/


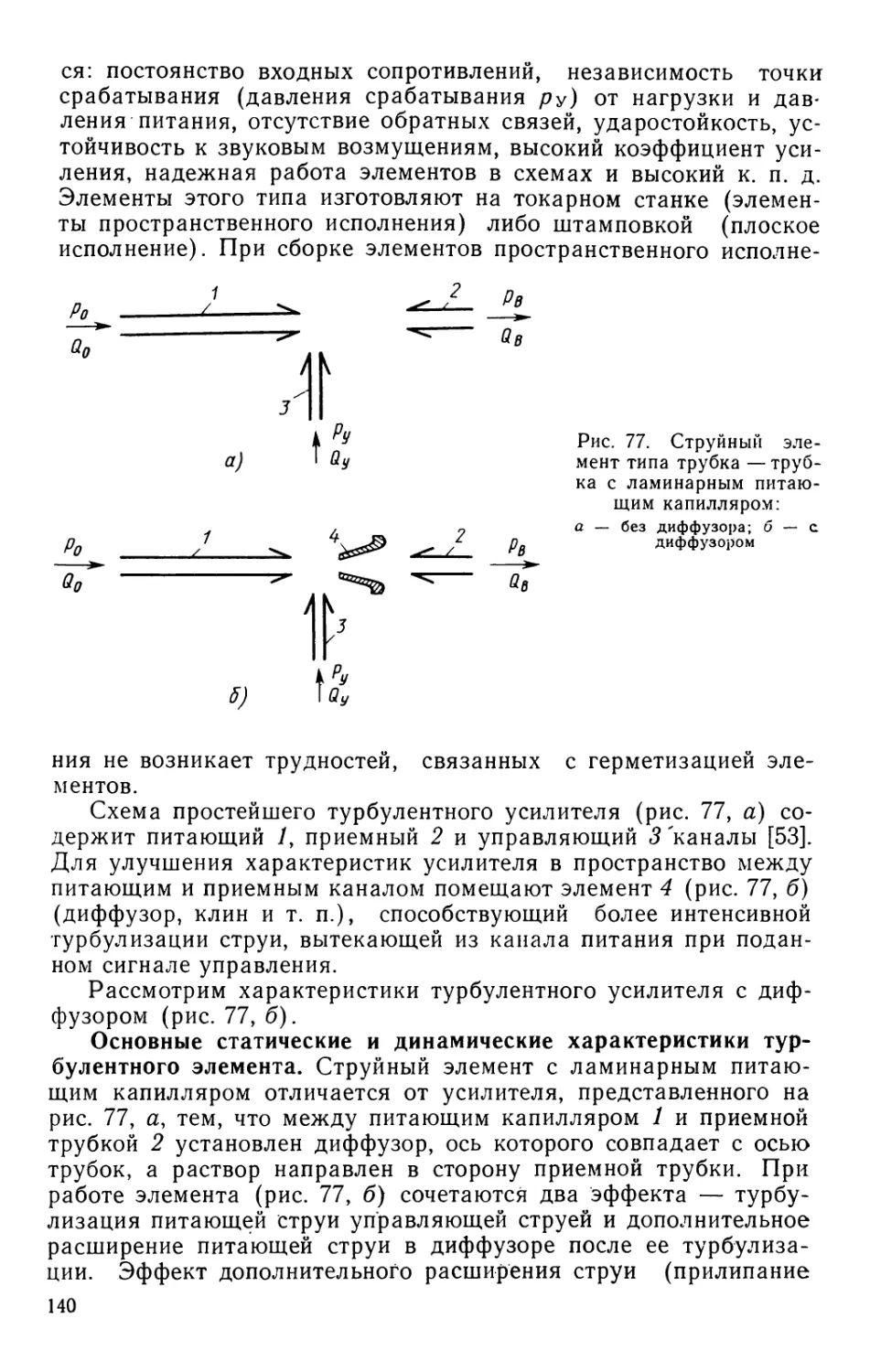
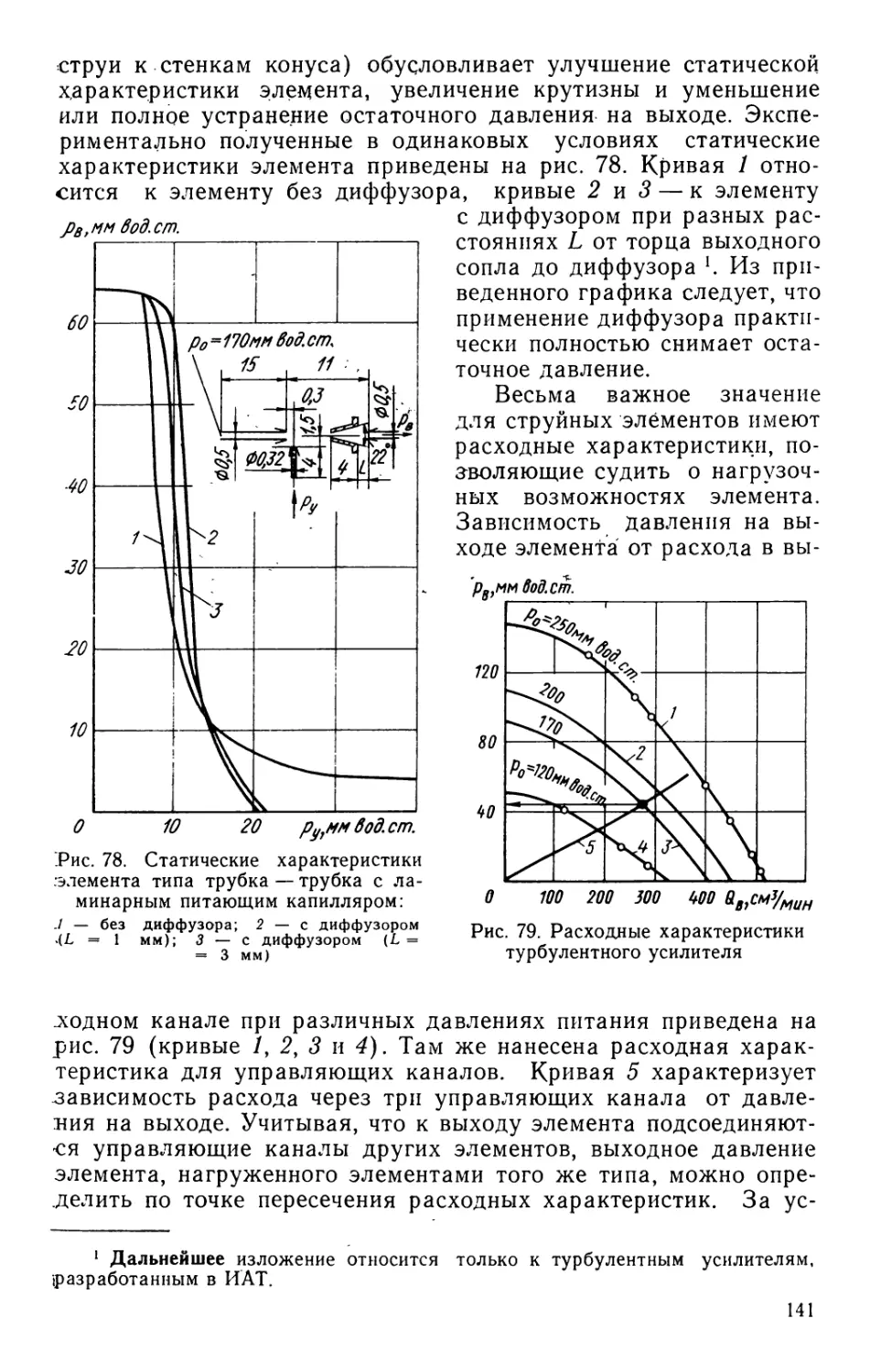


Автор: Дмитриев В.Н. Градецкий В.П.
Теги: инженерное дело техника в целом машиностроение автоматика
Год: 1973




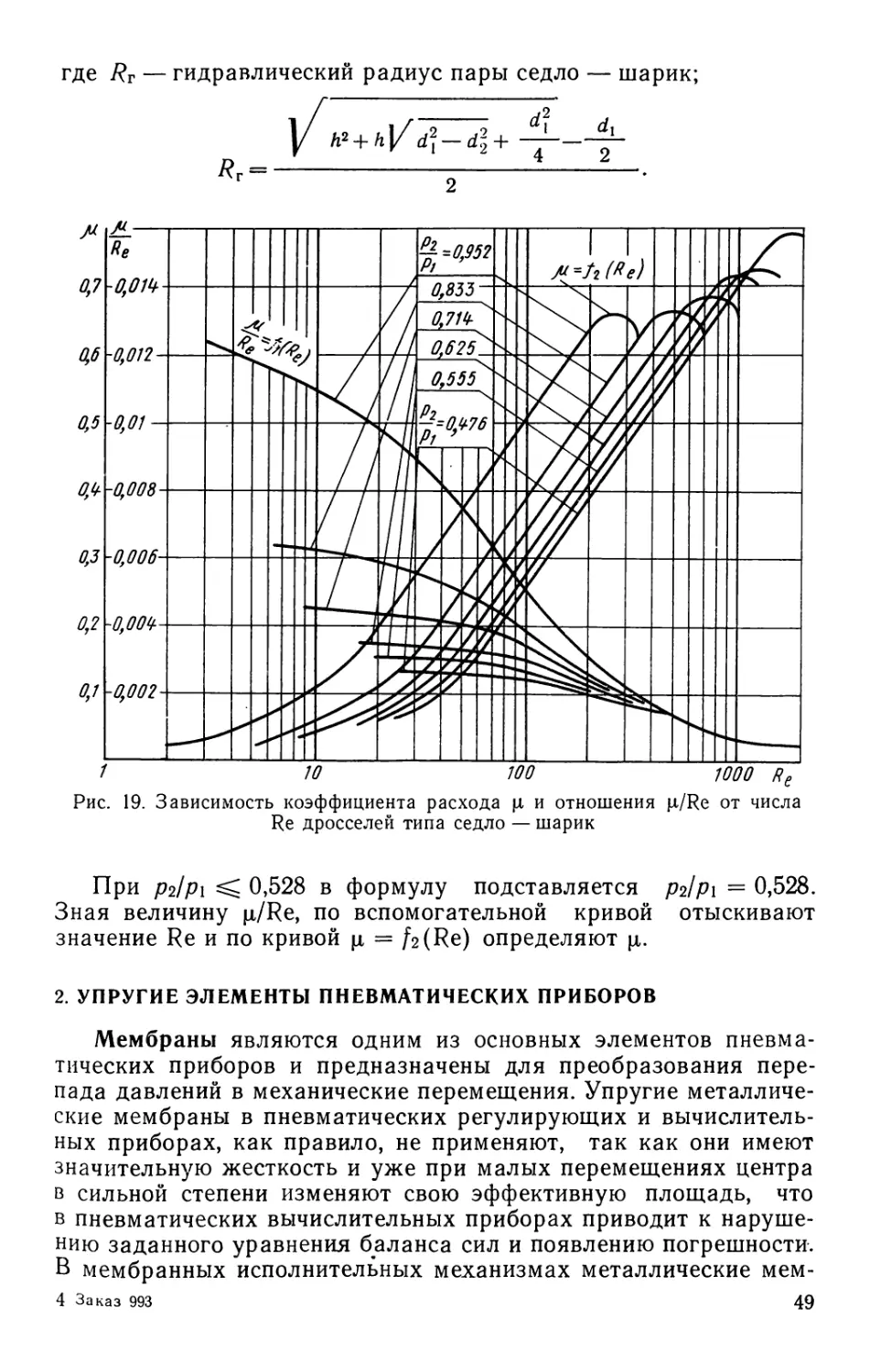
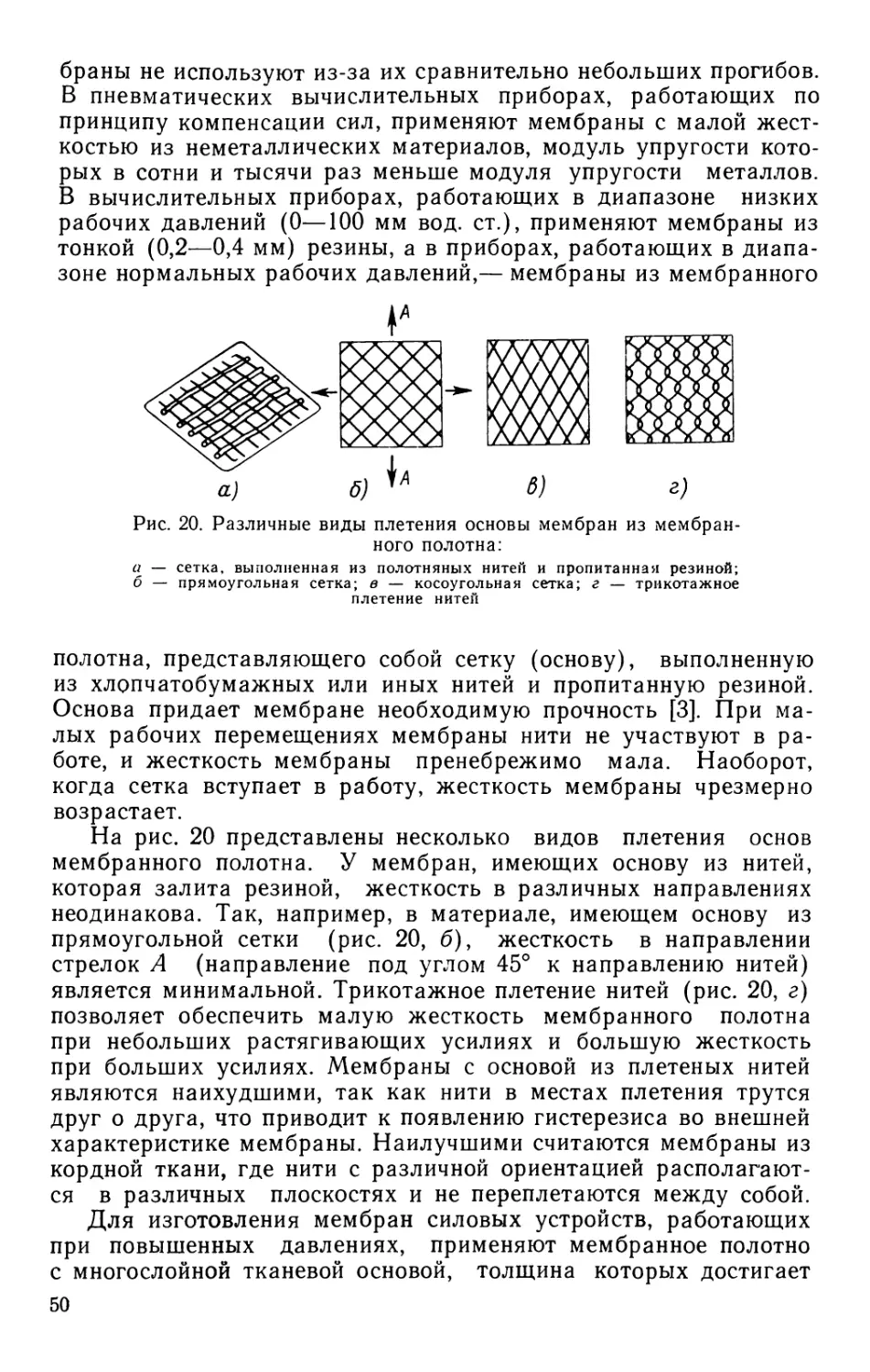
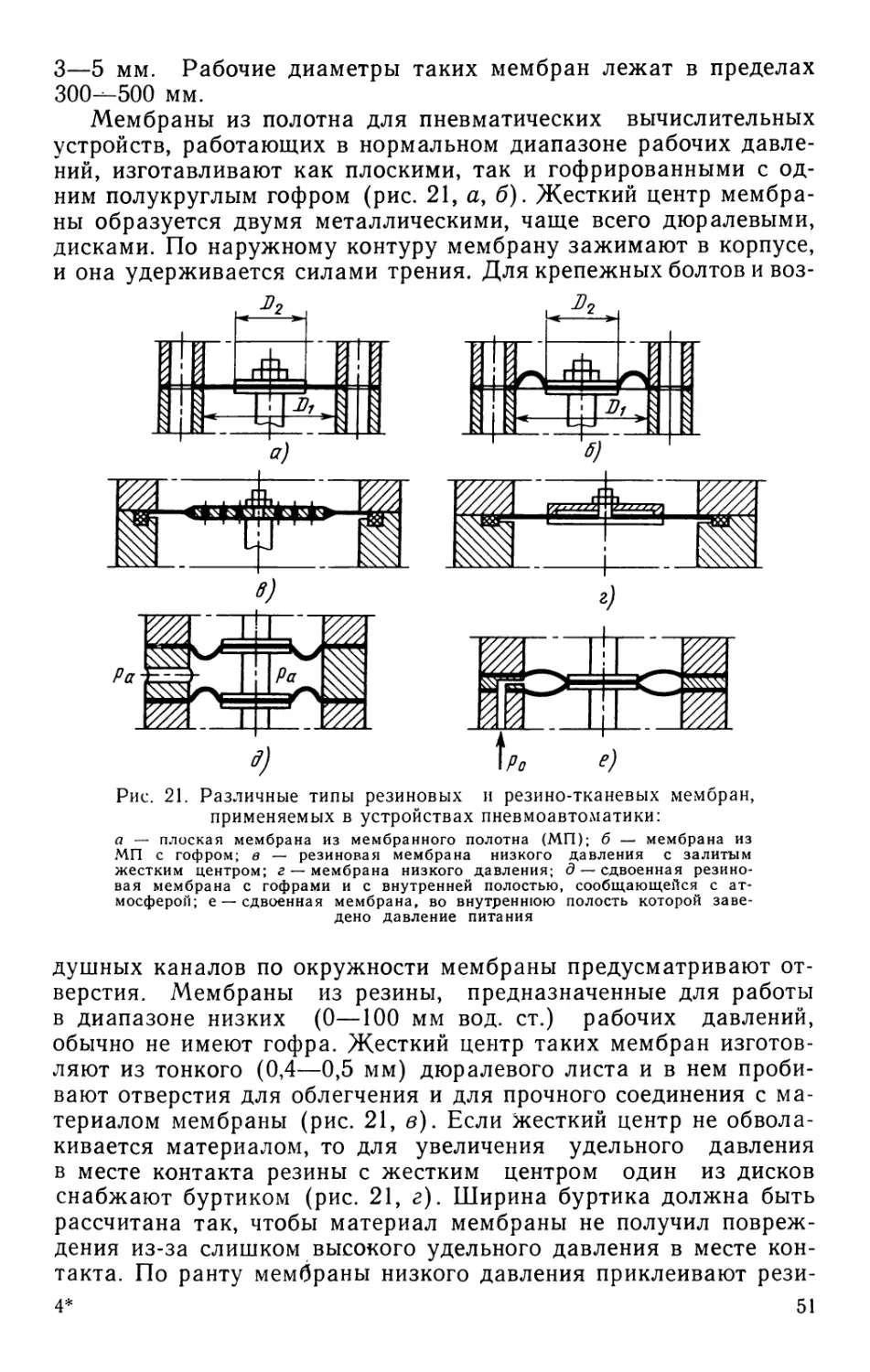
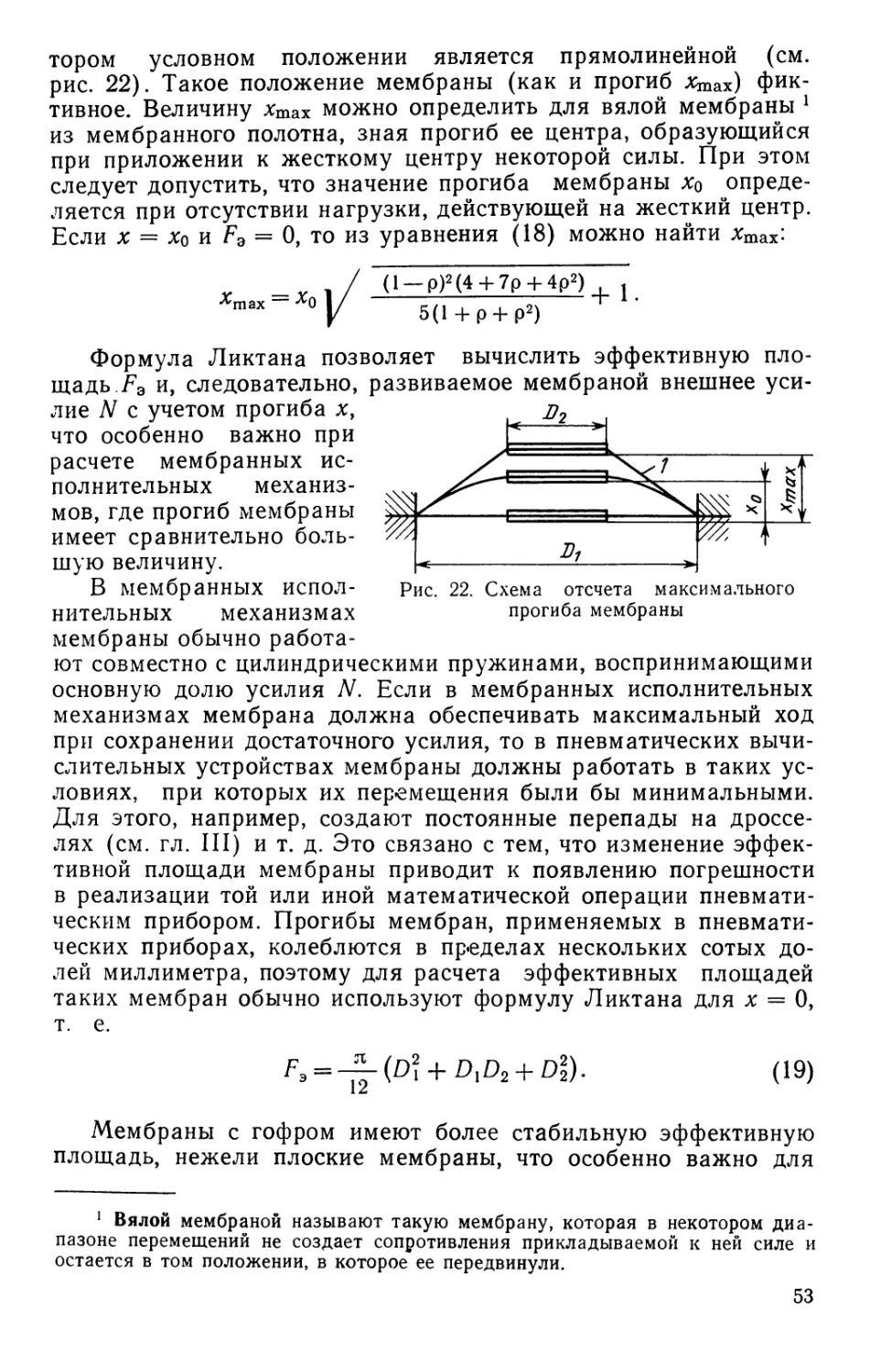
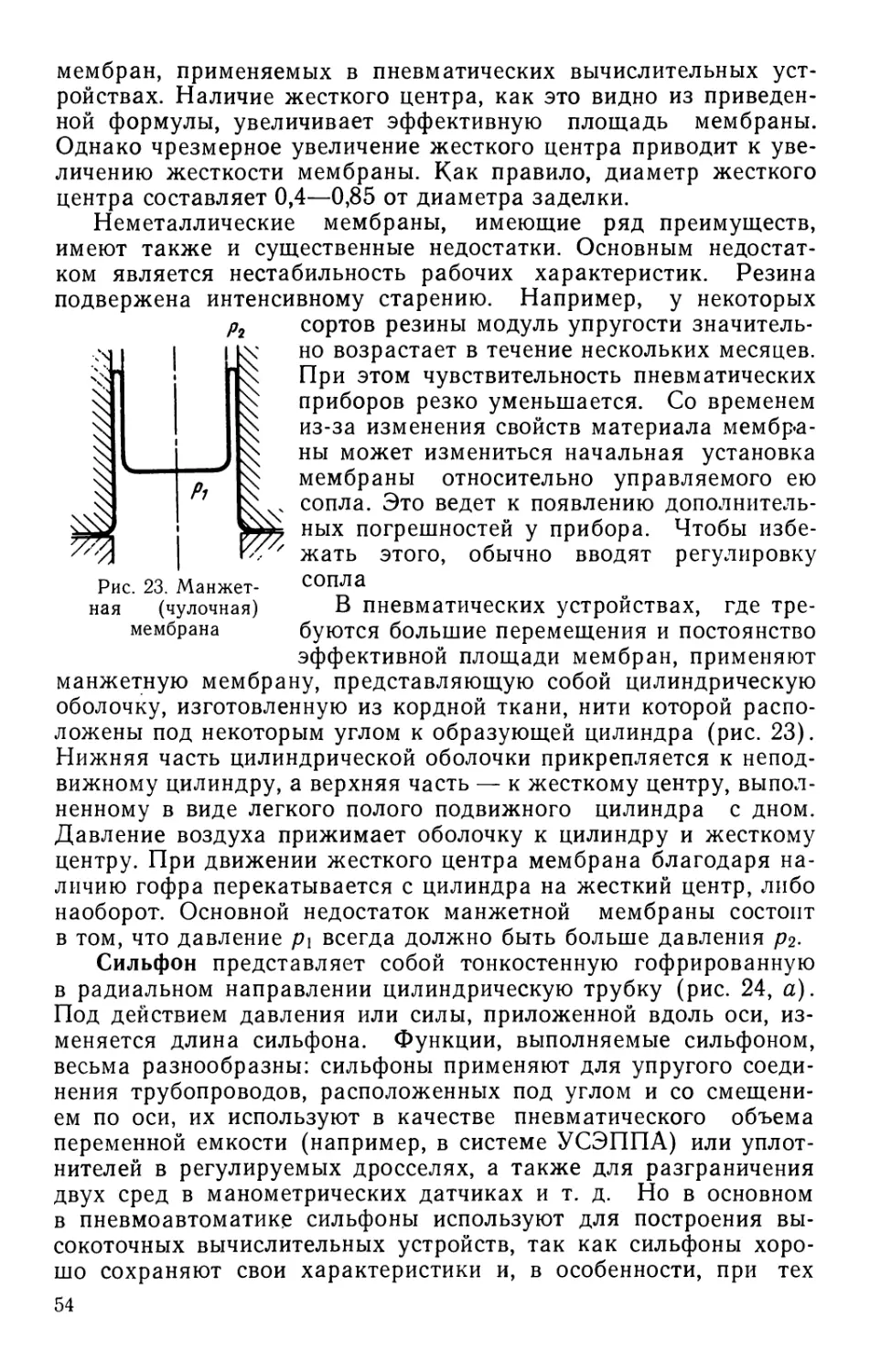
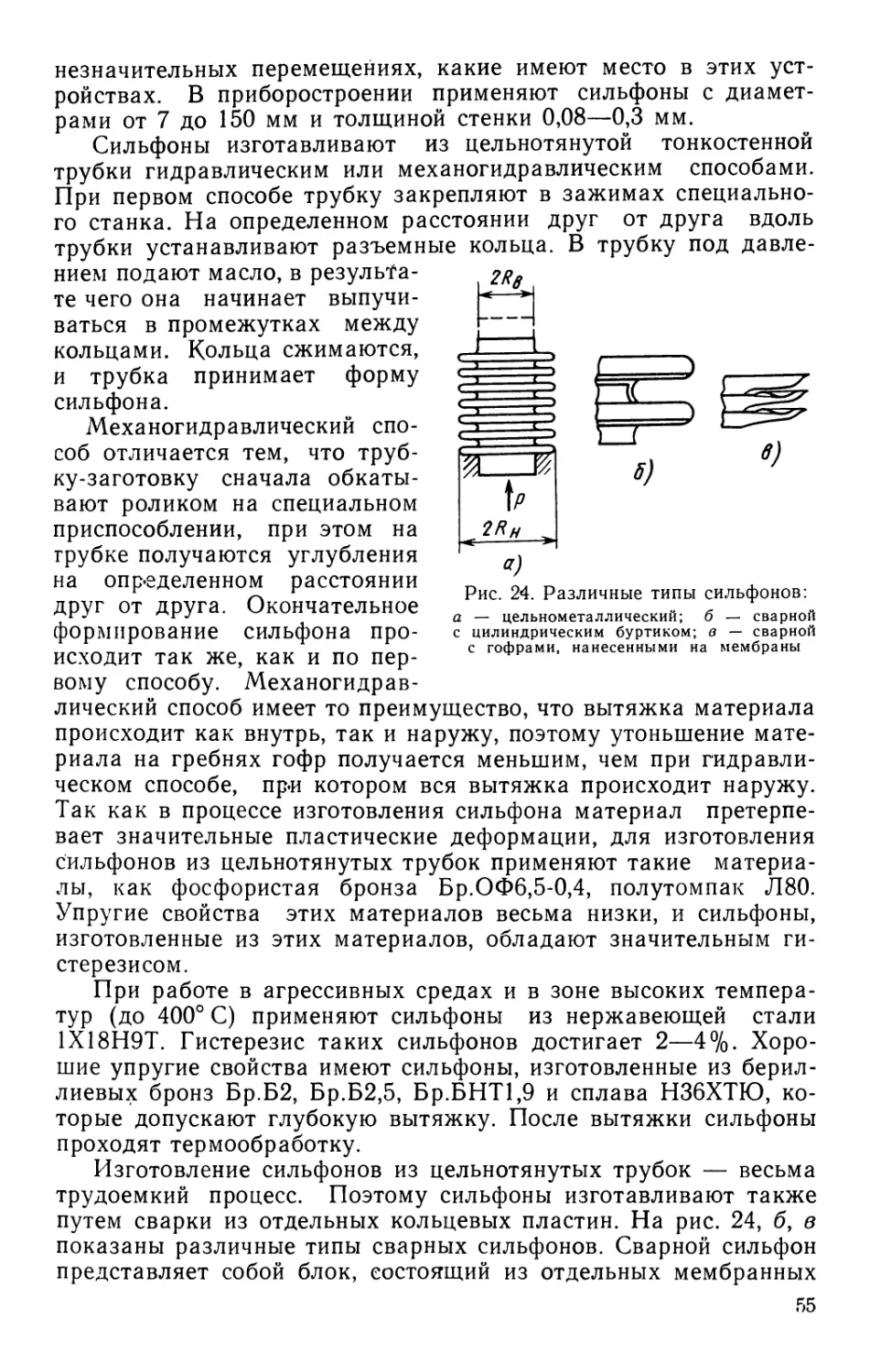
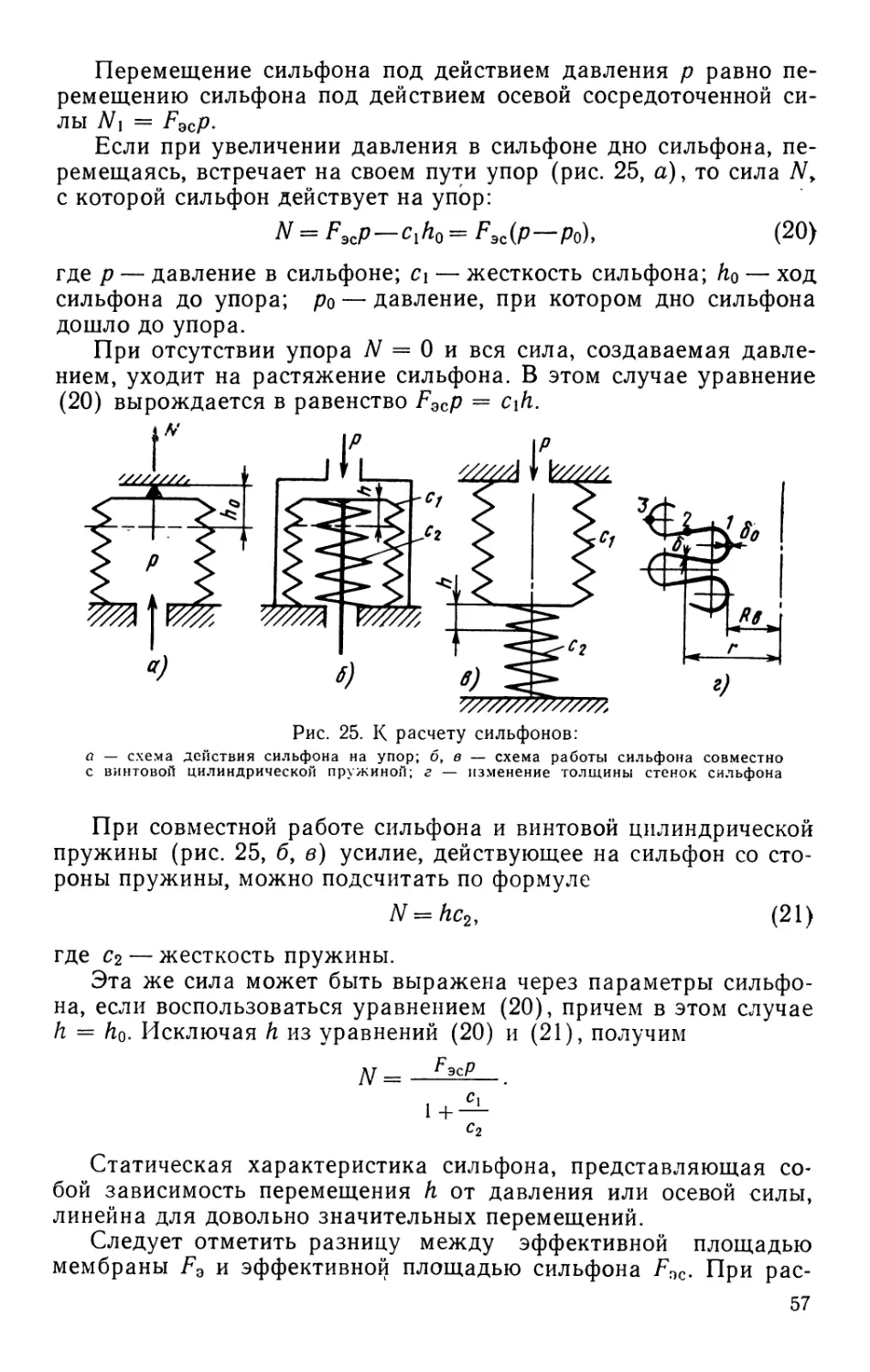
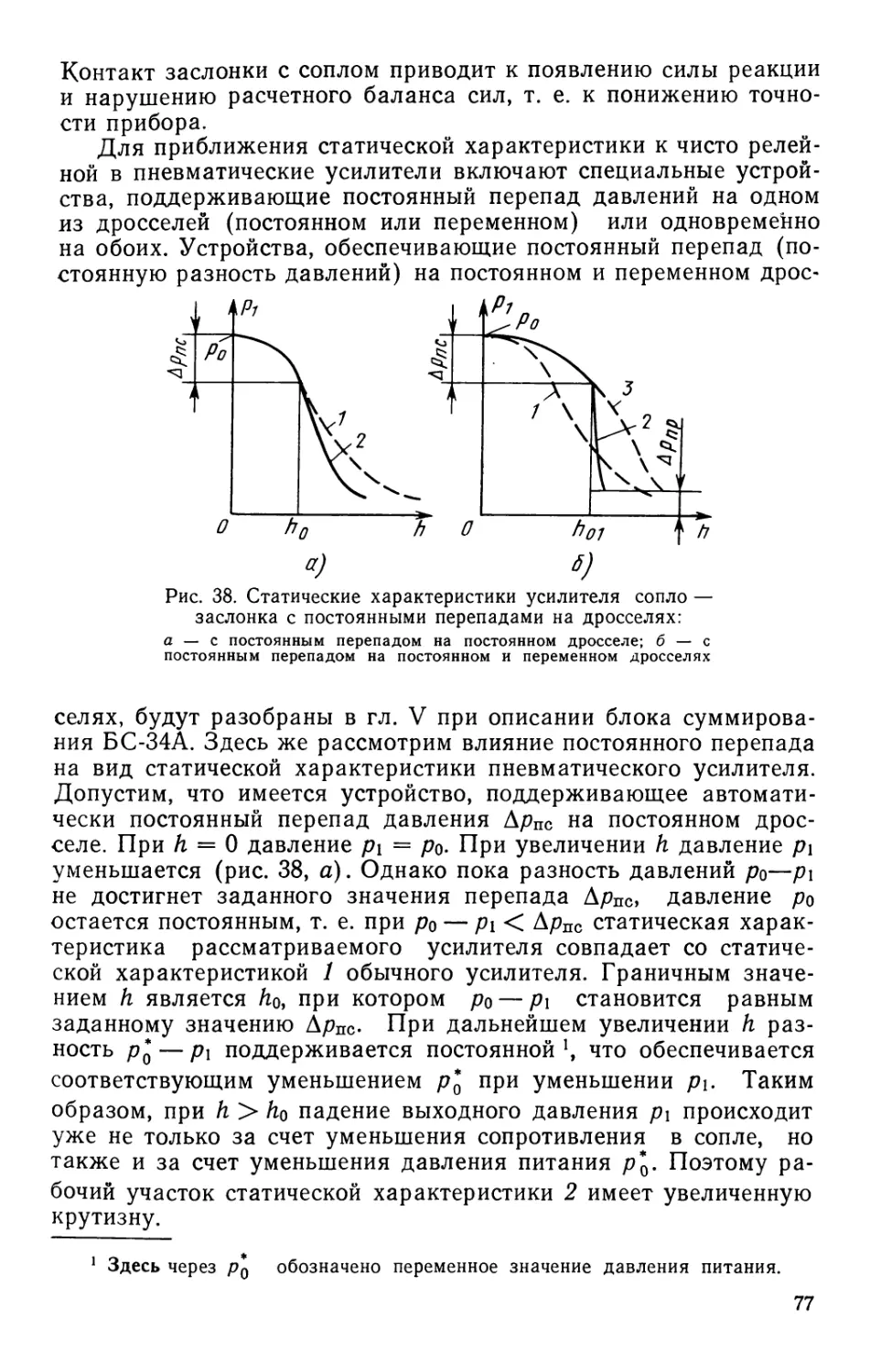
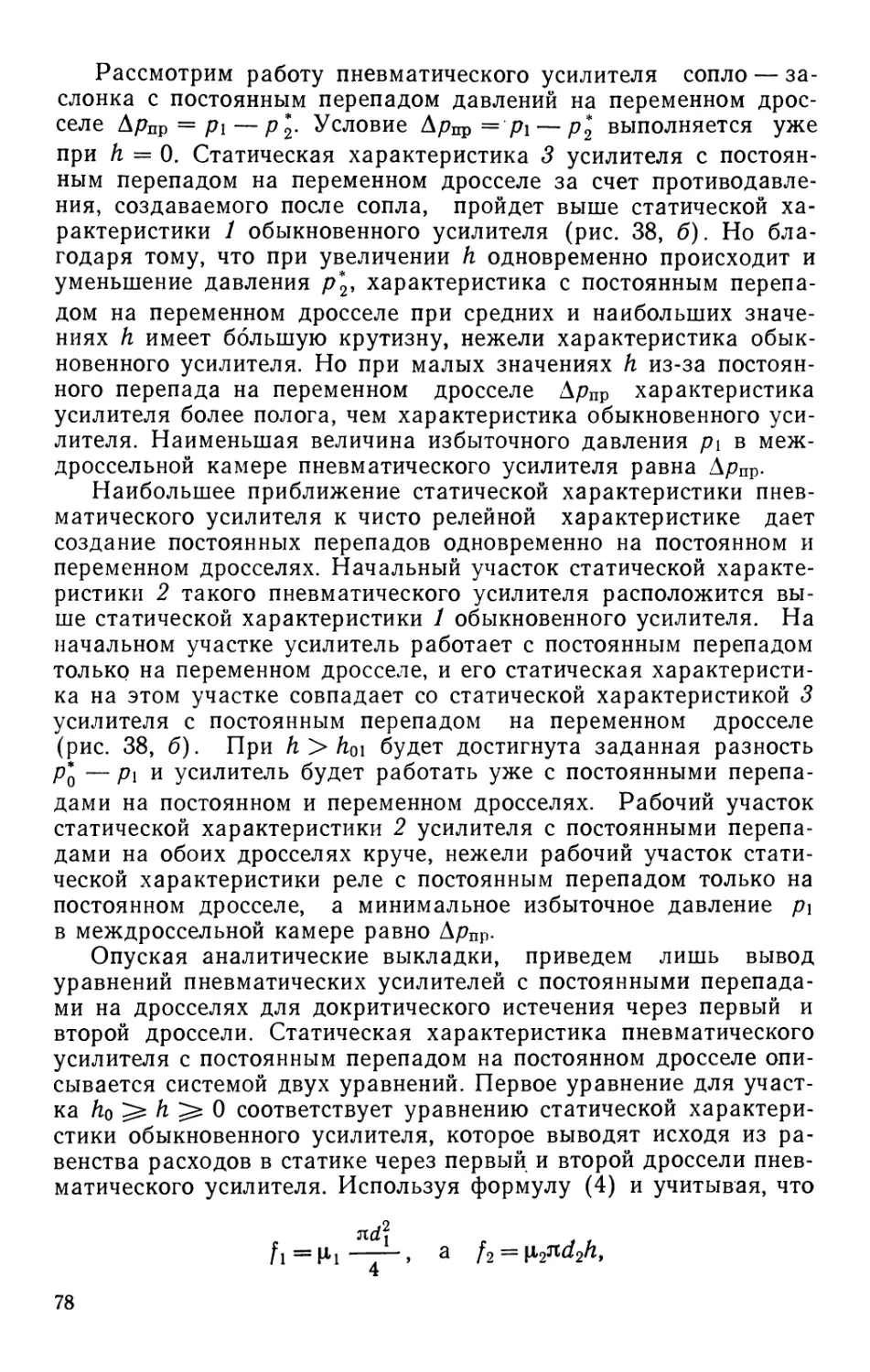
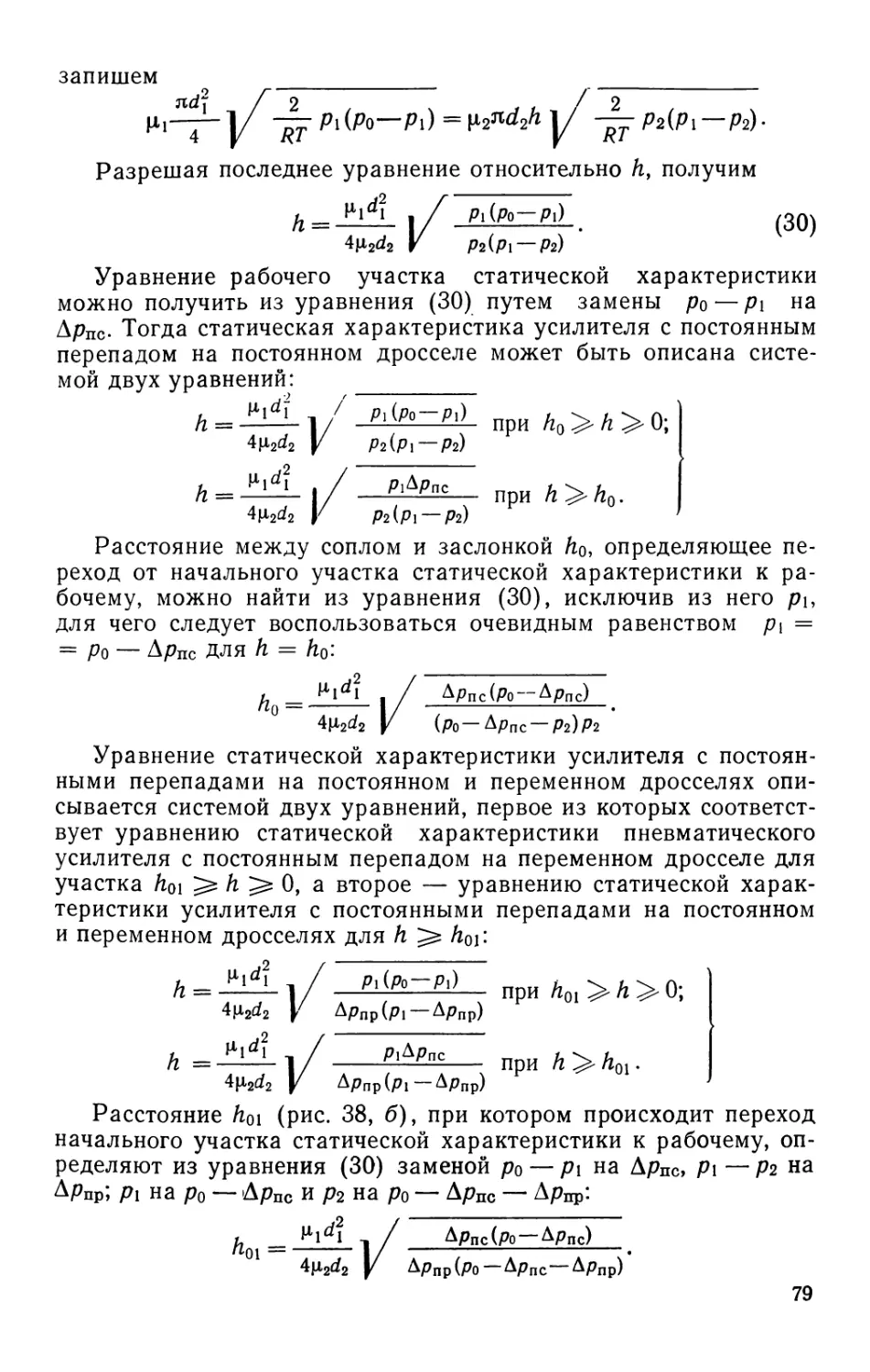
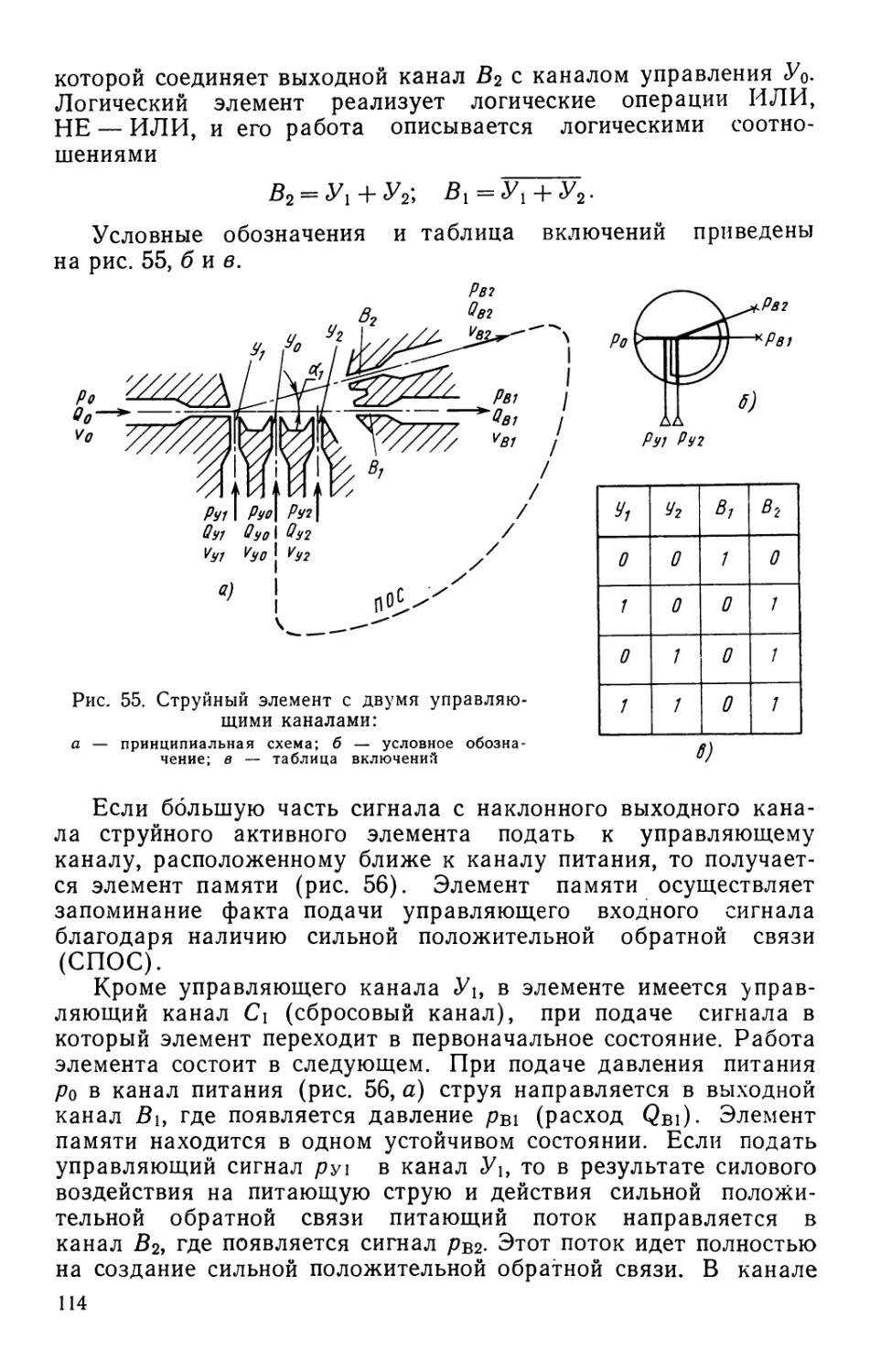
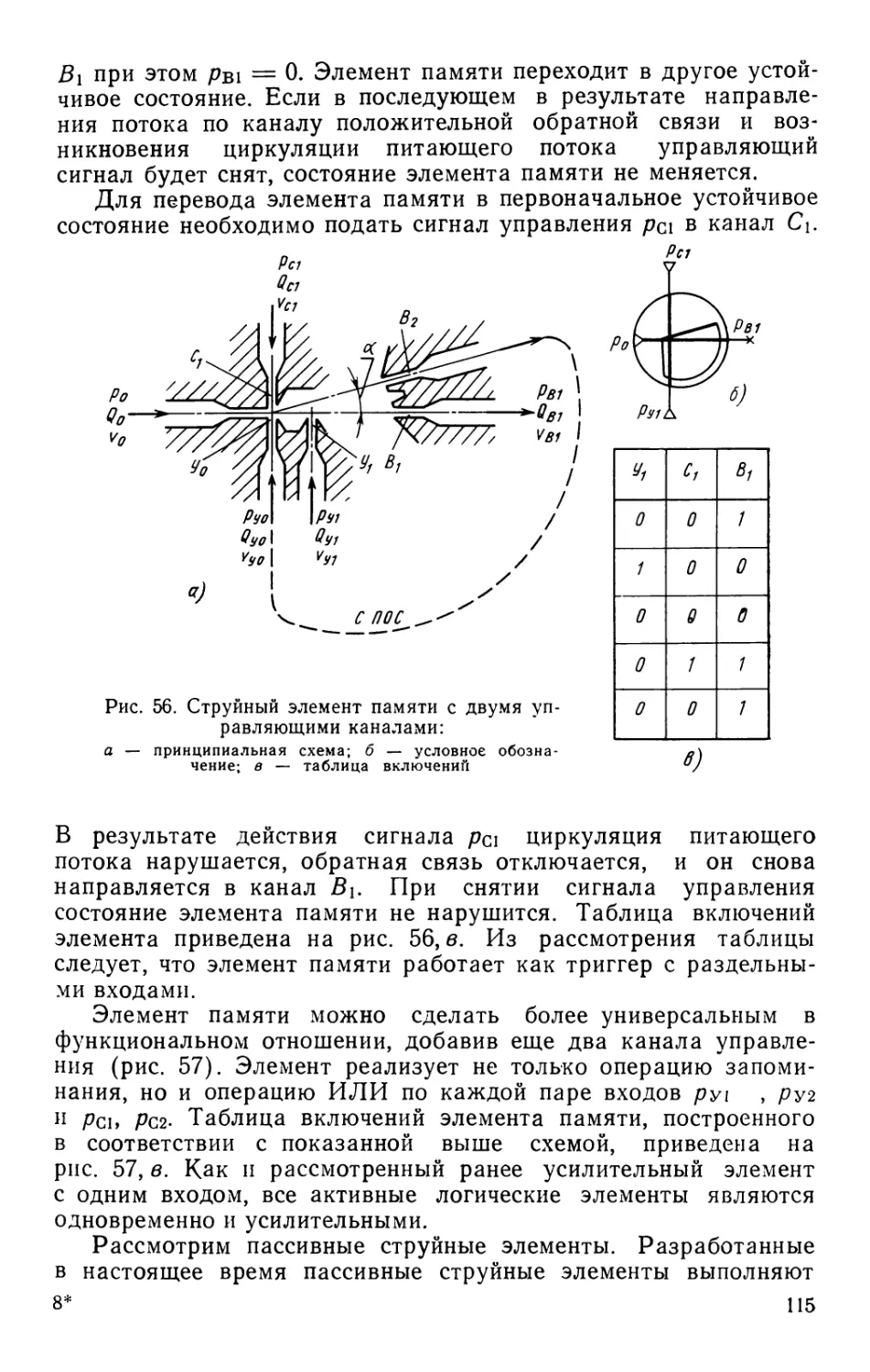
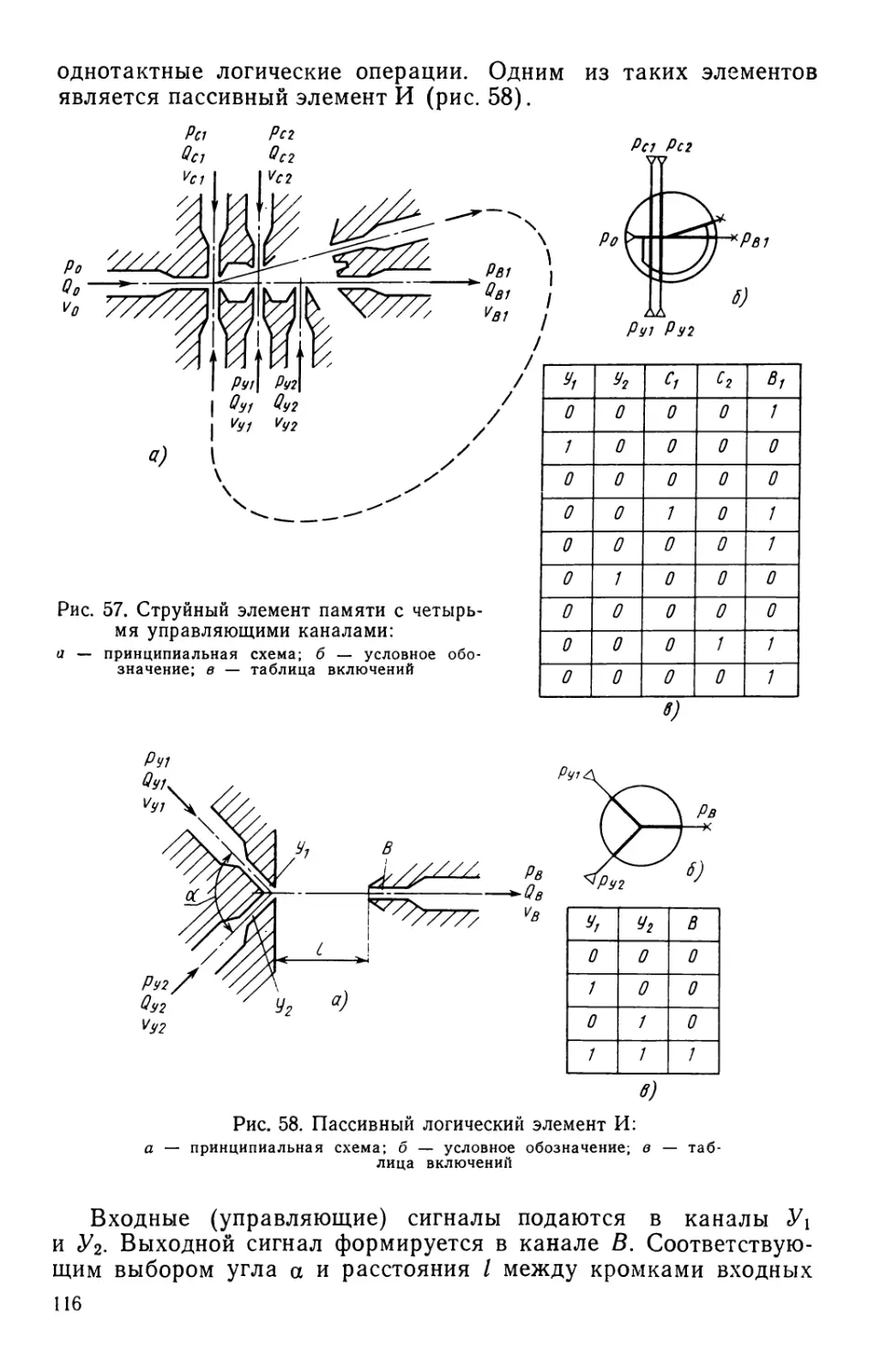
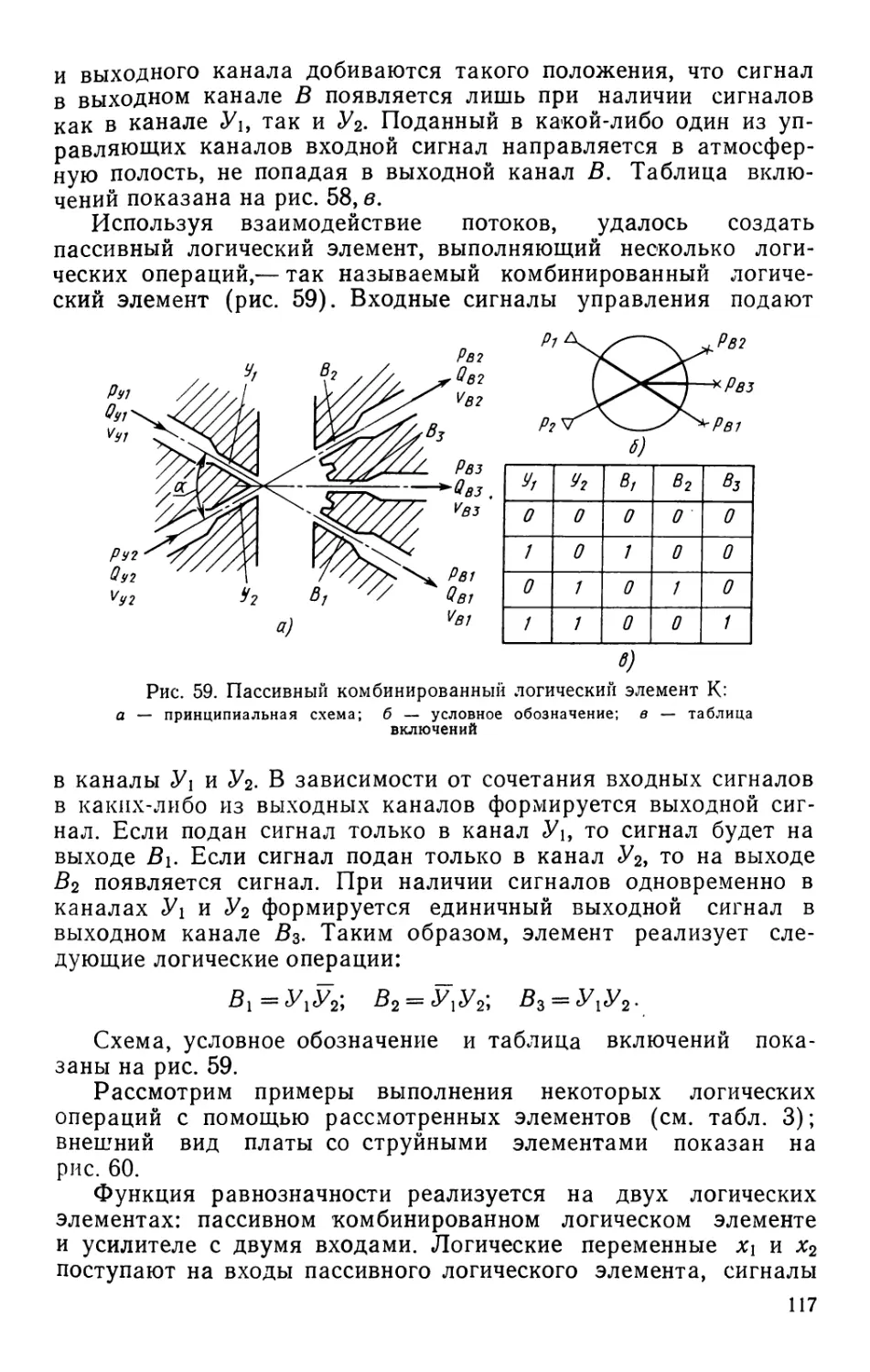
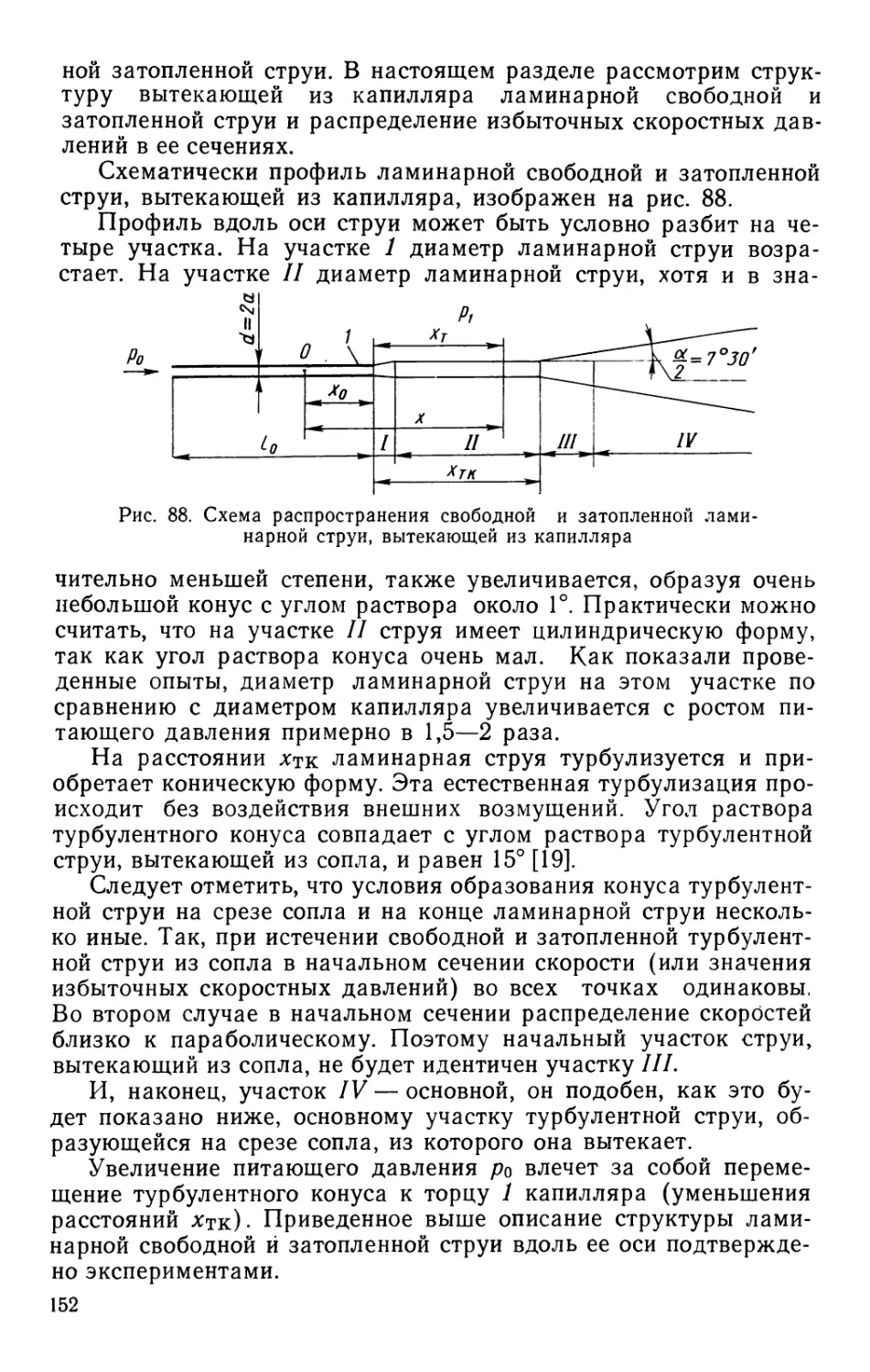
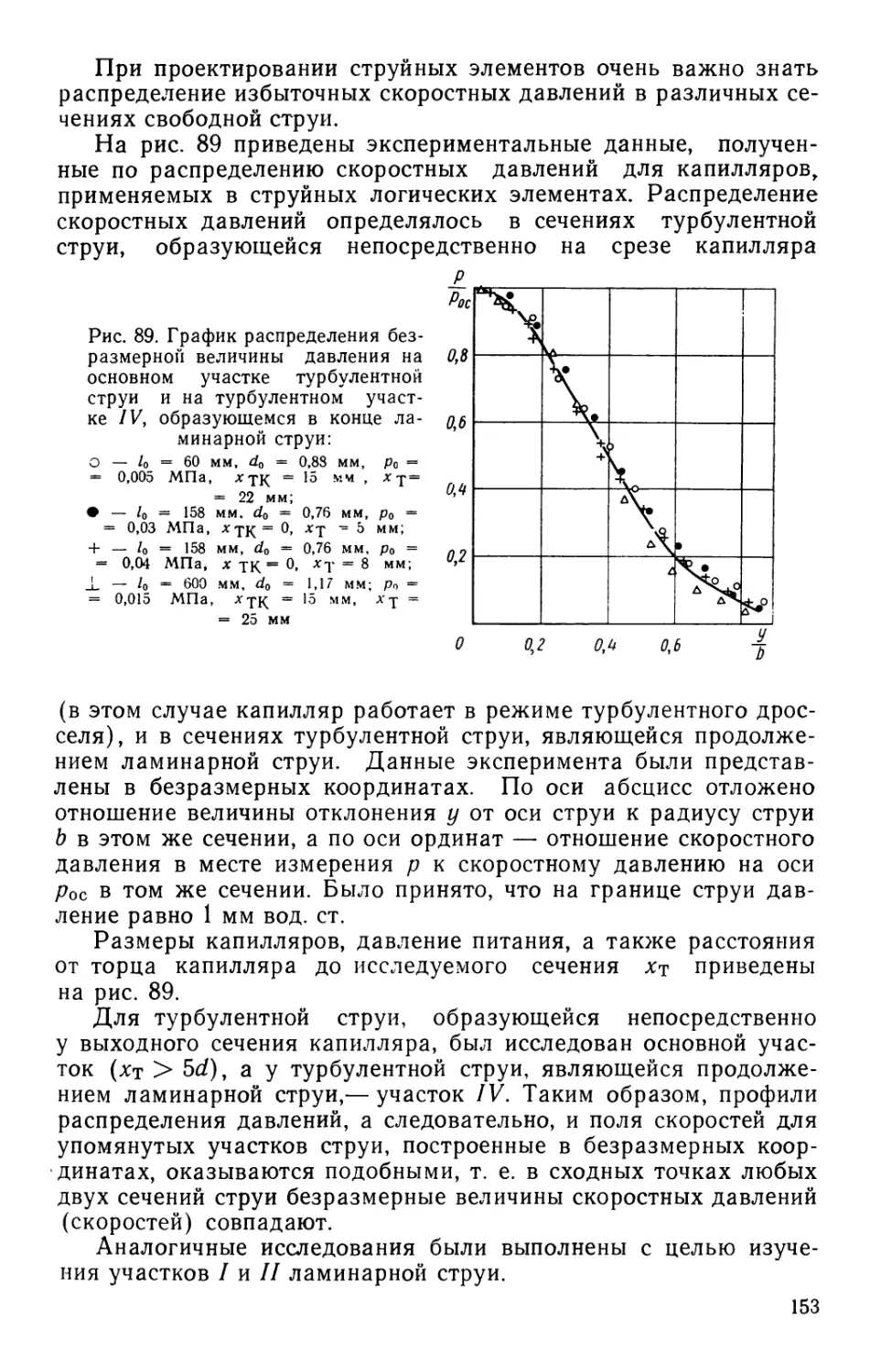
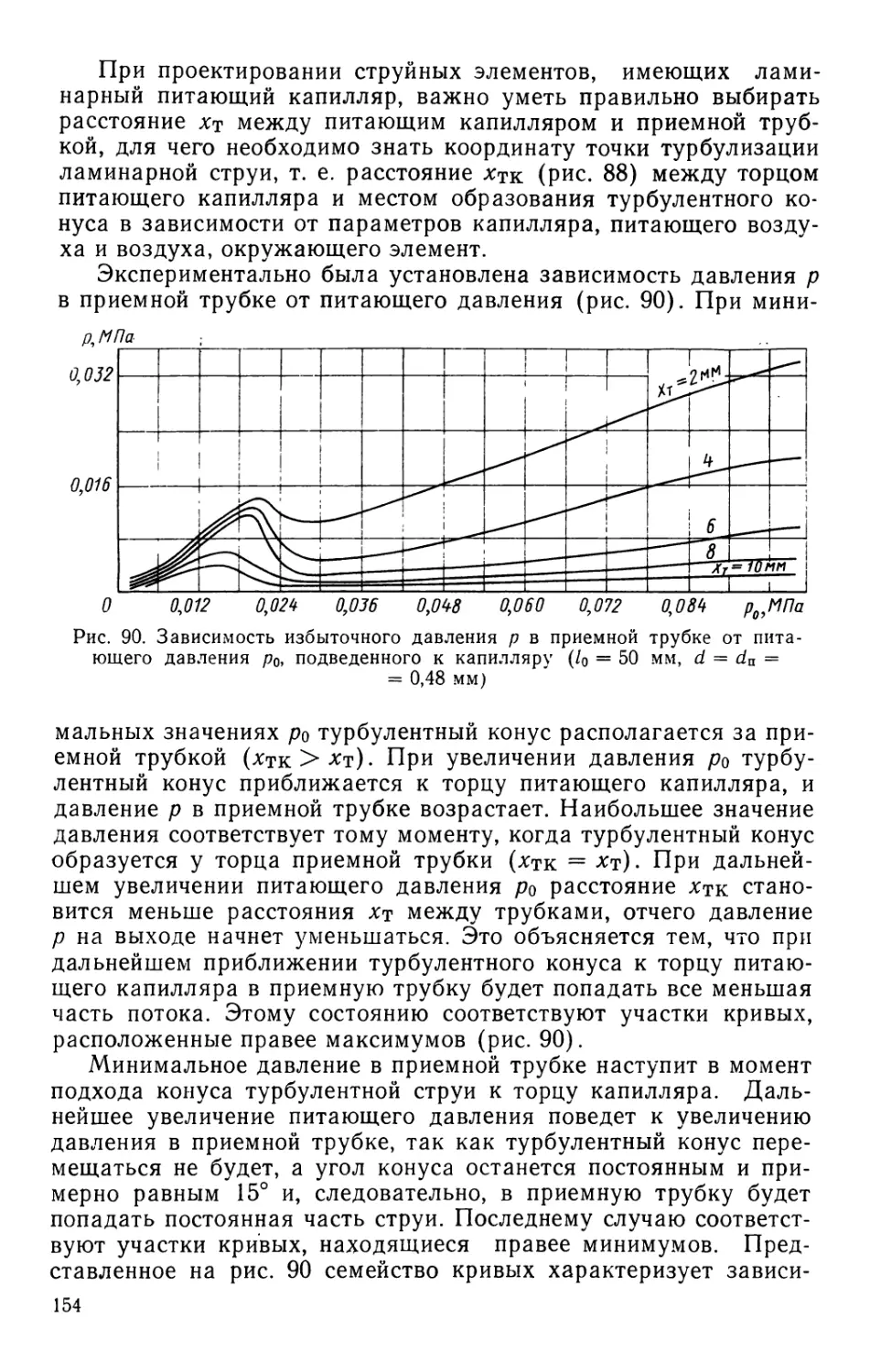
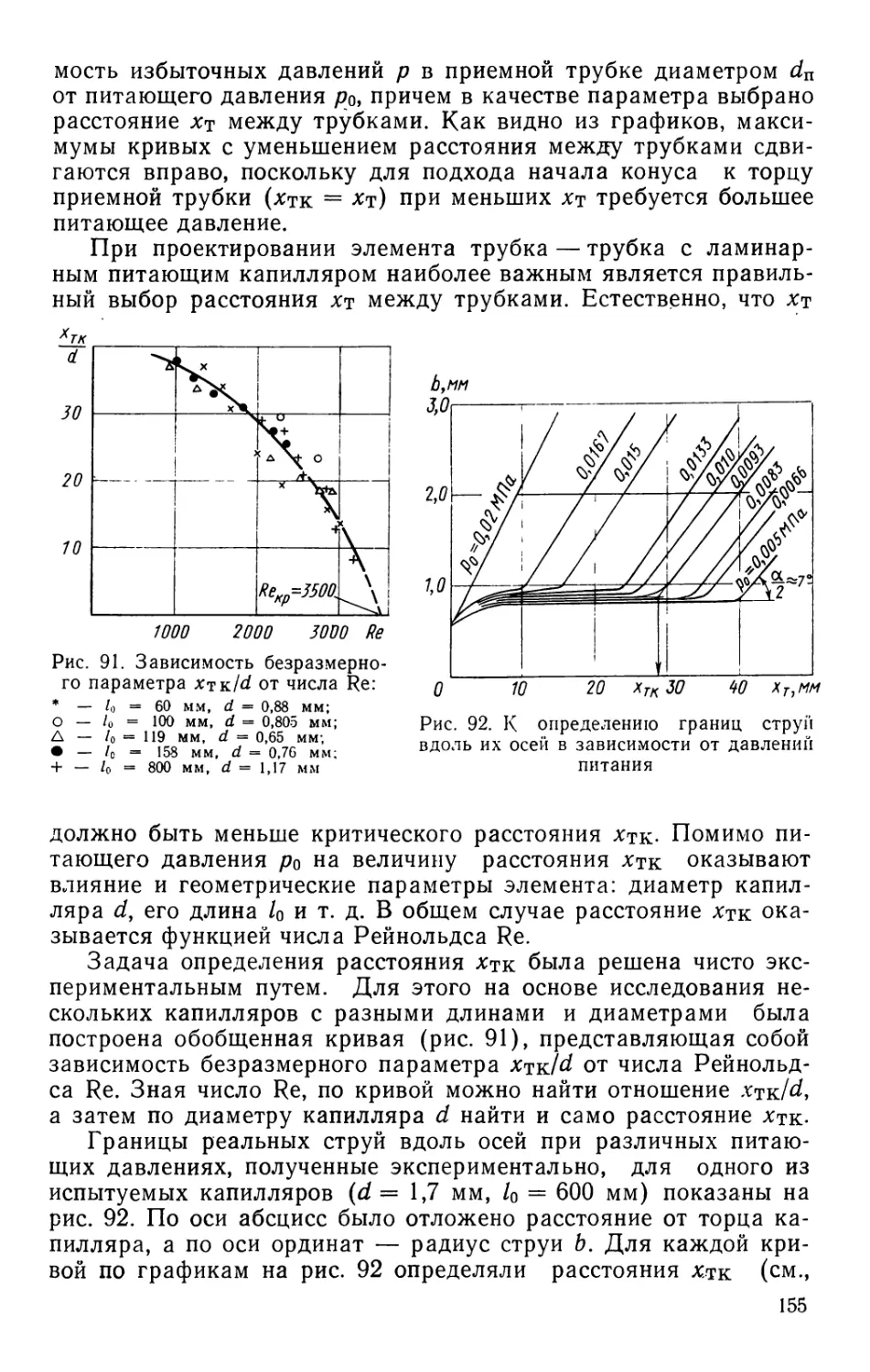
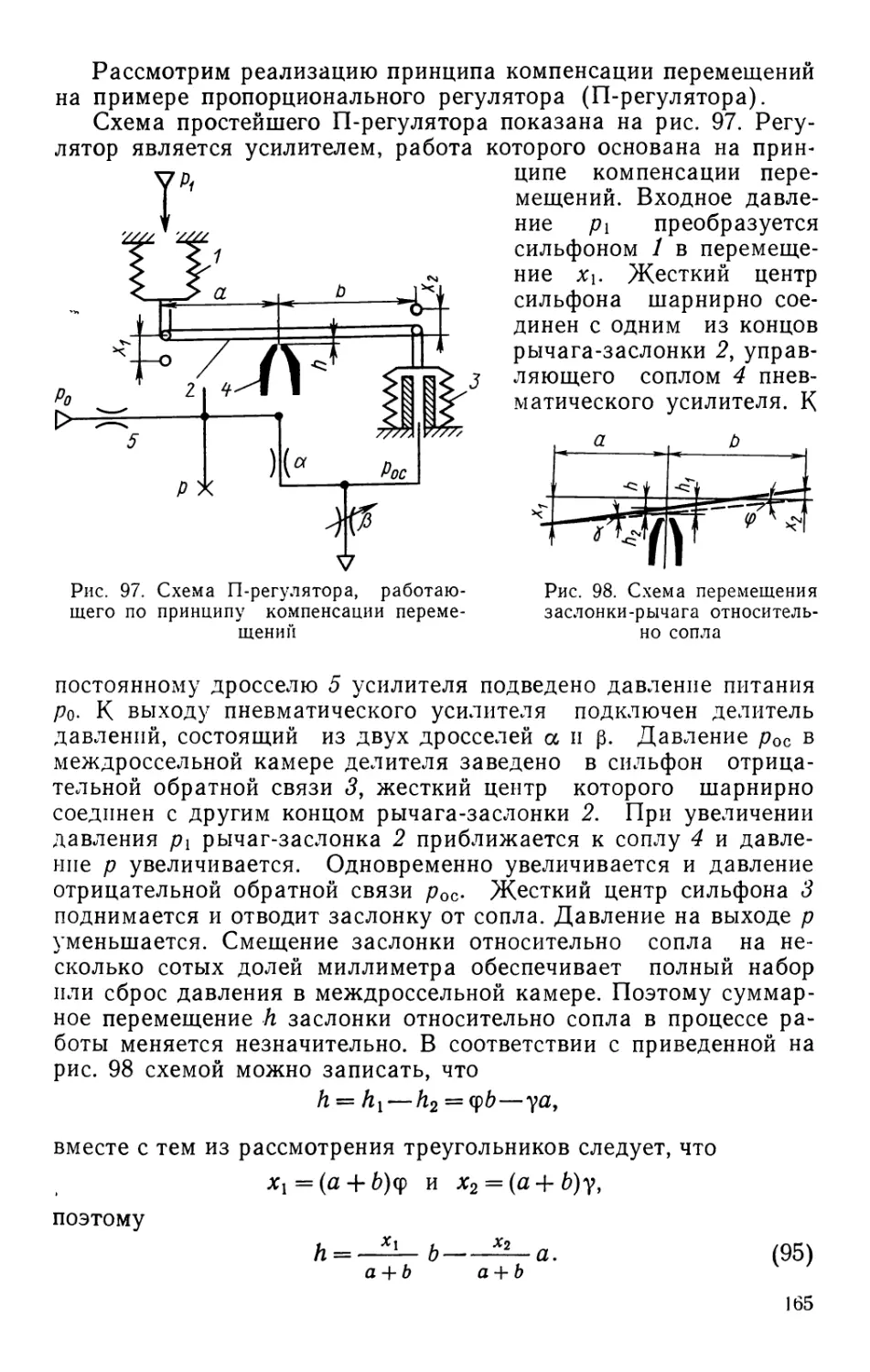
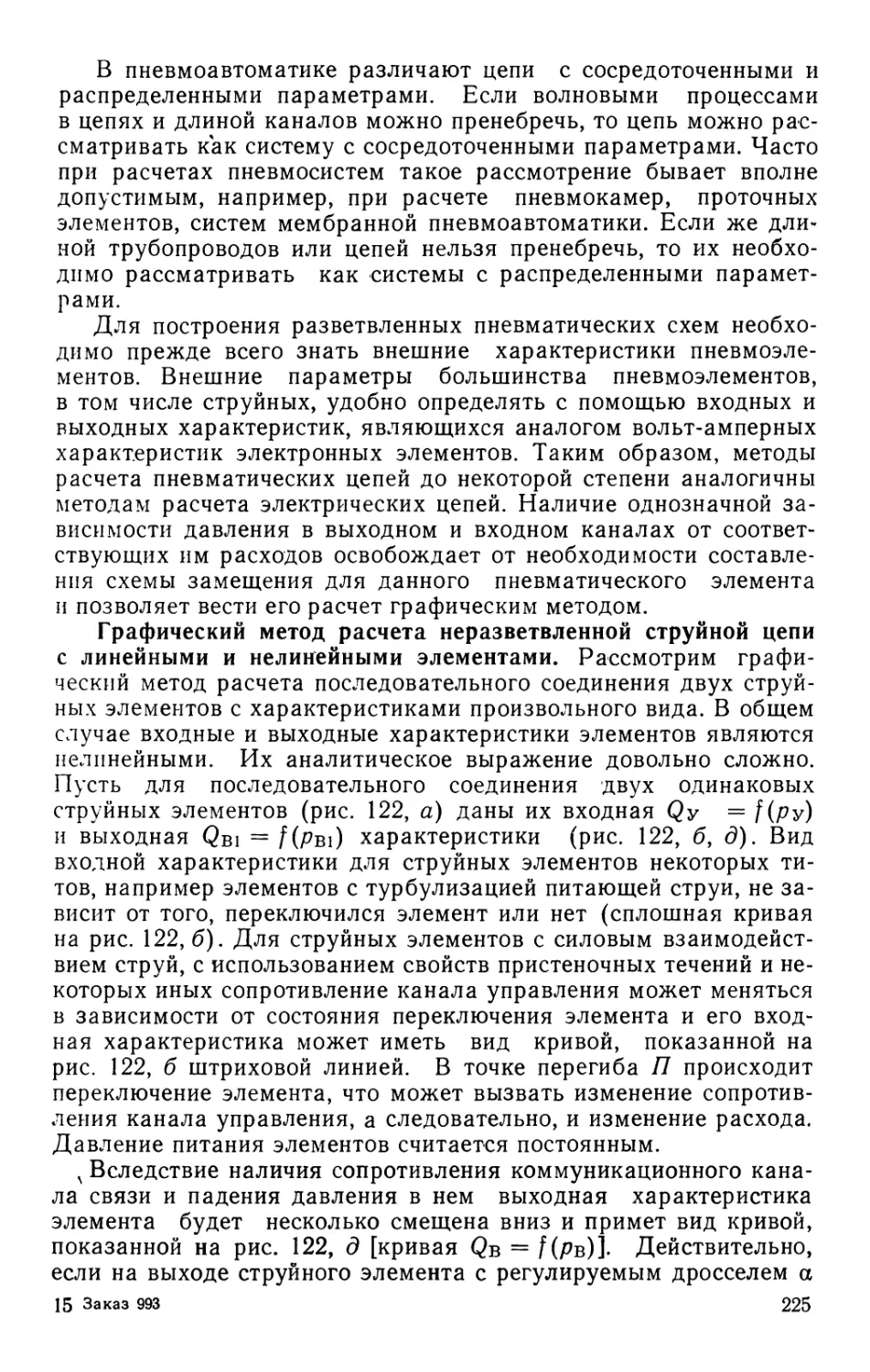
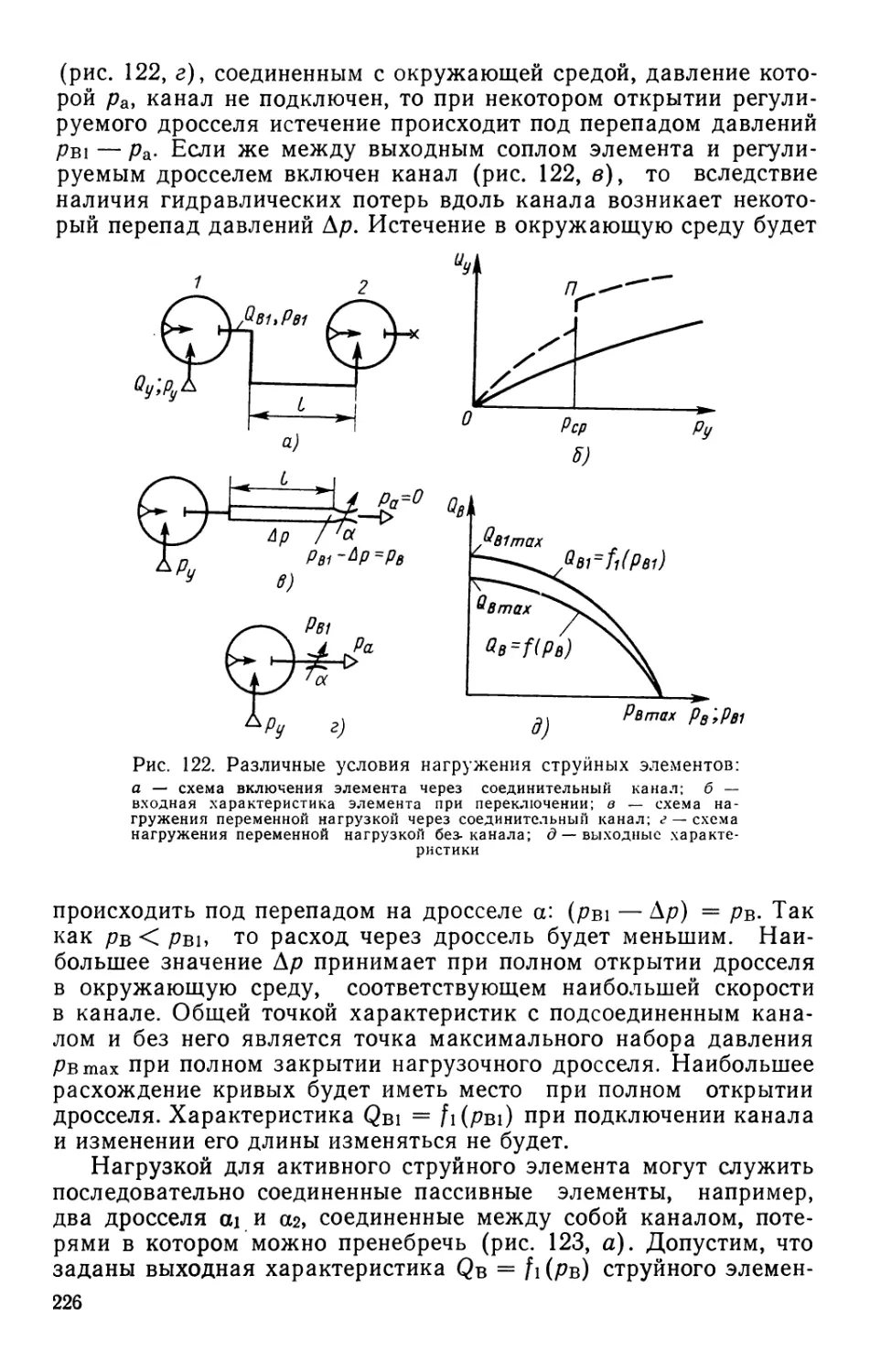
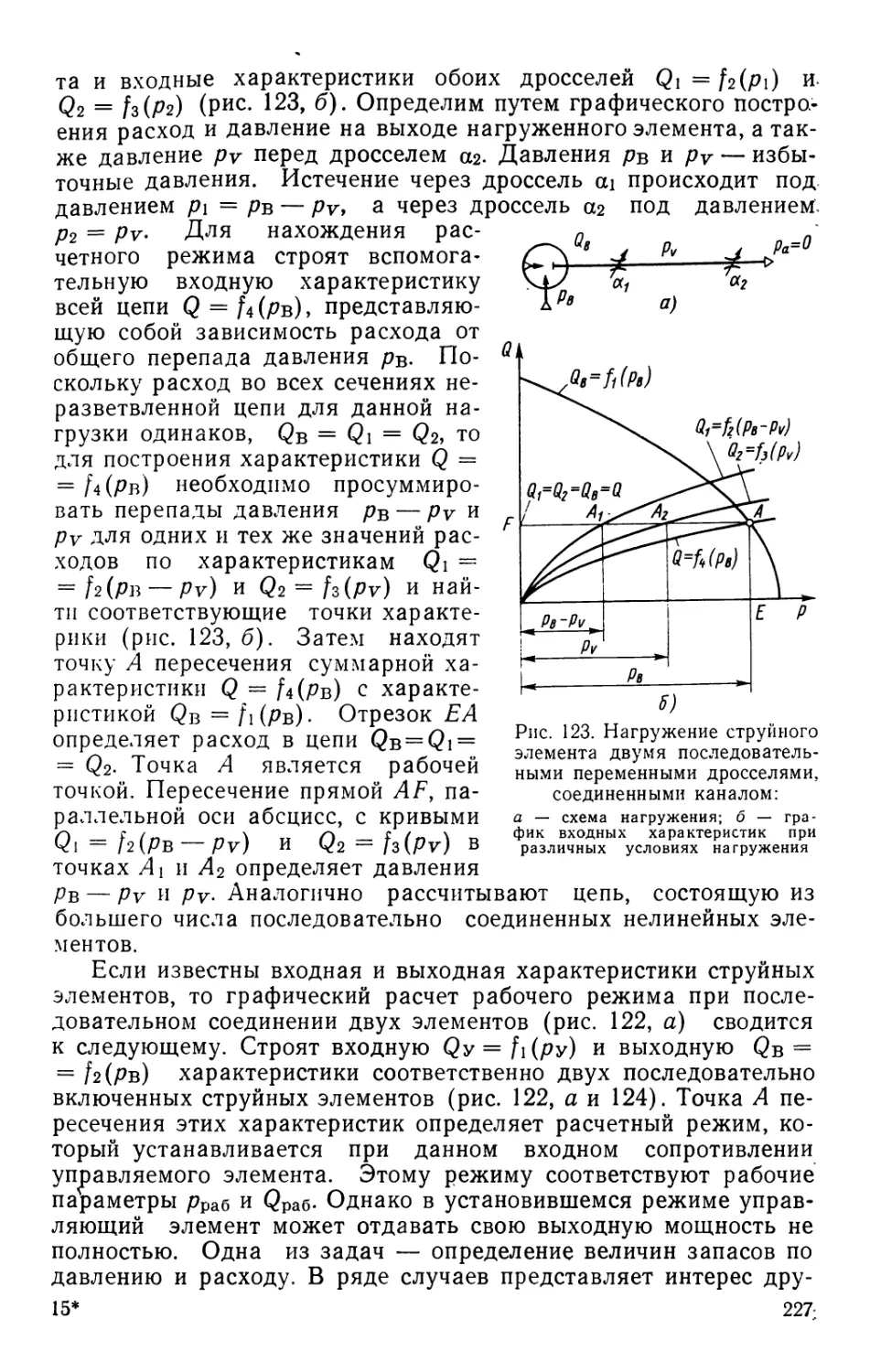
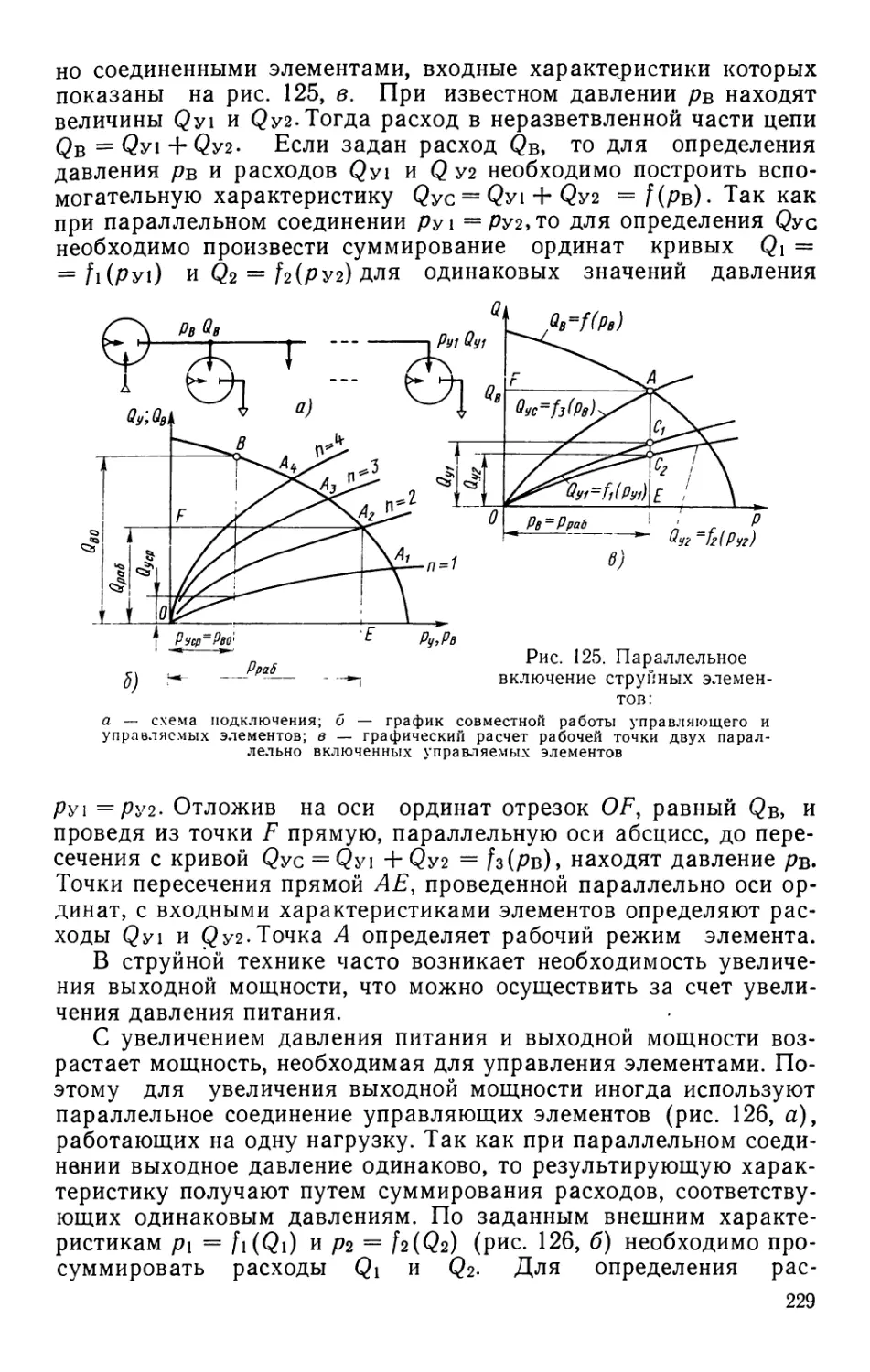
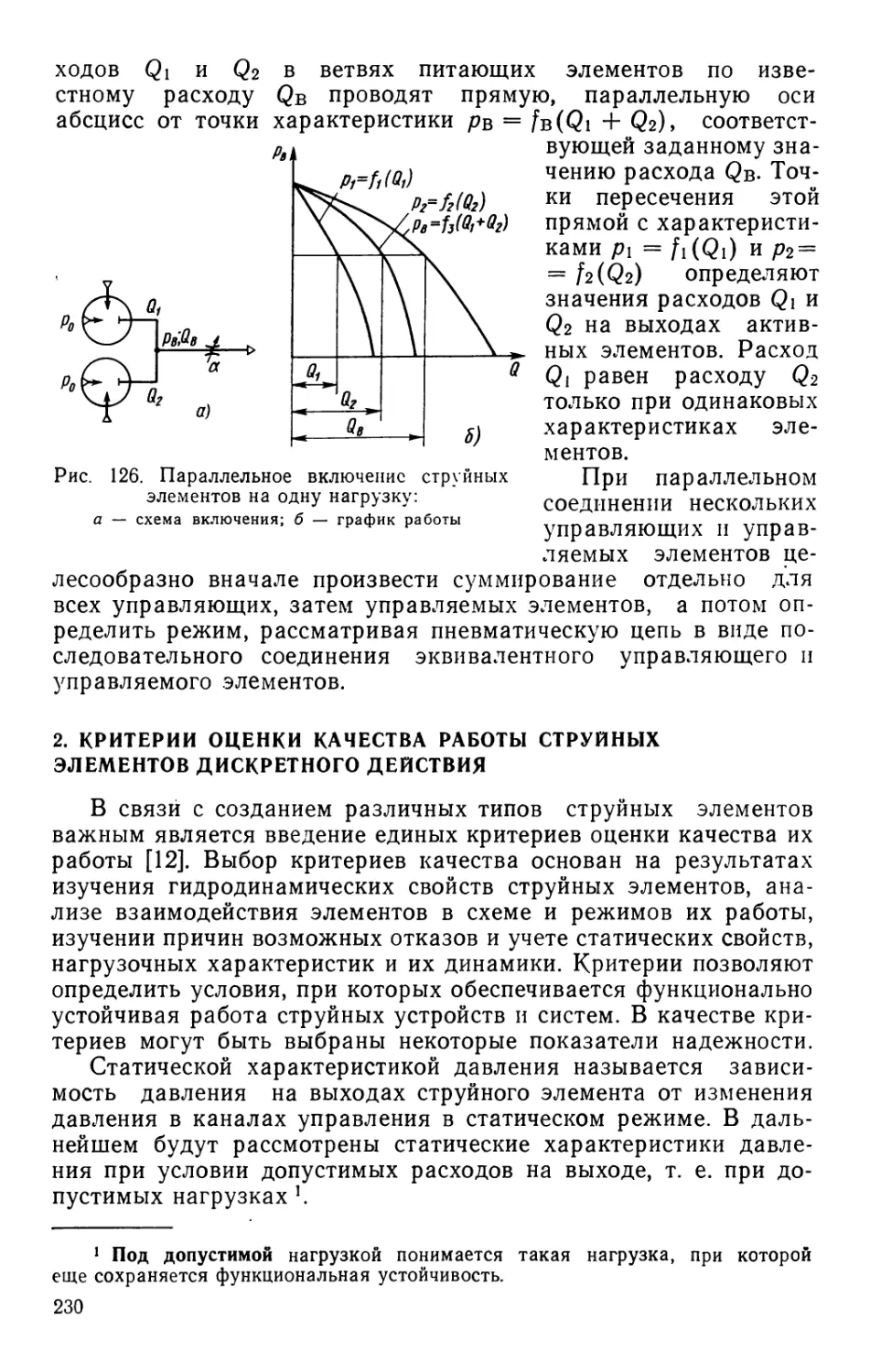
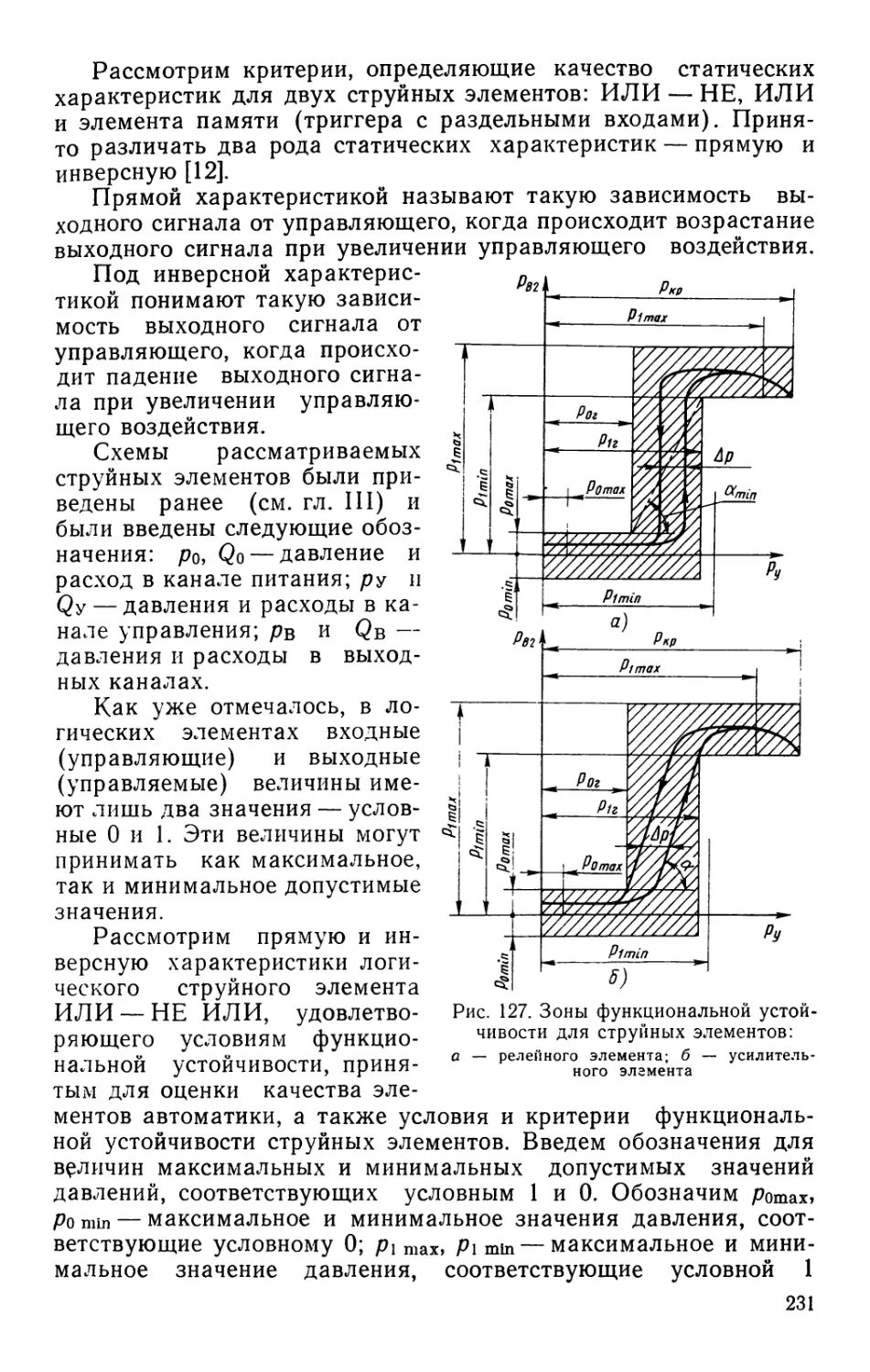
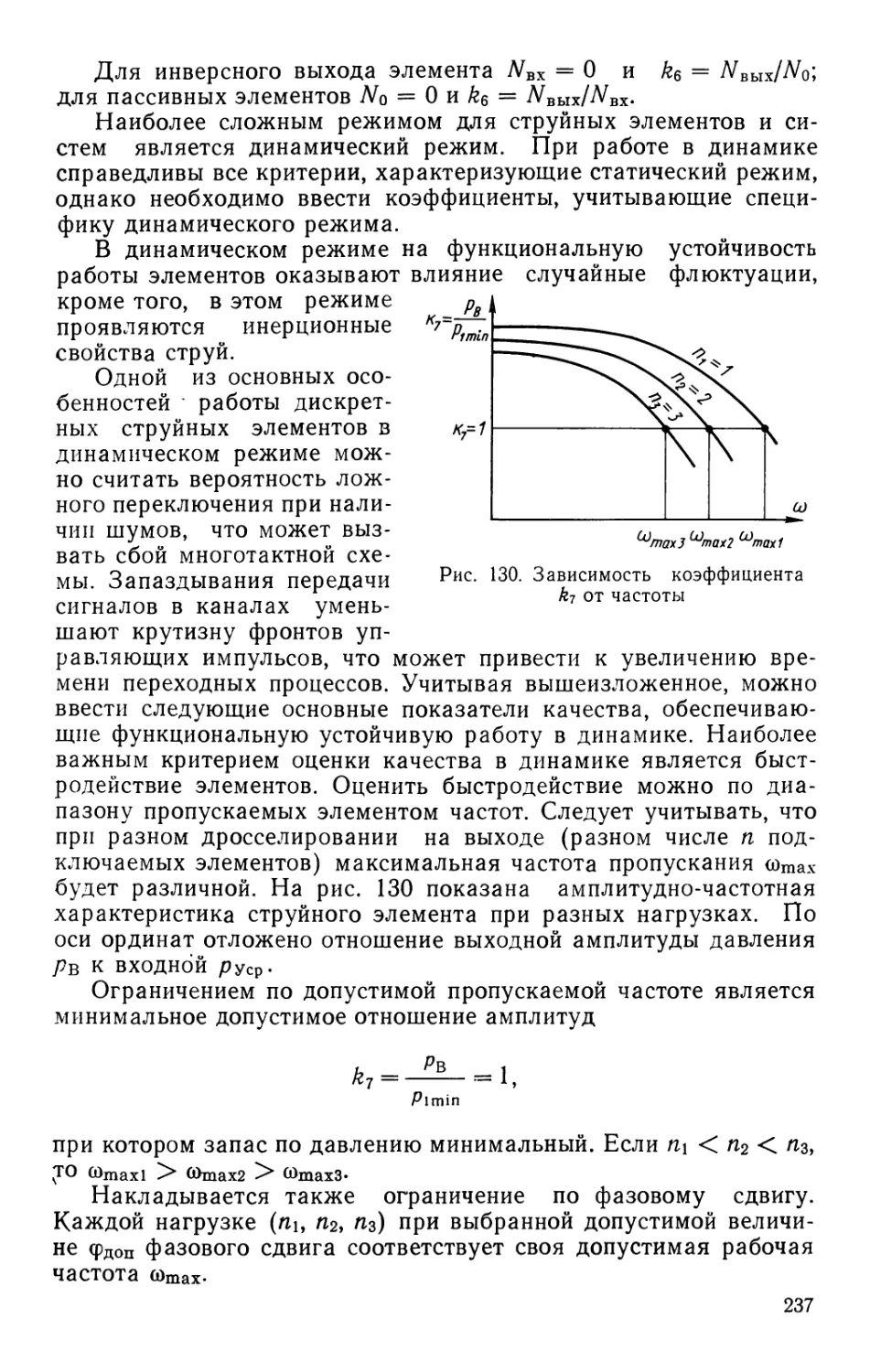
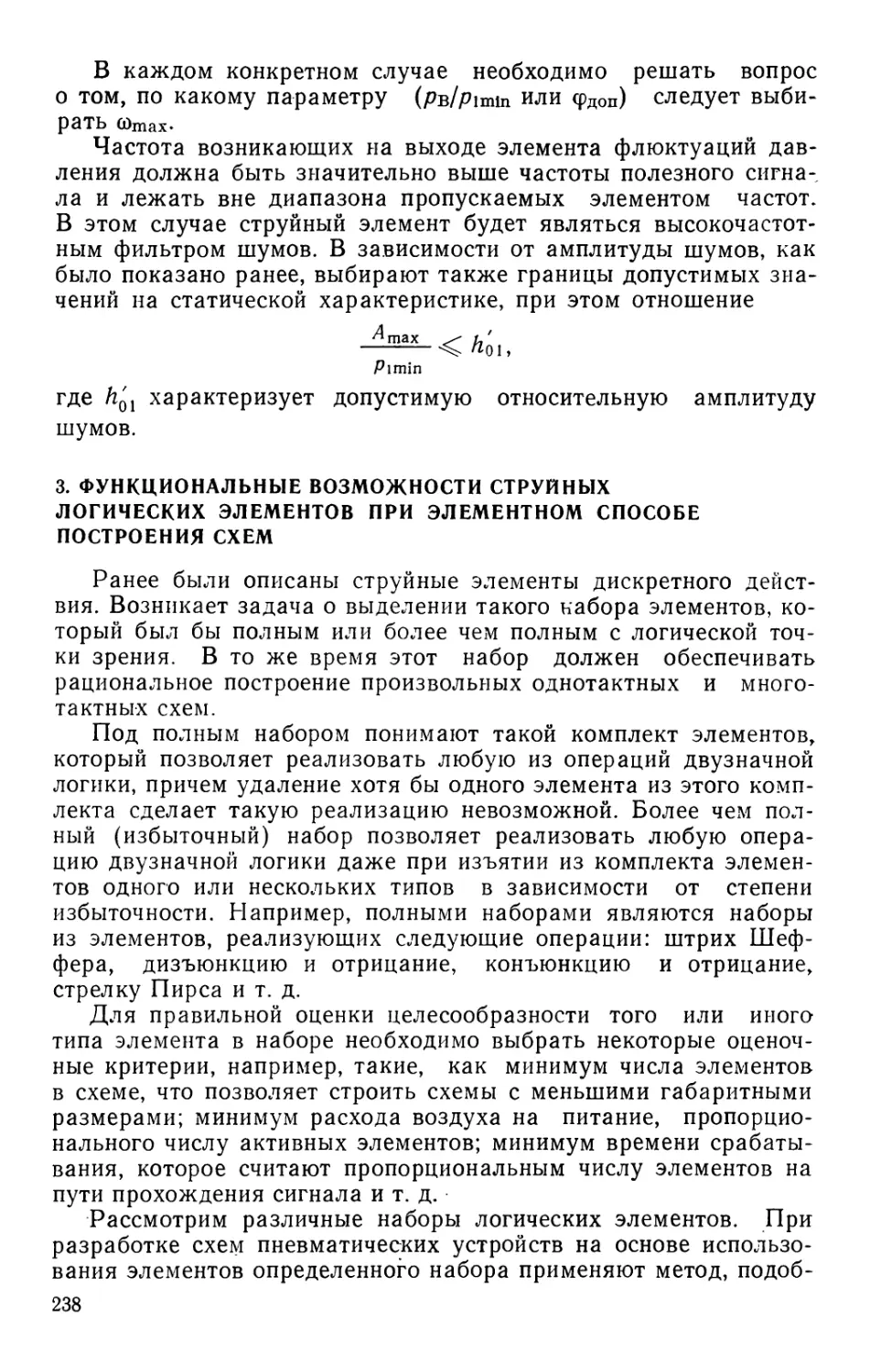
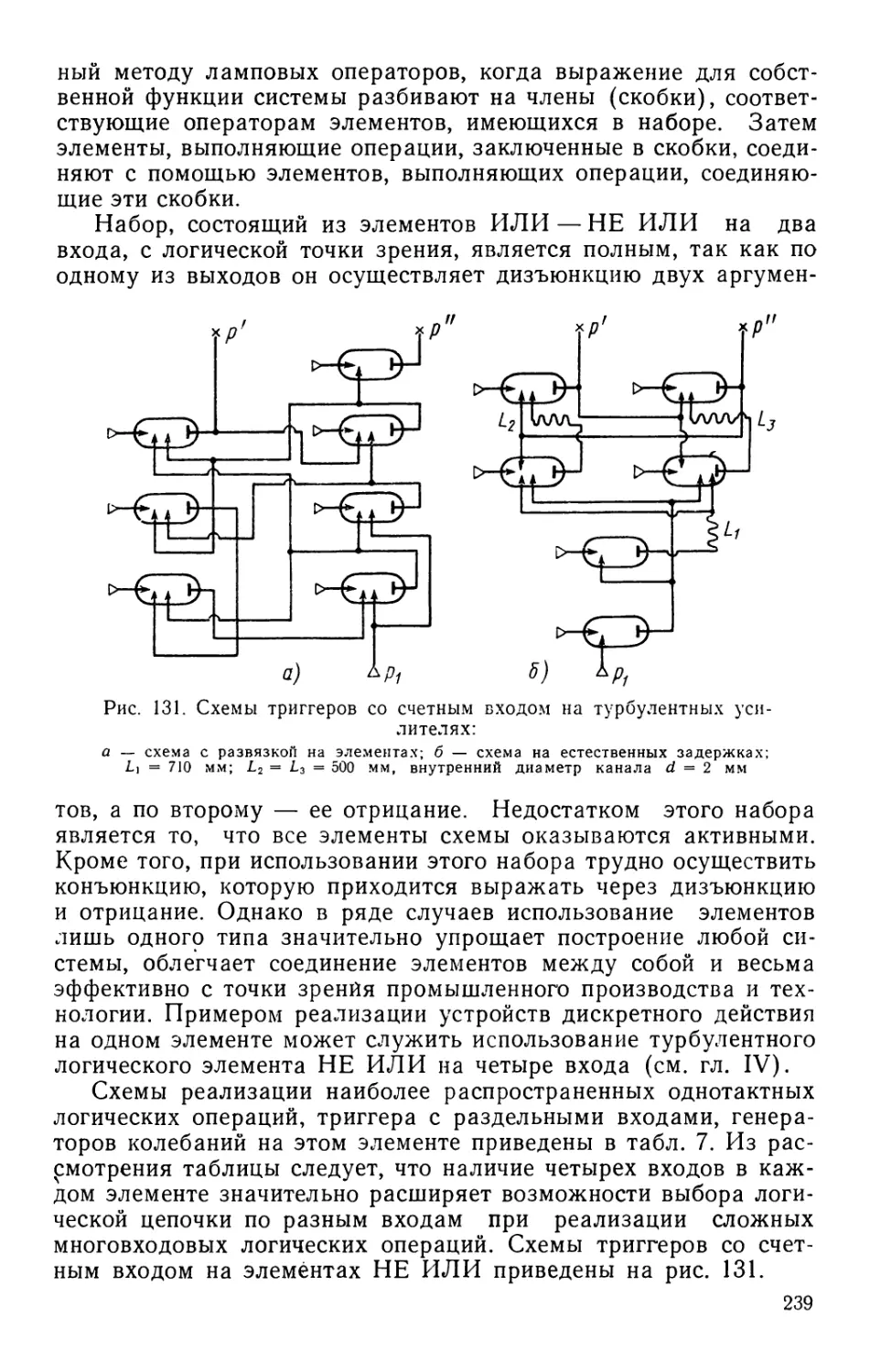
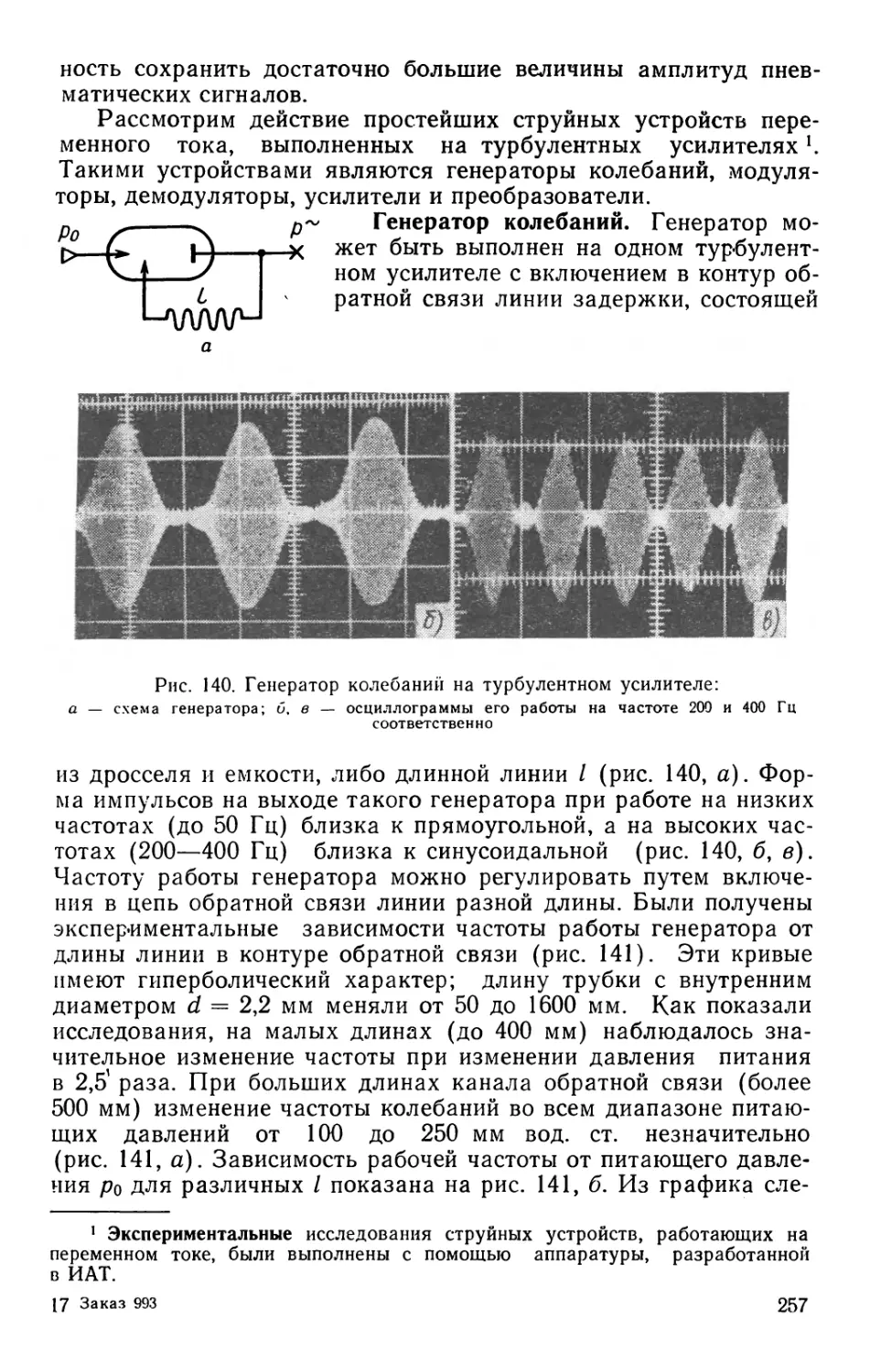
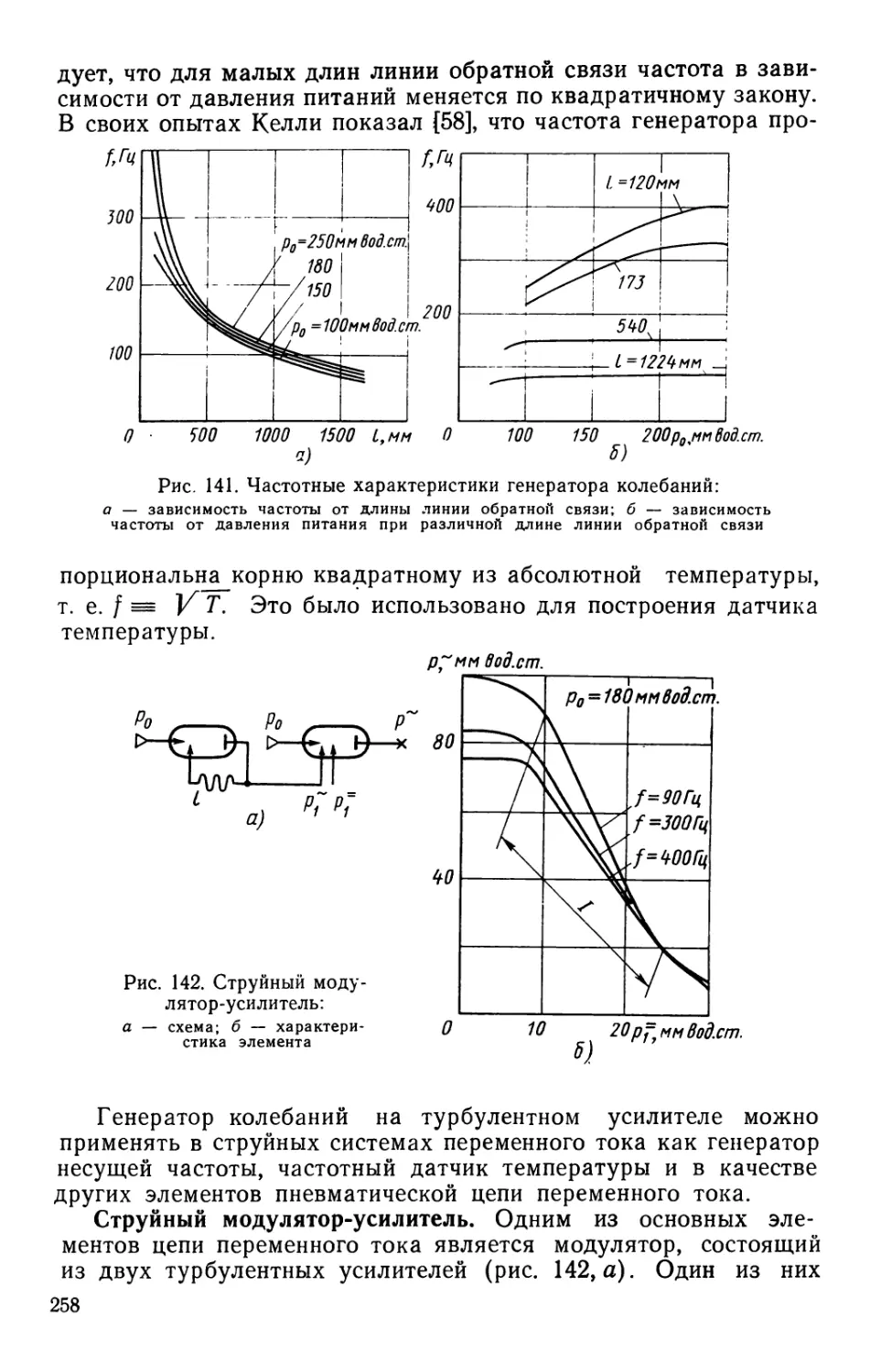
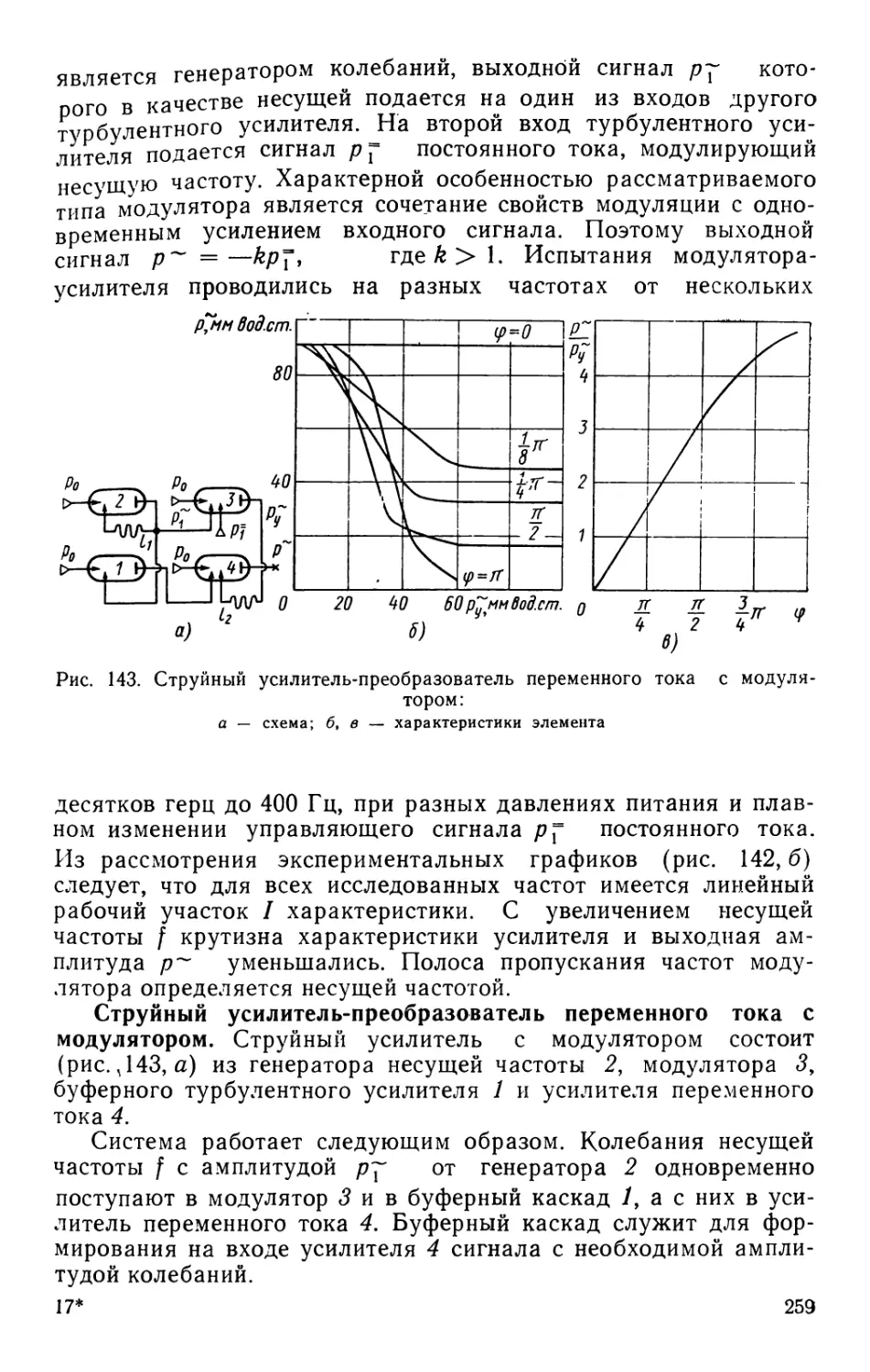
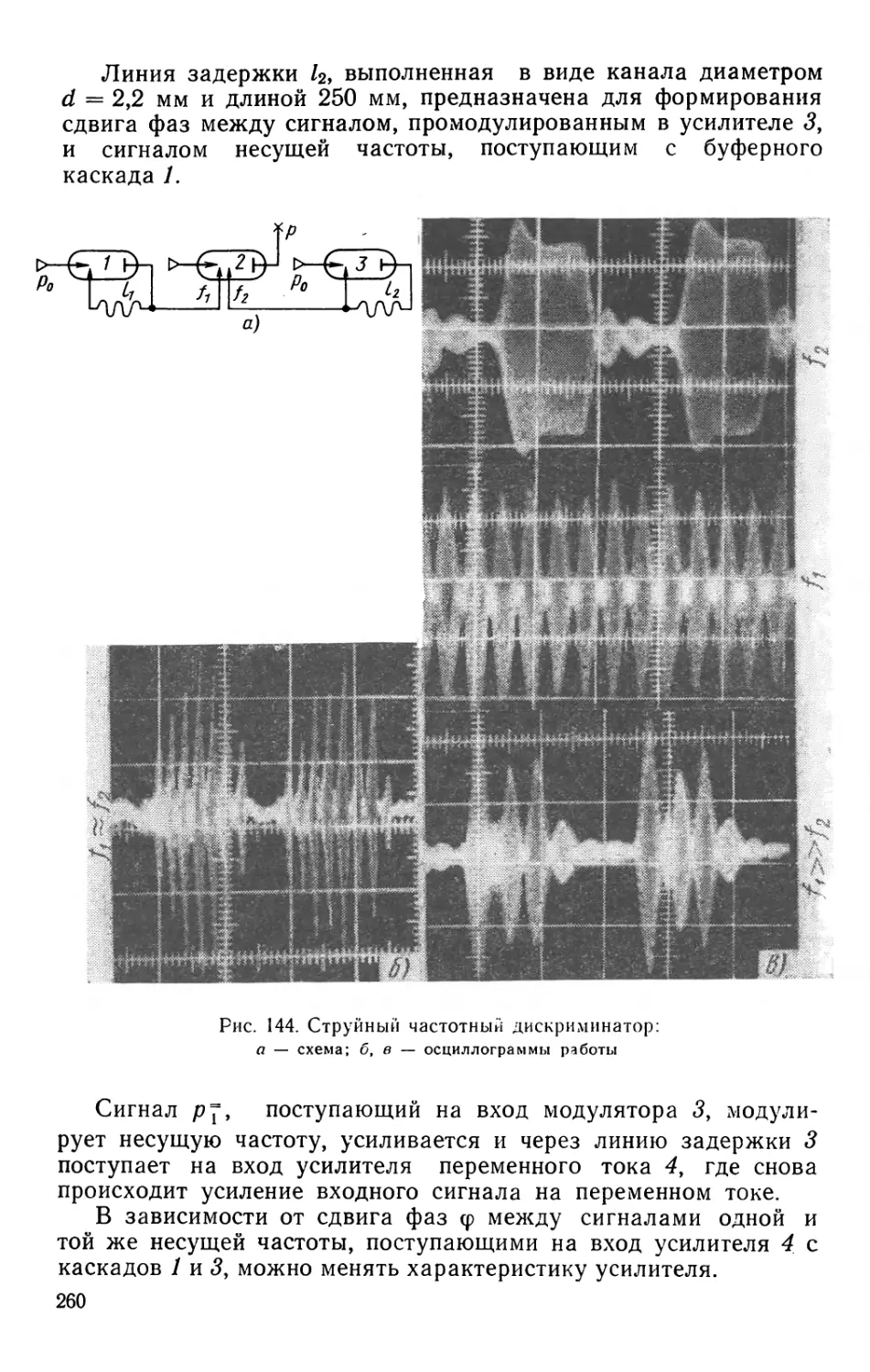
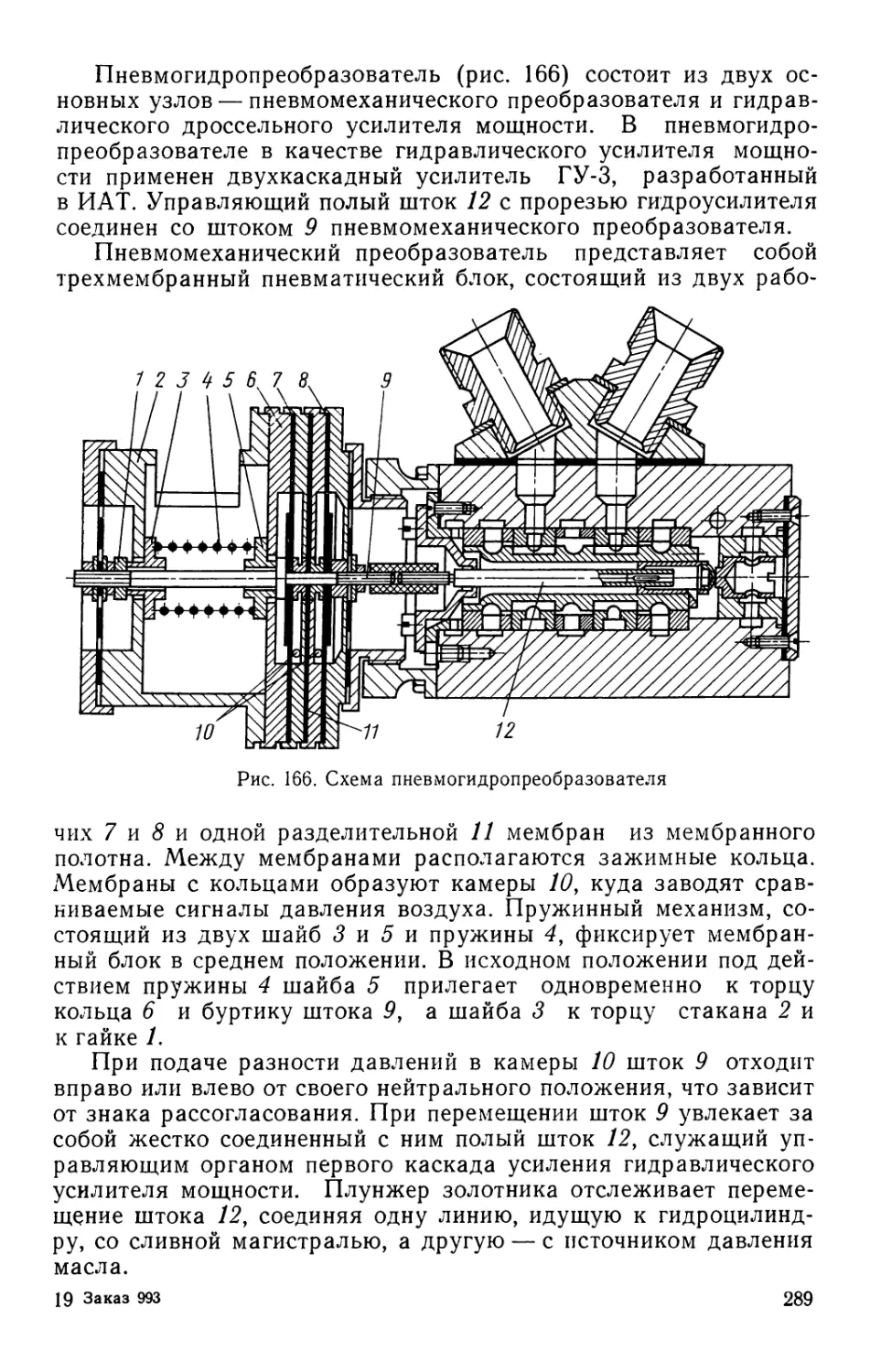
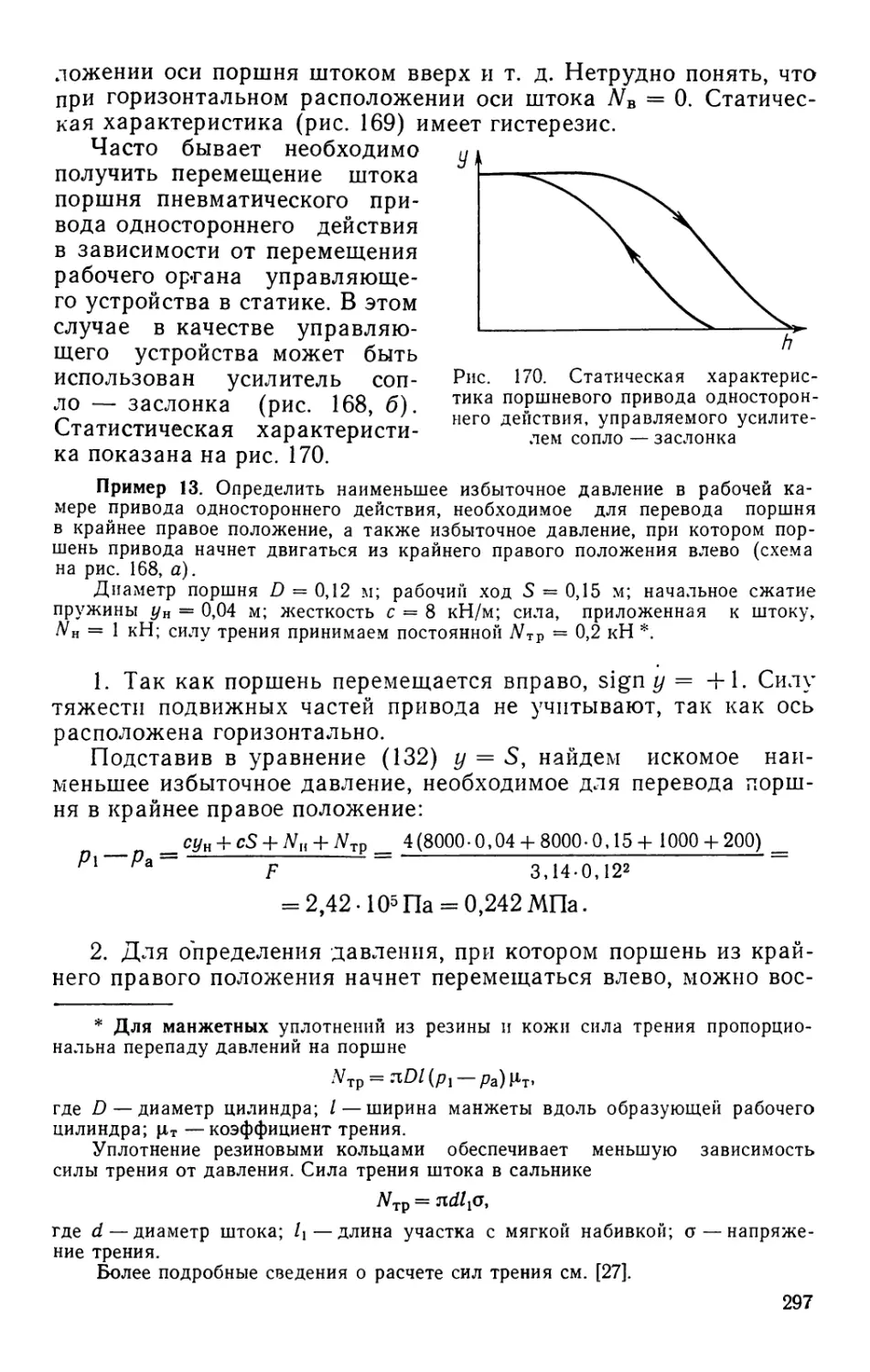
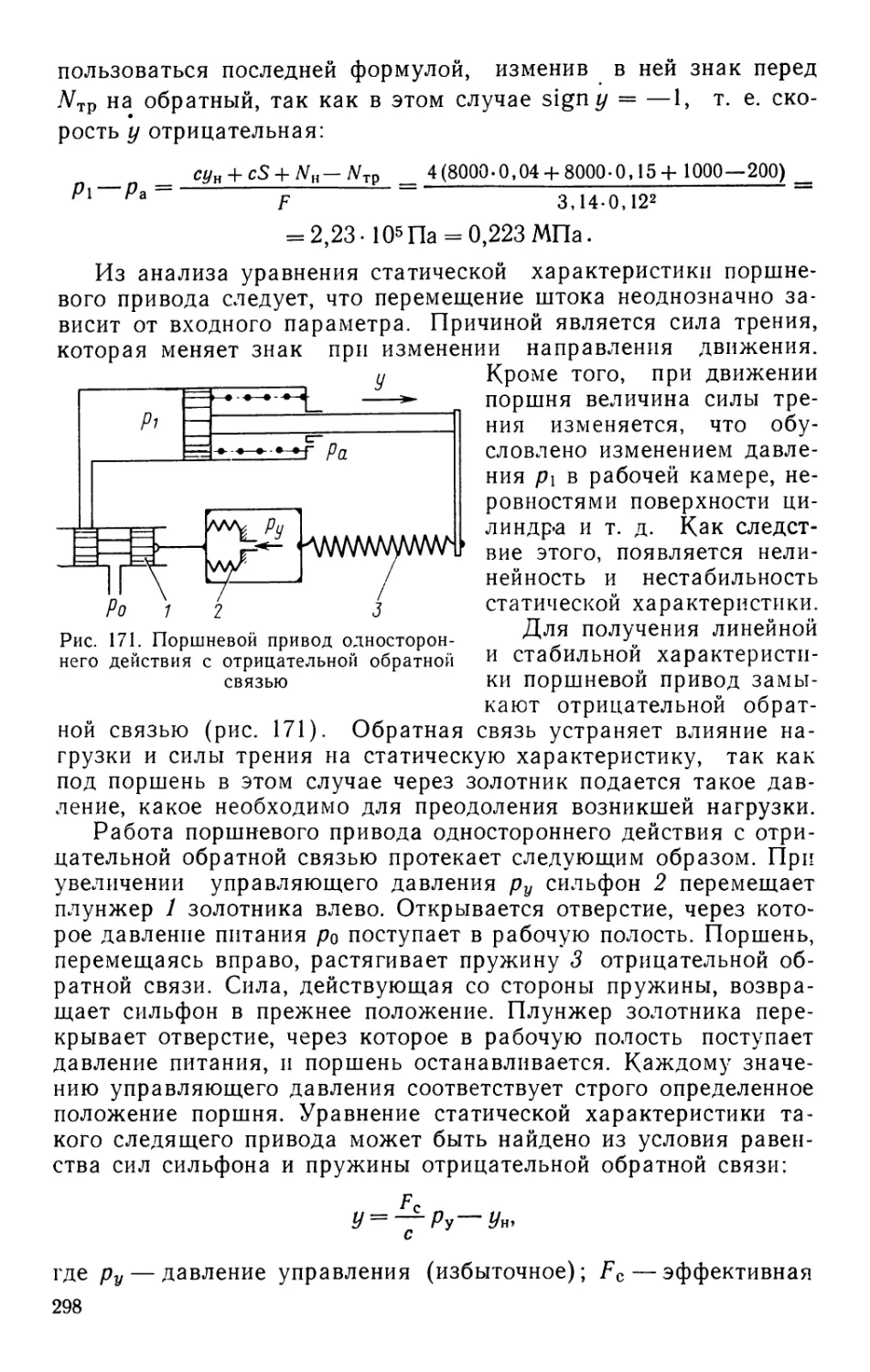
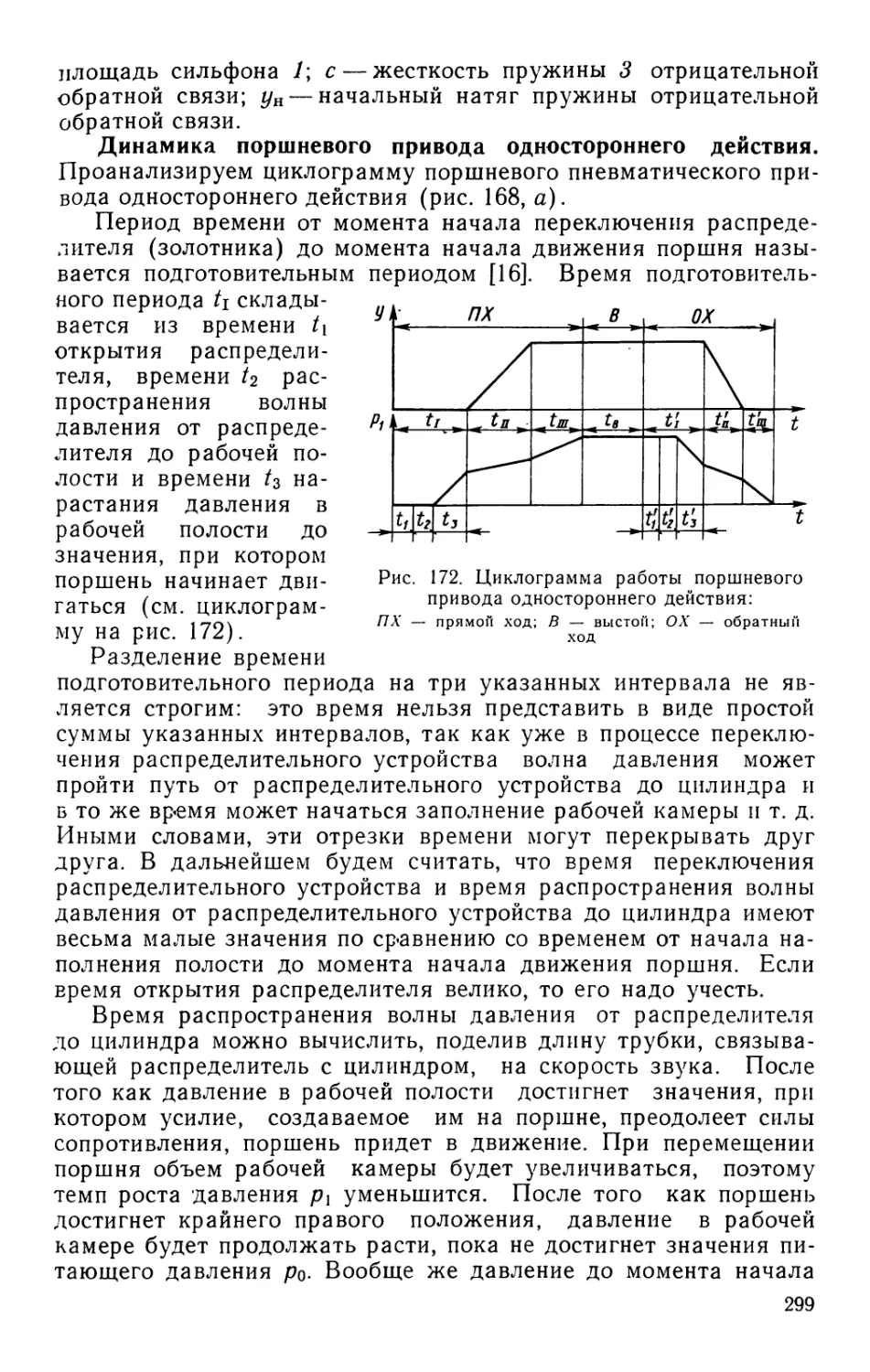
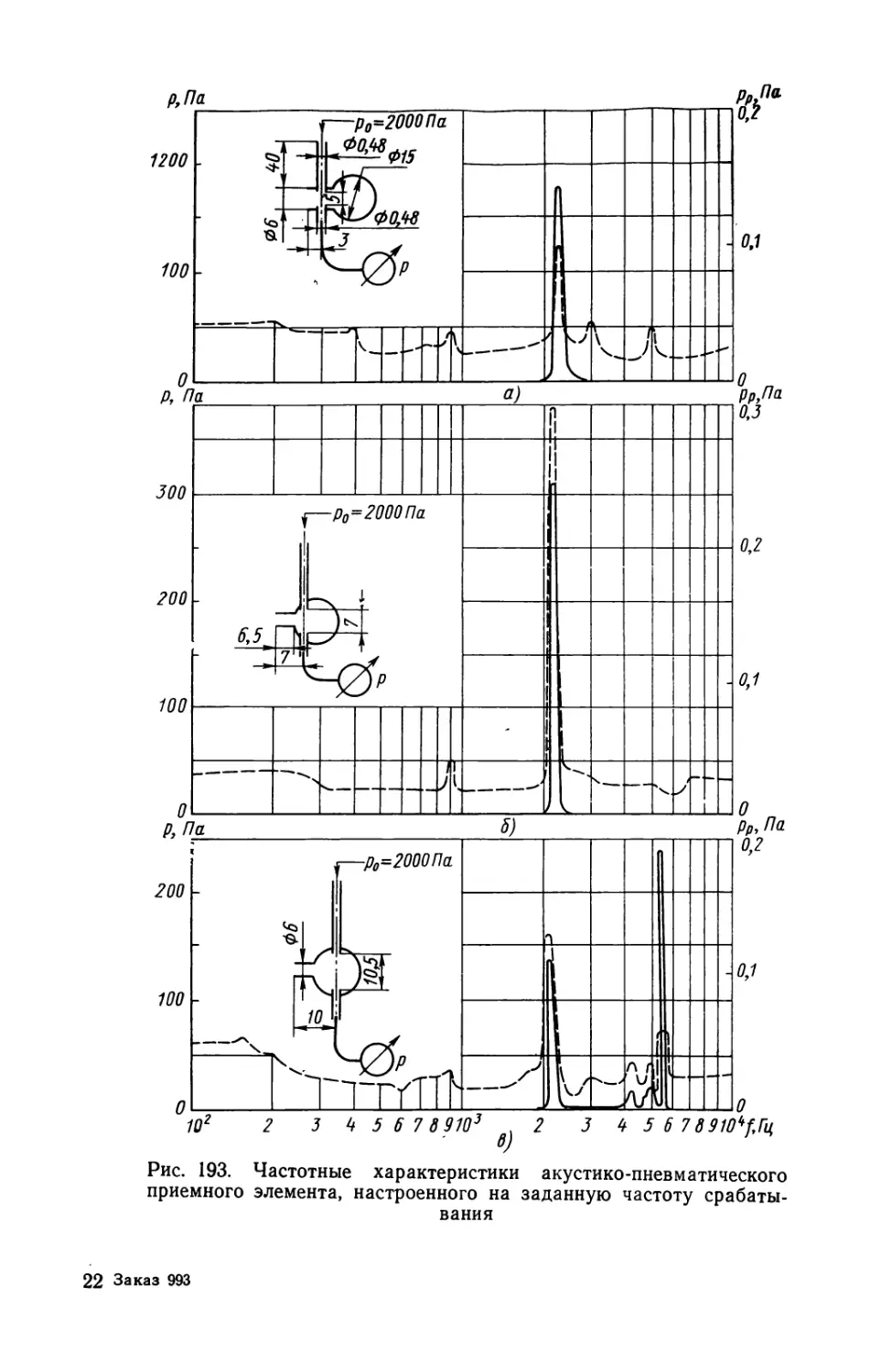
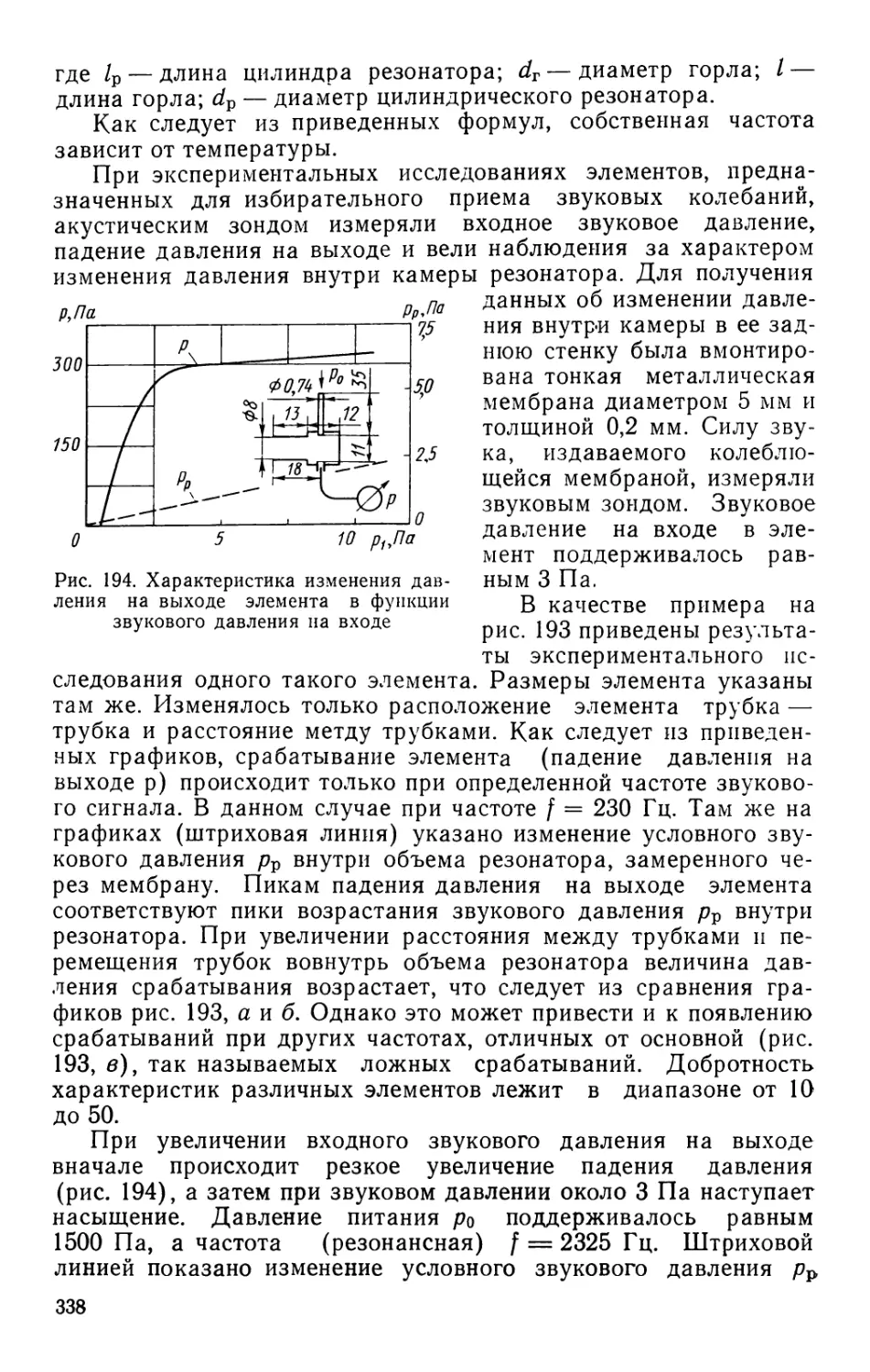
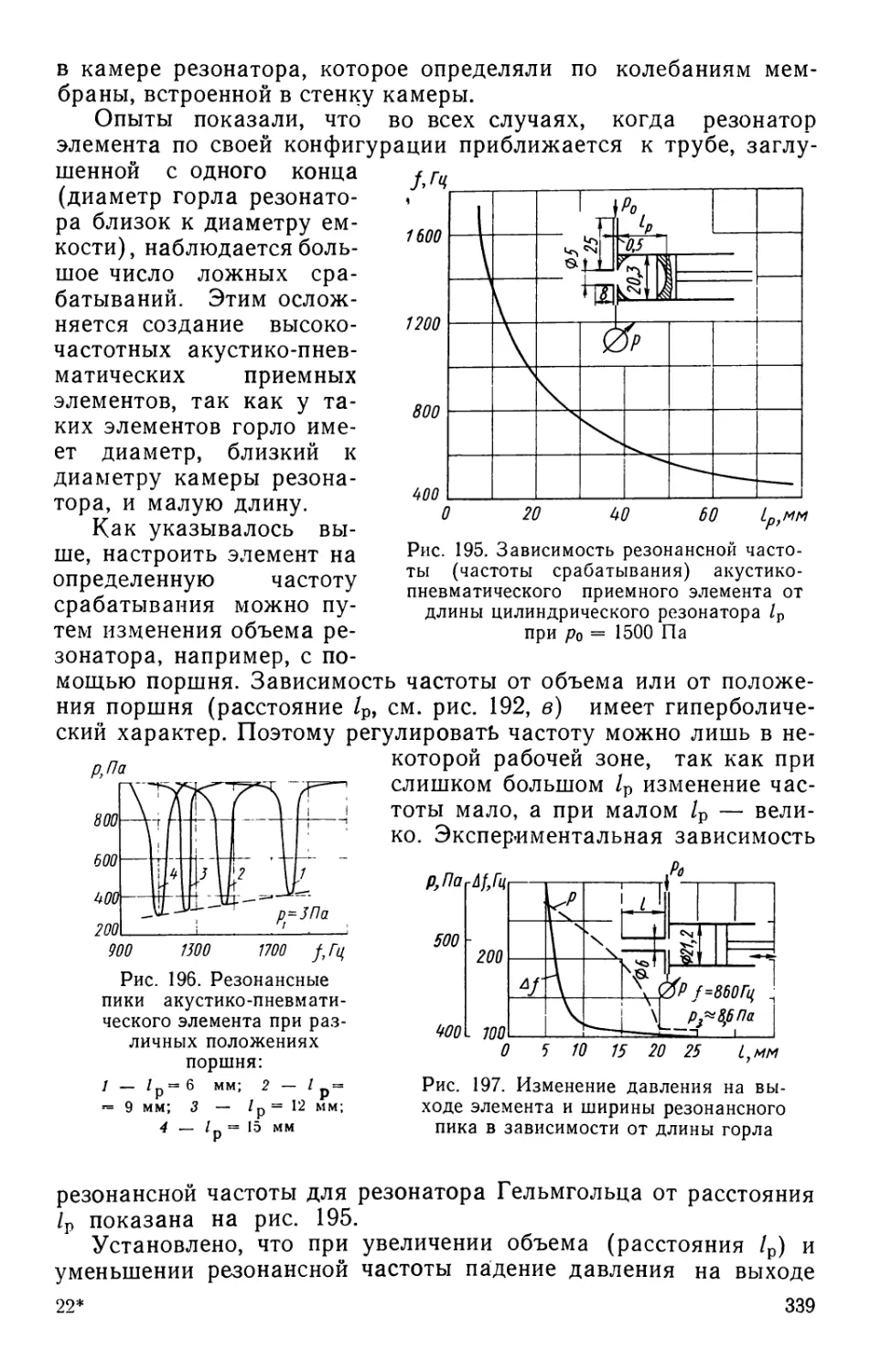
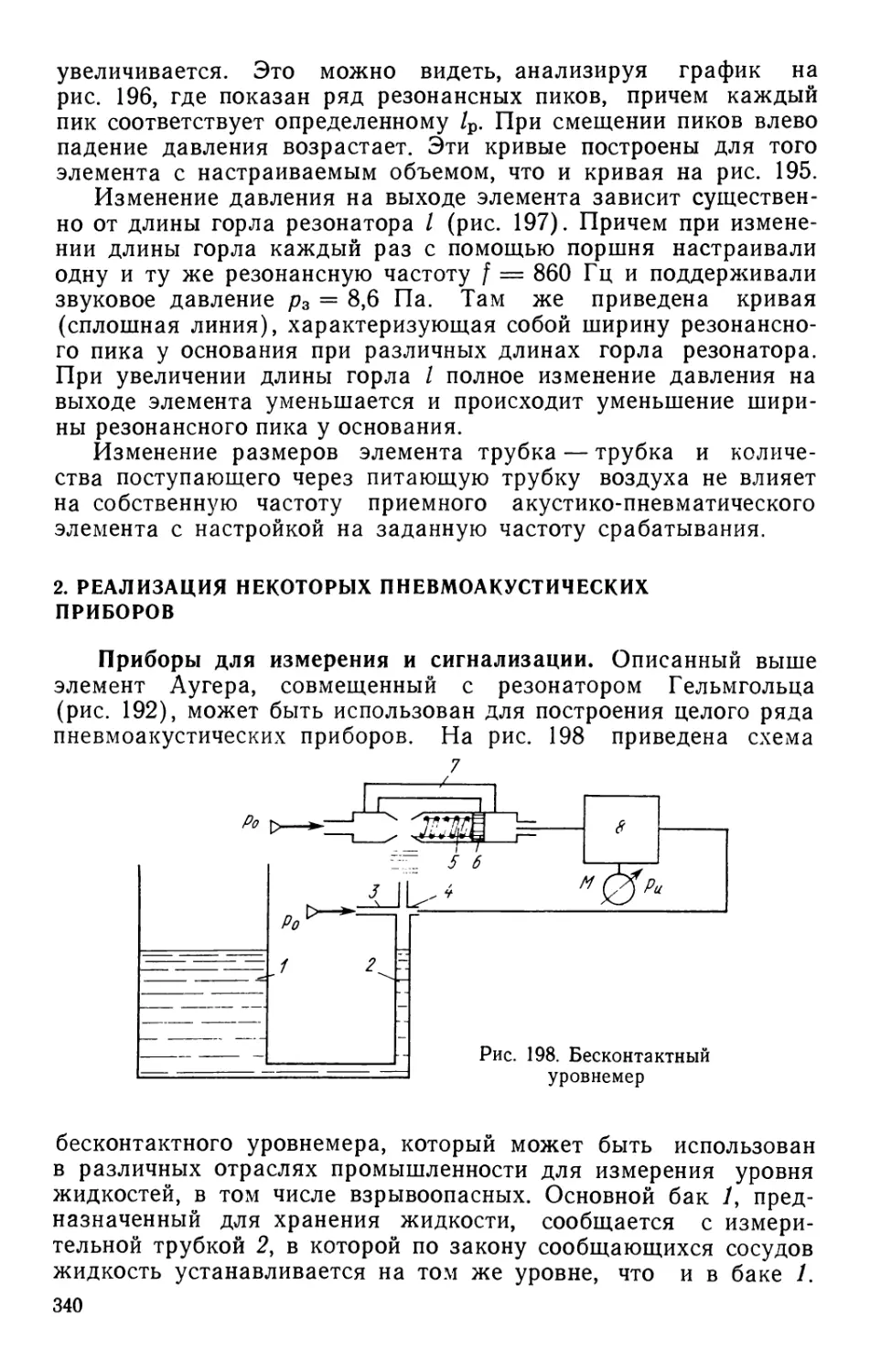
Текст
В. Н. ДМИТРИЕВ, В. Г. ГРАДЕЦКИЙ
ОСНОВЫ
П Н ЕВМО АВТОМАТИ КИ
Москва
«МАШИНОСТРОЕНИЕ»
1973
д 53
УДК 62—525
Дмитриев В. Н., Градецкий В. Г. Основы пневмоавтоматики.
М., «Машиностроение», 1973, 360 с.
В книге изложены основные сведения по теории и технике
мембранной и струйной пневмоавтоматики. Приведены методы
расчета элементов, их характеристики, принципы построения, опи-
саны основные системы пневмоавтоматики. Показаны тенденции
развития современной пневмоавтоматики.
Особое внимание уделено дискретной ветви струйной пнев-
моавтоматики, струйным логическим элементам различных типов,
элементам с турбулизацией течения как наиболее распростра-
ненным.
Даны основные сведения о новой области автоматики — пнев-
моакустике, сочетающей гидродинамические и акустические эф-
фекты, рассмотрены типовые схемы и устройства.
В книге приведены сведения о системах питания мембранной
и струйной пневмоавтоматики.
Книга рассчитана на научных работников, инженеров, зани-
мающихся исследованием и разработкой технических средств
автоматики. Табл. 11. Ил. 208. Список лит. 67 назв.
Рецензент д-р техн, наук | И. В. Лебедев |
Д 3'38-318- 318-73
038(01)—73
© Издательство «Машиностроение», 1973 г.
ПРЕДИСЛОВИЕ
Цель настоящей книги заключается в изложении основных
сведений по пневмоавтоматике, составляющей одно из ведущих
направлений в технике автоматического регулирования и
управления.
При написании книги были использованы результаты наи-
более крупных исследований отечественных и зарубежных
ученых. Обобщение результатов позволило в сравнительно не-
большом объеме дать достаточно полное изложение сути пнев-
моавтоматики. Настоящая монография в отличие от большин-
ства вышедших за последние годы работ, в которых рассмат-
риваются отдельные разделы пневмоавтоматики, включает все
основные ее разделы. В некоторых работах, что можно считать
вполне правомерным, отделяют мембранную автоматику от
струйной. Однако на практике чаще всего используется сочета-
ние мембранных и струйных элементов в единой системе, обу-
словленное рациональным выбором средств и решаемой
задачей автоматизации.
В соответствии с выбранной методикой изложения первые
главы посвящены элементам мембранной и струйной пневмо-
автоматики, далее приведены основные принципы построения
систем пневмоавтоматики и на ряде примеров показана их реа-
лизация, рассмотрены преобразующие периферийные и испол-
нительные пневматические-устройства и в последней главе
показаны тенденции развития струйной пневмоавтоматики с
переходом в область еще более низких рабочих давлений.
На протяжении более пятнадцати лет интенсивные исследо-
вания в области вначале мембранной, а затем струйной пневмо-
автоматики проводятся в Ордена Ленина Институте проблем
управления (автоматики и телемеханики). Так, в 1955—1957 гг.
впервые в СССР в этом институте были разработаны агрегатная
унифицированная система (АУС) и Универсальная система
элементов промышленной пневмоавтоматики (УСЭППА), а в
1957—1959 гг. был предложен струйный принцип построения
систем пневмоавтоматики. Поэтому вполне естественно, что
авторы настоящей книги базировались главным образом на
работах, проведенных в этом институте.
3
В настоящее время существует ряд книг по пневмоавтома-
тике, посвященных как углубленному рассмотрению отдельных
вопросов, так и некоторым более широким специальным
областям.
Теория проточных и струйных элементов пневмоавтоматики
изложена в работах Л. А. Залманзона [24, 25]. Расчету струйных
элементов разных типов посвящены исследования И. В. Лебе-
дева [28, 29], С. Л. Трескунова [44], А. М. Касимова, И. В. Вай-
сер [11], И. С. Мезина [31, 32], Ю. И. Островского [34] и других
авторов.
Общие вопросы, касающиеся пневматических элементов,
систем и приборов автоматического регулирования, изложены в
работах А. А. Таля, Г. Г. Березовец [6, 7], Т. К. Берендс,
Т. К. Ефремовой, А. А. Тагаевской [5, 6], А. В. Богачевой [8],
А. И. Трушина, И. Б. Криштул, М. К. Соме [20] и других иссле-
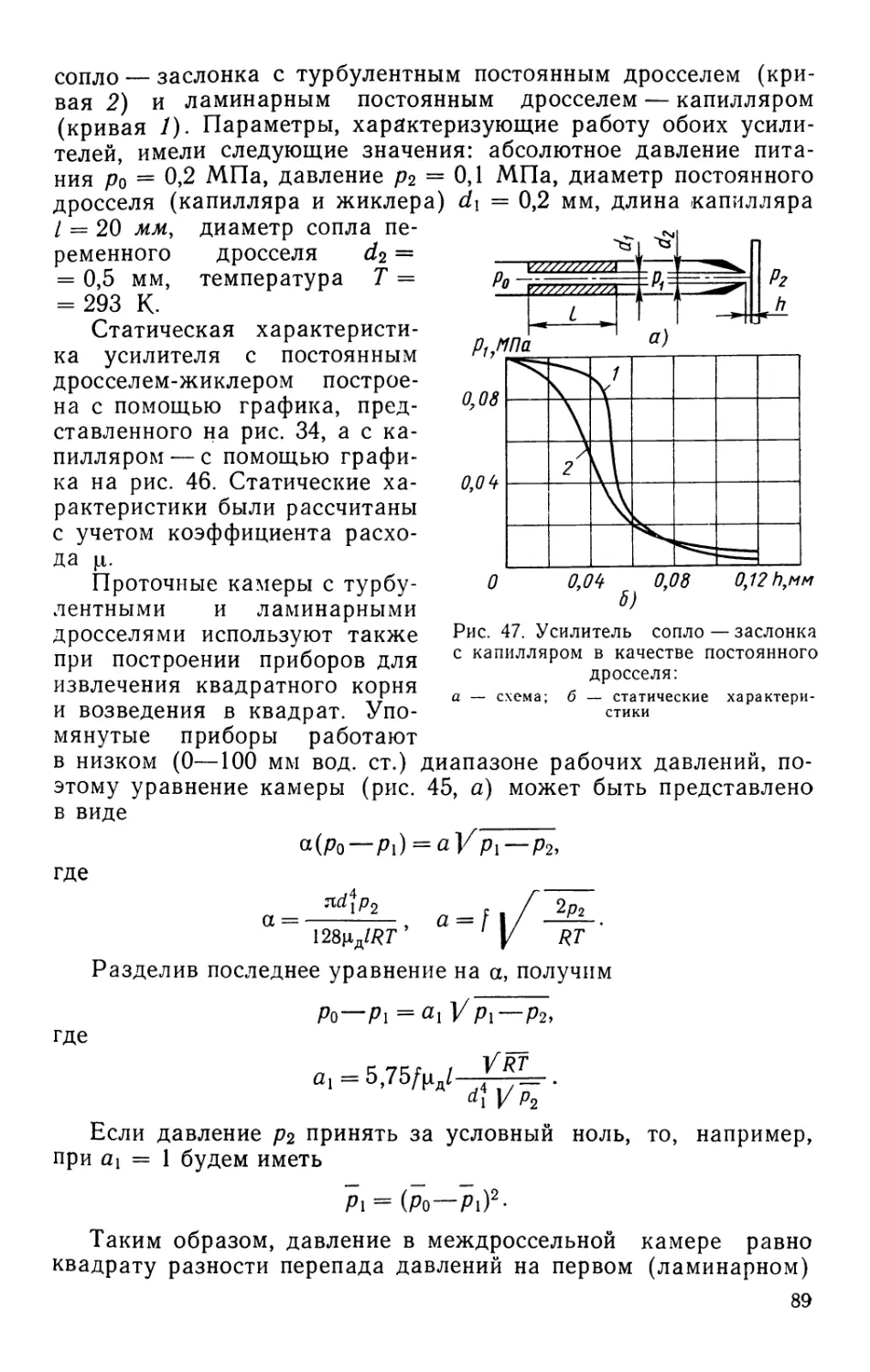
дователей.
Современные методы синтеза пневматических систем управ-
ления и теории пневмоприводов отражены в работах Е. В. Герц,
Г. В. Крейнина [16—18], В. П. Зенченко, С. А. Юдицкого [52].
Пневматическим регуляторам общепромышленного назначе-
ния, пневматическим датчикам и вторичным приборам посвя-
щены работы В. С. Прусенко [37, 38]. Релейные системы пневмо-
автоматики и пневматические вычислительные приборы непре-
рывного действия описаны в книгах М. Д. Лемберга,
В. И. Чернышева и др.
Имеется ряд зарубежных книг, освещающих различные
вопросы пневмоавтоматики и переведенных на русский язык.
К ним принадлежит книга В. Фернера [46] и сборник [42].
В результате проведения ежегодных Всесоюзных совещаний
по пневмоавтоматике (всего было 12 таких совещаний) вышел
ряд сборников трудов этих совещаний, содержащих обширный
материал по различным вопросам пневмоавтоматики.
В отличие от перечисленных работ (а здесь упомянуты
почти все наиболее важные работы по пневмоавтоматике)
настоящая работа представляет собой попытку объединить
основные сведения по пневмоавтоматике и изложить их по
возможности кратко. В книге впервые представлен раздел
новой области техники — пневмоакустики. Авторы отдают себе
отчет в том, что книга не свободна от недостатков, один из
которых связан с неравномерным освещением рассматривае-
мых вопросов. Некоторые вопросы, представляющие круг
интересов самих авторов, получили более подробное толко-
вание.
Замечания по книге просим направлять по адресу: Москва,
Б-78, 1-й Басманный пер., д. 3, издательство «Машиностроение»
ВВЕДЕНИЕ
Современная пневмоавтоматика позволяет успешно решать
большинство практических задач управления производствен-
ными процессами.
В таких отраслях промышленности, как химия, металлур-
гия, пищевая и газовая промышленности, медицина и др.,
применение пневматических систем управления дает наиболее
существенный эффект. Широкое внедрение технических средств
пневмоавтоматики в ряд отраслей промышленности объясняет-
ся теми их положительными свойствами, которые отсутствуют
у средств электро- и гидроавтоматики. Так, в традиционной
для пневмоавтоматики отрасли промышленности — нефтехимии
особенно важны такие качества пневматических устройств, как
пожаро- и взрывобезопасность, высокая надежность, дешевиз-
на, простота эксплуатации и возможность использования в
агрессивных средах.
По сравнению с гидроавтоматикой пневмоавтоматика имеет
такие положительные качества, как возможность сбрасывать
воздух из любой точки пневмосистемы в атмосферу, отсутствие
возвратных линий, ведущих в бак, а также безопасность утечки
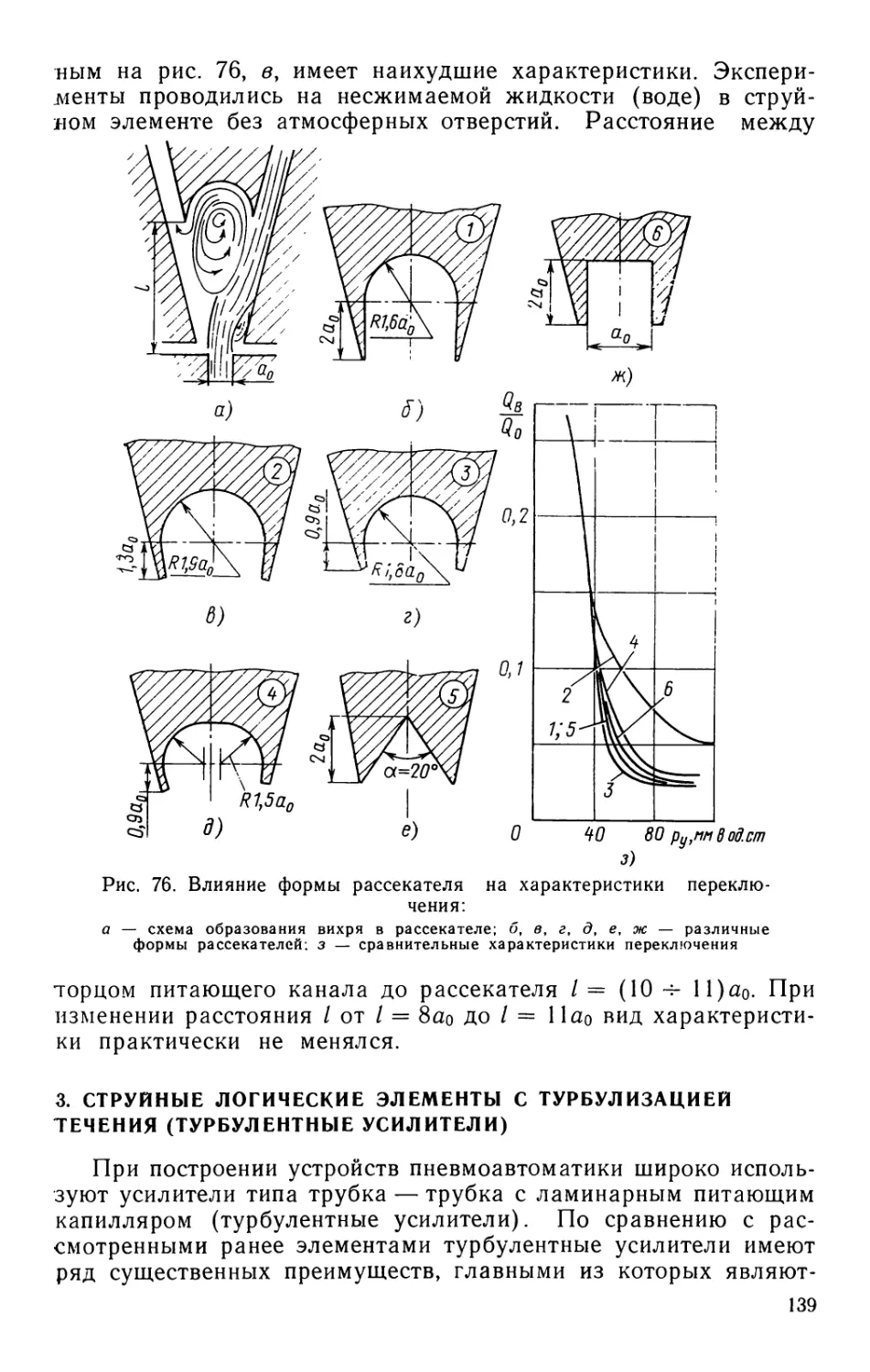
воздуха (утечка масла в гидросистеме крайне нежелательна).
Наиболее существенными недостатками устройств пневмо-
автоматики следует считать низкое быстродействие и дально-
действие. Если в электронике скорость передачи сигналов
определяется скоростью распространения электромагнитных
волн, то скорость передачи пневматических сигналов ограничи-
вается скоростью звука. Дальнодействие пневматических си-
стем ограничивается расстояниями порядка нескольких сотен
метров. При больших расстояниях необходимы промежуточные
усилители либо иные специальные устройства.
Использование в качестве рабочей среды воздуха или дру-
гого газа в технике регулирования началось с применения
силовых элементов — поршневых и мембранных исполнитель-
ных механизмов. Для первых этапов развития пневмоавтомати-
ки характерны громоздкие пневматические регуляторы, имею-
щие тяги и рычаги, построенные по принципу компенсации
перемещений. Развитию пневмоавтоматики способствовали
новые идеи, которые возникали и реализовывались во времени
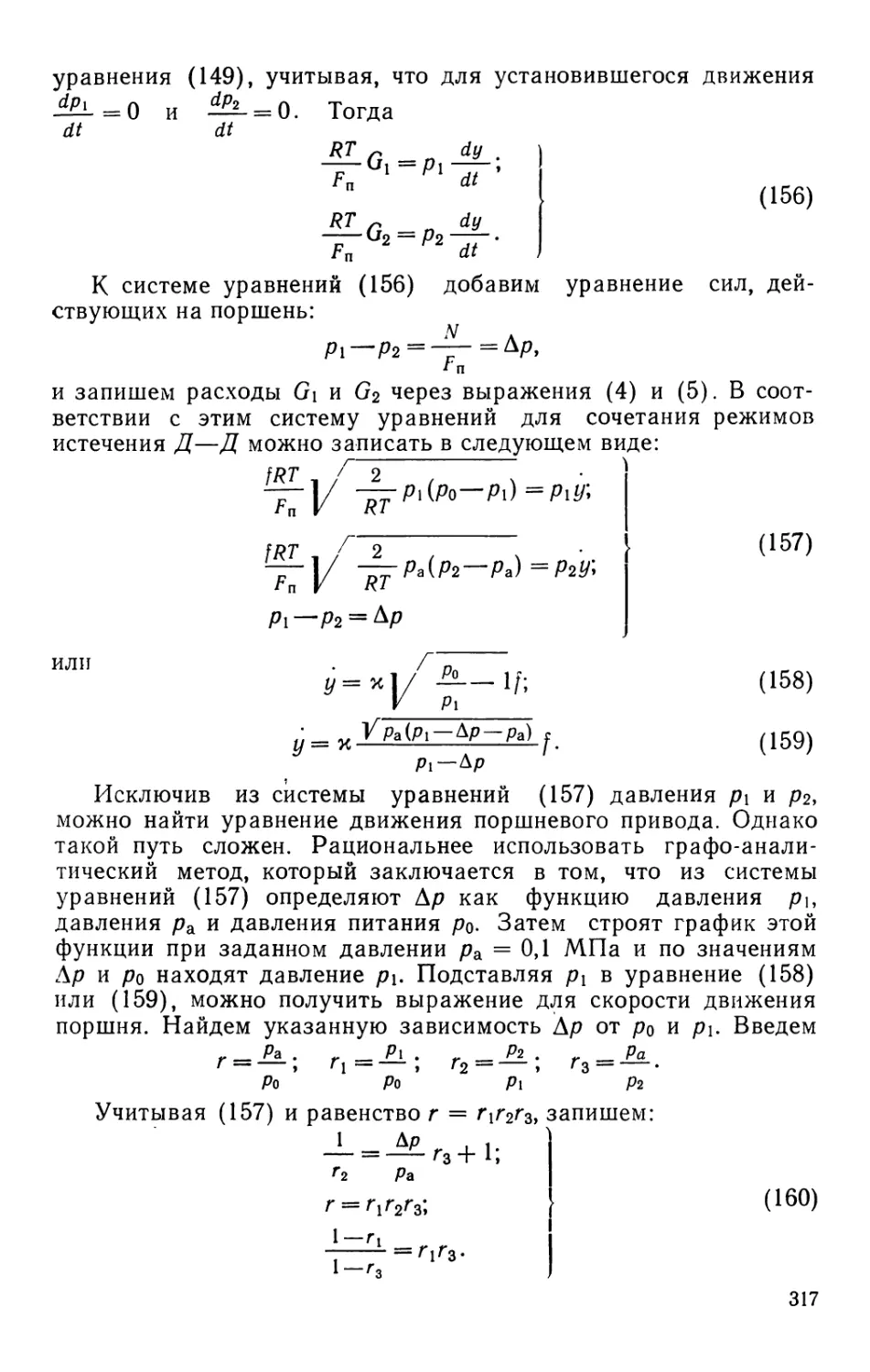
по мере ее развития. Эти новшества в основном сводятся к пере-
ходу от принципа компенсации перемещений к принципу ком-
пенсации сил, применению не только нормального диапазона
рабочих давлений (0,14 МПа), но и низкого (0,002 МПа), внед-
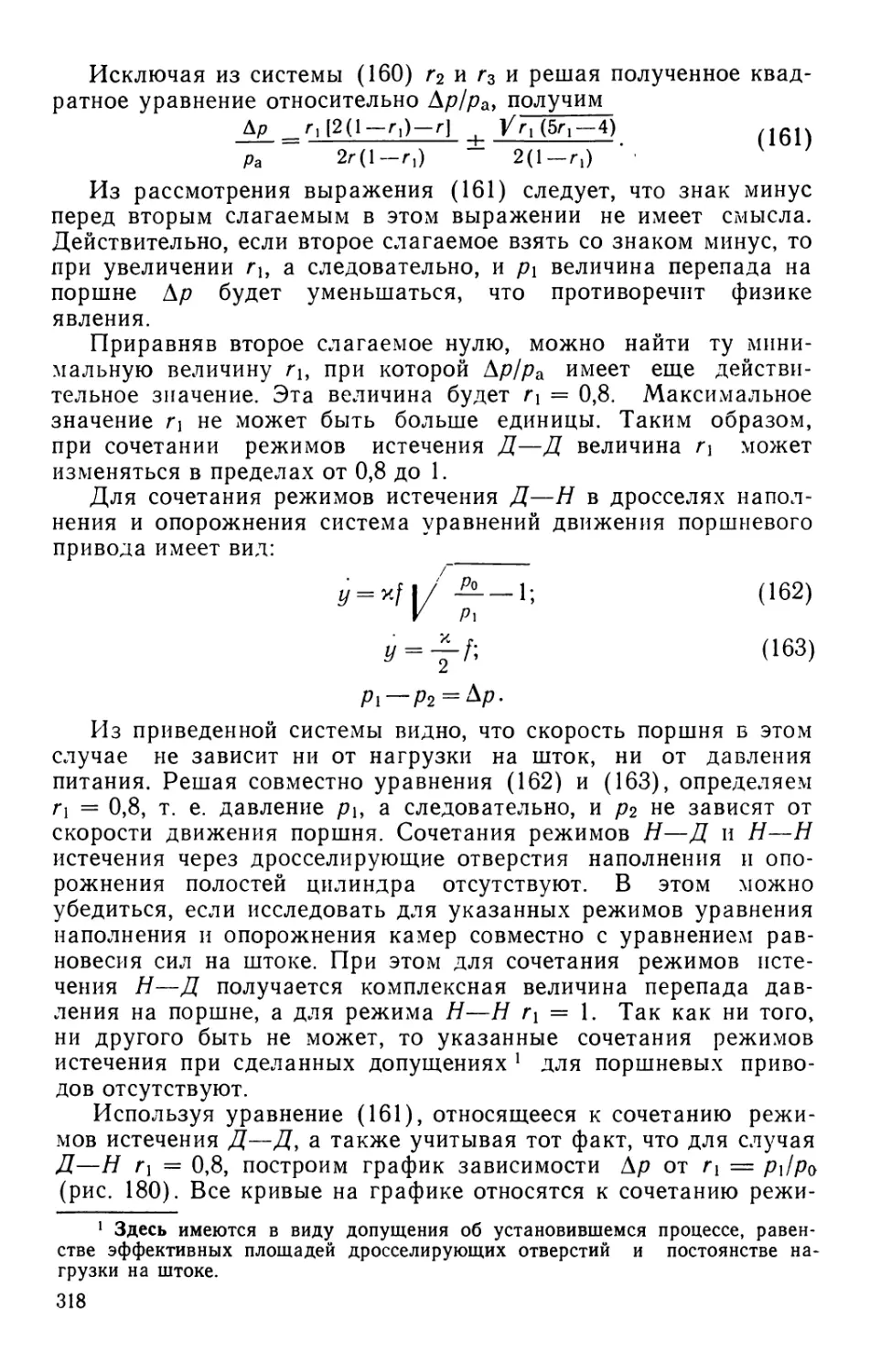
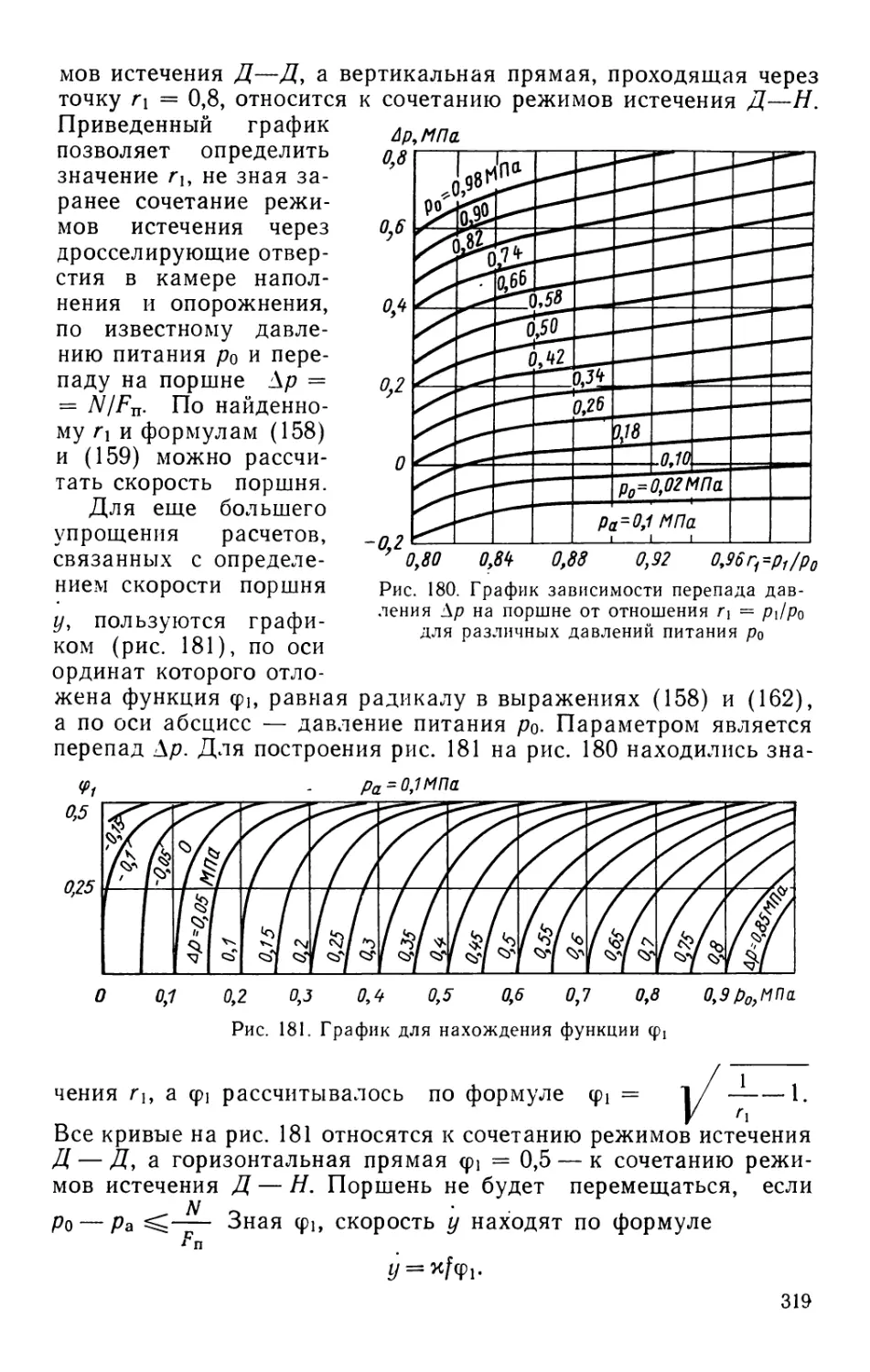
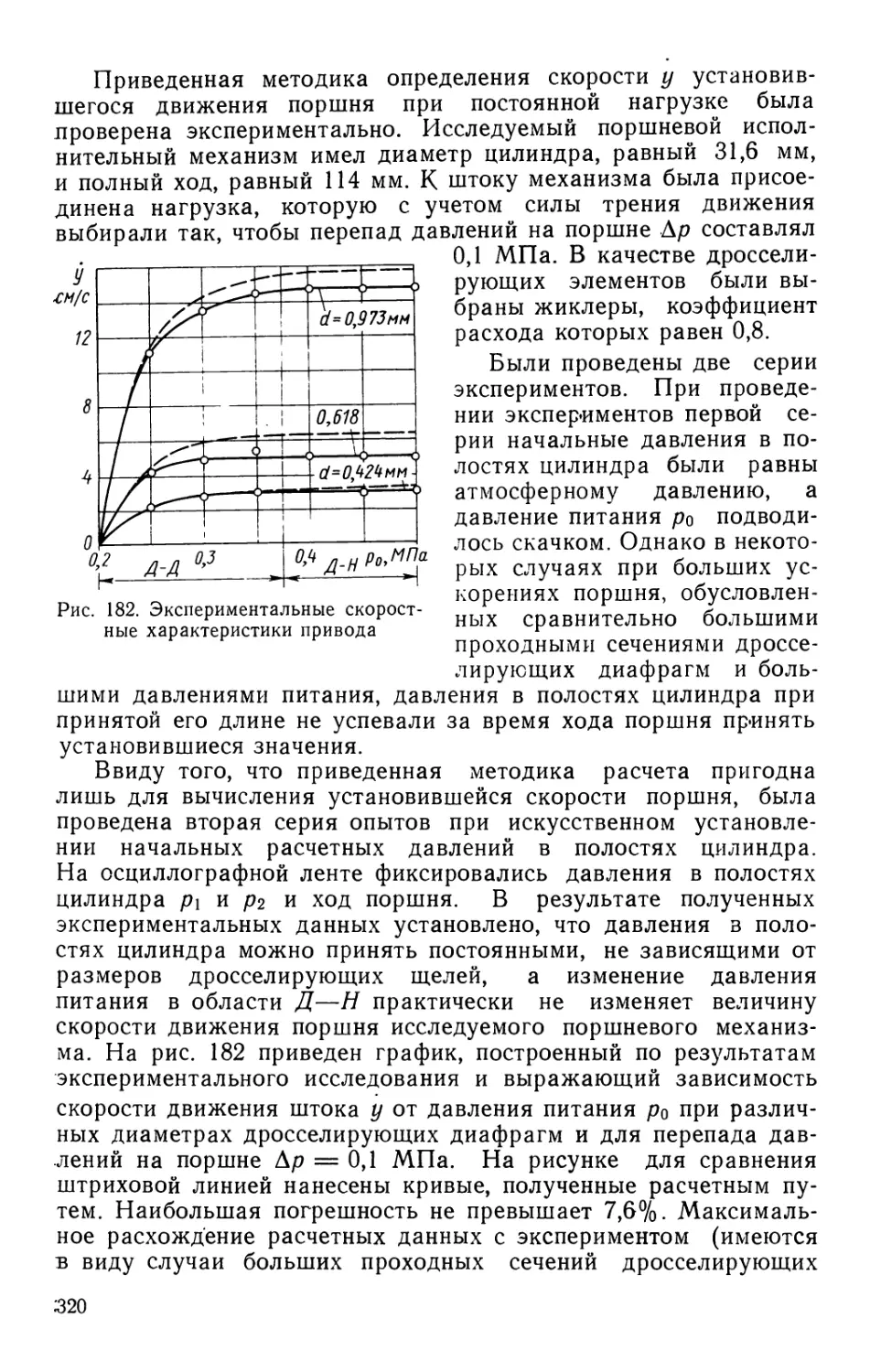
рению элементного принципа построения пневматических при-
боров, использованию струйной техники (пневмоники) и тех-
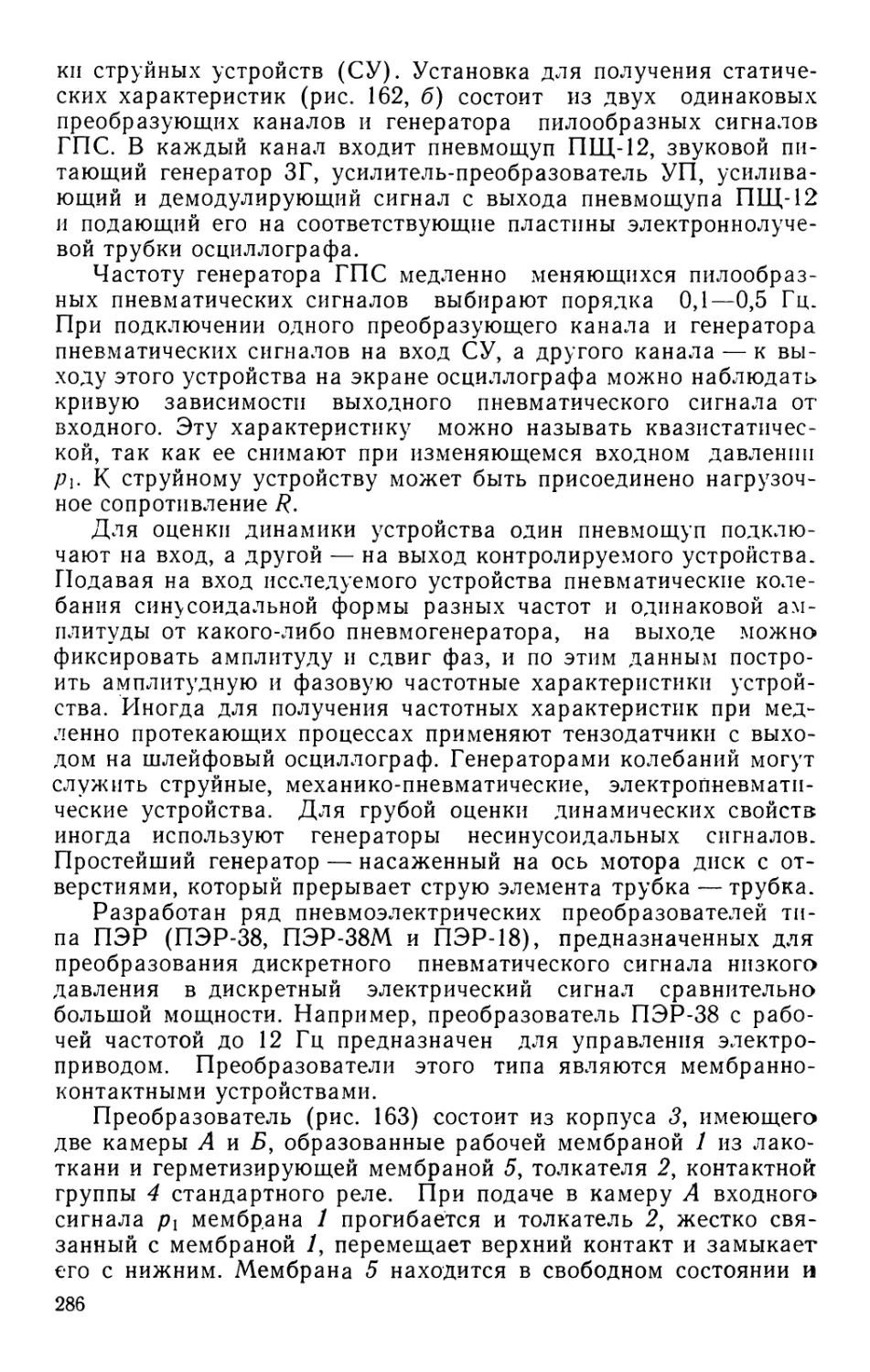
ники переменных токов для построения систем пневмоавтомати-
ки, а также эффектов взаимодействия струй со звуковыми
сигналами.
Итогом перехода от принципа компенсации перемещений
к принципу компенсации сил явилось построение агрегатной
унифицированной системы (АУС) и освоение этой системы
приборов нашей промышленностью. Приборы этой системы
выгодно отличаются от приборов, построенных по принципу
компенсации перемещений, малыми габаритными размерами и
малыми величинами механических перемещений. Появились
первые вычислительные приборы, такие, как сумматор, множи-
тельное устройство и т. д.
Применение рабочих давлений низкого диапазона позволило
легко получать линейные пневматические сопротивления и стро-
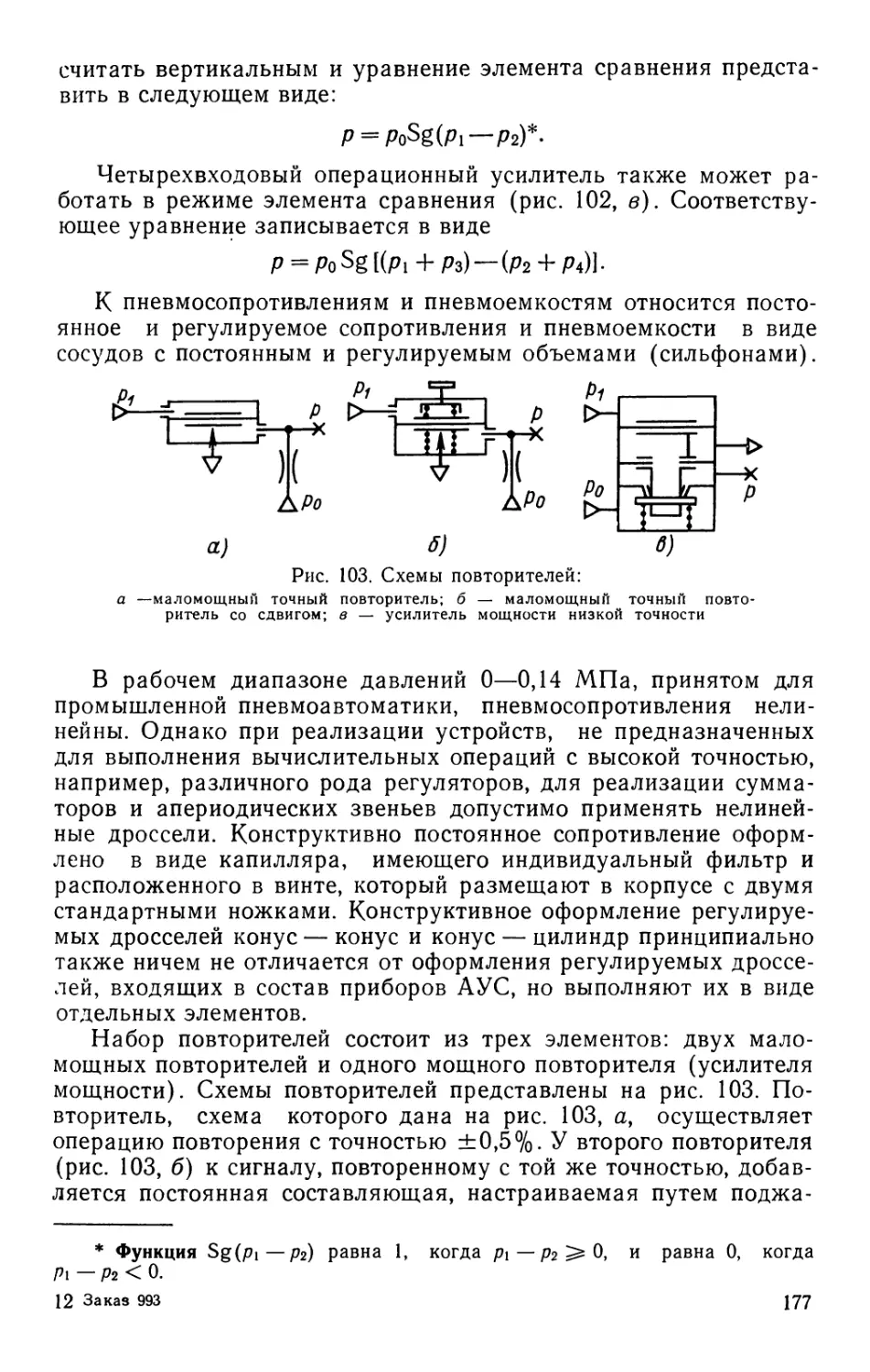
ить вычислительные приборы с применением решающего (опе-
рационного) пневматического усилителя так, как это делается
в области электроники. Снижение диапазона давлений дало,
кроме того, и еще целый ряд выгод, таких, как уменьшение
расхода воздуха, использование в качестве источников питания
вентиляторов и т. д. Перенос из электроники в область пневмо-
автоматики элементного принципа построения приборов из от-
дельных резисторов, конденсаторов, усилительных реле и т. д.
позволил отказаться от трудоемкого конструирования каждого
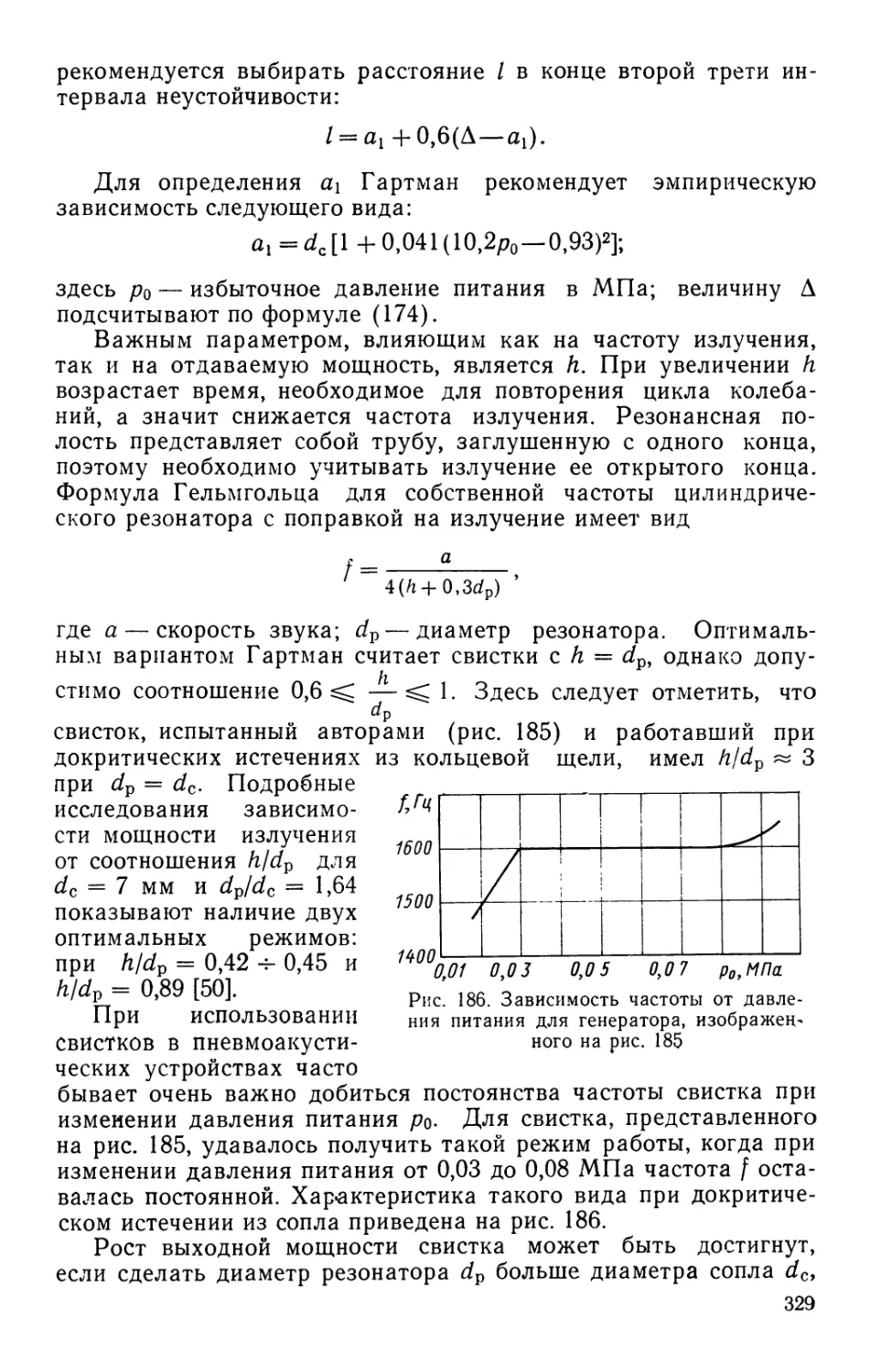
отдельного прибора.
Элементный способ построения вычислительных приборов
и устройств пневмоавтоматики нашел свое воплощение в Уни-
версальной системе элементов промышленной пневмоавтомати-
ки, которая выпускается в настоящее время нашей промышлен-
ностью. Сейчас большое число устройств пневмоавтоматики,
работающих в промышлености, реализовано на элементах
УСЭППА.
Подобно тому, как в свое время в области электроавтомати-
ки зародилось новое техническое направление — электроника,
так и в области пневмоавтоматики возникло новое направле-
ние — пневмоника, или струйная техника. Принципы струйной
техники коренным образом отличаются от всех ранее извест-
ных принципов построения пневматических приборов. В при-
борах струйной техники полностью отсутствуют какие-либо
механические подвижные детали, а управление осуществляется
за счет взаимодействия струй воздуха. Приборы струйной
техники миниатюрны и допускают применение технологии
6
печатных схем. В струйной технике используются как постоян-
ные, так и переменные пневматические токи. Последнее обеспе-
чивает получение высокой точности при создании вычислитель-
ных приборов.
В пневмонике применяется элементно-модульноагрегатный
способ построения систем, базирующийся на интегральных схе-
мах, который становится характерным и для мембранных при-
боров.
И, наконец, в последнее время зародилось новейшее
направление — пневмоакустика. В основе пневмоакустики ле-
жит свойство воздушных струй взаимодействовать со звуко-
выми сигналами. Уже сейчас построены пневмоакустические
приборы, позволяющие осуществлять управление звуком на
расстоянии, некоторые измерения и т. д. Освоение этого нового
направления даст возможность в будущем улучшить техниче-
ские средства пневмоавтоматики.
Краткий перечень новых направлений, по которым идет
развитие технических средств пневмоавтоматики, показывает,
какое важное место она занимает в автоматизации различных
производственных процессов и в технике управления. В настоя-
щее время пневмоавтоматика достигла такого уровня развития,
при котором практически возможно построение любого управ-
ляющего устройства непрерывного действия, любой релейной
схемы и любого управляющего устройства непрерывно-дискрет-
ного действия. Ограничением является лишь низкое быстродей-
ствие систем пневмоавтоматики.
В последнее время произошло значительное усложнение
задач автоматического регулирования и управления, что дик-
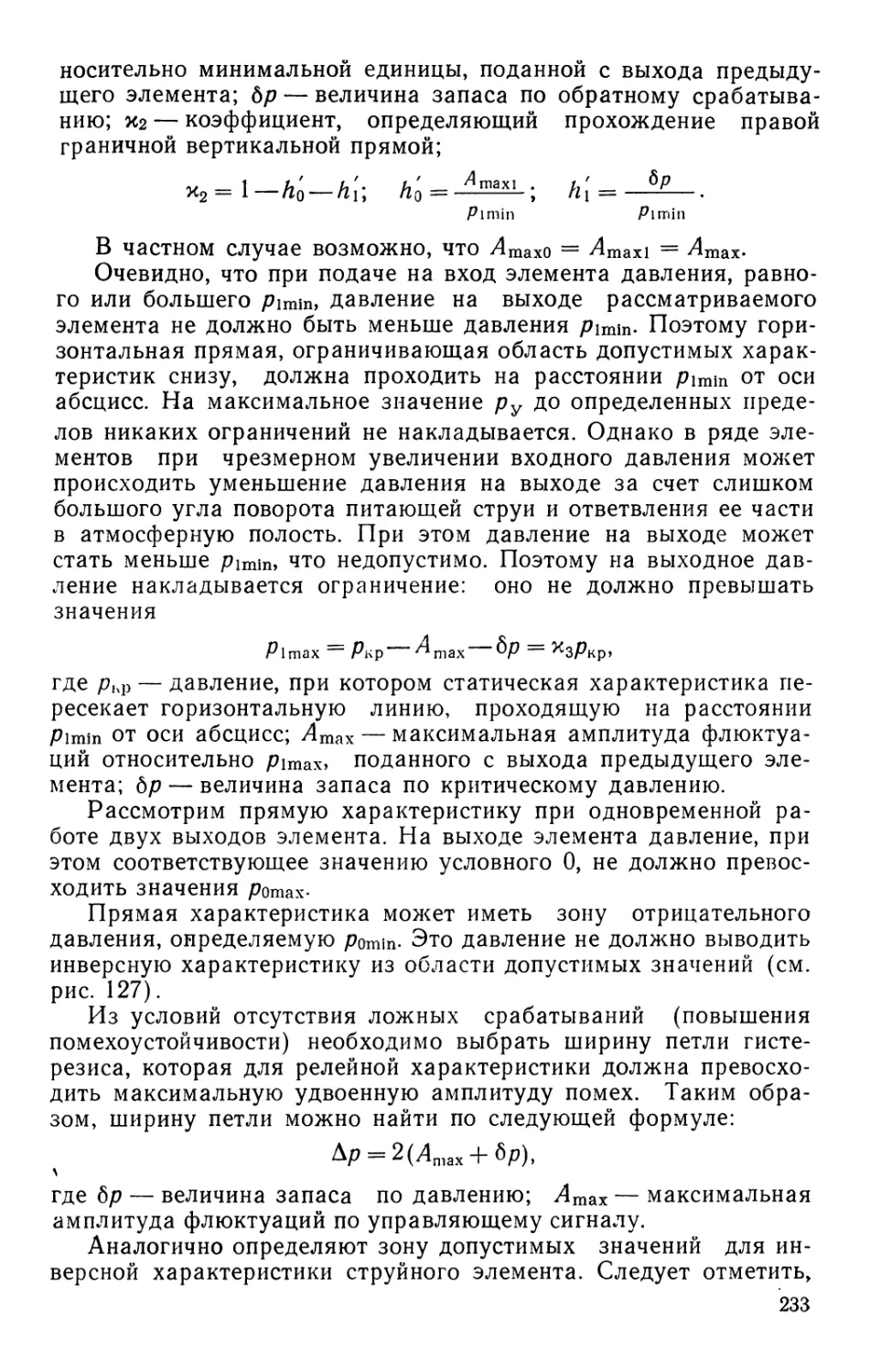
туется требованиями повышения производительности оборудо-
вания, уменьшения брака, повышения качества управления,
повышения надежности оборудования и средств автоматизации,
а также повышением технико-экономической эффективности
автоматизируемого производства в целом.
В соответствии с этими задачами в области пневмоавтома-
тики на базе системы УСЭППА, а также на элементах и
модулях струйной техники были созданы вычислительные, уп-
равляющие и регулирующие устройства, с помощью которых
можно осуществлять комплексную автоматизацию различных,
подчас весьма сложных, объектов управления. На элементах
УСЭППА строят все непрерывные приборы и целый ряд дис-
кретных и непрерывно-дискретных устройств. Все эти приборы
выпускаются серийно заводом «Тизприбор» и входят в систему
«Старт». Так, помимо регуляторов с П и ПИ законами регули-
рующего воздействия в систему «Старт» входит также регуля-
тор, реализующий пропорционально-интегрально-дифференци-
альный (ПИД) закон.
В систему «Старт» входит также прибор извлечения квад-
ратного корня, прибор селектирования большего или меньшего
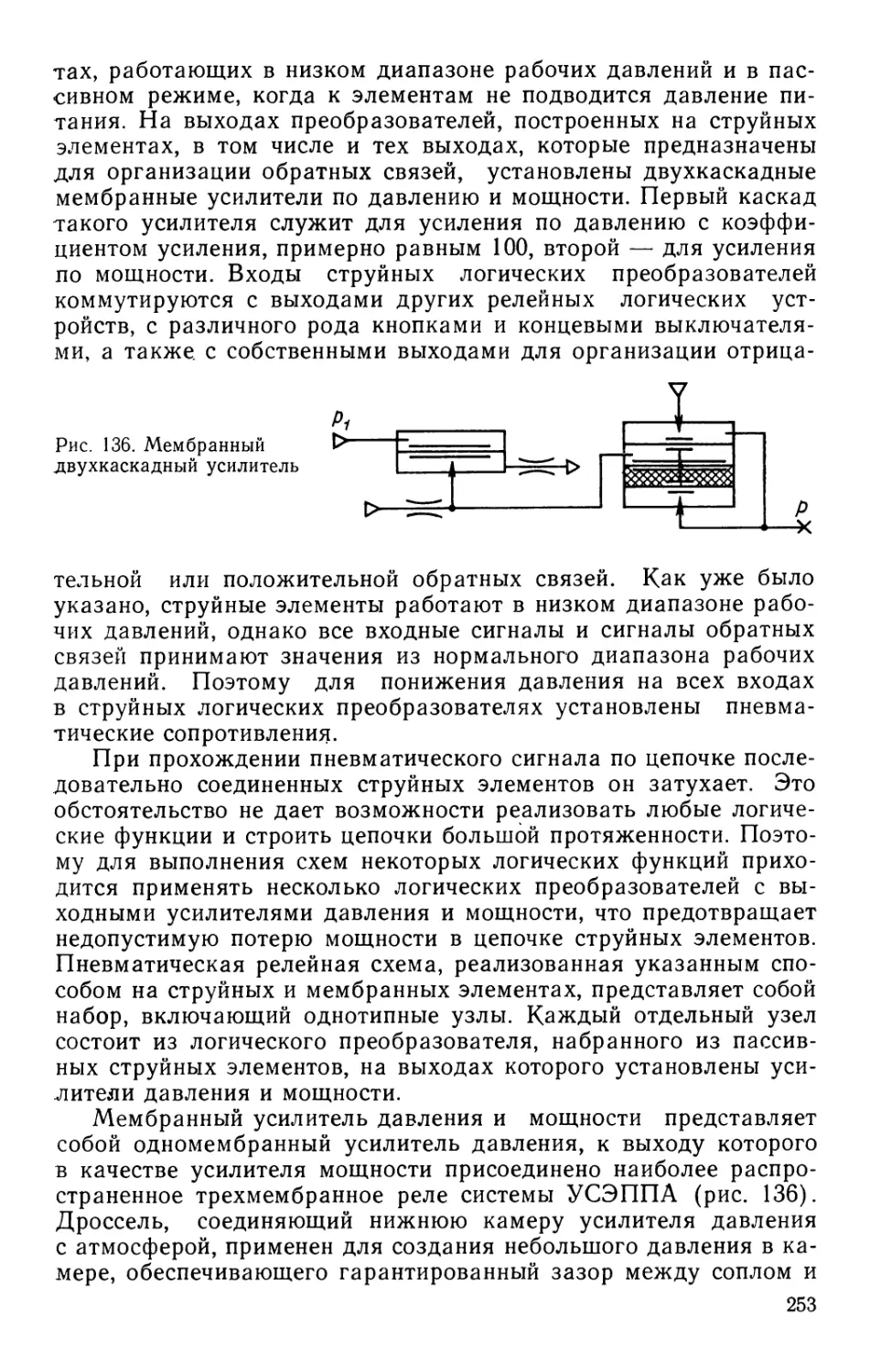
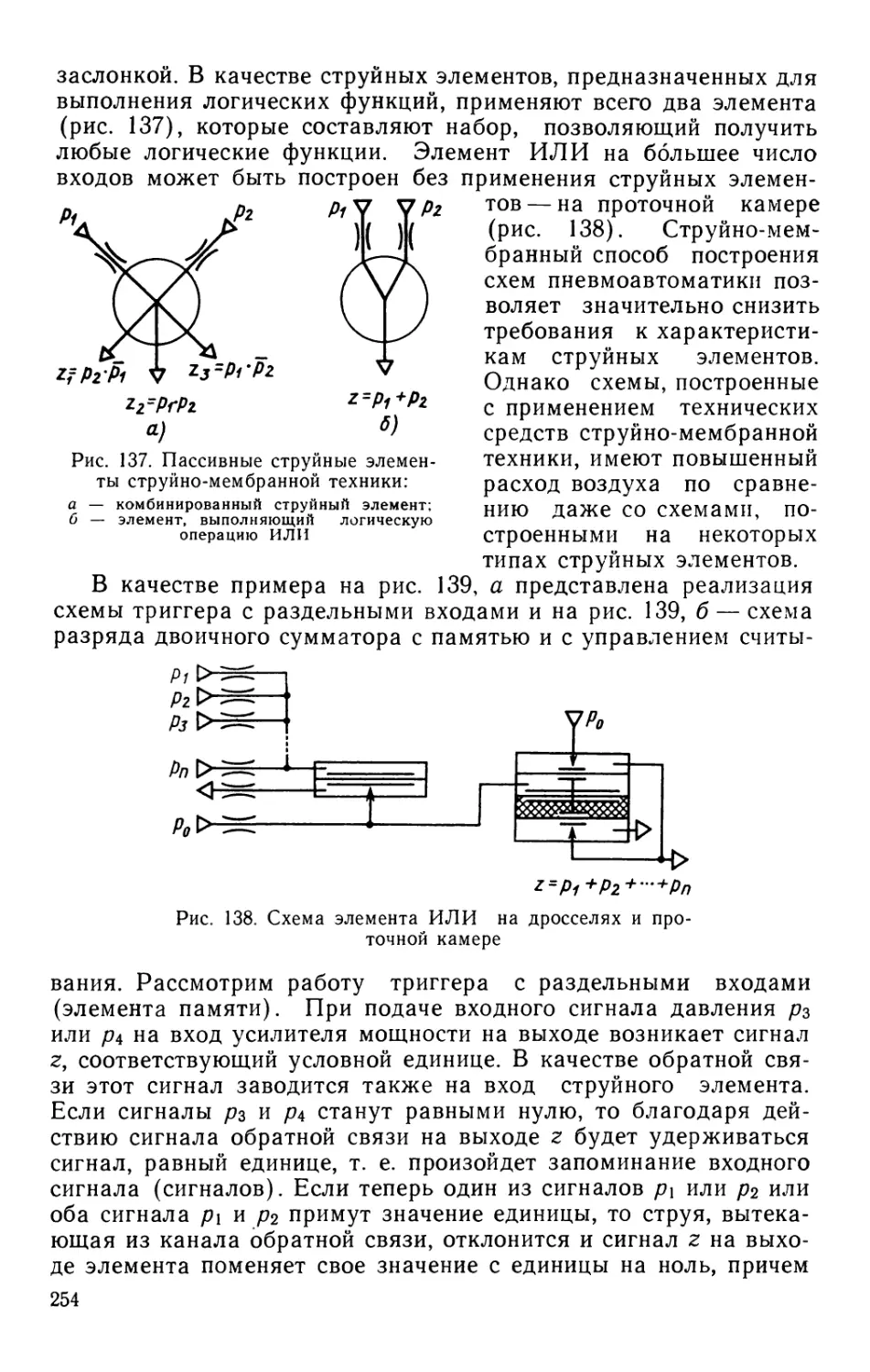
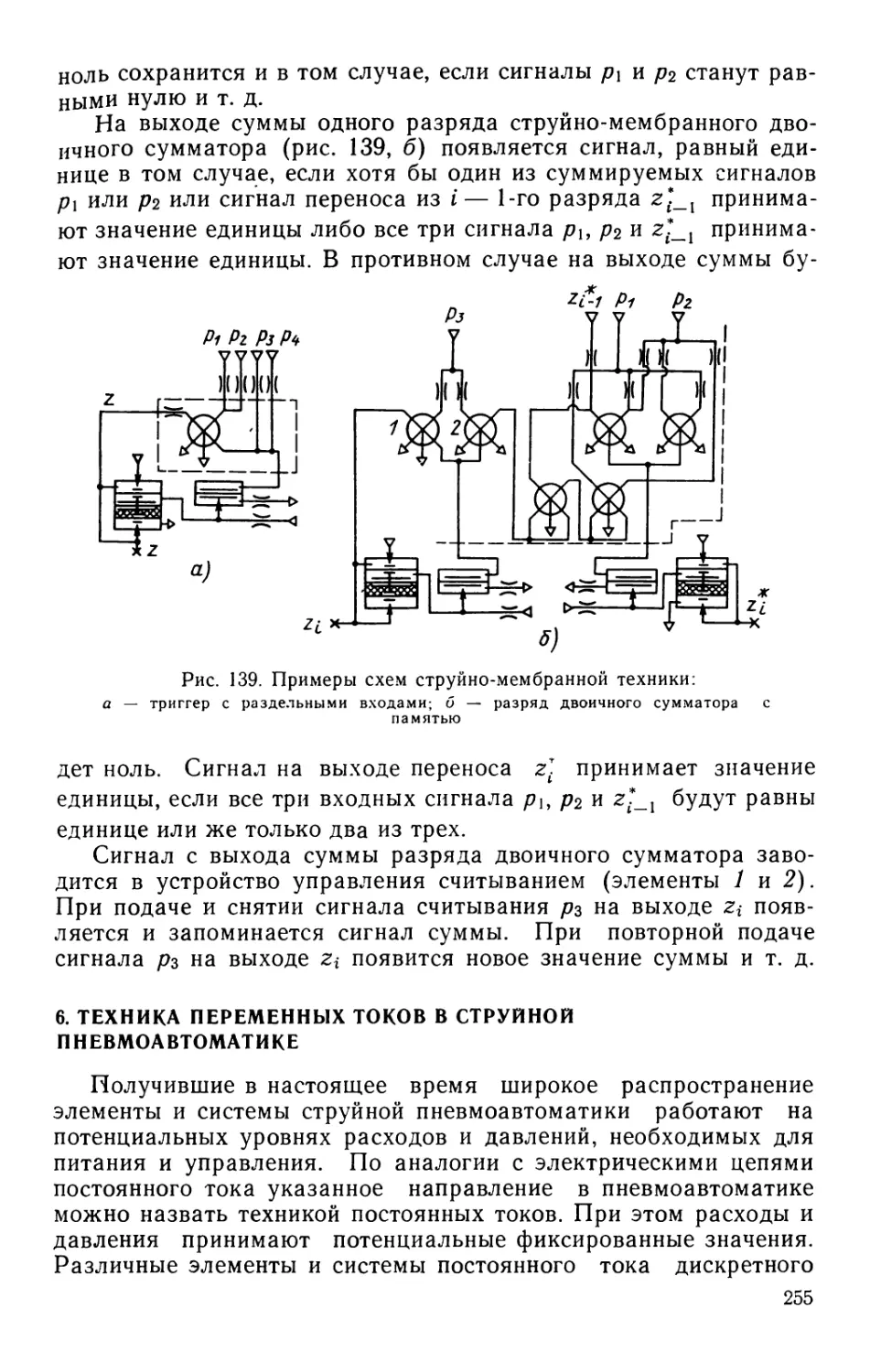
7
сигнала, три типа экстремальных регуляторов, многоточечное
обегающее устройство и т. д.
На элементах УСЭППА строят такие сложные управляющие
устройства, как «Автооператор», предназначенный для автома-
тизации предприятий по производству полиэтилена, станция
централизованного контроля и управления, служащие для
совместной работы с электронными управляющими машинами
и т. д.
Система струйных модулей позволила создать устройства
программного управления металлорежущими станками, си-
стему оптимизации прямой гидратации этилена, струйные циф-
ровые регуляторы и другие приборы и устройства.
Технические средства струйной и мембранной пневмоавто-
матики позволили создать современную медицинскую аппара-
туру для искусственного дыхания и кровообращения, которая
широко применяется в медицинской практике.
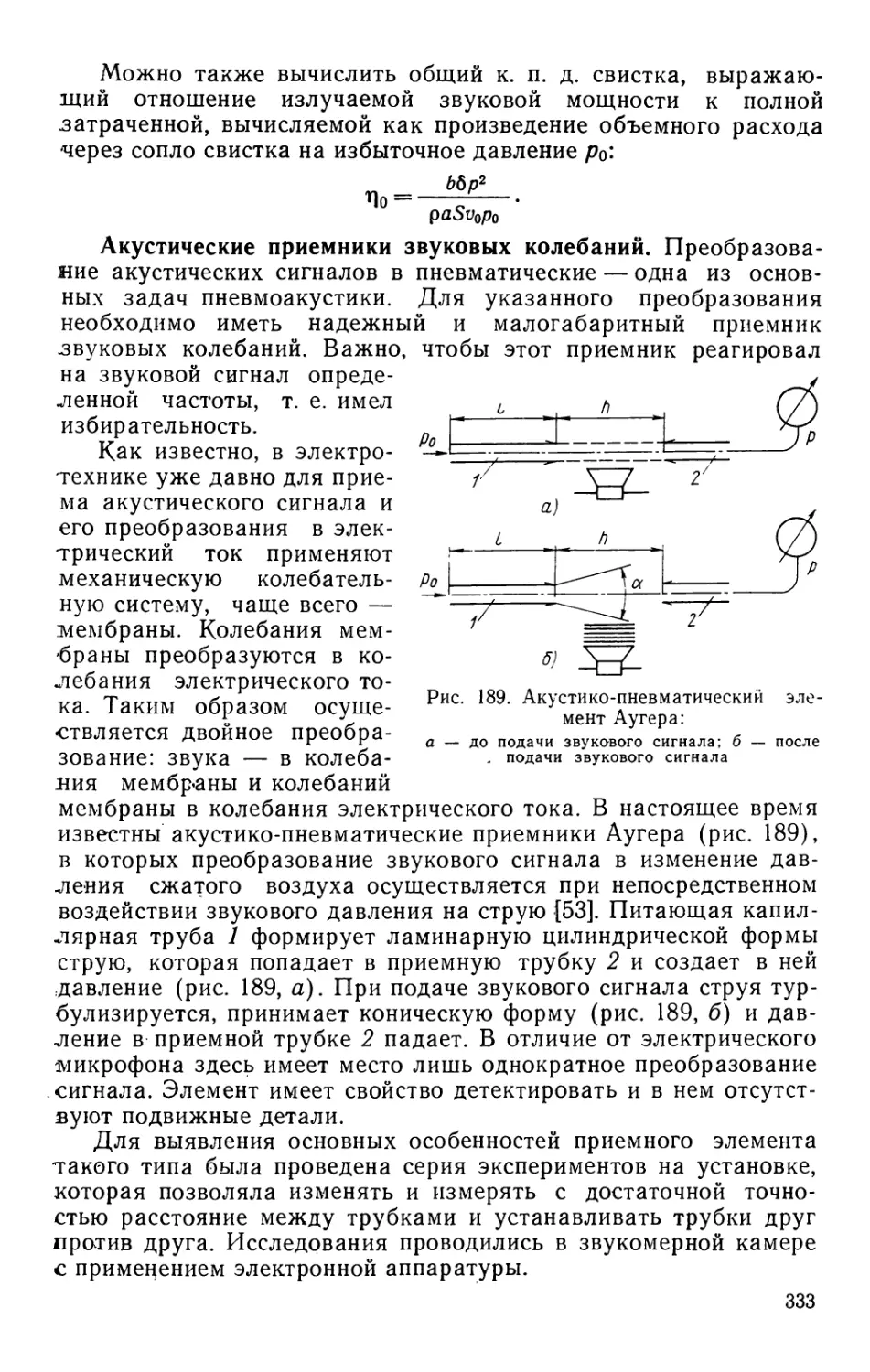
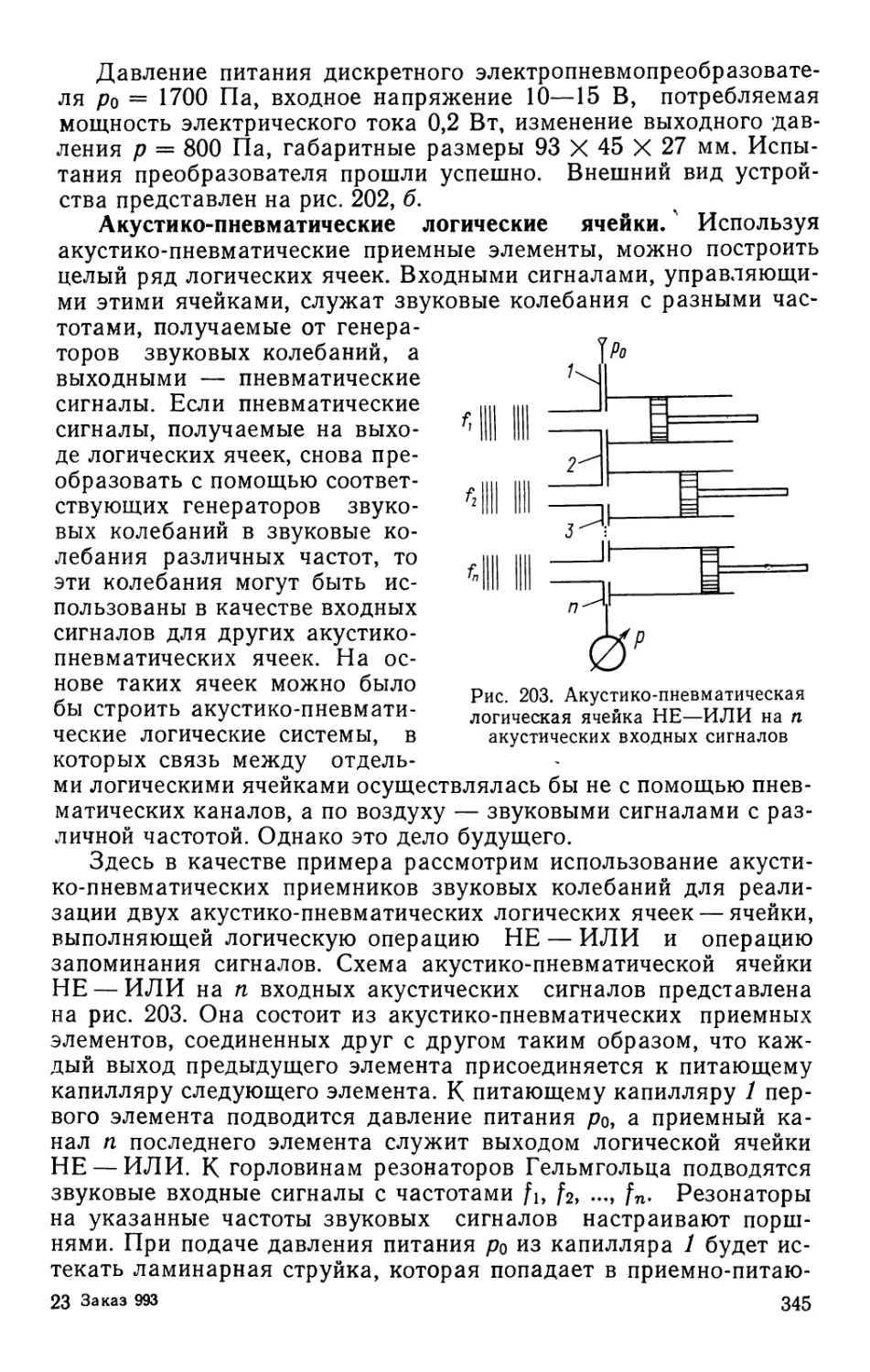
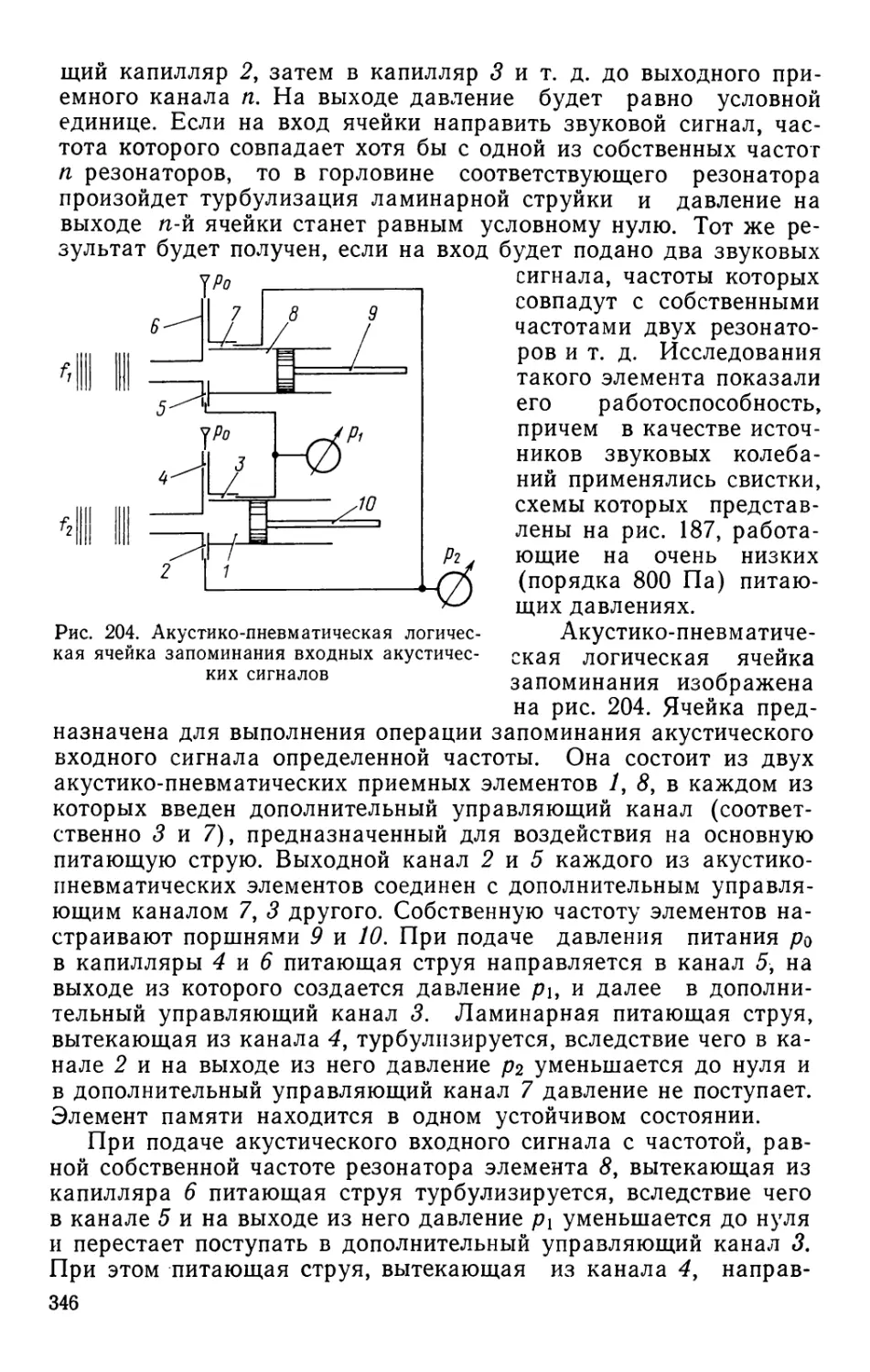
На основе приемных акустико-пневматических элементов
созданы устройства дистанционного управления, длинная пнев-
матическая линия с пассивным электрическим контуром и т. д.
Из приведенных здесь примеров видно, что техническими
средствами пневмоавтоматики может быть решен очень ши-
рокий круг как простых, так и весьма сложных задач управле-
ния.
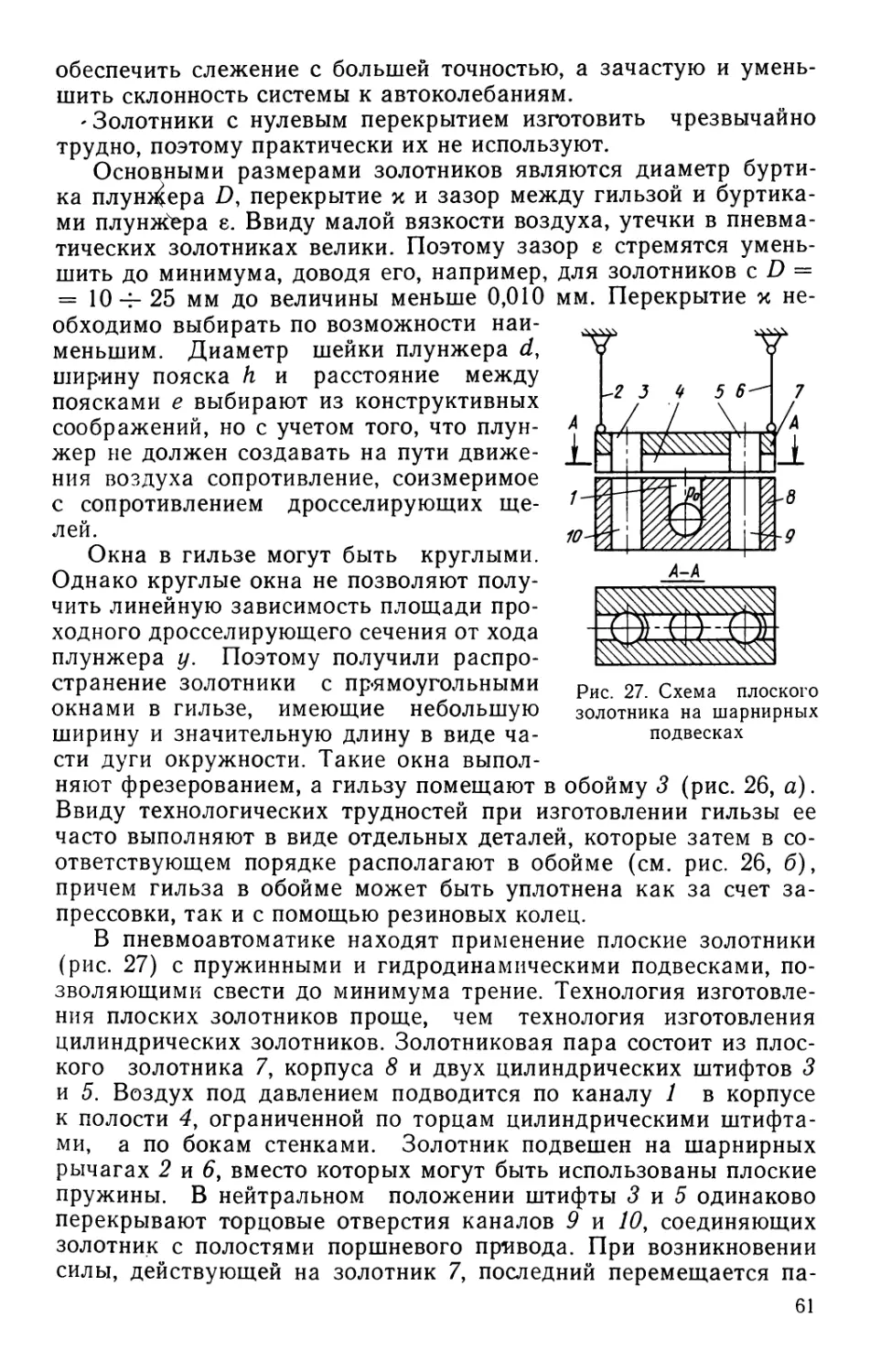
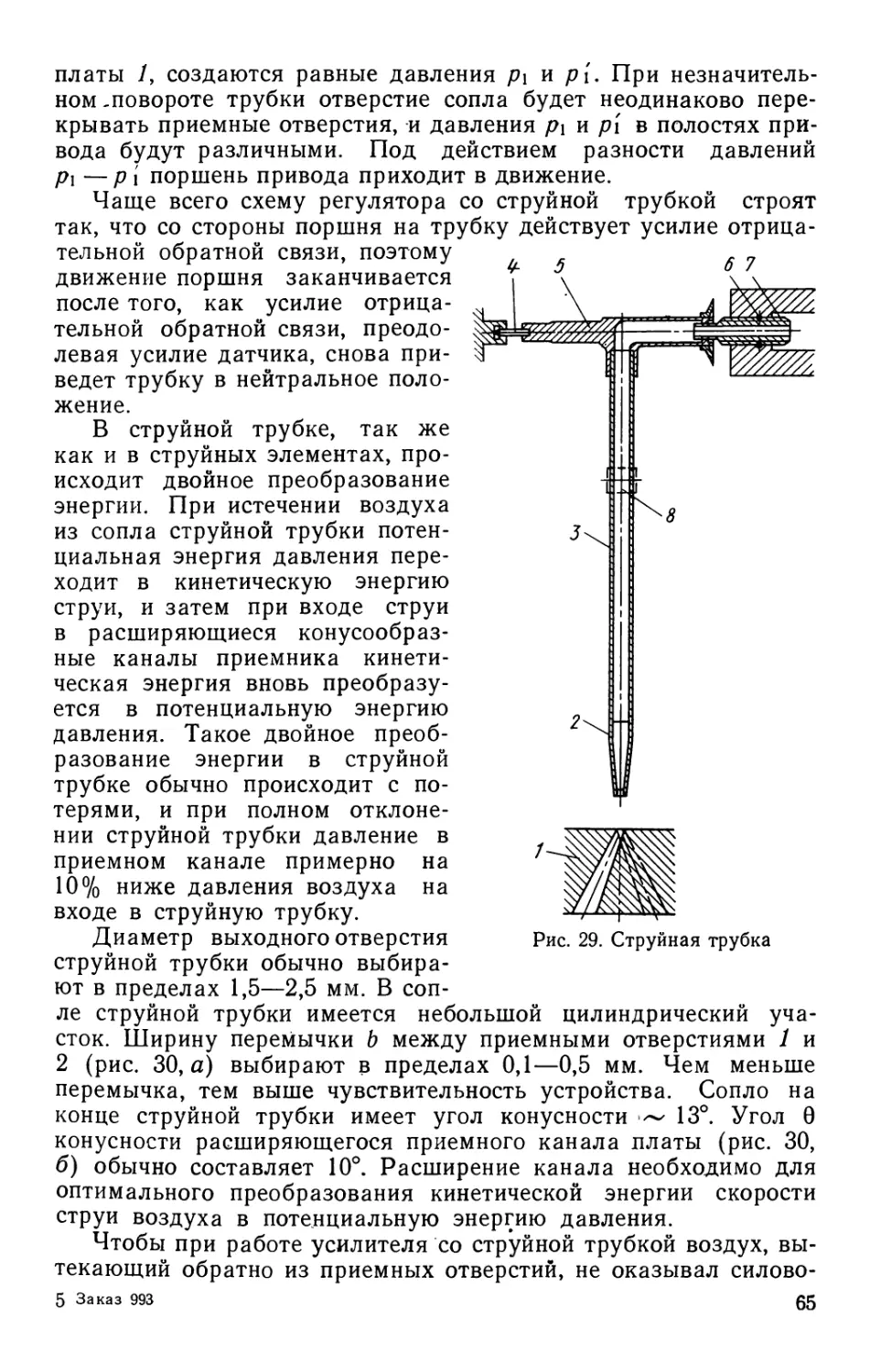
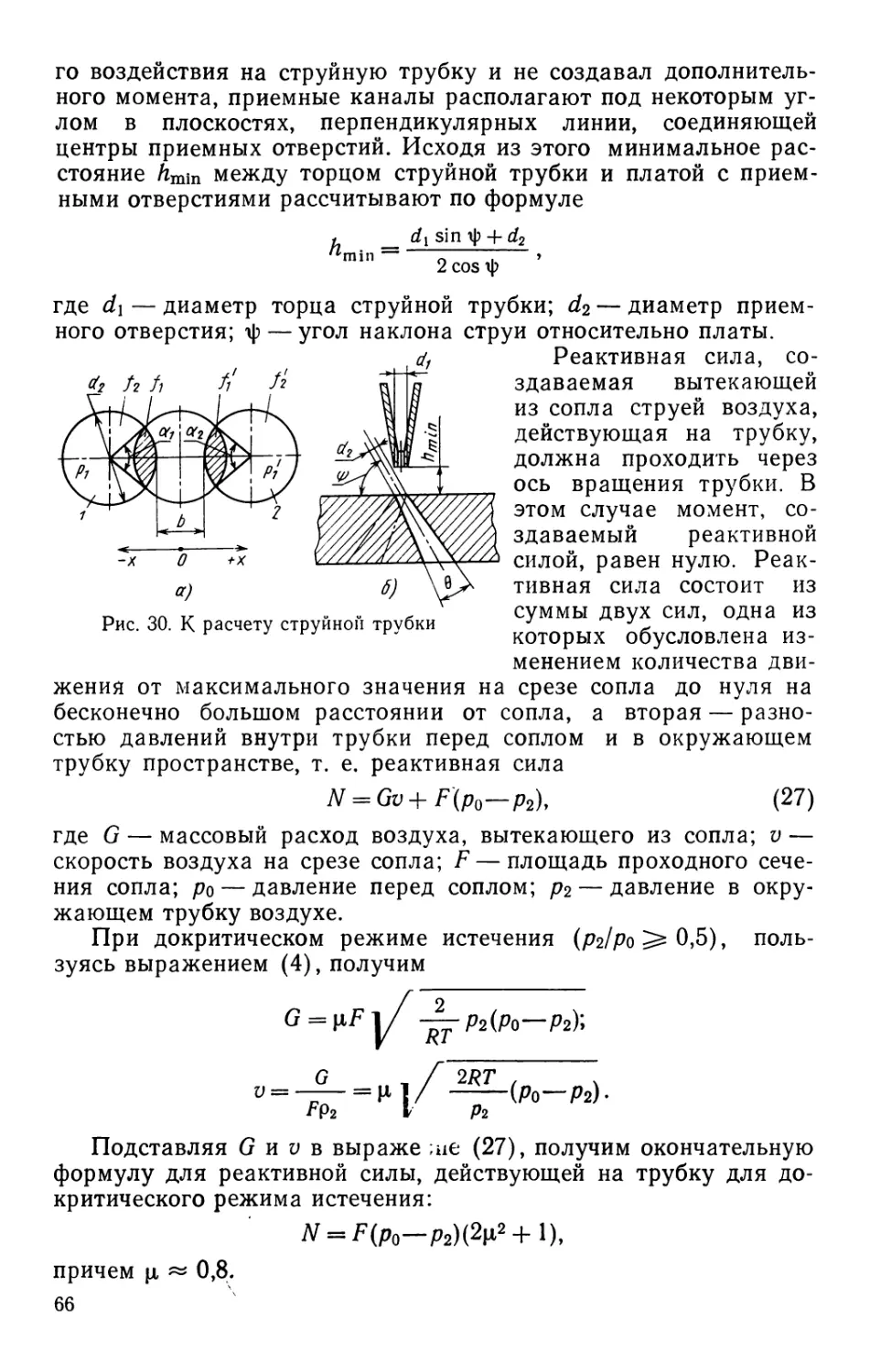
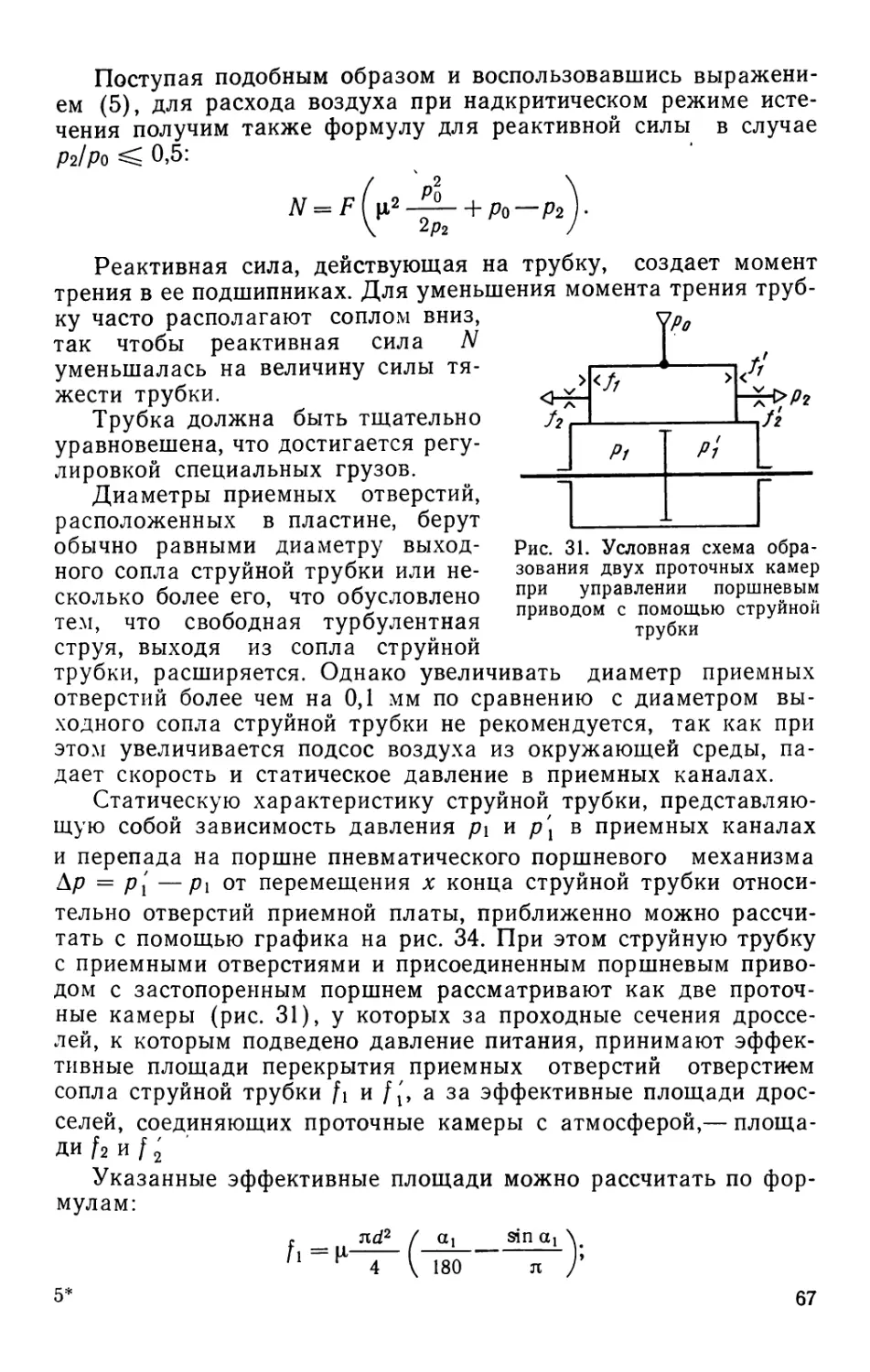
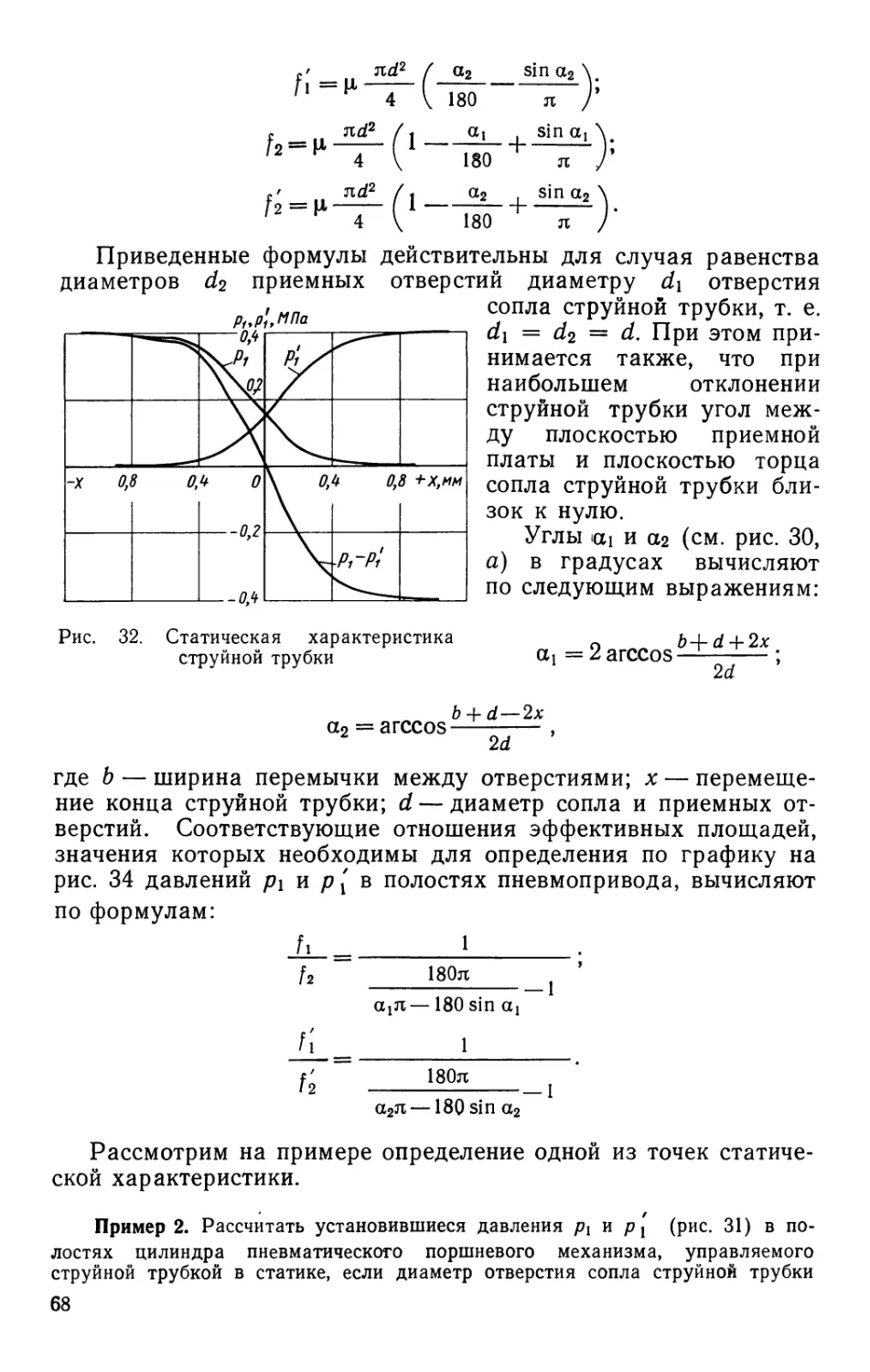
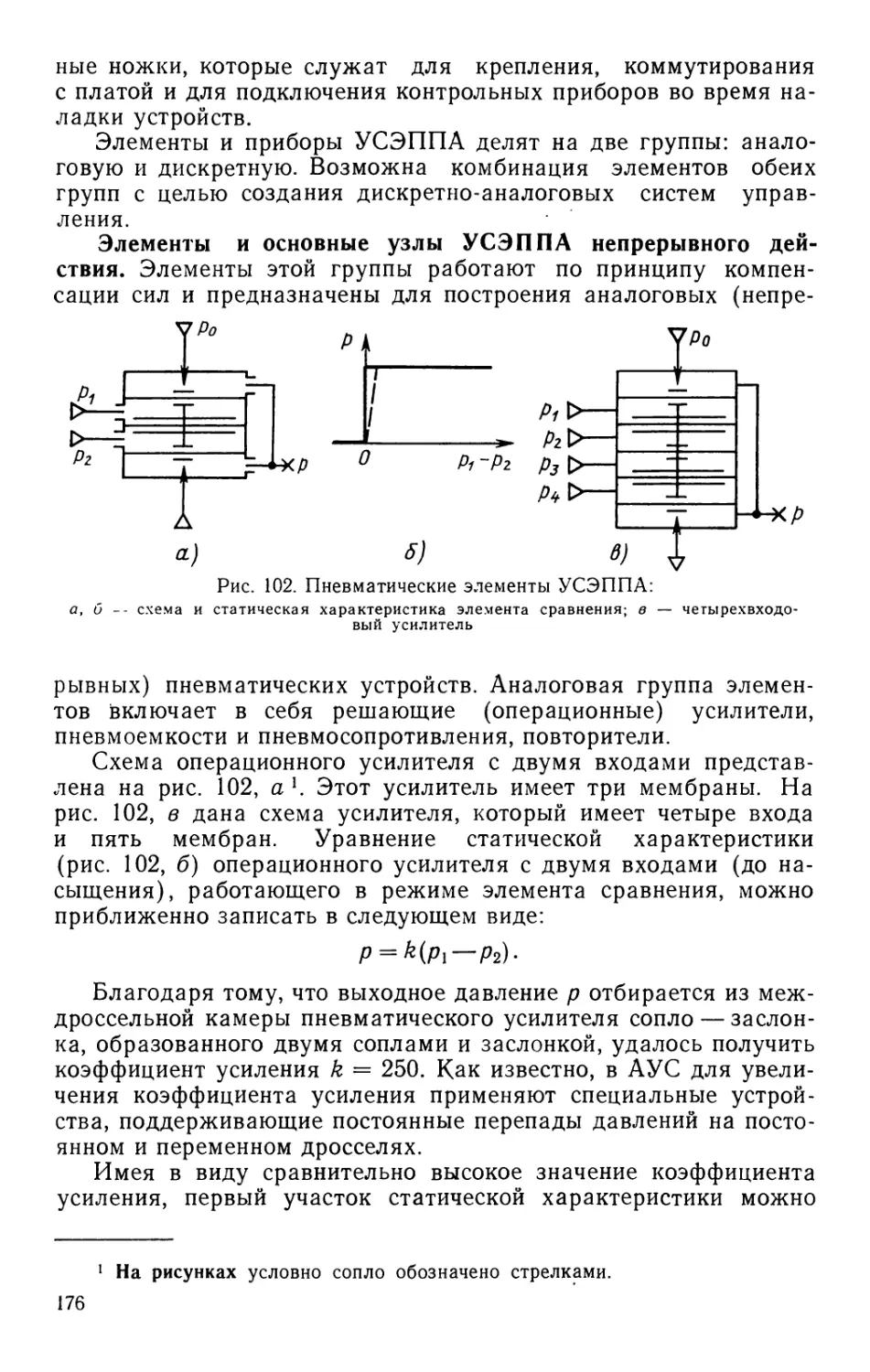
Глава I
ПОДГОТОВКА ВОЗДУХА
ДЛЯ СИСТЕМ ПНЕВМОАВТОМАТИКИ
1. ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К ВОЗДУХУ
Воздух в системах пневмоавтоматики является энергоноси-
телем и носителем сигналов информации. Он заполняет каналы,
емкости пневмосистем, протекает через узкие щели дроссели-
рующих устройств, воздействует на упругие элементы. Поэтому
качество воздуха в значительной степени определяет надеж-
ность работы систем пневмоавтоматики.
В промышленной пневмоавтоматике принято три диапазона
давлений питания: низкий (0,0012—0,005 МПа), нормальный
(0,118—0,175 МПа) и высокий (0,4—0,98 МПа). Давления низ-
кого диапазона применяют для питания мембранных вычисли-
тельных приборов низкого давления [46], а также устройств
струйной пневмоавтоматики. Для питания основных управ-
ляющих и регулирующих мембранных приборов пневмоавтома-
тики, которыми в настоящее время оснащено большинство
предприятий, используют давления нормального диапазона.
Высокие давления применяют для питания поршневых и мем-
бранных исполнительных устройств.
Использование низких давлений для питания вычислитель-
ных устройств обусловлено тем, что при низких давлениях
легко могут быть получены линейные пневматические сопротив-
ления, что необходимо, например, для построения вычислитель-
ных приборов на базе решающих усилителей и уменьшения
расхода воздуха в случае применения устройств струйной пнев-
моавтоматики. Перевод приборов на работу в низкий диапазон
давлений уменьшает расход воздуха при ламинарном течении
примерно в 150 раз, а при турбулентном — примерно в 10 раз.
Отличие в потребляемой мощности оказывается еще более
разительным.
Наличие в пневмоавтоматике различных диапазонов питаю-
щих давлений определяет собой и несколько различные требо-
вания к параметрам питающего воздуха и оборудованию, слу-
жащему для его подготовки. Так, для струйных приборов,
имеющих сравнительно большие проходные сечения дроссели-
рующих отверстий и питаемых от вентилятора, который не
вносит масла в подаваемый к прибору воздух, очистка воздуха
от пыли с применением фильтров тонкой очистки необязательна.
9
Если наименьшие размеры проходных сечений струйных элемен-
тов малы (менее 0,5 мм), то необходима тонкая очистка воздуха
от пыли. Воздух, питающий приборы, работающие при давле-
ниях нормального и высокого диапазонов, подвергается значи-
тельному сжатию, при этом его влажность возрастает Так,
например, если давление воздуха увеличить с 98 до 236 кПа, а
затем охладить до прежней температуры, то абсолютная влаж-
ность увеличится в 2,4 раза. Если при этом относительная
влажность1 2 станет больше 100%, то из воздуха выпадет кон-
денсат. Влага, содержащаяся в воздухе, пагубно сказывается
на работе пневматических устройств. Конденсируясь на деталях,
она вызывает их коррозию, а если температура этих деталей от-
рицательная, то могут возникнуть ледяные пробки, препят-
ствующие поступлению воздуха и вызывающие примерзание
подвижных деталей. Поэтому в системе подготовки воздуха для
устройств, работающих при нормальных и высоких рабочих
давлениях и при температурах ниже нуля, должно быть пре-
дусмотрено устройство для осушки воздуха (дегидратор).
Воздух следует осушать до такой влажности, чтобы точка росы 3
его была ниже температуры среды, окружающей пневматиче-
ское устройство. Пневматические вычислительные устройства,
работающие при низком давлении, не требуют осушки воздуха,
так как увеличение влажности воздуха после его сжатия ни-
чтожно и практически роли не играет.
Если источником сжатого воздуха служит поршневой ком-
прессор, поршни которого подвергают смазке, то в воздухе,
поступающем к пневматическим устройствам, будут находиться
пары масла. Масляные пары отрицательно влияют на работу
пневматических приборов, а в результате длительного действия
могут полностью вывести их из строя. Масло, осаждающееся
на внутренних поверхностях пневматических приборов, не
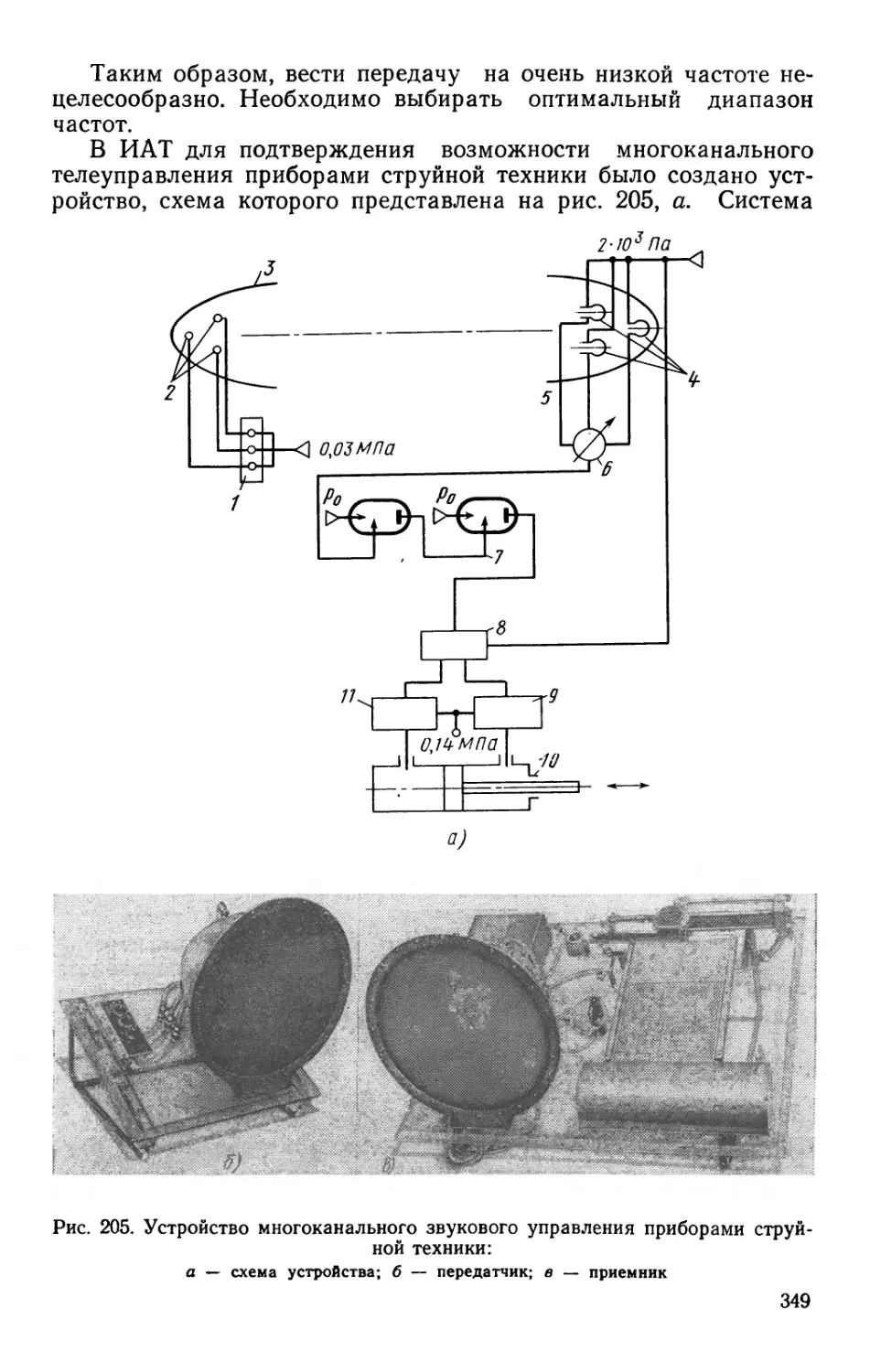
только засоряет дросселирующие органы, но и разрушает
резиновые мембраны. В последние годы, для того чтобы полно-
стью избавиться от масляных паров, питание приборов осу-
ществляют от беспоршневых компрессоров.
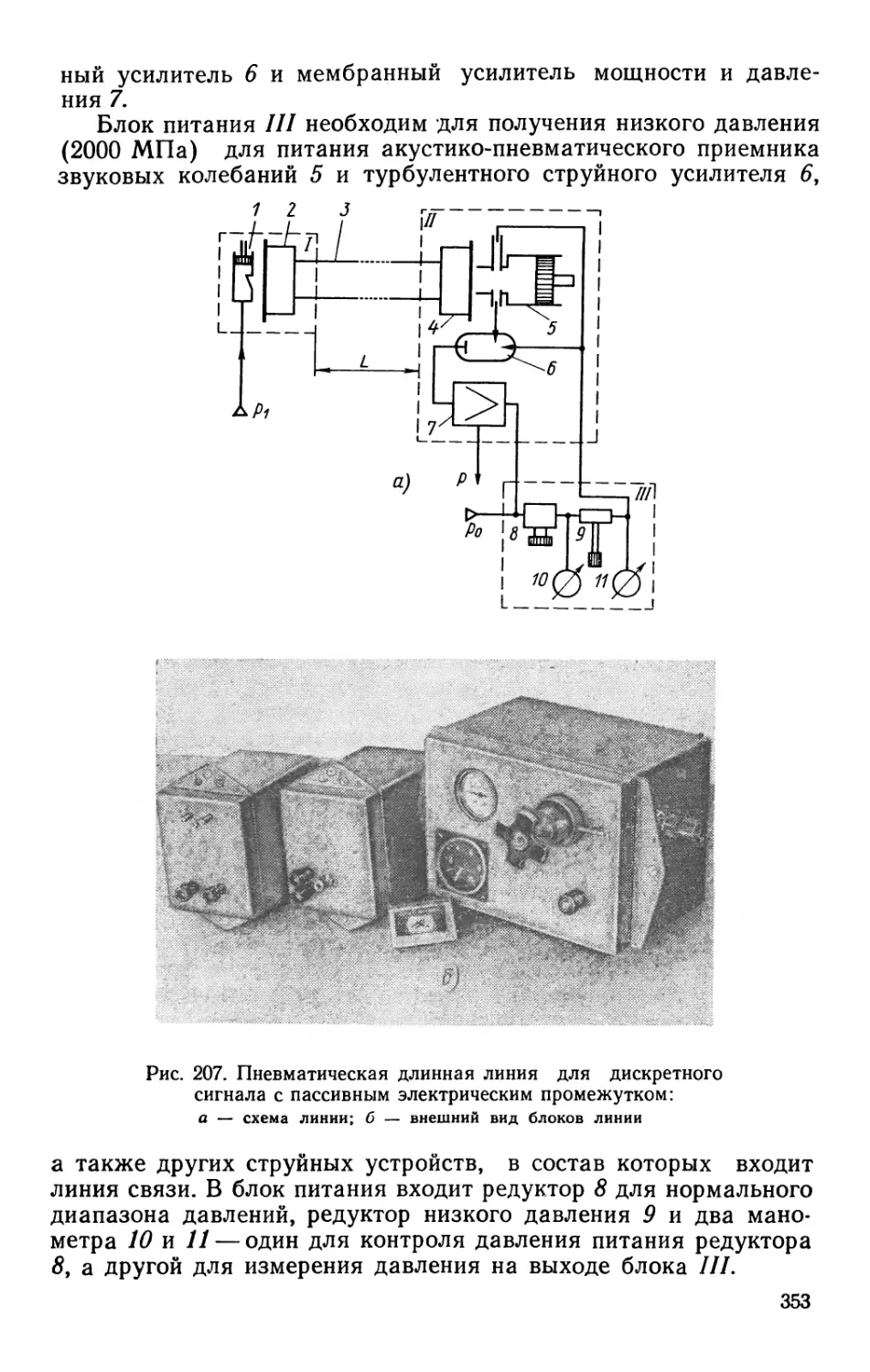
1 Под абсолютной влажностью воздуха понимают массу водяного пара,
содержащегося в 1 м3 влажного воздуха.
2 Относительной влажностью (р воздуха называют отношение массы во-
дяного пара, содержащегося в 1 м3 влажного воздуха, к максимально возмож-
ной его массе при данных условиях (при той же температуре и том же дав-
лении) :
где рп — плотность пара; рн — плотность насыщенного пара.
3 Температура, при которой начинаются конденсация и выпадение влаги
из воздуха, называется точкой росы. Если охлаждать воздух, содержащий
влагу при постоянном давлении, то относительная влажность воздуха по мере
охлаждения будет возрастать. Наконец, наступит момент, когда влага начнет
выделяться из воздуха в виде капель.
10
2. ПОДГОТОВКА ВОЗДУХА ДЛЯ СИСТЕМ
ПНЕВМОАВТОМАТИКИ, РАБОТАЮЩИХ В ОБЛАСТИ
НОРМАЛЬНЫХ И ВЫСОКИХ ДАВЛЕНИЙ
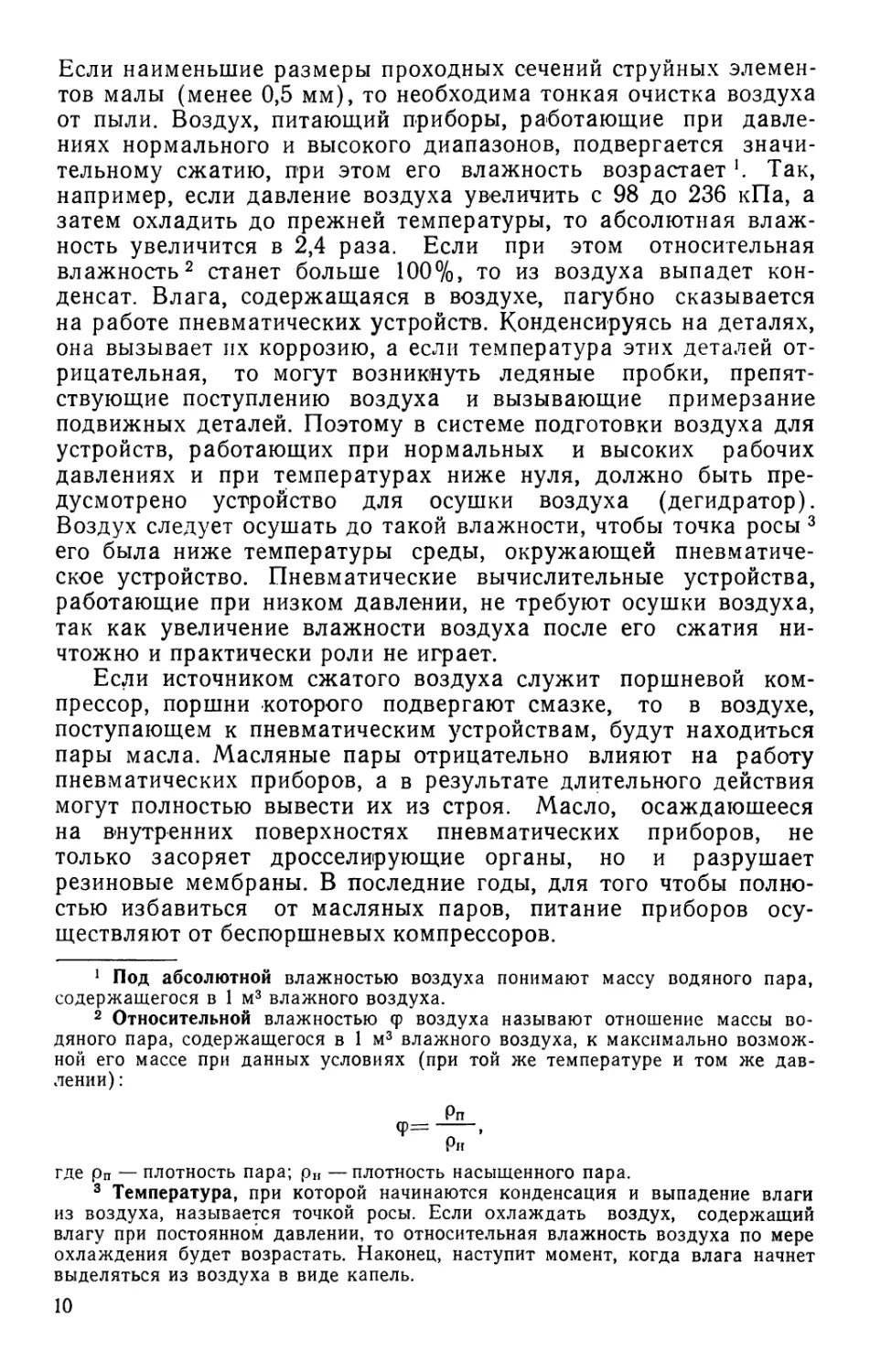
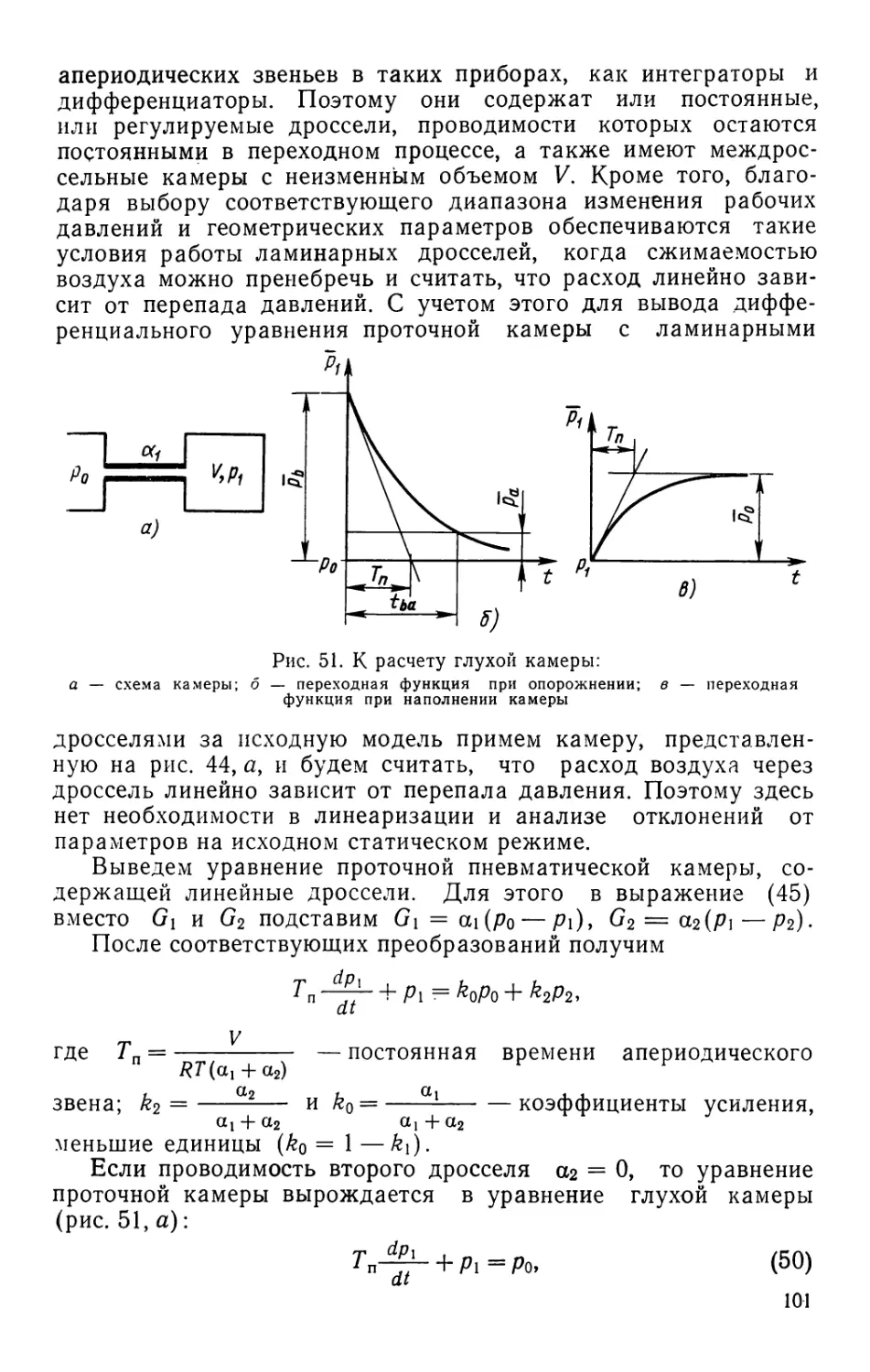
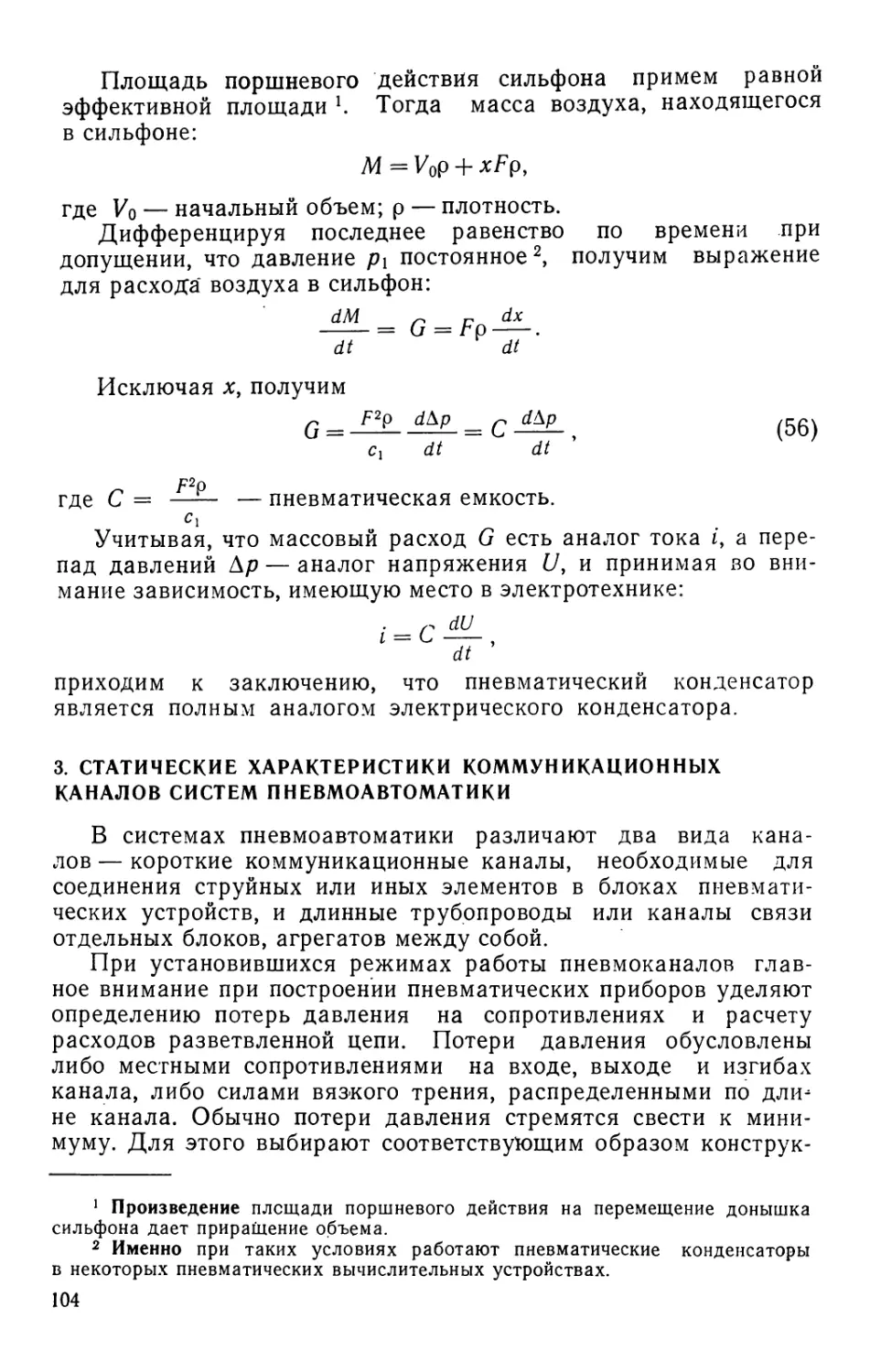
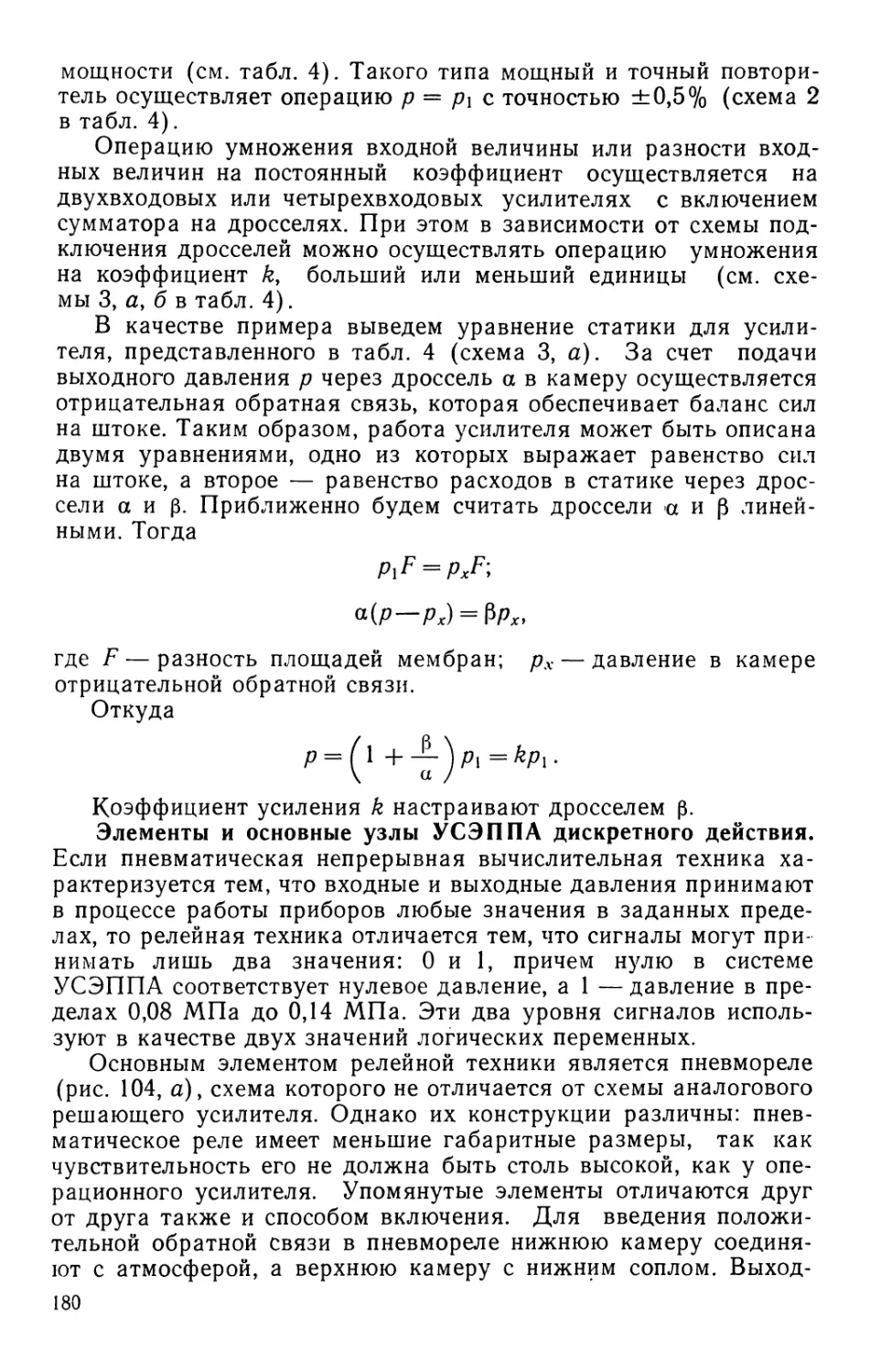
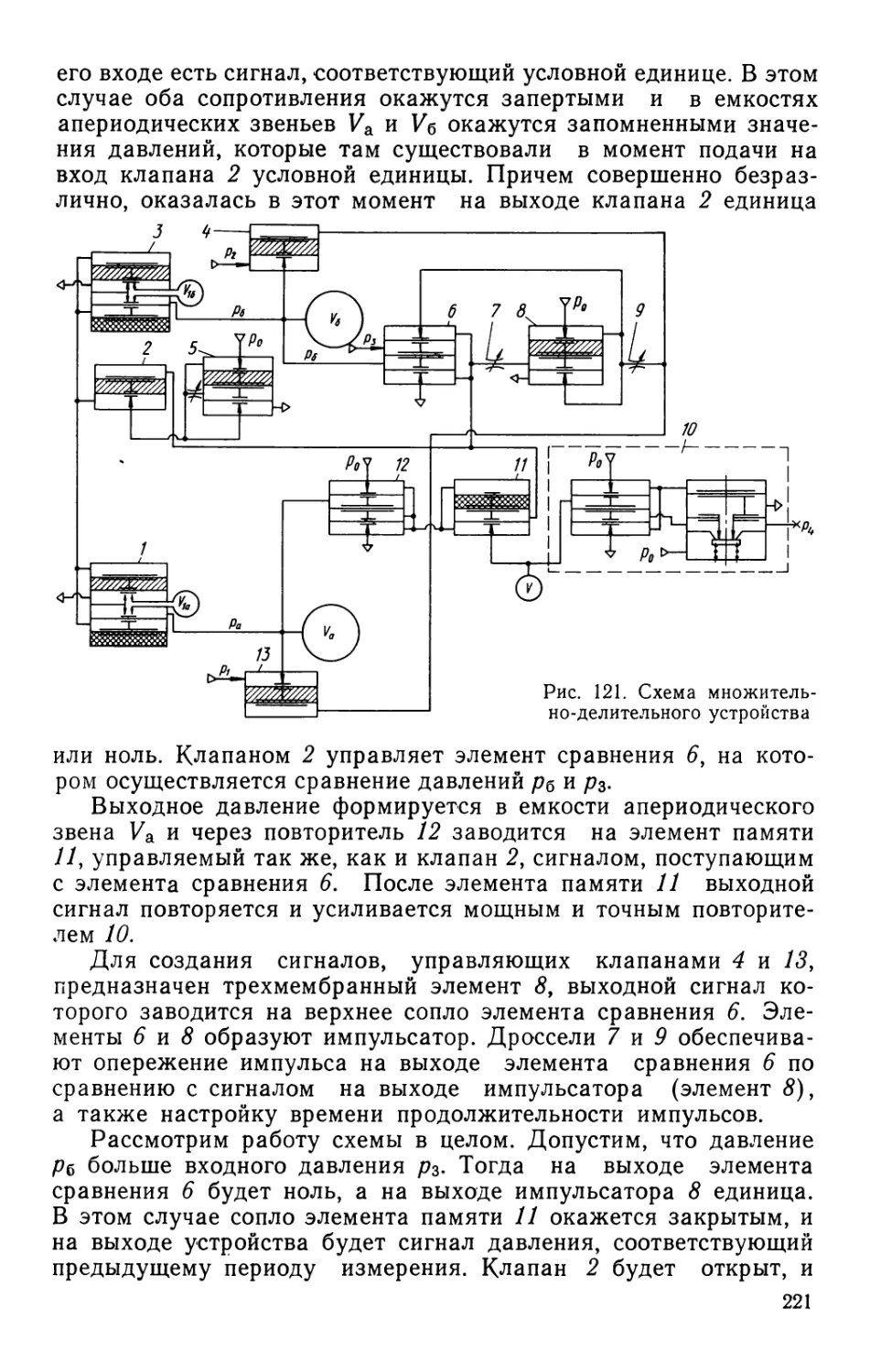
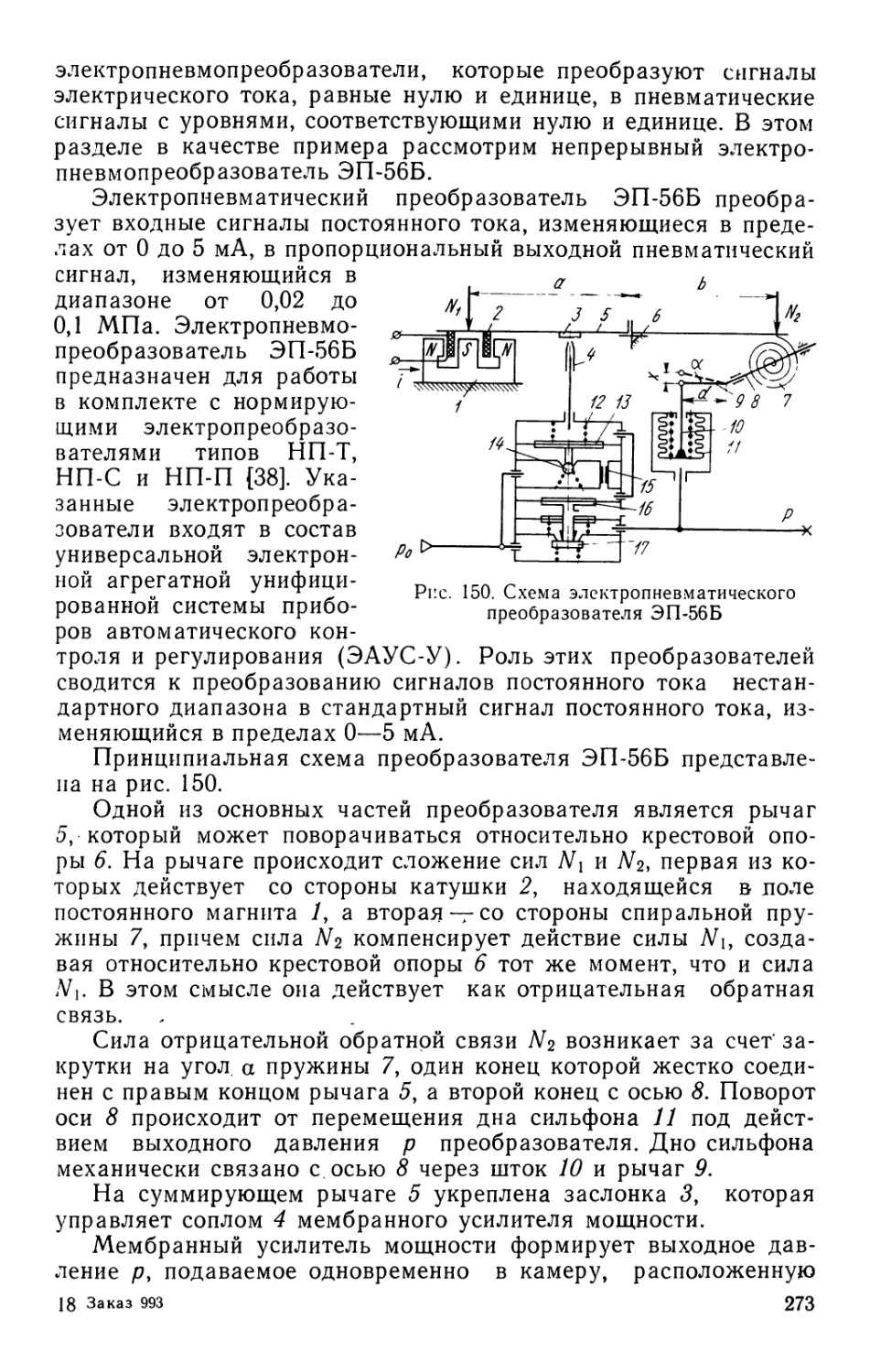
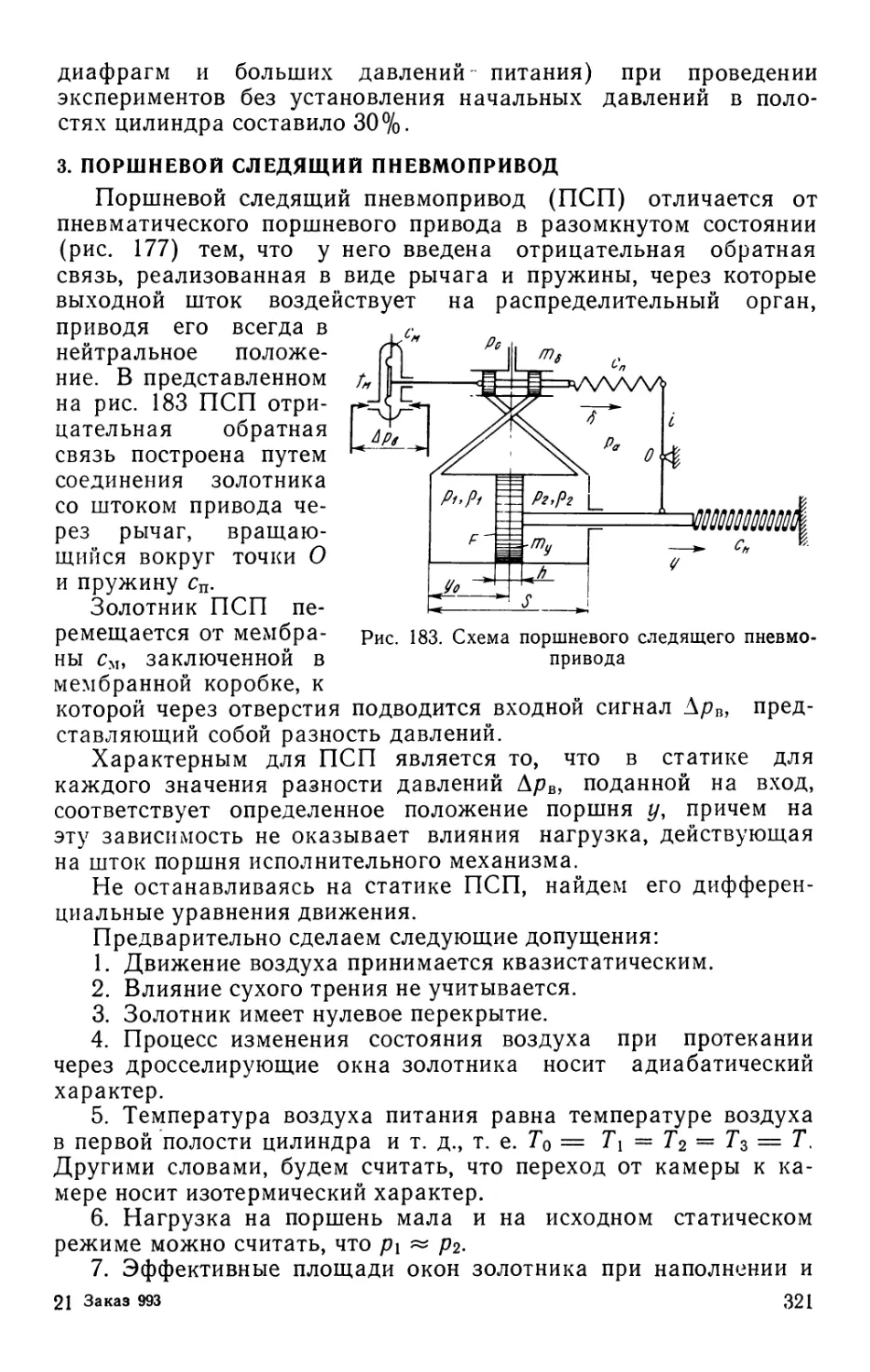
Схема подготовки воздуха. Схема снабжения систем пнев-
моавтоматики сжатым воздухом показана на рис. 1. Сжатие
воздуха осуществляется поршневым компрессором 2. Обычно
устанавливается два компрессора, один из которых является
запасным. На входе в компрессор воздух очищается от пыли
фильтром 1. Наилучшими фильтрами для этой цели считаются
мокрые: масляные и водяные [37]. Очистка от пыли предохраня-
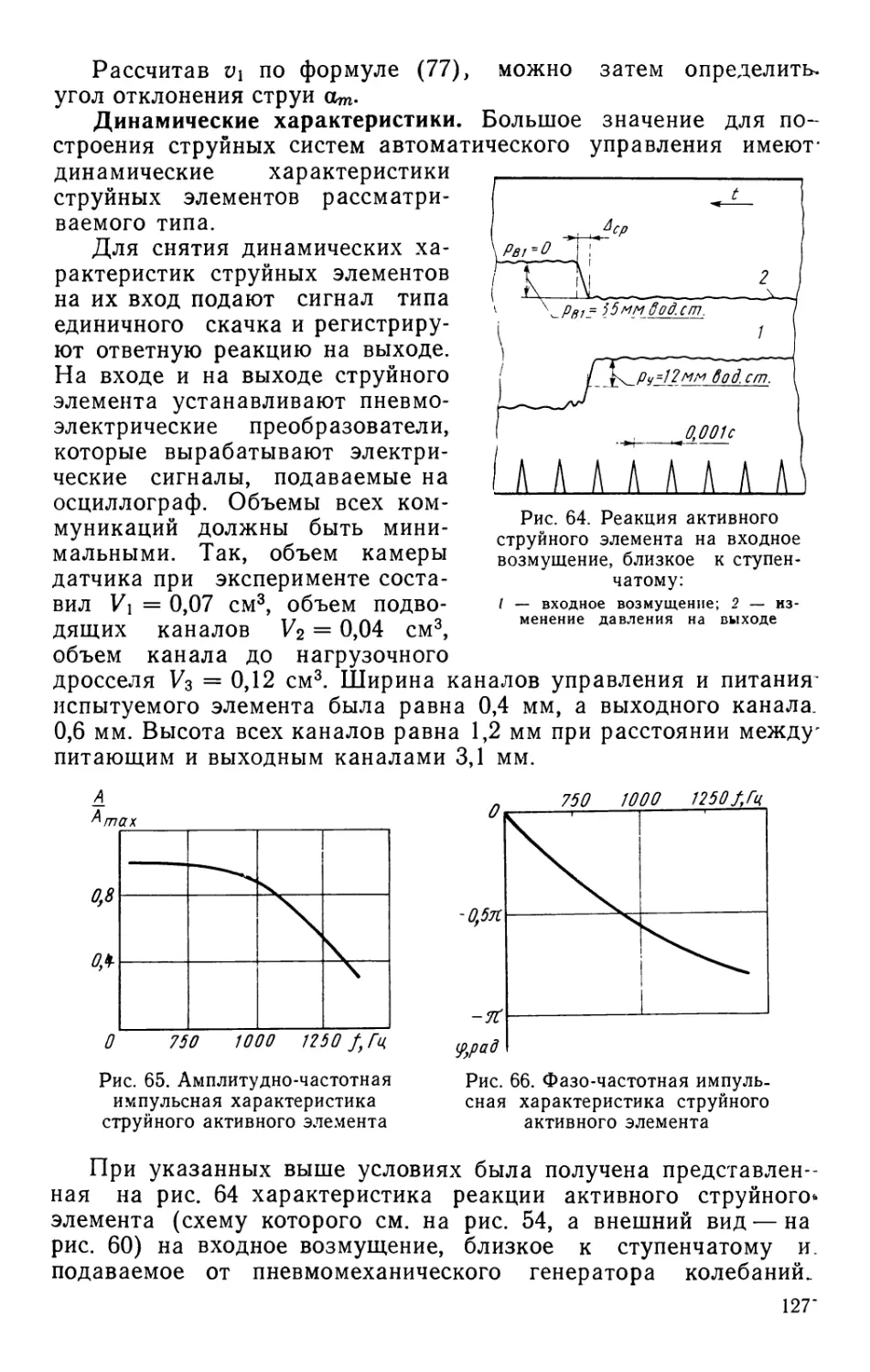
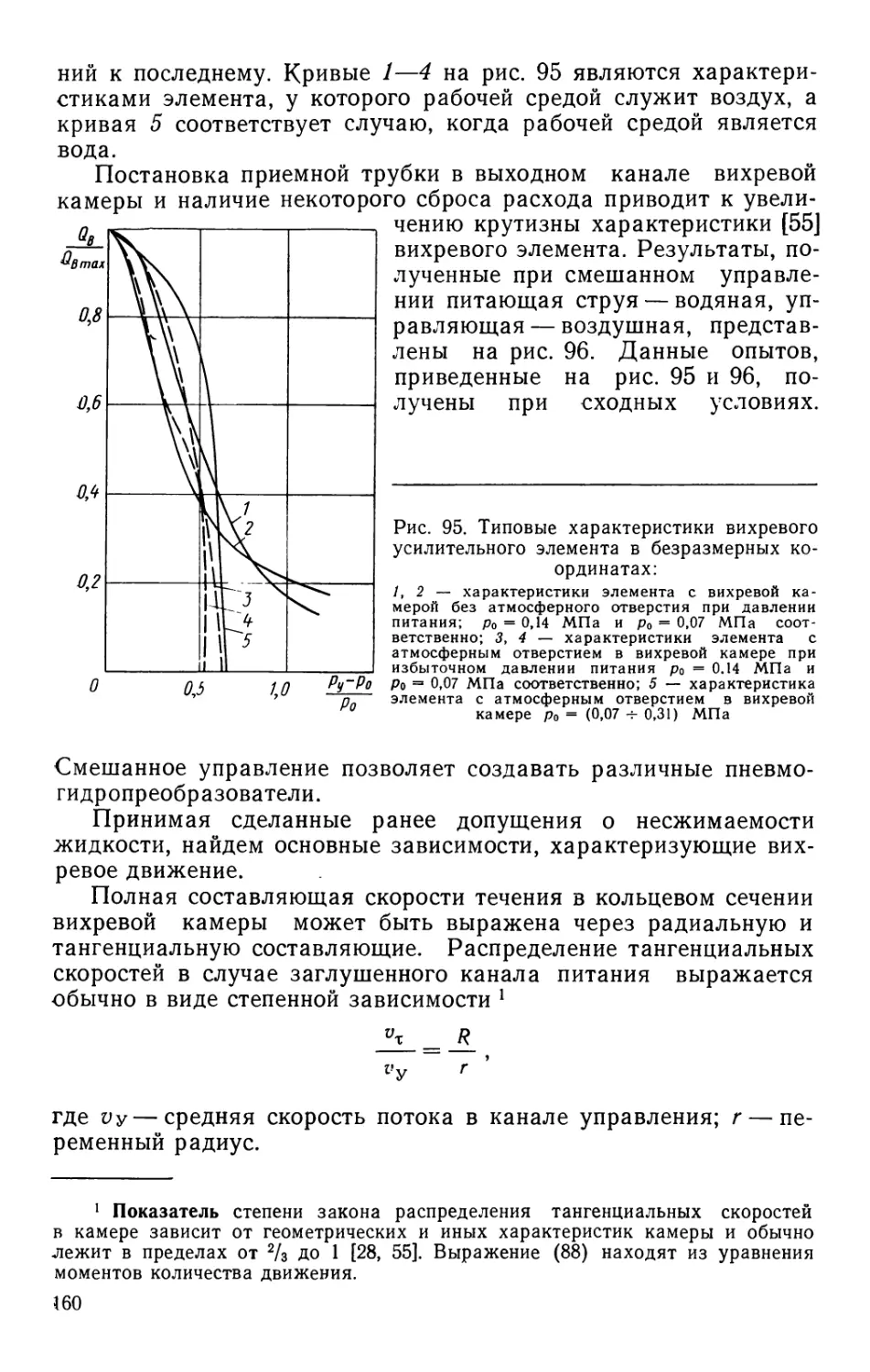
Рис. 1. Схема подготовки воздуха для снабжения пневматических устройств
ет компрессор от преждевременного износа. Немаловажное
значение имеет выбор места для забора атмосферного воздуха,
направляемого в компрессор. Следует учитывать, что чем ниже
температура всасываемого воздуха, тем меньше содержится в
нем влаги и тем выше его плотность. Поэтому воздухозаборник
лучше всего располагать в местах с наименьшей температурой.
Такое место обычно выбирают снаружи здания, с северной сто-
роны вдали от источников загрязнения воздуха.
Из компрессора воздух попадает в ресивер 7, предназначен-
ный для аккумулирования запасов сжатого воздуха и сглажи-
вания пульсаций. При наличии ресивера отпадает необходи-
мость в беспрерывной работе компрессора, что значительно
удлиняет его срок службы. В то время, когда компрессор ока-
зывается отключенным, питание пневматических устройств
осуществляется за счет накопленного в ресивере сжатого воз-
духа. Отключение компрессора при достижении верхнего
установленного давления и включение его ъ работу при умень-
шении давления до нижнего установленного предела осущест-
11
вляется с помощью электрической системы автоматики 3,
содержащей электрические реле и магнитные пускатели, причем
дискретным датчиком давления служит контактный манометр 5.
Электрическая система автоматически включается дистанцион-
но с помощью кнопки 17.
Прежде чем попасть в ресивер 7, воздух проходит через
водяной холодильник 6, где оставляет 70—80% влаги, и выхо-
дит оттуда со 100%-ной относительной влажностью. Вода в хо-
лодильник поступает из линии 8. Если системы пневмоавтома-
тики и аппаратура воздухоподготовки расположены в местах,
где температура не падает ниже нуля, то, учитывая, что при
поступлении к приборам воздух проходит через редукторы и
давление его падает, а влажность снижается до величины по-
рядка 30%, при 20° С, дальнейшую его осушку можно не про-
водить. В ресивере 7 также конденсируется некоторое количе-
ство воды, которую периодически необходимо удалять. Для
этого служит вентиль 10, управляемый электрической автома-
тической системой.
Предохранительный клапан 4, установленный на ресивере 7,
не позволяет давлению подняться выше допустимого уровня
при выходе из строя электрической системы автоматики.
Большая часть масла, содержащегося в воздухе, конденси-
руется в холодильнике бив ресивере 7, меньшая часть остается
в маслоотделителе 11.
Если системы пневмоавтоматики и воздухоподготовки
пневматических вычислительных, приборов работают при тем-
пературах ниже нуля, а также при необходимости обеспечить
повышенную надежность этих устройств, проводят глубокую
осушку воздуха, для чего применяют селикагелиевый двухсту-
пенчатый дегидратор 12.
Давление в воздушной линии поддерживается постоянным
с помощью регулятора 13. После регулятора давления при
отсутствии дегидратора 12 воздух обычно направляют в реси-
вер 14, несколько меньшей емкости, чем ресивер 7. Оттуда
воздух через распределительную гребенку поступает к филь-
трам 15, редукторам 16, а затем к приборам.
Воздух высокого давления для питания поршневых и мем-
бранных исполнительных механизмов отбирается до фильтров
15. Для повышения степени очистки воздуха от пыли после ре-
дукторов 16 иногда включают дополнительные фильтры. Вода
сбрасывается в канализационную систему 9 из холодильни-
ка 6.
В последнее время для питания пневматических приборов,
работающих при нормальном и высоком давлении, все чаще
начинают использовать специальные автоматические установки,
которые полностью осуществляют весь рабочий цикл подготов-
ки воздуха: его сжатие, очистку от пыли и масла, осушку, а
также поддерживают давление в заданных пределах.
12
Сжатие воздуха. Несмотря на трудности очистки сжатого
воздуха от масла, чаще всего для сжатия воздуха применяют
поршневые компрессоры с обычной смазкой. Такие компрессо-
ры сжимают воздух до избыточного давления порядка 0,6—
1 МПа.
Воздушным поршневым компрессорам посвящена об-
ширная специальная литература,
поэтому здесь они не рассматрива-
ются. Сжатие воздуха иногда осу-
ществляют при помощи мембранных
компрессоров, позволяющих полу-
чить свободный от паров масла сжа-
тый воздух.
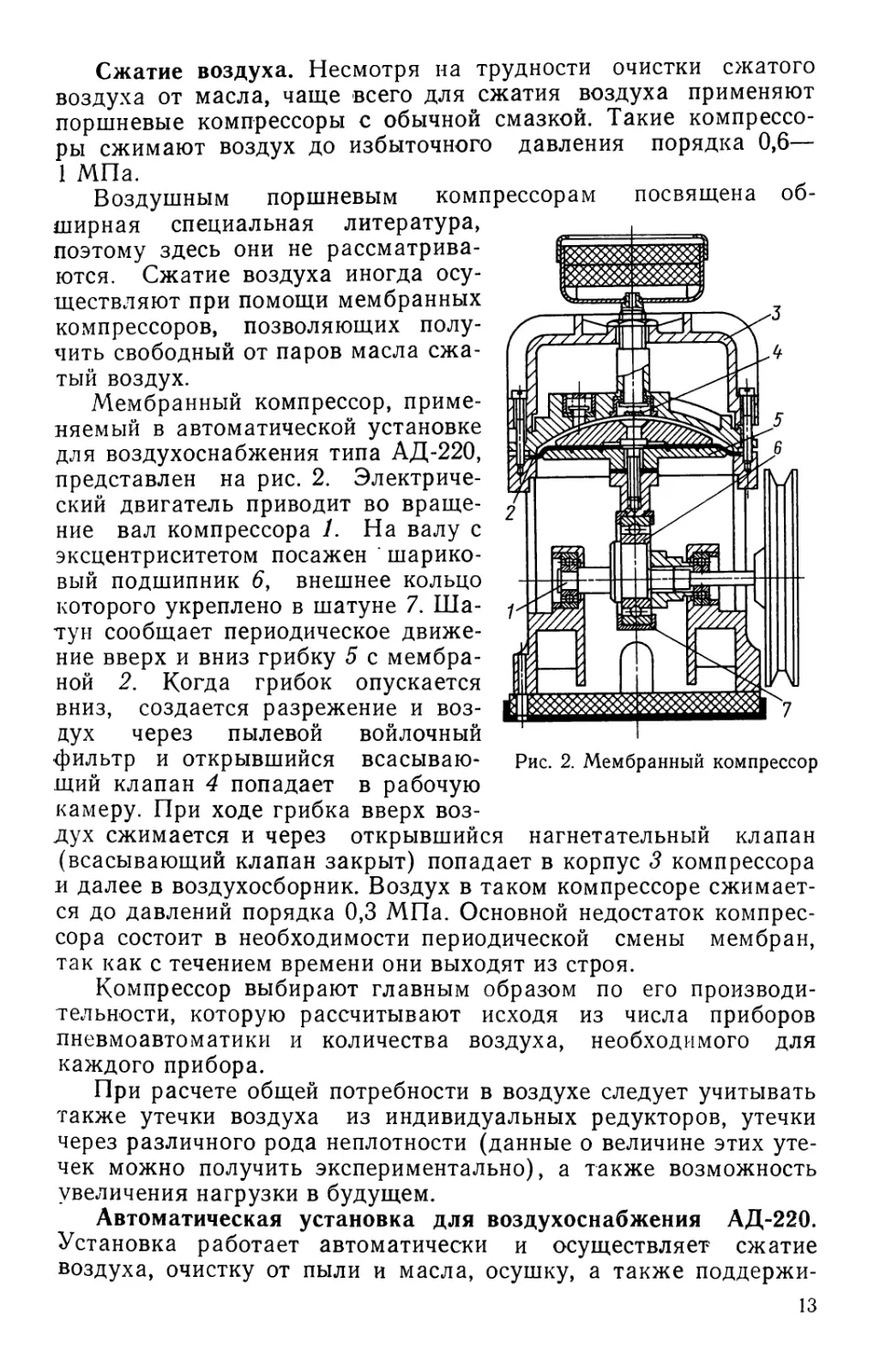
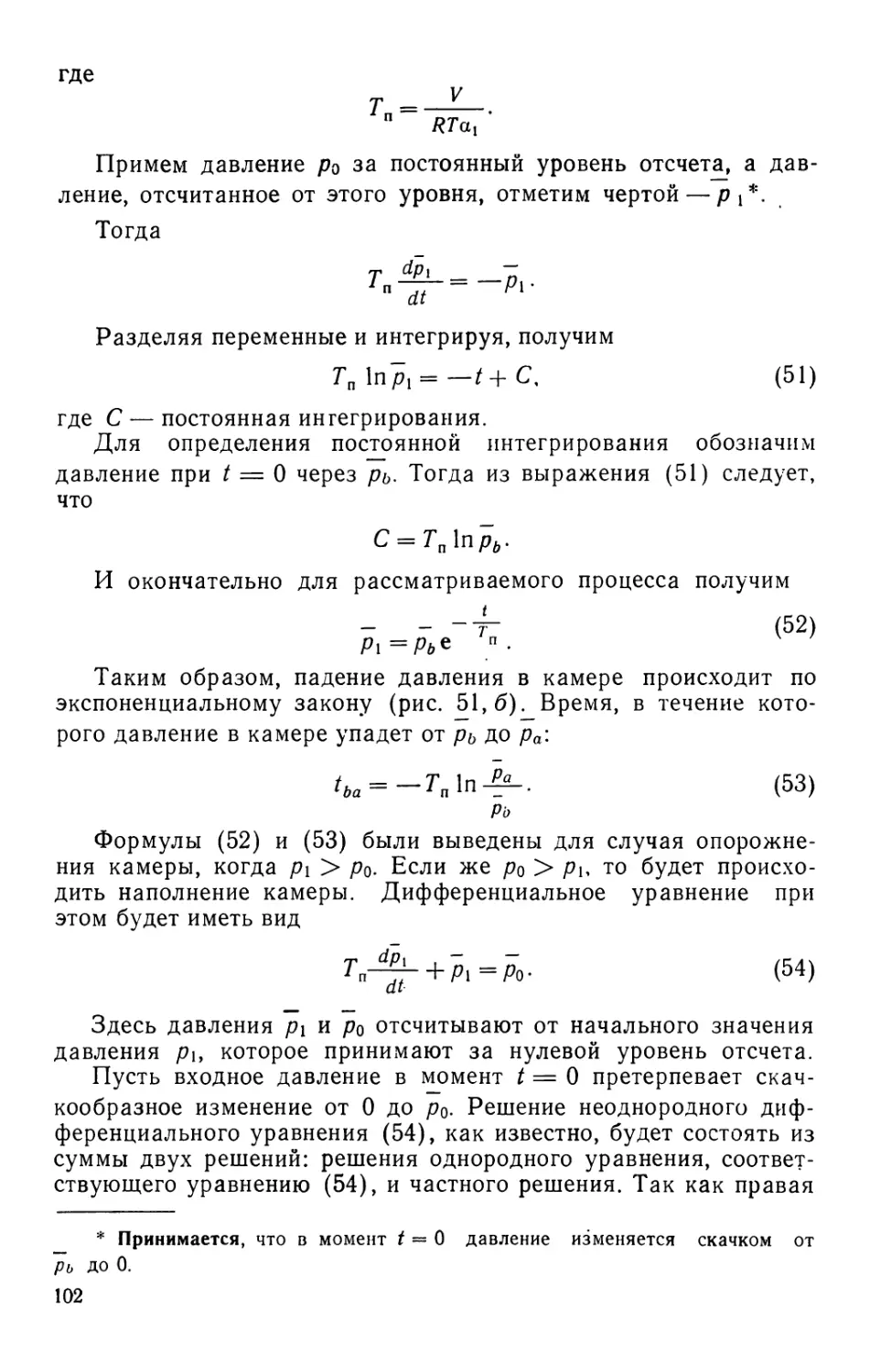
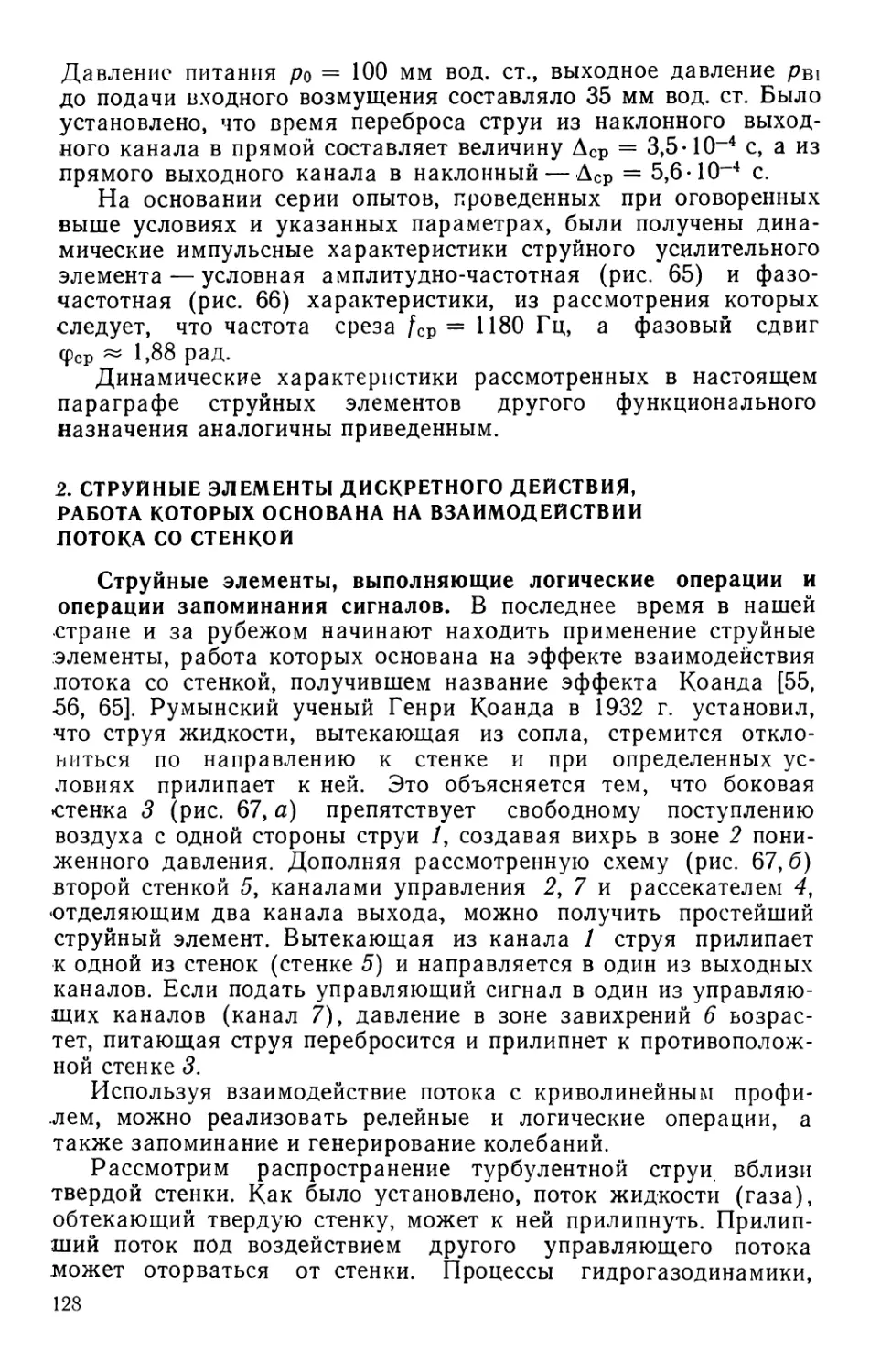
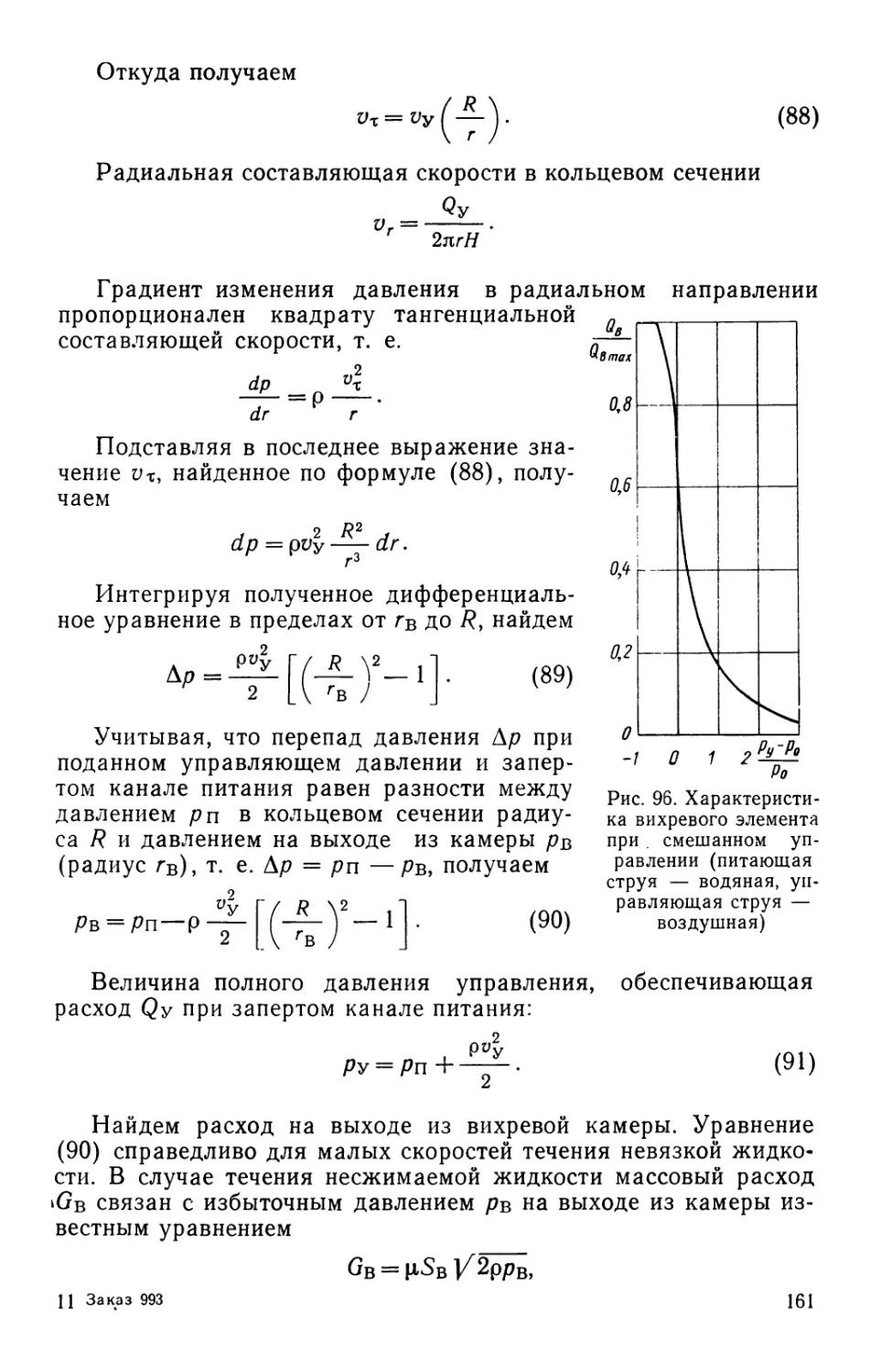
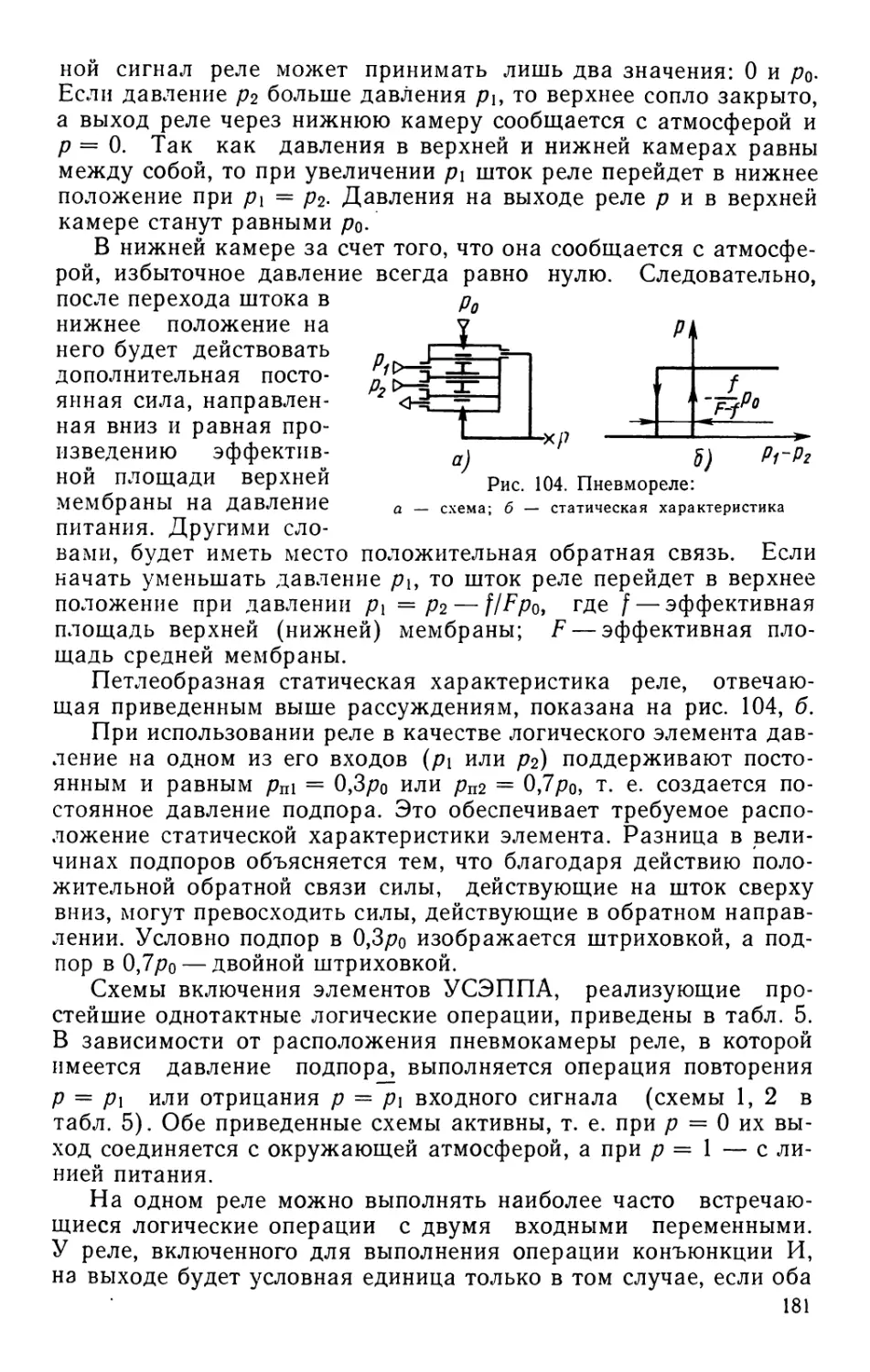
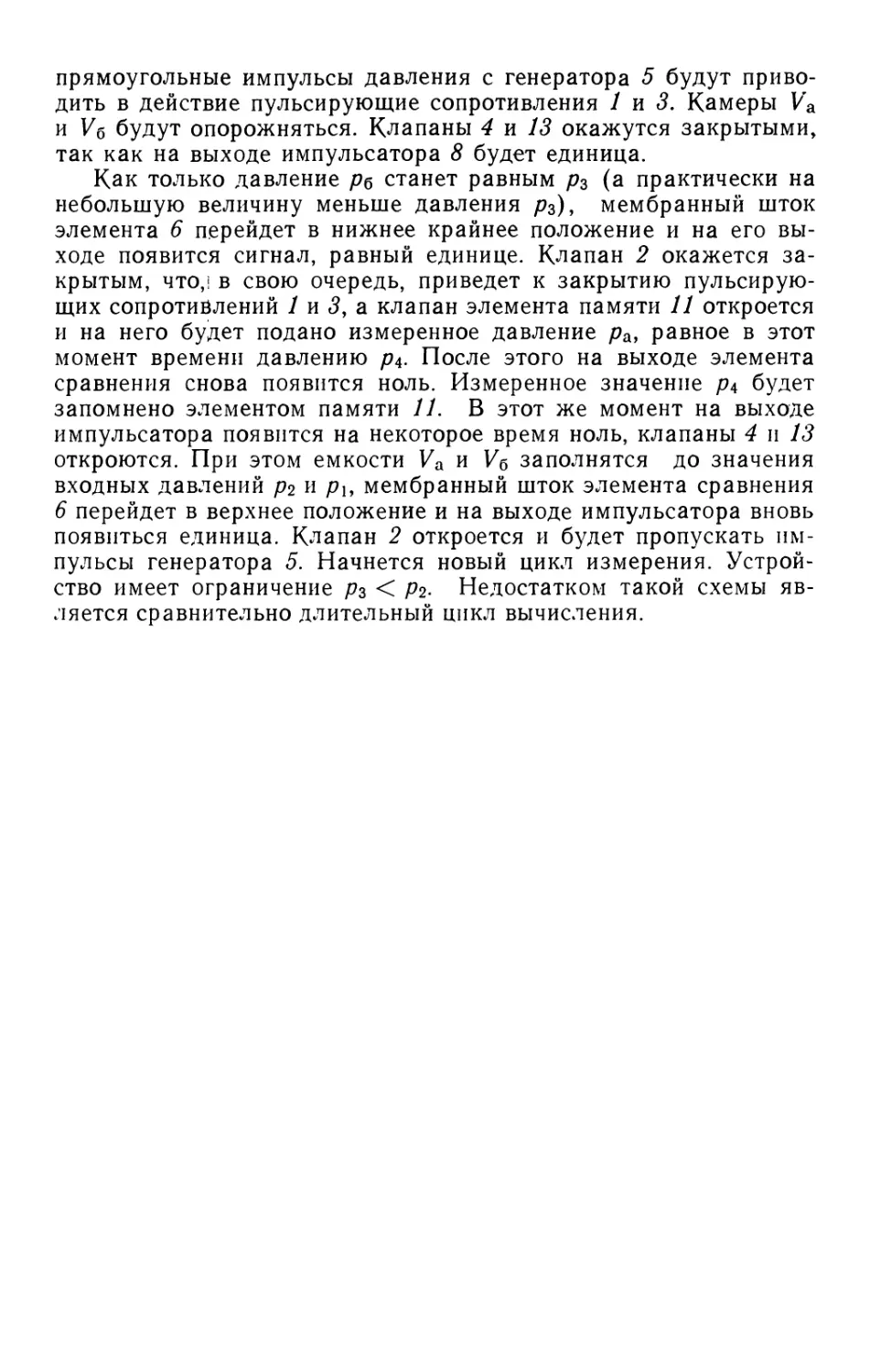
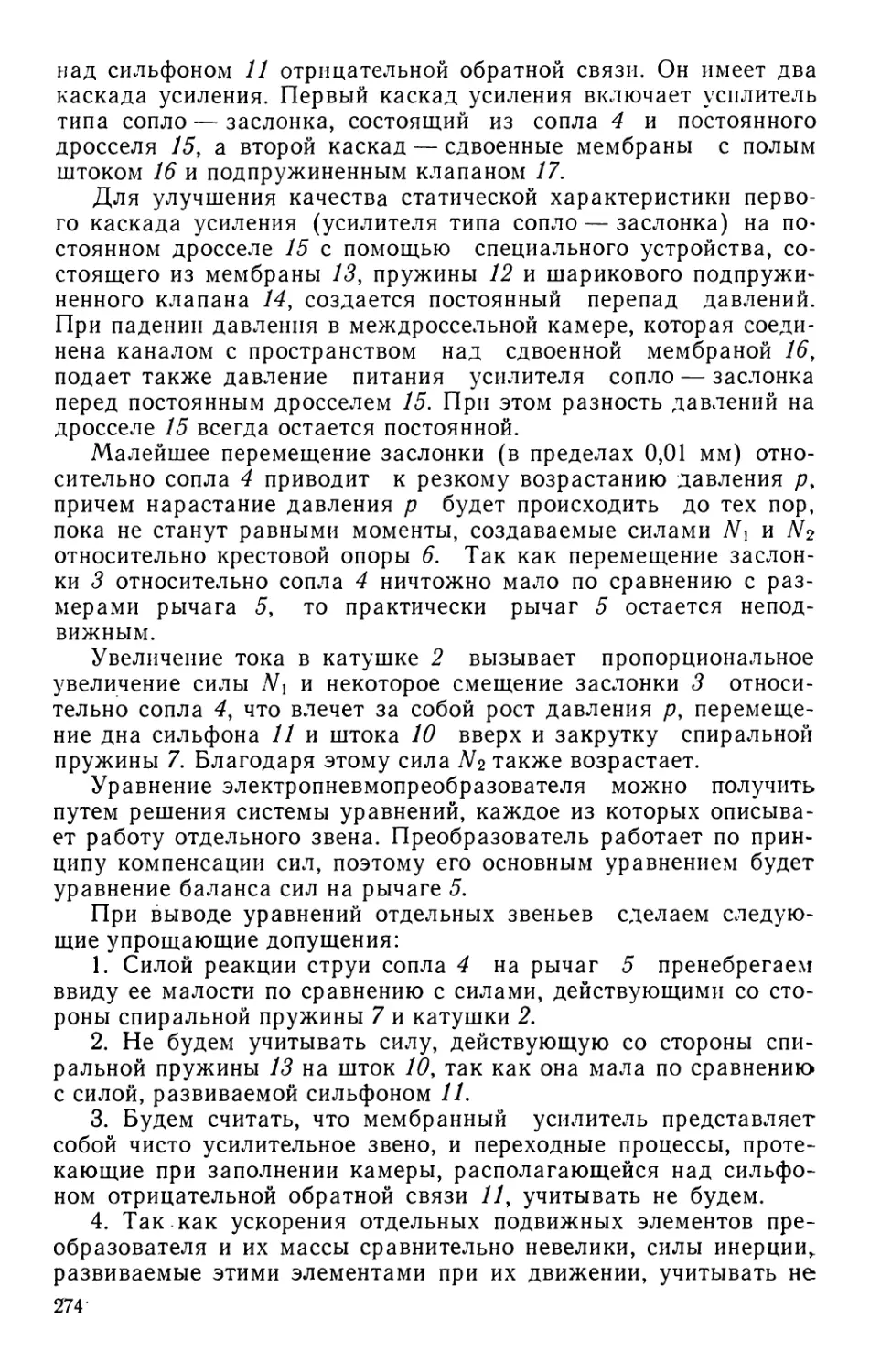
Мембранный компрессор, приме-
няемый в автоматической установке
для воздухоснабжения типа АД-220,
представлен на рис. 2. Электриче-
ский двигатель приводит во враще-
ние вал компрессора 1. На валу с
эксцентриситетом посажен ‘ шарико-
вый подшипник 6, внешнее кольцо
которого укреплено в шатуне 7. Ша-
тун сообщает периодическое движе-
ние вверх и вниз грибку 5 с мембра-
ной 2. Когда грибок опускается
вниз, создается разрежение и воз-
дух через пылевой войлочный
фильтр и открывшийся всасываю-
щий клапан 4 попадает в рабочую
камеру. При ходе грибка вверх воз-
Рис. 2. Мембранный компрессор
дух сжимается и через открывшийся нагнетательный клапан
(всасывающий клапан закрыт) попадает в корпус 3 компрессора
и далее в воздухосборник. Воздух в таком компрессоре сжимает-
ся до давлений порядка 0,3 МПа. Основной недостаток компрес-
сора состоит в необходимости периодической смены мембран,
так как с течением времени они выходят из строя.
Компрессор выбирают главным образом по его производи-
тельности, которую рассчитывают исходя из числа приборов
пневмоавтоматики и количества воздуха, необходимого для
каждого прибора.
При расчете общей потребности в воздухе следует учитывать
также утечки воздуха из индивидуальных редукторов, утечки
через различного рода неплотности (данные о величине этих уте-
чек можно получить экспериментально), а также возможность
увеличения нагрузки в будущем.
Автоматическая установка для воздухоснабжения АД-220.
Установка работает автоматически и осуществляет сжатие
воздуха, очистку от пыли и масла, осушку, а также поддержи-
13
вает давление воздуха в заданных пределах. Установка объеди-
няет в себе компрессор, фильтр для пыли, дегидратор, ресивер и
систему автоматики, обеспечивающую периодичность протека-
ния всех процессов. Максимальная производительность1 * ее
невелика и составляет всего 22 л/мин при влажности осушен-
ного воздуха не более 0,3 г/м3 и давлении в пределах
0,25—0,3 МПа.
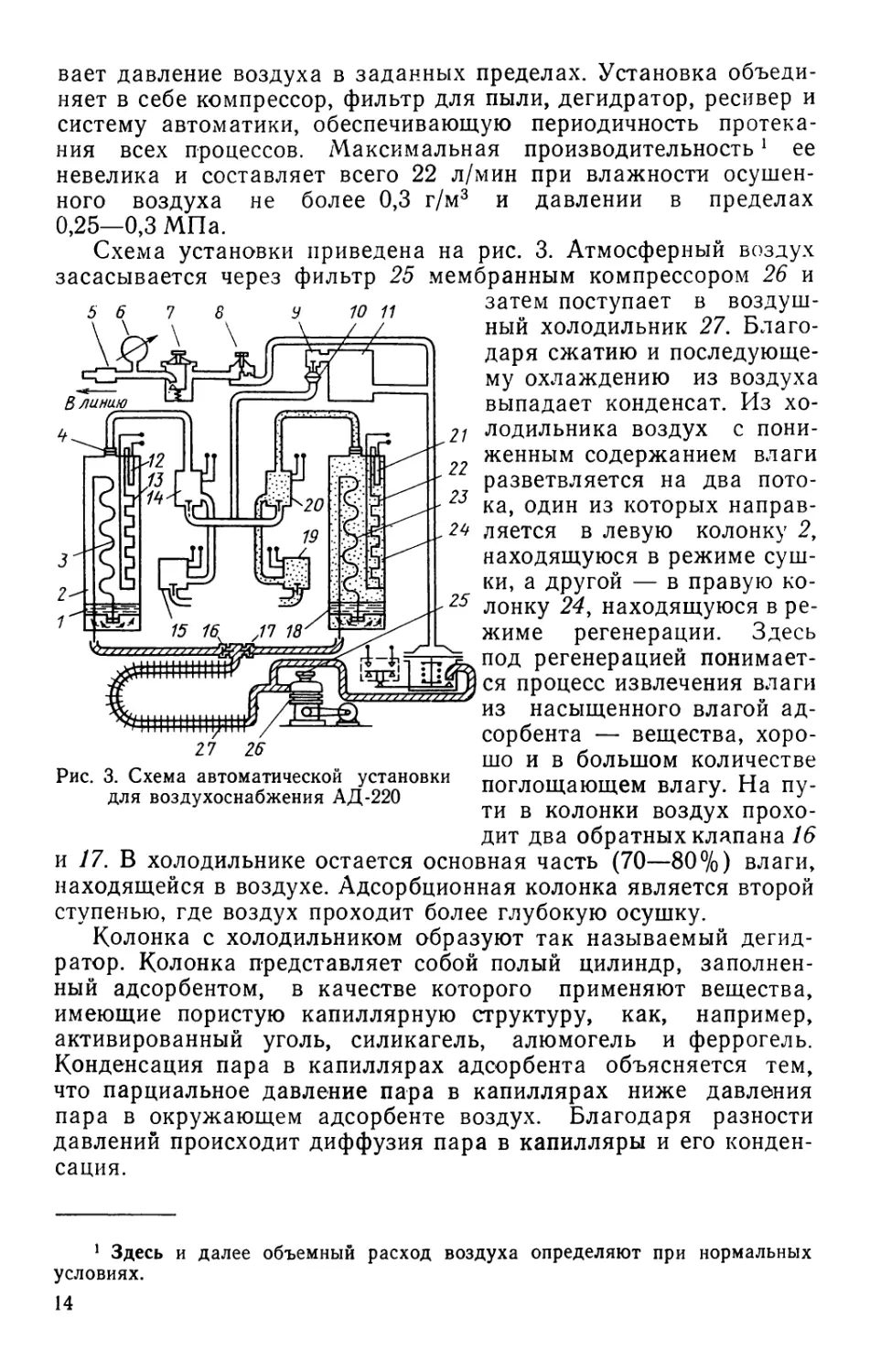
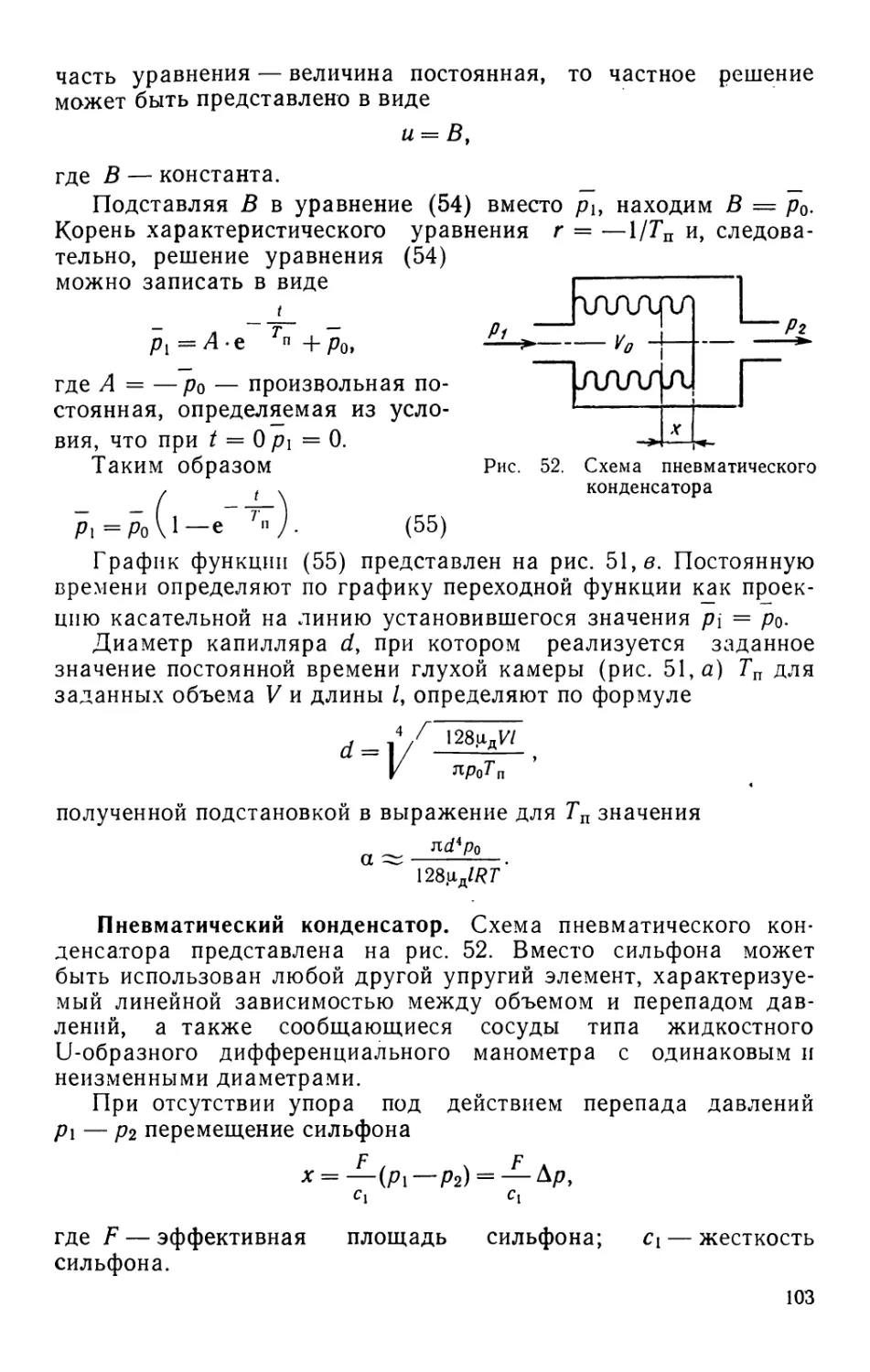
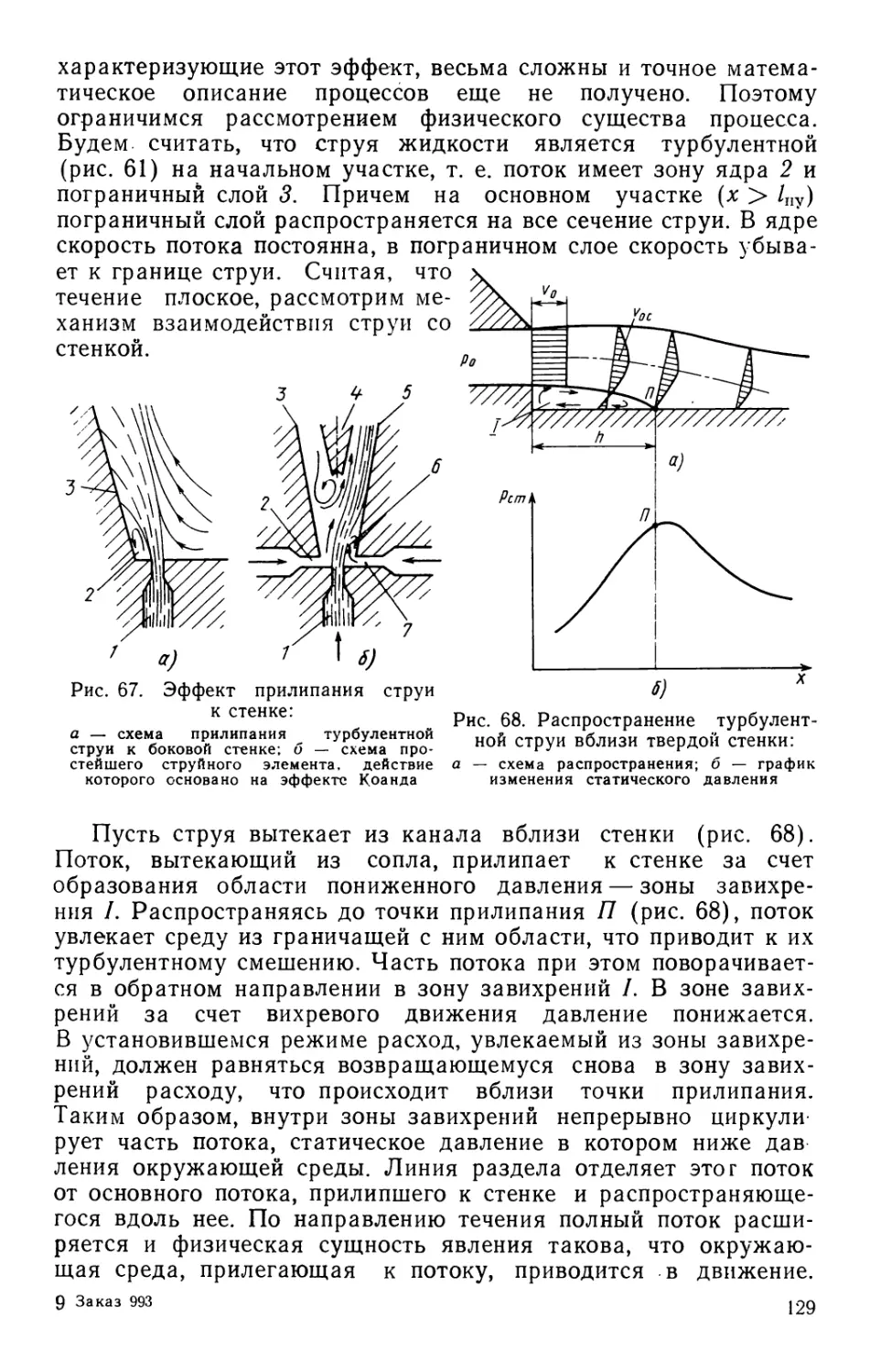
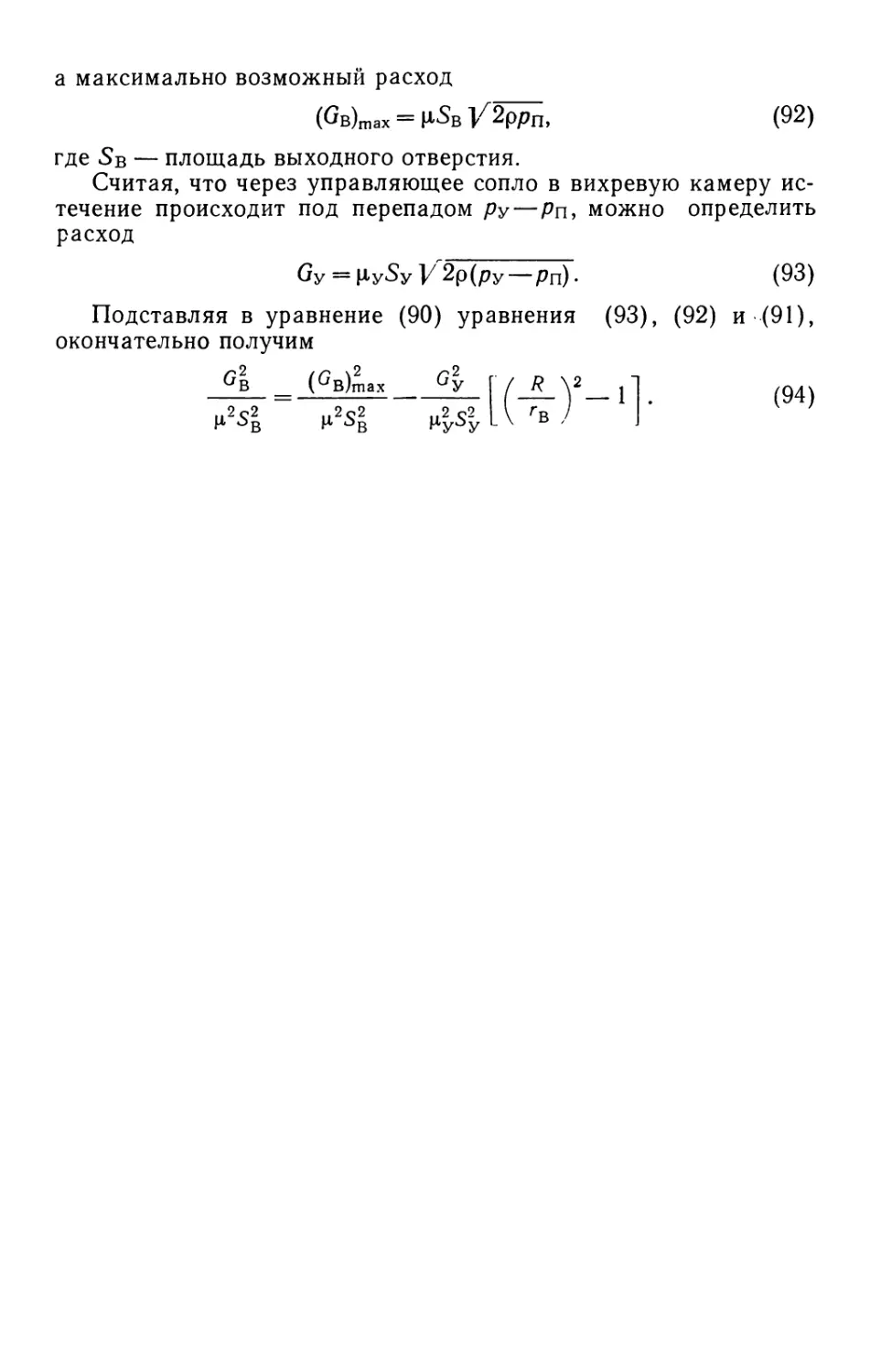
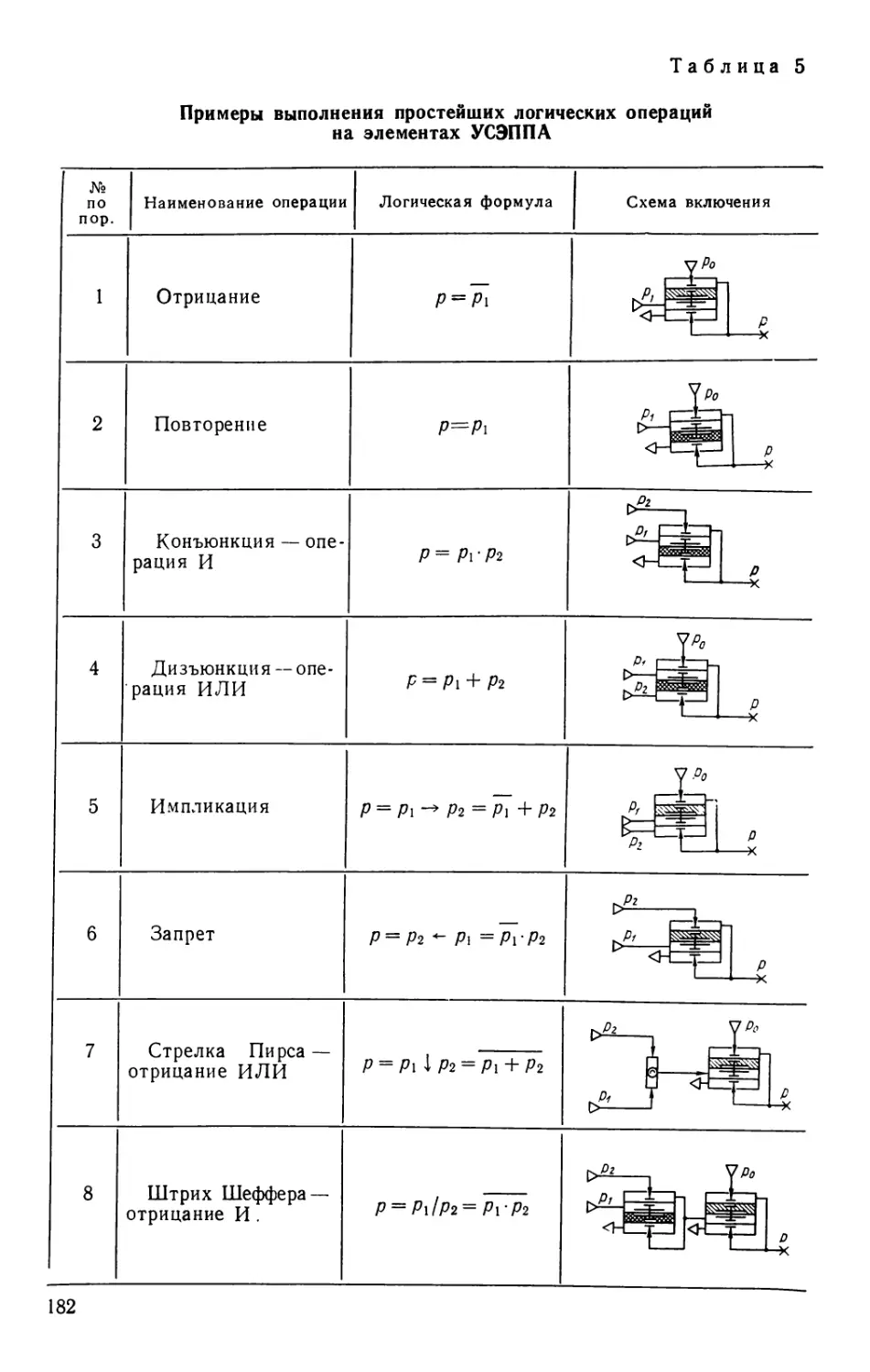
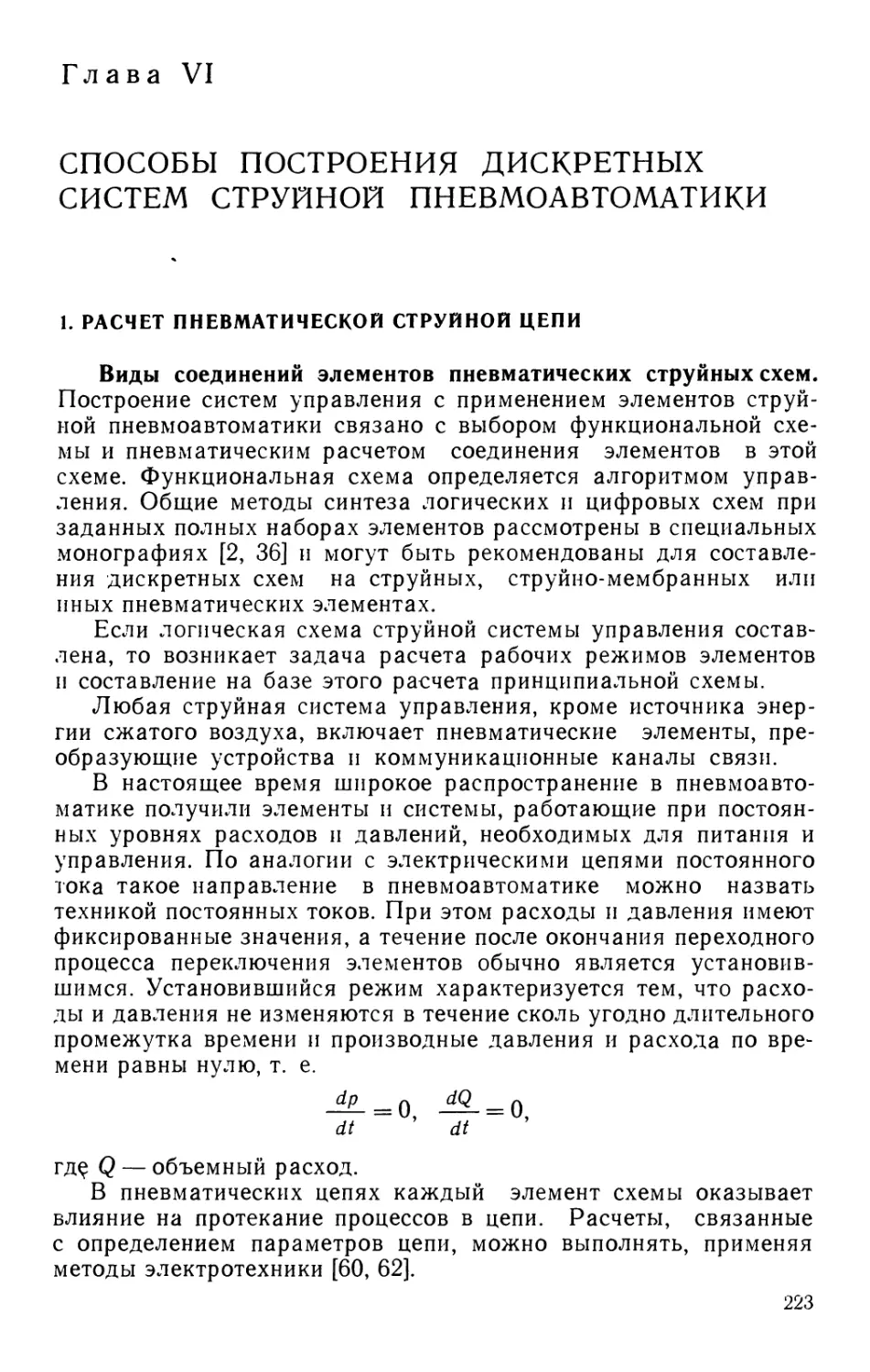
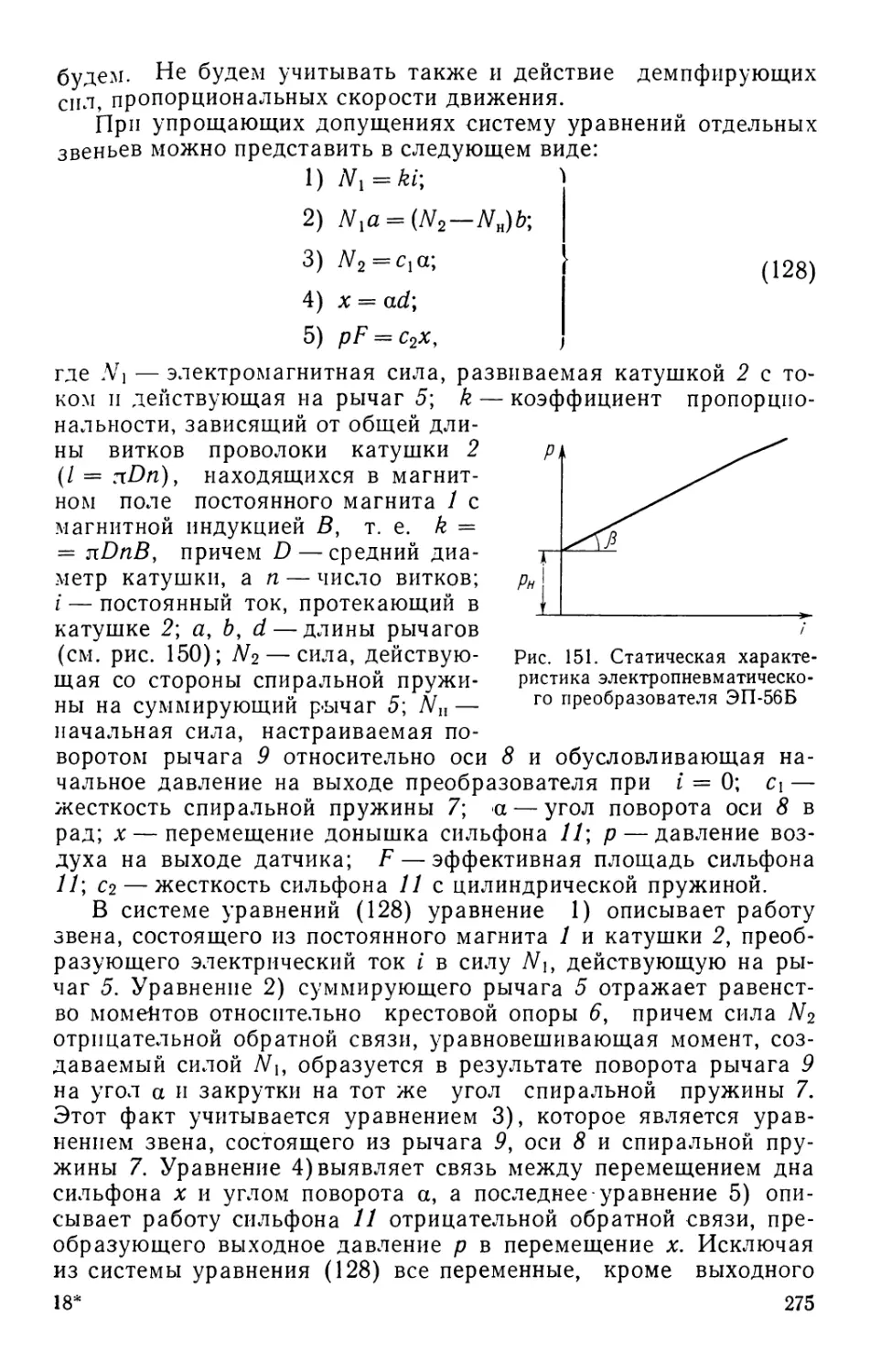
Схема установки приведена на рис. 3. Атмосферный воздух
засасывается через фильтр 25 мембранным компрессором 26 и
5 6 7 8 У 10 11
27 26
Рис. 3. Схема автоматической установки
для воздухоснабжения АД-220
затем поступает в воздуш-
ный холодильник 27. Благо-
даря сжатию и последующе-
му охлаждению из воздуха
выпадает конденсат. Из хо-
лодильника воздух с пони-
женным содержанием влаги
разветвляется на два пото-
ка, один из которых направ-
ляется в левую колонку 2,
находящуюся в режиме суш-
ки, а другой — в правую ко-
лонку 24, находящуюся в ре-
жиме регенерации. Здесь
под регенерацией понимает-
ся процесс извлечения влаги
из насыщенного влагой ад-
сорбента — вещества, хоро-
шо и в большом количестве
поглощающем влагу. На пу-
ти в колонки воздух прохо-
дит два обратных клапана 16
и 17. В холодильнике остается основная часть (70—80%) влаги,
находящейся в воздухе. Адсорбционная колонка является второй
ступенью, где воздух проходит более глубокую осушку.
Колонка с холодильником образуют так называемый дегид-
ратор. Колонка представляет собой полый цилиндр, заполнен-
ный адсорбентом, в качестве которого применяют вещества,
имеющие пористую капиллярную структуру, как, например,
активированный уголь, силикагель, алюмогель и феррогель.
Конденсация пара в капиллярах адсорбента объясняется тем,
что парциальное давление пара в капиллярах ниже давления
пара в окружающем адсорбенте воздух. Благодаря разности
давлений происходит диффузия пара в капилляры и его конден-
сация.
1 Здесь и далее объемный расход воздуха определяют при нормальных
условиях.
14
В адсорбционных колонках установки АД-220 применен
силикагель (ЗЮг) в виде зерен диаметром 3—4 мм. Чтобы пред-
ставить себе, насколько сильно развита сеть капилляров в си-
ликагеле, достаточно сказать, что их боковая поверхность для
1 кг массы этого вещества составляет 4-105 м2. Это обеспечивает
высокую влагоемкость адсорбента и позволяет осушать воздух
до относительной влажности 2—3% при температуре воздуха
15—20° С, что соответствует точке росы при температуре минус
30—40е С.
Адсорбированную силикагелем влагу можно легко удалить,
пропуская через него часть осушенного воздуха, составляющего
5—7% от общего количества и нагретого до 150—200° С. Такой
способ восстановления силикагеля носит название горячей реге-
нерации. Помимо этого существует еще способ холодной реге-
нерации, состоящий в том, что через насыщенный влагой сили-
кагель пропускается часть осушенного холодного воздуха,
составляющего 20—25% от общего количества, с пониженным
давлением.
Условия для регенерации адсорбента в колонке установки
АД-220 обеспечиваются за счет нагрева силикагеля электриче-
скими спиралями 13 или 22 и продувки через него нагретого
воздуха. Воздух нагревается при прохождении по спиральным
змеевикам 3 или 23. На конце змеевиков установлены фильтры
1 и 18, состоящие из двух металлических сеток, между которыми
предусмотрен слой прессованной металлической стружки,
предотвращающий проникновение частичек силикагеля на дни-
ще колонки. Пройдя этот фильтр, воздух направляется вверх,
минуя слой силикагеля и фильтр 4, заполненный стеклянной
тканью, задерживающей силикагелиевую пыль. После этого
воздух выходит из колонки. Описанная конструкция колонки
характерна для дегидраторов небольшой производительности,
так как в адсорбере большого размера равномерно нагреть
адсорбент нагревателями рассмотренного типа невозможно.
Правая и левая колонки взаимозаменяемы, и в процессе
работы они меняются ролями. Когда силикагель насытится
влагой, колонка вступает в фазу регенерации, в это время в
работу включается колонка, уже прошедшая регенерацию и
остывшая.
В колонках имеются температурные реле 12 и 21, которые
регулируют температуру колонок в стадии регенерации. Если
температура силикагеля превышает 190° С, реле выключают
нагреватели.
Выйдя из колонки 2, воздух проходит через открытый соле-
ноидный клапан 14, фильтр 10, обратный клапан 9 и попадает
в воздухосборник 11. Соленоидный клапан 15 при этом закрыт.
Далее воздушная линия разветвляется. Одна магистраль ведет
к потребителю. Здесь воздух проходит через игольчатый4 кла-
пан 8, редуктор 7 и индикатор влажности 5. Давление воздуха,
15
поступающего к потребителю, контролируется манометром 6.
Линия, идущая из воздухосборника 11 вниз, подводит воздух
к мембране реле давления. Если давление превысит заданное,
реле отключит двигатель компрессора и выпустит лишний
воздух из линии.
Воздух, идущий от холодильника 27 по правому трубопро-
воду, попадает в колонку 24, в которой происходит восстановле-
ние силикагеля. Силикагель, нагретый до 190° С, интенсивно
испаряет влагу, которая уходит с воздухом через соленоидный
клапан 20, отключающий колонку 24 от магистрали, идущей
к потребителю, и открытый соленоидный клапан 19 и выбрасы-
вается в атмосферу. Во время регенерации производительность
установки сокращается, что, естественно, является недостатком.
По описанному циклу установка работает в течение 7 ч. После
этого силикагель в правой колонке 24 полностью освобождает-
ся от влаги, и электрическое командное устройство закрывает
соленоидный клапан 19 и отключает нагреватель. Левая осуши-
тельная колонка 2 продолжает еще работу в течение 5 ч. Пра-
вая регенерированная колонка за это время успевает полностью
остыть. По прошествии 12 ч колонка 24 включается командным
устройством на осушку воздуха, а колонка 2 — на регенерацию.
Таким образом, полный рабочий цикл осуществляется за 24 ч.
Индикатор 5, с помощью которого контролируют влажность
воздуха, поступающего к потребителю, представляет собой стек-
лянную трубку, заполненную индикаторным веществом — си-
ликагелем, обработанным 10%-ным раствором хлористого
кобальта. По цвету индикаторного вещества, пользуясь специ-
альной шкалой цветности, определяют относительную влаж-
ность осушенного воздуха.
Как уже указывалось, автоматическая установка АД-220
имеет недостаток, заключающийся в том, что воздух, идущий
на регенерацию колонки, сбрасывается в атмосферу, в резуль-
тате чего снижается производительность колонки. В некоторых
других подобных установках такая непроизводительная потеря
воздуха устранена. Воздух, расходуемый на регенерацию,
в этих устройствах не сбрасывается в атмосферу, а засасывается
газоструйным насосом и возвращается на вход установки,
осушается и снова поступает к пневматическим приборам.
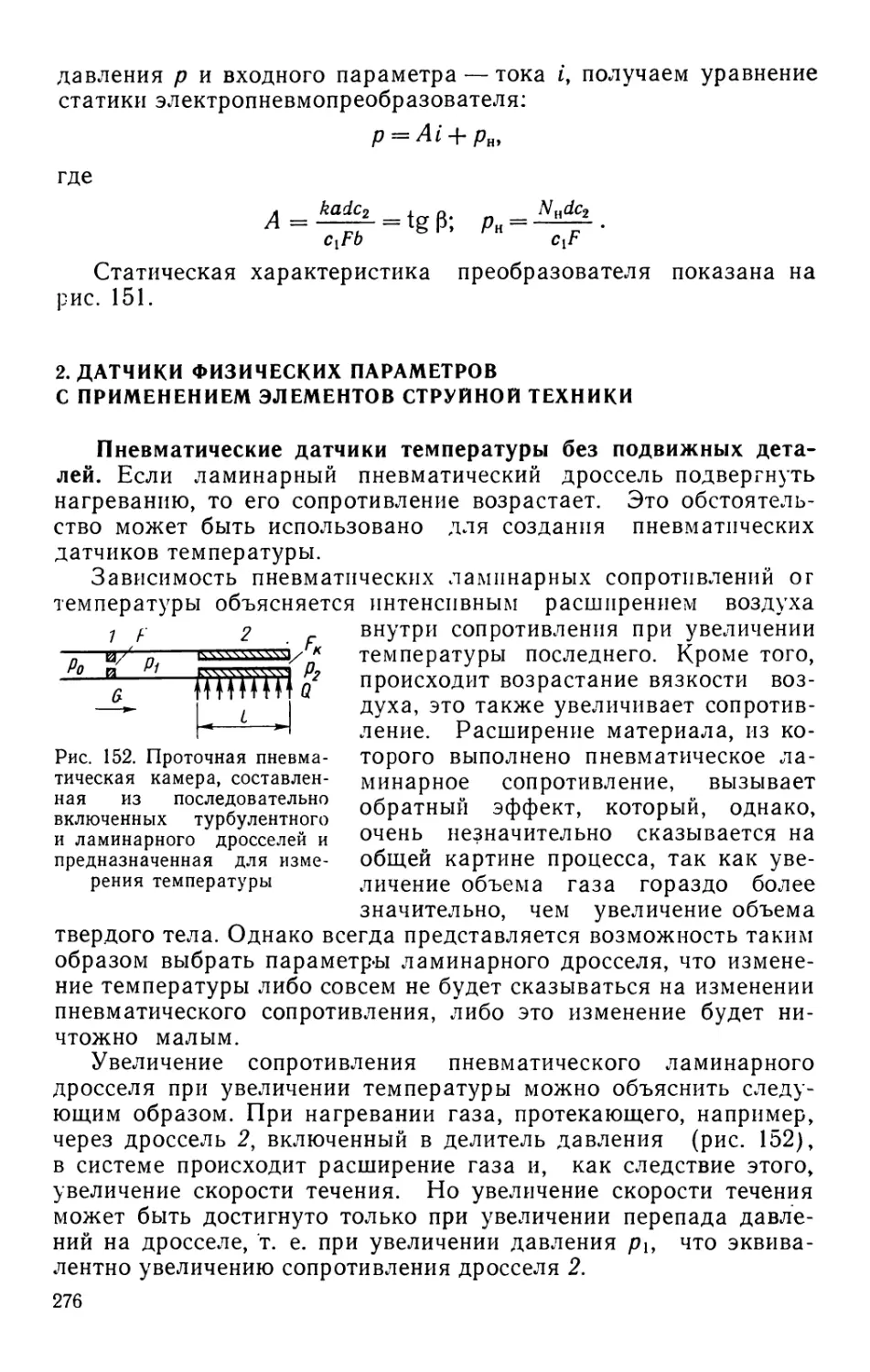
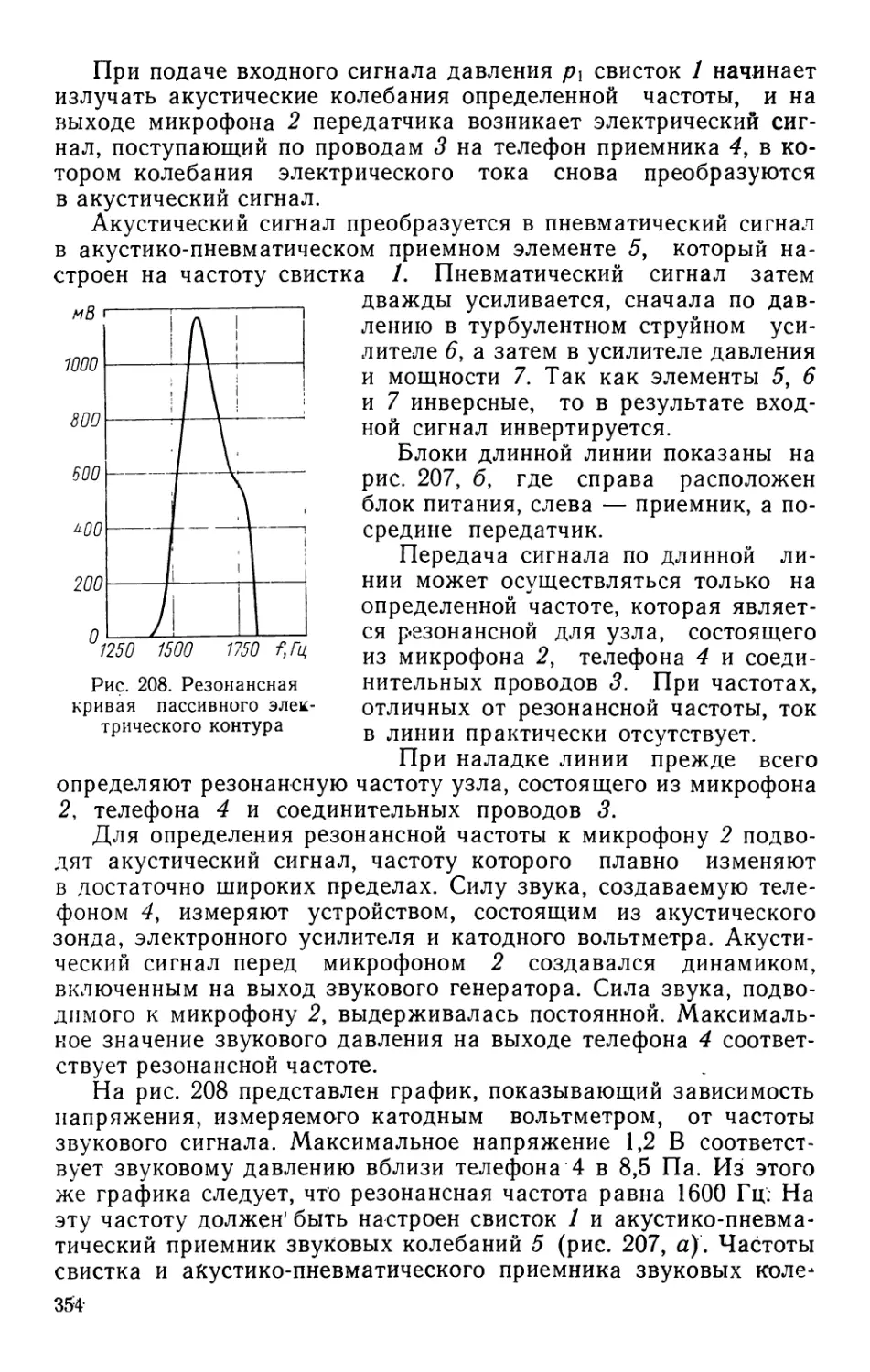
Фильтры и стабилизаторы давления (редукторы). Как уже
отмечалось ранее, одним из необходимых условий обеспечения
стабильной и надежной работы технических средств пневмоав-
томатики является высококачественная очистка воздуха от
масла и пыли. В настоящее время для очистки воздуха приме-
няют различные фильтры. Фильтры по принципу действия делят
на сухие, мокрые, центробежные и др. В пневмоавтоматике
применяют исключительно сухие пористые фильтры. В качестве
фильтрующих материалов используют фетр, войлок, шерстяную
вату и т. д. Однако в последнее время все большее применение
16
в фильтрах находит ткань марки ФПП (ткань И. В. Петряно-
ва). Эта ткань представляет собой слой ультратонких волокон,
изготовляемых из различных полимеров. Ткань длительно
выдерживает нагрев до температуры 60° С, не смачивается во-
дой и нечувствительна к агрессивным средам. Однако под воз-
действием масел ткань разбухает. Самым положительным
свойством этой ткани является способность задерживать части-
цы пыли с размерами не менее 10 мкм.
В сухих пористых фильтрах применяют керамические
фильтрующие элементы из шамотной массы. Сам фильтрую-
щий элемент выполняют в форме пустотелого цилиндра.
Диаметр пор керамических фильтров составляет примерно
20—30 мкм и поэтому качество очистки воздуха такими филь-
трами невелико. Кроме того, качество ухудшается из-за
неоднородности пористости по всей поверхности фильтрующего
цилиндра, а также из-за хрупкости керамики, что влечет за
собой отрыв проходящим воздухом мельчайших частиц и
транспортировку их в устройства пневмоавтоматики. Эти недо-
статки отсутствуют у металлокерамических фильтров, которые
отличаются большей прочностью и меньшим диаметром филь-
трующих пор. В системе пневмоавтоматики металлокерамиче-
ские фильтры используют для предварительной очистки воздуха
во влагоотд ел ителях.
Принцип действия такого влагоотделителя состоит в том, что
под действием центробежных сил мелкие частички жидкости
отбрасываются на стенки стакана и собираются в капли, сте-
кающие в нижнюю отделенную отражателем спокойную зону.
Затем воздух проходит через фильтр и выходит через отверстие.
Очень интересным является оценка фильтрующих свойств раз-
личных материалов, проведенная на основе сравнительных
испытаний. В результате испытаний, проведенных Бюро взаимо-
заменяемости совместно с лабораторией аэрозолей Физико-
химического института им. Л. Я. Карпова [13], был установлен
ряд фильтрующих материалов, которые по степени качества
очистки воздуха можно расположить следующим образом:
фильтрующая ткань ФПП, шерстяная вата, ультратонкое стек-
лянное волокно, капроновое волокно, металлокерамика, фетр и
войлок.
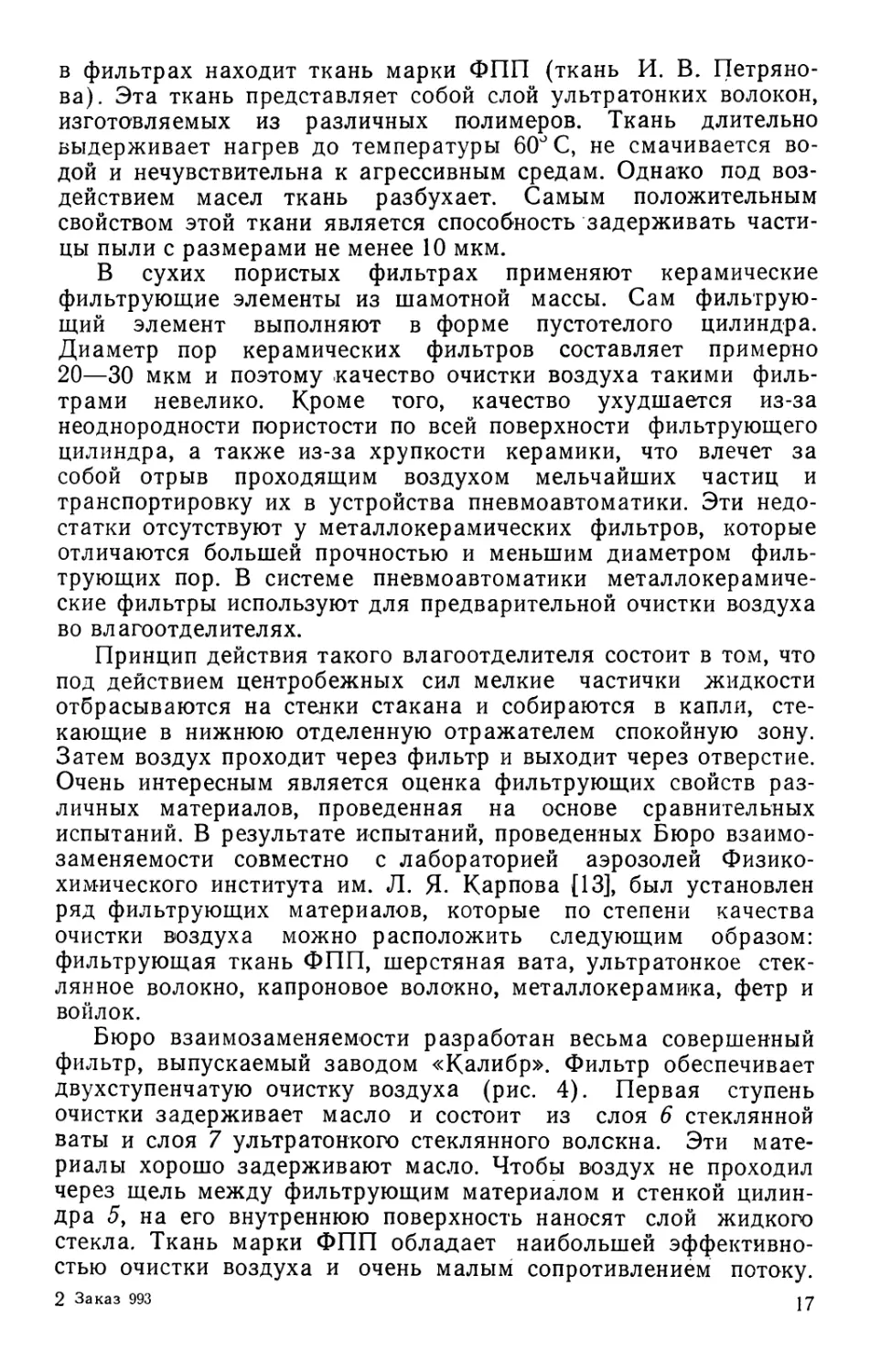
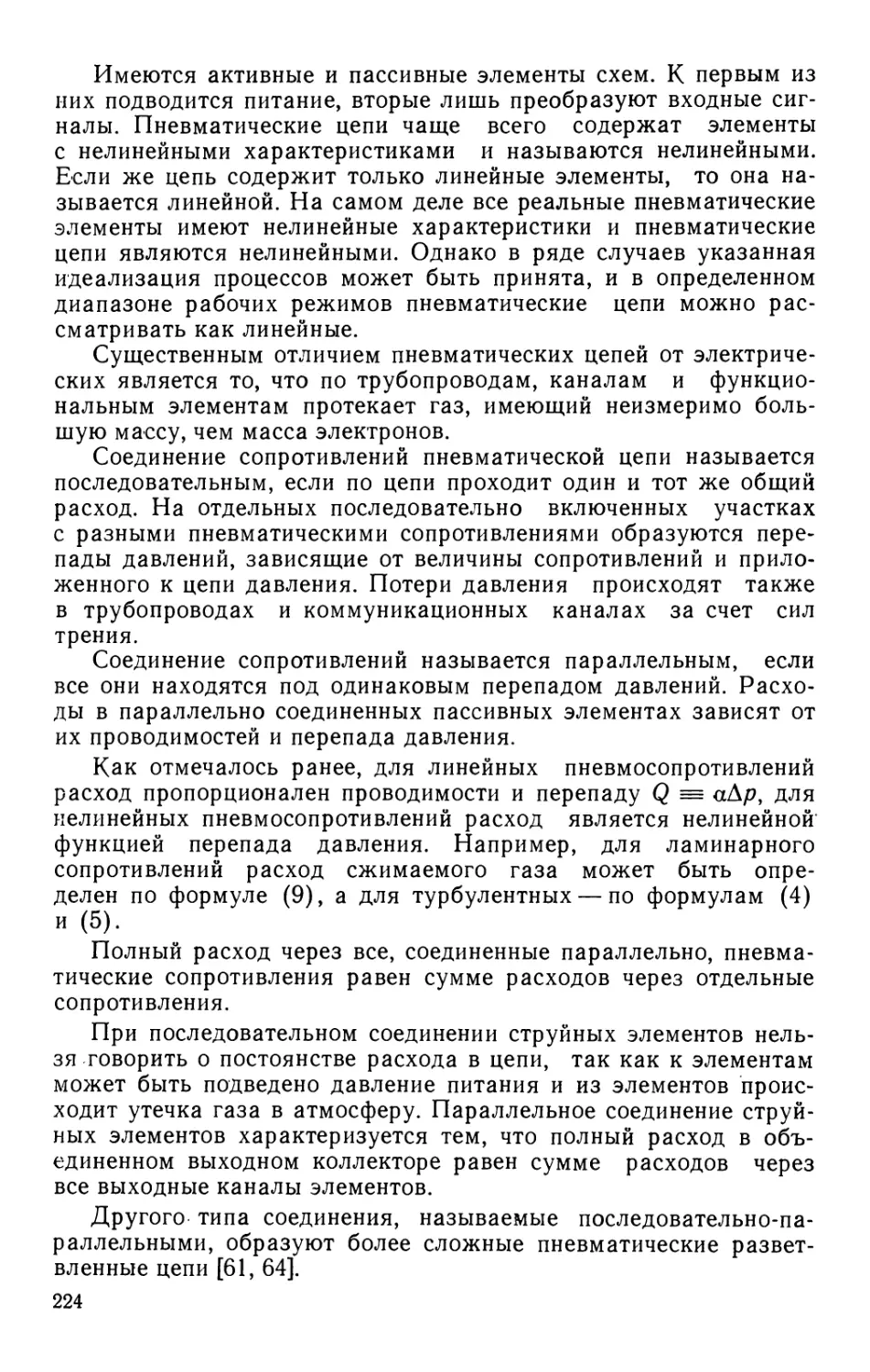
Бюро взаимозаменяемости разработан весьма совершенный
фильтр, выпускаемый заводом «Калибр». Фильтр обеспечивает
двухступенчатую очистку воздуха (рис. 4). Первая ступень
очистки задерживает масло и состоит из слоя 6 стеклянной
ваты и слоя 7 ультратонкого стеклянного волскна. Эти мате-
риалы хорошо задерживают масло. Чтобы воздух не проходил
через щель между фильтрующим материалом и стенкой цилин-
дра 5, на его внутреннюю поверхность наносят слой жидкого
стекла. Ткань марки ФПП обладает наибольшей эффективно-
стью очистки воздуха и очень малым сопротивлением потоку.
2 Заказ 993 jy
Поэтому в качестве материала второй ступени 4 используют
ткань марки ФПП-15-1,5*. Ею обернута в три слоя наружная
поверхность двухслойного фильтрующего патрона. Ткань за-
крыта сеткой S, патрон прижимается к корпусу 2 пружиной 9,
упирающейся в отражатель 11, под которым образуется спо-
койная зона, заполняемая конденсатом. Для удаления кон-
денсата служит вентиль 10. Прозрачный колпак 1 укрепляется
на корпусе с помощью гайки 3, герметичность соединения обе-
спечивается резиновым кольцом. Наибольший расход воздуха
через фильтр равен 120 л/мин, избыточное давление, подводи-
мое к фильтру, составляет 0,2—0,6 МПа.
Как известно, давление воздуха, подводимого к пневматиче-
ским приборам, должно быть постоянным или мало изменяться
во времени и, кроме того, долж-
на обеспечиваться возможность
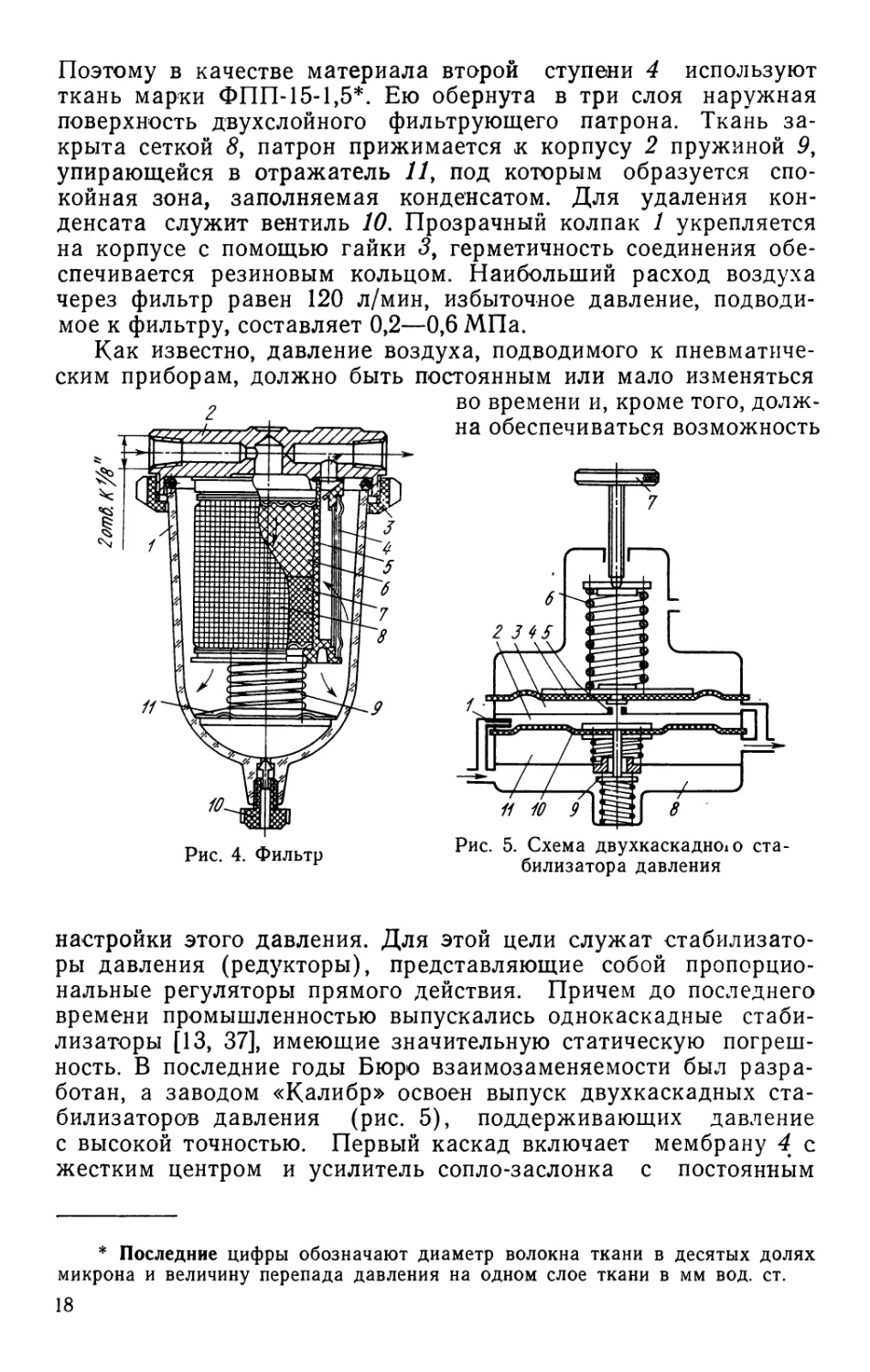
Рис. 5. Схема двухкаскаднохо ста-
билизатора давления
настройки этого давления. Для этой цели служат стабилизато-
ры давления (редукторы), представляющие собой пропорцио-
нальные регуляторы прямого действия. Причем до последнего
времени промышленностью выпускались однокаскадные стаби-
лизаторы [13, 37], имеющие значительную статическую погреш-
ность. В последние годы Бюро взаимозаменяемости был разра-
ботан, а заводом «Калибр» освоен выпуск двухкаскадных ста-
билизаторов давления (рис. 5), поддерживающих давление
с высокой точностью. Первый каскад включает мембрану 4 с
жестким центром и усилитель сопло-заслонка с постоянным
* Последние цифры обозначают диаметр волокна ткани в десятых долях
микрона и величину перепада давления на одном слое ткани в мм вод. ст.
18
дросселем /, междроссельной камерой 2 и пневматическим со-
противлением сопло-заслонка 5. Причем роль заслонки выпол-
няет штифт жесткого центра. Второй каскад усиления состоит
из мембраны 10, подпружиненного клапана 9, камеры питания 8
и выходной камеры 11. С выхода под мембрану 4, в камеру 3
заводится давление отрицательной обратной связи.
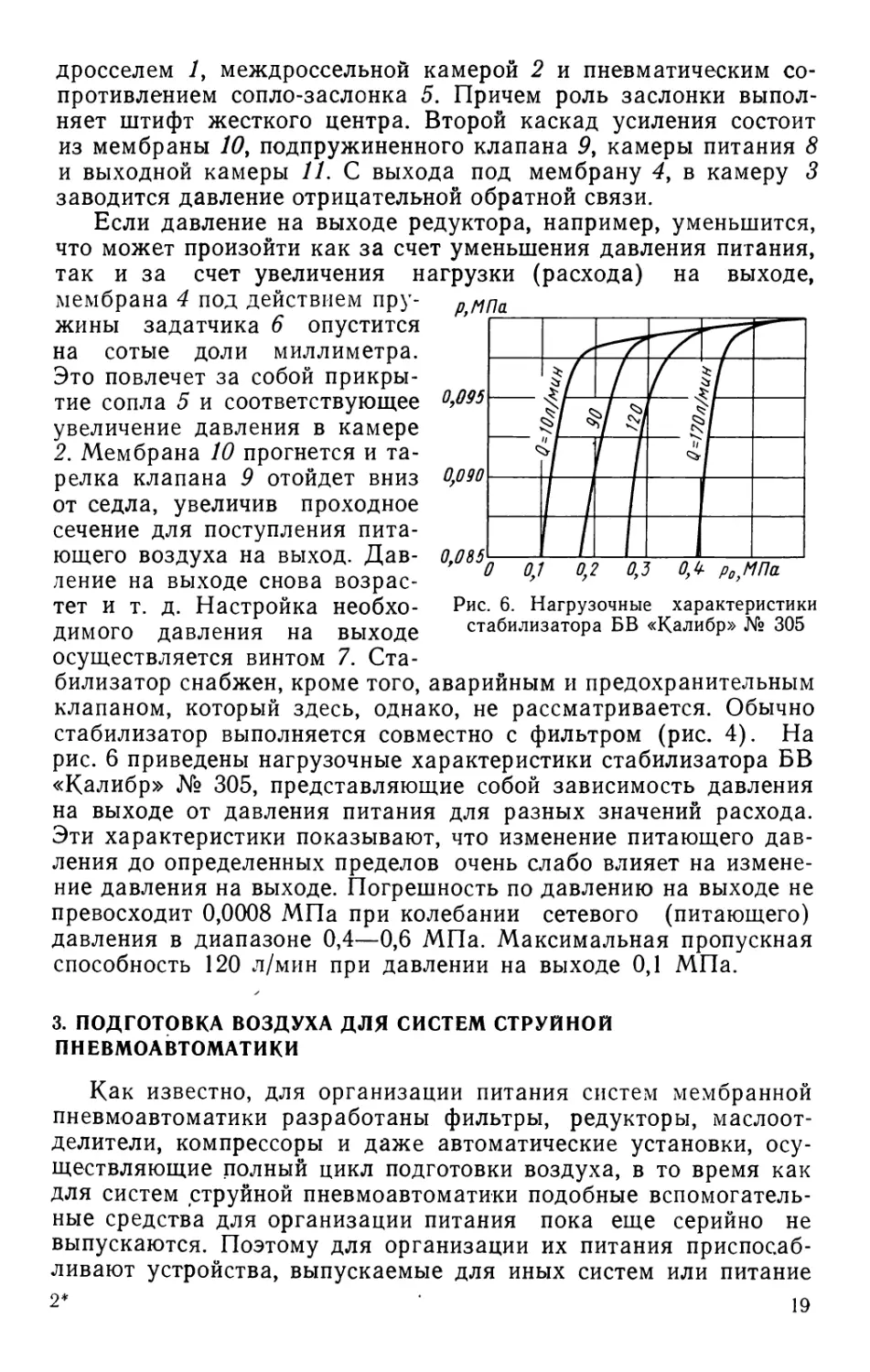
Если давление на выходе редуктора, например, уменьшится,
что может произойти как за счет уменьшения давления питания,
так и за счет увеличения нагрузки (расхода) на выходе,
мембрана 4 под действием пру-
жины задатчика 6 опустится
на сотые доли миллиметра.
Это повлечет за собой прикры-
тие сопла 5 и соответствующее
увеличение давления в камере
2. Мембрана 10 прогнется и та-
релка клапана 9 отойдет вниз
от седла, увеличив проходное
сечение для поступления пита-
ющего воздуха на выход. Дав-
ление на выходе снова возрас-
тет и т. д. Настройка необхо-
димого давления на выходе
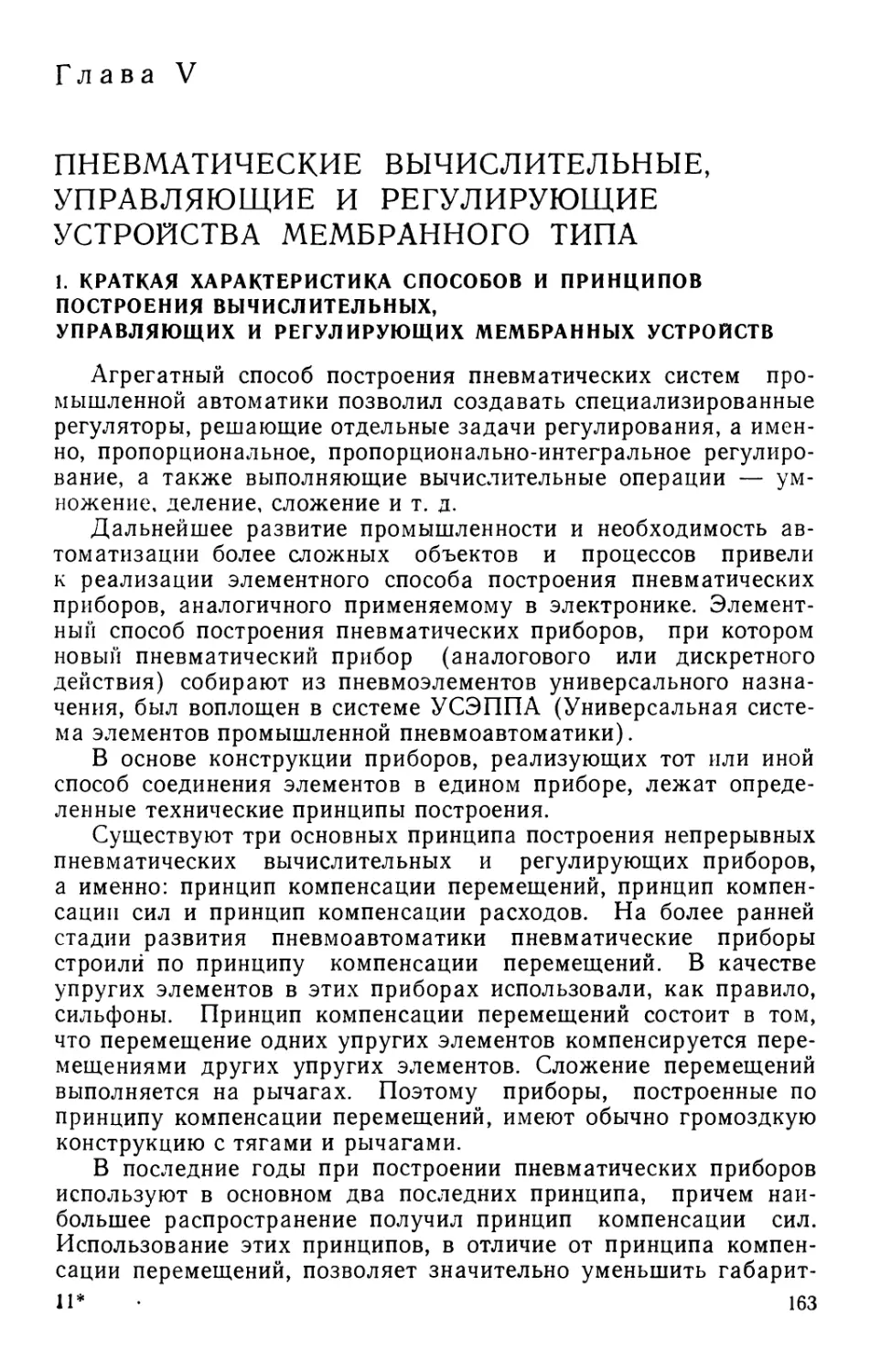
Рис. 6. Нагрузочные характеристики
стабилизатора БВ «Калибр» № 305
осуществляется винтом 7. Ста-
билизатор снабжен, кроме того, аварийным и предохранительным
клапаном, который здесь, однако, не рассматривается. Обычно
стабилизатор выполняется совместно с фильтром (рис. 4). На
рис. 6 приведены нагрузочные характеристики стабилизатора БВ
«Калибр» № 305, представляющие собой зависимость давления
на выходе от давления питания для разных значений расхода.
Эти характеристики показывают, что изменение питающего дав-
ления до определенных пределов очень слабо влияет на измене-
ние давления на выходе. Погрешность по давлению на выходе не
превосходит 0,0008 МПа при колебании сетевого (питающего)
давления в диапазоне 0,4—0,6 МПа. Максимальная пропускная
способность 120 л/мин при давлении на выходе 0,1 МПа.
3. ПОДГОТОВКА ВОЗДУХА ДЛЯ СИСТЕМ СТРУЙНОЙ
ПНЕВМОАВТОМАТИКИ
Как известно, для организации питания систем мембранной
пневмоавтоматики разработаны фильтры, редукторы, маслоот-
делители, компрессоры и даже автоматические установки, осу-
ществляющие полный цикл подготовки воздуха, в то время как
для систем струйной пневмоавтоматики подобные вспомогатель-
ные средства для организации питания пока еще серийно не
выпускаются. Поэтому для организации их питания приспосаб-
ливают устройства, выпускаемые для иных систем или питание
2* • 19
струйных систем организуют от сети высокого давления, пони-
жая его до необходимого уровня.
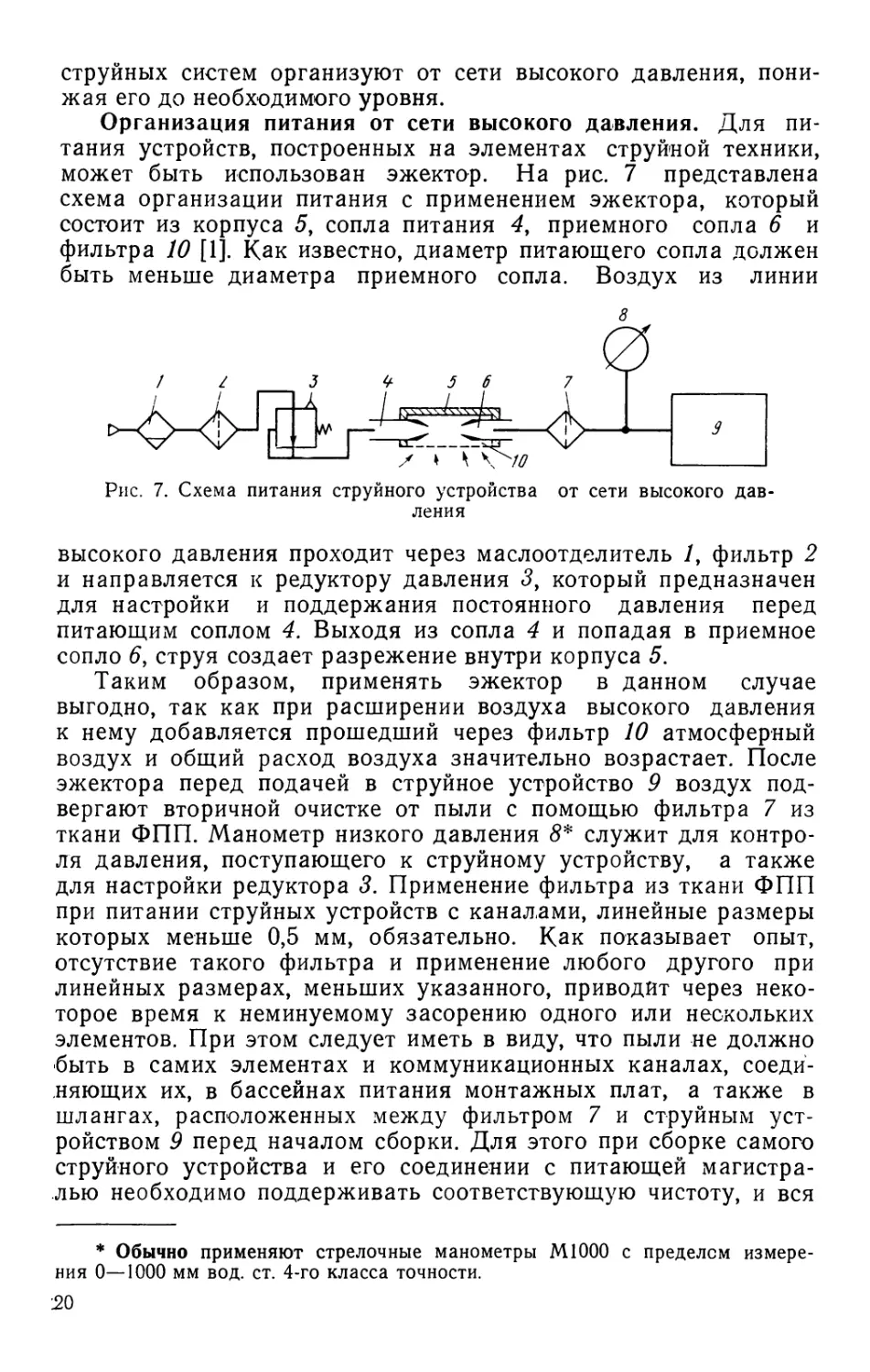
Организация питания от сети высокого давления. Для пи-
тания устройств, построенных на элементах струйной техники,
может быть использован эжектор. На рис. 7 представлена
схема организации питания с применением эжектора, который
состоит из корпуса 5, сопла питания 4, приемного сопла 6 и
фильтра 10 [1]. Как известно, диаметр питающего сопла должен
быть меньше диаметра приемного сопла. Воздух из линии
Рис. 7. Схема питания струйного устройства от сети высокого дав-
ления
высокого давления проходит через маслоотделитель /, фильтр 2
и направляется к редуктору давления 5, который предназначен
для настройки и поддержания постоянного давления перед
питающим соплом 4. Выходя из сопла 4 и попадая в приемное
сопло 6, струя создает разрежение внутри корпуса 5.
Таким образом, применять эжектор в данном случае
выгодно, так как при расширении воздуха высокого давления
к нему добавляется прошедший через фильтр 10 атмосферный
воздух и общий расход воздуха значительно возрастает. После
эжектора перед подачей в струйное устройство 9 воздух под-
вергают вторичной очистке от пыли с помощью фильтра 7 из
ткани ФПП. Манометр низкого давления 8* служит для контро-
ля давления, поступающего к струйному устройству, а также
для настройки редуктора 3. Применение фильтра из ткани ФПП
при питании струйных устройств с каналами, линейные размеры
которых меньше 0,5 мм, обязательно. Как показывает опыт,
отсутствие такого фильтра и применение любого другого при
линейных размерах, меньших указанного, приводит через неко-
торое время к неминуемому засорению одного или нескольких
элементов. При этом следует иметь в виду, что пыли не должно
быть в самих элементах и коммуникационных каналах, соеди-
няющих их, в бассейнах питания монтажных плат, а также в
шлангах, расположенных между фильтром 7 и струйным уст-
ройством 9 перед началом сборки. Для этого при сборке самого
струйного устройства и его соединении с питающей магистра-
лью необходимо поддерживать соответствующую чистоту, и вся
* Обычно применяют стрелочные манометры М1000 с пределом измере-
ния 0—1000 мм вод. ст. 4-го класса точности.
20
пыль из каналов и шлангов должна быть предварительно
удалена.
Фильтр из ткани ФПП представляет собой капсулу, заклю-
ченную в корпус, который соединен винтами с платой. В корпусе
и плате имеются подводящий и отводящий штуцеры. Капсула
(В-03) с тканью ФПП выпускается серийно нашей промыш-
ленностью.
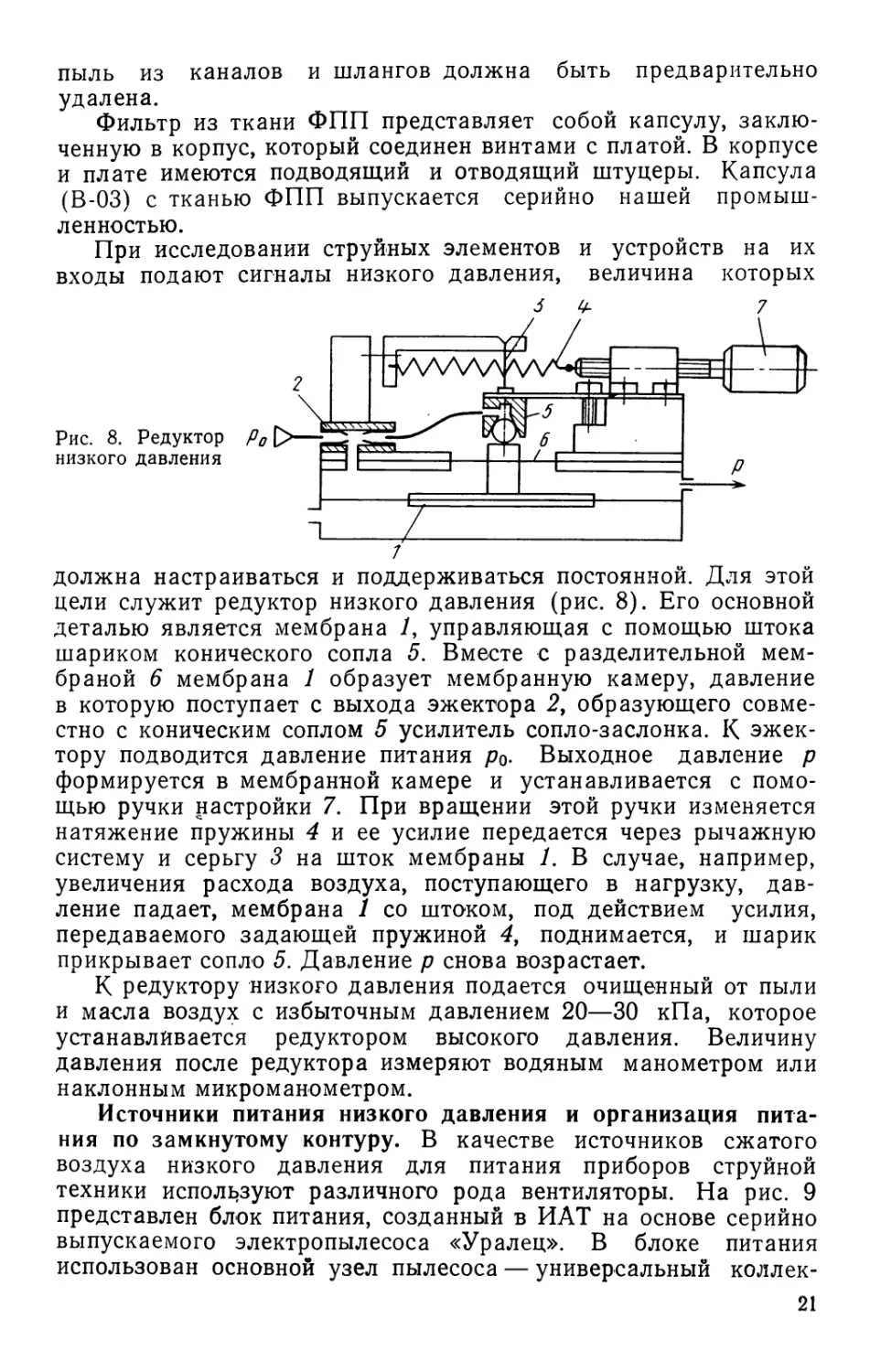
При исследовании струйных элементов и устройств на их
входы подают сигналы низкого давления, величина которых
Рис. 8. Редуктор
низкого давления
3 0- 7
1
должна настраиваться и поддерживаться постоянной. Для этой
цели служит редуктор низкого давления (рис. 8). Его основной
деталью является мембрана /, управляющая с помощью штока
шариком конического сопла 5. Вместе с разделительной мем-
браной 6 мембрана 1 образует мембранную камеру, давление
в которую поступает с выхода эжектора 2, образующего совме-
стно с коническим соплом 5 усилитель сопло-заслонка. К эжек-
тору подводится давление питания р0. Выходное давление р
формируется в мембранной камере и устанавливается с помо-
щью ручки настройки 7. При вращении этой ручки изменяется
натяжение пружины 4 и ее усилие передается через рычажную
систему и серьгу 3 на шток мембраны 1. В случае, например,
увеличения расхода воздуха, поступающего в нагрузку, дав-
ление падает, мембрана 1 со штоком, под действием усилия,
передаваемого задающей пружиной 4, поднимается, и шарик
прикрывает сопло 5. Давление р снова возрастает.
К редуктору низкого давления подается очищенный от пыли
и масла воздух с избыточным давлением 20—30 кПа, которое
устанавливается редуктором высокого давления. Величину
давления после редуктора измеряют водяным манометром или
наклонным микроманометром.
Источники питания низкого давления и организация пита-
ния по замкнутому контуру. В качестве источников сжатого
воздуха низкого давления для питания приборов струйной
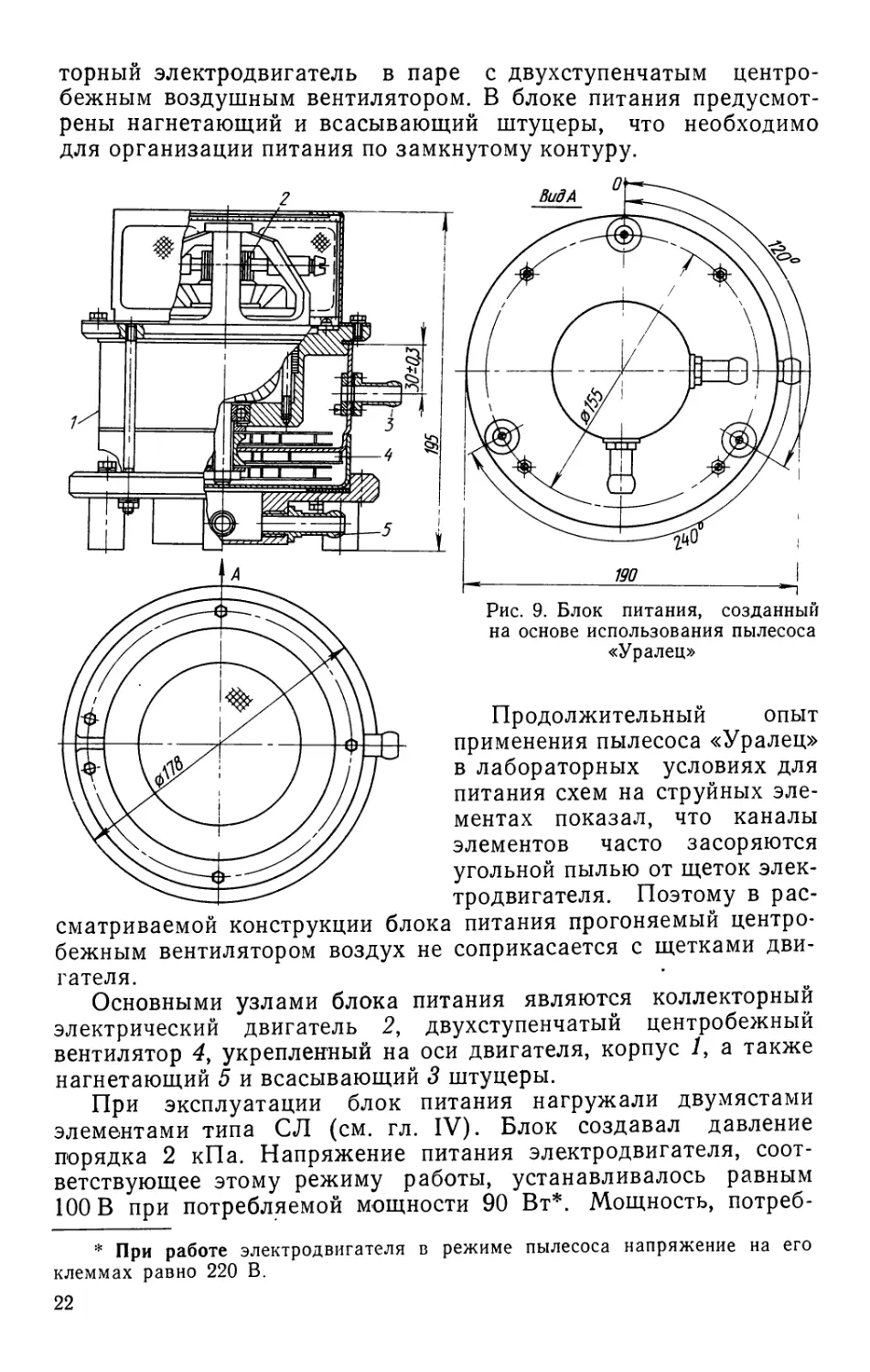
техники используют различного рода вентиляторы. На рис. 9
представлен блок питания, созданный в ИАТ на основе серийно
выпускаемого электропылесоса «Уралец». В блоке питания
использован основной узел пылесоса — универсальный коллек-
21
торный электродвигатель в паре с двухступенчатым центро-
бежным воздушным вентилятором. В блоке питания предусмот-
рены нагнетающий и всасывающий штуцеры, что необходимо
для организации питания по замкнутому контуру.
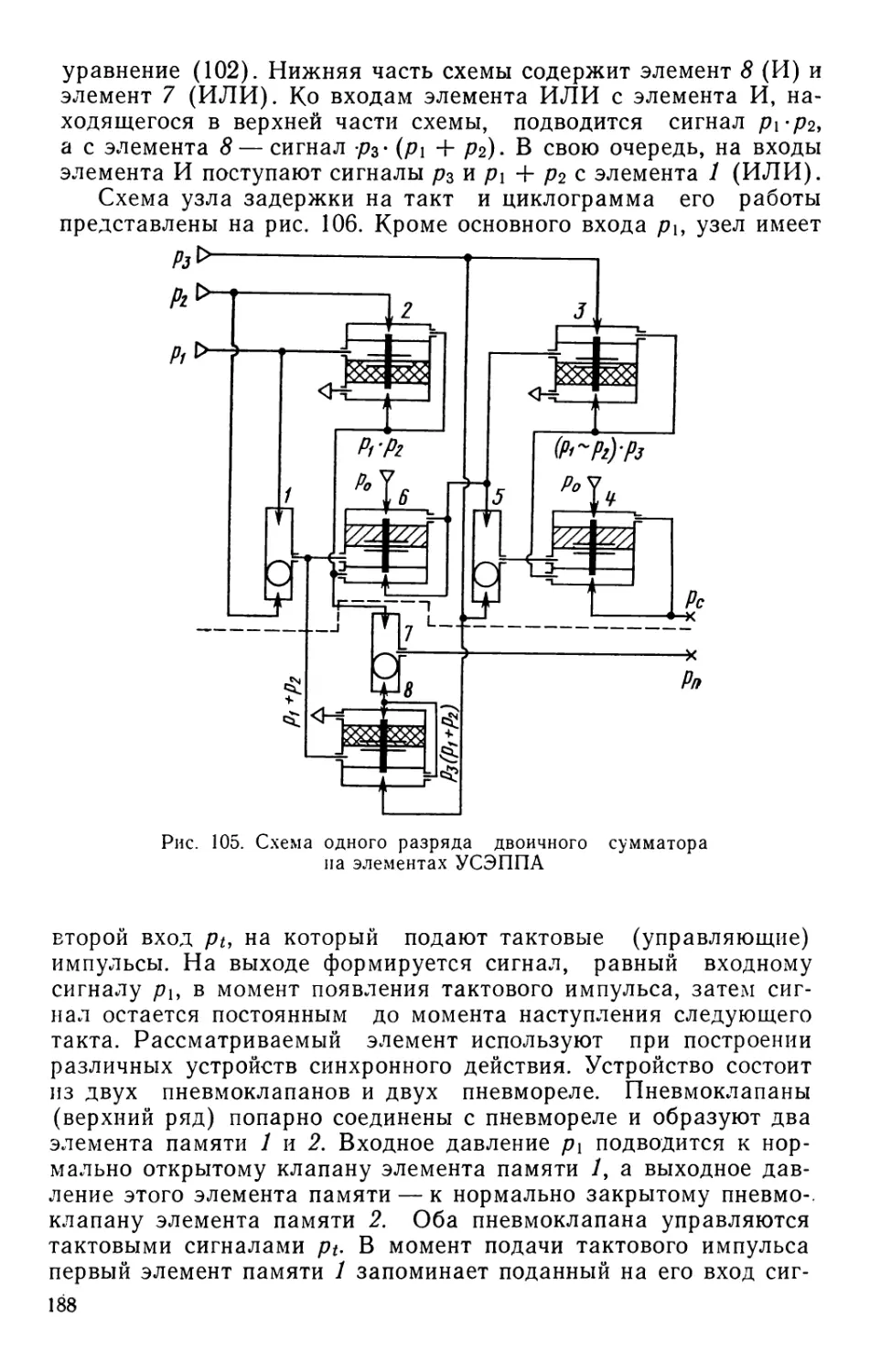
190 I
Рис. 9. Блок питания, созданный
на основе использования пылесоса
«Уралец»
Продолжительный опыт
применения пылесоса «Уралец»
в лабораторных условиях для
питания схем на струйных эле-
ментах показал, что каналы
элементов часто засоряются
угольной пылью от щеток элек-
тродвигателя. Поэтому в рас-
сматриваемой конструкции блока питания прогоняемый центро-
бежным вентилятором воздух не соприкасается с щетками дви-
гателя.
Основными узлами блока питания являются коллекторный
электрический двигатель 2, двухступенчатый центробежный
вентилятор 4, укрепленный на оси двигателя, корпус 7, а также
нагнетающий 5 и всасывающий 3 штуцеры.
При эксплуатации блок питания нагружали двумястами
элементами типа СЛ (см. гл. IV). Блок создавал давление
порядка 2 кПа. Напряжение питания электродвигателя, соот-
ветствующее этому режиму работы, устанавливалось равным
100 В при потребляемой мощности 90 Вт*. Мощность, потреб-
* При работе электродвигателя в режиме пылесоса напряжение на его
клеммах равно 220 В.
22
ляемая одним струйным элементом, с учетом потерь в блоке
питания составляла 0,45 Вт. Температура блока питания
при длительной работе с напряжением 100 В всего на 5° превы-
шала температуру окружающей среды, что позволило гаранти-
ровать надежную работу блока питания. В ИАТ имеется опыт
надежной эксплуатации блока питания в течение 2000 ч.
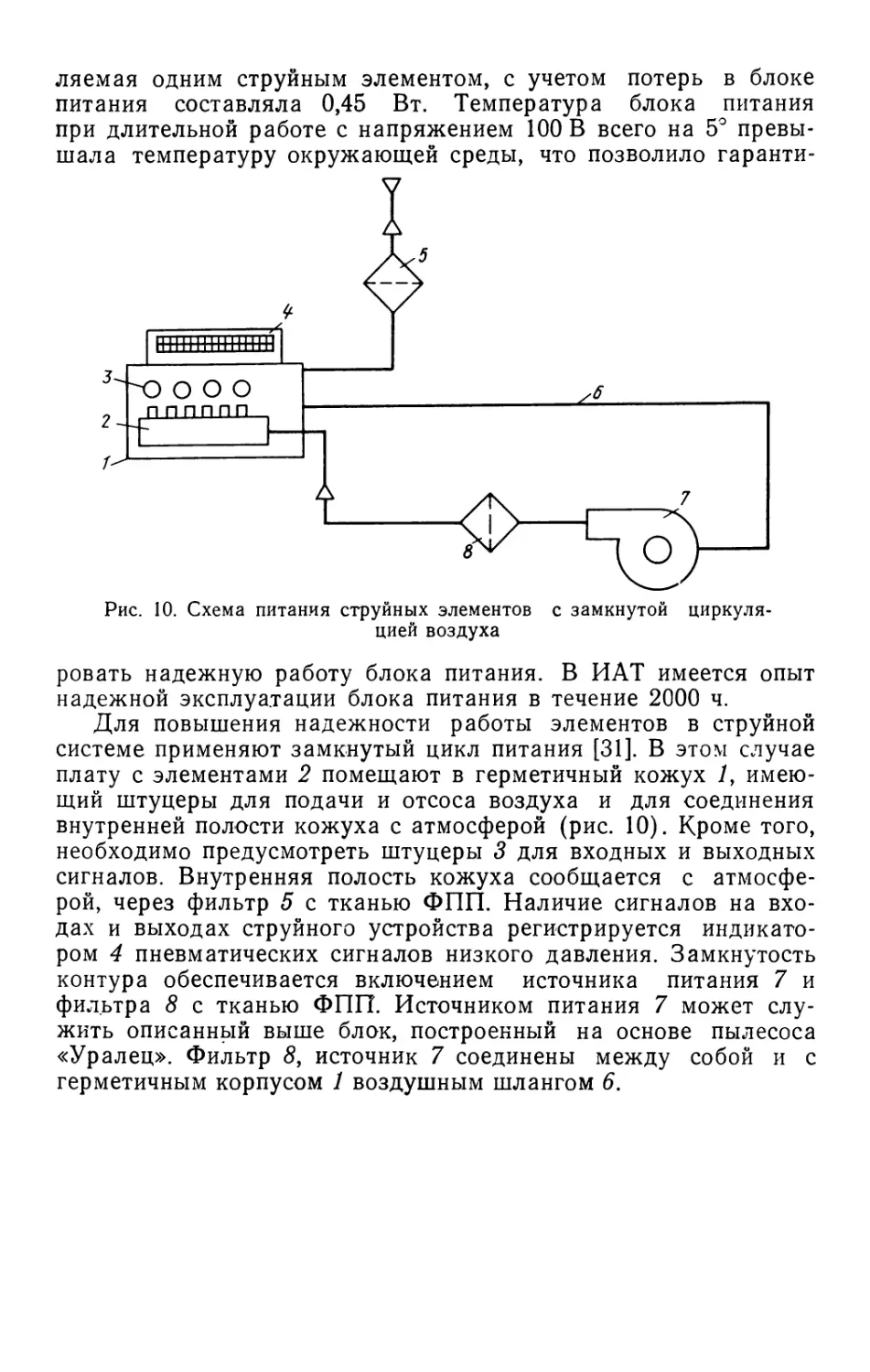
Для повышения надежности работы элементов в струйной
системе применяют замкнутый цикл питания [31]. В этом случае
плату с элементами 2 помещают в герметичный кожух /, имею-
щий штуцеры для подачи и отсоса воздуха и для соединения
внутренней полости кожуха с атмосферой (рис. 10). Кроме того,
необходимо предусмотреть штуцеры 3 для входных и выходных
сигналов. Внутренняя полость кожуха сообщается с атмосфе-
рой, через фильтр 5 с тканью ФПП. Наличие сигналов на вхо-
дах и выходах струйного устройства регистрируется индикато-
ром 4 пневматических сигналов низкого давления. Замкнутость
контура обеспечивается включением источника питания 7 и
фильтра 8 с тканью ФПП. Источником питания 7 может слу-
жить описанный выше блок, построенный на основе пылесоса
«Уралец». Фильтр 3, источник 7 соединены между собой и с
герметичным корпусом 1 воздушным шлангом 6.
Глава II
ЭЛЕМЕНТЫ ПНЕВМОАВТОМАТИКИ
Любая система пневмоавтоматики состоит из простейших
ячеек, которые принято называть элементами. Выпускаемые
в настоящее время промышленностью пневматические приборы
и системы управления состоят из проточных элементов — пнев-
матических сопротивлений, сопел (насадок), емкостей, комму-
никационных каналов, упругих элементов — мембран, сильфо-
нов, распределительных элементов — управляющих золотников,
струйных трубок и т. д. Само понятие «элемент» довольно ус-
ловно. В более сложных устройствах под элементом понимают
целый узел, выполняющий какую-либо законченную операцию.
Например, в электротехнике наряду с широко известными
простейшими элементами, такими, как резистор, конденсатор,
катушка индуктивности и др., в более сложном устройстве —
моделирующей установке элементом может быть решающий
усилитель, содержащий некоторое число ламп, транзисторов,
резисторов, конденсаторов и т. д. Часто термин «элемент»
употребляют в функциональном смысле независимо от вида
аппаратуры и энергии, например, как это имеет место для дис-
кретных и аналоговых элементов автоматики. Функциональные
элементы состоят из простых конструктивных элементов. Так,
пневматическое реле ,УСЭППА включает три мембраны и два
переменных дросселя, а струйный элемент аналогичного
функционального назначения имеет четыре сопла и систему
каналов.
В настоящей главе рассмотрены лишь простейшие кон-
структивные элементы пневматических устройств. Функцио-
нальные пневматические элементы будут рассмотрены в после-
дующих главах.
1. ПНЕВМАТИЧЕСКИЕ СОПРОТИВЛЕНИЯ (ДРОССЕЛИ)
Пневматические дроссели являются одним из основных
конструктивных элементов пневматических устройств и служат
для создания сопротивления течению газа и перепада давлений.
Подводимый ко входу пневматического сопротивления газ,
протекая через него, создает определенный перепад давлений,
24
подобно тому, как электрический ток, проходя через резистор,
создает падение напряжения.
В любом пневматическом сопротивлении полный перепад
давления равен сумме падений давления на отдельных участках
течения. Потери давления учитывают коэффициентом сопро-
тивления
£ = £вх + Сгр + £вых, (1)
где £вх, £вых И £тр — коэффициенты сопротивления, характери-
зующие соответственно потери на входе, на выходе и на трение
при течении газа по каналу дросселя. Суммарные потери давле-
ния на дросселе в самом общем случае пропорциональны квад-
рату скорости
t ра2
2 ’
где v — средняя скорость воздуха после сопротивления; р —
плотность воздуха. В частности, для трубы
/*
^тр = хТ’
где X— коэффициент трения; I и d — длина и диаметр. Коэффи-
циент трения X можно определить, например, по графику
Никурадзе.
Полный перепад давления в цепочке последовательно сое-
диненных дросселей можно рассчитать, если известны скорости
течения для отдельных участков цепи. Скорости течения ме-
няются по направлению течения. Если перепад давлений неве-
лик и числа М потока малы !, то можно вести расчеты процесса
дросселирования газа, в том числе и воздуха, пользуясь форму-
лами, выведенными для несжимаемой жидкости. Для опреде-
ленных типов дросселей характерны специфические законы
распределения скоростей и зависимости между скоростями,
расходами и перепадами давлений. Наиболее важной харак-
теристикой пневматического сопротивления является его рас-
ходная характеристика. Под расходной характеристикой пони-
мают зависимость расхода газа через дроссель . от перепада
давлений на дросселе (разности давлений до и после дросселя).
Пневматические сопротивления различают по следующим
признакам: по конструкции и назначению, характеру течения
воздуха, виду расходной характеристики.
* Потери по длине и местные потери зависят от геометрии дросселя и
режима течения и учитываются коэффициентом трения Л и местных потерь £.
v
1 Число М -------критерий подобия, выражающийся как отношение ско-
а
рости потока к скорости звука в том же месте.
25
По назначению дроссели делят на постоянные, регулируе-
мые и переменные. В постоянных дросселях пневматическое
сопротивление не изменяется в процессе работы пневматиче-
ского устройства. Сопротивление регулируемых дросселей мо-
жет быть установлено любым в определенных пределах,
обусловленных конструкцией дросселя и проходными сече-
ниями.
Настройка осуществляется вручную. Сопротивление пере-
менных дросселей изменяется в процессе работы пневматиче-
ского устройства.
По характеру течения газа в каналах дросселей их делят на
ламинарные и турбулентные. Турбулентные дроссели характери-
зуются малыми отношениями длины I канала дросселя к его
диаметру d и турбулентным режимом течения газа. Обычно
в турбулентных дросселях Z/d 10. Так как канал имеет малую
длину, а скорость течения велика, то протекающий по дросселю
газ не успевает обменяться теплом со стенками канала, и термо-
динамический процесс в дросселях такого типа можно считать
адиабатическим. Течение газа в турбулентных дросселях может
происходить как с дозвуковыми, так и со звуковыми скоростями
(соответственно различают докритический и надкритический ре-
жимы течения). Если не принимаются специальные меры (напри-
мер, расширяющиеся насадки), то скорости течения в каналах
с турбулентными дросселями в их выходных сечениях не могут
превысить скорости звука. Режим истечения через турбулент-
ный дроссель определяется величиной отношения давлений
и р2 до и после него. Отношение давлений, при котором проис-
ходит переход от дозвуковой скорости к звуковой, называется
критическим и обозначается (рг/р1)кр. Перепад давления, а
следовательно, и основные потери в турбулентных дросселях
обусловлены сжатием потока на входе в дроссель и расширени-
ем на выходе из него. Потери давления на трение (по длине
дросселя) малы и ими обычно пренебрегают.
В ламинарных дросселях отношение длины дросселя к его
условному диаметру велико (Z/dr^lO). В узких • и длин-
ных каналах формируется ламинарное течение газа. Ре-
жим течения в ламинарных дросселях может быть только докри-
тическим.
Возникновение критических режимов течения возможно
только лишь при высоких скоростях турбулентного потока. Так
как длина каналов ламинарных дросселей велика, при течении
воздух успевает обменяться теплом со стенками канала. Поэтому
обычно принимают, что термодинамический процесс изменения
состояния газа в дросселе является изотермическим. Потери дав-
ления в ламинарных дросселях происходят за счет сил вязкого
трения, распределенных по длине. Местные сопротивления на
входе в дроссель и на выходе из него весьма малы по сравнению
с потерями по длине, поэтому ими часто пренебрегают.
26
В зависимости от величины рабочих давлений и температуры
газа до и после дросселя, а у переменного дросселя также и
степени его открытия один и тот же дроссель может работать
как турбулентный или как ламинарный. Характер течения газа
в дросселе определяется условиями работы. В цилиндрическом
капилляре переход от ламинарного режима течения к турбулент-
ному происходит при критическом числе Рейнольдса Re = 2300 *,
при Re > 2300 поток турбулентный, при Re < 2300 — ламинар-
*)
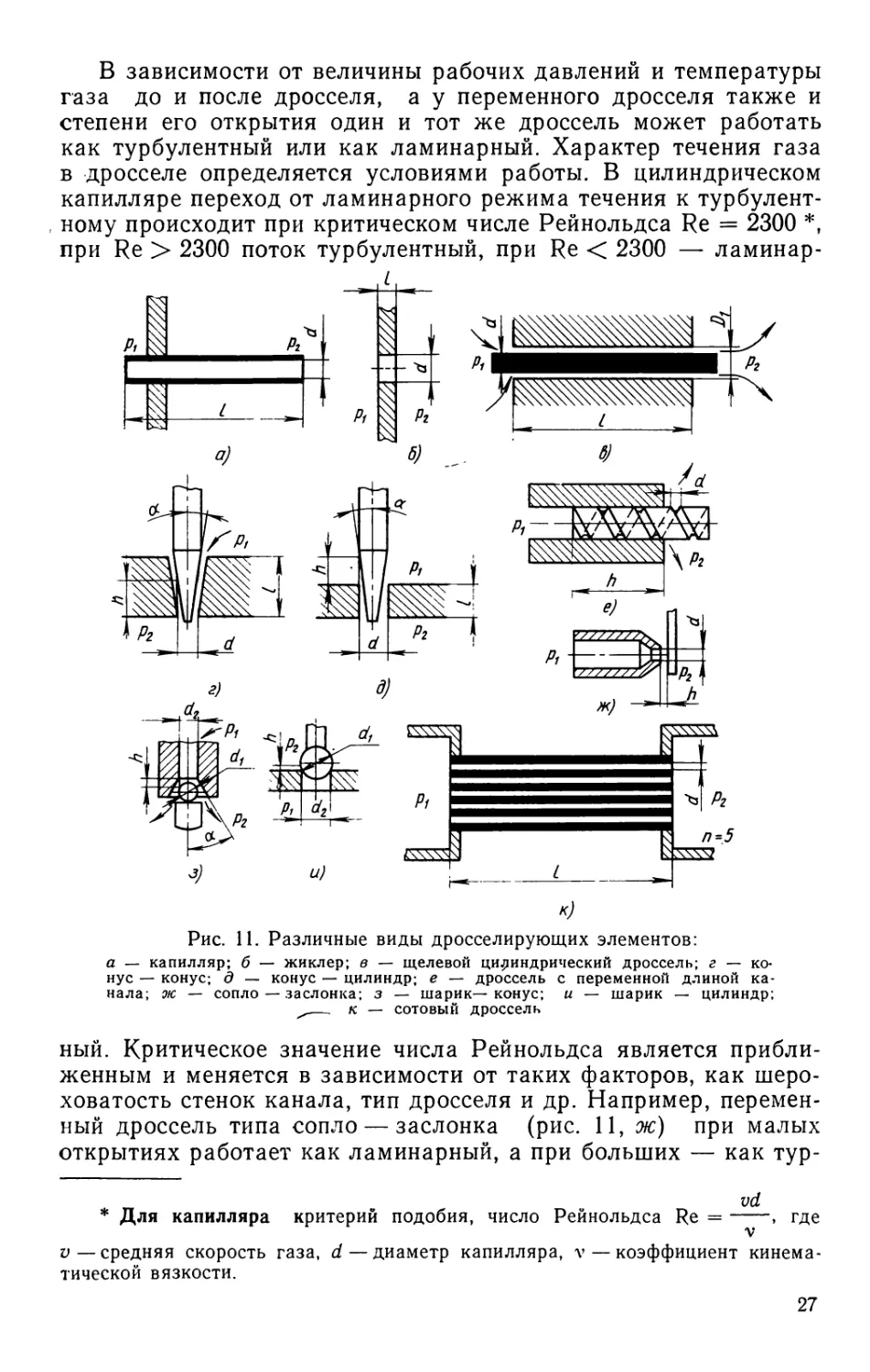
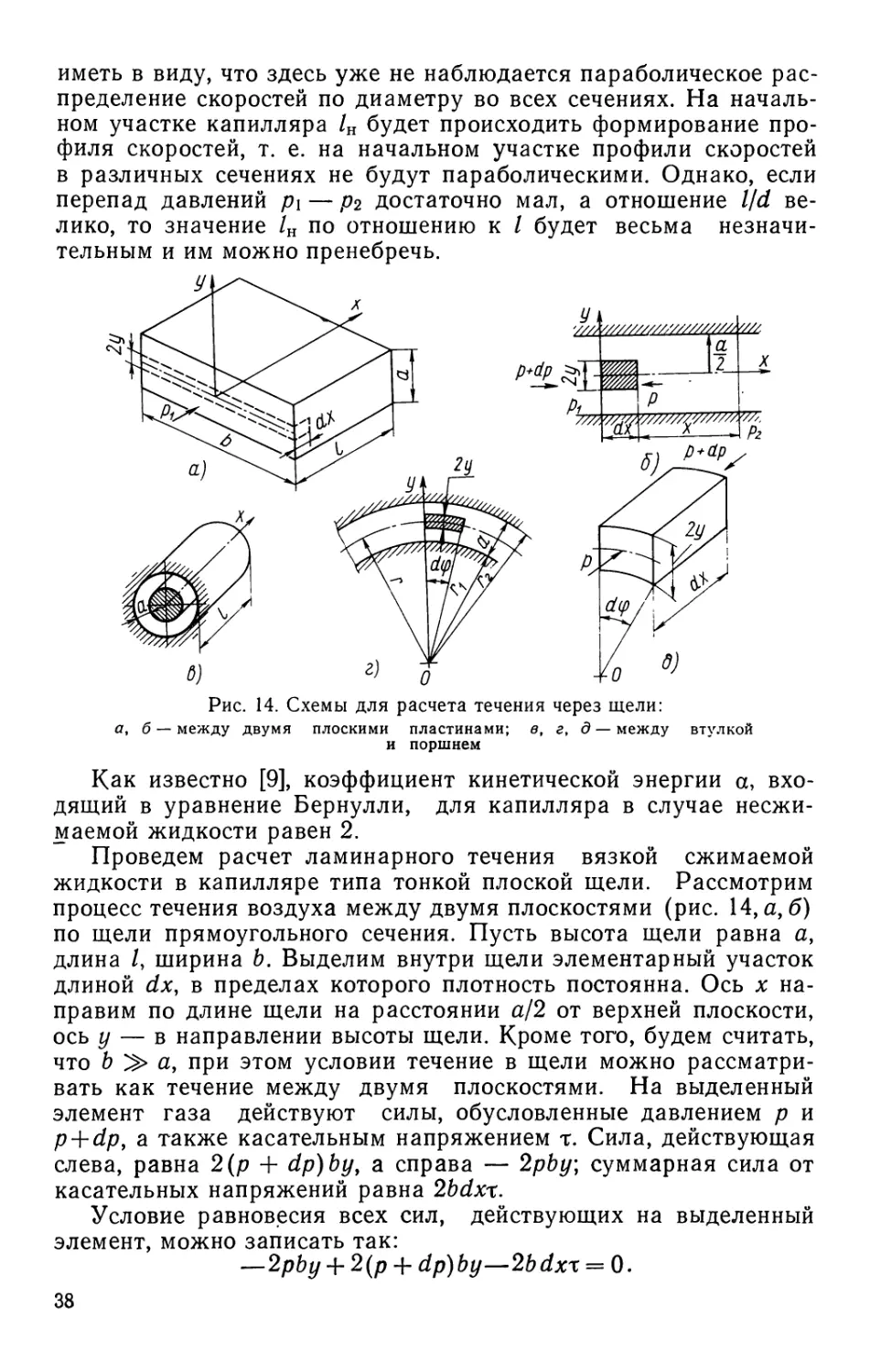
Рис. 11. Различные виды дросселирующих элементов:
а — капилляр; б — жиклер; в — щелевой цилиндрический дроссель; г — ко-
нус — конус; д — конус — цилиндр; е — дроссель с переменной длиной ка-
нала; ж — сопло — заслонка; з — шарик—конус; и — шарик — цилиндр;
___к — сотовый дроссель
ный. Критическое значение числа Рейнольдса является прибли-
женным и меняется в зависимости от таких факторов, как шеро-
ховатость стенок канала, тип дросселя и др. Например, перемен-
ный дроссель типа сопло — заслонка (рис. 11, ж) при малых
открытиях работает как ламинарный, а при больших — как тур-
* Для капилляра критерий подобия, число Рейнольдса Re =-------, где
v
v—средняя скорость газа, d — диаметр капилляра, v — коэффициент кинема-
тической вязкости.
27
булентный. Поэтому подразделение дросселей на турбулентные
и ламинарные весьма условно. Однако следует иметь в виду, что
турбулентные и ламинарные дроссели отличаются способом из-
менения сопротивления. Сопротивление, а следовательно, и пере-
пад давлений турбулентных дросселей изменяется обычно за
счет изменения проходного сечения, а у ламинарных — за счет
изменения длины канала дросселя.
По виду расходной характеристики дроссели делят на линей-
ные и нелинейные. В линейных дросселях зависимость массового
расхода газа от перепада давлений на дросселе линейна, т. е.
G = a(p{ — р2),
где а — проводимость дросселя.
В нелинейных дросселях расход газа нелинейно зависит от
перепада давлений на дросселе, и часто эта зависимость имеет
следующий вид:
G = 0/pi—р2,
где р — постоянный коэффициент.
При расчете расхода газа через турбулентные дроссели необ-
ходимо учитывать потери в результате сжатия потока на входе
в канал дросселя и расширения его при выходе из дросселя, ха-
рактеризуемые коэффициентом расхода ц. В общем случае коэф-
фициент расхода ц представляет собой сложную функцию гео-
метрических параметров дросселя и критериев подобия — чисел
Re и М. В общем виде коэффициент расхода можно представить
как отношение действительного расхода Сд к теоретическо-
му 1 GT:
При проведении исследований и практических расчетов коэф-
фициент расхода определяют экспериментально. Для ряда слу-
чаев истечения коэффициент расхода можно определить анали-
тически.
Известно, что [9] коэффициент расхода при истечении жидко-
сти из отверстия в тонкой стенке определяется так: ц = хф, где
х — коэффициент сжатия струи 2; ф — коэффициент скорости.
При одних и тех же условиях истечения коэффициент [8] сжа-
тия струи несжимаемой жидкости будет меньше, чем сжимаемой.
Пневматические сопротивления различных типов представле-
ны на рис. 11. К постоянным дросселям относятся капилляр,
жиклер, щелевой цилиндрический дроссель (рис. 11, а, б, в),
1 Под теоретическим понимается расчетный расход при ц = 1.
F' в
2 Коэффициент сжатия струи х = — представляет собой отношение
г
площади наиболее узкой части струи к площади отверстия.
28
к регулируемым — дроссели конус — конус, конус — цилиндр
и дроссель с переменной длиной канала (рис. 11, г, д, е), а к
переменным — дроссели сопло — заслонка, шарик — конус, ша-
рик — цилиндр (рис. 11, ж, з, и).
К турбулентным дросселям можно отнести дроссели сопло —
заслонка, конус — цилиндр, шарик — конус, жиклер, шарик —
цилиндр. К ламинарным дросселям относятся дроссели конус —
конус, капилляр, дроссель с переменной длиной канала и щеле-
вой дроссель. Если требуется обеспечить большой расход при
ламинарном течении, то применяют сотовый дроссель (рис. 11,к).
Сотовый дроссель состоит из нескольких капилляров, включен-
ных параллельно. Расход через такой дроссель равен сумме рас-
ходов через отдельные капилляры.
В конструкции регулируемых дросселей предусмотрена ручка
настройки, с помощью которой в турбулентных дросселях для
изменения сопротивления меняют площадь проходного сечения,
а в ламинарных дросселях — длину канала дросселя. Последнее
обстоятельство объясняется необходимостью получения хорошей
повторяемости характеристики и обеспечения плавности регули-
рования и связано с тем, что расход через ламинарный дроссель
пропорционален четвертой степени диаметра и обратно пропор-
ционален длине, а расход через турбулентный дроссель пропор-
ционален площади сечения. Примером конструкции дросселя
с переменной длиной канала может служить регулируемый дрос-
сель, на поверхности плунжера которого проточена спиральная
канавка (рис. 11, е). При повороте ручки настройки смещается
плунжер относительного цилиндрического корпуса, а следова-
тельно, меняется рабочая длина канала, определяющая величину
сопротивления.
Рассмотрим методы расчета и основные расчетные зависимо-
сти пневматических сопротивлений. Пневматические сопротивле-
ния различных типов отличаются характером течения потока
в каналах и в местах входа в сопротивление и выхода из него.
Поэтому каждому конкретному случаю течения и типу дросселя
будут соответствовать отличные от других расчетные формулы.
Пневматическое сопротивление типа жиклер. Жиклер пред-
ставляет собой пневматическое сопротивление, выполненное
в виде цилиндрического отверстия в стенке (рис. 11, б), у кото-
рого отношение l/d мало (l/d ^2ч-3), т. е. по величине этого
отношения жиклер находится между отверстием в тонкой стенке
(l/d = 0) и насадком (l/d = 2 н- 3).
Характер течения в дросселях такого вида турбулентный,
а термодинамический процесс принимают адиабатическим, так
как скорость течения газа велика, а длина канала соизмерима
с диаметром отверстия и теплообмен между газом и стенками
практически не происходит.'
Предположим, что газ вытекает из резервуара большой
емкости через отверстие с тонкими стенками. Размеры резервуа-
29
ра настолько велики, что скоростью газа перед отверстием
можно пренебречь, т. е. ^1=0. В этом случае уравнение Бернул-
ли для газа имеет вид
2 2
V2 + k / р2 Р1 \ = £ V2
2 k—1 \ р2 Pi / 2
А Ср
где k = —
cv
показатель адиабаты, для воздуха k = 1,4; ср и
Су — теплоемкости соответственно при постоянном давлении и
объеме, pi и р2 — плотности воздуха на входе в пневматическое
сопротивление и на выходе из него соответственно; £— коэффи-
циент местного сопротивления; и2 — скорость после дросселя.
Найдем выражения для скорости и расхода. Для этого решим
последнее уравнение относительно v2:
Учитывая известное выражение для адиабатического про-
цесса
/ 1 / _i_\
Pi = ( n k k I Р2,
\Р1 / Р2 J
а также уравнение состояния газа р\ = p\RT\ и подставляя их
в выражение для и2, получим
1>2 = <р1/
f К— 1
k—\
(_Р2_\ k
\ Pl /
где ф = -р===-----коэффициент скорости; R — газовая посто-
ну
янная (для воздуха R = 287,14 ----- ); Т\— абсолютная тем-
кг-К
пература воздуха до отверстия в градусах Кельвина.
Таким образом, находим, что массовый расход газа G =
= V2P2F (где р2 — плотность воздуха после отверстия; F — пло-
щадь проходного сечения отверстия) может быть рассчитан по»
следующей формуле для докритического режима:
0 = ^^! у
2 k
k-\
-^->0,528. (2>
Pi
Если постепенно уменьшать давление р2 после дросселя, ос-
тавляя постоянным давление р\ до него, то массовый расход G
воздуха вначале будет возрастать, а затем после достижения:
30
некоторого значения, называемого критическим, остается посто-
янным, сколько бы ни уменьшалось давление рг- Указанное яв-
ление объясняется тем, что некоторому критическому значению
давлений 0кр = (рг/рОкр на выходе дросселя соответствует кри-
тическая скорость, равная скорости звука и являющаяся макси-
мальной при данных условиях.
Для получения потока, имеющего скорость, большую, чем
скорость звука, необходимо применять специальные средства, на-
пример различного типа сопла (геометрическое, тепловое, меха-
ническое и т. д.). В практике получения сверхзвуковых скоростей
большое распространение получило сопло Лаваля. Течение газа
со сверхзвуковыми скоростями рассматривается в специальных
разделах газовой динамики, и эти вопросы в настоящей книге не
освещены. Заметим, что возмущения в воздухе распространяют-
ся со скоростью звука. Со скоростью звука будет распростра-
няться и волна разрежения, возникающая, например, от вакуум-
насоса, откачивающего воздух из пространства после дросселя.
Однако при надкритическом истечении возникающая на срезе
сопла звуковая скорость истечения не позволит возмущению из-
вне проникнуть внутрь сосуда, из которого происходит истечение,
и в какой-либо мере повлиять на режим самого течения. Как
следует из выражения (2), зависимость безразмерного расхода
G/GKp от отношения давлений pdp\ при изменении давления р?
после дросселя и постоянном р\ представляет собой параболу,
левая ветвь которой не отвечает физике явления. Следует отме-
тить, что увеличение давления р\ перед дросселем ведет к возра-
станию расхода и при установлении звуковой скорости на срезе
дросселя. В этом случае звуковая скорость не мешает проникно-
вению возмущений к отверстию, из которого происходит истече-
ние воздуха.
Формула для надкритического истечения получается из фор-
мулы (2) путем подстановки значения 0кр. Для нахождения 0Кр
продифференцируем по 0 = рг/pi выражение, стоящее в квадрат-
ных скобках формулы (2), и приравняем результат нулю. Зна-
чение коэффициента расхода ц принимается постоянным. Тогда
получим
2-k 1
— р k —*+Lp* =o.
k k
Решая последнее уравнение относительно 0, находим зна-
чение
k
о _ / Р2 \ _ / 2 \ *-1 .
Ркр ~ — г, . 1 J ’
\ Р1 / кр \ £ + 1 /
при котором расход достигает максимального значения GKp.
Подставляя в последнее выражение значение k = 1,4, нахо-
дим, что для воздуха |0кр = 0,528.
31
Формула для расчета надкритического истечения газа полу-
чается из формулы (2) путем подстановки вместо ръ!р\ отноше-
ния (р2/р1)кр и имеет вид
G = pFp1l// —---------—
Г У /г+1
2
k-
Pi
Выражения (2) и (3) носят название формул
Ванцеля.
Из рассмотрения последней формулы следует,
при надкритическом истечении зависит от давления
селем р\ и не зависит от давления после дросселя р2.
(3)
Сен-Венана
что расход
перед дрос-
Аналогично находят формулы для расчета расхода воздуха
и для других термодинамических процессов: изотермического,
изобарического и т. д. Следует заметить, что значения (3Кр для
различных процессов различны.
При расчете и проектировании систем пневмоавтоматики для
нахождения массового расхода воздуха через дроссели при тур-
булентном режиме течения часто применяют более простые фор-
мулы. А именно, для докритического истечения, когда pdpx
> 0,5,
а для надкритического истечения, когда p2/pi 0,5,
o-M'FA]/^r (5)
Покажем, что критическое отношение давлений для формул
(4) и (5) равно 0,5. Действительно, продифференцируем выра-
жение, стоящее в квадратных скобках формулы (4), по р = —
Pi
и результат приравняем нулю, тогда получим 1—2(p2/pi)i:p = 0.
Отсюда находим, что рКр = (рг/рОкр = 0,5. Приведенные фор-
мулы (4) и (5) довольно точно аппроксимируют точные форму-
лы (2) и (3). Максимальная относительная погрешность при
расчете расходов воздуха по приближенным формулам не пре-
вышает 3,4%.
И, наконец, при малых перепадах давлений на дросселе, ког-
да можно пренебречь изменением плотности, можно вести рас-
чет расхода по формулам гидравлики, справедливым для тече-
ния несжимаемой жидкости:
G = p-F/2р Ур^—р2.
32
При расчетах расхода газа через жиклер важное значение
имеет определение коэффициента расхода ц. Коэффициент рас-
хода для жиклеров со скругленной входной кромкой, с фаской
на входе в канал и для ряда других жиклеров находят по фор-
муле
где £вх — коэффициент сопротивления на входе, зависящий от
условий входа потока в жиклер.
Потери на выходе автоматически учитываются тем, что в рас-
четные формулы подставляют давление той среды, в которую
происходит истечение, а не давление в самом узком сечении
струи на выходе ее из дросселя.
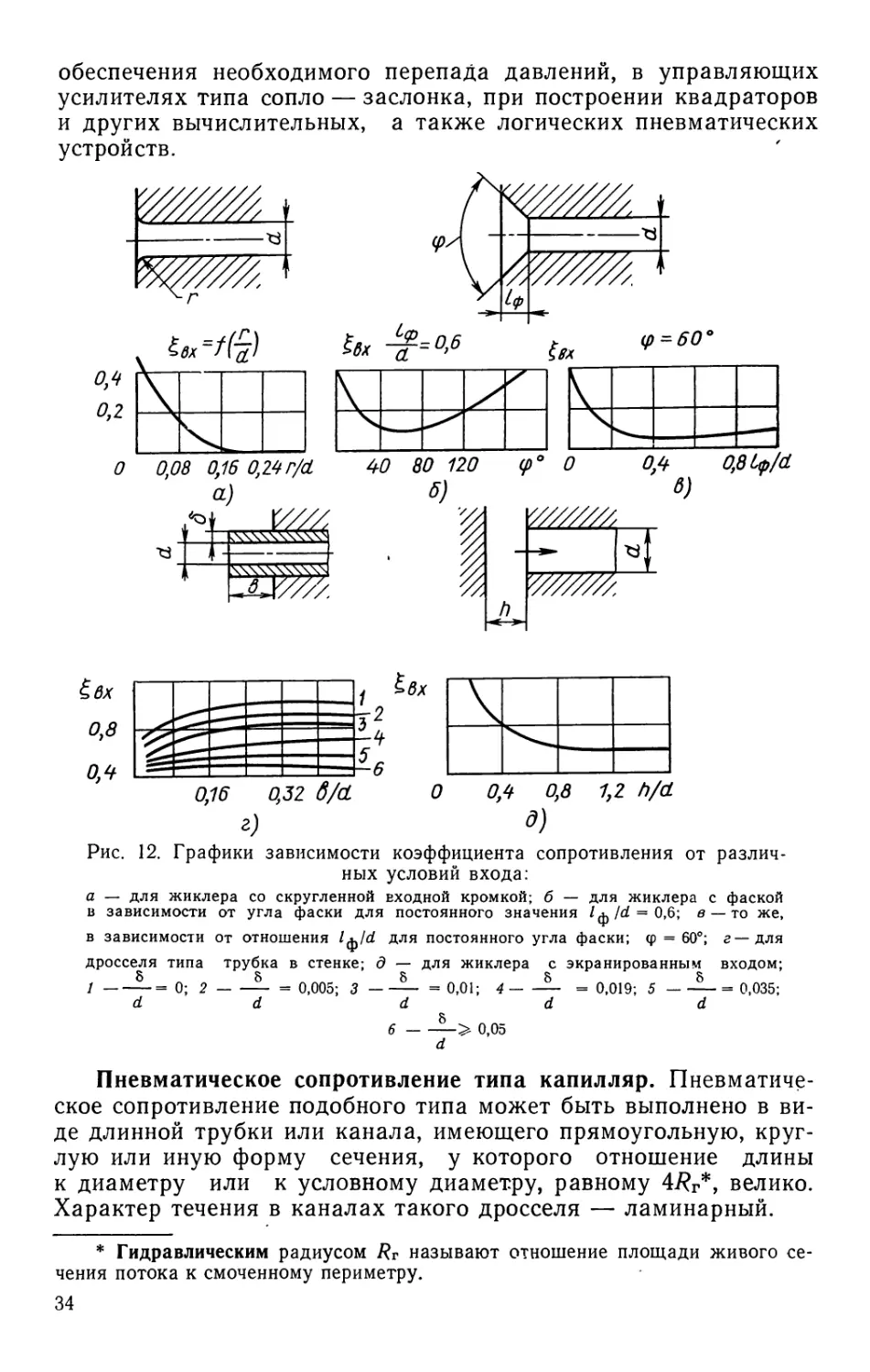
Коэффициент U зависит от типа жиклера. Эксперименталь-
ные графики зависимости коэффициента сопротивления £вх от
различных условий входа потока в жиклер представлены на
рис. 12 [24]. Приведенные графики сняты для дросселей, имею-
щих подводящий канал, площадь которого FQ значительно боль-
ше площади проходного сечения дросселя F. Если Fo соизмери-
ма с F, то значение £вх, полученное по графикам, следует умно-
жить на величину (1—F/Fo). Из рассмотрения приведенных
экспериментальных характеристик можно сделать следующие
выводы. При достаточно большом радиусе г скругления кромки
коэффициент сопротивления на входе уменьшается практически
до нуля (рис. 12, а). В довольно широких пределах коэффици-
ент сопротивления можно изменять путем подбора угла фаски <р
и ее глубины /ф (рис. 12, б, в). Коэффициент сопротивления жик-
лера зависит также от отношения толщины стенки к диаметру,
отношения расстояния 'от торца трубки до стенки к диаметру
(рис. 12, г) и от отношения расстояния до экрана (стенки) от
торца отверстия к диаметру (рис. 12, д).
Для отверстия в тонкой стенке коэффициент расхода можно
определить по формуле ц = 0,8х, где х — коэффициент сжатия
(сужения) струи, о котором шла речь ранее.
Значения коэффициента х [24], учитывающего уменьшение
расхода в связи с изменением профиля скоростей на выходе из
отверстия, для воздуха при отношениях рг/pi = 0,676 ч- 0,529
были получены С. А. Чаплыгиным и при отношениях рг/pi =
= 0,037 — Ф. И. Франклем.
Как было показано ранее, в жиклерах имеет место турбу-
лентный режим течения при числах Рейнольдса Re 2300. Од-
нако при очень малых диаметрах каналов и при малых значени-
ях перепада может существовать и ламинарное течение, что
соответствует уже ламинарному дросселю.
Жиклеры получили широкое распространение в системах
пневмоавтоматики и применяются как постоянные дроссели для
3 Заказ 993 33
обеспечения необходимого перепада давлений, в управляющих
усилителях типа сопло — заслонка, при построении квадраторов
и других вычислительных, а также логических пневматических
устройств.
Рис. 12. Графики зависимости коэффициента сопротивления от различ-
ных условий входа:
а — для жиклера со скругленной входной кромкой; б — для жиклера с фаской
в зависимости от угла фаски для постоянного значения /ф/й{ = 0,6; в — то же,
в зависимости от отношения l^ld для постоянного угла фаски; ср = 60°; г—для
дросселя типа трубка в стенке; д — для жиклера с экранированным входом;
1-------- 0; 2 -----— = 0,005; 3-----— = 0,01; 4------— = 0,019; 5 -----— = 0,035;
d d d d d
6-----0,05
d
Пневматическое сопротивление типа капилляр. Пневматиче-
ское сопротивление подобного типа может быть выполнено в ви-
де длинной трубки или канала, имеющего прямоугольную, круг-
лую или иную форму сечения, у которого отношение длины
к диаметру или к условному диаметру, равному 4/?г*, велико.
Характер течения в каналах такого дросселя — ламинарный.
* Гидравлическим радиусом 7?г называют отношение площади живого се-
чения потока к смоченному периметру.
34
Если перепад давлений на дросселе рассматриваемого типа
изменяется незначительно по сравнению с абсолютными их зна-
чениями, то течение газа можно рассматривать как течение не-
сжимаемой жидкости (р = const). В этом случае расход воздуха
зависит линейно от перепада давлений, а именно:
G = a(pi— р2),
где a — проводимость дросселя (величина, обратная сопротив-
лению) .
Свойство линейности характеристик ламинарных дросселей
используется для построения многих управляющих устройств
пневмоавтоматики. Поэтому, хотя в общем случае и надо учи-
тывать коэффициенты сопротивления на входе в капилляр и на
выходе из него, можно приблизительно (при р = const) считать,
что коэффициент сопротивления
^тр = XZ/tZ.
По длине капилляра в процессе течения газа формируется
параболический профиль скоростей. Участок, на котором проис-
ходит формирование профиля скоростей, называется начальным.
Длина /н начального участка ламинарного течения зависит от
диаметра капилляра d и числа Рейнольдса и определяется для
капилляра круглого сечения по формуле /н = 0,029dRe.
Поскольку капилляр имеет постоянную температуру 71, про-
цесс течения газа по капилляру можно считать изотермическим.
Будем считать, что параболический профиль скоростей сформи-
рован. При течении несжимаемой жидкости (р = const) парабо-
лический профиль будет оставаться одинаковым во всех сечени:
ях. В случае течения газа, когда р = var, параболический про-
филь скоростей меняется от сечения к сечению.
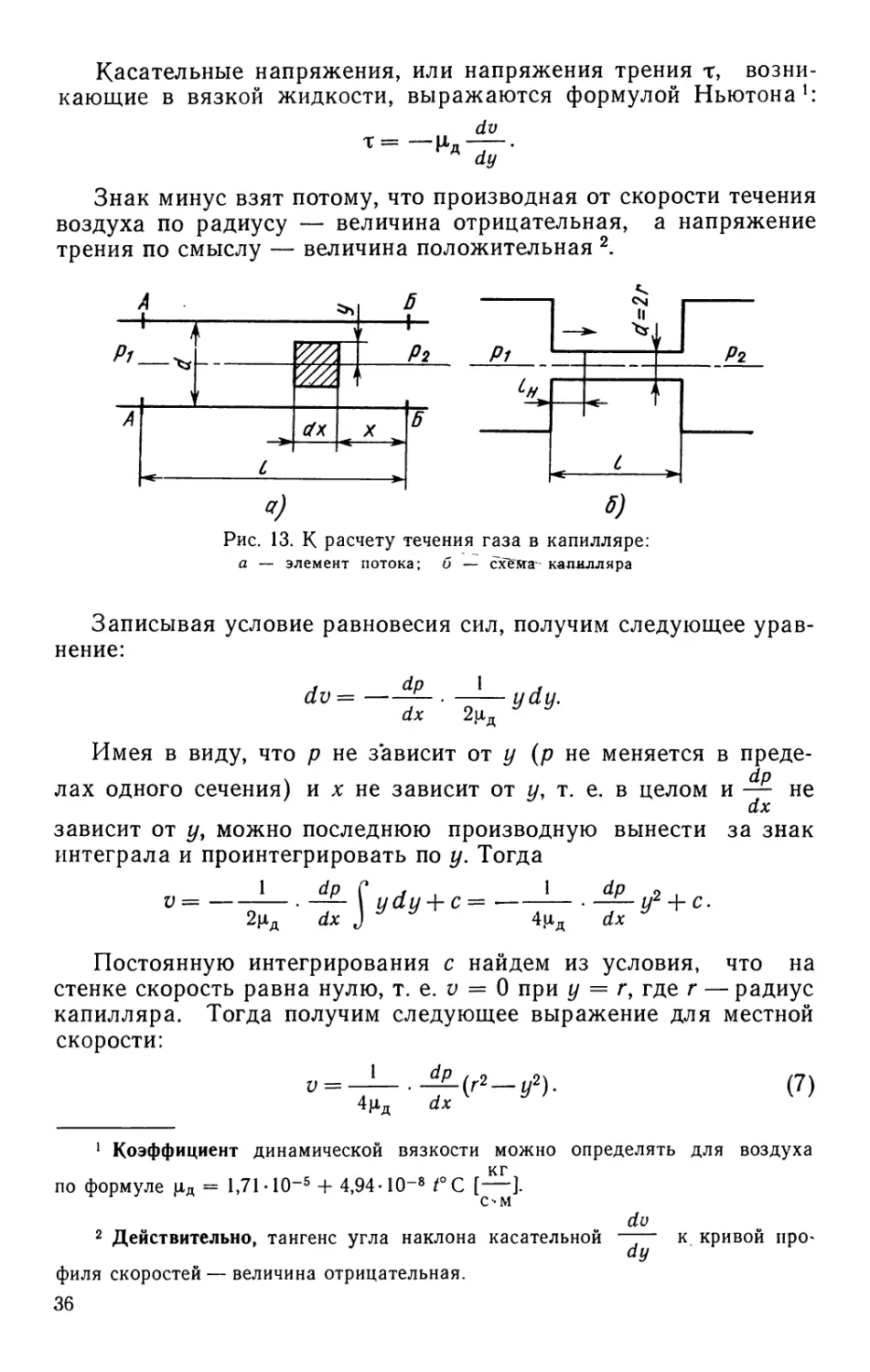
Рассмотрим установившийся процесс течения газа в капилля-
ре круглого сечения между плоскостями АА и ББ (рис. 13). Так
как воздух является сжимаемой средой, его плотность по длине
капилляра I меняется от одного сечения к другому. Выделим
внутри капилляра соосный с ним элементарный цилиндри-
ческий участок канала длиной dx, отстоящий от сечения ББ на
расстоянии %, внутри которого плотность можно считать посто-
янной.
Составим условие равновесия всех сил, действующих на вы-
деленный элементарный цилиндрический участок струйки возду-
ха длиной dx и радиусом у.
Сила гидродинамического давления, действующая на
торцовые поверхности элементарного цилиндра при разно-
сти давлений dp, направлена вдоль оси капилляра й равна
ny2dp.
Сила трения, возникающая на боковой поверхности элемен-
тарного цилиндра при его движении, равна величине 2jiz/rdx.
3* 35
Касательные напряжения, или напряжения трения т, возни-
кающие в вязкой жидкости, выражаются формулой Ньютона1:
Знак минус взят потому, что производная от скорости течения
воздуха по радиусу — величина отрицательная, а напряжение
трения по смыслу — величина положительная 2.
«2 5)
Рис. 13. К расчету течения газа в капилляре:
а — элемент потока; б — схема капилляра
Записывая условие равновесия сил, получим следующее урав-
нение:
dv=-^-
dx
~—У^У-
2цд
Имея в виду, что р не зависит от у (р не меняется в преде-
лах одного сечения) и х не зависит от у, т. е. в целом и — не
dx
зависит от у, можно последнюю производную вынести за знак
интеграла и проинтегрировать по у. Тогда
1
v =----------
Ид
1 dp 9 ,
-----• ——у2 + с.
4,ид-dx
Постоянную интегрирования с найдем из условия, что на
стенке скорость равна нулю, т. е. v = 0 при у = г, где г — радиус
капилляра. Тогда получим следующее выражение для местной
скорости:
У = ^_.^(г2-у2). (7)
4цд dx
1 Коэффициент динамической вязкости можно определять для воздуха
кг
по формуле цд = 1,71 -10-5 4- 4,94• 10-8 /°C [—].
с •• м
du
2 Действительно, тангенс угла наклона касательной ~~— к кривой про*
dy
филя скоростей — величина отрицательная.
36
Если по капилляру течет несжимаемая жидкость, то профиль
скоростей будет оставаться постоянным во всех сечениях, и, сле-
довательно, v не будет зависеть от х. Тогда можно проинтегри-
ровать уравнение (7) второй раз:
{ р\
v ( dx = —^—(r2—y2) I dp
J 4цд J
о Рг
и окончательно
u = PlZl^(r2_y2).
4цд/
Подсчитаем объемный расход
г
Q = 2л ( vydy = -^- —л г4.
J dx 811.
о
Для несжимаемой жидкости Q = const, и полученное уравне-
ние для этого случая можно проинтегрировать еще раз и полу-
чить окончательное выражение для объемного расхода
i Р\
Qtdx=^-r^dp и Q = .
J 8цд J 8цд/
о р2
Найдем выражение для массового расхода G воздуха с уче-
том его сжимаемости. В пределах элементарного участка струи
dx плотность постоянна. Однако на протяжении всей длины I
капилляра от сечения к сечению плотность, в силу сжимаемо-
сти воздуха, является переменной величиной. Находя из уравне-
ния состояния значение р и подставляя в формулу для массового
расхода, получим следующее выражение:
G = Qp = -^.^.-^rS (8)
dx RT 8цд
откуда после интегрирования
G=- -(pi — pi), (9)
256цд/РГ '
где- d = 2r.
Уравнения (8) и (9) называются формулами Пуазейля для
сжимаемой вязкой жидкости.
При выводе формул предполагалось, что профиль скоростей
параболический. Это предположение оправдано тем, что участок,
ограниченный сечениями АА и ББ, был выбран за пределами
начального участка. При расчете расхода воздуха через капил-
ляр, включенный по схеме, показанной на рис. 13, б, следует
37
иметь в виду, что здесь уже не наблюдается параболическое рас-
пределение скоростей по диаметру во всех сечениях. На началь-
ном участке капилляра /н будет происходить формирование про-
филя скоростей, т. е. на начальном участке профили скоростей
в различных сечениях не будут параболическими. Однако, если
перепад давлений р\ — р2 достаточно мал, а отношение l/d ве-
лико, то значение /н по отношению к I будет весьма незначи-
тельным и им можно пренебречь.
Рис. 14. Схемы для расчета течения через щели:
а, б — между двумя плоскими пластинами; в, г, б — между втулкой
и поршнем
Как известно [9], коэффициент кинетической энергии а, вхо-
дящий в уравнение Бернулли, для капилляра в случае несжи-
маемой жидкости равен 2.
Проведем расчет ламинарного течения вязкой сжимаемой
жидкости в капилляре типа тонкой плоской щели. Рассмотрим
процесс течения воздуха между двумя плоскостями (рис. 14, а, б)
по щели прямоугольного сечения. Пусть высота щели равна а,
длина /, ширина Ь. Выделим внутри щели элементарный участок
длиной dx, в пределах которого плотность постоянна. Ось х на-
правим по длине щели на расстоянии а/2 от верхней плоскости,
ось у — в направлении высоты щели. Кроме того, будем считать,
что b а, при этом условии течение в щели можно рассматри-
вать как течение между двумя плоскостями. На выделенный
элемент газа действуют силы, обусловленные давлением р и
p + dp, а также касательным напряжением т. Сила, действующая
слева, равна 2(р + dp)by, а справа — %pby\ суммарная сила от
касательных напряжений равна 2bdxx.
Условие равновесия всех сил, действующих на выделенный
элемент, можно записать так:
—2pby + 2(р + dp)by—2bdxx = 0.
38
Раскрывая скобки и приводя подобные члены, получим
dpy = xdx, откуда следует, что т = у-^ . Вместе с тем, учитывая,
что на основании закона вязкого трения Ньютона т = —рд—, и
dy
приравнивая правые части в выражениях для касательных на-
пряжений, найдем, что
dp
У~-
dx
Так как производная —
dx
может быть вынесена за знак
1
и -------
М'д
не зависит от у и, следовательно,
интеграла, получим
dx 2
Постоянную интегрирования с находят из следующих гранич-
ных условий: при у = а/2, v = 0. Определив постоянную интегри-
рования для профиля скоростей в щели, находим следующую
зависимость:
v = J____<*_. dP h ( 2У yi.
цд 8 dx L \ cl / J
Для несжимаемой жидкости последнее уравнение можно про-
интегрировать второй раз аналогично тому, как это было сдела-
но для расчета течения в круглом капилляре. Получим оконча-
тельное выражение для местной скорости
V=_L__?L. -<д?—Г1 . (Ю)
|1д 8 / |_ \ а / J
Найдем максимальную скорость течения несжимаемой жид-
кости в капилляре прямоугольного сечения. Скорость течения
будет максимальной, если член, стоящий в квадратных скобках
формулы (10), будет иметь максимальное значение, т. е. равен
единице, что соответствует у = 0. Поэтому
„ _ Д2(Р1~р2)
Заметим, что, так как b а, ширина щели b не входит в фор-
мулы для подсчета скорости.
Вычислим объемный расход несжимаемой жидкости, проте-
кающей через щель:
а
Т
Q = 2 J bvdy.
о
Подставив значения скорости v и выполнив интегрирование,
найдем
q = a3b(pi—p2)
12р,д/
39
Учитывая, что объемный расход равен произведению площади
сечения F = ab щели на среднюю скорость, можно записать
Q = _Vma2Lad=a6.
1,5 Р
откуда следует, что средняя скорость при течении несжимаемой
жидкости в щели
7. __ umax
ср- 1,5’
(И)
Определим массовый расход газа, протекающего через щель
прямоугольного сечения, с учетом его сжимаемости. На пррФяже-
нии длины I плотность воздуха в силу сжимаемости будет вели-
течения изотермическим и
чиной переменной. Считая процесс
Р
учитывая, что р =-, получим
RT
G=dp_p
dx RT
a3b
12цд
После интегрирования найдем
2_ 2).
24^1RT
Вычислим значение коэффициента кинетической энергии a
для случая течения несжимаемой жидкости по щели. Для этого
подставим выражения (10) и (11) в формулу искомого коэффи-
циента
f pv3 dF 2
а = 2---= -^4
a J
Выполняя интегрирование, окончательно найдем, что коэффи-
циент кинетической энергии для узкой щели а « 1,54.
Таким образом, величины коэффициентов кинетической энер-
гии для капилляра круглого сечения и капилляра типа щели
прямоугольного сечения не совпадают. Это объясняется тем, что
при течении газа в капилляре круглого сечения неравномерность
поля скоростей проявляется в большей степени.
В практике проектирования элементов пневмоавтоматики
(дросселей и т. п.) встречается еще один важный случай лами-
нарного течения газа — течение по кольцевому зазору
(рис. 14, в). Вывод формул течения газа по капилляру с коль-
цевым зазором аналогичен выводу формул для щели с той лишь
разницей, что за ширину принимается длина окружности сред-
него диаметра d = 2г (рис. 14, г). Выделим некоторый элемент
потока газа (рис. 14, д) с центральным углом dq и длиной dx.
40
Спроектировав все действующие на него силы на ось у и при-
равняв их нулю, получим
—2pyrdq + (р + dp)2yrdq— x(r + y)dq dx—т(г— y)dq*dx = 0.
Как и для случая течения вязкой жидкости в щели, найдем,,
что
цд 8 dx [ \ cl /
т. е. профили скоростей в этих двух случаях течения совпадают,,
поэтому выражения для средней и максимальной скоростей так-
же совпадают.
Осуществив вычисления, аналогичные тем, что были выпол-
нены для течения газа через плоскую прямоугольную щель, най-
дем следующие выражения для расходов через кольцевую щель,
для объемного расхода несжимаемой жидкости
С=-^7(Р1-р2), (12>
12цд/
соответственно для массового расхода сжимаемой жидкости
G = Q W (pl — pl), (13)
24цд/РГ
i d\ + d2 t
где d = -L— = rx + r2.
Пневматические сопротивления типа конус—цилиндр, ци-
линдр — цилиндр и конус — конус. Пневматические сопротивле-
ния 1 этих типов относят к щелевым цилиндрическим или кони-
ческим дросселям, поскольку перепад давлений формируется за
счет сопротивления узкой щели, образуемой между втулкой и
подвижными стержнем или иглой. При изменении положения
стержня в дросселе цилиндр — цилиндр меняется длина рабочей
части Z, а в дросселях конус — цилиндр и конус — конус меняет-
ся, кроме того, и величина радиального зазора д. Щелевые ци-
линдрические и конические дроссели применяют в качестве ре-
гулируемых дросселей, например, для настройки коэффициента
усиления проточной камеры, для изменения постоянной времени
глухой камеры, изменения сопротивления цепи обратной связи
в пневматических генераторах колебаний и т. п.
Характер течения в дросселях рассматриваемого типа может
быть как ламинарным, так и турбулентным. В большинстве слу-
чаев при малых щелевых зазорах в дросселях конус — конус и
цилиндр — цилиндр имеет место ламинарный режим течения.
Однако при больших открытиях режим течения будет турбулент-
ным. Переход от ламинарного режима к турбулентному проис-
1 Термины «пневматическое сопротивление» и «дроссель» — эквивалент-
ны. В литературе применяются оба эти термина.
41
ходит, когда число Re достигает своего критического значения.
Для щелевых дросселей обычно принимают ReKp = 1100.
Расход через дроссель конус — цилиндр можно определить
по формулам (2), (3) или (4), (5), принимая за расчетную пло-
щадь минимальную площадь F проходного сечения дросселя,
являющуюся боковой поверхностью усеченного конуса. Образу-
ющая этого конуса представляет собой перпендикуляр, опущен-
ный с кромки цилиндра на образующую конуса дросселя, т. е.
F = n(d — h sin a cos a)/zsin a,
где a — половина угла раствора конуса; h — xQjy конуса; d —
диаметр цилиндра.
Расход через дроссель цилиндр — цилиндр и дроссель ко-
нус— конус при малых а можно рассчитывать по формуле (13).
Если же дроссель цилиндр — цилиндр имеет небольшую относи-
тельную длину, то расчет ведут по формулам (2), (3) или (4),
(5). При этом за проходное сечение принимают площадь кольца.
Регулируемые дроссели указанных выше типов получили до-
вольно широкое распространение и являются одним из основных
видов пневматических сопротивлений. Однако следует отметить,
что стабильность и повторяемость такого пневматического со-
противления в большой степени определяются удачно выбранной
конструкцией и качеством его изготовления. Недостатком такого
дросселя является сильная зависимость его сопротивления от
взаимного расположения оси стержня или иглы и оси втулки и
его постоянства. Изменение сопротивления ведет к изменению
расхода через дроссель. Последнее обстоятельство особенно
сильно сказывается при перенастройке, когда бывает трудно по-
лучить достаточно хорошую повторяемость расходных характе-
ристик.
Сопротивление типа сопло — заслонка. Пневматическое со-
противление сопло — заслонка, имеющее сравнительно простую
конструкцию (рис. 15, а), широко используется в устройствах
пневмоавтоматики. Сопротивление состоит из сопла 1 и заслон-
ки 2. В результате перемещения заслонки относительно сопла
меняется воздушный зазор, а следовательно, и величина пнев-
мосопротивления. В дросселях рассматриваемого типа суммар-
ное сопротивление складывается из сопротивлений на входе
в щель, сопротивления, возникающего в результате поворота вы-
текающего из сопла воздуха на угол 90°, сопротивления при
течении в щели, образованной плоскостью заслонки и торцом
сопла, и потерь на выходе.
Эффективное регулирование сопротивления дросселя сопло —
заслонка возможно лишь при малых зазорах h между заслонкой
и торцом сопла (рис. 15, б). Обычно величина h лежит в преде-
лах 0 < h поскольку при h = dc/4 площадь сопла стано-
4
вится равной боковой поверхности цилиндра ndh. Эксперименты
42
показывают, что на практике заслонка оказывает дросселирую-
щее действие при расстояниях h= (1,4 4- l,6)dc/4. Задача рас-
чета данного сопротивления, как указывалось ранее, состоит
в определении его расходной характеристики.
jirju/Re
0,8-
0,7-
-0,012
0,5-0,010
0,4 -0,008
0,3-0,006
0,2 -0004
0,1 -0,002
О -
О
1 2 34 6 810 2 3 4 6 810г 2 3 4 6 810* 2 3 4 6 Re
б)
Рис. 15. К расчету дросселя типа сопло — заслонка:
а — схема элемента; б — зависимость коэффициента расхода Ц от расстояния h
между соплом и заслонкой; в — зависимость коэффициента расхода ц и ц/Re от
числа Рейнольдса Re
Силу реакции струи потока на заслонку обычно стремиться
уменьшить за счет уменьшения диаметра сопла, давления пита-
ния и т. д. Более подробно силовое воздействие струи на за-
слонку будет рассмотрено ниже.
Расход газа через рассматриваемое сопротивление при тур'
булентном режиме течения можно найти, пользуясь формулами
(2) и (3) или (4) и (5), полученными для турбулентных дрос-
селей.
43
Для расчета расходной характеристики дросселя сопло — за-
слонка необходимо определить значение коэффициента расхода.
Для рассматриваемого сопротивления коэффициент расхода
определяют экспериментально, как отношение действительного
расхода к теоретическому, т. е. р = Од/бт, и находят его зави-
симость от числа Рейнольдса Re и отношения давлений р2/рь
Заметим, что отношение давлений рг/pi эквивалентно числу
Маха:
На рис. 15, в приведены экспериментально полученные гра-
фики коэффициентов расходов дросселей типа «сопло — заслон-
ка», где они представлены в зависимости p = fi(Re); парамет-
ром служит отношение давлений рг/рь Однако непосредственно
по графику определить р трудно, так как для вычисления Re не-
обходимо, в свою очередь, знать коэффициент р. Действительно,
_ GARr
Рд /Ид /Ид
где гидравлический радиус
D л dh h
л г —-----— — ,
2лб/ 2
(И)
а площадь проходного сечения f = ndh. Таким образом, число
Re зависит от действительного расхода бд, который равен про-
изведению теоретического GT на р. Поэтому на графике нане-
сены еще и вспомогательные кривые
— = fi (Re) для различных
Re
значений отношения рг/рь
Зная значение p/Re, по вспомогательной кривой находят ве-
личину Re, а затем определяют значение коэффициента расхода
р. Выражение для p/Re имеет следующий вид:
Р
(15)
При p2/pi 0,528 в выражение (15) следует подставить
Р2/Р1 = 0,528. Кривые на рис. 15, в действительны для расстоя-
ний между соплом и заслонкой h d/4. При расстояниях h >
> сЦА: площадь проходного сечения отверстия сопла становится
меньше площади рабочего зазора.
Для построения кривых были исследованы сопла с заслонка-
ми с отношением диаметра торца сопла к диаметру сопла от 1,3
до 6,5. При малых числах Re коэффициент расхода р достигает
44
очень малых величин, что указывает на формирование ламинар-
ного режима течения воздуха. В этом случае можно использо-
вать формулы для турбулентного течения, что автоматически
учитывается коэффициентом расхода.
Для практических расчетов дросселя сопло — заслонка, когда
истечение происходит в атмосферу и Т = 293° К, удобно пользо-
ваться графиком на рис. 15, б, показывающим зависимость ко-
эффициента расхода ц от расстояния h между соплом и за-
слонкой.
В приборах пневмоавтоматики заслонкой обычно управляет
маломощный чувствительный элемент. Если сила, развиваемая
чувствительным элементом, соизмерима с силой, действующей на
заслонку со стороны сопла, то величину этой силы необходимо
учитывать. Величина этой силы, нагружающей измерительный
прибор, может ограничить выбор чувствительных элементов
пневматических регуляторов. Величина этой силы [22, 27] скла-
дывается из двух составляющих Ffl = Ffli + ЕЛ2, где Ffll — реак-
тивная сила, возникающая при попадании потока на заслонку и
растекании его по поверхности заслонки при повороте на угол
90°; Fh2 — сила, возникающая от действия статического давле-
ния,’ действующая на торец сопла и заслонку и воспринимаемая
ими.
При малых Л, когда в круге радиуса rc Рг = pi, силу реак-
ции струи на заслонку можно вычислить по следующей фор-
муле:
F/l = — --Ь ягДр!—р2) +
^сРс
я
2л ptrdr—np2(R2 — r2c)
(16)
где G — массовый расход; гс — радиус сопла; рс — плотность
воздуха на срезе сопла; R— радиус торца; рг — текущее значе-
ние давления между торцом сопла и заслонкой; г — текущий
радиус.
При h = 0 расход G = 0 и выражение, стоящее в квадратных
скобках, обращается в 0, тогда
Fh =^c(Pi— р2)- (17)
Как следует из формулы (16), для вычисления Fh необходимо
я
определить значение интеграла | prrdr. Интеграл можно вычис-
’гс
лить с помощью графиков, показывающих зависимость произве-
дения ртг от г (рис. 16). Площадь под кривой дает значение ис-
комого интеграла. Графики, показанные на рис. 16, получены из
экспериментальных кривых рг = Рт(г).
В некоторых случаях необходима проверка расчетных дан-
ных, полученных по формулам (16) и (17). На рис. 17 представ-
лена установка, предназначенная для экспериментального опре-
45
деления силы воздействия струи на заслонку. Установка состоит
из уравновешенного рычага 2, поворачивающегося вокруг оси 3,.
рг(г)г,МПа
элемента сопло — заслонка от г:
1 — h = 0,003 см; 2 — h = 0,004 см;
3 — h — 0,005 см; 4 — h = 0,006 см
укрепленной на рубиновых опо-
рах. На одном конце рычага име-
ется заслонка 4, на другом —
противовес 1. Груз М можно пе-
ремещать вдоль рычага, на кото-
ром нанесена шкала, по которой
определяют расстояние от груза
до оси 3. Груз служит для урав-
новешивания силы Fh, которая со-
здается струей воздуха, вытекаю-
щей из сопла 6. Перед соплом 6
расположен постоянный дроссель-
7. Давление питания р0 и давле-
ние перед соплом р\ измеряют ма-
нометрами. Микрометр 5 служит
для измерения величины h.
Для повышения точности от-
счета показаний микрометра был предусмотрен дополнительный
лимб с ценой деления 1 мкм.
Метод измерения силы Fh состоит в следующем. После уста-
Рис. 17. Схема установки для определения силы воздействия струи на за-
слонку
46
новки рычага 2 в горизонтальное положение путем регулировки
положения сопла по высоте тщательно подгоняют заслонку диа-
метром 8 мм к торцу сопла, что необходимо для обеспечения
перпендикулярности оси сопла к заслонке и герметичности при
Л = 0.
Герметичность контакта сопло — заслонка проверяют, поме-
щая каплю бензина между заслонкой и торцом сопла. Подгонка
считается хорошей, если при подаче сжатого воздуха в сопло не
наблюдается выделение пузырьков воздуха.
Силу Fh определяют из условия равенства моментов вокруг
оси 3 по формуле
Fh =-----,
1 120
где М — сила тяжести груза в Н; I — расстояние от оси враще-
ния рычага до груза в мм.
Расстояние h устанавливают, перемещая груз М, и опреде-
ляют двумя способами.
При первом способе, который заключается в предваритель-
ном снятии тарировочных кривых р\ = Pi(h) при р0 = const и
Pi = pi (ро) при h = const, расстояние h определяют по давле-
нию рх.
При втором способе — электроконтактном — составляют
электрическую цепь из источника питания S, вольтметра 9 и
контакта, которым служит рычаг 2, электрически изолирован-
ный рубиновыми опорами от корпуса прибора. Расстояние h
измеряют по шкале микрометра. Момент касания штифта ко-
нуса заслонки регистрируется вольтметром 9.
Если диаметр D торца сопла достаточно велик, то наряду
с положительными силами, направленными в сторону заслон-
ки, возможны и отрицательные, т. е. направленные в сторону
сопла, силы. Экспериментальные графики зависимости силы Fh>
действующей на заслонку, от расстояния h см между соплом и
заслонкой показаны на рис. 18. Из рисунка видно, что при умень-
шении расстояния h резко возрастает сила Fh- При наличии
торца (кривая /) сила Fh может иметь любой знак, при малом
торце (кривая 2) сила Fh принимает только положительные зна-
чения. Величины hy и /гн соответствуют устойчивому и неустойчи-
вому положению заслонки.
Уравновешенная заслонка при 0 < h < /гн всегда устанавли-
вается в положение hy.
При значительных открытиях h > hy радиальная составляю-
щая скорости потока возрастает и потенциальная энергия пото-
ка в зоне между соплом и заслонкой переходит в кинетическую
энергию. Давление между торцом сопла и заслонкой может стать
отрицательным, при этом действие силы направлено в сторону
сопла.
47
Пневматическое сопротивление типа седло — шарик. Расход
в дросселе седло — шарик изменяется за счет изменения площа-
ди проходного сечения между шариком и седлом. Минимальную
площадь проходного сечения пневматического сопротивления
этого типа (рис. 11, и) находят как боковую поверхность усе-
ченного конуса, которую можно определить по формуле
F =nd^ |/Л2 + h у d2_d2 + j[----------^4------------
2 У 4 “
8|/ /12 + /г1^</2-^+-у-
где d{ и d2— соответственно диаметры шарика и седла; h —
расстояние между шариком и седлом по вертикали от кромки
седла до пересечения с окружностью.
Рис. 18. Зависимость си-
лы, действующей на за-
слонку, от расстояния
между соплом и заслон-
кой при избыточном дав-
лении pi = 0,05 МПа и
абсолютном давлении
р2 = 0,1 МПа:
1 — D = 4,43 мм; d с =
= 1 мм; 2 — D -= 1,4 мм;
dQ = 1 мм
Образующая усеченного конуса есть отрезок линии, соеди-
няющей кромку седла с центром шарика, располагающийся
между кромкой седла и точкой пересечения с окружностью.
При некотором открытии дросселя, соответствующем опреде-
ленному расстоянию шарика от седла, площадь боковой поверх-
ности усеченного конуса будет равна площади проходного сече-
ния седла. Приравняв указанные площади, можно найти Ль:
Л А!/7 2^1-4+ уd2 d2.
2 У 2 2
Коэффициенты расхода находят с помощью графиков, пред-
ставленных на рис. 19. Кривые получены для следующих пар:
di = 9,46 мм, d2 = 4,14 мм; di = 7,92 мм, d2 = 4,14 мм; d\ =
= 3,96 мм, d2 = 2,02 мм при h Лк. Графики jui/Re = Л (Re) по-
зволяют найти р, не зная Re. Значение p/Re вычисляют по фор-
муле [23]
48
где /?г — гидравлический радиус пары седло — шарик;
При p2/pi 0,528 в формулу подставляется p2/pi = 0,528.
Зная величину p/Re, по вспомогательной кривой отыскивают
значение Re и по кривой р = f2(Re) определяют р.
2. УПРУГИЕ ЭЛЕМЕНТЫ ПНЕВМАТИЧЕСКИХ ПРИБОРОВ
Мембраны являются одним из основных элементов пневма-
тических приборов и предназначены для преобразования пере-
пада давлений в механические перемещения. Упругие металличе-
ские мембраны в пневматических регулирующих и вычислитель-
ных приборах, как правило, не применяют, так как они имеют
значительную жесткость и уже при малых перемещениях центра
В сильной степени изменяют свою эффективную площадь, что
в пневматических вычислительных приборах приводит к наруше-
нию заданного уравнения баланса сил и появлению погрешности.
В мембранных исполнительных механизмах металлические мем-
4 Заказ 993 49
браны не используют из-за их сравнительно небольших прогибов.
В пневматических вычислительных приборах, работающих по
принципу компенсации сил, применяют мембраны с малой жест-
костью из неметаллических материалов, модуль упругости кото-
рых в сотни и тысячи раз меньше модуля упругости металлов.
В вычислительных приборах, работающих в диапазоне низких
рабочих давлений (0—100 мм вод. ст.), применяют мембраны из
тонкой (0,2—0,4 мм) резины, а в приборах, работающих в диапа-
зоне нормальных рабочих давлений,— мембраны из мембранного
Рис. 20. Различные виды плетения основы мембран из мембран-
ного полотна:
а — сетка, выполненная из полотняных нитей и пропитанная резиной;
б — прямоугольная сетка; в — косоугольная сетка; г — трикотажное
плетение нитей
г;
полотна, представляющего собой сетку (основу), выполненную
из хлопчатобумажных или иных нитей и пропитанную резиной.
Основа придает мембране необходимую прочность [3]. При ма-
лых рабочих перемещениях мембраны нити не участвуют в ра-
боте, и жесткость мембраны пренебрежимо мала. Наоборот,
когда сетка вступает в работу, жесткость мембраны чрезмерно
возрастает.
На рис. 20 представлены несколько видов плетения основ
мембранного полотна. У мембран, имеющих основу из нитей,
которая залита резиной, жесткость в различных направлениях
неодинакова. Так, например, в материале, имеющем основу из
прямоугольной сетки (рис. 20, б), жесткость в направлении
стрелок А (направление под углом 45° к направлению нитей)
является минимальной. Трикотажное плетение нитей (рис. 20, г)
позволяет обеспечить малую жесткость мембранного полотна
при небольших растягивающих усилиях и большую жесткость
при больших усилиях. Мембраны с основой из плетеных нитей
являются наихудшими, так как нити в местах плетения трутся
друг о друга, что приводит к появлению гистерезиса во внешней
характеристике мембраны. Наилучшими считаются мембраны из
кордной ткани, где нити с различной ориентацией располагают-
ся в различных плоскостях и не переплетаются между собой.
Для изготовления мембран силовых устройств, работающих
при повышенных давлениях, применяют мембранное полотно
с многослойной тканевой основой, толщина которых достигает
50
3—5 мм. Рабочие диаметры таких мембран лежат в пределах
300-=-500 мм.
Мембраны из полотна для пневматических вычислительных
устройств, работающих в нормальном диапазоне рабочих давле-
ний, изготавливают как плоскими, так и гофрированными с од-
ним полукруглым гофром (рис. 21, а, б). Жесткий центр мембра-
ны образуется двумя металлическими, чаще всего дюралевыми,
дисками. По наружному контуру мембрану зажимают в корпусе,
и она удерживается силами трения. Для крепежных болтов и воз-
Рис. 21. Различные типы резиновых и резино-тканевых хмембран,
применяемых в устройствах пневмоавтоматики:
а — плоская мембрана из мембранного полотна (МП); б — мембрана из
МП с гофром; в — резиновая мембрана низкого давления с залитым
жестким центром; г — мембрана низкого давления; д — сдвоенная резино-
вая мембрана с гофрами и с внутренней полостью, сообщающейся с ат-
мосферой; е —сдвоенная мембрана, во внутреннюю полость которой заве-
дено давление питания
душных каналов по окружности мембраны предусматривают от-
верстия. Мембраны из резины, предназначенные для работы
в диапазоне низких (0—100 мм вод. ст.) рабочих давлений,
обычно не имеют гофра. Жесткий центр таких мембран изготов-
ляют из тонкого (0,4—0,5 мм) дюралевого листа и в нем проби-
вают отверстия для облегчения и для прочного соединения с ма-
териалом мембраны (рис. 21, в). Если жесткий центр не обвола-
кивается материалом, то для увеличения удельного давления
в месте контакта резины с жестким центром один из дисков
снабжают буртиком (рис. 21, г). Ширина буртика должна быть
рассчитана так, чтобы материал мембраны не получил повреж-
дения из-за слишком высокого удельного давления в месте кон-
такта. По ранту мембраны низкого давления приклеивают рези-
4* 51
новое кольцо, служащее для ее центрования в корпусе, натяже-
ния и герметизации рабочих камер.
При изменении знака перепада давлений на гофрированной
мембране положение гофра резко меняется и мембрана «про-
хлопывает». Это явление крайне нежелательно, так как при этом
изменяется эффективная площадь мембраны и объем мембран-
ной камеры, что нарушает заданный баланс сил и изменяет по-
стоянную времени вычислительных приборов. Поэтому при про-
ектировании пневматических регулирующих и вычислительных
приборов необходимо обеспечить такие условия работы мембра-
ны, чтобы знак перепада давлений на ней не менялся. Если уст-
ранить «прохлопывание» путем выбора схемы не удается, при-
меняют сдвоенные гофрированные мембраны (рис. 21, д). По-
лость, ограниченная мембранами, в данном случае сообщается
с атмосферой. В таких условиях перепад давлений не изменяет
своего знака. Фирма Санвик предложила применять сдвоенные
плоские мембраны, во внутреннюю полость которых заводят дав-
ление питания (рис. 21, е). Так как рабочее давление в любой
из мембранных камер прибора ниже давления питания, «прохло-
пывания» не наступает.
Эффективной площадью мембраны называют условную пло-
щадь, равную частному от деления внешнего рабочего усилия,
развиваемого мембраной под действием перепада давления, на
этот перепад, т. е. Fd = N/Ap. Эффективная площадь мембраны
существенно зависит от перемещения х ее центра от нулевого
уровня, за который принимается плоскость заделки. При увели-
чении х эффективная площадь мембраны так же, как и разви-
ваемое ею усилие N, падает. Если нет упора и мембрана про-
гибается свободно, то развиваемое ею усилие N и эффективная
площадь Рэ равны нулю. В данном случае развиваемое мембра-
ной усилие полностью компенсируется внутренними силами, воз-
никающими в материале мембраны.
Формула для определения эффективной площади эластичной
мембраны, устанавливающая зависимость последней от конст-
руктивных размеров и прогиба, была получена французским
ученым Ликтаном [17]:
л/)?
F3 =------L
12
1 + р + р2_ x(l-p)lZ4 + 7p +4р2
(18)
О2
где р= х — ход жесткого центра от плоскости заделки;
хтах — максимально возможный ход мембраны.
Формула (18) имеет существенные недостатки. Так, в фор-
муле не отражена зависимость эффективной площади от физи-
ческих свойств материала мембраны и необходимо заранее знать
максимальный прогиб xmax. Максимальны^ прогиб хтах можно
определить, если считать, что образующая^ 1 мембраны в неко-
52
тором условном положении является прямолинейной (см.
рис. 22). Такое положение мембраны (как и прогиб Хтах) фик-
тивное. Величину %тах можно определить для вялой мембраны 1
из мембранного полотна, зная прогиб ее центра, образующийся
при приложении к жесткому центру некоторой силы. При этом
следует допустить, что значение прогиба мембраны Хо опреде-
ляется при отсутствии нагрузки, действующей на жесткий центр.
Если х = Xq и Fd = 0, то из уравнения (18) можно найти хтах:
^max *0
(1 р)2(4 + 7р + 4р2) }
5(1 + р + р2)
Формула Ликтана позволяет вычислить эффективную пло-
щадь. F3 и, следовательно, развиваемое мембраной внешнее уси-
лие N с учетом прогиба х,
что особенно важно при
расчете мембранных ис-
полнительных механиз-
мов, где прогиб мембраны
имеет сравнительно боль-
шую величину.
В мембранных испол-
нительных механизмах
Рис. 22. Схема отсчета максимального
прогиба мембраны
мембраны обычно работа-
ют совместно с цилиндрическими пружинами, воспринимающими
основную долю усилия N. Если в мембранных исполнительных
механизмах мембрана должна обеспечивать максимальный ход
при сохранении достаточного усилия, то в пневматических вычи-
слительных устройствах мембраны должны работать в таких ус-
ловиях, при которых их перемещения были бы минимальными.
Для этого, например, создают постоянные перепады на дроссе-
лях (см. гл. III) и т. д. Это связано с тем, что изменение эффек-
тивной площади мембраны приводит к появлению погрешности
в реализации той или иной математической операции пневмати-
ческим прибором. Прогибы мембран, применяемых в пневмати-
ческих приборах, колеблются в пределах нескольких сотых до-
лей миллиметра, поэтому для расчета эффективных площадей
таких мембран обычно используют формулу Ликтана для х = 0,
т. е.
(19)
Мембраны с гофром имеют более стабильную эффективную
площадь, нежели плоские мембраны, что особенно важно для
1 Вялой мембраной называют такую мембрану, которая в некотором диа-
пазоне перемещений не создает сопротивления прикладываемой к ней силе и
остается в том положении, в которое ее передвинули.
53
мембран, применяемых в пневматических вычислительных уст-
ройствах. Наличие жесткого центра, как это видно из приведен-
ной формулы, увеличивает эффективную площадь мембраны.
Однако чрезмерное увеличение жесткого центра приводит к уве-
личению жесткости мембраны. Как правило, диаметр жесткого
центра составляет 0,4—0,85 от диаметра заделки.
Неметаллические мембраны, имеющие ряд преимуществ,
имеют также и существенные недостатки. Основным недостат-
ком является нестабильность рабочих характеристик. Резина
подвержена интенсивному старению. Например, у некоторых
р2 сортов резины модуль упругости значитель-
Рис. 23. Манжет-
ная (чулочная)
мембрана
но возрастает в течение нескольких месяцев.
При этом чувствительность пневматических
приборов резко уменьшается. Со временем
из-за изменения свойств материала мембра-
ны может измениться начальная установка
мембраны относительно управляемого ею
сопла. Это ведет к появлению дополнитель-
ных погрешностей у прибора. Чтобы избе-
жать этого, обычно вводят регулировку
сопла
В пневматических устройствах, где тре-
буются большие перемещения и постоянство
эффективной площади мембран, применяют
манжетную мембрану, представляющую собой цилиндрическую
оболочку, изготовленную из кордной ткани, нити которой распо-
ложены под некоторым углом к образующей цилиндра (рис. 23).
Нижняя часть цилиндрической оболочки прикрепляется к непод-
вижному цилиндру, а верхняя часть — к жесткому центру, выпол-
ненному в виде легкого полого подвижного цилиндра с дном.
Давление воздуха прижимает оболочку к цилиндру и жесткому
центру. При движении жесткого центра мембрана благодаря на-
личию гофра перекатывается с цилиндра на жесткий центр, либо
наоборот. Основной недостаток манжетной мембраны состоит
в том, что давление р\ всегда должно быть больше давления р2.
Сильфон представляет собой тонкостенную гофрированную
в радиальном направлении цилиндрическую трубку (рис. 24, а).
Под действием давления или силы, приложенной вдоль оси, из-
меняется длина сильфона. Функции, выполняемые сильфоном,
весьма разнообразны: сильфоны применяют для упругого соеди-
нения трубопроводов, расположенных под углом и со смещени-
ем по оси, их используют в качестве пневматического объема
переменной емкости (например, в системе УСЭППА) или уплот-
нителей в регулируемых дросселях, а также для разграничения
двух сред в манометрических датчиках и т. д. Но в основном
в пневмоавтоматике сильфоны используют для построения вы-
сокоточных вычислительных устройств, так как сильфоны хоро-
шо сохраняют свои характеристики и, в особенности, при тех
54
незначительных перемещениях, какие имеют место в этих уст-
ройствах. В приборостроении применяют сильфоны с диамет-
рами от 7 до 150 мм и толщиной стенки 0,08—0,3 мм.
Сильфоны изготавливают из цельнотянутой тонкостенной
трубки гидравлическим или механогидравлическим способами.
При первом способе трубку закрепляют в зажимах специально-
го станка. На определенном расстоянии друг от друга вдоль
трубки устанавливают разъемные кольца. В трубку под давле-
нием подают масло, в результа-
те чего она начинает выпучи-
ваться в промежутках между
кольцами. Кольца сжимаются,
и трубка принимает форму
сильфона.
Механогидравлический спо-
соб отличается тем, что труб-
ку-заготовку сначала обкаты-
вают роликом на специальном
приспособлении, при этом на
трубке получаются углубления
на определенном расстоянии
друг от друга. Окончательное
формирование сильфона про-
исходит так же, как и по пер-
вому способу. Механогидрав-
S)
Рис. 24. Различные типы сильфонов:
а — цельнометаллический; б — сварной
с цилиндрическим буртиком; в — сварной
с гофрами, нанесенными на мембраны
лический способ имеет то преимущество, что вытяжка материала
происходит как внутрь, так и наружу, поэтому утоньшение мате-
риала на гребнях гофр получается меньшим, чем при гидравли-
ческом способе, при котором вся вытяжка происходит наружу.
Так как в процессе изготовления сильфона материал претерпе-
вает значительные пластические деформации, для изготовления
сильфонов из цельнотянутых трубок применяют такие материа-
лы, как фосфористая бронза Бр.ОФ6,5-0,4, полутомпак Л80.
Упругие свойства этих материалов весьма низки, и сильфоны,
изготовленные из этих материалов, обладают значительным ги-
стерезисом.
При работе в агрессивных средах и в зоне высоких темпера-
тур (до 400° С) применяют сильфоны из нержавеющей стали
1Х18Н9Т. Гистерезис таких сильфонов достигает 2—4%. Хоро-
шие упругие свойства имеют сильфоны, изготовленные из берил-
лиевых бронз Бр.Б2, Бр.Б2,5, Бр.БНТ1,9 и сплава Н36ХТЮ, ко-
торые допускают глубокую вытяжку. После вытяжки сильфоны
проходят термообработку.
Изготовление сильфонов из цельнотянутых трубок — весьма
трудоемкий процесс. Поэтому сильфоны изготавливают также
путем сварки из отдельных кольцевых пластин. На рис. 24, б, в
показаны различные типы сварных сильфонов. Сварной сильфон
представляет собой блок, состоящий из отдельных мембранных
55
коробок. Благодаря наличию глубоких гофров чувствительность
сварных сильфонов выше, чем чувствительность сильфонов, из-
готовленных из цельнотянутых трубок. Упругие свойства и эф-
фективная площадь таких сильфонов также более стабильны.
Наиболее стабильную эффективную площадь имеют сильфоны
с цилиндрическим буртиком (рис. 24, 6), эффективная площадь
у таких сильфонов практически не зависит от шва. Материал
сварных сильфонов при формовке испытывает меньшую вытяж-
ку, чем при изготовлении из цельнотянутых трубок. Для устра-
нения «прохлопываний» отдельных мембран, из которых состоит
сварной сильфон, на них наносятся гофры (рис. 24, в). Благо-
даря этому сильфоны имеют меньшую нелинейность характери-
стики и больший допустимый ход. Главным недостатком сварных
сильфонов является их низкая коррозионная стойкость из-за на-
личия сварных швов.
При необходимости повысить жесткость сильфона его уста-
навливают совместно с винтовой цилиндрической пружиной.
Если сильфон изготовлен из материала с низкой упругостью, то,
выбрав жесткость пружины в несколько раз больше жесткости
сильфона, можно практически избавиться от какого-либо влия-
ния упругих свойств сильфона на статическую характеристику.
Для экономии места пружину размещают внутри сильфона. Уве-
личение жесткости сильфона за счет увеличения толщины стен-
ки невыгодно, так как материал работает на изгиб и при том же
прогибе возрастут напряжения.
При очень больших давлениях, когда прочность тонкостенно-
го сильфона оказывается недостаточной, применяют многослой-
ные сильфоны, что ведет к уменьшению напряжений и увеличе-
нию чувствительности по сравнению с однослойными сильфонами
той же толщины. Однако вследствие трения слоев у многослой-
ных сильфонов увеличивается гистерезис.
При конструировании приборов стремятся установить силь-
фоны так, чтобы они работали на сжатие, так как в этом случае
они выдерживают давление в 1,5—2 раза выше, чем при работе
на растяжение.
Если сильфоны используют в пневматических вычислитель-
ных устройствах, работающих по принципу компенсации сил, то
давление обычно подается во внутрь сильфона, так как переме-
щение сильфона при этом ничтожно и потеря устойчивости пря-
молинейной формы оси исключена.
Для расчета эффективной площади сильфона применяют ши-
роко известную эмпирическую формулу, дающую хорошее совпа-
дение с экспериментом:
Р л(7?в + 7?н)2
F,.,------;.
где RH и 7?в — соответственно наружный и внутренний радиусы
сильфона.
56
Перемещение сильфона под действием давления р равно пе-
ремещению сильфона под действием осевой сосредоточенной си-
лы Wi = FQCp.
Если при увеличении давления в сильфоне дно сильфона, пе-
ремещаясь, встречает на своем пути упор (рис. 25, а), то сила N„
с которой сильфон действует на упор:
N = F3zp—cxh0 = F3c(P—Ро), (20)
где р — давление в сильфоне; С\ — жесткость сильфона; йо — ход
сильфона до упора; ро — давление, при котором дно сильфона
дошло до упора.
При отсутствии упора N = 0 и вся сила, создаваемая давле-
нием, уходит на растяжение сильфона. В этом случае уравнение
(20) вырождается в равенство F9Cp = C\h.
Рис. 25. К расчету сильфонов:
а — схема действия сильфона на упор; б, в — схема работы сильфона совместно
с винтовой цилиндрической пружиной; г — изменение толщины стенок сильфона
При совместной работе сильфона и винтовой цилиндрической
пружины (рис. 25, б, в) усилие, действующее на сильфон со сто-
роны пружины, можно подсчитать по формуле
N = hc2, (21)
где С2 — жесткость пружины.
Эта же сила может быть выражена через параметры сильфо-
на, если воспользоваться уравнением (20), причем в этом случае
h = й0. Исключая й из уравнений (20) и (21), получим
N =________
Статическая характеристика сильфона, представляющая со-
бой зависимость перемещения й от давления или осевой силы,
линейна для довольно значительных перемещений.
Следует отметить разницу между эффективной площадью
мембраны Рэ и эффективной площадью сильфона F3C. При рас-
57
смотрении в предыдущем разделе эластичных мембран понятие
жесткости не вводилось, при этом эффективная площадь мем-
браны оказывается зависящей от величины хода при любых воз-
можных смещениях жесткого центра. Если ввести понятие жест-
кости, под которой понимается отношение силы действующей
на сильфон, к перемещению его днища й, то эффективная пло-
щадь сильфона Еэс будет постоянной при условии сохранения
постоянства жесткости. Это имеет место на линейном участке
статической характеристики. Таким образом, произведение эф-
фективной площади мембраны Еэ на давление р дает внешнее
рабочее усилие, а соответствующее произведение эффективной
площади сильфона Лэс на давление — полную силу, часть кото-
рой в общем случае идет на создание внешнего рабочего усилия,
а часть — на растяжение сильфона. Однако все сказанное не
исключает возможности при описании жестких мембран вводить
в рассмотрение жесткость.
Под площадью поршневого действия сильфона понимают ус-
ловную площадь, равную частному от деления приращения объе-
ма на перемещение днища. Для сильфона площадь поршневого
действия может быть приближенно принята равной эффектив-
ной площади, т. е. ДУ = ЕЭсй, где h — перемещение дна сильфо-
на; ДУ — приращение объема.
Жесткость сварных сильфонов [3], у которых толщина мате-
риала д во всех точках практически одинакова, рассчитывают по
формуле
Ед3
с =-------,
2/гД/?2
где п — число рабочих гофров; — наружный радиус сильфо-
на; Е — модуль упругости материала. Коэффициент А вычисляют
по формуле
д_3(1 — Мп) ~ф2 — 1 41п2ф"
4л _ ф2 ф2 — 1 ’
где цп — коэффициент Пуассона; ф— безразмерный параметр
сильфона, ф = RU/RB.
У бесшовного сильфона, изготовленного гидравлическим или
механогидравлическим способом путем вытяжки заготовки, тол-
щина стенки в различных точках различная. Во внутренних точ-
ках на радиусе RB (рис. 25, г) толщина стенки равна толщине до
трубки-заготовки. С увеличением радиуса толщина убывает. Тол-
щина стенки сильфона в зависимости от радиуса может быть
рассчитана по эмпирической формуле
б = 60-?2-.
Г
Для расчета бесшовных сильфонов используют формулу (22),
куда вместо д3 подставляют его осредненное значение, равное
58
среднему арифметическому из кубов толщин сильфона в несколь-
ких точках, взятых на различных расстояниях от оси. Так, для
точек, отстоящих от оси на расстояниях 7?в, ——11 и (соот*
ветственно точек /, 2, 3 на рис. 25, г), эти толщины будут
2/?в Я _ £ Кв
—-— и °з — °о ' •
Ан
= 60, 62 = 60
Ав + Ан
Усредненное значение определяют
е 3 г
63 = J_(63 + 63 + 63) = ^_ !
□ о
из выражения
+ f—V+ —
\ 1 + ip / гр3
У сильфонов, выпускаемых нашей промышленностью, всегда
есть паспорта с указанием жесткости, поэтому на практике необ-
ходимость в ее расчете отпадает.
3. ПНЕВМАТИЧЕСКИЕ ЗОЛОТНИКОВЫЕ УСИЛИТЕЛИ
(ЗОЛОТНИКИ)
Пневматические золотники по своей конструкции и принципу
действия практически не отличаются от гидравлических золот-
ников и применяются для управления пневматическими поршне-
выми исполнительными механизмами.
Конструктивное оформление золотниковых пар очень разно-
образно. Однако по конструкции все золотники можно разделить
на две группы — цилиндрические и плоские. Примеры двухбур-
точного и трехбурточного цилиндрических золотников представ-
лены на рис. 26. Там же схематически показана схема подклю-
чения поршневого исполнительного механизма.
Золотник состоит из двух основных элементов: плунжера 1
с буртиками и гильзы 2 с прямоугольными фрезерованными ок-
нами. Так как в пневмоавтоматике нет необходимости в возврат-
ных линиях для сброса отработанного воздуха, то золотники
чаще всего выполняют с плунжером, имеющим два буртика (по-
яска). Плунжер должен свободно перемещаться в гильзе, при
этом пневматическое сопротивление для утечки воздуха в атмо-
сферу должно быть достаточно большим, т. е. радиальный зазор
между гильзой и плунжером должен быть минимальным. Мате-
риалы, из которых изготавливают гильзу и плунжер, должны
иметь наименьшее трение в паре при отсутствии смазки, близкие
температурные коэффициенты расширения, чтобы избежать за-
клинивания плунжера в гильзе при изменении температуры, а
также иметь максимальное сопротивление истиранию.
Принцип работы золотника состоит в том, что плунжер, пере-
мещаясь от датчика или вручную, изменяет соответствующим
образом проходные сечения окон, и тем самым создает различ-
ные гидравлические сопротивления для воздуха, поступающего
59
в пневмоцилиндр и вытекающего в атмосферу, отчего зависит
скорость передвижения поршня. Отклоняясь в противоположную
сторону от нейтрального положения, плунжер изменяет функ-
циональное назначение окон, превращая окно наполнения в окно
опорожнения, и наоборот, тем самым изменяет направление дви-
жения поршня на обратное. Сжатый воздух питания подводится
к окну, расположенному посредине золотника.
Различают золотники с положительным, отрицательным и ну-
левым перекрытием. У золотников с положительным перекрыти-
ем ширина окна меньше ширины пояска буртика плунжера, т. е.
h Ь. В нейтральном положении буртики плунжера перекрыва-
ют окна гильзы и тем самым запирают воздух, находящийся
в силовом цилиндре. Поэтому золотники с положительным пере-
крытием получили еще название отсечных золотников. Недоста-
ток золотников с положительным перекрытием состоит в нали-
чии характерной зоны нечувствительности, определяемой разно-
стью между шириной буртика и шириной окна. Физически это
проявляется в том, что всякое перемещение плунжера от нейтра-
ли на расстояние, меньшее, чем половина указанной разности,
не приводит к открытию окон и, следовательно, к движению
штока поршня исполнительного механизма.
Буртики плунжера золотника с отрицательным перекрытием
имеют ширину ft, меньшую ширины окна Ь, что устраняет зону
нечувствительности. Однако с этим связан и основной недостаток
такого золотника, заключающийся в том, что даже при нейтраль-
ном положении плунжера имеется утечка рабочего воздуха в ат-
мосферу. В связи с этим золотники с отрицательным перекры-
тием называют еще проточными золотниками. Ширина окна
в таких золотниках больше ширины буртика плунжера на не-
большую величину, равную обычно 0,01—0,02 мм. Однако золот-
ники с отрицательным перекрытием применяют значительно ча-
ще, чем золотники с положительным перекрытием, так как они
дают возможность в приводах с отрицательной обратной связью
60
обеспечить слежение с большей точностью, а зачастую и умень-
шить склонность системы к автоколебаниям.
'Золотники с нулевым перекрытием изготовить чрезвычайно
трудно, поэтому практически их не используют.
Основными размерами золотников являются диаметр бурти-
ка плунжера D, перекрытие х и зазор между гильзой и буртика-
ми плунжера е. Ввиду малой вязкости воздуха, утечки в пневма-
тических золотниках велики. Поэтому зазор е стремятся умень-
шить до минимума, доводя его, например, для золотников с D =
= 10 4-25 мм до величины меньше 0,010 мм. Перекрытие х не-
обходимо выбирать по возможности наи-
меньшим. Диаметр шейки плунжера d,
ширину пояска h и расстояние между
поясками е выбирают из конструктивных
соображений, но с учетом того, что плун-
жер не должен создавать на пути движе-
ния воздуха сопротивление, соизмеримое
с сопротивлением дросселирующих ще-
лей.
Окна в гильзе могут быть круглыми.
Однако круглые окна не позволяют полу-
чить линейную зависимость площади про-
ходного дросселирующего сечения от хода
плунжера у. Поэтому получили распро-
странение золотники с прямоугольными
окнами в гильзе, имеющие небольшую
ширину и значительную длину в виде ча-
сти дуги окружности. Такие окна выпол-
няют фрезерованием, а гильзу помещают в
Рис. 27. Схема плоского
золотника на шарнирных
подвесках
обойму 3 (рис. 26, а).
Ввиду технологических трудностей при изготовлении гильзы ее
часто выполняют в виде отдельных деталей, которые затем в со-
ответствующем порядке располагают в обойме (см. рис. 26, б),
причем гильза в обойме может быть уплотнена как за счет за-
прессовки, так и с помощью резиновых колец.
В пневмоавтоматике находят применение плоские золотники
(рис. 27) с пружинными и гидродинамическими подвесками, по-
зволяющими свести до минимума трение. Технология изготовле-
ния плоских золотников проще, чем технология изготовления
цилиндрических золотников. Золотниковая пара состоит из плос-
кого золотника 7, корпуса 8 и двух цилиндрических штифтов 3
и 5. Воздух под давлением подводится по каналу 1 в корпусе
к полости 4, ограниченной по торцам цилиндрическими штифта-
ми, а по бокам стенками. Золотник подвешен на шарнирных
рычагах 2 и 6, вместо которых могут быть использованы плоские
пружины. В нейтральном положении штифты 3 и 5 одинаково
перекрывают торцовые отверстия каналов 9 и 10, соединяющих
золотник с полостями поршневого привода. При возникновении
силы, действующей на золотник 7, последний перемещается па-
61
раллельно корпусу <S, что приводит к открыванию каналов 9 и 10.
Через образовавшиеся щели полости поршневого привода соеди-
няются соответственно с атмосферой и питающим давлением.
Расчет цилиндрического золотника сводится к выбору диа-
метра буртика плунжера и размера окон, другими словами, пло-
щади дросселирующей щели золотника, обеспечивающей задан-
ную максимальную установившуюся скорость поршня при задан-
ной максимальной нагрузке на поршень привода и заданном
давлении питания золотника.
Величину эффективного проходного сечения щели золотника
находят из формулы для максимальной установившейся скоро-
сти движения поршня
/2ЯТ . /ооч
v = —c----Ф1А (23)
_____ Fn
где <pi =1/ ——1 определяют по графику на рис. 181 * для
V р\
заданных давления питания ро и перепада давлений на поршне
Др при условии равенства эффективных площадей fi = /2 = f
дросселирующих щелей и истечении в среду с давлением, рав-
ным 0,1 МПа (рис. 26, а). Перепад давления на поршне
г п
где N — постоянная нагрузка на поршень (включая силу трения)
в МН; Fn — площадь поршня в м2.
Разрешая выражение (23) относительно Д получим
f = п
7 “ |/W Ф1’
причем здесь v — максимальная заданная скорость движения
поршня при заданной нагрузке на поршень АЛ Задавшись диа-
метром плунжера D, выбирают длину окна гильзы золотника
I = /j + /2 (рис. 28), причем гильза 2 может иметь и одно прямо-
угольное окно, тогда I = li. Из уравнения для площади проход-
ного сечения дросселирующего окна определяют наибольший
ход ун плунжера 1 золотника, обеспечивающий реализацию мак-
симальной заданной скорости v поршня:
где ц — коэффициент расхода, который принимают равным 0,8
при значительных открытиях. Исходя из неравенства b > ун, вы-
бирают ширину окна в гильзе 2.
Приведенный расчет максимального хода плунжера относит-
ся к золотниковой паре с нулевым перекрытием. Остальные гео-
* Подробный вывод формулы (23) и пояснения по графику на рис. 181
см. гл. VIII.
62
метрические размеры плунжера и гильзы выбирают из конструк-
тивных соображений. Для определения максимального расхода
воздуха, идущего на наполнение полости поршневого привода
при установившейся скорости vy воспользуемся выражением
^нап PlFnV.
Подставляя сюда pi = pJRT и v, из фор-
мулы (23) получим
^нап
2 г
w™'1-
Давление р\ исключим, воспользовавшись
выражением для фь Тогда окончательно
бнап = ]/~^rfPo4>l ---Ц-- (26)
V RT 1 + ч>?
Пример 1. Определить основные размеры золотника при совместной его
работе с пневматическим поршневым приводом, если при установившемся дви-
жении абсолютные давления рз = 0,1 МПа, р0 = 0,7 МПа и Fn = 0,01 м2,
Т = 293 К, N = 0,0055 МН, v = 0,1 м/с.
Определим перепад давлений на поршне
/V 0,0055
Др = Р1 — Р2=-Г- = п А, =0,55 МПа
Г [J и, и 1
и по графику, представленному на рис. 181, для р0 = 0,7 МПа и Ар =
= 0,55 МПа, находим <pi = 0,25. Делаем вывод, что сочетание режимов исте-
чения через одинаковые дросселирующие щели золотника — ДД (докритиче-
ское истечение через обе щели золотника). Пользуясь полученными данными,
по формуле (24) можно рассчитать эффективную площадь щели
е vFn 0,1-0,01 7
f=—r----------= —у ------= 98-10“7 м2= 0,098 см2.
V2RT ф| /2-287,14-293-0,25
Зададимся диаметром плунжера D = 1 см. Гильза имеет одно окно. Угол
0 = 90°. Тогда длина окна
Максимальный ход плунжера рассчитывают по формуле
Ун —
f
МА
0,098
0,8-0,786
= 0,156 см.
Ширину окна в гильзе выбирают исходя из неравенства b > ун. Осталь-
ные геометрические размеры гильзы и плунжера золотника выбирают из кон-
структивных соображений. Массовый расход воздуха в камеру наполнения,
соответствующий скорости поршня и, определяют из выражения
/2 1___/ 2
RT fWl 1 + ф2 “ |/ 287,14-293
0,25
X 0,7-106--------= 0,0079.кг/с.
1+0,252
63
4. СТРУЙНАЯ ТРУБКА
Пневматические усилители со струйной трубкой по своей кон-
струкции аналогичны такого же типа гидравлическим усилите-
лям и предназначены для преобразования незначительных уси-
лий, образуемых датчиком, в сравнительно мощные потоки воз-
духа, направляемые в полости пневматического поршневого
исполнительного механизма. Коэффициент усиления по мощно-
сти устройства можно значительно повысить, если к усилителю
со струйной трубкой присоединить второй каскад усиления, вы-
полненный, например, в виде золотника. В этом случае управля-
ющие потоки воздуха с выхода струйной трубки будут направ-
ляться в соответствующие камеры плунжера золотника.
Применение двухкаскадных пневматических усилителей, а
в общем случае многокаскадных связано со стремлением поднять
коэффициент усиления по мощности и по давлению, равный
в этом случае произведению коэффициентов усиления отдельных
каскадов, не увеличивая усилие, развиваемое датчиком и необ-
ходимое для приведения в действие струйной трубки.
Действительно, возможно увеличение коэффициента усиления
струйной трубки за счет увеличения давления питания. Однако
это приведет также и к увеличению перестановочного усилия,
развиваемого датчиком, и уменьшению точности, так как в этом
случае увеличивается сила реакции струи и возрастет момент
трения в подшипниках трубки. Увеличение числа каскадов при-
водит к более существенному увеличению соответствующих ко-
эффициентов усиления, но при этом необходимое усилие со сто-
роны датчика не увеличивается, так как первый каскад питается
более низким давлением, чем второй и т. д. В качестве каскадов
усиления помимо струйных трубок и золотников применяют уси-
лители сопло — заслонка и чисто струйные усилители..
Струйная трубка (рис. 29) состоит из трубки <?, на конце ко-
торой имеется выходное сопло 2. Трубка в верхней своей части
соединена с тройником 5, который имеет две опоры: иглу 4 и
регулировочный полый винт 7, через который к трубке подводит-
ся питающий воздух под давлением. Для предотвращения
утечки воздуха винт 7 уплотнен резиновым кольцом 6. Благода-
ря опорам трубка может свободно поворачиваться на некоторый
угол вокруг оси, совпадающей с осью винта 7 и иглы 4. Поворот
трубки происходит за счет внешнего усилия, прикладываемого
к точке 8 со стороны датчика, при этом обычно в противополож-
ную сторону действует усилие пружины задатчика. Под соплом 2
на небольшом расстоянии расположена плата 1 с приемными
отверстиями.
Если суммарное усилие, действующее на трубку, равно нулю,
то отверстие сопла 2, из которого истекает воздух, одинаково
перекрывает приемные отверстия, расположенные в плате, и в
полостях поршневого пневмопривода, соединенных с каналами
£4
платы 1, создаются равные давления р\ и р{. При незначитель-
ном -повороте трубки отверстие сопла будет неодинаково пере-
крывать приемные отверстия, и давления р\ и р{ в полостях при-
вода будут различными. Под действием разности давлений
Р\ — р J поршень привода приходит в движение.
Чаще всего схему регулятора со струйной трубкой строят
так, что со стороны поршня на трубку действует усилие отрица-
тельной обратной связи, поэтому
движение поршня заканчивается
после того, как усилие отрица-
тельной обратной связи, преодо-
левая усилие датчика, снова при-
ведет трубку в нейтральное поло-
жение.
В струйной трубке, так же
как и в струйных элементах, про-
исходит двойное преобразование
энергии. При истечении воздуха
из сопла струйной трубки потен-
циальная энергия давления пере-
ходит в кинетическую энергию
струи, и затем при входе струи
в расширяющиеся конусообраз-
ные каналы приемника кинети-
ческая энергия вновь преобразу-
ется в потенциальную энергию
давления. Такое двойное преоб-
разование энергии в струйной
трубке обычно происходит с по-
терями, и при полном отклоне-
нии струйной трубки давление в
приемном канале примерно на
10% ниже давления воздуха на
входе в струйную трубку.
Диаметр выходного отверстия
струйной трубки обычно выбира-
ют в пределах 1,5—2,5 мм. В соп-
Рис. 29. Струйная трубка
ле струйной трубки имеется небольшой цилиндрический уча-
сток. Ширину перемычки b между приемными отверстиями 1 и
2 (рис. 30, а) выбирают в пределах 0,1—0,5 мм. Чем меньше
перемычка, тем выше чувствительность устройства. Сопло на
конце струйной трубки имеет угол конусности 13°. Угол 0
конусности расширяющегося приемного канала платы (рис. 30,
б) обычно составляет 10°. Расширение канала необходимо для
оптимального преобразования кинетической энергии скорости
струи воздуха в потенциальную энергию давления.
Чтобы при работе усилителя со струйной трубкой воздух, вы-
текающий обратно из приемных отверстий, не оказывал силово-
5 Заказ 993
65
го воздействия на струйную трубку и не создавал дополнитель-
ного момента, приемные каналы располагают под некоторым уг-
лом в плоскостях, перпендикулярных линии, соединяющей
центры приемных отверстий. Исходя из этого минимальное рас-
стояние Атт между торцом струйной трубки и платой с прием-
ными отверстиями рассчитывают по формуле
sin ф + d2
где d\ — диаметр торца струйной трубки; d2 — диаметр прием-
струи относительно платы.
ного отверстия; ф— угол наклона
Рис. 30. К расчету струйной трубки
Реактивная сила, со-
здаваемая вытекающей
из сопла струей воздуха,
действующая на трубку,
должна проходить через
ось вращения трубки. В
этом случае момент, со-
здаваемый реактивной
силой, равен нулю. Реак-
тивная сила состоит из
суммы двух сил, одна из
которых обусловлена из-
менением количества дви-
жения от максимального значения на срезе сопла до нуля на
бесконечно большом расстоянии от сопла, а вторая — разно-
стью давлений внутри трубки перед соплом и в окружающем
трубку пространстве, т. е. реактивная сила
N = Gv + F(p0—р2),
(27)
где G — массовый расход воздуха, вытекающего из сопла; v —
скорость воздуха на срезе сопла; F — площадь проходного сече-
ния сопла; ро— давление перед соплом; р2— давление в окру-
жающем трубку воздухе.
При докритическом режиме истечения (рг/ро 0,5), поль-
зуясь выражением (4), получим
/ 2
G = pFl/ — Рг(Ро—р2у,
У
G
v =------= и
Fp2
(Ро~Рг)-
Подставляя G и v в выраже ;не (27), получим окончательную
формулу для реактивной силы, действующей на трубку для до-
критического режима истечения:
W = F(p0—р2)(2р2 + 1),
причем р, ~ 0,8.
66
Поступая подобным образом и воспользовавшись выражени-
ем (5), для расхода воздуха при надкритическом режиме исте-
чения получим также формулу для реактивной силы в случае
Р2/Р0 0,5:
/ р? \
N = F Ц2-^ + р0-р2 .
\ 2р2 /
Реактивная сила, действующая на трубку, создает момент
трения в ее подшипниках. Для уменьшения момента трения труб-
ку часто располагают соплом вниз,
так чтобы реактивная сила N
уменьшалась на величину силы тя-
жести трубки.
Трубка должна быть тщательно
уравновешена, что достигается регу-
лировкой специальных грузов.
Диаметры приемных отверстий,
расположенных в пластине, берут
Рис. 31. Условная схема обра-
зования двух проточных камер
при управлении поршневым
приводом с помощью струйной
трубки
обычно равными диаметру выход-
ного сопла струйной трубки или не-
сколько более его, что обусловлено
тем, что свободная турбулентная
струя, выходя из сопла струйной
трубки, расширяется. Однако увеличивать диаметр приемных
отверстий более чем на 0,1 мм по сравнению с диаметром вы-
ходного сопла струйной трубки не рекомендуется, так как при
этом увеличивается подсос воздуха из окружающей среды, па-
дает скорость и статическое давление в приемных каналах.
Статическую характеристику струйной трубки, представляю-
щую собой зависимость давления р\ и р\ в приемных каналах
и перепада на поршне пневматического поршневого механизма
Др = р[ —рх от перемещения к конца струйной трубки относи-
тельно отверстий приемной платы, приближенно можно рассчи-
тать с помощью графика на рис. 34. При этом струйную трубку
с приемными отверстиями и присоединенным поршневым приво-
дом с застопоренным поршнем рассматривают как две проточ-
ные камеры (рис. 31), у которых за проходные сечения дроссе-
лей, к которым подведено давление питания, принимают эффек-
тивные площади перекрытия приемных отверстий отверстием
сопла струйной трубки fi и Ц, а за эффективные площади дрос-
селей, соединяющих проточные камеры с атмосферой,— площа-
ди f2 и f 2
Указанные эффективные площади можно рассчитать по фор-
мулам:
nd2 / di
1 — Н------( —
Г 4 \ 180
sin dj
л
5*
67
g2 sin a2
я /
сц sin a!
180 4 ~ ,
a2 i sin a2 '
180 + я ,
£' nd2 f
t' —4 (. 180
£ Jid2
f2 = H —
4
£' nd2
f2 = H —
4
Приведенные формулы действительны для случая равенства
диаметров d2 приемных отверстий диаметру d\ отверстия
Pi, PiЛ Па
Рис. 32. Статическая характеристика
струйной трубки
сопла струйной трубки, т. е.
di = d2 = d. При этом при-
нимается также, что при
наибольшем отклонении
струйной трубки угол меж-
ду плоскостью приемной
платы и плоскостью торца
сопла струйной трубки бли-
зок к нулю.
Углы >(Х1 И СС2 (см. рис. 30,
а) в градусах вычисляют
по следующим выражениям:
о b+d + 2x
a, = 2 arccos —-----;
2d
b + d — 2x
a2 = arccos----------
2d
где b — ширина перемычки между отверстиями; х — перемеще-
ние конца струйной трубки; d — диаметр сопла и приемных от-
верстий. Соответствующие отношения эффективных площадей,
значения которых необходимы для определения по графику на
рис. 34 давлений pi и р[ в полостях пневмопривода, вычисляют
по формулам:
А_ =__________!________.
f2 180я J
с^я— 180 sin a!
__ 1
f'2 1^1_____j
а2я —180 sin a2
Рассмотрим на примере определение одной из точек статиче-
ской характеристики.
Пример 2. Рассчитать установившиеся давления рх и р j (рис. 31) в по-
лостях цилиндра пневматического поршневого механизма, управляемого
струйной трубкой в статике, если диаметр отверстия сопла струйной трубки
68
и диаметры отверстий приемной пластины одинаковы d = 2 мм, абсолютное
давление перед отверстием струйной трубки р0 = 0,5 МПа, атмосферное дав-
ление Рг = 0,1 МПа, b = 0,2 мм, х = —0,1 мм.
Уплотнение поршня и штока будем считать абсолютно герметичным.
По формулам, приведенным выше, вычисляем
Л 0,2 + 2 —0,2
а, = 2 arccos----------=120°;
1 4
0,2 + 2 + 0,2
а2 = 2 arccos--------;-----= 106° 20'.
4
Пользуясь вышеприведенными формулами, находим отношения эффек-
тивных площадей:
/2
1
---------------------------= 0,64;
180-3,14
120-3,14 — 180 sin 120° —
Л
---------------------------------= 0,402.
__________180-3,14__________ !
106,33-3,14—180 sin 106° 20' “
= 0,2, по
Р2 0,1
По графику на рис. 34, используя кривую для г = — = ——
ро 0,5
найденным значениям fi/f2 и f j [f'2 находим p2/pi = 0,322 и р2/р { = 0,504, от-
Рг 0,1 ,
куда pi =-------=------= 0,31 МПа и р , = 0,1/0,504 = 0,198 МПа.
0,322 0,322 Р 1
Определяя таким способом давления р j и рх для других значений х, мож-
но построить статическую характеристику струйной трубки (рис. 32).
Глава III
ПНЕВМАТИЧЕСКИЕ КАМЕРЫ
И КОММУНИКАЦИОННЫЕ КАНАЛЫ СВЯЗИ
Если пневматическая камера содержит два дросселя или бо-
лее и через некоторые из них воздух втекает в камеру, а через
другие — вытекает, то она называется проточной. При наличии
всего лишь одного дросселя, через который происходит как на-
полнение, так и опорожнение камеры, она называется глухой.
Глухие и проточные камеры могут иметь как постоянный, так и
переменный объем, например, при использовании полости силь-
фона или другого упругого элемента. Камера, содержащая один
упругий элемент без дросселя, используется в пневмоавтоматике
в качестве емкости, представляющей собой аналог электрическо-
го конденсатора.
Изменяя сопротивления дросселей, подключенных к пневма-
тической камере, жесткость и эффективную площадь упругого
элемента, а также объем, можно существенным образом влиять
на динамические и статические характеристики камеры.
У глухих камер используются только их динамические свой-
ства, тогда как у проточных камер — как статические, так и ди-
намические. Пневматические проточные и глухие камеры полу-
чили широкое распространение в пневмоавтоматике. Проточная
пневматическая камера может быть использована как делитель
абсолютных и избыточных давлений. Если дроссели проточной
камеры линейные, то камера может работать как простейший
сумматор давлений. Наиболее широко пневматические проточ-
ные камеры применяют в пневматических приборах и регулято-
рах в качестве усилителей сопло — заслонка1, имеющих посто-
янный дроссель на входе в камеру и переменный дроссель соп-
ло — заслонка на выходе из камеры. Глухие камеры с дроссе-
лями, близкие по своим свойствам к апериодическим звеньям, а
также камеры с упругим переменным объемом находят приме-
нение при построении пневматических дифференцирующих и
интегрирующих устройств, генераторов импульсов, обегающих
устройств, реле времени и т. д. Для реализации апериодических
звеньев могут быть использованы также и проточные камеры.
1 Усилители сопло — заслонка в пневмоавтоматике иногда называют
реле типа сопло — заслонка, так как их статическая характеристика близка к
релейной.
70
L СТАТИКА ПНЕВМАТИЧЕСКИХ ПРОТОЧНЫХ КАМЕР
Статика пневматической проточной камеры, содержащей
два турбулентных дросселя. В пневмоавтоматике широкое рас-
пространение получили проточные камеры с двумя турбулентны-
ми дросселями (рис. 33). В такой проточной камере возможны
четыре различных сочетания режимов истечения через дроссе-
ли 1 и 2.
1. Докритическое истечение через дроссели 1 и 2 (в дальней
шем для краткости этот режим будем обозначать Д — Д).
2. Надкритическое истечение че-
рез дроссель 1 и докритическое ис-
течение через дроссель 2(Н—Д).
3. Докритическое истечение че-
рез дроссель 1 и надкритическое ис-
течение через дроссель 2(Д—Н).
4. Надкритическое истечение че-
рез дроссели 1 и 2 (Н—Н). Термо-
динамический процесс изменения со-
1 2
Рис. 33. Схема проточной каме-
ры с двумя турбулентными
дросселями
стояния газа в камерах мо-
жет быть принят изотермическим, т. е. То = 1\ = Т2 = Т, в то
время как при истечении через дроссель процесс принимается
адиабатическим. Это допущение хорошо подтверждается экспе-
риментами. Первое допущение действительно для случая малой
скорости течения воздуха в камере по сравнению со скоростью
течения в дросселе, либо при равных скоростях течения воздуха
в камерах [24].
Уравнения статических характеристик пневматической каме-
ры (рис. 33) можно получить из условия равенства расходов
в установившемся режиме через первый и второй дроссели. Для
сочетания режимов истечения Д — Д через первый и второй
дроссели уравнение статической характеристики, если восполь-
зоваться упрощенными формулами для адиабатического течения
[см., например, формулу (4)] через дроссель, можно записать
в виде
/1
/2
— PdPo—Р\) =h
KI
1/ ~^PdPi— Рг),
у Ki
где fi и f2 — эффективные площади турбулентных дросселей 1
и 2, представляющие собой произведение геометрических площа-
дей на коэффициенты расхода.
Обозначим р2/ро = г; ра/р0 = и; рг/pi = г2, тогда для сочета-
ния режимов истечения Д — Д с учетом того, что г = г\г2, по-
лучим
/_А\2
\ fi /
= Г2Г
1—r2 .
г2—г ’
Г] >0,5; г2>0,5. (28)
7.1
Аналогичным способом находят уравнения и для остальных
возможных сочетаний режимов истечения через первый и второй
дроссели проточной камеры. Эти уравнения будут иметь вид:
для сочетания режимов истечения Н — Д
/L\2 = 4r2/_Lz£2.\
ft J \ r2 J'
для Д — Н
(—Y =------------; 0,5; r2 0,5;
\ h J 4(r2-r) 1 2
для H — H
— = — n<0,5; r2<0,5.
^2 r2
(29)
Однако выполнить статический расчет по приведенным фор-
мулам весьма трудно, так как часто заранее неизвестны сочета-
ние. 34. График для определения давлений в междроссельной ка-
мере с турбулентными дросселями
ния режимов истечения через первый и второй дроссели проточ-
ной пневматической камеры, например, если заданы f2, Ро и р2
и требуется определить давление в междроссельной камере
Следовательно, заранее неизвестно, какой из приведенных фор-
мул следует воспользоваться. Исключение составляет случай
72
г 0,5, когда в обоих дросселях имеет место докритическое ис-
течение.
Задача расчета пневматической проточной камеры с турбу-
лентными дросселями упрощается, если воспользоваться графи-
ками, приведенными на рис. 34. Кривые на графике построены
по уравнениям (28) —(29) статики проточной камеры. График
разбит на четыре зоны, каждая из которых соответствует одно-
му из возможных сочетаний режимов истечения через дроссели
проточной камеры. Граница между областями Н — Д, Д — Д и
Н — Н, Д — Н выражается уравнением прямой линии г2 = 0,5.
Действительно, при г2 0,5 во втором дросселе всегда будет
иметь место докритический режим истечения, а при г2 0,5 —
надкритический.
Уравнение границы между областями Н — Н и Д — Н опре-
деляется из уравнения для сочетания режимов истечения Д — Н
подстановкой r2 = г/п = г/0,5, так как на границе областей
Г\ = 0,5. Отсюда получаем fi/f2 = 0,5.
И, наконец, уравнение границы между областями Д — Д и
Н — Д можно найти, если заменить в уравнении статики для со-
четания режимов истечения Д — Д г на произведение Г\Г2 и под-
ставить в полученное выражение г\ = 0,5. После преобразований
получим
(Т-У = <2(1—/'г)-
Пользуясь графиком, представленным на рис. 34, можно, на-
пример, определить давление в междроссельной камере если
известны эффективные площади дросселей fi и f2 и давления р0
и р2. Помимо этого одновременно автоматически определяется и
сочетание режимов истечения через первый и второй дроссели.
Пример 3. Заданы абсолютные давления р0 = 0.25 МПа и р2 = 0,103 МПа.
а также = 0,8. Требуется определить давление р{. Находим отношение
P2IP0 = 0,412. Затем восстанавливаем перпендикуляр из точки fi/f2 = 0,8 к оси
абсцисс (график рис. 34), находим его пересечение с кривой для р2/р0 = 0,412.
Кривой для отношения р21ро = 0,412 нет; для нахождения точки пересечения
необходимо, применяя метод интерполяции, приближенно нанести на графике
отрезок кривой. Из точки пересечения опускаем перпендикуляр на ось орди-
/ Р2 °’103
нат и определяем отношение r2 = p2/Pi = 0,569, откуда р\ = — —-=
г2 0,569
= 0,181 МПа.
Из графика также определяем, что сочетание режимов истечений через
дроссели 1 и 2 соответствует области Д — Д.
При построении статических характеристик пневматических
проточных камер следует учитывать коэффициенты расхода че-
рез первый и второй дроссели, так как в противном случае рас-
чет может дать значительные погрешности.
Пневматическая проточная камера с переменными дроссе-
лями. Учет коэффициента расхода при расчете статической
характеристики. Кроме проточных камер с постоянными дрос-
73
селями, в пневмоавтоматике широкое распространение нашли
также проточные камеры с регулируемыми дросселями и про-
точные камеры с переменными дросселями, называемые усили-
телями типа сопло — заслонка (рис. 35). Если для проточных
камер с постоянными дросселями коэффициент расхода можно
приближенно считать постоянным, то для проточных камер с пе-
ременными дросселями он изменяется в широких пределах. По-
этому при расчете статических характеристик это изменение
коэффициента расхода необходимо учитывать.
Под статической характеристикой в данном случае понимают
зависимость давления в междроссельной камере от открытия
Рис. 35. Проточная камера
с переменным дросселем
сопло —заслонка
дросселя в установившемся режиме. Открытие дросселя можно
характеризовать, например, расстоянием h между соплом и за-
слонкой.
Существует несколько методов учета коэффициентов расхода
дросселирующих органов проточной камеры. Остановимся на
методе последовательных приближений. Допустим, что требует-
ся определить давление р\ в междроссельной камере для задан-
ных значений проходных сечений F\ и F2 и давлений ро и р2. Так
как заранее нельзя определить одновременно коэффициенты рц
и pt2, то поступают следующим образом. В первом приближении
задают давление р/* так, что ро > р}> р2. Зная все параметры
первого и второго дросселей, при помощи специальных графиков
(например, представленных на рис. 15) определяют коэффици-
енты расхода ц/ и Определив отношение эффективных пло-
щадей
/_А_\ и‘1/71
\ /2 /1
по графику на рис. 34 по кривой для заданного отношения рг/ро
находим значение (Р2/Р1 )п- Сравнив это значение с предыдущим
(P2/pi)i, полученным делением р2 на р*, и убедившись, что они
существенно отличаются друг от друга, переходим к следующе-
му приближению. Зная новое значение р}1 = ———, находим
(Р2/Р1) 11
pj1 и цР- Для нового значения отношения
\ fs /U 1ы1Г^2
Римской цифрой обозначен номер приближения I, II, ..., N.
74
по графику на рис. 34 находим новое значение (рг/рОпь Посту-
пая описанным образом, действуют до тех пор, пока вновь най-
денное отношение (pz/pjw не станет равным (p2/pi)jv-i, после
чего определяют р\. Опыт показывает, что процесс отыскания р\
сходится после трех-четырех последовательных приближений.
Приведем пример расчета одной точки статической характе-
ристики усилителя сопло — заслонка.
Пример 4. Определим методом последовательных приближений одну
точку статической характеристики усилителя сопло — заслонка (рис. 35). Па-
раметры усилителя следующие: диаметр постоянного дросселя (жиклера)
d\ = 0,37 мм, диаметр сопла переменного мп
дросселя сопло—заслонка d2=2,45 мм, аб-
солютное давление после второго дросселя
Рг = 0,1 МПа, абсолютное давление пита-
ния ро = 0,222 МПа, р2/ро = 0,45, темпера-
тура Т = 293 К. Найдем давление р\ в меж-
дроссельной камере, соответствующее от-
крытию h, = 0,03 мм. Так как первый дрос-
сель — жиклер, то его коэффициент расхода
можно принять постоянным = 0,8.
Зададимся в первом приближении
pl = 0,16 МПа и по графику на рис. 15, б
по кривой для принятого давления и для
заданного h найдем р2 = 0,24*.
Подсчитаем отношения эффективных
площадей:
М \ = И1~4~
\ f2 / I Р2Я^2^
Рис. 36. Статические характери-
стики усилителя типа сопло —
заслонка
На графике по кривой для р2/р0 = 0,45, которая может быть приблизи-
тельно намечена между кривыми с р21Ро = 0,5 и р2/ро = 0,4, находим отноше-
ние (Р2/Р1)п = 0,5. Так как отношение первого приближения (p2/pi) i = 0,625
значительно отличается от отношения второго приближения, приступаем к на-
хождению третьего приближения.
Возьмем отношение (рг/рОп = 0,5, следовательно, р 1Х= 0,2 МПа. По
графику на рис. 15, б находим р^1 = 0,35. В данном случае
f—) =0,55;
\ Pi /ш
р[н =0,182 МПа.
* Коэффициенты расхода, найденные по графику, представленному на
рис. 15, могут быть отнесены как к формулам (2) и (3), так и к формулам
(4) и (5) Сен-Венана Ванцеля, так как результаты расчетов, полученных по
этим формулам, отличаются не более чем, на 3,4%.
75
Переходим к четвертому приближению. Действуя в описанной выше по-
следовательности, будем иметь
ц’п=0,3; (у-'} =1,25; (—} =0,53;
\ f2 /Ш \ Pl / IV
pjv = 0,189 МПа.
Пренебрегая различием в третьем знаке после запятой для р}11
принимаем pi = 0,189 МПа.
Действуя таким же образом, находим для других выбранных значений
•Л. На рис. 36 показаны статические характеристики пневматического усилителя
сопло — заслонка с параметрами, принятыми в данном примере, причем кри-
вая / — экспериментальная статическая характеристика, кривая 2 — статиче-
ская характеристика, рассчитанная без учета переменности коэффициента
расхода, и кривая 3 — статическая характеристика, рассчитанная с учетом
переменности коэффициента расхода методом последовательных приближе-
ний. Из приведенного графика следует, что неучет переменности коэффициен-
та расхода переменного дросселя сопло—заслонка при расчете статической
характеристики дает значительную погрешность.
Способы улучшения статической характеристики пневмати-
ческого усилителя сопло-заслонка. Усилитель сопло-заслонка
имеет особое значение в пневмоавтоматике, так как без него не
обходится почти ни один пневматический вычислительный при-
бор мембранного типа. Для повышения
чувствительности пневматических прибо-
ров, их точности необходимо стремиться
к увеличению крутизны рабочего участка
статической характеристики пневматиче-
ского усилителя сопло-заслонка, к сме-
щению рабочего участка вправо от нача-
ла координат и к перемещению участка
слева от рабочего участка, в зону боль-
ших давлений, чтобы увеличить полное
изменение давления на рабочем участке.
Другими словами, необходимо возможно
больше приблизить статическую характе-
ристику усилителя сопло-заслонка к чис-
то релейной характеристике (рис. 37).
Такое преобразование статической ха-
рактеристики дает возможность умень-
шить полный рабочий ход заслонки отно-
сительно сопла, ограничив его неболь-
пропорциональности статической характе-
ристики, а также удалить заслонку от сопла.
В мембранных приборах заслонками служат жесткие цент-
ры, поэтому уменьшение полного хода приводит к стабилизации
эффективной площади мембраны, т. е. к увеличению точности
прибора. При малых перемещениях заслонки, расположенной на
относительно большом расстоянии от сопла, исключается воз-
можность соприкосновения сопла с заслонкой при перекосах.
76
Рис. 37. Сравнение харак-
теристики усилителя соп-
ло — заслонка с релей-
ной характеристикой:
1 — статическая характери-
стика пневматического уси-
лителя; 2 — релейная ста-
тическая характеристика
шим участком зоны
Контакт заслонки с соплом приводит к появлению силы реакции
и нарушению расчетного баланса сил, т. е. к понижению точно-
сти прибора.
Для приближения статической характеристики к чисто релей-
ной в пневматические усилители включают специальные устрой-
ства, поддерживающие постоянный перепад давлений на одном
из дросселей (постоянном или переменном) или одновременно
на обоих. Устройства, обеспечивающие постоянный перепад (по-
стоянную разность давлений) на постоянном и переменном дрос-
а) 6)
Рис. 38. Статические характеристики усилителя сопло —
заслонка с постоянными перепадами на дросселях:
а — с постоянным перепадом на постоянном дросселе; б — с
постоянным перепадом на постоянном и переменном дросселях
селях, будут разобраны в гл. V при описании блока суммирова-
ния БС-34А. Здесь же рассмотрим влияние постоянного перепада
на вид статической характеристики пневматического усилителя.
Допустим, что имеется устройство, поддерживающее автомати-
чески постоянный перепад давления Дрпс на постоянном дрос-
селе. При h = 0 давление pi = ро. При увеличении h давление р\
уменьшается (рис. 38, а). Однако пока разность давлений ро—Р\
не достигнет заданного значения перепада Дрпс, давление ро
остается постоянным, т. е. при ро — pi < Дрпс статическая харак-
теристика рассматриваемого усилителя совпадает со статиче-
ской характеристикой 1 обычного усилителя. Граничным значе-
нием h является й0, при котором ро — pi становится равным
заданному значению Дрпс. При дальнейшем увеличении h раз-
ность р* — pi поддерживается постоянной \ что обеспечивается
соответствующим уменьшением p*Q при уменьшении рь Таким
образом, при й > й0 падение выходного давления р\ происходит
уже не только за счет уменьшения сопротивления в сопле, но
также и за счет уменьшения давления питания Pg. Поэтому ра-
бочий участок статической характеристики 2 имеет увеличенную
крутизну.
1 Здесь через р0 обозначено переменное значение давления питания.
77
Рассмотрим работу пневматического усилителя сопло — за-
слонка с постоянным перепадом давлений на переменном дрос-
селе ДрПр = р\ — р*2. Условие Д/7пр = р\ — Р2 выполняется уже
при h = 0. Статическая характеристика 3 усилителя с постоян-
ным перепадом на переменном дросселе за счет противодавле-
ния, создаваемого после сопла, пройдет выше статической ха-
рактеристики 1 обыкновенного усилителя (рис. 38, б). Но бла-
годаря тому, что при увеличении h одновременно происходит и
уменьшение давления р*2, характеристика с постоянным перепа-
дом на переменном дросселе при средних и наибольших значе-
ниях h имеет большую крутизну, нежели характеристика обык-
новенного усилителя. Но при малых значениях h из-за постоян-
ного перепада на переменном дросселе Д/?Пр характеристика
усилителя более полога, чем характеристика обыкновенного уси-
лителя. Наименьшая величина избыточного давления pi в меж-
дроссельной камере пневматического усилителя равна ДрПр-
Наибольшее приближение статической характеристики пнев-
матического усилителя к чисто релейной характеристике дает
создание постоянных перепадов одновременно на постоянном и
переменном дросселях. Начальный участок статической характе-
ристики 2 такого пневматического усилителя расположится вы-
ше статической характеристики 1 обыкновенного усилителя. На
начальном участке усилитель работает с постоянным перепадом
только на переменном дросселе, и его статическая характеристи-
ка на этом участке совпадает со статической характеристикой 3
усилителя с постоянным перепадом на переменном дросселе
(рис. 38, б). При h > й01 будет достигнута заданная разность
р* — р\ и усилитель будет работать уже с постоянными перепа-
дами на постоянном и переменном дросселях. Рабочий участок
статической характеристики 2 усилителя с постоянными перепа-
дами на обоих дросселях круче, нежели рабочий участок стати-
ческой характеристики реле с постоянным перепадом только на
постоянном дросселе, а минимальное избыточное давление р\
в междроссельной камере равно ДрПр-
Опуская аналитические выкладки, приведем лишь вывод
уравнений пневматических усилителей с постоянными перепада-
ми на дросселях для докритического истечения через первый и
второй дроссели. Статическая характеристика пневматического
усилителя с постоянным перепадом на постоянном дросселе опи-
сывается системой двух уравнений. Первое уравнение для участ-
ка йо h 0 соответствует уравнению статической характери-
стики обыкновенного усилителя, которое выводят исходя из ра-
венства расходов в статике через первый и второй дроссели пнев-
матического усилителя. Используя формулу (4) и учитывая, что
fl = Hl ---, & f2 =
78
запишем
nd? / 2 ч 1 < / 2
Hi-—!/ — Pi(Po—Р1)=Н2Л^1/ — p2(Pi — р2)-
4 у i\L р Ki
Разрешая последнее уравнение относительно й, получим
h = 1 / р^-р^ . (30)
4р-2^2 Г pz(p\ — Pz)
Уравнение рабочего участка статической характеристики
можно получить из уравнения (30) путем замены р0 — р\ на
Дрпс. Тогда статическая характеристика усилителя с постоянным
перепадом на постоянном дросселе может быть описана систе-
мой двух уравнений: _________
h==±^L}/ р.(р°-р.) при ho>h>o-,
4Ц2^2 V Р2(Р\—Р2)
h = ^1-1- \/ —— при й^>й0.
4Ц2^2 V Р2(Р\ — Р2)
Расстояние между соплом и заслонкой йо, определяющее пе-
реход от начального участка статической характеристики к ра-
бочему, можно найти из уравнения (30), исключив из него рь
для чего следует воспользоваться очевидным равенством р{ =
= Ро — Дрпс Для й = й0:
| / ^Рпс(Ро Арпе)
4Н2^2 у (ро &Рпс Рг) Р2
Уравнение статической характеристики усилителя с постоян-
ными перепадами на постоянном и переменном дросселях опи-
сывается системой двух уравнений, первое из которых соответст-
вует уравнению статической характеристики пневматического
усилителя с постоянным перепадом на переменном дросселе для
участка й01 й 0, а второе — уравнению статической харак-
теристики усилителя с постоянными перепадами на постоянном
и переменном дросселях для й йОь
2 . ----------
Л = ±1^1/ Р^-Р1\.. при ^,>^>0;
4Ц2^2 у ДРпр(Р1 ДРпр)
h =2^1-1/--------р^р™ при h>hn.
4р-2^2 f Дрпр(Р1 АДпр)
Расстояние й01 (рис. 38, б), при котором происходит переход
начального участка статической характеристики к рабочему, оп-
ределяют из уравнения (30) заменой р0 — р\ на Дрпс, Р\ — Pz на
дРпР; р\ на ро — Дрпс и р2 на р0 — Дрпс — Дрпр*.
h = / Д/>пс(Ро —ЛДпс) <
4ц2^2 У ^Pnp(Po Дрпс Дрпр)
79
Крутизну статической характеристики пневматического уси-
лителя сопло — заслонка можно повысить также пользуясь бо-
лее простыми техническими средствами. Так, например, приме-
няют пневматические усилители с двумя соплами (рис. 39).
Усилители такого рода в качестве вторых каскадов усиления
были использованы в первых отечественных пневматических ре-
гуляторах (регулятор 03-ТГ-610, регуляторы типа 04-ДП и т. д.
[37]). Двухсопельные пневматические усилители и реле являются
основными в системе УСЭППА [5]. Высокая крутизна статиче-
Рис. 39. Усилитель с двумя пере-
менными дросселями сопло—за-
слонка
Рис. 40. Статическая ха-
рактеристика усилителя
с двумя переменными
дросселями сопло — за-
слонка
ской характеристики такого усилителя реализуется за счет диф-
ференциальной схемы, при которой увеличению сопротивления
одного элемента сопло — заслонка соответствует уменьшение со-
противления второго такого же элемента сопло — заслонка. Ос-
таточное давление усилителя, построенного по двухсопельной
схеме, равно нулю. Однако его характеристика все же значи-
тельно отличается от релейной (рис. 40).
Уравнение статической характеристики пневматического уси-
лителя с двумя переменными дросселями для сочетания режи-
мов истечения Д — Д может быть записано в следующем виде:
hi
_______hm__________
М2 Л Рг(Р1~ Рг)
Mi У Pi(po — Pi)
где hm = hl + ho.
Иногда, например, при построении пневматических интегра-
торов требуется, чтобы при некоторых зазорах между соплом и
заслонкой на выходе пневматического усилителя формировалось
отрицательное давление. В этом случае используют реле с эжек-
тором вместо постоянного дросселя (рис. 41). Эжектор состоит
из двух сопел 1 и 2, установленных по одной оси друг против
•80
друга, и междроссельной камеры 3, в которой формируется вы-
ходное давление pi. Диаметр питающего сопла 1 несколько
меньше диаметра приемного сопла 2. Увеличение расстояния h
между соплом и заслонкой приводит к тому, что скорость воз-
духа, вытекающего из сопла /, увеличивается и происходит ин-
тенсивный переход потенциальной энергии сжатого воздуха в ки-
нетическую. Благодаря этому давление р\ падает и может стать
ниже атмосферного (отрицательное давление). Статическая ха-
рактеристика пневматического уси-
лителя с эжектором (рис. 42) имеет
большую крутизну. Такой усили-
тель обеспечивает высокую выход-
ную мощность, что объясняется
Рис. 42. Статическая ха-
рактеристика усилителя
сопло — заслонка
с эжектором
Рис. 41. Усилитель сопло — заслон-
ка с эжектором в качестве посто-
янного дросселя
возможностью увеличения проходного сечения питающего соп-
ла 1 при отсутствии остаточного давления в междроссельной
камере.
Высокую крутизну статической характеристики и хорошее
приближение ее к чисто релейной получают путем включения
в качестве постоянного дросселя ламинарного капилляра. По
такому принципу построены пневматические усилители первого
каскада усиления в регуляторах типа 04-ДП и т. д. Подробнее
о расчете такой характеристики будет сказано ниже.
Пневматический дроссельный пакет. В пневмоавтоматике
помимо двух турбулентных дросселей, соединенных последова-
тельно и разделенных междроссельной камерой, применяют так-
же дроссельные пакеты. Пневматический дроссельный пакет
представляет собой систему последовательно соединенных пнев-
матических проточных камер, разделенных турбулентными дрос-
селями с одинаковыми эффективными площадями (рис. 43).
В системе, содержащей любое число последовательно соеди-
ненных дросселей с равными эффективными площадями проход-
ного сечения, надкритический режим истечения при уменьшении
отношения давления за последним дросселем к давлению р0 на-
ступает в выходном дросселе. Как бы мало ни было отно-
шение этих давлений, надкритический режим устанавливается
только в последнем по потоку дросселе, в остальных же дроссе-
лях системы имеет место докритическое истечение. Это нетрудно
понять, если в дроссельном пакете, содержащем любое число
6 Заказ 993
Ро Рг р2
Ро Pi Р2 Рз
Рис. 43. Пневматические дроссельные пакеты и графики для определе-
ния давлений в междроссельных камерах при различном числе п
дросселей в пакете:
а — п = 2; б — п = 3; в — п = 4; г — п = 5; д — схема пакета, содержащего
п дросселей
турбулентных дросселей с одинаковыми эффективными площа-
дями, рассмотреть два последних дросселя п и п— 1, где п —
число дросселей в пакете (рис. 43). Действительно, каково бы ни
было давление перед предпоследним дросселем, надкритический
режим может установиться только в последнем дросселе, так как
fn-Jfn = 1, а из рассмотрения графика, представленного на
рис. 34, следует, что этот случай соответствует сочетаниям режи-
мов истечения Д — Д или Д — Н. Рассматривая далее пару дрос-
селей с номерами п — 1 и п — 2 (рис. 43, д) и учитывая, что
в п — 1-м дросселе докритическое истечение, легко убедиться,
что в дросселе с номером п — 2 может быть только докритиче-
ский режим истечения и т. д.
Так как заранее неизвестно, при каком отношении давлений
рп/ръ в последнем дросселе установится надкритический режим
истечения, то в общем случае нельзя составить уравнение для
дроссельного пакета. Поэтому здесь, как и ранее, для определе-
ния давлений в междроссельных камерах пакета целесообразно
воспользоваться специальным графиком.
В качестве примера рассмотрим дроссельный пакет, содер-
жащий три турбулентных дросселя с одинаковыми эффективны-
ми площадями (рис. 43, б).
Уравнения статики для такой системы при тех же допуще-
ниях, что и для проточной камеры с двумя турбулентными дрос-
селями, и для случая, когда в последнем дросселе докритиче-
ский режим истечения, имеют вид
Гз(1— n) = r( 1— r2)', I (31)
/•1(1— r2) = r(l— Гз), I
причем г = Г1Г2гз, где rt = pjpo, r2 = p2/plt г3 = р3/р2-, г = р3/Ро.
По оси абсцисс графика отложим отношение давлений р^ро,
а по ординате — отношения давлений на дросселях — Р\1Ръ,
Р2/Р1 и рз/рг. Следовательно, для пакета с тремя дросселями на
графике необходимо нанести три кривых.
Решая уравнения (31) совместно при учете выражения
г = г!г2г3 и исключая все переменные, кроме р3/р0 = г и
Р3/Р2 = гз, получим выражение для кривой, предназначенной
для определения давления р2:
г _____гз (гз (1 —гз) + I]_
кз(1 - г.) + I]2 +г3(1 - г3) '
Это соотношение позволяет определить г = р3/р0, при кото-
ром в последнем дросселе наступает надкритический режим
истечения. Для этого в последнее выражение подставляют
гз = 0,5. Соответствующее отношение г = рз/ръ = 0,345.
Для нахождения зависимости между г и г3 в случае надкри-
тического истечения из последнего дросселя следует записать
6* 83
условия равенства расходов через первый и второй, а также
через второй и третий дроссели. При этом для третьего дросселя
необходимо применить уравнение (5). Исключая из системы
двух уравнений лишние переменные, получим г3 = 1,45 г.
Кривые Г1 = fi (г) и г2 = /г (г) строят с использованием уже
построенной кривой г = /з(^з) и уравнений (31).
Точно по такой же методике строят кривые для дроссельных
пакетов, содержащих большее число дросселей.
На всех графиках (рис. 43) для дроссельных пакетов, содер-
жащих 2, 3, 4 и 5 дросселей, области, расположенные справа
от штриховой вертикальной прямой, относятся к случаю до-
критического истечения во всех дросселях. Прямые, располо-
женные слева от вертикальной штриховой прямой, относятся
к тому случаю, когда в последнем по потоку дросселе устанав-
ливается надкритическое истечение.
При докритическом истечении в дросселях, зная отношение
давления за последним дросселем к ро, можно определить сра-
зу все отношения давлений за каждым из дросселей к давлению
перед дросселем, а следовательно, давления в междроссельных
камерах. Если же в последнем дросселе истечение надкритиче-
ское, то по графику для данного числа дросселей определяют
только отношение давления за последним дросселем к давлению
перед ним. Затем определяют отношение давления перед по-
следним дросселем к р0, а для нахождения остальных отноше-
ний давлений следует обратиться к графику для дроссельного
пакета, содержащего на один дроссель меньше.
Пример 5. чДан пакет, содержащий три последовательно соединенных
дросселя. Абсолютные давления р0 = 0,5 МПа, р3 = 0,1 МПа. Требуется опре-
делить давления pi и р2. По отношению р3/ро = 0,2 из графика на рис. 43, б
находим рз/р2 = 0,29 и р2 = 0,1/0,29 = 0,345 МПа. Заключаем, что в последнем
дросселе имеет место надкритическое истечение. Поэтому, определив отношение
_Р^ = _Рз_ /_^ = _0^_ = 0,69,
Ро Ро / Р2 0,29
обращаемся к графику на рис. 43, а для дроссельного пакета, содержащего
два дросселя, и находим рг/pi = 0,8, р\ = 0,345/0,8 = 0,432 МПа.
Статика пневматических проточных камер с ламинарными
дросселями. В пневмоавтоматике ламинарные дроссели обычно
стремятся поставить в такие условия, при которых они рабо-
тают как линейные. Как известно, эти условия сводятся к тому,
чтобы обеспечить малые перепады давлений на дросселях по
сравнению с величинами абсолютных давлений. При этом рас-
ход воздуха через ламинарный дроссель будет представлять
собой линейную функцию перепада давлений
G = a(p0—Pi)-
84
Коэффициент а называют проводимостью дросселя ’. Для
капилляра
а = _Д^£1_
128цд/ЛГ
а для щелевого цилиндрического дросселя
а_ ЛО63 *Р]
12цд//?Т '
Изменение перепада давлений на дросселе мало но сравне-
нию с абсолютными значениями давлений, поэтому плотность
воздуха здесь принимается постоянной и ее вычисляют по
одному из значений давлений после дросселя (так это сделано
в приведенных выше формулах). Плотность может быть вычис-
лена также по давлению ро перед дросселем, либо по среднему
значению (pi + Ро)/2.
Из равенства расходов в статике для проточной камеры
(рис. 44, а) с линейными дросселями следует, что
аДРо—Pi) = а2(Р1— Рг)
И
р\ =----5— РоН----------Р2- (32)
+ &2 а1 + а2
Если давление р2 постоянное (например, атмосферное дав-
ление) и может быть принято за условный нуль, то формулу
(32) можно переписать в следующем виде:
где р[ и ро — соответствующие значения избыточных давлений,
отсчитанных от давления р2. Из последней формулы следует,
что в камере с двумя линейными дросселями^ поддерживается
постоянное отношение избыточных давлений pi/po, и эта каме-
ра может служить простейшим усилителем (делителем) с коэф-
фициентом усиления k = ai/(ai + a2), меньшим единицы.
Камера с линейными дросселями может выполнять роль
простейшего сумматора. На рис. 44, б представлена пневмати-
ческая камера, содержащая п линейных дросселей, причем че-
рез некоторые из них воздух втекает в камеру, а через другие —
вытекает. Пусть через т линейных дросселей воздух втекает в
камеру, а через п — т дросселей воздух вытекает из камеры.
1 Пъ аналогии с электротехникой, где ток равен произведению проводи-
мости на напряжение. В пневматике аналогом тока является массовый расход
воздуха, аналогом напряжения — перепад давлений, а аналогом резистора —
„ „ — 1
линеиныи дроссель. Численно пневматическое сопротивление R = —.
85
Расход воздуха при установившемся режиме течения в камеру
через f-й дроссель и из камеры через j-й дроссель выражают
формулами:
Gz=at(p,.—рк);
G/= а;(Рк—Р/),
где pi и pj — величины давлений входных сигналов; рк — дав-
ление в камере.
т+2
Рис. 44. Проточные пневматические камеры с ламинарными дросселями:
а — камера с двумя ламинарными дросселями; б — пневматический сумматор на дрос-
селях
Из условия равенства в статике суммы всех расходов, вте-
кающих в камеру, сумме всех расходов, вытекающих из камеры,
можно записать
т п
2 “Др*—Рк) = 2 —
i= 1 i = m+ I
откуда
tn п
^aiPi+ 2 V/
Рк=^4——• <33>
2 “<• + У а/
г = 1 / = т+1
Согласно выражению (33) давление рк есть линейная функ-
ция от входных давлений. Если установлены одинаковые
дроссели, т. е. си = аг = ... = а™ = ctm+i = ... = ctj = ... = ап,
то выражение (33) приводится к виду
tn п
2 Pi + S pj
__ 1 = 1 / = tn + 1
Вводя общее обозначение для входных давлений, получим
п
2 Pi
Рк = ‘-^—. (34)
tl
86
Из формулы (34) следует, что проточная камера с линейны-
ми дросселями может выполнять функции сумматора, выходное
давление которого равно среднему арифметическому от всех
подводимых к дросселям давлений. Погрешность такого сумма-
тора будет зависеть от того, насколько расходные характери-
стики его дросселей отличаются от линейных (на что влияет
сжимаемость воздуха), а также от того, насколько расходные
Рис. 45. Проточные пнев-
матические камеры с лами-
нарным и турбулентным
дросселями:
а — ламинарный дроссель рас-
положен первым по потоку;
б — ламинарный дроссель рас-
положен вторым по потоку
характеристики не будут совпа-
дать между собой из-за различия
в длинах и диаметрах
Рис. 46. График для определения дав-
ления в проточной камере, содержа-
щей ламинарный и турбулентный
дроссели
Статика пневматических проточных камер с дросселями
разного типа. Выше были рассмотрены проточные камеры с
турбулентными и ламинарными дросселями. Однако в пневмо-
автоматике иногда используют пневматические камеры, содер-
жащие турбулентные и ламинарные дроссели. На рис. 45
изображены пневматические проточные камеры с ламинарным
и турбулентным дросселями. Причем у камеры, изображенной
на рис. 45, а, ламинарный дроссель располагается первым по
потоку, а на рис. 45, б — вторым.
Для определения давления р\ в междроссельной камере не-
обходимо, как и для камер с турбулентными дросселями, зара-
нее знать режим истечения (докритический или надкритический)
через турбулентный дроссель. Поэтому здесь, как и ранее,
лучше всего воспользоваться графиком, построенным по урав-
нению статики междроссельной камеры. График на рис. 46
построен для камеры, представленной на рис. 45, а как наиболее
часто применяемой на практике, у которой ламинарным дрос-
селем служит капилляр. График разбит на две зоны Д и Н.
Границей между зонами является прямая r2 = Р2/Р1 = 0,5. Выше
прямой расположена зона, соответствующая докритическому
87
режиму истечения через турбулентный дроссель, а ниже —
надкритическому. Каждая кривая построена для определенного
значения г = р2/Ро- Уравнения кривых получены из условия
равенства в статике массовых расходов через ламинарный и
турбулентный дроссели, соответственно для докритического и
надкритического истечения через турбулентный дроссель имеют
следующий вид:
^4(Po-pf) / 2
2128.ид//?7’ V RT Р2 1 Р2 ’
Г2=-^>0,5
Р\
И лЛ4(р*-р?) - / —
2 12&^IRT P1 |/ 2RT ’
Г, = А<0,5.
Pi
Для составления этих уравнений были использованы выра-
жения (4), (5) и (9). Преобразуя эти уравнения и вводя отно-
шения давлений, для докритического истечения через турбулент-
ный дроссель получим
128-2- у~2 М VRT _ г2—f2
ТС Cl4p2 Г2Г2 У Г2 ( 1 — Г2)
и для надкритического истечения через турбулентный дроссель
128 ]/2 Цд/f y'RT = r2-f2
ТС сРр2 Г2Г2
В два последних уравнения в явном виде входит давление р2
и в отличие от равенств (28) и (29) здесь сохраняются величи-
ны Я и Т. Чтобы определить давление р\ в междроссельной
камере (рис. 45, а), необходимо рассчитать значение
МтЛ V RT _у и г =
d4p2 Ро
и с помощью графика на рис. 46 по кривой для этого значения г
найти Г2 = Р2/Р1. Аналогичным способом можно построить гра-
фик для камеры, представленной на рис. 45, б.
Проточную камеру, содержащую постоянный ламинарный и
переменный турбулентный дроссели, на практике чаще всего
используют как усилитель сопло — заслонка (рис. 47, а). Ока-
зывается, что усилитель с постоянным ламинарным дросселем
дает статическую характеристику, близкую по форме к стати-
ческой характеристике усилителя с постоянным перепадом на
постоянном и переменном дросселях. Для сравнения на
рис. 47, б приведены статические характеристики усилителя
88
сопло — заслонка с турбулентным постоянным дросселем (кри-
вая 2) и ламинарным постоянным дросселем — капилляром
(кривая 1). Параметры, характеризующие работу обоих усили-
телей, имели следующие значения: абсолютное давление пита-
ния ро = 0,2 МПа, давление р2 = 0,1 МПа, диаметр постоянного
d\ = 0,2 мм, длина капилляра
дросселя (капилляра и жиклера)
I = 20 мм, диаметр сопла пе-
ременного дросселя dz =
= 0,5 мм, температура Т =
= 293 К.
Статическая характеристи-
ка усилителя с постоянным
дросселем-жиклером построе-
на с помощью графика, пред-
ставленного на рис. 34, а с ка-
пилляром— с помощью графи-
ка на рис. 46. Статические ха-
рактеристики были рассчитаны
с учетом коэффициента расхо-
да ц.
Проточные камеры с турбу-
лентными и ламинарными
дросселями используют также
при построении приборов для
извлечения квадратного корня
и возведения в квадрат. Упо-
мянутые приборы работают
ndip2
а =---------, а =
128у,МТ
Рис. 47. Усилитель сопло — заслонка
с капилляром в качестве постоянного
дросселя:
а — схема; б — статические характери-
стики
в низком (0—100 мм вод. ст.) диапазоне рабочих давлений, по-
этому уравнение камеры (рис. 45, а) может быть представлено
в виде
а(Ро—р1) = а/р1— р2,
где ____
%р2
RT
Разделив последнее уравнение на а, получим
Ро — Pl =dl V Pl— Р2,
где _
а, = 5,75/Ид/-.
d\ V р2
Если давление р2 принять за условный ноль, то, например,
при Qi = 1 будем иметь
Pi = (Ро—Pi)2-
Таким образом, давление в междроссельной камере равно
квадрату разности перепада давлений на первом (ламинарном)
89
дросселе. Давление в междроссельной камере р\ может быть
определено также и с помощью графика, представленного на
рис. 46. Аналогичным способом можно получить уравнения для
случая, когда первым по потоку располагается турбулентный
дроссель (рис. 45, б):
= ^201,
где
а2 = 0,174
А V р2
VRT
и при а2 = 1, V Ро — Р\ = Р\.
Избыток давления над р2 здесь равен корню квадратному
из перепада давлений на турбулентном дросселе.
Ро= const
Рис. 48. Графическое построение статической характеристи-
ки пневматического усилителя сопло — заслонка:
а — расходная характеристика 1-го дросселя; б — расходная ха-
рактеристика 2-го дросселя; в — совмещение расходных характе-
ристик 1-го и 2-го дросселей; г — графический способ построения
характеристики усилителя
Если заранее характер течения воздуха неизвестен, то рас-
считать расход воздуха через дроссель трудно. В этом случае
гораздо проще получить расходную характеристику дросселя
экспериментально. Давление в междроссельной камере, состав-
ленной из двух дросселей, можно определить графическим
путем по расходным характеристикам. Если заданы давления
90
Pq и р2, то давление в междроссельной камере р\ можно найти,
используя расходные характеристики 1-го и 2-го дросселей
(рис. 48, а, б), полученные для р0 = const и р2 = const в зави-
симости от pi, путем их наложения друг на друга и определения
абсциссы точки пересечения (рис. 48, в). Другими словами,
способ сводится к нахождению точки пересечения расходных
характеристик дросселей, соответствующей равенству расходов
в статике через 1-й и 2-й дроссели. Применяя графическое по-
строение, можно также получить статическую характеристику
пневматического усилителя сопло — заслонка. Такое построение
проведено на рис. 48, г.
2. ДИНАМИКА ПНЕВМАТИЧЕСКИХ КАМЕР
считают независимым от
Рис. 49. Схема проточной
пневматической камеры, у
которой могут быть измене-
ны все входные величины,
характеризующие состояние
воздуха в камере
Линеаризованное уравнение динамики проточной пневмати-
ческой камеры с турбулентными дросселями [24]. При выводе
дифференциальных уравнений пневматических камер обычно
принимают два основных допущения. Первое из них состоит в
том, что расход воздуха через дроссель
сил инерции, обусловленных измене-
нием скорости течения во времени
в каждой данной точке, и мгновенное
значение расхода принимают равным
тому расходу, который был бы в ста-
тике при тех же давлениях до и после
дросселя. Другими словами, процессы
течения воздуха через дроссели рас-
сматривают как квазистатические.
Второе допущение связано с пред-
положением о том, что изменение со-
стояния воздуха в проточных камерах
происходит по изотермическому зако-
ну. На самом деле процесс изменения
состояния воздуха в камерах является
средним между изотермическим и
адиабатическим процессами. Расход-
ные характеристики турбулентных
дросселей существенно нелинейны.
Поэтому при выводе дифференциальных уравнений пневматиче-
ских камер, содержащих турбулентные дроссели, приходится
прибегать к линеаризации и рассматривать лишь малые отклоне-
ния параметров камеры от параметров при исходном статиче-
ском режиме. Принимается также, что сочетание режимов исте-
чения на дросселирующих органах, характерное для исходного
статического режима, сохраняется также и в переходном про-
цессе.
Выведем линеаризованное дифференциальное уравнение
проточной пневматической камеры, представленной на рис. 49.
91
Допустим, что в динамическом процессе могут изменяться все
величины, характеризующие состояние воздуха в междроссель-
ной камере, а именно: питающее давление р0, давление на вы-
ходе из камеры р2, эффективные проходные сечения дросселей
fi и f2 и объем камеры V за счет перемещения поршня (или уп-
ругого элемента) х. За время dt масса воздуха в камере изме-
няется на величину
dM = dMx—dM2, (35)
где dM\ — масса воздуха, поступившего в междроссельную ка-
меру за время dt через 1-й дроссель;
dM2 — масса воздуха, ушедшего из камеры через 2-й дроссель
за время dt.
Продифференцировав уравнение (35) по времени, будем
иметь
dM dMx dM2 г г .
dt dt dt dt
здесь G\ и G2 — соответственно массовые расходы воздуха в
камеру и из камеры.
Таким образом, расход воздуха, идущий на увеличение дав-
ления в камере, равен разности этих расходов. Масса воздуха
в камере в любой момент времени М = Vpb
Дифференциал этого выражения
dM = Vdp1 + p1dV.
Так как V = bV 4- Ус и pi = pic + dpi, то
dM = (6V + Vc)d(fipx + plc) + (dP1 + Plc)d(6V + Vc).
Здесь и далее значком d будут обозначаться абсолютные
приращения величин, отсчитываемых от их значений на исход-
ном статическом режиме, а индексом «с» — значения, относя-
щиеся к исходному статическому режиму.
Пренебрегая приращениями объема dV и плотности dpi по
сравнению с Vc и рс при исходном статическом режиме, получим
dM = VcddP1 + picddV,
учитывая, что
6pi = -^-, 6V=—6xF и р1с = -^-,
RT с RT
приводим правую часть равенства к виду
d8M = d8p{-------йбх;
RT RT
здесь F — площадь поршня или площадь поршневого действия 1
1 Под площадью поршневого действия понимается площадь, которая,
будучи умножена на перемещение, дает приращение объема.
92
любого другого упругого элемента (сильфона, мембраны и
т. д.). Продифференцировав последнее равенство по времени,
получим
dbM _ Vc ddpi p]cF dbx /ojv
dt ~ ~RT ~dt RT dt 1
С другой стороны, изменение расхода, идущего на изменение
давления в камере, является функцией ро, Рь Р2, fi и /2, т. е.
G1—= — =G(Po, Р1, р2, fl, f2)‘
dt
Следовательно, в линейном приближении правую часть
уравнения (37) можно представить в следующем виде:
dbM dG , dG с . dG я . dG ( dG /QO4
__ = _— 6p0 + —— 6pi + —— 6p2 + —— 6^+—— 6/2. (38)
dt dpo dp\ dp2 dfi d/2
В этом уравнении для частных производных введена сокра-
щенная запись, при которой опущены индексы р0 = Рос, Pi = Рю,
£ £ „ dG
fl = fic при производной --
дро
Учитывая, что левые части
можно записать
И т. д.
уравнений (37) и (38)
равны,
Vc d6pi plcF ddx
dt
dG
dG с dG г
-----Ро Н------+
RT dt RT dt др0 и др{ г
, dG к dG . dG
op2 df{ df2
(39)
dG
Поделим все члены уравнения (39) на--------------р1с
dPi
с dbx
жим и разделим член с 6р0 на рОс, член с ------- на хс, член
dt
i>p? на Р2с, член с dfi на flc и член с 6/2 на f2c. Переходя затем
относительным приращениям и обозначая
-^- = АРо;
Рос
Р1С
flc
и умно-
с
к
Pic
-^- = ДЛ;
/ 1C
— =Дх,
Хс
а/2;
В
получим дифференциальное уравнение проточной камеры
виде
+ kpi = .. + + ^2^2 + l^fAfl + &f2Af2, (40)
иг dt
93
где постоянные времени и коэффициенты усиления, соответ-
ственно, равны:
Ту =
—-—> Tx =
dpi
Fxc
„ dG
RT —-
dG
dfz
dG
dpi
dG
dp2
dG
fic .
Pic
Г2,
^2 —
dp i
dG
dfi Ac .
dG Pic
dp i
dG
dpo 1
dG rl '
(41)
(42)
dpi
связана с x функциональной завнси-
Площадь F может быть
мостью F = f(x). Тогда
dV= —Fdx—xdF
и на основании уравнения (37) можно записать
d6M -Q q _ Тс ddpi р,с f p _dx_ х dF_
dt 1 2 RT dt RT \ c dt c dt
_ Tc dfipi p,c / p dF_\ d\x
RT ' dt RT V С-Г c dx ) c dt '
Следовательно, постоянная времени
Причем (-----) в последнем выражении для Тх опреде-
\ dx / с
ляется как тангенс угла наклона касательной к характеристике
/? = /:(х) в точке, соответствующей исходному статическому
режиму.
94
Для примера определим значение коэффициента kfx для со-
четаний режимов истечения Д—Д и значение коэффициента kQ
для сочетания режимов истечения Н—Н. Напишем выражение
для разности расходов воздуха в камеру и из камеры для соче-
тания режимов истечения Д—Д:
/2 /^2
G = Gt — 62 = fi I/ — Pi(A>—Pi) —М/ — P2(Pi— P2)
л/ I Л1
и возьмем частные производные от этой разности по эффектив-
ной площади fi и по pi и, подставив в эти выражения значения
параметров на исходном статическом режиме, получим
0G , / 2 ( ч
dh ~~ V RT Pic^pQc Pic^
/ 2 / 2
dG _ ^lc I RT (p°c —^2c I pT P2c
dp\ 2 ^Pic(poc—Pic) 2 F(plc—p2c)
Воспользуемся выражением (41) для коэффициента kfx,
подставив в него найденные частные производные,
I/ DT Р[С(Р°С Р1с) г
=-----------------------?--* ------------------ - ----------.
| / 1 Ас(Рос 2plc) Vpic Р2с /2с У<Р2сР1с(Рос Р1с) Р1С
i 2RT У Pic(Poc Pic)(pic Ргс)
Переходя к отношениям давлений г2 = р2с/Р\с и г = p^IPqq,
на исходном статическом режиме, получим
А 2(г2—г) /1—г2
kfl =~f-------- ----------------
-Г~ V Г2г(г2 — г)— (r2 — 2г) У 1— r2
и
Для определения kQ при сочетании режимов истечения Н—Н
запишем соответствующую разность расходов
и найдем частные производные
._f . / 1 . / 1
др0 /1с|/ 2RT ’ dPi /2с У 2RT ‘
На основании выражения (42) для коэффициента k0 можно
написать
b f1с 1 Лс г2
/г0 = --------- -----.
/2С Г1 I2C Г
95
Более подробно линеаризованные уравнения динамики про-
точных пневматических камер разобраны в работе [24]. В этой
же работе приведены графики, которые дают возможность оп-
ределить коэффициенты дифференциальных уравнений проточ-
ных камер без проведения предварительных расчетов.
Нелинейные дифференциальные уравнения проточной пнев-
матической камеры с турбулентными дросселями. Если принять
объем камеры постоянным и предположить, что входные
величины могут претерпевать только скачкообразные измене-
ния, то нелинейные дифференциальные уравнения проточной
пневматической камеры интегрируются.
Выведем дифференциальные уравнения изменения давления
во времени в проточной пневматической камере (рис. 33). Как
и ранее, будем считать, что То = 1\ = Т2 = Т и что процесс
течения воздуха через дроссели квазистатический, т. е. расход
воздуха через дроссели не зависит от сил инерции. Примем
также, что термодинамический процесс изменения состояния
воздуха в дросселях— адиабатический.
Масса воздуха в междроссельной камере
М = Ер. (43)
Дифференцируя уравнение (43) по времени и используя
известное уравнение состояния газа, получим
V dp, 44
dt RT dt V '
В уравнении (44) величина представляет собой маС’
dt
совый расход воздуха в междроссельную камеру (или из нее)
в динамическом режиме, т. е. ---- = Gj — G2.
dt
Переписав уравнение (44) с учетом сказанного, получим
—---dP\__G __ q
RT dt
(45)
Массовые расходы Gi и G2 можно рассчитать по приближен-
ным формулам (4) и (5) для адиабатического процесса. Как и
в статике, здесь также возможны четыре различных сочетания
режимов истечения через первый и второй дроссели: Д—Д,
Н—Д, Д—Н и Н—Н. Подставляя в уравнение (45) соответ-
ствующие выражения (4) и (5), можно получить четыре диф-
ференциальных уравнения, относящихся к различным сочета-
ниям режимов истечения. Полученныё таким образом выраже-
ния при условии скачкообразного изменения любой из входных
величин (ро, fi, Ь и р2) являются уравнениями первого порядка
с разделяющимися переменными и могут быть проинтегрирова-
ны. При интегрировании указанных уравнений примем, что
96
коэффициенты расходов р. в течение переходного процесса
остаются постоянными. В результате интегрирования получим.
Для сочетания Д—Д
t = —
24
^r\ 1_____________Р1 Рг
^1(1 —Г1) 2ср
2r + pf—z-j
—arctg —
2 I
где С — постоянная
начальных условий;
2 ср
р? (2г1-1) + г,
arctg
ki—r)
К Рз~ f+v'7~
интегрирования,
2₽ip2 Vr,(l-r.)
Рз KpZ
которую находят
(46)
из
ф =
_1_____/_\2 г*_
2 2F / + k* 2
Р2 .
Ро
^ = —;
^2
•4 = -i/—;
f2 V RT
_ Pi •
1 — »
Po
— + ——I- ф;
2 242
— + ——
2 2&2
|/ 2 242 +<Р’ у 2 + 242 Ф'
Для сочетания режимов истечения Н—Д
/ = Л
A_i__L
r2 2r
-1--A-
2r
(47)
где г2 = p2/pl.
Для сочетания режимов истечения Д—Н
t= А--—
W + 1
2k а
In I ,+ C.
(48)
Для сочетания режимов истечения Н—Н
t = А In | k — гх | + С. (49)
В случае, когда f\ или f2 обращаются в нуль, выражения
(46) — (49) вырождаются соответственно в уравнения опо-
рожнения или заполнения глухой камеры.
При h = 0 для докритического истечения
t=— А
А—1+с
Г2
7 Заказ 993
.97
и для надкритического истечения
t= — Д In — + с.
Г2
При f2 = 0 для докритического истечения
где
и для надкритического истечения
t = А хгх + С.
Отметим, что уравнения переходных процессов в междрос-
сельных камерах зависят не от абсолютных значений давлений
Ро, Pi, Р2, а от их отношений г2, г. Для расчета переходного
процесса в междроссельной камере необходимо заранее знать,
какие сочетания режимов истечения будут иметь место во время
его протекания (возможны три различных сочетания режимов
истечения через первый и второй дроссели), к какому сочетанию
режимов истечения относится исходный статический режим и
каковы его параметры. Эта задача может быть решена с по-
мощью графика, представленного на рис. 34 и построенного
с использованием уравнений статики пневматической и проточ-
ной камеры. Кроме того, при расчете переходного процесса,
протекающего в междроссельной камере, необходимо знать
также величины коэффициентов расхода щ и ц2 дросселирую-
щих органов. Проточная пневматическая камера в устройствах
пневмоавтоматики выполняется чаще всего в виде усилителя
сопло — заслонка (рис. 35). Зависимость коэффициента расхо-
да от параметров дросселя сопло — заслонка, входящего
в состав такого усилителя, обычно задается графически. Кри-
вые, выражающие указанную зависимость, приведены
на рис. 15.
Пример 6. Для усилителя сопло — заслонка (рис. 35), имеющего постоян-
ный дроссель типа жиклер с d\ = 0,427 мм, переменный дроссель сопло — за-
слонка с d2 = 2,02 мм и объем междроссельной камеры V = 462 см3, опреде-
лить временную характеристику р\ = f (t) при изменении расстояния между
соплом и заслонкой скачком от hc = 0,037 мм до hycT = 0,083 мм. Абсолют-
ное давление питания р0 = 0,25 МПа, абсолютное давление за вторым дрос-
селем р2 = 0,1 МПа.
Прежде чем приступить к построению переходного процесса, следует опре-
делить давление в междроссельной камере р\с при исходном статическом
режиме и давление Р1УСт при новом установившемся статическом режиме. Так
как коэффициент расхода ц2 для второго дросселирующего органа не являет-
ся постоянным, а зависит при постоянном открытии h от давлений перед соп-
лом и после него, значения указанных выше давлений следует искать методом
последовательного приближения.
98
Найдем значение pic. Учитывая, что на исходном статическом режиме
Лс = 0,037 мм, а давление в междроссельной камере лежит в пределах
0 25 МПа Pic 0,1 МПа, берем в первом приближении р,2 = 0,4 (рис. 15, б).
Постоянным дросселем служит жиклер, поэтому можно считать, что щ =
const = 0,8.
Найдем отношение
nd?
(/i/AOi = Hl “ " : = 1,22.
При помощи графика на рис. 34, учитывая, что г = 0,4, находим г2 = 0,47.
Следовательно, pic = 0,212 МПа.
По графику, представленному на рис. 15, "б, определяем уточненное зна-
чение Нг1 = 0’48-
Тогда (fi/f2)n ~ 1 и, следовательно, pic = 0,2 МПа.
Найдем установившееся значение pi уст. В первом приближении для
hycr = 0,083 мм по графику на рис. 15, б находим pj = W и определяем
(fi/f2)i = 0,218. Пользуясь графиком на рис. 34, находим г2 = 0,9 и р!1уст =
= 0,108 МПа. Снова с помощью графика на рис. 15, б находим уточненное
значение р 21 = °’755 и рассчитываем (Л//2)п = 0,29.
По графику на рис. 34 определяем г2 = 0,877 и, следовательно, pi уСт =
= 0,114 МПа.
В новом установившемся режиме отношение filf2 = 0,29.
Вычислим также f2 для нового установившегося режима, учитывая, что
р2 = 0,755:
f2 = р2ш/2йс = 0,004 см2*.
Теперь есть все данные для расчета. Остается определить те сочетания
режимов истечения через первый и второй дроссели, которые будут сущест-
вовать в переходном процессе. Для этого воспользуемся графиком на рис. 34.
Намечая на кривой для г = 0,4 точку исходного статического режима (г2 = 0,5,
Г1 = 0,8) и нового установившегося значения (г2 = 0,877), замечаем, что вре-
менная характеристика будет проходить сначала через сочетание режимов
Д — Д, а затем Н — Ди граничное значение будет г2 = 0,8, что соответствует
ri = 0,5. Это следует из равенства г = zv2, которое действительно также в ди-
намике.
Для первого участка (Д — Д) расчет ведут по формуле (46). Постоянную
интегрирования определяют из условия, что = 0,8, t = 0. На втором участке
{Н— Д) расчет следует вести по формуле (47), причем постоянную интегри-
рования определяют из условия, что ri = 0,8 при t = Здесь Л — время, со-
ответствующее моменту перехода от сочетания режимов истечения Д — Д
кН — Д. Данные расчета сведены в табл. 1.
На рис. 50 представлена экспериментальная кривая переходного процесса.
Там же нанесены расчетные точки (по табл. 1).
* Так как ц2 зависит от давления перед соплом, в данном случае наибо-
лее правильным было бы разбить весь диапазон изменения pi на участки и
взять средние значения коэффициентов расхода для каждого участка. Если
же ради простоты взять одно значение ц2, то его следует выбирать соответст-
вующим окончанию переходного процесса, так как только в этом случае рас-
четное установившееся значение будет наиболее близко к экспериментально-
му. Физически это означает, что вместо медленно уменьшающегося в период
переходного процесса эффективного проходного сечения f2 из-за уменьшения
М2, обусловленного падением давления pi (см. график на рис. 15, б), взято его
наименьшее возможное значение. Вследствие этого расчетная кривая переход-
ного процесса должна пройти несколько выше экспериментальной.
Таблица 1
Расчетные данные для построения
переходного процесса
д-д н-д
t, с П Р\ = 0,2 5г«, МПа t, с ГЧ о, 1 Pi“ Гч МПа
0 1,13 2,76 3,91 /1 = 6,72 0,800 0,700 0,600 0,550 0,500 0,200 0,175 0,150 0,137 0,125 =6,72 7,25 7,84 8,94 12,25 0,800 0,815 0,830 0,850 0,877 0,125 0,123 0,120 0,118 0,114
Рис. 50. Экспериментальная
кривая переходного процес-
са в меж дроссельной камере
Динамика пневматических камер, содержащих ламинарные
дроссели. При выводе дифференциального уравнения (40) про-
точной камеры не было сделано никаких предположений отно-
сительно зависимости расхода воздуха через дроссели камеры
от их геометрических и термодинамических параметров.
Поэтому уравнение (40) и выражения для его коэффициентов
могут быть использованы также и для камеры, содержащей
ламинарные дроссели. Так как в формулы для расхода воздуха
ламинарных дросселей площади проходных сечений не входят,
то вместо них могут быть взяты проводимости дросселей а. При
изменении перепадов давлений в широком диапазоне следует
принять, что массовые расходы воздуха через дроссели проточ-
ной камеры равны
G| = а! (Рэ —Pi), <?2 = аДр?—Р’),
где для капилляра
, яс/4
а =--------,
для щелевого цилиндрического дросселя
п _ я£)63
а “ 24нд//?Г *
Уравнение (40) действительно и для случая включения
различных (смешанных) дросселей, например, турбулентного
и ламйнарного. При этом необходимо окончательный вывод
выражений коэффициентов дифференциального уравнения де-
лать с учетом соответствующей формулы для разности
расходов G.
В устройствах пневмоавтоматики проточные камеры с лами-
нарными дросселями чаще всего используют в качестве точных
100
апериодических звеньев в таких приборах, как интеграторы и
дифференциаторы. Поэтому они содержат или постоянные,
или регулируемые дроссели, проводимости которых остаются
постоянными в переходном процессе, а также имеют междрос-
сельные камеры с неизменным объемом V. Кроме того, благо-
даря выбору соответствующего диапазона изменения рабочих
давлений и геометрических параметров обеспечиваются такие
условия работы ламинарных дросселей, когда сжимаемостью
воздуха можно пренебречь и считать, что расход линейно зави-
сит от перепада давлений. С учетом этого для вывода диффе-
ренциального уравнения проточной камеры с ламинарными
Рис. 51. К расчету глухой камеры:
а — схема камеры; б — переходная функция при опорожнении; в — переходная
функция при наполнении камеры
дросселями за исходную модель примем камеру, представлен-
ную на рис. 44, а, и будем считать, что расход воздуха через
дроссель линейно зависит от перепала давления. Поэтому здесь
нет необходимости в линеаризации и анализе отклонений от
параметров на исходном статическом режиме.
Выведем уравнение проточной пневматической камеры, со-
держащей линейные дроссели. Для этого в выражение (45)
вместо Gj и G2 подставим Gi = ai(p0— Pi), G2 = a2(Pi—Рг).
После соответствующих преобразований получим
п ‘ J7,’ ’ + Р1 = &оРо + ^2^2,
at
'Г V
где Тп = —-—- — постоянная времени апериодического
звена; k2 =---—— и k0 = —-----------коэффициенты усиления,
a 1 + ct 2 a 1 + аг
меньшие единицы (k0 = 1 —ki).
Если проводимость второго дросселя аг = 0, то уравнение
проточной камеры вырождается в уравнение глухой камеры
(рис. 51, а):
Tn^- + Pl=Po, (50)
at
101
где
Примем давление р0 за постоянный уровень отсчета, а дав-
ление, отсчитанное от этого уровня, отметим чертой — Pi*.
Тогда
т dpi____________________________
Тп dt ~ pi'
Разделяя переменные и интегрируя, получим
Tnlnp1 = -/+C, (51)
где С — постоянная интегрирования.
Для определения постоянной интегрирования обозначим
давление при t = 0 через рь. Тогда из выражения (51) следует,
что
С = 7'п1пр4.
И окончательно для рассматриваемого процесса получим
- - -4- (52)
Таким образом, падение давления в камере происходит по
экспоненциальному закону (рис. 51,6). Время, в течение кото-
рого давление в камере упадет от рь до ра‘.
tba = -Ta\n^. (53)
Рь
Формулы (52) и (53) были выведены для случая опорожне-
ния камеры, когда р\ > р0. Если же р0 > Рь то будет происхо-
дить наполнение камеры. Дифференциальное уравнение при
этом будет иметь вид
+ (54)
dt
Здесь давления pi и р0 отсчитывают от начального значения
давления рь которое принимают за нулевой уровень отсчета.
Пусть входное давление в момент t = 0 претерпевает скач-
кообразное изменение от 0 до р0. Решение неоднородного диф-
ференциального уравнения (54), как известно, будет состоять из
суммы двух решений: решения однородного уравнения, соответ-
ствующего уравнению (54), и частного решения. Так как правая
* Принимается, что в момент t = 0 давление изменяется скачком от
рь до 0.
102
часть уравнения — величина постоянная, то частное решение
может быть представлено в виде
и = В,
где В — константа.
Подставляя В в уравнение (54) вместо находим В = р0.
Корень характеристического уравнения г = —1/Тп и, следова-
тельно, решение уравнения (54)
можно записать в виде
t
pi = А е г" + ро,
где А = — ро — произвольная по-
стоянная, определяемая из усло-
вия, что при t = 0 р\ = 0.
Таким образом
/ t \
Р1=Ро\1— е 7"Л (55)
Рис. 52. Схема пневматического
конденсатора
График функции (55) представлен на рис. 51, в. Постоянную
времени определяют по графику переходной функции как проек-
цию касательной на линию установившегося значения pi = ро.
Диаметр капилляра d, при котором реализуется заданное
значение постоянной времени глухой камеры (рис. 51, а) Ти для
заданных объема V и длины Z, определяют по формуле
,4 128цдУ7
ЛРоГп
полученной подстановкой в выражение для Тп значения
а л^4Ро
128,ид//?Г
Пневматический конденсатор. Схема пневматического кон-
денсатора представлена на рис. 52. Вместо сильфона может
быть использован любой другой упругий элемент, характеризуе-
мый линейной зависимостью между объемом и перепадом дав-
лений, а также сообщающиеся сосуды типа жидкостного
U-образного дифференциального манометра с одинаковым и
неизменными диаметрами.
При отсутствии упора под действием перепада давлений
р\ — Р2 перемещение сильфона
F . х F л
Х = —(Pl— р2) = &Р,
Ci Cl
где F — эффективная площадь сильфона; — жесткость
сильфона.
103
Площадь поршневого действия сильфона примем равной
эффективной площади L Тогда масса воздуха, находящегося
в сильфоне:
М = УоР + *Р Р,
где Vo — начальный объем; р — плотность.
Дифференцируя последнее равенство по времени при
допущении, что давление р\ постоянное1 2, получим выражение
для расхода воздуха в сильфон:
dM „ „ dx
----= G = гр-----.
dt dt
Исключая x, получим
q F2p d\p _ q dkp
Cj dt dt
(56)
F2p
где С = —— — пневматическая емкость.
Учитывая, что массовый расход G есть аналог тока /, а пере-
пад давлений Др — аналог напряжения U, и принимая во вни-
мание зависимость, имеющую место в электротехнике:
. г dU
г = С---,
dt
приходим к заключению, что пневматический конденсатор
является полным аналогом электрического конденсатора.
3. СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ КОММУНИКАЦИОННЫХ
КАНАЛОВ СИСТЕМ ПНЕВМОАВТОМАТИКИ
В системах пневмоавтоматики различают два вида кана-
лов— короткие коммуникационные каналы, необходимые для
соединения струйных или иных элементов в блоках пневмати-
ческих устройств, и длинные трубопроводы или каналы связи
отдельных блоков, агрегатов между собой.
При установившихся режимах работы пневмоканалов глав-
ное внимание при построении пневматических приборов уделяют
определению потерь давления на сопротивлениях и расчету
расходов разветвленной цепи. Потери давления обусловлены
либо местными сопротивлениями на входе, выходе и изгибах
канала, либо силами вязкого трения, распределенными по дли-
не канала. Обычно потери давления стремятся свести к мини-
муму. Для этого выбирают соответствующим образом конструк-
1 Произведение площади поршневого действия на перемещение донышка
сильфона дает приращение объема.
2 Именно при таких условиях работают пневматические конденсаторы
в некоторых пневматических вычислительных устройствах.
104
цию канала, сочетание сечений последовательно включенных
коммуникационных каналов и т. д. [25].
Рассмотрим местные потери и потери по длине в коммуника-
ционных пневматических каналах.
Потери, или падение давления в коммуникационном канале,
складываются из двух составляющих: потерь по длине, возни-
кающих в результате действия сил вязкого трения, и местных
потерь. Потери по длине и местные потери учитываются соот-
ветственно коэффициентом сопротивления трения £тр и коэф-
фициентом местного сопротивления £. Эти коэффициенты зави-
сят соответственно при ламинарном и переходном режимах
течения от числа Рейнольдса и геометрии канала или местного
сопротивления, а при турбулентном течении — только от гео-
метрии. Кроме того, при турбулентном и переходном режимах
упомянутые коэффициенты зависят также и от шероховатости
стенок.
Потери по длине каналов определяют по известной формуле
(57)
где ^тр коэффициент сопротивления трения; р — плотность
воздуха; v — средняя скорость течения потока; / — длина кана-
ла; л—коэффициент трения, зависящий от режима течения,
формы сечения и относительной шероховатости; dr — гидравли-
ческий диаметр, который находят как отношение учетверенной
площади поперечного сечения канала к периметру, т. е. dr =
= 4/7П.
Напомним, что гидравлический радиус Rr = dr/4. Для лами-
нарного режима течения (Re 2300) в канале круглого сече-
ния коэффициент трения л = 64/Re. При неразвитом турбулент-
ном режиме течения этот коэффициент определяют по
формуле Блазиуса: л = 0,316 Re-14 . В общем случае для труб
круглого сечения для всех режимов течения X определяют по
графику Никурадзе [9]. Если форма сечения канала отлична от
круглой, то X зависит не только от Re, но и от отношения h/b,
т. е. % = f (h/b, Re), где hub — соответственно высота и ширина
канала.
Вычислим число Рейнольдса для наиболее часто встречаю-
щихся каналов — прямоугольного и круглого сечений. Если
известна средняя скорость течения потока и, то нетрудно найти
числа Re, соответствующие разным формам коммуникационных
каналов. Считая, что число Re = vdrl\\ можно найти:
для канала прямоугольного сечения
_ 2ubh _ 2Q
v(b + h) v(b + h)
где v = Qlbh\ Q — объемный расход,
105
для канала круглого сечения
v viid
тде
v = 4Q/nd2.
4. ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ПНЕВМАТИЧЕСКИХ
КОММУТАЦИОННЫХ КАНАЛОВ
Динамические характеристики пневматической системы оп-
ределяются динамическими характеристиками отдельных ее
-звеньев, а именно, пневматических элементов и коммуникацион-
ных каналов связи. На практике при построении пневматиче-
ских управляющих систем бывает так, что система, имеющая
вполне удовлетворительные статические характеристики, оказы-
вается неработоспособной в динамическом режиме. Причина
часто заключается в неучете динамических характеристик пнев-
матических каналов.
В струйных управляющих системах пневматические элемен-
ты соединяют между собой коммуникационными каналами, как
правило, небольших сечений и длин, для которых отношение
l/dr < 10. Такие каналы называют короткими. В системах мем-
бранной или струйно-мембранной пневмоавтоматики сравни-
тельно малого быстродействия для этих целей используют более
длинные каналы. Наконец, передача пневмосигналов от дат-
чиков к системе управления и от последней к приводам осу-
ществляется по каналам большой длины, которые иногда
называют длинными линиями.
Процессы, происходящие в каналах, зависят от многих
•факторов и крайне сложны [25]. При передаче пневматических
сигналов
процесса
•факторов весьма сложен, поскольку еще не выяснены до конца
причины, обусловливающие преобладание
Поэтому на практике пользуются приближенными инженерны-
ми методами расчета характеристик коммуникационных кана-
лов, а также проводят большое число экспериментальных работ
по оценке погрешности приближенных методов расчета и уста-
навливают поправочные коэффициенты.
При обработке экспериментальных данных было условно
принято, что коммуникационный канал представляет собой
последовательное соединение звена чистого запаздывания и
апериодического звена, т. е. что выходное давление pi связано
с давлением на входе в канал ро следующими уравнениями:
т<г^7- + Pi = кр'з,
at
по каналам имеет место сочетание двух процессов —
разгона массы среды и волновых явлений. Учет этих
каждого из них.
(58)
Pj = Po(/—t),
106
где т — время чистого запаздывания; р 0 — промежуточное
давление (рис. 53).
На основании опытных данных для величины т принято сле-
дующее выражение:
I
Т = Т]-,
а
где I — длина канала; а — скорость звука в воздухе; т] — коэф-
фициент пропорциональности, равный 1,2, согласно опытным
данным для канала сечением 1,5 X 1,5 мм.
Опыты показали также, что для каналов указанного выше
сечения при наличии на их концах дроссельных сопротивлений,
Рис. 53. Упрощенная
структурная схема для
расчета коммуникацион-
ного канала
определяемых размерами сечений входного и выходного кана-
лов струйных элементов, постоянная времени апериодического
звена Гп = 15,5 • 10-101 с.
Это соотношение было получено для каналов длиной I =
= 100 -4- 900 мм.
При оценке суммарного времени 7\ передачи сигнала по
коммуникационному каналу было принято, что
Л = + т-
5. ПНЕВМАТИЧЕСКИЕ ДЛИННЫЕ ЛИНИИ
Как известно, процесс распространения волны пневматиче-
ского сигнала аналогичен процессу распространения волн в
электрической линии и описывается системой уравнений в част-
ных производных [24, 25]. В общем виде уравнения распростра-
нения волны пневматического сигнала имеют вид:
+7?Q + L = 0;
дх dt
^ + с^Р- = 0,
дх dt
(59)
где R = —Я^д ; Л = -у-; С = —f — площадь поперечно-
го сечения канала; цд— динамический коэффициент вязкости
воздуха; р — плотность воздуха; а — скорость звука.
Уравнения (59) получены в предположении, что изменение
давления в линии мало по сравнению с давлением при исходном
107
статическом режиме и, следовательно, газ можно считать не-
сжимаемым. Кроме того, было принято, что потери на трение
определяются так же, как при ламинарном установившемся
течении газа или жидкости по трубопроводу.
Систему (59) можно привести к одному уравнению 2-го
порядка в частных производных относительно объемного рас-
хода Q или давления р:
или
L^ + R
dt2 dt С dx2
dx2 dt2 dt
(60)
Методам интегрирования уравнения (59) и (60) при различ-
ных значениях R, L и С посвящено много работ в области элек-
тротехники, акустики, гидродинамики, теории упругости и т. д.
Приведем результаты решения уравнений (59), полученные
с применением методов операционного исчислений [24].
Методы операционного исчисления удобны в тех случаях,
когда переход от изображения к оригиналу можно осуществить
с использованием табличных изображений. Применительно к
каналам пневматических приборов результаты решения уравне-
ний (59) и (60) методами операционного исчисления приведем
для нескольких частных случаев.
Рассмотрим решение уравнений (59) длинной линии при
скачкообразном изменении возмущения на входе, которое мало
по сравнению с давлением в линии на исходном статическом
режиме. К выходу линии присоединена пневмокамера.
В общем виде уравнение, связывающее объемный расход Q
и изменение давления в пневмокамере, имеет вид
<Э = СКЖ
at
Для глухой камеры с постоянным объемом
С
° к — >
Ро
а для глухой камеры с переменным объемом
с;=^+^,
Ро с
где V—постоянный объем камеры; Уо и р0 — объем камеры и
давление на исходном статическом режиме; F — площадь пор-
шневого действия;- с — жесткость сильфона или пружины, ко-
торой нагружена мембрана, поршень или другой элемент,
изменяющий объем.
108
Рассмотрим процесс изменения давления в трубопроводе
для двух частных случаев, наиболее распространенных на
практике.
1. Допустим, что к концу длинной линии присоединена пнев-
мокамера с малым объемом, тогда приближенно можно считать,
что Ск = 0. Давление на входе изменяется скачком, в момент
/ = 0 от исходного значения, условно принимаемого за р = 0,
до значения рх=о> котороё сохраняется затем постоянным. Опу-
ская промежуточные выкладки,, приведем решение уравнений
(59), полученное методами операционного исчисления [24].
Давление в трубе на расстоянии х в некоторый момент време-
ни t
Г -at ~ / 3.-Z -3/ \
р(х, t) = px=Q 1+-—----------------------5-----)х
l2LC Li \-а + Р/ -а-Р//
L /=о
X (2/ + 1)jrcos^^-^-n1 / = 0,1,2,..., (61)
_ 2р/ 2 2 J
где
R
а =---;
2L
Зная значения L и С, по формулам (62) можно рассчи-
тать а и Pj при j = 0, 1, 2,... и для постоянного х вычислить чле-
ны ряда для различных t и, наоборот, при постоянном t
вычислить члены ряда для различных х в выражении (61) для
давления р(х, /). В первом случае найдем изменение давления
во времени в каком-то определенном сечении трубы, а во вто-
ром — изменение давления вдоль трубы в какой-то определен-
ный момент времени. Число членов ряда выбирают исходя из
требуемой точности.
2. Рассмотрим случай, когда к трубопроводу присоединена
пневмокамера, а отношение длины трубопровода к его диаметру
невелико. При этом условии можно пренебречь влиянием вяз-
кого трения и принять R = 0. Давление на входе в трубопровод
изменяется скачком при t = 0 на величину рх=0 и затем остает-
ся постоянным. Решение уравнений (59), полученное с помощью
методов операционного исчисления, имеет следующий вид [24]:
р(х, /) = рх=0
sin₽'T ,
---------cos — -_ t
2P/ + sin 23/ IVLC
(63)
Значение коэффициентов определяемых уравнением
ctg ₽/ = -^-, находят по специальным графикам и табли-
цам [24].
109
Таблица 2
Данные расчета коэффициента
0° Pi Р2 Рз ₽4 0° Pi ₽3
0 1,5708 4,7124 7,8540 10,9956 50 0,8057 3,3846 6,4133 9,5127
5 1,4451 4,3488 7,2865 10,2639 55 0,7506 3,3478 6,3923 9,4983
10 1,3390 4,0879 6,9665 9,9432 60 0,6939 3,3141 6,3735 9,4856
15 1,2481 3,9044 6,7860 9,7890| 65 0,6341 3,2827 6,3564 9,4740
20 1,1686 3,7712 6,6737 9,7008 70 0,5690 3,2530 6,3405 9,4633 :
25 1,0977 3,6704 6,5975 9,6436 75 0,4956 3,2245 6,3255 9,4532
30 1,0330 3,5910 6,5420 9,6033 80 0,4079 3,1968 6,3111 9,4435
35 0,9728 3,5264 6,4995 9,5729 85 0,2915 3,1692 6,2970 9,4341 '
40 45 0,9157 0,8603 3,4722 3,4256 6,4655 6,4373 9,5490 9,5294 90 0,000 3,1416 6,2832 9,4248 :
В табл. 2 приведены значения 0; для четырех корней урав-
нения (63) в зависимости от
а < 1
0 = arctg —,
где
6 =—.
Ск
При больших значениях j коэффициент 0j можно определять
по формуле
р;. = (/—1)Л4
(/—1)л
Глава IV
СТРУЙНЫЕ ЭЛЕМЕНТЫ ДИСКРЕТНОГО
ДЕЙСТВИЯ
В Институте Проблем управления (автоматики и телемеха-
ники) была предложена идея построения логических элементов,
автоматики с использованием различных гидрогазодинамиче-
ских эффектов [41]. Идея оказалась весьма плодотворной, и в
настоящее время существует большое число струйных уст-
ройств, в том числе элементы, модули и системы управления
дискретного действия [42].
Как показала практика, одни и те же функциональные
элементы можно реализовать, используя разные гидрогазоди-
намические принципы. На первый взгляд кажется не целесооб-
разным известное дублирование элементов. Однако логические
струйные элементы разных типов находят каждый свою более
рациональную область применения. Кроме того, важное значе-
ние имеют технологические приемы производства элементов и
модулей, определяющие мобильность их изготовления. Поэтому
рассмотрим все основные типы струйных логических элементов.
По сообщениям зарубежной печати, иностранные фирмы по-
ставляют на рынок струйные логические элементы и модули^
тоже построенные на разных принципах. Дальнейшее развитие
струйной техники и накопленный опыт покажут, какого типа
логические элементы одного и того же функционального назна-
чения окажутся более перспективными.
Любой струйный логический элемент имеет соответствую-
щие его назначению функциональные характеристики [54], основ-
ные из которых следующие:
1. Характеристики давления. С помощью этих характери-
стик определяют выполнение той или иной логической операции
в величинах давления. Например, зависимость давления
в выходном канале струйного элемента от управляющего дав-
ления, т. с. рв = f\ (py ).
2. Характеристики расхода, которые показывают, как свя-
заны между собой расходы в разных каналах элементов.
Такими характеристиками могут быть зависимости расхода в:
канале питания от давления питания либо расхода в выходном
канале от управляющего расхода, т. е. Qo = ЫРо)', Qb = fz(Qy)
и т. д.
Ill
3. Нагрузочные характеристики, которые являются расход-
ными характеристиками во входных и выходных каналах.
Иначе они называются входными и выходными характеристи-
ками. Этого типа характеристики определяются зависимостя-
ми Q у = Л(Ру ), Qb = Ь(Рв).
1. СТРУЙНЫЕ ЛОГИЧЕСКИЕ ЭЛЕМЕНТЫ, РАБОТА КОТОРЫХ
ОСНОВАНА НА ВЗАИМОДЕЙСТВИИ ТУРБУЛЕНТНЫХ СТРУЙ
Основные функциональные элементы. Использовать взаимо-
действие силовых струй для построения пневматических или
гидравлических устройств было предложено впервые В. Ферне-
ром [57]. Исследования показали, что на силовом взаимодей-
ствии потоков целесообразно строить струйные элементы
логического действия, выполняющие как простые логические
операции ДА, НЕ, ИЛИ, И, так и более сложные.
Рв2
Рис. 54. Струйный усилитель с одним вхо-
дом :
а — принципиальная схема; б — условнее обо-
значение; в — таблица включений; г — статиче-
ские характеристики
Струйные .элементы, действие которых основано на силовом
отклонении потоков, бывают активными и пассивными. У ак-
тивных элементов имеется специальный питающий канал, по
которому подводится давление питания. Пассивные элементы
не имеют такого канала, и выходной сигнал в них формируется
за счет сигналов.управления.
Рассмотрим принципиальные схемы и действие струйных
.активных элементов.
112
Если в пространстве, где произошло взаимодействие турбу-
лентных струй, вытекающих из сопел под прямым углом
(рис. 54), поставить два приемных канала — один соосно с
питающим, а другой под некоторым углом к нему, то получится
струйный логический элемент, выполняющий логические опера-
ции ДА и НЕ. Рабочая жидкость под давлением питания р0
подводится к каналу питания и вытекает из него со скоростью
имея расход Qo. В свою очередь, к каналу управления У\
подается сигнал управления (входной сигнал) под давлением
рУ1 , благодаря чему на срезе канала устанавливается скорость
yyi , а через канал протекает расход Qyi . Струя, вытекающая
из канала управления, отклоняет основную питающую струю.
С выходных каналов В\ и В2 снимают выходные сигналы Pbi
и рв2- Часть мощности с выходного канала В2 подается по кана-
лу положительной обратной связи ПОС во второй -канал управ-
ления Уо. Положительная обратная связь позволяет увеличить
крутизну характеристики и коэффициент усиления элемента.
Логический элемент рассматриваемого типа реализует
логические операции повторения (выходной сигнал рвг) и отри-
цания (выходной сигнал Pbi). Его работа может быть описана
следующими логическими соотношениями Ч
В2 = У1; ВХ=У}.
Условное обозначение и таблица включений приведены
на рис. 54, б и в соответственно. Одновременно с выполнением
логической операции элемент осуществляет усиление входного
сигнала, т. е. на выходах Bi и В2 значения сигналов Pbi и рВ2
больше, чем pyi. Статическая характеристика (рис. 54, г) пока-
зывает изменение давлений рв1 и рВ2 на выходах элемента в
зависимости от управляющего давления pyi .
В набор струйных элементов входит также элемент, имею-
щий два входных (управляющих) канала и построенный в
соответствии со схемой, показанной на рис. 55, а. Любой из двух
или оба одновременно сигнала управления (входных сигнала)
под давлением pyi (скорость vh расход Qi) и ру2 (скорость v2
и расход Q2) подаются к каналам управления У1 и У2. Под дей-
ствием любого из этих сигналов (или двух одновременно) пи-
тающая струя отклоняется, при этом в выходном канале В[
давление падает, а в канале В2—возрастает. Таким образом,
с выходных каналов В{ и В2 снимаются выходные сигналы Pbi
и рВ2. В рассматриваемом элементе для увеличения крутизны
характеристики введена положительная обратная связь, линия
1 Как известно, логические переменные могут принимать лишь два зна-
чения — условные 1 и 0. Абсолютные значения давлений и расходов, соответ-
ствующие условные 1 и 0, выбираются исходя из обеспечения функционально
устойчивой работы струйных логических элементов (см. гл. VI). В дальнейшем
в таблицах включений приводятся значения двоичных переменных 1 и 0 на
выходах, соответствующих определенным состояниям входов.
8 Заказ 993 ЦЗ
которой соединяет выходной канал В2 с каналом управления Уо.
Логический элемент реализует логические операции ИЛИ,
НЕ — ИЛИ, и его работа описывается логическими соотно-
шениями
В2 = У\ + У2*, Bi — У \ 4- У 2 •
Условные обозначения и таблица включений приведены
на рис. 55, бив.
Рис. 55. Струйный элемент с двумя управляю-
щими каналами:
а — принципиальная схема; б — условное обозна-
чение; в — таблица включений
Ру] Ру2
У1 У2 В, в2
0 0 7 0
1 0 0 7
0 1 0 7
1 1 0 7
6)
Если большую часть сигнала с наклонного выходного кана-
ла струйного активного элемента подать к управляющему
каналу, расположенному ближе к каналу питания, то получает-
ся элемент памяти (рис. 56). Элемент памяти осуществляет
запоминание факта подачи управляющего входного сигнала
благодаря наличию сильной положительной обратной связи
(СПОС).
Кроме управляющего канала Уь в элементе имеется управ-
ляющий канал Ci (сбросовый канал), при подаче сигнала в
который элемент переходит в первоначальное состояние. Работа
элемента состоит в следующем. При подаче давления питания
ро в канал питания (рис. 56, а) струя направляется в выходной
канал Bi, где появляется давление pBi (расход Qbi). Элемент
памяти находится в одном устойчивом состоянии. Если подать
управляющий сигнал pyi в канал Уь то в результате силового
воздействия на питающую струю и действия сильной положи-
тельной обратной связи питающий поток направляется в
канал В2, где появляется сигнал рВ2- Этот поток идет полностью
на создание сильной положительной обратной связи. В канале
114
Bi при этом Pbi = 0. Элемент памяти переходит в другое устой-
чивое состояние. Если в последующем в результате направле-
ния потока по каналу положительной обратной связи и воз-
никновения циркуляции питающего потока управляющий
сигнал будет снят, состояние элемента памяти не меняется.
Для перевода элемента памяти в первоначальное устойчивое
состояние необходимо подать сигнал управления pci в канал Сь
Рис. 56. Струйный элемент памяти с двумя уп-
равляющими каналами:
а — принципиальная схема; б — условное обозна-
чение; в — таблица включений
В результате действия сигнала pci циркуляция питающего
потока нарушается, обратная связь отключается, и он снова
направляется в канал В\. При снятии сигнала управления
состояние элемента памяти не нарушится. Таблица включений
элемента приведена на рис. 56, в. Из рассмотрения таблицы
следует, что элемент памяти работает как триггер с раздельны-
ми входами.
Элемент памяти можно сделать более универсальным в
функциональном отношении, добавив еще два канала управле-
ния (рис. 57). Элемент реализует не только операцию запоми-
нания, но и операцию ИЛИ по каждой паре входов pyi , руг
11 Рсь Рс2- Таблица включений элемента памяти, построенного
в соответствии с показанной выше схемой, приведена на
рис. 57, в. Как и рассмотренный ранее усилительный элемент
с одним входом, все активные логические элементы являются
одновременно и усилительными.
Рассмотрим пассивные струйные элементы. Разработанные
в настоящее время пассивные струйные элементы выполняют
8* 115
однотактные логические операции. Одним
является пассивный элемент И (рис. 58).
из таких элементов
РС1 РС2
Qci Ос?
Рис. 57. Струйный элемент памяти с четырь-
мя управляющими каналами:
а — принципиальная схема; б — условное обо-
значение; в — таблица включений
Pci РС2
Pyi Руг
«)
I
/
/
Рис. 58. Пассивный логический элемент И:
а — принципиальная схема; б — условное обозначение; в — таб-
лица включений
Входные (управляющие) сигналы подаются в каналы У1
и У2. Выходной сигнал формируется в канале В. Соответствую-
щим выбором угла а и расстояния I между кромками входных
116
и выходного канала добиваются такого положения, что сигнал
в выходном канале В появляется лишь при наличии сигналов
как в канале Уь так и У2. Поданный в какой-либо один из уп-
равляющих каналов входной сигнал направляется в атмосфер-
ную полость, не попадая в выходной канал В, Таблица вклю-
чений показана на рис. 58, в.
Используя взаимодействие потоков, удалось создать
пассивный логический элемент, выполняющий несколько логи-
ческих операций,— так называемый комбинированный логиче-
ский элемент (рис. 59). Входные сигналы управления подают
Рис. 59. Пассивный комбинированный логический элемент К:
а — принципиальная схема; б — условное обозначение; в — таблица
включений
в каналы У1 и У2. В зависимости от сочетания входных сигналов
в каких-либо из выходных каналов формируется выходной сиг-
нал. Если подан сигнал только в канал Уь то сигнал будет на
выходе Bi. Если сигнал подан только в канал У2, то на выходе
В2 появляется сигнал. При наличии сигналов одновременно в
каналах У1 и У2 формируется единичный выходной сигнал в
выходном канале В3. Таким образом, элемент реализует сле-
дующие логические операции:
61=У1У2; В2 = У1У2; Вз = У1У2.
Схема, условное обозначение и таблица включений пока-
заны на рис. 59.
Рассмотрим примеры выполнения некоторых логических
операций с помощью рассмотренных элементов (см. табл. 3);
внешний вид платы со струйными элементами показан на
рис. 60.
Функция равнозначности реализуется на двух логических
элементах: пассивном комбинированном логическом элементе
и усилителе с двумя входами. Логические переменные Х[ и х2
поступают на входы пассивного логического элемента, сигналы
117
с крайних выходов которого управляют усилительным элемен-
том. Выходной сигнал у, снимаемый с инверсного выхода уси-
лительного элемента, реализует искомую функцию равнозначно-
сти по формуле
Х{Х2 + Х2*1 = (*1 + *2)(*1 + Х2) =
= XjXj + XjX2 + Х]Х2 + Х2Х2 = Х]Х2 -{- Х^Х2 = Xj х2 = у.
Функция сложения по модулю два, используемая для
построения двоичных сумматоров, эквивалентна операции
Рис. 60. Внешний вид платы со струйными элементами
отрицания равнозначности и по своей реализации аналогична
операции разнозначное™ с той лишь разницей, что сигналом у
является сигнал с прямого выходного канала усилительного
элемента. При этом осуществляется логическая операция:
х{х2 + х2*1 = х{ ~х2 = \7 х2 = у.
Функция штрих Шеффера реализуется на одном пассивном
комбинированном логическом элементе и одном усилительном
элементе. Над логическими переменными Xi и х2, поступающими
па вход пассивного логического элемента, выполняется опера-
ция И с последующим инвертированием в усилительном элемен-
те. Сигнал у снимают с инверсного выхода усилительного эле-
мента. Операция осуществляется в соответствии с логической
формулой
Х^Х2 = *1/*2 = !Л
Другая схема последовательного включения пассивного
логического и усилительного элементов реализует функцию
импликации по логической формуле
XjX2 =Xj->X2 = f/.
118
Функция стрелка Пирса осуществляется на одном элементе
в соответствии с логической формулой
X! +х2=^1 1 Х2 = г/.
Рассмотренные функции дают возможность синтезировать
произвольные, более сложные функции алгебры логики.
Существуют разные способы реализации сложных функций из
элементарных. На приведенном наборе струйных элементов
Таблица 3
Логические операции, выполняемые на струйных элементах
Наименование логической
операции
Логическая формула
Равнозначность У = XtX2 + *1*2 = *1*2 + + Х^2 = *i ~ Х2
Сложение по модулю два (исключенное ИЛИ) У = Х\Х2 + Х2*1~ *1 V*2
Отрицание И (штрих Шеффера) r/ = X1X2 = *l/*2
Импликация ^/ = *1*2 = Л\ Х2
Отрицание ИЛИ (стрелка Пирса) У = Х[ +Х2=*1 ! *2
Триггер с раздельны- ми входами
Схема
наиболее удобно синтезировать логические схемы, используя
известные в алгебре логики два способа: способ перенумерации
аргументов и способ подстановки в данную функцию новых
функций вместо аргументов этой функции.
Пример 7. В качестве примера рассмотрим реализацию какой-либо слож-
ной логической функции на данном наборе струйных элементов.
119
Пусть задана сложная логическая функция в виде:
£ = [(х,х2) (xiX2)j + [(*2 ' 1)(х, + 1)],
где ___
х2 = ихи2.
Преобразуем исходное выражение таким образом, чтобы оно состояло
из логических формул, представленных в табл. 3. Применяя правила алгебры
логики, получим
L = [*1*2 + *1*2] + 1Х2' 1’1] = [*1 (х2 + *2)] + х2 = (Х1 • 1) + х2 =
= хх + Х2 = Х1Х2 = Х1(и1 +и2).
Таким образом, исходное выражение или преобразованное выражение
реализуется на данном наборе струйных элементов в виде следующих вариан-
тов схемы: логическая операция НЕ—И либо ИЛИ отрицаний, либо логиче-
ская операция штрих Шеффера логического переменного х{ от логической
операции стрелка Пирса переменных щ и и2, т. е.
£ = (Х1Х2) = ^1/^2 = ^1 / «1 1«2 = *1 + *2-
Методика расчета соударяющихся струй. Свойства турбу-
лентной затопленной струи и
Рис. 61. К расчету турбулентной струи:
а — схема струи; б — график изменения
скорости вдоль оси струи; 1 — полюс струи;
2 — ядро струи; 3 — пограничный слой; / —
начальный участок; // — основной участок;
/// — переходное сечение
основные гидродинамические
зависимости, характеризу-
ющие распространение тур-
булентных потоков и тур-
булентных струй, лежащие
в основе расчета их взаимо-
действия, достаточно под-
робно изучены [1].
Рис. 62. Расчетная схема
взаимодействия турбулент-
ных струй
Турбулентная струя состоит из начального и основного
участков (рис. 61), имеет зону ядра 2, где скорость постоянна,
и пограничный слой 3, в котором скорость убывает к границе
струи.
120
Рассмотрим методику расчета [25] соударения двух струй
(рис. 62), вытекающих из питающего канала О и управляющего
канала У. Примем такую расчетую схему, когда на основную
свободную и затопленную струю (струю питания), вытекающую
со скоростью Vo из канала О, имеющего площадь поперечного
сечения f0, действует свободная и затопленная струя управле-
ния, вытекающая со скоростью v у из канала У, имеющего
площадь поперечного сечения fy . Для простоты рассмотрения
будем считать, что угол у между направлением вытекающих
струй равен 90°. Величины давления, расхода и скорости резуль-
тирующей струи в сечении ВВ обозначим соответственно рв,
Qb, ^в.
Наибольший интерес, с точки зрения возможности построе-
ния струйных элементов, представляет определение угла
отклонения а результирующей струи. Зная этот угол, можно
соответствующим образом расположить в определенном месте
приемный канал. Важно также определить скорость, расход и
давление в приемном канале.
Существуют различные методы расчета взаимодействия
турбулентных струй. Один из них основан на теории потен-
циального течения идеальной жидкости. Этот метод анализа
обычно применяют при рассмотрении упрощенной модели
потока жидкости для пропорционального струйного элемента.
Однако указанный метод может быть использован при анализе
элементов дискретного действия, когда необходимо определить
угол поворота а приемного канала по отношению к осевой
линии питающего потока. Обычно при гидродинамических
расчетах подобного рода принимается ряд дополнительных
допущений, касающихся физического существа процесса.
Основные допущения сводятся к следующим [25].
1. Направление результирующего потока и его размеры
определяются силовым взаимодействием струй только в обла-
сти, расположенной вблизи кромок каналов, из которых
вытекает поток. Далее результирующая струя считается сфор-
мированной и распространяющейся как турбулентная струя.
Указанное обстоятельство позволяет применить для результи-
рующей струи соотношения, которые справедливы для одиноч-
ной турбулентной затопленной струи.
2. Статическое давление во всей области взаимодействия
струй не изменяется.
3. Течение жидкости или воздуха рассматривается при
малых перепадах давления, поэтому сжимаемостью рабочей
среды можно в первом приближении пренебречь и принять
плотность р = const (изохорический процесс).
4. Течение плоское.
При указанных выше допущениях можно применить теорему
о количестве движения и неразрывности потока для результи-
рующей струи.
121
Учитывая предположение о неизменном статическом
давлении для всей области взаимодействия струй, для количе-
ства движения в проекциях на оси х и у можно записать
следующие выражения:
G(M) = Gb^b cos а. (64)
GyVy = GbVb sin а, (65)
где Go, Gy , Gb — массовые расходы в каналах питания, управ-
-ления и в зоне взаимодействия струй; и0, vy , Ув — скорости те-
чения вдоль осей потока.
Разделив уравнение (65) на уравнение (64), получим
tg а = = GyVy
fovo G°v°
Учитывая, что количество движения потока Gv -= pfv2,
а квадрат скорости v2 = р, после подстановки последних вели-
чин в формулу для определения угла а окончательно получаем
1 / fy Ру \
а = arctg (-.---- .
\ /о ро /
Для нахождения скорости (расхода) суммарного потока
рассмотрим результирующую струю как одиночную затопленную
струю, берущую начало в плоскости, которая проходит через
точку пересечения осей питающего и управляющего каналов и
составляет с осью канала управления угол а.
Результирующая струя при сделанных допущениях как бы
вытекает из канала шириной /в со скоростью vb>
При такой интерпретации расчетные данные для границ
•суммарной струи хорошо согласуются с опытными данными,
что было установлено рядом исследователей [25].
Для построения струйных логических элементов необходимо
знать распределение скоростей течения и полного избыточного
давления, характеризующих результирующую струю в пределах
•ее основного участка, расположенного вне области взаимодей-
ствия струй. Как и для одиночной турбулентной струи, основной
участок начинается при х/йв ~ 5, где hB— ширина канала.
Найдем значение скорости vB в плоскости ВВ, являющейся
условным срезом сопла для результирующей струи, и сечение
/в этого сопла. Для нахождения скорости vB составим два урав-
нения. Первое уравнение — уравнение количества движения
для двух соударяющихся струй. Его можно получить из уравне-
ний (64) и (65):
(Gb^b)“ = (Goyo)" + (GyOy)2
или
(66)
122
Второе уравнение — уравнение неразрывности потока в
начальной области взаимодействия струй:
{вив = IqVq + fyVy •
Решая уравнение (66) и последнее уравнение относительно
ов и /в, получим
VB fovo + fyvy
/В = ___-•
/М)2 + ('у4)2
Рис. 63. Расчетная схема отклонения струи
в элементе памяти с положительной обрат-
ной связью
Приближенный расчет максимального угла отклонения
струи в элементе памяти с положительной обратной связью.
При проектировании струйных элементов памяти с положи-
тельной обратной связью необходимо знать угол отклонения
питающей струи, образующейся при действии струи, вытекаю-
щей из канала обратной
связи. Точный расчет те-
чения в струйном элемен-
те представляет значи-
тельные трудности. Для
облегчения расчета при-
нимают упрощенную кар-
тину течения (рис. 63) и
делают следующие допу-
щения.
1. Жидкость несжи-
маема.
2. Течение установив-
шееся.
3. Профиль скоростей
отклоненной струи не де-
формируется перед при-
емным каналом.
4. Приемное сопло находится на основном участке свобод-
ной турбулентной затопленной струи.
5. Кривизну канала обратной связи и связанные с этим
потери считают пренебрежимо малыми.
6. Управляющее сопло диаметром d\ и жиклер нагрузки
диаметром d3 имеют одинаковый коэффициент гидравличе-
ских потерь £ и, следовательно, скорость истечения через эти
дроссели одинакова.
7. Управляющая струя при соударении в достаточной мере
перекрывает питающую струю, что обусловлено примерным
равенством диаметров d\ и dQ управляющего и питающего сопел.
123
Максимальный угол а™ между осями питающего и приемно-
го каналов соответствует совпадению оси отклоненной струи
с осью приемного канала. Считается, что питающая струя,
направляемая в приемный канал положительной обратной
связи, образуется за счет смешения двух струй, причем
результирующая струя вытекает из отверстия с условным диа-
метром dQ. Центр проходного сечения f3, соответствующий этому
диаметру, расположен на расстоянии d\/2 от торца питающего
сопла, причем расстояние /0 = di/2 + h cos а™. Можно считать,
что до смешения двух струй, питающей и управляющей, на рас-
стоянии dj/2 от питающего сопла не происходит увеличения
расхода за счет подмешивания воздуха из окружающей среды.
Уравнения для d3 и эквивалентной скорости уэ получаются соот-
ветственно из уравнения неразрывности для сечения f3 и сечений
fi и f0 и уравнения сохранения количества движения для сече-
ния f3; считаем, что профиль скоростей в сечении f3 прямо-
угольный:
/>э = М) + Л V1, (Ga)2 = (G0u0)2 + (G1 v! )2.
Откуда
d3 = (d\V\ -I- do^o) ОЛ + ^о^и) jj
_± (67)
v3 = + dove) (d\Vi + doVo) 4 J
где Go, Gi и G3 — массовые расходы через питающее сопл.,
управляющее сопло и эквивалентное сечение.
Скорость истечения из питающего сопла рассчитывают по
известной формуле
^о = Ф1
2 /
— (Ро —Pi).
Р
Для решения поставленной задачи составим уравнения Бер-
нулли для трех сечений (см. рис. 63): I—/, выбранного
в непосредственной близости от торца приемного сопла положи-
тельной обратной связи; III—III и II—II, проходящих по срезу
управляющего сопла диаметром d} и дросселя нагрузки диа-
метром d3 и перед ними:
«1Ру2
9
а2ру3
Pl Н---------- — Р2 + 2
2 2
1Х Ру1
dt 2
Р^1_
2 ’
(68)
где си — коэффициент кинетической энергии турбулентной
струи в сечении I—I для г = d2/2; v2 — средняя скорость в
сечении I—I в радиусе г; аг — коэффициент кинетической энер-
124
гии в сечении II—II (аг « 1,1); — скорость в сечении //—//;
X—коэффициент трения канала положительной обратной связи
длиной /1; v1 — скорость в сечении III—1П\ £ — коэффициент
местных потерь системы, состоящей из сопла управления и на-
грузочного жиклера диаметром d3.
Попутно отметим, что истинное давление в канале положи-
тельной обратной связи может отличаться от давления,
рассчитанного по формулам, что объясняется неучетом гид-
равлических потерь и некоторых других факторов.
Добавив к уравнениям (68) уравнение неразрывности
^4 = ^1 +Vlf3 (69)
и решив их совместно, относительно скорости получим
У1=фу2> (70)
где
Скорость v2 можно найти из уравнения
J V df 2 I vy dy
(71)
Уравнение для распределения скоростей в сечении /—/,
полученное из уравнений для профиля скоростей в струе [1, 25],
имеет вид
h
0,3 + 0,14-----
d3
(72)
Прямой метод нахождения и2 сложен, так как для этого
пришлось бы в уравнение (71) подставить уравнение (72), а
в уравнение (72), в свою очередь, уравнения (67), в которые
предварительно необходимо подставить Vi из формулы (70).
В результате получается сложное дифференциальное уравнение
относительно у2. Поэтому ограничимся нахождением скоростей
v2 и Vi методом последовательных приближений. Для первого
приближения будем считать, что d9 = d0.
Введем обозначения:
D =------!----- и в =--------!-----.
h, В c/q
0,3 + 0,14— Atg++-+
аэ 2 2
125
В выражения для D' и В' в первом приближении следует
подставить do вместо d3, а в выражение (72) Vo вместо v3.
Штрихами будем обозначать номер приближения.
Тогда
( —V
v' = Dv0\\ — В'у2 ) . (73)
Подставляя последнее выражение в уравнение (71) и проин-
тегрировав его, получим
/ 3 X
02 = £>Ч(1-----^-В'г2 +-^- В'2гЧ (74)
и соответственно
/ — \
v'l = 0'фОо ( 1--- В'г2 4- — В'г3 ). (75)
\ 7 5 J
Обозначив
Z 3 \
/-• f /1 ® rj / 2 । 2 п / 2 Я I
с = 1--------В г Ч-----В г3 ,
\ 7 5 )
можем записать
. (76)
Найдем второе приближение, для которого скорость
истечения воздуха из сопла управления будет определена уже
с учетом подмешивания к питающей струе струи управления.
В коэффициенты D" и В" значение dd будет входить в форме вы-
ражения (67), куда вместо Vi следует подставить выражение
(75) для скорости, найденное в первом приближении. В формулу
для нахождения скорости v вместо ио подставим уэ, определен-
ное из соотношения (67) с учетом выражения (75), затем
полученное выражение для v" подставим в уравнение (71).
Выполнив снова интегрирование, получим
1
и2 =D"(c1qVq + diD'4q4VQc'4)2 (d2vQ + d\D'qvQc')~' x
, 3 \ i
x ( 1---- B"r2 + — B"2r3) = D"v0C" (dt + diD^C'4)2 X
X (do + diD'cpC')"’; (77)
v"i = D"voC'<f>(dt + dtD'yC'")2 (do+ diD'cpC')-1.
Остановимся на втором приближении и будем считать, что»
Vi и" . Максимальный угол отклонения струи под действием
струи управления можно рассчитать по формуле
G,p, Ф1
Govo dQVj
126
Рассчитав &i по формуле (77), можно затем определить-
угол отклонения струи а™.
Динамические характеристики. Большое значение для по-
строения струйных систем автоматического управления имеют*
динамические характеристики
струйных элементов рассматри-
ваемого типа.
Для снятия динамических ха-
рактеристик струйных элементов
на их вход подают сигнал типа
единичного скачка и регистриру-
ют ответную реакцию на выходе.
На входе и на выходе струйного
элемента устанавливают пневмо-
электрические преобразователи,
которые вырабатывают электри-
ческие сигналы, подаваемые на
осциллограф. Объемы всех ком-
муникаций должны быть мини-
мальными. Так, объем камеры
датчика при эксперименте соста-
вил Vi = 0,07 см3, объем подво-
дящих каналов V2 = 0,04 см3,
Рис. 64. Реакция активного
струйного элемента на входное
возмущение, близкое к ступен-
чатому:
I — входное возмущение; 2 — из-
менение давления на выходе
объем канала до нагрузочного
дросселя V3 = 0,12 см3. Ширина каналов управления и питания-
испытуемого элемента была равна 0,4 мм, а выходного канала.
0,6 мм. Высота всех каналов равна 1,2 мм при расстоянии между'
питающим и выходным каналами 3,1 мм.
импульсная характеристика
струйного активного элемента
Рис. 66. Фазо-частотная импуль-
сная характеристика струйного
активного элемента
При указанных выше условиях была получена представлен-
ная на рис. 64 характеристика реакции активного струйного*
элемента (схему которого см. на рис. 54, а внешний вид — на
рис. 60) на входное возмущение, близкое к ступенчатому и.
подаваемое от пневмомеханического генератора колебаний.
12У
Давление питания ро = 100 мм вод. ст., выходное давление Pbi
до подачи входного возмущения составляло 35 мм вод. ст. Было
установлено, что время переброса струи из наклонного выход-
ного канала в прямой составляет величину Дср = 3,5-10-4 с, а из
прямого выходного канала в наклонный — Дср = 5,6-10-4 с.
На основании серии опытов, проведенных при оговоренных
выше условиях и указанных параметрах, были получены дина-
мические импульсные характеристики струйного усилительного
элемента — условная амплитудно-частотная (рис. 65) и фазо-
частотная (рис. 66) характеристики, из рассмотрения которых
следует, что частота среза fcp = 1180 Гц, а фазовый сдвиг
фсР ~ 1,88 рад.
Динамические характеристики рассмотренных в настоящем
параграфе струйных элементов другого функционального
назначения аналогичны приведенным.
2. СТРУЙНЫЕ ЭЛЕМЕНТЫ ДИСКРЕТНОГО ДЕЙСТВИЯ,
РАБОТА КОТОРЫХ ОСНОВАНА НА ВЗАИМОДЕЙСТВИИ
ПОТОКА СО СТЕНКОЙ
Струйные элементы, выполняющие логические операции и
операции запоминания сигналов. В последнее время в нашей
стране и за рубежом начинают находить применение струйные
элементы, работа которых основана на эффекте взаимодействия
потока со стенкой, получившем название эффекта Коанда [55,
56, 65]. Румынский ученый Генри Коанда в 1932 г. установил,
что струя жидкости, вытекающая из сопла, стремится откло-
ниться по направлению к стенке и при определенных ус-
ловиях прилипает к ней. Это объясняется тем, что боковая
•стенка 3 (рис. 67, а) препятствует свободному поступлению
воздуха с одной стороны струи /, создавая вихрь в зоне 2 пони-
женного давления. Дополняя рассмотренную схему (рис. 67,6)
второй стенкой 5, каналами управления 2, 7 и рассекателем 4,
•отделяющим два канала выхода, можно получить простейший
струйный элемент. Вытекающая из канала 1 струя прилипает
к одной из стенок (стенке 5) и направляется в один из выходных
каналов. Если подать управляющий сигнал в один из управляю-
щих каналов (канал 7), давление в зоне завихрений 6 возрас-
тет, питающая струя перебросится и прилипнет к противополож-
ной стенке 3.
Используя взаимодействие потока с криволинейным профи-
лем, можно реализовать релейные и логические операции, а
также запоминание и генерирование колебаний.
Рассмотрим распространение турбулентной струи вблизи
твердой стенки. Как было установлено, поток жидкости (газа),
обтекающий твердую стенку, может к ней прилипнуть. Прилип-
ший поток под воздействием другого управляющего потока
может оторваться от стенки. Процессы гидрогазодинамики,
128
характеризующие этот эффект, весьма сложны и точное матема-
тическое описание процессов еще не получено. Поэтому
ограничимся рассмотрением физического существа процесса.
Будем, считать, что струя жидкости является турбулентной
(рис. 61) на начальном участке, т. е. поток имеет зону ядра 2 и
пограничный слой 3. Причем на основном участке (х > /пу)
пограничный слой распространяется на все сечение струи. В ядре
скорость потока постоянна, в пограничном слое скорость убыва-
ет к границе струи, считая, что
течение плоское, рассмотрим ме-
ханизм взаимодействия струи со
стенкой.
Рнс. 68. Распространение турбулент-
ной струи вблизи твердой стенки:
а — схема распространения; б — график
изменения статического давления
Рис. 67. Эффект прилипания струи
к стенке:
а — схема прилипания турбулентной
струи к боковой стенке; б — схема про-
стейшего струйного элемента, действие
которого основано на эффекте Коанда
Пусть струя вытекает из канала вблизи стенки (рис. 68).
Поток, вытекающий из сопла, прилипает к стенке за счет
образования области пониженного давления — зоны завихре-
ния /. Распространяясь до точки прилипания П (рис. 68), поток
увлекает среду из граничащей с ним области, что приводит к их
турбулентному смешению. Часть потока при этом поворачивает-
ся в обратном направлении в зону завихрений /. В зоне завих-
рений за счет вихревого движения давление понижается.
В установившемся режиме расход, увлекаемый из зоны завихре-
ний, должен равняться возвращающемуся снова в зону завих-
рений расходу, что происходит вблизи точки прилипания.
Таким образом, внутри зоны завихрений непрерывно циркули-
рует часть потока, статическое давление в котором ниже дав
ления окружающей среды. Линия раздела отделяет этот поток
от основного потока, прилипшего к стенке и распространяюще-
гося вдоль нее. По направлению течения полный поток расши-
ряется и физическая сущность явления такова, что окружаю-
щая среда, прилегающая к потоку, приводится в движение.
9 Заказ 993 19g
Таким образом, когда поток располагается вблизи стенки,
происходит вовлечение окружающей среды на его границах
только лишь с одной стороны, противоположной по отношению
к стенке. Увлечение среды с другой стороны потока ограничено
стенкой, в результате чего и образуется зона завихрений,
давление в которой уменьшается. Более высокое давление на
противоположной стороне потока, где вовлечение окружающей
среды не встречает ограничений, прижимает основной поток
к стенке. Если в зону завихрений ввести поток управления, рас-
ход которого достаточен для выравнивания давлений с обеих
сторон основного потока, то основной поток отделится от стен-
ки. Чем больше турбулентность потока, тем интенсивнее уно-
сятся частицы из окружающего пространства и тем сильнее
прилипание. Турбулизация может быть достигнута как за счет
увеличения числа Рейнольдса, так и за счет увеличения шеро-
ховатости стенок питающего канала. Последнее ведет к умень-
шению толщины пограничного слоя.
На рис. 68 показана картина протекания потока вдоль
стенки; центральная часть потока, полное давление в которой
равно давлению источника питания, не подвергается воздей-
ствию окружающей среды. Между зоной завихрений и ядром
потока имеется внутренняя зона смешения, которая образуется
из потока питания и среды, увлекаемой из зоны завихрений.
Внутри ядра потока скорости течения постоянны. Величины ско-
ростей в установившемся потоке подчиняются закону распреде-
ления скоростей, который перестает действовать после прили-
пания к стенке из-за влияния сил вязкого трения, действующих
в пограничном слое, а также сил, увлекающих среду. Эпюра
распределения давлений рст вдоль стенки показана на рис. 68, б.
Если возникновение перепада давлений по направлению потока
вызывает обратный ток через пограничный слой в зону низкого
давления, то поток будет отрываться от стенки и снова возвра-
щаться подобно тому, как это происходит при обтекании крыла
самолета.
. Исторически первыми были предложены элементы с криво-
линейным профилем, однако применение нашли элементы с
прямолинейным профилем или стенкой. Такого типа элементы
разработаны в ИАТ, НИИтеплоприборе, НИИ абразивной про-
мышленности (г. Волжский). Известны также разработки раз-
личных модификаций указанного типа элементов зарубежными
фирмами Bowles Eng. Corp., отделением фирмы AEL, фирмы
Bendix, Corning Fluidic Dev и др.
Схема релейного струйного моностабильного элемента, дей-
ствие которого основано на эффекте Коанда, показана на
рис. 69. Типовой струйный элемент состоит из питающего сопла,
к которому подводится воздух с давлением р0, управляющего
канала стенок. С\ и С2 и выходных каналов В\ и В2. Полости
01 и 02 соединяются с окружающей средой (атмосферой).
130
Рис. 69. Релейный струйный элемент, действие которого осно-
вано на эффекте Коанда:
а—схема элемента; б—условное обозначение модификации элемента;
в — функциональная характеристика элемента; г — входная и выход-
ная характеристики в относительных координатах
Рис. 70. Элемент памяти (триггер с раздельными вхо-
дами):
а — схема элемента; б — функциональная.характеристика; в —
нагрузочные входная и выходная характеристики; г — ус-
ловное обозначение; д — таблица включений
9*
Функциональная операция, выполняемая элементом, опреде-
ляется его геометрией. Начальное положение питающей струи
также зависит от геометрических параметров элемента. В сред-
нем положении на равном расстоянии между стенками струя
статически неустойчива. Конструкцию элемента рассчитывают
таким образом, чтобы струя питания в первоначальном поло-
жении прилипала к одной из стенок (например, к стенке С2).
Это обеспечивается небольшой несимметрией в расположении
выходных каналов и рассекающего клина по отношению к ка-
налу питания. Переключение струи от одной стенки к другой
происходит при подаче управляющего сигнала в канал Уь Так,
если в первоначальном положении струя прилипает к стенке С2
и направляется в выходной канал В2, то при подаче сигнала
в канал У1 происходит отрыв струи от стенки С2 и прилипание
ее к стенке Сь Подбором соответствующих длин стенок С1 и С2
и углов их наклона можно получать различные режимы работы
струйного элемента. При малой длине стенок и больших углах
их наклона элемент работает в режиме усилительного реле.
Функциональная характеристика такого элемента приведена на
рис. 69, в. С помощью элемента можно реализовать логические
операции В2 = У\ отрицания и В^ = У{ — повторения входного
сигнала.
Петлю гистерезиса Apyi статической характеристики ре-
лейного струйного элемента можно менять путем изменения
геометрии элемента. Например, относительное увеличение
длины стенок способствует лучшему прилипанию струи и увели-
чению петли гистерезиса. Выходная и входная нагрузочные
статические характеристики, выражающие зависимость расхода
от давления в соответствующем канале, показаны на рис. 69, г.
В результате перепада давлений возникают силы, удержи-
вающие струю у стенки после снятия управляющего сигнала
(рис. 70). Таким образом, получается бистабильный элемент.
Струя в таком элементе занимает два устойчивых состояния, а
элемент носит название элемента памяти или струйного тригге-
ра с раздельными входами. Последовательность работы струй-
ного элемента в указанном режиме приведена в таблице
на рис. 70, д. Статическая и нагрузочные характеристики эле-
мента памяти показаны на рис. 70, б, в.
Варьируя геометрические параметры, можно получить
струйные элементы с различным функциональным назначением,
характеристики которых меняются в довольно широком
диапазоне. В частности, гистерезис характеристики может
меняться от величины, обеспечивающей появление эффекта
запоминания, до практически нулевого значения. Коэффициент
усиления сохраняется достаточно большим.
Существует несколько модификаций рассмотренного струй-
ного элемента, которые обеспечивают выполнение иных логи-
132
гт —. л /7 ।/ /7л* /7 « — I/q
Ро> Qo , v0
а)
6) в) г)
Рис. 71. Логический элемент ИЛИ, НЕ — ИЛИ:
а — схема элемента; б — условное обозначение; в — таблица
включений; г — условная схема модификации элемента
Рис. 72. Двоичный струйный полусумматор:
а — схема двоичного полусумматора на одном струйном
элементе; б — таблица включений
ческих операций. Наиболее распространенные из них представ-
лены на рис. 71—73.
На рис. 71 дана схема элемента, выполняющего логические
операции ИЛИ, НЕ—ИЛИ. Если хотя бы один из управляющих
сигналов отсутствует, то струя за счет несимметрии (или в
результате подачи подпирающего давления в канал, располо-
жу
Рис. 73. Струйный триггер
со счетным входом:
а, б, в, г, д — схемы различ-
ных состояний триггерного эле-
мента при его работе; е —
циклограмма работы
женный напротив управляющих каналов и не показанный
на рис. 71) всегда в начальном состоянии направляется в выход-
ной канал В2. При подаче управляющих сигналов в каналы У1
или У2 или же в оба канала одновременно питающая струя от-
клоняется, прилипает к правой стенке и направляется в выход-
ной канал В[. Соответствующим подбором геометрии элемента
можно устанавливать величину гистерезиса, необходимую для
обеспечения требуемой помехоустойчивости L При снятии уп-
равляющих сигналов питающая струя переключается к левой
стенке. Таким образом, с помощью рассматриваемого элемента
реализуются логические операции ИЛИ (выходной канал В\)
и НЕ—ИЛИ (выходной канал В2) (рис. 71, в), т. е. В{ =
= У{ + У2; В = У! + У2.
Один из вариантов струйного элемента рассматриваемого
типа может менять режим работы и в зависимости от способа
включения выполнять либо логические операции (например,
НЕ—ИЛИ, рис. 71, а, б, в), либо операцию запоминания сигна-
1 Действительно, если флюктуации входного сигнала (помеха) меньше
ширины петли гистерезиса, то ложного срабатывания не происходит.
134
лов (рис. 70). Элемент, имеющий несколько режимов работы,
обычно имеет две пары управляющих каналов, расположенных
симметрично относительно канала питания (рис. 71, г). Подоб-
ного типа элемент [55] в зависимости от способа включения
работает в одном из следующих трех режимов: режиме
ИЛИ—НЕ—ИЛИ (используются входы Уь и У2, вход У3 соеди-
нен с окружающей атмосферой); режиме «запрет — имплика-
ция» (используются входы У1 и У4, вход У2 заглушен, вход У3 сое-
динен с окружающей атмосферой); режиме триггера с раздель-
ными входами (используются входы У2 и У3, входы У1 и У4
заглушены).
Как уже отмечалось ранее, при сложении чисел, заданных
в двоичном коде, применяют двоичный сумматор на определен-
ное число п разрядов, включающий п — 1 одноразрядных сум-
маторов. Схема одноразрядного сумматора может быть собрана
на пяти стандартных элементах ИЛИ—НЕ—ИЛИ. Однако
струйная техника, открывающая большие возможности для
создания новых типов многофункциональных элементов, по-
зволила реализовать схему суммирования значительно проще.
Схема двоичного полусумматора на одном элементе имеет два
входа У\ и У2 и два выхода В{ и В2 (рис. 72). На два входа У\
и У2 подается код суммируемых чисел, на выходе В{ получается
код суммы, на выходе В2 — код переноса. Последовательность
операций показана в таблице на рис. 72, б. Действительно,
поданная только на вход У2 струя направляется в выхлопной
канал В\. Тоже самое происходит и при подаче сигнала на
вход Уь когда струя, обтекая вогнутую криволинейную стенку,
направляется в выходной канал В{. И только при наличии обоих
входных сигналов pyi и ру> суммарная струя направляется в
канал В2, где появляется сигнал рв2- Таким образом реализуют
логические операции:
В^У^ + У^, В2 = У1У2.
Струйный триггер со счетным входом. Используя свойства
пристеночных течений и эффект Коанда, удалось создать [65]
струйный триггер со счетным входом. Оригинальная схема
такого триггера на одном элементе показана на рис. 73, где
цифрами обозначены каналы: /, 2 — каналы выхода, 3 — коль-
цевой канал цепи внутренней обратной связи (реализуется за
счет изменения направления циркуляции потока), 4--канал
управления, 5 — канал питания.
Рассмотрим действие триггера со счетным входом.
Питающая струя может находиться в двух устойчивых
состояниях (рис. 73, а, б). В одном устойчивом состоянии
(рис. 73, а) питающая струя, вытекая из канала питания 5 под
давлением pQ, направляется в выходной канал /, где создается
давление рвг При этом питающая струя, прилипая к левой
стенке, прикрывает левое сопло кольцевого канала 3. Вслед-
135
ствие этого за счет подсоса воздуха через левое сопло из кана-
ла 3, а также подсоса из окружающей среды через атмосферные
отверстия 01 и О2 и подачи его через правое сопло в канал 3
в последнем возникает циркуляция потока, направленная по
часовой стрелке.
В другом устойчивом состоянии (рис. 73, б) питающая
струя, прилипая к правой стенке, направляется в выходной
канал 2, где создается давление рв2- При этом правое сопло
канала 3 прикрыто, вблизи него образуется разрежение, и цир-
куляция потока в канале 3 меняет свое направление.
Работа триггера происходит следующим образом. Пусть
начальное положение струи такое, что питающий поток на-
правляется в канал 2 (рис. 73,6). Поданный в канал 4 управ-
ляющий поток ру увлекается циркуляционным потоком
в канале 3, направляется к правому соплу и, взаимодействуя
с питающим потоком (рис. 73, в), отрывает его от правой стенки.
Струя питания направляется в выходной канал /, где создается
давление рв1 (рис. 73,6). После снятия управляющего сигнала
ру питающая струя продолжает оставаться в новом положе-
нии устойчивого равновесия, а циркуляция потока в канале 3
происходит по часовой стрелке (рис. 73,6). Поэтому при подаче
следующего управляющего импульса струя под давлением ру
(рис. 73, г) направляется в канале 3 в сторону циркуляции
к левому соплу и, взаимодействуя с питающим потоком,
направит его в выходной канал 2. Циклограмма работы триг-
гера приведена на рис. 73, е.
Выбор геометрических параметров элемента, работающего
по принципу отрыва пограничного слоя. Рациональный выбор
геометрии струйного элемента, работающего по принципу
отрыва пограничного слоя, может быть сделан на основании
изучения гидродинамических процессов, протекающих в эле-
менте.
При проектировании струйных элементов рассматриваемого
типа необходимо знать связь между основными геометрически-
ми размерами элемента и его рабочими параметрами — числом
Re питающей струи, величинами давления и расхода переклю-
чения, внешними характеристиками и т. п. [44, 63].
Влияние кривизны стенки на рабочие характеристики струй-
ного элемента. Кроме прямолинейной и вогнутой стенок для
построения струйных элементов используют и выпуклые стенки,
профиль которых подобен профилю крыла самолета (рис. 74).
В такого типа релейном элементе при подаче давления питания
Ро струя направляется в выходной канал, где появляется дав-
ление рвь При подаче управляющего сигнала ру происходит
отрыв потока от стенки, и давление в нижнем выходном канале
резко падает. На рис. 74, б показана статическая характеристи-
ка элемента для верхнего выходного канала при отсутствии
нагрузки в выходном канале. На основе элемента может быть
136
Рис. 74. Струйный элемент, имеющий профиль крыла:
а — схема элемента; 6 — статическая характеристика; в, г —
схемы состояний генератора колебаний
Рис. 75. Влияние формы стенки на характеристики струйного эле-
мента:
а — элемент с выпуклой стенкой; б — с плоской стенкой; в — с вогнутой
стенкой; г — сравнительные характеристики
выполнен генератор колебаний, работающий на глухую пневмо-
камеру [25] (рис. 74, в, г).
При проектировании струйных элементов, работа которых
основана на использовании явления отрыва потока от стенки,
существенным является правильный выбор формы стенки,
с которой взаимодействует поток. В результате проведенных
исследований [63] было установлено, что наилучшую выходную
характеристику (кривая 1 на рис. 75, г) при равных прочих
условиях имеет элемент с выпуклой стенкой, наихудшую харак-
теристику— элемент с вогнутой стенкой (рис. 75, г, кривая 3).
Элемент с прямолинейной стенкой имеет удовлетворительную
характеристику (рис. 75, г, кривая 2). Элемент с выпуклой стен-
кой обеспечивает наибольшее давление в приемном канале и
наименьшее падение давления на начальном участке выходной
характеристики.
Радиус кривизны стенки обычно принимают равным
R = (18 -г- 20) До и выбирают из условия того, чтобы внутренняя
граничная линия тока Совпадала с границей стенки. Однако не-
большие технологические отклонения в кривизне выпуклой
стенки могут нарушать характер переключения элемента, что
повышает требования к технологии. Поэтому наибольшее рас-
пространение получили струйные элементы с прямолинейной
стенкой. Для обеспечения удовлетворительных характеристик
рекомендуется принимать следующие соотношения линейных
размеров, отнесенные к ширине питающего канала:
а/а0 = 1,2; aylaQ = 0,6 н- 0.5;
1/а0 =10н-11; hla,Q = Z\
а = 22 ~ 24°; а^/а^ =1,5.
Влияние формы рассекателя на характеристики струйного
элемента. Форма рассекателя влияет на характеристику пере-
ключения и главным образом на ее крутизну. Рассекатели могут
иметь разную конфигурацию (рис. 76). В рассекателе, имею-
щем вогнутую форму, образуется вихрь и небольшой обратный
поток (рис. 76, а). Вихрь разделяет поток, направляющийся
в один из выходных каналов, и предотвращает его проникнове-
ние в другой канал. Наилучшей формой рассекателя считается
такая, которая обеспечивает наибольшую крутизну характери-
стики и наименьшее остаточное давление. Остроугольные рассе-
катели (рис. 76, е) применяют главным образом в аналоговых
струйных элементах.
Как показали экспериментальные исследования [64], наилуч-
шей можно считать форму рассекателей, показанных на
рис. 76, б, е, ж. Сравнительные статические характеристики, по-
лученные для рассекателей различной формы, показаны на
рис. 76, з. Номера кривых на рис. 76, з соответствуют номерам,
указанным на рис. 76, б — ж. Элемент с рассекателем, показан-
ие
ным на рис. 76, в, имеет наихудшие характеристики. Экспери-
менты проводились на несжимаемой жидкости (воде) в струй-
ном элементе без атмосферных отверстий. Расстояние между
з)
Рис. 76. Влияние формы рассекателя на характеристики переклю-
чения:
а — схема образования вихря в рассекателе; б, в, г, д, е, ж — различные
формы рассекателей; з — сравнительные характеристики переключения
торцом питающего канала до рассекателя I = (10 4- 11)а0. При
изменении расстояния I от I = 8ао до I = Ило вид характеристи-
ки практически не менялся.
3. СТРУЙНЫЕ ЛОГИЧЕСКИЕ ЭЛЕМЕНТЫ С ТУРБУЛИЗАЦИЕЙ
ТЕЧЕНИЯ (ТУРБУЛЕНТНЫЕ УСИЛИТЕЛИ)
При построении устройств пневмоавтоматики широко исполь-
зуют усилители типа трубка — трубка с ламинарным питающим
капилляром (турбулентные усилители). По сравнению с рас-
смотренными ранее элементами турбулентные усилители имеют
ряд существенных преимуществ, главными из которых являют-
139
ся: постоянство входных сопротивлений, независимость точки
срабатывания (давления срабатывания ру) от нагрузки и дав-
ления питания, отсутствие обратных связей, ударостойкость, ус-
тойчивость к звуковым возмущениям, высокий коэффициент уси-
ления, надежная работа элементов в схемах и высокий к. п. д.
Элементы этого типа изготовляют на токарном станке (элемен-
ты пространственного исполнения) либо штамповкой (плоское
исполнение). При сборке элементов пространственного исполне-
ние. 77. Струйный эле-
мент типа трубка —труб-
ка с ламинарным питаю-
щим капилляром:
а — без диффузора; б — с
диффузором
ния не возникает трудностей, связанных с герметизацией эле-
ментов.
Схема простейшего турбулентного усилителя (рис. 77, а) со-
держит питающий /, приемный 2 и управляющий 3 "каналы [53].
Для улучшения характеристик усилителя в пространство между
питающим и приемным каналом помещают элемент 4 (рис. 77, б)
(диффузор, клин и т. п.), способствующий более интенсивной
турбулизации струи, вытекающей из канала питания при подан-
ном сигнале управления.
Рассмотрим характеристики турбулентного усилителя с диф-
фузором (рис. 77, б).
Основные статические и динамические характеристики тур-
булентного элемента. Струйный элемент с ламинарным питаю-
щим капилляром отличается от усилителя, представленного на
рис. 77, а, тем, что между питающим капилляром 1 и приемной
трубкой 2 установлен диффузор, ось которого совпадает с осью
трубок, а раствор направлен в сторону приемной трубки. При
работе элемента (рис. 77, б) сочетаются два эффекта — турбу-
лизация питающей струи управляющей струей и дополнительное
расширение питающей струи в диффузоре после ее турбулиза-
ции. Эффект дополнительного расширения струи (прилипание
140
струи к стенкам конуса) обусловливает улучшение статической
характеристики элемента, увеличение крутизны и уменьшение
или полное устранение остаточного давления на выходе. Экспе-
риментально полученные в одинаковых условиях статические
характеристики элемента приведены на рис. 78. Кривая 1 отно-
сится к элементу без диффузора, кривые 2 и 3 — к элементу
'Рис. 78. Статические характеристики
элемента типа трубка — трубка с ла-
минарным питающим капилляром:
./ — без диффузора; 2 — с диффузором
.(L = 1 мм); 3 — с диффузором (L =
= 3 мм)
с диффузором при разных рас-
стояниях L от торца выходного
сопла до диффузора !. Из при-
веденного графика следует, что
применение диффузора практи-
чески полностью снимает оста-
точное давление.
Весьма важное значение
для струйных элементов имеют
расходные характеристики, по-
зволяющие судить о нагрузоч-
ных возможностях элемента.
Зависимость давления на вы-
ходе элемента от расхода в вы-
Рис. 79. Расходные характеристики
турбулентного усилителя
годном канале при различных давлениях питания приведена на
рис. 79 (кривые /, 2, 3 и 4). Там же нанесена расходная харак-
теристика для управляющих каналов. Кривая 5 характеризует
зависимость расхода через три управляющих канала от давле-
ния на выходе. Учитывая, что к выходу элемента подсоединяют-
ся управляющие каналы других элементов, выходное давление
элемента, нагруженного элементами того же типа, можно опре-
делить по точке пересечения расходных характеристик. За ус-
1 Дальнейшее изложение относится только к турбулентным усилителям,
1разработанным в ИАТ.
141
ловную единицу выбрано давление в 40 мм вод. ст. Максималь-
ная нагрузка составляет четыре — пять элементов (при давле-
нии питания 250 мм вод. ст.) и три элемента (при давлении пи-
тания 170 мм вод. ст.). Внешний вид турбулентного усилителя
дан на рис. 80.
Расходы, необходимые для питания и управления элементов,,
принцип действия которых основан на взаимодействии струй„
Рис. 80. Турбулентный усилитель:
а — для монтажа на трубках; б — для монтажа на платах
значительно превосходят соответствующие расходы для элемен-
тов типа трубка с ламинарным питающим капилляром. Так, на-
пример, для плоского элемента расход на управление (канал
сечением 0,4 X 1,2 мм при управляющем сигнале в 40 мм вод. ст.)
составляет от 0,0045 до 0,0105 л/с, а для элемента трубка —
трубка (канал диаметром 0,35 и длиной 4 мм) — 0,0025 л/с.
При выборе режима работы любого струйного элемента сле-
дует стремиться к максимальному использованию его выходной
мощности. В связи с этим представляют интерес мощностные
характеристики элемента трубка — трубка, по которым выбира-
ют оптимальные с точки зрения использования выходной мощ-
ности величины выходных расходов и давлений. Зависимость
мощности на нагрузке, присоединенной к выходу элемента, от
выходного давления представлена на рис. 81. Мощность опреде-
ляли как произведение перепада давлений на дросселе нагрузки
на объемный расход (данные взяты из графика на рис. 79). Па-
раметром служила величина давления питания элемента. Из
рис. 81 следует, что графики изменения мощности имеют экстре-
мумы (максимумы), причем расположение максимума изменяет-
ся в зависимости от давления питания. Обычно стремятся выби-
142
рать рабочую точку вблизи максимума. Для уменьшения изме-
нения мощности следует сужать диапазон питающих давлений.
Как показали исследования, для разработанных элементов при-
емлемым диапазоном давлений питания оказался диапазон 150—
250 мм вод. ст. В указанном
диапазоне питающих давлений
единичным сигналом соответ-
ствует давление от 40 до
120 мм вод. ст., нулевым сиг-
налам — давление от 0 до 3 мм
вод. ст. Таким образом, гра-
ничные значения взяты доста-
точно широко,'а запас являет-
ся весьма большим.
При питающем давлении в
170 мм вод. ст. один струйный
элемент рассматриваемого ти-
па потребляет мощность No =
= 0,01 Вт. При увеличении чи-
сла элементов, подключаемых
Рис. 81. Зависимость мощности на на-
грузке струйного элемента от давле-
ния на выходе
параллельно к выходу, наряду с уменьшением выходного давле-
ния уменьшаются и флюктуации давления на выходе элемента,
ко точки срабатывания не смещаются.
Следует отметить, что при наличии диффузора с углом рас-
твора конуса а = 25° при подаче управляющего давления ру =
= 20 мм вод. ст. остаточное давление на выходе элемента прак-
тически равно нулю. Однако
без диффузора в элементах
рассматриваемого типа не
удается получить нулевое
остаточное давление даже
при значительно больших
управляющих давлениях.
Кроме того, статическая ха-
рактеристика элемента при
наличии диффузора имеет
большую крутизну во всем
Рис. 82. Амплитудно-частотная харак-
теристика турбулентного усилителя
диапазоне.
Разработанный в ИАТ
струйный элемент выполняет логическую операцию НЕ — ИЛИ
на четыре выхода. Следовательно, с помощью этих элементов
можно реализовать любую логическую операцию (см. гл. VI).
Элемент может пропускать сигналы с частотой порядка 250—
500 Гц. Амплитудно-частотная характеристика элемента, полу-
ченная при давлении питания ро = 170 мм вод. ст. и подаче на
вход прямоугольных импульсов постоянной высоты и возрастаю-
щей частоты от специального электропневматического генерато-
ра колебаний, показана на рис. 82.
143
Описываемый элемент можно сделать очень чувствительным
к звуковым колебаниям и даже есть возможность настраивать
его на определенную частоту звукового сигнала. В этом случае
элемент трубка — трубка с ламинарным питающим капилляром
соединяют определенным образом с резонатором Гельмгольца.
Такое качество элемента открывает перспективы для развития
нового направления в автоматике — пневмоакустики.
В то же время этот элемент, предназначенный для работы
в системах струйной техники, при определенных условиях (при
размещении его в специальном корпусе) весьма устойчив к зву-
ковым возмущениям. Так было установлено, что если к отвер-
стию, соединяющему внутреннюю полость элемента с атмосфе-
рой, подать звуковой сигнал со звуковым давлением, равным
100 бар, и при этом изменять частоту звукового сигнала от 0 до
10 000 Гц, то ложных срабатываний элемента при этом не на-
блюдается.
Выбор основных параметров турбулентного элемента. Для
выбора основных параметров элемента трубка — трубка как
пневматических (давление питания, величины управляющих сиг-
налов и т. д.), так и конструктивных используют чисто экспери-
ментальные и расчетные методы. Так, для определения опти-
мального диаметра атмосферного отверстия, при котором полу-
чается наилучшая статическая характеристика элемента, прово-
дят ряд экспериментов. С этой целью с элемента с изменяемым
диаметром атмосферного отверстия была снята серия статиче-
ских характеристик. Оказалось, что наилучшую статическую ха-
рактеристику имеет элемент с диаметром атмосферного отвер-
стия 2,5 мм. Местоположение атмосферного отверстия также
играет существенную роль. Наилучшую статическую характери-
стику обеспечивает элемент с отверстием, расположенным напро-
тив конца приемной трубки.
Экспериментально установлено, что крутизна статической ха-
рактеристики будет больше, если управляющая струя, турбули-
зирующая питающую струю, является ламинарной. В этом слу-
чае действие управляющей струи проявляется наиболее эффек-
тивно.
С точки зрения нагрузочной способности элемента наиболее
выгодно, чтобы входное сопротивление было как можно больше.
Однако при большом входном сопротивлении статическая харак-
теристика элемента ухудшается. На рис. 83 показано семейство
экспериментальных статических характеристик турбулентных
усилителей для различных входных капилляров, при р0 =
= 170 мм вод. ст. Наилучшей статической характеристикой (до-
статочная крутизна, приемлемое расположение линии срабаты-
вания и сопротивление, дающее возможность увеличить число
нагрузочных элементов до четырех, допустимое остаточное дав-
ление) является характеристика с управляющим капилляром,
имеющим длину 4 мм и диаметр 0,35 мм (рис. 83, кривая 2).
144
Как проверено на практике, наибольший коэффициент уси-
ления имеет элемент, у которого пересечение управляющей и
питающей струй происходит в
Рис. 83. Статические харак-
теристики турбулентных уси-
лителей с различными уп-
равляющими трубками:
J — I = 1,5 мм; d = 0,25 мм;
2 — I = 4 мм; d = 0,35 мм;
3 — I = 4 мм; d = 0,5 мм
непосредственной близости от тор-
ца питающего капилляра. В каче-
стве примера на рис. 84 приведе-
на зависимость выходного давле-
ния от расстояния Z (от торца пи-
тающего капилляра до оси управ-
Рис. 84. Зависимость давления на
выходе элемента от расстояния I
от торца питающего капилляра до
оси управляющего капилляра
ляющего капилляра) при давлении на входе в управляющий
капилляр, равном 40 мм вод. ст.
Помимо эксперимента для проектирования элемента может
быть использован и расчетный метод. Однако на данном этапе
развития струйной тех-
ники расчетные методы
не являются точными,
и поэтому результа-
ты расчета подверга-
ют экспериментальной
проверке.
Расчет давления в
Рис. 85. Схема для расчета давления в прием-
ном канале турбулентного усилителя при под-
ключении жиклеров в качестве нагрузки
приемном канале тур-
булентного элемента.
Найдем выражение для
давления в приемной
трубке рв в случае истечения из питающей трубки (рис. 85) ла-
минарной струи. Нагрузкой элемента могут служить одинако-
вые капилляры или жиклеры. Рассмотрим вначале случай, ког-
да нагрузкой приемной трубки являются п параллельно вклю-
ченных жиклеров радиусом гж.
10 Заказ 993
145
Так как давление питания в струйных элементах такого рода
низкое, то можно рассматривать воздух как несжимаемую жид-
кость, т. е. процесс изменения состояния воздуха принять изо-
хорическим. Потерями энергии между сечениями 1—1 и 2—2
(рис. 85) пренебрегаем. Приемная трубка имеет небольшую
длину.
Сделав указанные допущения, запишем уравнения Бернулли
для сечений 1—1, 2—2 и 2—2, 3—3, причем сечение 1—1 выбе-
рем в свободной ламинарной струе на весьма малом расстоянии
от торца приемной трубки, сечение 2—2 в приемной трубке, а
сечение 3—3 — на срезе жиклеров:
2 ’
, OlP^l , «2Ри2
Pi -I--— = Рв +—~
CLл OVn О V о
Рв + ~ТЛ = Р1 + ^
Р'^з
2
(78)
К этим двум уравнениям добавим уравнение неразрывности
v2F = v3fn. (79)
В уравнениях (78) и (79) приняты следующие обозначения:
р\ — давление в окружающей среде; щ — коэффициент кинети-
ческой энергии для сечения струи 1—1 при радиусе г, т. е. той
части струи, которая попадает в приемный канал на его срезе;
р — плотность воздуха; —средняя скорость в сечении /—1 на
радиусе г; рв — давление в приемной трубке; аг — коэффициент
кинетической энергии для потока в приемной трубке; v2 — сред-
няя скорость в приемной трубке; и3— средняя скорость на вы-
ходе из жиклера; — коэффициент сопротивления жиклера1;
F — площадь проходного сечения приемной трубки; f — площадь
проходного сечения жиклера.
Учитывая, что F = яг2, a f = , и решая уравнения (78) и
(79) совместно относительно избыточного давления в приемной
трубке, получим
(80)
2
а,ри1
РБ —Р! - 2(1+а2ф2)
В этом уравнении ср — коэффициент скорости v2:
Коэффициент в случае, если радиусы гж и г мало отлича-
ются друг от друга, вычисляется по формуле
1 При параллельном соединении одинаковых дросселей коэффициент со-
противления всей системы равен коэффициенту сопротивления одного дрос-
селя.
146
где Z— коэффициент сопротивления жиклера [24].
Формула, выражающая распределение скоростей в сечении
свободной и затопленной ламинарной струи, имеет вид
(1 + W ’
(81)
где
2n2vxa2
в = рЦ2;
\ 4xcvxa J
Q — объемный расход воздуха через питающий капилляр; v —
коэффициент кинематической вязкости; у — расстояние от оси
струи до скорости в данной точке; х — расстояние от условного
источника О (см. рис. 85) до рассматриваемого сечения струи;
а — радиус питающей трубки.
Расстояние х вычисляют по формуле х = х0 + %т, причем
xq = 0,2Q/jtv — есть расстояние от торца питающей трубки до
условного источника (полюса) О, а %т — расстояние от торца
питающей трубки до рассматриваемого сечения (в нашем случае
до сечения 1—1 или до торца приемной трубки).
Среднюю скорость по расходу у входа в приемную трубку
(сечение 1—/) определяют из выражения
I v dF 2л j vy dy
F_______ о_____________ A
F ~~ лг2 ~ 1 + Br2
(82)
Подставляя уравнение (82) в уравнение (80), получим окон-
чательную формулу для вычисления избыточного давления
в приемной трубке
,83)
Коэффициент кинетической энергии щ представляет собой
отношение кинетической энергии в ламинарной струе на расстоя-
нии х0 + %т от полюса на радиусе г к кинетической энергии
в том же сечении и при том же радиусе, вычисленной по средней
скорости:
f v3dF
Щ = (84)
Подставляя в выражение (84) v, Vi и F и интегрируя его, по-
лучим
O+yr +ВГ2},------!—1 (85)
лА3г2 J (l+Bz/2)6 5Br2 L (1+.5г2)2]’
10*
147
При малых нагрузках, подключаемых к приемной трубке,
профиль скоростей в трубке близок к прямоугольному, т. е.
<х2 При максимальной нагрузке (правый конец трубки пол-
ностью открыт) профиль скоростей будет близок к профилю ско-
ростей в струе на левом торце приемной трубки, т. е. «2^ аь
Поэтому можно аппроксимировать изменение а2 в зависимости
от отношения гж/г приближенной формулой
а2=1
Г
Пример 8. Рассчитать давление в приемной трубке элемента трубка —
трубка с ламинарными питающими капиллярами (рис. 85). Приемная трубка
нагружена одним жиклером (п=1). Параметры элемента следующие: /0 =
= 3,47 см; а = 0,035 см; г — 0,035 см; хт = 0,8 см, гж = 0,016 см; pQ = 100 мм
вод. ст = 981 Па. Коэффициент кинематической вязкости v = 0,15 см2/с, плот-
ность воздуха р = 1,2 кг/м3, коэффициент сопротивления £ = 0,5.
Расход через питающий капилляр был определен экспериментально:
Q = 7,28 см3/с.
Объемный расход воздуха через дроссель можно определить также по
формуле Пуазейля:
Q = яа2(Ро—Р,)
8р.д/о
где цд — коэффициент динамической вязкости воздуха, цд = 1,81 X
X 10~5 * кг/(м • с).
1. Рассчитаем расстояние от торца капилляра до полюса:
2. Расстояние от полюса до торца приемной трубки
х = х0 + хт = 3,08 + 0,8 = 3,88 см.
Вг2 =
1
ОС] =---------
5 Sr2
3. Зная х, можно вычислить
Q \2 / 7,28 \2
----- =(------------ =0,99.
4nvx / \ 4л-0,15-3,88 /
4. По формуле
(1 +ВГ2)3_----!----
v 7 (1 + 8г2)2]
находим коэффициент кинетической энергии в сечении струи перед приемной
трубкой
оц =—— Г(1 +0,99)3 — —------------1 = 1,545.
5-0,99 L (1+0,99)2 J
5. Коэффициент кинетической энергии для потока внутри приемной труб-
ки рассчитываем по приближенной формуле
гж 0,016
а2=1+(а,-1)^-= 1 +(1,545-1)—— =1,26.
г U.Uoo
148
6. Определим квадрат коэффициента скорости
г4 Г ( гж А
— 1+Ц1-— -«2
4 L \ г2 П
0.0354
0.0164
и произведение
0.0162 \
“ 0,0352 )
= 0,0324
а2ф2= 1,26-0,0324 = 0,0408.
7. Значение А найдем по формуле
Q2 7,282
Л =--—---= п п л tr. =3770 см/с = 37,7 м/с.
2n*vxa2 2л2-0,15-3,88-0,0352 '
8. По полученным данным определим давление в приемной трубке
_ <*1Р / л \2_
₽в Pl 2(l+a2q>2) V l+Br2 )
1,545-1,2 / 37,7 \2
= -------—-------( --------- ) =319 Па = 32,6 мм. вод. ст.
2(1 +0,0408) \ 1 + 0,99 J
Если нагрузка на приемной трубке отсутствует, то ф = 0 и рв—р\ =
= 34 мм вод. ст.
Помимо нагрузки в виде турбулентных дросселей приемная
трубка может нести нагрузку также и в виде ламинарных дрос-
селей — капилляров (рис. 86) (например, управляющие капил-
ляры турбулентного усилителя).
1 2 3
Рис. 86. Расчетная схема давления в приемном канале
турбулентного усилителя при нагрузке в виде капилля-
ров
Для вывода уравнения, позволяющего определить давление
в приемной трубке, так же как и ранее, выписывают уравнения
Бернулли для сечений 1—1, 2—2 и 2—2, 3—3, а также уравнение
неразрывности:
a1Puf а2р^
р, + —_=рв + -т-;
2 2
a2pt»2 a3pv3
Рв + —-— = Pi + —-— + G
Fv2 = fv3n.
149
В этих формулах аз — коэффициент кинетической энергии для
сечения 3—3, выбранного на правом срезе капилляра (для сфор-
мированного параболического профиля скоростей аз = 2); v3 —
средняя скорость воздуха в капилляре; £ — суммарный коэффи-
циент сопротивления на входе в капилляр и по длине капилляра;
п — число параллельно включенных одинаковых капилляров на-
грузки;
ак
^Вх+ гк Re ’
%Qi
V JlVrK
где Z—коэффициент трения по длине капилляра; Re — число
Рейнольдса для капилляра; dK — диаметр капилляра нагрузки;
$вх — коэффициент сопротивления на входе в капилляр.
Решая уравнения относительно разности рв— ръ исключая
лишние переменные и подставляя вместо найденное из урав-
нения (82), получим формулу, совпадающую с формулой (83).
Разница заключается лишь в выражении для коэффициента ско-
рости:
2 \( r V 1 Г । , А 32 \ 1 |-i
ф2= --- -у аз+ Свх+ — — —02 • (86
1\ Г К / П2 L \ гк Re / J I
Как следует из приведенных выражений, число Re зависит от
объемного расхода Qi через капилляр нагрузки, который, в свою
Рис. 87. Зависимость избыточ-
ного давления в приемном ка-
нале от давления питания
очередь, зависит от рв и т. е.
получается как бы замкнутый
круг — искомая разность рв — pi
зависит от величин рв и рь По-
этому в данном случае следует
воспользоваться известным мето-
дом последовательных приближе-
ний, который состоит в том, что
задаются каким-то средним зна-
чением рв — pi, находят по нему
Qj и новое значение рв — Р\, за-
тем по новому значению рв — Р\
находят Qi и т. д.
Для вычисления коэффициен-
та кинетической энергии аг мож-
но использовать формулу аг =
= 1 + (ai — l)rK/r. При этом будет допущена погрешность боль-
шая, чем при расчете элемента с нагрузкой в виде турбулентно-
го дросселя.
Чтобы оценить возможность применения полученных формул
для практических расчетов, связанных с определением давления
в приемной трубке при нагружении ее ламинарными дросселя-
ми, были экспериментально определены давления в приемной
150
трубке при различных давлениях питания ро. Нагрузкой для
приемной трубки служил капилляр.
На рис. 87 даны размеры элемента трубка — трубка с лами-
нарным питающим капилляром и размеры капилляра нагрузки.
Там же сплошной линией изображена экспериментальная зави-
симость избыточного давления в приемном канале от давления
питания, а штриховой линией — расчетная кривая. Совпадение
кривых удовлетворительное.
Пример 9. Рассчитать давление в приемной трубке, нагруженной капил-
ляром. Параметры элемента те же, что и в примере 8. Размеры капилляра
нагрузки: гк = 0,0265 см; /к = 1,6 см. Величины х0, х, В г2, Л, вычисляемые
так же, как в примере 8, имеют те же числовые значения.
Вычислим коэффициент кинетической энергии
гк 0,0265
а2 = 1 + («] —1)—у-= 1 + (1,545—1) 0 оз5 — 1,4.
Число Re для капилляра нагрузки может быть найдено из двух известных
выражений:
D 2Q, п "'k(Pb-Pi)
nvrK 8р.д/к
Откуда
гк(Рв-Р1)
Re=----л---1----•
4уцд/к
Как было сказано выше, вместо искомой разности рв — Pi в последнюю
формулу можно подставить любое промежуточное значение, заключенное
в пределах от рв — pi до 0, а затем найти более точное значение рв — Pi
методом последовательных приближений по формуле (83). Однако здесь ради
простоты вместо указанной разности подставим это значение, определенное
экспериментально:
рв—-Pi = 284 Па.
Тогда
„ (2,65-10“ “)3-284
Re =---------------------—----------- = 305.
40,15-10—4 • 1,81 • 10—°-1,6-10—2
Зная число Re, а2 и учитывая, что для капилляра а3 = 2, найдем
Значение давления в приемной трубке при нагружении ее капилляром
получим, если значение рв — Pi при отсутствии нагрузки, определенное по
формуле (83) в примере 8, разделить на 1 + а2ф2 = 1,057:
Рв~ Р\ -
34
1,057
= 32 мм,вод. ст. = 312 Па.
Некоторые экспериментальные данные о структуре лами-
нарной струи. Как было сказано ранее, для построения одного
класса струйных логических элементов, называемых турбулент-
ными усилителями, используют эффект турбулизации ламинар-
151
ной затопленной струи. В настоящем разделе рассмотрим струк-
туру вытекающей из капилляра ламинарной свободной и
затопленной струи и распределение избыточных скоростных дав-
лений в ее сечениях.
Схематически профиль ламинарной свободной и затопленной
струи, вытекающей из капилляра, изображен на рис. 88.
Профиль вдоль оси струи может быть условно разбит на че-
тыре участка. На участке 1 диаметр ламинарной струи возра-
стает. На участке II диаметр ламинарной струи, хотя и в зна-
Рис. 88. Схема распространения свободной и затопленной лами-
нарной струи, вытекающей из капилляра
чительно меньшей степени, также увеличивается, образуя очень
небольшой конус с углом раствора около Г. Практически можно
считать, что на участке II струя имеет цилиндрическую форму,
так как угол раствора конуса очень мал. Как показали прове-
денные опыты, диаметр ламинарной струи на этом участке по
сравнению с диаметром капилляра увеличивается с ростом пи-
тающего давления примерно в 1,5—2 раза.
На расстоянии %тк ламинарная струя турбулизуется и при-
обретает коническую форму. Эта естественная турбулизация про-
исходит без воздействия внешних возмущений. Угол раствора
турбулентного конуса совпадает с углом раствора турбулентной
струи, вытекающей из сопла, и равен 15° [19].
Следует отметить, что условия образования конуса турбулент-
ной струи на срезе сопла и на конце ламинарной струи несколь-
ко иные. Так, при истечении свободной и затопленной турбулент-
ной струи из сопла в начальном сечении скорости (или значения
избыточных скоростных давлений) во всех точках одинаковы.
Во втором случае в начальном сечении распределение скоростей
близко к параболическому. Поэтому начальный участок струи,
вытекающий из сопла, не будет идентичен участку III.
И, наконец, участок IV — основной, он подобен, как это бу-
дет показано ниже, основному участку турбулентной струи, об-
разующейся на срезе сопла, из которого она вытекает.
Увеличение питающего давления ро влечет за собой переме-
щение турбулентного конуса к торцу 1 капилляра (уменьшения
расстояний %тк). Приведенное выше описание структуры лами-
нарной свободной й затопленной струи вдоль ее оси подтвержде-
но экспериментами.
152
При проектировании струйных элементов очень важно знать
распределение избыточных скоростных давлений в различных се-
чениях свободной струи.
На рис. 89 приведены экспериментальные данные, получен-
ные по распределению скоростных давлений для капилляров,
применяемых в струйных логических элементах. Распределение
скоростных давлений определялось в сечениях турбулентной
струи, образующейся непосредственно на срезе капилляра
Рис. 89. График распределения без-
размерной величины давления на
основном участке турбулентной
струи и на турбулентном участ-
ке IV, образующемся в конце ла-
минарной струи:
О — /о = 60 мм, d0 = 0,88 мм, Ро =
= 0,005 МПа, *ТК = 15 мм • ХТ =
= 22 мм;
• — /0 = 158 мм. d0 = 0,76 мм, ро =
= 0,03 МПа, *ТК= 0» ХТ ~ 5 мм»
+ — /о = 158 мм, d0 = 0,76 мм, ро =
= 0,04 МПа, х ТК= 0, Ху = 8 мм;
I — /0 = 600 мм, d0 = 1,17 мм; Ро =
= 0,015 МПа, *ТК = мм, АТ =
= 25 мм
(в этом случае капилляр работает в режиме турбулентного дрос-
селя), и в сечениях турбулентной струи, являющейся продолже-
нием ламинарной струи. Данные эксперимента были представ-
лены в безразмерных координатах. По оси абсцисс отложено
отношение величины отклонения у от оси струи к радиусу струи
b в этом же сечении, а по оси ординат — отношение скоростного
давления в месте измерения р к скоростному давлению на оси
Рос в том же сечении. Было принято, что на границе струи дав-
ление равно 1 мм вод. ст.
Размеры капилляров, давление питания, а также расстояния
от торца капилляра до исследуемого сечения хт приведены
на рис. 89.
Для турбулентной струи, образующейся непосредственно
у выходного сечения капилляра, был исследован основной учас-
ток (%т > 5d), а у турбулентной струи, являющейся продолже-
нием ламинарной струи,— участок IV. Таким образом, профили
распределения давлений, а следовательно, и поля скоростей для
упомянутых участков струи, построенные в безразмерных коор-
динатах, оказываются подобными, т. е. в сходных точках любых
двух сечений струи безразмерные величины скоростных давлений
(скоростей) совпадают.
Аналогичные исследования были выполнены с целью изуче-
ния участков I и II ламинарной струи.
153
При проектировании струйных элементов, имеющих лами-
нарный питающий капилляр, важно уметь правильно выбирать
расстояние хт между питающим капилляром и приемной труб-
кой, для чего необходимо знать координату точки турбулизации
ламинарной струи, т. е. расстояние %тк (рис. 88) между торцом
питающего капилляра и местом образования турбулентного ко-
нуса в зависимости от параметров капилляра, питающего возду-
ха и воздуха, окружающего элемент.
Экспериментально была установлена зависимость давления р
в приемной трубке от питающего давления (рис. 90). При мини-
Рис. 90. Зависимость избыточного давления р в приемной трубке от пита-
ющего давления р0, подведенного к капилляру (/о = 50 мм, d = dn =
= 0,48 мм)
мальных значениях ро турбулентный конус располагается за при-
емной трубкой (%тк > *т). При увеличении давления ро турбу-
лентный конус приближается к торцу питающего капилляра, и
давление р в приемной трубке возрастает. Наибольшее значение
давления соответствует тому моменту, когда турбулентный конус
образуется у торца приемной трубки (хтк = x-г). При дальней-
шем увеличении питающего давления ро расстояние хтк стано-
вится меньше расстояния хт между трубками, отчего давление
р на выходе начнет уменьшаться. Это объясняется тем, что при
дальнейшем приближении турбулентного конуса к торцу питаю-
щего капилляра в приемную трубку будет попадать все меньшая
часть потока. Этому состоянию соответствуют участки кривых,
расположенные правее максимумов (рис. 90).
Минимальное давление в приемной трубке наступит в момент
подхода конуса турбулентной струи к торцу капилляра. Даль-
нейшее увеличение питающего давления поведет к увеличению
давления в приемной трубке, так как турбулентный конус пере-
мещаться не будет, а угол конуса останется постоянным и при-
мерно равным 15° и, следовательно, в приемную трубку будет
попадать постоянная часть струи. Последнему случаю соответст-
вуют участки кривых, находящиеся правее минимумов. Пред-
ставленное на рис. 90 семейство кривых характеризует зависи-
154
мость избыточных давлений р в приемной трубке диаметром dn
от питающего давления ро, причем в качестве параметра выбрано
расстояние хт между трубками. Как видно из графиков, макси-
мумы кривых с уменьшением расстояния между трубками сдви-
гаются вправо, поскольку для подхода начала конуса к торцу
приемной трубки (хтк = *т) при меньших хт требуется большее
питающее давление.
При проектировании элемента трубка — трубка с ламинар-
ным питающим капилляром наиболее важным является правиль-
ный выбор расстояния хт между трубками. Естественно, что хт
Рис. 91. Зависимость безразмерно-
го параметра x^mld от числа Re:
* — /о = 60 мм, d = 0,88 мм;
О — /о = 100 мм, d = 0,805 мм;
А — /0 = 119 мм, d = 0,65 мм;
• — /с = 158 мм, d = 0,76 мм;
+ — /о = 800 мм, d = 1,17 мм
Ь,ММ
'______и_________________
0 10 20 хткЗО 40 хт,мм
Рис. 92. К определению границ струп
вдоль их осей в зависимости от давлений
питания
должно быть меньше критического расстояния хтк- Помимо пи-
тающего давления р0 на величину расстояния хтк оказывают
влияние и геометрические параметры элемента: диаметр капил-
ляра d, его длина /0 и т. д. В общем случае расстояние хтк ока-
зывается функцией числа Рейнольдса Re.
Задача определения расстояния хтк была решена чисто экс-
периментальным путем. Для этого на основе исследования не-
скольких капилляров с разными длинами и диаметрами была
построена обобщенная кривая (рис. 91), представляющая собой
зависимость безразмерного параметра х^кЫ от числа Рейнольд-
са Re. Зная число Re, по кривой можно найти отношение xwJd,
а затем по диаметру капилляра d найти и само расстояние хтк-
Границы реальных струй вдоль осей при различных питаю-
щих давлениях, полученные экспериментально, для одного из
испытуемых капилляров (d = 1,7 мм, /0 = 600 мм) показаны на
рис. 92. По оси абсцисс было отложено расстояние от торца ка-
пилляра, а по оси ординат — радиус струи Ь. Для каждой кри-
вой по графикам на рис. 92 определяли расстояния хтк (см.,
155
например, кривую для избыточного давления р0 = 0,0093 МПа)
и рассчитывали число Рейнольдса по формуле
vd 4Qd 4Gd 4 G
v nd2v nd2pv л pAd
где G — массовый расход воздуха через капилляр; цд— динами-
ческий коэффициент вязкости воздуха; d — диаметр капилляра.
Формула для числа Рейнольдса получена на основе извест-
ного выражения Re = vd/v путем подстановки v = Ид/р, умноже-
ния числителя и знаменателя на F, замены произведения Fvp на
G и подстановки F = ш/2/4 (здесь v — средняя скорость по сече-
нию капилляра; v — коэффициент кинематической вязкости; р —
плотность воздуха; F — площадь поперечного сечения капил-
ляра).
Расходы, необходимые для расчета чисел Re, были определе-
ны экспериментально при тех же питающих давлениях, которые
устанавливались для снятия граничных кривых (рис. 92). Затем
по значениям xwjd и Re был построен график, изображенный на
рис. 91. Для кривой, представленной на рис. 91, была подобрана
также эмпирическая зависимость вида
= 50,1 —7,178 е°’000547 Re
d
(87)
действительная для чисел Re, изменяющихся в диапазоне от
800 до. 3000.
Рассмотрим примеры использования графика, представлен-
ного на рис. 91.
Пример 10. Пусть требуется определить расстояние хтк от торца питаю-
щего капилляра до места образования турбулентного конуса. Истечение про-
исходит в атмосферу. Предположим, что заданы следующие геометрические
размеры капилляра: d = 0,3 мм, /0 = 60 мм, абсолютное давление ро —
= 0,118 МПа, Т = 293 К (температура воздуха), газовая постоянная R =
= 287,14 м2/(с2 • град), цд = 1,81 • 10~5 кг/(м-с) для Т = 293 К, р\ = 0,1 МПа.
Примем следующий порядок расчета.
1. Определим расход воздуха через капилляр по формуле Пуазейля:
G = ^4(Рр~Р1) = л (0,3-10~3)4(118 0002 —100 0002) _ 0 43.10—5 кг/с
256цд//?Т 256-1,81-10~5-0,06-287-293 ’ ’ КГ/С'
2. Определим число Re для потока
3. По рис. 91 (используя найденное значение числа Re) найдем отношение
хтк/^ = 37,1 и расстояние от торца питающего капилляра до места образо-
вания турбулентного конуса хтк = 37,1 -0,3 = 11,13 мм.
4. Безразмерный параметр xwdd можно найти также по эмпирической
формуле (87).
Для проверки проделаем следующее вычисление:
*ТК •= 50,1—7,178 е0’000547 Re = 50,1—7,178 е° •000547’1080 = 37,1;
хтк = 37,1-0.3= 11,13 мм.
Пример 11. Для элемента трубка — трубка с питающим капилляром
(d = 0,5 мм, /0 = 100 мм) определим максимально допустимое давление пита-
ния, если расстояние между трубками %т = 10 мм. Коэффициент запаса по
положению турбулентного конуса составляет п = 1,5. Значения остальных
параметров те же, что и в примере 10.
1. Расстояние между торцом питающего капилляра и местом расположе-
ния турбулентного конуса с учетом коэффициента запаса п:
хтк = пхт = 1 ,5-10 = 15 мм.
2. Определим отношение
ХТК
d
15
0,
и по графику на рис. 91 найдем число Рейнольдса; оно составит Re = 1900.
3. Рассчитаем расход
G=-^-djxflRe =-у -0,5-10~3-1,81 • 10—5-1900 = 1,35-10—5 кг/с.
4. Питающее давление можно определить, решив уравнение Пуазейля
для газа относительно р0 и подставив туда необходимые числовые значения
параметров:
256р,д/о/?Тб? 2
—*31---------=
яс?4
256-1.81 • 10“5-0.1 • 287-293-1,35 10“5 , i п10 =
я (0.5-IO"3)4 +
= 1,12.105 Па = 0,112 МПа.
4. ВИХРЕВЫЕ ЭЛЕМЕНТЫ
Элементы струйной техники, действие которых основано на
образовании закрученного движения в специальной вихревой
камере (рис. 93), применяют чаще всего в качестве диодов и ре-
гулируемых сопротивлений. Вихревой элемент имеет каналы пи-
тания /, управления 2 и в центре вихревой камеры 3 — канал
выхода 4.
В вихревом элементе при отсутствии сигнала управления
струя из канала питания 1 подается радиально в выходной ка-
нал 4. При подаче управляющего сигнала, направленного тан-
генциально и перпендикулярно к направлению питающей струи,
происходит силовое взаимодействие струй питания и управления.
Результирующая струя, отклоняясь на некоторый угол вследст-
вие образующегося разрежения у внутренней поверхности вихре-
157
вой камеры, притягивается к стенке. Далее при непрерывной по-
даче управляющего сигнала образуется вихревое движение.
Выходной канал 4 может быть наглухо соединен с вихревой
камерой (рис. 93, а), либо оформлен в виде приемной трубки 4
(рис. 93, б), когда вихревая камера через образующийся зазор
соединяется с атмосферой.
В результате проведенных исследований [28] было установле-
но, что для течения несжимаемой жидкости безразмерная вели-
чина перепада давления Ap/pUg/2 может быть выражена в функ-
ции безразмерных геометрических размеров и гидродинамиче-
Z 7
Z 1
Рис. 93. Схема вихревого элемента:
а — постановка приемного выходного канала без атмосферного отверстия в вихревой ка-
мере; б — с атмосферными отверстием в вихревой камере
ских критериев, определяющих процессы течения в вихревой
камере. Теоретически было получено и подтверждено экспери-
ментально [29], что безразмерная величина давления является
некоторой функцией следующих параметров:
Ар
Р 2
/ D by Qy
\ ^в ^В ^В Qb
Мв
V
где Ар — перепад давления между граничными сечениями; —
скорость потока в выходном сопле; б/в = 2гв — диаметр выходно-
го сопла; D = 2R — диаметр вихревой камеры; &п, by — ширина
сопел питания и управления; Н — высота вихревой камеры; Qy,
Qbi — расход в канале управления и выходном канале; р, v —
плотность и кинематический коэффициент вязкости рабочей
среды.
Коэффициент сопротивления £у в управляющем сопле зависит
[28] от безразмерной высоты камеры Н = а также от числа
Re при значениях Re, меньших 5000 (рис. 94, а).
Зависимость коэффициента сопротивления £о по каналу пита-
ния от отношения Qy/Qo представлена на рис. 94, б. Как видно
из рисунка, величина £0 на начальном участке остается практи-
чески постоянной. Начиная с величины Qy/Qo = 0,1, происходит
резкое возрастание £0 и при Qy/Qo = 1 ^о-> °°. Таким образом
158
происходит запирание канала питания потоком управления.
В элементах рассматриваемого типа полное запирание канала
питания происходит при отношении QylQn — 7з и менее. Эффек-
тивность работы вихревой камеры как пневматических сопро-
тивлений возрастает с увеличением потери энергии при образо-
вании вихря.
При работе вихревого элемента как эжектора было обнару-
жено [39], что увеличение расхода эжектируемой среды с ростом
давления питания наблюдается до избыточных давлений поряд-
Рис. 94. Коэффициент сопротивления вихревой камеры:
а — зависимость £у канала управления от числа Re и параметра
H‘d в, б — зависимость £0 канала питания от относительного рас-
хода Qy/Qo
ка 0,09 МПа, далее эжектор выполняет роль стабилизатора
расхода эжектируемого газа. Это явление объясняется тем, что
при давлениях питания, больших 0,09 МПа, отверстие входа
эжектируемой среды превращается в дроссель с закритическим
характером течения вследствие значительного разрежения в
центре вихревой камеры.
Работа вихревого диода основана на том, что при соединении
питающей и управляющей линий поток питания течет с образо-
ванием вихря и пневматическое сопротивление прямому потоку
резко возрастает. При противоположном направлении потока со-
противление мало, так как в этом случае нет вихреобразования.
Отношение расходов прямого и обратного потоков в вихревом
диоде составляет 2,5—3. Увеличение пневматического сопротив-
ления при образовании вихря положено в основу работы вихре-
вого стабилизатора [29, 39].
Вихревой элемент при определенных соотношениях геометри-
ческих размеров может работать в режиме усилителя, реле или
•запоминающего устройства [39].
Типовые характеристики вихревого элемента при работе его
в режиме усилителя показаны на рис. 95, где по оси ординат
отложено отношение расходов в выходном канале, а по оси абс-
цисс — отношение разности управляющего и питающего давле-
159
ний к последнему. Кривые 1—4 на рис. 95 являются характери-
стиками элемента, у которого рабочей средой служит воздух, а
кривая 5 соответствует случаю, когда рабочей средой является
вода.
0,5
10 РУ Ро
' Ро
Постановка приемной трубки в выходном канале вихревой
камеры и наличие некоторого сброса расхода приводит к увели-
чению крутизны характеристики [55]
вихревого элемента. Результаты, по-
лученные при смешанном управле-
нии питающая струя — водяная, уп-
равляющая — воздушная, представ-
лены на рис. 96. Данные опытов,
приведенные на рис. 95 и 96, по-
лучены при сходных условиях.
о
Рис. 95. Типовые характеристики вихревого
усилительного элемента в безразмерных ко-
ординатах:
1, 2 — характеристики элемента с вихревой ка-
мерой без атмосферного отверстия при давлении
питания; р0 = 0,14 МПа и р0 = 0,07 МПа соот-
ветственно; 3, 4 — характеристики элемента с
атмосферным отверстием в вихревой камере при
избыточном давлении питания р0 = 0.14 МПа и
Ро = 0,07 МПа соответственно; 5 — характеристика
элемента с атмосферным отверстием в вихревой
камере р0 = (0,07 4- 0,31) МПа
Смешанное управление позволяет создавать различные пневмо-
гидропреобразователи.
Принимая сделанные ранее допущения о несжимаемости
жидкости, найдем основные зависимости, характеризующие вих-
ревое движение.
Полная составляющая скорости течения в кольцевом сечении
вихревой камеры может быть выражена через радиальную и
тангенциальную составляющие. Распределение тангенциальных
скоростей в случае заглушенного канала питания выражается
обычно в виде степенной зависимости 1
Л_ = А
гу г
где vу — средняя скорость потока в канале управления; г — пе-
ременный радиус.
1 Показатель степени закона распределения тангенциальных скоростей
в камере зависит от геометрических и иных характеристик камеры и обычно
лежит в пределах от 2/3 до 1 [28, 55]. Выражение (88) находят из уравнения
моментов количества движения.
160
Откуда получаем
(88)
Радиальная составляющая скорости в кольцевом сечении
Qy
r 2лгН
Градиент изменения давления в радиальном направлении
пропорционален квадрату тангенциальной
составляющей скорости, т. е.
dr г
Подставляя в последнее выражение зна-
чение Vx, найденное по формуле (88), полу-
чаем
, 2 R2 J
ар = риу-dr.
г3
Интегрируя полученное дифференциаль-
ное уравнение в пределах от гв до /?, найдем
о
4р_^Г^У_11. (89)
2 L\ 'В I J
Учитывая, что перепад давления Др при
поданном управляющем давлении и запер-
Рис. 96. Характеристи-
ка вихревого элемента
при . смешанном уп-
равлении (питающая
струя — водяная, уп-
равляющая струя —
воздушная)
том канале питания равен разности между
давлением рп в кольцевом сечении радиу-
са R и давлением на выходе из камеры рв
(радиус гв), т. е. Др = рп —Рв, получаем
Рв = Рп-р-^Г<-^-¥-1]. (90)
2 L\ в 7 J
Величина полного давления управления, обеспечивающая
расход Qy при запертом канале питания:
2
Ру = Рп+"~"- (91)
Найдем расход на выходе из вихревой камеры. Уравнение
(90) справедливо для малых скоростей течения невязкой жидко-
сти. В случае течения несжимаемой жидкости массовый расход
Gb связан с избыточным давлением рв на выходе из камеры из-
вестным уравнением
GB = ц£в р4 2ррв,
1 j Заказ 993
161
а максимально возможный расход
(^в)тах = (92)
где Sb — площадь выходного отверстия.
Считая, что через управляющее сопло в вихревую камеру ис-
течение происходит под перепадом ру— Рп, можно определить
расход
Gy = Ну^у V 2р(ру—рп) • (93)
Подставляя в уравнение (90) уравнения (93), (92) и (91),
окончательно получим
GB _ (^в)тах ^У / R \2_________ j /д^ч
ц2£2 h2S2 p,ySy I \ гв / Г
Глава V
ПНЕВМАТИЧЕСКИЕ ВЫЧИСЛИТЕЛЬНЫЕ,
УПРАВЛЯЮЩИЕ И РЕГУЛИРУЮЩИЕ
УСТРОЙСТВА МЕМБРАННОГО ТИПА
1. КРАТКАЯ ХАРАКТЕРИСТИКА СПОСОБОВ И ПРИНЦИПОВ
ПОСТРОЕНИЯ ВЫЧИСЛИТЕЛЬНЫХ,
УПРАВЛЯЮЩИХ И РЕГУЛИРУЮЩИХ МЕМБРАННЫХ УСТРОЙСТВ
Агрегатный способ построения пневматических систем про-
мышленной автоматики позволил создавать специализированные
регуляторы, решающие отдельные задачи регулирования, а имен-
но, пропорциональное, пропорционально-интегральное регулиро-
вание, а также выполняющие вычислительные операции — ум-
ножение, деление, сложение и т. д.
Дальнейшее развитие промышленности и необходимость ав-
томатизации более сложных объектов и процессов привели
к реализации элементного способа построения пневматических
приборов, аналогичного применяемому в электронике. Элемент-
ный способ построения пневматических приборов, при котором
новый пневматический прибор (аналогового или дискретного
действия) собирают из пневмоэлементов универсального назна-
чения, был воплощен в системе УСЭППА (Универсальная систе-
ма элементов промышленной пневмоавтоматики).
В основе конструкции приборов, реализующих тот или иной
способ соединения элементов в едином приборе, лежат опреде-
ленные технические принципы построения.
Существуют три основных принципа построения непрерывных
пневматических вычислительных и регулирующих приборов,
а именно: принцип компенсации перемещений, принцип компен-
сации сил и принцип компенсации расходов. На более ранней
стадии развития пневмоавтоматики пневматические приборы
строили по принципу компенсации перемещений. В качестве
упругих элементов в этих приборах использовали, как правило,
сильфоны. Принцип компенсации перемещений состоит в том,
что перемещение одних упругих элементов компенсируется пере-
мещениями других упругих элементов. Сложение перемещений
выполняется на рычагах. Поэтому приборы, построенные по
принципу компенсации перемещений, имеют обычно громоздкую
конструкцию с тягами и рычагами.
В последние годы при построении пневматических приборов
используют в основном два последних принципа, причем наи-
большее распространение получил принцип компенсации сил.
Использование этих принципов, в отличие от принципа компен-
сации перемещений, позволяет значительно уменьшить габарит-
11* • 163
ные размеры приборов и применить блочный и элементный спо-
соб построения. Эти принципы чрезвычайно перспективны.
Приборы, работающие по принципу компенсации сил, в каче-
стве основных узлов включают в себя мембраны из мембранного
полотна, соединенные общим штоком. Принцип компенсации сил
заключается в том, что на штоке автоматически поддерживается
баланс сил, т. е. равнодействующая оказывается всегда равной
нулю. Торец штока управляет соплом пневматического усилителя
сопло — заслонка. Перемещения штока составляют сотые доли
миллиметра, т. е. практически шток не перемещается. На этом
принципе построена пневматическая ветвь приборов Агрегатной
унифицированной системы и приборов непрерывного действия
Универсальной системы элементов промышленной пневмоавто-
матики.
Принцип компенсации расходов перенесен в пневмоавтома-
тику из электроники. Пневматические приборы, построенные по
этому принципу, в качестве основного элемента содержат реша-
ющий усилитель. Расход воздуха, направляемый с выхода реша-
ющего усилителя через дроссель в суммирующую камеру, ком-
пенсирует расходы воздуха от входных сигналов, поступающих
через дроссели в эту же камеру. При этом давление в камере
либо остается постоянным, либо все время равным давлению,
формируемому в другой камере решающего усилителя. Решаю-
щие усилители работают по принципу компенсации сил.
Рассмотрим на примере схем, получивших в свое время наи-
большее распространение, реализацию основных принципов по-
строения пневматических приборов.
2. РЕАЛИЗАЦИЯ ПРИНЦИПА КОМПЕНСАЦИИ ПЕРЕМЕЩЕНИЙ
В РЕГУЛЯТОРАХ, ПОСТРОЕННЫХ НА БАЗЕ ИЗМЕРИТЕЛЬНЫХ
ПРИБОРОВ
Обычно регуляторы, построенные на базе измерительных при-
боров, имеют задатчик, регулирующее и регистрирующее уст-
ройства. Поэтому такие регуляторы иногда называют регулято-
рами приборного типа. Достоинства этих регуляторов состоят
в том, что функции контроля и регулирования объединены в од-
ном приборе, что упрощает конструкцию, монтаж и эксплуата-
цию. Как уже отмечалось ранее, недостатком таких регуляторов
являются большие габаритные размеры и невозможность реали-
зации многоконтурных систем регулирования. Однако иногда
регуляторы рассматриваемого типа могут быть использованы
как корректирующие устройства и в многоконтурных системах
автоматического управления.
С помощью этих регуляторов могут быть реализованы П
(пропорциональный), ПИ (пропорционально-интегральный) -за-
коны регулирования, и чаще всего они являются регуляторами
давления, уровня, температуры и иных параметров [37].
164
Рассмотрим реализацию принципа компенсации перемещений
на примере пропорционального регулятора (П-регулятора).
Схема простейшего П-регулятора показана на рис. 97. Регу-
лятор является усилителем, работа которого основана на прин-
ципе компенсации пере-
мещений. Входное давле-
ние pi преобразуется
сильфоном 1 в перемеще-
ние Жесткий центр
сильфона шарнирно сое-
динен с одним из концов
рычага-заслонки 2, управ-
ляющего соплом 4 пнев-
матического усилителя. К
Рис. 97. Схема П-регулятора, работаю- Рис. 98. Схема перемещения
щего по принципу компенсации переме- заслонки-рычага относитель-
щений но сопла
постоянному дросселю 5 усилителя подведено давление питания
Ро. К выходу пневматического усилителя подключен делитель
давлений, состоящий из двух дросселей а и р. Давление рос в
междроссельной камере делителя заведено в сильфон отрица-
тельной обратной связи 3, жесткий центр которого шарнирно
соединен с другим концом рычага-заслонки 2. При увеличении
давления р{ рычаг-заслонка 2 приближается к соплу 4 и давле-
ние р увеличивается. Одновременно увеличивается и давление
отрицательной обратной связи рос. Жесткий центр сильфона 3
поднимается и отводит заслонку от сопла. Давление на выходе р
уменьшается. Смещение заслонки относительно сопла на не-
сколько сотых долей миллиметра обеспечивает полный набор
пли сброс давления в междроссельной камере. Поэтому суммар-
ное перемещение h заслонки относительно сопла в процессе ра-
боты меняется незначительно. В соответствии с приведенной на
рис. 98 схемой можно записать, что
h = hx— h2 = (pft—ya,
вместе с тем из рассмотрения треугольников следует, что
х1=(а + 6)(р и х2 = (а+Ь)у,
поэтому
й =-------------------------b---------— а.
а-\-Ь а + Ь
(95)
165
Так как h очень мало, то можно принять его равным нулю и
записать
х{Ь = х2а.
С другой стороны, Xi = ^1Р1, а х2 = k2pQc. Подставляя эти ра-
венства в последнее уравнение, получим
kxbpx = k2apoz. (96)
Если предположить, что дроссели делителя линейны, то его
уравнение можно записать в виде
«(Р—Рос) = ₽Рос>
откуда
Подставляя последнее равенство в уравнение (96), оконча-
тельно получим следующее выражение для выходного давления:
Принцип компенсации перемещений лежит также в основе
действия регулятора типа 04 [37], реализующего, например ПИ-
закон.
3. РЕАЛИЗАЦИЯ ПРИНЦИПА КОМПЕНСАЦИИ СИЛ
И АГРЕГАТНОГО СПОСОБА ПОСТРОЕНИЯ ПРИБОРОВ
В СИСТЕМЕ АУС И КУСПА
Принцип компенсации сил является основным для построе-
ния приборов мембранной пневмоавтоматики и выгодно отли-
чается от принципа компенсации перемещений тем, что для его
реализации не требуются громоздкие рычаги. Принцип компен-
сации сил нашел техническое воплощение в мембранных блоках
[7] систем АУС и УСЭППА. Набор блоков АУС позволил перей-
ти к построению сложных многоконтурных систем автоматиче-
ского регулирования.
В последнее время на смену АУС приходит более прогрес-
сивная система УСЭППА. Однако приборы АУС по-прежнему
используют в промышленности.
Агрегатная унифицированная система пневматических прибо-
ров построена по функциональному признаку. Это значит, что
каждый из приборов АУС выполняет определенную возложен-
ную на него функцию. Все основные приборы выполнены в виде
отдельных цилиндрической формы блоков, набранных из круглых
166
однотипных стандартных шайб, между которыми находятся мем-
браны из прорезиненного полотна. Шайбы стянуты между собой
болтами.
В состав АУС входит большое число приборов, которые под-
разделяются на несколько групп: датчики, регулирующие и вы-
числительные блоки, вторичные регистрирующие и показываю-
щие приборы, блоки вспомогательного назначения. Для всех при-
боров АУС выбран единый диапазон изменения пневматических
Рис. 99. Принципиальная схема регулирующего блока
АУС 4РБ-32А
входных и выходных сигналов. Избыточное давление 0,02—
0,1 МПа при избыточном давлении питания 0,14 МПа. В состав
АУС входят также электропневматические и иные преобразова-
тели, позволяющие проводить комплексную автоматизацию раз-
личных промышленных объектов.
Рассмотрим устройство и действие основных приборов, вхо-
дящих в систему АУС, и проиллюстрируем на их примере реали-
зацию принципа компенсации сил.
Регуляторы АУС. Основным регулирующим прибором в
системе АУС является пропорционально-интегральный регуля-
тор. В номенклатуре приборов АУС он числится как регулирую-
щий блок 4РБ-32А. Этот блок обеспечивает пропорционально-
интегральный закон регулирующего воздействия с широкими
пределами изменения диапазона дросселирования и времени изо-
167
дрома. Конструктивно регулирующий блок состоит из набора
одинаковых по диаметру (стандартных) шайб, отделенных друг
от друга гибкими мембранами из прорезиненного полотна. Мем-
браны и стенки шайб образуют пневматические камеры блока,
которые могут соединяться между собой каналами, проходящи-
ми в стенках шайб. На поверхности блока расположены органы
настройки диапазона дросселирования, времени изодрома и винт
настройки контрольной точки. Регулятор состоит из следующих
основных элементов (рис. 99): усилителя (камеры /, 2, 3, 4),
камеры отрицательной обратной связи с дросселем сопло — за-
слонка 19, элемента сравнения (камеры 6, 7), камеры 8 положи-
тельной обратной связи, изодромного элемента (камеры 9, 10) и
отключающего реле (камеры 11, 12, 13). Давление питания ро
подводят к камере 1 и к постоянному дросселю 5 пневматиче-
ского усилителя первого каскада усиления, а также постоянному
дросселю 14 повторителя давления изодромного элемента. Сопло
19 пневматического усилителя управляется штоком 17 элемента
сравнения. С помощью элемента сравнения давление р\, посту-
пающее от датчика измеряемого параметра, сравнивается с за-
данным давлением р2, поступающим от пневматического задат-
чика. Выходное давление регулятора р, снимаемое с усилителя
мощности, подается в камеру отрицательной обратной связи,
в камеру положительной обратной связи 8 через дроссель диа-
пазона дросселирования * 1 си и в камеру 12 отключающего эле-
мента., Из камеры 12 через сопло 15 выходное давление поступа-
ет в камеру 11 и на выход регулятора. Помимо этого выходное
давление подводится к дросселю изодрома 14 типа конус — конус
аз, соединенному с глухой камерой 10. Дроссель аз совместно
с камерой 10 образует апериодическое звено.
Рассмотрим работу регулятора. Допустим, что в какой-то мо-
мент времени регулируемый параметр изменился, что привело
к увеличению давления р\ в камере 6. Равновесие сил на мем-
бранном элементе сравнения нарушается, и шток 17 опускается
вниз, прикрывая сопло пневматического усилителя. Так как дав-
ление р при этом также увеличивается на мембранном элементе
сравнения, наступит новое равновесие сил, причем, если pi оста-
нется больше р2, выходное давление будет продолжать расти.
Рассмотрим это подробнее. По мере приближения торца штока
17 к соплу 19 давление в камере 4 возрастает, и мембраны 20 со
штоком вторичного реле (усилителя мощности) перемещаются
вниз. Питающий воздух из камеры 1 начинает поступать через
образовавшуюся щель между седлом и шариком в камеру 2.
Давление в камере 2 возрастает и, действуя на нижнюю мембра-
ну, уравновешивает силу, появившуюся за счет увеличения дав-
1
1 Диапазоном дросселирования условно называют величину —• 100%,
выражаемую в процентах, где k — коэффициент усиления регулятора.
168
ления в камере 4 (внутренняя отрицательная обратная связь
усилителя мощности). Подводимое в камеру 8 давление осуще-
ствляет положительную обратную связь. В эту камеру выходное
давление поступает с делителя давления, выполненного на дрос-
селях си и а2. Действуя на верхнюю и нижнюю мембраны блока
сравнения, давления отрицательной и положительной обратных
связей компенсируют увеличение усилия, действующего вниз, за
счет возросшего давления р\. Через дроссель аз происходит на-
полнение камеры 10 и, как следствие этого, увеличение давления
Ри. Давление в камере 9 равно давлению в камере 10. Таким
образом, давление после дросселя аг будет медленно нарастать,
что поведет к увеличению давления рПс в камере положительной
обратной связи 8 и новому увеличению давления р и т. д. Если
р\ будет оставаться больше р2, то выходное давление увеличится
до своего наибольшего значения !, а давления в камерах 2, 4, S,
Р, 10, 11, 12 и камере отрицательной обратной связи будут равны
между собой и выходному давлению. Так как мембраны выпол-
нены из прорезиненного полотна и практически не обладают
жесткостью, то шток 17 элемента сравнения при выравнивании
давлений pi и р2 может занимать любое положение, при кото-
ром на выходе регулятора устанавливается давление, соответст-
вующее перемещению регулирующего органа в положение, при
котором параметр возвращается к заданному значению.
При уменьшении регулируемого параметра торец штока от-
ходит от сопла. Давление на выходе регулирующего блока
уменьшается, а воздух из пневматических камер выходит в ат-
мосферу через полый шток усилителя мощности. Для настройки
контрольной точки служит винт и плоская пружина 16, а также
пружина 18. Так как перемещение штока элемента сравнения
в процессе работы чрезвычайно мало, то и усилия пружин 16 и
18 практически остаются постоянными.
Если регулирующий клапан, установленный на входе регуля-
тора, необходимо перевести на ручное управление и отключить
от регулирующего блока, то в камеру 13 подают избыточное дав-
ление рк, равное питающему давлению. Мембрана перекрывает
сопло 15, в результате чего поступление воздуха в линию испол-
нительного механизма прекращается.
При полностью открытом дросселе ai отрицательная обрат-
ная связь исключается и регулятор по своему действию прибли-
жается к двухпозиционному. При полностью закрытом дросселе
ai действие отрицательной обратной связи проявится в наиболее
полной мере. Регулирующий блок 4РБ-32А может работать так-
же и в режиме пропорционального регулятора (П-регулятора).
Для этого необходимо полностью перекрыть дроссель изодрома
‘аз. В этом случае давление на выходе блока при нулевом рас-
1 Наибольшее значение выходного давления равно питающему давлению
минус давление, обусловленное усилием пружины 21, предназначенной для
создания постоянного перепада на сопле 19 усилителя.
169
согласовании равно давлению ри, которое остается постоянным,
причем здесь имеется в виду, что давление контрольной точки \
настраиваемое винтом и пружиной 16, равно нулю. Этот вывод
легко проверить, используя уравнение регулирующего блока.
Рис. 100. Временная харак-
теристика регулирующего
блока 4РБ-32А
Работу регулирующего блока опи-
сывает система уравнений: уравне-
ние баланса сил на элементе сравне-
ния, уравнение камеры положительной
обратной связи и уравнение камеры
изодрома:
Pnc‘F + P\f = PP + Plf\
«1(Р—Рпс) = а2(Рпс—Ри);
Т dPvl > „ „
1 и —— + ри = р,
at
где F — эффективная площадь верхней
и нижней мембраны элемента сравне-
ния; f— эффективная площадь камер 6 и 7, равная разности
эффективных площадей мембран, ограничивающих камеру;
Ги =--------постоянная времени камеры изодрома; Т — абсо-
RTa3
лютная температура (в градусах по шкале Кельвина).
Усилия пружин 16 и 18 системы настройки контрольной точки
при выводе уравнений не учитываются.
Исключая переменные рПс и ри , окончательно находим
tx
P = ^(P1—р2) +-j^- I (Р1—РЖ
*0
где k = -у- •• — коэффициент усиления регулятора.
Как видно из последнего уравнения, регулятор имеет взаимо-
связь настроек. Это проявляется в том, что при регулировании
коэффициента усиления регулятора k одновременно изменяется
истинная постоянная времени изодрома T^lk, что является су-
щественным недостатком регулятора. Этот недостаток отсутст-
вует у регуляторов, построенных на решающих усилителях и на
элементах УСЭППА. На рис. 100 приведен график изменения вы-
ходного давления ПИ-регулятора при скачкообразном входном
воздействии.
Устройства, реализующие математические операции. Для
реализации алгебраического суммирования трех пневматических
сигналов, из которых два складываются, а один вычитается, слу-
жит блок суммирования БС-34А.
1 Контрольной точкой называют давление на выходе регулятора при ну-
левом рассогласовании и при работе блока в режиме П-регулятора.
170
Принципиальная схема блока представлена на рис. 101. Блок
состоит из следующих основных элементов: мембранного изме-
рительного устройства, образованного камерами 12, 14, 16, и
двухкаскадного усилителя. Первый каскад усилителя выполнен
на базе элемента типа сопло — заслонка (сопло 10, постоянный
дроссель 25 и междроссельная камера 9). Второй каскад, обра-
зованный камерами 1, 3, 5, 6, является усилителем мощности.
Второй каскад усиления, существенно увеличивающий выходную
Рис. 101. Принципиальная схема пневматического блока суммиро-
вания БС-34А
мощность прибора, позволяет подключать к его выходу длинные
линии и большие нагрузки, не снижая его точности. Работа при-
бора основана на принципе компенсации сил.
Измерительное устройство предназначено для алгебраическо-
го сложения усилий, возникающих под действием входных дав-
лений р\, рг, рз и усилия пружины 18. Вырабатываемое усилите-
лем мощности давление р в качестве отрицательной обратной
связи подается в камеру 11 и уравновешивает усилия, действую-
щие со стороны измерительного (суммирующего) устройства.
В пневматическом блоке суммирования БС-34А предусмотре-
ны также вспомогательные устройства, позволяющие поддержи-
вать постоянный перепад давлений на постоянном дросселе 25 и
переменном дросселе 10 типа сопло — заслонка, управляющим
пневматическим усилителем (первым каскадом усиления). Обес-
печение постоянного перепада на постоянном и переменном дрос-
171
селях, как известно, существенно увеличивает крутизну статиче-
ской характеристики пневматического усилителя сопло — за-
слонка, благодаря чему уменьшается прогиб мембран и повы-
шается стабильность их эффективных площадей, а в целом
повышается точность прибора. Заслонкой для сопла 10 служит
нижний торец штока 13, который жестко соединяет между собой
мембраны 19, 20, 21 измерительного элемента.
Рассмотрим работу сумматора. На шток 13 действуют уси-
лия, обусловленные давлениями р\, р2, рз, р и усилием пружи-
ны 18. В положении статического равновесия сумма этих сил
равна нулю. При нарушении статического равновесия, напри-
мер, в случае изменения одного из входных пневматических сиг-
налов торец штока 13 смещается относительно сопла 10, что
влечет за собой изменения давлений воздуха в камерах 6 и 9,
в которые через постоянный дроссель 25 непрерывно поступает
воздух. Если давление в камерах 6 и 9 повышается, что может
быть вызвано опусканием штока 13, то мембраны 27 и 28 усили-
теля, соединенные полым штоком 4, под действием этого давле-
ния перемещаются вниз в направлении открытия шарикового
клапана. Из камеры 1 питающий воздух через шариковый кла-
пан проходит в камеру 3, а оттуда на выход и в камеру 11 отри-
цательной обратной связи. Усилитель мощности работает с коэф-
фициентом усиления по давлению, равным единице, т. е. давле-
ние в камере 6 всегда равно давлению в камере 3, если прене-
бречь усилием, создаваемым пружиной 2. Если шток 13 под дей-
ствием результирующей силы отодвигается от сопла 10, то дав-
ление в камерах 9 и 6 уменьшается, в результате чего мембран-
ный блок усилителя мощности перемещается вверх. Полый шток
отходит от шарика, и камера 3 соединяется с атмосферой. Дав-
ление в камерах 3 и И, а следовательно, и на выходе уменьшает-
ся до тех пор, пока мембраны сумматора не займут новое рав-
новесное положение. При этом шарик и шток усилителя мощно-
сти (вторичного реле) занимают положение, при котором
отсутствует расход воздуха в камеру 3 и из нее в атмосферу.
Выходное давление р. действующее на нижнюю поверхность
мембраны 28, осуществляет внутреннюю отрицательную обрат-
ную связь в усилителе мощности. Давление отрицательной об-
ратной связи в камере И, а следовательно, и на выходе блока
при статическом равновесии всегда равно алгебраической сумме
давлений, подводимых к входным штуцерам сумматора, плюс
давление, уравновешивающее усилия от задающей пружины 18
и пружины 22. Такое равенство имеет место потому, что эффек-
тивные площади мембран 19 и 21 выбраны равными между собой
и равными половине эффективной площади мембраны 20. Для
доказательства этого напишем уравнение, выражающее равно-
весие сил на штоке 13:
N + P\F + p2F—p2F—pF = О,
172
откуда
. и
Р — Р1+ р2--Рз + ~ »
F
гце N — суммарная сила, развиваемая пружинами 18 и 22; F —
эффективная площадь мембран 19 и 21.
Величина дополнительного слагаемого N/F устанавливается
натяжением задающей пружины 18 путем вращения винта 17.
Рассмотрим работу устройства, поддерживающего постоян-
ный перепад давлений на постоянном дросселе 25 пневматиче-
ского усилителя сопло — заслонка. Устройство включает в себя
подпружиненный шариковый клапан 26, под который подводится
давление питания, мембрану 24 и пружину 23, усилие которой
определяет собой величину постоянного перепада давлений на
дросселе 25. Покажем, что это устройство действительно поддер-
живает постоянный перепад.
Для этого напишем уравнение сил, действующих на мембра-
ну 24:
Fxp'\ +K = pzFx, (98)
откуда
р2—Р\ = = COnst,
1
где F\—эффективная площадь мембраны 24\ р[—давление
воздуха в междроссельной камере 9 усилителя сопло—заслонка;
К—сила, развиваемая пружиной 23; р'2 — давление в камере 8.
Сила К при работе устройства остается практически постоян-
ной, так как прогиб мембраны крайне незначителен, а жест-
кость пружины 23 невелика. Из равенства (98) следует, что при
уменьшении давления р J уменьшается также и давление пита-
ния первичного реле р 2, так как шарик 26 прикрывает отверстие,
через которое камера 7 сообщается с камерой 8. Это обстоятель-
ство и обеспечивает высокую крутизну статической характери-
стики. Постоянный перепад на переменном дросселе 10 поддер-
живается за счет введения отрицательной обратной связи путем
подачи давления р под мембрану 21. Величина постоянного пе-
репада на сопле определяется величиной усилия, создаваемого
пружиной 2. Это легко проверить, написав уравнение равновесия
сил на мембранном блоке усилителя мощности.
К устройствам, предназначенным для выполнения нелинейных
математических операций, могут быть отнесены множительные
устройства, устройства для извлечения квадратного корня, для
возведения в квадрат, функциональные преобразователи и неко-
торые другие приборы. Например, множительное устройство
БФ-2 может быть использовано для возведения в квадрат вход-
ного сигнала, а в некоторых случаях — для извлечения квадрат-
ного корня из входного сигнала. Принцип работы блока БФ-2
заключается в том, что момент, создаваемый силой, пропорцио-
173
нальной одному из входных сигналов и действующей на перемен-
ном плече, длина которого пропорциональна второму входному
сигналу, уравновешивается моментом силы, создаваемой выход-
ным давлением и действующей на постоянном плече. Работа
блока основана на принципе компенсации моментов сил.
Система приборов КУСПА. Эта система включает в себя
ряд регуляторов, предназначенных для регулирования парамет-
ров потоков газового топлива (КУСПА расшифровывается как
комплексная упруго-силовая пневмогазовая автоматика). Регу-
ляторы системы КУСПА реализуют различные законы регули-
рующих воздействий (П, ПИ, ПИД и др.).
Регуляторы системы КУСПА построены по принципу компен-
сации сил (моментов). Но в отличие от систем АУС и УСЭППА
здесь усилия (моменты) суммируются на рычагах, а вместо мем-
бран для преобразования давления в усилие применяют сильфо-
ны. Благодаря применению сильфонов, которые, как известно,
по сравнению с резинотканевыми и резиновыми мембранами
имеют высокую стабильность, точность регуляторов повышается.
Все усилия, развиваемые сильфонами при подаче в них сигналов
давления, суммируются на системе связанных между собой ры-
чагов, расположенных в одной плоскости с упругими опорами.
Рычаги соединяются упругими стяжками. Подвижная система
рычагов имеет незначительное перемещение, что является след-
ствием применения в качестве управляющего органа усилителя
сопло — заслонка.
Для усиления сигнала, снимаемого с выхода усилителя соп-
ло — заслонка по мощности, служит мембранный усилитель
мощности, выходной сигнал с которого направляется на выход
регулятора и на сильфон отрицательной обратной связи, а в изо-
дромном регуляторе — и на блок изодрома, который состоит из
емкости, регулируемого сопротивления и сильфона. Постоянный
перепад давлений, поддерживаемый на постоянном сопротивле-
нии усилителя сопло — заслонка, усилителя мощности, еще в
большей степени уменьшает ход заслонки. Так как смещения
рычагов очень незначительные, для их поворота можно исполь-
зовать крестообразные упругие опоры без трения. Все это также
приводит к повышению точности приборов КУСПА.
Все приборы для конкретного объекта составляют один блок
в виде колонки, в котором монтируются регуляторы, система за-
щиты, контрольно-измерительные приборы, аппаратура дистан-
ционного управления и вспомогательное оборудование. Такое
конструктивное оформление позволяет получить компактный
блок, сократить сроки монтажа и стоимость устройства. Это
связано с тем, что при таком монтаже, например, отпадает не-
обходимость в индивидуальных корпусах регуляторов и т. д.
Пневматические регуляторы системы КУСПА питаются сжатым
воздухом с избыточным давлением 0,14 МПа. В качестве источ-
ника питания может быть использован транспортируемый газ.
174
4. РЕАЛИЗАЦИЯ ПРИНЦИПА КОМПЕНСАЦИИ СИЛ
И ЭЛЕМЕНТНОГО СПОСОБА ПОСТРОЕНИЯ ПНЕВМАТИЧЕСКИХ
ПРИБОРОВ В СИСТЕМЕ УСЭППА
Блоки пневматической агрегатной унифицированной системы
обеспечивают построение широкого класса систем автоматиче-
ского регулирования. Если задача автоматизации не столь слож-
на и является типовой, то ее можно решить с помощью типовых
блоков АУС. Однако, так как каждый блок АУС выполняет свою
определенную функциональную зависимость и является закон-
ченной конструкцией, то реализация новой сложной системы уп-
равления требует конструирования новых блоков.
Требования к современным системам автоматического управ-
ления значительно возросли и уровень современной автоматиза-
ции требует наличия довольно сложной системы управления, ча-
сто дискретного или дискретно-непрерывного действия, когда,
например, управляющая логическая часть задает режимы рабо-
ты отдельным регуляторам либо включает их в определенной по-
следовательности. В химической, нефтеперерабатывающей и
иных отраслях промышленности приходится решать задачи ав-
томатической оптимизации. В таких условиях нецелесообразно
автоматизировать объекты управления только путем расшире-
ния номенклатуры приборов, например, увеличения ассортимен-
та приборов АУС. Поэтому естественным оказалось применение
элементного способа построения пневматических приборов, ши-
роко используемого в электроавтоматике, при котором каждый
новый прибор, реализуемый в системе УСЭППА, собирают из
отдельных стандартных элементов.
На целесообразность использования поэлементного способа
построения пневматических приборов впервые обратил внимание
немецкий инженер В. Фернер [46]. Практическое применение этот
способ впервые нашел в СССР после того, как в Институте ав-
томатики и телемеханики была предложена полная система уни-
версальных пневмоэлементов мембранного типа, работающих
в нормальном диапазоне рабочих давлений (0—0,14 МПа), и
отработан бесшланговый (печатный) способ монтажа [5]. Стан-
дартные элементы, объединенные в универсальную систему эле-
ментов промышленной пневмоавтоматики УСЭППА, собирают
на платах. На основе этих элементов могут быть реализованы
приборы практически любой сложности.
Все элементы УСЭППА малогабаритные, выполняют лишь
самые простейшие функции и не содержат внутренних соедини-
тельных каналов (коммуникаций). Практически любой из эле-
ментов имеет свой аналог в электрической и электронной аппа-
ратуре. Монтаж элементов ведется на специальных коммутаци-
онных платах, внутри которых проложены каналы, необходимые
для соединения элементов между собой и подвода к ним питаю-
щего воздуха. У элементов имеются специальные коммутацион-
175
ные ножки, которые служат для крепления, коммутирования
с платой и для подключения контрольных приборов во время на-
ладки устройств.
Элементы и приборы УСЭППА делят на две группы: анало-
говую и дискретную. Возможна комбинация элементов обеих
групп с целью создания дискретно-аналоговых систем управ-
ления.
Элементы и основные узлы УСЭППА непрерывного дей-
ствия. Элементы этой группы работают по принципу компен-
сации сил и предназначены для построения аналоговых (непре-
Рис. 102. Пневматические элементы УСЭППА:
а, б -- схема и статическая характеристика элемента сравнения; в — четырехвходо-
вый усилитель
рывных) пневматических устройств. Аналоговая группа элемен-
тов включает в себя решающие (операционные) усилители,
пневмоемкости и пневмосопротивления, повторители.
Схема операционного усилителя с двумя входами представ-
лена на рис. 102, a L Этот усилитель имеет три мембраны. На
рис. 102, в дана схема усилителя, который имеет четыре входа
и пять мембран. Уравнение статической характеристики
(рис. 102, б) операционного усилителя с двумя входами (до на-
сыщения), работающего в режиме элемента сравнения, можно
приближенно записать в следующем виде:
р = /г(?1—р2).
Благодаря тому, что выходное давление р отбирается из меж-
дроссельной камеры пневматического усилителя сопло — заслон-
ка, образованного двумя соплами и заслонкой, удалось получить
коэффициент усиления k = 250. Как известно, в АУС для увели-
чения коэффициента усиления применяют специальные устрой-
ства, поддерживающие постоянные перепады давлений на посто-
янном и переменном дросселях.
Имея в виду сравнительно высокое значение коэффициента
усиления, первый участок статической характеристики можно
1 На рисунках условно сопло обозначено стрелками.
176
считать вертикальным и уравнение элемента сравнения предста-
вить в следующем виде:
P = PoSg(pi—рг)*.
Четырехвходовый операционный усилитель также может ра-
ботать в режиме элемента сравнения (рис. 102, в). Соответству-
ющее уравнение записывается в виде
Р = Ро Sg [(Р1 + Рз)—(р2 + Р<)1 •
К пневмосопротивлениям и пневмоемкостям относится посто-
янное и регулируемое сопротивления и пневмоемкости в виде
сосудов с постоянным и регулируемым объемами (сильфонами).
Рис. 103. Схемы повторителей:
а —маломощный точный повторитель; б — маломощный точный повто-
ритель со сдвигом; в — усилитель мощности низкой точности
В рабочем диапазоне давлений 0—0,14 МПа, принятом для
промышленной пневмоавтоматики, пневмосопротивления нели-
нейны. Однако при реализации устройств, не предназначенных
для выполнения вычислительных операций с высокой точностью,
например, различного рода регуляторов, для реализации сумма-
торов и апериодических звеньев допустимо применять нелиней-
ные дроссели. Конструктивно постоянное сопротивление оформ-
лено в виде капилляра, имеющего индивидуальный фильтр и
расположенного в винте, который размещают в корпусе с двумя
стандартными ножками. Конструктивное оформление регулируе-
мых дросселей конус — конус и конус — цилиндр принципиально
также ничем не отличается от оформления регулируемых дроссе-
лей, входящих в состав приборов АУС, но выполняют их в виде
отдельных элементов.
Набор повторителей состоит из трех элементов: двух мало-
мощных повторителей и одного мощного повторителя (усилителя
мощности). Схемы повторителей представлены на рис. 103. По-
вторитель, схема которого дана на рис. 103, а, осуществляет
операцию повторения с точностью ±0,5%. У второго повторителя
(рис. 103, б) к сигналу, повторенному с той же точностью, добав-
ляется постоянная составляющая, настраиваемая путем поджа-
* Функция Sg(pi — р2) равна 1, когда pi — р2 0, и равна 0, когда
Pi — Р2 < 0.
12 Заказ 993 1 77
тия пружин винтом. Таким образом, для второго повторителя
действительно равенство
р = р, ± А,
где А — дополнительное постоянное давление, зависящее от уси-
лия, создаваемого пружинами.
Причем знак плюс относится к случаю, когда равнодействую-
щая сила двух пружин направлена вниз, а минус — когда сила
направлена вверх.
Низкий уровень выходной мощности двух первых повторите-
лей обусловлен тем, что выходное давление р забирается из
междроссельной камеры пневматического усилителя сопло — за-
слонка, имеющего постоянный дроссель с большим сопротивле-
нием. Эти повторители предназначены для работы на внутри-
схемных коммуникациях и их выходные давления подаются
в глухие мембранные камеры малых размеров.
Третий повторитель (рис. 103, в) имеет низкую точность
(±5%) и большую выходную мощность. При отсутствии расхо-
да на выходе повторитель не потребляет никакой мощности, так
как в этом состоянии клапан находится на своем седле, а конец
штока закрыт. По принципу работы и схеме этот повторитель
аналогичен усилителю мощности, входящему в состав АУС. Зна-
чительная мощность на выходе повторителя обеспечивается при-
менением клапана с большими размерами.
Реализация некоторых алгебраических операций, таких, как
суммирование, усиление и т. д., на операционных усилителях
с применением пневмосопротивлений может быть выполнена на
схемах, приведенных в табл. 4.
Наиболее простым сумматором пневматических сигналов яв-
ляется сумматор, выполненный на дросселях (схема 1, а в
табл. 4). Однако погрешность выполнения операций таким сум-
матором достаточно велика, а на выходе не получается сигнала
необходимой мощности. Поэтому часто применяют сумматор, со-
стоящий из дроссельного сумматора и повторителя (схема 1, б
в табл. 4), подключаемого к его выходу, а также сумматор, вы-
полненный на четырехвходовом усилителе (схема 1, в в табл. 4).
На сумматоре, собранном по последней схеме, точность выпол-
нения операций вполне приемлема и составляет величину поряд-
ка ±0,5%. На четырехвходовом усилителе можно реализовать
также операцию
„ _ Pl + Р2
Р 2
Операцию повторения сигнала можно реализовать на одном
двухвходовом усилителе. Если в линию отрицательной обратной
связи такого усилителя включить усилитель мощности, то полу-
чается усилительное звено с коэффициентом усиления по давле-
нию, равным 1, и с усилением выходного сигнала по расходу и
178
Таблица 4
Примеры выполнения алгебраических операций на элементах УСЭППА
№ по пор. Наименование операции Реализуемая математи- ческая формула Схема включения
1 Алгебраическое суммирование: а) на дросселях Р — ^iPl + ^2р2 . « . ь Р a fl 9 t> * ь Рг
б) на дросселях с повторителем Pi у
1 а + р’ 2 а+р 1 - p
1 т 1-
V
в) на мембран- ном четырехвхо- довом усилителе Р — Р\ — Р2 + Р3 Y
РгЬ>— Рз^- 1 p
т 1-
V
Р1 + Рз Р~ 2 1 V
0— p
т L
V
2 Повторение давле- ния и усиление рас- хода или мощности Р = Р1 yPo
1 - P- Jp
Lt
V Po
3 Умножение на по- стоянный коэффици- ент: а) на двухвходо- вом усилителе с сумматором на дросселях k 1 Л ”1» ; + II Ct ах | з yPo
1
1 T
V
б) на четырех- входовОхМ усили- теле с суммато- ром на дросселях 1 Р- а Р1 1+-5- а 1 t, L. 1
- ~1o
— k J , k % 1 1+— а
1 1
?=(*+— )х \ а / X (Pi — Р2) 4- р3 6 1 + — = k, k > 1 а
dr ^Po p
РзоЙ- Pzt> Al> г 1
т L
L v \
12*
179
мощности (см. табл. 4). Такого типа мощный и точный повтори-
тель осуществляет операцию р = pi с точностью ±0,5% (схема 2
в табл. 4).
Операцию умножения входной величины или разности вход-
ных величин на постоянный коэффициент осуществляется на
двухвходовых или четырехвходовых усилителях с включением
сумматора на дросселях. При этом в зависимости от схемы под-
ключения дросселей можно осуществлять операцию умножения
на коэффициент k, больший или меньший единицы (см. схе-
мы 3, ау б в табл. 4).
В качестве примера выведем уравнение статики для усили-
теля, представленного в табл. 4 (схема 3, а). За счет подачи
выходного давления р через дроссель а в камеру осуществляется
отрицательная обратная связь, которая обеспечивает баланс сил
на штоке. Таким образом, работа усилителя может быть описана
двумя уравнениями, одно из которых выражает равенство сил
на штоке, а второе — равенство расходов в статике через дрос-
сели аир. Приближенно будем считать дроссели а и р линей-
ными. Тогда
P\F = PXP',
а(р—рх) = Ррх,
где F — разность площадей мембран; рх — давление в камере
отрицательной обратной связи.
Откуда
P = fl + —')/’! =^Pl-
\ и /
Коэффициент усиления k настраивают дросселем р.
Элементы и основные узлы УСЭППА дискретного действия.
Если пневматическая непрерывная вычислительная техника ха-
рактеризуется тем, что входные и выходные давления принимают
в процессе работы приборов любые значения в заданных преде-
лах, то релейная техника отличается тем, что сигналы могут при-
нимать лишь два значения: 0 и 1, причем нулю в системе
УСЭППА соответствует нулевое давление, а 1 — давление в пре-
делах 0,08 МПа до 0,14 МПа. Эти два уровня сигналов исполь-
зуют в качестве двух значений логических переменных.
Основным элементом релейной техники является пневмореле
(рис. 104, а), схема которого не отличается от схемы аналогового
решающего усилителя. Однако их конструкции различны: пнев-
матическое реле имеет меньшие габаритные размеры, так как
чувствительность его не должна быть столь высокой, как у опе-
рационного усилителя. Упомянутые элементы отличаются друг
от друга также и способом включения. Для введения положи-
тельной обратной связи в пневмореле нижнюю камеру соединя-
ют с атмосферой, а верхнюю камеру с нижним соплом. Выход-
180
ной сигнал реле может принимать лишь два значения: 0 и pQ.
Если давление р2 больше давления то верхнее сопло закрыто,
а выход реле через нижнюю камеру сообщается с атмосферой и
р = 0. Так как давления в верхней и нижней камерах равны
между собой, то при увеличении pi шток реле перейдет в нижнее
положение при pi = р2. Давления на выходе реле р и в верхней
камере станут равными р0.
В нижней камере за счет того, что она сообщается с атмосфе-
рой, избыточное давление всегда равно нулю. Следовательно,
после перехода штока в р0
нижнее положение на
него будет действовать
дополнительная посто-
янная сила, направлен-
ная вниз и равная про-
изведению эффектив-
ной площади верхней
мембраны на давление
питания. Другими сло-
Рк
Рис. 104. Пневмореле:
fn
y~fPo
5) РгРг
а — схема; б — статическая характеристика
вами, будет иметь место положительная обратная связь. Если
начать уменьшать давление то шток реле перейдет в верхнее
положение при давлении pi = р2— flFp^ где f — эффективная
площадь верхней (нижней) мембраны; F — эффективная пло-
щадь средней мембраны.
Петлеобразная статическая характеристика реле, отвечаю-
щая приведенным выше рассуждениям, показана на рис. 104, б.
При использовании реле в качестве логического элемента дав-
ление на одном из его входов (pi или р2) поддерживают посто-
янным и равным pni = О,3ро или рп2 = О,7ро, т. е. создается по-
стоянное давление подпора. Это обеспечивает требуемое распо-
ложение статической характеристики элемента. Разница в вели-
чинах подпоров объясняется тем, что благодаря действию поло-
жительной обратной связи силы, действующие на шток сверху
вниз, могут превосходить силы, действующие в обратном направ-
лении. Условно подпор в О,3ро изображается штриховкой, а под-
пор в О,7ро — двойной штриховкой.
Схемы включения элементов УСЭППА, реализующие про-
стейшие однотактные логические операции, приведены в табл. 5.
В зависимости от расположения пневмокамеры реле, в которой
имеется давление подпора, выполняется операция повторения
р = pi или отрицания р = р\ входного сигнала (схемы 1,2 в
табл. 5). Обе приведенные схемы активны, т. е. при р = 0 их вы-
ход соединяется с окружающей атмосферой, а при р = 1 — с ли-
нией питания.
На одном реле можно выполнять наиболее часто встречаю-
щиеся логические операции с двумя входными переменными.
У реле, включенного для выполнения операции конъюнкции И,
на выходе будет условная единица только в том случае, если оба
181
Таблица 5
Примеры выполнения простейших логических операций
на элементах УСЭППА
№ по пор. Наименование операции Логическая формула Схема включения
1 Отрицание Р = Р? А ^Ро р
2 Повторение Р=Р1 Pi я! I р -4 к
3 Конъюнкция — опе- рация И Р— Р\’ Р2 Р —к
4
Р = Р\ + Р2
5
Дизъюнкция -- опе-
рация ИЛИ
Импликация
Р — Р\ р2 — Р\ + Р2
Pf V-tL р
pl
6
Запрет
tA
р
Р ~ Р2 Р\ — Р\'Р2
7 Стрелка Пирса — отрицание ИЛИ Р — Р\ 1 Р2 — Р\ + Р2 —1 р
8 Штрих Шеффера — отрицание И . р = Р\!р2 = Р\Р2 i—P-t, 15 _ I—к —tzL D
182
Продолжение табл. 5
входных сигнала pi и р2 равны 1 (схема 3 в табл. 5). Во всех
остальных случаях на выходе будет 0. При подаче сигнала pi =
= 1, а р2 = 0 шток опустится вниз, нижнее сопло окажется за-
крытым, и на выходе появится сигнал р = 0. Если pi = 0 и
р2 = 0, то сигнал р2 на выход не пройдет, так как шток будет
находиться в верхнем положении и закрывать верхнее сопло
и т. д. Схема элемента И пассивная, так как единица на выходе
формируется за счет входного сигнала р2.
У реле, предназначенного для выполнения операции дизъюнк-
ции (схема 4 в табл. 5), выходной сигнал будет равен 1 тогда,
когда хотя бы один из входных сигналов pi или р2 равен 1. Если
pi = 0, а р2 = 1, то шток остается неподвижным, а сигнал р2 = 1
проходит на выход. Если pi =1, а р2 = 0, то шток опускается
вниз, открывается питающее сопло и сжатый воздух питания
направляется на выход и т. д.
При выполнении операции импликации (схема 5 в табл. 5) на
выходе появляется 0 в том случае, если pi = 1, а р2 = 0. При
этом шток реле приподнимается и открывается нижнее сопло,
соединяя выход со входом. Во всех остальных случаях на выходе
имеется сигнал р = 1 либо за счет поступления питающего дав-
ления, либо за счет прохождения сигнала р2 = 1.
Схема логического элемента запрет также представлена
в табл. 5 (см. схему 6). Некоторые логические элементы, схемы
которых показаны в табл. 5, полуактивны в том смысле, что один
из выходных сигналов (0 или 1) формируется путем непосред-
ственного коммутирования выходной линии с одной из входных
линий.
183
Дизъюнкцию двух независимых переменных можно выполнить
с помощью полностью пассивного элемента — сдвоенного шари-
кового клапана. При подаче к одному из сопел сигнала, равного
1, шарик закрывает противоположное сопло, а единичный сигнал
проходит на выход. Если оба входных сигнала р\ и р2 равны 1,
то шарик располагается в среднем положении.
С помощью пневмореле и шарикового элемента ИЛИ можно
реализовать любые логические функции.
Функция стрелка Пирса характеризуется тем, что она обра-
щается в 1 тогда и только тогда, когда оба аргумента равны О,
т. е.
Pl I Р2 = Р1 + Р2,
и ее реализация (см. схему 7 табл. 5) сводится к последователь-
ному соединению шарикового пассивного элемента ИЛИ (дизъ-
юнкция) и элемента отрицания, построенного на основе пневма-
тического реле.
Схему двухвходового логического элемента штрих Шеффера
собирают с применением двух пневматических реле (схема 8
в табл. 5). Так как операция штрих Шеффера есть отрицание
конъюнкции
Р1/Р2 = Р1 • Р2>
то элемент получен последовательным включением элементов
конъюнкции и отрицания.
В табл. 5 (схема 9) представлен также логический элемент,
называемый «равнозначность». Для этого логического элемента
справедливо тождество, согласно которому на выходе получает-
ся 1 тогда, когда оба аргумента имеют одинаковые значения:
P = Pl~P2 = (Pl+P2)~>(PlP2)-
Из последней формулы следует, что в схеме логического эле-
мента равнозначность — выходы элементов дизъюнкция и конъ-
юнкция, подключены ко входам элемента импликация.
Логическая функция сложение по модулю два (исключенное
ИЛИ) представляет собой отрицание равнозначности. Таблица
этой функции может быть получена из таблицы функции равно-
значность заменой в строке для р нулей на единицы, а единиц
на нули. Она составлена согласно тождеству.
Р = (pl V Р2) = (р2 *- Р1) + (Р1 Р2>
и может быть реализована на трех элементах: два элемента за-
прет и один пассивный шариковый элемент ИЛИ (схема 10
в табл. 5).
Логические элементы, приведенные в табл. 5, образуют пол-
ный комплект, необходимый для реализации логических опера-
ций двух независимых переменных.
184
Схемы многовходовых логических мембранных элементов по-
лучают последовательным наращиванием двухвходовых элемен-
тов. Например, схема элемента конъюнкции на п входов содер-
жит п — 1 пневматическое реле и работает в соответствии со
следующей таблицей:
р = РгРг- • • • 'Рп
Р1 0 1 0 1 0 0 1
Р2 0 0 1 1 0 1 1
Рп, 0 0 0 0 0 1 1
Р 0 0 0 0 0 0 1
Логические устройства на мембранных элементах синтезиру-
ют по правилам алгебры логики [36]. Приведем пример синтеза
схемы одноразрядного двоичного сумматора. Одноразрядный
двоичный сумматор предназначен для сложения двух цифр од-
ного разряда чисел, заданных в двоичном коде, и имеет три вхо-
да: два для складываемых цифр и третий — для переноса ре-
зультата из предыдущего разряда при его наполнении. Два вы-
хода одноразрядного сумматора предназначены для выдачи сум-
мы в данном разряде и переноса в следующий разряд.
Работа одноразрядного сумматора задается следующей таб-
лицей:
k 1 2 3 4 5 6 7 8
Pl 0 1 0 1 0 1 0 1
Р2 0 0 1 1 0 0 1 1
Рз 0 0 0 0 1 1 1 1
Рс 0 1 1 0 1 0 0 1
Рп 0 0 0 1 0 1 1 1
Для построения схемы одного разряда двоичного сумматора
составим выражения для логических функций рс и рп, зависящих
от трех логических переменных рь р2, р$. Построение аналити-
ческих формул для функций рс и рп заданных таблицей, осуще-
ствляется следующим образом. Выбирают те столбцы, где функ-
ции принимают значение, равное единице, и для этих столбцов
выписывают конъюнкции для всех независимых переменных. Над
185
независимыми переменными, равными нулю, проставляются зна-
ки отрицания. Для составления аналитического выражения для
Рс выберем те столбцы, где функция будет равна 1. Это — столб
цы с k = 2, 3, 5 ,8.
Выпишем конъюнкции для этих столбцов таблицы:
Рс2 = Р\'Р2 'Рз>
РсЗ = Р\ *Р2’Рз»
РсЗ = Р\ 'Р2'Рз\
РсЗ = Р\' Р2'РЗ-
Аналитическое выражение для рс получим, соединив выпи-
санные конъюнкции знаками дизъюнкций:
Рс = Рс2 + РсЗ + РсЗ + РсЗ = (Р1 *Р2 ’Рз) + (Pl 'Р2 *Рз) + (Pl * Р2 ' Рз) +
+ (РгР2’Рз). (99)
Действительно, рс будет равно 1 только для k = 2, 3, 5, 8,
в остальных случаях (этим остальным случаям соответствуют
столбцы с k = 1, 4, 6, 7) функция рс будет равна нулю. Форма,
в которой записано аналитическое выражение для рс, называет-
ся совершенной нормальной дизъюнктивной формой. Такая фор-
ма представляет собой дизъюнкцию, членами которой являются
конъюнкции из всех независимых переменных и их отрицаний.
Слово «совершенная» опускается, если в каждом члене этой фор-
мы не обязательно содержатся конъюнкции всех независимых
переменных. То же самое относится к совершенной нормальной
конъюнктивной форме. Применяя известные тождества матема-
тической логики, преобразуем выражение (99) к более простому
виду. Сгруппируем члены и вынесем за скобки р2 и р2.
Рс = {Р2 1(Р1 • Рз) + (Р1 • Рз)]} + (Р2 1(Р1 -Рз) + (Р1 Рз)]} •
Очевидно, что
(Р1-Рз) + (РгРз) = Р1~Рз-
Перепишем выражение для рс с учетом последнего заме-
чания:
Рс = {р2 [(Р! • Рз) + (Р1 • Рз)]} + [р2(Р1 ~ Рз)]-
Член в первых квадратных скобках, записанный в совершен-
ной нормальной дизъюнктивной форме, можно записать в нор-
мальной конъюнктивной форме, для чего знаки «•» изменяют на
знаки « + » и, наоборот, над каждой независимой переменной
ставят знак отрицания. Так как при этом получается отрицание
функции, стоящей в квадратных скобках, то следует поставить
знак отрицания: •
Рс = [рг(Р1 + Рз) (Pi + Рз) ] + [Pi(Pi ~ Рз)]-
186
И, наконец, учитывая известные тождества, получим
Рс = (р2 (Р1~Рз)] + \.р2 (Р1 ~ Рз)] = Р\ ~ р2 ~ Рз • (100)
Пользуясь последней таблицей, запишем также аналитиче-
ское выражение для рп- Функция р п будет принимать значение 1
в точках с номерами k = 4, 6, 7, 8 и, следовательно,
Рп = (Р1 • р2-Рз) + (Р1 • р2-Рз) + (Pl-Р2-Рз) + (Р1 ' р2-Рз)
Преобразуем совершенную нормальную дизъюнктивную фор-
му, для чего, группируя члены, вынесем за скобки р2 и р3:
Рп = {р2 • Р\(Рз + Рз)] + {Рз [(Pi • Рг) + (Pi • Рг)] I •
Выражение (рз + рз) = 1 и поэтому
Рп = (Р1 • р2) + {рз [(р 1 • Рг) + (Рг р2)]} • (101)
С членом, заключенным в квадратные скобки, проделываем
следующие преобразования: переведем его в совершенную нор-
мальную конъюнктивную форму, проведем умножение, опустим
члены prPi и р2*Р2, так как они равны 0, перейдем к конъюнк-
тивной форме, а член, содержащийся во вторых круглых скоб-
ках, переведем в дизъюнктивную форму:
(Р1-Р2)+(Р1-Р2) = (Р1 + Р2)(Р1 +р2) =
= (Pi • Pi) + (Pi • Рг) + (Pi • Рг) + (Рг -Рг) =
= (РгРг) + (РгРг) = =(РгРг)-(Р1 +Рг)-
Подставляя последнее выражение в формулу (101), будем
иметь
Рп = (Р1 - Рг) + [Рз(ргРг) • (Pi + Рг)] •
Воспользовавшись известным тождеством
a + a-b = a + b,
окончательно получим
Рп = (Р1-р2) + [Рз(Р1+р2)1- (102)
Схема одного разряда двоичного сумматора (рис. 105) по-
строена в соответствии с логическими уравнениями (100) и (102).
В верхней части схемы (выше штриховой линии) расположены
два элемента «равнозначность». Элементы включают в себя
пневматические реле 2, 6 и 5, 4, работающие соответственно
в режиме «конъюнкции» и «импликации», и шариковые элементы
ИЛИ У и 5. На вход одного элемента «равнозначность» подаются
давления р^ и р%, а на вход второго элемента — выходной сигнал
первого р\ ~ р2 и давление р3. Таким образом, верхняя часть
схемы реализует логическое уравнение (100), а нижняя часть —
187
уравнение (102). Нижняя часть схемы содержит элемент 8 (И) и
элемент 7 (ИЛИ). Ко входам элемента ИЛИ с элемента И, на-
ходящегося в верхней части схемы, подводится сигнал pi-^2,
а с элемента 8 — сигнал -р3- (р{ + р2). В свою очередь, на входы
элемента И поступают сигналы р3 и pi + р2 с элемента 1 (ИЛИ).
Схема узла задержки на такт и циклограмма его работы
представлены на рис. 106. Кроме основного входа узел имеет
Рз>--------------------------------------
Рис. 105. Схема одного разряда двоичного сумматора
на элементах УСЭППА
второй вход р^ на который подают тактовые (управляющие)
импульсы. На выходе формируется сигнал, равный входному
сигналу в момент появления тактового импульса, затем сиг-
нал остается постоянным до момента наступления следующего
такта. Рассматриваемый элемент используют при построении
различных устройств синхронного действия. Устройство состоит
из двух пневмоклапанов и двух пневмореле. Пневмоклапаны
(верхний ряд) попарно соединены с пневмореле и образуют два
элемента памяти 1 и 2. Входное давление р{ подводится к нор-
мально открытому клапану элемента памяти /, а выходное дав-
ление этого элемента памяти — к нормально закрытому пневмо-,
клапану элемента памяти 2. Оба пневмоклапана управляются
тактовыми сигналами pt. В момент подачи тактового импульса
первый элемент памяти 1 запоминает поданный на его вход сиг-
188
нал р\, а второй элемент памяти 2 пропускает этот сигнал на вы-
ход р. После снятия тактового импульса первый элемент памяти
1 пропускает входной сигнал р{ на выход р* , а элемент памяти
2 запоминает входной сигнал рь существовавший в момент по-
дачи импульса.
После подачи следующего тактового импульса на выходах р
и р* появится значение входного сигнала, существовавшего
Рис. 106. Элемент задержки на такт:
а — схема элемента; б — циклограмма работы
в момент подачи этого импульса, и т. д. Следовательно, во вре-
мя работы выходной сигнал задержки р в момент наступления
такта становится равным входному p[f а затем остается неизмен-
ным до момента подачи следующего тактового импульса. На
втором выходе задержки р* значение входного сигнала, подан-
ного в момент подачи тактового импульса, удерживается посто-
янным только на протяжении этого импульса. Во время отсутст-
вия тактового импульса выход р* равен значению входного сиг-
нала pi в каждый данный момент времени.
В качестве примера использования элемента задержки на
такт может служить схема пневматического триггера со счетным
входом (рис. 107). В структурном отношении схема представ-
ляет собой элемент НЕ, выход которого замкнут на собственный
вход через элемент задержки на такт. Важной особенностью
этого триггера является то, что он имеет два рабочих выхода р*
и р. Причем на выходе р* появляется сигнал по заднему фронту
импульса pt, а на выходе р — по переднему фронту (см. цикло-
грамму работы триггера на рис. 107, б).
Рассмотрим принцип действия триггера. Для этого предста-
вим себе, что в начальный момент времени управляющий им-
пульс pt отсутствует, а на входе элемента НЕ р = 0 и, следова-
тельно, на его выходе р = 1. Тогда элемент памяти 2 задержки
на такт пропустит 1 на выход р*, а на выходе элемента памяти 1
будет* 0. В момент подачи управляющего импульса р/ элемент
189
Рис. 107. Триггер со счетным входом на элементах
УСЭППА:
а — схема триггера; б — циклограмма его работы
Рис. 108. Импульсаторы на элементах УСЭППА:
а — импульсатор со смещением по фронту и спаду; б — импуль-
сатор со смещением по фронту; в — генератор прямоугольных:
импульсов с настраиваемой частотой
памяти 2 запомнит 1, поданную на его вход с элемента НЕ, а эле-
мент памяти 1 пропустит 1, поданную на его вход с элемента,
памяти 2, на выход р. На входе и выходе элемента НЕ сигналы
изменятся на противоположные. После снятия управляющего
импульса сигнал 0 с выхода элемента НЕ пройдет на выход р*
элемента памяти 2, а элемент памяти 1 запомнит 1 и т. д. Из
приведенного описания работы триггера следует, что изменение-
на выходе элемента памяти 1 наступает при подаче управляюще-
го импульса (передний фронт), а на выходе р* элемента памя-
ти 2 — при снятии управляющего импульса (задний фронт).
Помимо описанного устройства задержки на такт для постро-
ения пневматических многотактных релейных схем используют
так называемые естественные задержки. В отличие от рассмот-
ренной выше задержки на такт естественная задержка не имеет
тактового (синхронизирующего) входа. Продолжительность ее
такта целиком определяется постоянной времени звена, состав-
ленного из емкости V и пневмосопротивления.
В качестве примеров использования естественной задержки,
на рис. 108 приведены схемы импульсаторов и генератора прямо-
угольных импульсов с настраиваемой величиной времени
такта Т. В импульсаторе со смещением переднего и заднего фрон-
тов (рис. 108, а) входной сигнал р{ в форме импульсов давления
подводится к регулируемому дросселю апериодического звена..
При подаче импульса давления емкость апериодического звена
начнет постепенно заполняться воздухом через дроссель. Через
время то, когда давление в емкости апериодического звена до-
стигнет уровня р j = О,7ро, шток, соединяющий мембраны реле,
перейдет в нижнее положение и закроет своим торцом нижнее
сопло, при этом на выход импульсатора будет поступать давле-
ние питания ро- Давление в емкости апериодического звена будет
продолжать расти, пока не достигнет своего наибольшего значе-
ния (см. график на рис. 108, а). После снятия импульса pi дав-
ление р\ начнет уменьшаться, однако переброс штока в верх-
нее положение и поступление на выход атмосферного давления
произойдет при р\ = рП2—~Ро^ , что обусловлено наличием,
в пневмореле положительной обратной связи. Моменту перебро-
са штока реле в верхнее положение соответствует пересечение
кривой опорожнения с линией р * = рП2—рР~р Время задерж-
ки по заднему фронту п в общем случае не равно времени за-
держки по фронту То-
Чтобы ликвидировать задержку п по заднему фронту им-
пульса, достаточно вместо давления питания к верхнему соплу
подвести входной сигнал р{ (рис. 108, б). Тогда при снятии им-
пульса на входе в тот же момент исчезает давление на выходе
импульсатора, так как вход при нижнем положении штока сооб-
19Г.
Основные звенья регуляторов УСЭППА
Таблица 6
№ по пор. Наименование Закон регулирования и передаточная функция Схема включения
Р =
1 Усилительное зве- F — f -L / —г-К -X-F Р
но W^ = k = F-2f IS
2 Апериодическое звено t Та p = pt=Q^ а; k w(S)= Tas + 1 V G Та = ; а = clRT Др a \ [ p
3 Интегрирующее звено т 1 С Р = — (Pi — Pz)dt\ 1 и J 0 V Fh = ; aRT P1t>— p2t>— .I. a *
Дифференцирую-
щее звено на двух-
входовом усилителе
(звено предварения)
т dp' ,
р=т*^г+р"
Т =-^-
А aRT ’
IT(s) = TAs+l
Дифференцирую-
щее звено на двух
четырехвходовых
усилителях
т dp' ,
Р=Т*-7Г+Р>'
№'(s) = 7>
щается с выходом импульсатора. Если подать импульс на вход
элемента, то сигнал на выходе появится после того, как в емкости
апериодического звена давление р,* достигнет значения давле-
ния подпора рпг , и шток перейдет в нижнее положение. Это
определяет смещение выходного сигнала по фронту на величину
т. В отличие от импульсатора, представленного на рис. 108, а,
этот импульсатор является пассивным, так как давление питания
к нему не подводится.
192
Генератор прямоугольных импульсов (рис. 108, в) построен
с применением тех же элементов, что и описанные импульсаторы,
а именно пневмореле и регулируемых сопротивлений. Характер-
ной особенностью генератора прямоугольных импульсов являет-
ся то, что в нем осуществлена обратная связь путем подачи вы-
ходного сигнала в нижнюю мембранную камеру через регулируе-
мое сопротивление. Таким образом, работа генератора обеспе-
чивается за счет указанной обратной связи и внутренней положи-
тельной обратной связи, имеющейся в самом реле. Если шток
реле находится в нижнем положении, то давление р на выходе
равно давлению питания ро. При этом происходит наполнение
камеры через регулируемый дроссель. Когда давление в камере
р* станет равным pni Ч--, шток перебросится в верхнее по-
Г f
ложение и закроет верхнее сопло, давление на выходе генерато-
ра упадет до нуля и начнется опорожнение камеры. Так как
давления в нижней и верхней сопловых камерах теперь равны
между собой и равны атмосферному давлению, переброс штока
в нижнее положение произойдет в момент, когда давление р*
станет равным pni . Период прямоугольных импульсов Тп мож-
но изменять с помощью дросселя.
Регуляторы непрерывного действия. Принципиальные схе-
мы регуляторов, собранные на элементах УСЭППА, в основном
аналогичны схемам регуляторов АУС с той лишь разницей, что
регуляторы на базе УСЭППА строят на элементах. Элементы
собирают в типовые узлы, из которых можно компоновать регу-
ляторы, реализующие любой закон регулирования.
Основные звенья цепи регулирования на элементах УСЭППА.
Схемы основных звеньев регуляторов на элементах УСЭППА
приведены в табл. 6.
Усилительное звено (схема 1 в табл. 6) построено на двух-
входовом элементе. При подаче входного давления р^ на выходе
появляется усиленный сигнал р, т. е. р = kpXi где k — коэффи-
циент усиления.
Апериодическое (инерционное) звено представляет собой по-
следовательное соединение дросселя проводимости а, емкости V
и двухвходового мембранного усилительного элемента, работаю-
щего в режиме повторителя (схема 2 в табл. 6). Как было пока-
зано ранее, давление на выходе пневматической камеры с дрос-
селем изменяется по экспоненциальному закону так, например,
при опорожнении
___________t_
p = pt=oe Ta
Передаточная функция звена имеет вид
13 Заказ 993 193
где Та =—— постоянная времени звена; V — объем подсое-
диняемой камеры; R — газовая постоянная; Т — абсолютная
температура; а — проводимость дросселя; а =--- ; О — массо-
Др
вый расход; G = pQ; р — плотность воздуха, Q — объемный
расход.
Интегрирующее звено для интегрирования разности входных
давлений построено на основе четырехвходового усилителя, ра-
ботающего в режиме сумматора, и апериодического звена, охва-
ченного положительной обратной связью (схема 3 в табл. 6).
Работа интегрирующего звена описывается уравнением
t
P = — \(pi—p2)dt,
и о
'г У
где Тп =--------постоянная времени интегрирующего звена.
aRT
\р
Если pi — р2 = Др = const, то р = -у- t и давление на выходе
будет изменяться во времени по линейному закону. Когда давле-
ние на выходе р становится равным входному сигналу типа еди-
ничного скачка Др, время, прошедшее с момента появления сиг-
нала Др, станет равным постоянной времени интегратора, т. е.
/ = Лр
Величина постоянной времени интегрирующего звена опреде-
ляется значением проводимости а переменного дросселя и вели-
чиной емкости V.
Передаточная функция интегрирующего звена, построенного
по рассматриваемой схеме:
= <103>
Точность выполнения операции интегрирования 2—3% до-
статочна для построения промышленных регуляторов. Однако
такая точность недостаточна для выполнения вычислительных
операций.
Наиболее часто применяют дифференцирующие звенья двух
типов: на одном двухвходовом усилителе (схема 4 в табл. 6) и
на двух четырехвходовых усилителях (схема 5 в табл. 6).
Операция р = Тд + рь выполняемая на двухвходовом
dt
усилителе, охваченном инерционной отрицательной обратной
связью, носит название предварения. Здесь Тд— время предва-
~ V ‘
₽е"“я'г»“^Г-
194
_ z dp\ «
В статическом режиме ——= 0, и звено отслеживает входное
dt
давление Передаточная функция звена
r(s) = rAs+l.
При выполнении операции собственно дифференцирования
уровень отсчета может не совпадать с дифференцируемой вели-
чиной. В этом случае для выполнения операции дифференциро-
вания используют схему 5 в табл. 6, состоящую из двух четырех-
входовых усилителей. Дифференцируемой величиной является
6)
Рис. 109. П-регулятор с суммированием на мембранах:
а — принципиальная схема; б — структурная схема
входной сигнал рь а условным уровнем отсчета — величина р2.
Выходное давление в переходном режиме пропорционально ско-
рости изменения основного входного давления р\ и величине не-
зависимого входного давления т. е.
р=т^+р2-
dt
В статическом режиме на выходе отслеживается входное дав-
ление р2. Время предварения (дифференцирования) путем на-
стройки проводимости дросселя а и емкости V можно менять
в пределах от 3 с до 10 мин.
Пропорциональные регуляторы. На элементах УСЭППА мож-
но строить пропорциональные регуляторы по различным схемам.
Структурная схема пропорционального регулятора включает
сумматор и усилитель. Принципиальная схема П-регулятора,
собранного на двух четырехвходовых усилителях и усилителе
мощности, показана на рис. 109, а. На вход регулятора поступает
13* 195
сигнал рассогласования Др = р\—р% и сигнал р3, начального
давления или давления, соответствующего контрольной точке.
Найдем уравнение П-регулятора при условии, что время запол-
нения камер четырехвходового решающего усилителя, работаю-
щего в режиме усилителя через дроссели 6, 0 и а, пренебрежимо
мало. Работа П-регулятора в этом случае может быть описана
системой, состоящей из двух уравнений, из которых первое отно-
сится к сумматору, а второе записывается из условия равенства
массовых расходов через дроссели а и 0. При этом учитывают
тот факт, что в статическом режиме давление р3 = ра , а р = р$.
Кроме того, сделаем допущение, что дроссели линейные. Тогда
/ = р2 + Рз—Рь
а(р—Рз) = Р(Рз—/).
где р' — давление на выходе сумматора.
Исключая давление р\ получим уравнение регулирующего
воздействия П-регулятора:
Р = Р2) + Рз,
где k = —— коэффициент усиления. Величину k можно изменять
а
в пределах от 0 до оо с помощью регулируемого сопротивления
0, входящего в дроссельный сумматор в цепи отрицательной об-
ратной связи точного усилителя мощности.
Для подавления колебаний в П-регуляторе имеется дополни-
тельная демпфирующая гибкая отрицательная обратная связь
(дроссель 6), действие которой проявляется лишь в переходных
режимах.
С учетом закона регулирующего воздействия передаточная
функция идеального П-регулятора по входному сигналу рассо-
гласования будет иметь вид
^дри ($) = £.
По входному сигналу р3: 1ГРзН (s) = 1.
Определим передаточные функции для реального регулятора.
Для этого при записи уравнений, описывающих работу П-регу-
лятора, необходимо учесть процессы заполнения и опорожнения
камер с давлением р а и через дроссели а, 0 и 6. С учетом
этого система уравнений запишется так:
р' = р2 + рз—Р1 = рз—^р;
Та —~~ + Ра ~ k\P + k2p ;
at
(104)
Р& + РЗ = Ра + Р,
196
где
k{=—— ; й = -2_;
d + Р CL + Р
V Ve
zp a zp б
1 a =---------I 1 r =-------.
ЯГ(а+Р) ’ RTd
Используя систему уравнений (104), находим реальные пере-
даточные функции по сигналу рассогласования Др и по сиг-
налу рз'
Т js s 4~ 1
Гдр(5) = /г-----;----5------------= w (s)ft7n(s);
Т&Т& —s2 + Тъ(2 + k)s + I
w — 1 >
TaT&—s2 + T5(2 + k)s+l
(’V+I)(ra-^ + l')
^P.(s) =------p-----,
Vs — s2+r5(2 + ^)s+l
где IFn(s) и WP3 (s) —передаточные функции поправок, вноси-
мые инерционными звеньями реального регулятора.
Структурная схема П-регулятора приведена на рис. 109, б.
Краткие технические характеристики и пределы изменения па-
раметров рассматриваемого П-регулятора следующие: коэффи-
циент усиления k изменяется в пределах от 0,03 до 20, смещение
контрольной точки составляет ±1%, граничная частота пропус-
кания Огр = П-регулятор марки ПР2.5 выпускается заво-
дом «Тизприбор».
Пропорционально-интегральные регуляторы. На элементах
УСЭППА может быть построено несколько модификаций регу-
ляторов, реализующих пропорционально-интегральный закон
(ПИ-регуляторов). Структурно ПИ-регулятор включает пропор-
циональную часть (П-регулятор) и интегральную часть. Инте-
гральную часть реализуют путем включения апериодического
звена в цепь положительной обратной связи П-регулятора или
путем подачи давления с выхода интегрирующего звена в каме-
ры П-регулятора, куда ранее подавалось давление рз. Регулято-
ры первого типа имеют взаимосвязанные настройки коэффициен-
та усиления и постоянной времени интегрирования. Настройки
регуляторов второго типа — независимые.
Схем.а регулятора первого типа представлена на рис. 110, а.
Закон регулирующего воздействия ПИ-регулятора без учета
переходных процессов в камерах с дросселями а, 0 и б может
197
быть получен путем исключения переменных р' и pv из системы
уравнений, описывающих его работу:
Ь Pv — Р»
at
Р' = P2 + PV~P1\
₽(/—Pv) = a(Pv—Р)>
(105)
откуда
Р = *(Р1—Рг) + у- Г (Pi —p2)dt,
Ч -0
Закон регулирующего воздействия ПИ-регулятора второго
типа без взаимосвязи настроек (рис. НО, б) имеет вид
p = k(Pl —р2) +y-f(Pi— P2)d^
V о
Это уравнение идеального регулятора может быть получено
из системы уравнений (105), если в ней заменить первое урав-
нение на
Ру = f (Pl — Pi}dt.
Ч '0
198
Передаточная функция реального ПИ-регулятора включает
передаточную функцию идеального ПИ-регулятора
Jvs
и поправку №п(<$), т. е.
r(s) = rH(s)rn(s).
Поправочную передаточную функцию можно определить из
системы уравнений (104), если вместо р3 в эту систему ввести
интегральную составляющую \р/Ту s (см. схему на рис. ПО, б)
и выделить №и($) •
r(S) = r„(S)U7n(S) = f-^-
\ Tvs
FgS + 1
Та \_______
V? J тат5
-----s2 + T8(2 + ft)s+l
Г55 4- 1
rn(s) = fl+4
\ k
\
kTvs 4- 1 J
—— $2 4-Г5(2 4-6)$ 4-1
ПИ-регулятора (рис. НО, в)
Структурная схема реального
может быть получена из схемы П-регулятора (рис. 109, б) вве-
дением интегрирующего
ющего звена ПИ-регу-
лятора второго типа,
выпускаемого заводом
«Тизприбор» под мар-
кой ПР3.21, изменяется
в пределах 3—100 с.
П ропорционально-
интегрально - диффе-
ренциальные регулято-
ры. Регулятор, форми-
рующий ПИД-закон
регулирования, можно
построить на основе
ПИ-регулятора и диф-
ференцирующего звена.
Сигнал р' с выхода
звена. Постоянная времени интегриру-
Рис. 111. Схема ПИД-регулятора на элемен-
тах УСЭППА
дифференцирующего звена подается на вход сумматора
(рис. 111), куда ранее было подано давление р\. Уравнения, опи-
сывающие работу идеального ПИД-регулятора, имеют вид
Р = £(Р1—р2) + р3;
7^-(р1—рг);
Рз =
pi =(T'as+ l)pb
где k = —, Т ' - — Та , а Та = Va/RTO — постоянная времени
u f
апериодического звена дифференциатора.
199
В приведенной системе первое уравнение относится к П-рёгу-
лятору, второе — к интегратору и третье — к дифференцирую-
щему звену. Исключая переменные р / и р3, получим закон из-
менения давления р на выходе ПИД-регулятора (закон регули-
рующего воздействия):
t
Р = Ь(Р\ — Рг) + -7— f (pl—p2)dt + kT'o-^-.
Tvs J dt
ПИД-регулятор рассмотренного типа марки ПР3.25 выпус-
кается заводом «Тизприбор».
На .элементах УСЭППА, как уже отмечалось ранее, можно
реализовать произвольный закон регулирования [5, 14]. Кроме
лого, сочетание аналоговых и дискретных элементов позволяет
создавать непрерывно-дискретные регуляторы, оптимизаторы и
другие регуляторы. Широкие технические возможности УСЭППА
позволяют строить и регуляторы с переменной структурой.
5. ПНЕВМАТИЧЕСКИЕ ЭКСТРЕМАЛЬНЫЕ РЕГУЛЯТОРЫ
(АВТОМАТИЧЕСКИЕ ОПТИМИЗАТОРЫ)
В связи с широкой автоматизацией производственных про-
цессов и необходимостью работы с наивыгоднейшими показате-
лями, удовлетворяющими некоторым критериям качества, в по-
следнее время начинают находить применение экстремальные
регуляторы, или оптимизаторы.
На современном уровне автоматизации производственных
процессов часто требуется решать задачи обеспечения наивыгод-’
нейших или оптимальных условий протекания технологических
процессов. Таким условиям может соответствовать экстремаль-
ное (максимальное или минимальное) значение параметра ре-
гулируемого процесса, например, расхода какого-либо продукта.
В качестве регулируемого параметра может быть выбран и неко-
торый сводный параметр, удовлетворяющий наибольшей эконо-
мической эффективности процесса. Эти задачи решают с по-
мощью экстремальных регуляторов, или оптимизаторов. Суще-
ствуют различные схемы автоматических оптимизаторов на
пневматических элементах, отличающиеся алгоритмом поиска.
В качестве примера ограничимся рассмотрением оптимизатора
с запоминанием максимума или минимума.
Экстремальный регулятор с запоминанием максимума или
минимума. Создание пневматических оптимизаторов началось
с построения экстремального регулятора непрерывного действия
с запоминанием максимума [33]. Логическая схема оптимизатора
с непрерывным поиском экстремума и соответствующая ей схе-
ма на элементах УСЭППА показаны на рис. 112, 113. Давление
ру, пропорциональное текущему значению оптимизируемой ве-
200
личины, поступает на вход элемента П памяти и усилительные
реле Р\ и Лг, с выхода которых пневматические сигналы подают-
ся на элементы ИЛИХ и ИЛИ2. Выходной сигнал с элемента
ИЛИ2 через элемент задержки 3 поступает на вход элемента
ИЛИХ и одновременно на вход триггера Тг. Выходной сигнал q5
триггера управляет интегратором. Интегратор через усилитель
связан с исполнительным органом и определяет направление
движения этого органа. При наличии любого из сигналов qh q2r
поступающих на вход элемента ИЛИ, осуществляется сброс за-
Рис. 112. Логическая схема
оптимизатора с запомина-
нием максимума
помненного сигнала элемента памяти П. Циклограмма работы
регулятора, собранного по приведенной логической схеме, пред-
ставлена на рис. 114, где показана последовательность измене-
ний давления в различных точках.
Максимум давления ру фиксируется в камере запоминания
элемента П при движении регулирующего органа как «вправо»,
так и «влево» по статической характеристике. Направление дви-
жения меняется на обратное, когда р3 — РУ> 6. При этом на
выходе элемента ИЛИ2 появляется импульс q2, который пере-
ключает триггер Тг. Если до подачи импульса q2 давление q$ на
выходе триггера было равно 1, то импульс q2 сбрасывает давле-
ние q$ до 0. Одновременно импульс поступает на вход элемента
ИЛИХ и сбрасывает запомненное значение элемента П памяти.
В зависимости от динамических свойств объекта выбирается
определенная задержка времени, в течение которого удерживает-
ся импульс q2. При достижении в процессе поиска одного из
ограничений pXmax, Рх min, Pi max осуществляется переключение
.регулирующего органа.
Переключение осуществляется в случае, когда регулируемый
параметр достигает ограничения, или, например, при аварийном
режиме работы.
201
P max
Рис. 113. Схема экстремального регулятора с запоминанием
максимума на элементах УСЭППА
Рис. 114. Циклограмма работы экстремального регулятора с за-
поминанием максимума на элементах УСЭППА
Упрощенная схема экстремального регулятора с запоминани-
ем максимума, соответствующая блок-схеме на рис. 112 и выпол-
ненная на элементах УСЭППА, приведена на рис. 113. Схема
включает следующие узлы: ограничений /, запоминания //, ре-
верса ///, интегратора IV, триггера со счетным входом V.
Входное давление ру поступает в элемент непрерывной памя-
ти узла // и далее в элемент сравнения узла ///, где оно сравни-
вается с запомненным в предыдущем такте давлением р3. При
увеличении ру в допустимых пределах происходит также
увеличение давления р3. Когда ру достигнет максималь-
ного значения ру = ру max, затем начинает уменьшаться, проис-
ходит его запоминание, при этом р3 = р^тах- Как только раз-
ность между запомненным максимальным значением и текущим
значением ру станет равной зоне нечувствительности б, т. е.
Рз — Ру = б, на выходе элемента сравнения узла реверса /// по-
является сигнал, поступающий на входы элемента задержки
триггера со счетным входом V (см. график на рис. 114).
Триггер V переключает интегратор IV, осуществляя реверс
направления движения регулирующего органа. Одновременно
импульс с выхода элемента задержки сбрасывает запомненное
значение р3.
Скорость изменения давления на выходе интегратора можно
изменять настройкой сопротивления дросселя.
Таким образом, при каждом переходе через экстремум значе-
ния входной величины ру осуществляется реверс направления
движения регулирующего органа и вблизи максимального зна-
чения рУтах устанавливаются автоколебания. В устройстве узла
ограничения / предусмотрено изменение направления движения
регулирующего органа при выходе параметров за допустимые
пределы.
6. ПОСТРОЕНИЕ ПНЕВМАТИЧЕСКИХ ВЫЧИСЛИТЕЛЬНЫХ
ПРИБОРОВ НА БАЗЕ ПНЕВМАТИЧЕСКОГО РЕШАЮЩЕГО
УСИЛИТЕЛЯ
При построении пневматических вычислительных приборов
широко используется способ одного универсального элемента,
при котором все регулирующие и вычислительные приборы
строят на основе одного стандартного элемента — пневматичес-
кого решающего (операционного) усилителя, подобно тому, как
это принято делать для электронных моделирующих установок.
Кроме решающего усилителя, для построения вычислительных
приборов используют несколько простых стандартных и обычных
для пневмоавтоматики элементов: постоянные и регулируемые
линейные дроссели, турбулентные дроссели, эжекторы и ем-
кости.
В качестве одного из основных звеньев в приборы, построен-
ные с применением решающего усилителя, входит дроссельный
203
сумматор, для которого выбран низкий (0—100 мм вод. ст.) диа-
пазон рабочих давлений, обеспечивающий линейную зависимость
расхода воздуха через дроссель от перепада давлений.
Работа приборов основана на принципе компенсации расхо-
дов \ который состоит в том, что изменение расходов в камеру
решающего усилителя через входные дроссели компенсируется
расходом, поступающим в камеру с выхода решающего усилите-
ля через дроссель отрицательной обратной связи.
Пневматический решающий усилитель. Схема решающего
усилителя представлена на рис. 115. Устройство состоит из кор-
пуса 5, в котором размещен мембранный блок 2 с двумя одина-
Рис. 115. Мембранный пневматический решающий усили-
тель низкого давления:
а — схема; б — статическая характеристика; в — условное
обозначение
ковыми тонкими мембранами низкого давления, сопла S, которое
с помощью настроечного устройства, не показанного на рисунке,
может быть установлено в различные положения относительно
заслонки (перемещение вверх и вниз), и эжектнрующего посто-
янного дросселя 6. Жесткие центры мембран связаны скобой 7,
выполняющей по отношению к соплу 8 функцию заслонки. Мем-
бранный блок образует в корпусе три камеры 1, 3 и 4. К камерам
4 и 1 подведены давления и рг, а камера 5, где расположены
сопло 8 и заслонка, сообщается с атмосферой. Эжектор 6 вклю-
чен в питающую магистраль с давлением ро, а также в линию
сопла 8. Давления pi и р2 являются для усилителя входными,
а давление р, устанавливающееся в межсопловой камере
эжектора 6,— выходным. Очевидно, что р = р0, когда заслонка
полностью закрывает сопло, и р = 0 (или даже меньше нуля),
когда сопло оказывается открытым. Последнее обстоятельство
связано с тем, что вместо обычного постоянного дросселя в схе-
ме решающего усилителя использован эжектор.
1 Следует оговориться, что сам решающий усилитель работает по принци-
пу компенсации сил,
204
В соответствии с принципиальной схемой решающего усили-
теля можно составить выражение для его статической характе-
ристики:
P = Po-Sg(pi— р2),
т. е. р = ро, когда > рг, и р = 0, когда р\ < рг. На рис. 115, б
представлена статическая характеристика, отражающая послед-
нюю зависимость. Чем точнее в решающих усилителях реализует-
ся эта зависимость, тем выше точность приборов, построенных
с применением этих усилителей. В дальнейших схемах решаю-
щий усилитель будет изображаться, как показано на рис. 115, в.
Пневматические вычислительные приборы, выполняющие
линейные, нелинейные математические операции и операцию
интегрирования. Выше был описан сумматор наиболее про-
стого типа на дроссельных линейных сопротивлениях. Такой
сумматор можно назвать некомпенсационным, так как в нем от-
сутствует обратная связь. Если все дроссели сумматора одина-
ковы, давление на его выходе
п
Р=Ь%РЬ
1 = 1
где k = 1/п; п — число дросселей. Так как k всегда меньше еди-
ницы, с помощью сумматора нельзя выполнять обычное сложе-
ние, а так как k > 0, то нельзя выполнять и вычитание, т. е.
возможности такого сумматора ограничены.
На рис. 116, а дана схема более сложного сумматора — сум-
матора второго типа, построенного с применением решающего
усилителя. Этот сумматор можно назвать компенсационным
инвертирующим сумматором, так как он работает по принципу
компенсации расходов и каждый из его входных сигналов сум-
мируется с обратным знаком. К камере 4 решающего усилителя
(рис. 115, а) подводится постоянное давление р\ = р* (рис.
116, а) —так называемый условный нуль, а к камере 1 через
постоянные дроссели .си, аг, ап — давления входных сигналов
Pi и через дроссель а* — давление, устанавливающееся на вы-
ходе усилителя. Обычно р* = 50 мм вод. ст. В результате дейст-
вия отрицательной обратной связи давление в камере 1 всегда
поддерживается равным давлению в камере 4, т. е. равным р*.
Уравнение расходов для камеры 1 при допущении, что все дрос-
сели линейные, будет
п
а*(.Р~Р*) + У р*) = 0.
£ = 1
Так как давление р* принято за условный нуль и от него сле-
дует вести отсчет давлений, то, вводя обозначения pi = pi — р*
р = р — р*у получим
п
^=—^kiPb
1 = 1
205
где
k =
-El
a*
ki
oo.
0
Этот тип сумматора имеет более широкие возможности по
сравнению с некомпенсационным сумматором, однако он также
не обеспечивает выполнение операции вычитания, так как ki > О-
Рис. 116. Схемы пневматических вычислительных приборов, построенных
на базе решающего усилителя и выполняющих линейные математические
операции:
а — компенсационного инвертирующего сумматора; б — инвертора; в — инвер-
тирующего усилителя; г — дроссельного компенсационного сумматора; д —
повторителя; е — П-регулятора
Если di = СХ2 = ... = ш = ... = ап = а*, то = k2= ... =
—— k j —= ... —— k 72, 1 И
п
Р = —^Р1-
Частными случаями сумматора, представленного на
рис. 116, а, являются инвертор, выполняющий операцию р =
= —pj, и инвертирующий усилитель, выполняющий операцию’
р = —kp\. Схему инвертора можно получить из схемы суммато-
ра, если на его вход подать лишь одно давление р{ (рис. 116, б)
при условии, что проводимости он = а* = а. Инвертирующий:
усилитель (рис. 116, в) отличается от инвертора тем, что посто-
янный дроссель, к которому подводят входное давление заме-
206
йен регулируемым линейным дросселем, благодаря чему прово-
димость аь а следовательно, и коэффициент k = сц/а* можно
настраивать.
Третий тип устройства — дроссельный компенсационный сум-
матор (рис. 116, г). К камере 1 решающего усилителя (см.
рис. 115, а) как и в инвертирующем сумматоре, через постоянные
дроссели подводят п входных давлений и выходное давление уси-
лителя р. Однако в отличие от сумматора второго типа к камере
4 рассматриваемого сумматора подключен выход некомпенсаци-
онного сумматора, к т постоянным линейным дросселям которо-
го подводится т входных сигналов рп+ь Рп+2, •••, Рп+т- Запишем
уравнение равенства расходов, характеризующее работу дрос-
сельного некомпенсациокного сумматора:
т
V al+„(p,+„—ра) = 0,
1 = 1
откуда
т
5 ai + nPt4-n
i = l
где ра — давление в камере 4 решающего усилителя.
Уравнение для определения давления в камере 1 имеет вид
п
2 ai(Pi—Рь) + «*(р—Рь) = О,
1=1
откуда
п
^а(рс + а*р
2«i+«*
1 = 1
В результате действия компенсирующей отрицательной об-
ратной связи давления в камерах 4 и 1 решающего усилителя
в процессе его работы будут равны, т. е. ра = Рь и, следова-
тельно,
п т
2 Wi + а*р 2 ai+«A+n
_i=l__________ t = l_______
п т ’
2 а/ + а* 2 ai+n
1=1 1=1
или
т п
Р = <7 2 an+‘Pn+i а‘Р‘’ (io6>
1=1 1 = 1
207
где
1 + У Qi
а,- tei
, q =-----------.
а* т
i=n
Давления ра и ръ в камерах решающего усилителя 4 и 1 в
процессе работы изменяются. Из уравнения (106) следует, что
сумматор этого типа позволяет выполнять любую линейную ал-
гебраическую операцию.
Если число входных сигналов, подводимых к верхней камере
решающего усилителя, превышает на единицу число сигналов,
подводимых к нижней камере, т. е. т = п + 1 (причем дроссели
принимаются одинаковыми), то уравнение (106) примет вид
п+1 п
р= ^Pn+i — ^Pi-
1 = 1 1=1
Такой сумматор часто применяют при построении различных
пневматических вычислительных устройств непрерывного дейст-
вия. При п = 0 схема вырождается в схему так называемого
повторителя (рис. 116, д), выполняющего операцию р = р\.
Входной дроссель и дроссель в линии отрицательной обратной
связи в повторителе не нужны, так как они ухудшают динамику
устройства.
В качестве примера использования сумматора для построения
приборов рассмотрим схему пропорционального регулятора, за-
кон регулирующего воздействия которого выражается уравне-
нием
P = k(P\ — Рг) + Рз, (Ю7)
где р — давление на выходе регулятора; р{ и рг — давления, про-
порциональные измеряемой и заданной величинам регулируемо-
го параметра; р3 — давление, соответствующее контрольной
точке; k — коэффициент усиления регулятора.
Схема (рис. 116, е) содержит два сумматора, из которых пер-
вый является компенсационным инвертирующим сумматором вто-
рого типа (инвертирующий усилитель), а второй — компенсаци-
онным сумматором третьего типа. Выражение (107) легко отыс-
кать, решая совместно уравнения
Р4 = Рг + Рз—Рь
ai(p4—Рз) = а2(Рз—р),
списывающие работу каждого сумматора в отдельности. Для
этого из приведенной системы исключают давление р^ формиру-
ющееся на выходе сумматора третьего типа, и полученное равен-
ство разрешают относительно р.
208
Если в схемы сумматоров ввести нелинейные дроссели, то
с помощью этих сумматоров можно выполнять некоторые нели-
нейные алгебраические операции.
Рис. 117. Схемы пневматических вычислительных приборов, постро-
енных на базе решающего усилителя и выполняющих нелинейные ма-
тематические операции:
а — квадратичный инвертирующий сумматор; б — устройство, выполняющее
__ п ______________________
операцию р = — sign р^в — график функции, реализуемой квад-
i= 1
ратичным инвертером; г — схема квадратора; д — характеристика квадрато-
ра; е — график функции р2 = — Р\ sign рх; ж — график функции р =
=— И |Р1| sign рх; 3 — график функции р = V IPil
Операции возведения в квадрат и извлечения квадратного
корня можно выполнить на базе компенсационного сумматора
второго типа, заменив в нем некоторые линейные дроссели с рас-
ходными характеристиками вида G = а’Др на нелинейные дрос-
сели с расходными характеристиками вида G = 0 |/ Др
(рис. 117, а, б).
14 Заказ 993 209
Заменим, например, линейный дроссель в линии отрицатель-
ной обратной связи сумматора на нелинейный (рис. 117, а). То-
гда, если р р*9 уравнение можно записать в следующем виде:
п _____
У a,(Pz—Р*) = — Р / Р—Р*,
1=1
а если р р*, то
п
2 ai(Pi~Р*) = ₽ ^Р*—Р-
1 = 1
(108)
(Ю9)
Возводя уравнения (108) и (109) в квадрат и переходя к от-
счету от условного уровня р*, получим
, ai
где ki = —
р
п
При этом р р*, если сумма отрицательная или
i=i
равна нулю, и р р*, если она положительная или равна нулю.
На основании сказанного можно объединить два последних
уравнения в одно, записав
п
sign SkiPi-
1=1
Прибор, выполняющий операцию такого вида, называется
квадратичным инвертирующим сумматором. В частности, если
п = 1 и ai = Р, получается прибор, называемый квадратичным
инвертором. Его уравнение будет иметь вид
Р= — Р\ signp!.
График этой функции показан на рис. 117, в.
Если квадратичный инвертор включить последовательно с ус-
тройством, реализующим зависимость
Рг= —Pi-signp1( (110)
то получится прибор, называемый квадратором (рис. 117, г), вы-
полняющий операцию
- —2
Р=Р1‘
График этой функции представлен на рис. 117, д.
210
Устройство, предназначенное для выполнения операции (НО),
график которой показан на рис. 117, е, состоит из инвертора И и
двух клапанов — верхнего (ВК) и нижнего (Я/С). Не разбирая
здесь конструкции этих клапанов, отметим лишь, что кла-
пан оказывается открытым (входная и выходная линия сое-
диняются между собой), если давление, действующее снизу,
больше давления, действующего сверху, и наоборот. Условное
обозначение клапана на схеме такое же, как и решающего уси-
лия, но без V-образного значка. Входной сигнал (рис. 117, г)
подается одновременно к дросселю 8 инвертора И и к верхнему
клапану ВК и нижнему клапану Я/С Если р\ < 0, т. е. р\ < р*,
то верхний клапан закрыт, а нижний открыт и входной сигнал
беспрепятственно проходит на вход квадратичного инвертора
(КИ), где возводится в квадрат. Если же р\ > 0, т. е. pi > р*у-
то нижний клапан оказывается закрытым, а сигнал через откры-
тый верхний клапан поступает на вход квадратичного инверто-
ра, предварительно пройдя через инвертор, т. е. изменив свой
знак с положительного на отрицательный.
При последовательном соединении квадратичного инвертора
с устройством, реализующим зависимость
P2 = Pisignpi
и состоящим из тех же клапанов и инвертора, но включенных по
другой схеме, получится инвертирующий квадратор, выполняю-
щий операцию
— “2
Р = —Pi-
Если в компенсационном инвертирующем сумматоре заменить
входные линейные дроссели на турбулентные с квадратичной
расходной характеристикой (рис. 117, б), то уравнение будет
иметь вид
2 ГI Р‘ I sien ~Pt + а*р = °>
1 = 1
откуда
Р = — Г I Pi I sigHPb
i«=l
где k * =
а*
В частном случае, если п = 1 и а = рь
Р = — Klpjsignpp (111)
График этой функции представлен на рис. 117, ж.
14:
211
Чтобы построить прибор, предназначенный для извлечения
квадратного корня из модуля одной переменной
P = /|pi|, (112)
нужно прибор, реализующий функцию (111), включить последо-
вательно с устройством, выполняющим операцию (ПО). Графи-
чески функция (112) представлена на рис. 117, з.
В пневмоавтоматике интеграторы чаще всего строят на базе
двух элементов: сумматора и охваченного единичной положи-
Рис. 118. Схемы интеграторов, построенных на базе решающих усилителей:
а — интегратор, построенный по схеме апериодического звена, охваченного положитель-
ной обратной связью; б — интегратор, построенный на базе одного решающего усили-
теля с параметрической компенсацией; в — интегратор, построенный по схеме решаю-
щего усилителя, охваченного обратной связью через конденсатор; г — статическая ха-
рактеристика усилителя давления и мощности
тельной обратной связью апериодического звена с коэффициен-
том усиления, равным единице. Интегратор (рис. 118, а) состоит
из двух решающих усилителей и емкости V с регулируемым ли-
нейным дросселем. Один решающий усилитель (С) работает
в режиме сумматора, а другой (/7) — в режиме повторителя.
Емкость V и линейный дроссель а, установленный на ее входе,
составляют апериодическое звено. Уравнение интегратора мож-
но получить, решая совместно уравнения сумматора и апериоди-
ческого звена:
Pc = Pl+P — Р*> Та^- + р = рс,
at
у
где Та =----- — постоянная времени апериодического звена;
212
у___объем пневмоемкости; R— газовая постоянная (для возду-
ха R = 287,14 м2/с2 град); Т—абсолютная температура; рс, р19
р*> р — давления, соответственно, на выходе из сумматора, вход-
ное давление, давление условного нуля и давление на выходе из
интегратора; ,
Р=^-~ f(Pi— P*)dt.
1 a J
О
Повторитель включают в схему интегратора для того, чтобы
коэффициент передачи апериодического звена был равен едини-
це. Настройка постоянной времени интегратора Та осуществ-
ляется регулируемым дросселем апериодического звена <а.
При построении интегратора в качестве емкости апериодиче-
ского звена можно использовать как глухую, так и проточную
камеры. На рис. 118, б показана схема интегратора, собранного
на одном решающем усилителе и с проточной камерой в качестве
апериодического звена (емкость V и дроссели <р и р). Дроссель р
является одновременно дросселем апериодического звена и сум-
матора. Уравнения, описывающие работу схемы, имеют вид
т dP . „ 1 Л । л Л '
Т а + Р = "TZ— Рс + — Р2>
dt 1 + tl 1 fl
m(px—p2} = p2—p-,
KP*—Pi) = P2—pc,
(H3)
zp Г
где /а = — постоянная времени апериодического
а . у р
звена; m =— , I = —, п =—-------отношения проводимостей со-
Р д <р
ответствующих дросселей.
Исключив из системы уравнений (113) давление р% и выход-
ное давление сумматора рс, получим
т dp , 1 +1 , m( \ +1) I л ,
Та + р =----------------р Ч------— Pl-------------р* +
dt r (1+т)(1 + л) г (l+m)(l+„) rl l+nr
+---------------Pi +--------р • (114)
(1 +m)(l +n) rl (l+m)(l+„) v ’
Для того чтобы схема, представленная на рис. 118, б, работа-
ла как интегратор, необходимо и достаточно, чтобы коэффици-
ент при р в правой части уравнений (114) был равен единице,
а коэффициент при рх был равен коэффициенту при р*, т. е. не-
обходимо выполнить условия параметрической компенсации.
Напишем эти условия:
---- + п--= 1;
(1 +/п)(1 +п)----------(1+лг)(1+л)
m (1 + /)тп I
(1 + т) (1 + л) (1+/п)(1+л) 1+л
213
В результате преобразований последних уравнений легко ус-
тановить, что они одинаковы и, следовательно, необходимо удов-
летворить лишь одному уравнению
т + тп = 1. (115)
Так, например, если принять /= 1, то, учитывая условие (115),
получим
Р=1 ' 1 (116)
+
а ф
Постоянные дроссели чаще всего реализуют в виде отрезков
капилляров с одинаковым диаметром. Для этого случая
bob
а=~Г' ₽=_г
za z3
b
Ч=~
ч>
б=4
Ь
У = ~Г ’
v
где /а, /?, /ф , /в — длины капилляров; b = р —коэффици-
ент, определяемый из формулы Пуазейля (р — плотность возду-
ха, d — диаметр капилляра).
Подставляя выражение для а, ₽, ф в уравнение (116), полу-
чим простое соотношение для подбора длин капилляров:
/р —— Id Icp.
Уравнение интегратора с учетом выражения (114) и перечис-
ленных условий можно записать в следующем виде:
+ Р = р+ * (Р1—Р*)
at 1 + п
или
t
Р = ~^~ С(Р1— P*)dt,
1 и J
О
где Ти = —— = ——постоянная времени интегратора.
Емкость камеры апериодического звена делают переменной
и настройку постоянной времени осуществляют не дросселем, а
путем изменения объема V.
Пневматический интегратор можно построить по схеме, кото-
рая аналогична схеме электронного интегратора. Как известно,
основными элементами электронного интегратора являются
электронный решающий усилитель, охваченный через конденса-
тор обратной связью и включенный на входе решающего усили-
теля резистор, к которому подводится входной сигнал. Схема
пневматического интегратора, включающего решающий усили-
тель 2, пневматический конденсатор 4 в цепи отрицательной
обратной связи и линейный регулируемый дроссель 3 на входе,
214
представлена на рис. 118, а. Выход решающего усилителя соеди-
нен с инверсным усилителем давления и мощности /, имеющим
характеристику, представленную на рис. 118, г.
При увеличении давления р3 возникающее на мембране уси-
лие преодолевает силу цилиндрической пружины, и шарик, же-
стко соединенный со штоком, опускается вниз, закрывая отвер-
стие, через которое на выход подается питающее давление ро-
Выход усилителя давления и мощности сообщается с атмосфе-
рой. Если сигнал р3 отсутствует, то цилиндрическая пружина
приподнимает мембрану, и шарик закрывает верхнее отверстие
седла, при этом на выход усилителя поступает питающее давле-
ние. Благодаря последовательному соединению решающего уси-
лителя с инверсным усилителем давления и мощности не
только увеличивается выходная мощность интегратора, но и воз-
растает общий коэффициент усиления, равный произведению
коэффициента усиления решающего усилителя на коэффициент
усиления усилителя давления и мощности, что приводит к повы-
шению точности работы интегратора.
Инверсный усилитель имеет высокий коэффициент усиления,
так как внутренняя отрицательная обратная связь в этом усили-
теле отсутствует. В верхней камере решающего усилителя 2 ав-
томатически поддерживается давление, равное давлению в ниж-
ней камере. Действительно, при малейшем возрастании давления
в верхней камере давление р уменьшается и сильфон конденса-
тора 4 увеличивается в объеме. Давление в верхней камере сно-
ва становится равным давлению в нижней камере. Этот интегра-
тор работает также по принципу компенсации расходов, так как
расход воздуха через линейный дроссель 3 равен расходу возду-
ха в сильфон пневматического конденсатора 4.
Расход воздуха в сильфон конденсатора выражается фор-
мулой
Q= Q d(p2 — p)
dt
где С = —- — пневматическая емкость.
Плотность воздуха в верхней мембранной камере решающего
усилителя сохраняет постоянное значение, поскольку давление
в верхней камере постоянное. Благодаря этому также
G = —
dt
Расход воздуха через дроссель 3 можно представить в виде
G = a(p,—р2).
Так как расход воздуха через дроссель равен расходу воздуха
в сильфон, то
a(Pi— р2) = — С~^->
215.
откуда
t t
P = — yr f (Pi —p2)dt =------L- C(P1 — p2)dt,
J * и J
0 0
где Ти ------постоянная времени интегратора, настраиваемая
ос
дросселем 3 (рис. 118, в).
7. ЛИНЕЙНОЕ ПУЛЬСИРУЮЩЕЕ СОПРОТИВЛЕНИЕ
И НЕПРЕРЫВНЫЕ ПНЕВМАТИЧЕСКИЕ ВЫЧИСЛИТЕЛЬНЫЕ
УСТРОЙСТВА, ПОСТРОЕННЫЕ НА ЕГО БАЗЕ
Выше было показано, что при рабочих давлениях нормаль-
ного и высокого диапазонов начинает проявляться сжимаемость
воздуха. При этом условии практически невозможно реализо-
вать линейное пневматическое сопротивление, которое необходи-
мо для построения вычислительных устройств на базе решаю-
Рис. 119. Пульсирующее пневматическое сопротивление:
а — принципиальная схема; б — конструктивная схема; в — апериодиче-
ское звено на пульсирующем дросселе
щего усилителя, выполняющих любые математические опера-
ции. Как известно, именно отсутствие такого сопротивления
ограничивало область применения системы УСЭППА [5].
Сравнительно недавно было предложено пульсирующее ли-
нейное сопротивление [47], расход воздуха через которое линей-
но зависит от перепада давлений.
Принципиальная схема пульсирующего сопротивления пред-
ставлена на рис. 119, а. Сопротивление состоит из емкости Vi и
двух пневматических контактов клапанов 1 и 2, осуществляю-
щих поочередное подключение емкости Vi к входной линии с аб-
солютным давлением р\ и выходной линии с абсолютным дав-
лением Р2-
Допустим, что контакт 1 замкнут, а контакт 2 разомкнут (это
соответствует открытому клапану 1 и закрытому клапану 2).
Тогда масса газа в емкости
^,=9^=-^-.
216
Когда контакт 1 разомкнут, а контакт 2 замкнут, количество
газа в емкости
Ki
Таким образом, в результате одного замыкания каждого из
контактов в выходную линию из входной (при р\ > pz) перетечет
масса газа
AM = Af1-M2 = 4ir(Pi-p2)-
Ki
Если же каждый из контактов замкнется п раз, то в выход-
ную линию из входной поступит масса газа
М = п-ДМ=^-(Р1-р2). (117)
Ki
Продифференцируем равенство (117) по времени, предпола-
гая, что р\ и р2 в каждом импульсе остаются постоянными:
dM r dn , \ V\f / х
—- = G = -^-.—-(px — p2) = -^-(p,—p2)-
dt KT dt KT
u dn
здесь G — массовый расход газа, a------частота замыкания
dt
контактов 1 и 2 (частота открытия клапанов).
Если частота остается постоянной, то
G = a(pi—рг), (118)
VJ
где а =—— —проводимость пульсирующего сопротивления,
RT
постоянная величина.
Как следует из уравнения (118), пульсирующее сопротивле-
ние линейно при любых давлениях pi и р2-
Из сказанного ясно, что пульсирующее сопротивление позво-
ляет работать во времени, протекающем как дискретно, так и
с требуемым приближением непрерывно.
Проводимость сопротивления а в реальном времени прямо
пропорциональна частоте f сигнала управления и емкости V\.
Это позволяет изменять проводимость, изменяя частоту f и ем-
кость V], т.- е. управлять пульсирующим сопротивлением. Управ-
ляемость сопротивления дает возможность реализовать широкий
класс линейных и нелинейных математических вычислительных
операций, а также операции интегрирования и дифференцирова-
ния как дискретно, так и с требуемым приближением непрерыв-
но во времени.
f Например, на базе решающего усилителя, работающего в нор-
мальном или высоком диапазоне рабочих давлений, можно по-
строить с применением пульсирующего сопротивления все вы-
числительные устройства непрерывного действия [5, 6], работаю-
217
щие в соответствующих диапазонах давлений. Благодаря тому,
что сопротивление управляемое, номенклатура вычислительных
устройств может быть значительно расширена.
К контактам сопротивления, работающим в дискретном режи-
ме, предъявляют высокие требования: они должны обеспечи-
вать герметичность и большое число безотказных срабатываний.
Конструктивная схема пульсирующего сопротивления пред-
ставлена на рис. 119, б. Сопротивление содержит четыре мем-
браны, которые попарно соединены штоками. Малые жесткие
центры совместно с соплами образуют пары сопло — заслонка
(контакты 1 и 2). Мембраны делят корпус пульсирующего сопро-
тивления на шесть камер. В камеры 4 и 9 заводится давление
подпора, в камеру 6 — давление из камеры 7 воздух поступа-
ет в выходную линию. Управляющие импульсы давления посту-
пают с выхода генератора прямоугольных импульсов в камеры
3 и 8. При отсутствии управляющего давления в камерах 3 и 8
нижнее сопло оказывается закрытым, а верхнее открытым, и
происходит заполнение камеры 5 (емкости У\) до давления р\.
При подаче управляющего импульса состояние пар сопло — за-
слонка изменится на обратное и произойдет опорожнение каме-
ры 5 (объема 1Л) в выходную линию до давления р2.
Одним из наиболее важных вычислительных устройств не-
прерывного действия, которое может быть построено с примене-
нием пульсирующего сопротивления, является множительно-
делительное устройство. Однако, прежде чем рассмотреть прин-
цип действия множительно-делительного устройства, следует
остановиться на работе апериодических пневматических звень-
ев — главных элементов этих устройств.
Схема апериодического звена с пульсирующим сопротивле-
нием представлена на рис. 119, в. Масса воздуха в объеме V
будет
Q = py = -P-V(
RT
а расход в этот объем
_^L = G = _L_ JR.
dt ~ ~ RT ‘ dt
Тем обстоятельством, что объем пульсирующего дросселя
суммируется с объемом апериодического звена, мы пренебре-
гаем. С другой стороны, из уравнения для пульсирующего дрос-
селя (118) следует, что
GV । dn ( \
=---— • --(Pi— р)«
RT dt V
Приравнивая расходы, получим
+ р = (119)
218
где N = —---постоянная «времени»; Vi — объем камеры пуль-
сирующего сопротивления; п—дискретное «время» (число им-
пульсов) .
Если принять, что pi с момента отсчета времени постоянно и
больше начального давления рн в камере (при п = 0), то реше-
ние уравнения (119) будет
п
Р = Р1+(рн—Р1)е N. (120)
Если же начальное давление принять за условный ноль, то
р = (1 (121)
Уравнения (119), (120) и (121) соответствуют наполнению
камеры V. Если же рассматривать опорожнение камеры V и
принять давление pi за условный ноль, то
ЛГ-^- + р = О
dt
и его решение
Р=Ро* N,
где ро — начальное значение избыточного (над pi) давления
в камере V.
Принцип построения множительно-делительного устройства
и алгоритм его работы можно проследить на примере работы
двух апериодических звеньев с пульсирующими сопротивлениями
(рис. 120). Условимся для простоты отсчитывать все давления
от уровня атмосферного давления и записывать эти давления
без черточек. Заполним емкости Va и Vq через соответствующие
контакты до значения входных давлений pi и рг, а затем с по-
мощью этих же контактов их загерметизируем. Включив пуль-
сирующие сопротивления, будем опорожнять камеры Va и Vq и,
когда давление ро достигнет значения давления р3, остановим
пульсирующие дроссели и измерим давление ра = р4, которое
примем за выходное давление (рис. 120, б).
Установлено, что
f Другими словами, устройство, работающее по такому алго-
ритму, будет осуществлять множительно-делительную операцию
с возведением отношения р3/рг в степень
#2
219
Покажем это. Уравнения апериодических звеньев (рис. 120, а)
имеют вид
Рис. 120. Множительно-делительное устройство:
а — схема поясняющая работу устройства; б — кривые изменения
давлений в камерах Va и Vq
По условию алгоритма работы
п
р3 = р2е
п
Р4 = Pi е •
Исключая я, получим
Л'1
Р4 = Р1(—V3,
\ Р2 J
причем показатель степени
*1 Уб Via
w2 V16 va
и в частном случае может быть равен единице.
Схема множительно-делительного устройства построена в со-
ответствии с описанным алгоритмом работы и представлена на
рис. 121. Устройство состоит из двух апериодических звеньев,
причем первое звено включает пульсирующее сопротивление 3 и
емкость Уб, а второе — пульсирующее сопротивление 1 и ем-
кость Va. Управляющие тактовые импульсы к сопротивлениям 1
и 3 поступают от генератора прямоугольных импульсов 5. Такто-
вые импульсы предварительно проходят через клапан 2, который
прекращает подачу импульсов на сопротивления 1 и 3, когда на
220
его входе есть сигнал, соответствующий условной единице. В этом
случае оба сопротивления окажутся запертыми и в емкостях
апериодических звеньев Va и Уб окажутся запомненными значе-
ния давлений, которые там существовали в момент подачи на
вход клапана 2 условной единицы. Причем совершенно безраз-
лично, оказалась в этот момент на выходе клапана 2 единица
или ноль. Клапаном 2 управляет элемент сравнения 6, на кото-
ром осуществляется сравнение давлений р^ и р3.
Выходное давление формируется в емкости апериодического
звена Va и через повторитель 12 заводится на элемент памяти
11, управляемый так же, как и клапан 2, сигналом, поступающим
с элемента сравнения 6. После элемента памяти 11 выходной
сигнал повторяется и усиливается мощным и точным повторите-
лем 10.
Для создания сигналов, управляющих клапанами 4 и 13,
предназначен трехмембранный элемент 8, выходной сигнал ко-
торого заводится на верхнее сопло элемента сравнения 6. Эле-
менты 6 и 8 образуют импульсатор. Дроссели 7 и 9 обеспечива-
ют опережение импульса на выходе элемента сравнения 6 по
сравнению с сигналом на выходе импульсатора (элемент S),
а также настройку времени продолжительности импульсов.
Рассмотрим работу схемы в целом. Допустим, что давление
Рб больше входного давления р3. Тогда на выходе элемента
сравнения 6 будет ноль, а на выходе импульсатора 8 единица.
В этом случае сопло элемента памяти 11 окажется закрытым, и
на выходе устройства будет сигнал давления, соответствующий
предыдущему периоду измерения. Клапан 2 будет открыт, и
221
прямоугольные импульсы давления с генератора 5 будут приво-
дить в действие пульсирующие сопротивления 1 и 3. Камеры Va
и Vq будут опорожняться. Клапаны 4 и 13 окажутся закрытыми,
так как на выходе импульсатора 8 будет единица.
Как только давление Рб станет равным р3 (а практически на
небольшую величину меньше давления р3), мембранный шток
элемента 6 перейдет в нижнее крайнее положение и на его вы-
ходе появится сигнал, равный единице. Клапан 2 окажется за-
крытым, что,; в свою очередь, приведет к закрытию пульсирую-
щих сопротивлений 1 и 5, а клапан элемента памяти 11 откроется
и на него будет подано измеренное давление ра, равное в этот
момент времени давлению р4. После этого на выходе элемента
сравнения снова появится ноль. Измеренное значение р4 будет
запомнено элементом памяти 11. В этот же момент на выходе
импульсатора появится на некоторое время ноль, клапаны 4 и 13
откроются. При этом емкости Va и Уб заполнятся до значения
входных давлений рг и рь мембранный шток элемента сравнения
6 перейдет в верхнее положение и на выходе импульсатора вновь
появиться единица. Клапан 2 откроется и будет пропускать им-
пульсы генератора 5. Начнется новый цикл измерения. Устрой-
ство имеет ограничение р3 < рг. Недостатком такой схемы яв-
ляется сравнительно длительный цикл вычисления.
Глава VI
СПОСОБЫ ПОСТРОЕНИЯ ДИСКРЕТНЫХ
СИСТЕМ СТРУЙНОЙ ПНЕВМОАВТОМАТИКИ
1. РАСЧЕТ ПНЕВМАТИЧЕСКОЙ СТРУЙНОЙ ЦЕПИ
Виды соединений элементов пневматических струйных схем.
Построение систем управления с применением элементов струй-
ной пневмоавтоматики связано с выбором функциональной схе-
мы и пневматическим расчетом соединения элементов в этой
схеме. Функциональная схема определяется алгоритмом управ-
ления. Общие методы синтеза логических и цифровых схем при
заданных полных наборах элементов рассмотрены в специальных
монографиях [2, 36] и могут быть рекомендованы для составле-
ния дискретных схем на струйных, струйно-мембранных или
иных пневматических элементах.
Если логическая схема струйной системы управления состав-
лена, то возникает задача расчета рабочих режимов элементов
и составление на базе этого расчета принципиальной схемы.
Любая струйная система управления, кроме источника энер-
гии сжатого воздуха, включает пневматические элементы, пре-
образующие устройства и коммуникационные каналы связи.
В настоящее время широкое распространение в пневмоавто-
матике получили элементы и системы, работающие при постоян-
ных уровнях расходов и давлений, необходимых для питания и
управления. По аналогии с электрическими цепями постоянного
тока такое направление в пневмоавтоматике можно назвать
техникой постоянных токов. При этом расходы п давления имеют
фиксированные значения, а течение после окончания переходного
процесса переключения элементов обычно является установив-
шимся. Установившийся режим характеризуется тем, что расхо-
ды и давления не изменяются в течение сколь угодно длительного
промежутка времени и производные давления и расхода по вре-
мени равны нулю, т. е.
__ Q dQ __ Q
dt ’ dt
гд$ Q — объемный расход.
В пневматических цепях каждый элемент схемы оказывает
влияние на протекание процессов в цепи. Расчеты, связанные
с определением параметров цепи, можно выполнять, применяя
методы электротехники [60, 62].
223
Имеются активные и пассивные элементы схем. К первым из
них подводится питание, вторые лишь преобразуют входные сиг-
налы. Пневматические цепи чаще всего содержат элементы
с нелинейными характеристиками и называются нелинейными.
Если же цепь содержит только линейные элементы, то она на-
зывается линейной. На самом деле все реальные пневматические
элементы имеют нелинейные характеристики и пневматические
цепи являются нелинейными. Однако в ряде случаев указанная
идеализация процессов может быть принята, и в определенном
диапазоне рабочих режимов пневматические цепи можно рас-
сматривать как линейные.
Существенным отличием пневматических цепей от электриче-
ских является то, что по трубопроводам, каналам и функцио-
нальным элементам протекает газ, имеющий неизмеримо боль-
шую массу, чем масса электронов.
Соединение сопротивлений пневматической цепи называется
последовательным, если по цепи проходит один и тот же общий
расход. На отдельных последовательно включенных участках
с разными пневматическими сопротивлениями образуются пере-
пады давлений, зависящие от величины сопротивлений и прило-
женного к цепи давления. Потери давления происходят также
в трубопроводах и коммуникационных каналах за счет сил
трения.
Соединение сопротивлений называется параллельным, если
все они находятся под одинаковым перепадом давлений. Расхо-
ды в параллельно соединенных пассивных элементах зависят от
их проводимостей и перепада давления.
Как отмечалось ранее, для линейных пневмосопротивлений
расход пропорционален проводимости и перепаду Q = аДр, для
нелинейных пневмосопротивлений расход является нелинейной
функцией перепада давления. Например, для ламинарного
сопротивлений расход сжимаемого газа может быть опре-
делен по формуле (9), а для турбулентных — по формулам (4)
и (5).
Полный расход через все, соединенные параллельно, пневма-
тические сопротивления равен сумме расходов через отдельные
сопротивления.
При последовательном соединении струйных элементов нель-
зя говорить о постоянстве расхода в цепи, так как к элементам
может быть подведено давление питания и из элементов проис-
ходит утечка газа в атмосферу. Параллельное соединение струй-
ных элементов характеризуется тем, что полный расход в объ-
единенном выходном коллекторе равен сумме расходов через
все выходные каналы элементов.
Другого типа соединения, называемые последовательно-па-
раллельными, образуют более сложные пневматические развет-
вленные цепи [61, 64].
224
В пневмоавтоматике различают цепи с сосредоточенными и
распределенными параметрами. Если волновыми процессами
в цепях и длиной каналов можно пренебречь, то цепь можно рас-
сматривать как систему с сосредоточенными параметрами. Часто
при расчетах пневмосистем такое рассмотрение бывает вполне
допустимым, например, при расчете пневмокамер, проточных
элементов, систем мембранной пневмоавтоматики. Если же дли-
ной трубопроводов или цепей нельзя пренебречь, то их необхо-
димо рассматривать как системы с распределенными парамет-
рами.
Для построения разветвленных пневматических схем необхо-
димо прежде всего знать внешние характеристики пневмоэле-
ментов. Внешние параметры большинства пневмоэлементов,
в том числе струйных, удобно определять с помощью входных и
выходных характеристик, являющихся аналогом вольт-амперных
характеристик электронных элементов. Таким образом, методы
расчета пневматических цепей до некоторой степени аналогичны
методам расчета электрических цепей. Наличие однозначной за-
висимости давления в выходном и входном каналах от соответ-
ствующих им расходов освобождает от необходимости составле-
ния схемы замещения для данного пневматического элемента
и позволяет вести его расчет графическим методом.
Графический метод расчета неразветвленной струйной цепи
с линейными и нелинейными элементами. Рассмотрим графи-
ческий метод расчета последовательного соединения двух струй-
ных элементов с характеристиками произвольного вида. В общем
случае входные и выходные характеристики элементов являются
нелинейными. Их аналитическое выражение довольно сложно.
Пусть для последовательного соединения двух одинаковых
струйных элементов (рис. 122, а) даны их входная Qy = f(py)
и выходная Qbi = f(PBi) характеристики (рис. 122, б, б). Вид
входной характеристики для струйных элементов некоторых Ти-
тов, например элементов с турбулизацией питающей струи, не за-
висит от того, переключился элемент или нет (сплошная кривая
на рис. 122, б). Для струйных элементов с силовым взаимодейст-
вием струй, с использованием свойств пристеночных течений и не-
которых иных сопротивление канала управления может меняться
в зависимости от состояния переключения элемента и его вход-
ная характеристика может иметь вид кривой, показанной на
рис. 122, б штриховой линией. В точке перегиба П происходит
переключение элемента, что может вызвать изменение сопротив-
ления канала управления, а следовательно, и изменение расхода.
Давление питания элементов считается постоянным.
г Вследствие наличия сопротивления коммуникационного кана-
ла связи и падения давления в нем выходная характеристика
элемента будет несколько смещена вниз и примет вид кривой,
показанной на рис. 122, д [кривая Qb = f (рв)]. Действительно,
если на выходе струйного элемента с регулируемым дросселем а
15 Заказ 993 225
(рис. 122, г), соединенным с окружающей средой, давление кото-
рой ра, канал не подключен, то при некотором открытии регули-
руемого дросселя истечение происходит под перепадом давлений
Рв1 — ра- Если же между выходным соплом элемента и регули-
руемым дросселем включен канал (рис. 122, в), то вследствие
наличия гидравлических потерь вдоль канала возникает некото-
рый перепад давлений Др. Истечение в окружающую среду будет
Рис. 122. Различные условия нагружения струйных элементов:
а — схема включения элемента через соединительный канал; б —
входная характеристика элемента при переключении; в — схема на-
гружения переменной нагрузкой через соединительный канал; г — схема
нагружения переменной нагрузкой без-канала; д — выходные характе-
ристики
происходить под перепадом на дросселе a: (pbi — Др) = рв. Так
как рв < рвь то расход через дроссель будет меньшим. Наи-
большее значение Др принимает при полном открытии дросселя
в окружающую среду, соответствующем наибольшей скорости
в канале. Общей точкой характеристик с подсоединенным кана-
лом и без него является точка максимального набора давления
рв max при полном закрытии нагрузочного дросселя. Наибольшее
расхождение кривых будет иметь место при полном открытии
дросселя. Характеристика Qbi = Л(рв1) при подключении канала
и изменении его длины изменяться не будет.
Нагрузкой для активного струйного элемента могут служить
последовательно соединенные пассивные элементы, например,
два дросселя си и аг, соединенные между собой каналом, поте-
рями в котором можно пренебречь (рис. 123, а). Допустим, что
заданы выходная характеристика Qb = fi (рв) струйного элемен-
226
Р)"' X——И-»''”
41. " "•
Рис. 123. Нагружение струйного
элемента двумя последователь-
ными переменными дросселями,
соединенными каналом:
а — схема нагружения; б — гра-
фик входных характеристик при
различных условиях нагружения
та и входные характеристики обоих дросселей Q1=f2(/?i) и.
Q2 = f3(p2) (рис. 123, б). Определим путем графического постро-
ения расход и давление на выходе нагруженного элемента, а так-
же давление pv перед дросселем аг. Давления рв и pv — избы-
точные давления. Истечение через дроссель ai происходит под
давлением р\ = рв — Pv, а через дроссель аг под давлением:
р2 = pv. Для нахождения рас-
четного режима строят вспомога-
тельную входную характеристику
всей цепи Q = /4(pb), представляю-
щую собой зависимость расхода от
общего перепада давления рв- По-
скольку расход во всех сечениях не-
разветвленной цепи для данной на-
грузки одинаков, Qb = Qi = Q2, то
для построения характеристики Q =
= А(рв) необходимо просуммиро-
вать перепады давления рв — Pv и
Pv для одних и тех же значений рас-
ходов по характеристикам Qi =
= МРв — Pv) и Q2 = h(Pv) и най-
ти соответствующие точки характе-
рна (рис. 123, б). Затем находят
точку А пересечения суммарной ха-
рактеристики Q = /4(Рв) с характе-
ристикой Qb = /1(Рв). Отрезок ЕА
определяет расход в цепи Qb = Qi =
= Q2. Точка А является рабочей
точкой. Пересечение прямой AF, па-
раллельной оси абсцисс, с кривыми
Qi = k(PB — Pv) и Q2 = h(Pv) в
точках Ai и А2 определяет давления
Рв — Pv и pv Аналогично рассчитывают цепь, состоящую из
большего числа последовательно соединенных нелинейных эле-
ментов.
Если известны входная и выходная характеристики струйных
элементов, то графический расчет рабочего режима при после-
довательном соединении двух элементов (рис. 122, а) сводится
к следующему. Строят входную Qy = fi(py) и выходную Qb =
= Ь(Рв) характеристики соответственно двух последовательно
включенных струйных элементов (рис. 122, а и 124). Точка А пе-
ресечения этих характеристик определяет расчетный режим, ко-
торый устанавливается при данном входном сопротивлении
управляемого элемента. Этому режиму соответствуют рабочие
параметры рраб и Qpa6. Однако в установившемся режиме управ-
ляющий элемент может отдавать свою выходную мощность не
полностью. Одна из задач — определение величин запасов по
давлению и расходу. В ряде случаев представляет интерес дру-
15* 227;
Рис. 124. к расчету рабочей точки
струйных элементов
гая постановка этой задачи — определение коэффициента ветв-
ления управляющего элемента L
Графический способ расчета разветвленной струйной цепи
с линейными и нелинейными элементами. Для решения постав-
ленных задач необходимо знать величины давления руср и расхо-
да QyCp, при которых происходит срабатывание управляемого
элемента. Моменту срабатывания управляемого дискретного эле-
мента на его входной характеристике (рис. 124) соответствует
точка С. Для обеспечения срабатывания на выходе управляюще-
го элемента должно быть давление рво = руср и расход Qycp.
Таким образом, срабатывание может быть обеспечено, если точ-
ка С расположена ниже выходной характеристики. Расход Qbo
определяют по точке пересече-
ния прямой BD с нагрузочной
характеристикой Qb = Ырв).
Расход Qbo — Q УсР и яв-
ляется тем резервным расхо-
дом, который имеет управляю-
щий элемент. Коэффициент за-
паса по давлению срабатыва-
ния kp = Рраб/Руср , а запаса
по расходу kQ = Qpaa/Qycp.
Если управляющий элемент
нагружен элементами одинако-
вого типа с одинаковыми вход-
ными сопротивлениями, то
kQ = QBo/QyCp определяет
наибольшее количество подсоединяемых элементов и носит наз-
вание коэффициента ветвления.
Допустим, что в струйной разветвленной цепи к выходу од-
ного управляющего элемента подсоединено несколько управляе-
мых элементов (рис. 125, а), имеющих в общем случае нелиней-
ные характеристики. При этом на выходную характеристику
управляющего элемента накладывается сетка его входных харак-
теристик (рис. 125, 6). Каждая входная характеристика соответ-
ствует определенному числу подключаемых элементов (n = 1, 2,
3, 4). Число подключаемых элементов выбирают таким, чтобы
удовлетворялось условие рраб руср. Точки Aif Л2, А3, Л4, лежа-
щие на пересечении входных и выходной кривых, определяют
различные режимы работы цепи при разных нагрузках. Напри-
мер, точка Л2 определяется величиной расхода Qpa6 и давления
Рраб, если нагрузкой являются два элемента. Площадь прямо-
угольника OEA2F равна рабочей мощности Afpa6 = Qpa6*Ppa6.
В ряде случаев известна не результирующая входная харак-
теристика, а входные характеристики отдельных элементов. Рас-
смотрим случай, когда один элемент нагружен двумя параллель-
1 Часто коэффициент ветвления называют коэффициентом нагрузочной
способности.
228
но соединенными элементами, входные характеристики которых
показаны на рис. 125, в. При известном давлении рв находят
величины Qyi и Qy2- Тогда расход в неразветвленной части цепи
QB =Qyi + Qy2. Если задан расход Qb, то для определения
давления рв и расходов Qyi и Q уг необходимо построить вспо-
могательную характеристику Qyc = Qyi + Qy2 = /(рв). Так как
при параллельном соединении pyi =Ру2,то для определения Qyc
необходимо произвести суммирование ординат кривых Qi =
= fi(pyi) и Q2 = f2(py2) для одинаковых значений давления
Рис. 125. Параллельное
включение струйных элемен-
тов:
а — схема подключения; б — график совместной работы управляющего и
управляемых элементов; в — графический расчет рабочей точки двух парал-
лельно включенных управляемых элементов
pyi =Ру2. Отложив на оси ординат отрезок OF, равный Qb, и
проведя из точки F прямую, параллельную оси абсцисс, до пере-
сечения с кривой Qyc = Qy\ +Qy2 = Мрв), находят давление рв.
Точки пересечения прямой АЕ, проведенной параллельно оси ор-
динат, с входными характеристиками элементов определяют рас-
ходы Qyi и Qy2.Точка А определяет рабочий режим элемента.
В струйной технике часто возникает необходимость увеличе-
ния выходной мощности, что можно осуществить за счет увели-
чения давления питания.
С увеличением давления питания и выходной мощности воз-
растает мощность, необходимая для управления элементами. По-
этому для увеличения выходной мощности иногда используют
параллельное соединение управляющих элементов (рис. 126, а),
работающих на одну нагрузку. Так как при параллельном соеди-
нении выходное давление одинаково, то результирующую харак-
теристику получают путем суммирования расходов, соответству-
ющих одинаковым давлениям. По заданным внешним характе-
ристикам р\ = fi(Qi) и р2 = f2(Q2) (рис. 126, б) необходимо про-
суммировать расходы Qi и Q2. Для определения рас-
229
ХОДОВ Q1 И (?2
стному расходу
абсцисс от точки
в ветвях питающих элементов по
Qb проводят прямую, параллельную
характеристики рв = fs(Qi + Q2),
Рис. 126. Параллельное включение струйных
элементов на одну нагрузку:
а — схема включения; б — график работы
изве-
оси
соответст-
вующей заданному зна-
чению расхода Qb. Точ-
ки пересечения этой
прямой с характеристи-
ками pi = fi(Qi) и р2 =
= /2(^2) определяют
значения расходов Q! и
Q2 на выходах актив-
ных элементов. Расход
Qi равен расходу Q2
только при одинаковых
характеристиках эле-
ментов.
При параллельном
соединении нескольких
управляющих и управ-
ляемых элементов це-
лесообразно вначале произвести суммирование отдельно для
всех управляющих, затем управляемых элементов, а потом оп-
ределить режим, рассматривая пневматическую цепь в виде по-
следовательного соединения эквивалентного управляющего и
управляемого элементов.
2. КРИТЕРИИ ОЦЕНКИ КАЧЕСТВА РАБОТЫ СТРУЙНЫХ
ЭЛЕМЕНТОВ ДИСКРЕТНОГО ДЕЙСТВИЯ
В связи с созданием различных типов струйных элементов
важным является введение единых критериев оценки качества их
работы [12]. Выбор критериев качества основан на результатах
изучения гидродинамических свойств струйных элементов, ана-
лизе взаимодействия элементов в схеме и режимов их работы,
изучении причин возможных отказов и учете статических свойств,
нагрузочных характеристик и их динамики. Критерии позволяют
определить условия, при которых обеспечивается функционально
устойчивая работа струйных устройств и систем. В качестве кри-
териев могут быть выбраны некоторые показатели надежности.
Статической характеристикой давления называется зависи-
мость давления на выходах струйного элемента от изменения
давления в каналах управления в статическом режиме. В даль-
нейшем будут рассмотрены статические характеристики давле-
ния при условии допустимых расходов на выходе, т. е. при до-
пустимых нагрузках ].
1 Под допустимой нагрузкой понимается такая нагрузка, при которой
еще сохраняется функциональная устойчивость.
230
Рассмотрим критерии, определяющие качество статических
характеристик для двух струйных элементов: ИЛИ — НЕ, ИЛИ
и элемента памяти (триггера с раздельными входами). Приня-
то различать два рода статических характеристик — прямую и
инверсную [12].
Прямой характеристикой называют такую зависимость вы-
ходного сигнала от управляющего, когда происходит возрастание
выходного сигнала при увеличении управляющего воздействия.
Под инверсной характерис-
тикой понимают такую зависи-
мость выходного сигнала от
управляющего, когда происхо-
дит падение выходного сигна-
ла при увеличении управляю-
щего воздействия.
Схемы рассматриваемых
струйных элементов были при-
ведены ранее (см. гл. III) и
были введены следующие обоз-
начения: ро, Qo— давление и
расход в канале питания; ру и
Qy — давления и расходы в ка-
нале управления; рв и Qb —
давления и расходы в выход-
ных каналах.
Как уже отмечалось, в ло-
гических элементах входные
(управляющие) и выходные
(управляемые) величины име-
ют лишь два значения — услов-
ные 0 и 1. Эти величины могут
принимать как максимальное,
так и минимальное допустимые
значения.
Рассмотрим прямую и ин-
версную характеристики логи-
ческого струйного элемента
ИЛИ — НЕ ИЛИ, удовлетво-
ряющего условиям функцио-
нальной устойчивости, приня-
тым для оценки качества эле-
Рис. 127. Зоны функциональной устой-
чивости для струйных элементов:
а — релейного элемента; б — усилитель-
ного элемента
ментов автоматики, а также условия и критерии функциональ-
ной устойчивости струйных элементов. Введем обозначения для
величин максимальных и минимальных допустимых значений
давлений, соответствующих условным 1 и 0. Обозначим ротах,
Ро шт — максимальное и минимальное значения давления, соот-
ветствующие условному 0; Pi max, Pi min — максимальное и мини-
мальное значение давления, соответствующие условной 1
231
(рис. 127). Функциональная устойчивая работа логических струй-
ных элементов в системах управления может происходить только
в том случае, если статические характеристики струйных эле-
ментов будут отвечать определенным требованиям. Этим требо-
ваниям должны удовлетворять минимальное и максимальное
значения сигналов, соответствующих 0и1, коэффициенты усиле-
ния, наклон хаактеристик и т. п. Другими словами, все семейст-
во характеристик элементов, входящих в систему, должно укла-
дываться в определенным образом выделенную область допусти-
мых значений.
Построим область допустимых прямых характеристик, исходя
из требований функциональной устойчивой работы элементов.
При этом следует основываться на том, что элемент не должен
сработать от давления рОтах и надежно должен сработать от
давления pimin (при увеличении управляющего давления), а так-
же не должен сработать от pimm и надежно должен сработать
при уменьшении давления до ротах (при уменьшении управляю-
щего давления). Область допустимых характеристик следует
строить так, чтобы обеспечить запасы по максимальному значе-
нию условного 0 и минимальному значению условной 1, при этом
необходимо учитывать случайные флюктуации давлений. В вы-
деленной зоне статическая характеристика может занимать лю-
бое положение, однако должно соблюдаться усилие атт
а 90°. В частном случае, например, прямая характеристика
может быть как чисто релейной (рис. 127, а), так и наклонной
(рис. 127, б) с петлей гистерезиса Др.
Левую граничную вертикальную прямую области допустимых
характеристик выбирают из условия максимального значения
сигнала ротах, соответствующего условному 0 (рис. 127). Эта
граница может быть определена следующим соотношением:
Рог == Ротах 4" ^тахО 4" = РОтах(1 ^0 4“ ^1) = Ротах»
где ротах — максимальное остаточное давление на выходе преды-
дущего элемента; Лтахо — максимальная амплитуда флюктуа-
ций, отсчитанная от значения pomaxi бр— величина запаса по
прямому срабатыванию; xi — коэффициент, определяющий про-
хождение левой граничной вертикальной прямой, xi = 1 + hQ +
+ h\\
ft0 = -dlSS*L; hx = -$£—.
Ротах Ротах
Правую граничную вертикальную прямую выбирают из усло-
вия минимального значения сигнала pimin, соответствующего ус-
ловной 1. Эта прямая может быть определена соотношением
Р1г= Pimin" 4maxi бр = Pimin (1 ^0 ^0 ^sPlmin*
где pimin — минимальное значение давления, соответствующее
условной 1; Лщах1 — максимальная амплитуда флюктуаций от-
232
носительно минимальной единицы, поданной с выхода предыду-
щего элемента; др — величина запаса по обратному срабатыва-
нию; %2 — коэффициент, определяющий прохождение правой
граничной вертикальной прямой;
Х2= 1— ho — hi, ho=-^±; h{ = -^—.
Pl min Pimin
В частном случае возможно, что Лтахо = ЛтаХ1 = Лтах.
Очевидно, что при подаче на вход элемента давления, равно-
го или большего pimin, давление на выходе рассматриваемого
элемента не должно быть меньше давления pimin- Поэтому гори-
зонтальная прямая, ограничивающая область допустимых харак-
теристик снизу, должна проходить на расстоянии pimin от оси
абсцисс. На максимальное значение ру до определенных преде-
лов никаких ограничений не накладывается. Однако в ряде эле-
ментов при чрезмерном увеличении входного давления может
происходить уменьшение давления на выходе за счет слишком
большого угла поворота питающей струи и ответвления ее части
в атмосферную полость. При этом давление на выходе может
стать меньше pimin, что недопустимо. Поэтому на выходное дав-
ление накладывается ограничение: оно не должно превышать
значения
Plmax = Ркр ^тах $Р = ^зРкр>
где рьр — давление, при котором статическая характеристика пе-
ресекает горизонтальную линию, проходящую на расстоянии
Pimin от оси абсцисс; Лтах— максимальная амплитуда флюктуа-
ций относительно pimax, поданного с выхода предыдущего эле-
мента; др — величина запаса по критическому давлению.
Рассмотрим прямую характеристику при одновременной ра-
боте двух выходов элемента. На выходе элемента давление, при
этом соответствующее значению условного 0, не должно превос-
ходить значения рошах-
Прямая характеристика может иметь зону отрицательного
давления, определяемую pomin- Это давление не должно выводить
инверсную характеристику из области допустимых значений (см.
рис. 127).
Из условий отсутствия ложных срабатываний (повышения
помехоустойчивости) необходимо выбрать ширину петли гисте-
резиса, которая для релейной характеристики должна превосхо-
дить максимальную удвоенную амплитуду помех. Таким обра-
зом, ширину петли можно найти по следующей формуле:
Др = 2(ДП1ах + 6р),
где др — величина запаса по давлению; Лтах — максимальная
амплитуда флюктуаций по управляющему сигналу.
Аналогично определяют зону допустимых значений для ин-
версной характеристики струйного элемента. Следует отметить,
233
что инверсная характеристика имеет спад в зоне отрицательных
управляющих давлений. Ограничение области допустимых зна-
чений справа определяется давлением pomin- Ограничение, накла-
дываемое на давление pimax, справедливо при работе элемента
на два выхода. Если используется только один инверсный выход,
то эти ограничения снимаются, что в ряде случаев является це-
лесообразным.
Построим области допустимых характеристик для элемента
памяти. При запоминании пневматического сигнала на инверс-
ном выходе необходимо, чтобы при подаче и снятии давления рг
Рис. 128. Зоны функциональной устойчивости струйного элемента
памяти:
а — прямого переключения; б — обратного переключения
на выходе было давление рвь соответствующее значению услов-
ной единицы. Статические характеристики для инверсного выхо-
да в зависимости от давлений ру и рс показаны на рис. 128. За-
поминание сигнала, соответствующего значению условного 0, про-
исходит при подаче и последующем снятии сигнала р у,соответ-
ствующего условной единице. Граничные значения давлений pir
и рог устанавливают так же, как и для логических элементов
ИЛИ — НЕ ИЛИ. Величины pimin, Plmax, Ротах, POmin, COOTBeTCT-
вующие значениям условных 1 и 0, из условия совместной ра-
боты логических и запоминающих элементов следует выбирать
одинаковыми. Возможно наличие отрицательных давлений ру и
рс. Однако максимальные значения указанных отрицательных
давлений не должны быть меньше ротш- При этом pomin выбира-
ют по той же методике, что и для элемента ИЛИ — НЕ ИЛИ.
Зависимость давления рв1 от управляющих давлений ру и рс
показана на рис. 128, где штриховкой указана зона допустимых
характеристик.
Проведенный анализ позволяет сформулировать следующие
критерии качества работы струйных элементов в статическом ре-
жиме.
234
Коэффициентом запаса по прямому срабатыванию струйного
элемента можно считать отношение
= > 1,
Р1Г
по обратному срабатыванию — отношение
&1О =---> 1.
Ротах
Для функционально устойчивой работы струйных элементов
необходимо выполнение следующего условия:
k __ Pi max Ротах > ।
Pir Рог
Выполнение неравенства k\ > 1 можно считать необходимым
условием работоспособности элемента. Элемент, не соответству-
ющий этому условию, исключается из дальнейшего рассмотре-
ния. Очевидно, что, чем больше /гь тем больше запас по сраба-
тыванию и тем более функционально устойчив элемент.
Для уменьшения вероятности ложных срабатываний элемен-
та необходимо, чтобы величины условных единиц и нулей были
четко разграничены и отношение
k2 = _£iniin_ > 1
Ротах
должно быть как можно большим.
Одним из основных критериев оценки элемента можно счи-
тать коэффициент усиления по давлению. Наклон статической
характеристики должен быть больше минимально допустимого
наклона
fe3==_?lmin~P°max_ = tg а.
Р1Г Рог Др
Одним из главных показателей качества работы струйных
элементов является их нагрузочная способность. Для построения
разветвленных логических схем на модулях и элементах струй-
ной техники (см. гл. VI) нагрузочные характеристики элементов
должны быть такими, чтобы к их выходам можно было подклю-
чать как можно большее число элементов. Минимально допусти-
мое число элементов должно быть не менее двух. Поэтому не-
обходимо обеспечить достаточно большие и по возможности оди-
наковые входные сопротивления элементов. Приведенные выше
статические характеристики были рассмотрены для нагружен-
ных струйных элементов. При максимальной нагрузке элемента
давление на его выходе не должно быть меньше pimin, а при
минимальной нагрузке не должно превышать pimax- Нагрузочные
свойства элемента оценивают с помощью входной и выходной
нагрузочных характеристик, пересечение которых определяет
235
рабочую зону АВС по нагрузкам (рис. 129). Входная характери-
стика, представляющая собой зависимость между расходом и
давлением на входе элемента, определяет его входное сопротив-
ление. На рис. 129 показаны характеристики двух граничных
входных сопротивлений, соответствующих минимальному п =
= ftmin и максимальному п = /гтах допустимым входным нагруз-
кам, где п — число подключаемых элементов.
Выходная нагрузочная характеристика Qb = /(рв) ограничи-
вает зону допустимых значений, образуемую в результате допу-
Рис.
129. К
расчету коэффициента
ветвления
одинаковых
формуле
стимого изменения рабочих
параментров элемента. От-
сюда следует, что макси-
мальная и минимальная на-
грузки элементов и соответ-
ствующие им расходы следу-
ет выбирать таким образом,
чтобы давление на выходе
элемента не было меньше
минимального давления
Pimm и не превосходило мак-
симальное давление pimax»
соответствующее условной 1.
Таким образом, число на-
грузочных элементов, или
коэффициент ветвления, при
входных сопротивлениях элементов определяют по
Qimax
^тах ^4 п
4'1 min min
где Qimax — максимальный расход на выходе управляющего эле-
мента, соответствующий Pimin; Qlminmin— рЗСХОД, Необходимый
для управления одним элементом при pimin-
Коэффициент усиления по расходу показывает, во сколько
раз расход на выходе превосходит расход, необходимый для уп-
равления при разных нагрузках, которым соответствуют допус-
тимые значения давления.
Коэффициент усиления по мощности в общем случае равен
отношению мощности при максимальной нагрузке на выходе
к подводимой мощности на входе:
_ Nвых QimaxPimin
Nbx QlminPlmax
При сравнении энергетических показателей элементов удоб-
но использовать коэффициент полезного действия, равный отно-
шению выходной мощности элемента к мощности, подводимой
извне:
k6 = nbhx .
No + N»x
236
Для инверсного выхода элемента AfBx = 0 и kQ = NBblx/No\
для пассивных элементов = 0 и kQ = NBB1X/NBX.
Наиболее сложным режимом для струйных элементов и си-
стем является динамический режим. При работе в динамике
справедливы все критерии, характеризующие статический режим,
однако необходимо ввести коэффициенты, учитывающие специ-
фику динамического режима.
В динамическом режиме на функциональную устойчивость
работы элементов оказывают влияние случайные флюктуации,
кроме того, в этом режиме
проявляются инерционные
свойства струй.
Одной из основных осо-
бенностей работы дискрет-
ных струйных элементов в
динамическом режиме мож-
но считать вероятность лож-
ного переключения при нали-
чии шумов, что может выз-
вать сбой многотактной схе-
мы. Запаздывания передачи
сигналов в каналах умень-
шают крутизну фронтов уп-
Рис. 130. Зависимость коэффициента
k7 от частоты
равляющих импульсов, что может привести к увеличению вре-
мени переходных процессов. Учитывая вышеизложенное, можно
ввести следующие основные показатели качества, обеспечиваю-
щие функциональную устойчивую работу в динамике. Наиболее
важным критерием оценки качества в динамике является быст-
родействие элементов. Оценить быстродействие можно по диа-
пазону пропускаемых элементом частот. Следует учитывать, что
при разном дросселировании на выходе (разном числе п под-
ключаемых элементов) максимальная частота пропускания <отах
будет различной. На рис. 130 показана амплитудно-частотная
характеристика струйного элемента при разных нагрузках. По
оси ординат отложено отношение выходной амплитуды давления
pB К ВХОДНОЙ руср.
Ограничением по допустимой пропускаемой частоте является
минимальное допустимое отношение амплитуд
й7=-^- = 1
Pimin
при котором запас по давлению минимальный. Если п\ < п2 < лз,
ТО COmax 1 > G>max2 > СОщахЗ*
Накладывается также ограничение по фазовому сдвигу.
Каждой нагрузке (ni, n2i Пз) при выбранной допустимой величи-
не срдоп фазового сдвига соответствует своя допустимая рабочая
Частота Cdmax-
237
В каждом конкретном случае необходимо решать вопрос
о том, по какому параметру (рв/pimin или <рдоп) следует выби-
раТЬ O)max«
Частота возникающих на выходе элемента флюктуаций дав-
ления должна быть значительно выше частоты полезного сигна-
ла и лежать вне диапазона пропускаемых элементом частот.
В этом случае струйный элемент будет являться высокочастот-
ным фильтром шумов. В зависимости от амплитуды шумов, как
было показано ранее, выбирают также границы допустимых зна-
чений на статической характеристике, при этом отношение
^^</20!,
Pimin
где /т01 характеризует допустимую относительную амплитуду
шумов.
3. функциональные возможности СТРУЙНЫХ
ЛОГИЧЕСКИХ ЭЛЕМЕНТОВ ПРИ ЭЛЕМЕНТНОМ СПОСОБЕ
ПОСТРОЕНИЯ СХЕМ
Ранее были описаны струйные элементы дискретного дейст-
вия. Возникает задача о выделении такого набора элементов, ко-
торый был бы полным или более чем полным с логической точ-
ки зрения. В то же время этот набор должен обеспечивать
рациональное построение произвольных однотактных и много-
тактных схем.
Под полным набором понимают такой комплект элементов,
который позволяет реализовать любую из операций двузначной
логики, причем удаление хотя бы одного элемента из этого комп-
лекта сделает такую реализацию невозможной. Более чем пол-
ный (избыточный) набор позволяет реализовать любую опера-
цию двузначной логики даже при изъятии из комплекта элемен-
тов одного или нескольких типов в зависимости от степени
избыточности. Например, полными наборами являются наборы
из элементов, реализующих следующие операции: штрих Шеф-
фера, дизъюнкцию и отрицание, конъюнкцию и отрицание,
стрелку Пирса и т. д.
Для правильной оценки целесообразности того или иного
типа элемента в наборе необходимо выбрать некоторые оценоч-
ные критерии, например, такие, как минимум числа элементов
в схеме, что позволяет строить схемы с меньшими габаритными
размерами; минимум расхода воздуха на питание, пропорцио-
нального числу активных элементов; минимум времени срабаты-
вания, которое считают пропорциональным числу элементов на
пути прохождения сигнала и т. д.
Рассмотрим различные наборы логических элементов. При
разработке схем пневматических устройств на основе использо-
вания элементов определенного набора применяют метод, подоб-
238
ный методу ламповых операторов, когда выражение для собст-
венной функции системы разбивают на члены (скобки), соответ-
ствующие операторам элементов, имеющихся в наборе. Затем
элементы, выполняющие операции, заключенные в скобки, соеди-
няют с помощью элементов, выполняющих операции, соединяю-
щие эти скобки.
Набор, состоящий из элементов ИЛИ — НЕ ИЛИ на два
входа, с логической точки зрения, является полным, так как по
одному из выходов он осуществляет дизъюнкцию двух аргумен-
Рис. 131. Схемы триггеров со счетным входом на турбулентных уси-
лителях:
а — схема с развязкой на элементах; б — схема на естественных задержках;
L] = 710 мм; L2 = L3 = 500 мм, внутренний диаметр канала d = 2 мм
тов, а по второму — ее отрицание. Недостатком этого набора
является то, что все элементы схемы оказываются активными.
Кроме того, при использовании этого набора трудно осуществить
конъюнкцию, которую приходится выражать через дизъюнкцию
и отрицание. Однако в ряде случаев использование элементов
лишь одного типа значительно упрощает построение любой си-
стемы, облегчает соединение элементов между собой и весьма
эффективно с точки зренйя промышленного производства и тех-
нологии. Примером реализации устройств дискретного действия
на одном элементе может служить использование турбулентного
логического элемента НЕ ИЛИ на четыре входа (см. гл. IV).
Схемы реализации наиболее распространенных однотактных
логических операций, триггера с раздельными входами, генера-
торов колебаний на этом элементе приведены в табл. 7. Из рас-
смотрения таблицы следует, что наличие четырех входов в каж-
дом элементе значительно расширяет возможности выбора логи-
ческой цепочки по разным входам при реализации сложных
многовходовых логических операций. Схемы триггеров со счет-
ным входом на элементах НЕ ИЛИ приведены на рис. 131.
239
Таблица 7
Реализация логических операций на струйном элементе НЕ ИЛИ
Наименование логической операции Логическая формула Принципиальная схема
Операция НЕ Z = %! при х2 = х3 = х4 = 0
Операция НЕ ИЛИ Z = X, + х2 + х3 + *4 = = х1х2х3х4
Операция И (два входа) Z = Xjf/i при = и2 = = х2 = х3 = х4 = у2 = у 2 = = ^4 = 0 xfx2x3^ и -ЛУ z 1^2 У1У2Ц3УУ
Комбинированная ло- гическая операция z = (x1 + x2 + x3 + x4)- • {У\ + У2 + Уз + У а) и\и2
Операция И (четыре входа) z = Х\У\и\'1\ при Х2 = х3 = х4 = у2 = у3 = = У\ = и2 - и3 = и4 = = У1 = У2 = У3 = О XfX2 XgX^ YfYz v3 v4 "1^ (ЬУгУзУу UfU2Us u4
Реализация конъюк- тивной формы дизъюк- тивных групп г = (х1 + х2 + х3 + х4)' (У1 + Уг + Уз + У4)- • (Wj + U-2 + U3 + U4) •• •(»1 + »г + 1’з + ’’4)
Операция ИЛИ (че- тыре входа) Комбинированная ло- гическая операция 2 = + %2 + Х3 + Х4 при и2 = и3 = и4 = 0 2 = (х1 + а:2 + л:3 + х4) • £^2 ”^з 4 u2 U3 U-4
Операция равнознач- ность Z = XjX2 + х1 х2 Py 111 7
240
Продолжение табл. 7
Наименование логической операции Логическая формула Принципиальная схема
Триггер с раздель- ными входами Запоминание любого сигнала хь х2, хз или УхУгУъ *2*1 У1У1 Уз
Генератор колебаний Генерирование колеба- ний: регулировка часто- ты со за счет изме- нения длины канала / и диаметра кана- ла d регулировка часто- ты со за счет наст- ройки дросселя а и величины емкости V И --- - о.) £ X , s. Z III а \ । -Jill 5)
Рассмотрим иной набор, включающий элемент ИЛИ — НЕ
ИЛИ и элемент И.
Учитывая, что в собственных функциях встречаются выраже-
ния вида %1Х2, можно ввести в набор комбинированный логиче-
ский элемент, для которого эти выражения являются собствен-
ными операторами по крайним выходам (см. гл. IV).
Реализацию дизъюнкции на п входов можно осуществить
в наборе ИЛИ — НЕ ИЛИ, а также с помощью активного эле-
мента ИЛИ, дополненного пассивным элементом ИЛИ.
Для осуществления конъюнкции на п входов можно исполь-
зовать п — 1 пассивных элементов И, каждый из которых осу-
ществляет конъюнкцию двух аргументов.
Следует заметить, что, хотя конъюнкцию двух аргументов
выполняет также и комбинированный логический элемент по
среднему выходу, однако для реализации большинства схем эле-
мент И не является необходимым. Введение элемента И оправ-
дано в тех случаях, когда нет необходимости соединять крайние
выходы с атмосферой. При этом уменьшаются габаритные раз-
меры и упрощается компоновка схемы.
Операцию запоминания входного сигнала можно осуществить
на одном специальном активном элементе памяти.
Таким образом, при построении дискретных устройств раз-
личного назначения на турбулентных логических элементах ло-
гически полный набор может состоять всего лишь из одного
элемента НЕ — ИЛИ на четыре входа. Если используют плоские
элементы с взаимодействием струй, то, учитывая удобство вы-
полнения логической операции И с одновременным отрицанием
16 Заказ 993 241
Рис. 133. Реакция сумматора на единичное входное воздействие:
1 — входное воздействие; 2 — код суммы; 3 — код переноса
одного из входных сигналов на одном комбинированном логиче-
ском элементе, целесообразно дополнить им набор струйных
элементов.
Пример 12. В качестве примера рассмотрим синтез одноразрядного сумма-
тора на основе набора струйных элементов, состоящего из активного элемента
ИЛИ — НЕ ИЛИ и пассивного комбинированного логического элемента. Обо-
значим как и ранее, рь рг, Рз—двоичный код входных величин, рс — код сум-
мы, рп — код переноса.
0.002 с
Рис. 134. Осциллограммы, поясняющие работу одноразрядного
сумматора при периодическом воздействии:
1 — входное воздействие; 2 — код переноса
В дизъюнктивной совершенной нормальной форме для логических функций
рс и рп можно записать следующие выражения:
РС = (Р1Р2Р3) + (Р1Р2Р3) + (Р1Р2Р3) + (Р1Р2Р3);
Рп = (Р1Р2Р3) + (Р1Р2Р3) + (Р1Р2Р3) + (Р1Р2Р3) -
Проведя преобразования алгебры логики, получим
3 Рс = р* [(P1P2) + (Р1Р2Я + Рз[(Р1Рг) + (Р1Р2)];
Рп = (Р1Р2) + (Р1Рз) + (РгРз)-
Для того чтобы синтезировать схему в выбранном наборе струйных эле-
ментов, сгруппируем члены так, чтобы между переменными выполнялись бы
16* 24а
только операции, реализуемые элементом ИЛИ и комбинированным логичес-
ким элементом. После преобразования получим:
для кода суммы
Рс = {/>3 [(Р1Р2) + (р2р 1)]} + {р3 [(P1P2) + (P2P1)]};
для кода переноса
Рп ~ (Р1Р2) + {Рз [(Р1Р2) + (Р2Р1)]} •
Принципиальная схема полного одноразрядного сумматора показана
на рис. 132.
На двух входах схемы предусмотрены усилительные не функциональные
элементы У\ и У2. На вход р3 поступает сигнал переноса из предыдущего раз-
ряда, который нет необходимости усиливать. Последовательность операций,
выполняемых на этих элементах, соответствует последовательности логичес-
ких вычислений, определяемых скобками в формулах для рс и рп. Рассмот-
рим работу схемы при каком-либо состоянии входов. Например, допустим,
что pi = 1, а р2 = рз = 0. Тогда усилительный элемент на выходе только по-
вторяет сигнал рь усиливая его. Далее комбинированный логический элемент
выполняет операцию р\р2. Так как входной сигнал р2 = 0, а р\ = 1, то
Pip2 = 1 и p2Pi = 0. После выполнения операции ИЛИ (квадратные скобки
второго члена в выражении рс) получим (Р1Р2) + (Р2Р1) = 1+0=1.
Так как р3 = 0, на крайнем правом выходе комбинированного логического
элемента /С2 будем иметь реализацию выражения во вторых фигурных
скобках:
Рз[(Р\Рг) + (Р2Р1) ] = 1.
Таким образом, независимо от того, каково значение первой фигурной
скобки, на выходе элемента ИЛИ рс = 1.
Следовательно, подав на вход сумматора pi = 1, получим на выходе его
рс = 1. При этом, как легко видеть, что рп = 0.
Динамические исследования показали, что при прохождении сигнала по
наиболее длинной цепи (код переноса) сумматор без сбоев пропускает вход-
ные импульсы с частотой до 290 Гц.
На рис. 133 показана осциллограмма реакции сумматора по входам рс
и рп на единичное воздействие продолжительностью А = 0,0012 с. Время
срабатывания для кода суммы Ai = 0,0027 с; для кода переноса А2 = 0,00346 с.
Осциллограммы, поясняющие работу одноразрядного сумматора на часто-
те 135 Гц, показаны на рис. 134.
Одним из примеров практической реализации струйных си-
стем управления дискретного действия при элементном способе
построения может служить применение системы элементов «Вол-
га», один из вариантов которой включает два типа струйных
элементов: триггер с раздельными входами и элемент ИЛИ —
НЕ ИЛИ на два входа [45]. Действие струйных элементов рас-
сматриваемого типа основано на эффекте Коанда и их схемы
аналогичны схемам, приведенным на рис. 70, 71. Триггер с раз-
дельными входами (рис. 70) представляет собой бистабильный
струйный элемент, имеющий два входа и два выхода. Элемент
ИЛИ — НЕ ИЛИ — моностабильный струйный усилитель с тре-
мя входами — двумя управляющими и одним запрещающим.
Такой набор элементов обеспечивает построение большинства ло-
гических сравнительно несложных систем управления машина-
244
ми-автоматами, прессами, литейными машинами и иным техно-
логическим оборудованием. Центральной частью структурной
схемы подобных систем является логический блок.
Элементный принцип построения, используемый при проекти-
ровании логических блоков систем управления технологическим
оборудованием, обеспечивает свободный доступ к струйным эле-
ментам, возможность контроля входов и выходов без нарушения
логических связей, конструктивную простоту, дешевизну изго-
товления, удобство монтажа и обслуживания. Поэтому системы
управления элементного принципа построения нашли наиболее
широкое применение при практической реализации струйных си-
стем управления и в первую очередь блоков релейной автомати-
ки и защиты.
Системы управления, построенные на базе элементов «Вол-
га», могут работать в крайне тяжелых условиях окружающей
среды, например при значительной запыленности воздуха, что
объясняется сравнительно большими проходными сечениями ка-
налов струйных элементов (2 X 1 мм2 в сечении), однако при
этом увеличиваются потребляемые расходы воздуха.
4. МОДУЛЬНЫЙ И АГРЕГАТНЫЙ СПОСОБЫ ПОСТРОЕНИЯ
СТРУЙНЫХ УСТРОЙСТВ. ИНТЕГРАЛЬНЫЕ СТРУЙНЫЕ СХЕМЫ
Сложные цифровые или иные системы управления в ряде
случаев целесообразно осуществлять на струйных модулях. Каж-
дый модуль выполняет определенную функциональную опера-
цию и представляет собой отдельный одно- или двухразрядный
блок. Модульный принцип построения струйных приборов нашел
свое выражение в отечественной системе модулей струйной тех-
ники (СМСТ) [11], а также в ряде зарубежных разработок [64].
Была сделана попытка создания универсального логического мо-
дуля [34]. Ряд модулей, изготовленных на одной плате, образуют
интегральную струйную схему. Отдельный модуль представляет
собой плату из пластмассы, керамики, металла, ситалла или ино-
го материала со струйными элементами, закрытую крышкой,
соединяемую с платой винтами, заклепками или клеем. Для
реализации прибора модули соединяют между собой в макромо-
дули или блоки с помощью коммуникационных каналов, выпол-
ненных в монтажных платах. Каналы соединяют входы и выходы
модулей в соответствии со схемой устройства. При модульном
способе построения предусматривают создание специализиро-
ванных функциональных блоков необходимой номенклатуры- на
струйных интегральных схемах.
Отступление от идеи функциональной универсальности, при-
сущей элементному способу построения, и реализация модуль-
ного способа позволяют строить сложные приборы в ряде случаев
с меньшей избыточностью и более экономично, т. е. чем шире
набор модулей, тем больше выбор для варьирования в схемах
245
и тем меньше избыточность при построении схем. Однако уве-
личение номенклатуры приводит к возникновению отдельных
технологических трудностей. При наличии штампов на отрабо-
танные конструкции отдельных модулей и интегральных струй-
ных схем и налаженном серийном производстве модульный
способ построения приборов струйной пневмоавтоматики являет-
ся вполне приемлемым.
Рассмотрим структуру системы модулей струйной техники
СМСТ, которая с функциональной точки зрения разработана до-
статочно детально. Структура СМСТ содержит набор дополни-
тельных устройств, используемых при построении приборов и
систем автоматизации. Система является более чем полным на-
бором, однако широкий выбор модулей позволяет избежать из-
лишней избыточности при создании схем.
Система модулей включает в себя несколько групп модулей:
дискретного действия, аналоговых операций и усилителей мощ-
ности. Модули этих групп можно использовать в любых сочета-
ниях при построении различных по назначению приборов и си-
стем.
Группа модулей дискретного действия включает модули ло-
гических и арифметических операций и запоминающих уст-
ройств. Модуль, относящийся к этой группе,— триггер со счет-
ным входом можно использовать как для выполнения арифмети-
ческих операций, так и при построении запоминающих устройств.
Для выполнения логических операций над двумя логически-
ми переменными предназначены модули таких логических опе-
раций, как НЕ — ИЛИ, равнозначность и неравнозначность,
НЕ — И, импликация. Модули собирательной схемы ИЛИ и ло-
гической операции И имеют по четыре входа. Последовательное
соединение модулей позволяет реализовать логические схемы
для произвольного числа входных сигналов.
К модулям арифметических операцйй относятся модули пол-
ного одноразрядного сумматора, полного одноразрядного вычи-
тателя, вентили и ячейки поразрядного сравнения, необходимые
для построения вычислительных устройств.
Полный одноразрядный сумматор представляет собой один
разряд блоков суммирования, которые можно строить путем со-
единения в цепочку нужного числа разрядов. Аналогично на базе
полного одноразрядного вычитателя можно собирать блоки вы-
читания на нужное число разрядов. Блоки сложения и вычита-
ния можно применять в управляющих вычислительных устрой-
ствах, для построения в сочетании с запоминающими регистрами
интегрирующих и дифференцирующих устройств, в цифровых
регуляторах и т. п.
Блок вентилей служит для того, чтобы при поданном на раз-
решающий вход сигнале пропускать записанное в параллельном
двоичном коде многоразрядное число, которое хранится в запо-
минающем регистре на его входе.
246
Модули поразрядного сравнения, соединенные в блок сравне-
ния, позволяют сравнивать два числа в параллельном коде и
получать сигналы о равенстве этих чисел или неравенстве с уче-
том знака неравенства. Такие блоки применяют в цифровом
следящем приводе, в двухпозиционных регуляторах, системах
с автоматическим поиском и т. д.
Модули запоминающих устройств позволяют строить запо-
минающие статические и сдвигающие регистры на произвольное
число разрядов, устройства десятичного счета (декатроны), обе-
гающие устройства, линии задержки, матричные запоминающие
устройства и другие многотактные схемы. Элементарная ячейка
памяти представляет собой устройство запоминания на такт.
В модуле фиксируется то значение входного сигнала (1 или 0),
которое соответствует моменту наступления очередного тактового
сигнала. Дискретная информация остается запомненной до мо-
мента подачи следующего тактового сигнала. Логическая схема
одной из модификаций элементарной ячейки памяти позволяет
осуществлять запись при наличии двух поданных сигналов (чи-
слового и командного) и стирание — при подаче специальной
команды на дополнительный вход.
Триггер с раздельными входами, имеющий два положения
устойчивого равновесия, обеспечивает запоминание факта нали-
чия одного или нескольких входных сигналов, поданных на вза-
имно исключающие управляющий или сбросовый входы. Триггер
со счетным входом представляет собой ячейку с двумя устойчи-
выми состояниями, имеющую один рабочий вход и вход для
установки на нуль. При каждом воздействии на рабочий вход
триггера происходит смена его устойчивого состояния, т. е. осу-
ществляется деление на два частоты входных сигналов. Триггер
со счетным входом позволяет создавать различные счетные схе-
мы, интеграторы, таймеры и т. п.
В группу модулей аналоговых операций входят модули, пред-
назначенные для реализации линейных и нелинейных непрерыв-
ных математических операций. Устройством для формирования
линейного закона управления служит решающий усилитель, три
разновидности которого отличаются по числу входов, типу вход-
ного каскада и по выходной мощности.
На базе модулей непрерывного действия можно создавать
аналоговые и регулирующие устройства, а также выполнять не-
которые нелинейные математические операции, такие, как воз-
ведение в квадрат, извлечение квадратного корня, умножение и
деление независимых переменных. Хотя функциональные воз-
можности аналоговой ветви достаточно широки, однако точность
выполнения аналоговых операций на современных средствах
струйной техники пока еще не велика. Погрешность выполнения
операций составляет величину порядка 2—4%. Однако при пе*
реходе на переменные токи точность может значительно воз-
расти.
247
Выходные устройства Средства преобразования и дистанционные передачи Модули для обработки информации и выработки команд управления Средства преоб- разования и дистанционные передачи команд управления Выходные устройства
Модули логических операций Модули арифме- тических операций Модули за- поминающих устройств Модули вспомо- гательных устройств
Прерыватель путевой Электропневма- тический преобразователь НЕ — ИЛИ Сумматор двоичный Триггер Усилитель расхода Пневмоэлектри- ческий преоб- разователь Повыситель
Считывающее устройство Акустико-пнев- матический преобразователь НЕ - И Сравнение поразрядное Триггер счетный Генератор (грубый) Пневмоакусти- чески й преобразователь Индикаторы
Пневмокнопка Тумблеры Переключатели Гидропнезмати- ческий преобразователь ИЛИ, НЕ - ИЛИ Вентиль Элементарная ячейка памяти Генератор (точный) Пневмогидрав- лический преобразователь Усилитель мощности
Клавишные устройства н-Д Угол — код Давление — код И, НЕ - Н Преобразователь код Грея—двоич- ный Триггер Реле предельное Д-Н Код — давление Код — переме- щение Записывающее устройство. Печатающие машины
Специальные датчики Понизитель давления Равнознач- ность Регистр сдвигающий Дроссель регулирующий Переключатель потоков
Эжектор Исполнительные механизмы
Ниппель проверочный
Блок сравнения восьмиразрядных чисел Блок декад- ного счетчика
Для релейных устройств
ИЛИ Усилитель ДА-НЕ
a)
НЕ-ИЛИ HE-И
*1 хг Z
0 0 1
0 1 1
1 0 1
1 1 0
Повыситель давления
X
0 1 0
1 0 1
ИЛИ НЕ-ИЛИ И НЕ-И
Х1 *2 ч
0 0 0 1
0 1 1 0
1 0 1 0
1 1 1 0
X, Х2 ь
0 0 0 1
0 1 0 1
1 0 0 1
1 1 1 0
( к
Л ч 7
t
( 7^
Ч
4
Триггер
Сравнение поразрядное
249
Рис. 135. Система модулей струйной техники СМСТ-2:
а — структура системы; б — примеры выполнения модулей СМСТ-2
В СМСТ входят также модули дискретного и аналогового
усилителей мощности. Дискретный усилитель мощности пред-
ставляет собой пятикаскадный струйный усилитель, причем вы-
ходные каскады усилителя построены на элементах, действие
которых основано на использовании явления отрыва погранич-
ного слоя.
Для соединения струйных приборов с датчиками различных
величин, введения в приборы команд, задаваемых оператором,
преобразований сигналов и т. п. предусмотрен ряд дополнитель-
ных входных устройств. Предусмотрены также и выходные уст-
ройства, служащие для передачи воздействий на исполнитель-
ные механизмы, вывода или считывания сигналов в приборах и
системах автоматики. К ним относятся усилитель мощности,
двоичные и цифросинтезирующие индикаторы, пневмоэлектриче-
ские преобразователи и т. д.
Структуру системы модулей струйной техники СМСТ-2 иллю-
стрирует рис. 135, а. Эта система скорректирована с целью мак-
симального приближения к техническим средствам автоматики
ГСП [43]. Как следует из рассмотрения рис. 135, а, функциональ-
ные модули относятся к центральной части структуры — к груп-
пе средств обработки информации и выработки команд управ-
ления. Центральная группа функциональных модулей разбита
на четыре подгруппы: модули логических операций; модули
арифметических устройств; модули запоминающих устройств и
модули вспомогательных устройств.
Все струйные модули имеют единые уровни входных и вы-
ходных сигналов: 0 (от —4 до +4 мм вод. ст.) и 1 (от 40 до
80 мм вод. ст.). Нагрузочная способность не менее 3, коэффици-
ент запаса по срабатыванию не ниже 1,2.
Для реализации релейных устройств внутри центральной
части структуры выделена подветвь, в которую входят: струй-
ный усилитель ДА — НЕ с двумя взаимоинверсными выходами
и плата с пассивными элементами, которая выполняет операции
ИЛИ на четыре входа. Давление питания усилителя 0,02 +
-}- 0,003 МПа. Уровень сигнала 0 от —4 до +4 мм вод. ст. и сиг-
нала 1 от 40 до 1000 мм вод. ст. Коэффициент разветвления ра-
вен 6.
Развитием модульного принципа является создание приборов
из агрегатных блоков или макромодулей (интегральных схем).
В структуре (рис. 135, а) указаны два таких макромоду-
ля — декадный счетчик и блок сравнения двух двоичных вось-
миразрядных чисел. Число макромодулей можно увеличивать по
мере необходимости. Набор первичных элементов состоит из де-
вяти элементов, работа которых основана на использовании
принципа свободного взаимодействия турбулентных струй и
взаимодействия струйных течений со стенками — эффект Коан-
да. Характеристики базовых элементов системы СМСТ-2 улуч-
шены [11]. В последовательной цепочке модулей сочетаются и
250
чередуются пассивные и активные струйные элементы, что обес-
печивает помехоустойчивость и повышает функциональную ус-
тойчивость работы модулей. Питание струйных модулей осуще-
ствляется нормализованным давлением воздуха 0,14 МПа через
фильтры с тканью Петрянова и струйные эжекторы. Эжектор
согласно структуре СМСТ-2 рассчитан на обеспечение питанием
струйных блоков, выполняющих законченные укрупненные функ-
ции, например, сравнение двух восьмиразрядных двоичных чи-
сел, функции декадного счетчика и т. д. Примеры схем с моду-
лями СМСТ показаны на рис. 135, б.
Система СМСТ предназначена для создания довольно слож-
ных вычислительных устройств дискретного действия, в основе
построения которых заложен агрегатный принцип.
Агрегатный принцип нашел также свое отражение в работах
НИИТеплоприбора [49] при построении комплекса вычислитель-
ных устройств струйной автоматики. Устройства комплекса пред-
назначены для выполнения основных цифровых и логических
операций, связанных с вводом, выводом, переработкой и хране-
нием дискретной информации.
Комплекс включает следующие устройства: сложения и вы-
читания, командозадающее, динамической памяти, преобразова-
ния кодов, ручного ввода чисел.
Устройство сложения и вычитания предназначено для сложе-
ния и вычитания двух двоичных чисел как положительных, так
и отрицательных. Оно выполнено по обычной для арифметиче-
ских устройств схеме комбинационного параллельного сложения
в обратном коде с циклическим переносом.
Устройство динамической памяти служит для записи двоич-
ных чисел, их хранения, переадресации и выдачи по управляю-
щей команде. Разрядность записываемых чисел и их количество
зависят от комплекта и разрядности статических регистров, на
которых построено устройство.
Устройство сравнения сравнивает два числа, заданные парал-
лельным двоичным или двоично-десятичным кодом, оно имеет
три выхода, соответствующие результатам сравнения «больше»,
«равно», «меньше».
Устройство преобразования кодов выполняет преобразование
сдвинутых двоичных или двоично-десятичных кодов в цифровой
двоичный или двоично-десятичный код. Сдвинутые коды посту-
пают при считывании с кодовых масок непрерывно-дискретных
преобразователей, работающих по методу двойной щетки [36, 49].
Устройство ручного ввода чисел служит для преобразования
десятичных чисел, задаваемых ручными пневматическими задат-
чиками, в их двоичный эквивалент. Это устройство работает по
принципу комбинационного параллельного сложения кодов деся-
тичных цифр с учетом их двоичных весов и является также
входным устройством центральной части цифровых систем уп-
равления.
251
Командозадающее устройство предназначено для последова-
тельной выдачи командных сигналов. Предусмотрена возмож-
ность работы в кольцевом режиме и в режиме одиночных цик-
лов, а также возможность принудительной выдачи командных
сигналов в любой такт работы.
Предусмотрена возможность увеличения емкости любого уст-
ройства комплекса путем увеличения числа входящих в него
унифицированных секций. По конструктивным признакам комп-
лекс дискретных устройств струйной пневмоавтоматики аналоги-
чен агрегатной системе вычислительной техники и комплексу
электронных технических средств локальных информационных
управляющих систем (КТСЛИУС).
Устройства комплекса построены на основе одного многоре-
жимного струйного дискретного элемента — пневмистора, что
способствует унификации и является существенным преимуще-
ством. Действие пневмистора основано на эффекте Коанда. В от-
личие от струйного элемента, показанного на рис. 70, 71, пнев-
мистор имеет по два входных канала, расположенных симмет-
рично относительно питающего канала, и два взаимоинверсных
выхода. Изменение режима работы достигается выбором способа
включения элемента. В зависимости от способа включения мож-
но осуществлять либо логические операции ИЛИ — НЕ ИЛИ,
запрет—импликация, либо операцию запоминания сигнала, ре-
жим триггера с раздельными входами.
Устройства комплекса применяют для построения систем циф-
ровой регистрации, цифрового программного управления, а так-
же в системах автоматического контроля, управления адресова-
нием в специализированных вычислительных устройствах.
К недостатку агрегатной системы дискретных устройств, по-
строенных на одном универсальном элементе, следует отнести
несколько меньшее быстродействие по сравнению с модульными
устройствами. Преимуществом их является возможность боль-
шей унификации и сравнительная простота технологии изготов-
ления, требующая наличия всего одной разновидности штампа
струйного элемента.
5. СТРУЙНО-МЕМБРАННАЯ ТЕХНИКА
В струйно-мембранной технике, развитие которой идет па-
раллельно со струйной и мембранной техникой, для построения
пневматических устройств используют как струйные, так и мем-
бранные элементы [6].
Устройства, собранные на струйных и мембранных элемен-
тах, несомненно, имеют ряд преимуществ по сравнению с чисто
мембранными устройствами — меньшие габаритные размеры,
содержат меньше подвижных и упругих деталей, что повышает
их надежность. В этих устройствах все преобразователи, выпол-
няющие логические операции, реализуются на струйных элемен-
252
тах, работающих в низком диапазоне рабочих давлений и в пас-
сивном режиме, когда к элементам не подводится давление пи-
тания. На выходах преобразователей, построенных на струйных
элементах, в том числе и тех выходах, которые предназначены
для организации обратных связей, установлены двухкаскадные
мембранные усилители по давлению и мощности. Первый каскад
такого усилителя служит для усиления по давлению с коэффи-
циентом усиления, примерно равным 100, второй — для усиления
по мощности. Входы струйных логических преобразователей
коммутируются с выходами других релейных логических уст-
ройств, с различного рода кнопками и концевыми выключателя-
ми, а также, с собственными выходами для организации отрица-
Рис. 136. Мембранный
двухкаскадный усилитель
тельной или положительной обратных связей. Как уже было
указано, струйные элементы работают в низком диапазоне рабо-
чих давлений, однако все входные сигналы и сигналы обратных
связей принимают значения из нормального диапазона рабочих
давлений. Поэтому для понижения давления на всех входах
в струйных логических преобразователях установлены пневма-
тические сопротивления.
При прохождении пневматического сигнала по цепочке после-
довательно соединенных струйных элементов он затухает. Это
обстоятельство не дает возможности реализовать любые логиче-
ские функции и строить цепочки большой протяженности. Поэто-
му для выполнения схем некоторых логических функций прихо-
дится применять несколько логических преобразователей с вы-
ходными усилителями давления и мощности, что предотвращает
недопустимую потерю мощности в цепочке струйных элементов.
Пневматическая релейная схема, реализованная указанным спо-
собом на струйных и мембранных элементах, представляет собой
набор, включающий однотипные узлы. Каждый отдельный узел
состоит из логического преобразователя, набранного из пассив-
ных струйных элементов, на выходах которого установлены уси-
лители давления и мощности.
Мембранный усилитель давления и мощности представляет
собой одномембранный усилитель давления, к выходу которого
в качестве усилителя мощности присоединено наиболее распро-
страненное трехмембранное реле системы УСЭППА (рис. 136).
Дроссель, соединяющий нижнюю камеру усилителя давления
с атмосферой, применен для создания небольшого давления в ка-
мере, обеспечивающего гарантированный зазор между соплом и
253
заслонкой. В качестве струйных элементов, предназначенных для
выполнения логических функций, применяют всего два элемента
(рис. 137), которые составляют набор, позволяющий получить
любые логические функции. Элемент ИЛИ на большее число
входов может быть построен без
ZrPrPz z=Pi+Pz
а) б)
Рис. 137. Пассивные струйные элемен-
ты струйно-мембранной техники:
а — комбинированный струйный элемент;
6 — элемент, выполняющий логическую
операцию ИЛИ
применения струйных элемен-
тов— на проточной камере
(рис. 138). Струйно-мем-
бранный способ построения
схем пневмоавтоматики поз-
воляет значительно снизить
требования к характеристи-
кам струйных элементов.
Однако схемы, построенные
с применением технических
средств струйно-мембранной
В качестве примера на рис.
техники, имеют повышенный
расход воздуха по сравне-
нию даже со схемами, по-
строенными на некоторых
типах струйных элементов.
', а представлена реализация
схемы триггера с раздельными входами и на рис. 139, б — схема
разряда двоичного сумматора с памятью и с управлением считы-
Р1
z=pi+p2+-'-+Pn
Рис. 138. Схема элемента ИЛИ на дросселях и про-
точной камере
вания. Рассмотрим работу триггера с раздельными входами
(элемента памяти). При подаче входного сигнала давления р3
или р4 на вход усилителя мощности на выходе возникает сигнал
г, соответствующий условной единице. В качестве обратной свя-
зи этот сигнал заводится также на вход струйного элемента.
Если сигналы р3 и р4 станут равными нулю, то благодаря дей-
ствию сигнала обратной связи на выходе г будет удерживаться
сигнал, равный единице, т. е. произойдет запоминание входного
сигнала (сигналов). Если теперь один из сигналов р\ или р2 или
оба сигнала р\ и р2 примут значение единицы, то струя, вытека-
ющая из канала обратной связи, отклонится и сигнал г на выхо-
де элемента поменяет свое значение с единицы на ноль, причем
254
ноль сохранится и в том случае, если сигналы р\ и р2 станут рав-
ными нулю и т. д.
На выходе суммы одного разряда струйно-мембранного дво-
ичного сумматора (рис. 139, б) появляется сигнал, равный еди-
нице в том случае, если хотя бы один из суммируемых сигналов
pi или р2 или сигнал переноса из i— 1-го разряда zt*_I принима-
ют значение единицы либо все три сигнала р\, р2 и z^_{ принима-
ют значение единицы. В противном случае на выходе суммы бу-
Рис. 139. Примеры схем струйно-мембранной техники:
а — триггер с раздельными входами; б — разряд двоичного сумматора с
памятью
дет ноль. Сигнал на выходе переноса z! принимает значение
единицы, если все три входных сигнала р2 и z*._x будут равны
единице или же только два из трех.
Сигнал с выхода суммы разряда двоичного сумматора заво-
дится в устройство управления считыванием (элементы 1 и 2).
При подаче и снятии сигнала считывания рз на выходе zt- появ-
ляется и запоминается сигнал суммы. При повторной подаче
сигнала рз на выходе Zi появится новое значение суммы и т. д.
6. ТЕХНИКА ПЕРЕМЕННЫХ ТОКОВ В СТРУЙНОЙ
ПНЕВМОАВТОМАТИКЕ
Получившие в настоящее время широкое распространение
элементы и системы струйной пневмоавтоматики работают на
потенциальных уровнях расходов и давлений, необходимых для
питания и управления. По аналогии с электрическими цепями
постоянного тока указанное направление в пневмоавтоматике
можно назвать техникой постоянных токов. При этом расходы и
давления принимают потенциальные фиксированные значения.
Различные элементы и системы постоянного тока дискретного
255
действия при условии функциональной устойчивой работы базо-
вых логических элементов успешно используют в промышленно-
сти. Однако применение аналоговых струйных устройств затруд-
нено вследствие их невысокой точности, что является следствием
высокого уровня шумов, дрейфа нуля усилителя и низкого коэф-
фициента усиления. Повысить точность аналоговых струйных
устройств, а также улучшить некоторые показатели качества дис-
кретных элементов и расширить области применения струйной
пневмоавтоматики можно, перейдя на технику переменных токов
(потоков), широко известную в электротехнике.
Главными преимуществами струйных систем переменного то-
ка по сравнению с системами постоянного тока можно считать
уменьшение влияния шумов, отсутствие дрейфа нуля, возмож-
ность обеспечения повышенной точности и быстродействия.
К существенным преимуществам следует также отнести возмож-
ность создания достаточно точных и быстродействующих струй-
ных датчиков, позволяющих измерять различные регулируемые
параметры — температуру, давление, положение и др.
Техника переменных токов в пневмоавтоматике развивается
на стыке акустики и пневматики. Как известно, в системах, ра-
ботающих на переменном токе, должен быть стабильный источ-
ник гармонических колебаний питающего потока. Такими устрой-
ствами, предназначенными для питания, могут быть струйные
генераторы колебаний, акустико-пневматические элементы с ре-
зонаторами Гельмгольца, пневмомеханические (в том числе —
камертонные генераторы). В ряде случаев удается совместить
генератор колебаний с функциональным элементом — усилите-
лем переменного тока.
Принцип действия струйных систем переменного тока может
базироваться на использовании частотной, фазовой, амплитудной
или иного типа модуляции основного гармонического питающего
сигнала путем воздействия на него управляющего сигнала как
потенциального, так и гармонического.
Элементами цепи переменного тока в струйной технике могут
служить элементы различных типов [60]. Весьма эффективным
является использование в качестве струйных элементов перемен-
ного тока турбулентных усилителей.
Существуют две возможности модулирования несущей часто-
ты — относительно некоторой постоянной составляющей и отно-
сительно нулевого уровня. При модуляции струйного сигнала
относительно постоянной составляющей затем выделяют огибаю-
щую. Амплитуды колебаний малы, так как питающая струя
в элементе с силовым взаимодействием струй обычно не откло-
няется на полную величину, а в турбулентном струйном элемен-
те перемещение турбулентного конуса относительно приемного
сопла не является полным.
Использование в струйной пневмоавтоматике в основном
двух видов модуляции — фазовой и частотной дает возмож-
256
ность сохранить достаточно большие величины амплитуд пнев-
матических сигналов.
Рассмотрим действие простейших струйных устройств пере-
менного тока, выполненных на турбулентных усилителях L
Такими устройствами являются генераторы колебаний, модуля-
торы, демодуляторы, усилители и преобразователи.
Генератор колебаний. Генератор мо-
жет быть выполнен на одном турбулент-
ном усилителе с включением в контур об-
ратной связи линии задержки, состоящей
X
а
Рис. 140. Генератор колебаний на турбулентном усилителе:
а — схема генератора; б, в — осциллограммы его работы на частоте 200 и 400 Гц
соответственно
из дросселя и емкости, либо длинной линии I (рис. 140, а). Фор-
ма импульсов на выходе такого генератора при работе на низких
частотах (до 50 Гц) близка к прямоугольной, а на высоких час-
тотах (200—400 Гц) близка к синусоидальной (рис. 140, б, в).
Частоту работы генератора можно регулировать путем включе-
ния в цепь обратной связи линии разной длины. Были получены
экспериментальные зависимости частоты работы генератора от
длины линии в контуре обратной связи (рис. 141). Эти кривые
имеют гиперболический характер; длину трубки с внутренним
диаметром d = 2,2 мм меняли от 50 до 1600 мм. Как показали
исследования, на малых длинах (до 400 мм) наблюдалось зна-
чительное изменение частоты при изменении давления питания
в 2,5' раза. При больших длинах канала обратной связи (более
500 мм) изменение частоты колебаний во всем диапазоне питаю-
щих давлений от 100 до 250 мм вод. ст. незначительно
(рис. 141, а). Зависимость рабочей частоты от питающего давле-
ния ро для различных / показана на рис. 141, б. Из графика сле-
1 Экспериментальные исследования струйных устройств, работающих на
переменном токе, были выполнены с помощью аппаратуры, разработанной
в ИАТ.
17 Заказ 993
257
дует, что для малых длин линии обратной связи частота в зави-
симости от давления питаний меняется по квадратичному закону.
В своих опытах Келли показал (58], что частота генератора про-
Рис. 141. Частотные характеристики генератора колебаний:
а — зависимость частоты от длины линии обратной связи; б — зависимость
частоты от давления питания при различной длине линии обратной связи
порциональна корню квадратному из абсолютной температуры,
т. е. f = V Т. Это было использовано для построения датчика
температуры.
Рис. 142. Струйный моду-
лятор-усилитель:
а — схема; б — характери-
стика элемента
Генератор колебаний на турбулентном усилителе можно
применять в струйных системах переменного тока как генератор
несущей частоты, частотный датчик температуры и в качестве
других элементов пневматической цепи переменного тока.
Струйный модулятор-усилитель. Одним из основных эле-
ментов цепи переменного тока является модулятор, состоящий
из двух турбулентных усилителей (рис. 142, а). Один из них
258
является генератором колебаний, выходной сигнал р~ кото-
рого в качестве несущей подается на один из входов другого
турбулентного усилителя. На второй вход турбулентного уси-
лителя подается сигнал р= постоянного тока, модулирующий
несущую частоту. Характерной особенностью рассматриваемого
типа модулятора является сочетание свойств модуляции с одно-
временным усилением входного сигнала. Поэтому выходной
сигнал р~ =—kpT’ где&>1. Испытания модулятора-
усилителя проводились на разных частотах от нескольких
Рис. 143. Струйный усилитель-преобразователь переменного тока с модуля-
тором:
а — схема; б, в — характеристики элемента
десятков герц до 400 Гц, при разных давлениях питания и плав-
ном изменении управляющего сигнала р= постоянного тока.
Из рассмотрения экспериментальных графиков (рис. 142, б)
следует, что для всех исследованных частот имеется линейный
рабочий участок I характеристики. С увеличением несущей
частоты f крутизна характеристики усилителя и выходная ам-
плитуда р~ уменьшались. Полоса пропускания частот моду-
лятора определяется несущей частотой.
Струйный усилитель-преобразователь переменного тока с
модулятором. Струйный усилитель с модулятором состоит
(рис. J43, а) из генератора несущей частоты 2, модулятора 3,
буферного турбулентного усилителя 1 и усилителя переменного
тока 4.
Система работает следующим образом. Колебания несущей
частоты f с амплитудой р~ от генератора 2 одновременно
поступают в модулятор 3 и в буферный каскад /, а с них в уси-
литель переменного тока 4. Буферный каскад служит для фор-
мирования на входе усилителя 4 сигнала с необходимой ампли-
тудой колебаний.
17* 259
Линия задержки /г, выполненная в виде канала диаметром
d = 2,2 мм и длиной 250 мм, предназначена для формирования
сдвига фаз между сигналом, промодулированным в усилителе 3,
и сигналом несущей частоты, поступающим с буферного
каскада 1.
Рис. 144. Струйный частотный дискриминатор:
а — схема; б, в — осциллограммы работы
Сигнал рр, поступающий на вход модулятора 3, модули-
рует несущую частоту, усиливается и через линию задержки 3
поступает на вход усилителя переменного тока 4, где снова
происходит усиление входного сигнала на переменном токе.
В зависимости от сдвига фаз ср между сигналами одной и
той же несущей частоты, поступающими на вход усилителя 4 с
каскадов 1 и 3, можно менять характеристику усилителя.
260
Проведенные экспериментальные исследования показали,
что крутизна характеристики усилителя существенно зависит
от сдвига фаз ф между переменным сигналом управления р~
и сигналом несущей частоты (рис. 143,6). При ф = 0 коэффи-
циент усиления равен 0, при ф = л коэффициент усиления
получается максимальным. График зависимости коэффициента
усиления tg а = —-— от угла сдвига фаз <р показан на
Р7
рис. 143, в. Зависимости, представленные на рис. 143,6, в, сняты
при ро = 180 мм вод. ст., р~ = 65 мм вод. ст. и f = 250 Гц.
Рассматриваемый усилитель может быть использован как
фазовый дискриминатор.
Струйный частотный дискриминатор. В технике переменно-
го тока часто возникает необходимость сложения или вычитания
сигналов переменного тока с одинаковыми амплитудами, но
отличающихся по частоте. Эту роль выполняет частотный дис-
криминатор. Струйный частотный дискриминатор (рис. 144, а)
состоит из двух струйных элементов 1 и 3, работающих в ре-
жиме генератора, с выхода которых сигналы переменного тока
подаются на входы струйного элемента 2.'
Настройка частот fi и f2 генераторов 1 и 3 осуществляется
с помощью линии задержек 1\ и /2. Один из генераторов служит
источником опорной частоты. Частоту второго генератора мож-
но изменять в зависимости от изменяемого параметра (темпе-
ратуры, давления, механического перемещения и т. д.). Таким
образом, этот генератор может служить датчиком некоторого
физического параметра.
Струйный частотный дискриминатор работает в двух режи-
мах. Если частоты обоих генераторов близки fi « f2, то в ре-
зультате сравнения этих частот на выходе получаются биения
частот с амплитудой и частотой Д/ = f\ —f2. Система имеет
высокую чувствительность и реагирует на малые изменения
частот измерительного генератора (датчика). На осциллограм-
ме рис. 144,6 представлены биения двух близких частот
Если частота эталонного генератора значительно выше
частоты измерительного генератора, т. е. f\ f2, то в рассмат-
риваемой системе имеет место амплитудно-частотная модуля-
ция. ^Экспериментально полученные осциллограммы, иллюстри-
рующие этот режим работы, показаны на рис. 144, в, где сверху
показаны колебания с частотой f2 генератора 3, в средней ча-
сти — колебания с частотой f 1 генератора /, а внизу — выходной
сигнал р~ . При проведении эксперимента fi = 330 Гц, f2 =
= 80 Гц, ро = 180 мм вод. ст.
Глава VII
ПНЕВМАТИЧЕСКИЕ ДАТЧИКИ
И ПРЕОБРАЗОВАТЕЛИ
Датчиком называется элемент системы автоматического
контроля, регулирования или управления, предназначенный
для преобразования измеряемого (регулируемого) физического
параметра в другой физический параметр, который может быть
использован в качестве носителя рабочих сигналов в регули-
рующих и вычислительных системах. В частном случае датчик
может служить также и для преобразования физических
величин. В этом случае имеет значение масштаб преобразова-
ния, который выбирают с таким расчетом, чтобы выходная
величина изменялась в пределах, определяемых прибором пли
регулятором, подключенным к выходу датчика.
Пневматические датчики преобразуют контролируемые и
регулируемые величины различной физической природы в
пневматические сигналы, используемые для управления раз-
личного рода пневматическими приборами и регуляторами.
Любой пневматический датчик состоит из измерительного
устройства и пневмопреобразователя, преобразующего пере-
мещение или усилие в пневматический сигнал давления. Важ-
нейшим элементом измерительного устройства является чув-
ствительный орган, который непосредственно воспринимает
изменение контролируемого или регулируемого пара-
метра.
В качестве чувствительных органов в датчиках могут быть
использованы эластичные и упругие мембраны, сильфоны,
трубчатые пружины, термометрические баллоны (термобалло-
ны), поплавки, диафрагмы и т. д.
Чувствительный орган непосредственно воспринимает воз-
действие измеряемого параметра, поэтому он в наибольшей
степени подвержен тепловым, химическим, механическим и
иного рода воздействиям. В этом отношении другие элементы
системы управления или измерения такие, как вторичные
измерительные приборы, регулирующие блоки и вычислитель-
ные устройства, находятся в лучших условиях, так как
устанавливаются в помещения с нормальной температурой и
незагрязненным воздухом. Поэтому к датчикам и их чувстви-
тельным органам предъявляют наиболее жесткие требования.
262
Датчики обычно снабжают измерительными приборами, а
иногда и самопишущими приборами. Это позволяет контроли-
ровать работу датчика и судить о его исправности. Следователь-
но датчики, которые могут служить также целям измерения,
делят на шкальные и бесшкальные.
После пневмопреобразователя, включающего, как правило,
в качестве выходного каскада пневматический усилитель мощ-
ности, следует пневматическая дистанционная линия, по кото-
рой выходной сигнал датчика поступает к пневматическим
приборам и регуляторам. Некоторые датчики могут иметь
чувствительный орган, который удален на значительное рас-
стояние от самого датчика. Примером может служить датчик
температуры, чувствительный орган которого — термобаллон
располагают обычно на значительном расстоянии от датчика и
соединяют с последним капиллярной трубкой.
Преобразователи трансформируют один вид сигнала в дру-
гой по форме (например, дискретный сигнал в непрерывный и
наоборот) либо по виду энергии (например, электрический
сигнал в пневматический или механическое перемещение в пнев-
матический сигнал, причем последний используется в качестве
носителя информации). Таким образом, преобразователи могут
также выполнять роль датчиков. Как пример можно назвать
преобразователь температуры, в котором термометр сопротив-
ления служит чувствительным органом. Однако преобразовате-
ли в основном применяют для переработки сигналов, являющих-
ся носителями информации в схемах вычислительных и
регулирующих устройств. Примером тому может служить пнев-
моэлектрический и электропневматический преобразователи,
трансформирующие пневматические сигналы в электрические и
наоборот. Датчики и преобразователи могут быть реализованы
на основе использования пневмомеханического принципа, с при-
менением мембран и иных упругих элементов и построены по
принципу компенсации перемещений, компенсации сил или рас-
ходов или же с применением элементов струйной техники (пнев-
моники).
1. ДАТЧИКИ И ПРЕОБРАЗОВАТЕЛИ ФИЗИЧЕСКИХ
ПАРАМЕТРОВ ПНЕВМОМЕХАНИЧЕСКОГО ДЕЙСТВИЯ
Датчик температуры. Наибольшее распространение в раз-
личных отраслях промышленности получили манометрические
термометры с пневматической дистанционной передачей [38].
В качестве чувствительных органов в манометрических датчиках
применяют термобаллоны. Датчики температуры по виду жид-
кости, заполняющей термобаллон, делят на газовые, жидкостные
и ртутные. В каждой из указанных групп могут быть датчики,
в состав которых входят либо показывающие измерительные
приборы, либо самопишущие приборы, либо датчики без указан-
263
ных приборов. Выпускаемые нашей промышленностью датчики
температуры предназначены для работы в комплекте с вторич-
ными измерительными приборами и регулирующими блоками
систем АУС и УСЭППА.
Измерительные системы датчиков температуры заполняют
нейтральным газом (азотом), что позволяет измерять темпера-
туру в диапазоне от —60 до +600° С; жидкостных термомет-
ров— жидкостями: пропиловым
Рг 11
|ЛЛЛАЛЬ^
[ ллЛл|
Рис. 145. Схема манометрического бесшкаль-
ного термометра ТП-331 с пневматической
дистанционный передачей
алкоголем (от 60 до +60° С),
толуолом (от —40 до
+ 160° С), ксилолом (от 0
до 300° С). Измеритель-
ные системы ртутных тер-
мометрических датчиков
температуры заполняют
ртутью. Это дает возмож-
ность измерять темпера-
туру в диапазоне от —30
до +600° С. Принцип из-
мерения температуры та-
кими датчиками состоит в
том, что при нагревании
термобаллона с газом или
жидкостью пропорцио-
нально температур-e изме-
няется давление в балло-
не или его объем.
Рассмотрим схему и
принцип действия мано-
метрического бесшкаль-
ного термометра ТП-331
с пневматической дистан-
ционной передачей, пред-
назначенного для измерения температур от —60 до +600° С
(рис. 145). Прибор включает измерительную манометрическую
систему, состоящую из термобаллона /, капилляра 2, сильфона 3
с внешним кожухом и передающего штока 4\ задатчик с пружи-
ной 5 и регулируемым винтом 6; суммирующую рычажную си-
стему (рычаги 7 и 3, подвижная опора 9); пневмопреобразова-
тель 13 усилия в давление воздуха и устройство 11 запаздываю-
щей отрицательной обратной связи (предварения).
Термобаллон 1 помещают в среду, температуру
необходимо измерить и преобразовать в давление
воздуха. При изменении температуры, например
увеличении, давление газа в баллоне 1 также возрастает про-
порционально температуре и это изменение давления по капил-
лярной трубке 2 передается в пространство над сильфоном 3,
что ведет к появлению дополнительной силы, которая через
шток 4 передается на рычаг 7, вращающийся вокруг оси 10.
264
которой
сжатого
при ее
Часть этой силы через шток передается на мембрану пневмо-
преобразователя 13. Действующее на мембрану с противопо-
ложной стороны выходное давление создает уравновешиваю-
щую силу. Со стороны рычага 8 через подвижную опору 9 на
рычаг 7 действует дополнительная сила отрицательной обрат-
ной связи, запаздывающая во времени и создающая эффект
предварения. Запаздывание во времени реализуется введением
в схему регулируемого дросселя времени предварения 12 с ем-
костью 11 между сильфоном и кожухом.
Перемещение подвижной опоры 9 позволяет изменять
коэффициент отрицательной обратной связи и, следовательно,
коэффициент усиления всего устройства в целом, а также
диапазон измерения.
Пружина 5 и регулировочный винт 6 предназначены для
задания нижнего предела измерения.
Для отыскания уравнения датчика необходимо составить
уравнения отдельных звеньев, входящих в него.
Чувствительный элемент (термобаллон 1 с соединительной
трубкой 2 и емкостью над сильфоном 3) в качестве входной
величины имеет температуру Т окружающей термобаллон сре-
ды, а в качестве выходной — давление р\. Изменение емкости
термобаллона, соединительной капиллярной трубки и объема
между сильфоном 3 и кожухом, обусловленное перемещением
донышка сильфона, мало и поэтому им можно пренебречь по
сравнению с суммарным объемом. В качестве приближенного
уравнения, описывающего изменение давления р\ в зависимости
от изменения температуры Т во времени, можно принять урав-
нение апериодического звена
(T1S+ 1)р, =
где Ti — постоянная времени; s = —— — оператор дифферен-
dt
цирования; k\ — коэффициент усиления.
Давление рх преобразуется в усилие Л/\ сильфоном с эффек-
тивной площадью Fci, причем перемещение сильфона мало, и
поэтому им можно пренебречь и, следовательно, можно не
учитывать противодействующую силу, возникающую из-за
жесткости сильфона. С учетом сказанного уравнение сильфона,
характеризующее преобразование давления в силу, можно
записать в следующем виде:
^1 = Pl^cl -
Рычажная система датчика предназначена для суммирова-
ния усилий N2, N5f действующих со стороны сильфона 3
(см. рис. 145), пружинного задатчика 5, 6 и сильфона 11 эле-
мента предварения. Суммарное усилие 7V3 передается затем
через шток на мембрану пневмопреобразователя. Расчетная
схема рычажной системы представлена на рис. 146. Перемеще-
265
нием подвижной опоры (позиция 9 на рис. 145) можно изменять
длины соответствующих плеч рычагов и тем самым перена-
страивать общий коэффициент усиления датчика. Для опреде-
ления выходного усилия W3 в зависимости от входных усилий
TVi, N%, Ns составим уравнения моментов сил относительно осей
вращения 1 и 2 (рис. 146):
Л/\ (а + b -г с) = N2 (я + Ь + с) + W3 (Ь + с) + N4с;
N5(d + e) = N4e.
Исключая усилие TV4, действующее на рычаги со стороны
подвижной опоры, получим
W3 = (Wi-Mv— + (1 +— }(-T—Y
\ b + c / \ е / \ b + с /
Введя обозначения
окончательно будем иметь
yV3 = (^-^)ei_^82.
Пневмопреобразователь 13 (см. рис. 145) предназначен для
преобразования силы У73 в пропорциональное ей давление. Это
Рис. 146. Схема
рычажной системы
звено состоит из двух каскадов усиления. Пер-
вый каскад — усилитель сопло — заслонка,
второй каскад — усилитель мощности. Благо-
даря тому, что объемы камер пневмопреобра-
зователя незначительны и пневматические со-
противления также малы, переходные процес-
сы в пневмопреобразователе протекают зна-
чительно быстрее, чем, например, переходный
процесс нарастания давления в термобаллоне
при увеличении температуры. Эти переходные
процессы можно не учитывать и считать пнев-
мопреобразователь чисто статическим звеном,
описываемым уравнением
N3 = pF,
где р — давление на выходе пневмопреобразователя; F— эф-
фективная площадь мембраны.
Пневмопреобразователь работает по принципу компенсации
усилий. Поэтому перемещение мембраны, на которую передает-
ся усилие N3l очень мало, следовательно, эффективная площадь
F практически остается постоянной.
Элемент предварения состоит из регулируемого пневмати-
ческого сопротивления 12 и емкости. Если принять, что сопро-
266
тивление линейно, то элемент предварения можно описать
уравнением апериодического звена (см. гл. III, п. 2):
(T2S+ 1)р2 = Р,
где гг — постоянная времени.
Давление р2 преобразуется в силу 7V& сильфоном. Уравнение
сильфона, если пренебречь его ходом, будет иметь вид
N5 = pFc2,
т%е Fc2 — эффективная площадь сильфона.
За исходный статический режим выберем положение си-
стемы, когда сила N\ равна силе W2. Будем рассматривать
отклонение давлений температуры и других параметров именно
от этого исходного статического режима. Запишем исходную
систему уравнений при этих условиях:
Cqs-b l)6pi =£1бТ;
= /?с1бр1;
бм3 = бм^—6w5e5; (122}
6N3 = 6pF; '
(t2s + 1 )бр2 = бр;
6W5 = 6p2Fc2.
Здесь 6 обозначает приращение соответствующих парамет-
ров относительно их значений на выбранном исходном статиче-
ском режиме.
Из системы уравнений (122) исключим все переменные,
кроме входного параметра — температуры дТ и выходного пара-
метра—давления др. Тогда передаточная функция датчика
др = £ (T2S + 1)
ST (t2s+ 1)(t1s+ 1)
где
F
'о =------------Т2’
F + F С2&2
k\&\FC2
F + FC2&2
причем k — коэффициент усиления датчика.
Так как т2' мало, им можно пренебречь, и тогда прибли-
женную передаточную функцию системы можно записать
в следующем виде:
dp _ тг$-4-1
дТ Tjs 4-1
а уравнение датчика примет вид выражения
(tjS + 1)бр = £(т2$ + 1)бТ.
(123)
267
Из последнего уравнения видно, что тг является временем
предварения.
В статическом режиме
dp = kf>T. (124}
Для определения изменения давления др на выходе датчика
во времени решим уравнение (123) в предположении, что темпе-
ратура в начальный момент времени претерпевает скачкообраз-
ное изменение от своего значения на исходном статическом ре-
жиме, т. е.
/<0, 6Г = 0; |
/>0, 6Г = 6Т1. /
Найдем значение давления на выходе датчика температуры
дро в момент времени t = 0, для чего проинтегрируем уравнение,,
умножив предварительно его на dt\
Ър0 t* 5Л t*
ddp + J dpdt = kx2 J ddT + k J dTdt.
bo oo
Вследствие того, что /* = 0 (рассматривается нулевой момент
i*
времени), интегралы у dpdt и у dTdt будут равны нулю и
о о
для приращения давления в нулевой момент получим следующее
выражение:
т16р0 = йт26Г1 и dpo = k — 67\.
Т1
Из последнего равенства следует, что в первый момент вре-
мени давление на выходе достигает значительной величины. Ре-
шение уравнения (123) будет представлять собой сумму общего»
решения (динамическая часть) и частного решения [статическая
часть — уравнение (124)]. Общее решение является решением
уравнения
и имеет вид
6рд = С е .
Следовательно, решение уравнения (123) будет
____________________________t_
dp = Ce Т1+/г67\. (125)
Постоянная интегрирования С в этом уравнении определяет-
ся из условия, что при t = 0
бр = бр0 = ^-^-6Т1.
Т1
268
Подставляя в уравнение (125) найденное таким способом
С = k81\ ( — 1 ,
«окончательно получим
бр = k8T{
Из полученного решения следует, что в начальный момент
времени на выходе происходит увеличение давления до величины
k — 6Tj (в этом проявляется эффект предварения), а затем мед-
*1
ленный спад до установившегося значения k8T{ (кривая 2 на
рис. 147). В реальной системе давление сразу не может возрасти
Рис. 147. Изменение давления
на выходе датчика при скачко-
образном изменении темпера-
туры:
1 — кривая изменения темпера-
туры; 2 — идеализированная кри-
вая изменения давления на выходе
датчика; 3 — реальная кривая из-
менения давления на выходе дат-
чика
Рис. 148. Структурная схема
датчика температуры ТП-331
до определенного значения, так как на это затрачивается неко-
торое время (кривая 3). При выводе уравнения было получено
несколько идеализированное решение, так как в ходе решения
были приняты некоторые допущения. На основании системы
уравнений (122) и схемы датчика, представленной на рис. 145,
можно составить структурную схему датчика температуры
(рис. М8). В каждом прямоугольнике, обозначающем отдельное
звено датчика температуры, записывается его передаточная
функция (в общем случае динамический коэффициент усиления
звена).
Датчик уровня бесшкальный компенсационный У П-332.
Датчик УП-332 (рис. 149) предназначен для измерения уровня
жидкостей в открытых или находящихся под давлением сосудах.
Юн снабжен дистанционной пневматической передачей и работа-
ет совместно с измерительными приборами и блоками АУС и
УСЭППА. Принцип измерения уровня жидкости основан на ис-
пользовании эффекта потери веса тонущего поплавка при увели-
269
чении уровня (при погружении). Датчик уровня отличается от
датчика температуры, описанного выше лишь чувствительным!
элементом, в качестве которого Здесь применен тонущий по-
плавок.
Измерительная часть датчика уровня состоит из буйка
трехплечего рычага 2 и уплотнительного сильфона 3. Устройство
задания (винт 4 и пружина 5) служит для настройки начальной
точки или того значения:
уровня жидкости, с кото-
рого датчик начинает вы-
давать показания.. Меха-
ническая рычажная систе-
ма, включающая тягу 7У
рычаги 8 и 11, преобразу-
ет моменты, создаваемые
усилием Л^2, развиваемым
пружиной 5, и усилием S„
создаваемым поплавком,,
в усилие М3, передавае-
мое через шток на мем-
брану пневмопреобразо-
вателя 15. Пневмопреоб-
разователь 15 работает
по принципу компенсации
усилий и имеет два кас-
када усиления. Первый
каскад усиления — усили-
тель давления реализован
в виде усилителя типа
сопло — заслонка, а вто-
рой каскад — усилитель
мощности в виде мощно-
го управляемого клапана. Часть усилия с рычага 8 через под-
вижную регулируемую опору 9 и рычаг И передается на шток
элемента предварения 12.
Перемещаемая опора 9 изменяет соотношение длин плеч ры-
чагов 8 и И и тем самым коэффициент усиления датчика. На-
стройка коэффициента усиления датчика необходима при изме-
нении диапазона измерения уровня и корректировке выходного
сигнала в соответствии с изменением плотности контролируемой
жидкости.
Элемент предварения предназначен для введения производной
в закон изменения выходного давления р датчика уровня и со-
стоит из пневматического апериодического звена, составленного
из регулируемого сопротивления для настройки времени предва-
рения 13, надсильфрнной емкости и сильфона 14. Вход апериоди-
ческого звена (регулируемый дроссель 13) включен к выходу
датчика. Сильфон 14 преобразует давление, возникающее на вы-
270
ходе апериодического звена, в усилие. За счет элемента предва-
рения введена запаздывающая отрицательная обратная связь.
Это приводит к тому, что при изменении входного сигнала (уров-
ня жидкости) из-за отсутствия в первое время отрицательной
обратной связи на выходе резко возрастает давление, которое
затем уменьшается по мере увеличения действия отрицательной
обратной связи. Давление питания датчика составляет 0,14 МПа.
Найдем выражение, устанавливающее связь между давлени-
ем на выходе р и изменением уровня жидкости Л, для чего запи-
шем систему уравнений, характеризующих работу датчика
уровня:
1) N2m = Sl + Nxm\
2) Nx(a + b + c) = N3(b + c) + N4c;
3) N3 = Fp',
4) N5 = Fz2P\\
5) W5(d + e) =
6) (rs + l)p, = p;
7) S = G—Л<руж;
(126)
здесь N2 — сила натяжения настроечной пружины 5; S — усилие,,
действующее со стороны поплавка на рычаг длиной /; Afb N3,
N3, a, b, с, d, е — силы и длины плеч рычагов (см. рис. 146);
F — эффективная площадь мембраны пневмопреобразователя;.
FC2 — эффективная площадь сильфона 14 элемента предварения;
Pi — давление на выходе апериодического звена элемента пред-
варения; G — сила тяжести поплавка; h — высота уровня жид-
кости; уж — удельный вес жидкости; ср — площадь поперечного-
сечения поплавка; т — постоянная времени апериодического зве-
на элемента предварения.
В приведенной системе уравнение 1) представляет собой
уравнение равенства моментов относительно точки 6\ 2) —урав-
нение равенства моментов вокруг точки 10, суммируемых на ры-
чаге <?; 3) — выражение для усилия, создаваемого пневмопреоб-
разователем; 4) —выражение для усилия, создаваемого силь-
фоном 14 элемента предварения; 5) — уравнение равенства
моментов на рычаге 11\ 6) —уравнение апериодического звена
элемента предварения и, наконец, 7) — уравнение усилия, дей-
ствующего со стороны поплавка.
Исключая из системы уравнений (126) все переменные, кро-
ме выходного давления р и входной величины уровня Л, получим
(т^Ч- 1)р = А + x2sh + Bh, (127)
где
т = F т; А = !Ne'~GWi .
F 4" FC2&2 F + FC2&2
271
ФУжеЗе! д». g = ФУжеЗе1
Р 4“ ^С2е2 Р 4“ Fc2&2
Член X2sh учитывает воздействие по производной.
Как следует из последних выражений, ti мало по сравнению
с т2 и поэтому в некоторых частных случаях им можно прене-
бречь и, следовательно,
р = /1 Т2 s/i -f- Bh.
В статическом режиме уравнение датчика уровня имеет вид
р = А 4- Bh.
В отличие от уравнения (124) статического режима датчика
температуры здесь присутствует постоянная А, соответствующая
давлению на выходе датчика при h = 0, что объясняется отсче-
том переменных от исходного статического режима р = 0.
При перемещении подвижной опоры 9 изменяются значения
всех коэффициентов уравнения (127), так как при этом изменя-
ются 8! и 82. Поэтому при настройке коэффициента усиления В
одновременно изменяются и постоянные времени xi и т2 и началь-
ное давление А. Это свидетельствует о взаимозависимости на-
строек. После настройки коэффициента В можно с помощью
пружины 5 перенастроить коэффициент Л, а с помощью дросселя
13— постоянные времени п и Т2- Действуя в описанной ранее
последовательности, можно найти давление на выходе датчика
в момент времени t = 0:
Ро — —~ h\ + А.
Решение уравнения (127) имеет следующий вид:
_______________________________t__
p=(—hx— Bhx]t +A + Bhx
\ Tq /
при скачкообразном изменении входного сигнала
(t < 0, h = 0;
U>0, h = hx.
Электропневматические преобразователи. В пневмоавтома-
тике для трансформации сигнала электрического тока в пропор-
циональный ему пневматический сигнал в форме давления сжа-
того воздуха применяют электропневматические преобразовате-
ли. В релейной пневматической технике применяют дискретные
272
электропневмопреобразователи, которые преобразуют сигналы
электрического тока, равные нулю и единице, в пневматические
сигналы с уровнями, соответствующими нулю и единице. В этом
разделе в качестве примера рассмотрим непрерывный электро-
пневмопреобразователь ЭП-56Б.
Электропневматический преобразователь ЭП-56Б преобра-
зует входные сигналы постоянного тока, изменяющиеся в преде-
лах от 0 до 5 мА, в пропорциональный выходной пневматический
сигнал, изменяющийся в
диапазоне от 0,02 до
0,1 МПа. Электропневмо-
преобразователь ЭП-56Б
предназначен для работы
в комплекте с нормирую-
щими электропреобразо-
вателями типов НП-Т,
НП-С и НП-П [38]. Ука-
занные электропреобра-
зователи входят в состав
универсальной электрон-
ной агрегатной унифици-
рованной системы прибо-
ров автоматического кон-
Рис. 150. Схема электропневматического
преобразователя ЭП-56Б
троля и регулирования (ЭАУС-У). Роль этих преобразователей
сводится к преобразованию сигналов постоянного тока нестан-
дартного диапазона в стандартный сигнал постоянного тока, из-
меняющийся в пределах 0—5 мА.
Принципиальная схема преобразователя ЭП-56Б представле-
на на рис. 150.
Одной из основных частей преобразователя является рычаг
5, который может поворачиваться относительно крестовой опо-
ры 6. На рычаге происходит сложение сил и М2, первая из ко-
торых действует со стороны катушки 2, находящейся в поле
постоянного магнита /, а вторая —со стороны спиральной пру-
жины 7, причем сила М2 компенсирует действие силы созда-
вая относительно крестовой опоры 6 тот же момент, что и сила
iVj. В этом смысле она действует как отрицательная обратная
связь.
Сила отрицательной обратной связи М2 возникает за счет за-
крутки на угол, а пружины 7, один конец которой жестко соеди-
нен с правым концом рычага 5, а второй конец с осью 8. Поворот
оси 8 происходит от перемещения дна сильфона 11 под дейст-
вием выходного давления р преобразователя. Дно сильфона
механически связано с. осью 8 через шток 10 и рычаг 9.
На суммирующем рычаге 5 укреплена заслонка 3, которая
управляет соплом 4 мембранного усилителя мощности.
Мембранный усилитель мощности формирует выходное дав-
ление р, подаваемое одновременно в камеру, расположенную
18 Заказ 993
273
вад сильфоном 11 отрицательной обратной связи. Он имеет два
каскада усиления. Первый каскад усиления включает усилитель
типа сопло — заслонка, состоящий из сопла 4 и постоянного
дросселя 15, а второй каскад — сдвоенные мембраны с полым
штоком 16 и подпружиненным клапаном 17.
Для улучшения качества статической характеристики перво-
го каскада усиления (усилителя типа сопло — заслонка) на по-
стоянном дросселе 15 с помощью специального устройства, со-
стоящего из мембраны 13, пружины 12 и шарикового подпружи-
ненного клапана 14, создается постоянный перепад давлений.
При падении давления в междроссельной камере, которая соеди-
нена каналом с пространством над сдвоенной мембраной 16,
подает также давление питания усилителя сопло — заслонка
перед постоянным дросселем 15. При этом разность давлений на
дросселе 15 всегда остается постоянной.
Малейшее перемещение заслонки (в пределах 0,01 мм) отно-
сительно сопла 4 приводит к резкому возрастанию давления р,
причем нарастание давления р будет происходить до тех пор,
пока не станут равными моменты, создаваемые силами Nx и N2
относительно крестовой опоры 6. Так как перемещение заслон-
ки 3 относительно сопла 4 ничтожно мало по сравнению с раз-
мерами рычага 5, то практически рычаг 5 остается непод-
вижным.
Увеличение тока в катушке 2 вызывает пропорциональное
увеличение силы и некоторое смещение заслонки 3 относи-
тельно сопла 4, что влечет за собой рост давления р, перемеще-
ние дна сильфона 11 и штока 10 вверх и закрутку спиральной
пружины 7. Благодаря этому сила N2 также возрастает.
Уравнение электропневмопреобразователя можно получить
путем решения системы уравнений, каждое из которых описыва-
ет работу отдельного звена. Преобразователь работает по прин-
ципу компенсации сил, поэтому его основным уравнением будет
уравнение баланса сил на рычаге 5.
При выводе уравнений отдельных звеньев сделаем следую-
щие упрощающие допущения:
1. Силой реакции струи сопла 4 на рычаг 5 пренебрегаем
ввиду ее малости по сравнению с силами, действующими со сто-
роны спиральной пружины 7 и катушки 2.
2. Не будем учитывать силу, действующую со стороны спи-
ральной пружины 13 на шток 10, так как она мала по сравнению
с силой, развиваемой сильфоном 11.
3. Будем считать, что мембранный усилитель представляет
собой чисто усилительное звено, и переходные процессы, проте-
кающие при заполнении камеры, располагающейся над сильфо-
ном отрицательной обратной связи 11, учитывать не будем.
4. Так .как ускорения отдельных подвижных элементов пре-
образователя и их массы сравнительно невелики, силы инерции^
развиваемые этими элементами при их движении, учитывать не
274-
будем. Не будем учитывать также и действие демпфирующих
сил, пропорциональных скорости движения.
При упрощающих допущениях систему уравнений отдельных
звеньев можно представить в следующем виде:
1) Nx = ki;
2) WH)fe;
3) Af2=qa; > (128)
4) х = ad;
5) pF = c2x,
где A7i — электромагнитная сила, развиваемая катушкой 2 с то-
ком п действующая на рычаг 5; k — коэффициент пропорцио-
нальности, зависящий от общей дли-
ны витков проволоки катушки 2
(I = д£>и), находящихся в магнит-
ном поле постоянного магнита 1 с
магнитной индукцией В, т. е. k =
= nDnB, причем D — средний диа-
метр катушки, а п — число витков;
i — постоянный ток, протекающий в
катушке 2; a, ft, d — длины рычагов
(см. рис. 150); N2— сила, действую-
щая со стороны спиральной пружи-
ны на суммирующий р-ычаг 5; Nu —
ристика электропневмэтическо-
го преобразователя ЭП-56Б
начальная сила, настраиваемая по-
воротом рычага 9 относительно оси 8 и обусловливающая на-
чальное давление на выходе преобразователя при i = 0; С\ —
жесткость спиральной пружины 7; а— угол поворота оси 8 в
рад; х — перемещение донышка сильфона 11; р — давление воз-
духа на выходе датчика; F — эффективная площадь сильфона
11; с2— жесткость сильфона 11 с цилиндрической пружиной.
В системе уравнений (128) уравнение 1) описывает работу
звена, состоящего из постоянного магнита 1 и катушки 2, преоб-
разующего электрический ток I в силу Nh действующую на ры-
чаг 5. Уравнение 2) суммирующего рычага 5 отражает равенст-
во моментов относительно крестовой опоры 5, причем сила N2
отрицательной обратной связи, уравновешивающая момент, соз-
даваемый силой 2V1, образуется в результате поворота рычага 9
на угол а и закрутки на тот же угол спиральной пружины 7.
Этот факт учитывается уравнением 3), которое является урав-
нением звена, состоящего из рычага 9, оси 8 и спиральной пру-
жины 7. Уравнение 4) выявляет связь между перемещением дна
сильфона х и углом поворота а, а последнее-уравнение 5) опи-
сывает работу сильфона 11 отрицательной обратной связи, пре-
образующего выходное давление р в перемещение х. Исключая
из системы уравнения (128) все переменные, кроме выходного
18*
275
давления р и входного параметра — тока г, получаем уравнение
статики электропневмопреобразователя:
p = Ai + p„,
где
ЛкаДсп 1 о А/..de?
= —= pH=-JL/-
CiFb CiF
Статическая характеристика преобразователя показана на
рис. 151.
2. ДАТЧИКИ ФИЗИЧЕСКИХ ПАРАМЕТРОВ
С ПРИМЕНЕНИЕМ ЭЛЕМЕНТОВ СТРУЙНОЙ ТЕХНИКИ
Пневматические датчики температуры без подвижных дета-
лей. Если ламинарный пневматический дроссель подвергнуть
нагреванию, то его сопротивление возрастает. Это обстоятель-
ство может быть использовано для создания пневматических
датчиков температуры.
Зависимость пневматических ламинарных сопротивлений ог
температуры объясняется интенсивным расширением воздуха
^44
• г..
штш! q
Рис. 152. Проточная пневма-
внутри сопротивления при увеличении
температуры последнего. Кроме того,
происходит возрастание вязкости воз-
духа, это также увеличивает сопротив-
ление. Расширение материала, из ко-
тическая камера, составлен-
ная из последовательно
включенных турбулентного
и ламинарного дросселей и
предназначенная для изме-
торого выполнено пневматическое ла-
минарное сопротивление, вызывает
обратный эффект, который, однако,
очень незначительно сказывается на
общей картине процесса, так как уве-
рения температуры личение объема газа гораздо более
значительно, чем увеличение объема
твердого тела. Однако всегда представляется возможность таким
образом выбрать параметры ламинарного дросселя, что измене-
ние температуры либо совсем не будет сказываться на изменении
пневматического сопротивления, либо это изменение будет ни-
чтожно малым.
Увеличение сопротивления пневматического ламинарного
дросселя при увеличении температуры можно объяснить следу-
ющим образом. При нагревании газа, протекающего, например,
через дроссель 2, включенный в делитель давления (рис. 152),
в системе происходит расширение газа и, как следствие этого,
увеличение скорости течения. Но увеличение скорости течения
может быть достигнуто только при увеличении перепада давле-
ний на дросселе, т. е. при увеличении давления что эквива-
лентно увеличению сопротивления дросселя 2.
&
276
Сопротивление турбулентных дросселей при их нагревании
тоже увеличивается, однако это увеличение не столь ярко выра-
жено, как у ламинарных дросселей.
Простейшим пневматическим датчиком температуры может
служить делитель (рис. 152), состоящий из турбулентного дрос-
селя 1 и ламинарного капиллярного дросселя 2.
Можно найти зависимость между температурой воздуха, про-
текающего через последовательно соединенные турбулентный
дроссель и ламинарный капилляр, и давлением воздуха в камере,
расположенной между дросселями 1 и 2 в статическом режиме.
Для этого необходимо приравнять расход воздуха через турбу-
лентный дроссель расходу воздуха через капилляр. Формирова-
нием параболического профиля скоростей на начальном участке
капилляра пренебрежем, т. е. расход воздуха через капилляр
будем рассчитывать по формуле Пуазейля. Тогда для случая до-
критического течения через турбулентный дроссель ( — ^0,5)
\ Ро /
будем иметь
HF I / — Р! (До—Pi) = , (129)
где FK — площадь поперечного сечения капилляра.
Следует учесть, что коэффициент динамической вязкости цд
также зависит от температуры, причем наиболее простой являет-
ся степенная зависимость
Ид _ А т V
Ндо \ То /
где цдо — динамическая вязкость воздуха при температуре То.
Показатель степени п для воздуха в диапазоне температур 90—
300° К равен 8/э, а при температурах 300—400° К п = 3Л- Исклю-
чив из уравнения (129) с помощью равенства (130) цд, получим
/ 2 2 \2п+1
т / Р1-Р2 \
\ V Р\(Ро — Pl)J
где постоянная величина
и, — . •
16л/|лдо.и/? / 2R
Поступая аналогичным образом, можно найти зависимость
между температурой Т и давлением в междроссельной камере
р для случая критического течения воздуха (pi/р0 0,5) через
турбулентный дроссель:
2
Ро J
277
где
V2F2kT2q
Cl i —----------•
16л/Цд0цГ у R
Температуру среды можно измерять с помощью пневматиче-
ских мостиковых схем, подобных электрическим мостам Уитсто-
на. Одна из таких схем представлена на рис. 153. В диагональ
моста включен дифференциальный манометр, измеряющий раз-
ность давлений, образующихся в междроссельных камерах верх-
ней и нижней ветвей моста. Нагревая сразу два ламинарных
дросселя верхней и нижней ветвей моста, один из которых яв-
ляется первым, а другой — вторым по потоку, можно существен-
но повысить чувствительность устройства. Для настройки на-
Ро
Рис. 153. Схема пневматического моста
Рис. 154. Зависимость пе-
репада давления в диаго-
нали моста от температу-
ры пневматического со-
противления
чальной разности Ар устанавливают регулируемое сопротив-
ление.
Попутно отметим, что пневматический мост может быть ис-
пользован для преобразования электрической величины в раз-
ность давлений. Так, например, электрический ток, проходящий
через нагревательную катушку, может отдавать тепло пневма-
тическому сопротивлению. Таким способом могут быть преобра-
зованы электрические величины в давление без подвижных
деталей. На рис. 154 показана зависимость перепада давлений
в диагонали моста от температуры сопротивления [46].
Разница между электрическим и пневматическим сопротив-
лением состоит в том, что при изменении температуры у первого
изменяется электрическая проводимость материала, а у второго
сопротивление зависит главным образом от свойств протекаю-
щего по нему газа.
Существенным недостатком способа измерения температуры
с помощью пневматических сопротивлений является низкое бы-
стродействие, что связано с необходимостью передачи тепла че-
рез стенки сопротивления к протекающему по нему газу. По-
этому такие датчики целесообразно применять при регулирова-
нии температуры объектов с большими постоянными времени.
278
Описанные датчики целесообразно использовать также в качест-
ве дискретных устройств для измерения положения уровня жид-
костей, имеющих очень низкую температуру, таких, как жидкий
кислород, азот и т. д. В этом случае из-за большой разности
температур сопротивления и жидкости скорость передачи тепла
через стенки металлической капиллярной трубки в начальный
период переходного процесса значительно возрастает.
Помимо проточных пневматических камер, содержащих тур-
булентные и ламинарные дроссели, и пневматических мостико-
вых схем для измерения
температуры применяют
струйные измерители тем-
пературы, которые пред-
ставляют собой струйные
элементы, имеющие раз-
нотипные каналы. Давле-
ние на выходе таких
струйных элементов суще-
ственно зависит от темпе-
ратуры измеряемой сре-
ды. На рис. 155, а дана
схема струйного элемен-
та, у которого питающий
Р
Рис. 155. Струйный датчик температуры:
а — схема; б — статическая характеристика
датчика
канал выполнен в виде
турбулентного дросселя /, а управляющим каналом является
ламинарный капилляр 2. Благодаря взаимодействию питающей
и управляющей струи результирующая струя отклоняется на
угол а и попадает в выходной канал 3. Зависимость tg а от абсо-
лютной температуры Т для случая взаимодействия турбулентной
и ламинарной струй выряжается равенством [26]
tg а =------------,
(374 + 5,03Г)2 Г
где с — постоянный коэффициент для элемента заданной геомет-
рии при неизменном давлении питания р0, заведенного в питаю-
щий канал /ив канал управления 2, и неизменном давлении ок-
ружающей среды.
При увеличении температуры окружающей струйный элемент
среды сопротивление ламинарного управляющего канала 2 воз-
растает, угол отклонения струи а уменьшается и давление в при-
емном канале 3 падает. Примерный вид зависимости давления
в приемном канале р от температуры в статике показан на
рис. 155, б.
Установлено также, что эффект отклонения результирующей
струи в зависимости от температуры получается и при однотип-
ных питающих и управляющих каналах (турбулентных или ла-
минарных), но при различной геометрии самих каналов (здесь
имеются в виду как размеры, так и форма каналов).
279
При изготовлении струйных элементов — датчиков темпера-
туры из термостойких материалов (керамики, специальных тем-
пературостойких сплавов) они могут работать при очень низких
и очень высоких температурах, при которых никакие другие дат-
чики работать не могут.
В самое последнее время в качестве датчиков (чувствитель-
ных элементов) температуры начинают применять струйные ге-
Рис. 156. Бистабильный
струйный элемент, рабо-
тающий в режиме генера-
тора, частота колебаний
которого зависит от тем-
пературы
Рис. 157. Примерный вид измене-
ния давления во времени на выхо-
де бистабильного струйного эле-
мента, работающего в режиме ге-
нератора (частотного датчика тем-
пературы)
нераторы, частота колебаний которых зависит от изменения тем-
пературы [58, 59].
Изменение частоты колебаний струйного элемента при изме-
нении температуры окружающей среды и, следовательно, темпе-
ратуры проходящего через него газа связано с зависимостью
скорости звука в газе от температуры. Как известно, скорость
звука а при условии, что процесс в звуковой волне адиабатиче-
ский, выражается формулой
a = ]/kRT,
где R — газовая постоянная; Т — абсолютная температура в гра-
дусах Кельвина. Таким образом, скорость звука зависит только
от температуры.
На рис. 156 представлена схема бистабильного струйного
элемента, каждый из выходов которого замкнут через канал I
отрицательной обратной связи на соответствующий вход элемен-
та. При изменении температуры окружающей элемент среды и
протекающего по нему воздуха будет изменяться скорость про-
хождения звуковой волны в линиях отрицательной обратной
связи. Например, при увеличении температуры время прохожде-
ния фронта звуковой волны по линии отрицательной обратной
связи будет уменьшаться и частота колебаний будет расти.
280
Частота струйных бистабильных генераторов колебаний может
быть подсчитана по формуле (см. рис. 157)
f = — =--------,
1 0 21 + 2тс
где 0 = 211с 4- 2т — период колебаний; / — длина линии отрица-
тельной обратной связи; т — время переключения струи из одного
стабильного положения в другое; с — скорость распространения
колебаний по каналу отрицательной обратной связи.
Если предположить, что скорость распространения колебаний
по каналу отрицательной обратной связи приближается к скоро-
сти звука, т. е. с ~ а, и время переключения т очень мало, то
f = —= ^kRT-. (131)
' 21 21 '
Из последнего равенства следует, что
df = — dT.
2Т
Таким образом, изменение частоты при данной температуре
пропорционально частоте, поэтому для увеличения чувствитель-
ности выгодно работать на больших частотах. Для получения
постоянного сигнала давления, зависящего от температуры, час-
тоту сигнала, поступающую от струйного генератора, предназна-
ченного для измерения температуры, смешивают с эталонной
частотой примерно той же величины, что и частота генератора.
Затем низкочастотный сигнал частоты биений при помощи схе-
мы, построенной на струйных элементах, превращают в постоян-
ный сигнал.
Струйный измеритель числа оборотов. Действие одного из
струйных измерителей числа оборотов основано на преобразова-
нии импульсов различной ширины в импульсы постоянной шири-
ны (независимо от частоты следования импульсов) и изменении
скважности следования импульсов в функции измеряемого числа
оборотов.
Принципиальная схема и циклограмма работы преобразова-
теля пока-заны на рис. 158, 159. Входной сигнал р{ с частотой
поступает в запоминающее устройство ЗУ и далее во временное
устройство ВУ, на выходе которого формируются импульсы оди-
наковой ширины, причем ширина импульсов не зависит от часто-
ты
До поступления очередного входного импульса давление пе-
редается от элемента памяти 5 по каналу 1 (рис. 158) на вход
логического элемента 4, выполняющего операцию И. При подаче
входного импульса давление с выхода элемента И передается
по каналу 3 на вход элемента памяти 5. Давление в канале 1 ис-
чезает, и входной сигнал на дальнейшее протекание процесса
влиять не будет. С выхода элемента памяти 5 давление переда-
281
ЗУ ВУ
Рис. 159. Циклограмма работы преоб-
разователя скважности
Рис. 158. Схема преобразователя
скважности
ется по каналу 2 положительной обратной связи ко второму ка-
налу управления, благодаря чему происходит запоминание сиг-
нала на выходе 13. Одновременно по каналу 12 сигнал с выхода
элемента 5 передается на вход усилителя 9, в котором происхо-
дит окончательное формирование выходного сигнала р2. При
поступлении давления в выходной канал 10 оно будет переда-
ваться также по каналу обратной связи 11 и через дроссель 8 в
камеру 7. С повышением давления в камере 7 оно начнет пере-
даваться по каналу 6 к элементу 5, и
произойдет переключение этого эле-
мента в исходное состояние. При
этом выходной сигнал р2 становится
равным нулю, а элемент 4 оказыва-
ется снова подготовленным к пере-
даче следующего сигнала р\.
Время протекания той части про-
цесса, которой определяется скваж-
ность импульсов, зависит от харак-
теристик дросселя 8 и камеры 7 и
не связано с продолжительностью
импульса р\. Поэтому, как показано
на рис. 159, при различных по про-
должительности входных импульсах
Рис. 161. Экспериментально по-
лученная зависимость у = 4>(f)
Р\ получаются импульсы р2 одина-
ковой длительности, равной т. Это подтверждается и экспери-
ментальными характеристиками, приведенными на рис. 160, 161.
Если время чередования импульсов р\ изменяется, то при раз-
личных периодах их повторения Л, Т2 и Т3 (на рис. 159) для р2
меняется скважность сигналов и, следовательно, величина, об-
ратная скважности у = т/Т. Так как Т = 1/f, где f — частота, то
у = rf. Таким образом, у прямо пропорциональна частоте f.
Экспериментальная характеристика показана на рис. 161.
Входное устройство в измерителе — диск с отверстиями, же-
стко связанный с валом и прерывающий струю в элементе
трубка—трубка, либо любой импульсный элемент, характери-
зующий вращательное движение. При изменении числа оборотов
вала (угловой скорости со) меняется частота повторения сигна-
лов на входе элемента 4 и изменяется скважность сигналов на
выходе элемента 9. От скважности сигналов зависит давление
в выходной камере 7, соединенной с выходным каналом элемен-
та 9 через дроссель 8.
3. ПРЕОБРАЗОВАТЕЛИ СИСТЕМ ПНЕВМОНИКИ
На выходе струйной управляющей части системы формиру-
ются сигналы низкого давления порядка 40—100 мм вод. ст. Эти
сигналы необходимо преобразовать для обеспечения воздейст-
вия на исполнительный механизм.
283
Ряд выпускаемых серийно датчиков технологических процес-
сов имеют электрический выходной сигнал. Чтобы подать такой
сигнал на вход струйной системы управления, его необходимо
преобразовать в пневматический сигнал определенного диапазо-
на. Необходимо также контролировать форму сигналов и объ-
ективно оценивать статические и динамические характеристики
струйных систем. Преобразование сигналов с выходов струйных
элементов и систем в электрические сигналы для обеспечения
соединения этих устройств с электронной осциллографирующей
и регистрирующей аппаратурой осуществляется с помощью
пневмоэлектрических преобразователей. Для индикации могут
быть использованы как пневмоэлектрические, так и пневмоме-
ханические преобразователи.
Устройства, соединяющие струйную управляющую часть
с исполнительными механизмами, определяются видом привода
и могут'быть пневмоэлектрическими, пневмогидравлическими,
пневмомеханическими, пневмопневматическими, преобразующи-
ми сигналы низкого давления в сигналы высокого давле-
ния — так называемые повысители давления и мощности. Ниже
будут рассмотрены некоторые наиболее распространенные пре-
образователи систем пневмоники [4, 35].
Пневмоэлектрические преобразователи. По назначению
пневмоэлектрические преобразователи систем пневмоники мож-
но подразделить на две группы: 1) преобразователи, используе-
мые для исследования струйных элементов и устройств и конт-
роля их параметров; 2) преобразователи, предназначенные для
получения электрического сигнала необходимой мощности в це-
пи управления.
Среди пневмоэлектропреобразователей, предназначенных
для контроля и исследования протекающих в струйных устрой-
ствах процессов, наибольшее распространение получили индук-
тивный аналоговый преобразователь типа ПЩ-12 — измеритель
давления; термоэлектрические струйные анемометры — измери-
тели расхода и чувствительные тензодатчики.
Пневматический щуп ПЩ-12 (рис. 162) [4] обеспечивает
безынерционный контроль давления низкого диапазона (2—
200 мм вод. ст.) и высокой частотой (до 600 Гц). Пневмощуп
отличается от ранее используемых приборов универсальностью
и удобством в эксплуатации. Он позволяет без какой-либо спе-
циальной усилительной электронной аппаратуры оперативно
контролировать с помощью стандартного электронного осцилло-
графа и звукового питающего генератора происходящие в струй-
ных устройствах процессы изменения давления как низкой, так
и высокой частот, оценивать длительность и форму пневмоим-
пульсов, а также уровень и характер шумов. Чувствительный
элемент пневмощупа представляет собой индуктивный датчик,
собранный по трансформаторной схеме (рис. 162, а). Пневмодат-
чик состоит из дифференциального трансформатора, в который
284
входят два магнитопровода У, замыкающиеся общей мембраной
6 из пермаллоя. Каждый магнитопровод имеет рабочий зазор 7
п дополнительный зазор: в одном магнитопроводе постоянный
зазор 3, а в другом — регулируемый зазор S, используемый для
точной балансировки магнитной системы. Первичные обмотки
75 дифференциального трансформатора, находящиеся на полых
кернах 5 магнитопроводов и питаемые от звукового генератора,
создают два встречных потока, сходящихся в мембране 6. При
подаче давления в канал 2 на вторичных обмотках 14 дифферен-
Рис. 162. Пневмощуп ПЩ-12:
а — конструктивная схема; б — схема включения
циального трансформатора образуется соответствующая раз-
ность напряжений. Тонкая мембрана толщиной 0,02—0,03 мм и
диаметром 12 мм, обеспечивающая высокие рабочие частоты и
чувствительность прибора, зажата между широкими торцами
двух металлических обойм 12. Собственная частота мембраны
порядка 6000 Гц. Точное фиксирование малых рабочих зазоров
порядка 0,02—0,04 мм, равных толщине прокладки 13, также
способствует увеличению чувствительности.
Объем пневмокамеры, ограниченной неметаллической шай-
бой 10, составляет величину всего 50 мм3 и при прогибе мембра-
ны увеличивается не более чем на 1,5 мм3.
Балансировка плеч дифференциального трансформатора при
давлении, равном нулю, осуществляется путем последователь-
ной подстройки активного сопротивления потенциометра 4 и ре-
активного сопротивления обмоток винтом 9, изменяющим вели-
чину регулируемого зазора. При подаче в камеру пневмощупа
контролируемого давления на выходе дифференциального транс-
форматора образуется разностное напряжение, поступающее
через согласующий повышающий резонансный трансформатор
И на вход электронного осциллографа.
С помощью двух пневмощупов и дополнительной аппаратуры
можно получать статические (квазистатические) характеристи-
285
ки струйных устройств (СУ). Установка для получения статиче-
ских характеристик (рис. 162, б) состоит из двух одинаковых
преобразующих каналов и генератора пилообразных сигналов
ГПС. В каждый канал входит пневмощуп ПЩ-12, звуковой пи-
тающий генератор ЗГ, усилитель-преобразователь УП, усилива-
ющий и демодулирующий сигнал с выхода пневмощупа ПЩ-12
и подающий его на соответствующие пластины электроннолуче-
вой трубки осциллографа.
Частоту генератора ГПС медленно меняющихся пилообраз-
ных пневматических сигналов выбирают порядка 0,1—0,5 Гц.
При подключении одного преобразующего канала и генератора
пневматических сигналов на вход СУ, а другого канала — к вы-
ходу этого устройства на экране осциллографа можно наблюдать
кривую зависимости выходного пневматического сигнала от
входного. Эту характеристику можно называть квазистатичес-
кой, так как ее снимают при изменяющемся входном давлении
/7ь К струйному устройству может быть присоединено нагрузоч-
ное сопротивление R.
Для оценки динамики устройства один пневмощуп подклю-
чают на вход, а другой — на выход контролируемого устройства.
Подавая на вход исследуемого устройства пневматические коле-
бания синусоидальной формы разных частот и одинаковой ам-
плитуды от какого-либо пневмогенератора, на выходе можно
фиксировать амплитуду и сдвиг фаз, и по этим данным постро-
ить амплитудную и фазовую частотные характеристики устрой-
ства. Иногда для получения частотных характеристик при мед-
ленно протекающих процессах применяют тензодатчики с выхо-
дом на шлейфовый осциллограф. Генераторами колебаний могут
служить струйные, механико-пневматические, электропневмати-
ческие устройства. Для грубой оценки динамических свойств
иногда используют генераторы несинусоидальных сигналов.
Простейший генератор — насаженный на ось мотора диск с от-
верстиями, который прерывает струю элемента трубка — трубка.
Разработан ряд пневмоэлектрических преобразователей ти-
па ПЭР (ПЭР-38, ПЭР-38М и ПЭР-18), предназначенных для
преобразования дискретного пневматического сигнала низкого
давления в дискретный электрический сигнал сравнительно
большой мощности. Например, преобразователь ПЭР-38 с рабо-
чей частотой до 12 Гц предназначен для управления электро-
приводом. Преобразователи этого типа являются мембранно-
контактными устройствами.
Преобразователь (рис. 163) состоит из корпуса 5, имеющего
две камеры А и Б, образованные рабочей мембраной 1 из лако-
ткани и герметизирующей мембраной 5, толкателя 2, контактной
группы 4 стандартного реле. При подаче в камеру А входного
сигнала рх мембрана 1 прогибается и толкатель 2, жестко свя-
занный с мембраной /, перемещает верхний контакт и замыкает
его с нижним. Мембрана 5 находится в свободном состоянии и
286
выполняет роль компенсатора объема герметизированной каме-
ры. Преобразователь ПЭР-38М может работать непосредствен-
но от одного струйного модуля с частотой до 10 Гц. Работа на
частотах, выше 10 Гц, требует применения промежуточного уси-
лителя расхода воздуха и параллельного включения ряда моду-
лей. Наличие контактов снижает надежность таких преобразо-
вателей. Однако следует учитывать такие важные преимущества
-508
Рис. 163. Схема пневмо- 7
электрического преобра- Рис. 164. Схема пневмоэлектрического преобразо-
зователя ПЭР-38 вателя ПЭР-18
подобных преобразователей, как простота и малые габаритные
размеры.
Мембранно-контактный преобразователь ПЭР-18 (рис. 164)
отличается тем, что металлическая мембрана 2 выполняет роль
контактной пластины, причем контактная пара 2 и 1 герметизи-
рована и работает в легком режиме сеточного контакта. Кон-
такты включены в цепь базы транзисторного усилителя, работа-
ющего в режиме ключа. На контактах действует постоянная
активная нагрузка порядка 200 Ом при токе 0,5 мА, что делает
его нечувствительным к увеличению переходного сопротивления
контактов от 0 до 200 Ом; рабочая частота — около 800 Гц.
Существует несколько конструкций бесконтактных пневмо-
электропреобразователей [30], предназначенных для управления
электро- и гидроприводом.
Электропневматические преобразователи ЭПР-1 и ЭПР-2.
Помимо непрерывных электропневмопреобразователей в релей-
ной пневмоавтоматике широко используются преобразователи
дискретного электрического сигнала в дискретный пневматиче-
ский сигнал, устанавливаемые на входе в пневматическое уст-
ройство.
Дискретные электропневматические преобразователи ЭПР-1
и ЭПР-2 построены на основе электромагнитных реле. Якорь,
реле играет роль заслонки по отношению к соплу. Само сопло
укрепляется на реле.
Принципиальная схема электропневматического преобразо-
вателя ЭПР-1 представлена на рис. 165, а. Основой преобразо-
вателя служит малогабаритное быстродействующее электромаг-
287
нитное реле РЭС-10, выпускаемое серийно. При отсутствии на
входе электрического сигнала £7ВХ якорь-заслонка 2 находится
в верхнем крайнем положении и закрывает сопло 4. Сопло 4 в со-
вокупности с эжектирующим соплом 3 образует усилитель типа
сопло — заслонка, поэтому на выходе из междроссельной каме-
ры образуется пневматический сигнал, соответствующий услов-
ной единице.
При подаче на вход электрического напряжения якорь притя-
гивается катушкой и сопло 4 открывается. Благодаря этому воз-
Рис. 165. Схемы электропневматических преоб-
разователей:
л — ЭПР-1 с инверсной характеристикой; б — ЭПР-2
с прямой характеристикой
дух через него свобод-
но проходит в корпус 1
и затем через атмо-
сферное отверстие 5 на-
ружу. Сопло 3 облада-
ет эжектирующим свой-
ством, и поэтому дав-
ление условного нуля
несколько ниже атмо-
сферного. Рассмотрен-
ный преобразователь
имеет инверсную ре-
лейную характеристи-
ку. В качестве преобра-
зователя прямого дей-
ствия может служить
дискретный электро-
пневматический преоб-
разователь ЭПР-2,
принципиальная схема
которого представлена на рис. 165, б. Этот преобразователь так
же, как и ЭПР-1, построен на базе реле РЭС-10. Диапазон ра-
бочих частот описанных дискретных преобразователей находит-
ся в пределах 0—400 Гц.
Элемент сопло — заслонка удовлетворительно работает в ши-
роком диапазоне частот и имеет четкие пневматические импуль-
сы при оптимальном входном напряжении и правильно подоб-
ранных основных параметрах.
Пневмогидропреобразователь. Для управления гидроприво-
дом разработан пневмогидравлический преобразователь, транс-
формирующий пневматический сигнал разности давлений в гид-
равлический сигнал. Для этих целей могут быть использованы
и иные преобразователи, например, преобразующие давление
воздуха в давление масла и др.
Пневмогидропреобразователи, необходимые для связи пнев-
матических систем управления с гидравлическими системами
управления гидроприводами, являются гибридными системами
и позволяют сочетать преимущества пневматической (в частно-
сти, струйной) автоматики с преимуществами гидропривода.
288
Пневмогидропреобразователь (рис. 166) состоит из двух ос-
новных узлов — пневмомеханического преобразователя и гидрав-
лического дроссельного усилителя мощности. В пневмогидро-
преобразователе в качестве гидравлического усилителя мощно-
сти применен двухкаскадный усилитель ГУ-3, разработанный
в ИАТ. Управляющий полый шток 12 с прорезью гидроусилителя
соединен со штоком 9 пневмомеханического преобразователя.
Пневмомеханический преобразователь представляет собой
трехмембранный пневматический блок, состоящий из двух рабо-
Рис. 166. Схема пневмогидропреобразователя
чих 7 и 8 и одной разделительной 11 мембран из мембранного
полотна. Между мембранами располагаются зажимные кольца.
Мембраны с кольцами образуют камеры 10, куда заводят срав-
ниваемые сигналы давления воздуха. Пружинный механизм, со-
стоящий из двух шайб 3 и 5 и пружины 4, фиксирует мембран-
ный блок в среднем положении. В исходном положении под дей-
ствием пружины 4 шайба 5 прилегает одновременно к торцу
кольца 6 и буртику штока 9, а шайба 3 к торцу стакана 2 и
к гайке 1.
При подаче разности давлений в камеры 10 шток 9 отходит
вправо или влево от своего нейтрального положения, что зависит
от знака рассогласования. При перемещении шток 9 увлекает за
собой жестко соединенный с ним полый шток 12, служащий уп-
равляющим органом первого каскада усиления гидравлического
усилителя мощности. Плунжер золотника отслеживает переме-
щение штока 12, соединяя одну линию, идущую к гидроцилинд-
ру, со сливной магистралью, а другую — с источником давления
масла.
19 Заказ 993 289
Давление питания первого каскада (низкое давление) под-
водится к крайней левой камере гидроусилителя через постоян-
ный дроссель. Таким образом, постоянный дроссель со щелью
штока 12 образует междроссельную камеру, давление в которой
изменяется в зависимости от открытия щели, т. е. от величины
смещения штока. Это давление действует на левый торец плун-
жера золотника с силой, которая уравновешивается силой, воз-
никающей от действия давления питания первого каскада усиле-
ния на поршень, расположенный справа, поэтому в статике всег-
да справедливо равенство
PiF = Poif,
гре р\ — давление в междроссельной камере; pOi — давление
питания первого каскада усиления; F— площадь левого торца
плунжера золотника; f — площадь торца поршня, расположен-
ного справа.
При перемещении штока 12 приведенное равенство сил нару-
шается, превращаясь в неравенство. Под действием разности сил
плунжер перемещается до тех пор, пока открытие щели штока 12
не будет соответствовать прежнему значению давления в меж-
дроссельной камере. Таким образом плунжер золотника отсле-
живает положение штока 12. Давление питания второго каскада
(высокое давление) подводится к выточке в средней части зо-
лотника.
Пневматические мембранно-шариковые преобразователи
давления непрерывного действия. Мембранно-шариковые пре-
образователи давления непрерывного действия предназначены
для перехода с нормального диапазона давлений (0—0,1 МПа)
на низкий (0—100 мм вод. ст.) и с низкого на нормальный. Пре-
образователи служат для работы с устройствами струйной тех-
ники.
Шариковый элемент представляет собой цилиндрический ка-
нал, в котором расположен шарик. Разность диаметров шарика
и канала колеблется в пределах 0,01—0,03 мм, что практически
обеспечивает свободное перекатывание шарика в цилиндричес-
ком канале. Если к цилиндрическому каналу подведено давле-
ние, то на шарике развивается усилие, равное произведению
эффективной площади шарика на давление. Если центр шарика
при работе прибора не выходит за пределы цилиндрического ка-
нала, то можно считать, что эффективная площадь шарика оста-
ется практически постоянной и равной площади его сечения по
диаметру.
Понизитель и повыситель давления непрерывного действия
работают по принципу компенсации сил. При подаче на вход
понизителя давления (рис. 167, а) на шарике 5 развивается уси-
лие, перемещающее мембранный блок 4 и заслонку 3, которая
прикрывает сопло 2. Благодаря этому возрастает давление р в
эжекторе /, составляющем с соплом 2 усилитель типа сопло —
290
заслонка. Это давление, редуцированное посредством дросселей
6 и 7, поступает в камеру отрицательной обратной связи. Давле-
ние р на выходе понизителя, а следовательно, и в камере отри-
цательной обратной связи возрастает до тех пор, пока усилие,
действующее со стороны шарика 5, не уравновесится усилием,
действующим со стороны мембранного блока 4.
Дроссели 6 и 7 служат для настройки коэффициента усиле-
ния понизителя. Нормально понизитель настраивается на работу
Рис. 167. Мембранно-шариковые преобразователи:
а — понизитель; б — повыситель
с коэффициентом передачи 0,01. Уравнение понизителя в стати-
ке имеет вид
P = kpx,
где р\ — входной сигнал; k — коэффициент передачи. Оно по-
лучено из условия равенства сил на шарике и мембранном блоке
и равенстве расходов через линейный дроссель 6 и 7.
В повысителе давления (рис. 167, б) входной сигнал pi низ-
кого давления через делитель, состоящий из регулируемых дрос-
селей 1 и 2, подается в мембранную камеру низкого давления.
Таблица 8
Основные технические характеристики
непрерывных мембранно-шариковых преобразователей
Преобразо- ватель Макси- мальный расход воздуха на линии питания, л ч Макси- мальный расход воздуха на лилии управле- ния, л ч Максимальный допустимый расход при погрешности 5%, л ч Пределы изменения коэффициен- та усиле1ия Погреш- ность
Понизитель давления 216 250 При р= 100 мм вод. ст. 70 0,009-0,015 +0,5%
Повыситель давления 240 4 При р= 1 ати 600 90—115 +0,5%
19*
291
Усилие, развиваемое на мембране 5, перемещает ее, изменяя про-
ходное сечение сопла управления 3. Давление из межсопловой
камеры эжектора 6 передается на вход усилителя мощности 7,
а с его выхода — в канал шарикового элемента отрицательной
обратной связи, причем это давление изменяется до тех пор, по-
ка усилие на шарике 4 не уравновесит усилие на мембране.
Эффективная площадь мембраны превышает эффективную пло-
щать шарика в 120 раз. Благодаря этому избыточное давление
на выходе р изменяется в диапазоне 0—0,1 МПа при изменении
pi в пределах 0—100 мм вод. ст. В повысителе необходим усили-
тель мощности 7, так как он обычно работает на значительную
нагрузку. Статическое уравнение повысителя имеет такой же
вид, как и уравнение понизителя, с той разницей, что k ~ 100.
Краткие технические данные рассмотренных устройств приведе-
ны в табл. 8.
Глава VIII
ПНЕВМАТИЧЕСКИЕ ИСПОЛНИТЕЛЬНЫЕ
МЕХАНИЗМЫ
Пневматические исполнительные механизмы представляют
собой силовые устройства, предназначенные для выполнения
команд, формируемых регулирующими или управляющими пнев-
матическими системами. Пневматический исполнительный меха-
низм управляет непосредственно регулирующим органом (шибе-
ром, клапаном, направляющей лопаткой и т. д.) или иным меха-
низмом, например, механизмом для подачи инструмента,
зажимом детали или механизмом тормозного устройства.
В пневмоавтоматике применяют довольно разнообразные
пневматические механизмы. Однако в подавляющем большинст-
ве случаев используют поршневые и мембранные исполнитель-
ные механизмы, так как они просты по конструкции, имеют вы-
сокую надежность и обеспечивают значительные усилия на
штоке. По сравнению с электрическим приводом поступательно-
го движения, развивающим те же усилия, пневмопривод значи-
тельно легче, дешевле и проще по конструкции.
Преимущества пневматического привода по сравнению с гид-
равлическим приводом заключаются в относительной простоте
конструкции как самого привода, так и устройств управления и
более низкой стоимости. Некоторая утечка воздуха, которая мо-
жет происходить из пневмопривода, не отражается заметно на
его работе. В противоположность этому утечка масла из гидро-
привода недопустима. Существенно также отсутствие обратных
трубопроводов, так как отработанный воздух сбрасывается не-
посредственно в окружающую атмосферу.
Пневматические исполнительные механизмы могут работать
при больших колебаниях температуры воздуха, тогда как при
этих условиях масло резко меняет свою вязкость. Кроме того,
при повышении температуры может возникнуть нежелательное
явление кавитации !.
1 При повышении температуры увеличивается давление образования на-
сыщенного пара и в жидкости могут образоваться пузырьки и каверны, за-
полненные парами. Образование пузырьков и каверн в жидкости, заполненных
воздухом и парами, носит название кавитации. Кавитация пагубно сказывает-
ся на работе гидропривода: нарушается заданный закон движения поршня,
выкрашивается и ржавеет металл и т. д.
293
Скорости пневматических исполнительных механизмов при
соответствующем выборе размеров проходных сечений достига-
ют больших величин (порядка нескольких метров в секунду),
тогда как скорости гидравлических приводов определяются ча-
сто производительностью насосного агрегата.
Усилия, развиваемые пневматическим приводом, обычно
меньше усилий, развиваемых гидравлическим приводом тех же
размеров. Это связано с тем, что силовое давление воздуха
в промышленных пневмосетях составляет обычно 0,4—0,6 МПа.
В авиации применяют питающее давление порядка 10 МПа и бо-
лее, это обеспечивает большие перекладывающие усилия при
сравнительно небольших габаритных размерах пневмопривода.
Применение в промышленных установках сравнительно низких
давлений воздуха связано с опасностью поломки и взрыва само-
го пневмопривода, подводящих трубопроводов и иных узлов,
находящихся под давлением. Для гидропривода опасность
взрыва не существует, так как масло практически несжимаемо.
Недостатком пневмопривода по сравнению с гидроприводом
является то, что он не может с высокой точностью отслеживать
входной сигнал. Это связано в первую очередь со сжимаемостью
воздуха. Поэтому, несмотря на многие преимущества пневмо-
приводов, в следящих системах, от которых требуется большая
точность, чаще применяют гидроприводы.
Вращательное движение, особенно вращение с неограничен-
ным углом поворота выходного вала, удобнее всего реализовать
на основе электрического силового привода, но в определенных
условиях, например, в пожаро- и взрывоопасных помещениях
пневматический привод конкурирует с электрическим. Пневмати-
ческий вращательный привод целесообразно применять там, где
необходимо обеспечить высокое число оборотов при сравнитель-
но небольшой мощности (переносные шлифовальные круги, руч-
ные дрели и т. д.). При необходимости плавно изменять число
оборотов используют гидравлический вращательный привод.
Пневматические поршневые приводы делят на приводы одно-
стороннего и двустороннего действия. У привода одностороннего
действия движение в прямом направлении происходит за счет
подачи в полость цилиндра сжатого воздуха, а обратный
ход совершается под действием пружины, которая сжимается
при движении поршня в прямом направлении. Прямой и обрат-
ный ход у привода двустороннего действия происходит под дав-
лением сжатого воздуха, подаваемого в соответствующие камеры
цилиндра, причем каждый раз в одну полость подается питающее
давление, а другая полость сообщается с атмосферой.
Поршневые пневматические приводы могут служить для пе-
рекладки рабочего органа из одного крайнего положения в дру-
гое, а также отслеживать сигнал, подаваемый на вход системы.
В последнем случае вводится отрицательная обратная связь:
силовая или по положению.
294
Преимуществом мембранного привода является отсутствие
подвижных уплотнений, так как рабочим элементом служит
мембрана с жестким центром. Это обусловливает высокое каче-
ство уплотнения и совсем незначительное влияние сил трения.
Недостаток мембраны — в слишком коротком ходе и ограничен-
ной передаче усилия с мембраны на шток. Последнее связано
с тем, что усилие, развиваемое сжатым воздухом, идет на прео-
доление сил упругости мембраны. Поэтому в предельном поло-
жении шток не передает усилие.
Помимо обычных приводов, содержащих мембраны с жест-
кими центрами, в качестве исполнительных механизмов применя-
ют длинноходовые мембранные пневматические приводы с чу-
лочной мембраной и др. [16—18].
1. ПНЕВМАТИЧЕСКИЙ ПОРШНЕВОЙ ПРИВОД
ОДНОСТОРОННЕГО ДЕЙСТВИЯ
Работа и статические характеристики поршневого привода
одностороннего действия. На рис. 168, а представлена конструк-
тивная схема наиболее распространенного пневматического
поршневого привода одностороннего действия. Приводом можно
управлять с помощью золотника, крана, клапана или других
Рис. ЮЗ. Пневматический поршневой привод одностороннего дей-
ствия:
а — управляемый с помощью золотника; б — управляемый с помощью уси-
лителя сопло — заслонка
управляющих устройств. Привод может быть также присоединен
в качестве исполнительного механизма к выходу регулятора
АУС или регулятора, построенного на элементах УСЭППА.
Рассмотрим работу поршневого привода одностороннего дей-
ствия. При срабатывании управляющего устройства питающее
давление р0 поступает в рабочую подпоршневую полость Vo-
Поршень под действием втекающего в открывшееся отверстие
сжатого воздуха начинает перемещаться вправо, сжимая пружи-
ну. Приложенная к штоку поршня сила AfH может как помогать
295
движению, так и противодействовать ему. Все зависит от на-
правления действия приложенной силы. В обратном направлении
поршень привода перемещается под действием силы сжатой
пружины. Движение в обратном направлении начинается после
того, как рабочая полость соединится с атмосферой, что осуще-
ствляется управляющим устройством (золотником, краном и
т. д.). Двигаясь влево, поршень вытесняет воздух через отвер-
стие управляющего устройства в атмосферу. Здесь так же, как
и в случае движения вправо, сила NH может содействовать или
противодействовать перемещению
поршня. Нерабочая камера, в кото-
рой расположена цилиндрическая
пружина, сообщается с атмосферой
через большое отверстие и поэтому
при всех последующих расчетах
принимаем, что давление в камере
равно атмосферному.
Важными характеристиками
Рис 169 Статическая харак- пневматического поршневого приво-
теристика поршневого привода да являются статические характери-
одностороннего действия, уп- стики — зависимость перемещения
равляемого золотником штока поршня у от давления в ра-
бочей камере pi в статике.
Статическая характеристика поршневого привода односто-
роннего действия, управляемого золотником, представлена на
рис. 169. Аналитически в общем случае эту характеристику мож-
но получить из условия равенства сил на штоке:
(Pi—Pa)F = cy„ + су + А/н + Л/тр sign y±NB, (132)
где pi —давление в рабочей камере; ра — давление окружающей
среды (в частном случае атмосферное давление); F — площадь
поршня; уп — начальное сжатие пружины; с — жесткость пружи-
ны; jVh — сила, приложенная к штоку поршня; у — перемещение
поршня; ЛЛгр — сила трения; у — скорость перемещения поршня;
NB — сила тяжести движущихся частей привода.
Найдем из уравнения (132) перемещение штока
F z ч Унс ± Л^н + WTp sign у ± NB F N
У = — (Pl—Pa)-------------------------- —(Pl —Pa-------- ,
c c c c
где
No = yHc ±N„ + 7VTP sign у + NB.
Функция sign у введена для того, чтобы учесть изменение
направления силы трения при изменении направления дви-
жения штока поршня. Знак плюс перед будет при совпаде-
нии направления действия силы с направлением действия силы
пружины, а знак плюс перед NB ставят при вертикальном распо-
296
Рис. 170. Статическая характерис-
тика поршневого привода односторон-
него действия, управляемого усилите-
лем сопло — заслонка
ложении оси поршня штоком вверх и т. д. Нетрудно понять, что
при горизонтальном расположении оси штока NB = 0. Статичес-
кая характеристика (рис. 169) имеет гистерезис.
Часто бывает необходимо
получить перемещение штока
поршня пневматического при-
вода одностороннего действия
в зависимости от перемещения
рабочего органа управляюще-
го устройства в статике. В этом
случае в качестве управляю-
щего устройства может быть
использован усилитель соп-
ло — заслонка (рис. 168, 6).
Статистическая характеристи-
ка показана на рис. 170.
Пример 13. Определить наименьшее избыточное давление в рабочей ка-
мере привода одностороннего действия, необходимое для перевода поршня
в крайнее правое положение, а также избыточное давление, при котором пор-
шень привода начнет двигаться из крайнего правого положения влево (схема
на рис. 168, а).
Диаметр поршня D = 0,12 м; рабочий ход S = 0,15 м; начальное сжатие
пружины г/н = 0,04 м; жесткость с = 8 кН/м; сила, приложенная к штоку,
WH = 1 кН; силу трения принимаем постоянной Мтр = 0,2 кН *.
1. Так как поршень перемещается вправо, sign у = +1. Силу
тяжести подвижных частей привода не учитывают, так как ось
расположена горизонтально.
Подставив в уравнение (132) у = S, найдем искомое наи-
меньшее избыточное давление, необходимое для перевода порш-
ня в крайнее правое положение:
_ _ сун 4- cS + М„ + Мтр __ 4(8000-0,04 + 8000-0,15+ 1000 + 200) __
P1 Pa~~ F ~~ 3,14 0,122 —
= 2,42-105 Па = 0,242 МПа.
2. Для определения давления, при котором поршень из край-
него правого положения начнет перемещаться влево, можно вое-
* Для манжетных уплотнений из резины и кожи сила трения пропорцио-
нальна перепаду давлений на поршне
N тр = л;/?/ (pi ра) Р-т»
где D — диаметр цилиндра; I — ширина манжеты вдоль образующей рабочего
цилиндра; цт —коэффициент трения.
Уплотнение резиновыми кольцами обеспечивает меньшую зависимость
силы трения от давления. Сила трения штока в сальнике
Утр =
где d— диаметр штока; 1\—длина участка с мягкой набивкой; о — напряже-
ние трения.
Более подробные сведения о расчете сил трения см. [27].
297
пользоваться последней формулой, изменив в ней знак перед
Утр на обратный, так как в этом случае sign у = —1, т. е. ско-
рость у отрицательная:
суц + cs + дгн_ дгтр _ 4(8000-0,04 + 8000-0,15+ 1000—200)
F ~ 3,14-0.122
= 2,23- 105Па = 0,223 МПа.
Из анализа уравнения статической характеристики поршне-
вого привода следует, что перемещение штока неоднозначно за-
висит от входного параметра. Причиной является сила трения,
которая меняет знак при изменении направления движения.
Рис. 171. Поршневой привод односторон-
него действия с отрицательной обратной
связью
ной связью (рис. 171). Обратная
Кроме того, при движении
поршня величина силы тре-
ния изменяется, что обу-
словлено изменением давле-
ния pi в рабочей камере, не-
ровностями поверхности ци-
линдра и т. д. Как следст-
вие этого, появляется нели-
нейность и нестабильность
статической характеристики.
Для получения линейной
и стабильной характеристи-
ки поршневой привод замы-
кают отрицательной обрат-
связь устраняет влияние на-
грузки и силы трения на статическую характеристику, так как
под поршень в этом случае через золотник подается такое дав-
ление, какое необходимо для преодоления возникшей нагрузки.
Работа поршневого привода одностороннего действия с отри-
цательной обратной связью протекает следующим образом. При
увеличении управляющего давления ру сильфон 2 перемещает
плунжер 1 золотника влево. Открывается отверстие, через кото-
рое давление питания ро поступает в рабочую полость. Поршень,
перемещаясь вправо, растягивает пружину 3 отрицательной об-
ратной связи. Сила, действующая со стороны пружины, возвра-
щает сильфон в прежнее положение. Плунжер золотника пере-
крывает отверстие, через которое в рабочую полость поступает
давление питания, и поршень останавливается. Каждому значе-
нию управляющего давления соответствует строго определенное
положение поршня. Уравнение статической характеристики та-
кого следящего привода может быть найдено из условия равен-
ства сил сильфона и пружины отрицательной обратной связи:
Fc
У = — Ру—Ун
с
где ру — давление управления (избыточное); Fc — эффективная
298
площадь сильфона /; с — жесткость пружины 3 отрицательной
обратной связи; ун — начальный натяг пружины отрицательной
обратной связи.
Динамика поршневого привода одностороннего действия.
Проанализируем циклограмму поршневого пневматического при-
вода одностороннего действия (рис. 168, а).
Период времени от момента начала переключения распреде-
лителя (золотника) до момента начала движения поршня назы-
вается подготовительным периодом [16]. Время подготовитель-
ного периода Ц склады-
вается из времени t\
открытия распредели-
теля, времени t2 рас-
пространения волны
давления от распреде-
лителя до рабочей по-
лости и времени /з на-
растания давления в
рабочей полости до
Рис, 172. Циклограмма работы поршневого
привода одностороннего действия:
ПК — прямой ход; В — выстой; ОХ — обратный
ход
значения, при котором
поршень начинает дви-
гаться (см. циклограм-
му на рис. 172).
Разделение времени
подготовительного периода на три указанных интервала не яв-
ляется строгим: это время нельзя представить в виде простой
суммы указанных интервалов, так как уже в процессе переклю-
чения распределительного устройства волна давления может
пройти путь от распределительного устройства до цилиндра и
в то же время может начаться заполнение рабочей камеры и т. д.
Иными словами, эти отрезки времени могут перекрывать друг
друга. В дальнейшем будем считать, что время переключения
распределительного устройства и время распространения волны
давления от распределительного устройства до цилиндра имеют
весьма малые значения по сравнению со временем от начала на-
полнения полости до момента начала движения поршня. Если
время открытия распределителя велико, то его надо учесть.
Время распространения волны давления от распределителя
до цилиндра можно вычислить, поделив длину трубки, связыва-
ющей распределитель с цилиндром, на скорость звука. После
того как давление в рабочей полости достигнет значения, при
котором усилие, создаваемое им на поршне, преодолеет силы
сопротивления, поршень придет в движение. При перемещении
поршня объем рабочей камеры будет увеличиваться, поэтому
темп роста давления р\ уменьшится. После того как поршень
достигнет крайнего правого положения, давление в рабочей
камере будет продолжать расти, пока не достигнет значения пи-
тающего давления р0. Вообще же давление до момента начала
299
обратного хода должно достигнуть лишь заданного значения
для достижения необходимой силы на штоке поршня. Исходя
из рассмотренных интервалов времени, можно записать время
прямого хода поршня:
Tnx = ^i + ^п + ^пь (133)
здесь ti — время от момента включения распределителя до нача-
ла движения (время подготовительного периода); /ц — время
движения поршня; /щ— время изменения давления от давления,
достигнутого в конце хода поршня, до давления, при котором на
штоке поршня создастся необходимое усилие.
По истечении некоторого промежутка времени /в, называемо-
го временем выстоя поршня *, срабатывает распределитель, при
этом рабочая полость привода будет сообщаться с атмосферой.
Сжатый воздух через отверстие в распределителе начинает вы-
текать в атмосферу, п давление рх будет падать. Когда давление
упадет до некоторого значения, которое можно вычислить по
формуле (132), поршень под действием силы пружины, сжатой
при прямом ходе, начнет двигаться в обратном направлении.
В отличие от прямого хода поршня при обратном ходе воздух
как бы выжимается поршнем через отверстие в атмосферу. Ра-
бочая камера превращается в камеру противодавления.
При обратном ходе можно наметить точно такие же интерва-
лы времени, как и при прямом ходе (^ , t[b и^'ц) (см. рис. 172).
Уравнения динамики поршневого привода одностороннего
действия при наполнении и опорожнении рабочей камеры и ка-
меры противодавления выводят в предположении, что темпера-
тура питающего воздуха равна температуре воздуха в камере и
температуре окружающей среды, которая остается постоянной
в процессе работы привода 1 2. Кроме того, при расчете принимаем,
что термодинамический процесс изменения состояния воздуха
при прохождении его через дросселирующее отверствие в распре-
делительном устройстве — адиабатический. Такое предположе-
ние оправдано тем, что скорость протекания воздуха через дрос-
сель велика, а длина канала дросселя мала. Характер течения
воздуха через дросселирующее отверстие — турбулентный. Пи-
тающее давление р0, давление ра и коэффициент расхода также
1 В частном случае это время может быть равно нулю, кроме того, дви-
жение поршня в обратную сторону может начаться и до наступления момен-
та, когда поршень приходит в крайнее правое положение.
2 Наилучшее совпадение с экспериментальными данными дает расчет
переходных процессов с использованием уравнения теплового баланса. Однако
здесь ради простоты будем принимать температуру в камере, в атмосфере
и в линии перед дросселем постоянной, т. е. будем считать, как это делалось
ранее для проточных камер, что процесс перехода от области перед дросселем
к области за дросселем и т. д.— изотермический. При этом время наполнения
окажется несколько больше, чем то же время, вычисленное с применением
уравнения теплового баланса [16].
300
принимаем постоянными, т. е. допущения те же, что и при рас-
чете проточных пневматических камер.
Время наполнения рабочей полости (подготовительный пе-
риод) вплоть до начала движения поршня можно определить по
формулам, полученным выше для случая заполнения глухой ка-
меры:
для надкритического режима истечения, когда Г\ = pi/po
< 0,5,
<134>
и для докритического истечения, когда Г\ = pjpz 0,5,
/3 = 4 1/тГ (arctg 1 ----arctg 1/гМ , (135)
и/ V RT \ у 1—r1K у 1 _Г1н/
где Г1Н и Г1к — соответственно начальные и конечные значения ri;
/ — площадь проходного сечения дросселя, a Vo — начальный
объем при у = 0 (рис. 168, а), причем значению riK соответствует
рк, вычисляемое по усилию, при котором начинается движение
поршня (см. пример 13).
Рабочий ход поршня привода одностороннего действия про-
текает при переменном объеме заполняемой воздухом рабочей
полости, причем изменяется сила воздействия пружины на пор-
шень, появляется сила инерции и сила демпфирования. Поэтому
в уравнении изменения состояния воздуха в камере необходимо
учесть изменение объема и дополнить это уравнение уравнением
движения, выражающим равенство сил на поршне при его дви-
жении.
Отыщем уравнение изменения состояния воздуха в рабочей
камере при прямом ходе поршня. Массу воздуха М в рабочей
камере при движении поршня можно записать в виде
M = P1(Vo + V) = ^(Vo + m
где V — переменная часть объема рабочей полости привода;
А — площадь поршня; pi — плотность воздуха.
Продифференцируем это уравнение по времени:
— = J_ d^F p dy_
dt RT di ' ° RT dt
Изменение массы воздуха в камере во времени представляет
собой массовый расход воздуха в камеру G, который определя-
ют по формуле (4), если истечение докритическое, и по формуле
(5), если истечение надкритическое:
<1зв)
301
Vo
здесь у =—-------условная начальная координата положения
F
поршня.
Уравнение движения при перемещении поршня вперед будет
иметь вид
Р(Р\—Pa) = fny+$y + cy + N, (137)
где ру — сила демпфирования, пропорциональная первой степе-
ни скорости; р — коэффициент демпфирования; т — масса
поршня и подвижных деталей, приведенная к поршню, а
N = cyH ± W„ + WTP±WB.
Для определения времени перемещения поршня, а также
изменения давления и перемещения поршня во времени необхо-
димо уравнения (136) и (137) решить совместно и проинтегриро-
вать. Однако это невозможно, так как уравнение (136) —нели-
нейное. Поэтому воспользуемся методом численного интегриро-
вания.
Для небольшого промежутка времени Д/г- и f-го участка ин-
тегрирования уравнения (136) и (137) можно представить
в виде 1
^Рм = ~ f “7“ рх \ &ti*,
Уо+У1-1^ г 7
Рн = РЦ1..п+^Рм\
F , х |3 • С N
У= — (Р\1—Ра)---------------У<_х-----; zlQOX
т т т т (138)
~^У( = У i—\^ о
ih = у t_! +Д^-;
У1 У(— \ + Ус — \ + 9 »
здесь \ti представляет собой шаг интегрирования. Чем
меньше шаг, тем больше точность интегрирования, однако
число шагов при этом увеличивается.
При решении первого уравнения системы (138) следует
иметь в виду, что при рц/pQ 0,5 (надкритический режим исте-
чения) расход будет постоянным и его следует подсчитывать по
формуле (5), а при р\г!рь 0,5 (докритический режим истече-
ния) — переменным и его следует подсчитывать по формуле (4)
для каждого \ti в отдельности.
1 Выражение для yi находят последовательным интегрированием урав-
нения dyi = yidt.
302
На первом участке ДЛ(1 = 0) принимаем уо = 0, рю —---------h
F
-I- ра, yQ = 0 и рассчитываем Арп по первому уравнению си-
стемы (138). По найденному Лри определяем /?ц и затем у\.
Считая, что у\ постоянно на участке Д/ь отыскиваем Дг/i и ух
и по последней формуле системы (138) находим у\. Затем ана-
логичный расчет проводят для участка Д/г и т. д. до тех пор,
пока не будет достигнуто равенство у = S.
п
Полное время перемещения поршня т = 2Д/г-, где п — число
участков Д/г- на протяжении всего времени перемещения поршня.
Иногда для сокращения расчетов при приближенном интегри-
ровании рекомендуется использовать метод Рунге — Кутта [16].
Заключительный период рассчитывают так же, как и
подготовительный, за начальные условия принимают параметры,
соответствующие концу периода перемещения поршня. Так,
например, начальный объем будет равен Vo + SF, а за началь-
ное давление следует принять давление в рабочей камере,
которое будет в момент достижения у = S.
Если возвратная пружина отсутствует (с = 0) и, следова-
тельно, нагрузка постоянная, то можно говорить об установив-
шейся скорости, которая будет при условии, что = 0.
Величину установившейся скорости определяют из уравне-
ния (136):
dy _ RT q
dt “ Fpx ’
причем
P1= ±nh + w +Pa)
F
а расход G находят по формуле (4), если pi/p0 0,5, и по фор-
муле (5), если p\lpQ 0,5.
Пример 14. Рассчитать зависимость перемещения поршня от времени для
пневматического поршневого привода одностороннего действия. Проходное
сечение изменяется скачком от полного закрытия до полного открытия. Диа-
метр отверстия наполнения d = 2*10-3 м; начальный объем рабочей полости
V0 = 5-10-4 м3; абсолютное давление питания р0 = 0,491 МПа; коэффициент
расхода р, = 0,8; диаметр поршня D = 0,12 м; рабочий ход S = 0,1 м; началь-
ное сжатие пружины рн=0,04 м; жесткость с = 7,850 кН/м; сила, приложенная
к штоку, Nn = 981 Н; сила трения NTp = 196 Н; масса, приведенная к порш-
ню, т = 196 кг/см; начальное абсолютное давление в рабочей камере рю =
= ра = 0,0981 МПа; абсолютная температура Т = 288 К; газовая постоянная
воздуха R = 287,14 Дж/(кг-К); давление ра = 0,0981 МПа.
Золотник расположен непосредственно на цилиндре привода (/2 = 0).
Движение поршня начнется после того, как давление в рабочей камере до-
стигнет величины
303
Л^н + ^тр + ^н 4(981 + 196 + 7850-0,04)
Рк = ~ + Ра —
F ' ra 3J4-0J22
+ 98100 = 2,3-105 Па = 0,23МПа.
0,0981
------=0,2,
0,491
Истечение через дроссель надкритическое, так как
0,23
г1к = 0 49 -= 0,468, поэтому время подготовительного периода следует рас-
считать по формуле (134):
, / -Ill / JL, ч _ 5'10~4-4
1 3 Ilf V RT Г|к Г1н) 0,8-3.14-22.10
--------(0,468 — 0,2) = 0,264 с.
287-288
Временную характеристику будем рассчитывать, используя систему урав-
нений (138). Рассчитаем предварительно числовые коэффициенты, входящие
в эту систему уравнений:
, Vo 4,510—4
f/n = — =------------= 0,044 м;
0 F 3,14-0,122
RT 287,14-288-4
-^- =------------ = 73-105 1/с2;
F 3,14-0,122 1
F 3J4-0.122 7
= 577-10~7 м2/кг.
4-196
tn
Коэффициент демпфирования р можно рассчитать по приближенной фор-
муле [27] *:
8цдал
R] + Rl 1 >
RJ
где Ид—динамический коэффициент вязкости воздуха (р,д = 1,79• 10_5 Па-с
при температуре 15°С); а — ширина поршня; R2— внутренний радиус цилинд-
ра; /?1 — радиус поршня.
Примем R2 = 6,00 см, Ri = 5,99 см, а = 5 см. Тогда
8-1,79-10~ 5-3,14-0,05
62 + 5,992 1
62 —5,992~ л 6
П 5,99 )
= 22,6-10-7
кг/с;
* Приближенная формула для коэффициента Р выведена в предположе-
нии, что жидкость проходит через зазор между поршнем и цилиндром, тогда
как в настоящей работе при выводе основных рабочих формул для расчета
привода это обстоятельство не учитывается. Тем не менее расчет проводится
с учетом .р, чтобы наиболее полно раскрыть ход самих выкладок.
304
22,6-10~~7
196
= 115-1О“10 1/с;
W 981 + 196 + 7850-0,04 _ , „
— =-------------------------=7,6 м/с2,
т ,пс
196
Р жд с N F
Коэффициент — по сравнению с другими коэффициентами—,—, —,
т т т т
₽ п
что — ~ 0.
т
входящими в уравнение для у7-, мал, поэтому можно принять, 1
Выпишем систему уравнений (138) с числовыми коэффициентами:
Лр“' “0,044+ (73'
Pli~ Pl(i—1) + ДР|1>
у. = 577 • 10-7 (рг .—98100) — 40у,_, — 7,6;
= У&ь
Уг = У(-! +
У^1
yi = yi^+yi_^t + ——.
(139)
Примем шаг интегрирования \ti = 0,05 с.
Все результаты расчетов, связанных с численным интегрированием систе-
мы уравнений (139), сведены в табл. 9. В первой строке выписаны значения
параметров, относящихся к концу подготовительного периода прямого хода
поршня пневмопривода одностороннего действия. Номер каждой строки таб-
лицы принимаем за i — 1-й, а каждой последующей за i-й.
Из табл. 9 следует, что отношение давлений pi/pQ в конце рабочего хода
(начало заключительного периода) при 5 = 0,1 м равно примерно Гщ = 0,62,
а /п — 1,5 с. В конце заключительного периода прямого хода Гщ = 1.
Время заключительного периода прямого хода рассчитывают по формуле,
куда в качестве объема подставляют значение Vo + 5F:
Временная характеристика, представляющая собой зависимость переме-
щения у поршня, от времени, представлена на рис. 173.
На рис. 174 показана зависимость перемещения штока поршня от време-
ни, начальный участок которой, относящийся к ходу поршня вперед, построен
по данным настоящего примера. Остальные данные для построения участка
указанной кривой, относящегося к обратному ходу, взяты из примера 15. По
20 Заказ 993 305
о
мени
Рис. 175. Фазовая траектория
движения поршня
Таблица 9
Таблица численного интегрирования системы уравнений (139)
t °. др(- pli= =₽1(<-1)+ + лри Sy.= yi\ti +Ч yi=yi—\ + +yi-x“+ .. д + Ю 1 2
с — кг с Па Па м/с2 м с м с м
0 0,468 0,00303 0 230- Ю3 0 0 0 0
0,05 0,519 0,00300 24900 254-103 1,430 0,0715 0,0715 0,00179
0,10 0,527 0,00300 4120 258-103 1,578 0,0791 0,1506 0,00734
0,15 0,494 0,00303 -16200 242-103 0,418 0,0209 0,1715 0,01535
0,20 0,461 0,00303 -16200 226-103 -0,845 -0,0422 0,1292 0,02287
0,25 0,451 0,00303 —5000 221-103 -1,416 —0,0708 0,0584 0,02759
1,30 0,615 0,00292 20300 301 ДО3 0,740 0,0370 -0,0711 0,07964
1,35 0,650 0,00286 17250 319-103 1,710 0,0855 0,0144 0,07823
1,40 0,665 0,00282 6670 326-103 2,370 0,1185 0,1329 0,08191
1,45 0,647 0,00287 -8920 317-103 1,720 0,0860 0,2189 0,09071
1,50 0,610 0,00292 -17850 299-1О3 0,330 0,0165 0,2354 0,10206
данным таблицы построена также фазовая траектория, представленная
на рис. 175.
Время полного хода поршня
Гпх = ^+^и +/ш = 0,264 + 1,50 + 2,363 = 4,127 с.
При обратном ?соде поршня рабочая полость превращается
в полость противодавления, которая через отверстие соединяет-
ся с атмосферой. Время, в течение которого давление в полости
противодавления падает до значения, при котором начинается
движение поршня в обратном направлении, определяют по
формулам, выведенным ранее для глухих камер (гл. III):
для надкритического режима истечения (р&1р\ 0,5)
f 1 / 2 Л 1 1 1 \
Ц = ---— I/ —— In — — In —
Ц/ Г R? \ г1н г1к /
(140)
и для докритического режима истечения (ра/Р1 0,5)
здесь V 0 = Vo + FS.
В отличие от уравнений (134) и (135) в уравнениях (140) и
(141) Г1н и Г1к есть отношение давлений в момент открытия вы-
хлопного отверстия и в момент начала движения поршня (чаще
20* 307
всего Ра/р1н = Ра/ро). Давление рк, при котором начнется дви-
жение поршня, определяют по формуле
„ (Ун + S)c + ± NB—NTP
Рк =---------------------+ Ра
Г
Причем здесь NB и Мд берут со знаком плюс, если направ-
ление их действия совпадает с направлением усилия возвратной
пружины. Уравнение движения поршня при обратном ходе
имеет вид
F(pi—pa) + my + $y = —cy + N, (143)
где
N = с(Ун 4“ *5) + 7Vн -+- 7VB—Л^тп>
\Z'H 1 / — п — в тр>
здесь у отсчитывают от нового исходного положения и за его
положительное направление принимают направление справа —
налево (см. рис. 168, а).
Уравнение изменения давления в полости опорожнения
выводят так же, как и для полости наполнения. С учетом нового
исходного положения поршня и изменившегося направления у
это уравнение можно записать в следующем виде:
~Tc=f (rt + s-й-^- («)
В левой части уравнения поставлен знак минус, так как
расход в направлении «из камеры» приводит к уменьшению
количества воздуха в ней. При опоражнивании камеры давление
после дросселя ра будет постоянным, а перед дросселем рх —
переменным. Так, точное решение уравнений (143) и (144)
практически невозможно, поэтому, как и в предыдущем случае,
их приводят к виду, удобному для численного интегрирования:
л 1 / RT г • \ л/. 1
y0 + S-y{_i \ F /
Рн = Pi(i— i) “I" &Рц>
У1 = —~(Рн—Ра) Pt-i —- У^г + — ;
tn m m tn
^У[ =
Ус = Ус—\ + Дуь
• А -
Ус = Ус—\ + Ус^1 + У1
Интегрирование системы уравнений (145) проводят до тех
пор, пока у не станет равным S. В качестве исходных парамет-
308
ров берут величины, соответствующие концу подготовительного
периода.
Заключительный период (время t'т ) рассчитывают по
формуле (140) или (141), причем за начальное давление для
этого периода принимают давление, соответствующее концу
хода поршня в обратном направлении, а за конечное — давле-
ние ра.
Во всех расчетах силу трения принимали постоянной, однако
сила трения зависит от скорости перемещения поршня, перепада
давления на поршне и некоторых других факторов (температу-
ры, чистоты обработки внутренней поверхности цилиндра
и т. д.). Принятое допущение о постоянстве силы трения не
вносит значительной погрешности в расчет в том случае, если
она мала по сравнению с остальными силами, приложенными
к поршню. В тех случаях, когда сила трения соизмерима
с остальными силами, это необходимо учитывать (см., напри-
мер, формулу в сноске на стр. 297).
Пример 15. Рассчитать время перехода поршня пневматического привода
одностороннего действия из одного крайнего положения в другое, начиная
с момента открытия золотника, при движении поршня в обратную сторону
(рис. 168, а). Абсолютное давление в начале обратного хода (начальное дав-
ление) равно давлению питания рп = р0 = 0,491 МПа; диаметр выхлопного
отверстия d = 2-10-3 м. Остальные величины те же, что и в примере 14.
Конечное давление подготовительного периода определяют по формуле
(142):
(i/H + S)c + NH — NTp 4 [(0,04 + 0 Л)7850 + 981 — 196]
Рк~ F +Ра- 3,14-0,122 +
+ 98 100 = 2,651 Ю5 Па « 0,265МПа.
Отношения давлений в начале и в конце подготовительного периода
обратного хода поршня:
Ра Ра 0.0981 _
— — Г1 и — — О, + •
Рн Ро 0,491
Следовательно, за все время подготовительного периода здесь будет иметь
место надкритическое истечение. Поэтому для расчета времени подготови-
тельного периода следует воспользоваться формулой (140). Предварительно
рассчитаем объем камеры
V' = Vo + FS = 5-10~ 4 + 0,1 ---4^0,122 = 163. 10-5 мз,
а затем определим
1 1 И 163-ю-5-4
L = / = —— I / ------( In — — In--- =------------5----7- X
1 3 Hf V RT \ г,„ r1K / 0,8-3,14-22-10“6
1 / 2 /, 1 , 1 \
Х]/ 287-288 (. П0,2— П 0,37/ 1,96 С’
309
Временную характеристику и время обратного хода поршня рассчитывают
с помощью системы уравнений (145). Выпишем эту систему уравнений с чис-
Р
ловыми коэффициентами. Член с коэффициентом — опускают по тем же
tn
соображениям, что и в примере 14. Предварительно вычисляют параметр Nlm\
N c(ytt + S) + Л^н —Л^тр 7859(0,04 + 0,1) + 981 — 196
т tn 196
= 9,6 м/с2.
Тогда
pli=pl(i-"+bpw
у.= — 577- 10-7(ри—98100)—40t/(._] +9,6;
^У1 =
У i = Ус-\ +
Mi
У1 = У^ +yl^ti + yi—-
(146)
Таблица 10
Таблица численного интегрирования системы уравнений (146)
t °.- =₽1«-1)+ Vi-Vi_l+ .. + У; 1 2
с — кг/с Па Па м/с2 м с м с м
0 0,00164 0 265-1О3 0 0 0 0
0,05 0,37 0,00164 —4160 261-103 0,2323 0,01162 0,01162 0,000290
0,10 0,376 0,00161 -3120 260-1О3 0,3384 0,0169 0,02852 0,00130
0,15 0,384 0,00158 -1540 256-1О3 0,448 0,0224 0,05092 0,00328
0,20 0,383 0,00160 505 257-103 0,349 0,01745 0,06837 0,00627
0,25 0,380 0,00160 215 257-1О3 0,220 0,0110 0,07937 0,00995
0,30 0,382 0,00161 3220 260-1О3 —0,120 -0,0060 0,07337 0,01337
0,35 0,377 0,00163 2770 263-1О3 -0,416 -0,0208 0,05257 0,01652
0,40 0,373 0,00163 730 264-1О3 -0,581 —0,0290 0,02357 0,01842
2,70 0,472 0,00127 -2280 206-’103 —0,19 —0,0095 0,02617 0,09141
2,75 0,477 0,00125 -3730 2(Е-103 -0,03 —0,0015 0,02467 0,09260
2,80 0,485 0,00122 —4210 197,5-103 0,17 0,0085 0,03317 0,09447
2,85 0,496 0,00121 -2360 195,5-103 0,22 0,0110 0,04417 0,09696
2,90 0,503 0,00120 —294 197-103 0,15 0,00775 0,05192 0,09969
2,95 0,503 0,00121 -98,1 195-103 0 0 0,05192 0,10223
310
Расход Gf-i, входящий в первое уравнение, рассчитывают по
формуле (4) или (5) в зависимости от отношения р&1р\г- Отно-
шение давлений, соответствующих началу рабочего хода
поршня в обратном направле-
нии, будет 0,37, что равно от-
ношению давления в конце
подготовительного периода.
Результаты расчетов, выпол-
ненных при численном инте-
грировании системы уравнений
(146), частично приведены в
табл. 10, а временная характе-
ристика на рис. 176. Из табли-
цы следует, что t'n = 2,92 с и
время от момента переключе-
ния золотника до перехода
поршня в исходное положение
// + /н = 1,96 + 2,92 = 4,88 с.
Рис. 176. Временная характеристика
поршневого привода одностороннего
действия при обратном ходе
Так как в конце обратного хода поршня riH = palpi = 0,503 (см.
табл. 10), т. е. больше 0,5, то время заключительного периода
следует рассчитывать по формуле (141), причем V'o = Vo, а
r1K = 1. Таким образом,
= 5-10"4-4.1 / 2 (1/ -L-
0,8л-22-10~ь V 287-288 0,503
= 0,976 с.
Полное время обратного хода с учетом времени, в течение
которого давление в камере противодавления падает до атмо-
сферного, будет
Тох = ti + tn 4- /щ = 1,96 4- 2,92 4" 0,976 = 5,856 с.
2. ПНЕВМАТИЧЕСКИЙ ПОРШНЕВОЙ ПРИВОД
ДВУСТОРОННЕГО ДЕЙСТВИЯ
Циклограмма и динамика привода двустороннего действия.
Пневматический поршневой привод двустороннего действия
представлен на рис. 177. Управление таким приводом чаще
всего осуществляется с помощью золотника. Для управления
двусторонними приводами используют также струйные трубки
и усилители типа сопло — заслонка. -Если, например, сместить
золотник вправо, то в правую рабочую полость привода начнет
поступать сжатый воздух из питающей магистрали, а левая
полость противодавления будет сообщаться с атмосферой.
После того, как перепад давлений на поршне достигнет такого
311
значения, при котором усилие, создаваемое поршнем, преодоле-
ет силы сопротивления, начинается движение поршня влево
и т. д.
Так же, как и для поршневого привода одностороннего
действия, период времени от момента открытия золотника до
момента начала движения поршня называют подготовительным
периодом и обозначают через (циклограмма поршневого
привода двустороннего действия показана на рис. 178). Время
подготовительного периода
складывается из времени от-
крытия золотника Л, времени
распространения воздушной
волны t2 и времени нарастания
давления в рабочей полости и
падения давления в полости
противодавления /3-
Как и ранее, временем от-
крытия золотника или другого
управляющего органа в даль-
нейшем будем пренебрегать
Рис. 178. Циклограмма работы порш- так же, как и временем рас-
невого привода двустороннего дейст- пространения волны давления
вия от управляющего органа до ра-
бочей полости. Вр^емя переме-
щения поршня на величину рабочего хода обозначим /ц, а время
нарастания давления в рабочей полости и падения давления в по-
лости противодавления \ которое называется заключительным
периодом, обозначим через /ць Таким образом, время прямого
хода
Тпх = ti +6i + 6п-
1 За время заключительного периода принимается время опорожнения ка-
меры противодавления, если это время больше времени нарастания давления
в рабочей камере до давления питания р0, и наоборот.
312
Аналогично этому, время обратного хода поршня
Тох = Л + Gi + Gn •
Уравнение движения поршня пневмопривода двустороннего
действия имеет вид
PiF—p2Fu = my + $y + cy + N, (147)
где
N = суи 4- Na + NTp ± NB +
p2 — давление в камере противодавления1 *; Fn — площадь
поршня со стороны полости противодавления; ра — давление
окружающей среды; — площадь штока поршня (/Дд =
= F — Fn); с — жесткость пружины нагрузки.
Уравнение (147) решают совместно с уравнениями напол-
нения и опорожнения соответственно рабочей полости и полости
противодавления, которые имеют вид
RT &Р\ / ' I \ । dy .
—+ +
(148)
В этих уравнениях G\ и G2 — массовые расходы воздуха для
, vo
камеры наполнения и камеры противодавления; у =---- и
F
у0 =--- —условные начальные координаты положения
F п
поршня соответственно со стороны полости наполнения и поло-
сти опорожнения; уп—координата положения поршня со сто-
роны полости опорожнения. В левой части второго уравнения
(148) поставлен знак минус, так как расход G2 уменьшает
количество воздуха в камере опорожнения.
Учитывая, что уп = S — у, последние уравнения можно
переписать в следующем виде:
RT п dp\ , . f\ . du
F dt у Ы dt
-^=^s~y+y^~' <>«)
Как и для привода одностороннего действия, система урав-
нений (149) и (147) в конечном виде проинтегрирована быть
не может, поэтому для ее решения целесообразно применить
метод численного интегрирования и записать эти уравнения
в следующем виде:
1 Здесь, как и выше, под давлениями подразумеваются их абсолютные
значения.
313
&Pli~ , ( p Р|(,_1)#(_Д A/,-,
Pli~ Pl(i-t) + ^P]i’
^Pn ~ ~ ~ f 7 ^2(i-l) + Pi(i— l)^i— 1 ) A/f,
5—У^Х+У0 \ /-n /
^2i = ^2(i—1) + Ap21>
Af/( = уДУ,
У, = У<_х + Ai/p
у At?
yi = yi-l+yi^l + -Lr!-
Рис. 179. Поршневой привод
двустороннего действия с по-
стоянной нагрузкой на штоке
установившегося движения
Решение проводят так же, как и решение аналогичной
системы для привода одностороннего действия, что было
подробно рассмотрено выше.
Графо-аналитический метод расчета установившейся скоро-
сти пневмопривода двустороннего действия с постоянной на-
грузкой. Из-за сжимаемости возду-
ха и переменности заполняемых воз-
духом и опорожняемых полостей ци-
линдра движение пневматического
поршневого привода может быть
описано лишь системой сложных не-
линейных дифференциальных урав-
нений. Такие системы интегрируют
либо численным методом, либо с
помощью ЭВМ, что в общем случае
довольно сложно. Однако, если не-
обходимо определить лишь скорость
поршневого привода двустороннего
действия с постоянной нагрузкой, задачу можно значительно уп-
ростить путем использования графо-аналитического метода. Этот
метод с успехом применяют для поршневых пневмоприводов,
поршень которых совершает значительное перемещение и несет
постоянную нагрузку. Класс таких устройств в промышленности
довольно обширен: приводы зажимных устройств, приводы ме-
ханизмов подачи и конечных органов регуляторов, перемещаю-
щие шиберы, заслонки и т. д. Указанные поршневые исполни-
тельные механизмы часто имеют на всем пути своего движения
либо постоянную, либо мало изменяющуюся нагрузку.
Рассмотрим сначала ненагруженный поршневой исполни-
тельный механизм при установившемся движении [36], т. е.
314
N = 0 и у = const (рис. 179). Давление питания р0 поддержи-
вается постоянным, а давление ра примем постоянным, что чаще
всего имеет место на практике. Нетрудно понять, что если
нагрузки на поршень отсутствуют и процесс установившийся,
то поршневой исполнительный механизм представляет собой
обычную пневматическую проточную камеру и, следовательно,
Р\ = Р2 = const. Учитывая, что конструкции золотников и рас-
пределительных устройств других типов всегда обеспечивают
равенство геометрических площадей дросселирующих щелей
F\ = F2, то при допущении, что в механизмах такого рода
коэффициенты расхода через дросселирующие отверстия напол-
нения и опорожнения полостей цилиндра равны между собой,
т. е. pi = ц2, получим равенство их эффективных площадей:
Ц1Л = jx2F2 = f.
Из теории пневматических камер известно, что если
изменять эффективные площади дросселирующих отверстий
таким образом, что их отношение всегда остается постоянным,
то при условии, что ро и рл также неизменны, давление в
междроссельной камере pi будет также постоянно.
Учитывая все эти условия, составим уравнения, описываю-
щие движение ненагруженного поршневого механизма. В дан-
ном случае эти уравнения сводятся к уравнениям заполнения и
опорожнения соответствующих полостей цилиндра. При записи
уравнений воспользуемся, как и ранее, выражениями (4) и (5)
для расхода воздуха. Указанные уравнения получают, прирав-
нивая расход воздуха через дросселирующую щель расходу
воздуха через сечение цилиндра. Так как отношение эффектив-
ных площадей дросселирующих отверстий постоянное (это
отношение равно единице), то, как следует из графика, пред-
ставленного на рис. 34, при любых значениях отношения pjpo
возможны лишь два сочетания режимов истечения через дроссе-
лирующие отверстия — Д—Д или Д—Н. Тогда для сочетания
режимов истечения через дросселирующие отверстия Д—Д
будем иметь:
для камеры наполнения
И/ ^Р1(Ро-Р1)=-^/7пУ; (150)
У КА
для камеры опорожнения
Г 1/ -^Ра(Р1-Рз)=-^пУ- (151)
У KI мл
Исключая из уравнений (150) и (151) отношение — =
Ро
будем иметь
У = -1 =ХФ„Л (152)
Рп У 1— у (1— г)2 + 4г2
315
где
Fn V 1-г+И(1-г)2 + 4г2 Ро
Для сочетания режимов истечения Д—Н имеем
f^-^PiiPo—Pi) =-~РпУ, (153)
у Ki Ki
(154)
Проведя аналогичные преобразования, получим
у = (155>
Из выражений (152) и (155) следует, что скорость поршня
при сочетании режимов истечения Д—Д зависит от эффектив-
ной площади проходного сечения Д от отношения ра/Рэ = г и
коэффициента х, а при сочетании Д—Н — только от f и х и не
зависит от давления питания ро.
Определим области применения уравнений (152) и (155).
Решая совместно уравнения (153) и (154), находим следующее
соотношение, являющееся при сочетании режимов истечения
Д—Н постоянным:
гх = 21. = 0,8.
Ро
Таким образом, как следует из теории проточной камеры,
при сочетании режимов истечения Д—Д rx = Pi/p0 0,8. Дру-
гими словами, если гх = 0,8, то применяют формулу (155), а
если Г1 0,8 — формулу (152). Отношение гх при заданных
условиях не может быть меньше 0,8.
Исследуем функцию фп, входящую в выражение (152), для
чего продифференцируем ее по г = pJpQ и результат прирав-
няем нулю. Из полученного уравнения найдем г, при котором фп
принимает максимальное значение. Это отношение г равно 0,4,
а значение функции фп при этом отношении равно 0,5. Следо-
вательно, при г = 0,4 выражение (152) оказывается идентичным
выражению (155) для Д—Н. Поэтому при ра/Ро 0,4 следует
пользоваться выражением (155) или в выражение (152) подста-
вить фп = 0,5. Отсюда, например, можно сделать вывод, что у
привода без нагрузки, при установившемся движении, для уве-
личения скорости перемещения штока при ра = 0,1 МПа нет
смысла увеличивать давление pQ выше 0,25 МПа.
Найдем уравнения пневматического поршневого привода
двустороннего действия, находящегося под действием постоян-
ной нагрузки N = ±NH ± NB + AfTp. Для этого перепишем
316
уравнения (149), учитывая, что для установившегося движения
-^-=0 и ^ = 0. Тогда
dt dt
RT* г* _ dy ,
Fn dt
RT r dy
Fn dt
(156)
К системе уравнений (156) добавим уравнение сил, дей-
ствующих на поршень:
Р1—Р2 = 4-=АР,
t п
и запишем расходы Gi и G2 через выражения (4) и (5). В соот-
ветствии с этим систему уравнений для сочетания режимов
истечения Д—Д можно записать в следующем виде:
fRT 1 /Г~^ '(
— 1/ — Р1(Ро—Р1)
Fa V RT
fRT . /~2 ’ . • } (157)
~ 1/ — ра(р2~Ра)=р2У>
* п г А2
Pl—р2 = Лр
или Г Пп
у=х|/ -^--1/; (158)
у=Н /Ра(Р.-Др-ра) f (159)
Pl—ьр
Исключив из системы уравнений (157) давления р\ и р2,
можно найти уравнение движения поршневого привода. Однако
такой путь сложен. Рациональнее использовать графо-анали-
тический метод, который заключается в том, что из системы
уравнений (157) определяют Др как функцию давления рь
давления ра и давления питания ро. Затем строят график этой
функции при заданном давлении ра = 0,1 МПа и по значениям
Др и ро находят давление рь Подставляя р^ в уравнение (158)
или (159), можно получить выражение для скорости движения
поршня. Найдем указанную зависимость Др от ро и рь Введем
г Ра . г Pl . Р2 . Ра
Г----, -- , Г2 =--- » '3 =-•
Ро Ро Р1 Рг
Учитывая (157) и равенство г = Г1Г2г3, запишем:
1 Др । 1
— = —-гз+ 1;
г2 Ра
г = г^гз;
(160)
1—Г1
1— гз
= гхг3.
317
Исключая из системы (160) г2иг3и решая полученное квад-
ратное уравнение относительно kplp^ получим
Ар =П [2(1—г,) —г] Угх (5г,—4) (161)
Ра 2r (1 -г,) “ 2(1—rj) ’
Из рассмотрения выражения (161) следует, что знак минус
перед вторым слагаемым в этом выражении не имеет смысла.
Действительно, если второе слагаемое взять со знаком минус, то
при увеличении гь а следовательно, и р{ величина перепада на
поршне Др будет уменьшаться, что противоречит физике
явления.
Приравняв второе слагаемое нулю, можно найти ту мини-
мальную величину ri, при которой \р!р& имеет еще действи-
тельное значение. Эта величина будет Г\ = 0,8. Максимальное
значение г\ не может быть больше единицы. Таким образом,
при сочетании режимов истечения Д—Д величина rj может
изменяться в пределах от 0,8 до 1.
Для сочетания режимов истечения Д—Н в дросселях напол-
нения и опорожнения система уравнений движения поршневого
привода имеет вид:
y^v'f ктг-1’’ (162)
= (163)
р{—р2 = \р.
Из приведенной системы видно, что скорость поршня в этом
случае не зависит ни от нагрузки на шток, ни от давления
питания. Решая совместно уравнения (162) и (163), определяем
г\ = 0,8, т. е. давление рь а следовательно, и р2 не зависят от
скорости движения поршня. Сочетания режимов Н—Д и Н—Н
истечения через дросселирующие отверстия наполнения и опо-
рожнения полостей цилиндра отсутствуют. В этом можно
убедиться, если исследовать для указанных режимов уравнения
наполнения и опорожнения камер совместно с уравнением рав-
новесия сил на штоке. При этом для сочетания режимов исте-
чения Н—Д получается комплексная величина перепада дав-
ления на поршне, а для режима Н—Н = 1. Так как ни того,
ни другого быть не может, то указанные сочетания режимов
истечения при сделанных допущениях 1 для поршневых приво-
дов отсутствуют.
Используя уравнение (161), относящееся к сочетанию режи-
мов истечения Д—Д, а также учитывая тот факт, что для случая
Д—Н Г] = 0,8, построим график зависимости Др от гх = рДр&
(рис. 180). Все кривые на графике относятся к сочетанию режи-
1 Здесь имеются в виду допущения об установившемся процессе, равен-
стве эффективных площадей дросселирующих отверстий и постоянстве на-
грузки на штоке.
318
мов истечения Д—Д, а вертикальная прямая, проходящая через
точку г\ = 0,8, относится к сочетанию режимов истечения Д—Н.
Приведенный график
позволяет определить
значение не зная за-
ранее сочетание режи-
мов истечения через
дросселирующие отвер-
стия в камере напол-
нения и опорожнения,
по известному давле-
нию питания ро и пере-
паду на поршне Ар =
= N/F-n. По найденно-
му гх и формулам (158)
и (159) можно рассчи-
тать скорость поршня.
Для еще большего
упрощения расчетов,
связанных с определе-
нием скорости поршня
у, пользуются графи-
ком (рис. 181), по оси
Рис. 180. График зависимости перепада дав-
ления \р на поршне от отношения Г\ = pi/p0
для различных давлений питания р0
ординат которого отло-
жена функция фь равная радикалу в выражениях (158) и (162),
а по оси абсцисс — давление питания р0. Параметром является
перепад Ар. Для построения рис. 181 на рис. 180 находились зна-
чения Г1, a epi рассчитывалось по формуле epi = j/ —-----1.
Все кривые на рис. 181 относятся к сочетанию режимов истечения
Д — Д, а горизонтальная прямая <pi = 0,5 — к сочетанию режи-
мов истечения Д — Н. Поршень не будет перемещаться, если
Ро — Ра — Зная epi, скорость у находят по формуле
F и
319
Приведенная методика определения скорости у установив-
шегося движения поршня при постоянной нагрузке была
проверена экспериментально. Исследуемый поршневой испол-
нительный механизм имел диаметр цилиндра, равный 31,6 мм,
и полный ход, равный 114 мм. К штоку механизма была присое-
динена нагрузка, которую с учетом силы трения движения
выбирали так, чтобы перепад давлений на поршне Ар составлял
0,1 МПа. В качестве дроссели-
рующих элементов были вы-
браны жиклеры, коэффициент
расхода которых равен 0,8.
Были проведены две серии
экспериментов. При проведе-
нии экспериментов первой се-
рии начальные давления в по-
лостях цилиндра были равны
атмосферному давлению, а
давление питания ро подводи-
лось скачком. Однако в некото-
рых случаях при больших ус-
корениях поршня, обусловлен-
ных сравнительно большими
проходными сечениями дроссе-
лирующих диафрагм и боль-
Рис. 182. Экспериментальные скорост-
ные характеристики привода
шими давлениями питания, давления в полостях цилиндра при
принятой его длине не успевали за время хода поршня принять
установившиеся значения.
Ввиду того, что приведенная методика расчета пригодна
лишь для вычисления установившейся скорости поршня, была
проведена вторая серия опытов при искусственном установле-
нии начальных расчетных давлений в полостях цилиндра.
На осциллографией ленте фиксировались давления в полостях
цилиндра р\ и р2 и ход поршня. В результате полученных
экспериментальных данных установлено, что давления в поло-
стях цилиндра можно принять постоянными, не зависящими от
размеров дросселирующих щелей, а изменение давления
питания в области Д—Н практически не изменяет величину
скорости движения поршня исследуемого поршневого механиз-
ма. На рис. 182 приведен график, построенный по результатам
экспериментального исследования и выражающий зависимость
скорости движения штока у от давления питания pQ при различ-
ных диаметрах дросселирующих диафрагм и для перепада дав-
лений на поршне Ар = 0,1 МПа. На рисунке для сравнения
штриховой линией нанесены кривые, полученные расчетным пу-
тем. Наибольшая погрешность не превышает 7,6%. Максималь-
ное расхождение расчетных данных с экспериментом (имеются
в виду случаи больших проходных сечений дросселирующих
320
диафрагм и больших давлений питания) при проведении
экспериментов без установления начальных давлений в поло-
стях цилиндра составило 30%.
Рис. 183. Схема поршневого следящего пневмо-
привода
подводится входной сигнал Арв, пред-
3. ПОРШНЕВОЙ СЛЕДЯЩИЙ ПНЕВМОПРИВОД
Поршневой следящий пневмопривод (ПСП) отличается от
пневматического поршневого привода в разомкнутом состоянии
(рис. 177) тем, что у него введена отрицательная обратная
связь, реализованная в виде рычага и пружины, через которые
выходной шток воздействует на распределительный орган,
приводя его всегда в
нейтральное положе-
ние. В представленном
на рис. 183 ПСП отри-
цательная обратная
связь построена путем
соединения золотника
со штоком привода че-
рез рычаг, вращаю-
щийся вокруг точки О
и пружину сп-
Золотник ПСП пе-
ремещается от мембра-
ны см, заключенной в
мембранной коробке, к
которой через отверстия
ставляющий собой разность давлений.
Характерным для ПСП является то, что в статике для
каждого значения разности давлений Дрв, поданной на вход,
соответствует определенное положение поршня у, причем на
эту зависимость не оказывает влияния нагрузка, действующая
на шток поршня исполнительного механизма.
Не останавливаясь на статике ПСП, найдем его дифферен-
циальные уравнения движения.
Предварительно сделаем следующие допущения:
1. Движение воздуха принимается квазистатическим.
2. Влияние сухого трения не учитывается.
3. Золотник имеет нулевое перекрытие.
4. Процесс изменения состояния воздуха при протекании
через дросселирующие окна золотника носит адиабатический
характер.
5. Температура воздуха питания равна температуре воздуха
в первой полости цилиндра и т. д., т. е. TQ = 7\ = Т2 = Т3 = Г.
Другими словами, будем считать, что переход от камеры к ка-
мере носит изотермический характер.
6. Нагрузка на поршень мала и на исходном статическом
режиме можно считать, что pi ~ р2.
7. Эффективные площади окон золотника при наполнении и
21 Заказ 993 321
опорожнении принимаются равными между собой, что почти
всегда имеет место на практике.
В качестве исходного положения поршня выберем положе-
5
ние, соответствующее г/о = — • Выведем уравнение ПСП, следуя
известной методике (48]. Запишем дифференциальные уравне-
ния, характеризующие равенство сил на золотнике и на поршне,
считая, что площади поршня справа и слева одинаковы:
Лрв/м = + 08 + (сп + см) 6 + c„i у, (164)
Fn(Pi— р2) = гпи-^ + ру-^+сиу-, (165)
здесь fM — эффективная площадь мембраны; тъ— приведенная
масса золотника; д — ход золотника; сп — жесткость пружины
отрицательной обратной связи; см — жесткость мембраны;
Рв —коэффициент демпфирования золотника; i—коэффициент
передачи рычага отрицательной обратной связи; у — ход пор-
шня исполнительного механизма; ту — приведенная масса
поршня; — коэффициент демпфирования поршня; сн — жест-
кость пружины нагрузки.
Воздействием силы, передаваемой пружиной сп через рычаг i
на шток поршня, пренебрегаем, так как она мала по сравнению
с силой, развиваемой поршнем. Как и в случае поршневого
привода двустороннего действия, к этим двум уравнениям
следует присовокупить уравнения заполнения и опорожнения
двух полостей цилиндра. Для получения этих уравнений запи-
шем выражения для массы воздуха в левой и правой полостях
цилиндра:
All = Pi (уо + У-Fn,
М2 = р2 (S — yQ — y-^Fn.
Дифференцируя эти уравнения по времени, получим
1 dMx
Fn dt
dpi
dt
1 dM2
Fn dt
du , / c h \
dp2
dt '
(166)
(167)
( . h \
(l/o + l/--)
где h — ширина поршня.
Как и ранее, производные
dMx dM2
dt dt
представляют
собой мгновенные массовые расходы соответственно в полость
цилиндра или. из полости цилиндра через окна золотника.
Так как было сделано допущение, что нагрузки на шток
поршня малы (pi ~ р2 = рн), то поршень можно рассматривать
322
как тонкую пленку, не оказывающую в статике на исходном
режиме никакого влияния на давления в камерах цилиндра,
т. е. при вычислении давления рп силовой цилиндр с управляю-
щим золотником можно рассматривать как проточную камеру
с давлением питания р0 и переменными проходными сечениями,
но всегда остающимися равными друг Другу, т. е. = [2 = f.
В реальных условиях работы ПСП будет иметь место докрити-
ческое истечение в полость наполнения и надкритическое исте-
чение из полости опорожнения. Действительно, если восполь-
зоваться графиком для определения давления в междроссель-
ной камере (рис. 34) и учесть, что f\ = /2, Ра = 0,1 МПа, а ро
обычно более 0,3 МПа, т. е. г = р3/Pq = 0,33, то станет ясным,
что на дросселирующих щелях золотника всегда будет иметь
место сочетание режимов истечения Д—Н (докритическое ис-
течение в камеру и надкритическое истечение из камеры). Вос-
пользовавшись уравнением (29) для случая Д—Н, получим
М\2 = г'
\ f2 / 4(г2 — г)
Подставим в это уравнение f\/f2 = 1 и г = Г\Г2. Из полученно-
го уравнения найдем, что = 0,8 и начальное давление р\ ~
~ Р2 = Рн в камерах поршневого привода рн = 0,8 р0.
Уравнения (166), (167), учитывая возможные сочетания ре-
жимов истечения и что р = pIRT, перепишем в виде:
для б >_0____________
— Pi(Po—Pi) + (Уо + У ; (168)
Fn V RT RT dt 2 J RT dt V
H б -в /~ 1 T?2 Fiy 1 / о /l \ 1 dp2 / 1
------P2I/ -----=------—— + { S — Уъ — у------------(169)
Рп V 2RT RT dt \ * 2 J RT dt
для 6 < 0
Я6 - f 1 pi dy , / h \ 1 dp}
-----P\ 1 / — h \ Uo H- У-)------j (170)
Fn K V 2RT-------------------------------------RT dt V 2 J RT dt-V
H6 , f 2 , 4 p2 dy , / e /1 \ 1 dp2
~rV -^rP2(Po—P2) = —^-TT + \S — y°—y—
Гп у RT RT dt \ 2 / RT dt
(171)
где H — длина прямоугольной щели золотника.
Системы дифференциальных уравнений (168), (169) и (170),
(171) являются нелинейными, и поэтому получить их точное
решение в общем виде невозможно. Приближенное выражение
для перемещения штока поршня во времени в зависимости от
входного перепада давлений можно найти, если провести час-
тичную линеаризацию этих уравнений.
Для перемещений у, малых по сравнению с длиной ци-
линдра S, и при малых нагрузках на поршень перепады давле-
21* 323
ний на нем незначительны. При этих условиях исходная
система нелинейных уравнений может быть линеаризована.
Исследуем систему при начальном ненагруженном состоянии,
считая, что при t = 0, р\ = р2 = рн, а у0 = —. При отклонении
системы от статического положения равновесия будем иметь
Pl =PH + ^Pb |
Pi = Ри + ДР2, I
(172)
где Api и Др2 — малые по сравнению с рн приращения давлений
в соответствующих полостях исполнительного поршневого
механизма. Будем считать, что порядок малости у и б такой же,
как и Дрь Др2 и т. д. Подставляя в уравнения (168), (169) и
(170), (171) равенства (172) и пренебрегая \р\ и Др2 по срав-
S—h
нению с ри и у по сравнению с —-— , получим следующие
линеаризованные уравнения:
для б > 0
^2RTpH(p0-pn) = рЛ + ;
гп dt 2 at
Н6
Fn
ЧТ___dy S — h
2 ~Pli~dt 4 2 dT ’
для б < 0
dy S— h dbpi
dt 2 dt '
]/2RT рн(р0—рн) = -рЛ+
л ц dt и dt
С учетом равенства рн = 0,8 ро обозначим
и ь = 2рн тогда
S-h
для б > 0
dt dt
М±Рг_=—а& + Ь —
dt dt
и для б < 0
dt dt
=а& + b^-.
dt dt
a Hp„V2RT
Fn(S-h)
324
Производная от перепада на поршне по времени при б > О
Др2) __d&p 2b dy
dt dt dt
и при 6 < О
= —2а6—2&-^.
Последние два уравнения можно записать в виде одного
уравнения, введя функцию sign 6*:
^- = 2аб signS—26 —.
dt & dt
(173)
Уравнение (173) совместно с уравнениями (164) и (165)
описывает движение ПСП. Однако эта система нелинейна, так
как в уравнение (173) входит нелинейная функция. Эту функ-
цию нельзя линеаризовать, поэтому для отыскания приближен-
ных периодических решений указанной системы применяют
методы гармонической линеаризации, малого параметра и
другие, которые позволяют приблизительно определить частоту
и амплитуду автоколебаний, а также отделить области устой-
чивости системы. Это уравнение можно решить также на ЭВМ.
* Функция sign б равна +1 при б 0 и —1 при б < 0.
Глава IX
ПНЕВМОАКУСТИКА
Если рассмотреть историю развития пневматических вычис-
лительных и управляющих устройств, то можно отметить одну
характерную особенность — это стремление понизить диапазон
рабочих давлений и увеличить рабочие частоты. Наблюдается
тенденция к снижению уровня мощности, необходимой на
переработку и передачу информации, по сравнению с мощно-
стью, затрачиваемой на приведение в действие исполнительных
механизмов. И как важный шаг в этом направлении явился
переход к низкому, от 0 до 100 мм вод. ст., диапазону рабочих
давлений и использование переменных токов в пневмоавтома-
тике.
Дальнейшее снижение амплитуд и увеличение частоты и
скорости распространения рабочих сигналов связано с перехо-
дом в область звуковых амплитуд и частот, качественно
отличающуюся от области переменных токов, так как звуковые
колебания — это упругие колебания.
В области переменных токов происходит перетекание
материальной среды — воздуха, в области акустики — упругие
колебания частичек воздуха относительно среднего положения.
Новое направление, развивающееся на стыке струйной техники
и акустики, получило название пневмоакустика.
Дальнейшее развитие указанного направления требует
решения ряда научных и технических задач, важнейшими из
которых являются выбор диапазона рабочих частот !, создание
логических элементов типа звук — звук, решение вопросов
дальности передачи рабочих сигналов, а также взаимодействия
акустических сигналов с газовыми струями и многих других.
Применение технических средств пневмоакустики позволит
создавать быстродействующие акустические и акустико-пневма-
тические системы переработки информации, телемеханические
системы дальней связи, измерительные системы, управляющие
системы и т. д.
1 В акустике условно различают три диапазона частот: инфразвуковые
частоты (ниже 20 Гц), звуковые (от 20 до 20 000 Гц) и ультразвуковые (свы-
ше 20 000 Гц).
326
В настоящей главе описываются некоторые элементы пнев-
моакустики, приборы и линии передачи.
1. ЭЛЕМЕНТЫ ПНЕВМОАКУСТИЧЕСКИХ УСТРОЙСТВ
Пневматические генераторы звуковых колебаний. Генерато-
рами звуковых колебаний служат различного рода свистки.
Наибольшее распространение в пневмоакустике получили
свистки Гартмана [10] и свистки [19] с цилиндрическим резона-
тором.
Классический генератор Гартмана изображен на рис. 184.
Генератор состоит из сопла 1 со штуцером для подвода сжатого
воздуха и цилиндрического резонатора
3, объем которого можно регулировать
с помощью поршня 4, Кольцевой дер-
жатель 2 обеспечивает соосность сопла
и резонатора и возможность переме-
щения сопла относительно резона-
тора.
Рис. 185. Генератор Гарт-
мана конструкции И АТ:
dc — dp = 16 мм;
h = 45 мм
Рис. 184. Схема генератора Гартмана
Передвижной поршень 4 служит для настройки свистка на
оптимальный режим. Имеется большое разнообразие конструк-
ций свистков Гартмана, подробно описанных в литературе.
Поэтому здесь остановимся лишь на одной конструкции
свистка Гартмана (рис. 185). Этот свисток выгодно отличается
от классического (рис. 184) тем, что он имеет значительно
меньший расход воздуха, так как воздух поступает из сопла 3
на кольцевое острие резонатора 2 через кольцевую щель шири-
ной примерно 0,15—0,2 мм, образованную соплом и цилиндри-
ческим вкладышем с подводящим штуцером 4. Настройка на
оптимальный режим осуществляется, как и ранее, поршнем /,
донышко которогго выполнено в виде вогнутой отражающей
сферической поверхности, а также изменением расстояния I.
Когда перепад давлений на сопле свистка Гартмана
(рис. 184) ниже критического, т. е. paJpn < 0,528, то на срезе
327
сопла устанавливается скорость потока, равная скорости звука.
Любое уменьшение отношения р&1рь ниже критического не
влияет в дальнейшем на скорость газа на срезе сопла. Однако
при выходе из сопла струя расширяется и приобретает сверх-
звуковую скорость, что связано с опережением темпа уменьше-
ния плотности р по сравнению с темпом роста сечения струи S.
В струе возникает система скачков уплотнения, представляю-
щих собой поверхности разрыва, которые чередуются через
определенные промежутки, т. е. возникают волны простран-
ственной осцилляции струи.
Для определения длины волны получена [10] следующая
эмпирическая формула:
Д = Adc |/1О,2ро —0,9, (174)
где pQ — избыточное давление газа в МПа; А — коэффициент,
изменяющийся для сопел разных типов в пределах от 0,77 до
1,22; среднее значение, предложенное Эмденом, Аср = 0,89;
dc — диаметр сопла в см.
Переходя поверхности скачков уплотнения, газ резко
изменяет свои параметры (давление, температуру, плотность).
Изучив структуру струи, Гартман нашел, что, помещая резона-
тор в область, где давление струи возрастает, называемую
областью неустойчивости, можно получить мощные акустиче-
ские колебания. Колебания также возникают, если вместо резо-
натора в указанное место струи установить диск, чему соответ-
ствует резонатор с полностью выдвинутым поршнем (h = 0).
В настоящее время отсутствует точное объяснение физиче-
ской картины генерации звука в излучателе Гартмана.
Свисток Гартмана способен работать также и при дозвуко-
вых скоростях истечения газа из сопла. Так, свисток, конструк-
ция которого показана на рис. 185, работал при нижнем уровне
давления 0,01 МПа.
Испытания показали [10], что увеличивать мощность акусти-
ческого излучения можно, повышая питающее давление.
Однако рост мощности излучения у свистков Гартмана с
обычным коническим соплом ограничен избыточным давлением
порядка 0,5 МПа. При дальнейшем увеличении р0 происходит
уменьшение мощности излучения. Существенное увеличение
мощности при Pq > 0,5 МПа можно получить, применяя сопло
Лаваля. Так, например, фирма Astrosonics Inc (США) получила
значительное увеличение мощности свистка Гартмана, применив
коническое сопло, заканчивающееся небольшим диффузором,
позволившим получить на срезе число Маха М = 1,5.
Колебания в газоструйном генераторе возникают лишь при
определенных расстояниях между соплом и резонатором, опре-
деляемых расположением зоны неустойчивости. Для кониче-
ского сопла, исходя из наибольшей интенсивности излучения,
328
рекомендуется выбирать расстояние / в конце второй трети ин-
тервала неустойчивости:
I = ах + 0,6(Д—aj.
Для определения а\ Гартман рекомендует эмпирическую
зависимость следующего вида:
= dc [1 + 0,041 (1О,2ро —0,93)2];
здесь ро — избыточное давление питания в МПа; величину Д
подсчитывают по формуле (174).
Важным параметром, влияющим как на частоту излучения,
так и на отдаваемую мощность, является h. При увеличении h
возрастает время, необходимое для повторения цикла колеба-
ний, а значит снижается частота излучения. Резонансная по-
лость представляет собой трубу, заглушенную с одного конца,
поэтому необходимо учитывать излучение ее открытого конца.
Формула Гельмгольца для собственной частоты цилиндриче-
ского резонатора с поправкой на излучение имеет вид
f =---------,
4(/i+0,3r/p)
где а — скорость звука; dp— диаметр резонатора. Оптималь-
ным вариантом Гартман считает свистки с h = dp, однако допу-
стимо соотношение 0,6 I. Здесь следует отметить, что
г/р
свисток, испытанный авторами (рис. 185) и работавший при
докритических истечениях
при dp = dc. Подробные
исследования зависимо-
сти мощности излучения
от соотношения ft/dp для
dc = 7 мм и d^dc = 1,64
показывают наличие двух
оптимальных режимов:
при ft/dp = 0,42 4- 0,45 и
Л/dp = 0,89 [50].
При использовании
свистков в пневмоакусти-
Рис. 186. Зависимость частоты от давле-
ния питания для генератора, изображен-
ного на рис. 185
ческих устройствах часто
бывает очень важно добиться постоянства частоты свистка при
изменении давления питания ро. Для свистка, представленного
на рис. 185, удавалось получить такой режим работы, когда при
изменении давления питания от 0,03 до 0,08 МПа частота f оста-
валась постоянной. Характеристика такого вида при докритиче-
ском истечении из сопла приведена на рис. 186.
Рост выходной мощности свистка может быть достигнут,
если сделать диаметр резонатора dp больше диаметра сопла dc,
329
т. е. k = >1. Так как струя на выходе из сопла расши-
ве
ряется, то такой выбор соотношения dp и dc обеспечивает более
полное использование энергии струи. Однако увеличивать диа-
метр dp сверх диаметра струи нельзя, так как это приводит
к срыву генерации.
Помимо генераторов акустических колебаний Гартмана
получили распространение свистки с цилиндрическим резонато-
Рис. 187. Генераторы с цилиндрическим резонатором:
<а — обычный; б — система струя — нож; в — система струя — нож — резонатор; г — свисток
с частотой f = 2900 Гц; высота цилиндра резонатора b = 15,6 мм; д— схема резонатора
с перемещаемой лопастью
ром. Конструкция наиболее распространенного свистка
этого типа представлена на рис. 187, а. Свисток состоит из
сопла 2 с прямоугольным сечением и цилиндрической камеры 1.
Издаваемый свистком при нормальном питающем давлении р0
звук не является звуком пластинки («колеблющегося ножа»),
на который набегает вытекающая из прямоугольного сопла
струя, усиленного цилиндрическим резонатором. Так, если струя
воздуха набегает на нож без резонатора при нормальнОхМ дав-
лении питания ро, равном примерно 0,005 МПа, что соответ-
ствует скорости 42,7 м/с, звук не возникает, каково бы ни было
относительное расположение ножа 1 и сопла 2 (рис. 187,6).
При нормальном питающем давлении р0 звук также не появ-
ляется, если нож 1 с соплом 2 находится на некотором расстоя-
нии от резонатора 3 (рис. 187, в), каково бы ни было их взаим-
ное расположение. Звук возникает лишь тогда, когда нож
становится краем резонатора.
330
При работе свистка в нормальных условиях звук получается
чисто синусоидальным и почти без гармоник.
Если давление ро повышается, то появляется «звук струи» и
«звук ножа», усиленный резонатором. Основная частота не
излучается, а появляется более высокая частота и ультразву-
ковой свист. При избыточном давлении питания ро = 0,2 4-
0,3 МПа и при толщине струи примерно 0,2 мм свисток,
представленный на рис. 187, г, позволяет получить основную
частоту и гармоники более высоких частот. Край резонатора,
•образующий «нож», должен быть обязательно заострен. Если
свисток имеет цилиндрический резонатор, то часть струи, попа-
дая в последний, завихряется и, выходя через прорезь,
отклоняет периодически основную струю. Этим объясняется
большая мощность, излучаемая таким свистом при ро =
= 0,2 4- 0,3 МПа, т. е. при сверхзвуковом истечении из сопла.
При небольшом давлении питания (нормальном) явления
протекания струи по внутренней стенке резонатора (завихре-
ние струи) не обнаруживается. Это подтверждается тем, что при
нормальном давлении питания частота свистка и интенсивность
излучения не нарушаются при разных положениях предмета
в резонаторе: если в резонаторе сделать лопасть и менять ее
положение относительно оси (рис. 187, д), то частота остается
постоянной. При высоких давлениях интенсивность излучения
зависит от положения лопасти.
Большое количество экспериментов, проведенных со свист-
ками, имеющими резонаторы различной формы (прямоуголь-
ные, сферические, эллиптические и т. д.), выявили преимущество
свистков с цилиндрической формой резонаторов с круглым
основанием.
Частота звука (круговая); излучаемого свистком, может
быть рассчитана по формуле
где коэффициент К незначительно зависит от длины прорези
свистка (для свистка, показанного на рис. 187, г, величина К
равняется 0,713); V — объем камеры свистка.
Как следует из последнего выражения, частота для полицей-
ского свистка не зависит от ширины b (при одновременном из-
менении резонатора и прямоугольного сопла).
Как показали проведенные опыты, частота излучаемого
звукового сигнала при докритическом истечении сильно зависит
от питающего давления (рис. 188, а).
Для получения более стабильной частоты следует работать
при больших питающих давлениях и сверхзвуковом истечении
воздуха из сопла (рис. 188,6). Эскизы свистков в обоих случаях
приведены на рисунке.
331
Работа свистка при нормальном давлении подобна работе
очень короткой органной трубы, у которой давление в резонато-
ре в каждый данный момент времени одинаково. При этом
выходящая из отверстия воздушная струя колеблется под
влиянием звуковых волн, возникающих в резонаторе. К продоль-
ной скорости струи, вдоль линии АВ, добавляется поперечная
скорость. При этом давление в резонаторе в каждый момент во
всех точках одинаково.
Рис. 188. Зависимость частоты свистков f от давления питания р0:
а — звуковое истечение; б — сверхзвуковое истечение
В течение первого полупериода работы свистка воздух
наполняет резонатор, а в следующий полупериод поступивший
воздух выбрасывается наружу. Поэтому для получения коле-
баний струю часто несколько направляют ко внутренней части
резонатора. Все это подтверждает теорию Гельмгольца и Релея
о поддержании колебаний с помощью струи, периодически
отклоняющейся у «ножа».
Мощность излучения свистка выражается как произведение
площади отверстия сопла S = Ьб на интенсивность звука
/ = р2!ра\
pa
где p — эффективное значение акустического давления на вы-
ходе из свистка; р—плотность воздуха; а — скорость звука.
Затраченная мощность — это мощность воздушной струи на
выходе из сопла:
GV* i
Г. =---®- = J_pSP3
р 2 2 0
где G — массовый расход воздуха; v0 — скорость истечения
воздуха из сопла.
Тогда коэффициент полезного действия свистка
Ia_=_W_
WP (SaSv* '
332
чтобы этот приемник реагировал
б?
Рис. 189. Акустико-пневматический эле-
мент Аугера:
а — др подачи звукового сигнала; б — после
. подачи звукового сигнала
Можно также вычислить общий к. п. д. свистка, выражаю-
щий отношение излучаемой звуковой мощности к полной
затраченной, вычисляемой как произведение объемного расхода
через сопло свистка на избыточное давление ро:
„ Ь6Р2
Ло =--------•
paSvopo
Акустические приемники звуковых колебаний. Преобразова-
ние акустических сигналов в пневматические — одна из основ-
ных задач пневмоакустики. Для указанного преобразования
необходимо иметь надежный и малогабаритный приемник
звуковых колебаний. Важно,
на звуковой сигнал опреде-
ленной частоты, т. е. имел
избирательность.
Как известно, в электро-
технике уже давно для прие-
ма акустического сигнала и
его преобразования в элек-
трический ток применяют
механическую колебатель-
ную систему, чаще всего —
мембраны. Колебания мем-
браны преобразуются в ко-
лебания электрического то-
ка. Таким образом осуще-
ствляется двойное преобра-
зование: звука — в колеба-
ния мембраны и колебаний
мембраны в колебания электрического тока. В настоящее время
известны акустико-пневматические приемники Аугера (рис. 189),
в которых преобразование звукового сигнала в изменение дав-
ления сжатого воздуха осуществляется при непосредственном
воздействии звукового давления на струю [53]. Питающая капил-
лярная труба 1 формирует ламинарную цилиндрической формы
струю, которая попадает в приемную трубку 2 и создает в ней
давление (рис. 189, а). При подаче звукового сигнала струя тур-
булизируется, принимает коническую форму (рис. 189, б) и дав-
ление в приемной трубке 2 падает. В отличие от электрического
микрофона здесь имеет место лишь однократное преобразование
сигнала. Элемент имеет свойство детектировать и в нем отсутст-
вуют подвижные детали.
Для выявления основных особенностей приемного элемента
такого типа была проведена серия экспериментов на установке,
которая позволяла изменять и измерять с достаточной точно-
стью расстояние между трубками и устанавливать трубки друг
против друга. Исследования проводились в звукомерной камере
с применением электронной аппаратуры.
333
В результате исследований было установлено, что приемный
элемент Аугера, реагирующий на весьма широкий спектр частот,,
для избирательного приема акустических сигналов неприемлем.
При экспериментальных исследованиях звуковое давление
в непосредственной близости от струи выдерживалось постоян-
ным и равным 3 Па, а частота электрических колебаний, пода-
ваемых на динамик, изменялась с помощью звукового генерато-
Рис. 190. Характеристики изменения давления на выходе акустико-
пневматического приемника Аугера в зависимости от частоты звуко-
вого сигнала при рз = 3 Па:
а — ро = 2000 Па; I = 40 мм, d = 0,48 мм; б — h = 20 мм, р0 = 4000 Па,
I = 40 мм, d = 0,48 мм, h = 15 мм, р0 = 4000 Па и h = 15 мм, р0 = 5000 Па
ра в широком диапазоне. Звуковое давление измеряли акусти-
ческими зондами, включенными на вход электронных усилите-
лей, к выходу которых были присоединены катодные вольтмет-
ры. Частоту, задаваемую звуковым генератором, контролирова-
ли электронным частотомером, к входу которого был подклю-
чен акустический зонд.
На рис. 190 показаны графики, построенные по эксперимен-
тальным данным. По оси ординат отложено падение давления р
на выходе, а по оси абсцисс—частота звукового сигнала f.
Параметром является расстояние h между трубками. Кривые
получены для разных давлений питания р0 и при различных
геометрических параметра — длинах питающих капилляров /,
диаметрах питающих капилляров и приемных трубок d. Экспе-
рименты проводились с элементами, у которых диаметр питаю-
щего капилляра был равен диаметру приемной трубки. Шкала
частот на графиках логарифмическая. Согласно полученным
334
данным, диапазон, частот, на которые реагирует приемник,
например, при h = 10 мм, лежит в пределах от 4 до 15 кГц
(рис. 190, а). Из приведенных экспериментальных графиков сле-
дует, что при увеличении давления питания ро значения частот,
при которых происходит падение давления на выходе, увеличи-
вается. Уменьшение расстояния h между трубками в элементах
типа трубка — трубка с ламинарным питающим капилляром
приводит к сужению рабочего диапазона частот. Уменьшается
при уменьшении расстояния между трубками также и величина
падения давления на выходе элемента.
Наибольшее падение давления (рис. 190, а) происходит при
несколько меньшем расстоянии. Полученное явление объясняется
тем, что при увеличении расстояния
между трубками от 15 до 20 мм проис-
ходит также уменьшение давления на
выходе в приемной трубке до величи-
ны, меньшей, чем падение давления
при h = 15 мм в случае подачи звуко-
вого сигнала.
Как известно, на работу рассматри-
ваемых элементов существенно влияет
давление питания. С увеличением дав-
ления питания увеличивается и давле-
ние в приемной трубке, однако расстоя-
ние до турбулентного конуса уменьша-
ется. Поэтому рост давления в прием-
ной трубке может происходить лишь до
определенного значения давления пи-
тания, называемого критическим дав-
тельного давления в зависи-
мости от расстояния между
трубками (звуковое давле-
ние на входе р3 = 3 Па,
Ро = Ю00 Па, I = 70 мм,
d = 0,88 мм)
лением.
Коэффициент усиления k турбулентного усилителя в рас-
сматриваемом режиме представляет собой отношение изменения
давления на выходе к звуковому давлению на входе, т. е.
k = р/р3.
Коэффициент усиления k зависит не только от параметров
турбулентного усилителя и величины входного сигнала, но и от
частоты входного звукового сигнала. При частотах звукового
сигнала, выходящих за определенные пределы, и некотором
постоянном звуковом давлении элемент не реагирует на звук.
Максимальное значение коэффициента усиления составляет
величину порядка 500—550.
Коэффициент усиления растет с увеличением давления р0 и
расстояния между трубками h. Однако ро и h не должны превы-
шать граничных значений, о которых было сказано выше.
На рис. 191 в качестве примера приведена зависимость
относительного падения давления на выходе элемента от рас-
стояния между трубками h. Как следует из рисунка, уже при
h = 20 мм наступает насыщение.
335
Для того чтобы элемент срабатывал только при определен-
ной частоте звукового сигнала, его необходимо соединить
с резонатором Гельмгольца (рис. 192, а) так, как показано
на рис. 192,6. Резонатор Гельмгольца состоит из горловины и
емкости V и имеет то свойство, что амплитуда звукового дав-
ления внутри его полости резко возрастает при совпадении его
собственной частоты колебаний с частотой звукового сигнала,
который воздействует на его вход. Поэтому ламинарная струя,
Ро Ро
Рис. 192. Акустико-пневматические приемники звуко-
вых колебаний, настраиваемые на заданную частоту
вытекающая из питающего капилляра под давлением р0, будет
турбулизоваться только при фиксированной частоте звукового
входного сигнала, равной собственной частоте резонатора
Гельмгольца [19]. Настройку рассматриваемого элемента на
определенную частоту звукового сигнала можно осущест-
влять, изменяя, например, объем резонирующей камеры с
помощью поршня (рис. 192, в).
Собственная частота колебаний для резонатора Гельмгольца
(в радианах в секунду) может быть рассчитана по известной
формуле
г Q
где Y kRT — скорость звука; S — площадь горла; I — длина
горла; V — объем емкости резонатора; k = cPlcv — показатель
адиабаты.
Однако расчет собственной частоты по этой формуле
приводит к значительным погрешностям, так как эта формула
пригодна для резонаторов, имеющих значительное отношение
l/dr. Однако существуют другие формулы, дающие более точные
результаты. Одна из таких формул [40] пригодна для расчета
собственной частоты акустико-пневматического элемента с ци-
линдрическим резонатором (рис. 192, в):
л VkRT 1
со =-----------------.
336
Рис. 193. Частотные характеристики акустико-пневматического
приемного элемента, настроенного на заданную частоту срабаты-
вания
22 Заказ 993
где /р — длина цилиндра резонатора; dr— диаметр горла; I —
длина горла; dp— диаметр цилиндрического резонатора.
Как следует из приведенных формул, собственная частота
зависит от температуры.
При экспериментальных исследованиях элементов, предна-
значенных для избирательного приема звуковых колебаний,
акустическим зондом измеряли входное звуковое давление,
падение давления на выходе и вели наблюдения за характером
изменения давления внутри камеры резонатора. Для получения
Рис. 194. Характеристика изменения дав-
ления на выходе элемента в функции
звукового давления на входе
данных об изменении давле-
ния внутр-и камеры в ее зад-
нюю стенку была вмонтиро-
вана тонкая металлическая
мембрана диаметром 5 мм и
толщиной 0,2 мм. Силу зву-
ка, издаваемого колеблю-
щейся мембраной, измеряли
звуковым зондом. Звуковое
давление на входе в эле-
мент поддерживалось рав-
ным 3 Па.
В качестве примера на
рис. 193 приведены результа-
ты экспериментального ис-
следования одного такого элемента. Размеры элемента указаны
там же. Изменялось только расположение элемента трубка —
трубка и расстояние метду трубками. Как следует из приведен-
ных графиков, срабатывание элемента (падение давления на
выходе р) происходит только при определенной частоте звуково-
го сигнала. В данном случае при частоте f = 230 Гц. Там же на
графиках (штриховая линия) указано изменение условного зву-
кового давления рр внутри объема резонатора, замеренного че-
рез мембрану. Пикам падения давления на выходе элемента
соответствуют пики возрастания звукового давления рр внутри
резонатора. При увеличении расстояния между трубками и пе-
ремещения трубок вовнутрь объема резонатора величина дав-
ления срабатывания возрастает, что следует из сравнения гра-
фиков рис. 193, а и б. Однако это может привести и к появлению
срабатываний при других частотах, отличных от основной (рис.
193, в), так называемых ложных срабатываний. Добротность
характеристик различных элементов лежит в диапазоне от 10
до 50.
При увеличении входного звукового давления на выходе
вначале происходит резкое увеличение падения давления
(рис. 194), а затем при звуковом давлении около 3 Па наступает
насыщение. Давление питания р0 поддерживалось равным
1500 Па, а частота (резонансная) / = 2325 Гц. Штриховой
линией показано изменение условного звукового давления рр
338
в камере резонатора, которое определяли по колебаниям мем-
браны, встроенной в стенку камеры.
Опыты показали, что во всех случаях, когда резонатор
элемента по своей конфигурации приближается к трубе, заглу-
шенной с одного конца
(диаметр горла резонато-
ра близок к диаметру ем-
кости), наблюдается боль-
шое число ложных сра-
батываний. Этим ослож-
няется создание высоко-
частотных акустико-пнев-
матических приемных
элементов, так как у та-
ких элементов горло име-
ет диаметр, близкий к
диаметру камеры резона-
тора, и малую длину.
Как указывалось вы-
ше, настроить элемент на
определенную частоту
срабатывания можно пу-
тем изменения объема ре-
Рис. 195. Зависимость резонансной часто-
ты (частоты срабатывания) акустико-
пневматического приемного элемента от
длины цилиндрического резонатора /р
при ро = 1500 Па
зонатора, например, с по-
мощью поршня. Зависимость частоты от объема или от положе-
ния поршня (расстояние /р, см. рис. 192, в) имеет гиперболиче-
ский характер. Поэтому регулировать частоту можно лишь в не-
900 1300 1700 /7Гц
Рис. 196. Резонансные
пики акустико-пневмати-
ческого элемента при раз-
личных положениях
поршня:
которой рабочей зоне, так как при
слишком большом /р изменение час-
тоты мало, а при малом /р — вели-
ко. Экспериментальная зависимость
Рис. 197. Изменение давления на вы-
ходе элемента и ширины резонансного
пика в зависимости от длины горла
1 — /р = 6 мм; 2 — I р =
= 9 мм; 3 — /р= 12 мм;
4 — /р = 15 мм
резонансной частоты для резонатора Гельмгольца от расстояния
/р показана на рис. 195.
Установлено, что при увеличении объема (расстояния /р) и
уменьшении резонансной частоты падение давления на выходе
22* 339
увеличивается. Это можно видеть, анализируя график на
рис. 196, где показан ряд резонансных пиков, причем каждый
пик соответствует определенному /р. При смещении пиков влево
падение давления возрастает. Эти кривые построены для того
элемента с настраиваемым объемом, что и кривая на рис. 195.
Изменение давления на выходе элемента зависит существен-
но от длины горла резонатора I (рис. 197). Причем при измене-
нии длины горла каждый раз с помощью поршня настраивали
одну и ту же резонансную частоту f = 860 Гц и поддерживали
звуковое давление р3 = 8,6 Па. Там же приведена кривая
(сплошная линия), характеризующая собой ширину резонансно-
го пика у основания при различных длинах горла резонатора.
При увеличении длины горла I полное изменение давления на
выходе элемента уменьшается и происходит уменьшение шири-
ны резонансного пика у основания.
Изменение размеров элемента трубка — трубка и количе-
ства поступающего через питающую трубку воздуха не влияет
на собственную частоту приемного акустико-пневматического
элемента с настройкой на заданную частоту срабатывания.
2. РЕАЛИЗАЦИЯ НЕКОТОРЫХ ПНЕВМОАКУСТИЧЕСКИХ
ПРИБОРОВ
Приборы для измерения и сигнализации. Описанный выше
элемент Аугера, совмещенный с резонатором Гельмгольца
(рис. 192), может быть использован для построения целого ряда
пневмоакустических приборов. На рис. 198 приведена схема
Рис. 198. Бесконтактный
уровнемер
бесконтактного уровнемера, который может быть использован
в различных отраслях промышленности для измерения уровня
жидкостей, в том числе взрывоопасных. Основной бак /, пред-
назначенный для хранения жидкости, сообщается с измери-
тельной трубкой 2, в которой по закону сообщающихся сосудов
жидкость устанавливается на том же уровне, что и в баке 1.
340
Верхняя часть трубки, заполненная воздухом, образует объем
резонатора Гельмгольца, а затем переходит в горло, в устье
которого имеется питающий капилляр 3 и приемная трубка 4.
Таким образом, в верхней части измерительной трубки распо-
лагается акустико-пневматический элемент, собственная частота
которого зависит от объема или от положения уровня жидкости
в сосуде 1.
Перед горлом установлен свисток4 Гартмана 7 с резонатором
5 и поршнем 6, положение которого зависит от давления ри.
Так как частота звука, излучаемого свистком Гартмана, зависит
от объема резонатора 5 свистка 7, то по давлению ри под
Рис. 199. Пневмоакустический
измеритель частоты звукового
сигнала
Рис. 200. Пневмоакустичес-
кий сигнализатор неисправ-
ностей
поршнем можно судить о частоте колебаний. Поршень 6 и
резонатор 5 могут также составлять часть следящей системы.
Тогда положение поршня будет зависеть от входного давления
и на точность измерения не будет влиять трение поршня о стенки
цилиндрического резонатора, а также нестабильность пружины
и т. д.
Сигнал с выхода акустико-пневматического элемента подает-
ся на вход логического устройства 8, построенного на турбу-
лентных усилителях и осуществляющего сканирующее движение
поршня 6. В тот момент, когда частота звука совпадет с соб-
ственной частотой акустико-пневматического элемента, на вход
логической системы управления 8 поступит сигнал, соответ-
ствующий условному 0. Сканирование прекратится, и по мано-
метру М отсчитывают уровень. Через некоторое время, продол-
жительность которого зависит от настройки реле времени,
входящего в состав устройства S, цикл начинается снова.
По аналогичному принципу может быть построен прибор
для определения звуковой частоты (рис. 199), содержащий
акустико-пневматический преобразователь 1 с переменной на-
стройкой на частоту срабатывания и логическое устройство 4,
осуществляющее медленное перемещение поршня вправо и вле-
во. В момент совпадения частоты подводимого к горлу резона-
тора звука с собственной частотой резонатора в последнем
наступает резкое увеличение звукового давления. Ламинарная
струйка, вытекающая из питающего капилляра 2, разрушается,
и сигнал на выходе элемента изменяет свое значение с I на 0.
341
Логическое устройство 4 останавливает поршень и на маномет-
ре 3 фиксируется давление, пропорциональное частоте. Через
некоторое время логическое устройство подаст команду и
движение поршня возобновится и т. д. При выборе длины
цилиндра резонатора и пути следования поршня следует учиты-
вать, что зависимость собственной частоты такого резонатора от
положения поршня имеет характер гиперболы (рис. 195).
Часто о неисправности работы двигателя, турбины или иного
устройства можно судить по изменению частоты генерируемых
им звуковых колебаний. Другими словами, неисправности почти
всегда сопутствует определенная частота звука, издаваемого
тем или иным устройством. Для обнаружения этой частоты и
сигнализации о неисправности служит акустический сигнализа-
тор неисправностей (рис. 200). Сигнализатор содержит
настраиваемый на заданную частоту акустико-пневматический
приемный элемент, состоящий из резонатора 4, питающего ка-
пилляра <3, приемного канала 2 и поршня 5, а также струйного
инвертирующего элемента /, струйного элемента памяти 6,
пневматического усилителя давления и мощности 7 и излучате-
ля звуковых колебаний (свистка) 8.
Резонатор 4 с помощью поршня 5 настраивают на звуковой
сигнал определенной частоты соответствующей неисправности
контролируемого объекта. Этот сигнал турбулизирует питаю-
щую струю, вытекающую из канала 3. Вследствие этого дав-
ление на выходе канала 2 уменьшается, и сигнал с выхода
инвертирующего элемента 1 подается на вход элемента памя-
ти 6, где происходит «запоминание» звукового сигнала опреде-
ленной частоты. Сигнал с выхода элемента памяти 6 проходит
на вход пневматического или струйного усилителя 7, где усили-
вается по давлению и мощности, и поступает к излучателю
звуковых колебаний 8. Сброс элемента памяти на нуль осу-
ществляется путем подачи сигнала сброса рс.
Датчики и преобразователи. Используя акустическую ли-
нию связи, можно построить генератор пневматических коле-
баний, который выполняет роль датчика частоты колебаний
пневматического давления, зависящего от какого-либо физиче-
ского параметра, например, расстояния, состава газа, темпера-
туры, давления и т. д. Схема датчика показана на рис. 201.
Датчик состоит из акустико-пневматического приемного
элемента 4, расположенного на некотором расстоянии I напро-
тив излучателя звуковых колебаний 1 и пневматического или
струйного усилителя мощности и давления 6. Выходной канал 5
акустико-пневматического приемного элемента включен на
вход усилителя 6 давления и мощности, а выход последнего —
к свистку 1. Пространство между элементом 4 и свистком 1
служит каналом акустической обратной связи. С помощью
соответствующих -приспособлений можно изменять длину I этого
канала. К капилляру акустико-пневматического приемного
342
Рис. 201. Генератор пневматиче-
ских колебаний с акустической
линией отрицательной обратной
связи, частота которого зависит
от какого-либо физического па-
раметра
элемента подведено низкое давление питания pOi порядка
2000 Па, а к усилителю 6 давление р02 из нормального диапа-
зона — около 0,2 МПа. Резонатор 4 настроен на частоту свист-
ка 1.
Питающая струя, вытекающая из капилляра 3, направляется
в канал 5, на выходе которого создается сигнал р^ который, бу-
дучи усилен по давлению и мощности в усилителе 3, приводит
в действие свисток 1. Сигнал свистка направляется к горлу 2
резонатора 4 и турбулизирует ламинарную струю, вытекающую
из капилляра 3, и давление р\
уменьшается до нуля. Генератор че-
рез время, определяемое инерцион-
ностью системы, перестает работать.
Питающая струя уже не турбулизи-
руется и поступает в канал 5, на
выходе которого появляется давле-
ние pi, и колебательный цикл повто-
ряется снова. При неизменном рас-
стоянии /, составе и температуре га-
за частота работы преобразователя
не будет меняться.
При изменении расстояния I ме-
жду свистком 1 и резонатором 4
меняется частота колебаний всего
устройства, т. е. устройство работает в режиме частотного дат-
чика расстояния. Действительно, если расстояние /, например,
уменьшается, а параметры газа не изменяются, то и скорость
звука в нем неизменна, и, следовательно, время прохождения
звукового сигнала в цепи отрицательной обратной связи умень-
шается, что ведет к увеличению частоты колебаний давления р
на выходе частотного преобразователя. Если расстояние I воз-
растает, то частота колебаний давления р уменьшается.
При изменении иного физического параметра, например, тем-
пературы проходящего между генератором и приемным акусти-
ко-пневматическим элементом газа, но неизменном его составе
и расстоянии /, частота колебаний давления р на выходе рас-
сматриваемого устройства будет однозначно определяться тем-
пературой, т. е. устройство в целом будет работать в режиме
частотного датчика температуры. Действительно, увеличение
температуры ведет к уменьшению плотности среды и увеличению
скорости распространения звука в цепи отрицательной обратной
связи. При неизменных расстоянии / и составе среды увеличение
скорости распространения звукового сигнала ведет к возраста-
нию частоты колебаний давления на выходе преобразователя.
У опытного образца такого датчика расстояние I увеличивалось
до нескольких метров, при этом частота была равна долям герца.
Акустико-пневматический элемент, показанный на рис. 192, б,
позволяет создать электропневматический преобразователь без
343
контактов и подвижных деталей, что несомненно повышает его
надежность.
Дискретный бесконтактный электропневмопреобразователь
(рис. 202, а) состоит из мультивибратора 1 на транзисторах, пре-
образующего напряжение 12 В постоянного тока в прямоуголь-
ные импульсы, телефона 2 (ДЭМША) и акустико-пневматичес-
кого приемного элемента 5, собственная частота резонатора
которого совпадает с частотой импульсов, поступающих с выхо-
Рис. 202. Электропневматический преобразователь без контактов и под-
вижных деталей:
а — схема; б — внешний вид
да мультивибратора (4 кГц). Постоянный ток, преобразованный
мультивибратором в прямоугольные импульсы, подается в теле-
фон, который преобразует их в звуковые колебания той же час-
тоты. Звуковой сигнал, поступая на вход акустико-пневматичес-
кого приемного элемента, вызывает падение давления на его
выходе. Принципиально в электропневмопреобразователе этого
типа можно было бы использовать элемент Аугера. Однако при-
менение акустико-пневматического элемента, описанного ранее,
оказывается в данном случае более целесообразным, так как
резонатор усиливает звуковые колебания и тем самым повышает
чувствительность устройства.
344
Давление питания дискретного электропневмопреобразовате-
ля ро = 1700 Па, входное напряжение 10—15 В, потребляемая
мощность электрического тока 0,2 Вт, изменение выходного дав-
ления р = 800 Па, габаритные размеры 93 X 45 X 27 мм. Испы-
тания преобразователя прошли успешно. Внешний вид устрой-
ства представлен на рис. 202, б.
Акустико-пневматические логические ячейки. Используя
акустико-пневматические приемные элементы, можно построить
целый ряд логических ячеек. Входными сигналами, управляющи-
ми этими ячейками, служат звуковые колебания с разными час-
Г,
Рис. 203. Акустико-пневматическая
логическая ячейка НЕ—ИЛИ на п
акустических входных сигналов
тотами, получаемые от генера-
торов звуковых колебаний, а
выходными — пневматические
сигналы. Если пневматические
сигналы, получаемые на выхо-
де логических ячеек, снова пре-
образовать с помощью соответ-
ствующих генераторов звуко-
вых колебаний в звуковые ко-
лебания различных частот, то
эти колебания могут быть ис-
пользованы в качестве входных
сигналов для других акустико-
пневматических ячеек. На ос-
нове таких ячеек можно было
бы строить акустико-пневмати-
ческие логические системы, в
которых связь между отдель-
ми логическими ячейками осуществлялась бы не с помощью пнев-
матических каналов, а по воздуху — звуковыми сигналами с раз-
личной частотой. Однако это дело будущего.
Здесь в качестве примера рассмотрим использование акусти-
ко-пневматических приемников звуковых колебаний для реали-
зации двух акустико-пневматических логических ячеек — ячейки,
выполняющей логическую операцию НЕ — ИЛИ и операцию
запоминания сигналов. Схема акустико-пневматической ячейки
НЕ — ИЛИ на п входных акустических сигналов представлена
на рис. 203. Она состоит из акустико-пневматических приемных
элементов, соединенных друг с другом таким образом, что каж-
дый выход предыдущего элемента присоединяется к питающему
капилляру следующего элемента. К питающему капилляру 1 пер-
вого элемента подводится давление питания р0, а приемный ка-
нал п последнего элемента служит выходом логической ячейки
НЕ — ИЛИ. К горловинам резонаторов Гельмгольца подводятся
звуковые входные сигналы с частотами fb /2, fn- Резонаторы
на указанные частоты звуковых сигналов настраивают порш-
нями. При подаче давления питания р0 из капилляра 1 будет ис-
текать ламинарная струйка, которая попадает в приемно-питаю-
23 Заказ 993
345
щий капилляр 2, затем в капилляр 5 и т. д. до выходного при-
емного канала п. На выходе давление будет равно условной
единице. Если на вход ячейки направить звуковой сигнал, час-
тота которого совпадает хотя бы с одной из собственных частот
п резонаторов, то в горловине соответствующего резонатора
произойдет турбулизация ламинарной струйки и давление на
выходе n-й ячейки станет равным условному нулю. Тот же ре-
зультат будет получен, если на вход будет подано два звуковых
Рис. 204. Акустико-пневматическая логичес-
кая ячейка запоминания входных акустичес-
ких сигналов
сигнала, частоты которых
совпадут с собственными
частотами двух резонато-
ров и т. д. Исследования
такого элемента показали
его работоспособность,
причем в качестве источ-
ников звуковых колеба-
ний применялись свистки,
схемы которых представ-
лены на рис. 187, работа-
ющие на очень низких
(порядка 800 Па) питаю-
щих давлениях.
Акустико-пневматиче-
ская логическая ячейка
запоминания изображена
на рис. 204. Ячейка пред-
назначена для выполнения операции запоминания акустического
входного сигнала определенной частоты. Она состоит из двух
акустико-пневматических приемных элементов /, 3, в каждом из
которых введен дополнительный управляющий канал (соответ-
ственно 3 и 7), предназначенный для воздействия на основную
питающую струю. Выходной канал 2 и 5 каждого из акустико-
пневматических элементов соединен с дополнительным управля-
ющим каналом 7, 3 другого. Собственную частоту элементов на-
страивают поршнями 9 и 10. При подаче давления питания ро
в капилляры 4 и 6 питающая струя направляется в канал 5, на
выходе из которого создается давление р\, и далее в дополни-
тельный управляющий канал 3. Ламинарная питающая струя,
вытекающая из канала 4, турбулизируется, вследствие чего в ка-
нале 2 и на выходе из него давление р2 уменьшается до нуля и
в дополнительный управляющий канал 7 давление не поступает.
Элемент памяти находится в одном устойчивом состоянии.
При подаче акустического входного сигнала с частотой, рав-
ной собственной частоте резонатора элемента 3, вытекающая из
капилляра 6 питающая струя турбулизируется, вследствие чего
в канале 5 и на выходе из него давление р{ уменьшается до нуля
и перестает поступать в дополнительный управляющий канал 3.
При этом питающая струя, вытекающая из канала 4, направ-
346
ляется в канал 2, на выходе которого создается давление р2, и
далее в дополнительный управляющий канал 7. При снятии
акустического сигнала струя, вытекающая из управляющего ка-
нала 7, продолжает турбулизировать питающую струю, вытека-
ющую из канала 6, чем достигается запоминание факта наличия
акустического сигнала заданной частоты Элемент памяти бу-
дет находиться в этом устойчивом состоянии до тех пор, пока не
будет подан акустический сигнал определенной частоты /г. на ко->
торую настроен резонатор 1. В этом случае турбулизируется
питающая струя, вытекающая из канала 4, давление р% на выхо-
де из канала 2 уменьшается до нуля, а вытекающая из дополни-
тельного управляющего канала 3 струя под давлением р турбу-
лизирует питающую струю, вытекающую из канала 4 и т. д.
3. ПНЕВМОАКУСТИЧЕСКИЕ ЛИНИИ СВЯЗИ
В настоящее время известны три основных способа передачи
пневматических сигналов на большие расстояния при помощи
или с использованием на той или иной стадии преобразования
звуковых колебаний. Первый способ сводится к передаче звуко-
вых колебаний по воздуху. При этом звуковые колебания различ-
ных частот получают путем преобразования давления сжатого
воздуха. Обратное преобразование звуковых колебаний в давле-
ние воздуха осуществляют с помощью акустико-пневматических
приемных элементов, настроенных на определенные частоты.
Второй способ сводится к передаче звуковых колебаний по труб-
ке. И, наконец, третий способ, который позволяет передавать
пневматические сигналы на десятки километров, сводится к пре-
образованию пневматического сигнала в звук, а затем в электри-
ческий ток в передатчике, к передаче электрического тока по
проводам и, наконец, вторичному преобразованию электричес-
кого тока в звук и звука — в пневматический сигнал.
Первый способ позволяет передавать пневматические сигна-
лы лишь на десятки метров, что связано с тем, что звуковые ко-
лебания сильно рассеиваются и поглощаются в свободной атмо-
сфере. Причем ослабление звуковой волны при рассеивании
связано с увеличением шаровой поверхности фронта при удале-
нии от излучающего звука тел. Рассеивание звука можно умень-
шить, делая фронт звуковой волны плоским. Поглощение звука
в воздухе объясняется наличием вязкости, теплопроводности и
молекулярного поглощения. Ослабление звукового давления р
на расстоянии г от излучающего тела можно рассчитать по фор-
муле [15]
р = р0е-8г,
где ро — звуковое давление на поверхности излучающего тела,
имеющего форму шарика; б — коэффициент поглощения.
23* 347
Коэффициент поглощения
6 = -1±д_(й2/' J +JL2L±z±\
3 а3р \ 4 Цд k J
где цд — коэффициент динамической вязкости среды; а — ско-
рость распространения звука в среде; р — плотность среды; со —
звуковая частота: х— теплопроводность среды; k = — —пока-
cv
затель адиабаты.
Из последнего выражения видно, что коэффициент поглоще-
ния зависит и от частоты звукового сигнала во второй степени.
Поэтому передача звуковых сигналов по воздуху на большие
расстояния из-за значительного поглощения звука невозможна.
Очень важным является вопрос о правильном выборе часто-
ты. Для того чтобы уменьшить поглощение звука при передаче
звуковых сигналов по воздуху, следует брать как можно мень-
шую частоту. Однако для того, чтобы предотвратить рассеива-
ние звука и, следовательно, передавать звуковую волну в виде
направленного луча с плоским фронтом, необходимо использо-
вать различного рода звуковые концентраторы, такие, как рупо-
ры, параболоиды и звуковые линзы. Дальность передачи кон-
центраторами звуковой волны в виде луча тем больше, чем боль-
ше размеры концентраторов по сравнению с длиной звуковой
волны. Например, параболоид передает звуковую волну в виде
луча на расстояние
L -А
кр X ’
где у0 — радиус зрачка параболоида; А—длина звуковой волны.
На больших расстояниях звуковой луч превращается в рас-
ходящийся конус и быстро рассеивается. Как следует из послед-
ней формулы, чтобы передать звуковую волну в виде луча на
большее расстояние, необходимо уменьшать длину звуковой
волны. При приеме звуковой волны концентратором имеет силу
соотношение: чем больше по сравнению с длиной звуковой
волны размеры концентратора, тем больше коэффициент усиле-
ния, представляющий собой отношение звукового давления
в центре фокального пятна к звуковому давлению в падающей
волне. Например, для параболоида коэффициент усиления по
давлению
£ = yoctg In-----------------,
р % 2 1 + cos ат
где ат — угол раскрытия !.
1 Угол между осью параболоида и линией, соединяющей фокус с точкой
параболоида, соответствующей у0.
348
Таким образом, вести передачу на очень низкой частоте не-
целесообразно. Необходимо выбирать оптимальный диапазон
частот.
В ИАТ для подтверждения возможности многоканального
телеуправления приборами струйной техники было создано уст-
ройство, схема которого представлена на рис. 205, а. Система
Рис. 205. Устройство многоканального звукового управления приборами струй-
ной техники:
а — схема устройства; б — передатчик; в — приемник
349
управления содержит следующие основные блоки: передатчик,
приемник, логическую управляющую часть и пневматический
исполнительный механизм. Для создания направленного излу-
чения передатчик имеет параболоид 3 (радиус зрачка у0 =
= 120 мм; фокусное расстояние f = 19 мм), в фокусе которого
размещены три свистка 2, выполненные в соответствии с рис.
187, а. Давление питания к свисткам подается при нажатии кно-
пок 1. Свистки имеют различные объемы резонирующих полос-
тей и генерируют звуковые сигналы с частотами 2,5; 3 и 5 кГц.
Приемник звуковых сигналов может быть расположен на рас-
стоянии до 40 м от передатчика. В фокусе параболоида 5 при-
емника расположены три акустико-пневматических приемных
элемента 4, настроенных на те же частоты. Элементы питаются
сжатым воздухом с давлением 2000 МПа.
Выходы акустико-пневматических элементов при помощи
пневматического переключателя 6 можно попеременно подклю-
чать ко входу струйного реле 7, составленного из двух турбу-
лентных усилителей и предназначенного для усиления выходного
сигнала приемного элемента. Сигнал с выхода струйного реле
управляет триггером 8. Последний, в свою очередь, осуществля-
ет переключение мембранных усилителей 9 и И давления и мощ-
ности, выходы которых соединены с полостями цилиндра испол-
нительного механизма 10.
Приемник реагирует только на ту частоту, на которую он на-
строен переключателем 6. При нажатии кнопки передатчика,
включающей свисток, генерирующий ту частоту, на которую на-
строен приемник, срабатывает соответствующий элемент 4. Дав-
ление на выходе этого элемента уменьшается. Небольшое паде-
ние давления на выходе указанного элемента вызывает резкое
уменьшение давления на выходе струйного релейного элемента,
что изменяет состояние триггера 8. Триггер переключает усили-
тели 9 и 11, и в камеру поршневого исполнительного механизма
10, которая ранее сообщалась с атмосферой, поступает воздух
высокого давления. Вторая камера сообщается с атмосферой.
Поршень исполнительного механизма переходит в противополож-
ное крайнее положение. При прекращении подачи звукового
сигнала поршень остается в прежнем положении. Для перевода
поршня в первоначальное положение следует снова подать зву-
ковой сигнал. На рис. 205, бив представлены действующие ма-
кеты передатчика и приемника.
Изложенный принцип управления одним исполнительным ме-
ханизмом может быть использован при разработке устройств
управления несколькими исполнительными механизмами с раз-
ветвленной логической схемой управления.
Зависимость давления на выходе акустико-пневматического
приемного элемента, установленного в фокусе параболоида (f =
= 19 мм, у0 = 120 мм), от расстояния L между этим параболои-
дом и параболоидом со свистком, работающим при постоянной
35Э
Рис. 206. Графики зависимости падения давле-
ния р на выходе акустико-пневматического при-
емного элемента от расстояния между парабо-
лоидами
частоте и давлении питания и установленном в фокусе, дана на
рис. 206. Расстояние между параболоидами L измерялось в мет-
рах, а начальное давление на выходе акустико-пневматических
приемных элементов составляло 1000 Па. По оси ординат
откладывалось отклонение давления от начального уровня. При-
емные элементы были настроены на частоты, излучаемые свист-
ками соответственно 4125 и 2775 Гц.
Пневмоакустическое устройство для передачи голоса на рас-
стояние разработала американская фирма Geuge Industries Inc
[60]. Перенос голосовой информации от передатчика до приемни-
ка осуществляется зву-
ковым модулирован-
ным лучом. Передатчик
представляет собой па-
раболоид, снабженный
ультразвуковым свист-
ком, который генери-
рует несущую частоту.
Питается передатчик от
баллона со сжатым
воздухом. Несущая ча-
стота модулируется по
амплитуде звуками го-
лоса. Демодуляция по-
лучаемого от передат-
чика сигнала осуществ-
ляется в приемнике с
помощью струйного
устройства, принцип действия которого основан на использова-
нии ламинарных потоков. Источником энергии для приемника
служит баллон со сжатым воздухом. Передача осуществляется
на расстояния порядка 100 м в пределах прямой видимости. Для
передачи на большое расстояние необходимо создать острона-
правленный звуковой луч. Такой луч можно сформировать, при-
меняя высокие несущие частоты. Однако колебания высоких час-
тот сильнее поглощаются в атмосфере, так как коэффициент по-
глощения пропорционален квадрату частоты. На направление
звукового луча влияют перемещающиеся потоки воздуха. Прин-
цип действия прибора может быть использован также для опре-
деления расстояния или обнаружения предметов, например, во
взрывоопасной атмосфере.
Способ передачи звукового или пневматического сигнала по
трубке дает возможность увеличить дальность действия до не-
скольких сотен метров, а скорость передачи, как и при первом
способе, довести до скорости звука. Для ускорения процессов
передачи пневматических дискретных сигналов применяют раз-
личные средства, в том числе промежуточные усилители и блоки
предварения. Для передачи нескольких пневматических сигналов
351
по одной линии используют амплитудную модуляцию передавае-
мых сигналов. Однако методы непосредственной передачи пнев-
матических сигналов по трубопроводам обеспечивают лишь при-
ближение скорости передачи к скорости звука.
Проводятся также работы, связанные с передачей пневмати-
ческих сигналов путем предварительного преобразования их
в звуковые, с передачей звукового сигнала по трубке, а затем
обратного преобразования звукового сигнала в пневматический.
Однако этот способ встречает затруднения, так как для обеспе-
чения беспрепятственной передачи необходимо, чтобы диаметр
трубки значительно превышал длину звуковой волны и г. д.
Часто в пневмоавтоматике возникает проблема быстрой пере-
дачи пневматических сигналов на десятки километров. Разра-
ботка быстродействующих линий связи для передачи пневмати-
ческих сигналов на большие расстояния приобретает особое зна-
чение в связи с развитием систем струйной пневмоавтоматики
с малым временем протекания переходных процессов (от тысяч-
ных до десятых долей секунды). В быстродействующих пневма-
тических струйных системах скорости передачи сигналов по
длинным линиям связи должны быть больше скорости работы
самой системы. Для реализации таких линий связи применяют
третий способ со следующей цепочкой преобразования сигна-
лов— пневматический — акустический — электрический — акус-
тический — пневматический.
Недостатком такого способа является необходимость приме-
нения преобразователей. Однако скорость передачи сигналов
значительно возрастает. Поэтому применение пассивной элект-
рической проводной линии связи для дальней и быстрой переда-
чи весьма эффективно. Благодаря чрезвычайной надежности и
простоте выбранных преобразователей одного вида энергии
в другой такая линия передачи дискретных сигналов в целом
оказалась очень надежной и удобной. Так как в линии связи по
проводам происходит передача электрического сигнала, ее дли-
на может быть во много раз больше обычной пневматической
длинной линии, выполненной в виде трубки. Схема длинной ли-
нии связи с пассивным электрическим контуром, созданная
в ИАТ, представлена на рис. 207, а. Она состоит из трех блоков:
передатчика /, приемника // и блока питания ///. Передатчик
предназначен для преобразования пневматического входного
сигнала в колебания электрического тока и включает в себя
свисток Гартмана 1 и дифференциальный электромагнитный
микротелефон 2, работающий в режиме микрофона. Приемник
//, соединенный электрическими проводами 3 с передатчиком Д
предназначен для обратного преобразования колебаний элек-
трического тока в пневматический сигнал. Для осуществления
указанного преобразования в приемнике имеется также микро-
телефон 4, работающий в режиме телефона, акустико-пневмати-
ческий приемник звуковых колебаний 5, струйный турбулент-
352
ный усилитель 6 и мембранный усилитель мощности и давле-
ния 7.
Блок питания III необходим для получения низкого давления
(2000 МПа) для питания акустико-пневматического приемника
звуковых колебаний 5 и турбулентного струйного усилителя 6,
Рис. 207. Пневматическая длинная линия для дискретного
сигнала с пассивным электрическим промежутком:
а — схема линии; б — внешний вид блоков линии
а также других струйных устройств, в состав которых входит
линия связи. В блок питания входит редуктор 8 для нормального
диапазона давлений, редуктор низкого давления 9 и два мано-
метра 10 и И — один для контроля давления питания редуктора
S, а другой для измерения давления на выходе блока III.
353
При подаче входного сигнала давления р\ свисток 1 начинает
излучать акустические колебания определенной частоты, и на
выходе микрофона 2 передатчика возникает электрический сиг-
нал, поступающий по проводам 3 на телефон приемника 4, в ко-
тором колебания электрического тока снова преобразуются
в акустический сигнал.
Акустический сигнал преобразуется в пневматический сигнал
в акустико-пневматическом приемном элементе 5, который на-
строен на частоту свистка 1. Пневматический сигнал затем
Рис. 208. Резонансная
кривая пассивного элек-
трического контура
дважды усиливается, сначала по дав-
лению в турбулентном струйном уси-
лителе 6, а затем в усилителе давления
и мощности 7. Так как элементы 5, 6
и 7 инверсные, то в результате вход-
ной сигнал инвертируется.
Блоки длинной линии показаны на
рис. 207, б, где справа расположен
блок питания, слева — приемник, а по-
средине передатчик.
Передача сигнала по длинной ли-
нии может осуществляться только на
определенной частоте, которая являет-
ся резонансной для узла, состоящего
из микрофона 2, телефона 4 и соеди-
нительных проводов 3. При частотах,
отличных от резонансной частоты, ток
в линии практически отсутствует.
При наладке линии прежде всего
определяют резонансную частоту узла, состоящего из микрофона
2, телефона 4 и соединительных проводов 3.
Для определения резонансной частоты к микрофону 2 подво-
дят акустический сигнал, частоту которого плавно изменяют
в достаточно широких пределах. Силу звука, создаваемую теле-
фоном 4, измеряют устройством, состоящим из акустического
зонда, электронного усилителя и катодного вольтметра. Акусти-
ческий сигнал перед микрофоном 2 создавался динамиком,
включенным на выход звукового генератора. Сила звука, подво-
димого к микрофону 2, выдерживалась постоянной. Максималь-
ное значение звукового давления на выходе телефона 4 соответ-
ствует резонансной частоте.
На рис. 208 представлен график, показывающий зависимость
напряжения, измеряемого катодным вольтметром, от частоты
звукового сигнала. Максимальное напряжение 1,2 В соответст-
вует звуковому давлению вблизи телефона 4 в 8,5 Па. Из этого
же графика следует, что резонансная частота равна 1600 Гц. На
эту частоту должен' быть настроен свисток 1 и акустико-пневма-
тический приемник звуковых колебаний 5 (рис. 207, а). Частоты
свистка и аКустико-пневматического приемника звуковых коле-
354
баний настраивают путем изменения соответствующих резони-
рующих объемов.
Нижний и верхний предел входного сигнала рх может быть
определен из графика на рис. 186, представляющего собой зави-
симость частоты излучаемого свистком акустического сигнала
от давления. Из рассмотрения кривой следует, что частота ос-
тается постоянной при изменении входного сигнала от 0,03 до
0,08 МПа, т. е. этот диапазон должен быть принят за рабочий.
Данные о напряжении на выходе передатчика при различ-
ных значениях избыточного давления силе тока в линии, а
также напряжении при отключенном приемнике приведены
в табл. 11.
Таблица 11
Основные характеристики передатчика
МПа Напряжение на выходе передатчика, В Сила тока в линии, мА Частота свистка, Гц
при включенном приемнике при отключенном приемнике
0,02 0,5 0,6 0,6 1500
0,04 1,5 2,1 1,65 1600
0,08 2,8 3,2 2,5 1600
Вопрос о максимальной длине L линии сводится к определе-
нию максимального электрического сопротивления проводов <3,
при котором продолжается надежная работа линии. Это сопро-
тивление оказалось равным 5,3 кОм. Таким образом, если при-
нять, что приемник и передатчик соединены медным проводом
диаметром 0,5 мм, то, пользуясь известным соотношением из
электротехники, можно определить, что длина линии L = 28 км.
Система, состоящая из микрофона и телефона и соединитель-
ных проводов, может иметь не один, а два резонансных пика.
По линии, содержащей такую систему, можно одновременно пе-
редавать два дискретных пневматических сигнала. Передатчик
такой длинной линии должен иметь два свистка, излучающих
акустические сигналы с частотами, соответствующими резонанс-
ным частотам микрофона, соединенного с телефоном. На те же
частоты должны быть настроены акустико-пневматические при-
емные элементы приемника. При увеличении числа резонансных
пиков соответствующим образом может быть увеличено число
дискретных пневматических сигналов, одновременно передавае-
мых по длинной линии. С помощью электронной аппаратуры
было исследовано время передачи сигнала по длинной линий.
При этом на вход длинной линии подавали ступенчатый сигнал
с крутым фронтом. Время преобразования сигнала в передающем
и приемном устройствах оказалось на порядок больше, чем время
чистого запаздывания, которое составило 0,06 с.
СПИСОК ЛИТЕРАТУРЫ
1. Абрамович Г. Н. Прикладная газовая динамика. М., «Наука», 1969,
824 с.
2. Айзерман М. А. и др. Логика, автоматы, алгоритмы. М-, Физматгиз,
1963, 556 с.
3. Андреева Л. Е. Упругие элементы приборов. М., Машгиз, 1962, 456 с.
4. Беляев М. М., Мезин И. С., Шубин А. И. Разработка аппаратуры для
наблюдения с помощью электронного осциллографа статических и динамиче-
ских характеристик устройств струйной техники. В кн.: Пневматические сред-
ства и системы управления. М., «Наука», 1970, с. 278—281.
5. Берендс Т. К., Ефремова Т. К., Тагаевская А. А. Элементы и схемы
пневмоавтоматики. М., «Машиностроение», 1968, 312 с.
6. Берендс Т. К., Таль А. А. О струйно-мембранной технике.— «Автома-
тика и телемеханика», 1969, № 7, с. 179—183.
7. Березовец Г. Т., Малый А. Я., Наджаров Э. М. Приборы пневматичес-
кой агрегатной унифицированной системы и их использование для автоматиза-
ции производственных процессов. М., Гостоптехиздат, 1962, 212 с.
8. Богачева А. В. Пневматические элементы систем автоматического уп-
равления. М., «Машиностроение», 1966, 238 с.
9. ’Богомолов А. И., Михайлов К. А. Гидравлика. М., Изд-во литературы
по строительству, 1972, 97 с.
10. Борисов Ю. Я. Газоструйные излучатели звука гартмановского типа.—
В кн.: Физика и техника мощного ультразвука, М., «Наука», 1967, с. 9—63.
11. Вайсер И. В., Касимов А. М. Система модулей струйной техники
СМСТ-2.— «Приборы и системы управления», 1970, № 5, с. 10—13.
12. Васильева Н. П., Петрухин Б. П. Проектирование логических элемен-
тов автоматики. М„ «Энергия», 1970, 336 с.
13. Высоцкий А. В. и др. Пневматические измерения линейных размеров.
М., Машгиз, 1963, 168 с.
14. Гарбер Е. Д., Стегаличев Ю. Г., Усачев Ю. А. Автоматическое уп-
равление судовыми дизельными установками с ВРШ. Л., «Судостроение»,
1967, 168 с.
15. Гензель Г. С., Заездный А. М. Основы акустики. М.—Л., «Морской
транспорт», 1952, 388 с.
16. Герц Е. В., Крейнин Г. В. Динамика пневматических приводов машин-
автоматов. М., «Машиностроение», 1964, 229 с.
17. Герц Е. В. Пневматические приводы. М., «Машиностроение», 1969,
356 с.
18. Герц Е. В., Крейнин Г. В. Теория и расчет силовых пневматических
устройств. М., Изд-во АН СССР, 1960, 172 с.
19. Градецкий В. Г., Дмитриев В. Н. Исследование элемента типа труб-
ка — трубка с ламинарным питающим капилляром.— «Приборы и системы уп-
равления», 1967, № 2, с. 10—12.
20. Градецкий В., Г. и др. Применение струйной техники в медицине.—
В кн.: Пневматические средства и системы управления, М., «Наука», 1970,
с. 340—349.
356
21. Гребер А. Давление в зоне завихрений под прилипающими ламинар-
ными потоками и пограничным слоем. В кн.: Струйная пневмогидроавтомати-
ка. М., «Мир», 1966, с. 130—145.
22. Дмитриев В. Н., Шашков А. Г. Силовое действие струи на заслонку
в пневматических и гидравлических управляющих органа хтипа сопло —
заслонка.— «Автоматика и телемеханика», 1956, т. XVII, № 6, с. 559—569.
23. Дмитриев В. Н. Элементы пневматических устройств. В кн.-: Справоч-
ник по приборостроению и средствам автоматики. Т. 2, кн. 1, М., «Машино-
строение», 1964, с. 373—40 L
24. Залманзон Л. А. Проточные элементы пневматических приборов кон-
троля и управления. М., Изд-во АН СССР, 1961, 248 с.
25. Залманзон Л. А. Теория элементов пневмоники. М., «Наука», 1969,
570 с.
26. Залманзон Л. А., Луцук Ю. В. Струйный измеритель температуры.
В кн.: Новое в пневмонике. М., «Наука», 1969, с. 117—121.
27. Крассов И. М. Гидравлические элементы в системах управления. М.,
«Машиностроение», 1967, 256 с.
28. Лебедев И. В. Исследование аэродинамики вихревых элементов пнев-
моники. В кн.: Пневматические средства и системы управления, М., «Наука»,
1970, с. 238—241.
29. Лебедев И. В. О применении вихревых элементов струйной техники.
В кн.: Приборы и устройства струйной техники (пневмоники). Ч. 2, Л.,
ЛДНТП, 1968, с. 30—35.
30. Львов С. В. и др. Бесконтактный пневмоэлектрический преобразова-
тель. В кн.: Новое в пневмонике. М., «Наука», 1969, 168—170 с.
31. Мезин И. С. и др. Струйные турбулентные элементы.— «Приборы и
системы управления», 1970, № 5, с. 14—17.
32. Мезин И. С. и др. Электропневматические и пневмоэлектрические
преобразователи для струйной техники (пневмоники). В кн.: Новое в пневмо-
нике. М., «Наука», 1969, с. 150—165.
33. Островский Ю. И. Пневматический экстремум-регулятор.— «Автома-
тика и телемеханика», 1957, № 11, с. 1046—1051.
34. Островский Ю. И., Трескунов С. М. Многофункциональный пневми-
сторный модуль. В кн.: Приборы и устройства струйной техники. Л., ЛДНТП,
1968, с. 12—22.
35. Пневматические средства и системы управления. М., «Наука», 1970,
400 с.
36. Поспелов Д. А. Арифметические и логические основы вычислительных
машин дискретного действия. Ч, 2, М., Изд. МЭИ, 1961, 108 с.
37. Прусенко В. С. Пневматические регуляторы. М.— Л., «Энергия», 1966,
270 с.
38. Прусенко В. С. Пневматические датчики и вторичные приборы.
М.— Л., «Энергия», 1965, 186 с.
39. Рыжнев В. Ю., Перловский Р. Ш., Залкинд Л. А. Экспериментальное
исследование некоторых вихревых элементов пневмоники. В кн.: Новое в пнев-
монике. М„ «Наука», 1969, 110—117 с.
40. Сажин С. Г. Автоматическое устройство для измерения малых давле-
ний.— «Химическое и нефтяное машиностроение», 1970, № 2, с. 43—45.
41. Струйные приборы контроля и управления и техника пневматических
печатных схем.— «Автоматика и телемеханика». Т. XXIV, 1963, № 8,
1155—1157 с.
42. Струйная пневмоавтоматика. М., «Мир», 1966, 382 с.
43. Сотсков Б. С. Государственная система приборов и средств автома-
тизации. М., ЦНИИТЭИприборостроения, 1969, 29 с.
44. Трескунов С. Л., Особенности соударения струй в камерах струйных
элементов. В кн.: Новое в пневмонике. М., «Наука», 1969, с. 93—98.
45. Тикеджи Б. А. и др. Струйные элементы системы «Волга» и их при-
менение.— «Приборы и системы управления», 1970, № 5, с. 19—21.
46. Фернер В. Пневматические приборы низкого давления. М., «Мир»,
1964, 316 с.
357
М; Фудим Е, В. Построение пневматических вычислительных устройств на
пульсирующих сопротивлениях. В кн.: Системы и устройства пневмоавтома-
тики. М., «Наука», 1969, с. 135—158.
48. Челомей В. Н. О пневматических сервомеханизмах.— «Изв. АН СССР.
ОТН», 1954, № 5, с. 39—50.
49. Чудаков А. Д., Бельский В. К., Жолков Ю. А. Комплекс вычислитель-
ных устройств струйной автоматики.— «Приборы и системы управления»,
1970, № 5, с. 17—19.
50. Школьникова Р. И. Воздухоструйные генераторы акустических коле-
баний для коагуляции аэрозолей.— «Акустический журнал». Т. 9, вып. 3,
1963, с. 368—375.
51. Шлихтинг Г. Возникновение турбулентности. М., Изд-во иностр, лит.,
1962, 204 с.
52. Юдицкий С. А. Метод построения систем управления технологически-
ми машинами-автоматами с гидро- и пневмоприводом. В кн.: Пневматические
средства и системы управления. М., «Наука», 1970, с. 14—23.
53. Auger R. The Turbulence Amplifier. Fluid Amplifier Handbook, Washing-
ton, 1962, 211 p.
54. Baida M. Staticke charakteristiky pneumatickeho resilovace s valnym
turbulentnim prondem. Automatizace, 1966, N 9, p. 2—7.
55. Bourque C., Newmann B. Reattachment of a Two—Dimensional Incom-
pressible Jet to an Adjacent Flat Plate. The Aeronautical Quarterly, v. 11,
1960, N 3.
56. Bowles R., Dexter E. A. Second Generation of Fluis System Application.
«Fluidies», Boston, 1965.
57. Ferner V. Neue pneumatische bzw. hydraulische Elemente in der Mefi—
und Regelungstechnik. Die Technik, Heft 6, 1954, p. 359—365.
58. Kelly L. A Fluidic Temperature Control Using Frequency Modulation
and Phase Discrimination. Trans, of the ASME, 1967, N 2, p. 32—38.
59. Kirchner I. Fluid Thermometry. Electronic and Control Instrum., 1969,
N 1, p. 16.
60. Khol Ronald. A—C Fluidies. Machine Design, v. 41, 1969, N 3.
61. Dat I. Fabre I., Gamma! H. Some Fluidic concepts Applied to Flow
Measurement. Preprins of the 2 nd IFAC Symposium on Fluidics, Prague,
June 28—July 2, 1971, p. 1—10.
62. Schaedel H. Untersuchungen in Linearen Bauelementen in der Fluidik.
«Frequenz», 1970, 24, N 5, p. 149—154.
63. Sarpkaya T., Kirchner I. The Comparative Performance Characteristics
of Vented and Unvented, Cusped and Straight and Curved Walled Bistable
Amplifiers Proceed, of Third Cranfield Fluidics Conf., paper F3, BHRA,
1968, p. 1—8.
64. Third Cranfield Fluidics Conference, Preprinted Papers, Turin, 8—10 may,
1968, p. Al—F2.
65. Parker G. The Design of Digital Fluidic Components and Systems«
A Review. Proceed of Fifth Cranfield Fluidics Conference, paper R3, BHRA,
1972, p. 37—58.
66. Sarpkaya T. Of Fluid Mechanics and Fluidics and of Analysis Physical
Insight. Proceed of Fifth Cranfield Fluidics Conference, paper R2, BHRA, 1972,
p. 17—36.
67. O’Brien R. Fluidic Applications Review. Proceed of Fifth Cranfield
Fluidics Conference, paper Rl, BHRA, 1972, 1—16.
ОГЛАВЛЕНИЕ
Предисловие • • 3
Введение .......................................................... 3
Глава I. Подготовка воздуха для систем пневмоавтоматики 9
1. Требования, предъявляемые к воздуху........................9
2. Подготовка воздуха для систем пневмоавтоматики, работаю-
щих в области нормальных и высоких давлений . . .11
3. Подготовка воздуха для систем струйной пнемоавтоматики . 19
Глава II. Элементы пневмоавтоматики ... .24
1. Пневматические сопротивления (дроссели) .... 24
2. Упругие элементы пневматических приборов ... 49
3. Пневматические золотниковые усилители (золотники) . 59
4. Струйная трубка.......................................... 64
Глава III. Пневматические камеры и коммуникационные каналы связи 70
L Статика пневматических проточных камер..................71
2. Динамика пневматических камер..........................91
3. Статические характеристики коммуникационных каналов си-
стем пневмоавтоматики......................................104
4. Динамические характеристики -пневматических коммуникаци-
онных каналов..............................................106
5. Пневматические длинные линии...........................107
Глава IV. Струйные элементы дискретного действия .111
1. Струйные логические элементы, работа которых основана на
взаимодействии турбулентных струй..........................112
2. Струйные элементы дискретного действия, работа которых ос-
нована на взаимодействии потока со стенкой.................128
3. Струйные логические элементы с турбулизацией течения (тур-
булентные усилители) . . ....................139
4. Вихревые элементы........................................157
Глава V. Пневматические вычислительные, управляющие и регули-
рующие устройства мембранного типа.................163
1. Краткая характеристика способов и принципов построения уп-
равляющих вычислительных и регулирующих мембранных
устройств ..............................*..................163
2. Реализация принципа компенсации перемещений в регулято-
рах, построенных на базе измерительных приборов . 164
3. Реализация принципа компенсации сил и агрегатного способа
построения приборов в системе АУС и КУСПА .... 166
4. Реализация принципа компенсации сил и элементного способа
построения пневматических приборов в системе УСЭППА . 175
359
5. Пневматические экстремальные регуляторы (автоматические
оптимизаторы)..............................................200
6. Построение пневматических вычислительных приборов на базе
пневматического решающего усилителя........................203
7. Линейное пульсирующее сопротивление и непрерывные пнев-
матические вычислительные устройства, построенные на его
базе..................................................... 216
Глава VI. Способы построения дискретных систем струйной пневмо-
автоматики ...................................................223
1. Расчет пневматической струйной цепи........................223
2. Критерии оценки качества работы струйных элементов дискрет-
ного действия..............................................230
3. Функциональные возможности струйных логических элементов
при элементном способе построения схем.................238
4. Модульный и агрегатный способы построения струйных уст-
ройств. Интегральные струйные, схемы ......................245
5. Струйно-мембранная техника...........................252
6. Техника переменных токов в струйной пневмоавтоматике . . 255
Глава VII. Пневматические датчики и преобразователи .... 262
1. Датчики и преобразователи физических параметров пневмоме-
ханического действия.......................................263
2. Датчики физических параметров с применением элементов
струйной техники .......................................... 276
3. Преобразователи систем пневмоники.......................283
Глава VIII. Пневматические исполнительные механизмы . . 293
1. Пневматический поршневой привод одностороннего действия . 295
2. Пневматический поршневой привод двустороннего действия . 311
3. Поршневой следящий пневмопривод.........................321
Глава IX. Пневмоакустика........................................ . 326
L Элементы пневмоакустических устройств ... . 327
2. Реализация некоторых пневмоакустических приборов . 340
3. Пневмоакустические линии связи......................... . 347
Список литературы . 356
Вадим Николаевич Дмитриев
Валерий Георгиевич Градецкий
ОСНОВЫ ПНЕВМОАВТОМАТИКИ
Редактор издательства Т. В. Абизова
Технический редактор Е. П. Смирнова Корректор Л. В. Асташенок,
Художник Е. В. Бекетов
Сдано в набор 17/V 1973 г. Подписано к печати 24/Х 1973 г. Т-15797
Формат 60 X 9O’/ie Бумага № 1 Печ. л. 22,5 Уч.-изд. л. 22,4
Тираж 12500 Заказ Кг 993 Цена 1 р. 62 к.
Издательство «Машиностроение», 107885 Москва, Б-78, 1-й Басманный пер., д. 3
Экспериментальная типография ВНИИ полиграфии Государственного комитета
Совета Министров СССР по делам издательств, полиграфии и книжной торговли
Москва, К-51, Цветной бульвар, 30