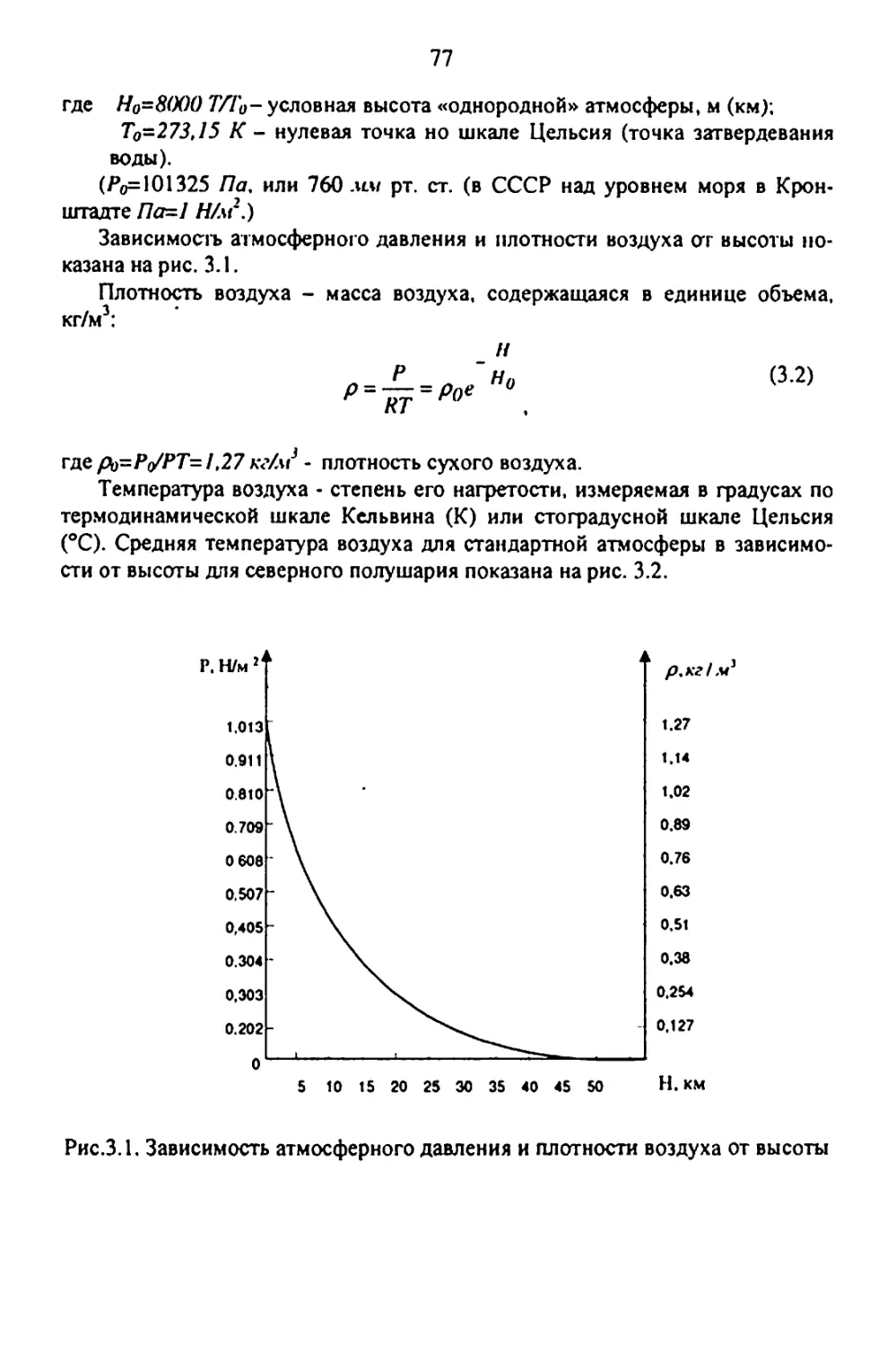
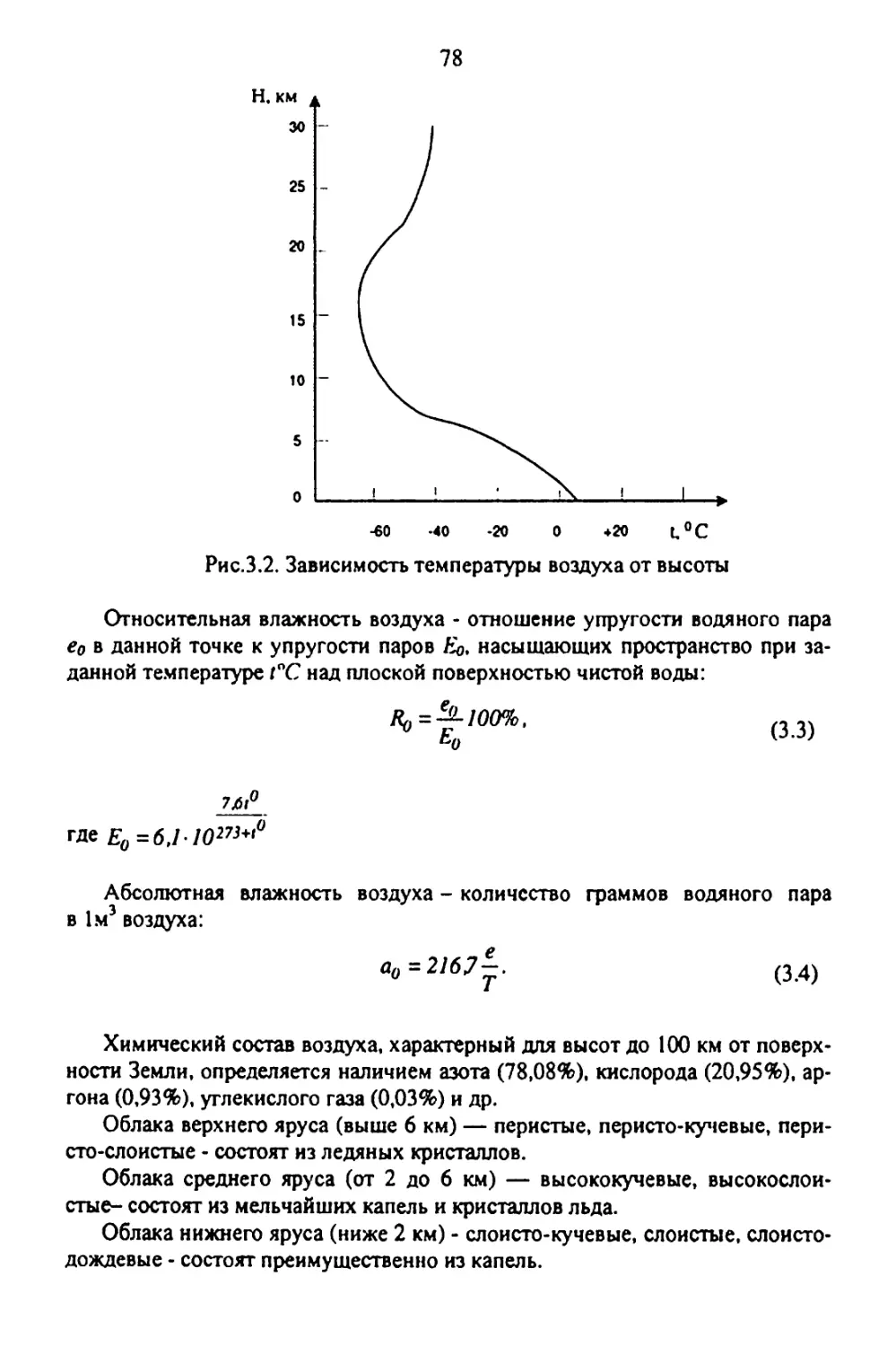
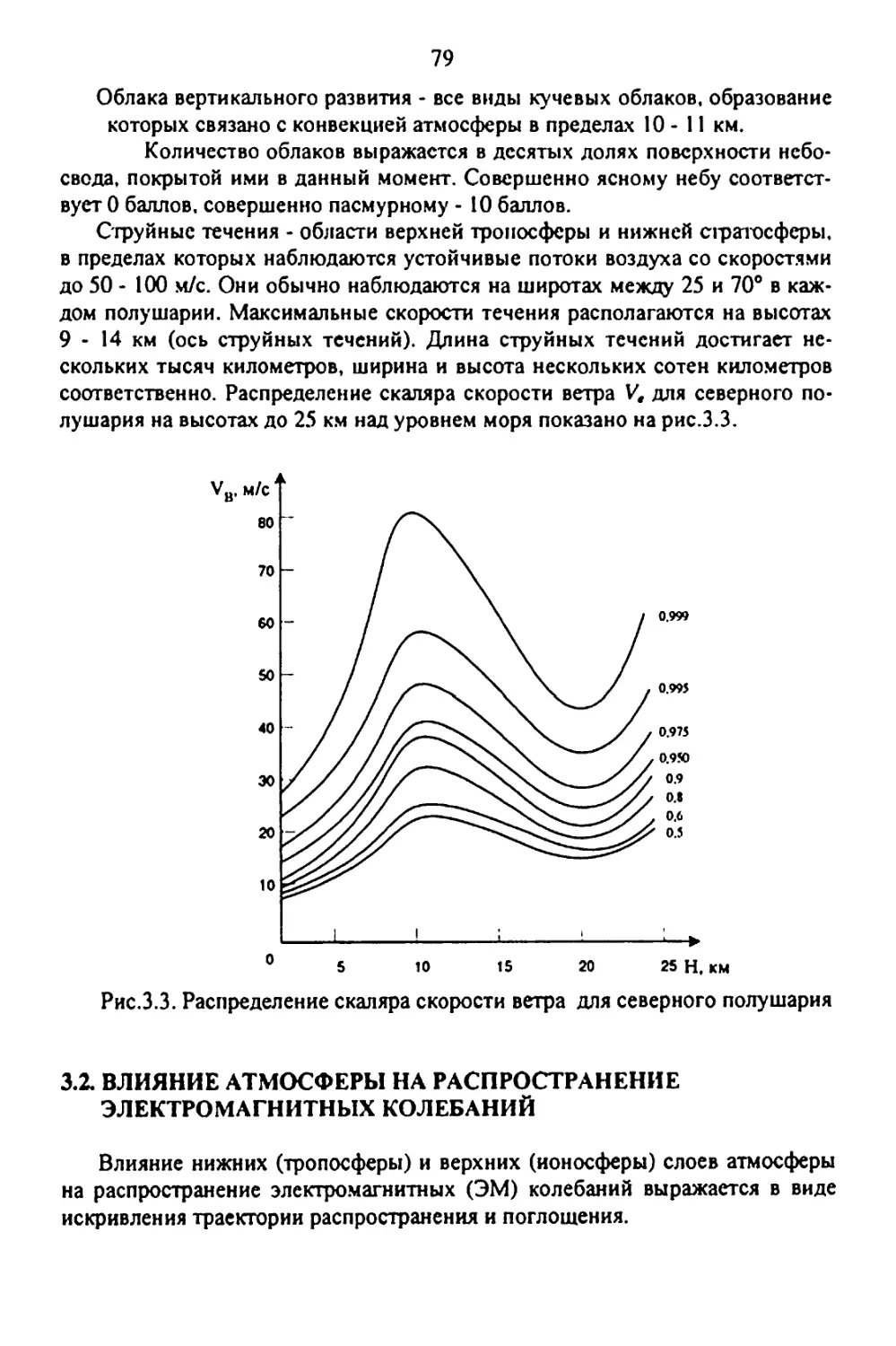
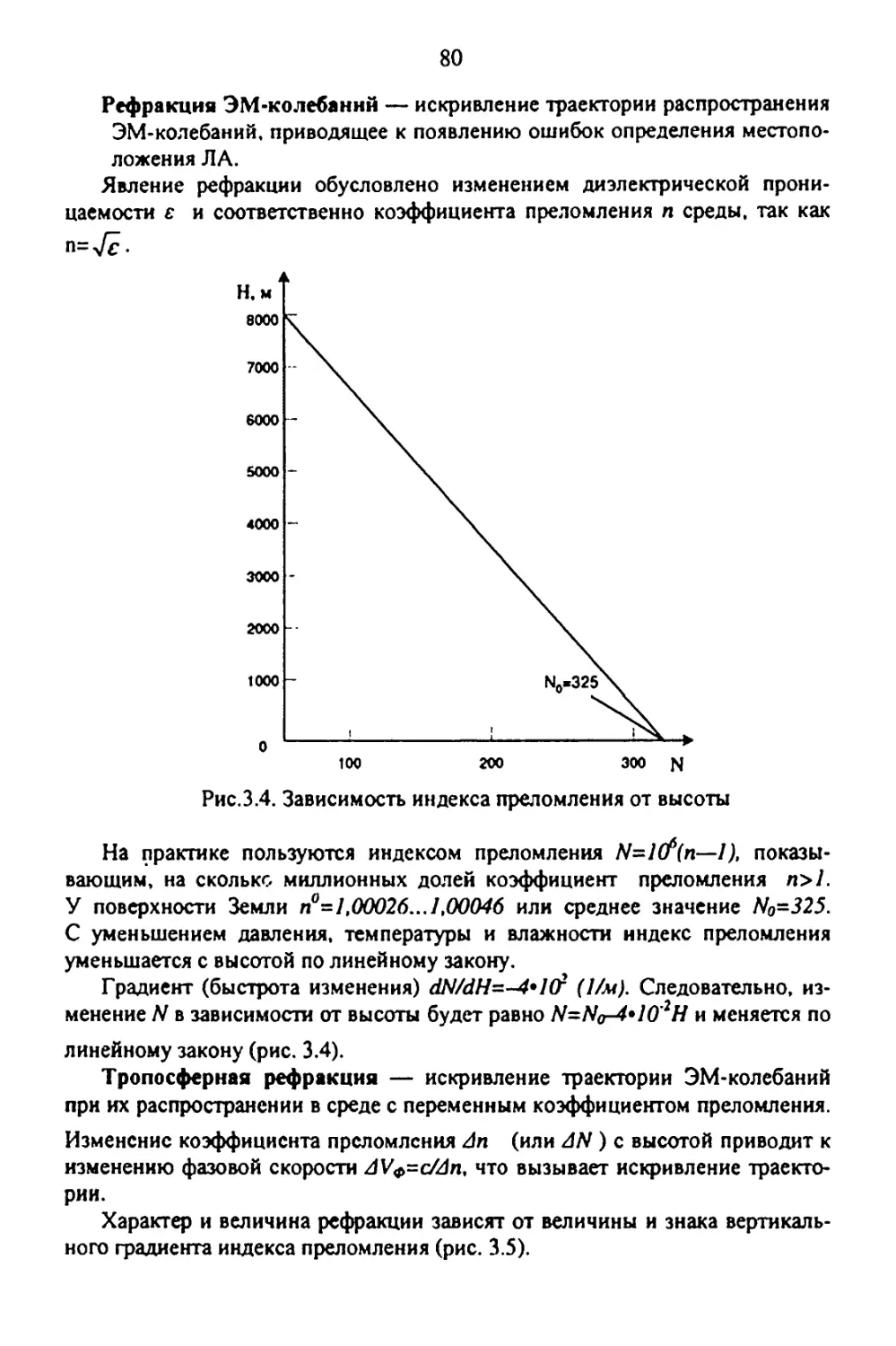
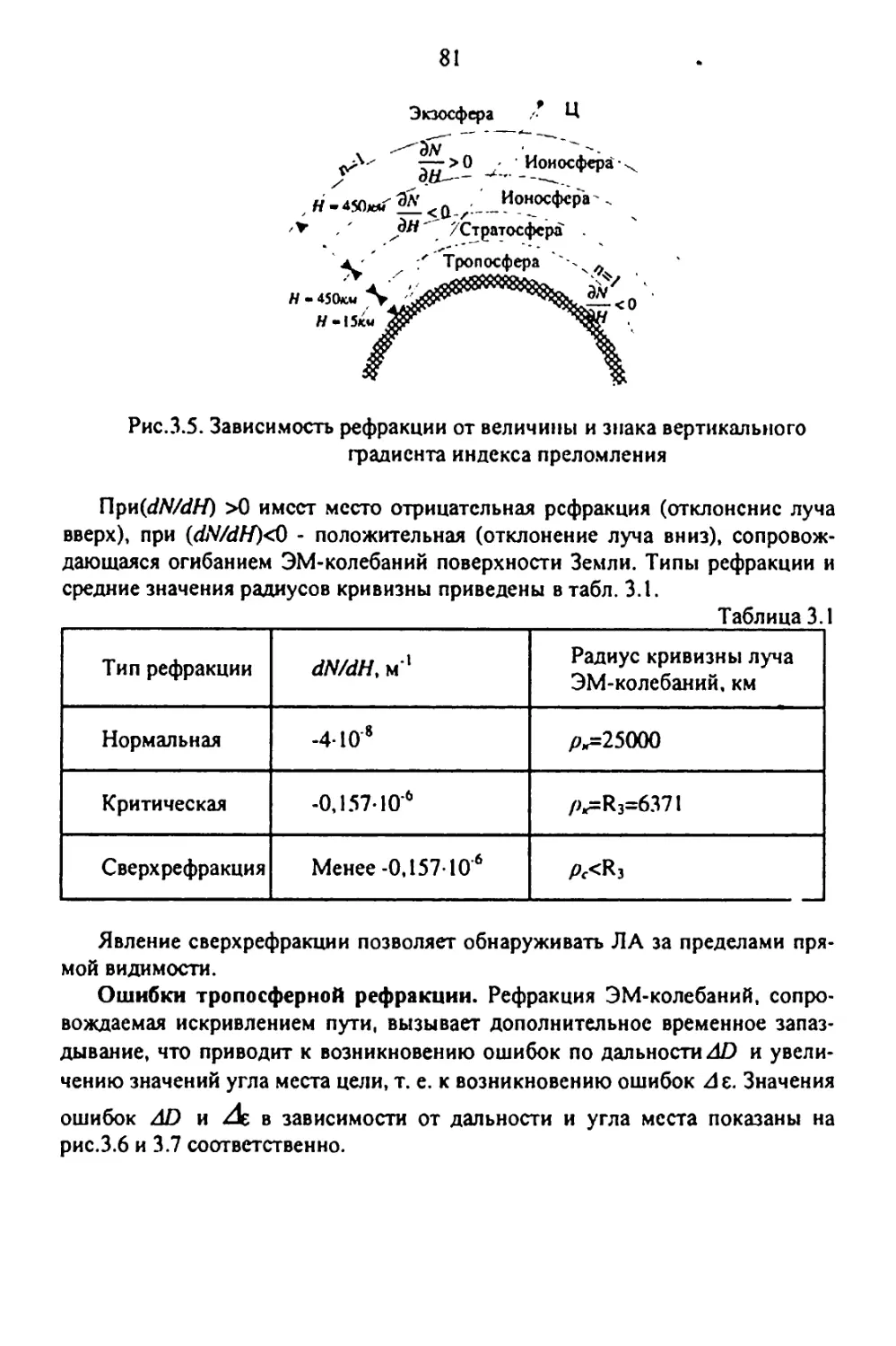
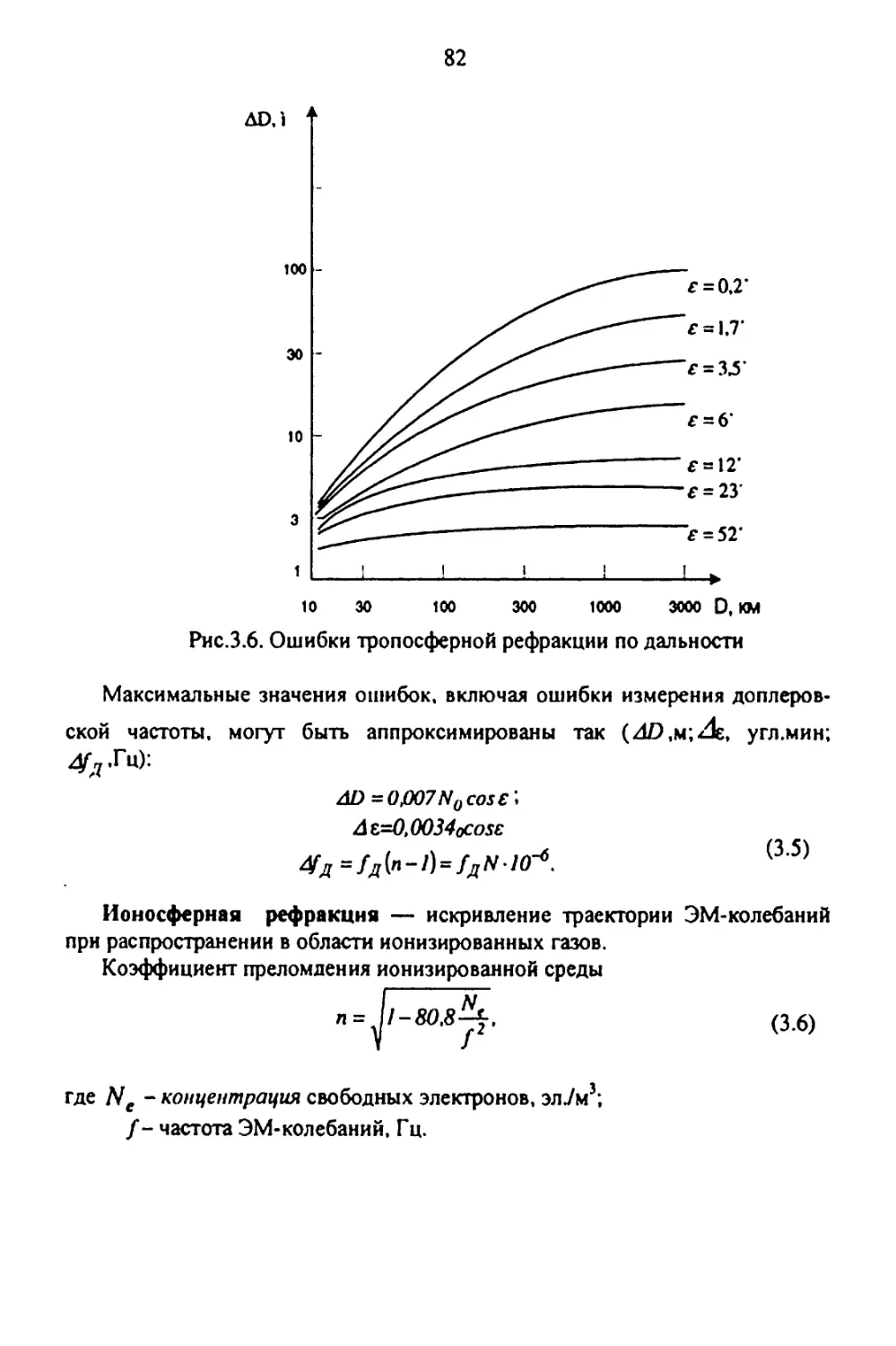
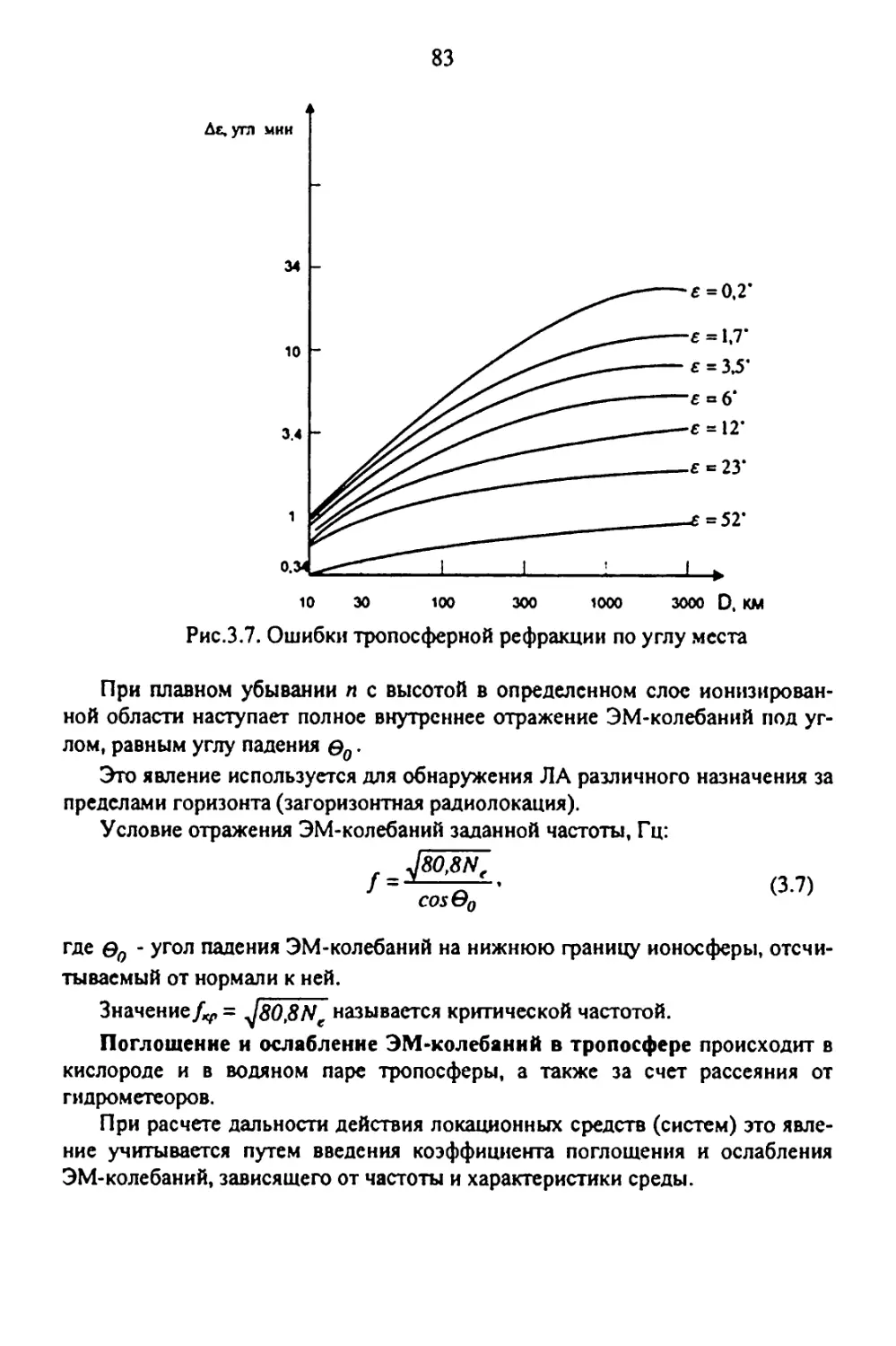
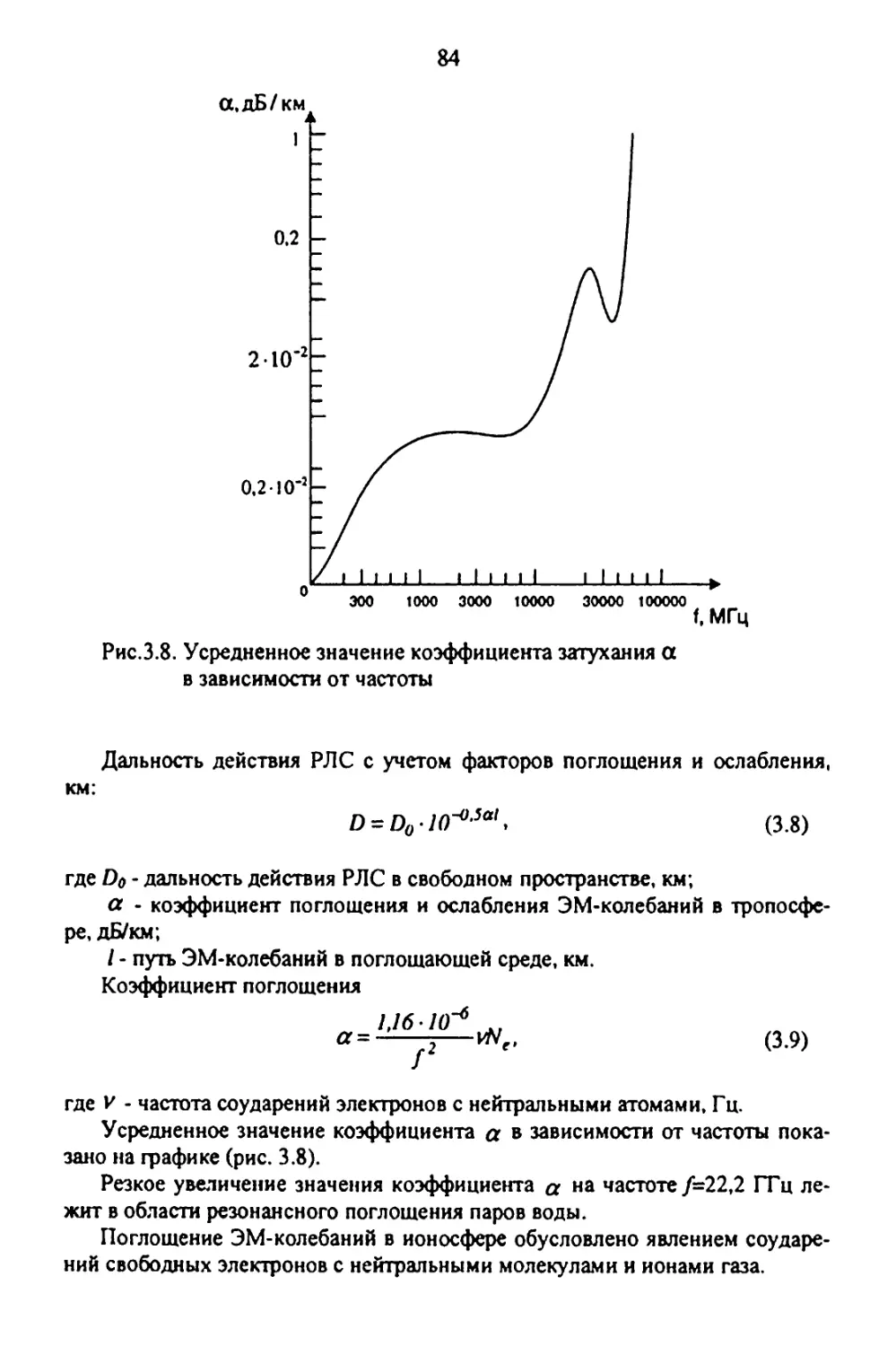
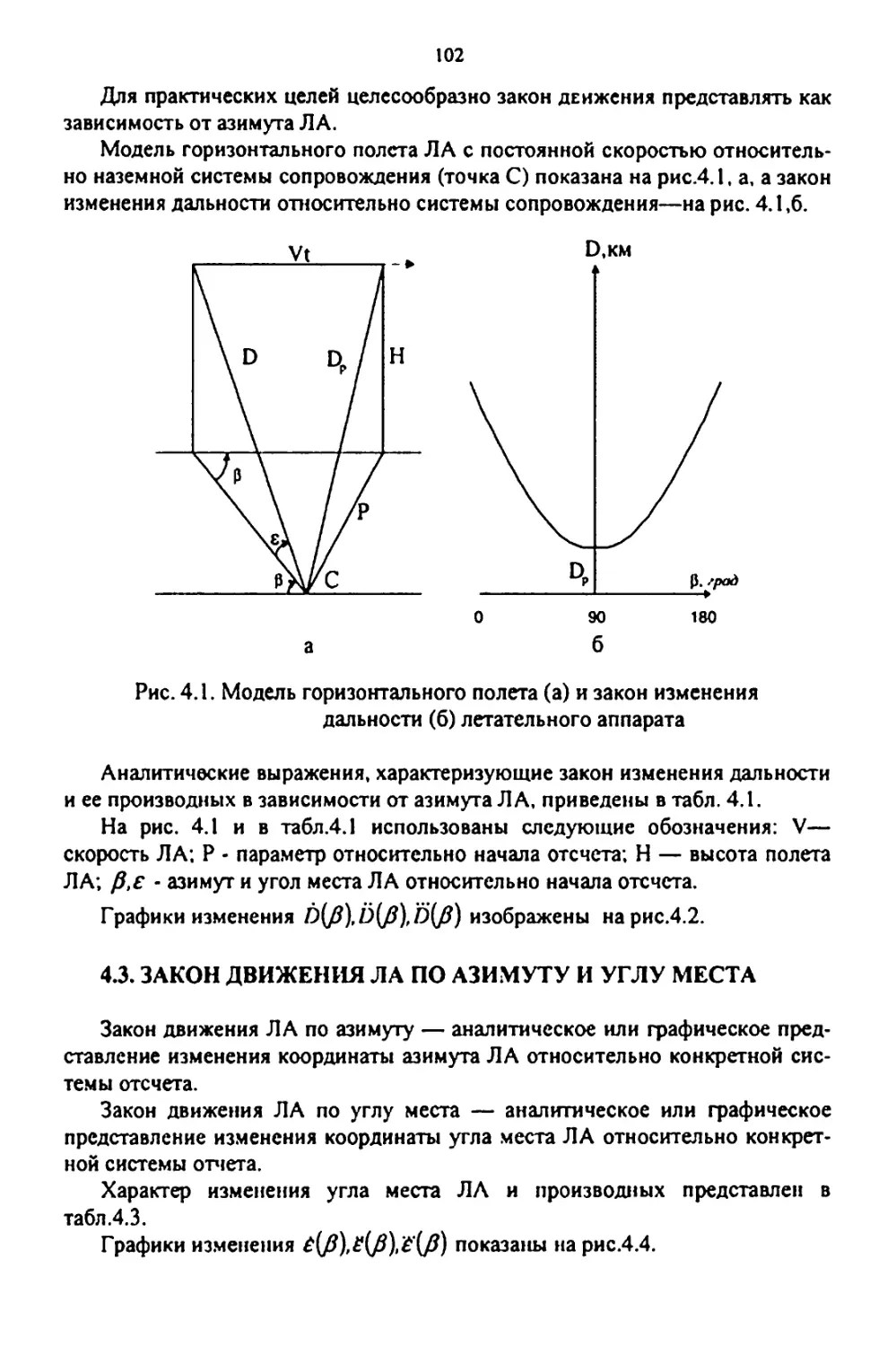
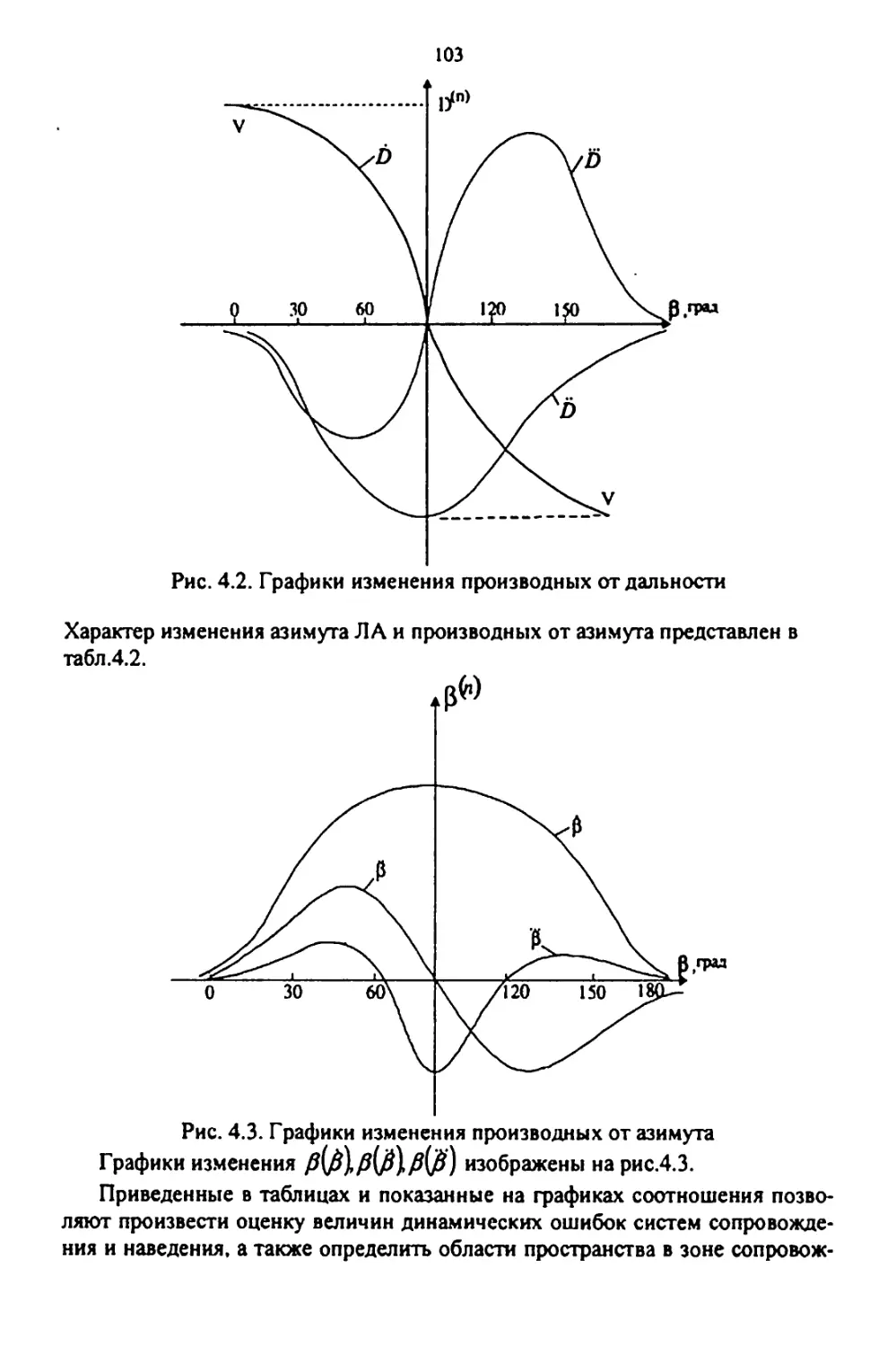
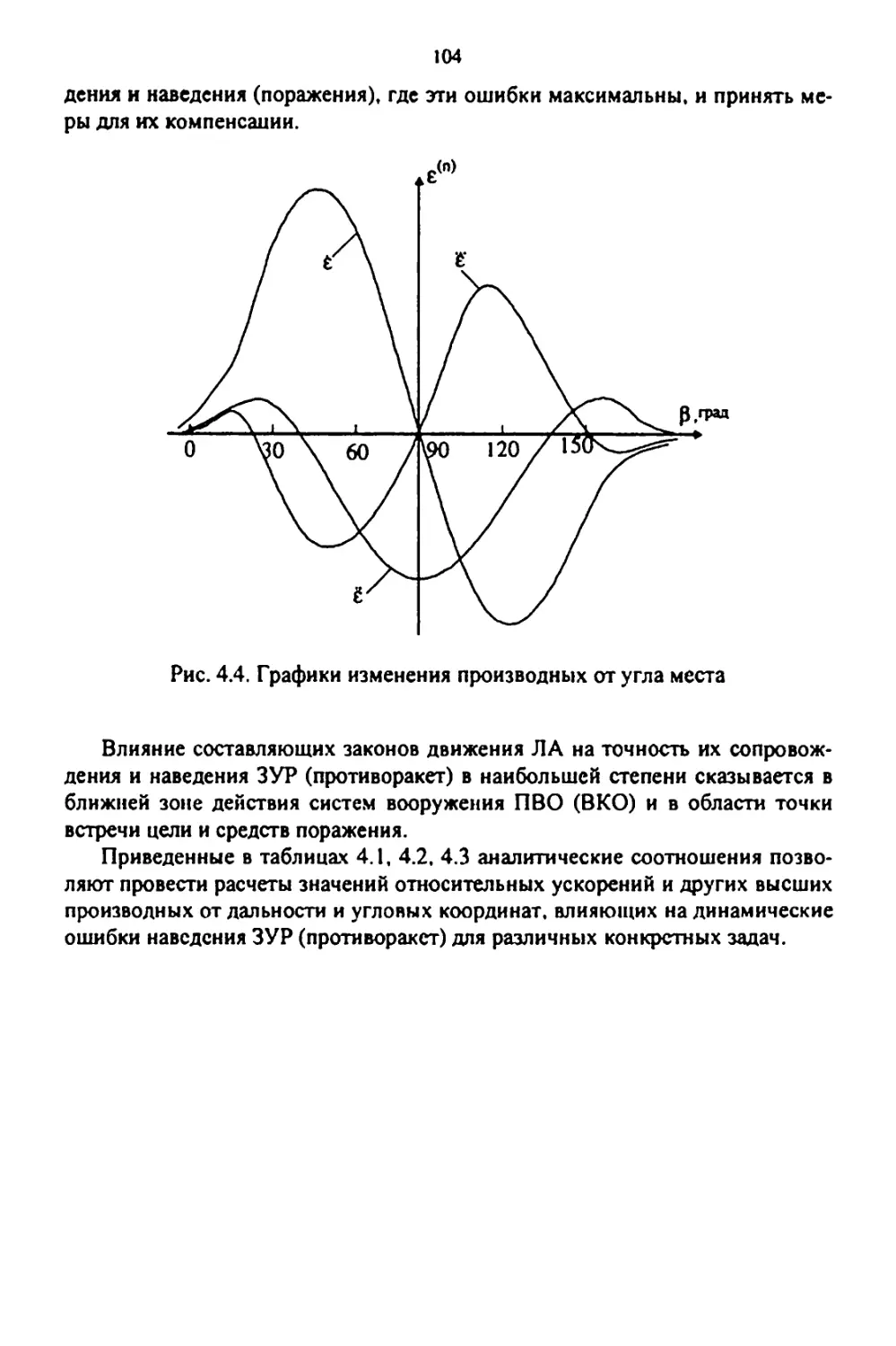
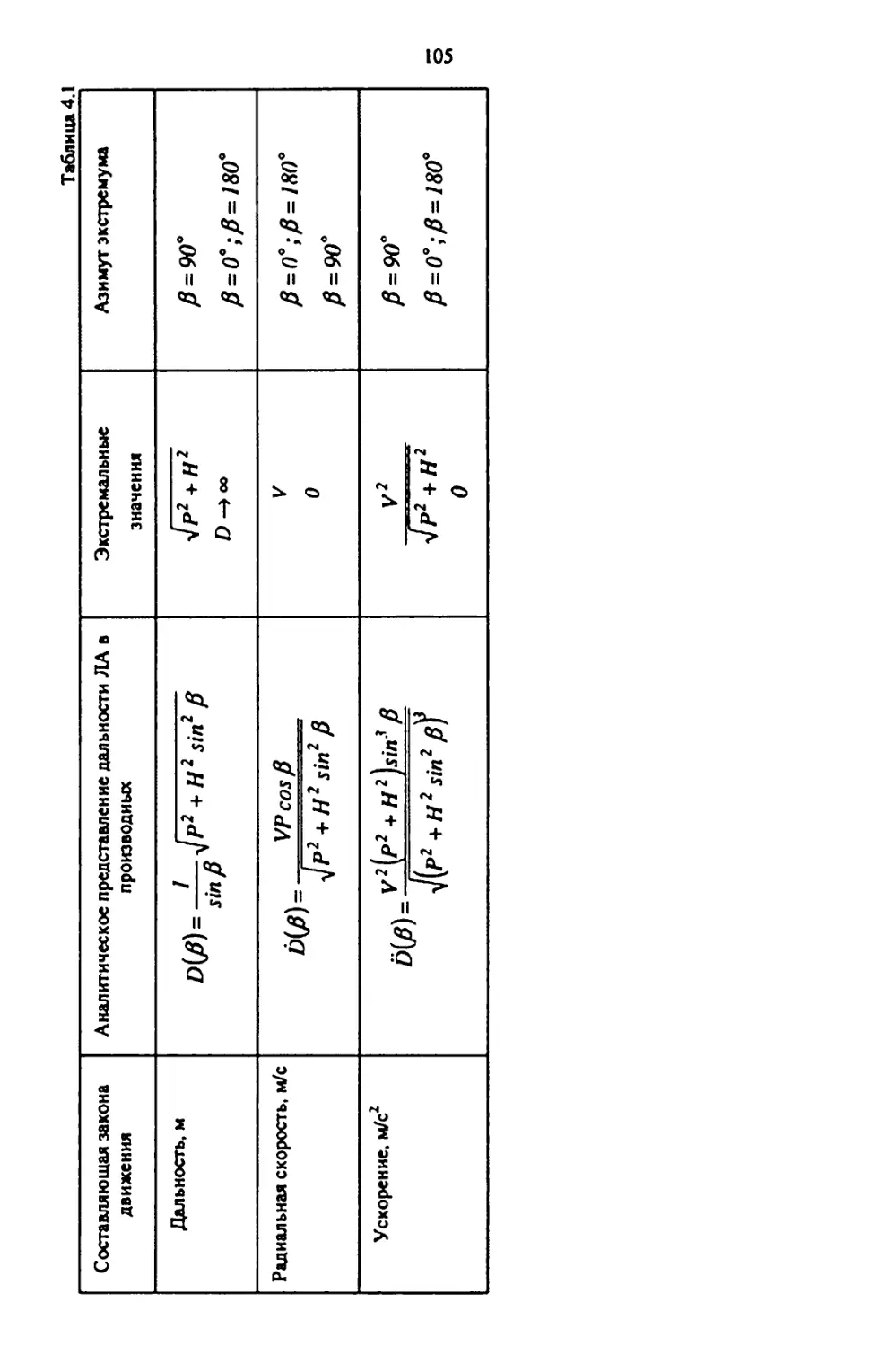
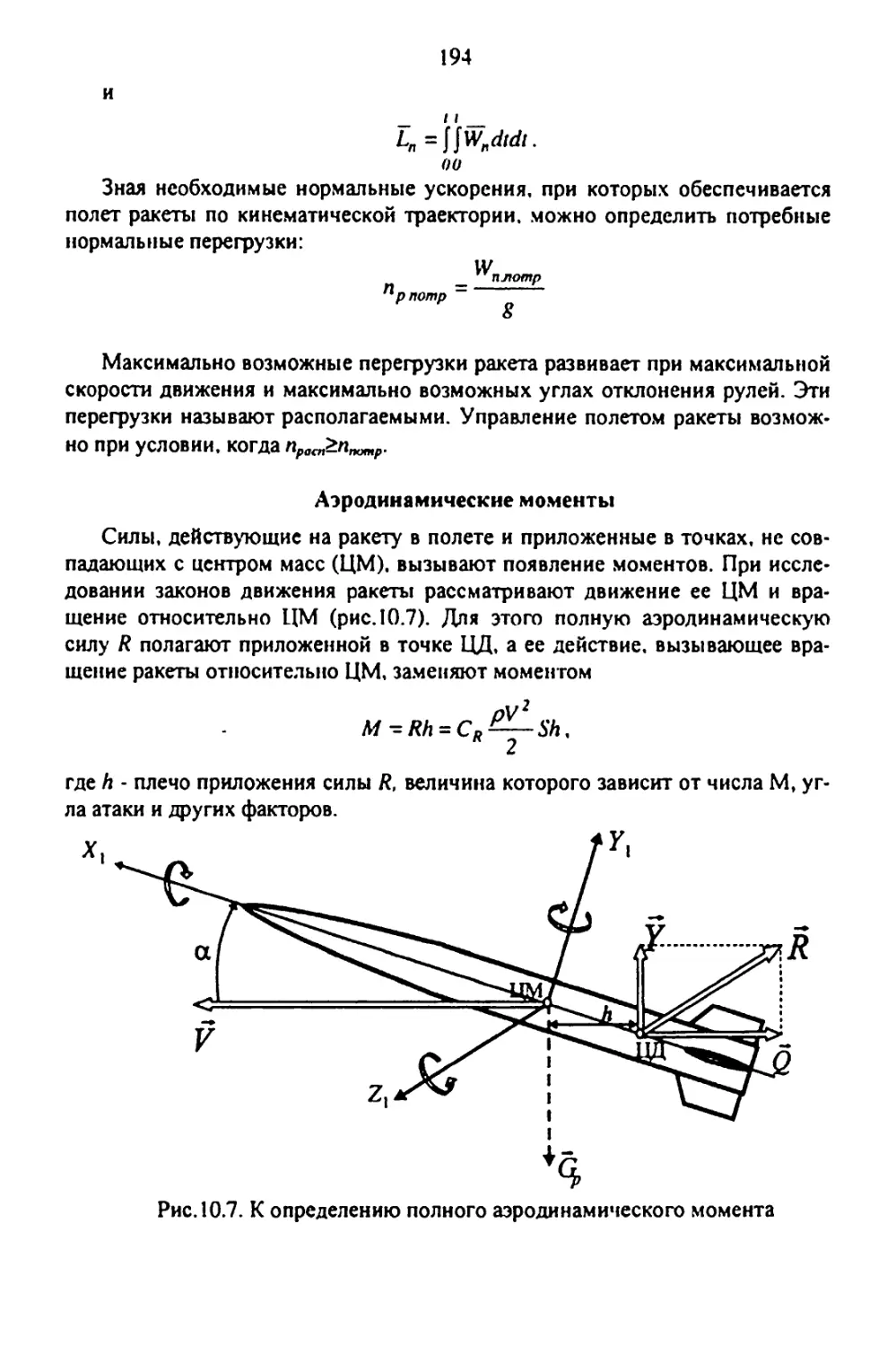
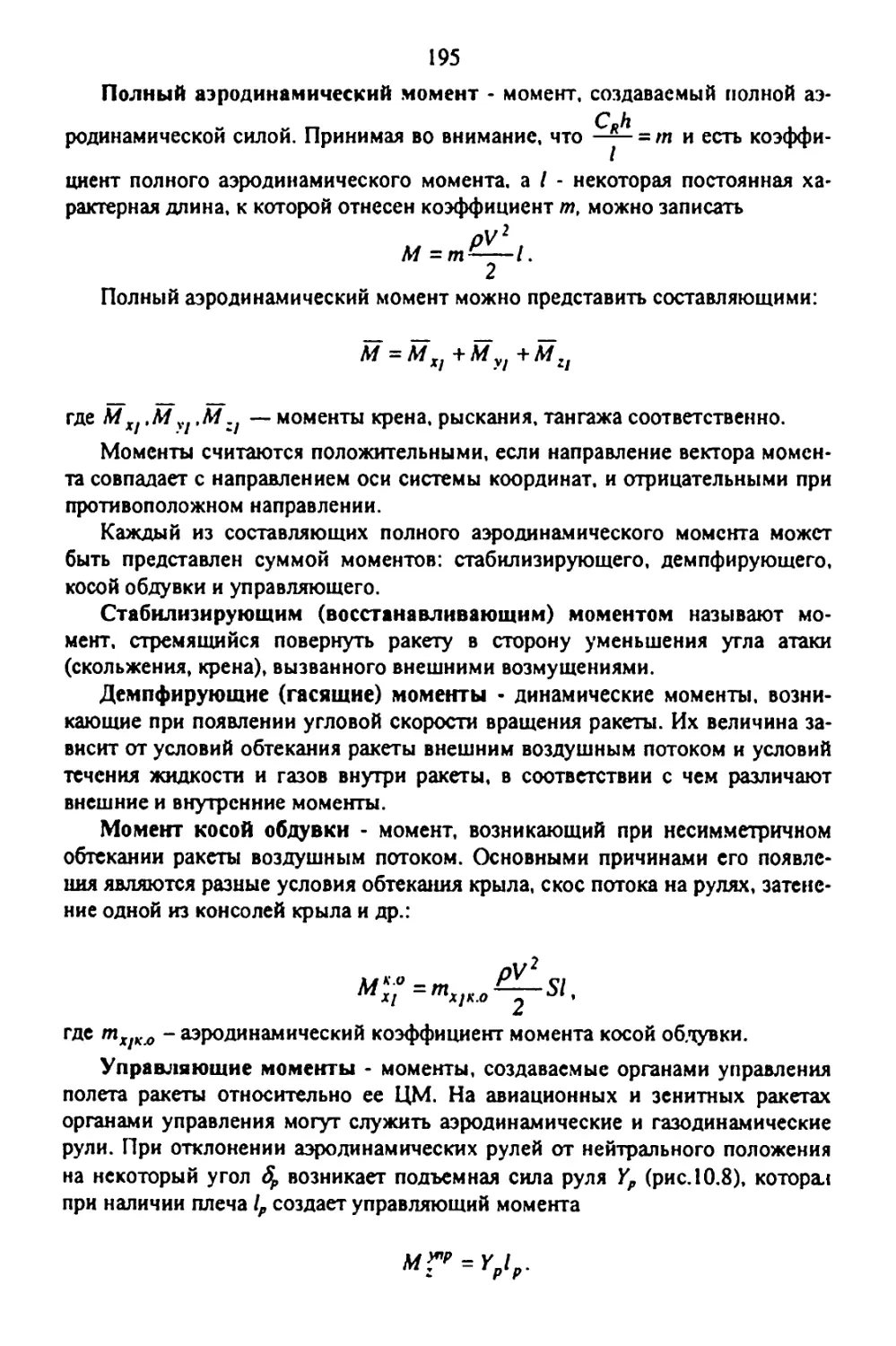
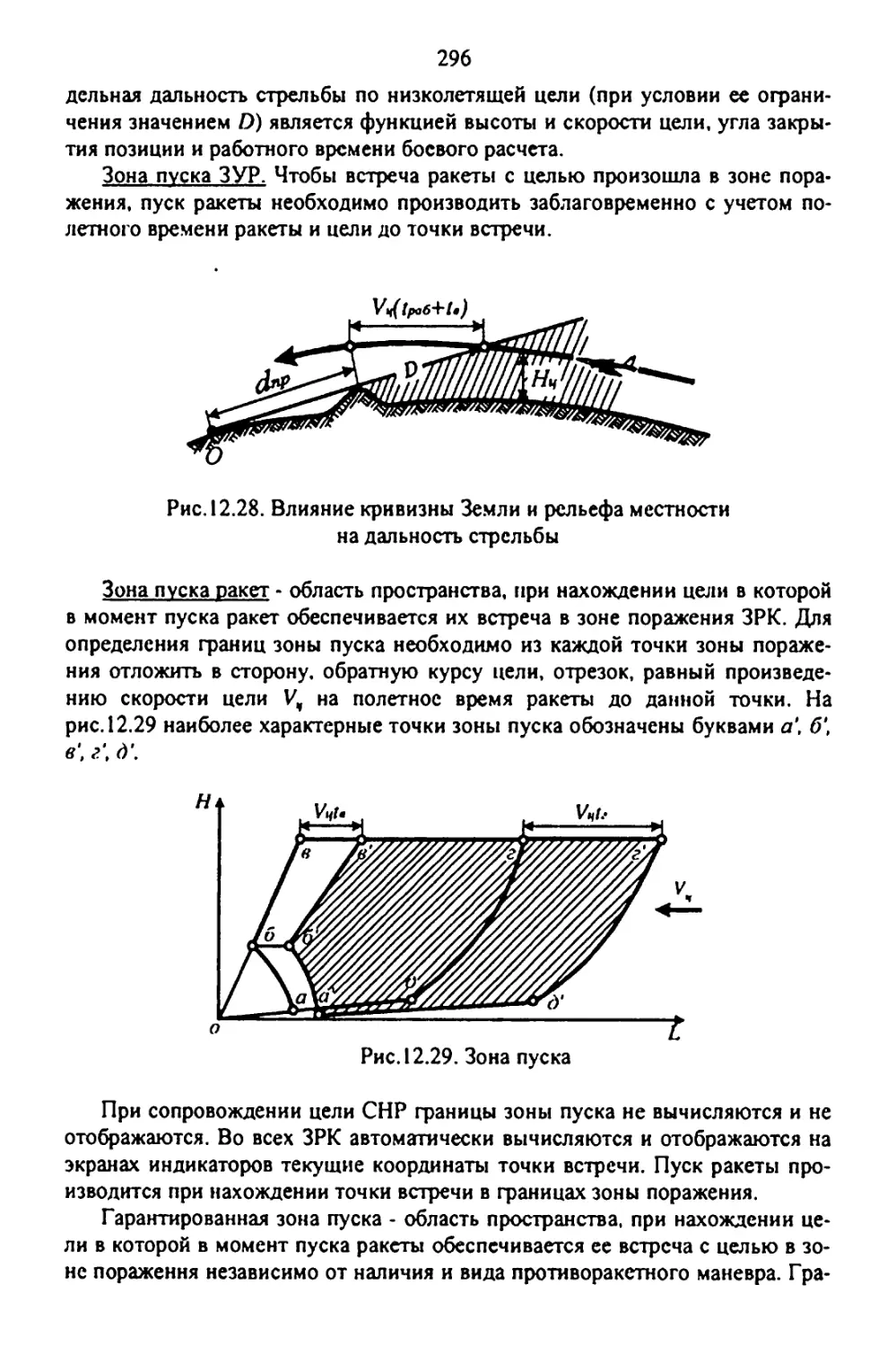
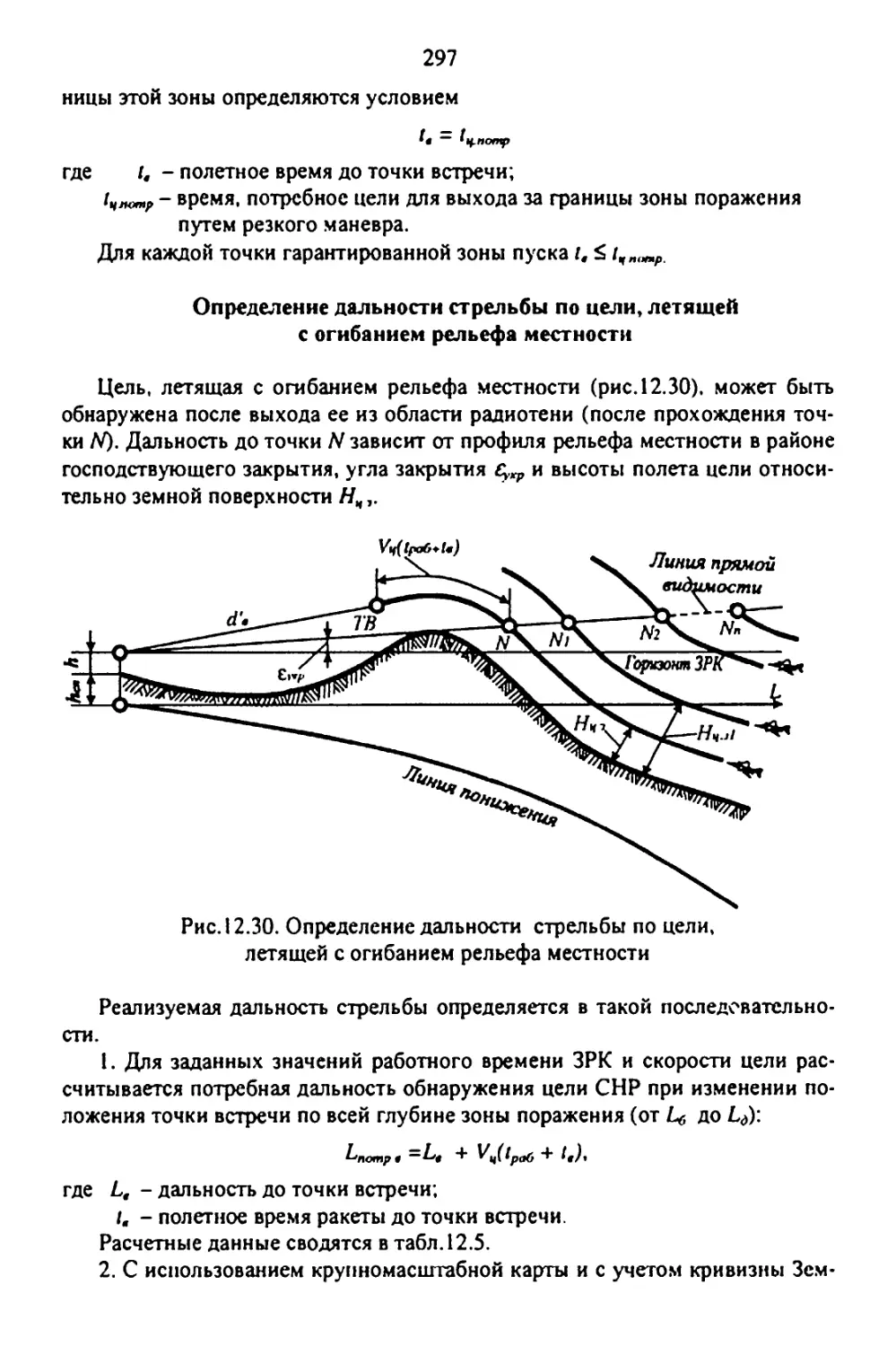
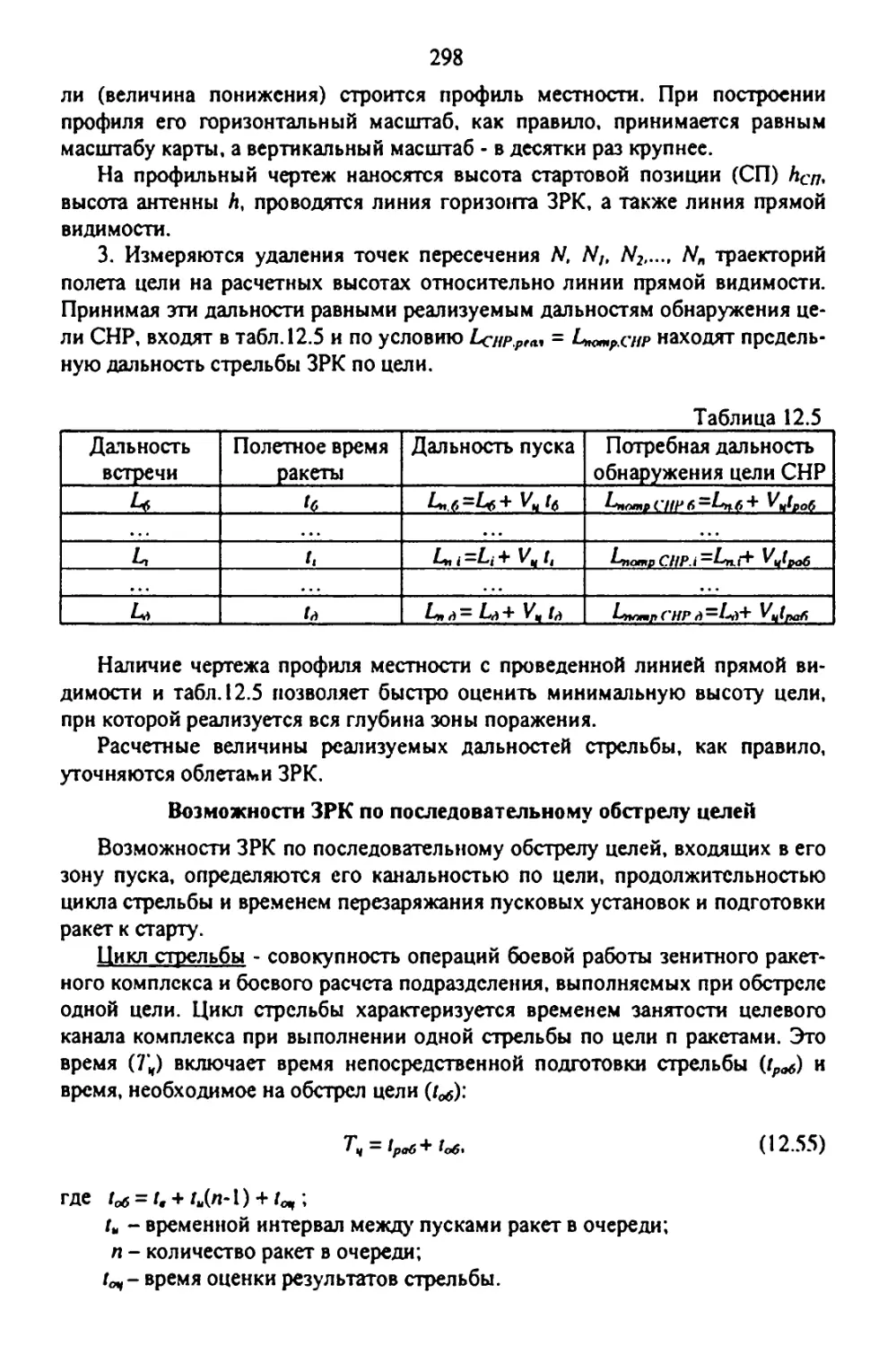
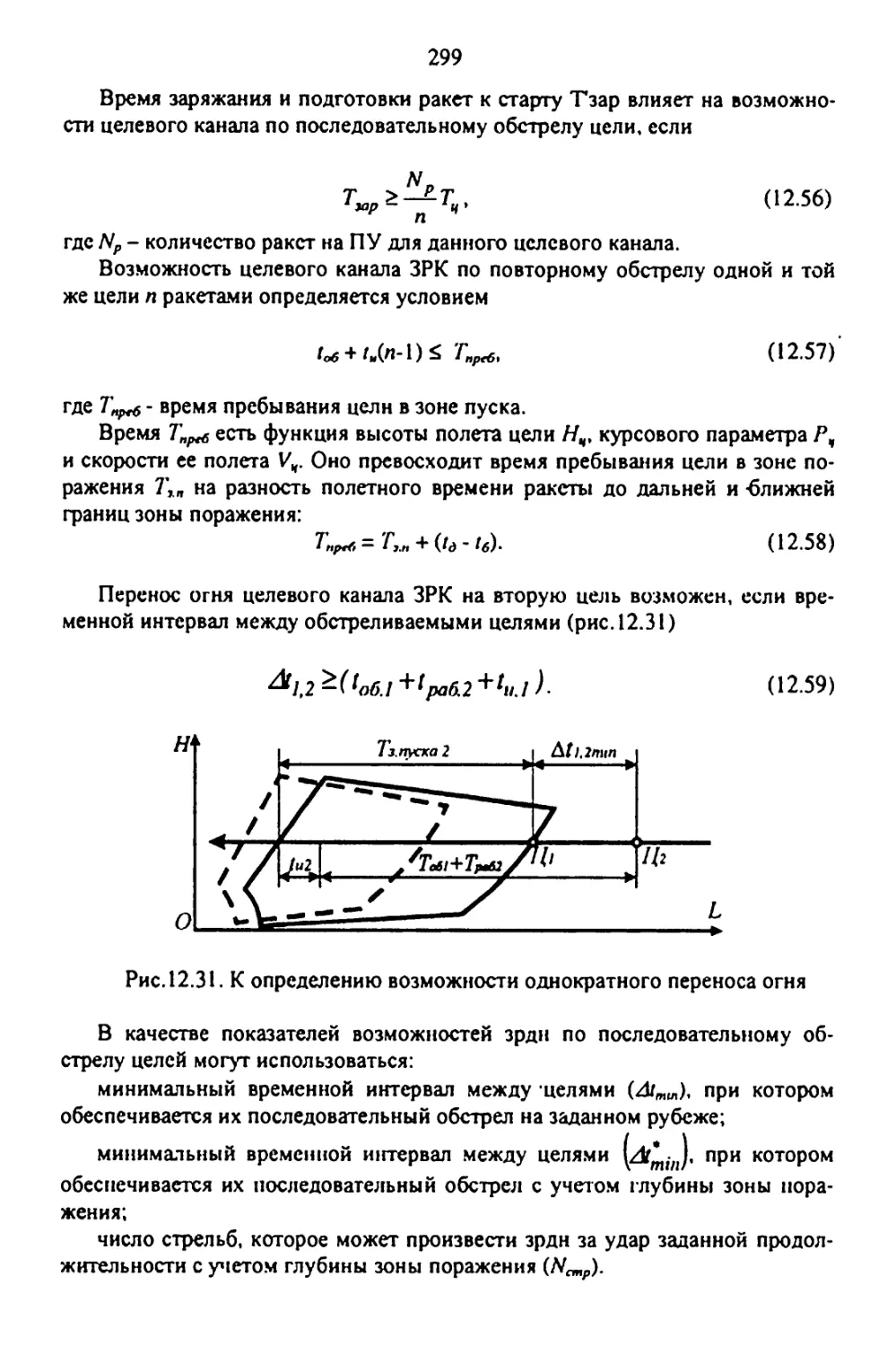
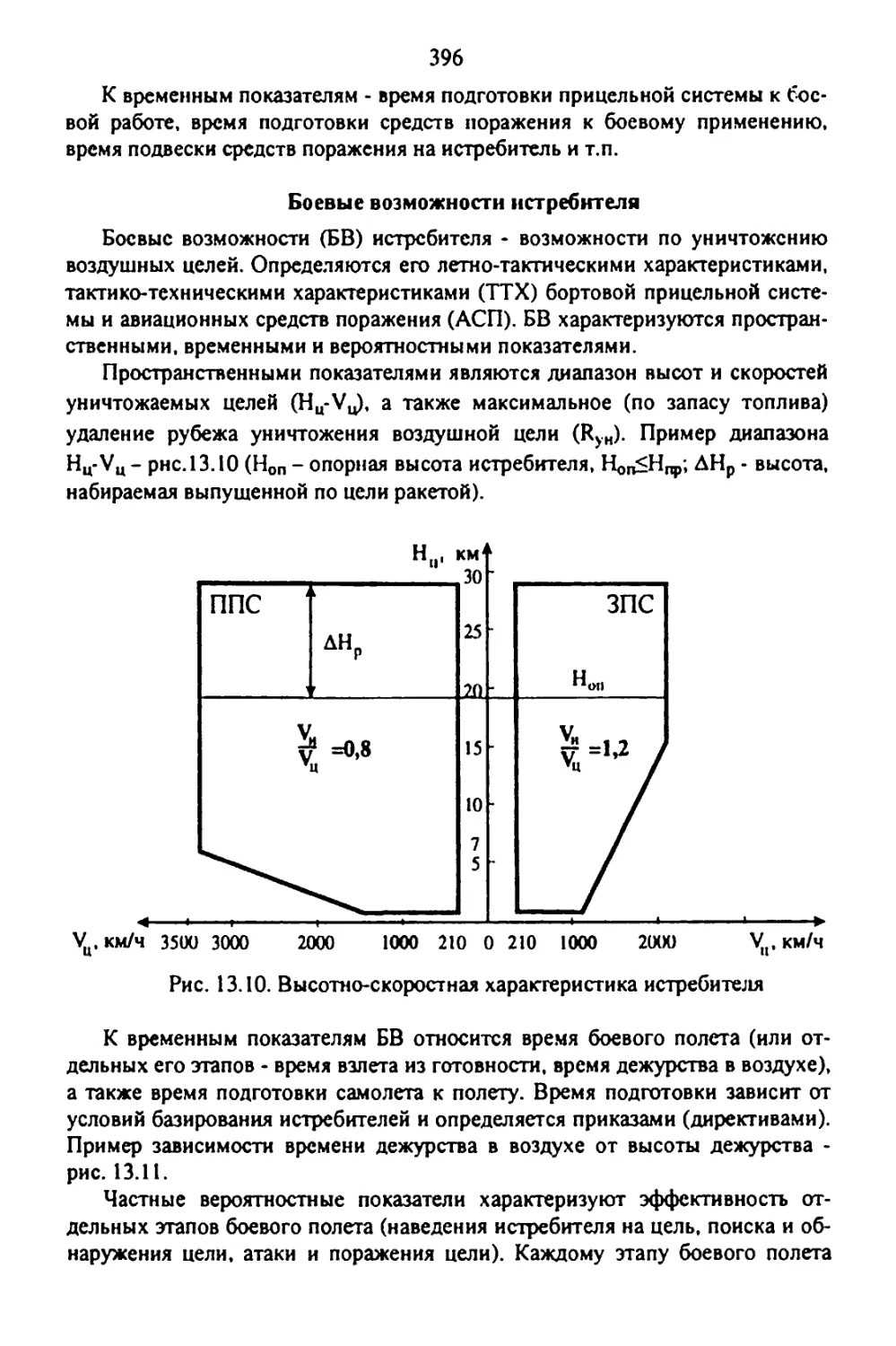
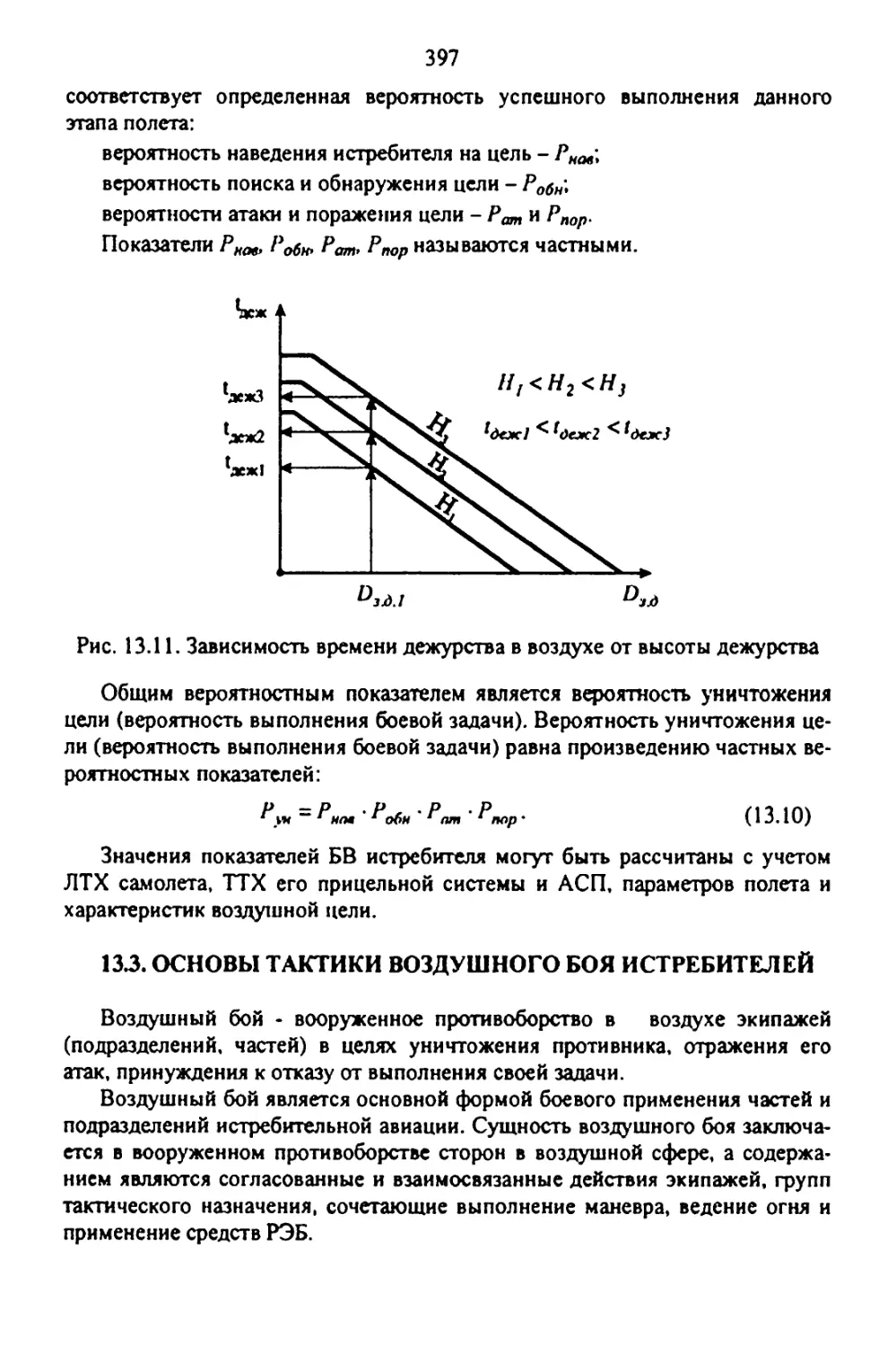
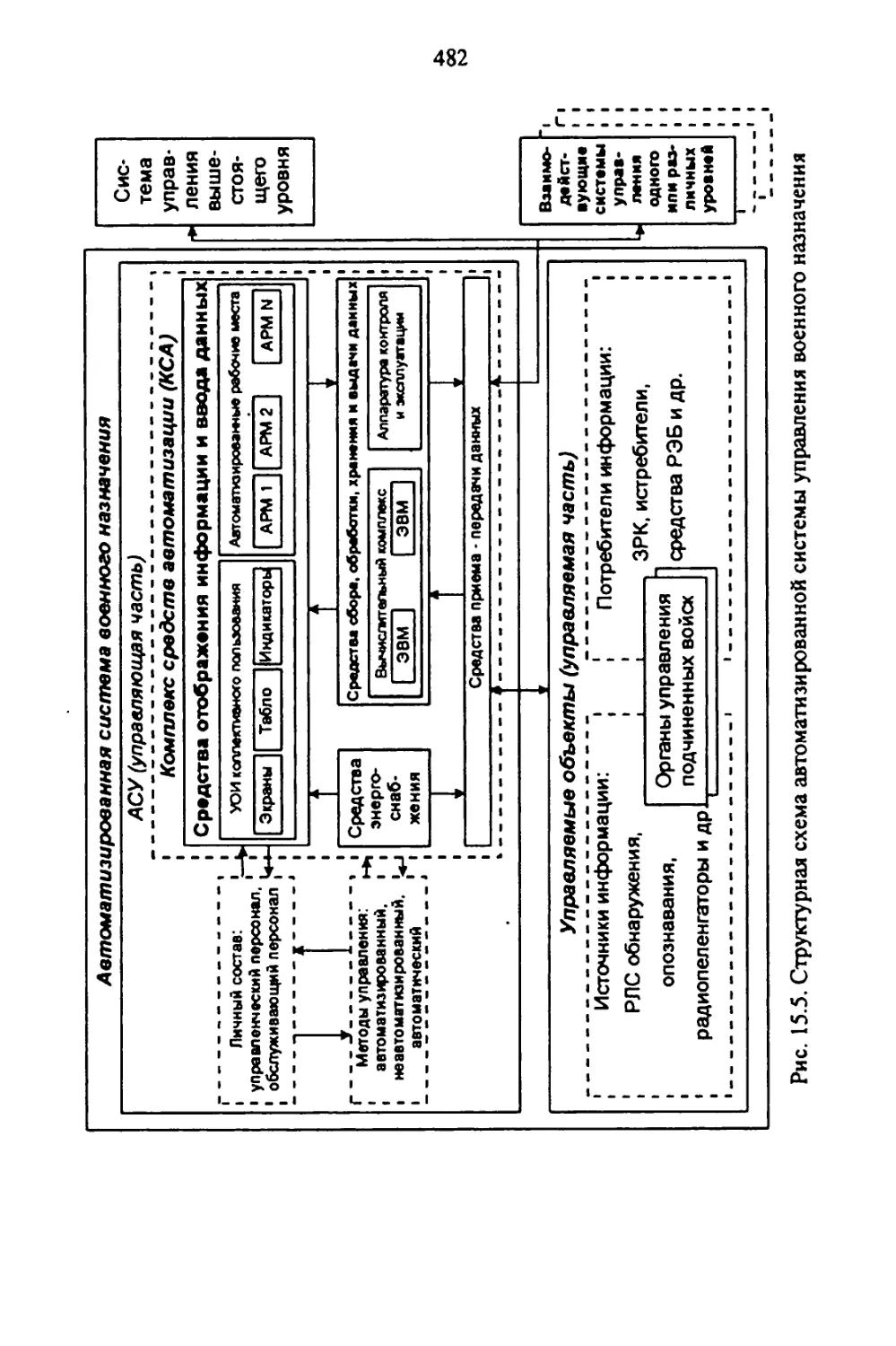
/


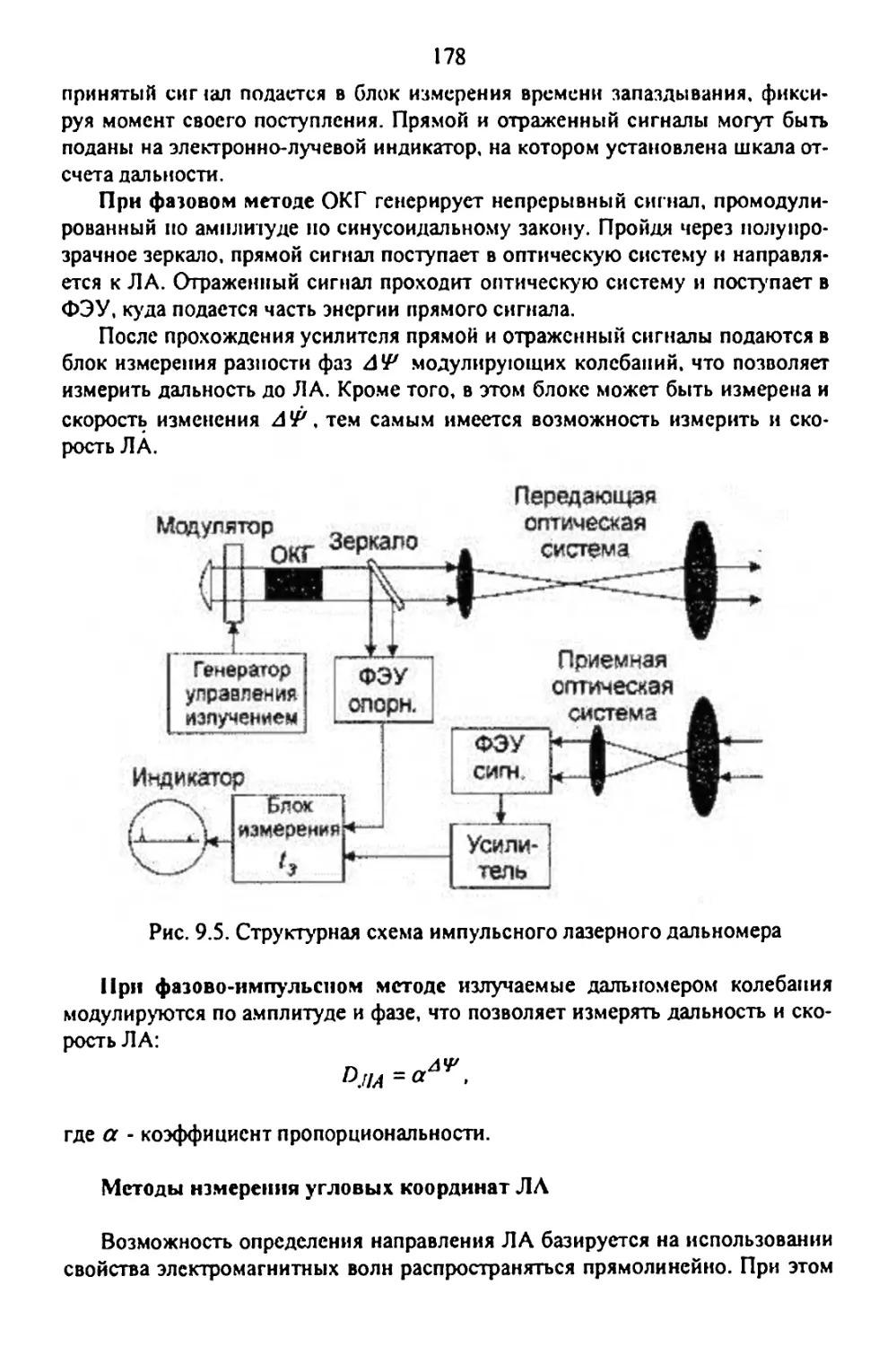
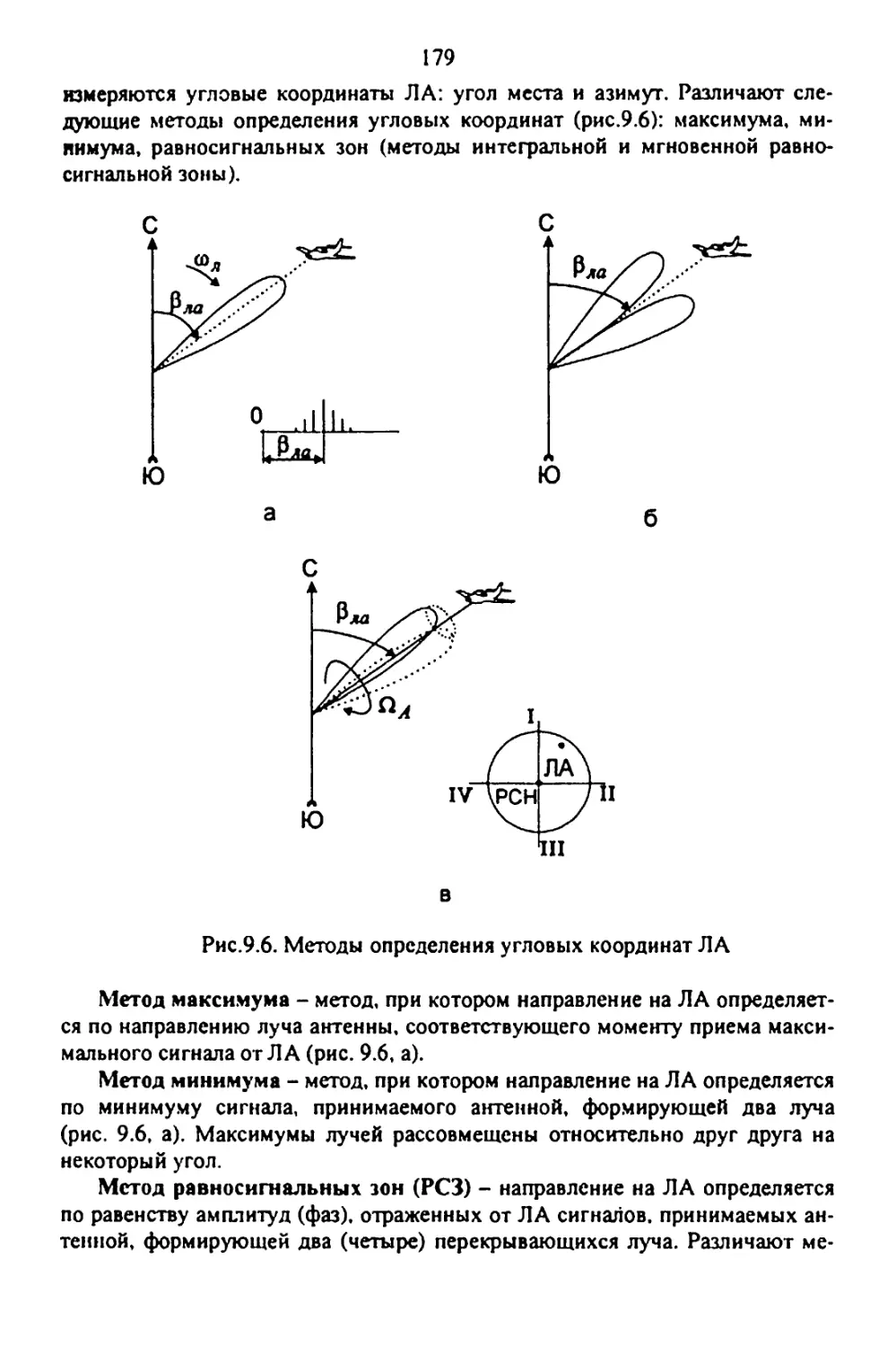
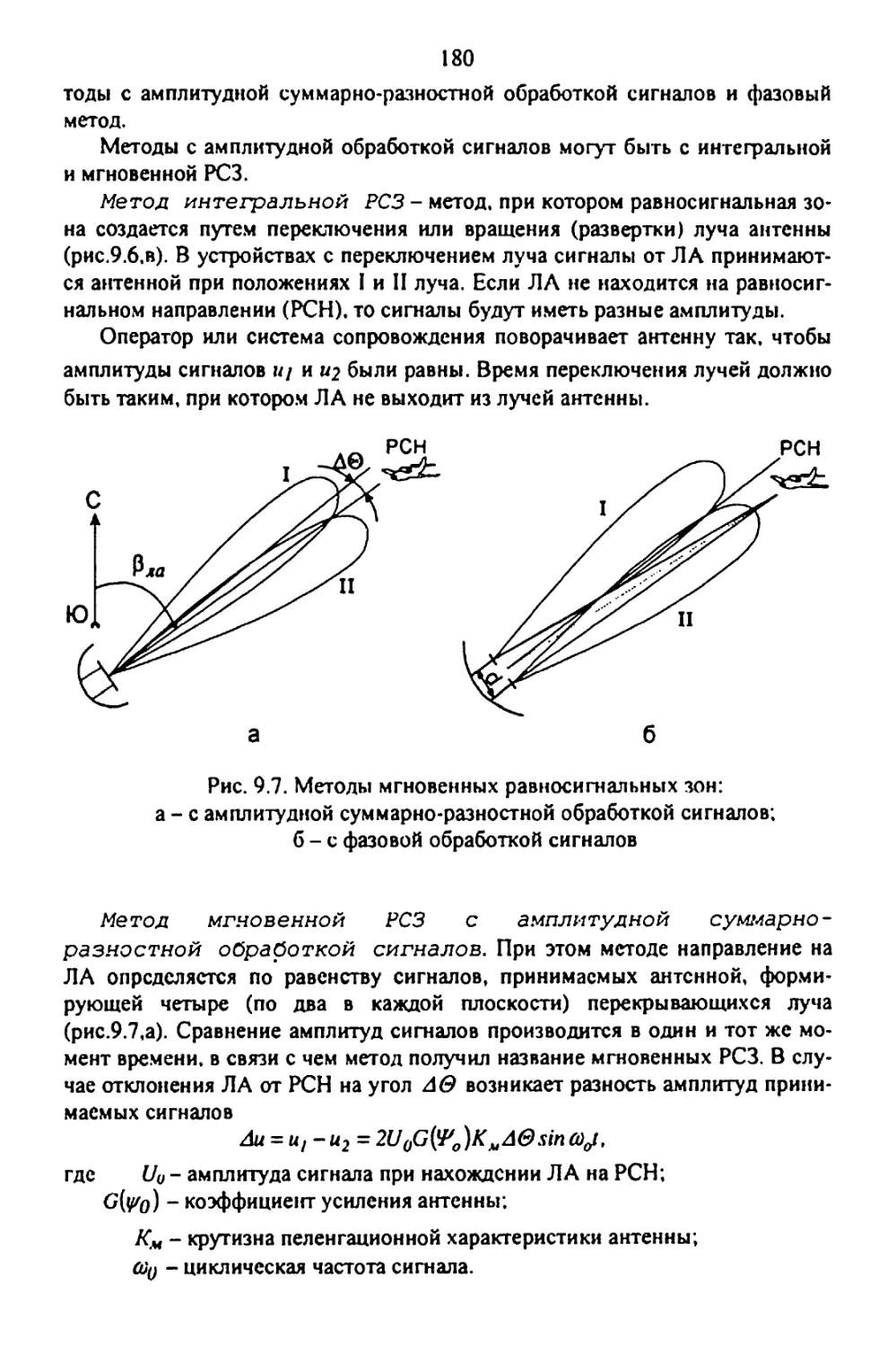
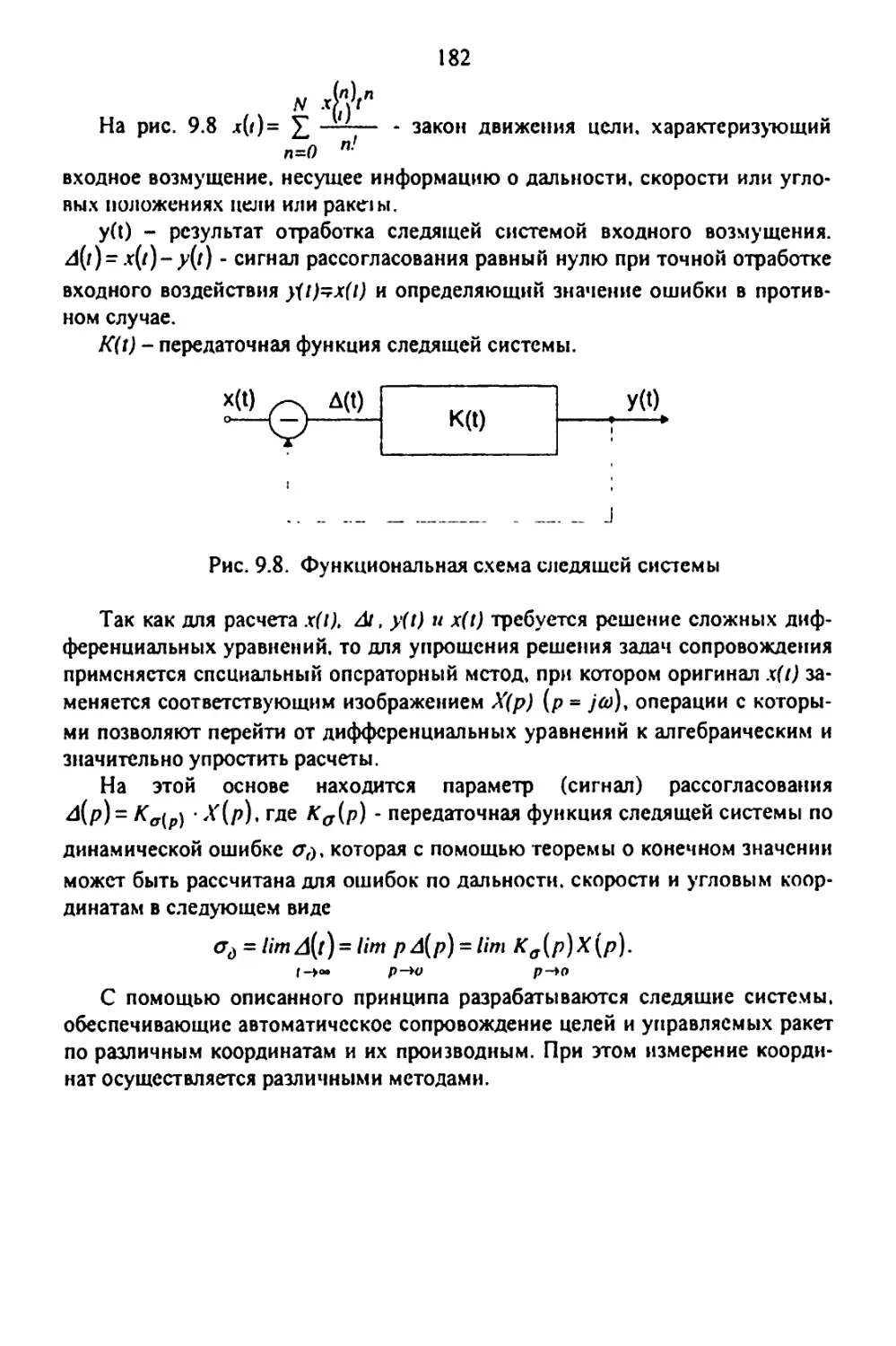
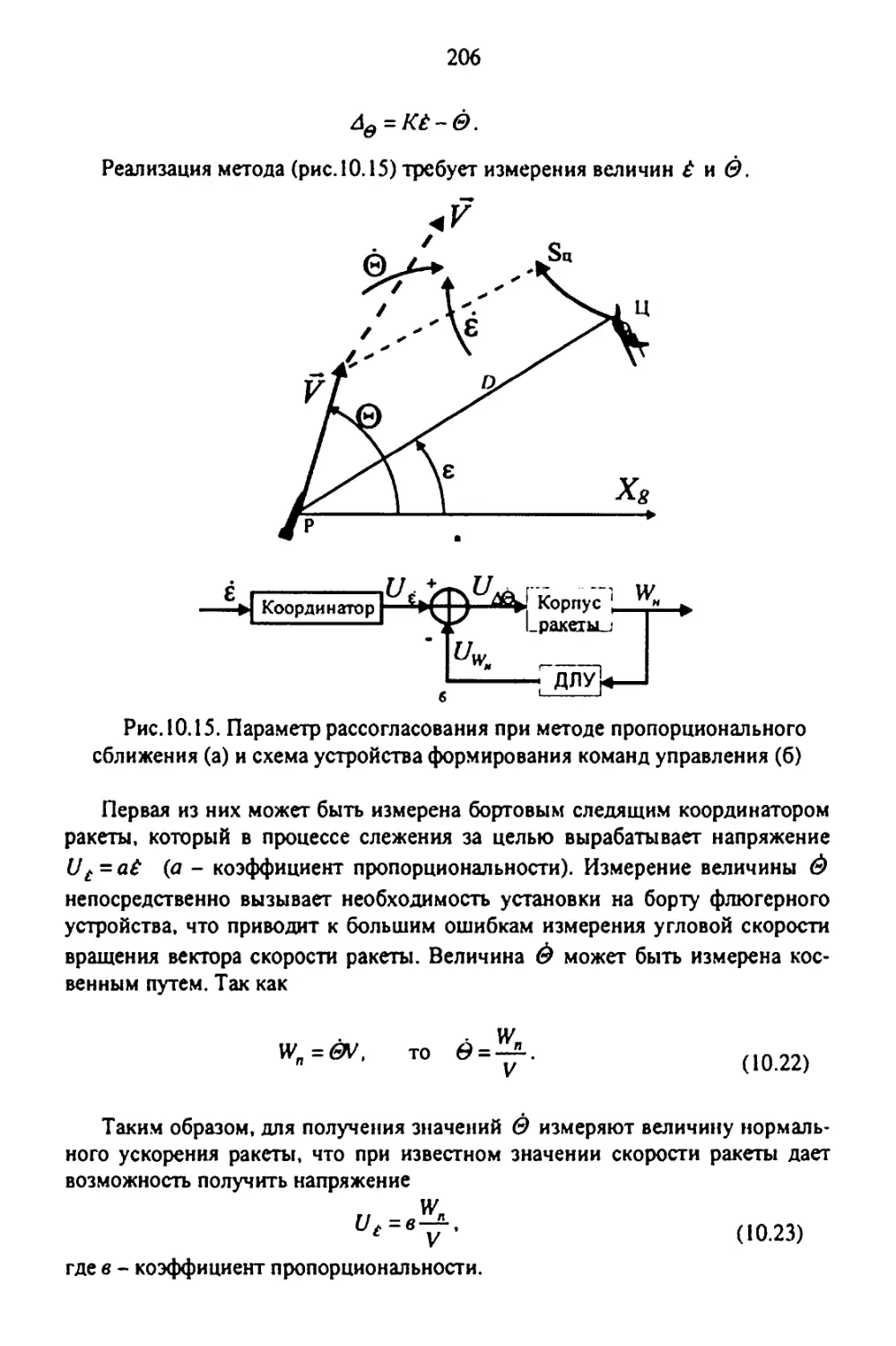




Текст
СПРАВОЧНИК
ОФИЦЕРА
ВОЗДУШНО-КОСМИЧЕСКОЙ
ОБОРОНЫ
Тверь, 2006 г.
СПРАВОЧНИК
офицера воздушно-космической обороны
Под редакцией заслуженного работника
высшей школы РФ, доктора военных наук,
профессора |С.К. БУРМИСТРОВА)
Тверь, 2006
ББК 68.65я2
С74
УДК 623(03)
Ю.Г.Аношко (2.2, 2.3.1); И.Р.Ашурбейли (7); О.Р. Балаян (1.1 ... 1.4);
В.В. Барвиненко (17); Г.П.Бендерский (11); Н.Г.Бокий (12.3);
|С.К.Бурмистров! (3 ... 6); А.Ю.Горьков (7.1...7.4, 12.4.5); Б.Н.Горевич (2.1);
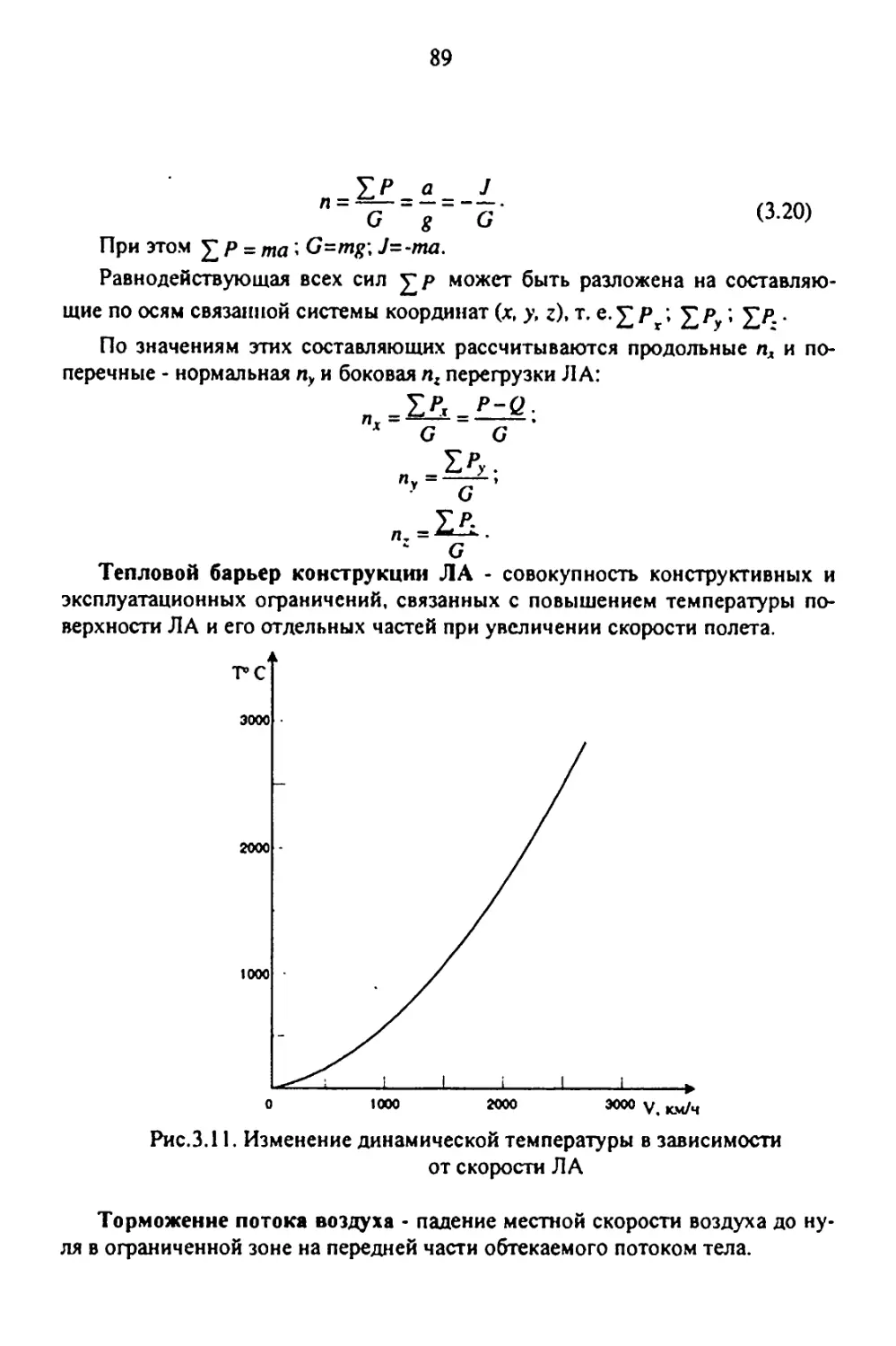
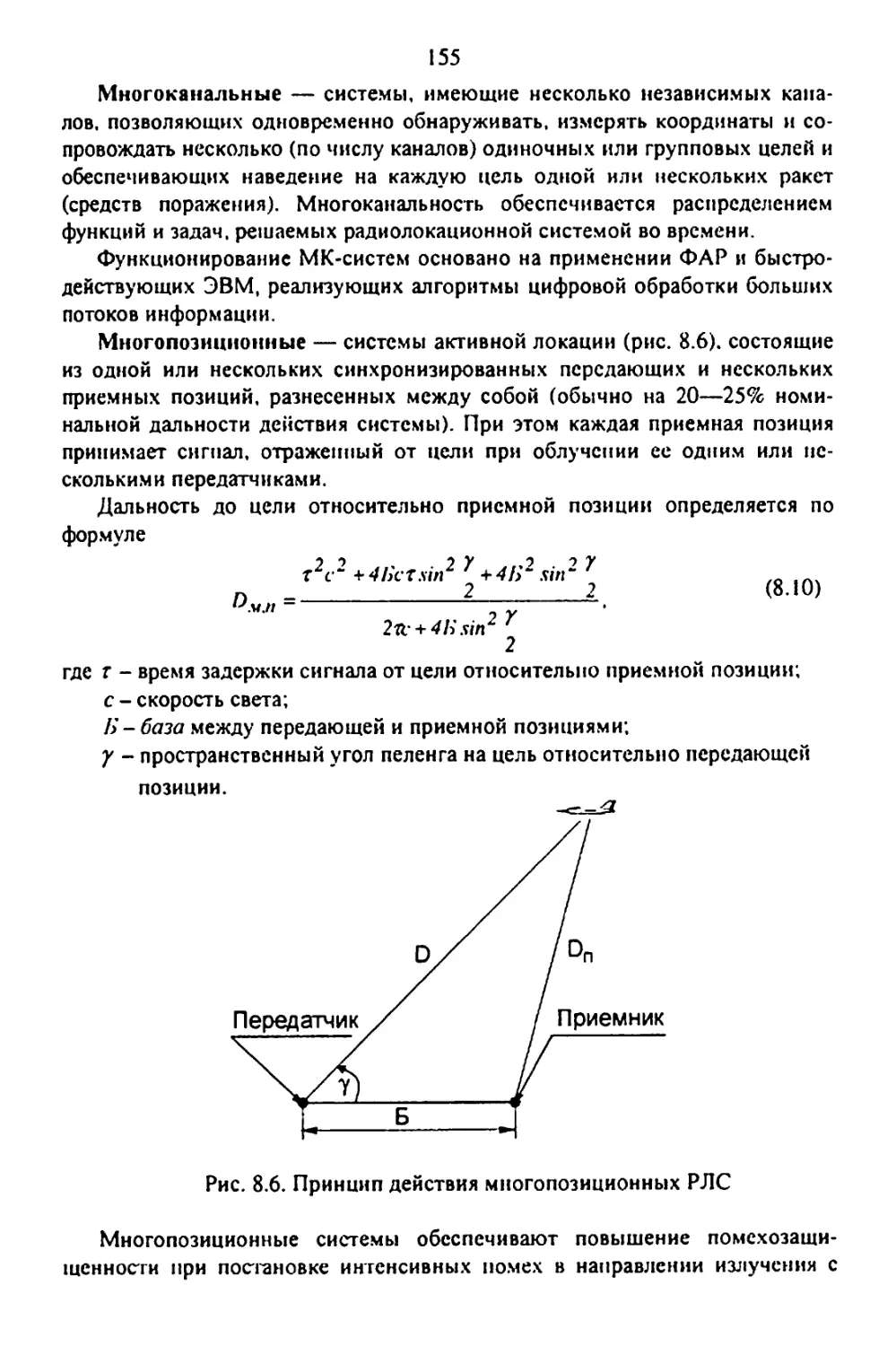
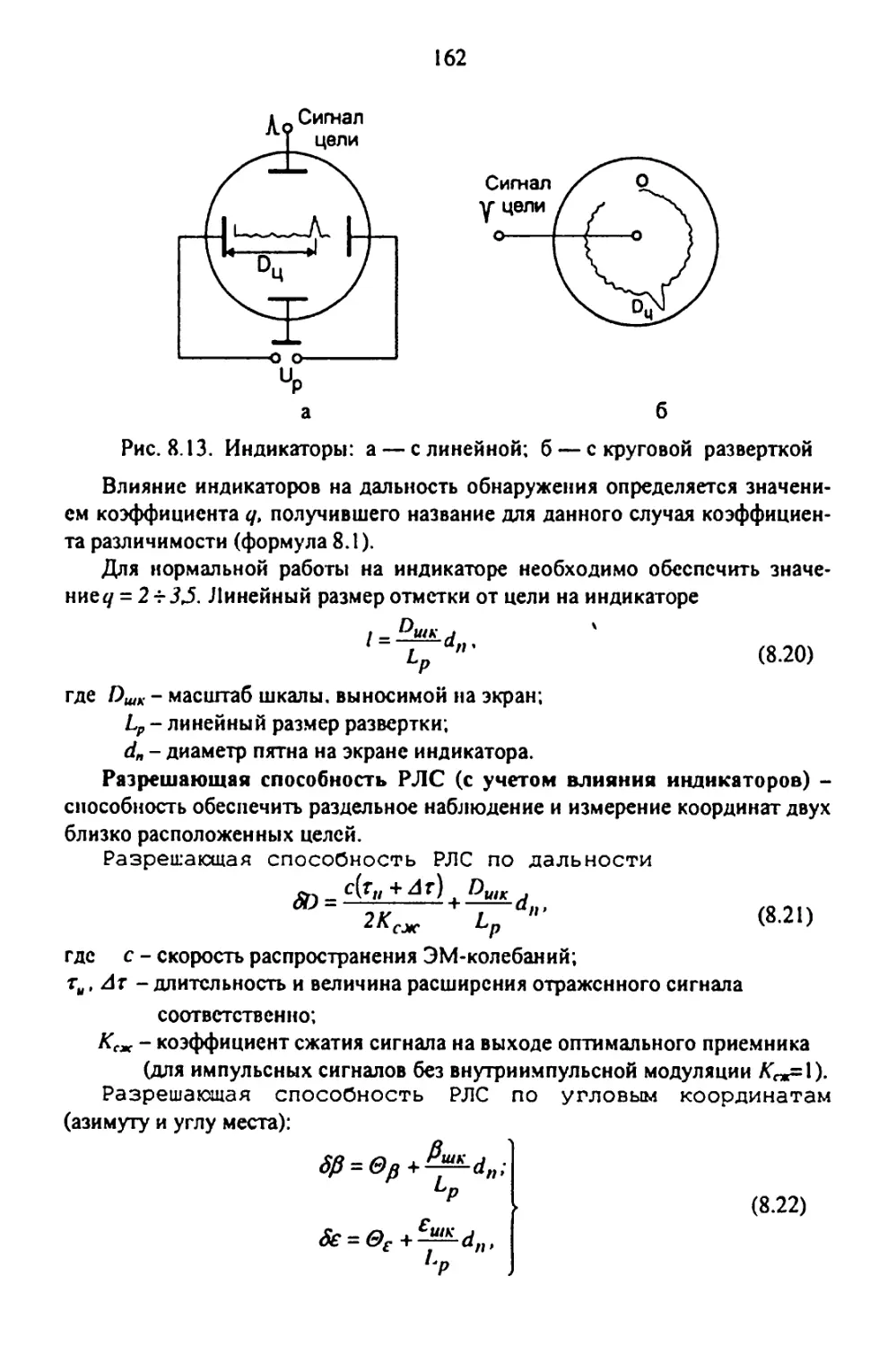
В.П.Демидов (8.1 ... 8.2); А.В.Заходяйченко (15.8); В.Н.Кийко (8.3);
В.В.Королев (14.5); А.А.Лсманский (12. Историческая справка);
В.Л.Лясковский (15.1 ... 15.7); А.С.Маташков, А.В.Воякин, О.В.Ковылов,
(13.1 ... 13.4); А.А.Ноговицын (15.3); Ю.Д.Подгорных (2.3.2 ... 2.3.4);
В.П.Саушкин (14.2 ... 14.8); В.Н.Самусенко (2.4, 12.4.7, 12.4.8); М.А.Сигаев,
А.А.Сергеев, В.В.Мацюк (10, 12.1, 12.2); А.В.Морозов (16.8); М.А.Фролов
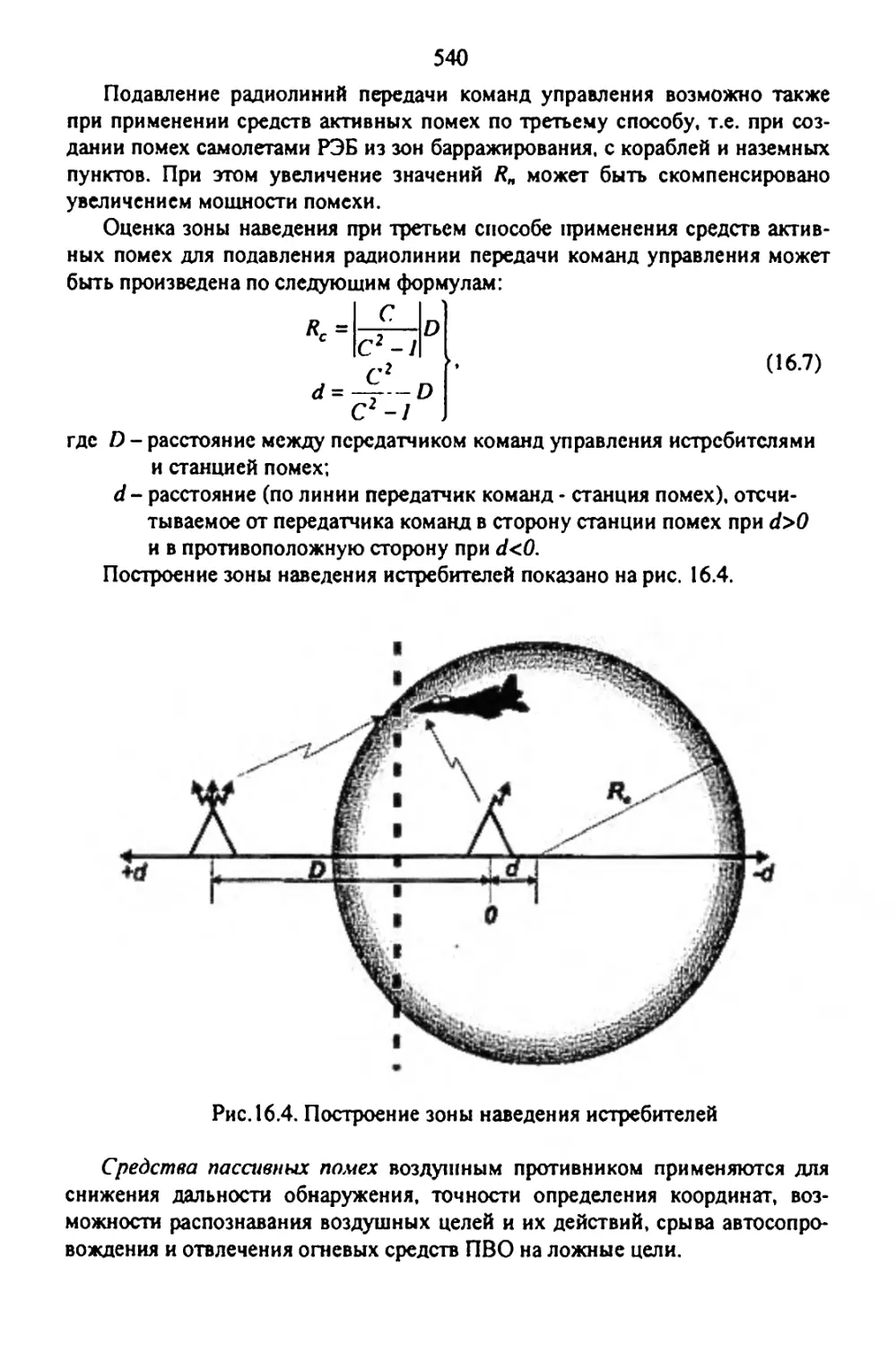
(8.4, 9); Б.Ф.Чельцов (Предисловие); В.Н.Шачнев (16.1 ... 16.7);
А.В.Шрамченко (14.1); В.В.Шувертков, В.Ф.Бычко, П.Б.Шостак (12.4.1.
12.4.2, 12.4.3, 12.4.4, 12.4.6).
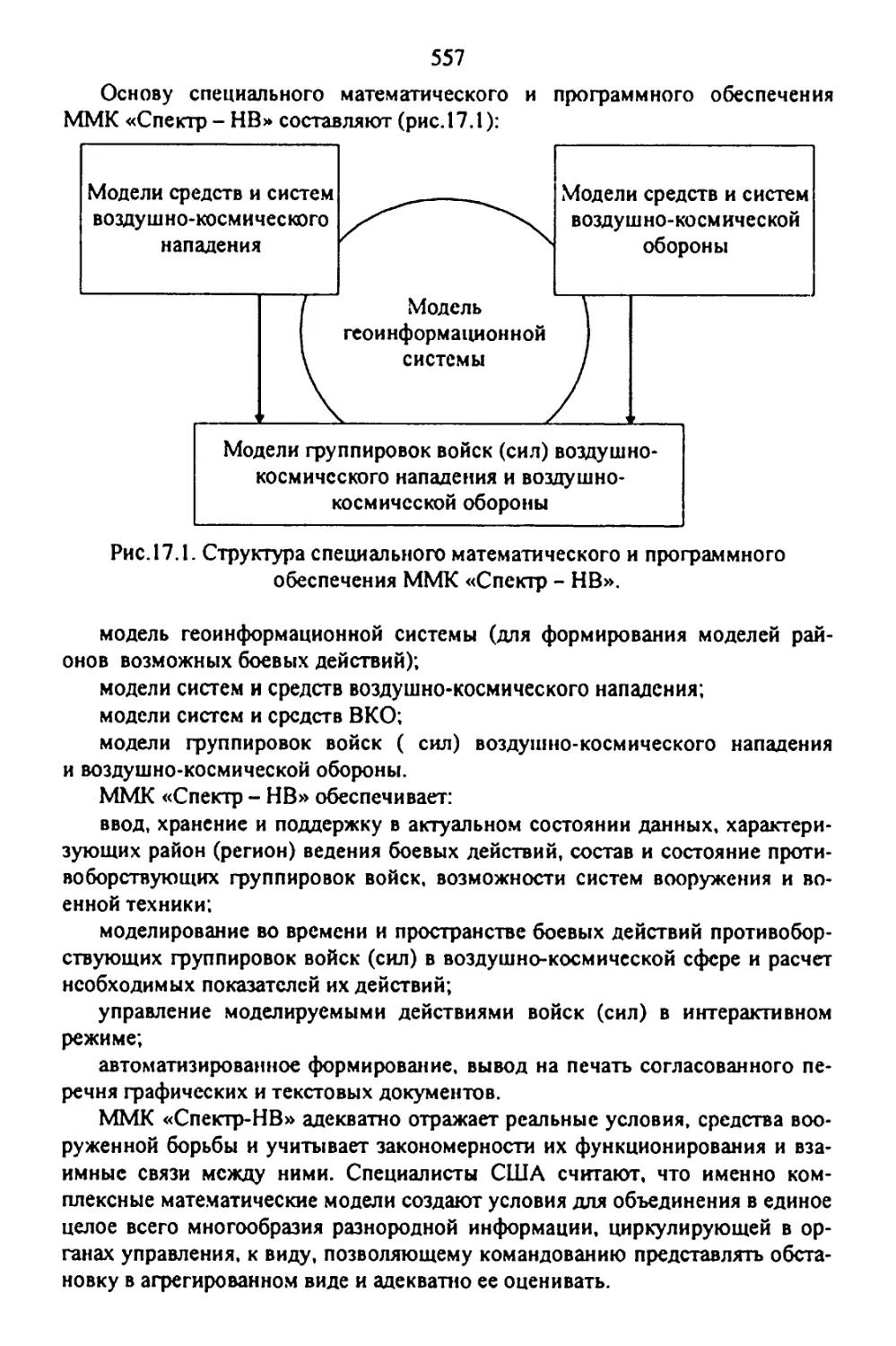
Справочник офицера воздушно-космической обороны/ Под об-
щей редакцией С.К. Бурмистрова. - Тверь: BA ВКО, 2006. - 564 с.
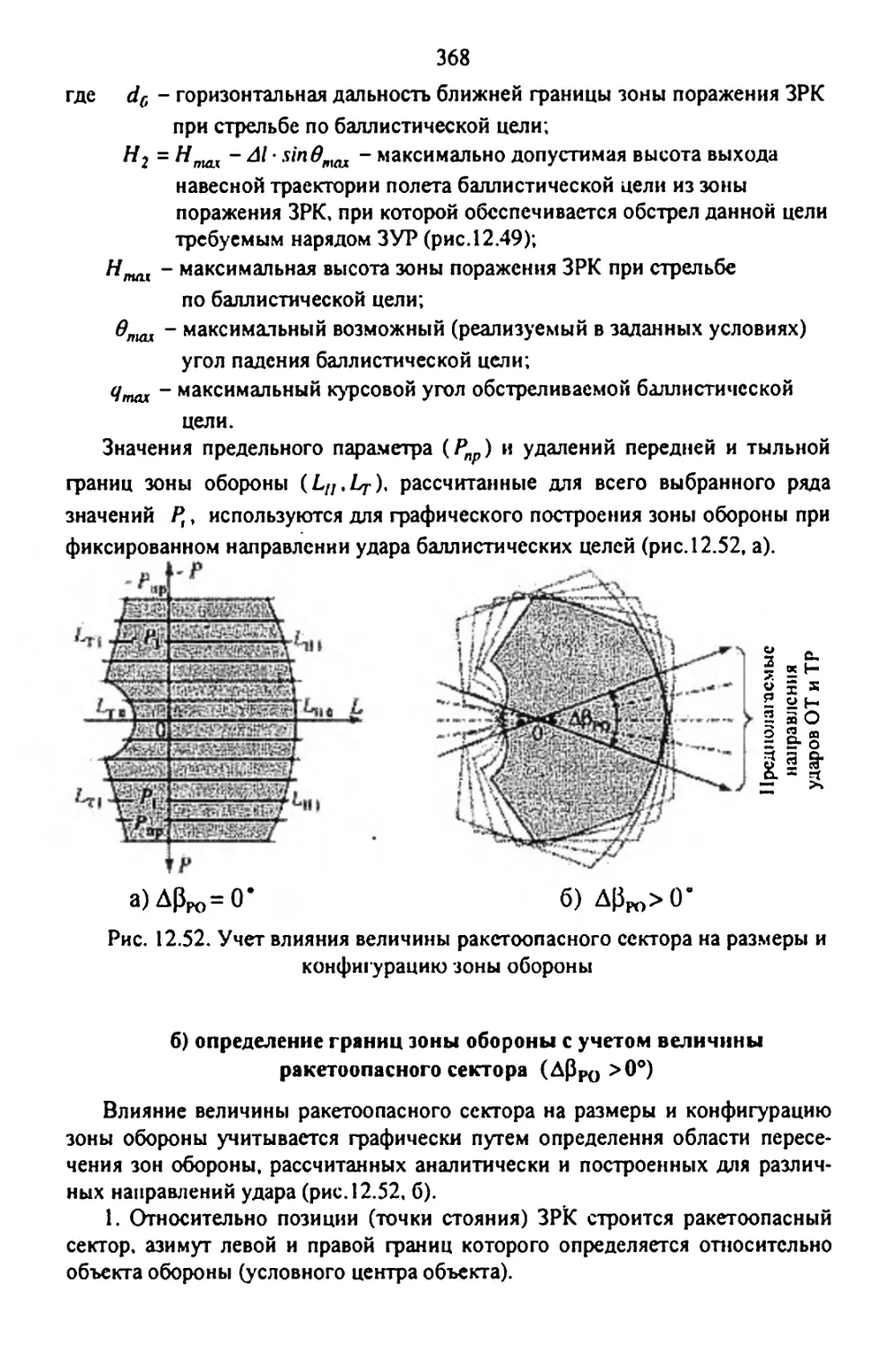
В Справочнике приводятся основные характеристики сил и
средств воздушно-космического нападения противника, задачи и
структура сил и средств воздушно-космической обороны, структу-
ра войск ПВО ВВС. краткая история их развития. Рассматривают-
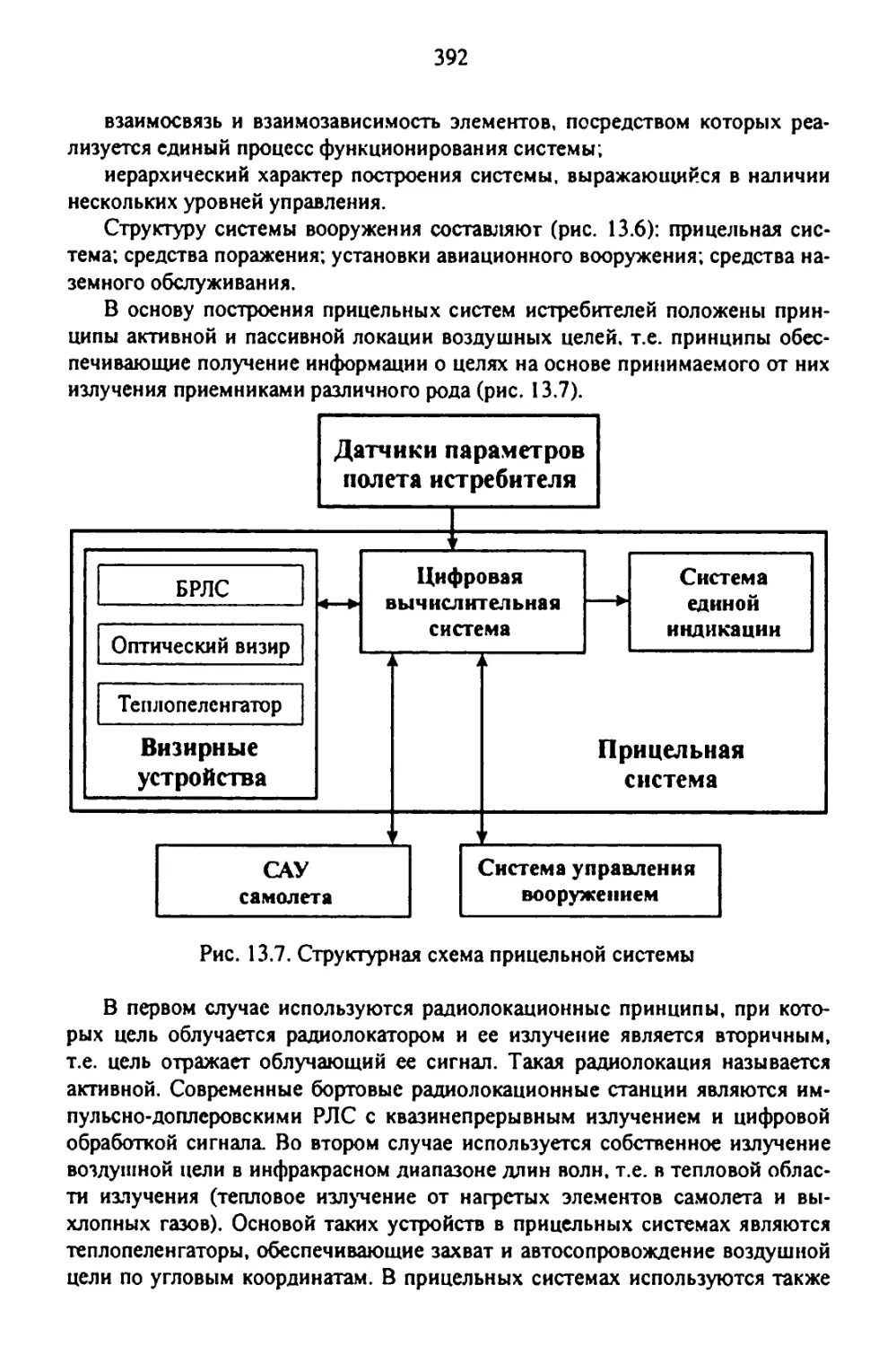
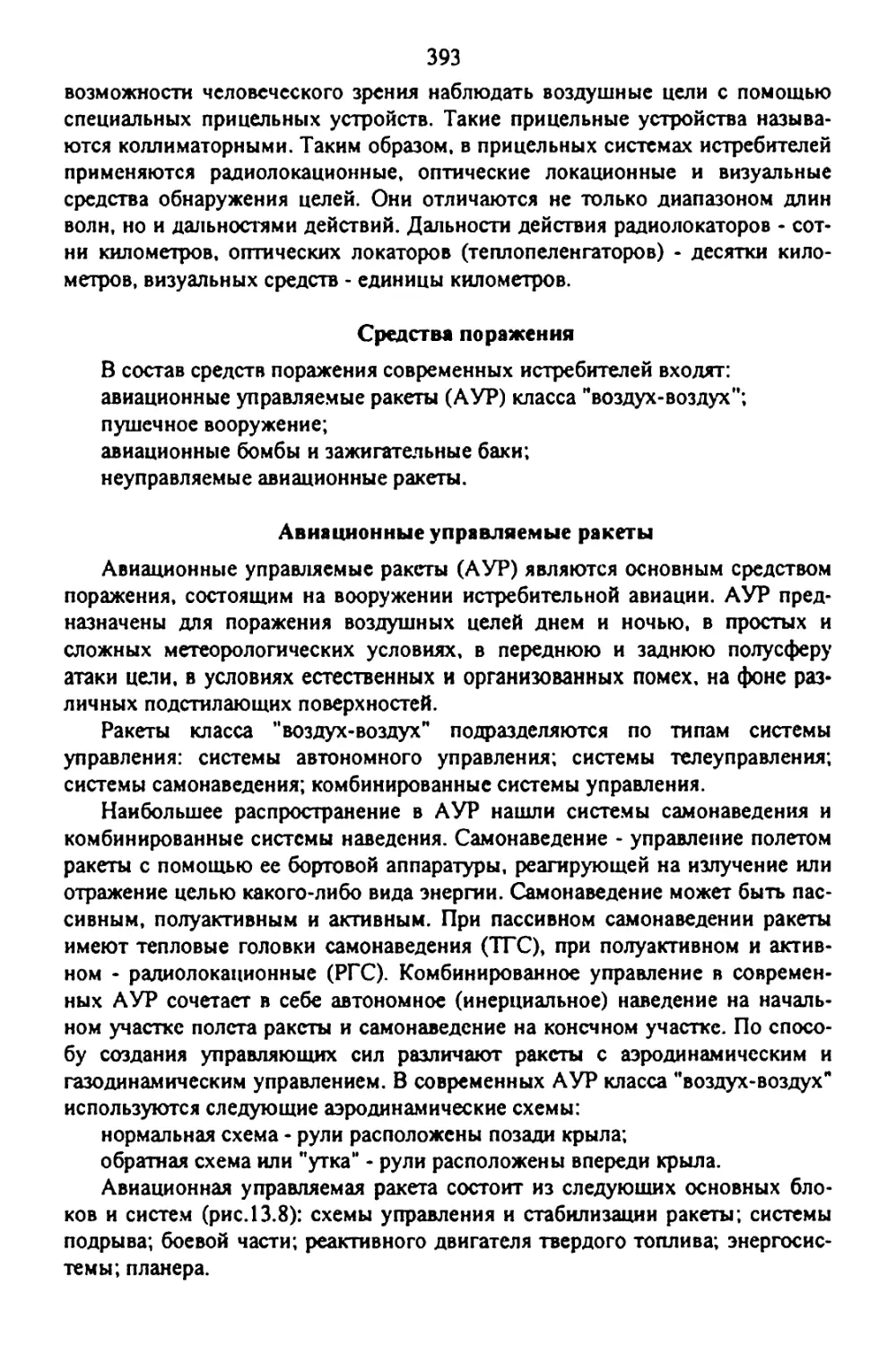
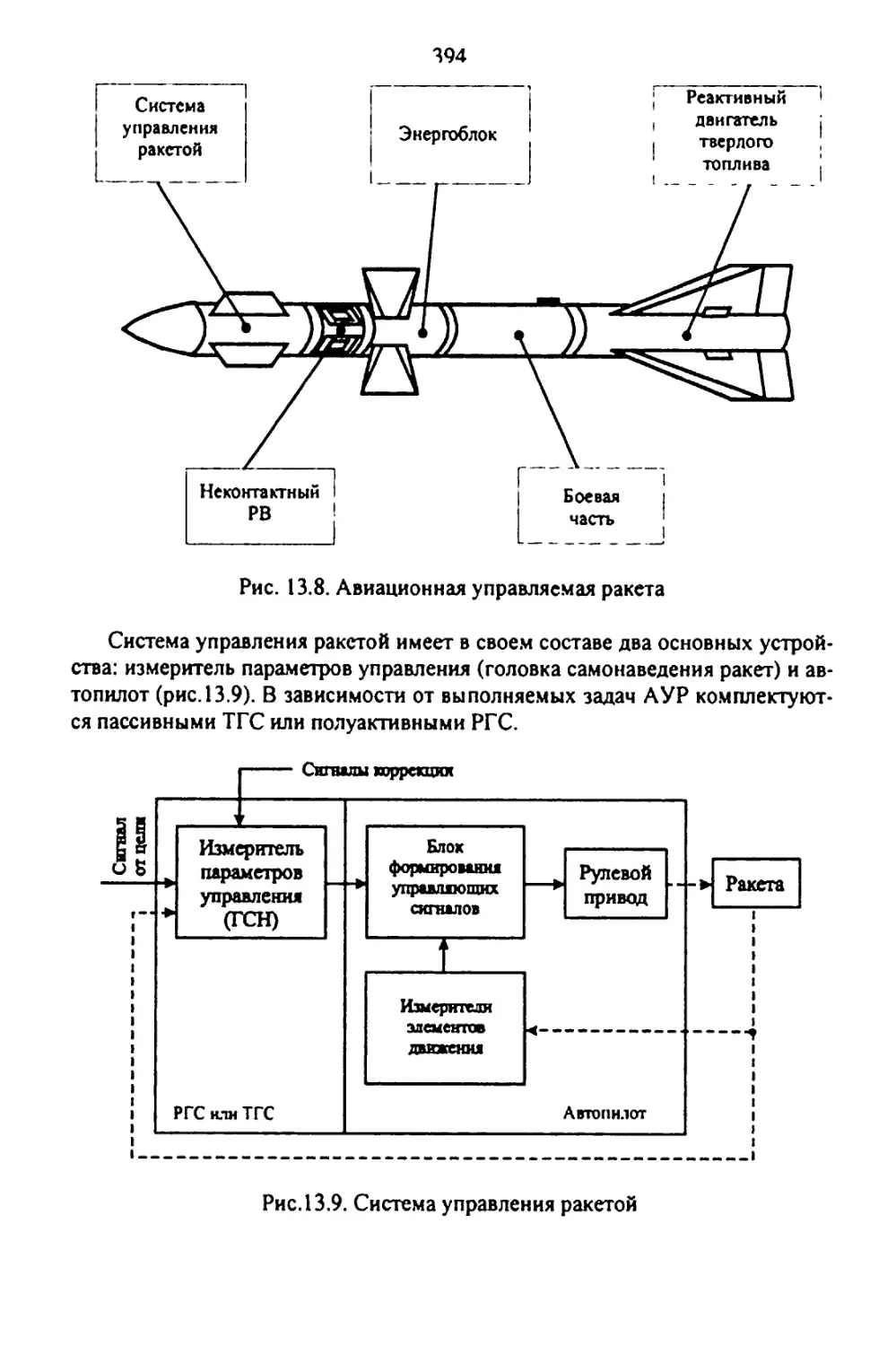
ся основы построения систем вооружения и боевого применения
зенитных ракетных войск, истребительной авиации, радиотехниче-
ских войск, систем управления оружием и войсками, а также ра-
диоэлектронной борьбы и моделирования в системе воздушно-
космической обороны.
Справочник предназначен для офицеров войск командного и
инженерного профилей, преподавателей и слушателей ВУЗов по
воздушно-космической специальности.
Авторский коллектив выражает благодарность руководству
НПО «Алмаз» имени академика А.А. Расплетина за оказанную по-
мощь в издании настоящего Справочника.
ББК 68.65я2
Тверь: В А ВКО, 2006
3
ПРЕДИСЛОВИЕ
Становлению и развитию современной воздушно-космической обороны
предшествовал длительный период зарождения и создания противовоздуш-
ной обороны (ПВО). В России на начальном этапе ПВО получила название
’’воздушная оборона”, которая зародилась в годы первой мировой войны
1914-1917 гг. в связи с применением воюющими государствами самолетов,
дирижаблей и аэростатов на поле боя. Воздушная оборона осуществлялась
специальными артиллерийскими подразделениями и авиацией с использова-
нием визуальных постов воздушного наблюдения.
В годы гражданской войны и иностранной военной интервенции 1917 -
1922 гг. воздушная оборона создавалась при наличии средств и сил и нс име-
ла единого руководства. В СССР к созданию системы ПВО страны присту-
пили в ходе военной реформы 1924 - 1925 гг. В 1924 году вместо термина
"воздушная оборона" вводится термин "противовоздушная оборона", а с де-
кабря 1926 года - "воздушно-химическая оборона (ВХО)". С января 1928 го-
да введенным в действие Положением о противовоздушной обороне Союза
ССР термин "противовоздушная оборона (ПВО)" признан официально.
В феврале 1941 года Генеральный штаб во главе с Г.К. ЖУКОВЫМ
впервые разработал концепцию "единого оперативного построения противо-
воздушной обороны территории страны", включившую 13 зон ПВО в грани-
цах 14 военных округов. Основные силы ПВО сосредоточивались в пригра-
ничных районах и на стратегических коммуникациях. С учетом сложившейся
обстановки с ноября 1941 года Постановлением ГКО из сухопутных фронтов
и военных округов были изъяты зенитные средства обороны объектов, а из
ВВС 39 истребительных авиаполков, на основе которых впервые был создан
самостоятельный род войск - ВОЙСКА ПВО ТЕРРИТОРИИ СТРАНЫ (ТС),
непосредственно подчиненные Наркому обороны. Оперативное построение
новой ПВО ТС не привязывалось к границам сухопутных фронтов и военных
округов. Тыл страны - объекты экономики и население впервые обрели за-
щиту от ударов с воздуха. К середине 1943 года под действия Войск ПВО
(ТС) были подведены испытанные в наземной сфере ОБЩЕВОЙСКОВЫЕ
ОСНОВЫ ведения вооруженной борьбы.
После нескольких реорганизаций ПВО ТС в послевоенный период, По-
становлением СМ СССР и ЦК КПСС от 27.5.1954 года и Приказом МО СССР
объявлена новая организация Войск ПВО страны.
Были введены общепринятые армейские структуры: объединения (окру-
га, армии) и соединения (корпуса, дивизии) ПВО. Данные преобразования и
учреждение должности Главнокомандующего Войсками ПВО страны - за-
местителя Министра Обороны СССР определили войска ПВО как вид Воо-
руженных Сил. На должность главнокомандующего Войсками ПВО был на-
значен Маршал Советского Союза Л.А. ГОВОРОВ.
Непрерывное развитие средств воздушного и космического нападения,
когда они функционально и организационно становятся САМОСТОЯТЕЛЬ-
НОЙ ВОЕННОЙ СИЛОЙ, приводит к тому, что угроза с воздуха и космоса
4
превращается в первоочередную по времени и главную составляющую общей
военной угрозы государству в целом.
Единство воздушно-космического противника предопределяет необхо-
димость противопоставления ему единой, самостоятельной СИСТЕМЫ
ВОЗДУШНО-КОСМИЧЕСКОЙ ОБОРОНЫ (ВКО) всех видов объектов го-
сударства.
Огромными усилиями военной науки в послевоенный период, особенно
начиная с 50-х годов прошлого столетия, в стране были заложены основы
создания новых образцов и систем вооружения зенитных ракетных и радио-
технических войск, истребительной авиации, средств и систем ракетно-
космической обороны.
Все эти меры преобразовали противовоздушную оборону и изменили
весь ее облик. Началась разработка составных частей ВОЗДУШНО-
КОСМИЧЕСКОЙ ОБОРОНЫ.
Были созданы соединения, а затем и объединения, включающие системы:
предупреждения о ракетном нападении (ПРН); противоракетной обороны
(ПРО); контроля космического пространства (ККП); противокосмической
обороны (ПКО).
Дальнейшее развитие этих систем должно было проходить в рамках еди-
ной воздушно-космической обороны, способной противостоять постоянно
возрастающей угрозе со стороны средств и сил воздушно-космического на-
падения вероятного противника. При этом единое воздушно-космическое
пространство должно рассматриваться как специфический театр военных
действий. В состав данного ТВД входит обширная область космического
пространства и поверхности Земли под ней, в пределах которой могут раз-
вертываться космические средства и системы различного назначения и могут
вестись военные действия.
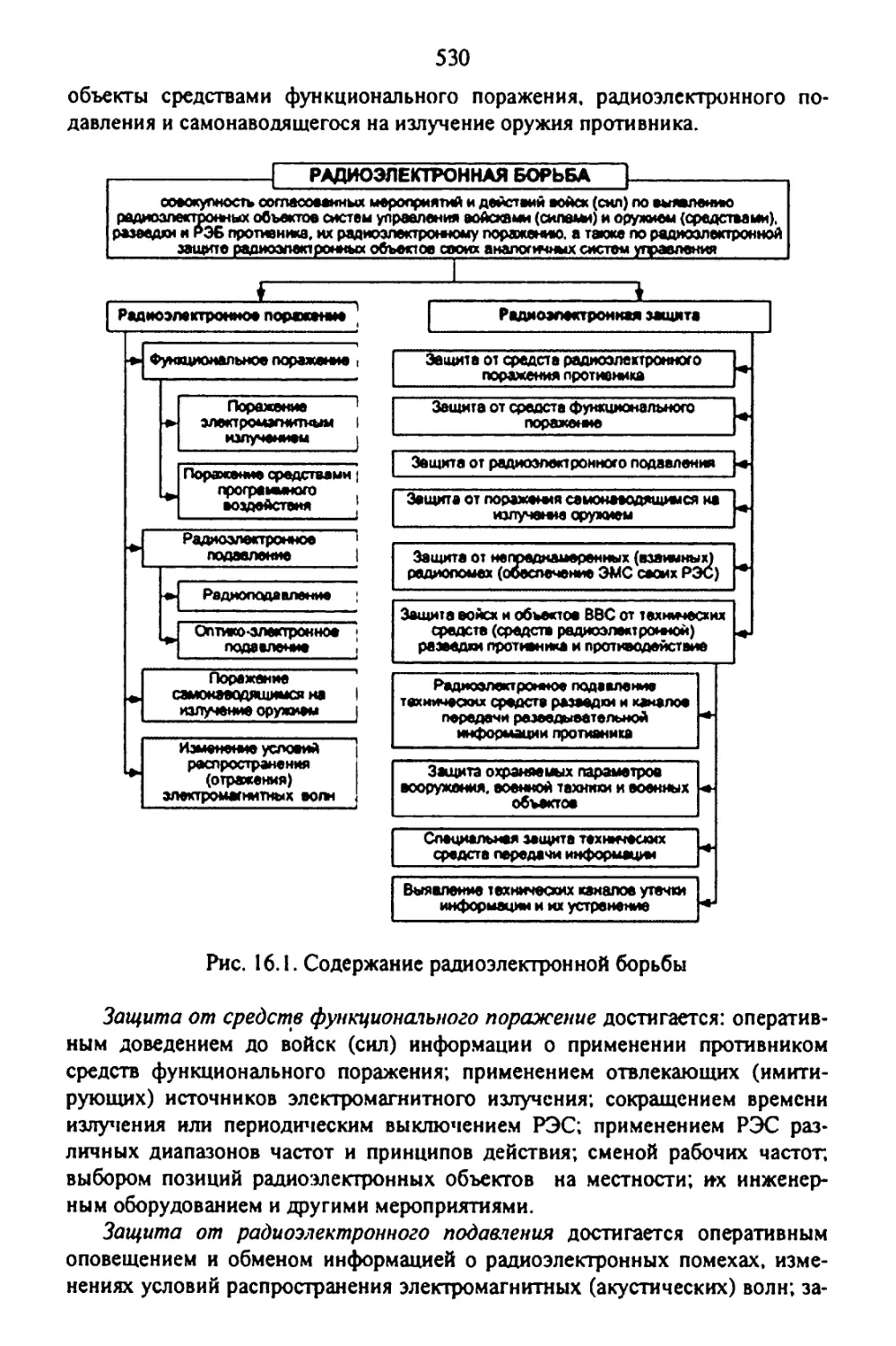
Воздушно-космическая оборона (ВКО) - вид обороны, представляющий
собой комплекс общегосударственных и военных мероприятий, проводимых
с целью защиты государства и его Вооруженных Сил от ударов и других а-
рессивных действий воздушно-космических сил и средств противника. Ос-
новными составными частями ВКО являются:
противовоздушная оборона;
ракетно-космическая оборона.
Противовоздушная оборона - составная часть ВКО, включающая проти-
восамолетную и тактическую противоракетную оборону.
Противосамолетная оборона - составная часть ПВО, представляющая со-
бой организованные действия специально выделенных войск (сил) по обна-
ружению аэродинамических летательных аппаратов противника и отраже-
нию (срыву) его ударов по обороняемым объектам.
Тактическая противоракетная оборона (ТПРО) - составная часть ПВО,
представляющая собой организованные действия специально выделенных
сил и средств по обнаружению стартов тактических (оперативно-
тактических) баллистических ракет противника и их поражению на траекто-
риях полета.
5
Ракетно-космическая оборона (РКО) - составная часть ВКО, представ-
ляющая собой организованные действия специально выделенных сил и
средств по предупреждению о ракетно-космическом нападении, поражению
стратегических баллистических и аэробаллистических ракет и других воен-
но-космических средств противника.
Основными составными частями РКО являются:
предупреждение о ракетном нападении;
контроль космического пространства;
стратегическая противоракетная оборона;
противокосмическая оборона.
Предупреждение о ракетном нападении (ПРН) - составная часть РКО,
представляющая собой организованные действия специально выделенных
сил и средств по ведению разведки ракетных сил потенциальных противни-
ков с целью достоверного обнаружения начала ракетного нападения и свое-
временного оповещения органов государственного и военного управления.
Контроль космического пространства (ККП) - составная часть РКО,
представляющая собой организованные действия специально выделенных
сил и средств по ведению разведки космических объектов с целью своевре-
менного оповещения органов государственного и военного управления о со-
стоянии и изменениях космической обстановки.
Стратегическая противовоздушная оборона (СПРО) - составная часть
РКО, представляющая собой организованные действия специально выделен-
ных сил и средств по разведке и поражению стратегических баллистических
и аэробаллистических ракет противника на траекториях их полета.
Противокосмическая оборона (ПКО) - составная часть РКО, представ-
ляющая собой организованные действия специально выделенных сил и
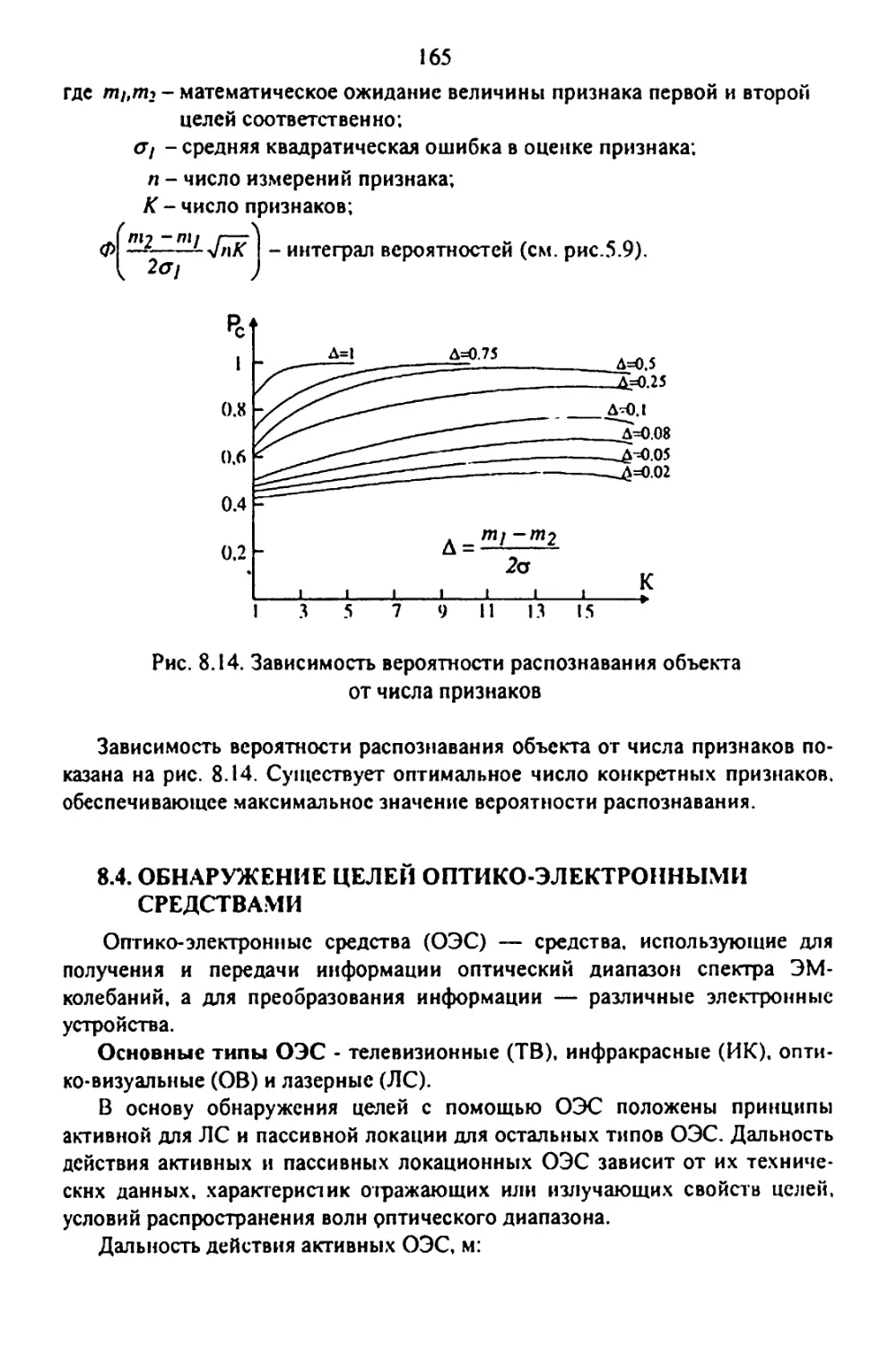
средств по поражению космических аппаратов и других военно-космических
средств противника.
Для успешного решения задач воздушно-космической обороны выделя-
ются специальные войска (силы) и средства и создается система ВКО.
Система ВКО - совокупность созданных на Земле, в воздушно-
космическом пространстве и объединенных соответствующими функцио-
нальными связями смешанных (разновидовых и разнородных) группировок
войск (сил) и средств, а также органов управления ими для решения задач
ВКО.
Структурно система ВКО объединяет:
систему разведки и предупреждения о воздушно-космическом нападе-
нии, включающую системы ПРН и ККП;
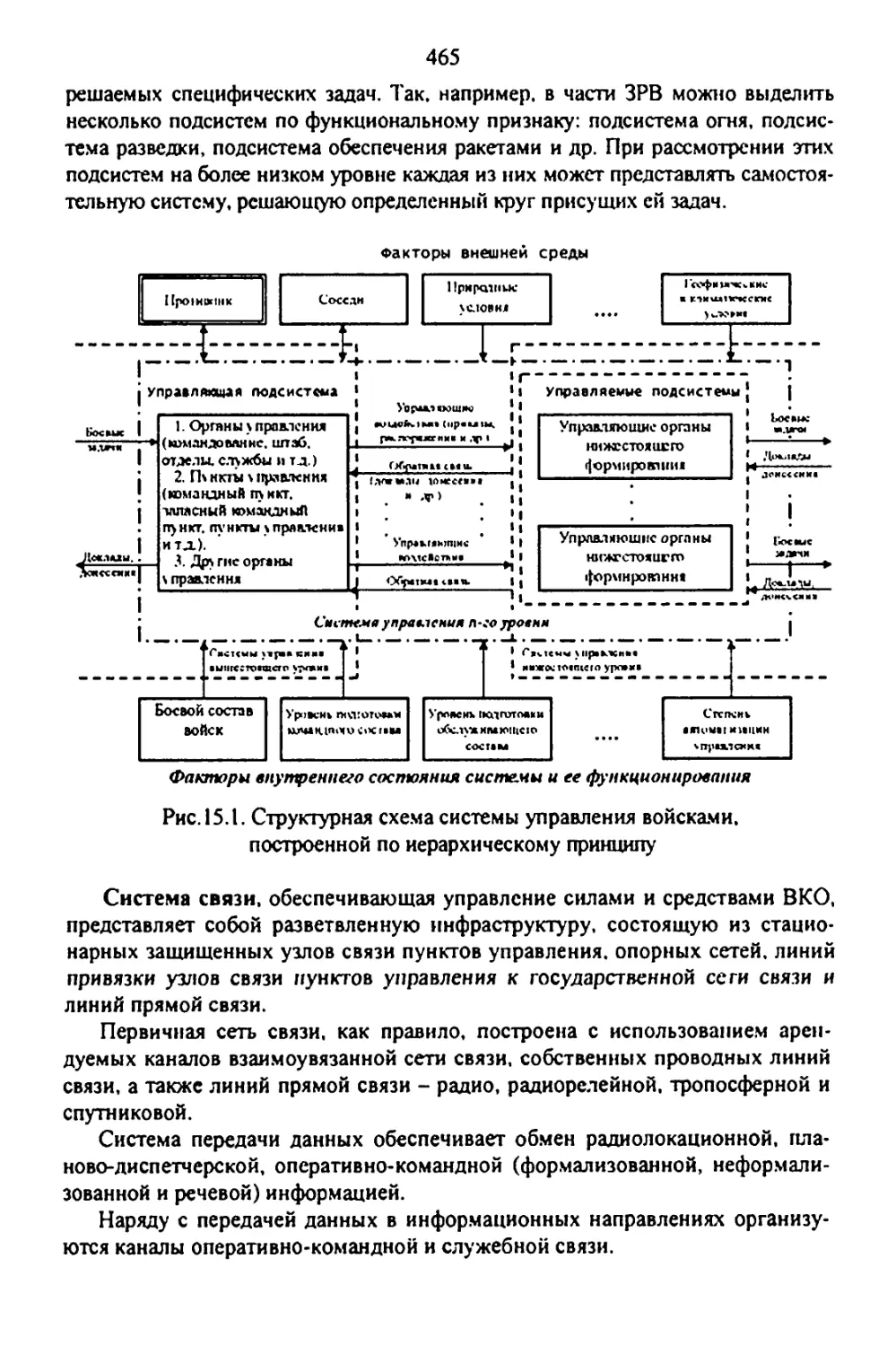
систему управления войсками (силами) ВКО как совокупность разверну-
тых на Земле и в воздушно-космическом пространстве органов и объектов
военного управления для руководства войсками (силами) ВКО при решении
поставленных задач;
систему поражения ВКО. как совокупность созданных на Земле и в воз-
душно-космическом пространстве взаимосвязанных противоракетных и
противокос.мических группировок РКО истребительных авиационных,
зенитных ракетных и зенитных артиллерийских группировок видов ВС для
6
ракетных и зенитных артиллерийских группировок видов ВС для поражения
воздушно-космических сил и средств противника в полете;
систему обеспечения ВКО как совокупность государственных и военных
предприятий, организаций и учреждений группировок специальных войск
(сил) и самих войск (сил) ВКО. а также органов управления ими для решения
задач обеспечения ВКО;
систему подготовки войск (сил) ВКО как совокупность элементов учеб-
но-материальной базы, организационно-методических и учебно-
воспитательных мероприятий для решения задач подготовки войск (сил) к
ведению боевых действий.
Составными частями системы ВКО являются: система РКО, объединяю-
щая системы ПРН, ККП, ПРО и ПКО и система ПВО, объединяющая систему
противосамолетной обороны и систему тактической ПРО.
7
1. ПРОТИВОВОЗДУШНАЯ ОБОРОНА.
ОБЩИЕ СВЕДЕНИЯ
Противовоздушная оборона - комплекс мероприятий и боевые действия
по отражению нападения воздушного противника и защите группировок
Вооруженных Сил, промышленных районов, административно-политических
центров, населения от ударов с воздуха. Она осуществляется силами и сред-
ствами ПВО, истребительной авиацией (ИА) ВВС и другими силами и сред-
ствами и организуется во всех частях, соединениях и объединении по реше-
нию командира. В настоящее время ПВО - составная часть воздушно-
космической обороны.
Термин - противовоздушная оборона (сокращенно ПВО) был введен ре-
шением Реввоенсовета страны 31 января 1928 г. по предложению командар-
ма 1-го ранга Каменева С.С. Данный термин был принят вместо существую-
щих различных терминов по обороне объектов и войск от удара с воздуха.
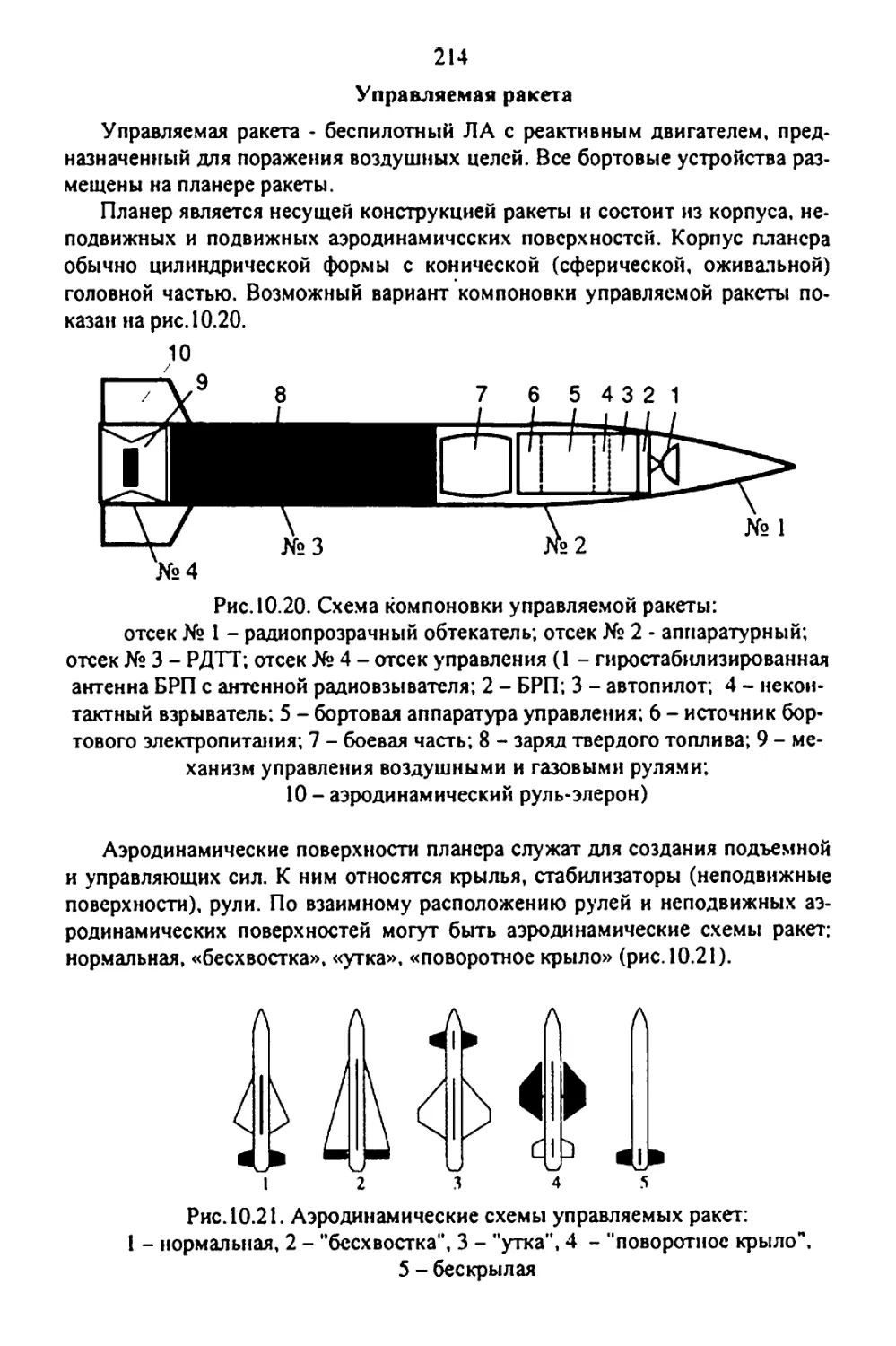
Этим решением был отвергнут термин - воздушно-химическая оборона.
1.1. НАЗНАЧЕНИЕ И СТРУКТУРА ПВО НА РАЗЛИЧНЫХ
ЭТАПАХ РАЗВИТИЯ
ПВО предназначена для защиты административно-политических цен-
тров. группировок войск и других важнейших объектов, составляющих осно-
ву экономической и военной мощи государства, от ударов противника с воз-
духа как самостоятельно, так и во взаимодействии с другими видами ВС.
ПВО организационно состоит из соединений ПВО, частей, учреждений и
включает: зенитные ракетные войска (ЗРВ), авиацию ПВО (А ПВО) и радио-
технические войск (РТВ), являющиеся родами войск, а также части и подраз-
деления специальных войск, части и учреждения тыла
1.1.1. Зенитные ракетные войска
ЗРВ - род Войск ВВС. Во взаимодействии с ВВС не допускают удары
воздушного противника по важнейшим объектам страны и группировкам
войск.
На вооружении состоят зенитные ракетные комплексы (ЗРК) различного
назначения, обладающие большой огневой мощью и высокой точностью по-
ражения СВН во всем диапазоне высот и скоростей, на больших удалениях
от обороняемых объектов в любое время суток, в любых метеорологических
условиях и в условиях радиопомех.
Организационно ЗРВ состоят из частей, имеющих в своем составе огне-
вые и технические подразделения, подразделения управления, оснащенные
автоматизированными системами управления (АСУ), и подразделения об-
служивания.
8
1.1.2. Истребительная авиация ВВС
ИЛ ВВС - род войск ВВС, прикрывает важнейшие направления, районы
и объекты от ударов воздушного противника. Основу составляют части ИА.
’вооруженные истребителями, способными вести как дальние, так и ближние,
1 маневренные воздушные бои, уничтожать низколетяшие малоразмерные це-
ли и наносить удары по СВН противника на дальних подступах к обороняе-
мым объектам в широком диапазоне высот и скоростей в любых метеороло-
гических условиях днем и ночью.
Истребители дальнего действия обеспечивают уничтожение самолетов -
носителей КР "воздух - земля" до рубежа их пуска.
Кроме того ИА ВВС как род боевой авиации, предназначенный для унич-
тожения в воздухе пилотируемых и беспилотных летательных аппаратов
противника, может также применяться для поражения наземных (надводных)
целей и ведения воздушной разведки.
1.1.3. Радиотехнические войска
РТВ - род войск ВВС, ведут непрерывный контроль за воздушным про-
странством, радиолокационную разведку СВН противника в полете и выдают
по ним разведывательную информацию для принятия решения на боевые
действия ЗРВ и ИА ВВС
На вооружении состоят современные радиолокационные станции (РЛС),
позволяющие в любое время года и суток независимо от метеорологических
условий и помех обнаруживать СВН противника на всех высотах, опознавать
и определять их точные координаты.
1.1.4. Части и учреждения тыла
Части учреждения тыла предназначены для решения задач тылового
обеспечения боевых действий войск, сил и средств ПВО и ИА ВВС.
1.2. НАЗНАЧЕНИЕ И СТРУКТУРА ВОЙСК ПВО СУХОПУТНЫХ
ВОЙСК
Войска ПВО военного округа (фронта) в своем составе имеют силы и
средства ПВО.
Войска ПВО СВ - род войск, в который входят зенитные ракетные, зе-
нитные артиллерийские и радиотехнические части и подразделения. Они
предназначены для нанесения поражения противнику в воздухе и отражения
ударов по войскам и другим объектам; используются во всех видах боя и
операции, при передвижении войск и расположении их на месте.
9
Основными принципами боевого применения ПВО Сухопутных войск
считаются: постоянная готовность к отражению ударов воздушного против-
ника, сосредоточение основных сил и средств ПВО на прикрытии главных
группировок войск и важнейших объектов тыла, тесное взаимодействие сил и
средств ПВО между собой и с прикрываемыми войсками, непрерывность
боевых действий, маневренность (мобильность), высокая эффективность, ус-
тойчивость и непреодолимость (непрерывная и гибкая), централизация
управления.
13. НАЗНАЧЕНИЕ И СТРУКТУРА ПВО ВМФ
ПВО ВМФ - важнейший вид боевого обеспечения действий сил флота;
организуется с целью отразить удары воздушного противника по силам фло-
та и его береговым объектам.
Задачи ПВО ВМФ, исходя из оценки сил флота как объектов ПВО. - при-
крыть военно-морские базы, пункты рассредоточения кораблей и береговых
объектов флота, силы флота в морс, решаются во взаимодействии с Войска-
ми ПВО.
Основу ПВО сил флота в море составляют корабельные зенитные огне-
вые средства, усиленные в пределах досягаемости силами и средствами
Войск ПВО.
Основные задачи ПВО на морском театре военных действий (ТВД): раз-
ведка воздушного противника и оповещение о нем сил флота и береговых
объектов, воспрещение противнику ведения воздушной разведки и минных
постановок с воздуха, прикрытие от ударов с воздуха сил флота в море и на
базах.
1.4. ИСТОРИЧЕСКАЯ СПРАВКА
1.4.1. Зарождение ПВО
Возникновение и развитие противовоздушной обороны (ПВО) относится
к периоду первой мировой войны, когда авиация стала широко применяться в
военных целях. В 1913 г. во Франции, а затем в 1914 г. в России и Германии
были созданы пушки для стрельбы по воздушным целям.
В русской армии для этого-стали приспосабливаться полевые орудия, пу-
леметы на специальных установках и морские пушки. Первая батарея для
стрельбы по самолетам из 75-мм морских пушек была сформирована в ок-
тябре 1914 г. В 1915 г. начался выпуск первых зенитных пушек и построен
Русско-Балтийским вагонным заводом первый в мире самолет-истребитель
РБВЗ-С-16. Для обнаружения авиации противника, наблюдения за ее дейст-
виями, оповещения сил и средств ПВО и населения городов о воздушной
опасности была организована служба воздушного наблюдения, оповещения и
связи (ВНОС).
10
К мероприятиям, дополнявшим ПВО, также относились: создание убе-
жищ, организация противопожарной зашиты, проведение маскировки и све-
томаскировки городов, оборудование ложных объектов, предупреждение на-
селения о воздушной опасности.
В годы первой мировой войны впервые в военной практике сложились
принципы ПВО объектов ораны и войск; были выработаны приемы и спосо-
бы борьбы с воздушным противником.
1.4.2. ПВО в годы гражданской войны
Одним из первых подразделений ПВО молодой республики был «Сталь-
ной противосамолетный артиллерийский дивизион, (бронепоезд)», построен-
ный в Петрограде на Путиловском заводе. К весне 1918 г. в Красной Армии
было около 200 зенитных артиллерийских батарей и 12 истребительных
авиаотрядов. Стройной структуры ПВО объектов не было. Только для при-
крытия Петрограда создавалась система ПВО, включавшая 16 зенитных ар-
тиллерийских батарей и 19 самолетов-истребителей.
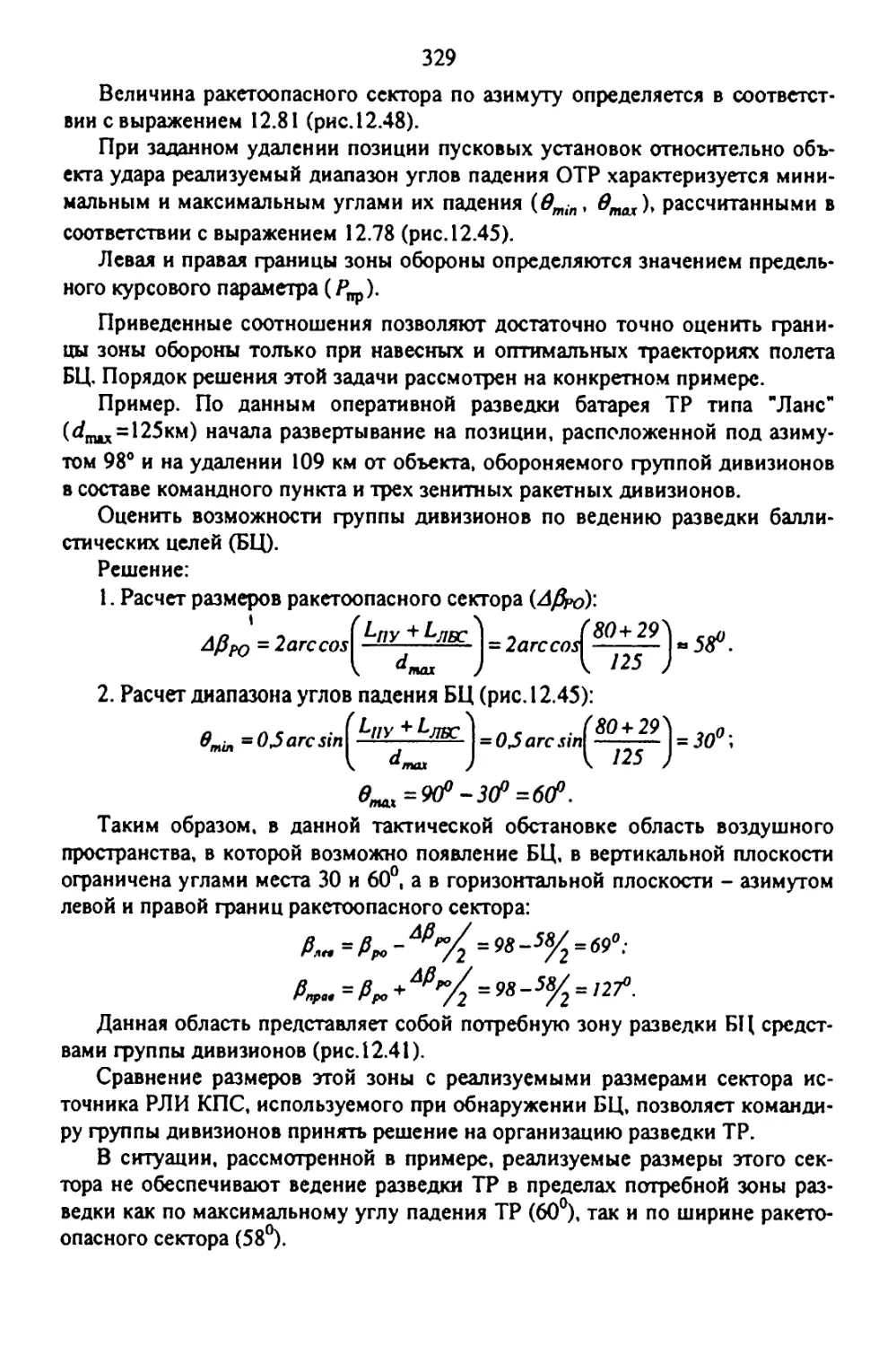
Прикрытие от ударов с воздуха других важных объектов организовыва-
лось лишь на период непосредственной угрозы воздушного нападения.
В период гражданской войны и на основе опыта первой мировой войны
получила дальнейшее развитие тактика войск ПВО, были разработаны прин-
ципы построения ПВО крупных пунктов страны, зародились элементы опе-
ративного искусства войск ПВО.
1.4.3. Развитие ПВО после окончания гражданской войны
В 1924 г. в Ленинграде из отдельных дивизионов был сформирован 1-й
полк зенитной артиллерии (ЗА) РККА, а в 1927 г. - 1-я зенитная артиллерий-
ская бригада. Основу организационного построения ПВО в 20-х годах со-
ставляли пункты ПВО. входившие в сектора ПВО на территории пригранич-
ных военных округов, командующие войсками которых несли ответствен-
ность за ПВО в границах округа. В этот же период создается сеть постов
ВНОС в приграничной полосе и вокруг наиболее крупных центров страны.
В 1927 г. в штабе РККА создается отдел, а в 1930 г. - Управление, ведав-
шее вопросами ПВО. С 1932 г. оно подчинялось непосредственно наркому по
военным и морским делам. На Управление ПВО РККА было возложено об-
щее руководство ПВО всей территории страны, а также объединение дея-
тельности всех гражданских ведомств, учреждений и общественных органи-
заций в этой области.
В 1934 г. Управление ПВО РККА возглавлял один из выдающихся воен-
ных деятелей командарм 1-го ранга С. С. Каменев, а в 1936 г. - командарм
2-го ранга А.И.Седякин.
Проведены были и другие важные мероприятия по укреплению ПВО. В
военных округах были созданы управления ПВО, во главе которых стояли
начальники ПВО военных округов, непосредственно подчинявшиеся коман-
11
дующим войсками округов, а в специальном отношении - начальнику ПВО
РККА.
В ЗО-х годах войска ПВО были оснащены новой боевой техникой. Раз-
вертываются новые части и соединения ПВО. совершенствуются их органи-
зационная структура и принципы боевого использования. На вооружение ЗА
поступают новые образцы зенитных пушек - 76,2-мм образца 1931 и 1938гг.,
85-мм и автоматическая 37-мм образца 1939 г., приборы управления артил-
лерийским зенитным огнем ПУАЗО-2 в 1935 г. и ПУАЗО-З в. 1939 г. ИА на-
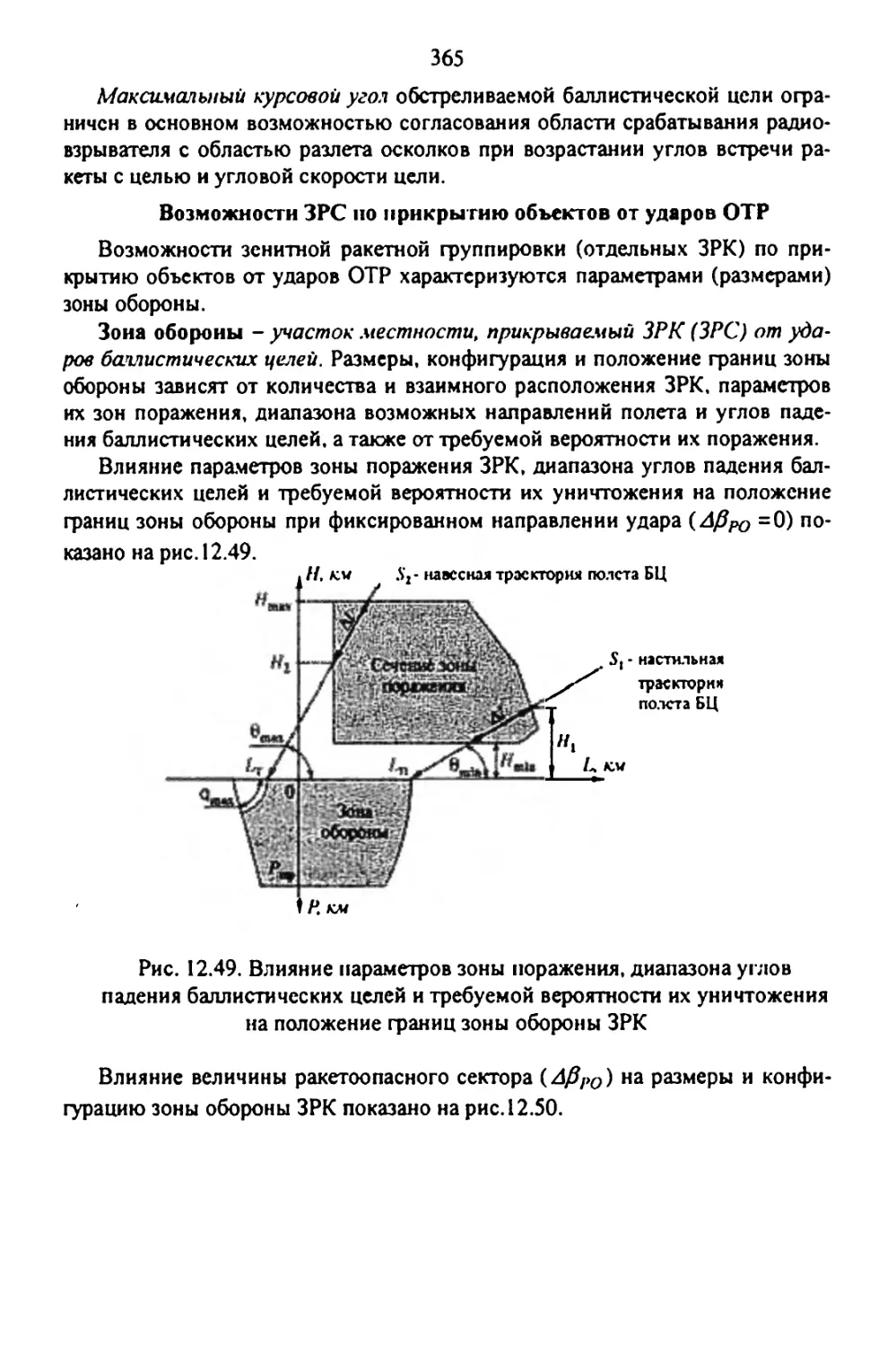
чинает оснащаться более современными самолетами-истребителями И-15,
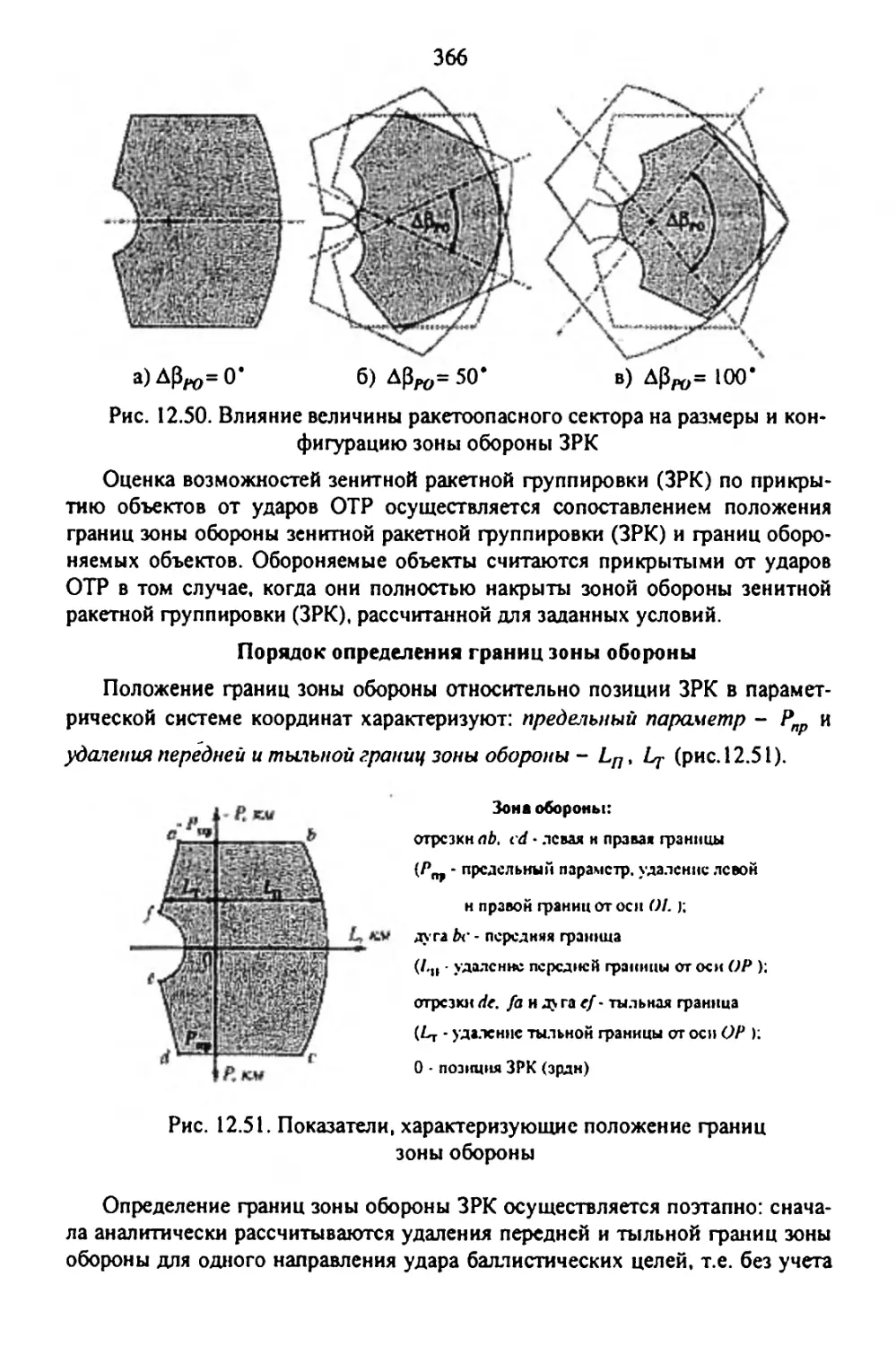
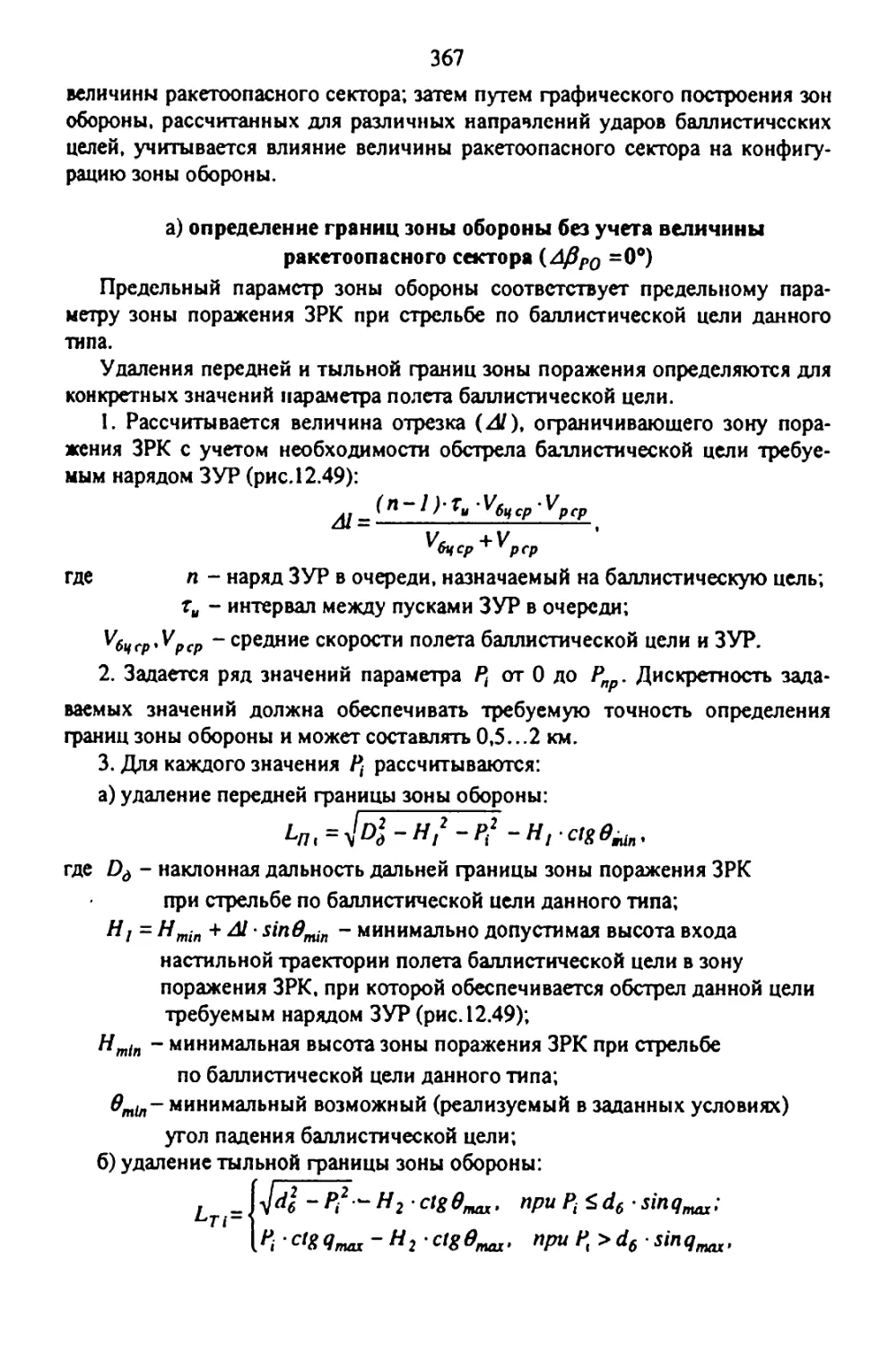
-16, -153, а с 1940 г. - Як-1, МиГ-3 и с 1941 г. - ЛаГГ-3. В войска ПВО посту-
пают отечественные прожекторы, звукоулавливатели и аэростаты воздушно-
го заграждения. В этот же период советская промышленность освоила произ-
водство оптических дальномеров. Служба ВНОС в 1939 г. получает первые
отечественные радиолокационные станции обнаружения РУС-1, а в 1940 г. -
РУС-2. С 1934 по 1939 г. количество зенитных орудий увеличилось почти в 3
раза, а истребителей - в 1,5 раза.
В 1932 г. создаются первые зенитные артиллерийские дивизии.
Шло совершенствование организационных форм и структуры управления
войсками ПВО. В 1937 г. для ПВО важных промышленных и администра-
тивных центров страны (Москвы, Ленинграда, Баку) были сформированы
корпуса ПВО, а для обороны других важных городов и районов (Киева, Мин-
ска. Одессы, Батуми, Хабаровска и др.) - дивизии и отдельные бригады ПВО.
В состав этих соединений включались все рода войск ПВО, кроме истре-
бительной авиации, которая продолжала оставаться в подчинении коман-
дующих ВВС военных округов. Однако базировалась она в соответствии с
задачами ПВО, участвовала во всех оперативных учениях войск ПВО. С на-
чалом войны предусматривалось оперативное ее подчинение командирам со-
единений ПВО.
В феврале 1941г. вся приграничная территория страны была разделена на
зоны ПВО (по числу военных округов), которые возглавляли помощники ко-
мандующих войсками военных округов по ПВО. В декабре 1940 г. Управле-
ние ПВО РККА преобразуется в Главное управление (ГУ) ПВО Красной Ар-
мии. На него возлагалось планирование оперативного применения войск
ПВО, учет их вооружения и руководство боевой подготовкой. С 14 июня
1941г. ГУ ПВО возглавил генерал-полковник, а в последующем главный
маршал артиллерии Н. Н. Воронов. Начальником штаба ГУ ПВО с момента
его формирования стал генерал-майор Н.Н. Нагорный. Проведенные меро-
приятия значительно укрепили ПВО Советского Союза.
1.4.4. ПВО в годы Великой Отечественной войны
Начало Великой Отечественной войны застало войска ПВО в период их
перевооружения. Поступившие на вооружение советской авиации самолеты
Як-1 и МиГ-3 обладали более высокими характеристиками, чем самолеты
12
немецко-фашистской авиации, но их в войсках было недостаточно. В ЗЛ еще
мало было новых 37-мм автоматических и 85-мм з< нитных пушек.
В начале июля 1941 г. ГКО принимает ряд мер по усилению прикрытия
Москвы и Ленинграда. Донбасского, Московского. Ярославского и Горьков-
ского промышленных районов, а также по организации защиты некоторых
стратегических мостов через Волгу. С этой целью было ускорено формиро-
вание частей ИА, ЗА, зенитных пулеметных и прожекторных частей. В даль-
нейшем была создана ПВО промышленных районов Поволжья и Волжского
речного пути.
Классическим примером организации ПВО крупного политического и
промышленного центра являлась ПВО Москвы. Такой мощной ПВО на про-
тяжении всей второй мировой войны не имела ни одна столица капиталисти-
ческих государств. Она осуществлялась 1-м корпусом ПВО. которым коман-
довал генерал-майор артиллерии Д. А. Журавлев, и оперативно подчиненным
ему 6-м истребительным авиационным корпусом ПВО под командованием
полковника И. Д. Климова.
В составе этих соединений к началу массированных воздушных налетов
немецко-фашистской авиации (22 июля 1941 г.) имелось свыше 600 истреби-
телей, более 1000 зенитных орудий среднего и малого калибра, около 350 зе-
нитных пулеметов, свыше 600 зенитных прожекторов. 124 поста аэростатов
воздушного заграждения и 612 постов ВНОС. Наличие таких крупных сил и
средств и умелая организация управления ими сорвали попытки противника
нанести массированные удары с воздуха по столице Советского Союза. Силь-
ной была также ПВО Ленинграда, которую осуществляли 2-й корпус ПВО и
оперативно подчиненный ему 7-й истребительный авиационный корпус.
9 ноября 1941 г. ГКО принял решение, в соответствии с которым была
введена должность командующего войсками ПВО территории страны, сфор-
мированы штаб и другие органы управления. Первым командующим войска-
ми ПВО территории страны - заместителем НКО по ПВО был назначен гене-
рал-майор М. С. Громадин.
В целях лучшего взаимодействия сил и средств ПВО в январе 1942 г. ко-
мандованию ПВО была полностью подчинена истребительная авиация, вы-
деленная для прикрытия объектов. В результате было обеспечено централи-
зованное управление войсками в оперативном и тактическом звеньях.
В связи со значительным увеличением численности войск ПВО в апреле
1942 г. была проведена частичная реорганизации структуры войск ПВО: об-
разован Московский фронт ПВО, а в Ленинграде и несколько позже в Баку
созданы армии ПВО. Появились первые оперативные объединения войск
ПВО.
Переход Красной Армии к широким наступательным операциям сущест-
венно изменил условия ведения боевых действий войск ПВО.
Одной из важных задач войск ПВО в этот период стала оборона железно-
дорожных коммуникаций и водных переправ, аэродромов фронтовой и даль-
ней авиации, железнодорожных эшелонов и речных судов в пути, а также
13
обеспечение воздушной блокады окруженных группировок (Сталинград,
Корсунь-Шевченковский и др.). Необходимость обеспечения тесного взаи-
модействия сил и средств ПВО различных видов Вооруженных Сил при
борьбе с воздушным противником в прифронтовой полосе требовала даль-
нейшего совершенствования структуры ПВО.
В июне 1943 г. Управление командующею войсками ПВО территории
страны было расформировано, а вместо него созданы два фронта ПВО: За-
падный и Восточный. Войска ПВО. защищавшие Москву, были реорганизо-
ваны в Особую Московскую армию ПВО. В марте - апреле 1944 г. Западный
и Восточный фронты, а также Закавказская зона ПВО были реорганизованы в
Северный, Южный и Закавказский фронты ПВО.
В связи с дальнейшими успешными наступательными действиями Крас-
ной Армии для удобства управления в декабре 1944 г. соединения, осуществ-
лявшие оборону объектов глубокого тыла страны, были выделены в новый.
Центральный фронт ПВО со штабом в Москве, а Северный и Южный были
преобразованы в Западный и Юго-Западный фронты ПВО.
На Дальнем Востоке в марте 1945 г. в соответствии с постановлением
ГКО на базе Дальневосточной и Забайкальской зон ПВО, а также перегруп-
пированных из европейской части СССР сил и средств ПВО созданы три ар-
мии ПВО: Приморская. Приамурская и Забайкальская, входившие в состав
фронтов.
В ходе Великой Отечественной войны войска ПВО с честью выполнили
задачи, возложенные на них Советским правительством. Главный итог их
боевой деятельности состоит в том. что они сохранили от разрушения и
уничтожения фашистской авиацией крупные промышленные и администра-
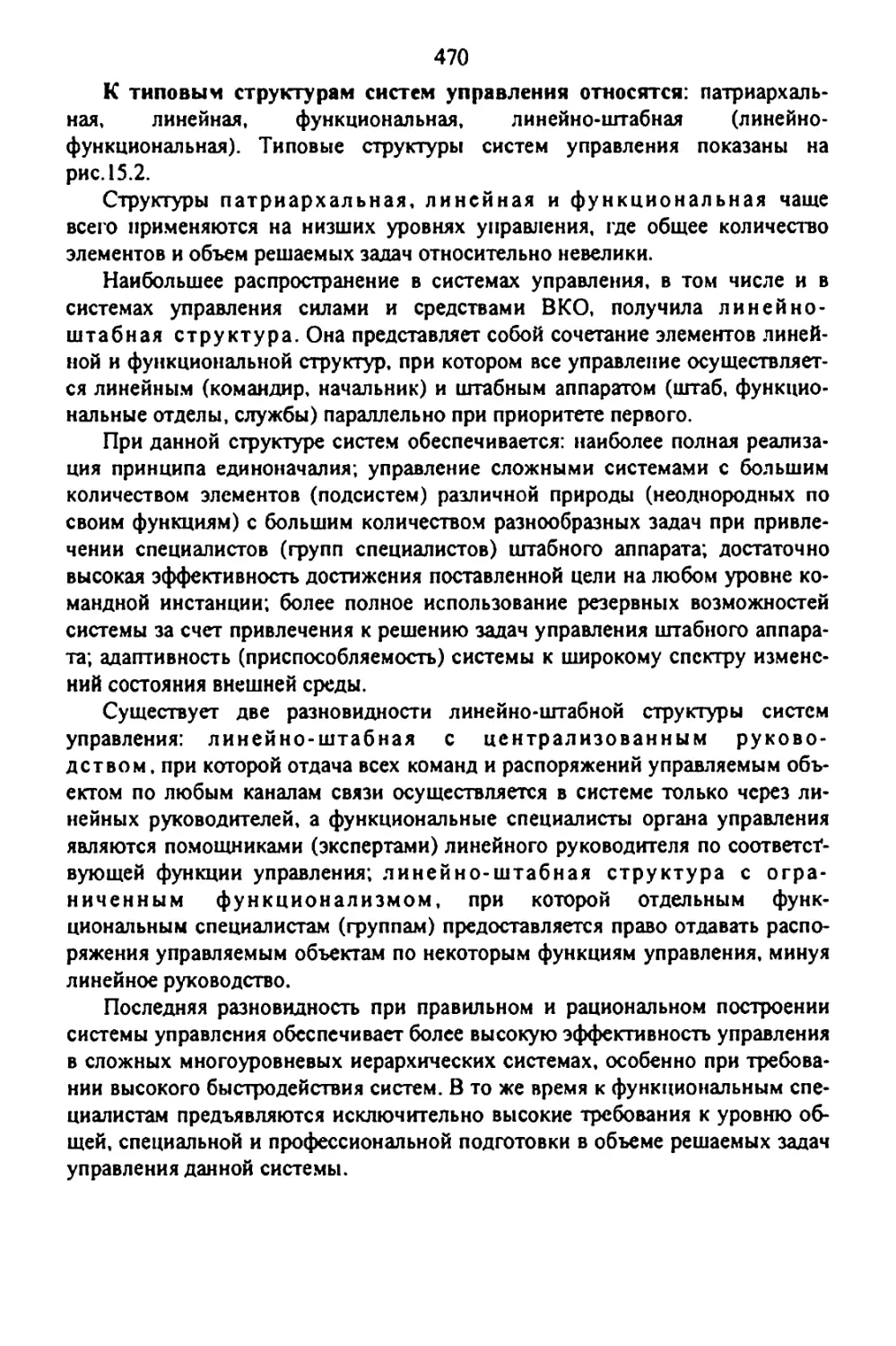
тивные центры страны, тысячи населенных пунктов, группировок войск и
тем самым в значительной степени способствовали быстрому росту военно-
экономического потенциала страны. За время войны войска ПВО уничтожи-
ли более 7 300 самолетов и много другой боевой техники противника, чем
внесли крупный вклад в общее дело разгрома немецко-фашистских захватчи-
ков.
В ходе войны организационно оформились как рода войск ПВО зенитная
артиллерия и истребительная авиация. Большое развитие получили служба
ВНОС, прожекторные части и части аэростатов воздушного заграждения.
Были созданы оперативные объединения, оперативно-тактические соедине-
ния. соединения и части родов войск.
Свыше 80 тыс. солдат, сержантов, офицеров и генералов войск ПВО бы-
ли награждены орденами и медалями, 92 воина удостоены высокого звания
Героя Советского Союза, а командир авиаэскадрильи капитан А. Т. Карпов
стал кавалером двух медалей «Золотая Звезда» Героя Советского Союза. За
успешные боевые действия 11 соединений и частей войск ПВО были удо-
стоены почетных наименований и 29 - звания гвардейских.
14
1.4.5. Развитие ПВО в послевоенный период
После окончания второй мировой войны США и Великобритания сохра-
нили огромные по своей численности ВВС. Реакционные круги этих госу-
дарств стали проводить враждебную политику по отношению к Советскому
Союзу и другим странам содружества.
В этих условиях Центральный Комитет и Советское правительство, при-
нимая меры по дальнейшему укреплению обороноспособности нашей Роди-
ны, большое внимание уделяют совершенствованию ее ПВО. К 1952 г. ИА
ПВО была перевооружена на реактивные самолеты-истребители (МиГ-15,
МиГ-17. сверхзвуковой истребитель МиГ-19 и др.), значительная часть кото-
рых имела радиолокационные прицелы. Зенитная артиллерия получила но-
вые зенитные артиллерийские комплексы, состоявшие из 57-, 100- и 130-мм
зенитных орудий, радиолокационной станции орудийной наводки и прибора
управления артиллерийским зенитным огнем. Войска ВНОС получили ра-
диолокационные станции П-3 и П-За.
С 1952 г. Войска ПВО стали получать зенитную ракетную технику с ра-
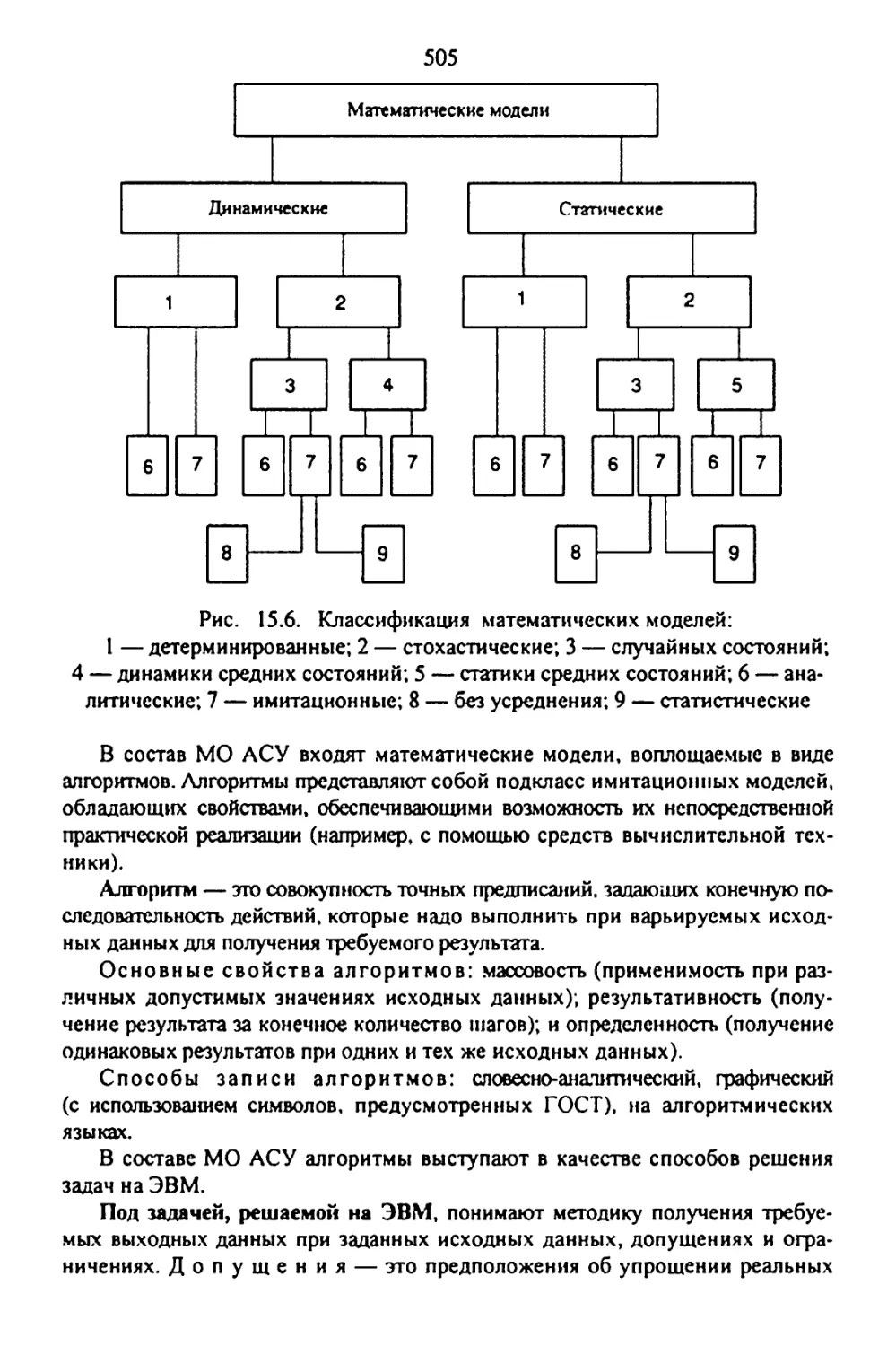
кетами различной дальности действия и назначения. В их составе выделился
новый род войск - зенитные ракетные войска противовоздушной обороны.
В ИА ПВО стали поступать сверхзвуковые истребители с ракетным воору-
жением «воздух - воздух». Войска ВНОС начали получать в массовом коли-
честве новые станции обнаружения и наведения ИА. Возник новый род войск
ПВО - радиотехнические войска ПВО, официально названные так в 1955 г.
В большом количестве стали поступать разнообразные автоматизированные
системы управления (АСУ) и другая техника.
В 1955 году были завершены испытания и принята на вооружение систе-
ма С-25, а с 1954 года начата разработка зенитного комплекса средней даль-
ности С-75, который был принят на вооружение в 1957 году под шифром
С-75 "Двина".
В том же 1957 году началась разработка зенитного ракетного комплекса
С-125 "Нева", а в 1961 году комплекс был принят на вооружение. Одновре-
менно шла модернизация ЗРК С-75.
Следующим шагом в развитии зенитной ракетной техники было сущест-
венное увеличение дальности стрельбы с целью обеспечения борьбы со стра-
тегическими бомбардировщиками - носителями крылатых ракет "воздух-
земля" до рубежей их пуска.
Разработка такой зенитной ракетной системы, получившей название
С-200 "Ангара", началось в 1958 году.
Совершенствовались и средства радиолокационной разведки воздушного
противника.
К концу 1955 года завершился процесс замены постов визуального на-
блюдения и был принят план перевооружения радиотехнических войск на
новые средства обнаружения воздушного противника и наведения истреби-
телей.
15
В период до 1959 г. были приняты на вооружение радиолокационные
станции метрового диапазона - П-12, дециметрового диапазона - П-15, РЛС
П-14, радиовысотомер ПРВ-10, который в совокупности с РЛС П-35 обеспе-
чивал измерение трех координат цели. В это же время создается мощный
универсальный радиолокационный комплекс П-80 ’’Алтай", модернизиро-
ванная система опознавания "Кремний-2". Ж
В период 1954-1961 гг. на вооружение были приняты истребители ПВО:
МиГ-17 и ФУ; Миг-19п; Як-25; Су-9; Як-28. При этом начиная с 1956 нача-
лось вооружение истребителей-перехватчиков ракетами и радиолокацион-
ными прицелами.
Одновременно с разработкой и принятием на вооружение новых систем
вооружения происходило совершенствование организационной структуры и
развитие теории боевого применения родов войск и оперативного искусства
Войск ПВО.
Были созданы оперативные объединения (округа и армии) и оперативно-
тактические соединения противовоздушной обороны (корпуса и дивизии),
включавшие в свой состав соединения и части всех родов войск.
1.4.6. Развитие противовоздушной обороны после 1960 г.
Начиная с 60-х годов осуществляется модернизация состоящих на воо-
ружении и создание новых образцов вооружения.
Зенитный ракетный комплекс С-75 в различных модификациях состоял
на вооружении войск в системе ПВО многих зарубежных государств, приме-
нялся в локальных зонах во Вьетнаме и на Ближнем Востоке показал, что он
способен обеспечивать борьбу со всеми основными типами средств воздуш-
ного нападения современного парка. Однако, с учетом требований времени,
начиная с 1980 г. этот ЗРК заменяется новым многоканальным по цели ком-
плексом средней дальности С-300. В это же время, после проведения модер-
низации в течение 70-х годов, комплекс С-200, получивший название "Вега",
обеспечивал повышенную дальность стрельбы в условиях всех видов помех.
В 1983 г. на вооружение принят самоходный, мобильный вариант ЗРК
С-300 ПС. который обладает более высокой надежностью и улучшенными
тактико-техническими характеристиками. ЗРК С-300 различных модифика-
ций входит в состав зенитной ракетной системы С-300 (ЗРС). которая вклю-
чает: командный пункт с пунктом боевого управления, радиолокатором об-
наружения, средствами электропитания, связи и транспортировки; зенитные
ракетные комплексы, каждый из которых имеет радиолокатор подсвета и на-
ведения, низковысотный (или всевысотный) обнаружитель ЗУР. пусковые
комплексы, средства электропитания, связи и транспортировки.
На основе этой системы осуществлялось дальнейшее совершенствование
организационной структуры ЗРВ. Подробные сведения о развитии ЗРС см. в
гл. 12 «Зенитные ракетные войска» - Историческая справка.
16
За период с 1964 г. по 1984 г. на вооружение поступают новые самолеты-
истребители третьего и четвертого поколений: Су-1Г, Су-15тм: Як-28п;
Ту-128; МиГ-25а; МиГ-23;МиГ-31; Су-27.
Самолеты МиГ-31 и Су-27 составляют основу самолетного парка авиации
ПВО. Их конструкция предполагает проведение модернизации и новых мо-
дификаций, направлениями которых являегся увеличение боевого радиуса
действия и повышение эффективности вооружения.
Осуществлялась непрерывная модификация радиолокационного ком-
плекса П-80 в целях повышения помехозащищенности и улучшения тактико-
технических характеристик.
В результате в 1972г. был принят на вооружение радиолокационный ком-
плекс 5Н87. а в начале 80-х годов начата разработка трех координатных РЛК,
первым из которых стал радиолокационный комплекс СТ-67.
Псступление на вооружение армий США и СССР баллистических ракет с
межконтинентальной дальностью пролета, запуск искусственных спутников
Земли и экспериментальных космических аппаратов в 50-е годы обусловили
необходимость решения проблемы ракетно-космической обороны страны и
войск.
Интенсивно начали развиваться системы: предупреждения о ракетном
нападении, контроля космического пространства, противокосмической и
противоракетной обороны.
Особенностью строительства и развития средств ракетно-космической
обороны явилось их уникальность и стационарность, высокая сложность,
полная автоматизация их работы в боевом цикле и высокая энергоемкость.
Создание и развитие войск РКО существенно изменило роль и место
Войск ПВО в вооруженной борьбе.
Возросшие требования к ПВО и перевооружение частей на новую техни-
ку потребовали дальнейшего совершенствования организационной структу-
ры Войск ПВО и системы управления ими. В феврале 1946 г. была введена
должность командующего Войсками ПВО, который непосредственно подчи-
нялся командующему артиллерией Вооруженных Сил Советского Союза.
Командующим Войсками ПВО был назначен генерал-полковник
М.С.Громадин. начальником штаба - генерал-полковник Н.Н. Нагорный.
В 1948 г. впервые в уставах было указано, что Войска ПВО наряду с Су-
хопутными войсками, ВВС и ВМФ являются видом Вооруженных Сил. Это
положение полностью вытекало из опыта Великой Отечественной войны и
отражало объективную закономерность возрастания роли Войск ПВО в по-
слевоенный период в связи с совершенствованием средств воздушного напа-
дения (СВН) и способов их применения. В этом же году Войска ПВО были
выведены из подчинения командующего артиллерией Вооруженных Сил
СССР. Командующим Войсками ПВО стал Маршал Советского Союза
Л.А.Говоров, а с 1952 г. - генерал-полковник Н.Н. Нагорный. В мае 1954 г.
была учреждена должность главнокомандующего Войсками ПВО. Первым
главнокомандующим в мае 1954 г. был назначен Маршал Советского Союза
Л.А. Говоров. В дальнейшем главнокомандующими были: Маршал Совет-
17
скоро Союза С.С. Бирюзов (1955 - 1962), маршал авиации В.А. Судсц (1962—
1966), Маршал Советского Союза П.Ф. Батицкий (1966-1978), главный мар-
шал авиации А.И. Колдунов (1978-1987), гснсрал-армии И.М. Третьяк (1987-
1991). С августа 1991 г. первым главнокомандуюцЧм Войками ПВО в
Вооруженных Силах РФ был назначен генерал армии В.А. Прудников (1991 —
1997).
Указом Президента РФ от 16 июля 1997 г. "О первоочередных мерах по
реформированию ВС РФ и совершенствованию их структуры" Войска ПВО
объединены с ВВС в единый Вид ВС. Главнокомандующим ВВС назначен
генерал армии А.М. Корнуков (1998-2002). 23 января 2002 года в должность
гланокомандующего ВВС вступил генерал-полковник В.С. Михайлов
(Указом президента РФ №259 от 22.02.2004 присвоено воинское звание -
генерал армии).
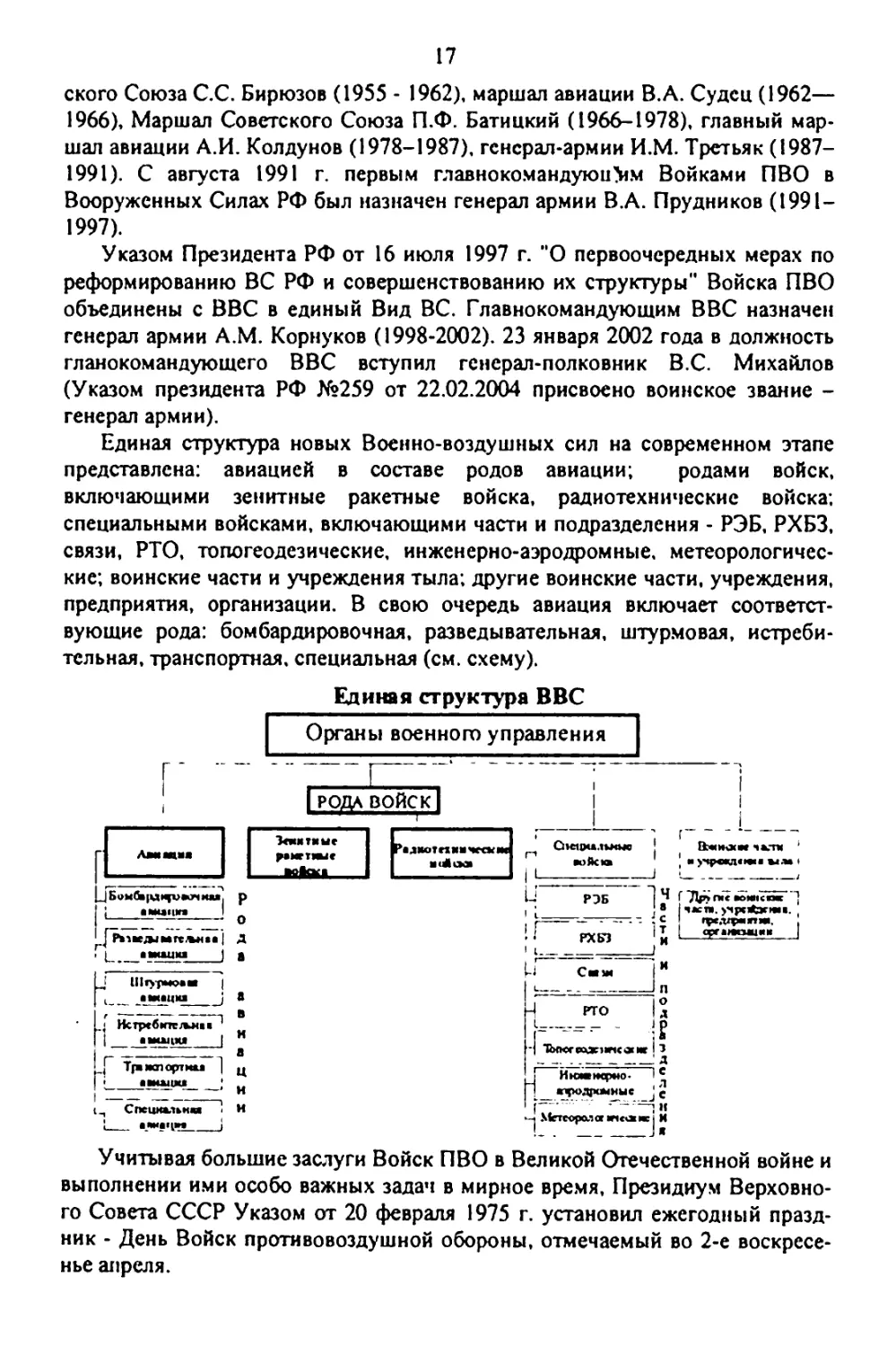
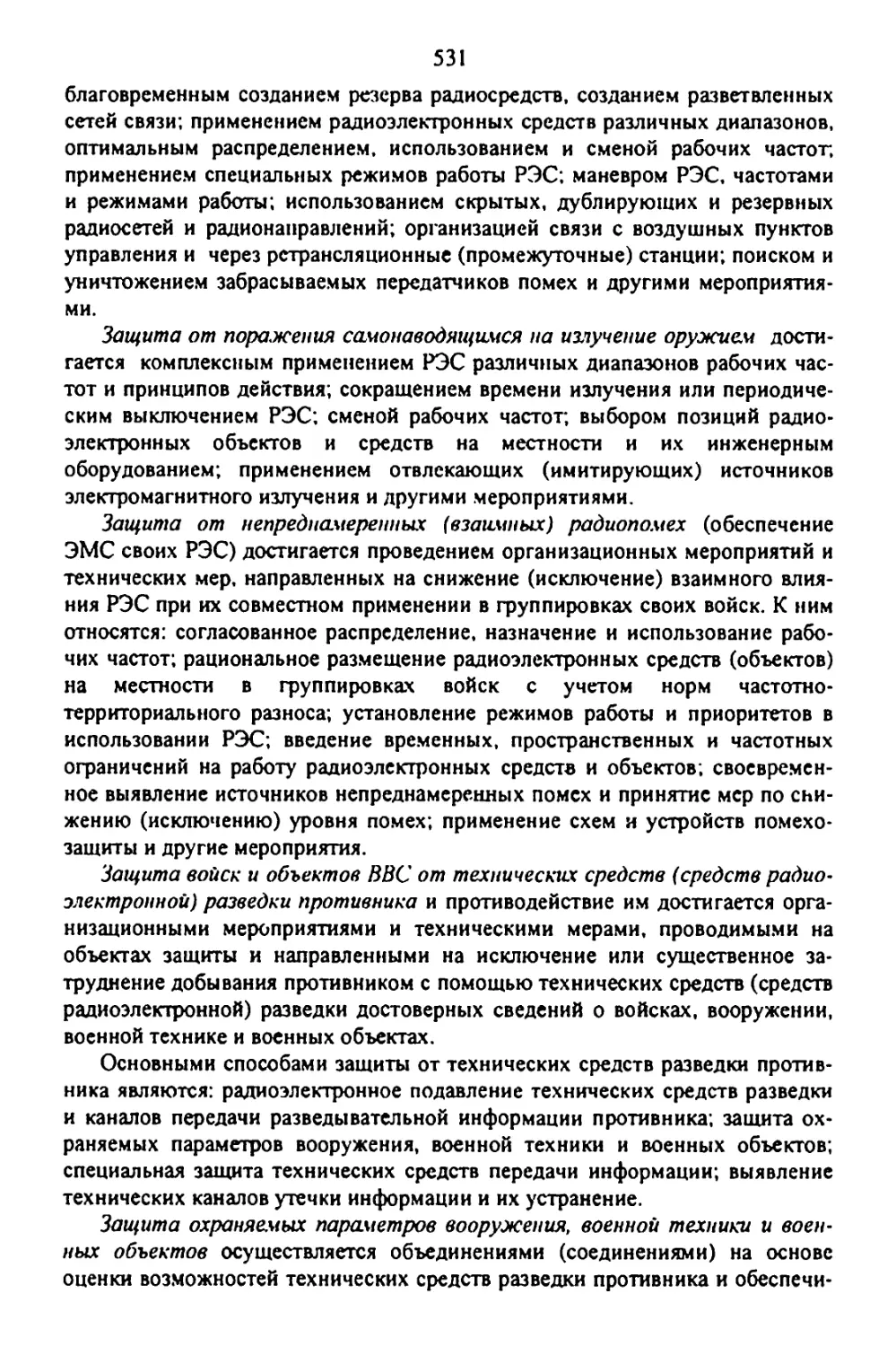
Единая структура новых Военно-воздушных сил на современном этапе
представлена: авиацией в составе родов авиации; родами войск,
включающими зенитные ракетные войска, радиотехнические войска;
специальными войсками, включающими части и подразделения - РЭБ, РХБЗ,
связи, РТО, топогеодезические, инженерно-аэродромные, метеорологичес-
кие; воинские части и учреждения тыла; другие воинские части, учреждения,
предприятия, организации. В свою очередь авиация включает соответст-
вующие рода: бомбардировочная, разведывательная, штурмовая, истреби-
тельная, транспортная, специальная (см. схему).
Единая структура ВВС
Органы военного управления
Учитывая большие заслуги Войск ПВО в Великой Отечественной войне и
выполнении ими особо важных задач в мирное время, Президиум Верховно-
го Совета СССР Указом от 20 февраля 1975 г. установил ежегодный празд-
ник - День Войск противовоздушной обороны, отмечаемый во 2-е воскресе-
нье апреля.
18
2. ОБЩИЕ СВЕДЕНИЯ О СИСТЕМАХ ВКН И ВКО
2.1. СИЛЫ И СРЕДСТВА ВОЗДУШНО-КОСМИЧЕСКОГО
НАПАДЕНИЯ
2.1.1. Классификация сил
Анализ опыта последних военных конфликтов и тенденций развития
вооружения и военной техники в наиболее развитых в военном отношении
странах мира свидетельствует, что воздушно-космическое пространство пре-
вратилось в важнейшую сферу вооруженной борьбы. Силам воздушно-
космического нападения (СВКН) отводится решающее значение в достиже-
нии целей войны не только на начальном этапе, но и на всем ее протяжении.
В состав СВКН входят объединения, соединения и части ВВС, ВМС и
сухопутных войск, па вооружении которых состоят средства воздушно-
космического нападения. СВКН в США включают: стратегические наступа-
тельные силы в составе стратегических ракетных сил наземного и морского
базирования и стратегической бомбардировочной авиации и силы общего
назначения, в том числе части, соединения и объединения авиации ВВС, час-
ти авиации ВМС, подразделения и части армейской авиации.
Основными задачами СВКН могут быть: подрыв военно-экономического
потенциала, нарушение системы государственного и военного управления,
завоевание ядерного превосходства и превосходства в воздухе, изоляция
района боевых действий, непосредственная авиационная поддержка и веде-
ние радиоэлектронной борьбы (РЭБ).
2.1.2. Классификация средств
Средствами воздушно-космического нападения являются: баллистические
ракеты, пилотируемые и беспилотные средства воздушного нападения и раз-
ведки. системы дальнего радиолокационного обнаружения и управления и
различное высокоточное оружие, доставляемое средствами воздушного на-
падения.
2.1.2.1. Баллистические ракеты
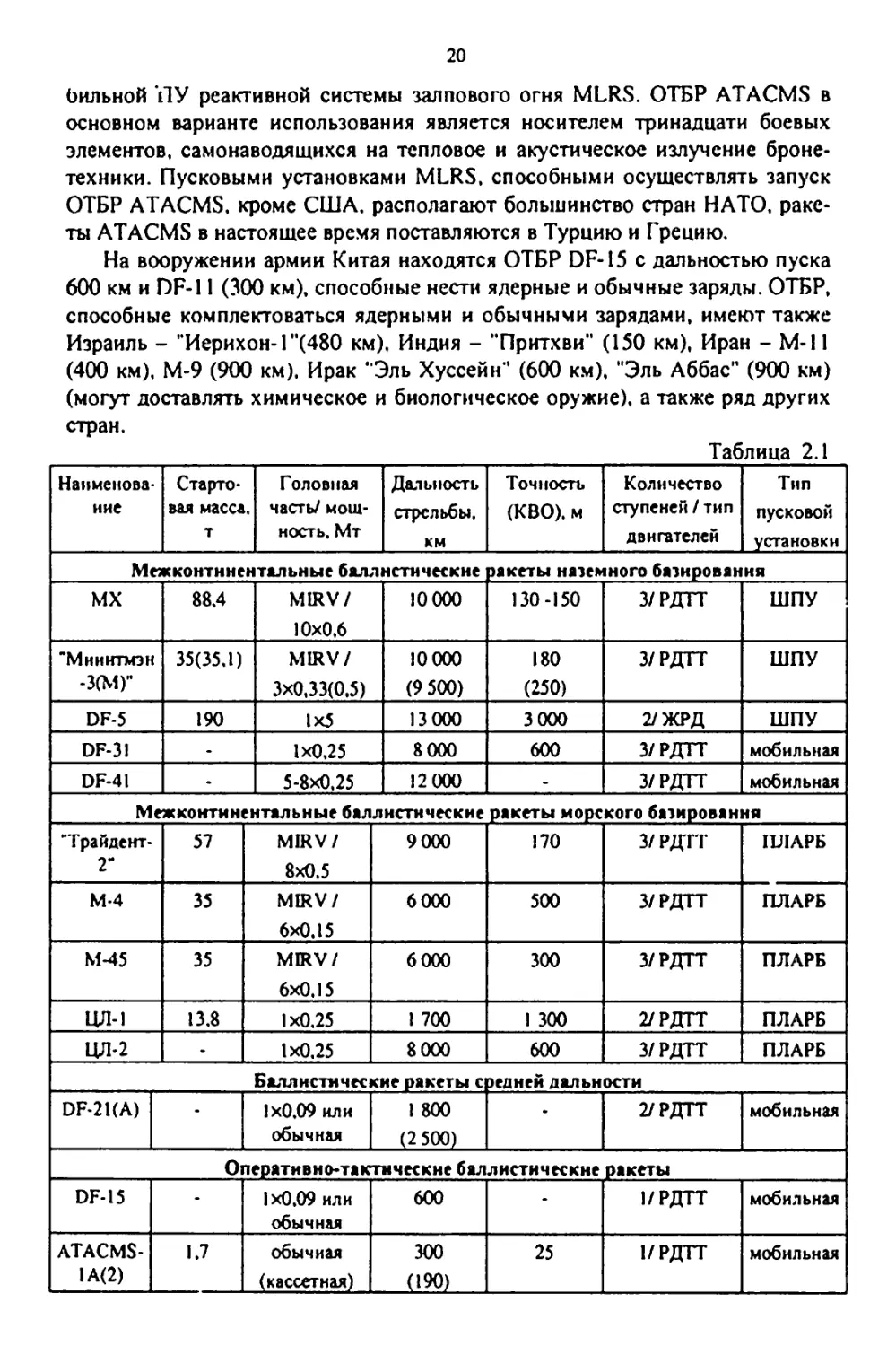
Баллистические ракеты (БР) в зависимости от дальности действия под-
разделяются на межконтинентальные (более 5 000 км), средней дальности
(до 5 000 км) и оперативно-тактические (до 1 000 км). Характеристики ос-
новных БР приведены в табл.2.1.
Межконтинентальные баллистические ракеты (МБР) предназначены
для поражения ядерными зарядами пунктов управления пуском и пусковых
установок стратегических ракет, основных центров государственного и выс-
шего военного управления и других целей.
19
МБР составляют основу триады стратегических ядерных сил США, в ко-
торую входят МБР наземного и морского базирования и стратегическая бом-
бардировочная авиация, способная нести ядерные авиабомбы и крылатые
ракеты с ядерными боезарядами.
МБР наземного базирования имеют большую дальность (до 10 000 км),
скорость (до 7.5 км/с) и высоту (1 000 км и более) полета, высокую боевую
готовность и могут наносить удары в любое время года и суток независимо
от метеорологических условий.
К современным МБР наземного базирования США относятся ракеты
MX. "Минитмэн-З(М)". Эти ракеты снаряжаются несколькими боеголовками
индивидуального наведения (типа MIRV) и имеют ракетные двигатели твер-
дого топлива (РДТТ). Ракетный комплекс MX является железнодорожным, а
"Минитмэн-З(М)" - стационарным, с размещением ракет в шахтных пуско-
вых установках (ШПУ). К 2012 г., в связи с сокращением стратегических на-
ступательных вооружений, планируется замена разделяющихся головных
частей МБР "Минитмэн-3" на моноблочные, ликвидация МБР MX с переда-
чей их головных частей повышенной мощности и точности для оснащения
МБР "Минитмэн-З”. Модернизация двигателей всех трех ступеней позволит
увеличив дальность стрельбы "Минитмэн-3" до 12 000 - 15 000 км.
МБР наземного базирования имеет также Китай. Эти ракеты являются
как стационарными, с запуском из ШПУ, так и мобильными, с запуском из
наземных пусковых устройств, перевозимых тягачами. Ракеты оснащаются
жидкостными ракетными двигателями (ЖРД) и РДТТ. Китай располагает
ракетами типа "Дун Фэн" - DF-5, DF-31, разрабатывается ракета DF-41. Ин-
дия разрабатывает МБР "Сурья" с дальностью пуска 10 000 км.
МБР морского базирования размешаются на подводных лодках с атом-
ными баллистическими ракетами (11ЛАРБ). К современным баллистическим
ракетам подводных лодок (БРПЛ) США относятся "Трайдснт-2". Эти ракеты
могут размещаться только на ПЛАРБ типа "Огайо". Кроме США, МБР мор-
ского базирования располагают Франция (ракеты М-4С и М-45), Великобри-
тания (ракеты "Трайдент-2"), Китай ("Цзюй Лан" - ЦЛ-1, ЦЛ-2).
Баллистические ракеты средней дальности (БРСД)
БРСД, способные нести ядерные боезаряды, на вооружении своих армий
имеют: Китай - DF-21 (дальность пуска 1800 км), Израиль - "Иерихон-
2/В)"( 1300/1500 км), "Иерихон-3" (2000 км). Индия -"Агни-1/И/ИГ
(1000/2500/3500 км), Иран - "Шахаб-3" (1500 км), М-9 (900 км), Пакистан -
"Гхаури" (1500 км), "Хайдер" (2500 км), Северная Корея - "Но Донг" и др.
Оперативно-тактические баллистические ракеты (ОТБР)
США в настоящее время располагают наземной ракетной системой
ATACMS оперативно-тактического назначения. ОТБР ATACMS поставляет-
ся в транспортно-пусковом контейнере. Запуск ОТБР осуществляется с мо-
20
Сильной Т1У реактивной системы залпового огня MLRS. ОТБР ATACMS в
основном варианте использования является носителем тринадцати боевых
элементов, самонаводящихся на тепловое и акустическое излучение броне-
техники. Пусковыми установками MLRS, способными осуществлять запуск
ОТБР ATACMS, кроме США. располагают большинство стран НАТО, раке-
ты ATACMS в настоящее время поставляются в Турцию и Грецию.
На вооружении армии Китая находятся ОТБР DF-15 с дальностью пуска
600 км и DF-11 (300 км), способные нести ядерные и обычные заряды. ОТБР,
способные комплектоваться ядерными и обычными зарядами, имеют также
Израиль - "Иерихон-1 "(480 км), Индия - "Притхви" (150 км), Иран - М-11
(400 км). М-9 (900 км). Ирак "Эль Хуссейн” (600 км), "Эль Аббас" (900 км)
(могут доставлять химическое и биологическое оружие), а также ряд других
стран.
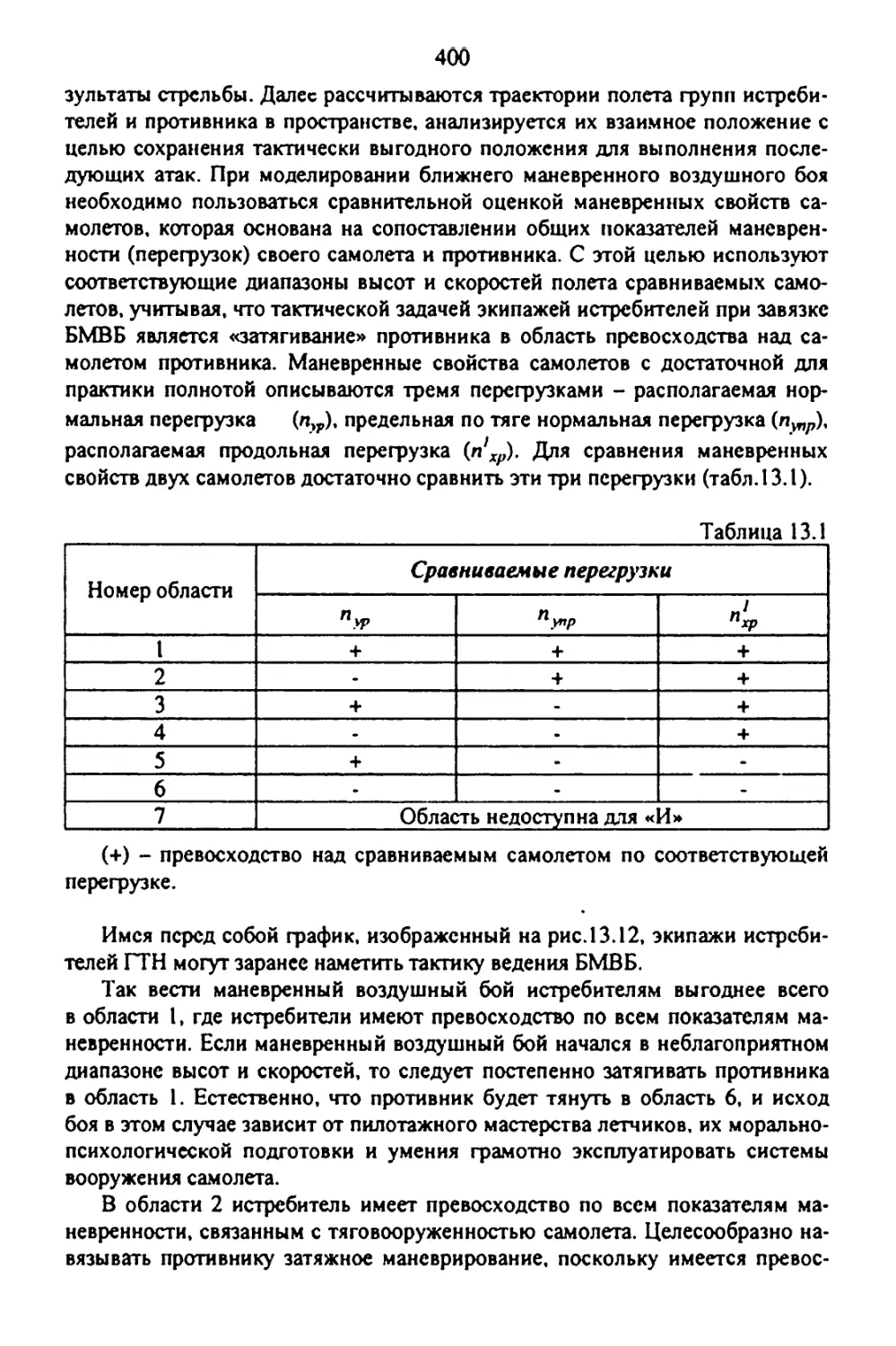
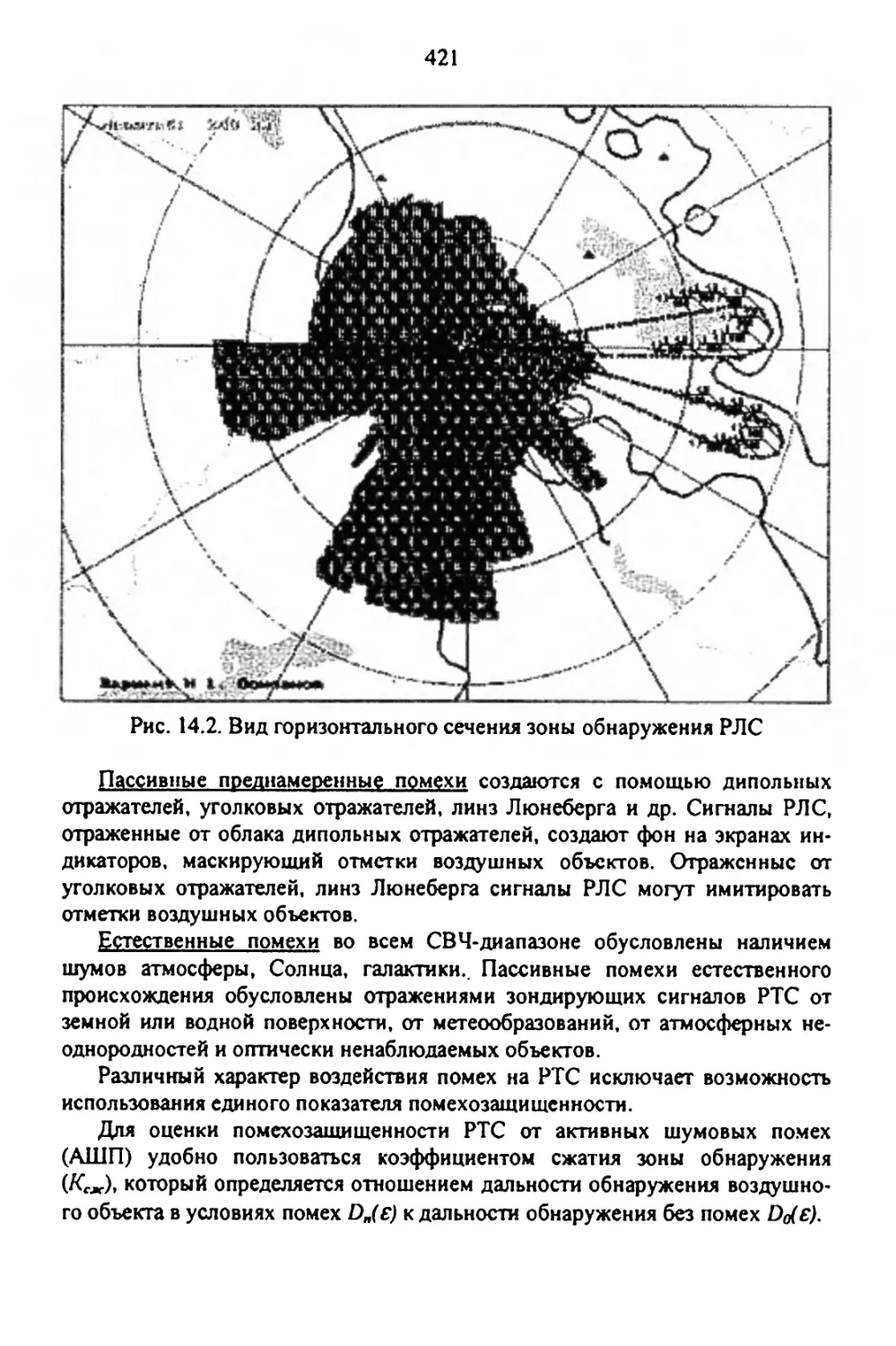
Таблица 2.1
Наименова- ние Старто- вая масса, т Головная часть/ мощ- ность. Мт Дальность стрельбы, км Точность (КВО). м Количество ступеней / тип двигателей Тип пусковой установки
Межконтинентальные баллистические ракеты наземного базирования
MX 88.4 MIRV/ 10x0,6 10 000 130-150 3/РДТТ ШПУ
"Мннитмэн -3(М)" 35(35.1) MIRV/ 3x0,33(0,5) 10 000 (9 500) 180 (250) 3/РДТТ ШПУ
DF-5 190 1x5 13000 3000 2/ЖРД ШПУ
DF-31 - 1x0,25 8000 600 3/РДТТ мобильная
DF-4I 5-8x0.25 12000 - 3/РДТТ мобильная
Межконтинентальные баллистические ракеты морского базирования
"Трайдент- 2" 57 MIRV/ 8x0.5 9 000 170 3/ РДТТ ПЛАРБ
М-4 35 MIRV/ 6x0.15 6 000 500 3/РДТТ ПЛАРБ
М-45 35 MIRV/ 6x0,15 6 000 300 3/РДТТ ПЛАРБ
ЦП-1 13.8 1x0.25 I 700 1 300 2/РДТТ ПЛАРБ
ЦЛ-2 - 1x0.25 8000 600 3/РДТТ ПЛАРБ
Баллистические ракеты с редней дальности
DF-2KA) 1x0.09 или обычная I 800 (2 500) 2/РДТТ мобильная
Оперативно-тактические баллистические ракеты
DF-15 - 1 х0,09 или обычная 600 - 1/РДТТ мобильная
ATACMS- 1А(2) 1.7 обычная (кассетная) 300 25 1/РДТТ мобильная
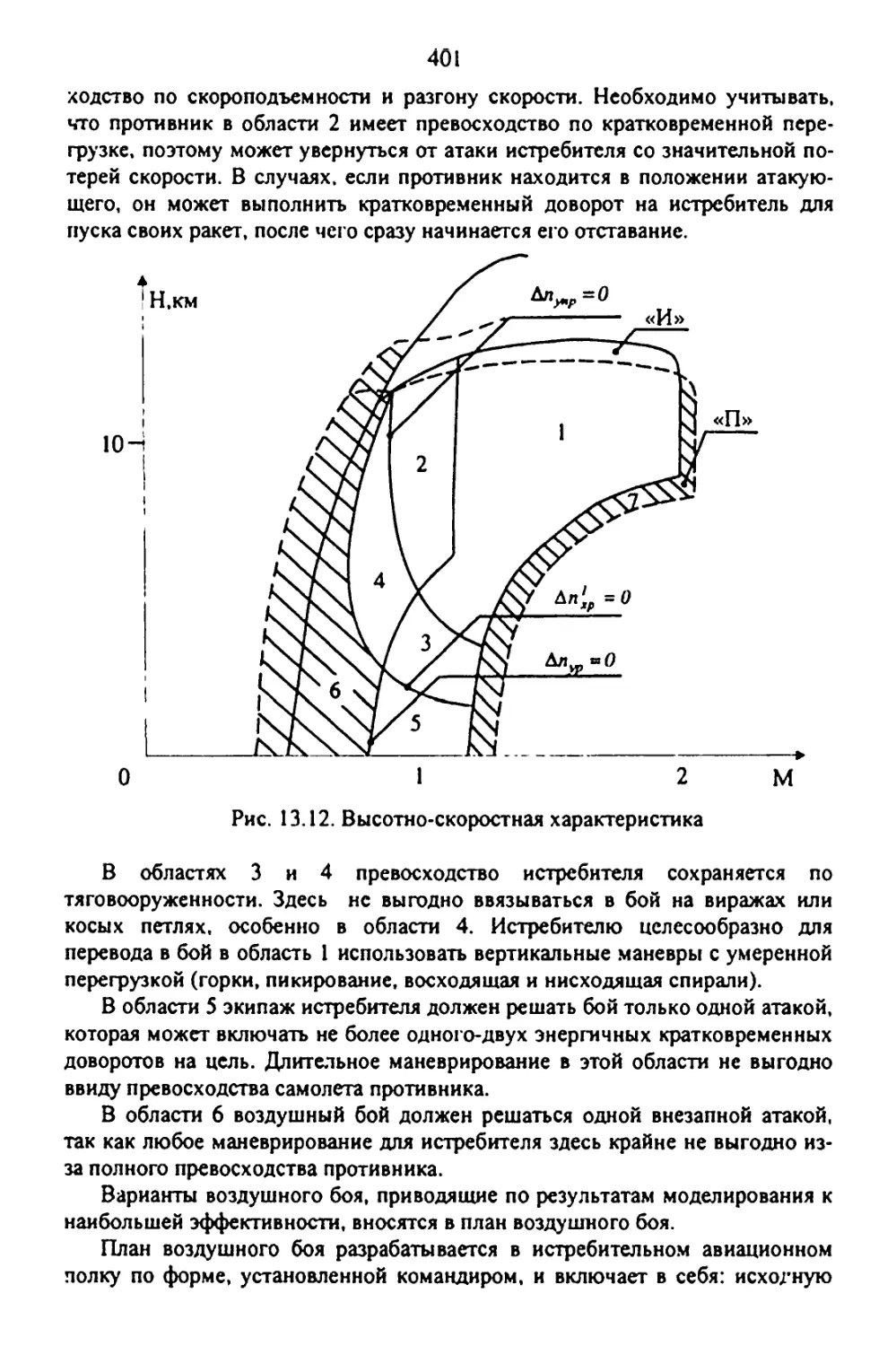
21
2.1.2.2. Пилотируемые и беспилотные средства воздушного нападе-
ния и разведки, системы дальнего радиолокационного обнаружения й
управления
К пилотируемым и беспилотным средствам воздушного нападения отно-
сятся бомбардировщики, тактические истребители и штурмовики ВВС и
ВМС, самолеты и вертолеты армейской авиации, ударные беспилотные лета-
тельные аппараты (БЛА).
Стратегические бомбардировщики имеются на вооружении ВВС
США. К ним относятся самолеты В-52Н и более современные сверхзвуковые
В-1В и малозаметные В-2 А. Стратегические бомбардировщики (СБ) предна-
значены для доставки и боевого применения большого количества боеприпа-
сов на расстояниях до 10 - 20 тысяч километров. Они имеют боевую нагрузку
до 40 т, в состав которой входят различное вооружение для огневого пора-
жения объектов, а также аппаратура РЭБ для подавления РЭС различного на-
значения. СБ имеют ядерное оружие - стратегические крылатые ракеты воз-
душного базирования (КРВБ) AGM-86A ALCM и AGM-129 АСМ, ядерные
бомбы В-61, В-83, а также обычное оружие - КРВБ AGM-86C CALCM,
управляемые ракеты (УР) AGM-I42, неуправляемые и управляемые авиа-
бомбы (АБ и УАБ) различного типа, разовые бомбовые кассеты (РБК).
Основным направлением модернизации СБ в ближайшие годы является
повышение их боевой эффективности путем оснащения перспективным
оружием: оперативно-тактическими КРВБ JASSM, УАБ типа JDAM GBU-
29/30/31, кассетными бомбами с коррекцией ветрового сноса WCMD, плани-
рующими УАБ (УПАБ) большой дальности JSOW, а в более отдаленной пер-
спективе - бомбами малого калибра типа SSB и SDB. Особенностями пер-
спективного оружия СБ является существенное повышение его точности, ав-
тономности и всепогодности за счет использования для наведения данных
спутниковой навигационной системы GPS. В безъядерной войне будущего
самолеты СБ планируется использовать для доставки огромного количества
индивидуально наводимого высокоточного оружия малого калибра.
Тактический бомбардировщик F-117 ВВС США выполнен, как и
стратегический бомбардировщик В-2А, по технологии "стеле". Самолет
предназначен прежде всего для ночных атак особо важных целей в ходе ав-
тономных одиночных вылетов с использованием высокоточного оружия. Он
может использоваться также для тактической радиоэлектронной разведки
районов, прикрытых средствами ПВО противника.
Тактические истребители и штурмовики ВВС предназначены для изо-
ляции района боевых действий путем уничтожения авиации и средств ПВО.
нанесения ударов по военно-промышленным объектам, непосредственной
авиационной поддержки сухопутных войск, ведения тактической разведки и
РЭБ. Современные тактические истребители обладают дальностями полега
22
до 6 100 км, скоростями до 2 600 км/ч. высотами полета до 18 000 м и могут
нести боевую нагрузку до 9 т.
Наиболее массовыми тактическими ударными самолетами ВВС США
являются истребители F-15, F-16, а также штурмовики А-10. На стадии при-
нятия на вооружение ВВС США находятся ударные тактические истребите-
ли пятого поколения F-22. На вооружении ВВС стран Европы состоят мно-
гоцелевые истребители "Tornado" (Великобритания, Германия, Италия),
"Hawk" (Великобритания). "Harrier" (Великобритания), "Jaguar" (Великобри-
тания. Франция). "Mirage" (Франция).
В перспективе на замену самолетов F-15, F-16 поступят разрабатываемые
в США тактические истребители JSF. Обновление парка истребителей стран
Европы планируется за счет разрабатываемого кооперацией стран тактиче-
ского истребителя "Еврофайтер" (EF-2000).
Тактические истребители могут нести обычные и управляемые бомбы,
ракеты "воздух-воздух", "воздух-земля", средства РЭБ и разведки. Кроме то-
го, ударные истребители F-16C/D, F-15E, "Tornado GR.4", "Mirage-2000N" и
перспективные истребители JSF и EF-2000 могут вооружаться ядерными
бомбами.
Тактические истребители и штурмовики ВМС предназначены для
действий с многоцелевых авианосцев и нанесения ударов по морским и на-
земным объектам.
Наиболее массовыми тактическими самолетами ВМС США являются ис-
требители F-14, F/A-18A/C. Основу палубной авиации США на ближайшую
перспективу составит начавший поступать на вооружение истребитель-
штурмовик F/A-18E/F. В дальнейшем па вооружение поступит разрабаты-
ваемый в палубном варианте тактический истребитель JSF.
На вооружении ВМС стран Европы состоят истребители "Harrier" и "Sea
Harrier", "Tornado" и др. Кроме тактической ударной авиации ВМС распола-
гают вертолетами различных типов.
Армейская авиация состоит из частей и подразделений армейских са-
молетов и вертолетов. Основу армейской авиации США составляют вертоле-
ты общего назначения (многоцелевые), наиболее массовыми представителя-
ми которых являются, например, UH-60 "Black Hawk" и АН-1 "Cobra", огне-
вой поддержки (AH-64A/D "Apache"), транспортно-десантные (СН/МН-47
"Chinook"), разведки и целеуказания (ОН/58А/С "Kiowa") и др.
Разведывательные самолеты предназначены для ведения комплексной
разведки (радио, радиотехнической и видовой). Стратегическими разведы-
вательными самолетами США являются SR-71, U-2. RC-135. К тактическим
разведывательным самолетам относятся RF-4E, RF-5E, RF-16.
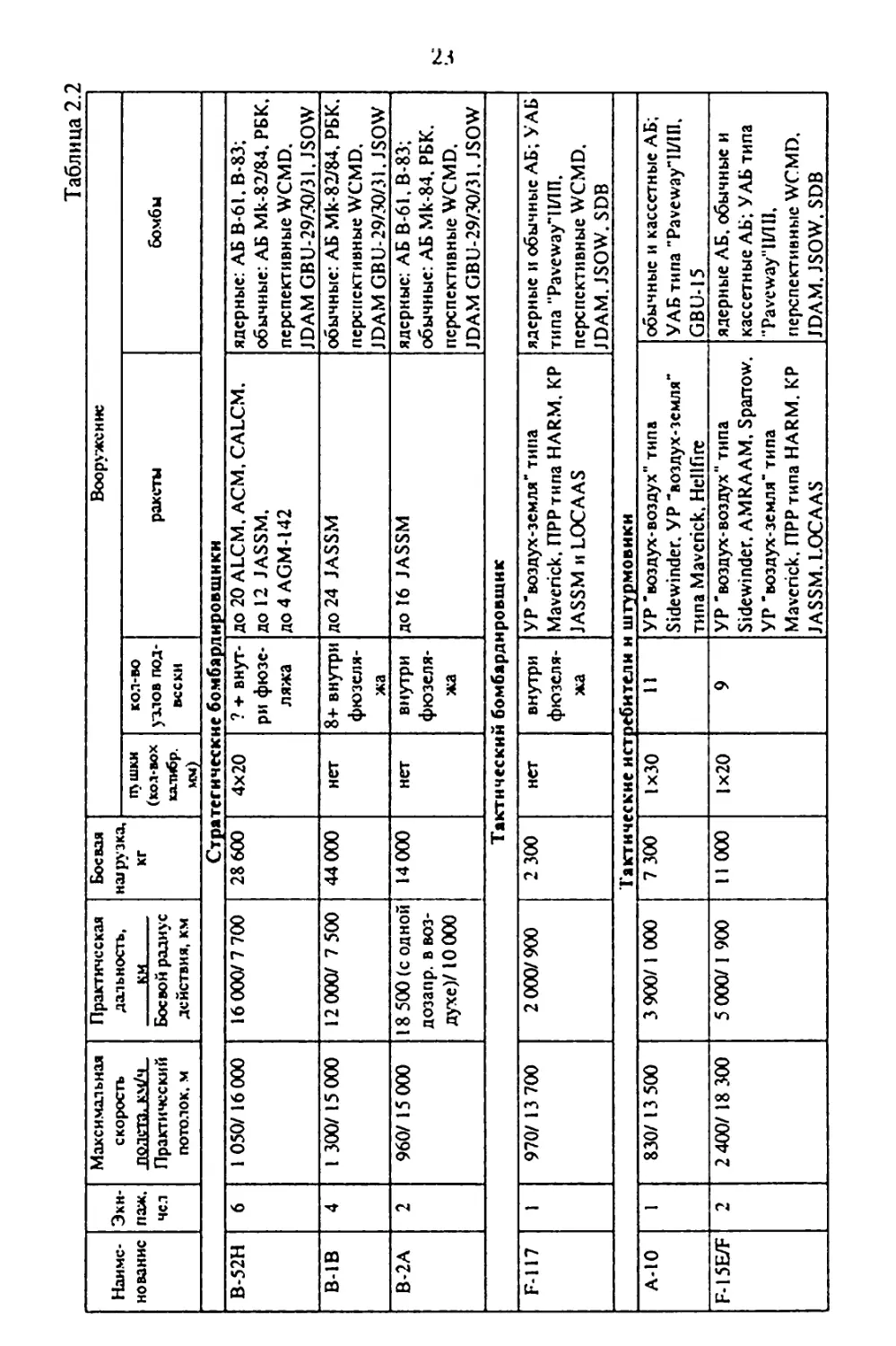
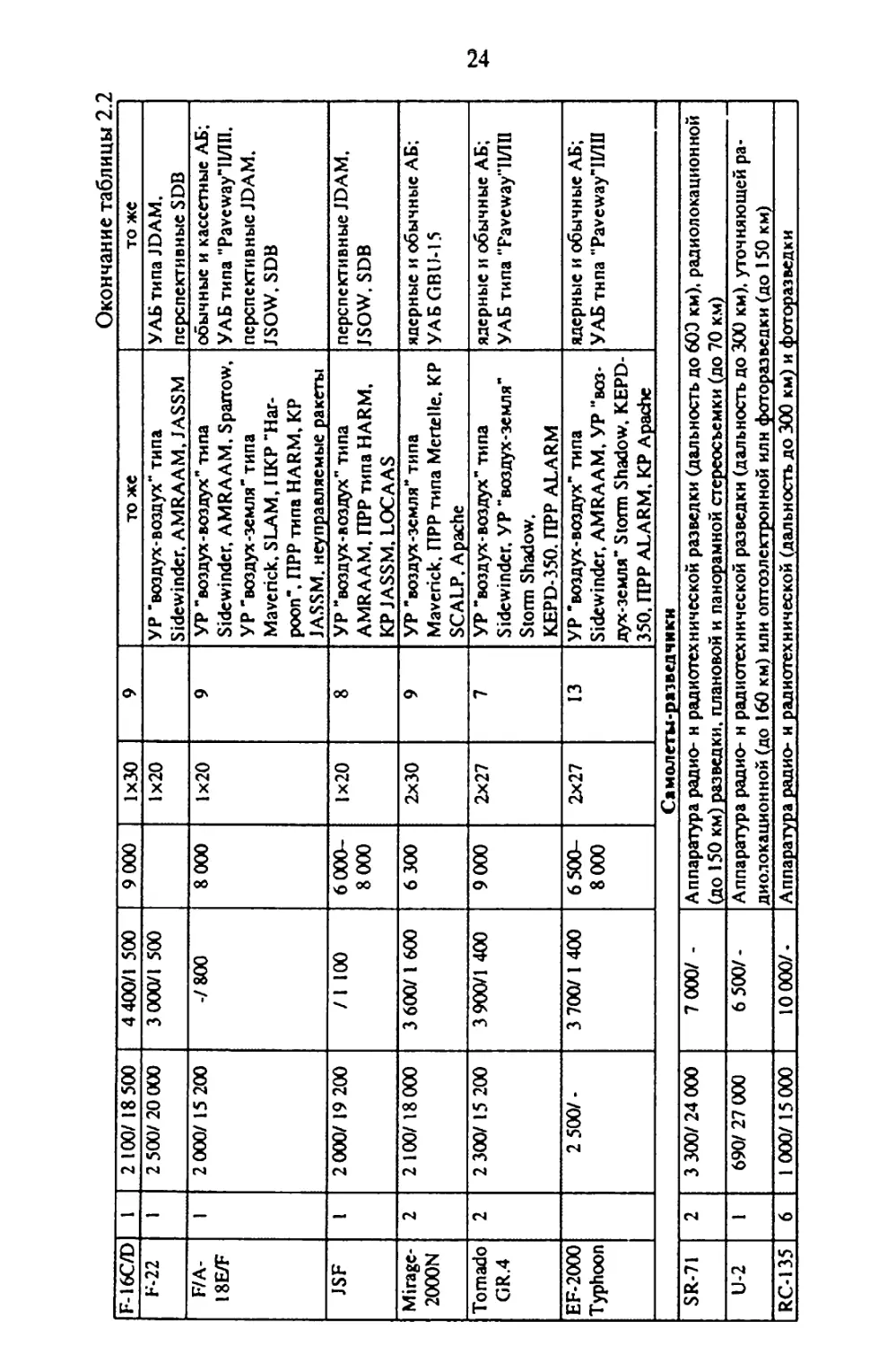
Тактико-технические данные основных боевых и разведывательных са-
молетов приведены в табл.2.2.
Таблица 2.2
Наиме- нование Эки- паж, чел Максимальная скорость Практический потолок, м Практическая дальность, КМ Боевой радиус действия, км Боевая Вооружение
кг п>шкн (код-вох калибр, мм) кол-во узлов под- вески ракеты бомбы
Стратегические бомбардировщики
В-52Н 6 1 050/ 16 000 16 000/7 700 28 600 4x20 ? + внут- ри фюзе- ляжа до 20 ALCM, ACM, CALCM. до 12 JASSM, до 4 AGM-142 ядерные: АБ В-61, В-83; обычные: АБ Мк-82/84. РБК. перспективные WCMD. JDAM GBU-29/3O/3I. JSOW
В-1В 4 1 300/15 000 12 000/ 7 500 44 000 нет 8+ внутри фюзеля- жа до 24 JASSM обычные: АБ Мк-82/84. РБК. перспективные WCMD. JDAM GBU-29/30/31. JSOW
В-2А 2 960/15 000 18 500 (с одной дозапр. в воз- духе)/ 10 000 14000 нет внутри фюзеля- жа до 16 JASSM ядерные: АБ В-61, В-83; обычные: АБ Мк-84. РБК. перспективные WCMD. JDAM G В U-29/30/31. JSOW
Тактический бомбардировщик
F-117 1 970/ 13 700 2 000/900 2 300 нет внутри фюзеля- жа УР “воздух-земля" типа Maverick. ПРРтипа HARM, КР JASSM и LOCAAS ядерные и обычные АБ; УАБ типа "Paveway"il/in. перспективные WCMD. JDAM. JSOW. SDB
Тактические ист ребители и штурмовики
А-10 1 830/ 13 500 3 900/1 000 7 300 1x30 11 УР 'воздух-воздух" типа Sidewinder. УР "воздух-земля" типа Maverick, Hellfire обычные и кассетные АБ; УАБ типа ”Paveway"Il/in. GBU-I5
F-I5E/F - 2 400/18 300 5 000/1 900 11 000 1x20 9 УР 'воздух-воздух" типа Sidewinder. AMRAAM, Spanow. УР 'воздух-земля" типа Maverick, ПРРтипа HARM. КР JASSM. LOCAAS ядерные АБ. обычные и кассетные АБ; УАБ типа "Pave way" 11/111, перспективные WCMD. JDAM. JSOW. SDB
Окончание таблицы 2.2
F-16C/D I 2 100/18 500 4 400/1 500 9 000 1x30 9 то же то же
Н-22 1 2 500/ 20 000 3 000/1 500 1x20 УР ’воздух-воздух" типа Sidewinder. AMRAAM, JASSM УАБ типа JDAM. перспективные SDB
F/A- 18E7F 1 2 000/15 200 -/800 8000 1x20 9 УР "воздух-воздух" типа Sidewinder, AMRAAM, Sparrow. УР "воздух-земля" типа Maverick. SLAM, IIKP "Har- poon", ПРР типа HARM, КР JASSM. неуправляемые ракеты обычные и кассетные АБ; УАБ типа "Pavcway"Il/IIl. перспективные JDAM. JSOW.SDB
JSF I 2 000/ 19 200 /1 100 6 000- 8000 1x20 8 УР "воздух-воздух" типа AMRAAM. ПРР типа HARM, КР JASSM. LOCAAS перспективные JDAM, JSOW. SDB
Mirage- 2000N 2 2 100/18 000 3 600/1 600 6 300 2x30 9 УР "воздух-земля" типа Maverick, ПРР типа Mertelle. КР SCALP. Apache ядерные и обычные АБ; УАБС.В1М5
Tornado GR.4 2 2 300/ 15 200 3 900/1 400 9000 2x27 7 УР "воздух-воздух" типа Sidewinder, УР "воздух-земля" Storm Shadow. KEPD-35O. ПРР ALARM ядерные и обычные АБ; УАБ типа "Paveway '11/in
EF-2000 Typhoon 2 500/- 3 700/1 400 6 500- 8000 2x27 13 УР "воздух-воздух" типа Sidewinder, AMRAAM, УР "воз- дух-земля" Storm Shadow. KEPD- 350, ПРР ALARM. КР Apache ядерные и обычные АБ; УАБ типа "Paveway"II/lU
Самолеты-разведчики
SR-71 2 3 300/ 24 000 7 000/ - Аппаратура радио- н радиотехнической разведки (дальность до 60Э км), радиолокационной (до 150 км) разведки, плановой и панорамной стереосъемки (до 70 км)
U-2 1 690/ 27 000 6 500/- Аппаратура радио- н радиотехнической разведки (дальность до 300 км), уточняющей ра- диолокационной (до 160 км) или оптоэлектронной илн фоторазведки (до 150 км)
RC-135 6 1 000/ 15 000 10 000/- Аппаратура радио- и радиотехнической (дальность до 300 км) и фоторазведки
25
Самолеты дальнего радиолокационного обнаружения (ДРЛО) и
управления предназначены для разведки воздушного противника, оповеще-
ния о нем сил ПВО и управления силами ПВО и тактической авиации. Само-
леты могут осуществлять общий контроль вывода авиации в район боевых
действий, воздушного и морского движения.
Наиболее распространены в мире самолеты ДРЛО и управления Е-3
"Sentry" системы AWACS. На вооружении ВВС США и объединенных ВВС
НАТО находятся модификации самолета Е-ЗА/В/С, на вооружении ВВС Ве-
ликобритании и Франции состоят самолеты E-3D и E-3F соответственно. На
вооружении ВМС США, Египта, Израиля, Франции и Японии находятся
также палубные самолеты ДРЛО и управления Е-2С "Hawkeye".
Самолеты ДРЛО и управления способны обнаруживать воздушные цели
на больших дальностях (бомбардировщиков - до 650 км, истребителей - до
400 км), сопровождать их и управлять в воздушных боях тактической авиа-
цией с передачей речевой и визуально отображаемой информации на борт
нескольких десятков самолетов одновременно. Осуществляется дооснащение
самолетов станциями радиотехнической разведки, системами спутниковой
навигации GPS, что позволит обнаруживать самолеты по излучению борто-
вых радиоэлектронных средств на дальностях до 600 км, распознавать их и
определять координаты с точностью до 50 м. Для использования самолетов
Е-3 в рамках ПРО на ТВД они дооснащаются оптико-электронным комплек-
сом обнаружения оперативно-тактических ракет.
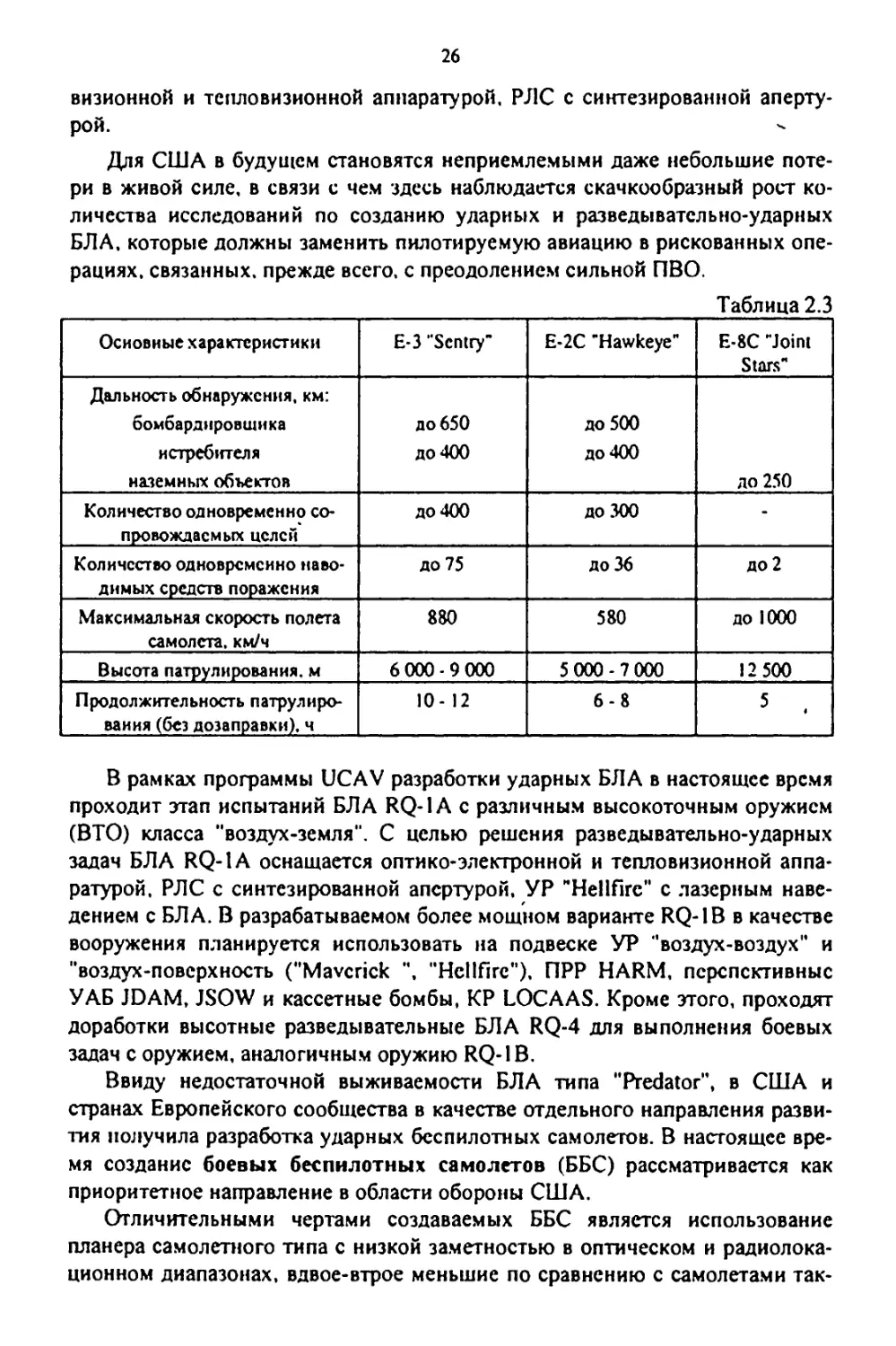
Особое место в ВВС США занимает самолет Е-8С, предназначенный для
радиолокационной разведки наземных целей и управления нанесением уда-
ров. Его основным разведывательным средством является РЛС 3-см диапа-
зона, работающая в режимах селекции движущихся наземных целей с выде-
лением за несколько секунд до 1 тыс. объектов и синтезирования апертуры
антенны для видовой съемки. Аппаратура самолета позволяет распознать тип
обнаруженного объекта на дальности до 180 км. Основные характеристики
самолетов приведены в табл. 2.3.
Беспилотные летательные аппараты выполняют широкий круг задач
тактического, оперативного и стратегического уровня - разведывательных,
связных, постановки помех и ударных. Лидером в создании и применении
БЛА являются США. В настоящее время ВС США располагают 200 БЛА са-
молетного и вертолетного типа, выполняющих в основном разведыватель-
ные функции. Основными разведывательными БЛА США длительного
патрулирования являются БЛА RQ-1 "Predator " и RQ-4 "Global Hawk ". Эти
аппараты имеют высоту полета 7 600 и 20 000 м, продолжительность полета
24 и 40 ч, скорость полета 200 и 630 км/ч соответственно. Районы барражи-
рования указанных БЛА назначаются в радиусе до 1000 и 5000 км от линии
фронта. Они оснащаются в основном аппаратурой видовой разведки - теле-
26
визионной и тепловизионной аппаратурой. РЛС с синтезированной аперту-
рой.
Для США в будущем становятся неприемлемыми даже небольшие поте-
ри в живой силе, в связи с чем здесь наблюдается скачкообразный рост ко-
личества исследований по созданию ударных и разведывательно-ударных
БЛА. которые должны заменить пилотируемую авиацию в рискованных опе-
рациях. связанных, прежде всего, с преодолением сильной ПВО.
Таблица 2.3
Основные характеристики Е-3 "Sentry" Е-2С "Hawkeye" Е-8С "Joint Stars"
Дальность обнаружения, км: бомбардировщика истребителя наземных объектов до 650 до 400 до 500 до 400 до 250
Количество одновременно со- провождаемых целей до 400 до 300 -
Количество одновременно наво- димых средств поражения до 75 до 36 до 2
Максимальная скорость полета самолета, км/ч 880 580 до 1000
Высота патрулирования, м 6 000 - 9 000 5000-7000 12 500
Продолжительность патрулиро- вания (без дозаправки), ч 10-12 6-8 5
В рамках программы UCAV разработки ударных БЛА в настоящее время
проходит этап испытаний БЛА RQ-1A с различным высокоточным оружием
(ВТО) класса "воздух-земля". С целью решения разведывательно-ударных
задач БЛА RQ-1A оснащается оптико-электронной и тепловизионной аппа-
ратурой. РЛС с синтезированной апертурой, УР ’’Hellfire" с лазерным наве-
дением с БЛА. В разрабатываемом более мощном варианте RQ-1B в качестве
вооружения планируется использовать на подвеске УР "воздух-воздух" и
"воздух-повсрхность ("Maverick ", "Hellfire"), ПРР HARM, перспективные
УАБ JDAM, JSOW и кассетные бомбы, КР LOCAAS. Кроме этого, проходят
доработки высотные разведывательные БЛА RQ-4 для выполнения боевых
задач с оружием, аналогичным оружию RQ-1B.
Ввиду недостаточной выживаемости БЛА типа "Predator", в США и
странах Европейского сообщества в качестве отдельного направления разви-
тия получила разработка ударных беспилотных самолетов. В настоящее вре-
мя создание боевых беспилотных самолетов (ББС) рассматривается как
приоритетное направление в области обороны США.
Отличительными чертами создаваемых ББС является использование
планера самолетного типа с низкой заметностью в оптическом и радиолока-
ционном диапазонах, вдвое-втрое меньшие по сравнению с самолетами так-
27
тической авиации массогабаритныс характеристики, более высокая манев-
ренность. не ограниченная физиологией летчика и повышенная прочность
планера. ББС будущего способен взлетать с аэродрома и возвращаться на не-
го. выполнять боевые задачи на дальностях, сравнимых с дальностью дейст-
вия современных тактических истребителей, действуя при этом под дистан-
ционным управлением операторов или самостоятельно, по одному из вари-
антов заложенной программы. Рассматриваются варианты управления ББС с
борта тактических боевых самолетов (двухместных типа F-15, F-22), с воз-
душного пункта управления или с земли (корабля). Управление осуществля-
ется с использованием передаваемых оператору с борта ББС видеоизображе-
ний. Основным предназначением ББС будет борьба с целями в оперативном
тылу противника и подавление системы ПВО, а в отдаленной перспективе - и
борьба с воздушными целями.
В настоящее время в стадии разработки и летных испытаний находятся
прототипы будущих ББС США - аппараты Х-45А.В и Х-47А.В.
В качестве оружия для ББС Х-45, Х-47 планируется использовать стан-
дартное ВТО многоцелевых истребителей с предпочтением малоразмерному:
УАБ типа JDAM калибра 225 и 450 кг, УАБ SDB калибра 45 кг, перспектив-
ные малоразмерные ПРР, контейнеры с миниатюризованными КР LOCAAS.
На борту ББС должно быть 6-12 единиц различного оружия.
Система развертывания ББС перед боевым применением отличается вы-
сокой мобильностью. Так в одном из вариантов, транспортным самолетом С-
17 (С-5А) в район боевого применения доставляются 6 (12) контейнеров с
хранящимися в них ББС и наземная станция управления, а также боеприпасы
в кассетах. Подготовка ББС к вылету с расконсервацией и установкой консо-
лей крыла занимает до часа.
2.1.2.3. Высокоточное оружие, доставляемое средствами воздушного
нападения
Первостепенное значение, которое приобрели средства воздушного на-
падения в современных войнах, во многом определяется оснащением их вы-
сокоточным оружием (ВТО).
Боевое применение средств воздушного нападения в современных бое-
вых действиях осуществляется в рамках оперативно создаваемых разведыва-
тельно-ударных систем. При этом осуществляется оперативное объединение
и функционирование в реальном масштабе времени всех типов носителей
ВТО (самолетов стратегической и тактической авиации, боевых беспилот-
ных летательных аппаратов), средств разведки и связи космического и воз-
душного базирования, навигационной космической системы GPS и самого
ВТО.
В общем случае, под высокоточным оружием понимается оружие, эф-
фективность которого достигается главным образом за счет точного попада-
ния средств поражения в цель.
28
Основными видами авиационного высокоточного оружия являются кры-
латые ракеты, управляемые ракеты "воздух-поверхность" и "воздух-воздух",
управляемые авиационные бомбы.
Крылатые ракеты воздушного и морского базирования (КРВБ и КРМБ)
Крылатым ракетам отдается предпочтение при решении задач начально-
го периода войны - уничтожении стационарных объектов военно-
промышленного потенциала. Основными достоинствами крылатых ракет,
являющимися результатом самолетной схемы построения планера, являются
большая дальность полета, осуществление полета на малых высотах
(10-250 м), а также возможность построения траектории полета с огибанием
рельефа местности и в обход позиций средств ПВО.
Основным типом крылатой ракеты воздушного базирования, нашед-
шей широкое применение в военных конфликтах последних лет, является
ракета CALCM, состоящая на вооружении стратегической авиации ВВС
США. Эта ракета создана на базе ядерной ракеты ALCM. B дальнейшем для
пополнения запасов КРВБ большой дальности предполагается закупка раз-
рабатываемых малозаметных ракет большой дальности JASSM. Ракета
JASSM в различных вариантах должна иметь максимальную дальность
стрельбы от 300 до 1000 км, оснащаться автономной инерциальной системой
наведения с коррекцией по данным GPS и обеспечивать поражение как ста-
ционарных, так и мобильных наземных целей. На конечном участке наведе-
ния предполагается использование тепловизионной ГСН, что обеспечит вы-
сокую точность наведения. Отсутствие радиовысотомера обеспечивает
скрытный полет ракеты к цели. Ракета поступит на вооружение стратегиче-
ской и тактической авиации ВВС и ВМС США. В странах Европы имеются
КРВБ собственной разработки.
Системы управления современных и разрабатываемых крылатых ракет
оснащаются приемниками сигналов спутниковой навигационной системы
GPS, что позволяет отказаться от использования для коррекции траектории
полета высотомеров и осуществлять полет в режиме радиомолчания. Повы-
шение точности наведения обеспечивается за счет использования на конеч-
ном участке полета головок самонаведения (ГСН). ГСН работают в инфра-
красном (ИК) или миллиметровом диапазоне волн (ММДВ).
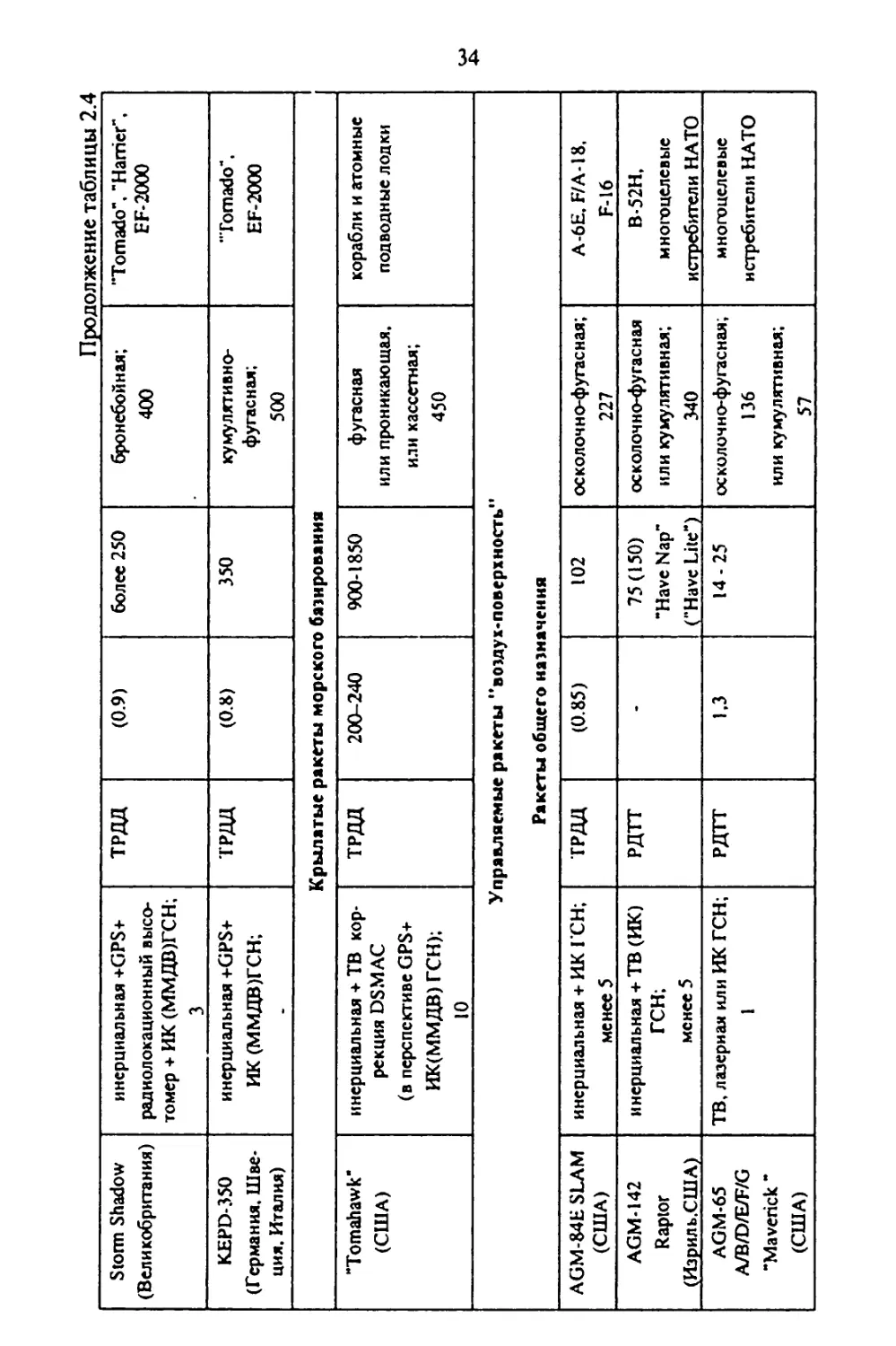
Крылатые ракеты морского базирования запускаются с кораблей и
атомных подводных лодок. Представителем КРМБ является крылатая ракета
ВМС США "Tomahawk" различных модификаций, предназначенная для по-
ражения стационарных объектов на дальностях до 900-1850 км (в зависимо-
сти от модификации). Ракета "Tomahawk" BGM-109A оснащена ядерной
боевой частью (БЧ). Модификации ракеты AGM-109A/C/D/F имеют обыч-
ную БЧ различного типа (осколочно-фугасную, проникающую, кассетную,
снаряжаемую суббоеприпасами). Кроме того, в зависимости от модификации
29
используются различные типы систем наведения ракеты, что позволяет ис-
пользовать ракеты для поражения объектов различного класса.
Запускаемые КРМБ выходят на заданные цели с помощью комбиниро-
ванной системы наведения. При полете над морем работает только инерци-
альная навигационная система наведения ракеты, а после пересечения бере-
говой полосы включается телевизионная корреляционная система наведения
по цифровым картам местности DSMAC, которая способна уменьшить
ошибку наведения ракеты до 20-25 м. Осуществляемая модернизация ракет
направлена на усовершенствование системы наведения на конечном участке
траектории по цифровым картам местности и на оснащение их навигацион-
ной системой GPS. Для повышения точности наведения на конечном участке
полета планируется использовать лазерную, ИК ГСН, полуактивную ГСН
миллиметрового диапазона длин волн или построенную на их основе комби-
нированную ГСН. Разрабатываются новые типы БЧ, позволяющие решать
широкий круг задач - от разбрасывания управляемых суббоеприпасов над
участком с большой площадью до поражения бронированных целей.
В ближайшее время на вооружение всех крейсеров и эсминцев поступит
новая тактической КРМБ "Tactical Tomahawk". Эта ракета обладает увели-
ченной на 30% дальностью стрельбы и возможностью перенацеливания в
полете. Ракета будет способна барражировать в воздухе в течение 2-3-х ча-
сов с момента пуска до получения целеуказания на поражение цели.
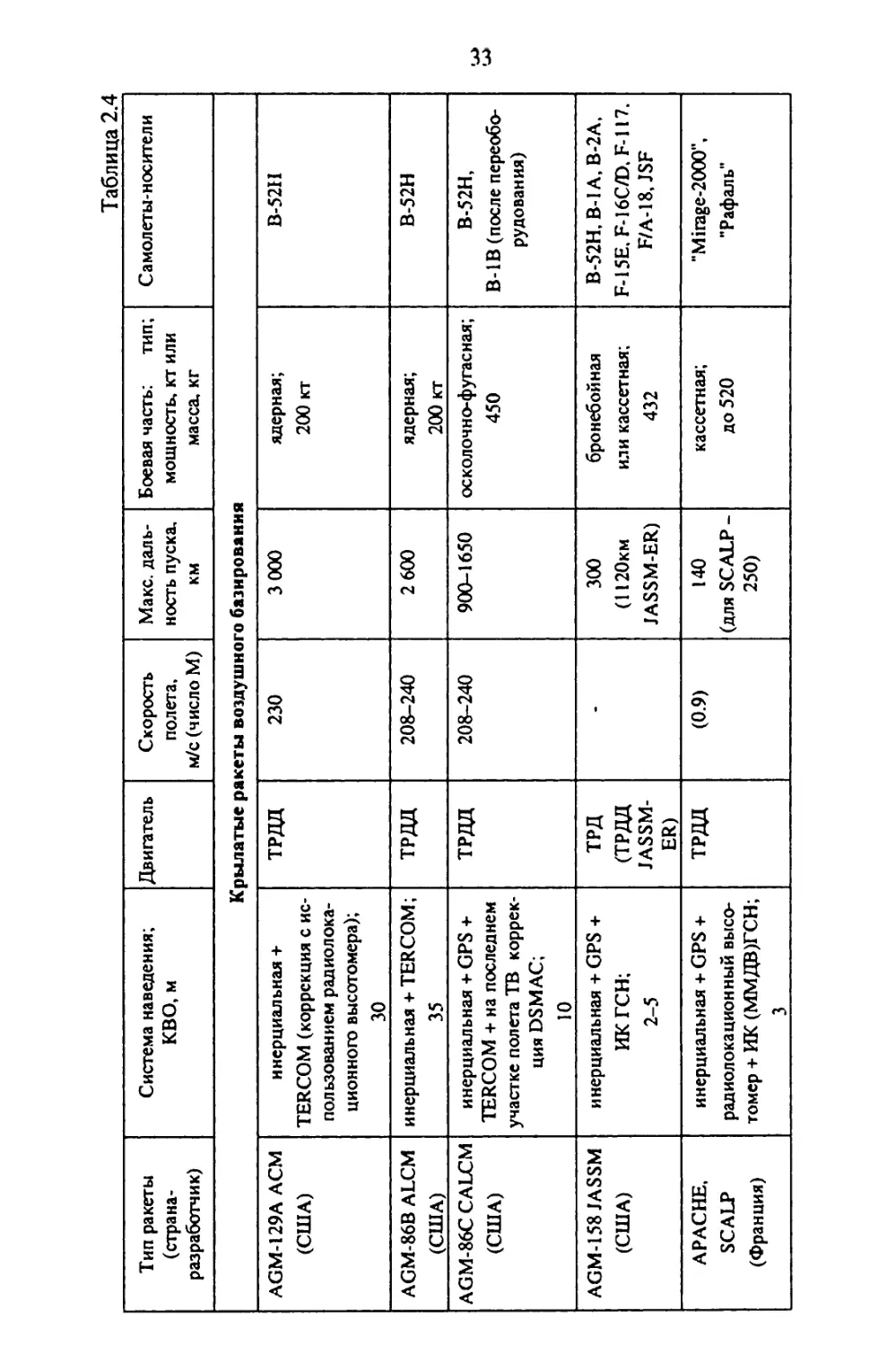
Сравнительная характеристика различных типов современных и пер-
спективных крылатых ракет дана в табл. 2.4.
Управляемые ракеты класса "воздух-поверхность"
Современные и перспективные УР "воздух-поверхность" предназначены
для поражения важных высокозащищенных малоразмерных целей унитар-
ными и кассетными боевыми частями. Ввиду особенностей планера, при на-
ведении ракет данного класса не используется полет с огибанием рельефа
местности, траектория полета определяется точкой пуска с самолета-
носителя и методом наведения, реализуемым по данным бортовой системы
наведения. Вместе с тем ракеты являются более дешевыми по сравнению с
КР и нашли широкое применение в последних военных конфликтах.
В зависимости от целевого назначения УР "воздух-поверхность" подраз-
деляются на ракеты общего назначения и противорадиолокационные ракеты
(ПРР).
УР "воздух-поверхность" общего назначения предназначены для по-
ражения бронетанковой техники, командных пунктов и позиций ЗРК, аэро-
дромных сооружений и самолетов на них, кораблей и др.
К наиболее массовым ракетам УР большой дальности (дальностью пуска
не менее 100 км) относится УР AGM-84E SLAM. Ракета находится на воо-
ружении палубной авиации ВМС США и нашла широкое применение в по-
следних вооруженных конфликтах. Новая модификация ракеты AGM-84H
30
SLAM-ER имеет дальность пуска до 280 км. Она оснащается приемником
сигналов спутниковой системы навигации GPS.
Для поражения целей с больших дальностей с самолетов с В-52Н исполь-
зовались УР AGM-142 модификаций "Have Nap" и "Have Lite" - американи-
зированный вариант израильских "Рореуе-1" и "Рореуе-П" соответственно.
Ракеты применялись из-за недостатка ракет CALCM, являясь их дешевой за-
меной. Управление ракет на начальном участке полета осуществляется с но-
сителя, на конечном участке используется телевизионная или тепловизион-
ная ГСН.
Наиболее массовой УР, нашедшей широкое применение во всех локаль-
ных конфликтах последнего десятилетия, является тактическая УР AGM-65
"Maverick". Семейство УР AGM-65 объединяет ракеты различного назна-
чения (предназначенные как для поражения малоразмерных прочных целей
типа танк, бронетранспортер, полевое укрепление, пусковых установок и
др., так и для борьбы с объектами на поверхности воды), отличные друг от
друга системами управления и боевой частью.
Для поражения особо важных мобильных целей, таких как подвижные
средства ПВО, пусковые установки баллистических ракет, в США разраба-
тывается гиперзвуковая (ГЗ) УР ARRMD. Основное назначение ГЗ У Р - дос-
тавка в район нахождения цели для ее поражения миниатюрного суббоепри-
паса за время, меньшее, чем требуется цели для смены своей позиции. Пред-
полагается, что ракета ARRMD будет снабжаться одним суббоеприпасом
автономного поиска целей LOCCAS. Дальность пуска ракеты составит
360 км, скорость полета - 6 М.
Для борьбы с морскими целями на вооружении авиации ВМС, кораблей
и подводных лодок зарубежных стран находятся различные противокора-
бельные ракеты. Высота полета ракет этого класса вблизи объекта пораже-
ния составляет 2 - 5 м. Представителями ракет этого типа являются ракеты
AGM-84 "Harpoon" и AGM-119 "Penguin", разработанные в США. Ракета
"Harpoon" имеет инерциальную систему наведения и активную радиолока-
ционную ГСН, дальность стрельбы составляет до 150 км, ракета снабжается
фугасной или полубронебойной БЧ массой 227 кг. Ракега "Penguin" снабже-
на инерциальной системой наведения в сочетании с ИК ГСН, дальность
стрельбы - до 40 км, БЧ - фугасная или полубронебойная, массой 120 кг.
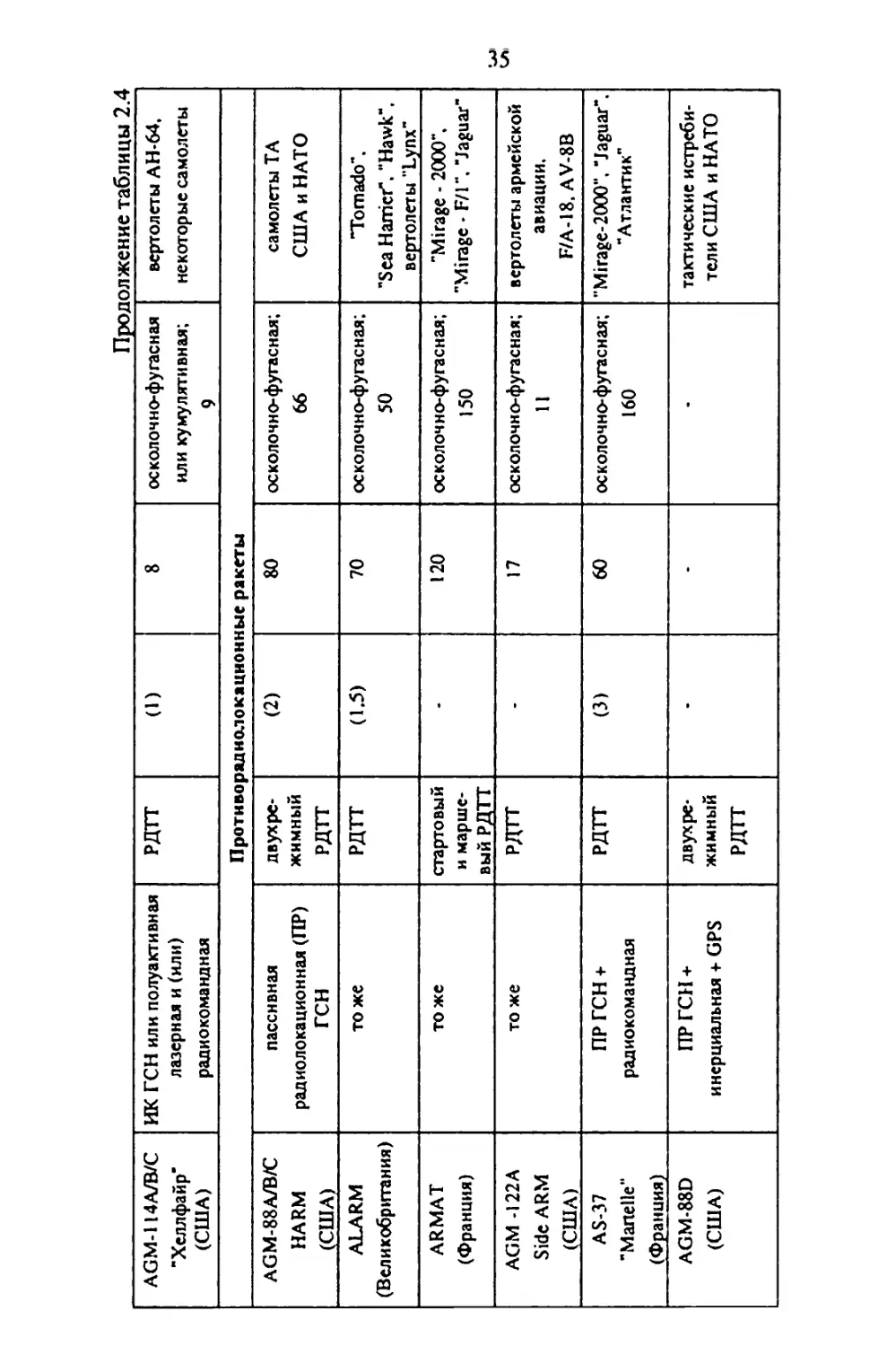
Противорадиолокационпые ракеты являются одним из основных
средств поражения РЛС ПВО, а также любых других РЛС активного типа.
Они находятся на вооружении самолетов тактической авиации и авиации
ВМС практически всех основных западных государств. ПРР широко и доста-
точно эффективно использовались во всех войнах, начиная с 60-х годов и
кончая последними вооруженными конфликтами.
Особенностями современных ПРР являются использование пассивных
ГСН, работающих в диапазоне волн выбранной для поражения РЛС. Учиты-
вая, что в процессе полета к цели ошибка наведения уменьшается, в случае
31
отсутствия специальных мер противодействия использование ПРР обеспечи-
вает практически гарантированное уничтожение цели.
Наиболее широкое применение в последних войнах получили ПРР AGM-
88А/В/С HARM, состоящие на вооружении авиации НАТО. ПРР оснащена
пассивной радиолокационной ГСН с широким рабочим диапазоном, обеспе-
чивающим возможность применения ракеты по различным РЛС непрерыв-
ного и импульсного излучения. Подрыв осколочно-фугасной БЧ осу-
ществляется посредством неконтактного лазерного взрывателя в точке опти-
мального разлета осколков. В качестве двигательной установки ПРР
используется двухрежимный твердотопливный двигатель. ПРР может при-
меняться как по данным самолетного приемника, определившего наличие,
координаты и параметры источника радиоизлучения, так и без наличия ин-
формации о цели. Второй способ применяется при поражении удаленных
целей. В этом случае, если ракета в процессе полета обнаруживает излучение
цели, то она наводится на нее, в противном случае происходит самоликвида-
ция ПРР. Особенностью ракеты HARM является ее способность автоматиче-
ски перенацеливаться в ходе полета, если РЛС-цель, которую ГСН ракеты
сопровождает, прекращает работу.
В ближайшее время на вооружение тактической авиации США и стран
НАТО поступят ракеты HARM новой модификации - AGM-88D. В состав
системы наведения этой ракеты для управления полетом на начальном и
среднем участке траектории будет входить инерциальная система, корректи-
руемая по данным космической радионавигационной системы GPS, а также
будет использоваться более совершенное программное обеспечение, что
должно существенно повысить эффективность ракеты и упростить ее приме-
нение в сложных условиях боевой обстановки.
Особенностью английской ПРР ALARM является наличие режима авто-
номного поиска цели. При этом ракета набирает высоту около 12 000 м и по-
сле прекращения работы двигателя снижается на парашюте, обеспечиваю-
щем нахождение ПРР в воздухе относительно длительное время (до несколь-
ких минут). В течение этого времени ГСН ведет поиск цели и в случае ее
обнаружения парашют отстреливается и ракета пикирует на цель. Если цель
прекращает излучение, то ПРР удерживается на курсе с помощью блока на-
ведения бортовой инерциальной системы навигации.
Другими типами современных ПРР являются ПРР "Side ARM" (США),
ARMAT и "Martelle" (Франция).
В США проходит испытания ПРР HSARM, созданная на базе ракеты
HARM для самолетов ВМС. Ее особенностью является оснащение прямо-
точным воздушно-реактивным двигателем (ПВРД), что обеспечивает полет
с высокими скоростями на большие дальности. Кроме этого, прорабатывает-
ся возможность оснащения ПРР комбинированной ГСН. В стадии разработ-
ки также находится ПРР AARGM, в которой кроме наличия в составе систе-
мы наведения системы INS/GPS, будет использоваться комбинированная ра-
диолокационная ГСН (пассивная и активная). Поиск и наведение ПРР на
32
работающую РЛС будут осуществляться по данным пассивной ра-
диолокационной ГСН, а в случае прекращения работы станции ее наведение
возможно с помощью активной радиолокационной головки миллиметрового
диапазона. Ракету намечается построить по бескрылой аэродинамической
схеме и оборудовать складывающимися аэродинамическими рулями в хво-
стовой части. В совокупности с меньшими геометрическими размерами по
сравнению с ПРР HARM изменение конструкции ракеты позволит разме-
щать ее во внутрифюзеляжных отсеках малозаметных самолетов типа JSF.
Перспективными ПРР европейской разработки являются ракеты ARF
(Франция) и ARMIGER (Германия). Отличительными особенностями этих
ракет являются наличие тепловизионной ГСН, используемой для наведения
на цель на конечном этапе наведения в дополнение к пассивной радиолока-
ционной ГСН, а также большая дальность пуска (до 100 и более км).
Сравнительная характеристика УР "воздух-поверхность" основных типов
дана в табл. 2.4.
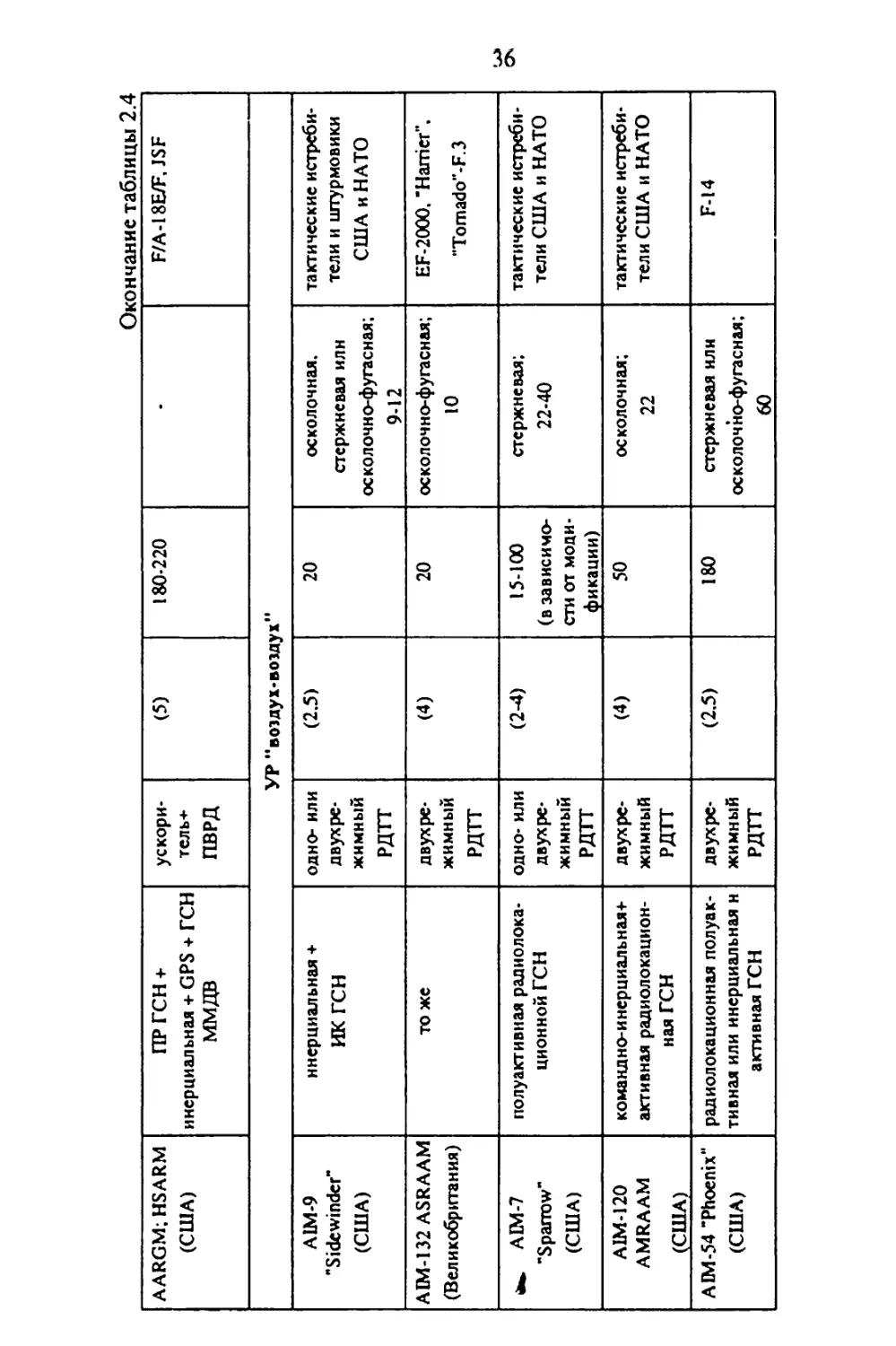
Управляемые ракеты "воздух-воздух"
Для успешного ведения борьбы с воздушными целями в различных усло-
виях боевой обстановки на вооружении авиации находятся ракеты малой,
средней и большой дальности стрельбы.
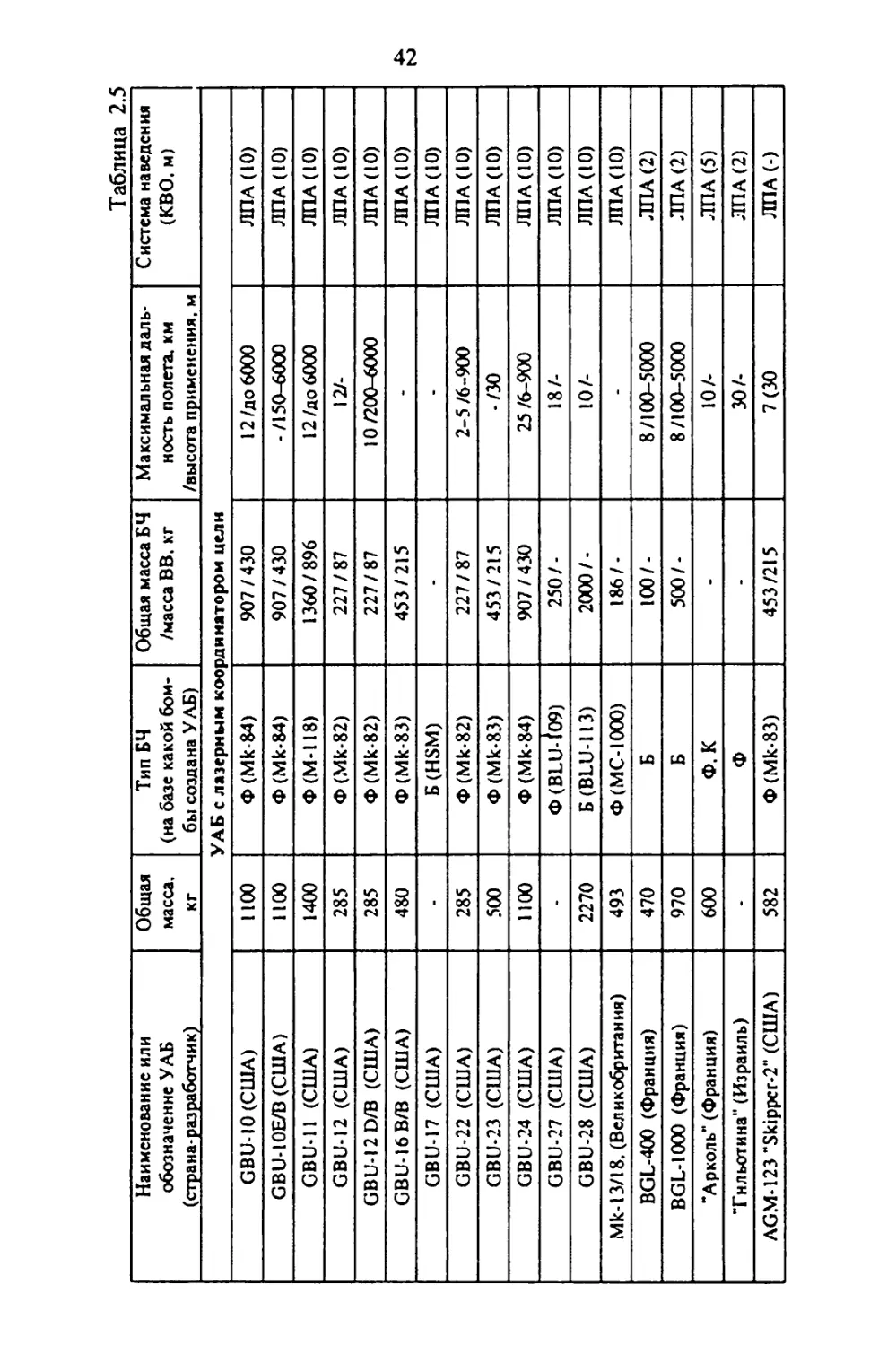
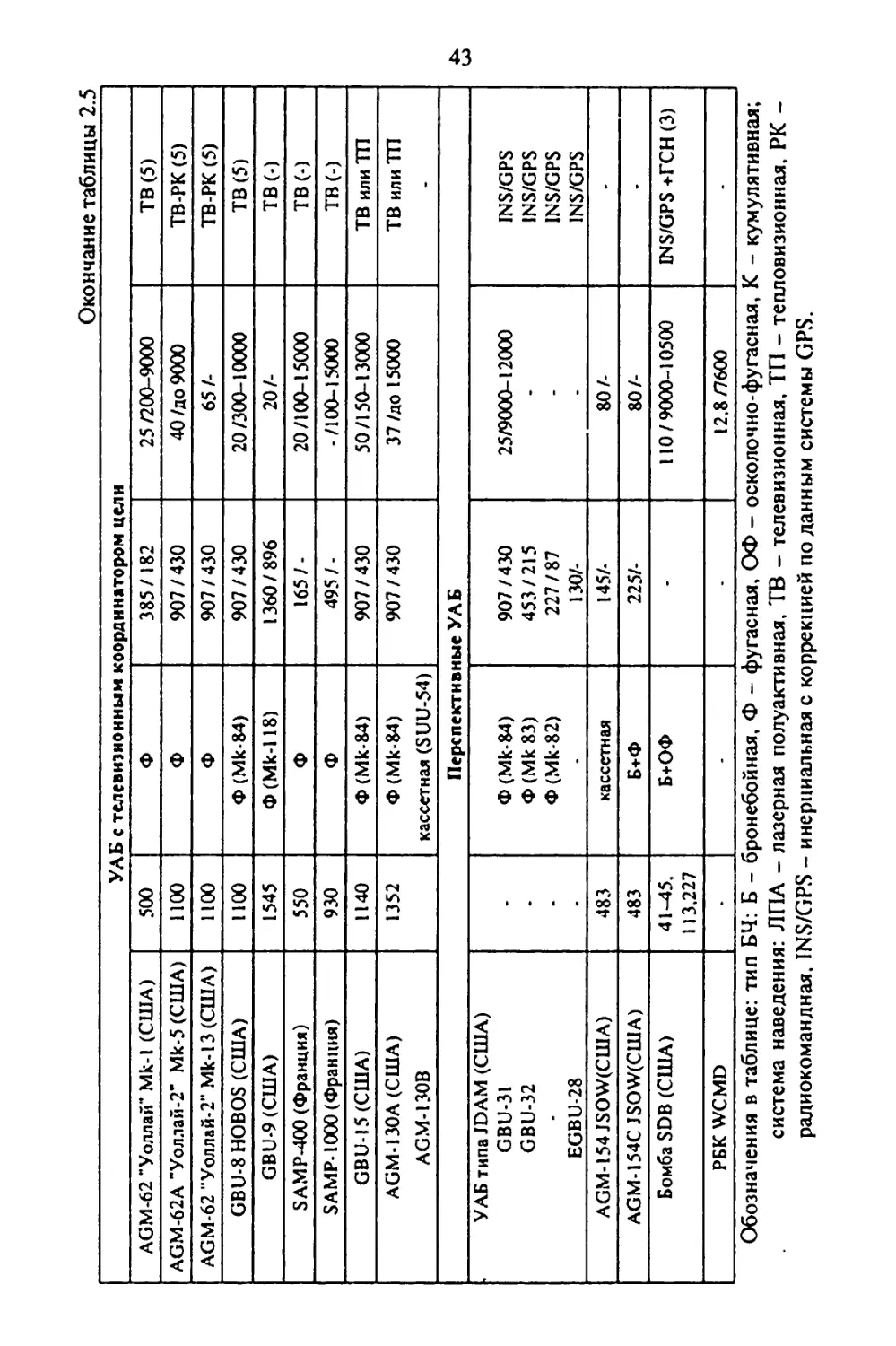
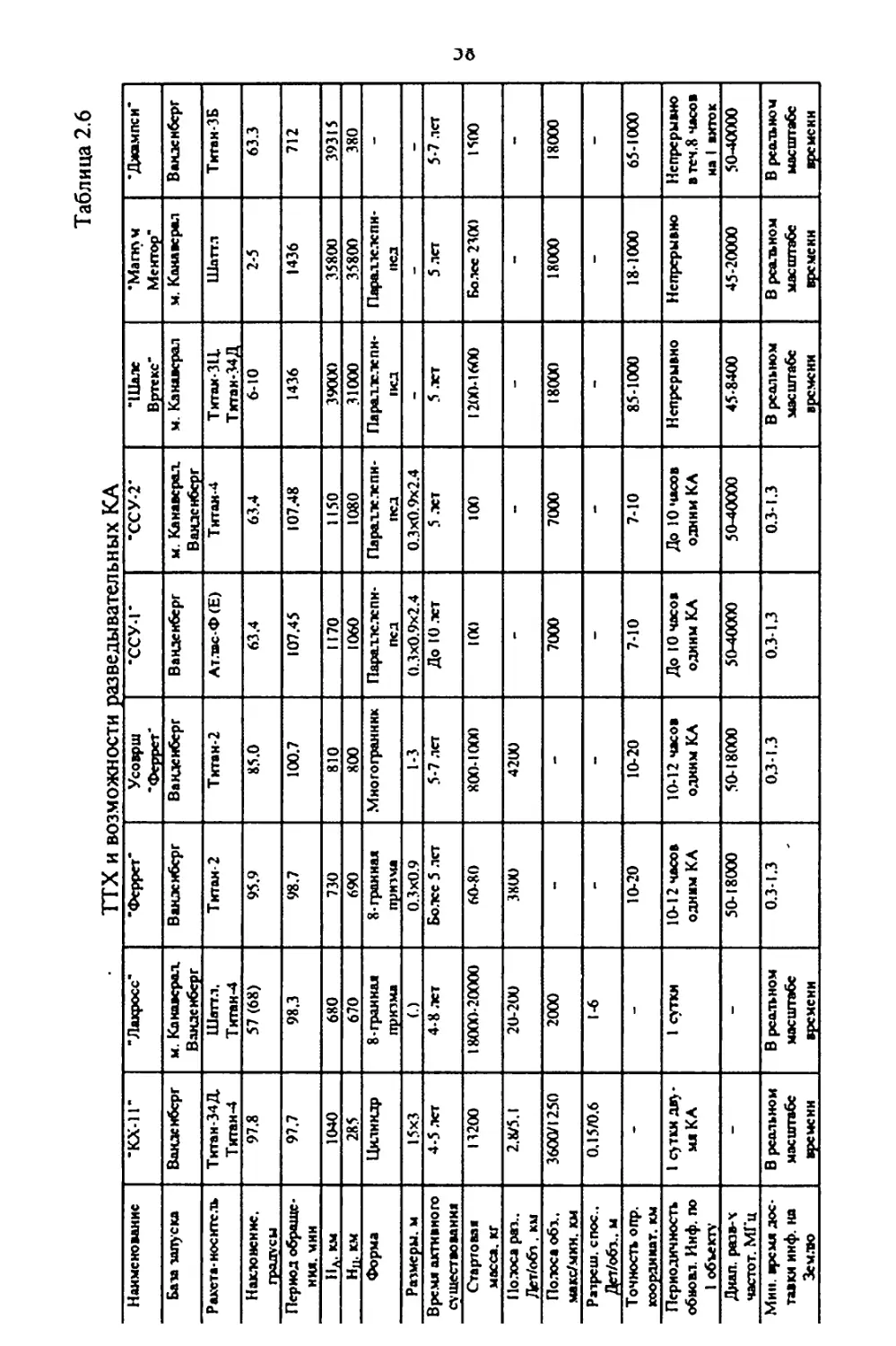
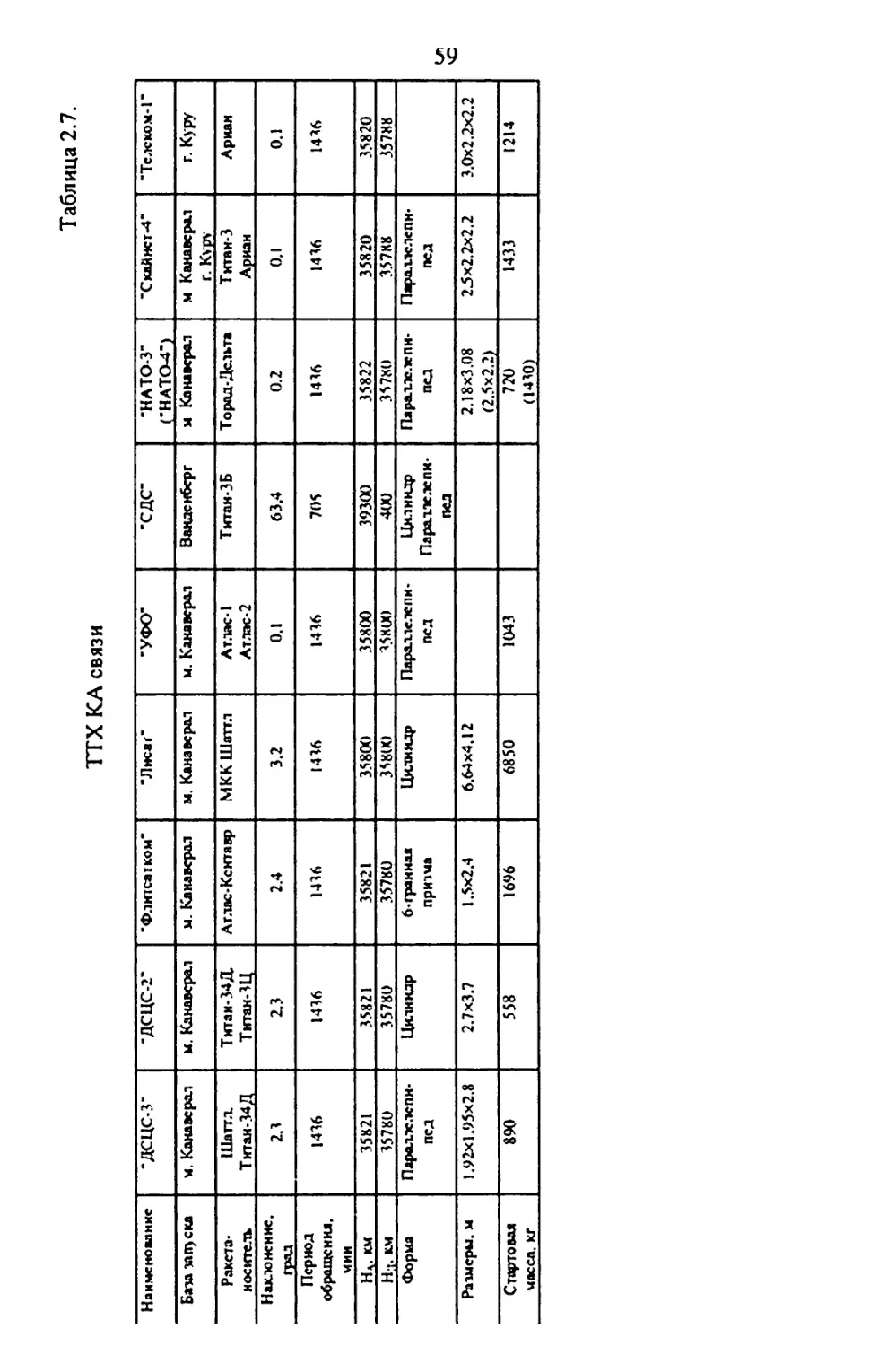
Ракеты малой дальности (до 20 км) предназначены для перехвата и га-
рантированного уничтожения высокоскоростных и маневренных воздушных
целей в ближнем бою, в том числе малоразмерных крылатых ракет. Практи-
чески все ракеты этого типа име ют системы наведения с тепловизионными
ГСН, что обеспечивает их автоматическое наведение и высокую помехоза-
щищенность. Основными типами ракет малой дальности, используемых на
самолетах тактической авиации США и НАТО, являются AIM-9 "Sidewinder"
и AIM-132 ASRAAM.
Ракета "Sidewinder" имеет большое количество модификаций. Все мо-
дификации ракет имеют одинаковое количество комплектующих блоков, ко-
торыми являются: система наведения, взрыватель, боевая часть, двигатель.
Все ракеты, за исключением AIM-9C и AIM-9R, укомплектованы инфра-
красными головками самонаведения и могут использоваться только в про-
стых метеоусловиях. Ракета AIM-9C оснащена радиолокационной головкой
самонаведения, поэтому может поражать цели как в простых, так и в слож-
ных метеоусловиях. AIM-9R оснащена оптической системой наведения. Раз-
личные модификации ракеты отличаются также типом и параметрами БЧ
(осколочная, стержневая, осколочно-фугасная). Их подрыв осуществляется
неконтактными взрывателями при пролете ракет на расстоянии в пределах 5-
6 м от цели. При прямом попадании боевые части подрываются от контакт-
ных взрывателей. Двигатели твердотопливные с одним или двумя режимами
работы (стартовым и маршевым).
Таблица 2.4
Тип ракеты (страна- разработчик) Система наведения; КВО, м Двигатель Скорость полета, м/с (число М) Макс, даль- ность пуска, км Боевая часть: тип; мощность, кт или масса, кг Самолеты-носители
Крылатые ракеты воздушного базирования
AGM-129A АСМ (США) инерциальная + TERCOM (коррекция с ис- пользованием радиолока- ционного высотомера); 30 ТРДД 230 3 000 ядерная; 200 кт В-52»
AGM-86B ALCM (США) инерциальная + TERCOM; 35 ТРДД 208-240 2600 ядерная; 200 кт В-52Н
AGM-86C CALCM (США) инерциальная + GPS + TERCOM + на последнем участке полета ТВ коррек- ция DSMAC; 10 ТРДД 208-240 900-1650 осколочно-фугасная; 450 В-52Н, В-1В (после переобо- рудования)
AGM-158 JASSM (США) инерциальная + GPS 't- ИК ГСН; 2-5 ТРД (ТРДД JASSM- ER) 300 (1120км JASSM-ER) бронебойная или кассетная; 432 В-52Н, B-IA.B-2A, F-15E. F-16C/D. F-117. F/A-18.JSF
APACHE. SCALP (Франция) инерциальная -t- GPS ’t- радиолокационный высо- томер + ИК (ММДВ)ГСН; 3 ТРДД (0.9) 140 (для SCALP - 250) кассетная; до 520 "Mirage-2000", "Рафаль”
Продолжение таблицы 2.4
Storm Shadow (Великобритания) инерциальная +GPS+ радиолокационный высо- томер + ИК (ММДВ)ГСН; 3 ТРДД (0.9) более 250 бронебойная; 400 "Tornado". "Harrier". EF-2000
KEPD-350 (Германия. Шве- ция. Италия) инерциальная +GPS+- ИК (ММДВ)ГСН; ТРДД (0.8) 350 кумулятивно- фугасная; 500 "Tornado". EF-2000
Крылатые ракеты морского базирования
“Tomahawk* (США) инерциальная + ТВ кор- рекция DSMAC (в перспективе GPS+ ИК(ММДВ) ГСН); 10 ТРДД 200-240 900-1850 фугасная или проникающая, или кассетная; 450 корабли и атомные подводные лодки
Управляемые ракеты “воздух-поверхность" Ракеты общего назначения
AGM-84E SLAM (США) инерциальная + ИК ГСН; менее 5 ТРДД (0.85) 102 осколочно-фугасная; 227 A-6E.F/A-18. F-16
AGM-142 Raptor (Изриль.США) инерциальная + ТВ (ИК) ГСН; менее 5 РДТТ - 75(150) "Have Nap" ("Have Lite") осколочно-фугасная или кумулятивная; 340 В-52Н, многоцелевые истребители НАТО
AGM-65 A/B/D/E/F/G "Maverick " (США) ТВ, лазерная или ИК ГСН; 1 РДТТ 1,3 14-25 осколочно-фугасная; 136 или кумулятивная; 57 многоцелевые истребители НАТО
Продолжение таблицы 2.4
AGM-114A/B/C "Хеллфайр" (США) ИХ ГСН или полуактивная лазерная и (или) радиокомандная РДТТ (D 8 осколочно-фугасная или кумулятивная; 9 вертолеты АН-64, некоторые самолеты
Протнвораднолокацнонные ракеты
AGM-88A/B/C HARM (США) пассивная радиолокационная(ПР) ген двух ре- жимный РДТТ (2) 80 осколочно-фугасная; 66 самолеты ТА США и НАТО
ALARM (Великобритания) тоже РДТТ (L5) 70 осколочно-фугасная; 50 "Tornado". "Sea Harrier", "Hawk", вертолеты "Lynx"
ARMAT (Франция) тоже стартовый н марше- вый РДТТ 120 осколочно-фугасная; 150 "Mirage - 2000", "Mirage - F/l". "Jaguar"
AGM -I22A Side ARM (США) то же РДТТ - 17 осколочно-фугасная; 11 вертолеты армейской авиации. F/A-18. AV-8B
AS-37 "Martelle" (Франция) ПР ген +• радиокомандная РДТТ (3) 60 осколочно-фугасная; 160 "Mirage-2000”. "Jaguar". "Атлантик"
AGM-88D (США) ПР ген + инерциальная +• GPS двух ре- жимный РДТТ тактические истреби- тели США и НАТО
Окончание таблицы 2.4
AARGM;HSARM (США) ПР ГСН 4- инерциальная + GPS + ГСН ммдв ускори- тель+ ПВРД (5) 180-220 F/A-18E/F. JSF
УР "воздух-воздух"
AIM-9 "Sidewinder" (США) инерциальная + ИХ ГСН одно- или двухре- жимный РДТТ (2.5) 20 осколочная. стержневая или осколочно-фугасная; 9-12 тактические истреби- тели и штурмовики США и НАТО
AIM-132 ASRAAM (Великобритания) то же двухре- жимный РДТТ (4) 20 осколочно-фугасная; 10 EF-2000. "Harrier". "Tomado"-F.3
AIM-7 "Sparrow" (США) полуакгивная радиолока- ционной ГСН одно- или двух ре- жимный РДТТ (2-4) 15-100 (в зависимо- сти от моди- фикации) стержневая; 22-40 тактические истреби- тели США и НАТО
AIM-120 AMRAAM (США) команд но- и нерц и ал ь н ая +• активная радиолокацион- ная ГСН двух ре- жимный РДТТ (4) 50 осколочная; 22 тактические истреби- тели США и НАТО
AIM-54 "Phoenix" (США) радиолокационная полуак- тивная или инерциальная н активная ГСН двух ре- жимный РДТТ (2.5) 180 стержневая или осколоч но-фугасная; 60 F-14
37
Ракета ASRAAM разработана на замену ракеты “Sidewinder", имеет более
высокую скорость полета и возможность пуска в сторону от курса самолет-
носителя, что позволяет снизить требования к его маневренности. Пуск ракет
указанных типов может осуществляться с предварительным захватом ГСН
цели или без негл по целеуказанию от бортовых прицельных устройств, в
том числе от нашлемной системы
К ракетам средней дальности (до 100 км) относятся AIM-7 "Sparrow" и
AIM-120 AMRAAM.
Ракета "Sparrow" предназначена для поражения целей в любых
метеорологических условиях, наводится по методу пропорциональной
навигации и оснащена полуактивной радиолокационной ГСН.
Необходимость подсветки цели снижает маневренные возможности
самолета-носителя. На вооружении находится 11 модификаций ракеты,
оснащенных БЧ стержневого типа и отличающихся дальностью полета - от
15 до 100 км.
Ракета AMRAAM пришла на смену УР "Spanow". По сравнению с УР
"Sparrow" в AIM-120 достигнуто существенное снижение стартового веса,
габаритов ракеты, повышена эффективность борьбы как с высотными энер-
гично маневрирующими, так и с низколетящими целями в условиях интен-
сивного ведения радиоэлектронной борьбы. Она является всепогодной, ее
отличают применение БЧ направленного действия и комбинированной сис-
темы наведения (командно-инерциальное на начальном и среднем участках
полета и активное радиолокационное на конечном), обеспечивающей авто-
номное наведение на цель. Траектория полета рассчитывается бортовой мик-
роЭВМ таким образом, чтобы обеспечить наибольшего эффекта при подры-
ве БЧ.
Ракеты большой дальности (свыше 100 км) предназначены для борь-
бы с истребителями и противокорабельными ракетами. К таким УР относит-
ся устаревшая УР авиации ВМС CILIA AIM-54 "Phoenix". В США осуществ-
ляется разработка новой ракеты па базе концепции AMRAAM. Новая ракета
будет.иметь дальность стрельбы до 150 км, скорость до М=5, массу БЧ около
25 кг. Планируется оснастить ракету твердотопливными ускорителем и мар-
шевым двигателем, система наведения будет включать инерциальную систе-
му и активную радиолокационную ГСН. Сравнительная характеристика УР
"воздух-воздух" основных типов дана в табл. 2.4.
Управляемые авиационные бомбы
Управляемые авиационные бомбы являются одним из наиболее распро-
страненных видов авиационного высокоточного оружия, предназначенного
для нанесения ударов по наземным целям различного типа. В настоящее
время УАБ находятся на вооружении ударных самолетов стратегической и
тактической авиации армий США и практически всех стран НАТО и про-
должается разработка новых типов этих авиационных боеприпасов.
38
В УАБ сочетаются высокая поражающая способность БЧ обычных авиа-
бомб и высокая точность наведения на цель, присущая УР класса "воздух-
поверхность”. Отсутствие двигателя и топлива к нему позволяет при равной
с УР стартовой массе доставить к цели более мощную БЧ. Для применения
УАБ без входа самолетов-носителей в зону объектовой ПВО противника ис-
пользуется режим планирования бомбы, сбрасываемой на больших высотах.
Дальности пуска планирующих бомб фактически перекрывают зону приме-
нения УР класса "воздух-поверхность" средней дальности. Благодаря про-
стоте изготовления и эксплуатации УАБ дешевле, чем УР. Однако УАБ не
заменяют УР. т.к. уступают им по некоторым характеристикам. В частности,
у них меньше средняя скорость полета к цели, ограничено применение на
малых высотах.
Современные и некоторые перспективные типы УАБ построены на ос-
нове штатных неуправляемых авиабомб путем оснащения их комплектами
аппаратуры наведения, несущими аэродинамическими поверхностями и хво-
стовой частью с рулями управления.
В настоящее время наиболее широкое распространение нашли УАБ, ис-
пользующие в системе наведения лазерные координаторы цели (создаваемые
по программе "Paveway"), УАБ типа "Уоллай", использующие телевизион-
ные или тепловизионные координаторы целей и перспективные УАБ, ис-
пользующие для наведения информацию космической навигационной сис-
темы GPS (УАБ типа JDAM).
В зависимости от типа планера и траектории движения к цели, можно
рассматривать УАБ с отвесными, падающими траекториями и планирующие
УАБ (УПАБ). Последние оснащены аэродинамическими поверхностями, а
некоторые - и двигателями (примером является УАБ AGM-130), что факти-
чески переводит их в разряд УР.
По типу БЧ прежде всею следует различать УАБ с унитарными и кассет-
ными БЧ.
Несмотря на широкое распространение и высокую точность УАБ с пас-
сивными лазерными координаторами целен, в применении им присущ
общий недостаток - необходимость непрерывной подсветки объекта удара
вплоть до подрыва боеприпаса. Подсветка цели может осуществляться как
непосредственно с самолета-носителя, так и с обеспечивающего самолета.
Некоторое снижение ограничений применения УАБ с лазерными системами
наведения достигнуто за счет совершенствования лазерного координатора
цели и бортового микропроцессора выработки команды управления в УАБ
серии "Paveway - 2, 3" второго и третьего поколения (GBU-10E/B. GBU-
12D/B, GBU-16B/B, GBU-28, Мк 13/18 ).
Еще одним существенным недостатком лазерных систем наведения явля-
ется значительное снижение точности наведения УАБ в условиях плохих ме-
теоусловий и задымления. Особенности пассивных лазерных систем наве-
дения определяют небольшие дальности применения УАБ, оснащенных та-
кими системами.
39
В отличие от УАБ с пассивными лазерными системами наведения, УАБ с
телевизионными (тепловизионными) координаторами цели пассивного
типа не требуют подсветки, что позволяет реализовать при их боевом приме-
нении принцип "выстрелил-забыл". Телевизионный координатор цели
(ТВКЦ) используется на УАБ типа "Уоллаи’. ТВКЦ обеспечивает наведение
бомбы на оптически контрастные объекты, выбор и идентификация которых
производятся оператором. Связь самолета-носителя с УАБ после ее сброса
прекращается, он может выполнять любые маневры, а бомба в автономном
режиме наводится на цель. В модификации "Уоллай-2" AGM-62 использует-
ся телевизионно-командная система наведения, позволяющая экипажу про-
изводить бомбометание по целям с известными координатами при отсутст-
вии визуального контакта с ними. Наведение УАБ осуществляет оператор по
радиолинии управления, как при приближении самолета к цели, так и при
удалении от нее после сброса бомбы. Источником информации для выработ-
ки команд служит телеизображение, которое транслируется с авиабомбы на
борт носителя.
УАБ с телевизионной системой наведения используются только днем
при хорошей видимости. Для действий ночью и при неблагоприятных ме-
теоусловиях предусматривается использовать УАБ с тепловизионными ГСН
(типа GBU-15).
Использование координаторов цели без подсветки объекта удара позво-
ляет существенно увеличить дальность применения УАБ, в связи с чем мно-
гие из УАБ с ТВКЦ оснащены аэродинамическими поверхностями и отно-
сятся к классу УПЛБ. Для увеличения дальности планирования УГ1АБ их
применение осуществляется с больших высотах, без входа носителя в зону
действия зенитных средств.
Совершенствование навигационной спутниковой системы привело к соз-
данию в США нового типа УАБ - корректируемых авиабомб, использующих
для корректировки траектории данные системы GPS. Программа создания
корректируемых авиабомб получила название JDAM (Joint Direct Attack
Munition - "боеприпасы прямого попадания").
Результаты боевого применения УАБ JDAM в последних военных кон-
фликтах показали высокую эффективность этого типа УАБ.
Использование в JDAM инерциальной системы наведения обеспечивает
точность попадания в цель 30 м, а сочетание инерциальной системы с ин-
формацией GPS обеспечивает КВО не более 13 м. Такая точность попадания
позволяет отказаться от использования в УАБ дорогостоящих ГСН.
Особенность систем наведения УАБ JDAM определяет тактику их при-
менения. Бомбометание УАБ в прошедших войнах осуществлялось с высот
порядка 9-12 км, с дальностей до 25 км. Самолет подходил к цели зигзагом,
несколько раз включая бортовую РЛС и осуществляя картографирование ме-
стности. Если цель радиолокационно контрастна, определялись ее координа-
ты, которые вводились в систему самонаведения JDAM. Затем осуществлял-
ся сброс УАБ и самолет выполнял очередное задание, не заботясь о наведе-
40
нии боеприпаса. После сброса с самолета КАБ осуществляет полет в точку с
координатами цели с использованием текущей координатной информации о
своем положении от системы GPS. При этом боеприпасы типа JDAM не мо-
гут наводиться на движущиеся объекты.
Координаты целеуказания для ввода в УАБ JDAM могут быть получены
также от пилотируемых (Е-8С. U-2) и беспилотных разведчиков, оснащен-
ными РЛС с синтезированной апертурой. В открытой литературе заявлено,
что время между выдачей целеуказания самолетам, находящимся вблизи
объекта атаки, и нанесением улара может составлять 12 минут. Особо под-
черкивается, что сочетание оружия JDAM и разведчиков позволяет сформи-
ровать разведывательно-ударный комплекс, который не зависит от погодных
условий и времени суток.
Независимость наведения УАБ JDAM теоретически обеспечивает унич-
тожение одним бомбовым залпом одновременно большое количество раз-
личных малоразмерных целей, удаленных друг от друга. Типовыми целями
являются ангары, капониры, мосты, укрепленные КП, объекты системы
ПВО. Носителями УАБ JDAM являются все типы стратегических бомбарди-
ровщиков и самолеты А-10, F-117, F-14A/B/D, F-15E, F-16C/D и F/A-18C/D, а
в перспективе - F-22, F/A-l 8E/F и JSF.
Основными достоинствами УАБ JDAM являются независимость их при-
менения от погоды и времени суток, реализация принципа применения "
выстрелил-забыл", возможность индивидуального точного наведения бое-
припасов на малоразмерные неподвижные цели.
Использование спутниковой системы наведения и раскрывающегося
крыла позволяет существенно повысить дальность применения УАБ, что
нашло отражение в создании новой УПАБ AGM-154 JSOW (Joint Stand-off
Weapon - "единое оружие, запускаемое вне зоны ПВО"), ориентированной на
применение без входа в зону объектовой ПВО. Впервые УПАБ JSOW ис-
пользовалась в Балканской компании 1999 г. с самолетов ВМФ F/A-18C вне
зоны действия комплексов ПВО средней дальности. При сохранении высо-
кой точности попадания (КВО УАБ составляет не более 13 м) УПАБ JSOW
способна независимо от погодных условий и времени суток при применении
с больших высот поражать незащищенные или среднезащищенные цели на
дальности 65-80 км. Основными объектами для ударов боеприпасов этого
типа являются средства ПВО противника. УПАБ разработана в двух вариан-
тах - с кассетной БЧ или БЧ проникающего типа. Отмечается предпочти-
тельность применения УПАБ JSOW по сравнению с УР AGM-130. AGM-142
и SLAM-ER в последних бомбардировках объектов ПВО Ирака ввиду суще-
ственной разницы в цене этих средств (несколько десятков тысяч долларов
против нескольких сотен).
Носителями УПАБ являются самолеты F-16. F/A-18C/D, JSF. В 2001 г.
закуплено около 1200 ед. УПАБ JSOW.
Все более широкое применение в последних войнах находят разовые
бомбовые кассеты (РБК), которые используются в основном для поражения
41
площадных (групповых) целей, прежде всего бронетанковой техники. В вой-
не в Югославии (1999 г.) использовались с самолетов В-1В, В-5211 новые
РБК CBU-87, CBU-89 и CBU-97. РБК CBU-97 оснащены 30 самоприцели-
вающимися суббосприпасами BLU-108/B. После отделения суббосприпасы
медленно спускаются на парашюте, вращаясь, просматривают земную по-
верхность датчиками ПК или микроволнового диапазона. При попадании в
поле зрения цели осуществляется подрыв кумулятивной БЧ, формируется
ударное ядро - сгусток расплавленного металла, поражающий объект сверху.
Для повышения точности наведения перспективных кассетных боепри-
пасов в неблагоприятных метеорологических условиях планируется их ос-
нащение системой управления с коррекцией ветрового сноса WCMD, вклю-
чающей блок простейшей инерциальной системы, сигнальный процессор и
рули. В операции в Афганистане с В-52Н использовались кассетные боепри-
пасы CBU-103. оснащенные системой коррекции воздействия ветра WCMD.
Основными направлениями развития перспективных УАБ являются
дальнейшее повышение их точности, дальности применения и миниатюриза-
ция.
В качестве одного из перспективных направлений повышения точности
УАБ предполагается снабжение их ГСН для наведения на цель на конечном
участке полета. Так, предполагается использование в УАБ JDAM недорогой
матричной тепловизионной ГСН. Оснащение УАБ ГСН позволяет распозна-
вать тип цели и в соответствии с этим адаптировать режим работы БЧ. При-
менение ГСН также обеспечивает использование УАБ по подвижным целям.
Кроме УАБ JDAM планируется оснащение ГСН перспективных УАБ SDB.
С целью увеличения дальности полета УАБ JDAM планируется оснаще-
ние их раскрывающимся после сброса крылом. При сбрасывании со средних
и больших высот такая модернизация увеличит дальность применения
с 16-24 до 64-97 км.
Одним из приоритетных направлений развития УАБ является создание
малокалиберного оружия. В настоящее время ВВС США начали реализацию
программы создания высокоточных авиационных боеприпасов малого ка-
либра, оснащенных блоками управления. Программа разработки миниатюр-
ных бомб точного индивидуального наведения получила обозначение SDB
(Small Diametr Bomb). Командование ВВС США рассматривает бомбы SDB
как принципиально новое оружие, которое доведет до максимума эффектив-
ность боевых вылетов, позволяя одному самолету иметь на борту значитель-
но большее количество независимо друг от друга наводимых на цель бое-
припасов, которые могут точно доставляться к цели с дальности вне зоны
досягаемости противника. Принятие на вооружение бомбы запланировано с
2007 г. План производства составляет 100 000 ед. Носителями боеприпаса
являются самолеты В-1. В-2 А, А-10. F-15E, F-l 17А, F-22, JSF.
Характеристики отдельных типов УАБ приведены в табл. 2.5.
Таблица 2.5
Наименование или обозначение УАБ (страна-разработчик) Общая масса, кг Тип БЧ (на базе какой бом- бы создана УАБ) Общая масса БЧ /масса ВВ. кг Максимальная даль- ность полета, км /высота применения, м Система наведения (КВО. м)
УАБ с лазерным координатором цели
СВи-Ю(США) 1100 Ф(Мк-84) 907 / 430 12 /до 6000 ЛПА (10)
GBU-10E/B (США) 1100 Ф(Мк-84) 907/430 -/150-6000 ЛПА (10)
GBU-11 (США) 1400 Ф (М-118) 1360/896 12/до 6000 ЛПА (10)
GBU-I2 (США) 285 Ф(Мк-82) 227 / 87 12/- ЛПА(Ю)
GBU-I2D/B (США) 285 Ф(Мк-82) 227/87 10/200-6000 ЛПА(Ю)
GBU-I6B/B (США) 480 Ф(Мк-83) 453/215 ЛПА (10)
GBU-17 (США) Б (HSM) - ЛПА (10)
GBU-22 (США) 285 Ф(Мк-82) 227 / 87 2-5/6-900 ЛПА (10)
GBU-23 (США) 500 Ф(Мк-83) 453/215 -/30 ЛПА (10)
GBU-24 (США) 1100 Ф (Мк-84) 907 / 430 25/6-900 ЛПА (10)
GBU-27 (США) Ф(Вки-109) 250/- 18/- ЛПА (10)
GBU-28 (США) 2270 B(BLU-I13) 2000/- 10/- ЛПА (10)
Мк-13/18, (Великобритания) 493 Ф(МС-ЮОО) 186/- - ЛПА (10)
BGL-400 (Франция) 470 Б 100/- 8/100-5000 ЛПА (2)
BGL-1000 (Франция) 970 Б 500/- 8/100-5000 ЛПА (2)
"Арколь" (Франция) 600 Ф.К - 10/- ЛПА (5)
’’Гильотина" (Израиль) - Ф 30/- ЛПА (2)
AGM-123 "Skippcr-2" (США) 582 Ф(Мк-83) 453/215 7(30 ЛПА (-)
Окончание таблицы 2.5
УАБ с телевизионный координатором цели
AGM-62 "Уоллам" Мк-1 (США) 500 Ф 385/182 25 /200-9000 ТВ (5)
AGM-62A "Уоллай-2" Мк-5 (США) 1100 Ф 907/430 40/до 9000 ТВ-РК (5)
AGM-62 "Уоллай-2" МЫЗ (США) 1100 Ф 907 / 430 65 /- ТВ-РК (5)
GBU-8 HOBOS (США) 1100 Ф (Мк-84) 907/430 20/300-10000 ТВ (5)
GBU-9 (США) 1545 Ф (Мк-118) 1360/896 20/- ТВ (-)
SAMP-400 (Франция) 550 Ф 165/- 20/100-15000 ТВ (-)
SAMP-1000 (Франция) 930 Ф 495 / - -/100-15000 ТВ(-)
GBU-I5(CII1A) 1140 Ф (Мк-84) 907 / 430 50/150-13000 ТВ или ТП
AGM-130A (США) AGM-130B 1352 Ф (Мк-84) кассетная (SUU-54) 907/430 37/до 15000 ТВ или ТП
Перспективные УАБ
УАБ типа JDAM (США) GBU-31 GBU-32 EGBU-28 Ф (Мк-84) Ф(Мк83) Ф(Мк-82) 907/430 453/215 227/87 130/- 25/9000-12000 INS/GPS INS/GPS INS/GPS INS/GPS
AGM-154 JSOW(CUIA) 483 кассетная 145/- 80/-
AGM-154C JSOW(CLHA) 483 Б+Ф 225/- 80/-
Бомба SDB (США) 41-45, 113,227 Б+ОФ - 110/9000-10500 INS/GPS +ГСН (3)
РБК WCMD 12,8/7600
Обозначения в таблице: тип БЧ: Б - бронебойная, Ф - фугасная, ОФ - осколочно-фугасная, К - кумулятивная;
система наведения: ЛПА - лазерная полуактивная, ТВ - телевизионная, ТП - тепловизионная, РК -
ралиокомандная. INS/GPS - инерциальная с коррекцией поданным системы GPS.
44
Проходят войсковые испытания новые типы интеллектуальных само-
прнцеливающихся суббоеприпасов, способных после раскрытия кассеты
самостоятельно обнаруживать цели в заданной зоне, независимо от того, яв-
ляются ли они стационарными или подвижными, идентифицировать их и за-
хватывать на сопровождение. После оценки характеристик цели такие бое-
припасы в нужный момент инициируют взрывчатое вещество и формируют
"ударное ядро", поражающее цель сверху.
Основным достоинством интеллектуальных суббоеприпасов, в отличие
от боеприпасов с лазерной подсветкой выбранной цели, является их не под-
верженность воздействию метеоусловий, задымленности поля боя, отсутст-
вие необходимости во внешнем источнике информации.
К боеприпасам такого типа относятся SADARM (США), SMART (ФРГ) и
BONUS (Франция - Швеция). Этими боеприпасами могут снаряжаться как
155-мм артиллерийские снаряды с дальностью стрельбы несколько десятков
километров, так и оперативно-тактические ракеты ATACMS. УАБ GBU-I5 с
кассетной БЧ, УР AGM-130 и перспективные управляемые авиационные кас-
сеты.
На заключительном этапе создания находится миниатюризированный
боеприпас автономного поиска и атаки наземных целей LOCAAS, предна-
значенный для решения широкого круга боевых задач.
Концепция применения LOCAAS предусматривает барражирование в
режиме патрулирования над районом боевых действий нескольких боепри-
пасов. Каждый из них осуществляет самостоятельный поиск наземных целей
и обмен информацией целеуказания с другими. При выборе цели осуществ-
ляется ее атака одним или несколькими боеприпасами.
Программой разработки LOCAAS предусматривается создать два вари-
анта боеприпаса: с двигателем и без него. В первом варианте при стартовой
массе 43 кг боеприпас способен барражировать до 30 мин, при этом даль-
ность полета составит 170-185км. Во втором варианте при сбрасывании бое-
припаса с больших высот дальность полета составит 60-70 км. Скорость в
режиме патрулирования составляет 370 км/ч.
Система управления полетом боеприпаса включает инерциальную и
спутниковую навигационная систему GPS. На конечном участке наведения
на цель используется активная лазерная ГСН (ладар) или ГСН мм диапазона.
ГСН позволяет получать трехмерные изображения обнаруженных объектов.
После автоматического распознавания типа целей осуществляется выбор
наиболее приоритетной из них и режим работы БЧ. Многорежимная БЧ в за-
висимости от типа цели формирует осколочное поле (для слабозащищенных
целей) или ударный стержень (для бронированных машин). Подрыв БЧ осу-
ществляется при пролете КР над целью.
КР LOCAAS имеет универсальное использование по типам носителей.
Предполагается оснастить этими боеприпасами практически все боевые са-
молеты ВВС США, в том числе стратегические бомбардировщики и тактиче-
ские истребители, прежде всего F-117, F-22 и JSF. Доставка нескольких
45
LOCAAS в зону боевых действий может осуществляться также с помощью
кассетных авиационных бомб или гиперзвуковых УР ARRMD. В ближайшей
перспективе ожидается оснащение ими БЛА "Predator " и "Global Hawk ", а в
отдаленной перспективе - беспилотных боевых самолетов.
2.2. КОСМИЧЕСКИЕ СИСТЕМЫ ВОЕННОГО НАЗНАЧЕНИЯ
Космические средства военного назначения представляют собой важный
составной компонент общей структуры ВС США и стран НАТО и вносят
существенный вклад в повышение эффективности боевого использования
ВС США и ОВС НАТО, предназначаются для боевой и повседневной дея-
тельности войск и сил в глобальном масштабе. Процесс внедрения космиче-
ской техники в системы национальных вооружений расширяется также в
КНР и Японии. По характеру решаемых задач космические системы военно-
го назначения (КСВН) подразделяются на боевые, боевого обеспечения и
вспомогательные. В настоящее время наиболее широкое применение нахо-
дят беспилотные космические аппараты (КА) боевого обеспечения действий
ВС США. Боевые космические средства находятся в стадии разработок и ис-
следований.
Далее рассмотрены состояние и перспективы развития космических
средств боевого обеспечения и перспективные боевые космические средства.
2,2.1. Классификация космических систем военного назначения
По назначению иностранные КА классифицируются на военные, ком-
мерческие, исследовательские, межпланетные космические аппараты.
Военные в свою очередь классифицируются на боевые, боевого обеспе-
чения, военно-экспериментальные, многоцелевые.
Боевые КА - предназначены для ведения боевых действий в космосе или
из космоса (например, инспекция КА, поражение наземных целей и косми-
ческих аппаратов, подавление РЭС, размещенных на Земле и в космосе).
Разработка таких КА в США ведется по программе стратегической обо-
ронной инициативы (СОИ). В настоящее время официально зарегистриро-
ванных боевых КА не выявлено.
КА боевого обеспечения предназначены для обеспечения повседневной и
боевой деятельности всех видов ВС. Они классифицируются на разведыва-
тельные, обнаружения старта БР и ядерных взрывов, навигационные, связ-
ные, метеорологические и топогеодезические.
Военно-эксперимента1ъные КА (военные исследовательские КА) предна-
значены для отработки аппаратуры перспективных военных КА, проведение
экспериментов в военных целях.
Космические аппараты, выполняющие одновременно две и более целе-
вые задачи, называются многоцелевыми (например. КК "Шаттл", обнаруже-
ния старта БР, ядерных взрывов и т.д.).
46
Коммерческие КА предназначены для решения народнохозяйственных
задач (например, метеорологические, связные, топогеодезические, навигаци-
онные и другие).
Исследовательские КА предназначены для исследования космического
пространства, изучения планет и Солнца, исследование природных ресурсов
Земли и т.д.).
В настоящее время ведущей зарубежной космической державой являют-
ся США. которые поддерживают в оперативном состоянии следующие
космические системы боевого обеспечения действий вооруженных сил.
2.2.2. Классификация иностранных КА
Космические системы разведывательных КА;
Космические системы раннего обнаружения старта БР и ядерных взры-
вов;
Космические системы радионавигационного обеспечения;
Космические системы топогеодезического обеспечения;
Космические системы метеорологического обеспечения;
Космические системы связи и ретрансляции данных.
Кроме того, МО США для решения различных военно-прикладных задач
систематически арендует у Национального управления по аэронавтике и ис-
следованиям космического пространства (НАСА) многоразовые космиче-
ские корабли (МКК) системы "Шаттл” и другие космические средства по-
тенциально военного назначения.
2.2.2.1. Космические системы разведывательных КА
Космическая разведка - мероприятие по добыванию разведывательных
данных с использованием космических средств.
Для ведения разведки из космоса используют КА видовой, радиотехни-
ческой, радио, радиолокационной разведки. Ведется разработка аппаратуры
для ведения инфракрасной (тепловой) разведки.
Видовая разведка - это получение портретных (видовых) изображений
разведываемых объектов (районов) с помощью оптических, оптико-
электронных и фотосистем;
Радиотехническая разведка - это получение характеристик радиоэлек-
тронных средств (РЭС) путем перехвата их излучений;
Радиоразведка - это перехват и анализ информации, передаваемой по
радио и радиорелейным линиям связи;
Радиолокационная разведка - обнаружение объектов и определение их
координат и параметров.
47
Система радио- и радиотехнической разведки (начало эксплуатации
1977 г.)
Назначение. Перехват телеметрической информации с баллистических
ракет (БР) при их испытании, информации передаваемой по радио- и радио-
релейным линиям связи, определения местоположения и характеристик РЭС.
Состав системы. Космический элемент - 8 КЛ радиотехнической раз-
ведки. (3 КА "Шале", 3 КА "Вортекс", 1 КА "Магнум'', I КА "Ментор"). На-
земный элемент - Центр управления. 8 ПУЛИ, наземные станции управления
и приема информации. Центр сбора и обработки данных (г. Форт-Мид,
шт.Мэриленд).
Видовая разведка системы оптико- электронной разведки (начало
эксплуатации 1978 г.)
Назначение. Регулярное и оперативное наблюдение за территорией и
стратегическими объектами иностранных государств. Разведка строительст-
ва и функционирования важных государственных объектов.
Состав системы. Космический элемент - 2-3 КА оптико-электронной
разведки "КХ-Г, 2 КА - ретранслятора "СДС". Наземный элемент - Цен гр
управления (г. Саннивейл, шт. Калифорния). 8 пунктов управления и приема
информации. Центр приема и обработки информации (Форт-Бельвуар, вбли-
зи г. Вашингтон).
Система радиолокационной разведки (начало эксплуатации 1988 год)
Назначение. Систематическое наблюдение за дислокацией и
перемещением войск и военной техники противника (ракеты мобильного
базирования и бронетанковая техника, корабли, самолеты и др. мобильные
средства).
Состав системы. Космический элемент - 2-4 КА радиолокационной раз-
ведки "Лакросс" и КА ретрансляторы "СДС-2". Наземный элемент - Центр
управления; Центр сбора и обработки информации.
Система радиотехнической разведки (начало эксплуатации 1963 г.)
Назначение. Определение местоположения, основных тактико-
технических характеристик и режимов функционирования РЭС.
Состав системы. Космический элемент 2 КА радиотехнической развед-
ки "Феррет-Д" и 2 усовершенствованных КА радиотехнической разведки
"Феррет". Наземный элемент - Центр управления, с ПУНИ и мобильными
станциями приема информации. Центр сбора и обработки данных (г. Форт-
Мид, шт. Мэриленд).
48
Система морской радиотехнической разведки (начало эксплуатации
1980г.)
Назначение. Обнаружение и слежение за кораблями и подводными лод-
ками в акватории Мирового океана для определения их местоположения и
курса перемещения, а также опознавания их госпринадлежности.
Состав системы. Космический элемент - 3-5 групп КА "ССУ-Г и "ССУ-
2"(по 3 КА в группе). Наземный элемент - Центр управления (г. Саннивейл,
шт. Калифорния), 8 ПУЛИ, наземные станции приема информации, совме-
щенные с центрами обработки (г. Данди, Великобритания; о. Гуам; Мериан-
ские острова; б. Датч-Харбор, Алеутские острова; г. Норфолк, шт. Вирджи-
ния; о. Диего-Гарсия, архипелаг Чагос).
Перспективы развития систем разведывательных КА
Совершенствование систем видовой разведки направлено на создание
КА оптико-электрошюй разведки "КХ-12", который по сравнению с "КХ-1Г
будет иметь улучшенные характеристики бортовой аппаратуры, больший за-
пас топлива и возможность дозаправки его топливом на орбите.
Ведется разработка спутников комплексного всепогодного наблюдения и
создание системы комплексной всепогодной разведки океанских ТВД-
"ИТСС".
2-4 КА комплексного всепогодного наблюдения планируется выводить
на орбиты с наклонением 60-70 град и средней высотой до 800 км с целью
обнаружения движущихся целей и выявления группировок войск и их ра-
диолокационную разведку с разрешением несколько метров, радиотехниче-
скую разведку в диапазоне 50-50000 МГц, а также инфракрасную разведку с
разрешением до 5 м.
Система комплексной всепогодной разведки океанских ТВД "ИТСС"
предназначена для разведки целей в акватории Мирового океана и воздуш-
ном пространстве над ним. КА данной системы планируется выводить на
круговые орбиты с наклонением 60...70 град и высотой до 1100 км. Плани-
руется в системе использовать 2-3 спутника, которые будут вести радиоло-
кационную разведку в полосе до 1500 км с разрешением до 20 м. инфракрас-
ную разведку в полосе до 1500 км с разрешением до 25 м.
Кроме того, США используют для ведения радиолокационной, радио-
технической и обзорной фоторазведки КА по программе "Шаттл" и плани-
руют использовать его в будущем.
2J.2.2. Система обнаружения старта БР и ядерных взрывов (начало
эксплуатации 1970 г.)
В 1966 г. США приступили к созданию системы обнаружения старта БР
на базе КА "ИМЕЮС"
49
Назначение: Обнаружение старта БР противника и предупреждение о
нем, обнаружение ядерных взрывов на поверхности Земли, в атмосфере и в
космическом пространстве.
Состав системы:
Космический элемент 5 КА " ИМЕЮС" на стационарной орбите (по 2
над Атлантическим и Тихим океанами и 1 над Индийским океаном);
Наземный центр - Главный центр оперативного управления;
Центр оперативного управления и обработки данных;
Запасные станции приема информации;
Мобильные станции приема информации и обработки данных.
Дальнейшее совершенствование системы проводится в рамках СОИ, ко-
торая предусматривает создание спутников "ВСТС" и "ССТС".
2.2.23. Космические системы навигационных КА ("Транзит", "На-
встар")
Навигационная система "Транзит" (начало эксплуатации - 1964 г.)
Назначение: Определение и уточнение своего местоположения подвод-
ными лодками и кораблями ВМС США и Великобритании.
Состав системы:
Космический элемент - 57 КА "Транзит"
Наземный элемент - центр управления
4 станции слежения;
2 станции ввода данных.
Возможности: Точность определения местоположения подвижными
объектами до 100 м, неподвижными до 35 м ("Транзит-Н" до 13м);
Количество обсерваций в сутки 2-6 в зависимости от района обсервации.
Глобальная навигационная система "НАВСТАР" (начало эксплуата-
ции - 1993 г.)
Назначение: Определение местоположения и скорости движения раз-
личных подвижных и неподвижных объектов (пользователей), таких как са-
молеты, вертолеты, надводные корабли, подводные лодки, автобронетанко-
вая техника, подразделения сухопутных войск, а также отдельные солдаты.
Кроме решения навигационных задач данного типа сс предполагается ис-
пользовать для самонаведения баллистических и крылатых ракет, обеспече-
ния КА различного назначения полетов самолетов, проведения картографи-
ческих и топогеодезических работ, а также для обнаружения ядерных взры-
вов.
Состав системы:
Космический элемент - 21 КА "Навстар-2" в оперативном использовании
и 3 КА в резерве;
Наземный элемент - Центр управления;
4 станции ввода данных
50
Возможности:
рабочая зона - глобальная:
проведение навигационных измерений - непрерывно;
длительность процесса определения местоположения - от 2-3 секунд до
нескольких минут;
точность определения объектами в любой точке земного шара своего ме-
стоположения - 16 метров, скорости движения - 5...6 см/с.
2.2.2.4. Системы связи
В настоящее время МО США, НАТО. Великобритании и Франции экс-
плуатируют следующие космические системы:
стратегическую на базе систем "ДЦСЦ-2"; "ДЦСЦ-3";
тактическую КА "Флитсатком" и "Лисат";
сбора и передачи данных - КА "СДС”;
тактическую систему связи "Афсатком";
"Телеком-Г’.
Стратегическая система связи США "ДСЦС" (начало эксплуатации -
1966 г.)
Назначение: Обеспечение глобальной стратегической связью всех видов
ВС США.
Состав системы:
Космический элемент - 4 КА "ДСЦС-2" ("ДСЦС-З"), один - над Атлан-
тическим океаном, один над Индийским океаном, два над Тихим оксаном;
Наземный элемент - Центр управления;
Станции управления (стационарные и корабельные).
Возможности:
Количество каналов: КА ‘’ДСЦС-2” - 1300 радиотелефонных каналов,
КА "ДСЦС-З" 3900.
Обеспечивается закрытая радиотелефонная, радиотелеграфная связь, а
также передача фото - и телевизионных изображений, цифровых данных.
Система тактической связи ВМС "ФЛИТСАТКОМ" (начало эксплуа-
тации - 1978 г.)
Назначение: Обеспечение связью кораблей и подводных лодок ЗМС и
самолетов ВМС и ВВС США.
Состав системы: Космический элемент - 4-6 КА "Флитсатком" ("Ли-
сат") по одному над Атлантическим и Индийским океанами и два над Тихим
океаном (с 1993 г. планируегся начать замену этих КА на спутник нового
поколения "УФО");
51
Наземный элемент - Центр управления и станция управления аналогич-
ны системе "ДСЦС".
Возможности: Количество каналов связи - КА "Флитсатком” и Лисат -
30 радиотелефонных и 12 радиотелетайпных каналов.
Принцип применения: Спутники "Флитсатком" и "Лисат" находятся на
стационарной орбите и размещены по экватору так, что их зоны обзора пе-
рекрывают всю территорию Земного шара, за исключением полярных рай-
онов свыше 76 град. Такое орбитальное положение КА позволяет постоянно
поддерживать связь с кораблями, подводными лодками, находящимися в ак-
ватории Мирового океана.
Состав системы:
Космический элемент - 4 КА "ДСЦС-2" ("ДСЦС-3") один над Атлан«и-
ческим океаном, один над Индийским океаном, два над Тихим океаном;
Наземный элемент - Центр управления;
Станции управления (стационарные и корабельные).
Возможности:
Количество каналов: КА "ДСЦС-2" 1300 радиотелефонных каналов, КА
"ДСЦС-3"- 3900;
Обеспечивается закрытая радиотелефонная, радиотелеграфная связь, а
также передача фото- и телевизионных изображений, цифровых данных.
Система сбора и передачи данных "СДС" (начало эксплуатации -
1975г.)
Назначение: Обеспечение связью командных пунктов с самолетами
ВВС в районах Крайнего Севера, прием и передача информации с разведы-
вательных КА в Центр сбора и обработки информации, ретрансляции ин-
формации со станций слежения за КА, расположенных вне территории
США.
Состав системы:
Космический элемент - 3 КА "СДС" на высокоэллиптической орбите;
Наземный элемент - Центр управления и станции управления, аналогич-
ные системе "ДСЦС";
Наземные и самолетные станции.
Возможности:
Количество каналов связи на одном КА - 15 радиотелетайпных каналов;
Диапазон частот: 240...320 МГц для связи с самолетами, 2,2...2.3 ГГц
для приема и ретрансляции информации.
Система связи ВВС '’АФСАТКОМ" (начало эксплуатации 1979 г.)
Назначение: Обеспечение связью высшего командования ВС США со
стратегическими силами (МБР. Г1ЛАРБ, стратегические бомбардировщики).
52
Состав системы:
Космический элемент - система своих спутников не имеет, а использует
каналы связи КА "Флитсатмм", "Лисат", "СДС" и "ДСЦС-З";
Наземный элемент - Центр управления и станции тех систем, от которых
используются КА, наземные, корабельные и самолетные станции.
Возможности:
Количество каналов связи - 12 радиотелетайпных на каждом КА "Флит-
сатком", "Лисат’’ и "СДС";
Диапазон частот: 20...320 МГц. На КА "ДСЦС-З" используются радиоте-
лефонные каналы в диапазоне частот 240...320 МГц и 7...8 ГГц.
Система связи североатлантического блока "НАТО" (начало экс-
плуатации 1970 г.)
Первоначально в системе использовались КА "НАТО-1" и "НАТО-2" за-
пущенные в 1970 и 1971 гг. соответственно. С 1976 г. в системе использова-
лись КА "НАТО-3". В 1991 г. произведен запуск первого КА "НАТО-4".
Назначение: Обеспечение связью объединенных вооруженных сил бло-
ка НАТО.
Состав системы:
Космических элементов - 1-2 КА "НАТО-3" ("НАТО-4") над Атлантиче-
ским океаном;
Наземный комплекс - Центр управления и станции управления системы
"ДСЦС" (осуществляет контроль и управление работой КА), центр управле-
ния работой каналов связи (ретрансляционной аппаратурой). Наземные (ста-
ционарные и мобильные) станции, корабельные станции.
Возможности:
Количество каналов связи: "НАТО-3"- 950 радиотелефонных каналов,
"НАТО-4"- 1200 радиотелефонных каналов.
Система связи Великобритании (начало эксплуатации 1969 г.)
Первоначально в системе использовались КА "Скайнет" первого и второ-
го поколения. В настоящее время используются КА третьего поколения, по-
лучившие наименование "Скайнет-4".
Назначение: Обеспечение связью командования вооруженных сил Ве-
ликобритании с военными базами, находящимися на других территориях, а
также надводными кораблями.
Состав системы:
Космический элемент - 1-2 КА "Скайнет-4" над Атлантическим океаном;
Наземный элемент - Центр управления станции управления системы
"ДСЦС" (осуществляет контроль и управление работой КА), наземные стан-
ции (стационарные и мобильные), размещенные в Великобритании и на во-
енных базах, корабельные станции.
53
Возможности:
Количество каналов связи - 1600 радиотелефонных каналов (диапазона
7...6 ГГц).
Принцип применения: спутники находятся на стационарной орбите и
размещены нал экватором так, что в зоне обзора находятся территории Ве-
ликобритании, Северной Африки и стран Персидского залива. Такое орби-
тальное положение КА позволяет обеспечивать связью командование ВС с
частями, находящимися на военных базах и морскими соединениями. Могут
использоваться и спутники связи США "ДСЦС", если в этом возникает необ-
ходимость.
Система связи Франции "СИРАКУЗ" (начало эксплуатации 1987 г.)
Назначение: Обеспечение связью командования вооруженных сил
Франции со стратегическими и оперативными силами и силами флота.
Состав системы:
Космический элемент - своих КА нет, используются ретрансляторы на 1
КА "Телеком-1" и 2 КА "Телеком-2";
Наземный элемент - Центр управления и станции управления, сеть на-
земных (стационарных и мобильных) и корабельных станций.
Возможности:
Количество ретрансляторов - 2;
Диапазон частот-7,25...8,4 ГГц.
2.2.25. Метеорологическая система "ДМС" (начало эксплуатации
1966г.)
Назначение: Регулярное и оперативное получение информации о со-
стоянии атмосферы над различными ТВД с целью обеспечения повседнев-
ной (или боевой) деятельности всех видов вооруженных сил США и ведение
видовой разведки из космоса.
Состав системы:
Космический элемент - 2 КА "ДМС";
Наземный элемент - Центр управления и обработки информации.
Главный метеоцентр ВМС; станция приема управления метеоданных;
Центр управления ВВС Великобритании; малогабаритные мобильные
(наземные и корабельные) станции приема данных.
Возможности: обзор одним КА всей поверхности Земли 2 раза в сутки с
полосой 3000 км и разрешающей способностью 0,55 км, определение темпе-
ратурного профиля атмосферы до высоты 30 км от уровня моря с точностью
0,5 град С.
54
2.2.2.6. Топогеодезическая система "ГЕОС/ЧТ" (начало эксплуатации
- 1985г.)
Назначение: Уточнение координат отдельных стратегических объектов.
Уточнение формы, размеров гравитационного поля Земли.
Состав системы:
Космический элемент - 1 КА Теосат";
Наземный элемент - Центр управления и сеть наземных станций слеже-
ния и приема информации, а также наземных приемо-передающих радио-
дальномерных станций.
Возможности: Определение расстояния от спутника до океанской
поверхности с точностью до 10 см, что обеспечивает повышение точности
стрельбы БРСД на 10%; период просмотра всей поверхности Мирового
океана - 6 месяцев. Военно-политическое руководство США планирует рас-
ширение обеспечивающих функций космических систем военного назначе-
ния и, в первую очередь, за счет использования долговременных орбиталь-
ных станций, а также развертывания космических комплексов РЭБ, создания
многофункциональных многоразовых средств.
2.2.3. Боевые космические средства
2.23.1. Многоразовые космические средства
Важнейшая роль в использовании космического пространства в военных
целях нашими потенциальными противниками отводится МНОГОРАЗО-
ВЫМ КОСМИЧЕСКИМ СРЕДСТВАМ, которые способны выполнять
различные активные и обеспечивающие функции. В настоящее время в США
созданы и успешно эксплуатируются МНОГОРАЗОВЫЕ КОСМИЧЕСКИЕ
КОРАБЛИ системы "Шаттл", продолжается разработка МНОГОРАЗОВЫХ
ВОЗДУШНО-КОСМИЧЕСКИХ АППАРАТОВ.
Многоразовая космическая система "ШАТТЛ" (начало эксплуата-
ции- 1961 год)
Назначение:
ведение разведки;
инспекция и перехват КА вероятного противника;
вывод на орбиты и возвращение на Землю спутников различного назна-
чения;
ремонт и обслуживание спутников на орбите;
создание на орбите долговременных орбитальных станций;
проведение экспериментов и исследование по перспективной космиче-
ской технике.
Состав:
космический корабль (КК);
твердотопливные ускорители многоразового применения;
55
подвесной топливный бак одноразового применения;
Космический корабль:
Тактико-технические характеристики КК:
длина - 37,5 м;
размах крыла - 23,9 м;
масса максимальной полезной нагрузки - 120 т;
размер отсека полезной нагрузки - 18,3x4,6 м;
стартовая тяга основной двигательной установки -510 т;
запас характеристической скорости при штатном полете - 305 м/с;
с дополнительным запасом топлива - 760 м/с количество ЖРД - 3.
Возможности КК:
максимальная масса полезной нагрузки - 29,25 т;
максимальная высота орбиты при запуске с м. Канаверал: при штатном
запасе топлива - 600 км, с дополнительным запасом топлива - 1200 км;
с б. Ванденберг: при штатном запасе топлива - 450 км, с дополнительным
запасом топлива - 1170 км;
диапазон наклонений орбиты: м. Канаверал - 36-62 град. б. Ванденберг -
56... 104 град;
возможности изменения наклонения орбиты: при штатном запасе топли-
ва - 1 град, с дополнительным запасом топлива - 4 град;
продолжительность полета - до 30 суток;
величина аэродинамического бокового маневра при посадке КК -
2200км;
минимальное время подготовки к очередному запуску с момента посадки
КК - 14 суток (реально - более 51 сут.);
ресурс полетов одного КК - до 100 полетов.
Межорбнтальные буксиры (МОБ)
Межорбитальные буксиры позволяют расширить возможности КК по
программе "Шаттл" по выводу полезных нагрузок. Они служат для перевода
различных КА с низкой опорной орбиты на рабочую. Кроме того, межорби-
тальные буксиры используются и в составе ракет-носителей для вывода на
орбиту вокруг Земли спутников различного назначения.
2.2.3.2. Многоразовые воздушно-космические аппараты
Одним из важнейших направлений в развитии космической техники яв-
ляется создание МНОГОРАЗОВЫХ МАЛОГАБАРИТНЫХ ВОЗДУШНО-
КОСМИЧЕСКИХ АППАРАТОВ, которые, по сути дела, представляют собой
новейший класс вооружения, рассчитанный на выполнение широкого круга
задач в большом диапазоне высот и скоростей полета.
Перспективные МВКА могут использоваться для ведения разведки и
РЭБ, поражения космических, воздушных и наземных целей, обслуживания
на орбите своих КА, обеспечения управления ВС и военными действиями.
56
МВКА типа "Мини Шаттл" конструктивно представляют собой связку
"орбитальная ступень - топливный бак", которой задаются определенная вы-
сота и скорость полета с помощью самолета-носителя. После отделения от
самолета МВКА включает двигательную установку и самостоятельно выхо-
дит на орбиту. Посадка аппарата - по самолетному варианту на ВГШ. Эки-
паж 2-3 чел.
МВКА "Спейс Крузер" выполнен в форме конуса длиной около 8,5 м и
диаметром 3,2 м с небольшими аэродинамическими поверхностями. Вывод в
космос - в грузовом отсеке МКК "Шаттл". Посадка - парашютным спосо-
бом. Аппарат может использоваться как с экипажем (1-2 чел), так и в беспи-
лотных вариантах.
МВКА типа АСЛВ представляет собой орбитальную ступень аэродина-
мической формы, выводимую в космос с помощью ракетных ускорителей.
Сход с орбиты и посадка аппарата осуществляется с помощью двигателей.
По замыслу разработчиков, МВКА должны иметь общий рабочий ре-
сурс- до 500 вылетов, расчетное время подготовки к повторному старту - не
более 10 суток, продолжительность орбитального полета - несколько суток.
Они должны удовлетворять требованиям высокой надежности эксплуатации,
маневренности и многофункциональности.
2.23.3. Трансатмосферные летательные аппараты
Трансатмосферные летательные аппараты представляют собой новейший
класс воздушно-космических средств. Их отличает способность совершать
полет как в атмосфере на высотах 30 ... 90 км на скоростях М = 12...20, так и
в космическом пространстве на скоростях более 25 значений числа Маха в
течение длительного времени.
ТЛА конструктивно представляют собой орбитальную ступень, имею-
щую аэродинамическую форму и выводимую на орбиту (траекторию полета)
с помощью ракетных ускорителей. Для обеспечения переменного профиля
полета в качестве силовой установки ТЛА предусматривается использовать
различные типы реактивных двигателей:
воздушно-реактивные - для полета в атмосфере до скорости М=5;
гиперзвуковые прямоточные (при М=5...!2, Н=ЗО...7О км); ЖРД для вы-
хода на орбиту (при М=25, Н=100 км).
2.23.4. Перспективные боевые космические средства
Использование существующих космических вооружений только в каче-
стве средств обеспечения ВС считается в США недостаточным для достиже-
ния военно-технического превосходства над Россией. В настоящее время ак-
тивно ведется разработка боевых космических средств.
Наиболее крупным шагом в этом направлении стала реализуемая с 1984г.
программа создания широкомасштабной системы ракетно-космической обо-
57
роны (СОИ), в рамках которой разрабатываются боевые космические систе-
мы оружия противоракетной и противокосмической обороны класса "Кос-
мос-Космос". Вплотную к СОИ примыкает программа создания ударных
космических средств с оружием класса " Космос-Земля ".
В составе космического эшелона перспективной системы РКО планиру-
ется использовать орбитальные ракетные комплексы, лазерные комплексы
различных типов и комплексы с электродинамическими ускорителями масс.
Космические ракетные комплексы типа "Хай Фронтиер" предназначены для
поражения БР противника на активном участке их полета, должны иметь в
своем составе средства, обеспечивающие поиск цели, управление и наведе-
ние, энергетическую установку, а в качестве средств поражения - до 50 ма-
логабаритных противоракет с ИК-ГСН (перехватчики типа ХИТ или МХВ).
Космические лазерные комплексы могут использоваться для уничто-
жения КА на низких орбитах и боеголовок БР на среднем участке их траек-
тории. Они представляют собой боевые платформы с лазерными установка-
ми импульсного излучения (химические лазеры), средствами обнаружения и
управления. Планируется также использование боевых орб ггальных станций
с одноразовыми рентгеновскими лазерами с накачкой от ядерного взрыва.
Космические комплексы с ЭДУМ ("Электромагнитные пушки") пред-
назначаются для поражения боеголовок БР по внешним целеуказаниям - от
КА системы БСТС. Включает метательные устройства, накопители энергии,
средства наведения и управления огнем, энергетическую установку. "Элек-
тромагнитные пушки" способны метать плазменные или твердотельные по-
ражающие элементы со скорострельностью до 20 выстрелов в минуту.
В таблицах 2.6 и 2.7 представлены ТТХ и возможности разведыватель-
ных КА и КА связи.
2.3. СИЛЫ И СРЕДСТВА ВОЗДУШНО-КОСМИЧЕСКОЙ
ОБОРОНЫ
23.1. Основные определения
Космическое пространство - пространство, простирающееся за преде-
лами земной атмосферы. Иногда рассматривают не космическое пространст-
во в целом или космос, а те или иные его области, характеризующие весьма
различные свойства - околоземное космическое пространство (ОКП), меж-
звездное пространство и т.д. Для обобщенной характеристики условий пило-
тируемого полета используются такие понятия как «ближний космос»,
«дальний или открытый космос», характеризующие высоту полета по от-
ношению к Земле и переход космонавтов в условия отсутствия атмосферы, в
состояние невесомости.
Таблица 2.6
ТТХ и возможности разведывательных КА
Наименование "КХ-11" "Лакросс" "Феррет" Усоврш "Феррет" "ССУ-Г "ССУ-2" "Шале Вртекс' "Магнум Ментор" "Дмампси*
Бата запуска Ванденберг м. Канаверал. Ванденберг Ванденберг Ванденберг Ванденберг м. Канаверал. Ванденберг м Канаверал м. Канаверал Ванденберг
Ракета-носитель Титан-34 Д. Титан-4 Шаттл, Титан-4 Титаи-2 Титан-2 Атлас-Ф (Е) Титам-4 Титаи-ЗЦ. Тктаи-34Д Шаттл Титан-ЗБ
Наклонение, градусы 97.8 57 (68) 95.9 85.0 63.4 63.4 6-10 2-5 63.3
Период обраще- ния. мни 97.7 98.3 98.7 100.7 107.45 107.48 1436 1436 712
НА. км 1040 680 730 810 1170 1150 39000 35800 39315
Ни. км 285 670 690 800 1060 1080 31000 35800 380
Форма Цилиндр 8-граи идя призма 8-граи нал призма Многогранник Параллелепи- пед Параллелепи- пед Параллелепи- пед Параллелепи- пед -
Размеры. м 15x3 (.) 03x0.9 1-3 03x0.9x2.4 03x0.9x2.4 - - -
Время активного существования 4-5 лет 4-8 лет Более 5 лет 5-7 лет До 10 .зет 5 .зет л .зет 5 лет 5-7 лет
Стартовая масса. кг 13200 18000-20000 60-80 800-1000 100 100 1200-1600 Болес 2300 1500
11о.тоса раз.. Дет/обз. км 2.8/5.1 20-200 3800 4200 - - -
Полоса обз., макс/мии. км 3600/1250 2000 - 7000 7000 18000 18000 18000
Разреш. слое.. jipilotn.. м 0.15/0.6 1-6 - - - - - - -
Точность опр. координат, км - - 10-20 10-20 7-10 7-10 85-1000 18-1000 65-1000
Периодичность обновл. Инф. по 1 объекту 1 сутки дву - мяКА 1 сутки 10-12часов одним КА 10-12 часов одним КА До 10 часов одним КА До 10 часов одним КА Непрерывно Непрерывно Непрерывно втеч.8 часов на 1 виток
Диал, разв-ч частот. МГц - - 50-18000 50-18000 50-40000 50-40000 45-8400 45-20000 50-40000
Мин. время дос- тавки инф. на Землю В реальном масштабе времени В реальном масштабе времени 0.3-1.3 03-1.3 0.3-13 0.3-13 В реальном мае штабе времени В реальном масштабе времени В реальном масштабе времени
ТТХ КА связи
Таблица 2.7.
Наименование * ДСЦС-З" "ДСЦС-2" "Флитсатком* "Л нсаг" 'У ФО" "СДС* "НАТО-3" ("НАТО-4") "Скай нет-4" "Телеком-1"
База запуска м. Канаверал м. Канаверал м. Канаверал м. Канаверал м. Канаверал Ванденберг м Канаверал м Канаверал г. Kvpv г. Куру
Ракета* носитель Шаттл. Титан-34Д Титан-34 Д. Тнтан-ЗЦ Атлас-Кентавр МКК Шаттл Атлас-1 Атлэс-2 Тктая-ЗБ Торад-Дельта Тктан-3 Ариан Ариан
Наклонение, град 2.3 13 2.4 3.2 0.1 63.4 0.2 0.1 0.1
Период обращен ил. МИИ 1436 1436 1436 1436 1436 705 1436 1436 1436
Нл. км 35Н21 35821 35821 35800 35800 39300 35822 35820 35820
H:t. км 35780 35780 35780 3581X1 35КОО 400 35780 35788 357X8
Форма Параллелепи- пед Цилиндр 6-гранная призма Цилиндр Параллелепи- пед Цилиндр Параллелепи- пед Параллелепи- пед Параллелепи- пед
Размеры, м 1.92x1.95x2.8 2.7x3.7 1.5x2.4 6.64x4.12 2.18x3.08 (2.5х2.2) 2.5x2.2x2.2 3.0x2.2x2.2
Стартовая масса, кг 890 558 1696 6850 1043 720 (1430) 1433 1214
60
В международном космическом праве нет договорной нормы, устанавли-
вающей границу между воздушным и космическим пространством. Преоб-
ладающей является точка зрения, согласно которой такая граница должна
быть установлена на высоте минимальных высот перигеев искусственных
спутников Земли (ИСЗ) - около 100 км над поверхностью Земли.
Решением Международной авиационной федерации (ФАИ) условно
принято считать полеты космическими в том случае, если высота их
составляет не менее 100 км.
Начало милитаризации космического пространства путем создания воен-
ных информационно-разведывательных систем было положено выводом
США КА разведки типа «Мидас», «Сэмос», «Дискавери»; КА геодезического
обеспечения пусков МБР типа «Геос». «Геос-А »; КА навигационного обес-
печения подводных лодок-ракетоносцев типа «Транзит»; КА военной связи
типа «ДСЦС». «НАТО» и др.; КА обнаружения стартов БР типа «Имьюс».
Околоземное космическое пространство (ОКП) - космическое про-
странство, ограниченное сферой Земного притяжения, радиус которой со-
ставляет 930 000 км. В ОКП основным притягивающим телом, влияющим на
движение КА. является Земля.
Космический театр военных действий (КТВД) - обширная область
космического пространства и поверхности Земли под ней. в пределах кото-
рой развертываются космические системы (КС) различного предназначения
государств или коалиций государств и могут вестись военные действия раз-
личных масштабов.
Важнейшим элементом КТВД являются орбитальные группировки (ОГ)
КА, созданные на орбитах, элементы которых изменяются в широком диапа-
зоне: углы наклонения плоскостей орбит - от 0° до 180°; высоты полета от
(100-200) км до 100 000 - 140 000 км; эксцентриситеты от 0 до 1.
Орбитальная группировка (ОГ) КА - совокупность КА одинакового
предназначения, положение каждого из которых строго определено в косми-
ческом пространстве и во времени. ОГ рассматривается к< к один из элемен-
тов космической системы (КС).
Часто под ОГ понимают всю совокупность КА. находящихся в космиче-
ском пространстве, или совокупность КА, принадлежащих тому или иному
государству или коалиции государств (ОГ России, ОГ США, ОГ стран НАТО
и т.д.). В этом случае в состав ОГ входят КА различного предназначения или
КА ОГ различных КС.
Космическая обстановка - совокупность баллистических ракет (БР),
КА и сопутствующих им элементов (PH, их элементов, ступеней, фрагментов
и др.), средств подавления и преодоления систем предупреждения о ракет-
ном нападении (ПРН), противоракетной и противокосмической обороны
(ПРО, ПКО) (станций активных помех (САП), ЛЛЦ, ТЛЦ, ДРЛО и др.), дви-
жущиеся в космическом пространстве в настоящее время и в будущем.
61
Постоянное наблюдение (контроль), оценка степени опасности космиче-
ской обстановки в связи с целенаправленной деятельностью человека со-
ставляют мониторинг космической обстановки.
Космический объект (КО) - тело, находящееся в космическом про-
странстве. Различают естественные и искусственные КО. К естественным
КО относятся звезды, планеты, астероиды, кометы, метеоры. К искусствен-
ный КО относят КА, последние ступени ракет-носителей (PH), фрагменты
запуска и разрушения. В космическом международном праве термин «КО»
используется только для обозначения объектов искусственного происхожде-
ния. Естественные КО в космическом праве называют небесными телами.
Космический аппарат (КА) - общее название различных технических
устройств, предназначенных для выполнения целевых задач в космосе. КА
делятся на две основные группы: околоземные орбитальные КА, движущие-
ся по геоцентрическим орбитам, не выходя за пределы сферы действия гра-
витационного поля Земли - искусственные спутники Земли (ИСЗ) и межпла-
нетные КА.
При этом различают:
автоматические КА (ИСЗ, искусственные спутники планет (Луны, Солн-
ца, Венеры, Марса и т.д.);
автоматические межпланетные КА;
пилотируемые космические корабли-спутники, обитаемые орбитальные
станции, межпланетные космические корабли. Для доставки грузов на пило-
тируемые КА служат автоматические транспортные КА (АТКА).
КА, предназначенные для решения одной задачи, называют одноцелевы-
ми КА\ КА, решающие несколько задач - многоцелевыми. При этом одна из
задач может быть выделена в качестве основной и определять целевое пред-
назначение КА.
Вместо термина «космический аппарат» иногда применяется термин
«космический летательный аппарат» (КЛА).
Отличительной особенностью большинства КА является способность к
длительному самостоятельному функционированию в условиях космическо-
го пространства. Этому способствует наличие на борту КА необходимых
технических систем обеспечения функционирования (энергопитания, регу-
лирования теплового режима, ориентации и стабилизации, управления дви-
жением, обеспечения жизнедеятельности экипажей пилотируемых КА и др.).
Интервал времени, в течение которого КА существует как небесное тело,
принято называть временем существования КА. Интервал времени, в тече-
ние которого КА выполняет программу полета с заданной эффективностью,
называют временем активного функционирования (существования) КА.
Искусственный спутник Земли (ИСЗ) - КА, выведенный на орбиту во-
круг Земли для решения прикладных и научных задач. Запуск первого ИСЗ,
ставшим первым в мире искусственным небесным телом, созданным челове-
ком, был осуществлен в СССР 4 октября 1957г.
62
В соответствии с международной договоренностью КА называется
спутником, если он совершает не менее одного оборота вокруг Земли. При
несоблюдении этого условия КА считается ракетным зондом, проводящим
измерения вдоль баллистической траектории и не регистрируется как спут-
ник.
Последние ступени PH, головные обтекатели и некоторые другие летали,
отделяемые от КА (ИСЗ)при выводе их на орбиты, представляют собой вто-
ричные орбитальные объекты и не называются спутниками, хотя они обра-
щаются по околоземным орбитам и в ряде случаев являются объектами на-
блюдения для научных целей.
Орбита КА - замкнутая непрерывная линия, которую описывает центр
масс (ЦМ) КА при своем движении вокруг центрального тела. Орбита харак-
теризуется величинами, получившими название геометрические параметры
(характеристики) и элементы орбиты.
Период обращения КА - промежуток времени в течение которого КА
совершает полный оборот вокруг центрального тела. Период обращения Т
определяется величиной большой полуоси орбиты а (см. п.2.3.2) и рассчиты-
вается с помощью выражения вида
где ц- гравитационный параметр, равный для Земли 398 600 км’/с2.
_ 24часа
Если отношение —-----г равно целому числу, то движение КА называет-
Т\час)
ся периодическим, орбита - периодической, а КА - периодическим КА.
Трасса полета КА - проекция орбиты КА на поверхность Земли. Диапа-
зон широт трассы полета КА определяется максимальной (р^ и минималь-
ной фпип широтами, в пределах которых проходит трасса при заданном на-
клонении орбиты (см. п.2.3.2) -i. Диапазон широт трассы полета КА опре-
деляется только наклонением орбиты:
при /£90°
при <>90° -(18О°-О£р£(18О°-О.
Межвитковое смещение трассы полета КА - расстояние по паралле-
ли между трассами двух смежных витков, выраженное угловой или ли-
нейной Д1Г величинами. При этом
ДАТ = -СЛ7’;
Д1Т - 111,2 -ДЛТ cos q>.
где Ok-угловая скорость вращения Земли;
Т- период обращения КА;
63
111,2 - коэффициент пересчета геоцентрического угла в соответствую-
щую ему длину поверхности Земли ;
<р- географическая широта места, на котором определяется межвит-
ковое смещение трассы полета КА.
Суточный сдвиг трассы полета КА - расстояние по параллели между
трассами одноименных витков двух смежных суток, выраженное в угловом
или линейном Д1сд изменениях. Одноименными называются витки с
одинаковыми порядковыми номерами в каждых сутках
= A^‘Nc+36(f;
А1Сд- 111,2 ДАс# - cos <р;
К, 1440Г 1
——- (м];
Т
где Ne- целое число витков, совершаемых КА за сутки.
Обычно Ne округляют до целого числа, пользуясь данными табли-
цы 2.8).
Таблица 2.8
Средняя высота орбиты КА, км до 425 425. .735 735...1100
Число витков 16 15 14
Основные точки и участки трассы полета КА приведены на рис. 2.1.
Восходящий узел трассы (Вь В2) - точка пересечения трассы с эквато-
ром при движении КА из южного полушария в северное.
Нисходящий узел трассы (Н, Н,) - точка пересечения трассы с эквато-
ром при движении КА из северного полушария в южное.
Вертекс трассы (q) - точка трассы, в которой она достигает максималь-
ной широты {(Ртах).
Антипод вертекса (q') - точка трассы, в которой она достигает мини-
мальной широты (^шп).
Восходящая ветвь трассы q q' - участок трассы от антипода вертекса
до вертекса (по направлению движения КА).
Нисходящий виток трассы q q' - участок трассы от вертекса до анти-
пода вертекса (по направлению движения КА).
Форма трассы полета КА изменяется в зависимости от высоты полета и
наклонения его орбиты.
Космическая система (КС) - совокупность согласованно действующих
и взаимосвязанных технических средств, размещенных в космосе - КА и на
Земле - наземный комплекс управления (НКУ), предназначенных для реше-
ния одной или нескольких целевых задач в космосе или из космоса.
64
Космический комплекс (КК) - совокупность функционально взаимо-
связанных КА и наземных технических средств, предназначенных для само-
стоятельного решения задач в космосе и из космоса или для обеспечения та-
ких задач в составе КС. КК включает ракету-носитель (PH), КА, технический
комплекс, стартовый комплекс, средства измерительного комплекса космо-
дрома и наземный комплекс управления КА.
Рис. 2.1. Основные точки и участки трассы полета КА
Автоматическая межпланетная станция (АМС) - непилотируемый КА
для доставки научной аппаратуры к небесным телам и для изучения межпла-
нетного космического пространства и Солнечной системы. Существуют схе-
мы полетов с возвращением АМС на Землю и без возвращения. Результаты
исследований и изображения небесных тел передаются на Землю по радио-
каналу или с помощью аппаратов.
Авиационно-космические аппараты (АКА) - летательные аппараты,
способный совершать орбитальный полет в ОКП и маневрировать в атмо-
сфере с использованием аэродинамических сил. Подразделяются на:
65
воздушно-космические самолеты (ВКС). которые могут взлетать и
выходить на геоцентрические орбиты самостоятельно;
воздушно-космические корабли (ВКК), которые выводятся на орбиту с
помощью PH (ракетных систем одноразового или многоразового примене-
ния) или с помощью самолетной системы выведения.
Межорбитальные буксиры - общее название ракетных блоков различ-
ного типа, предназначенных для перевода КА с низкой орбиты на более вы-
сокую, вплоть до стационарной (см.п.2.3.3), а также для вывода КА из поля
тяготения Земли.
23.2. Геометрические параметры и элементы орбит
Геометрические параметры (геометрические характеристики) орбиты -
величины, позволяющие определить форму и размеры орбиты. Так как наи-
более распространенной является эллиптическая орбита, рассмотрим гео-
метрические параметры и основные характерные точки применительно к
этой орбите (рис.2.2).
Рис. 2.2. Основные точки и геометрические параметры орбиты
Г'; F- фокусы эллипса (орбиты). Фокус, в котором расположен центр
масс притягивающего тела (Земли), называют действительным (предполо-
жим, что это F);
второй фокус (в нашем случае -F') называют мнимым;
О - центр орбиты;
точки орбиты А и П называют апсидами, а прямую АП -линией апсид.
Применительно к рисунку: точка А - наиболее удаленная от притяги-
вающего центра F, называется апоценгром орбиты; точка П - наименее уда-
ленная от притягивающего центра - перицентром орбиты.
Перицентр орбиты КО при движении вокруг Земли называется перигеем;
при движении вокруг Солнца - перигелием; при движении вокруг Луны -
66
периселением. Соответственно называется и апоцентр: апогеем, афелием,
апоселением.
Величины, позволяющие определить размеры и форму орбиты (см. рис.
2.2):
а - большая полуось орбиты;
в - малая полуось орбиты;
Р - фокальный параметр орбиты;
е -эксцентриситет орбиты;
С - линейный эксцентриситет орбиты.
Положение КО на орбите может быть определено с помощью радиуса-
вектора - г или истиной аномалии - т].
Величина радиуса-вектора точки П - называется радиусом перигея - гп;
величина радиуса-вектора точки А- радиусом апогея - гл. При этом
r/7=H[i+R3; гА= Нл+Кз.
где Иц. НА _ высота перигея и апогея орбиты над поверхностью Земли;
R3- радиус Земли, принятой за шар, равный 6 371 км.
При известных Иц и НА геометрические параметры орбиты могут быть
определены с помощью выражений:
a = In±lA.B2=a2_c2i.
2
с = а-гп, с = ае;с = -(гА -гп);
(2.1)
р = 21а1п_
га+гп
В целях однозначного определения положения КА в космическом про-
странстве применяют элементы невозмущенного движения или просто эле-
менты орбиты:
долготу восходящего узла - П;
наклонение орбиты -i;
аргумент перигея -чо;
большую полуось орбиты -а;
эксцентриситет орбиты - е;
время прохождения КА через перигей - т.
При этом И и i позволяют определить положение плоскости орбиты КА в
космическом пространстве; со - ориентацию орбиты в плоскости; а - разме-
ры орбиты; е - форму орбиты; т - положение КА на орбите в любой момент
времени (рис.2.3.)
67
П - перигей орбиты;
- абсолютная геоцентрическая система координат;
у - точка весеннего равноденствия;
О - центр масс Земли;
И - восходящий узел орбиты;
U - нисходящий узел орбиты;
HU - линия узлов;
Т] - истинная аномалия КА;
U - аргумент широты КА.
Рис. 2.3. Элементы эллиптической геоцентрической орбиты
Долгота восходящего узла - Л - угол с вершиной в центре масс Земли
между направлениями на точку весеннего равноденствия и восходящий узел
орбиты. Возможный диапазон изменения угла И приведен в таблице 2.9.
Наклонение орбиты - i - угол с вершиной в восходящем узле орбиты
между плоскостью экватора и плоскостью орбиты, отсчитываемый против
часовой стрелки (рис. 2.3). Диапазон изменения угла i приведен в табли-
це 2.9.
Интервал изменения 0° i < 90° соответствует движение КА с запада на
восток, называемое прямым движением, а интервалу 90° < i < 180° соответ-
ствует движение КА с востока на запад, называемое обратным.
Аргумент перигея - (О - угол с вершиной в центре масс Земли между на-
правлениями на восходящий узел орбиты и перигей, отсчитываемый в плос-
кости орбиты по направлению движения КА (см. рис. 2.3). Диапазон измене-
ния угла (0 приведен в таблице 2.9.
68
Большая полуось - а и эксцентриситет орбиты - е представлены выше
(см. рис. 2.2 и формулы 2.1). Диапазон изменения а и е приведен в таблице
2.9.
Время прохождения через перигей - v - время, в течение которого КА
проходит отрезок орбиты от перигея до i-ro текущего положения (рис. 2.3).
Диапазон т приведен в таблице 2.9.
Возможно использование другой совокупности элементов орбиты, кото-
рые связаны однозначными зависимостями с перечисленными выше. Так,
вместо большой полуоси орбиты а можно использовать фокальный параметр
Р (рис.2.3), связанный с большой полуосью выражением Р=а(1-е2). Вместо т
можно использовать истинную аномалию т|.
При движении КА по круговой орбите достаточно четырех элементов,
полностью определяющих движение. Чаще всего используют Л, i, радиус
круговой орбиты - г и время прохождения КА через восходящий узел орби-
ты -Tq.
Исключение составляет случай, когда i = 0 или i = 180°, так как при этом
плоскость орбиты совпадает с плоскостью экватора и положение восходяще-
го узла становится неопределенным. В этом случае для определенности по-
лагают. что 0 = 0 и в качестве начала отсчета аргумента широты U прини-
мают направление на точку весеннего равноденствия у. За время т принима-
ют время прохождения КА через направление на точку весеннего
равноденствия.
Таблица 2.9
Элементы орбиты И i (0 а е т
Возможный диапа- зон изменения 0-360° 0-180° 0-360° гл + гп 2 0 <е <1 0-Т
Элементы орбиты могут быть определены, если будут известны началь-
ные условия движения (характеристика конца активного участка -траектории
полета PH, с помощью которой КА выводится на орбиту) или результаты
траекторных измерений.
2.33. Трассы полета космических объектов
Для построения трассы полета КО необходимо определить аргумент
широты КО (и) и географическую долготу восходящего узла (tft). Географи-
ческая долгота восходящего узла и для круговой и для эллиптической орбит
рассчитывается по известной формуле Xft = tjp+ Л, где первое слагаемое
представляет собой геоцентрический угол между направлением на гринвич-
ский меридиан и направлением на точку весеннего равноденствия, вычис-
69
ляемый по астрономическому ежегоднику, а второе - долгота восходящего
узла.
Алгоритм расчёта трассы полёта КО, двигающегося
по круговой орбите
Аргумент широты КО, двигающегося на круговой орбите, пропорцио-
нален продолжительности полета КО с момента последнего прохождения
восходящего узла tft. Это обусловлено постоянной скоростью движения
КО. Исходя из этого можно записать
и = 360° (t - tn)/T.
Тогда алгоритм расчета трассы кругового КО представляет собой:
1. r=R3+H, R3 =6371 км;
2. Т = g = 398600 км3/с2;
3. Хп=1ф + £2;
4. Uj = 360- jAt/T;
5. <Pj = arcsin(sin и} sin i);
6. AXj =arccos(cosuj/cos(pJ);
7. X j = Xft ± AXj - co^At, = 0,25 град/ мин,
“ + “ при1<90°,“-“ при1>90°.
В качестве исходных данных алгоритма используются: высота полета
КО (Н); долгота восходящего узла (И) с временем его прохода: наклонение
орбиты (i); временной интервал расчета координат подспутниковых точек
(ДО.
Последовательно рассчитывая широту <Pj и долготу Xj для достаточно
малых промежутков времени At и нанося полученные координаты на карту,
получим изображение трассы полета КО.
При нанесении трассы на географическую карту Земли достаточно рас-
считать участок трассы, соответствующий половине периода обращения, а
затем, используя симметрию, продолжить трассу на заданное число витков.
Алгоритм расчёта трассы полёта КО,
двигающегося по эллиптической орбите
Зависимость аргумента широты КО от времени для эллиптической ор-
биты значительно более сложная, чем для круговой. Это связано с неравно-
мерной скоростью движения КО - в районе перигея она выше, в районе апо-
гея - ниже.
IQ
Данная зависимость может быть представлена следующей системой:
u = (D + T|;
• Т| = 2arctg(tg(E / 2) • 7(1+ е)/(1-е)}
E-esinE = n(t-T}
Зависимость эксцентрической аномалии Е от времени (уравнение Кеп-
лера) представляет собой трансцендентное уравнение и обычно решается ме-
тодом последовательных приближений до достижения требуемой точности
Е.
Следует обратить особое внимание на то. что для расчета координат
подспутниковых точек отсчет временных интервалов должен начинаться с
момента прохождения КО восходящего узла = T + Atft, который обычно
неизвестен. Его можно рассчитать, решив данную систему уравнений отно-
сительно I для и=360° (сумма аргумента перигея и истинной аномалии в вос-
ходящем узле орбиты есть 360°).
Исходя из этого, алгоритм расчета трассы полета КО, движущегося по
эллиптической орбите, может быть записан в следующем виде:
l.Xn =t^> + П; 2ja = R3 +Нл; З.гп = R3 + НП ;4.е = (гА -гп)/(гА +гп);
5.а = (гА +гп)/2; б.п = 7и/а3; 7.Т|П = 360-w,
8.Eq = 2arctg(ig(nft/2)-70-e)/(l +е)); 9.Atn =(En -esinEn)/n;
10. Ej - esin Ej = n • (Atn + jAt}. 11.1^= 2arctg(tg(EJ/2)- 7(1+ e)/(l-e)}
12. и^со + т^; 13. <Pj = arcsin^sinUj • sini)t 14. ДХ}= arccos^cosUj/costPj);
15. Xj = ± - Cfy At.
Исходными данными этого алгоритма являются: высоты апогея и пе-
ригея (Н,, Нп); долгота восходящего узла с временем его прохождения (П,
tn); наклонение орбиты (i); аргумент перигея (со); временной интервал рас-
чета (At).
Если в качестве “шага” в определении координат подспутниковых то-
чек использовать изменение истинной аномалии Т| (что иногда практикует-
ся) , то такой алгоритм будет включать формулы 1,8,9,12-15 алгоритма.
При этом по формулам 8 и 9 рассчитываются эксцентрическая анома-
лия и время, соответствующие текущему значению истинной аномалии.
Понятно, что нельзя в данном случае ограничиваться расчетом поло-
вины витка, так как трасса КО, двигающегося по эллиптической орбите, не-
симметрична.
Следует помнить, что приведенные алгоритмы справедливы только для
невозмущенного движения КО и не учитывают отклонений, возникающих
под влиянием различных возмущающих факторов.
71
2.3.4. Классификация орбит КА
Если КА движется вокруг Земли (в данном случае Земля является цен-
тральным телом), то его орбиту называют геоцентрической. Геоцентриче-
ские орбиты могут быть классифицированы;
по высоте:
низкие - с высотой 120 - 1500 км;
средние - с высотой 1500 - 20000 км;
высокие - с высотой более 20000 км;
по наклонению:
экваториальные - i = 0° или i = 180°;
полярные - i = 90°;
промежуточные - 0° < i < 90°; 90° < i < 180°;
по эксцентриситету:
круговые - е = 0;
эллиптические - 0 < е < Г,
параболические - е = 1;
гиперболические - е > 1.
Последний признак классификации позволяет определять типы орбит,
которые представлены на рис. 2.4.
Тип орбит еще может быть определен с помощью таких величин, как
вектор Лапласа -/, постоянной энергии - h, скорости движения - V (таблица
2.10).
Таблица 2.10
Тип орбит е f h V
Круговая е = 0 f = 0 h = -H r 4
Эллиптическая 0 <е < 1 f<H h<0 o<v<^
Параболическая е = 1 f=p h = 0 V-J?
Гиперболическая е> 1 f>n h>0 V’jl1*
Примечание:
ц - гравитационный параметр, равный 398600 км3/с2;
г - величина радиуса вектора КА - расстояние от центра масс Земли
до КА на орбите.
72
Рис. 2.4. Типы орбит КА в центральном гравитационном поле
Орбиту, эксцентриситет которой е>0,5, называют высокоэллиптической
орбитой. Такие орбиты нашли широкое применение при формировании ОГ
КС связи, обнаружения старта БР, ретрансляции, перехвата космических ли-
ний связи и др.
Орбиты, двигаясь по которым КА имеет период обращения равный или
кратный звездным суткам (24 часам), называются синхронными орбитами.
Трасса полета КА в этом случае, представляет собой замкнутую линию. При
этом КА периодически проходит над определенной точкой земной поверх-
ности в одно и то же местное время. Если период обращения равен 24 часам
и наклонение орбиты находится в пределах 0°< i <180° , то трасса имеет
форму восьмерки, сохраняющей свое положение по отношению к поверхно-
сти Земли. КА находится над некоторым районом земной поверхности, пе-
ремещаясь в пределах широт, соответствующих наклонению орбиты.
Частным случаем синхронной орбиты являются стационарная, квазиста-
ционарная, солнечно-синхронная и синхронно-эллиптическая орбиты.
Стационарная орбита - орбита с периодом обращения 24 часа и углом
наклонения / = 0°. Высота такой орбиты составляет 35852 км. КА, выведен-
ный на такую орбиту, будет постоянно находиться над одной и той же точ-
кой земного экватора.
Квазистационарная орбита - орбита с периодом обращения 24 часа и уг-
лом наклонения, близким к нулю.
Солнечно-синхронная орбита - орбита, движение плоскости которой
синхронизировано с вращением Земли вокруг Солнца. Плоскость орбиты по-
73
ворачивается в этом случае с угловой скоростью 0.9856 град/сутки. Поворот
плоскости орбиты обуславливается действием на движение КА нецентраль-
ного гравитационного поля Земли.
Синхронно-эллиптическая орбита - орбита с наклонением 63,5° или
116,5° и периодом обращения, равным 24 часам. Если Т=24 часам, апогей
синхронно-эллиптической орбиты расположен над одной и той же точкой
поверхности Земли. Если Т=12 часам, апогей располагается поочередно над
двумя точками.
23.4.1. Международные организации, связанные с исследованием и
использованием космического пространства в мирных целях
Межправительственные:
- комитет ООН по использованию космического пространства в мирных
целях. Учрежден Генеральной Ассамблеей ООН в 1959 году со штаб-
квартирой в Нью-Йорке. В Комитете представлены 53 страны, в том числе
Россия, США, Великобритания, Франция и др. Изучает проблемы междуна-
родного сотрудничества, исследования и использования космического про-
странства в мирных целях;
- ИТСО - консорциум по спутниковой связи. Создан в 1964 году (до
1973 г - «Интелсат»). Объединяет 142 страны. Обеспечивает связь и телеви-
дение с помощью ИСЗ типа «Интелсат» и радиорелейных линий. Исполни-
тельный орган (компания «Комсат») контролируется правительством США.
Россия в ИТСО не входит. Часть каналов связи КА типа «Интелсат» исполь-
зуют МО США и другие страны - члены НАТО;
- ЕСА - Европейское космическое агентство создано в 1975 году. Объе-
диняет 14 западноевропейских стран (Франция, ФРГ, Великобритания, Ита-
лия, Дания, Нидерланды. Испания, Швейцария, Швеция, Ирландия, Норве-
гия, Бельгия, Австрия, Финляндия). Осуществляет совместные программы по
освоению космоса средствами стран-участниц. Штаб-квартира - в Париже;
- НАТО - Организация Североатлантического договора. Командование
объединенных ВС НАТО использует спутниковую систему связи на основе
КА типа «НАТО», выводимых на стационарные орбиты над Атлантическим
океаном. Они обеспечивают связь по 1200 радиотелефонным каналам. Суще-
ствует сопряжение с аппаратурой КА типа ДСЦС;
- АСТР - Международная организация региональной спутниковой связи
арабских государств. Создана для обеспечения радиотелефонной и телевизи-
онной связью арабских государств. В состав организации входит 22 государ-
ства: Алжир, Тунис, Марокко, Бахрейн, ОАЭ, Египет. Ирак, Кувейт, Ливан.
Ливия, Оман, Сомали и др. Система связи базируется на КА типа «Арабсат»;
- ЕВМЕТСАТ - Европейская организация межспутниково'о обеспече-
ния. Создана для сбора и ретрансляции данных в интересах метеослужб бо-
лее, чем в 100 стран мира. Периодичность поступления мстеоинформации
74
составляет 25 минут. Метеорологическая система базируется на КА типа
"МЕТЕОСАТ";
- ЕВТЕЛСАТ - Европейская организация спутниковой связи. Создана и
осуществляет обеспечение радиорелейной и телевизионной связью 46 госу-
дарств (Австрия. Бельгия, Белоруссия, Венгрия. Германия, Греция, Италия,
Кипр, Латвия, Литва, Польша, Норвегия, Украина, Турция и др.). Система
связи базируется на КА типа "Екс", "Сесат", "Евроберд". "Атлантик Берд";
- ИНМАРСАТ - Международная организация морской спутниковой свя-
зи с подвижными абонентами. Создана и осуществляет обеспечение мобиль-
ной связью морских судов с берегом. Кроме связной аппаратуры, ИСЗ, при-
меняемые в этой системе "Инмарсат-З", оснащены навигационным оборудо-
ванием, аналогичным тому, какое установлено на борту ИСЗ системы
"Навстар". В системе применяются КА типа "Мареке" и "Инмарсат-2".
ИНМАРСАТ объединяет 78 государств;
- ИНТЕРСПУТНИК - международная организация спутниковой связи.
Создана в 1971 году осуществляет сотрудничество 23 государств (России,
Белоруссии, Венгрии, Вьетнама, Ирана, Киргизии, Кубы, Лаоса, Монголии,
Номибии, Румынии, Северной Кореи, Украины и др.) по созданию и разви-
тию систем связи.
Неправительственные:
- КОСПАР - комитет по космическим исследованиям. Создан в 1985 го-
ду при Международном совете научных союзов в целях содействия всем ви-
дам исследований, осуществляемых с помощью ракет или ракетных транс-
портных систем. Членами КОСПАР являются 13 международных научных
союзов, занимающихся космическими исследованиями, а также Академии
наук и другие научные организации 35 стран. Секретариат Комитета - в Па-
риже;
- Международная астронавтическая организация - создана в 1950 году
для содействия широкому международному обмену научными результатами
и планами развития космической науки и техники. Объединяет около 63 ас-
тронавтических обществ 35 стран ("Интеркосмос"). Федерацией утверждены
Международная академия астронавтики и Международный институт косми-
ческого права;
- АМСАТ - Международная радиолюбительская организация. Создана
для обеспечения связью радиолюбителей разных стран с использованием
экспериментальных спутников связи Германии, Японии, США, Португалии,
Италии, Бразилии, Аргентины, Франции, Великобритании, Южной Кореи.
75
2.4. СИСТЕМА ОБЕСПЕЧЕНИЯ СИЛ И СРЕДСТВ ВОЗДУШНО-
КОСМИЧЕСКОЙ ОБОРОНЫ
Система обеспечения сил и средств воздушно-космической обороны,
представляет собой совокупность сил и средств, развернутых по единому за-
мыслу и плану, инфраструктуры, создаваемой в интересах воздушно-
космической обороны и комплекса мероприятий, проводимых с целью соз-
дания войсками ПВО ВВС необходимых условий для эффективного выпол-
нения поставленных задач и максимального снижения эффективности дейст-
вий воздушно-космического противника.
Система обеспечения, являясь компонентой единой системы воздушно-
космической обороны включает достаточно самостоятельные подсистемы,
которые в свою очередь могут рассматриваться как системы оперативного,
морально-психологического, технического и тылового обеспечения, а также
.соответствующие им силы и средства, которые создаются и функционируют
на стратегическом, оперативном и тактическом уровнях. Каждая из этих сис-
тем решает вполне самостоятельные задачи по обеспечению эффективности
применения войск ПВО ВВС в целом. По своей сути сложившаяся к настоя-
щему времени подсистема технического обеспечения войск ПВО ВВС пред-
ставляет собой совокупность подсистем технического обеспечения родов
войск ПВО ВВС. Эти подсистемы имеют комплекс общих задач, которые
решаются применительно к каждому роду войск и поэтому могут рассматри-
ваться как самостоятельные системы технического обеспечения родов войск.
76
3. СРЕДА ВОЗДУШНО-КОСМИЧЕСКОГО
ПРОСТРАНСТВА КАК ТЕАТР ВОЕННЫХ ДЕЙСТВИЙ
3.1. ХАРАКТЕРИСТИКА АТМОСФЕРЫ
Атмосфера Земли - газообразная оболочка с общей массой около
5,15-1015 т, что составляет менее одной миллионной массы земного шара. До
высот 80-100 км химический состав сухого воздуха однороден. По мере уда-
ления от поверхности Земли различают следующие основные слои атмосфе-
ры: тропосферу, стратосферу, ионосферу и сферу рассеяния (экзосферу).
Тропосфера - приземная область атмосферы с увеличивающейся по мере
продвижения от полюса к экватору высотой от 7 до 18 км и содержащей 0,8
массы атмосферы.
Стратосфера - часть атмосферы от верхней границы тропосферы до высот
80-90км, характеризующаяся сильными и постоянными ветрами и значитель-
ным изменением температуры.
Ионосфера - часть атмосферы, расположенная над стратосферой до высот
800км и характеризующаяся наличием свободных положительных и отрица-
тельных зарядов, образующихся пол действием солнечных и космических
излучений.
Сфера рассеяния (экзосфера) - область пространства над ионосферой, по-
степенно переходящая в околоземное космическое пространство. Теоретиче-
ская граница атмосферы 28 000 км над полюсами и 42 000 км над экватором.
Стандартная атмосфера - модель строения атмосферы, представляющая
собой результат осреднения многолетних наблюдений и измерений парамет-
ров атмосферы, таких, как атмосферное давление, плотность, температура,
относительная и абсолютная влажность, химический состав воздуха, облач-
ный покров, струйные течения.
Атмосферное давление - давление, оказываемое воздухом на тело, нахо-
дящееся в заданной точке пространства, Па:
gH
Р = Роект> (3.1)
где Ру - давление над уровнем моря. Па;
8=9,81 ускорение свободного падения;
Н - текущее значение высоты, м (км);
R=287Дж/(кг К) - газовая постоянная;
T=tn+273,15 - температура воздуха, К.
Для упрощения расчетов атмосферное давление может быть аппроксими-
ровано следующим соотношением:
_и_
Р = Рое "°,
77
где Но=8()ОО Т/Го-условная высота «однородной» атмосферы, м (км);
ТО-273,15 К - нулевая точка но шкале Цельсия (точка затвердевания
воды).
(Ро= 101325 Па, или 760 .uw рт. ст. (в СССР над уровнем моря в Крон-
штадте Па=1 Н/м2.)
Зависимость атмосферного давления и плотности воздуха от высоты по-
казана на рис. 3.1.
Плотность воздуха - масса воздуха, содержащаяся в единице объема,
кг/м3:
Н
p = _L = Poe~"o
И RT ™
(3.2)
где f^-P^PT-i ,27 кг/м - плотность сухого воздуха.
Температура воздуха - степень его нагретости, измеряемая в градусах по
термодинамической шкале Кельвина (К) или стоградусной шкале Цельсия
(°C). Средняя температура воздуха для стандартной атмосферы в зависимо-
сти от высоты для северного полушария показана на рис. 3.2.
Рис.3.1. Зависимость атмосферного давления и плотности воздуха от высоты
Рис.3.2. Зависимость температуры воздуха от высоты
Относительная влажность воздуха - отношение упругости водяного пара
е0 в данной точке к упругости паров Ео, насыщающих пространство при за-
данной температуре ГС над плоской поверхностью чистой воды:
(3.3)
7j6t°
где Ео =6,1 • 10273+,°
Абсолютная влажность воздуха - количество граммов водяного пара
в 1м3 воздуха:
а0=2/б7р (3 4)
Химический состав воздуха, характерный для высот до 100 км от поверх-
ности Земли, определяется наличием азота (78,08%), кислорода (20,95%), ар-
гона (0,93%), углекислого газа (0,03%) и др.
Облака верхнего яруса (выше 6 км) — перистые, перисто-кучевые, пери-
сто-слоистые - состоят из ледяных кристаллов.
Облака среднего яруса (от 2 до 6 км) — высококучевые, высокослои-
стые- состоят из мельчайших капель и кристаллов льда.
Облака нижнего яруса (ниже 2 км) - слоисто-кучевые, слоистые, слоисто-
дождевые - состоят преимущественно из капель.
79
Облака вертикального развития - все виды кучевых облаков, образование
которых связано с конвекцией атмосферы в пределах 10-11 км.
Количество облаков выражается в десятых долях поверхности небо-
свода, покрытой ими в данный момент. Совершенно ясному небу соответст-
вует 0 баллов, совершенно пасмурному - 10 баллов.
Струйные течения - области верхней тропосферы и нижней стратосферы,
в пределах которых наблюдаются устойчивые потоки воздуха со скоростями
до 50 - 100 м/с. Они обычно наблюдаются на широтах между 25 и 70° в каж-
дом полушарии. Максимальные скорости течения располагаются на высотах
9 - 14 км (ось струйных течений). Длина струйных течений достигает не-
скольких тысяч километров, ширина и высота нескольких сотен километров
соответственно. Распределение скаляра скорости ветра V, для северного по-
лушария на высотах до 25 км над уровнем моря показано на рис.3.3.
Рис.3.3. Распределение скаляра скорости ветра для северного полушария
3.2. ВЛИЯНИЕ АТМОСФЕРЫ НА РАСПРОСТРАНЕНИЕ
ЭЛЕКТРОМАГНИТНЫХ КОЛЕБАНИЙ
Влияние нижних (тропосферы) и верхних (ионосферы) слоев атмосферы
на распространение электромагнитных (ЭМ) колебаний выражается в виде
искривления траектории распространения и поглощения.
80
Рефракция ЭМ-колебаннй — искривление траектории распространения
ЭМ-колебаний, приводящее к появлению ошибок определения местопо-
ложения ЛА.
Явление рефракции обусловлено изменением диэлектрической прони-
цаемости £ и соответственно коэффициента преломления п среды, так как
n=VF-
Рис.3.4. Зависимость индекса преломления от высоты
На практике пользуются индексом преломления N=l(f(n—1), показы-
вающим, на сколько миллионных далей коэффициент преломления п>1.
У поверхности Земли л°= 1,00026... 1,00046 или среднее значение No-325.
С уменьшением давления, температуры и влажности индекс преломления
уменьшается с высотой по линейному закону.
Градиент (быстрота изменения) dN/dH=-4*10T (1/м). Следовательно, из-
менение У в зависимости от высоты будет равно N-No-4*10'2H и меняется по
линейному закону (рис. 3.4).
Тропосферная рефракция — искривление траектории ЭМ-колебаний
при их распространении в среде с переменным коэффициентом преломления.
Изменение коэффициента преломления Jn (или AN ) с высотой приводит к
изменению фазовой скорости АУФ=с/Ап, что вызывает искривление траекто-
рии.
Характер и величина рефракции зависят от величины и знака вертикаль-
ного градиента индекса преломления (рис. 3.5).
81
Экзосфера / U
|^>0 -X Ионосфера-
Н - 4Ю*Г < ft.zJ _ Ионосфера' .
/Стратосфера .
Рис.3.5. Зависимость рефракции от величины и знака вертикального
градиента индекса преломления
При(<й74///) >0 имеет место отрицательная рефракция (отклонение луча
вверх), при (dN/dH)<Q - положительная (отклонение луча вниз), сопровож-
дающаяся огибанием ЭМ-колебаний поверхности Земли. Типы рефракции и
средние значения радиусов кривизны приведены в табл. 3.1.
Таблица 3.1
Тип рефракции dN/dH, м4 Радиус кривизны луча ЭМ-колебаний, км
Нормальная -4-10 8 р„=25ООО
Критическая -0,157-10’6 /\=R3=6371
Сверхрефракция Менее -0,157106 pf<R3
Явление сверхрефракции позволяет обнаруживать ЛА за пределами пря-
мой видимости.
Ошибки тропосферной рефракции. Рефракция ЭМ-колебаний, сопро-
вождаемая искривлением пути, вызывает дополнительное временное запаз-
дывание, что приводит к возникновению ошибок по дальности 4D и увели-
чению значений угла места цели, т. е. к возникновению ошибок Ле. Значения
ошибок AD и zde в зависимости от дальности и угла места показаны на
рис.3.6 и 3.7 соответственно.
82
Рис.3.6. Ошибки тропосферной рефракции по дальности
Максимальные значения ошибок, включая ошибки измерения доплеров-
ской частоты, могут быть аппроксимированы так угл.мин;
4Г7.Гц):
ДО =0,007No cos е\
Ae=0,0034ocose
(35)
Ионосферная рефракция — искривление траектории ЭМ-колебаний
при распространении в области ионизированных газов.
Коэффициент преломления ионизированной среды
где Ne - концентрация свободных электронов, эл Ум3;
/- частота ЭМ-колебаний. Гц.
83
10 30 100 300 1000 3000 D. км
Рис.3.7. Ошибки тропосферной рефракции по углу места
При плавном убывании п с высотой в определенном слое ионизирован-
ной области наступает полное внутреннее отражение ЭМ-колебаний под уг-
лом, равным углу падения е0.
Это явление используется для обнаружения ЛА различного назначения за
пределами горизонта (загоризонтная радиолокация).
Условие отражения ЭМ-колебаний заданной частоты, Гц:
где е0 - угол падения ЭМ-колебаний на нижнюю границу ионосферы, отсчи-
тываемый от нормали к ней.
ЗначениеД, = ^80,8Ne называется критической частотой.
Поглощение и ослабление ЭМ-колебаний в тропосфере происходит в
кислороде и в водяном паре тропосферы, а также за счет рассеяния от
гидрометеоров.
При расчете дальности действия локационных средств (систем) это явле-
ние учитывается путем введения коэффициента поглощения и ослабления
ЭМ-колебаний, зависящего от частоты и характеристики среды.
84
Рис.3.8. Усредненное значение коэффициента затухания а
в зависимости от частоты
Дальность действия РЛС с учетом факторов поглощения и ослабления,
км:
D = DolO4)5al.
(3.8)
где Do - дальность действия РЛС в свободном пространстве, км;
а - коэффициент поглощения и ослабления ЭМ-колебаний в тропосфе-
ре, дБ/км;
/ - путь ЭМ-колебаний в поглощающей среде, км.
Коэффициент поглощения
1,16-МГ6 ..
а = --------yNe,
(3.9)
где У - частота соударений электронов с нейтральными атомами, Гц.
Усредненное значение коэффициента а в зависимости от частоты пока-
зано на графике (рис. 3.8).
Резкое увеличение значения коэффициента а на частоте /=22,2 ГТц ле-
жит в области резонансного поглощения паров воды.
Поглощение ЭМ-колебаний в ионосфере обусловлено явлением соударе-
ний свободных электронов с нейтральными молекулами и ионами газа.
85
33. ВЛИЯНИЕ АТМОСФЕРЫ ПА УСЛОВИЯ ПОЛЕТА ЛА
РАЗЛИЧНОГО НАЗНАЧЕНИЯ
Физические условия полета - совокупность физических свойств атмо-
сферы и физических явлений, возникающих во время полета ЛА.
Эти условия значительно изменяются в зависимости от высоты, скорости
и траектории движения, от конструкции и назначения ЛА, от времени года и
суток, от района полета и других факторов. Значительный уровень развития
аэродинамики, успехи в создании двигательных установок и новых высоко-
прочных материалов позволяют получить высокие летно-тактические харак-
теристики современных ЛА.
Сила земного притяжения F - это сила в \Н, с которой тело массой т, на-
ходящееся на высоте Н, притягивается к Земле:
ш—
(R3 + H}2 (К3 + Н)2
(3.10)
где у = 6/)7Ю~п(н м2)/кг2 - гравитационная постоянная*.
Afj=6- Ю24кг - масса Земли;
/?з=6371-103 м - радиус Земли.
Ускорение свободно падающего тела у поверхности Земли g - ускоре-
ние под действием силы земного притяжения.
Вследствие суточного вращения Земли величина ускорения свободно па-
дающего тела (м/с2) зависит от географической широты
g = g0(l+010052 sin2?). (3.11)
где go=9,78 .м/с2 - ускорение свободного падения па экваторе;
р- географическая широта, град.
В зависимости от высоты ускорение свободно падающего тела изменяет-
ся по закону
g H = (3.12)
SH [Kj+Hj
Условия полета ЛА в поле тяготения Земли без учета влияния атмо*
сферы. По известному значению g» может быть определена круговая ско-
рость VKp летательного аппарата (спутника), совершающего полет по круго-
вой орбите на высоте Н:
Vv=JgH(R3 + H) (3.13)
В частности, при Н=О и gH = g получим значение первой космической
скорости Vi=yjgR3 ^7,9к.м/с, достигнув которой ЛА становится спутником
Земли.
86
При этом период обращения (Т) спутника вокруг Земли будет равен
2яЯ>
7 =----83 мин.
V
С учетом высоты полета спутника значение линейной скорости его дви-
жения VH уменьшается в соответствии с соотношением
vh=Rj | Q.
V, + H
При достижении спутником высоты полета //« 36000км его скорость бу-
дет равна VH„ 3200 м/с •
В данном случае угловая скорость вращения спутника относительно цен-
тра Земли £?с будет совпадать с угловой скоростью вращения наземного объ-
екта Q* расположенного на поверхности Земли, т.с. Qc- Из-
данное условие обеспечивает возможность нахождения спутника над оп-
ределенным объектом на Земле в течение всего времени пребывания на ор-
бите, получившей название стационарной.
Соответственно вторая космическая скорость V3=^2gR3 «11,2км/с- По-
лучив такую скорость, ЛЛ становится спутником в пределах солнечной сис-
темы.
Чтобы преодолеть силу притяжения Солнца, ЛА должен иметь скорость
V3 = 7v22+v.L = 16167км/с.
где V<bJX = VOp6.(42 - /) - скорость выхода ЛА из сферы действия Земли по от-
ношению к Солнцу (УОрб.=29,76 км/с - скорость движения Земли по орбите).
Траектории движения тел в поле тяготения Земли при скоростях, лежа-
щих между первой и второй космическими скоростями, будут представлять
собой эллипсы, один из фокусов которых совпадает с центром Земли.
Условия полета аэродинамических ЛА. Связь между требуемой скоро-
стью п< пета аэродинамических ЛА, атмосферным давлением Р и плотностью
воздуха р на данной высоте устанавливается уравнением энергии (уравнение
Бернулли):
V2
р — +Р = const, (3.14)
где q = - скоростной напор.
Следовательно, с увеличением высоты (с уменьшением значений Р ир)
для поддержания полета аэродинамического ЛА данного типа необходимо
увеличивать скорость полета.
Силы и факторы, действующие на ЛА
Полная аэродинамическая сила R — результирующая всех сил давле-
ния и трения, действующих на ЛА в процессе полета:
87
= (3.15)
где cr - коэффициент полной аэродинамической силы;
$ - площадь крыла, м2.
Подъемная сила Y — проекция полной аэродинамической силы на пер-
пендикуляр к скорости воздушного потока:
= (3.16)
где су — коэффициент подъемной силы.
Лобовое сопротивление Q — проекция полной аэродинамической силы
на направление скорости набегающего потока и имеющая направление в сто-
рону, противоположную движению ЛА:
Q = cxS^~. (3.17)
где сх — коэффициент лобового сопротивления, являющийся суммой коэф-
фициентов лобового сопротивления при отсутствии Сц и наличии сХ( подъ-
емной силы, с учетом стреловидности крыла (О...6О0).
Значения коэффициентов сх и cv и распределение сил, действующих на
ЛА, показаны на рис. 3.9 и 3.10 соответственно.
Рис.3.9. Значения коэффициентов сх(а) и су(б) с учетом
стреловидности крыла
•88
Всякое движение по своей сути реактивно, так как основано на отбрасы-
вании массы в обратном движению направлении (винты самолета отбра-
сывают воздух, винты парохода - воду и т. д.).
Рис. 3.10. Распределение сил, действующих на летательный аппарат
(3.18)
Однако только движение реактивного ЛА нс требует наличия окружаю-
щей среды (за исключением воздушно-реактивного), так как отбрасываемая
масса рабочего тела находится на борту ЛА.
Сила тяги Р является основной величиной, характеризующей реактив-
ный двигатель как элемент силовой установки ЛА:
/J=Ge + Gr v
8 C 8
где Ge ,GT - секундные массовые расходы воздуха и топлива
соответственно, Н/с;
Уо V- скорости истечения газов и движения ЛА соответственно, м/с.
Аэродинамическое качество ЛА - отношение подъемной силы У к лобо-
вому сопротивлению Q (отношение коэффициента подъемной силы к коэф-
фициенту лобового сопротивления):
у
K-Q-Z <3,9>
В процессе полета ЛА, обладающего массой т на его конструкцию дей-
ствует геометрическая сумма внешних сил вызывающая результирую-
щее ускорение а, м/с2:
аЛ?.
т
Возникновение ускорения сопровождается наличием сил инерции. Вели-
чина силы инерции J(H) всецело зависит от ускорения, а направление всегда
противоположно направлению ускорения J= -та.
Перегрузки ЛА - безразмерное отношение величины равнодействующей
всех сил, действующих на ЛА, к величине его силы тяжести:
89
(3.20)
n = ^=‘=-'
G g G
При этом £ p = ma; G=mg\ J--ma.
Равнодействующая всех сил £p может быть разложена на составляю-
щие по осям связанной системы координат (х, у, ?), т. е.£р*; £ ру; £р..
По значениям этих составляющих рассчитываются продольные пл и по-
перечные - нормальная пу и боковая пг перегрузки ЛА:
Пх G G
* G
г G
Тепловой барьер конструкции ЛА - совокупность конструктивных и
эксплуатационных ограничений, связанных с повышением температуры по-
верхности ЛА и его отдельных частей при увеличении скорости полета.
Рис.3.11. Изменение динамической температуры в зависимости
от скорости ЛА
Торможение потока воздуха - падение местной скорости воздуха до ну-
ля в ограниченной зоне на передней части обтекаемого потоком тела.
90
Динамическая температура поверхности ЛА - повышение температу-
ры за счет превращения кинетической энергии потока воздуха в потен-
циальную при его торможении:
= (г-273°)Г/ + ^-1. (3.21)
где М - отношение скорости потока воздуха к скорости звука;
Т- 273° - абсолютная температура окружающего воздуха.
Теоретическая зависимость динамической температуры от скорости ЛА
показана на рис. 3.11.
Уменьшение относительной прочности современных авиационных мате-
риалов, в том числе и нержавеющей стали, в зависимости от температуры
показано на рис. 3.12.
Рис.3.12. Относительное уменьшение прочности материалов при
повышении температуры
Режим полета аэродинамических ЛА обусловлен рядом ограничений,
влияющих на характер их боевого применения (рис. 3.13).
Верхняя граница определяется допустимым давлением в каналах возду-
хозаборников, а нижняя — пределом прочности конструкции. Пунктиром
показаны предельные температуры для различных материалов конструкции
ЛА.
91
Статический потолок Нет- наибольшая высота горизонтального устано-
вившегося полета аэродинамического ЛА. при которой выполняется условие,
определяемое уравнением энергии (3.14).
Минимально допустимая скорость полета — наименьшая скорость
VmUT установившегося полета на данной высоте, исключающая сваливание аэ-
родинамического ЛА:
v _ I 2G
'mindon . с (3.22)
У Р St у fen
Рис.3.13. Ограничения режимов полета ЛА
Максимально допустимая скорость полета - наибольшая скорость у^
установившегося полета на данной высоте при максимальном или форсаж-
ном режиме работы двигателя, обеспечивающая безопасность полета аэро-
динамического ЛА:
(3.23)
где - предельная величина скоростного напора для данного типа ЛА.
Качественные характеристики V^ndo» и для аэродинамических
ЛА показаны на рис. 3.14.
92
Рис.3.14. Качественные характеристики скоростей полета
аэродинамических ЛА
Принцип реактивного движения аэробаллистических и
баллистических ракет
При реактивном движении в качестве движущей силы используется ре-
акция вытекающей струи. Теория реактивного движения для точки с пере-
менной массой, движущейся прямолинейно в безвоздушном пространстве
при отсутствии внешних сил, разработана К.Э. Циолковским в виде первой
задачи, а для движения вертикально вверх - в виде второй задачи.
Первая задача Циолковского. Скорость точки V/ в конце процесса го-
рения при начальной скорости Vo;
V; = 2JV,/4/ + -£4. (3.24)
\ MsJ
где V, - относительная скорость истечения частиц;
т - отброшенная масса топлива;
М5- масса точки в конце процесса отбрасывания топлива.
Вторая задача Циолковского. Полная высота Н подъема точки будет
складываться из активного участка Sa, проходимого за время th и пассивного
участка Sn, проходимого точкой с постоянной массой Мг =М0 -т и скоро-
стью, равной скорости V, в конце активного участка:
W=Se + S„=V0,;-^ + a^ + ^., (3.25)
где а—удельный расход топлива;
v2 =vo +aVitr
93
3.4. ХАРАКТЕРИСТИКА ПОЛЕТА АЭРОБАЛЛИСТИЧЕСКИХ
И БАЛЛИСТИЧЕСКИХ РАКЕТ
Аэробаллистические ракеты — реактивные ЛА. летящие по баллисти-
ческой траектории на основе законов аэродинамики и имеющие:
дальность полета £ _ у/д/лЗб». (3.26) g
максимальную высоту траектории
(327)
g
длительность полета 7. 2V; sin® (3.28) g
где Но - высота полета носителя (самолета) в момент пуска ракет;
V/ - скорость полета к моменту остановки двигателя;
0 - угол бросания;
g - ускорение свободного падения.
Характеристики траектории показаны на рис. 3.15.
Рис.3.15. Характеристики траектории аэробаллистического Л А
Баллистические ракеты (БР) - ЛА. траектория которых состоит из ак-
тивного участка полета с работающим двигателем, на протяжении которого
аппарат приобретает запас кинетической (скорость полета) и потенциальной
(высота полета) энергии, и пассивного участка, когда движение происходит
по закону свободно брошенного тела, т. е. по баллистической кривой.
Траекторию баллистической ракеты можно разбить на три характерных
участка (рис. 3.16).
94
Рис.3.16. Траектория полета баллистической ракеты
Активный участок — часть траектории от точки пуска А до конца рабо-
ты двигателя (точка К), на которой осуществляется разгон до требуемой по
величине и направлению скорости V*.
Участок свободного полета — часть траектории (от точки К до точки В),
на которой ЛА осуществляет полет по баллистической кривой.
Конечный участок — часть траектории (от точки В до точки С), на кото-
рой ЛА движется в плотных слоях атмосферы.
Проекция полной дальности полета БР на поверхность Земли
L=La+Le+Lb ,
где La, L& Lb - соответственно проекции активного, свободного полета и ко-
нечного участков траектории.
Так как Le»La+Lb, то в первом приближении можно пренебречь значе-
ниями La и Lb, т. е.
L " Lj$ — 2<pR3>
где <р - центральный угол, радиан;
Rj- радиус Земли,
или L» 114j5R3<p°{<p° -измеряется в градусах)-
Зависимость между скоростью V*. углом ее наклона к горизонту Зк, вы-
сотой активного участка //*. и угловой дальностью полета 2<р выражена
формулой:
ц l-cos2<p
k = ТТг------------------~---------1 ’ (329)
C°S2 ~ C0S^P “ )C0S®k I
где (Y - гравитационная постоянная, М3 - масса Земли); гк=Нк+В},
95
Рис.3.17. Основные соотношения, характеризующие полет БР
Связь между проекцией дальности ЬБ полета БР на поверхность Земли,
скоростью Vk в конце активного участка и углом бросания &к показана на
рис. 3.17 (на рисунке точки с минимальными углами бросания ок обведены
кружками).
Условно все типы ЛА можно классифицировать по следующим призна-
кам: ЛА легче воздуха; аэродинамические крылатые ЛА; аэробаллистические
ЛА; ракеты - крылатые и баллистические; авиационно-космические и косми-
ческие ЛА.
На рис.3.18 приведены возможные характеристики дозвуковых Ф. сверх-
звуковых Ф и гиперзвуковых <3> ЛА с указанием ограничений по требуемым
температурным режимам (7’m) в градусах Кельвина, высотам (Н, км) и скоро-
стям (У,км/с и М), а также по характеристикам прочности (q, кГс/м2).
Создание новых композиционных материалов с повышенной прочностью
и высокими температурными характеристиками обеспечивает возрастание
возможностей ЛА различного назначения при полете в пределах воздушно-
космического пространства.
33. ОБЩАЯ ОЦЕНКА СРЕДЫ ВОЗДУШНО-КОСМИЧЕСКОГО
ПРОСТРАНСТВА
В воздушно-космическом пространстве сконцентрированы различные
природные образования, такие как ионосфера, полярные сияния, радиацион-
96
ные пояса, метеорные потоки, магнитное поле и другие образования, оказы-
вающие влияние как на условия применения ЛА, так и систем вооруже-
ния Войск ПВО различного назначения.
Под действием излучений радиоактивных элементов Земли, космических
лучей, ультрафиолетового и рентгеновского ихтучения Солнца, а также в ре-
зультате воздействия на частицы воздуха метеорных тел образуются элек-
трически заряженные частицы - электроны и ионы.
Области с повышенной концентрацией свободных электронов называют
ионизированными слоями. Эти слои отражают электромагнитные колебания
различных длин волн высокочастотного диапазона, что обеспечивает воз-
можность создания систем загоризонтной локации и связи.
По уровням возрастающей концентрации свободных электронов и, сле-
довательно. по различным свойствам отражения электромагнитных колеба-
ний эти слои делят на слои D, Е, Eh Е2, состояние которых зависит от време-
ни суток, года, солнечной активности и других факторов окружающего Зем-
лю воздушно-космического пространства можно упрощенно получить путем
анализа его структуры, приведенной на рис.3.19.
В космическом пространстве имеются значительные области полярных
сияний. Около 94% сияний в земной тени проходит на высотах 9... 130 км и
около 6% на высотах до 40 км.
Эти области оказывают существенное влияние на распространение элек-
тромагнитных колебаний в широком диапазоне волн, что должно учитывать-
ся в решении задач локации, связи, навигации и др. В частности, в зоне по-
лярных сияний увеличиваются шумовые происхождения в диапазоне
ЗО...ЗОООМГц.
Обширные области в атмосфере и за ее пределами, внутри которых вдоль
магнитных силовых линий движутся протоны и электроны, называют радиа-
ционными поясами. Различают два основных пояса внутренний и внешний.
Внутренний - состоит главным образом из движущихся электронов с энерги-
ей £>=500 КэВ, сконцентрированных на высотах Я=600...1600 км в секторе
40° от магнитного экватора. Внешний - состоит главным образом из движу-
щихся протонов с энергией £'„=800 МэВ, сконцентрированных на высотах
Н=6 ООО...50 000 км в секторе ± 50...60°от магнитного экватора.
Следовательно, при нахождении ЛА в зонах радиационных поясов воз-
никает сложная задача защиты экипажей и аппаратуры от воздействия силь-
ной радиации, что требует оценки выбираемых траекторий.
Поэтому космические аппараты могут находиться либо на низких, либо
средних, либо высоких орбитах (рис.3.19), а траектории их запуска и посадки
должны проходить через околополярные области.
Н, км
Рис.3.18. Высотно-скоростные ограничения движения ЛА
98
Метеорные потоки наблюдаются, когда Земля при движении вокруг
Солнца пересекает области их концентрации. При этом на высотах
50... 130км наблюдаются многочисленные метеоры, которые воздействуют на
корпус ЛА, а также создают ионизированные следы, оказывающие сущест-
венное влияние на распространение электромагнитных колебаний, создавая
помехи РЭС. Так как орбиты и параметры движения метеорных потоков в
пределах солнечной системы известны, то их появление может быть спрог-
нозировано.
Магнитное поле Земли в первом приближении подобно полю гигантского
магнитного диполя, ось которого отстоит от земной оси примерно на 11 ° в
сторону Тихого океана с Южным (в северном полушарии) и Северным ( в
южном полушарии) геомагнитными полюсами.
Наличие мировых аномалий (Восточно-Сибирская с повышенной и Бра-
зильская с резко пониженной напряженностями), а также воздействие кор-
пускулярных потоков, вырывающихся из солнечной короны и достигающих
магнитосферы Земли, деформирует дипольное поле. Поэтому магнитное поле
Земли простирается на 10... 12 R3 со стороны Солнца и имеет "хвост" магни-
тосферы с размером до 1000 R3.Ha границе встречи "солнечного ветра" с
магнитным полем возникает ударная волна, разогревающая частицы до вы-
соких температур и, образуя слой, получивший название магнитопаузы, ко-
торая отделяет поле Земли от внешних полей.
Искривление траекторий заряженных частиц в магнитном поле Земли
приводит к возникновению так называемого магнитотормозного излучения,
создающего помехи в радио- и оптическом диапазонах. Каждодневное изме-
нение земной атмосферы (особенно в приполярных областях) приводит к
временным нарушениям: коротковолновой связи и связи с КА, помехам РЛС
метрового диапазона, возникновению индуцированных токов в кабельных
линиях связи, линиях электропередач и системах телевидения.
Таким образом, создание и функционирование различного назначения
систем, прямо или косвенно связанных с окружающей Землю воздушно-
космической средой, требуют детального изучения свойств этой среды, вы-
ступающей в качестве специфического театра военных действий.
99
Н, км
Рис. 3.19. Среда воздушно-космического пространства
100
3.6. СТРУКТУРА ПРОТИВОБОРСТВУЮЩИХ СИСТЕМ ВКН-ВКО
Обобщенно структуру противоборствующих систем в воздушно-
космическом пространстве можно представить рисунком 3.20.
Рис 3.20. Структура противоборствующих систем
Системы, выполняющие функции нападения (давления), формируются на
базе средств и организационной структуры сил воздушно-космического на-
падения с подсистемами управления.
Системы, выполняющие функции обороны (сдерживания), формируются
на базе систем вооружения и организационной структуры Войск ПВО (ВКО)
с соответствующими подсистемами управления.
Противоборство этих систем осуществляется в среде воздушно-
космического пространства, выступающей в данном рассмотрении как спе-
цифический театр военных действий.
101
4. ЗАКОНЫ ДВИЖЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
4.1. ОБЩИЕ СВЕДЕНИЯ
Движение - всякое изменение, охватывающее все процессы, происходя-
щие во Вселенной. Если движение материи в целом ничем не ограничено, аб-
солютно неотвратимо и неуничтожимо, то движение каждого отдельного те-
ла ограничено в пространстве и времени и поэтому может быть определено
только относительно конкретной системы отсчета (системы координат).
Поскольку реальное движение всегда происходит одновременно относи-
тельно ряда систем отсчета, постольку возможен ряд способов его оценки.
Выбор системы отсчета диктуется только условиями целесообразности и
простоты описания.
Закон движения ЛА — аналитическая или графическая зависимость ко-
ординат ЛА от времени для заданной системы отсчета. Представление дви-
жения ЛА возможно благодаря таким физическим явлениям, как скорость,
ускорение и другие высшие производные от скорости.
Для сферической системы координат в общем виде законы движения ЛА
по дальности и угловым координатам могут быть представлены в виде вре-
менных рядов:
, \ a fit2 Ы3 £ n("}t"
0(,)=0(0)+D, + - + - + ...= Z—-
0(l)=p(o)+fa + ^ + ^ + ...= £
И P 2f 3f
( \ A St2 ft* Д
2! 3! n=0 n!
(4.1)
где D^n\^n\e^— значения (л-х) производных от дальности, азимута и уг-
ла места соответственно;
N — число членов ряда.
Законы движения ЛА по дальности, азимуту и углу места определяют ус-
ловия работы дальномерных и угломерных систем сопровождения соответст-
венно. При этом для систем сопровождения с известным порядком астатизма
значения производных от дальности и угловых координат определяют вели-
чины динамических ошибок, а следовательно, и точность измерения коорди-
нат ЛА.
4.2. ЗАКОН ДВИЖЕНИЯ ЛА ПО ДАЛЬНОСТИ
Закон движения ЛА по дальности — аналитическое или графическое
представление изменения координаты дальности ЛА относительно конкрет-
ной системы отсчета.
102
Для практических целей целесообразно закон движения представлять как
зависимость от азимута ЛА.
Модель горизонтального полета ЛА с постоянной скоростью относитель-
но наземной системы сопровождения (точка С) показана на рис.4.1, а, а закон
изменения дальности относительно системы сопровождения—на рис. 4.1,6.
Рис. 4.1. Модель горизонтального полета (а) и закон изменения
дальности (б) летательного аппарата
Аналитические выражения, характеризующие закон изменения дальности
и ее производных в зависимости от азимута ЛА, приведены в табл. 4.1.
На рис. 4.1 и в табл.4.1 использованы следующие обозначения: V—
скорость ЛА; Р - параметр относительно начала отсчета; Н — высота полета
ЛА; р.Е - азимут и угол места ЛА относительно начала отсчета.
Графики изменения Ь(/3), Ь(/3),Ь(/3) изображены на рис.4.2.
4.3. ЗАКОН ДВИЖЕНИЯ ЛА ПО АЗИМУТУ И УГЛУ МЕСТА
Закон движения ЛА по азимуту — аналитическое или графическое пред-
ставление изменения координаты азимута ЛА относительно конкретной сис-
темы отсчета.
Закон движения ЛА по углу места — аналитическое или графическое
представление изменения координаты угла места ЛА относительно конкрет-
ной системы отчета.
Характер изменения угла места ЛА и производных представлен в
табл.4.3.
Графики изменения показаны на рис.4.4.
103
Рис. 4.2. Графики изменения производных от дальности
Характер изменения азимута ЛА и производных от азимута представлен в
табл .4.2.
Рис. 4.3. Графики изменения производных от азимута
Графики изменения изображены на рис.4.3.
Приведенные в таблицах и показанные на графиках соотношения позво-
ляют произвести оценку величин динамических ошибок систем сопровожде-
ния и наведения, а также определить области пространства в зоне сопровож-
104
дения и наведения (поражения), где эти ошибки максимальны, и принять ме-
ры для их компенсации.
Влияние составляющих законов движения ЛА на точность их сопровож-
дения и наведения ЗУР (противоракет) в наибольшей степени сказывается в
ближней зоне действия систем вооружения ПВО (ВКО) и в области точки
встречи цели и средств поражения.
Приведенные в таблицах 4.1, 4.2, 4.3 аналитические соотношения позво-
ляют провести расчеты значений относительных ускорений и других высших
производных от дальности и угловых координат, влияющих на динамические
ошибки наведения ЗУР (противоракет) для различных конкретных задач.
Таблица 4.1
Составляющая закона движения Аналитическое представление дальности ЛА в производных Экстремальные значения Азимут экстремума
Дальность, м D(j3)=-l~Jp2 + H2sin20 sin 0 >1р2 + н2 D —> 0 = 90* 0 = 0*; 0=180*
Радиальная скорость, м/с . ^Pcos2p г JP2 + Н2 sin2 0 V 0 0 = 0*;0=180* 0 = 90*
Ускорение, м/с2 у[{р2 +Н2 sin2 дУ V2 4р2 + н2 0 0 = 90* 0 = 0*; 0 = 180*
Таблица 4.2
Составляющая закона дви- жения Аналитическое представление дальности ЛА в про- изводных Экстремальные значения Азимут экстремума
Азимут, рад 0(l) = arccig р- - Jp2 + Н2 - -
Угловая скорость. 1/с 0 V Р + Н Д = О°;Д = 75О° £ = 9/Г
Угловое ускорение. 1/с2 -2v2 cos 0sin* Р V2 ±0,65— г Рг + Н* 0 = 60°
Таблица 4.3
Составляющая закона движения Аналитическое представление дальности ЛА в произ- водных Экстремальные значе- ния Азимут экстремума
Угол места, рад e(ft) = sin 0 arclg H/P ft = 0';ft=180a ft = 909
Угловая скорость, 1/с . / VH cos ft sin2 /7 t(p]=p’+H^P iti.MVWP2 ±V/H Р = 55°;р=12Г(Р» H ft=O°;ft = /80°(Р <<H)
Угловое ускорение, 1/с2 V2H sin3 ft 2-3sin2 ft- ^ysin4 ft | \—-—5—2 I P ) V2H2/P3 v2/h>1p2 +h 2 ft = 909(P»H ) ft = 90°(P«H)
108
5. ФИЗИЧЕСКИЕ ПРИНЦИПЫ, ЛЕЖАЩИЕ В ОСНОВЕ
ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ЛА
5.1. СИСТЕМЫ КООРДИНАТ, ПРИМЕНЯЕМЫЕ ДЛЯ РЕШЕНИЯ
ЗАДАЧ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ
ЛА
Положение ЛА в пространстве может быть определено только по отно-
шению к каким-либо другим телам, которые называют телами отсчета.
В качестве тел отсчета могут быть приняты: Солнце, центр Земли, опре-
деленная точка на поверхности Земли, центр масс ЛА и т. д. С телом отсчета
связывается определенная система координат.
Для решения задач определения местоположения ЛА, их наведения и по-
ражения в околоземном пространстве могут применяться земные (неподвиж-
ные относительно Земли), связанные и скоростные (подвижные относительно
Земли) системы координат.
Земные системы координат
Геоцентрическая прямоугольная (X,P,Z) н сферическая (г, <р,А) сис-
темы. За начало координат О принимается центр масс Земли, а ось OY пря-
моугольной системы направляется по оси вращения Земли, оси ОХ и OZ так,
чтобы образовать правую систему координат.
В сферической системе положение ЛА определяется радиусом-вектором
г и геоцентрической широтой <р и долготой Я (рис. 5.1, а).
Связь между геоцентрическими прямоугольными и сферическими коор-
динатами:
X = rcostpsinA;
Y = rsintp;
Z = г cos <р cos А.
(5.1)
Поверхностная прямоугольная (х, у, z) и сферическая (р,0,^систе-
мы. За начало координат о принимается определенная точка земной поверх-
ности, ось оу прямоугольной системы направляется вертикально вверх, ось
ох связывается с направлением на север (или на местный ориентир), а ось oz
так, чтобы получить правую систему координат.
В сферической системе координат положение ЛА определяется наклон-
ной дальностью D и двумя углами 0,е, определяющими направление векто-
ра наклонной дальности D.
Угол £ между вектором Г) и его проекцией на горизонтальную плос-
кость называется углом места; угол 0, определяющий в горизонтальной
109
плоскости направление проекции D относительно начала отсчета (оси ох).
называется азимутом (рис. 5.1,6).
Рис.5.1. Геоцентрическая (а) и поверхностная (б) системы координат
Связь между поверхностными прямоугольными и сферическими систе-
мами координат:
D = -jx2 + у2 + z2;
fi = arclg~;
х
e = arcig I У у.
Jx' + y*
(5.2)
Подвижные (относительно Земли) системы координат
Связанная система координат (xhyhzi). За начало координат о
(рис.5.2,а) принимается центр масс ЛА: ось oxi направлена вдоль продольной
оси ЛА, ось oyi в плоскости вертикального, а ось ozt в плоскости горизон-
тального сечения ЛА так, чтобы получить правую систему координат.
Угол между продольной осью ЛА и ее проекцией на горизонтальную
плоскость называется углом тангажа 6.
Угол между проекцией продольной оси ЛА на горизонтальную плоскость
и осью ох называется углом курса (рыскания)
Угол между вертикальной плоскостью, проходящей через ось oxt и
связанной осью оу/, называется углом крена у.
На рис. 5.2, а изображена схема взаимного расположения связанной и
земной систем координат при совмещении их центра.
но
Углы образуются путем последовательных поворотов:!— вокруг
оси у на угол 2 — вокруг оси г'на угол t5; 3 — вокруг оси xt на угол/.
Скоростная система координат (rCTyozJ. За начало координат принима-
ется центр масс; ось охс совпадает с вектором скорости, оси оус и oz* лежат
соответственно в вертикальной и горизонтальной плоскостях симметрии ЛА
(рис.5.2, б}.
Положение скоростной системы координат относительно связанной оп-
ределяется углами атаки и скольжения.
Угол атаки а— угол между проекцией вектора скорости V на верти-
кальную плоскость симметрии ЛА и осью ОХ|.
Угол скольжения ft — угол между вектором скорости и вертикальной
плоскостью симметрии ЛА.
Рис. 5.2. Связанная (а) и скоростная (б) системы координат
Выбор каждой конкретной системы координат определяется: условиями
боевой задачи, выполняемой данной системой вооружения; требованием про-
стоты конструкции антенн и пусковых устройств; требованием снижения
динамических ошибок, простоты производимых расчетов и другими факто-
рами.
В общем виде переход от одной системы прямоугольных координат к
другой осуществляется по формулам аналитической геометрии и таблицам
направляющих косинусов.
Пример перехода от системы (х/, yh Z/) к системе (х, у, z) и наоборот при-
веден в табл. 5.1, где для упрощения значения косинусов заменены буквами.
Ill
Таблица 5.1
Координаты Xt У» Z| Формулы пересчета координат
X У Z <4 hl Cl «2 c2 «3 h3 сз x = a/x/+a2y/+aJz/; y = bJxl+b2yl+b3z1; ^ = С1Х1+С2У1+С3^1 X/ =aix + bty^Ciz; у, = a2x + b2y + c2z: Zi = a3x + b3y + c3z ,
Значения направляющих косинусов между связанной и земной система*
ми координат приведены в табл. 5.2, а между связанной и скоростной систе-
мами координат — в табл. 5.3.
Для решения отдельных специфических задач могут быть применены
различные модификации систем координат.
Биконическая система координат
В системах вооружения ПВО, радиолокационная подсистема которых
включает в свой состав фазированную антенную решетку (ФАР) широко ис-
пользуется система координат, получившая название биконическая.
Такое название связано с тем, что направление на цель (ОЦ) представляет
собой касательную образующих двух конусов, получаемых путем вращения
вокруг осей у и z (рис. 5.3).
Рис. 5.3. Биконическая система координат
Таблица 5.2
Координаты 0X1 oyi OZ!
ох cost) cos iff - cos iff sin 0 cos y + siniff sin у cos iff sin 0 sin у 4- sin iff cos у
оу sinti cos^cosy - cos sin у
OZ - sin iff cos cos iff sin у + sin iff sin 0 cos у cos iff cos у - sin iff sin sin у
Таблица 5.3
Координаты *1 У1 Z|
oxc COS (X COS fl - cos fl sin a sin fl
ОУс sin a cos a 0
OZc -cos a cos fl sin a cos fl cos fl
113
В качестве исходного примем следующее условие: элементы ФАР лежат
в плоскости ху; элементы, расположенные вдоль оси х имеют номера у, а
вдоль оси у -г, начало координат совмещено с центром ФАР. Тогда, если
сигнал в точке 0 будет равен Л’ (t ) = Sm sin(2x f t). то в точке А с координата-
ми xj и у/ S^t) = sin(2^(t + т,)). где = — - запаздывание сигнала отно-
сительно геометрического центра ФАР. При этом относительный фазовый
сдвиг будет равен = 2nftJi = 2nfAD/с = 2лЛ1)/Я.
После расчета значения 4D получим:
2т . Л 2я . -
yfji ~~^xj cos as,n ® + >'is,n as,n ® = + ^v( •
Отсюда видно, что каждый из указанных фазовых сдвигов и за-
висит от двух углов сферических координат а и 0. при использовании ко-
торых усложняется процесс управления диаграммой направленности ФАР.
Поэтому на практике расчет этих фазовых сдвигов осуществляется с по-
мощью углов биконической системы координат 0X(f и 0 в следующем виде
2я _ 2л ~
=~ИХ> cose,° ’ = Ть с°*&т •
Для эквидистантной ФАР конструктивно реализуется строчно-
столбцевой метод управления диаграммой направленности, так, что форми-
рование Wx осуществляется в j-м столбце, а - в i-й строке.
5.2. ФИЗИЧЕСКИЕ ЯВЛЕНИЯ, ЛЕЖАЩИЕ В ОСНОВЕ
ОБНАРУЖЕНИЯ ЛА В ПОЛЕТЕ
Обнаружение ЛА в процессе их полета может быть обеспечено только
путем приема отраженной от поверхности ЛА или излученной самим ЛА
энергии. Возможно обнаружение также путем фиксирования изменений ок-
ружающей среды, связанных с процессом движения ЛА в этой среде.
Следовательно, физические явления, составляющие объективную основу
обнаружения, могут быть разделены натри группы.
1. Отражение энергии — физическое явление, обеспечивающее обнару-
жение за счет различий отражающих свойств ЛА и окружающей его среды.
Поэтому возможно активное обнаружение ЛА. если облучать их потоком
электромагнитной энергии, энергии звуковых волн или потоком частиц, дви-
жущихся с большой скоростью, и принимать отраженные сигналы. При этом
возможно использование отраженной от ЛА энергии Солнца или других кос-
мических источников.
2. Излучение энергии — физическое явление, обеспечивающее обнару-
жение за счет различного рода излучений самих ЛА в процессе полета (излу-
чение бортовых источников, тепловое излучение при нагреве корпуса ЛА,
излучение факела реактивного двигателя, звуковое излучение). Эти явления
114
обеспечивают создание систем пассивного обнаружения ЛА в полете в ра-
дио-, оптическом, звуковом диапазонах волн. Носители ядерного оружия яв-
ляются источниками очень слабых ядерных излучений, обнаружение кото-
рых практически возможно только на очень малых расстояниях.
3. Возмущение среды — физические явления, сопровождаемые измене-
ниями окружающей среды в процессе полета ЛА (изменение химического
состава, ионизация воздуха, изменение поля земного тяготения, земного маг-
нетизма и др.). Эти явления потенциально могут быть использованы для
решения задач обнаружения ЛА при условии реализации методов фиксации
этих явлений.
Классификация физических явлений, которые принципиально могут быть
использованы для решения задач обнаружения, показана на рис. 5.4.
Из всех перечисленных явлений для обнаружения ЛА в полете наиболее
широко используются явление отражения энергии, лежащее в основе актив-
ной и полуактивной локации, и явление излучения, составляющее основу
пассивной локации.
Вторичное излучение. Падающую на поверхность ЛА волну называют
первичной, отраженную или рассеянную — вторичной, а явление отражения
или рассеяния — вторичным излучением.
Эффективная отражающая поверхность (ЭОП) целей. Если на по-
верхности точечной цели, находящейся от источника излучения на расстоя-
нии D, создается плотность потока мощности первичной волны, то в ре-
зультате всенаправленного вторичного излучения цели в точке приема, со-
вмещенной с излучателем, будет принят сигнал мощностью
/’ = 4ЛгЛ„/>,
где S„p — плотность потока мощности в точке приема, Вт/м2.
Рис. 5.4. Классификация физических явлений, лежащих в
основе обнаружения ЛА
115
Отношение этой мощности к плотности потока первичной волны назы-
вают эффективной отражающей поверхностью цели ац. м2:
a*-^-4xD т? (5,3)
Реальные цели (или группа целей) по закономерностям вторичного излу-
Рис. 5.5. Модель вторичного излучения из двух излучателей
Модель из двух излучателей. Суммарная ЭОП модели из двух излуча-
телей с ЭОП иа2 каждого из них (рис. 5.5):
СГЧ = СТ/ + 02 + 2y/(Tl(T2 cw| ~ sin 0
(5.4)
Сдвиг фаз между сигналами, отраженными от излучателей сг/псг2:
л 24D 4ri .
д> - слЛ1 = 2л{--= — sin 0.
где /— расстояние между излучателями;
0 - угол между нормалью к плоскости расположения излучателей и
направлением облучения.
Суммарная ЭОП модели из п излучателей
<г, = £<7,
(5.5)
где д>у — сдвиг фаз между i-.и и j-м излучателями.
ЭОП тел, малых по сравнению с длиной волны < Я), приближенно
выражается формулой
I6
^=4я3-^- (5.6)
ЭОП тел, размеры которых соизмеримы с длиной волны • Л/2):
116
(Тц "0,17(21^ "0.17Л2.
(5.7)
Во всех рассмотренных случаях за /ц принимается некоторый эквивалент
размеров реальной цели.
Особый интерес представляют методы расчета ЭОП целей, размеры ко-
торых значительно превышают длину волны (4,»Д В этом случае резуль-
тирующая ЭОП реальных целей на основании принципа суперпозиции (на-
ложения) рассчитывается как сумма ЭОП плоских и выпуклых поверхностей.
Анализ принятых моделей показывает, что диаграмма вторичного излу-
чения реальных целей носит лепестковый характер. Изменение положения
ЛА в процессе полета относительно точки приема приводит к изменению ин-
тенсивности отраженных сигналов. Это явление характеризует ЭОП как слу-
чайную величину.
Плотность распределения ЭОП как случайной величины при
одночастотном ft ), двухчастотном f2 ) облучении цели:
(5.8)
где о0 иац - математическое ожидание и текущее значение ЭОП цели соот-
ветственно.
Рис. 5.6. Плотность распределения эффективной отражающей поверхно-
сти при одночастотном (а) и двухчастотном (б) облучении цели
117
Дисперсия ЭОП цели при одночастотном облучении. Dt а при
двухчастотном D2 = а$/2. Следовательно, применение двухчастотных (мно-
гочастотных) РЛС приводит к уменьшению отклонения ЭОП как случайной
величины от математического ожидания сг0, что соответствует увеличению
дальности и вероятности обнаружения.
В табл. 5.4 приведены значения математического ожидания ЭОП тел раз-
личной конфигурации.
Математические ожидания отражающих поверхностей различных ЛА
приведены в табл. 5.5. Нижняя граница значений ЭОП соответствует цели
под нулевым ракурсом, а верхняя — под ракурсом 45°.
5.3. ОТНОСИТЕЛЬНОЕ РАСПРЕДЕЛЕНИЕ ЧАСТОТ ПО ТИПАМ
РЭС
Обобщенно соотношение длины волны А и размеров объектов отражения
может быть продемонстрировано с помощью графика рис. 5.7, где на оси ор-
динат отображено отношение ЭОП металлического шара аш к площади его
максимального сечения S = xr2 (г - радиус), а по оси абсцисс - отношение
длины окружности шара С. = 2яг к длине волны А.
Таблица 5.4
Конструкция тела Расчетные соотношения для определения ЭОП, м2
Металлический шар радиусом, г = яг2(при г»А}
Эллипсоид (параболоид)с радиу- сами кривизны rtur2 а0 =ЯГ{-г2 (при Г/ и г2»Л)
Проводящая поверхность отраже- ния с размерами сторон а и b а0 =4я(а Ь/Л)2 (при а и h»A)
Металлический цилиндр с радиу- сом основания г и образующей / а0 = 2яг12 / А(при 2яг/ А »/)
Металлический конус с радиусом основания г и углом при вершине а ^о=^2^2^(при г» А}
118
Таблица 5.5
Тип ЛА а0.м2
Стратегический бомбардировщик 10-20
Средний бомбардировщик 8-15
Истребитель 1-2
Крылатые ракеты 0,1-1
Головные части БР 0,001-0,01
Космические аппараты 1-2
На графике обозначены условные границы применения различных типов
РЭС: ЗГЛ - загоризонтная локация; СДО - станции дальнего обнаружения;
РТВ - РЭС радиотехнических войск; ЗРВ - РЭС зенитных ракетных войск;
ИА - РЭС истребительной авиации; ОЭС - оптико-электронные средства.
На практике металлический шар используется в качестве эталона при
относительной оценке ЭОП различных типов летательных аппаратов.
123456789 10
Рис. 5.7. Зависимость ЭОП шара от соотношения его размеров
и длины волны
119
5.4. ОБНАРУЖЕНИЕ ЛА РАДИОЛОКАЦИОННЫМИ
СРЕДСТВАМИ
Радиолокация — отрасль радиоэлектроники, обеспечивающая опреде-
ление местоположения объектов и получение сведений о них за счег приема
и анализа радиосигналов.
Радиолокационные цели — объекты радиолокации, т. е. физические те-
ла (например, ЛА), сведения о которых представляют практический интерес.
В зависимости от области применения радиолокации цели могут быть:
аэродинамическими, баллистическими и космическими, наземными и над-
водными или могут быть цели природного происхождения (ионизированные
образования и следы, облака, скопление гидрометеоров и др.).
Радиолокационная информация — совокупность сведений о целях,
полученных методами радиолокации.
Радиолокационные станции (РЛС) - технические средства получения
радиолокационной информации.
Единый процесс получения радиолокационной информации может быть
условно разделен на следующие этапы: обнаружение, измерение координат и
параметров движения, разрешение и распознавание целей.
Обнаружение — процесс принятия решения о наличии или отсутствии
цели в данной области пространства путем приема и статистической обра-
ботки суммарного значения s(t) радиолокационных сигналов и помех n(t), т.е.
y(l)=s(!)+n(i). Принятие решения происходит при двух взаимно исключаю-
щих условиях.
.. [Л/ -э цель есть; \ А*,есть цель:
Условие! Решение!
I -» Ч*ли ,,ет- [ Ау -»нет цели.
Следовательно, возможны четыре ситуации совмещения событий «усло-
вие» и «решение», которые выражаются условными вероятностями:
A*/At; A^/At ; А] / Aq: А^/Ац.
Возможности возникновения этих ситуаций характеризуются вероятно-
стями правильных и ошибочных решений (Рпо - вероятность правильного
обнаружения, P,L„ - вероятность правильного необнаружения, Рл„ -
вероятность ложной тревоги, Рпр - вероятность пропуска цели).
Сумма Р„о и Р„р - образует полную группу несовместных событий, т. е.
Рп<лРпр=ЦРпо=1‘Рпр). Аналогично РЛт+Рпя=1 (Р,„=1-Рп>.). Эти соотноше-
ния показывают, что среди вероятностей Р„„, Р„р, Рчт, Р„„ независимыми
являются только две, поэтому для характеристики устройств обнаружения (и
РЛС в целом) используют вероятности Рпои Рлт.
Статистический характер обнаружения сигналов определяется значения-
ми плотностей распределения помехи Рп, смеси сигнала и помехи Рс, кото-
рые для нормального закона имеют вид:
120
(5.9)
p (v) =____I__e 2a‘
сЛУ) 4^0
где a - среднее квадратическое отклонение.
Рис. 5.8. Графическое представление вероятностей
правильного обнаружения и ложной тревоги
При известной величине порога у0 приемного устройства:
= РслЬ-Ь;
Уо
Уо
Графически значения Р„.„ и Р,т изображены на рис. 5.8 (заштрихованные
области).
Вероятность правильного обнаружения Р„.о - вероятность при-
нятия решения о наличии цели путем выделения сигнала на фоне помех при
условии, если цель действительно присутствует в данном объеме простран-
ства, т. е. Рпл = /Aj). Практическое значение
= 05 ±0.99,
(5.10)
121
2
- интеграл вероятностей, график которого изображен
на рис. 5.9.
Рис. 5.9. График интеграла вероятностей
Рп.о=0.5;
При у-уо
при у»уо
Вероятность ложной тревоги Рят - вероятность принятия решения
о наличии цели при условии, если цель отсутствует в данном объеме про-
странства. Практическое значение
10~4 ±10'8.
(5.11)
Величина порога уо определяется значением критерия оптимальности и
задачей, выполняемой обнаружителем.
Критерии оптимальности обнаружения — закономерные ре-
шающие правила принятия решения о наличии или отсутствии цели в усло-
виях помех.
В теории обнаружения используются критерии: минимума среднего рис-
ка, максимума отношения правдоподобия, идеального наблюдателя, Нейма-
на — Пирсона, последовательного наблюдателя и др.
122
Рис. 5.10. Зависимость отношения правдоподобия от
величины суммарного сигнала
Наиболее общим критерием оптимальности системы обнаружения явля-
ется критерий минимума среднего риска, который может быть сведен к так
называемому весовому критерию
~ ^о^л.т ~ тах>
(5.12)
где 10 - весовой множитель, определяющий величину порога обнаружителя,
при котором обеспечивается максимальное значение соотношения (5.13).
Следствием критерия минимума среднего риска является критерий мак-
симума отношения правдоподобия:
= г г”‘
(5.13)
Зависимость отношения правдоподобия от величины суммарного сигнала
показана на рис. 5.10, где значение 1(у)>10 эквивалентно значению у>у0.
Если необходимо величину порога выбрать непосредственно по заданно-
му уровню Рл„, то используется критерий Неймана — Пирсона.
Параметр обнаружения q — безразмерное отношение энергии Е по-
лезного сигнала к спектральной плотности No помех:
2Е
Ч=7ГО- <514>
123
Величина параметра обнаружения определяет все основные тактические
характеристики РЛС, такие, как дальность и вероятность обнаружения, веро-
ятность ложной тревоги, точность измерения координат и др.
Для сигналов со случайной фазой и амплитудой связь между значениями
Ряп и Ря„ определяется соотношением
2_
р _ p2+q (5-15)
rnjo •
Графическое представление згой зависимости называется кривыми
обнаружения (рис. 5.11).
Анализ кривых обнаружения показывает, что увеличение вероятности
правильного обнаружения может быть получено или за счет увеличения Ря„
при q=const, или за счет увеличения q при Р,„=const, что соответствует уве-
личению потенциала РЛС.
Оптимальный приемник — приемник, обеспечивающий при прочих
равных условиях максимальное значение отношения энергии полезного сиг-
нала к спектральной плотности помехи q^.
Суммарный сигнал на выходе оптимального приемника описывается
Ш’Н)*. (5.16)
где у(1) - принятый сигнал;
s*(l~ г)- ожидаемый сигнал;
г - временной сдвиг между принятым и ожидаемым сигналами.
124
Физический смысл оптимальной операции обнаружения состоит в том,
что умножение принимаемого сигнала y(t) на ожидаемый s(i-t) обеспечивает
подавление помех, не совпадающих с ожидаемым сигналом по времени и
частоте.
а
б
Рис. 5.12. Схема корреляционного приемника (а) и
приемника с оптимальным фильтром (б)
Правая часть формулы (5.16) называется корреляционным интегра-
лом. Решение корреляционного интеграла обеспечивается построением либо
корреляционного приемника, либо приемника с оптимальным фильтром.
Корреляционный приемник — приемник, обеспечивающий получе-
ние корреляционного интеграла (5.16) с помощью умножителя, интегратора и
порогового устройства (рис. 5.12, а).
Приемник с оптимальным фильтром — приемник, обеспечиваю-
щий получение корреляционного интеграла (5.16) с помощью оптимального
фильтра, детектора и порогового устройства (рис. 5.12, б). При этом $’(/ -т)
есть реакция фильтра на входное воздействие в виде короткого импульса
(8 -функции), представляющая собой зеркальное отображение зондирующего
сигнала, сдвинутое на произвольное время т. Преимуществом корреляторов
является их гибкость, возможность быстрого перехода к различным формам
сигналов, для чего достаточно изменить функцию s(t), подаваемую на вход
умножителя. Оптимальный фильтр согласован только с сигналом определен-
ной формы и требует существенного изменения схемы для согласования с
другим сигналом. Однако энергетические возможности этих приемников
(с точки зрения получения q^) примерно одинаковы.
125
Автоматические обнаружители — устройства, обеспечивающие
принятие решения о наличии или отсутствии цели в результате соответст-
вующей обработки смеси сигнала и помехи на выходе приемника.
Автоматические обнаружители классифицируются по их функциональ-
ному назначению.
Бинарные (двоичные) обнаружители — устройства, обеспечи-
вающие принятие решения о наличии или отсутствии сигнала от цели.
Многоальтернативные обнаружители — устройства, обеспечи-
вающие принятие решения о наличии или отсутствии сигналов от целей в
каждой из к ячеек разрешения для заданного объема пространства.
В этом случае общее число возможных решений будет равно 2*.
Последовательные обнаружители — устройства, обеспечивающие
получение заданной вероятности правильного решения при наименьшем
среднем числе наблюдений за счет введения двух порогов: у0 и уь Уровни
порогов выбираются по отношению максимума правдоподобия:
Уо
(5.17)
Если уровень сигнала лежит в пределах между у0 и у/, то производится
повторное испытание.
Дискретные процессы при обнаружении сигналов
На практике, особенно в связи с внедрением ЭВМ. часто используются
дискретные процессы, которые можно разделить на две категории — форми-
рование дискретных выборок и квантование.
Формирование дискретных выборок — выбор дискретных значений
непрерывного процесса с ограниченным спектром, позволяющий предста-
вить этот процесс в виде разложения в ряд по неслучайным функциям
со случайными коэффициентами у* (теорема Котельникова):
>•(')=
(5.18)
126
a—сигнал управления; б—характеристика выборок;
в— восстановение сигнала
где yn=y(tk) - значения y(t) в дискретные равноотстоящие моменты
времени =^(при к=0±1±2..., рис. 5.13, а. б);
4i = ll2 f max - интервал дискретизации;
yrk (t) - сдвинутые между собой на время At функции вида sin х/х:
^(,) = (5.19)
max
Восстановление первоначального процесса y(t) по дискретным выборкам
обеспечивается путем свертки значений у* с функцией pk(i) (рис. 5.13, в).
Таким образом, обеспечивается дискретное представление непрерывных
команд для передачи их на борт ЛА и восстановление этих команд с помо-
щью бортовой аппаратуры.
127
Квантование — процесс кодирования выборок в цифровую форму.
Квантование осуществляется по уровню (величине сигналов), по времени
(например, по времени запаздывания сигнала, т. е. по дальности) и по частоте
(например по доплеровскому изменению частоты, т.е. по скорости). Кроме
того, вводятся специальные преобразователи для угловых координат, обеспе-
чивающие преобразование угла поворота вала в цифру или угол поворота
диаграммы направленности антенны.
Во всех случаях величина сигнала, интервал времени или значения угла
выражаются в дискретной форме в виде, например, двоичных чисел, что
обеспечивает производство их расчетов на ЭВМ.
Для обеспечения операции квантования на выход приемных устройств
(рис. 5.12) подключаются устройства преобразования уровня сигналов в
цифру и второе пороговое устройство, обеспечивающее выработку решения
о наличии цели, если число сигналов m превысит некоторое значение то, оп-
ределяемое по определенному критерию. Таким образом, дискретный обна-
ружитель выполняет операцию оценки т>т0.
Двоичное кодирование — процесс преобразования отдельных выборок
или непрерывных сигналов в двоичный код.
Любую физическую величину, выраженную в десятичных единицах N,
можно преобразовать в двоичный код:
N=a02° + а222 +а323 +...= ^а,2‘. <5-20)
где at — коэффициенты, принимающие значение 0 или I в зависимости от
величины N, i=0, 1, 2, 3.п.
Например, /¥= 10=0-2° +1-21 +0-22 + !-23 = 0101.
При этом ао=О, at=I, а2=0, а}=1.
Следовательно, различные физические величины (координаты ЛА, ко-
манды управления, характеристики движения ЛА и др.) можно представить в
двоичном коде и различные операции расчета производить на ЭВМ.
128
6. СТАТИСТИЧЕСКИЕ МОДЕЛИ СИГНАЛОВ И ПОМЕХ
Характер и качество информации, получаемой с помощью РЛС, зависят
от структуры и свойств зондирующих сигналов. В зависимости от назначе-
ния РЛС зондирующие сигналы обеспечивают: требуемую энергию излуче-
ния для обнаружения ЛА на заданной дальности с последующим измерением
их координат и параметров движения, требуемое разрешение ЛА и соответ-
ствующее подавление различного рода помех.
Зондирующие сигналы характеризуются рядом энергетических парамет-
ров.
Мгновенная активная мощность Р(1) - усредненное за период То теку-
щее значение мощности (Вт) излучаемых колебаний p(t)=u(t)i(t) (u(l) и i(t)~
мгновенные значения напряжения и тока, усредненные за период высокой
частоты Го):
I т<>
₽(<) = —f ₽(<)Л. (6.1)
*0 О
Наибольшее значение мгновенной мощности называют пиковой, т.е.
= Рпих-
Импульсная мощность - мощность, усредненная за время длительности
импульса ти:
Р^-Цр^ИР",. (6.2)
~и о
Для импульсов прямоугольной формы значения импульсной и пиковой
мощностей совпадают, т.е. Ры=Ряи^
Энергия импульса Е„, Дж:
rw
F.u = J/>(/)d = Р.т.
О
Средняя мощность - мощность, усредненная за период следования им-
пульсов Т„:
p-=^pt м
где С=7Угм - скважность импульсов.
Энергия пачки из п когерентных импульсов
Ек = Еип. (6.5)
Энергия пачки некогерентных импульсов
= (6.6)
129
6.1. ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К ЗОНДИРУЮЩИМ
СИГНАЛАМ
В системах вооружения ЗРВ для целей обнаружения и измерения коор-
динат летательных аппаратов (ЛА) находят широкое применение следующие
типы зондирующих сигналов: простые импульсные и сложные импульсные с
дополнительной линейной частотной модуляцией (ЛЧМ). фазовой (ФМ) или
фазо-кодовой модуляцией (ФКМ), а также непрерывные (длинноимпульс-
ные) - простые монохроматические, сложные с периодической ЛЧМ, ФМ и
ФКМ.
К различным типам зондирующих сигналов предъявляются следующие
обобщенные требования:
а) обеспечение требуемой энергии излучения для обнаружения различ-
ных типов целей на заданной дальности и с заданной вероятностью;
б) обеспечение высокой производительности и помехозащищенности;
в) обеспечение возможности измерения дальности и скорости с заданной
точностью;
г) обеспечение высокой разрешающей способности по дальности и ско-
рости;
д) зондирующие сигналы должны быть простыми при формировании в
передатчике и при оптимальной обработке в приемнике;
е) зондирующие сигналы должны обеспечивать возможность решения за-
дачи распознавания типов ЛА и отождествления траектории их движения.
Нет (даже теоретически) единой структуры зондирующего сигнала, по-
зволяющего обеспечить получение требуемого объема информации в раз-
личных условиях обстановки. Следовательно, структура сигнала либо долж-
на адаптироваться к определенным условиям обстановки, либо необходим
набор различных сигналов и связанных с ними соответствующих режимов
работы.
6.2. ТИПЫ СИГНАЛОВ, РЕАЛИЗОВАННЫЕ В СИСТЕМАХ
ВООРУЖЕНИЯ ВКО
В настоящее время освоены следующие типы зондирующих сигналов:
1. "Гладкие" импульсные сигналы различной длительности и с постоян-
ной частотой (f0 = const).
2. "Сложные " импульсные сигналы с внугриимпульсной модуляцией по
фазе или по частоте.
3. Некогерентная пачка импульсных сигналов.
4. Когерентная пачка импульсных сигналов.
5. Импульсная последовательность многочастотных сигналов.
6. Непрерывное монохроматическое излучение.
7. Непрерывное излучение с периодической модуляцией по фазе и часто-
те.
130
Первые пять типов зондирующих сигналов обеспечивают возможность
использования одной антенны (в том числе и ФАР) и на передачу, и на при-
ем.
Применение непрерывного излучения требует наличия раздельных ан-
тенн. либо разнесенных в пространстве, либо экранированных друг от друга.
Проводятся широкие исследования по теоретической разработке и реали-
зации зондирующих сигналов со сложными законами модуляции сигналов по
длительности и частоте, например с квадратичным законом изменения несу-
щей.
Следует отметить, что импульсные сигналы в зависимости от диапазона
несущей частоты и условий влияния доплеровской частоты делят па коротко-
импульсные (ти <---) и длинно-импульсные (ти >--).
4VU 4VU
Это явление связано с тем, что при больших значениях скоростей сопро-
вождаемых целей и малых значениях А высокий уровень доплеровских час-
тот приводит к значительному изменению структуры отраженного сигнала и,
следовательно, к необходимости изменения структуры приемного устройст-
ва.
Учитывая исключительно важную роль зондирующих сигналов в реше-
нии задач передачи, приема и обработки информации операции с ними дос-
таточно полно разработаны и объединены обобщенной научной дисципли-
ной- "Теория сигналов".
Исходным в производстве операций над сигналами является их
аналитическое описание.
63. ОБЩИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ СИГНАЛОВ
Любой процесс S(t) не удовлетворяющий условию S(l)= const называется
колебанием.
Для решения практических задач в области локации целей широко при-
меняются три основных вида колебаний:
а) гармонические колебания
\• 0) = so cos(o)qI + <р0); (6.7)
б) периодические колебания
S„(/) = S(< + n7;); (6.8)
в) модулированные колебания
S я (t) = SM (i) • cos <рм (г). (6.9)
где: So - амплитуда гармонического колебания;
С0о = 2л[0 - круговая частота (f0 - несущая частота);
- начальная фаза колебания;
Т„ - период повторения сигналов;
л -0, 1.2...- число периодов повторения;
S^t) - закон амплитудной модуляции;
131
<рЛ!) = а>1 + Фо ~ закон частотной (co = var) или фазовой (<p0 = var) модуля-
ций.
При этом сигналом называется сообщение, предназначенное для переда-
чи информации на расстояние.
Для отображения реальных процессов, происходящих, например, в коле-
бательном контуре, гармонические колебания часто представляются
комплексным числом, имеющим три формы записи:
а) алгебраическая S = а + jft;
б) тригонометрическая 5 = 50(сол^+ jsinp);
в) показательная 5 = или S = SoeJ<a (при <р0 =й)
Физическая сущность приведенных значений в различных формах записи
поясняется рис.6.1, где а - действительная часть,Д - мнимая часть,
- модуль числа, <p = arcig — - аргумент.
а
Рис. 6.1. Представление сигнала комплексным числом
Первые слагаемые в алгебраической и тригонометрической формах запи-
си отображают значение энергии, выделяемой на активной части колебатель-
ного контура, вторые - на реактивной (энергия, накапливаемая в индуктив-
ном и емкостном элементах).
Показательная форма записи основана на представлении комплексного
числа с помощью формул Эйлера
5 = S0{cos(p + j sin (р) = Sae^t
S' = S0(cos(p - j sin(p} = Soe~1<p.
(6.10)
При этом угол <p измеряется в радианах, а функция - периодическая
с периодом 2 я/.
132
Для случая, когда начальная фаза колебания равна нулю <рй =0 соотно-
шения (6.10) примут вид
S(l)=Soe'a.
(6.11)
Соотношения S(i) и S*(l) называются комплексно сопряженными, гео-
метрически представляют собой зеркальное отображение модуля S" относи-
тельно действительной оси и играют исключительную роль в теории сигна-
лов. радиотехнике и электронике.
В частности, оптимальный приемник производит операции по вычисле-
нию произведения отраженного от цели сигнала S(l) на ожидаемый S*(f),
представляющий собой амплитудно-частотный спектр фильтра комплексно
сопряженный с S(t) с последующим накоплением (интегрированием) выход-
ной энергии Эвмх. Аналитически такие операции описываются так называе-
мым корреляционным интегралом вида
(6.12)
где г- временной интервал рассогласований между сигналами 5(7) и
Рассмотрим конкретный пример записи сигнала с гармоническим коле-
банием в различных формах.
Пусть задана амплитуда сигнала 50 в комплексном виде. т.е. Sn = l + jjl.
Тогда запись сигнала может быть представлена в трех видах в следующей
последовательности: алгебраическая, тригонометрическая, показательная.
5 = / + } • (6.13)
Все основные характеристики РЛС. связанные со структурой зондирую-
щих сигналов, обобщаются функцией неопределенности этих сигналов, ко-
торая определяет возможности РЛС по разрешению ЛА, по точности и одно-
значности измерения их координат.
Функция неопределенности (ФН) зондирующих сигналов - двухмер-
ная автокорреляционная функция р(г,/) сигналов, одновременно представ-
ляющая их структуру, как во временной, так и в спектральной области
(рис.6.2, а и б):
Чем уже (острее) рельеф функции неопределенности в соответствующем
направлении, тем выше точность и разрешающая способность по дальности
или скорости. Сечение ФН по оси частот есть спектр одиночного импульса,
а сечение по оси г - его корреляционная функция.
133
Рис.6.2, а. Двухмерная автокорреляци-
онная функция радиолокационного
сигнала
Рис.6.2, б. Сечение двухмерной
автокорреляционной функции им-
пульсного сигнала
Простые сигналы - зондирующие сигналы РЛС, произведение длитель-
ности ти которых на ширину их спектра Af примерно равно единице
(г„4Г = /).
Следовательно, увеличение длительности таких сигналов приводит к
уменьшению их спектра в обратно пропорциональной зависимости и наобо-
рот. Недостатком таких сигналов является то, что увеличение дальности дей-
ствия РЛС, требующее увеличения ти (для повышения энергии), ухудшает
разрешающую способность по дальности.
Кроме того, такие сигналы не обеспечивают (без принятия специальных
мер) разрешение ЛА по скорости.
6.4. ОДИНОЧНЫЙ РАДИОИМПУЛЬС
*(')=
S0cos(w0t + (p0)npu\t\<^.
(6.14)
где o)q - 2nf0 -----несущая круговая частота,
то
fo - ее линейное представление,
То - период высокочастотного колебания,
ти - длительность импульса.
Сечение двухмерной корреляционной функции прямоугольного им-
пульсного сигнала в виде эллипса показано на рис.6.2,6. Условно можно
134
принять, что различия в дальности и скорости двух или нескольких ЛА не
могут быть обнаружены, если отраженные от них сигналы попадают внутрь
эллипса.
Принцип неопределенности ч радиолокации - принцип, утверждающий,
что имеется некоторая неопределенность в одновременном определении
дальности и скоросги. т.е. выи(рыш в разрешающей способности и точности
по дальности достигается за счет ухудшения этих характеристик по скорости,
и наоборот.
Изменяя параметры сигнала, можно лишь перераспределить эту неопре-
деленность, т.е. изменить форму эллипса, не уменьшив его суммарной пло-
щади.
Сложные сигналы - зондирующие сигналы РЛС, произведение длитель-
ности ги которых на ширину их спектра ДГ может быть получено значи-
тельно больше единицы (тмДГ»/).
Это достигается за счет введения внутриимпульсной модуляции частоты
(частотно-модулированные сигналы) или фазы (фазомодулированные сигна-
лы).
Достоинством этих сигналов является то, что при большой длительности
обнаружения можно обеспечить требуемую разрешающую способность по
дальности путем "сжатия” сигнала на выходе обнаружителя на величину, оп-
ределяемую коэффициентом сжатия К«ж.
Линейно-частотно-модулированные (ЛЧМ) сигналы - сигналы, частота
которых в течение длительности импульса меняется по линейному закону,
т.е.
/(/)=/о + 4Г-.
Л/
где /о - начальная частота;
4f- девиация частоты в течение длительности сигнала.
Аналитическое выражение сигнала
s(l) = S0 Г ] (6.15)
Коэффициент сжатия сигнала Ксж =тиДГ. Следовательно, энергия зон-
дирующего сигнала с импульсной мощностью Р„ равна Е = Рити, а длитель-
ность сигнала на выходе оптимального приемника
На рис. 6.3. показано сечение функции ЛЧМ - сигнала, границы которого
на оси времени определяет величину сигнала ’’сжатия" гвых.
135
Рис.6.3. Сечение двухмерной автокорреляционной
функции ЛЧМ-сигнала
Фазокодоманипулированные (ФКМ) сигналы - сигналы, расширение
спектра которых достигается за счет манипуляции фазы по определенному
правилу.
ФКМ-сигнал состоит из N прямоугольных дискретов длительностью гд,
объединенных в единый сигнал с длительностью г„, и имеет аналитическое
выражение
'(») = Y (- )<™ at = КТД . (6.17)
К=о
где числа К (0, 1, 2.N-1) образуют последовательность нулей и единиц,
которая определяет порядок чередования фаз.
Структура ФКМ-сигнала, форма записи кода фазы и сечение ФН изобра-
жены на рис. 6.4. При этом для ФКМ-сигнала справедливы равенства:
r,=NTjl; Гд=-^-: T„4r = N = Kcjr.
136
Рис.6.4. Сечение двухмерной автокорреляционной
функции ФКМ-сигнала
В результате оптимальной обработки на выходе фильтра получается вы-
ходной сигнал, равный т<мг =Гд (рис.6.4).
Фаза ФКМ-сигнала может меняться скачком либо <р = 0 (код 0), либо
<р = л (код 1).Однако максимальное значение =2E/N0 достигается, ес-
ли применяется оптимальный код и фаза меняется от нуля до <Pq , равного
<Ро
(6.18)
Если взять произвольное исходное число п двоичных знаков, то общее
число дискрет ФКМ-сигнала равно 2п -1-N (при п=3 N=7\ при п=4 N=15
и т.д).
Правило получения оптимального кода
Ki = Ki_„ ф к{
(6.19)
где Kt - код фазы л+/, п+2,...Ы-го дискрета ФКМ-сигнала;
Ф-логическая сумма двоичных знаков, при которой
0Ф0 = 0; ОФ 1 = 1; ]®1 = 0. Например, п=011, т.е. 3 знака получим
23-1=Л/=0111010, что соответствует сигналу, изображенному на рис.6.4. Сиг-
нал имеет /7=7 дискрет и смену фаз по закону 0111010.
137
Рис. 6.5 Временное (а) и спектральное (б) представление последователь-
ности импульсов: тп~ длительность пачки импульсов; ти- длительность
отдельного импульса; ТП-период посылки импульсов, равный ТП = //Л}у
В интересах увеличения дальности обнаружения можно обеспечить не-
прерывное излучение последовательности ФКМ-сигналов, при этом необхо-
димо решать задачу устранения неоднозначности в определении дальности.
Последовательность (пачка) импульсов - основной вид зондирования
пространства в импульсной радиолокации. Периодическая модуляция им-
пульсов частотой посылок Еп изменяет структуру спектра и вид корреляци-
онной функции (рис.6.5).
При этом для пачки когерентных радиоимпульсов результирующая энер-
гия возрастает до уровня Ек=Еи.п. что обеспечивает увеличение дальности
действия и точность работы РЛС.
На рис.6.5,б изображен физический смысл "слепых скоростей", состоя-
щий в том, что доплеровская частота, совпадающая с линиями собственного
спектра сигнала, не может быть выделена в этих точках. Она может быть вы-
делена в интервалах между линиями спектра, что является основой построе-
ния когерентно-импульсных РЛС с аппаратурой СДЦ. Для устранения эф-
фекта "слепых скоростей" требуется изменение Тп.
6.5. МОНОХРОМАТИЧЕСКОЕ ИЗЛУЧЕНИЕ
5(/) = So cos(d)0t + % )при I -> оо. (6.20)
Применение монохроматического сигнала исключает возможность опре-
деления дальности из одного пункта и поэтому он используется либо в базо-
вых системах, либо в системах, где требуется высокая точность измерения
скорости.
Непрерывные сигналы с периодической модуляцией
S(i-nT„)= &n(i) приТп=ти, (6.21)
138
где 5л(/) = 50cos[(a(f) + p(f)] - модулированный либо по фазе, либо по частоте
сигнал длительностью ги, при этом период повторения таких сигналов сов-
падает с их длительностью.
Реализация непрерывных сигналов с периодической модуляцией позво-
ляет определять как скорость движения цели, так и дальность до нее при на-
личии специальной схемы устранения неоднозначности.
6.6. МОДЕЛИ СИГНАЛОВ, АДДИТИВНЫХ
И МУЛЬТИПЛИКАТИВНЫХ ПОМЕХ
Все перечисленные типы сигналов представляют собой модели с полно-
стью известными параметрами, или модели детерминированных сигналов.
Такие модели сигналов содействуют выявлению наиболее общих, принципи-
альных сторон их оптимальной обработки.
Модель сигнала со случайными независимыми начальной фазой и ампли-
тудой
(6.22)
где р = |в.у5|| - вектор случайных параметров амплитуды (в) и фазы (Д)
сигнала.
Распределение (в) моделируют релеевским, гаммалогарифмически - нор-
мальным и т.д. распределением. Распределение начальной фазы р прини-
мают обычно равновероятным.
Поступающие на вход приемника колебания могут быть представлены в
виде
у(/)= + n(f). (6.23)
где B(t) - зависящий от времени случайный модулирующий множитель;
- амплитуда ожидаемого полезного сигнала, зависящая от
времени и некоторого векторного параметра И;
n(t) - случайная налагающаяся (аддитивная) помеха.
При этом B(t) представляет собой мультипликативную (модулирующую)
помеху, важной количественной характеристикой которой является корреля-
ционная функция.
Аддитивные маскирующие помехи различают:
по их происхождению - внутри приемные, индустриальные, взаимные,
преднамеренные;
139
по способу создания - активные, пассивные (отражение зондирующих
сигналов от мешающих отражателей); комбинированные (активно-
пассивные);
по вызываемому эффекту - маскирующие (подавляющие), имитирующие
(создающие эффект ложных целей).
Аддитивные имитирующие помехи:
непреднамеренные (несинхронные и синхронные), возникающие при воз-
действии сигналов однотипных РЛС;
преднамеренные (ответные, уводящие по дальности, уводящие по
радиальной скорости и угловым координатам).
6.7. ОСНОВНЫЕ ПАРАМЕТРЫ КОГЕРЕНТНОЙ ПАЧКИ
РАДИОИМПУЛЬСОВ (КПР)
Длительность пачки - Гс=Т„(п-1),
где: Тп - период повторения, п - количество импульсов в пачке.
При этом под пачкой радиоимпульсов понимается такая их
последовательность, при которой постоянная времени фильтра приемного
устройства Тф2Тп, что необходимо для накопления энергии пачки импульсов.
Энергия пачки радиоимпульсов определяется огибающей спектра оди-
ночного радиоимпульса длительностью ти в диапазоне частот .
/ *и
содержит около 93% потенциальной энергии и оценивается величиной
E,t=Ejn, где = Рити - энергия одиночного радиоимпульса мощностью Ри
(Рис. 6.5. б).
Потенциальные возможности измерения доплеровских частот лежат
в пределах ± fd = / , что соответствует диапазону скоростей сопровождае-
/ *и
мых целей (Л - длина волны РЛС).
Количество гармонических составляющих спектра m. = 2Q - /, где
Т /
Q= у- скважность радиоимпульсов.
Амплитуда гармонической составляющей Sn на несущей частоте /0 равна
Sn = nStTu . где 5/ - амплитуда одиночного импульса.
Ширина спектра гармонических составляющих - = ^, что
соответствует потенциальному значению разрешающей
когерентно-импульсной РЛС по скорости <5У=уДГ. =^.
способности
и определяет
величину «слепых» скоростей.
140
Разрешающая способность по дальности - &) = ~ти и соответствует зна-
чению «слепых» дальностей.
Предназначение КПР:
увеличение дальности действия РЛС. т.к. D = \
повышение точности измерения координат, т.к. ошибка измерения
координаты х----><7Д = —;
обеспечение возможности одновременного измерения дальности D
и скорости V цели;
обеспечение возможности использования одной антенны (ФАР) на
передачу и на прием;
повышение помехозащищенности РЛС на основе обеспечения вы-
соких уровней энергии полезного сигнала на фоне помех.
Все перечисленные свойства КПР обеспечивают возможность создания
специализированных многоканальных систем огневого поражения летатель-
ных аппаратов различного назначения в интересах ПВО (ВКО).
141
7. ОСНОВЫ СИСТЕМОТЕХНИКИ
7.1. ОБЩИЕ СВЕДЕНИЯ
Под системотехникой в настоящее время понимается - научно-
техническая дисциплина, охватывающая вопросы проектирования, создания,
испытания и эксплуатации больших сложных систем (1агце scale systems)
различного назначения. При этом под системой понимается совокупность
взаимосвязанных элементов, составляющих единое целое, несвойственное
отдельным элементам.
К числу таких систем можно отнести системы вооружения ПВО, ПРО,
ПКО, АСУВ и др. При работе над ними возникают проблемы, относящиеся
как к свойствам отдельных подсистем, так и к закономерностям функциони-
рования рассматриваемых объектов в целом.
В общем виде '’сложной” называется система, обладающая одним или не-
сколькими признаками следующего содержания:
система допускает разбиение на подсистемы, изучение каждой из кото-
рых с учетом влияния других подсистем имеет содержательный характер в
рамках определенной задачи;
система функционирует в условиях существующей неопределенности, а
воздействие на нее внешней среды обусловливает случайный характер изме-
нения ее параметров и структуры;
система способна осуществлять целенаправленный выбор своего поведе-
ния.
Дополнительными особенностями, характеризующими "большую” сис-
тему, являются:
большие пространственные размеры, большое количество элементов и
состояний, сложный комплекс соотношений, описывающих систему;
наличие централизованного и децентрализованного управления в слож-
ной иерархической структуре;
большой объем циркулирующих информационных, энергетических и ве-
щественных потоков;
наличие конфликтных ситуаций, многоканальность, многофункциональ-
ность и многоцелевой аспект функционирования.
Научной базой системотехники является теория больших (сложных) сис-
тем различного назначения.
При этом для больших (сложных) систем характерно проектирование в
две стадии: макропроектирование (внешнее), когда решаются функциональ-
но-структурные вопросы, и микропроектирование (внутреннее), когда разра-
батываются элементы системы, их структура и взаимосвязи.
С другой стороны, под системотехникой можно понимать совокупность
всех методов и вспомогательных средств, предназначенных для планирова-
ния, оптимизации и развития систем различного назначения с целью макси-
мизации их общественной полезности или минимизации общественных за-
трат.
142
Системотехника имеет тесные взаимосвязи с кибернетикой, ик(|юрмати-
кой и исследованием операций.
Обобщающими признаками больших (сложных) систем являются:
наличие единства и целостности всей совокупности элементов и подсис-
тем;
большие размеры по числу элементов, функций, входов, выходов, под-
систем и др.;
высокая сложность функционирования, когда изменение одной перемен-
ной ведет к изменению последующих;
высокая степень автоматизации при наличии элементов робототехники;
нерегулярность внешних воздействий, что не обеспечивает возможности
точного предсказания нагрузки;
наличие конкурирующих сторон.
Наиболее характерной структурной особенностью большой системы яв-
ляется взаимосвязанность ее элементов, позволяющая ей принимать большое
число состояний и адаптироваться к изменению внешних условий.
Так как военная наука, более чем какая-либо другая, пользуется катего-
риями целого, не ограничиваясь рассмотрением частей, то необходимы поис-
ки различных решений и реализаций, объединяемых единой теорией.
При этом если физически эти решения и реализации различны, то мате-
матически одинаковы. Здесь математика выступает как искусство называть
разные вещи одинаковыми именами.
Когда круг интересов ограничивается техническими, кибернетическими и
информационными системами, такой объединяющей теорией является "Тео-
рия больших систем".
Поэтому целесообразно говорить о военной системотехнике как при-
кладной дисциплине военной сцстемологии.
Военная системотехника призвана эффективно обеспечить решение цело-
го ряда проблем военной деятельности таких, как:
разрешение противоречий между составными частями проблемы; устра-
нение неоднозначности и неопределенности исходных критериев оценки
принимаемых решений;
установление единства языка описания, обеспечивающего взаимосвязь
между различными частями проблемы.
Формальные характеристики системотехники пока страдают некоторой
неопределенностью, однако нет никаких сомнений относительно ее методов,
основной особенностью которых является комплексное системное планиро-
вание. охватывающее все процессы от формулировки идеи процесса проек-
тирования и производства до эксплуатации и замены средств и систем по
окончании их жизненного цикла.
Следует отметить, что если общее развитие техносферы в определенной
степени предполагает решение целого ряда социальных проблем, то в основе
развития средств и систем вооруженной борьбы лежат сложные обществен-
но-политические явления, происходящие в мире.
143
Создание и развитие техноссреры ("второй реальности"), связанное с не-
посредственной деятельностью людей, имеет три основных направления:
поиск и реализация новых видов энергии;
разработку и производство новых видов орудий (систем) различного на-
значения;
разработку и производство новых композиционных материалов, свойства
которых не имеют аналога в природе.
Различные виды энергии предполагают взаимосвязь между механиче-
ской. химической, электрической, атомной, ядерной энергиями с возрастани-
ем энергоемкости от 107 Дж/кг для химической до 1017 Дж/кг для энергии ан-
нигиляции.
Разработка орудий (систем) предполагает размеры, простирающиеся
от 10’7 м до размеров ближнего и дальнего космоса.
Композиционные материалы предполагают наличие таких свойств, как
прочность при малом весе, вязкость, термостойкость, радиопрозрачность, ра-
диационную стойкость значительно выше, чем у составных компонентов.
Все процессы, протекающие в природе и обществе, состоят, по сути дела,
в переносе и преобразовании материи, энергии и информации, поэтому для
систем разного назначения характерны материально-энергетические и ин-
формационные процессы.
7.2. ЭРРАТИЧЕСКИЕ ДИНАМИЧЕСКИЕ СИСТЕМЫ
УПРАВЛЕНИЯ ВОЙСКАМИ И ОРУЖИЕМ
Человеко-машинные системы - комплекс техносферы и ноосферы, кото-
рая представлена человеком или группой людей. Для военных систем харак-
терны следующие виды операторной деятельности, отличающиеся как по
форме, так и по содержанию: контрольные, управленческие, поисковые, вос-
станавливающие и обучающие.
Операторная - деятельность по поддержанию аппаратуры или программ
в боеготовом состоянии, а также их использование в соответствии с задан-
ным алгоритмом.
Между различными видами деятельности нельзя провести строгих гра-
ниц, так как в совокупности они должны рассматриваться как единый интел-
лектуальный организм. Изучением систем - "оператор-машина-среда" зани-
мается эргономика, предметом которой являются кибернетические системы.
7.3. КИБЕРНЕТИЧЕСКИЕ ТЕХНИЧЕСКИЕ СИСТЕМЫ В ВКО
Особое место в решении задач воздушно-космической обороны занимает
кибернетика - наука об управлении. Она тесно связана с техническими, био-
логическими. экономическими и военными науками, с другой стороны, тео-
ретические основы кибернетики, системотехники и теории исследования опе-
раций лежат в области системологии.
144
Системотехника в тесной взаимосвязи с кибернетикой в наибольшей сте-
пени применяются в технических, экономических и военных науках и высту-
пает как прикладная научная дисциплина, направленная на достижение прак-
тических целей. Она призвана обеспечить сокращение пути от фундамен-
тальных исследований до внедрения больших (сложных) систем на основе
комплексного подхода и оптимизации процесса их создания. Кроме гою.
системотехника призвана облегчить и сократить путь познания сложных сис-
тем на основе их изоморфизма.
Техническая кибернетика изучает технические системы управления и
рассматривает в комплексе все этапы - от сбора и анализа информации до
принятия решений, доведения команд до исполнительных органов и контро-
ля исполнения (обратная связь). Ее важнейшей практической задачей являет-
ся разработка и внедрение автоматических и автоматизированных систем во
все виды управления. Особое место техническая кибернетика занимает в ре-
шении задач эргатических систем, в которых рассматриваются вопросы ра-
ционального распределения функций между человеком и автоматически дей-
ствующими устройствами. Самостоятельным направлением технической ки-
бернетики является распознавание образов (чтение текстов, оценка типов
СВКН и др.), а в перспективе - распознавание тактических ситуаций.
7.4. ОСНОВНЫЕ ПРИНЦИПЫ СИСТЕМОТЕХНИКИ
Системный подход предполагает применение определенных принципов,
носящих, в основном, методологический характер. Это означает, что для ка-
ждой конкретной системы тот или иной принцип необязателен и задача сис-
темологии состоит в том, чтобы выявить степень его применимости.
К числу системных принципов следует отнести принципы: целостности,
автономности, дополнительности, действия, неопределенности н выбора.
Совокупность этих принципов составляет руководство к действию по ис-
следованию и разработке систем.
1. Принцип целостности - предполагает рассмотрение системы как еди-
ного целого, обладающего такими свойствами, которые отсутствуют у эле-
ментов (подсистем).
Принцип утверждает, что система - не "множество" элементов (подсис-
тем), а целостный объект, допускающий различные членения на подсистемы.
При этом часть может быть сложнее целого, что имеет фундаментальное зна-
чение для системологии вообще и системотехники в частности.
Это обстоятельство связано с тем, что концепция системотехники пред-
полагает проведение упрощений за счет членения системы на отдельные
элементы и если элемент оказывается сложнее системы, то данная концепция
не реализуется.
Принцип целостности требует учета всех взаимосвязей внутри системы, а
также с надсистемой и средой и предполагает раскрытие и обеспечение сис-
темных свойств на всех этапах исследования или синтеза системы.
145
2. Принцип автономности утверждает, что целостность системы регули-
руется ее внутренними законами, которые определяются физическим содер-
жанием. связаны с устройством системы и зависят от внешней среды.
Из всей совокупности естественно-научных законов можно определить
две группы, имеющие особо важное значение - законы, определяющие внут-
рисистемную метрику и законы сохранения.
Внутренние законы нс противоречат естествен но-научным, но дополняют
их. делая систему такой, какая она есть, т.к. действуют только в ее простран-
ственно-временной метрике.
Под метрикой системы понимается не геометрия (размеры, расстояния
между элементами и др.), а ее функциональное пространство, в пределах ко-
торого осуществляются все временные процессы, происходящие в системе.
Все. что происходит в системе, описывается значительно проще в этом
функциональном пространстве и поэтому введение адекватной пространст-
венно-временной метрики означает раскрытие основного закона функциони-
рования системы.
Так. например, для радиолокационной станции (РЛС) как системы про-
странственно-временной метрикой являются физические процессы, происхо-
дящие в передающей, приемной, антенной, индикаторной и других подсис-
темах в сочетании с пространственно-временными процессами облучения
цели и получения информации о ее местоположении в виде отраженных сиг-
налов.
Эта своего рода автономная метрика не только определяет систему, но и
ограничивает возможные способы ее декомпозиции.
Следовательно, наличие самостоятельной пространственно-временной
метрики системы составляет первую часть принципа автономности. Второй
его частью являются внутрисистемные законы сохранения, непосредственно
связанные с величинами, которые не зависят от выбора метрики и системы
координат, т.е. являются инвариантами.
Инвариантами являются все физические величины - масса, скорость, ус-
корение, напряжение, ток и т.д. Они не изменяются при взаимодействии под-
систем и могут только перераспределяться, подчиняясь законам сохранения.
В качестве таких автономных законов сохранения могут рассматриваться
"Закон сохранения энергоресурса" системы; 'Закон сохранения энергоин-
формативности" (произведения энергии на количественное значение инфор-
мации).
Кроме инвариантов существует для каждой системы соответствующий
набор величин, также непосредственно связанных с законами сохранения.
Если предположить для системы 5 с пространственно-временной метри-
кой AS’ множество таких величин В={вк}.к = /,Л, а в качестве множества ин-
вариантов И={И„}.п = 1.N. то можно обобщенно сформулировать принцип
автономности.
"Для всех систем 5 существует пространственно-временная метрикаАУ
множества величин В и инвариантов И таких, что пара {/?,И}определяется
146
устройством системы и при любых возможных вилах внутрисистемного
взаимодействия остается постоянной и не зависит от метрики".
3. Принцип дополнительности основан на способности системы накапли-
вать информацию и обеспечивать дополнительное усиление одного стимули-
руемого внешней средой фактора за счет ослабления других.
В технических системах это г принцип угверждаег. что необходим поиск
проявления различных свойств системы в различных ситуациях (в различных
средах). При этом эти свойства оказываются несовместимыми ни в одной из
ситуаций в отдельности.
Таким образом, "принцип дополнительности" отвергает как необосно-
ванный компромисс "того или другого понемногу", а также отвергает непер-
спективную позицию "или-или".
Кратко принцип дополнительности можно сформулировать следующим
образом: "Любая система во взаимодействии со средой может проявлять раз-
личные свойства в различных ситуациях так. что эти свойства оказываются
несовместимыми ни в одной из сложившихся ситуаций".
4. Принцип действия основан на том. что до определенного уровня дей-
ствие среды компенсируется усилием одних и ослаблением других процес-
сов. а, начиная с некоторого уровня. требуется определенная "перестройка"
системы.
Такая "перестройка" связана с накоплением до заданного уровня (порога)
количества определенного вещества, количества энергии или количества оп-
ределенной информации. Следовательно, реакция системы на внешнее воз-
действие имеет пороговый характер, а величина порога регулируется адап-
тивными свойствами системы.
Примерами приложения этого принципа являются: обнаружение в РЛО
сигналов, превысивших уровень порога, переход электрона на более высо-
кую орбиту под действием энергии не менее одного кванта и др.
5. Принцип неопределенности получил распространение в теории систем
из квантовой механики, где утверждается: произведение ошибки в измерении
координаты на ошибку в измерении импульса частицы не может быть мень-
ше постоянной величины при любой точности эксперимента. При этом по-
вышение точности определения количественно описываемого свойства сис-
темы сверх некоторого предела влечет за собой понижение возможной точ-
ности другого свойства.
Наиболее наглядно проявляется действие этого принципа в радиолока-
ции, где структура сигнала определяется его длительностью rf и спектром
Д/с, но на них налагается ограничение следующего порядка 4^ст( «1.
Отсюда, всякая попытка увеличить точность измерения дальности за счет
изменения тс ведет к снижению точности измерения скорости цели за счет
измерения 4fc.
Поэтому определение принципа неопределенности можно свести к сле-
дующему: максимальная точность измерения свойств системы зависит от
присущей данной системе области неопределенности, внутри которой повы-
147
шение точности одного свойства влечет за собой снижение точности измере-
ния другого свойства.
В философии данный принцип является своеобразным разделом, опира-
ясь на который имеются утверждения познаваемости или непознаваемости
окружающего нас мира. Области неопределенности Кант в свое время назы-
вал “вещью в себе”.
6. Принцип выбора представляет собой развитие и обобщение принципа
неопределенности в том. что, например, поведение любой системы одно-
значно предсказать нельзя.
Познание и практическое использование этого принципа имеет два ас-
пекта: первый - стимулирование или подавление свободы выбора и второй -
описание свободы выбора.
В поисковых творческих системах свобода выбора должна быть макси-
мальной, в исполнительных - либо ограниченной, либо отсутствовать вовсе.
Описание свободы выбора количественное или качественное возможно
статистическими методами для массовых однотипных ситуаций, но не имеет
практической целесообразности при оценке уникальных систем, например,
человека или единственных образцов технических систем.
Ограничиваясь сказанным, можно сформулировать данный принцип в
следующем виде: "Сложные 5о-системы обладают областью выбора и спо-
собностью выбирать поведение, как реакцию на внешнее воздействие, в за-
висимости от внутренних критериев целесообразности.
148
8. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ
ОБНАРУЖЕНИЯ И ОПОЗНАВАНИЯ
Бортовые и наземные радиолокационные устройства, решающие задачи
обнаружения и измерения координат ЛА, составляют единый класс радио-
технических систем, варианты которых показаны на рис.8.1.
Рис.8.1. Наземные и бортовые радиотехнические системы
При определенном сочетании этих устройств совместно с их линиями
получим системы различного назначения: системы активной локации - ли-
нии 2 и 3 связи; системы пассивной локации - линия 3 связи; системы полу-
активной локации - линии 1 и 3 связи; системы локации с ответом - линии 4
и 5 связи; системы телеуправления - линии 4 связи.
8.1. ДАЛЬНОСТЬ ДЕЙСТВИЯ РАДИОЛОКАЦИОННЫХ СИСТЕМ
Дальность действия РЛС - одна из важнейших тактических характери-
стик, обеспечивающих выполнение боевой задачи по обнаружению, сопро-
вождению и измерению координат цели.
Дальность действия в свободном пространстве для импульсных РЛС с
совмещенными приемной и передающей антеннами:
D -,1
" ^fPva.<lK'
где Ри — излучаемая мощность;
Go - коэффициент усиления антенны;
Я-длина волны;
О',, - эффективная отражающая поверхность цели;
149
npmin ~ чувствительность приемника,
q - параметр обнаружения;
К - результирующий коэффициент потерь.
Дальность действия импульсных РЛС с совмещенными приемной и пе-
редающей антеннами может быть представлена в обобщенном виде
где П, м2 - приведенный потенциал РЛС.
При этом параметр обнаружения, определяющий основные характери-
стики РЛС в зависимости от П, D и ац будет равен
Па« г.
q = ——. q - величина безразмерная.
D4
Если в качестве зондирующего сигнала используется КПР, значение из-
- Р / т /
лучаемои мощности усредняется так, что РС1) = и/п - Ри
1 /ъ /чг
Коэффициент потерь системы. Коэффициент потерь К учитывает
различного рода потери в передающем и приемном трактах РЛС. В общем
виде результирующий коэффициент потерь можно представить как
произведение К = f] К,;,
i=l
где К, - частичные коэффициенты, характеризующие потери в различных
элементах РЛС.
Расчет коэффициентов потерь /С, является специфической задачей, учи-
тывающей особенности каждой конкретной РЛС.
Однако для практических целей можно произвести приближенную коли-
чественную оценку этих коэффициентов:
К\ - коэффициент потерь, учитывающий рассогласование полосы про-
пускания приемника РЛС со спектром зондирующего сигнала; приближенно
^=0,9дБ (tft«l,23);
/6 - коэффициент, учитывающий флуктуационные потери, связанные с
флуктуацией отраженных сигналов; Я*2=»1,5дБ (К2 »1,44) при условии обеспе-
чения вероятности правильного обнаружения Л„„=0,5;
Ki - коэффициент, учитывающий потери последе! ею орного интегриро-
вания (некогерен гное интегрирование):
К; = /«(/-/)/« И,
где у - коэффициент, характеризующий качество интегрирования;
п - количество интегрируемых импульсов.
При условии, что у -0,8; К3 = 2lg п. Если количество интегрируемых
импульсов п=10, то /О=2дБ( Kj « 1,58).
150
Коэффициент обнаружения qn, получаемый за счет последетекторного
интегрирования п импульсов, выражается через коэффициент обнаружения
одиночного сигнала qt:
Чп =
К< — коэффициент, учитывающий потери за счет накопления шумов
на экране индикатора:
где р-——- (т, п - числа выборок шума и сигнала соответственно).
/I
При;и=п=/0 К4=0,5 дБ-1,22.
Таким образом, с учетом перечисленных факторов суммарный коэффи-
циент затухания, Дб:
+К2 +Кз +К4-4,9,
что соответствует результирующему значению коэффициента потерь.
Подставляя значение результирующего коэффициента потерь К в урав-
нение (8.1), получим расчетную формулу, позволяющую определить даль-
ность действия РЛС с учетом вероятностей обнаружения q>l (рис. 5.11). При
<7=1 уравнение (8.1) дает возможность определить максимальную дальность
обнаружения с вероятностью правильного обнаружения Рпо » 0,5.
Все приведенные соотношения справедливы при условии, что потери пе-
редающего тракта учтены путем подстановки в уравнение (8.1) значения из-
лучаемой мощности на выходе антенны, т. е. Р^=Р,М. При этом
^вых ~ Рг7? ’
где Рг - мощность на выходе высокочастотного генератора;
Т]— коэффициент полезного действия (КПД) антенно-фидерного
тракта (7 < 1).
Методика учета потерь путем введения результирующего коэффициента
К может быть применена для различных модификаций уравнений дальности
(8.2), (8.3).
С учетом коэффициента ослабления ЭМ-колебаний в атмосфере
а (дБ/км) на интервале прохождения в поглощающей среде / (км) формула
дальности примет вид
D = Л а" IO~oeSa'. (8.2)
’Р„рттчК
Дальность действия РЛС непрерывного излучения
V (4^No4K
где Е=Рсрт=РС[/Д[п - величина энергии, излучаемой
151
в пространство. Дж;
4fn - полоса пропускания приемника, Гц;
РСр_ средняя мощность излучения. Вт;
No - спектральная плотность помех. Вт/Гц;
(jm-p &пр- коэффициенты усиления передающей и приемной антенн.
Дальность действия РЛС с учетом затухания ЭМ-колебаний в ионо-
сфере определяется по формулам (8.2), (8.3).
Схема РЛС импульсного и непрерывного действия показана на рис. 8.2.
Рис. 8.2. Структурная схема РЛС импульсного (а) и
непрерывного (б) излучения
Дальность действия РЛС с учетом вероятности обнаружения может
быть определена с помощью функции распределения вероятностей, показан-
ной на рис. 8.3:
р(п)=Д «J ,
где D - текущее значение дальности, изменяющееся от 0 до Z)^,;
Do - дальность, определяемая по формулам (8.2), (8.3).
Значения D, и D2 характеризуют дальность обнаружения ЛА определен-
ного типа с вероятностью РЛфО=0,9 для одно- и двухчастотного облучения.
Значения этих дальностей определяются уровнем порога (рис 8.3).
Дальность действия РЛС с учетом влияния Земли при малых углах места
где h - высота антенны РЛС, м;
Нц - высота цели над поверхностью Земли, м.
152
Рис. 8.3. График дальности действия РЛС с учетом вероятности обнаружения
при одночастотном (1) и двухчастотном (2) облучении
Дальность прямой видимости (D„t.) - предельная максимальная даль*
ность обнаружения ЛА наземными РЛС с учетом кривизны Земли:
О„,.(««) = 3.57(да +
С учетом рефракции в атмосфере
^л.»(/си) = 4,+ (.»)).
(8.5)
Дальность действия систем с ответом (уравнение радиосвязи):
D - jL I
4 % 1 ^прпипЯ^а
(8.6)
где Gnep, Gnp - коэффициенты усиления антенн излучающей и принимаю-
щей РЛС соответственно;
ц - параметр обнаружения;
Ka=KjK}K4 - коэффициент потерь (Ка =*2,2 при К 2-1 )•
8.2. МЕТОДЫ ИЗМЕРЕНИЯ ДАЛЬНОСТЕЙ
ДО ПОМЕХОНОСИТЕЛЕЙ
1. Триангуляционный метод - метод пеленгации помехоносителей из
двух и более разнесенных приемных пунктов (рис. 8.4), один из которых рас-
положен в точке О, а остальные в точках А и Д.
Дальность до помехоносителя
D=__________...
cose(cos fl - sin PctgPt) (8.7)
153
где Б - база между точками О и А. м;
E.ft.fti - углы места и азимута постановщика помех, измеряемые
относительно точек О и А.
Рис. 8.4. Триангуляционный метод определения дальности
2. Угломерно-разностно-дальномерный метод - метод, основанный на
измерении угловых направлений на помехоноситель и разности дальностей
между целью и точкой О, целью и точкой А (рис. 8.4).
Дальность
Б2-4Р2
2(Б cos Р cos £ - ADa)‘
где ADa- разность в определении дальностей до помехоносителя между точ-
ками О и А, м.
3. Разностно-дальномерный метод - метод, основанный на измерении
разности дальностей между помехоносителем и точками О и А (рис. 8.5).
Рис. 8.5. Разностно-дальномерный метод измерения дальности
154
Дальность
2(zl/>„+JOj
(8.9)
где />' - база между точками О и А, м;
4Da,ADe - разности дальностей до помехоносителя между пунктами,
расположенными в гонках А и В, м.
Для методов 2 и 3 определение разности дальностей Д1)п и Д1)в осущест-
вляется с помощью установки на пункте О специального коррелятора, учи-
тывающего при расчете значение базы (Б) между пунктами и время задержки
т3,т.е. AD = т}с-Б.
83. ОСНОВНЫЕ УСТРОЙСТВА И ХАРАКТЕРИСТИКИ
РАДИОЛОКАЦИОННЫХ СИСТЕМ
С учетом задач, решаемых ПВО, радиолокационные системы различного
назначения могут быть: многофункциональными (МФ), многочастотными
(МЧ), многорежимными (МР), многоканальными (МК), многопозиционными
(МП) и других модификаций.
Многофункциональные — системы, выполняющие ряд функций: по*
иск. обнаружение, измерение координат, распознавание (включая опознава-
ние), сопровождение ЛА и наведение на них средств поражения.
Многочастотные — системы, обеспечивающие одновременное (или в
ограниченном интервале времени) облучение ЛА на нескольких независи-
мых частотах, предназначенные для повышения помехозащищенности, ре-
шения задач распознавания типов ЛА. а также для получения требуемых
значений вероятностей правильного обнаружения и низких значений веро-
ятностей ложных тревог.
Основными направлениями создания МЧ-систем являются комбиниро-
вание каналов локации ЛА. работающих в различных диапазонах частот, а
также использование сверхширокополосных сигналов и сигналов, пере-
страиваемых по частоте от импульса к импульсу.
Многорежимные — системы, имеющие возможность выбора различных
режимов работы, обеспечивающих эффективное функционирование системы
в сложных условиях радиоэлектронной обстановки. При этом под режимом
работы следует понимать совокупность технических и тактических приемов,
обеспечивающих достижение определенной эффективности системы в усло-
виях радиоэлектронного противодействия и огневого воздействия со сторо-
ны противника.
Основу MP-систем составляют управляемые переменные параметры и
применение различных зондирующих сигналов, что обеспечивает адаптацию
системы к сложным условиям радиоэлектронной обстановки.
155
Многоканальные — системы, имеющие несколько независимых кана-
лов, позволяющих одновременно обнаруживать, измерять координаты и со-
провождать несколько (по числу каналов) одиночных или групповых целей и
обеспечивающих наведение на каждую цель одной или нескольких ракет
(средств поражения). Многоканальность обеспечивается распределением
функций и задач, решаемых радиолокационной системой во времени.
Функционирование МК-систем основано на применении ФАР и быстро-
действующих ЭВМ, реализующих алгоритмы цифровой обработки больших
потоков информации.
Многопозиционные — системы активной локации (рис. 8.6). состоящие
из одной или нескольких синхронизированных передающих и нескольких
приемных позиций, разнесенных между собой (обычно на 20—25% номи-
нальной дальности действия системы). При этом каждая приемная позиция
принимает сигнал, отраженный от цели при облучении ее одним или не-
сколькими передатчиками.
Дальность до цели относительно приемной позиции определяется по
формуле
оо о у о о у
Г 2^i;-sin- 2 (8 |0)
где г - время задержки сигнала от цели относительно приемной позиции;
с - скорость света;
Б - база между передающей и приемной позициями;
у - пространственный угол пеленга на цель относительно передающей
позиции.
Многопозиционные системы обеспечивают повышение помехозащи-
щенности при постановке интенсивных помех в направлении излучения с
156
передающей позиции. Все перечисленные радиолокационные системы
включают в себя ряд специальных элементов (устройств).
Передающие устройства — однокаскадные или многокаскадные уст-
ройства, обеспечивающие формирование и генерирование высокочастотных
зондирующих сигналов с заданными значениями формы и выходной мощно-
сти.
Передающие устройства классифицируются по виду генераторных при-
боров — ламповые, магнетронные, амплитронные, клистронные, платино-
трон ые и др.
Схемы однокаскадного и многокаскадного передающих устройств пока-
заны на рис. 8.7. При формировании сигналов с внутриимпульсной модуля-
цией передающие устройства включают в себя элементы кодирования и
управления фазой и частотой.
Приемные устройства — устройства, обеспечивающие выделение сиг-
налов определенной частоты и формы с последующим их усилением и пре-
образованием к виду, необходимому для работы оконечного устройства.
От синхронизатора к антенне
К антенне
Рис. 8.7. Структурные схемы однокаскадного (а) и
многокаскадного (б) передающих устройств
Структурная схема приемного устройства супергетеродинного типа изо-
бражена на рис. 8.8.
От антенны К оконечному устройству
Рис. 8.8. Структурная схема приемного устройства
супергетеродинного типа
157
В зависимости от назначения РЛС и вида зондирующего сигнала устрой-
ства оптимального обнаружения могут быть помещены на входе приемника
или на выходе смесителя.
При использовании в качестве зондирующего сигнала когерентной пачки
радиоимпульсов применяются корреляционно-фильтровые приемники с пе-
рестраиваемыми тк корреляторами и тф фильтрами в определенных диапа-
зонах дальностей и скоростей.
Чувствительность приемника (Рпр min) — минимальное значение
средней мощности (Вт) сигнала на входе приемника, при котором обеспечи-
вается от1 ошение мощности сигнала к мощности шума, равное 1:
' (8.11)
где 76=1,38 10 пДж/К°- постоянная Больцмана;
Ш - коэффициент шума приемника;
То - температура, К0;
Д[„ - полоса пропускания приемного устройства, Гц.
На практике используется понятие пороговой чувствительности, т. е.
чувствительности, при которой обеспечиваются прием и обнаружение отра-
женных сигналов с заданной вероятностью;
^пор—Р пр min Ч* (8.12)
где q - параметр обнаружения [см. формулу (5.14)].
Чувствительность P^pmtn обычно выражается в децибелах
Рпр min = 101g — > ДБ,
“пр min
где Руо - значение мощности, соответствующее уровню отсчета, Вт (напри-
мер, при /\.о=10’3 Вт и /’я/>/я/й=10иВт Р;рт,П = \ ЮдБ).
Формула пересчета
Pnpmin
.Вт. (8J3)
Антенные устройства — устройства, обеспечивающие направленное
излучение и прием электромагнитных колебаний. Антенны обладают свой-
ством обратимости и классифицируются по следующим типам: однозеркаль-
ные, многозеркальные и фазированные антенные решетки.
Однозеркальные антенны представляют собой конструкцию из зер-
кала (рефлектора) и облучателя (рис. 8.9, а). В качестве зеркала может быть
использован параболический цилиндр, усеченный параболоид и т. д., в каче-
стве облучателей — отдельные элементы или линейные решетки, состоящие
из вибраторов, щелей и рупоров.
158
Управление положением диаграммы направленности (Д11) обеспечивает-
ся путем механического поворота всей антенны или в ограниченном секторе
путем изменения положения облучателя.
Многозеркальные антенны состоят из большого (параболического)
и малого (гиперболического) зеркал (рис. 8.9.6). Электромеханическое ска-
нирование ДН при неподвижной антенне может осуществляться за счет по-
ворота облучателей или малого зеркала, обеспечивая сканирование, в 2—2,5
раза превышающее углы поворота в однозеркальной антенне.
Рис. 8.9. Однозеркальные (а) и многозеркальныс (б)
антенные устройства
Фазированные антенные решетки (ФАР) - система излучателей
(элементов), в которой перемещение ДН в пространстве производится введе-
нием переменных фазовых сдвигов между сигналами, излучаемыми или
принимаемыми отдельными элементами.
а б
Рис. 8.10. Фазированные антенные решетки, построенные по схемам на
«проход» (а) и на отражение (б)
159
Различают три основных типа ФАР: с пассивными, с активными элемен-
тами и матричного типа. ФАР с пассивными элементами может быть по-
строена по схеме на «проход» (рис. 8.10, а) и на отражение (рис. 8.10, б).
ФАР с активными элементами включает в себя систему генераторов, фа-
зовращателей и излучателей, управляемых с ЭВМ.
Управление фазой <р осуществляется фазовращателями, построенными
на основе p-i-n (пин) диода для ФАР с длиной волны А > 10 с.м или на осно-
ве намагниченных ферритов для ФАР с длиной волны А < 10 см.
При этом p-i-n диоды выполняют роль быстродействующих переключа-
телей четвертьволновых отрезков, а ферриты в зависимости от величины на-
магничивающего тока изменяют значение фазы (р в заданных пределах так.
что волна с левой поляризацией проходит практически без потерь, а с пра-
вой- интенсивно поглощается. Данное свойство ферритов используется для
управления фазой элеклромагни гных колебаний с круговой поляризацией.
Основные соотношения в однозеркальных и многозеркальных ан-
тенных устройствах. При заданной длине волны А и размерах антенн L мо-
гут быть определены:
ширина диаграммы направленности Оъ плоскостях азимута б^и
угла места 0£, рад:
= KL/&e = KT/ (8-И)
где К - коэффициент пропорциональности (К «= 0,88);
Lp Le - размеры антенны в плоскостях азимута и угла места;
коэффициент усиления антенны Go'.
Я2;]
, _ * (8.15)
~ ^п^гвом. J
где S^, - эффективная и геометрическая площади антенны
соответственно;
Кп - коэффициент использования площади антенны
(для различных типов антенн Kn-Q,5 - 0,7);
связь коэффициента усиления с диаграммой направлен-
ности
4л- 40000 25000
0^0°- (8.16)
где 0р,0£ - ширина диаграммы направленности, рад;
- ширина диаграммы направленности, град;
Кп • принят равным 0.6.
160
Основные соотношения в фазированных антенных решетках. При
заданной ширине сектора сканирования в плоскостях азимута рск и угла
места еск можно установить основные зависимости в антенных решетках.
Расстояние между элементами решетки обычно выбирается равным по-
ловине длины волны:d - Л/2. При d=consi ФАР называется - эквидистант-
ной.
Общее число активных (пассивных) элементов в плоской эквидистант-
ной ФАР
N аРск£ск_
ере£ * (8.17)
Коэффициент усиления ФАР Go .
Ширина диаграммы направленности в соответствующей плоскости
& = (8.18)
Leos а
где а— угол между нормалью к плоскости решетки и положением ДН в
данный момент.
Если допустить возможность расширения ДН при отклонении от норма-
ли к плоскости в два раза, то 1/cos а = 2, т.е. а = ±60°.
Следовательно, сектор сканирования рск{еск) - 2а = 120.°
Для практических расчетов нормированную ДН антенны как функцию
угла в соответствующей плоскости можно аппроксимировать соотношения-
ми:
F(e) = e -по уровню половинной мощности; (8 19)
Л'(г) = е -по напряженности поля.
Аналогичные соотношения будут и для плоскости ft.
Индикаторные устройства (ИУ) — устройства, обеспечивающие на-
блюдение за воздушной обстановкой, обнаружение и измерение координат
ЛА. Состав и тип ИУ определяются назначением РЛС.
Различают следующие типы индикаторов:
индикаторы кругового обзора (рис. 8.11);
секторные индикаторы (рис. 8.12);
индикаторы полуавтоматического съема;
индикаторы с линейной и круговой разверткой (рис. 8.13);
знаковые индикаторы.
161
Рис. 8.11. Индикаторы кругового обзора: а - круговой режим; б - сектор-
ный режим (1, 2, 3,4 - соответственно масштабные метки /?. D и отметки
от групповой цели и местных предметов)
Рис. 8.12. Секторные индикаторы:
а - азимут - дальность (1,2- соответственно масштабные метки р и D);
б-угол места - дальность (1-линии равной высоты); в-дальность - скорост ь
{1,2-соответственно масштабные метки D и V)
162
(8.20)
Рис. 8.13. Индикаторы: a — с линейной; 6 — с круговой разверткой
Влияние индикаторов на дальность обнаружения определяется значени-
ем коэффициента q, получившего название для данного случая коэффициен-
та различимости (формула 8.1).
Для нормальной работы на индикаторе необходимо обеспечить значе-
ние<7 = 2-гЗ,5. Линейный размер отметки от цели на индикаторе
/ - DWK j
1 . аП'
LP
где 1)шк - масштаб шкалы, выносимой на экран;
Lp - линейный размер развертки;
d„ - диаметр пятна на экране индикатора.
Разрешающая способность РЛС (с учетом влияния индикаторов) -
способность обеспечить раздельное наблюдение и измерение координат двух
близко расположенных целей.
Разрешающая способность РЛС по дальности
_ с(тг/ 4- dr) + DU)K
2КСЖ Lp
где с - скорость распространения ЭМ-колебаний;
ты, Ат - длительность и величина расширения отраженного сигнала
соответственно;
Кеж ~ коэффициент сжатия сигнала на выходе оптимального приемника
(для импульсных сигналов без внутриимпульсной модуляции К^Х).
Разрешающая способность РЛС по угловым координатам
(азимуту и углу места):
(8.21)
sp=ep^d„:
Lp
Se = @c^d„,
Lp
(8.22)
163
где Ршк,£шк ~ соответственно величины сектора по азимуту и углу
места, град;
Lp - линейный размер азимутальной (угломестной) развертки.
Разрешающая способность РЛС по высоте — минимальная из-
меряемая разность высот двух целей, находящихся на одинаковой дальности
и под одним азимутом:
где £и,к,£ - величина сектора по углу места и текущее значение угла места.
Разрешаемый объем РЛС — часть пространства в зоне обзора РЛС,
ограниченная расстояниями, равными разрешающим способностям по
Э.Дг, т.е.
V = D2dDSP&. (8.24)
Принцип измерения высоты цели. С учетом сферической формы Земли
высота ЛА (цели) над ее поверхностью в зависимости от дальности D
„ 1)2
И = Dsm£ + — . (8 25)
где £ - угол места цели;
R.j «8500км - эффективный радиус Земли.
Второе слагаемое возрастает при увеличении дальности, поэтому для
расчета высоты на индикаторах высота — дальность наносятся нелинейные
графики, выражающие зависимость (8.25).
Зона обнаружения РЛС - область пространства, на границе которой це-
ли с определенной ЭОП обнаруживаются с заданной вероятностью.
Граница зоны обнаружения определяется результирующей ДН и преде-
лом обзора (круговой или секторный).
Сечение зоны обнаружения в вертикальной плоскости без учета влияния
Земли D(e) = DF(e) (Г(г) - диаграмма направленности антенны в плоско-
сти £).
При наличии влияния Земли антенна РЛС принимает сигналы, отражен-
ные от цели Si и от поверхности земли
11ри этом
st = s0F(e-£0);
s2 = S0pF(£ + £0\
где p - модуль коэффициента отражения;
е,Со - соответственно текущее значение угла места цели и угол наклона
максимума ДН к горизонту.
По теореме косинусов, суммарное значение этих двух сигналов, имею-
щих сдвиг фаз
$ = y]s2 + sj + 2sjS2 cos(p = s0F3,
164
где
b'3 = ^F2(£-£o)+pF2(E + E0)+2pF(E-E0)F(E + E0)cos(p-
результирующая ДН приемной антенны в вертикальной плоскости с учетом
влияния Земли.
При €о=0, что соответствует условию расположения максимума ДН па-
раллельно горизонтальной поверхности, при котором сказывается влияние
Земли, получим _______________
F3 = F(e)J1 + р2 + 2pcosE. (8.26)
В общем случае сдвиг фазы
где <рх - сдвиг фазы за счет разности хода прямого (от цели) и отраженного
от Земли сигналов;
(Pq - сдвиг фазы при отражении ЭМ-колебаний от Земли.
Для РЛС метрового диапазона с горизонтальной поляризацией при всех
углах Е от 0 до 90°, р^1,(ро^я получим
F3 - F(E)2sin — .
2
При заданной высоте h антенны сдвиг фазы
2^_. .
<рх = — 2hstn€.
Следовательно,
F3 = Г(£-)Ф(г),
где Ф(е) = называют множителем Земли.
Для малых углов Е полученное значение множителя Земли справедливо
и для вертикальной поляризации.
Формула (8.26) позволяет рассчитать зоны обнаружения для условий
ровной поверхности земли, а учет влияния неровной поверхности осуществ-
ляется с помощью специальной методики или облетом РЛС.
Распознавание целей - отнесение обнаруженной цели к определенному
классу (типу) на основании анализа признаков, присущих данной цели.
В качестве признаков могут быть использованы размеры цели, конфигу-
рация, характер отражающей поверхности, характеристики реактивного дви-
гателя, закон движения, вид излучения бортовых систем и др.
Оценка перечисленных признаков производится путем анализа совокуп-
ности отраженных сигналов и законов движения ЛА.
Вероятность распознавания Ррася- Если необходимо решить задачу рас-
познавания двух обнаруженных ЛА по К признакам, каждый из которых
измеряется п раз. то вероятность распознавания
(8.27)
165
где mt.nb - математическое ожидание величины признака первой и второй
целей соответственно;
о*/ - средняя квадратическая ошибка в оценке признака;
п - число измерений признака;
К - число признаков;
ф - интеграл вероятностей (см. рис.5.9).
Рис. 8.14. Зависимость вероятности распознавания объекта
от числа признаков
Зависимость вероятности распознавания объекта от числа признаков по-
казана на рис. 8.14. Существует оптимальное число конкретных признаков,
обеспечивающее максимальное значение вероятности распознавания.
8.4. ОБНАРУЖЕНИЕ ЦЕЛЕЙ ОПТИКО ЭЛЕКТРОННЫМИ
СРЕДСТВАМИ
Оптико-электронные средства (ОЭС) — средства, использующие для
получения и передачи информации оптический диапазон спектра ЭМ-
колебаний. а для преобразования информации — различные электронные
устройства.
Основные типы ОЭС - телевизионные (ТВ), инфракрасные (ИК). опти-
ко-визуальные (ОВ) и лазерные (ЛС).
В основу обнаружения целей с помощью ОЭС положены принципы
активной для ЛС и пассивной локации для остальных типов ОЭС. Дальность
действия активных и пассивных локационных ОЭС зависит от их техниче-
ских данных, характеристик отражающих или излучающих свойств целей,
условий распространения волн рптического диапазона.
Дальность действия активных ОЭС, м:
166
(8.28)
Г) _ ,1 -CJrl
где Рмх, - излучаемая мощность, Вт;
Snp- площадь приемной апертуры, м2;
- эффективная отражающая поверхность цели, м2;
0tl€p - ширина диаграммы направленности антенны, рад;
Рф - мощность излучения фона, Вт;
q - параметр обнаружения;
у - коэффициент ослабления излучения в атмосфере, дБ/км;
I - пуп», проходимый лучом в плотных слоях атмосферы, км.
Тепловое излучение ЛА в полете - в ИК-диапазоне - происходит
вследствие аэродинамического нагрева конструкции, работы реактивного
двигателя и воздействия солнечной радиации.
Распределение интенсивности изучения J4m (Вт/см3) для абсолютно
черного тела определяется по закону Планка:
j = £l_______________________________(_
4jn- / Q_/'
еЛТ
где константы с/ = 3,74 1О'12 Вт см2, С2-1,4 с.\сК\
Т- абсолютная температура нагретого тела, К.
Интенсивность излучения реальных тел
(8.29)
(8.30)
где е - спектральный коэффициент излучения (£**0,7 для никелевого спла-
ва в области максимального излучения).
Зависимость J от длины волны показана на рис. 8.15, а.
Индикатриса излучения — геометрическое место точек в пространстве,
характеризующее уровни излучения одинаковой интенсивности.
Вертикальное сечение индикатрисы теплового излучения ЛА с реактив-
ным двигателем показано на рис. 8.15, б.
Дальность действия пассивных ИК-систем
(8.31)
у
где \ - площадь проекции цели;
- спектральная плотность излучения фона, Вт/м2А ср;
й )„р - угол поля зрения приемника, ср;
J4jnE,q - определены в формулах (8.29), (8.30).
Дальность действия телевизионных систем
у
(8.32)
167
где Вл - спектральная плотность излучения поверхности цели SH вследствие
освещения ее солнцем;
г, - коэффициент отражения цели;
Рф - мощность излучения фона;
д - параметр обнаружения.
Рис. 8.15. Интенсивность (а) и индикатрисы (б) теплового излучения целей
Приведенные в формулах (8.28}-(8.31) величины имеют значения:
Рф * /0~/7 Вт; 0Л = 3- /О'2 Вт/(см2 • мкм - ср) - для дневного неба;
0Л - 10~* Вт/(см2 я км ср) - для ночного неба;
q = 2 ч- 3; Вд = 10~2 Вт/(см2 • мкм • ср)- гц = 0.2 +0,8.
Разрешающая способность по дальности. Разрешающей способностью
по дальности обладают только активные ОЭС. работающие в импульсном
режиме.
Значение разрешающей способности по дальности, так же как и в радио-
локации, определяется величиной длительности сигнала тг, который
учитывается при оценке
Рф = псрНутс,
где пср - среднее число фотонов в сигнале;
й = 6,62 • 10"34 Дж • с - постоянная Планка;
v- частота излучения.
Разрешающая способность по угловым координатам <3(9:
для активных систем д0а = 0цер;
для пассивных ИК-систем д0п =
для ТВ-систем дОщ = —
b
d„, где 0пер - угол расходимости луча гене-
ратора; Л - угол поля зрения передающей трубки; h - ширина мишени пе-
редающей трубки; dn - диаметр развертывающего луча (пятна).
168
83. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ОПОЗНАВАНИЯ
Опознавание, определение государственной и ведомственной принад-
лежности обнаруженного объекта (самолета, корабля и др.) осуществляется
визуально или с помощью специальных радиоэлектронных систем опознава-
ния.
Система опознавания государственной принадлежности, комплекс тех-
нических средств и способов, предназначенных для установления государст-
венной принадлежности летательных аппаратов по принципу «свой - чу-
жой» с помощью передачи запросных и приема ответных закодированных
сигналов.
Система опознавания летательных аппаратов, комплекс технических
средств и способов, предназначенных для установления государственной и
ведомственной принадлежности самолетов, контроля за их полетами и
управления воздушным движением. Система состоит из запросного и ответ-
ного устройств, входящих в состав бортовых и наземных РЛС. По принципу
использования сигналов такие РЛС классифицируют как имеющие совме-
щенную (функцию запросчик выполняет РЛС), автономную или полуавто-
номную (смешанную) системы опознавания.
Базовые принципы систем опознавания были разработаны во время вто-
рой мировой войны и предполагают: формирование запросных сигналов в
различных режимах работы (только для военных ЛА, для военной и граж-
данской авиации); формирование ответных сигналов - «свой», «бедствие»,
«потеря радиосвязи», «нападение на экипаж»; исключение применения про-
тивником имитаторов кодов системы опознавания; обеспечение имитостой-
кости системы на основе непрерывного совершенствования криптографиче-
ского кодирования информации; оснащение систем опознавания устройст-
вами самоуничтожения для защиты от возможности попадания в руки
противника; разработку специальных режимов формирования сигналов об-
щего и адресного запроса; повышение помехозащищенности на основе уве-
личения энергетического потенциала, использования широкополосных сиг-
налов и создания устройств подавления помех.
Основные принципы совершенствования систем опознавания: повыше-
ние надежности опознавания целей на больших расстояниях; автоматизация
управления воздушным движением повышенной интенсивности; оснащение
переносных ЗРК дополнительными устройствами опознавания; решение за-
дач опознавания не только воздушных, но и наземных объектов, особенно в
связи с интенсивным развитием управляемых ракет класса «воздух-земля»,
пуск которых осуществляется за пределами видимости целей.
169
9. МЕТОДЫ ОБЗОРА ПРОСТРАНСТВА, ОПРЕДЕЛЕНИЯ
КООРДИНАТ И ПАРАМЕТРОВ ДВИЖЕНИЯ ЛА
9.1. МЕТОДЫ ОБЗОРА ПРОСТРАНСТВА
Обзор воздушного пространства производится в целях обнаружения ЛА и
может осуществляться по направлению (угловым координатам), дальности и
скорости.
Обзор пространства по направлению позволяет обнаружить и
определить угловые координаты ЛА.
Для обзора могут применяться радиолокационные, оптические и инфра-
красные средства.
Методы обзора пространства по направлению - метод кругового обзора,
методы пространственного обзора в узком секторе.
Метод кругового обзора обеспечивает обзор всей верхней полусферы
воздушного просгранства. Для этого применяют радиолокатор, антенна ко-
торого перемешается по азимуту на 360 ° (рис.9.1,а). Луч антенны широкий в
вертикальной плоскости и узкий в горизонтальной (доли градуса). Частота
вращения луча должна быть такой, чтобы было возможно получение задан-
ного числа отраженных от ЛА импульсов или накопление необходимого для
обнаружения уровня энергии сигнала в оконечном устройстве обнаружения.
Время обзора
где 0)а - угловая скорость вращения антенны.
В радиолокаторах с ФАР перемещение луча антенны осуществляется
электронным способом в результате перестройки фазовращателей. Время пе-
рестройки фазовращателей, обеспечивающей перемещение луча в другое уг-
ловое положение, практически не зависит от дискретности перемещения луча
по угловой координате.
Достоинство метода - возможность обзора пространства во всей верхней
полусфере.
Для одновременного определения азимута и угла места ЛА может приме-
няться веерообразный луч. Разрешающая способность и точность определе-
ния угловых координат ЛА зависят от ширины луча в вертикальной и гори-
зонтальной плоскостях.
К методам пространственного обзора в узком секторе относят строч-
ный. линейного пилообразного сканирования и спиральный.
При строчном методе обзор пространства осуществляется узким
(иглообразным) лучом, совершающим возвратно-поступательное движение в
двух взаимно перпендикулярных плоскостях в заданном секторе (рис.9.1,6).
Перемещение луча производится качанием (вращением) антенн радиоло-
катора или электронным способом по жесткой программе, когда каждый уча-
170
сток пространства просматривается в течение неизменного отрезка времени
независимо от результата обнаружения.
Рис. 9.1. Возможные методы обзора пространства:
а - круговой; б - строчный;
в - линейный пилообразный; г - спиральный (винтовой)
Время обзора
(9.2)
где Де° ,Д0° - ширина сектора в вертикальной и горизонтальной плоскостях
соответственно;
- ширина луча (ширина диаграммы направленности антенны);
бУ 7 - угловая скорость луча
Строчный метод с использованием ФАР обеспечивает обзор пространст-
ва как по жесткой, так и по гибкой программе.
При реализации строчного обзора пространства с использованием ФАР
время обзора
171
(9.3)
^псрсстр !'
стР VC..1
где Тел - время стояния луча (время локации одного направления);
Tmpt(v,p - время перестройки фазовращателей.
При облучении цели когерентной пачкой из п зондирующих импульсов с
частотой повторения Л'„, с различной шириной диаграммы направленности
tfp и и с соответствующим коэффициентом их перекрытия /-г2, вре-
мя обзора заданного сектора с помощью ФАР будет равно
_кД£иДр°п
‘ сект ~
При методе линейного пилообразного сканирования обзор
пространства в заданном секторе осуществляется одним или двумя взаимно
перпендикулярными лучами ножеобразной формы (рис.9.1,в). Данный метод
позволяет определить относительные коррдинаты всех ЛА, находящихся в
секторе сканирования. .
При спиральном методе обзора луч антенны совершает движение по
спирали. Метод используется для поиска и наведения луча антенны для
сопровождения ЛА по направлению (рис.9.1.г).
Обзор пространства в узком секторе может производиться с помощью
оптических средств.
Обзор пространства по дальности производится в целях обнаружения и
определения дальности до ЛА в радиолокаторе с непрерывным излучением
фазокодоманипулированных сигналов. Обзор пространства, например, мож-
но обеспечить в результате последовательного изменения временной задерж-
ки опорного кодированного сигнала. При нахождении ЛА на некоторой
дальности опорный и отраженный сигналы, совпадающие по структуре и
MOMeirry времени, образуют сигнал обнаружения. Время обзора по дальности
зависит от структуры и длительности фазокодоманипулированного сигнала,
скорости изменения задержки опорного сигнала, заданного уровня сигнала
обнаружения.
В корреляционно-фильтровых приемниках с учетом периода повторения
импульсов Т„ в пачке, что соответствует интервалу однозначного определе-
СТ /
ния дальности А!') = ”4,, обзор по дальности осуществляется с помощью
корреляторов, число которых равно тк - (SD - разрешающая способ-
ность РЛС по дальности). Для просмотра всего диапазона возможных даль-
ностей корреляторы перестраиваются каждым очередным импульсом пачки
последовательно.
С целью сокращения времени обзора по дальности используются данные
целеуказания от специальных обзорных РЛС.
172
Обзор пространства по скорости обеспечивает разрешение ЛА, летя-
щих с различными скоростями.
В основу обзора по скорости положен эффект Доплера, проявляющийся в
приращении частот сигналов, отраженных от движущихся ЛА. При этом ве-
личина приращения частоты Доплера определяется по формуле
(94)
где Л - длина волны передатчика РЛС;
Vr - радиальная составляющая скорости ЛА.
В основу построения большинства систем поиска по скорости (частоте)
положен спектральный метод. При этом может применяться последователь-
ный, параллельный или комбинированный метод обзора по частоте.
При последовательном методе поиска приемное устройство ра-
диолокатора одновременно пропускает лишь небольшой спектр частот Доп-
лера, определяемый полосой пропускания фильтра.
Ж
4 f
лау\ ла^улауу
fcl fc2 fc3 f
Рис. 9.2. Последовательный поиск по частоте:
а - с перестройкой фильтра; б - с перестройкой гетеродина;
1 - смеситель; 2 - перестраиваемый фильтр; 3 - синхронизатор;
4 - гетеродин; 5 - фильтр; 6 - перестраиваемый гетеродин
Поиск по частоте может производиться путем последовательного изме-
нения резонансной частоты узкополосного фильтра (рис.9.2,а) и перестройки
173
частоты гетеродина в диапазоне доплеровских частот (рис.9.2,б). Устройстве
регистрации сигналов будет последовательно отображать сигналы, отражен-
ные от 1,2. 3..n-го ЛА.
Время обзора
°™ Тн'~
где 4/ф - полоса пропускания узкополосного фильтра;
7’///- время наблюдения, т.е. интервал времени, в течение которого
спектр сигнала должен существовать на входе узкополосного
фильтра.
Метод параллельного поиска исключает недостатки последова-
тельного метода. Определение частот Доплера в отраженном сигнале осуще-
ствляется набором узкополосных фильтров, каждый из которых настроен на
преобразованный по частоте спектр сигнала определенного ЛА, а весь набор
перекрывает диапазон частот Доплера.
При параллельном методе число фильтров, обеспечивающих обзор, оп-
ределяется из выражения
_ ^Дтах
пф ~--
(9.5)
4Г/
Достоинства метода - малое время обзора и более полное использование
энергии спектров сигналов; недостаток - необходимость использования зна-
чительного количества узкополосных фильтров.
Уменьшение количества фильтров и получение определенного времени
обзора достигается при реализации комбинированного метода обзо-
ра.
При этом интервал однозначно определяемых частот в пределах часто-
ты повторения Fn импульсов в пачке, что соответствует диапазону скоростей
AV^/2 • Fn, перекрывается тф узкополосными фильтрами так, что
Эти фильтры затем последовательно перестраиваются син-
хронно с каждой гармонической составляющей спектра пачки в пределах
ожидаемых доплеровских частот. Для сокращения времени обзора по скоро-
сти используются данные целеуказания от специальных РЛС.
Обзор пространства с помощью ФАР
Электрическое управление лучей в двух взаимно перпендикулярных
плоскостях (s,/3) возможно только в поверхностной (плоской) ФАР. Рис. 9.3
поясняет принцип управления лучом в плоскости £ для п элементов решет-
174
ки, отстоящих друг от друга на расстоянии d = для эквидистантной ФАР
(Л - длина волны).
Управление лучом в плоскости е обеспечивается изменением угла
. <р Л иг
а = arcsm——, когда достигается максимум энергии в точке Ц, где (р - фазо-
2nd
вын сдвиг электромагнитной волны между соседними элементами, прини-
мающий дискретные значения Дер, например, 22,5°, 45... 180". При постоян-
ных значениях d и Л и дискретных изменениях Д<р. управление величиной а
при “больших" углах обеспечивается только за счет изменения Д(р, мини-
мальные значения которого определяются свойствами ферритовых фазовра-
щателей. Для ’’малых" значений изменения а используется понятие d3Ktt=md,
что означает одновременное формирование одинакового сдвига фаз на m
элементах ФАР.
Например, при = 45’ значение "больших’ углов а будет при
а > 15* и "меньших" - при а <15* с использованием dJKe.
Управление лучом в другой (перпендикулярной) плоскости fl анало-
гично рассмотренному.
9.2. МЕТОДЫ ИЗМЕРЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ
ДВИЖЕНИЯ ЛА
Методы измерения дальности до ЛА радиолокационными средствами
Определение дальности до ЛА основано на прямолинейности распро-
странения электромагнитных волн и постоянстве их скорости. Дальность
может быть измерена радиолокационными и оптическими средствами. Для
этого определяется время прохождения сигнала от источника излучения до
ЛА и обратно:
175
«ли =4-.
где с - скорость распространения электромагнитной энергии;
О - время прохождения сигнала до ЛА и обратно (время запаздывания
сигнала).
Время о может быть измерено по запаздыванию отраженного от ЛА им-
пульса, величиной изменения частоты передатчика, величиной изменения
фазы радиолокационного сигнала. В связи с этим различают три метода из-
мерения дальности - импульсный, частотный и фазовый.
Импульсный метод — метод, при котором радиолокатор излучает в на-
правлении ЛА высокочастотный импульс малой длительности. Моменты из-
лучения и приема импульса фиксируются на временной развертке индикато-
ра (рис. 9.4, а). За время прохождения импульса к ЛА и обратно луч элек-
тронно-лучевой трубки вычерчивает на экране линию, длина которой про-
порциональна дальности до ЛА. Дальность можно отсчитать по механиче-
ской или электронной шкале индикатора.
Рис. 9.4. Методы измерения дальности:
а - импульсный; б - частотный; в - фазовый
При импульсном методе разрешающая способность РЛС по дальности
M = ^+MDd„,
176
где ти - длительность импульса передатчика:
MD - масштаб развертки дальности индикатора;
dn - диаметр электронного пятна ЭЛТ.
Диапазон однозначного определения дальности
л - с^п
VЛАтах ~ ~у »
где Тп - период повторения импульсов передатчика.
Минимальная дальность до ЛА, измеряемая импульсной РЛС:
''ЛА min 2
где te- время восстановления чувствительности приемника.
Достоинства метода - возможность измерения дальности и разрешения
по дальности многих ЛА, сравнительная простота; недостаток - невозмож-
ность измерения малых дальностей, большая импульсная мощность излуче-
ния.
Частотный метод — метод, при котором время запаздывания отражен-
ного от ЛА сигнала измеряется величиной изменения частоты передатчика.
Передатчик излучает электромагнитную энергию с линейно-изменяюшейся
частотой высокочастотных колебаний (рис. 9.4, б). За время прохождения
электромагнитных волн к ЛА и обратно к приемнику РЛС частота передат-
чика изменится на величину
АГ 21)ЛА
Afnep-^n с ’
где rjn - скорость изменения частоты излучаемых электромагнитных колеба-
ний.
Принятые сигналы от ЛА и высокочастотные колебания передатчика по-
ступают на смеситель приемника, где выделяется разностная частота
V = Г — Г =
гр J пер Jomp £,]. •
где - девиация частоты излучаемых высокочастотных колебаний;
7’„ - период повторения модулирующей частоты передатчика.
Дальность до ЛА
cFDT„
Разрешающая способность по дальности
4AFM
где АНф - ширина полосы пропускания фильтра приемника.
Диапазон однозначного измерения дальности
177
DjlAmax QC^M‘
о
Минимальная дальность до ЛА, определяемая РЛС:
л > 1 с
DjMmin - 4
Достоинства метода — возможность измерения малых дальностей, малая
мощность излучения; недостаток — сложность одновременного измерения
дальности многих ЛА.
Фазовый метод - метод, при котором время запаздывания сигнала от ЛА
определяется величиной изменения фазы излучаемых передатчиком сигналов
(рис. 9.4, в). За время запаздывания сигнала фаза этих колебаний изменится
на величину
A4'^2nFMt3
где Л’и - частота высокочастотных колебаний.
Дальность до ЛА
олл=-^-лч>.
Диапазон однозначного измерения дальности
1>ЛЛтах=~-.
Достоинство метода - высокая точность измерения дальности; недостат-
ки - неоднозначность измерения дальности, отсутствие разрешающей спо-
собности.
Измерение дальности до ЛА оптическими средствами
Измерение дальности до ЛА в оптическом диапазоне волн осуществляет-
ся оптическими дальномерами. Дальность определяется по времени запазды-
вания отраженного от ЛА сигнала, излученного генератором дальномера. Для
этого излучаемые колебания генератора модулируются по амплитуде или фа-
зе. В соответствии с этим различают три метода измерения дальности: им-
пульсный, фазовый и фазово-импульсный.
При импульсном методе ЛА облучается импульсами малой длительно-
сти. Передатчик содержит оптический квантовый генератор (ОКГ), модуля-
тор, генератор управления излучением (рис.9.5). В определенные моменты
времени ОКГ генерирует кратковременные импульсы, которые поступают на
полупрозрачное зеркало. Основная часть энергии импульса проходит через
зеркало в передающую оптическую систему и направляется к ЛА. Малая
часть энергии импульса ответвляется в опорный фотоэлектронный усилитель
(ФЭУ) и далее подается в блок измерения времени запаздывания, фиксируя
момент излучения зондирующего импульса.
Отраженный от ЛА сигнал проходит приемную оптическую систему, по-
ступает в сигнальный ФЭУ и далее в усилитель сигналов. После усиления
178
принятый сиг <ал подастся в блок измерения времени запаздывания, фикси-
руя момент своего поступления. Прямой и отраженный сигналы могут быть
поданы на электронно-лучевой индикатор, на котором установлена шкала от-
счета дальности.
При фазовом методе ОКГ генерирует непрерывный сигнал, промодули-
рованный по амплитуде но синусоидальному закону. Пройдя через полупро-
зрачное зеркало, прямой сигнал поступает в оптическую систему и направля-
ется к ЛА. Отраженный сигнал проходит оптическую систему и поступает в
ФЭУ, куда подается часть энергии прямого сигнала.
После прохождения усилителя прямой и отраженный сигналы подаются в
блок измерения разности фаз ДУ модулирующих колебаний, что позволяет
измерить дальность до ЛА. Кроме того, в этом блоке может быть измерена и
скорость изменения ДФ, тем самым имеется возможность измерить и ско-
рость ЛА.
Рис. 9.5. Структурная схема импульсного лазерного дальномера
При фазово-импульсном методе излучаемые дальномером колебания
модулируются по амплитуде и фазе, что позволяет измерять дальность и ско-
рость ЛА:
где а - коэффициент пропорциональности.
Методы измерения угловых координат ЛА
Возможность определения направления ЛА базируется на использовании
свойства электромагнитных волн распространяться прямолинейно. При этом
179
измеряются угловые координаты ЛА: угол места и азимут. Различают сле-
дующие методы определения угловых координат (рис.9.6): максимума, ми-
нимума, равносигнальных зон (методы интегральной и мгновенной равно-
сигнальной зоны).
в
Рис.9.6. Методы определения угловых координат ЛА
Метод максимума - метод, при котором направление на ЛА определяет-
ся по направлению луча антенны, соответствующего моменту приема макси-
мального сигнала от ЛА (рис. 9.6, а).
Метод минимума - метод, при котором направление на ЛА определяется
по минимуму сигнала, принимаемого антенной, формирующей два луча
(рис. 9.6, а). Максимумы лучей рассовмещены относительно друг друга на
некоторый угол.
Метод равносигнальных зон (РСЗ) - направление на ЛА определяется
по равенству амплитуд (фаз), отраженных от ЛА сигналов, принимаемых ан-
тенной, формирующей два (четыре) перекрывающихся луча. Различают ме-
180
тоды с амплитудной суммарно-разностной обработкой сигналов и фазовый
метод.
Методы с амплитудной обработкой сигналов могут быть с интегральной
и мгновенной РСЗ.
Метод интегральной РСЗ - метод, при котором равносигнальная зо-
на создается путем переключения или вращения (развертки) луча антенны
(рис.9.6.в). В устройствах с переключением луча сигналы от ЛА принимают-
ся антенной при положениях I и II луча. Если ЛА не находится на равносиг-
нальном направлении (РСН). то сигналы будут иметь разные амплитуды.
Оператор или система сопровождения поворачивает антенну так, чтобы
амплитуды сигналов uj и U2 были равны. Время переключения лучей должно
быть таким, при котором ЛА не выходит из лучей антенны.
Рис. 9.7. Методы мгновенных равносигнальных зон:
а - с амплитудной суммарно-разностной обработкой сигналов;
б - с фазовой обработкой сигналов
Метод мгновенной РСЗ с амплитудной суммарно -
разностной обработкой сигналов. При этом методе направление на
ЛА определяется по равенству сигналов, принимаемых антенной, форми-
рующей четыре (по два в каждой плоскости) перекрывающихся луча
(рис.9.7,а). Сравнение амплитуд сигналов производится в один и тот же мо-
мент времени, в связи с чем метод получил название мгновенных РСЗ. В слу-
чае отклонения ЛА от РСН на угол Д0 возникает разность амплитуд прини-
маемых сигналов
Au = U/ -u2 = 2U(p(y'o)KM40sinCOot,
где Uo - амплитуда сигнала при нахождении ЛА на РСН;
G&o) ~ коэффициент усиления антенны;
Км ~ крутизна пеленгационной характеристики антенны;
- циклическая частота сигнала.
181
Напряжение Ди используется в системе управления положением антен-
ны. Под действием управляющего напряжения антенна поворачивается в на-
правлении уменьшения величины 40, в результате чего ЛА оказывается на
РСН.
Суммарный сигнал ug =uj +U2 не несет информации об отклонении ЛА
от РСН и используется в устройствах для измерения дальности и скорости
ЛА.
Метод мгновенных РСЗ с фазовой обработкой сигналов -
метод, при котором направление на ЛА определяется по равенству фаз сиг-
налов. принимаемых двумя антеннами, размещенными на некоторой базе d
(рис. 9.7,6). При отклонении ЛА от РСН разность фаз сигналов uh u2:
. 2nd . . _ 2nd
4<р = —— sin 40 « —40.
где Л - рабочая длина волны РЛС.
Для измерения разности фаз применяются волноводные кольцевые мос-
ты. фазовые детекторы и др. Напряжение, пропорциональное величине 40.
используется для управления положением антенн при автоматическом со-
провождении ЛА по направлению.
Достоинство метода - высокая точность измерения; недостатки - неодно-
значность определения величины 40. зависимость точности измерения от
состояния волноводного тракта РЛС.
Метод измерения радиальной составляющей скорости ЛА
Отражаемые (излучаемые) движущимися объектами высокочастотные
сигналы получают приращение доплеровской частоты Fz/. величина которой
пропорциональна радиальной составляющей V, скорости движения:
2УГ
Л ’
Откуда
FnA
Vr =-4-
г 2
Измерение радиальной составляющей скорости ЛА сводится к измере-
нию доплеровского приращения частоты принимаемых сигналов, для чего
могут применяться аналоговые и цифровые устройства измерения.
Принципы сопровождения целей и управляемых ракет
Устройства сопровождения ЛА (аналоговые и цифровые), используемые
в системах вооружения ПВО, реализуются на основе обобщенного принципа
действия с помощью замкнутой следящей системы (контура).
182
n=0
входное возмущение, несущее информацию о дальности, скорости или угло-
вых положениях цели или раком.
y(t) - результат отработка следящей системой входного возмущения.
d(/) = - сигнал рассогласования равный нулю при точной отработке
входного воздействия у(1)^х(1) и определяющий значение ошибки в против-
ном случае.
K(t) - передаточная функция следящей системы.
X(t) Д(О
K(t)
y(t)
Рис. 9.8. Функциональная схема следящей системы
Так как для расчета x(i), Al, y(t) и x(t) требуется решение сложных диф-
ференциальных уравнений, то для упрощения решения задач сопровождения
применяется специальный операторный метод, при котором оригинал x(i) за-
меняется соответствующим изображением Х(р) (р = ja>), операции с которы-
ми позволяют перейти от дифференциальных уравнений к алгебраическим и
значительно упростить расчеты.
На этой основе находится параметр (сигнал) рассогласования
4р)=*ст(р) ' гле ка(р) - передаточная функция следящей системы по
динамической ошибке которая с помощью теоремы о конечном значении
может быть рассчитана для ошибок по дальности, скорости и угловым коор-
динатам в следующем виде
ad = limd(t) = lim рА(р)-11т Ка(р)Х(р}.
С помощью описанного принципа разрабатываются следящие системы,
обеспечивающие автоматическое сопровождение целей и управляемых ракет
по различным координатам и их производным. При этом измерение коорди-
нат осуществляется различными методами.
183
10. ОСНОВЫ УПРАВЛЕНИЯ ЗЕНИТНЫМИ
И АВИАЦИОННЫМИ РАКЕТАМИ
10.1. СВЕДЕНИЯ ИЗ АЭРОДИНАМИКИ
Аэродинамика («аэр» - воздух, «динамис» - сила) - наука, занимающая-
ся изучением законов движения тел в атмосфере. Большие заслуги в развитии
аэродинамики принадлежат выдающимся отечественным ученым
Н.Е.Жуковскому, И.В. Мещерскому, К.Э. Циолковскому.
Полет авиационных и зенитных управляемых ракет происходит в атмо-
сфере Земли (в воздухе), которая представляет собой смесь газов, характери-
зующихся своими закономерностями.
Газовые законы
Закон Бойля-Марио па. При неизменной температуре и массе 1*аза про-
изведение численных значений давления Р и объема V есть величина посто-
янная:
PV = const.
Следовательно, при уменьшении давления газа в определенное число раз
во столько же раз увеличивается его объем.
Закон Гей-Люссака. При постоянном давлении объем данной массы газа
прямо пропорционален его абсолютной температуре:
V=aV',T = V^
*0
где Vo- объем газа при температуре То=273,15°К;
а=1/Т0- коэффициент объемного расширения.
Закон утверждает, что отношение некоторого объема газа к его темпера-
туре есть величина постоянная при неизменных давлении и массе газа:
V
— = const.
Т
На основании этих двух законов выведен общий газовый закон - уравне-
ние состояния газа: для данной массы газа произведение его объема на дав-
ление, деленное на соответствующую абсолютную температуру, есть вели-
чина постоянная:
PV
R =--- или PV = RT,
Т
где /?=287,039 м2/с2К - газовая постоянная для сухого воздуха.
184
Уравнение Менделеева - Клапейрона:
PV= — RT,
А
где М - произвольная масса газа;
//-молярная масса газа.
Основные законы аэродинамики
Движение воздуха может быть установившимся и неустановившимся.
Движение, при котором скорости в фиксированных точках пространства не
зависят от времени, называется установившимся. Если скорость воздуха в
фиксированных точках пространства меняется во времени, движение называ-
ется неустановившимся. Эти определения относят и к другим параметрам
воздушного потока (к давлению, температуре, плотности).
В аэродинамике при изучении законов движения воздуха поток считают
установившимся, при этом пользуются понятиями о линии тока и струйке.
Линией тока называют линию, касательная в каждой точке которой совпа-
дает с направлением скорости в этой точке в данный момент времени. Воз-
дух, текущий внутри трубки, поверхность которой образована линией тока,
называется струйкой. Через боковые стенки струйки течения воздуха нет,
струйка может сужаться, расширяться, приспосабливаться к форме обтекае-
мого тела. Воздушный поток представляется состоящим из отдельных стру-
ек.
Рис. 10.1. К выводу уравнения Бернулли
Уравнение постоянства расхода (уравнение неразрывности). Ско-
рость течения V несжимаемой жидкости (газа) в струйке обратно пропорцио-
нальна площади поперечного сечения S струйки (рис. 10.1):
или
V2 5,
VtS|=V2S2=V5 = const.
(10.1)
185
Уравнение (10.1) называют уравнением постоянства массового расхода
или уравнением неразрывности, выражающим закон сохранения массы,
сформулированный М.В. Ломоносовым.
Уравнение энергии (уравнение Бернулли) выражает закон сохранения
энергии для движущейся идеальной жидкой среды.
Рассматривается струйка газа с произвольными сечениями Si и S2, соот-
ветствующими параметрами в этих сечениях (Рь Ть р^ Р2, Т2, р2) и скоростя-
ми V„ V2. Полная энергия газа, имеющего массу т, складывается из потен-
циальной энергии положения, внутренней энергии и кинетической энергии.
Потенциальная энергия положения Е„ характеризует способность газа со-
вершать работу при изменении положения центра тяжести массы газа отно-
сительно условного уровня
где от/ - масса газа в сечении трубки I (рис. 10.1);
Л/ - средняя высота струйки газа в сечении I (рис. 10.1).
Потенциальная энергия Ер давления есть работа сил давления PtSi на пу-
ти за единицу времени, равном скорости V,:
ЕГ = Р^ = Р^.
Р\
Внутренняя энергия Е„ характеризует способность газа совершать работу'
при изменении температуры
Е^С^т^,
где Су - удельная теплоемкость газа при постоянном объеме;
Г/ - абсолютная температура газа.
Кинетическая энергия Ек характеризует способность движущегося газа
совершать работу
Е=^.
‘ 2
Полная удельная энергия, которой обладает единица массы газа в сече-
ниях 1 и II (рис. 10.1)
= «V £++ ^=(10.2)
Р\ z Pl z
Выражение (10.2) называется уравнением Бернулли, или уравнением со-
хранения энергии.
186
Принимая hi=h2 (сжимаемость газа отсутствует: pi=Pi=p<
CvT^CvT^CvT),
получим
+ Р2 или + Р = const.
2 2 2
pv2
где -----скоростной напор или динамическое давление.
Таким образом, для несжимаемого газа сумма статического и дина-
мического давлений в любом сечении установившегося потока есть величина
постоянная. Практически это означает, что всякое увеличение скорости по-
тока приводит к уменьшению давления в потоке н'наоборот.
Уравнение движения. Произведение массы тела на его ускорение равно
силе, приложенной к нему:
= А*,
или
F = mtV2-mtVl=mt(V2-Vl),
где т, - масса воздуха, отбрасываемая телом в 1 с;
V - скорость потока воздуха.
Если скорость потока V, до встречи с телом была больше, чем после взаи-
модействия с ним, то сила F тормозит движение тела. При сжимаемости газа
изменение скорости движения приводит к изменению внутренней энергии
газа. Сжимаемость характеризуется и скоростью звука. При скоростях потока
более 0.5 - 0,6 скорости звука сжимаемость газа увеличивается. За критерий
оценки сжимаемости газа принято отношение скорости потока к скорости
звука (число Маха - Майевского)
м = -.
а
При движении тела в воздушной среде со скоростью, равной скорости
звука, возникают лобовые скачки уплотнения, в результате чего резко изме-
няется характер обтекания тел потоком.
Поток называется дозвуковым, если М<1, при М>1 поток называется
сверхзвуковым. Соответственно различают дозвуковые и сверхзвуковые ско-
рости полета ЛА.
Обтекание тел воздушным потоком
Обтекание тел воздушным потоком сопровождается внесением в поток
возмущений, которые передаются во всех направлениях как малые измене-
ния плотности и давления в рассматриваемой среде. Скорость распростране-
ния малых возмущений равна скорости звука.
При V<a (рис.10.2.а) звуковая волна успевает уходить от тела вперед и на
некотором удалении от него вызывает деформацию струи потока. Если У=а,
187
возмущения вперед от тела распространяться не будут и впереди по направ-
лению движения тела поток оказывается невозмущенным.
Рис. 10.2. Обтекание тел воздушным потоком:
а - при скорости меньшей скорости звука; б - при скорости
большей скорости звука
При V>a (рис. 10.2,6) образуется конус малых возмущений, представ-
ляющий собой огибающую звуковых волн. Внутри конуса возмущений име-
ют место изменения давления и плотности, за его пределами поток остается
невозмущенным. Угол при вершине конуса возмущения зависит от скорости
потока и скорости звука
.а .1
(р - aresm — = aresm —.
V М
При обтекании тела сверхзвуковым потоком, представляющим собой
бесконечно большое количество материальных точек, возникают скачки уп-
лотнения.
Скачок уплотнения есть концентрация звуковых волн на небольшом
удалении от тела. Перед телом образуется область повышенной температуры,
в которой местная скорость звука оказывается больше, чем в невозмущенном
потоке. По мере удаления от тела в стороны концентрация звуковых волн
уменьшается и скачок уплотнения переходит в граничную волну малых воз-
мущений. Толщина скачка уплотнения около 108 мм. В скачке скорость
уменьшается, а плотность и давление растут.
Рис. 10.3. Зависимость формы скачков уплотнения
от формы головной части тела:
а - прямой скачок уплотнения; б, в - косой скачок уплотнения
Уз
188
Изменение параметров в скачке приводит к возникновению за ним зоны
уплотненного воздуха (ударной волны). Форма и расположение скачков уп-
лотнения зависят от формы головной части тела (рис. 10.3).
По форме различают прямой и косой скачки уплотнения. Прямой скачок
уплотнения расположен перпендикулярно потоку. Скорость потока V/ перед
скачком и скорость потока У,'за скачком уплотнения связаны зависимостью
где аК1)ии, - критическая скорость звука.
За прямым скачком V<a, для косого скачка V'<a^„ (V,' - нормальная
составляющая скорости косого скачка).
Скорость полета, при которой возникают местные скачки уплотнения,
называют критической, а число М полета - М^,. Возникновение скачков уп-
лотнения приводит к резкому увеличению лобового сопротивления и вибра-
циям ЛА.
Силы, действующие на ракету в полете
При анализе сил, действующих на ракету в полете, пользуются связанной
и поточной (скоростной) системами координат (рис. 10.4).
Рис. 10.4. Связанная и поточная (скоростная) системы координат ракеты
При этом принимают:
t? = 0 + a.
где I? - угол тангажа ракеты;
0 - угол наклона вектора скорости;
а - угол атаки;
где у/- угол рыскания;
Р - угол скольжения;
ф - угол курса.
(Ю.З)
189
Ракета при полете испытывает продольное ускорение
dV
W = —
di
и нормальное ускорение
%=0V,
где 0 = d&/di.
При наличии нормального ускорения траектория ракеты имеет радиус
кривизны
_ V _V2
pT~@~wn
или кривизну траектории
Поступательное движение ракеты происходит под действием силы Р,
создаваемой ракетным двигателем. Эта сила называется реактивной силой
или тягой ракетного двигателя. Она направлена вдоль продольной оси OXi
ракеты (рис. 10.5).
Рис. 10.5. Силы, действующие на ракету в полете:
Р-сила тяги; Gp- сила тяжести; R- полная аэродинамическая сила;
Q- сила лобового сопротивления; Y- подъемная сила; Z- боковая сила
Сила тяги представляет собой реакцию (противодействие) истекающих
из сопла реактивного двигателя газов на стенки и проявляется в виде сил
давления. Ее величина определяется равнодействующей неуравновешенных
190
сил по поверхности камеры сгорания. Зависимость тяги от свойств ракетного
двигателя и внешних условий
Р = —У,+(РС + -^).
Я '
где в, - секундный расход газа;
V,-скорость истечения газов па срезе сопла двигателя;
# - ускорение свободного падения;
Рс - давление газа на срезе сопла;
Рн- атмосферное давление на высоте Н,
Sf - площадь сечения выходного сопла.
Величина тяги обусловливает скорость и дальность полета ракеты.
Стремление к управлению дальностью и скоростью полета приводит к необ-
ходимости регулирования тяги, что представляет определенные технические
трудности.
Удельная тяга - отношение тяги ракетного двигателя к секундному
расходу топлива
р =P- = JL
*” Gc
где тс - секундный расход массы газа.
Величина удельной тяги характеризует эффективность использования
топлива в данном ракетном двигателе (показатель качества топлива, совер-
шенства конструкции ракетного двигателя). Она соответствует тяге, которая
создается в двигателе при сгорании в нем одного килограмма топлива за од-
ну секунду. Для большинства современных ракетных двигателей
PV4 = 2200 + 3400 Для расчетного режима работы двигателя имеем
где Uс- скорость истечения газов на срезе сопла.
Таким образом, для расчетного режима величина определяется
только скоростью истечения газов.
Сила тяжести - сила притяжения ракеты к Земле. Она равна произведе-
нию массы ракеты на ускорение свободно падающего тела:
G,
Для диапазона высот полета авиационных и зенитных ракет величина #
может быть принята постоянной и равной 9,81 м/с2. Тогда в любой момент
времени
191
где Gpo- начальный вес ракеты (вес ракеты при пуске);
t - время работы ракетного двигателя.
Направление силы Gr совпадает с направлением радиуса Земли, прове-
денного в данную точку. Сила тяжести действует в вертикальной плоскости.
Тяга и сила тяжести приложены к центру масс (ЦМ) ракеты.
Движение ракеты в воздушной среде вызывает появление аэродинамиче-
ской силы, которая зависит от параметров среды, скорости полета и особен-
ностей конструкции ракеты. Появление аэродинамической силы обусловлено
воздействием факторов, возникающих при движении ракеты в воздушной
среде.
Полная аэродинамическая сила R равнодействующая всех аэродина-
мических сил (рис. 10.5), действующих на каждый элемент поверхности тела
(ракеты). Она приложена к точке, называемой центром давления (ЦД):
где С'я - безразмерный (аэродинамический) коэффициент, зависящий
от угла атаки а и других факторов,
р- плотность воздуха;
V — скорость движения тела относительно воздуха;
5 - площадь поверхности тела.
Направление Я зависит от формы тела, углов аир. При движении раке-
ты под некоторым углом к набегающему потоку (при наличии углов атаки а
и скольжения р) полную аэродинамическую силу можно разложить на три
составляющие, направленные по осям поточной системы координат ракеты.
Эти составляющие называются силой лобового сопротивления, подъемной
силой и боковой силой.
Сила лобового сопротивления - составляющая полной аэродинами-
ческой силы, действующая в направлении, противоположном оси ОХ:
п-г Pv\
Q-C.—i. (Ю.4)
где Сл - коэффициент лобового сопротивления (безразмерная величина,
зависящая от формы и скорости полета ракеты);
5 - площадь наибольшего поперечного сечения, перпендикулярного на-
бегающему потоку воздуха.
Из формулы (10.4) следует, что сила лобового сопротивления изменяется
с изменением скоростного напора. При V=const величина Q изменяется с
высотой полета ракеты.
Коэффициент С, зависит в основном от числа М, углов атаки и скольже-
ния. Наибольшее изменение Сх имеет место в области М=1.
Подъемная сила - составляющая полной аэродинамической силы, пер-
пендикулярна вектору скорости ракеты и направлена по оси ОУ:
v-r Pv\
Y~c>—S- (10.5)
192
где Су - коэффициент подъемной силы.
Величина коэффициента Су есть функция М, угла атаки, угла отклонения
рулей ракеты <£. При а=О коэффициент СУ=О. Увеличение а вызывает рост
подъемной силы. Это происходит до достижения критического значения угла
атаки а*р, после чего происходит срыв воздушного потока и указанные выше
зависимости нарушаются. В области летных углов атаки зависимость С\(а)
может быть принята линейной. Тогда
Су =atgr;,
где tgrf- крутизна изменения величины Су при изменении угла атаки.
Обозначив tgij = С®, выражение (10.5) примет вид
Y-C^a^—S.
2
Наличие подъемной силы обусловливает полет аэродинамического ЛА в
воздушной среде и его маневренные свойства.
Управление величиной подъемной силы производится изменением угла
атаки. При а=0 подъемная сила равна нулю. Минимальная величина при
которой возможен горизонтальный полет ракеты
a.=-^L_
v2psc°
При максимально возможном угле атаки для горизонтального полета
ракета должна иметь скорость
V
Практически полет авиационных, особенно зенитных ракет, происходит с
набором высоты, что требует иметь
Боковая сила - составляющая полной аэродинамической силы, направ-
ленная перпендикулярно вектору скорости ракеты V по оси OZ:
Z = Cz^~S.
z 2
где С. - коэффициент боковой силы.
Для осесимметричных ракет Z определяется факторами, аналогичными
для подъемной силы. Боковая сила изменяется с изменением угла отклонения
рулей курса ракеты.
Из рис. 10.5 видно, что центр масс (ЦМ) находится ближе к носовой части
ракеты, чем центр давления (ЦД). Такое положение этих точек создает ус-
тойчивое равновесие ракеты. При изменении угла атаки положение ЦД изме-
няется. С увеличением а ЦД приближается к ЦМ, что ухудшает устойчи-
вость ракеты.
193
Ускорения и перегрузки, действующие на ракету в полете
Силы, действующие на ракету в полете, создают условия для управления
ее движением по курсу и тангажу. Для управления движением ракеты по
криволинейной траектории необходимо к ракете приложить некоторую
управляющую силу, создающую ускорение сближения , направленное в
сторону сближения ракеты с кинематической траекторией (рис. 10.6) Состав-
ляющими этого ускорения являются нормальное Wn и тангенциальное %,
ускорения:
Составляющая Wr направлена по вектору скорости V и не вызывает из-
менения направления движения ракеты. Составляющая Wn действует нор-
мально (перпендикулярно) вектору скорости. Будучи приложенной к центру
масс ракеты, она вызывает изменение направления движения. Управление
полетом ракеты сводится к управлению величиной %:
где & = d0/dt - угловая скорость поворота вектора скорости ракеты.
Рис. 10.6. Составляющие ускорения сближения ракеты
с кинематической траекторией
Так как &=V/Rf (Rr- радиус кривизны кинематической траектории), то
для движения по заданной траектории ракета должна иметь ускорение
_ V2
^п.потр ~ r •
За некоторое время ракета пройдет путь
00
194
и
Ln =\]w„dtdl.
оо
Зная необходимые нормальные ускорения, при которых обеспечивается
полет ракеты по кинематической траектории, можно определить потребные
нормальные перегрузки:
IV
_ плотр
Прпотр ~ ~
Максимально возможные перегрузки ракета развивает при максимальной
скорости движения и максимально возможных углах отклонения рулей. Эти
перегрузки называют располагаемыми. Управление полетом ракеты возмож-
но при условии, когда Пр^п^р.
Аэродинамические моменты
Силы, действующие на ракету в полете и приложенные в точках, не сов-
падающих с центром масс (ЦМ). вызывают появление моментов. При иссле-
довании законов движения ракеты рассматривают движение ее ЦМ и вра-
щение относительно ЦМ (рис. 10.7). Для этого полную аэродинамическую
силу R полагают приложенной в точке ЦД, а ее действие, вызывающее вра-
щение ракеты относительно ЦМ, заменяют моментом
М - Rh = CR^—Sh,
R 2
где Л - плечо приложения силы R, величина которого зависит от числа М, уг-
Рис.10.7. К определению полного аэродинамического момента
195
Полный аэродинамический момент - момент, создаваемый полной аэ-
родинамическои силой. Принимая во внимание, что —у— = т и есть коэффи-
циент полного аэродинамического момента, а I - некоторая постоянная ха-
рактерная длина, к которой отнесен коэффициент т, можно записать
М = т----1.
2
Полный аэродинамический момент можно представить составляющими:
М =MX]+Myt+MZl
где МХ/,Му ,МZj —• моменты крена, рыскания, тангажа соответственно.
Моменты считаются положительными, если направление вектора момен-
та совпадает с направлением оси системы координат, и отрицательными при
противоположном направлении.
Каждый из составляющих полного аэродинамического момента может
быть представлен суммой моментов: стабилизирующего, демпфирующего,
косой обдувки и управляющего.
Стабилизирующим (восстанавливающим) моментом называют мо-
мент, стремящийся повернуть ракету в сторону уменьшения угла атаки
(скольжения, крена), вызванного внешними возмущениями.
Демпфирующие (гасящие) моменты - динамические моменты, возни-
кающие при появлении угловой скорости вращения ракеты. Их величина за-
висит от условий обтекания ракеты внешним воздушным потоком и условий
течения жидкости и газов внутри ракеты, в соответствии с чем различают
внешние и внутренние моменты.
Момент косой обдувки - момент, возникающий при несимметричном
обтекании ракеты воздушным потоком. Основными причинами его появле-
ния являются разные условия обтекания крыла, скос потока на рулях, затене-
ние одной из консолей крыла и др.:
„—s/,
д/ ajk.u 2 ’
где mXJKX) - аэродинамический коэффициент момента косой обдувки.
Управляющие моменты - моменты, создаваемые органами управления
полета ракеты относительно ее ЦМ. На авиационных и зенитных ракетах
органами управления могут служить аэродинамические и газодинамические
рули. При отклонении аэродинамических рулей от нейтрального положения
на некоторый угол 8р возникает подъемная сила руля Yp (рис. 10.8), котора<
при наличии плеча 1Р создает управляющий момента
«Г = Yplp
196
Так как
где Су - аэродинамический коэффициент подъемной силы руля;
SB - площадь руля,
то
М”1’ =Csy3,^-S0lp.
Рис. 10.8. К определению управляющего момента
Управляющие моменты могут быть созданы также интерцепторами, по-
воротными камерами, управляющими соплами.
Устойчивость и управляемость ракет
Установившийся режим полета ракеты характерен статическим
равновесием, при котором сумма моментов, действующих на ракету, равна
нулю. При этом углы атаки, скольжения и крена имеют постоянные значе-
нияСтатическая устойчивость - способность ракеты восстанавливать нару-
шенное равновесие после прекращения действия возмущений.
Различают устойчивость по тангажу (продольную устойчивость), курсу
(путевую устойчивость) и крену. Степень устойчивости во многом зависит от
взаимного положения ЦМ и ЦД.
197
Условие устойчивости
дт,. п
—— = m\Y<,0 или —— = т? <,0
дС.. да Zl
Ракета является устойчивой, если при действии возмущений приращение
угла атаки и приращение коэффициента стабилизирующего момента имеют
противоположные знаки.
Управляемость ракеты - способность ракеты реагировать на отклоне-
ние органов управления (рулей) от нейтрального положения. Под управляе-
мостью ракеты иногда понимают способность ракеты двигаться по ки-
нематической траектории.
При управлении ракетой изменяется угол поворота рулей, что приводит к
появлению управляющего момента
В результате ракета повернется на некоторый угол, при котором наступит
ее равновесие, так как
м™+м*р=о.
Угол атаки, при котором ракета окажется в состоянии равновесия, назы-
вают балансировочным углом атаки Ofc, а зависимость Оаот - балан-
сировочной.
Увеличение управляемости достигается увеличением управляющего мо-
мента и уменьшением стабилизирующего. Для этого используют различные
аэродинамические схемы ракет и соответствующие органы управления.
10.2. МЕТОДЫ НАВЕДЕНИЯ РАКЕТ И СИСТЕМЫ УПРАВЛЕНИЯ
Методы наведения
Для вывода ракеты в точку встречи с целью могут быть применены раз-
личные методы наведения. Метод наведения определяет характер траектории
ракеты, объем необходимой для наведения ракеты информации о движении
цели и самой ракеты, а также структуру системы управления. Проектирова-
ние любого ЗРК обычно начинается с выбора метода наведения.
Под методом наведения понимают закон согласования движения ракеты
с известным законом движения цели, обеспечивающий теоретически точное
попадание ракеты в цель. Метод наведения задается системой уравнений,
связывающих координаты движения цели с координатами движения ракеты
и их производными.
Траектория требуемого движения ракеты, определяемая уравнениями ме-
тода наведения, называется кинематической. Характер кинематической тра-
ектории устанавливается при кинематических исследованиях в предположе-
нии, что цель и ракета являются точечными, причем траектория движения
цели известна.
198
К методу наведения предъявляются следующие требования:
кривизна кинематической траектории должна быть наименьшей. Невы-
полнение этого требования приводит к увеличению динамических ошибок
наведения и, следовательно, к снижению вероятности поражения цели. Кро-
ме того, при реализации траектории со значительной кривизной увеличива-
ется время полета ракеты к цели, а значит, уменьшается пропускная способ-
ность ЗРК и глубина зоны поражения;
метод наведения должен быть помехоустойчивым, т.е. должен обеспе-
чить наведение ракеты на цель в условиях интенсивного РЭП. В радиотехни-
ческих системах наименее помехоустойчивым является, как правило, канал
дальности. Следовательно, при выборе метода наведения необходимо отдать
предпочтение тому методу, который не требует для его реализации инфор-
мации о дальности до цели;
метод должен обеспечивать наведение ракеты на цель во всех возможных
условиях ее боевого применения и. прежде всего, при маневре, а также при
полете на малых и предельно малых высотах;
метод должен обеспечить простоту его технической реализации.
Метод наведения налагает определенные требования на характер движе-
ния ракеты или, другими словами, устанавливает связь между законом дви-
жения цели и ракеты.
В процессе полета ракеты под действием большого числа факторов и при
изменении положения воздушной цели в пространстве происходит наруше-
ние заданного закона сближения, ракета сходит с кинематической тра-
ектории.
Мера нарушения связей, налагаемых методом наведения на закон движе-
ния ракеты, называется параметром рассогласования (параметром управле-
ния). В соответствии с данным определением параметр рассогласования
4t) = A(i)-B(i),
где A(i),B(t) - заданный и фактический законы движения ракеты соответст-
венно.
Принятый метод наведения и. как следствие этого, параметр рассогласо-
вания определяют структуру системы наведения.
Лучшим считается метод наведения, при котором траектория движения
ракеты имеет наименьшую кривизну; наиболее проста приборная реализация
системы наведения; обеспечивается заданная дальность стрельбы прн тре-
буемой точности.
В зависимости от условий, налагаемых методом наведения на положение
ракеты в пространстве в каждый момент времени, различают двухточечные и
трехточечные методы наведения (рис. 10.9).
Двухточечные методы наведения
Двухточечными называют методы наведения, при которых параметр рас-
согласования определяется положением в пространстве двух точек— ракеты
199
и цели. Эти методы находят применение в системах самонаведения и теле-
управления второго вида. К ним относятся: метод прямого наведения, метод
погони, методы параллельного и пропорционального сближения.
Метод прямого наведения - метод, при котором в процессе движения ра-
кеты к цели выполняется условие: продольная ось ракеты постоянно направ-
лена на цель. Эю условие требует равенства угла тангажь й ракеты углу на-
клона £ линии ракета-цель (Р-Ц):
„ = е. (10.6)
Из формулы (10.6) и рис. 10.10 следует, что параметр рассогласования
при этом методе
д,=е-О. '107>
Методы
наведения
ракет
Двуточечные | | Трехгочечные
Рис. 10.9. Классификация методов наведения
В процессе наведения ракеты требуется непрерывное измерение величи-
ны Д,. т. е. угла между направлением оси ОХ, ракеты и линией Р-Ц. Для это-
го может быть использован бортовой измеритель (координатор), который
выдает сигнал рассогласования
200
где Кл - коэффициент пропорциональности.
Для наведения по этому методу на борту ракеты устанавливают следя-
щий координатор, ось ОХК которого ориентируется по линии Р-Ц. С появле-
нием ошибки слежения в следящей системе координатора выраба-
тывается напряжение, поступающее в устройство управления положением
чувствительного (измерительного) элемента (антенны или оптической систе-
мы координатора), вызывая совмещение оси ОХК с линией Р-Ц. Тем самым
определяется направление на цель относительно оси ОХ/ ракеты.
Напряжение, пропорциональное углу может быть получено на под-
вижном контакте потенциометра, установленного на корпусе ракеты
(рис. 10.10). Подвижный контакт механически связан с датчиком угла ус-
тановленным на оси вращения измерительного элемента координатора.
Рис. 10.10. Возникновение параметра рассогласования при
методе прямого наведения (а) и схема устройства его измерения (б)
Напряжение подается в счетно-решающий прибор (СРП) ракеты, где
используется при формировании команд управления. Под действием команд
рули поворачиваются на некоторый угол, в результате чего ракета изменяет
направление полета так, чтобы ее продольная ось совпала с линией Р-Ц.
К достоинствам метода следует отнести хорошую помехозащищенность
(не требует информации о дальности) и достаточно простую аппаратурную
реализацию.
Основным недостатком метода является большая кривизна траектории в
районе точки встречи и, как следствие, большие нормальные ускорения ЗУР.
Метод прямого наведения с постоянным углом упреждения требует по-
стоянного угла упреждения между продольной осью ОХ/ ракеты и линией
Р-Ц (рис. 10.11). Данное условие можно записать как
<7 = <Л>.
(10.8)
201
где q - текущее значение угла между продольной осью ракеты ОХ/
и линией Р-Ц;
qo - заданный угол упреждения.
При нарушении равенства (10.8) возникает параметр рассогласования
(Ю.9)
Его значение может быть измерено координатором. Напряжение U? про-
порциональное значению этого угла, снимается с подвижного контакта по-
тенциометра. установленного на корпусе ракеты. Для получения напряжения
UJt) может быть использована схема сравнения уровней напряжений, на
которую подается напряжение = aq0 и напряжение U/t).
Рис.10.11. Параметр рассогласования при методе прямого
наведения с постоянным углом упреждения и схема формирования команд
Как видно из формулы (10.9), напряжение рассогласования
£/д/О = а<70-aq(t ) = alq0-q(t)l. (10.10)
где а - коэффициент пропорциональности.
Полученное в соответствии с формулой (10.10) напряжение может быть
подано в СРП для выработки команд управления. Под действием их рули ра-
кеты отклонятся на определенные углы, в результате чего ракета разовьет
нормальные ускорения и выйдет на кинематическую траекторию.
При этом установится равенство q(t)=q0.
Метод прямого наведения с постоянным углом упреждения обеспечивает
движение ракеты по траектории, имеющей меньшую кривизну.
Достоинства и недостатки метода те же, что и для метода прямого наве-
дения, хотя нормальные ускорения ЗУР несколько меньше.
Следовательно, методом погони (чистого преследования) называется та-
кой метод наведения, при котором в каждый момент времени вектор скоро-
сти ракеты направлен на цель (рис. 10.12)
202
<9=£
(10.11)
Из определения метода следует, что угловое отклонение вектора скоро-
сти ракеты V от направления на цель представляет параметр рассогласования
qu- G- £,
(10.12)
где 0- угол наклона вектора скорости ракеты.
Рис. 10.12. Параметр рассогласования при методе погони
и схема устройства его измерения
Как видно из рис. 10.12, для наведения ракеты по этому методу требуется
измерять текущее значение угла qn. Для этого необходимо знать направление
вектора V, которое может быть определено силовым флюгерным устройст-
вом, ориентирующим ось ОХ, координатора по набегающему потоку воздуха
(по вектору воздушной скорости ракеты). В случае установки радиолокаци-
онного координатора он образует равносигнальную зону, направление рав-
ных сигналов которой и является осью ОХК координатора
При полете ракеты координатор измеряет угол отклонения равносиг-
нального направления от направления на цель и выдает напряжение
Под действием команд ракета движется так, что угол рассогласования
оказывается равным нулю, что удовлетворяет условию идеальной связи.
При реализации метод накладывает жесткие ограничения на соотноше-
ние скоростей ракеты и цели (ограничения по коэффициенту Ку=У/Уц). Так,
при Kv > 2 потребные нормальные кинематические ускорения (а следова-
тельно, и Ппопр) ЗУР могут стать бесконечно большими.
203
В силу отмеченных свойств, применение метода погони в чистом виде
весьма ограничено. Он дает приемлемые по точности результаты лишь при
обстреле малоподвижных, неподвижных целей или при стрельбе вдогон.
Методом погони с постоянным углом упреждения называется такой ме-
тод, когда требуемое движение ракеты определяется условием, при котором
в течение всего времени полета ракеты до точки встречи угол между векто-
ром скорости ракеты и линией ракета-цель (угол упреждения ) остается
постоянным. Уравнение идеальных связей
=е-@.
(10.13)
Для реализации этого метода, как и метода погони, требуется определять
положение вектора скорости ракеты. При наведении по этому метолу ракета
развивает меньшие нормальные ускорения, что повышает динамическую
точность наведения. Однако методу присущи те же недостатки, что и методу
погони. Поэтому он имеет вспомогательное значение. Обычно он использу-
ется на начальном участке наведения ракет для обеспечения полета на боль-
шие дальности при ограниченном запасе топлива.
Методом параллельного сближения называется такой метод наведения,
когда в течение всего времени полета ракеты до точки встречи линия “раке-
та-цель” остается параллельной заданному направлению. Другими словами,
метод требует такого движения ракеты, при котором угловая скорость вра-
щения линии Р-Ц должна быть равна нулю, т. е.
£ = 0 или фй=0. (10.14)
Выражение (10.14) является уравнением идеальной связи. Из рис.10.13
видно,
т.в.
Рис. 10.13. Параметр рассогласования при методе параллельного сближения
204
что данный метод является методом упреждения. В процессе движения раке-
ты к цели ее вектор скорости упреждает линию Р-Ц на угол
(10.15)
где q4 - угол между вектором скорости цели и линией Р-Ц.
Параметром рассогласования может быть:
4 = ^
(10.16)
Наиболее простым для приборной реализации может быть вариант, при
котором параметр рассогласования представляется угловой скоростью вра-
щения линии Р-Ц. Для измерения величины £ на борту ракеты устанавлива-
ют следящий координатор, непрерывно совмещающий ось координатора с
направлением на цель. При появлении угловой скорости вращения линии Р-Ц
координатор вырабатывает напряжение рассогласования
(10.17)
где Ке- коэффициент пропорциональности.
Напряжение поступает в СРП для формирования команд управления.
В системах телеуправления при наведении ракеты по методу параллель-
ного сближения параметр рассогласования измеряется аппаратурой пункта
наведения. Его величина, например, в вертикальной плоскости равна
(рис.10.14)
(10.18)
При наведении ракеты по данному методу величина угла места линии
Р-Ц должна оставаться постоянной в течение всего времени полета ракеты к
цели, т.е. £=£,. При движении ракеты по кинематической траектории должно
выполняться условие
205
Ер - £к = £ц + arcsin
(10.19)
Если в качестве параметра рассогласования принять линейное отклоне-
ние ракеты от кинематической траектории, то его величина определится из
выражения
he = Dp Ер - £ц + arcsin
(10.20)
Для приборной реализации метода в соответствии с выражением (10.20)
необходимо иметь наземный (бортовой) радиолокационный или оптический
визир, определяющий координаты цели и ракеты, устройство запоминания
угла наклона линии Р-Ц в момент начала радиоуправления.
Таким образом, для реализации метода параллельного сближения необ-
ходимо в каждый момент времени иметь информацию о дальности до цели,
т.е. метод отличается плохой помехозащищенностью. Это обстоятельство яв-
ляется недостатком метода и ограничивает его применение.
Рис.10.14. К определению параметра рассогласования при наведении те-
леуправляемой ракеты по методу параллельного сближения
Методом пропорционального сближения называется такой метод наведе-
ния, при котором в течение всего времени полета ракеты к цели угловая ско-
рость поворота вектора скорости ракеты остается пропорциональной угловой
скорости поворота линии “ракета-цель"
& = Кё,
(10.21)
где К- коэффициент пропорциональности (навигационная постоянная).
Невыполнение условия (10.21) приводит к возникновению параметра рас-
согласования
206
дв = к£-ё.
Реализация метода (рис. 10.15) требует измерения величин ё и 0.
Рис. 10.15. Параметр рассогласования при методе пропорционального
сближения (а) и схема устройства формирования команд управления (б)
Первая из них может быть измерена бортовым следящим координатором
ракеты, который в процессе слежения за целью вырабатывает напряжение
Ut = а£ (а - коэффициент пропорциональности). Измерение величины &
непосредственно вызывает необходимость установки на борту флюгерного
устройства, что приводит к большим ошибкам измерения угловой скорости
вращения вектора скорости ракеты. Величина $ может быть измерена кос-
венным путем. Так как
W=0V, то 0 = -V
" V
(10.22)
Таким образом, для получения значений 0 измеряют величину нормаль-
ного ускорения ракеты, что при известном значении скорости ракеты дает
возможность получить напряжение
^=в-7’ (10.23)
где в - коэффициент пропорциональности.
207
Величина Wn измеряется датчиком линейных ускорений (ДЛУ).
Напряжение рассогласования
UAe = KU£-Ue. (10.24)
Это напряжение входит в команду управления, отклоняя рули ракеты так,
что при появлении угловой скорости вращения линии Р-Ц ракета изменяет
направление движения, при котором вектор скорости поворачивается со
скоростью 0- Kt.
При наведении ракеты по данному методу имеют место ошибки наведе-
ния, обусловленные влиянием массы ракеты, обтекателя, продольных уско-
рений. Для их компенсации в состав напряжения U( вводятся соответству-
ющие составляющие.
Нормальные потребные перегрузки ракеты
KV (10.25)
---t.
8
Коэффициент пропорциональности К принимается равным нескольким
единицам. Его величина изменяется в зависимости от направления атаки.
При атаке точно навстречу цели она наибольшая, при атаке в заднюю полу-
сферу - наименьшая.
Из выражения (10.20) следует, что при Х=1 метод пропорционального
сближения соответствует методу погони, при #=«> - методу параллельного
сближения.
При реализации метода пропорционального сближения в системах теле-
управления формирование сигнала рассогласования может осуществляться
по аналогии с методом параллельного сближения.
В силу сравнительно небольшой кривизны кинематических траекторий,
высокой помехозащищенности, возможности легкого сопряжения с другими
методами и простоты технической реализации метод пропорционального
сближения получил самое широкое распространение.
Трехточечные методы наведения
Трехточечными методами наведения называют,такие, при наведении по
которым определяется взаимное положение в пространстве трех точек —
пункта наведения, ракеты и цели. К их числу относят метод трех точек и ме-
тоды упреждения.
Метод трех точек (метод совмещения, метод накрытия цели) требует та-
кого движения ракеты, при котором ракета в любой момент времени должна
находиться на линии пункт наведения - цель (на линии визирования цели). Из
определения метода следует, что координаты точек кинематической траекто-
рии /Ъ для любого момента времени должны быть:
208
(10.26)
где Д - угол места и азимут цели соответственно. При отклонении ракеты
от линии пункт наведения - цель возникает параметр рассогласования:
(Zl£ = f,-rp.-
(10.27)
Для определения параметра рассогласования необходимо измерять теку-
щие значения угловых координат цели и ракеты. Эта задача решается уст-
ройствами сопровождения цели и ракеты по углу места и азимуту, в качестве
которых используются радиолокационные станции и оптические визиры (в
том числе и телевизионно-оптические).
Измеренные значения координат £р, Д, Д могут быть поданы на уст-
ройство вычитания, с выхода которого снимаются напряжения рассогласова-
ния:
[U^ = КеД€;
[и^КцАр. (10'28>
Под действием напряжении U&.Uпроисходит отклонение рулей тан-
гажа и курса, в результате ракета выходит на линию пункт наведения —
цель. Однако это не обеспечивает равной точности наведения зенитной
управляемой ракеты (ЗУР) при различных дальностях стрельбы. С увеличе-
нием дальности ракеты при одной и той же величине zlf, (ЛД) значение ли-
нейного отклонения ракеты от линии пункт наведения - цель увеличивается,
т. е. точность наведения ухудшается.
Для получения равной точности стрельбы независимо от дальности па-
раметр рассогласования представляют линейным отклонением ракеты от ли-
нии пункт наведения - цель:
~ Dd sin Де;
и П AR (Ю.29)
h40=Dp МП Л?.
Так как Де, Др весьма малы, выражение (3.181) можно записать так:
* ^рДЕ;
~ Dp Др.
(10.30)
В соответствии с формулой (10.30) вырабатываются напряжения рассо-
гласования, составляющие основу команд управления полетом ЗУР.
209
Методы упреждения — методы, при наведении по которым текущая точ-
ка кинематической траектории упреждает линию пункт наведения — цель на
некоторый угол. Величина упреждения пропорциональна скорости изме-
нения угловых координат цели. При управлении полетом ракеты в двух вза-
имно перпендикулярных плоскостях углы упреждения (в полярной системе
координат)
^упр
Рюр = ( 0ц ^SE^,
(10.31)
где /л»- время сближения ракеты с целью.
D-Dp Д[)
Принимая во внимание, что 1с6л = ~ = ~лБ СК0Р0СТЪ измене-
ния дальности ракета - цель), можно записать:
(10.32)
Упр AD
В линейной мере величина упреждения равна
4
hr = -^ADDB;
до р
Ви COSEU
hB = . 4 ADDD.
, pw AD р
(10.33)
Из выражения (10.33) следует, что величина упреждения пропорциональ-
на дальности ракета-цель и при AD=0 становится равной нулю. Таким обра-
зом, кинематическая траектория при методе упреждения проходит через точ-
ку нахождения цели.
£ Д COSE,.
Множители = Cf и дп в выРажении (10.33) называют ко-
эффициентами упреждения. Различают методы упреждения с перемен-
ными и постоянными коэффициентами. Реализация методов упреждения
осуществляется использованием наземных (бортовых самолетных) радиоло-
кационных и оптических угломерных устройств (визиров), как и при методе
трех точек. Значения , Д£) могут быть получены путем дифференци-
рования соответствующих величин.
210
При наведении ракет по данном методам кривизна траектории уменьша-
ется, что увеличивает дальность и точность стрельбы.
10.3. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ УПРАВЛЕНИЯ
ЗЕНИТНЫМИ И АВИАЦИОННЫМИ РАКЕТАМИ
Система управления авиационными (зенитными) ракетами — совокуп-
ность элементов, обеспечивающих подготовку к пуску, пуск и наведение ра-
кет на цели. Частью системы управления является система наведения, управ-
ляющая полетом ракеты.
Различают системы: командные телеуправления, тслензведения,
самонаведения (рис. 10.16).
Системы управления
зенитными и авиационными
ракетами
Рис. 10.16. Системы управления зенитными и авиационными ракетами
Командными системами телеуправления называют такие, в которых
управление полетом ракеты осуществляется с помощью команд, формируе-
мых на пункте управления и передаваемых на ракету по радиолинии управ-
ления. В состав системы входят устройства измерения координат цели и ра-
кеты, устройство формирования команд управления (УФК), командная ра-
диолиния управления (КРУ), пусковые устройства (пусковые установки).
Различают командные системы телеуправления I и II типа (ТУ-I, ТУ-П).
Командная система ТУ-I (рис. 10.17, а). Средства пункта управления
по данным целеуказания или самостоятельно обнаруживают цели. В процес-
се автоматического или ручного сопровождения измеряются координаты це-
ли (чаще в сферической системе координат).
Значения координат поступают в УФК, где формируются команды управ-
ления, и далее через КРУ передаются на борт ракеты.
Дальность действия КРУ зависит от технических параметров аппаратуры
передающего и приемного трактов:
211
DKPy -
Pn.KPy^lG2^> n
> - ,''стР.тал •
(10.34)
где Рп. a-v-мощность излучения передатчика КРУ;
G/, G2 - коэффициенты направленного действия антенн передатчика
и приемника КРУ соответственно;
Акту- длина рабочей волны КРУ;
Р„рт1п- чувствительность бортового приемника линии;
Dc„pmeu - максимальная дальность стрельбы.
Рис. 10.17. Схемы командных систем управления I типа (а) и II типа (б):
/ - устройство сопровождения цели; 2 - устройство сопровождения раке-
ты; 3-УФК; 4 - КРУ; 5 - пусковые устройства
После дешифрации в бортовой аппаратуре команды управления посту-
пают в автопилот и на рули ракеты, управляя их положением.
Командная система ТУ-П (рис. 10.17,6) отличается отТУ-I тем, что
устройство получения информации о параметрах движения цели (координа-
тор) размещено на борту ракеты. Данные о цели после предварительного
преобразования и обработки бортовой аппаратурой по радиолинии переда-
ются на пункт управления и вводятся в УФК. Сюда же поступают и коорди-
наты ракеты, измеряемые визирами пункта управления. Дальнейший процесс
аналогичен управлению в системе ТУ-1.
Системы теленаведения - системы управления ракетами, в которых
команды управления полетом формируются на борту ракеты. Их величина
пропорциональна отклонению ракеты от равносигнального направления,
создаваемого радиолокационными визирами пункта управления (рис. 10.18).
Такие системы иногда называют системами наведения по радиолучу. Они
бывают одно- и двухлучевыми.
Системы самонаведения - системы, в которых управление полетом ракет
осуществляется командами управления, формируемыми на борту ракет. При
этом информация, необходимая для их формирования, выдается бортовым
устройством (координатором). В таких системах используются самонаводя-
212
щиеся ракеты, в управлении полетом которых пункт управления участия не
принимает.
По виду энергии, используемой для информации о параметрах движения
цели, различают системы самонаведения: активные, полуактивные, пассив-
ные.
Активными называются системы самонаведения, в которых источник
облучения цели установлен на борту ракеты. Отраженные от цели сигналы
принимаются бортовым координатором и служат для измерения параметров
движения цели (параметра рассогласования), рис. 10.19,а.
Рис. 10.18. Схемы систем теленаведения: а - одиолучевая; б - двухлучевая;
/ - устройство сопровождения цели и наведения ракеты; 2 - пусковые уст-
ройства; 3 - устройства наведения ракеты
Рис. 10.19. Схемы систем самонаведения: а - активная; б - полуактивная; в
- пассивной; / - бортовой координатор; 2- СРП; 3 - автопилот;
4 - станция подсвета цели; 5 - пусковое устройство
213
В полуактивных системах самонаведения источник облучения цели
размещен на пункте управления (рис.10.19,6). Отраженные от цели сигналы
используются бортовым координатором для измерения параметра рассогла-
сования.
Пассивными называют такие системы самонаведения, в которых для
измерения параметров движения цели используется энергия, излучаемая це-
лью. Это может быть тепловая (лучистая), световая, радиотепловая энергия
(рис. 10.19.В).
В состав системы самонаведения входят устройства, измеряющие пара-
метр рассогласования, счетно-решающий прибор, автопилот и рулевой тракт.
Контроль качества наведения может быть визуальным или с помощью ра-
диолокационных и телевизионно-оптических средств, установленных на
пункте управления.
Комбинированные системы управления — системы, в которых наведение
ракеты на цель осуществляется несколькими системами последовательно.
Они могут находить применение в комплексах средней дальности и дальнего
действия. Это может быть комбинация командной системы телеуправления
на начальном участке траектории полета ракеты и самонаведение на конеч-
ном или наведение по радиолучу на начальном участке и самонаведение на
конечном. Такая комбинация систем управления обеспечивает наведение ра-
кет на цели с достаточной точностью при больших дальностях стрельбы.
Кроме рассмотренной схемы комбинированного управления могут при-
меняться и другие. Например, сочетание комбинированного управления (на
время вывода ракеты на кинематическую траекторию), инерциального наве-
дения (на основном участке наведения ЗУР) с переходом на телеуправление
2-го вида или на самонаведение (активное, полуактивное или пассивное) на
конечном участке наведения ракеты. При этом схема наведения может вы-
глядегь следующим образом:
(ТУ-П
АВТОНОМ=>ИНЕРЦ+ТУ-1=> {аСН
(ПА СН, ПСН
При такой схеме инерциальное наведение применяется не в чистом виде,
а в сочетании с коррекцией ЗУР на траектории. Суть этого наведения состоит
в том, чтобы удержать ракету на некоторой предварительно рассчитанной
траектории. Такое наведение иногда еще называют "h- наведением". При
этом на ЦБК возлагается задача расчета оптимальной траектории полета ЗУР
в расчетную точку встречи исходя из сохранения ракетой на конечном этапе
максимальной располагаемой перегрузки.
Применение данной схемы позволяет сократить частоту обращения к ра-
кете, а следовательно, увеличить дальность стрельбы. В сочетании с самона-
ведением ЗУР на конечном этапе такая схема позволяет увеличить количест-
во целевых каналов ЗРС.
214
Управляемая ракета
Управляемая ракета - беспилотный ЛА с реактивным двигателем, пред*
назначенный для поражения воздушных целей. Все бортовые устройства раз-
мещены на планере ракеты.
Планер является несущей конструкцией ракеты и состоит из корпуса, не-
подвижных и подвижных аэродинамических поверхностей. Корпус планера
обычно цилиндрической формы с конической (сферической, оживальной)
головной частью. Возможный вариант компоновки управляемой ракеты по-
казан на рис. 10.20.
Рис. 10.20. Схема компоновки управляемой ракеты:
отсек № 1 - радиопрозрачный обтекатель; отсек № 2 - аппаратурный;
отсек № 3 - РДТТ; отсек №4 - отсек управления (1 - гиростабилизированная
антенна БРП с антенной радиовзывателя; 2 - БРП; 3 - автопилот; 4 - некон-
тактный взрыватель; 5 - бортовая аппаратура управления; 6 - источник бор-
тового электропитания; 7 - боевая часть; 8 - заряд твердого топлива; 9 - ме-
ханизм управления воздушными и газовыми рулями;
10 - аэродинамический руль-элерон)
Аэродинамические поверхности планера служат для создания подъемной
и управляющих сил. К ним относятся крылья, стабилизаторы (неподвижные
поверхности), рули. По взаимному расположению рулей и неподвижных аэ-
родинамических поверхностей могут быть аэродинамические схемы ракет:
нормальная, «бесхвостка», «утка», «поворотное крыло» (рис. 10.21).
Рис. 10.21. Аэродинамические схемы управляемых ракет:
1 - нормальная, 2 - "бесхвостка", 3 - "утка", 4 - "поворотное крыло",
5 - бескрылая
215
Двигатели управляемых ракет делятся на две группы: ракетные и воз-
душно-реактивные.
Ракетным называется двигатель, который использует топливо, полно-
стью находящееся на борту ракеты. Для его работы не требуется забора ки-
слорода из окружающей среды. По виду топлива ракетные двигатели раз-
деляются на ракетные двигатели твердого топлива (РДТТ) и жидкостные ра-
кетные двигатели (ЖРД). В качестве топлива в РДТТ используются ракетные
пороха и смесевые твердые топлива, которые позволяют заливку и прессова-
ние непосредственно в камеру сгорания двигателя.
Воздушно-реактивные двигатели (ВРД) — двигатели, в которых
окислителем служит кислород, забираемый из окружающего воздуха. В ре-
зультате на борту ракеты содержится только горючее, что позволяет увели-
чить запас топлива. Недостаток ВРД — невозможность их работы в разре-
женных слоях атмосферы. Они могут применяться на ЛА при высотах полета
до 35-40 км.
Автопилот (АП) предназначен для стабилизации угловых движений раке-
ты относительно центра масс. Кроме того, АП является составной частью
системы управления полетом ракеты и управляет положением самого центра
масс в пространстве в соответствии с командами управления. В первом слу-
чае АП выполняет роль системы стабилизации ракеты, во втором — роль
элемента системы управления.
Для стабилизации ракеты в продольной, азимутальной плоскостях и при
движении относительно продольной оси ракеты (по крену) используются три
независимых канала стабилизации — по тангажу, курсу и крену (рис. 10.22).
Чувствительные элементы АП измеряют угловые отклонения раке-
ты #,$,/, ее скорость V и скоростной напор рУ*/2. Так, при воздействии
внешних возмущений (под воздействием ветра, при изменении плотности
воздуха, асимметрии ракеты и т.п.) происходит, например, поворот ракеты на
некоторый угол /вокруг продольной оси OXi т.е. возникает крен. Наличие
крена ракеты может в некоторых системах управления привести к тому, что
рули курса будут изменять положение ракеты по тангажу, а рули высоты по
курсу, что приведет к нарушению работы системы управления.
Рис. 10.22. Структурная схема автопилота
216
С появлением угла у чувствительный элемент канала стабилизации раке-
ты по крену измеряет величину угла и выдает пропорциональный по величи-
не сигнал. После усиления и преобразования этот сигнал поступает на орга-
ны управления, которые повернут, например, элероны на определенный угол.
В результате вращение ракеты по крену прекратится и будет устранен угол
крена. После этого элероны займут нейтральное положение. Подобным же
образом осуществляется стабилизация ракеты относительно осей OYt и OZt.
В системах стабилизации ракет в качестве чувствительных элементов ис-
пользуются гироскопические измерители, датчики линейных ускорений (ак-
селерометры), датчики скоростного напора и др.
Основу гироскопического измерителя составляет гироскоп - быстро вра-
щающийся маховик (ротор), укрепленный концами оси вращения в рамке,
называемой рамкой гироскопа. Ротор приводится во вращение элек-
тродвигателем.
Датчики линейных ускорений (ДЛУ) представляют собой инерционное
тело, подвешенное на пружинах, концы которых закреплены на корпусе и
грузе датчика. Для устранения колебаний тела установлен демпфер. На оси
перемещения груза закреплен подвижный контакт потенциометра.
При ускорении ракеты, равном нулю, груз находится в среднем положе-
нии. С появлением ускорения ракеты груз перемещается вдоль оси на вели-
чину, пропорциональную величине ускорения. В результате с подвижного
контакта потенциометра снимается напряжение, пропорциональное величине
ускорения. ДЛУ могут быть использованы для измерения продольных и бо-
ковых (нормальных) ускорений. Сначала ось ДЛУ параллельна (совпадает)
продольной оси OXt ракеты, затем — направлена по оси OYt или OZh
Для измерения скоростного напора применяют датчики, измеряющие
давление воздуха при набегании воздушного потока. В результате выдается
электрический сигнал, пропорциональный величине рУ’/2.
Преобразовательно-усилительные устройства АЛ чаще пред-
ставляют собой электронные преобразователи токов и напряжений. Для этого
применяют магнитные и электронные усилители-преобразователи, инте-
гральные микросхемы, обладающие высокой стабильностью работы и на-
дежностью в условиях вибраций и перегрузок ракеты.
Исполнительные устройства АП служат для перемещения рулей
ракеты. Они могут быть пневматическими, гидравлическими и электромо-
торными. Их назначение - преобразование электрической энергии команд
управления в угол поворота рулей ракеты. Часто эти устройства называют
рулевыми машинами.
Задающие устройства - устройства управления полетом ракеты на
автономном участке траектории. В их задачу входит изменение режима рабо-
ты бортовой аппаратуры по заранее заданной программе.
Бортовая аппаратура управления полетом ракеты является составной ча-
стью системы управления. Ее устройство определяется принятой системой
управления, реализованной в комплексе управления зенитными и
авиационными ракетами.
217
В системах командного телеуправления на борту ракеты устанавливают
устройства, составляющие приемный тракт командной радиолинии управле-
ния (КРУ).
В их состав входят антенна и приемник радиосигналов команд управле-
ния, селектор команд, демодулятор.
В системах командного телеуправления II вида на борту раке-
ты устанавливают координатор, измеряющий параметры движения цели, и
передатчик для передачи их в соответствующем коде на пункт управления,
находящийся на земле (при управлении зенитными ракетами) или самолете.
В системах теленаведения и самонаведения бортовая аппарату-
ра управления включает координатор цели и счетно-решающий прибор
(СРП). Координатор измеряет параметр рассогласования и выдает в СРП на-
пряжение рассогласования соответствующей величины и знака. В СРП фор-
мируются команды управления, в состав которых вводятся составляющие
компенсации ошибок наведения. С выхода СРП команды управления посту-
пают на АЛ для управления рулями ракеты.
Координаторы, применяемые в системах самонаведения, могут быть ра-
диолокационными и оптическими (световыми и инфракрасными).
Радиолокационный координатор содержит антенну, передатчик (в
координаторах активного типа), приемник, автоселектор, оконечное устрой-
ство, устройство отработки рассогласований, приемник и антенну канала
сигналов синхронизации (рис. 10.23).
Рис. 10.23. Схема радиолокационного координатора (а)
и его системы координат (б)
Показанный на рис. 10.23,а координатор является следящим. Ось ОХК ко-
ординатора, являющаяся электрической осью антенны, непрерывно совме-
щается с направлением на цель. При сопровождении цели ее положение от-
носительно оси ОХК может быть определено координатами: углами рассогла-
сования в продольной и поперечной плоскостях; углом рассогласования
<рн углом фазирования Ф; углом фазирования и линейным отклонением цели
218
Д от линии ()ХК\ линейными отклонениями Ду, Az цели от оси координатора
(рис. 10.23,6). При точном сопровождении цели значения этих координат
должны быть близки к нулю и цель должна находиться на направлении оси
ОХК.
Захват цели на автоматическое сопровождение координатором осуществ-
ляется до или после старта ракеты, для чего он предварительно наводится на
цель посредством команд начальной установки (КНУ), поступающих с пунк-
та управления. При этом переключатель П1 находится в положении 1. а вы-
ключатель П2 разомкнут. Напряжение команд через усилитель поступает на
гиропривод устройства отработки рассогласований, управляющий положе-
нием антенны. В результате ось ОХК совмещается с направлением на цель и
цель оказывается в луче антенны. Отраженные от цели сигналы улавлива-
ются антенной и через переключатель приема-передачи (ППП) подаются в
приемник.
При достаточной мощности отраженных сигналов на выходе оконечного
устройства появляется управляющее напряжение, величина и знак которого
соответствуют величине и знаку отклонения цели от оси ОХК. После этого
переключатель П1 переводится в положение 2, замыкая цепь обратной связи
в следящей системе сопровождения цели по направлению. Координатор пе-
реходит в режим автоматического сопровождения по направлению и дально-
сти (скорости). После этого замыкается выключатель П2 и напряжение рас-
согласования, пропорциональное параметру рассогласования, поступает в
СРП для формирования команд управления.
Напряжение рассогласования через переключатель П1 и усилитель по-
ступает на моментные моторы гиростабилизированиой платформы, управляя
положением антенны. В результате цель оказывается на направлении оси OXt
координатора.
Устройства отработки рассогласований координаторов являются испол-
нительными устройствами следящей системы. Они выполняется в виде ги-
ропривода, обеспечивающего стабилизацию антенны и управление ее по-
ложением.
Сопровождение цели по направлению может осуществляться по методу
интегральных и мгновенных равносигнальных зон. Последний считается наи-
более предпочтительным, так как обеспечивает более высокую точность
сопровождения. При методе мгновенных равносигнальных зон может произ-
водиться как амплитудная суммарно-разностная, так и фазовая обработка ра-
диолокационных сигналов.
При амплитудной суммарно-разностной обработке сигналы,
принятые антенной, поступают в устройство «суммы — разности», в резуль-
тате формируются разностный ил и суммарный Uj. сигналы;
(/j =2KU0фуКм costyt;
= 2KU0(p_ costal,
где Uo - напряжение сигнала, соответствующее направлению максимума
219
луча антенны на цель;
Км - крутизна пеленгационной характеристики;
К - коэффициент преобразования;
аь - несущая частота сигнала.
При фазовой обработке радиолокационных сигналов произво-
дится сравнение фаз высокочастотных колебаний сигналов, отраженных от
цели и принимаемых антеннами. В результате формируется напряжение,
пропорциональное разности фаз Дуг,
,, г, , 2л- 2nd .
и л = КфДуг = — ДК = — sin<py,
где Кф - коэффициент преобразования;
d - расстояние между фазовыми центрами антенн (база);
Л - рабочая длина волны координатора;
ДК. - разность хода радиоволн, отраженных от цели и принимаемых
антеннами координатора.
Оптические координаторы устанавливаются на ракетах малой
дальности стрельбы. Они более компактны и имеют малую массу. В состав
такого координатора входят оптическая система, установленная под свето-
прозрачным обтекателем, анализатор поля изображений цели, приемник лу-
чистой энергии, усилитель фототока, оконечное устройство и устройство от-
работки рассогласования (рис. 10.24).
Светопрозрачный Корпус
обтекатель ракеты
Рис. 10.24. Схема оптического координатора:
1 - зеркальная оптическая система; 2 - анализатор поля изображения;
3 - фотоприемник; 4 - усилитель фототока; 5 - оконечное устройство;
6 - устройство отработки рассогласований
По принципу измерения координат цели оптические координаторы де-
лятся на частотные, амплитудные, время-импульсные и др.
В частотном координаторе анализатор поля изображений представляет
собой вращающийся диск, разделенный на прозрачные и непрозрачные об-
ласти.
220
При вращении диска происходит модуляция потока, в результате на вы-
ходе фотоприемника выделяются импульсы фототока, частота следования
которых будет определяться положением изображения цели на поверхности
диска. При отклонении цели влево от оси ОХК частота импульсов увеличива-
ется, при отклонении вправо - уменьшается. В результате на выходе усилите-
ля фототока имеет место переменный ток определенной частоты, соответст-
вующей положению изображения цели относительно оси ОХ*. В оконечном
устройстве установлены электрические фильтры, настроенные на определен-
ные частоты. После разделения и преобразования фототока формируется на-
пряжение, которое поступает в устройство отработки рассогласований. В ре-
зультате изменяется положение оптической системы и цель оказывается на
направлении оси координатора.
Координаторы других типов отличаются рисунком модулирующих дис-
ков и конструкцией оконечных устройств. Большинство оптических коорди-
наторов являются следящими. В процессе сопровождения цели они вы-
рабатывают напряжение, пропорциональное угловой скорости вращения ли-
нии ракета-цель (Р-Ц), что необходимо при реализации метода
параллельного и пропорционального сближения.
Боевое снаряжение зенитных и авиационных ракет есть сочетание боевой
части и взрывателя.
Боевая часть имеет боевой заряд, детонатор и корпус. По принципу
действия боевые части могут быть осколочными и осколочно-фугасными. По
данным зарубежной печати, некоторые типы ЗУР могут оснащаться и ядер-
ными боевыми частями (например, в ЗРК «Найк-Геркулес»).
Поражающими элементами боевой части являются как осколки, так и го-
товые элементы, размещенные на поверхности корпуса. В качестве боевых
зарядов применяют бризантные (дробящие) взрывчатые вещества (тротил,
смеси тротила с гексогеном и др.).
Взрыватели ракет могут быть неконтактными и контактными. Некон-
тактные взрыватели в зависимости от места положения источника энергии,
используемой для срабатывания взрывателя. Подразделяются на активные,
полуактивные и пассивные. Кроме того, неконтактные взрыватели подразде-
ляются на электростатические, оптические, акустические, радиовзрыватели.
В зарубежных образцах ракет чаще применяются радио- и оптические взры-
ватели. В отдельных случаях одновременно работают оптический и радио-
взрыватель, что повышает надежность подрыва боевой части в условиях
электронного подавления.
В основу работы радиовзрывателя положены принципы радиолокации.
Поэтому такой взрыватель представляет собой миниатюрный радиолокатор,
формирующий сигнал подрыва при определенном положении цели в луче
антенны взрывателя.
По устройству и принципам работы радиовзрыватели могут быть им-
пульсными (как правило, активными), доплеровскими (частотными) и
фазовыми.
221
В импульсном взрывателе (рис. 10.25) передатчик вырабатывает высоко-
частотные импульсы малой длительности, излучаемые антенной в направле-
нии цели. Луч антенны согласован в пространстве с областью разлета оскол-
ков боевой части.
Рис. 10.25. Структурная схема импульсного радиовзрывателя
При нахождении цели в луче отраженные сигналы принимаются антен-
ной, проходят приемное устройство и поступают на каскад совпадений, куда
подается строб-импульс. При их совпадении выдается сигнал подрыва дето-
натора боевой части. Длительность строб-импульсов обусловливает диапазон
возможных дальностей срабатывания взрывателя. Минимальная дальность
срабатывания
D
uPB.min ~ 2 ’
где - длительность импульса передатчика.
Другой способ согласования области срабатывания РВ с областью разле-
та осколков заключается в измерении угла срабатывания по изменению
доплеровской частоты, которая для систем с полуактивным наведением мо-
жет быть найдена из соотношения
^^(l-cosp).
Изменение доплеровской частоты определяется лишь относительной
скоростью сближения ракеты с целью и изменяется в достаточно узком диа-
пазоне. Поэтому на практике принимают 4Fd постоянной величиной. При
этом условия согласования несколько ухудшаются. Для повышения надеж-
ности срабатывания РВ и его помехоустойчивости используют два канала с
различными значениями отстройки 4Fdl и ЛГд2.
Таким образом, пеленгационные РВ с одним или двумя доплеровскими
каналами (10.26) построены на сравнении доплеровского сдвига частоты с
заранее известной. Каждый канал содержит смеситель, УПЧ с АРУ и узкопо-
лосные фильтры (УПФ1 и УПФ2). Следящая система по скорости поддержи-
222
вает на большом удалении ракеты от цели постоянство частоты гетеродина.
После срыва слежения по скорости начинается резкое изменение промежу-
точной частоты в обоих каналах.
Рис. 10.26. Структурная схема доплеровского радиовзрывателя
Узкополосные фильтры отстроены от канала промежуточной частоты
приемника РВ на величины ДЛз/ и ДЕд2. В моменты времени, когда
и AFd=AFd2 в каналах вырабатываются сигналы, поступающие на схему “И".
При их последовательном появлении выдается сигнал подрыва. Использова-
ние двух или более каналов повышает надежность и помехозащищенность
РВ.
При выборе частот отстройки доплеровских каналов учитывается запаз-
дывание в исполнительных устройствах РВ.
Для улучшения согласования РВ с БЧ, особенно в условиях помех и при
малых скоростях сближения ракеты с целью, в РВ может вводиться частот-
ный экстраполятор, который в зависимости от промаха и скорости сближе-
ния ракеты с целью (времени Лг/.? изменения частоты сигнала на величину,
равную расстройке фильтров относительно друг друга) формирует регули-
руемое время задержки (в срабатывании исполнительной схемы РВ.
При использовании фазового метода пеленгации в приемные каналы РВ
до старта или перед включением выдается разность фаз
2лл/.,
=— (l-cos<pcp),
где d - расстояние между фазовыми центрами приемных антенн РВ.
Структурная схема полуактивного РВ с фазовым методом пеленгации
приведена на рис. 10.27. Каждый канал содержит смеситель и усилитель с
АРУ. Сопровождение по скорости (частоте Доплера) осуществляется следя-
щей системой (СС “V"), изменяющей частоту гетеродина. Один из каналов
содержит управляемый фазовращатель (ФВ), куда вводится фазовый сдвиг
(^р), соответствующий расчетному углу срабатывания. Когда разность фаз в
каналах сравняется с заданной, фазовый детектор (ФД) выдает сигнал под-
223
рыва. В ЗРК фазовий сдвиг, пропорциональный величине относительной
скорости (1/2 D), может вводиться до старта (для ЗРК с самонаведением) ли-
бо непосредственно перед встречей ракеты с целью (для ЗРК с телеуправле-
нием).
Рис. 10.27. Структурная схема фазового радиовзрывателя
Контактные взрыватели могут быть электрическими и ударными Они на-
ходят применение в ракетах малой дальности при высокой точности стрель-
бы. что обеспечивает подрыв боевой части при прямом попадании ракеты.
Для повышения вероятности поражения цели осколками боевой части
принимаются меры по согласованию областей срабатывания взрывателя и
разлета осколков. При хорошем согласовании область разлета осколков, как
правило, совпадает в пространстве с областью нахождения цели.
Наземные (самолетные) устройства измерения координат целей и ракет
Данные устройства обеспечивают измерение текущих координат целей и
ракет. Они находят применение в системах телеуправления. В качестве тако-
вых используются радиолокационные, оптические и телевизионно-
оптические визиры.
Радиолокационный визир представляет собой радиолокационную
станцию сопровождения цели по направлению и дальности. В результате из-
меряются текущие координаты цели в принятой системе координат (чаще
сферической). Принцип их работы был рассмотрен ранее. Аналогичные ра-
диолокационные визиры используются для сопровождения ракет и измере-
ния их текущих координат.
Оптический визир выполняется в виде визирных колонок или опти-
ческого прицела, позволяющего визуально наблюдать за целью и вести ее
ручное сопровождение. Такие визиры находят применение в зенитных ракет-
ных комплексах ближнего действия. Их дальность действия 10-15 км.
Телевизионно-оптический визир представляет собой телевизион-
ную систему, состоящую из телевизионной передающей камеры и видеокон-
224
трольного устройства. Изображение цели в передающей телевизионной ка-
мере преобразуется в электрические телевизионные сигналы, которые по ка-
белю поступают в видеоконтрольное устройство, создавая изображение цели
на телевизионном экране. В результате имеется возможность ручного сопро-
вождения цели и измерения текущих значений угловых координат.
В телевизионно-оптических визирах предусматривается автоматическое
сопровождение, в том числе и наводимых на цели ракет. Для получения ус-
тойчивого сопровождения на борту ракет устанавливаются трассеры — ис-
точники светового и инфракрасного излучения.
Устройства формирования команд (УФК) предназначены для по-
лучения электрических напряжений, величина и знак которых соответствуют
величине и знаку отклонения ракеты от кинематической траектории. Струк-
тура УФК зависит от принятого метода наведения ракет и метода компенса-
ции ошибок наведения.
КРУ представляет собой многоканальную линию связи, предназначен-
ную для преобразования и передачи команд управления. Число каналов ли-
нии соответствует числу передаваемых команд при одновременном управ-
лении несколькими ракетами.
225
11. ТОЧНОСТЬ ИЗМЕРЕНИЯ КООРДИНАТ
И ПАРАМЕТРОВ ДВИЖЕНИЯ ЛА
11.1. СИСТЕМЫ РАДИОДИАПАЗОНА
Общие положения
В процессе сопровождения целей и наводимых на них управляемых ракет
неизбежно присутствуют погрешности, обусловленные самыми разными
причинами. Эти погрешности характеризуются систематическими и случай-
ными ошибками.
Причины, вызывающие систематические ошибки могут быть выявлены и
учтены, случайные же ошибки вызываются, как правило, большим числом
отдельных причин, действующих различным образом в каждом конкретном
событии.
Исключить случайные ошибки, связанные со случайной величиной х
невозможно, но их можно уменьшить или учесть при определенном усредне-
нии и знании законов их распределения/(х), устанавливающими связь между
возможными значениями х и соответствующим им вероятностям.
Для нормального закона распределения вводятся следующие разновидно-
сти ошибок:
г-вероятная J/(x)dr = OJ;
rj - простая средняя ц = 2$xf(x)dx;
о
а - среднеквадратическая а = 4о ,
где D= \(х-х^/(х}Лх (D - дисперсия, хо - математическое ожидание).
Е - вероятностное отклонение Е - 42ра,
где р = 0,4769 - коэффициент пересчета.
На основе теории ошибок измерений вводится термин «мера точности»
Расчетные соотношения для оценки случайных ошибок различных сис-
гем радиодиалазона (активных, полуактивных, пассивных) применяются как
шя отдельных координат, так и результирующих их значений.
Активные системы
Ошибки в измерении дальности
с 4зд2
а=--------, м,
Л 2 Ай)^Паа~
226
где Па - приведенный потенциал, рассчитываемый по формуле 8.1;
Да) - 2яД£ - эффективная полоса пропускания приемного устройства.
Ошибки в измерении скорости
А 43Д2 ,
(Ту, = -----г=. -и/с,
2 7 ITT In /т
где А - длина волны РЛС;
тс - длительность импульсного сигнала на выходе приемника.
Ошибки в измерении угловых координат
К 0сД2 ктввД2
где 0с,0р - ширина диаграммы направленности антенны
(ФАР) в плоскостях £ и ft соответственно, размерность
которых определяет размерность ошибок;
Kg=0,6 при оценке угловых координат по максимуму диаграммы
направленности и Кк-0,4 при реализации моноимпульсного
метода.
Полуактнвные системы
Ошибки в измерении дальности
а = сЛДрлсДгсн , и
Д 2яДГгсн^Ппаац
Ошибки в измерении скорости
а = 1. ^ДглсДгсн л(/с
V! 2 "
Ошибки в измерении угловых координат
* я Ofi(e)rCH Л рлс Д ген
=--------7===---------<
у1Ппа^ц
где Ппа = , W2 (параметры - РРЛС< СРЛС, Pnp.miftrcth Gtvn
Рцр.пип ГСН
относятся к наземной РЛС и бортовой ГСН);
тс - длительность сигнала РЛС;
Д[гсн ~ полоса пропускания приемника ГСН;
Gp(e)ieH ~ ширина диаграммы направленности ГСН.
Системы с активным ответом
Ошибки в измерении дальности
227
Ошибки в измерении угловых координат
<W) =
ОЩ(е)Д
где /7„ = Ротв^пСЗУР^ ' м2 _ G3yp _ соответственно мощность и ко-
М!1\Р.тт
эффициент усиления антенны ответчика ЗУР, Р^.^ G„ -чувствительность
приемника и коэффициент усиления приемной антенны РЛС соответственно,
^(с) “ ширина диаграммы направленности антенны РЛС).
Пассивные системы
Ошибки в измерении угловых координат
Р G С А2
где Пп =—ц ц п—,.и2 _ приведенный потенциал (PVG4 - мощность из-
MPnp.min
лучения и коэффициент усиления сигнала от цели; Рпр1п^ G„ - чувствитель-
ность приемника и коэффициент усиления приемной антенны РЛС).
Измерение дальности и параметров движения целей пассивными систе-
мами возможно только при использовании разнесенных в пространстве при-
емных пунктов.
Расчет суммарных ошибок основан на выполнении следующих условий:
1. Значения ошибок измерения координат должны быть приведены к
единой размерности, например, (Уд.м: а^Д.м; <?еД.м если <тд и ае имеют
радианную меру.
2. Принимается допущение о независимости координат, т.е. суммирова-
нии дисперсии ошибок.
При этом суммарная ошибка измерения координат цели будет равна
<^Z = +(<ТдД)2+(^Д)2,л/.
Для систем наведения управляемых ракет на цель суммарная ошибка сла-
гается из ошибок измерения координат цели ац и ошибок измерения коор-
динат ракеты <тр.
+ (стлЛ Р + .
С учетом того, что ошибки <Тд вероятность вывода ракеты в
точку встречи с целью можно оценивать вероятностью попадания ракеты в
круг заданного радиуса г в картинной плоскости.
Приняв значение г=г„ - радиусу поражения цели, получим соотношение
между допустимой суммарной ошибкой и заданным радиусом пораже-
ния
228
<TrjS03/6r„.
Следовательно, допустимое значение суммарной ошибки в измерении
координат цели и ракеты в точке встречи должно соответствовать одной тре-
ти радиуса поражения.
11.2. СИСТЕМЫ ОПТИЧЕСКОГО ДИАПАЗОНА
Активные системы
Оценку точности работы активных (лазерных) систем оптического диапа-
зона можно провести аналогично оценкам точности работы активных систем
радиодиапазона с учетом известных значений ЭОП цели (<тч) и привсденно-
го потенциала системы оптического диапазона Пап1х,
т- „ 4зд2
Т.е. (У и —-----ил’жаддг ,
2
_ 2
°',1г~я02рф
где РП1 - излучаемая мощность, Вт; Sn/) - площадь приемной апертуры, м2;
О - ширина диаграммы направленности антенны, рад;
Рф- мощность излучения окружающего фона, Вт.
Пассивные ИК - системы
<опрД
Д—. - ошибка <р пеленга цели, измеряемая в стерадианах.
Пик = —Ш—— ,м2(Jач,Вт/см* - интенсивность излучения
абсолютно черного тела (8.29);
е *= 0.7 - спектральный коэффициент излучения реальной
цели;
8ц.м2- площадь проекции цели;
0vВт/см2mkmjср- спектральная плотность излучения фона;
й),ср-утоп поля зрения приемника.
Пассивные телевизионные системы
&ллД с
- ошибка у пеленга цели, измеряемая в стерадианах.
Уптс
B.SuruS&cAA j ?
П-^ = ц , м (Вд, Вт/см , мкм.ср. - спектральная плотность из-
№
лучения поверхности цели 5Ч с коэффициентом отражения гц* 0,2 -0,8
вследствие освещения ее солнцем; 5^, м2 - рабочая площадь объектива сис-
229
темы; АЛ, м - диапазон принимаемых волн; Рф, Вт - мощность излучения
фона; 0)^, ср - угол поля зрения объектива).
Системы оптического диапазона в решении задач ПВО используются в
качестве дальномеров, обнаружителей, измерителей координат и автомати-
ческого сопровождения летательных аппаратов.
Потенциально лазерные системы оптического диапазона могут быть ис-
пользованы как системы функциональною поражения.
230
12. ЗЕНИТНЫЕ РАКЕТНЫЕ ВОЙСКА
Историческая справка
Впервые в СССР в конце 40-х гг. нескольким отделам НИИ-88 офици-
ально была поставлена задача по изучению и обобщению опыта, накопленно-
го советскими и зарубежными специалистами в области конструирования и
построения ЗУР. В основу этой работы было положено направление совер-
шенствования и доводки ЗУР немецкого производства с отечественными
двигателями.
ЗРС первого поколения
В 1950г. постановлением Правительства СССР КБ-1 (ныне НПО "Алмаз")
было определено головным разработчиком системы ПВО города Москвы,
получившей обозначение С-25 "Беркут". Ракета для этой системы под шиф-
ром "205" разрабатывалась в КБ С.А. Лавочкина.
Работы по созданию системы С-25 и ракеты "205" велись в крайне сжа-
тые сроки, что объяснялось наличием у вероятного противника стратегиче-
ских бомбардировщиков, способных нести ядерные заряды. Параллельно,
еще до получения результатов испытаний, было начато серийное производ-
ство их компонентов. Более 50 заводов работали над созданием двигателей,
элементов и агрегатов конструкции, блоков систем управления. Летом 1951г.
были произведены первые пуски, а весной 1953г. состоялись первые пере-
хваты реальных воздушных целей, в качестве которых использовались отра-
ботавшие свой ресурс боевые самолеты.
На основе зенитной ракетной системы (ЗРС) С-25 к середине 50-х гг. бы-
ла создана система ПВО Москвы, имевшая два кольцевых рубежа обороны и
состоявшая из радиолокационных систем дальнего и ближнего обнаружения
и 56 зенитных ракетных полков со стационарными пусковыми установками,
предназначенными для запуска ракет "205". Каждый полк был способен об-
стреливать до 20 воздушных целей, находящихся на дальности до 30км и на
высотах от 3 до 20км в азимутальном секторе перехвата 5O...6O/0. ЗРС С-25
стала первой отечественной зенитной ракетной системой, поступившей на
вооружение войск ПВО. Претерпев ряд модификаций, она простояла па воо-
ружении около 30 лет.
Наиболее значительным событием периода становления отечественных
ракетных средств ПВО стало создание передвижной ЗРС С-75. Ее разработка
осуществлялась в КБ-1 под руководством А.А. Расплетина, а в ОКБ-2 (ныне
МКБ «Факел») под руководством П.Д. Грушина для этой системы в 1953г.
была создана ракета В-750 (1Д).
ЗРС С-75 и созданные для нее ракеты В-750 находились на вооружении
более 30 лет, пройдя ряд модификаций. Эта система первой из отечественных
ракетных средств ПВО прошла и боевые испытания. Ракетой В-750 этой сис-
темы 1 мая 1960г. под Свердловском был сбит американский самолет-
разведчик У-2, пилотируемый Ф. Пауэрсом. Успешно применялась ЗРС С-75
231
во время войны во Вьетнаме, где с 1965 по 1973г. с ее помощью было унич-
тожено более 2,5 тысячи американских самолетов. Высокую эффективность
продемонстрировала ЗРС С-75 и в ходе других локальных конфликтов, в ча-
стности. в Ближневосточном регионе.
В отличие от ранее названных систем, ЗРС С-75 была первой передвиж-
ной системой, способной приступить к отражению воздушного налета с
марша за несколько часов. По своим тактико-техническим данным С-75 опе-
режала характеристики многих ЗРС зарубежных разработок того периода.
Основной структурной единицей ЗРС является зенитный ракетный ком-
плекс (ЗРК), представляющий собой автономно функционирующую сово-
купность боевых и обеспечивающих средств. В составе ЗРС может быть не-
сколько типов ЗРК, различающихся областью применения и некоторыми
техническими устройствами. В связи с определяющей ролью ЗРК в системе в
последнее время ЗРК часто отождествляется с ЗРС.
К концу 50-х гг. относится появление первых ЗРК корабельного базиро-
вания. В нашей стране, как правило, создание таких комплексов шло по пути
использования в морских условиях ЗУР. созданных для наземных войск. По-
добным путем, например, был создан корабельный ЗРК средней дальности
М-2 («Волхов-М»), в составе которого использовалась одна из модификаций
ЗУР В-750. Таким же образом был создан корабельный ЗРК малой дальности
М-1 ("Волна") с модифицированным вариантом ракеты из состава ЗРС С-125,
которая ранее создавалась для войск ПВО.
Первое поколение ЗРК решало в основном задачи борьбы с самолетами.
В этот период развитие ЗРС шло в основном по пути совершенствования
средств обнаружения и распознавания целей, систем управления ракетами,
повышения дальности, скорости полета и маневренности ЗУР.
Вместе с тем происходили бурные перемены и в развитии авиации - в те-
чение сравнительно короткого промежутка времени скорости полета самоле-
тов возросли до 1800-2500км/ч, а практический потолок - до 15...22км.
Самолеты стали оснащаться системами создания помех, существенно
уменьшилась их эффективная поверхность рассеивания (ЭПР), значительно
повысились их маневренные качества, самолеты стали способны выполнять
свои задачи практически в любых погодных условиях. Вместе с тем намети-
лась четкая тенденция к стабилизации максимальных скоростей и высот по-
лета. Для серийных самолетов они в 90-х гг. составили 2ООО...25ООкм/ч и
20км, соответственно.
ЗРС второго поколения
Исходя из приведенных выше особенностей развития авиации, были
сформулированы требования к ЗРС второго поколения. В результате,
1958... 1966гг. под руководством академика А. А. Расплетина была разрабо-
тана зенитная ракетная система дальнего действия С-200 с самонаводящими-
ся на цели зенитными ракетами.
С поступлением на вооружение этой системы была практически решена
задача борьбы с самолетами на дистанциях в несколько сотен километров до
232
рубежа запуска с них управляемых ракет класса "воздух-поверхность". На
основе их использования была получена возможность создания систем ПВО,
способных обеспечить защиту не только важнейших объектов, но и целых
стран от нападения с воздуха. Создание таких систем существенно повысило
эффективность борьбы с самолетами, что было подтверждено практикой бое-
вых действий в ряде локальных войн и конфликтов. Претерпев несколько
этапов модернизации, до уровня С-200Д, система состояла на вооружении
ЗРВ страны более тридцати лет, заставив вероятного противника внести
серьезные коррективы в тактику действий своих СВН.
Вместе с тем, перед разработчиками всегда актуальной оставалась задача
иметь высокоэффективные многоканальные зенитные ракетные комплексы с
единым многофункциональным радиолокатором, обеспечивающим обзор
большого сектора пространства и одновременное управление наведением
многих ракет на многие цели.
ЗРС третьего поколения
Незадолго до своей скоропостижной кончины А.А. Расплетин выступил с
инициативой и начал работать над унифицированной многоканальной систе-
мой нового поколения С-ЗОО. Успехи микроэлектроники, вычислительной
техники, развитие фазированных антенных решеток позволили в этой систе-
ме, осуществленной под руководством преемника Расплетина Генерального
конструктора академика Б.В. Бункина (Генеральный конструктор ракеты -
академик П.Д. Грушин), решить задачи, аналогичные стоявшим перед созда-
телями С-25, на качественно новом техническом уровне (многоканальный
радиолокатор наведения ракет - на одной транспортной единице, пусковая
установка для четырех.ракет также на одной транспортной единице) и с ха-
рактеристиками, обеспечивающими поражение самых разнообразных средств
воздушного нападения на всех высотах, в том числе предельно малых.
Создание и внедрение в практику работы проектно-конструкторских ор-
ганизаций быстродействующей вычислительной техники (ЭВМ) позволило
перейти в этот период к принципиально новым приемам проектирования, ос-
нованным на методах оптимального проектирования. В основу этих методов
был положен поиск параметров и характеристик ЗУР и ЗРС, наиболее полно
отвечающих выбранному критерию их эффективности.
Развитие методов оптимального проектирования привело к внедрению в
поисковую работу конструктора диалектического метода, в основу которого
была положена идея о взаимозависимости и взаимообусловленности всех ка-
честв ракеты и ЗРК в целом. С внедрением этих методов существенно изме-
нился и сам труд конструктора и проектировщика в процессе создания новых
образцов техники. В дополнение к интуиции и практическому опыту конст-
руктора появились научно обоснованные методы, позволяющие на базе по-
стоянно увеличивающихся возможностей ЭВМ быстро решать задачи опти-
мального выбора ракеты среди большого множества вариантов.
233
Этот период, несомненно, следую оценить как период становления и соз-
дания самостоятельной отрасли по проектированию и массовому изготовле-
нию зенитных ракетных комплексов.
Разработка и постановка на вооружение третьего поколения ЗРК и ЗУР в
решающей степени были связаны с расширением номенклатуры целей и их
характеристик. В 70-80-х гг. на вооружение армии ряда стран были приняты
СВН, получившие название высокоточного оружия (ВТО). В настоящее вре-
мя ВТО рассматривается как основное средство для нанесения превентивно-
го, упреждающего удара, способное вывести из строя или парализовать сис-
темы и средства ПВО, повысив тем самым эффективность последующего
применения обычных СВН. В ходе же последующих боевых действий ВТО
используется, как правило, для поражения особо важных малоразмерных
объектов. Основной задачей ЗРС третьего поколения как раз и явилась борь-
ба с ВТО.
С целью повышения боеготовности, ракеты всех ЗРК оснащены двигате-
лями твердого топлива. Вошла в практику установка ракет в герметичные
транспортно-пусковые контейнеры (ТПК). что в сочетании с оригинальными
конструктивными решениями, новыми системами и методиками испытаний
обеспечило их беспроверочное хранение при постоянной готовности к запус-
ку в течение десяти лет и более. Все ЗРК третьего поколения стали мобиль-
ными, время подготовки к пуску ЗУР с марша в зависимости от типа ЗРК на-
ходится в пределах от 5 минут до нескольких секунд.
Еще одной важной особенностью нового поколения ЗУР стала их
унификация. Разработчикам удалось создать ограниченную номенклатуру
ЗУР, способную обеспечить поддержку действий сухопутных войск,
кораблей ВМФ. а также ПВО жизненно важных военных и гражданских
Принципиальные изменения произошли в системе обнаружения и слеже-
ния за целями. Радиолокационные станции, обеспечивающие этот процесс,
стали использовать фазированные антенные решетки (ФАР), что в сочетании
с быстродействующими вычислительными устройствами позволяет одновре-
менно отслеживать полет нескольких десятков целей и управлять полетом до
десяти ЗУР.
Современная отечественная система ПВО способна поражать воздушные
цели любого типа. Войска ПВО имеют на вооружении ЗРК С-300ПМУ и
С-300ПМУ1 серии ’’Фаворит".
Зенитная ракетная система С-ЗОО различных модификаций с успехом
демонстрировалась, включая стрельбы по реальным целям, на многих меж-
дународных выставках вооружений.
Для борьбы с непрерывно развивающимися средствами воздушного на-
падения требуются все более совершенные системы обороны четвертого по-
коления серии "Триумфатор". Над их созданием продолжают успешно рабо-
тать коллективы НПО "Алмаз" во главе с Генеральным конструктором
А.А.Лиманским и МКБ "Факел" под руководством Генерального конструк-
тора В.Г. Светлова.
234
12.1. СИСТЕМЫ ЗЕНИТНОГО РАКЕТНОГО ОРУЖИЯ
12.1.1. Классификация и боевые свойства зенитных ракетных комплексов
Зенитное ракетное оружие относится к ракетному оружию «земля -
воздух» и предназначено для уничтожения средств воздушного нападения
противника зенитными управляемыми ракетами (ЗУР). Оно представлено
различными системами.
Система зенитного ракетного оруж ия (зенитная ракетная система) - со-
вокупность зенитного ракетного комплекса (ЗРК) и средств, обеспечиваю-
щих его применение.
Зенитный ракетный комплекс - совокупность функционально связанных
средств, предназначенных для поражения воздушных целей зенитными
управляемыми ракетами.
В состав ЗРК входят: средства обнаружения, опознавания и целеуказания,
средства управления полетом ЗУР, одна или несколько пусковых установок
(ПУ) с ЗУР.
Техническую основу ЗРК составляет система управления ЗУР. В зависи-
мости от принятой системы управления различают комплексы: телеуправле-
ния ЗУР, самонаведения ЗУР, комбинированного управления ЗУР. Каждый
ЗРК обладает определенными боевыми свойствами и особенностями, сово-
купность которых может служить классификационными признаками, позво-
ляющими отнести его к определенному типу.
К боевым свойствам ЗРК относятся всепогодность, помехозащищен-
ность. мобильность, универсальность, надежность, степень автоматизации
процессов ведения боевой работы и др.
Всепогодность - способность ЗРК обеспечить уничтожение воздушных
целей в любых погодных условиях. Различают ЗРК всепогодные и не всепо-
годные. Последние обеспечивают уничтожение целей при определенных по-
годных условиях и времени суток.
Помехозащищенность - свойство, обеспечивающее способность ЗРК
уничтожать воздушные цели в условиях помех, создаваемых противником
для подавления электронных (оптических) средств.
Мобильность - свойство, проявляющееся в транспортабельности и вре-
мени перевода из походного положения в боевое и из боевого в походное.
Относительным показателем мобильности может служить суммарное время,
необходимое для смены стартовой позиции в заданных условиях. Составной
частью мобильности является маневренность.
Наиболее мобильным считается комплекс, обладающий большей транс-
портабельностью и требующий меньшего времени на совершение маневра.
Мобильные комплексы могут быть самоходными, возимыми и переносными.
Немобильные ЗРК называют стационарными.
Универсальность - свойство, характеризующее технические возможно-
сти ЗРК уничтожать воздушные цели в большом диапазоне дальностей и вы-
сот.
235
Надежность - способность нормально функционировать в заданных ус-
ловиях эксплуатации.
По степени автоматизации различают зенитные ракетные комплексы
автоматические, полуавтоматические и неавтоматические. В автоматических
ЗРК все операции по обнаружению, сопровождению целей н наведению ра-
кет выполняются автоматами без участия человека. В полуавтоматических и
неавтоматических ЗРК в решении ряда задач принимает участие человек.
Зенитные ракетные комплексы различают по числу целевых и ракетных
каналов. Комплексы, обеспечивающие одновременное сопровождение и об-
стрел одной цели, называются одноканальными. а нескольких целей - много-
канальными.
По дальности стрельбы комплексы подразделяются на ЗРК дальнего
действия (ДД), средней дальности (СД), малой дальности (МД) и ближнего
действия (БД).
12.1.2. Состав и характеристики элементов зенитных ракетных комплексов
В соответствии с решаемыми задачами функционально необходимыми
элементами ЗРК являются: средства обнаружения, опознавания ЛА и целе-
указания; средства управления полетом ЗУР; пусковые установки и пусковые
устройства; зенитные управляемые ракеты.
Для борьбы с низколетящими целями могут применяться переносные зе-
нитные ракетные комплексы (ПЗРК).
При использовании в составе ЗРК (например, «Пэтриот») многофункцио-
нальных РЛС (МФ РЛС) они выполняют роль средств обнаружения, опозна-
вания. устройств сопровождения ЛА и наводимых на них ракет, устройств
передачи команд управления, а также станций подсвета цели для обеспече-
ния работы бортовых радиопеленгаторов.
Средства обнаружения
В зенитных ракетных комплексах в качестве средств обнаружения ЛА
могут использоваться радиолокационные станции, рассмотренные в разделах
8 и 9, оптические и пассивные пеленгаторы.
Оптические средства обнаружения (ОСО). В зависимости от места
расположения источника излучения лучистой энергии оптические средства
обнаружения подразделяются на пассивные и полуактивные.
В пассивных ОСО, как правило, используется лучистая энергия, обуслов-
ленная нагревом обшивки ЛА и работающими двигателями, либо световая
энергия Солнца, отраженная от ЛА.
В полуактивных ОСО на наземном пункте управления располагается оп-
тический квантовый генератор (лазер), энергия которого используется для
зондирования пространства.
236
Пассивное ОСО представляет собой телевизионно-оптический визир
(рис. 12.1), в состав которого входят передающая телевизионная камера
(ПТК), синхронизатор, каналы связи, видеоконтрольное устройство (ВКУ).
Телевизионно-оптический визир преобразует поток световой (лучистой)
энергии, идущей от ЛА, в электрические сигналы, которые передаются по
кабельной линии связи и используются в ВКУ для воспроизведения передан-
ного изображения ЛА, находящегося в поле прения объектива ПТК.
Рис. 12.1. Структурная схема телевизионно-оптического визира
с ручным сопровождением цели
В передающей телевизионной трубке оптическое изображение преобра-
зуется в электрическое, при этом на фотомозаике (мишени) трубки возникает
потенциальный рельеф, отображающий в электрической форме распре-
деление яркости всех точек ЛА.
Считывание потенциального рельефа происходит электронным лучом
передающей трубки, который под действием поля отклоняющих катушек
движется синхронно с электронным лучом ВКУ. На сопротивлении нагрузки
передающей трубки возникает видеосигнал изображения, который усилива-
ется предварительным усилителем и по каналу связи поступает на ВКУ. Ви-
деосигнал после усиления в усилителе подается на управляющий электрод
приемной трубки (кинескопа).
Синхронизация движения электронных лучей ПТК и ВКУ осуществляет-
ся импульсами строчной и кадровой разверток, которые не замешиваются с
сигналом изображения, а передаются по отдельному каналу.
Оператор наблюдает на экране кинескопа изображения ЛА, находящихся
в поле зрения объектива визира, а также визирные метки, соответствующие
положению оптической оси ТОВ по азимуту (0) и углу места (е), в результате
чего могут быть определены азимут и угол места ЛА.
237
Полуактивные ОСО (лазерные визиры) по своей структуре, принципам
построения и выполняемым функциям почти полностью аналогичны радио-
локационным. Они позволяют определять угловые координаты, дальность и
скорость цели. Состав лазерного визира показан на рис. 12.2.
В качестве источника сигнала используется лазерный передатчик, запуск
которого осуществляется импульсом синхронизатора. Световой сигнал лазе-
ра, пройдя систему зеркал телескопа, излучается в пространство, отражается
от ЛА и принимается телескопом.
Узкополосный фильтр, стоящий на пути отраженного импульса, умень-
шает воздействие посторонних источников света на работу визира. Далее от-
раженные от ЛА световые импульсы попадают на светочувствительный при-
емник, преобразуются в сигналы видеочастоты и используются в блоках из-
мерения угловых координат и дальности, а также для отображения на экране
индикатора.
В блоке измерения угловых координат вырабатываются сигналы управ-
ления приводами оптической системы, которые обеспечивают как обзор про-
странства, так и автоматическое сопровождение ЛА по угловым координатам
(непрерывное совмещение оси оптической системы с направлением на ЛА).
Средства опознавания ЛА
Средства опознавания позволяют определить государственную
принадлежность обнаруженного ЛА и отнести его к категории «свой -
чужой». Они могут быть совмещенными и автономными. В совмещенных
устройствах сигналы запроса и сигналы ответа излучаются (принимаются)
устройствами РЛС.
238
На "своем" ЛА устанавливается приемник запросных сигналов, прини*
мающий закодированные сигналы запроса, посылаемые РЛС обнаружения
(опознавания). Приемник декодирует запросный1 сигнал и при соответствии
этого сигнала установленному коду выдает его в передатчик сигналов ответа,
установленный на борту "своего" ЛА. Передатчик вырабатывает закодиро-
ванный сигнал и посылает его в направлении РЛС, где он принимается, деко-
дируется и после преобразования выдается на индикатор в виде условной
метки, которая высвечивается рядом с отметкой от «своего» ЛА. ЛА против-
ника на запросный сигнал РЛС не отвечает.
Средства целеуказания
Средства целеуказания предназначены для приема, обработки и анализа
информации о воздушной обстановке и определения последовательности об-
стрела обнаруженных целей, а также передачи данных о них на другие бое-
вые средства.
Информация об обнаруженных и опознанных ЛА, как правило, поступает
от РЛС. В зависимости от вида оконечного устройства средств целеуказания
анализ информации о ЛА осуществляется автоматически (при использовании
ЭВМ) или вручную (оператором при использовании экранов электронно-
лучевых трубок). Результаты решения ЭВМ (счетно-решающего прибора)
могут отображаться на специальных пультах, индикаторах в виде сигналов
для принятия оператором решения об их дальнейшем использовании либо
передаются на другие боевые средства ЗРК автоматически. Если в качестве
оконечных устройств используется экран, то отметки от обнаруженных ЛА
отображаются световыми знаками.
Данные целеуказания (решения на обстрел целей) могут передаваться как
по кабельным линиям, так и по радиолиниям связи.
Средства целеуказания и обнаружения могут обслуживать как одно, так и
несколько подразделений ЗРВ.
Средства управления полетом ЗУР
В случае обнаружения и опознавания ЛА анализ воздушной обстановки,
а также порядок обстрела целей осуществляет оператор. При этом в работе
средств управления полетом ЗУР участвуют: устройства измерения дально-
сти; устройства измерения угловых координат; устройства измерения скоро-
сти; устройство выработки команд управления (УВК) и устройства передачи
команд (командная радиолиния управления); автопилот и рулевой тракт ра-
кеты.
Устройство выработки команд управления предназначено для выра-
ботки электрических сигналов, величина и знак которых соответствуют ве-
личине и знаку отклонения ракеты от кинематической траектории. Величина
и направление отклонения ЗУР от кинематической траектории проявляются в
нарушении связей, обусловливаемых характером движения цели и методом
наведения на нее ЗУР. Меру нарушения этой связи называют параметром
рассогласования h(t).
239
Величина параметра рассогласования измеряется средствами сопровож-
дения ЗРК, которые на основании h(t) формируют соответствующий элек-
трический сигнал в виде напряжения или тока, называемый сигналом рассо-
гласования UА
Сигнал рассогласования является основной составляющей при формиро-
вании команды управления. Для повышения точности наведения ракеты на
цель в состав команды управления вводятся некоторые сигналы коррекции.
Так, в системах телеуправления при реализации метода трех точек для со-
кращения времени вывода ракеты в точку встречи с целью, а также уменьше-
ния ошибок наведения ракеты на цель в состав команды управления могут
вводиться сигнал демпфирования Лсд и сигнал компенсации динамических
ошибок hKA, обусловленных движением цели, массой (весом) ракеты и др.
Результирующие команды управления будут равны сумме сигналов рас-
согласования и составляющих компенсации:
=1/^+1/^
Kff=upfi+uc^+uKAfi.
Типовая схема УВК при реализации метода трех точек показана на
рис. 12.3.
Координаты
Рис. 12.3. Структурная схема устройства выработки команд
Напряжения команд управления могут вырабатываться в УВК в три эта-
па.
На первом этапе вырабатываются напряжения сигнала рассогласования в
плоскостях е и Р (напряжения сигналов ошибки):
UA£=K„p4eDp;
V^=KnpAPDp,
240
где К„р - коэффициент преобразования;
Д£. Д Р - разность угловых координат цели и ракеты;
Dp - дальность до ракеты.
Для этого в устройство формирования напряжения от уст-
ройств измерения координат поступают координаты цели и ракеты в виде
электрических сигналов.
Напряжение (U&) поступает в устройство формирования демпфи-
рующего сигнала, которое формирует сигнал hCM (hca^), пропорциональный
скорости изменения т.е. осуществляется дифференцирование на-
пряжения сигнала ошибки.
Далее вырабатываются составляющие компенсации динамических оши-
бок ЛКЛ. Затем формируются напряжения команды управления в виде сум-
мы сигналов
При наведении ракет по методу упреждения производится формирова-
ние сигнала упреждения, пропорционального скорости изменения угловой
координаты цели и относительной скорости сближения ракеты с целью. Да-
лее сигналы суммируется с сигналом ил.
Различают УВК двух типов - аналоговые и цифровые. В аналоговых УВК
формирование команд управления достигается выполнением операции над
аналоговыми величинами, в цифровых - в реальном масштабе времени по
заранее составленной программе, содержание которой определяется структу-
рой команды управления.
Кроме решения задач, связанных с формированием команд управления,
УВК могут выполнять и другие задачи: определять момент пуска ракет, фор-
мировать разовые команды, управлять режимами работы бортовой аппарату-
ры и т.д.
В отличие от систем командного управления в системах самонаведения
УВК размещаются на борту ракеты. Их схемное построение соответствует
реализуемому методу наведения ЗУР.
Устройства передачи команд (командные радиолинии управления).
В системах телеуправления передача команд управления с пункта наведения
на бортовые устройства ЗУР осуществляется посредством аппаратуры, обра-
зующей командную радиолинию управления (КРУ). Эта линия обеспечивает
передачу команд управления полетом ракеты, разовых команд, изменяющих
режимы работы бортовой аппаратуры. КРУ представляет собой многока-
нальную линию связи, число каналов которой соответствует числу переда-
ваемых команд при одновременном управлении несколькими ракетами.
Радиоканал - совокупность устройств, обеспечивающих передачу на борт
ракеты одной команды. В состав радиоканала входят передающий тракт, сре-
да распространения волн, приемный тракт. Преобразование медленно изме-
няющегося напряжения команды Urft) в радиосигналы, пригодные для пере-
дачи на борт ракеты, решает аппаратура передающего тракта, размещаемая
на пункте наведения. На борту ракет устанавливается аппаратура приемного
241
тракта, обеспечивающая прием радиосигналов команд и преобразование их в
форму, пригодную для управления исполнительными органами.
Преобразование команд управления в радиосигналы в передающем трак-
те производится, как правило, в три этапа: на первом этапе медленно изме-
няющиеся напряжения команд преобразуются в напряжения поднесущих
частот по принятому методу, на втором - формируется признак принадлеж-
ности команды, на третьем - осуществляется преобразование в высокочас-
тотные радиосигналы. Типовая структурная схема многоканальной команд-
ной радиолинии управления показана на рис. 12.4.
ПреоСра-ю-
6
Передающий
тракт
РПК
Шифратор
Рис. 12.4. Структурная схема многоканальной радиолинии управления
I канал
J Прсобраю- L Колирующее
1 — Г устройств
2 канал
; Приемный |
гу-|c.j; n'fek
• I 2 канал
Приемник^ Селектор Р| р
3 канал
Дешифратор
На первом этапе для преобразования команд управления могут быть
применены методы с импульсными и гармоническими поднесущими.
Методы с импульсными поднесущими:
амплитудно-импульсный метод (АИМ), когда напряжение команды Urft)
преобразуется в импульсы напряжения, амплитуда которых изменяется в со-
ответствии с изменением напряжения команды;
частотно-импульсный метод (ЧИМ), когда напряжение команды преобра-
зуется в импульсы напряжения, частота повторения которых изменяется по
закону
времяимпульсный (ВИМ) или фазоимпульсный (ФИМ) метод, когда на-
пряжение команды преобразуется в импульсы напряжения, временное поло-
жение которых по отношению к опорным импульсам изменяется в соответст-
вии с изменением величины и знака Uk(i)\
широтно-импульсный метод (ШИМ), когда напряжение команды преоб-
разуется в импульсы, ширина (длительность) которых изменяется в соответ-
ствии с законом изменения напряжения Urft)',
кодово-импульсный метод (КИМ), когда напряжение (/^преобразуется
в импульсы напряжения, представляющие собой цифровой (чаще двоичный)
код.
242
Методы с гармоническими поднесущими:
амплитудно-частотный метод (АЧМ). когда напряжение команды преоб-
разуется в гармонические колебания, фаза которых изменяется в соответст-
вии с напряжением Uk(t)\
фазочастотный метод (ФЧМ), когда напряжение команды преобразуется
в гармонические колебания, фаза которых изменяется в соответствии с
напряжением U^t).
На втором этапе осуществляется кодирование команд, когда каждой
команде придается свой признак принадлежности. В качестве кода могут
быть гармонические колебания или импульсные комбинации
Аппаратурно первый и второй этапы преобразования реализуются в пре-
образователе и кодирующем устройстве шифратора.
Сигналы 5/0 с выхода кодирующих устройств всех радиоканалов посту-
пают в суммирующее устройство (модулятор передатчика), на выходе кото-
рого формируется сигнал
S(t)=K£KvlL,,
i=i
где К-коэффициент усиления;
- сигнал на выходе А го преобразователя;
Ц - оператор кодирования Аго радиоканала.
На третьем этапе сигналы S(i) поступают в генератор радиочастоты для
модуляции несущих колебаний по одному из их параметров - амплитуде,
частоте или фазе.
Преобразованные в высокочастотные колебания команды управления че-
рез антенну излучаются в пространство.
На борту ракеты установлена аппаратура приемного тракта, содержащая
антенну, приемник, селектор и демодулятор.
Приемник селектирует принятые сигналы команд по несущей частоте и
усиливает радиосигналы.
Разделение суммарного сигнала на сигналы команд и фильтрацию помех
осуществляет декодирующее устройство, представляющее собой набор се-
лекторов. каждый из которых выселяет из сигнала S(t) сигнал определенной
команды. В качестве отличительного признака служит признак принадлеж-
ности команды. На выход декодирующего устройства пройдут сигналы тех
команд, которые соответствуют виду операторов преобразования селекторов,
который обратен оператору кодирования Lh
С выхода селекторов сигналы поступают в демодуляторы соответствую-
щих радиоканалов, которые преобразуют сигналы команд в напряжения тре-
буемой формы, как правило, в медленно изменяющиеся напряжения (токи),
характеризующие величину и знак команды. Операторы преобразования де-
модуляторов обратны операторам преобразователя передающего тракта. На-
пряжения команд с выходов демодуляторов поступают в исполнительные
устройства аппаратуры ракеты и используются для управления ее работой.
243
Пусковые установки, пусковые устройства
Пусковые установки (ПУ) и пусковые устройства - специальные устрой-
ства, предназначенные для размещения, прицеливания, предстартовой подго-
товки и пуска ракеты. ПУ состоит из пускового стола (транспортно-
пускового контейнера) или направляющих, механизмов наводки, средств го-
ризонтирования, проверочно-пусковой аппаратуры, источников электропита-
ния и др.
ПУ различают:
по виду старта ракет - с вертикальным и наклонным стартом;
по подвижности - стационарные, полустационарные (разборные), под-
вижные.
Стационарные ПУ в виде пусковых столов монтируются на специальных
бетонированных площадках и перемещению не подлежат.
Полустационарные ПУ при необходимости могут разбираться и после
транспортировки устанавливаться на другой позиции.
Подвижные ПУ размещаются на специальных транспортных средствах.
Применяются в мобильных ЗРК и выполняются в самоходном, возимом, но-
симом (переносном) вариантах. Самоходные ПУ размещаются на гусеничных
или колесных шасси, обеспечивая быстрый переход из походного положения
в боевое и обратно. Возимые ПУ устанавливаются на гусеничных или колес-
ных несамоходных шасси, перевозятся тягачами.
Переносные пусковые устройства выполняются в виде пусковых труб, в
которые устанавливается ракета перед пуском. Пусковая труба может иметь
прицельное устройство для предварительного нацеливания и пусковой меха-
низм.
По количеству ракет, находящихся на пусковой установке, различают
одинарные ПУ, спаренные и т.д.
Зенитные управляемые ракеты
Зенитные управляемые ракеты классифицируются по количеству ступе-
ней, аэродинамической схеме, способу наведения, типу боевого заряда.
ЗУР могут быть одно- и двухступенчатыми. Большинство ЗУР зарубеж-
ного производства являются одно- и двухступенчатыми.
По аэродинамической схеме различают ЗУР, выполненные по нормаль-
ной схеме, по схеме «поворотное крыло», «утка».
По способу наведения различают самойаводящиеся и телеуправляемые
ЗУР. Самонаводящейся называется ракета, на борту которой установлена ап-
паратура управления се полетом. Телеуправляемыми называют ЗУР, уп-
равляемые (наводимые) наземными средствами управления (наведения).
По типу боевого заряда за рубежом различают ЗУР с обычными и ядер-
ными боевыми частями.
244
Переносные зенитные ракетные комплексы
ПЗРК предназначены для борьбы с низколетящими целями. В основу по-
строения ПЗРК может быть положена пассивная система самонаведения
("Ред Ай”, "Стингер”), радиокомандная ("Блоупайп"), наведения по ла-
зерному лучу (RBS-70).
ПЗРК с пассивной системой самонаведения в общем случае включают
в себя пусковую установку (пусковой контейнер), пусковой механизм, аппа-
ратуру опознавания, зенитную управляемую ракету.
Пусковая установка представляет собой трубу из стеклопластика, в кото-
рой хранится ЗУР. Труба герметична. Снаружи трубы располагаются при-
цельные приспособления для подготовки пуска ракет и пусковой механизм.
Пусковой механизм включает в себя электрическую батарею питания ап-
паратуры как самого механизма, так и головки самонаведения (до пуска ра-
кеты); баллон с хладогентом для охлаждения приемника теплового излуче-
ния ГСН во время подготовки ракеты к пуску; коммутирующее устройство,
обеспечивающее необходимую последовательность прохождения команд и
сигналов; индикаторное устройство.
Аппаратура опознавания включает в себя антенну опознавания и элек-
тронный блок, в состав которого входят приемопередающее устройство, ло-
гические схемы, вычислительное устройство, источник питания.
Ракета твердотопливная с головкой самонаведения, которая может рабо-
тать в ИК- и ультрафиолетовом диапазонах, приемник излучения охлажда-
ется. Совмещение оси оптической системы ГСН с направлением на цель в
процессе ее сопровождения осуществляется с помощью гироскопического
привода.
Пуск ракеты из контейнера производится с помощью стартового ускори-
теля. Маршевый двигатель включается, когда ракета удалится на расстояние,
исключающее поражение стрелка-зенитчика струей работающего двигателя.
В состав радиокомандных ПЗРК входят транспортно-пусковой контей-
нер, блок наведения с аппаратурой опознавания и зенитная управляемая ра-
кета. Сопряжение контейнера с расположенной в нем ракетой и блоком наве-
дения осуществляется в процессе подготовки ПЗРК к боевому применению.
На контейнере размещены две антенны: одна - устройства передачи
команд, другая - аппаратура опознавания, внутри контейнера находится сама
ракета.
Блок наведения включает: монокулярный оптический прицел, обеспечи-
вающий захват и сопровождение цели; ИК-устройство измерения отклоне-
ния ракеты от линии визирования цели; устройство выработки и передачи
команд наведения; программное устройство подготовки и производства пус-
ка; запросчик аппаратуры опознавания «свой - чужой». На корпусе блока
имеется контроллер, применяемый при наведении ракеты на цель.
245
После пуска ЗУР оператор сопровождает ее по излучению хвостового
ИК-трассера с помощью оптического прицела. Вывод ракеты на линию ви-
зирования осуществляется вручную или автоматически.
В автоматическом режиме отклонение ракеты от линии визирования, из-
меренное ИК-устройством, преобразуется в команды наведения, передавае-
мые на борт ЗУР. Отключение ИК-устройства производится через 1,5-2 с
полета, после чего ракета наводится в точку встречи вручную при условии,
что оператор добивается совмещения изображения цели и ЗУР в поле зрения
прицела, изменяя положение выключателя контроля.
Команды управления, пропорциональные положению выключателя отно-
сительно нейтрали, передаются на борт ЗУР, обеспечивая ее полет по тре-
буемой траектории.
В зарубежных комплексах, обеспечивающих наведение ЗУР по лазерно-
му лучу, для наведения ракеты на цель в хвостовом отсеке ЗУР размещаются
приемники лазерного излучения, которые вырабатывают сигналы, управ-
ляющие полетом ракеты.
В состав блока наведения входят оптический прицел, устройство форми-
рования лазерного луча с изменяемой в зависимости от удаления ЗУР фоку-
сировкой.
12.1.3. Тактико-технические характеристики зенитного ракетного
комплекса
Тактико-технические характеристики (ТТХ) характеризуют боевые воз-
можности ЗРК. К ним относятся: назначение ЗРК; дальность и высоты пора-
жения воздушных целей; возможности уничтожения целей, летящих с раз-
личными скоростями; вероятности поражения воздушных целей при отсутст-
вии и наличии помех, при стрельбе по маневрирующим целям; число
целевых и ракетных каналов; помехозащищенность ЗРК; работное время ЗРК
(время реакции); время перевода ЗРК из походного положения в боевое и на-
оборот (время развертывания и свертывания ЗРК на стартовой позиции); ско-
рость передвижения; .боекомплект ракет; запас хода; массовые и габаритные
характеристики и др.
ТТХ задаются в тактико-техническом задании на создание нового образ-
ца ЗРК и уточняются в процессе полигонных испытаний. Значения показате-
лей ТТХ обусловлены конструктивными особенностями элементов ЗРК,
принципами их работы.
Назначение ЗРК - обобщенная характеристика, указывающая на боевые
задачи, решаемые посредством данного типа ЗРК.
Дальность стрельбы - дальность, на которой цели поражаются с вероят-
ностью не ниже заданной. Различают минимальную и максимальную даль-
ность (ближнюю и дальнюю границы зоны поражения).
Высота стрельбы - высота, на которой цели поражаются с вероятностью
не ниже заданной. Различают минимальную и максимальною высоты (ниж-
нюю и верхнюю границы зоны поражения).
246
Возможность уничтожения целей, летящих с различными скоростями, -
характеристика, указывающая на предельно допустимое значение скоростей
полета целей, уничтожаемых в заданных диапазонах дальности и высот их
полета.
Величина скорости полета це1и обусловливает значения потребных пе-
регрузок ракеты, динамических ошибок наведения и вероятность поражения
цели одной ракетой. При больших скоростях цели возрастают потребные пе-
регрузки ракеты, динамические ошибки наведения, уменьшается вероятность
поражения. В результате уменьшаются значения максимальной дальности и
высоты уничтожения целей.
Вероятность поражения цели - вероятность появления события, со-
стоящего в нанесении цели ущерба при стрельбе ЗУР, в результате чего цель
не в состоянии выполнить боевую задачу. Цель может быть поражена при
стрельбе одной или несколькими ракетами, поэтому рассматривают соответ-
ствующие вероятности поражения Р/ и Рп.
Целевой канал - совокупность элементов ЗРК, обеспечивающих одновре-
менное сопровождение и обстрел одной цели. Различают ЗРК одно- и много-
канальные по цели. Многоканальный по цели комплекс позволяет одно-
временно обстреливать несколько целей.
В состав целевого канала входят визир и устройство определения коор-
динат цели.
Ракетный канал - совокупность элементов ЗРК, обеспечивающая одно-
временно подготовку к старту, старт и наведение одной ЗУР на цель. В со-
став ракетного канала входят: пусковое устройство (пусковая установка),
устройство подготовки к старту и старта ЗУР, визир и устройство определе-
ния координат ракеты; элементы устройства выработки и передачи команд
управления ракетой. Составной частью ракетного канала является ЗУР.
ЗРК могут быть одно- и многоканальными по ракете. Одноканальными
выполняются переносные комплексы. Они позволяют одновременно наво-
дить на цель только одну ракету.
Многоканальные по ракете ЗРК обеспечивают одновременный обстрел
одной или нескольких целей несколькими ракетами. Такие ЗРК имеют боль-
шие возможности по последовательному обстрелу целей.
Для получения заданного значения вероятности уничтожения цели ЗРК
имеет 2-3 ракетных канала на один целевой канал.
В качестве показателя помехозащищенности используются: коэффициент
помехозащищенности (Л"п,), допустимая плотность мощности помехи, при
которой обеспечивается своевременное обнаружение (вскрытие) и уничто-
жение (поражение) цели (р^); дальность открытой зоны (Оол) - дальность,
начиная с которой цель обнаруживается (вскрывается) на фоне помех при по-
становке постановщиком помехи, плотность мощности которой р.
В качестве коэффициента помехозащищенности Кт используется, как
правило, отношение МОЖ числа уничтоженных целей в условиях помех
(Л/ч.„) к его значению без помех (Мо):
247
При условии, что длина волны передатчика помех и подавляемого радио*
электронного средства (РЭС) одинакова, показатель при постановке ак-
тивных шумовых помех определяется как
Рд,6> (4^тРшКпЕ(^)й1тт1,л61'
где Р„ - мощность передатчика, подавляемого РЭС;
Gn - коэффициент усиления передающей антенны;
G„p - коэффициент усиления приемной антенны;
Л2 - длина волны РЭС;
/ - коэффициент несовпадения поляризации помехового и полезного
сигналов;
rj - коэффициент потерь в антенно-волноводном (фидерном) тракте;
^-эффективная отражающая поверхность цели;
D2j, - дальность до постановщика помех;
т - коэффициент различимости, показывающий во сколько раз
мощность сигнала должна превосходить мощность шумов для
его обнаружения;
Рш - мощность собственных шумов приемного устройства;
К„ - коэффициент подавления;
F(A<p) - нормированный множитель диаграммы направленности приемной
антенны;
zip - угол отклонения направления приема сигнала помехи от
направления максимума основного лепестка диаграммы
направленности приемной антенны РЭС в наклонной плоскости;
DKnvmp w - потребная дальность обнаружения цели для се обстрела на
дальней (ближней) границе зоны поражения.
Значение D4nompd(6) определяется как
^цлотр.д{(>) ~ б) + Iр.У б) + раб + ’
где Ld(6i - курсовая дальность до дальней (ближней) границы зоны
поражения;
Уи, Нц, Рц - скорость, высота, курсовой параметр обстреливаемой
цели соответственно;
время полета ракеты до дальней (ближней) границы зоны
поражения.
248
При постановке помех на самоприкрытие (индивидуальный способ защи-
ты) F(Atp) = I; D„ =
Дальность открытой зоны определяется как
р_ J
~\(4^тРшК„Р(Лр)р„ '
Работное время ЗРК (время реакции) - интервал времени от начала об-
наружения цели до готовности ЗРК к пуску первой ракеты. Оно определяется
временем, которое затрачивается на поиск и захват цели и на подготовку ис-
ходных данных для стрельбы. Работное время ЗРК зависит от конструктив-
ных особенностей и характеристик ЗРК, от уровня подготовки боевого расче-
та. Для современных ЗРК его величина находится в пределах от единиц до
десятков секунд.
Время перевода ЗРК из походного положения в боевое - время с мо-
мента подачи команды на перевод комплекса в боевое положение до готов-
ности комплекса к открытию огня. Для ПЗРК это время минимальное и со-
ставляет несколько секунд.
Время перевода ЗРК в боевое положение определяется исходным состоя-
нием его элементов, режимом перевода и видом источника электропитания.
При условии, что комплекс развернут на позиции, время перевода в го-
товность к боевому применению определяется как
гот ~1СЭС^1КФ'
где 1сэс- время включения средств электроснабжения;
(кф- время проведения контроля функционирования ЗРК.
Время перевода ЗРК из походного положения в боевое
Tfocc ~ ^поз 1рам (топ ((.'ЭС (про* ’
где tnoi - время занятия позиции;
- время развертывания техники ЗРК на позиции;
(топ - время топопривязки;
tnpot - время проведения проверок параметров и контроля
функционирования зрдн.
Время перевода ЗРК из боевого положения в походное - время с мо-
мента подачи команды на перевод 3FK в походное положение до окончания
построения элементов ЗРК в походную колонну
Т/юх ~ (cetpm (постр ’
где (све/т - время свертывания техники ЗРК;
249
Люси» - время построения походной колонны.
Возможности по перемещению ЗРК характеризуются скоростью его пе-
ремещения по шоссе, грунтовым дорогам, воде, а также возможностью
транспортировать его железнодорожным, водным и воздушным транспор-
том.
Боевой комплект (бк) - количество ракет, установленное на один ЗРК.
Является расчетно-снабженческой единицей при исчислении обеспеченности
и потребности в ракетах для выполнения боевой задачи. Для ЗРК он состав-
ляет единицы - десятки ракет.
Запас хода - предельное расстояние, которое может пройти автотранс-
портное средство ЗРК, израсходовав полную заправку топлива. Запас хода
учитывается при расчете маршей и т.п.
Массовые характеристики - предельные массовые характеристики эле-
ментов (кабин) ЗРК и ЗУР.
Габаритные характеристики - предельные внешние очертания элемен-
тов (кабин) ЗРК и ЗУР, определяемые их наибольшей шириной, длиной и вы-
сотой.
Массовые и габаритные характеристики элементов ЗРК учитываются прн
организации маршей и перевозки зенитного ракетного комплекса.
12.1.4. Направления повышения эффективности зенитного
ракетного оружия
В современных условиях центральным направлением совершенствования
ракетной техники является повышение ее эффективности. Реализация этого
требования предполагает:
повышение скорости и маневренности ЗУР, что расширяет зону пораже-
ния СВН, позволяет проводить повторные пуски, повышает огневую произ-
водительность ЗРК;
повышение точности наведения ЗУР. улучшение динамических свойств
ракет, совершенствование информационно-управляющих комплексов, значи-
тельное повышение помехоустойчивости радиоэлектронных средств;
повышение эффективности поражения СВН, совершенствование боевого
снаряжения ЗУР, применение специальных энергетических средств для кор-
ректировки полета в зоне поражения;
расширение диапазона дальностей и высот ЗУР, применение аэробалли-
стических траекторий, газодинамического управления, совершенствование
систем управления с целью обеспечения поражения СВН в широком диапа-
зоне дальностей (10...400 км), высот (0...35 км) и скоростей (0,2...8 М) при
массированном их применении, ограниченном времени пребывания в зоне
поражения, малой ЭПР и активном противодействии.
Параметрический ряд ЗУР.
Широкий диапазон целевых задач ЗУР, от зональной обороны до войско-
вого применения, указывает на то. что многофункциональные средства зе-
нитной обороны, видимо, и впредь будут представлять собой семейство ра-
250
кет - параметрический ряд. На основе анализа возможных вариантов прове-
дения операции средствами воздушного нападения видится минимальный
параметрический ряд ЗУР из трех ракет:
1) зенитная ракета большой дальности, обеспечивающая поражение на
дальних рубежах обороны стратегических авиационных средств (в первую
очередь самолетов радиолокационного обеспечения);
2) многоцелевая высокоточная ЗУР средней дальности, обеспечивающая
поражение разнообразных целей (в том числе и ОТБР) в широком диапазоне
дальностей и высот полета;
3) высокоточная ЗУР малой дальности, обеспечивающая поражение про-
рвавшихся ВТО на предельно малых высотах.
Исходя из прогнозов возможного совершенствования средств воздушно-
го нападения, можно предположить следующие пути развития систем управ-
ления перспективными ЗРК и ЗУР.
Требования к перспективным системам управления ЗУР.
Прежде всего, одним из главных требований к перспективным системам
управления ЗУР и ЗРК становится увеличение их канальности. т.е. способно-
сти обеспечивать отражение массированного налета разнотипных целей с
разных направлений. Решение згой задачи стало возможным в связи с созда-
нием и внедрением в практику боевого применения многофункциональных
радиолокационных станций с фазированной антенной решеткой и электрон-
ным сканированием луча (МФ РЛС), позволяющим реализовать ряд функ-
ций, которые ранее выполнялись, но далеко не в таком объеме многими бло-
ками аппаратуры системы управления. В числе функций МФ РЛС: обнару-
жение и автоматическое сопровождение большого числа разнотипных целей,
определение их координат и параметров движения, подготовка исходных
данных для стрельбы (целеуказания), управление стартом и полетом не-
скольких ракет одновременно, формирование и передача на борт управляю-
щих команд, эффективное противодействие помехам со стороны противника,
распознавание объектов по принципу «свой-чужой» и т.п. Кроме того, МФ
РЛС может осуществлять автоматизированный контроль технического со-
стояния элементов ЗРК, выдачу команд на включение резервных устройств
при неисправности основных блоков, а также может иметь в своем составе
имитатор воздушной обстановки, необходимый для тренировки боевых рас-
четов.
Вертикальный старт ЗУР.
Можно считать общепризнанным мнение о том, что применение в пер-
спективных ЗРК вертикального старта с последующим интенсивным склоне-
нием в направлении на цель, приближающуюся с любого направления, обес-
печивает отражение кругового налета. Вертикальный старт позволяет суще-
ственно упростить конструкцию пускового устройства, исключить
обладающие большой инерционностью механические поворотные части и
как следствие значительно сократить время на подготовку ЗРК к пуску.
251
Комбинированная система управления.
Также устоявшейся можно признать точку зрения о целесообразности
применения на перспективных ЗРК и ЗУР комбинированных систем управ-
ления, состоящих из инерциальной системы управления на большей части
траектории и активного радиолокационного самонаведения (с возможным
дублированием инфракрасной ГСН) на участке сближения с целью. Это по-
зволяет на этапе инерциального управления освободить каналы радиолокато-
ра от функции сопровождения ЗУР и увеличить число одновременно сопро-
вождаемых и обстреливаемых целей. Применение активного самонаведения
освобождает радиолокатор от функции сопровождения и подсветки цели на
участке самонаведения, что также расширяет возможнссти радиолокатора по
числу сопровождаемых целей.
Активное самонаведение.
Кроме того, переход на активное радиолокационное самонаведение по-
зволяет перейти на длины волн порядка 1-2 см вместо 3-5 см, используемых
при полуактивном самонаведении. Переход на меньшую длину волны увели-
чивает точность измерения угловых координат цели, а также уменьшает га-
бариты антенны и, следовательно, габариты и массу ГСН и ракеты в целом.
Это, в свою очередь, позволяет в пределах заданных ограничений увеличить
число ЗУР в боекомплекте.
Маневренные свойства ЗУР.
Для перспективных ЗУР можно считать общепринятым применение на
конечном этапе самонаведения газодинамических способов создания управ-
ляющих сил и моментов, позволяющих придать ракете сверхмаиевренныс
свойства, обеспечить сверхточное (вплоть до прямого попадания) наведение
на цель и высокоэффективное поражение ее боевого снаряжения.
Мобильность.
Непременным условием для перспективных ЗРК и ЗУР является их вы-
сокая мобильность, способность перемещаться практически по любой мест-
ности при времени развертывания с марша в пределах нескольких минут.
Еще одним важным требованием к современным и перспективным ЗУР
следует считать возможность их длительного (до десяти лет и более) бсспро-
всрочного хранения и постоянной боеготовности в любых климатических и
других эксплуатационных условиях.
Предполагается, что реализация этих идей позволит уменьшить стар-
товую массу ЗУР средней дальности до 300...400 кг при максимальной даль-
ности полета до 100 км и более, высотах поражения целей о г нескольких мет-
ров до 25...30 км,
Рассмотрим последовательность боевой работы перспективного гипо-
тетического ЗРК средней дальности сухопутного базирования, основанного
на перечисленных выше принципах (рис. 12.5). Все составляющие элементы
комплекса смонтированы на самоходных шасси, что придает ЗРК высокую
мобильность и боеготовность. Ракеты / комплекса установлены в герметич-
ных транспортно-пусковых контейнерах (ТПК), обеспечивающих длительное
беспроверочное хранение ракет и их постоянную готовность к запуску.
252
Рис. 12.5. Схема системы управления перспективными ЗУР
Первичная информация о появлении средств воздушного нападения по-
лучается от других средств ПВО, например от космической системы преду-
преждения и целеуказания 2. Эта информация передается в много-
функциональную радиолокационную станцию 3 и пункт (кабину) управления
ЗРК 4. По данным внешнего целеуказания МФ РЛС обнаруживает, захваты-
вает и сопровождает цели, определяя их координаты и скорости. Информа-
ция сосредоточивается в пункте управления ЗРК, где расположен цифровой
вычислительный комплекс (ЦВК), обеспечивающий введение в подсистемы
ЗРК единых пространственных и временных координат, обработку посту-
пающих с МФ РЛС данных о положении целей и ракет, формирование на-
чальных данных для ориентации (целеуказания) ракет комплекса на конкрет-
ные цели, определение времени и места пуска, а также формирование необ-
ходимых управляющих команд.
Этапы полета ЗУР.
Пуск ЗУР производится по команде пункта управления с одной из мо-
бильных пусковых установок комплекса 5. Старт ракеты чаще всего осуще-
ствляется путем выброса из ТПК с помощью катапультного устройства с по-
следующим запуском двигателя ракеты. Полет ЗУР разделяется на несколько
этапов. Первый этап - вертикальный старт и склонение ЗУР в упрежденную
точку встречи, вычисленную до пуска в пункте управления. Информация об
253
упрежденной точке встречи уточняется как в предпусковой период, так и в
течение всего полета ЗУР в зависимости от параметров движения сопровож-
даемой цели. Уточняющаяся информация о точке встречи, координатах и
скорости цели передается на борт ЗУР по линии радиокоррекции с МФ РЛС в
течение второй фазы полета - участка инерциального управления. На этом
участке команда управления формируется в бортовой цифровой вычисли-
тельной машине ЗУР. Для этого используются полученные по радиолинии
данные о координатах и скорости полета цели, а также определенные в бор-
товой инерциальной системе управления координаты и скорость ЗУР.
После сближения с целью до относительной дальности, на которой ак-
тивная радиолокационная головка самонаведения (АРГСН) способна обна-
ружить и захватить цель, ей от МФ РЛС выдается целеуказание по углам и
скорости сближения. АРГСН производит поиск цели 6 и захват ее на автосо-
провождение. С этого момента начинается третья фаза полета ЗУР - участок
самонаведения. На конечной фазе самонаведения, при непосредственном
сближении ракеты с целью, приводится в действие газодинамическая система
управления ЗУР и осуществляется энергичное маневрирование для выбора
(устранения) промаха. Поражение цели происходит методом прямого соуда-
рения (кинетическим поражением) или путем подрыва боевого снаряжения
по команде от неконтактного взрывателя с воздействием на цель поражаю-
щими элементами боевой части ЗУР.
После запуска и срабатывания первой ЗУР производится оценка резуль-
татов стрельбы. Если цель не поражена первой ракетой и имеется необходи-
мый запас времени, то принимается решение о пуске второй ЗУР. В случае,
если баланс времени не позволяет вести пуски в режиме «выстрел-оценка-
выстрел», стрельба может осуществляться залпом из двух или нескольких
ракет. После поражения цели или ее ухода из зоны возможных пусков боевая
работа ЗРК заканчивается.
12.2. ОСНОВЫ СТРЕЛЬБЫ ЗЕНИТНЫМИ УПРАВЛЯЕМЫМИ
РАКЕТАМИ
12.2.1. Сущность стрельбы зенитными управляемыми ракетами
Важнейшей задачей боевого расчета КП зрдн является обеспечение мак-
симальной реализации огневых возможностей ЗРК, что достигается четким
знанием Наставлений ЗРВ, Правил стрельбы ЗУР и твердыми навыками в
выполнении операций стрельбы по воздушной цели.
Процесс боевой работы зенитного ракетного подразделения, направлен-
ный на поражение воздушной цели, принято называть стрельбой.
Процесс боевой работы зрдн включает следующие этапы:
заблаговременную подготовку стрельбы;
предварительную подготовку стрельбы (подготовка дивизиона к стрель-
бе);
непосредственную подготовку стрельбы;
254
стрельбу на поражение дели;
оценку результатов обстрела цели.
Содержание этих мероприятий и порядок их выполнения определены ос-
новными руководящими документами, к которым относятся Правила
стрельбы ЗУР и Руководства ЗРВ по боевой работе зенитного ракетного
дивизиона.
К заблаговременной подготовке стрельбы относятся следующие меро-
приятия:
перевод вооружения и военной техники из походного в боевое положе-
ние;
топографическая подготовка стрельбы и управления огнем;
проведение мероприятий по обеспечению стрельбы по целям на малых и
предельно малых высотах;
инженерное оборудование и маскировка позиций;
установление связей оповещения, обеспечения радиолокационной ин-
формацией и информацией управления.
В дальнейшем, в ходе несения боевого дежурства, отработки задач бое-
вой подготовки часть из указанных мероприятий продолжает проводиться
(маскировка, инженерное обеспечение и т.д.).
Под подготовкой стрельбы дивизиона понимается совокупность меро-
приятий боевой работы боевого расчёта, проводимых в дивизионе с момента
объявления готовности № 1 до постановки задачи с КП группы дивизионов
(выдачи целеуказания) или до принятия решения командиром дивизиона на
ввод данных целеуказания в РПН по самостоятельно обнаруженным целям.
Основной задачей подготовки стрельбы дивизиона является включение и
поддержание всех его средств в высокой степени боевой готовности.
В процессе подготовки стрельбы дивизиона проводятся следующие ме-
роприятия:
приведение дивизиона в готовность № 1;
оценка готовности дивизиона к стрельбе;
ведение разведки воздушного противника;
изучение и оценка воздушной и помеховой обстановки;
уяснение задачи, поставленной с КП полка (группы дивизионов), или
принятие решения на уничтожение самостоятельно обнаруженных воздуш-
ных целей.
Приведение дивизиона в готовность № 1 производится, как правило, по
команде с КП полка (группы дивизионов) или решением командира дивизио-
на при самостоятельном ведении боя с воздушным противником. При приве-
дении дивизиона в готовность № I производятся: включение средств ЗРК.
контроль их функционирования и оценка готовности дивизиона к стрельбе.
Команда на включение средств ЗРК должна быть подана с таким расче-
том. чтобы дивизион мог начать обстрел целей на дальней границе зоны по-
ражения. Рубежи включения средств ЗРК, удовлетворяющие этому условию,
определяются по формуле
255
^як.1 ЗРК ~ d<> tfa + 1цу + t зрдн + р<) Л
где d(} - максимальная горизонтальная дальность до дальней границы
зоны поражения, км;
1бг ~ время приведения дивизиона в готовность № I. с;
tjp$„ ~ работное время дивизиона, с;
~ время полета ракеты до дальней границы зоны поражения, с;
tlfy - время ввода ЦУ в РПН или время обмена информацией между
КП полка (группы дивизионов) и дивизионом (максимальное), с;
V, - скорость полёта цели, км/с.
При оценке готовности дивизиона к стрельбе определяются:
готовность средств дивизиона;
количество готовых ракет на ПУ (по типам);
готовность боевого расчета.
Ведение разведки воздушного противника в дивизионе при автомати-
зированном управлении ведется собственными средствами разведки, а при
выходе их из строя или в случае необходимости (особенно на малых высотах
и по баллистическим целям) поиск целей производится РПН (РПЦ, СНР).
Изучение и оценка воздушной и помеховой обстановки начинается с
момента получения первых сведений о воздушном противнике и проводится
непрерывно в течение всего налета по информации с КП полка (группы ди-
визионов), по данным АСЦУ, РПН (СНР), постов визуального наблюдения и
других источников информации.
Оценка воздушной обстановки включает оценку воздушного противника
и направлена на вскрытие замысла его действий, общего характера удара и
определение характеристик каждой цели.
Основу оценки замысла и общего характера удара воздушного противни-
ка составляет разведывательная информация, передаваемая с КП полка
(группы дивизионов), где отражаются:
цель и задачи, к решению которых стремится противник;
состав сил и средств, участвующих в ударе;
направления, маршруты, высоты осуществления удара;
построение боевого порядка: какие группы (цели) являются ударными и
какие обеспечивающими, т.е. степень важности целей;
эшелонирование СВН противника по глубине, плотность и предполагае-
мая продолжительность удара;
возможные типы СВН;
ожидаемые способы противодействия противника (маневр, радиоэлек-
тронное и огневое подавление).
Дивизиону доводятся также сведения о действиях своих истребителей: по
каким целям действуют, рубежи ввода в бой, возможность входа в зону по-
ражения дивизиона, маршругы и высоты полета, а также указания о мерах по
обеспечению их безопасности.
256
Оценка помеховой обстановки осуществляется по информации о наличии
помех и их плотности, поступающей с КП, взаимодействующих подразделе-
ний радиолокационной и радиотехнической разведки, соседних дивизионов,
собственных радиоэлектронных средств дивизиона, а также на основе про-
гнозирования возможностей и вариантов постановки помех противником
РЭС дивизиона.
К изучению помеховой обстановки решением командира дивизиона мо-
жет привлекаться РПН (РПЦ, СНР), работающий в пассивном режиме в пре-
делах сектора ответственности дивизиона. По наличию и характеру сигналов
помех на индикаторах АСЦУ и РПН определяются наличие, вид и интенсив-
ность помех, а так же направления или секторы действия постановщиков по-
мех.
В результате оценки воздушной и помеховой обстановки определяются:
количество, характеристики ожидаемых целей и степень их важности;
возможности дивизиона по обстрелу целей;
наличие и характер радиоэлектронных помех и возможные меры защиты
от них;
возможность применения противником крылатых ракет и ПРР, а также
ДПЛА;
наличие в воздухе своих летательных аппаратов и меры по обеспечению
их безопасности.
Важность цели, если она не указана с КП, определяется следующим обра-
зом:
по степени опасности для обороняемого объекта (носители ядерного
оружия, АКР) и влияния на ведение боя (специальные самолеты постановки
помех, постановщики помех из состава ударных групп);
по составу целей (более важными считаются групповые цели);
по направлению полета (более важными считаются цели с меньшим кур-
совым параметром относительно прикрываемого объекта или позиции диви-
зиона);
по положению цели относительно рубежа выполнения боевой задачи (бо-
лее важными являются цели, находящиеся ближе к этому рубежу, т.е. цели,
способные действовать по объекту раньше других).
Уяснение командиром дивизиона задачи, поставленной с вышестояще-
го КП, позволяет ему правильно и глубоко понять свою роль в её выполне-
нии и является предпосылкой к успешному ведению боя.
Задача дивизиону на уничтожение воздушных целей включает:
целеуказание (автоматическое или неавтоматизированное);
информацию о характере цели или действиях воздушного противника в
целом;
команду на уничтожение цели и при необходимости указания о порядке
ведения огня по ней;
распоряжение о расходе ракет и режиме управления приводом РПН.
Одним из способов постановки задачи дивизиону может быть назначение
ответственного сектора стрельбы на малых высотах, прежде всего на ракето-
257
опасных направлениях, в пределах которого командир дивизиона самостоя-
тельно выбирает цели для обстрела.
Непосредственная подготовка стрельбы - комплекс мероприятий, про-
водимый боевым расчетом КП зрдн (подразделения) до открытия огня по це-
ли. Основными мероприятиями непосредственной подготовки стрельбы яв-
ляются поиск, обнаружение и захват цели на сопровождение, определением
характера и параметров ее движения, определение наличия, вида и интенсив-
ности помех, выбор режимов работы СНР (РПН, РПЦ), метода наведения,
назначение типа и количества ракет, определение момента пуска первой ра-
кеты. интервала пуска ракет и т.д. Она, как правило, начинается с момента
получения задачи с вышестоящего КП или самостоятельного принятия реше-
ния на уничтожение цели и заканчивается моментом готовности подразделе-
ния к пуску ЗУР.
Задача на уничтожение цели включает целеуказание (указание о место-
положении цели в пространстве), команду уничтожить цель и при необходи-
мости указание о порядке ведения по ней огня.
Основное содержание непосредственной подготовки стрельбы: уяснение
задачи и оценка воздушной обстановки; поиск цели и ее обнаружение; опо-
знавание цели; захват цели станцией наведения ракет (РЛС подсвета) и ее со-
провождение по угловым координатам, дальности, а возможно и скорости;
решение задачи пуска ЗУР и подготовка исходных данных для стрельбы; на-
ведение и захват цели ГСН (если в системе самонаведения эта операция про-
водится до пуска при нахождении ЗУР на установке); подготовка к пуску
пусковых установок и ракет; оценка готовности зенитного ракетного ком-
плекса (канала) к стрельбе.
Стрельба на поражение цели - процесс боевой работы, включающий
пуск и наведение на цель назначенного количества ракет.
Для поражения цели необходимо, во-первых, осуществить сближение ра-
кет с целью с требуемой точностью и, во-вторых, когда это сближение про-
изошло, подорвать их боевую часть таким образом, чтобы поражающие эле-
менты накрыли цель.
По достижении целью определенной дальности относительно ЗРК произ-
водится пуск зенитной управляемой ракеты. После пуска ЗУР сс сближение с
непрерывно перемещающейся в пространстве воздушной целью осу-
ществляется системой управления, под которой понимается совокупность
устройств, определяющих взаимное положение ракеты и цели и обеспечи-
вающих выработку команд управления и наведения ракеты на цель в течение
всего времени ее полета до встречи с целью.
Требуемая траектория сближения ракеты с целью задается уравне-
ниями связи, определяющими движение ракеты в зависимости от координат
и параметров движения цели. Вид уравнений связи определяет метод наведе-
ния ракеты на цель. Управление ракетой, как правило, осуществляется лишь
по направлению. Понятие о требуемой дальности до ракеты не вводится.
Следовательно, для наведения ракеты достаточно задать уравнение связи по
угловым координатам, например по £и Д.
258
Меру нарушения связи в каждой плоскости наведения принято называть
параметром управления или сигналом рассогласования. Этот па-
раметр пропорционален отклонению регулируемой величины от требуемого
значения, т.е. является ошибкой системы управления. Система управления,
изменяя направление полета ракеты, должна устранять эту ошибку и держать
се в таких пределах, при которых обеспечивается заданная точность сближе-
ния ракеты с целью.
Реальная траектория будет отличаться от требуемой. По признаку
наведения она может быть разделена на три участка: начальный участок, уча-
сток вывода и участок наведения.
Начальный участок - это участок траектории неуправляемого полета ра-
кеты после старта. Наличие этого участка обусловливается рядом обстоя-
тельств: управление ракетой становится достаточно эффективным после дос-
тижения ею определенной скорости полета, управление целесообразно осу-
ществлять после сброса ускорителей и т.д.
В конце неуправляемого полета положение ракеты может не соответст-
вовать выбранному методу наведения и положению цели. Вывод ракеты на
требуемую траекторию считается законченным, если ее отклонение не пре-
восходит заданной величины, определенной эффективностью действия по
цели боевого снаряжения ЗУР. Участок траектории, промежуточный между
начальным участком и участком наведения, называется участком вывода ра-
кеты на требуемую траекторию. При рассмотрении минимально возможной
дальности стрельбы ЗРК (ближней границы зоны поражения) под участком
вывода часто понимают участок траектории от точки старта до окончания
вывода ракеты на требуемую траекторию.
Участок наведения - участок траектории, на котором наведение ракеты на
цель осуществляется согласно заданному методу наведения.
Подрыв боевой части ракеты в районе точки встречи может про-
изводиться двумя способами: с помощью неконтактного взрывателя и по
команде с земли.
Общая схема непосредственной подготовки и стрельбы на поражение це-
ли показана на рис. 12.6,
Рис. 12.6. К определению сущности стрельбы ЗУР
259
где точки Цю,Цо.ЦпЦл - положения воздушной цели в моменты получения
данньгх ЦУ, обнаружения цели СНР, пуска ракеты и встречи ракеты с целью;
1 и 2 - требуемая и действительная траектории ЗУР, Рр - точка на траекто-
рии, в которой происходит подрыв боевой части ракеты. За время движения
цели от точки Ц11У до Ц„ производится непосредственная подготовка стрель-
бы, а от точки Цп до Цм - наведение ракеты.
Оценка результатов стрельбы - установление боевым расчетом подраз-
деления факта поражения или непоражения цели в результате ведения по ней
огня. Она начинается с момента подрыва первой ракеты у цели.
12.2.2. Ошибки наведения ЗУР
Точность наведения ракеты оценивается числовыми характеристиками
закона распределения ошибок наведения в картинкой или какой-либо другой
характерной плоскости у цели.
Картинной называется плоскость, перпендикулярная линии визирования
цели (рис. 12.7, а).
При теоретическом анализе эффективности стрельбы в качестве плоско-
сти оценки ошибок наведения ракеты, иногда, принимается плоскость, пер-
пендикулярная вектору относительной скорости (рис. 12.7, б).
Рис. 12.7. Плоскости оценки ошибок наведения
Ошибки наведения ракеты на цель по своему характеру могут быть сис-
тематическими и случайными, а по причинам возникновения их принято де-
лить на динамические, флуктуационные и инструментальные.
Понятие о систематических и случайных ошибках
Систематическими ошибками называются такие ошибки, которые при
стрельбе остаются постоянными или изменяются по вполне определенному
закону. Систематическая ошибка может быть выявлена и устранена путем
ввода соответствующих поправок. Если величина систематической ошибки
зависит от параметров движения цели, изменяющихся при стрельбе в широ-
ких пределах, то точная компенсация такой ошибки в ряде случаев за-
труднена.
Величины систематических ошибок и h. определяют положение центра
рассеивания точек пересечения действительных траекторий относительно
цели в картинной плоскости (тч. С на рис. 12.8).
Случайными ошибками называются такие ошибки, которые при каж-
дом пуске ракеты могут принимать различные значения величины и знака,
причем неизвестно заранее, какие именно. Эти ошибки вызывают случайные
отклонения точек пересечения действительных траекторий с картинной
плоскостью относительно центра рассеивания (тч. Р на рис. 12.8).
Рис. 12.8. Ошибки наведения в картинной плоскости
Ошибки наведения порождаются в результате воздействия большого
числа факторов. Как правило, ни одна из составляющих ошибок не является
доминирующей. Поэтому на основании центральной предельной теоремы
теории вероятностей можно считать, что ошибки наведения в картинной
плоскости будут распределены по нормальному закону. Если считать, что
каналы управления независимы, а ошибки наведения по ортогональным осям
некоррелированы, то плотность распределения ошибок наведения можно за-
писать в виде
261
где hyt hz - МОЖ величины отклонений ЗУР от цели в соответствующей
плоскости наведения;
<7у, - среднеквадратические ошибки отклонений.
Средняя квадратическая ошибка а есть характеристика рассеива-
ния случайной величины около ее математического ожидания. Квадрат сред-
ней квадратической ошибки называется дисперсией:
а21 X/=М[(Х -тх )2 ], (12.2)
где X - случайная величина;
тх- математическое ожидание случайной величины;
М [(X- тх)2] - математическое ожидание отклонения случайной
величины от ее среднего значения.
Статистическая дисперсия случайной величины вычисляется по
формуле
где х4 - наблюдаемые значения случайной величины;
хср - статистическое среднее случайной величины.
При оценке рассеивания случайных величин, подчиненных нормальному
закону, часто вместо средней квадратической ошибки используют числовую
характеристику, называемую срединной ошибкой или срединным от-
клонением.
Срединным отклонением называется половина длины участка, сим-
метричного относительно центра рассеивания, вероятность попадания в ко-
торый равна 0,5. Срединное отклонение Е связано со средней квадратической
ошибкой соотношением А*=0,675а
.-За ,-2з ,-а 0 ст |2О|За.
0,02 0,14 0,34 1 0,34 0,14 1 0,02 1
-4Е -ЗЕ-2Е -Е n Е 2Е ЗЕ 4Е
0,02 0,070,16 0,250,25 0,16 0,07 0,02
Рис. 12.9. Шкалы <т и Е нормального закона
Рассеивание случайной величины практически укладывается на участке
±3а или ±4Е. Шкалы средних квадратических и срединных ошибок нор-
мального закона показаны на рис. 12.9.
262
Динамическая ошибка наведения ракеты на цель
Динамической ошибкой наведения ЗУР на цель принято называть откло-
нение ракеты от цели, возникшее в результате отработки системой управле-
ния внешних воздействий, обусловленных движением цели, а также про-
дольным движением ракеты. При этом предполагается, что входное воздей-
ствие не имеет случайных помех и инструментальных ошибок.
Динамика процесса наведения в значительной мере предопределяется
коэффициентом усиления и быстродействием контура управления.
Основными составляющими динамической ошибки и причинами их
возникновения могут быть: ошибки, обусловленные ограниченными воз-
можностями ракеты по перегрузке; ошибки, вызванные погрешностями ввода
в команды управления компенсационных поправок на систематическую со-
ставляющую динамической ошибки; ошибки переходных процессов.
Рис. 12.10. Возникновение ошибки при ограниченных возможностях
ракеты по перегрузке: 1- требуемая (кинематическая) траектория;
2 - реализуемая (динамическая) траектория
Ошибки, обусловленные ограниченными возможностями ракеты по пере-
грузке. Располагаемые перегрузки ракеты (прас„) определяют минимально
возможный радиус кривизны траектории ракеты
2L.
прасл8
(12.4)
Кривизна требуемой траектории ракеты определяется методом ее наведе-
ния, параметрами движения цели и самой ракеты. Если в заданных условиях
полета ракеты к цели ее располагаемые перегрузки станут меньше требу-
емых, то ракета сойдет с требуемой траектории и будет двигаться по дуге ок-
ружности радиуса рт4П. Возникнет динамическая ошибка, обусловленная ог-
раниченной маневренностью ракеты (рис. 12.10).
263
Ошибки такого рода могут иметь место при потере ракетой скорости (на
пассивном участке траектории), при обстреле высотных и скоростных целей
(за пределами возможностей ЗРК по скорости или высоте).
Ошибки, вызванные погрешностями ввода в команды управления ком-
пенсационных поправок на систематическую составляющую динамической
ошибки. Наиболее характерными составляющими такого рода ошибок явля-
ются, динамическая ошибка метода наведения; ошибка компенсации веса ра-
кеты; поправка на продольное ускорение ракеты (в системах, использующих
метод пропорционального сближения).
Динамической ошибкой метода наведения принято называть
ошибку, характеризующую потребную величину параметра рассогласования
для реализации требуемого движения ЗУР (рис. 12.11).
Рис. 12.11. Иллюстрация динамической ошибки метода наведения:
/- кинематическая траектория; 2 - динамическая траектория
Физический смысл этой ошибки следующий.
Кинематическая (требуемая) траектория, по которой должна двигаться
ракета при ее сближении с целью, в общем случае криволинейна. К ракете в
каждый момент времени должна быть приложена нормальная сила, способ-
ная в требуемой степени искривить траекторию. Ее величина про-
порциональна углу отклонения рулей, а следовательно, и команде управле-
ния.
Таким образом, ракета может двигаться по криволинейной траектории
только при наличии в каждый момент времени ее ошибки относительно тре-
буемого положения. Чем больше кривизна траектории при заданном коэффи-
циенте усиления разомкнутого контура управления, тем больше значение
этой ошибки. Необходимо компенсировать эту ошибку, т.е. вводом компен-
сационной поправки в команду управления совместить динамическую тра-
екторию с кинематической.
При обстреле неманеврирующей цели
264
д~ Ко' (12-5)
где ^„-нормальное ускорение ракеты, движущейся по требуемой
траектории;
Ко - коэффициент усиления разомкнутого контура управления.
Нормальные кинематические ускорения ракеты в районе точки встречи с
целью в общем случае зависят от координат цели, их первых и вторых произ-
водных, параметров движения ракеты (в частности, от знака ускорения ЗУР)
и коэффициента пропорциональности метода наведения. Коэффициент уси-
ления разомкнутого контура управления также не остается стабильным для
различных условий встречи ракеты с целью.
Следовательно, формирование компенсационной поправки достаточно
сложно. Стремление осуществить более точную компенсацию динамической
ошибки метода наведения, как правило, приводит к возрастанию случайной
составляющей ошибки наведения ЗУР. Очевидно, оптимальным будет реше-
ние. обеспечивающее наименьшую величину суммарной ошибки.
Компенсационная поправка обычно представляется в виде:
= X}(t ;
ь (12.6)
\Ьдд = X2(t )psm€4,
где X2(i) - временные функции;
- первые производные угла места и азимута или угловые
скорости линии Р-Ц.
Сила тяжести является одной ил внешних сил, приложенных к ракете
при ее полете. Она непрерывно создает возмущающее воздействие на контур.
Если в команде управления не иметь компенсационной поправки, то дейст-
вие силы тяжести вызовет появление систематической ошибки наведения ра-
кеты в вертикальной плоскости (угол поворота рулей, необходимый для ком-
пенсации силы тяжести аэродинамической подъемной силы, может быть по-
лучен только при наличии соответствующего параметра рассогласования).
Ускорение силы тяжести может быть разложено на две составляющие:
нормальную и касательную к траектории (рис. 12.12).
Компенсационная поправка на нормальную составляющую
_gcos<p
~ к (12.7)
вводится в один или оба канала управления в зависимости от ориентировки
крыльев в полете и принципа стабилизации ракеты по крену.
Это воздействие силы тяжести необходимо компенсировать. Так как в
общем случае плоскость сближения ракеты с целью не вертикальна и ракета
приводится к этой плоскости разворотом на угол ?Кр (рис. 12.13), то сигналы
компенсации силы веса ракеты по каналам управления могут вычисляться по
формулам:
265
gcostpcosy^
7*>'t 2D
gcos(pcosyKp
Г*ч 2D
(12.8)
где 7кр~ угол крена между плоскостью управления и вертикальной
плоскостью.
Рис. 12.12. К определению поправки на массу (вес) ракеты
Требуемый для вычисления по этим формулам 7Кр вырабатывается
свободным гироскопическим прибором, входящим в состав автопилота.
Действие касательной составляющей к траектории в системах самонаве-
дения ЗУР, использующих методы пропорционального или параллельного
сближения, аналогично влиянию продольного ускорения ракеты. Оно учиты-
вается соответствующими компенсационными поправками.
Продольное ускорение самонаводящейся ракеты приводит к
непрерывному перемещению положения мгновенной точки встречи, а, сле-
довательно, к появлению дополнительной составляющей угловой скорости
линии визирования цели
/А - п*8 ,л
(12.9)
где пл - продольная перегрузка ракеты;
D - скорость изменения дальности Р-Ц;
<pf - угол упреждения.
Для разгрузки контура управления и уменьшения динамической ошибки,
обусловленной его инерционностью, в состав команд управления вводится
266
компенсационная поправка на продольное ускорение. Продольная перегрузка
сравнительно просто измеряется датчиками, расположенными на борту раке-
ты.
Рис. 12.13. К определению сигнала компенсации действия силы тяжести
Ошибки переходных процессов, вызванные маневром цели, изменением
метода наведения в процессе полета ракеты, а также резкими возмущениями
контура наведения. Маневр цели направлением или скоростью приводит к
резкому изменению параметров требуемой траектории ЗУР, к возрастанию
сигнала рассогласования на входе системы управления. Динамическая ошиб-
ка наведения ракеты на маневрирующую цель в районе точки встречи зави-
сит от соотношения перегрузок, развиваемых целью и ракетой, инерционно-
сти контура управления и времени начала маневра цели относительно мо-
мента встречи. Маневр цели не приводит к резкому возрастанию ошибки
наведения, если соотношение развиваемых ракетой перегрузок свыше 1,5-2.
Наиболее эффективен маневр цели, который совершается за несколько се-
кунд до встречи.
Величина ошибки будет определяться коэффициентом усиления контура
управления, постоянной времени (временем запаздывания), а также распола-
гаемыми перегрузками ракеты и нормальным ускорением цели. Пусть в не-
который момент времени цель начала разворот с перегрузкой и отклони-
лась от траектории на величину QS^-gt2. В виду инерционности контура
управления ракета будет отрабатывать возмущение с запаздыванием Т и по-
ложение мгновенной точки встречи изменится на величину 0,5npg(t -т)2.
Промах при этом с учетом того, что пр >пц будет равен разности вычис-
ленных величин (при t > т)
Пи
267
Максимальный промах наступит при
пр
и будет иметь величину
пцдтг
Минимальная величина промаха hm =0 будет при
Л •
1-у]пц/пр
Зависимости hM(t) при маневре цели приведены на рис. 12.14. При этом
для hj( = 3, Пр = б , т = 2с получили tmax = 4с. hmax = 120м и t0 - 6,8с.
Рис. 12.14. Ошибка наведения при маневре цели
Следует отметить, что такой подход только приближенно позволяет оце-
нить промах ракеты при маневре цели. Однако эта методика позволяет оце-
нить необходимый интервал между пусками при стрельбе очередью ракет по
целям, которые могут применить маневр уклонения.
Вынужденное изменение метода наведения при полете- ракеты к цели
приводит к появлению значительной величины параметра рассогласования,
т.к. ракету необходимо перевести на новую кинематическую траекторию. Ес-
ли встреча ракеты с целью произойдет до окончания этого перевода, то со-
путствующие переходному процессу возросшие ошибки снизят вероятность
поражения цели. Следовательно, изменение метода наведения при полете
ЗУР целесообразно лишь при определенном значении интервала времени до
встречи с целью, который достаточен для затухания переходного процесса.
Переход ракеты с активного участка траектории на пассивный, особенно
при резком спаде тяги двигателя, в той или иной степени сопровождается
возрастанием ошибок наведения.
268
Встреча ракеты с целью на этом участке траектории, как правило, неже-
лательна с точки зрения обеспечения максимума вероятности поражения це-
ли.
Флуктуационная и инструментальная
ошибки наведения ракеты на цель
Флуктуационной ошибкой называется отклонение ракеты от цели, воз-
никшее вследствие случайных возмущений в контуре управления. Причина-
ми появления случайных возмущений могут быть: колебания амплитуды и
эффективного центра отраженного от цели сигнала; внутренние шумы радио-
электронной аппаратуры; естественные помехи (местность, гидрометеороло-
гические факторы и др.); помехи, создаваемые противником, и др.
Флуктуации принятого сигнала приводят к появлению ошибок измерения
координат цели. С достаточной степенью точности можно считать, что флук-
туационные ошибки наведения телеуправляемой ракеты пропорциональны
флуктуационным ошибкам сопровождения цели, прежде всего по угловым
координатам:
аф ~ КфРсопр ф- (12.10)
Флуктуационные ошибки сопровождения групповой цели (группы СВН,
наблюдаемых в виде одной отметки), как правило, больше флуктуационных
ошибок сопровождения одиночной цели. Мешающее воздействие земли и
местных предметов на работу РЛС при обстреле низколетящих целей может
приводить к возрастанию ошибок сопровождения цели, а, следовательно, и
ошибок наведения ракеты на цель.
Организованные радиоэлектронные помехи могут привести не только к
возрастанию ошибок сопровождения цели, но и к изменению преобразова-
тельных свойств элементов системы управления из-за перегрузок ее шумами.
Наличие флуктуационной составляющей ошибки в координатах цели неиз-
бежно ведет к появлению таких же составляющих ошибки в производных
координат. При многократном дифференцировании координат величина
ошибки может оказаться соизмеримой с полученным результатом. Следова-
тельно, простота вычисления параметра рассогласования непосредственно
связана с уменьшением флуктуационной ошибки метода наведения. С этой
точки зрения метод трех точек лучше методов спрямления траекторий.
Системы самонаведения, использующие пеленгационные устройства с
мгновенным равносигнальным направлением, теоретически не чувствитель-
ны к амплитудным флуктуациям отраженного от цели сигнала. Угловые
флуктуации этого сигнала влияют на точность определения параметра рассо-
гласования, являясь основным источником флуктуационных ошибок самона-
ведения ракеты. Основной вклад вносят флюктуационные ошибки угловых
координат за счет случайного перемещения центра отражения по поверхно-
сти цели. Они могут быть определены через характерный размер цели L и
расстояние ракета-цель D* (рис. 12.15).
269
где к - коэффициент пропорциональности, равный 1/6 при нормальном и
0,5>/з при равномерной плотности законов распределения угловых флуктуа-
ций вдоль характерного размера цели.
Рис. 12.15. Закон распределения угловых ошибок
Флуктуационные ошибки, являясь по своему существу случайными, вы-
зывают рассеивание траектории ЗУР относительно цели.
Инструментальной ошибкой называется отклонение ракеты от цели,
возникшее вследствие конструктивных и производственных погрешностей
параметров аппаратуры, их нестабильности, ухода от номинальных значений
и др. Она включает инструментальные ошибки устройств измерения коорди-
нат цели и ракеты, выработки и передачи команд управления, автопилота
ЗУР и других элементов контура управления.
Совокупность факторов, вызывающих появление инструментальных
ошибок, условно можно разделить на две большие группы.
Первая группа - допущения принятых методов измерения координат и
параметров движения цели и ракеты и выработки команд управления.
Примерами инструментальных ошибок такого рода являются погрешно-
сти компенсации скручивания систем координат при пространственном
управлении ракетой, влияние обтекателя головки самонаведения на измене-
ние угловой скорости поворота антенны при сопровождении цели, ошибки
измерения разности координат цели и ракеты при использовании методов
сканирования диаграммы направленности и активного ответа ЗУР и др.
Под скручиванием систем координат понимается нарушение параллель-
ности осей измерительной и исполнительной систем координат при про-
странственном управлении ЗУР (рис. 12.16). В измерительной системе коор-
динат определяется ошибка в положении ракеты (параметр рассогласования).
Оси этой системы координат связаны: при телеуправлении - с плоскостями
поворота антенн и измерения угловых координат СНР, при самонаведении - с
осями рамок гироплатформы, относительно которых производится измерение
углов и угловых скоростей поворота антенны ГСН. Исполнительная система
270
координат связана с ракетой, в ней создаются нормальные силы, изменяющие
Рис. 12.16. Возникновение угла скручивания
При малых углах скручивания ухудшается качество наведения (затяги-
ваются переходные процессы, снижается точность), при больших - наведение
становился неустойчивым.
Следовательно, при наведении ракеты на цель необходимо не допускать
скручивания координат измерительной и исполнительной систем координат
или непрерывно определять угол скручивания и учитывать его при фор-
мировании команд управления. Допущения при решении этой задачи приво-
дят к возникновению инструментальной ошибки.
Ошибка наведения из-за ошибок в определении угловых координат цели
ГСН (БРП) возникает вследствие неоднократного преломления радиоволн
при прохождении через радиопрозрачный обтекатель. В связи с этим изме-
ренная угловая координата цели будет отличаться от истинной на величину
. В общем случае коэффициент преломления Kv зависит от формы об-
текателя, материала, из которого он изготовлен, частоты сигнала.
Если обтекатель изготовить в форме усеченной сферы, то коэффициент
преломления не будет зависеть от направления. При расположении приемной
антенны в центре усеченной сферы К„р со всех направлений будет одинаков.
Рассмотрим это явление для одной плоскости (рис. 12.17).
271
Рис. 12.17. К возникновению инструментальной ошибки за счет обтекателя
Из рис. 12.17 следует, что в результате преломления сигнального луча в
материале обтекателя координатор цели вместо истинной угловой координа-
ты Eti определит угловую координату (пеленгационную). Алгебраиче-
ская разность
^об ~£г~£ц
носит название пеленгационной ошибки обтекателя и ее зависимость от £г
показана на рис. 12.18.
Рис. 12.18. Зависимость пеленгационной ошибки от £*.
Скорость изменения ошибки равна
Величина зависит от физических свойств материала обтекателя и
времени. При этом с увеличением £г ошибка, вызванная влиянием обтекате-
ля, возрастает, то есть
272
Ле = /{ег).
_df.{e,) de, _df(e,)
Нам необходимо компенсировать • Компенсация может осуществ-
ляться за счет различной толщины стенок обтекателя. Кроме того, может
быть применена параметрическая компенсация, при этом зависимость
df(e,)/de, в середине рабочего диапазона заменяется коэффициентом Kt
(см. рис. 12.12). Компенсация ошибки, вызванной обтекателем, может произ-
водится по закону
^1обк i
a>lo6K=«ifa
(12.11)
где К\ - коэффициент усиления в цепи компенсации обтекателя.
Вторая группа - производственные допуски и регулировочные по-
грешности выставки номинальных параметров аппаратуры ЗРК, и в первую
очередь элементов контура наведения ЗУР.
Инструментальные ошибки такого рода зависят от состояния техники,
сроков и условий ее эксплуатации, качества профилактических работ на ней
Если в решении задачи наведения ракеты (при телеуправлении) какая-
либо операция выполняется человеком, то он тоже будет вносить инструмен-
тальную ошибку наведения.
Для каждого ЗРК инструментальная ошибка наведения ракеты характери-
зуется математическим ожиданием и средней квадратической ошибкой. От
комплекса к комплексу значение этой ошибки в большей мере случайно.
Мгновенный промах самонаводящейся ракеты
Наличие мертвой зоны самонаведения, обусловленной срывом автомати-
ческого сопровождения цели по угловым координатам из-за их насыщения
или ’’ослеплением'' координатора при малых дальностях Р-Ц, приводит к по-
явлению так называемого мгновенного промаха ракеты.
После прекращения функционирования системы самонаведения ракета
осуществляет неуправляемый полет с нормальной перегрузкой, соответст-
вующей моменту срыва АС ГСН. Величина мертвой зоны относительно не-
велика (от 50-70 до 300-500 м). Поэтому в первом приближении можно счи-
тать, что в ее пределах траектория ракеты мало отличается от прямолиней-
ной, а скорость практически остается постоянной.
Точку пространства, в которой произошла бы встреча ракеты с целью,
если начиная с данного момента времени ракета и цель двигались бы прямо-
линейно и равномерно, принято называть мгновенной точкой встречи. Ес-
ли в момент срыва самонаведения вектор скорости ракеты направлен в мгно-
(12.12)
273
венную точку встречи (вектор относительной скорости ракеты совпадает с
линией Р-Ц), то будет попадание ракеты в цель. Ошибка в положении векто-
ра скорости относительно мгновенной точки встречи приводит к промаху
ЗУР. Величина этого промаха h (рис. 12.19) равна
, О*2 D*2 .
h = —-------ф,
D V
*отн
где D* - расстояние Р-Ц в момент срыва самонаведения ЗУР;
D - cos//» У^ (т.к. угол р. достаточно мал);
у
$> = -g^-sinр - угловая скорость поворота линии Р-Ц;
К.. = V^+^-awcosv/v,.
Рис. 12.19. Мгновенный промах самонаводяшейся ракеты
Пример. Оценить величину промаха ракеты, если срыв ее самонаведения
произошел при следующих условиях: расстояние между ракетой и целью
D*=500 м, угловая скорость линии Р-Ц ф =5 грал/с, относительная скорость
ракеты У^и =1500 м/с. В момент срыва самонаведения ракета двигалась с
нормальной перегрузкой п-3.
Решение:
, D*2 . 500!-3
Л =----ф ------------я 8,7.и.
1500-57,3
Поправка 4А на криволинейное движение ЗУР (с перегрузкой п=3) после
срыва самонаведения
274
2
где Wn =ng - нормальное ускорение ракеты;
О’
= -----время сближения ракеты с целью.
I D*
ng--
4Л =—
2
At.
Таким образом, промах ракеты составит 8,7 - 1.6 « 7,1м. Следовательно,
учитывая малую величину промаха, никаких мер по его компенсации пред-
принимать не следует.
Вероятность попадания в круг заданного радиуса
При известном математическом ожидании (hy,hz) и средней квадратиче-
ской ошибке (cr„Gz) рассеивания траекторий ракет у цели и нормальном зако-
не ошибок наведения ЗУР вероятность Р попадания ракеты в круг заданного
радиуса R вычисляется следующим образом. Пусть имеется закон распреде-
ления ошибок наведения вида
( y-hy )2 ( ;-h: )2
Ыу.г) = —1—е 2а> 2°< . (12.13)
При этом функция распределения промахов, определяющая вероятность
попадания ракеты в круг радиуса R, определяется интегралом
(У-ffyt2 (z-h-)2
RR RR 1 1 J- fn2
F(r<R)=^fJ(y,z)dydz=jj------e y 2 dydz. (12.14)
00 00"^:
где R - yjy2 + z2.
Этот интеграл через элементарные функции не выражается, поэтому для
вычисления вероятности попадания ракеты в круг заданного радиуса необхо-
димо пользоваться либо специальными графиками, либо таблицами, либо ме-
тодами численного интегрирования.
Рассмотрим частные случаи решения этого интеграла.
Первый случай. Систематические ошибки наведения отсутствуют (hy=
hz= 0), ошибки наведения подчиняются круговому закону (а> =<т. = о):
275
R2
г <> К) = J - e2°2. (12.15)
Формула (12.15) позволяет решать и обратные задачи, т.е. определять
среднюю квадратическую ошибку а по заданной вероятности попадания в
круг заданного радиуса.
Второй случай. Наведение ракеты на цель сопровождается систематиче-
скими ошибками {hy * 0 и hz * 0). Случайные ошибки подчиняются кругово-
му закону (Оу =аг = о).
Решение задач, связанных с вероятностью попадания в круг заданного
радиуса, производится с использованием семейства кривых равной вероятно-
сти в координатах a'R и h/R, показанных на рис. 12.20.
Рис. 12.20. Семейство кривых равной вероятности
Третий случай. Систематические ошибки наведения отсутствуют (Л, = 0
и Л. = 0), а случайные ошибки наведения подчиняются эллиптическому зако-
ну (a^oi).
Вероятность попадания ракеты в круг заданного радиуса определяется по
табл. 12.1. Входами в таблицу являются величины а и б, вычисляемые сле-
дующим образом:
l)npu <ту<о\
2) при ay>az
(12.16)
276
Четвертый случай. Наведение ракеты на цель сопровождается система-
тическими ошибками (Л, * 0 и h, # 0), случайные ошибки подчиняются эл-
липтическому закону на плоскости
Вероятность попадания в круг заданного радиуса ввиду сложности ана-
литических расчетов может быть определена графически с использованием
сетки кругового рассеивания.
Таблица 12.1
а б
0 0.2 0.4 0.6 0.8 1.0
0.1 0.0023 0,0023 0,0025 0,0029 0.0038 0,0538
0.2 0.0091 0,0092 0,0099 0.0113 0,015 0,1073
0.3 0.0203 0,0207 0,0221 0,0253 0.0334 0,1604
0.4 0.0357 0.0365 0,0389 0,0444 0.0586 0.2127
0.5 0.0553 0.0564 0.0602 0,0686 0,0899 0,2641
0.6 0.0786 0,0802 0,0855 0.0972 0.1265 0.3143
0.7 0.1055 0,1075 0,1144 0,1298 0.1676 0,3632
0.8 0,1355 0,1381 0.1468 0,1660 0,2124 0.4105
0.9 0,1683 0,1714 0.1820 0,2052 0.2599 0,4552
1.0 0,2034 0,2072 0,2197 0,2467 0,3091 0,5000
1.1 0,2406 0.2449 0,2593 0,2900 0,3593 0,5419
1.2 0,2793 0.2842 0,3003 0,3346 0,4095 0,5817
1.3 0,3192 0.3245 0,3424 0,3798 0,4592 0.6194
1.4 0,3597 0.3656 0,3849 0,4250 0,5075 0.6550
1.5 0,4006 0,4068 0,4276 0,4599 0,5541 0,6883
1.6 0.4414 0.4480 0.4698 0,5139 0,5981 0,7195
1.7 0,4819 0,4888 0,5114 0,5506 0,6403 0,7485
1.8 0.5215 0.5287 0,5520 0,5978 0,6794 9.7753
1.9 0,5601 0.5674 0,5912 0,6370 0,7156 0,8000
2.0 0.5975 0.6049 0,6288 0,6742 0,7488 0.8227
2.1 0.6333 0.6408 0,6645 0,7091 0,7792 0.8434
2.2 0,6675 0,6749 0.6984 0,7415 0,8068 0.8622
2.3 0,6998 0.7071 0,7301 0.7716 0,8316 0.8792
2.4 0,7303 0.7374 0,7596 0 7991 0.8538 0,8945
2.5 0,7587 0,7656 0.7880 0,8243 0,8736 0.9082
2.6 0,7852 0,7918 0.8122 0,8470 0,8910 0.9205
2.7 0 8096 0,8159 0.8352 0,8675 0,9095 0,9314
2.8 0,8320 0.8380 0.8561 0.8858 0,9201 0.9410
2.9 0,8524 0,8580 0.8750 0.9020 0.9320 0,9495
3.0 0,8709 0,8762 0,8918 0.9164 0,9423 0 9570
3.2 0.9026 0,9072 0,9203 0,9399 0,9589 0.9691
3.4 0,9279 0.9316 0,9424 0,9576 0,9712 0,9782
3.6 0,9476 0,9506 0.9591 0.9707 0,9801 0.9848
3.8 0.9626 0,9650 0,9716 0,9800 0.9865 0,9896
4,0 0,9737 0,9756 0,9806 0,9867 0.9909 0,9930
4.2 0.9819 0,9833 0,9870 0,9912 0.9940 0,9954
4.4 0,9878 0,9388 0,9914 0.9944 0,9961 0,9970
4.6 0,9919 0,9926 0,9945 0,9964 0,9975 0,9981
4.8 0,9947 0,9952 0,9965 0,9978 0,9985 0,9988
5.0 0,9966 0.9970 0,9978 0,9986 0,9991 0,9993
271
12.23. Координатный закон поражения цели.
По способу воздействия на цель боевые части ЗУР разделяют на фугас-
ные, осколочные и кумулятивные. Наибольшее применение нашли осколоч-
ные боевые части направленного действия.
При подрыве ЗУР поражение цели может быть достигнуто: разрушением
ее конструкции, выводом из строя жизненно важных отсеков, воспламенени-
ем топлива на борту и др.
Радиус эффективного фугасного действия боевого снаряжения ЗУР зави-
сит в первую очередь от массы взрывчатого вещества и высоты цели. Оценка
фугасного воздействия может быть произведена по формуле (результат в
метрах)
где а =2...2,5 м кг,/6/см - коэффициент, учитывающий форму
и конструкцию БЧ;
Q„ - тротиловый эквивалент, примерно равный массе
взрывчатого вещества, кг;
ЛРф - избыточное давление во фронте ударной волны,
приводящее к разрушению цели (для широ-
кого класса воздушных целей
ЛРф=0,3-0,6 кГ/см2)-,
b - 0,025 1/км - коэффициент, характеризующий падение радиуса
поражения с высотой (вследствие падения плотно-
сти и давления воздуха);
Нч - высота точки подрыва, км.
Осколочное действие боевой части может привести к механическому
разрушению конструкции воздушной цели, поражению уязвимых отсеков,
воспламенению топлива, выводу из строя членов экипажа.
Оценку радиуса поражения R„f„„ цели при воздействии потока осколков
плотностью Л» можно произвести по формуле
р
г'пот.о
Г 0,9М
где М - количество осколков БЧ;
Уст - суммарный статический угол разлета осколков в радиальной
(экваториальной) плоскости ракеты (обычно Хж=360°);
Д<рст - угол разлета осколков в статике.
Поражение цели достигается в основном за счет воздействия одиночных
осколков (плотностью Ао <2 - 5 1/м2) но уязвимым отсекам (агрегатам) цели.
Необходимым условием поражения цели является накрытие ее осколками
278
боевой части. Это условие при заданных значениях скорости ракеты, скоро-
сти цели, угла между ними, угла и скорости разлета поражающих эцрментов
определяет требуемый момент подрыва боевой части ЗУР.
Поражающий элемент встречается с целью в случае, если в момент
подрыва боевой части цель находится на линии, совпадающей с
относительной скоростью этого элемента (рис. 12.21).
Рис. 12.21. Относительная скорость поражающего элемента
Область пространства вокруг ракеты, при нахождении цели в которой в
момент подрыва боевой части ее уязвимые отсеки накрываются потоком раз-
летающихся осколков, называется областью возможного поражения цели.
Положение этой области при стрельбе не остается постоянным. Скорость
воздушных целей изменяется в широких пределах, скорость ракеты на траек-
тории также не постоянна, угол встречи ракеты с целью (угол между направ-
лениями векторов скорости цели и скорости ракеты) зависит от координат и
параметров движения цели и начальных условий пуска ЗУР. Следовательно,
выбор момента подрыва боевой части должен производиться с учетом
конкретных условий встречи ракеты с целью.
Рис. 12.22. Статическая область разлета осколков боевой части ЗУР
279
При симметричной относительно продольной оси ракеты статической
области разлета осколков (рис. 12.22, а) область возможного поражения цели
представляет собой объем, ограниченный двумя коническими поверхностями
с вершиной в точке подрыва боевой части и с осями, совпадающими с векто-
ром относи тельной скорости ракеты. В данном объеме распределяются отно-
сительные траектории осколков. Такая форма области возможного пора-
жения цели позволяет не учитывать при выборе момента подрыва боевой
части направление промаха ракеты.
Если статическая область разлета осколков характеризуется величиной
угла разлета относительно продольной оси ракеты а^и углом разлета ос-
колков в радиальной плоскости (рис. 12.22, б), то при управлении взрывом
боевой части учитываются не только величина и направление вектора скоро-
сти ракеты и цели, но и направление промаха ЗУР. Перед подрывом боевого
заряда ракета разворачивается относительно продольной оси соответственно
направлению промаха.
Подрыв боевой части ракеты в районе точки встречи может производить-
ся двумя способами: выдачей команды на подрыв боевой части с наземного
пункта управления при нахождении ракеты у цели и с помощью не-
контактного взрывателя, устанавливаемого на ракете.
Первый способ при выборе момента подрыва боевой части не позволяет
учесть условия встречи ракеты с целью. При использовании на ракете на-
правленных осколочно-фугасных боевых частей он применяется при стрель-
бе в особых случаях (например, по наземным или малоподвижным целям).
Второй способ является основным. Из всех типов неконтактных взрыва-
телей в ЗРК наибольшее распространение получили радиовзрыватели.
Под областью срабатывания радиовзрывателя понимается пространст-
венная область около ракеты, определяемая геометрическим местом услов-
ных центров цели в момент срабатывания радиовзрывателя, т.е. подрыва бое-
вой части ракеты. Вероятностным описанием этой области является закон
срабатывания радиовзрывателя (tfx. у, z).
Он характеризует распределение координат подрыва боевой части в рай-
оне точки встречи:
co(xty,z) = /2(х/y,z)P(y,z), (12.17)
где fi(x/y,z) - плотность распределения координаты х срабатывания взрыва-
теля при заданной ошибке наведения у,г;
P(y,z) - вероятность срабатывания радиовзрывателя по цели в зависи-
мости от ошибок наведения у,z.
Область срабатывания радио взрывателя должна совпадать с областью
разлета осколков в относительном движении. Если эти области совпадают
(рис. 12.23, а), то говорят, что радиовзрыватсль согласован с боевой частью.
При несовпадении этих областей (рис. 12.23, б) наблюдается та или иная сте-
пень рассогласования радиовзрывателя с боевой частью и снижение вероят-
280
ности поражения цели при заданной величине промаха.
а б
Рис. 12.23. К определению согласования радиовзрывателя и боевой части ЗУР
Возможные способы согласования радиовзрывателя и боевой части раке-
ты:
дискретное или плавное изменение угла наклона диаграммы направлен-
ности радиовзрывателя к продольной оси ракеты в зависимости от условий
встречи ракеты с целью (скорости цели, скорости ракеты, положения точки
встречи и т. д.)',
изменение угла наклона статической области разлета осколков к про-
дольной оси ракеты в зависимости от скорости цели и условий стрельбы (из-
менение этого угла достигается выбором соответствующих точек иницииро-
вания боевого заряда);
выбор момента срабатывания радиовзрывателя с помощью доплеровских
измерителей скорости.
Подрыв боевой части ракеты происходит при дальностях до цели, соот-
ветствующих величине промаха. Ограничение дальности действия некон-
тактного взрывателя производится для того, чтобы исключить возможность
его срабатывания по необстреливаемой цели, т.е. цели, находящейся за пре-
делами радиуса эффективного действия поражающих элементов боевой час-
ти.
Количественное представление координатного закона поражения цели
Поражение цели, а также наносимый ей ущерб при подрыве боевой части
ЗУР зависят от следующей случайной совокупности факторов: значений ко-
ординат точки подрыва ЗУР относительно цели; степени накрытия цели по-
током поражающих элементов боевой части; эффективности поражающего
воздействия боевой части (массы и формы поражающих элементов, скорости
поражающих элементов в момент удара по цели и их плотности, эффектив-
ности фу^сного действия боевого заряда и др.); уязвимости воздушной цели;
условий встречи ракеты с целью (высоты точки встречи, величины и направ-
281
ления вектора скорости ракеты и цели и др.).
При заданном боевом снаряжении ЗУР и характеристиках цели вероят-
ность ее поражения в основном зависит от координат точки разрыва ракеты и
условий встречи ракеты с целью.
Интегральная функция G(x,y,z), определяющая величину вероятности по-
ражения цели в зависимости от координат точки подрыва ракеты относи-
тельно цели, называется координатным законом поражения цели.
Функцию Go(y,z), определяющую вероятность поражения цели в зависи-
мости от ошибок наведения ЗУР на цель в картинной плоскости, принято на-
зывать условным координатным законом поражения:
+хтах
G0(y,z) = \G(x,y,z)f2(x/ул).
~хтах
(12.18)
где величины -x,^, определяют возможный интервал рассеивания точек
подрыва боевой части ракет вдоль траектории I I =3б;.
Графически условный координатный закон поражения цели может быть
представлен семейством замыкающихся кривых равной вероятности
(рис. 12.24), которые позволяют определить вероятность поражения цели для
любых заданных значений у и z. В общем случае эти замыкающиеся кривые
не являются окружностями, т.е. вероятность поражения цели зависит не
только от величины, но и от направления промаха ракеты.
При заданных характеристиках боевого снаряжения ЗУР параметры ус-
ловного координатного закона поражения зависят от уязвимости цели и ус-
ловий встречи ракеты с целью.
Под уязвимостью воздушной цели понимается степень ее чувствитель-
ности к поражению при подрыве боевой части ракеты в заданных условиях
встречи.
Рис. 12.24. Графическое изображение условного
координатного закона поражения цели
282
Оценка уязвимости вероятных целей производится косвенно путем обще-
го анализа их конструкции и сравнения с уязвимостью типовых отсеков са-
молетов-мишеней.
Уязвимость цели зависит от условий се встречи с ЗУР (высоты, скорости
и ориентации цели относительно точки взрыва и др.).
Непосредственно к самолету примыкает и ограничивает часть простран-
ства вокруг него - зона безусловного поражения цели. При подрыве ЗУР в
этой зоне с практической достоверностью самолет уничтожается вследствие
общих разрушений конструкции, наносимых фугасным действием боевой
части в сочетании с осколочным Действием плотного потока поражающих
элементов.
При подрыве боевой части за пределами зоны безусловного поражения
цель поражается в результате механического или зажигательного действия
отдельных поражающих элементов по уязвимым отсекам самолета. Уяз-
вимость цели в этом случае определяется количеством уязвимых отсеков
первой и второй групп и их площадью в проекции на плоскость, перпендику-
лярную вектору относительной скорости осколков.
К отсекам первой группы принято относить элементы воздушной цели,
вывод из строя любого из которых влечет ее поражение (кабина летчика,
двигатель одномоторного самолета, бомбовый отсек и др.), к отсекам второй
группы - элементы, вывод из строя определенного числа которых в некото-
рой совокупности (поражаемой комбинации отсеков) приводит к поражению
воздушной цели.
Аналитически условный закон поражения цели может быть представ-
лен функцией, зависящей от двух аргументов: величины промаха г и направ-
ления промаха <р. При заданных характеристиках боевого снаряжения плот-
ность осколков Л определяется величиной промаха г. а приведенная уязвимая
площадь самолета 5V - направлением промаха (рн величиной промаха г:
Gafr.tp)-! е (12.19)
При экспериментальном определении условного закона поражения цели
зависимость (12.19) представляют в виде
G0(r.g» = l-e .
где оц(<Р) - параметр условного закона поражения цели, зависящий при за-
данном боевом снаряжении ракеты от типа цели, условий стрельбы и направ-
ления промаха.
При приближенной оценке эффективности стрельбы зенитными управ-
283
ляемыми ракетами двухмерный условный закон поражения цели заменяется
круговым условным законом поражения цели. Аппроксимация закона осуще-
ствляется путем усреднения параметра а</фУ.
1 2к
<*о= — la0(<P)d<p. (12.21)
/я1 0
Тогда
ао
£ (12.22)
G0(r) = l-e
Параметр условного закона поражения цели <Хо численно равен величине
промаха г, при которой условная вероятность поражения цели составляет
0,632 (рис.12.25), так как G0(r = ^) = l-e_| =0,632.
Рис. 12.25. Характер зависимости G^r)
Возможны и другие аппроксимации условного закона поражения цели.
например:
г2
9 р2
G0(r) = e 2Яо
(12.23)
где Ro - параметр условного закона поражения, численно равный величине
промаха, при котором условная вероятность поражения цели составляет
0,607: Go(r =R0) = е 3 =0,607.
12.2.4. Количественные показатели эффективности стрельбы ЗУР
Вероятность поражения одиночной цели одной ракетой.
Поражение цели ЗУР можно представить в виде сложного случайного со-
бытия, состоящего из двух других случайных событий, происходящих
последовательно во времени (рис. 12.26).
Первое случайное событие заключается в том, что подрыв боевой части
ракеты произошел именно в данной точке пространства с координатами x,y,z
относительно цели. Вероятность этого события определяется законом оши-
284
бок/Гх.у.г), сопровождающих стрельбу.
Рис. 12.26. К определению вероятности поражения цели
Второе случайное событие заключается в том, что поражающие элементы
боевой части ракеты, разорвавшейся именно в данной точке с координатами
x,y,z, поразят цель. Вероятность этого события определяется координатным
законом поражения цели G (x.y.z).
Следовательно, вероятность поражения цели одной ракетой
Р/ = / f \f(x,y,z)G(x,y,z)dxdydz.
(12.24)
Функция f(x,у,г)отлична от нуля лишь в некотором (небесконечном) объ-
еме у цели. В этом объеме и производится интегрирование.
Зависимость (12.24) может быть представлена в виде
Р/ = / f fi( у. Z )Р( у, Z )G0( у, z )dydz,
(12.25)
где fi(y,z) - закон ошибок наведения ракеты на цель;
P(y,z) - зависимость вероятности срабатывания неконтактного взрыва-
теля от ошибок наведения;
Go(y,z) - условный координатный закон поражения цели.
Порядок вычисления интеграла по формуле (12.25) зависит от вида по-
285
дынтегральных функций.
Первый случай. Ошибки наведения подчинены круговому закону
(c7i=ay=o), центр рассеивания совпадает с целью (hy=hz=O), т.е. плотность
вероятности распределения промахов
и -4
f(r) = —re .
cr
Закон поражения цели круговой вида
“1
G0(r) = l-e '2 .
(12.26)
(12.27)
Радиус срабатывания неконтактного взрывателя неограничен. Тогда
(12.28)
где/Gf/j - функция, значения которой приведены в табл. 12.2.
Буквой % в табл. 12.2 обозначено Vi30 / а.
Пример. Рассчитать вероятность Pt, если <7?= <7,= 10 м, <V=25 м.
Решение:
JZ-25
10
= 3,54.
Z =
По табл. 12.2/4(3,54) =0,021; Р, =1- 3,54 0,021=0,926.
Второй случай. Законы ошибок наведения и радиус срабатывания некон-
тактного взрывателя те же, что и в первом случае.
Закон поражения цели описывается функцией вида
Тогда
г2
G0(r) = e
(12.29)
(12.30)
286
Таблица 12.2
X КМ X км X КМ X км
0,0 2,5 0,07389 5,0 0,004045 7,5 0,0002653
0,1 9,8538 2.6 0,06528 5,1 0,003619 7.6 0.0002383
0,2 4,7760 2,7 0,05774 5,2 0,003239 7,7 0,0002141
0,3 3,0560 2.8 0,05111 5,3 0,002900 7,8 0,0001924
0,4 2.1844 2,9 0,04529 5,4 0.002597 7.9 0,0001729
0,5 1,6564 3,0 0,04016 5,5 0,002326 8,0 0,0001554
0,6 1,3028 3,1 0,03563 5.6 0,002083 8.1 0,0001396
0,7 1,0503 3,2 0,03164 5.7 0,001866 8.2 0,0001255
0,8 0.8618 3,3 0,02812 5,8 0,001673 8.3 0,0001128
0,9 0.7165 3,4 0,02500 5.9 0.001499 84 0,0001014
1.0 0.О019 ЗЛ 0,02224 S.0 0,001344 8,5 0,00009120
U 0,5098 3,6 0,01979 6 0,001205 8,6 0,00008200
1.2 0,4346 3,7 0,01763 6,2 0,001081 8,7 0,00007374
1.3 0,3725 3,8 0,01577 6.3 0,0009691 8,8 0,00006631
1.4 0,3208 3.9 0,01400 6,4 0,0008693 8.9 0,00005964
1.5 0.2774 4,0 0,01248 6,5 0,0007799 9.0 0,00005364
1.6 0.2406 4,1 0,01114 6,6 0,0006998 9,1 0,00004825
1.7 0,2094 4,2 0,009938 6,7 0,0006280 9,2 0,00004340
1.8 0,1826 4,3 0,008872 6,8 0,0005636 9.3 0,00003904
1.9 0,1597 4,4 0,007923 6,9 0,0005059 9,4 0,00003512
2,0 0,1399 4,5 0,007078 7,0 0,0004542 9,5 0,00003160
2,1 0,!227 4,6 0,006325 7.1 0,0004078 9.6 0,00002843
2,2 0,1079 4,7 0,005654 7,2 0,0003662 9,7 0,00002559
2,3 0,09498 4,8 0,005055 7,3 0,0003288 9.8 0,00002302
2,4 0.08372 4,9 0,004521 7,4 0,0002953 9,9 0,00002027
10,0 0,00001865
Пример. Рассчитать вероятность Рь если ах=о;-10 м, /?о=30 м.
Решение:
= 0,9.
Третий случай. Ошибки наведения ракеты подчинены круговому закону
(сг^сг^о), центр рассеивания не совпадает с целью (Лу*О и h^O), т. е. плот-
ность вероятности распределения промахов
287
f(r) = ^e *°г
G
(12.31)
где h = yjh2y + h} ;
,(rh\ . _
Io —r - функция Бесселя нулевого порядка от мнимого аргумента
\(Г )
(модифицированная функция Бесселя).
Закон поражения цели описывается функцией
г2
G0(r) = e 2R°
Радиус срабатывания неконтактного взрывателя неограничен, тогда
р = 2бГЧ (12.32)
7
Пример. Рассчитать вероятность Ph если м, /?о=30 м, h=15 м.
Решение:
/ ~--2-----2 е
302 +J02
152 С зо2 1
2 /О2[ ЗО2+1О2 ) -Q8Q
Четвертый случай. Законы ошибок наведения и радиус срабатывания не-
контактного взрывателя те же, что и в случае третьем.
Закон поражения цели круговой вида
J1
Gg(r) = J-e '2 .
Тогда
Вычисление зависимости (12.33) производится методами численного ин-
тегрирования.
288
Пятый случай. Ошибки наведения подчинены эллиптическому закону
(cTyCcrJ, центр рассеивания совпадает с целью, т. е. плотность вероятности
распределения промахов
= —Д 4аХ f Г (<7, -р 1 (12.34)
(ГуСГ. 4сГуСГ, J'
Закон поражения цели круговой вида
_Л1 2_
G0(r)=e гк3.
(12.35)
Радиус срабатывания неконтактного взрывателя ограничен величиной
Гти- Т0ГДа
р1=~-----22а' . 2Je(K.T} (12.36)
1 + Qj + 2t?2
а -£1. а -Zl- к- '~а1 •
где «2-^. К~1 + а2+2а2- т- 4<т2
г
- табличная функция, приведенная в табл.12.3.
о
Пример. Рассчитать вероятность поражения цели, если (7у= 5 м, <тг = 10 м,
/?О=30 М, Гтох=20 м.
Решение: ^,=5/10=0,5; а* =0,25; ^2=5/30=0,166; =0,027;
/С=. .. |-°'025 = 0,577; г=^°^ + 2 0.027 =
1 + 0,25 + 2 0,027 4-52
205
По табл.12.3 /,= 1,175, тогда Л =——-1,175 «0,90.
1,304
В первых трех случаях принято условие, что радиус срабатывания некон-
тактного взрывателя неограничен (превосходит максимально возможный
промах ракеты). Если при стрельбе по цели условие RyB^h+la может нару-
шаться, то при расчете вероятности поражения цели необходимо дополни-
тельно учитывать зависимость срабатывания неконтактного взрывателя от
ошибок наведения P(y,z). Наиболее просто это сделать, когда функция P(y,z)
представлена в виде
P(y.z) = P(r)
1 при r£Rre;
0 при r>RPB.
289
Таблица 12.3
т Значения величины К
0 0,2 0.4 0.6 0,8 1.0
0,0 0 0 0 0 0 0
0,2 0,1813 0,1813 0,1814 0,1815 0,1816 0,1818
0,4 0,3297 0,3298 0,3303 0,3311 0,3322 0,3337
0,6 0,4512 0,4517 0,4530 0,4554 0,4586 0,4629
0.8 0,5507 0,5516 0,5545 0Л593 0,5661 0,5749
1.0 0,6321 0,6337 0,6386 0,6468 0,6584 0,6736
1.2 0,6988 0,7012 0,7086 0,7209 0,7386 0,7620
1.4 0,7534 0,7567 0,7669 0,7841 0,8089 0,8422
1.6 0,7981 0,8025 0,8157 0,8383 0,8712 0,9157
1,8 0,8347 0,8401 0,8566 0,8850 0,9267 0,9839
2.0 0,8647 0,8712 0,8910 0,9255 0,9766 1,0426
2.2 0,8892 0,8968 0,9201 0,9607 1,0217 1,1025
2,4 0,9093 0,9179 0,9446 0,9916 1,0627 1,1642
2,6 0,9257 0,9354 0,9655 1,0186 1,1001 1,2183
2,8 0,9392 0,9499 0,9831 1,0424 1,1345 1,2699
3,0 0,9502 0,9618 0,9982 1,0635 1,1661 1,3195
3,2 0,9592 0,9718 1,0110 1,0822 1,1953 1,3672
3.4 0,9666 0,9800 1,0220 1,0988 1,2223 1.4132
3,6 0,9727 0,9868 1,0314 1.1136 1,2475 1,4578
3.8 0,9776 0,9925 1,0394 1,1268 1,2708 1,5010
4,0 0,9817 0,9971 1,0463 1,1386 1,2926 1,5430
4.2 0,9830 1,0010 1,0522 1,1492 1,3130 1,5839
4,4 0,9877 1,0043 1,0574 1,1587 1,3320 1,6237
4,6 0,9899 1,0070 1,0619 1,1679 1,3499 1,6625
4,8 0,9918 1,0092 1,0657 1,1749 1,3666 1,7005
5,0 0,9933 1,0111 1,0690 1,1818 1,3823 1,7376
5,4 0,9955 1,0140 1,0743 1,1937 1,4110 1,8025
5.8 0,9970 1,0160 1,0783 1,2034 1,4369 1,8686
6,2 0,9980 1,0174 1,0814 1,2114 1,4590 1,9452
6.6 0,9986 1,0183 1,0837 1,2180 1,4792 2,0097
7,0 0,9991 1,0190 1,0854 1,2237 1,4972 2,0732
При таком законе срабатывания взрывателя во втором и третьем случаях
для определения вероятности поражения цели необходимо значения вероят-
ностей, полученных по формулам (12.30) и (12.32), умножить на вероятность
попадания в круг радиусом г^. В третьем случае значения вероятности по-
падания в круг RpB подсчитываются при характеристиках ошибок а’ и А',
равных
290
h*=h
*0
Яо2 + а2
(12.37)
Тогда формула вычисления вероятности поражения цели для самого об-
щего случая примет вид
h2
, “о с 2,к^а2 К',« ,h' ), (12.38)
Rq + ст2 сг' ст*
J(RPB )
где Л —) - вероятность попадания ракеты в круг радиуса R^ при
<т ст
систематической ошибке h* и случайной ошибке <7*.
Вероятность поражения одиночной цели п ракетами.
При вычислении вероятности поражения цели п ракетами учитывается
характер цели с точки зрения возможности накопления ущерба при ее после-
довательном обстреле зенитными управляемыми ракетами.
Если накопления ущерба нет и вероятности поражения цели каждой ра-
кетой одинаковы, то вероятность поражения цели п пакетами
Рп=]-(1-Р1)п.
(12.39)
Величина Р„ при различных значениях Pi и п приведена в табл. 12.4. Из
табл. 12.4 видно, что, например, при Р/=0,7 пуск второй ракеты повышает ве-
роятность поражения цели на 0,21, третьей ракеты - на 0,063, а четвертой ра-
кеты - всего лишь на 0,019.
Число ракет, обеспечивающее заданную вероятность поражения цели Л,
рассчитывается по формуле
(12.40)
При накоплении ущерба
Г.л > Р1.п-1 >->Р!,2 > Р!.1
(вторая цифра у индекса Р, означает очередность пуска пакеты). Тогда
P„=J-(J-Pu)(l-Pt.2)...(l-Pljt). (12.41)
291
Таблица 12.4
Р1 Ъ
п=2 н=3 н=4 п=5 л =6
0,10 0,19 0,27 0,35 0,41 0,47
0,15 0,28 0,39 0,48 0,56 0,62
0,20 0,36 0,49 0,59 0,67 0,74
0,25 0,44 0,58 0,68 0.76 0,82
0,30 0,51 0,66 0,76 0,83 0,88
0,35 0,58 0,72 0,82 0.88 0,92
0,40 0,64 0,78 0,87 0,92 0,95
0,45 0,70 0,83 0,91 0,95 0,97
0,50 0.75 0,87 0,94 0,97 0,98
0,55 0,80 0,91 0,96 0,98 0,99
0,60 0,84 0.94 0,97 0,99 0,995
0,65 0,877 0,967 0,985 0,995 0,998
0,70 0,910 0,973 0,992 0,998 0,999
0,75 0,937 0,984 0,996 0,999 0,9998
0,80 0,960 0,992 0,998 0,9997
0,85 0,977 0,997 0,999
0,90 0,990 0,999
0,95 0,997 0,9999
Определить с достаточной точностью значения вероятностей РЛ/.Р1п
для заданных типов целей и условий стрельбы очень сложно. При расчете
вероятности поражения цели п ракетами, как правило, пользуются формулой
(12.39), а накопление ущерба учитывают некоторым средним для всех ракет в
очереди приращением вероятности поражения цели одной ракетой (ДР).
Тогда
Рп=1-[1-(Р1 + ДР)]г. (12.42)
Учет надежности общей части аппаратуры ЗРК и обшей части пускового
комплекса производится с помощью вероятности безотказной работы РМвр)
и а надежность канальной части пускового комплекса и ракет - с
помощью вероятностей и которые представляют собой веро-
ятность того, что за время стрельбы не произойдет отказов. Таким образом,
р„ l-[l-P^(‘6p)Pp(‘6p)(Pi "}• 02.43)
Количество ракет, необходимое для достижения заданной вероятности
пооажения цели пои стоельбе.
292
I P I
/d/--------------------
l Р0(1бр)РпК.о(1бр))
iPpdc,, КР^лр>\
(12.44)
Пример. Дано: Pt =0,8; Л/М), 15; РМбр)= РПко(1бр)=0ЭЪ\ PnxJtepPQVb,
Рр(1бр)= 0,97. Определить количество ракет для поражения цели с ве-
роятностью Л, =0,95.
Решение:
0,95
0,98 0,98
1g! 1-0,96 0.97 (0,8 + 0.15)1
/яр
Математическое ожидание числа пораженных целей.
При стрельбе по группе одиночных целей математическое ожидание чис-
ла уничтоженных СВН равно сумме вероятностей поражения обстрелянных
одиночных целей:
= (12.45)
Если вероятности поражения Р, одинаковы, то
Мс = N4Pi.
(12.46)
Оценка вероятности поражения не менее т или точно т из N4 одиночных
целей сводится к вычислению:
при одинаковых вероятностях поражения целей - соответствующих чле-
нов биномиального разложения:
Р( j = т) = С%ц Рт (1 - P)N* ~т; (12-47>
N4
P(j>m)= £ pm(l-p)N4~m (12.48)
j=m
или
P( j a m) = I - У a P” (/ - (| 2.49)
j-o
при различных вероятностях поражения цели - коэффициентов произво-
дящей функций вида
(12.50)
/«=0 j*0
293
Пример. Количество обстрелянных целей N* =3. Вероятность поражения
первой цели Pi = 0,7. второй цели Р2 = 0,5. третьей цели Pt= 0.9.
Определить вероятность уничтожения ровно двух и не менее двух целей.
Решение: [(1 - Р,) + PzZ]((1 - Р2) + Р2 z]f( 1 - Р0 + Р<z] =
=(0,3+0,7z) (O,5+O,5z) (0,1+0,9z) = = 0,015 + 0,185z + 0,485z2 + 0,315 z3;
P(j = 2) = 0,485;
P(j> 2) = 0,485 + 0.315 = 0,8.
При стрельбе по групповой цели, т.е. группе самолетов, наблюдаемых на
индикаторе РЛС в виде одной отметки, при условии, если захват радиолока-
тором сопровождения или ГСН того или иного самолета группы рав-
новероятен и при подрыве ЗУР по данному самолету поражение других са-
молетов группы исключено, математическое ожидание
(12.51)
Пример. Если /7=3; п=6; Р=0,9, то
Оценка эффективности стрельбы при противодействии воздушной цели.
Эффективность стрельбы при противодействии воздушней цели (радио-
электронные помехи, маневр) может снижаться вследствие:
а) возрастания ошибок наведения и снижения эффективности боевого
снаряжения ЗУР:
р! =jjfi(y>z)P*(y,z)Go(y,z)dydz (12.52)
(звездочкой обозначены соответствующие законы в условиях противо-
действия цели);
б) нарушения нормального функционирования элементов комплекса
(прекращение поступления в контур наведения информации о координатах и
параметрах движения цели, разрыв контура наведения ЗУР, ложное срабаты-
вание радиовзрывателя и др.). Тогда вероятность Рф нормальною функцио-
нирования системы определится как
= (1253)
294
где к - количество каналов, подверженных действию радиоэлектронных
помех при наведении и подрыве ЗУР у цели;
Pop.- - вероятность того, что помеха будет организована;
Р„р- вероятность попадания помехи в приемное устройство
подавляемого канала ЗРК;
Р„ - вероятность того, что мощность помехи *удет достаточна для
нарушения нормального функционирования контура наведения;
в) выхода цели из зоны поражения к моменту встречи с ракетой.
Оценка вероятности поражения цели п ракетами производится с учетом
всех перечисленных выше факторов.
12.25. Зоны поражения и пуска, возможности ЗРК по последователь*
ному обстрелу целей
Зона поражения ЗРК
Зона поражения комплекса - область пространства, в пределах которой
обеспечивается поражение воздушной цели зенитной управляемой ракетой в
расчетных условиях стрельбы с заданной вероятностью. С учетом эф-
фективности стрельбы она определяет досягаемость комплекса по высоте,
дальности и курсовому параметру.
Расчетные условия стрельбы - углы закрытия позиции ЗРК равны нулю,
характеристики и параметры движения цели (ее эффективная отражающая
поверхность, скорость и др.) не выходят за заданные пределы, атмосферные
условия не мешают наблюдению цели.
Реализуемая зона поражения - часть зоны поражения, в которой обеспе-
чивается поражение цели определенного типа в конкретных условиях
стрельбы с заданной вероятностью
Зона обстрела - пространство вокруг ЗРК, в котором обеспечивается на-
ведение ракеты на цель.
Зона поражения изображается в параметрической системе координат и
характеризуется положением дальней, ближней, верхней и нижней границ.
Основные ее характеристики: горизонтальная (наклонная) дальность до
дальней и ближней границ dJDd) и ddD6), курсовая дальность до дальней и
ближней границ и Ц,минимальная и максимальная высоты и
предельный курсовой угол и максимальный угол места Горизон-
тальная дальность до дальней границы зоны поражения и предельный курсо-
вой угол определяют предельный параметр зоны поражения РпреА, т.е. макси-
мальный параметр цели, при котором обеспечивается ее поражение с вероят-
ностью не ниже заданной. Для многоканальных по цели ЗРК характерной
величиной также является параметр зоны поражения Рстра, до которого ко-
личество проводимых стрельб по цели не менее, чем при нулевом параметре
ее движения.
Типичное сечение зоны поражения вертикальной биссекторной и гори-
зонтальной плоскостями показано на рис. 12.27.
295
Положение границ зоны поражения определяется большим количеством
факторов, связанных с техническими характеристиками отдельных элементов
ЗРК и контура управления в целом; условиями стрельбы; характеристиками и
параметрами движения воздушной цели.
Положение дальней границы зоны поражения определяет потребную
дальность обнаружения СНР
Цютпрснр =Ld+ VJtprf + td), (12.54)
где - работное время (продолжительность операций с начала поиска цели
СНР до момента пуска ракеты);
/а - полетное время ракеты до дальней границы зоны поражения.
V’ б
Рис. 12.27. Зона поражения ЗРК
Если при каких-либо значениях эффективной отражающей поверхности,
скорости и высоты цели реализуемая дальность действия СНР оказывается
меньше потребной (Lew <Lno"PcHpL то это приведет к сокращению расчетной
зоны поражения ЗРК, т. е. к уменьшению предельной дальности стрельбы.
Положение реализуемой дальней и нижней границ зоны поражения ЗРК
может также зависеть и от рельефа местности. Из рис. 12.28 видно, что пре-
296
дельная дальность стрельбы по низколетящей цели (при условии ее ограни-
чения значением D) является функцией высоты и скорости цели, угла закры-
тия позиции и работного времени боевого расчета.
Зона пуска ЗУР. Чтобы встреча ракеты с целью произошла в зоне пора-
жения, пуск ракеты необходимо производить заблаговременно с учетом по-
летного времени ракеты и цели до точки встречи.
Рис. 12.28. Влияние кривизны Земли и рельефа местности
на дальность стрельбы
Зона пуска ракет - область пространства, при нахождении цели в которой
в момент пуска ракет обеспечивается их встреча в зоне поражения ЗРК. Для
определения границ зоны пуска необходимо из каждой точки зоны пораже-
ния отложить в сторону, обратную курсу цели, отрезок, равный произведе-
нию скорости цели V, на полетное время ракеты до данной точки. На
рис. 12.29 наиболее характерные точки зоны пуска обозначены буквами а', б‘,
в', г', д’.
Рис. 12.29. Зона пуска
При сопровождении цели СНР границы зоны пуска не вычисляются и не
отображаются. Во всех ЗРК автоматически вычисляются и отображаются на
экранах индикаторов текущие координаты точки встречи. Пуск ракеты про-
изводится при нахождении точки встречи в границах зоны поражения.
Гарантированная зона пуска - область пространства, при нахождении це-
ли в которой в момент пуска ракеты обеспечивается ее встреча с целью в зо-
не поражения независимо от наличия и вида противоракетного маневра. Гра-
297
ницы этой зоны определяются условием
где - полетное время до точки встречи;
- время, потребное цели для выхода за границы зоны поражения
путем резкого маневра.
Для каждой точки гарантированной зоны пуска it £
Определение дальности стрельбы по цели, летящей
с огибанием рельефа местности
Цель, летящая с огибанием рельефа местности (рис. 1230), может быть
обнаружена после выхода ее из области радиотени (после прохождения точ-
ки /V). Дальность до точки W зависит от профиля рельефа местности в районе
господствующего закрытия, угла закрытия и высоты полета цели относи-
тельно земной поверхности Нц1.
Рис. 12.30. Определение дальности стрельбы по цели,
летящей с огибанием рельефа местности
Реализуемая дальность стрельбы определяется в такой последовательно-
сти.
1. Для заданных значений работного времени ЗРК и скорости цели рас-
считывается потребная дальность обнаружения цели СНР при изменении по-
ложения точки встречи по всей глубине зоны поражения (от L* до LdY
Lnompt + V4(tpa6 + lt),
где Lt - дальность до точки встречи;
/« - полетное время ракеты до точки встречи.
Расчетные данные сводятся в табл. 12.5.
2. С использованием крупномасштабной карты и с учетом кривизны Зсм-
298
ли (величина понижения) строится профиль местности. При построении
профиля его горизонтальный масштаб, как правило, принимается равным
масштабу карты, а вертикальный масштаб - в десятки раз крупнее.
На профильный чертеж наносятся высота стартовой позиции (СП) hCn,
высота антенны h, проводятся линия горизонта ЗРК, а также линия прямой
видимости.
3. Измеряются удаления точек пересечения N, Nb N2. N„ траекторий
полета цели на расчетных высотах относительно линии прямой видимости.
Принимая эти дальности равными реализуемым дальностям обнаружения це-
ли СНР, входят в табл. 12.5 и по условию Ьснр.ргм - Uo^chp находят предель-
ную дальность стрельбы ЗРК по цели.
Таблица 12.5
Дальность встречи Полетное время ракеты Дальность пуска Потребная дальность обнаружения цели СНР
1б ^и.б=Д(5'*‘ ^б ЪпотрСИРб=2Ьг.б + Vfit роб
Ц t, ЬпотрСНР ^Ьп.г*- КХх>об
к L/пл— Ьл'Ь' Vч Гз Л—ДН"
Наличие чертежа профиля местности с проведенной линией прямой ви-
димости и табл. 12.5 позволяет быстро оценить минимальную высоту цели,
прн которой реализуется вся глубина зоны поражения.
Расчетные величины реализуемых дальностей стрельбы, как правило,
уточняются облетами ЗРК.
Возможности ЗРК по последовательному обстрелу целей
Возможности ЗРК по последовательному обстрелу целей, входящих в его
зону пуска, определяются его канальностью по цели, продолжительностью
цикла стрельбы и временем перезаряжания пусковых установок и подготовки
ракет к старту.
Цикл стрельбы - совокупность операций боевой работы зенитного ракет-
ного комплекса и боевого расчета подразделения, выполняемых при обстреле
одной цели. Цикл стрельбы характеризуется временем занятости целевого
канала комплекса при выполнении одной стрельбы по цели п ракетами. Это
время (У*) включает время непосредственной подготовки стрельбы {tpa6) и
время, необходимое на обстрел цели (/<*):
Л = (12.55)
где /вб = /< + /и(л-1) + /в,;
L - временной интервал между пусками ракет в очереди;
п - количество ракет в очереди;
ц- время оценки результатов стрельбы.
299
Время заряжания и подготовки ракет к старту Тзар влияет на возможно-
сти целевого канала по последовательному обстрелу цели, если
(12.56)
где Np - количество ракет на ПУ для данного целевого канала.
Возможность целевого канала ЗРК по повторному обстрелу одной и той
же цели п ракетами определяется условием
to6 + /,(л-1) <; Tnpt6, (12.57)’
где 7^ - время пребывания цели в зоне пуска.
Время Tnpt6 есть функция высоты полета цели Нц, курсового параметра
и скорости ее полета Оно превосходит время пребывания цели в зоне по-
ражения Тгп на разность полетного времени ракеты до дальней и -ближней
границ зоны поражения:
Л^=Г,и + (/э-/Д (12.58)
Перенос огня целевого канала ЗРК на вторую цель возможен, если вре-
менной интервал между обстреливаемыми целями (рис. 12.31)
Рис. 12.31. К определению возможности однократного переноса огня
В качестве показателей возможностей зрдн по последовательному об-
стрелу целей могут использоваться:
минимальный временной интервал между целями (Л/т(Л), при котором
обеспечивается их последовательный обстрел на заданном рубеже;
минимальный временной интервал между целями ПРИ котором
обеспечивается их последовательный обстрел с учетом глубины зоны пора-
жения;
число стрельб, которое может произвести зрдн за удар заданной продол-
жительности с учетом глубины зоны поражения (Na„p).
300
Для того чтобы каждая из последовательно входящих в зону пуска ЗРК
целей обстреливалась на заданном рубеже, необходимо выполнение условия
- для многоканальных ЗРК;
Д1т1Я> Тц - для одноканальных ЗРК,
где tnl - время поиска и захвата целей на сопровождение целевым каналом.
Минимальный временной интервал между целями, при котором обеспе-
чивается их последовательный обстрел с учетом глубины зоны поражения
можно определить по формулам:
. • Т - tu( п - 1)
4{min - lnj---с—Г7-----'»---- - для многоканальных ЗРК;
N4 - 1
At* Т Тпр~1и(П~1)
^пйп ~ ц.ср----------j------- Для одноканальных ЗРК.
Количество стрельб, которое может произвести зрдн за дар заданной
продолжительности с учетом глубины зоны поражения, можно определить
по формулам:
[Г
N стр - * + ent ] ’------------г - для многоканальных ЗРК;
I lnj J
л/ /□. ,\ТпР+т^-1и(п-1 Л
Ncmp = 1 + ent ] -1------------г - Для одноканальных ЗРК,
I J
где - длительность удара воздушного противника.
Огневая производительность комплекса - количество стрельб в единицу
времени. Определяет возможную плотность зенитного ракетного огня под-
разделения (/7Л.) при отражении удара воздушного противника
----для одноканатьных по цели ЗРК;
(12.60)
- для многоканальных по цели ЗРК,
где К - число целевых каналов комплекса.
Если процесс боевой работы многоканального по цели ЗРК включает по-
следовательные операции с наибольшей занятостью каждого целевого канала
(как правило, это поиск и захват цели на сопровождение) 1п.з>Тц/К, то
301
Классификация целей по признаку наблюдения
их на экранах РЛС и виды огня
В практике стрельбы зенитными управляемыми ракетами для определе-
ния характерных особенностей воздушных целей используют следующие по-
нятия.
Одиночная цель - самолет или другое СВН, наблюдаемое на экранах ин-
дикаторов РЛС в виде одной отметки.
Групповая цель - несколько самолетов или других СВН, наблюдаемых
хотя бы на одном из индикаторов РЛС в виде наложенных друг на друга от-
меток.
Возможности деления целей на одиночные и групповые во многом зави-
сят от разрешающей способности РЛС, способности и натренированности
операторов. Для групповых целей характерны повышенная флуктуация и
увеличенные размеры отметки, своеобразный характер флуктуации отметки,
повышенная дальность обнаружения и др.
Группа целей - несколько самолетов или других СВН, одновременно на-
блюдаемых на экранах индикаторов РЛС в виде одиночных целей.
Маневрирующая цель - летательный аппарат, изменяющий хотя бы один
из параметров (скорость, высота, курсовой параметр) движения в процессе
подготовки и ведения стрельбы.
Противоракетный (противозенитный) маневр цели по времени и месту
выполнения принято делить на маневр против управления и маневр против
стрельбы.
Маневр против управления - маневр, совершаемый одиночной целью
или группой самолетов, действия которых согласованы по времени и месту
до дальней границы зоны пуска ЗРК. Может осуществляться как одиночной
целью, так и группой самолетов, действия которых согласованы по времени и
месту. Маневр выполняется с задачей затруднить управление огнем, непо-
средственную подготовку стрельбы и тем самым снизить количество стрельб
и их эффективность или отвлечь действия зенитных средств.
Маневр против стрельбы - маневр, совершаемый целью после пуска по
ней ракеты. Осуществляется с задачей избежать встречи с ракетой или сни-
зить эффективность стрельбы.
Барражирующая цель - цель, совершающая полет по характерным замк-
нутым траекториям в определенном районе.
Цель-постановщик помех - намеченный для поражения самолет или дру-
гое СВН, создающее активные помехи станциям разведки или каким-либо
элементам ЗРК (системам сопровождения цели и ракеты, радиолиниям
управления и связи и др.).
Цель под прикрытием помех - намеченный для поражения самолет или
другое СВН, летящее под прикрытием активных помех, созданных передат-
чиками помех, установленными на других самолетах (ЛА), на наземных ус-
тановках, кораблях и др.
Под воздействием активных помех может происходить искажение, мас-
кировка или потеря полезного сигнала.
302
Тип цели, ее состав, координаты и параметры движения, способы проти-
водействия и их эффективность определяют выбор режима боевой работы
ЗРК, способа сопровождения цели, метода наведения, вида огня, назначение
расхода ракет, выбор момента пуска ЗУР.
Вид огня, порядок пуска ракет при обстреле цели
Применяют огонь одиночными ракетами и огонь очередью ракет.
Огонь одиночными ракетами - вид огня, при котором пуск последующей
ракеты по цели производится после оценки результатов стрельбы по ней пре-
дыдущей ракетой. Применяется при длительном пребывании цели в зоне
пуска и отсутствии необходимости в переносе огня на другую цель.
Огонь очередью ракет - вид огня, при котором цель обстреливается на-
значенные количеством ракет с установленными интервалами между их пус-
ками. Темп пуска ракет исключает возможность предварительной оценки ре-
зультатов стрельбы каждой ракетой. Время пребывания воздушной цели в
зоне поражения ЗРК, как правило, весьма ограничено. Поэтому первая оче-
редь ракет должна обеспечивать надежное уничтожение цели.
Порядок подготовки и ведения стрельбы по воздушным целям в различ-
ных условиях обстановки определяют правила стрельбы. Они содержат ре-
комендации: по оценке воздушного противника, своих средств; по выбору
целей для уничтожения, режимов боевой работы, методов наведения; по под-
готовке исходных данных для стрельбы; по назначению расхода ракет и виду
огня; по выбору моментов пуска ЗУР; по оценке результатов стрельбы и др.
Их применение должно обеспечить наибольшую эффективность и экономич-
ность стрельбы.
123. УПРАВЛЕНИЕ ОГНЕМ ПОДРАЗДЕЛЕНИЙ ЗРВ
123.1. Сущность и содержание управления огнем
Управление огнем зенитных ракетных подразделений - важнейшая со-
ставная часть управления их боем и представляет собой совокупность меро-
приятий (функций управления), осуществляемых в целях наиболее полного
использования огневых возможностей подразделений при отражении удара
СВН противника. Оно включает: уяснение задачи на уничтожение СВН,
оценку обстановки, принятие решения на отражение удара воздушного про-
тивника, постановку задач подразделениям на уничтожение воздушных це-
лей, контроль за выполнением поставленных задач и оценку результатов ве-
дения боя.
Противовоздушный бой исключительно скоротечен и динамичен. Поэто-
му управление огнем осуществляется в условиях чрезвычайно ограниченного
времени и строится на разумном сочетании централизации и самостоятельно-
го ведения огня подразделениями.
303
Под уяснением задачи на уничтожение СВН понимается уяснение замыс-
ла решения старшего командира на отражение удара воздушного противника,
своей роли в отражении удара и своих задач по уничтожению целей.
В результате уяснения задачи устанавливается, какие воздушные цели
необходимо уничтожить самостоятельно и во взаимодействии с другими си-
лами и средствами ПВО.
Оценка обстановки включает оценку воздушной обстановки (воздушного
противника и действий своих самолетов), радиоэлектронной обстановки, со-
стояния и возможностей своих подразделений, взаимодействующих сил и
средств, условий ведения огня.
Оценка воздушного противника включает: во-первых, определение обще-
го характера и замысла налета, состава сил и средств, основных направлений
и возможной продолжительности удара, решаемых задач и относительной
важности целей; во-вторых, оценку каждого средства воздушного нападения
как цели для зенитных ракетных подразделений: ее состава, скорости и высо-
ты полета, курсового параметра относительно позиций подразделений, под-
летного времени, способов противодействия управлению и стрельбе.
Определение относительной важности цели непосредственно связано с
оценкой ее тактической значимости в данном налете, значимости факта
уничтожения для решения боевой задачи зенитным ракетным подразделени-
ем.
Наиболее важными целями являются баллистические цели, крылатые ра-
кеты различного предназначения, самолеты ударных групп и радиоэлектрон-
ной борьбы, а также самолеты, осуществляющие огневое подавление зенит-
ных ракетных подразделений. В составе ударной группы наиболее важными
являются цели - возможные носители наибольшего потенциала средств по-
ражения объекта.
Оценка способов противодействия воздушным противником управлению
и стрельбе производится на основе анализа их характерных признаков, на-
блюдаемых на индикаторах РЭС, а также оценки характера изменения пара-
метров движения целей.
Оценка радиоэлектронной обстановки осуществляется путем анализа
информации о наличии помех и степени их мешающего воздействия на РЭС
разведки ЗРК, а также путем прогнозирования возможности постановки по-
мех противником.
В результате оценки радиоэлектронной обстановки командир делает вы-
воды о ее влиянии на ведение разведки воздушного противника, управление
огнем и стрельбу, определяет наиболее целесообразные режимы и способы
боевой работы по целям.
Оценка состояния и возможностей своих подраздезений производится
путем анализа непрерывно поступающей от них информации (докладов и до-
несений) о состоянии и боевой деятельности на основе глубокого знания ко-
мандиром боевых свойств и характеристик вооружения, а также уровня
подготовки боевых расчетов.
304
В результате оценки своих хюдразделений командир определяет, что он
может в каждый момент боя противопоставить воздушному противнику, ка-
кие действия он должен предпринять, чтобы выполнить боевую задачу.
Оценка взаимодействующих сил и средств производится путем анализа
информации, поступающей с вышестоящего КП. от соседних подразделений,
своих средств разведки. В результате этого анализа командир определяет, в
какой степени боевые действия соседей способствуют выполнению боевой
задачи, как обеспечить безопасность полетов своих самолетов, уточняет спо-
собы взаимодействия.
Условия ведения огня (время года и суток, метеорологические условия,
естественные и искусственные помехи и др.) оцениваются с точки зрения их
влияния на режимы боевой работы ЗРК, способы обстрела целей, положение
реализуемых границ зон поражения, продолжительность цикла стрельбы,
эффективность стрельб и др.
Решение на отражение удара воздушного противника принимается ко-
мандиром на основе уяснения задачи на уничтожение СВН противника и
оценки обстановки. Оно включает: замысел боя, распределение огня по воз-
душным целям (какие цели, какими подразделениями и в какой последова-
тельности уничтожать), уточнение способов взаимодействия с другими си-
лами и средствами ПВО, рубежи и порядок постановки задач на уничтожение
воздушных целей.
В основе замысла боя с воздушным противником, наносящим удар по
обороняемому объекту (войскам), лежит определение наиболее важных це-
лей и порядка их уничтожения.
Главное в решении при управлении огнем - распределение огня подраз-
делений по воздушным целям (целераспределение).
Постановкой задач на уничтожение воздушных целей решение команди-
ра доводится до подразделений. Задача включает целеуказание (определение
местоположения цели в пространстве), команду на уничтожение цели и ука-
зание о порядке ведения огня. Предельное сокращение времени постановки
задач подразделениям достигается применением сигналов, коротких распо-
ряжений, максимальным использованием средств автоматизации.
При контроле за выполнением поставленных задач необходимо убедить-
ся в правильности захвата ЗРК целей, назначенных для уничтожения. Это
достигается сравнением на КП координат целеуказания и координат обнару-
женной и сопровождаемой комплексом цели.
Уяснение задачи, оценка обстановки, принятие решения, постановка за-
дач подразделениям при отражении удара группы СВН противника осущест-
вляются, как правило, непрерывно и одновременно (по разным целям) с уче-
том особенностей ведения боя в тот или иной момент времени.
Факторы, определяющие эффективность и устойчивость управления ог-
нем подразделений.
Эффективность и устойчивость управления - основные требования к
управлению огнем подразделений.
305
Обобщенным показателем эффективности управления огнем принято
считать отношение числа уничтоженных СВН (МУНичт) при отражении удара
воздушного противника к числу СВН (NMax), которое могло бы быть унич-
тожено при максимальном использовании огневых возможностей подразде-
лений с учетом важности целей:
N
KTV=-^~. (12.61)
Nmax
Важность целей учитывается весовыми коэффициентами.
Эффективность централизованного управления огнем определяется: оп-
тимальностью распределения огня по воздушным целям (целераспредсле-
ния), точностью выдачи целеуказания, своевременностью постановки задач
подразделениям на уничтожение воздушных целей (оперативностью управ-
ления).
Оптимальным вариантом распределения огня (целеуказания) является
такой вариант, который максимизирует число уничтоженных СВН с учетом
их важности, т.е. обеспечивает наибольшую эффективность выполнения бое-
вой задачи.
Оптимальность распределения огня (целераспределения) характеризуется
коэффициентом (Kv), представляющим собой отношение числа распреде-
ленных СВН (Nllp) к числу оптимально распределенных СВН (Уопт), которое
могло бы быть при полном использовании огневых возможностей подразде-
лений:
NUD
= (1262)
Точность выдачи целеуказания определяет вероятность беспоискового
обнаружения цели, назначенной для уничтожения данным ЗРК. Если значе-
ние этой вероятности близко к единице, то по данным целеуказания цель об-
наруживается без поиска и работное время подразделения определяется вре-
менем, потребным для подготовки стрельбы ЗУР. При этом также исключа-
ется возможность перепутывания целей подразделениями.
При необходимости поиска цели время, затрачиваемое на ее обнаруже-
ние. зависит от поисковых возможностей станции наведения ракет.
Оперативность управления огнем характеризует своевременность приня-
тая решения и постановки огневых задач подразделениям, т.е. возможность
выполнения задач по наличию времени. Требование оперативности управле-
ния огнем определяет положение рубежей постановки задач подразделениям
(рубежей целеуказания). Удаление такого рубежа от позиции подразделения
(рис. 12.32) равно:
для обстрела цели на дальней границе зоны поражения
^ЦУд = do + Уч(!раб +1д )> (12.63)
для обстрела цели на ближней границе зоны поражения
306
+ (12.64)
где dd (d6 )- дальность до дальней (ближней) границы зоны поражения;
1раб ~ работное время подразделения;
(t6 ) - полетное время до дальней (ближней) границы зоны
поражения.
Рис. 12.32. Положение дальнего и ближнего рубежей постановки задач
на уничтожение целей (рубежей целеуказания)
Оперативность управления огнем достигается созданием потребной глу-
бины радиолокационной разведки; правильной организацией, слаженной и
четкой работой боевого расчета КП, при которой на цикл управления расхо-
дуется минимум времени; сокращением работного времени ЗРК за счет по-
вышения точности целеуказания с КП и выучки личного состава.
Потребная дальность радиолокационной разведки целей составляет
^обнлотр ~^ЦУ + ljan )• (12.65)
где tKn - работное время КП, осуществляющего управление огнем
подразделений (время с момента отображения информации о цели
на средствах отображения КП до момента выдачи ЦУ по ней
в подразделение);
1зал ~ время запаздывания информации о цели (время с момента
обнаружения цели станцией разведки и целеуказания до момен-
та отображения информации о ней на средствах
отображения КП).
Требование оперативности управления не означает целесообразности
преждевременной постановки задач подразделениям на уничтожение воз-
душных целей. Заблаговременная постановка задач подразделениям повыша-
ет эффективность противодействия СВН противника управлению и стрельбе
(маневра, радиоэлектронных помех, огневого подавления и т. д.).
307
Устойчивость управления огнем обеспечивается живучестью и помехо-
защищенностью систем управления и связи, гибким ислользованием различ-
ных вариантов управления (с различной степенью централизации), высокой
выучкой боевых расчетов.
Распределение огня подразделений по воздушным целям (целераспреде-
ление).
Распределение огня подразделений по воздушным целям составляет ос-
нову решения командира на их уничтожение. Решение должно формулиро-
ваться с учетом степени важности целей.
При распределении огня используются расчетные способы оценки обста-
новки и решения задачи целераспрсделения, выработанные принципы и ча-
стные правила управления огнем, интуиция, логическое мышление и опыт
командира.
Правила распределения огня
Наиболее общими из них являются:
уничтожение целей с учетом их важности. При распределении огня необ-
ходимо оценивать воздушные цели по степени их важности (тактической
значимости), обеспечивая надежный обстрел наиболее важных из них;
наибольшее соответствие основного предназначения ЗРК. назначаемого
для уничтожения цели, ее характеристикам и параметрам движения. Этим
обеспечивается наибольшая эффективность стрельб;
уничтожение целей на предельных дальностях стрельбы, а маневрирую-
щих - с учетом гарантированных зон пуска. При этом достигается максими-
зация количества стрельб, обеспечивается уничтожение воздушных целей на
возможно больших удалениях от обороняемого объекта (войск), повышается
эффективность обстрела маневрирующих целей;
сосредоточение огня по целям во всех случаях, когда это возможно;
назначение каждому подразделению такого количества целей, сколько
стрельб оно может провести в данных условиях обстановки;
учет предложений нижестоящего КП при наличии у него в данной обста-
новке более полной информации. Решение, не соответствующее реальной об-
становке, не является оптимальным. Поэтому от наличия и качества инфор-
мации о целях в той или иной командной инстанции зависят степень центра-
лизации управления огнем и характер принимаемых решений.
12.3.2. Автоматизация процесса управления огнем подразделений в
средствах управления части ЗРВ
Максимальный эффект в решении задачи распределения огня подразде-
лений по целям из состава удара достигается при использовании на КП спе-
циализированных вычислительных средств (ВС), основной задачей которых
является выработка для боевого расчета машинных рекомендаций по целе-
распределению.
308
Основу программного обеспечения специализированных ВС в составе
современных средств управления (СУ) АКП отечественного и зарубежного
производства составляют так называемые программы управления.
Общие сведения о программном обеспечении ВС СУ
Специализированные ВС в составе СУ, как правило, предназначены для
решения следующего объема задач:
автоматического захвата и сопровождения целей и пеленгов ПАП по дан-
ным источника РЛИ;
полуавтоматического захвата целей, пеленгов ПАП и пеленгов по обла-
кам пассивных помех;
автоматического распределения целей и пеленгов на ЗРК;
автоматической выдачи на ЗРК данных ЦУ по целям и пеленгам;
автоматизированной выдачи на ЗРК данных ЦУ по целям, пеленгам ПАП
и пеленгам по облакам пассивных помех по командам операторов КП;
определения государственной принадлежности целей;
отработки команд операторов по управлению средствами системы;
отображения внешней обстановки и контроля за боевыми действиями
средств системы;
взаимодействия с вышестоящим командным пунктом (ВКП) и соседними
КП;
вывода оперативной информации на печатающее устройство по оконча-
нии боевой работы;
тренировки боевых расчетов КП и подразделений.
Структурно программное обеспечение ВС состоит из комплекса относи-
тельно самостоятельных программ, каждая из которых направлена на реше-
ние конкретной специфической задачи из перечисленного объема.
Программы управления, как правило, представлены в виде самостоятель-
ных и логически взаимосвязанных программных модулей, обеспечивающих
решение частных задач в составе общей задачи управления огнем подразде-
лений. К этим частным задачам относятся:
обработка информации от источников радиолокационной информации
(РЛИ).
обработка информации о состоянии и фазах боевой работы ЗРК.
подготовка данных и решение задачи целераспределения (ЦР).
выдача команд управления на ЗРК.
подготовка и выдача команд управления на подчиненные источники и
информации;
подготовка и выдача информации на ВКП и соседние КП.
Состав и взаимодействие модулей при решении задач управления огнем
подразделений показаны на рис. 12.33.
309
Рис. 12.33. Состав и взаимодействие модулей программ управления ВС СУ
Задача управления огнем подразделений, основу которой составляют
программы целераспределения и целеуказания, в ВС СУ решается автомати-
чески, а боевой расчет командного пункта системы контролирует и при необ-
ходимости оперативно вмешивается в процесс ее решения на любой стадии.
При этом в алгоритмах ЦР и ЦУ в общем случае реализуются следующие
правила и ограничения:
движение аэродинамических целей принимается равномерным и прямо-
линейным, а баллистических - по баллистической траектории;
отбор целей для ЦР производится по зонам поражения ЗРК;
назначение зрдн производится только нате цели, сопровождение которых
обеспечивается в рабочем секторе станции наведения ракет (СНР) ЗРК до
момента их поражения;
темп решения задачи ЦР равен темпу обновления информации, посту-
пающей от источника РЛИ в режиме сопровождения целей;
целеуказание выдается на зрдн автоматически при наличии не менее двух
совпадающих решений в смежных циклах ЦР (одного - по маловысотным
целям);
в процессе сопровождения зрдн одновременно нескольких целей автома-
тически корректируется положение биссектрисы рабочего сектора его СНР;
самолеты с признаком “свой” автоматически исключаются из процесса
целераспределения;
назначение зрдн на цель для уничтожения и выдача ЦУ осуществляется
автоматически при прохождении целью расчетного рубежа целеуказания;
при невозможности стрельбы зрдн и отсутствии команд от операторов
КП переназначение целей осуществляется автоматически;
310
при работе зрдн по самостоятельно обнаруженным маловысотным целям
их действия автоматически координируются через СУ КП ЗРС;
автоматическое назначение дублирующих воздействий по наиболее
опасным целям (маловысотным и баллистическим);
учет рельефа местности при выборе зрдн и определении времени выдачи
ЦУ по цели;
автоматическое назначение и корректировка направлений ответственно-
сти зрдн;
автоматическая координация действий по целям при взаимодействии с
соседними КП;
сохранение за боевым расчетом приоритета в принятии решений;
индикация на средствах отображения СУ машинных рекомендаций по ЦР
иЦУ.
Управление огнем зрдн осуществляется, как правило, с использованием
автоматического способа захвата и сопровождения целей при автоматиче-
ском способе решения задач ЦР и ЦУ.
Содержание программы обработки РЛИ от различных источников
В основу работы этой про!раммы положен алгоритм вторичной и элемен-
тов третичной обработки информации от источника РЛИ, результатом рабо-
ты которого является формирование единого массива трасс (ЕМТ) целей, со-
держащего информацию обо всех целях, сопровождаемых КП. Информацией
для решения задачи вторичной обработки служат отметки автоматического
съема данных (АСД), поступающие от источника РЛИ, и отметки опознава-
ния, поступающие от наземного радиолокационного запросчика (НРЗ).
Информация обо всех отметках после прохождения специального кон-
троля запоминается в отдельном массиве памяти ЦВК для последующей об-
работки. Основной задачей специального контроля является исключение из
дальнейшего анализа отметок АСД, не удовлетворяющих конкретно сформу-
лированным требованиям по их достоверности.
Оставшиеся отметки АСД подвергаются процедуре математического
стробирования. Размеры математических стробов при этом совпадают с раз-
мерами физических стробов. Если же отметка АСД не попадает ни в один из
стробов имеющихся трасс целей, то по этой отметке заводится новая трасса.
В дальнейшем отметки в стробах подвергаются обработке согласно алгорит-
му отбора ближайшей к центру строба отметки, в результате чего выбирается
угметка, по которой обновляется информация по трассе.
При выставке оператором СУ сектора ручного захвата (СРЗЦ) отметки
ЧСД из него поступают в ЦВК с соответствующим признаком, запоминаются
j самостоятельном массиве памяти и используются для полуавтоматического
захвата целей в этом секторе. Автоматическая завязка трасс по ним не произ-
юдится. По мере старения (t > эти отметки из массива исключаются.
Отметки АСД с признаком пеленга для источника РЛИ запоминаются
акже в двух отдельных массивах. Первый из них предназначен для полуав-
оматического захвата пеленга оператором, а второй используется для реше-
311
ння задачи автозахвата и автосопровождения пеленга. Выбор отметки для
обновления информации по трассе пеленга производится так же как и в слу-
чае с обычными трассами, за исключением того, что математическое строби-
рование отметок ведется только по угловым координатам.
Отметки опознавания запоминаются в специально выделенном массиве
памяти ЦВК и используются на этапе работы алгоритма принятия решения о
государственной принадлежности цели.
Сформированный массив отметок АСД используется в дальнейшем для
решения задачи автозахвата (АЗ) и автосопровождения (АС) цели.
Автозахват и автосопровождение цели
Критерием автозахвата трассы цели является поступление трех отметок в
четырёх последовательных полупсриодах обзора при обязательной второй
отметке. Последнее условие связано с необходимостью расчета в этот период
времени значений скорости изменения соответствующих координат цели и
вектора ее путевой скорости.
По каждой прошедшей отбор отметке заводится новая трасса с координа-
тами, равными координатам отметки, и скоростями их изменения, равными
нулю. По этой трассе назначаегся строб захвата первого рода, размеры кото-
рого определяются с учетом максимального перемещения цели за полупери-
од обзора источника РЛИ. Вторая отметка от цели поступает с номером
строба, в котором она обнаружена. По ней обновляются координаты трассы,
вычисляются скорости их изменения и рассчитываются координаты экстра-
полированной точки для назначения строба захвата второго рода. Трасса ос-
тается на этапе автозахвата, а третья и все последующие отметки по трассе
отбираются аналогично второй отметке.
Этап автозахвата. На этапе автозахвата производится контроль каждой
трассы с целью определения возможности ее дальнейшего сопровождения
или принятия решения на сброс трассы. На этапе автозахвата трасса сбрасы-
вается, если скорость цели выходит за пределы допустимых значений
а также если она близка к какой-либо трассе, находящейся на
автосопровождении (дублирующая трасса). В процессе АС трассы критерием
ее сброса является наличие двух пропусков отметок подряд, а для баллисти-
ческих целей - трех.
Трасса цели, прошедшая этап автозахвата переводится в режим автосо-
провождения и ей ставится в соответствие номер цели из списка свободных
номеров. По трассе назначаются стробы автосопровождения с номером, рав-
ным номеру цели этой трассы.
Каждой новой сформированной трассе присваивается свой номер КП, под
которым цель отображается на индикаторах и участвует в обмене КП со все-
ми внешними источниками РЛИ. В начальный момент все номера считаются
свободными. При переводе трассы в режим сопровождения по данным любо-
го источника РЛИ на КП ей присваивается первый свободный номер из об-
щего списка. При сбросе трассы ее номер освобождается и записывается в
конце очереди свободных номеров. Если при появлении новой цели выясня-
312
стся, что массив целей переполнен (более целей), то производится реви-
зия целей, находящихся на сопровождении СУ. В ходе ревизии сопровож-
даемая цель с наибольшим подлетным временем сравнивается по этому па-
раметру с вновь захваченной целью и наименее опасная из них исключается
из процесса нумерации.
Автосопровождение трассы можег осуществляться с различным темпом в
зависимости от ее текущей дальности, а также от типа и тактической важно-
сти.
Селекция баллистических целей. В процессе АС целей, начиная с фикси-
рованного рубежа, производится селекция баллистических целей.
При дальности цели, большей этого рубежа (например, 120 км), и време-
ни существования трассы более 30 с цель считается баллистической, если
вертикальная составляющая ее ускорения близка к ускорению свободного
падения (пассивный участок). При дальности цели, меньшей этого рубежа,
цель считается баллистической, если выполняется предыдущее условие или
если высота полета цели и горизонтальная составляющая ее скорости пре-
вышают заданные пороги, что характерно для активного участка полета ТБР
с дальностью запуска 100... 150 км.
Автосопровождение пеленгов. Логика захвата и автосопровождения пе-
ленгов на постановщики помех имеет некоторые отличия по сравнению с уже
рассмотренными целями. Автоматический захват пеленга возможен только в
том случае, если отметка АСД пеленга находится вне пределов сектора руч-
ного захвата, выставленного оператором на одном из рабочих мест управле-
ния работой источника РЛИ. При поступлении отметки АСД пеленга, не по-
падающей ни в один математический строб существующих трасс, по ней за-
водится новая трасса. Если в течение последующего времени поступит
вторая отметка АСД пеленга, попадающая в математический строб завязан-
ной трассы, то ей присваивается соответствующий номер и она переводится в
режим автосопровождения. В противном случае отметка пеленга остается на
этапе завязки трассы. Вместе с тем. если в секторе ручного захвата операто-
ром выполнены все критерии полуавтоматического захвата пеленга, а в сле-
дующем периоде обзора приходит отметка АСД с признаком пеленга и она
попадает в математический строб завязанной оператором трассы, то эта трас-
са переводится на автоматическое сопровождение.
Автосопровождение трассы пеленга. Автосопровождение трассы пеленга
отличается от автосопровождения обычной трассы тем, что стробирование
отметок производится только по азимуту и углу места. Фильтрация отметок
по трассе пеленга производится также только по угловым координатам по
принципу обычных трасс.
Сглаженные координаты любого из указанных типов целей, полученные
после фильтрации, запоминаются в специальном массиве координат целей по
данным источника РЛИ, а затем рассматривается необходимость переписи
этих координат в единый массив трасс (ЕМТ).
Этап третичной обработки РЛИ, С учетом особенностей боевого порядка
группы дивизионов и группировки ЗРВ в районе ПВО обнаружение и сопро-
313
вождение каждой цели в составе удара возможно, как правило, несколькими
источниками РЛИ. Поэтому в основу работы СУ КП ЗРС, как правило, закла-
дывается принцип использование информации от наиболее достоверного ис-
точника РЛИ.
С учетом этого на этапе третичной обработки РЛИ координаты цели, по-
ступающие от каждого радиолокационного источника РЛИ, запоминаются в
специально отведенном для него массиве памяти ЦВК. Наличие такой ин-
формации обеспечивает сокращение числа ложных трасс, повышение точно-
сти выдачи ЦУ, что достигается регулярным проведением операции отожде-
ствления трасс и выбора при этом наиболее точного источника РЛИ для их
сопровождения.
Так как трассы, сопровождаемые СНР зрдн, не считаются ложными, то
отождествление между ними не производится.
Координаты ЦУ для зрдн вычисляются в системе координат, привязан-
ной к его точке стояния. В качестве координат ЦУ могут использоваться
данные от соседних СНР. источника РЛИ, соседних и вышестоящего КП.
При выдаче СНР зрдн признака АС цели (по данным ЦУ или по само-
стоятельно захваченной) в СУ производится отождествление захваченной
СНР цели с целями, сопровождаемыми любым из перечисленных источников
РЛИ до первого отождествления. При этом в СУ координаты цели и скорости
их изменения, полученные от этих источников РЛИ, приводятся к единому
моменту времени, производится вычисление их взвешенных отклонений и
сравнение с порогами, величина которых зависит от типа источника РЛИ.
В программе ВС СУ не производится отождествление различных целей,
которые сопровождаются одной СНР. так как в алгоритмах ЦВК реализован
принцип, в соответствии с которым разные целевые каналы однозначно не
могут сопровождать одну и ту же цель. Отождествление целей СУ произво-
дится только при первом поступлении от СНР донесения о присвоении ей
признака автоматического сопровождения с точными координатами, при по-
следующих донесениях о данной цели производится только обновление ко-
ординат и скоростей их изменения по данным СНР.
Одновременное сопровождение целей несколькими источниками РЛИ.
Для более надежного сопровождения отдельных целей организуется их одно-
временное сопровождение несколькими источниками РЛИ (СНР и источник
РЛИ). К таким целям относятся:
баллистические;
постановщики специальных видов помех для СНР (не маскирующих ко-
ординату' дальности);
цели, сопровождаемые операторами СНР.
В этом случае после отождествления координат в СУ цель сопровождает-
ся по данным СНР и источника РЛИ (соседнего КП, ВКП). В случае потери
цели СНР ее сопровождение продолжается по данным этих источников РЛИ
с ранее присвоенным номером. Переход СУ на новый источник РЛИ осуще-
ствляется по выработанному автоматически признаку СНР "Координаты не-
314
достоверные". Этот признак вырабатывается в том случае если СНР нб мо-
жет восстановить сопровождение цели по своим внутренним данным.
Сформированный таким образом на КП ЗРС единый массив трасс (ЕМТ)
представляет собой информацию обо всех автоматически сопровождаемых
целях при условии сопровождения каждой цели с использованием данных от
наиболее важного источника РЛИ.
На основе ЕМТ в дальнейшем производится решение основной задачи
боевых алгоритмов - задачи ЦР и ЦУ.
Содержание программ решения задач
целераспределеяня и целеуказания
Основной задачей программы ЦР является формирование на основе еди-
ного массива трасс (ЕМТ) массивов целей трех видов:
упорядоченного массива целей для решения задачи ЦР (МОЦ);
массива целей, который может быть распределен на рассматриваемый
зрдн (МР):
массива целеуказания для рассматриваемого зрдн (МЦУ).
Количество массивов второго и третьего видов соответствует количеству
боеготовых ЗРК.
Программа формирования упорядоченного массива целей для ЦР (МОЦ).
В рамках этой программы решаются следующие задачи:
отбор целей по зонам поражения ЗРК;
группирование целей в строи;
вычисление подлетного времени цели для каждого ЗРК и обобщенного
подлетного времени;
отбор целей для ЦР и ранжирование их по обобщенному подлетному
времени.
Действие программы начинается с операции отбора из всех целей ЕМТ,
находящихся на сопровождении КП, только тех, которые могут быть обстре-
ляны хотя бы одним зрдн и по которым не ведутся успешные действия своих
и соседних зрдн. Под успешными понимаются действия зрдн по цели, при
которых выполнены условия ее обстрела по зоне поражения и рабочему сек-
тору СПР.
Отбор целей производится по зонам поражения каждого боеготового зрдн
(признак боеготовности /-го зрдн //w-*0). Считается, что /-я цель может быть
обстреляна зрдн, если ее высота полета Ht <11^, курсовая дальность относи-
тельно координат точки стояния зрдн > 0, а параметр ее движения
Р}1 < Pimax- В результате такого анализа каждой отобранной цели присваива-
ется признак %=1. Логика решения задачи отбора представлена на
рис. 12.34.
Отобранные таким образом цели проходят процедуру группирования
(формирования компактных групп).
Процедура группирования. При этом возможны два варианта. Первый ва-
риант соответствует случаю, когда группа целей действительно действует в
315
составе определенного строя, а второй когда случайным образом произошло
близкое пространственное расположение отдельных целей в составе удара.
Количество сформированных таким образом строев записывается в па-
мять ВС. для каждого строя указывается его номер, количество целей в
строю и номер головной цели. При распределении в дальнейшем таких про-
странственно близких целей выбор зрдн производится только по головной
цели группы, остальные цели этой группы распределяются по возможности
на этот же ЗРК.
Для каждой из отобранных таким образом целей производится расчет
подлетного времени до ближней границы зоны поражения тех (/-х) зрдн,
которые могут ее обстрелять, т.е.
где L)t - курсовая дальностьу-й цели относительно /-го зрдн;
Lb, - курсовая дальность до ближней границы зоны поражения /-го зрдн:
Уцг- горизонтальная составляющая скорости у-й цели.
Рис. 12.34. Логика отбора целей в состав ЕМТ по зонам поражения ЗРК
По полученному массиву подлетных времен каждой цели рассчитывается
ее обобщенное (среднее) подлетное время Т0К] с учетом количества зрдн,
способных ее обстрелять по параметрам зоны поражения, как
/ к
Т0Б) (12.67)
316
где К - количество ЗРК, в зоны поражения которых входит рассматриваемая
цель.
В результате этой операции формируется неупорядоченный массив целей
каждая из которых характеризуется своим значением То%- Из этого массива
целей производится целенаправленный отбор тех целей, которые могут и
должны в дальнейшем участвовать в процедуре целераспределения. При этом
этап отбора не проходят цели, если:
по ним выдано ЦУ;
они назначены лицами боевого расчета;
их трассы не сформированы для ЦР;
они имеют признаки: "оповещение”, "запрета действий", "свой", W;(=0,
7'о£)=0;
по ним отсутствует замер высоты;
их скорость имеет значение менее Vy min;
по ним нет обновления информации более установленного промежутка
времени.
После этого неупорядоченный по Ток, массив целей, прошедших отбор
для проведения операции ЦР, подвергается процедуре ранжирования, т.е.
упорядочения их величины обобщенного подлетного времени, начиная с его
минимального значения, а затем по мере возрастания до максимального зна-
чения. В результате образуется упорядоченный массив целей для проведения
операции целераспределения или так называемый массив очередности целей
(МОЦ).
Программа Формирования массива распределения целей на ЗРК (МР).
Основное содержание этой программы заключается в формировании для
каждого ЗРК самостоятельного массива целей (МР), похожего на МОЦ, но
включающего только тс цели, которые могут быть обстреляны данным зрдн,
т.е. имеющие признак %=1.
Пример формирования массивов распределения, для ситуации, отобра-
женной на рис. 12.34, представлен в табл. 12.6.
Таблица 12.6
^ЧДель ЗР!Г\ 05 09 21
1 Wos, - -
2 wos.2 w21.2
3 - - W21._3
4 W05-4 Wom
Полученный таким образом для каждого ьго зрдн массив распределения
в каждом цикле обновления информации подвергается контролю и корректи-
ровке за счет внесения или вычеркивания из него отдельных целей. Пример-
ный порядок внесения (вычеркивания) целей из МР заключается в следую-
щем. Если в процессе перебора списка целей, сформированного для рассмат-
317
риваемого зрдн. будет найдена цель с большим значением Тоб^ чем у рас-
сматриваемой цели, то последняя займет ее место.
В результате проведения указанных операций для каждого зрдн форми-
руется список целей, на первом месте в котором стоит цель, готовая к уча-
стию в решении задачи закрепления ее за зрдн, имеющим наилучшие условия
по ее обстрелу. Решение указанной задачи начинается при условии, что цель
прошла заданный рубеж ЦР.
Программа формирования массива ЦУ для каждого ЗРК (МЦУ).
В результате действия этой программы достигается основная цель реше-
ния задачи ЦР, т.е. формирование для каждого зрдн списка целей, которые он
может обстрелять наиболее эффективно по сравнению с другими зрдн (с уче-
том принятого критерия ЦР - максимального числа уничтоженных целей за
минимальное время). При этом решаются задачи расчета времени выдачи ЦУ
на ЗРК, формирования команд управления и принятия решения на оконча-
тельное закрепление цели за конкретным зрдн.
Действие программы начинается с выбора из МОЦ цели с минимальным
значением ТОб^ т.е. стоящей во главе списка всех целей, сопровождаемых
СУ. После этого по номеру выбранной цели (/) определяется ьй зрдн, для ко-
торого рассматриваемая цель имеет минимальное значение подлетного вре-
мени. Для выбранного таким образом зрдн производится решение задачи оп-
ределения номера канала цели СНР для закрепления рассматриваемой цели.
Выбор капаю цели. В процессе выбора канала цели реализуется следую-
щая логика работы. Вначале с учетом регламента ЦР, количества каналов, за-
резервированных для размножения ЦУ по групповой цели, для ведения само-
стоятельных боевых действий и боезапаса ракет оценивается количество ка-
налов из числа боеготовых (исправных), на которые может быть выдано ЦУ.
Число каналов, на которые может быть выдано ЦУ, ограничено сверху
наименьшим из трех параметров:
числом каналов, регламентируемых для ЦР;
числом исправных каналов;
числом каналов, которые можно использовать исходя из боезапаса ракет.
Каналы цели, на которые может быть выдано ЦУ, ранжируются в поряд-
ке их освобождения, а для выдачи очередного ЦУ выбирается канал с мини-
мальным временем освобождения (Тосв)- Расчет времени освобождения ка-
нала производится с учетом следующих его возможных состояний:
канал исправен и свободен;
канал исправен и ведет обстрел ранее закрепленной цели;
канал неисправен.
В первом случае время освобождения канала принимается равным нулю.
Во втором случае время освобождения канала вычисляется в зависимости
от фазы боевых действий по цели. В алгоритме учитываются следующие фа-
зы боевых действий:
БД-1 - канал свободен;
БД-2 - ЦУ принято, производится поиск цели;
БД-3 - есть признак сопровождения цели по угловым координатам;
318
БД-4 - есть признак сопровождения цели по координатам Д, V, <рц, <рв‘.
БД-5 - произведен пуск ракет го цели.
Работное время, необходимое иа смену фазы от ее текущего номера до
последней фазы (tj.j), устанавливается фиксированным в каждом типе СУ.
Расчет времени освобождения канала. Время освобождения канала цели
рассчитывается по логике, представленной на рис. 12.35, с использованием
зависимости:
Тосв -Ттек + 1ц.тв> (12.68)
где 1цтв= 1ртв + - время полета цели до точки встречи с ЗУР;
tp тв- время полета ЗУР до точки встречи.
Тоа =TTCx+tuTB’ пе tuTB=tpTB+t
Рис. 12.35. Логика расчета времени освобождения целевого канала
Если канал цели неисправен, то время его освобождения по отношению к
текущему времени принимается равным нескольким минутам. Это фиктив-
ное время периодически обновляется до момента ввода канала в строй.
Время освобождения каждого канала цели запоминается и используется
при проведении процедуры ранжирования каналов и расчета момента выдачи
на них ЦУ.
Расчет момента времени формирования ЦУ (Г^) на целевой канал про-
изводится по логике, представленной на рис. 12.36, с использованием зависи-
мости
Тцу - Ттек + (1ц.тв~ ip.ra) + - 1раб> (12.69)
где tpAE - учитываемое ВС постоянное значение времени, необходимого
для учета отработки ЦУ и захвата цели СНР зрдн.
Тцу “Т,« +1ожхд+МцТВ-1рПМ_,р«б
Рис. 12.36. Логика расчета момента времени формирования целеуказания
Наличие рассчитанного значения времени формирования информации
ЦУ и времени освобождения целевого канала позволяет по их соотношению
определить возможность реализации этого ЦУ в заданное время (Тцу). Если в
расчетное время реализация ЦУ невозможна, то ВС производит расчет вре-
мени ожидания как to* - Т(х:в - Тцу и с учетом его уточняет значение нового
времени выдачи целеуказания (Тцу).
Если в рассматриваемом йм зрдн свободные каналы цели отсутствуют
или обстрел целей с учетом Тосв любого из каналов невозможен, то данная
цель исключается из рассмотрения для этого зрдн и для нее выбирается дру-
гой зрдн, способный ее обстрелять.
При наличии возможности обстрела рассматриваемой цели данным зрди
на следующем этапе проверяется условие совместности сопровождения ее
СНР с целями, ранее выданными на зрдн и сопровождаемыми его СНР.
Варианты боевой работы. Цели считаются совместно сопровождаемы-
ми, если на момент выдачи целеуказания и на момент встречи с ними ЗУР
они будут находиться в рабочем секторе СНР. При этом возможны два вари-
анта ведения боевой работы:
без доворота рабочего сектора СНР;
в результате доворота рабочего сектора СНР.
Во втором варианте дополнительно производится корректировка времени
выдачи ЦУ с учетом времени, необходимого на доворот рабочего сектора
СНР.
В варианте автоматического управления приводом СНР с СУ для реше-
ния задачи проверки на совместность сопровождения производится вычисле-
ние азимутов целей, по которым работает дивизион, на текущий момент и на
момент точки встречи, а также азимут цели, по которой предполагается вы-
дача ЦУ, на момент его выдачи и момент точки встречи. Из полученного
320
массива чисел выбираегся максимальное и минимальное значения азимута
(fimau Ртщ) И ПРОИЗВОДИТСЯ Проверка выполнения условия
Если данное условие выполняется, то проверяемая цель не считается со-
вместно сопровождаемой с целями, по которым уже работает дивизион. Если
же условие не выполняется, то новая цель считается совместно сопровож-
даемой, но дополнительно оценивается необходимость доворота рабочею
сектора СНР. При этом доворот рабочего сектора СНР считается необходи-
мым, если одно из полученных значений (р^ и р^) будет находиться за
пределами рабочего сектора СНР. В этом случае производится расчет нового
азимута биссектрисы рабочего сектора СНР по зависимости
Рбнс.нов = 1/2 (Рпах + Р,^) (12.70)
но с таким расчетом, чтобы угловое расстояние между Р^ и Рбнс.нов не пре-
вышало 45°, т.е. чтобы реализовывался принцип минимального отклонения
биссектрисы рабочего сектора СНР от ранее заданного направления ответст-
венности.
По полученному значению Рбнс.нов рассчитывается требуемый угол (J/3)
и время доворота рабочего сектора СНР по следующим зависимостям:
ЛР = (Рекс.те к - Pate поп): (12.71)
\2ДР
(12.72)
где Рпр - фиксированное значение ускорения движения привода СНР по ази-
муту на этапах разгона или торможения, определяемое ВС в зависимости от
фазы боевой работы СНР, град/с2.
Доворот рабочего сектора СНР осуществляется без ограничения по ази-
муту или в пределах заданного с СУ ограниченного сектора и должен быть
закончен до подхода цели к рубежу выдачи ЦУ. так как в момент прихода
ЦУ цель должна находиться в секторе СНР. В связи с этим дополнительно
производится вычисление относительного времени доворота рабочего секто-
ра СНР (Тдов = Ттек 4- 1дов) и проверка возможности совершения доворота до
расчетного времени выдачи ЦУ (7’дов ^Тцу).
Если условие выполняется, то рассматриваемая цель считается совместно
сопровождаемой с целями, по которым уже работает СНР. При невыполне-
нии условия для рассматриваемой цели пересчитывается новое время выдачи
ЦУ, соответствующее ему время задержки выдачи ЦУ и время полета ЗУР до
новой точки встречи. По полученной точке встречи снова производится про-
верка на совместность сопровождения с учетом нового значения времени вы-
дачи ЦУ.
Пример решения задачи. Логика решения задачи определения угла дово-
рота рабочего сектора СНР показана на примере, представленном на
рис. 12.37.
321
Пример решения задачи определения требуемого угла доворота рабочего
сектора СНР представлен для следующих исходных данных:
Рвис.твГ 60°. /!,„„= 39°, р^ 126°.
В приведенном примере условие = 126°-39°= 87°< с,„.. что
свидетельствует о наличии возможности доворота рабочего сектора СНР.
При этом новое значение азимута биссектрисы рабочего секгора составит
Рб.см. = OSiP™ + = 05(126 + 39) = 825°,
а величина угла доворота
^Р = \Р^. = -60° =22,5°
при времени доворота
'дов =^45/0,Г21-2с Л»-
Рис. 12.37. Логика расчета угла доворота рабочего сектора СНР
В варианте ручного дистанционного управления приводом СНР с СУ. ко-
гда исключен автоматический доворот сектора СНР, ширина сектора выдачи
ЦУ на СНР также принимается равной dflcrK„ СНР. Для проверки условия со-
вместности сопровождения в этом варианте производится вычисление азиму-
та цели на моменты выдачи ЦУ и точки встречи и последовательно проверя-
ется выполнение условий:
a s а л. А0естРПИ . и о а. А&с<ктРПП
Рцу s Рбис:тек ---2----’ ?ТВ s ^БИС ~-------2----’
Только при выполнении этих условий новая цель считается совместно
сопровождаемой с целями, по которым работает зрдн.
322
В результате программа обеспечивает ориентацию рабочего сектора СНР
в азимутальном направлении таким образом, чтобы обеспечивалось условие
принадлежности этому сектору всех целей, обрабатываемых на данный мо-
мент времени. В случае возникновения конфликтной ситуации предпочтение
отдается целям с наибольшим значением фазы боевых действий или вызы-
вающим меньшее уклонение сектора от направления ответственности.
Оценка возможности обстрела цели. Цель, прошедшая проверку на со-
вместность сопровождения, подвергается проверке на возможность ее об-
стрела рассматриваемым ЗРК с учетом углов закрытия в окрестности его по-
зиции. В ЗРС отдельных типов обеспечена возможность ввода в ВС СУ зна-
чений углов закрытия в определенном количестве секторов. Логика решения
задачи учета ВС СУ углов закрытия представлена на рис. 12.38.
Рис. 12.38. Логика расчета момента времени выдачи целеуказания
с учетом углов закрытия
Варианты учета углов закрытия. Возможны три варианта результата ре-
шения данной задачи:
угол закрытия зрдн на направлении движения цели не ограничивает
дальность прямой видимости на высоте ее полета и ЦУ по ней может быть
выдано в расчетный момент времени;
угол закрытия ограничивает дальность прямой видимости цели СНР на
расчетный момент выдачи ЦУ, но сс обстрел возможен до момента выхода на
ближний рубеж ЦУ. В этом случае решается задача расчета времени ожида-
ния выдачи ЦУ (!ож) и корректировки расчетного времени Тцу на величину
1ож (Тцу = Тцурдсч + 1ож)\
угол закрытия ограничивает дальность прямой видимости цели СНР, а
скорректированное время ЦУ с учетом 1ОЖ приводит к тому, что обстрел цели
323
зрдн возможен на дальности меньшей положения ближней границы зоны по-
ражения. В этом случае производится поиск другого зрдн, способного об-
стрелять эту цель, или, в крайней ситуации, цели может быть присвоен при-
знак прохождения зоны огня без воздействия.
Прошедшая все этапы отбора у-я цель закрепляется за /-м зрдн. Анало-
гичным образом проводится анализ всех целей, сопровождаемых КП.
В конечном итоге за каждым зрди из массива целей, предназначенных
для него на предварительном этапе отбора (МР), закрепляются только те це-
ли, которые он действительно способен обстрелять с учетом наличия и заня-
тости целевых каналов, возможностей по совместному сопровождению целей
и их обстрелу с учетом рельефа местности.
В результате решения этой задачи обеспечивается предварительное рас-
пределение дивизионов по целям при условии, что каждая цель будет об-
стреливаться одним конкретным дивизионом.
Приоритетность выбора зрдн. Рассмотренный процесс решения задачи по
/•й цели (первой по значению T^j в ЕМТ) и /-му ЗРК (для которого j-я цель
имеет минимальное подлетное время) повторяется дополнительно и по всем
остальным боеготовым зрдн. После этого по данной цели выбирается зрдн с
наилучшими условиями работы (обстрела цели). При этом учитывается ряд
дополнительных критериев в порядке их приоритета:
значение отклонения сектора СНР от направления ответственности, вы-
зываемое распределением рассматриваемой цели;
достаточность запаса боекомплекта ракет;
значение времени, оставшегося до точки встречи (расчетный момент по-
ражения цели);
наличие на обработке у зрдн ЦУ по пеленгу на ПАП по результатам пре-
дыдущего ЦР;
величина разности времен полетного времени ракеты до расчетной точки
встречи с целью и до ближней границы зоны поражения .
С учетом этих критериев может появиться возможность корректировки
момента выдачи ЦУ то распределенным целям- в сторону уменьшения, т.е.
более ранней выдачи ЦУ.
Корректировка момента выдачи ЦУ. В результате решения оптимизаци-
онной задачи закрепленные за каждым зрдн цели представляют собой массив
целеуказания (МЦУ) для каждого зрдн. Указанные массивы целеуказаний за-
поминаются в специально выделенных массивах памяти ВС и отображаются
в виде формуляров ЦР на средствах отображения СУ для анализа их Лицами
боевого расчета.
До наступления момента выдачи ЦУ по каждой конкретной цели в каж-
дом цикле обновления информации МЦУ подвергается контролю и коррек-
тировке по логике решения рассмотренной задачи целераспределения. Зада-
чей подобного контроля является поиск наиболее выгодного варианта пере-
распределение целей между зрдн с точки зрения увеличения дальности
поражения каждой цели.
324
Для исключения возможности реализации случайного ЦУ в алгоритме
ЦР, как правило, принимается двойной цикл распределения. Если цель в двух
смежных циклах рекомендуется одному и тому же зрдн, то она за ним и за-
крепляется. Исключение составляют только маловысотные цели (Нц<А км),
по которым решение принимается в течение одного цикла, а в некоторых
случаях и баллистические цели.
По окончании решения задачи распределения всех целей МОЦ на основ-
ные зрдн может решаться задача назначения дублирующих воздействий по
наиболее важным целям. Данная задача решается, как правило, только по
близким маловысотным и баллистическим целям. Указанные цели автомати-
чески распределяются с выдачей ЦУ по возможности на два зрдн. Решение
задачи производится в два такта. На первом такте по принятому алгоритму
выбирается основной дивизион. На втором такте выбирается второй (дубли-
рующий) дивизион по такому же алгоритму, но с условием, что этот второй
зрдн свободен (имеет свободные КЦ) или рассматриваемая цель не конкури-
рует с целями, рассматриваемыми для дублирующего зрдн в качестве основ-
ных.
Автоматическое распределение пеленгов. При автоматическом распреде-
лении на зрдн пеленгов ПАП источник РЛИ используется описанный выше
механизм распределения целей с учетом ряда особенностей. Положение пе-
ленга ПАП в ЕМТ среди других целей определяется априорно выбранным и
присвоенным ему значением подлетного времени, которое впоследствии
корректируется и формируется с использованием-информации, полученной
по результатам обработки пеленга зрдн. Проверка принадлежности точки
встречи рабочему сектору зрдн не производится, так как для пеленга она не
рассчитывается. При проверке на возможность совместного сопровождения с
другими целями расчетные положения цели на момент выдачи ЦУ и на мо-
мент встречи с ЗУР заменяются ближней и дальней точками (Ш, П2) поиска
зрдн по линии пеленга (рис. 12.39).
Рис. 12.39. Логика поиска целей 1-м зрдн по пеленгу ПАП источнику РЛИ
325
Критерий выбора зрдн, на который распределяется пеленг ПАП источ-
ника РЛИ, основан на анализе возможностей зрдн, основными из которых
являются:
отсутствие боезапаса ЗУР;
максимальное количество свободных целевых каналов;
минимальное количество целей, сопровождаемых СУ в пространстве
просмотра пеленгового направления СНР зрдн;
минимальный угловой размер сектора поиска СНР по линии пеленга.
Выдача ЦУ на зрдн для поиска по линии -пеленга ПАП источника РЛИ
производится в расчетный момент времени, когда Ттек=Твыд.цу- Основным
критерием отмены ЦУ по пеленгу является безрезультатный поиск зрдн на
линии пеленга в течение фиксированного промежутка времени. Повторное
распределение пеленга на данный зрдн производится не ранее установленно-
го времени после окончания предыдущего цикла поиска и при наличии сво-
бодных каналов цели. Кроме того, при выдаче целеуказания по пеленгу не
производится проверка наличия рубежа выдачи целеуказания.
Содержание программы взаимодействия СУ с ЗРК
в различных условиях обстановки
Обмен информацией между СУ и ЗРК производится циклами с указанием
его номера. В ходе обмена информацией для обеспечения работы алгоритма
ЦР ЦВК СУ получает от ЗРК следующую информацию о состоянии и теку-
щих действиях:
боеготовность;
боезапас ракет;
фаза боевых действий по каждой сопровождаемой цели;
режим управления приводом антенного поста СНР;
азимутальное положение биссектрисы рабочего сектора СНР;
режим сопровождения цели зрдн.
Перечисленная информация используется для прогнозирования времени
занятости целевых каналов ЗРК, проверки возможности совместного сопро-
вождения распределяемых целей с целями, по которым уже работает зрдн.
Взаимодействие СУ и СНР при работе по пеленговой информации
Задачей отработки зрдн ЦУ по пеленгу ПАП источнику РЛИ или пеленгу
другой СНР является вскрытие рассматриваемой СНР постановщика помех и
(или) прикрываемых им целей. При этом СНР производит поиск целей на на-
правлении пеленга в секторе с заданными границами. Вариант решения по-
добной задачи ранее представлен на рис. 12.39.
Для предотвращения захвата целей, сопровождаемых другими СНР и не
лежащих на пеленге, но находящихся в секторе поиска СНР по пеленгу в мо-
мент отработки ЦУ, на СНР перед выдачей ЦУ выдаются бланки захвата по
этим целям. По целям* сопровождаемым по данным источник РЛИ, бланки
326
захвата на СНР не передаются. Но, если при отработке ЦУ по пеленгу, СНР
обнаруживает и захватывает на сопровождение цель, сопровождаемую СУ по
данным источника РЛИ, то ВС СУ решает задачу оценки целесообразности
ее обстрела этим зрдн. При положительном решении цель остается на сопро*
вождении СНР для обстрела, в противном случае на СНР по этой цели пере-
даются команда ’’Отмена ЦУ" и бланк захвата (см. рис. 12.39).
Аналогичным образом осуществляется взаимодействие между КП ЗРС и
СНР при выдаче и отработке ЦУ по линии пеленга пассивной помехи. Если
границы сектора поиска по облаку пассивной помехи, установленные опера-
тором СУ, не соответствуют возможностям СНР по реализации принципа со-
вместности сопровождения целей, то оператором дополнительно произво-
дится корректировка положения дальней границы облака пассивной помехи.
При обнаружении СНР на линии пеленга и захвате на сопровождение
ПАП в диапазоне рабочих частот СНР ВС СУ возможно решение задачи ор-
ганизации координатной поддержки стрельбы зрдн по ПАП (т.е. определения
дальности до ПАП и выдачи ее значения в канал цели, сопровождающий
ПАП).
Одним из способов решения этой задачи при наличии пересечения пелен-
га СНР с пеленгом другого СНР или пеленгом источника РЛИ является вы-
числение положения триангуляционной точки на пересечении двух пеленгов
(рис. 12.40).
Рис. 12.40. Организация координатной поддержки стрельбы зрдн по ре-
зультатам решения триангуляционной задачи (источник РЛИ - СНР)
При однозначном решении задачи триангуляции в формуляре цели ото-
бражается условный символ, например, буква ИТ". При отсутствии возмож-
ности решения триангуляционной задачи в указанном формуляре цели ото-
бражается другой символ, например, "Ж" (рис. 12.40).
327
Организация взаимодействия КП ЗРС и зрдн
по маловысотным и наземным целям
При сопровождении СНР зрдн самостоятельно обнаруженных маловы-
сотных целей ЦВК СУ автоматически производит передачу координат этих
целей на СНР всех боеготовых зрдн с задачей бланкирования самостоятель-
ного захвата ими этих целей. Если же оператор СУ осуществляет выдачу ЦУ
в ручном режиме по такой цели другому зрдн для решения задачи сосредото-
чения огня, то бланкирование с нее для данного дивизиона автоматически
снимается.
1233. Постановка задач подразделениям на уничтожение
воздушных целей
Задача на уничтожение цели включает целеуказание (ЦУ), приказ унич-
тожить цель и при необходимости указание о порядке ведения огня. При ис-
пользовании в составе КП СУ выдача сигнала ЦУ обычно принимается рав-
нозначной постановке задачи.
Возможные способы целеуказания:
при автоматизированном управлении:
автоматическое наведение луча на цель, назначенную для
уничтожения. Способ обеспечивает выдачу целеуказания без потери времени
и с высокой точностью. Точность выдачи ЦУ определяется ошибками изме-
рения координат цели станциями разведки, ошибками их съема и ввода в
ЦВК системы управления. В современных СУ данный способ целеуказания
является основным;
привязка к отметке воздушной цели на индикаторах передаю-
щего и принимающего целеуказания единого номера или выдача на индика-
тор принимающего ЦУ условного знака. Способ применяется при наличии
соответствующих технических средств отображения и передачи данных;
при неавтоматизированном управлении:
по квадратам сетки ПВО - целеуказание осуществляется переда-
чей номера квадрата, в котором находится проекция цели в данный момент.
Сетка наносится на планшеты и индикаторы командных пунктов, осуществ-
ляющих и принимающих целеуказание. Квадраты сетки определенным обра-
зом нумеруются. Точность выдачи ЦУ по индикаторам ограничивается ценой
малого квадрата, а по планшетам зависит и от времени запаздывания, и от
точности отображения на них данных воздушной обстановки;
передачей азимута, дальности и высоты цели - трансфор-
мация данных целеуказания, как правило, осуществляется принимающим
ЦУ;
по ориентирным направлениям (странам света). Обычно прини-
мается: 1 - север, 2 - восток, 3 - юг, 4 - запад, 12 и 14 - северо-восток и севе-
ро-запад; 32 и 34 - юго-восток и юго-запад;
328
по взаимному положению целей - способ сводится к указанию
положения отметки данной цели относительно отметок других целей, наблю-
даемых на экранах индикаторов. Перепутывание целей достоверно исключа-
ется лишь при относительно малом удалении передающего и принимающего
ЦУ или учете этого удаления при отображении воздушной обстановки.
При всех способах ЦУ выдающий и принимающий целеуказание должны
убедиться в правильности обнаружения и захвата цели ЗРК. Это достигается
сравнением координат цели (квадрата сетки, взаимного положения), относи-
тельно которой ставится задача на уничтожение воздушной цели, с коорди-
натами (квадратом сетки, взаимным положением) обнаруженной и взятой на
сопровождение воздушной цели.
123.4. Особенности управления огнем подразделений части ЗРВ при
отражении удара оперативно-тактических ракет
Анализ объектов, составляющих цели и задачи первого массированного
удара воздушного противника в ходе проведения им воздушно-наземной на-
ступательной операции в приграничном (приморском) районе ПВО, и опыт
конфликта в районе Персидского залива позволяют сделать вывод о том. что
в полосе, удаленной от государственной границы (линии боевого соприкос-
новения - ЛЕС) на 100... 180 км, а в перспективе до 200...300 км и более, за-
дачи по их уничтожению будут решаться при Широком применении вероят-
ным противником оперативно-тактических ракет (ОТР) различных типов.
Особенности подготовки стрельбы по ОТР и управления огнем
В процессе подготовки стрельбы и управления огнем зрдн для решения
задачи отражения удара ОТР по обороняемому объекту командир полка дол-
жен оценить:
возможности полка по ведению разведки баллистических целей;
возможности зрдн по обстрелу баллистических целей, летящих по раз-
личным траекториям в реализуемом противником диапазоне углов их паде-
ния, с учетом положения зрдн в боевом порядке относительно объекта обо-
роны.
Решение данной задачи возможно при наличии у командира следующего
объема информации о противнике:
тип ОТР. используемых противником (d^Y,
положение ПУ ОТР относительно линии боевого соприкосновения (Lny)
и удаление объекта обороны от ЛЕС );
наиболее вероятное направление появления ОТР.
В результате оценки этой информации определяются границы области
возможного появления БЦ (потребной области разведки), которые характери-
зуются величиной ракетоопасного сектора по азимуту и ожидаемыми
углами падения БЦ (0mbt, 0^).
329
Величина ракетоопасного сектора по азимуту определяется в соответст-
вии с выражением 12.81 (рис.12.48).
При заданном удалении позиции пусковых установок относительно объ-
екта удара реализуемый диапазон углов падения ОТР характеризуется мини-
мальным и максимальным углами их падения (0т|Я, рассчитанными в
соответствии с выражением 12.78 (рис. 12.45).
Левая и правая границы зоны обороны определяются значением предель-
ного курсового параметра (Р^).
Приведенные соотношения позволяют достаточно точно оценить грани-
цы зоны обороны только при навесных и оптимальных траекториях полета
БЦ. Порядок решения этой задачи рассмотрен на конкретном примере.
Пример. По данным оперативной разведки батарея ТР типа "Ланс"
(rfnux=125км) начала развертывание на позиции, расположенной под азиму-
том 98° и на удалении 109 км от объекта, обороняемого группой дивизионов
в составе командного пункта и трех зенитных ракетных дивизионов.
Оценить возможности группы дивизионов по ведению разведки балли-
стических целей (БЦ).
Решение:
1. Расчет размеров ракетоопасного сектора (ДрроУ.
- ( ^пу + ^лбс "1 о (80+29\
I J I 125 )
58?.
2. Расчет диапазона углов падения БЦ (рис. 12.45):
^] = 30°-
\ <*тах ) х 125 J
ff^=9(f-3<f=6lf.
Таким образом, в данной тактической обстановке область воздушного
пространства, в которой возможно появление БЦ, в вертикальной плоскости
ограничена углами места 30 и 60°, а в горизонтальной плоскости - азимутом
левой и правой границ ракстоопасного сектора:
А~ ^72 ^8~58/2 = 69°;
*Л?г°/2 = = 127°.
Данная область представляет собой потребную зону разведки БЦ средст-
вами группы дивизионов (рис. 12.41).
Сравнение размеров этой зоны с реализуемыми размерами сектора ис-
точника РЛИ КПС, используемого при обнаружении БЦ, позволяет команди-
ру группы дивизионов принять решение на организацию разведки ТР.
В ситуации, рассмотренной в примере, реализуемые размеры этого сек-
тора не обеспечивают ведение разведки ТР в пределах потребной зоны раз-
ведки как по максимальному углу падения ТР (60°), так и по ширине ракето-
опасного сектора (58°).
330
Данный факт требует от командира группы дивизионов привлечения к
ведению разведки ТР СНР зрди. При этом он должен определить для каждого
зрдн начальные значения угла места назначаемого сектора автономного об-
наружения и его биссектрисы. Вариант решения может иметь вид. представ-
Рис. 12.42. Вариант построения системы разведки ТР
с использованием СНР зрдн
331
В рассматриваемом примере решение на привлечение СНР для ведения
разведки ТР является оправданным, так как ТР типа “Ланс" имеет макси-
мальное значение скорости полета, не превышающее ее предельное значение.
Анализ параметров зоны обороны зрдн и ее положения относительно
точки стояния дивизиона показывает, что они в большой степени зависят от
реализуемой в данных условиях траектории полета ОТР.
Наиболее вероятным вариантом отражения удара ОТР полком будет та-
кой, когда ее боевой порядок будет адаптирован к решению задач противо-
самолетной обороны (объектовый характер обороны). В этом случае по от-
ношению к направлению удара ОТР часть зрдн в боевом порядке может ока-
заться за объектом обороны, а остальные - перед ним.
При принятии решения на оборону объекта необходимо дополнительно
решить задачу или выбора рациональных удалений позиций зрди от объекта,
или оценки возможностей каждого из зрдн в существующем боевом порядке
по реализации их огневых возможностей.
Одним из основных показателей огневых возможностей зрдн является
количество стрельб (Nctp), проводимое за время удара воздушного противни-
ка заданной продолжительности (Гуд). С учетом конфигурации зоны пораже-
ния ЗРК данный показатель при прочих равных условиях зависит от положе-
ния позиции зрдн (Lcn) относительно объекта обороны (точка прицеливания
ОТР) по направлению До. Примерный характер такой зависимости для за-
данной траектории ОТР представлен на рис. 12.43 .
Рис. 12.43. Зависимость N„,p от удаления позиции дивизиона от объекта
Для заданной величины Ncn> по приведенной зависимости можно опре-
делить диапазон допустимых значений удаления зрдн от объекта (£<//). при
которых он выполнит поставленную задачу. Для условий, приведенных на
рис. 12.42(оптимальная траектория полета ОТР), зрдн обеспечит выполнение
боевой задачи с проведением не менее трех стрельб при удалении его пози-
ции на 16 км впереди объекта (+Lcn) или на 22 км позади него (- /<л).
Применение противником настильных траекторий ОТР (6^=20°) обеспе-
чивает проведение указанного количества стрельб при удалении позиций
(Lcn), превышающих их нормативные значения, используемые для построе-
332
ния боевого порядка группировки ЗРВ для целей противосамолетной оборо-
ны.
При выполнении задачи ведения тактической ПРО из боевого порядка,
адаптированного к ведению противосамолетной обороны, командир, оценив
реализуемые противником траектории (диапазон углов), должен конкретизи-
ровать задачу каждому зрдн с учетом его положения в боевом порядке груп-
пировки и указать лицам боевого расчета СУ порядок выдачи ЦУ в зрдн,
обеспечивающий максимальную реализацию их огневых возможностей с
учетом конкретной траектории падения БЦ.
Выбор места источника РЛИ СУ в позиционном районе полка должен
также осуществляться с учетом достаточно большого числа противоречивых
факторов. При этом его расположение должно обеспечить требуемые даль-
ности обнаружения ОТР, при запуске их с максимальной дальности, и свое-
временную выдачу информации ЦУ на зрдн. Кроме того, КПС должен раз-
мещаться вне прикрываемого объекта, обеспечивать качественную работу
средств связи, а также находиться под прикрытием зрдн в общей системе ог-
ня группировки.
Наиболее критичным из этой суммы факторов является фактор своевре-
менности выдачи ЦУ зрдн для максимальной реализации их огневых воз-
можностей. Критичность этого фактора состоит в том, что он накладывает
серьезные ограничения на величину выноса позиции зрдн относительно по-
зиции КП ЗРС в направлении ожидаемого удара ОТР. При этом вынос пози-
ции зрдн вперед по отношению к КП ЗРС на расстояние, большее определен-
ного значения при вполне определенной дальности обнаружения ОТР источ-
ником РЛИ, приводит к ограничению реализуемой зоны поражения по
максимальным дальностям стрельбы.
При значительном выносе КП ЗРС относительно позиции зрдн вперед
может наступить ограничение по ближней границе зоны поражения, так как
минимально реализуемая дальность выдачи ЦУ в этом случае будет обеспе-
чивать обстрел ОТР только в районе дальней границы зоны поражения ЗРК.
Указанные обстоятельства приводят к необходимости проведения допол-
нительной оценки возможностей источника РЛИ до ведению разведки ОТР
или выбора для него соответствующей позиции.
С точки зрения максимальной реализации потенциальных возможностей
источника РЛИ по обнаружению ОТР на предельных дальностях позицию
КПС предпочтительно выбирать на максимально возможном удалении от
биссектрисы ракетоопасного сектора вплоть до расположения ее на фланге
группировки.
333
12.4. ОСНОВЫ ПОДГОТОВКИ И ВЕДЕНИЯ БОЕВЫХ ДЕЙСТВИЙ
ЗЕНИТНЫМИ РАКЕТНЫМИ ЧАСТЯМИ (ПОДРАЗДЕЛЕНИЯМИ)
12.4.1. Некоторые положения тактики зенитных ракетных
частей (подразделений)
Принципы боевого применения зенитных ракетных частей (войск)
Основные принципы боевого применения зенитных ракетных войск
включают две категории принципов. Это, принципы, характерные только для
тактики соединений и частей ЗРВ, и принципы, раскрывающие с учетом
особенностей боевых действий зенитных ракетных войск ряд частных прин-
ципов общей тактики. Сформулированные на основе теоретических иссле-
дований и обобщения опыта войск они служат руководящим началом прак-
тической деятельности командиров и штабов, предопределяя способы бое-
вого применения зенитных ракетных частей и соединений, особенности
организации и ведения ими боевых действий.
На современном этале развития зенитных ракетных войск противовоз-
душной обороны страны основные принципы их боевого применения форму-
лируются следующим образом:
постоянная высокая боевая готовность к безусловному выполнению бое-
вой задачи;
уничтожение воздушного противника на подступах к обороняемым объ-
ектам до рубежей выполнения им задачи;
сосредоточение основных усилий на обороне важнейших объектов, на
наиболее вероятных направлениях и высотах действий противника;
согласованное совместное применение ЗРК (ЗРС) различного типа и ис-
пользование для обороны объектов (районов) бригад и полков смешанного
состава;
тесное взаимодействие зенитных ракетных бригад и полков с истреби-
тельной авиацией и другими войсками и силами ПВО;
целесообразное сочетание при отражении ударов воздушного противника
централизованного управления с самостоятельным ведением боя дивизиона-
ми;
внезапность, непрерывность, активность и решительность действий;
решительный маневр силами и средствами;
заблаговременное создание, умелое использование и своевременное вос-
становление резервов;
всестороннее обеспечение боевых действий.
Постоянная высокая боевая готовность полка ЗРВ означает его спо-
собность организованно и своевременно вступить в бой и в любых условиях
обстановки выполнить поставленную боевую задачу.
Комплексный характер содержания боевой готовности требует и ком-
плексного подхода к организации и проведению на системной основе всех
мероприятий по ей повышению.
334
Важнейшими среди этих мероприятий для зенитных ракетных войск яв-
ляются: заблаговременное планирование боевых действий и правильное по-
нимание командирами и штабами своих задач; заблаговременное (а для мо-
бильных полков и групп дивизионов - в установленные сроки) развертывание
в боевой порядок и создание систем огня, разведки и управления; укомплек-
тованность, и обеспеченность всем необходимым для ведения боя; постоян-
ная готовность вооружения и боевой техники к боевому применению, а лич-
ного состава - к выполнению боевой задачи; высокая выучка боевых расче-
тов; высокая мобилизационная готовность; четкая организация и несение
боевого дежурства; установление сроков приведения подразделений в готов-
ность номер один с учетом подлетного времени; своевременность и органи-
зованное приведение в высшие степени боевой готовности.
Уничтожение воздушного противника на подступах к обороняемым
объектам до рубежей выполнения им задачи (РВЗ) - основополагающий
принцип организации зенитной ракетной обороны и ведения боевых дейст-
вий частями и соединениями ЗРВ. Только при реализации этого принципа
обеспечивается защита обороняемых объектов и выполнение поставленных
боевых задач (не допустить удара противника по объектам и группировкам
ВС). Это достигается совместным применением дивизионов различного типа,
выносом их зон поражения за РВЗ и ведением огня на встречных курсах и на
максимальных дальностях.
Рубеж выполнения задачи противником есть рубеж, при достижении ко-
торого авиация противника способна применить по обороняемому объекту
средства поражения, не уничтожаемые бригадой (полком) или уничтожаемые
с недостаточной эффективностью, а беспилотные средства (крылатые ракеты,
ударные БЛА и др.) - нанести поражение объекту при их уничтожении.
Удаление РВЗ от границ обороняемого объекта зависит от высоты и ско-
рости полета целей, применяемых ими средств поражения. При построении
ЗРО необходимо определять и учитывать совокупность всех возможных ру-
бежей. представляющих некоторую область выполнения задачи противни-
ком.
Сосредоточение основных усилий на обороне важнейших объектов, на
наиболее вероятных направлениях и высотах действий противника - специ-
фическое определение одного из общих принципов военного искусства -
принципа решительного сосредоточения усилий на важнейших направлениях
(в районах) в решающий момент для выполнения главных задач.
Сосредоточение усилий зенитных ракетных войск для обороны от ударов
с воздуха важнейших объектов и районов страны достигается выделением
для обороны основных сил и средств ЗРВ, уплотнением и эшелонированием
боевых порядков бригад; применением вооружения, обладающего наиболь-
шими возможностями по уничтожению воздушного противника; планирова-
нием и осуществлением маневра полков и дивизионов; увеличением запаса
ракет с обычными и ядерными боеприпасами; использованием резерва.
335
Оборона объекта должна быть круговой, но это не исключает необходи-
мости в зависимости от конкретных условий сосредоточения усилий на том
или ином направлении или диапазоне высот.
Особое внимание следует обращать на обеспечение наибольших
возможностей борьбы на предельно малых и малых высотах, особенно в
условиях сложного рельефа местности.
Согласованное совместное применение ЗРК (ЗРС) различного типа и
использование для обороны объектов (районов) бригад и полков смешанного
состава - частный принцип тактики ЗРВ, определяющий важнейшее направ-
ление совершенствования зенитной ракетной обороны на современном этапе
ее развития. Этот принцип имеет свою объективную основу и отражает дей-
ствие закона зависимости способов и форм вооруженной борьбы от свойств
оружия и боевой техники.
Процесс противоборства средств нападения с воздуха и средств ПВО
происходит непрерывно. В настоящее время противник располагает разнооб-
разнейшим арсеналом средств воздушного нападения и может наносить уда-
ры по обороняемым объектам в широком диапазоне высот и скоростей поле-
та с использованием различных средств поражения и особенно высокоточно-
го оружия (бомб, ракет «воздух- земля», управляемых бомб и др.), с
применением огневого и радиоэлектронного подавления группировок ЗРВ.
Опыт локальных войн показал, что в условиях все возрастающей скоро-
течности и плотности ударов воздушного противника требовали' надежно-
сти обороны объектов предопределяет необходимость создания многослой-
ной системы зенитного ракетного огня с взаимным огневым прикрытием
элементов боевого порядка частей и соединений ЗРВ. Практическая реализа-
ция данного принципа позволит обеспечить высокую эффективность и все-
высотность ЗРО объектов (районов) за счет эшелонирования огня, макси-
мального использования возможностей ЗРК (ЗРС) соответственно их основ-
ному предназначению, более высокую помехоустойчивость систем огня,
разведки и управления и живучесть бригады (полка).
Тесное взаимодействие зенитных ракетных войск с истребительной
авиацией и другими войсками и силами ПВО - принцип боевого приме-
нения ЗРВ, наиболее полно отражающий объективную закономерность их
боевых действий в противовоздушных боях, сражениях и операциях. Он яв-
ляется практическим преломлением к условиям ПВО одного из общих прин-
ципов военного искусства, указывающего на то, что успех боевых действий
достигается согласованным применением и тесным взаимодействием всех
видов Вооруженных Сил, родов войск и сил.
Тесное взаимодействие зенитных ракетных полков с истребительной
авиацией и другими силами и средствами ПВО обеспечивается: заблаговре-
менной и качественной разработкой, планированием и проведением ком-
плекса мероприятий для его осуществления; наличием на командных пунктах
взаимодействующих частей и подразделений идентичной информации о воз-
душной обстановке; умелым использованием аппаратуры опознавания; уста-
новлением и непрерывным поддержанием связи взаимодействия; постоянной
336
взаимной информацией об обстановке и принятых решениях; глубоким зна-
нием командирами боевых возможностей и способов боевого применения
взаимодействующих сил и средств; строгим соблюдением командирами и
боевыми расчетами установленных правил совместных действий.
Целесообразное сочетание при отражении ударов воздушного про-
тивника централизации управления с самостоятельным ведением боя
дивизионами - принцип боевого применения, выполнение которого обеспе-
чивает наиболее полное использование огневых возможностей соединений и
частей ЗРВ при отражении ударов воздушного противника в различных наи-
более .сложных условиях обстановки. Это достигается оснащением полков
автоматизированными системами управления; дивизионов - станциями раз-
ведки и целеуказания, а также организацией приема информации на'команд-
ные пункты непосредственно от подразделений радиотехнических войск.
В зенитных ракетных частях всегда организуется и осуществляется цен-
трализованное управление огнем. Та или иная степень централизации управ-
ления при ведении боя зависит от конкретных условий обстановки, а также
от качества подготовки боевых действий (организации боевого управления и
радиолокационного обеспечения, предварительного планирования и отработ-
ки вариантов действий войск и др.).
При наличии АСУ необходимым условием для выработки оптимальных
решений, составляющих основу управления, является наличие на командном
пункте достоверной и оперативной информации о воздушных целях, соответ-
ствующей по своим характеристикам требованиям управления огнем. Реше-
ние, не соответствующее реальной обстановке или принятое без учета балан-
са времени, не является оптимальным. Степень централизации управления
должна быть такой, чтобы принимаемые решения соответствовали обстанов-
ке и обеспечивали наибольшую эффективность боевых действий. Части и
подразделения ЗРВ должны иметь такие средства и организационную струк-
туру, которые обеспечивали бы ведение ими самостоятельных боевых дейст-
вий при нарушении единой системы управления. Важнейшим мероприятием
является организация непосредственного (автономного) радиолокационного
обеспечения боевых действий частей и подразделений ЗРВ.
Внезапность, непрерывность, активность и решительность действий
достигается:
внезапность - постоянным введением противника в заблуждение отно-
сительно истинного боевого порядка полка; непрерывным ведением разведки
и своевременным вскрытием замысла удара воздушного противника; неожи-
данным применением новых тактических приемов и способов уничтожения
воздушного противника; проведением мероприятий по противодействию
техническим и другим средствам разведки противника; строгим выполнени-
ем правил СУВ;
непрерывность действий по воздушному противнику - эшелонированием
зенитной ракетной обороны объектов (районов), построением боевых поряд-
ков полков и использованием в их составе комплексов, обладающих воз-
можностями по повторному обстрелу целей; организацией взаимодействия с
337
тактическими группами истребителей ПВО, а также другими соседними час-
тями и силами ПВО; своевременным пополнением ракетами, топливом, ма-
териальными средствами и восстановлением вооружения и боевой техники.
Активность и решительность действий заключаются в постоянном
стремлении к нанесению максимальных потерь воздушному противнику, не-
допущению его ударов по объектам, срыву его планов, дерзкими, смелыми,
энергичными действиям с предельной настойчивостью и упорством.
Решительный маневр огнем, силами и средствами, как принцип бое-
вого применения ЗРВ играет важную роль для повышения мобильности, эф-
фективности и устойчивости зенитной ракетной обороны. Его реализация
способствует внезапности действий, является одним из средств сосредоточе-
ния усилий и осуществляется в целях скрытности боевых порядков и живу-
чести полка, усиления зенитной ракетной обороны важных направлений, из-
менения боевых порядков для решения вновь возникающих задач, восста-
новления нарушенной боеспособности войск.
Резерв создается для решения внезапно возникающих задач, своевре-
менного наращивания усилий на прикрытии объектов и направлений, восста-
новления боеспособности полка. В зависимости от обстановки в резерв вы-
деляются подразделения постоянной готовности или вновь формируемые.
Резерв может находиться в развернутом состоянии на обороне объекта (рай-
она) с запретом излучения и задачей немедленной готовности к открытию
огня или свертыванию и совершению марша, либо в свернутом состоянии в
готовности к маршу. Резерв содержится на подготовленных в инженерном
отношении, тщательно замаскированных, скрытых от всех видов разведки
противника позициях и районах.
В зенитном ракетном полку создается запас ЗРК, ЗУР, наиболее уязви-
мых элементов, узлов и агрегатов, материально-технических средств. Резерв
размещается рассредоточенно с обеспечением условий доставки в подразде-
ления в минимальные сроки.
В целях непрерывного поддержания высокой боевой готовности подраз-
делений и их способности успешно выполнять поставленные задачи в любых
условиях обстановки в зрп организуется и постоянно осуществляется обес-
печение боевых действий, которое включает: боевое, техническое, тыловое
и морально-психологическое обеспечение.
Всестороннее обеспечение боевых действий полка достигается своевре-
менным и полным проведением мероприятий по его планированию, органи-
зации и осуществлению.
Основные принципы боевого применения ЗРВ должны использоваться не
изолированно один от другого, а вместе, как система принципов. Их исполь-
зование на практике - дело сложное, требующее глубокого анализа и учета
всех элементов обстановки, подчас противоречивых и недостаточно опреде-
ленных, оценки возможных вариантов действий воздушного противника,
изучения перспектив его развития. В реализации принципов и проявляются
искусство командиров и штабов.
338
12.4.2. Система зенитного ракетного огня
Система зенитного ракетного огня (система огня) - спланированное и
организованное по направлениям, высотам, рубежам и секторам (полосам)
сочетание огня зрдн для уничтожения воздушного противника при зенитной
ракетной обороне объектов.
Система огня создается в соответствии с боевой задачей полка и замыс-
лом боевых действий, наличием сил и средств, возможным характером дей-
ствий воздушного противника, особенностями района боевых действий и
обороняемых объектов.
Создание системы огня зрп достигается:
а) тщательным планированием распределения огня дивизионов по на-
правлениям, высотам, рубежам и секторам;
б) развертыванием зрп в боевой порядок (размещением дивизионов на
местности);
в) подготовкой каждого дивизиона к ведению противовоздушных боев с
максимальным использованием боевых возможностей (обеспечение требуе-
мой глубины радиолокационной разведки; требуемых углов закрытия; орга-
низацией управления огнем с КП полка в любых условиях обстановки; уста-
новлением порядка и правил обстрела целей при самостоятельном ведении
боя зрдн).
С целью всесторонней количественной оценки системы огня, а также
возможностей полка по ее созданию вводится ряд показателей, основные из
которых:
а) размеры зоны зенитного ракетного огня;
б) кратность перекрытия реализуемых зон поражения - р\
в) кратность прикрытия объекта (только для МК зрдн) - Кп;
г) плотность огня на заданных рубежах - /7а.;
д) количество стрельб до заданных рубежей - Ncmf\
е) средняя эффективность стрельб -
Размеры зоны огня - это один из основных показателей, характеризую-
щих созданную систему огня полка: по фронту - LIM по глубине - по
высоте - Для полка всегда желательно иметь сплошную зону огня мак-
симально возможного размера (Lw max, max) и не имеющую провалов на
малых и предельно малых высотах.
Размеры зоны огня зависят от количества и типов зрдн в составе полка,
их вооружения, размещения на местности и размеров реализуемых зон
поражения (с учетом рельефа местности и характеристик СВН ожидаемых в
зоне огня полка).
Кратность перекрытия реализуемых зон поражения зрдн (р) характе-
ризует возможности полка по одновременному сосредоточению огня диви-
зионов для уничтожения воздушных целей в той или иной точке зоны огня,
я =0,£х. Так, если в некоторой области зоны огня зрп создано трехкратное
339
перекрытие зон поражения одноканальных ЗРК, то это означает, что в любой
точке этой области одна цель может быть одновременно обстреляна тремя
ЗРК или одновременно могут быть обстреляны три цели, каждая одним ЗРК.
Для многоканальных ЗРК возможности по сосредоточению огня и одновре-
менному обстрелу целей в данной области зоны огня возрастают соответст-
венно их канальности.
Кратность прикрытия объекта (К„) - характеризует возможности полка
по одновременному и последовательному сосредоточению огня групп диви-
зионов I зрдн на том или ином направлении (либо вкруговую) при отражении
ударов по объекту.
Кратность прикрытия оценивается средним числом зрдн, участвующих в
отражении удара (относительным числом целевых каналов), Кп = {(); KJ:
где ^ПОГ,ПОГ j - усредненные вкруговую количество стрельб
и плотность огня, создаваемые всеми, участвующими в отражении удара МК
дивизионами (Е) и одним МК зрдн (j) соответственно.
При организации объектовой ЗРО кратность прикрытия объектов много-
канальными зрдн, как правило, должна быть не менее однократной. Прикры-
тие объекта с большей кратностью достигается увеличением кратности пере-
крытия зон поражения зрдн за счет уменьшения интервалов между позиция-
ми зрдн, т.е Jcn Х=5> р t=s> Кп t,a повышение кратности прикрытия
позволяет говорить о повышении степени участия дивизионов полка в отра-
жении удара воздушного противника.
Поэтому кратность прикрытия часто используют для задания требований
к боевому порядку зрп, так как данный показатель связывает параметры бое-
вого порядка и показатели системы огня полка выражением:
К Д jlVO'ShQ ; Р"о j + р пред t
360° Jcnj
(12.74)
где j - общее количество МК зрдн j-ro типа;
2<pOt5hQ j ~ сектор прикрытия одного МК зрдн j-ro типа;
PN() р^пРЕД] ~ параметр зоны поражения МК зрдн j-ro типа, до которого
обеспечивается проведение дивизионом такого же
количества стрельб, как и при нулевом параметре
движения цели, и предельный параметр зоны поражения;
^с/7у _ интервалы между позициями зрдн j-ro типа.
Из выражения 12.74 можно определить требуемую кратность прикрытия,
а также требование к выбору интервалов между позициями МК зрдн для
340
обеспечения требуемой кратности прикрытия (участия в отражении удара ВП
Р N 0 , + ПРЕД /
требуемого количества МК зрдн): Jcll. £--------------.
7
Плотность огня на заданных рубежах характеризуется количеством
стрельб в минуту, которое могут провести дивизионы полка при отражении
удара воздушного противника. Она определяется огневой производительно-
стью дивизионов и степенью их участия в отражении удара (/).
Как правило, оценку плотности огня полка выполняют для каждого вари-
анта действий воздушного противника (направления сосредоточения основ-
ных усилий полка) для МВ и СБВ. Если в состав зрп входят зрдн нескольких
типов, т.е. го>1, то для каждого варианта необходимо определить следующие
значения плотностей огня;
1) создаваемое зрдн полка всех типов;
2) создаваемое МК зрдн. составляющими основу ЗРО:
на ожидаемом (наиболее вероятном) направлении действий воз-
душного противника;
вкруговую.
Для определения плотности огня, создаваемой дивизионами полка всех
типов (на ожидаемых направлениях действий воздушного противника), не-
обходимо:
а) определить дивизионы каждого типа (/) и плотность огня одного диви-
зиона каждого типа, принимающих участие в отражении удара воздушного
противника
б) просуммировать плотность огня, создаваемую дивизионами всех ти-
пов, участвующих в отражении удара:
/7«- = 'Пх)' (12.75)
где Kj - количество зрдн j-го типа, участвующих в отражении удара
воздушного противника;
Пог} - плотность огня на заданном рубеже одного зрдн/-го типа.
Плотность огня одного дивизиона С-300П характеризуется его возмож-
ностями по последовательному обстрелу целей и определяется выражением:
П _ 60
(12.76)
Г Т
I 1 Hi
mad tn. ;
1 К
I ик;
где Тц - среднее время цикла стрельбы, затрачиваемое на подготовку
обстрела цели, обстрел и оценку результатов обстрела;
60 - временной интервал, равный одной минуте (60 с);
ln3j - время поиска и захвата цели на сопровождение;
- количество целевых каналов.
341
Для оценки плотности огня полка вкруговую (на остальных направлени-
ях) создаваемой на заданном рубеже МК дивизионами, используют показа-
тель описанный выше: кратность прикрытия - Кц. Коэффициент Кц рассчи-
тывается с учетом количества МК дивизионов в составе зрп (через JCn) и ха-
рактеризует степень участия МК дивизионов в отражении удара воздушного
противника. Таким образом, он усредняет вкруговую возможности МК зрди
(их возможности по созданию системы огня полка):
Пог=кп -nofj.
Примеч. Если в состав зрп входят однотипные зрдн (т=1), то значения
Kj и Кп будут равны, т.е. Kj = Яд.
Количество стрельб до заданных рубежей характеризует возможности
системы огня по обстрелу целей, одновременно входящих в зону огня сразу
со всех направлений (для создания круговой ЗРО), и отражению удара опре-
деленной продолжительности. Оно зависит от количества и типов зрдн, уча-
ствующих в отражении удара, размещения их относительно объекта обороны
на местности и рассчитывается по направлениям, диапазонам высот (малым
и средним и большим) и вариантам действий СВН воздушного противника:
= 'Nctnpj • (12.77)
где N} - количество стрельб, проводимое до заданного рубежа одним зрдн
;-го типа.
По аналогии с плотностью огня полка оценку количества стрельб, прово-
димых МК дивизионами полка, производят с использованием коэффициента,
характеризующего кратность прикрытия объекта Он позволяет усред-
нить вкруговую возможности созданной системы огня полка по количеству
стрельб:
~ К [] ' ^апр j ’
Средняя эффективность стрельб характеризует надежность уничтоже-
ния воздушных целей и определяется средней вероятностью поражения це-
лей за стрельбу в данных условиях обстановки. Если в составе зрп все зрдн
одного типа (т=7), то значение средней эффективности есть функция веро-
ятности поражения цели одной ракетой (/,) и расхода ракет за стрельбу (п>),
т.е.:
Произведение количества стрельб по целям на среднее значение их эф-
фективности определяет математическое ожидание числа уничтоженных це-
лей:
Для достижения наибольших значении показателей системы огня не-
обходимо:
1) создать соответствующие (требуемые) системы разведки и управления;
342
2) провести комплекс мероприятий по созданию благоприятных условий
стрельбы для каждого дивизиона;
3) подготовить боевые расчеты;
4) накопить требуемое количество ракет на позициях зрдн.
12.4.3. Система управления части ЗРВ
Как известно, управление частью ЗРВ заключается в целенаправленной
деятельности командира, штаба и других органов управления по поддержа-
нию боевой готовности, подготовке подразделений к боевым действиям и
руководству ими при выполнении поставленных боевых задач.
. Основные принципы управления: единоначалие, личная ответственность
командиров за принимаемые решения и результаты выполнения поставлен-
ных задач; централизация управления во всех звеньях с предоставлением
подчиненным инициативы в определении способов выполнения поставлен-
ных задач; твердость и настойчивость в проведении принятых решений и
планов; оперативное и гибкое реагирование на изменение обстановки.
Основным определяющим содержанием управления при ведении боевых
действий является управление огнем. Для осуществления управления огнем в
зенитном ракетном полку создается система управления.
Под системой управления полка ЗРВ понимается совокупность функцио-
нально связанных органов управления, пунктов управления, средств связи и
автоматизированного управления, обеспечивающих сбор, обработку и ото-
бражение информации об обстановке, принятие решений (в том числе по це-
лераспределению), доведение задач до подчиненных подразделений (в том
числе выдачу целеуказаний) и контроль их исполнения.
К органам управления зрп относятся командир полка, заместители, штаб,
службы, командиры подразделений.
При ведении боевых действий основным органом управления является
боевой расчет КП полка, возглавляемый командиром полка.
В перечень пунктов управления полка входят командный и запасный ко-
мандный пункты полка, командные пункты групп дивизионов и зенитных ра-
кетных дивизионов, тыловой пункт управления. ПУ технических дивизионов
и батарей.
Командный пункт (КП) полка является основным пунктом управления, с
которого командир полка осуществляет управление подразделениями при
подготовке и в ходе боевых действий. КП полка может быть стационарным
или подвижным (самоходным, буксируемым). КП полков и групп дивизио-
нов, осуществляющих мобильную зенитную ракетную оборону, являются,
как правило, подвижными. Для них в позиционном районе полка при подго-
товке боевых действий выбираются основная и несколько запасных позиций
(как правило, не менее двух). Места расположения запасных позиций выби-
раются с учетом возможности обеспечения КП боевой радиолокационной
343
информацией, связью с подчиненными подразделениями, связью с выше-
стоящими КП и скрытого расположения.
Для оценки возможностей системы управления полка может использо-
ваться ряд количественных показателей, основными из которых являются:
размеры зоны управления полка; кратность перекрытия зон управления КП
различных уровней (звеньев) управления; продолжительность цикла управ-
ления; вероятность правильного и своевременного решения задач управле-
ния; емкость системы управления, ее производительность и пределы работы
по дальности.
Размеры зоны управления представляют собой показатель, позволяющий
оценить пространственные возможности системы управления полка. Под зо-
ной управления понимается участок местности вокруг КП данного звена
(уровня) управленческой инстанции, в пределах которого обеспечивается
управление подчиненными подразделениями с использованием средств ав-
томатизации.
Огибающая зона управления КП всех звеньев представляет собой зону
управления полка в целом и характеризует возможности по обеспечению ав-
томатизированного управления подразделениями в любой точке внутри этой
зоны.
Кратность перекрытия зон управления КП различных уровней (звеньев)
характеризует возможности по передаче управления с одного КП на другой.
В качестве временных показателей, позволяющих оценивать оператив-
ность управления, используются работное время системы управления (t^) и
продолжительность цикла управления (/, ^). Эти показатели могут приме-
няться для оценки решения системой управления любой из задач, однако ча-
ще всего возникает необходимость оценки времени решения задачи управле-
ния огнем (целераспределение и выдача целеуказаний). Понимая под работ-
ным временем системы управления промежуток времени от момента
получения информации о воздушной цели на КП зрп до момента постановки
задачи на ее уничтожение зрдн (выдачи ЦУ в зрдн), его можно оценивать по
Соотношению:
где - работное время КП j-ro уровня (звена) в многозвенной системе
управления;
1С - время, затрачиваемое на обмен информации между КП соседних
уровней (цикл обмена информацией);
т - количество КП (звеньев) в системе управления, где решается
задача целераспределения и целеуказания.
Длительность цикла управления представляет собой затраты времени на
решение наиболее характерных повторяющихся задач в установившемся ре-
жиме функционирования системы. В общем случае цикл управления опреде-
ляется суммарным временем, затрачиваемым на сбор информации, оценку
обстановки, принятие решений, постановку задач подчиненным подразделе-
344
ниям, выполнение поставленных задач, контроль и оценку результатов вы-
полнения.
При решении задачи управления огнем цикл управления определяется по
формуле:
t = tcy,+t +lKnj^P
цупр * раб *цстр т ‘оцрез »
где 1ЦфР- время, необходимое зрдн для выполнения поставленной задачи
(цикл стрельбы зрдн);
- время, затраченное на оценку результатов стрельбы зрдн
на КП зрп.
Обобщенным показателем качества решения системой управления задач,
возлагаемых на нее, можно считать вероятность своевременного и правиль-
ного их решения в различных условиях обстановки (/\рреш). Аналитическое
выражение для этого показателя будет различным и достаточно сложным
применительно к каждой задаче управления. На практике его можно опреде-
лять обработкой статистических данных по результатам учений и трениро-
вок.
Главной целью управления полком ЗРВ при ведении боевых действий яв-
ляется обеспечение максимального использования его боевых возможностей
в бою (нанесение воздушному противнику максимальных потерь с учетом
важности воздушных целей при минимальных собственных потерях) в инте-
ресах выполнения поставленной боевой задачи.
Управление при ведении боевых действий включает: управление приве-
дением в готовность №1; управление силами и средствами разведки по сбо-
ру, обработке и отображению данных о противнике; управление огнем групп
дивизионов (зрдн); управление маневром подразделений; осуществление
(поддержание) взаимодействия с соседями; управление обеспечением боевых
действий; контроль за состоянием и функционированием вооружения и бое-
вой техники; управление восстановлением нарушенной боеспособности и
ликвидацией последствий нападения противника.
12.4.4. Противовоздушный бой
Боевые действия - это сложный процесс, представляющий собой
организованное применение частей и подразделений при выполнении
поставленных задач.
Зенитные ракетные полки (зрп), организационно входящие в состав ЗРВ
ВВС, имеют в своем составе огневые и технические подразделения. КП и
ПУ. оснащенные АСУ и подразделениями обеспечения.
В общем случае, боевые действия зрп включают: приведение полка в го-
товность №1; сбор и обработку данных о противнике; ведение огня дивизио-
нами; осуществление взаимодействия с другими силами и средствами ПВО;
подготовку и накопление ЗУР на позициях зрдн; контроль за состоянием и
функционированием вооружения и боевой техники; совершение маневра
345
подразделениями полка; восстановление боеспособности и ликвидацию по-
следствий нападения противника.
Содержанием боевых действий частей и подразделений ЗРВ является
совокупность различных форм и способов их ведения.
Противовоздушный бой как форма боевых действий зенитных ракетных
и артиллерийских частей и подразделений ведется в целях поражения воз-
душного противника и недопущения его ударов по обороняемому объекту и
прикрываемым войскам.
В общем случае противовоздушный бой представляет собой согласо-
ванные по цели, месту и времени действия зенитных ракетных соединений,
частей и подразделений по уничтожению воздушного противника или срыву
его воздействия по прикрываемым войскам и объектам.
Основные составляющие противовоздушного боя полка: огонь зенитны-
ми управляемыми ракетами и маневр подразделениями (зрдн).
В ходе противовоздушного боя полка осуществляется разведка воздуш-
ного и наземного противника, радиоэлектронная борьба, противовоздушные
бои групп дивизионов, зрдн и специально назначенных групп с наземным
противником, маневр силами и средствами, проведение мероприятий по вос-
становлению нарушенной системы зенитной обороны и обеспечению боевых
действий.
К особенностям противовоздушного боя относятся: его оборонитель-
ный характер; ограниченность района боевых действий и его привязанность к
обороняемым объектам; решительность; скоротечность; напряженность; рез-
кие и быстрые изменения обстановки, сочетание в ходе боя действий, на-
правленных на защиту обороняемого объекта и обеспечение собственной
живучести, необходимость непрерывного взаимодействия с другими силами
и средствами.
Противовоздушный бой полка, группы дивизионов, зрдн характеризуется
решительностью целей, скоротечностью, резким и быстрым изменением об-
становки, высокой напряженностью и должен вестись с максимальным ис-
пользованием боевых возможностей и максимальным напряжением всех мо-
ральных и физических сил личного состава.
Основные характеристики противовоздушного боя: продолжительность;
количество СВН противника, входящих в зону огня (поражения); количество
проведенных стрельб; количество уничтоженных СВН противника; расход
ракет. Указанные показатели в целом характеризуют длительность, ход и на-
пряженность боя.
Противовоздушный бой полка начинается с момента вскрытия нападения
воздушного противника на обороняемые полком объекты (районы) и закан-
чивается уничтожением воздушного противника или прекращением огня
всеми подразделениями (в том числе батареями ПЗРК).
Противовоздушный бой группы дивизионов (зрдн) начинается с момента
получения боевой задачи с КП полка (группы дивизионов) или самостоя-
тельного обнаружения и принятия решения командиром группы дивизионов
346
(зрдн) на уничтожение СВН противника и заканчивается их уничтожением
или прекращением огня.
Продолжительность боя зрп связана с продолжительностью удара воз-
душного противника.
Количество стрельб, проводимых дивизионами полка за период боя, за-
висит от ряда факторов, основные из которых: количество и тип участвую-
щих в отражении ударов дивизионов; количество стрельб, проводимых каж-
дым дивизионом в бою, наличие ракет на позициях, продолжительность уда-
ра воздушного противника и условия боевой обстановки (высота и скорость
полета целей, применение противником радиоэлектронных помех и др.).
Расход зенитных управляемых ракет за период боя непосредственно свя-
зан с количеством стрельб, проводимых каждым дивизионом полка при от-
ражении удара средств воздушного нападения противника, и расходом ракет
в каждой стрельбе дивизиона.
Противовоздушный бой ведется различными способами с применением
разнообразных тактических приемов.
Основные способы противовоздушного боя:
сосредоточенный огонь по наиболее важным целям для их надежного
уничтожения;
рассредоточенный огонь для одновременного нанесения урона макси-
мальному количеству целей;
самостоятельное ведение огня зенитными ракетными подразделениями.
Сосредоточение огня применяется во всех случаях, когда командиру уда-
лось вскрыть замысел противника и выявить наиболее важные цели (группы
целей) из числа участвующих в ударе, а также, когда плотность удара СВН
не превышает огневых возможностей полка.
Рассредоточение огня применяется в случаях, когда плотность удара воз-
душного противника равна или превышает огневые возможности полка и ко-
мандиру не удалось выявить наиболее важные цели (группы целей) из числа
участвующих в ударе или эти цели имеют одинаковую относительную важ-
ность.
Самостоятельное ведение огня зрдн применяется в условиях, когда цен-
трализованное управление невозможно или нецелесообразно.
Реализация способов ведения противовоздушного боя осуществляется
тактическими приемами по его составляющим.
Ведение огня по воздушным целям группам дивизионов (зрдн) при реали-
зации сосредоточенного (рассредоточенного) способа ведения противовоз-
душного ведения боя осуществляется по целеуказанию с КП полка, с КП
группы дивизионов или по данным собственных средств разведки групп ди-
визионов (зрдн при координации с КП полка (группы дивизионов).
Ведение огня групп дивизионов (зрдн) при координации с КП зрп (гр.дн.)
реализуется следующими тактическими приемами:
установлением приоритета групп дивизионов (зрдн) в обстреле сопрово-
ждаемой ими цели;
перенацеливанием огня групп дивизионов (зрдн);
347
согласованием во времени порядка обстрела сопровождаемых группами
Дивизионов (зрдн) целей или групп целей.
При самостоятельном ведении огня зрдн реализуются следующие такти-
ческие приемы:
ведение огня зрдн в основных секторах стрельбы и ответственных секто-
рах на малых высотах;
ведение огня по приоритетному для ЗРК признаку;
ведение огня с выбором целей по заранее установленным правилам;
ведение огня на самооборону и взаимное прикрытие.
Таблица 12.7
Способы и тактические приемы ведения противовоздушного боя полком ЗРВ
Состав- ляющие боя Способы веления боя (по данному признаку) Тактические приемы
I 2 3
Огонь Ведение огня зрдн (грли) при цсле- у катании с КП полка (при решении задачи цслсраспределения на КП полка) 1. Одновременное сосредоточение огня для уничтоже- ния наиболее важных целей. 2. Последовательное сосредоточение огня по группам целей (повторный обстрел). 3. Рассредоточение огня по целям для нанесения воз- душному противнику максимальных потерь
Самостоятельное ведение огня зрдн (гр.дх.) (при невозможности центра- лизованного ) правления или нецеле- сообразности) 1. Ведение огня с первоочередным уничтожением це- лей в основных секторах стрельбы и ответственных секторах на малых высотах. 2. Ведение огня с выбором целей по приоритетному для ЗРК признаку. 3. Ведение отня с выбором целей по заранее установ- ленным правилам. 4. Ведение огня по согласованию с взаимодействую- щими подразделениями порядка обстрела целей. 5. Веление огня на самооборону и взаимное прикрытие
Координируемое с КП полка веле- ние огня зрдн (tpjiii.) по данным своих средств разведки зрдн («рли) 1. Ведение огня с учетом приоритета (ограничений) в действиях зрдн (грдн). выдаваемых с КП полка. 2. Огонь с перенацеливанием зрдн (трлн) с КП полка. 3. Согласование во времени порядка обстрела сопрово- ждаемых 1рдн. целей или групповых целей
Маневр Маневр по замыслу зенитной ракет- ной обороны объекта 1. Выдвижение зрдн (грдн) из районов дислокации на боевые позиции в предвидении боя. 2. Упреждающее перестроение боевого порядка полка (смена позиции зрдн) в предвидении боя. 3. Периодическая смена позиций зрдн. 4. Вывод зрдн в "засады* и на рубежи уничтожения крылатых ракет. 5. Тактическое маневрирование для обмана противника
Маневр по обстановке (.Упреждающий маневр зрдн на вскрытые направления действий основных сил противника. 2.Маневр дтя восстановления системы огня. ЗВывод зрдн из-под улара на запасные позиции и дей- ствия из ••засад'*. 4. Маневр для выполнения новых задач
Одной из составляющих боя является маневр. Маневр силами и средст-
вами включает: маневр подразделений, маневр огнем (сосредоточение, рас-
средоточение огня по целям), маневр ЗУР. Маневр силами и средствами
348
предназначен для скрытия боевого порядка и живучести, усиления зенитной
ракетной обороны объектов, изменения боевого порядка и восстановления
нарушенной боеспособности войск.
Маневр подразделений в полку осуществляется в целях:
обмана противника и ввода его в заблуждение относительно истинного
характера обороны;
увеличения степени реализации зон поражения;
обеспечения скрытности боевого порядка и внезапности огня;
для вывода подразделений из-под удара и периодической смены позиций;
восстановления нарушенной системы огня и др.
Маневр силами и средствами реализуется применением следующих так-
тических приемов:
выдвижением групп дивизионов (зрдн) из районов дислокации (с учеб-
ных, дежурных позиций и др.) на боевые позиции;
упреждающим перестроением боевого порядка полка в предвидении боя;
периодической сменой позиции;
выдвижением зрдн на рубежи уничтожения крылатых ракет;
действиями из засад.
Маневр огнем - это перенос решением командира полка (группы диви-
зионов) огня дивизионов дальнего действия и средней дальности на новые
цели, а также на более важные групповые и одиночные цели.
Маневром огнем достигается одновременное и последовательное сосре-
доточение огня по целям в соответствии с замыслом ведения противовоз-
душного боя или рассредоточение огня для нанесения воздушному против-
нику максимальных потерь.
12.43. Основы подготовки боевых действии части ЗРВ
Для успешного выполнения боевой задачи, возложенной на часть (под-
разделение) требуется их всесторонняя подготовка, которая включает меро-
приятия, выполняемые заблаговременно и непосредственно перед боевыми
действиями.
Заблаговременная подготовка к боевым действиям осуществляется, как
правило, в мирное время. Она начинается с момента получения боевой зада-
чи и заканчивается к установленному срок)', совершенствуется и продолжа-
ется непрерывно до начала приведения части в высшие степени боевой го-
товности, в ходе повседневной деятельности и несения боевого дежурства.
Непосредственная подготовка к боевым действиям начинается с нача-
лом приведения части в высшие степени боевой готовности и осуществляет-
ся до начала отражения первого удара воздушного противника. Непосредст-
венная подготовка осуществляется также в ходе боевых действий после по-
лучения (уточнения) боевой задачи на отражение последующих ударов.
Заблаговременная подготовка части к боевым действиям включает:
принятие решения на боевые действия; постановку боевых задач
подразделениям; планирование боевых действий; организацию боевых
действий части (построение боевого порядка и создание системы огня;
349
(построение боевого порядка и создание системы огня; организацию взаимо-
действия между подразделениями части и соседями; организацию всех видов
обеспечения и управления; подготовку подразделений и несение боевого де-
журства).
В боевой задаче части указываются: боевой состав; во взаимодействии с
кем уничтожать воздушного противника; на обороне каких объектов (на-
правлений) и в каких границах сосредоточить основные усилия; объекты и
группировки войск, которые необходимо прикрыть в зоне огня; границы по-
зиционного района; резерв и порядок его использования; сроки готовности к
боевым действиям.
С получением боевой задачи командир части уясняет ее, оценивает об-
становку, принимает решение, ставит боевые задачи подчиненным подразде-
лениям, дает указания по планированию, организует взаимодействие, обес-
печение и управление, а также подготовку подразделений к выполнению
боевых задач.
При уяснении полученной боевой задачи командир части должен глубоко
изучить и понять: цель предстоящих боевых действий; замысел старшего
командира; боевую задачу, место и роль своей части в выполнении боевой
задачи по замыслу старшего начальника; задачи соседей и порядок взаимо-
действия с ними; время, отведенное на подготовку к боевым действиям.
На основе уяснения полученной боевой задачи командир части определя-
ет мероприятия, которые требуется провести немедленно; проводит расчет и
распределение времени, имеющегося для подготовки к боевым действиям;
отдает заместителям, штабу, начальникам служб и командирам подразделе-
ний предварительные распоряжения для их ориентирования на предстоящие
боевые действия и о подготовке данных для принятия решения.
Оценка обстановки включает оценку: воздушного противника; наземного
(морского) противника; объекта (района) обороны; состояния и боевых воз-
можностей части, соседних соединений, частей и подразделений; местно-
сти и климатических условий; радиоэлектронной обстановки; инженерной,
‘радиационной, химической и биологической обстановки, экологической и об-
щественно-политической обстановки.
Оценка воздушного противника заключается во всестороннем изучении и
анализе его базирования, состава, состояния, боевых возможностей и задач, к
решению которых он будет стремиться. Оценка проводится на основе дан-
ных, полученных из вышестоящего штаба, информации взаимодействующих
частей и подразделений, а также результатов разведки противника силами и
средствами части.
В результате оценки воздушного противника определяются: ожидаемое
количество и типы средств воздушного нападения противника при ударе по
объекту; наиболее вероятные диапазоны высот полета; основные направле-
ния ударов и рубежи пуска ракет ’'воздух-земля”; наиболее вероятные мар-
шруты полета на малых и предельно малых высотах; боевые порядки воз-
душного противника и ожидаемые плотности удара; возможные способы и
тактические приемы действий воздушного противника при преодолении зе-
350
ни твой ракетной обороны и нанесении ударов по обороняемому объекту;
подлетное время, ожидаемые направления (секторы) применения ОТ и ТБР.
Типы пилотируемых и беспилотных СВН, удары которых возможны по
обороняемому объекту, определяются путем сопоставления радиусов (даль-
ностей) действия самолетов (беспилотных ЛА) с удалением объекта от их
аэродромов (районов базирования).
Максимальная дальность полета самолета на оптимальной высоте
DT=0,8Dmill, а радиус боевых действий R6 ^=0,4DT.
При полете на малой высоте Dm,-KDt, a R6^=Dt/2K {К - коэффициент,
учитывающий сокращение максимальной дальности полета).
При полете по переменному профилю (рис. 12.44) радиус боевых дейст-
вий самолета соответственно равен:
= —[Dr-25л/ в(/С-/)].
Рис. 12.44. К определению радиуса боевых действий при полете
по переменному профилю
351
Оценка наземного (морского) противника включает изучение его место-
положения, состава и возможных действий в позиционном районе части;
предполагаемых районов высадки воздушных (морских) десантов и диверси-
онных групп; досягаемости оперативно-тактических и тактических балли-
стических ракет, тактических артиллерийских и ракетных средств; возмож-
ностей по радиоэлектронному подавлению РЭС части наземными (корабель-
ными) средствами.
В результате оценки наземного (морского) противника определяются ме-
роприятия по предупреждению внезапного нападения, по организации на-
земной обороны, по повышению живучести части и помехоустойчивости
систем огня, разведки и управления.
Оценка объекта (района) обороны включает изучение характера, разме-
ров объекта (района), важности его элементов (объектов) и расположения от-
носительно других объектов (районов). Граница обороняемого частью объек-
та (района) определяется вышестоящим командиром.
В результате оценки объекта определяются: средства, которые может
применить воздушный противник по обороняемому объекту (объектам); на-
правления сосредоточения основных усилий воздушного противника; наибо-
лее вероятные способы действий воздушного противника; возможные изме-
нения условий ведения боевых действий в результате применения противни-
ком ОМП, а также в результате радиационно, химически и биологически
опасных аварий, разрушения плотин, пожаров, завалов, затоплений.
При оценке состояния и боевых возможностей части командир уточня-
ет: состав части и ее укомплектованность; состояние ВВТ; обеспеченность
подразделений и их защищенность при воздействии обычных средств и
ОМП, а также при авариях (разрушениях) радиационно, химически и биоло-
гически опасных объектов; уровень боевой выучки и морально-боевые каче-
ства личного состава и определяет, какие мероприятия необходимо провести
в целях выполнения поставленной боевой задачи и своевременного перевода
части с мирного на военное положение, накопления требуемого запаса ракет,
обеспечения живучести части и помехоустойчивости систем огня, разведки и
управления.
При оценке соседних частей и подразделений, взаимодействующих по
ПВО определяется, в какой мере соседние части и подразделения будут спо-
собствовать выполнению поставленной боевой задачи и какие необходимо
провести мероприятия по осуществлению взаимодействия с ними.
При оценке местности и климатических условий определяются: в какой
мере рельеф местности и климатические условия влияют на выполнение бое-
вой задачи; возможные высоты полета самолетов, крылатых ракет и других
летательных аппаратов; зоны видимости радиолокационных средств на ма-
лых и предельно малых высотах; какие необходимо провести мероприятия
для максимального использования боевых возможностей части и обмана про-
тивника.
При оценке радиоэлектронной обстановки определяются: возможности
сил и средств разведки и РЭБ противника по радиоэлектронной разведке, ра-
352
диоэлектронному подавлению, применению самонаводящихся на излучение
ракет (снарядов) и забрасываемых передатчиков помех; районы, в которых
могут возникать взаимные помехи своих РЭС и пути обеспечения их элек-
тромагнитной совместимости. На основе оценки радиоэлектронной обста-
новки разрабатываются мероприятия противодействия техническим средст-
вам разведки противника и радиоэлектронной защиты.
При оценке инженерной обстановки определяются: возможность исполь-
зования местности для укрытия техники и вооружения; возможность приме-
нения противником систем дистанционного минирования в позиционном
районе и на путях маневра подразделений; проходимость местности для бое-
вой техники к транспортных средств, наличие мест, пригодных для оборудо-
вания пунктов полевого водообеспечения; маскирующие и защитные свойст-
ва местности; изменения местности, происшедшие в результате применения
противником огневого поражения по радиационно и химически опасным
объектам, плотинам водохранилищ и оружия массового поражения.
При оценке радиационной, химической и биологической обстановки
определяются: возможные зоны поражения подразделений; зоны
радиоактивного, химического и биологического заражения; влияние
указанных факторов на организацию и ведение боевых действий;
мероприятия по радиационной, химической и биологической защите.
На основе оценки обстановки определяются возможные варианты дейст-
вий воздушного противника. Каждый из вариантов характеризуется целями и
задачами, к решению которых воздушный противник будет стремиться, со-
ставом привлекаемых сил и средств, направлениями (высотами) сосредото-
чения усилий, тактическими приемами и способами преодоления зенитной
ракетной обороны и нанесения ударов по обороняемому объекту.
Для планирования боевых действий, как правило, принимается наиболее
неблагоприятный для ЗРВ вариант действий противника, остальные вариан-
ты учитываются, если требуют принципиально отличных решений команди-
ра и действий подразделений.
Для обоснования принимаемого решения проводятся тактические рас-
четы по оценке: противника и радиоэлектронной обстановки; соответствия
основных параметров боевого порядка ожидаемым условиям выполнения
боевой задачи; основных показателей систем огня, разведки и управления и
их соответствия требуемым; возможностей и вариантов маневра подразделе-
ниями; возможностей по подготовке и накоплению ракет; влияния взаимо-
действующих соединений, частей и подразделений на эффективность зенит-
ной ракетной обороны; ожидаемой эффективности зенитной ракетной оборо-
ны при различных вариантах действий воздушного противника.
При оценке обстановки применяются аналитические и графоаналитиче-
ские методы тактических расчетов с использованием простейших вычисли-
тельных средств и ПЭВМ.
На основе уяснения боевой задачи, оценки обстановки и проведенных
тактических расчетов командир части принимает решение на боевые дейст-
вия.
353
Решение включает: замысел боевых действий; боевые задачи подчинен-
ным подразделениям; основные вопросы взаимодействия, обеспечения и ор-
ганизации управления. Одновременно определяются основные задачи мо-
рально-психологического обеспечения.
Основу решения составляет замысел боевых действий, в котором опре-
деляются: объекты и направления, на обороне которых сосредоточиваются
основные усилия; тактические приемы и способы действий по уничтожению
различных СВН противника; системы огня, разведки и боевой порядок части;
варианты маневра подразделениями и условия их осуществления.
При построении систем огня, разведки и боевого порядка определяется:
как организовать оборону объекта и его элементов; какой иметь боевой поря-
док и на каком удалении от объекта (в каких районах) осуществить выбор
боевых позиций; какую кратность прикрытия (плотность огня) создать по на-
правлениям и высотам; как усилить прикрытие объектов на малых и пре-
дельно малых высотах на наиболее опасных направлениях; какими мерами в
данных условиях обеспечить высокую помехоустойчивость систем огня, раз-
ведки. управления; какие провести первоочередные мероприятия по обору-
дованию позиционного района.
Зенитная ракетная оборона объекта, как правило, строится круговой, так
как выбор направления удара, осуществляется противником и в принципе он
может действовать по любому из них. Однако это не умаляет важности оцен-
ки и прогнозирования наиболее вероятных направлений действий и маршру-
тов полета на малых и предельно малых высотах СВН противника, сосредо-
точения на этих направлениях и маршрутах усилий своих сил и средств.
Для принятия решения на построение системы огня командиру необхо-
димо с учетом конкретных условий обстановки произвести оценку возмож-
ных способов и вариантов действий своих подразделений, выбрать и сфор-
мулировать замысел тех из них, которые будут положены в основу подготов-
ки и ведения противовоздушного боя.
Главными вопросами, решаемыми командиром при нахождении варианта
системы огня и боевого порядка, являются: обеспечение уничтожения воз-
душного противника до рубежей выполнения задачи во всем возможном
диапазоне высот его полета; создание требуемой (максимально возможной)
кратности перекрытия зон поражения ЗРК с учетом опасности направлений и
диапазонов высот; обеспечение высокой помехоустойчивости и живучести
системы огня, а также разведки и управления.
Уничтожение воздушного противника на подступах к объекту, сохране-
ние объекта достигаются выносом зоны огня за рубежи выполнения задачи.
Положение этих рубежей изменяется в широких пределах и зависит от типа
СВН, высоты и скорости их полета и применяемых средств поражения. Вы-
нос за всю совокупность этих рубежей зон поражения ЗРК приводит к "рас-
тягиванию” боевого порядка, снижению кратности прикрытия объекта, т.е.
эффективности ПВО. Поэтому, решая эту задачу, командир учитывает воз-
можные варианты действия противника, исходит из своего замысла на при-
менение своих сил и способов действий при отражении его ударов, борьбе с
354
воздушными целями различного типа. Результатом такого анализа является
определение эшелонности прикрытия объекта, рубежей и районов располо-
жения основных и запасных позиций с учетом специфики основного предна-
значения ЗРК.
Кратность перекрытия зон поражения определяется величиной взаимных
удалений (интервалов) позиций зенитных ракетных подразделений и харак-
теризует возможное их участие в отражении ударов воздушного противника
с тех или иных направлений, на различных высотах, т.е. возможности созда-
ваемой системы огня по плотности огня и количеству стрельб. Требуемое
значение этих показателей определяется ожидаемыми параметрами ударов
воздушного противника, а возможность их достижения - наличием сил и
средств.
Устойчивость системы огня, разведки и управления в условиях радио-
электронного и огневого противодействия противника - важнейший фактор
эффективности зенитной ракетной обороны. Основные ее составляющие -
помехоустойчивость и живучесть. Естественно, в центре внимания команди-
ра при выработке решения находятся вопросы рационального использования
частотного диапазона и комплексирования радиоэлектронных средств, мас-
кировки и дезинформации противника, взаимного и непосредственного при-
крытия подразделений, смены позиций, маневра частотами, борьбы с поста-
новщиками помех и средствами огневого подавления и др.
В конечном счете, замысел должен предопределить: вид и вариант бое-
вого порядка; границы позиционных районов зенитных ракетных дивизио-
нов, их основные и ответственные секторы (полосы); требуемые районы раз-
вертывания сил и средств разведки; технические и организационные меры по
обеспечению помехоустойчивости и живучести систем огня и разведки в
данных условиях обстановки.
При формулировании вариантов маневра указываются: цель маневра, ма-
неврирующие подразделения; силы и средства обеспечения маневра; куда и
как совершать маневр; сроки готовности к боевым действиям.
Определяя боевые задачи подчиненным зенитным ракетным подраз-
делениям командир указывает: во взаимодействии с кем уничтожать воз-
душного противника в зоне поражения ЗРК; на уничтожении каких типов
СВН сосредоточить основные усилия и с каких направлений; какие КП, ди-
визионы прикрыть в зоне огня зрдн; границы позиционного района, места
боевых позиций и порядок маневра; сроки готовности к боевым действиям.
Взаимодействие представляет собой согласованные по целям, задачам,
месту, времени и способам выполнения задач действия войск (сил) для дос-
тижения цели боя (операции).
При определении основных вопросов взаимодействия командир части
указывает: порядок и способы взаимодействия соседних зрдн (выбор целей
для уничтожения на участках перекрытия реализуемых зон поражения, поиск
целей на предельно малых высотах, ведение огня на взаимное прикрытие и
прикрытие маневрирующих подразделений, а также в условиях радиоэлек-
тронного подавления); порядок взаимодействия подразделений с самолета-
355
ми-истребителями и меры по обеспечению безопасности полетов своей авиа-
ции; порядок совместных действий подразделений части и подразделений
соседних частей на участках перекрытия их зон поражения и ответственных
за стыки; порядок обмена информацией взаимодействия.
Обеспечение боевых действий - это комплекс мероприятий, направлен-
ных на поддержание подразделений в высокой боевой готовности, сохране-
ние их боеспособности, создание благоприятных условий для организованно-
го и своевременного вступления в бой, а также на воспрещение или преду-
преждение внезапного нападения противника, снижение эффективности его
ударов.
В решении командира определяются первоочередные мероприятия обес-
печения, сроки их выполнения, выделяемые силы и средства, порядок их ис-
пользования.
Для осуществления управления частью (подразделениями) создается
система управления, включающая органы управления, пункты управления,
систему связи, АСУ и другие технические средства. Решением командира
определяются главные вопросы организации системы управления и особен-
ности управления огнем подразделений в различных условиях обстановки.
Решение командира на боевые действия уточняется после рекогносци-
ровки местности, для проведения которой штаб части разрабатывает план ре-
когносцировки. Рекогносцировка проводится рекогносцировочными группа-
ми, состав и задачи которых определяются в зависимости от целей рекогнос-
цировки и наличия времени.
Боевые документы по управлению
Основными боевыми документами по управлению являются: план пере-
вода части с мирного на военное время, план боевых действий, боевые при-
казы, боевые распоряжения по переводу подразделений части с мирного на
военное время.
В боевом приказе (боевом распоряжении) указываются: краткие выво-
ды из оценки противника; замысел боевых действий; боевые задачи подраз-
делениям способы их выполнения; взаимодействующие подразделения и час-
ти, их задачи, позиционные районы, порядок осуществления взаимодействия;
сроки готовности подразделений к боевым действиям; положение командных
пунктов, порядок управления подразделениями в различных условиях обста-
новки; выделяемый расход ресурсов; заместители командира.
План боевых действий представляет собой совокупность документов, в
которых детализируется решение, определяются последовательность, спосо-
бы и сроки выполнения боевых задач подразделениями. Основу плана бое-
вых действий составляет его общая тактическая часть, разрабатываемая на
карте (картах) с текстуальной пояснительной запиской. План разрабатывает
штаб при активном участии командира, заместителей и начальников служб.
Пояснительная записка детализирует решение командира и включает:
выводы из оценки противника; боевую задачу части; задачи соседей; замысел
356
боевых действий; боевые задачи подчиненным подразделениям; определяет
основные вопросы взаимодействия, восстановления боеспособности и
управления.
Организация боевых действий части
Построение боевого порядка и создание системы огня включает: под-
готовку и занятие подразделениями боевых позиций по замыслу боевых дей-
ствий, их инженерное оборудование и маскировку; проведение комплекса
работ по обеспечению максимальной реализации боевых возможностей каж-
дого зрдн; подготовку и оборудование путей маневра подразделений в пози-
ционном районе; проведение облетов радиолокационных средств.
Взаимодействие организуется: между подразделениями части - на осно-
ве решения командира и разработанного плана боевых действий; с соседями -
на основе боевого приказа и распоряжений по взаимодействию, поступаю-
щих с вышестоящего штаба.
Обеспечение боевых действий организуется на основе распоряжений по
видам обеспечения поступающих с вышестоящего штаба и решения коман-
дира части. Проводимые мероприятия должны отвечать замыслу боевых дей-
ствий и предусматривать возможность маневра силами и средствами, обеспе-
чивать поддержание подразделений в постоянной боевой готовности к вы-
полнению боевой задачи в различных условиях обстановки.
Организация управления заключается: в развертывании командных
пунктов, пунктов управления и автоматизированной системы управления; в
создании системы разведки и системы связи; в четком распределении функ-
ций между заместителями командира, штабом, службами при подготовке и
ведении боевых действий; в слаживании боевых расчетов командных пунк-
тов и пунктов управления, проведении мероприятий по обеспечению эффек-
тивности и устойчивости управления.
Подготовка подразделений к боевым действиям заключается в подго-
товке вооружения и военной техники, слаживании боевых расчетов в составе
подразделений и части, совместной отработке с взаимодействующими частя-
ми и подразделениями возможных вариантов выполнения боевых задач.
Подготовка подразделений к боевым действиям ведется постоянно и
должна обеспечивать успешное выполнение поставленной части боевой за-
дачи в любых условиях обстановки.
Непосредственная подготовка
Непосредственная подготовка к боевым действиям включает: выполне-
ние мероприятий, предусмотренных планом перевода части с мирного на во-
енное время, в том числе приведение систем огня, разведки и управления в
состояние окончательной готовности к выполнению боевой задачи; усиление
разведки воздушного противника; уточнение плана боевых действий с уче-
том конкретной обстановки; проведение мероприятий по инженерному до-
оборудованию позиционного района и маскировке позиций подразделений;
пополнение и рассредоточение ракет и других материальных средств; про-
357
верку боевой готовности подразделений и части в целом, а также проведение
других мероприятий, направленных на подготовку к немедленному ведению
боевых действий. При внезапном нападении воздушного противника эти ме-
роприятия проводятся в ходе ведения боевых действий.
Порядок приведения части в высшие степени боевой готовности опреде-
ляется планом перевода части смирного на военное время, который разраба-
тывается текстуально.
Перевод части с мирного на военное время обеспечивается своевремен-
ным доведением до подразделений установленных сигналов и распоряжений,
своевременным сбором личного состава боевых расчетов, уточнением задач,
проведением установленных мероприятий в части, осуществлением непре-
рывного контроля за ходом выполнения мероприятий по переводу части с
мирного на военное время.
Приведение систем огня, разведки и управления в состояние окончатель-
ной готовности к выполнению боевой задачи заключается: в выполнении ме-
роприятий, проведение которых ограничивается в мирное время (маневр
подразделений на запасные позиции, в том числе маневр мобильных зрдн с
дежурных (учебных) позиций на боевые, доведение углов закрытия радиоло-
кационных средств до минимально возможных и др.); в выставлении вынос-
ных постов визуального и химического наблюдения; в организации получе-
ния информации от дополнительно развертываемых средств взаимодейст-
вующих частей и подразделений; в уточнении порядка управления
подразделениями и взаимодействия в сложившейся обстановке.
Усиление разведки воздушного противника заключается в приведении
системы разведки в состояние окончательной готовности к выполнению бое-
вой задачи, в ведении непрерывной разведки частью или всеми средствами
разведки в зависимости от обстановки, в совершенствовании порядка полу-
чения разведывательной и боевой информации от вышестоящего КП, от
взаимодействующих частей и подразделений.
Уточнение плана боевых действий заключается в конкретизации замысла
боевых действий, боевых задач подразделениям в соответствии с изменения-
ми в составе, базировании и состоянии боевой готовности воздушного про-
тивника, его возможных целей и задач и уточненным решением вышестоя-
щего командира; в уточнении порядка взаимодействия с соседями; в органи-
зации усиления обороны определившихся наиболее важных направлений.
Проведение мероприятий по инженерному дооборудованию позиционного
района и маскировке позиций, направленных на повышение живучести под-
разделений части, заключается в первоочередном проведении мероприятий
защиты личного состава, и боевой техники на занятых после маневра боевых
позициях, в проведении инженерных мероприятий по маскировке войск и
введению противника в заблуждение относительно боевого состава и боевого
порядка, в подготовке путей маневра, в прикрытии позиций инженерными
заграждениями, в оборудовании пунктов полевого водообеспечения.
358
Подготовка части к боевым действиям завершается комплексной провер-
кой готовности ее подразделений и части в целом к выполнению боевой за-
дачи.
12.4.6. Особенности организации тактической ПРО частями
и подразделениями ЗРВ
В настоящее время в мире наблюдается устойчивая тенденция распро-
странения ракетного оружия и ракетных технологий, особенно баллистиче-
ских ракет с дальностью полета до 1000 км. В соответствии с принятой клас-
сификацией данные ракеты относятся к классу оперативно-тактических
ракет (ОТР).
Большинство стран, имеющих на вооружении ОТР. находятся в непо-
средственной близости от границ Российской Федерации и в случае возник-
новения региональных конфликтов имеют возможность наносить ракетные
удары по объектам, находящимся на нашей территории. Это предопределяет
необходимость организации и осуществления противоракетной обороны не-
стратегического уровня (тактической ПРО).
Тактическая ПРО представляет собой организованные действия зенит-
ных ракетных частей, соединений, группировок и обеспечивающих их сил и
средств, проводимые с целью непосредственной защиты объектов и войск от
ударов ОТР путем их обнаружения и поражения на конечных участках траек-
торий полета.
На современном этапе развития и состояния средств борьбы с ОТР в Воо-
руженных Силах Российской Федерации одним из основных варианте?
создания тактической ПРО является совершенствование группировок ЗРВ в
районах возможного возникновения конфликтов с целью придания им спо-
собности защищать объекты и войска от ударов ОТР.
Оценка ОТР как целей для ЗРВ
Оценка ОТР как целей для ЗРВ включает анализ:
основных показателей, характеризующих ОТР как цели для ЗРВ, и
предполагаемые ракетные удары;
тактико-технических характеристик основных типов ОТР, находящихся
на вооружении армий различных стран мира;
сильных и слабых сторон ОТР.
Основные показатели, характеризующие ОТР как цели для ЗРВ, и пред-
полагаемые ракетные удары, условно можно разделить на две группы:
общепринятые - характерные для удара любых СВН, такие, как макси-
мальная скорость цели (Vmnr), эффективная отражающая поверхность цели -
ЭОП (5^), наряд средств (/V), плотность и продолжительность удара (Л^,
irf), радиус поражения боевой части (Rnop) и другие;
359
специфические - (поскольку специфические показатели могут харакге-
ризовать удар не только ОТР, но и баллистических ракет любого типа, при их
описании используется аббревиатура более широкого значения: БР - балли-
стические ракеты; БЦ - баллистические цели), характерные только для удара
баллистических целей, такие, как максимальная и прицельная дальность по-
лета БР (d^, dntM), углы бросания БР, определяющие полет по оптималь-
ной, настильной или навесной траектории (а„р1, значения пре-
дельных углов бросания БР {ат1п, минимальный и максимальный уг-
лы падения БР (0min> 0ntai)> величина ракетоопасного сектора (ДрР0),
нормативное удаление пусковых установок ОТР от линии боевого соприкос-
новения (Ll/y) (рис. 12.45).
Рис. 12.45. Основные показатели, характеризующие траектории полета
баллистических ракет
Максимальная дальность полета БР (d^) обусловлена законами дви-
жения тела по баллистической траектории и в общем виде определяется
сложной функциональной зависимостью, учитывающей стартовую массу ра-
кеты, тягу и время работы двигательной установки, условия старта, лобовое
сопротивление и другие факторы.
При проведении тактических расчетов применяются табличные значения
максимальной дальности полета конкретных типов ОТР (табл. 12.8).
Прицельная дальность полета БР (dn01) - расстояние между точкой
старта и точкой прицеливания.
Основным показателем, определяющим прицельную дальность полета
БР, является угол бросания БР (<т) - угол между горизонтальной плоско-
стью и направлением вектора скорости БР в момент окончания активного
участка полета.
Максимальная дальность полета БР (d^) достигается при оптимальном
угле бросания (аор,), который для ОТР составляет примерно 45° (рис. 12.45).
360
Таблица 12.8
Основные характеристики ОТР с обычной (неядерной) боевой ча-
стью, состоящие на вооружении армий различных стран
Наименование БР (Страна) d max, км V max, км/с ЭОП, м2 в диапазоне длин волн КВО, м Тип ГЧ Мас- са БЧ, кг Норма- тивное удаление от ЛБС, км
см дм м
"Фрог-7" (Польша) 70 0,83 0,45 0,5 1.1 400 Не- отд. 450 20...40
"Ланс-2" (США) 120 1,08 0,03 0,06 0.8 60 Не- отд. 450 20...40
"Атакмс” (США) 150 1,21 0,02 0,03 0.4 25 Не- отд. 540 20...40
"Адес" (Франция) 250 1,57 0,04 0,05 0.5 170 Не- отд. 600 20...40
"Атакмс-М" (США) 300 1,72 0,02 0,03 0,4 285 Не- отд. 540 20...40
ОТР-ЗОО (Польша, КНДР) 300 1,72 0,4 0.6 0.4 900 Не- отд. 1000 30... 180
"Текнекс" (США) 500 2,21 0,04 0,04 0.6 40 Не- отд. 1060 30... 180
ОТР-600 (Иран, КНДР) 600 2,43 0.7 1.0 0.7 1500 Не- отд. 500 80... 160
"Аль-Хуссейн" (Ирак) 650 2,52 0,4 0.6 0.9 1000 Не- отд. 400 80... 160
"Иран-700" (Иран) 700 2,62 0,35 0.4 0.9 600 От- дел. 500 80... 160
"Аль-Аббас” (Ирак) 900 2,8 0,4 0.6 0.9 1500 Не- отд. 250 80... 160
Примечание: Значения ЭОП ОТР приведены для ракурсов, не превышающих ±45°.
При углах бросания, отличных от оптимального, полет ОТР к назначен-
ному объекту может осуществляться по двум типам траекторий: настильной
(пологой) и навесной, которым соответствуют два различных угла бросания
БР: аиас и ант = 90° -анос (рис. 12.45).
В этом случае прицельная дальность полета ОТР определяется выра-
жением: d„01 = dmax • sin 2а.
Диапазон углов бросания БР ограничен предельными значениями ат,„ и
атах, которые определяются конструктивными особенностями ОТР. Для
большинства типов ОТР предельные значения углов бросания находятся в
диапазоне: ат1п = 18...22°; 0^ = 68...72°.
Предельные углы бросания БР ограничивают минимально возможную
дальность пуска ОТР, что не позволяет наносить ракетные удары по объек-
там, расположенным относительно пусковых установок ракет ближе
0,6..0,65^.
361
Кроме того, запуск ОТР при углах бросания, близких к предельным, при-
водит к резкому увеличению кругового вероятного отклонения от точки при-
целивания (КВО), что существенно ограничивает возможности применения
ОТР по точечным (малоразмерным) объектам.
Максимальная дальность полета и предельные углы бросания ОТР
конкретных типов с учетом нормативного удаления пусковых установок
ОТР от линии боевого соприкосновения (Lnyt рис. 12.48, табл. 12.8) опреде-
ляют положение максимального и минимального рубежей досягаемости.
ОТР как цели для ЗРВ характеризуют минимальный и максимальный
углы падения БР (0ппяи #nuu) - углы, определяемые относительно горизон-
та наклоном касательной к траектории полета БР в точке падения при на-
стильной и навесной траекториях (рис. 12.45):
Й -awinfd^/d^) -atf-a (12-78)
“mtn 2 ’ “"tax ~ V" “min •
Высота ОТР в любой точке траектории полета определяется выражени-
ем
M^cos'e
(12.79)
где dmeK - текущая горизонтальная дальность БЦ от точки старта.
Рассмотренные аналитические выражения позволяют рассчитать и по-
строить реализуемые траектории полета ОТР заданного типа при различных
углах бросания (рис. 12.46).
Рис. 12.46. Траектории полета ОТР-ЗОО при различных углах бросания
Скорость ОТР в течение полета постоянно изменяется. При этом график
изменения скорости ОТР имеет три ярко выраженных участка (рис. 12.47):
разгон во время работы двигателя;
плавное изменение скорости, соответствующее полету по баллистической
траектории в разреженных слоях атмосферы;
торможение при входе в плотные слои атмосферы.
362
Важно отметить, что характер изменения скорости ОТР на втором участ-
ке (при полете по баллистической траектории) обусловлен преимущественно
изменением вертикальной составляющей скорости. Горизонтальная состав-
ляющая скорости полета ОТР на данном участке остается практически неиз-
менной. в значительной степени зависит от угла бросания (падения) и опре-
деляется выражением
V. = Vo • cos в = const,
где Vo - скорость ЫД в момент окончания работы двигательной установки,
соответствует максимальной скорости полета ОТР (VffI/n, табл. 12.8).
Знание горизонтальной составляющей скорости позволяет рассчитывать
время полета ОТР до точки прицеливания:
Т —
"" Vv-cose' (12.80)
Рис. 12.47. Характер изменения скорости ОТР-ЗОО во время полета
по настильной, навесной и оптимальной траекториям
Важным тактическим показателем, характеризующим параметры предпо-
лагаемого ракетного удара, является ракетоопасный сектор (Д/3Р0) - сек-
тор в азимутальной плоскости, в пределах которого возможен удар балли-
стических целей по обороняемому объекту. Величина ракетоопасного сек-
тора определяется по карте отдельно для каждого объекта.
При отсутствии разведывательной информации о положении стартовых
позиций ОТР величина ракетоопасного сектора определяется по формуле
^ГО = 2агссо5^У^., (i2gi)
где Lny - нормативное удаление пусковых установок ОТР от линии боевого
соприкосновения (ЛБС);
L:/f-c ~ удаление обороняемого объекта от ЛБС (рис. 12.48).
363
Таким образом, применительно к ЗРВ направление предполагаемого уда-
ра ОТР всегда будет ограничено в горизонтальной плоскости величиной ра-
кетоопасного сектора, а в вертикальной плоскости диапазоном реализуемых
углов падения, что позволяет заблаговременно строить систему разведки и
систему огня для решения задач тактической ПРО.
Рис. 12.48. Определение границ и величины ракетоопасного сектора
ОТР обладают высокой способностью по преодолению оборонительных
систем противника. Это сильная сторона ОТР, которая обусловлена:
малым подлетным временем к объектам поражения (2...3 мин. при
стрельбе на дальность до 100 км, 3...7 мин. при стрельбе на дальность
ЗОЮ км);
маюй ЭОП (0,01...0,5 м2) и широким диапазоном реализуемых углов па-
дения (20...700);
относительно большими скоростями (1000...3000 м/с) и высотами поле-
та (40...400 км);
устойчивостью боевых блоков (головных частей) ОТР к воздействию
ударной волны и осколков, определяемой маюй суммарной площадью жиз-
ненно важных отсеков (ЖВО) и их высокой защищенностью.
Наряду с сильными сторонами ОТР имеют и слабые стороны, к которым
относятся:
сравнительно низкая точность наведения для большинства ракет,
имеющих только инерциальную систему наведения, что исключает возмож-
ность их применения по точечным объектам (КВО = 600... 1500 м);
невозможность эффективной стрельбы по подвижным и маневрирую-
щим целям.
364
наличие демаскирующего признака (работа двигательной установки на
начальном участке полета) способствует обнаружению старта ОТР в инфра-
красном диапазоне из космоса и с воздуха;
сравнительно большая ЭОП при полете на восходящем участке траек-
тории позволяет обнаруживать стартующие ОТР с земли и с воздуха в ра-
диолокационном диапазоне.
Слабые стороны ОТР ограничивают противника в выборе объектов для
нанесения ракетных ударов и выявляют уязвимые места БЦ при организации
борьбы с ними.
Возможности зенитных ракетных комплексов по обстрелу ОТР
Возможности зенитных ракетных комплексов (ЗРК) по обстрелу ОТР ха-
рактеризуют:
ограничения по максимальной скорости обстреливаемых целей;
параметры зоны поражения ЗРК при стрельбе по ОТР.
Возможности огневых средств по обстрелу ОТР ограничены максималь-
ной скоростью обстреливаемых целей (V™ ЗРК). С учетом этого стрельба по
ОТР возможна только при выполнении условия:
VTTX3PK>V
/пал max ‘
Для конкретного типа ОТР максимальная скорость полета (У,лЛ1)
определяется из табл. 12.8 либо рассчитывается по формуле
Vma< = V0 = max 8 О 1™/С J,
где g0 =0,00981 км/с2 - ускорение свободного падения.
Важными показателями возможностей ЗРК по обстрелу ОТР конкретного
типа являются параметры зоны поражения.
Зона поражения ЗРК ограничена возможностями по обстрелу ОТР кон-
кретного типа в определенных (заданных) условиях стрельбы.
Для зоны поражения ближняя и верхняя границы, как правило, не зависят
от характеристик БЦ и определяются в основном возможностями ЗУР:
ближняя граница - минимально необходимым временем вывода ЗУР на
кинематическую траекторию;
верхняя граница - маневренными возможностями ЗУР в разреженных
слоях атмосферы (соотношением располагаемых и потребных перегрузок).
Нижняя граница зоны поражения определяется высотой "безопасного"
перехвата БЦ и зависит преимущественно от типа боевой части ОТР.
Дальняя граница реализуемой зоны поражения ЗРК при стрельбе по БЦ в
значительной степени зависит от эффективной отражающей поверхности
баллистической цели и ее максимальной скорости полета (5^ и V^,
табл. 12.8), скорости полета ЗУР, уровня помех. Кроме того, на положение
дальней границы зоны поражения существенное влияние может оказывать
положение КПС и его возможности по обнаружению, завязке трасс и выдаче
ЦУ огневым средствам.
365
Максимальный курсовой угол обстреливаемой баллистической цели огра-
ничен в основном возможностью согласования области срабатывания радио-
взрывателя с областью разлета осколков при возрастании углов встречи ра-
кеты с целью и угловой скорости цели.
Возможности ЗРС но прикрытию объектов от ударов ОТР
Возможности зенитной ракетной группировки (отдельных ЗРК) по при-
крытию объектов от ударов ОТР характеризуются параметрами (размерами)
зоны обороны.
Зона обороны - участок местности, прикрываемый ЗРК (ЗРС) от уда-
ров баллистических целей. Размеры, конфигурация и положение границ зоны
обороны зависят от количества и взаимного расположения ЗРК, параметров
их зон поражения, диапазона возможных направлений полета и углов паде-
ния баллистических целей, а также от требуемой вероятности их поражения.
Влияние параметров зоны поражения ЗРК, диапазона углов падения бал-
листических целей и требуемой вероятности их уничтожения на положение
границ зоны обороны при фиксированном направлении удара (Д0ро =0) по-
казано на рис. 12.49.
//, kw навесная траектория полета БЦ
5, - настильная
траектория
полета БЦ
Рис. 12.49. Влияние параметров зоны поражения, диапазона углов
падения баллистических целей и требуемой вероятности их уничтожения
на положение границ зоны обороны ЗРК
Влияние величины ракетоопасного сектора (ДРр0) на размеры и конфи-
гурацию зоны обороны ЗРК показано на рис. 12.50.
366
Рис. 12.50. Влияние величины ракетоопасного сектора на размеры и кон-
фигурацию зоны обороны ЗРК
Оценка возможностей зенитной ракетной группировки (ЗРК) по прикры-
тию объектов от ударов ОТР осуществляется сопоставлением положения
границ зоны обороны зенитной ракетной группировки (ЗРК) и границ оборо-
няемых объектов. Обороняемые объекты считаются прикрытыми от ударов
ОТР в том случае, когда они полностью накрыты зоной обороны зенитной
ракетной группировки (ЗРК), рассчитанной для заданных условий.
Порядок определения границ зоны обороны
Положение границ зоны обороны относительно позиции ЗРК в парамет-
рической системе координат характеризуют: предельный параметр - Рпр и
удаления передней и тыльной границ зоны обороны - Ln, Lj- (рис. 12.51).
Зона обороны:
отрезки ab. ed • левая н правая границы
{Pnf - предельный параметр, удаление левой
н правой границ от осн 01.);
дуга be - передняя граница
(/.и - удаление передней границы от оси ОР ):
отрезки de. fa н д> га cf- тыльная граница
(Lj - удаление тыльной границы от осп ОР );
0 - позиция ЗРК (зрдн)
Рис. 12.51. Показатели, характеризующие положение границ
зоны обороны
Определение границ зоны обороны ЗРК осуществляется поэтапно: снача-
ла аналитически рассчитываются удаления передней и тыльной границ зоны
обороны для одного направления удара баллистических целей, т.е. без учета
367
величины ракетоопасного сектора; затем путем графического построения зон
обороны, рассчитанных для различных направлений ударов баллистических
целей, учитывается влияние величины ракетоопасного сектора на конфигу-
рацию зоны обороны.
а) определение границ зоны обороны без учета величины
ракстоопасного сектора (.Afipo =0°)
Предельный параметр зоны обороны соответствует предельному пара-
метру зоны поражения ЗРК при стрельбе по баллистической цели данного
типа.
Удаления передней и тыльной границ зоны поражения определяются для
конкретных значений параметра полета баллистической цели.
I. Рассчитывается величина отрезка (J/), ограничивающего зону пора-
жения ЗРК с учетом необходимости обстрела баллистической цели требуе-
мым нарядом ЗУР (рис. 12.49):
Убцср'Урср
^бцср+Урср
где п - наряд ЗУР в очереди, назначаемый на баллистическую цель;
ти - интервал между пусками ЗУР в очереди;
Vtycp. - средние скорости полета баллистической цели и ЗУР.
2. Задается ряд значений параметра Pt от 0 до Рпр. Дискретность зада-
ваемых значений должна обеспечивать требуемую точность определения
границ зоны обороны и может составлять 0,5...2 км.
3. Для каждого значения Р( рассчитываются:
а) удаление передней границы зоны обороны:
Ln, ^О’-Н’-Р2-Н, Clge^,
где Dd - наклонная дальность дальней границы зоны поражения ЗРК
при стрельбе по баллистической цели данного типа;
Нj = Hmin + Д1 • sin0min - минимально допустимая высота входа
настильной траектории полета баллистической цели в зону
поражения ЗРК, при которой обеспечивается обстрел данной цели
требуемым нарядом ЗУР (рис. 12.49);
Нт{п - минимальная высота зоны поражения ЗРК при стрельбе
по баллистической цели данного типа;
0т1„- минимальный возможный (реализуемый в заданных условиях)
угол падения баллистической цели;
б) удаление тыльной границы зоны обороны:
LTI= ~Р‘‘ ~нг 'с,Хвш- при P^ds -sinq^:
И с'«9™х - н! egпри P,>d6 sinq^.
368
где dG - горизонтальная дальность ближней границы зоны поражения ЗРК
при стрельбе по баллистической цели;
Н2 = Нп1ах - Л/ • sin0max - максимально допустимая высота выхода
навесной траектории полета баллистической цели из зоны
поражения ЗРК, при которой обеспечивается обстрел данной цели
требуемым нарядом ЗУР (рис. 12.49);
~ максимальная высота зоны поражения ЗРК при стрельбе
по баллистической цели;
0П1ал ~ максимальный возможный (реализуемый в заданных условиях)
угол падения баллистической цели;
Чтах ~ максимальный курсовой угол обстреливаемой баллистической
цели.
Значения предельного параметра (Рпр) и удалений передней и тыльной
границ зоны обороны (£./z. jLj-). рассчитанные для всего выбранного ряда
значений Р,, используются для графического построения зоны обороны при
фиксированном направлении удара баллистических целей (рис. 12.52, а).
^Iie
г VW?
И
- _ 1
Р
а)ДРро=0-
б) д|зю>о-
Рис. 12.52. Учет влияния величины ракетоопасного сектора на размеры и
конфигурацию зоны обороны
б) определение границ зоны обороны с учетом величины
ракетоопасного сектора (Л0рО >0°)
Влияние величины ракетоопасного сектора на размеры и конфигурацию
зоны обороны учитывается графически путем определения области пересе-
чения зон обороны, рассчитанных аналитически и построенных для различ-
ных направлений удара (рис. 12.52, б).
1. Относительно позиции (точки стояния) ЗРК строится ракетоопасный
сектор, азимут левой и правой границ которого определяется относительно
объекта обороны (условного центра объекта).
369
2. В пределах ракетоопасного сектора, начиная с левой границы и
заканчивая правой, с дискретностью 5 ..10° наносятся возможные
направления удара баллистических целей.
3. Относительно каждого направления удара строится зона обороны, рас-
считанная аналитически.
4. Определяется область пересечения зон обороны, построенных для всех
возможных направлений удара, которая представляет собой зону обороны
ЗРК с учетом величины ракетоопасного сектора (рис. 12.52, б).
12,4.7. Система обеспечения боевых действий ЗРВ
Система технического обеспечения ЗРВ ВВС представляет собой сово-
купность органов управления, снабжения, ремонтных органов и источников
материальных средств, функционирующих по единому плану, предусматри-
вающему обеспечение требуемых уровней поддержания или приращения
боевых возможностей обеспечиваемых войск.
Техническое обеспечение организуется и осуществляется во всех видах
боевой и повседневной деятельности войск в соответствии с их задачами, со-
ставом, замыслом боевых действий и условиями боевой обстановки.
Под техническим обеспечением ЗРВ понимается комплекс спланирован-
ных по цели, месту и времени организационных и технических мероприятий,
направленных на снабжение войск ВВТ, поддержание их в постоянной го-
товности к выполнению боевых задач, своевременный перевод в высшие
степени боевой готовности, надежное функционирование в ходе боевых дей-
ствий, быстрое возвращение в строй при повреждениях. Оно представляет
собой согласованные действия элементов системы технического обеспече-
ния: органов управления, снабжения, ремонтных органов, источников мате-
риальных средств, сил и средств частей (соединений, объединений), а также
сил и средств взаимодействующих органов и местной промышленной базы
для достижения целей технического обеспечения.
Сущность технического обеспечения заключается в поддержании воору-
жения и военной техники (ВВТ), ракет и боеприпасов, военно-технического
имущества в постоянной готовности к применению.
Техническое обеспечение базируется на следующих принципах:
обеспечение войск вооружением и военной техникой (ВВТ), зенитными
управляемыми ракетами и военно-техническим имуществом (ВТИ) по схеме
"сверху-вниз";
сосредоточение основных усилий на обеспечении группировок войск,
выполняющих задачи на главных направлениях;
своевременное и бесперебойное пополнение запасов вооружения и воен-
ной техники, ракет, боеприпасов, ЗИП и ВТИ до установленных норм;
своевременное проведение технического обслуживания; восстановление
поврежденного вооружения, в первую очередь, в боевых порядках войск ме-
тодом агрегатного ремонта и перекомплектации;
370
своевременное наращивание усилий по восполнению потср® за счет пе-
рераспределения сил и средств;
максимальное использование местной промышленной базы для восстано-
вительного ремонта и пополнения запасов средств измерений, оборудования,
материалов и инструментов.
Основными задачами технического обеспечения являются:
сбор и обобщение данных о наличии, состоянии и расходе ВВТ, опреде-
ление потребностей в них и своевременное истребование их в органах
снабжения;
организация эксплуатации ВВТ;
организация ремонта ВВТ;
организация восстановления ВВТ, получивших боевые повреждения;
эшелонирование и накопление зенитных управляемых ракет на старто-
вых позициях зенитных ракетных дивизионов.
В свою очередь, организация эксплуатации ВВТ в части ЗРВ включает
организацию процессов:
получения и ввода в эксплуатацию вооружения; технического обслужи-
вания и текущего ремонта; рекламационной работы; категорирования и спи-
сания; частотной службы; модернизаций и доработок вооружения ЗРВ; кон-
троля технического состояния ВВТ; хранения ВВТ; транспортирования ВВТ;
безопасной эксплуатации ВВТ в части ЗРВ.
Успешное решение задач технического обеспечения достигается:
готовностью командиров, штабов и инженерного состава к организа-
ции и руководству техническим обеспечением;
высокой специальной технической подготовкой личного состава, знанием
им вооружения, умением правильно, технически грамотно и своевременно
проводить соответствующие технические обслуживания;
четким планированием и целесообразной организацией применения сил и
средств технического обеспечения, своевременным накоплением, эшелони-
рованием и гибким маневром ими;
правильным и своевременным определением потребности войск в воору-
жении, ракетах и способностью органов технического обеспечения своевре-
менно обеспечивать ими части;
готовностью личного состава войск и органов технического обеспечения
своевременно обеспечивать и проводить восстановление поврежденного во-
оружения; своевременным проведением мероприятий по защите, охране и
обороне частей, подразделений и учреждений технического обеспечения;
непрерывным, твердым и гибким управлением техническим обеспечени-
ем.
Параметры системы технического обеспечения ЗРВ, в плане, организации
эксплуатации и ремонта ВВТ, опосредованно, через значения показателей
надежности, влияют на огневые возможности группировок ЗРВ ВВС, что
является первым тактико-техническим аспектом влияния.
Вторым, не менее важным, тактико-техническим аспектом является
влияния на огневые возможности группировки ЗРВ ВВС восполнения во-
371
оружения и военной техники, получивших боевые повреждения. Известно,
что основное требование, предъявляемое к зенитной ракетной обороне, явля-
ется ее устойчивость, т.е. способность обороняющихся войск противостоять
ударам противника.
Третьим тактико-техническим аспектом является влияние на огневые воз-
можности группировок ЗРВ характеристик системы эшелонирования и
накопления зенитных управляемых ракет на стартовых позициях зенитных
ракетных дивизионов, являющейся составной частью системы технического
обеспечения. Степень влияния системы технического обеспечения на при-
рост огневых возможностей группировки ЗРВ можно учитывать через соот-
ветствующий коэффициент вида
М0-Мц
о =---------,
Мц
где - математическое ожидание числа уничтоженных целей,
определяющее огневые возможности группировки ЗРВ в реальных
условиях,
Мо - математическое ожидание числа уничтоженных целей, определяю-
щее огневые возможности группировки ЗРВ в случае абсолютно
надежных ЗРК и ЗУР ( КБГ-1 для ЗРК и Кбр1=1 для /-й ЗУР)
S = . ' КГ>Г, •['КБ!Ч 'Ъ)"]' ,Ncnp.ij
1 = 1 J J = 1
где: KPi - коэффициент реализации потенциальных огневых возможно-
стей ЗРК i-го типа, определяемый через произведение коэффи-
циентов снижения эффективности ЗРК за счет системы управле-
ния и стрельбы по маневренным, маловысотным и целям под
прикрытием помех;
Ksp, - коэффициент боевой работы ЗУР ЗРК /-го типа;
Кбп - коэффициент надежности ЗРК /-го типа;
Рц- вероятность поражения цели одной ракетой ЗРК /-го типа;
п - число ЗУР в очереди;
L - число типов ЗРК в группировке ЗРВ;
f* - число ЗРК /-го типа в группировке ЗРВ;
Ncmp.ij - число стрельб, совершенных ЗРК /-го типа с номером j.
Таким образом, рассмотренные тактике-технические аспекты влияния
системы технического обеспечения на огневые возможности группировок
зенитных ракетных войск доказывают, что они в большой степени обу-
словлены как характеристиками этой системы, так и процессом организа-
ции взаимодействия составляющих ее сил и средств.
372
Вилы технического обеспечения ЗРВ
Основными видами технического обеспечения ЗРВ являются ракетно-
техническое, инженерно-ракетное и инженерно-артиллерийское обеспечение.
Ракетно-техническое обеспечение организуется и осуществляется в
целях поддержания постоянной боеготовности зенитных ракет и ком-
плектующих элементов для их содержания, а также своевременной под-
готовки и доставки войскам зенитных ракет. Ракетно-техническое обес-
печение в ЗРВ организуется в объединениях ВВС и ПВО, соединениях
ПВО, частях зенитных ракетных войск. Основные задачи ракетно-
технического обеспечения: накопление и рациональное эшелонирование
войсковых и оперативных запасов зенитных ракет (в соединениях ПВО и
частях зенитных ракетных войск), хранение (содержание), рассредоточе-
ние, укрытие и обеспечение сохранности; проведение их технического
обслуживания, ремонта и восстановления технического ресурса; контроль
за выполнением правил обращения с ракетами при их хранении, транс-
портировании и подготовке к боевому применению в зенитных ракетных
частях; выполнение работ по ликвидации последствий аварий с ракетами
и боеприпасами; эвакуация или уничтожение ракет и боеприпасов в слу-
чае неотвратимой угрозы захвата их противником в боевых условиях;
обеспечение войск военно-техническим имуществом и документацией,
необходимыми для эксплуатации, боевого применения и ремонта ракет;
обеспечение живучести и постоянной готовности частей технического
обеспечения к выполнению задач, организация управления ими.
Ракетно-техническое обеспечение зенитных ракетных войск ВВС осуще-
ствляется силами инженерно-технического состава зенитных ракетных час-
тей, технических батарей, войсковыми ремонтными органами, арсеналами
(заводами по ремонту ВТИ), базами (складами) снабжения и хранения во-
оружения, выездными ремонтными бригадами заводов по ремонту ВТИ и
предприятий промышленности.
Ракетно-техническое обеспечение зенитных ракетных войск на оператив-
ном уровне организуется в объединении ВВС и ПВО - заместителем коман-
дующего объединения ВВС и ПВО по вооружению.
Инженерно-ракетное обеспечение организуется и осуществляется в
целях поддержания постоянной боеготовности зенитного ракетного во-
оружения и его восстановления (ремонта) при повреждениях (отказах) и воз-
вращения в строй.
Основные задачи ИРО: обеспечение частей и подразделений зенит-
ными ракетными системами и комплексами, пусковыми установками,
специальными машинами, средствами эксплуатации и ремонта и военно-
техническим имуществом; накопление и рациональное эшелонирование вой-
сковых запасов; хранение (содержание), рассредоточение и обеспечение
их сохранности; техническое обслуживание, ремонт и обеспечение доработок
зенитных ракетных систем и комплексов, пусковых установок, специальных
373
машин; восстановление и возвращение в строй при повреждении; организа-
ция контроля за выполнением правил эксплуатации и ремонта.
Инженерно-ракетное обеспечение зенитных ракетных войск на опера-
тивном уровне организуется - заместителем командующего объединения по
вооружению.
Инженерно-ракетное обеспечение осуществляется арсеналами (заво-
дами по ремонту ВТИ), базами (складами) снабжения и хранения во-
оружения, выездными ремонтными бригадами заводов по ремонту ВТИ
и предприятий промышленности.
Инженерно-ракетное обеспечение в соединении ПВО (части)
осуществляется силами боевых расчетов подразделений, ремонтно-
техническими ротами частей ЗРВ, ремонтно-восстановительным баталь-
оном соединения ПВО.
Техническое обслуживание и текущий ремонт зенитного ракетного
вооружения осуществляются силами войск, ремонтными частями и под-
разделениями частей, соединения и объединения ПВО. Капитальный и
средний ремонт зенитного ракетного вооружения осуществляется про-
мышленными предприятиями объединений ПВО, Центра (ремонтными
базами, заводами, арсеналами) и предприятиями промышленности.
Инженерно-артиллерийское обеспечение организуется и осуществля-
ется в целях поддержания постоянной боеготовности вооружения и боепри-
пасов общевойсковой номенклатуры, его восстановления (ремонта) вооруже-
ния при повреждениях (отказах) и возвращения в строй.
Основные задачи инженерно-артиллерийского обеспечения: уком-
плектование войск необходимым количеством артиллерийского воору-
жения, стрелкового оружия, боеприпасов; организация их технического
обслуживания, хранения, транспортирования, текущего и планового ре-
монта; своевременное восстановление и возвращение в строй при по-
вреждении. учет наличия и состояния; контроль за техническим состоя-
нием, расходом ресурса, условиями хранения артиллерийского воору-
жения, стрелкового оружия, боеприпасов.
Техническое обслуживание и текущий ремонт артиллерийского во-
оружения и стрелкового оружия проводятся силами и средствами войск
с участием ремонтных органов соединений и частей, средний ремонт -
силами и средствами соответствующих военных округов, капитальный
ремонт - ремонтными органами Центра и предприятий промышленно-
сти.
Силы и средства технического обеспечения зенитных ракетных войск
Техническое обеспечение осуществляется личным составом, экс-
плуатирующим ВВТ, а также силами и средствами технического обес-
печения Центра, объединений, соединений, частей и подразделений.
К силам и средствам технического обеспечения относятся личный
состав, средства обслуживания, эвакуации, ремонта и хранения ВВТ,
374
ракет, боеприпасов и военно-технического имущества, имеющиеся в
частях и подразделениях технического обеспечения.
К силам и средствам технического обеспечения центра относятся:
управления Начальника вооружения ВВС;
военная приемка Министерства обороны (МО), базы хранения во-
оружения, военные контрольно-испытательные и технические базы;
арсеналы, центральные базы ремонта, базы снабжения и хранения
ВВТ, ремонтные заводы, ремонтно-технические базы, базы ремонта и
хранения вооружения и военной техники;
центральная база измерительной техники, центральные лаборатории
измерительной техники;
центральные заводы по ремонту автомобильной техники и средств
подвижности вооружения;
выездные ремонтные бригады предприятий Министерства обороны и
предприятий промышленности.
К силам и средствам технического обеспечения ЗРВ объединений
относятся:
аппарат заместителя командующего по вооружению;
базы ремонта и хранения ВВТ (базы снабжения и хранения ВВТ) и
выездные ремонтно-восстановительные бригады, формируемые по мо-
билизационному плану;
подвижные ремонтные базы;
база измерительной техники;
лаборатория по ремонту энергооборудования и кондиционеров
(ЛРЭОК);
авторемонтный завод, оснащенный подвижными авторемонтными
мастерскими ПАРМ-ЗМ;
отделение ремонта КСА в составе отдела АСУ и связи;
подвижная ремонтно-химическая мастерская (ПРХМ);
авторемонтная передвижная станция инженерных машин (АПРИМ),
ремонтный взвод, взвод материального обеспечения инженерной служ-
бы.
База ремонта и хранения ВВТ является стационарным предприятием
армейского подчинения и предназначена для ведения технической
разведки, эвакуации и ремонта ВВТ. В состав базы входят: управление;
технический отдел; отдел главного экономиста; отдел технического
контроля; производственные цехи; службы обслуживания.
В мирное время стационарные ремонтные предприятия производят
капитальный (средний) ремонт ВВТ. а в военное время - капитально-
восстановительный ремонт вооружения, получившего повреждения
сильной степени.
Выездная ремонтная бригада (ВРБ) является составной частью ста-
ционарной базы и предназначена для оказания помощи войскам (силам)
в условиях военного времени для выполнения восстановительного ре-
375
монта элементов BBT в боевых порядках войск (сил), поврежденных в
средней степени.
Выездная ремонтная бригада в своем составе имеет: группы по ре-
монту радиоэлектронных средств; группы по ремонту стартового и тех-
нологического оборудования; группы по ремонту ракет; группы по ре-
монту энергетических средств; группы по ремонту АСУ; группы по ре-
монту вычислительных средств.
Количество специалистов в составе каждой группы может изменять-
ся в зависимости от характера выполняемых работ.
Подвижная ремонтная база является ремонтным предприятием ар-
мейского подчинения и предназначена для выполнения среднего восстано-
вительного ремонта в боевых порядках войск. В ее состав входят: управление;
подразделения технического обеспечения; основные подразделения и подраз-
деления технического обслуживания. Для восстановления средств многока-
нальных ЗРС всех модификаций в настоящее время используется передвиж-
ная ремонтная база (ПРБ). В составе базы входят специализированные мас-
терские, размещенных в унифицированных полуприцепах для проведения
следующих работ: диагностика неисправных элементов с точностью до ком-
плектующего элемента и последующего контроля отремонтированных эле-
ментов; ремонт ячеек, субблоков, вторичных источников питания и кабелей;
проведение технических и слесарных работ на ЗРС; контроль, диагностика и
ремонт средств связи; контроль, диагностика и ремонт ЦВК и стендов для
ремонта блоков ЦВК.
База измерительной техники (БИТ) объединения ВВС и ПВО осуще-
ствляет: поверку, ремонт и регулировку КИПС, АКИПС, средств измерения
общего назначения и специальной измерительной аппаратуры (специальных
приборов авиации и связи др.).
Лаборатория по ремонту энергооборудования и кондиционеров предна-
значена для перепроверки приборов и устройств высокого напряжения,
поверки и текущего ремонта энергооборудования, оказания помощи лично-
му составу боевых расчетов в выполнении технических обслуживании и ре-
монта энергосредств. В ее состав входят: отделение ремонта низковольтной
аппаратуры и кондиционеров; отделение ремонта высоковольтной аппарату-
ры и дизелей.
Лаборатория оснащена электротехнической лабораторией, мастерской
обслуживания МТО-АТ и машиной ремонта кобелей КАМ.
К силам и средствам технического обеспечения ЗРВ соединения отно-
сятся:
отделение ремонта КСА;
отделение хранения вооружения РХБ защиты;
авторемонтная мастерская;
лаборатория измерительной техники (ЛИТ);
инженерно-технический взвод;
Кроме того, в военное время предусмотрена выездная ремонтная бригада
вооружения ЗРВ.
376
Основным войсковым подвижным ремонтно-восстановительным органом
в соединении ПВО является лаборатория измерительной техники.
Лаборатория предназначена для поверки и ремонта средств измерений
общего назначения, переносимых и встроенных в аппаратуру и оборудование
ВВТ.
К силам и средствам технического обеспечения частей ЗРВ относятся:
аппарат заместителя командира по вооружению;
ремонтно-технические роты;
контрольно-проверочные расчеты;
мастерские и склады узла связи;
склады войсковых запасов;
инженерные отделения;
отделения химической защиты (в военное время - взводы);
отделения АСУ;
автомобильная служба, технические средства автопарка.
В частях имеются групповые комплекты ЗИП. В подразделениях для ре-
шения задач технического обеспечения привлекаются боевые расчеты под-
разделений и одиночные комплекты ЗИП.
Работа командира, штаба и заместителя командира по вооружению
при организации управлении техническим обеспечением
Под организацией управления техническим обеспечением понимает-
ся целенаправленная деятельность командиров, штабов и других органов
управления по созданию системы управления ТО, поддержанию ее в высо-
кой боевой готовности, развитию и наращиванию при подготовке и веде-
нии боевых действий, а также осуществлению мероприятий по обеспече-
нию ее устойчивой работы в любых условиях обстановки.
В общем случае организация управления ТО включает:
установление основополагающих вопросов управления ТО в решении
командира части на боевые действия;
планирование технического обеспечения;
доведение до подразделений положений по управлению ТО в ходе бое-
вых действий.
Непосредственное руководство выполнением всех мероприятий по орга-
низации управления ТО осуществляет заместитель командира части по во-
оружению.
Содержание, последовательность и методы работы заместителя команди-
ра части по вооружению определяются обстановкой, характером поставлен-
ных задач и установленными сроками готовности войск к их выполнению.
Во всех случаях организация и методы работы должны обеспечивать:
твердое и непрерывное руководство силами и средствами ТО и подразде-
лениями;
поддержание взаимодействия между ними, своевременное принятие ре-
шений;
377
полное и качественное осуществление мероприятий по планированию
технического обеспечения;
оперативное реагирование на изменения обстановки и наиболее эффек-
тивное использование сил и средств ТО в ходе боевых действий.
Важным элементом в работе заместителя командира по вооружению при
организации управления ТО является рациональное распределение задач и
функций управления между командными инстанциями и внутри них.
При проведении этой работы руководствуются следующими положения-
ми:
вышестоящий орган управления решает только те задачи, которые не мо-
гут быть решены на низшем уровне или решаются им с недостаточной эф-
фективностью;
каждый орган управления решает задачи в соответствии с потребным и
располагаемым временем;
учитывается наличие необходимой, своевременной и достоверной ин-
формации в органах управления для решения соответствующих задач;
вынужденная передача функций управления на нижестоящие командные
инстанции не снимает ответственности с вышестоящих инстанций за реше-
ние задачи в целом;
при определении соотношения творческой деятельности человека и ЭВМ
необходимо руководствоваться принципом ответственности и взаимодопол-
няемости (совместимости).
При распределении задач и функций управления ТО учитываются сле-
дующие факторы:
общий объем решаемых задач, частота их возникновения или повторе-
ния;
тактическая важность задачи в общем потоке возникающих задач управ-
ления;
располагаемое время и наличие необходимой информации для решения
задачи управления;
эргономические показатели трудовой деятельности лиц боевых расчетов,
их компетентность и полномочия в решении тех или иных задач управления.
Способы управления определяются на основе:
количественного анализа соотношения располагаемого потребного вре-
мени управления для различных звеньев управления с учетом конкретных
особенностей района боевых действий;
предполагаемого характера действий воздушного противника и послед-
ствий применения его сил и средств;
Основной объем работ, связанных с разработкой, доведением и контро-
лем выполнения мероприятий по организации управления ТО, возлагается на
заместителя командира части по вооружению, который руководит должност-
ными лицами, осуществляющими техническое обеспечение.
378
Планирование технического обеспечения в части ЗРВ
Мероприятия по организации управления ТО разрабатываются в ходе
планирования технического обеспечения. Процесс планирования техническо-
го обеспечения в часги ЗРВ осуществляется на основе исходных данных.
Исходными данными для принятия решения на техническое обеспечение
являются распоряжения по видам технического обеспечения вышестоящего
командования, замысел командира соединения (части) ЗРВ на боевые дейст-
вия и отданные им указания по техническому обеспечению, результаты уяс-
нения поставленной задачи, оценки обстановки, проведенные заместителем
командира по вооружению и начальниками подчиненных служб расчеты.
Уяснив боевую задачу и распоряжения по техническому обеспечению,
командир части делает выводы и дает указания своему заместителю по во-
оружению.
В своих указаниях командир соединения (части) ЗРВ определяет:
на каких подразделениях сосредоточить основные усилия сил и средств
технического обеспечения;
как осуществлять обеспечение подразделений вооружением и военной
техникой, боеприпасами и военно-техническим имуществом;
какие новые или дополнительные мероприятия по техническому обеспе-
чению необходимо осуществить в связи с изменением боевого состава со-
единения (части) ЗРВ или его боевого порядка;
какие вопросы, связанные с техническим обеспечением, необходимо до-
полнительно согласовать с органами тыла, соседями;
технический ресурс, который должны иметь вооружение и военная тех-
ника к началу боевых действий;
сроки готовности вооружения к боевым действиям;
какие мероприятия необходимо провести в подчиненных подразделениях
немедленно по организации технического обеспечения.
Исходя из указаний в подчиненные подразделения могут поступать пред-
варительные распоряжения, которые включают и вопросы технического
обеспечения.
Выработке замысла технического обеспечения предшествует всесторон-
няя оценка обстановки.
Она включает:
оценку противника (предполагаемая обстановка в границах ответствен-
ности подразделений; возможные потери; ожидаемый расход ракет, боепри-
пасов; возможные интервалы времени между нанесением ударов противни-
ком; прогноз радиационной, химической и биологической обстановки);
оценку своих войск (состояние и обеспеченность подразделений ВВТ,
военно-техническим имуществом, ракетами и боеприпасами; состояние,
обеспеченность и возможности подразделений технического обеспечения;
состояние материальных средств, предназначенных для восстановления
ВВТ; возможности по маневру силами и средствами технического обес-
379
печения; условия взаимодействия и управления техническим обеспечени-
ем);
оценку района боевых действий (состояние коммуникаций, влияние
местности, времени года, метеорологических и климатических условий на ор-
ганизацию технического обеспечения; возможности использования сил и
средств технического обеспечения Центра, других видов Вооруженных Сил
и предприятий местной промышленной базы; возможные изменения условий
в результате применения ядерного оружия по войскам и объектам).
В результате уяснения задачи, оценки обстановки, проведенных рас-
четов начальниками служб, заместитель командира части по вооружению
вырабатывает предложения командиру на организацию технического
обеспечения боевых действий, которые включают основу замысла техниче-
ского обеспечения.
В предложениях заместитель командира части по вооружению отражает
основные вопросы организации технического обеспечения:
цели и задачи технического обеспечения;
силы и средства, привлекаемые для решения этих задач:
мероприятия технического обеспечения с учетом особенностей пред-
стоящих боевых действий;
способы технического обеспечения (эшелонирование сил и средств
ТО по пространству и времени);
условия выполнения задач технического обеспечения;
дополнительные силы и средства, необходимые для решения задач
ТО;
порядок охраны и обороны сил и средств технического обеспечения;
организация управления силами и средствами ТО.
Заместитель командира части по вооружению непосредственно орга-
низует и планирует ракетно-техническое, инженерно-ракетное, инженер-
но-артиллерийское, инженерно-радиоэлектронное, автотехническое и
метрологическое обеспечение.
Планирование технического обеспечения выражается в разработке
комплекса организационно-технических мероприятий, включающих по-
следовательность, способы и время выполнения силами и средствами
технического обеспечения поставленных задач, распределение их усилий
по решаемым задачам и направлениям, порядок взаимодействия сил и
средств технического обеспечения, организация управления.
При планировании технического обеспечения предусматриваются:
сосредоточение основных усилий на обеспечении подразделений, вы-
полняющих главные задачи;
своевременное и бесперебойное пополнение запасов ракет, боеприпа-
сов и военно-технического имущества, прежде всего войсковых запасов,
до установленных норм;
проведение технического обслуживания и замены выработавших ус-
тановленные ресурсы блоков, агрегатов и узлов на ВВТ непосредственно
в боевых порядках войск;
380
первоочередное комплексное восстановление и возвращение в стро?
ВВТ, требующего наименьшего объема работ; по возможности непосред-
ственно в районе выхода их из строя;
максимальное использование местной промышленной базы для ре-
монта ВВТ, а также для удовлетворения потребности войск в промыш-
ленном оборудовании, инструменте и материалах.
Вопросы технического обеспечения отражаются в Плане обеспечения
боевых действий части ЗРВ.
План обеспечения боевых действий части ЗРВ разрабатывается на
карте с пояснительной запиской.
На карту наносятся:
необходимые данные о противнике;
границы ответственности объединения;
боевой порядок части и частей специальных войск;
пункты размещения частей и подразделений технического обеспече-
ния объединения ВВС и ПВО, Центра, а также других видов Вооружен-
ных Сил, выполняющих задачи в интересах технического обеспечения;
пункты хранения запасов вооружения и военной техники, ракет и во-
енно-технического имущества;
распределение сил и средств технического обеспечения по частям ро-
дов войск и специальных войск;
запланированные пути подвоза вооружения и военной техники, ракет
и других материально-технических средств в части родов войск и
специальных войск;
названия станций погрузки (выгрузки);
указываются направления маневра силами и средствами технического
обеспечения в соответствии с вариантами боевых действий;
аэродромы, вертолетные площадки, использование которых возможно
в интересах технического обеспечения;
пункты сбора поврежденного ВВТ;
схемы связи между пунктом управления техническим обеспечением,
частями и подразделениями технического обеспечения и другие данные.
Текстуально вопросы технического, обеспечения отражаются во вто-
ром разделе пояснительной записки.
В этом разделе заместитель командира по вооружению определяет:
замысел технического обеспечения;
основные задачи технического обеспечения при подготовке и в ходе
боевых действий, порядок и сроки их выполнения;
состав сил и средств технического обеспечения и порядок их исполь-
зования;
наличие и техническое состояние вооружения и военной техники;
мероприятия технического обеспечения;
расчет выхода из строя вооружения и военной техники и порядок его
восстановления;
381
мероприятия по радиационной, химической и биологической защите,
охране и обороне сил и средств технического обеспечения;
организацию управления техническим обеспечением;
срок готовности сил и средств технического обеспечения.
Доведение до подразделений положений по управлению ТО в ходе
боевых действий осуществляется устно или письменно в виде указаний,
распоряжений и приказов.
12.4.8. Обеспечение живучести элементов военной техники
и группировок войск (сил)
Живучесть - свойство объекта сохранять или быстро восстанавли-
вать боеспособность (способность выполнять боевые задали в соответст-
вии с предназначением) при ведении боевых действий.
Под объектом в определении живучести может пониматься как от-
дельный элемент военной техники (кабина, контейнер, устройство), так и
группировка войск (сил) оснащенная этой техникой.
В этом плане живучесть как свойство, содержание которого представ-
лено на рис. 12.53, необходимо рассматривать как применительно к эле-
ментам ВВТ. так и применительно к группировкам войск (сил).
Для отдельного элемента военной техники живучесть характеризуется
двумя свойствами более низкого уровня - неуязвимостью и восстанавли-
ваемостью.
Неуязвимость элемента военной техники (ЭВТ) - это свойство про-
тивостоять снижению его способности частично или полностью выпол-
нять функциональное предназначение в условиях воздействия поражаю-
щих факторов оружия противника.
Неуязвимость элемента военной техники обеспечивается
конструкционной и функциональной неуязвимостью.
Конструкционная неуязвимость ЭВТ - это свойство противостоять
снижению способности выполнять функциональное предназначение за
счет мер конструкционного характера в условиях воздействия поражаю-
щих факторов оружия противника.
Конструкционная неуязвимость ЭВТ обеспечивается:
прочностью конструкции;
устойчивостью к ударной волне, осколочному полю;
устойчивостью к высоким температурам;
устойчивостью к проникающей радиации;
приданием ЭВТ рикошетирующих и обтекаемых форм;
пространственным разносом дублированных элементов внутри кон-
струкции ЭВТ;
нанесением маскировочной окраски.
Функциональная неуязвимость ЭВТ — это свойство сохранить пол-
ную или частичную способность к выполнению функционального пред-
382
назначения ЭВТ в условиях воздействия поражающих факторов оружия
противника.
Функциональная неуязвимость обеспечивается:
Дублированием отдельных устройств ЭВТ;
введением режимов работы ЭВТ, обеспечивающих возможность вы-
полнения функционального предназначения в ограниченном объеме при
выходе из строя основного режима.
Восстанавливаемость - это свойство объекта, характеризующее при-
способленность к восстановлению его боеспособности после воздействия
поражающих факторов оружия.
Восстанавливаемость обеспечивается функциональной восстанав-
ливаемостью и ремонтопригодностью.
Функциональная восстанавливаемость - это свойство объекта час-
тично или полностью восстанавливать его боеспособность в условиях
боевых повреждений.
Функциональная восстанавливаемость обеспечивается конструктив-
ной автономностью функционирования систем и унификацией элементов
объекта военной техники.
Ремонтопригодность - свойство объекта, заключающееся в приспо-
собленности к обнаружению причин возникновения его отказов, повреж-
дений и устранению их последствий путем проведения ремонтов и техни-
ческих обслуживаний.
Применительно к понятию живучести объектов свойство ремонтопри-
годности в основном проявляется в приспособленности к устранению по-
следствий воздействия поражающих факторов оружия противника и
достигается облегченным доступом к элементам, построением
аппаратуры по модульному принципу, снижением времени демонтажа и
монтажа элементов.
Кроме понятия живучести отдельного элемента военной техники
существует понятие живучести группировки войск (сил), включающее
живучесть личного состава и живучесть группировок войск.
Живучесть личного состава - свойство личного состава выполнять
заданные функции в ходе ведения боевых действий.
Живучесть личного состава обеспечивается выучкой личного состава,
использованием средств защиты, использованием защитных свойств ме-
стности и инженерным оборудованием мест работы личного состава.
Живучесть группировок войск включает понятия: живучесть зенит-
ных ракетных систем (ЗРС) и их группировок; живучесть системы техни-
ческого обеспечения и живучесть системы управления.
Под живучестью ЗРС и их группировок понимается свойство про-
странственно расположенных отдельных элементов ВВТ, объединенных в
зенитную ракетную систему или в их группировку, противостоять и бы-
стро частично или полностью восстанавливать боеспособность после воз-
действия поражающих факторов оружия противника.
Живучесть
Рис. 12.53. Содержание живучести
384
Живучесть группировок войск подразделяется на функциональную
живучесть и организационно-тактическую живучесть.
Функциональная живучесть группировок это свойство, характери-
зующее способность группировок частично или полностью выполнять
боевые задачи после нанесения им боевых повреждений.
Функциональная живучесть группировок войск достигается возмож-
ностью использования уцелевших элементов группировок, элементов
системы ТО и системы управления, обеспечивающих полное или частич-
ное восстановление боевых возможностей ЗРС или их группировок.
Организационно-тактическая живучесть - это свойство ЗРС или их
группировок максимально сохранять боеспособность за счет организаци-
онно-тактических мер.
Организационно-тактическая живучесть достигается:
правильным пространственных расположением элементов ЗРС или их
группировок;
использованием средств отвлечения и защиты;
инженерным оборудованием позиций;
маскировкой;
своевременным рассредоточением боекомплектов ЗУР;
организацией мансвра в позиционном районе, скрытностью передви-
жения.
Живучесть системы технического обеспечения - это свойство сис-
темы противостоять и быстро восстанавливать выполнение заданных
функций в условиях воздействия средств поражения воздушного против-
ника.
Живучесть системы технического обеспечения достигается: правиль-
ным пространственным расположением ее элементов, инженерным обо-
рудованием мест их расположения, маскировкой, своевременным
рассредоточением в границах группировки, скрытностью передвижения
при решении задач технического обеспечения.
Живучесть системы управления это свойство системы противосто-
ять и быстро восстанавливать выполнение функций управления в услови-
ях воздействия организационных, технических мер, а также средств по-
ражения воздушного противника.
Живучесть системы управления достигается: созданием запасных ко-
мандных пунктов и пунктов управления, маскировкой элементов системы
управления, размещением ее элементов в прочных фортификационных
сооружениях, применением дублированных средств и видов связи.
385
13. ИСТРЕБИТЕЛЬНАЯ АВИАЦИЯ
13.1. ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ И СТРУКТУРА
СИСТЕМЫ ВООРУЖЕНИЯ
Истребительная авиация (ИА) - род военной авиации, предназначен-
ный для уничтожения в воздухе пилотируемых и беспилотных летательных
аппаратов противника; может применяться также для поражения наземных
(морских) объектов и ведения воздушной разведки. Является одним из ос-
новных средств борьбы с воздушным противником. Входит в состав ВВС и
ВМФ.
Системы вооружения истребителей
Под системой вооружения истребительной авиации понимается совокуп-
ность наземных и воздушных средств, объединенных в единый комплекс,
предназначенный для решения задачи уничтожения средств воздушного на-
падения противника.
Структурная схема системы вооружения истребительной авиации пред-
ставлена на рис. 13.1 и имеет в своем составе: истребитель, наземную систе-
му управления и систему наземного обслуживания авиационной техники.
Истребитель, являясь носителем бортовой сисгемы вооружения, имеет
множество летных характеристик. Эти характеристики обеспечивают полную
реализацию потенциальных боевых возможностей бортовой системы воору-
жения истребителя.
Рис. 13.1. Структурная схема системы вооружения истребительной авиации
Летно-тактические характеристики истребителей
Летные характеристики истребителей, оказывающие наибольшее влияние
на их тактику, называются летно-тактическими характеристиками (ЛТХ).
ЛТХ включают пять групп показателей.
Высотно-скоростные характеристики
Вся область скоростей (чисел М) и высот, на которых возможен горизон-
тальный полет с постоянной скоростью, называется диапазоном скоростей и
высот прямолинейного горизонтального установившегося полета (диапазо-
ном Н-М). Примерный вариант диапазона Н-М - рис. 13.2.
386
Рис. 13.2. Вариант диапазона Н-М
Внутри диапазона Н-М возможен установившийся полет, полет с
торможением или с разгоном. На верхней и правой границах еще возможен
полет с постоянной скоростью, но невозможен горизонтальный разгон. Полет
со скоростями менее VyuH (левее границы VMUH гп) невозможен по условиям
безопасности. Диапазон Н-М иллюстрирует предельные возможности
истребителя по высоте и скорости полета.
Минимальная скорость полета - это скорость, при которой выполняются
установленные условия безопасности полета. Различают минимальную ско-
рость горизонтального полета (У^.г-л.) и минимальнню скорость (Умин_иан)
маневрирования (эволютивная). Для маневренных самолетов за практиче-
скую минимальную скорость принимают эволютивную скорость (обычно
выбирается из условия достаточной управляемости и запаса угла атаки для
выполнения маневра с перегрузкой 1.5, но могут накладываться и другие ог-
раничения). Величина эволютивной скорости указывается в инструкции лет-
чику и может составлять 300 км/ч (для высокоманевренных истребителей на
высотах 0-15 км).
Минимальную скорость горизонтального полета (У^,. ,.„.) можно рассчи-
тать по формуле (13.1):
У Су доп’Рн
(13.1)
где G - полетный вес истребителя;
Р - тяга силовой установки;
адоп ~ допустимый угол атаки;
387
^удоп ~ допустимый коэффициент подъемной силы;
рн - плотность воздуха на высоте полета;
S - площадь крыла.
Максимальная скорость полета
Максимальной называется скорость, которую истребитель развивает в
горизонтальном полете при максимальной тяге.
Максимальная скорость (на Я=0...11 км) ограничивается по прочности
конструкции самолета, а максимальное число М (на Н>\ 1 км) - по путевой
устойчивости самолета и термопрочности двигателей. При полете на малой
высоте максимальная скорость современных истребителей может составлять
1400... 1500 км/ч. На высотах более 11 км максимальная скорость может дос-
тигать 2500...3000 км/ч (Л/=2.35...2.85).
Максимальная высота, на которой возможен прямолинейный установив-
шийся горизонтальный полет, называется статическим потолком. Практиче-
ский потолок (Ялр) - максимальная высота, на которой еще обеспечивается
дальнейший подъем с вертикальной скоростью от 3 до 5 м/с. Нпр зависит
от числа М полета, тяги двигателей и веса истребителя. Максимальное значе-
ние Нпр истребителей примерно 18...21 км.
Скороподъемность
Вертикальная скорость набора высоты (скороподъемность) Vy является
одной из основных характеристик маневренного самолета. В случае устано-
вившегося набора высоты (набора с постоянной скоростью и постоянным уг-
лом наклона траектории) Vy определяется из треугольника скоростей
(рис. 13.3).
Рис. 13.3. К определению скороподъемности
Vy=Vsm0Mo6. (13.2)
Максимальное значение Vy достигается на наивыгоднейшей скорости на-
бора высоты. Эта скорость больше скорости, соответствующей набора
с ^набмакс’ Режим полета на максимальную скороподъемность является бо-
лее скоростным, чем режим набора с максимальным углом. При выдержива-
нии в наборе постоянной скорости (числа Л/) вертикальная скорость изменя-
388
ется по определенному закону. Высокоманевренные истребители реализуют
максимальную скороподъемность вблизи земли на дозвуковой скорости.
Пример зависимости Уумакс от высоты полета - рис. 13.4.
Рис. 13.4. Высото-скоростная характеристика
Вертикальная скорость рассчитывается по формуле (13.3):
,вд
где X - лобовое сопротивление истребителя;
а - скорость звука на высоте полета.
Достижение заданной высоты за минимальное время (или с минималь-
ным расходом топлива) возможно при полете по оптимальной программе на-
бора, приводимой в специальной документации.
Маневренность
Маневренность - способность истребителя изменять положение в про-
странстве. Цель маневрирования - занятие выгодного положения для атаки
противника или уклонение от атаки противника. При маневрировании истре-
битель движется по криволинейной траектории. Радиус кривизны траектории
определяется величиной нормальной перегрузки пу (пу - отношение подъем-
ной силы, действующей на самолет, к полетному весу). Эффективному ма-
неврированию соответствуют малые радиусы кривизны траектории, которые
возможны только при больших перегрузках. Максимальное значение пере-
389
грузки Пу современных истребителей достигает 9. Перегрузка является об-
щим показателем маневренности и определяет частные показатели: *
гг- радиус разворота (виража) в горизонтальной плоскости;
[ф - время разворота на заданный угол ztyr,
<х>? (в) ~ угловая скорость в горизонтальной (вертикальной) плоскости.
Дальность и продолжительность полета
Основными факторами, определяющими дальность и продолжительность
полета, являются заправка топливом, боевая нагрузка, режим работы двига-
телей и профиль (высота и скорость) полета. Максимальная дальность полета
достигается на крейсерских режимах (обычно Л/=0.85 и /7=11... 13 км). Наи-
большей продолжительности полета соответствует наивыгоднейшая ско-
рость, которая меньше крейсерской (но тоже зависит от высоты). Значения
указанных скоростей приводятся в специальной документации. Дальность и
продолжительность полета вычисляются в ходе инженерно-штурманского
расчета (ИШР). И1ПР проводится для строго определенных конкретных ус-
ловий и исходных данных. Пример профиля полета на максимальную даль-
ность - рис. 13.5.
5
Н, км
13
11
10
0 1000 2000 3000 4000 ,
htpaxm' км
Рис. 13.5. Профиль полета на максимальную дальность
Взлетно-посадочные характеристики (ВПХ)
ВПХ диктуют требования к условиям аэродромного базирования истре-
бителей (в частности к длине ВПП). К ВПХ относятся скорость отрыва (У^)
и длина разбега (L^) при взлете, а также посадочная скорость (У„«.) и длина
пробега (Д,р) при посадке. Характер движения истребителя на разбеге близок
к равноускоренному, а при пробеге - к равнозамедленному. Это позволяет
приближенно оценивать ВПХ по формулам (13.4... 13.9):
390
Г — OmP
LPa36 ~7~i
Z Jx part
(13.4)
(13.5)
(13.6)
(13.7)
(13.8)
(13.9)
где p - плотность воздуха на аэродроме взлета (посадки);
Суотр(пос) - коэффициент Су при взлете (посадке);
}хразб(торм) ~ ускорение на разбеге (замедление при торможении);
К(пос) ~ аэродинамическое качество на взлете (посадке);
/- коэффициент трения качения на разбеге при взлете;
fmopM ~ коэффициент трения при торможении на пробеге.
13.2. СИСТЕМЫ ВООРУЖЕНИЯ ИСТРЕБИТЕЛЕЙ
И ПОКАЗАТЕЛИ ИХ БОЕВЫХ ВОЗМОЖНОСТЕЙ
Бортовая авиационная система вооружения
Под бортовой авиационной системой вооружения понимается сложный
комплекс бортовых средств самолета, предназначенных для решения задачи
уничтожения воздушных и наземных (надводных) целей.
Система вооружения обладает рядом особенностей, из которых важней-
шими являются:
наличие единой цели;
управляемость системы, обеспечивающая целенаправленность
функционирования системы;
Рис. 13.6. Структура системы вооружения истребителя
392
взаимосвязь и взаимозависимость элементов, посредством которых реа-
лизуется единый процесс функционирования системы;
иерархический характер построения системы, выражающийся в наличии
нескольких уровней управления.
Структуру системы вооружения составляют (рис. 13.6): прицельная сис-
тема; средства поражения; установки авиационного вооружения; средства на-
земного обслуживания.
В основу построения прицельных систем истребителей положены прин-
ципы активной и пассивной локации воздушных целей, т.е. принципы обес-
печивающие получение информации о целях на основе принимаемого от них
излучения приемниками различного рода (рис. 13.7).
Рис. 13.7. Структурная схема прицельной системы
В первом случае используются радиолокационные принципы, при кото-
рых цель облучается радиолокатором и ее излучение является вторичным,
т.е. цель отражает облучающий ее сигнал. Такая радиолокация называется
активной. Современные бортовые радиолокационные станции являются им-
пульсно-доплеровскими РЛС с квазинепрерывным излучением и цифровой
обработкой сигнала. Во втором случае используется собственное излучение
воздушной цели в инфракрасном диапазоне длин волн, т.е. в тепловой облас-
ти излучения (тепловое излучение от нагретых элементов самолета и вы-
хлопных газов). Основой таких устройств в прицельных системах являются
теплопеленгаторы, обеспечивающие захват и автосопровождение воздушной
цели по угловым координатам. В прицельных системах используются также
393
возможности человеческого зрения наблюдать воздушные цели с помощью
специальных прицельных устройств. Такие прицельные устройства называ-
ются коллиматорными. Таким образом, в прицельных системах истребителей
применяются радиолокационные, оптические локационные и визуальные
средства обнаружения целей. Они отличаются не только диапазоном длин
волн, но и дальностями действий. Дальности действия радиолокаторов - сот-
ни километров, оптических локаторов (теплопеленгаторов) - десятки кило-
метров, визуальных средств - единицы километров.
Средства поражения
В состав средств поражения современных истребителей входят:
авиационные управляемые ракеты (АУР) класса "воздух-воздух";
пушечное вооружение;
авиационные бомбы и зажигательные баки;
неуправляемые авиационные ракеты.
Авиационные управляемые ракеты
Авиационные управляемые ракеты (АУР) являются основным средством
поражения, состоящим на вооружении истребительной авиации. АУР пред-
назначены для поражения воздушных целей днем и ночью, в простых и
сложных метеорологических условиях, в переднюю и заднюю полусферу
атаки цели, в условиях естественных и организованных помех, на фоне раз*
личных подстилающих поверхностей.
Ракеты класса "воздух-воздух" подразделяются по типам системы
управления: системы автономного управления; системы телеуправления;
системы самонаведения; комбинированные системы управления.
Наибольшее распространение в АУР нашли системы самонаведения и
комбинированные системы наведения. Самонаведение - управление полетом
ракеты с помощью ее бортовой аппаратуры, реагирующей на излучение или
отражение целью какого-либо вида энергии. Самонаведение может быть пас-
сивным, полуактивным и активным. При пассивном самонаведении ракеты
имеют тепловые головки самонаведения (ТГС), при полуактивном и актив-
ном - радиолокационные (РГС). Комбинированное управление в современ-
ных АУР сочетает в себе автономное (инерциальное) наведение на началь-
ном участке полета ракеты и самонаведение на конечном участке. По спосо-
бу создания управляющих сил различают ракеты с аэродинамическим и
газодинамическим управлением. В современных АУР класса "воздух-воздух"
используются следующие аэродинамические схемы:
нормальная схема - рули расположены позади крыла;
обратная схема или "утка" - рули расположены впереди крыла.
Авиационная управляемая ракета состоит из следующих основных бло-
ков и систем (рис. 13.8): схемы управления и стабилизации ракеты; системы
подрыва; боевой части; реактивного двигателя твердого топлива; энергосис-
темы; планера.
394
Рис. 13.8. Авиационная управляемая ракета
Система управления ракетой имеет в своем составе два основных устрой-
ства: измеритель параметров управления (головка самонаведения ракет) и ав-
топилот (рис. 13.9). В зависимости от выполняемых задач АУР комплектуют-
ся пассивными ТГС или полуактивными РГС.
Рис. 13.9. Система управления ракетой
395
Система подрыва АУР предназначена для подрыва боевой части при
пролете с заданным промахом вблизи цели или при прямом попадании
ракеты в цель, а также для самоликвидации ракеты на траектории полета в
случае большого промаха. Состав системы подрыва - неконтактный
взрыватель, контактный взрыватель, предохранительно-исполнительный
механизм. В современных АУР нашли применение неконтактные,
радиолокационные, оптические, лазерные и комбинированные взрыватели.
Реактивный двигатель твердого топлива (РДТТ) предназначен для созда-
ния тяги, обеспечивающей полет ракеты со скоростью, необходимой для вы-
полнения тактической задачи.
Пушечное вооружение истребителя является автоматическим и предна-
значено для поражения воздушных и наземных целей. Авиационные пушки
различают по калибру (20 мм, 23 мм, 30 мм), виду энергии, используемой для
работы автоматики (энергия горячих газов, энергия отдачи ствола), количе-
ству стволов (одноствольные, многоствольные) и патронников, способу пи-
тания (ленточное, беззвеньевое).
Авиационные бомбы подразделяются на три группы: основного, специ-
ального и вспомогательного назначения. Бомбы основного назначения слу-
жат для поражения объектов противника действием взрыва, удара или огня.
К ним относятся фугасные, осколочные, осколочно-фугасные, зажигательные
бомбы и т.д. Бомбы специального назначения включают в свой состав фото-
осветительные, дымовые, агитационные и т.п. Бомбы вспомогательного на-
значения - светящиеся и ориентирно-сигнальные.
Неуправляемые авиационные ракеты (НАР) предназначены для пораже-
ния наземных целей. НАР имеет относительно простое устройство и облада-
ет невысокой по сравнению с АУР точностью попадания в цель. Достаточная
вероятность поражения цели достигается при пуске по ней нескольких НАР.
Боевые возможности бортовой авиационной системы вооружения
Под боевыми возможностями бортовых авиационных систем вооружения
понимается целый ряд наиболее существенных показателей, достигаемых в
определенных условиях боевого применения системы вооружения. Все эти
показатели условно можно разделить на пространственные, вероятностные и
временные.
К пространственным показателям относятся:
дальности обнаружения и захвата целей прицельной системой;
зоны захвата и автосопровождения целей прицельной системой;
дальности пуска АУР;
дальности стрельбы из пушек и т.п.
К вероятностным показателям - вероятность поражения цели одной раке-
той, вероятность обнаружения (захвата) воздушной цели прицельной систе-
мой, вероятность безотказной работы системы вооружения и т.п.
396
К временным показателям - время подготовки прицельной системы к бое-
вой работе, время подготовки средств поражения к боевому применению,
время подвески средств поражения на истребитель и т.п.
Боевые возможности истребителя
Боевые возможности (БВ) истребителя - возможности по уничтожению
воздушных целей. Определяются его летно-тактическими характеристиками,
тактико-техническими характеристиками (ТТХ) бортовой прицельной систе-
мы и авиационных средств поражения (ДСП). БВ характеризуются простран-
ственными, временными и вероятностными показателями.
Пространственными показателями являются диапазон высот и скоростей
уничтожаемых целей (Нц-Уц), а также максимальное (по запасу топлива)
удаление рубежа уничтожения воздушной цели (RyH). Пример диапазона
Нц-Vy - рис. 13.10 (Ноп - опорная высота истребителя, HonSH^; ДНр - высота,
набираемая выпушенной по цели ракетой).
Рис. 13.10. Высотно-скоростная характеристика истребителя
К временным показателям БВ относится время боевого полета (или от-
дельных его этапов - время взлета из готовности, время дежурства в воздухе),
а также время подготовки самолета к полету. Время подготовки зависит от
условий базирования истребителей и определяется приказами (директивами).
Пример зависимости времени дежурства в воздухе от высоты дежурства -
рис. 13.11.
Частные вероятностные показатели характеризуют эффективность от-
дельных этапов боевого полета (наведения истребителя на цель, поиска и об-
наружения цели, атаки и поражения цели). Каждому этапу боевого полета
397
соответствует определенная вероятность успешного выполнения данного
этапа полета:
вероятность наведения истребителя на цель - Рнол\
вероятность поиска и обнаружения цели - РОбн\
вероятности атаки и поражения цели - Рт и Рпор.
Показатели Рнов, Р^ Р^, Рпор называются частными.
Рис. 13.11. Зависимость времени дежурства в воздухе от высоты дежурства
Общим вероятностным показателем является вероятность уничтожения
цели (вероятность выполнения боевой задачи). Вероятность уничтожения це-
ли (вероятность выполнения боевой задачи) равна произведению частных ве-
роятностных показателей:
~ ’ ^обн ' ^пт ' ?пор ♦ (13.10)
Значения показателей БВ истребителя могут быть рассчитаны с учетом
ЛТХ самолета, ТТХ его прицельной системы и ДСП, параметров полета и
характеристик воздушной цели.
133. ОСНОВЫ ТАКТИКИ ВОЗДУШНОГО БОЯ ИСТРЕБИТЕЛЕЙ
Воздушный бой - вооруженное противоборство в воздухе экипажей
(подразделений, частей) в целях уничтожения противника, отражения его
атак, принуждения к отказу от выполнения своей задачи.
Воздушный бой является основной формой боевого применения частей и
подразделений истребительной авиации. Сущность воздушного боя заключа-
ется в вооруженном противоборстве сторон в воздушной сфере, а содержа-
нием являются согласованные и взаимосвязанные действия экипажей, групп
тактического назначения, сочетающие выполнение маневра, ведение огня и
применение средств РЭБ.
398
Современному воздушному бою присущи следующие основные черты:
групповой характер; большой пространственный размах; скоротечность и
высокий динамизм развития событий; наличие, как правило, двух фаз -
дальнего и ближнего воздушного боя; деление сил противоборствующих
сторон на группы различного тактического назначения; сложность
воздушной н помеховой обстановки.
Воздушный бой начинается, как правило, с момента обнаружения про-
тивника (получения о нем достаточной информации) и принятия решения на
вступление в бой.
Важнейшими условиями достижения истребителями победы в воздуш-
ном бою являются: захват и удержание инициативы в течение всего боя;
стремительность сближения и внезапность атак; искусное сочетание маневра
и огня; создание превосходства над противником в отдельных очагах боя;
умелое применение средств РЭБ в бою; своевременное наращивание сил в
бою за счет ввода резерва; согласованные, тщательно спланированные по
единому замыслу действия экипажей и групп различного тактического на-
значения.
В процессе ведения воздушного боя истребители применяют различные
тактические приемы.
Тактическим приемом называются действия экипажей (подразделений) в
воздухе, направленные на полное использование боевых возможностей и ус-
ловий обстановки для успешного выполнения боевой задачи и исключения
потерь от воздействия противника. Содержание тактических приемов опре-
деляется тактической ситуацией, боевой задачей, типами и количеством уча-
ствующих в бою самолетов и условиями обстановки.
Классификация воздушных боев:
по характеру боя - наступательные и оборонительные;
по количеству участвующих в бою истребителей - одиночные и группо-
вые;
по наличию визуального контакта - дальние и ближние воздушные бои;
по типу летательных аппаратов - бои с истребителями, бомбардировщи-
ками, транспортными самолетами, вертолетами и другими ЛА;
по соотношению сил - с уступающим, равным и превосходящим по силам
противником;
по условиям ведения боя - воздушные бои днем или ночью; на предельно
малых, малых, средних, больших высотах и в стратосфере; в простых или
сложных метеорологических условиях и другие.
Наступательный воздушный бой - основной вид боя истребителей, целью
которого является поражение воздушного противника.
Оборонительный воздушный бой - вынужденный вид боя истребителей.
Он возникает, когда противник имеет тактическое или количественное пре-
восходство. Целью оборонительного воздушного боя является срыв атак про-
тивника, по возможности перехват инициативы и переход к наступательному
бою.
399
Одиночный воздушный бой - бой одиночного истребителя с одним или
несколькими самолетами противника. Основным его содержанием является
маневрирование экипажей с ведением огня и применением средств РЭБ.
Групповой воздушный бой - бой группы истребителей с одним или не-
сколькими самолетами противника. Основным его содержанием являются
согласованные действия экипажей и подразделений по единому замыслу и
плану.
Дальний воздушный бой - бой, ведущийся вне визуальной видимости
противника с применением бортовых прицельных систем и авиационных ра-
кет "воздух-воздух” большой и средней дальности. Характеризуется боль-
шими скоростями истребителей и сравнительно небольшими перегрузками
при маневре.
Ближний воздушный бой - бой, ведущийся, как правило, при визуальной
видимости противника с применением авиационных ракет "воздух-воздух"
малой дальности и пушек. Характеризуется большими перегрузками, полным
использованием маневренных возможностей истребителей и физиологиче-
ских возможностей экипажа.
В ходе противоборства в воздухе истребители могут переходить от одно-
го вида боя к другому (от группового к одиночному, от оборонительного к
«ступательному). С беспилотными СВН, не имеющими средств
противодействия, воздушные бои не ведутся, они поражаются в воздухе
истребителями в результате выполнения по ним атак.
План воздушного боя
Современный воздушный бой носит групповой характер и характеризу-
ется высокой скоротечностью, быстрой сменой обстановки, сложностью по-
лучения и обработки информации о противнике. Непременным условием по-
беды в воздушном бою является четкое взаимодействие экипажей истребите-
лей в группах и согласованное воздействие на противника с целью его
уничтожения. Все это определяет необходимость заблаговременного плани-
рования воздушного боя.
Основой плана воздушного боя является замысел командира. В нем
должны предусматриваться для конкретных условий обстановки несколько
наиболее вероятных вариантов действий противника и для каждого вари-
анта - наиболее целесообразные действия своих истребителей, которые, как
правило, разбиваются по группам тактического назначения для демонстра-
тивных, атакующих действий и т.д.
При планировании воздушного боя особо тщательно разрабатывается
следующее: процесс обнаружения и сближения; дальний воздушный бой;
ближний маневренный воздушный бой; выход из боя.
Планирование воздушного боя в современных условиях базируется на
математическом моделировании. При моделировании дальнего ракетного боя
с помощью различных методик моделируется применение истребителями ра-
кет большой и средней дальности по самолетам противника, оцениваются ре-
400
зультаты стрельбы. Далее рассчитываются траектории полета групп истреби-
телей и противника в пространстве, анализируется их взаимное положение с
целью сохранения тактически выгодного положения для выполнения после-
дующих атак. При моделировании ближнего маневренного воздушного боя
необходимо пользоваться сравнительной оценкой маневренных свойств са-
молетов, которая основана на сопоставлении общих показателей маневрен-
ности (перегрузок) своего самолета и противника. С этой целью используют
соответствующие диапазоны высот и скоростей полета сравниваемых само-
летов, учитывая, что тактической задачей экипажей истребителей при завязке
БМВБ является «затягивание» противника в область превосходства над са-
молетом противника. Маневренные свойства самолетов с достаточной для
практики полнотой описываются тремя перегрузками - располагаемая нор-
мальная перегрузка (л>р), предельная по тяге нормальная перегрузка (nwp),
располагаемая продольная перегрузка (л'х/,). Для сравнения маневренных
свойств двух самолетов достаточно сравнить эти три перегрузки (табл. 13.1).
Таблица 13.1
Номер области Сравниваемые перегрузки
пур ПУ*Р 4
1 + + +
2 - + +
3 + - +
4 - +
5 + -
6 - -
7 Область недоступна для «И»
(+) - превосходство над сравниваемым самолетом по соответствующей
перегрузке.
Имея перед собой график, изображенный на рис.13.12, экипажи истреби-
телей ГТН могут заранее наметить тактику ведения БМВБ.
Так вести маневренный воздушный бой истребителям выгоднее всего
в области 1, где истребители имеют превосходство по всем показателям ма-
невренности. Если маневренный воздушный бой начался в неблагоприятном
диапазоне высот и скоростей, то следует постепенно затягивать противника
в область 1. Естественно, что противник будет тянуть в область 6, и исход
боя в этом случае зависит от пилотажного мастерства летчиков, их морально-
психологической подготовки и умения грамотно эксплуатировать системы
вооружения самолета.
В области 2 истребитель имеет превосходство по всем показателям ма-
невренности, связанным с тяговооруженностью самолета. Целесообразно на-
вязывать противнику затяжное маневрирование, поскольку имеется превос-
40 i
ходство по скороподъемности и разгону скорости. Необходимо учитывать,
что противник в области 2 имеет превосходство по кратковременной пере-
грузке, поэтому может увернуться от атаки истребителя со значительной по-
терей скорости. В случаях, если противник находится в положении атакую-
щего, он может выполнить кратковременный доворот на истребитель для
пуска своих ракет, после чего сразу начинается его отставание.
В областях 3 и 4 превосходство истребителя сохраняется по
тя го вооруженности. Здесь нс выгодно ввязываться в бой на виражах или
косых петлях, особенно в области 4. Истребителю целесообразно для
перевода в бой в область 1 использовать вертикальные маневры с умеренной
перегрузкой (горки, пикирование, восходящая и нисходящая спирали).
В области 5 экипаж истребителя должен решать бой только одной атакой,
которая может включать не более одного-двух энергичных кратковременных
доворотов на цель. Длительное маневрирование в этой области не выгодно
ввиду превосходства самолета противника.
В области 6 воздушный бой должен решаться одной внезапной атакой,
так как любое маневрирование для истребителя здесь крайне не выгодно из-
за полного превосходства противника.
Варианты воздушного боя, приводящие по результатам моделирования к
наибольшей эффективности, вносятся в план воздушного боя.
План воздушного боя разрабатывается в истребительном авиационном
полку по форме, установленной командиром, и включает в себя: исходную
402
обстановку; замысел воздушного боя; боевой порядок противника; боевой
порядок авиационной эскадрильи; динамику воздушного боя; порядок взаи-
модействия; сигналы управления; порядок выхода из боя.
Вариант плана воздушного боя представлен на рис. 13.13.
Рис. 13.13. Вариант воздушного боя
В процессе воздушного боя между экипажами (группами) непрерывно
поддерживаются информационное, траекторное, огневое и помеховое взаи-
модействие.
Информационное взаимодействие осуществляется путем передачи ин-
формации об обнаружении противника, его и своих действиях, изменениях
обстановки.
Траекторное взаимодействие осуществляется путем выдерживания с по-
мощью средств межсамолетной навигации или визуально заданного боевого
порядка, а также согласованного по месту и времени его изменения для вы-
хода экипажей в исходные положения для атаки назначенных групп против-
ника.
Огневое взаимодействие осуществляется путем согласованных одновре-
менных (последовательных, поочередных) атак экипажей (пар) по назначен-
ным целям.
Помеховое взаимодействие осуществляется путем согласованного при-
менения экипажами средств РЭП.
13.4. БОЕВЫЕ ВОЗМОЖНОСТИ ПОДРАЗДЕЛЕНИЙ И ЧАСТЕЙ
ИСТРЕБИТЕЛЬНОЙ АВИАЦИИ
Под боевыми возможностями подразделений и частей истребительной
авиации понимается их способность к выполнению боевых задач в конкрет-
ных условиях обстановки. Основу понятия «боевые возможности» составляет
403
ожидаемый результат действий истребителей. Полное описание боевых воз-
можностей иап дает совокупность пространственных, временных, а также ве-
роятностных показателей. Все показатели боевых возможностей иап взаимо-
связаны и взаимообусловлены.
Они носят вероятностный характер и зависят от боевого состава полка,
тина истребителей, состоящих на вооружении, уровня подготовки легного
состава, применяемого вооружения, используемых АСУ, качества разведыва-
тельной и боевой информации; состояния боеготовности, условий базирова-
ния, состояния боевого, технического и тылового обеспечения, метеоусло-
вий, времени суток и ряда других.
Пространственные показатели боевых возможностей характеризуют
пространство, в пределах которого истребительный авиационный полк может
выполнять поставленную боевую задачу. К ним относятся область боевого
воздействия (ОБВ), расчетные рубежи уничтожения воздушного противника
(РУ) в различных условиях, рубеж подъема истребителей (РПИ) и др.
ОБВ иап - это пространство вокруг аэродрома постоянного базирова-
ния, рассредоточения и маневра, в любой точке которого истребители полка
по располагаемому запасу топлива могут выполнить боевую задачу. Нижняя
граница ОБВ ограничена минимальной, верхняя - максимальной высотой
боевого применения средств поражения истребителей, дальняя граница -
максимальным по располагаемому запасу топлива (с учетом высоты (профи-
ля), скорости полета, состава групп истребителей, выполняющих боевую за-
дачу, и дальности полета ракет) удалением рубежа уничтожения воздушной
цели.
Горизонтальное сечение ОБВ представляет собой эллипс (рис. 13.14),
фокусами которого являются аэродромы взлета и посадки, большая ось равна
тактической дальности полета истребителя (группы); а при посадке истреби-
телей на аэродром взлета - круг с радиусом R„, равным 0,5D„ (рис. 13.15).
Рис. 13.14. Горизонтальное сечение ОБВ
404
Рис. 13.15. Горизонтальное сечение ОБВ при посадке истребителей
Практическое построение ОБВ на заданной высоте осуществляется в сле-
дующем порядке.
1) Определяется тактическая дальность полета истребителей для задан-
ных условий (Ни, Vu, состав группы) по формуле:
Om=K,(D„p-Vul6}. <13|1>
где К,- коэффициент, учитывающий состав группы истребителей. Для
одиночного истребителя и пары /С,=1; для звена /<.=0,96; для
иаэ /<г=0.87;
D„p - практическая дальность полета истребителя на заданной высоте
определяется по «Инструкции расчета дальности и продолжи-
тельности полета»;
Vu - скорость истребителя при выполнении боевой задачи;
t6 - время ведения воздушного боя (определяется командиром).
2) На карте измеряется расстояние между аэродромом взлета и посадки
(Dfl).
3) По формуле
0,5 Dm k/X/Dj2-/I
r =_____т 1 л/ т______I, (13.12)
l + (Dai Dm) cos а
где а- угол, заключенный между главной осью эллипса и направлением по-
лета истребителя. Задаваясь значениями а, рассчитывают величины г.
4) На карте точки концов г соединяют плавной кривой и получают ОБВ
на заданной высоте.
Рубеж уничтожения воздушной цели (РУ)- это рубеж, на котором на-
ходится воздушная цель в момент ее уничтожения (рис. 13.16).
405
Рубеж подъема
истребителей - рубеж,
иа котором находится
воздушная цель в
момент подачи
истребителям команды на
запуск двигателей
Рубеж ввода в бой
истребителей - рубеж,
на котором находится
воздушная цель в
момент вступления
истребителей в бой
Рубеж уничтожения -
рубеж, на котором
находится воздушная цель
в момент подрыва ракеты
Он может быть заданным или расчетным. Заданный РУ устанавливается
полку вышестоящим командиром из тактических соображений и условий
обороны объектов. Расчетный рубеж вычисляется исходя из располагаемой
дальности обнаружения воздушного противника, параметров его полета,
возможностей истребителя и способа боевых действий по формулам:
а) при полете истребителя на первом этапе навстречу цели:
.j у _До6н Уц 'Os +1р) +
^РУО,ЛР>- 7~1
(13.13)
где - дальность получения информации ©’воздушной цели;
1ман •
(13.14)
где tnoc- время с момента обнаружения цели наземными средствами до
взлета истребителя;
1пас “ ^ихф + I реш + ^ком + (13.15)
где tuwp - время прохождения информации от источника до КП;
406
~ время принятия решения на взлет;
1ком ~ время прохождения команды на взлет;
t6f - время вылета истребителя из различных степеней готовности;
= 1проф + U» - время маневра, (13.16)
гДе 1проф ~ время полета истребителя по программе полета на перехват;
- время полета истребителя на боевом курсе или время ведения
воздушного боя.
1тзпс^проф-^}-1о-уц '1р - при атакс в ЗПС.
Ълпс = $„роф + 10-Уч^р- при атаке в ППС,
где 3проф ~ путь, проходимый истребителем при выполнении программы
полета к воздушной цели (определяется из инструкции по
боевому применению истребителя);
R - радиус разворота истребителя;
1О - путь, проходимый истребителем от точки окончания маневра
до точки пуска (участок атаки);
1р - время полета ракеты к цели (определяется из инструкции по
боевому применению вооружения).
б) при полете на первом этапе вдогон цели:
Дру . (13.17)
“ к 1-п
в) при отсутствии у истребителя участка горизонтального полета:
Л ру ~ JIqGh ~ +1 р)" (13.18)
Выбор формулы для расчета располагаемого кинематического рубежа
уничтожения производится в следующей последовательности.
1. По высоте и скорости полета противника выбрать программу полета
истребителя.
2. По программе полета истребителя определить величины гги /г.
3. Сравнить разность - V4 (tv + tp) с /гд, выбрать расчетную
формулу и определить Д^.
Если До6ч - Уц (tv + tp )2lvB, это говорит о наличии у истребителей уча-
стка горизонтального полета и о том, что полет на первом этапе проходит на-
встречу цели. Следовательно, расчеты рубежа производятся по 13.15.
Если разность Д^ - Уц - (tv + tр)<1хВ'1'0 необходимо сравнить ее с .
При - Уц (!< +1р)<1гд у истребителя имеется участок горизонталь-
ного полета и полет на первом этапе происходит вдогон цели. Следователь-
407
но, расчет располагаемого кинематического рубежа необходимо производить
по формуле 13.17.
Если Ъ-Довн + tp т0 У истребителя нет участка горизон-
тального полета и расчеты необходимо производить по формуле 13.18.
Примечание. При малом времени полета ракеты и небольших скоростях
цели время полета ракеты, как правило, не учитывается.
Полученное расчетное значение ДРУр сравнить сДРУз. Если
ДРУрЪ.ДРУз, то закончить расчеты; если ДРУр<ДРУз, то необходимо изме-
нить способ боевых действий или повысить степень боевой готовности ис-
требителей к вылету. В условиях большой дальности обнаружения воздуш-
ного противника возможно, что ДРУр окажется больше величины тактиче-
ского радиуса истребителя. В этих условиях принимается ДРУр -Rm и
рассчитывается рубеж подъема истребителей (РПИ).
Рубеж подъема истребителей - это рубеж, на котором находится воздуш-
ная цель в момент подачи экипажам истребителей команды на запуск двига-
телей
= Dpy, + V, (f+ij, (13.19)
где I — / г - + tpfu, )>
В практической работе авиационных командиров и штабов часто прихо-
дится решать задачу по определению потребной глубины РЛИ по заданной
дальности рубежа уничтожения воздушного противника:
=^+V('r+'J- (13.20)
Временные показатели боевых возможностей иап
Характеризуют динамику боевых действий иап. К ним относятся: время
приведения полка в боевую готовность (7&); время взлета истребителей из
различных степеней боевой готовности (/^); время выполнения боевой зада-
чи (7$,); продолжительность дежурства истребителей в воздухе (7^^); про-
должительность ведения поиска в районе поиска (Т^); время маневра (Тман)
полка; время подготовки самолетов к повторному вылету (7^) боевое напря-
жение и др.
Большинство из указанных временных показателей боевых возможно-
стей определяется практическим путем и носят нормативный характер (7&>
а некоторые могут быть рассчитаны по формулам.
408
Время взлета группы:
7’ A (N
7«и ~ t«ii} + А/ ч 1 ]>
\ z J
где гвм1- время взлета первого экипажа (пары, звена);
Д/ - интервал взлета;
W - количество самолетов в группе
z - количество одновременно взлетающих самолетов.
Время выполнения боевой задачи:
T(ii ~ ^ииб + ^гп + pajj + Гиом + •
где t)w6 - время набора высоты;
1раК- время разгона скорости;
1гп - время горизонтального полета.
_ J,-d„ dn
t<>6~ V r + V г '
г соли сблр
(13.21)
(13.22)
(13.23)
где d9 - дальность вывода истребителя в исходное положение для атаки;
dn - дальность пуска ракет;
~ скорость сближения истребителя с целью;
^сблр “ скорость сближения ракеты с целью.
Скорость сближения определяется по формуле:
v.a, = Jv/. (13.24)
где а- разность курсов истребителя и цели.
Время дежурства истребителей в воздухе (поиска) определяется из гра-
фиков (рис. 13.11) в зависимости от удаления и высоты зоны дежурства
(района поиска) и условий выполнения боевой задачи.
Время, потребное на выполнение маневра, - это время от получения бое-
вой задачи на выполнение маневра до выхода маневрирующих истребителей
на заданные рубежи ввода в бой.
При выполнении маневра на дальность, превышающую тактическую, и
вводе в бой истребителей на заданном рубеже, время маневра можно опреде-
лить по формуле:
Т. + Д| + Д^- + Д”- ^к^+к^-И^. (13.25)
где 1„я - время, необходимое для постановки задач, подготовку к маневру
и на взлет группы;
ДХ,Д2.. ДК - дальности перелетов между аэродромами;
к - количество аэродромов посадки;
V - крейсерская скорость полета истребителя;
409
tnoc - время посадки истребителей;
1тм>г~ время подготовки к вылету и взлета на промежуточных
аэродромах;
1р»6 ~ время полета до заданного рубежа ввода в бой.
Если маневр проводится без выполнения боевой задачи, то время
определяется по формуле:
Л. =»„. + --1—+*• W- (13.26)
В зависимости от цели маневра и количества маневрирующих истребите-
лей он может проводиться с перебазированием и без перебазирования.
Маневр без перебазирования осуществляется только летным эшелоном на
боевых самолетах. В этом случае подготовка самолетов к повторному вылету
возлагается на личный состав части, базирующейся на аэродроме маневра.
При выполнении маневра с перебазированием перевозка личного состава
и материальных средств производится воздушным и наземным (морским)
эшелонами, а управление летными экипажами и подготовка самолетов на
промежуточных аэродромах - личным составом полка, совершающего ма-
невр.
Боевое напряжение характеризует количество боевых вылетов на эки-
паж, подразделение, полк за сутки. В процессе боевых действий оно может
составлять;
на первые 2-3 суток - 3-5 вылетов в сутки;
на первые 10 суток - 2-4 вылета в сутки;
в течение месяца - 2-3 вылета в сутки.
Вероятностные показатели боевых возможностей иап
Основными вероятностными показателями боевых возможностей иап яв-
ляются; полная вероятность уничтожения воздушной цели (Р>НУ, математиче-
ское ожидание числа уничтоженных самолетов противника за один вылет
полка (МЧУ, потребный наряд истребителей для уничтожения самолета про-
тивника (Nu), а также интегральный критерий эффективности боевых дейст-
вий истребителей при выполнении боевой задачи (Э^)-
При ведении боевых действий процесс уничтожения воздушной цели
можно представить состоящим из ряда событий, каждое из которых носит
вероятностный характер. Такими событиями могут быть: наличие боеготово-
го истребителя и свободного канала наведения (Робе*); успешное наведение
успешное поражение цели выделенными истребителями
При этом полная вероятность уничтожения цели определяется как произ-
ведение вероятностей этих событий:
Рун ~ Робея ' Рщм ‘ Р пор • ( I 3.27)
410
При выполнении истребителем нескольких атак по одной цели вероят-
ность поражения определяется по формуле:
Рто, = /-Д(/-Р„,,и). (13.28)
где Р„ор1 - вероятность поражения в i-й атаке;
К - число атак (пусков ракет) в бою.
При уничтожении воздушной цели группой истребителей, выполняющих
по одной атаке, вероятность поражения определяется по формуле:
= (13.29)
где z - количество истребителей в группе.
При ведении самостоятельного поиска Рун определяется:
= (13.30)
где Ро6н - вероятность обнаружения цели истребителем;
Рот - вероятность выхода в атаку.
Математическое ожидание числа уничтоженных самолетов противника
(Мч) определяется:
= (13.31)
1=1
где W - количество атакованных целей;
PW{ - вероятность уничтожения i-й цели.
Наряд истребителей (групп), который необходимо выделить для уничто-
жения одного самолета противника с заданной вероятностью, определяется
по формуле:
где Рг - гарантийная вероятность;
Р] - вероятность уничтожения самолета противника одним
истребителем (группой).
Для уничтожения заданной доли (Л/,) групповой цели, состоящей из оди-
ночных самолетов:
(13.33)
“"М-р.)-
Интегральный критерий эффективности действий истребителей может
быть рассчитан по формулам:
411
Пц/
о' ' Пи
Эла = тах-----
ъ
.. Пц - ГЦ
Эм = max—2---
। W
* ’ van
(1334)
(1335)
где Пц,Пи - соответственно ущербы, наносимые авиации противника и иап;
i - номер варианта выполняемой боевой задачи полка;
Nuevi- силы полка, выделяемые для выполнения боевой задачи,
выраженные в единицах боевого потенциала.
Запись max означает, что выбирается максимальный Лй результат на мно-
жестве / вариантов выполнения боевой задачи.
При этом:
Nиап ~ У ' Kfe %п.к «об Купр' (13.36)
где W - количество истребителей в полку;
- коэффициент боеготовности истребителей;
Кмс - коэффициент подготовки летного состава; в расчетах можно поль-
зоваться осредненными коэффициентами подготовки летного состава в зави-
симости от классной квалификации, полученными эмпирическим путем
(табл.13.2).
Таблица 13.2
Класс летчика Снайпер 1 2 3 Без класса
Коэффициент подготовки Кпк 1.4 1.2 1.0 0.7 0.4
Коб - коэффициент обеспечения;
К>пр - коэффициент качества управления, выраженный через потенциал
управления.
является относительным интегральным критерием, показывающим
отношение ущербов, приходящихся на единицу боевого потенциала привле-
каемых сил истребителей, а - разностно-относительным критерием,
показывающим отношение разности ущербов, приходящихся на ту же еди-
ницу.
412
14. РАДИОТЕХНИЧЕСКИЕ ВОЙСКА
14.1. ПРЕДНАЗНАЧЕНИЕ И ЗАДАЧИ, РЕШАЕМЫЕ
РАДИОТЕХНИЧЕСКИМИ ВОЙСКАМИ ВВС
Радиотехнические войска (РТВ) предназначены для ведения радиолока-
ционной разведки воздушного противника и радиолокационного обеспечения
органов управления видов Вооруженных Сил Российской Федерации, систем
управления боевыми средствами авиации. ПВО и РЭБ при решении ими за-
дач мирного и военного времени.
В соответствии со своим предназначением радиотехнические войска вы-
полняют следующие задачи:
ведение радиолокационной разведки воздушного противника;
радиолокационное обеспечение управления войсками (силами);
радиолокационное обеспечение боевых действий (боевого применения)
соединений и частей ЗРВ, авиации, частей и подразделений РЭБ;
радиолокационное обеспечение полетов авиации по планам боевой под-
готовки;
радиолокационное обеспечение центров Единой системы организации
воздушного движения (ЕС ОрВД);
контроль за соблюдением порядка использования воздушного простран-
ства Российской Федерации.
Радиотехнические войска привлекаются для обнаружения надводных це-
лей, ядерных взрывов, наблюдения за запуском (спуском) космических объ-
ектов на начальных (конечных) участках их -раскторий. Кроме того, все ра-
диотехнические соединения, части и подразделения в границах позиционных
районов (районах расположения радиотехнических подразделений, КП, ПУ)
ведут разведку наземного (морского) противника, радиационную, химиче-
скую, биологическую разведку.
Радиолокационная разведка - это добывание, сбор, обработка и анализ
сведений о воздушной обстановке в назначенной области воздушного про-
странства радиотехническими средствами радиотехнических подразделений,
боевыми расчетами командных пунктов радиотехнических подразделений,
частей и соединений.
Сведения о воздушных целях, своих воздушных объектах, помеховой об-
становке, добытые в ходе ведения радиолокационной разведки, составляют
радиолокационную информацию, которая может дополняться данными дру-
гих видов разведки.
Радиолокационное обеспечение - это комплекс мероприятий, направ-
ленных на предоставление командующему (командиру), боевым расчетам
командных пунктов, пунктов (центров) управления данных о местоположе-
нии, параметрах движения, других характеристиках воздушных целей и сво-
их самолетов, добываемых радиотехническими войсками.
Радиолокационное обеспечение включает в себя радиолокационную раз-
ведку, формирование информации о воздушной обстановке и ее выдачу
413
обеспечиваемым органам управления в соответствии с поставленной зада-
чей.
В зависимости от принадлежности органа управления, условий и харак-
тера решаемых им задач различают следующие виды радиолокационного
обеспечения:
радиолокационное обеспечение управления войсками (силами);
радиолокационное обеспечение боевых действий соединений и частей
ЗРВ;
радиолокационное обеспечение боевых действий авиации;
радиолокационное обеспечение боевого применения частей и подразде-
лений РЭБ;
радиолокационное обеспечение полетов авиации по планам боевой под-
готовки;
радиолокационное обеспечение центров Единой системы организации
воздушного движения.
Контроль за соблюдением порядка использования воздушного про-
странства Российской Федерации заключается в проверке выполнения воз-
душными судами маршрута, высоты и времени полета, указанных в заявках,
извещениях, расписаниях, а также выполнения установленных правил поле-
тов над территорией страны и порядка перелета Государственной границы
РФ.
Обнаружение надводных целей заключается в поиске, обнаружении
надводных кораблей (боевые или корабли специального назначения, корабли
на подводных крыльях, на воздушной подушке, экранопланы) и передаче
информации о них на вышестоящий командный пункт и взаимодействующие
КП флота.
Засечка ядерных взрывов заключается в установлении факта ядерных
взрывов, определении их координат, мощности, вида, времени и передаче
информации о них на вышестоящий и взаимодействующие КП и ПУ, слеже-
нии за распространением радиоактивных облаков.
14.2. СИСТЕМЫ ВООРУЖЕНИЯ РАДИОТЕХНИЧЕСКИХ
ПОДРАЗДЕЛЕНИЙ (ЧАСТЕЙ)
Под системой вооружения радиотехнического подразделения (части) по-
нимается совокупность образцов (комплексов) вооружения и другой военной
техники, обеспечивающих выполнение определенных боевых задач и пред-
назначенных для оснащения радиотехнических войск. Образец вооружения -
конкретная конструкция какого-либо вида оружия для выполнения опреде-
ленных задач самостоятельно или в составе комплекса вооружения. Ком-
плекс вооружения - совокупность образцов военной техники, функциональ-
но связанных и совместно используемых для решения боевых задач.
Основными видами вооружения и военной техники (ВВТ) радиотехниче-
ских подразделений (частей) являются радиоэлектронная техника (РЭТ) и
средства связи.
414
К неосновным видам ВВТ относятся автомобильная техника, зенитные
установки, стрелковое вооружение, гранатометы, боеприпасы, техника тыла,
инженерная техника, средства индивидуальной защиты, специальные средст-
ва РЭТ и другая техника воинских частей.
Под радиоэлектронной техникой понимаются наземные радиотехниче-
ские средства, комплексы средств автоматизации и специальные средства.
Радиотехнические средства (РТС) включают:
радиолокационные станции (РЛС) и комплексы (РЛК) обнаружения, пре-
дупреждения, целеуказания, наведения, станции программного обзора;
автоматические радиолокационно-связные комплексы (АРЛСК);
подвижные радиовысотомеры (ПРВ);
станции активного запроса и ответа (САЗО), в том числе и наземные ра-
диолокационные запросчики (НРЗ), комплексированные вторичные радиоло-
каторы (КВРЛ);
автоматические комплексы (станции), работающие на нетрадиционных
методах радиолокации.
Радиолокационной станцией (радиолокатором, радаром) называется уст-
ройство для обнаружения, распознавания различных объектов (целей), опре-
деления их координат и получения о них других сведений методами радио-
локации. Вторичный радиолокатор - РЛС, работающая на принципах актив-
ного запроса и ответа и использующая сигналы, посылаемые с летательного
аппарата в ответ на сигналы РЛС.
Различают РЛС (РЛК):
а) по способу локации - активные (с пассивным или активным ответом),
полуактивные и пассивные;
б) по месту установки - наземные, корабельные, авиационные, спутнико-
вые и др.;
в) по виду излучения - импульсные и с непрерывным (квазинепрерыв-
ным) излучением;
г) по рабочему диапазону длин волн - метровый, дециметровый, санти-
метровый диапазоны и др.;
д) по назначению - обнаружение целей, разведка, управление оружием,
обеспечение полетов, метеорологическое обеспечение и др.
В радиотехнических подразделениях (частях) радиолокационные станции
и комплексы по своему предназначению подразделяются также на РЛС
(РЛК) боевого режима, РЛС (РЛК) дежурного режима и специальные РЛС.
Радиолокационные станции (комплексы) боевого и дежурного режимов под-
разделяются на РЛС (РЛК) обнаружения маловысотных воздушных объектов
и РЛС (РЛК) обнаружения воздушных объектов на средних и больших высо-
тах. Кроме того, радиолокационные станции (комплексы) подразделяются по
маневренным возможностям на стационарные и подвижные (самоходные и
буксируемые) РЛС (РЛК).
Основные элементы РЛС: передающая (в пассивных РЛС отсутствует) и
приемная системы, антенная система с системой управления антенной, вы-
ходные устройства (индикаторы, АРМ), ЭВМ для управления работой РЛС и
415
обработки сигналов (в новых сложных РЛС), источники электропитания.
Обобщенная структурная схема импульсной РЛС, работающей на одну
приемопередающую антенну, представлена на рис. 14.1.
К потребителю радиолокационной
информации
Рис. 14.1. Обобщенная структурная схема импульсной РЛС
Передающая система (радиопередатчик) генерирует высокочастотные
(ВЧ) колебания, излучаемые антенной, непрерывного или импульсного типа.
В РЛС (РЛК) радиотехнических подразделений (частей) наибольшее распро-
странение получили импульсные радиопередатчики, состоящие из генерато-
ра, создающего ВЧ колебания, модулятора, формирующего импульсы высо-
кого напряжения для возбуждения в генераторе этих колебаний, и источника
электропитания. Работа такого передатчика синхронизируется от специаль-
ного устройства (синхронизатора), вырабатывающего через равные интерва-
лы времени синхронизирующие импульсы запуска. В режиме передачи ан-
тенный переключатель подключает к антенне передатчик, а в режиме
приема - приемник. Он же осуществляет «развязку» между приемником и
передатчиком (осуществляет защиту приемника от просачивающейся мощ-
ности передатчика).
Отраженный от воздушного объекта сигнал улавливается антенной и че-
рез антенный переключатель поступает на вход приемной системы (радио-
приемника), где он усиливается, преобразуется по частоте и детектируется. В
большинстве случаев радиоприемники выполняются по супергетеродинной
416
схеме и могут принимать очень слабые (до 10’15 Вт и менее) сигналы опреде-
ленной частоты и формы. В приемной системе имеются схемы защиты РЛС
от воздействия помех, регулировки усиления, перестройки по частоте, селек-
ции движущихся целей и др. В современных РЛС радиотехнических подраз-
делений (частей) в оконечных каскадах приемника аналоговый сигнал преоб-
разуется в цифровую форму и его дальнейшая обработка осуществляегся в
цифровом виде.
Усиленный и подготовленный к дальнейшей обработке сигнал поступает
на устройство первичной обработки (УПО), основной задачей которого явля-
ется первичное извлечение информации о траекторных и сигнальных пара-
метрах целей из отраженных импульсов. Полученная информация в цифро-
вом виде поступает на ЭВМ, которая служит для окончательной обработки
радиолокационной информации и автоматизации процесса работы РЛС. УПО
и ЭВМ в совокупности образуют систему обработки информации.
Вычислительные средства РЛС осуществляют, кроме первичной, вторич-
ную обработку радиолокационной информации. Под первичной обработкой
обычно понимают обнаружение эхо-сигнала и извлечение из него коорди-
натной и сигнальной информации в единичном замере (одном зондировании
воздушного пространства). Под вторичной обработкой понимают определе-
ние параметров движения воздушного объекта в результате анализа эхо-
сигналов, полученных в нескольких тактах зондирования. В процессе вто-
ричной обработки выполняются операции сглаживания значений параметров
эхо-сигналов, полученных в единичных замерах, их экстраполяции на сле-
дующий такт зондирования и т.п. Это дает возможность осуществлять по-
строение траекторий движения воздушных объектов.
Помимо решения задач обработки информации ЭВМ обеспечивает
управление работой РЛС во всех режимах (обнаружение, сопровождение,
распознавание). Она формирует массивы информации, которые поступают на
устройство управления РЛС. Это устройство распределяет информацию
управления по отдельным устройствам станции в виде соответствующих ко-
манд. По этим командам происходит выбор соответствующего режима рабо-
ты, типа зондирующего сигнала, частоты следования импульсов и т.д. ЭВМ
также осуществляет выбор области пространства, в которую излучаются зон-
дирующие сигналы, путем управления положением диаграммы направленно-
сти антенны через систему управления антенной. Эта система обеспечивает
либо выбор положения фокусирующей поверхности антенны для зеркальных
систем, либо электронное сканирование луча в фазированных антенных ре-
шетках, либо и то и другое вместе в антенных системах, механически пере-
мещаемых по какой-либо координате, например, по азимуту.
Антенная система служит для излучения и приема радиоволн и выполня-
ется в различных вариантах в зависимости от назначения РЛС, места уста-
новки и используемого диапазона радиоволн. В метровом и в длинноволно-
зой части дециметрового диапазона радиоволн применяются вибраторные
штейны; в коротковолновой части дециметрового, в сантиметровом и мил-
шметровом диапазонах - рефлекторные (зеркальные), рупорные, линзовые,
417
диэлектрические антенны, а также фазированные антенные решетки. Ширина
луча антенны при заданной длине волны обратно пропорциональна ее разме-
рам. Поэтому для сужения характеристики направленности антенны обычно
уменьшают длину волны и увеличивают размеры антенны.
Перемещение луча антенны в пространстве осуществляется несколькими
способами: механическим поворотом всей антенны с помощью электродви-
гателей и сервомоторов; электромеханическим - в пространстве перемещает-
ся только облучающий элемент антенны; электрическим (электронным) -
управление лучом и его формой производится за счет изменения фазы, час-
тоты, амплитуды и других параметров сигналов, излучаемых рядом излуча-
телей.
Необходимость обеспечения синхронной работы большого количества
отдельных устройств и систем РЛС требует высокоточной взаимной привяз-
ки начала и конца работы каждого устройства во времени. Такая привязка
обеспечивается устройством, которое называется синхронизатором. Синхро-
низатор генерирует высокостабильную последовательность опорных (такто-
вых) импульсов, относительно которых привязывается во времени работа
всех остальных устройств РЛС.
Полученная РЛС информация должна поступить к ее потребителю в
удобном для него виде. Она либо передается в цифровом виде непосредст-
венно с ЭВМ в каналы связи (трассовый выход), либо передается на систему
отображения и регистрации радиолокационной информации. Эта система
может содержать визуальные индикаторные устройства (например, на основе
электронно-лучевых трубок, электролюминесцентных приборов, жидких
кристаллов и др.) и устройства регистрации информации на специальных
лентах, магнитных дисках и др.
Комплексы средств автоматизации (КСА) включают:
КСА обработки радиолокационной информации и управления радиотех-
нического подразделения;
КСА обработки радиолокационной информации и управления радиотех-
нической части.
Автоматизированная система управления радиотехнической части пред-
ставляет собой совокупность взаимосвязанных командных пунктов (пунктов
управления) подразделений и командного пункта части, оснащенных КСА.
Специальные средства включают:
имитационную аппаратуру и тренажеры;
радиопрозрачные укрытия, вышки (башни);
автоматические или автоматизированные диагностические средства и ре-
монтные средства;
мобильные (подвижные) станции ремонта и технического обслуживания;
мобильные (подвижные) лаборатории измерительной техники;
табельное оборудование и оснастку стационарных объединенных ре-
монтных мастерских воинских частей;
радиотехнические средства, придаваемые к РЭТ по отдельным заказам
(радио- и кабельные линии передачи радиолокационной информации, свето-
418
водная аппаратура для передачи сигналов, выносные индикаторные посты и
ДР);
вспомогательные машины и механизмы (кабелеукладчики, краны, анкер*
ные машины и др.).
Образец РЭТ есть функционально законченное целевое техническое
средство, относящееся к номенклатуре РЭТ (радиолокационная станция, ра-
диолокационный комплекс, радиовысотомер, комплекс средств автоматиза-
ции, специальное техническое средство ремонта и технического обслужива-
ния, тренажер и др.). Группа образцов РЭТ - совокупность образцов, харак-
теризующаяся общностью назначения, решаемых задач и принципов
применения.
Средства связи - это радио- и радиорелейные станции, кабельные и про-
водные линии связи, телефонные и телеграфные аппараты, автоматические
телефонные станции, аппаратура громкоговорящей связи и т.п. Средства свя-
зи предназначены для передачи информации и команд управления на раз-
личные расстояния. Средства связи подразделяются на проводные, радио-,
радиорелейные (тропосферные) и космические.
143. ТАКТИКО-ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ РТС
Возможности РТС по обнаружению и сопровождению воздушных объек-
тов определяются совокупностью показателей, иногда именуемых тактико-
техническими характеристиками (ТТХ). Под ТТХ понимаются количествен-
ные и качественные показатели, характеризующие возможности РТС по вы-
полнению боевых задач в конкретных условиях воздушной и радиоэлектрон-
ной обстановки.
Ойюрнмми т?ктчтеккми.2саракг.?ри.£гик.ами ELC явд>и<хкж
название, шифр, назначение и состав РТС;
состав получаемой информации;
режимы работы и параметры зоны обнаружения в зависимости от режи-
мов работы;
помехозащищенность;
разрешающие способности по дальности и угловым координатам при ав-
томатической обработке и визуальном съеме информации;
разрешающие способности по азимуту и углу места при определении пе-
ленгов на постановщики активных помех;
точность определения дальности и угловых координат при первичной об-
работке информации;
точность определения плоскостных координат, высоты, скорости и курса
при вторичной обработке информации;
точность определения азимута и угла места при определении и сопрово-
ждении пеленгов на постановщики активных помех;
средние длительности захвата, сопровождения, разрывов и существова-
ния ложных трасс в различных условиях сопровождения (одиночные и груп-
419
повые цели, без и при наличии маневра, в обстановке активных и пассивных
помех);
максимальное количество одновременно сопровождаемых трасс воздуш-
ных объектов и пеленгов на постановщики активных помех (пропускная или
информационная способность);
мобильность.
Основными техническими характеристиками РТС являются:
потенциал, мощность излучения (импульсная и средняя);
диапазон рабочих длин волн (несущая частота сигнала или последова-
тельность несущих частот при многочасовой работе), форма, длительность и
частота повторения зондирующих импульсов, средняя и импульсная мощно-
сти излучения;
число одновременно формируемых лучей антенны, ширина и форма диа-
граммы направленности антенны (ДНА) в азимутальной и угломестной плос-
костях, геометрические размеры и эффективная площадь антенны, коэффи-
циент усиления антенны, уровень боковых лепестков ДНА, высота фазового
центра антенны;
ширина полосы пропускания приемника, длительность сжатого импуль-
са, чувствительность приемника, отношение сигнал/шум при заданных веро-
ятностях правильного обнаружения и ложной тревоги, мощность шума, спек-
тральная мощность шума, коэффициент шума приемника, суммарный коэф-
фициент потерь в приемном тракте, характеристики пеленгационного канала
и устройства подавления помех;
амплитуда и длительность управляющих и выходных сигналов аналого-
вых радиолокационных средств (метка «Север», МАИ, импульс запуска, им-
пульсы запроса и метки диапазонов работы запросчика, импульсы запроса и
метки о значении измеренного угла места или высоты с первичного радиовы-
сотомера).
Иногда отдельно выделяют эксплуатационные характеристики РТС, к ко-
торым относятся:
текущая стадия жизненного цикла;
типы алгоритмов передачи данных и состав типов сопрягаемых КСА
пунктов управления и командных пунктов;
полное время включения, среднее время наработки на отказ, среднее вре-
мя восстановления, технический ресурс;
ограничения функционирования по наиболее вероятным помехам, клима-
тическим и атмосферным условиям.
Состав получаемой информации
Под составом получаемой информации понимается перечень сведений
(данных) о воздушных объектах, которые могут быть получены с помощью
РТС. Эти сведения могут характеризовать пространственное положение воз-
душных объектов по дальности (О), азимуту (J5), углу места (г) или высоте
(Н), их количественный состав, государственную принадлежность, парамет-
ры движения (курс и скорость полета), класс и (или) тип.
420
Совокупность сведений о воздушных объектах и радиоэлектронной об-
становке, полученных с помощью средств радиолокации, называется радио-
локационной информацией.
Зона обнаружения РТС
Зоной обнаружения РТС называется область пространства, в пределах
которой воздушные объекты с определенной эффективной отражающей по-
верхностью (ЭОП) при установленной вероятности ложной тревоги обнару-
живаются в каждом обзоре с вероятностью не менее заданной.
Параметрами зоны обнаружения являются: минимальный (£,„) и макси-
мальный углы места, в пределах которых осуществляется обзор воз-
душного пространства; сектор обзора по азимуту; дальность обнаружения
воздушного объекта в свободном пространстве; верхняя граница бес проваль-
ного обнаружения; дальность обнаружения на фиксированных высотах
&об*(Н)\ радиус «мертвой воронки».
При оценке параметров зоны обнаружения РТС необходимо учитывать,
что они зависят от большого количества как внешних, так и внутренних фак-
торов и являются в силу этого величинами статистическими. Условно можно
выделить следующие группы факторов, влияющих на зону обнаружения
РТС: параметры среды распространения радиоволн; технические параметры
РТС; параметры радиоэлектронной обстановки и флюктуации ЭОП воздуш-
ных объектов (рис. 14.2).
Помехозащищенность
Под помехозащищенностью понимают способность РТС выполнять свои
функции при воздействии внешних помех. Другими словами, помехозащи-
щенность является показателем надежности работы радиоэлектронной тех-
ники в условиях воздействия на нее различного рода помех.
По источнику возникновения помехи можно разделить на естественные и
искусственные (организованные).
Помехи искусственного происхождения делятся на активные, генерируе-
мые специальными радиопередатчиками или станциями, и пассивные, обра-
зуемые за счет рассеяния (отражения) различными объектами электро-
магнитных волн, излучаемых радиоэлектронными средствами (РЭС).
Активные преднамеренные радиопомехи создаются с помощью специ-
альных излучающих устройств. Воздействуя на приемные устройства РЭТ,
активные помехи затрудняют или полностью исключают прием и обработку
полезных сигналов, т. е. нарушают нормальное функционирование этих РТС.
По характеру воздействия на оконечное устройство подавляемого РТС они
могут быть маскирующими и имитирующими.
421
Рис. 14.2. Вид горизонтального сечения зоны обнаружения РЛС
Пассивные преднамеренные помехи создаются с помощью дипольных
отражателей, уголковых отражателей, линз Люнеберга и др. Сигналы РЛС,
отраженные от облака дипольных отражателей, создают фон на экранах ин-
дикаторов, маскирующий отметки воздушных объектов. Отраженные от
уголковых отражателей, линз Люнеберга сигналы РЛС могут имитировать
отметки воздушных объектов.
Естественные помехи во всем СВЧ-диапазоне обусловлены наличием
шумов атмосферы, Солнца, галактики.. Пассивные помехи естественного
происхождения обусловлены отражениями зондирующих сигналов РТС от
земной или водной поверхности, от метеообразований, от атмосферных не-
однородностей и оптически ненаблюдаемых объектов.
Различный характер воздействия помех на РТС исключает возможность
использования единого показателя помехозащищенности.
Для оценки помехозащищенности РТС от активных шумовых помех
(АШП) удобно пользоваться коэффициентом сжатия зоны обнаружения
(Ксж), который определяется отношением дальности обнаружения воздушно-
го объекта в условиях помех D„(e) к дальности обнаружения без помех D^e).
422
Коэффициент сжатия зоны обнаружения РТС характеризует степень со-
хранения дальности действия в условиях воздействия АШП. Величина Ксж
зависит от технических характеристик РТС и радиоэлектронной обстановки:
(14.1)
(14.2)
(14.3)
кя1
где GMp - коэффициент усиления приемной антенны РТС;
Л - длина волны РТС, м;
L„p - коэффициент потерь в приемном тракте РТС;
N„ - коэффициент шума приемника РТС;
tjn- коэффициент подавления помех автокомпенсационной
аппаратурой РТС при воздействии W источников АШП;
W - количество источников АШП, воздействующих на РТС;
Pt - плотность мощности помех, создаваемая i-м ПАП для
рассматриваемой РТС;
Rm - удаление /-го ПАП от РТС;
Fnp(Ej - значение нормированной диаграммы направленности приемной
антенны РТС в вертикальной плоскости в направлении на /-й
источник АШП;
Fnp(pt) - значение нормированной диаграммы направленности приемной
антенны РТС в горизонтальной плоскости в направлении на /-й
источник АШП.
Помехозащищенность РТС от пассивных помех принято характеризовать
коэффициентом подавления помех (К„), коэффициентом подпомсховой ви-
димости (Км), а также дальностью обнаружения и качеством проводки воз-
душных объектов на фоне дипольных отражателей с заданной допустимой
линейной плотностью помехи на сто метров пути
Коэффициент подавления помехи определяется как отношение мощности
помехи на входе устройства защиты к мощности помехи на его выходе. Этот
показатель легко измерить, но он недостаточно полно характеризует устрой-
ство защиты, т.к. не учитывает прохождение полезного сигнала и влияние
собственных шумов.
Более общим показателем является коэффициент подпомеховой видимо-
сти, который показывает, во сколько раз средняя мощность сигнала от цели
на входе приемника может быть слабее мощности пассивной помехи, чтобы
обеспечивалось обнаружение сигнала с заданными вероятностями правиль-
ного обнаружения и ложной тревоги.
423
С коэффициентом подпомеховой видимости связан такой показатель, как
допустимое количество пачек дипольных отражателей на 100 метров пути:
100°и (14.4)
------------------------------------ч—-
U Ро.5Р &пач
где D - дальность до пассивной помехи;
ац - ЭОП цели (воздушного объекта);
Д.5/> - ширина диаграммы направленности антенны РТС по азимуту
по уровню половинной мощности (в радианах);
- ЭОП пачки дипольных отражателей.
Разрешающая способность
Разрешающая способность по некоторому параметру характеризует воз-
можность раздельного радиолокационного наблюдения близко расположен-
ных объектов и раздельно измерять параметры каждого объекта.
Разрешающая способность по координатам характеризуется минималь-
ным расстоянием по какой-либо координате при одинаковых значениях дру-
гих координат. Так разрешающая способность по дальности характеризует
возможность обнаружения и сопровождения двух объектов, находящихся в
одном и том же направлении, но на разных дальностях. Разрешающая спо-
собность по дальности численно равна наименьшему расстоянию в простран-
стве между двумя объектами, находящимися на одинаковых азимутах и углах
места, при котором эти объекты еще могут наблюдаться раздельно.
Потенциальная разрешающая способность РТС по дальности в основном
определяется откликом согласованного фильтра на входной сигнал или
функцией неопределенности радиолокационного сигнала. Сечение функции
неопределенности вертикальной плоскостью, параллельной оси времени,
представляет собой квадрат амплитуды выходного сигнала согласованного
фильтра. Численное значение потенциальной разрешающей способности по
дальности равно ширине пика функции неопределенности радиолокационно-
го сигнала вдоль оси времени на уровне 0,5 и определяется по формуле:
3D =СТи
™ 2 ' (14.5)
где ц - длительность радиоимпульса на выходе согласованного
фильтра.
Потенциальная разрешающая способность по угловым координатам оп-
ределяется функцией отклика антенны по угловым координатам, представ-
ляющей собой просто диаграмму направленности антенны. Численное значе-
ние разрешающей способности по угловым координатам принимается обыч-
но равным угловому расстоянию между точками по уровню половинной
мощности (-ЗдБ) диаграммы направленности антенны.
Разрешающая способность по высоте зависит от разрешающей способно-
сти по углу места:
зн = €ojp'D'cos£
57,3
(14.6)
424
где £Ь.5Р - ширина диаграммы направленности антенны по углу места
по уровню половинной мощности;
е- угол места воздушного объекта;
D - дальность до воздушного объекта.
Реальная разрешающая способность обычно хуже потенциальной. Ухуд-
шение обусловлено неоптимальной обработкой сигнала, наличием нелиней-
ности в трактах обработки. В РЛС, в которых осуществляется визуальный
съем информации с индикаторов, разрешающая способность зависит также
от диаметра луча на экране электронно-лучевой трубки (ЭЛТ), размеров
ЭЛТ, масштаба отображения обстановки, вида развертки.
Точность информации
Точность информации характеризует степень соответствия истинного и
измеренного значения координат и параметров движения воздушного объек-
та. Точность определения некоторого параметра V (дальности D, азимута Д
угла места г и др.) обычно характеризуется средней квадратической ошибкой
av (CKO). Потенциальная (минимально возможная) СКО определения данно-
го параметра сумт может быть представлена в виде:
П- - К-
мин~у[р' (14.7)
где Ку - некоторый коэффициент, зависящий от параметров зондирующего
сигнала и самого РТС;
р- отношение сигнал/шум по мощности.
При измерении дальности (D), угловых координат (&) и радиальной ско-
рости (Уг) воздушного объекта коэффициенты К& К& Kv находятся по фор-
мулам:
п* _ 1 . If _ А)
где Пзф - эффективная ширина спектра радиолокационного сигнала;
- эффективная длина апертуры (раскрыва) антенны, нормированная
к длине волны;
- эффективная длительность сигнала.
Таким образом, точность измерения дальности при заданном отношении
сигнал/шум тем выше, чем шире спектр радиолокационного сигнала; точ-
ность измерения угловой координаты - чем больше апертура антенны (при
фиксированной длине волны); точность измерения скорости - чем больше
длительность радиолокационного сигнала.
Конкретные значения параметров /7^, зависят от вида зондирующего
сигнала, а - от параметров антенны.
При фиксированных параметрах РТС потенциальная точность измерения
параметров воздушного объекта тем выше, чем больше отношение сиг-
нал/шум на входе приемника станции.
425
Иногда в технической документации используется такой показатель, как
ошибки в 80% измерений Ajo%. СКО связана с ошибкой в 80% измерений
следующим соотношением А»* = 1,28сг.
14.4. ОПРЕДЕЛЕНИЕ ЗОНЫ ОБНАРУЖЕНИЯ РЛС (РЛК)
Размеры и форма зоны обнаружения определяются техническими харак-
теристиками РЛС (РЛК). эффективной отражающей поверхностью цели,
уровнем шумов на входе приемного устройства, а также зависят от диаграм-
мы направленности антенны РЛС (РЛК), подстилающей поверхности, окру-
жающего рельефа местности и других условий. В практике радиотехниче-
ских подразделений (частей) в качестве исходной зоны обнаружения РЛС
(РЛК) принимается область пространства, в пределах которой вероятность
обнаружения цели с ЭОП, равной 1 м2, - не менее 0,5. Для получения зон об-
наружения соответствующих другим значениям ЭОП делается пересчет раз-
меров исходной зоны по соответствующим формулам.
Зону обнаружения РЛС (РЛК) в угломестной плоскости можно разделить
на три области: область «свободного» пространства, интерференционная об-
ласть и область нижней кромки, которые отличаются методиками расчета.
Общая задача расчета зоны обнаружения РЛС (РЛК) аналитическим методом
решается путем ее декомпозиции на три самостоятельные подзадачи:
1) определение нормированной диаграммы направленности приемо-
передающей антенны РЛС (РЛК) - F(£)\
2) расчет дальностей обнаружения по воздушным объектам с заданной
ЭОП с учетом энергетического потенциала, а также режимов генерации и об-
работки сигналов - D(e)\
3) определение вероятности обнаружения воздушного объекта в заданной
точке и построение огибающей зоны обнаружения РЛС (РЛК) в горизонталь-
ной или вертикальной плоскости.
Уровень диаграммы направленности в свободном пространстве каждого
из лучей приемопередающей антенны может рассчитываться по амплитудно-
фазовому распределению следующим образом:
(г) = ЕД • + у 4/ • j • • (14 9)
где {лг )}^в/ - АФР антенны;
W - число элементов в решетке;
Д1 - расстояние между элементами решетки, м;
Я - длина волны, м.
Расчет ДНА в свободном пространстве с помощью АФР является универ-
сальным. Он может быть использован для расчета уровня ДНА как в любом
угломестном, так и в любом азимутальном направлении (в области главного
лепестка, близких боковых и фоновых лепестков ДНА). Он применим также
к любому типу используемых на практике антенн: антенной решетке, зер-
кальным антеннам и т.д. В последнем случае зеркальная антенна может быть
426
аппроксимирована набором элементов антенной решетки, расположенных
друг от друга на расстоянии не более длины волны.
Аналитически зону обнаружения РЛС (РЛК) в вертикальной плоскости
можно представить выражением:
^(f) = oe -Fe(r) Ф(г). (14.10)
где De - максимальная дальность обнаружения ВО с ЭОП, равной а0, в
свободном пространстве;
Р<(£) - нормированная диаграмма направленности антенны (ДНА) РЛС
(РЛК) в свободном пространстве;
Ф(£) - интерференционный множитель (множитель Земли).
Для решения практических задач дальность обнаружения РЛС (РЛК) в
свободном пространстве можно вычислить по формуле:
где W- множитель ослабления на трассе радиолинии;
сго - эффективная отражающая поверхность воздушного объекта;
rj - коэффициент полезного действия антенны;
Р±- мощность излучения;
- эффективная площадь раскрыва антенны;
Р^ртт - чувствительность приемника, соответствующая заданным
вероятностям правильного обнаружения и ложной тревоги.
При заданной высоте ha антенны РЛС (РЛК) и горизонтальной поляриза-
ции сигнала множитель Земли равен:
^.2-^Н.^ <1412>
Для малых углов места £ полученное значение множителя Земли спра-
ведливо и для вертикальной поляризации. Но формула позволяет проводить
расчет только для ровной поверхности земли.
Зная коэффициент сжатия и дальность обнаружения воздушного объекта
с ЭОП, равной oi, без учета воздействия АШП можно определить дальность
обнаружения РЛС (РЛК) в помехах:
D!M = K,,DOM (14.13)
Значение коэффициента пересчета зоны обнаружения РЛС (РЛК) (К„) по
воздушному объекту с ЭОП, равной сг,о, если известна зона обнаружения по
воздушному объекту с ЭОП, равной оь, определяется известным выражени-
ем:
к.=к„^- (1414>
где Ксж - коэффициент сжатия зоны обнаружения РЛС (РЛК) в условиях
воздействия АШП.
Следует отметить, что на формирование поля электромагнитных волн в
районе воздушного объекта существенное влияние оказывают рельеф мест-
ности и подстилающая поверхность. Наиболее сильное влияние рельефа ме-
427
стности возникает при радиолокационном наблюдении маловысотных целей.
Неучет данного фактора приводит к существенным погрешностям в опреде-
лении зон обнаружения РЛС (РЛК). Поэтому в радиотехнических подразде-
лениях (частях) наиболее широкое распространение получил расчетно-
экспериментальный метод, в котором зоны обнаружения рассчитываются
аналитически с учетом рельефа местности и уточняются облетом. Данный
метод подробно описан в методических рекомендациях радиотехническим
войскам ПВО «Выбор позиции радиотехнического подразделения».
Влияние местных предметов
Для оценки и учета влияния рельефа и местных предметов на работу ра-
диолокационных станций производится топогеодезическая обработка пози-
ций, которая включает: построение профилей местности в ближней и дальней
зонах; определение углов уклона позиций; определение углов закрытия; рас-
чет областей радиотеней.
Средние углы уклона позиции определяются по специальной методике с
использованием профилей местности в ближней зоне (радиусом до
800... 1500 м). Профили местности в ближней зоне снимаются по плану пози-
ции. который оформляется в масштабе 1:5 000 при высоте сечения рельефа
0,5... 1 м. Топографические карты местности даже самых крупных масштабов
для этой цели не пригодны, так как высота сечения рельефа на них составля-
ет, как правило, не менее 5... 10 м, поэтому план позиции может быть постро-
ен только по результатам топографической съемки местности.
Обнаружение целей на малых высотах
На малых высотах (малых углах места) значительное влияние на зону об-
наружения РЛС (РЛК) оказывают углы закрытия, создаваемые местными
предметами и рельефом местности. Углы закрытия определяются инструмен-
тально, если есть возможность разместить теодолит (буссоль) на одной высо-
те с электрическим центром антенны и имеется хорошая наблюдаемость пре-
пятствий. Если нельзя определить угол закрытия теодолитом или буссолью,
он рассчитывается по специальной методике.
Для определения углов закрытия позиции и расчета областей радиотеней
РЛС (РЛК) на малых высотах строятся профили местности в дальней зоне
(до 150 км). Для повышения точности используются крупномасштабные кар-
ты, как правило, масштаба 1:50 000. Однако могут применяться и карты мас-
штабов 1:100 000 или 1:200 000. Для построения профиля местности в даль-
ней зоне на карте из точки стояния РЛС (РЛК) по выбранному азимуту про-
водят прямую и определяют на ней отметки самых высоких и самых низких
точек (или характерные точки рельефа). Координаты отметок в масштабе
дальность-высота переносят в радиолокационный формуляр радиотехниче-
ского подразделения на специальную палетку.
Обнаружение целей на средних и больших высотах
При построении зоны обнаружения РЛС (РЛК) на средних и больших вы-
сотах используется нормированная ДНА РЛС (РЛК), которая для конкретной
428
позиции может быть получена экспериментальным путем, например, астро-
номическим методом по радиоизлучению Солнца или с помощью специаль-
ного генератора, настроенного на несущую частоту РЛС (РЛК). ДНА радио-
локационной станции - графическое изображение пространственного рас-
пределения электромагнитного поля, в пределах которого РЛС обеспечивает
обнаружение, сопровождение и определение характеристик движения целей
с заданной вероятностью. Различают косекансную, веерную, однолучевую,
многолучевую и игольчатую.
Для построения зоны обнаружения РЛС (РЛК), кроме нормированной
ДНА, необходимо знать дальность обнаружения РЛС (РЛК) в направлении
максимума излучения ДНА (О^). Эта дальность может быть получена экс-
периментальным путем по результатам облета РЛС (РЛК):
л = (14.15)
Kn.F(ceoY
где - дальность обнаружения ВО, входящего в зону обнаружения
РЛС (РЛК) под углом места 6*, (при облете);
Кя - коэффициент пересчета зоны обнаружения РЛС (РЛК);
F(£rO) - значение нормированной ДНА РЛС (РЛК) под углом места £*>.
Угол места связан с высотой полета зависимостью:
Л
2A, /
где - высота полета ВО при облете над уровнем моря;
Яя=Няо,-Ав,
где - высота позиции РЛС (РЛК) относительно уровня моря;
ha - высота электрического центра антенны РЛС (РЛК) относительно
(14.16)
£м = arcsii
(14.17)
позиции.
Если нет возможности получить облетное значение дальности обнаруже-
ния РЛС (РЛК), она может быть получена аналитически по приведенным
выше формулам.
Методика учета влияния позиции на зону обнаружения РЛС
Не имея возможности измерять значения ДНА на конкретной позиции
экспериментальным путем, на практике часто прибегают к упрощенным ме-
тодикам учета влияния позиции на зону обнаружения РЛС (РЛК), которое в
наибольшей степени проявляется для РЛС (РЛК) метрового и дециметрового
диапазонов волн. У этих РЛС (РЛК) зона обнаружения формируется как пря-
мым, так и отраженным от поверхности лучом (в дециметровом и метровом
диапазонах волн отражения от Земли близко к зеркальному). В сантиметро-
вом диапазоне в связи с диффузным отражением от Земли формирование зо-
ны обнаружения осуществляется практически только прямым лучом. В связи
с этим при построении зон обнаружения РЛС (РЛК) метрового и дециметро-
вого диапазонов учитывается средний уклон позиции (^). Для введения по-
правки все точки зоны обнаружения РЛС (РЛК) в вертикальной плоскости
429
переносятся со своим знаком на угол ytp. Для РЛС (РЛК) сантиметрового
диапазона принимают ^р=0.
Таким образом, зная дальность обнаружения РЛС (РЛК) в направлении
максимума излучения ДНА - и нормированную ДНА РЛС (РЛК) в вер-
тикальной плоскости - F(e), полученную расчетным путем для некоторых
идеальных условий или при полигонных испытаниях РЛС (РЛК), учет влия-
ния конкретной позиции осуществляется по формуле:
О..»(е)= К„ • • t'(e-rep<1418>
где D^s) - дальность обнаружения ВО, находящегося под углом места
£кРЛС (РЛК);
<ро - угол наклона фокальной оси антенны РЛС (РЛК).
Рассчитанные и построенные на специальных палетках в вертикальной
плоскости зоны обнаружения РЛС (РЛК) уточняются облетом, который про-
водится под одним или несколькими азимутами в зависимости от различия
углов уклона на разных азимутах. Облет позволяет уточнять фактическое
значение коэффициента использования радиогоризонта РЛС (РЛК) на данной
позиции, а также влияние уклона позиции. Данные облета наносятся на ту же
палетку, на которой рассчитывалась зона обнаружения. Величина отклонения
расчетной дальности обнаружения от облетной вводится на азимуте облета и
на других азимутах, под которыми уклон позиции равен или близок углу ук-
лона азимута облета. При расхождении результатов облета с расчетными
данными более 20% расчет должен быть проведен заново.
Описываемый метод определения зоны обнаружения РЛС (РЛК) дает
приемлемые результаты, если неровности отражающего участка удовлетво-
ряют условию:
(14.19)
32Л„
где d„ - расстояние от точки стояния РЛС (РЛК) до неровностей.
На практике далеко не всегда удается найти площадку, удовлетворяю-
щую требованиям, предъявляемым к отражающему участку. Если высота не-
ровностей отражающего участка в ближней зоне в два-три раза превышает
допустимые значения, то происходит частичное рассеяние электромагнитной
энергии при отражении от земли, что приводит к уменьшению мощности
сигнала, отраженного в направлении цели. Как показала практика, на таких
позициях дальность обнаружения снижается на 15-20% от расчетной.
Если размеры отражающего участка вокруг РЛС (РЛК) намного меньше
допустимых значений и рельеф местности в ближней зоне сильно изрезан, то
отражение электромагнитной энергии от подстилающей поверхности приоб-
ретает рассеянный характер. В результате нс происходит синфазного отра-
жения от земли, что снижает потенциальную дальность обнаружения РЛС
(РЖ) на 20-25%. Кроме того, значительно увеличивается изрезанность диа-
граммы направленности в вертикальной плоскости.
430
143. ТАКТИКА РАДИОТЕХНИЧЕСКИХ ПОДРАЗДЕЛЕНИЙ
(ЧАСТЕЙ)
Основы боевого применения радиотехнических
подразделений (частей)
Боевое применение радиотехнических подразделений (частей) представ-
ляет собой организованное использование сил и средств для выполнения по-
ставленных боевых задач.
В зависимости от условий обстановки радиотехническая часть выполня-
ет следующие основные задачи:
в мирное время:
поддержание боевой и мобилизационной готовности подразделений и
частей;
несение боевого дежурства по противовоздушной обороне выделенными
(назначенными) силами;
радиолокационное обеспечение полетов авиации по планам боевой под-
готовки;
радиолокационное обеспечение центров Единой системы организации
воздушного движения (ЕС ОрВД);
контроль за соблюдением порядка использования воздушного простран-
ства Российской Федерации;
в военное время:
ведение радиолокационной разведки воздушного противника;
радиолокационное обеспечение управления войсками (силами);
радиолокационное обеспечение боевых действий (боевого применения)
соединений и воинских частей ЗРВ, авиации, воинских частей и подразделе-
ний РЭБ.
Кроме того, подразделения части могут привлекаться для обнаружения
ядерных взрывов.
Основная цель боевого применения радиотехнических подразделений
(частей) заключается в обеспечении радиолокационной информацией о воз-
душной обстановке боевых расчетов командного пункта соединения ПВО и
обеспечиваемых соединений, воинских частей и подразделений.
Боевое применение радиотехнических подразделений (частей) осуществ-
ляется в форме разведывательно-информационных действий.
Разведывательно-информационные действия радиотехнических под-
разделений (частей) представляют собой комплекс согласованных по целям,
задачам, месту и времени мероприятий, проводимых по единому замыслу и
плану в интересах ведения радиолокационной разведки и обеспечения ра-
диолокационной информацией о воздушной обстановке боевых расчетов ко-
мандного пункта соединения ПВО и обеспечиваемых соединений, воинских
частей и подразделений. Разведывательно-информационные действия вклю-
431
чают: ведение радиолокационной разведки; выдачу радиолокационной ин*
формации; маневр сил и средств подразделений (частей).
Содержанием боевого применения радиотехнических частей (подразде-
лений) является (рис. 14.3): разведывательно-информационные действия,
включающие радиолокационную разведку, выдачу радиолокационной ин-
формации и маневр сил и средств; восстановление нарушенной боеспособно-
сти; управление и взаимодействие; проведение мероприятий по всем видам
обеспечения; непосредственное прикрытие и наземная оборона подразделе-
ний и командных пунктов.
Рис. 14.3. Содержание боевого применения радиотехнических частей
Для выполнения боевой задачи по ведению радиолокационной разведки и
выдаче радиолокационной информации радиотехнические подразделения
(части) развертываются в боевые порядки в своих позиционных районах.
Позиционный район - это участок местности, на котором радиотехниче-
ское подразделение (часть) развертывается в боевой порядок. Боевой порядок
радиотехнической части включает боевые порядки радиотехнических под-
разделений, один или несколько запасных командных пунктов, резервы. Бое-
вой порядок радиотехнического подразделения (части) должен соответство-
вать поставленной боевой задаче, замыслу боевого применения и обеспечи-
вать: максимальную реализацию тактико-технических характеристик
вооружения и военной техники подразделения (части); устойчивое управле-
ние подразделениями и расчетами; надежное взаимодействие с соседними
радиотехническими подразделениями (частями); устойчивость в условиях
применения противником средств огневого и радиоэлектронного подавления;
электромагнитную совместимость; возможность для совершения маневра.
432
В позиционном районе оборудуются боевые (основные и запасные), де-
журные, учебные и ложные позиции, пути маневра, линии связи и электропе-
редач, места рассредоточения материальных средств. Границы позиционного
района радиотехнического подразделения (части) указываются (назначаются)
в боевом приказе.
На боевой позиции радиотехнического подразделения размещаются: ко-
мандный пункт (пункт управления), приемный и передающий радиоцентры,
радиотехнические средства и комплекс средств автоматизации, пост визуаль-
ного и химического наблюдения, средства непосредственного прикрытия и
наземной обороны, инженерные сооружения.
Каждый радиолокатор, аппаратура опознавания радиотехнического под-
разделения обеспечивают получение вполне определенных сведений о воз-
душных объектах. Совокупность зон обнаружения, измерения высоты и опо-
знавания радиотехнических средств радиотехнического подразделения, раз-
вернутых на одной позиции, обеспечивают получение информации о
местоположении, государственной принадлежности, характеристиках лока-
ционных целей и образуют зону радиолокационной информации, под кото-
рой понимается наибольшая для заданных условий обстановки область воз-
душного пространства, в пределах которой обеспечивается определение пло-
скостных координат, высоты полета, государственной принадлежности
воздушных объектов и их характеристик.
Учитывая ограниченные возможности радиотехнических средств по объ-
ему просматриваемого пространства, для увеличения зоны наблюдения ра-
диолокационные средства размещают определенным образом в пространстве,
а для получения новых синергетических свойств, недоступных отдельным
РЛС, объединяют их в систему радиолокационной разведки путем организа-
ции взаимосвязей между ними и управления ими, в зависимости от склады-
вающейся обстановки и поставленных задач.
Под системой радиолокационной разведки понимается сложная органи-
зационно-техническая система, представляющая собой совокупность ста-
бильно взаимосвязанных и устойчиво взаимодействующих в пространстве и
во времени сил и средств радиолокации, автоматизации и связи, которые
функционируют совместно для формирования некоторых интегративных
свойств и достижения определенных целей, стоящих перед данной системой.
Отличительными признаками радиолокационной системы являются ориенти-
рованность в пространстве, обеспечивающая охват определенной части фи-
зического пространства в соответствии с целевым назначением, и целена-
правленная адаптация к изменяющимся условиям функционирования, кото-
рая обеспечивается управлением.
Радиолокационное поле
Совокупность зон радиолокационной информации нескольких радиотех-
нических подразделений радиолокационной системы образует радиолокаци-
онное поле (РЛП) - область пространства, в пределах которого радиолокаци-
онными средствами обеспечивается обнаружение целей противника и своих
433
объектов с вероятностью нс менее заданной, определение их координат, па-
раметров движения, государственной принадлежности и тактических харак-
теристик. РЛП может быть сплошным и очаговым, многоярусным и одно-
ярусным; его размеры и структура зависят от количества, размещения в про-
странстве и тактико-технических характеристик радиолокационных средств,
а также от интенсивности радиоэлектронного противодействия прогивннка.
РЛП обычно состоит из полей активной и пассивной локации.
Показатели боевых возможностей
Под боевыми возможностями радиотехнических подразделений (частей)
понимается совокупность свойств, характеризующих способность радиотех-
нических подразделений (частей) выполнять поставленные боевые задачи в
конкретных условиях обстановки за установленное время.
Боевые возможности радиотехнических подразделений (частей) оцени-
ваются совокупностью пространственных и информационных показателей.
Пространственные показатели характеризуют размеры области пространства,
в пределах которого объекты разведки могут обнаруживаться с вероятностью
не менее заданной. Информационные показатели оценивают качество (пол-
ноту, точность и достоверность) выдаваемой информации.
К пространственным показателям относятся параметры создаваемого ра-
диолокационного поля: рубеж обнаружения на заданной высоте (/?„); высоты
верхней (/У<г) и нижней границ (/7„..) сплошного поля; коэффициенты непре-
рывности (К„) и перекрытия поля (Кпгр).
Под рубежом обнаружения понимается замкнутая линия, полученная в
результате сечения радиолокационного поля поверхностью, равноотстоящей
всеми своими точками от рельефа местности или уровня моря (в зависимости
от заданного режима полета воздушного объекта - с огибанием рельефа ме-
стности или горизонтального).
Высотой верхней границы сплошного поля называется та максимальная
высота горизонтального полета воздушных объектов, отсчитанная от уровня
моря, на которой обеспечивается непрерывное наблюдение этих объектов,
определение их координат, параметров движения, государственной принад-
лежности и характеристик.
Высотой нижней границы сплошного поля называется та минимальная
высота относительно рельефа местности, на которой обеспечивается непре-
рывное наблюдение воздушных объектов, совершающих полет с огибанием
рельефа местности, определение их координат, параметров движения, госу-
дарственной принадлежности и характеристик.
Для характеристики радиолокационного поля по обеспечению непрерыв-
ной проводки воздушных объектов используется такой показатель, как коэф-
фициент непрерывности поля - К,р который может быть определен как от-
ношение площади поля на заданной высоте в заданном районе к площади
района. Район может быть ограничен требуемыми рубежами обнаружения
или совпадать с границами района ответственности, или задан какими-либо
434
другими условиями. Количественная оценка непрерывности радиолокацион-
ного поля, позволяет определить высоту нижней и верхней границ сплошно-
го поля. Сплошное радиолокационное поле занимает диапазон высот, в кото-
ром /С, принимает значение, равное 1. Практически К„ можно принять и
меньшим 1, но при условии, что разрывы РЛП не будут влиять на качество
выполнения поставленных задач.
Коэффициент перекрытия поля в заданной точке пространства определя-
ется количеством зон информации радиотехнических подразделений взаимно
перекрывающихся в определенной точке воздушного пространства. Для за-
данного района или трассы полета воздушного объекта может рассчитывать-
ся средний коэффициент перекрытия как отношение суммы коэффициентов
перекрытия над каждым элементарным участком к количеству элементарных
участков, на которые разбит район или трасса.
К числу основных показателей боевых возможностей радиолокационной
системы, как системы информационной, кроме параметров радиолокацион-
ного поля, относятся:
полнота отображения, как отношение числа отображенных объектов к
числу действующих объектов;
точность отображения, которая характеризуется средними квадратиче-
скими ошибками отображения места положения объектов;
достоверность отображения, как отношение числа ложных объектов
(трасс) к общему числу отображенных объектов (трасс).
Полнота отображения определяется количеством одновременно обраба-
тываемых (выдаваемых, отображаемых) радиотехническим подразделением
(частью) объектов (Nto) с установленным качеством (дискретностью, точно-
стью, составом информации, запаздыванием). Показатель Nto называется аб-
солютной пропускной способностью по сбору, обработке и выдаче инфор-
мации. Относительная пропускная способность определяется отношением
количества отображенных к количеству действующих в заданном районе
объектов, информацию по которым необходимо выдавать потребителям.
Точность информации характеризуется среднеквадратическими ошибка-
ми (СКО) определения координат обнаруженных объектов. В качестве пока-
зателей точности информации иногда пользуются значениями СКО опреде-
ления местоположения объекта средствами разведки в полярной системе ко-
ординат по дальности (ад), азимуту (сга) и углу места (сгД При выдаче
информации в АСУ полярные координаты обнаруженных объектов, как
правило, пересчитываются в прямоугольные (в декартовы координаты XY и Z
или Н АСУ), следовательно, точность информации, выдаваемой радиолока-
ционной системой, может характеризоваться СКО определения координат
обнаруженных объектов (сг^) в плоскости XY и по высоте (аА).
Ошибка, обусловленная запаздыванием информации, в АСУ может бьггь
учтена экстраполяцией координат на момент выдачи РЛИ. При этом СКО
выдачи экстраполированных координат (сгм,) учитывают не только ошибки в
измерении координат, но объединяют ошибки определения координат и па-
435
раметров движения, вносимые всеми звеньями в процессе обработки и выда-
чи информации, а также учитывают маневр цели.
Достоверность информации оценивается коэффициентом ложных трасс
(К^), который может рассчитываться как с учетом, так и без учета длитель-
ности непрерывного сопровождения действительных трасс (iMf) и существо-
вания ложных трасс
Методы оценки боевых возможностей
Для оценки боевых возможностей радиотехнических подразделений (час-
тей) по частным показателям необходимо определить конкретные значения
этих показателей, сравнить их с требуемыми значениями и выявить степень
их взаимного соответствия. Степень соответствия может быть выражена в
абсолютных, относительных или вероятностных величинах. Результаты
сравнения позволяют сделать выводы и выработать конкретные мероприя-
тия, направленные на более полную реализацию разведывательно-
информационных возможностей и доведение значений отдельных показате-
лей до требуемых.
При определении значений пространственных показателей разведыва-
тельно-информационных возможностей радиотехнических подразделений
(частей) применяются разные методы. К наиболее известным из них относят-
ся аналитический, графоаналитический и расчетно-экспериментальный ме-
тоды. а также метод дискретно-последовательного анализа.
Суть аналитического метода сводится .к тому, что для расчета параметров
радиолокационного поля как с учетом воздействия, так и без учета активных
шумовых помех (АШП) используются некоторые аналитические зависимо-
сти.‘Рубеж обнаружения радиолокационного поля представляет собой оги-
бающую окружностей, проведенных из точек стояния подразделений радиу-
сом, равным среднестатистической дальности обнаружения типовой РЛС на
заданной высоте.
Несмотря на то, что чисто аналитическому методу определения парамет-
ров РЛП присущи определенные недостатки, связанные с трудностью учета
ряда факторов (в первую очередь, невозможно корректно учесть влияние
рельефа местности и подстилающей поверхности на формирование зон обна-
ружения РЛС на конкретных позициях, динамику изменения воздушной и
радиоэлектронной обстановки и т.д.), имеются задачи управления, в которых
этот метод целесообразно использовать. Например, когда необходимо опера-
тивно рассчитать параметры РЛП или, хотя бы ориентировочно, определить
потребное количество сил и средств для создания в заданном районе РЛП с
требуемыми параметрами.
При известном коэффициенте использования радиогоризонта радиолока-
ционной станцией для нормальной рефракции радиоволн дальность об-
наружения цели, летящей на высоте Hto, без учета воздействия АШП можно
определить по известной формуле дальности радиогоризонта:
Оой»(Я«,) = 4./2 (14-20)
436
где ha - высота электрического центра антенны РЛС над подстилающей по-
верхностью.
Если известен угол закрытия (%), то при горизонтальном полете воздуш-
ного объекта на высоте Я*, относительно уровня моря дальность радиогори-
зонта может быть определена по формуле:_____
Ор..(Н„) = ту,)2 + 2 • sin г,. (14-21)
= (*422)
где - высота местного предмета, создающего угол закрытия для РЛС;
4м» - удаление местного предмета от РЛС.
При некоторых допущениях расчет значения коэффициента сжатия зон
обнаружения РЛС в помехах (Ксж) можно существенно упростить (см. 14.1-
14.3):
= I 1 (1423)
сж v + x-V
где А - параметр, характеризующий технические характеристики РЛС.
Алгоритм аналитического расчета коэффициента К? следующий. В ана-
лизируемом ударе СВН противника выбирается прикрытая помехами группа
целей одного типа (например, СА или ТА, СКР), действующая в одном диа-
пазоне высот. Принимается, что центр выбранной группы целей находится на
удалении 0,5 Do от РЛС. Такое расстояние выбирается исходя из предпосы-
лок более корректного учета вклада ПАП из зон барражирования в условиях
неопределенности степени сжатия зоны обнаружения РЛС (РЛК) и получе-
ния равной (в сторону завышения и в сторону занижения) погрешности в оп-
ределении дальности обнаружения РЛС в помехах.
Рассчитывается количество ПАП r-го типа, находящихся в секторе глав-
ного луча (Nnf,) и боковых лепестков (Я^). Для этого весь налет СВН про-
тивника, имеющий глубину 7 „ разбивается на п полос, каждая из которых
равна 0,2 D„ относительно выбранной РЛС. Определяются расстояния до се-
редины ;-й полосы (центра зоны барражирования ПАП) - RnJ. Считается, что
постановщики помех в пределах каждой полосы распределены равномерно
по площади:
04.24)
N 04.25)
nor пгг ’
где Nr - число ПАП r-го типа в составе налета СВН;
Do - дальность обнаружения РЛС СВН противника (по типам и высотам
полета) при отсутствии помех, км;
- ширина главного луча диаграммы направленности антенны (ДНА)
437
РЛС в горизонтальной плоскости по уровню половинной мощности;
L^p - протяженность налета СВН по фронту, км;
Г„ - глубина налета СВН противника, км.
Если N„er < /, то рассчитывается среднее значение угла между направле-
нием на ПАП и прикрываемыми целями:
а =6876 —, (1426)
Ч
где - среднее расстояние между ПАП и прикрываемой помехами целью,
км.
При dtp £ считается, что в главном луче ДНА РЛС находится один
ПАП, если - ни одного. Помехопостановщики из зон барражиро-
вания засчитываются в состав постановщиков, воздействующих по боковым
лепесткам ДНА РЛС.
Для упрощения расчета Ке принимаются значения нормированных диа-
грамм направленности приемной антенны РЛС в вертикальной плоскости и
передающей антенны ПАП в горизонтальной и вертикальной плоскостях
равными единице. Тогда значение коэффициента Ке равно:
=ю’£е, •[(*„(1427)
где Nt - количество типов ПАП (СА. ТА, БЛА и т.д.);
Qr - спектральная плотность мощности АШП с борта ПАП r-го типа;
Nn.r- количество ПАП r-го типа, действующих по главному лучу ДНА
РЛС;
/4Р - средний уровень боковых лепестков ДНА РЛС с учетом АКН;
Ntt6r - количество ПАП r-го типа, действующих по боковым лепесткам
ДНА РЛС;
п„ - количество полос, на которые разделен налет СВН противника;
R„j - расстояние от РЛС до середины j-н полосы или до центра
барражирования j-й полосы, или до центра барражирования
j-го ПАП, км.
Для расчета дальности обнаружения РЛС на средних и больших высотах
пользуются следующей формулой, которая действительна только для линий
равных углов места:
(14.28)
где - дальность обнаружения воздушного объекта под углом места
£для известной зоны обнаружения РЛС;
ГУл(е) - дальность обнаружения воздушного объекта под углом места
г для заданного коэффициента пересчета.
438
Дальность обнаружения в помехах
Для того, чтобы определить в помехах дальность обнаружения воздушно-
го объекта, совершающего полет на высоте Н,о, необходимо знать дальность
обнаружения без помех на некоторой условной высоте Н*:
1Гл(н>к.1>'Лн’\ <14М>
где (Н,„) - дальность обнаружения в помехах воздушного объекта,
совершающего полет на высоте Н«>\
- дальность обнаружения РЛС на высоте Я*:
H‘-H~~h'+h (14-30)
К„
Для малых высот ранее приведенную формулу определения дальности
обнаружения РЛС с учетом помех можно представить в виде:
/ ч ( г-} (1431)
о;.(«..) = 4.12 К,tf.-l + •
IV J
При пассивной локации реализуется дальность прямой видимости. При-
чем, можно принять К„- К„= /, тогда:
Ол(«„) = 4.12(>/Й; + 7л;) (14.32)
При высоте сечения зоны обнаружения РЛС, значительно превышающей
высоту электрического центра антенны, с достаточной для практики точно-
стью можно принять:
) (14.33)
Вероятность обнаружения воздушного объекта, который находится на
удалении Dto от РЛС, при известной дальности обнаружения с вероятностью
0,5 (O,z«o.5) определяется по формуле:
Высота нижней границы сплошного радиолокационного поля
Если предположить, что в районе площадью Sp равномерно (по углам
равносторонних треугольников) размещены л радиотехнических подразделе-
ний, оснащенных однотипными РЛС. то воспользовавшись формулой даль-
ности радиогоризонта, можно аналитически определить потенциально воз-
можную высоту нижней границы РЛП:
+(1-^.)Аа. <14.35)
[К,К, V n v “J “
или решить обратную задачу, когда известна площадь района и необходимо
определить минимально необходимое количество радиотехнических подраз-
делений, чтобы создать РЛП с высотой нижней границы Hfir:
439
Приведенная формула позволяет оперативно получать оценки минималь-
но необходимого количества маловысотных подразделений в зависимости от
типа РЛС (/Q, высоты подъема электрического центра антенны типовой РЛС
(ha), площади района (Sp) и заданной высоты нижней границы сплошного
РЛП (Нш). При этом предварительно могут быть отсеяны явно нерациональ-
ные варианты боевого состава и вооружения радиотехнических подразделе-
ний (части).
Высота верхней границы сплошного радиолокационного поля
Для определения высоты верхней границы сплошного РЛП рассчитыва-
ется предельная высота беспровального обнаружения в помехах типовой
РЛС, формирующей верхний ярус РЛП:
(14.37)
где - предельная высота беспровального обнаружения типовой РЛС без
помех.
Затем определяется возможное значение высоты верхней границы РЛП
по формуле:
(14.38)
где d - расстояние между соседними радиотехническими
подразделениями, формирующими верхний.ярус РЛП;
^гп1х“ максимальный угол ДНА типовой РЛС.
Если выполняется условие:
(1439)
то за высоту верхней границы РЛП принимается значение Нщ-, в противном
случае сплошного РЛП нет.
Графоаналитический метод предполагает нанесение зон обнаружения
РЛС па карту или другой графический документ в виде кругов с центром в
точке стояния РЛС радиусом, значение которого соответствует дальности
обнаружения на заданной высоте в соответствии с техническими данными
или результатом аналитического расчета. Широко используется при отработ-
ке графических боевых документов.
Достоинствами аналитического или графоаналитического методов опре-
деления параметров РЛП является простота и оперативность получения ре-
зультатов. Они могут быть использованы на этапе предварительного отбора
возможных способов (вариантов) разведывательно-информационных дейст-
440
вий радиотехнических подразделений (части), когда необходимо иметь хотя
бы примерное представление о параметрах РЛП, если известны наличные си-
лы и средства и район развертывания.
Полученные аналитическим или графоаналитическим методами значения
параметров РЛП могут служить предельными оценками пространственных
показателей разведывательно-информационных возможностей, которые мо-
гут быть достигнуты при условии оптимального выбора и размещения ра-
диолокационных средств на местности. На практике же эти значения часто не
достижимы. На формирование поля электромагнитных волн в районе воз-
душных объектов существенное влияние оказывают рельеф местности и под-
стилающая поверхность. Неучет данного фактора приводит к существенным
погрешностям в определении зон обнаружения РЛС. Поэтому на практике
наиболее широкое распространение получил расчетно-экспериментальный
метод, в котором зоны обнаружения РЛС рассчитываются аналитически с
учетом рельефа местности и уточняются облетом.
Для оценки и учета влияния рельефа и местных предметов на работу ра-
диолокационных станций производится топогеодезическая обработка пози-
ций, которая включает: построение профилей местности в ближней и дальней
зонах; определение углов уклона позиций; определение углов закрытия; рас-
чет областей радиотеней.
Безоблетные методы определения зон обнаружения РЛС
Недостатки, присущие расчетно-экспериментальному методу, связанные
главным образом с трудоемкостью, большими погрешностями расчета, а
также с дороговизной и в ряде случаев невозможностью проведения топооб-
работки и облета позиций РЛС, явились причиной интенсивного развития
безоблетных методов определения зон обнаружения РЛС с использованием
электронной вычислительной техники. К самым распространенным относит-
ся метод дискретно-последовательного анализа, основанный на проверке вы-
полнения условий обнаружения над элементарными участками местности
(ЭУМ) - дискретами, на которые предварительно разбивается весь район от-
ветственности радиотехнического подразделения (части).
Для расчета высот нижней (h„) и верхней (ht) границ радиолокационного
поля нал ЭУМ применяется дискретно-последовательный перебор ЭУМ.
Значение высоты нижней границы над ЭУМ относительно уровня моря оп-
ределяется по формуле:
н’^ =------£------+А (1440)
г-кЛ-к'. k.-JkZ
где dt - удаление /-го ЭУМ от РЛС;
R„ - эквивалентный радиус Земли;
у3 - угол закрытия над Лм ЭУМ;
Н„т - высота позиции РЛС над уровнем моря;
ha - высота ЭЦА РЛС над подстилающей поверхностью.
441
Тангенс угла закрытия, создаваемого z-м ЭУМ, определяется по формуле:
,„у _ -A d,. (14.41)
где - угол закрытия, создаваемый i-м ЭУМ ;
- абсолютная высота z-ro ЭУМ относительно уровня моря.
Углом закрытия для РЛС в направлении на r-й ЭУМ будет являться мак-
симальный угол из всех углов закрытия, которые создаются предшествую-
щими в этом направлении ЭУМ.
Значение высоты нижней границы радиолокационного поля над i-ым
ЭУМ относительно рельефа местности равно:
К = н:-Н'. (14.42)
Значение высоты верхней границы радиолокационного поля над ЭУМ
относительно уровня моря рассчитывается по формуле:
Hr" = d -tge+H+h, (14.43)
tt fi о mix поз а ’
где £тах - максимальный угол ДНА РЛС в вертикальной плоскости.
ЭУМ, над которыми воздушный объект виден на заданной высоте, объе-
диняются в области обнаружения. Огибающая этих областей будет представ-
лять собой рубеж обнаружения РЛП на заданной высоте. Минимальная и
максимальные высоты, на которых обеспечивается непрерывное сопровож-
дение воздушных объектов в границах ответственности радиотехнического
подразделения (части), принимаются за высоту нижней и верхней границы
РЛП.
Метод дискретно-последовательного анализа нашел широкое распро-
странение при разработке методик определения параметров РЛП с использо-
ванием ЭВМ. В основе метода лежит определение дальности прямой види-
мости РЛС в зависимости от экранирующих свойств местности. Условия от-
ражения радиоволн от подстилающей поверхности при этом не учитываются.
Это является существенным недостатком метода, поскольку данный фактор в
значительной степени влияет на образование зоны обнаружения РЛС.
Учет влияния Земли на дальность обнаружения
Для достоверного учета влияния Земли при расчете дальности обнаруже-
ния РЛС необходимо знать радиофизические и геометрические свойства
грунтов и характер растительных покровов поверхности. Сложность геомет-
рической и радиофизической структуры земной поверхности обусловливает
наличие множества различных математических моделей для расчета дифрак-
ции электромагнитных волн на подстилающей поверхности.
Довольно часто при нахождении напряженности электрического поля,
отраженного от земной поверхности задачу решают путем расчета интерфе-
ренционного множителя Земли. Теоретические аспекты определения интер-
ференционного множителя в литературе наиболее полно освещены на основе
теории дифракции. Однако реализация их при проведении расчетов трудна,
442
что связано с большим объемом вычислений, и крайне ограничена, т.к. точ-
ные решения найдены лишь для узких условий, не охватывающих все мно-
жество встречающихся на практике случаев. Коэффициенты отражения Фре-
неля часто рассчитываются для плоской поверхности и уточняются различ-
ными поправочными коэффициентами для пересеченной местности,
полученными экспериментально.
Фацетные модели подстилающей поверхности
Потребность в достаточно простых и наглядных моделях, хорошо объяс-
няющих основные закономерности отражения, но позволяющих избежать
трудности, связанные с решением задач дифракции электромагнитных волн
на сложных поверхностях, привела к появлению фацетных моделей (facette -
грань). В этих моделях поверхность заменяется фацетами, т.е. малыми пло-
скими площадками, ориентированными в разных направлениях. Варианты
этих моделей определяют рассеянное поле, используя методы геометриче-
ской или физической оптики в зависимости от соотношения размеров фаце-
тов и длины волны. Фацетные модели являются наиболее простыми моделя-
ми, дающими высокое совпадение с экспериментальными данными.
Исходными данными для фацетной модели подстилающей поверхности
служат: информация о рельефе местности; информация об электрических
свойствах поверхности (лес, почва, болото, море и т.д.); информация об объ-
ектах. расположенных на местности (линии электропередач, строения и т.д.).
Все эти данные могут быть получены из цифровых карт местности (ЦКМ).
Рельеф местности в ЦКМ может задаваться линиями равных высот. Участок
местности между такими линиями удобно аппроксимировать площадками
(или фацетами). Каждый из таких фацетов обладает своими радиофизиче-
скими свойствами, которые могут отличаться для различных участков мест-
ности. Радиофизические свойства можно определить из семантической ин-
формации, заложенной в ЦКМ, а размеры фацета определяются применяе-
мым масштабом карты и степенью неровности местности.
Ошибки определения координат воздушных объектов
Определение и выдача координат воздушных объектов производится с
некоторыми ошибками. По природе возникновения все ошибки можно под-
разделить на следующие: грубые ошибки или промахи; систематические
ошибки; случайные ошибки. Как правило, грубые ошибки при оценке пока-
зателей точности РЛИ из расчетов исключаются. Систематические ошибки
обусловливаются причинами, действующими вполне определенным образом.
Например, неточное ориентирование РЛС вызывает систематическую ошиб-
ку в определении азимута. Систематические ошибки могут быть определены
расчетным путем или при помощи более точных измерителей'и устранены
или учтены в виде поправок.
Случайные ошибки вызываются большим числом отдельных причин, не
поддающихся точному учету и действующих в каждом отдельном измерении
различным образом. Поэтому исключить или учесть случайные ошибки не-
443
возможно. Однако последовательность ряда измерений в целом обладает оп-
ределенными свойствами, средние результаты достаточно большого числа
отдельных измерений остаются практически постоянными. Так как случай-
ная ошибка является фактически отклонением случайной величины от ее
среднего значения, то в качестве числовой характеристики случайных оши-
бок принято считать среднюю квадратическую ошибку (СКО).
Порядок расчета показателей точности РЛИ заключается в следующем:
определяется способ выдачи РЛИ и конкретный вариант его реализации; со-
ставляется схема прохождения информации от первоисточника до потреби-
теля и определяются звенья, принимающие участие в обработке и выдаче
информации; величина СКО на выходе канала информации по каждой из ко-
ординат цели определяется ошибками измерения этих координат радиолока-
ционной станцией (радиовысотомером) и ошибками всех последующих
звеньев, участвующих в ее обработке и выдаче потребителю.
Всю обработку РЛИ принято делить на первичную, вторичную и третич-
ную. Задачей первичной обработки является выделение полезных сигналов о
радиолокационных целях на фоне помех, определение координат и характе-
ристик целей. В ходе вторичной обработки осуществляется отождествление
полученных отметок о целях с ранее существовавшими трассами или ини-
циализация новых трасс, определение параметров движения целей и сглажи-
вание координат. На этапе третичной обработки производится приведение к
единому времени, пересчет координат к единой системе координат и отожде-
ствление трасс.
Для случайной составляющей ошибки определения высоты, полагая, что
наклонная дальность (D„) и угол места воздушного объекта (£<) являются не-
зависимыми случайными величинами, справедлива формула:
, (
d; - н.--------
(14.44)
Н, । D; t Рн
I\ 2 Я, R3
где aD - средняя квадратическая ошибка определения дальности до цели;
ас- средняя квадратическая ошибка определения угла места цели.
Ошибки измерения плоскостных координат при пересчете наклонной
дальности и азимута воздушного объекта в декартовы координаты системы
координат КСА равны:
Д ; О2 • al + Я2 • ст2
=Л1К-Н;}-0-^ ° (14.45)
V ‘Л ~ ц
При решении триангуляционной задачи по ПАП средняя квадратическая
ошибка определения плоскостных координат равна:
где D„h Dm2 - удаление ПАП от каждого из двух пеленгаторов;
егд/, Од? ~ СКО измерения пеленга на ПАП пеленгаторами;
444
/- угол между пеленгами на ПАП.
При сглаживании координат и параметров траекторий воздушных объек-
тов по экспоненциальному закону средние квадратические ошибки опреде-
ления скорости равны:
у'2 71-рг
Т. ' 1 + Р '
(14.47)
Полагая, что точность измерения координат от обзора к .обзору не изме-
няется, можно получить:
h-p 2-р2 (14-43)
~ “ Vi+р (1+р)1
За счет запаздывания информации возникает систематическая ошибка.
равная:
(14.49)
где Vv - скорость воздушного объекта;
- время запаздывания радиолокационной информации.
Уменьшить СКО, возникающую вследствие запаздывания РЛИ, можно
путем экстраполяции координат на момент выдачи информации. Тогда СКО
экстраполированных координат равна:
2/Г \-р {, „ t2
+ —— А 1 + 2- —
(1+р)1 1 + р ( Г;
(14.50)
При практических расчетах можно принять значение коэффициента
сглаживания (р) равным 0,4...0,6 по неманеврирующим целям и 0 - по ма-
неврирующим.
Оценка точности РЛИ. выдаваемой по данным разных источников и с ис-
пользованием различных систем передачи данных, может производиться раз-
личными способами. Например, можно сравнивать фактические ошибки оп-
ределения координат воздушных объектов с допустимыми в абсолютных или
относительных величинах. Такой подход дает ответ, соответствует или нет
точность РЛИ предъявляемым требованиям, но не позволяет оценить влия-
ние различной степени несоответствия на решение задач выдачи целеуказа-
ния зрдн, станциям помех, наведения истребителей на цели и других задач.
Поэтому точность РЛИ удобнее оценивать вероятностью выдачи РЛИ задан-
ной точности.
При нормальном законе распределения ошибок целеуказания (наведе-
ния), предположении об их независимости и с учетом того, что при выдаче
РЛИ в АСУ систематические ошибки могут быть скомпенсированы, вероят-
ность выдачи РЛИ заданной точности для целеуказания (Р?.г//к) и наведения
{Рзт.н) определяется по формуле:
Рз.т11У^(14’51)
\ J \ & fl J \ )
445
(14.52)
где Ф(Х) - интеграл вероятности, непривсденная функция Лапласа;
Рд, Rp Rc - размеры пространства, просматриваемого СНР (РПЦ, РПН,
БРЛС) по дальности, азимуту и углу места соответственно;
Од, ар ае - СКО выдачи целеуказания СНР (РПЦ, РПН, БРЛС) по даль-
ности. азимуту и углу места соответственно.
'Tin i
В приведенной формуле расчет вероятности попадания цели и поисковый
объем СНР (РПЦ, РПН, БРЛС) по дальности производится для случая, когда
по дальности просматривается пространство, симметричное относительно
целеуказания. В некоторых типах ЗРК (АРКИ) по дальности просматривается
пространство, которое начинается от ЗРК (истребителя) и ограничивается
масштабом индикатора по дальности или дальностью обнаружения СНР
(РПЦ, РПН. БРЛС). Тогда вероятность выдачи РЛИ заданной точности для
целеуказания зрдн равна:
p =
ГЗТДУ<Н>
0,5 Rr
(14.53)
(14.54)
где Dyy - дальность выдачи целеуказания зрдн:
&ЦУ = (^р + ^80 ' (.GpK + 1р )•
dp - реализуемая дальность поражения цели ЗРК;
Уво - скорость горизонтального полета воздушного объекта;
1зрК- работное время ЗРК;
tp- полетное время ЗУР до встречи с целью.
Если захват цели на автосопровождение зенитным ракетным комплексом
производится не только по угловым координатам и дальности, но еще и по
скорости, то в формуле (14.34) необходимо учесть вероятность требуемой
точности определения скорости, которая зависит от размера диапазона про-
сматриваемых скоростей (Rv) и средних квадратических ошибок определения
радиальной составляющей скорости цели (сту).
Расчеты и практика показывают, что при современных методах наведе-
ния, поисковых возможностях истребителей и возможностях средств радио-
локации по точности определения координат воздушных объектов средние
квадратические ошибки по дальности значительно меньше допустимых, по-
этому формула (14.34) при расчете вероятности выдачи РЛИ заданной точно-
сти для наведения истребителя на цель принимает вид:
P =<Z>
r3 T H ^1
(14.55)
Ошибки целеуказания
В АСУ информация выдается в прямоугольных координатах. При выдаче
целеуказания ЗРК или на борт истребителя прямоугольные координаты пере-
считываются в полярные: дальность, азимут, угол места цели относительно
446
ЗРК или истребителя. Можно установить зависимости ошибок выдачи целе- указания от точностных показателей радиолокационной системы:
_ lo,5 (Duy ff^+(Z aHy (14.56)
D' +Z! у иЦУ +
<7. = 57,3 = 40,5 • , (14.57)
a = 57 3 D//y + Z (14.58)
(14.59)
где - СКО определения экстраполированных плоскостных
координат и высоты воздушного объекта на входе АКП
зрбр (зрп);
Hto - высота полета воздушного объекта;
Я, - радиус Земли.
Если йцу»2, можно воспользоваться приближенными равенствами:
ан (14.60)
ае-57,3—
у/2 Оцу
При экспоненциальном сглаживании параметров движения воздушного
объекта ошибки определения радиальной составляющей скорости связаны с
ошибками выдаваемых экстраполированных координат отношением:
,/ГУ <7-1 (ы.бо
О'»
i+р Т,
Аналогичным образом оценивается точность РЛИ, выдаваемой станциям
помех подразделений радиоэлектронной борьбы.
Ошибки выдачи целеуказания по азимуту и углу места истребителю со-
ставляют:
<7, = 57,3 cd.- -j—--- + ;—!—т.
' ” 1/о,г,и-ДН‘ (ушт.)-
(14.62)
а ^ ^Г + (0-„-ДЯ;) (У2 <7,3 (146-
’ ’ огт
vjifi Dun - расстояние между истребителем и целью на конечном этапе
наведения в момент поиска цели бортовым локатором по
целеуказанию с пункта наведения;
ЛН - превышение (принижение) истребителя над целью при атаке;
У ил - скорость истребителя при атаке цели;
447
То - периодичность измерения курса истребителя.
При Dim » АН приведенные формулы упрощаются и принимают вид:
<7, = 57,7 <7^ • + (14.64)
аг=57,зЛ-^ = 81-^. (14.65)
1'нц инц
При наведении методами «погоня» или «перехват» на конечном этапе на-
ведения в момент включения БРЛС ошибка наведения по курсу равна:
„ (1466)
Q DVT
1'ы>ЛС * 1 о
где Dmjic - дальность до цели, на которой дается команда на включение
БРЛС.
В связи с тем, что в радиолокационной системе выдача РЛИ организуется
от нескольких источников радиолокационной информации, расположенных в
разных направлениях относительно КП - потребителя РЛИ, а потребителями
РЛИ могут предъявляться различные требования к точности РЛИ, целесооб-
разно точность РЛИ оценивать по основным направлениям для каждого по-
требителя отдельно на малых, средних и больших высотах. При наличии в
подразделениях РЛС (РЛК) различных типов расчет точностных показателей
проводится применительно к радиолокационным станциям (комплексам) с
лучшими точностными характеристиками.
Полнота.отображения обшей воздушной обстановки определяется коли-
чеством одновременно обрабатываемых (отображаемых) радиолокационной
системой воздушных объектов (Nto). Возможность радиолокационной систе-
мы по количеству одновременно обрабатываемых (отображаемых) воздуш-
ных объектов рассчитываются, как правило, по направлениям и определяют-
ся суммарными информационными возможностями подразделений, участ-
вующих в сборе, обработке и выдаче РЛИ с данного направления, но не
превышают информационной способности пунктов управления. Последова-
тельность расчета значения Nto включает следующие этапы:
выбор направления и определение подразделений, участвующих в сборе,
обработке и выдаче РЛИ с данного направления;
составление схемы прохождения информации от первоисточника до по-
требителя и определение количества информационных каналов и звеньев,
принимающих участие в обработке и выдаче информации;
расчет пропускной способности отдельных звеньев н каналов в целом;
расчет информационных показателей радиолокационных рот и позиций,
радиотехнических батальонов и радиотехнических соединений и частей.
Под информационным каналом понимается совокупность функционально
связанных звеньев, участвующих в добывании, сборе, обработке, формиро-
вании и выдаче информации на соответствующие КП.
448
Информационное звено - часть информационного канала (личный состав,
технические средства или их совокупность), выполняющая одну или не-
сколько законченных операций по сбору, обработке и выдаче информации.
При автоматизированной выдаче РЛИ начальными звеньями канала ин-
формации являются операторы съема плоскостных координат и высоты. При
известных нормативах работы операторов пропускную способность по коли-
честву одновременно сопровождаемых целей можно определить по формуле:
/V =к (14.67)
' <Z ‘dZ’
lZ
где /^-количество рабочих мест по съему Z-й координаты;
У? - норматив работы оператора по количеству одновременно сопро-
вождаемых целей по Z-й координате;
/z - установленная нормативом дискретность съема Z-й координаты;
tax - фактическая (заданная) дискретность съема Z-й координаты.
Возможности радиолокационной системы по количеству одновременно
обрабатываемых (отображаемых) воздушных объектов определяются сум-
марными информационными возможностями подразделений, участвующих в
сборе, обработке и выдаче РЛИ с данного направления:
(л/ N 1
• (14.68)
lXY 41 J
(14.69)
где Kxy, Кн - количество информационных звеньев по съему плоскостных
координат и высоты соответственно;
Nxy> Nh - нормативы по количеству одновременно сопровождаемых
ВО с дискретностью Ixy и 1ц по плоскостным координатам
и высоте соответственно;
hxY. tdH - фактическая дискретность съема плоскостных координат
и высоты;
возможности ПУ радиотехнического подразделения
(КП части) по количеству одновременно обрабатываемых
воздушных объектов;
^пап ~ возможности КП радиотехнической части по количеству ПАП,
сопровождаемых по пеленгам подчиненных подразделений;
- количество подразделений, участвующих в сборе, обработке
и выдаче РЛИ.
При относительной оценке информационных возможностей можно вос-
пользоваться коэффициентом соответствия, но можно также представить ра-
диолокационную систему как однофазную или многофазную систему массо-
вого обслуживания с ограниченным временем пребывания заявок в очереди.
В последнем случае относительная пропускная способность или вероятность
взятия воздушного объекта на сопровождение (вероятность выдачи РЛИ по
449
воздушному объекту) определяется по известным формулам теории массово-
го обслуживания:
А. «./?) (14.70)
где - информационные возможности радиолокационной системы
по количеству одновременно сопровождаемых (выдаваемых)
целей;
a, ft - параметры системы массового обслуживания.
= <1471>
где Мо- количество воздушных объектов в ударе или на заданном
интервале времени;
- продолжительность удара или заданного интервала времени;
f„p - среднее время пребывания воздушных объектов в РЛП.
Если информационные возможности радиолокационной системы состав-
ляют Nto одновременно сопровождаемых (выдаваемых) воздушных объектов,
то относительную пропускную способность радиолокационной системы
можно рассчитать по формуле:
. =N l-exp(g-Wj (14.72)
W„-aexp(a-W„)'
При а = Nt0 функция не определена. Однако можно показать, что:
(14.73)
Ложные цели
Причины появления ложных целей могут быть различны. Среди них:
ложные отметки, образованные шумами приемников РЛС; ложные отметки,
образованные активными и пассивными помехами; отметки от действитель-
ных воздушных объектов, не отождествленные с их трассами; ложные пере-
сечения пеленгов на ПАП и др. Вывести точные аналитические соотношения
для среднего времени существования и коэффициента ложных трасс не пред-
ставляется возможным в силу зависимости этих показателей от большого
числа неточно определяемых параметров. Однако эти показатели могут быть
рассчитаны на имитационных моделях или по эмпирическим формулам, про-
веренным на работоспособность в широком диапазоне их практического
применения:
к.. =0,9 [(0,9 ^Г -/%J(14.74)
А/?
10 при Ыллл>Х- (14.75)
где NnAn - количество ПАП, действующих в радиолокационном поле.
450
Приведенные показатели разведывательно-информационных возможно-
стей имеют ясный физический смысл и могут достаточно полно характеризо-
вать качество выполнения задач радиотехническими подразделениями (час-
тями). Необходимость сопоставления различных вариантов боевого приме-
нения радиотехнических подразделений (частей) по совокупности
пространственных и информационных показателей предполагает разработку
специальных методов их сравнения. В некоторых случаях при сравнении ва-
риантов можно из совокупности показателей выбрать один главный и реше-
ние принимать по его значению, остальные использовать как дополнитель-
ные. Можно также найти обобщенный показатель как математическую
свертку или сумму частных, взятых с весовыми коэффициентами. Но все это
искусственные приемы, и они не всегда применимы на практике, так как по-
казатели различаются по смыслу.
В соответствии с принципами системного подхода общими для всех по-
казателями, учитывающими общесистемные свойства, должны служить по-
казатели эффективности. Показатель эффективности есть мера степени соот-
ветствия предполагаемого или реального результата действий требуемому.
Под эффективностью радиолокационной разведки понимается степень,
соответствия предполагаемых (вероятных) или реально полученных резуль-
татов действий радиотехнического подразделения (части) по добыванию све-
дений об объектах разведки с помощью радиолокационных средств предъяв-
ляемым требованиям с учетом понесенных потерь, затрат материальных
средств и времени.
Эффективность обработки и выдачи информации - степень соответствия
ожидаемых (вероятных) или реально полученных результатов по доведению
до потребителей сведений установленного качества, добытых в процессе раз-
ведки. предъявляемым требованиям.
Интегральным показателем может служить показатель эффективности
разведывательно-информационных действий, который определяется эффек-
тивностью радиолокационной разведки и эффективностью обработки и вы-
дачи радиолокационной информации.
Показатели эффективности определяются процессом функционирования
радиолокационной системы. Для получения их количественных оценок при
различных сочетаниях варьируемых параметров в сложной, динамично изме-
няющейся воздушной и радиоэлектронной обстановке необходимо иметь со-
ответствующие методы, реализованные на ЭВМ.
Наиболее приспособленными для оценки эффективности сложных систем
являются модели имитационного типа. Имитационное моделирование ис-
пользуется как универсальный метод для обоснования решений в условиях
неопределенности и для учета в моделях трудно формализуемых факторов.
Имитационные модели, учитывающие динамику разведывательно-
информационных действий, способны существенно повысить качество
управленческих решений. Существенным достоинством имитационного мо-
делирования является возможность сочетания творческого неформального
A5I
мышленья человека с методами математического моделирования и возмож-
ностями ЭВМ.
14.6. МЕТОДЫ РАСЧЕТА ПАРАМЕТРОВ ПОЛЯ ПАССИВНОЙ
ЛОКАЦИИ
Поле пассивной локации создается как с помощью приемных устройств
РТС тех же радиотехнических подразделений, так и специальных комплек-
сов пассивной (активно-пассивной) локации (КПЛ), использующих для обна-
ружения и определения тактических характеристик целей излучаемые ими
высокочастотные сигналы.
Известны следующие основные методы пассивной локации:
триангуляционный (угломерный);
корреляционно-базовые (угломерно-разностно-дальномерный, разностно-
дальномерный, разностно-дальномерно-угломерный и др.).
Метод триангуляции основан на определении угловых положений ис-
точников излучений несколькими пеленгующими подразделениями и после-
дующем вычислении координат этих источников путем решения, так назы-
ваемой, триангуляционной задачи.
Рис. 14.4. К определению зон пеленгации и триангуляции
Каждое радиотехническое средство создаст зону пеленгации, представ-
ляющую собой область пространства, в пределах которой обеспечивается оп-
ределение пеленгов на ПАП в азимутальной и угломестной плоскостях. На
размеры и форму зоны пеленгации РТС оказывают влияние его технические
характеристики, окружающий рельеф местности, уровень мощности излу-
чаемых шумов (сигналов) с борта воздушного объекта и высоты его полета.
452
Область совпадения зон пеленгации двух подразделений образуем зону три-
ангуляции ПАП.
Зоной триангуляции называется область воздушного пространства, в пре-
делах которой обеспечивается определение пространственного положения
ПАП двумя разнесенными на местности пеленгующими подразделениями
(рис. 14.4). Радиус зоны пеленгации определяется дальностью прямой види-
мости:
где Нилп - высота полета источника излучений;
ha„m - высота антенны пеленгующего источника.
При сопровождении нескольких ПАП, кроме истинных пересечений пе-
ленгов, образуются ложные точки пересечения пеленгов (рис. 14.4). Количе-
ство ложных пересечений пеленгов (Ыпапл) при использовании информации
двух пеленгующих подразделений связано с количеством сопровождаемых
ПАП соотношением:
NПАПЛ ~ NПАП ' ПАП
где Nf/Ап - количество сопровождаемых ПАП.
Вероятность того, что в точке пересечения пеленгов находится именно
ПАП, равная величине, обратной числу ПАП в зоне триангуляции:
Р = ——.
N ПАП
Для повышения достоверности определения истинного местонахождения
ПАП в практике войск используют информацию от трех пеленгующих под-
разделений. Третье подразделение позволяет отсеивать ложные пересечения.
Три подразделения (ячейка триангуляции) формируют поле триангуляции,
представляющее собой область пространства, в каждой точке которого обес-
печивается пеленгация ПАП тремя подразделениями одновременно. Сочета-
ние полей триангуляции триангуляционных ячеек образует поле триангуля-
ции части.
Основными условиями формирования поля триангуляции являются: на-
личие во всех пеленгующих подразделениях РЛС (РЛК) одного и того же
частотного диапазона; возможность сбора, обработки пеленгационной ин-
формации подразделений на одном КП; ориентирование поля триангуляции в
направлении ожидаемых действий ПАП; соответствие базы между пелен-
гующими подразделениями требуемым границам поля и высоте полета ПАП.
Современные средства автоматизации радиотехнических подразделений,
частей, позволяющие подключать к аппаратуре обработки пеленгов на ПАП
несколько источников информации, обеспечивают автоматический (полуав-
томатический) выбор источников РЛИ и обработку информации о пеленгах
от нескольких подразделений в любой комбинации средств пеленгации излу-
чений бортовых РЭС СВН. При этом, как правило, реализуются два алгорит-
ма отбора источников пеленговой информации: ЗР либо 2Р+ £.
453
Корреляционно-базовые методы пассивной локации в основном вклю-
чают: разностно-дальномерный, угломерно-разностно-дальномерный мето-
ды.
Комплексы, реализующие разностно-дальномерный метод, определяют
пространственные координаты излучающих воздушных объектов по резуль-
татам измерения разности хода помехи до приемных пункгов. При корреля-
ционной обработке помеховых сигналов одна пара приемных пунктов может
получить одно значение разности хода. Этому значению соответствует в про-
странстве одна координатная поверхность положения в виде гиперболоида
вращения. Чтобы получить три координаты цели, необходимо иметь три не-
зависимых значения разности хода, три гиперболоида, пересечение которых
дает точку положения цели в пространстве. Следовательно, разностно-
дальномерный комплекс должен иметь не менее трех различных баз.
Наиболее рационально это обеспечивается с помощью одного централь-
ного и трех вынесенных приемных пунктов. Центральный пункт принадле-
жит каждой из трех баз. На нем производится независимая корреляционная
обработка сигналов каждой базы, в результате чего определяются взаимные
запаздывания сигналов. Для каждой пары приемных пунктов рассчитывают-
ся разности хода -4/6, i={ 1,2, 3}.
В угломерно-разностно-дальномерных КПЛ (УРД КПЛ) для определения
пространственных координат ПАП достаточно иметь два разнесенных при-
емных пункта. На одном из них измеряются угловые координаты ПАП (0, е),
а путем совместной корреляционной обработки помеховых сигналов от обо-
их пунктов измеряется разность хода помехи
Местоположение ПАП определяется путем расчета координат точки пе-
ресечения линии положения с координатной поверхностью положения. Для
осуществления корреляционной обработки здесь, как и в разностно-
дальномерных комплексах, необходима неискаженная передача принятых
сигналов с вынесенного пункта на центральный.
Так же как и поле активной локации, поле пассивной локации характери-
зуется параметрами:
рубеж обнаружения ПАП на данной высоте;
высота нижней границы сплошного поля пассивной локации
высота верхней границы сплошного поля пассивной локации Hj1An.
Для определения параметров поля пассивной локации необходимы сле-
дующие исходные данные: координаты подразделений, назначенные для пе-
ленгации постановщиков активных помех (ПАП), а также координаты ком-
плексов пассивной локации (КПЛ); высота полета и дальность прямой види-
мости ПАП. После определения дальности прямой видимости ПАП
радиусом, равным полученному значению из центров боевых порядков под-
разделений, наносятся на карту зоны пеленгации. В результате наложения
зон пеленгации образуется область, в каждой точке которой обеспечивается
тройное пересечение пеленгов пеленгующих подразделений. Внешняя гра-
ница этой области и зон обнаружения КПЛ и будет представлять собой ру-
беж поля пассивной локации на высоте полета ПАП.
454
При этом необходимо учитывать особенности поля триангуляции, со-
стоящие в том, что точность определения координат ПАП методом триангу-
ляции существенно зависит от местоположения ПАП относительно источни-
ков пеленгации. Поэтому необходимо строить поле триангуляции с заданной
точностью определения координат ПАП. С учетом известных средних квад-
ратических ошибок определения пеленга на ПАП (aptt) ошибки координат
ПАП рассчитываются по формулам (14.76,14.77):
У COS (€)
(14.77)
Смысл используемых в вышеприведенных выражениях переменных по-
казан на рис. 14.5.
Рис. 14.5. К определению ошибок расчета координат ПАП
методом триангуляции
Исследование функции (14.76) на экстремум (поиск минимума ошибок)
позволяет определить оптимальные значения величин а и Д/Б. Результаты
проведенных расчетов показывают, что а = 71/2, а Д/Б = 0,35. В этом случае
достигается минимальная ошибка определения плоскостных координат ПАП,
которая составляет - = 0,92-орБ.
Для определения высоты нижней и верхней границ поля пассивной лока-
ции (поля триангуляции) аппроксимируем область пеленгации триангуляци-
455
онной ячейки правильным шестиугольником, вписанным в окружность ра-
диусом Д(Н) (рис. 14.6).
Рис. 14.6. К аппроксимации зоны пеленгации триангуляционной ячейки
При условии расположения пеленгующих подразделений по вершинам
равносторонних треугольников значение высоты нижней границы сплошного
поля триангуляции можно определить следующим образом.
= 0.15,
^подр
(14.78)
В связи с тем, что высоты постановки активных помех лежат в интервале
4 000... 10 000 м, определение высоты верхней границы поля триангуля-
ции практически не целесообразно.
Из последовательности проведенных расчетов построения поля триангу-
ляции видно, что параметры его будут зависеть от высоты полета ПАП, рас-
стояний между пеленгующими подразделениями и требуемой точности оп-
ределения координат ПАП. Поэтому на этапе планирования боевого приме-
нения подразделений (частей) командиру и штабу необходимо моделировать
и проводить анализ различных вариантов полей пассивной локации с целью
выбора наиболее рациональных вариантов назначения подразделений для
формирования поля триангуляции.
456
14.7. ОСНОВЫ ПОДГОТОВКИ РАДИОТЕХНИЧЕСКИХ
ПОДРАЗДЕЛЕНИЙ (ЧАСТЕЙ) К БОЕВОМУ ПРИМЕНЕНИЮ
Подготовка радиотехнического подразделения (части) к боевому приме-
нению представляет собой комплекс мероприятий, проводимых командиром,
штабом, отделениями, службами и подразделениями по организации и все-
стороннему обеспечению выполнения поставленной боевой задачи.
Подготовка к боевому применению радиотехнического подразделения
(части) осуществляется на основании боевой задачи, поставленной выше-
стоящим командиром, и решения командира подразделения (части) на вы-
полнение боевой задачи (на боевое применение части).
В мирное время осуществляется заблаговременная подготовка радиотех-
нического подразделения (части) к боевому применению. Она начинается с
получением боевой задачи и продолжается до получения сигнала (распоря-
жения) на приведение в высшие степени боевой готовности.
Заблаговременная подготовка включает: принятие решения командиром
подразделения (части) на выполнение боевой задачи (боевое применение);
планирование выполнения боевой задачи (боевого применения) и восстанов-
ления нарушенной боеспособности; постановку боевых задач боевым расче-
там (подразделениям); организацию управления, взаимодействия и всех ви-
дов обеспечения; совершенствование боевого порядка; организацию и несе-
ние боевого дежурства; подготовку штаба, боевых расчетов (подразделений)
к выполнению боевой задачи; контроль и оказание помощи боевым расчетам
(подразделениям).
С момента получения сигнала на приведение в высшие степени боевой
готовности начинается непосредственная подготовка радиотехнического
подразделения (части) к боевому применению. Она продолжается до обна-
ружения воздушного противника своими средствами и включает: усиление
радиолокационной разведки воздушного пространства; увеличение состава
дежурных сил и средств; принятие (уточнение) решения на выполнение бое-
вой задачи (боевое применение); уточнение (постановку) задач боевым рас-
четам (подразделениям); маневр силами и средствами; увеличение (пополне-
ние) запасов материальных средств на позициях; проведение других меро-
приятий по подготовке к немедленному применению вооружения и военной
техники.
К наиболее важным этапам подготовки к боевому применению относятся
процессы выработки решения и планирования боевого применения. Разделе-
ние этих процессов является чисто условным. По своему содержанию это
единый процесс, который осуществляется с привлечением большого количе-
ства исполнителей, действующих в тесной взаимосвязи. Этот процесс завер-
шается разработкой и оформлением к установленному сроку планирующих
документов.
457
Планирование боевого применения
Основным содержанием планирования боевого применения радиотехни-
ческого подразделения (части) является:
подготовка и уточнение исходных данных о противнике, своих войсках,
позиционном районе;
анализ возможных действий вероятного противника на подступах к гра-
ницам и в границах позиционного района;
определение требований, предъявляемых к радиолокационной информа-
ции органами управления вооруженных сил и воздушным движением, зенит-
ными ракетными подразделениями (частями), частями авиации, частями и
подразделениями РЭБ;
оценка разведывательно-информационных возможностей и эффективно-
сти разведывательно-информационных действий подразделения (части) с
учетом взаимодействующих сил и средств разведки воздушного противника;
разработка вариантов боевого применения, расчеты на передвижение мо-
бильных сил и средств и определение способов выдачи радиолокационной
информации с различными вариантами их реализации;
разработка мероприятий по организации и осуществлению управления и
взаимодействия, всестороннему обеспечению боевого применения и доуком-
плектованию радиотехнического подразделения (части);
оценка устойчивости радиотехнического подразделения (части), опреде-
ление вероятных потерь и разработка мероприятий по восстановлению на-
рушенной боеспособности;
разработка мероприятий по поддержанию радиотехнического подразде-
ления (части) в постоянной боевой готовности и переводу их в высшие сте-
пени боевой готовности;
документальное оформление решения командира (начальника) на выпол-
нение боевой задачи (боевое применение) и других боевых документов.
Все планируемые мероприятия обосновываются соответствующими так-
тическими расчетами. Основной целью проведения расчетов является повы-
шение объективности оценки разведывательно-информационных возможно-
стей и качества принимаемых решений за счет количественной обоснованно-
сти планируемых мероприятий. Интересы принятия всесторонне
обоснованных решений и планов требуют переработки большого количества
информации, производства целого ряда расчетов, тесно увязанных между со-
бой по исходным данным и получаемым результатам. Это достигается созда-
нием эффективных комплексов математических моделей и расчетных задач,
функционирующих в составе систем имитационного моделирования (СИМ)
на единой информационной базе.
Системы имитационного моделирования
СИМ состоят из следующих подсистем: имитационных моделей, отра-
жающих определенную предметную область; иерархии аналитических моде-
458
лей, дающих упрощенное описание различных сторон моделируемых явле-
ний; информационной подсистемы, включающей базу (банк) данных, а в
перспективе базу знаний, основанную на идеях искусственного интеллекта;
подсистемы управления и сопряжения, обеспечивающей взаимодействие
всех компонентов СИМ между собой и работу с пользователем (лицом, при-
нимающим решения) в режиме интерактивного диалога.
Нахождение рациональных решений обеспечивается проведением де-
тальных повариантных расчетов. Отличия вариантов друг от друга обуслов-
ливаются изменениями постоянной и переменной исходной информации о
расположении районов, объектов, рубежей или направлений сосредоточения
основных усилий, составе привлекаемых сил и средств, расположении их на
местности, характере применяемого маневра, продолжительности и последо-
вательности действий по выполнению поставленных задач. Порядок прове-
дения расчетов при планировании боевого применения радиотехнического
подразделения (части) с использованием СИМ представлен на рис. 14.7.
1 Уяснение задач, стоящих перед рцздотсхничесп<м подразделением (частью) |
1
1 Подготовка и уточнение постоянных исходных данных о противнике, своих и язвимо- 1 действующих силах и средствах, позициоином районе, корректировка баз данных 1
1
Анализ возможных действий вероятного противник! нв подступах | к границам я а границах заданного района |
4 Задание исходного набора вариантов применения реи'иотехннчсского подразделения (части) в позиционном районе (построен ie возможно бочес потной группы вариантов)
1 Предварительный качественный анализ вариантов 1 1 (ограничение области решений) |
1
I Отображение на фоне ЦКМ требуемых рубежей выдачи РЛИ и границ созданного 1 I РЛП для заданных значений ЭОП воздушных объектов н высот их полета |
1
ш I Оценка раждывятслъно-мнформяимоимых возможностей 1 I радиотехнического лодраххлеммя (части) по чястмым показателям |
1
LU I Предварительный аыбор вариантов боевого применения 1 | радиотехнического подразделения (части) |
1
ш I Визуализация цифровой карты местности позиционного района 1 | на экране дисплея ЭВМ 1
1
1 Расчет и отображение иа фоне ЦКМ границ и других 1 | параметров созданного РЛП I
1
11 Определение разрывов РЛП и задание с помотаю интерактивных средств позицион- ных районов и ответственных секторов для развертывания радиолокационных средств мобильных формирований
1
1 Поиск и предварительный выбор позиций развертывания мобильных 1 1 радиотехннческэ<х формирований в заданном районе I
1
1 Расчет в отображение карточек углов закрытия и профилей местности 1 1 в ближней н дальней эонах |
14 Проверка соответствия углов закрытия требованиям по критическим значениям для заданных типов РЛС (в случае несоответствия позиция считается непригод- ной дхя развертывания данного типа РЛС)
459
Топогеодсзичссквв обработка выбранных поти|ц<й поданным ЦКМ и запись хяракте- 1 ристик в базу данных |
1 16 1 | Расчет эон обнаружения РЛС на выбранных позициях I
1
17 После предварительного выбора нескольких позиций сравнительный анализ по углам закрытия н зоне обнаружения, окончательный выбор похций дза развертывания радиолокационных средств
18 Визуализация зоны информации (РЛП) подразделения (части)с учетом эон обнаруже- ние РЛС нв выбранных позициях, расчет коэффициентов непрерывности (Д’.) и перекрытия РЛП (К^
1
1 19 | I Составление сценария имитационного эксперимента на ЭВМ |
I Оценка эффективности разведывательно-ннформвцмонных действий [ | подразделение (части) на имитационной модели, расчет |
1 Диализ н обобщение результатов расчетов в соответствии с 1 1 поставленными задачами |
22 Проведение повторных расчетов (при иеибходимиыи) путем мдвшта новых вариантов боевого применения для поиска рациональных (лучших) решений
1
| 23 |Военно экономическая о цен кд рвссматрнаасыых вариантов
2А I Тактические выводи по определению лучшего варианта боевого
I применения подразделения (части), оформление боевых документов
Рис. 14.7. Порядок проведения расчетов при планировании боевого при-
менения радиотехнического подразделения (части) с использованием СИМ
Перечень боевых документов
При планировании боевого применения в радиотехнической части разра-
батываются следующие боевые документы: План боевого применения радио-
технической части; боевые приказы (боевые распоряжения); приказ по тылу;
распоряжения подразделениям по видам обеспечения (боевому, морально-
психологическому, техническому). План боевого применения радиотехниче-
ской части представляет собой комплекс боевых документов, в которых де-
тализируется решение командира, определяется последовательность, спосо-
бы и сроки выполнения боевых задач подразделениями, распределяются си-
лы и средства по задачам. В радиотехническом подразделении
разрабатываются рабочая карта командира подразделения, план передвиже-
ния подразделения на запасную позицию, план непосредственного прикры-
тия и наземной обороны подразделения.
460
15. СИСТЕМЫ УПРАВЛЕНИЯ
15.1. ОБЩАЯ ХАРАКТЕРИСТИКА СИСТЕМ УПРАВЛЕНИЯ
СИЛАМИ И СРЕДСТВАМИ ВКО
Содержание, принципы и требования, предъявляемые
к управлению силами и средствами ВКО
Исследованием сущности и выявлением объективных закономерностей и
принципов управления войсками (силами) и средствами, разработкой органи-
зационно-технических принципов построения систем управления, совершен-
ствованием методов работы командиров и органов управления занимается
теория управления войсками (силами) и средствами.
В самом общем смысле под управлением понимают совокупность целе-
направленных действий, включающую оценку ситуации и состояния объекта
управления, выбор управляющих воздействий и их реализацию.
Управление войсками (силами) и средствами представляет собой ос-
нованную на законах вооруженной борьбы и принципах военного искусства
целенаправленную деятельность органов управления (командующих,
командиров, штабов, служб и других органов управления) по сбору,
переработке и анализу информации об обстановке в целом, по выработке
управляющих воздействий и их доведению до управляемых подсистем
(войск) с целью поддержания постоянной боевой готовности войск (сил) и
средств, подготовки их к ведению воздушных операций (боевых действий) и
руководству войсками (силами) и средствами при выполнении поставленных
задач. Цель управления состоит в том, чтобы обеспечить постоянную
боевую и мобилизационную готовность войск (сил) и средств, их
боеспособность, эффективное использование боевых возможностей войск
(сил) и средств, а также успешное выполнение ими задач в установленные
сроки в любых условиях обстановки.
Основными принципами управления в военной сфере являются:
единство государственного и военного руководства;
единоначалие;
централизация управления во всех звеньях с предоставлением подчинен-
ным возможности проявлять инициативу в определении способов выполне-
ния поставленных им задач;
твердость и настойчивость в проведении принятых решений и планов;
оперативное и гибкое реагирование на изменение обстановки;
личная ответственность командующих (командиров) за принимаемые
решения, применение подчиненных войск (сил) и результаты выполнения
поставленных им задач.
Содержание управления обусловлено необходимостью проведения в за-
данное время комплекса мероприятий по организации воздушных операций
(боевых действий) и руководству подчиненными войсками (силами) и сред-
461
ствами при выполнении ими боевых задач для достижения поставленной це-
ли.
Управление включает:
1 .Непрерывное настойчивое добывание, сбор, изучение и анализ данных
об обстановке.
2 .Своевременное принятие (уточнение) решений на операцию (боевые
действия).
3 .Качественное планирование воздушных операций (боевых действий).
4 .Своевременное доведение задач до подчиненных войск (сил).
5.0рганизацию и поддержание взаимодействия.
б.Организацию и проведение мероприятий по повышению (поддержа-
нию) боевой готовности войск (сил) и средств, обеспечению их боеспособно-
сти, оперативному, специальному техническому, тыловому и другим видам
обеспечения.
7.0рганизацию системы управления (в том числе системы связи).
8.Подготовку войск (сил) и средств к выполнению поставленных задач, а
также непосредственное руководство ими.
9.0рганизацию и осуществление контроля войск (сил) и средств за вы-
полнением поставленных задач.
10. Поддержан не высокого морального состояния войск.
Основой управления войсками (силами) и средствами является решение
командующего (командира, начальника).
Основные пути совершенствования управления силами и средствами
ВКО:
дальнейшая разработка фундаментальных основ теории управления си-
лами и средствами ВКО, проверка основных ее положений на войсковых и
командно-штабных учениях, командно-штабных военных играх, а также с
помощью методов математического моделирования воздушных операций
(боевых действий);
повышение военно-технической и профессиональной подготовки офице-
ров пунктов и органов управления силами и средствами ВКО;
совершенствование методов подготовки офицеров в области теории и
практики управления силами и средствами ВКО;
улучшение организационной структуры системы управления силами и
средствами ВКО;
разработка и внедрение в процессы управления высокоэффективных про-
граммно-технических средств для автоматизации управленческих процессов;
развитие организационных форм, способов и методов работы управлен-
ческого состава и эксплуатационного персонала пунктов и органов управле-
ния силами и средствами ВКО;
комплексная автоматизация управления силами и средствами ВКО.
Для осуществления управления силами и средствами ВКО создана соот-
ветствующая ее организации система управления.
462
Требования, предъявляемые к управлению силами и средствами ВКО
Основными требованиями к управлению силами и средствами ВКО яв-
ляются: устойчивость управления; непрерывность управления; оператив-
ность управления; скрытность управления.
Устойчивость управления - это способность командования, штаба и
системы управления выполнять свои функции и сохранять основные пара-
метры управления в пределах установленных норм при активном противо-
действии противника и естественных помехах среды существования системы
управления.
Непрерывность управления - это способность командования, штаба и
системы управления непрерывно оказывать необходимые управляющие воз-
действия на подчиненные силы и средства.
Устойчивость и непрерывность управления достигается правильным вы-
бором способов и средств управления в зависимости от сложившейся обста-
новки, а также организацией бесперебойной связи в системе управления.
Данные требования непосредственно связаны с живучестью и помехозащи-
щенностью системы управления (определения живучести и помехозащищен-
ности системы управления даны ниже).
Живучесть системы управления обеспечивается:
рациональным размещением, маскировкой и резервированием средств
управления;
созданием запасных пунктов управления (в том числе и подвижных);
применением дублирующих средств и видов связи с организацией пря-
мых, обходных и резервных каналов связи;
организацией охраны и обороны элементов системы управления;
установкой ложных элементов системы управления;
применением варианта построения системы управления наиболее устой-
чивого к воздействиям противника.
Важную роль в повышении живучести системы управления имеет забла-
говременное создание условий для децентрализованного управления.
Помехозащищенность системы управления достигается:
использованием помехоустойчивых источников информации;
применением средств пассивной локации;
управлением источниками информации с учетом складывающейся поме-
ховой обстановки;
использованием помехозащищенных каналов связи и методов кодирова-
ния информации.
Оперативность управления - это способность командующих (команди-
ров), штабов и других органов управления осуществлять руководство силами
и средствами в сроки, обеспечивающие успешное выполнение поставленных
задач.
Оперативность управления достигается: знанием обстановки; своевре-
менной подготовкой операции (боевых действий); постоянной высокой бое-
вой готовностью и слаженностью органов управления и их умелым переме-
463
щением; обеспечением надежной работы системы связи; четкой организаци-
ей сбора и обработки информации об обстановке; комплексным использова-
нием всех технических средств управления и связи; автоматизацией управле-
ния силами и средствами; повышением живучести (защищенности) пунктов
управления; организацией быстрого восстановления нарушенного управле-
ния; своевременной передачей управления с одних пунктов управления на
другие; своевременными докладами о складывающейся обстановке, боевой
готовности и боевых действиях сил и средств.
Скрытность управления - это способность сохранять в тайне от про-
тивника основные мероприятия по подготовке и ведению операций (боевых
действий), структуру системы управления и циркулирующую в пей инфор-
мацию.
В интересах скрытого управления силами и средствами:
проводится работа с личным составом по повышению бдительности;
ограничивается круг лиц, допущенных к планированию операций (бое-
вых действий) и к ознакомлению секретными сведениями;
скрытно размещаются и перемещаются пункты управления;
устанавливается порядок ведения переговоров по техническим средствам
связи;
применяется засекречивающая аппаратура, шифрование и кодирование
сведений, передаваемых по открытым каналам связи;
проводятся организационные и программно-технические мероприятия по
защите информации, хранимой, передаваемой и обрабатываемой в системе
управления.
Выполнение требований к управлению силами и средствами ВКО в со-
временных условиях неразрывно связано с постоянным поиском путей даль-
нейшего развития и совершенствования системы управления силами и сред-
ствами ВКО.
15.2. ОПРЕДЕЛЕНИЕ, СТРУКТУРА И КЛАССИФИКАЦИЯ
СИСТЕМ УПРАВЛЕНИЯ
Система управления есть упорядоченная совокупность взаимосвязан-
ных и взаимодействующих элементов, подсистем, образующих единое целое
в целях достижения в процессе функционирования определенного (за-
данного) результата.
Любая система управления состоит из элементов (подсистем), которые
могут выполнять в системе самые различные функции.
Элемент системы — часть системы управления, которая выполняет в ней
строго определенную функцию самостоятельно или в совокупности с други-
ми однородными или неоднородными элементами.
К однородным, т. е. качественно-тождественным, элементам отно-
сятся такие элементы, у которых общие свойства преобладают, хотя по вто-
ростепенным, несущественным признакам они могут и отличаться.
464
К неоднородным элементам относятся такие элементы, которые от-
личаются друг от друга по основным существенным признакам, т. е. они яв-
ляются по своим функциям принципиально различными элементами.
Подсистема — это выделенная по определенным признакам (свойствам,
качествам, функциям и т. д.) часть системы управления и выполняющая одну
или несколько функций, присущих данной системе управления.
В военном деле для решения задач управления войсками и оружием созда-
ются системы управления военного назначения, которые во всех случаях отра-
жают организационно-штатную структуру войск (структуру систем вооруже-
ния) в любом масштабе и на всех уровнях. Такие системы управления создаются
и организуются также и для управления силами и средствами ВКО.
Система управления войсками (СУВ) — это совокупность функционально
и иерархически связанных органов управления, пунктов управления, систем свя-
зи, систем и средств автоматизации управления войсками, а также специальных
систем, обеспечивающих сбор, обработку и передачу информации. Структурная
схема системы управления войсками, построенной по иерархическому принци-
пу, показана на рис. 15.1.
Органы управления (командование, штаб, отделы, службы и другие
штатные или нештатные органы) предназначены для выполнения функций по
управлению войсками в различных звеньях. Во всех случаях они занимают цен-
тральное и определяющее место в системе управления.
Пункты управления —это специально оборудованные и оснащенные
техническими средствами места, с которых командиры (командующие) через
свои штабы осуществляют управление войсками при подготовке и ведении
боевых действий (при несении боевого дежурства). Для управления силами и
средствами ВКО создаются: командные пункты, запасные командные пункты,
тыловые, вспомогательные и другие пункты управления. Они могут быть ста-
ционарными и подвижными. Пункты управления силами и средствами ВКО,
как правило, оснащаются комплексами средств автоматизации (КСА).
Учитывая специфику деятельности органов управления и их размещение на
пунктах управления, можно выделить органы и пункты управления в отдельную
управляющую подсистему в рамках данной системы управления.
Такая управляющая подсистема должна вырабатывать для всех нижестоя-
щих звеньев системы (объектов управления) управляющие воздействия.
Например, применительно к частям родов войск ВКО (ЗРВ, ИА, РТВ)
управляющей подсистемой является орган управления, размещенный на соот-
ветствующих пунктах управления.
Объектами управления в системе являются органы управления нижестоя-
щих формирований, так как непосредственно через них реализуются все управ-
ляющие воздействия органов управления данной системы управления. Войско-
вые формирования (подразделения, части и выше) в масштабе данной системы,
как правило, могут быть разнородными (разнотипными) по своему назначению
и функциям.
Учитывая это, в системе управления можно также выделить управляемые
подсистемы, которые будут отличаться друг от друга объемом и характером
465
решаемых специфических задач. Так. например, в части ЗРВ можно выделить
несколько подсистем по функциональному признаку: подсистема огня, подсис-
тема разведки, подсистема обеспечения ракетами и др. При рассмотрении этих
подсистем на более низком уровне каждая из них может представлять самостоя-
тельную систему, решаюнгую определенный круг присущих ей задач.
Факторы внешней среды
Факторы внутреннего состояния системы и ее функционирования
Рис. 15.1. Структурная схема системы управления войсками,
построенной по иерархическому принципу
Система связи, обеспечивающая управление силами и средствами ВКО,
представляет собой разветвленную инфраструктуру, состоящую из стацио-
нарных защищенных узлов связи пунктов управления, опорных сетей, линий
привязки узлов связи пунктов управления к государственной сети связи и
линий прямой связи.
Первичная сеть связи, как правило, построена с использованием арен-
дуемых каналов взаимоувязанной сети связи, собственных проводных линий
связи, а также линий прямой связи - радио, радиорелейной, тропосферной и
спутниковой.
Система передачи данных обеспечивает обмен радиолокационной, пла-
ново-диспетчерской, оперативно-командной (формализованной, неформали-
зованной и речевой) информацией.
Наряду с передачей данных в информационных направлениях организу-
ются каналы оперативно-командной и служебной связи.
466
Система связи объединяет силы и средства связи, развернутые в соответ-
ствии с задачами, решаемыми войсками, и созданной системой управления.
Система связи составляет техническую основу системы управления и обеспечи-
вает обмен информацией между пунктами управления и их элементами в данной
системе управления.
Общие признаки систем управления. Для систем управления любого на-
значения. масштаба и уровня характерен ряд признаков, которые являются об-
щими для всех разновидностей по сложности и уровню систем управления со-
циального типа, в том числе и систем управления войсками.
К таким наиболее существенным признакам систем управления можно
отнести следующие:
организация системы, т. е. наличие определенной структуры системы;
наличие в системе разнообразных связей, различных по уровню, мас-
штабам н назначению, обеспечивающих взаимодействие между элементами
(подсистемами);
целевое предназначение системы (для решения одной определенной за-
дачи или комплекса различных задач);
наличие акта управления (процесса управления) и соответствующей ему
информации;
сложность системы, определяемую числом элементов, подсистем и боль-
шим количеством связей как между элементами, так и между управляющей
подсистемой и управляемыми подсистемами;
наличие усилительных свойств системы, т. е. достижение определенной
эффективности по конечному результату;
динамичность протекающих в системе процессов, что особенно харак-
терно для систем управления войсками тактического уровня;
наличие общей задачи и единой цели функционирования для всей систе-
мы управления;
возможность расчленения системы управления на группы наиболее тесно
взаимодействующих элементов - подсистемы, имеющие свое специальное
назначение и цель функционирования (обычно система управления войсками
имеет иерархическую структуру и представляет собой комплекс подсистем
различных уровней и рангов);
сложность поведения системы, связанную со случайным характером
внешних воздействий и большим количеством обратных связей внутри сис-
темы;
устойчивость по отношению к внешним и внутренним помехам;
органы управления подсистем и всей системы организованы по иерархи-
ческому принципу и представляют собой коллективы, функционирующие во
главе с руководителями разных рангов;
главнейшие функции управления, планирования, оценки ситуации или
складывающейся обстановки и принятия решений осуществляются непо-
средственно коллективом органов управления; организованные коллективы
органов управления предопределяют у всей системы в целом, как и у любого
467
социального организма, существование в той или иной степени свойств адап-
тации и самоорганизации;
в органах управления различных рангов использованы комплексы
средств автоматизации для обработки потоков входной информации и опти-
мизации принимаемых решений.
Отличия систем управления войск ВКО. Системы управления, приме-
няемые в войсках ВКО, в сравнении с другими системами военного назначе-
ния имеют ряд характерных особенностей:
большое количество многофункциональных управляемых объектов (или
совокупности управляемых подсистем) различной природы, сложности и
широкого назначения, что порождает в свою очередь интенсивные потоки
информации, разнообразной и неоднородной по составу, назначению, спосо-
бу кодирования и т.д.;
высокое быстродействие систем управления (особенно тактического
уровня управления), обусловленное характером действий сил и средств про-
тивовоздушной обороны при отражении внезапных, массированных ударов
воздушного противника в сложных условиях обстановки;
широкий диапазон изменения состояний системы при сохранении ее
структуры, а также высокие динамичность и темп изменения этих состояний;
функционирование систем в больших пространственных масштабах и в
реальном масштабе времени, что обусловлено необходимостью подчинения
темпа выполнения соответствующих функций системы реальному процессу,
происходящему вне системы управления;
рассматриваемые системы относятся к категории систем с переменной
структурой и способны функционировать при выходе из строя отдельных
элементов (функционирование в режиме живучести);
одновременное решение множества боевых задач в достаточно большом
пространственном объеме (наведение противоракет, противоспутннков, ис-
требителей. стрельба ЗРК, управление средствами РЭБ, прием и обработка
радиолокационной, оптической информации и т.д.);
высокий уровень автоматизации задач, решаемых в процессе боевой и
повседневной деятельности;
принятие решений командирами всех степеней в ограниченные сроки и
при недостаточной информации об обстановке, что требует высокой профес-
сиональной подготовки, умений и навыков оперативного состава системы
управления в принятии решения с высокой степенью ответственности и рис-
ка;
высокие требования к функционированию подсистемы передачи данных
в контуре управления в условиях значительного количества внешних и внут-
ренних источников информации, различной достоверности и точности ин-
формации от различных источников, специфических особенностей типов со-
общений от различных источников и параметров помех в каналах связи;
большое количество дестабилизирующих факторов, которые могут воз-
действовать на систему управления и ее элементы в процессе функциониро-
вания (электрические, климатические и механические воздействия, возни-
468
кающими в процессе функционирования системы, специфические факторы
условий боевого применения системы и др.);
жесткие ограничения на массогабаритные, энергетические и конструк-
тивные характеристики элементов системы, обусловленные спецификой ее
функционирования (для ряда бортовых и наземных систем управления, а
также подвижных пунктов управления автономного существования указан-
ные характеристики являются определяющими при выборе элементов систе-
мы управления);
детерминированность по своему содержанию потока информации, цир-
кулирующей в системе управления, что определяет принципы распределения
функций между личным составом и средствами автоматизации, а также
структуру основных видов обеспечения системы управления;
высокие требования к своевременности и надежности (правильности)
выполнения функций по обработке и передаче информации (возможные на-
рушения нормального функционирования элементов системы из-за ошибок в
обработке и передаче информации, отказов отдельных подсистем и элемен-
тов могут привести к существенному снижению эффективности применения
системы в контуре управления, а в ряде случаев указанные нарушения могут
повлечь за собой невыполнение поставленной перед войсками боевой зада-
чи);
длительный период эксплуатации системы управления, что требует нали-
чия резервов ресурсов системы для возможной ее модернизации в соответ-
ствии с изменением форм и способов применения средств воздушного напа-
дения противника, сил и средств противовоздушной обороны, а также мето-
дов управления ими.
Виды связи в системе управления. В каждой нормально функциони-
рующей системе управления между ее органами управления и управляемыми
объектами происходит вещественный, энергетический и информационный
обмен. В соответствии с этим в системе реально существует несколько видов
связи: вещественные (обмен веществом); энергетические (обмен энер-
гией); информационные (обмен информацией).
Приоритет того или иного вида связи в системе управления определяется
ее назначением, масштабом и особенностями решаемых задач, т. е. уровнем
управления системы. На более низких уровнях управления преобладают ве-
щественные и энергетические связи, на более высоких — информационные.
Информационные связи характерны для любой системы управления, так
как систем управления без информационного обмена в них вообще не суще-
ствует.
В системах управления силами и средствами ВКО широко используются
все виды связи, но значительный объем занимают информационные связи.
Структура системы — это ее состав, порядок расположения элементов
(подсистем) относительно друг друга и совокупность устойчивых связей ме-
жду всеми ее элементами (подсистемами), обеспечивающих целость системы
при изменении внутренних и внешних факторов. Структура сама по себе вы-
469
ражает лишь то, что остается устойчивым, относительно неизменным при
различных преобразованиях в системе.
С одной стороны, структура отражает организационную форму системы,
с другой — зависит в значительной степени от той совокупности функций,
которые должны быть реализованы в процессе функционирования. При оп-
ределении струкгуры системы управления воедино объединяются принципы
управления, технические средства, люди с их методами и приемами работы в
ходе принятия решений на конкретном уровне управления в соответствии с
поставленной перед системой управления целью. Важность сохранения
структуры систем управления войсками подчеркивает тот факт, что в воору-
женной борьбе противоборствующие стороны стремятся в первую очередь
нарушить структуру систем управления.
Структура систем управления силами и средствами ВКО, как и дру-
гих систем военного назначения, определяется организационно-штатной
структурой частей и подразделений родов войск, а также особенностями и
характером решаемых боевых задач.
К характерным особенностям, которые влияют на структуру систем
управления силами и средствами ВКО, можно отнести:
ожидаемый характер и способы действий воздушно-космического про-
тивника при преодолении системы ВКО;
общее количество однотипных (разнотипных) элементов (подсистем) и
их количественные и качественные характеристики с точки зрения целевого
предназначения;
необходимость организации и осуществления взаимодействия между эле-
ментами (подсистемами) как внутри системы, так и вне ее в процессе
функционирования;
относительная обособленность (самостоятельность) отдельных элементов
(подсистем) и различное их влияние на общую эффективность системы;
обеспечение высокой постоянной боевой готовности к решению внезапно
возникающих задач, особенно при ведении боевых действий;
необходимость решения задач управления в реальном масштабе времени,
в условиях его острого дефицита и неопределенности, при недостаточности
информации о действиях воздушно-космического противника;
необходимость автоматизации решаемых задач и процессов управления в
целях повышения качества и эффективности управления;
достаточно большое взаимное пространственное расположение элемен-
тов (подсистем) с учетом их внутренних и внешних связей;
принципы управления и взаимодействия между воинскими формирова-
ниями;
типы источников информации, объектов управления и объектов обслу-
живания;
количество одновременно обслуживаемых физических объектов (воз-
душных и космических объектов, управляемых, управляющих и взаимодей-
ствующих систем, источников информации) для различных пунктов и орга-
нов управления.
470
К типовым структурам систем управления относятся: патриархаль-
ная, линейная, функциональная, линейно-штабная (линейно-
функциональная). Типовые структуры систем управления показаны на
рис. 15.2.
Структуры патриархальная, линейная и функциональная чаше
всего применяются на низших уровнях управления, где общее количество
элементов и объем решаемых задач относительно невелики.
Наибольшее распространение в системах управления, в том числе и в
системах управления силами и средствами ВКО, получила линейно-
штабная структура. Она представляет собой сочетание элементов линей-
ной и функциональной структур, при котором все управление осуществляет-
ся линейным (командир, начальник) и штабным аппаратом (штаб, функцио-
нальные отделы, службы) параллельно при приоритете первого.
При данной структуре систем обеспечивается: наиболее полная реализа-
ция принципа единоначалия; управление сложными системами с большим
количеством элементов (подсистем) различной природы (неоднородных по
своим функциям) с большим количеством разнообразных задач при привле-
чении специалистов (групп специалистов) штабного аппарата; достаточно
высокая эффективность достижения поставленной цели на любом уровне ко-
мандной инстанции; более полное использование резервных возможностей
системы за счет привлечения к решению задач управления штабного аппара-
та; адаптивность (приспособляемость) системы к широкому спектру измене-
ний состояния внешней среды.
Существует две разновидности линейно-штабной структуры систем
управления: линейно-штабная с централизованным руково-
дством. при которой отдача всех команд и распоряжений управляемым объ-
ектом по любым каналам связи осуществляется в системе только через ли-
нейных руководителей, а функциональные специалисты органа управления
являются помощниками (экспертами) линейного руководителя по соответст-
вующей функции управления; линейно-штабная структура с огра-
ниченным функционализмом, при которой отдельным функ-
циональным специалистам (группам) предоставляется право отдавать распо-
ряжения управляемым объектам по некоторым функциям управления, минуя
линейное руководство.
Последняя разновидность при правильном и рациональном построении
системы управления обеспечивает более высокую эффективность управления
в сложных многоуровневых иерархических системах, особенно при требова-
нии высокого быстродействия систем. В то же время к функциональным спе-
циалистам предъявляются исключительно высокие требования к уровню об-
щей, специальной и профессиональной подготовки в объеме решаемых задач
управления данной системы.
471
уровень
Командир
(начххьник)
Исполнители
уровень
уровень
уровень
осуществляемые системой
Рис. 15.2. Типовые структуры систем управления войсками:
а — патриархальная; б—линейная; в — функциональная;
г—линейно-штабная с централизованным руководством
Командир
(начальник)
Командир
(начальник)
Командир
(начальник)
Н Й [Х| Ш |л|
Непосредственные исполнители
уровень
Командир
(начальник)
Функциональные специалисты
Исполнители Исполнители
Классификация систем управления. Системы управления, в том числе и
применяемые для управления силами и средствами ВКО можно классифици-
ровать по различным наиболее характерным признакам, которые в той или
иной степени отражают назначение системы управления и ее влияние на реа-
лизацию боевых возможностей войск и оружия. В принципе любая класси-
фикация относительна и может подчеркивать существенные стороны, свой-
ства, характеристики или особенности систем управления.
Системы управления силами и средствами ВКО, могут быть классифи-
цированы по следующим признакам:
по функциональному назначению (сфере применения);
по уровню управления;
по времени реакции на обработку входного потока информации, приня-
тия решений и доведения их до исполнителей (по реактивности);
по размерам занимаемой территории (территориальному признаку);
по характеру управляемого процесса;
472
по степени мобильности средств автоматизации;
по степени автоматизации процесса управления;
по числу уровней управления (иерархической структуре);
по принципу управления и подчиненности;
по пропускной способности;
по серийнсспособности.
По функциональному назначению (сфере применения) СУ разделяют:
СУ боевыми средствами, СУ войсками и СУ специального назначения.
Система управления боевыми средствами — это такая система, которая
обеспечивает сбор, обработку и анализ информации, необходимой для
оптимизации управления боевыми средствами в целях наиболее эффек-
тивного их применения.
СУБС характерны для таких тактико-огневых подразделений, как диви-
зион ЗУР, батарея ЗУР зенитных ракетных войск. Классическим примером
СУБС является система управления в батарее, на вооружении которой нахо-
дится зенитный ракетный комплекс или зенитный комплекс ствольной ар-
тиллерии. Аналогичные СУБС создаются и для наведения истребителей ВКО
на воздушные цели. СУБС органически входят в системы управления вой-
сками и являются их подсистемами или элементами. При рассмотрении по
уровню иерархии СУБС занимают самый низший уровень систем управле-
ния.
К СУВ относятся системы всех уровней вплоть до высших звеньев. По
совокупности других признаков эти системы могут быть стационарными и
подвижными, неавтоматизированными и автоматизированными, инфор-
мационными и управляющими. Низшим звеном СУВ считается система
управления в части рода войск, которая включает в себя СУБС.
СУ специального назначения обеспечивают сбор, обработку и анализ спе-
циальной информации. Примером СУ специального назначения, входящей в
состав СУ силами ВКО. является СУ метеослужбой.
По уровню управления выделяют СУ тактического, оперативного и
стратегического масштаба.
По реактивности СУ выделяют три класса систем.
1 .СУ жестко регламентированного режима реального времени или СУ с
высокой реактивностью на входной поток информации (СУ “жесткого” ре-
ального времени). К этим СУ относятся такие, у которых время доведения
информации о состоянии управляемого процесса до пунктов управления со-
ставляет единицы секунд, время на обработку поступающей информации,
включая ожидание начала обработки, составляет миллисекунды - десятки
миллисекунд, время на принятие решений - единицы секунд, а время доведе-
ния принятого решения до исполнительных органов (управляемых объектов)
составляет единицы или десятые доли секунды. В данных СУ реальное (те-
кущее) время, измеряемое с высокой точностью, является важнейшим пара-
метром, от которого зависят входная информация и вырабатываемые реше-
ния.
473
2 .СУ нежестко регламентированного режима реального времени или
СУ со средней реактивностью на входной поток информации (СУ “мягкого"
реального времени). Для этого класса СУ время доведения информации о со-
стоянии управляемого процесса составляет десятки секунд или минуты, вре-
мя на обработку поступающей информации - единицы или даже десятки се-
кунд, время на принятие решений - десятки секунд или минуты (в отдельных
случаях десятки минут), время доведения решений до исполнителей - де-
сятки секунд или минуты.
3 . СУ практически нереального масштаба времени, т. е. СУ со слабой
реактивностью или с отсутствием реактивности на входной поток информа-
ции. Для таких СУ время на обработку поступающей информации составляет
минуты или часы, а сам процесс сбора информации достаточно длителен и
может достигать нескольких суток. В подобного рода СУ зачастую отсутст-
вует замкнутый автоматизированный контур управления, СУ обрабатывает и
анализирует поступающую информацию, выдает соответствующие справоч-
ные данные, а решения в таких системах, как правило, принимает человек.
При этом время выработки и доведения их до исполнителей также может
достигать нескольких суток.
По территориальному признаку СУ разделяют на два класса:
1. Локальные СУ. К этому классу относятся СУ. элементы которых со-
средоточены на ограниченной территории: в пределах одного здания, инже-
нерно-строительного сооружения или учреждения.
2. Территориальные СУ. Это СУ, элементы которых рассредоточены на
большой территории. Элементы территориальных СУ могут быть удалены
друг от друга на значительные расстояния (до 200 - 400 км и более) и сопря-
гаются между собой телекодовыми трактами передачи данных.
По характеру управляемого процесса в системах управления военного на-
значения выделяют два класса СУ:
i. СУ боевыми действиями (например, СУ для управления боевыми дей-
ствиями ЗРК, СУ для наведения истребителей на воздушные цели, СУ стан-
циями РЭБ).
2.Организационные СУ (например, СУ для планирования задач матери-
ально-технического снабжения войск, СУ штабов и военных учреждений).
По степени мобильности средств различают четыре класса СУ.
1. Стационарные СУ. В этом случае элементы СУ размещаются в ста-
ционарных сооружениях. Это наиболее распространенный вариант исполне-
ния СУ, при котором элементы системы размещаются в специальных поме-
щениях или инженерно-строительных комплексах. Такие системы практиче-
ски не могут быть перебазированы.
2. Перебазируемые СУ. К этому классу относятся такие СУ, элементы ко-
торых размещаются в подвижных объектах на колесных шасси. Подобные
СУ при необходимости могут быть перебазированы. При таком варианте ис-
полнения СУ ее элементы могут размещаться в кузовах автомашин, специ-
альных прицепах, полуприцепах, контейнерах, фургонах и т.д.
474
3. Комбинированные (смешанные) СУ. К ним относятся СУ, одна часть
аппаратуры которых размещается в стационарных сооружениях, а другая -
на подвижных объектах.
4. Подвижные СУ. Это СУ, элементы которых размещаются на движу-
щихся объектах, таких, как самолеты, вертолеты, корабли, автомобили и др.
Основное требование, предъявляемое к подобным СУ, - обеспечение воз-
можности работы при движении элементов системы.
По иерархической структуре выделяют два класса СУ.
1. Одноуровневые СУ. В таких СУ имеется центр управления, который
по информации от соответствующих источников осуществляет непосредст-
венное управление объектами (процессами), т.е. управление объектами про-
изводится напрямую без промежуточных инстанций.
2. Многоуровневые (иерархические) СУ. В структуру иерархических СУ
входят элементы различных уровней управления. Число уровней управления
может достигать 4-5, а в некоторых случаях и более. В центре управления
высшего уровня по обобщенной информации об управляемом процессе (объ-
екте) вырабатываются укрупненные решения по управлению нижестоящими
объектами управления, которые в свою очередь управляют подчиненными
им объектами.
По принципу управления и подчиненности различают централизованные,
децентрализованные и смешанные АСУ. В смешанных системах управление
некоторыми объектами (процессами) происходит централизованно, а други-
ми - децентрализовано.
По степени автоматизации процесса управления разделяют неавтомати-
зированные, автоматизированные и автоматические СУ.
По пропускной способности СУ подразделяются на системы с высокой,
средней и низкой пропускной способностью. Обычно применительно к кон-
кретным СУ или совокупности СУ одинакового функционального назначе-
ния пропускную способность измеряют в категориях, отражающих реальный
физический смысл выполняемых системой функций. К таким категориям от-
носят число одновременно обрабатываемых в СУ управляемых объектов и
объектов обслуживания.
При классификации СУ по признаку серийноспособности выделяют три
класса систем.
1. Уникальные СУ. Это такие СУ, которые производятся только в единст-
венном экземпляре.
2. Малосерийные СУ. К ним относятся такие СУ, производство которых
реализуется в ограниченном числе экземпляров (обычно максимальный объ-
ем малой серии составляет 5-7 образцов).
3. Крупносерийные СУ. Это СУ, производство которых носит достаточно
массовый характер (реализуются в десятках, а то и сотнях экземпляров).
475
15.3. СУЩНОСТЬ И СОДЕРЖАНИЕ ПРОЦЕССА УПРАВЛЕНИЯ
СИЛАМИ И СРЕДСТВАМИ ВКО
Наличие процесса управления в созданной системе является ее основным
свойством и главным условием функционирования этой системы управления.
Процесс управления — это непрерывный последовагельный ор1Вниза-
ционно-тсхничсский процесс, осуществляемый с широким использованием
различных методов и программно-технических средств по выработке управ-
ляющих воздействий для достижения заданной цели управления.
В системах управления силами и средствами ВКО наряду с веще-
ственным и энергетическим обменом преобладает обмен информацией меж-
ду органами и объектами управления на всех уровнях управления, что опре-
деляется спецификой подготовки и ведения боевых действий подразделе-
ниями, частями родов войск ВКО. Именно поэтому в таких системах процесс
может быть охарактеризован как информационный процесс, в котором сбор,
обработка, хранение и передача информации занимают исключительно важ-
ное место.
Цель СУВ - максимальная реализация боевых возможностей управляе-
мых объектов. Данная цель может быть достигнута за счет: изменения со-
стояния и режимов работы элементов, подсистем (объектов) и всей системы в
целом для достижения определенной эффективности; изменения (или под-
держания на определенном уровне) структуры системы; перераспределения
функций между элементами, подсистемами внутри самой системы; наиболее
полное использование всех резервных возможностей системы и др.
Содержание процесса управления СУВ — выполнение органом управ-
ления системы определенных функций во временной и логической последо-
вательности.
Функция управления — совокупность взаимосвязанных действий, на-
правленная на достижение определенной цели.
В СУВ процесс управления включает ряд последовательных этапов, на
каждом из которых решается определенная функция управления.
На рис. 15.3 показана типовая структурная схема процесса управления в
системах управления войсками.
Цикл управления — это промежуток времени, в течение которого осу-
ществляется последовательное решение задач управления до полного их вы-
полнения в масштабе данной системы управления войсками.
В общем случае цикл управления состоит из следующих составляющих:
Тцу ~ !уясн + ^обр ^оц.обст + ^пр.реш + ^ост + ’
где Тч>. - продолжительность цикла управления;
tync - время, в течение которого осуществляется получение боевой
задачи от вышестоящего командира и ее уяснение в органе
управления системы;
476
Рис. 15.3. Типовая схема процесса управления, осуществляемого в системах
управления силами и средствами ВКО
477
to6p - время, в течение которого производится добывание данных
о противнике, обработка и обобщение информации об
обстановке в целом;
^оч обст - время, необходимое командиру (боевому расчету, штабу) для
оценки обстановки и подготовки данных для принятия решения;
1пр реш - время, затрачиваемое командиром на принятие решения (плана
действий) с формулировкой конкретных боевых задач войскам
(частям, подразделениям), входящим в данную систему
управления;
tnOcm. ~ время, необходимое командиру (штабу) на постановку задач
подчиненным подразделениям;
sc - продолжительность цикла воздействия боевых средств
подчиненных войск при выполнении ими боевых задач;
/О1/- время, в течение которого в органе управления системы
осуществляется анализ, обобщение данных о результатах
боевых действий войск и доклад (боевые донесения)
о выполнении поставленных боевых задач.
Совокупность составляющих цикла управления без времени цикла
воздействия боевых средств t ч называется работным временем ор-
гана управления системы.
Осуществление самого процесса управления возможно при наличии в
системе необходимой информации.
Информация — это совокупность определенных сведений, необходимых
для выполнения присущих данной системе функций в соответствии с целью
этой системы.
Информация, используемая в любых системах управления, в том числе и
в СУВ, должна обладать двумя основными свойствами: обеспечивать по сво-
ему содержанию решение определенного круга задач, характерных для сис-
темы данного типа; иметь единую систему кодирования, соответствующую
данной системе управления и других, связанных с ней систем.
Чем выше уровень системы по ее иерархии, тем в более обобщенном ви-
де необходима ей информация об обстановке, но зато в больших пространст-
венно-временных масштабах.
Классификация информации, используемой в СУВ и СУБС силами и
средствами ВКО (рис. 15.4), может быть проведена по совокупности различ-
ных признаков в зависимости от требований потребителей и особенностей
получения, обработки и назначения информации.
Информационное обеспечение СУВ и СУБС - это совокупность меро-
приятий и действий, организуемых, проводимых и направленных органами
управления систем на добывание информации об обстановке от источников
данной системы и других систем, ее обобщение и доведение в необходимом
виде за требуемое время до потребителей.
Каждая система управления с участием вышестоящей и нижестоящих
систем (объектов), а также взаимодействующих систем создает
«информационное поле», формируемое самыми разнообразными
478
источниками информации. Чем выше степень разнообразия источников фор*
мирования такого поля, тем оно устойчивее к воздействию противника. «Ин-
формационное поле», созданное единичными однотипными средствами, об-
ладает низкой устойчивостью.
Оперативно-тактическая
информация
Постоянная (статическая) 11срсмсиная (динамическая)
Признаки классификации
|
1
По назначению По источникам получения По представлению на отображение По характеру обработки 11о составу
I. Рази .-ды на- тельная инфор- мация. 2 Боевая информация 3. Отчетная информация 4. Справочная информация и др 1 Радиолокаци- онные и оптичес- кие среда ва 2 Средства пас- сивной локации. 3 . Средства радиотехнической разведки. 4 . Випальнос наблюдение и др 1 .Устройства индивидуальною тюль тования 2 .Устройства КОЛ.ТСКТПВНОТО полыования. 3 . Выходные устройства, средства святи и др 1. Первичная информация. 2. Вторичная информация. 3. Третичная информация. 1. Информация о।руипнровкс (на. те tv) против- ника в це.ю.м к своих войсках. 2. Да ни тле ио каждому во тду in- ному или косми- ческому объекту.
т
11о качсстту По ЦСНШСТИ По степени срочности Но состоянию объектов у нрав;тения По характеру использопания
1. Точность. 2. Дискретность 3. Время запаз- дывания. 4 Достоверность 5. Выдача с тре- буемых рубежей и др 1 Информация о внезапности улара, о приме- нении ОМП и др. 2. Информация о носителях ядер- ною оружия/ 3. Информация о направлении главною улара и др. 1. Информация особой важности 2 Внеочередная информация. 3. Текущая ин- формация 1. Информация обоеютовности 2 Информация о боеспособности 3.Информация о дислокации 4.Информация о повседневной деятельности и др. 1 Боевая дея- тельное ib (бое- вые действия). 2 .Боевое дежур- ство. 3 Боевая подго- товка. 4 . Повседневная деятельность и др
Рис. 15.4. Классификация оперативно-тактической информации,
используемой в системах управления силами и средствами ВКО
Основные требования к информации, используемой в СУВ и СУБС
силами и средствами ВКО: своевременность и непрерывность поступления;
достаточная точность и дискретность, обеспечивающая решение задач на
данном уровне; простота кодирования, обеспечивающая немедленное ее ис-
479
пользование в НСУ и АСУ; достаточная степень укрупнения состава инфор-
мации, соответствующая определенному уровню системы, достоверность.
Человек как оператор в системе управления. Личный состав в системах
управления войсками, широко применяющий разнообразные технические
средства при выполнении своих функций, обычно называют операторами.
Оператор СУ - человек. осуществляющий чрудовую деятельность, основу кото-
рой составляет взаимодействие с объектом воздействия - машиной и средой на ра-
бочем месте при использовании информационной модели и органов управления.
Деятельность оператора СУ - процесс, осуществляемый оператором для дости-
жения поставленных перед СУ целей.
Среда на рабочем месте оператора СУ - совокупность химических, биологиче-
ских и психологических факторов, воздействующих на оператора СУ на его рабочем
месте в ходе его деятельности.
Наиболее характерными особенностями деятельности человека-оператора в
системе управления силами и средствами ВКО являются следующие:
управление большим числом разнотипных объектов, что усложняет оценку их
состояний, организацию контроля и управления объектами, а следовательно, предъ-
являет жесткие требования к уровню квалификации и подготовки оператора;
большое удаление от управляемых объектов и невозможность восприятия их
состояния непосредственно;
высокие требования к быстродействию и надежности работы, связанные с бы-
стрым протеканием управляемых процессов;
высокая степень ответственности за совершаемые действия;
постоянная готовность к экстренным действиям.
В СУ силами и средствами ВКО различают несколько видов оператор-
ской деятельности, классифицируемых в зависимости от основной функции,
выполняемой человеком-оператором. Условно можно выделить три наибо-
лее характерных вида деятельности:
оператор-наблюдатель — контролирует работу аппаратуры, следит
за состоянием боевой готовности, осуществляет поиск и обнаружение целей;
оператор - исполнитель — поддерживает связь между элементами
системы, выдает команды и распоряжения подчиненным, принимает обрат-
ную информацию, докладывает командиру обобщенную информацию;
оператор-руководитель — руководит процессом функционирова-
ния всей системы управления на соответствующем уровне.
В системах управления силами и средствами ВКО циркулируют
преимущественно информационные потоки, и операторы в этих системах
должны их перерабатывать с использованием КСА.
Обладая большим количеством сенсорных входов, человек-оператор мо-
жет воспринимать информацию с помощью анализаторов.
Анализаторы — это сложные системы чувствительных нервных образо-
ваний, воспринимающие и анализирующие раздражения, действующие на
человека. Каждый такой анализатор состоит из воспринимающего отдела —
рецептора (все органы чувств — зрение, слух и др.), проводниковой части и
высших нервных центров в коре головного мозга. Совокупность анализато-
480
ров у человека образует своеобразную систему, которая является мно-
гоканальной и обладает индивидуальными возможностями по восприятию,
приему и переработке разнообразной информации. Например, 81% информа-
ции воспринимается зрительным. 13% - слуховым, а остальное другими ка-
налами (тактильным, температурным, вестибулярным и др.).
15.4. ОБЩАЯ ХАРАКТЕРИСТИКА АВТОМАТИЗИРОВАННЫХ
СИСТЕМ УПРАВЛЕНИЯ СИЛАМИ И СРЕДСТВАМИ ВКО
Назначение и структура АСУ. Необходимость обеспечения оперативного
управления силами и средствами ВКО, достижения обоснованности и опти-
мальности принимаемых решений, а также осуществления качественного
планирования и контроля деятельности войск требует применения высоко-
эффективных автоматизированных систем управления (АСУ).
АСУ представляет собой совокупность личного состава и комплекса
средств автоматизации, реализующая информационную технологию выпол-
нения задач по обработке информации и управлению в интересах эффектив-
ного функционирования управляемых объектов. АСУ обеспечивает эффек-
тивное функционирование объекта управления путем автоматизированного
выполнения функций управления. Степень автоматизации функций управле-
ния определяется необходимостью, возможностями формализации процесса
управления и должна быть экономически и (или) социально обоснована.
АСУ военного назначения делятся на автоматизированные системы
управления боевыми средствами (АСУ БС), автоматизированные системы
управления войсками (АСУВ) и автоматизированные системы специального
назначения.
Типовая структурная схема автоматизированной системы военного назначе-
ния показана на рис. 15.5.
Управляемыми объектами для АСУВ являются подчиненные войска, а
для АСУ БС — вооружение и боевая техника главным образом боевые сред-
ства разведки и поражения (системы зенитного оружия, системы вооружения
истребительной авиации и радиотехнических войск, средства радиоэлек-
тронной борьбы). Все управляемые объекты являются для АСУ как источни-
ками, так и потребителями информации.
Источники информации вырабатывают и передают данные об обста-
новке, по которым осуществляется управление. Среди источников информа-
ции для АСУ БС ВКО основную роль играют радиолокационные станции
(РЛС) различного назначения, передающие данные о воздушной обстановке,
а для АСУВ — органы управления подчиненных войск. Источниками инфор-
мации для АСУ могут служить и неуправляемые объекты (устройства), на-
пример автоматические датчики.
Потребителями информации являются управляемые объекты, непо-
средственно реализующие вырабатываемые АСУ управляющие воздействия
для достижения требуемых целей и задач. Например, непосредственные по-
требители информации в управляемых объектах АСУВ — органы у правде-
481
ния подчиненных войск, а в АСУ БС — системы управления вооружения и
боевой техники, а также исполнительные органы технических устройств.
Внешними по отношению к рассматриваемой АСУ источниками и потре-
бителями информации являются система управления вышестоящего уровня,
а также взаимодействующие системы управления одного или различных
уровней.
В составе любой АСУ можно выделить: личный состав; методы управле-
ния; комплекс средств автоматизации.
Личный состав разделяется на управленческий персонал, реализующий
в АСУ творческие функции управления, и обслуживающий персонал.
Методы управления — это приемы и способы работы управленческого
персонала, используемые в его деятельности по реализации функций управ-
ления. В АСУ методы автоматизированного и неавтоматизированного уп-
равления сочетаются, дополняя друг друга.
Комплекс средств автоматизации - представляет собой совокупность
взаимосогласованных компонентов и комплексов программного, техническо-
го и информационного обеспечения, разрабатываемая, изготовляемая и по-
ставляемая как продукция производственно-технического назначения (сово-
купность всех компонентов АСУ за исключением людей).
В АСУ силами и средствами ВКО КСА предназначен для автоматиза-
ции процессов сбора данных об обстановке, обработки и отображения этих
данных в целях выдачи рекомендаций должностным лицам органов управле-
ния при выработке ими решений по управлению войсками (боевыми средст-
вами) и доведения в соответствии с принятыми решениями задач и управ-
ляющих воздействий до управляемых объектов.
В КСА выделяют три функциональные системы, являющиеся подсисте-
мами единой АСУ: командно-сигнальную; командно-информационную; ин-
формационно-расчетную.
Командно-сигнальная система (КСС) — совокупность средств ав-
томатизации, предназначенных для доведения команд и сигналов, а также
для получения подтверждений и донесений об их выполнении. В состав
средств автоматизации КСС входят средства ввода команд и сигналов, круг-
лосуточно функционирующая сеть связи и средства вывода команд и сигна-
лов на устройства визуального отображения, звуковой сигнализации и на
другие исполнительные устройства. Для КСС характерны незначительные
объемы передаваемой информации при жестких требованиях к времени и
достоверности передачи.
Автоматизированная система военного назначения
Управляемые объекты (управляемая часть)
Сис-
тема
управ-
ления
выше-
стоя-
щего
уровня
Источники информации:
РЛС обнаружения, j *
опознавания, Органы управления
подчиненных войск
радиопеленгаторы и др!т. . ..
Потребители информации:
ЗРК, истребители,
средства РЭБ и др.
Рис. 15.5. Структурная схема автоматизированной системы управления военного назначения
483
Командно - информационная система (КИС) — совокупность
средств автоматизации, предназначенных для сбора, систематизации и ото-
бражения данных о текущей обстановке и доведения задач до подчиненных
(исполнителей). Для КИС характерны развитая система устройств отображе-
ния данных о текущей обстановке индивидуального и коллективного пользо-
вания и жесткий временной цикл функционирования, обусловленный необ-
ходимостью обработки и отображения данных об обстановке в реальном
масштабе времени. Средства КИС, развертываемые на командных пунктах
(КП) и пунктах управления (ПУ), применяются для непосредственного
управления войсками и боевыми средствами при выполнении ими боевых за-
дач в ходе боевых действий и боевого дежурства.
Информационно-расчетная система (ИРС) — совокупность
средств автоматизации, предназначенных для сбора, хранения, обработки и
выдачи на устройства отображения и печати различной информации в инте-
ресах проведения расчетов, необходимых для анализа обстановки, принятия
решения и планирования. ИРС реализуется в виде комплекса технических
средств, включающего одну или несколько электронно-вычислительных ма-
шин (ЭВМ) и связанную с ними каналами передачи данных систему абонент-
ских пунктов, представляющих собой дистанционно удаленные от ЭВМ уст-
ройства ввода-вывода данных со средствами отображения, развернутыми на
рабочих местах управленческого и обслуживающего персонала. Основной
режим работы ИРС — режим коллективного использования ресурсов ЭВМ
по запросам должностных лиц органа управления с одновременно и незави-
симо работающих абонентских пунктов.
В конкретных типах АСУ некоторые из функциональных подсистем
КСС, КИС, ИРС могут быть представлены в большем или меньшем объеме, а
иногда и вовсе отсутствовать.
Виды структур АСУ
Внутреннее строение АСУ характеризуют при помощи структур, описы-
вающих устойчивые связи между их элементами.
При описании АСУ используют следующие виды структур, отличающие-
ся типом элементов и связей между ними:
функциональные (элементы - функции, задачи, процедуры; связи - ин-
формационные);
технические (элементы - устройства, компоненты и комплексы; связи -
линии и каналы связи);
организационные (элементы - коллективы людей и отдельные исполни-
тели; связи - информационные, соподчинения и взаимодействия);
документальные (элементы - неделимые составные части и документы
АСУ; связи - взаимодействия, входимости и соподчинения);
алгоритмические (элементы - алгоритмы; связи - информационные);
программные (элементы - программные модули; связи - управляющие);
484
информационные (элементы - формы существования и представления
информации в системе; связи - операции преобразования информации в сис-
теме).
Режимы функционирования АСУ
По признаку исправности входящих в АСУ средств можно выделить: ос-
новной режим, когда все средства АСУ находятся в исправном состоянии;
режим живучести, когда те или иные средства АСУ выходят из строя или
находятся на регламенте.
По признаку выполняемых в данный момент задач различают режимы
управления реальными объектами, тренажа, функционального контроля и
смешанные, в ходе которых совмещается либо все три режима, либо два из
них.
Организация указанных режимов требует разработки соответствующих
решений по обеспечению их функционирования с помощью реконфигурации
МПО и технических средств. Далее по каждой подсистеме АСУ конкретизи-
руются принципы построения и технические решения по организации функ-
ционального взаимодействия элементов подсистем, решаются вопросы орга-
низации информационных потоков и обмена данными, разрабатывается под-
робная структура обмена информацией, определяются скорость,
достоверность и задержки в передаче информации для различных звеньев
управления, рассчитываются частные характеристики подсистем.
Основные понятия н определения по организации создания
и функционирования АСУ
Жизненный цикл АСУ - совокупность взаимосвязанных процессов созда-
ния и последовательного изменения состояния АСУ от формирования исход-
ных требований к ней до окончания эксплуатации и утилизации КСА.
Концепция создания АСУ - система взаимосвязанных взглядов на процесс
создания АСУ, определяющая общий замысел создания с учетом принятых
принципов построения АСУ.
Концептуальная модель создания АСУ - абстрактная модель, содержащая
на качественном уровне принципы построения, структуру системы, способ
определения существенных ее свойств и вопросы организации управления в
системе при ее функционировании.
Принципы создания АСУ - основные руководящие правила, составляю-
щие основу концепции построения АСУ и позволяющие выбрать рациональ-
ную структуру системы с учетом целей ее функционирования.
Процесс создания АСУ - совокупность работ от формирования исходных
требований к системе до ввода в действие.
Стадия создания АСУ - одна из частей процесса создания АСУ, установ-
ленная нормативными документами и заканчивающаяся выпуском докумен-
тации на АСУ, содержащей описание полной, в рамках заданных требований,
модели АСУ на заданном для данной стадии уровне, или изготовлением не-
485
серийных компонентов АСУ, или приемкой АСУ в промышленную эксплуа-
тацию.
Этап создания АСУ - часть стадии создания АСУ, выделенная по сооб-
ражениям единства характера работ и (или) завершающего результата или
специализации исполнителей.
Очередь АСУ - часть АСУ, для которой в техническом задании на созда-
ние АСУ в целом установлены отдельные сроки ввода и набор реализуемых
функций.
Развитие АСУ - целенаправленное улучшение характеристик или рас-
ширение функций АСУ.
Сопровождение АСУ - деятельность по оказанию услуг, необходимых
для обеспечения устойчивого функционирования или развития АСУ.
взаимодействие АСУ - обмен данными, командами и сигналами между
функционирующими АСУ.
Функция АСУ - совокупность действий АСУ, направленная на достиже-
ние определенной цели. Функции АСУ устанавливают в техническом зада-
нии на создание автоматизированной системы на основе анализа цели управ-
ления, заданных ресурсов для их достижения, ожидаемого эффекта от авто-
матизации. Каждая функция АСУ реализуется совокупностью комплексов
задач, отдельных задач и операций.
Задача АСУ - функция или часть функции АСУ, представляющая собой
формализованную совокупность автоматических действий, выполнение ко-
торых приводит к результату заданного вида.
Алгоритм функционирования АСУ - алгоритм, задающий условия и по-
следовательность действий компонентов системы при выполнении ею своих
функций.
Научно-технический уровень АСУ - показатель или совокупность
показателей, характеризующая степень соответствия технических и
экономических характеристик АСУ современным достижениям науки и
техники.
Сообщение АСУ - сведения в виде законченного блока данных, переда-
ваемые при функционировании АСУ.
Унифицированная процедура в АСУ - общая часть различных автоматизи-
рованных функций или задач, представляющая собой формализованную со-
вокупность их одинаковых действий.
Диалоговый режим выполнения функции АСУ - режим выполнения функ-
ции АСУ, при котором человек управляет решением задачи, изменяя ее усло-
вия и (или) порядок функционирования АСУ на основе оценки информации,
представляемой ему техническими средствами системы.
Неавтоматизированный режим выполнения функции АСУ - режим вы-
полнения функции АСУ, при котором она выполняется только человеком.
Компонент АСУ - часть АСУ, выделенная по определенному признак)'
или совокупности признаков и рассматриваемая как единое целое.
486
Комплектующее изделие « АСУ - изделие или единица научно-
технической продукции, применяемое как составная часть АСУ в соответст-
вии с техническими условиями или техническим заданием на него.
Программное изделие в АСУ - программное средсгво. изготовленное, про-
шедшее испытания установленного вида и поставляемое как продукция
производственно-технического назначения для применения в АСУ.
Информационное средство АСУ - комплекс, упорядоченный относитель-
но постоянной информации на носителе данных, описывающей параметры и
характеристики заданной области применения, и соответствующей докумен-
тации, предназначенный для поставки пользователю.
Информационное изделие в АСУ - информационное средство, изготов-
ленное, прошедшее испытания установленного вида и поставляемое как про-
дукция производственно-технического назначения для применения в АСУ.
Программно-технический комплекс АСУ - продукция, представляющая
собой совокупность средств вычислительной техники, программного
обеспечения и средств создания и заполнения машинной информационной
базы при вводе системы в действие достаточных для выполнения одной или
более задач АСУ.
Информационная база АСУ - совокупность упорядоченной информации,
используемой при функционировании АСУ.
Внемашинная информационная база АСУ - часть информационной базы
АСУ, представляющая собой совокупность документов, предназначенных
для непосредственного восприятия человеком без применения средств вы-
числительной техники.
Машинная информационная база АСУ - часть информационной базы
АСУ, представляющая собой совокупность используемой в АСУ информа-
ции на носителях данных.
Автоматизированное рабочее место (АРМ) - программно-технический
комплекс АСУ, предназначенный для автоматизации деятельности
определенного вида.
Совместимость АСУ - комплексное свойство двух или более АСУ, ха-
рактеризуемое их способностью взаимодействия при функционировании (со-
вместимость АСУ включает техническую, программную, информационную,
организационную, лингвистическую и при необходимости метрологическую
совместимость).
Входная информация АСУ - информация, поступающая в АСУ в виде до-
кументов. сообщений, данных, сигналов необходимая для выполнения функ-
ций АСУ.
Выходная информация АСУ - информация, получаемая в результате вы-
полнения функций АСУ и выдаваемая на объект ее деятельности - пользова-
телю или в другие системы.
Оперативная информация АСУ - информация, отражающая на данный
момент времени состояние объекта, на который направлена деятельность
АСУ.
487
Нормативно-справочная информация АСУ - информация, заимствован-
ная из нормативных документов и справочников и используемая при функ-
ционировании АСУ.
Тактико-технические характеристики АСУ - упорядоченная по опреде-
ленному замыслу совокупность количественных и качественных характери-
стик АСУ, определяющих ее свойства и боевые возможности.
Документация на АСУ - комплекс взаимоувязанных документов, в кото-
ром полностью описаны все решения по созданию и функционированию сис-
темы, а также документов, подтверждающих соответствие системы требова-
ниям технического задания и готовность ее к эксплуатации (функционирова-
нию).
Приемочная документация на АСУ - документация, фиксирующая сведе-
ния, подтверждающие готовность АСУ к приемке ее в эксплуатацию, соот-
ветствие АСУ требованиям нормативных документов.
Техническое задание на АСУ - документ, оформленный в установленном
порядке и определяющий цели создания АСУ, требования к АСУ и основные
исходные данные, необходимые для ее разработки, а также план-график
создания АСУ.
Технический проект АСУ - комплект проектных документов на АСУ. раз-
рабатываемый на стадии "Технический проект", утвержденный в установ-
ленном порядке, содержащий основные проектные решения по системе в це-
лом, ее функциям и всем видам обеспечения АСУ и достаточный для разра-
ботки рабочей документации на АСУ.
Рабочая документация на АСУ - комплект проектных документов на
АСУ, разрабатываемый на стадии "Рабочая документация", содержащий
взаимоувязанные решения по системе в целом, ее функциям, всем видам
обеспечения АСУ, достаточные для комплектации, монтажа, наладки и
функционирования АСУ, ее проверки и обеспечения работоспособности.
Эксплуатационная документация на АСУ - часть рабочей документации
на АСУ, предназначенная для использования при эксплуатации системы, оп-
ределяющая правила действия персонала и пользователей системы при ее
функционировании, проверке и обеспечении ее работоспособности.
Технорабочий проект АСУ - комплект проектных документов АСУ, ут-
вержденный в установленном порядке и содержащий решения в объеме тех-
нического проекта и рабочей документации на АСУ.
Организация-заказчик (пользователь) - организация, для которой созда-
ется АСУ и которая обеспечивает финансирование, приемку работ и эксплуа-
тацию АСУ, а также выполнение отдельных работ по созданию АСУ.
Организация-разработчик - организация, которая осуществляет работы
по созданию АСУ, представляя заказчику совокупность научно-технических
услуг на разных стадиях и этапах создания, а также разрабатывает и постав-
ляет различные программные и технические средства АСУ.
Организация-поставщик - организация, которая изготавливает и постав-
ляет программные и технические средства по заказу разработчика или
заказчика.
488
Организации-проектировщики различных частей проекта объекта ав-
томатизации - организации, предназначенные для проведения строитель-
ных, электротехнических, санитарно-технических и других подготовитель-
ных работ, связанных с созданием АСУ.
В зависимости от условий создания АСУ возможны различные совмеще-
ния функций заказчика, разработчика, поставщика и других организаций,
участвующих в работах по созданию АСУ.
155. ПРИНЦИПЫ ПОСТРОЕНИЯ И ФУНКЦИОНИРОВАНИЯ АСУ
Оперативно-тактические принципы построения АСУ
1. Соответствие цели создания, назначения боевых и технических
возможностей АСУ задачам, составу и организационно-штатной структуре
управляемых войск (сил) и средств, их системе управления, уровню развития
средств воздушного нападения и управляемых объектов, способам подготов-
ки и ведения операций (боевых действий).
2. Организационное, программно-техническое и информационное един-
ство построения АСУ и ее подсистем, обеспечивающее управление разнови-
довыми силами и средствами ВКО. а также возможность взаимодействия ав-
томатизированных органов управления как по вертикали, так и по горизонта-
ли.
3. Сбалансированное развитие АСУ, соответствующее развитию систем
радиолокационной и радиотехнической разведки, радиоэлектронного
подавления и огневого поражения воздушных объектов.
4. Сбалансированное построение всех составных частей АСУ родов войск
(сил) ВКО, а также систем автоматизированного управления средствами ВКО
других видов ВС РФ.
5. Комплексная автоматизация наиболее скоротечных, трудоемких и бы-
стро действующих функций управления на всех уровнях, соответствие степе-
ни автоматизации этих функций динамике управляемых процессов, а также
роли и месту этих функций в достижении общей и частных целей управле-
ния.
6. Обеспечение живучести, адаптации и самоорганизации АСУ в соответ-
ствии с изменениями внутренних и внешних параметров ее функционирова-
ния при различных условиях обстановки, составе и параметрах решаемых за-
дач.
7. Рациональное сочетание централизованного и децентрализованного
управления войсками (силами) и оружием, возможность перехода от центра-
лизованного управления к децентрализованному и обратно без потери
управления.
8. Обеспечение возможности управления в иерархической системе через
инстанцию (а в некоторых случаях и через несколько инстанций).
9. Инвариантность управления, заключающаяся в возможности обеспече-
ния как автоматизированного, так и неавтоматизированного режима управ-
ления с переходом из одного режима в другой без потери управления.
489
10. Комплексное и согласованное применение основной, дублирующей и
резервных систем автоматизированного управления войсками, силами и
средствами.
Общесистемные принципы построения АСУ
1. Принцип системности заключается в том, что при создании, функ-
ционировании и развитии АСУ должны быть установлены и сохранены такие
связи между структурными элементами системы, которые обеспечивают ее
цельность и взаимодействие с другими системами.
2. Принцип развития (открытости) заключается в том, что, исходя из
перспектив развития процессов и объектов автоматизации, АСУ должна соз-
даваться с учетом возможности пополнения и обновления функций АСУ и
видов ее обеспечения путем доработки программных и (или) технических
средств или настройкой имеющихся средств.
3. Принцип совместимости заключается в том, что при создании АСУ
должны быть реализованы информационные интерфейсы, благодаря кото-
рым она может взаимодействовать с другими системами в соответствии с ус-
тановленными правилами.
4. Принцип стандартизации (унификации) заключается в том, что при
создании АСУ должны быть рационально применены типовые, унифициро-
ванные н стандартизованные элементы, проектные решения, пакеты при-
кладных программ, комплексы, компоненты.
5. Принцип адаптивности заключается в необходимости создания АСУ,
обладающей способностью к изменению своих параметров в зависимости от
внутренних параметров функционирования и характеристик внешней среды.
6. Принцип эффективности заключается в достижении рационального
соотношения между затратами на создание АСУ и целевыми эффектами,
включая конечные результаты, получаемые в результате автоматизации.
Оперативно-тактические принципы функционирования АСУ
I. Сохранение ведущей роли командиров и штабов в процессе управ-
ления войсками, правильное сочетание творческой деятельности человека с
работой средств автоматизации.
2. Максимальная автоматизация выполнения технических и расчетно-
информационных функций, возложенных на должностные лица органов
управления.
3. Простота и удобство взаимодействия операторов со средствами ав-
томатизации при вводе, обработке и восприятии информации.
4. Обеспечение разграничения доступа к информации, предотвращение
несанкционированных действий и несанкционированного применения
средств автоматизации.
5. Организация функционирования и обслуживания АСУ незначитель-
ным числом квалифицированных специалистов.
490
6. Осуществление автоматизированно, v обмена информацией с выше*
стоящими, подчиненными и взаимодействующими инстанциями в различных
формах (речь, данные, видеоизображения).
7. Обеспечение единства управления разновидовыми силами ВКО на ос-
нове комплексной оценки воздушной и наземной обстановки.
Принципы совершенствования организационной структуры АСУ
Создание АСУ требует, как правило, изменения (совершенствования) ор-
ганизационной структуры объекта автоматизации. Принципы совершенство-
вания организационной структуры включают следующие основные положе-
ния.
1. Выделение структурных звеньев на каждом организационном уровне
должно осуществляться так, чтобы каждое звено работало на достижение оп-
ределенной совокупности целей, требуемая при этом интеграция всех видов
деятельности достигается созданием специализированных подразделений,
полностью отвечающих за выполнение определенной группы функций.
2. Организационная структура должна базироваться на интегрированных
информационных потоках; потоки между звеньями должны быть сведены до
минимума и идти кратчайшими маршрутами.
3. Достижение единства организации процессов планирования, учета,
анализа, регулирования, т.е. обеспечения координации и синхронизации дей-
ствия всех служб и исполнителей должно быть получено за счет усиления
непосредственного контакта с вычислительным комплексом.
15 .6. ОБЕСПЕЧЕНИЕ АСУ
В процессе создания и функционирования АСУ различают следующие
виды обеспечения: организационное; методическое; информационное; мате-
матическое; программное; техническое; лингвистическое; эргономическое;
правовое.
Проектные решения по программному, техническому и информационно-
му обеспечению реализуют как изделия в виде взаимоувязанной совокупно-
сти компонентов и комплексов, входящих в состав АСУ (их частей) с необ-
ходимой документацией. Проектные решения по остальным видам обеспече-
ния входят в состав АСУ (их частей) в качестве организационно-
методических и эксплуатационных документов или реализуют в компонентах
программного, технического или информационного обеспечения. Проектные
решения математического обеспечения реализуют, как правило, через про-
граммное или в отдельных случаях техническое обеспечение. Лингвистиче-
ское обеспечение представляют и реализуют в информационном или про-
граммном обеспечении.
Техническое обеспечение (комплексы технических средств) АСУ - сово-
купность всех технических средств, используемых при функционировании
АСУ.
491
Техническое обеспечение реализует автоматизацию информационных
процессов, имеющих место при автоматизированном управлении.
Техническое обеспечение АСУ можно условно разделить на техническое
обеспечение (КТС) пунктов (органов) управления и технические средства
подсистемы связи и передачи данных.
Техническое обеспечение пунктов (органов) управления. В пунктах (ор-
ганах) управления КТС обеспечивают решение следующих основных задач:
реализацию всего объема математического обеспечения, решающего возло-
женные на КСА автоматические и автоматизированные функциональные за-
дачи управления и обработки информации; обмен информацией с абонента-
ми передачи данных; отображение информации; документирование инфор-
мации; функциональный контроль оборудования КСА; привязку процессов
обработки информации и управления к системе единого времени, принятой в
АСУ, электроснабжение КСА, обеспечение жизнедеятельности органов
управления.
В составе КТС пунктов (органов) управления можно выделить следую-
щие основные элементы: вычислительный комплекс (ВК); КТС отображения
информации; КТС документирования; КТС передачи данных; КТС единого
времени; КТС контроля функционирования; центральный пункт управления;
КТС энергоснабжения; КТС обеспечения жизнедеятельности.
В состав подвижных пунктов управления могут входить КТС навигации,
КТС топопривязки и КТС ориентирования.
В автоматизированных системах управления вычислительный ком*
плекс решает следующие задачи: осуществляет логическую и вычислитель-
ную обработку данных по реализации основных автоматических и автомати-
зированных функциональных задач; прием информации из КТС передачи
данных; выдачу информации в КТС передачи данных; подготовку и выдачу
информации в КТС отображения (принудительно и по запросам операторов);
выполнение команд операторов, связанных с вмешательством в процесс уп-
равления и обработки информации; подготовку, запись и хранение данных о
ходе процессов управления и обработки информации, функционировании
операторов и аппаратуры КСА и выдачу по требованию указанных данных в
КТС документирования для составления отчетных документов; прием син-
хрочастоты и кода времени из КТС системы единого времени и организацию
службы реального масштаба времени; комплексный функциональный кон-
троль всех подсистем КТС в целом; связь с центральным пультом управления
при организации различных режимов работы.
Существует большое количество вариантов структурного построения ВК.
Это связано с тем, что на структуру построения ВК влияет значительное чис-
ло факторов (способ комплексирования и резервирования входящих в него
ЭВМ и отдельных устройств; степень мобильности (стационарное или под-
вижное исполнение); требуемая производительность центрального процес-
сора и каналов ввода-вывода ЭВМ, надежность, элементная и конструктив-
ная база; массогабаритные размеры, характеристики энергопотребления,
стоимость и др).
492
ВК может применяться как для решения основных задач в процессе
функционирования АСУ, т. е. только в качестве управляющего ВК, так и в
качестве технологического средства разработки математического и про-
граммного обеспечения.
ВК включает одну или несколько ЭВМ.
ЭВМ представляет собой совокупность электронных усгройств, осущест-
вляющих автоматическое решение задач, представленных программами и
данными в цифровой форме. В состав ЭВМ входят: процессор; оперативная
память; периферийное оборудование; каналы ввода-вывода.
Процессор — это основная часть ЭВМ, непосредственно осуществ-
ляющая процесс обработки данных и управляющая им. В состав процессора
обычно входят арифметическо-логическое устройство, устройство управ-
ления и устройства оперативной памяти. Арифметическо-логическое устрой-
ство — функциональная часть процессора, выполняющая арифметические и
логические машинные операции. Машинные операции — это операции, ко-
лируемые в непосредственно выполняемой программе работы ЭВМ в виде
отдельных машинных команд, реализация которых осуществляется аппара-
турно. Устройство управления — функциональная часть процессора, выпол-
няющая предусмотренные программой машинные операции управления и
вырабатывающая управляющие сигналы, координирующие действия различ-
ных устройств ЭВМ.
Оперативная память представляет собой совокупность оперативных
запоминающих устройств, предназначенных для записи, хранения и выдачи
данных, непосредственно участвующих в выполнении машинных операций,
осуществляемых в процессоре.
Периферийное оборудование ЭВМ — это набор разнообразных
периферийных устройств, представляющих собой накопители и устройства
ввода-вывода. Под накопителями понимаются устройства внешней памя-
ти ЭВМ большой емкости. В АСУ силами и средствами ВКО наиболее ши-
роко применяются накопители на магнитных лентах (НМЛ) и накопители на
магнитных дисках (НМД). Устройства ввода-вывода предназначены
для автоматизации ввода и (или) вывода данных с носителей (на носители)
данных. К устройствам ввода-вы вода относятся печатающие устройства, те-
летайпы, графопостроители, дисплеи, мультиплексоры передачи данных.
Каналы в во да-вы вода — устройства, реализующие обмен данными
между оперативной памятью и периферийным оборудованием ЭВМ
параллельно с обработкой данных в процессоре. Каналы ввода-вывода де-
лятся на селекторные и мультиплексные. Селекторный канал реализует
обмен данными только в монопольном режиме работы. Монопольный
режим - режим, при котором канал обслуживает только одно периферийное
устройство ЭВМ. Мультиплексный канал реализует обмен данными в
монопольном или мультиплексном режиме. Мультиплексный режим -
режим, при котором канал обслуживает попеременно несколько одновремен-
но работающих периферийных устройств в интервалах времени, устанавли-
ваемых автоматически.
493
К основным техническим характеристикам ЭВМ относятся: система ко-
манд; быстродействие; производительность; емкость устройства памяти; раз-
рядность.
Под системой команд понимают совокупность всех возможных ти-
пов машинных команд, аппаратурно реализованных в ЭВМ и кодируемых
при записи непосредственно выполняемых профамм.
Быстродействие характеризует скорость обработки данных в ЭВМ и
измеряется количеством машинных операций данного типа (например, опе-
раций сложения), выполняемых процессором ЭВМ в единицу времени.
Производительность — среднестатистическое число машинных
операций, выполняемых процессором в единицу времени при решении дос-
таточно большого количества задач.
Под емкостью устройства памяти понимается наибольшее коли-
чество данных, выраженных в единицах информации, которое можно
одновременно хранить в устройстве. Емкость устройства памяти ЭВМ
обычно измеряется в байтах (8 двоичных разрядов) или в килобайтах
(1 килобайт принимается равным 1024 байтам).
Разрядность — это количество двоичных разрядов, отводимых для
представления числа или другой единой кодовой группы двоичных симво-
лов, обрабатываемой процессором при выполнении одной машинной опера-
ции.
По назначению ЭВМ делятся на ЭВМ общего назначения и специализи-
рованные ЭВМ.
ЭВМ общего назначения предназначены для решения широкого кру-
га задач и имеют развитую систему машинных операций, запоминающих уст-
ройств и устройств ввода-вывода.
Специализированные ЭВМ предназначены для решения
определенного класса задач или одной задачи. Специализация ЭВМ жестко
определяет состав и структуру ее устройств, что позволяет добиться упроще-
ния конструкции ЭВМ, повышения ее быстродействия. Среди
специализированных ЭВМ выделяют управляющие. Управляющая ЭВМ
представляет собой машину, используемую в качестве центрального звена
управляющей части автоматизированной или автоматической системы
управления, рассчитанного на автоматический прием и обработку данных,
поступающих в процессе управления, и выдачу информации непосредствен-
но на исполнительные органы технических устройств или человеку-оператору.
Комплекс технических средств отображения предназначен для ото-
бражения информации, в интересах определенных должностных лиц (группы
лиц) органа управления с целью обеспечения выполнения должностными ли-
цами своих функциональных обязанностей.
КТС отображения обеспечивает решение следующих задач: прием ин-
формации от ВК (принудительно и по запросам оператора); формирование и
отображение индивидуальных кадров на терминальных устройствах в соот-
ветствии с вызванной программой отображения и дополнительными запро-
сами операторов; прием и первичная обработка команд, введенных операто-
494
рами с АРМ; селекция информации по запросам операторов; изменение
масштаба отображаемой информации по запросам с АРМ; сдвиг по команде
оператора центра информационного кадра для того или иного терминала;
формирование, отображение и смена электронной карты; редактирование
вводимой информации; выдача в ВК команд, связанных с изменением со-
держания зон информации ВК и с использованием информации, отсутст-
вующей в КТС отображения.
Аппаратура отображения информации в АСУ включает: устройства
отображения информации (УОИ), устройства (пульты) для ввода или вывода
информации операторами в ВК или ЭВМ, аппаратуру сопряжения УОИ с
другими элементами системы.
Устройства отображения информации являются основными элемента-
ми аппаратуры отображения. Они устанавливаются на командных пунктах
ВКО любой командной инстанции.
Устройства (пульты) для ввода — вывода данных в ЭВМ (ВК) обеспечи-
вают ввод (вывод) информации для отображения на соответствующих уст-
ройствах (индикаторах).
Аппаратура сопряжения УОИ с другими элементами системы обеспечи-
вает нормальное функционирование в боевом режиме всей аппаратуры ото-
бражения информации.
Все УОИ АСУ по конструктивному оформлению и технической реализа-
ции подразделяются на три основных типа: проекционные, панельные и ин-
дикаторные УОИ на электронно-лучевых трубках.
Проекционные УОИ предназначены для получения изображения
увеличенных размеров. Они работают по принципу проецирования его на
экран для общего обозрения. В состав такого УОИ входят входной блок,
генератор знаков, блок записи, проекционное устройство и экран.
Панельные УОИ предназначены для отображения информации на мат-
ричном экране определенных размеров с использованием электролюминес-
центных, оптико-механических или газонаполненных элементов. Панельные
УОИ применяются как-для коллективного, так и для индивидуального поль-
зования.
Индикаторные УОИ на электронно-лучевых трубках (ЭЛТ) предназначе-
ны для отображения более детальной обстановки при получении инфор-
мации непосредственно от источников (радиолокационные средства разведки
и др.), а также при получении информации по каналам связи внутри данной
системы управления или от других АСУ.
По применению и особенностям отображения информации на экранах
все УОИ подразделяются: по назначению, по типу отображаемой информа-
ции и по способам формирования знаков на экранах УОИ.
По назначению УОИ подразделяются на устройства коллективного и
индивидуального пользования.
УОИ коллективного пользования предназначены для воспроизведения
информационной модели общей воздушной (наземной) обстановки в преде-
лах определенного района боевых действий, состояния боевой готовности
495
своих войск и т. д. На основе такой модели осуществляется ка гественная
оценка обстановки и подготовка данных для принятия решения командиром.
К УОИ коллективного пользования относятся большие экран >i и элек-
тронные табло, которые устанавливаются для представления информации
всему боевому расчету.
На больших экранах отображается динамическая и сгатическая информа-
ция об общей обстановке, о характере и направлениях действий воздушного
противника, дислокации своих войск, рельефе местности, географических
ориентирах и т. д. Вся информация отображается в определенном масштабе.
Размеры экранов могут составлять несколько метров.
Электронные табло предназначены для отображения информации о бое-
вом состоянии войск, их боевых возможностях, о ходе боевых действий в
данный момент времени, о результатах боевых действий и т. д. Табло служат
как бы дополнением к большим экранам и на них отображается информация
с определенной степенью детализации по отдельным вопросам.
УОИ индивидуального пользования предназначены для более детального
и полного отображения информации в определенном районе при получении
ее от первичных (радиолокационные средства разведки) и вторичных (АСУ)
источников информации. К УОИ индивидуального пользования относятся
первичные и вторичные индикаторы и табло, на которых избирательно ото-
бражается информация, предназначенная для определенных лиц боевого рас-
чета. При этом на первичных индикаторах отображается информация, полу-
чаемая непосредственно от радиолокационных станций системы, а на вто-
ричных индикаторах — от средств обработки информации АСУ в
преобразованном виде. В отдельных случаях могут устанавливаться индика-
торы, на которых одновременно отображается как первичная, так и вторич-
ная информация, поступающая от нескольких источников (совмещенная ин-
формация).
Отображение информации на экранах индикаторов УОИ формируется из
элементов двух видов: знаковых групп из цифр, букв и типовых (специаль-
ных) условных обозначений-линий нестандартной протяженности (изобра-
жение конфигурации районов расположения войск, местности, конкретной
дислокации войск, характерных рубежей и зон и т. д.).
Знаковая индикация предполагает создание определенных систем симво-
лов в виде различных геометрических фигур, цифр и букв.
Совокупность этих символов, сведенных в определенные группы, ха-
рактеризующие состояние и изменение состояния того или иного объекта
(или нескольких объектов), называется формуляром. В виде формуляров мо-
гут отображаться на экранах УОИ данные о воздушных целях, данные о сво-
их истребителях-перехватчиках, данные о состоянии и боевых действиях ба-
тареи (дивизионов) ЗУР или ЗА и т. д.
Местоположение формуляра на экране УОИ строго определено и харак-
теризует местоположение объектов (своих и противника) и их состояние.
Так, в АСУ "Сейдж" (США) формуляр цели состоит из 9 знаков (три строки
496
по три знака в каждой). В других АСУ изображение осуществляется только в
символьной форме (АСУ "Миссайл-Монитор" — США).
Для отображения информации в символьной форме чаще всего исполь*
зуются геометрические фигуры простой и сложной конфигурации. Наиболь-
шей легкостью и точностью опознавания обладают треугольник, ромб, пря-
моугольник, круг и квадрат.
Кроме того, могут использоваться типовые и специальные символы,
имеющие мнемоническое и ассоциативное значение (самолет-
бомбардировщик или истребитель, КП, ЗРК и др.).
Требования к УОИ определяются факторами трех основных групп: тех-
нические факторы, характеризующие систему отображения, устройства и ме-
тоды отображения; информационные факторы, отражающие характер и осо-
бенности перерабатываемой информации; психофизиологические факторы,
учитывающие возможности человека-оператора при работе на устройствах
отображения информации.
Первые две группы факторов характеризуют систему отображения в це-
лом с технической точки зрения, а третья группа — оператора или коллектив
операторов (боевой расчет).
Основными требованиями, предъявляемыми к УОИ, являются: своевре-
менность отображения и представления информации боевому расчету систе-
мы управления с темпом, равным или меньшим, чем темп ведения боевых
действий; наглядность; полнота; точность; контрастность и яркость отобра-
жения.
Для оценки качества работы УОИ могут использоваться следующие по-
казатели: информационная емкость; информативность или удельная инфор-
мационная емкость; скорость отображения информации; разрешающая спо-
собность; эксплуатационная надежность и достоверность.
Информационная емкость УОИ характеризует то максимальное количе-
ство, которое может быть отображено на экране. Информационная емкость
УОИ зависит от количества знакомест на экране индикатора и от количества
знаков в алфавите генератора знаков. Чем больше количество знакомест и
чем больше алфавит генератора знаков, тем выше информационные возмож-
ности экрана индикатора УОИ.
Информативность или удельная информационная емкость индикатора—
это количество информации, приходящейся на одно знакоместо. Информа-
тивность определяется только алфавитом генератора знаков.
Скорость отображения информации характеризуется количеством
информации, отображаемой на экране индикатора в единицу времени. Есте-
ственно, что проектируемая скорость отображения информации не должна
превышать психофизиологические возможности оператора по ее считыва-
нию.
Время полного обновления информации Тп о — это промежуток времени, в
течение которого осуществляется заполнение всех знакомест на экране инди-
катора УОИ. Оно зависит от метода формирования знаков и способа запол-
497
нения знакомест. При последовательном и- .1ри параллельном заполнении
знакомест соответственно
Т -NT-}
‘ п.о ' ’ зн1 зн1 I
Л/ >
Г -И^-Т [
1 п.о 'дач
m )
где N3f1 - число знакомест на экране индикатора;
Тзн - время записи одного знака;
m - число одновременно заполняемых знакомест.
В общем случае предельная скорость отображения информации прямо
пропорциональна информативности индикатора и обратно пропорциональна
времени формирования знака в системе отображения.
Достоверность отображения информации характеризует степень соот-
ветствия воспринимаемых знаков знакам, подлежащим фактическому ото-
бражению.
Количественно достоверность отображения информации может быть оце-
нена вероятностью правильного восприятия информации знака Р„р или
вероятностью ложного считывания знака Рл.
С определенной степенью приближения достоверность отображения ин-
формации может выражаться средним значением вероятности правильного
или ложного считывания:
rfleprtp(xf), рл(х,) - вероятности правильного и ложного считывания знаках,.
В общем случае вероятности правильного (ложного) считывания различ-
ных знаков неодинаковы и зависят от формы знаков, методов их формирова-
ния.
Разрешающая способность УОИ — один из основных показателей эф-
фективности их работы. Она рассматривается в совокупности с физиологиче-
скими возможностями человека-оператора. Как правило, разрешающая спо-
собность УОИ устанавливается исходя из разрешающей способности нор-
мального зрения человека и определяется размерами знаков (линейными или
угловыми) и их расстоянием до глаза наблюдателя:
S„=2r]H,S^. (153)
где S3ti - линейный размер знака;
r3N - расстояние до знака;
а - угловой размер знака.
Оптимальная величина знака, обеспечивающая наиболее быстрое и точ-
ное считывание, равна 40 мин (по высоте). При знаках большего размера
498
время и точность считывания практически не меняются. Наименьшая допус-
тимая величина знака составляет 20 мин.
После определения величины знака по высоте можно определить и дру-
гие размеры знака (ширину, толщину контура, расстояние между знаками).
Наиболее предпочтительные соотношения между этими параметрами
знака примерно могут быть следующие (снеговые знаки на земном фоне):
ширина — 3/5 высоты знака: толщина — 12% высоты; расстояние между
знаками — 1/2 ширины знака.
Эксплуатационная надежность характеризует степень эксплуатационно-
го совершенства УОИ и оценивается вероятностью безотказной работы в те-
чение определенного срока службы или средним сроком службы. При опре-
делении размеров оперативных залов КП ВКО. где планируется размещение
УОИ коллективного пользования (большие экраны, табло), учитывается рас-
стояние между операторами и рассматриваемой поверхностью экранов:
г = %(₽/2)- <15-4>
где г - расстояние до экрана;
Ш - ширина экрана;
<р- угол обзора (в расчетах обычно берется в пределах 50...60°;
максимальное значение угла не более 90°, при этом $ в вертикальной
плоскости берется примерно равным половине угла в горизонтальной
плоскости).
Устройства (пульты) ввода данных предназначены для ввода в ЭВМ
должностными лицами органа управления сообщений об обстановке и о при-
нятых решениях, а также запросов на решение требуемых задач по обработке,
выдаче и отображению необходимой информации.
Устройства ввода данных в совокупности с устройствами отображения
индивидуального пользования конструктивно оформляются в виде автомати-
зированных рабочих мест должностных лиц органа управления, оснащенных
необходимым количеством табло, индикаторов, клавиш выключателей и пере-
ключателей. В простейшем случае автоматизированное рабочее место пред-
ставляет собой персональную ЭВМ.
Требования, предъявляемые к средствам отображения информации, в
первую очередь зависят от четкого определения роли и функций лиц боевого
расчета при решении задач обработки информации и управления. На автома-
тизированных командных пунктах боевой расчет, как правило, принимает
участие в решении следующих основных задач:
управление состоянием боевой готовности подчиненных частей и под-
разделений;
оценка сложившейся обстановки и определение замысла противника;
определение степени угрозы нападения на обороняемые объекты;
оценка рекомендаций ВК и результатов решения задач по управлению
подчиненными силами и средствами;
организация и обеспечение взаимодействия между активными средства-
ми ВКО, а также с соседними частями и подразделениями;
499
обеспечение управления боевыми действиями при выходе из строя
отдельных элементов АСУ;
организация документирования хода боевых действий.
Для успешного решения указанных задач лица боевого расчета автомати-
зированного пункта (органа) управления должны иметь информацию о
воздушной обстановке; состоянии и боевых действиях подчиненных сил и
средств; состоянии обороняемых объектов; процессах наведения истребите-
лей-перехватчиков; рекомендациях ВК по управлению подчиненными сила-
ми и средствами; результатах функционального контроля аппаратуры КСА;
ходе и результатах регламентных и ремонтных работ; боевом и материально-
техническом снабжении войск.
Вся эта информация должна поступать на устройства отображения кол-
лективного и индивидуального пользования, которые совместно с пультами
боевого управления являются средствами взаимодействия лиц боевого расче-
та с вычислительным комплексом АКП.
Поэтому в наиболее общем виде требования к средствам отображения
информации АКП можно сформулировать следующим образом.
Средства отображения информации должны обеспечивать информацией
операторов в те моменты времени, когда в этом возникает необходимость, в
количествах, достаточных для оценки сложившейся ситуации, принятии пра-
вильного решения и контроля за его исполнением, а также соответствующих
реальным возможностям человека по восприятию и переработке информации
в форме, наиболее адекватной особенностям восприятия, специфики выпол-
няемых оператором функций, а также общим условиям боевой работы на ав-
томатизированном пункте управления.
Информацию, отображаемую на устройствах отображения автоматизиро-
ванных пунктов управления, можно разделить на следующие четыре вида:
информация о воздушном противнике; информация о своих средствах ВКО;
информация об обороняемых объектах; информация о других условиях об-
становки (метеорологической, радиационной, гидрографической и пр.).
Комплекс технических средств передачи данных решает следующие
задачи: прием из трактов передачи данных информации, ее накопление мас-
сивами, блоками или сообщениями и передача этой информации в цифровом
виде в ВК; прием цифровой информации от ВК массивами, блоками или со-
общениями и выдача этой информации в соответствующие тракты передачи
данных; повышение достоверности информации программными или аппара-
турными методами; учет задержек сообщений; коммутация пакетов или со-
общений; аппаратурное или аппаратурно-программное сопряжение с раз-
личного типа абонентами передачи данных и с ВК; организация контроля
функционирования трактов передачи данных (совместно с ВК).
Комплекс технических средств документирования предназначен лля
автоматической регистрации входной и выходной информации циркули-
рующей по каналам оперативно-командной и телскодовой связи (данных о
воздушной обстановке, боевой готовности и боевых действиях), а также ито-
500
говых данных, представляемых в виде, удобном для последующего анализа,
разбора и изучения.
КТС документирования решает следующие задачи: регистрация, хране-
ние и воспроизведение в реальном масштабе времени информации, передава-
емой по трактам передачи данных; регистрация, хранение и воспроизведение
в реальном масштабе времени телефонных и радиопереговоров; прием ин-
формации из ВК, ее обработка для представления в форме документов задан-
ного вида (графиков, таблиц, схем, справок, текстовой информации).
Комплекс технических средств системы единого времени предназна-
чен для формирования сигналов единого времени и выдачи их на функцио-
нальные элементы системы.
КТС системы единого времени осуществляет решение следующих задач:
формирование сигналов единого времени заданной периодичности и прину-
дительная их выдачу абонентам; отсчет абсолютного астрономического вре-
мени и выдача его абонентам по их требованию или с принудительно задан-
ной периодичностью; индикация текущего астрономического времени; при-
вязку сигналов единого времени к государственному эталону.
КТС системы единого времени обеспечивает установление истинного
времени при документировании результатов измерений и обработке ин-
формации об аварийных ситуациях, при использовании текущего времени
при вычислениях. Аппаратная реализация КТС системы единого времени
обычно основана на использовании задающего генератора тактовых импуль-
сов, делителя частоты, счетчиков или пересчетных схем, запускаемых про-
граммно или кнопкой в нужные моменты времени. Значительная часть вы-
числений, производимых управляющим ВК, имеет определенную перио-
дичность выполнения. Поэтому в состав алгоритма диспетчеризации
вычислений управляющего ВК включают специальную подпрограмму, кото-
рая осуществляет наблюдение за показаниями счетчика реального времени и
в определенные моменты производит запись заявок на выполнение периоди-
ческих подпрограмм.
Центральный пульт управления предназначен для связи между опера-
тором и оборудованием КТС или отдельными его подсистемами. Он обеспе-
чивает: управление работой всех или заданной подсистемы КТС; контроль за
состоянием КТС (подсистемы); проведение наладочных и профилактических
работ.
Длительное использование автоматизированных пунктов (органов)
управления невозможно без специальных технических средств обеспечения
нормального функционирования как КСА, так и личного состава. К таким
средствам относятся КТС энергоснабжения и КТС обеспечения жизнедея-
тельности.
Комплекс технических средств энергоснабжения предназначен для
обеспечения всех потребителей пункта (органа) управления электроэнергией
как в повседневном, так и в автономном периодах боевой деятельности. При
повседневной деятельности пункты (органы) управления обеспечиваются
электроэнергией от внешних источников, принадлежащих Минэнерго РФ.
501
При автономной работе обеспечение электроэнергией осуществляется от ав-
тономных источников питания (обычно автономное питание пунктов управ-
ления осуществляется от дизель-генераторной установки).
Комплекс технических средств обеспечения жизнедеятельности
включает системы отопления, водо- и воздухоснабжения, фильтровентиля-
ции, кондиционирования, канализации и дренажа, пожарной сигнализации и
пожаротушения, приборы для оценки радиоционной обстановки и др., задача
которых состоит в обеспечении нормального режима работы боевого расчета
личного состава пунктов (органов) управления в течение времени, необходи-
мого для выполнения боевой задачи.
Комплекс технических средств внутренней и внешней связи подраз-
деляется на подсистемы оперативно-командной и технической связи. Под-
система оперативно-командной связи включает в себя внешнюю и внутрен-
нюю оперативно-командную связь.
Подсистема внешней оперативно-командной связи предназначена для ор-
ганизации между элементами АСУ речевой телефонной связи операторов,
переговоров технического персонала, обслуживающих КСА и средства связи,
а также для телеграфной передачи. Внешняя оперативно-командная связь иг-
рает существенную роль в обеспечении постоянной готовности средств ав-
томатизации и связи. Как правило, между сопрягаемыми элементами АСУ
организуется не менее двух телефонных каналов оперативно-командной свя-
зи, что позволяет обеспечить необходимую надежность и бесперебойность
передачи информации. Основные и резервные телефонные каналы опера-
тивно-командной связи организуются по территориально разнесенным трас-
сам. Телеграфные каналы оперативно-командной связи обычно не резерви-
руются.
Внешняя оперативно-командная связь может быть организована по прин-
ципу двусторонней телефонной связи или по принципу громкоговорящей
связи. Громкоговорящая связь строится в общем случае по избирательно-
циркулярной схеме, что позволяет с высокой оперативностью одновременно
вести независимые переговоры по индивидуальным направлениям,
объединять индивидуальные направления при выборочном циркуляре, а
также организовывать общую циркулярную сеть с обеспечением привилегии
циркулярной передачи перед индивидуальными переговорами и выборочным
циркуляром. Двусторонняя телефонная связь, обеспечивающая соединение
абонентов друг с другом, используется при длительных переговорах. При
этой связи существенно снижаются помехи окружающим лицам, а потери
времени на операции вызова и вхождения в связь оправданы большой про-
должительностью переговоров.
Оперативно-командная связь базируется на сетях проводной, тропосфер-
ной, радиорелейной или спутниковой связи.
Подсистема внутренней оперативно-командной связи является составной
частью организуемой в АСУ оперативно командной связи и предназначена
для обеспечения четкого взаимодействия при решении задач управления и
обработки информации как внутри функциональных групп операторов, так и
502
между группами операторов КСА. Внутренняя оперативно-командная связь,
так же как и внешняя, может строиться по принципу двусторонней телефон-
ной связи или по принципу громкоговорящей связи.
При организации телефонной связи реализуются следующие функции:
возможность выхода с рабочего места оператора на телефонные станции
внутренней и дальней связи; возможность переключения канала дальней свя-
зи с коммутатора непосредственно на рабочее место оператора.
При организации громкоговорящей связи, как правило, выполняются сле-
дующие основные функции: прямая двусторонняя связь по индивидуальным
направлениям (избирательная связь); объединение индивидуальных
направлений в группы, в каждой из которых обеспечивается циркулярная
передача, и объединение групп в единую общую сеть данного объекта; прием
вызова голосом независимо от занятости абонента по линиям телефонной
связи и другим линиям громкоговорящей связи; обеспечение привилегии
циркулярной передачи перед индивидуальными переговорами; возможность
изменения числа абонентов в любой циркулярной сети.
Подсистема передачи данных состоит из трактов передачи данных, ко-
торые представляют собой совокупность каналов связи и оконечных уст-
ройств. Оконечные устройства, в свою очередь, состоят из оконечных техни-
ческих средств передачи данных и оконечных технических средств связи.
Первые являются принадлежностью соответствующего КСА (описаны выше
как КТС передачи данных), а вторые являются принадлежностью узла связи
данного пункта управления.
В состав оконечных технических средств связи входят следующие основ-
ные элементы: кроссовая аппаратура и аппаратура уплотнения (каналообра-
зования). Кроссовая аппаратура предназначена для взаимного соединения
(кроссировки) различного вида аппаратуры узла связи, аппаратура каналооб-
разования - для обеспечения возможности использования одной физической
цепи (линии связи) для передачи информации по нескольким каналам связи
(для нескольких абонентов). Оконечные технические средства передачи дан-
ных и оконечные технические средства связи являются групповыми устрой-
ствами. так как обслуживают всю совокупность трактов передачи данных
конкретного КСА пункта управления.
Тракты передачи данных могут быть организованы на каналах провод-
ной, тропосферной, радиорелейной, спутниковой и других типов связи. Они
должны обеспечивать бесперебойную, надежную и достоверную при задан-
ном уровне задержек и потерь передачу смысловой и служебной информации
между различными элементами АСУ.
Наиболее важные характеристики каналов связи: степень искажений, ко-
торым подвергается передаваемый сигнал, уровень помех в канале и затуха-
ние сигнала. Линейные искажения состоят из частотных и фазовых, они оп-
ределяются переходной характеристикой канала или. что эквивалентно, ком-
плексным коэффициентом передачи канала. Для уменьшения фазовых
искажений в канале связи включают фазокорректирующие цепи. Нелинейные
искажения возникают в результате действия нелинейных элементов и узлов
503
(дроссели и трансформаторы с сердечниками, усьлителн. окислившиеся кон-
такты и др.). При наличии нелинейных искажений в составе сигнала появля-
ются высшие гармонические составляющие и комбинационные частоты.
В результате воздействия помех сигнал искажается и условия разделения
сигналов ухудшаются. Источниками синусоидальных, импульсных и флук-
туационных помех являются соседние передагчики. промышленные уста-
новки. линии электропередачи, атмосферные помехи, внутренние шумы в
аппаратуре связи и др. Помехи в реальных системах связи ограничивают
нижний уровень мощности сигнала и достоверность (надежность) связи.
Затухание канала связи определяется потерей мощности сигналов в нем
(уменьшением уровня мощности сигнала).
По характеру передаваемых сообщений каналы связи разделяют на теле-
графные. телефонные, фототелеграфные, радиовещания, телевизионные, те-
лемеханические, передачи данных, радиолокационные и др. Они различают-
ся главным образом диапазоном и полосой частот.
Качество функционирования средств приема-передачи данных принято
характеризовать следующими показателями: скоростью передачи данных,
пропускной способностью, достоверностью передачи сообщений.
Скорость передачи данных характеризует количество информации, пере-
даваемой в единицу времени. Скорость передачи двоичных сигналов оцени-
вается количеством элементарных посылок, передаваемых в одну секунду,
т.е. в с ’ (бодах). По скорости передачи различают три типа трактов передачи
данных: низкоскоростные, имеющие скорость передачи до 200 дв.разрУс.
и базирующиеся на телеграфных каналах связи; срсднескоростные со скоро-
стью передачи от 200 до 5000 дв.разр./с, базирующиеся на телефонных кана-
лах связи; высокоскоростные со скоростью передачи свыше 5000 дв.разр./с,
базирующиеся на телефонных каналах или специальных линиях связи.
Под пропускной способностью канала связи понимают максимальное ко-
личество информации, которое может быть передано в единицу времени при
требуемой достоверности передачи сообщений.
Достоверность передачи сообщений характеризует степень соответствия
принимаемых сообщений передаваемым. Количественно она может быть
оценена вероятностью правильного или вероятностью ложного приема ин-
формации. С точки зрения достоверности передачи информации различают
следующие типы трактов передачи данных: малой достоверности с ве-
роятностью сбоя одиночного разряда до 102, средней достоверности с ве-
роятностью сбоя одиночного разряда I О’3... 105; высокой достоверности с ве-
роятностью сбоя одиночного разряда менее 10Л Для повышения достоверно-
сти передачи сообщений применяются корректирующие коды, основанные
на введении избыточности.
Математическое обеспечение АСУ - совокупность математических ме-
тодов. моделей и алгоритмов, примененных в АСУ.
Математическое обеспечение (МО) представляет собой совокупность
методов и средств, позволяющих строить математические модели и алгорит-
мы решения функциональных задач управления. Оно включает в себя сред-
504
ства МО, методы выбора или построения МО. В состав средств входят моде-
ли и методы решения типовых функциональных задач управления, матема-
тические средства моделирования, методы оценки качества получаемых ре-
шений. К методам выбора и построения МО можно отнести методы опреде-
ления типа функциональной задачи управления, методы построения
математических моделей, методы оценки адекватности используемых мате-
матических моделей.
Математические методы представляют собой различные способы исполь-
зования математического аппарата тех или иных математических теорий. В
составе МО АСУ математические методы выступают в качестве средств по-
строения математических моделей.
Математическая модель представляет собой описание рассматриваемого
объекта или процесса (оригинала) на языке математических соотношений.
Процесс построения математической модели и ее применение для исследова-
ния оригинала называют математическим моделированием.
Классификация математических моделей показана на рис. 15.6. В динами-
ческих моделях в отличие от статических учитывается фактор времени, а в
стохастических (случайных) в отличие от детерминированных - случайные
факторы. В моделях случайных состояний случайные факторы учитываются в
виде случайных величин, задаваемых законами их распределения, а в моделях
средних состояний случайные факторы представляются их числовыми харак-
теристиками (математическое ожидание, дисперсия и др.).
Аналитическая модель — описание оригинала на языке математиче-
ских зависимостей. Под математическими зависимостями понимают математи-
ческие соотношения, характеризующие функциональные зависимости и взаимные
соответствия (равенство, неравенство, принадлежность, истинность, ложность
и др.) переменных величин, представленных в символьной форме.
Имитационная математическая модель — описание оригинала на языке
математических предписаний. Под математическими предписаниями понимают
математические соотношения, устанавливающие вид и порядок ма-
тематических и логических действий над переменными величинами, пред-
ставленными в символьной форме. При осуществлении действий, описываемых
имитационной моделью, происходит математическое воспроизведение про-
странственных, временных и других свойств оригинала.
В моделях без усреднения воспроизводится и используется однократная
реализация моделируемого объекта (процесса), в то время как в статистических
моделях воспроизводится некоторое множество случайных реализаций и по-
лучаемые при этом результаты усредняются.
505
Рис. 15.6. Классификация математических моделей:
1 — детерминированные; 2 — стохастические; 3 — случайных состояний;
4 — динамики средних состояний; 5 — статики средних состояний; 6 — ана-
литические; 7 — имитационные; 8 — без усреднения; 9 — статистические
В состав МО АСУ входят математические модели, воплощаемые в виде
алгоритмов. Алгоритмы представляют собой подкласс имитационных моделей,
обладающих свойствами, обеспечивающими возможность их непосредственной
практической реализации (например, с помощью средств вычислительной тех-
ники).
Алгоритм — это совокупность точных предписаний, задающих конечную по-
следовательность действий, которые надо выполнить при варьируемых исход-
ных данных для получения требуемого результата.
Основные свойства алгоритмов: массовость (применимость при раз-
личных допустимых значениях исходных данных); результативность (полу-
чение результата за конечное количество шагов); и определенность (получение
одинаковых результатов при одних и тех же исходных данных).
Способы записи алгоритмов: словесно-аналитический, графический
(с использованием символов, предусмотренных ГОСТ), на алгоритмических
языках.
В составе МО АСУ алгоритмы выступают в качестве способов решения
задач на ЭВМ.
Под задачей, решаемой на ЭВМ, понимают методику получения требуе-
мых выходных данных при заданных исходных данных, допущениях и огра-
ничениях. Допущения — это предположения об упрощении реальных
506
объектов или процессов, вводимые при формализации задачи. Формализация
задачи представляет собой процесс, ведущий от первоначально составляемого
нестрогого — содержательного (вербального) описания задачи — к точному опи-
санию способа ее решения на том или ином искусственном (формализованном)
языке. Формализация задачи включает разработку строгой постановки задачи,
построение аналитической модели рассматриваемого в задаче объекта или про-
цесса, составление и описание алгоритма решения задачи.
Ограничения — это требования, определяющие форму представления и
пределы изменения значений входных и выходных данных.
Классификация задач, решаемых на ЭВМ, может быть проведена по
целевому назначению, по характеру обработки данных и по области приме-
нения.
По целевому назначению среди задач можно условно выделить
оперативно-тактические, инженерные, учетно-плановые и др.
Оперативно-тактические задачи предусматривают определение количест-
венных и качественных показателей, необходимых для принятия решений,
планирования боевых действий и выполнения других функций управления
войсками. По уровню управления эти задачи могут быть разделены на опера-
тивные и тактические.
Инженерные задачи предназначены для проведения инженерных расче-
тов.
Учетно-плановые задачи предусматривают автоматизацию информаци-
онно-расчетных процессов по материально-техническому обеспечению
войск, учету наличия личного состава, учету состояния техники и т. п.
По характеру отработки данных задачи, решаемые на ЭВМ, де-
лятся на информационные и расчетные.
Информационные задачи представляют собой машинные методики, реа-
лизующие алгоритмы сбора, обработки, систематизации и выдачи данных,
необходимых для повышения эффективности различных видов управленче-
ской деятельности или обеспечения решения расчетных задач.
Расчетные задачи представляют собой методики вычисления на ЭВМ чи-
словых значений искомых показателей. Более или менее четко эти задачи
можно поделить на методики машинного расчета и методики машинного мо-
делирования.
По области практического применения задачи, решаемые на
ЭВМ в интересах управления войсками, разделяют на штабные, исследова-
тельские и учебные.
Штабные задачи применяются в повседневной деятельности по управле-
нию войсками.
Исследовательские задачи используются при обосновании способов по-
строения и применения вооружения и боевой техники в процессе их разра-
ботки и испытаний, а также при исследовании других вопросов.
Учебные задачи создаются для боевой подготовки войск и учебного про-
цесса военно-учебных заведений.
507
Общая задача, решаемая при автоматизированном управлении, реализу-
ется совокупностью взаимосвязанных алгоритмов, что и обеспечивает авто-
матизацию основных функций управления. В содержание задачи обычно
включают целевое назначение, математическую модель, функциональную и
информационную связи с другими задачами, способы реализации в ВК и
приближенные оценки эффекгивности. На этапе физическою проектирова-
ния исходным для разработки программного обеспечения является документ
«Постановка задачи и алгоритм решения», в котором излагаются организа-
ционно-техническая сущность задачи, ее информационная база и алгоритми-
зация решения. Существующие в настоящее время методы построения алго-
ритмов в основном не содержат формальной основы для их автоматизиро-
ванного синтеза, т. е. разработка алгоритмов представляет собой творческий
процесс. Разработчику обычно предоставляется определенная методика по
процессу алгоритмизации задачи, включающая в себя выделение предпола-
гаемых операторов, запись содержания действий, установление порядка их
выполнения. При этом рекомендуется реализовать ряд типовых этапов по
разработке алгоритма, к которым можно отнести следующие:
описание общего замысла алгоритма; формализация задачи; разработка
обобщенной схемы алгоритма; разработка структуры отдельных блоков; оп-
ределение возможности применения стандартных блоков; стыковка блоков
алгоритма; разработка блоков логического контроля; оптимизация схемы ал-
горитма; уточнение поля информации; оценка машинных ресурсов для реа-
лизации алгоритма.
Учитывая, что для традиционных задач управления уже разработаны ти-
повые алгоритмы решения, в первую очередь при построении алгоритмов
необходимо учесть предшествующий опыт и использовать имеющийся задел.
Весьма трудоемкой на этапе физического проектирования является рабо-
та по написанию программ.
Программное обеспечение АСУ - совокупность программ на носителях
данных и программных документов, предназначенная для отладки, функцио-
нирования и проверки работоспособности АСУ.
Программное обеспечение (ПО) АСУ включает в себя две составляющие:
общее ПО и специальное ПО.
Общее ПО АСУ (ОПО) - часть программного обеспечения АСУ, пред-
ставляющая собой совокупность программных средств, разработанных вне
связи с созданием данной АСУ.
Специальное ПО АСУ (СПО) - часть программного обеспечения АСУ,
представляющая собой йовокупность программ, разработанных при создании
данной АСУ.
Обычно ОПО АСУ представляет собой совокупность программ общего
назначения, предназначенных для организации вычислительного процесса и
для организации технологических процессов разработки и сопровождения
программных средств.
ОПО должно обеспечивать требуемый режим обработки данных, кото-
рый с развитием средств вычислительной техники непрерывно совершенст-
508
вовался в направлении приближения вычислительной среды к пользователю.
В общем случае средства ОПО могут быть разделены на управляющую и об-
рабатывающую части. Управляющая часть обеспечивает решение задачи в
требуемом режиме. Обрабатывающая часть транслирует содержание задачи,
записанной на некотором языке программирования, во внутренний машин-
ный язык ЭВМ. С помощью обрабатывающей части осуществляется также
редактирование программных модулей и генерация необходимой конфигура-
ции вычислительной системы в целом. Пакеты прикладных программ со-
ставляют СПО АСУ.
СПО включает программы и комплексы программ, реализацией кото-
рых достигается выполнение целей и задач, соответствующих прямому на-
значению АСУ. В их состав входят программы, реализующие алгоритмы
сбора и обработки данных, выполнения расчетов и моделирования в интере-
сах оптимизации деятельности управленческого персонала АСУ, алгоритмы
ввода-вывода данных, а также алгоритмы их преобразования в целях ото-
бражения и осуществления обмена с источниками и потребителями инфор-
мации.
Эффективность работы АСУ в значительной мере определяется построе-
нием управляющей программы реального времени (центрального диспетче-
ра), которая должна обеспечить устойчивое функционирование системы в
любых условиях, в том числе при ее полной загрузке. Качество функциони-
рования АСУ связано с реализацией управляющей программой многих задач,
основными из которых являются следующие:
организация приема и обеспечение высокой скорости обработки всего
потока поступающей в КСА информации;
незамедлительное принятие решений по вновь появившимся в АСУ объ-
ектам обслуживания;
своевременный пересмотр решений при изменении состояний управляе-
мого процесса;
обеспечение минимальных задержек при доведении принятых решений
до управляемых объектов;
обеспечение высокой скорости восстановления хода вычислительного
процесса после сбоев и отказов КСА и его элементов;
обеспечение требуемой скорости обмена как между различными КСА,
так и между устройствами внутри КСА,
реконфигурация средств АСУ и различных КСА применительно к соз-
давшимся условиям функционирования;
высокая точность привязки всех процессов обработки информации и
управления к единому реальному времени.
В документации на программное обеспечение дается постановка задачи,
ее описание и математическая модель решения. Документация на программ-
ное обеспечение предназначена для того, чтобы достичь определенного
уровня детализации алгоритма, при котором он может быть реализован про-
граммистом без дополнительных разъяснений. В соответствии с этим суще-
ствует ряд форм представления алгоритмов, к которым можно отнести еле-
509
дующие: описание на естественном языке, задание в математической форме,
графическая запись алгоритма, описание алгоритма с использованием ин-
формационных языков, представление алгоритмов с помощью алгоритмиче-
ских языков. Обобщенное представление конкретного алгоритма дает вычис-
лительный граф системы, построенный на основе модели процесса обработ-
ки.
Основными требованиями к ПО АСУ являются:
1. ПО должно быть достаточно для выполнения всех функций АСУ, а
также должно иметь средства организации всех требуемых процессов обра-
ботки данных, позволяющие своевременно выполнять все автоматизирован-
ные функции во всех регламентированных режимах функционирования АСУ.
2. ПО должно обладать следующими основными свойствами:
функциональная достаточность (полнота);
надежность (в том числе восстанавливаемость, наличие средств выявле-
ния ошибок);
адаптируемость;
модифицируемость;
модульность построения;
удобство эксплуатации.
3. ПО должно допускать загрузку и проверку по частям и производить
замену одних программ без коррекции других
4. ПО должно быть построено таким образом, чтобы отсутствие отдель-
ных данных не сказывалось на выполнении функций АСУ, при которых эти
данные не используются.
5. ПО должно иметь средства диагностики технического обеспечения
АСУ и контроля на достоверность входной информации.
6. В ПО должны быть реализованы меры по защите от ошибок при вводе
и обработке информации, обеспечивающие заданное качество выполнения
функций АСУ.
7. ОПО должно позволять осуществлять настройку компонентов СПО и
дальнейшее развитие ПО АСУ без прерывания процесса ее функционирова-
ния. Должна быть обеспечена защита уже сгенерированной и загруженной
части ПО от случайных изменений.
8. Все программы СПО конкретной АСУ должны быть совместимы как
между собой, так и с ОПО.
Основными задачами проектирования математического и программ-
ного обеспечения (МПО) являются:
выбор (создание, отладка и сдача в эксплуатацию) средств общего мате-
матического и программного обеспечения (ОМПО), разработка технологиче-
ских процессов создания программ на основе принципиальных решений,
принятых при общесистемном проектировании;
настройка (создание) управляющей программы реального времени (цен-
трального диспетчера);
510
построение моделей для исследования и отработки различных функ
аномальных задач специального математического и программного обеспече-
ния (СМПО);
выбор математических методов и моделей, разработка алгоритмов и про-
грамм решения функциональных задач СМПО;
организация на базе принципов и методов, разработанных в процессе
общесистемного проектирования, комплексного проектирования алгоритмов
и программ, включая задачи комплексной увязки всех программ в единую
программную систему, оптимального использования вычислительных
ресурсов технических средств по памяти и производительности, адаптации
МПО к условиям функционирования АСУ;
проведение автономной, полукомплексной и комплексной отладки МПО
и сдача его в эксплуатацию.
Лингвистическое обеспечение АСУ (ЛО АСУ) - совокупность средств и
правил для формализации естественного языка, используемых при общении
оперативного состава и эксплуатационного персонала АСУ с КСА при функ-
ционировании АСУ.
Средства для формализации естественного языка персонала АСУ пред-
ставляют собой языки программирования и информационные языки.
Языки программирования — это алгоритмические языки, предназна-
ченные для описания программ обработки данных. В настоящее время ис-
пользуется множество языков программирования разного уровня развития.
Машинные языки были исторически первыми. Их алфавит содержит
только цифры (например, операции, выполняемые ЭВМ, обозначаются: 01 —
сложение, 02 — вычитание и т. д.). Программа на машинном языке пред-
ставляет последовательность машинных команд и является полной инструк-
цией о последовательности операций, которые должна выполнить ЭВМ.
Языки символьного кодирования появились в результате перехода от
цифровых обозначений команд к более наглядным символьным (например,
операции, выполняемые ЭВМ, обозначаются: СЛ - сложение, ВЧ - вы-
читание и т. д.). К таким языкам относятся автокоды (языки 1:1), каждая
команда которых соответствует одной машинной команде, и макроязыки
(языки 1 : п), команды которых, называемые макрокомандами, соответствуют
последовательностям из нескольких машинных команд.
Использование языков символьного кодирования и всех последующих
языков еще более высокого уровня развития требует наличия транслятора,
осуществляющего перевод программы с данного языка на машинный.
Языки символьного кодирования, как и машинные языки, - машинно-
зависимые, требующие учета особенностей конструкции конкретных ЭВМ
и состава их оборудования. Этими языками пользуются только про-
фессиональные программисты.
Языки высокого уровня используют общеизвестную математическую
символику и служебные слова, применяемые в обычной речи (НАЧАЛО,
ВЫПОЛНИТЬ и др.). Обычно они являются машинно-независимым,
и программирование на них доступно широкому кругу специалистов. С целью
511
упрощения многие из этих языков разработаны как проблемно-
ориентированные для решения инженерных и научных задач, технико-
экономических задач, задач обработки списков символьных данных различ-
ного содержания и т. д. Созданы и универсальные языки програм-
мирования. которые моуг успешно применяться в различных предметных
областях.
Информационные языки предназначены для описания данных, цирку-
лирующих в АСУ, и запросов на ввод, вывод данных и их обработку по про-
граммам. заблаговременно составленным на языках программирования. Сре-
ди них выделяют языки управленческого персонала, используемые
для обмена сообщениями, связанными с прямым предназначением АСУ, и
языки обслуживающего персонала —дня обмена сообщениями в ин-
тересах задания режимов работы АСУ и ее элементов и поддержания их в
требуемом эксплуатационно-техническом состоянии.
Основные требования к ЛО АСУ следующие:
1. ЛО должно быть достаточным для общения различных категорий
пользователей в удобной для них форме со средствами автоматизации и для
осуществления процедур преобразования и машинного представления обра-
батываемой в АСУ информации.
2. В ЛО должны быть:
предусмотрены языковые средства для описания любой используемой в
АСУ информации;
унифицированы используемые языковые средства;
стандартизованы описания однотипных элементов информации и записи
синтаксических конструкций;
обеспечены удобство, однозначность и устойчивость общения пользова-
телей со средствами автоматизации;
предусмотрены средства исправления ошибок, возникающих при обще-
нии пользователей с КСА.
3. ЛО должно быть отражено в документации (инструкциях, описаниях)
организационного обеспечения АСУ в виде правил общения пользователей с
КСА во всех режимах функционирования АСУ.
Информационное обеспечение АСУ - совокупность форм документов,
классификаторов, нормативной базы и реализованных решений по объемам,
размещению и формам существования информации, применяемой в АСУ при
ее функционировании.
Информационное обеспечение (ИО) определяет размещение и формы ор-
ганизации информации, используемой в автоматизированном управлении.
Оно представляет собой совокупность методов и средств построения и реа-
лизации информационной базы и разделяется на две большие группы - вне-
машинное и внутримашинное.
Внемашинное ИО, базируясь на принципах автоматизации информаци-
онного процесса подготовки и представления информации, включает в себя
систему классификации и кодирования, нормативно-справочные документы,
оперативные документы, методические и инструктивные материалы. Инфор-
512
мания здесь обычно отображается в виде документов, движение которых в
процессе функционирования АСУ реализуется в соответствии с организаци-
онной структурой системы управления.
Внутримашинное ИО включает в себя информационные массивы, со-
ставляющие основу информационной базы системы.
Обязательными составными частями внемашинного ИО являются: уни-
фицированная система документации; классификаторы оперативно-
тактической и военно-технической информации; словари оперативно-
тактических и военно-технических терминов; правила формализации естест-
венного языка для ввода информации в КСА (языковые средства
пользовательского интерфейса).
Основу ИО составляют единая система классификации и кодирования
информации (ЕСКК), унифицированная система документации и массивы
данных, используемых при функционировании АСУ.
Единая система классификации и кодирования военно-
технической информации - совокупность принятых методов и результата клас-
сификации и кодирования в виде комплекса взаимосвязанных клас-
сификаторов. ЕСКК применяется для однозначного и компактного описания
больших объемов информации в целях унификации и облегчения сопряже-
ния различных средств автоматизации и АСУ между собой, создания более
простых условий практического использования АСУ и подготовки специали-
стов для их эксплуатации.
Классификация информации — разделение некоторого множества объек-
тов на подмножества в соответствии с принятыми признаками и методами
классификации.
Признак классификации —это некоторая характеристика объектов,
по которой производится классификация. Например, при классификации
средств воздушно-космического нападения такими признаками могут быть:
район базирования, тип средства, радиус (дальность) действия, скорость и
высота полета, вооружение, способ боевого применения и т. п.
Метод классификации определяет порядок разделения множества
объектов на подмножества. Обычно применяются— иерархический и фасет-
ный методы классификации (или их комбинация).
Кодирование информации — образование и присвоение объекту класси-
фикации (подмножеству объектов) или признаку классификации некоторого
кодового обозначения в соответствии с принятым методом кодирования. Ко-
дирование объектов может осуществляться методами порядкового, серийно-
порядкового, последовательного и параллельного кодирования.
Результаты классификации и кодирования отражаются в классифика-
торах, содержащих систематизированный свод наименований объектов
классификации, признаков классификации и их кодовых обозначений.
Унифицированная система документации (УСД) — это
определенным образом организованный комплекс взаимосвязанных
документов, отвечающих единым правилам и требованиям и содержащих
ин(|юрмацию, необходимую для управления войсками с применением средств
513
необходимую для управления войсками с применением средств автоматиза-
ции и связи.
Под документом понимается всякий материальный носитель данных, свя-
занных с деятельностью войск, имеющий юридическую силу. По назначению
документы делятся на боевые, служебные и уставные, а по содержанию — на
руководящие (организационно-распорядительские, плановые, инструктивные
и др.) и информационно-отчетные (справочные, учетные, отчетные и др.).
К УСД предъявляются следующие основные требования: минимально
возможное количество типов и форм документов и их согласованность между
собой; соответствие задачам, решаемым в процессе управления войсками;
удобство работы с документами; возможность непосредственной обработки
документов средствами автоматизации.
Массивы данных, используемых в АСУ, в целях организации их цен-
трализованной обработки объединяются в базы данных (БД), совокупность
которых образует информационный фонд.
База данных представляет собой поименованную совокупность систе-
матизированных данных, относящихся к определенной предметной области:
данные о группировке и вооружении противника; данные о группировке и
вооружении своих войск; данные о районе обороны, условиях боевых дейст-
вий; нормативно-справочные данные и др.
Информационный фонд (ИФ) наряду с БД, как правило, включает
архивы. Создание ИФ в виде заблаговременно введенных в память ЭВМ и
при необходимости обновляемых данных позволяет повысить эффективность
применения средств автоматизации за счет уменьшения избыточности потока
вводимых данных, автоматизации процессов их подготовки и централизован-
ного использования для всего множества задач, решаемых АСУ. Работа с дан-
ными ИФ осуществляется посредством системы управления базами данных
(СУБД).
СУБД — совокупность языковых и программных средств, предназначен-
ных для создания, ведения и совместного использования БД многими пользо-
вателями. Программные средства СУБД автоматизируют такие процессы, как
организация данных (ввод, контроль и размещение данных в устройствах па-
мяти ЭВМ), ведение БД (обновление, изменение, расширение состава, ре-
организация, исключение данных и т. п.), обработка запросов к БД и инфор-
мационная обработка данных (поиск, выборка, формирование и выдача) в со-
ответствии с запросами, а также обеспечивают в АСУ защиту данных от
разрушения и несанкционированного доступа.
Основными требованиями к ИО АСУ являются:
1. ИО должно быть достаточным для выполнения всех функций АСУ.
2. Для кодирования информации должны быть применены классификато-
ры, принятые у заказчика АСУ.
3. ИО АСУ должно быть совместимо с ИО систем, взаимодействующих с
ней, по содержанию, системе кодирования, методам адресования, форматам
данных и форме представления информации, получаемой и выдаваемой
АСУ.
514
4. Формы документов, создаваемых АСУ, должны соответствовать тре-
бованиям стандартов или нормативно-технических документов ведомства за-
казчика.
5. Совокупность информационных массивов должна быть организована в
виде баз данных на машинных носителях.
6. Форма представления выходной информации должна быть согласована
с заказчиком (пользователем) системы.
7. Применяемые в выходных документах АСУ термины и сокращения
должны быть общепринятыми и согласованы с заказчиком системы.
8. В АСУ должны быть предусмотрены необходимые меры по контролю
и обновлению данных в информационных массивах КСА, восстановлению
массивов после отказа каких-либо программно-технических средств АСУ, а
также контролю идентичности одноименной информации в базах данных
КСА.
Эргономическое обеспечение АСУ - совокупность реализованных реше-
ний в АСУ по согласованию психологических, психофизиологических, ан-
тропометрических, физиологических характеристик и возможностей пользо-
вателей АСУ с техническими характеристиками КСА АСУ и параметрами
рабочей среды на рабочих местах персонала АСУ.
Эргономическое обеспечение обеспечивает оптимальные условия для вы-
сокоэффективной и безошибочной деятельности человека-оператора в авто-
матизированной системе. В состав эргономического обеспечения входят ме-
тоды, методики, нормативно-справочные документы и технические средства,
обеспечивающие формулировку и реализацию требований к рабочим местам
человека в системе, а также к условиям деятельности обслуживающего пер-
сонала. При этом предусматриваются меры по созданию нормативных усло-
вий взаимодействия человека и технической системы, что позволяет резко
снизить вероятность ошибочных действий пользователей АСУ. Эргономиче-
ские требования определяются характером деятельности, т. е. ролью челове-
ка в системе, и закладываются в процессе ее проектирования. Поэтому при
создании АСУ разрабатываются формализованные модели деятельности че-
ловека (коллектива людей) в организационно-технической системе, и на ос-
нове количественной оценки ее параметров предъявляются обоснованные
требования к уровню подготовки, формированию системы отбора, повыше-
нию квалификации кадров, работающих в контуре автоматизированного
управления.
Эффективность взаимодействия оперативного состава и технических
средств достигается оптимальным распределением функций между средст-
вами автоматизации и человеком-оператором, разработкой хорошо проду-
манной конструкции органов управления средств отображения, заданием по-
нятной и удобной для операторов символики отображения, а также обеспе-
чением высокой скорости реакции средств отображения на запросы
операторов.
Организационное обеспечение АСУ - совокупность документов,
устанавливающих организационную структуру, права и обязанности
оперативного
515
состава и эксплуатационного персонала АСУ в условиях функционирования,
проверки и обеспечения работоспособности АСУ
Основу организационного обеспечения (ОО) составляет схема организа-
ционной структуры, которая содержит: состав подразделений (должностных
лиц) организации, обеспечивающих функционирование АСУ либо исполь-
зующих при принятии решения информацию, полученную от АСУ; основ-
ные функции и связи между подразделениями и отдельными должностными
лицами, их подчиненность.
При разработке документов ОО руководствуются принципами системного
подхода, актуальности и эффективности работ, рационального сочетания воз-
можностей человека и техники, непрерывности развития АСУ, типизации тех-
нических и организационных решений, а также принципом регламентирован-
ной ответственности.
Организационное обеспечение делят на общее и специальное.
К общему ОО относятся руководящие документы (приказы, директивы,
положения, руководства), регламентирующие общие вопросы создания, внедре-
ния и применения автоматизированных систем управления.
Кспециальному ОО относятся документы (методики, технические описа-
ния, инструкции, рекомендации и др.), определяющие содержание и порядок
разработки, внедрения и использования конкретной АСУ.
Основными требованиями к ОО АСУ являются:
1. ОО должно быть достаточным для эффективного выполнения персона-
лом АСУ возложенных на него обязанностей при осуществлении всех авто-
матизированных и неавтоматизированных функций управления.
2. ОО АСУ должна позволять выполнение всех функций АСУ с учетом
их распределения по уровням управления.
3. Распределение обязанностей между операторами должно осуществ-
ляться с учетом установленного нормативно-техническими документами до-
пустимого уровня психофизиологической и эмоциональной нагрузки опера-
торов, связанной с выполнением возлагаемых на него обязанностей, и его
ответственности за итоговые и промежуточные результаты работы, а также
требуемого уровня активности в процессе его работы.
4. Инструкции ОО АСУ должны определять действия персонала АСУ,
необходимые для выполнения каждой автоматизированной функции во всех
режимах функционирования АСУ, с учетом заданных требований по без-
ошибочности и быстродействию реализации персоналом АСУ своих функ-
циональных обязанностей, а также содержать конкретные указания о дейст-
виях в случаях возникновения аварийных ситуаций или нарушения нормаль-
ных условий функционирования АСУ.
5. По каждой автоматизируемой функции, которая выполняется во
взаимодействии данной АСУ с другими системами, инструкции персоналу
АСУ и этих систем должны быть взаимоувязаны для всех режимов
выполнения данной функции и содержать указания о действиях персонала
при отказах технических средств АСУ.
516
Методическое обеспечение АСУ - совокупность документов, описываю-
щих технологию функционирования АСУ, методы выбора и применения
пользователями технологических приемов для получения конкретных ре-
зультатов при функционировании АСУ.
Документы методического обеспечения включают описание:
элементов функциональной структуры АСУ (подсистем АСУ);
автоматизированных функций и (или) задач (комплексов задач);
совокупности действий (операций), выполняемых при реализации авто-
матизированных функций;
информационных связей между элементами и с внешней средой с крат-
ким указанием содержания сообщений и (или) сигналов, передаваемых по
связям, и при необходимости связи других типов (входимости, подчинения и
т.д.);
технологического процесса обработки данных (состав и последователь-
ность выполнения технологических операций по сбору, подготовке, контро-
лю, передаче, обработке и отображению информации).
Документы методического обеспечения должны:
содержать сведения, необходимые для быстрого и качественного освое-
ния и правильной эксплуатации КСА;
содержать указания по деятельности персонала АСУ в аварийных ситуа-
циях или при нарушении нормальных условий функционирования АСУ;
не содержать положений, допускающих неоднозначное толкование.
Правовое обеспечение АСУ • совокупность правовых норм, регламенти-
рующих правовые отношения при функционировании АСУ и юридический
статус результатов ее функционирования. Правовое обеспечение обычно
реализуют в организационном обеспечении АСУ.
Правовое обеспечение представляет собой совокупность нормативных ак-
тов, определяющих организацию, цели, задачи, структуру, функции, а также
правовой статус автоматизированной системы и ее составляющих. Создавае-
мые в рамках правового обеспечения нормативные документы должны
определять правовые стороны как разработки, так и функционирования АСУ.
В состав правового обеспечения наряду с общегосударственными законами
входят также приказы, инструкции и методические материалы министерств,
ведомств, организаций, предприятий и учреждений, в рамках которых разра-
батываются АСУ. В данном виде обеспечения отражается правовой аспект
регулирования отношений разработчика и заказчика в процессе создания
системы. Методическими материалами должны определяться этапы разра-
ботки и используемые при этом средства информационной технологии. При
разработке правового обеспечения особое внимание должно быть обращено
на возможности доступа к банкам данных и банкам знаний, условия исполь-
зования программного продукта, а также правовое положение пользователей
в условиях распределенной обработки информации.
Правовое обеспечение АСУ должно включать совокупность правовых
норм:
517
определяющих юридическую силу информации на носителях данных и
документов, используемых при функционировании АСУ и создаваемых
системой;
регламентирующих правовые отношения между людьми, входящими в
состав персонала АСУ (права, обязанности и ответственность), а также меж-
ду персоналом АСУ и персоналом систем, взаимодействующих с АСУ.
Правила и предписания, вытекающие из юридической силы информации
на носителях данных и правовых норм, должны быть включены в инструк-
ции организационного обеспечения и положения о соответствующих служ-
бах АСУ.
15.7. ОЦЕНКА ЭФФЕКТИВНОСТИ АСУ
Показатели оценки эффективности АСУ, Показатель эффективности
АСУ - это численная мера или характеристика, которая количественно ха-
рактеризует степень выполнения системой цели своего функционирования,
(поставленной задачи, определенной функции) или количественная оценка
свойства, выбранного в качестве характеристики эффективности системы.
АСУ относится к категории сложных систем и имеет множество целей и
свойств, а значит и множество показателей эффективности, но из их числа
для оценки эффективности обычно выбирают самые существенные, самые
значимые показатели.
При выборе совокупности показателей эффективности АСУ необходимо
в первую очередь руководствоваться требованием получения оценок соот-
ветствия системы своему целевому назначению. При этом АСУ должна ха-
рактеризоваться, во-первых, как система, предназначенная для повышения
эффективности боевого применения войск (сил) и средств, управление кото-
рыми осуществляется с использованием АСУ (боевая эффективность АСУ);
а, во-вторых, как система предназначенная для эффективного решения задач
по обработке информации и управлению (функциональная эффективность
АСУ).
Показатели для оценки АСУ можно условно разделить на три большие
группы:
1. Интегральные показатели, которые носят общий (интегральный) ха-
рактер и дают оценку эффекта от внедрения АСУ. К ним в первую очередь
относится показатель прироста эффективности действий управляемых объек-
тов за счет применения рассматриваемого варианта построения АСУ. В каче-
стве интегрального показателя АСУ силами и средствами ВКО обычно ис-
пользуется математическое ожидание предотвращенного ущерба или мате-
матическое ожидание количества уничтоженных целей.
2. Дифференциальные показатели, которые носят частный характер и да-
ют оценку эффективности отдельных свойств АСУ. К ним относятся сле-
дующие показатели: боевая готовность, емкость, пропускная способность,
оперативность, качество решения задач управления, помехоустойчивость,
живучесть, устойчивость, скрытность, мобильность и пределы работы.
518
3. Точечные показатели, которые характеризуют качество функциониро-
вания АСУ в данный момент времени. Это так называемые оперативные по-
казатели управления, которые являются основой для оценки качества и орга-
низации управления информационными процессами, с помощью которых
вырабатываются решения по оптимизации процесса обработки информации
и управления в каждый текущий момент времени. К ним относятся: состоя-
ние работоспособности элементов КСА в текущий момент времени; состоя-
ние информационной загрузки элементов КСА (операторов, программно-
технических средств, каналов связи) в текущий момент времени и др.
Показатели эффективности АСУ должны отражать, с одной стороны, эф-
фективность системы более высокого порядка (метасистемы, составной ча-
стью которой является АСУ), а с другой - способность АСУ осуществлять
решение задач по обработке информации и управлению с требуемым каче-
ством в заданном диапазоне условий применения рассматриваемой системы.
Из указанного следует вывод о принципиальном различии двух подходов
к оценке эффективности АСУ, а именно:
эффективность АСУ как мера вклада, вносимого рассматриваемой систе-
мой в решение задачи системы высшего порядка (метасистемы), куда данная
система входит в качестве составной часть;
эффективность АСУ как мера полноты решения задач рассматриваемой
системы в определенных условиях ее применения.
Заметим, что основным требованием при определении показателя эффек-
тивности АСУ является соответствие данного показателя цели применения
системы в контуре управления войсками (силами) и средствами. Данное тре-
бование наилучшим образом может быть реализовано в рамках системного
подхода при анализе метасистемы (надсистемы) на основе принципа внешне-
го дополнения.
Определим показатель эффективности АСУ исходя из анализа метаси-
стемы. В данном случае эффективность АСУ может оцениваться приростом
эффективности ведения операций (боевых действий) управляемыми силами и
средствами за счет применения данной системы. Формально такой прирост
эффективности ДЭ может быть записан в виде:
ДЭ = (Э’-ЭУЭ',
где Э', Э - показатели эффективности, характеризующие реализацию боевых
возможностей войск (сил) и средств при использовании или отсутствии дан-
ной автоматизированной системы соответственно.
В качестве показателей боевой эффективности Э, Э' обычно использует-
ся математическое ожидание предотвращенного ущерба или математическое
ожидание количества уничтоженных целей. При этом оценку эффективности
в соответствии с приведенной формулой называют оценкой боевой эффек-
тивности АСУ.
Проведем оценку чувствительности данного показателя к основным ха-
рактеристикам АСУ. Для этого рассмотрим основные факторы, определяю-
щие Э'. В общем виде эффективность можно представить следующим об-
разом:
Э'=/Г/7са< Птф> П.1С> ПСпп, Пуо, Пус, Пвс),
где Пса - параметры средств автоматизации;
Птф - параметры тактического фона ведения операций (боевых
действий);
Плс - параметры деятельности личного состава АСУ (как обслуживаю-
щего персонала, так и лиц боевого расчета, принимающих
управляющие решения);
Пспп - параметры средств приема-передачи информации между пунктами
управления различного уровня в АСУ;
Пуи - параметры объектов, управляющих рассматриваемой системой;
Пус - параметры управляемых объектов, подсистем и элементов;
Пес - параметры взаимодействующих систем.
Многопарамстричность задачи оценки эффективности АСУ приводит к
значительным трудностям при попытке создания адекватной модели расчета
Э\ позволяющей определить долю эффективности, вносимой средствами ав-
томатизации в общую эффективность боевых действий (что, вообще, не оз-
начает принципиальной невозможности ее создания).
Исходя из указанных трудностей расчета показателей боевой эффектив-
ности АСУ, основанных на понятии эффективности как мере вклада в эффек-
тивность метасистемы, рассмотрим показатели АСУ, основанные на понятии
функциональной эффективности системы.
К наиболее существенным частным показателям эффективности АСУ,
которые в большей степени влияют на реализацию боевых возможностей
войск (сил) и боевых средств относятся следующие показатели: боевая го-
товность; емкость; пропускная способность; оперативность; качество реше-
ния задач управления; помехоустойчивость; живучесть; устойчивость;
скрытность; мобильность; пределы работы.
Боевая готовность характеризует степень соответствия АСУ решению за-
дач управления войсками (силами) и средствами в любой момент времени.
Количественно этот показатель оценивается временем перевода аппаратуры
АСУ из одной степени боевой готовности в другую, более высокую.
Так как АСУ предназначены для повышения эффективности боевого
применения войск (сил) и боевых средств, то время перевода АСУ в боевой
режим не должно превышать времени перевода боевых средств в готовность
к ведению боевых действий и перевода войск (сил) в боевую готовность при
подготовке и ведении операций.
Емкость характеризует предельные возможности АСУ по решаемым за-
дачам управления войсками (силами) и боевыми средствами. Она может
оцениваться различными показателями по конкретным задачам управления.
Так, например, емкость АСУ по обработке информации о воздушной
обстановке характеризуется максимальным количеством воздушных
объектов, по которым одновременно может производиться прием, обработка
и выдача информации.
520
Емкость АСУ может оцениваться максимат.» ым количеством
каналов одновременного наведения истребительной авиации или числом ба-
тарей, дивизионов зенитных управляемых ракет, которые могут управляться
автоматизировано (или автоматически). Требования к емкости АСУ в основ-
ном определяются организационно-штатной структурой войск и ожидаемым
характером действий воздушного противника.
Пропускная способность характеризует предельные информационные
возможности АСУ при решении задач управления с заданным качеством.
Количественно пропускная способность может быть оценена циклом реше-
ния конкретных задач в АСУ в единицу времени с определенной дискретно-
стью и точностью.
Так, АСУ может характеризоваться количеством одновременно обраба-
тываемых воздушных объектов, количеством выдаваемых целеуказаний ЗРК
или наведений ИА в единицу времени (за определенный промежуток време-
ни). Применением быстродействующих ВК и организацией рационального
процесса боевой работы личного состава достигается достаточно высокая
пропускная способность АСУ.
Оперативность АСУ характеризует ее быстродействие, т.е. возможность
системы реагировать на изменения боевой обстановки. Количественно опе-
ративность системы может быть оценена временными затратами боевого
расчета органа управления при решении задач в процессе управления (работ-
ное время). Чем меньше работное время, тем выше быстродействие системы,
тем выше ее оперативность. Уменьшение составляющих работного времени
без снижения качества решения задач является одним из важнейших направ-
лений по повышению оперативности управления. Быстродействие системы
зависит от степени автоматизации, уровня подготовки личного состава и
слаженности органов управления элементов системы управления.
Качество решения задач управления в АСУ характеризует ее возможно-
сти с требуемой полнотой, своевременностью, достоверностью и точностью
решать поставленные задачи. Количественно этот показатель может выра-
жаться значениями ошибок решения определенной задачи и вероятностью
правильного ее решения.
Например, качество обработки радиолокационной информации в АСУ
оценивается средними квадратическими ошибками сопровождения траекто-
рий воздушных объектов, коэффициентом ложных трасс и др., а качество
решения задач выдачи целеуказание зенитным средствам может оцениваться
вероятностью беспоискового целеуказания станциям наведения зенитных
управляемых ракет.
Помехоустойчивость характеризует способность АСУ выполнять свои
функции в условиях воздействия помех, умышленно создаваемых противни-
ком, а также естественных помех условий существования системы управле-
ния. Помехоустойчивость АСУ зависит от помехозащищенности источников
информации, системы связи АСУ и особенности построения алгоритмов об-
работки информации и боевого управления в КСА. Основной показатель по-
мехоустойчивости - заданная вероятность выполнения поставленных задач
521
управления с использованием АСУ при воздействии помех определенной ин-
тенсивности.
Живучесть характеризует свойство АСУ сохранять или быстро восста-
навливать свою боевую способность по решению задач управления в слож-
ных условиях боевой обстановки. Она складывается из боевой устойчивости
и эксплуатационной надежности.
Боевая устойчивость характеризуется способностью АСУ противостоять
огневому воздействию противника и оценивается количественно вероятно-
стью функционирования системы при выходе из строя отдельных ее элемен-
тов. Наиболее уязвимыми элементами АСУ являются пункты управления и
элементы системы связи.
Основными эксплуатационными свойствами, характеризующими надеж-
ность АСУ, являются безотказность, долговечность, ремонтопригодность и
сохраняемость. Эксплуатационная надежность АСУ может оцениваться ве-
роятностью безотказной работы отдельных элементов системы в течение оп-
ределенного времени, вероятностью их восстановления в течение заданного
промежутка времени, средним временем наработки на отказ элементов сис-
темы, а также средним временем их восстановления.
В понятие "живучесть" могут входить такие свойства АСУ, как ее спо-
собность получать информацию от источников по различным заранее преду-
смотренным вариантам, а также сохранять возможность управления объек-
тами в ходе боевых действий при изменении ими своего местоположения
(маневр в ходе боя).
В целом живучесть АСУ определяется живучестью наиболее уязвимых ее
элементов с точки зрения способности их противостоять воздействию про-
тивника, а также степенью резервирования элементов АСУ в процессе ее
функционирования.
Устойчивость - комплексное свойство АСУ, характеризуемое помехо-
устойчивостью и живучестью автоматизированной системы управления.
Скрытность - это способность АСУ обеспечивать решение возложенных
на нее задач при сохранении в тайне от противника циркулирующую в ней
информацию, структуру системы управления и места расположения элемен-
тов системы управления.
Мобильность характеризуется способностью средств автоматизации к
передвижению в составе войск как в период подготовки, так и в ходе ведения
боевых действий. С учетом своего назначения АСУ могут быть стационар-
ными. подвижными и смешанными. Мобильность АСУ оценивается возмож-
ностью транспортировки элементов системы автомобильным, железнодо-
рожным, воздушным и речным транспортом.
Пределы работы характеризуют предельные значения параметров обра-
батываемых и отображаемых воздушных объектов. АСУ характеризуются
пределами работы по дальности, высоте, скорости движения воздушных
объектов.
К основным показателям эффективности КСА пунктов управления отно-
сят: количество одновременно сопровождаемых ВО; среднее время наработ-
522
ки на отказ; время непрерывной работы; среднее время восстановления; год
принятия на вооружение; количество АРМ; количество и типы одновременно
управляемых объектов; время приведения в различные степени боевой го-
товности; массогабаритные характеристики; состав боевого расчета; числен-
ность обслуживающего персонала; время развертывания и свертывания на
позиции; количество и типы одновременно подключаемых источников ин-
формации; временно-вероятностные характеристики решения функциональ-
ных задач; цикл функционирования; темп выдачи информации потребите-
лям; зона (радиус) контролируемого пространства; темп обновления инфор-
мации; время перевода КСА из дежурного режима работы или тренажа в
боевой; вариант конструктивного исполнения (стационарный, перебазируе-
мый, подвижный).
Проектирование, производство и испытания АСУ. Проектирование,
производство и испытания АСУ проходит следующие этапы: проектирова-
ние, технические предложения (аванпроекты), эскизные и технические про-
екты, изготовление и испытание опытного образца (стендовое, заводское,
межведомственное, государственное). На основе результатов испытаний
принимаются решения (на достаточно высоком уровне) о приеме системы и
запуске в серийное производство.
На всех данных этапах осуществляется военно-научное сопровожденние
процесса создания АСУ.
Эксплуатация АСУ. Эксплуатация АСУ охватывает мероприятия:
а) приведения АСУ в установленную степень готовности к использова-
нию;
б) использования по назначению;
в) хранения;
г)транспортирования;
д) сопровождения и модернизации.
Приведение АСУ в установленную степень готовности к использованию
производится после изготовления или капитального ремонта и предусматри-
вает обычно подготовительные работы: контроль, приемку и закрепление
элементов системы за подразделениями; документальное оформление готов-
ности к нормальной (штатной) эксплуатации согласно имеющейся докумен-
тации.
Важнейшими составными частями эксплуатации АСУ являются меро-
приятия контроля технического состояния (исправности, работоспособно-
сти, готовности к работе по назначению) и технического обслуживания АСУ
как объекта эксплуатации (периодического, планового, непланового, регла-
ментированного и т.д.), рассчитанные на повышение готовности к выполне-
нию поставленных перед системой задач. В процессе технического обслужи-
вания могут привлекаться к проведению наиболее сложных его видов (а так-
же отдельных видов ремонта) специализированные подразделения и
организации. В условиях широкого использования средств автоматизации в
пунктах и органах управления существенное значение приобретают меро-
приятия планирования технического обслуживания и ремонта КСА.
523
Отдельные мероприятия технического обслуживания предусматриваются
в соответствии с документацией в процессе хранения (длительного, кратко-
срочного) и транспортирования подсистем и элементов КСА.
Снятие средств автоматизации с эксплуатации проводят после оформле-
ния нормативных документов при наступлении так называемого предельного
состояния объекта эксплуатации, когда и дальнейшее его использование и
ремонт оказываются невозможными или нецелесообразными.
15.8. АВТОМАТИЗАЦИЯ ОБРАБОТКИ РАДИОЛОКАЦИОННОЙ
ИНФОРМАЦИИ В АСУ
В процессе боевого применения АСУ боевые расчеты пунктов управле-
ния при обработке радиолокационной информации о воздушной обстановке
решают следующие основные задачи:
сбор и автоматизированная обработка радиолокационной информации от
подчиненных радиолокационных средств обнаружения воздушных целей;
наглядное отображение воздушной обстановки и состояния подчиненных
средств обнаружения;
выработка команд управления средствами обнаружения и передача этих
команд исполнителям;
осуществление обмена радиолокационной информацией с вышестоящи-
ми и нижестоящими пунктами управления, а также с соседями.
Процесс автоматизированной обработки радиолокационной информации
принято делить на следующие этапы: первичная обработка информации
(ПОИ); вторичная обработка информации (ВОИ); третичная обработка ин-
формации (ТОЙ).
Под первичной обработкой понимается преобразование радиолокаци-
онных сигналов, поступающих с выхода приемного устройства радиолокаци-
онной станции за один обзор пространства. В процессе первичной обработки
решаются задачи обнаружения отметок и измерения координат целей. Под
отметкой понимается событие, состоящее в появлении на выходе приемника
РЛС сигналов, расцениваемых в соответствии с логикой обнаружения как
эхо-сигналы от цели. Полученная в результате первичной обработки радио-
локационная информация кодируется в виде сообщений, которые могут хра-
ниться в запоминающих устройствах и передаваться по каналам связи. Эти
сообщения характеризуют (с определенной достоверностью) мгновенное по-
ложение целей. Для выявления трасс целей возникает необходимость в по-
следующей (вторичной) обработке информации.
Вторичной обработкой принято называть преобразование радиолокаци-
онной информации, поступающей в виде сообщений об сТТметках за несколь-
ко обзоров пространства одной и той же РЛС. При вторичной обработке
осуществляется решение задач обнаружения и сопровождения трасс (траек-
торий) целей. Получаемая при этом информация в виде сообщений о теку-
щих координатах и параметрах движения целей может выдаваться потреби-
телям. Однако одну и ту же цель могут наблюдать несколько радиолокаци-
524
онных станций. Эти РЛС работают несинхронно и выдают информацию о
координатах целей относительно точки своего стояния. Все это вызывает не-
обходимость в дальнейшей (третичной) обработки радиолокационной
информации.
Под третичной обработкой принято понимать преобразование радиоло-
кационной информации, поступающей в виде сообщений о трассах целей от
нескольких источников. В процессе третичной обработки производится ре-
шение задачи объединения и обобщения сведений, поступающих от различ-
ных источников. Получаемая после этого информация имеет тот же состав,
что и исходная, но более высокую достоверность и точность.
К основным характеристикам радиолокационной информации о воздуш-
ной обстановке относят:
период обновления радиолокационной информации;
время реакции;
время от момента появления новой трассы до ее выдачи на АРМ
должностным лицам органов управления;
вероятность правильного отождествления в условиях заданных ошибок
определения координат воздушных объектов;
коэффициент проводки (отношение суммарного времени сопровождения
трасс на выходе КСА ко времени сопровождения трасс хотя бы одним
источником информации);
коэффициент ложных трасс;
вероятность правильной ретрансляции команд с вышестоящего КП;
среднеквадратическое отклонение в определении плоскостных координат
воздушных объектов;
среднеквадратическое отклонение в определении высоты воздушных
объектов;
среднеквадратическое отклонение в определении скорости воздушных
объектов.
Первичная обработка. Возможны автоматизированный и автоматиче-
ский методы первичной обработки радиолокационной информации.
Автоматизированный метод — метод, при котором обнаружение цели
оператор осуществляет визуально на первичном индикаторе, отображающем
принимаемые РЛС эхо-сигналы, а измерение и кодирование координат про-
изводятся техническими устройствами съема без участия оператора. Автома-
тизированный метод используется при обнаружении целей в условиях помех
и при выборочном съеме информации, отображаемой на экране индикатора.
Автоматический метод предусматривает полное исключение человека
из процесса первичной обработки информации и основан на использовании
специализированного вычислительного устройства. При автоматическом ме-
тоде реализуется цифровая обработка информации, поэтому напряжение, по-
ступающее с выхода приемного устройства РЛС, преобразуется в дискрет-
ную величину, выраженную в двоичном коде. Это преобразование выполняет
квантизатор.
525
Обнаружение сигналов. Оптимальный метод обнаружения полезных
сигналов на фоне помех (шумов) сложен в реализации, поэтому на практике
чаще используются упрощенные методы. Один из наиболее простых мето-
дов, применяемый в импульсных РЛС, основан на анализе плотности прини-
маемых импульсных сигналов. Обнаружение отметки осуществляется путем
выявления пачки эхо-сигналов, отраженных от цели. Начало пачки определя-
ется по критерию / из т, а конец — при фиксации к пропусков (логика обна-
ружения 7/т - к").
Измерение координат цели. Измерение дальности основывается на
определении интервала времени от момента посылки зондирующего сигнала
до момента приема отраженного сигнала приемным устройством РЛС.
Измерение азимута цели в импульсных РЛС сводится к расчету ази-
мута середины пачки отраженных сигналов, получаемых при обзоре про-
странства в горизонтальной плоскости (аналогично осуществляется измере-
ние и угла места цели).
Вторичная обработка. В зависимости от степени участия оператора ме-
тод решения задач обнаружения и сопровождения трасс целей может быть
автоматизированным или автоматическим. Автоматическое обнаружение
траектории цели называется автозахватом, а автоматическое сопровожде-
ние- автосопровождением.
Решение задач вторичной обработки базируется на принципе пообзорной
связи отметок, полученных по каждой цели. По измеренным координатам в
очередных циклах обзора и рассчитанным параметрам целей (курс, скорость,
ускорение и т. д.) можно определить (построить) траекторию цели. Так, при
прямолинейном и равномерном движении траектория цели будет прямой.
Поэтому в очередном цикле обзора пространства цель (и соответственно от-
метка от цели на экране индикатора РЛС) появится не в произвольной точке,
а в некоторой области, удаленной по направлению движения цели на рас-
стояние, определяемое периодом обзора радиолокационной станции и скоро-
стью движения цели.
Алгоритмы вторичной обработки реализуют следующие основные опе-
рации: стробирование, расчет параметров движения цели, экстраполяцию
координат цели, сличение.
Стробирование. Операция стробирования сводится к выделению
строба - области вероятного нахождения цели в следующем цикле обзора
пространства. Форма строба может быть различной. Оптимальной формой
строба при работе в прямоугольной системе координат является эллипсоид.
Строб первичного захвата формируется по получении каждой отметки
(возможно и ложной), не относящейся к сопровождаемым целям. Его вели-
чина рассчитывается из условия движения цели с максимальной предпола-
гаемой скоростью в произвольном направлении. Величина последующих
стробов при автозахвате и всех стробов при автосопровождении рассчитыва-
ется соответственно для каждой предполагаемой и для каждой выявленной
траектории с учетом измеренных в предыдущих обзорах координат и рассчи-
танных по ним параметров движения цели.
526
Расчет параметров движения цели. Параметры определяются на осно-
вании информации о координатах цели за п обзоров радиолокационной стан-
ции. Поскольку измерение координат осуществляется с ошибками, то для по-
вышения качества информации возникает необходимость в сглаживании (ин-
терполяции) параметров движения, которое может осуществляться методом
наименьших квадратов, методом средневзвешенных или экспоненциальным
методом.
Экстраполяция координат цели. В общем случае под экстраполяцией
принято понимать распространение результатов одной части явления, полу-
ченных из наблюдения, на другую его часть. При экстраполяции координат
устанавливается (определяется) закон движения цели в интервале времени за
п обзоров пространства, который распространяется за пределы интервала на-
блюдения, например на и+m обзоров. Обычно принимается гипотеза о пря-
молинейном и равномерном движении цели. Для уменьшения ошибок экст-
раполированные координаты рассчитывают методом сглаживания.
Сличение. Операция сличения сводится к сравнению координат, соот-
ветствующих отметкам, попавшим в строб, и выбору (селекции) одной из
них для продолжения траектории. Плотность вероятности появления отметки
от сопровождаемой цели увеличивается с приближением к экстраполирован-
ной точке (центру строба). Селекция осуществляется с использованием мето-
дов минимальных эллиптических и минимальных линейных отклонений.
Третичная обработка. К основным операциям третичной обработки от-
носятся: приведение информации к единому началу отсчета, отождествление
сообщений, формирование обобщенных сообщений.
Приведение информации к единому началу отсчета в про-
странстве осуществляется выполнением операции преобразования коорди-
нат, а к единому началу отсчета во времени — выполнением операции экст-
раполяции координат на момент времени обработки. Наиболее простыми яв-
ляются формулы преобразования для прямоугольной системы координат.
Для экстраполяции координат применяются те же методы, что и при вторич-
ной обработке.
Отождествление сообщений. В процессе отождествления решается
задача отбора сообщений, относящихся к одной цели, но поступивших от
различных источников радиолокационной информации. Этот процесс обыч-
но включает грубое и точное отождествление.
Грубое отождествление сводится к оценке разности одноименных коор-
динат и параметров движения целей, указанных в сообщениях. Два сообще-
ния относятся к одной цели, если разности всех указанных в них координат и
параметров не превышают соответствующих допустимых значений. В ре-
зультате грубого отождествления образуются группы предварительно ото-
ждествленных сообщений по каждой цели.
Точное отождествление осуществляется на основании анализа дополни-
тельных признаков, характеризующих индивидуальность каждой цели. При
точном отождествлении могут применяться логические правила, а, б, в, г.
527
Правило а. Если в группу предварительно отождествленных сообщений
вошли сообщения от разных источников, то эти сообщения относятся к раз-
личным целям и их отождествить нельзя (группа сформирована ошибочно).
Правило б. Если в группу вошло по одному сообщению от каждого
источника, то эти сообщения относятся к одной цели (группа
отождествленных сообщений сформирована правильно).
Правило в. Если в группе содержится одинаковое количество сообще-
ний от каждого источника радиолокационной информации, то общее число
целей в группе равно количеству сообщений любого из источников.
Правило г. Если в группу вошло неодинаковое количество сообщений
от разных источников, то в группе столько целей, сколько сообщений
поступило от источника, выдавшего наибольшее их количество.
В случаях применения правила в или г осуществляется последующий ана-
лиз сообщений с использованием метода максимального правдоподобия,
метода наименьших квадратов и др.
Формирование обобщенных сообщений сводится к осреднению
значений координат и параметров каждой цели, полученных в сообщениях от
различных источников. Осреднение может осуществляться с использованием
методов средневзвешенных значений, предпочтительного отбора по досто-
верности источников и предпочтительного отбора по времени поступления
информации.
Рассмотренные этапы автоматизированной обработки радиолокационной
информации следует различать с тактическими понятиями первичной и вто-
ричной обработки радиолокационной информации. В тактике под первичной
и вторичной обработкой принято понимать обработку радиолокационной
информации, которую осуществляет боевой расчет с использованием соот-
ветственно первичных и вторичных индикаторов.
528
16. РАДИОЭЛЕКТРОННАЯ БОРЬБА
16.1. СОДЕРЖАНИЕ РАДИОЭЛЕКТРОННОЙ БОРЬБЫ
Радиоэлектронная борьба (РЭБ) - совокупность согласованных меро-
приятий и действий войск (сил) по выявлению радиоэлектронных объектов
систем управления войсками (силами) и оружием (средствами), разведки и
РЭБ противника, их радиоэлектронному поражению, а также по радиоэлек-
тронной защите радиоэлектронных объектов своих аналогичных систем
управления (рис. 16.1).
В операциях и боевых действиях радиоэлектронная борьба является од-
ним из основных видов оперативного (боевого) обеспечения и занимает важ-
ное место в системах комплексного поражения противника, защиты своих
войск (сил) и объектов, информационного противоборства и в выполнении
оперативных (боевых) задач.
Радиоэлектронная борьба организуется и ведется в целях дезорганизации
систем управления войсками (силами) противника, снижения эффективности
применения его оружия, боевой техники и радиоэлектронных средств, обес-
печения устойчивости работы систем и средств управления своими войсками
(силами) и оружием, а также для обеспечения действий своих сил и средств.
Она осуществляется в тесном сочетании с огневым поражением (захватом,
выводом из строя) основных объектов систем и средств управления войсками
(силами), оружием, разведки и радиоэлектронной борьбы противника, дру-
гими видами оперативного (боевого) обеспечения.
Цели радиоэлектронной борьбы определяются в строгом соответствии с
замыслом операций (боевых действий) и достигаются выполнением следую-
щих основных задач: вскрытие (выявление) радиоэлектронной обстановки;
вывод из строя радиоэлектронных средств; разрушение (искажение) про-
граммного обеспечения и баз данных (знаний); веление комплексного техни-
ческого контроля состояния защиты войск и объектов от технических
средств разведки противника и противодействие им; обеспечение электро-
магнитной совместимости радиоэлектронных средств; снижение эффектив-
ности применения средств радиоэлектронного поражения противника.
Радиоэлектронное поражение - совокупность мероприятий и действий
войск (сил) по воздействию на радиоэлектронные объекты систем управле-
ния войсками (силами), оружием противника, средствами функционального
поражения, радиоэлектронного подавления, самонаводящимся на излучение
оружием, а также изменению условий распространения (отражения) элек-
тромагнитных волн.
Функциональное поражение (ФП) заключается в разрушении (поврежде-
нии) элементов и узлов радиоэлектронных объектов, информации противни-
ка и включает поражение электромагнитным излучением и средствами про-
граммного воздействия.
Поражение электромагнитным излучением заключается в разрушении
(повреждении) элементов и узлов радиоэлектронных объектов противника
529
средствами функционального поражения с мощными сверхвысокочастотны-
ми, лазерными и другими излучениями.
Поражение средствами программного воздействия заключается в пре-
кращении функционирования информационно-технических объектов путем
внедрения в автоматизированные системы специальных программ (про-
граммных вирусов, закладок, ложных информационных объектов).
Радиоэлектронное подавление заключается в снижении эффективности
(качества) функционирования радиоэлектронных объектов противника, пу-
тем воздействия на их приемные устройства активными и пассивными ра-
диоэлектронными помехами.
В зависимости от используемого диапазона частот (длин волн) и среды
их распространения радиоэлектронное подавление в ВВС включает радиопо-
давление и оптико-электронное подавление
Радиоподавление ведется в диапазоне радиоволн и заключается в нару-
шении работы радио-, радиорелейных, тропосферных, спутниковых средств
связи, средств радиолокации и радионавигации, радио- и радиотехнической
разведки, радиовзрывателей авиационных бомб и артиллерийских снарядов
(мин) противника путем воздействия на их приемные устройства электро-
магнитными излучениями и применения ложных радиолокационных целей и
ловушек.
Оптико-электронное подавление ведется в инфракрасном и оптическом
(видимом) диапазонах длин волн и заключается в снижении эффективности
функционирования тепловизионных, телевизионных, лазерных и оптико-
визуальных систем и средств разведки, наблюдения, связи и управления
оружием, путем воздействия на них активными помехами и применением
ложных целей и ловушек.
Поражение самонаводящимся на излучение оружием заключается в
уничтожении, выводе из строя, повреждении радиоизлучающих устройств
радиоэлектронных объектов противника осколочно-фугасным воздействием
авиационными, ракетно-артиллерийскими системами и средствами с пассив-
ными радиотехническими системами самонаведения.
Изменение условий распространения (отражения) электромагнитных
волн заключается в изменении свойств среды их распространения (отраже-
ния) путем применения средств постановки пассивных помех, создания в ат-
мосфере искусственных ионизированных образований и изменения радио-
электронной контрастности объектов.
Радиоэлектронная защита (РЭЗ) - совокупность мероприятий и действий
войск (сил) по устранению (ослаблению) воздействия на свои радиоэлек-
тронные объекты средств радиоэлектронного поражения противника, защите
от непреднамеренных (взаимных) радиопомех (обеспечению ЭМС своих
РЭС) и от технических средств (средств радиоэлектронной) разведки против-
ника.
Защита от средств радиоэлектронного поражения противника заклю-
чается в снижении эффективности воздействия на свои радиоэлектронные
530
объекты средствами функционального поражения, радиоэлектронного по-
давления и самонаводящегося на излучение оружия противника.
----------------1 РАДИОЭЛЕКТРОННАЯ БОРЬБА |_______________________
совокупность согласованных мероприятий и действий войск (сип) по выявлению
радиоэлектронных объектов систем управления войсками (силами) и оружием (средствами),
разведки и РЭ6 противника, нх радиоэлектротому поражению, а также по радиоэлектронной
защите радиоэлектронных объектов своих анапоожных систем управления
Радиоэлектронное пораженые ' I Радиоэлектронная защита
Поражение1
электромагнитным I
нэпу те* ятем।
Поражение средствами |
I Защита от средств радиоэлектронного I
I__________поражения противника__________
I Защита от средств функционального L
________________поражение________________Г*
| Защита от радиоэлектронного подавления
I Защита от поражения самонаесдящимся на L
|юлучете оружием Г*
программного
воздействия
Изменение условий
распространения
(отражения)
электромагнитных вот
Рис. 16.1. Содержание радиоэлектронной борьбы
Защита от средств функционального поражение достигается: оператив-
ным доведением до войск (сил) информации о применении противником
средств функционального поражения; применением отвлекающих (имити-
рующих) источников электромагнитного излучения; сокращением времени
излучения или периодическим выключением РЭС; применением РЭС раз-
личных диапазонов частот и принципов действия; сменой рабочих частот,
выбором позиций радиоэлектронных объектов на местности; их инженер-
ным оборудованием и другими мероприятиями.
Защита от радиоэлектронного подавления достигается оперативным
оповещением и обменом информацией о радиоэлектронных помехах, изме-
нениях условий распространения электромагнитных (акустических) волн; за-
531
благовременным созданием резерва радиосредств, созданием разветвленных
сетей связи; применением радиоэлектронных средств различных диапазонов,
оптимальным распределением, использованием и сменой рабочих частот,
применением специальных режимов работы РЭС; маневром РЭС, частотами
и режимами работы; использованием скрытых, дублирующих и резервных
радиосетей и радионаправлений; организацией связи с воздушных пунктов
управления и через ретрансляционные (промежуточные) станции; поиском и
уничтожением забрасываемых передатчиков помех и другими мероприятия-
ми.
Защита от поражения самонаводящимся на излучение оружием дости-
гается комплексным применением РЭС различных диапазонов рабочих час-
тот и принципов действия; сокращением времени излучения или периодиче-
ским выключением РЭС; сменой рабочих частот; выбором позиций радио-
электронных объектов и средств на местности и их инженерным
оборудованием; применением отвлекающих (имитирующих) источников
электромагнитного излучения и другими мероприятиями.
Защита от непреднамеренных (взаимных) радиопомех (обеспечение
ЭМС своих РЭС) достигается проведением организационных мероприятий и
технических мер, направленных на снижение (исключение) взаимного влия-
ния РЭС при их совместном применении в группировках своих войск. К ним
относятся: согласованное распределение, назначение и использование рабо-
чих частот; рациональное размещение радиоэлектронных средств (объектов)
на местности в группировках войск с учетом норм частотно-
территориального разноса; установление режимов работы и приоритетов в
использовании РЭС; введение временных, пространственных и частотных
ограничений на работу радиоэлектронных средств и объектов; своевремен-
ное выявление источников непреднамеренных помех и принятие мер по сни-
жению (исключению) уровня помех; применение схем и устройств помехо-
защиты и другие мероприятия.
Защита войск и объектов ВВС от технических средств (средств радио-
электронной) разведки противника и противодействие им достигается орга-
низационными мероприятиями и техническими мерами, проводимыми на
объектах защиты и направленными на исключение или существенное за-
труднение добывания противником с помощью технических средств (средств
радиоэлектронной) разведки достоверных сведений о войсках, вооружении,
военной технике и военных объектах.
Основными способами защиты от технических средств разведки против-
ника являются: радиоэлектронное подавление технических средств разведки
и каналов передачи разведывательной информации противника; защита ох-
раняемых параметров вооружения, военной техники и военных объектов;
специальная защита технических средств передачи информации; выявление
технических каналов утечки информации и их устранение.
Защита охраняемых параметров вооружения, военной техники и воен-
ных объектов осуществляется объединениями (соединениями) на основе
оценки возможностей технических средств разведки противника и обеспечи-
532
вается: категорированием вооружения, военной техники и военных объектов
и определением охраняемых сведений об объектах защиты исходя из замыс-
ла оперативной маскировки; устранением (ослаблением) демаскирующих
признаков РЭС; доведением до соединений (частей) информации о появле-
нии носителей технических средств разведки; введением территориальных,
пространственных, временных и частотных ограничений на применение воо-
ружения, военной техники и РЭС военных объектов, а также ограничений на
определенные режимы их работы и другими мероприятиями.
Специальная защита технических средств передачи информации вклю-
чает организационные мероприятия и технические меры по закрытию воз-
можных технических каналов утечки информации за счет побочных элек-
тромагнитных излучений, наводок, высокочастотного навязывания и элек-
троакустических преобразований и осуществляется в сочетании с
аппаратурными, программными и криптографическими способами защиты.
Выявление технических каналов утечки информации и их устранение
включает: определение информативных характеристик физических полей
вооружения, военной техники и военных объектов в зависимости от способов
их использования; оценку возможностей выявления охраняемых параметров
техническими средствами разведки; определение наиболее опасных видов и
средств разведки и уточнение зон возможной разведки; разработку и осуще-
ствление органами управления организационных мероприятий и технических
мер закрытия (ослабления) технических каналов утечки информации; опера-
тивное пресечение нарушений установленных норм и требований по проти-
водействию разведкам.
Радиоэлектронная защита сил и объектов объединения достигается ком-
плексным применением радиоэлектронных средств, выполнением норм час-
тотно-территориального разноса РЭС соединений и частей при развертыва-
нии систем управления, введением ограничений на применение РЭС, а также
выявлением источников непреднамеренных (взаимных) помех и проведением
мероприятий по исключению (ослаблению) их влияния.
162. БОРТОВЫЕ КОМПЛЕКСЫ РЭБ БОЕВЫХ САМОЛЕТОВ
ОСНОВНЫХ ИНОСТРАННЫХ ГОСУДАРСТВ
Бортовые комплексы РЭБ по своему функциональному предназначению
подразделяются на средства РЭБ индивидуальной защиты и средства РЭБ
групповой защиты.
Бортовые комплексы индивидуальной защиты предназначены в основ-
ном для подавления РЭС управления оружием, непосредственно угрожаю-
щих самолету взрывателей и ГСН управляемых ракет. РЭС ЗРК и БРЛС ис-
требителей. В современный бортовой комплекс индивидуальной защиты са-
молетов включаются:
средства исполнительной радиотехнической разведки;
обнаружительный приемник ИК диапазона;
приемник предупреждения о лазерном облучении;
533
импульсно-доплеровская РЛС обнаружения атакующих ракет со стороны
ЗПС;
станция активных помех радиолокационного диапазона;
передатчик амплитудно-модулированных тепловых помех (станция по-
мех ИК-диапазона);
расходуемые средства РЭП и аппаратура для их постановки;
средства отображения обстановки и предупреждения экипажа.
Комплексы РЭБ групповой защиты предназначены для подавления сис-
тем управления силами и средствами ПВО: РЛС обнаружения и целеуказа-
ния, РЭС радиосвязи и передачи команд, РЭС опознавания, а также РЛС ЗРК.
Ими оснащаются специализированные постановщики помех - самолеты РЭБ.
Средствами РЭП групповой (коллективной) защиты СВН могут оснащаться и
специальные БЛА. В состав комплекса РЭБ самолетов-постановщиков поме^
включается также средства РЭБ индивидуальной защиты.
Специализированные самолеты радиоэлектронной борьбы находятся на
вооружении тактической авиации ВВС и ВМС США, европейских стран
НАТО, а также Израиля, Китая и Японии.
В настоящее время в составе тактической авиации этих стран состоят три
класса самолетов РЭБ:
постановщики активных помех РЛС ПВО: ЕА-6В "Проулер" (ВВС и
ВМС США), HFB-320 (ВВС Германии), "Канберра" Т.4 (ВВС Великобрита-
нии), G.222 (ВВС Италии);
постановщики активных помех РЭС радиосвязи, опознавания и навига-
ции: самолеты ЕС-1 ЗОН (ВВС США). PD-808 (ВВС Италии), DC-8 (ВВС
Франции), "Боинг-707" (ВВС Германии);
ударные самолеты РЭБ для поиска и уничтожения излучающих РЭС ПВО
противорадиолокационными ракетами: F-16C/J (ВВС США), "Торнадо" ECR
(ВВС Германии).
Основным тактическим приемом самолетов-постановщиков помех по
прикрытию групп ударных самолетов ТА является постановка помех из зон
барражирования.
Районы барражирования самолетов РЭБ - постановщиков помех выбира-
ются вне зоны поражения огневых средств ПВО. В отдельных случаях, при
низкой степени риска, самолеты РЭБ могут осуществлять постановку помех
из боевых порядков ударных групп ТИ при их сопровождении вглубь терри-
тории противника.
При достижении прикрываемыми ударными самолетами рубежа приме-
нения оружия создание помех из зон барражирования в частотных диапазо-
нах их бортовых РЭС маловероятно.
На каждое направление прорыва ПВО устанавливаются 2-3 зоны бар-
ражирования по 2 - 3 самолета РЭБ в каждой, а также 2-3 пары истребите-
лей для их прикрытия.
Тактическое назначение самолетов РЭБ второго класса - дезорганизация
систем управления силами и средствами ПВО. Самолет РЭБ ЕС—1 ЗОН
"Компас Колл" обеспечивает предварительную или непосредственную, в хо-
534
де боевых действий авиации, радио- и радиотехническую разведку РЭС ра-
диосвязи, навигации и госопознавания систем ПВО и постановку им помех.
Типовая схема боевого применения ЕС-1 ЗОН предусматривает барражи-
рования парой самолетов на высоте 9000 м по замкнутым маршрутам над
своей территорией или пролеты вдоль границы с ведением радио- и радио-
технической разведки и подавления РЭС на глубину 300-350 км. Самолет
ЕС-1 ЗОН оснащен комплексом РЭБ групповой защиты "Компас Колл”, рабо-
той которого управляют 8 операторов РЭБ. Среди операторов РЭБ - несколь-
ко (3 - 4) специалистов (лингвистов), владеющих иностранными языками,
ведущих прослушивание линий радиосвязи, перевод сообщений и внесение в
линии радиосвязи ложных речевых сообщений.
Получаемая развединформация о РЭС сравнивается с записанными в па-
мяти ЭВМ эталонными сигналами с целью принятия решения о типе РЭС и о
приоритете его подавления. Бортовой ЭВМ определяются рациональные ви-
ды помех и режимы их применения. Основные виды создаваемых сигналь-
ных помех: шумовые заградительные и прицельные по частоте; дезинформи-
рующие - хаотические импульсные, ложные синхрогруппы и синхроимпуль-
сы, ложные команды.
Для решения задач радиоэлектронной борьбы в боевых действиях СВН с
системой ПВО на ТВД могут использоваться самолеты ЕС-1 ЗОЕ "Ривет Рай-
дер" из состава авиакрыла специальных операций ВВС национальной гвар-
дии США. Данные самолеты предназначены для ведения информационной
войны. Их аппаратурное оснащение позволяет вести прослушивание радио-
передач и просмотр телепередач, ведущихся на территории протигнка,
трансляцию с воздуха радиовещательных и телевизионных программ, подго-
товленных специалистами по информационной борьбе, а также подавление
шумовыми и специальными помехами гражданских радио- и тслесетей, во-
енных систем связи и управления метрового и дециметрового диапазона
волн. Мощность излучения передатчиков помех самолета ЕС-1 ЗОЕ "Ривет
Райдер" составляет - 40 кВт.
Предназначение ударных самолетов РЭБ - разведка излучающих РЭС
ПВО и их огневое поражение противорадиолокационными ракетами.
В настоящее время на вооружении ВВС США состоит один тип ударного
самолета РЭБ F-16C/J (или F-16D/J). Самолет - двухместный, в составе эки-
пажа - один оператор РЭБ. F-16 С/J оснащается 4 противорадиолокационны-
ми ракетами HARM и подвесным контейнером с системой AN/ASQ-213 HTS
(HTS - HARM Targeting System) разведки и целеуказания ПРР HARM.
163. СИЛЫ И СРЕДСТВА РАДИОЭЛЕКТРОННОЙ БОРЬБЫ ВВС
Основу сил радиоэлектронной борьбы ВВС составляют авиационные и
наземные части (подразделения) радиоэлектронной борьбы, входящие в со-
став объединений, соединений и частей.
535
К авиационным частям (подразделениям) РЭБ относятся: отдельные вер*
толетные эскадрильи РЭБ, авиационные отряды РЭБ, вертолетные звенья
РЭБ.
К наземным частям и подразделениям РЭБ относятся: отдельные полки
РЭБ; отдельные батальоны РЭБ; подразделения комплексного технического
контроля (КТК) (центральный узел КТК, отдельные узлы КТК, отдельные
группы контроля радиоизлучений (КРИ)).
Отдельные вертолетные эскадрильи РЭБ (авиационные отряды РЭБ,
авиационные звенья РЭБ) предназначены для обеспечения боевых действий
авиационных частей и соединений путем прикрытия боевых порядков лета*
тельных аппаратов от обнаружения радиолокационными средствами и защи-
ты от поражения средствами ПВО путем радиоэлектронного подавления ра-
диоэлектронных средств систем управления войсками и оружием.
Отдельный полк (батальон) РЭБ объединения ВВС предназначен для
обеспечения боевых действий авиационных частей и соединений при проры-
ве (преодолении) системы ПВО противника и прикрытия наземных объектов
от радиолокационной разведки, прицельных ударов авиации путем радио-
электронного подавления радиолокационных средств управления оружием,
средств радиосвязи и авиационных навигационных приемопередающих уст-
ройств.
Подразделения комплексного технического контроля предназначены для
контроля за эффективностью проводимых мероприятий по оперативной мас-
кировке и радиоэлектронной защите в частях и соединениях объединений
ВВС.
Боевые возможности частей РЭБ определяются их возможностями по ра-
диоэлектронной разведке, радиоэлектронному поражению и маневру, а для
подразделений КТК - по комплексному техническому контролю и оценива-
ются соответствующими показателями.
Возможности по радиоэлектронной разведке характеризуются способ-
ностью выявить (обнаружить) излучения радиоэлектронных средств против-
ника, определить их состав, принадлежность и местоположение, режимы ра-
боты и технические характеристики, необходимые для ведения радиоэлек-
тронной борьбы. Показателем возможностей по радиоэлектронной разведке
является количество разведываемых радиоэлектронных объектов противника
при их поиске, слежении, перехвате (сопровождении), обнаружении и опре-
делении местоположения (пеленговании и дальнометрии).
Возможности по радиоэлектронному поражению характеризуются спо-
собностью одновременно разрушить (повредить) и подавить радиоэлектрон-
ные объекты противника, в т.ч. и самонаводящимся на излучение оружием, а
также изменить условия распространения (отражения) электромагнитных
волн и оцениваются количеством разрушенных (поврежденных), подавлен-
ных радиоэлектронных объектов противника, глубиной и степенью пораже-
ния, дальностью (зоной) прикрытия, количеством прикрываемых объектов,
способностью изменить условия распространения электромагнитных волн.
536
Возможности по маневру авиационных частей (подразделений) РЭВ ха-
рактеризуются временем по их перебазированию на другие аэродромы (пло-
щадки), временем подготовки к выполнению боевых задач.
Возможности по маневру наземных частей (подразделений) РЭБ харак-
теризуются способностью их перемещения в назначенные районы, разверты-
вания (свертывания) на боевых позициях и переносу усилий по РЭБ на дру-
гие направления, объекты и цели. Показателем маневренных возможностей
является время свертывания, перемещения, развертывания боевых порядков,
переноса усилий по направлениям и диапазонам (частотам) излучений.
Возможности по комплексному техническому контролю характеризуют-
ся способностью выявлять технические каналы утечки информации, а также
демаскирующие признаки в деятельности войск (сил) и объектов контроля.
Показатели возможностей контроля характеризуются количеством наблю-
даемых радиосвязей и радиотехнических средств, а также количеством кон-
тролируемых объектов технических средств передачи, обработки и хранения
режимной (служебной) информации.
Возможности частей РЭБ зависят от их боевого и численного состава,
степени обученности и морально-психологического состояния личного со-
става, укомплектованности и технического состояния средств разведки, ра-
диоэлектронного поражения, управления и КТК.
Для решения задач радиоэлектронной борьбы используются различные
по назначению, размещению, виду воздействия, реализуемым физическим
принципам действия бортовые и наземные средства РЭБ, средства управле-
ния, связи, передачи данных, а также средства комплексного технического
контроля и технического обслуживания.
163.1. Способы ведения РЭБ
Как показал опыт боевых действий авиации в локальных войнах и воо-
руженных конфликтах, при преодолении системы ПВО широко и массиро-
ванно применяла средства помех, устанавливаемых на специальных самоле-
тах РЭБ и ударных самолетах, земле, кораблях.
Выделяют три основных способа применения помех с использованием
самолетных средств РЭП:
самоприкрытие (рис. 16.2, а), когда помехи создаются с борта самолета,
преодолевающего систему ПВО;
групповое прикрытие (рис. 16.2, б), когда помехи создаются с борта са-
молета РЭБ, летящего в составе группы;
прикрытие направлений прорыва системы ПВО, когда помехи создаются
с борта самолетов РЭБ, находящихся в зоне барражирования (рис. 16.2, в).
537
г,
б в
Рис. 16.2. Способы боевого применения самолетных средств РЭП
Одной из основных задач, решаемых средствами активных помех, явля-
ется уменьшение зоны действия РЭС противника: для РЛС - это уменьшение
дальности (области) обнаружения целей, для средств радиоуправления ору-
жием и войсками - уменьшение зоны наведения и управления.
Возможности средств активных помех по уменьшению дальности обна-
ружения РЛС при каждом способе их применения будут различны и могут
оцениваться размерами открытой зоны.
Под открытой зоной понимается пространство вокруг РЛС. в пределах
которого цели (самолеты) на фоне помех наблюдаются. Величина открытой
зоны характеризуется значением радиуса открытой зоны (Яо,). Чем меньше
Ro„ тем меньше возможности РЛС по обнаружению целей, тем эффективнее
воздействие помех. Значение /?О7 определяется по формуле:
К„ РЛС'О R2
<16|>
путем ее решения относительно R4:
ъ.,=
I А £
Vg^/G,., Р
(16.2)
где
^КпРяСяо0ц
GJJi)/уровень боковых лепестков приемной антенны РЛС,
по которому воздействует помеха;
Ji - угол между направлениями на цель и на постановщик помех;
р - плотность мощности помехи, создаваемая постановщиком помех.
Для указанных выше способов применения средств активных помех вы-
ражение (16.2) соответственно будет выглядеть следующим образом:
538
R°’6 =^cMgu ’
я
Vg>g„’
Радиусы открытых зон можно определять графически, если заранее по
формуле (16.1) рассчитать необходимую плотность мощности (рм) для данной
РЛС в зависимости от R4 для случаев /?, = /?„ и R„ =const. По этим графикам
находят RO1 для данного значения р (рис. 16.3).
Кроме радиуса открытой зоны возможности средств активных помех
можно характеризовать эффективным сектором подавления.
Под эффективным сектором подавления РЛС понимается сектор, в пре-
делах которого цели на фоне помех не наблюдаются. Биссектриса эффектив-
ного сектора подавления направлена от РЛС на источник помех. Чем больше
эффективный сектор подавления, тем большие возможности средств актив-
ных помех по прикрытию целей.
Величина эффективного сектора подавления (^) определяется из урав-
нения подавления (16.1) путем его решения относительно G./G^o:
(16.3)
РКц
Оценка средств активных помех через производится для определения
возможностей прикрытия помехами ударных самолетов специальными или
обеспечивающими самолетами, т. е. при применении средств активных по-
мех по второму и третьему способам. Из формулы (16.3) видно, что G/G.lo, а
следовательно, и есть функции расстояния до цели (/?,). Чем больше
тем меньше G/Glo, а следовательно, больше (р^>. Считается, что групповая
цель прикрывается, если угловые размеры цели (сц) не превышают эффек-
тивный сектор подавления, т.е. а,. Угловые размеры цели в зависимости
от R4 определяются из выражения:
(16.4)
где / - линейные размеры групповой цели.
Рассмотренные способы применения средств активных помех против
РЛС с учетом энергетических соотношений имеют различную эффектив-
ность. Самым эффективным способом по интенсивности помехи является
первый, затем - второй и третий. Каждый из этих способов имеет достоинст-
ва и недостатки тактического характера, поэтому в чистом виде ни один из
способов применяться нс будет.
Для подавления РЛС огневых комплексов ПВО будет использован пер-
вый способ, для скрытия состава групп ударных самолетов - второй, для
скрытия направления удара и состава групп ударных самолетов при их нахо-
539
ждении в дальней зоне РЛС (в приграничной, приморской полосе), а в неко-
торых случаях и в ближней зоне РЛС с использованием ЗПП (зона подавле-
ния в этом случае обеспечивается за счет максимального приближения ис-
точника помех к подавляемым РЛС) - третий способ.
Рис. 16.3. Определение /?о, графическим методом
Средства радиоуправления также могут подавляться указанными выше
тремя способами применения средств активных помех.
Для их оценки можно использовать уравнение подавления радиоканала:
Кп PCGC<) R2
Критерием оценки является величина зоны управления по радиолинии в
условиях помех. Чем меньше зона управления, тем эффективнее способ при-
менения средств помех.
Учитывая критерий оценки радиолиний управления, уравнение подавле-
ния (16.5) можно представить в следующем виде:
R — R С
‘ "JgjgZ' <'6.6)
где
С= P‘G‘ 4*
У у PnGn #пр '
Максимально необходимая дальность управления по радио ограничива-
ется дальностью до цели. Следовательно, при первом и втором способах
применения средств активных помех всегда значение RC<R„- Для снижения
зоны управления необходимо, чтобы значение С«1.
540
Подавление радиолиний передачи команд управления возможно также
при применении средств активных помех по третьему способу, т.е. при соз-
дании помех самолетами РЭБ из зон барражирования, с кораблей и наземных
пунктов. При этом увеличение значений R„ может быть скомпенсировано
увеличением мощности помехи.
Оценка зоны наведения при третьем способе применения средств актив-
ных помех для подавления радиолинии передачи команд управления может
быть произведена по следующим формулам:
где D - расстояние между передатчиком команд управления истребителями
и станцией помех;
d - расстояние (по линии передатчик команд - станция помех), отсчи-
тываемое от передатчика команд в сторону станции помех при d>0
и в противоположную сторону при d<0.
Построение зоны наведения истребителей показано на рис. 16.4.
Рис. 16.4. Построение зоны наведения истребителей
Средства пассивных помех воздушным противником применяются для
снижения дальности обнаружения, точности определения координат, воз-
можности распознавания воздушных целей и их действий, срыва автосопро-
вождения и отвлечения огневых средств ПВО на ложные цели.
541
Основным средством пассивных помех для имитации и маскировки са-
молетов от радиолокационного наблюдения остаются противорадиолокаци-
онные отражатели (ПРЛО), сбрасываемые с самолета автоматами сбрасыва-
ния или выстреливаемые специальными ракетами.
В ВВС США предусматриваются три способа применения ПРЛО при
преодолении системы ПВО: непрерывное выбрасывание, хаотическое выбра-
сывание, разовое выбрасывание (выстреливание) значительного количества
пачек ПРЛО.
Непрерывное выбрасывание ПРЛО - на маршруте полета производится
непрерывный выброс пачек с темпом, обеспечивающим получение необхо-
димого количества пачек ПРЛО на 100 м пути. При этом создается полоса, в
пределах которой маскируются все находящиеся в ней самолеты. Такой спо-
соб применения ПРЛО используется для скрытия состава, боевого порядка и
маршрутов полета ударных групп самолетов.
Хаотическое выбрасывание - пачки ПРЛО выбрасываются с хаотической
последовательностью всеми самолетами, находящимися в зоне действия РЛС
РТВ и ЗРВ. При этом применяются пачки с различным временем раскрыва. В
результате такого их применения на экранах индикаторов РЛС формируется
большое количество ложных отметок, затрудняющих распознавание целей.
Способ разового выбрасывания пачек ПРЛО - с самолета за короткий
промежуток времени выбрасывается значительное количество пачек с мини-
мальным временем раскрыва (одновременно может применяться маневр са-
молета). Этот способ применяется при преодолении зоны поражения ЗРК и
защите самолета во время атаки истребителями противника. Защита заклю-
чается в срыве сопровождения самолета в результате перезахвата облака
ПРЛО радиолокационной станцией управления ракетами "земля - воздух"
или "воздух - воздух".
163.2. Наземные средства помех частей и подразделений РЭБ
Наземные средства РЭБ предназначены для обеспечения боевых дейст-
вий соединений и частей путем радиоэлектронного подавления радиоэлек-
тронных объектов ПВО, авиации, разведки и РЭБ противника.
К наземным средствам РЭБ относятся: средства радиоэлектронной раз-
ведки и средства радиоэлектронного подавления - средства активных помех
радиолокации, радиосвязи, радионавигации и средства пассивных помех.
Средства радиоэлектронной разведки по видам разведки подразделяются
на средства радио,- радиотехнической, радиолокационной и оптико-
электронной разведки.
Средства радиоэлектронной разведки обеспечивают прием и регистра-
цию электромагнитных излучений РЭС, пеленгование и определение их ме-
стоположения, типа, технических и других характеристик, целеуказание для
боевого применения средств радиоэлектронного поражения.
К средствам радиоэлектронного поражения относятся средства функцио-
нального поражения, средства радиоэлектронного подавления, самонаводя-
542
щееся на излучение оружие, а также средства, обеспечивающие изменения
условий распространения (отражения) электромагнитных волн.
По физическим принципам воздействия средства функционального по-
ражения разделяются на средства поражения электромагнитными импульса-
ми и средства программно-технического воздействия.
Средства поражения электромагнитными импульсами - совокупность
технических средств с мощным электромагнитным излучением, воздействие
которым приводит к разрушению (повреждению) элементов узлов РЭС про-
тивника.
Средства программно-технического воздействия - совокупность техниче-
ских средств, обеспечивающих внедрение в АСУ противника "вредящих ви-
русов".
Средства радиоэлектронного подавления - совокупность технических
средств, обеспечивающих затруднение или исключение приема сигналов
средствами радиосвязи, радиолокации, радионавигации, а также средствами
систем управления (наведения) оружия.
Средства самонаводящиеся на излучение - совокупность технических
средств с пассивными головками самонаведения, обеспечивающих разруше-
ние (повреждение) радиоэлектронных объектов.
Средства, обеспечивающие изменения условий распространения (отра-
жения) электромагнитных волн, - совокупность технических средств для по-
становки пассивных помех, создания в атмосфере искусственных ионизиро-
ванных образований и изменения контрастности объектов.
Средства комплексного технического контроля - совокупность техниче-
ских средств, обеспечивающих выявление технических каналов утечки ин-
формации, демаскирующих признаков в деятельности войск (сил) в ходе бое-
вого применения и использования вооружения, военной техники и военных
объектов по одному или нескольким из контролируемых физических полей, а
также контроль соблюдения мер по обеспечению ЭМС РЭС в группировках
своих войск. В зависимости от вида осуществляемого контроля различают
средства радио-, радиотехнического, фотографического, визуально-
оптического контроля, специальной защиты технических средств передачи и
обработки информации.
16.4. ФОРМЫ И СПОСОБЫ БОЕВОГО ПРИМЕНЕНИЯ
СИЛ И СРЕДСТВ РЭБ
Основными формами боевого применения сил и средств РЭБ являются:
радиоэлектронный удар и систематические действия по радиоэлектронной
борьбе.
Радиоэлектронный удар представляет собой совокупность согласованных
и взаимосвязанных по цели, задачам, месту и времени мощных и относи-
тельно кратковременных воздействий средствами радиоэлектронного пора-
жения, наносимых по единому замыслу и плану, для выполнения задач дез-
организации функционирования радиоэлектронных объектов систем управ-
543
ления войсками и оружием противника в отдельных звеньях управления про-
тивника в установленные сроки.
Радиоэлектронный удар может наноситься как самостоятельно, так и в
сочетании с действиями авиации и ЗРВ по огневому (ядерному) поражению
объектов систем управления противника. Основу удара составляет массиро-
ванное применение средств радиоэлектронного поражения.
Систематические действия по РЭБ ведутся в периоды между радиоэлек-
тронными ударами.
Основными способами ведения радиоэлектронной борьбы в операции
(боевых действиях) являются массированное, избирательное и избирательно-
массированное применение сил и средств РЭБ, которые представляют собой
избранный вариант воздействия на радиоэлектронные объекты противника.
Способы ведения радиоэлектронной борьбы зависят от поставленных за-
дач по РЭБ, их масштаба и требуемых сроков выполнения, наличия сил и
средств РЭБ и могут осуществляться одновременным или последовательным
воздействием на радиоэлектронные объекты противника. Одновременно или
последовательно проводятся и мероприятия по радиоэлектронной защите
своих войск и объектов.
Массированный способ применяется при наличии достаточно большого
количества сил и средств РЭБ и предполагает комплексное огневое и радио-
электронное поражение радиоэлектронных объектов. Этот способ является
основным при обеспечении действий авиации ЗРВ и РТВ на главных направ-
лениях в операции (боевых действиях).
Избирательный способ применяется при недостаточном количестве сил и
средств РЭБ и направлен на исключение эффективного применения отдель-
ных радиоэлектронных объектов в противостоящей группировке войск про-
тивника. При этом способе силы, привлекаемые для ведения радиоэлектрон-
ной борьбы, действуют последовательно по оперативным задачам объедине-
ния ВВС.
Избирательно-массированный способ применяется для огневого и радио-
электронного поражения максимального количества радиоэлектронных объ-
ектов противника на отдельных направлениях и в особые периоды действий
войск в операции (боевых действиях). Одновременно на других направлени-
ях поражаются только его отдельные радиоэлектронные объекты.
165. ОСНОВЫ БОЕВОГО ПРИМЕНЕНИЯ ЧАСТЕЙ
И ПОДРАЗДЕЛЕНИЙ РЭБ
Отдельный батальон РЭБ-С в операциях армии (корпуса) может дейст-
вовать в полном составе или поротно, в рассредоточенном боевом порядке
при необходимости прикрытия группировки войск армии (корпуса), дейст-
вующих на разобщенных направлениях.
При прикрытии стационарных высококонтрастных объектов позиции рот
радиопомех выбираются на ожидаемых направлениях налета авиации про-
тивника и вблизи от прикрываемых объектов и районов, занятых войсками.
544
Станции радиопомех ближней радионавигации развертываются, как правило,
в позиционном районе подразделения помех УКВ-радиосвязи авиации про-
тивника отдельного батальона РЭБ-Н ОА (АК).
Существует два способа прикрытия объектов от налета авиации, опреде-
ляющие построение боевого порядка подразделений радиопомех:
1) зональный. При этом способе объект прикрывается станцией помех
вкруговую. Характеристикой боевого порядка при данном способе является
радиус прикрытия. В этом случае располагаемая спектральная мощность по-
мехи превышает значение мощности, необходимое для подавления;
2) объектовый. При этом способе объект может быть прикрыт вкруговую
только несколькими станциями, т. е. спектральной мощности помехи одной
станции недостаточно для подавления бортовой радиолокационной станции
(БРЛС). Характеристикой боевого порядка при данном способе является сек-
тор прикрытия.
Определяющим параметром для выбора способа прикрытия является эф-
фективная отражающая поверхность объекта.
Типовые объекты, которые прикрываются подразделениями радиопомех
самолетным средствам, подразделяются на подвижные и неподвижные. К
подвижным относятся такие объекты, как ракетные бригады, нестационар-
ные командные пункты, общевойсковые и танковые соединения второго
эшелона на исходных рубежах либо маршрутах выдвижения и др. К непод-
вижным объектам относятся мосты, аэродромы, населенные пункты, атом-
ные электростанции и другие важные промышленные объекты.
Перечисленные выше объекты прикрытия для подразделения радиопомех
самолетным средствам имеют значения эффективной отражающей поверхно-
сти от 100 до 10 ООО м2.
Порядок боевого применения овэ РЭБ А ВВС и ПВО зависит от характе-
ра действия авиации армии ВВС и ПВО, направлений прорыва зон ПВО про-
тивника нашей авиацией.
Вертолетным звеньям назначаются аэродромы (площадки) подскока, как
можно ближе к назначенным зонам барражирования, чтобы наиболее эффек-
тивно использовать время нахождения вертолетов РЭБ в зонах постановки
помех.
Вертолеты овэ РЭБ обычно находятся в трех-четырех зонах над своей
территорией, по одному - два Ми-8 ППА и Ми-8 СМВ в каждой зоне.
При выполнении овэ РЭБ боевых задач полным составом протяженность
каждой зоны по фронту не должна превышать 20...25 км, расстояние между
зонами может достигать 30 км.
В ходе боевых действий армии ВВС и ПВО организуется централизован-
ное управление овэ РЭБ с командного пункта армии ВВС и ПВО в целях не-
допущения срыва помехами пуска и управления зенитными, авиационными
ракетами, работы РЛС ПВО и бортовых РЭС самолетов и вертолетов своих
войск.
545
Порядок боевого применения УКТК А ВВС и ПВО зависит от содержа-
ния задач по противодействию технической разведке противника, которые
определяются планом оперативной маскировки и планом РЭБ.
Для решения поставленных задач УКТК развертывает стационарный пост
комплексного технического контроля, три подвижных поста комплексного
технического контроля (КТК) и один подвижный пост контроля обеспечения
электромагнитной совместимости.
Стационарный пост КТК размещается вблизи КП армии ВВС и ПВО (КП
К ПВО), подвижные посты - в районах размещения контролируемых объек-
тов войск армии. В ходе операции подвижные посты перемещаются в те рай-
оны, где необходимо осуществить КТК.
Позиции станций радио- и радиотехнического контроля выбираются с
расчетом охвата контролем возможно большего количества радиосвязей сво-
их войск, излучений специальных РЭС, а также обеспечить своевременное
проведение воздушного и наземного визуально-оптического наблюдения,
фотографирования, военных объектов и войск в районах и на позициях
УКТК в операциях армии ВВС и ПВО решает задачи во взаимодействии
с узлом контроля безопасности связи фронта, УКТК соседей, УКТК других
видов ВС и частями РЭБ армии.
Управление УКТК осуществляется с пункта управления начальника РЭБ
армии через узлы связи контролируемых объединений и соединений.
16.6 . РАДИОЭЛЕКТРОННАЯ ЗАЩИТА (РЭЗ)
Радиоэлектронная защита радиоэлектронных средств (РЭС) является
составной частью радиоэлектронной борьбы и включает: защиту от предна-
меренных радиопомех, создаваемых противником; защиту от непреднаме-
ренных помех (обеспечение электромагнитной совместимости); защиту от
электромагнитных излучений искусственного и естественного происхожде-
ния.
Радиопомеха - электромагнитное излучение в диапазоне радиочастот, ко-
торое ухудшает или может ухудшить показатели качества функционирования
радиоэлектронного средства.
Классификация радиопомех показана на рис. 16.5.
Непреднамеренная радиопомеха - радиопомеха, создаваемая источником
искусственного или естественного происхождения, не предназначенная для
нарушения функционирования радиоэлектронного средства.
Преднамеренная радиопомеха - радиопомеха, создаваемая средством ра-
диоэлектронного подавления или другим привлекаемым для этой цели сред-
ством, предназначенное для искажения, разрушения, затруднения прохожде-
ния или изменения характеристик информации, добываемой или передавае-
мой (принимаемой) с помощью радиоэлектронного средства.
Радиоэлектронная защита представляет собой совокупность согласован-
ных по цели, способам, месту и времени мероприятий и действий войск, про-
546
водимых в интересах обеспечения устойчивости управления войсками и
оружием.
Помехозащищенность радиоэлектронных средств (ПЗ РЭС) характеризу-
ет его способность выполнять функциональные задачи в условиях ведения
противником радиоэлектронного подавления.
Помехозащищенность РЭС определяется защищенностью от непосредст-
венной разведки комплексов радиоэлектронного подавления противника и
помехоустойчивостью.
Помехоустойчивость радиоэлектронного средства характеризует его
способность выполнять функциональные задачи с требуемым качеством при
воздействии на него преднамеренных радиопомех, создаваемых противни-
ком.
Защищенность РЭС от непосредственной разведки комплексов радио-
электронного подавления характеризует его способность противостоять до-
быванию аппаратурой радиоэлектронной разведки разведывательных дан-
ных, необходимых для создания эффективных радиопомех.
Основными организационно-тактическими мероприятиями РЭЗ являют-
ся: оперативное оповещение и обмен информацией о радиопомехах и изме-
нениях условий распространения электромагнитных излучений; заблаговре-
менное создание резерва РЭС; применение РЭС, работающих в различных
диапазонах радиоволн; оптимальный выбор, распределение и смена рабочих
частот РЭС в группировках войск; маневр РЭС, частотами и режимами их
работы; использование скрытых, дублирующих, обходных и резервных ра-
диосетей и радионаправлений; организация связи и управления с воздушных
пунктов и через ретрансляторы; своевременный поиск и обезвреживание за-
брасываемых передатчиков радиопомех и другие мероприятия.
547
К техническим способам относят такие, которые реализуются в принци-
пах построения радиоэлектронных средств, в способах передачи, приема и
обработки сигналов, а также в схемах защиты от радиопомех. Их реализация
основана на учете отличий полезных сигналов РЭС от радиопомех в несущей
частоте, амплитуде, фазе, длительности, частоте следования, направлении
прихода, поляризации и положении фазового фронта электромагнитных волн
в месте приема, а также случайных изменений перечисленных параметров.
Техническими способами защиты от радиопомех являются: получение
необходимого отношения сигнал/помеха в приемнике РЭС; накопление сиг-
налов в радиоприемном устройстве; предотвращение перегрузки приемных
устройств; селекция (выделение) и фильтрация сигналов; помехоустойчивое
кодирование; использование излучений средств радиопомех для получения
информации о целях и др. В перспективе возможно применение оптималь-
ных способов приема и самонастраивающихся (адаптивных) систем, способ-
ных на основе анализа помех и качества приема изменять параметры сигна-
лов и характеристики приемных устройств, с тем, чтобы свести к минимуму
эффект воздействия помех на РЭС.
Защита РЭС от радиоэлектронной разведки противника достигается ор-
ганизационными мероприятиями и техническими мерами, проводимыми на
радиоэлектронных объектах и направленными на исключение или сущест-
венное затруднение добывания о них сведений с помощью технических
средств разведки.
Защита РЭС от непреднамеренных радиопомех (обеспечение ЭМС) дос-
тигается проведением организационных мероприятий и технических мер.
16.7 . ОБЕСПЕЧЕНИЕ ЭЛЕКТРОМАГНИТНОЙ
СОВМЕСТИМОСТИ РАДИОЭЛЕКТРОННЫХ СРЕДСТВ
Непрерывно возрастающее количество радиоэлектронных средств (РЭС)
при их объективно существующем техническом несовершенстве порождает
проблему обеспечения их совместной работы с заданными параметрами ка-
чества. Эта проблема, в свою очередь, есть совокупность двух взаимосвязан-
ных проблем: эффективного использования спектра электромагнитных коле-
баний и обеспечения электромагнитной совместимости (ЭМС) РЭС. Органи-
зационно эти проблемы решаются на различных этапах жизненного цикла
РЭС и систем:
первая - на этапе создания РЭС;
вторая - на этапе их эксплуатации.
Спектр электромагнитных колебаний - электромагнитные колебания (по-
ля) как разновидность материи объективно существуют в диапазоне от долей
герц (Гц) до частот свыше 1019 Гц. Весь этот диапазон для удобства обраще-
ния с ним и по превалирующему виду излучения разбит на диапазоны: ра-
диочастот; оптический; рентгеновского излучения; у-излучения.
Электромагнитная совместимость - совокупность свойств и характери-
стик РЭС, а также условий их работы, при которых уровень непреднамерен-
548
ных помех, создаваемых различными источниками, обеспечивает работу РЭС
с требуемым качеством.
Радиоэлектронное средство - техническое средство, состоящее из одно-
го или нескольких радиопередающих и/или радиоприемных устройств и
вспомогательного оборудования.
При совместной работе РЭС, различной высокочастотной аппаратуры,
электрических устройств и установок могут создаваться непреднамеренные
помехи искусственного происхождения, нарушающие нормальное функцио-
нирование РЭС (электромагнитную совместимость).
Непреднамеренные помехи подразделяют на взаимные, индустриальные и
контактные.
Взаимные помехи - помехи одним РЭС, создаваемые излучениями других
РЭС при совместном их применении.
Индустриальные помехи - помехи, создаваемые высокочастотными из-
лучениями устройств промышленного, научного, медицинского, бытового
назначения, не предназначенных для передачи информации.
Контактные помехи обусловлены переизлучениями электромагнитных
колебаний переменными во времени линейными и нелинейными сопротив-
лениями между проводящими телами (контактами), движущимися в поле из-
лучения радиопередающих устройств.
Обеспечение ЭМС РЭС достигается согласованием мероприятий по цели,
задачам, месту и времени. Исходными данными для обеспечения ЭМС РЭС
являются:
размещение (решение о размещении) конкретных РЭС в заданном рай-
оне;
потенциальные источники непреднамеренных помех;
нормы частотно-территориального разноса (ЧТР) для потенциальных не-
совместимых РЭС (ПН РЭС);
технические характеристики РЭС, влияющие на ЭМС РЭС;
физико-географические условия района (рельеф местности, условия рас-
пространения радиоволн и т.п.).
Основными этапами обеспечения ЭМС РЭС являются, как правило, сле-
дующие:
оценка ЭМС РЭС;
принятие решения на проведение организационных мероприятий по
обеспечению ЭМС РЭС;
реализация принятого решения;
контроль соблюдения частотных назначений для РЭС и ограничений на
их работу с излучением.
Оценка электромагнитной совместимости РЭС
Задача оценки (прогнозирования) ЭМС РЭС возникает, когда решаются
вопросы об изменении частотных, пространственных и временных режимов
работы одного или нескольких РЭС, разрешенных в одном районе или о раз-
мещении дополнительных РЭС в этом районе. Содержание оценки ЭМС РЭС
549
заключается в выявлении (отборе) потенциально несовместимых РЭС в рас-
сматриваемом районе.
Потенциально несовместимые РЭС - это РЭС, которые при одновремен-
ной работе могут оказывать мешающее воздействие либо взаимно друг на
друга, либо одно из них на другое.
Потенциально несовместимые РЭС отбираются на основе временного,
частотного и энергетического критериев поэтапно.
На первом этапе выявляются потенциально несовместимые РЭС по вре-
менному критерию.
На втором этапе для выявленных по временному критерию ПН РЭС оце-
нивается их ЭМС по частотному критерию.
На третьем этапе для выявленных уже по частотному критерию ПН РЭС
проводится оценка их ЭМС по энергетическому критерию. Если этот крите-
рий соблюдается для всех выявленных на предыдущих этапах ПН РЭС, то
ЭМС РЭС по этому признаку в районе считается обеспеченной, в противном
случае принимается решение о ведении дополнительных временных, частот-
ных и энергетических ограничений работы РЭС и оценка их ЭМС повторяет-
ся до получения положительного решения (если таковое существует).
Важную роль в обеспечении ЭМС РЭС играют различные организацион-
ные способы, под которыми понимаются решения, реализация которых при-
водит к исключению или существенному снижению до приемлемого уровня
непреднамеренных помех в ходе эксплуатации РЭС. Организационные спо-
собы могут быть классифицированы следующим образом.
Планирование использования радиочастотного спектра:
выделение полос частот;
распределение полос частот;
присвоение частот (полос частот).
Выбор условий эксплуатации РЭС:
назначение рабочих частот;
частотно-территориальный разнос;
использование экранирующих свойств местности,
ограничения режимов работы;
выявление источников непреднамеренных помех, оценка их влияния на
ЭМС РЭС и по возможности их устранение.
В общем случае мощность непреднамеренной помехи на входе приемни-
ка (рецептора) в пределах его основной полосы пропускания может быть рас-
считана по выражению:
у-Кпр К,
/6 я2 Я2
где Р„ - мощность передатчика непреднамеренной помехи;
G„(р.е), G„p(р,е) - коэффициенты усиления передающей и приемной
антенны по основным или боковым лепесткам;
Л - длина волны мешающего и рабочего РЭС;
550
у - коэффициент совпадения поляризации сигнала
и помехи,0 у< 1;
Кпр - коэффициент ослабления помехи в приемнике,
зависящий от соотношения спектров сигнала
и помехи, частотной избирательности приемника
и др. параметров,0 £ Кпр £ 1;
Кч - коэффициент совпадения частот,0 < Кч < 7;
В основе расчета норм ЧТР лежит соотношение:
где Рп лж - допустимый уровень непреднамеренной помехи на входе прием-
ника.
Основные ограничения при расчете норм ЧТР РЭС состоят в том, что не
учитывается ослабление энергии электромагнитных колебаний за счет не-
совпадения поляризации сигнала и помехи, экранирующих свойств местно-
сти и предметов, тропосферного рассеяния радиоволн. Эти обстоятельства
позволяют подходить к нормам ЧТР как к опорным, имеющим рекоменда-
тельный характер.
Ослабление помехи на основной частоте сигнала за счет несовпадения их
поляризации может достигать величины 25 дБ (при ортогональной поляриза-
ции).
Использование экранирующих свойств .местности. Ослабление энергии
радиоволн за счет препятствий на трассе их распространения является функ-
цией длины волны, геометрических размеров, конфигурации препятствий и
их поглощающих свойств. Для конкретных ситуаций ослабление рассчиты-
вается приближенно и проверяется экспериментально.
Ограничения режимов работы РЭС вводятся, как правило, централизо-
ванно соответствующими радиочастотными органами и заключаются:
в установлении приоритетов использования РЭС;
во введении временных запретов работы РЭС на определенных частотах;
в определении территориальных и пространственных запретов на разме-
щение и работу РЭС;
в ограничении мощности передающих устройств и т.п.
Выявление источников непреднамеренных помех часто оказывается
трудной задачей, решение которой требует знания многих характерных опо-
знавательных признаков, таких, как:
направление прихода помех;
время, продолжительность, цикличность действия помехи;
интенсивность помехи и результат ее воздействия на оконечные устрой-
ства РЭС и др.
После выявления источника помехи принимаются соответствующие ме-
ры по обеспечению ЭМС РЭС.
551
16.8 . ИНФОРМАЦИОННОЕ ПРОТИВОБОРСТВО
Важной особенностью современного межгосударственного противобор-
ства является возрастание роли в нем информационных факторов. В военной
области это выражается в актуализации специфического вида вооруженной
борьбы, который получил в отечественной военной литературе название
“информационная борьба” (ИБ). В настоящем разделе рассматриваются сле-
дующие аспекты ИБ: понятийный аппарат теории ИБ. составные части и их
содержание, а также система форм информационной борьбы.
По взглядам зарубежных специалистов под информационной войной в
широком смысле понимается совокупность мероприятий, предназначенных
для обеспечения информационного преимущества по отношению к потенци-
альному или реальному противнику. При этом четко обозначены два уровня
реализации концепции - государственный и военный. В отечественной воен-
ной литературе понятию “информационная война” соответствуют термины
“информационное противоборство” и “информационная борьба”.
Информационную войну целесообразно рассматривать в двух основных
аспектах: в широком понимании - как новую форму межгосударственного
противоборства (в этом случае имеет смысл использовать термин "информа-
ционное противоборство"), и в более узком значении - применительно к об-
ласти вооруженной борьбы (здесь целесообразно использовать термин "ин-
формационная борьба").
Суть информационного противоборства заключается в обеспечении
достижения целей государственной политики в мирное и военное время пу-
тем применения специальных средств и способов воздействия на информа-
ционный ресурс противостоящей стороны, а также осуществления защиты и
эффективного использования собственного информационного ресурса. В за-
висимости от объекта воздействия информационное противоборство может
быть информационно-психологическим, для которого объектом выступает
общество, большие социальные группы или отдельные личности, и инфор-
мационно-техническим. нацеленным на технические системы.
В контексте специфической области вооруженной борьбы под информа-
ционной борьбой понимается совокупность согласованных мероприятий и
действий войск, проводимых по единому замыслу и плану с целью захвата и
удержания информационного превосходства над противником (или снижения
его информационного превосходства) при подготовке и в ходе военных (бое-
вых) действий. Информационное превосходство предполагает, что степень
информированности органов управления своими войсками и оружием такова,
что они обеспечены более полной, точной, достоверной и своевременной ин-
формацией об обстановке в зоне боевых действий, чем соответствующие ор-
ганы управления противника. При этом состояние и возможности собствен-
ной системы управления должны позволять реализовать это преимущество в
боевых действиях войск (сил).
Под информационным ресурсом в военной области целесообразно по-
нимать военную информацию, находящуюся на различных физических носи-
552
гелях и циркулирующую между объектами инфраструктуры системы управ-
ления, а также сами объекты последней.
Одним из ключевых понятий теории информационной борьбы является
информационное оружие, под которым следует понимать технические, про-
граммные и иные специальные средства информационной борьбы, воздейст-
вующие на информационный ресурс 1тротивника. При этом необходимо раз-
личать использование сил и средств, привлекаемых к мероприятиям инфор-
мационной борьбы, и собственно информационного оружия. К последнему
относятся средства радиоэлектронного поражения (подавления), программ-
но-математического воздействия, массовой информации (в том числе синте-
заторы аудио- и видеосообщений по ним), создания голографических изо-
бражений в атмосфере, психотронные генераторы и др.
Важнейшей задачей теории информационной борьбы является разработка
форм ее ведения. От ее решения во многом зависит эффективность примене-
ния сил и средств, привлекаемых к информационной борьбе в военных кон-
фликтах.
Учитывая специфические особенности информационной борьбы, к фор-
мам ее ведения целесообразно отнести следующие:
информационные операции;
информационные сражения;
информационные действия (информационные акции);
информационные удары.
Информационная операция - совокупность согласованных и взаимосвя-
занных по задачам, месту, времени и общим замыслом информационных
сражений, действий (акций) и ударов, проводимых с целью завоевания и
удержания информационного превосходства над противником или снижения
его информационного превосходства на театре военных действий или страте-
гическом (операционном) направлении.
В зависимости от своих целей информационные операции могут быть
наступательными и оборонительными.
Целью наступательной информационной операции является завоева-
ние и удержание информационного превосходства над противником. В этой
операции главные усилия направляются на дезорганизацию систем управле-
ния войсками и оружием противника, часть сил и средств обеспечивает ус-
тойчивость собственного управления. При этом все действия по информаци-
онной борьбе должны обеспечивать благоприятные условия для боевых дей-
ствий войск (сил).
Оборонительная информационная операция, проводимая в условиях
подавляющего информационного превосходства противника, имеет целью
снижение этого превосходства. В этой операции главные усилия сил и
средств направляются на обеспечение информационной безопасности орга-
нов управления объединений и соединений, на защиту информации в систе-
мах управления войсками (силами) и оружием. Часть сил и средств направ-
ляется на дезорганизацию управления войсками и оружием противника. Все
553
это также направлено на обеспечение благоприятных условий для действий
войск.
Поставленные цели информационных операций достигаются решением
следующих задач: информационным воздействием на противника, информа-
ционной защитой и эффективным использованием информационных ресур-
сов собственной группировки войск (сил). Информационная операция обыч-
но проводится в рамках соответствующей воздушной, наземной, самостоя-
тельной, совместной или специальной операции. Поэтому перечисленные
задачи будут иметь свою специфику в зависимости от решаемых в рассмат-
риваемый период времени оперативных задач войск (сил).
По масштабам информационные операции можно классифицировать на
стратегические, оперативно-стратегические, оперативные и оперативно-
тактические.
В целом информационная операция может характеризоваться следующи-
ми основными показателями: пространственным размахом, продолжительно-
стью, количественным и качественным составом привлекаемых сил и средств
и др. Необходимо отметить, что информационная борьба стирает такие четко
определенные для боевых операций атрибуты, как фронт и тыл (информа-
ционное воздействие может осуществляться на всю глубину территории про-
тивника), война и мир (сторона, подвергшаяся информационному воздейст-
вию, может об этом и не знать) и пр.
В ряде случаев пространственно-временные характеристики операции,
проводимой группировкой войск, и особенности информационной обстанов-
ки могут вызвать введение в рамках информационной операции такой формы
информационной борьбы, как информационное сражение. В такой интерпре-
тации информационное сражение - это составная часть информационной
операции, в ходе которой решается одна или несколько ее важнейших стра-
тегических (оперативных) задач. Оно представляет собой совокупность со-
гласованных и взаимосвязанных по цели, задачам, месту и времени инфор-
мационных действий (акций) и ударов. В зависимости от масштаба и вида
проводимой информационной операции в ней может быть одно или не-
сколько информационных сражений, осуществляемых одновременно или по-
следовательно. Подобно информационным операциям информационные
сражения классифицируются по целям и масштабам.
Информационные действия (акции) - совокупность согласованных по це-
ли, задачам, месту и времени мероприятий, проводимых привлекаемыми для
решения задач информационной борьбы силами и средствами в течение оп-
ределенного времени в заданном районе (на данном направлении). В рамках
информационных действий (акций) могут проводиться информационные
удары.
Информационные действия (акции) можно классифицировать по целям
(наступательные и оборонительные), по масштабам (стратегические, опера-
тивно-стратегические, оперативные, оперативно-тактические и тактические)
и по виду воздействия (информационно-технические, информационно-
психологические и комбинированные).
554
Наступательные информационные действия (акции) - активные, це-
ленаправленные, согласованные по задачам, месту и времени воздействия
привлекаемых к ведению информационной борьбы сил и средств в течение
определенного времени в заданном районе по отдельным информационным
объектам системы управления противника или его информационного ресурса
в целом. В рамках наступательных информационных действий могут прово-
диться различные информационные удары. Информационные акции (напри-
мер, манипулирование средствами массовой информации, культуры, искус-
ства и др.) будут проводиться в рамках информационного противоборства.
Важным видом наступательных информационных действий является ин-
формационная блокада - согласованное по задачам, месту и времени при-
менение сил и средств с целью наиболее полного снижения возможностей
противника по получению и использованию информации, необходимой для
эффективного ведения операций (боевых действий). Одним из основных спо-
собов достижения цели информационной блокады является радиоэлектрон-
ное блокирование - согласованное воздействие средствами радиоэлектрон-
ного подавления и функционального поражения на технические элементы
систем разведки и каналы передачи информации противника.
Большой вклад в осуществление информационной блокады вносят меро-
приятия психологической борьбы.
Действия (акции) по информационной защите - согласованное по за-
дачам, месту и времени применение привлекаемых для ведения информаци-
онной борьбы сил и средств с целью обеспечения устойчивости функциони-
рования системы управления войсками (силами) в условиях информационно-
го воздействия противника.
Под информационным ударом понимается кратковременное мощное
согласованное информационное воздействие сил и средств на наиболее важ-
ный элемент (элементы) системы управления противника для достижения
решительных целей по завоеванию информационного превосходства (сниже-
ния информационного превосходства противника).
Информационные удары можно классифицировать по масштабам (стра-
тегические, оперативно-стратегические, оперативные, оперативно-
тактические, тактические), по видам (радиоэлектронные, радиоэлектронно-
огневые, компьютерные, информационно-психологические, комбинирован-
ные) и степени массирования сил и средств (массированные, избирательные
и сосредоточенно-массированные).
Радиоэлектронный удар - согласованное по времени, глубине и задачам
внезапное массированное комплексное воздействие разнородных сил и
средств радиоэлектронного подавления и функционального поражения по
радиоэлектронным объектам системы управления противника с целью срыва
управления на отдельных направлениях (или с отдельных пунктов управле-
ния) на определенное время.
Радиоэлектронно-огневой удар - согласованное по времени, глубине и
задачам массированное комплексное радиоэлектронное и огневое воздейст-
вие сил и средств радиоэлектронной борьбы, ракетных войск и артиллерии,
555
авиации и других сил и средств, выделенных для борьбы с системами управ*
ления противника, с целью срыва управления на отдельных направлениях на
определенное время. Заметим, что данная форма уже имеется в руководящих
документах ВС РФ.
Компьютерный (программный) удар - согласованное по времени,
месту и задачам внезапное массированное комплексное воздействие атакую-
щих сил и средств специального программно-математического воздействия
по компьютеросодержащим объектам системы управления противника с це-
лью срыва управления на отдельных направлениях (или с отдельных пунктов
управления) на определенное время.
Информационно-психологический удар - согласованное по времени,
месту и задачам массированное комплексное морально-психологическое
воздействие сил и средств психологической борьбы и других привлекаемых к
ведению информационной борьбы сил и средств на личный состав (прежде
всего персонал органов управления) группировки противника с целью сры-
ва (затруднения) управления на отдельных направлениях на определенное
время. В этой связи необходимо отмстить активно разрабатываемые в по-
следнее время за рубежом возможности прямого воздействия информацион-
ных технологий на психику человека, а также непосредственного психофи-
зиологического воздействия на работу жизненно важных органов его орга-
низма.
В зависимости от обстановки в информационном ударе могут применять-
ся избирательный, сосредоточенно - массированный или массированный спо-
собы применения сил и средств информационной борьбы.
556
17. МОДЕЛИРОВАНИЕ В СИСТЕМЕ
ВОЗДУШНО-КОСМИЧЕСКОЙ ОБОРОНЫ
Вооруженная борьба в воздушно-космической сфере - сложный процесс
взаимодействия десятков тысяч объектов (в границах стратегического на-
правления может действовать до 50 тысяч космических, воздушных, назем-
ных, морских объектов и средств поражения). Управление ими требует полу-
чения, сбора, обработки, отображения и анализа информации о своих вой-
сках (силах) и войсках (силах) противника, прогнозирования действий войск
(сил) противника, разработки, оценки и выбора рациональных вариантов
действий своих войск (сил) для решения поставленных задач в воздушно-
космической сфере. При этом все процессы управления, особенно в угро-
жаемый период и в ходе военных действий, происходят в условиях дефицита
располагаемого времени и информации. Данные факторы, а также большая
стоимость вооружения и системы ВКО в целом требуют для обоснования
вопросов строительства системы ВКО, выбора образцов ВВТ для нее, под-
держки принятия решений на отражение ударов СВКН противника, а также
для подготовки органов управления использования математического модели-
рования. Для этого необходимы моделирующие комплексы (МК), которые
должны удовлетворять целому ряду требований:
возможность моделирования средств, группировок и действий СВКН
противника;
возможность моделирования средств, группировок и действий войск
(сил) системы ВКО;
наличие моделей геофизической обстановки (прежде всего электронных
карт различного масштаба);
возможность расчета любых показателей, характеризующих результаты
боевых действий группировок СВКН противника и войск (сил) ВКО, и при-
менения отдельных образцов ВВТ;
возможность проведения двусторонних компьютерных учений и игр в
рамках оперативной и боевой подготовки и прогнозирования развития ситуа-
ций в военных конфликтах в любых районах мира.
Главное требование к МК - адекватность моделирования вооруженной
борьбы в воздушно-космической сфере возможным реальным действиям
СВКН противника и войск (сил) ВКО.
Единственным моделирующим комплексом, удовлетворяющим указан-
ным требованиям, является разрабатываемый ЗАО «Концерн ВНИИНС»
многофункциональный моделирующий комплекс (ММК) «Спсктр-НВ».
ММК «Спектр - НВ» представляет собой систему моделей объектов и
процессов вооруженного противоборства в воздушно-космической сфере,
реализованную на универсальных вычислительных средствах. Он создан на
основе объектно-ориентированной технологии, базирующейся на принципах
объектно-ориентированного анализа сложных систем и объектно-
ориентированного их проектирования.
557
Основу специального математического и программного обеспечения
ММК «Спектр - НВ» составляют (рис. 17.1):
Рис. 17.1. Структура специального математического и программного
обеспечения ММК «Спектр - НВ».
модель геоинформационной системы (для формирования моделей рай-
онов возможных боевых действий);
модели систем и средств воздушно-космического нападения;
модели систем и средств ВКО;
модели группировок войск ( сил) воздушно-космического нападения
и воздушно-космической обороны.
ММК «Спектр - НВ» обеспечивает:
ввод, хранение и поддержку в актуальном состоянии данных, характери-
зующих район (регион) ведения боевых действий, состав и состояние проти-
воборствующих группировок войск, возможности систем вооружения и во-
енной техники;
моделирование во времени и пространстве боевых действий противобор-
ствующих группировок войск (сил) в воздушно-космической сфере и расчет
необходимых показателей их действий;
управление моделируемыми действиями войск (сил) в интерактивном
режиме;
автоматизированное формирование, вывод на печать согласованного пе-
речня графических и текстовых документов.
ММК «Спектр-НВ» адекватно отражает реальные условия, средства воо-
руженной борьбы и учитывает закономерности их функционирования и вза-
имные связи между ними. Специалисты США считают, что именно ком-
плексные математические модели создают условия для объединения в единое
целое всего многообразия разнородной информации, циркулирующей в ор-
ганах управления, к виду, позволяющему командованию представлять обста-
новку в агрегированном виде и адекватно ее оценивать.
558
Важной особенностью ММК «Спектр-НВ» является полная визуализа-
ция всех процессов моделирования. На экранах можно наблюдать действия
всех войск (сил) и средств на стратегическом направлении или одного из
средств вооруженной борьбы.
Моделирование с помощью ММК вариантов состава и действий СВКН
противника, вариантов оснащения образцами вооружения и военной техники
и построения системы ВКО, способов действий войск (сил) по выполнению
задач борьбы с СВКН противника, а также возможность оценивать по вы-
бранным показателям и критериям их результаты, которые позволяют про-
гнозировать действия СВКН противника и разрабатывать рациональные спо-
собы действий группировок войск (сил) ВКО.
Показанные свойства ММК «Спектр-НВ» обеспечивают обоснование
структуры системы ВКО и направлений развития ВВТ, поддержку принятия
решений и планирование операций (других форм военных действий), а также
оперативную и боевую подготовку должностных лиц органов управления.
Разработка предложений для органов управления ВС по решению задач
обоснования структуры системы ВКО, направлений развития ВВТ. а также
разработка рациональных способов действий войск (сил) и средств ВКО с
помощью ММК «Спектр-НВ» осуществляется в следующей последователь-
ности (рис. 17.2).
Первоначально из общей картографической базы (геоинформационной
системы) ММК выбирается необходимый участок цифровой карты анализи-
руемого региона (района), в котором будет осуществляться оценка предпри-
нимаемых действий (шагов). Затем создаются и размещаются на местности
модели основных объектов СВКН противника и системы ВКО (по вариантам
ее построения).
Далее задаются условия (время года, суток, метеоусловия и т.п.) развития
обстановки, в том числе действий противоборствующих сторон в районе кри-
зиса, показатели и критерии для их оценки.
Для каждого варианта построения системы ВКО и оснащения ее образ-
цами ВВТ разрабатываются и вводятся в ММК «Спектр-НВ» варианты спо-
собов действий войск (сил) ВКО.
Эти данные являются основой для моделирования разработанных вари-
антов построения системы ВКО, оснащения ее образцами ВВТ и способов ее
применения. Одновременно с этими операциями определяются (выбираются)
требования к эффективности системы ВКО и эффективности способов дейст-
вий.
После ввода всех данных осуществляется моделирование каждого вари-
анта. Полученные результаты моделирования сопоставляются с выбранными
критериями и служат основой для оценки эффективности и выбора вариантов
построения системы ВКО, оснащения ее образцами ВВТ и (или) способа дей-
ствий войск (сил) и средств ВКО, удовлетворяющих предъявленным требо-
ваниям.
559
I Выбор район! (per иона). на фоне i
I «второ го будут проводиться |
исследования
Изменение
обстановки, состава
группировок войск
(снл)и (или) средств
борьбы в системе
ВКО
I Сопл кис модели нсобсодкмсй
оперативной (оперетквно-
стратсгичссюй) обстановки
созиннс одехтронных группирсвок
войск (сил) и средств, обьскпя
инфраструктуры ндр объектен,
валяющихся элементами системы
ВКО
О гфсделс нив (выбо р) I
требований к
результата м действий
системы В КО
Формирование условий
ведения военных действий
(время гада, суток,
мстооу ело ВИЯ и др.)
Коррекция
({заработка новых)
способов (вартантое)
решения
поставленной зада ин
' Разработка способов (вариантов) ,
действий группировок войск (сил)
I В КО и СВКН в выбранном районе1
1 '
| Выбор показателей
I и «фитерисвоиенки i
результатов действий ;
I войск(снл) сторон при
! прнмсясннн системы ВКО j
Моделирование действий группировок войск (ост) ВКО
и СВКН и получение численных значений выбрткных
показателей тех оценки
НЕТ
СЖТ(Ш1 (средств, способе»),
Оиенха полученных результатов
н набор вариантов,
удовлетворяющих заданным
(выбржным) требованиям
(уа омеге ореоцм) iwikum
(нУранхш) трсАошнмш
Формирование предложений по выберу рациональной системы ВКО.
регионального варианта оснашетмяссобразиами ВВТ или определение!
рациональных способов действий при решении задач j
воххушно-юсьмчеспзй обороны (по выбранным критериям) ।
Рис. 17.2. Методика разработки предложений для органов управления по
решению задачи обоснования структуры системы ВКО, оснащения ее образ-
цами ВВТ и (или) разработки рациональных способов действий войск
Л Л
560
В случае если среди полученных результатов нет вариантов, удовлетво-
ряющих требованиям, производится изменение обстановки, состава группи-
ровок войск (сил) и (или) средств борьбы, способов их действий либо кор-
ректировка (разработка новых) вариантов системы ВКО, оснащения ее дру-
гими образцами ВВТ или изменяются требования (задачи).
Основное содержание методики использования ММК «Спектр - НВ» в
оперативной и боевой подготовке состоит в том, что обучаемые создают с
помощью ММК виртуальные группировки войск (сил) сторон и условия их
действий, а затем моделируют те или иные ситуации вооруженной борьбы,
наблюдая за процессом развития обстановки (результатами действий проти-
воборствующих сторон) на экранах мониторов. Многократное выполнение
функциональных обязанностей с проигрыванием, наблюдением и анализом
различных оперативных или боевых эпизодов и их результатов позволяет
обучаемым приобрести необходимый багаж знаний и определенный опыт.
561
ОГЛАВЛЕНИЕ
ПРЕДИСЛОВИЕ 3
1. ПРОТИВОВОЗДУШНАЯ ОБОРОНА. ОБЩИЕ СВЕДЕНИЯ 7
1.1. Назначение и структура ПВО на различных этапах развития
1.2. Назначение и структура войск ПВО Сухопутных войск 8
1.3. Назначение и структура ПВО ВМФ 9
1.4. Историческая справка
2. ОБЩИЕ СВЕДЕНИЯ О СИСТЕМАХ ВКН И ВКО 18
2.1. Силы и средства воздушно-космического нападения
2.1.1. Классификация сил
2.1.2. Классификация средств
2.2. Космические системы военного назначения 45
2.2.1. Классификация космических систем военного назначения -
2.2.2. Классификация иностранных КП 46
2.2.3. Боевые космические средства 54
2.3. Силы и средства воздушно-космической обороны 57
2.3.1. Основные определения
2.3.2. Геометрические параметры и элементы орбит 65
2.3.3. Трассы полета космических объектов 68
2.3.4. Классификация орбит КА 71
2.4. Система обеспечения сил и средств воздушно-космической 75
обороны
3. СРЕДА ВОЗДУШНО-КОСМИЧЕСКОГО ПРОСТРАНСТВА КАК 76
ТЕАТР ВОЕННЫХ ДЕЙСТВИЙ
3.1. Характеристика атмосферы
3.2. Влияние атмосферы на распространение электромагнитных ко- 79
лебаний
3.3. Влияние атмосферы на условия полета КА различного назначе- 85
ния
3.4. Характеристика полета аэробаллистических и баллистических 93
ракет
3.5. Общая оценка среды воздушно-космического пространства 95
3.6. Структура противоборствующих систем ВКН - ВКО 100
4. ЗАКОНЫ ДВИЖЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ 101
4.1. Общие сведения
4.2. Закон движения ЛА по дальности
4.3. Законы движения ЛА по азимуту и углу места 102
5. ФИЗИЧЕСКИЕ ПРИНЦИПЫ, ЛЕЖАЩИЕ В ОСНОВЕ ПОЛУЧЕНИЯ 108
ИНФОРМАЦИИ О ЛА
5.1. Системы координат, применяемые для решения задач обнару- -
жения и определения местоположения ЛА
5.2. Физические явления, лежащие в основе обнаружения ЛА в по- 113
лете
5.3. Относительное распределение частот по типам РЭС 117
562
5.4. Обнаружение ЛА радиолокационными средствами 119
6. СТАТИСТИЧЕСКИЕ МОДЕЛИ СИГНАЛОВ И ПОМЕХ 128
6.1. Требования, предъявляемые к зондирующим сигналам 129
6.2. Типы сигналов, реализованные в системах вооружения ВКО
6.3. Общие сведения из теории сигналов 130
6.4. Одиночный радиоимпульс 133
6.5. Монохроматическое излучение 137
6.6. Модели сигналов, аддитивных и мультипликативных помех 138
6.7. Основные параметры когерентной пачки радиоимпульсов (КПР) 139
7. ОСНОВЫ СИСТЕМОТЕХНИКИ 141
7.1. Общие сведения
7.2. Эргатические динамические системы управления войсками и 143
оружием
7.3. Кибернетические технические системы в ВКО
7.4. Основные принципы системотехники 144
8. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ОБНАРУЖЕНИЯ И ОПО- 148
ЗНАВАНИЯ
8.1. Дальность действия радиолокационных систем
8.2. Методы измерения дальностей до помехоносителей 152
8.3. Основные устройства и характеристики радиолокационных сис- 154
тем
8.4. Обнаружение целей оптико-электронными средствами 165
8.5. Принципы построения систем опознавания 168
9. МЕТОДЫ ОБЗОРА ПРОСТРАНСТВА, ОПРЕДЕЛЕНИЯ КООРДИ- 169
НАТ И ПАРАМЕТРОВ ДВИЖЕНИЯ ЛА
9.1. Методы обзора пространства
9.2. Методы измерения координат и параметров движения ЛА 174
10. ОСНОВЫ УПРАВЛЕНИЯ ЗЕНИТНЫМИ И АВИАЦИОННЫМИ 183
РАКЕТАМИ
10.1 . Сведения из аэродинамики
10.2 . Методы наведения ракет и системы управления 197
10.3 . Принципы построения систем управления зенитными и авиа- 210
ционными ракетами
11. ТОЧНОСТЬ ИЗМЕРЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ДВИ- 225
ЖЕНИЯЛА
11.1. Системы радиодиапазона
11.2. Системы оптического диапазона 228
12. ЗЕНИТНЫЕ РАКЕТНЫЕ ВОЙСКА 230
12.1. Системы зенитного ракетного оружия 234
12.1.1. Классификация и боевые свойства зенитных ракетных -
комплексов
12.1.2. Состав и характеристики элементов зенитных ракетных 235
комплексов
12.1.3. Тактико-технические характеристики зенитного ракет- 245
ного комплекса
563
12.1.4. Направления повышения эффективности зенитного ра- 249
кетного оружия
12.2. Основы стрельбы зенитными управляемыми ракетами 253
12.2.1. Сущность стрельбы зенитными управляемыми ракетами -
12.2.2. Ошибки наведения ЗУР 259
12.2.3. Координатный закон поражения цели 277
12.2.4. Количественные показатели эффективности стрельбы 283
ЗУР
12.2.5. Зоны поражения и пуска, возможности ЗРК по последо- 294
вательиому обстрелу цели
12.3. Управление огнем подразделений ЗРВ 302
12.3.1. Сущность и содержание управления огнем
12.3.2. Автоматизация процесса управления огнем подразделе- 307
ний в средствах управления части ЗРВ
12.3.3. Постановка задач подразделениям на уничтожение воз- 327
душных целей
12.3.4. Особенности управления огнем подразделений части 328
ЗРВ при отражении удара оперативно-тактических ракет
12.4. Основы подготовки и ведения боевых действий зенитными ра- 333
кетными частями (подразделениями)
12.4.1. Некоторые положения тактики зенитных ракетных час- -
тей (подразделений)
12.4.2. Система зенитного ракетного огня 338
12.4.3. Система управления части ЗРВ 342
12.4.4. Противовоздушный бой 344
12.4.5. Основы подготовки боевых действий части ЗРВ 348
12.4.6. Особенности организации тактической ПРО частями 358
и подразделениями ЗРВ
12.4.7. Система обеспечения боевых действий ЗРВ 369
12.4.8. Обеспечение живучести элементов военной техники 381
и группировок войск (сил)
13. ИСТРЕБИТЕЛЬНАЯ АВИАЦИЯ 385
13.1. Основные определения и структура системы вооружения
13.2. Системы вооружения истребителей и показатели их боевых 390
возможностей
13.3. Основы тактики воздушного боя истребителей 397
13.4. Боевые возможности подразделений и частей истребительной 402
авиации
14. РАДИОТЕХНИЧЕСКИЕ ВОЙСКА 412
14.1. Предназначение и задачи, решаемые радиотехническими вой- -
сками ВВС
14.2. Системы вооружения радиотехнических подразделений (час- 413
тей)
14.3. Тактико-технические характеристики РТС 418
14.4. Определение зоны обнаружения РЛС (РЛК) 425
564
14.5. Тактика радиотехнических подразделений (частей) 430
14.6. Методы расчета параметров поля пассивной локации 451
14.7. Основы подготовки радиотехнических подразделений (частей) 456
к боевому применению
15. СИСТЕМЫ УПРАВЛЕНИЯ 460
15.1. Общая характеристика систем управления силами и средства- -
ми ВКО
15.2. Определение, структура и классификация систем управления 463
15.3. Сущность и содержание процесса управления силами и сред- 475
ствами ВКО
15.4. Общая характеристика автоматизированных систем управле- 480
ния силами и средствами ВКО
15.5. Принципы п'строения и функционирования АСУ 488
15.6. Обеспечение АСУ 490
15.7. Оценка эффективности АСУ 517
15.8. Автоматизация обработки радиолокационной информации 523
в АСУ
16. РАДИОЭЛЕКТРОННАЯ БОРЬБА 528
16.1. Содержание радиоэлектронной борьбы
16.2. Бортовые комплексы РЭБ боевых самолетов основных ино- 532
странных государств
16.3. Силы и средства радиоэлектронной борьбы ВВС 534
16.3.1. Способы ведения РЭБ 536
16.3.2. Наземные средства помех частей и подразделений РЭБ 541
16.4. Формы и способы боевого применения сил и средств РЭБ 542
16.5. Основы боевого применения частей и подразделений РЭБ 543
16.6. Радиоэлектронная защита (РЭЗ) 545
16.7. Обеспечение электромагнитной совместимости радиоэлек- 547
тронных средств
16.8. Информационное противоборство 551
17. МОДЕЛИРОВАНИЕ В СИСТЕМЕ ВОЗДУШНО-КОСМИЧЕСКОЙ 556
ОБОРОНЫ
Справочник офицера воздушно-космической обороны / Под общей
редакцией С. К. Бурмистрова. - Тверь: BABKO, 2005. - 564 с.
Подписано в печать 19.05.06. Печать офсетная.
Объем 17,625 п. л. Формат 70х90‘/?2. Тираж 1000 экз. Заказ № 5068.
Отпечатано в Тверской областной типографии.
170100, г. Тверь, Студенческий пер., 28.