 4-Г
?/- £р(р) у J е)Л =
> о——г —Т/2 р=—Г
. ¥=0 ¥=0
2р(р)=е (6.143)
р= -г
¥=0
Средняя мощность символов, составленных из h функций f(j, 0),
равна Р:
Р = ИР/. (6.144)
Сделаем следующие допущения:
а) вероятность того, что коэффициент ax(j) примет значение
ар , не зависит от р: р (р) = 1 /2г;
б) разность |ар— ар -t | не зависит от р |ар — ар .t| =ао- Это ус-
ловие выполняется, если ар кратно а^.
ар = Рао, Р = ± 1 • -±г.
Средняя мощность Pj функции f(j, 0) может быть получена из
(6.143) и (6.144):
-К '
р1= ^Рг^2г = (а^)^р2 = -Ш1^+Яа2==Р//г> (6.145)
р=—г р=1
а2-6Р/Л(г+ l)(2r+ 1).
Пусть передается символ Fx(0). приемной стороне взаим-
ная корреляция с функциями f(j, 9) дает коэффициенты ах (/)•
Наложение аддитивного теплового шума преобразует эти коэф-
фициенты в a(j). Они имеют гауссово распределение со средними
значениями |р|ась —|р|ао или 0; |р|=1, .г. Эти коэффициенты
обозначим через a^(j)f af^(j) и a^(j):
/a^Sil Х- = <а(+р)> = р; / д(~Р) 0) \ = <Ц(“Р)> = — р;
\ а0 / \ /
(6.146)
/*Ч/)\ = <а^> = о.
\ аа /
Дисперсия этих распределений получается по аналогии с (6.117):
о2 = <Х(/)/ао> = Л(г + 1)(2г + 1)Р1г Г/6Р =
= й(г+ 1)(2г + 1)Р„ г/6пР = Л(г+ 1)(2г+ 1)Рд//6пР; (6.147)
h — число ненулевых коэффициентов; n=logz(2r)h
\п,
— коли-
чество информации, приходящееся на символ, в дв. ед., если все
247
символы передаются с равной вероятностью; 2г — число ненуле-
вых значений, которые могут принимать коэффициенты a%(j);
Рп,т— средняя мощность п ортогональных компонент теплового
шума на интервале ортогональности длительностью Т; P=haz0(r+
+ 1)(2г+1)/6 — средняя мощность сигнала; J^=nl2T\ Рц —сред-
няя мощность теплового шума в полосе частот Af.
Символы комбинационных кодов порядка выше третьего пере-
даются не с одинаковой энергией. Можно определить наименьшую
энергию А1>ГфДля обнаружения сигнала согласно (5.24). Это озна-
чает, что надо вычислить (2r)h (т) сумм:
т—1
(6.148)
и определить наименьшую из них. Если не является наимень-
шей для где х означает переданный символ Fx (0), то появ-
ляется ошибка.
Наименьшее значение получается, если складывается h наи-
меньших членов [a(j)—a^(7)]2; h членов, для которых a(j) равно
ах(])^0 при отсутствии теплового шума, будут h наименьшими
Рис. 6.10. Плотности вероятности
а(°), а(+1>, а<-р), а<4-Р>, а<-г>
и а(+г>. Заштрихованные площадки
указывают ошибки
членами .при наличии аддитивного
теплового шума, если выполняются
следующие условия (см. рис. 6.10):
1. Ни один из h коэффициентов
а(+р) = а<+Р)(/)/а0 и —а<“р) =
—afr^)(j)/ao не отличается от своего
среднего значения |а/ао| = |р|
больше, чем от любого другого
среднего значения |р'| = 1, .G
#=.р;
2. Ни один из п коэффициентов
а(+р) и —д(-р) не отличается от лю-
бого из значений 1, ..., г больше,
чем абсолютное значение одного из
т—h коэффициентов а(°>. Выполне-
ние этого условия необходимо, толь-
ко если выполнено условие 1.
Эти два условия для троичных
комбинационных кодов равносиль-
ны условиям (6.119) и (6.120). Вы-
числение вероятности ошибки го-
раздо более затруднительно. Здесь
результаты будут приведены без доказательства.
Пусть означает вероятность ошибки из-за теплового
шума для комбинационного кода порядка 2г+1, использующего h
из т функций. Для больших значений т, h, г и малых о2:
248
h^>l; r 1; a2 ~hraPSf/3nP< 1;
n = log2 (2r)h j ~ log2 (rmlh)h. 1
можно получить следующую формулу:
Рт, h — 1 с с ,
4‘ = -j-|n'—” = Tln(m~4)ft—т^7 • <6J50)
Пусть количество информации на один символ п бесконечно рас-
тет:
lim = 1, т)2 > 0, тц — любое число;
’ (6.151)
,im Pm^h} = °- П2<°. П1<0-
п-*оо ’
Случай т]2<0, г)1 >0 невозможен, так как справедливо
n, = [Al„(„_4)__^_]+[X|n4__g_j. (6.152)
Член во второй скобке равен т)1- Из т]1>0 следует, что т]2 должно
быть больше 0. Следовательно, т)2>0 дает вероятность ошибки 1
при и>оо. Переписав т]г, получим следующее условие для безоши-
бочной передачи:
P/P^>^-^ln(m — h)h- (6.153)
Подставляя п из (6.149), получаем
Р/Р.. > — г2 In 2|п(т~.-)Л. (6.154)
V 3 Щгт/h)
Рассмотрим, насколько можно приблизиться к пределу Шен-
нона в форме (6.54) при использовании комбинационных кодов
порядка 2r+1. Средняя мощность шума Рщ в ф-ле (6.150) для т)2
должна быть заменена на
РА. = Р„ Т = пР. Т = —Рт Т'
п, Т 1, Т m ГП; Т
Из (6.151) можно получить
limp<?''+1) = 0 при P/Pm т > ^-r2\n(m — h)h. (6.155)
я-*оо * ’ Зш
Используя соотношение
r^2n'h—, (6.156)
tn
которое следует из (6.149) для г>1, из (6.155) можно получить
п < Л ioga ([---------------------1 р-^-1 . (6.157)
2 6 1[4Л8 ln(m — h)h J Pm, т J
249
Надо так выбрать h=h(m), чтобы правая часть этого неравен-
ства для определенного значения т и фиксированного отношения
Р1Рт,т стала максимальной. Выражение слишком сложно, чтобы
находить максимум путем дифференцирования. Можно видеть, од-
нако, что коэффициент h перед логарифмом должен быть как мож-
но большим. Если h станет очень большим, то член в скобках ста-
нет меньше единицы. Это выражение с увеличением т становится
произвольно малым. Следовательно, h выбирается так, чтобы вы-
полнялось условие
3m3________
4ft® 1п (т — ft) ft
= К = const.
(6.158)
Это наводит на мысль, что h надо взять равным
h = In т. (6.159)
Из (6.157) следует
(6Л6О)
Количество информации п/Т, передаваемое за единицу времени,
становится равным
с = Т<^7^[|0&(Р/Р"'г) + 10в!К1- (6|6,)
Эта формула для больших значений Р1Рт,т отличается от
предела Шеннона (6.54) только коэффициентом (1пт)~1/3. Это не-
большое различие, вероятно, объясняется выбором равномерного
распределения для р(р), а не гауссова распределения. Физический
смысл условия Р/Ртп.т^К понятен. В (6.149) предполагалось, что
г^>1; наличие большого количества значений коэффициентов ax(j)
позволяет безошибочно передавать информацию только при усло-
вии большого отношения сигнал/шум.
Список литературы
1. Mann Р. A. Der Zeitablauf von Rauschspannungen. — «Е1. Nachr. Technik»,
1943, Bd. 20, S. 183—189.
2. Stumpers F. L. Theory of frequency modulation noise. — «Proc. IRE», 1948,
v. 36, p. 1081—^10912.
3. Vo el eke r H. B. Toward a unified theory of modulation. — «Proc. IEEE»,
11966, v. 54, p. 340—353, 735—755.
4. Rademacher H. Einige Satze von allgemeinen Orthogonal—funktionen.
Math Annalen, -10122, Bd. 87, S. 122—<138.
5. Fowle F. F. The transposition of conductors. — «Transactions А1ЕЕ», 1905,
v. 23, p. 659—687.
6. О s b о r n e H. S. The design of transpositions for parallel power and telephone
line circuits. — «Transactions А1ЕЕ», 1918, v. 37, p. 897—936.
7. Pinkert H. S. Induktionsschutz fur Fernsprechleitungen. Telegraphen und
Fernsprechtechink, 3. Sonderheft, 1919, S. 108—119.
8. Klein W. Die Theorie des Nebensprechens auf Leitungen. Berlin/New York:
Springer, -1955.
9. Walsh J. L. A closed set of orthogonal functions. — «Amer. J. of Mathe-
matics», 1923, v. 45, p. 5—24.
10. Howe P. W. The use of Laguerre and Walsh functions in materials problems
of variable loading at high temperature. Technical Report AD-434122(I964).
11. France M. M. Walsh functions, normal numbers and pseudo-random func-
tions. Technical Report AD-621360(1965).
1.1.1
I. Tri comi F. Vorlesungen uber Orthogonalreihen. Berlin/New York, Springer,
1955.
2. Sansone G. Orthogonal functions. New York, Interscience, 1959.
3. L e n s e J. Reihenentwicklungen in der mathematischen Physik. Berlin, de
Gruyter, 1953.
4. Milne-Thomson J. M. The calculus of finite differences. London,
McMillan, il951.
5. N б r 1 u n d N. E. Vorlesungen fiber Differenzenrechnung. Berlin/New York,
Springer, 1024.
1.1.2
1. Courant R., Hilbert D. Methoden der mathematischen Physik. Berlin/New
York, Springer, 1931.
2. Morse P. M., Feshbach HL Methods of theoretical physics. New York,
McGraw-Hill, 1953.
3. L e n s e J. Reihenentwicklungen in der mathematischen Physik. Berlin, de
Gruyter, 1953.
4. Eier R. Signalanalyse mit Laguerreschen Polynomen. — «Archiv elek. Uber-
tragung», 1966, Bd. 20, S. '185—-194.
5. Whittaker E. T., Watson G. N. A course of modem analysis. London,
Cambridge U. Press, «1952.
6. Tit ch marsh E. C. Theory of the Fourier-integral. London, Oxford U.
Press, 4937.
7. Al exits G. Konvergenzprobleme dor Orthogonalreihen. Berlin, Deutscher
Verlag der Wissenschaften, I960.
1.1.3
I. Smirnow W. I. Lehrgang der hoheren Mathematik. Berlin, Deutscher
Verlag der Wissenschaften, 1961, Part. 2.
2. Titchmarsh E. C. Theory of the Fourier-integral. London, Oxford Univer-
sity Press, 11937.
3. Bracewell R. The Fourier-transform and its applications. New York,
McGraw-Hill, 11965.
251
4. В e n n e 11 W. R., Davey J. R. Da/ta transmission. New York, McGraw-Hill,
1965.
5. Wiener N. The Fourier-integral and certain of its applications. London,
Cambridge University Press, 1933.
1.1.4
1. Walsh J. L. A closed set of orthogonal functions. — «Amer. J. of Mathe-
matics», 11923, v. 45, p. 5—24.
2. Rademacher H. Einige Satze von allgemeinen Orthogonal—funktionen.
Math. Annalen, il922, Bd. 87, S. 122—138.
3. Henderson K. W. Some notes on the Walsh—functions. — «Transactions
IEEE», 11964, EC-13, p. 50-52.
4. Lied 1 R. Uber eine spezielle Klasse von stark multiplikativ orthogonalen
Funktionensystemen. Monatshefte fur Mathematik, 1964, Bd. 68, S. 130—137.
5. Lied 1 R. Walsh-Funktionen und endlichdimensionale Hilbertraume. Monat-
shefte fur Mathematik, 1966, Bd. 70, S. 342—348.
6. Liedl R. Uber giwisse Funktionale im Raum C(v> [0, 1] und Walsh-Fourier-
koeffizienten. Monatshefte fiir Mathematik, .1968. Bd. 72, S. 38—44.
7. W e i s s P. Zusammenhang von Walsh-Fourier-Reihen mit Polynomen.
Monatshefte fiir Mathematik, 1967, Bd. 711, S. Л65—-179.
8. Pichler F. Synthese linearer periodisch zeitvariabler Filter mit vorgeschrie-
benem Sequenzverhalten. — «Arch, elektr. Ubertragung», 1968; Bd. 22, S. 150—
161.
9. Pichler F. Das System der sal- und cal-Funktionen als Erweiterung des
Systems der Walsh-Funktionen und die Theorie der sal- und cal-Fouriertrans-
formation. Thesis, Dept, of Mathematics, Innsbruck University, Austria, 1967.
10. Vilenkin N. W. On a class of complete orthogonal systems «(in Russian).
Izv. Akad. Nauk., Ser. Math., 1947, v. I I, p. 363—400.
11. Fine N. J. On the Walsh-f unctions.— «Trans. Amer. Math. Soc.», 1949, v. 65,
p. 372—414.
43. Paley R. E. A remarkable series of orthogonal functions. Proc. London Math
Soc. <2), 1932, v. 34, p. 241--279.
14. S e 1 e r i d g e R. G. Generalized Walsh transforms. — «Pacific J. of Mathe-
matics», 1955, v. 5, p. 451—480.
15. T о n i S. Su un notevole systema orthogonale di funzioni. Atti Accad. Sci.
1st Bologna, Cl. Sci. fis. 1958, Ann. 246 Rend. XI, Ser. 5, Nol. 225—230.
16. Morgenthaler G. W. On Walsh-Fourier series. — «Transactions Amer.
Math. Soc.», 1957, v. 84, p. 472—507.
17. Wiener N. Nonlinear problems in random theory. New York, MIT Press
and Wiley, 1958, p. 21.
18. Fowle F. F. The transposition of conductors. — «Transactions А1ЕЕ», 1905,
v. 23, p. 659—687.
19. Peterson W. W. Error-correcting codes. New York, MIT Press and Wiley,
11961.
20. Loomis L. H. An introduction to abstract harmonic analysis. Englewood
Cliffs NJ, Van Nostrand, 1953.
’ 21. Hammond J. L., Johnson R. S. A review of orthogonal square wave
functions and their application to linear networks. — «J. of the Franklin
Institute», 1962, v. 273, p. 2111-^225.
22. V i 1 e n к i n N. W. On the theory of Fourier integrals on topologic groups
(in Russion). Math. Sbornik (N.S.), 4952, v. 30(72), p. 233—244.
23. Fine N. J. The Walsh functions. Encyclopaedic Dictionary of Physics, Oxford,
Pergamon Press, in print.
I 24. Polyak B., Shr eider Yu. A. The application of Walsh functions in
• approximate calculations. Voprosy Theori Matematicheskix Mashin 2, Bazilev-
skii, Moscow, Fizmatgiz, 1962.
25. Boulton P. I. Smearing techniques for pattern recognition (Hadamard-
Walsh transformation). Thesis, Univers, of Toronto, Canada, (1968).
26. Sylvester J. J. Thoughts on inverse orthogonal matrices, simultaneous
sign-successions, and tessalated pavements in two or more colours, with
applications to Newton’s rule, ornamental tile-work, and the theory of num-
bers. Phil. Mag., 1867, v. 34, p. 464—475.
252
1J.2
1. Morse P. M., Feshbach H. Methods of theoretical physics. New York,
McGraw-Hill, 1953, v. 1, p. 942—945.
2. Bracewell R. The Fourier-transform and its applications. New York,
McGraw-Hill, 1965.
3. К a n t о г о w i t s c h L. W., A к i 1 о w G. P. Funktionalanalysis in normierten
Raumen. Berlin, Akademie, 1964.
1.2.4
1. Harmuth H. Verallgemeinerung des Fourier—Integrates und des Begriffes
Frequenz. — «Archiv elek. Ubertragung», 1964, Bd. 18, S. 439—451’.
2. Pichler F. Das System der sal- und caLFunktionen als Erweiterung des
Systems der Walsh-funktionen und die Theorie der sal- und cal-Fouriertrans-
formation. Thesis, Dept, of Mathematics, Innsbruck University, Austria, 1967.
1.2.5
1. Green R. R. A serial orthogonal decoder. Space Programs Summary, Jet
Propulsion Laboratory, Pasadena, Cal. tl966, v. IV, iN 37—39, p. 247—251.
2. Posner E. C. Combinatorial structures in planetary reconnaissance. Sympo-
sium on error—correcting codes, Math. Research Center of the US Army,
University of Wisconsin, 1968.
3. Welch L. R. Computation of finite Fourier series. Space Programs Summary,
Jet Propulsion Laboratory, Pasadena, Cal., 1966, v. IV, N 37—39, p. 295—297.
4. Pratt W. K-, Kane J., Andrews H. C. Hadamard transform image
coding. Proc. IEEE», 1969, v. 57, p. 58—68.
5. Wh el ch el J. E., Guinn D. F. Fast Fourier-Hadamard transform and its
use in signal representation and classification. EASCON*68 Record, 1968,
p. 561—573.
6. Haar A. Zur Theorie der orthogonalen Funktionensysteme. Math. Annalen,
1910, v. 69, S. 331—371.
7. Shanks J. L. Computation of the fast Walsh-Fourier transform. — «IEEE
Trans, on Computers», -1969, v. C—fl8, p. 457—459.
1.3.1
1. Stumpers F. L. Theory of frequency modulation noise. Proc. IRE, 1948,
v. 36, p. 1081—1092.
2. Mann P. A. Der Zeitablauf von Rauschspannungen. — «EL Nachr. Technik»,
1943, Bd. 20. S. 183—489.
3. P a n t e r P. F. Modulation, noise and spectral analysis. New York, Mcgraw-
Hill, 1965.
4. Harmuth H. A generalized concept of frequency and some applications.
«IEEE Transactions on Information Theory», 1968, IT-14, p. 375—382.
1.3.2
1. Wunsch G. Moderne Systemtheorie. Leipzig, Geest P& Portig, 1962.
2.1.1
I. Lerner R. M. Representation of signals; design of signals. In Lectures on
Communication System Theory. New York, McGraw-Hill, 1961.
2. Luke H. D. Binare orthogonale Signalalphabete mit speziellen Korrelation-
seigenschaften. —«Archiv etek. Ubertragung», -1966, Bd. 20, S. 310—316.
3. A к i у a m a M. Orthogonal PCM transmission with weighted bit length. —
«J. of the Institute of Electrical Communications Engineers of Japan», 1966,
v. 49, p. 11'53—1159.
4. Schmid P. E., Dudley Hl S., Skinner S. E. Partial response signal
formats for parallel data transmission. IEEE Int. Conf, on Communications,
Record, 1968, p. 8Ы—816.
5. Chang R. W., G i b b у R. A. A theoretical study of performance of an
orthogonal multiplexing data transmission scheme. IEEE Int. Conf, on Com-
munications, Record, .1968, p. 833—837.
6. L a n ge F. H. Signale und Systeme 1. Braunschweig, Vieweg, 4966.
253
2.1.3
1. Whittaker J. M. Interpolator function theory. Cambridge Tracts in
Mathematics and Mathematical Physics, London, Cambridge University Press,
1935, v. 33.
2. Levinson N. Gap and density theorems. Amer. Math. Soc. Coll. Publ., 1940,
v. 26.
3. Shannon С. E. Communication in the presence of noise. Proc. IRE, 1949,
v. 37, p. 10—21.
4. Goldmann S. Information theory. Englewood Cliffs NJ. Prentice Hall, 1953.
5. Linden D. A. A discussion of sampling theorems. Proc. IRE, 1959, v. 47,
p. 1219—1226.
6. Kohlenberg A. Exact interpolation of band-limited functions. — «J. Applied
Physics», 1953, v. 24, p. 1432—1436.
7. Kluvanec I. Sampling theorem in abstract harmonic analysis. Mathematicko
fyzkalny Casopis, Sloven. Akad. Vied, i!965, v. 15, p. 43—48.
2.1.4
1. Lange F. H. Korrelationselektronik. Berlin, Verlag Technik, 1959.
2. Burr-Brown. Research Corp., Handbook of operational amplifier applica-
tions, Tucson, Arizona, 1963.
3. Philbrick researches, Inc. Applications manual for computing amplifiers,
Dedham, Mass., 1966.
4. Johnson С. K. Analog computer techniques. New York, McGraw-Hill, 1963.
5. Korn G. A., Korn T. M. Electronic analog and hybrid computers. New York,
McGraw-Hill, 1964.
6. Schmid P., Nowak D., H a r m u t h H. Detection of orthogonal sine and
cosine pulses by linear active RC networks. Proc. 1967. Int. Telemetering
Conf., Washington DC, p. 210—220.
7. Swick D. A. Walsh—function generation. «IEEE Transactions on Information
Theory, v. IT-115(1969), p. 167.
2.1.5
1. Ballard A. H. Orthogonal multiplexing, Space and Aeronautics. Technical
Reference Series «Aerospace Electronics, Advanced Communications», 1962,
v. 3, Nov., p. 51—60.
2. Sanders R. W. The digilock orthogonal modulation system. Advances in
Communication Systems. 1965, v. 1, p. 57—75.
3. Kuhn B. G., Morey К. H., Smith W. B. The orthomatch data transmission
system. — «IEEE Transactions on Space Electronics and Telemetry», 1963,
v. SET-9, p. 63—66.
4. Viterbi A. J. On coded phase-coherent communications. — «IRE Trans-
actions on Space Electronics and Telemetry», 1961, SET-7, p. 3—14.
5. Mosier R. R., CI aba ugh R. G. Kineplex, a bandwidthefficient binary
transmission system. — «Transactions AIEE, Communication and Electronics»,
1957, v. 76, p. 723—727.
6. J a f f e R. M. Digilock telemetry system for the Air Force special weapons
center’s Blue Scout Jr. — «IRE Transactions on Space Electronics and Telemetry»,
1962, v. SET-8, p. 44—50.
7. Sanders R. W. Communication efficiency comparison of several communi-
cation systems. — «Proc. IRE», 1960, v. 48, p. 575—588
8. D о e 1 z M. L., Heald E. T., Martin D. L. Binary data transmission
techniques for linear systems. — «Proc. IRE», 1957, v. 45, 656—661.
9. W i e r J. M. Digital data communication techniques. — «Proc. IRE», 1961,
v. 49, p. 196—209.
10. F i I i p о w s к у R. F., Muehldorf E. I. Space communications systems;
Space communications techniques. Englewood Cliffs NJ, Prentice Hall, 1965.
11. Katsum a ru K-, Yashi T. H., Takada Y., Ogawa K. Super multichan-
nel carrier telegraph system by phase modulation i(Rectiplex system). Fujitsu
Scientific and Technical, 1965, J. 4, p. 261—279.
254
12. Harmuth H. On the transmission of information by orthogonal time func- I
tions. — «Transactions A1EE, Communication and Electronics», 19*60, v. 79, (
p. 248—255.
13. Harmuth H. Radio communication with orthogonal time functions.—
«Transactions Al EE, Communication and Electronics», I960, v. 79, 221—228.
14. Schmid P., Dudley H. S., Skinner S. E. Partial response signal
formats for parellel data transmission. — «IEEE Transactions on Communi-
cation Technology», 1969, in print.
15. OSC — A bandwidth-efficient frequency multiplex system for non-equalized
voice channels, Allen-Bradley Co., Internal Report, 1968.
16. О s a t а к e T., К i г i s a w a K. An orthogonal pulse code modulation system. —
«Electronics and Communications in Japan», 1967, v. 50, p. 35 —43.
2.2.1
1. Wagner K. W. Elektromagnetische Wellen. Bale, Birkhauser, 1953.
2. Smirnow W. 1. Lehrgang der hoheren Mathematik, Teil II, Berlin, Deutscher
Verlag der Wissenschaften, 1901.
3. Meacham L. A. Negative impedance boosting for 2-wire bilateral signal
transmission. 1968, IEEE Int. Conf, on Communications, Record, p. 165—168;
also Bell System Tech. J., 1968, v. 47, p. 1019—»1041.
4. Rathbun D. K, Jensen H. J. Nuclear test instrumentation with miniature
superconductive cables. — «IEEE Spectrum», 1968, v. 5, p. 91—99.
5. Allen R. J., N a h m a n n N. S. Analysis and performance of superconductive
coaxial transmission lines. — «Proc. IEEE», 1964, v. 52, p. 1147—«1154.
6. Sandy G. F. Square wave (Rademacher—Walsh functions) analysis. Mitre
Corporation, Working Paper WP-1585 (1968).
2.2.2
1. Siebert W. M. Signals in linear time invariant systems. In Lectures on
Communication System Theory, New York, McGraw-Hill, 196’1.
2.3.1
1. Wagner K. W. Spulen und Kondensatorleitungen. — «Archiv fiir Elektro-
technik», 1919, Bd. 8, S. 61—92.
2. Campbell G. A. Physical theory of the electric wave Filter. — «Bell System
Tech. J.», 1922, v. 1, p. 1—32.
3. Z о b e 1 O. J. Theory and design of uniform and composite electric wave
filters. — «Bell System Tech. J.», 1923, v. 2, p. >1—46.
4. Bartlett A. C. The theory of electrical artificial lines and filters. New York,
Wiley, 1930.
5. Cauer W. Siebschaltungen. Berlin, VDLVerlag. 1931.
6. Guillem in E. A. Communication Networks. Vol. 1: The classical theory
of lumped constant networks; Vol. 2: The classical theory of long lines,
filters, and related networks. New York, Wiley, 1931.
7. Cauer W. Theorie der linearen Wechselstromschaltungen. Leipzig, Akade-
mische Verlagsgesellschaft, 1941; English edition: Synthesis of linear commu-
nication networks. New York, McGraw-Hill, 1958.
8. Pichler F. Synthese linearer periodisch zeitvariabler Filter mit vorgeschrie-
benem Sequenzverhalten. — «Archiv elektr. Ubertragung», 1968, Bd. 22,
S. Г50—<161.
9. Harmuth H. Sequency filters based on Walsh functions. — «IEEE Trans- I
actions on Electromagnetic Compatibility», 1968, v. EMC-10, p. 293—295.
10. Harmuth H. Sequency filters. Proceedings of the Summerschool on Circuit
Theory, 1968, Czechoslovak Academy of Science, Prague.
2.3.3
1. Nowak D. J., Schmid P. E. Introduction to digital filters. — «IEEE Trans-
actions on Electromagnetic Compatibility», 1968, v. EMC-10, p. 210—220.
255
3.1.1
1. Costas J. P. Synchronous communication. — «Proc. IRE», 1956, v. 44,
p. /1713—1718.
2. Black H. S. Modulation theory. New York, Van Nostrand, 1953.
3. S c h w a г z M. Information transmission, modulation and noise. New York,
McGraw-Hill, 1959.
4. P a n t e r P. F. Modulation, noise and spectral analysis. New York, McGraw-
Hill, 1965.
5. Viterbi A. J. Principles of coherent communication. New York, McGraw-
Hill, 1966.
3.1.2
•1. Crowley T. H., Harris G. G., Miller S. E., Pierce J. R.,
Runyon J. P. Modern communications. New York, Columbia U., Press, 1962.
2. Haas W. Moglichkeiten des Ersatzes von Induktivitaten und Schwingkreisen
in zukiinftigen Systemen der Multiplextechnik. — «Frequenz», iI965, Bd. 19,
S. 297-^307.
3. Flood J. E. Time division multiplew systems. — «Electronic Engr.», 1953,
v. 25, p. 2—5, 53-63, 101—106, H46-.150.
4. Roberts F. F., Simmonds J. C. Multichannel communication systems. —
(Wireless Engr.», (1945, v. 22, p. 538—549, 576—589.
5. Bennett W. R. Time division multiplex systems. — «Bell System Tech. J.»,
1941, p. 199—22 Г.
6. R a a b e H. Untersuchungen an der wechselzeitigen Mehrtachubertragung
(Multiplexiibertragung). — «Elektrische Nachrichten—Technik», 1939, Bd. 16,
S. 213—228.
7. Technical Staff Bell Telephone Laboratories. Transmission Systems for
Communications, Winston-Salem NC, Western Electric Co. Technical Publica-
tions, 1965.
8. Technical Staff Siemens Central Laboratories Nachrichtenubertragung.
Berlin/New York, Springer, 1966
9. Schwartz M., Bennett W. R., Stein S. Communication systems and
techniques. New York, McGraw-Hill, 1966.
10. L a n d о n V. D. Theoretical analysis of various systems of multiplex trans-
mission. — «RCA Review», 1943, v. 9, p. 287-^351. 438—482.
Id. Harmuth H. Sequenz— Multiplexsysteme fur Telephonic und Dateniibertra-
gung. 1. Quadraturmodulation; 2. Einseitenband—Modulation. — «Archiv
elektr. Ubertragung», 1968, Bd. 22, S. 27—35, 102-408.
12. Harmuth H. Tragersystem fur die Nachrichtentechnik. W. German patent
il 191 416,11963.
13. В eb ar th H. P. Verfahren zur digitalen Codierung von Ferngesprachen...
W. German patent 11 244 855, 1964.
14. Pichler F. Das Sequenzvielfach, ein neues Sprechwegenetz fiir Vollelektro-
nische Fcrnsprechvermittlimgsamter.
15. XII. Int Wiss. Kolloquium der Technischen Hochschule Ilmenau, East Ger-
many, 1967, v. 7, S. 15—20.
3.1.4
1. Honey J. F., Weaver D. K. An introduction to single sideband commu-
nication. — «Proc. IRE», ,1956, v. 44, p. 1667—1675.
2. N о r g a a r d D. E. The phase-shift method of single-sideband signal genera-
tion; The phase-shift method of single-sideband signal reception. — «Proc.
IRE», 4965, v. 44, p. >1^718—1743.
3. S a r a g a W. Single-sideband generation. — «Electronic Technology», 1962,
v. 39, p. 168—171.
4. Weaver D. K. A third method of generation and detection of single-sideband
signals. — «Proc. IRE», 4956, v. 44, p. 1703—4705.
5. N у q u i s t Hl Certain topics in telegraph transmission theory. — «Trans-
actions А1ЕЕ», /1928, v. 47, p. 617-4644.
256
6. Becker F. К., Davey J. R., S a 11 z b e r g B. R. An AM vestigial sideband
data transmission set using synchronous detection for serial transmission
up to 3000 bits per second. — «Transactions Al EE, Communication and Elec-
tronics*, 1962, v. 81, p. 97—^101.
7. Bennett W. R., Davey J. R. Data transmission. New York, McGraw-Hill,
1965.
8. Harmuth H., Schmid P. E., Nowak D. L. Transposed sideband modu-
lation for data transmission. — «IEEE Transactions on Communication Techno-
logy», 1967, v. COM-15, p. 868—870.
3.1.5
1. Baghdady E. J. Analog modulation systems. In Lectures on Communication
System Theory, New York, McGraw-Hill, I9GI.
2. Viterbi A. J. Principles of coherent communication. New York, McGraw-
Hill, 1966.
3. Pichler F. Das System der sal- und cal-Funktionen als Erweiterung des
Systems der Walsh-Funktionen und die Theorie der sal- und cal-Fouriertrans-
formation. Thesis Dept, of Mathematics, Innsbruck University, Austria, 1967.
3.2.1
1. V a n Der Pol. B. Frequency Modulation. «Proc. IRE», 1930, v. 18, p. 111194—
1205.
2. H u n d A. Frequency modulation. New York, McGraw-Hill, 1942.
3. С u с c i a C. L. Hlarmonics, sidebands, and transients dn oommunication engi-
neering. New York, McGraw-Hill, J952.
4. Bl ack H. S. Modulation theory. Princeton NJ, Van Nostrand, 1953.
3.2.2
1. Crosby M. G. Communication by phase modulation. Proc. IRE, 1939, v. 27,
p. 126—136.
2. Black H. S. Modulation theory. Princeton NJ, Van Nostrand, J953.
3. Panter P. F. Modulation, noise and spectral analysis. New York, McGraw-
Hill, 1965.
3.2.3
1. Oliver В. M., Pierce J. R., Shannon С. E. The philosophy of PCM.—
«Proc. IRE», 1948, v. 36, p. 4324—<1331.
2. Mayer H. F. Principles of pulse code modulation. Advan. Electron, New York,
Academic Press, 195k
3. Flood J. E. Time division multiplex systems, Part 4. — «Electronic Engr.»,
1953, v. 25, p. 446—150.
4. Goodall W. M. Telephony by pulse-code-modulation. — «Bell System
Tech.», J, 11947, v. 26, p. 395-409.
5. d e Jager F. Delta modulation: A method of PCM transmission using the
1-unit code. — «Philips Research Report», 1952, v. 7, p. 442—466.
6. Bennett W. R. Spectra of quantized signals. — «Bell System Tech. J.»,
1948, v. 27, p. 446—472.
3.3.1
4. Hertz H. Die Krafte elektrischer Schwingungen behandelt nach der
Maxwell’schen Theorie. Ann. Phys., Neue Folge, 1889, Bd. 36, S. 1-422.
2. Zuhrt HI. Electromagnetische Strahlungsfelder. Berlin/New York, Springer,
1953.
3. Slater J. C., Frank H. Electromagnetism, New York, McGraw-Hill, 1947.
4. Ware L. A. Elements of electromagnetic waves, New York, Pitman, 4949.
5. Becker R., Sauter F. Theorie der Elektrizitat. Stuttgart, Teubner, 1964,
v. 1.
6. L a n d a u L. D., L i f s c h i t z E. M. Lehrbuch der theoretischen Physik.
Berlin, Akademie, 1961, v. 11.
7. К r a u s J. Antennas. New York, McGraw-Hill, 1950.
8. Scheikunoff S. A. Electromagnetic waves. New York, Van Nostrand, 1943.
257
3.3.3
1. Harmuth H. Grundlagen und mogliche Anwcndungen der Sequenztechnik.
Bulletin des Schweizerischen Elektrotechnischen Vereines, 1968, Bd. 59,
S. 1196—1203.
4.1.1
1. Cramer H. Mathematical methods of statistics. Princeton, Princeton Univer-
sity Press, >1946.
2. Kolmogoroff A. Foundations of the theory of probability. New York,
Chelsea, I960.
4.3.2
1. Schlitt H. Systemtheorie fur regellose Vorgange. Berlin/New York, Sprin-
ger, 1960.
2. Middleton D. An introduction to statistical communication theory. New
York, McGraw-Hiill, 1960.
3. Lee Y. W. Statistical theory of communication. New York, Wiley, 1960.
4. Lee Y. W., Cheatham T. P., Wiesner J. B. Application of correlation
analysis to the detection of periodic signals in noise. — «Proc. IRE», 1950,
v. 38, p. J/165—1171.
5. G r e e n P. E. The output signal-to-noise ratio of correlation detectors. —
«IRE Transactions on Information Theory», 1958, v. IT-4, p. 10—18.
6. Wiener N. Generalized harmonic analysis. Acta Mahtematica, 1930, v. 55,
p. 117—258.
7. Fischer F. A. Die mathematische Behandlung zufalliger Vorgange in der
Schwingungstechnik. — «Fernmeldetechnische Zeitschrift», 1952, Bd. 5.
S. 161—158.
5.1.1
1. Doob J. L. Stochastic prosesses. New York, Wiley, 1963.
2. V a n Der Z i el A. Noise. Englewood Cliffs NJ, Prentice Hall, 1954.
3. RiceS. O. Mathematical analysis of random noise. — «Bell System Tech. J.»,
1944, v. 23, p. 282—332, 1945, v. 24, p. 46—156.
4. Smullin D., Haus H. A. Noise in electron devices. New York, Wiley, 1959.
5. Bennett W. R. Electrical noise. New York, McGraw-Hill, 1960.
6. Davenport W. B., Root W. L. An introduction to the theory of random
signals and noise. New York, McGraw-Hill, 1958.
7. Schwartz M. Information transmission, modulation and noise. New York,
McGraw-Hill, 1959.
8. Root W. L., Pitcher T. S. On the Fourier-series expansion of random
functions. Annals of Math. Statistics, 1955, v. 26, p. 313—318.
9. H a u s HL A. et al. IRE standards of methods of measuring noise in linear
twoports. — «Proc. IRE», 11960, v. 48, p. 60—68.
10. Dorr K. Die statistische Verteilung der Nulldurchgange von Rauschspannun-
gen. — «Archiv elek. Ubertragung», 1965, Bd. 19, S. 685—4>98.
LI. Szalay G. Die Verteilungsdichte der Intervalle bei einem Rauschsignal mit
Schwellwert. — «Archiv elek. Ubertragung», 1964, Bd. 18, S. 316—322.
12. J о h n s о n J. B. Thermal agitation of electricity in conductors. — «Physical
Review», J928, v. 32, p. 97—.109.
5.2.1
1. Kotel’nikov V. A. The theory of optimum noise immunity. New York,
McGraw-Hill, 1959.
2. Siebert W. M., Root W. L. Statistical decision theory and communications.
In Lectures on communication system theory. New York, McGraw-Hill, -1961.
3. M i d d I e t о n D. An introduction to statistical communication theory. New
York, McGraw-Hill, 1960.
4. W a i n s t a i n L. A., Z u b а к о v V. D. Extraction of signals from noise.
Englewood Cliffs NJ, Prentice Hall, 1962.
258
5. Harman W. A. Principles of the statistical theory of communication. New
York, McGraw-Hill, 1963.
6. Wiener N. Extrapolation, interpolation and smoothing of stationary time
series. New York, MIT Press and Wiley, 1949. 4
7. Hancock J. C. Signal detection theory. New York, McGraw-Hill, 196(6.
8. Livinson N. The Wiener RMS error criterion in filter design and predic-
tion. — «J. of Math, and Physics», 1947, v. 25, p. 261—278.
9. Kolmogoroff A. Interpolation and extrapolation of stationary random
sequencies. Bulletin de l’acad£mie des sciences de USSR, Ser. Math., 1941,
v. 5, p. 3—»1*4.
10. Sherman S. Non-mean square error criteria. — «IRE Transactions on
Information Theory», 1959, v. IT-4, p. 125—126.
11. Bode H. W. A simplified derivation of linear leastsquare smoothing and
prediction theory. — «Proc. IRE», 1950, v. 38, p. 417—426.
12. Arthurs E., Dym HI. On the optimum detection of digital signals in the
presence of white Gaussion noise. — «IRE Transactions on Communication
Systems», 1962, v. CS-10, p. 336—372.
5.2.3
1. North D. O. An analysis of the factors which determine signal/noise discrimi-
nation in pulsed-carrier svstems, reprinted in Proc. IEEE, 1963, v. 51, p. 1016—
1027.
2. Turin G. L. An introduction to matched filters. — «IRE Transactions on
Information Theory», 1960, v. IT-6, p. 311—329.
3. Schiissler W. Uber den Entwurf optimaler Suchfilter. — <NTZ», 1964,
Bd. 17, S. 605—613.
4. Schlitt H. Systemtheorie fur regellose Vorgange. Berlin/New York, Sprin-
ger, 1960.
5. Z a d e n L. A., R a g a z z i n i I. R. Optimum filters for the detection of
signals in noise. —i«Proc. IRE», i!95i2, v. 40, p. 1123—L131.
6. Peterson E. L. Statistical analysis and optimization of systems. New York,
Wiley, 1961.
5.2.4
J. Corrington M. S., Adams R. N. Advanced analytical and signal proces-
sing techniques:App!icaticn of Walshfunctions to nonlinear analysis. Technical
Report AD-277942, 1962.
2. Weiser F. E. Walsh function analysis of instantaneous nonlinear stochastic
problems. Thesis, Polytechnic Institute of Brooklyn, 1964.
5.3.1
1. Bachdady E. J. Diversity techniques. In Lectures on communication system
theory. New York, McGraw-Hill, 1961.
2. Brennan D. G. Linear diversity combining techniques. Proc. IRE, <1959,
v. 47, p. 1075—d 102.
3. Pierce J. N., Stein S. Multiple diversity with nonindependent fading.—
«Proc. IRE», 1960, v. 48, p. 89—104.
4. Price R. Optimum detection of random signals in noise with application to
scatter multipath communications. — «IRE Transactions on Information
Theory», 1956, v. IT-2, p. 125—^135.
5. Price R., Green P. E. A communication technique for multipath channels.—
«Proc. IRE», 1958, v. 46, p. 55'5—570.
6. G I e n A. B. Comparison of PSK vs FSK and PSK—AM vs FSK—AM binary
coded transmission systems. — «IEEE Transactions on Communication Sys-
tems», I960, CS-8, p. 87—100.
7. Rid out P. N., Wheeler L. K. Choice of multi-channel telegraph systems
for use on HF radio links. — «Proc. 1ЕЕ», 1963, v. 110, p. 1402—>1410.
8. T u r i n G. L. On optimal diversity reception I. — «IRE Transactions on
Information Theory», 1961, v. IT-7, p. 154—<166.
9. Turin G. L. On optimal diversity reception II. — «IRE Transactions on
Communication Systems», 1962, v. CS-ilO, p. 22—31.
259
10. Law H. В. The detectability of fading radiotelegraph signals in noise.—
«Proc. LEE», .1957, v. 1043, p. 4 30—440.
Lh Voelcker Hl B. Phase shift keying in fading channels. — «Proc. IRE»,
1960, v. 107B, p. 31—38.
IS. Pierce J. N. Theoretical diversity improvement in frequencyshift keying.—
«Proc. IRE», 1968, v. 46, p. 903—910.
13. A1 n a 11 J. W., Jones E. D., La w H. B. Frequency diversity in the reception
of selective fading binary frequency-modulated signals. — «Ргос. LEE», 1957,
v. 104B, p. 96—110.
14. Bello P. A., Nelin B. D. The effect of freguency selective fading on the
binary enor probabilities of incoherent and differentially coherent matched
filter receivers. — «IEEE Transactions on Communication Systems», 1963,
v. CS-ld, p. 170—186.
15. В essli ch Ph. Fehlermahrscheinlichkeit binarer Ubertragungsverfahren bei
Stdrungen durch Rauschen und Schwund. «Archiv elek. Ubertragung», 1963,
Bd. 47, S. (185—197.
16. Besslich Ph. Fehlerwahrscheinlichkeit b.narer Ubertragungen bei Mehrfac-
bempfang und Frequenz-selektivem Schwund. «Archiv elek. Ubertragung», 1963,
Bd. 17, S. 271-^277.
17. Zuhrt H. Die Summenhaufigkeitskurven der exzentrischen Rayleigh-Verteilung
und ihre Anwendung auf Ausbreitungsmessungen. — «Archiv elek. Ubertra-
gung», 1957, Bd. till, S. 478—484.
18. Henze E. Theoretische Untersuchungen uber einige Diversity—Verfahren. —
«Archiv elek. Ubertragung», 4957, Bd. 11, S. 183—194.
19. Schwartz M., Bennett W. R., Stein S. Communication systems and
techniques. New York, McGraw-Hill, 1966.
20. G г о s s к о p f J., Scholz M., V о g t K. Korrelationsmessungen im Kurzwellen-
bereich. NTZ, 1958, Bd. /11» S. 91—95.
6Л.1
1. Nyquist H. Certain topics in telegraph transmission theory. — «Trans-
actions А1ЕЕ», 1928, v. 47, p. 617—644.
2. Kupfmuller K. Uber Einschwingvorgange in Wellenfiltern. — «Elecktrische
Nachrichtcn-Technik», 1924, Bd. 1, S. 144 —152.
3. Kupfmuller K. Ausgleichsvorgange und Frequenzcharakteristiken in
linearen Systemen. — «Elektrische Nachrichten-Technik», 1928, Bd. 5, S. 18—32.
4 Hartley R. V. L. Transmission of information. — «Bell System Tech. J.»,
11928, v. 7, p. 535—563.
5. Kupfmiiller K. Die Systemtheorie der elektrischen Nachrichteniibertragung.
Stuttgart, Hiirzel, 1952.
6. Shannon С. E. A mathematical theory of communication. — «Bell System
Tech. J.», 1948, v. 27, p. 379—423, 623—656.
7. Shannon С. E. Communication in the presence of noise. — «Proc. IRE»,
1949, v. 37, p. 10—21.
6.1.2
4. Fa no R. M. Transmission of information. New York, MIT Press and Wiley,
1961.
2. Schmidt К. O. Vorschlage zur Berechnung der wirklichen Kanalkapazitat
beim Vorhandensein von Verlusten auf dem Ubertragungswege. — «Archiv
elek. Ubertragung», 1954, Bd. 8, S. il 9—26.
3. Zemanek H. Elementare Informationstheorie. Wien. Oldenfurg, 1959.
4. Fey P. Informationstheorie. Berlin, Akadeinie, 1963.
5. S о m m e r v i 11 e D. M. Y. An introduction to the geometry of N dimensions.
New York, Dutton, 1929.
6. Madelung E. Die mathematischen Hilfsmittel des Physikers. Berlin/New
York, Springer, ;1957.
6.1.3
iE Harmuth H. Die Ubertragungskapazitat von Nachrichtenkanalen nach der
Verallgemeinerung des Begriffes Frequeaz. — «Archiv elek. Ubertragung», 1965,
Bd. 49, S. 125—133.
260
2. Sommerfeld A. Uber die Fortpflanung des Lichtes in dispergierenden
Medien. Ann. Phys., 1914, v. 44, S. il77—202.
6.2.1
1. Da venport W. B. Jr., R о о t W. L. An introduction to the theory of random
signals and noise. New York, McGraw-Hill, 1958.
2. Harman W. W. Principles of the statistical theory of communication. New
York, McGraw-Hlill, 1963.
3. W a i n s te i n L. A., Z u b а к о v V. D. Extraction of signals from noise. Engle-
wood Cliffs NJ, Prentice Hall, 1962.
6.2.2
1. H a r m u t h H., Schmid P. E., D u d 1 e у H. S. Multiple access communica-
tion with binary orthogonal sine and cosine pulses using heavy amplitude
clipping. 1968 IEEE Int. Conf, on Communications Record, p. 794—799.
2. V a n Vleck J. H., Middleton D. The spectrum of clipped noise. Proc.
IEEE, 1966, v. 54, p. 2—^19.
3. S u n d e E. D. Ideal binary pulse transmission by AM and FM. — «Bell System
Tech. J.», 1959, v. 38, p. 1357—1426.
6.2.3
1. Aikens A. J., Lew in ski D. A. Evaluation of message circuit noise. — «Bell
System Tech. J.», I960, v. 39, p. 879—909.
2. S m i t h D. В., В r a d 1 e у W. E. The theory of impulse noise in ideal frequency-
modulation receivers. Proc. IRE 1946, v. 34, p. 743—751.
3. Bennett W. R. Electrical noise. New York, McGraw-Hill, 1960.
4. S t u m p e r s F. L. On the calculation of impulse—noise transients in frequency-
modulation receivers. Philips Research Repts., 1947, v. 2, p. 468—474.
5. Hlarmuth H. Kodieren mit orthogonalen Funktionen. — «Archiv elek. Uber-
tragung», 1963, Bd. 'И7, S. 429-^437, 508-^518.
6.3.1
I. H a m m i n g R. W. Error detecting and error correcting codes. — «Bell System
Tech. J.», 1950, v. 29, p. 147^*160.
2. SI epi an D. A class of binary signaling alphabets. — «Bell System Tech. J.»,
1956, v. 35, p. 203—234.
3. WozencraftJ. M., R e i f f e n B. Sequential decoding. New York, MIT Press
and Wiley, 1961.
4. G a 11 a ge r R. C. Low-density parity-check codes. Cambridge, Mass., MIT-Press,
1963.
5. Muller D. E. Application of Boolean algebra to switching circuit design and
to error detection. — «IRE Transactions on Electronic Computers», 4954,
v. EC-3, p. 6—‘12.
6. Peterson W. W. Error correcting codes. New York, MIT Press and Wiley,
<1961.
7. Peterson W. W. Progress of information theory 1960—63. — «IEEE Trans-
actions on Information Theory», 1963, IT-10, p. 221—264.
8. Lee C. Y. Some properties of non-binary error correcting codes. — «IRE Trans-
actions on Information Theory», 1958, IT-4, p. 72—82.
9. Ulrich W. Non—binary error correcting codes. — «Bell System Tech. J.»,
1957, v. 36, p. 1341—1388.
10. Reed I. S. A class of multiple-error-correcting codes and the decoding sche-
me. — «IRE Transactions on Information Theory», 1954, v. IT-4, p. 38—49.
111. Weiss P. Uber die Verwendung von Walshfunktionen in der Codierungs-
theorie. — .«Archiv elek. Ubertragung», 1967, Bd. 21, S. 255—258.
6.3.2
1. Golomb S. W. et al. Digital communications. Englewood Cliffs NJ, Prentice
Hall, 1964.
2. H armuth H. Orthogonal codes. Proc. IEE, 1960, 107C, p. 242-248.
261
3 AronsteinR. H. Comparison of orthogonal and block codes. — «Proc. 1ЕЕ»,
4963, v. lilO, p. 1965—1967.
4. Hsieh Р.» Hsiao M. Y. Several classes of codes generated from orthogonal
functions. — «IEEE Transactions on Information Theory», 1964, v. IT-10,
p. 88-91.
5. FanoR. Communication in the presence of additive Gaussian noise. New York,
Academic Press, 1953.
6. Lachs G. Optimization of signal waveforms. — «IEEE Transactions on Infor-
mation Theory», 1963, v. IT-9, p. 95—97.
7. Paley R. E. On orthogonal matrices. J. Math, and Physics», 1933, v. 12,
p. 311—320.
8. Stanton R. G., Sprott D. A. A family of difference sets. — «Canadian J.
of Math.», 1958, v. 10, p. 73—77.
9. Bose R. C., Shrikande S. S A note on a result in the theory of code
construction. — «Information and Control», 1959, v. 2, p. 183—194.
10. Neidhardt P. Informationstheorie und automatische Informationsverarbei-
tung. Berlin, Verlag Technik, 1964.
6.3.3
il. Wood H. Random normal deviates, Tracts for Computers 25. London, Cam-
bridge University Press, 1948.
2. U S Department of Commerce, Handbook of mathematical functions, National
Bureau of Standards Applied Mathematical Series 55. Washington DC, US
Government Printing Office, 1964.
3. The RAND Corporation, A million random digits with 100 000 normal
deviates. Glencoe III., The Free Press, 1955.
4. Peterson W. W. Error correcting codes. New York, MIT Press and Wiley,
1961.
5. Elias P. Error—free coding. — «IRE Transactions on Information Theory»,
1954, v. IT-4, p. 29—37.
6.3.4
1. Harmuth H. Kodieren mit orthogonalen Functioned II. Kombinations-Alpha-
bete und Minimum-Energie-Alphabete. — «Archiv elek. Ubertragung», 1963,
Bd. 17, S. 508—518.
2. Kasack U. Korrelationsempfang von Buchstaben in binarer bzw. ternarer
Darstellung bei Bandbegrenzungen und gauBschem Rauschen. — «Archiv elek.
Ubertragung», 1968, Bd. 22, S. 487-493.
Дополнительная литература ко второму изданию
1. Andrews Н. С., Caspari К- L. A generalized technique for spectral
analysis. — «IEEE Trans, on Computers», 1970, v. C-19, p. 16—25.
2. Andrews HI. C., Kane J. Kronecker matrices, computer implementation and
generalized spectra. J. Association for Computing Machinery, in print (scheduled
for April 1970).
3. A1 e x a n d r i d i s N. A. Hadamard transform in template matching pattern
recognition. Proc. 3rd Hawaii Int. Conf, on System Science, 1970, p. 127.
4. Carl J. W. Generalized harmonic analysis for pattern recognition: A biologi-
cally derived model. Master's Thesis, Department of Electrical Engineering.
Air Force Institute of Technology, Dayton, Ohio, 1969.
5. Decker J. A., Harmit M. Experimental operation of a Hadamard spectro-
meter. Applied Optics, 1969, v. 8, p. 2552—2554.
6. F i 1 i p о w s k у R. F. Multiorthogonal data transmission systems. Digest 1967
IEEE Int. Conf, on Communications, Minneapolis, p. 36.
7. Franc fort E. Evaluation and optimization of performance criteria in linear
systems containing an uncertain parameter. Master's Thesis, Department of
Electrical engineering, Polytechnic Institute of Brooklyn, 1968.
8. Gibbs J. E., Gebbie G. A. Application of Walsh functions to transform
spectroscopy. — «Nature», 1969, v. 224, p. 1012—1013.
9. Gibbs J. E., Millard M. J. Walsh functions as solutions of a logical
differential equation, DES Report N 1, t!969; Some methods of solution of
linear ordinary logical differential equations, DES Report N 2, 1969; Some
properties of functions on the non—negative integers less than 2n, DES
Report N 3, 1969 National physical Laboratory, Division of Electrical Science,
Teddington, Middlesex, England.
10. Golomb S. W., Baumert L. D. The search for Hadamard matrices.—
«Amer. Math Monthly», 1963, v. 70(2), p. 12—-17.
11. Huggins W. H. Representation and analysis of signals, part 1: The use
of orthogonalized exponentials, Technical Report AD 208133, 1958.
12. Ito T. Note on a class of statistical recognition functions. — «IEEE Trans,
on Computers», 1969, v. C-18, p. 76—79.
13. Kaczmarz S., Steinhaus Hl Theorie der Orthogonalreihen. New York,
Chelsea Publ. Co., 195h, (originally published Warszawa-Lwow, Monografje
Matematyczne, VI, 1935).
14. Kowalczyk E. Some problems of applying orthogonal functions in tele-
communications (in Polish). Rozprawy Elektrotechniczne, 1966, v. 12, p. 469—
15. L a Barre J. B. K- A transform technique for linear, time-varying, discrete-
time systems. PhD Thesis, Department of Electrical Engineering, U of Michigan,
Ann Arbor, 1969.
16. Meltzer B., Searle N. H., Brown R. Numerical specification of biological
form. Nature, 1967, v. 216, p. 32—36.
17. N a m b i a г К. K. A note on the Walsh functions. — «IEEE Trans, on Elec-
tronic Computers», 1964, EC-13, p. 631—632.
18. Pichler F. Walsh-Fourier Synthese optimaler Filter. — «Archiv der elek.
Ubertragung», in print.
19. Schreiber H. H. Bandwidth requirements for Walsh functions. IEEE Trans,
on Information Theory, in print.
20. S e a r 1 e N. H. Shape analysis by use of Walsh functions. Proc. 5th Int.
Machine Intelligence Workshop. Edinburgh, Edinburgh University Press, 1969.
Й1. Shaw L., Ch a I on P. An expansion for evaluating sensitivity to a random
parameter. Automatica, 1969, v. 5, p. 265—273.
263
22. Siemens К., Kit al R. Digital Walsh—Fourier analysis of periodic wave-
forms. — «IEEE Trans, on Instrumentation and Measurement», I960, v. IM-18,
December.
23. S t a n a t D. F. Unsupervised learning of mixtures of probability functions.
In Pattern Recognition, L. N. Kanal ed. Washington D. C., Thompson Book
Co., 1968.
24. Szok W. G. Waveform characterization in terms of Walsch functions. Masters
Thesis, Department of Electrical Engineering, Syracuse University, .1968.
25. Так i Y., Ha tori M. PCM Communication system using Hadamard trans-
formation. — «Electronics and Communications in Japan», d9Q6, v. 49(11),
p. 247-4257.
26. W a t a r i C. On decomposition of Walsh-Fourier series; Multipliers for Walsh-
Fourier series; Mean convergence of Walsh-Fourier series; Best approximation
by Walsh polynomials. — «Tdhoku Math. J.», 1965, v. 17, p. 76^—86; 1964,
v. 16, p. 239—^251; 4964, v. 16, p. 133—^138; 1963, v. 15, p. 1—5.
27. Wong E., Eisenberg E. Iterative synthesis of threshold functions.—
<J. Math. Analysis and Applications», 1965, v. 11, p. 226—235.
28. Y a n о S. On Walsh—(Fourier series. — «Tdhoku Math. J.», 1901», v. 3(2),
D. 223—242.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Автокорреляционная функция 178
Активная антенна 142
Алфавитный биортогональный 61
— блочный 228
г— телеграфный 55
— трансортогональный 61
Белый нормальный шум 180
Борелевское множество 152
Верхняя боковая 90
Взаимокорреляционная функция 179
Волны Уолша 139
Генератор функций Уолша 66
Группа двоичная 25
— топологическая 23
Двоичный символ 58
Детектор синусоидальных и косину-
соидальных импульсов 69
Диполь Герца 133
Дискретизация 63
Зона ближняя 135
— волновая ’135
Импульс 9
Импульсные помехи 224
Инвариантность обобщенного преоб-
разования Фурье 34
— ортогонального преобразования
Фурье 14
Интегратор 69
Ковариация 175
Кодирование 150
Комбинационные коды 238
Компандеры 193
Коррекция временного рассогласова-
ния 122
Корреляционная функция периодичес-
ких функций Уолша 128
Корреляция 55, 175
Коэффициент корреляции 176
Линейный оператор 49
Матрица Адамара 20
—< задержки 80
— ортогональная 232
— перекрестных искажений 80
Метод временного разнесения 196
— пространственного разнесения
196
— Сарага 117
— сдвига фаз 117
— Уивера 118
— частотного разнесения 196
Многоканальная система 95
Множество 152
Модуляция амплитудная 89
— квадратурная 95
— кодовая 133
— по временной базе 129
— по временному положению 131
— с частично подавленной боковой
121
Моменты 158
Неравенство Бесселя 13
Нижняя боковая 90
Нормализованная полоса пропускания
84
Одномерная случайная величина 151
Однополосная модуляция 95, ИЗ
Перемножитель 67
Плотность вероятности случайной ве-
личины 155
Полиномы Бернулли 11
— Лежандра 12
Представление сигналов с помощью
векторов 56
— коэффициентов 56
— функций 56
Преобразование Лапласа обобщенное
45
— Пихлера 23
— Уолша—Фурье 23
— Уолша—Фурье быстрое 42
— Уолша—Фурье быстрое обрат-
ное 43
— Файна 23
— Фурье 14
— Фурье обобщенное 31
— Хаора—Фурье 42
Пропускная способность канала свя-
зи 207
Разделение сигналов временное 56
— ортогональное 56
— частотное 56
Разностное уравнение функций Уол-
ша 20
Распределение Бернулли 156
265
Расстояние Хэмминга 228
Система функций замкнутая 14
— несчетная 25
— полная 13
— счетная 25
— Уолша 10
— синусоидальных и косинусои-
дальных 9
Скорость передачи 202
Сложение по модулю два 21
Согласованный фильтр 191
Статистическая независимость случай-
ных величин 154
Супергруппа 104
Телеграфное уравнение 75
Уплотнение временное 56
— ортогональное 56
— частотное 56
Уравнение Максвелла 134
Условная вероятность 153
Фильтр 47
— высших частостей 87
— нижних частостей 80
— частотный заградительный 87
— полосовой 82
— цифровой 87
— широкополосный 86
Формула Шеннона 213
Функции линейно зависимые 8
— линейно независимые 8
— нечетные 15
— ограниченные во времени и по
частости 52
— ортогональные 8
— параболического цилиндра 19
— Радемахера 23
— Уолша 19
Функция Дирака 50
— множества 152
— распределения случайной вели-
чины 154
Частостный спектр 52, 54
Частость 46
Частота обобщения 34, 46
ОГЛАВЛЕНИЕ
Предисловие к русскому переводу...................................... 3
Предисловие автора................................................... 4
Введение ............................................................ 5
1. Математические основы передачи сигналов ......................... 8
1.1. Ортогональные функции........................................ 8
1.2. Преобразование Фурье и его обобщение.........................25
1.3. Обобщенная частота...........................................43
2, Непосредственнная передача сигналов............................ . 55
2J. Ортогональное разделение как обобщение временного и частотного
разделений....................................................55
2.2. Характеристика каналов связи.................................74
2.3. Частотные фильтры, основанные на функциях Уолша .... 80
3. Передача сигнала на несущей......................................89
3.1. Амплитудная модуляция (AM)...................................89
3.2. Модуляция по временной базе, модуляция по временному положе-
нию и кодовая модуляция..........................................129
3.3. Несинусоидальные электромагнитные волны.....................134
4. Случайные величины...............................................150
4.1. Одиночные величины..........................................150
4.2. Системы величин.............................................160
4.3. Статистическая зависимость................................. 175
5. Применение ортогональных функций в статистических задачах . . 180
5.1. Разложение стохастических функций в ряд...................180
5.2. Аддитивные помехи...........................................185
5.3. Мультипликативные помехи....................................195
6. Синтез сигнала для повышения надежности систем связи .... 202
6.1. Пропускная способность канала...............................202
6.2. Вероятность ошибки..........................................216
6.3. Кодирование.................................................227
Список литературы...................................................251
Дополнительная литература ко второму изданию.......................263
Предметный указатель.............................................265
Хеннинг Ф. Хармут
ПЕРЕДАЧА ИНФОРМАЦИИ ОРТОГОНАЛЬНЫМИ ФУНКЦИЯМИ
Редактор Т. Б. Полиектова
Художник И. А. Дутов
Техн, редактор К. Г. Маркой
Корректор В. В. Суркова
Сдано в набор 27/Х1 1974 г. Подп. в печ. 5/III 1975 г.
Формат 60x90/ie Бумага тип. № 2 17,0 уел. печ. л. 17,81 уч.-нзд. л.
Тираж 4800 экз. Изд. № 16093 Зак. № 322 Цена 1 руб. 60 коп.
Издательство «Связь». Москва 101000, Чистопрудный бульвар, д. 2
Типография издательства «Связь» Госкомиздата СССР
Москва 101000, ул. Кирова, д. 40
В издательстве «Связь»
в ближайшее время выходят книги:
Смирнов В. А. Приближенные методы расчета
помехоустойчивости и искажении в системах переда-
чи информации.
Описываются приближенные методы расчета поме-
хоустойчивости и искажений в системах связи, поз-
воляющие значительно упростить расчеты и обеспе-
чить достаточную точность. Могут быть оценены шумы
на выходе приемников при любых видах модуляции
и пороговые значения отношения сигнал/шум на вхо-
де приемников.
Книга может быть полезна научным работникам,
инженерам и студентам радиотехнических факуль-
тетов.
Стиффлер Д. Д. Теория синхронной связи (Stiffler J. J.
Theory of Synchronous communications) Нью-Джерси,
1971, пер. с англ.
Книга Стиффлера является пока единственной в
мировой литературе монографией, в которой система-
тизирована и ясно изложена современная теория син-
хронизации систем связи.
Теория синхронизации излагается на основе тео-
рии решений. Рассматривается синхронизация с по-
мощью отдельного канала, а также непосредственно
по последовательности сигналов, несущих информа-
цию.
Книга рассчитана на научных работников, инже-
неров, аспирантов и студентов старших курсов, специ-
ализирующихся в области передачи информации, вы-
числительной техники и кибернетики.
269