/















































Автор: Быховский М.А.
Теги: электротехника радиолокация массовая радиобиблиотека
ISBN: 978-5-9912-0691-4
Год: 2018
Текст
ЗАРОЖДЕНИЕ И РАЗВИТИЕ РАДИОЛОКАЦИОННОЙ ТЕХНИКИ
МАССОВАЯ
РАДИОБИБЛИОТЕКА ЛЕТ
Мрб
М. А. БЫКОВСКИЙ
ЭЙРОМДЕНПЕ П РАЗВИТИЕ
РЙЙПОЙОКЙЦПОННОН
ТЕННПКП
Москва
Горячая линия - Телеком
2018
УДК 621.396.96:621.37/39(091)
ББК 32.95
Б95
Быховский М. А.
Б95 Зарождение и развитие радиолокационной техники. -
М.: Горячая линия - Телеком, 2018. - 194 с: ил. - (Массовая
радиобиблиотека; Вып. 1287).
ISBN 978-5-9912-0691-4.
Книга состоит из двух частей и посвящена истории развития ра-
диолокационной техники в нашей стране, а также в Великобритании,
США и Германии. В первой части рассказывается о первых идеях
радиолокации, о важнейших изобретениях в этой области, о радио-
локационных станциях, созданных в XX веке. Отмечаются многочис-
ленные применения радиолокации для решения насущных задач, та-
ких, например, как управления воздушным движением, исследова-
ний поверхности Земли, исследовании планет солнечной системы
и т.п. Одна из глав книги посвящена развитию теоретических основ
радиолокации — важного раздела теории связи. В разделах этой части
книги указаны ученые и инженеры, с именами которых связаны те
или иные достижения в области радиолокации. Вторая часть книги
содержит 43 кратких очерка деятельности специалистов в нашей
стране и за рубежом, сделавших в XX столетии значительный вклад
в создание радиолокационных систем.
Для широкого круга читателей.
ББК 32.95
Адрес издательства в Интернет WWW.TECHBOOK.RLI
Научно-популярное издание
Быховский Марк Аронович
Зарождение и развитие радиолокационной техники
Массовая радиобиблиотека. Выпуск 1287
Редактор И. А. Етисеев
Компьютерная верстка И. А. Елисеев
Обложка художника В. Г. Ситникова
Печать цифровая. Подписано в печать 12 09.2017. Формат 60x88/16. Уч. изд. л. 12,13.
Тираж 1000 экз. (2-й завод 50 экз.) Изд. №170691
ООО «Научно-техническое издательство «Горячая линия — Телеком»
ISBN 978-5-9912-0691-4 © М. А. Быховский, 2018
© Издательство «Горячая линия — Телеком», 2018
Сокращения
Русские аббревиатуры
АФАР — активная фазированная антенная решетка
ВВС — Военно-воздушные силы
ВМФ — Военно-морской флот
ВНЗ — возвратно-наклонное зондирование
ВНОС — воздушное наблюдение, оповещение и связь
ГАУ — Главное артиллерийское управление
ГКО — Государственный комитет обороны
ДН — диаграмма направленности антенн
ЗГРЛС — загоризонтные РЛС
И КО — индикатор кругового обзора
ККП — контроль космического пространства
КрА — Красная армия
ЛА — летательный аппарат
ЛЧМ — линейная частотная модуляция
ЛФТИ — Ленинградский физико-технический институт
ЛЭФИ — Ленинградский электрофизический институт
МБР — межконтинентальная баллистическая ракета
МРЛ — метеорологические радиолокаторы
МТИ — Массачусетский технологический институт
НИИ — научно-исследовательский институт
НИИДАР — НИИ дальней радиосвязи
НИИИС КрА — Научно-исследовательский и испытательный
институт связи Красной Армии
НИ ИР — Научно-исследовательский институт радио
ПВО — противовоздушная оборона
ПЛ — подводная лодка
ПРН — предупреждение о ракетном нападении
ПРО — противоракетная оборона
РЛС — радиолокационная станция
РСА — радиолокаторы с антеннами с синтезированной апер-
турой
РТИ — Радиотехнический институт
4
Сокращения
РУС — радиоулавливатель самолетов
СВЧ — сверхвысокие частоты
СДЦ — селекция движущихся целей
СОН — станция орудийной наводки
СССР — Союз Советских Социалистических Республик
США — Соединенные Штаты Америки
УВД — управление воздушным движением
УПВО — управление ПВО
ФАР — фазированная антенная решетка
ЧМ — частотная модуляция
ШПС — широкополосные сигналы
ЭПР — эффективная поверхность рассеяния
Английские аббревиатуры
Bell Labs — Bell Laboratories (Белловская лаборатория)
В MEWS — Ballistic Missile Early Warning System
CH — Chain Home
MADRE —Magnetic-Drum Radar Equipment
MIMO — Multiple Input Multiple Output
MUSIC — Multiple Storage, Integration, and Correlation
PATRIOT — Phased Array Tracking Radar to Intercept On Target
Введение
Из всех предыдущих веков XX век по количеству достижений
в науке и технике оказался самым продуктивным. Это прояви-
лось и в радиотехнике, многие направления которой в XX веке
получили бурное развитие. С момента создания А.С. Поповым
и Г. Маркони в 1895 г. первых беспроводных систем (радиоси-
стем), предназначенных для передачи телеграфных сигналов,
появлялись все новые и новые направления ее применения.
К началу XX века относятся первые попытки передачи с по-
мощью радио звуковых сигналов, приведшие в начале 1920-х
годов к созданию и массовому распространению систем радио-
вещания. После изобретения электронного телевидения в начале
1930-х годов началось создание систем телевизионного веща-
ния. Техника передачи по радиоканалам данных, речи, а также
сигналов звукового и телевизионного вещания по наземным
линиям связи, а начиная с 1960-х годов, и по спутниковым, по-
стоянно развивалась. Это развитие продолжается и в настоящее
время. Упомянутые системы относятся к системам передачи и
распространения информации с помощью радио. Они оказали
исключительно большое влияние на развитие нашей цивили-
зации. Однако значение современной радиотехники для жизни
человеческого общества не ограничивается только радиовеща-
нием и связью.
В начале XX века были выдвинуты фундаментальные идеи
«радиовидения» — создания радиосистем, с помощью которых
можно было бы днем и ночью, в условиях тумана и облачности
определять в пространстве направление на различные объекты
и измерять расстояние от точки наблюдения до них. На основе
этих идей были созданы радиолокационные станции (РЛС) и
радионавигационные системы (РНС), нашедшие широчайшее
применение для решения разнообразных задач, как военного,
так и мирного характера.
Необходимость повысить точность определения координат
объектов потребовала освоения радиоволн дециметрового,
6
Введение
а затем сантиметрового и миллиметрового диапазонов частот,
создания мощных электронных и полупроводниковых приборов
для передатчиков таких систем, сложных управляемых антенн,
приемных устройств с высокой чувствительностью и т.п.
Создание радиолокационных систем явилось мощным ка-
тализатором развития радиотехники в целом, электроники и
схемотехники, освоения новых более высоких диапазонов ча-
стот, развития радиопромышленности. Развитие теоретических
основ радиолокации привело к созданию таких новых научных
направлений в теории связи как:
• статистическая радиотехника, в которой разработаны методы
решения задач анализа прохождения сигналов и помех через
нелинейные блоки, входящие в состав сложных приемных
устройств, предназначенных для приема радиолокационных
сигналов;
• теория потенциальной помехоустойчивости, позволяющая
синтезировать оптимальные алгоритмы обработки сигналов,
обеспечивающие высокую точность оценки параметров при-
нимаемых сигналов при минимальном отношении сигнал/
шум на входе приемника;
• теория сигналов - методов формирования сигналов, дающих
возможность создавать радиолокационные системы с высо-
кой точностью измерения дальности, азимута и углов места
лоцируемых объектов.
Исследования и разработки в области радиолокации, про-
водившиеся в годы Второй мировой войны, привели после ее
окончания к колоссальному прогрессу в технике телекоммуни-
каций и были использованы также при разработке новых систем
подвижной, фиксированной и спутниковой связи.
В данной книге представлены основные изобретения и
идеи в области радиолокации с пояснением принципов работы
устройств, предложенных для решения тех технических задач,
которые возникают в данной области. Подобные задачи возни-
кают и в других областях телекоммуникаций и идеи, выдвинутые
учеными и исследователями, работавшими над совершенствова-
нием радиолокационных систем, получали развитие и в других
областях телекоммуникаций.
Введение
7
Первая глава книги посвящена предыстории радиолокации.
Впервые идеи об использовании радиоволн для определения в
пространстве координат удаленных объектов выдвигали в на-
чале XX века Гульемо Маркони и Никола Тесла, изобретения
которых оказали огромное влияние на первых этапах развития
радиотехники. В 1904 г. было оформлено и испытано первое
изобретение в области радиолокации, сделанное немецким ис-
следователем Кристианом Хюльсмайером.
Во второй главе рассказывается об основных направлени-
ях технических разработок и теоретических работ в области
радиолокационных систем как военного, так и гражданского
назначения:
• доплеровские радиолокационные системы;
• импульсные радиолокационные системы, включающие
такие важные элементы, как дуплексер, позволяющий при
передаче сигналов и их приеме использовать одну и ту же
антенну, и индикатор кругового обзора, позволяющий на
экране электронно-лучевой трубки наблюдать за положением
лоцируемого объекта в пространстве;
• радиолокационные системы с непрерывными сигналами,
в том числе широкополосными сигналами, в частности,
с сигналами, модулированными по частоте;
• многочастотные радиолокационные системы;
• системы для определения «свой-чужой» при локации объ-
ектов;
• системы радиолокационного сопровождения целей с помо-
щью антенной техники,
• в том числе моноимпульсные радиолокационные системы;
• системы селекции движущихся целей, позволяющих обе-
спечить надежное функционирование радиолокационных
систем в сложных условиях высокого уровня помех;
• радиолокационные системы бокового обзора, принципы
работы которых широко используются не только в радио-
локации, но и в спутниковых системах дистанционного
зондирования Земли (ДЗЗ);
• фазированные антенные решетки (ФАР), позволяющие
одновременно осуществлять локацию более сотни объектов;
8
Введение
ФАР находят широкое применение в современных системах
подвижной связи, в системах связи, работающих в условиях
многолучевости и т.п.;
• многопозиционные радиолокационные системы, в том числе
типа MIMO (Multiple Input Multiple Output - множественный
вход множественный выход), идея которых применительно
к системам связи, предназначенным для передачи и приема
сообщений в многолучевых каналах связи, позволяет суще-
ственно повысить скорость передачи.
В этой же главе отмечаются те изобретатели и исследователи,
которые впервые выдвинули соответствующие идеи и претво-
рили их в жизнь.
В третьей главе дан краткий обзор развития РЛС в XX столе-
тии, возможности которых наблюдать лоцируемые объекты и из-
мерять их пространственные параметры возросли колоссально;
если дальность действия первых систем составлял десятки км, то
в конце XX века были созданы РЛС, позволяющие лоцировать
объекты, расположенные за многие тысяч километров, а созда-
ние планетарных РЛС позволило лоцировать и делать снимки
планет солнечной системы, расположенных за миллионы ки-
лометров от Земли.
В этой же главе отмечаются важнейшие гражданские при-
менения РЛС:
• для проведения ионосферных исследований и метеолокации;
• управления воздушным движением;
• зондирования поверхности Земли;
• исследований планет солнечной системы;
• управления транспортными средствами в автопилотах.
Быстроразвивающееся в последние годы применение РЛС в
автопилотах, устанавливаемых в автомобилях, скоро сделает их
применение массовым, доступным многим людям.
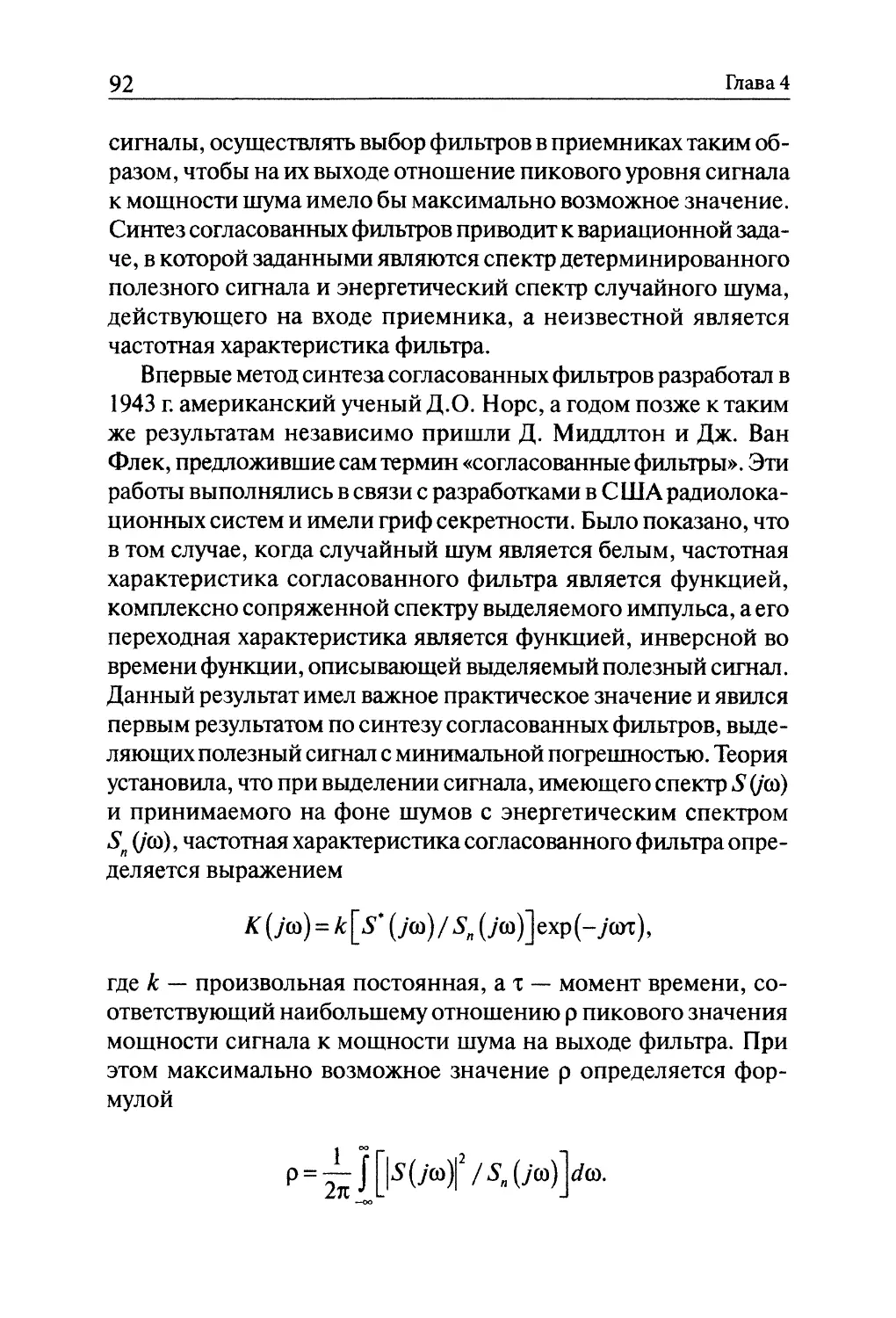
Четвертая глава посвящена краткому изложению теоретиче-
ских основ радиолокации, созданных выдающимися учеными
XX века, такими как, В.А. Котельников, Н. Винер, С.О. Райс,
Д. Миддлтон и др.
Остальные пять глав содержат краткие очерки деятельности
сорока трех изобретателей, ученых и инженеров, сыгравших
ключевую роль в создании и развитии РЛС.
Введение
9
Отметим, что различным аспектам истории радиолокации
посвящено множество публикаций, в частности, [1, 2). Данная
книга в значительной степени является переработкой книги [3|,
в которой достаточно подробно изложена история создания и
развития радиолокации, как в нашей стране, так и за рубежом.
В [3] дано описание технических характеристик многих радио-
локационных систем, разработанных в XX столетии для разных
применений. В ней также приведена обширная библиография
работ, посвященных истории радиолокации, ссылки на которые
в данной книге не повторяются. В [4] можно найти более обшир-
ные очерки о жизни и деятельности ученых, работы которых
сыграли существенную роль в технических основах радиолока-
ции, а также о развитии важнейших ее научных направлений.
Отдельно следует отметить книгу [5], которая представляет
собой наиболее обстоятельную теоретическую книгу, посвя-
щенную обработке сигналов в радиолокационных системах.
Одним из ее соавторов является В.Г. Репин — крупный ученый
и специалист, краткий очерк деятельности которого приведен
в главе 8 этой книги.
При создании данной книги использовались, в основном,
следующие источники:
1. Фомичев К.И. История радиолокации / Современная радио-
электроника (1950—1980-е годы) / Под ред. В.П. Борисова и
В.М. Родионова. М.: Наука, 1993.
2. История отечественной радиолокации / Сост. С. Муравьев.
М.: Столичная энциклопедия, 2015.
3. Быховский М.А. Развитие телекоммуникаций. На пути к
информационному обществу. Развитие радиолокационных
систем. М.: Горячая линия — Телеком, 2015.
4. Быховский М.А. Пионеры информационного века. История
развития теории связи. М.: Техносфера, 2006.
5. Бакут П.А., Большаков И.А., Герасимов Б.М., Курикша А.А.,
Репин В.Г., Тартаковский Г.П., Широков В.В. Вопросы стати-
стической теории радиолокации / Под ред. Г. П. Тартаковско-
го. Т. 1, 2. М.: Советское радио, 1970.
Глава 1
Предыстория развития радиолокационных систем
1.1. Первые идеи
Идея радиолокации состоит в использовании явления отра-
жения радиоволн от объектов, находящихся на определенном
расстоянии от точки приема, для определения их простран-
ственных координат. Экспериментально явление отражения
радиоволн было обнаружено в 1886-1889 гг. Генрихом Герцем
при проведении им знаменитых опытов, подтвердивших спра-
ведливость теории Джеймса Максвелла, который в 1864-1868 гг.
заложил основы классической электродинамики. Герц подтвер-
дил воззрения Максвелла, что радиоволны, как и видимый свет,
представляют собой электромагнитные колебания, д лина волны
которых существенно превосходит длину волны света. Явления
отражения радиоволн с разной длиной волны от зеркальных и
шероховатых поверхностей изучали многие физики, в частно-
сти, английский физик Джон Уильям Рэлей (1842-1919 гг.) и
выдающийся отечественный ученый Петр Николаевич Лебедев
(1866-1912 гг.).
В 1897 г. при проведении опытов по радиосвязи на Балтий-
ском море явление отражения радиоволн от корабля наблюдал
А.С. Попов. В отчете об этих опытах он писал: «...Наблюдалось
также влияние промежуточного судна. Так, во время опытов меж-
ду “Европой”и “Африкой”попадал крейсер “Лейтенант Ильин”,
и если это случалось при больших расстояниях, то взаимодействие
приборов прекращалось, пока суда не сходили с прямой линии».
В этом же отчете А.С. Попов отметил возможность применения
электромагнитных волн для пеленгации маяков: «Применение
Предыстория развития радиолокационных систем
11
источника электромагнитных волн на маяках в добавление к све-
товому или звуковому сигналам может сделать видимыми маяки
в тумане и в бурную погоду: прибор, обнаруживающий электро-
магнитную волну звонком, может предупредить о близости маяка,
а промежутки между звонками дадут возможность различать ма-
яки. Направление маяка может быть приблизительно определено,
пользуясь свойством мачт, снастей и т.п. задерживать электро-
магнитную волну, так сказать, затенять ее». Предложений по
использованию явления отражения радиоволн от объектов для
создания локационных систем А.С. Попов не высказывал.
Первым, кто публично и четко высказался о возможности
создания радиолокационных систем, был, по-видимому, знаме-
нитый изобретатель XX века Никола Тесла, сделавший десятки
крупных изобретений не только в области электроэнергетики,
но и в области радиотехники. В июне 1900 г. в интервью, опубли-
кованном в популярном американском ежемесячном журнале
«Century Illustrated Magazine», Тесла указал на возможность
«...использовать электромагнитные волны для излучения переда-
ющей станцией сигнала в любую точку земного шара, с помощью
которого можно будет определить позицию или курс движущегося
объекта, такого, например, как корабль, расстояние до него или
его скорость». В 1917 г., в конце Первой мировой войны, он
предложил применять радиоволны для обнаружения подводных
лодок, находящихся под водой, наблюдая отраженный сигнал на
флуоресцентном экране. Хотя техника того времени позволяла
обнаруживать подводные лодки, находящиеся на поверхности,
но обнаружить их под водой из-за сильного поглощения радио-
волн в воде было невозможно.
В марте 1899 г. Гульельмо Маркони в лекции, опубликованной
в июне 1922 г. в журнале Института радиоинженеров (Institute
of Radio Engineers), в Институте инженеров-электриков описал
эксперименте радиомаяком, который проводился им на остро-
вах в Южной Атлантике. Вспоминая об этом эксперименте, он
сказал: «...эту систему можно было бы использовать для того,
чтобы, облучая строения или корабли, обеспечивать передвижения
судов в условиях тумана, избегая приближения к опасным местам
на побережье... Сегодня возможно создать и установить на кора-
14
Глава 1
газета поместила подробное описание опытов, заканчивавшееся
словами: «Изобретение, улавливающее волны, отраженные от
металла, будет, вероятно, иметь большое значение в развитии
военной техники». В самой Германии новый прибор также не
нашел себе применения. Гросс-адмирал Тирпиц отозвался о нем
так: «Оно не представляет никакого интереса. Мои люди имеют
гораздо лучшие идеи!», имея в виду, что пароходные гудки для
предотвращения столкновений в тумане не менее эффективны,
нежели предложенное сложное устройство, и обходятся значи-
тельно дешевле.
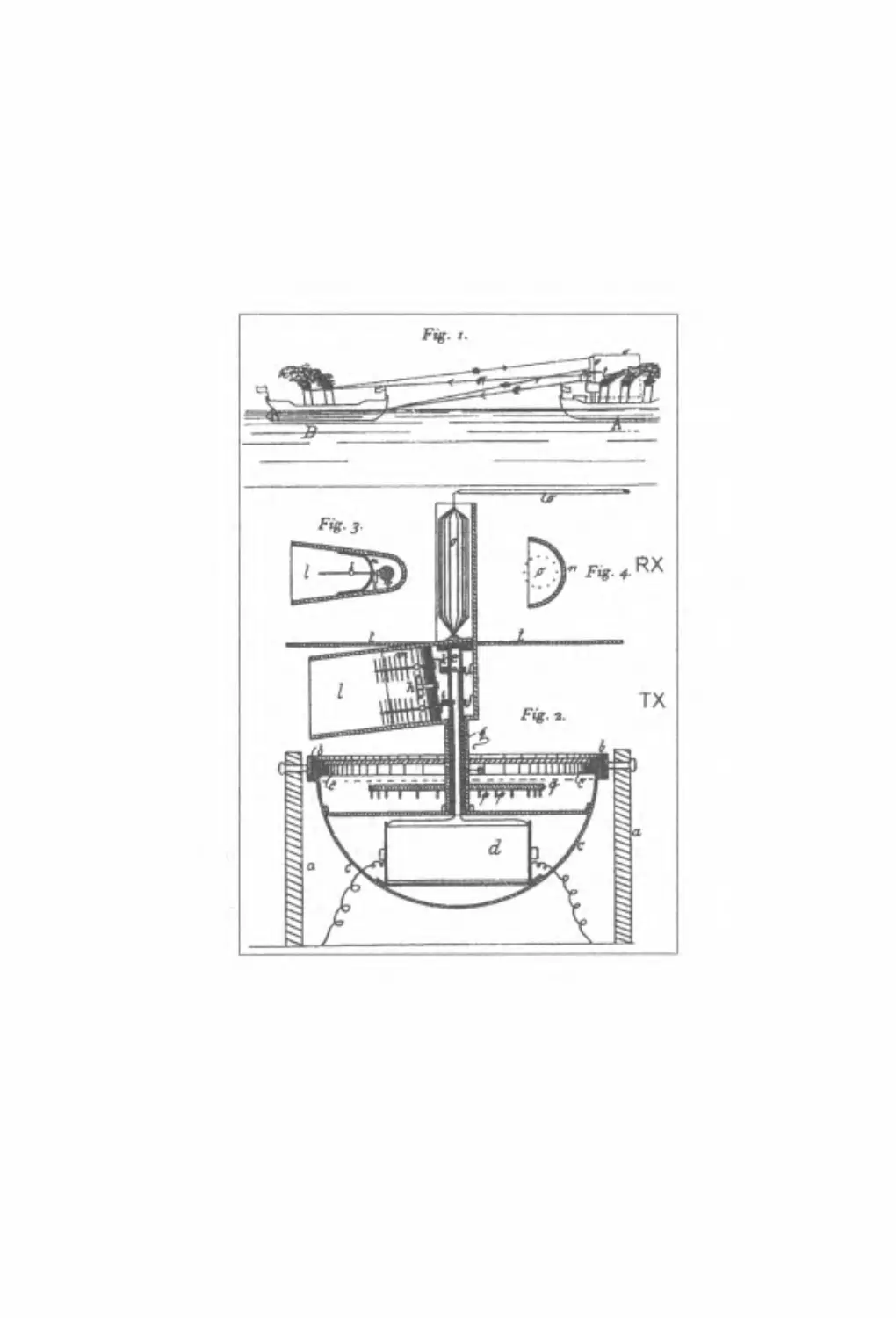
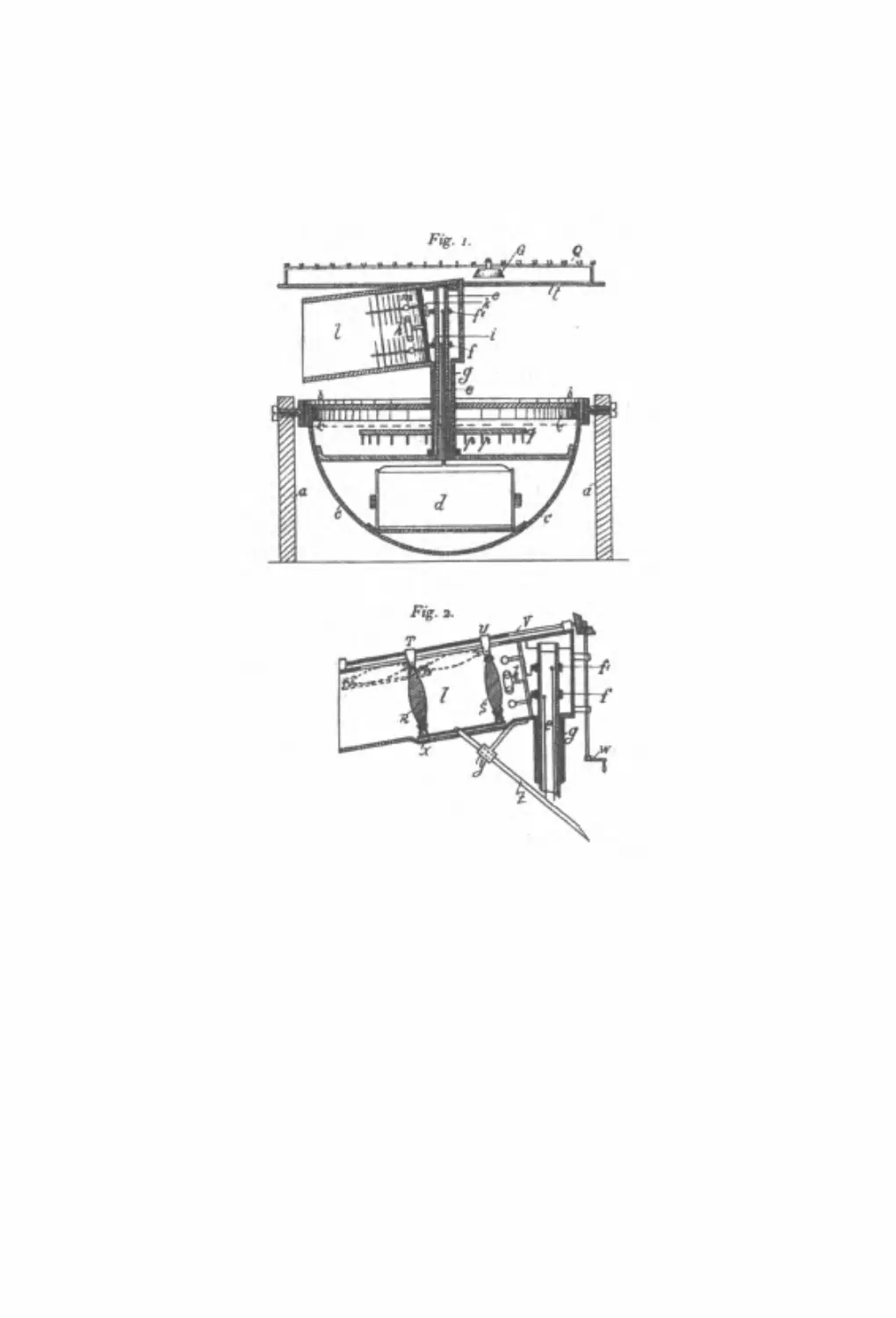
В конце 1904 г. Хюльсмайер предложил двухантенное устрой-
ство, позволявшее не только обнаруживать сигналы, отраженные
от кораблей, но и определять расстояние до них. На него он в
1905 г. получил британский патент. При всем своем несовер-
шенстве устройство Хюльсмайера содержало в себе основные
элементы современного радиолокатора: в состав аппарата вхо-
дили импульсный радиопередатчик, вращающиеся передающая
и приемная антенны направленного действия, радиоприемник
со световым или звуковым индикатором, воспринимавший от-
раженные объектами волны. На рис. 1.3 показана схема такого
устройства, взятая из патента Хюльсмайера.
Направленная антенна устройства располагалась на высоте h
и устанавливалась под углом О, при котором уровень принима-
емого сигнала был максимальным. При известных значениях h
и б расстояние D определялось по формуле D = h- tgi3.
Изобретение Хюльсмайера намного опередило свое время,
и, хотя им заинтересовались некоторые крупные морские ком-
пании, оно оказалось невостребованным. Заказы, на которые
рассчитывал Хюльсмайер, так и не поступили и разочарованный
изобретатель закрыл фирму и больше не возвращался к идее
телемобил ьскопа.
Интересно отметить, что уже после окончания Второй миро-
вой войны (в 1953 г.) во Франкфурте состоялась научная конфе-
ренция, посвященная развитию радиолокационной техники. На
эту конференцию в качестве почетных гостей были приглашены
Хюльсмайер и знаменитый разработчик радиолокационных
станций, защитивших Англию от атак германской авиации в
Предыстория развития радиолокационных систем
17
только благодаря порождаемым ею приверженцам и убежденным,
которые живут и умирают за нее». Действительно, несмотря
на неудачу Хюльсмайера внедрить свое устройство, идеи ис-
пользования радиоволн для определения координат объектов
в пространстве постепенно получали развитие. Эти идеи вы-
кристаллизовывались еще в течение нескольких десятилетий
после опытов Хюльсмайера.
Фридрих Энгельс дал четкую формулировку закону, по кото-
рому развивается научная мысль: «...медленно начинает история
свой бег от невидимой точки, вяло совершая вокруг неё свои обо-
роты; но круги её все растут, всё быстрее и живее становится
полет, наконец, она мчится подобно пылающей комете от звезды
к звезде, часто касаясь старых своих путей, часто пересекая их, и
с каждым оборотом всё больше приближается к бесконечности».
Именно по этому закону происходило и продолжает происходить
развитие радиолокации.
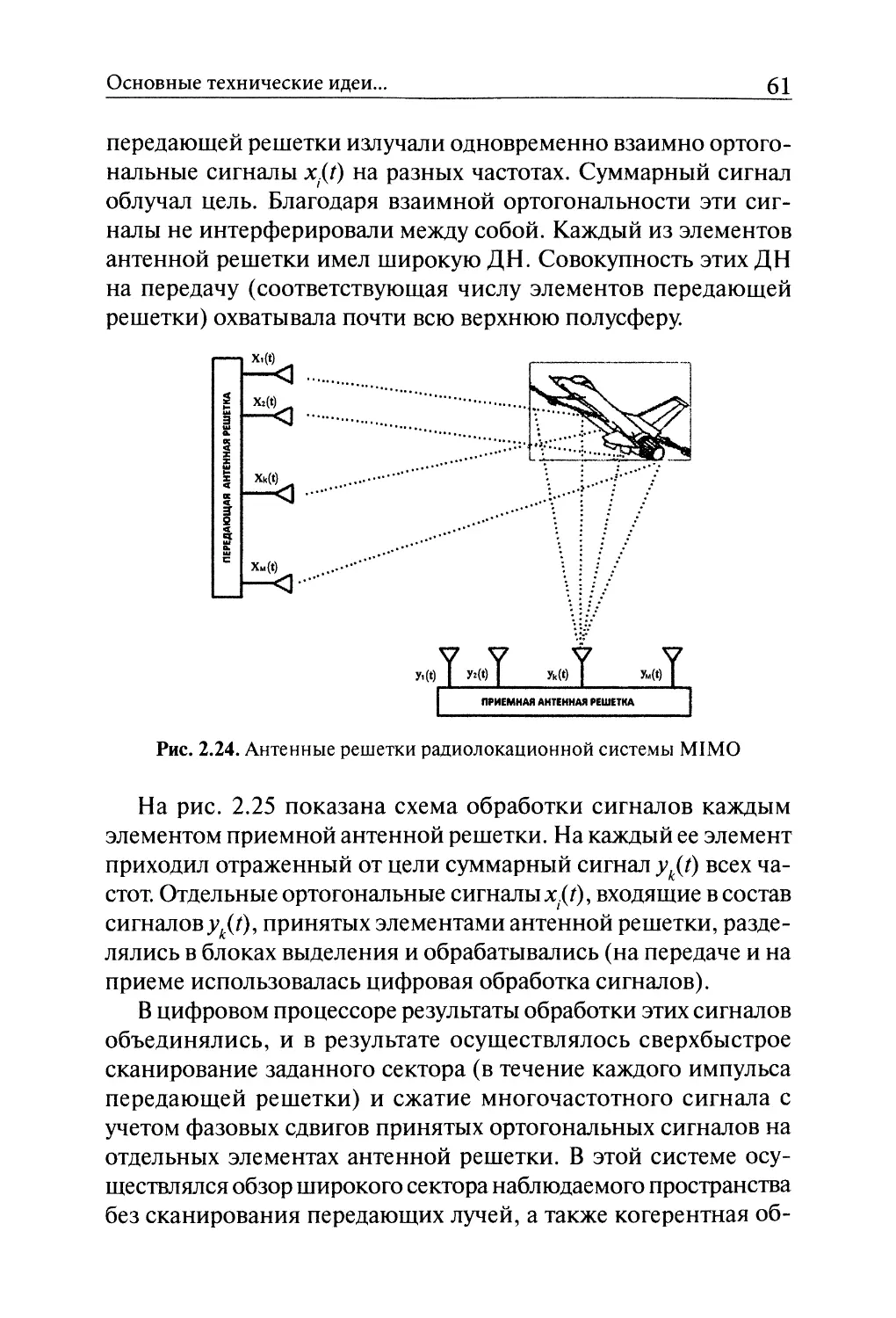
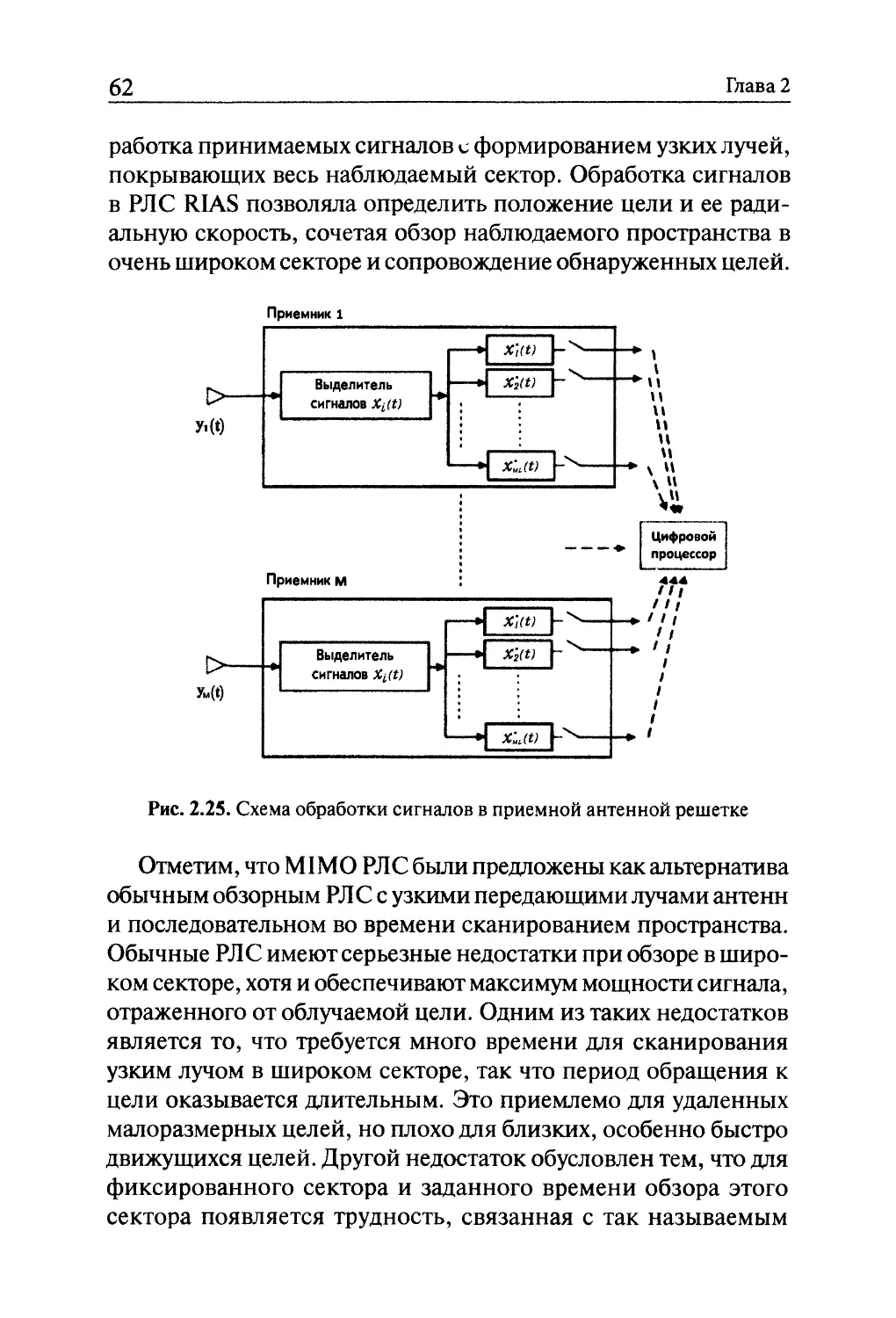
Глава 2
Основные технические идеи,
на которых основывалось развитие
радиолокационной техники
В этой главе рассказывается о развитии в XX столетии ос-
новных идей в области радиолокации с пояснением принципов
работы основных технических решений. Работы в этой обла-
сти долгие годы были строго засекречены. Поэтому ученые и
инженеры, занимавшиеся разработкой этой техники в разных
странах, нередко приходили к одним и тем же решениям неза-
висимодруг от друга и примерно в одно и то же время.
В сентябре 1922 г. два служивших в лаборатории ВМФ США
экспериментатора — Альберт Тейлор и Лео Юнг — проводили
опыты по радиосвязи на декаметровых волнах (3...30 МГц) че-
рез реку Потомак. В это время по реке прошел корабль, и связь
прервалась (такое же наблюдение, как уже отмечалось, было
сделано А.С. Поповым еще в 1897 г.). Это натолкнуло их на
мысль о применении радиоволн (метод интерференции неза-
тухающих колебаний) для обнаружения движущихся объектов
и они предложили руководству лаборатории начать работы в
этом направлении. Однако это предложение поддержки в то
время не нашло.
2.1. Создание станций для определения высоты
ионосферных слоев
Важные работы, приведшие впоследствии к созданию радио-
локационной техники, связаны с измерением высоты слоев ио-
носферы, отражающих радиоволны. Гипотезу о существовании
над Землей на определенной высоте ионосферы выдвинули еще
Основные технические идеи...
19
в самом начале XX века английский и американский ученые
Оливер Хевисайд и Артур Кеннеди. Эта гипотеза должна была
объяснить явление сверхдальнего распространения радиоволн
на тысячи километров, которое экспериментально было обна-
ружено Маркони в 1901 г. Несколько десятилетий эта гипотеза
не привлекала внимания ученых, но в 1920-х годах начались
эксперименты, направленные на определения физических па-
раметров ионосферы, в частности, определения ее высоты над
поверхностью Земли. Такая задача, по сути, родственна задаче
радиолокации — измерения расстояния между передатчиком и
объектом, отражающим радиоволны.
Первые практические применения радиоволн для измерения
расстояния до объектов (измерения высоты ионосферных сло-
ев над поверхностью Земли) были выполнены в 1925—1926 гг.
Э.В. Эпплтоном в Англии и Грегори Брейтом и Мэлром Тьювом
в США. Эпплтон использовал для этого сигналы с линейной
частотной модуляцией (ЛЧМ), а и Брейт и Тьюв — импульсные.
Их работы были опубликованы, стали известны специалистам
и оказали большое влияние на работы по созданию радиолока-
ционных систем в последующие годы.
Первым к таким исследованиям обратился английский уче-
ный Э.В. Эпплтон (исследования Эпплтоном ионосферы были
отмечены в 1947 г. Нобелевской премией). Один из использо-
ванных им в 1925 г. методов измерения высоты слоя ионосферы
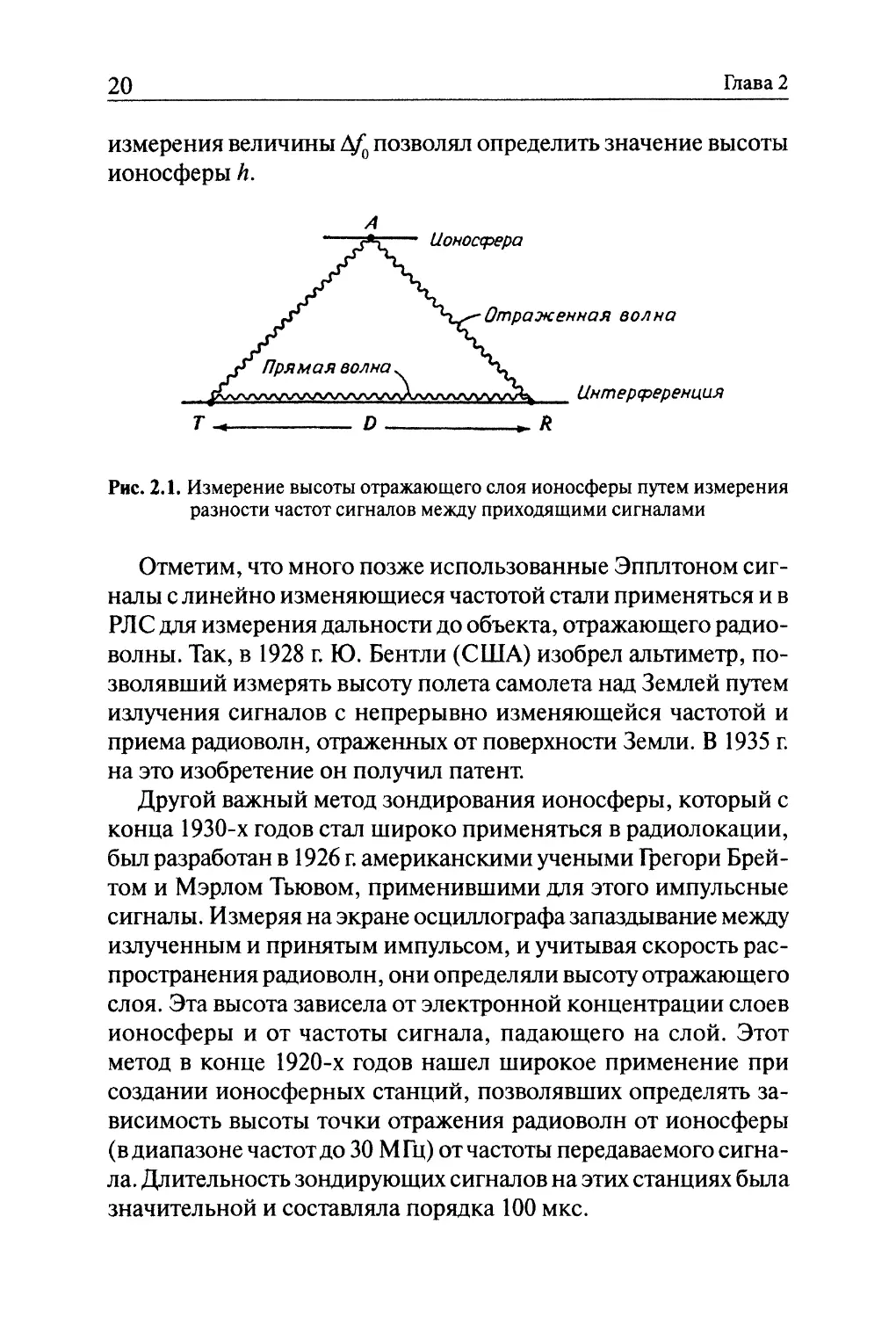
поясняется рис. 2.1. С целью измерения высоты ионосферы
передающая установка излучала зондирующий сигнал с мед-
ленно изменяющейся частотой. Этот сигнал, распространялся
как вдоль поверхности земли на известное расстояние D, так
и отражаясь от ионосферы. Измеряя в точке приема разность
частот между этими сигналами, можно было определить длину
пути распространения сигнала при его отражении от ионосфе-
ры, и из треугольника, показанного на рис. 2.1, найти высоту
ионосферного слоя. Если высота ионосферы была равна h,
а частота зондирующего сигнала изменялась со скоростью Д/7 Г,
то измеренная в точке приема разность частот принимаемых
сигналов составляла Af0 = М2Л — D)/cT (здесь с — скорость
распространения радиоволн, равная скорости света). Результат
20
Глава 2
измерения величины Vo позволял определить значение высоты
ионосферы h.
А
—------- UoHoerpepa
jT чГ' Отраженная волна
г» Прямая волна Ч,
интерференция
Т -»---------- D____________». Л
Рис. 2.1. Измерение высоты отражающего слоя ионосферы путем измерения
разности частот сигналов между приходящими сигналами
Отметим, что много позже использованные Эпплтоном сиг-
налы с линейно изменяющиеся частотой стали применяться и в
РЛС для измерения дальности до объекта, отражающего радио-
волны. Так, в 1928 г. Ю. Бентли (США) изобрел альтиметр, по-
зволявший измерять высоту полета самолета над Землей путем
излучения сигналов с непрерывно изменяющейся частотой и
приема радиоволн, отраженных от поверхности Земли. В 1935 г.
на это изобретение он получил патент.
Другой важный метод зондирования ионосферы, который с
конца 1930-х годов стал широко применяться в радиолокации,
был разработан в 1926 г. американскими учеными Грегори Брей-
том и Мэрлом Тьювом, применившими для этого импульсные
сигналы. Измеряя на экране осциллографа запаздывание между
излученным и принятым импульсом, и учитывая скорость рас-
пространения радиоволн, они определяли высоту отражающего
слоя. Эта высота зависела от электронной концентрации слоев
ионосферы и от частоты сигнала, падающего на слой. Этот
метод в конце 1920-х годов нашел широкое применение при
создании ионосферных станций, позволявших определять за-
висимость высоты точки отражения радиоволн от ионосферы
(в диапазоне частот до 30 МГц) от частоты передаваемого сигна-
ла. Длительность зондирующих сигналов на этих станциях была
значительной и составляла порядка 100 мкс.
Основные технические идеи...
21
2.2. Метод радиолокации с помощью
излучения непрерывных сигналов
Важное наблюдение, приведшее к изобретению радиолока-
торов доплеровского типа, было сделано в 1930 г. исследовате-
лем Лауренсом Хайландом, также работавшим в лаборатории
ВМФ вместе с Тейлором и Юнгом. Лауренс Хайланд, наблюдая
интерференцию прямой и отраженной от пролетавшего само-
лета радиоволн, понял, что вследствие доплеровского сдвига
частоты отраженного сигнала относительно частоты сигнала,
излучаемого передатчиком, на выходе приемника появляются
биения, дающие возможность обнаружения движущихся объ-
ектов — самолетов и морских судов. В 1930 г. им был получен
первый патент на такую РЛС.
На ранней стадии развития радиолокации исследователи
работали почти исключительно с непрерывными, а не с импульс-
ными сигналами. При этом движущиеся объекты обнаружива-
лись по доплеровскому сдвигу частоты отраженного от объекта
сигнала, приходящего на вход приемника вместе с зондирующим
сигналом, излученным передатчиком. Причиной этому было то,
что радиотехника того времени была наиболее подготовлена к
реализации именно такого метода радиолокации: уже имелись
передатчики, которые могли быть использованы для излучения
узкополосных непрерывных сигналов, а также узкополосные
приемные устройства.
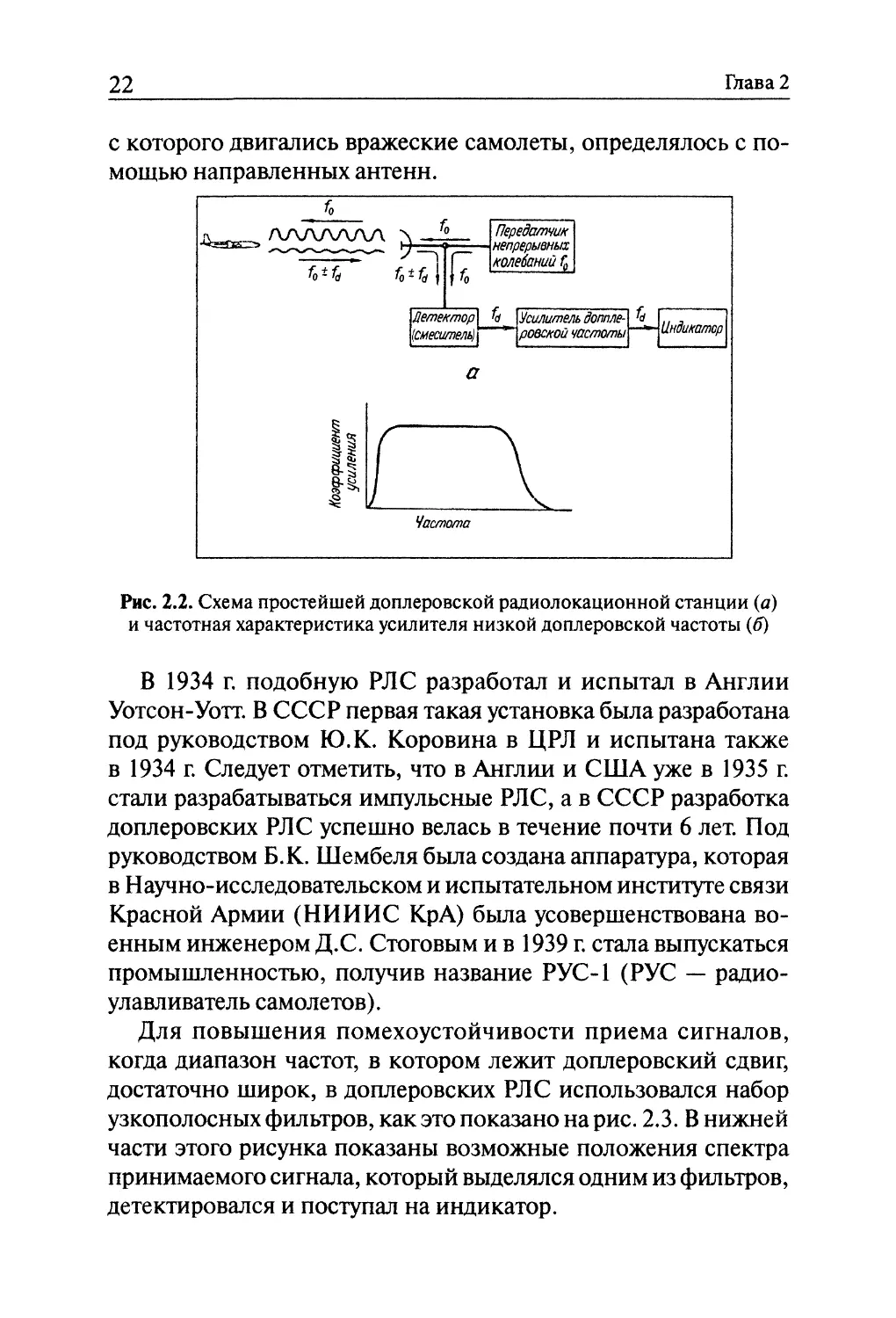
На рис. 2.2 показана схема простейшей доплеровской ра-
диолокационной станции (радиолокатора). В этом устройстве
передатчик излучал сигнал на частоте/0, а принимал сумму двух
сигналов на частотах/0 и/0 + fd, где fd — доплеровский сдвиг от-
раженного от самолета сигнала.
После детектирования в усилителе с помощью фильтра вы-
делялся сигнал с доплеровской частотой, которая при скоростях
полета самолетов в 1930-х годов (-400...600 км/ч) и использу-
емых для передачи сигналов частотах/0 (-200 МГц) составляла
до нескольких сот герц. Для индикации принимаемых сигналов
использовались головные телефоны или частотомеры, измеря-
ющие значение частоты fd принятых сигналов. Направление,
22
Глава 2
с которого двигались вражеские самолеты, определялось с по-
мощью направленных антенн.
Рис. 2.2. Схема простейшей доплеровской радиолокационной станции (а)
и частотная характеристика усилителя низкой доплеровской частоты (б)
В 1934 г. подобную РЛС разработал и испытал в Англии
Уотсон-Уотт. В СССР первая такая установка была разработана
под руководством Ю.К. Коровина в ЦРЛ и испытана также
в 1934 г. Следует отметить, что в Англии и США уже в 1935 г.
стали разрабатываться импульсные РЛС, а в СССР разработка
доплеровских РЛС успешно велась в течение почти 6 лет. Под
руководством Б. К. Шембеля была создана аппаратура, которая
в Научно-исследовательском и испытательном институте связи
Красной Армии (НИИИС КрА) была усовершенствована во-
енным инженером Д.С. Стоговым и в 1939 г. стала выпускаться
промышленностью, получив название РУС-1 (РУС — радио-
улавливатель самолетов).
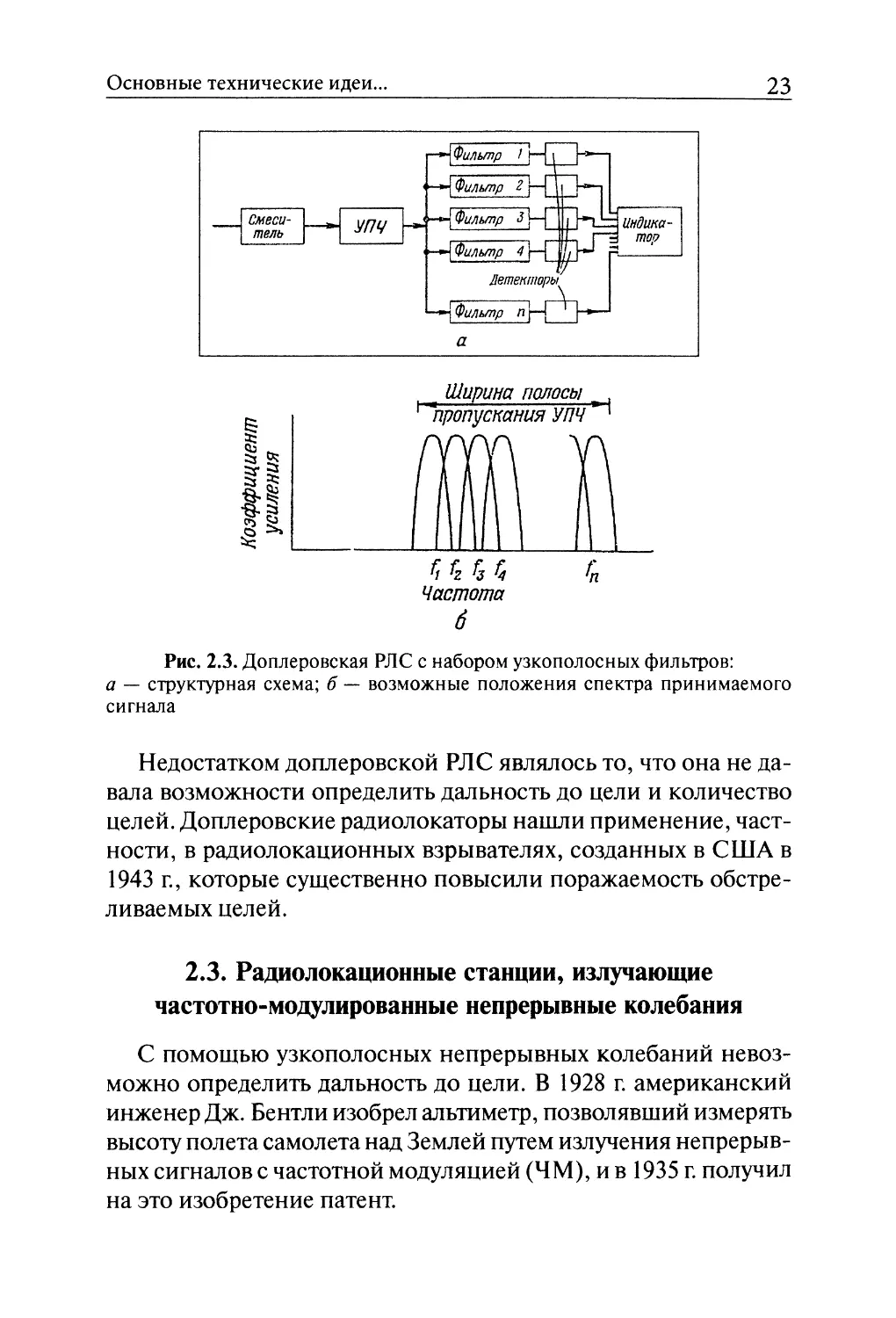
Для повышения помехоустойчивости приема сигналов,
когда диапазон частот, в котором лежит доплеровский сдвиг,
достаточно широк, в доплеровских РЛС использовался набор
узкополосных фильтров, как это показано на рис. 2.3. В нижней
части этого рисунка показаны возможные положения спектра
принимаемого сигнала, который выделялся одним из фильтров,
детектировался и поступал на индикатор.
Основные технические идеи...
23
-^Фильтр ! |—
____ Смеси-
тель
индика-
тор
• Фильтр 2
УПУ -*
| Фильтр 4 ।
Детекторы
—Ч Фильтр п [—1
а
Рис. 2.3. Доплеровская РЛС с набором узкополосных фильтров:
а — структурная схема; б — возможные положения спектра принимаемого
сигнала
Недостатком доплеровской РЛС являлось то, что она не да-
вала возможности определить дальность до цели и количество
целей. Доплеровские радиолокаторы нашли применение, част-
ности, в радиолокационных взрывателях, созданных в США в
1943 г., которые существенно повысили поражаемость обстре-
ливаемых целей.
2.3. Радиолокационные станции, излучающие
частотно-модулированные непрерывные колебания
С помощью узкополосных непрерывных колебаний невоз-
можно определить дальность до цели. В 1928 г. американский
инженер Дж. Бентли изобрел альтиметр, позволявший измерять
высоту полета самолета над Землей путем излучения непрерыв-
ных сигналов с частотной модуляцией (ЧМ), и в 1935 г. получил
на это изобретение патент.
24
Глава 2
Независимо к этой же идее измерения расстояния с помо-
щью радиоволн в 1937 г. пришел Б. К. Шембель, в лаборатории
которого была выполнена разработка РЛС «Гроза». В этой РЛС
применялись ЧМ сигналы, как с линейной, так и нелинейной
ЧМ. Испытания этой РЛС были проведены в том же году, но
не дали полностью удовлетворительных результатов, так как
используемый в передатчике магнетронный генератор имел
значительные шумы и давал колебания с большой нестабиль-
ностью частоты.
На рис. 2.4 показана схема РЛС с ЧМ сигналами и диаграмма,
поясняющая ее работу.
Передающая
антенна
Рис. 2.4. Схема РЛС с ЧМ сигналами (а) и диаграммы, поясняющие ее
работу: б — изменения относительно несущей частоты/0 в диапазоне частот
ДГ как частоты опорного сигнала ЧМ передатчика (сплошная кривая), так и
частоты принимаемого сигнала (пунктирная кривая), приходящего на вход
приемника с запаздыванием Т= 2D/c (R — расстояние от РЛС до цели,
с — скорость света); в — изменение частоты биений на выходе смесителя
в приемнике
Основные технические идеи...
25
В результате взаимодействия в смесителе этой РЛС поступаю-
щих на его вход опорного и принимаемого сигналов (изменения
частоты опорного сигнала на диаграмме показаны сплошной
линией, а принимаемого — пунктирнойУ на выходе усилителя
образуется разностная частота, которая изменяется так, как
показано на нижней части диаграммы. Значение этой частоты
зависит от дальности до цели R таким образом:
где fm — частота модулирующего пилообразного сигнала, Af—
полная девиация частоты ЧМ сигнала, с — скорость света.
При одновременном появлении в зоне наблюдения несколь-
ких объектов на разных расстояниях от РЛС на выходе смесителя
будут действовать сигналы с разными разностными частотами,
которые могут быть разделены отдельными узкополосными
фильтрами.
Радиолокационные станции с широкополосными ЧМ сигна-
лами стали применяться только с середины 1950-х годов.
2.4. Многочастотные радиолокационные станции
В 1930-1932 гг. отечественные ученые академики Л.И. Ман-
дельштам и Н.Д. Папалекси предложилирадиоинтерференцион-
ный метод определения расстояния до объекта с использованием
многочастотного зондирующего сигнала. В системах с такими
сигналами измерение расстояния сводится к измерению раз-
ности фаз между частотными составляющими этого сигнала.
С помощью данного метода ими была с прецизионной точ-
ностью измерена скорость распространения радиоволн вдоль
поверхности Земли. Исследования этих ученых послужили
основой для создания приборов для точного измерения рас-
стояний радиотехническими способами. Первые образцы таких
приборов — радиодальномеров — были разработаны в СССР
под руководством Л.И. Мандельштама, Н.Д. Папалекси и
Е.Я. Щеголева в 1935-1937 гг.
26
Глава 2
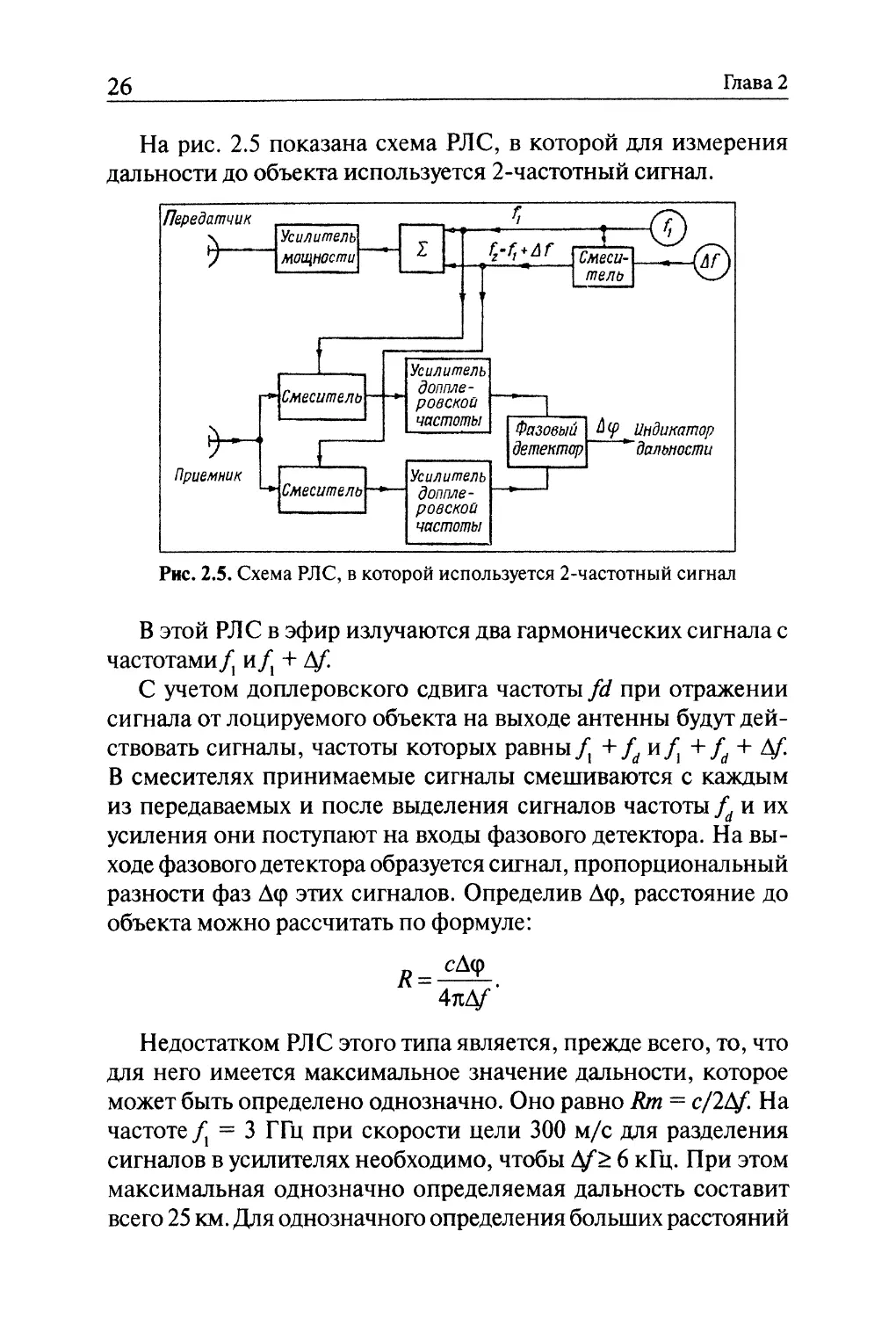
На рис. 2.5 показана схема РЛС, в которой для измерения
дальности до объекта используется 2-частотный сигнал.
Рис. 2.5. Схема РЛС, в которой используется 2-частотный сигнал
В этой РЛС в эфир излучаются два гармонических сигнала с
частотами/ и/( + ttf.
С учетом доплеровского сдвига частоты fd при отражении
сигнала от лоцируемого объекта на выходе антенны будут дей-
ствовать сигналы, частоты которых равны fx + fd и f + fd + &f.
В смесителях принимаемые сигналы смешиваются с каждым
из передаваемых и после выделения сигналов частоты fd и их
усиления они поступают на входы фазового детектора. На вы-
ходе фазового детектора образуется сигнал, пропорциональный
разности фаз А<р этих сигналов. Определив Дер, расстояние до
объекта можно рассчитать по формуле:
4яА/
Недостатком РЛС этого типа является, прежде всего, то, что
для него имеется максимальное значение дальности, которое
может быть определено однозначно. Оно равно Rm = с/2/sf. На
частоте /, = 3 ГГц при скорости цели 300 м/с для разделения
сигналов в усилителях необходимо, чтобы А/- 6 кГц. При этом
максимальная однозначно определяемая дальность составит
всего 25 км. Для однозначного определения больших расстояний
Основные технические идеи...
27
требуется применять сигналы с большим количеством частот.
Другим недостатком таких РЛС является то, что они позволяют
определять дальность только до одной цели.
2.5. Метод радиолокации с помощью излучения
импульсных сигналов
Импульсные РЛС стали разрабатываться только во второй
половине 1930-х годов, так как для них необходимо было создать
новую в те годы аппаратуру: передатчики с большой пиковой
мощностью и короткими (порядка 1...10 мкс) импульсами. Для
этого были необходимы новые электронные приборы, способ-
ные генерировать мощные импульсные сигналы надостаточно
высоких частотах; широкополосные приемные устройства, по-
зволявшие принимать радиоимпульсы малой длительности без
искажения их формы; для индикации цели необходимы были
быстродействующие осциллографы. Кроме того, у специалистов
имелись опасения, что при использовании импульсных РЛС
отражения сигналов от местных предметов создадут сильные
помехи приему отраженных от самолетов полезных сигналов.
Несмотря на сложность решения указанных технических задач,
импульсный метод радиолокации был освоен и на многие годы
стал основным в радиолокационных системах.
В основе идеи импульсной РЛ С лежит то, что для определения
расстояния до цели измеряют время, в течение которого излу-
ченный передатчиком РЛС электромагнитный импульс дойдет
до облучаемого объекта и, отразившись, вернется к приемнику
РЛС. Для определения этого времени (А/) в РЛС использовались
индикаторы кругового обзора (ИКО) на электронно-лучевых
трубках. Измерив время А/, расстояние до объекта можно было
определить по формуле R = (сА/)/2, где с — скорость света.
Первая импульсная РЛС была разработана в США в 1934 г. по
предложению Юнга. В этой РЛ С для передачи и приема сигналов ис-
пользовались разные антенны, те. эта РЛС была 2-позиционной —
в ней пункты передачи и приема сигналов нужно было разносить
на определенное расстояние для уменьшения помех, создаваемых
мощным передатчиком приему отраженных от цели сигналов.
28
Глава 2
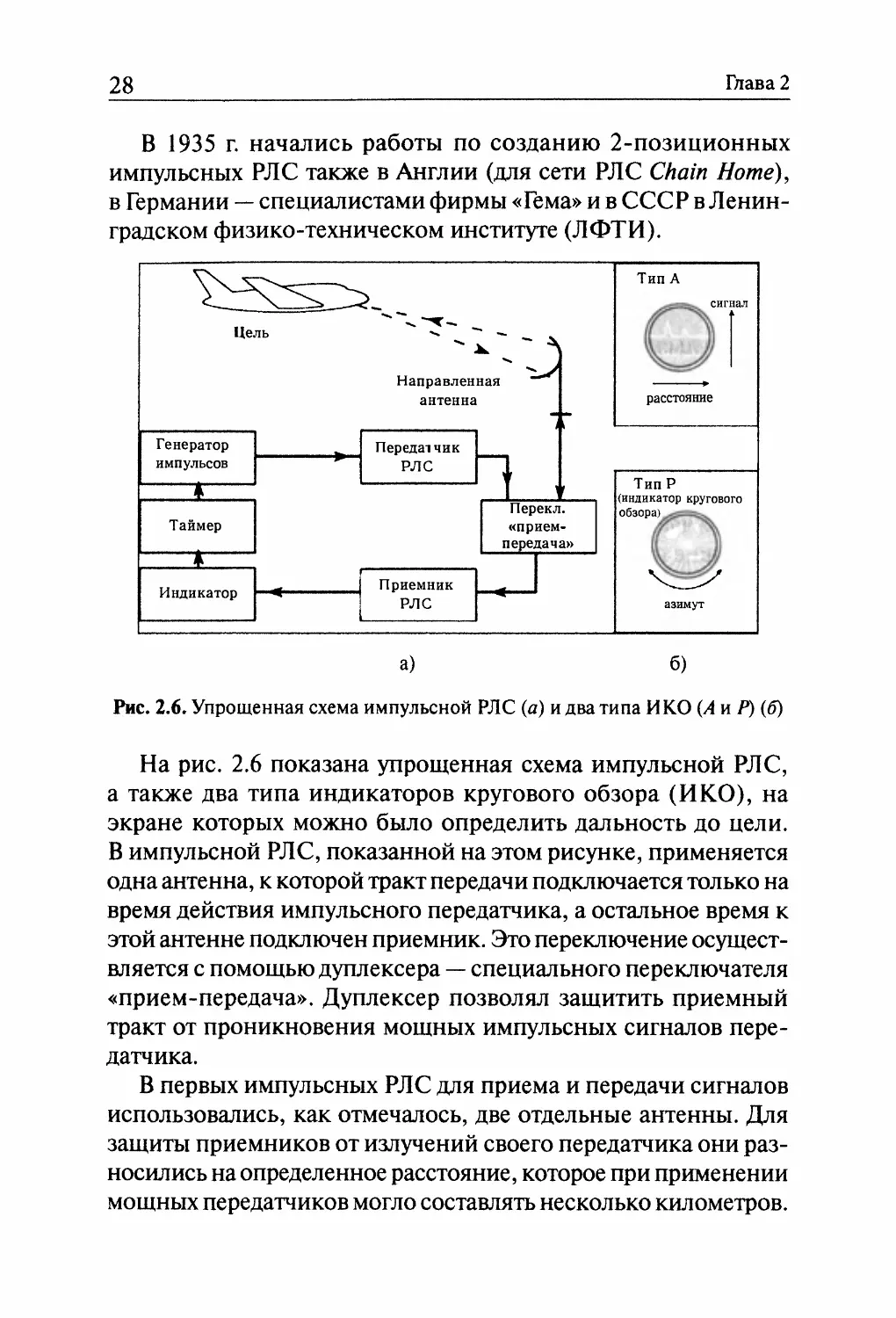
В 1935 г. начались работы по созданию 2-позиционных
импульсных РЛС также в Англии (для сети РЛС Chain Ноте),
в Германии — специалистами фирмы «Гема» и в СССР в Ленин-
градском физико-техническом институте (ЛФТИ).
Рис. 2.6. Упрощенная схема импульсной РЛС (а) и два типа И КО (А и Р) (ff)
На рис. 2.6 показана упрощенная схема импульсной РЛС,
а также два типа индикаторов кругового обзора (ИКО), на
экране которых можно было определить дальность до цели.
В импульсной РЛС, показанной на этом рисунке, применяется
одна антенна, к которой тракт передачи подключается только на
время действия импульсного передатчика, а остальное время к
этой антенне подключен приемник. Это переключение осущест-
вляется с помощью дуплексера — специального переключателя
«прием-передача». Дуплексер позволял защитить приемный
тракт от проникновения мощных импульсных сигналов пере-
датчика.
В первых импульсных РЛС для приема и передачи сигналов
использовались, как отмечалось, две отдельные антенны. Для
защиты приемников от излучений своего передатчика они раз-
носились на определенное расстояние, которое при применении
мощных передатчиков могло составлять несколько километров.
Основные технические идеи...
29
Это существенно усложняло РЛС, так как, в частности, возни-
кали большие трудности в обеспечении синхронного наведения
на цель приемной и передающей антенн.
Изобретение дуплексера сыграло большую роль в развитии
РЛС, так как применение в них одной антенны для приема и
передачи существенно упростило аппаратуру, уменьшило ее
габариты и массу. Это позволило создавать мобильные станции
для войск ПВО, морских кораблей и самолетов. В Германии ду-
плексер был изобретен инженером фирмы «Телефункен» Виль-
гельмом Снепом в 1936 г., в США его изобрели в 1937 г. Пэйж и
Юнг, а в СССР для одноантенной РЛС «Пегматит», разработка
которой началась в сентябре 1940 г., конструкция дуплексера
была предложена инженером Д.С. Михалевичем.
В импульсных РЛС информация о положении цели в про-
странстве изображалась с помощью И КО нескольких типов.
В первых импульсных РЛС использовались индикаторы типа Л
(см. рис. 2.6, б), в которых горизонтальная ось экрана градуи-
ровалась так, что расстояние до цели определялось по отметкам
на экране между переданным и принятым отраженным от цели
импульсом. Позже стали применяться И КО типа Р, более удоб-
ные для работы операторов РЛС. При появлении цели на экране
И КО возникала яркая точка, полярные координаты которой
определяли, соответственно, расстояние до нее и ее азимут.
Индикатор кругового обзора был изобретен в 1934 г. в Англии
Эдвардом Бовеном, в Германии — Гансом Холлманом, а в США
его изобрел в 1937 г. Роберт Пэйж.
2.6. Системы радиолокационного сопровождения целей
Важной задачей радиолокации, решаемой с помощью ан-
тенной техники, является точное измерение угловых координат
наблюдаемых объектов и их сопровождение по этим координа-
там. Для этой цели могут быть применены высоконаправленные
антенны с очень узкой диаграммой направленности (ДН) как
в азимутальной, так и в угломестной плоскостях. Однако на
самых первых этапах развития радиолокационных систем ис-
пользовались достаточно длинные волны (~ 10... 15 м) на которых
реализовать антенны с такой ДН было весьма сложно. Поэтому
30
Глава 2
инженерами были предложены другие методы. В 1930-х годах
для сопровождения цели с высокой точностью в радиолокации
стали применяться два метода — разностный метод (метод
последовательного переключения ДН) и метод конического
сканирования ДН.
Первый из них был основан на формировании ДН антенны с
двумя лучами в двух плоскостях (азимутальной и угломестной)
и последовательном их переключении.
а) б) в)
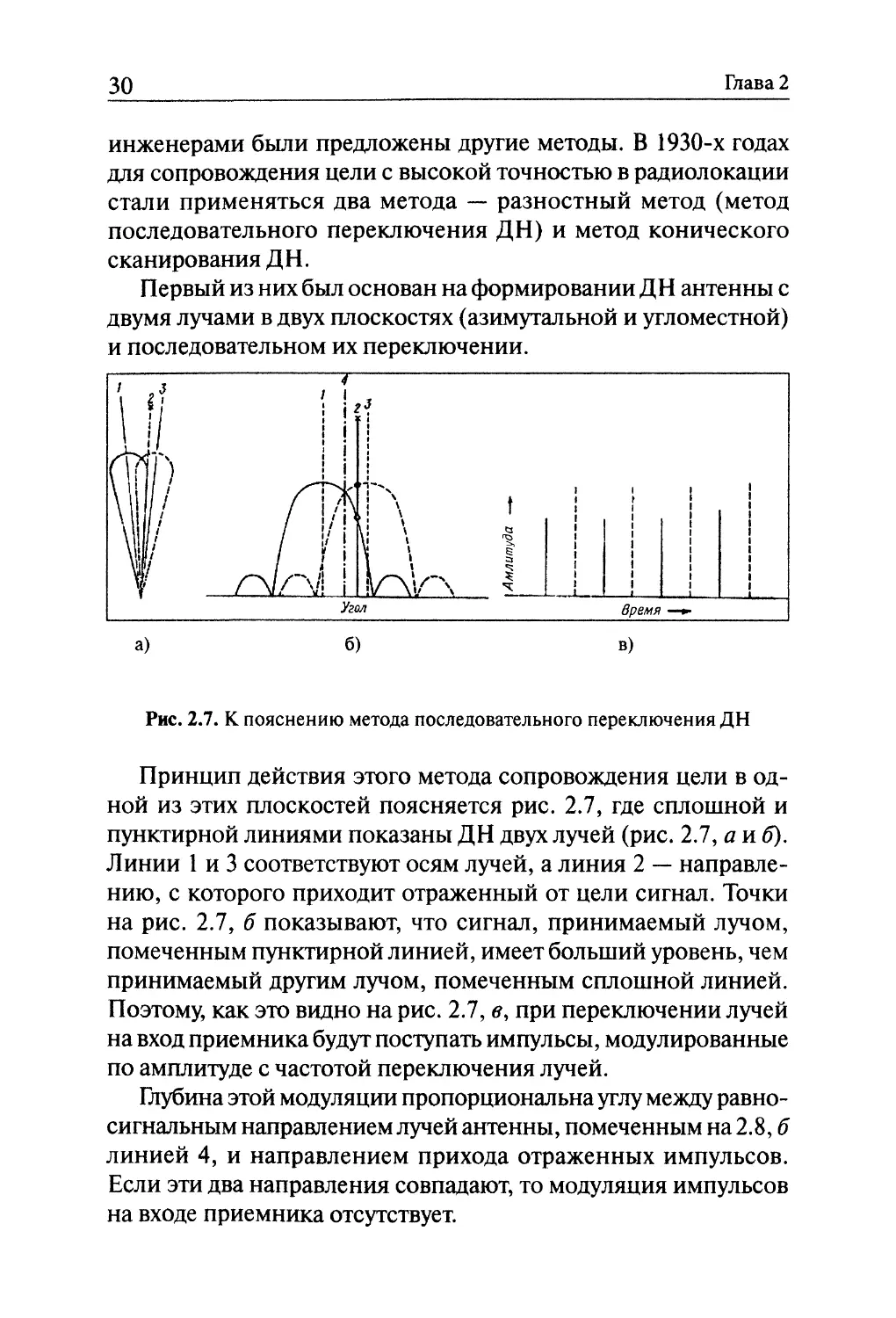
Рис. 2.7. К пояснению метода последовательного переключения ДН
Принцип действия этого метода сопровождения цели в од-
ной из этих плоскостей поясняется рис. 2.7, где сплошной и
пунктирной линиями показаны ДН двух лучей (рис. 2.7, а и б).
Линии 1 и 3 соответствуют осям лучей, а линия 2 — направле-
нию, с которого приходит отраженный от цели сигнал. Точки
на рис. 2.7, б показывают, что сигнал, принимаемый лучом,
помеченным пунктирной линией, имеет больший уровень, чем
принимаемый другим лучом, помеченным сплошной линией.
Поэтому, как это видно на рис. 2.7, в, при переключении лучей
на вход приемника будут поступать импульсы, модулированные
по амплитуде с частотой переключения лучей.
Глубина этой модуляции пропорциональна углу между равно-
сигнальным направлением лучей антенны, помеченным на 2.8, б
линией 4, и направлением прихода отраженных импульсов.
Если эти два направления совпадают, то модуляция импульсов
на входе приемника отсутствует.
Основные технические идеи...
31
Выделенный на выходе приемника сигнал, пропорциональ-
ный глубине амплитудной модуляции принятых импульсов
из-за переключения лепестков приемной антенны, управляет
изменением ее угла визирования (т.е. осуществляет сопровожде-
ние цели) таким образом, чтобы равносигнальное направление
антенны совпало с направлением прихода отраженного от цели
сигнала. Отметим, что усиление антенны в режиме обнаруже-
ния сигнала, когда направление его прихода совпадает с осью
антенны, всегда больше, чем в режиме его сопровождения,
когда его направление прихода совпадает с равносигнальным
направлением лучей антенны. Поэтому дальность действия РЛС
в режиме обнаружения сигнала при применении метода после-
довательного переключения ДН всегда больше, чем ее дальность
действия в режиме сопровождения (примерно в 2 раза).
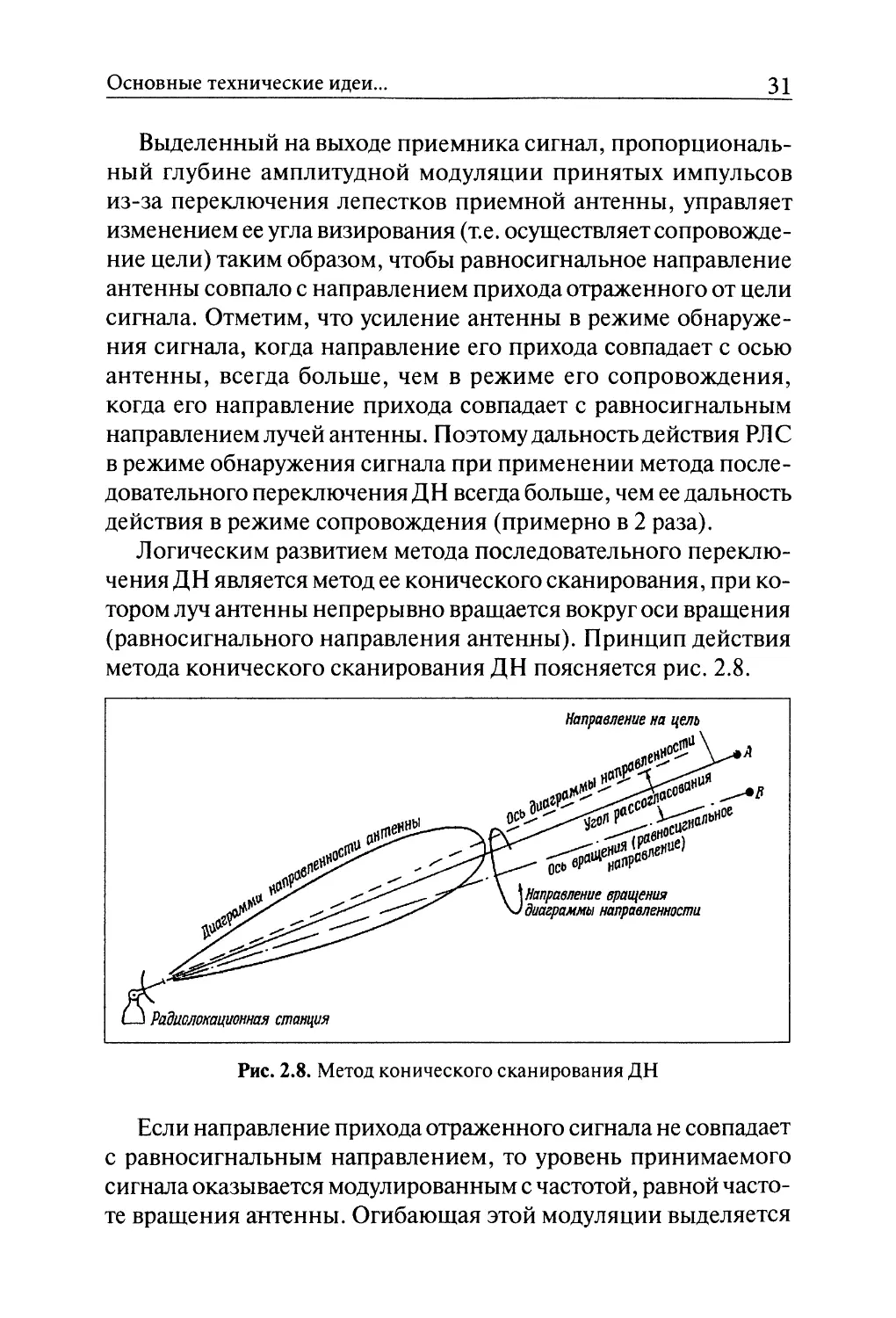
Логическим развитием метода последовательного переклю-
чения ДН является метод ее конического сканирования, при ко-
тором луч антенны непрерывно вращается вокруг оси вращения
(равносигнального направления антенны). Принцип действия
метода конического сканирования ДН поясняется рис. 2.8.
Рис. 2.8. Метод конического сканирования ДН
Если направление прихода отраженного сигнала не совпадает
с равносигнальным направлением, то уровень принимаемого
сигнала оказывается модулированным с частотой, равной часто-
те вращения антенны. Огибающая этой модуляции выделяется
32
Глава 2
из принятого отраженного сигнала и подается на управляющую
следящую систему, непрерывно поворачивающую антенну в
направлении на цель.
Метод последовательного переключения ДН был первым
применявшимся на практике методом радиолокационного со-
провождения. Метод конического сканирования ДН антенны,
как более простой, нашел широкое применение в РЛС не-
сколько позже. Эти методы одним из первых применил в 1937 г.
отечественный ученый Б.К. Шембель при разработке радио-
пеленгатора «Буря».
В США в 1937 г. метод равносигнальной зоны был применен
в РЛС 5СЛ-268, обеспечив точность оценки угловых координат
цели по азимуту 10 и по углу места 2,50. В 1942 г. промышлен-
ностью США стала выпускаться РЛС SCR-584 — первая в мире
станция, работавшая в диапазоне 3 ГГц. В ней для сопрово-
ждения цели был применен метод конического сканирования
ДН с частотой 30 Гц вокруг равносигнальной оси антенны. Она
обеспечивала точность определения угловых координат, равную
0,060.
В Великобритании в 1938 г. была создана РЛС GL-MK-X,
в которой для сопровождения цели использовался метод равно-
сигнальной зоны, обеспечивавший точность определения угло-
вых координат, равную ±0,50 по азимуту и ± 1,00 по углу места.
Более совершенный метод конического сканирования ДН был
применен в начале 1940-х годов в станции орудийной наводки
(СОН) GL-MK-3, обеспечив в ней точность отслеживания угло-
вых координат цели, равную ±0,13...0,170.
Метод равносигнальной зоны использовался в первых
германских РЛС «Seetakt» и «Freya», принятых на вооруже-
ние армии в 1937 г. Он обеспечивал точность сопровождения
цели по угловым координатам, равную 0,10. В июле 1939 г. в
Германии была разработана СОН «Вюрцбург», в которой для
наведения антенны на цель был применен метод конического
сканирования ДН.
Оба описанных выше метода имели особенности, снижавшие
точность сопровождения цели. При последовательном пере-
ключении ДН антенны и при ее коническом сканировании для
Основные технические идеи...
33
измерения угловой ошибки в двух ортогональных плоскостях
(азимутальной и угломестной) была необходима обработка не
менее трех отраженных сигналов. Практически число отражен-
ных сигналов при использовании метода последовательного
переключения обычно равнялось четырем, так как было не-
обходимо иметь не менее одного сигнала на каждое положение
диаграммы направленности. При коническом сканировании
для получения сигнала ошибки требовалось наличие более
четырех отраженных сигналов. Управление положением ДН в
пространстве при применении этих методов осуществлялось
путем выделения огибающей амплитуды принятых импульсных
сигналов. Однако эта огибающая изменялась не только за счет
переключения ДН антенн или ее конического сканирования,
но и за счет, например, флуктуации эффективной площади
рассеяния цели, интерференции полезного сигнала из-за при-
хода на вход антенны нескольких лучей и т.п. Влияние этих
изменений сильно ограничивало точность радиолокаторов,
в которых для выделения сигнала ошибки сопровождения
цели требовалась обработка большого количества отраженных
сигналов.
В 1943 г. американский ученый Роберт Пэйж изобрел моно-
импульсный метод определения угловых координат целей,
обладавший гораздо большей точностью, чем это было воз-
можно с использованием ранее предложенных методов. В
моноимпульсных РЛС угловые измерения производятся на
основе одного отраженного от цели импульса, а не многих, и
поэтому амплитудные флуктуации последовательности отра-
женных сигналов не оказывают воздействия на точность сопро-
вождения. Существует несколько методов, с помощью которых
можно получить информацию об угловой ошибке, принимая
только один отраженный импульсный сигнал. Применяя их,
одновременно используют несколько лучей сложной ДН, в
противоположность методам последовательного переключения
ДН или ее конического сканирования, в которых лучи антенны,
принимающие отраженные сигналы, последовательно занима-
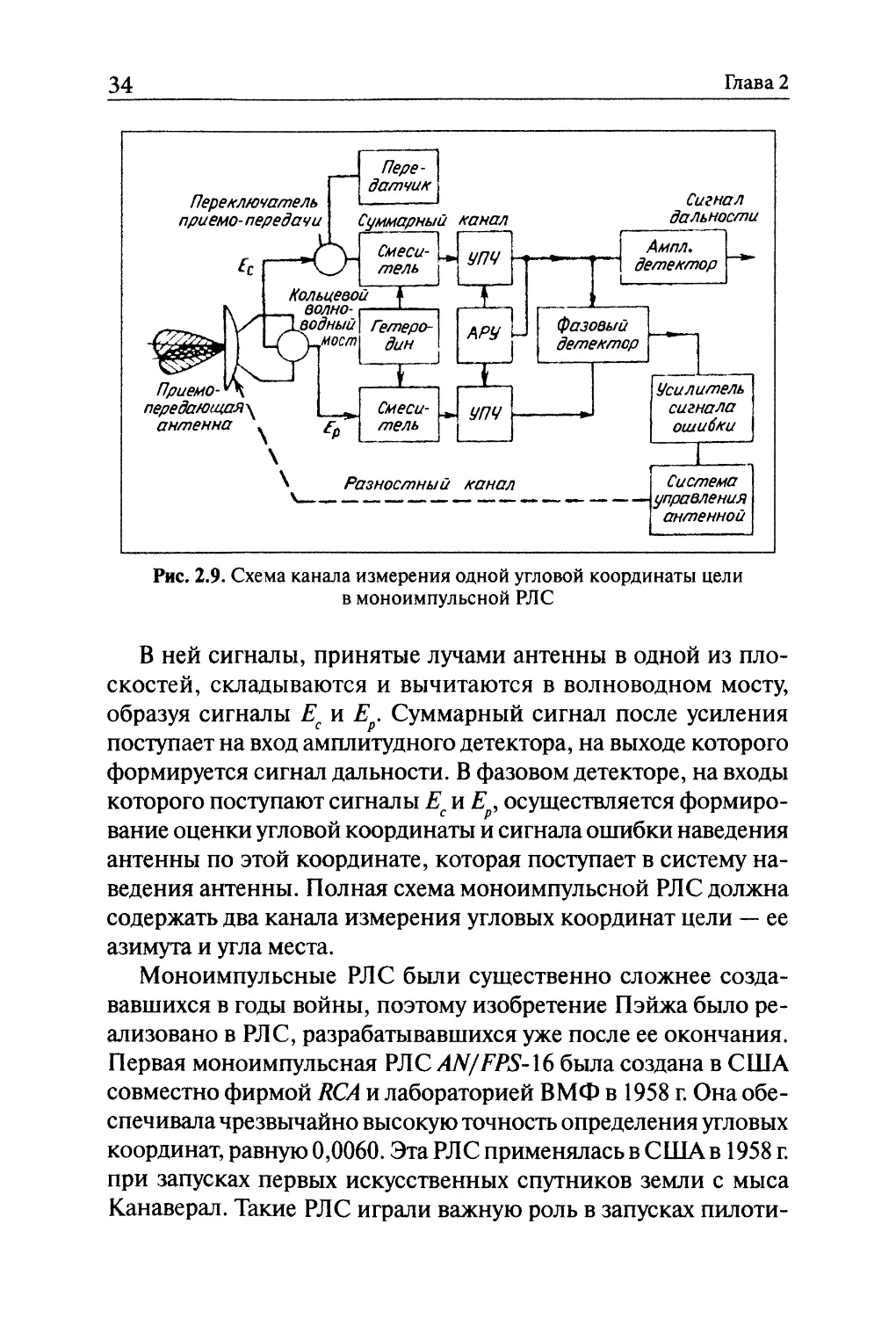
ют в пространстве различные положения. На рис. 2.9 показана
схема канала измерения одной из угловых координат цели в
моноимпульсной РЛС.
34
Глава 2
Рис. 2.9. Схема канала измерения одной угловой координаты цели
в моноимпульсной РЛС
В ней сигналы, принятые лучами антенны в одной из пло-
скостей, складываются и вычитаются в волноводном мосту,
образуя сигналы Ес и £. Суммарный сигнал после усиления
поступает на вход амплитудного детектора, на выходе которого
формируется сигнал дальности. В фазовом детекторе, на входы
которого поступают сигналы £ и £, осуществляется формиро-
вание оценки угловой координаты и сигнала ошибки наведения
антенны по этой координате, которая поступает в систему на-
ведения антенны. Полная схема моноимпульсной РЛС должна
содержать два канала измерения угловых координат цели — ее
азимута и угла места.
Моноимпульсные РЛС были существенно сложнее созда-
вавшихся в годы войны, поэтому изобретение Пэйжа было ре-
ализовано в РЛС, разрабатывавшихся уже после ее окончания.
Первая моноимпульсная РЛС AN/FPS-X6 была создана в США
совместно фирмой RCA и лабораторией ВМФ в 1958 г. Она обе-
спечивала чрезвычайно высокую точность определения угловых
координат, равную 0,0060. Эта РЛС применялась в США в 1958 г.
при запусках первых искусственных спутников земли с мыса
Канаверал. Такие РЛС играли важную роль в запусках пилоти-
Основные технические идеи...
35
руемых космических аппаратов к Луне по программе «Аполлон».
С развитием технологии и методов цифровой обработки сигна-
лов сложность и стоимость моноимпульсных РЛС снижалась и
в 1970-х годах они стали широко применяться во многих типах
радиолокационных станций.
2.7. Системы селекции движущихся целей
Одной из сложных проблем, возникавших при применении
импульсных РЛС, являлось выделение движущихся целей на
фоне отражений от неподвижных объектов. Сигналы, отра-
женные от местных предметов, могли, в частности, поступать
в радиолокационный приемник через боковые лепестки ДН
антенны. Эти сигналы существенно затрудняли выделение
слабого полезного сигнала, отраженного от движущейся цели,
находящейся на небольших дальностях от РЛС. Такие сигналы
«забивали» экран электронно-лучевой трубки паразитной ин-
формацией и мешали наблюдению за полезными сигналами.
В середине 1940-х годов США и Великобритания — союзники
в войне против Германии — разработали метод создания искус-
ственных помех германским РЛС с помощью массового выброса
над территории Германии металлизированных лент, создающих
для них ложные цели, дезориентировавшие противовоздушную
оборону (ПВО). Такие помехи были применены в 1943 г. при на-
лете союзной авиации на Гамбург. Германская авиация не смогла
защитить этот город от нападения из-за сбоя в работе ПВО, и
он был очень сильно разрушен. Для борьбы с такими помехами
немецким инженерам вскоре удалось разработать специальную
приставку, позволявшую защитить от них РЛС системы ПВО.
Ими был создан первый селектор движущихся целей (СДЦ),
работа которого была основана на эффекте Доплера. Селектор
движущихся целей позволял выделить движущиеся цели на фоне
неподвижных даже в том случае, когда сигналы, отраженные от
неподвижных объектов, имели уровень, на несколько порядков
больший уровня полезных сигналов. Радары, снабженные СДЦ,
называют также импульсно-допплеровскими РЛС.
На рис. 2.10 показана схема простейшего СДЦ, в котором
перед И КО установлен блок компенсирующий помехи от не-
36
Глава 2
подвижных или малоподвижных объектов. В нем имеется линии
задержки на время, равное длительности Т между соседними из-
лучаемыми РЛС импульсами. Она вместе с вычитающим устрой-
ством образует гребенчатый фильтр, подавляющий все состав-
ляющие сигнала на нулевой частоте и на частотах, кратных 1/Т.
Рис. 2.10. Схема селектора движущихся целей
Таким образом, осуществляется подавление всех сигналов,
отраженных от неподвижных объектов. Если же принимаемые
импульсы отражены от движущегося объекта и имеют отно-
сительно переданных доплеровский сдвиг по частоте, то их
амплитуды не постоянны от импульса к импульсу, и на выходе
вычитающего устройства остается некомпенсированный оста-
ток, представляющий собой двуполярный видеосигнал. Для
яркостной модуляции экрана И КО этот видеосигнал преоб-
разуется в однополярное напряжение с помощью двухтактного
детектора. В современных РЛС используются более сложные
гребенчатые фильтры по сравнению с тем, который показан
на рис. 2.10. В них возможно выделить полезный сигнал, отра-
женный от движущейся цели, на фоне помех от неподвижных
объектов, уровень которых на 20. ..30 дБ превышает его уровень.
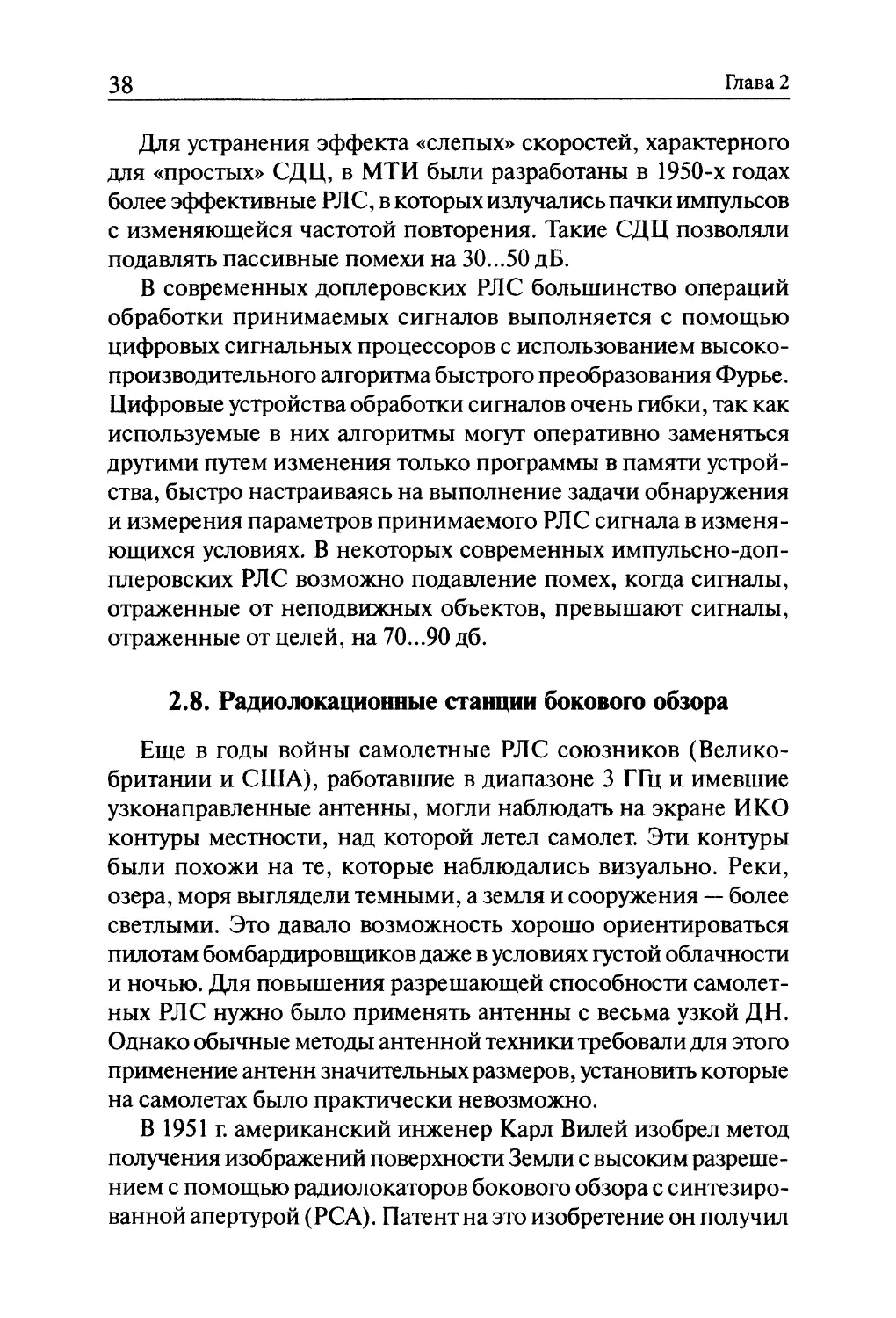
Рис. 2.11. Изображение на экране ИКО в РЛС
без СДЦ (а) и в РЛС с СДЦ (б)
Основные технические идеи...
37
На рис. 2.11 показаны изображения на экране И КО в обычной
РЛС без СДЦ и в РЛС, снабженной приставкой СДЦ. Видно, что
применение СДЦ позволило полностью очистить экран И КО
от «засветки» помехами, создаваемыми отражениями сигнала от
неподвижных объектов, и на экране можно вести наблюдение
за движущимися объектами.
Технические основы работы РЛС с СДЦ были разработаны
во время Второй мировой войны. Однако лишь в 1954 г. в отчете
фирмы Rand Corporation, написанном американским исследо-
вателем Эмерсоном, была дана строгая теоретическая оценка
предельных возможностей СДЦ и предложена методика расчета
соответствующих РЛС, выбора для них вида сигналов. Простые
СДЦ, работающие с постоянной частотой повторения импуль-
сов, не позволяли обнаружить цели со «слепыми» скоростями,
которые давали изменения фаз принятых соседних импульсов,
равных точно 3600. Скорость, при которой цель не видно на
экране РЛС, оснащенной СДЦ, зависит от ее рабочей частоты
и от частоты повторения импульсов.
Проблема подавления пассивных помех, связанных и отраже-
нием сигналов от поверхности Земли, стала особенно актуальной
в середине 1950-х годов, когда начало развиваться отдельное
направление радиолокации — маловысотная радиолокация,
особенностью которой являются небольшие (менее 100 км)
дальности обнаружения объектов на фоне мощных отражений
от подстилающей поверхности.
Одним из первых решение этой проблемы предложил в 1945 г.
Ю.Б. Кобзарев, который изобрел когерентно-импульсный метод
борьбы с пассивными помехами. На основе этого метода реали-
зована аппаратура защиты от пассивных помех и местных пред-
метов всех современных РЛС. В СССР метод был использован
при создании первой специализированной маловысотной РЛС
типа П-15 «Тропа», принятой на вооружение в 1955 г.
Аналогичные идеи были выдвинуты специалистами Радиаци-
онной лаборатории Массачусетского технологического инсти-
тута (МТИ). Они были реализованы при создании импульсно-
доплеровских РЛС, в том числе и тех, которые устанавливались
на боевых самолетах (ЛА/ЛРС-бЗ, 65 и др.).
38
Глава 2
Для устранения эффекта «слепых» скоростей, характерного
для «простых» СДЦ, в МТИ были разработаны в 1950-х годах
более эффективные РЛС, в которых излучались пачки импульсов
с изменяющейся частотой повторения. Такие СДЦ позволяли
подавлять пассивные помехи на 30...50 дБ.
В современных доплеровских РЛС большинство операций
обработки принимаемых сигналов выполняется с помощью
цифровых сигнальных процессоров с использованием высоко-
производительного алгоритма быстрого преобразования Фурье.
Цифровые устройства обработки сигналов очень гибки, так как
используемые в них алгоритмы могут оперативно заменяться
другими путем изменения только программы в памяти устрой-
ства, быстро настраиваясь на выполнение задачи обнаружения
и измерения параметров принимаемого РЛС сигнала в изменя-
ющихся условиях. В некоторых современных импульсно-доп-
плеровских РЛС возможно подавление помех, когда сигналы,
отраженные от неподвижных объектов, превышают сигналы,
отраженные от целей, на 70...90 дб.
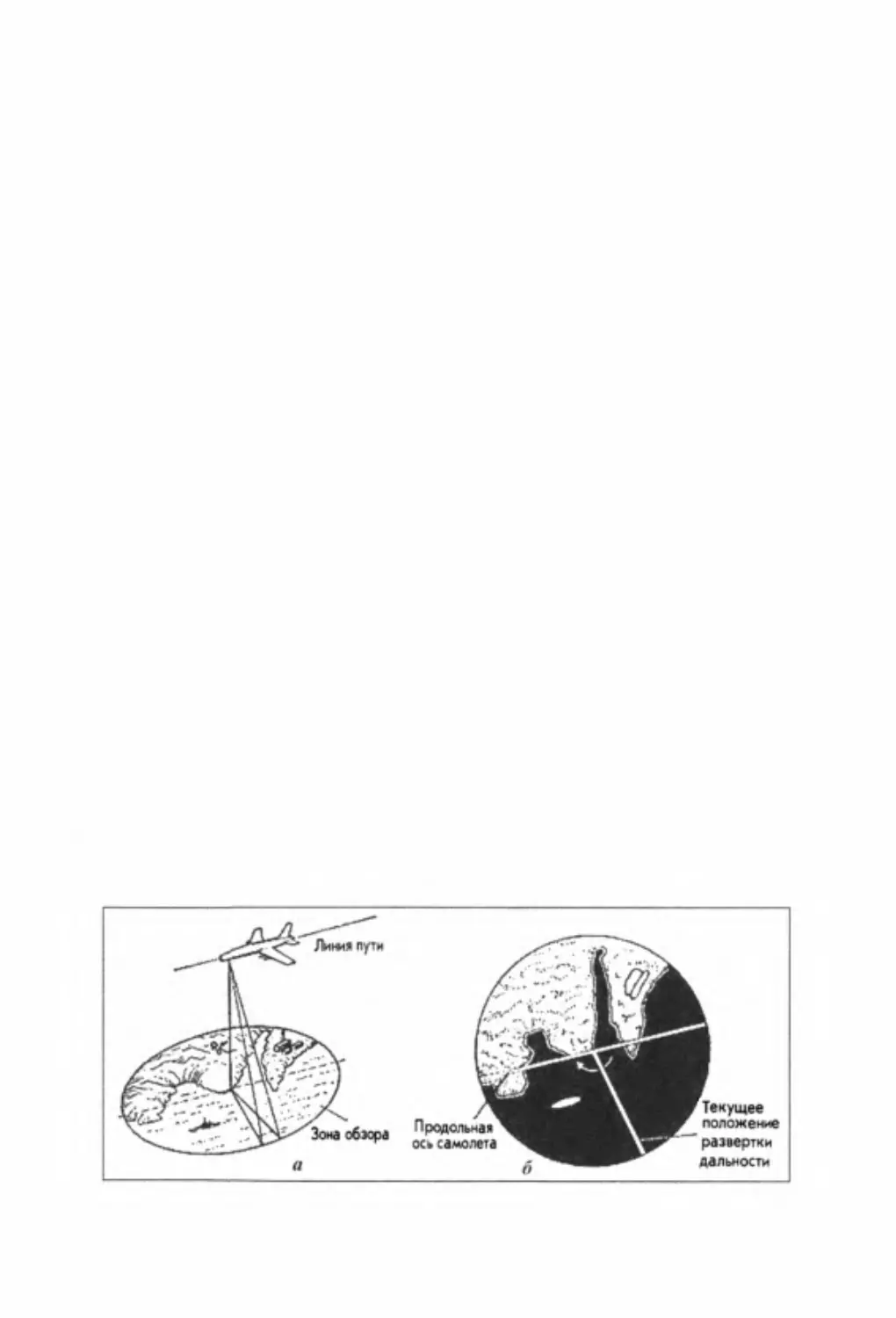
2.8. Радиолокационные станции бокового обзора
Еще в годы войны самолетные РЛС союзников (Велико-
британии и США), работавшие в диапазоне 3 ГГц и имевшие
узконаправленные антенны, могли наблюдать на экране И КО
контуры местности, над которой летел самолет. Эти контуры
были похожи на те, которые наблюдались визуально. Реки,
озера, моря выглядели темными, а земля и сооружения — более
светлыми. Это давало возможность хорошо ориентироваться
пилотам бомбардировщиков даже в условиях густой облачности
и ночью. Д ля повышения разрешающей способности самолет-
ных РЛС нужно было применять антенны с весьма узкой ДН.
Однако обычные методы антенной техники требовали для этого
применение антенн значительных размеров, установить которые
на самолетах было практически невозможно.
В 1951 г. американский инженер Карл Вилей изобрел метод
получения изображений поверхности Земли с высоким разреше-
нием с помощью радиолокаторов бокового обзора с синтезиро-
ванной апертурой (РСА). Патент на это изобретение он получил
Основные технические идеи...
39
в 1954 г. В начале 1950-х годов это направление радиолокацион-
ной техники стало разрабатываться и в СССР под руководством
члена-корреспондента АН СССР А.П. Реутова.
При использовании РСА высокое разрешение достигается
формированием искусственного раскрыва антенны в резуль-
тате поступательного движения летательного аппарата (ЛА),
несущего антенну сравнительно небольшого размера, которая
излучает зондирующие импульсы в направлении, перпендику-
лярном линии пути. Последовательные положения реальной
антенны в пространстве, соответствующие каждому излучен-
ному импульсу, могут рассматриваться как элементы некоторой
синтезированной антенной решетки. На рис. 2.12 поясняется
предложенный Вилей принцип синтеза апертуры в РСА. Участ-
ки поверхности Земли облучаются зондирующими сигналами,
излучаемыми с борта ЛА. Отраженные сигналы принимаются
антенной ЛА, которая перемещается вместе с ним. В момент
времени приходит первый, отраженный от цели импульс,
а в момент tN — последний. На ЛА производиться обработка им-
пульсов, принятых за время А/ = tN -t}. В течение этого времени
антенна перемещается в пространстве на расстояние £, которое
называют длиной синтезированной апертуры.
Рис. 2.12. Принцип синтеза апертуры в РСА
Основные технические идеи...
41
Радиолокаторы с синтезированной апертурой стали исполь-
зовать в военной авиации в основном для разведывательных
целей и навигации. Они также давали возможность разработать
системы получения детальных изображений поверхности Зем-
ли, необходимых для решения разнообразных хозяйственных
и научных задач. Кроме того, их можно было устанавливать на
космических аппаратах и решать широкий круг практически
важных задач, связанных с исследованием планет солнечной
системы.
2.9. Фазированные антенные решетки
Истории создания и развития антенной техники, в том числе
и фазированных антенных решеток (ФАР), посвящена одна из
глав книги. К разработке ФАР для РЛС приступили в середине
1950-х годов. Во многих РЛС самого разного назначения, кото-
рые создавались в 1960-2000 гг., применялись ФАР.
До начала, а также во время Второй мировой войны разраба-
тывались РЛС, в которых для обнаружения целей сканирование
пространства осуществлялось механически с помощью антенн,
формирующих один узкий «игольчатый» луч, либо два «лапатоо-
бразных» луча, один из которых имел узкую ДН в азимутальной
плоскости и широкую вугломестной, адругой — узкую ДН вугло-
местной плоскости и широкую в азимутальной. В первом случае
сканирование пространства осуществлялось «построчно» —
луч перемещался по азимуту в заданном угловом секторе, а затем
сканирование продолжалось с измененным углом места луча. Во
втором случае первый луч сканировал пространство по азимуту,
обнаруживал и сопровождал цель, а второй после обнаружения
цели сканировал пространство по углу места до его определения.
После обнаружения цели РЛС переходила на ее сопровождение,
определяя ее координаты: азимут, угол места и дальность.
Применение антенн с механическим сканированием про-
странства существенно ограничивало скорость сканирования,
что, в свою очередь, снижало эффективность применения РЛС
для обнаружения множества быстро движущихся целей. Для
этого нужны были другие антенные устройства, имевшие не-
42
Глава 2
сколько лучей, изменение положения которых в пространстве
осуществлялось с помощью электронных методов.
ФАР представляет собой ряд антенных излучателей, в которых
относительные фазы сигналов изменяются так, что эффективное
излучение антенны усиливается в каком-то одном желаемом
направлении и подавляется во всех остальных направлениях.
Такие антенны позволяют:
• формировать остронаправленные ДН, позволяющие опре-
делять угловые координаты источника излучения с повы-
шенной точностью;
• изменять направление луча неподвижной антенны, осущест-
вляя быстрое (в ряде случаев практически безынерционное)
сканирование — качание луча;
• управлять в определённых пределах формой ДН — изменять
ширину луча, уровни боковых лепестков и т.п. (для этого в
ФАР иногда осуществляют также управление и амплитудами
волн отдельных излучателей);
• повышать скорость обзора пространства на порядки, а также
увеличить срок службы системы, так как с введением ФАР
отпадает потребность в громоздких механизмах ориентации
полотна в пространстве и многосторонняя антенна с управ-
ляемой электронным образом ДН может обеспечить одно-
временный охват области наблюдения в 360°.
В США в 1957 г. в Линкольновской лаборатории сразу после
запуска первого советского спутника Земли была создана группа,
в которой началась работа над созданием специальной антенны
типа ФАР для обнаружения и сопровождения искусственных
спутников. Работы по созданию ФАР начались в 1958 г. Перво-
начально предполагалось создать РЛС, работающую в диапазоне
900 МГц, у которой пиковая мощность передатчика составляла
2,5 МВт (средняя мощность — 100 кВт), а сама антенна должна
была состоять из 500 отдельных активных элементов. В те годы
было сложно создать такую антенну, поэтому разработчики
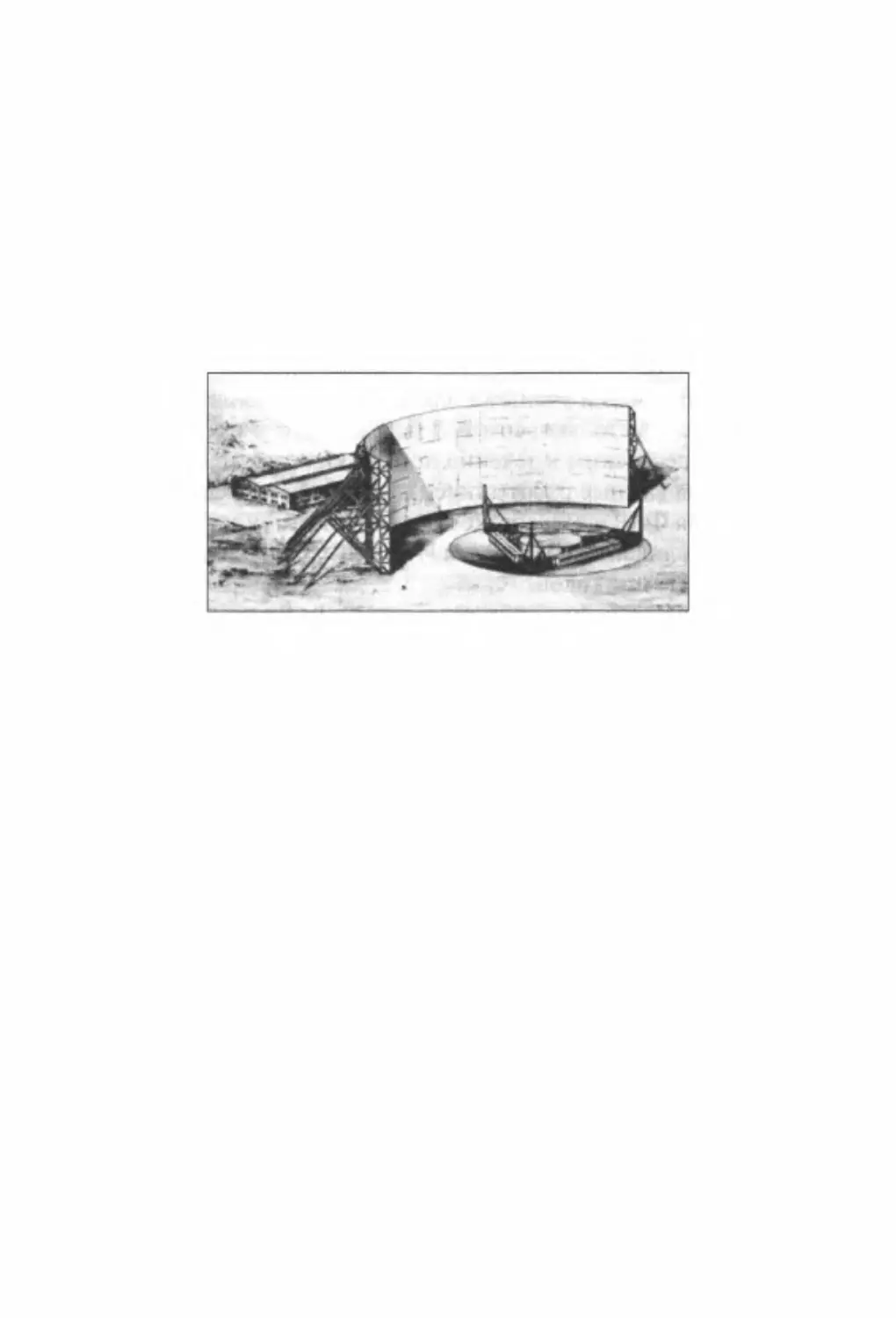
решили создать комбинированную антенную систему, которая
в азимутальной плоскости сканировала бы пространство с по-
мощью механических средств, а в вертикальной — с помощью
электронных. Изображение этой системы показано на рис. 2.14.
44
Глава 2
работу. Под руководством Ю.Я. Юрова были разработаны ФАР
с ферритовыми фазовращателями для работы в диапазоне ча-
стот 9...9,5 ГГц, которые позволяли осуществлять сканирование
наблюдаемого пространства с частотой 1...10 кГц. Ширина ДН
такой антенны, предназначенной для сопровождения целей,
составляла около 12°, а уровень боковых лепестков -(-15 дБ).
В 1959 г. группой Ю.Я. Юрова была создана ФАР в диапазоне
9...9,7 ГГц, содержащая 61 ферритовый фазовращатель, ширина
Д Н которой составляла 7°, а уровень боковых лепестков — (-18 д Б).
Отечественными учеными членами-корреспондентами АН
СССР А.А. Пистолькорсом и Л.Д. Бахрахом и профессором
Д.И. Воскресенским в течение нескольких десятилетий были
выполнены важные работы по созданию теоретических основ
построения ФАР и разработке конкретных антенн. Первые от-
крытые публикации по ФАР для РЛС в СССР появились только
в середине 1980-х годов.
Исторически первыми были внедрены ФАР с качанием луча,
построенные не на основе фазовращателей, а на принципе ча-
стотного сканирования. В них в системе формирования лучей
к элементам ФАР были подключены фидерные линии с резко
выраженной зависимостью фазовой скорости от частоты. При
изменении частоты сигнала, поступающего на вход ФАР, из-
менялись фазы сигналов, подводимых к отдельным элементам
антенны. В результате, это приводило к качанию луча. Эта про-
стая технология управления положением луча в пространстве не
обеспечивала достаточно высокую точность измерения угловых
параметров цели, а сами ФАР имели большие размеры.
Более совершенные ФАР с электрическим сканировани-
ем стали применяться позже. В таких ФАР было возможно с
большой скоростью управлять фазами сигналов, подаваемых
на отдельные элементы антенны. Для этого в них широко ис-
пользовались ферритовые и полупроводниковые фазовращатели
(с быстродействием порядка микросекунд и небольшими поте-
рями мощности). Управление фазовращателями осуществлялось
при помощи быстродействующей электронной системы, которая
в простейших случаях управляла группами элементов (напри-
мер, строками и столбцами в плоских ФАР с прямоугольным
Основные технические идеи...
45
расположением излучателей), а в наиболее сложных — каждым
фазовращателем в отдельности. Качание луча в пространстве
могло производиться как по заранее заданному закону, так и по
программе, вырабатываемой в ходе работы всего радиоустрой-
ства, в которое входит ФАР.
Наибольшими возможностями управления характеристиками
обладают активные ФАР (АФАР), в которых к каждому излуча-
телю или модулю подключен управляемый по фазе передатчик
или приёмник. Управление фазой в АФАР может производиться
в трактах промежуточной частоты, либо в цепях возбуждения ко-
герентных передатчиков, гетеродинов приёмников и т.п. В АФАР
фазовращатели могут работать в диапазонах волн, отличных от
того, в котором работает антенна. Передающие АФАР позволяют
осуществить сложение в пространстве мощностей когерентных
электромагнитных волн, генерируемых отдельными передат-
чиками. В приёмных АФАР совместная обработка сигналов,
принятых отдельными элементами, позволяет получать более
полную информацию об источниках излучения.
До конца 1980-х годов полностью управляемые электроникой
ФАР из-за их высокой сложности использовались, главным
образом, в больших стационарных РЛС, а также в РЛС круп-
ных кораблей ВМФ. Позже такие ФАР стали применять и на
самолетах ВВС. Разработка монолитных интегральных схем
СВЧ-диапазона открыла широкие перспективы для создания
АФАР, в том числе АФАР для самолетных РЛС. Новая техно-
логия позволила значительно снизить стоимость производства
твердотельных приемопередающих модулей для ФАР.
2.10. Многопозиционные радиолокационные системы
Первые радиолокационные станции, которые создавались с
использованием как непрерывных, так и импульсных излучений,
были двухпозиционными (бистатическими), так как до 1937 г.
для передачи и приема сигналов в таких РЛС применялись раз-
ные антенны и необходимая развязка между трактами передачи
и приема сигналов обеспечивалась тем, что приемная и пере-
дающая станции РЛС разносились на довольно значительное
расстояние. После 1937 г. специалистами был предложен способ
46
Глава 2
построения достаточно простых однопозиционных импульсных
РЛС, в которых одна и та же антенна использовалась как для
передачи, так и для приема сигналов. В течение нескольких деся-
тилетий такие РЛС доминировали в радиолокационной технике.
Тем не менее идеи применения многопозиционных РЛС для
решения задач ПВО нашли применение уже на ранней стадии
развития радиолокации: в 1939 г. по предложению военного
инженера В.Д. Стогова были проведены успешные испытания
первой многопозиционной РЛС, которая в том же году во вре-
мя войны с Финляндией была использована для организации
службы ПВО в приграничной с ней области (отметим, что до
1940 г. промышленность СССР выпускала только доплеровские
двухпозиционные РЛС с непрерывными сигналами).
В начале 1940-х годов во время Второй мировой войны в Гер-
мании была создана оригинальная многопозиционная система
Klein Heidelberg (КН), представлявшая сеть приемных РЛС, при-
нимавших как сигналы от английской РЛС, расположенной в
городе Дувр на южном побережье Англии, а также зондирующие
сигналы той же станции, отраженные от самолетов, приближав-
шихся к территории Германии.
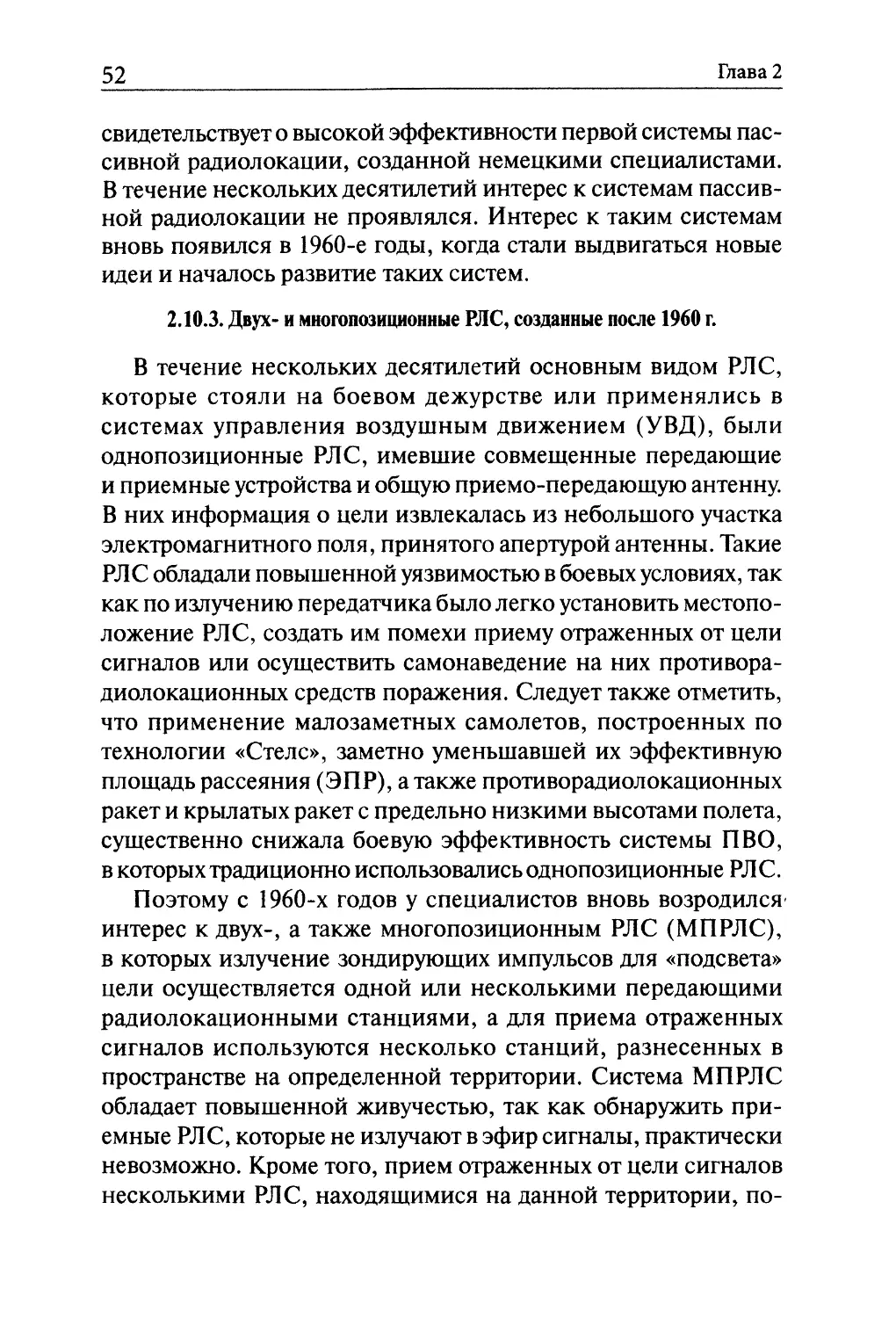
В 1960-е годы исследования многопозиционных РЛС и их
разработка стали вновь привлекать интерес специалистов. Этот
период истории развития радиолокационной техники, когда
был создан целый ряд бистатических и многопозиционных
РЛС (МПРЛС) как военного, так и гражданского назначения,
освещен в разделе 2.10 данной главы.
В 1984 г. были выдвинуты новые весьма перспективные идеи
создания радиолокационных систем типа MIMO (Multiple Input
Multiple Output — множественный вход множественный выход),
в которых особым образом в РЛС применяются ФАР и сложные
широкополосные сигналы.
2.10.1. Первые многопозиционные системы РЛС в СССР
В СССР в самом начале 1934 г. по инициативе управления
ПВО (УПВО) у директора ЛФТИ А.Ф. Иоффе состоялось сове-
щание, на котором обсуждались вопросы развертывания в СССР
работ по созданию средств обнаружения самолетов ночью и при
Основные технические идеи...
47
плохой видимости. На этом совещании присутствовал руково-
дитель Ленинградского электрофизического института (ЛЭФИ)
А.А. Чернышев. Вскоре после совещания (7 февраля 1934 г.) им
была подана в Отдел военных изобретений первая в СССР за-
явка на изобретение радиолокационной установки «Устройство
для обнаружения аэропланов и дирижаблей во время полета с
помощью электромагнитных волн». По сути, предлагаемое им
представляло собой многопозиционную систему, в которой
имелся один мощный передатчик непрерывных электромагнит-
ных излучений и большое число расположенных вокруг него в
отдалении приемных станций. Излучаемые сигналы должны
были облучать всю или часть области пространства вокруг
передатчика, а приемные станции с направленными антеннами
должны были определять координаты самолета по отношению
к определенным пунктам. Аналогичную идею выдвинул в том
же году пионер работ по созданию в СССР радиолокационной
техники П.К. Ошейков. Он предложил развернуть работы по
разработке двух многопозиционных систем «Вега» и «Конус».
Для реализации этих предложений по приказу заместителя
наркома обороны М.Н. Тухачевского в конце 1934 г. при УПВО
было создано конструкторское бюро, которое возглавил Ошей-
ков, а в Наркомате обороны было принято решение реализовать
предложенные им системы. На рис. 2.15 показана схема системы
«Вега».
\\
Пост ВНОС 1
а ^^приемник
Пункт П80 Пост ВНОС \1
_ ' Г/'Олл•> \
Радиоизлучающее
устройство ЛйСТ, ВНВС /
"^Приемник ~\~I5-zqkm-
Рис. 2.15. Схема системы «Вега»
48
Глава 2
Приемники этой системы должны были располагаться на
постах воздушного наблюдения, оповещения и связи (ВНОС)
с целью обнаружения самолетов в зоне, которая начиналась за
20...30 км от этих постов. Оповещение об обнаруженных само-
летах передавались на расстояние 50...75 км в пункт ПВО с по-
мощью связной аппаратуры, размещенной на трех автомашинах.
В этом пункте был расположен передатчик, «подсвечивающий»
самолеты, находившиеся в зоне действия постов наблюдения
системы в секторе 600. Другая предложенная Ощепковым
система «Конус» предназначалась не только для обнаружения
самолета в районах расположения приемных устройств, но и для
определения его азимута и дальности. Она должна была рабо-
тать в непрерывном режиме и в ней для определения дальности
до самолета применялись сигналы с частотной модуляцией.
В этой системе предполагалось использовать два передающих
устройства, одно из которых было ближнего действия (10... 15 км),
имело мощность до 25 Вт и работало на частотах 200...500 МГц.
Другое устройство, предназначенное для обнаружения само-
летов на расстоянии до 100 км, имело мощность до 1 кВт и из-
лучало сигналы на частотах 150...300 МГц. Отраженные сигналы
принимались двумя приемными устройствами. В системе обе-
спечивалось синхронное и синфазное вращение излучающих и
приемных параболических антенн диаметром 0,8 м. Аппаратура
для испытания систем «Вега» и «Конус» была создана в конце
1936 г., однако ее испытания не состоялись. Одной из причин
этого стал арест по ложному обвинению их идеолога Ощепкова,
который был осужден и в самом начале 1937 г. отправлен в за-
ключение.
В 1934 г. под руководством Б.К. Шембеля была создана
аппаратура РЛС «Рапид», которая позже в НИИИС КА была
усовершенствована военным инженером Д.С. Стоговым и в
1939 г. стала выпускаться промышленностью, получив название
РУС-1 (РУС — радиоулавливатель самолетов). В июне 1939 г. в
Киевском военном округе проводились испытания опытных об-
разцов этой РЛС, в ходе которых проверялись их возможности
в решении задач службы ВНОС, а также задач по наведению
истребителей на самолеты противника.
Основные технические идеи...
49
Рис. 2.16. Многопозиционная система обнаружения самолетов с РЛС РУС-1
Для выявления эффективности применения этой РЛС
Д.С. Стогов предложил схему расстановки станций РУС-1 в
многопозиционной системе обнаружения самолетов, которая
приведена на рис. 2.16. В этой системе приемные и передающие
станции располагались в две-три линии, что позволяло уточнять
направление полета цели. Один комплект станции, состоявший
из одного передающего и двух приемных устройств, обеспечивал
наблюдение за участком в 80 км. При испытаниях выявилось, что
станции сети обеспечивали 100%-ное обнаружение самолетов
при пересечении зоны обнаружения днем, ночью, в облаках и за
облаками на всех высотах от 100 м до потолка полета самолетов
различных типов и конструкций тех лет. Данная система позво-
ляла определить характер воздушной цели: один самолет, звено,
эскадрилья, с записью налейте, которая являлась документом,
подтверждавшим донесение поста наблюдения. В зависимости
от числа приемных постов в зоне обнаружения можно было
установить с точностью 10-20—40 км тот ее участок, где про-
летал самолет. Донесения постов наблюдения передавались на
главный пост ВНОС по линиям связи. По информации с поста
первой линии наблюдения истребители поднимались в воздух,
а по уточненным данным постов второй линии наблюдения
выводились командой с земли в район возможной встречи с
самолетами противника. Во время войны с Финляндией в 1939 г.
многопозиционная система обнаружения самолетов, имевшая
50
Глава 2
две линии наблюдения, была создана на Карельском перешей-
ке. Она позволяла определить участки и направления пролетов
самолетов противника. Полученные данные передавались на
Главный пост ВНОС Ленинградского ПВО.
После того, как были созданы импульсные РЛС с одной
приемо-передающей антенной и с лучшими тактико-техниче-
скими характеристиками по сравнению с РЛС с непрерывными
сигналами, многопозиционные радиолокационные системы
перестали создаваться.
2.10.2. Первая многопозиционная система РЛС в Германии
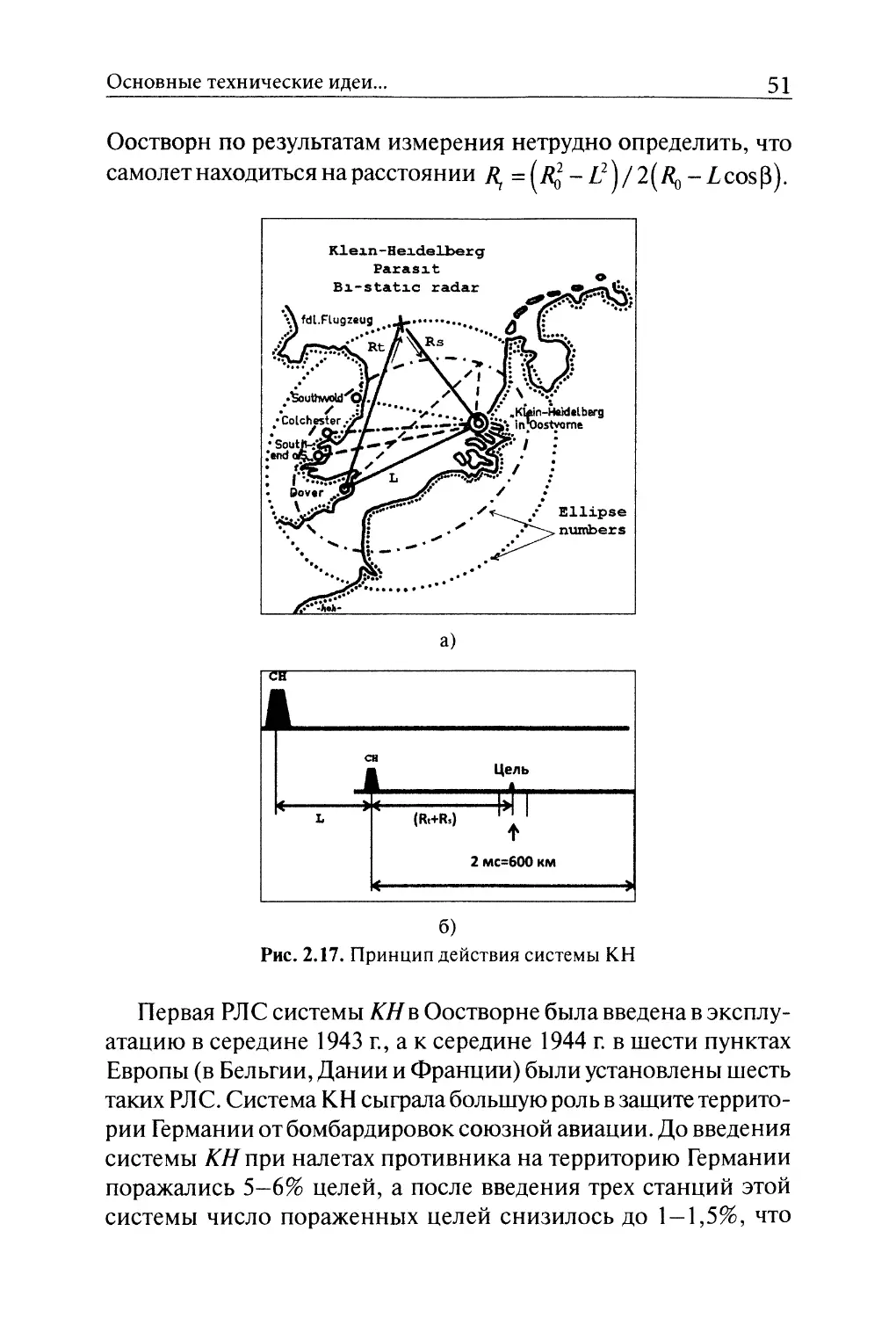
В Германии в годы Второй мировой войны была создана эф-
фективная радиолокационная система Klein Heidelberg (КН),
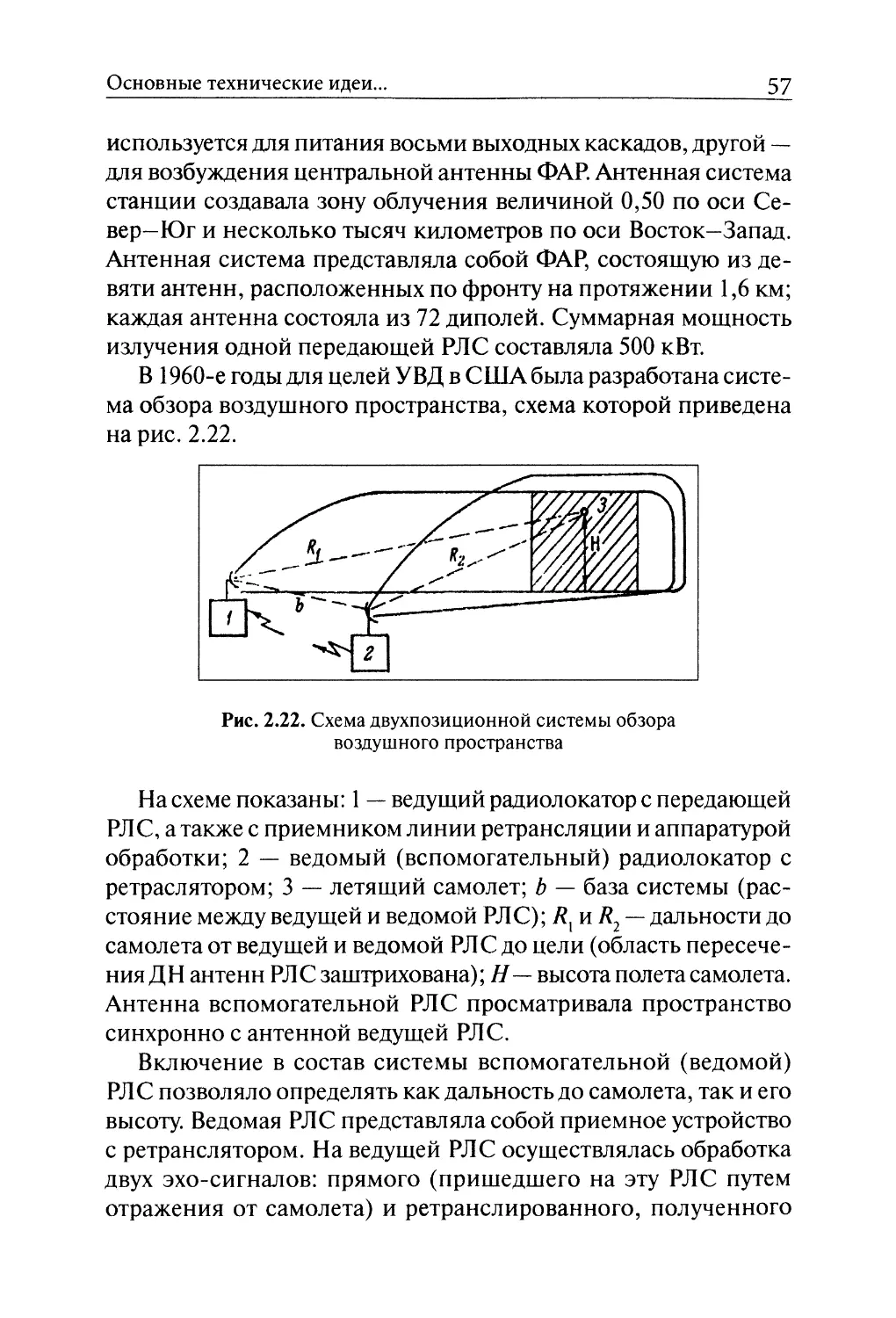
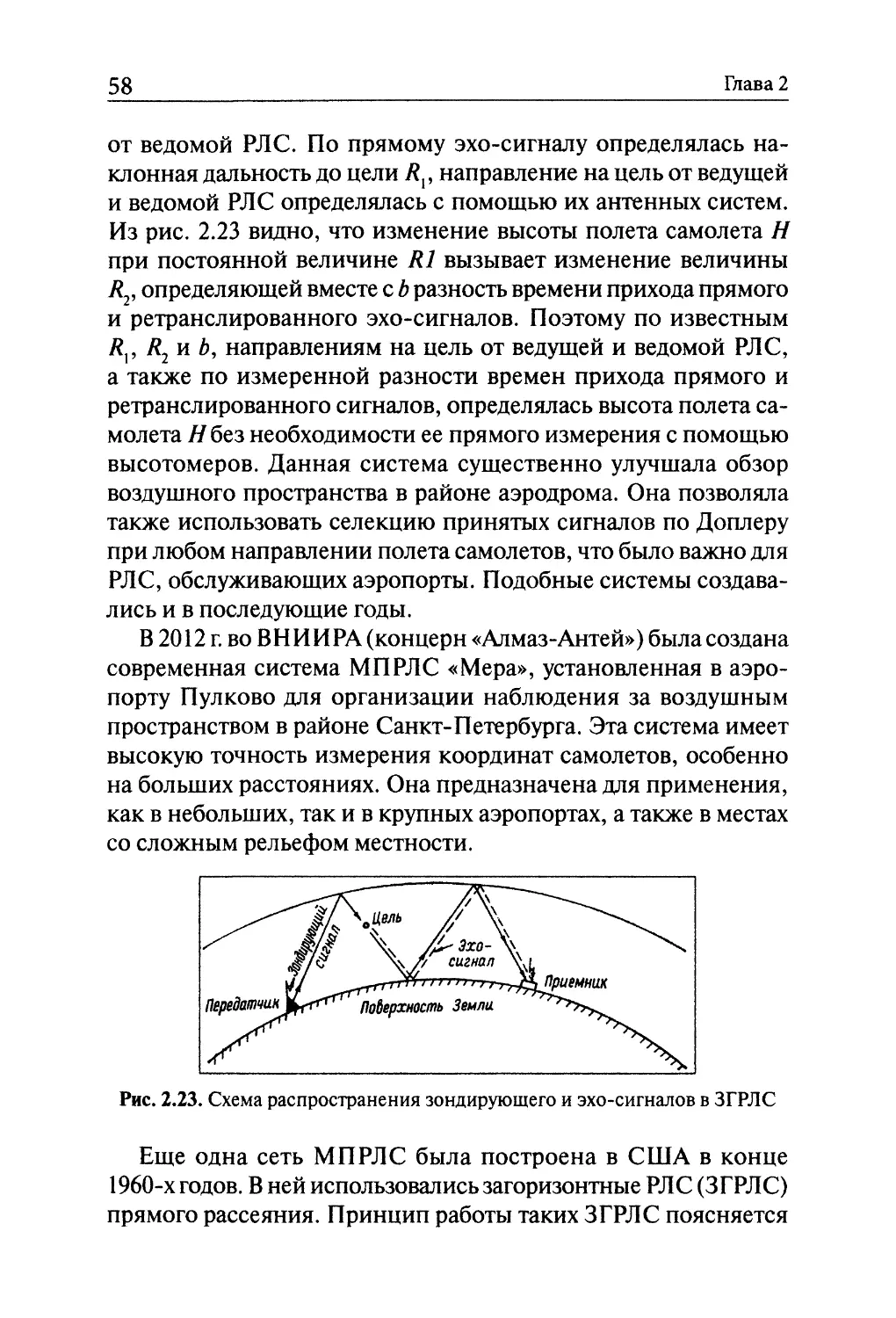
предназначенная для раннего предупреждения о налете враже-
ской авиации. Эта система была пассивной и использовала для
обнаружения вражеских самолетов, приближающихся к террито-
рии Германии, то, что они находились в радиолокационном поле
английских РЛС сети Chain Home (СН) и зондирующие сигналы
этих РЛС, отраженные от самолетов, летящих в направлении к
континентальному побережью, принимались станцией системы
КН, на которой определялись азимут летящего самолете и его
дальность до приемной станции. Принцип действия системы
КН поясняется рис. 2.18.
На рис. 2.17, а показаны: передающая РЛС сети СН, распо-
ложенная в городе Дувр (Dover) на южном побережье Англии;
приемная станции системы КН, расположенная в прибрежием
городе Оостворне (Oostvome) на территории Бельгии (отметим,
что расстояние между этими городами L точно известно); кре-
стиком на этом рисунке помечен летящий самолет, находящийся
на расстоянии Rt от Дувра и Я от Оостворна.
На приемной РЛС системы КН определялись также рассто-
яние Ro = (Rt + Я) и угол р между направлением от РЛС системы
КН на самолет относительно базовой линии Дувр-Оостворн.
Расстояние (Rt + А) определяется на экране монитора РЛС КН,
как показано на рис. 2.18, б по запаздыванию импульса РЛС,
пришедшего непосредственно от РЛС СН и в результате переот-
ражения от летящего самолета. Из треугольника Дувр-самолет-
Основные технические идеи...
51
Оостворн по результатам измерения нетрудно определить, что
самолет находиться на расстоянии R, = (jtf - £2)/2(/?о-£cosp).
Рис. 2.17. Принцип действия системы КН
Первая РЛС системы КН в Оостворне была введена в эксплу-
атацию в середине 1943 г., а к середине 1944 г. в шести пунктах
Европы (в Бельгии, Дании и Франции) были установлены шесть
таких РЛС. Система КН сыграла большую роль в защите террито-
рии Германии от бомбардировок союзной авиации. До введения
системы КН при налетах противника на территорию Германии
поражались 5-6% целей, а после введения трех станций этой
системы число пораженных целей снизилось до 1-1,5%, что
52
Глава 2
свидетельствует о высокой эффективности первой системы пас-
сивной радиолокации, созданной немецкими специалистами.
В течение нескольких десятилетий интерес к системам пассив-
ной радиолокации не проявлялся. Интерес к таким системам
вновь появился в 1960-е годы, когда стали выдвигаться новые
идеи и началось развитие таких систем.
2.10.3. Двух- и многопозиционные РЛС, созданные после 1960 г.
В течение нескольких десятилетий основным видом РЛС,
которые стояли на боевом дежурстве или применялись в
системах управления воздушным движением (УВД), были
однопозиционные РЛС, имевшие совмещенные передающие
и приемные устройства и общую приемо-передающую антенну.
В них информация о цели извлекалась из небольшого участка
электромагнитного поля, принятого апертурой антенны. Такие
РЛС обладали повышенной уязвимостью в боевых условиях, так
как по излучению передатчика было легко установить местопо-
ложение РЛС, создать им помехи приему отраженных от цели
сигналов или осуществить самонаведение на них противора-
диолокационных средств поражения. Следует также отметить,
что применение малозаметных самолетов, построенных по
технологии «Стеле», заметно уменьшавшей их эффективную
площадь рассеяния (ЭПР), а также противорадиолокационных
ракет и крылатых ракет с предельно низкими высотами полета,
существенно снижала боевую эффективность системы ПВО,
в которых традиционно использовались однопозиционные РЛС.
Поэтому с 1960-х годов у специалистов вновь возродился
интерес к двух-, а также многопозиционным РЛС (МПРЛС),
в которых излучение зондирующих импульсов для «подсвета»
цели осуществляется одной или несколькими передающими
радиолокационными станциями, а для приема отраженных
сигналов используются несколько станций, разнесенных в
пространстве на определенной территории. Система МПРЛС
обладает повышенной живучестью, так как обнаружить при-
емные РЛС, которые не излучают в эфир сигналы, практически
невозможно. Кроме того, прием отраженных от цели сигналов
несколькими РЛС, находящимися на данной территории, по-
54
Глава 2
• возможность формирования требуемой зоны обнаружения
цели;
• возможность измерения скорости и координат целей с вы-
сокой точностью;
• возможность надежного обнаружения малозаметных самоле -
тов, построенных по технологии «Стеле», за счет увеличения
ЭПР при больших углах наблюдения;
• повышенную помехозащищенность от пассивных и активных
помех.
За счет большого числа передающих позиций и их разне-
сения в пространстве с приемными позициями МП РЛС обе-
спечивает принципиально лучшую выживаемость в боевых
условиях. Отметим, что передающие РЛС системы МПРЛС
могут устанавливаться на самолетах боевого дозора. Выход из
строя одной передающей позиции не приводит к прекращению
работы всей системы МПРЛС, а приемные позиции не могут
быть обнаружены по излучению в связи с его отсутствием. При
этом дорогостоящая аппаратура (до 80% общей стоимости) со-
средоточена в основном на приемных позициях, а передающие
позиции обладают сравнительно низким энергетическим потен-
циалом и высокой мобильностью, что не позволяет определить
их местоположение с точностью, достаточной для их поражения
противником. В созданных МПРЛС были решены сложные
технические проблемы, связанные с когерентной обработкой
сигналов в разнесенных приемных позициях и синхронизацией
передающих и приемных устройств. Следует также отметить, что
применение М ПРЛ С дает возможность существенно увеличить
максимальное число целей, которое с помощью РЛС можно на-
блюдать в течение определенного интервала времени.
Возможны также другие конфигурации систем МПРЛС,
отличные от той, которая показана на рис. 2.18. На рис. 2.19
показана система, в которой на трех позициях расположены
три обычные РЛС, результаты измерения каждой из которых по
линиям связи поступают для обработки на общий командный
пункт. Точность определения параметров цели и слежения за
многими целями в такой системе выше, чем в системе, пока-
занной на рис. 2.18.
56
Глава 2
сделан отечественными учеными В.Я. Аверьяновым, В.С. Чер-
няком, В.С. Кондратьевым и А.Ф. Котовым.
Приведем несколько примеров практической реализации
МП РЛС.
На рис. 2.21 показана схема сети передающих и приемных
станций «Спасур», созданной в СШАв 1959 г. и предназначенной
для обнаружения, опознавания и каталогизации космических
объектов, находящихся на орбите. Спутники обнаруживались
во время прохождения ими вертикального барьерного веерного
луча, создаваемого передающими станциями.
В этой системе РЛС были разнесены друг от друга на тер-
ритории США на расстояние 400 км и более. Зона облучения
пространства над США, создаваемая передатчиками сети, рас-
пространялась от Сан-Диего (штат Калифорния) до Саванны
(штат Джорджия). Обнаружение и опознавание космических
объектов, пересекающих зону облучения, осуществлялось с
помощью приемных станций на основе триангуляционных и
корреляционных измерений. Сеть обнаруживала практически
все космические объекты при их первом же прохождении через
зону наблюдения. Она позволяла также опознавать даже мелкие
космические объекты (так был обнаружен отрезок проволоки
диаметром 1,6 мм и длиной 4,3 м). Центральный передатчик
основной передающей станции в Кикапу-Лейк работал на ча-
стоте 108,015 МГц и состоял из двух идентичных каналов с вы-
ходной мощностью каждого из них 62,5 кВт. Один из каналов
Основные технические идеи...
57
используется для питания восьми выходных каскадов, другой —
для возбуждения центральной антенны ФАР. Антенная система
станции создавала зону облучения величиной 0,50 по оси Се-
вер—Юг и несколько тысяч километров по оси Восток—Запад.
Антенная система представляла собой ФАР, состоящую из де-
вяти антенн, расположенных по фронту на протяжении 1,6 км;
каждая антенна состояла из 72 диполей. Суммарная мощность
излучения одной передающей РЛС составляла 500 кВт.
В 1960-е годы для целей УВД в США была разработана систе-
ма обзора воздушного пространства, схема которой приведена
на рис. 2.22.
Рис. 2.22. Схема двухпозиционной системы обзора
воздушного пространства
На схеме показаны: 1 — ведущий радиолокатор с передающей
РЛС, а также с приемником линии ретрансляции и аппаратурой
обработки; 2 — ведомый (вспомогательный) радиолокатор с
ретраслятором; 3 —- летящий самолет; b — база системы (рас-
стояние между ведущей и ведомой РЛС); и /?2 — дальности до
самолета от ведущей и ведомой РЛС до цели (область пересече-
ния ДН антенн РЛС заштрихована); Н— высота полета самолета.
Антенна вспомогательной РЛС просматривала пространство
синхронно с антенной ведущей РЛС.
Включение в состав системы вспомогательной (ведомой)
РЛС позволяло определять как дальность до самолета, так и его
высоту. Ведомая РЛС представляла собой приемное устройство
с ретранслятором. На ведущей РЛС осуществлялась обработка
двух эхо-сигналов: прямого (пришедшего на эту РЛС путем
отражения от самолета) и ретранслированного, полученного
58
Глава 2
от ведомой РЛС. По прямому эхо-сигналу определялась на-
клонная дальность до цели R{, направление на цель от ведущей
и ведомой РЛС определялась с помощью их антенных систем.
Из рис. 2.23 видно, что изменение высоты полета самолета Н
при постоянной величине R1 вызывает изменение величины
Rv определяющей вместе с b разность времени прихода прямого
и ретранслированного эхо-сигналов. Поэтому по известным
Rv R2 и b, направлениям на цель от ведущей и ведомой РЛС,
а также по измеренной разности времен прихода прямого и
ретранслированного сигналов, определялась высота полета са-
молета Я без необходимости ее прямого измерения с помощью
высотомеров. Данная система существенно улучшала обзор
воздушного пространства в районе аэродрома. Она позволяла
также использовать селекцию принятых сигналов по Доплеру
при любом направлении полета самолетов, что было важно для
РЛС, обслуживающих аэропорты. Подобные системы создава-
лись и в последующие годы.
В 2012 г. во ВНИИРА (концерн «Алмаз-Антей») была создана
современная система МПРЛС «Мера», установленная в аэро-
порту Пулково для организации наблюдения за воздушным
пространством в районе Санкт-Петербурга. Эта система имеет
высокую точность измерения координат самолетов, особенно
на больших расстояниях. Она предназначена для применения,
как в небольших, так и в крупных аэропортах, а также в местах
со сложным рельефом местности.
Рис. 2.23. Схема распространения зондирующего и эхо-сигналов в ЗГРЛС
Еще одна сеть МПРЛС была построена в США в конце
1960-х годов. В ней использовались загоризонтные РЛС (ЗГРЛС)
прямого рассеяния. Принцип работы таких ЗГРЛС поясняется
Основные технические идеи...
59
схемой, показанной на рис. 2.23. Как видно из этого рисунка,
зондирующий радиолокационный сигнал проходит путь в пря-
мом направлении (передатчик-Земля-приемник), а эхо-сигнал,
возникающий в результате рассеяния зондирующего сигнала
целью, проходит путь (передатчик-цель-приемник), отличный
от пути зондирующего сигнала. Отметим, что расстояние между
передатчиком и приемником в данной системе значительно и
может достигать половины окружности земли.
Цель, находящаяся в зоне между передатчиком и приемни-
ком, обнаруживалась по изменению принимаемого приемником
сигнала: при отсутствии цели принимался только один прямой,
отраженный от поверхности Земли зондирующий сигнал, а при
ее наличии принимались два сигнала: один — прямой зонди-
рующий сигнал, а другой — отличающийся от него по времени
прихода и по частоте (за счет доплеровского сдвига) эхо-сигнал.
В качестве зондирующего сигнала в ЗГРЛС использовались
широкополосные сигналы (ШПС) большой длительности с
псевдослучайной фазовой манипуляцией.
Для устранения неопределенности в положении цели, отраз-
ившей эхо-сигнал, в системе имелось нескольких разнесенных
приемных пунктов, что позволяло определить ее местополо-
жение триангуляционным или корреляционным способами.
Для повышения точности определения местоположения цели
применялась синхронизация приемного устройства сигналами
службы единого времени.
В этой системе МПРЛС (имевшей условное обозначение
440£) использовались мощные передающие РЛС и разнесен-
ные от них на несколько тысяч километров приемные пункты.
Она была предназначена для раннего оповещения о ракетном
нападении путем обнаружения эхо-сигналов от факелов ракет-
ных двигателей на активном участке полета и создаваемых ими
неоднородностей в ионосфере, а также от ядерных взрывов в
атмосфере.
Был создан также вариант системы 440£, основанный на
использовании РЛС ATV/GSQ 93, в который входили несколько
передатчиков, установленных в различных районах Дальнего
Востока, и приемных устройств, размещенных в Западной Ев-
60
Глава 2
ропе. Один из приемных пунктов (командный пункт) является
центром корреляционной обработки принимаемых сигналов.
Назначением этого варианта системы было наблюдение за
космическими летательными аппаратами на участке входа их в
атмосферу Земли. Синхронизация работы передающих и при-
емных устройств обеспечивалась сигналами единого времени,
поступающими по радиоканалу от радионавигационной системы
«Лоран-С».
2.10.4. Разработки РЛС типа MIM0
Одной из новых и весьма перспективных технологий в об-
ласти телекоммуникаций, выдвинутых в самом конце XX века,
стала технология передачи и приема сигналов, получившая на-
звание MIMO (Multiple Input Multiple Output — множественный
вход множественный выход). Для передачи сигналов с высокой
скоростью по многолучевому каналу связи такая технология
была разработана в Bell Labs. Первые результаты теоретических
исследований ее эффективности были опубликованы амери-
канским исследователем Г. Фошини в 1996 г. В этой системе для
передачи сигналов и их приема использовались многоэлемент-
ные антенные решетки.
В радиолокации подобная идея использования антенных
решеток для повышения вероятности обнаружения целей и точ-
ности измерения их параметров появилась раньше — в 1984 г.,
хотя термин «М1МО» применительно к таким системам стал
использоваться только с 2003 г. Первая публикация о новом
типе радиолокаторов, разработанных на основе технологии
MIMO французскими специалистами, появилась в 1984 г. Эта
радиолокационная система, работавшая в метровом диапазоне
длин волн, получила название RIAS (Radar Impulsion et Antenne
Synth tiques — РЛ С с синтезированными импульсом и апертурой
антенны).
Ее антенная система состояла из приемной и передаю-
щей антенных решеток с элементами, размещенными вдоль
двух концентрических окружностей, одна внутри другой. На
рис. 2.24 показана схема передающей и приемной антенных
решеток радиолокационной системы MIMO. Все элементы
Основные технические идеи...
61
передающей решетки излучали одновременно взаимно ортого-
нальные сигналы х (/) на разных частотах. Суммарный сигнал
облучал цель. Благодаря взаимной ортогональности эти сиг-
налы не интерферировали между собой. Каждый из элементов
антенной решетки имел широкую ДН. Совокупность этих ДН
на передачу (соответствующая числу элементов передающей
решетки) охватывала почти всю верхнюю полусферу.
Рис. 2.24. Антенные решетки радиолокационной системы MIMO
На рис. 2.25 показана схема обработки сигналов каждым
элементом приемной антенной решетки. На каждый ее элемент
приходил отраженный от цели суммарный сигнал yk(t) всех ча-
стот. Отдельные ортогональные сигналы х.(Г), входящие в состав
сигналов ^(Г), принятых элементами антенной решетки, разде-
лялись в блоках выделения и обрабатывались (на передаче и на
приеме использовалась цифровая обработка сигналов).
В цифровом процессоре результаты обработки этих сигналов
объединялись, и в результате осуществлялось сверхбыстрое
сканирование заданного сектора (в течение каждого импульса
передающей решетки) и сжатие многочастотного сигнала с
учетом фазовых сдвигов принятых ортогональных сигналов на
отдельных элементах антенной решетки. В этой системе осу-
ществлялся обзор широкого сектора наблюдаемого пространства
без сканирования передающих лучей, а также когерентная об-
62
Глава 2
работка принимаемых сигналов с формированием узких лучей,
покрывающих весь наблюдаемый сектор. Обработка сигналов
в РЛС RIAS позволяла определить положение цели и ее ради-
альную скорость, сочетая обзор наблюдаемого пространства в
очень широком секторе и сопровождение обнаруженных целей.
Приемник 1
Рис. 2.25. Схема обработки сигналов в приемной антенной решетке
Отметим, что MIMO РЛС были предложены как альтернатива
обычным обзорным РЛ С с узкими передающими лучами антенн
и последовательном во времени сканированием пространства.
Обычные РЛС имеют серьезные недостатки при обзоре в широ-
ком секторе, хотя и обеспечивают максимум мощности сигнала,
отраженного от облучаемой цели. Одним из таких недостатков
является то, что требуется много времени для сканирования
узким лучом в широком секторе, так что период обращения к
цели оказывается длительным. Это приемлемо для удаленных
малоразмерных целей, но плохо для близких, особенно быстро
движущихся целей. Другой недостаток обусловлен тем, что для
фиксированного сектора и заданного времени обзора этого
сектора появляется трудность, связанная с так называемым
Основные технические идеи...
63
«импульсным голодом». Это значит, что только малое число
импульсов может быть принято от каждой цели, что часто не-
достаточно для подавления пассивных помех. Кроме того, по-
следовательное сканирование пространства узким лучом часто
не позволяет выполнить все необходимые операции за время
приема сигнала от цели.
Интенсивные научные и экспериментальные исследования
MIMO РЛС начались в 2000-х годах. Существенный вклад в эти
исследования внес в последние годы отечественный ученый
профессор В.С. Черняк.
Глава 3
Основные этапы развития
радиолокационной техники
В данной главе отмечены те важнейшие исторические со-
бытия, которые привели к широкому применению радио-
локации во многих сферах человеческой деятельности. Более
обстоятельно история развития радиолокации рассмотрена в
книге М.А. Быховского «Развитие телекоммуникаций. На пути
к информационному обществу. Развитие радиолокационных
систем», выпущенной в 2015 г. московским издательством «Го-
рячая линия — Телеком».
3.1. Этапы создания радиолокационной техники
Первые идеи о возможности создания локационных систем
выдвинул в 1900 г. Никола Тесла. Однако к их реализации он не
приступал. Первую действующую радиолокационную аппара-
туру, позволявшую использовать радиоволны для определения
направления (пеленга) на невидимые объекты, создал в 1904 г.
немецкий изобретатель Кристиан Хюльсмайер, назвавший свой
прибор телемобильскопом. На это устройство он получил патент
в Германии и вскоре запатентовал его во многих европейских
странах, а также в США. В конце того же года Хюльсмайер
предложил двухантенное устройство, позволявшее не только
обнаруживать сигналы, отраженные от кораблей, но и опреде-
лять расстояние до них. На него он в 1905 г. получил британский
патент. Устройства Хюльсмайера были предназначены для обе-
спечения безопасности плавания судов ночью и в тумане.
Первые практические применения радиоволн для измере-
ния расстояния до наблюдаемых объектов (измерения высоты
Основные этапы развития радиолокационной техники
65
ионосферных слоев над поверхностью Земли) были выполнены
в 1925-1926 гг. Э.В. Эпплтоном в Англии и Грегори Брейтом
и Мэлром Тьювом в США. Эпплтон использовал для этого
сигналы с линейной частотной модуляцией (ЛЧМ), а и Брейт
и Тьюв — импульсные. Их работы были опубликованы, стали
известны специалистам и оказали большое влияние на работы
по созданию радиолокационных систем в последующие годы.
Начало крупномасштабных работ по созданию радиолокаци-
онных систем (радаров) связано с задачами военного характера.
К ним приступили в середине 1930-х годов — всего за несколько
лет до начала Второй мировой войны, развязанной гитлеровской
Германией. Эти работы были направлены, в первую очередь, на
создание систем противовоздушной обороны (ПВО), которые
должны были надежно обнаруживать вражеские бомбардиров-
щики на значительном расстоянии от целей, к которым они
направлялись. Радары давали возможность зенитным батареям
своевременно подготовиться к стрельбе или направить истре-
бители-перехватчики навстречу вражеским бомбардировщикам.
К разработке РЛС почти одновременно приступили ученые
и инженеры Англии, США, Германии, СССР и Японии. Эти
разработки, направленные на обеспечение безопасности этих
государств, были строго засекречены. К их выполнению были
привлечены лучшие специалисты, перед которыми была по-
ставлена сложнейшая задача в кратчайшие сроки создать новую
технику, передать ее в армию и подготовить операторов для ее
применения.
3.1.1. Развитие радиолокации в 1934-1940 гг.
В эти годы были разработаны первые РЛС, с помощью ко-
торых можно было бы в любую погоду, днем и ночью заблаго-
временно обнаруживать приближающиеся вражеские самолеты
на достаточно большом расстоянии от цели, к которой они
направлялись.
Самые первые РЛС (доплеровские), появившиеся в 1934 г.,
являлись, по сути, пеленгаторами, позволявшими определять
направление, с которого приближался самолет. При этом ис-
пользовались непрерывные сигналы и явление интерференции
66
Глава 3
прямой радиоволны и радиоволны с доплеровским сдвигом
частоты, отраженной от пролетавшего самолета. От идеи
создания доплеровских РЛС разработчики в США, Англии
и Германии вскоре отказались, приступив к разработке бо-
лее эффективных РЛС, в которых применялись импульсные
сигналы малой длительности. Такие РЛС были способны не
только определить направление, с котороптдетел самолет, но и
расстояние до него. В СССР над созданием доплеровских РЛС
специалисты работали до 1940 г. и первые РЛС, выпущенные
промышленностью СССР перед началом войны с Германией,
были доплеровского типа.
Следует отметить, что в 1930-е годы еще не были освоены
диапазоны частот выше 30 МГц, не было электронных при-
боров, необходимых для построения мощных импульсных
передатчиков, в которых формировались бы импульсы с дли-
тельностью порядка нескольких микросекунд. В эти годы еще
не была освоена техника создания антенн с узкой ДН и антенн
с электронным управлением в горизонтальной и вертикальной
плоскостях, а также не была отработана техника создания вы-
сокочувствительных широкополосных приемных устройств.
Кроме того, еще не были созданы методы решения многих задач,
связанных с оптимальной обработкой принимаемых радиолока-
торами сигналов, которые позволяли бы с высокой точностью
определять координаты вражеских самолетов на максимальной
дальности. Поэтому первые РЛС создавались в полосах частот
ниже 30 МГц. В Англии до начала войны на южном и западном
побережье была создана цепь РЛС «Chain Ноте» («национальная
цепь»), работавшая в этом диапазоне, сыгравшая значительную
роль в защите ее территории от налетов гитлеровской авиации
в годы войны.
Вскоре была разработана передающая и приемная техника,
позволявшая создавать РЛС, работавшие в диапазоне метро-
вых волн частот 100...500 МГц. В этом диапазоне можно было
создавать антенны с достаточно высокой направленностью и
сравнительно небольшими размерами. Применение таких ан-
тенн позволяло повысить разрешающую способность РЛС по
угловым координатам (азимуту и углу места).
Основные этапы развития радиолокационной техники
67
В предвоенные годы был выдвинут ряд идей, которые были
реализованы в разработках РЛС в годы войны, а некоторые
позже — в послевоенные годы. В РЛС для повышения точно-
сти измерения угловых координат начали применять антенны,
имевшие несколько лучей с достаточно широкой ДН, с помощью
которых после обнаружения самолета его угловые координаты
отслеживались по методу равносигнальной зоны. Несколько
позже для этой же цели стали применять более простой метод
конического сканирования ДН одной антенны.
В СССР в 1938 г. М.А. Бонч-Бруевич для повышения точ-
ности определения угловых координат объектов предложил
применять в РЛС антенны с веерными лучами в азимутальной
и угломестной плоскостях. Радиолокаторы с такими антеннами
создавались уже после окончания войны.
До начала войны независимо в США, Англии и Германии был
изобретен импульсный переключатель (дуплексер), позволяв-
ший создавать однопозиционные РЛС, в которых одна и та же
антенна использовалась для излучения зондирующих сигналов и
приема отраженных. Это существенно упростило конструкцию
РЛС и ее эксплуатацию. Втечение многих лет однопозиционные
РЛС были доминирующим типом РЛС, выпускаемых промыш-
ленностью. В СССР дуплексер был изобретен в 1942 г. и сразу
же был применен в импульсной РЛС «Пегматит», принятой на
вооружение армии в 1942 г.
Важными довоенными разработками стали: создание при-
боров-ответчиков «свой-чужой», позволявших распознать свои
самолеты и надежно уничтожать с помощью истребителей или
огнем зенитной артиллерии только вражеские самолеты, а также
разработка бортовых РЛС сравнительно небольшого веса, при-
годных для установки на самолетах.
В 1930-х годах отечественными специалистами А.А. Черны-
шевым (впоследствии академиком), П.К. Ощепковым, разрабо-
тавшим систему «Вега», и Д.С. Стоговым, реализовавшим РЛС
РКС-1 — «Рапид» были предложены первые многопозиционные
сети доплеровских РЛС. В системе Д.С. Стогова приемные и
передающие станции располагались в две-три линии, что по-
зволяло уточнять направление полета цели. Станции такой сети
68
Глава 3
обеспечивали 100%-ное обнаружение самолетов при пересече-
нии зоны обнаружения днем, ночью, в облаках и за облаками на
всех высотах от 100 м до потолка полета самолетов различных
типов и конструкций тех лет. Во время войны в Германии была
создана и активно использовалась для обнаружения английских
самолетов система двухпозиционных РЛС Klein Heidelberg (АН).
Однако после окончания войны интерес к таким системам про-
пал. К исследованиям и созданию многопозиционных РЛС с
непрерывным излучением вновь вернулись только примерно
через 10 лет.
3.1.2. Развитие радиолокации в 1940-1945 гг.
Во время войны в США и Англия наладили тесное сотруд-
ничество в военной сфере и активно обменивались секретной
технической информацией. Чрезвычайно важным для развития
РЛС было изобретение в 1940 г. в Англии физиками Джоном
Рэндаллом и Гарри Бутом мощных многорезонаторных магне-
тронов СВЧ. Это изобретение позволило во время войны про-
мышленности США и Англии наладить массовый выпуск РЛС,
работавших на частотах выше 3 ГГц. Эти РЛС использовались не
только в Сухопутных войсках, но и в ВВС и ВМФ. Во время во-
йны ряд таких РЛС был передан по ленд-лизу СССР и послужил
прототипами для создания аналогичной отечественной техники.
Большим достижением в технике РЛС стало создание в США
станции орудийной наводки (СОН) SCR-584, которая широко
использовалась в армиях союзников. Эта станция была передана
по ленд-лизу СССР и послужила прототипом для разработки
отечественного аналога такой РЛС — СОНот (приставка «от»
означает отечественная).
В диапазонах частот выше 3 ГГц стали производиться борто-
вые РЛС для ВВС и ВМФ. Одна из таких американских станций
AN/APQ-7, работавшая в диапазоне 10 ГГц, использовалась,
как бомбардировочный прицел с высокой разрешающей спо-
собностью, и была предназначена для слепого бомбометания с
большой высоты (12 000 км). Она имела уникальную антенну в
виде ФАР и позволяла видеть на экране РЛС радиолокационное
изображение городов на расстоянии 300 км. К концу войны
Основные этапы развития радиолокационной техники
69
промышленностью США было выпущено 1660 таких РЛС. Для
бомбометания, обнаружения судов и подводных лодок (ПЛ) в
США была разработана бортовая РЛС ASB, работавшая на ча-
стоте 515 М Гц и имевшая небольшой вес (всего 55 кг). За период
1942-1944 гг. промышленность США выпустила более 26 тыс.
таких РЛС.
В СССР в годы войны и особенно после 1943 г. (после орга-
низации Совета по радиолокации) началась активная работа
по созданию отечественной радиопромышленности и научных
институтов, в которых разрабатывалась отечественная радиоло-
кационная техника. В этот период был разработан и выпускался
отечественной промышленностью ряд РЛС для ПВО, ВВС и
ВМФ. Для оснащения отечественной армии использовались
также РЛС, переданные союзниками по ленд-лизу.
Германия к началу войны по объему разработок и развер-
тывания РЛС опережала другие страны. Однако в то время как
Великобритания и США ускорили свои работы в этой области,
германское командование к концу 1940 г. рассчитывало, что во-
йна Германией будет выиграна быстро. Поэтому исследования,
связанные с совершенствованием РЛС, были прекращены и
многих ученых и инженеров — разработчиков РЛС, призвали в
армию. Однако, неся большие потери самолетов, морских судов
и ПЛ, которые уничтожались союзниками благодаря широко-
му применению РЛС, немцы в 1943 г. поняли, что существенно
отстали в этой области и попытались наверстать упущенное.
Однако время было потеряно, так как в это время в войне на-
ступил перелом.
Крупным достижением немецких инженеров в этот период
стало изобретение важного устройства — селектора движущихся
целей (СДЦ), позволявшего подавить помехи, засвечивавшие
экраны индикаторов кругового обзора. Эти помехи возникали
из-за отражений зондирующих сигналов от местных предметов
(поверхности Земли, моря и т.п.), а также из-за отражений от
сбрасываемых с самолетов противника металлических лент, ис-
кусственно создававших помехи для дезориентации немецких
РЛС ПВО. Такие искусственные помехи нарушили работу гер-
манской системы П ВО при налете самолетов союзной авиации
70
Глава 3
на Гамбург, в результате которого этот город был очень сильно
разрушен, а союзная авиация вернулась на базы практически без
потерь. СДЦ в последующие годы совершенствовался и широко
использовался в РЛС во всех странах.
Еще одним важным изобретением военного периода, сде-
ланным американским исследователем Р. Пэйжем, является
открытый им принцип моноимпульсной радиолокации. Моно-
импульсные РЛС позволяют определять угловые координаты
цели с очень высокой точностью. Такие РЛС стали выпускаться
после окончания войны.
Во время войны в США были выполнены теоретические ис-
следования, которые привели к важному для теории связи по-
нятию согласованного фильтра. Такой фильтр устанавливается в
приемнике, а его параметры выбираются таким образом, чтобы
на его выходе при приеме отраженного от цели зондирующего
сигнала отношение пикового значения мощности сигнала к
мощности шума имело бы максимально возможное значение.
Процедуру синтеза такого фильтра, повышающего помехоустой-
чивость приема сигналов, разработали в 1943 г. Д.О. Норс, Д.
МидддтониДж. Ван Флек. Секретный отчет Д.О. Норса военных
лет, посвященный согласованным фильтрам, был опубликован
в журнале IEEE Proceedings № 7,1963 г.
3.1.3. Развитие радиолокации в 1945-1960 гг.
В эти годы были выполнены фундаментальные исследова-
ния, в результате которых была создана статистическая теория
радиолокации. Эти исследования касались как вопросов синтеза
оптимальных приемников сигналов в присутствии шумов, так и
процедур оценки вероятности правильного приема сигналов при
заданной вероятности ложной тревоги. Об этих исследованиях
более подробно рассказывается в главе 5. В работах С.О. Райса,
В.И. Бунимовича, Д. Миддлтона и др. были развиты методы
анализа сложных радиотехнических устройств, на которых
воздействуют как полезные сигналы, так и случайные шумы.
Академиком В.А. Котельниковым в эти годы была создана те-
ория потенциальной помехоустойчивости. Им были развиты
методы синтеза оптимальных приемников сигналов и методы
Основные этапы развития радиолокационной техники
71
оценки качества их приема. Аналогичные результаты были полу-
чены в СШАД. Миддлтоном и др. Весьма важной для развития
теории радиолокации стала монография английского ученого
Ф.М. Вудворда, опубликованная в 1953 г. В ней он ввел понятие
«функция неопределенности» (ФН) зондирующих сигналов.
Эта функция определяла разрешающую способность сигналов
РЛС по дальности и скорости движения цели. В этот же период
были созданы методы синтеза радиолокационных сигналов с
«хорошей» ФН и стали создаваться РЛС, в которых применялись
широкополосные сигналы с линейной частотной модуляцией
(ЛЧМ), а позже с фазово-кодовой модуляцией.
Система СДЦ была, как уже отмечалось, разработана во
время войны. В 1954 г. в отчете фирмы Rand Corporation (США)
было опубликовано исследование Р. Эмерсона, в котором была
дана строгая теоретическая оценка предельных возможностей
систем СДЦ, рассмотрены вопроса применения в них разного
рода фильтров и предложена методика их расчета.
В 1950-х годах начали создаваться импульсно-доплеровские
РЛС, способные вести наблюдение в неблагоприятных метео-
условиях, а также РЛС, имевшие антенны с синтезированной
апертурой (РСА), позволявшие выполнять картографическую
съемку земной поверхности с борта самолета любую погоду, а
также ночью с качеством, близким к фотосъемке.
К техническим достижениям этого периода относится разработ-
ка в США первой моноимпульсной РЛС AN/FPS-16, обладавшей
сверхвысоким разрешением угловых координат наблюдаемого
объекта (примерно 0,006 град.), а также создание для диапазона
частот 2...4 ГГц клистрона с пиковой мощностью 20 МВт.
В эти же годы при создании РЛС дальнего и сверхдальнего
обнаружения самолетов и баллистических ракет, в том числе
изготовленных с использованием технологии «Стеле», стали
создаваться РЛС, работавшие на сравнительно низких частотах
в диапазонах ОВЧ и УВЧ. Мощность таких РЛС могла состав-
лять несколько мегаватт, в них применялись большие антенны
с линейными размерами до сотен метров. В это же время были
созданы и нашли применение большие РЛС для наблюдений
Луны, Венеры, полярных сияний, метеоров и т.п.
72
Глава 3
Практически сразу же после окончания войны в США и в
СССР началось планирование работ по созданию систем ПВО и
противоракетной обороны (ПРО), способных надежно защитить
территории своих стран.
В США были разработаны первые программы создания
систем предупреждения о ракетном нападении (ПРИ) и ПРО
Nike-Zeus и Nike-X. В 1950-е годы США и Канада создали объ-
единенное командование «Норад» (NORAD — North American
Aerospace Defense Command), которое управляло системой «Би-
мьюс» (BMEWS — Ballistic Missile Early Warning System), являв-
шейся основной системой ПРИ. К важным разработкам этого
периода относится новая РЛС AN/SPG-56 (система «Талое»),
в которой для подавления пассивных помех применена система
СДЦ. Во время запуска космических аппаратов к Луне в рамках
программы «Аполлон» морские суда, оснащенные системой
«Талое», использовали ее для слежения за этими аппаратами на
начальной траектории их полета.
В СССР в 1950 г. было принято правительственное решение
о создании системы «Беркут» (С-25) для обеспечения непро-
ницаемой системы ПВО московского региона. Этот зенитно-
ракетный комплекс (ЗРК) был принят на вооружение в 1955 г.
и находился на боевом дежурстве до 1985 г. Хотя стационарная
система С-25 была весьма эффективной, однако она была чрез-
вычайнодорогой. В 1950-е годы в СССР были разработаны более
экономичные мобильные системы П ВО и П РО — С-75 и С-125.
В 1958 г. приступили к разработке перевозимого ЗРК С-200, об-
ладавшего по сравнению с ранее созданными системами С-25,
С-75 и С-125, расширенной зоной поражения целей, как по
дальности, так и по высоте.
3.1.4. Развитие радиолокации в 1960-1970 гг.
К достижениям этих лет относится создание первых больших
ФАР с электронным сканированием. В них сканирование ДН
антенны по азимуту осуществлялось с помощью управляемых
фазовращателей, а по углу места — за счет изменения частоты
зондирующего сигнала. Использовались также ФАР, в которых
сканирования ДН по обеим координатам осуществлялось по-
Основные этапы развития радиолокационной техники
73
средством фазовращателей с электронным цифровым управ-
лением.
В этот период для управления РЛС начали применяться
цифровые ЭВМ, которые становятся одним из важнейших эле-
ментов РЛ. Их стоимость вместе со стоимостью программного
обеспечения, составляет заметную часть от общей стоимости
РЛС. При создании РЛС все большое значение приобретает
применение в них цифровой техники на базе полупроводни-
ковых приборов и микросхем. Цифровая техника позволяла
реализовать весьма сложные алгоритмы обработки сигналов,
в результате чего стало возможным создавать многолучевые
РЛС, способные одновременно наблюдать за многими целями.
Цифровая техника позволяла создавать сложные системы СДЦ
как для наземных РЛС, так и для бортовых РЛС на самолетах,
летящих не только над морем, но и над сушей, где мешающие
отражения проявлялись значительно сильнее.
В эти годы (годы разгара холодной войны между СССР
и западными державами) в СССР и США большие средства
вкладывали в создание баллистических ракет (БР), в том числе
межконтинентальных баллистических ракет (МБР), способных
нести ядерные заряды. Значительные средства выделялись также
в создание радиолокационных систем П PH. В обеих странах раз-
рабатывались ЗГРЛС, которые могли обнаруживать самолеты,
корабли и запуски ракет на весьма больших дальностях от места
их установки. В эти же годы создавались радиолокационные
средства для слежения за космическими объектами.
В этот период были созданы РЛС с подавлением активных
помех, создаваемых противником. Для этого при появлении
помех предусматривался переход РЛС на работу на резервных
частотах. Кроме того, стали применяться активные компенса-
торы помех, приходящих по боковым лепесткам антенны РЛС.
Был также разработан новый электронный прибор — мощный
коаксиальный магнетрон, позволявший создавать генераторы
с высокой стабильностью частоты, полностью вытеснивший из
техники РЛС обычный магнетрон.
В 1970-1980 гг. продолжалось совершенствование техники
РЛС. В них стали широко использоваться цифровые методы
74
Глава 3
обработки принимаемых сигналов, что, в частности, позволяло
применять в РЛС эффективные системы СДЦ, используя для
передачи импульсные зондирующие сигналы с переменной
частотой повторения. Такие системы СДЦ обеспечивали значи-
тельное подавление пассивных помех (до 90 дБ), и, кроме того,
они не имели «слепых» скоростей движения цели, когда дви-
жущаяся с такими скоростями цель не могла быть обнаружена.
Развитие полупроводниковой электроники сделало возможным
создание полностью твердотельных РЛС без применения элек-
тровакуумных приборов. Это позволяло существенно уменьшить
габариты оборудования РЛС, снизить его энергопотребление,
существенно повысить функциональные возможности обработ-
ки сигналов. В частности, это позволяло любую РЛС оборудовать
собственной системой автоматического обнаружения целей и
их сопровождения. Применение цифровой обработки сигналов
позволяло в реальном времени осуществлять радиолокационную
аэрофотосъемку местности на борту самолета, а не путем пред-
варительной регистрации принятых сигналов с последующей их
обработкой на Земле, как это было необходимо при оптической
аэрофотосъемке.
В эти годы удалось создать входные каскады приемников на
полупроводниковых усилителях, имевших небольшой коэф-
фициент шума. Такие усилители стали широко применяться и
заменили в высокочувствительных приемниках РЛС мазеры и
параметрические усилители, малопригодные для большинства
РЛС. В этот же период в радиолокационную технику внедряются
устройства на поверхностных акустических волнах, позволявшие
расширить возможности практического применения широко-
полосных сигналов с большой базой, которые после сжатия
имели длительность всего в несколько наносекунд и обеспечи-
вали высокую разрешающую способность РЛС по дальности и
скорости цели.
В области антенной техники для РЛС были созданы антенны
со сверхнизким уровнем боковых лепестков ДН. Эти антенны
подавляли облучавшие антенну источники сильных мешающих
отражений, что делало возможным реализацию бортовых им-
пульсно-доплеровских РЛС.
Основные этапы развития радиолокационной техники
75
В СССР и США в эти же годы создаются РЛС для ПВО, ЗРК
для Сухопутных войск, ВВС и ВМФ, а также системы дальнего
обнаружения БР, системы ПРО и контроля космического про-
странства (ККП).
В Радиотехническом институте под руководством академика
А. Л .Минца создаются гигантские супер- РЛ С метрового диапа-
зона волн «Днестр», «Днестр-М» и «Днепр», которые ставятся
на боевое дежурство в системах ПРИ и КПП, размещенных по
периферии территории СССР. Создание сети таких РЛС про-
должалось и в последующие десятилетия.
В эти годы в СССР налажен промышленный выпуск разра-
ботанного в предыдущем десятилетии оборудования для систем
С-75, С-125 и С-200, а в 1969 г. начинается разработка новой
унифицированной системы С-300, предусматривавшая созда-
ние трех специализированных систем: С-300П для войск ПВО,
С-ЗООВ для Сухопутных войск и С-300Ф для ВМФ. Эта новая
система должна была заменить в войсках РЛС, созданные ранее.
В США во Флориде в 1962 г. началось строительство огромной
РЛС AN/FPS-85 с АФАР, предназначенной для ККП.
В эти же годы в СССР и США продолжались работы по
созданию ЗГРЛС, а также начались работы по созданию ави-
ационных комплексов дозора, предназначенных для дальнего
обнаружения вражеской авиации. Такие комплексы были раз-
работаны и в последующие годы после испытаний приняты на
вооружение ВВС.
3.1.5. Развитие радиолокации в 1970-2007 гг.
В 1970-2007 гг. во многих странах шла интенсивная работа по
созданию радиолокационной техники самого разного назначе-
ния. При этом использовались все новейшие достижения в об-
ласти вакуумной и полупроводниковой электроники, антенной
техники и т.п. В этих РЛС реализовывались сложные алгоритмы
обработки сигналов, позволявшие повысить их энергопотенци-
ал, разрешающую способность по дальности и скорости цели, а
также по ее угловым координатам. Были созданы многофункци-
ональные РЛС, позволявшие вести наблюдение одновременно
сотней целей.
76
Глава 3
В СССР и США были построены системы ПРН для дальнего
обнаружения БР, в состав которых входили группировки надго-
ризонтных РЛСиЗГРЛС, атакже системы обнаружения стартов
МБР с помощью космических аппаратов.
В Радиотехническом институте, ныне носящем имя акаде-
мика А.Л. Минца (РТИ) в 1970—1996 гг. для дальнего обнаруже-
ния БР были созданы и поставлены на боевое дежурство РЛС
метрового, дециметрового и сантиметрового диапазонов волн:
«Днестр» (1969 г.), «Днестр-М» (1974 г.), «Днепр» и «Даугава»
(1978 г.), «Дальял», «Дарьял-М» и «Дарьял-УМ» (1976-1978 гг.),
«Дон-2Н» (1996 г.), а в 2006 г. началось боевое дежурство РЛС
«Воронеж-М» — РЛС нового поколения метрового диапазона.
В 2009 г. специалистами НИИ дальней связи (НИИДАР) была
разработана РЛС дальнего обнаружения «Воронеж-ДМ», рабо-
тавшая в дециметровом диапазоне радиоволн.
В 1985 г. было завершено строительство и испытания обо-
рудования ЗГРЛС «Дуга-2», предназначенной для обнаружения
стартов МБР, и она была принята на вооружение. В 1986-1987 гг.
успешно прошли испытания системы «Волна» по загоризонтно-
му обнаружению кораблей. Эта система использовала механизм
пространственного распространения радиоволн и позволяла
обнаруживать корабли и авианесущие группировки США на
дальностях более 3000 км, дислоцируемые в зонах Тихого океана.
В 1975-1996 гг. в СССР велась разработка космической си-
стемы «Око», а затем «Око-1», которые предназначались для
обнаружения стартов МБР, запускаемых как с континенталь-
ной территории США, так и из остальных районов земного
шара, в том числе для обнаружения подводных лодок. Полная
группировка спутников системы «Око-1» включала в себя до
семи спутников на геостационарных орбитах и около четырех
спутников на высоких эллиптических орбитах.
В 1980-е годы в СССР были сняты с вооружения системы
С-25, С-75, С-125 и С-200, созданные в предыдущем десятиле-
тии, и система С-300П стала фактически единственным ЗРК для
Войск ПВО. В эти же годы была принята на вооружение система
С-300Ф и ею стали оснащаться тяжелые атомные крейсеры.
Были проведены испытания системы С-300В, и она также была
Основные этапы развития радиолокационной техники
77
принята на вооружение Сухопутных войск. В конце 1980-х годов
для замены системы С-300 началась разработка новой зенит-
но-ракетной системы С-400 с границей зоны поражения около
400 км. В 2007 г. эта система была принята на вооружение армии.
В этот же период для ПВО и Сухопутных войск были разра-
ботано значительное количество РЛ С, работавших в диапазонах
метровых, дециметровых и сантиметровых волн, в том числе
твердотельных трехкоординатных РЛ С средних и больших высот.
Разработанные РЛС позволяли обнаруживать и сопровождать
самолеты, крылатые и управляемые ракеты, малоразмерные
гиперзвуковые БР, изготовленные с использованием технологии
«Стеле», в том числе воздушные объекты, летящие на малых и
предельно малых высотах.
Для ВВС в СССР в 1970—2000 гг. создавались бортовые РЛС
нового поколения. Был также разработан предназначенный для
дальнего обнаружения целей новый комплекс авиационного
дозора А-50, принятый на вооружение в 1985 г.
В США в 1970-е годы создавалась система COBRA DANE,
назначением которой было предупреждение о ракетном нападе-
нии с северо-западного направления и контроль космического
пространства. В 1980-е годы была создана 3TRHCAN/FPS-118с
мощностью передатчика 1 М Вт и дальностью действия 4800 км.
Такие РЛС устанавливались в южной части США для контроля
судов, подводных лодок и самолетов, находящихся в водах Ти-
хого и Атлантического океанов. Они были установлены также
на Аляске для контроля объектов в восточной части СССР. Эти
ЗГРЛС находились в эксплуатации до 2007 г.
В эти же годы для Сухопутных войск были созданы мобиль-
ные РЛС, предназначенные для обнаружения и определения
координат стреляющих минометов, артиллерийских орудий и
ракетных систем залпового огня, а также твердотельные трех-
координатные РЛС с ФАР.
Значительным достижением специалистов США стало соз-
дание в 1980-е годы многофункциональной РЛС AN/MPQ-53
(PATRIOT — Phased Array Tracking Radar to Intercept On Target)
с ФАР и компьютерным автоматизированным управлением
режимами ее работы. Станция обеспечивала в заданном секторе
78
Глава 3
практически одновременное обнаружение, опознавание, сопро-
вождение от 90 до 125 воздушных объектов и управление полетом
всех наводимых на цели зенитных управляемых ракет (ЗУР).
В рассматриваемый период в США для ВВС были разра-
ботаны многофункциональные бортовые РЛС, работавшие в
диапазоне 8... 12 ГГц, которые предназначалась для работы в ре-
жимах «воздух-воздух» и «воздух-поверхность». Они позволяли
обнаруживать многие цели при любых ракурсах и осуществлять
их сопровождение. В США в этот период создан авиационный
комплекс дозора AWACS на базе самолета Боинг-707, который
мог летать в любую погоду над местностью с самым сложным
рельефом. Этот комплекс являлся самым большим в мире и
позволял на площади 450000 км2 обнаруживать и сопровождать
другие самолеты, оставаясь «невидимым» для наземных радаров.
3.1.6. Развитие загоризонтной радиолокации в 1950—1980 гг.
В СССР и США в этот же период приступили к разработке
чрезвычайно дорогостоящих загоризонтных РЛС (ЗГРЛС),
способных на расстоянии в тысячи километров обнаруживать
старты межконтинентальных баллистических ракет (МБР). Та-
кие РЛС были введены в эксплуатацию в 1970-1980 гг.
Первые идеи создания системы раннего (загоризонтного)
обнаружения самолетов в диапазоне коротких волн на удале-
нии до 3000 км возникли в 1946 г., когда отечественный ученый
Н.И. Кабанов открыл явление возвратно-наклонного зондиро-
вания (ВИЗ), названное позже «эффектом Кабанова». В 1957 г.
независимо от Кабанова к идее загоризонтной радиолокации
пришел крупный отечественный ученый — научный сотрудник
НИИРадио Минсвязи, лауреат Сталинской премии, Главный
конструктор первой отечественной 600-канальной радиоре-
лейной линии «Весна» Е.С. Штырен. Он стал ее прорабатывать
вместе со своими ближайшими помощниками: В.А. Шамшиным
(впоследствии министром связи СССР) и молодыми учеными
Э.И. Шустовым и Б.С. Кукисом. Система загоризонтного об-
наружения баллистических ракет получила название «Дуга»,
ее строительство и испытания были завершены в начале 1980-х
годов. Были построены три ЗГРЛС, расположенные в окрест-
Основные этапы развития радиолокационной техники 79
ностях городов Чернигов, Комсомольск-на-Амуре и Николаев.
В 1985 г. система ЗГРЛС была принята на вооружение.
В 1950-е годы в США явление ВНЗ было открыто физиком
Вильямом Сэйлером, работавшим в лаборатории ВМФ. Он
предложил использовать это явление для создания ЗГРЛС,
способных обнаружить старты МБР, запускаемых с территории
СССР, на расстоянии 5000 км.
В 1955 г. была создана система ЗГРЛС MUSIC (Multiple
Storage, Integration and Correlation) и проведены ее первые ис-
пытания такой системы, показавшие возможность обнаружения
запуска ракет на расстоянии 970 км, а атомных взрывов на рас-
стоянии 2700 км. После ряда усовершенствований в 1961 г. была
создана система MADRE (Magnetic-Drum Radar Equipment).
В конце 1960-х годов началось создание на юго-восточном по-
бережье Англии англо-американской системы Cobra Mist (РЛС
AN/FPS-95), работавшей в диапазоне 5...40 МГц, в которой ис-
пользовался передатчике пиковой мощностью 10 МВт. Система
была предназначена для обнаружения самолетов над западной
частью территории СССР. Позже, в 1980-х годах, в США была
создана ЗГРЛС AN/FPS-118 с мощностью передатчика 1 МВт
и дальностью действия 4800 км. Такие РЛС устанавливались в
южной части США для контроля судов, подводных лодок и са-
молетов, находящихся в водах Тихого и Атлантического океанов
и на Аляске, а также для контроля объектов в восточной части
СССР. Эти ЗГРЛС находились в эксплуатации до 2007 г.
В эти годы начались разработки ЗРК малого радиуса действия,
которыми в последующие периоды оснащались Сухопутные во-
йска и ВМФ, а также для ВВС бортовых РЛС нового поколения.
3.2. Организация работ по созданию радиолокационной
техники в годы Второй мировой войны
Быстрое развитие радиолокации и радиопромышленности
в странах антигитлеровской коалиции Великобритании, США
и СССР в значительной степени произошло за счет того, что в
этих странах были созданы Государственные комитеты, выраба-
тывавшие техническую политику выполнения соответствующих
80
Глава 3
работ и осуществлявшие координацию их выполнения промыш-
ленностью и армией. Эти комитеты возглавили крупные ученые
этих стран: в Англии — Генри Тизард, в США — Ванневар Буш, а
в СССР инициатором создания такого комитета и одним из его
активных руководителей был Аксель Иванович Берг. В состав
комитетов входили крупные ученые, ясно представлявшие те
научные, технические и организационные проблемы, быстрое
решение которых требовала военная обстановка.
3.2.1. Организация работ по созданию радиолокационной техники
в Великобритании
В Великобритании Комитет Тизарда был создан в 1934 г. Бла-
годаря активной деятельности этого Комитета к началу Второй
мировой войны на южном и западном побережье Англии была
создана сеть РЛС Chain Home (СН), сыгравшая решающую роль
в защите территории Англии от нападений армад гитлеровской
бомбардировочной авиации и от обстрелов немецкими ракета-
ми ФАУ-2. Большое значение имело налаженное в 1941 г., по
инициативе Тизарда, тесное техническое сотрудничество между
Великобританией и США, в ходе которого был организован
обмен информацией о ведущихся в этих странах секретных
разработках. Благодаря этому сотрудничеству во время войны
учеными и инженерами обеих стран были совместно проведены
разработки многих совершенных в техническом отношении
РЛС, в том числе РЛС, работавших в диапазонах частот выше
1 ГГц, которые массово выпускались промышленностью США
и Великобритании и поступали на вооружение армии.
3.2.2. Организация работ по созданию радиолокационной техники в США
В США по предложению Ванневара Буша в середине 1940 г.
Президентом Франклином Рузвельтом был создан Националь-
ный комитет оборонных исследований, и Буш был назначен
его Председателем. Буш сразу же привлек к участию в работе
Комитета ведущих американских ученых. Членами его Коми-
тета стали: президенты Национальной академии наук, Масса-
чусетского технологического института (МТИ), Гарвардского
университета, Калифорнийского технологического института,
Основные этапы развития радиолокационной техники
81
председатель совета директоров компании Bell Labs, а также
крупные военноначальники родов войск. В 1940 г. был также
учрежден Микроволновый комитет для изучения и применения
микроволн в радиолокации.
Были организованы научные лаборатории, в которых круп-
нейшими учеными и инженерами страны велись исследования
и разработки новой радиолокационной техники. Комитет осу-
ществлял масштабное финансирование всех, в том числе пер-
спективных разработок РЛС, финансировал их промышленный
выпуск. Следует отметить, что на создание радиолокационной
техники во время войны в США было затрачена огромная сумма
в 2,5 млрд $, в то время как объем финансирования создания в
США атомной бомбы оценивается в 2 млрд $.
Комитет Буша сыграл значительную роль и в осуществлении
других важных разработок. Так, в сентябре 1940 г. Норберт Винер
предложил финансировать создание цифрового компьютера.
Разработка компьютера EN1АС началась в 1943 г. и на данную
разработку было затрачено 500 тыс. $. Это была первая в мире
быстродействующая электронная вычислительная машина.
В июне 1941 г. в США для координации научных исследо-
ваний в оборонных целях в течение войны было создано Бюро
научных исследований и разработок, и его Председателем был
назначен Буш. Это Бюро отвечало непосредственно перед Кон-
грессом США за финансирование работ по созданию новых
технологий и не только для военных целей (оно финансировало,
в частности, производство пенициллина и других медикамен-
тов). В этой организации работали 850 человек, в годы войны
она заключила около 2500 контрактов на проведение научных
исследований, затратив на них 536 млн $.
В годы войны в США разрабатывалась не только новая воен-
ная техника, но и финансировались фундаментальные научные
исследования. Следует отметить, что результаты работ в области
радиолокации и техники СВЧ-диапазона, проведенных в годы
войны в Радиационной лаборатории МТИ, были опубликованы
в 28-томной серии книг, которые стали настольными для специ-
алистов многих стран. В самом конце 1940-х годов по инициа-
тиве А.И. Берга эти книги были переведены на русский язык и
опубликованы издательством «Советское радио».
82
Глава 3
3.2.3. Организация работ по созданию радиолокационной техники в СССР
В организации разработок отечественной радиолокационной
техники до начала войны значительную роль сыграли М.М. Ло-
банов — офицер Главного артиллерийского управления и
П.К. Ощепков — офицер Управления ПВО Красной армии.
Благодаря их энтузиазму и активной деятельности в СССР
начались разработки РЛС, и к началу войны отечественной
промышленностью было выпущено несколько десятков РЛС.
Важность радиолокации для защиты городов и промышленных
объектов и для ведения боевых действий стала очевидной уже в
первые месяцы войны, однако отечественная радиопромышлен-
ность была очень слабо развита и не могла обеспечить армию
нужным количеством радиолокационной техники. Некоторое
количество такой техники поставлялись в СССР союзниками
по ленд-лизу, но это не покрывало всех потребностей армии.
В 1943 г. А.И. Берг был принят руководителем советского
государства И.В. Сталиным и на встрече с ним привел убе-
дительные доводы необходимости срочного развертывания в
стране производства РЛС. Беседа продолжалась три часа и за-
кончилась одобрением предлагаемого Бергом Постановления
Государственного комитета обороны «О радиолокации», которое
было принято 4 июля 1943 г. В нем отмечалось исключитель-
ное значение радиолокации для повышения боеспособности
Красной армии и Военно-Морского флота, и ставились задачи
в области науки, промышленности, мобилизации квалифици-
рованных специалистов, подготовки кадров, концентрации
всех работ по радиолокации в специально созданном при
Правительстве Главном управлении. Председателем Совета по
радиолокации был назначен ГМ. Маленков — член Политбюро
КПСС, что подчеркивало государственную важность проблемы,
а А.И. Берг стал заместителем председателя Совета по радио-
локации и фактически он руководил всей его работой.
К работе в Совете были привлечены крупные отечествен-
ные ученые, инженеры, министры и военные специалисты.
В первом составе рабочего аппарата Совета были: научный от-
дел (руководитель академик Ю.Б. Кобзарев — основоположник
радиолокации в СССР), промышленный отдел (руководитель
Основные этапы развития радиолокационной техники
83
А.И. Шокин, в последующие годы возглавивший Министерство
электронной промышленности), военный отдел (руководитель
Г.А. Угер). В дальнейшем число отделов возросло в связи с рас-
ширением деятельности Совета и охватом новых направлений
работы. В состав постоянных членов Совета были введены
народные комиссары оборонных отраслей промышленности,
руководящие работники Госплана СССР, Наркомата обороны,
включая заместителя начальника Генерального штаба, а также
видные инженеры промышленности и ученые. В состав научного
отдела были включены В.Д. Калмыков (возглавлявший в после-
дующие годы Министерство радиопромышленности), а также
крупный специалист в области распространения радиоволн
академик А. Н. Щукин, возглавивший научно-технический совет.
С образованием Совета по радиолокации в СССР при актив-
ной роли Берга была выработана стратегическая линия развития
не только радиолокационной, но и радиоэлектронной техники
в целом, разработаны программы по созданию радиолокацион-
ной аппаратуры для ПВО, ВВС и ВМФ. Началась организация
или перепрофилирование специализированных научно-ис-
следовательских институтов, конструкторских бюро, заводов.
Были приняты важные решения по подготовке технических,
инженерных и научных кадров радиотехнического профиля для
промышленности, армии и флота.
В результате, во время войны в СССР был налажен выпуск
РЛС, а после войны в стране продолжалось быстрое развитие
радиотехнической промышленности и велись крупные научные
исследования. Это позволило наладить выпуск в нужном для
страны количестве радиолокационной техники и поставлять ее
на экспорт во многие страны мира.
Следует отметить самоотверженный энтузиазм участников
работ по созданию отечественной радиолокационной техники,
как в довоенные, так и в военные годы. Эти ученые, инженеры,
руководители НИИ и целых отраслей промышленности и во-
йсковых соединений самоотверженно работали над созданием
такой техники, которая позволяла защитить отечество и при-
ближала победу над врагом.
К сожалению, в довоенные 1930-е годы высшее военное
руководство СССР в должной степени не понимало значения
84
Глава 3
технических инноваций и, в частности, электроники и радио-
техники, необходимых для разработки РЛС и оснащения армии
радиосредствами. Согласно стратегическим планам военного
руководства война должна была вестись на территории про-
тивника, а для этого, по мнению руководства, небесный щит
для страны был не нужен. Для полноты исторической картины
отметим, что в те годы, хотя и были начаты работы по созданию
отечественных РЛС, многие ведущие отечественные специали-
сты, работавшие над их созданием, были по надуманным обви-
нениям репрессированы. Некоторым пришлось многие годы
провести в тюрьме, а некоторые специалисты были отстранены
от работ по созданию РЛС. В их числе оказались ключевые фи-
гуры создания отечественной радиолокационной и электронной
техники. В 1937 г. в связи с «делом» Тухачевского, осужденного
и расстрелянного по надуманному обвинению в измене Роди-
не, был арестован один из инициаторов и активных руководи-
телей разработок отечественной радиолокационной техники
П.К. Ощепков, работы которого поддерживал Тухачевский.
Около 10 лет Ощепков провел в тюрьме — из заключения был
освобожден только после окончания войны. В эти же годы от
работ над проблемами радиолокации были отстранены вы-
дающиеся отечественные специалисты: член-корреспондент
АН СССР М.А. Бонч-Бруевич — научный руководитель перво-
го отечественного НИИ, в котором разрабатывались РЛС,
и Б. К. Шембель, под руководством которого были созданы
самые первые отечественные РЛС, которые в 1940 г. стали
выпускаться промышленностью, и поступили на вооружение
армии. До войны несколько лет в тюремных застенках провели
видные отечественные ученые, академики А.И. Берг, А.Л. Минц,
С.А. Векшинский, крупный специалист в области техники СВЧ
С.А. Зусмановский и др., внесшие в военные и послевоенные
годы значительный вклад в создание отечественной радиолока-
ционной и электронной техники.
3.3. Гражданские применения радиолокации
Первыми гражданскими применениями радиолокаторов
были ионосферные исследования и метеолокация. Такие радио-
локаторы создавались в 1924-1934 гт.
Основные этапы развития радиолокационной техники
85
После окончания войны стали создаваться специальные
метеорадары, предназначенные для непрерывных наблюдений
за состоянием атмосферы в отдельных регионах. Метеорадары
являются весьма полезным инструментом для прогноза погоды и
в ряде стран на больших территориях к концу XX столетия были
созданы сети таких радаров, которые позволяли предсказывать
смерчи, град, дождь, снег, давать точные прогнозы погоды на
обширных территориях, информировать население о прибли-
жении мощных грозовых бурь.
3.3.1. Управление воздушным движением
Во время войны началось применение РЛС для управления
воздушным движением и посадкой военных самолетов на аэро-
дромы. После войны радиолокационные системы управления
воздушным движением, обеспечивавшие безопасность полетов,
нашли широкое применение во всем мире.
Ежедневно десятки тысяч людей используют самолеты для
полета из одного места в другое, тысячи самолетов осуществля-
ют на аэродромах взлет и посадку. Для поддержания высокого
уровня безопасности полетов на каждом из аэродромов во всех
странах организована служба управления воздушным движением
(УВД), обеспечивающая обмен информацией между авиадиспет-
черами и экипажами воздушных судов с использованием средств
радиолокации, радиосвязи, аэронавигации и ЭВМ.
Начало создания радиолокационных систем УВД относится
к 1940-м годам, когда американский ученый Луис Альварец,
руководивший группой специалистов из Лаборатории излучений
Массачусетского технологического института, выполнил экспе-
рименты с РЛС SCR-584 и показал возможность осуществления
посадки самолета с использованием полученной от радаров
информации. Эта была первая установка УВД, которая стала
известна как «Марк-1». Ее разработка была завершена в сентябре
1942 г. Одновременно с началом серии испытаний РЛС «Марк-
1», целью которых было определение ее возможностей и выра-
ботка норм ее эксплуатации на аэродромах, велась разработка
РЛС «Марк-2» с усовершенствованной системой сканирования
ДН антенн. Опытные испытания РЛС «Марк-2», снабженной
новыми антеннами и индикаторами, начались 1 января 1944 г.
86
Глава 3
Первые такие РЛС для УВД, получившие название
AN/M PN-1, были введены в действие на аэродромах ВВС США
в начале 1945 г. Они использовались в Европе, на Тихом океане
и Аляске и имели большой успех благодаря простоте размеще-
ния на местности, самокалибровке и тому, что они не требовали
дополнительного бортового оборудования и обучения пилотов.
Все заходы на посадку в критических ситуациях во время войны
были сделаны летчиками с использованием этой системы. Прин-
ципы, реализованные в системе AN/MPN-1, не изменились до
наших дней.
3.3.2. Радиолокаторы, использующие антенны с синтезируемой апертурой
В конце 1950-х годов были созданы бортовые самолетные
радары, использовавшие антенны с синтезируемой апертурой.
Такие радары используются в армии для радиоразведки. Но
они имеют также обширную сферу гражданских применений:
в геологии, в том числе при разведке месторождений полезных
ископаемых, нефтяных и газовых месторождений; в экологии
при контроле за окружающей средой; в сельском хозяйстве при
прогнозировании урожаев; при картографировании земных по-
кровов, при археологических исследованиях и т.д. Принципы,
лежащие в основе таких радиолокационных систем, изложены
в главе 2.
3.3.3. Планетарные радолокаторы
Планетарные исследования — еще одно важное направле-
ние в радиолокации. Первые применения радиолокации для
исследования Луны — спутника Земли — были выполнены
в 1946 г. Впервые задачу радиолокации Луны рассмотрели в
1942 г. академики Л.И. Мандельштам и Н.Д. Папалекси, по-
казавшие возможность ее решения имевшимися в то время
техническими средствами. Первые опыты радиолокации Луны
были проведены в 1946 г. 3. Баем в Венгрии и Дж. де Виттом и
Е. Стодолой в США с использованием военных радиолокаторов
SCR-270, работавших на частоте 110 МГц с пиковой мощностью
3 кВт. Радиолокационные исследования Луны позволили опреде-
лить расстояние между ней и Землей с точностью до сотен метров.
Основные этапы развития радиолокационной техники
87
Однако создать мощные радиолокаторы, позволившие ис-
следовать удаленные планеты солнечной системы, удалось
только в конце 1950-х годов. В 1961 г. была осуществлена локация
Венеры, в 1962 г. — Меркурия, а в 1963 г. — Марса. С помощью
планетарных радаров с высочайшей точностью была определена
величина астрономической единицы (расстояние между Землей
и Солнцем), были произведены измерения, рельефа поверхно-
стей Венеры и Марса и т.п.
Радиолокация более далеких планет солнечной системы ока-
залась намного более трудной задачей, потребовавшей создания
очень крупных антенн, мощных радиопередатчиков и высоко-
чувствительных приемников. Это связано с тем, что мощность
отраженного от цели сигнала уменьшается с увеличением рас-
стояния R пропорционально R4. Расстояние до ближайшей к
Земле планеты Венера даже в моменты ее наибольшего сближе-
ния с Землей примерно в 100 раз больше расстояния от Земли
до Луны. Поэтому, хотя поперечное сечение Венеры примерно в
10 раз больше поперечного сечения Луны, энергетический по-
тенциал радиолокатора Венеры должен быть на 70 дБ больше,
чем у Луны. Другая планета — Марс отстоит от Земли еще даль-
ше, чем Венера и энергетика радиолокатора Марса должна быть
на 90 дБ больше лунного.
Впервые эксперимент по радиолокации Венеры, считавший-
ся первоначально удачным, был выполнен в феврале 1958 г. в
Массачусетском технологическом институте группой известного
американского ученого Р. Прайса. В сентябре 1959 г. радиоло-
кация Венеры была проведена также учеными Дж. Эвансом и
Г. Тейлором в радиоастрономической обсерватории Джодрелл
Бэнк, принадлежащей Массачусетскому технологическому
институту. Первые успешные радиолокационные измерения
Венеры были проведены в 1961 г. практически одновременно в
США, Великобритании, а также СССР.
В нашей стране этими работами руководил академик
В.А. Котельников — директор Института радиотехники и элек-
троники (ИРЭ) АН СССР. В СССР для радиолокации Венеры
использовался приёмный комплекс «Плутон» Центра дальней
космической связи под Евпаторией с приёмными и передающи-
88
Глава 3
ми антеннами АДУ-1000, который обеспечивал все программы
исследования дальнего космоса до конца 1970-х годов.
3.3.4. Радиолокаторы в автопилотах
для управления транспортными средствами
Весьма перспективным направлением применения радио-
локационной техники является ее использование в автопилотах
для управления транспортными средствами, что должно резко
уменьшить количество дорожно-транспортных происшествий,
в которых в настоящее время в мире ежегодно гибнет более мил-
лиона человек. Первый автомобиль «Кадиллак-Циклон», осна-
щенный радарными установками, был создан фирмой General
Motors в 1959 г. С помощью радаров определялось расстояние до
впереди идущего автомобиля, а скорость движущегося автомо-
биля автоматически регулировалась так, чтобы путь торможения
не превышал этого расстояния. Это снижало риск столкновения
при внезапной остановке впереди едущего автомобиля. Данные
измерений, полученные от радаров, отображались на передней
панели автомобиля. В начале XXI века специалистами компа-
нии Google был разработан автопилот, испытанный на шести
автомобилях Toyota Prius, Lexus RX 450h и Audi TT, которые без
аварий проехали свыше 450000 км. В ближайшие годы ожида-
ется широкое применение автопилотов на всех автомобилях,
выпускаемых промышленностью.
Глава 4
Создание теоретических основ радиолокации
Разработчики радиолокационных систем стремились созда-
вать РЛС, имевшие максимально возможные дальность действия
и разрешающую способность по всем трем координатам цели:
дальности, азимуту и углу места. Для приема сигналов в РЛС ис-
пользовались сложные алгоритмы их обработки, причем уровень
принимаемых сигналов был низким, а их обработка осуществля-
лась в условиях действия случайных шумов. Проектирование
таких систем требовало решения не только инженерных задач,
связанных с совершенствованием приемных, передающих и ан-
тенных устройств, но и создания теоретических методов анализа
работы сложных систем при обработке сигналов в присутствии
шумов. Во время Второй мировой войны к разработке методов
анализа радиолокационной техники были привлечены многие
крупные ученые.
Начало теоретических исследований эффективности приема
сигналов с использованием статистических методов относится
к 1930-м годам. Однако только в середине 1940-х годов в связи с
проблемами создания эффективных РЛС в США, Великобрита-
нии и в СССР были широко развернуты научные исследования,
приведшие к созданию новой научной области — статистической
радиотехники, которая интенсивно развивалась вплоть до конца
XX столетия.
Статистическая радиотехника имеет ряд разделов и много-
численные применения в разнообразных технических задачах.
Для радиолокации особое значение имеют результаты этой тео-
рии, относящиеся к анализу прохождения случайных процессов
через различные линейные и нелинейные звенья приемного
тракта (детекторы, демодуляторы, фильтры, ограничители и
90
Глава 4
другие элементы), теория оптимальной фильтрации сигналов,
включая теорию обработки сигналов в СДЦ, позволяющих вы-
делять полезные сигналы на фоне мощных помех, вызванных
отражениями сигналов от неподвижных объектов.
Разработка теоретических основ радиолокации позволила
подвести под проектирование РЛС прочную научную базу, на
основе которой стало возможно создание РЛС, позволявших
надежно обнаруживать очень слабые радиолокационные сигна-
лы с высокой точностью измерения координат цели. Развитая
теория радиолокации не противоречила инженерной практике
прежних лет и не только подтвердила рациональность принятых
ранее инженерных решений, но и указала пути дальнейшего со-
вершенствования радиолокационной техники до тех пределов,
которые определяла теория. Не все полученные теоретические
результаты нашли отражение в открытой литературе 1950-х
годов, так как часть из них была засекречена. Однако именно
в эти годы теория радиолокации была признана в качестве не-
обходимой предпосылки разработки и расчета РЛС и прочно
вошла в инженерную практику.
Методы статистической радиотехники и оптимального при-
ема сигналов, создававшиеся в 1940— 1950 гг. для решения радио-
локационных задач, в последующие десятилетия продолжали
интенсивно развиваться и применяться во многих областях,
связанных с обработкой сигналов, таких как телекоммуника-
ционные системы, системы навигации, гидролокации, радио-
астрономии, сейсмологии и др. История развития статистиче-
ских методов в радиотехнике и их применение к решению задач
телекоммуникации более полно изложена в книге «Пионеры
информационного века» (Быховский М.А. — М.: Техносфера,
2006).
4.1. Методы анализа прохождения случайных процессов
через различные звенья приемного тракта
В годы войны над разработкой таких методов работали вы-
дающиеся американские ученые С.О. Райс и Д. Миддлтон.
В СССР значительный вклад в разработку методов статистиче-
Создание теоретических основ радиолокации
91
ской радиотехники внесли академик М.А. Леонтович, профессо-
ра В. И. Бунимович, Б.Р.Левин, Р.Л.СтратоновичиВ.И.Тихонов.
Первыми фундаментальными работами, в которых были
рассмотрены основные задачи статистической радиотехники,
и, в итоге, статистическая радиотехника оформилась как само-
стоятельное научное направление явились статьи американского
ученого С.О. Райса, опубликованные в 1944—1945 гг. В этих
статьях, получивших мировую известность и стимулировавших
многочисленные научные исследования в данном направлении
учеными многих стран, была последовательно изложена общая
теория флуктуационных шумов и представлены методы решения
многочисленных задач, связанных с прохождением сигналов и
шумов через различные звенья нелинейных приемных трактов.
В середине 1940-х годов подобные задачи рассматривались и
известным отечественным ученым В. И. Бунимовичем, который,
наряду с С.О. Райсом, является одним из пионеров, заложивших
основы статистической радиотехники. В 1951 г. им была издана
одна из первых в мире книг, в которой было дано систематиче-
ское изложение широкого круга вопросов, входящих в предмет
статистической радиотехники.
Другой крупной фигурой в данной области является выда-
ющийся американский ученый Д. Миддлтон, который также
в 1940-х годах получил оригинальные научные результаты, а в
начале 1960-х годов выпустил фундаментальную монографию,
которая обобщала все основные результаты, полученные им и
другими учеными в этой области. Д. Миддлтоном были решены
задачи по определению корреляционных функций и спектров
мощности при прохождении случайных процессов через многие
важнейшие элементы передающих и приемных устройств (мо-
дуляторы, преобразователи частоты, детекторы и т.п.). Книга
Миддлтона неоднократно переиздавалась в последующие годы.
4.2. Синтез согласованных фильтров
Одной из важнейших проблем радиотехники является прием
сигналов известной формы на фоне флуктуационных шумов.
Для повышения чувствительности радиолокаторов необходимо
было в устройствах, обрабатывающих принимаемые импульсные
92
Глава 4
сигналы, осуществлять выбор фильтров в приемниках таким об-
разом, чтобы на их выходе отношение пикового уровня сигнала
к мощности шума имело бы максимально возможное значение.
Синтез согласованных фильтров приводит к вариационной зада-
че, в которой заданными являются спектр детерминированного
полезного сигнала и энергетический спектр случайного шума,
действующего на входе приемника, а неизвестной является
частотная характеристика фильтра.
Впервые метод синтеза согласованных фильтров разработал в
1943 г. американский ученый Д.О. Норс, а годом позже к таким
же результатам независимо пришли Д. Миддлтон и Дж. Ван
Флек, предложившие сам термин «согласованные фильтры». Эти
работы выполнялись в связи с разработками в США радиолока-
ционных систем и имели гриф секретности. Было показано, что
в том случае, когда случайный шум является белым, частотная
характеристика согласованного фильтра является функцией,
комплексно сопряженной спектру выделяемого импульса, а его
переходная характеристика является функцией, инверсной во
времени функции, описывающей выделяемый полезный сигнал.
Данный результат имел важное практическое значение и явился
первым результатом по синтезу согласованных фильтров, выде-
ляющих полезный сигнал с минимальной погрешностью. Теория
установила, что при выделении сигнала, имеющего спектр 5 (/со)
и принимаемого на фоне шумов с энергетическим спектром
5 (/со), частотная характеристика согласованного фильтра опре-
деляется выражением
* (/со) = k[S' (jo))/Sn (jco)]exp(-jcox),
где к — произвольная постоянная, ат — момент времени, со-
ответствующий наибольшему отношению р пикового значения
мощности сигнала к мощности шума на выходе фильтра. При
этом максимально возможное значение р определяется фор-
мулой
1 00 Г л
P = dw.
Создание теоретических основ радиолокации
93
Приведенные выше простые формулы относятся к числу
ключевых соотношений в теории связи, которыми пользуются
инженеры при конструировании систем связи и радиолокации.
Теория согласованных фильтров является важным разделом
теории связи, так как такие фильтры являются необходимым
элементом оптимальных систем приема любых дискретных
сигналов на фоне гауссовских шумов. Сейчас почти все радио-
локационные приемники имеют в своем составе согласованный
фильтр или близкий к нему по своим техническим характери-
стикам.
Большое значение для развития теории согласованных
фильтров имела статья крупного американского ученого
ГЛ. Турина, который дал обширный аналитический обзор на-
учных работ по таким фильтрам, опубликованных до 1960 г.
Важные исследования методов построения согласованных
фильтров были выполнены в 1957—1966 гг. отечественным
профессором Ю.С. Лезиным. Им были исследованы свойства
согласованных фильтров, предназначенных для обнаружения
сигналов на фоне гауссовских шумов, рассмотрены методы
их построения и определена эффективность их применения.
В частности, он исследовал вопросы построения гребенчатых
фильтров, оптимальных для выделения из шумов последователь-
ности импульсных сигналов и рассмотрел вопросы построения
согласованных фильтров для импульсных широкополосных
сигналов с большой базой и низким уровнем боковых лепестков
в их корреляционной функции.
4.3. Радиолокационные сигналы
В начале развития радиолокации для измерения дальности
цели от радиолокационной станции использовались короткие
импульсные сигналы, а для измерения доплеровского сдвига
частоты принимаемого сигнала и, следовательно, радиальной
скорости движения цели, применялись сигналы достаточно
большой длительности. Для повышения разрешающей способ-
ности РЛС по дальности необходимо было уменьшить длитель-
ность зондирующих импульсов. Однако при этом снижалась их
энергия, что приводил о к уменьшен ию дальности действия РЛС.
94
Глава 4
Кроме того, РЛС, в которых применялись короткие импульсы,
имели низкую разрешающую способность при определении
скорости цели.
Поиски решения этой двойственной проблемы начались еще
в 1940-х годах и продолжались в течение более 40 лет. Значи-
тельное количество исследований было посвящено разработке
методов построения радиолокационных сигналов.
Как отмечалось в главе 2, еще в 1925 г. для измерения высо-
ты слоев ионосферы Э. Эпплтон применял широкополосные
сигналы с линейной частотной модуляцией (ЛЧМ). В середине
1930-х годов сигналы с ЛЧМ были использованы для измерения
дальности цели в радиодальномере «Гроза», созданном в лабо-
ратории Б.К. Шембеля.
Начало создания РЛС, в которых использовались специаль-
ные широкополосные сигналы, относится к 1950-м годам. В эти
годы в США и в СССР начались интенсивные исследователь-
ские работы по созданию радиолокационных систем с большой
дальностью обнаружения целей и высокой разрешающей спо-
собностью по дальности и скорости их движения. Теоретические
исследования показали, что в качестве таких сигналов должны
быть использованы широкополосные сигналы (ШПС).
Фундаментальный вклад в теорию радиолокационных сигна-
лов внес в 1953 г. английский ученый Ф. Вудворд, установивший,
что при разработке РЛС весьма важен выбор формы сигналов,
так как такие характеристики радиолокационной системы, как
разрешение по дальности, могут определяться не только средней
излучаемой мощностью и длительностью излучаемого импульса,
но и особой формой зондирующего сигнала. Он ввел в теорию
радиолокационных сигналов новое понятие — функцию не-
определенности (ФН) сигналов — двумерную функцию %(т,/),
которая была им определена таким образом:
х( v)=Ел W5’ (' “ т)е“'2^л-
Здесь s(t) — радиолокационный сигнал, a s\f) — комплекс-
но-сопряженный сигнал. Функция неопределенности х(т, /)
позволяет в наглядной форме установить возможности сигна-
лов разной формы, обеспечить разрешение целей по дальности
в
96
Глава 4
В 1950-1960 гг. усилия многих ученых и инженеров были на-
правлены на разработку методов построения широкополосных
сигналов с «хорошей» ФН. Первый шаг на этом пути сделал
Ф. Вудворд, предложивший в 1953 г. рассматривать регулярные
импульсные последовательности как кодированные радиоло-
кационные сигналы: вместо излучения одного импульса РЛС
излучала пачку коротких импульсов. При этом временные
интервалы между соседними импульсами в пачке могли быть
разными и даже случайными. Такие сигналы позволяли обеспе-
чить как необходимую дальность РЛС, так и ее высокую разре-
шающую способность по пространственным координатам цели
и по скорости ее движения. Они нашли широкое применение в
радиолокации. Изучение этих и других сигналов, представляю-
щих собой импульсные последовательности, было проведено в
работах многих ученых.
В технике связи, а также в радиолокации нашли примене-
ние сигналы, предложенные в 1953 г. английским инженером
Р. Баркером. Эти сигналы получались при фазовой манипуляции
на 1800 по определенному закону несущей частоты последова-
тельностью прямоугольных импульсов. Их автокорреляционная
функция %(т, 0) имела уровень боковых лепестков, равный \/N,
где N — длина (число символов) кода. Однако так как коды Бар-
кера могли иметь лишь небольшую длину, не превышающую 13
символов, их практическая ценность была ограничена, так как для
радиолокационных систем требовались создать широкополосные
сигналы достаточно большой длины, ФН которой была бы близка
к «кнопочной» с весьма низким уровнем боковых лепестков.
В 1954 г. С. Дарлингтоном в США и независимо отечествен-
ным ученым Я.Д. Ширманом (1956 г.) были разработаны методы
формирования и приема сигналов ЛЧМ. Такой импульсный сиг-
нал конечной длительности Тпри 0 < t < Тимеет следующий вид:
s(t) = Asin ^со0Г +
Здесь А и со — амплитуда и несущая частота сигнала, /У — де-
виация частоты. База этого сигнала равна В = AfT. В радио-
локации применяются сигналы с очень большой базой
В = 100... 10 000 » 1, спектр которых имеет ширину, равную V,
и практически прямоугольную форму.
98
Глава 4
Теория сложных сигналов, используемых в радиолокации,
получила серьезное развитие в работах отечественных ученых
Д.Е. Бакмана и Л.Е. Варакина. В 1960-1970-х годах ими были
разработаны конструктивные методы синтеза радиолокацион-
ных сигналов по функциям неопределенности и исследованы
оптимальные формы сигналов. Более подробно история раз-
вития методов построения радиолокационных сигналов с вы-
сокой разрешающей способностью изложена в книге «Развитие
телекоммуникаций. На пути к информационному обществу.
Развитие радиотехники и знаний о распространении радиоволн
в ХХстолении» (Быховский М.А. — М.: Либроком, 2013).
4.4. Синтез оптимальных фильтров для выделения
гауссовских случайных сигналов,
принимаемых на фоне гауссовских шумов
Первую основополагающую работу, в которой был разработан
математический аппарат, лежащий в основе теории линейной
фильтрации в дискретном времени опубликовал в 1939 г. академик
А.Н. Колмогоров, работа которого носила чисто математический
характер.
Во время Второй мировой войны, работая над проблемами по-
вышения эффективности наводки орудий зенитной артиллерии на
движущиеся с большой скоростью вражеские самолеты, подобная
же теория независимо была разработана крупным американским
математиком Н. Винером. Он рассмотрел задачи линейной филь-
трации сигналов, а также экстраполяции и интерполяции сигналов
для непрерывного времени и опубликовал свои результаты в книге,
изданной в 1949 г. В ней он указал на важность развитой им теории
для специалистов в области радиотехники, решающих задачи, свя-
занные с выделением полезных сигналов на фоне шумов.
4.5. Методы синтеза оптимальных алгоритмов обработки
принимаемых сигналов. Развитие методов оптимального
приема сигналов в СССР
В 1946 г. академиком Владимиром Александровичем Котель-
никовым была создана теория потенциальной помехоустой-
Создание теоретических основ радиолокации
99
чивости, позволявшая на основе результатов теоретического
анализа решать многочисленные практические задачи синтеза
оптимальных устройств обработки сигналов и определения их
помехоустойчивости в системах связи.
Задачи, связанные с обнаружением радиолокационных сиг-
налов и оценкой их параметров, в работе В.А. Котельникова не
рассматривались, однако разработанная им теория давала необ-
ходимый теоретический аппарат для их решения. Результаты В.А.
Котельникова были опубликованы в виде книги только 1956 г.,
а в 1959 г. эта книга была переведена на английский язык, издана
в США и получила широкую известность. Она оказала большое
влияние на развитие оптимальных методов приема дискретных
и непрерывных сигналов.
Применительно к задачам радиолокации развитую В.А. Ко-
тельниковым теорию оценки параметров сигналов развивали
в последующие годы многие крупные отечественные уче-
ные. Наиболее существенный вклад в развитие данного на-
правления этой теории в нашей стране внесли: чл.-корр. АН
СССР Л.А. Вайнштейн и его ученик В.Д. Зубаков, профессора
С.Е. Фалькович, Е.И. Куликов, А.П. Трифонов, И.А. Большаков,
В.Г. Репин и др. Их результаты представлены в монографиях,
в которых решены многие задачи, имеющие важное практиче-
ское значение для радиолокационных систем.
Исследования возможностей оптимального измерения угло-
вых координат объектов по методу сканирования диаграммы на-
правленности антенны радиолокатора выполнил в 1960-1970 гг.
профессор С.Е. Фалькович. Метод сканирования состоит в том,
что для повышения угловой разрешающей способности радио-
локатора обзор пространства производится за счет перемещения
антенны в пространстве. Если антенна находится на земле, то
сканирование осуществляется при помощи вращения антенны
вокруг оси, жестко связанной с конструкцией антенны. Если
же антенна установлена на борту самолета или искусственного
спутника Земли, то ее сканирование производится за счет дви-
жения летательного аппарата. Амплитудная ДН сканирующей
антенны может быть достаточно широкой, однако ее фазовая
диаграмма должна иметь существенную нелинейность. Законы
100
Глава 4
изменения частоты сигналов, отраженных от каждого из лоци-
руемых объектов, имеющих разные угловые координаты, из-за
сканирования антенны с нелинейной фазовой диаграммой су-
щественно отличаются. Это позволяет повысить разрешающую
способность радиолокатора и разделить разные объекты даже
в том случае, если все они находятся в основном лепестке ДН
антенны и их угловые координаты отличаются незначительно.
Широкую известность среди специалистов получила моно-
графия Л.А. Вайнштейна и В.Д. Зубакова, вышедшая в СССР
в 1960 г. и позже опубликованная в США. В ней, в частности,
была рассмотрена, по-видимому, впервые задача совместного
обнаружения сигнала и оценки его параметров.
Методы, развитые В.А. Котельниковым, были использова-
ны для решения ряда важных практических задач, связанных с
оценкой параметров сигналов в системах, где прием сигналов
ведется по нескольким каналам. К данному классу задач отно-
сятся как радиолокационные задачи, связанные с оптимальной
пространственно-временной обработкой сигналов. В начале
1960-х годов ученые стали применять теорию статистических
решений к таким системам. При пространственно-временной
обработке сигналов используются линейные, двумерные или
трехмерные антенные решетки. При этом временная обработка
сигналов в каналах, подсоединенных к элементам антенной
решетки, расположенных в различных точках пространства,
получается различной. Поэтому для реализации оптимального
приема сигналов требуется их совместная пространственно-
временная обработка.
В данном направлении важные результаты были получены
профессорами С.Е. Фальковичем и И.Н. Амиантовым. Ими
были найдены структуры оптимальных устройств обработки
сигналов, исследованы проблемы пеленгации неподвижных и
подвижных целей и рассмотрены вопросы влияния мультипли-
кативных и аддитивных помех на оптимальный прием сигналов.
Был также выполнен синтез оптимальных 4-канальных моно-
импульсных измерителей угловых координат (система Пэйжа)
источников гармонического и шумоподобного излучения.
В результате были получены оптимальные алгоритмы обработ-
Создание теоретических основ радиолокации
101
ки сигналов в данной системе как при их некогерентном, так
и при когерентном приеме и определена достижимая точность
измерения угловых координат целей. Было также проведено
обстоятельное исследование фазовых методов измерения угло-
вых координат целей, основанных на сравнении фаз колебаний,
принятых несколькими элементами антенны, образующими
двумерную решетку.
Плодотворный подход к синтезу оптимальных демодулято-
ров, в основе которого лежали идеи В.А. Котельникова, был
разработан в 1961 г. отечественными учеными И.А. Большако-
вым и В.Г. Репиным. Методы, развитые И.А. Большаковым и
В. Г. Репиным, были с успехом применены к большому числу
проблем, связанных с радиолокацией. Полученные результаты
отражены в фундаментальной двухтомной монографии «Во-
просы статистической теории радиолокации», написанной с
их участием большим коллективом авторов и опубликованной
в 1963-1964 гг.
В монографии, написанной отечественными учеными, рас-
смотрен большой круг проблем, связанных с обнаружением сиг-
налов и измерением дальности, скорости и угловых координат
лоцируемых объектов, как при импульсном, так и при непре-
рывном излучении сигналов. В ней рассмотрены когерентные и
некогерентные методы приема сигналов. Выполнено исследо-
вание методов пеленгации объектов с использованием антенн
типа фазируемых антенных решеток и антенн со сканированием
диаграммы направленности. Дан анализ многомерных следящих
измерителей, осуществляющих одновременное измерение сразу
нескольких параметров сигналов. Рассмотрены методы оценки
точности измерения параметров при большом уровне принима-
емых сигналов, а также весьма важные вопросы срыва слежения
в радиолокационных следящих измерителях.
4.6. Развитие методов оптимального приема
сигналов за рубежом
Во время войны в США к интенсивным работам по созданию
радиолокационных систем были привлечены многие крупные
ученые. Особенно значительные теоретические работы в этой
102
Глава 4
области проводились в Массачусетском технологическом ин-
ституте. Выше упоминались исследования Н. Винера, который,
занимаясь задачами повышения точности стрельбы зенитной
артиллерии по вражеским самолетам, создал фундаментальную
теорию фильтрации, интерполяции и экстраполяции сигналов.
В 1950 г. в МТИ вышла одна из первых посвященных поме-
хоустойчивости приема радиолокационных сигналов книг —
«Пороговые сигналы», содержавшая основные результаты в этой
области, полученные учеными МТИ 1940—1945 гг. В 1952 г. она
была переведена и издана в СССР издательством «Советское
радио». Одна из глав этой книги была написана крупным аме-
риканским ученым А. Зигертом, который был одним из первых,
кто обратил внимание на то, что математическим фундаментом,
на котором может быть построена теория оптимального при-
ема сигналов на фоне шумов, является теория статистических
решений, созданная математиками еще в середине 1920-х годов.
В книге «Пороговые сигналы» Зигертом был написан раздел,
в котором эта теория применялась к задачам оптимальной об-
работки радиолокационных сигналов, принимаемых на фоне
шумов.
В1950-1952 гг. были опубликованы весьма важные работы ан-
глийских ученых Ф. Вудворта и И. Дейвиса, посвященные про-
блемам оптимального приема радиолокационных сигналов. Эти
работы были переведены на русский язык и оказали заметное
стимулирующее влияние на развитие интенсивных исследова-
ний в данном направлении в СССР. В книге «Теория вероятно-
стей и теория информации с применениями к радиолокации»,
опубликованной в 1953 г., Вудворд ввел в теорию радиолокации
понятие обратной вероятности из области математической ста-
тистики и воспользовался им для определения характеристик
радиолокационного обнаружения и предварительного расчета
точности радиолокационных измерений.
Основополагающие результаты, относящиеся к задаче обна-
ружения радиолокационных сигналов, были получены амери-
канским ученым Дж. Маркумом в 1947 г. Им впервые был опре-
делен порядок расчета энергетики радиолокационных станций.
Он показал, что, прежде чем определять отношение сигнал /
Создание теоретических основ радиолокации
103
шум на входе радиолокационного приемника, необходимое для
надежного обнаружения сигналов, следует задать вероятность
их обнаружения и вероятность ложной тревоги. Кроме того, он
количественно доказал эффективность использования для по-
вышения помехоустойчивости приема сигналов большого числа
импульсов (интегрирования импульсов). До этого при расчете
дальности действия радиолокатора отношение сигнал / шум в
ряде случаев учитывалось неверно, в результате чего измерен-
ная дальность действия реальных РЛС зачастую оказывалась
намного меньше предсказанной.
Первоначально результаты Маркума были изложены в се-
кретном отчете фирмы Rand Corporation, но в 1960 г. они были
опубликованы в журнале IRE Transactions on Information Theory
и стали доступны широкому кругу специалистов. В этом же
журнале была помещена работа П. Сверлинга, обобщающая
результаты Маркума на случай флюктуирующих целей.
Значительную роль в развитии теории оптимального приема
сигналов сыграли многочисленные и глубокие работы выдаю-
щегося американского ученого Давида Миддлтона. В 1953 г. им
была опубликована одна из первых работ, в которой на основе
статистической теории проверки гипотез была разработана те-
ория обнаружения сигналов. Созданная Д. Миддлтоном теория
позволяла решать задачи обнаружения сигналов и оценки их
параметров в более общей постановке, нежели теория Котель-
никова.
Основополагающие работы Д. Миддлтона, развивавшие идеи
теории обнаружения сигналов, были переведены на русский
язык. Они, как и работы Ф. Вудворта, оказали существенное вли-
яние на быстрое распространение среди специалистов идей син-
теза оптимальных устройств обработки сигналов в присутствии
шумов, и определения их потенциальной помехоустойчивости.
В книге Д. Миддлтона «Введение в статистическую теорию
связи», опубликованной в США в 1960 г., систематически изло-
жены важнейшие результаты в области теории связи. Заслугой
Д. Миддлтона является также применение и развитие в теории
радиоприема математического метода последовательного анали-
за, предложенного Вальдом. Этот метод позволят синтезировать
104
Глава 4
оптимальные приемники в системах с обратной связью, когда
по обратному каналу на передаче становится известно о нена-
дежном обнаружении принятого сигнала и передатчик повторяет
передачу ранее переданного сигнала.
Американский ученый Г. Ван Трис в 1968 г. опубликовал три
тома своей уникальной монографии по теории оптимально-
го приема сигналов в разных каналах связи. Третий том этой
монографии был полностью посвящен задачам обнаружения
и оценки параметров сигналов в радиолокационных и гидро-
локационных системах, а в 1971 г. вышел четвертый том этой
монографии, полностью посвященный обработке сигналов,
принимаемых с помощью фазированных антенных решеток.
Эти книги неоднократно переиздавались. В 1972—1977 гг. пер-
вые три тома монографии Г. Ван Триса были изданы на русском
языке в издательстве «Советское радио». В них были обобщены
и изложены с единых позиций многочисленные результаты
теории оптимального приема дискретных и аналоговых сиг-
налов, полученные за всю многолетнюю историю ее развития.
Ван Трис выполнил гигантскую созидательную работу, написав
книги, в которых систематически и с единых позиций изложены
основные результаты одного из важнейших разделов теории
связи — теории потенциальной помехоустойчивости. Как его
собственные научные исследования, так и его книги вошли в
золотой фонд мировой науки.
4.7. Теоретическая оценка возможности подавления помех,
создаваемых отражениями от неподвижных объектов
Принцип работы РЛС с селектором движущихся целей
(СДЦ), позволявший подавить помехи от неподвижных объектов
на 30...90 дБ, был разработан в 1944 г. в Германии во время во-
йны. Однако, только в 1954 г. в отчете фирмы Rand Corporation
американским ученым Р. Эмерсоном была дана строгая теоре-
тическая оценка предельных возможностей СДЦ, предложены
методики расчета РЛС с СДЦ, а также определены способы
обработки принимаемых сигналов. Эмерсон ввел понятие оп-
тимального фильтра в СДЦ, рассмотрел вопросы применения
Создание теоретических основ радиолокации 105
трансверсальных фильтров, фильтров с селекцией по дальности,
применение переменных частот повторения импульсов с целью
выделения с помощью СДЦ движущихся объектов при любой
скорости их движения. Отсчет Эмерсона был секретным. Позд-
нее, однако, он был рассекречен и опубликован. Пока он оста-
вался секретным, он представлял в основном «академический»
интерес, поскольку техника обработки сигналов тех лет еще не
достигла уровня, позволявшего воспользоваться результатами
этой теории для решения практических задач. Возможность
широкого применения СДЦ появилась только в 1960-е годы,
когда на смену акустическим линиям задержки в системах СДЦ
пришли методы цифровой обработки, и РЛС с СДЦ получили
широкое распространение.
108
Глава 5
создание новейшей военной техники в США. Разработанные
им подходы по формированию государственной политики раз-
вития науки оказали сильное влияние на формирование такой
политики в США в послевоенные годы.
Ванне вар Буш в 1913 г. окончил колледж Тафтса, получив сра-
зу степень бакалавра и защитив магистерскую диссертацию. Еще
во время учебы в колледже он сделал первое из своих многочис-
ленных изобретений — прибор для картографирования участков
земной поверхности. Этот прибор по своему внешнему виду был
подобен газонокосилке — он имел два колеса и перьевую ручку,
которая наносила на лист бумаги план участка.
После окончания колледжа Буш стал работать в компании
General Electric (GE), а затем перешел в качестве инженера-
электрика в организацию Brooklyn Navy Yard. В 1915 г. он был
зачислен в Массачусетский технологический институт (МТИ)
для подготовки докторской диссертации в области электротех-
ники, которую защитил в 1916 г. В 1922 г. им вместе с коллегой —
профессором МТИ — был написан учебник по электротехнике.
В 1922 г. Буш вместе с коллегами изобрел термостаты, устро-
енные по принципу переключателя, управляемого температурой
воздуха. В зависимости от установленной температуры контакт-
ная группа переключалась в одно или в другое положение. Для
производства этих устройств была основана компания, доходы
которой вскоре превысили миллион $. В 1924 г. Буш участвовал
в изобретении электронной лампы, названной S-tube. В отличие
от выпускавшихся в те годы электронных ламп для ее питания
требовалась всего одна, а не две электрических батареи (одна в
анодной цепи, а другая в цепи накала). Эти лампы производи-
лись компанией, получившей позже название «Raytheon». В годы
войны она стала крупной фирмой, производившей электронные
компоненты для военной техники.
С 1927 г. Буш занялся созданием дифференциальных анали-
заторов — аналоговых вычислительных машин, позволявших
решать сложные нелинейные дифференциальные уравнения
высокого порядка. Им был создан анализатор для решения таких
уравнений, содержащих до 18 независимых переменных. Диф-
ференциальный анализатор Буша имел, в отличие от созданных
Организаторы работ по созданию радиолокационной техники...
109
ранее, не только механические, но и электронные компоненты.
Эта разработка Буша была отмечена в 1928 г. присуждением ему
медали института Франклина.
В 1930 г. президентом МТИ был избран Карл Комптон, при-
гласивший в 1932 г. Буша занять пост вице-президента этого
института, а также стать деканом Школы электротехники.
В эти годы студент Буша — Клод Шеннон, впоследствии став-
ший одним из крупнейших ученых XX века в области теории
связи, открыл в МТИ важное научное направление — теорию
синтеза релейных и переключающихся схем. Работая под руко-
водством Буша над вопросами создания дифференциального
анализатора, Шеннон впервые применил для синтеза таких
схем Булеву алгебру. Это исследование вошло в магистерскую
диссертацию Шеннона и разработанные им методы синтеза
сыграли важную роль в создании цифровых вычислительных
устройств и автоматов.
В 1935 г. Буш на собственные средства финансировал работы
по созданию скоростных вычислительных машин для взлома
секретных кодов, предназначенных для засекречивания со-
общений, передаваемых по каналам связи. В те годы из-за малой
производительности вычислительной техники эта работа не
увенчалась успехом, но это была первая работа в этом направле-
нии. Такие работы широко развернулись в последующие годы.
Они ведутся во многих странах и в настоящее время. Возможно,
данная работа послужила толчком для фундаментального ис-
следования ученика Буша Шеннона «Теория связи в секретных
системах», которая была выполнена в годы войны.
В мае 1939 г. Буш занял престижный пост президента инсти-
тута науки Карнеги в Вашингтоне, в котором широким фронтом
велись научные исследования по многим направлениям. Это
дало ему возможность, выступая в качестве консультанта пра-
вительства, оказывать влияние на государственную политику
развития научных исследований в США, включая вопросы
финансирования наиболее важных для государства научных
исследований. На этом посту Буш оставался до 1955 г.
В Буше удивительным образом и чрезвычайно органично
сочетались три мало совместимых качества: он был крупным
110
Глава 5
ученым академического толка, преподавателем и обладал ши-
роким инженерным видением. Однако наиболее значимым его
качеством оказались его уникальные способности организатора
науки, основанные на глубоком понимании природы творческой
деятельности и вытекающих из этого принципов организации
масштабных научных исследований и внедрения их результатов
в промышленное производство. Эти принципы не утратили
своего значения и сегодня и на них основана государственная
поддержка научных исследований в США.
Впервые Буш приступил к организации научных исследова-
ний на государственном уровне в США в декабре 1938 г., когда
стал председателем Национального консультативного комитета
по аэронавтике (предшественнике Национального управления
по воздухоплаванию и исследованию космического простран-
ства — National Aeronautics and Space Administration — NASA).
Этот комитет располагал финансовыми средствами и опреде-
лял правительственные заказы на исследования и разработки
в области аэронавтики. Приступая к работе, Буш был озабочен
слабой кооперацией между гражданскими учеными и военными.
Вскоре он наладил тесную координацию научных исследований
с требованиями военных к созданию новой техники. Членом
этого комитета Буш оставался до 1948 г.
Во время войны Буш возглавлял Национальный комитет
оборонных исследований, был председателем Бюро научных
исследований и разработок, через который шло государственное
финансирование всех научных разработок оборонного харак-
тера, в том числе, направленных на создание радиоворужения
армии США, разработку первой в мире электронной вычисли-
тельной машины ENIAC, реализацию манхэттенского проекта
создания атомной бомбы и др. Авторитет Буша и его активность
как организатора науки и развертывания оборонных работ в
США были столь велики, что многие его называли «царем аме-
риканской науки».
Ванневар Буш оказывал большое влияние на государствен-
ную политику развития науки в США и после окончания во-
йны. В 1945 г. он направил президенту Рузвельту меморандум
«The Endless Frontier Science (Предел науки — бесконечность)»,
Организаторы работ по созданию радиолокационной техники...
111
в которой изложил свои взгляды на государственное управление
научными исследованиями, сформулировав фундаментальные
принципы управления наукой:
• фундаментальные исследования всегда должны иметь госу-
дарственную поддержку;
• финансировать следует конкретных ученых, а не проекты;
• средства должны выделяться университетам как наиболее
открытым организациям;
• необходимо финансировать наиболее перспективных иссле-
дователей, в том числе студентов, которые посвящают себя
науке, вне зависимости от их послужного списка и финан-
совых возможностей;
• управление фундаментальными исследованиями должно
быть сконцентрировано в одном гражданском агентстве,
даже если они делаются в интересах министерства обороны.
Исследования чисто оборонного характера должны быть со-
средоточены в специальных службах, а не в этом агентстве.
Буш первым понял, что в мирное время требуется принци-
пиально иная модель организации научных исследований. Он
вынашивал идею конверсии науки, в которой предусматривалось
государственное финансирование и планирование результатов
научных исследований, однако при этом он считал, что важ-
нейшим принципом является соблюдение свободы творчества
ученого. Он подчеркивал, что движущей силой науки является
познавательный и личный интерес ученых. Полезный результат
научных работ поначалу не вполне очевиден, но перспективно
мыслящее государство, как считал Буш, обязано финансировать
и их, не требуя немедленной отдачи.
В 1946—1947 гг. Буш возглавлял Объединенную комиссию по
исследованиям и развитию. Им были созданы критерии оценки
научных работ, способы государственной поддержки, финан-
совые источники, соотношение государственных вливаний и
средств от частного бизнеса, способы выплат — как из бюджета,
так из страховых фондов и т.п. Предусмотрена была система ау-
дита, надзора, отчетов. Для выполнения проектов, которые фи-
нансировались руководимым им государственным комитетом,
он сам буквально поштучно перебирал американских ученых.
112
Глава 5
К моменту, когда меморандум Буша «Предел науки — бес-
конечность» был подготовлен, на смену великому президенту
США Франклину Рузвельту пришел Гарри Трумэн — человек
не столь широких взглядов. Затем началась холодная война и
внутриполитическая обстановка в стране заметно изменилась.
В новых условиях Трумэн отвергнул предложенную Бушем
концепцию развития науки в стране. Вплоть до 1957 г. она была
почти забыта. Только после запуска советского искусственного
спутника Земли в 1957 г., оказавшегося неожиданным для всего
мира, а также для США, в администрации президента США
Дуайта Эйзенхауэра осознали значение науки для национальной
безопасности. Тогда при выработке государственной политики
поддержки научных исследований в стране вновь обратились к
опыту Ванневара Буша.
Существенное влияние на формирование обновленных
взглядов на роль науки оказали и выступления в Конгрессе зна-
менитого математика Джона фон Неймана. В итоге 12 февраля
1958 г. было принято решение о создании при Министерстве
обороны организации, ответственной за фундаментальные ис-
следования. Этой организацией стала ARPA (Advanced Research
Projects Agency), из состава которой в 1960 г. выделилась чисто
гражданская организация NASA.
Идеи Ванневара Буша, выраженные в его записке «Предел
науки — бесконечность», лежат и в основе современной наци-
ональной политики США развития научных исследований. По-
ложения этой политики были сформулированы в сентябре 1998 г.
комитетом по науке Конгресса США в меморандуме «Unlocking
Our Future Toward a New National Science Policy» (Раскрывая наше
будущее: направления новой национальной научной политики),
определившим на многие годы государственную политику в
развитии науки в США.
Следует отдельно отметить, что Бушу-ученому принадлежит
одна из основополагающих научных идей в технике Интернета —
идея гипертекста (текста, содержащего указатели на другие доку-
менты). В 1945 г., сразу после окончания Второй мировой войны,
Ванневар Буш опубликовал статью «As We May Think» (Как мы
мыслим), в которой описал технологию Метех быстрого про-
114
Глава 5
В 1920-х годах А.И. Берг начал свою научную и педагогиче-
скую деятельность. С 1935 г. он — профессор Военно-морской
академии и преподаватель в Ленинградском электротехническом
институте. В 1936 г. Бергу была присвоена ученая степень доктора
технических наук.
В 1927 г. Берг возглавлял комиссию по разработке системы
и программы вооружения каждого класса корабля, подводной
лодки и берегового наблюдательного поста. По существу он
выполнял функции заместителя начальника вооружения ВМФ.
В 1937 г. А.И. Берг стал начальником Научно-исследователь-
ского морского института связи и телемеханики. В конце этого
же года Берга арестовали по обвинению во вредительстве. В за-
ключении он провёл два с половиной года. В мае 1940 г. Берг был
реабилитирован, восстановлен в воинском звании и вернулся к
преподавательской работе, а в 1941 г. ему было присвоено во-
инское звание инженер-контр-адмирал.
В годы войны А.И. Берг внес огромный вклад в развитие
радиотехнического вооружения Советской армии. После его
доклада И.В. Сталину о необходимости срочного развития в
стране научных исследований и разработок в области радио-
локационной техники 4 июля 1943 г. было принято Постанов-
ление Государственного комитета обороны (ГКО) о создании
Совета по радиолокации. Председателем этого Совета был на-
значен член ГКО и ЦК КПСС ГМ. Маленков, а заместителем
Председателя стал А.И. Берг. Кроме того, он стал заместителем
наркома электропромышленности. В результате работы Совета
по радиолокации в стране в течение короткого времени были
развернуты научные исследования и конструкторские работы
по радиолокации и смежным отраслям, организована подго-
товка радиолокационных кадров, создана радиолокационная
промышленность и в короткий срок налажен выпуск радио-
локационной техники.
По инициативе Берга в 1943 г. был основан Центральный на-
учно-исследовательский радиотехнический институт (ЦНИРТИ),
носящий в настоящее время его имя. В этом институте были
проведены фундаментальные и прикладные исследования в
области радиолокации, ставшие основой развития многих ее
Организаторы работ по созданию радиолокационной техники...
115
современных направлений. В 1943 г. Берг был избран членом-
корреспондентом АН СССР, а в 1946 г. стал ее действительным
членом.
После окончания войны А.И. Берг продолжал осуществлять
руководство развитием радиолокационной техники в СССР
вплоть до начала 1957 г. В 1953 г. он был назначен заместителем
министра обороны по радиоэлектронике. В 1955 г. по инициа-
тиве Берга в составе АН СССР был открыт Институт радиотех-
ники и электроники (ИРЭ) и он стал его первым директором.
Институт занимался широким кругом научных проблем, в том
числе и оборонного характера. В нем была собрана научная
элита специалистов в разных областях радиоэлектроники: рас-
пространения радиоволн (Б.А. Введенский), электронных при-
боров (Н.Д. Девятков), антенной техники (А.А. Пистолькорс),
радиолокации (Ю.Б. Кобзарев) и др. В 1954 г. по рекомендации
Берга директором ИРЭ стал выдающийся отечественный ученый
В.А. Котельников.
В 1957 г. А.И. Берг ушел с государственной службы и стал
работать в системе АН СССР. Благодаря своему высокому ав-
торитету он оказал в последующие годы значительное влияние
на развитие в нашей стране многих новых направлений в науке
и технике (электронно-вычислительные машины, автоматиза-
ция процессов управления, проблема надежности электронной
аппаратуры, программированное обучение в школах и вузах,
кибернетика в целом).
В 1959 г. решением Президиума АН СССР был создан На-
учный совет по комплексной проблеме «Кибернетика» (НСК),
получивший в 1961 г. статус научно-исследовательской организа-
ции АН СССР. Этим Научным советом Берг руководил в течение
20 лет. В НСК вокруг Берга собрались крупнейшие отечествен-
ные учёные самых разных профилей. В начале 1960-х годов при
поддержке А. И. Берга создавались институты кибернетики в
республиках СССР, новые отделы и лаборатории в институтах
АН СССР. В 1967 г. к работам НСК было привлечено более
800 ведущих научных специалистов, в том числе 14 академи-
ков, 30 членов-корреспондентов, около 200 докторов и свыше
300 кандидатов наук.
Организаторы работ по созданию радиолокационной техники...
117
ная степень доктора технических наук без защиты диссертации.
В этом же году он получил звание профессора. С 1940 г. Щукину
было присвоено воинское звание инженер-полковник, и он
стал начальником кафедры в академии. В годы войны он вместе
с коллективом академии находился в эвакуации в Астрахани,
а затем в Самарканде. Возглавляя кафедру «Радиотехнические
средства связи и наблюдения», Щукин подготовил научный труд
«Помехоустойчивость радиоприемников», имевший большое
значение для организации военной радиосвязи.
После возвращения в Ленинград Щукин продолжал работать
в Военно-морской академии имени А.Н. Крылова, и с 1945 г.
заведовал кафедрой радиотехники в Ленинградском политехни-
ческом институте. В 1946 г. А.Н. Щукин был избран членом-кор-
респондентом, а в 1953 г. — действительным членом АН СССР.
В 1943 г. Постановлением Государственного комитета оборо-
ны «О радиолокации» Щукин был включен в научную секцию
вновь созданного «Совета по радиолокации». С этого времени
организация исследований в области радиолокации стала основ-
ным направлением его деятельности. С 1947 г. он — руководи-
тель Совета по радиолокации при Совете Министров СССР, а с
августа 1949 г. — заместитель начальника 1-го Главного управ-
ления Министерства Вооружённых сил СССР. С августа 1950 г.
Щукин — заместитель начальника 3-го Главного управления
при Совете Министров СССР. С июля 1953 г. — заместитель и
первый заместитель начальника Главного управления специаль-
ного машиностроения Министерства среднего машиностроения
СССР. В 1950-х годах он принимал участие в организации работ
по созданию крупных радиолокационных систем противовоз-
душной обороны.
С 1955 г. А.Н. Щукин — заместитель Председателя Специ-
ального комитета при Совете Министров СССР по ракетному и
реактивному вооружению. В 1955 г. ему было присвоено звание
генерал-майора инженерно-технической службы. С 1957 года
он — заместитель председателя Комиссии Совета Министров
СССР по военно-промышленным вопросам, председатель На-
учно-технического совета этой комиссии. В 1962 г. ему было при-
своено воинское звание генерал-лейтенант-инженер. В 1965 г.
Организаторы работ по созданию радиолокационной техники...
119
тов электромагнитные волны. Его предложения были доложены
руководству войск ПВО, и он был переведен в управление ПВО.
Свои идеи Ощепков изложил в статье «Современные проблемы
развития техники противовоздушной обороны», опубликован-
ной в № 2 журнала «Противовоздушная оборона» за 1934 г.,
в которой им впервые в отечественной литературе были сфор-
мулированы основные принципы радиолокации.
По инициативе заместителя наркома обороны М.Н. Туха-
чевского 16 января 1934 г. Ощепков сделал доклад на заседании
АН СССР, в котором представил свою схему посылки электро-
магнитного луча на объект и получения луча, отраженного
от объекта. По его инициативе в ЛЭФИ была создана группа
исследователей и уже в начале июля 1934 г. были проведены
успешные опыты по радиолокации на аппаратуре, работавшей
на частоте 60 МГц. В 1934 г. на Ленинградском радиозаводе им.
Козицкого были выпущены опытные образцы предложенных
им РЛС «Вега» и «Конус» для системы радиообнаружения са-
молетов «Электровизор». По его инициативе в 1935 г. с ЛФТИ
был заключен договор на создание первого отечественного им-
пульсного радиолокатора, который был разработан и успешно
испытан в 1938 г.
Разработки ЛЭФИ и ЛФТИ легли в основу РЛС «РУС-1» и
«РУС-2», которые стали выпускаться серийно отечественной
промышленностью. Эти РЛС сыграли большую роль в обороне
крупных городов во время войны.
В июле 1937 г. Ощепков был арестован в связи с «делом Туха-
чевского» по обвинению во вредительстве, контрреволюцион-
ной агитации и участии в контрреволюционной организации и
приговорен к пяти годам заключения. По ходатайству наркома
обороны в декабре 1939 г. Ощепков был освобожден. Однако к
работам по радиолокации он допущен не был, а в составе НИИ
связи и особой техники занялся проблемой создания приборов
ночного видения. Однако в июле 1941г. он был арестован вновь,
вывезен в Саратов и Особым совещанием НКВД снова был
приговорен к 5 годам заключения «за принадлежность к анти-
советской организации». В Саратовской тюрьме он содержался
в одной камере с академиком Н.И. Вавиловым — выдающимся
советским ученым-генетиком.
120
Глава 5
Вскоре к Сталину поступило письмо от А.И. Иоффе,
Г.К. Жукова, В.М. Молотова и К.Е. Ворошилова с просьбой
использовать Ощепкова в интересах работ для армии. Сталин
на их письме написал «Согласен», и Ощепкова перевели в «ша-
рашку» НКВД в Свердловск. Ощепков был освобожден в 1946 г.
и до февраля 1947 г. он работал старшим инженером отдела
спецтехники МВД, затем МГБ СССР.
С 1947 г. Ощепков заведовал лабораторией, возглавлял отдел
вНИИ Академии артиллерийских наук. В 1954 г. он стал руко-
водителем электрофизической лаборатории Института метал-
лургии АН СССР. В 1953-1959 гг. в лаборатории Ощепкова были
разработаны электронно-акустические преобразователи для
визуализации звуковых изображений и электронно-оптические
преобразователи для инфракрасных интроскопов и микроско-
пов. Конвертеры «Уникон-55» и «Уникон-60» позволили визуа-
лизировать невидимое проникающее излучение. В 1964—1968 гг.
Ощепков возглавлял Научно-исследовательский институт ин-
троскопии, который в настоящее время является крупнейшей в
мире организацией (ЗАО НИИН МНПО «Спектр»), выпускаю-
щей широкую номенклатуру средств неразрушающего контроля.
В 1967 г. Ощепков создал Общественный институт по проблеме
энергетической инверсии для решения проблемы непосред-
ственного использования тепловой энергии окружающей среды.
П.К. Ощепков был активным изобретателем и имел более
30 изобретений в области радиолокации, светоэлектроники,
интроскопии. Им было опубликовано свыше 60 научных трудов.
Его интересная книга «Жизнь и мечта», в которой он рассказал
о том, как складывалась его судьба, выдержала три издания.
Михаил Михайлович Лобанов (1901-1984 гг.) — военный
инженер, одна из ключевых фигур в становлении и развитии
радиолокации в СССР, заместитель министра обороны, генерал-
лейтенант инженерно-технической службы.
С 1919 г. М.М. Лобанов служил в Красной Армии и уча-
ствовал в Гражданской войне. После ее окончания он учился в
4-й Казанской военно-инженерной школе комсостава КА по
специальности радиоэлектромеханика. В 1923—1926 гг. служил
в Киеве в 6-м отдельном радиотелеграфном батальоне. В 1930 г.
122
Глава 5
нов осуществлял проверку боеспособности радиолокационной
техники.
Из опыта боевых действий и анализа зарубежного зенитно-
го вооружения он делал выводы по совершенствованию РЛС.
В 1944 г. М.М. Лобанов получил воинское звание генерал-майор
инженерно-артиллерийской службы. Им были сделан ряд пред-
ложений, направленных на совершенствование тактико-техни-
ческих характеристик РЛС. В результате научно-технических и
организационных мероприятий была достигнута 100% надёж-
ность обнаружения самолётов независимо от скорости и высоты
их полета, значительно увеличена дальность их обнаружения
и точность пеленгования. Возглавляемое им управление ГАУ
добилось больших успехов в постановке задачи создания РЛС с
высокой помехоустойчивостью всех тактических назначений и
налаживанию их промышленного выпуска.
В 1949 г. Лобанов был назначен заместителем министра обо-
роны и начальником одного из Главных управлений вооружён-
ных сил Минобороны. Он отвечал за развитие радиолокационной
техники и оснащение ею армии и флота. Разработанная под его
руководством комплексная система оснащения и вооружения
всех видов и родов войск радиолокационными средствами на
годы определили масштабы развёртывания радиолокационной
промышленности. В 1954 г. ему было присвоено звание гене-
рал-лейтенант инженерно-технической службы. М.М. Лобанов
являлся инициатором создания нескольких высших военно-
инженерных учебных заведений с целью воспитания высоко-
квалифицированных кадров для армии.
После того как М.М. Лобанов вышел в 1961 г. в отставку, он
написал четыре содержательные книги по истории отечествен-
ной радиолокации, в которых впервые были отражены основные
этапы развития этого важного направления техники, начиная
с самых первых работ в этой области и кончая работами, вы-
полненными к концу войны. В его книгах имеется обширный
материал, касающийся как технической сути выполненных в
СССР разработок, так и участия в них многих специалистов,
внесших весомый вклад создание радиолокационной техники,
ее производство и внедрение в войска.
Пионеры создания радиолокационной техники
125
он окончил Харьковский университет и начал свою научную
деятельность в ЛФТИ. Работая под руководством профессора
Д.А. Рожанского, он занимался исследованиями генерации
волн метрового диапазона, изучал вопросы стабилизации этих
волн пьезокварцевыми резонаторами, вел разработку теории
нелинейных систем и стабилизации частоты без кварцевого
резонатора. Чтобы освоить технику измерения частоты Кобзарев
с 1930 г. также работал в ЦРЛ.
В 1935 г. Кобзарев — старший научный сотрудник и факти-
ческий заместитель профессора Д.А. Рожанского. В это время
в ЛФТИ была создана под руководством Рожанского специ-
альная лаборатория, в которой начались работы по созданию
импульсного радиолокатора. Ответственным исполнителем
этой разработки был назначен Кобзарев, сумевший в короткий
срок добиться крупных успехов в создании импульсной РЛС
дальнего обнаружения для службы ВНОС. После этого им было
проведено еще несколько исследовательских работ, связанных
с радиолокацией. На основе разработанной им аппаратуры
была создана РЛС «Редут», названная позже РУС-2, которая в
усовершенствованном виде выпускалась отечественной про-
мышленность в годы войны. В 1941 г. за создание первой в стране
импульсной РЛС Ю.Б. Кобзарев и его ближайшие помощники
П.А. Погорелко и Н.Я. Чернецов были награждены Сталинской
премией.
В июле 1943 г. при Государственном комитете обороны был
создан Совет по радиолокации, в котором Кобзарев возглавил
научно-технический отдел. Его обширные знания и нако-
пленный опыт работы в области радиофизики и радиотехники
позволили правильно оценивать возможности радиолокации,
определять перспективные направления научных исследований
с целью совершенствования аппаратуры и методов радиолока-
ции. После упразднения Совета по радиолокации Кобзарев стал
работать в НИИ радиопромышленности, а затем в Институте
радиотехники и электроники (ИРЭ) АН СССР.
В 1950-1960 гг. Кобзарев работал начальником отдела во
ВНИИРТ (Всероссийский НИИ радиотехники, НИИ-20).
В 1954 г. под его руководством была разработана первая в СССР
128
Глава 6
ческого института он был оставлен в институте для подготовки
к профессорскому званию. Ранние научные работы Роханского
посвящены проблемам электрического разряда в газах. В 1911 г.
он защитил магистерскую диссертацию на тему «Влияние искры
на колебательный разряд конденсатора», в которой рассматри-
вались процессы, возникающие в искре при высоко-частотном
колебательном разряде. Ряд работ харьковского периода его
деятельности посвящен резонансным явлениям в электрических
цепях. В 1911 — 1921 гг. Роханский — профессор Харьковского
университета. Он одним из первых выдвинул фундаментальные
идеи создания электронных приборов для генерирования деци-
метровых и сантиметровых волн и организовал в Харьковском
университете проведение соответствующих исследований.
В 1932 г. в ЛФТИ им была выдвинута вахная идея скоростной
модуляции потока электронов в лампе. На ее основе вскоре по-
явились новые приборы СВЧ — клистроны.
В 1921 — 1923 гг. Роханский работал в Нихегородской радио-
лаборатории. В 1922 г. им был разработан метод наводимых элек-
тродвихущих сил, являющийся сегодня фундаментом для расче-
та слохных многовибраторных антенн. В 1923 г. после перевода
всех сотрудников этой лаборатории в ЦРЛ он такхе переехал в
Ленинград. В ЦРЛ основным направлением его исследований
были вопросы генерации и распространения радиоволн, про-
блемы кварцевой стабилизации частоты ламповых генераторов
и разработка методов их расчета. С 1928 г. Роханский являлся
такхе сотрудником ЛФТИ, в котором под его руководством
разрабатываются конструкции коротковолновых генераторов
с кварцевой стабилизацией, нашедшие вскоре широкое при-
менение при создании отечественных радиостанций.
В 1935 г. по распоряхению А.Ф. Иоффе в ЛФТИ была орга-
низована специальная лаборатория для проведения работ по
проблеме обнарухения самолетов. Руководство лабораторией
было возлохено на Д.А. Роханского, предлохившего соз-
дать радиолокационное устройство, основанное на принципе
импульсного излучения. Ответственным исполнителем этих
работ был назначен Ю.Б. Кобзарев. В лаборатории начались
исследованию импульсного метода радиолокации и разработка
Пионеры создания радиолокационной техники
133
частоте. В 1935 г. ЛЭФИ вливается в новый институт НИИ-9.
В этом институте Шембель возглавляет лабораторию, в кото-
рой ведутся разработки первых станций радиообнаружения.
В устройствах, созданных в лаборатории Шембеля, применялись
наиболее передовые идеи, позволявшие повысить точность из-
мерения угловых координат целей — переключение лепестков
ДН приемной антенны и метод конического сканирования
ДН антенны. Эти методы были использованы при разработке
радиопеленгаторов «Буря» в 1937 г. В этом же году был создан
радиодальномер «Гроза» — одна из первых РЛС, в которой для
измерения дальности до цели применялись сигналы с линей-
ной и нелинейной частотной модуляцией. Использование в
РЛС метода конического сканирования в РЛС, создаваемых за
рубежом, относится к 1942 и 1943 гг., а широкополосные сиг-
налы с частотной модуляцией стали применяться в РЛС только
в 1950-х годах.
В 1937 г. межведомственной комиссией было признано, что
ход работ по созданию радиолокационной техники в НИИ-9
недостаточно успешен. После этого директор института
Н.И. Смирнов был снят с должности и репрессирован, главному
инженеру М.А. Бонч-Бруевичу было указано на неэффектив-
ность научного руководства работами, ведущимися в НИИ-9,
а Шембель был отстранен от всех ведущихся там разработок.
Следует отметить, что одна из выполненных в 1934 г. разработок
лаборатории Шембеля — РЛ С « Рапид» была принята под назва-
нием РУС-1 на вооружение армии в 1939 г. после того, как она
была усовершенствована в НИ И ИС КА военным инженером
Д.С. Стоговым. Было изготовлено 45 комплектов аппаратуры
РУС-1, которые во время войны с Финляндией и Второй ми-
ровой войны применялись в Карелии, на Дальнем Востоке и в
Закавказье.
После своего увольнения из НИИ-9 в конце 1937 г. Шембель
вернулся к разработке методов стабилизации частоты радио-
технических устройств, с исследований которых он начинал
свою научную деятельность. В 1946—1957 гг. Шембель работал
во Всесоюзном НИИ метрологии, а затем в Москве в Инсти-
туте химической физики АН СССР (научным сотрудником,
134
Глава 6
начальником лаборатории, начальником сектора). В 1950 г. за
разработку Государственного эталона времени на основе высоко-
частотного лампового генератора, стабилизированного кварце-
вым резонатором, Шембель был удостоен Сталинской премии.
По работам, относящимся к стабилизации частоты, он защитил
кандидатскую диссертацию, а в 1950 г. — докторскую. В 1967 г.
ему было присвоено ученое звание профессора.
В 1958 г. Шебель переходит на работу в Российский феде-
ральный ядерный центр — Всероссийский научно-исследо-
вательский институт технической физики имени академика
Е.И. Забабахина. В нем он занимается разработкой ускори-
тельной техники. Шембель проводит исследования, связанные
с ускорением заряженных частиц, разрабатывает линейные
ускорители тяжелых частиц, создает основы их инженерного
расчета и проектирования. Он — один из авторов первого в
СССР проекта мощного ускорителя. В 1967 г. Шембель с частью
своих сотрудников переехал в Протвино Московской области,
возглавив отдел высокочастотных генераторов в Институте фи-
зики высоких энергий, где был создан крупнейший кольцевой
ускоритель У-70.
Результаты научных исследований Б.К. Шембеля получи-
ли широкое практическое применение в промышленности.
Некоторые из них вошли в учебники по радиотехнике (схема
генератора Шембеля). Классическими являются его работы по
линейному эквиваленту нелинейного элемента электрической
цепи в теории лампового генератора, а также его исследования
различных схем кварцевых генераторов. Б. К. Шембель — автор
многих научных работ, трех книг и более 30 изобретений.
6.2. Пионеры радиолокации Великобритании
Роберт Уотсон-Уотт (1892-1973 гг.) — выдающийся ан-
глийский ученый и инженер, пионер радиолокации, внесший
огромный вклад в создании сети радиолокационных станций
на побережье Англии, защитившей страну от разрушительных
бомбардировок немецкой авиации. Уотсон-Уотт — потомок
Джеймса Ватта, знаменитого изобретателя первой в мире па-
136
Глава 6
В 1934 г. при министерстве авиации под руководством Ген-
ри Тизарда был создан Комитет, перед которым встала задача
срочной организации разработки средств ПВО для защиты
страны от нападений гитлеровской авиации. В Англии помнили
о германских бомбежках с воздуха с помощью дирижаблей, ис-
пользовавшихся Германией во время Первой мировой войны.
С тех пор развитие авиации привело к значительному увели-
чению скорости самолетов, что увеличивало опасность их ис-
пользования Германией для нападения на Англию. Директор
департамента научных исследований министерства авиации
обратился к Уотсону-Уотту за консультацией о возможности
использования для защиты от налетов авиации «лучей смерти» —
мощных радиоизлучений в направлении самолетов противника.
Анализ Уотсона-Уотта показал, что использовать такие лучи
невозможно. Вместе с тем, он прислал секретное предложение
создать устройство, способное обнаруживать приближающие-
ся самолеты противника по отраженным от них радиоволнам.
Вскоре он сконструировал устройство, предназначенное для
радиолокации воздушных объектов, и в 1935 г. получил первый
патент на изобретение подобной системы. В начале 1935 г. им
был разработан и успешно продемонстрирован радиолокатор,
с помощью которого был обнаружен самолет, находящийся на
расстоянии 64 км от РЛС. После этого Правительство Велико-
британии приняло решение о финансировании работ по созда-
нию для защиты территории Англии от налетов гитлеровской
авиации сети РЛС, названной Chain Home (СН). При министер-
стве авиации в 1936 г. была сформирована организация, которая
под руководством Уотсона-Уотта должна была построить эту
сеть.
До конца 1936 г. была построена первая очередь цепи из
пяти РЛС, расположенных на расстоянии 40 км друг от друга.
Строительство сети СН было завершено в 1939 г. Эта сеть РЛС,
состоявшая к 1939 г. из более 50 РЛС, сыграла решающую роль
в борьбе с налётами гитлеровской авиации на Великобританию
в годы войны.
В начале 1936 г. стало ясно, что из-за неудачных попыток бом-
бардировок днем гитлеровская авиация будет стараться осуще-
138
Глава 6
в исследовательской радиолаборатории лондонского универси-
тета Бовен работал над созданием радиопеленгатора, оснащен-
ного индикатором кругового обзора на катодно-лучевой трубке.
В 1934 г. он защитил докторскую диссертацию.
Бовен принимал активное участие в разработке и испытаниях
первых РЛС, которые были разработаны в Англии под руковод-
ством Уотсона-Уотта, а затем в совершенствовании оборудова-
ния (передатчиков, антенн и т.д.) сети РЛС Chain Home. Уже в
1936 г. дальность обнаружения вражеских самолетов с помощью
РЛС этой сети достигла 160 км.
Учитывая достижения и заслуги Бовена в создании сети СН,
а также его способности, Уотсон-Уотт — директор лаборатории,
поставил перед ним исключительно сложную для того времени
и еще никем не решенную техническую задачу — создание РЛС,
которая могла бы быть размещена на самолете. Необходимость
ее создания диктовалась тем, что точность наведения ИА на
вражеские самолеты только с использованием наземных РЛС
была недостаточно высокой, что снижало эффективность ис-
пользования ИА для защиты территории Англии, особенно в
условиях плохой видимости (ночью, в тумане и т.п.).
Уже в августе 1937 г. такая РЛС типа Al (Aircraft Interception)
была разработана. Она имела вес 91 кг, небольшие габариты
(0,24 м3) и потребляла всего 500 Вт. Работала эта станция на
частоте 200 МГц и дальность ее действия составляла 3 км. Ее
антенна была расположена в носу фюзеляжа самолета и не
снижала его аэродинамические характеристики. Эта РЛС была
принята на вооружение в 1939 г. и такими РЛС сразу же были
оснащены 100 самолетов. Применение РЛС типа AI существенно
повысила эффективность поражения вражеских самолетов —
она оказалась в три большей по сравнению с применением зе-
нитной артиллерии.
За этой разработкой последовала разработка самолетной РЛС
для обнаружения морских судов и подводных лодок. Создание
такой РЛС было необходимо для осуществления бомбардировок
военных кораблей Германии и подавления ПЛ, которые в первые
годы войны наносили большой урон американскому и англий-
скому флоту. Эти ПЛ топили многие корабли, направлявшиеся в
Пионеры создания радиолокационной техники
139
военными и гуманитарными грузами из США и Англии в СССР.
Такая РЛС типа ASV (Air to Surface Vessels) была создана под ру-
ководством Бовена в 1939 г. Во время войны промышленность
Англии выпустила 6000 РЛС типа ASV, многие тысячи таких РЛС
были выпущены в США и в Канаде.
В августе 1940 г. Бовен был включен в состав возглавляемой
Генри Тизардом английской делегации, направленной англий-
ским Правительством в США. Эта делегация должна была
проинформировать специалистов США о проводимых в Ан-
глии секретных разработках в области создания РЛС. Одной из
таких важных разработок был мощный магнетрон, созданный
в Бирмингемском университете английскими физиками Рэн-
даллом и Бутом. Этот магнетрон использовался английскими
специалистами при создании первой в мире РЛС, работавшей
в сантиметровом диапазоне волн. Миссией делегации Тизарда
было объединение усилий специалистов обеих стран в разработ-
ке и производстве новых РЛС, широкое применение которых в
войсках приближало победу союзников над общим врагом —
гитлеровской Германией. Участие Бовена сыграло важную роль в
успехе миссии Тизарда и позволило Радиационной лаборатории
Массачусетского института в кратчайшие сроки освоить опыт
английских коллег по созданию новых наиболее совершенных
РЛС, а также начать в США их массовый промышленный вы-
пуск.
В 1943 г. Бовен вернулся в Англию. Война подходила к концу,
выпуск РЛС промышленность был освоен и Бовен оказался не
у дел. Некоторое время он работал в Королевском колледже
в Лондоне, но в 1944 г. он получил предложение переехать в
Австралию на работу в Радиофизической лаборатории, с тем,
чтобы помочь развернуть в Австралии выпуск РЛС для войск
этой страны и США, действовавших в Тихоокеанском регионе.
Посоветовавшись с Уотсоном-Уоттом, Бовен принял это пред-
ложение. Бовен активно участвовал в создании в Австралии
промышленности, выпускающей РЛС. В 1946 г. он стал руко-
водителем одного из отделов Радиофизической лаборатории.
В это время он организовал подготовку в своем отделе одного
из первых в мире учебников по радиолокации.
142
Глава 6
гражданских специалистов. Юнг вместе с Тейлором участвовал
в экспериментах по передаче сигналов через реку Потомак, в
ходе которых было замечено влияние проходившего судна на
прием сигналов, когда оно пересекало линию прямой видимости
между передатчиком и приемником.
Одним из проектов Юнга в лаборатории морской авиации
была разработка метода передачи звуковых сигналов с по-
мощью амплитудной модуляции вместо использовавшегося
тогда кода Морзе. В 1923 г. была создана лаборатория ВМФ,
в которой Тейлор стал начальником радиоотдела, а Юнг — его
помощником. В следующем десятилетии Юнг играл ключевую
роль в разработке радиосистем, включая создание в 1925 г. экс-
периментальной системы для передачи сигналов на коротких
волнах на сверхдлинной (15 000 км) линии связи между стан-
цией в штате Вирджиния и кораблем США, находившимся в
Австралии.
В 1925 г. Грегори Брейт и Мэрл Тьюв — ученые из института
Карнеги, изучавшие ионосферу, обратились в лабораторию
ВМФ к Юнгу с просьбой разработать для этих исследований
передатчик, с помощью которого можно было бы определить
высоту ионосферных слоев. Юнг предложил метод измерения
высоты слоев ионосферы по запаздыванию между переданным и
принятым импульсом и разработал для этого импульсный пере-
датчик. Используя этот передатчик, Брейт и Тьюв определили,
что высота ионосферных слоев изменяется от 80 до 200 км.
В 1930 г. Лауренс Хайланд, один из сотрудников лаборатории
Тейлора, наблюдал биения переданного и отраженного от само-
лета сигнала с доплеровским сдвигом частоты. Вспомнив об экс-
периментах 1922 г., Тейлор и Юнг подготовили отчет, названный
«Сигналы радио-эхо, отраженные от движущихся объектов».
В отчете было предложено использовать наблюдавшиеся специ-
алистами лаборатории эффекты для обнаружения самолетов.
Отчет был отправлен в Вашингтон, а затем в лабораторию армии
войск связи. Никакой реакции на поступивший отчет не после-
довало. Тогда Тейлор предложил директору лаборатории ВМФ
провести разработку устройства для обнаружения самолетов в
инициативном порядке. Это предложение было одобрено.
144
Глава 6
открытия в 1930 г. Лоуренсом Хайландом эффекта биений ча-
стоты излученного сигнала и сигнала, отраженного от самолета с
доплеровским сдвигом частоты, Тейлор и Юнг пытались создать
аппаратуру обнаружения самолетов, основанную на этом эффек-
те. Однако эта разработка успеха не имела. Тогда Юнг предложил
создать устройство, используя импульсный метод измерения
дальности до цели, аналогичный тому, который он применил
при создании ионосферной станции для опытов Брейта и Тьюва
по измерению высоты слоев ионосферы. Тейлор поручил Пейжу
разработать такую аппаратуру, успешные испытания которой
прошли в декабре 1934 г. Передатчик излучал на частоте 60 МГц
импульсы длительностью 10 мкс, задержка между соседними
импульсами составляла 90 мкс, а дальность обнаружения само-
лета составила 1,5 км. После успешных испытаний сенат США
выделил $100 000 для создания РЛС. Работа была засекречена.
Радиолокационная станция, разработанная позже для кораблей
ВМФ, работала на частоте 200 МГц, на которой можно было
создать сравнительно малогабаритные антенны.
Пейж внес многочисленные усовершенствования в радио-
локационую технику. Совместно с Юнгом им был изобретен
в 1937 г. дуплексер — устойство, позволявшее использовать в
РЛС одну и туже антенну для передачи и приема сигналов. Он
изобрел также индикатор кругового обзора, позволяющий на
экране электронно-лучевой трубки определять одновременно
дальность до цели и ее азимут.
Когда в 1940 г. англичане передали американским специ-
алистам документацию на магнетрон сантиметрового диапазона
волн, Пэйж обратился к созданию РЛС в этом диапазоне и,
сотрудничая со специалистами Rad Labs МТИ и Bell Labs, внес
большой вклад в разработку новой технологии.
Одним из его важнейших достижений в области радиоло-
кации является изобретенный им в 1943 г. моноимпульсный
метод определения угловых координат целей с гораздо большей
точностью, чем это было возможно с использованием ранее
предложенных методов разностной ДН антенны или ее кониче-
ского сканирования. Моноимпульсные РЛС были существенно
сложнее тех, которые создавались в те годы. Поэтому это изо-
146
Глава 6
Для проведения дальнейших экспериментальных исследова-
ний Кухнольд привлек крупного ученого Генри Холлмана и двух
опытных радиолюбителей Пауля Эрбслона и Ганса Вильсена,
которые участвовали в разработке системы секретной связи с
высоконаправленными антеннами в диапазоне ультракоротких
волн. В январе 1934 г. при его поддержке они образовали новую
компанию, названную ими «Гема» (GEMA — Gesellschaft fiir
Electroakustische und Mechanische Apparate). Для создания опыт-
ной радиолокационной установки был использован магнетрон
фирмы «Филипс» с разрезным анодным блоком мощностью
70 Вт, работавший на частоте 600 МГц. В этой установке пере-
датчик формировал для излучения в эфир непрерывный сигнал,
а для обнаружения движущегося объекта использовались биения
между этим сигналом и отраженным сигналом с доплеровским
смещением частоты. В создании установки участвовали Ганс
Холлман и Теодор Шульц, работавшие в институте имени
Генриха Герца в Берлине. Ими были разработаны регенератив-
ный приемник и антенна типа «волновой канал». В созданной
установке приемная и передающая антенны были разнесены на
некоторое расстояние. В июне 1934 г. был проведен эксперимент
по обнаружению большого корабля в гавани города Кёльн, уда-
ленного на 2 км от приемной установки. Эксперимент оказался
неудачным из-a большой нестабильности частоты магнетрона.
В это время специалистам уже были известны опыты Брейта
и Тьюва по использованию импульсной ионосферной станции
для измерения высоты слоев ионосферы. Под руководством
Кухнольда специалисты фирмы «Гема» приступили к созданию
импульсной РЛС. Для этого использовался новый магнетрон
фирмы «Филипс», модулированный импульсами длительностью
2 мкс с частотой повторения 2 кГц. Передающая антенна состо-
яла из 10 пар диполей и отражателя. Для приема использовался
регенеративный приемник, а приемная антенна имела три пары
диполей и формировала два сдвинутых на определенный угол
луча. Это позволяло, используя метод последовательного пере-
ключения ДН, с достаточно высокой точностью определять
угловые координаты цели. В качества индикатора цели исполь-
зовалась трубка Брауна. Испытания новой установки, которую
148
Глава 6
в котором создавалась техника, работавшая в сантиметровом
диапазоне волн. Летом 1935 г. он стал директором исследова-
тельской радиолаборатории и стал в инициативном порядке
разрабатывать радиолокационное устройство с непрерывным из-
лучением. В ходе разработки были созданы приемник и передат-
чик, работавшие в диапазоне 600 МГц, в которых применялись
лампы Баркгаузена-Курца. При испытаниях устройства была
показана возможность обнаружения самолета по отраженному
сигналу, имевшему доплеровский сдвиг частоты.
Рунге привлек к проводимым работам Ганса Холлмана в каче-
стве консультанта. Они вместе разработали импульсный радио-
локатор, работавший на частоте 170 МГц. Сотрудник радиолабо-
ратории Вильгельм Степп изобрел дуплексер, позволявший для
передачи и приема импульсных сигналов использовать одну и
туже антенну. Созданная РЛС имела мощность всего несколько
ватт. Во время испытаний в 1936 г. с ее помощью был обнаружен
самолет на расстоянии 5 км. Данная разработка легла в основу
создания станции орудийной наводки «Вюрцбург», которая
была разработана по заказу ВВС. В этой РЛС использовались
импульсные сигналы длительностью 2 мкс с частотой повторе-
ния 4 кГц и применялась параболическая антенна диаметром 3 м.
В 1939 г. станция демонстрировалась Гитлеру. Радар «Вюрцбург»
широко применялся во время войны: в стационарном варианте
в ВВС, в мобильном — в сухопутных войсках германской армии.
В начале 1941 г. фирме «Телефункен» поступил от ВВС заказ
на создание самолетной РЛС для ведения боя в условиях плохой
видимости ИА. Под руководством Рунге летом этого же года
такая РЛС, названная «Лихтенштейн», была создана. Она рабо-
тала на частоте 485 МГц, имела мощность 1,5 кВт, дальность ее
действия составляла от 400 м до 4 км. Промышленный выпуск
таких РЛС начался в феврале 1942 г.
В 1943 г. Рунге возглавил Авиационный исследовательский
институт. После окончания войны в 1945 г. Рунге вновь стал со-
трудником фирмы «Телефункен», принимая участие в реоргани-
зации ее инженерного департамента. До своего ухода на пенсию
в 1963 г. Рунге организовал и руководил Исследовательским
институтом фирмы «Телефункен» в городе Ульм.
150
Глава 6
В 1933 г. на основе ранее выполненных им работ в области
радиолокации на этой фирме началось производство РЛС
«Вюрцбург». Обе созданные при его активном участии РЛС —
«Freya» и «Вюрцбург» (первая как станция наведения, а вторая,
позволявшая с высокой точностью определять расстояние до
самолетов и их высоту) — широко применялись в германской
армии во время войны.
В 1935 г. Холлман написал две книги: «Физика и техника
ультракоротких волн» и «Видение с помощью радиоволн»,
оказавшие значительное влияние на разработку радиолокаци-
онной техники. Несмотря на то, что при подготовке к изданию
их содержание подверглось цензуре, они содержали обширную
информацию, важную для проектирования РЛС. В период во-
йны Холлман курировал многие научные институты в оккупи-
рованных Германией странах и спас от депортации в Германию
многих ученых, работавших в этих организациях.
В середине 1930-х годов Холлман основал свою частную
«Лабораторию высокочастотной техники и электромедицины».
В ней вместе со своим братом — доктором медицины — он раз-
рабатывал, в частности, методы электрокардиографии. В конце
войны его дом и лаборатория оказались полностью разрушен-
ными. После ее окончания Холлман, получив приглашение
Правительства США, переехал с семьей в Калифорнию. В США
он продолжал вести активные научные исследования, в том
числе в области полупроводниковой техники. Через некоторое
время он стал директором исследовательской лаборатории, в
которой изучались, в частности, вопросы преобразования тепло-
вой, световой и атомной энергии в переменный ток низкой и
высокой частоты. В течение своей жизни Холлман опубликовал
значительное количество научных статей и был автором многих
патентов, воплощенных в жизнь.
ft
154
Глава 7
Педагогическая деятельность Ширмана началась в 1946 г. в
ЛВВИА. В 1949 г. Ширман был направлен в Харьков в Артилле-
рийскую радиотехническую академию, где продолжил научную
и педагогическую работу. В 1960 г. он защитил докторскую дис-
сертацию на тему «Проблема повышения разрешающей способ-
ности импульсных радиолокаторов по дальности без сокращения
длительности зондирующих радиоимпульсов», а в 1961 г. ему
было присвоено звание профессора. Докторская диссертация
Ширмана включала статистическую теорию разрешения сигна-
лов по времени запаздывания. Ее существенную часть составило
исследование вопросов, связанных с реализацией изобретен-
ного Я.Д. Ширманом в 1956 г. перспективного метода сжатия
широкополосных (сложных) радиоимпульсов, предложенного
независимо от аналогичных (закрытых тогда) зарубежных работ
и вызвавшего большой интерес в промышленности. Диссерта-
ция завершалась представлением результатов испытаний под
Харьковом первого в СССР макета радиолокационной станции
со сжатием ШПС.
Эти работы содействовали внедрению техники сжатия радио-
импульсов в большинство новых отечественных радиолокаторов.
На одном из последующих макетов РЛС (1963—1964 гг.) был
экспериментально достигнут отмеченный в диссертации каче-
ственно новый эффект — временное (дальностное) разрешение
было доведено до разрешения элементов целей с получением их
«дальностных портретов» для их распознавания.
Кроме того, статистическая теория временного разрешения
явилась основой более общей статистической теории простран-
ственно-временного разрешения, опубликованной Ширманом
в 1961 г. Эта теория привела к изобретению им в 1962-1963 гг.
совместно с С.И. Красногоровым широко применяемых адап-
тивных антенных систем, в которых используются корреляци-
онные автокомпенсаторы помех. В 1963-64 гг. эффективность
действия таких систем была подтверждена экспериментально.
Под руководством Ширмана было начато исследование во-
просов разрешения и помехозащиты в многопозиционной
локации.
156
Глава 7
скую диссертацию, он был направлен в Харьковское высшее
военное инженерное училище, в котором возглавил кафедру
приемных устройств и телеметрии. Докторскую диссертацию
он защитил в 1961 г. Демобилизовавшись в 1968 г. из армии,
С.Е. Фалькович стал заведующим кафедрой радиотехнических
систем Харьковского авиационного института.
В середине 1950-х годов С.Е. Фалькович приступил к соз-
данию статистической теории пространственно-временной
обработки сигналов и разработке ее приложений к синтезу
измерительных радиотехнических систем. К таким системам,
прежде всего, относятся системы радиолокации, радионавига-
ции, дистанционного зондирования, траекторных измерений,
радиотеплолокации, радиоастрономии и радиотелеметрии. Под
его руководством в Харькове сформировалась научная школа
пространственно-временной обработки сигналов.
В его собственных работах и в работах его учеников были по-
лучены фундаментальные результаты в области статистической
теории решений, оценивания и фильтрации электромагнитных
полей — функций времени и пространственных координат. На
основе системного подхода ими были синтезированы структур-
ные схемы формирования и обработки сигналов в оптимальных
радиотехнических системах.
С.Е. Фалькович являлся автором научных монографий,
в которых созданная В.А. Котельниковым теория потенци-
альной помехоустойчивости получила дальнейшее развитие.
В 1961 г. вышла его книга «Прием радиолокационных сигналов
на фоне флуктуационных помех», в 1970 г. — «Оценка параметров
сигналов», в 1981 г. — «Статистическая теория измерительных
систем», а в 1989 г. — «Оптимальный прием пространственно-
временных сигналов в радиоканалах с рассеянием».
Помимо книг, он опубликовал более 150 научных работ.
С.Е. Фалькович является не только крупным ученым, но и
замечательным педагогом, подготовившим более 50 канди-
датов и 10 докторов технических наук. Научные достижения
С.Е. Фальковича отмечены присуждением ему Государственной
премии СССР «За цикл работ по статистической теории радио-
электронных систем».
158
Глава 7
ряд задач, представляющих интерес для радиолокации, таких
как обнаружение сигнала с неизвестной амплитудой и фазой,
обнаружение когерентной и некогерентной пачек импульсов с
учетом скорости движения лоцируемого объекта, рассмотрена
проблема радиолокационного обнаружения «мерцающей» цели,
а также проблема измерения параметров сигнала (времени
прихода и доплеровской частоты), определяющих расстояние
до объекта и его скорость. Данная монография содержала ряд
новых, важных для проектирования радиолокационных систем
результатов. Она получила широкую известность и была издана
в США.
Другой цикл работ Л.А. Вайнштейна связан с теорией пере-
дачи сигналов и некоторыми смежными вопросами, базирую-
щимися на концепции аналитического сигнала. Их результаты
изложены в монографии «Разделение частот в теории колебаний
и волн», написанной им совместно с Д.Е. Бакманом и изданной
в 1983 г.
В самом начале научной деятельности Л .А. Вайнштейн мето-
дом факторизации (метод Винера-Хопфа) решил труднейшую
задачу, важную для последующего развития теории дифракции, —
задачу об излучении из открытого конца волновода. По своей
значимости эта работа сопоставима лишь с другой классической
ключевой задачей — задачей о дифракции волны на клине,
решение которой было получено пятьюдесятью годами ранее
знаменитым немецким физиком А. Зоммерфельдом. Постанов-
лением Президиума АН СССР в 1948 г. Л.А. Вайнштейну была
присуждена премия им. Мандельштама за лучшую работу в обла-
сти радио. Решение этой проблемы оказалось особенно важным
в связи с бурным развитием в 1940-х годах радиотехники СВЧ.
Л.А. Вайнштейном было написано более 160 научных работ
и девять монографий, получивших мировое признание. Многие
его результаты считаются классическими.
Помимо чисто научной, Л.А. Вайнштейн вел большую педа-
гогическую и организационную деятельность. С 1954 г. в течение
ряда лет он читал в МФТИ лекции по электродинамике СВЧ и
на этой основе написал монографию «Электромагнитные вол-
ны» (1957 г.), которая стала настольной книгой специалистов
Создатели теоретических основ радиолокации
161
Норберт Винер был вундеркиндом, и отец сознательно гото-
вил его к карьере учёного. Норберт Винер, как и его отец, знал
многие языки — французский, немецкий, датский, испанский,
английский, голландский, китайский — и имел философское
образование. В 17 лет закончил аспирантуру Гарвардского уни-
верситета и стал магистром искусств, а в 18 — доктором фило-
софии по специальности «математическая логика». В 1919 г. он
стал работать в знаменитом Массачусетском технологическом
институте (МТИ), в котором проработал всю жизнь.
Во время второй мировой войны Винер работает в военной
лаборатории МТИ, где создавались радиолокационные системы,
и занимается разработкой проблем автоматического управления
огнём зенитной артиллерии. В 1942 г. он составляет для военных
секретный отчёт о результатах выполненных исследований.
Только в 1949 г. они были рассекречены и изданы в виде моно-
графии «Интерполяция, экстраполяция и сглаживание стаци-
онарных временных рядов», которая сыграла важную роль в
создании методов синтеза оптимальных устройств обработки
принимаемых сигналов. Содержащиеся в ней результаты по-
зволяли синтезировать оптимальные физически реализуемые
линейные фильтры, которые на своём выходе формировали наи-
более точную оценку действующего на их входе сигнала или его
экстраполяцию (предсказание), используя все ранее принятые
значения этого сигнала.
В последующие годы теория оптимальной линейной филь-
трации Винера-Колмогорова получила дальнейшее развитие в
работе отечественного учёного А.М. Яглома, опубликовавшего
в журнале «Успехи математических наук» в 1952 г. статью «Вве-
дение в теорию стационарных случайных функций». Профессор
Ю.В. Ли — ученик Винера, бывший в 30-х годах аспирантом
МТИ, откликнулся на предложение своего учителя и в 1960 г.
написал книгу «Статистическая теория связи», в которой ви-
неровская теория оптимальной линейной фильтрации была
представлена в доступной для инженеров форме. В 1958 г. Винер
обобщил свою теорию на многомерный случай, когда несколько
линейных комбинаций N сигналов передаются по М каналам
связи, в каждом из которых действуют шумы.
в
Создатели теоретических основ радиолокации
163
В 1930 г. С. Райс становится сотрудником знаменитой Белл-
лаборатории, в которой он проработал до своего выхода на
пенсию в 1972 г. В конце своей карьеры Райс возглавлял отдел в
математическом исследовательском центре Белл-лаборатории.
После выхода на пенсию Райс продолжал активно вести научную
работу в Калифорнийском университете в городе Сан-Диего в
качестве физика-исследователя. Полученные Райсом резуль-
таты вошли во все монографии и учебники по статистической
радиотехнике.
В 1944 и 1945 гг. С. Райс участвовал в работах, которые вы-
полнялись по заказу Министерства обороны США и были
направлены на увеличение дальности действия и повышение
эффективности радиолокационных установок, используемых
в военных действиях против нацистской Германии. Выполнив
фундаментальные исследования по статистической радиотех-
нике, он уже в конце 1940-х годов стал признанным научным
лидером в этой области. Его знаменитая статья «Математический
анализ случайных шумов», написанная в 1943 г., была опубли-
кована в журнале «Bell System Technical Journal».
В своих работах С. Райс развил методы исследования ста-
тистических характеристик процессов, прошедших нелиней-
ные цепи приемных устройств (детекторов, преобразователей
частоты, пороговых устройств). Им была разработаны теория
дробового эффекта в электронных лампах и создан общий ме-
тод определения закона распределения тока, представляющего
собой наложение случайных возмущений.
С. Райсом была создана теория выбросов случайных про-
цессов, имеющая важное значение в общей теории связи. Ее
применяют при анализе помехоустойчивости приема сигналов,
устройств слежения, используемых в разных радиотехнических
системах, при анализе систем разнесенного приема замирающих
сигналов. Теория выбросов случайных процессов получила в
последующие годы развитие в работах многих крупных ученых,
создавших новые подходы к ее решению и обосновавших ее
математически строго. Райсом была создана импульсная модель
шума, возникающего при детектировании сигналов с частотной
модуляцией (ЧМ). Этот вид модуляции на протяжении большей
н
166
Глава 7
которые неоднократно переиздавались в последние полвека,
содержится как оригинальные результаты его собственных ис-
следований, так и обобщенный им огромный теоретический
материал, разработанный предшественниками, который пред-
ставлен в этих книгах в систематизированном и методически
отработанном виде.
Ван Трис получил степень бакалавра в Военной академии
США, позже магистерскую степень в Университете Мэрилэнд,
а в 1961 г. в Массачусетском Технологическом институте (МТИ)
защитил докторскую диссертацию.
Период с 1961 по 1972 гг. — время активной академической
деятельности Ван Триса. Он — профессор МТИ, активно ведет
исследовательскую работу и занимается преподаванием. В 1972г.
начинается новый период в жизни Ван Триса, который про-
должается до 1988 г. В это время он занимает ответственные
посты в крупных государственных компаниях, производящих
радиоэлектронное оборудование для армии США. С 1972 по
1975 гг. он был главным научным специалистом государствен-
ного Агентства военной связи. Он разрабатывает программу
научных исследований, организует для ее реализации инже-
нерный центр, а в составе этого агентства — Управление по раз-
работке военных систем спутниковой связи. Его деятельность
направлена на замену в военной связи морально устаревших
аналоговых систем цифровыми. В 1975-1978 гг. он помощник
вице-президента Корпорации спутниковой связи по разработ-
ке перспективных систем и возглавляет отдел систем связи,
в котором, в частности, разрабатывает планы развития системы
ИНТЕЛ CAT. В 1979—1981 гг. он занимает руководящие посты в
управлении Минобороны США, ответственном за проведение
исследований, разработку и закупку командных, связных и раз-
ведывательных систем. Деятельность Ван Триса в этот период
тесно связана с проектированием архитектуры военных спутни-
ковых систем. В частности, он инициатор программы создания
системы MILSTAR.
С 1981 г. он работал сначала вице-президентом, а с 1985 г. —
президентом одного из отделений крупнейшей государствен-
ной компании М/А-СОМ по производству радиоэлектронного
Создатели теоретических основ радиолокации
167
оборудования для армии США. В этой компании 1600 специ-
алистов разрабатывали модемы и декодеры для систем связи,
а также спутниковые терминалы для военных систем. Компа-
ния выпускала терминалы для наземной и спутниковой связи в
диапазоне метровых волн, модемы, терминалы для ядерных сил
США и для президентской связи. С 1988 г. Ван Трис возглавлял
созданный им в Университете Джорджа Масона в Калифорнии
крупный научный Центр перспективных исследований в обла-
сти управления, связи и разведки, был почетным профессором
информационных технологий и проектирования систем связи.
Ван Трис получил основные научные результаты в годы ра-
боты в МТИ. Его докторская диссертация была значительным
научным исследованием, в котором разработана методология
синтеза нелинейных систем управления с обратной связью. Эта
диссертация Ван Триса была опубликована в 1962 г. издатель-
ством МТИ в виде книги «Синтез оптимальных нелинейных
систем управления». В 1964 г. она была переведена на русский
язык и издана в СССР.
Наиболее значимой заслугой Ван Триса является создание
уникальной четырехтомной монографии по теории оптималь-
ного приема сигналов в разных каналах связи, впервые изданной
в 1968 г. Эта книга была переведена и издана в России и Китае.
В ней обобщены и изложены с единых позиций многочислен-
ные результаты теории оптимального приема дискретных и
аналоговых сигналов, полученные за многолетнюю историю ее
развития. Эта книга является наиболее полной монографией по
всем затронутым в ней вопросам. Она была переиздана 27 раз.
Во всем мире по ней осваивали теорию оптимального приема
сигналов несколько поколений ученых и инженеров.
Ван Трис — почетный член Международного института ин-
женеров по электротехнике и электронике (IEEE), Информа-
ционного агентства США, член Национальной академии наук
США, почетный член общества связи и других общественных
и правительственных групп, занимающихся проблемами связи
и информатизации.
170
Глава 8
связана с его участием в создании телевизионной аппаратуры
для Дворца Советов в Москве. По проекту предполагалось, что
ряд залов средней величины, в которых были запроектированы
стационарные киноустановки, должны быть оборудованы спе-
циальными проекционными телевизионными приёмниками,
позволяющими проектировать телевизионные изображения
на экраны размером до 10... 15 м2. В 1940 г. на радиовыставке,
организованной журналом «Радиофронт», разработанный под
руководством А.А. Расплетина телевизионный приёмник полу-
чил первую премию.
В 1940 г. в лаборатории А.А. Расплетина начались исследова-
ния возможности использования ТВ установок для воздушной
разведки и других возможностей применения телевидения в
военном деле. В июне 1941 г. началась Великая Отечественная
война и лаборатория А.А. Расплетина была оставлена в Ленин-
граде для выполнения этих работ, но с началом блокады города
эти работы были свёрнуты и сотрудники лаборатории стали за-
ниматься изготовлением радиостанций для фронта.
В 1943 г., пережив блокаду Ленинграда, в котором погибла
его семья, он был направлен в Москву во вновь созданный
институт, носящий ныне название Центральный научно-ис-
следовательский радиотехнический институт. Под руководством
А.А. Расплетина в этом институте была вскоре разработана
радиолокационная станция наземной артиллерийской разведки
(CHAP-1), при создании которой использовались несколько его
изобретений.
В августе 1950 г. А.А. Расплетин был переведен в КБ-1 для
работы над созданием системы ПВО «Беркут» (С-25) начальни-
ком радиолокационного отдела, а с августа 1953 г., после ареста
Л.П. Берии и отстранения от работ главных конструкторов
системы С.Л. Берия и П.Н. Куксенко, его назначили главным
конструктором системы. В рекордные сроки работы по созданию
системы С-25 были завершены и в мае 1955 г. она была принята
на вооружение. Эта система представляла собой эшелонирован-
ную зональную зенитно-ракетную систему для обороны Москвы
и Московского промышленного района.
В октябре 1954 г., параллельно с ведущимися работами над
системой С-25, в КБ-1 под руководством А.А. Расплетина
Создатели радиолокационной техники в СССР после 1945 года
171
была начата разработка перевозимого зенитного управляемого
ракетного оружия с ограниченным временем развертывания
(свертывания) на позиции для построения территориально
объектовой обороны. Таким оружием стал зенитный ракетный
комплекс (ЗРК) С-75. При проектировании этого перевозимого
ЗРКбыли найдены и внедрены многие новые научно-техниче-
ские решения. Работы по его созданию завершились в 1957 г. и
он был принят на вооружение.
В мае 1957 г. в КБ-1 началась разработка ЗРК С-125, создание
которого стало необходимым, так как в военной авиации по-
явились бомбардировщики, способные действовать на малых
высотах (менее 1 км). Эта система была принята на вооружение
в июне 1961 г.
Быстрое совершенствование средств воздушного нападения
требовало создания новых радиолокационных средств, которые
обеспечивали бы поражение крупноразмерных воздушных це-
лей на больших дальностях, а также высокоскоростных целей в
стратосфере. Это было необходимо для создания систем ПВО
больших территорий.
В июне 1958 г. под руководством А.А. Расплетина началось
создание первой в мире перевозимой системы такого класса —
ЗРК С-200. Эта система должна была обеспечивать высокие
точности измерений дальности, скорости и угловых координат
цели, а также высокую эффективность стрельбы как по целям в
условиях интенсивных помех прикрытия, так и по постановщи-
кам активных помех различных видов. Система была принята
на вооружение в феврале 1967 г.
С 1961 г. до конца своей жизни (1967 г.) А.А. Расплетин яв-
лялся руководителем и Генеральным конструктором крупней-
шего отечественного предприятия, которое ныне именуется
«Головное системное конструкторское бюро концерна ПВО
«Алмаз-Антей» им. академикаА.А. Расплетина». А.А. Расплетин
незадолго до своей скоропостижной кончины 8 марта 1967 г.
выступил с инициативой начать работы по унифицированной
многоканальной системе нового поколения С-300. Эта система
планировалась на замену ранее созданных. Она должна была
обеспечить уничтожение всех видов современных и перепек-
Создатели радиолокационной техники в СССР после 1945 года
173
С 1950 г. он работал в КБ-1 под руководством А.А. Расплетина.
Это КБ позднее стало называться «Головное системное кон-
структорское бюро концерна ПВО «Алмаз-Антей» им. академика
А.А. Расплетина». С 1955 г. Б.В. Бункин — заместитель и Главный
конструктор КБ-1. Несколько позже он был назначен непо-
средственным руководителем разработки первой перевозимой
системы зенитного управляемого ракетного оружия зенитно-
ракетного комплекса С-75, принятого на вооружении в 1957 г.
После смерти А.А. Расплетина Б.В. Бункин возглавил это
предприятие и стал его Генеральным конструктором. В этой
должности он проработал 30 лет (1968-1998 гг.), а в 1998-2007 гг.
был научным руководителем предприятия.
В 1958 г. под его руководством был разработан ЗРК) С-75. Этот
комплекс обладал способностью поражать цели на высоте 25 км.
Именно С-75 сбил под Свердловском 1 мая 1960 г. американский
самолет-разведчик, пилотируемый Фрэнсисом Пауэрсом.
Б.В. Бункин принимал участие в разработке ЗРК С-200,
занимался также модернизацией ЗРК С-125. Талантливый
конструктор, он внес значительный вклад в разработку ком-
плекса С-300П, при создании которого впервые применялись
электронные интегральные схемы, цифровая техника, были ав-
томатизированы его основные боевые функции. Комплекс был
способен обстреливать одновременно шесть целей с наведением
на каждую до двух ракет.
Б.В. Бункин был создателем стоящих на вооружении России
зенитно-ракетных систем С-300 П, которые постоянно модерни-
зировались. В середине 1980-х годов ЗРК С-ЗООП МУ был принят
на вооружение, в 1990—х годах были приняты на вооружение
модернизированные ЗРК — 300ПМУ-1, азатем 300ПМУ-2.
Б.В. Бункиным были выдвинуты идеи создания новейших
ЗРК С-400, воплощенные его последователями. В 2003 г. была
проведена завершающая серия испытаний ЗРК С-400, который
позволял решать задачи не только ПВО, но и нестратегические
задачи ПРО.
Б.В. Бункин — доктор технических наук (1966 г.), профессор
(1971 г.), автор более 400 научных работ и изобретений. Он вёл
большую педагогическую работу на кафедрах Московского фи-
Создатели радиолокационной техники в СССР после 1945 года 175
его товарищам были поручены ответственные работы, связанные
с настройкой первой отечественной зенитной ракетной системы
П ВО С-25 на подмосковных объектах. Выполняя эти работы, он
приобрел большой опыт в создании и отработке больших систем.
В 1954 г. В.П. Ефремов был назначен заместителем главного
инженера НИЭМИ, где начинались научно-исследовательские
работы по созданию мобильных ЗРК для Сухопутных войск.
В 1958 г. он стал главным конструктором первого мобильного
войскового ЗРК «Круг», который в 1964 г. был принят на воору-
жение армии и стал поступать в войска, где получил высокую
оценку. В 1967 г. В.П. Ефремов назначается научным руково-
дителем, а в 1968 г. — директором и главным конструктором
НИЭМИ. В 1971 г. специалисты НИЭМИ под его руководством
сдают на вооружение армии мобильный ЗРК «Оса» для мото-
стрелковых дивизий.
Перед войсковой ПВО встала новая задача — борьба с бал-
листическими ракетами и высокоточным оружием. В 1983 г.
принимается на вооружение зенитная ракетная система С-300В,
позволившая обеспечить эффективную ПВО важнейших объ-
ектов фронта и гражданских промышленных объектов. В этом
же году В.П. Ефремов назначается генеральным конструктором
НИЭМИ, а уже через год он сдает на вооружение ЗРК «Тор» —
первый в мире комплекс, обеспечивающий поражение высоко-
точного оружия.
В 1983 г. с целью интеграции науки и производства было соз-
дано Научно-производственное объединение (НПО) «Антей»,
задачей которого стала разработка не только оружия для ПВО
Сухопутных войск, но практически всей подобной радиолока-
ционной техники. С 1985 г. В.П. Ефремов — генеральный кон-
структор НПО «Антей». В 1991 г. на вооружение армии принят
ЗРК «Тор-Ml» с улучшенными тактико-техническими харак-
теристиками. В 1994 г. на базе концерна «Антей» было создано
акционерное общество «Промышленная компания “Концерн
‘Антей’”».
В 2002 г. после объединения «Промышленной компании
“Концерн ‘Антей’”» с ЦКБ «Алмаз» им. академикаА.А. Распле-
тина был создан единый зенитно-ракетный холдинг «Концерн
Создатели радиолокационной техники в СССР после 1945 года
177
щей способностью с использованием искусственного раскрыва
антенны». А.П. Реутов — специалист в области радиолокации
с синтезированной апертурой, систем информатики и мето-
дов формирования и обработки радиосигналов. Он является
одним из пионеров разработки радиоуправляемого оружия
и систем радиолокационного обзора Земли со сверхвысокой
разрешающей способностью, инициатором разработки дистан-
ционной радиоуправляемой робототехники. Под руководством
А.П. Реутова созданы малоразмерные многофункциональные
дистанционно-управляемые летательные аппараты для решения
задач контроля энергосетей, состояния коммуникаций, обеспе-
чения спасательных работ в сложных метеоусловиях.
Длительное время А.П. Реутов служил на инженерных долж-
ностях в Военно-воздушных силах СССР, был на испытательной
и научно-исследовательской работе. В 1986-1992 гг. он — за-
меститель Министра радиопромышленности СССР. С 1986 г.
являлся заведующим кафедрой радиопередающих устройств
Московского института радиотехники, электроники и автома-
тики (МИРЭА). Им подготовлено 50 кандидатов и 10 докторов
наук. А.П. Реутов был главным редактором журнала «Наукоем-
кие технологии», председателем докторского диссертационного
совета концерна радиостроения «Вега», членом Экспертного
совета по радиоэлектронике ВАК Минобрнауки России. Он —
автор и соавтор 100 научных работ (из них 8 монографий) и
20 авторских свидетельств и патентов. Заслуги А.П. Реутова от-
мечены многими правительственными наградами.
Создатели систем ракетно-космической обороны в СССР
179
А.Л. Минц осуществил первые опыты по радиотрансляции
передач, концертов, торжественных мероприятий. Одновре-
менно с 1924 г. он руководил строительством опытной Соколь-
нической радиотелефонной станции (станция им. А.С. Попова,
была введена в строй в 1927 г.). В 1928 г. по его инициативе было
организовано Бюро мощного радиостроения в Ленинграде
(Санкт-Петербурге), на базе которого в 1930 г. создана От-
раслевая радиолаборатория, а в 1935 г. — Комбинат мощного
радиостроения им. Коминтерна.
В 1932 г. А.Л. Минц экстерном окончил Московский электро-
технический институт инженеров связи. В 1934 г. в Ленинград-
ском институте инженеров связи он организовал кафедру пере-
дающих устройств. В этом же году ему была присуждена степень
доктора технических наук, и он стал профессором этой кафедры.
Многие годы А.Л. Минц руководил проектированием и стро-
ительством мощных вещательных радиостанций, из которых
крупнейшими стали: им. ВЦСПС (1929 г.), им. Коминтерна
(1933 г.), РВ-96 (1938 г.) и ряд других. Тогда же он разработал
ряд новейших образцов радиотехники и приборов, многие из
которых выпускались промышленностью и были поставлены
на вооружение Красной армии.
В 1931 — 1940 гг. А.Л. Минц неоднократно подвергался ре-
прессиям. После последнего ареста А.Л. Минц отбывал срок
в специальном конструкторском бюро НКВД, где занимался
разработкой самой мощной в мире коротковолновой станции
РВ-96 (120 кВт). В 1941 г., во время Великой Отечественной во-
йны, он, будучи осужденным, был назначен главным инженером
сооружения сверхмощной коротковолновой радиостанции в
Куйбышеве (ныне Самара), которая обслуживала Верховное
Главнокомандование и Правительство СССР, а также осущест-
вляла радиовещание на Европу. Только в 1958 г. он был оконча-
тельно реабилитирован по всем ранее выдвинутым против него
обвинениям.
В 1946 г. А.Л. Минц организовал и возглавил Радиотехниче-
скую лабораторию АН СССР, которая в 1957 г. была преобразова-
на в Радиотехнический институт (РТИ) АН СССР. В 1957-1970 гг.
он возглавлял этот институт, в котором вёл два направления
Создатели систем ракетно-космической обороны в СССР
181
технического центра (НТЦ) Особого конструкторского бюро
(ОКБ) «Вымпел», преобразованного в 1970 г. в Центральное на-
учно-производственное объединение. Работая в НТЦ, он в 1972 г.
был назначен главным конструктором систем предупреждения
о ракетном нападении и контроля космического пространства.
Под руководством В. Г. Репина в 1970—1987 гг. была разработа-
на техническая концепция формирования единой системы РКО
нашей страны. Он участвовал в работах по созданию системы
ПРО Москвы, в разработке ЗРК, систем управления крылатыми
ракетами. Эти системы встали на боевое дежурство в 1976 г. и
развивались в последующие годы.
В. Г. Репин являлся одним из ведущих отечественных ученых
в области радиолокации и теории информационных систем.
Он внёс основополагающий вклад в научные исследования,
разработки и внедрение крупнейших систем РКО. Научные
результаты В. Г. Репина отражены в трех фундаментальных моно-
графиях по вопросам обработки радиолокационных сигналов,
написанных с его участием, и в более чем 200 научных работах
по теории радио- и оптической локации, радиофизике, теории
фильтрации, теории решений, системному анализу и синтезу.
С 1962 г. В.Г. Репин преподавал на кафедре «Информационные
системы» МФТИ. Ряд его учеников стали известными учеными
в области радиолокации.
Заслуги В. Г. Репина отмечены многими правительственными
и ведомственными наградами. За создание систем предупреж-
дения о ракетном нападении (ПРИ) и контроля космического
пространства (ККП) он был удостоен Государственной пре-
мии, звания Героя Социалистического Труда (1978 г.), а также
почётного звания «Заслуженный деятель науки Российской
Федерации».
Григорий Васильевич Кисунько (1918—1998 гг.) — крупный
отечественный учёный в области антенной техники и один из
создателей отечественной системы ПРО.
В 1938 г. ГВ. Кисунько с отличием окончил физико-матема-
тический факультет педагогического института в городе Луганск
и поступил в аспирантуру по кафедре теоретической физики Ле-
нинградского государственного педагогического института име-
184
Глава 9
артиллерийском заводе. А.И. Савин очень быстро освоился с
технологией производства артиллерийских орудий и вскоре раз-
работал принципиально новое и более технологичное противо-
откатное устройство — один из важнейших узлов орудия, что по-
зволило в разы увеличить ежесуточный выпуск готовых орудий.
После войны в 1946 г. А.И. Савин смог завершить образование,
окончив МВТУ без отрыва от производства.
С 1945 г. в рамках проекта по созданию атомной бомбы под
руководством А.И. Савина разрабатывались промышленная
установка обогащения урановой руды. В процессе её создания
А.И. Савиным была спроектирована сложнейшая система раз-
грузки облученных урановых блоков и реактора на тяжелой воде.
В 1951 г. он был переведён в КБ-1 и назначен заместителем
Главного конструктора системы «Беркут» С.Л. Берии. С создания
этой системы в СССР началось создание реактивных управляе-
мых вооружений. В 1953 г. КБ-1 было реорганизовано в СКБ-41,
в котором А. И. Савин стал заместителем Главного конструктора
по противовоздушной тематике.
На этом этапе деятельности А.И. Савин был одним из соз-
дателей реактивной системы управляемого оружия «Комета»
класса «воздух-море», оборонных систем классов «воздух-море»,
«воздух-земля», «воздух-воздух», «земля-море», «земля-земля»
и «море-море». Коллектив СКБ по его руководством внес зна-
чительный вклад в создание уникальной системы противовоз-
душной обороны Москвы С-25.
В 1950-х годах А. И. Савин без отрыва от производства обуча-
ется в аспирантуре при КБ-1, в 1959 г. он защитил кандидатскую
диссертацию, а в 1965 г. стал доктором технических наук.
С 1960 г. под руководством А.И. Савина по решению Пра-
вительства началось создание комплекса противоспутниковой
обороны по перехвату и поражению вражеских искусственных
спутников земли военного назначения, пролетавших над тер-
риторией СССР. Для решения поставленных задач проводи-
лись научно-исследовательские работы по оптоэлектронике,
информатике, радиофизике, радиотехнике, радиоэлектронике,
фундаментальные научные исследования атмосферы, океана,
суши и околоземного космического пространства. В результате
Создатели систем ракетно-космической обороны в СССР
185
этих исследований были сформулированы и реализованы на
практике физические основы обнаружения и идентификации
малоразмерных космических объектов на фоне различных об-
разований в атмосфере, океане, на суше и в околоземном кос-
мическом пространстве.
В кооперации с КБ, возглавляемым В.Н. Челомеем, был
создан уникальный автоматизированный комплекс противо-
спутниковой обороны, главными составляющими которого
стали наземный командно-вычислительный и измерительный
пункт, специальная стартовая площадка на полигоне Байконур,
ракета-носитель и космический аппарат-перехватчик. Испыта-
ния комплекса начались в 1968 г., а первое в мире успешное по-
ражение цели (искусственный спутник) в космосе состоялось в
августе 1968 г. В 1979 г. усовершенствованный комплекс П КО был
поставлен на боевое дежурство. В США аналогичное поражение
спутника было осуществлено только в 1985 г. К моменту начала
в 1983 г. американской программы «звездных войн» в СССР
комплекс ПКО уничтожил в космосе до десятка спутников.
Другим важнейшим направлением работы А.И. Савина стало
создание наземных радиоэлектронных комплексов и бортовых
средств управления космическими аппаратами в рамках системы
ПРН. Эти системы продолжают находиться на вооружении, обе-
спечивая безопасность России. В 1973 г. был создан Научно-ис-
следовательский институт «Комета», в котором была разработана
система «Око», предназначенная для оперативного обнаружения
стартов МБР по излучению факела двигательной установки в ин-
фракрасном диапазоне и отслеживания их траекторий движения.
В 1980-е годы в этом же НИИ была создана глобальная система
«Око-1», предназначенная для обнаружения стартов М БР с само-
летов, наземных пусковых установок и подводных лодок.
В 1973—1999 гг. А.И. Савин являлся генеральным конструк-
тором и генеральным директором НИИ «Комета». С мая 1999 г.
он — научный руководитель ЦНИИ «Комета». С мая 2004 г.
А.И. Савин — генеральный конструктор ОАО «Концерн “ПВО
Алмаз-Антей”», а с мая 2007 г. — научный руководитель кон-
церна «ПВО Алмаз-Антей». На этих постах он занимался раз-
работкой глобальных информационно-управляющих систем.
Создатели систем ракетно-космической обороны в СССР
187
Строительство этой РЛСначалосьв 1978 г. Полностью она была
изготовлена и поставлена на боевое дежурство через 17 лет —
в 1989 г. РЛС «Дон-2Н» расположена в Московской области и
обеспечивает противоракетную безопасность всей центрально-
европейской части России. Радиус ее действия составляет свыше
3000 км. Она располагается в специально построенном для нее
комплексе в виде усеченной пирамиды, основание каждой из
сторон которой имеет длину свыше 100 метров. Комплекс имеет
14 этажей в высоту и 7 в глубину от поверхности земли. В 1994 г.
был проведен международный эксперимент, во время которого
с борта американского спутника «Шаттл» в открытый космос
были запущены три шарика диаметром 5, 10 и 15 см, которые
должны были быть обнаружены РЛС ряда стран, участвовавших
в этом эксперименте. Эксперимент показал высокую эффектив-
ность РЛС «Дон-2Н»: только эта РЛС смогла засечь все три ша-
рика и выдать в рекордное время данные расчета их траектории.
Американские РЛС обнаружили только два шарика покрупнее,
а РЛС других стран не засекли ни одного.
Создание супер-РЛС «Дон-2Н» было отмечено присуждени-
ем создавшему ее коллективу специалистов во главе с главным
конструктором В.К. Слокой Государственной премии СССР.
Почти 20 лет (1977-1996 гг.) В. К. Слока был генеральным ди-
ректором и научным руководителем РТИ. За заслуги в создании
оборонной техники он был награжден многими правительствен-
ными наградами. В декабре 1996 г. ему было присвоено звание
Героя Российской Федерации.
С 1996 г. В.К. Слока — генеральный конструктор «РТИ им.
академика А.Л. Минца». Он — действительный член Акаде-
мии технологических наук Российской Федерации, Академии
инженерных наук Российской Федерации и Международной
академии связи. С 1979 г. В.К. Слока заведует кафедрой радио-
физики в МФТИ.
Заключение
Поэзия и наука тождественны, если под наукой
должно разуметь не одни схемы знания, но сознание
кроющейся в них мысли. Поэзия и наука тождественны,
как постигаемые не одною какою-нибудь из способностей
нашей души, но всею полнотой нашего духовного существа,
выражаемого словом «разум».
Виссарион Григорьевич Белинский
Создание радиолокационных систем — одно из крупнейших
достижений XX века в области техники. История развития этих
систем дает прекрасную иллюстрацию справедливости слов В. Г.
Белинского — многочисленные изобретения, которые привели к
тому удивительному и быстрому прогрессу в этой области, были
бы невозможны, если бы их создатели не имели бы богатого во-
ображения и мощной интуиции — тех ценнейших человеческих
качеств, которыми обладают крупные поэты.
Радиолокационные станции самого разного назначения наш-
ли широчайшее применение в различных сферах человеческой
деятельности. Первое радиолокационное устройство, пред-
ложенное немецким исследователем Хюльсмайером в 1904 г.,
было предназначено для обеспечения безопасности плавания
судов. Оно опередило время и поэтому практического примене-
ния не нашло. Однако только в 1930-е годы, когда политическая
атмосфера в мире накалилась из-за серьезных военных угроз
гитлеровской Германии и правительства многих стран мира на-
чали готовиться к наступлению войны, в Англии, США и СССР
начались интенсивные работы по созданию радиолокационных
систем. В результате в конце 1930-х годов в этих странах были
созданы первые РЛС, поступавшие на вооружение войск ПВО,
сухопутных войск и ВМФ. Следует подчеркнуть, что создание
радиолокационной техники, которой оснащались войска союз-
Заключение
189
ников по антигитлеровской коалиции, в значительной степени
повлияло на достижение победы над гитлеровской Германией.
После окончания Второй мировой войны происходило бы-
строе совершенствование радиолокационных систем, и вскоре
появились новые обширные области их применения. Были
созданы радиолокационные системы ПРО, РЛС для управления
воздушным движением, навигационные радиолокаторы. Такие
системы стали использоваться для прогноза погоды, для иссле-
дований поверхностей Земли, других планет солнечной системы
(Венеры, Марса, Юпитера), Солнца и Луны. С помощью РЛС
были проведены фундаментальные астрономические исследова-
ния, сделаны атласы поверхности ряда планет. За годы развития
радиолокации значительно расширились полосы частот, пред-
назначенные для работы РЛС самого разного назначения (этот
диапазон простирается сейчас от частот в десятки мегагерц до
сотен гигагерц, длина волны которых отличается в 1010 раз!).
В середине XX века была создана теория радиолокации — одно
из важных направлений общей теории связи. Эта теория давала
возможность синтезировать устройства оптимальной обработки
принимаемых радиолокационных сигналов, которые обеспе-
чивали наивысшую точность измерения их пространственных
координат. Обо всем этом рассказывается в этой книге.
Пионерские работы в области радиолокации, приведшие к
созданию и внедрению первых РЛС, были выполнены выдаю-
щимися людьми. В Англии первые такие работы выполнялись
под руководством Уотсона-Уотта, в США основными разра-
ботчиками первых РЛС были Тейлор, Янг и Пэйж, в СССР —
Ощепков, Шембель и Кобзарев. В последующие годы многие
тысячи специалистов Европы, США и СССР, участвовавшие в
создании радиолокационных систем, выдвинули многочислен-
ные основополагающие идеи, которые позволяли создавать РЛС
колоссальной мощности в десятки мегаватт, способные с высо-
чайшей точностью определять пространственные координаты
и другие параметры наблюдаемых объектов, находящихся за
многие тысячи километров от локационной станции.
В этой книге приводятся сведения о жизни и деятельности не-
которых из этих замечательных людей — крупных специалистов,
190
Заключение
внесших значительный вклад в развитие радиолокации. Творче-
ский накал жизни этих людей, приведший к многочисленным
практически важным для человечества результатам, позволяет
характеризовать их жизнь как подвиг.
Знаменитый немецкий писатель Стефан Цвейг отмечал: «.Ду-
ховное значение подвига никогда не определяется его практической
полезностью. Лишь тот обогащает человечество, кто помогает
ему познать себя, кто углубляет его творческое самосознание», а
выдающийся немецкий поэт Иоганн Вольфганг Гете писал: «Луч-
шее, что нам дает история,— это возбуждаемый ею энтузиазм».
Действительно, история развития радиолокации в XX сто-
летии поражает не только тем огромным прогрессом, который
был достигнут за короткое по историческим меркам время в этой
области, но и мегаваттами той творческой энергии, которую ее
создатели внесли в эту область, затрагивающую многие стороны
человеческой жизни. Эта история побуждает тех, кто приходит
на смену этим людям, к самостоятельному творчеству, к тому,
чтобы внести собственный вклад в ее дальнейшее развитие.
Радиолокация продолжает развиваться, появляются новые
сферы применения РЛС, создаваемых для решения многих
важных задач, встающих перед Человечеством. В этой области
науки и техники имеется масса неизученного, она еще долго
будет интересна специалистам — физикам, математикам, радио-
инженерам. Одно из важных направлений современной радио-
локации, которое в настоящее время прорабатывается многими
исследователями, это системы МI МО, о которых рассказывалось
во второй главе этой книги.
Глубокой мысли В.Г. Белинского, что «...поэзия и наука
тождественны», отраженной в вышеприведенном эпиграфе,
соответствуют строки замечательного стихотворения немецкого
поэта Фридриха Шиллера «Идеал и жизнь»:
Мертвый камень, оживляя смело,
Создает богини тело
Вдохновенья пламенный порыв,
Но художник лишь в борьбе упорной
Побеждает мрамор непокорный,
Разумом стихию подчинив.
Заключение
191
Только труд, не знавший отступлений,
Истину постигнет до конца,
И над глыбой торжествует гений
Непреклонностью резца.
Перед высшей правдой идеала
Все отринь, что дух твой увлекало,
Что питало повседневный быт.
Этой цели женщиной рожденный
Никогда еще не достигал,
Здесь сияет гибельный, бездонный,
Неизведанный провал.
Эта мысль наверняка являлась жизненным кредо тех заме-
чательных творческих людей, которые выдвигали новые идеи
в области радиолокации и самоотверженно трудились над их
претворением в жизнь.
192
Заключение
Содержание
Сокращения.......................................3
Введение.........................................5
Глава 1. Предыстория развития радиолокационных систем.... 10
1.1. Первые идеи ..............................10
1.2. Первый патент на радиолокатор.............12
Глава 2. Основные технические идеи, на которых
основывалось развитие радиолокационной техники..18
2.1. Создание станций для определения высоты
ионосферных слоев.............................18
2.2. Метод радиолокации с помощью излучения
непрерывных сигналов..........................21
2.3. Радиолокационные станции, излучающие
частотно-модулированные непрерывные колебания.23
2.4. Многочастотные радиолокационные станции..25
2.5. Метод радиолокации с помощью излучения
импульсных сигналов...........................27
2.6. Системы радиолокационного сопровождения
целей.........................................29
2.7. Системы селекции движущихся целей........35
2.8. Радиолокационные станции бокового обзора.38
2.9. Фазированные антенные решетки............41
2.10. Многопозиционные радиолокационные
системы........................................45
2.10.1. Первые многопозиционные системы
РЛС в СССР..................................46
2.10.2. Первая многопозиционная система РЛС
в Германии.................................50
2.10.3. Двух- и многопозиционные РЛС, созданные
после 1960 г...............................52
2.10.4. Разработки РЛС типа MIMO...........60
Заключение
193
Diaea 3. Основные этапы развития радиолокационной
техники............................................64
3.1. Этапы создания радиолокационной техники.....64
3.1.1. Развитие радиолокации в 1934-1940 гг...65
3.1.2. Развитие радиолокации в 1940-1945 гг....68
3.1.3. Развитие радиолокации в 1945—1960 гг...70
3.1.4. Развитие радиолокации в 1960-1970 гг....72
3.1.5. Развитие радиолокации в 1970-2007 гг....75
3.2. Организация работ по созданию радиолокационной
техники в годы Второй мировой войны..............79
3.2.1. Организация работ по созданию
радиолокационной техники в Великобритании......80
3.2.2. Организация работ по созданию
радиолокационной техники в США ...............80
3.2.3. Организация работ по созданию
радиолокационной техники в СССР...............82
3.3. Гражданские применения радиолокации.........84
3.3.1. Управление воздушным движением.........85
3.3.2. Радиолокаторы, использующие антенны
с синтезируемой апертурой.....................86
3.3.3. Планетарные радолокаторы...............86
3.3.4. Радиолокаторы в автопилотах для управления
транспортными средствами......................88
Глава 4. Создание теоретических основ радиолокации.89
4.1. Методы анализа прохождения случайных
процессов через различные звенья приемного тракта.90
4.2. Синтез согласованных фильтров................91
4.3. Радиолокационные сигналы.....................93
4.4. Синтез оптимальных фильтров для выделения
гауссовских случайных сигналов, принимаемых
на фоне гауссовских шумов........................98
4.5. Методы синтеза оптимальных алгоритмов
обработки принимаемых сигналов. Развитие методов
оптимального приема сигналов в СССР...............98
4.6. Развитие методов оптимального приема сигналов
за рубежом........................................101
194
Заключение
4.7. Теоретическая оценка возможности подавления
помех, создаваемых отражениями от неподвижных
объектов.........................................104
Diaea 5. Организаторы работ по созданию радиолокационной
техники во время Второй мировой войны...............106
5.1. Организаторы работ в области радиолокации
в Великобритании и США...........................106
5.2. Организаторы работ в области радиолокации
в СССР............................................ИЗ
Глава 6. Пионеры создания радиолокационной техники..123
6.1. Отечественные пионеры радиолокации..........123
6.2. Пионеры радиолокации Великобритании.........134
6.3. Пионеры радиолокации США....................140
6.4. Пионеры радиолокации Германии...............145
Глава 7. Создатели теоретических основ радиолокации.151
7.1. Отечественные ученые........................151
7.2. Зарубежные ученые...........................159
Глава 8. Создатели радиолокационной техники в СССР
после 1945 года.....................................168
Глава 9. Создатели систем ракетно-космической
обороны в СССР......................................178
Заключение..........................................188
Доктор технических наук, профессор Московского технического
университета связи и информатики, академик Международной
академии связи и Международной академии информатизации.
Лауреат премии Правительства Российской Федерации в
области науки и техники, член Союза журналистов. Специалист в
области теории информации и помехоустойчивости систем
связи, методов обеспечения электромагнитной совместимости
радиосистем и управления использованием радиочастотного
спектра. Автор многих научных статей и книг, включая книги по
истории развития телекоммуникаций, а также 50 изобретений.
Книга посвящена истории развития радиолокационной техники
в нашей стране, а также в Великобритании, США и Германии. В
ней рассказывается о первых идеях радиолокации, о важнейших
изобретениях в этой области, о радиолокационных станциях,
созданных в XX веке. Отмечаются многочисленные применения
радиолокации для решения разнообразных задач, связанных
как с ее военными, так и с гражданскими применениями.
Приводятся 43 кратких очерка деятельности крупнейших
специалистов, сделавших значительный вклад в создание
радиолокационных систем в XX столетии.
Сайт издательства:
www.techbook.ru