/






Похожие




Текст
JfcXJK г
И не. № 19406 т.л.
no
*1
Экз. Л?
4Z./J.9/
'РООе
И КОНСТРУКЦИЯ -
ТАНКА
ин в,?»
I десяти томАх • —=^=
Под редакцией
д-ра техн, наук, проф. П. П. ИСАКОВА
Том 9
ДИНАМИЧЕСКИЕ ПРОЦЕССЫ
В МЕХАНИЧЕСКИХ СИСТЕМАХ
И АГРЕГАТАХ ТАНКА
Редактор тома канд. техн, наук В. А. Зайцев
Москва «МАШИНОСТРОЕНИЕ» 1988
УДК ЙЗ 438.3.001.5—752:623.438.3-585
Теория и конструкция танка. —Т. 9. Динамические
процессы в механических системах и агрегатах танка.—
М.: Машиностроение, 1988. 300 с.
В книге изложены вопросы исследования крутильных колебаний
и переходных динамических процессов в моторно-трансмиссионной
установке, влияния виброударных процессов на детали внутреннего
оборудования танка при его движении и производстве выстрела,
а также интенсивных ударов при снарядном обстреле танка без про-
бития его брони.
Книга предназначена для научных и инженерно-технических ра-
ботников. занимающихся вопросами создания н испытаний военных
гусеничных машин (ВГМ), а также может быть рекомендована в
качестве учебного пособия преподавателям и студентам вузов, слу-
шателям н курсантам военных академий и училищ соответствующего
профиля.
Ил. 135, табл. 28, список лит. 30 назв.
В книге пронумеровано 300 страниц.
ПРЕДИСЛОВИЕ
Динамические процессы, возникающие при работе механизмов
и агрегатов ВГМ, в отдельных случаях могут приводить к наруше-
нию функционирования приборов и систем, а также к их прежде-
временному выходу из строя.
Механические динамические процессы проявляются в виде кру-
тильных колебаний валопроводов и вращающихся масс в моторно-
трансмиссионных установках ВГМ в процессе передачи мощности
от двигателя до рабочих ветвей гусениц и в виде пространственных
вибраций и ударов, воспринимаемых оборудованием внутри танка
при его движении, стрельбе из основного оружия, взаимодействии
снарядов с броней корпуса и башни. Превышение допустимых
амплитуд крутильных колебаний в трансмиссии может привести
к усталостной поломке валов и зубчатых передач, выходу из строя
подшипниковых опор и дисков трения переключающих устройств
и другим отказам. Повышенный уровень вибраций, как правило,
приводит к нарушению функционирования приборов и элементов
электрорадиооборудования и потере виброустойчивости приборов
прицеливания. Неудачный выбор способов крепления и средств
виброударозащиты приборов и внутреннего оборудования может
привести к потере их работоспособности в процессе эксплуатации
при снарядном обстреле в условиях боя.
Динамические процессы необходимо исследовать на всех эта-
пах создания ВГМ, начиная с обоснования принципиальных схем
силовых передач, компоновки машины и вплоть до постановки
ВГМ на серийное производство, а также при их модернизации.
Знание параметров и характеристик динамических процессов, уме-
ние управлять ими позволяют снизить их отрицательное влияние
на работоспособность приборов и систем, повысить долговечность
оборудования.
1*
3
Для снижения виброактивности ходовой части и корпуса целесо-
образно применять агрегатно-модульную компоновку электрообору-
дования (кассетирование, использование панельно-каркасных кон-
струкций и др.). Внброударозащита приборов внутри ВГМ обеспе-
чивается с помощью приборных амортизаторов и специальных
подвесок. При проектировании новых приборов и аппаратуры не-
обходимо использовать более стойкие к виброударным воздейст-
виям комплектующие элементы (реле, конденсаторы, контакторы,
микросхемы и другие радиоэлементы).
Для обеспечения работоспособности механизмов и внутреннего
оборудования ВГМ необходим детальный анализ динамики маши-
ны, т. е. надо установить источники крутильных колебаний и виб-
ровозмущений, исследовать процесс формирования динамических
нагрузок, типизировать и обобщить параметры нагруженности,
разработать методы их экспериментального исследования и рас-
четного прогнозирования.
В книге приведены результаты исследований динамики состав-
ных частей ВГМ, полученные авторами за последние годы, а так-
же обобщены результаты, полученные ранее. Рассмотрены прин-
ципы построения динамических моделей исследуемых процессов,
методики расчетного и экспериментального определения основных
динамических параметров и характеристик, способы их схематиза-
ции и нагрузочно-скоростные спектры, методы и средства сниже-
ния динамических нагрузок как за счет изменения самой системы,
так и посредством введения специальных защитных устройств
(демпферы, антивибраторы, амортизаторы и др.).
Гл. 1—9 посвящены динамическим процессам в моторно-транс-
миссионных установках (крутильные колебания), влияющим на
долговечность их деталей в условиях реальной эксплуатации,
а гл. 10—14 — вопросам виброударной динамики ВГМ, влияющей
на стойкость агрегатов, приборов и аппаратуры к ударным воздей-
ствиям в процессе движения ВГМ, стрельбы из танковой пушки и
при артиллерийском обстреле танка.
Авторами книги являются Г. С. Белоугов, В. В. Гаюн, Г. С. Жар-
товскнй, В. А. Зайцев, Е. И. Зильбербург, И. С. Карасов, Л. Л. Ляц-
кнй, Ш. И. Нанава и Р. Д. Тетельбаум.
4
Глава 1. ДИНАМИЧЕСКИЕ ПРОЦЕССЫ В МОТОРНО-
ТРАНСМИССИОННЫХ УСТАНОВКАХ
1.1. ХАРАКТЕР ДИНАМИЧЕСКИХ ПРОЦЕССОВ
Особенности конструкции и эксплуатации ВГМ определяют спе-
цифический характер динамических процессов, возникающих в мо-
торно-трансмиссионных установках (МТУ). Как и всякая силовая
цепь, МТУ обладает упругими свойствами, т. е. при вращении со-
средоточенных масс с различной мгновенной скоростью под дейст-
вием периодических крутящих моментов возникают моменты сил
инерции сосредоточенных масс и моменты сил упругости соедине-
ний между ними. Под действием этих моментов система, выведен-
ная из состояния покоя, приходит в колебательное движение.
Колебания под действием внутренних переменных моментов
называются свободными, частота этих колебаний определяется в
основном параметрами системы. Каждому значению свободных ко-
лебаний соответствует определенная форма — совокупность соот-
ношений между амплитудами колебаний масс и деформациями сое-
динений. Число частот и форм свободных колебаний на единицу
меньше числа сосредоточенных масс системы.
Многочисленность составных частей в МТУ определяет множе-
ство сосредоточенных масс в системе, а наличие коробок передач—
различные варианты структурных схем, соответствующих включен-
ным передачам при прямолинейном движении машины и поворотах.
Все это определяет многообразие форм свободных колебаний, быст-
ро затухающих под действием моментов сил трения различных эле-
ментов МТУ.
Колебания под действием внешних переменных моментов назы-
ваются вынужденными. Частоты этих колебаний равны соответству-
ющим частотам периодических составляющих возмущающих мо-
ментов, которые в свою очередь пропорциональны частоте враще-
ния возбудителя колебаний. Частота колебаний возмущающих мо-
ментов может совпасть с одной из частот свободных колебаний
МТУ, и тогда колебания достигнут максимального развития. Часто-
та вращения, при которой наблюдается совпадение частоты вы-
нужденных и свободных колебаний, называется резонансной,
а резкое возрастание амплитуды колебаний при этом — резонан-
сом.
Источниками возбуждения вынужденных крутильных колеба-
ний в МТУ являются: неравномерный крутящий момент источника
5
энергии (поршневой двигатель внутреннего сгорания) и ее потреби-
телей (компрессоры, насосы и др.), колебания корпуса машины при
движении по неровному профилю дорог, вибрация устройств, пере-
дающих мощность (от соударения траков гусениц и зубьев шесте-
рен при входе в зацепление, при несоосности отдельных соедини-
тельных элементов).
Неравномерный профиль дорог и местности и переменный мо-
мент сопротивления движению обусловливают широкий диапазон
нагрузочных и скоростных режимов работы двигателя.
Скоростной диапазон не ограничивается максимально допусти-
мой и минимально устойчивой частотами вращения вала двигате-
ля. На неустановившихся режимах (например, при несвоевременных
переключениях с низших передач на высшие) возможно уменьше-
ние частоты вращения вала двигателя и выход ее за минимально
устойчивую зону, а при переключениях с высших на низшие пере-
дачи— увеличение се и превышение максимально допустимых
значений.
Широкий скоростной диапазон режимов работы двигателя, мно-
гообразие форм свободных колебаний и источников возбуждения
вынужденных колебаний в МТУ определяют большую вероятность
резонансных режимов, которые характеризуют не только опасный
уровень нагруженности элементов МТУ, но и возможность «зави-
сания» двигателя на резонансных частотах в зоне резонансных ко-
лебаний. Это явление возможно на пусковых частотах вращения
вала двигателя, когда необходимая на преодоление сил трения
при колебаниях в системе мощность превышает развиваемую дви-
гателем, что делает невозможным его надежный пуск. Важное мес-
то в работе МТУ занимают переходные процессы, обусловленные
частыми изменениями режима работы машины (повороты, разго-
ны, торможения, стрельба из танковой пушки), причем на элемен-
ты МТУ в этих случаях действуют импульсные нагрузки, образуе-
мые инерционной и колебательной составляющими. Во многих слу-
чаях эти нагрузки являются доминирующими. Переходные режимы
определяются процессами буксования фрикционных устройств, из-
менением во времени скоростей и ускорений машины, траекторий
ее движения и частот вращения отдельных звеньев МТУ.
Переходные процессы часто бывают неустойчивыми. Под устой-
чивостью понимается способность системы возвращаться в исход-
ное состояние после воздействия на нес какого-либо возмущения.
Неустойчивый характер переходных процессов, например, в момен-
ты буксования фрикционов, обусловливает возникновение в системе
расходящихся колебаний или автоколебаний.
Неустойчивой может оказаться и система автоматического регу-
лирования (САР) частоты вращения коленчатого вала двигателя
внутреннего сгорания, состоящая из двух основных частей: управ-
ляющего устройства и объекта регулирования. Управляющее
устройство включает в себя регулятор и систему управления кру-
тящим моментом двигателя. Процессы, происходящие в системе
6
управления крутящим моментом двигателя, определяются импульс-
ной подачей топлива и газодинамическими процессами в цилинд-
рах двигателя. Объектом регулирования являются двигатель, его
системы и связанные с ними агрегаты, т. е. вся моторно-трансмис-
сионная установка.
Неустойчивость САР может определяться резонансными ампли-
тудно-частотными характеристиками МТУ, если спектр частот се
собственных колебаний включает в себя частоты, при которых
входные воздействия эффективно трансформируются регулятором.
По суммарной динамической нагрузке элементов МТУ (от кру-
тильных колебаний динамических процессов при буксовании фрик-
ционных устройств) производится оценка их долговечности*.
1.2. ОСОБЕННОСТИ ИССЛЕДОВАНИЯ ДИНАМИЧЕСКИХ
ПРОЦЕССОВ
Методы исследования динамических процессов в моторно-
трансмиссионных установках ВГМ определяются поставленной
целью. Задачей исследования может быть анализ или синтез дина-
мического процесса. Целью анализа в динамических исследованиях
являются расчетно-теоретическое и экспериментальное определе-
ние характеристик динамических процессов, оценка допустимости
уровня действующих динамических нагрузок, а также обобщение
статистических данных по режимам работы систем и агрегатов,
формирование режимов их стендовых испытаний. Целью синтеза
является создание конструкций, обеспечивающих функциониро-
вание и требуемую надежность систем ВГМ посредством иденти-
фикации их параметров и оптимизации динамических характери-
стик по выбранным критериям при заданных воздействиях. К за-
дачам синтеза относятся также снижение динамической нагружен-
ное™ и защита агрегатов и систем от динамических воздействий.
Условия функционирования динамической системы отобража-
ются в виде совокупности параметров внешней среды и характери-
стик их взаимодействия. Режимы работы системы определяются
ее структурным состоянием в типичных фазах функционирования.
Нагрузочно-скоростные характеристики задаются в виде зако-
нов их временных, частотных или скоростных изменений. Каждый
режим реального динамического процесса может в разных случаях
рассматриваться как установившийся, стационарный или как не-
установнвшийся, переходный. Установившиеся процессы, в которых
изменение скоростного режима происходит очень медленно или
само изменение частоты вращения не является возмущающим
фактором, исследуются при неизменных, но различных структур-
ных состояниях трансмиссии во всем скоростном диапазоне. Пере-
ходными являются все режимы, обусловленные резким изменением
* Методика оценки долговечности элементов МТУ приведена в гл. 8, а также
в т. 5.
7
частоты вращения элементов МТУ или скорости движения маши-
ны, а также режимы, сопровождающиеся перестройкой структуры
системы (трогание или переключение передач, разгон и торможе-
ние, вход и выход машины из поворотов и др.).
Методы исследования динамики МТУ можно разделить на дза
основных вида: исследование на моделях и на натурных составных
частях в стендовых или объектовых условиях (исследовательские
испытания). Исследования на моделях выполняются аналитически-
ми методами и наряду с численными расчетами включают в себя
математическое моделирование на ЭВМ, физическое и натурно-
математическое моделирование с применением исследовательских
моделирующих комплексов (ИМК). В процессе исследовательских
испытаний имитируются динамические режимы работы и нагруже-
ния систем и агрегатов на стендах, а также производится их про-
верка непосредственно на машинах при ходовых испытаниях. Вы
бор метода исследования определяется стадией разработки ВГМ
на самых ранних этапах создания новых систем основными метода-
ми являются расчетный анализ и математическое моделирование
с применением ЭВМ; на стадии отработки опытных образцов —
исследовательские испытания натурных составных частей в стен-
довых и ходовых условиях. В последнее время существенное разви-
тие получил метод натурно-математического моделирования, при-
меняемый практически на всех этапах создания ВГМ и сочетаю-
щий в себе положительные качества математического моделирова-
ния и натурного эксперимента.
1.3. МОДЕЛИРОВАНИЕ ДИНАМИЧЕСКИХ ПРОЦЕССОВ
Исследование динамического процесса на моделях заключается
в выделении его из изучаемого физического явления и описании в
виде некоторой математической схемы, определяющей совокупность
основных внешних воздействий и взаимосвязи между элементами
системы, а также между нею, объектом управления и рабочими
органами или машиной в целом. Построение модели динамического
процесса требует его схематизации, т. е. выработки определенных
правил и допущений, на основе которых реальные процессы в
объекте заменяются идеализированными, но эквивалентными ис-
ходным по заданным параметрам или критериям. Также необходи-
ма схематизация исследуемого объекта, динамическая модель ко-
торого содержит идеализированные характеристики упругих, дисси-
пативных и инерционных элементов, а также имеет схематизиро-
ванные связи с внешней средой, в том числе силовое или кинемати-
ческое воздействие. Исследования на моделях существенно влияют
на развитие экспериментальных методов исследования (исследо-
вательских испытаний).
В математических моделях уравнениями одинаковой формы
описываются различные по своей природе явления. Прежде всего
по структурной и кинематической схемам определяются параметры
8
механической системы и вводятся обобщенные координаты <?4, кото-
рыми определяется абстрактная конфигурация системы, являющая-
ся моделью реальной системы. В обобщенных координатах отобра-
жается в (л-Н) мерном пространстве состояний (qi, t) поведение
системы в виде движения точки по некоторой траектории (i=
— 1,2,.... л; п — число степеней свободы системы; t — время). Ди-
намику таких механических систем рассматривают, основываясь на
положениях аналитической механики и, в частности, теории колеба-
ний.
Уравнения Лагранжа являются основой построения математиче-
ских моделей для любого рассматриваемого ниже динамического
процесса. Наряду с дифференциальными уравнениями движения
при этом используются логические условия и другие вспомогатель-
ные зависимости, отражающие специфику исследуемой системы и
ее взаимодействие с окружающей средой и объектом управления.
Исследовать динамику силовых передач с применением матема-
тических моделей можно различными способами. Для относительно
простых систем возможно чисто аналитическое решение. Для более
сложных систем математическая модель может быть реализована
численным интегрированием на ЦВМ. Широко распространено мо-
делирование на аналоговых вычислительных машинах (АВМ), при
котором с помощью электронных схем устанавливаются непосред-
ственные связи между величинами, соответствующими исходной
системе и электронной модели АВМ, либо отдельные математичес-
кие операции выполняются блоками, структура соединения которых
отражает уравнения движения. Для моделирования сложных про-
цессов на цифровых вычислительных машинах математическую мо-
дель преобразовывают в специальный моделирующий алгоритм.
Если для одномассовой нелинейной системы возможно получить
аналитическое решение в виде конкретных формул и определить об-
ласти и границы устойчивости простейших видов движения, то ана-
литически описать поведение многомассовой системы во всем диа-
пазоне изменения параметров самой системы и возмущения практи-
чески не представляется возможным. Для исследования такой си-
стемы составляются дифференциальные уравнения движения, опре-
деляемые структурой механической системы. При этом никаких ог-
раничений на условия проявления динамического процесса и вид
решения не накладывается. Аналоговая или цифровая модели
в этом случае реализуют то движение системы, которое свойствен-
но ей при заданном сочетании параметров.
Если математическая модель динамической системы построена
так, что сохраняется стохастический характер протекающего про-
цесса (например, моделируются элементарные явления и взаимо-
связь между ними), то с вероятностных позиций такое моделирова-
ние является статистическим выборочным экспериментом с моделью
системы во времени. Моделирование с непосредственным участием
оператора, играющего активную роль в управлении процессом, на-
зывается имитационным. Имитационное моделирование начинает
2 Зак. 20с
9
усиленно развиваться и в последнее время используется при иссле-
довании динамики ВГМ. Перспективными средствами имитацион-
ного моделирования являются исследовательские моделирующие
комплексы (ИМК), в которых органически сочетаются математи-
ческие модели динамических процессов реальных систем с физичес-
кими моделями систем, непосредственно связанных с человеком-
оператором.
ИМК для исследования динамики ВГМ при движении представ-
ляет собой натурно-математическую модель шасси, в которой чело-
веку-оператору (водителю ВГМ) с помощью физических моделей
информационных и моторных полей создаются реальные условия.
Внешняя среда вводится в математическую часть модели в виде
характеристик макро- и микрорельефа опорной поверхности (углы
подъемов, спусков, крена, поворота дороги; коэффициенты сопро-
тивления движению и коэффициенты сцепления гусениц с грунтом;
текущие размеры неровностей под каждой гусеницей и др.), а чело-
веку-оператору демонстрируется на экране дорожная обстановка.
Результат взаимодействия человека с машиной и внешней средой
при моделировании движения машины и сопровождающих его коле-
баний, вибраций и ударов, которые изменяют визуальное восприя-
тие внешней среды и механически воздействуют на оператора, вос-
производится посредством специального динамического стенда, где
размещается макет рабочего места водителя. Действие системы
человек—машина—среда определяется профессиональным мастер-
ством, психофизиологическим состоянием оператора, техническими
характеристиками машины и ее эргономичностью.
Для повышения достоверности получаемой информации в ИМК
могут входить натурные составные части или отдельные системы,
например, двигатель или вся моторно-трансмиссионная установка
с системами регулирования, управления и др. С помощью имита-
ционной натурно-математической модели шасси ВГМ можно про-
анализировать движение машины на заданной трассе, выявить ха-
рактерные режимы работы и нагружения отдельных агрегатов,
оптимизировать параметры системы по заданным критериям эф-
фективности.
10
Глава 2. ДИНАМИЧЕСКАЯ СХЕМАТИЗАЦИЯ
СИЛОВЫХ ПЕРЕДАЧ
2.1. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Динамическая модель силовой передачи ВГМ включает в себя
МТУ, ведущие колеса с рабочими ветвями гусеничного движителя
и корпус машины. Схематизация модели зависит от задачи ис-
следования: при анализе стационарных крутильных колебаний ис-
следуются малые колебания отдельных элементов относительно
направления переносного движения; при анализе переходных про-
цессов исследуются и относительное, и переносное движения.
Опытным путем установлено, что динамические процессы в си-
ловых передачах ВГМ и других транспортных машин можно изу-
чать на основе динамической модели с сосредоточенными массами
(рис. 2.1, а), с использованием систем обыкновенных дифферен-
циальных уравнений. Структурными элементами такой модели
являются сосредоточенные массы, упругие и диссипативные без-
ынерционные соединения. Диссипативная связь на расчетной ди-
намической схеме обычно не показывается, чтобы не загромождать
се (рис. 2.1, б).
Пусть общее число сосредоточенных масс равно ?„, а число
упругих соединений гс. Динамическими параметрами k-й сосредо-
точенной массы (k = 1, 2..., z0) являются ее момент инерции
и коэффициент поглощения энергии Ч^, характеризующий дисси-
пативный эффект сил сопротивления на k-й массе. Динамическими
параметрами m-го линейного упругого соединения (т= 1, 2,..., гс)
являются его податливость ет и коэффициент поглощения энергии
'Em, характеризующий диссипативный эффект сил сопротивления
в m-м соединении. В ряде случаев учитываются нелинейные харак-
теристики упругих соединений (зазоры, упругие муфты и др.).
Расчетная упругая характеристика при этом обычно задается в ку-
сочно-линейном виде.
Коэффициент поглощения энергии представляет собой отно-
шение работы сил сопротивления за одни период колебаний на k-й
массе к амплитуде кинетической энергии этой массы (Ч'*) или
в т-м соединении к амплитуде потенциальной энергии в этом
соединении (Ч,«).
2*
11
Вопросы определения упругих и диссипативных характеристик
различного типа муфт, демпферов и элементов валопровода под-
робно рассматриваются в специальной литературе. Наиболее на-
дежным способом определения характеристик являются испытания
на закруточном стенде; при этом коэффициент поглощения энергии
в муфте определяется по экспериментально полученной петле гис-
терезиса.
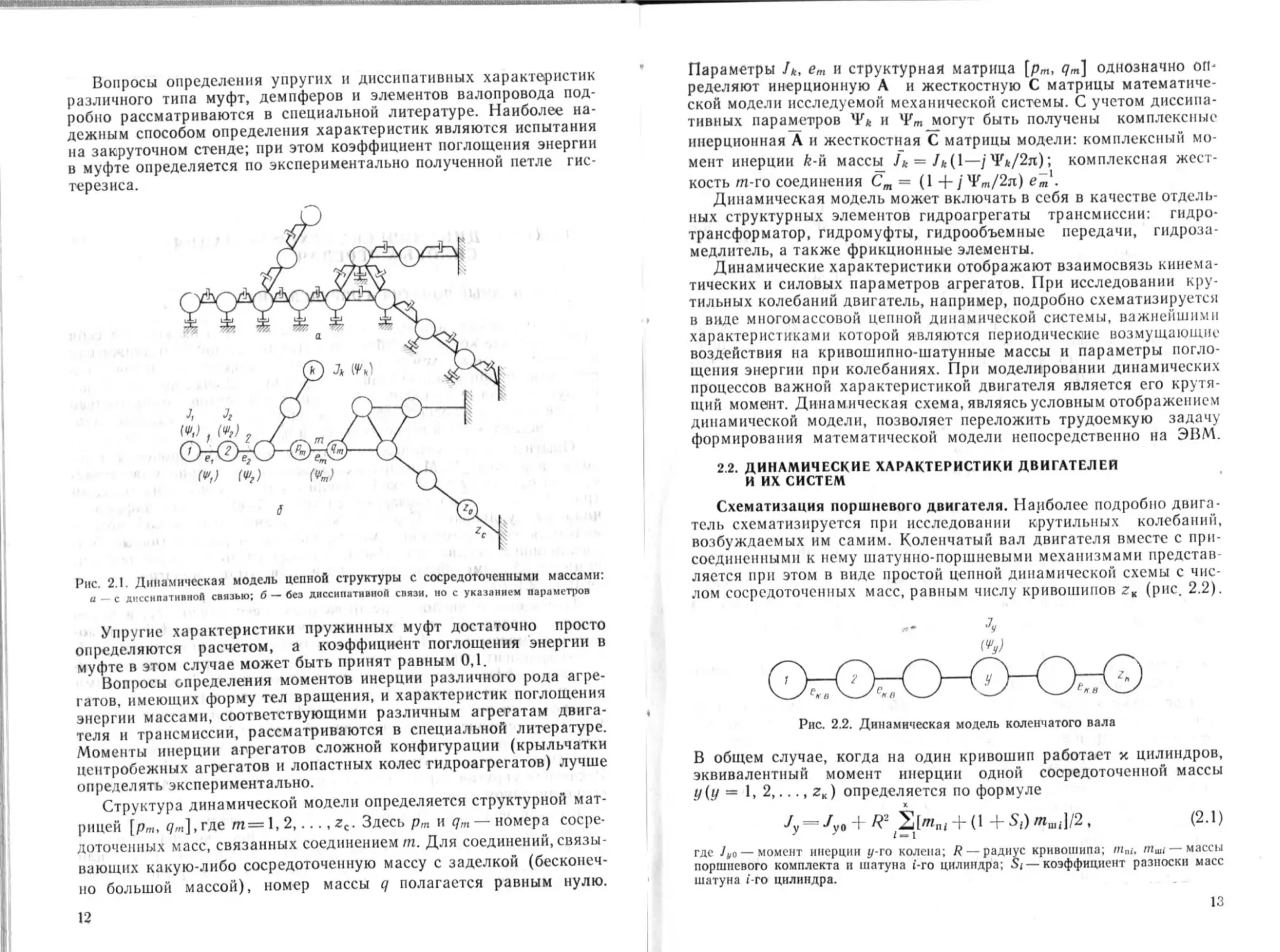
Рис. 2.1. Динамическая модель цепной структуры с сосредоточенными массами:
и - с диссипативной связью; б — без диссипативной связи, ио с указанием параметров
Упругие характеристики пружинных муфт достаточно просто
определяются расчетом, а коэффициент поглощения энергии в
муфте в этом случае может быть принят равным 0,1.
Вопросы определения моментов инерции различного рода агре-
гатов, имеющих форму тел вращения, и характеристик поглощения
энергии массами, соответствующими различным агрегатам двига-
теля и трансмиссии, рассматриваются в специальной литературе.
Моменты инерции агрегатов сложной конфигурации (крыльчатки
центробежных агрегатов и лопастных колес гидроагрегатов) лучше
определять экспериментально.
Структура динамической модели определяется структурной мат-
рицей [рП1, где т=1,2........гс. Здесь рт и —номера сосре-
доточенных масс, связанных соединением т. Для соединений, связы-
вающих какую-либо сосредоточенную массу с заделкой (бесконеч-
но большой массой), номер массы q полагается равным нулю.
12
Параметры /*, ет и структурная матрица (pm, gm] однозначно оп-
ределяют инерционную А и жесткостную С матрицы математиче-
ской модели исследуемой механической системы. С учетом диссипа-
тивных параметров V* и Тт^огут быть получены комплексные
инерционная А и жесткостная С матрицы модели: комплексный мо-
мент инерции k-н массы /* = /*(1—jWk/2n)\ комплексная жест-
кость m-го соединения Ст = (1 +/ Ч'т/ЗД ет'.
Динамическая модель может включать в себя в качестве отдель-
ных структурных элементов гидроагрегаты трансмиссии: гидро-
трансформатор, гидромуфты, гидрообъемные передачи, гидроза-
медлитель, а также фрикционные элементы.
Динамические характеристики отображают взаимосвязь кинема-
тических и силовых параметров агрегатов. При исследовании кру-
тильных колебаний двигатель, например, подробно схематизируется
в виде многомассовой цепной динамической системы, важнейшими
характеристиками которой являются периодические возмущающие
воздействия на кривошипно-шатунные массы и параметры погло-
щения энергии при колебаниях. При моделировании динамических
процессов важной характеристикой двигателя является его крутя-
щий момент. Динамическая схема, являясь условным отображением
динамической модели, позволяет переложить трудоемкую задачу
формирования математической модели непосредственно на ЭВМ.
2.2. ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ДВИГАТЕЛЕЙ
И ИХ СИСТЕМ
Схематизация поршневого двигателя. Наиболее подробно двига-
тель схематизируется при исследовании крутильных колебаний,
возбуждаемых им самим. Коленчатый вал двигателя вместе с при-
соединенными к нему шатунно-поршневыми механизмами представ
лястся при этом в виде простой цепной динамической схемы с чис-
лом сосредоточенных масс, равным числу кривошипов zM (рис. 2.2).
•4
Рис. 2.2. Динамическая модель коленчатого вала
В общем случае, когда на один кривошип работает х цилиндров,
эквивалентный момент инерции одной сосредоточенной массы
у (у = 1, 2,..., zK) определяется по формуле
7,-=<о + Я* 2(т„, + (1 + S,)Л1ш||/2. (2.1)
где /„о —момент инерции у-го колена; R — радиус кривошипа; ты, тШ1 — массы
поршневого комплекта и шатуна i-ro цилиндра; — коэффициент разноски масс
шатуна «-го цилиндра.
13
Значения /у0 могут быть различными из-за наличия противове-
сов на щеках или других конструктивных особенностей коленчатых
валов.
Для расчета крутильной податливости одного колена коленчато-
го вала ек в используются обычно полуэмпирические формулы, поэ-
тому необходимы экспериментальная проверка и уточнение этого
параметра по результатам статических и динамических испытаний.
Для вновь проектируемого двигателя используются обычно дан-
ные расчетно-экспериментального исследования аналогичных дви-
гателей. Так как процесс поглощения энергии в двигателе при ко-
лебаниях не поддается пока достоверному математическому опи-
санию, коэффициенты поглощения энергии массами двигателя оп-
ределяются по эмпирическим зависимостям, полученным посредст-
вом статистической обработки результатов экспериментальных ис-
следований резонансных колебаний различных двигателей, исполь-
зуемых в танках, а также в стендовых и объектовых установках
(при этом коэффициенты поглощения энергии в упругих соедине-
ниях динамической схемы коленчатого вала двигателя принимают-
ся равными нулю):
= 2 ,
/0,015 -f- 52 Фу тах , если Фу тах < 0,004;
ГДе ( 0,22 . если Фу тах > 0,004;
«у max 2 aty
«„ — относительная амплитуда колебаний у-й массы двигателя; а„та| — макси-
мальная из относительных амплитуд в пределах г« масс двигателя; /„ — момент
инерции уй массы; ш —круговая частота колебаний; А4, у— амплитуда гармони-
ческой составляющей возмущающего момента порядка v па уй массе двигателя.
В числителе выражения для Ф„ тах находится геометрическая
сумма возмущающих моментов v-й гармоники Е Afv^a^, построенная
(у)
в соответствии с векторной диаграммой.
Схематизация приводов двигателя осуществляется по правилам
схематизации элементов трансмиссии.
Поскольку в переходных режимах работы в силовых передачах
танков возбуждаются относительно низкочастотные колебания, це-
лесообразна упрощенная схематизация коленчатого вала двигателя
в виде одной сосредоточенной массы. Газотурбинный двигатель в
динамической схеме МТУ также представляется в виде одной со-
средоточенной массы, приведенной к выходному валу двигателя.
Момент инерции этой массы равен сумме приведенных к выходно-
му валу моментов инерции силовой турбины двигателя и масс вы-
ходного редуктора.
Периодические возмущающие воздействия на массы поршневых
двигателей. Поршневой двигатель (ПД) является главным нсточ-
14
ником возбуждения периодических крутильных колебании в мотор-
но-трансмиссионных установках ВГМ. Силовая функция ПД явля-
ется периодической по углу поворота коленчатого вала: для четы-
рехтактных ПД периодом является угол поворота 4л, а для двух-
тактных он равен 2л. В общем случае крутящий момент на валу от
одного цилиндра можно представить в виде силовой функции, раз-
ложенной в ряд Фурье:
М (а) = Мо + у; М, sin (av + 4%).
(»)
где v - 0,5; 1,0; 1,5; 2.0 .... для четырехтактного и v — 1, 2, 3 .... для двухтакт-
ного двигателей; а — угол поворота коленчатого вала, отсчитываемый от поло-
жения поршня в верхней мертвой точке по окончании такта сжатия; Мо — сред-
ний эффективный крутящий момент; М, — амплитуда возмущающего момента
гармонической составляющей v-ro порядка; —фазовый угол; М,
-Я*: arcig (AJBJ; А,, В, —амплитуды соответственно косинус-
ной з синусной составляющих возмущающего момента.
В общем случае амплитуды возмущающих моментов зависят от
газовых и инерционных составляющих, причем косинусная состав-
ляющая определяется только газовыми силами = г, а синус-
ная — как газовыми, так и инерционными: = В, г + В* ин •
Инерционные составляющие возмущающих моментов В.. И1| оп-
ределяются кинематикой и массами поршня и шатунно-кривошип-
ного механизма и пропорциональны квадрату частоты вращении
двигателя. При этом отличны от нуля они лишь для гармоник с
V- 1,2, 3 и 4:
ин = 0,28- 10“ (/п„ + Smlu) R'W;
нн 3 у ни * Bz ин = 2,75 Bt ни ;
В. т~-П№'кВх нн,
где В — вН-м; R — радиус кривошипа, м; X — безразмерный параметр (отноше-
ние радиуса кривошипа к длине шатуна); п — частота вращения, об/мин; тп.
гиш —масса поршня и шатуна в сборе, кг; S — коэффициент разнесения масс
шатуна.
Наиболее надежным способом определения газовых составляю-
щих возмущающих моментов является непосредственное разложе-
ние в ряд Фурье силовой функции, построенной на основе экспери-
ментальной индикаторной диаграммы р(а). Давление в цилиндре
измеряется обычно в интервале углов —л^а^я; для четырех-
тактных двигателей в интервалах углов —2я^ а С —л и
я^а<2л давление можно принимать равным атмосферному.
Крутящий момент на коленчатом валу, обусловленный рабочим
процессом в цилиндре,
^W = v^Wsln.[l+
где D — диаметр цилиндра.
15
Если давление определено через равные углы поворота коленча-
того вала двигателя Да, то амплитуды газовых составляющих воз-
мущающих моментов определяются по формулам
Л,г = — У М (Да#) COS (уДа#) ;
2 к——я
В-, г = У М (Да#) sin (уДа#),
где z — лт/Да (для двухтактного двигателя т - 1, для четырехтактного двига-
теля т — 2).
Наиболее удобным аналитическим методом определения газо-
вых составляющих моментов широкого класса двигателей является
метод [8], согласно которому амплитуды Д,г и В.Г можно пред-
ставить в виде
аг=^-аО,; А, = Л£
где — рабочий объем цилиндра; pt — индикаторное давление; рс — давление
в цилиндре в конце такта сжатия; b, , (r>, U, — безразмерные коэффициенты, по-
лученные в результате разложения в ряд Фурье безразмерных компрессионных
и индикаторных функций двигателя,
, . .. Хгм
2 (е»М2)2' 3 2 (В*+*>)•
X* 0,99 - 0,008 с;
В* = 1,42 + 0,083 е ; ~ 1.62 -f- 0,28 « ; 8, 1,43 4- 0,062 « ; е — степень сжатия
двигателя.
Для прицепных цилиндров (с прицепными шатунами) коэффи-
циенты /л, £*, Х« и Ь определяются следующим образом:
X* = 1,12—0,05у — (0,0027 + 0,0019у) е;
= 1,38 + 0,092е;
Ь= 1,9-0,12у + 0,31е;
Ь = 1,55—0,027у 4- (0,062 4- 0,005е) е,
где у —угол развала блока прицепных цилиндров, рад.
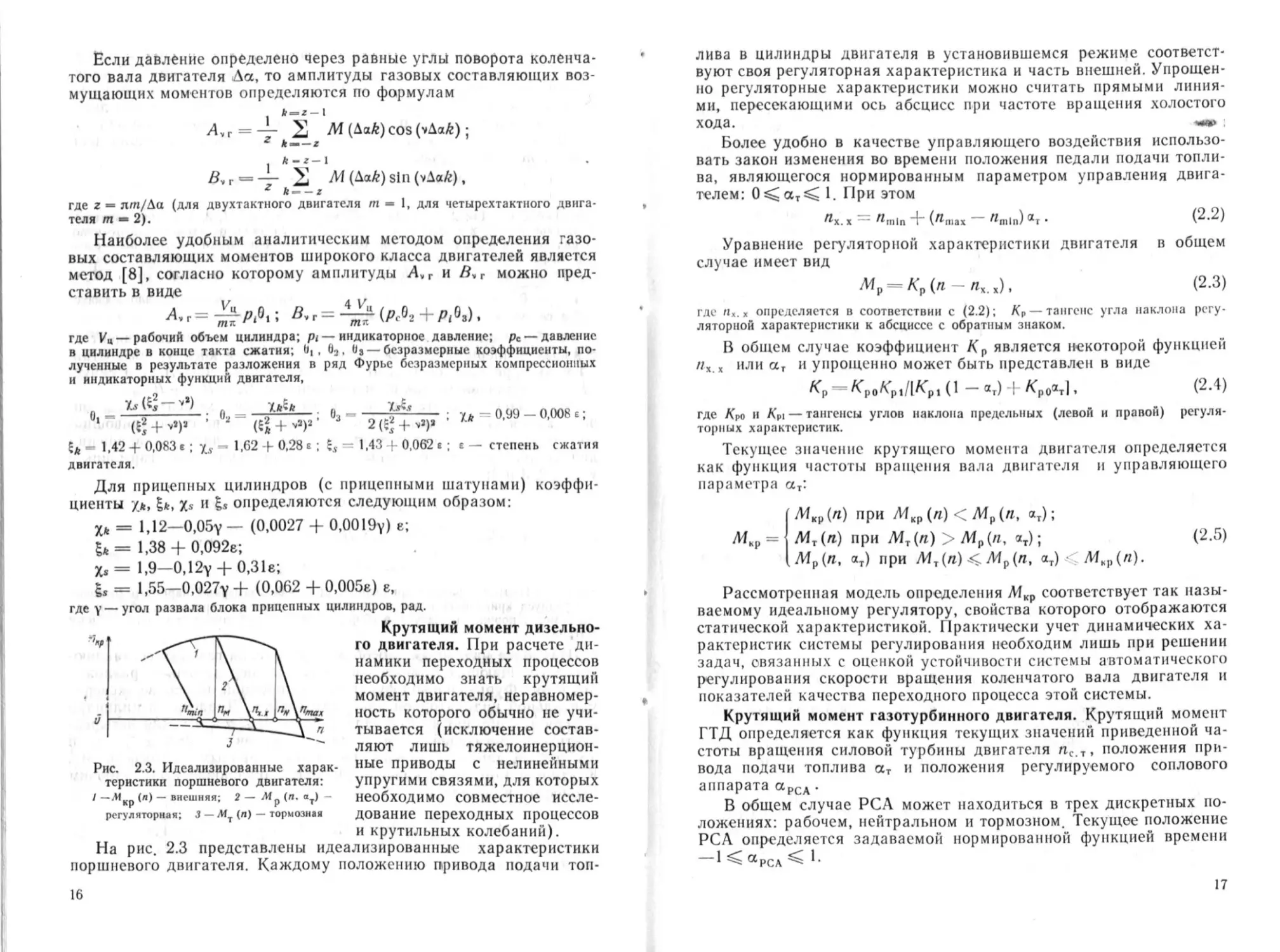
Крутящий момент дизельно-
го двигателя. При расчете ди-
намики переходных процессов
необходимо знать крутящий
момент двигателя, неравномер-
ность которого обычно не учи-
тывается (исключение состав-
ляют лишь тяжелоинерцион-
Рис. 2.3. Идеализированные харак- ные приводы с нелинейными
теристнки поршневого двигателя: упругими СВЯЗЯМИ, ДЛЯ которых
I -лвр (») - внешняя; 2-.мр(л. «р - необходимо совместное иссле-
рсгуляторная; 3 - Мт (п) - тормозная ДОВЭНИе ПервХОДНЫХ ПрОЦСССОВ
И крутильных колебаний).
На рис. 2.3 представлены идеализированные характеристики
поршневого двигателя. Каждому положению привода подачи топ-
16
лива в цилиндры двигателя в установившемся режиме соответст-
вуют своя регуляторная характеристика и часть внешней. Упрощен-
но регуляторные характеристики можно считать прямыми линия-
ми, пересекающими ось абсцисс при частоте вращения холостого
хода.
Более удобно в качестве управляющего воздействия использо-
вать закон изменения во времени положения педали подачи топли-
ва, являющегося нормированным параметром управления двига-
телем: 0^ат^ 1. При этом
^х. х — ^mln (^niax ^niln) ®г • (2-2)
Уравнение регуляторной характеристики двигателя в общем
случае имеет вид
Л<р-Кр(л-Лх.х). (2.3)
где лх. х определяется в соответствии с (2.2); КР— тангенс угла наклона регу-
ляторной характеристики к абсциссе с обратным знаком.
В общем случае коэффициент Кр является некоторой функцией
пх х или аг и упрощенно может быть представлен в виде
К,^К„К„ЦК„ (1 - X,) + Л>,|. (2.4)
где Кро и Кц — тангенсы углов наклона предельных (левой и правой) регуля-
торных характеристик.
Текущее значение крутящего момента двигателя определяется
как функция частоты вращения вала двигателя и управляющего
параметра ат:
1AfMp(a) при Мхр (п) < /Ир (я, ат);
/Ит(я) при /Ит(я) >/Ир(я, ат); (2.5)
/Ир(п, ат) при М^п) <. Мр(п, ат) Мир(я).
Рассмотренная модель определения Л4кр соответствует так назы-
ваемому идеальному регулятору, свойства которого отображаются
статической характеристикой. Практически учет динамических ха-
рактеристик системы регулирования необходим лишь при решении
задач, связанных с оценкой устойчивости системы автоматического
регулирования скорости вращения коленчатого вала двигателя и
показателей качества переходного процесса этой системы.
Крутящий момент газотурбинного двигателя. Крутящий момент
ГТД определяется как функция текущих значений приведенной ча-
стоты вращения силовой турбины двигателя пс.т, положения при-
вода подачи топлива ат и положения регулируемого соплового
аппарата аРСА.
В общем случае РСЛ может находиться в трех дискретных по-
ложениях: рабочем, нейтральном и тормозном. Текущее положение
РСА определяется задаваемой нормированной функцией времени
-1^<хРСА^ 1.
17
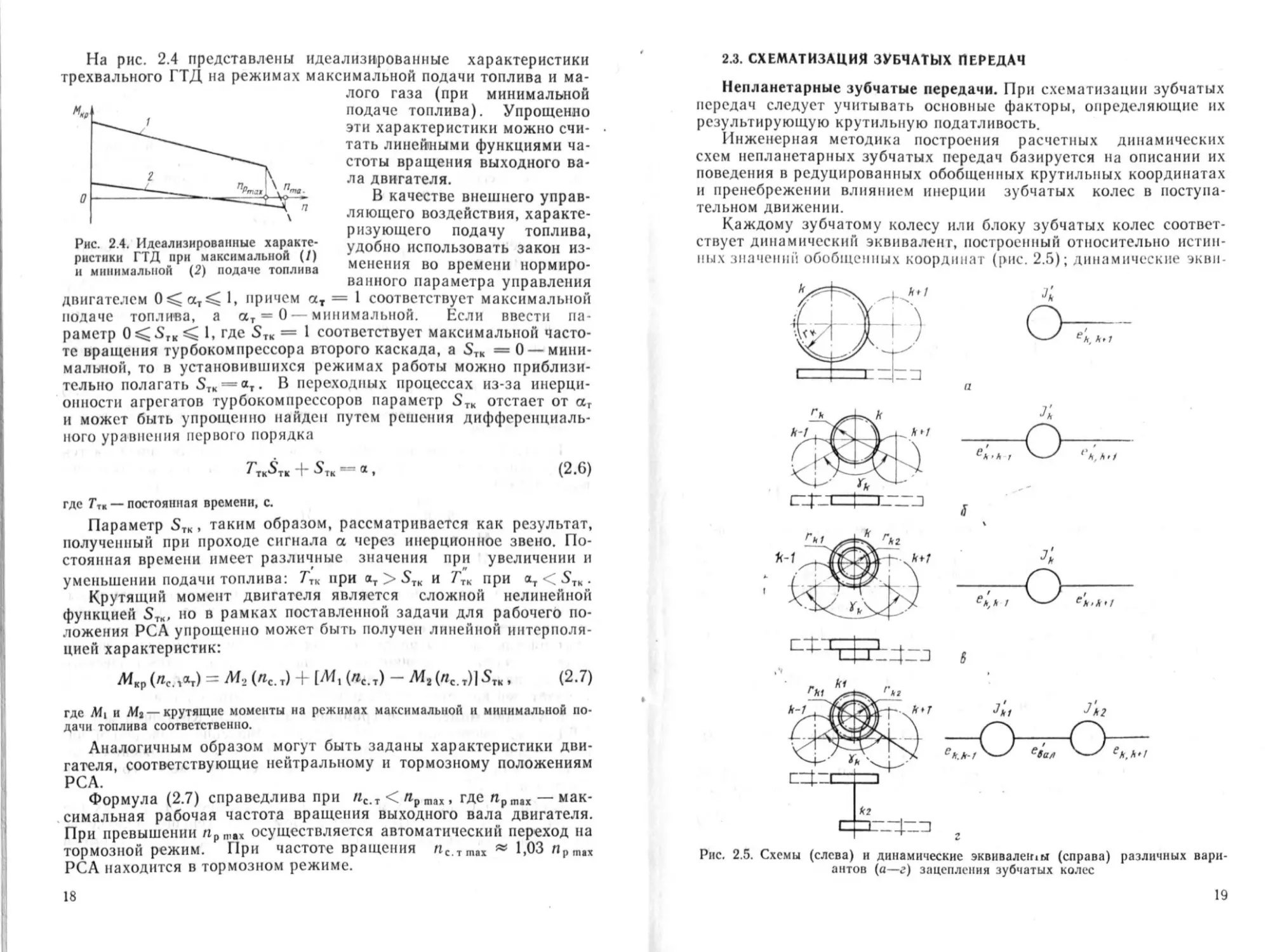
На рис. 2.4 представлены идеализированные характеристики
трехвального ГТД на режимах максимальной подачи топлива и ма-
лого газа (при минимальной
подаче топлива). Упрощенно
эти характеристики можно счи-
тать линейными функциями ча-
стоты вращения выходного ва-
ла двигателя.
Рис. 2.4. Идеализированные характе-
ристики ГТД при максимальной (/)
и минимальной (2) подаче топлива
В качестве внешнего управ-
ляющего воздействия, характе-
ризующего подачу топлива,
удобно использовать закон из-
менения во времени нормиро-
ванного параметра управления
двигателем I» причем ат = 1 соответствует максимальной
иодаче топлива, а ат = 0- минимальной. Если ввести па-
раметр С I, где <STtc = 1 соответствует максимальной часто-
те вращения турбокомпрессора второго каскада, a SrK = 0 — мини-
мальной, то в установившихся режимах работы можно приблизи-
тельно полагать STK = «T. В переходных процессах из-за инерци-
онности агрегатов турбокомпрессоров параметр STK отстает от ат
и может быть упрощенно найден путем решения дифференциаль-
ного уравнения первого порядка
^тк^тк 4- ^тк а
(2.6)
где Ттв — постоянная времени, с.
Параметр STK, таким образом, рассматривается как результат,
полученный при проходе сигнала а через инерционное звено. По-
стоянная времени имеет различные значения при увеличении и
уменьшении подачи топлива: 7ТК при ат > STK и Тгк при < STh.
Крутящий момент двигателя является сложной нелинейной
функцией Sn, но в рамках поставленной задачи для рабочего по-
ложения РСА упрощенно может быть получен линейной интерполя-
цией характеристик:
М,(«..,М = + |Л1,(«с.,) - М,(лс.,)]$Л. (2.7)
где Mi и Mt — крутящие моменты на режимах максимальной и минимальной по-
дачи топлива соответственно.
Аналогичным образом могут быть заданы характеристики дви-
гателя, соответствующие нейтральному и тормозному положениям
РСА.
Формула (2.7) справедлива при пс,г < лрт„, где прт1Х — мак-
симальная рабочая частота вращения выходного вала двигателя.
При превышении пр „а» осуществляется автоматический переход на
тормозной режим. При частоте вращения пС Т|Пах » 1,03 лрт„
РСА находится в тормозном режиме.
18
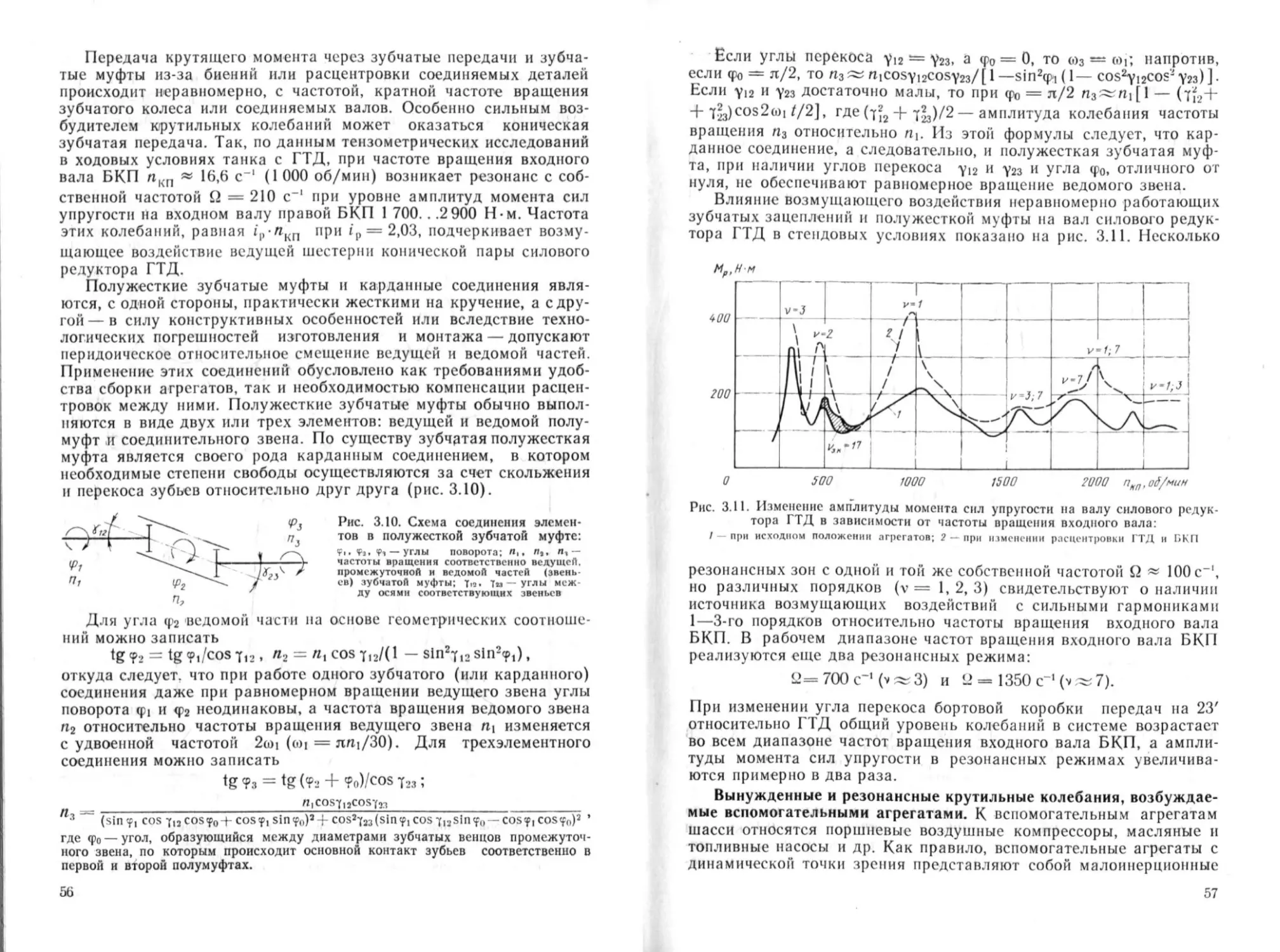
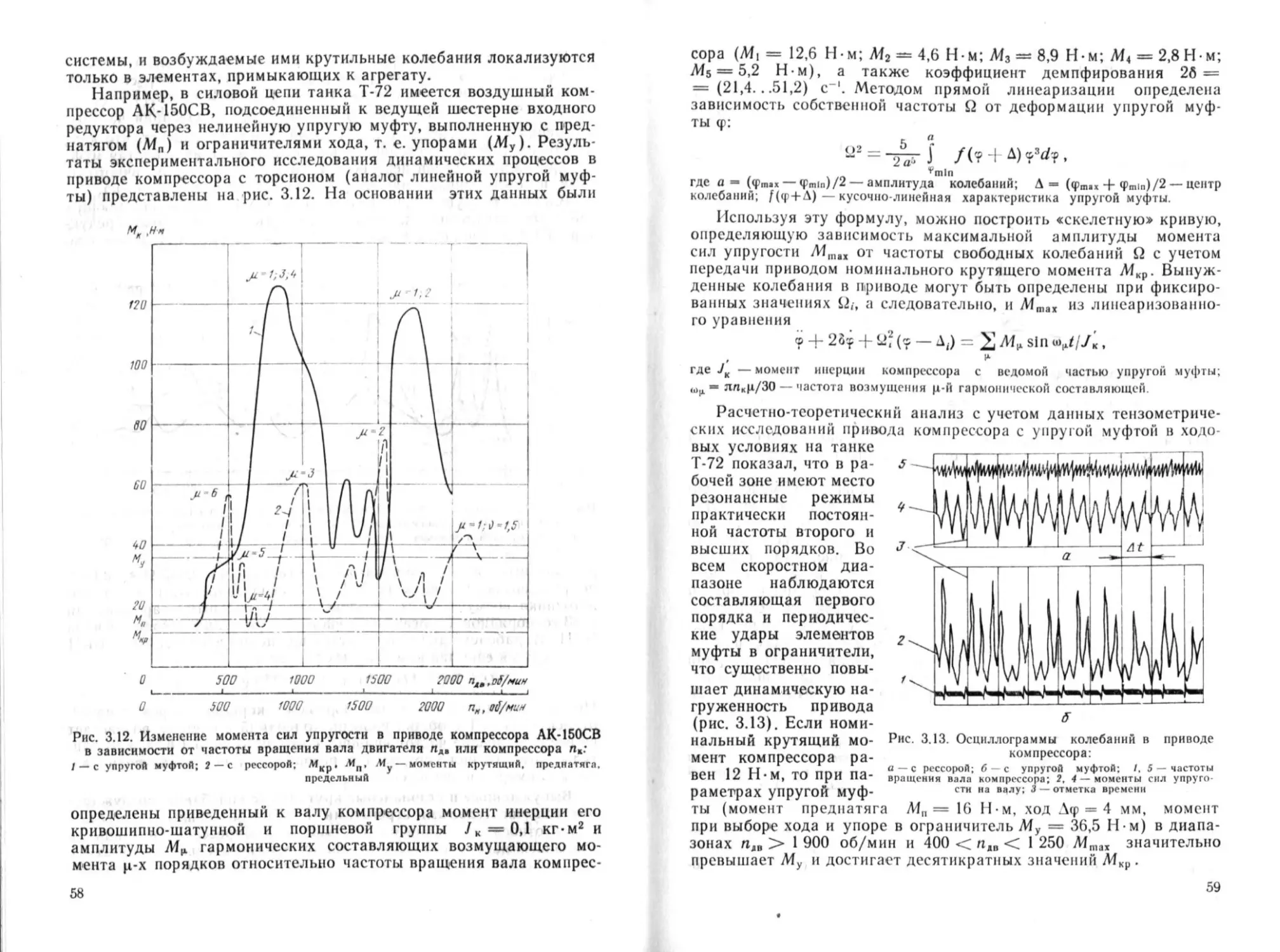
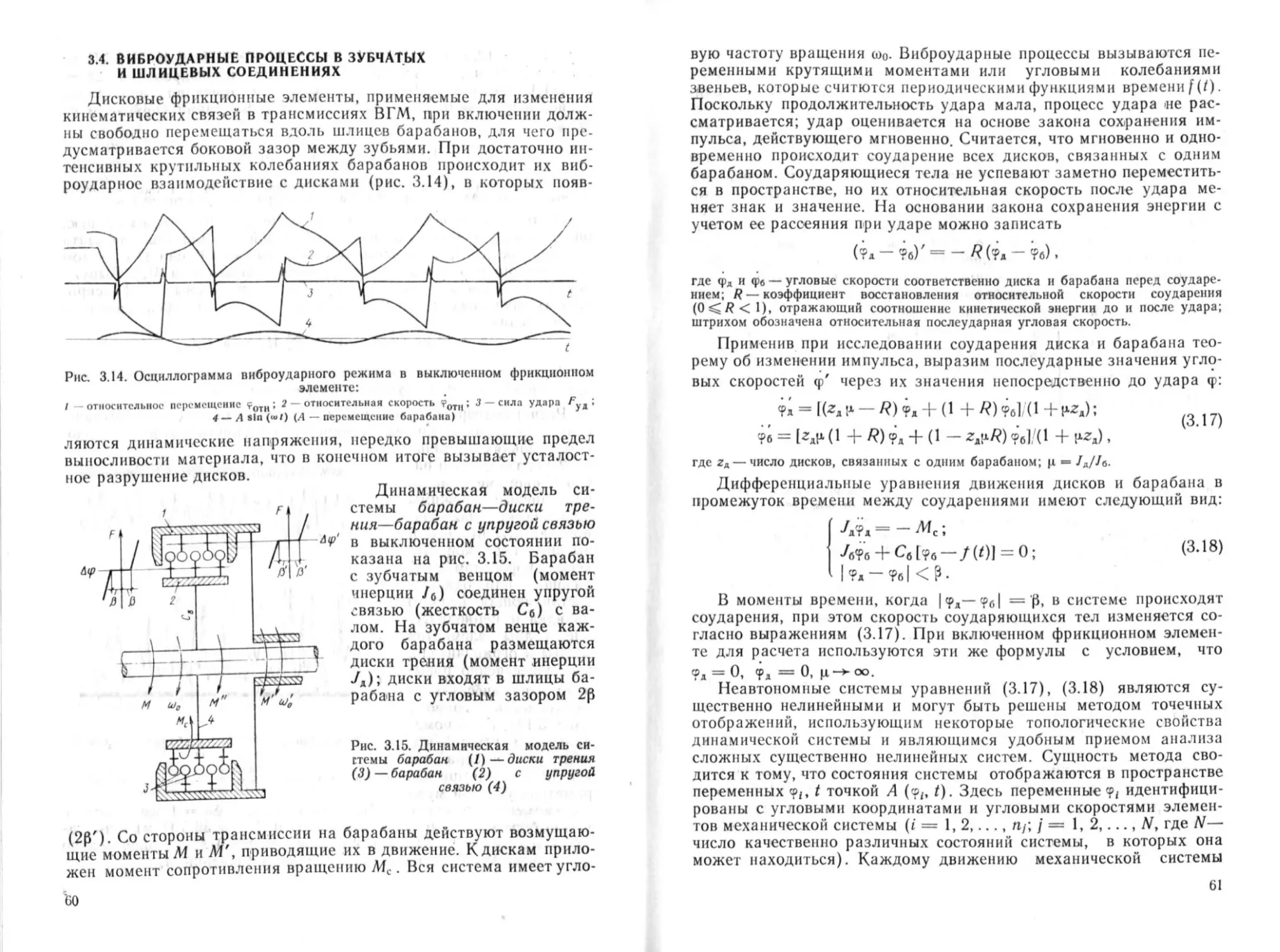
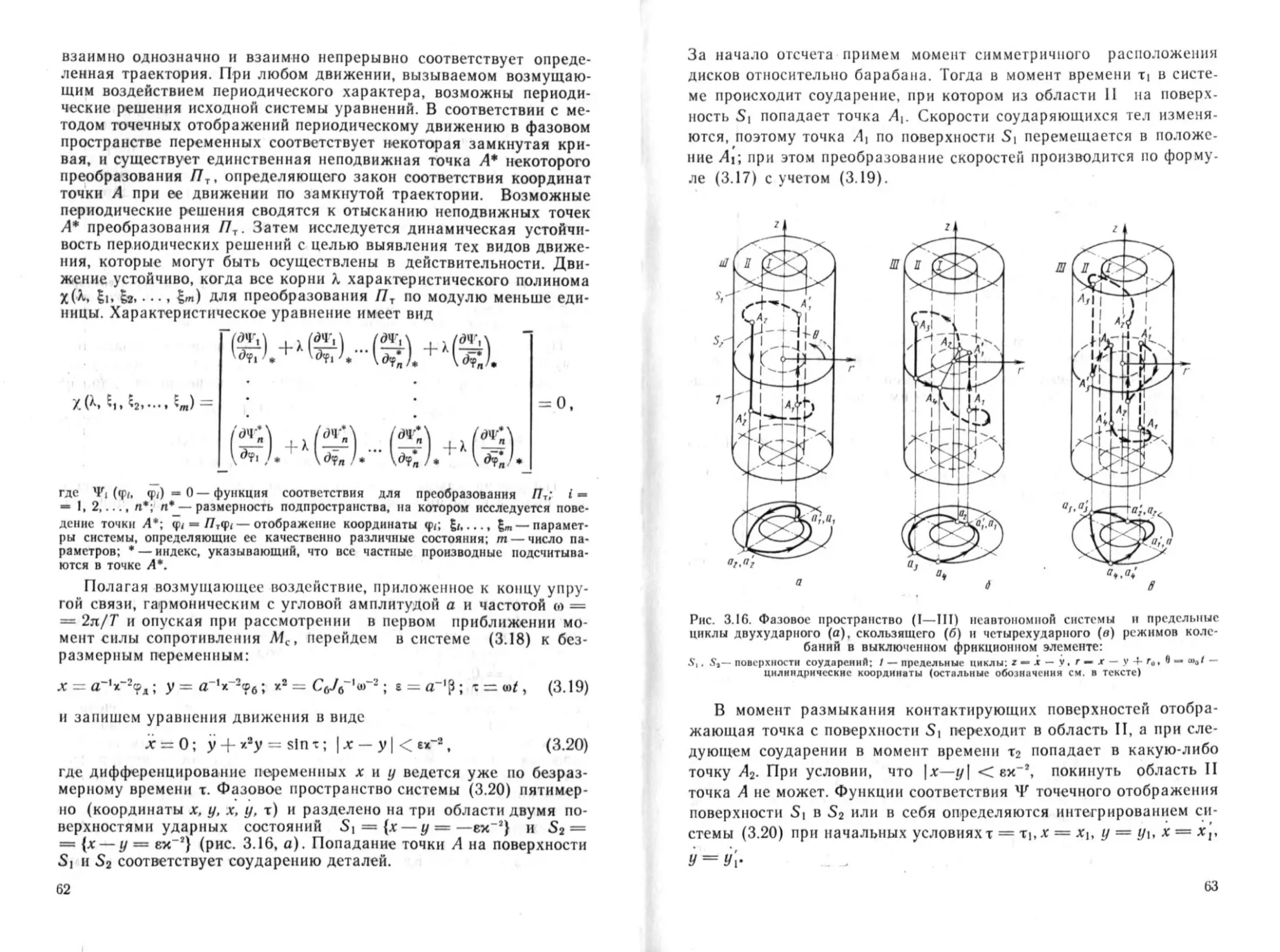
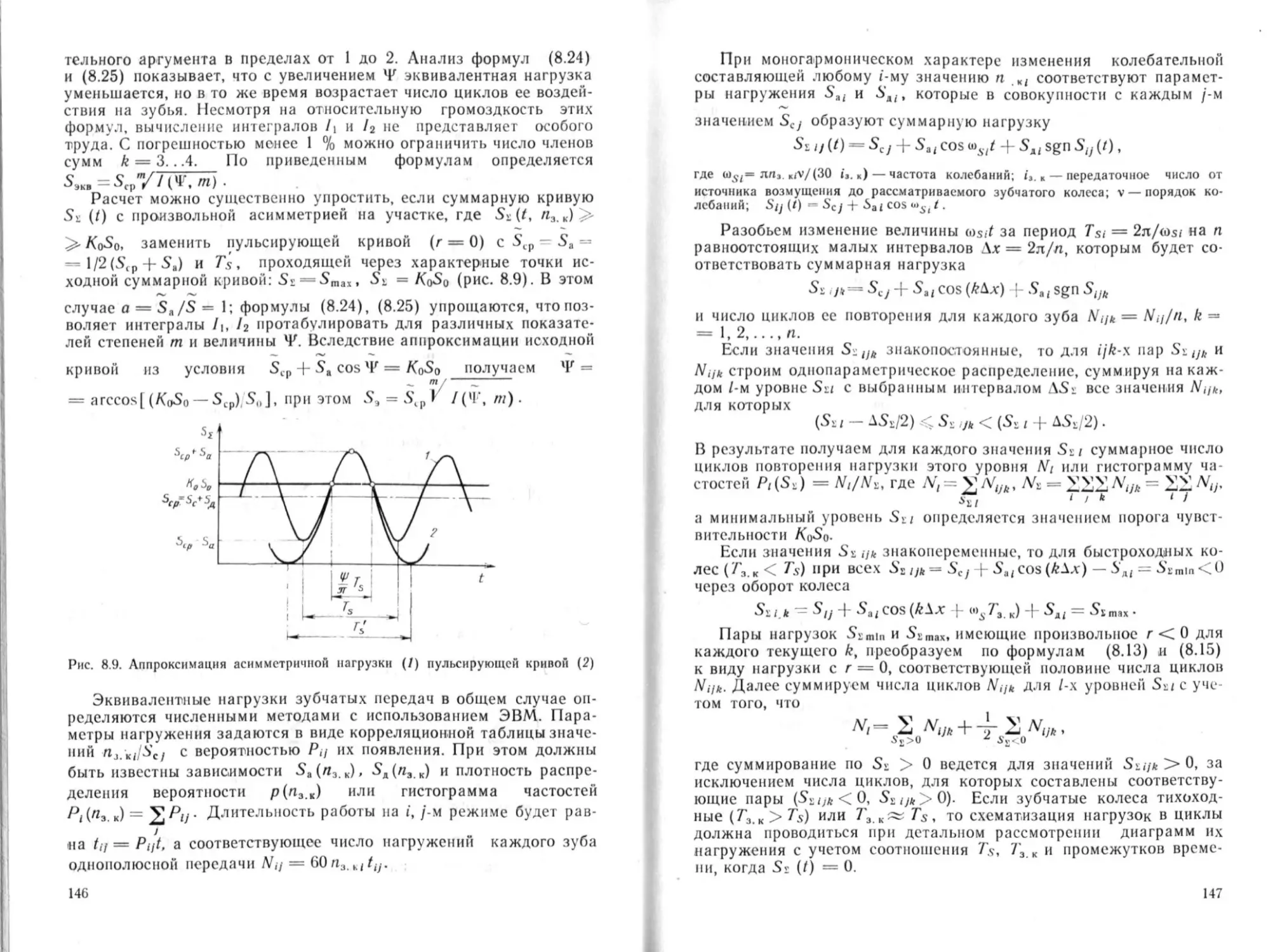
2.3. СХЕМАТИЗАЦИЯ ЗУБЧАТЫХ ПЕРЕДАЧ
Непланетарные зубчатые передачи. При схематизации зубчатых
передач следует учитывать основные факторы, определяющие их
результирующую крутильную податливость.
Инженерная методика построения расчетных динамических
схем непланетарных зубчатых передач базируется на описании их
поведения в редуцированных обобщенных крутильных координатах
и пренебрежении влиянием инерции зубчатых колес в поступа-
тельном движении.
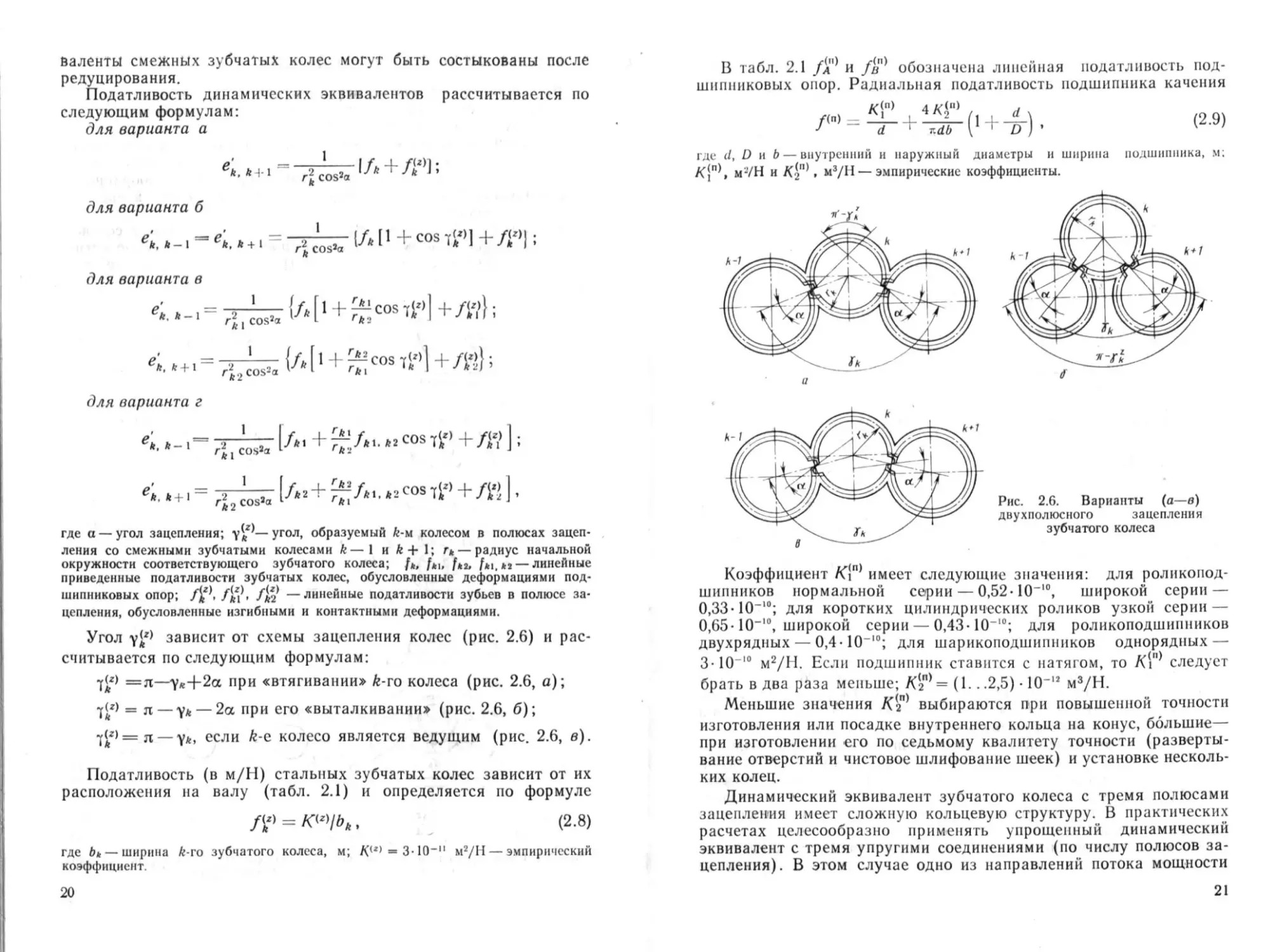
Каждому зубчатому колесу или блоку зубчатых колес соответ-
ствует динамический эквивалент, построенный относительно истин-
ных значений обобщенных координат (рис. 2.5); динамические экви-
Рис. 2.5. Схемы (слева) и динамические эквивалент (справа) различных вари-
антов (а—г) зацепления зубчатых колес
19
Валенты смежных зубчатых колес могут быть состыкованы после
редуцирования.
Податливость динамических эквивалентов рассчитывается по
следующим формулам:
для варианта а
<м-.-^Ьг1Л+Л”1;
для варианта б
1Л11 + cos + Д‘>|;
для варианта в
е>- ЧтЬт *’] +/W);
<.+.={/. 11+Итсо’ ’Н+/И)'
для варианта г
<Ь’+%'"»cos 1:
<*+-=^1л,+^Л,'‘гСО
где а —угол зацепления; y*Z)—угол, образуемый fc-м колесом в полюсах зацеп-
ления со смежными зубчатыми колесами k—1 и Л+ 1; г* —радиус начальной
окружности соответствующего зубчатого колеса; /», /*|, ft2, [щ.н — линейные
приведенные податливости зубчатых колес, обусловленные деформациями под-
шипниковых опор; /$, — линейные податливости зубьев в полюсе за-
цепления, обусловленные изгнбиымн и контактными деформациями.
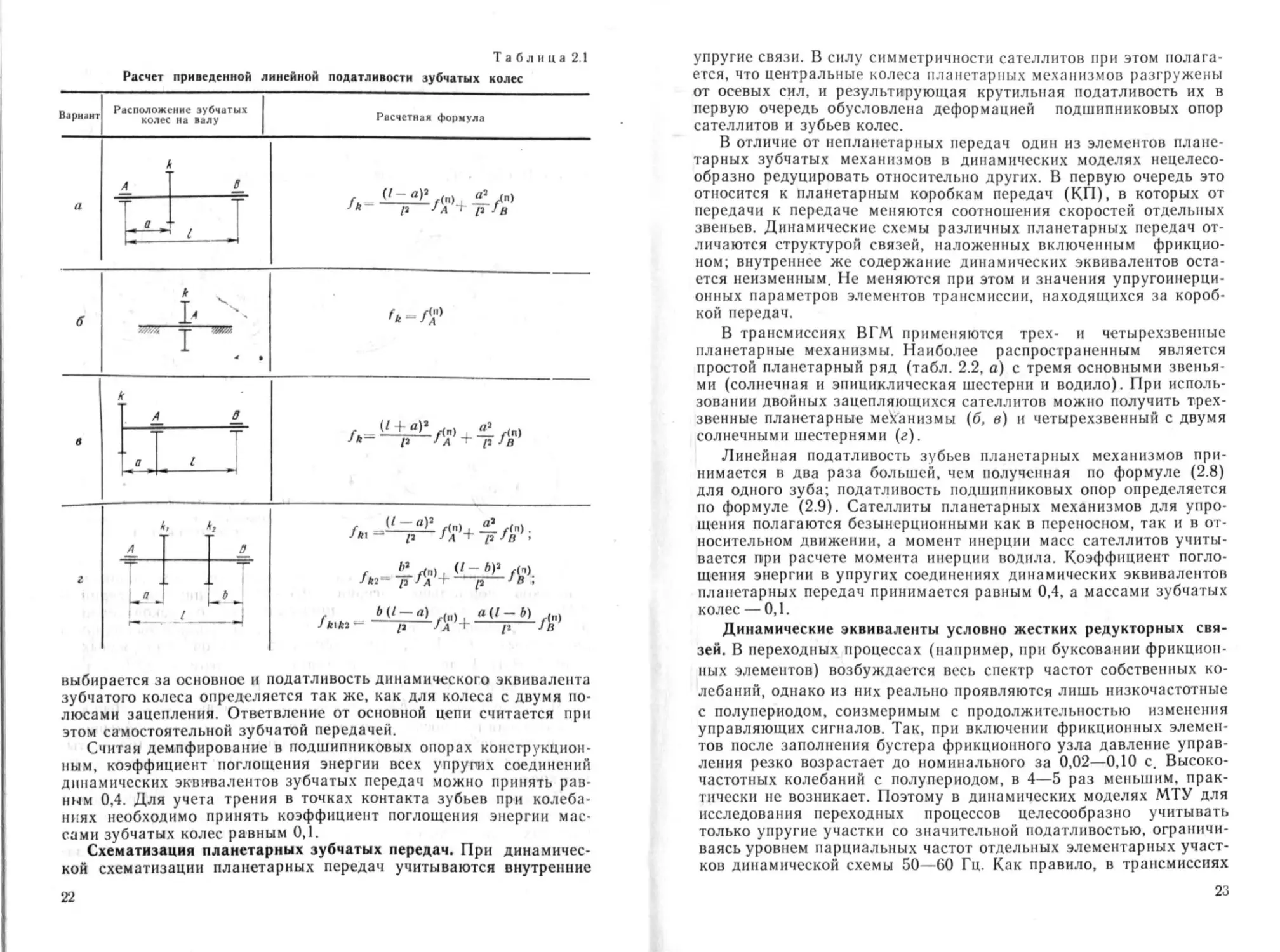
Угол зависит от схемы зацепления колес (рис. 2.6) и рас-
считывается последующим формулам:
yf) =д—у<-|-2а при «втягивании» Л-го колеса (рис. 2.6, а);
= л — у* — 2а при ег0 «выталкивании» (рис. 2.6, б);
;^ = л-у*, если е колесо является ведущим (рис. 2.6, в).
Податливость (в м/Н) стальных зубчатых колес зависит от их
расположения на валу (табл. 2.1) и определяется по формуле
Д‘> = Л™/дд, (2.8)
где Ьц — ширина Л-го зубчатого колеса, м; " 3-10_,‘ м2/Н— эмпирический
коэффициент
20
В табл. 2.1 /дп) и обозначена линейная податливость под-
шипниковых опор. Радиальная податливость подшипника качения
d 1 r.db V 1 D )
(2.9)
где d, D и b — внутренний и наружный диаметры и ширина подшипника, м
К\п}, »г/Н и , м’/Н — эмпирические коэффициенты.
Рис. 2.6. Варианты (а—в)
двухполюсного зацепления
зубчатого колеса
Коэффициент К{п) имеет следующие значения: для роликопод-
шипников нормальной серии — 0,52-10~'°, широкой серии —
0,33-10“'°; для коротких цилиндрических роликов узкой серии —
0,65-10"10, широкой серии — 0,43-10"'°; для роликоподшипников
двухрядных — 0,4-10_,°; для шарикоподшипников однорядных —
3-10-10 м2/Н. Если подшипник ставится с натягом, то K(in> следует
брать в два раза меньше; К(Р = (1.. .2,5) • 10"“ м3/Н.
Меньшие значения выбираются при повышенной точности
изготовления или посадке внутреннего кольца на конус, большие—
при изготовлении его по седьмому квалитету точности (разверты-
вание отверстий и чистовое шлифование шеек) и установке несколь-
ких колец.
Динамический эквивалент зубчатого колеса с тремя полюсами
зацепления имеет сложную кольцевую структуру. В практических
расчетах целесообразно применять упрощенный динамический
эквивалент с тремя упругими соединениями (по числу полюсов за-
цепления). В этом случае одно из направлений потока мощности
21
Таблица 2.1
Расчет приведенной линейной податливости зубчатых колес
выбирается за основное и податливость динамического эквивалента
зубчатого колеса определяется так же, как для колеса с двумя по-
люсами зацепления. Ответвление от основной цепи считается при
этом самостоятельной зубчатой передачей.
Считая демпфирование в подшипниковых опорах конструкцион-
ным, коэффициент поглощения энергии всех упругих соединений
динамических эквивалентов зубчатых передач можно принять рав-
ным 0,4. Для учета трения в точках контакта зубьев при колеба-
ниях необходимо принять коэффициент поглощения энергии мас-
сами зубчатых колес равным 0,1.
Схематизация планетарных зубчатых передач. При динамичес-
кой схематизации планетарных передач учитываются внутренние
22
упругие связи. В силу симметричности сателлитов при этом полага-
ется, что центральные колеса планетарных механизмов разгружены
от осевых сил, и результирующая крутильная податливость их в
первую очередь обусловлена деформацией подшипниковых опор
сателлитов и зубьев колес.
В отличие от непланетарных передач один из элементов плане-
тарных зубчатых механизмов в динамических моделях нецелесо-
образно редуцировать относительно других. В первую очередь это
относится к планетарным коробкам передач (КП), в которых от
передачи к передаче меняются соотношения скоростей отдельных
звеньев. Динамические схемы различных планетарных передач от-
личаются структурой связей, наложенных включенным фрикцио-
ном; внутреннее же содержание динамических эквивалентов оста-
ется неизменным. Не меняются при этом и значения упругоинерци-
онных параметров элементов трансмиссии, находящихся за короб-
кой передач.
В трансмиссиях ВГМ применяются трех- и четырехзвенные
планетарные механизмы. Наиболее распространенным является
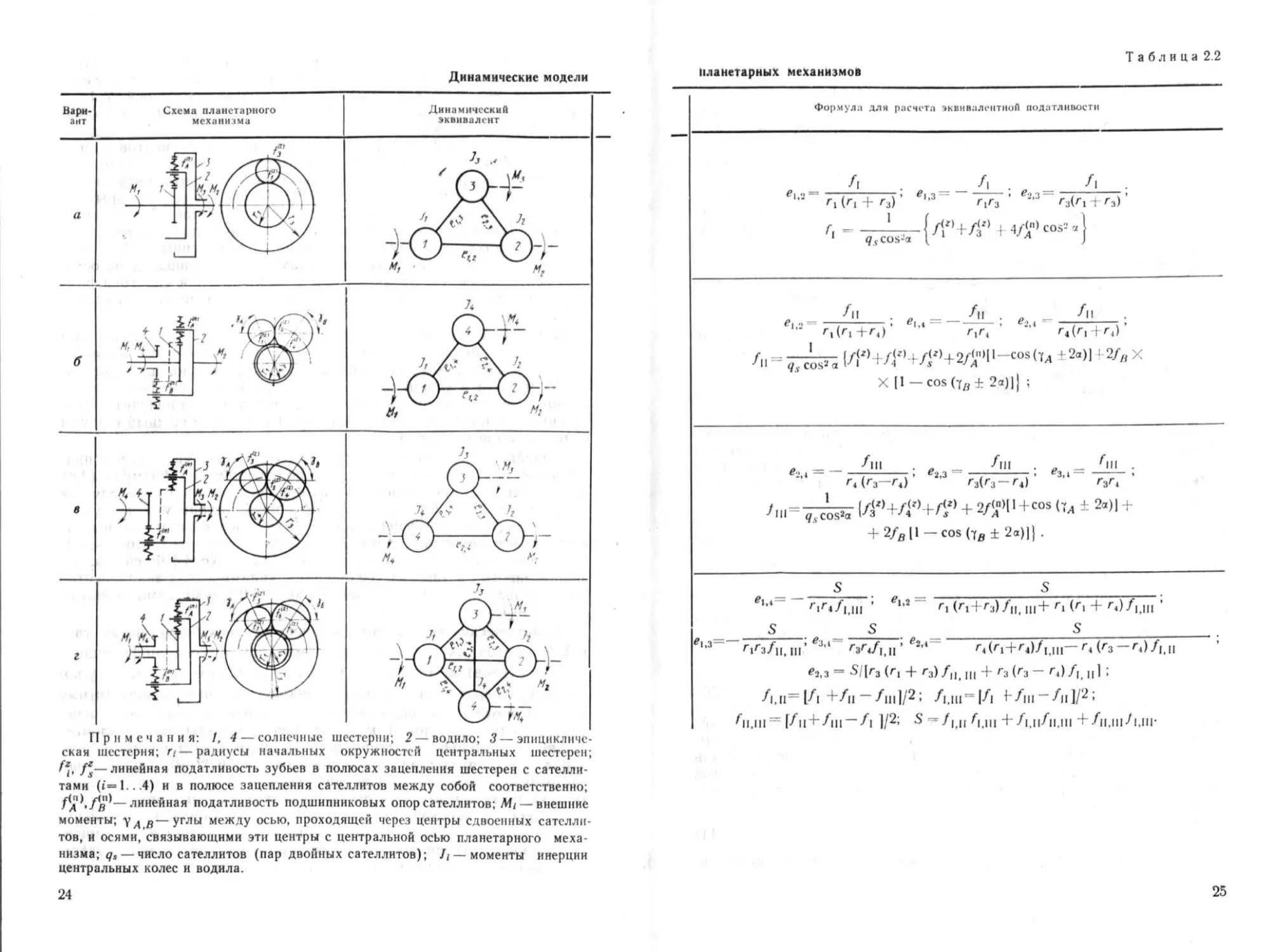
простой планетарный ряд (табл. 2.2, а) с тремя основными звенья-
ми (солнечная и эпициклическая шестерни и водило). При исполь-
зовании двойных зацепляющихся сателлитов можно получить трех-
звенные планетарные механизмы (б, в) и четырехзвенный с двумя
солнечными шестернями (г).
Линейная податливость зубьев планетарных механизмов при-
нимается в два раза большей, чем полученная по формуле (2.8)
для одного зуба; податливость подшипниковых опор определяется
по формуле (2.9). Сателлиты планетарных механизмов для упро-
щения полагаются безынерционными как в переносном, так и в от-
носительном движении, а момент инерции масс сателлитов учиты-
вается при расчете момента инерции водила. Коэффициент погло-
щения энергии в упругих соединениях динамических эквивалентов
планетарных передач принимается равным 0,4, а массами зубчатых
колес — 0,1.
Динамические эквиваленты условно жестких редукторных свя-
зей. В переходных процессах (например, при буксовании фрикцион-
ных элементов) возбуждается весь спектр частот собственных ко-
лебаний, однако из них реально проявляются лишь низкочастотные
с полупериодом, соизмеримым с продолжительностью изменения
управляющих сигналов. Так, при включении фрикционных элемен-
тов после заполнения бустера фрикционного узла давление управ-
ления резко возрастает до номинального за 0,02—0,10 с. Высоко-
частотных колебаний с полупериодом, в 4—5 раз меньшим, прак-
тически не возникает. Поэтому в динамических моделях МТУ для
исследования переходных процессов целесообразно учитывать
только упругие участки со значительной податливостью, ограничи-
ваясь уровнем парциальных частот отдельных элементарных участ-
ков динамической схемы 50—60 Гц. Как правило, в трансмиссиях
23
Динамические модели
Примечания: 1.4 — солнечные шестерни; 2 — водило; 3 — эпицикличе-
ская шестерня; Г/—радиусы начальных окружностей центральных шестерен;
f*a— линейная податливость зубьев в полюсах зацепления шестерен с сателли-
тами (i-1.4) и в полюсе зацепления сателлитов между собой соответственно;
линейная податливость подшипниковых опор сателлитов; At —внешние
моменты; у АВ— углы между осью, проходящей через центры сдвоенных сателли-
тов, и осями, связывающими эти центры с центральной осью планетарного меха-
низма; q,— число сателлитов (пар двойных сателлитов); Jt — моменты инерции
центральных колес и водила.
24
планетарных механизмов
Т а б л и ц а 2.2
Формула для расчета эквивалентной податливости
Л_______. , , А
Гу. <Г1 + Г3) ' 1,3 Г|Г1 ’ ’’3 г3(г, + Гэ)'
л о
/-|(П+М’ '* rtrt ' ** ГаСп + г*)’
/и 7777^ I/TW’vrw;,,i,-<:os(u±2в>| 12/« Х
X П — cos(Tfl± 2a)j| ;
Л.|=^л (ХГ+/1”+/«’ + 2Д”1'+со» (Ъ1 ± 2.Ц +
+ 2/д |1 — cos (7в ± 2в)]| .
S_____________________________S______________
*’’* rir«/|.in ’ <|’* г 1 (г»+гз)/ц, |||+ ri (ri + г«)/1,ш ’
S _ S________________________________________S_________________
г»гз/11. 111 ’ *3,‘ r»rtf I, II' г,,‘ ~ G (G+r4>/1,|Ц— г4 (r3 — G) /|, II
*т,з = 5/(г3 (г। r3)fllt щ + г3 (г3 — г«) /f и ];
/|.И= 16 +/|1 ~/nil/2: /|,И1=|/| b/|il“/|l]/2;
6l.Hl” |/||+’/|Л — /| ]/2’ 5 Т/|,П 6.1П +/|,1|/|1.П1 + /ii.iilA.lii-
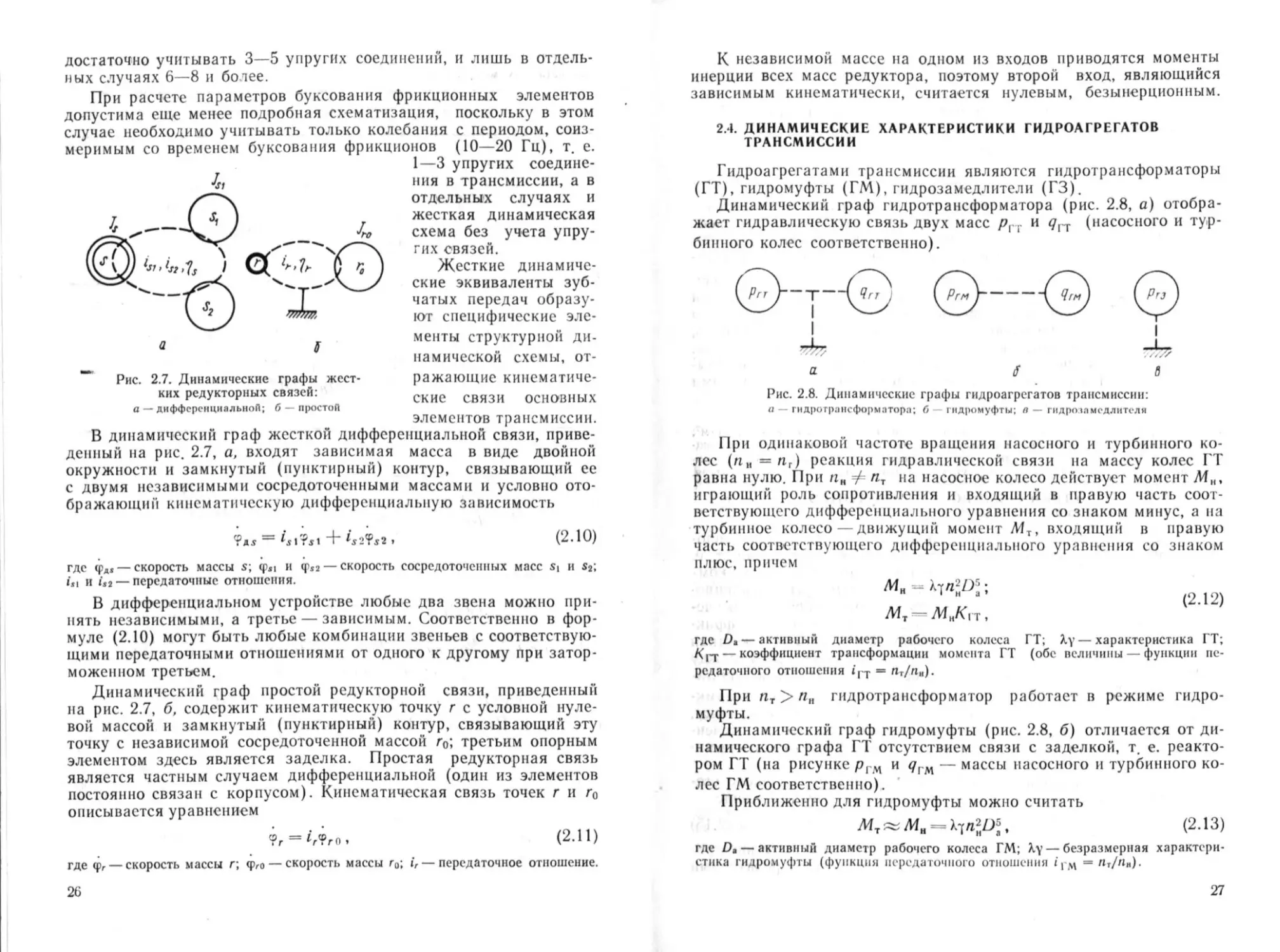
Рис. 2.7. Динамические графы жест-
ких редукторных связей:
а — диффсренцнальноЛ; б — простой
достаточно учитывать 3—5 упругих соединений, и лишь в отдель-
ных случаях 6—8 и более.
При расчете параметров буксования фрикционных элементов
допустима еще менее подробная схематизация, поскольку в этом
случае необходимо учитывать только колебания с периодом, соиз-
меримым со временем буксования фрикционов (10—20 Гц), т. е.
1—3 упругих соедине-
ния в трансмиссии, а в
отдельных случаях и
жесткая динамическая
схема без учета упру-
гих связей.
Жесткие динамиче-
ские эквиваленты зуб-
чатых передач образу-
ют специфические эле-
менты структурной ди-
намической схемы, от-
ражающие кинематиче-
ские связи основных
элементов трансмиссии.
В динамический граф жесткой дифференциальной связи, приве-
денный на рис. 2.7, а, входят зависимая масса в виде двойной
окружности и замкнутый (пунктирный) контур, связывающий ее
с двумя независимыми сосредоточенными массами и условно ото-
бражающий кинематическую дифференциальную зависимость
(2.10)
где <р*» — скорость массы s; <рц и ф»г— скорость сосредоточенных масс s( и
и i»t — передаточные отношения.
В дифференциальном устройстве любые два звена можно при-
нять независимыми, а третье — зависимым. Соответственно в фор-
муле (2.10) могут быть любые комбинации звеньев с соответствую-
щими передаточными отношениями от одного к другому при затор-
моженном третьем.
Динамический граф простой редукторной связи, приведенный
на рис. 2.7, б, содержит кинематическую точку г с условной нуле-
вой массой и замкнутый (пунктирный) контур, связывающий эту
точку с независимой сосредоточенной массой г0; третьим опорным
элементом здесь является заделка. Простая редукторная связь
является частным случаем дифференциальной (один из элементов
постоянно связан с корпусом). Кинематическая связь точек г и г0
описывается уравнением
= (2.11)
где <рг — скорость массы г; ф,о— скорость массы rQ; i, — передаточное отношение.
26
К независимой массе на одном из входов приводятся моменты
инерции всех масс редуктора, поэтому второй вход, являющийся
зависимым кинематически, считается нулевым, безынерционным.
2.4. ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ГИДРОАГРЕГАТОВ
ТРАНСМИССИИ
Гидроагрегатами трансмиссии являются гидротрансформаторы
(ГТ), гидромуфты (ГМ), гидрозамедлители (ГЗ).
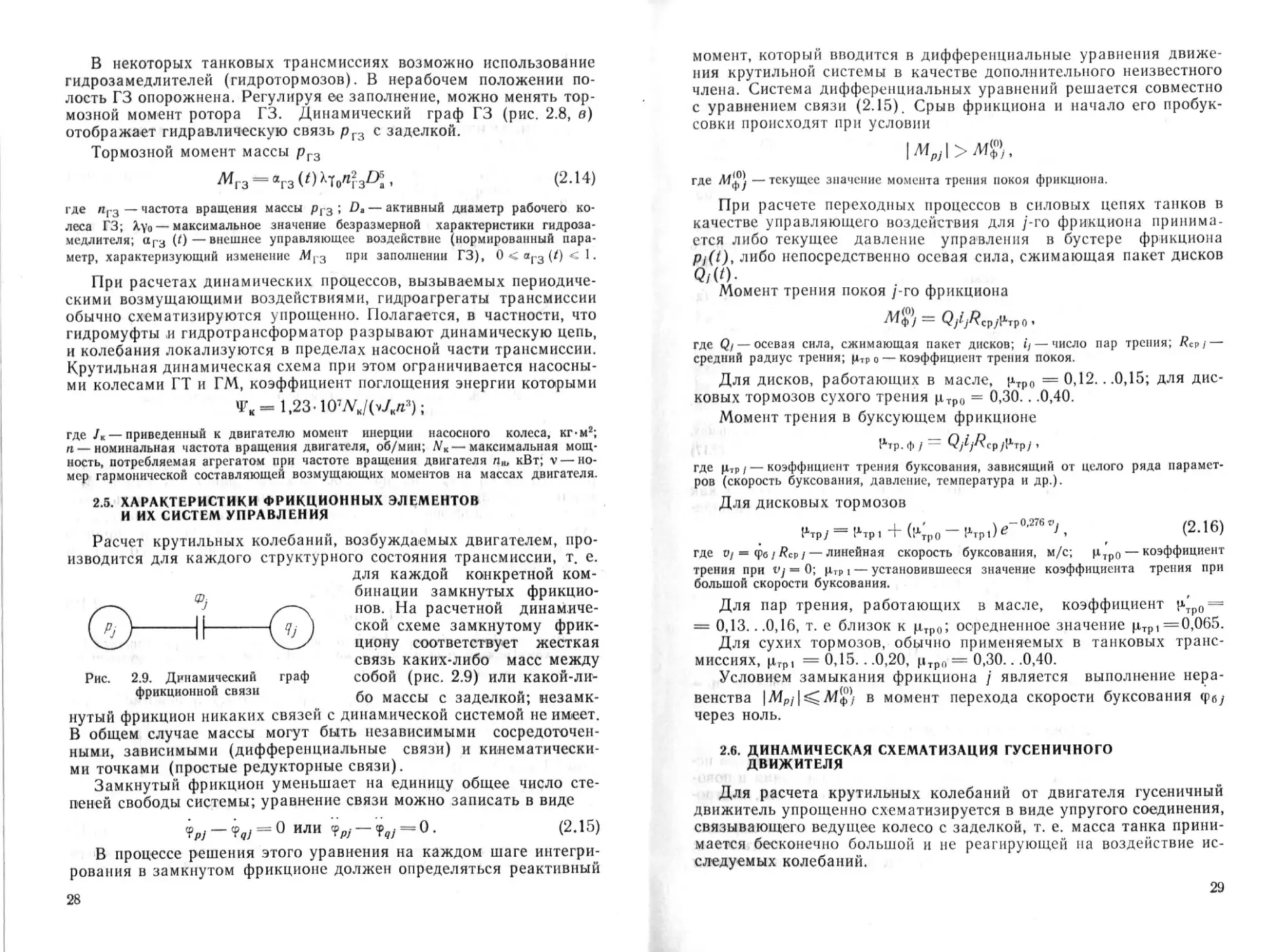
Динамический граф гидротрансформатора (рис. 2.8, а) отобра-
жает гидравлическую связь двух масс pvr и qrT (насосного и тур-
бинного колес соответственно).
Ргг -----------( Чп
Ргм
Чгм
Рис. 2.8. Динамические графы гидроагрегатов трансмиссии:
а — гидротрансформатора; б гидромуфты; а — гндрочамедлители
При одинаковой частоте вращения насосного и турбинного ко-
лес (ли=пг) реакция гидравлической связи па массу колес ГТ
равна нулю. При «т на насосное колесо действует момент Мн,
играющий роль сопротивления и входящий в правую часть соот-
ветствующего дифференциального уравнения со знаком минус, а на
турбинное колесо—движущий момент Afт, входящий в правую
часть соответствующего дифференциального уравнения со знаком
плюс, причем
где D.— активный диаметр рабочего колеса ГТ; Ху — характеристика ГТ;
Кгт — коэффициент трансформации момента ГТ (обе величины — функции пе-
редаточного отношения i('T “ лт/пн).
При пт > ли гидротрансформатор работает в режиме гидро-
муфты.
Динамический граф гидромуфты (рис. 2.8, б) отличается от ди-
намического графа ГТ отсутствием связи с заделкой, т е. реакто-
ром ГТ (на рисунке ргм и ^гм — массы насосного и турбинного ко-
лес ГМ соответственно).
Приближенно для гидромуфты можно считать
(2.13)
AfT /Ии = ,
где D. — активный диаметр рабочего колеса ГМ; Ху — безразмерная характери-
стика гидромуфты (функция передаточного отношения = п,/пн).
27
В некоторых танковых трансмиссиях возможно использование
гидрозамедлителей (гидротормозов). В нерабочем положении по-
лость ГЗ опорожнена. Регулируя ее заполнение, можно менять тор-
мозной момент ротора ГЗ. Динамический граф ГЗ (рис. 2.8, в)
отображает гидравлическую связь ргз с заделкой.
Тормозной момент массы ргз
МГз = «гз(0».ЪЛ?зЧ. (2.14)
где лгз — частота вращения массы pl 3 ; D, — активный диаметр рабочего ко-
леса ГЗ; Луо— максимальное значение безразмерной характеристики гидроза-
медлителя; агз (0 —внешнее управляющее воздействие (нормированный пара-
метр, характеризующий изменение Afr3 при заполнении ГЗ), О<агз(0<1.
При расчетах динамических процессов, вызываемых периодиче-
скими возмущающими воздействиями, гидроагрегаты трансмиссии
обычно схематизируются упрощенно. Полагается, в частности, что
гидромуфты и гидротрансформатор разрывают динамическую цепь,
и колебания локализуются в пределах насосной части трансмиссии.
Крутильная динамическая схема при этом ограничивается насосны-
ми колесами ГТ и ГМ, коэффициент поглощения энергии которыми
Ф„= l,2310WM/(vA«3);
где Д — приведенный к двигателю момент инерции насосного колеса, кг м2;
п — номинальная частота вращения двигателя, об/мин; NK— максимальная мощ-
ность, потребляемая агрегатом при частоте вращения двигателя лн. кВт; v — но-
мер гармонической составляющей возмущающих моментов на массах двигателя.
2.5. ХАРАКТЕРИСТИКИ ФРИКЦИОННЫХ ЭЛЕМЕНТОВ
И ИХ СИСТЕМ УПРАВЛЕНИЯ
Расчет крутильных колебаний, возбуждаемых двигателем, про-
изводится для каждого структурного состояния трансмиссии, т. е.
для каждой конкретной ком-
бинации замкнутых фрикцио-
нов. На расчетной динамиче-
ской схеме замкнутому фрик-
циону соответствует жесткая
связь каких-либо масс между
собой (рис. 2.9) или какой-ли-
бо массы с заделкой; незамк-
Рис. 2.9. Динамический граф
фрикционной связи
нутый фрикцион никаких связей с динамической системой не имеет.
В общем случае массы могут быть независимыми сосредоточен-
ными, зависимыми (дифференциальные связи) и кинематически-
ми точками (простые редукторные связи).
Замкнутый фрикцион уменьшает на единицу общее число сте-
пеней свободы системы; уравнение связи можно записать в виде
?PJ — ?w = 0 или Ъ/-?4/ = °- <2-,5>
В процессе решения этого уравнения на каждом шаге интегри-
рования в замкнутом фрикционе должен определяться реактивный
28
момент, который вводится в дифференциальные уравнения движе-
ния крутильной системы в качестве дополнительного неизвестного
члена. Система дифференциальных уравнений решается совместно
с уравнением связи (2.15). Срыв фрикциона и начало его пробук-
совки происходят при условии
|лМ>лф.
где Л!’”J — текущее значение момента трения покоя фрикциона.
При расчете переходных процессов в силовых цепях танков в
качестве управляющего воздействия для /-го фрикциона принима-
ется либо текущее давление управления в бустере фрикциона
либо непосредственно осевая сила, сжимающая пакет дисков
Q/(0-
Момент трения покоя /го фрикциона
= Q//?CpypTpo •
где Q/ — осевая сила, сжимающая пакет дисков; I/ — число пар трепня; ЛСР/ —
средний радиус трения; рТр о — коэффициент трения покоя.
Для дисков, работающих в масле, ртр0 = 0,12.. .0,15; для дис-
ковых тормозов сухого трения цтр0 = 0,30.. .0,40.
Момент трения в буксующем фрикционе
1*тР.ф / = »
где цтр / — коэффициент трения буксования, зависящий от целого ряда парамет-
ров (скорость буксования, давление, температура и др.).
Для дисковых тормозов
14,,. (2-16)
где V/ - фб//?ср/ — линейная скорость буксования, м/с; Цтр0 — коэффициент
трения при ej-O; цт₽|— установившееся значение коэффициента трения при
большой скорости буксования.
Для пар трения, работающих в масле, коэффициент р'р0 =
= 0,13.. .0,16, т. е близок к ртр0; осредненнос значение цтр) =0,065.
Для сухих тормозов, обычно применяемых в танковых транс-
миссиях, Игр 1 = 0.15.. .0,20, цтр0 = 0,30.. .0,40.
Условием замыкания фрикциона / является выполнение нера-
венства |Мр/КЛ!ф/ в момент перехода скорости буксования <рб/
через ноль.
2.6. ДИНАМИЧЕСКАЯ СХЕМАТИЗАЦИЯ ГУСЕНИЧНОГО
ДВИЖИТЕЛЯ
Для расчета крутильных колебаний от двигателя гусеничный
движитель упрощенно схематизируется в виде упругого соединения,
связывающего ведущее колесо с заделкой, т. е. масса танка прини-
мается бесконечно большой и не реагирующей па воздействие ис-
следуемых колебаний.
29
Крутильная податливость гусеничной ветви
ег = /трг'тр/^?в.к •
где frt — линейная податливость одного трака гусеницы; гт> — расчетное число
траков в рабочей ветви гусеницы; /?,.< —радиус ведущего колеса.
Для танковых гусениц с резннометаллическим шарниром fi9 =
= 10 ’ м/Н, для танковых гусениц с металлическим шарниром
/тр = 0,25-10-’ м/Н.
Коэффициент поглощения энергии Тг в гусеничных ветвях ра-
вен 0,4.. .0,5.
Упругие соединения, соответствующие гусеничным ветвям, свя-
зывают массы ведущих колес и гусениц, которые в свою очередь
через грунт воспринимают вес всей машины. Пусть <pi и фа — угло-
вые перемещения правого и левого ведущих колес (рад), a xt и х^—
линейные перемещения правой и левой гусениц в продольном на-
правлении. Суммарные упругодиссипативные моменты правой ило-
вой гусеничных ветвей определяются по следующим формулам:
М„ = + br (?i _ i .
ег
где Ьг — эквивалентный коэффициент линейного демпфирования в гусеницах,
Эг = Гг/(2жш<г); (2.17)
и —низшая собственная частота колебаний в МТУ.
Моменты Л4И и Afr2 воспринимаются ведущими колесами как
моменты сопротивления. Усилия в гусеницах от этих моментов опре-
деляются по формулам:
|^77,г при
e м,* .. • л
1^Гг пРиЛ1г.?!<0;
Р 7^7^ ПРИ >0;
пРиЛ|г1?.<0,
где лг—КПД гусеницы (для гусениц с рсзнномсталлнчсским шарниром Иг —
— 0,96; для гусениц с металлическим шарниром Лг - 0,88.. .0,90).
2.7. МОДЕЛЬ ДВИЖЕНИЯ ВГМ НА МЕСТНОСТИ
Для расчета переходных процессов в силовых цепях танков ис-
пользуется единая для режимов прямолинейного движения и пово-
рота модель движения гусеничной машины на местности, постро-
енная с учетом следующих допущений:
поверхность движения машины ровная с заданными характе-
ристиками грунта (/с, Реши, /си) или косогор с углом подъема а;
нормальные давления на грунт распределены по длине гусеницы
30
и изменяются линейно, причем эпюры изменения давления в зави-
симости от веса танка при отсутствии воздействия горизонтальных
сил имеют прямоугольный вид и одинаковы для правой и левой
гусениц; 'd
коэффициент сопротивления повороту является функцией радиу-
са поворота;
взаимодействие гусениц с грунтом характеризуется постоянными
неголономными связями в виде тягово-сцепных характеристик, в
результате чего сила тяги на гусеницах определяется их пробук-
совкой;
колебания корпуса машины не учитываются.
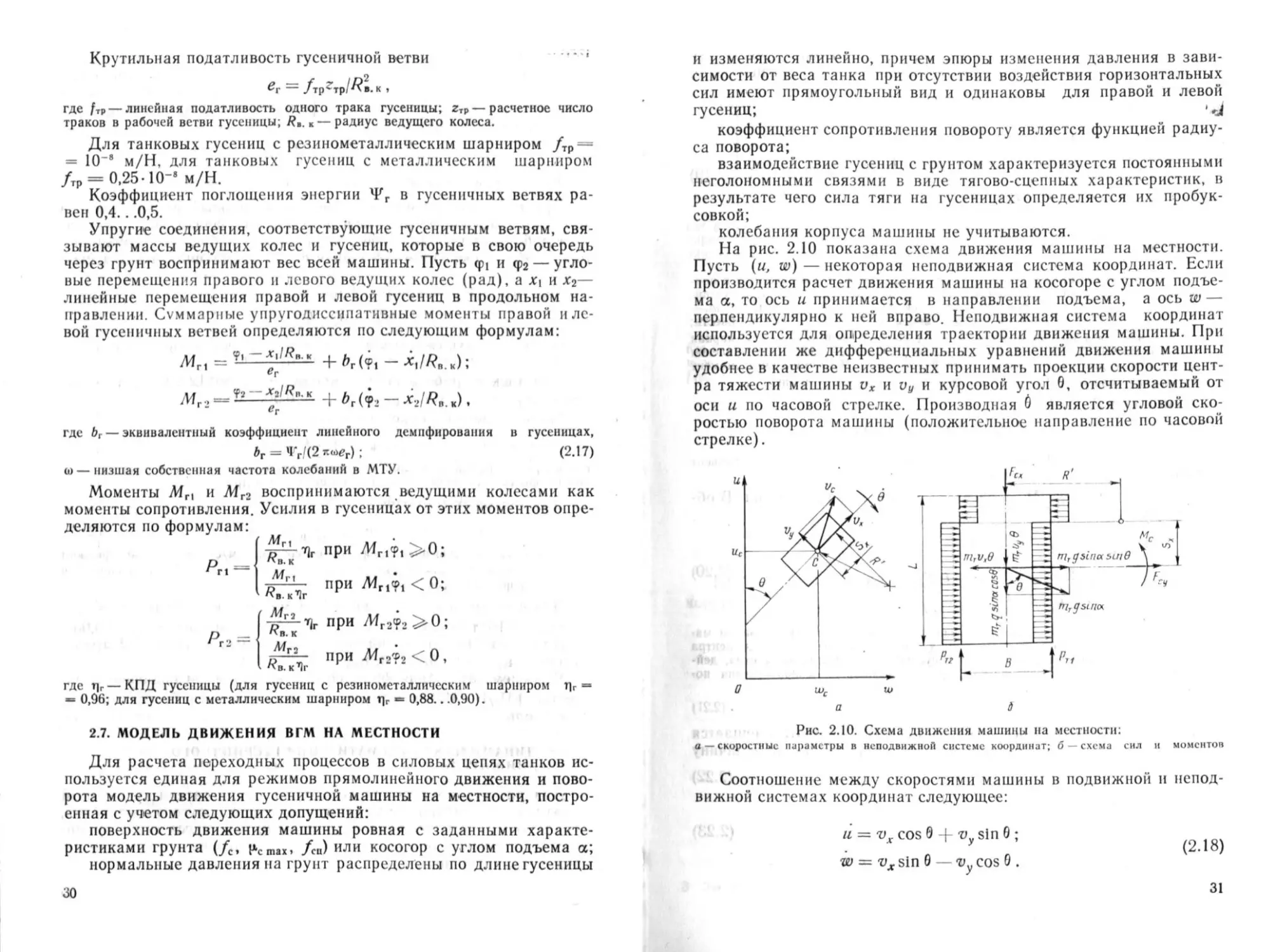
На рис. 2.10 показана схема движения машины на местности.
Пусть (и, w) — некоторая неподвижная система координат. Если
производится расчет движения машины на косогоре с углом подъе-
ма а, то ось и принимается в направлении подъема, а ось w —
перпендикулярно к ней вправо. Неподвижная система координат
используется для определения траектории движения машины. При
составлении же дифференциальных уравнений движения машины
удобнее в качестве неизвестных принимать проекции скорости цент-
ра тяжести машины vx и vy и курсовой угол 0, отсчитываемый от
осн и по часовой стрелке. Производная О является угловой ско-
ростью поворота машины (положительное направление по часовой
стрелке).
Рис. 2.10. Схема движения машины на местности;
а —скоростные параметры в неподвижной системе координат; б — схема сил и моментов
Соотношение между скоростями машины в подвижной и непод-
вижной системах координат следующее:
и = ч)х cos 0 4- sin 6 ;
w = sin 0 — -vy cos 0 .
(2.18)
31
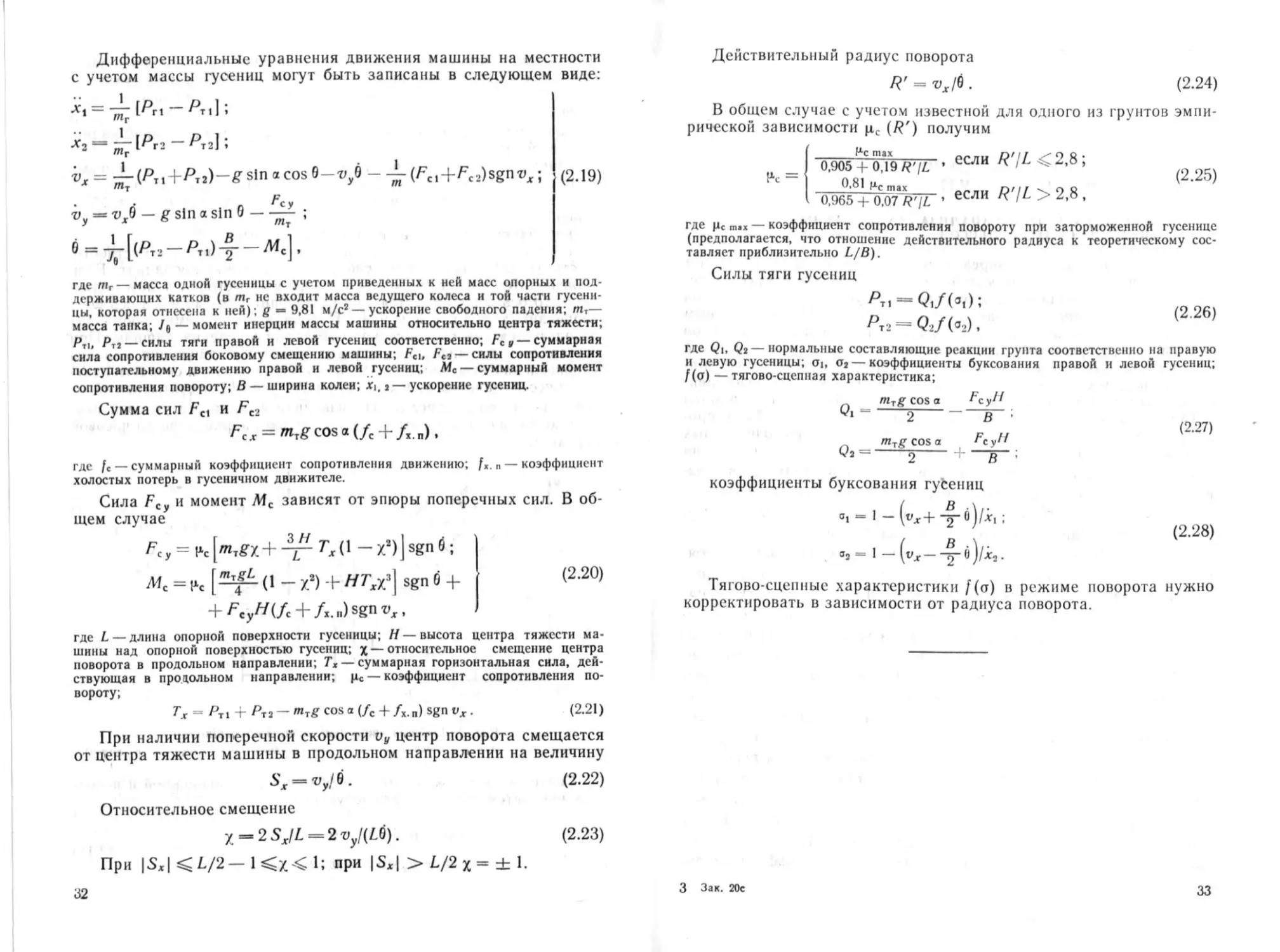
Дифференциальные уравнения движения машины на местности
с учетом массы гусениц могут быть записаны в следующем виде:
= ^-(Рп sin a COS 6-^,9 -(Fcl4-Fc2)sgnvx;
Vy = vx6 — g Sjn a Sin 9-;
в=^[(лг-л,)4~л,‘Ь
(2.19)
где тг— масса одной гусеницы с учетом приведенных к ней масс опорных и под-
держивающих катков (в /лг не входит масса ведущего колеса и той части гусени-
цы, которая отнесена к ней) ; g — 9,81 м/с2—ускорение свободного падения; глт—
масса танка; — момент инерции массы машины относительно центра тяжести;
Рт|, Pit — силы тяги правой и левой гусениц соответственно; Fе у—суммарная
сила сопротивления боковому смещению машины; Ftl, Fti — силы сопротивления
поступательному движению правой и левой гусениц; Мс— суммарный момент
сопротивления повороту; В — ширина колеи; Х|, i — ускорение гусениц.
Сумма сил Fe1 и Fc2
Fcx = mTgcosa(/c+/xn),
где /с —суммарный коэффициент сопротивления движению; /я. п — коэффициент
холостых потерь в гусеничном движителе.
Сила Fey и момент Мс зависят от эпюры поперечных сил. В об-
щем случае
ГСу = Нс [«тГх+ -тг - X1)] sKn й ;
Ме =Ив (1 - х’) + ЯГжХз] sgn 9 +
4-Fey^(/c4-/x.n)sgnt>x,
(2.20)
где L — длина опорной поверхности гусеницы; Я—высота центра тяжести ма-
шины над опорной поверхностью гусениц; X — относительное смещение центра
поворота в продольном направлении; Тя — суммарная горизонтальная сила, дей-
ствующая в продольном направлении; — коэффициент сопротивления по-
вороту;
Тх “ FTl + Рт3 — mrg cos а (/с 4- /х.и) sgn vx. (2.21)
При наличии поперечной скорости vv центр поворота смещается
от центра тяжести машины в продольном направлении на величину
(2.22)
Относительное смещение
z-2Sx/£ = 2Vy/(£9). (2.23)
При |S,|<£/2-l<x<l; при |SX| >£/2Х = ±1.
32
Действительный радиус поворота
R' = тх/б . (2.24)
В общем случае с учетом известной для одного из грунтов эмпи-
рической зависимости цс (/?') получим
0,905 7 0J9’ если ^2*8 ♦
0.81 це тах
Нс =
(2.25)
0,965 + 0,07 R'lL ’ еСЛИ R IL > 2,8 ’
где p£ — коэффициент сопротивления повороту при заторможенной гусенице
(предполагается, что отношение действительного радиуса к теоретическому сос-
тавляет приблизительно L/B).
Силы тяги гусениц
Л,-;
= <?;/(<.).
где Qi, Qi — нормальные составляющие реакции грунта соответственно на правую
и левую гусеницы; оь <та — коэффициенты буксования правой и левой гусениц;
/(а) - тягово-сцепная характеристика;
mTgcosg
Qi------2
(2.26)
Q,=^T +
fcy/l
В ;
(2.27)
коэффициенты буксования гуёениц
°i *“ 1 — (vjr+ -f- ;
V 2 ' (2.28)
в, - 1 — (vx—-уб)/ха.
Тягово-сцепные характеристики /(ст) в режиме поворота нужно
корректировать в зависимости от радиуса поворота.
3 Зак. 20с
33
Глава 3. СТАЦИОНАРНЫЕ ДИНАМИЧЕСКИЕ
ПРОЦЕССЫ В МТУ
3.1. ОСНОВЫ РАСЧЕТНОГО АНАЛИЗА СТАЦИОНАРНЫХ
ДИНАМИЧЕСКИХ ПРОЦЕССОВ
Основные понятия и определения. Колебательные процессы
в МТУ в виде крутильных колебаний валопроводов и масс от пе-
риодических возмущающих воздействий, обусловленных работой
двигателя внутреннего сгорания, гусеничного движителя, силовым
и кинематическим возмущением со стороны отдельных элементов
трансмиссии, определяют динамическое состояние этой составной
части танка. Хотя строго периодические процессы в таких механи-
ческих системах происходят крайне редко (что обусловлено зави-
симостью параметров возмущающих воздействий от режима работы
МТУ), стационарные колебательные процессы в них наиболее про-
должительны. При этом, как показывают данные многочисленных
экспериментальных исследований, влияние медленного изменения
режимов работы агрегатов несущественно. Эти обстоятельства поз-
воляют выделить стационарные режимы колебаний в самостоятель-
ный класс динамических процессов и применить к их исследованию
хорошо разработанные методы теории колебаний.
Реальная МТУ представляется динамической моделью, состоя-
щей из ряда элементов, соединенных между собой упругодиссипа-
тивными связями. Число масс в модели МТУ даже после упроща-
ющих преобразований может достигать нескольких десятков (сбо-
рочные единицы двигателя, трансмиссии и ходовой части; вспомога-
тельные агрегаты и устройства, являющиеся источниками динами-
ческих воздействий на всю систему). Система автоматического ре-
гулирования частоты вращения двигателя в динамическую модель
МТУ не включается, так как предполагается устойчивая работа
двигателя на любом скоростном режиме. В качестве примера на
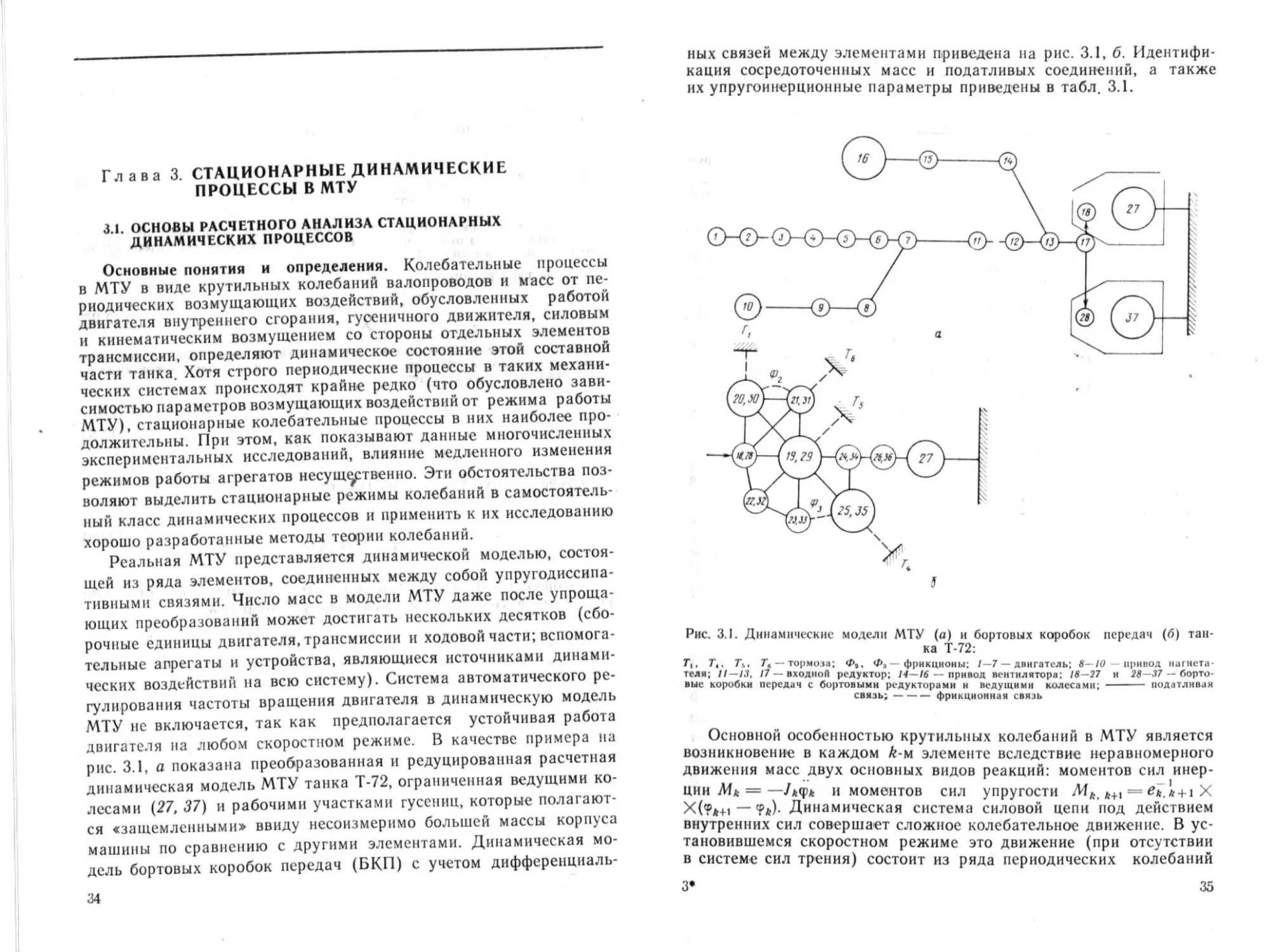
рис. 3.1, а показана преобразованная и редуцированная расчетная
динамическая модель МТУ танка Т-72, ограниченная ведущими ко-
лесами (27, 37) и рабочими участками гусениц, которые полагают-
ся «защемленными» ввиду несоизмеримо большей массы корпуса
машины по сравнению с другими элементами. Динамическая мо-
дель бортовых коробок передач (БКП) с учетом дифференциаль-
34
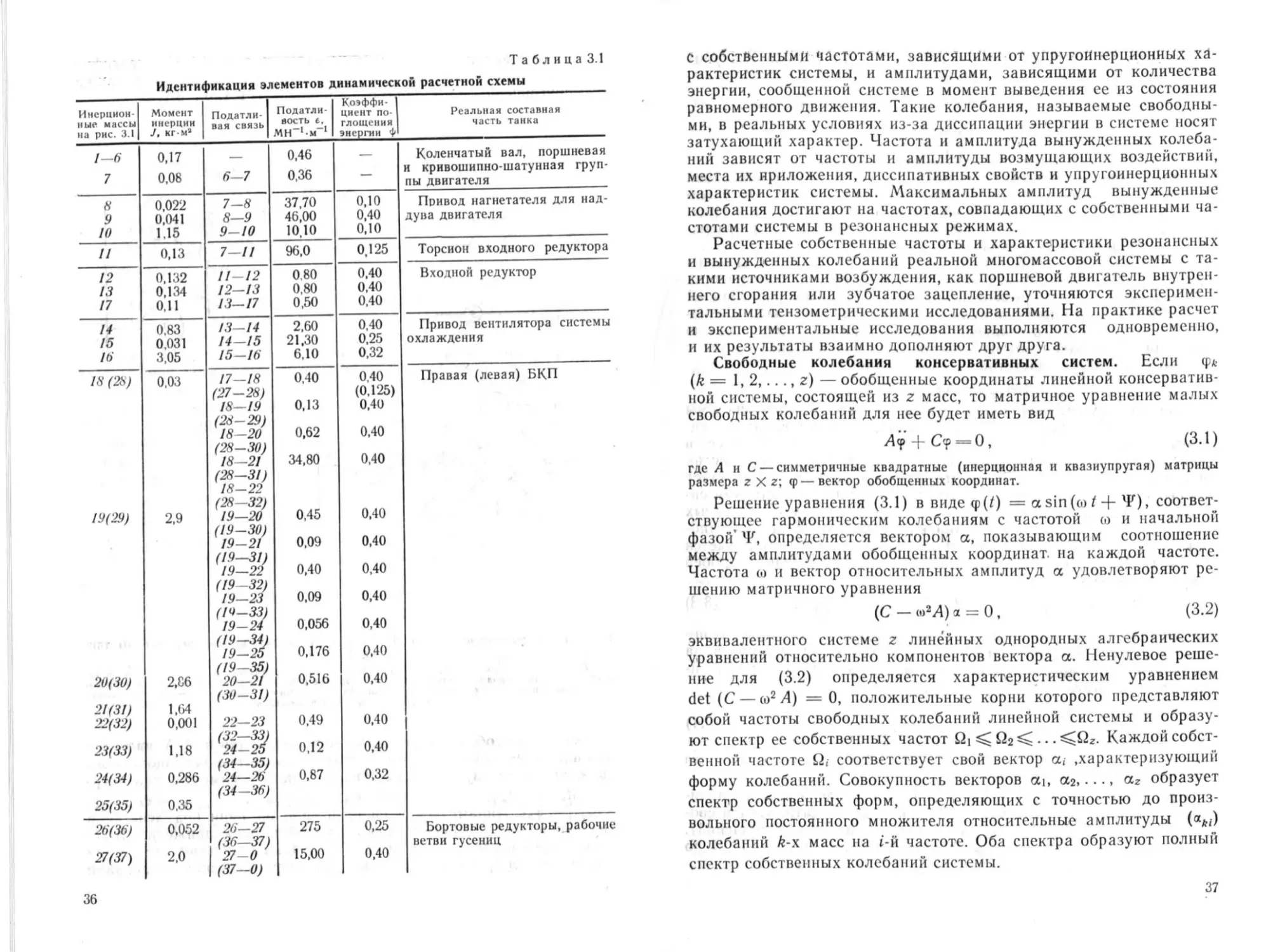
ных связей между элементами приведена на рис. 3.1, б. Идентифи-
кация сосредоточенных масс и податливых соединений, а также
их упругоинерционные параметры приведены в табл. 3.1.
Рис. 3.1. Динамические модели МТУ (а) и бортовых коробок передач (б) тан-
ка Т-72:
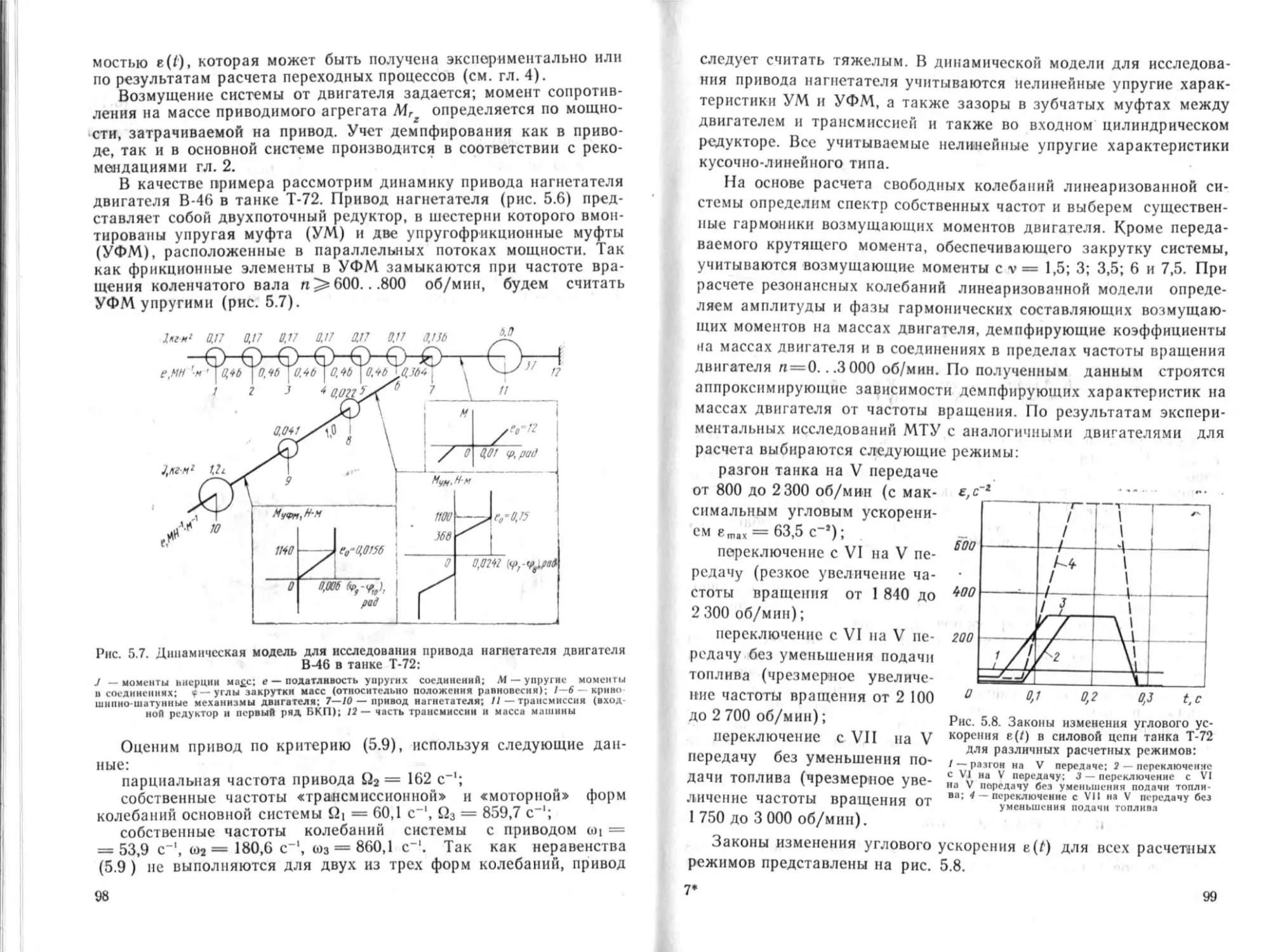
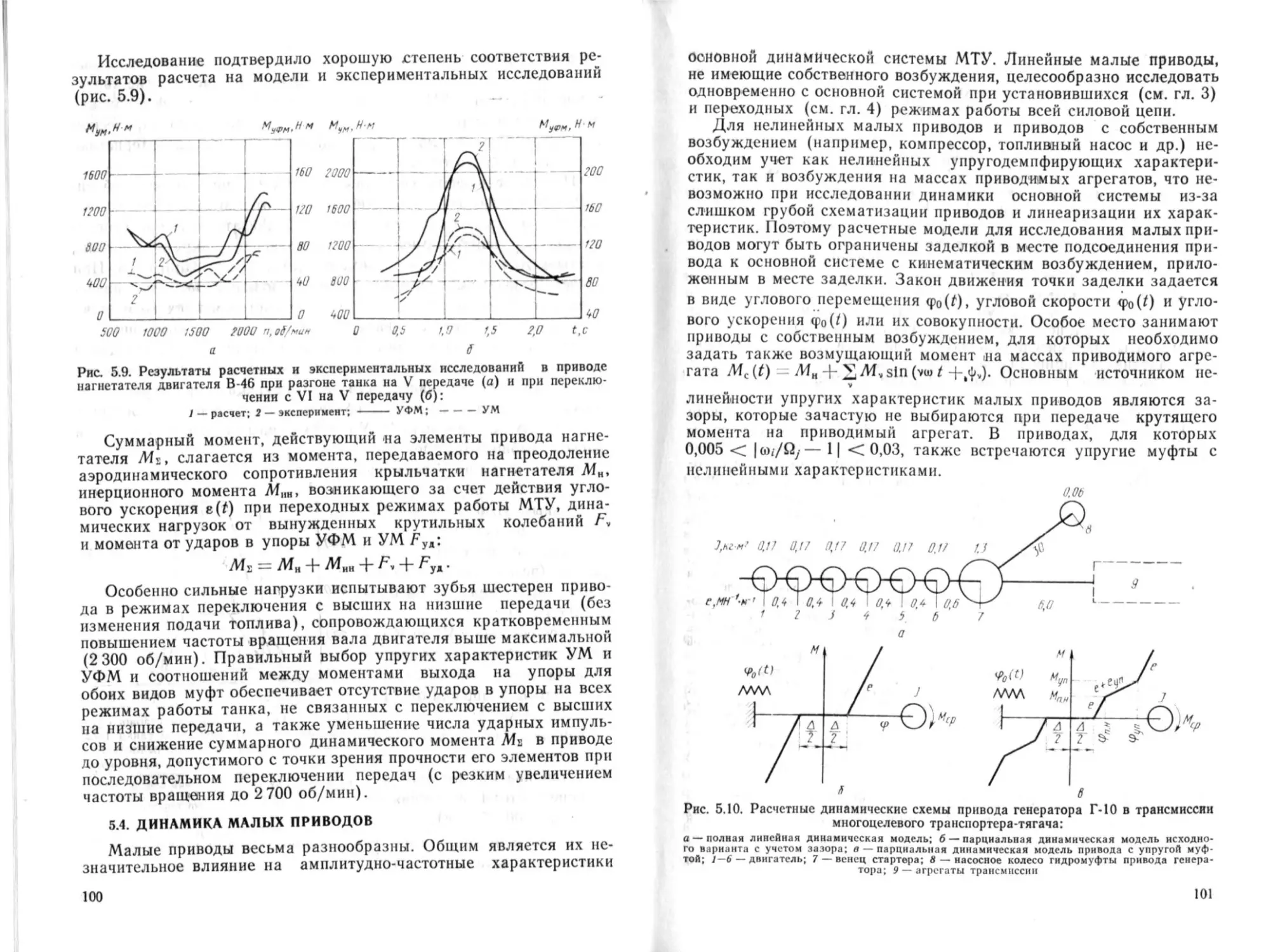
Г|, Tt. Г». Т, — тормола; Ф,. Фл — фрикционы; /—7 — двигатель; 8—10 — привод нагнета
гели; 11—13, /7 — входной редуктор; 14—16 — привод вентилятора; /8—27 и 28 -37 — борто-
вые коробки передач с бортовыми редукторами и ведущими колесами; - податливая
связь;-----фрикционная связь
Основной особенностью крутильных колебаний в МТУ является
возникновение в каждом k-м элементе вследствие неравномерного
движения масс двух основных видов реакций: моментов сил инер-
ции /И* =и моментов сил упругости Л1Л, >+| = e».*+i X
Х(?Л+1 — ?»)• Динамическая система силовой цепи под действием
внутренних сил совершает сложное колебательное движение. В ус-
тановившемся скоростном режиме это движение (при отсутствии
в системе сил трения) состоит из ряда периодических колебаний
3*
35
Таблица 3.1
Идентификация элементов динамической расчетной схемы
Инсрцион ные массы на рис. 3.1 Момент инерции J9 нг-м* Податли- вая связь Податлн ВОСТЬ 4. МН-,-м_| Коэффи- циент по- глощения энергии Ф Реальная составная часть танка
1—6 0,17 0,46 Коленчатый вал, поршневая
7 0,08 6—7 0,36 — и кривошипно-шатунная груп- пы двигателя
8 0,022 7—8 37,70 0,10 Привод нагнетателя для над-
9 0,041 8—9 46,00 0,40 дува двигателя
10 1,15 9—10 10,10 0,10
11 0,13 7—11 96,0 0,125 Торсион входного редуктора
12 0.132 11-12 0,80 0,40 Входной редуктор
13 0,134 12—13 0,80 0,40
17 0.11 13-17 0,50 0,40
14 0,83 13—14 2,60 0,40 Привод вентилятора системы
15 0,031 14—15 21,30 0,25 охлаждения
16 3,05 15—16 6,10 0,32
18(28) 0.03 17—18 0.40 0,40 Правая (левая) БКП
(27—28) (0.125)
18—19 (28—29) 0,13 0,40
18 -20 0,62 0,40
(28—30) 18—21 (28-31) 34,80 0,40
18—22 (28—32) 0,40
19(29) 2,9 19-20 (19—30) 0,45
0,40
19-21 0.09
(19—31) 19—22 0,40 0,40
(19 32) 19—23 (14-33) 0,09 0,40
19-24 0,056 0,40
0,176 0,40
20(30) 2.С6 (19—35) 20—21 0,516 0,40
(30-31)
21(31) 1,64 0,49 0,40
22(32) 0,001 22—23
23(33) 1,18 0,12 0,40
(34—35) 0,32
24(34) 0,286 24—26 (34—36) 0,87
25(35) 0,35
26(36) 0,052 26—27 (36-37) 275 15,00 0,25 0,40 Бортовые редукторы, рабочие ветви гусениц
27(37) 2,0 27—0 (37—0)
36
С собственными частотами, зависящими от упругоинерционных ха-
рактеристик системы, и амплитудами, зависящими от количества
энергии, сообщенной системе в момент выведения ее из состояния
равномерного движения. Такие колебания, называемые свободны-
ми, в реальных условиях из-за диссипации энергии в системе носят
затухающий характер. Частота и амплитуда вынужденных колеба-
ний зависят от частоты и амплитуды возмущающих воздействий,
места их приложения, диссипативных свойств и упругоинерционных
характеристик системы. Максимальных амплитуд вынужденные
колебания достигают на частотах, совпадающих с собственными ча-
стотами системы в резонансных режимах.
Расчетные собственные частоты и характеристики резонансных
и вынужденных колебаний реальной многомассовой системы с та-
кими источниками возбуждения, как поршневой двигатель внутрен-
него сгорания или зубчатое зацепление, уточняются эксперимен-
тальными тензометрическими исследованиями. На практике расчет
и экспериментальные исследования выполняются одновременно,
и их результаты взаимно дополняют друг друга.
Свободные колебания консервативных систем. Если
(k = 1, 2,..., z) — обобщенные координаты линейной консерватив-
ной системы, состоящей из z масс, то матричное уравнение малых
свободных колебаний для нее будет иметь вид
Л<р + С<р = О, (3.1)
где А н С —симметричные квадратные (инерционная и квазиупругая) матрицы
размера zXz; ф—вектор обобщенных координат.
Решение уравнения (3.1) в виде ф(/) = a sin (си t + Y), соответ-
ствующее гармоническим колебаниям с частотой ы и начальной
фазой’ 'К, определяется вектором а, показывающим соотношение
между амплитудами обобщенных координат, на каждой частоте.
Частота <о и вектор относительных амплитуд а удовлетворяют ре-
шению матричного уравнения
(С —«>2Л)а = 0, (3.2)
эквивалентного системе г линейных однородных алгебраических
уравнений относительно компонентов вектора а. Ненулевое реше-
ние для (3.2) определяется характеристическим уравнением
det (С — <1)2Л) =0, положительные корни которого представляют
собой частоты свободных колебаний линейной системы и образу-
ют спектр ее собственных частот Qt й2^ • • • Каждой собст-
венной частоте Q, соответствует свой вектор а, .характеризующий
форму колебаний. Совокупность векторов оы, а2,..., аг образует
спектр собственных форм, определяющих с точностью до произ-
вольного постоянного множителя относительные амплитуды (аЛ/)
колебаний Л-х масс на »-й частоте. Оба спектра образуют полный
спектр собственных колебаний системы.
37
Если из собственных форм образовать квадратную матрицу
Л = [a*J и провести инвариантное относительно Q преобразова-
ние обобщенных координат ср в q по формуле ф* = Vaw^, то ма-
тричное уравнение (3.1) будет иметь вид
^4-(А-’Л-’СЛ)7 = 0.
Это уравнение описывает независимые по каждой обобщенной
координате q колебания с собственными частотами Q. Обобщен-
ные координаты q, называемые нормальными (главными) коорди-
натами, широко применяются при качественном описании колеба-
тельных процессов и в прикладных расчетах.
В динамических системах, в которых число степеней свободы
достигает нескольких десятков (что характерно для большинства
МТУ), целесообразно применять численные методы с реализацией
на ЦВМ. Наиболее простым является метод динамической жестко-
сти, сущность которого заключается в следующем. Если на Л-ю
массу динамической системы действует гармонический момент
с амплитудой Млк и частотой он, то ее смещение
sin («>,/ | .
При этом суммарная динамическая жесткость всей системы
Нъы в Л-й точке при частоте ш, характеризует собой отклик си-
стемы на гармоническое возмущение, приложенное к Л-й массе, и
является функцией частоты, инерционных и упругих характеристик
системы. Для различных точек эта функция различна и обладает
тем свойством, что ее корни являются собственными частотами си-
стемы И,. Определение корней и соответствующих им собственных
частот свободных колебаний удобно производить одним из приб-
лиженных численных способов. Наиболее простым из них является
способ В. П. Терских, основанный на составлении цепных дробей
рекуррентного вида:
"’ = + (з.З)
или способ Толле—Хольцера (наиболее полно этот способ, осно-
ванный на определении «остаточного» момента сил упругости за
последней свободной массой системы в виде рекуррентных зависи-
мостей, рассмотрен С. Е. Бурцевым):
«л = “*-t + **-i. >-i. *;
Л1а л. *+» = Л4, *-i. * — Лш’а* •
(3.4)
где а* и М, »_ь *, Af. *, *4.1— амплитуды перемещений Л-fl массы и моментов сил
упругости соседних с А-й массой соединений.
При расчете задается начальное значение частоты ш и прини-
мается си = 1 (при этом Ма(м = 0, так как рассматриваются сво-
бодные колебания системы без воздействия внешних возмущений).
Расчет производится по рекуррентным формулам (3.3) и (3.4) до
последней массы z. В результате получаем некоторые значения аЛ)
38
и действующего за этой массой «остаточного> момента =
— В режиме свободных колебаний, когда w=Q„ Afxo (Qi)=0.
Это значение Q, находят посредством многократных последователь-
ных расчетов Й/ для различных ы. Суммарная динамическая жест-
кость системы Н^го (ш) = Л1,(|(ш)/аГо, поэтому при <о = £2,
Htzo (о)) = 0. Одновременно с i-й собственной частотой & рассчи-
тывают соответствующие ей амплитуды а*/ всех масс, которые оп-
ределяют собственную i-ю форму колебаний. Существуют алгорит-
мы и программы, позволяющие проводить автоматизированный
расчет крутильных колебаний для динамических моделей сложных
структур.
Отыскание спектра собственных частот и соответствующих им
форм эквивалентно решению алгебраической проблемы о собствен-
ных значениях матричного уравнения (3.2). Установлено, что наи-
более эффективным методом решения этой задачи является метод,
базирующийся на вычислительной схеме Гивенса—Хаусхолдера и
математических исследованиях Уилкинсона.
Сущность метода заключается в преобразовании динамической
матрицы D = Д’12СД’ 2 исследуемой системы (3.1) к трехдиаго-
нальпому виду за z — 2 шагов рекуррентного вычислительного про-
цесса и последующем определении собственных частот Q, трехдиа-
гональной матрицы в заданном интервале. Определяются собствен-
ные формы колебаний а,, отвечающие каждому значению £2( ме-
тодом обратной итерации и соответствующего преобразования ко-
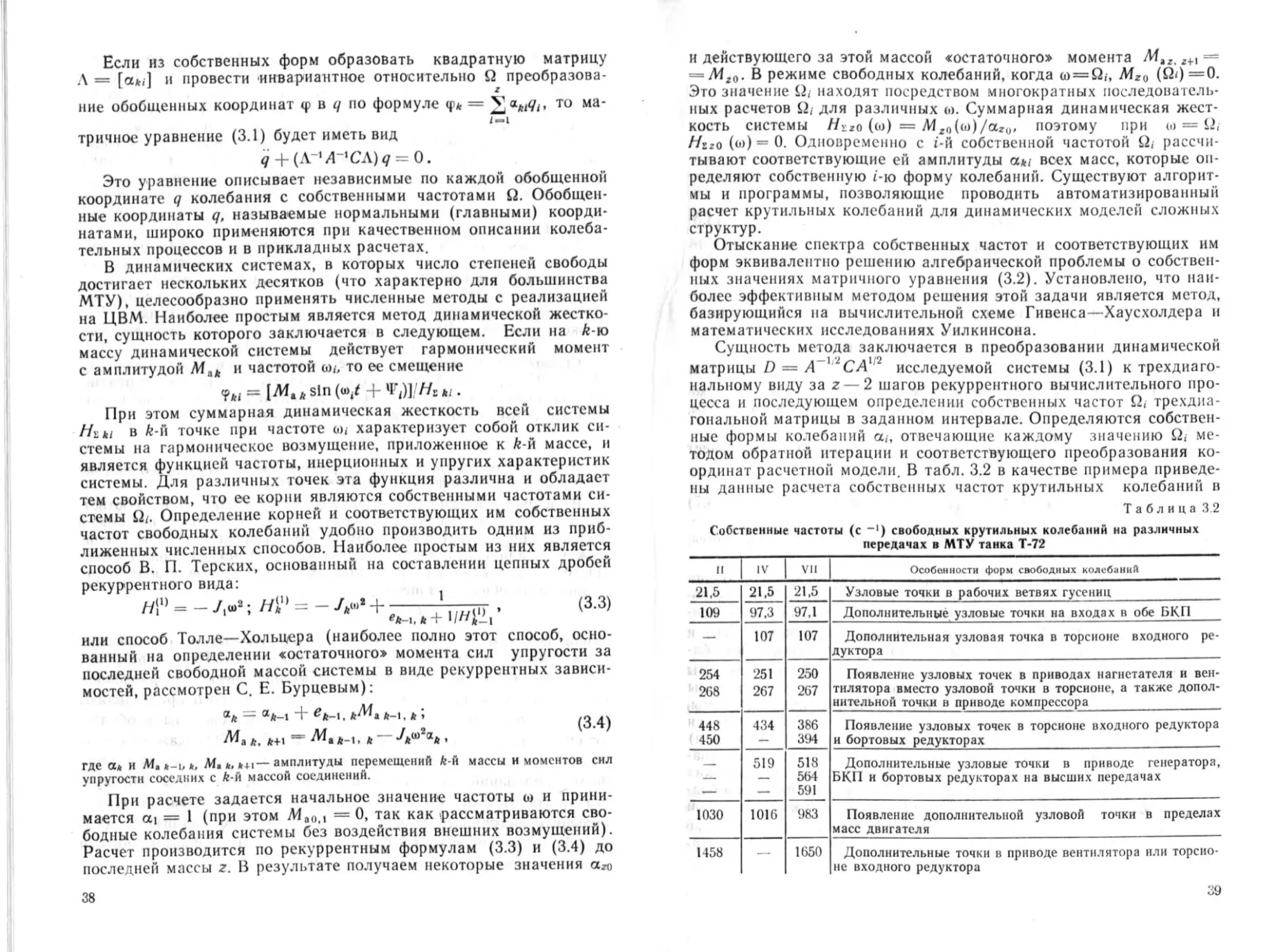
ординат расчетной модели. В табл. 3.2 в качестве примера приведе-
ны данные расчета собственных частот крутильных колебаний в
Таблица 3.2
Собственные частоты (с “*) свободных крутильных колебаний на различных
передачах в МТУ танка Т-72
II IV VII Особенности форм свободных колебаний
21,5 21,5 21,5 Узловые точки в рабочих ветвях гусениц
109 97,3 97,1 Дополнительные узловые точки на входах в обе БКГ1
—* 107 107 Дополнительная узловая точка в торсионс входного ре- дуктора
254 251 250 Появление узловых точек в приводах нагнетателя и вен-
2G8 267 267 тилятора вместо узловой точки в торсионе, а также допол- нительной точки в приводе компрессора
448 434 386 Появление узловых точек в торсионе входного редуктора
450 — 394 и бортовых редукторах
519 518 Дополнительные узловые точки в приводе генератора,
—— — 564 БКП и бортовых редукторах на высших передачах
— — 591
1030 1016 983 Появление дополнительной узловой точки в пределах масс двигателя
1458 1650 Дополнительные точки в приводе вентилятора или торсио- не входного редуктора
39
диапазоне w=0.. .1700 с~‘ для МТУ танка Т-72 на Н, IV и VII по*
родачах. Графическое изображение форм колебаний таких слож-
ных систем весьма громоздко, поэтому в таблице отмечены лишь
их характерные особенности. Такой анализ форм свободных коле-
баний дает качественную картину динамического состояния МТУ
при различных собственных частотах.
Особенности свободных колебаний диссипативных систем. Сво-
бодные колебания диссипативной системы описываются однород-
ным дифференциальным уравнением в матричной форме
Л<р 4- 4- С? = 0, (3.5)
где А и С—инерционная н квазиупругая матрицы; В — симметричная квадрат-
ная матрица, определяющая диссипативную функцию Рэлея в уравнениях Лаг-
ранжа второго рода.
Решение уравнения (3.5) имеет вид <р(0 = 0ех/ , где 0— ком-
плексный вектор. Характеристические показатели к равны корням
уравнения det (АХ24-Вл4-С) = 0. Это уравнение имеет 2г дейст-
вительных или попарно комплексно-сопряженных корня:
^=-^4-72;; ххИ = -«,-/2;. (3.6)
где > 0, Я, > 0 — действительные числа, являющиеся соответствующими ко-
эффициентами демпфирования н собственными частотами диссипативной системы;
/=/- i .
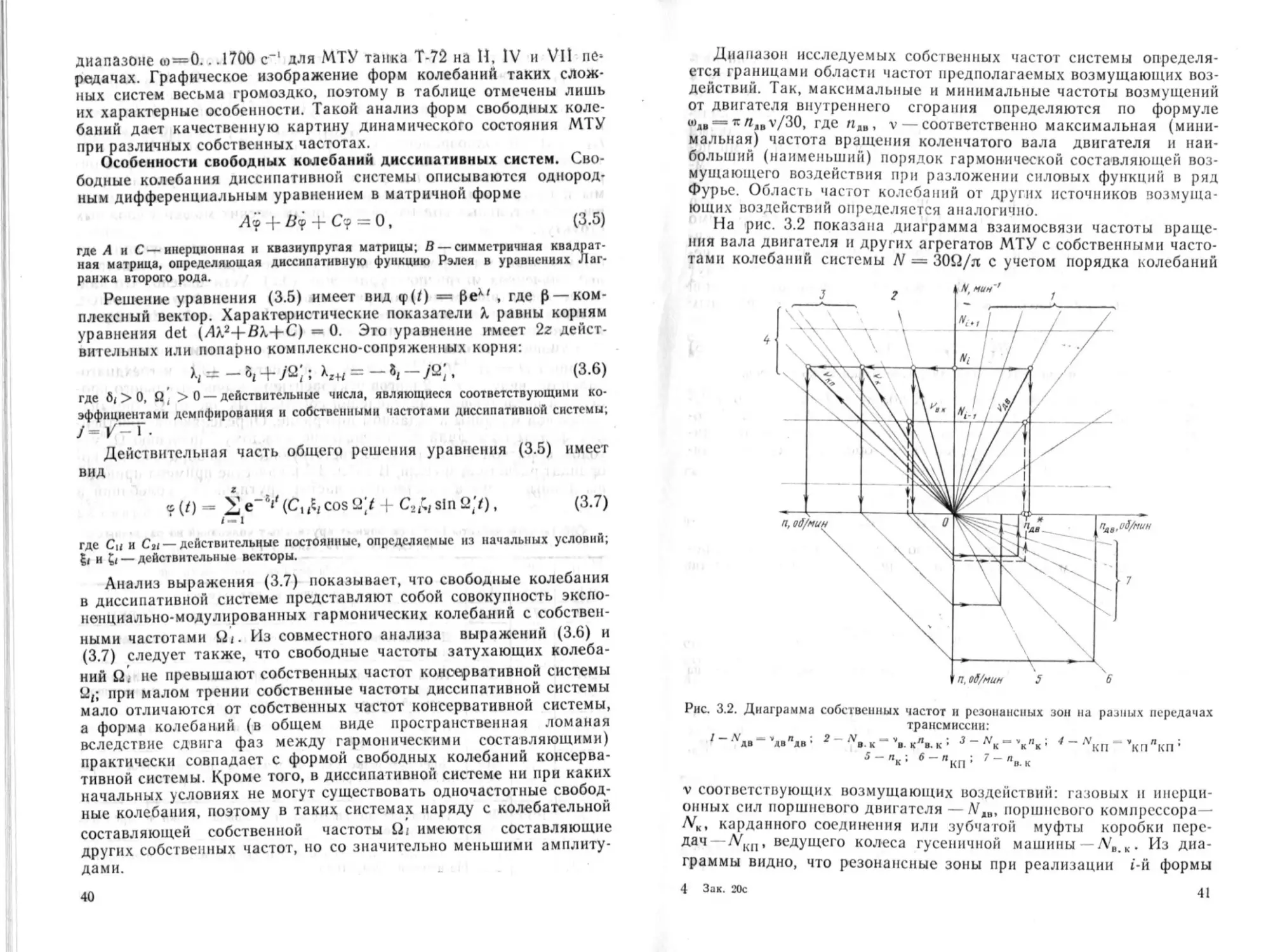
Действительная часть общего решения уравнения (3.5) имеет
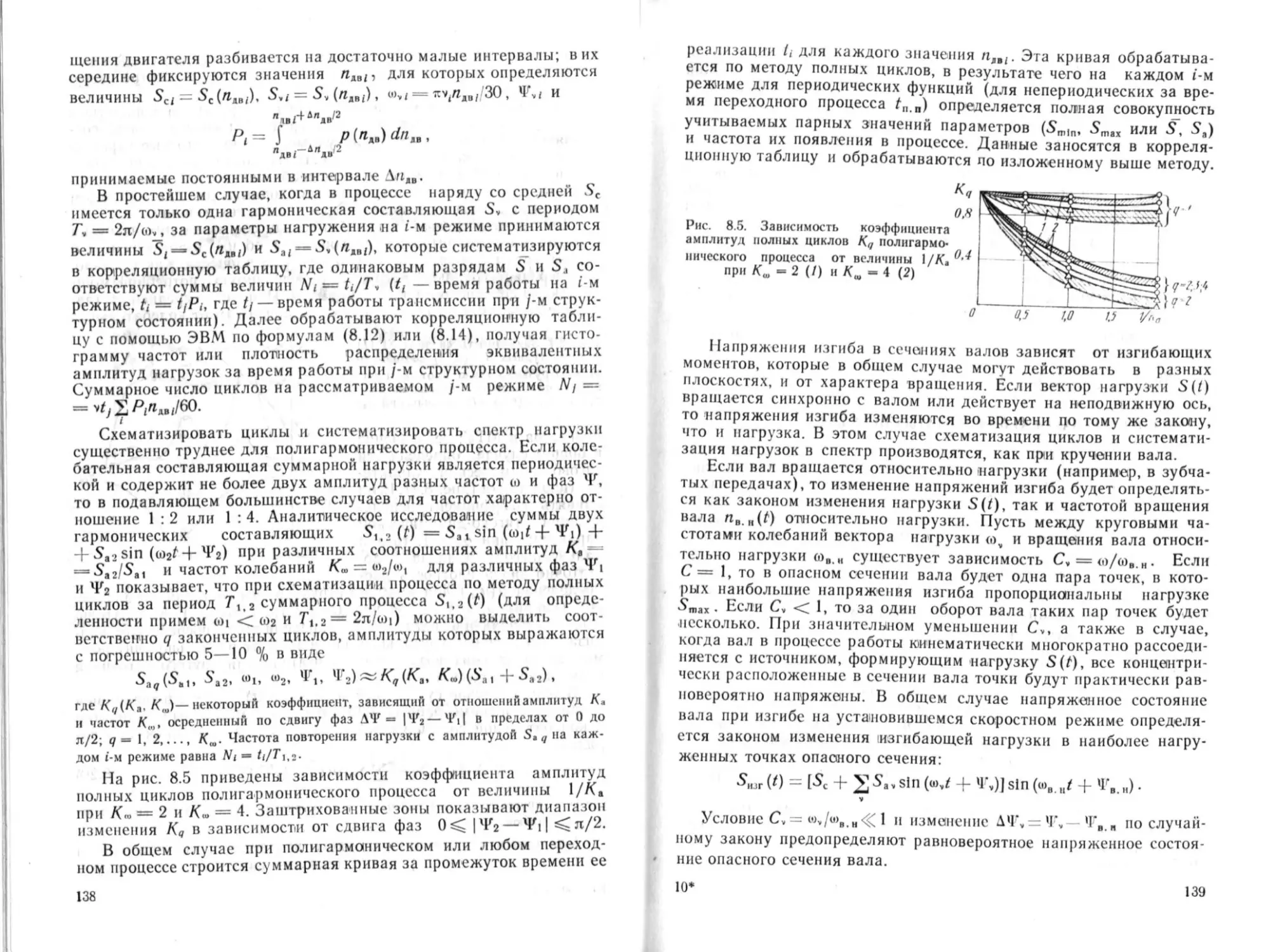
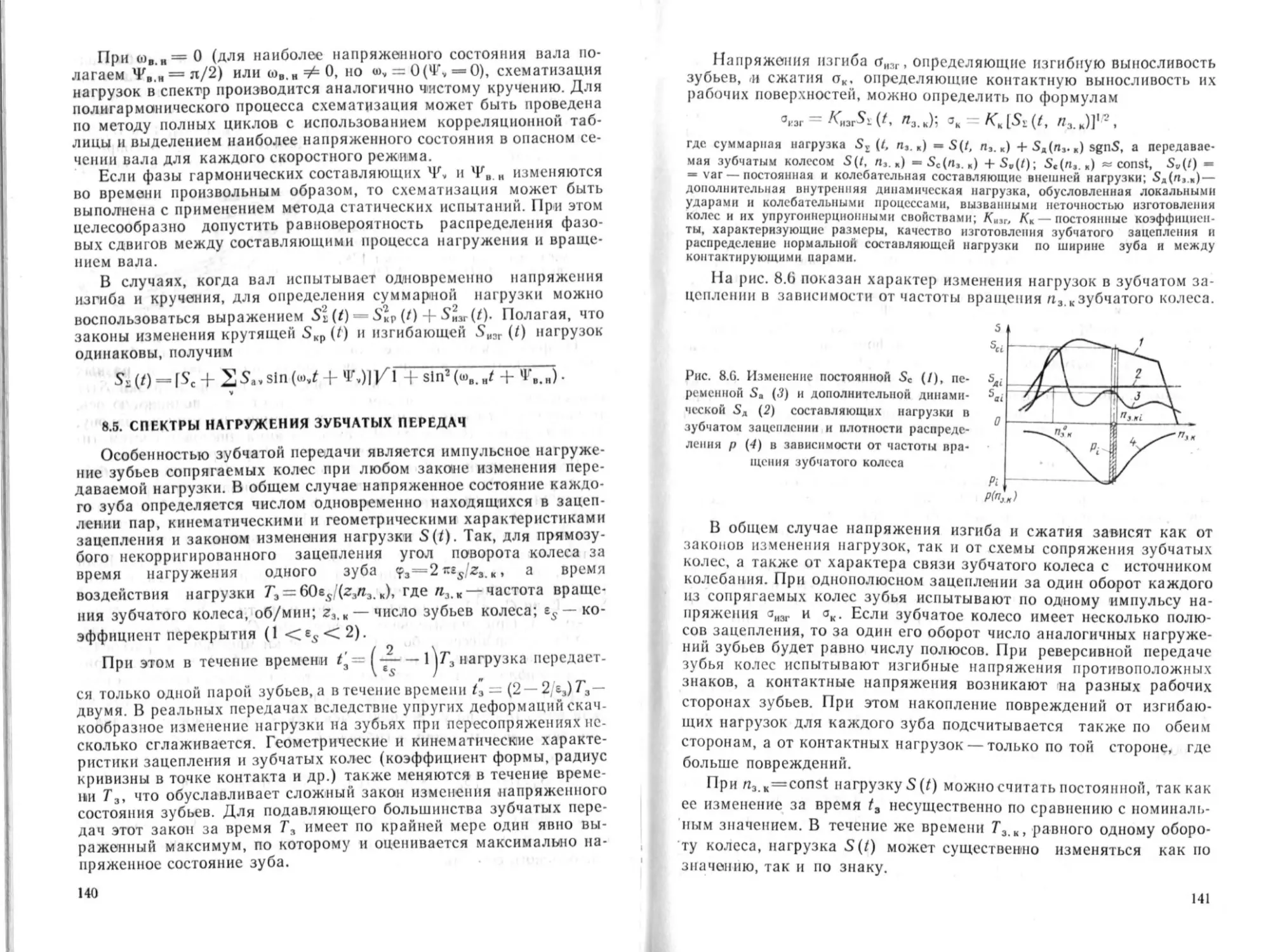
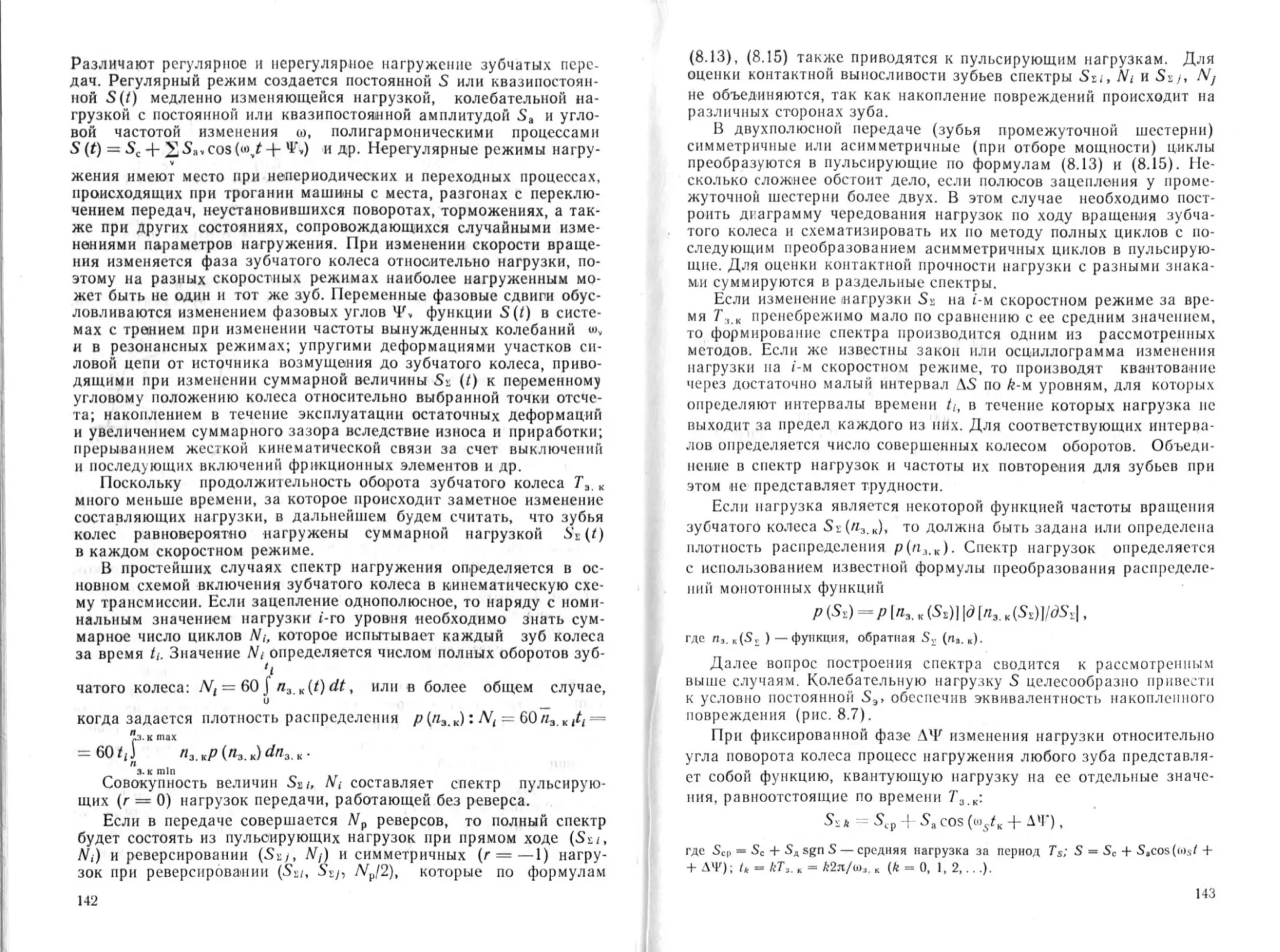
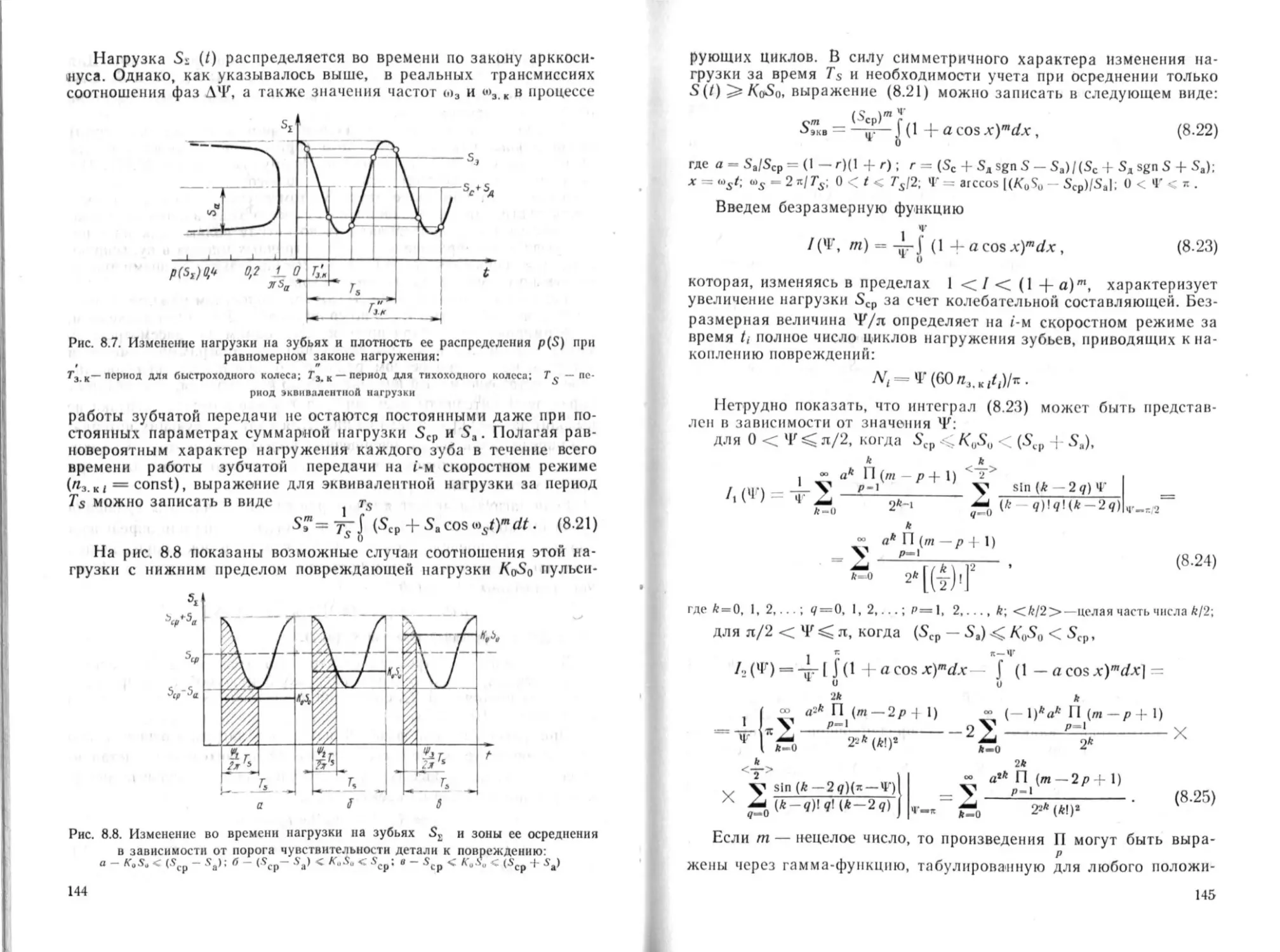
вид
о(/) = 2 e"V (Cu^ cos 27 + sin 27), (3.7)
Z-l
где Си и Си — действительные постоянные, определяемые из начальных условий;
Ju и w — действительные векторы.
Анализ выражения (3.7) показывает, что свободные колебания
в диссипативной системе представляют собой совокупность экспо-
ненциально-модулированных гармонических колебаний с собствен-
ными частотами Qi. Из совместного анализа выражений (3.6) и
(3.7) следует также, что свободные частоты затухающих колеба-
ний Q не превышают собственных частот консервативной системы
2,; при малом трении собственные частоты диссипативной системы
мало отличаются от собственных частот консервативной системы,
а форма колебаний (в общем виде пространственная ломаная
вследствие сдвига фаз между гармоническими составляющими)
практически совпадает с формой свободных колебаний консерва-
тивной системы. Кроме того, в диссипативной системе ни при каких
начальных условиях не могут существовать одночастотные свобод-
ные колебания, поэтому в таких системах наряду с колебательной
составляющей собственной частоты £2/ имеются составляющие
других собственных частот, но со значительно меньшими амплиту-
дами.
40
Диапазон исследуемых собственных частот системы определя-
ется границами области частот предполагаемых возмущающих воз-
действий. Так, максимальные и минимальные частоты возмущений
от двигателя внутреннего сгорания определяются по формуле
<о„== где Пд„, v — соответственно максимальная (мини-
мальная) частота вращения коленчатого вала двигателя и наи-
больший (наименьший) порядок гармонической составляющей воз-
мущающего воздействия при разложении силовых функций в ряд
Фурье. Область частот колебаний от других источников возмуща-
ющих воздействий определяется аналогично.
На рис. 3.2 показана диаграмма взаимосвязи частоты враще-
ния вала двигателя и других агрегатов МТУ с собственными часто-
тами колебаний системы N = ЗО£2/л с учетом порядка колебаний
Пль,и9/пчн
Рис. 3.2. Диаграмма собственных частот и резонансных зон на разных передачах
трансмиссии:
v соответствующих возмущающих воздействий: газовых и инерци-
онных сил поршневого двигателя — Wжв, поршневого компрессора—
карданного соединения или зубчатой муфты коробки пере-
дач—jVki1, ведущего колеса гусеничной машины Из диа-
граммы видно, что резонансные зоны при реализации i-й формы
4 Зак. 20с
41
собственных колебаний с частотой М будут располагаться на раз-
личных частотах вращения вала основного двигателя, при этом в
зоне определенных частот вращения вала двигателя л*в могут со-
седствовать резонансные частоты вращения, обусловленные коле-
баниями различных форм, возбуждаемыми различными порядками
и колебаниями одной формы, возбуждаемыми различными ис-
точниками, например, двигателем и ведущим колесом или ком-
прессором.
Вынужденные колебания. Из теории колебаний известно, что
при анализе вынужденных установившихся колебаний необходимо
учитывать их диссипативные свойства, иначе в резонансных режи-
мах амплитуды колебаний будут неограниченно возрастать, а в не-
резонансных зонах при большом трении расчетные значения будут
отличаться от действительных. Вынужденные колебания линейной
системы в общем случае описываются матрично-дифференциальным
уравнением вида
Л? + В?-|-С<р-Г(Г), (3.8)
где F(t) — вектор возмущающих воздействий, изменяющихся во времени.
Для установившихся вынужденных колебаний достаточно част-
ного решения этого уравнения в виде <р = txj coswi-f- a2sin<ot со-
ответствующего возмущающему воздействию гармонического ха-
рактера F(0 = F, coswt. Компоненты векторов а( и а2 определя-
ются из следующей системы уравнений:
(С — ®2Л) at -г Вшл., = Fa; |
— Bwlx 4- (С — a>M)a2 = 0. I
В общем случае при расчете удобно перейти к комплексным ве-
личинам—моментам инерции и податливости упругих участков
системы с трением:
в ел. *+1(1- н*. *+1 /)/(1 + А *+!).
где р* ц*. »ц - коэффициенты пропорциональности сил трения, действующих на
*-ю массу и в (Л, k + 1)-м соединении; / - /— 1 •
Возмущающее воздействие F(t) в этом случае также представ-
ляется в комплексном виде, т. е. для его составляющих, имеющих
характер равночастотных возмущений с различными фазами Тр,
можно записать:
7Р(С = 7. р sin (W 4- V,),
где /, р — ftp с ' — комплексная амплитуда рй возмущающей силы.
Согласно методу динамической жесткости, амплитуда вынуж-
денных колебаний k-н массы системы с линейным трением при
42
действии на нес возмущений с разными фазами при одинаковой
частоте имеет вид
Л-2 (?.,»,)//а», (3-9)
где ар— относительные комплексные амплитуды р-х масс, к которым приложе-
ны возмущения fap ; суммарная комплексная динамическая жесткость
системы в Л-й точке; г,— число масс, к которым приложены возмущающие воз-
действия.
Величина называется комплексным суммарным возбу-
дителем системы, модуль которого определяется суммарным векто-
ром комплексных чисел ftp и ар. Входящие в выражение величины
могут быть определены гармоническим анализом возмущающе-
го воздействия, а величины а» и — методом остаточного мо-
мента Толле—Хольцера. Заметим, что величины а*, являясь отно-
сительными амплитудами колебаний масс системы, образуют ком-
плексный спектр форм для заданного значения частоты.
Действительные значения амплитуд вынужденных колебаний
Л-й массы системы (3.8) равны модулю А*, а се перемещение
<рА = | XA|sln(<o/ 4- ¥Л), (3.10)
5l4ll«p|sln(V/p+4ep)
где Ч* = arclR ------------------------- Ч'„* ;
2l/P||«Pl cos (Ч7Р + Ч;р)
Ч'ур. Ч*ар, Ч'^ —фазы соответствующих комплексных чисел fp, ар, Hlk.
При воздействии на систему пг разночастотных и разнофазных
гармонических возмущений по аналогии с (3.9) и (3.10) получим
e 2| A*,(w,) |sin(<M + Ч'*,), v = 1, 2,..., т . (3.11)
При наличии фазовых сдвигов форма вынужденных колебаний
системы не является плоской, как в свободной консервативной си-
стеме. Комплексная амплитуда вынужденных колебаний Л-й массы
для всех П/
(3.12)
2/арар/
где ----------------------—----------------------------------
(у?-*’’) +/[л2|1‘* «Л< + >2114Л. *+« Ч*+1 («*!-«*+!.«)’]
(313)
а t-й суммарный возбудитель равен 27ар-®р/-
4*
43
Из выражения (3.13) видно, что при совпадении частоты коле-
баний <о с одной из собственных частот £2, амплитуды колебаний
масс ограничиваются силами трения, определяемыми коэффициен-
тами и* и ц*. Л+1.
Вне зоны резонансных колебаний трение в системе мало, ампли-
туды вынужденных колебаний почти такие же, как в системе без
трения; то же характерно и для фазовых сдвигов между возмущаю-
щими воздействиями и главными координатами. Вне резонансных
зон трение ввиду его малого значения в системе можно не учиты-
вать. При малом трении и совпадении частоты w с одной из собст-
венных частот Q, в выражении (3.12) превалирует составляющая
с А., в знаменателе которой множители ц* и ц*. *+1 имеют малые
значения. В силу ортогональности двух любых собственных форм
для любой £-й точки системы (^Лалра*, = 0, где р, q — номера
собственных форм) амплитуда колебаний Ак будет тем больше, чем
больше похоже распределение возмущающих воздействий на i-ю
форму главных свободных колебаний. Это свидетельствует о том,
что резонансные амплитуды определяются не абсолютными значе-
ниями возмущающих сил, а их суммарным возбудителем. Вследст-
вие малого трения форма резонансных колебаний практически
оказывается такой же, как в системе без трения. Можно поэтому
считать (с достаточной для практики точностью), что в резонансной
зоне вынужденные колебания являются как бы свободными в силу
того, что возмущающие силы в каждый момент оказывают на си-
стему действие, противоположное трению.
Если известны собственные спектры частот и соответствующие
им формы свободных колебаний, т. е. Qz и aw, то, выполнив инва-
риантное относительно Qz преобразование обобщенных координат
q* в (см. выше), получим
?, +2 а??, = !«„/».. (334)
где — гармоническое возмущающее воздействие от v-й гармоники, приложен-
ное в Л-й массе; 2 \ + Iх*. *+»**, ац (®М “ в*тьi)’l •
Решение уравнений (3.14) для i-й главной формы имеет вид
%
л(0 = ((2««Л.)/(2?с,.).
где К|1 - (»'»/У/)’13 + (24wv/fiJ)’; силовая функция, имеющая сдвиг
фаз относительно Д, на ‘Г,; = arctg — .
44
Амплитуда колебании k-ii массы от zB возмущающих воздейст-
вий, имеющих т гармонических составляющих при разложении в
ряд Фурье,
Л»= X X 1««
» —Ii-1 Z — 1
При совпадении tov с Й, последняя формула определяет резо-
нансную амплитуду, при этом Ci, = 26/, а /*, численно совпадает
с/*, и сдвинута по фазе на л/2. По изложенному алгоритму раз-
работаны программы.
Приращение энергии колеблющейся системы за некоторый про-
межуток времени А/ при действии возмущения и сил трения рас-
считывается по формуле А (77 4- Т) = ДЦ/,4- Д У^тр. Практический
метод расчета резонансных колебаний основывается на предполо
женин, что при резонансе форма этих колебаний совпадает с фор
мой собственных колебаний, а изменение за время А/ кинетической
и потенциальной энергии системы равно нулю. В момент резонанса
одновременно происходит максимальное отклонение всех масс, по
по углу поворота ведущего звена, принятого за начальное, фазо-
вый сдвиг возмущающих моментов для различных масс неодина-
ков. Так, для поршневого двигателя начальная фаза возмущающих
моментов v-x порядков для Л-х масс, отсчитываемая от верхней
мертвой точки колена первого цилиндра, * — Ч’, *ЧГ1Л, где
V, — начальная фаза v-й гармоники возмущающего момента;
ЧГ(Л — угол поворота коленчатого вала двигателя между вспыш-
ками в первом и k-м цилиндрах. Аналогичные соотношения можно
получить для всех других источников возмущающих периодических
воздействий.
Вся работа внешних возмущающих сил У7В при резонансе за-
трачивается на восполнение энергии, рассеиваемой силами сопро-
тивления от трения на массах двигателя, в материале валопрово-
дов, в зубчатых зацеплениях, подшипниковых опорах, фрикцион-
ных элементах и других кинематических парах. Определение рабо-
ты сил сопротивления WT(, за период колебания нс представляет
принципиальных трудностей. Из условия равенства работы возму-
щающих и демпфирующих’ сил определяется резонансная ампли-
туда колебаний начальной массы Aip„, а резонансные амплитуды
Л-х масс системы определяются по форме колебаний: Айрез =
= рез/®1 •
Нс все резонансные режимы, определяемые расчетом, могут
быть замечены на фоне вынужденных колебаний. Это обусловлено
незначительностью суммарного возбудителя и неустойчивостью
резонансной зоны при переходных режимах работы системы.
3.2. ВЛИЯНИЕ ВОЗМУЩАЮЩЕГО ВОЗДЕЙСТВИЯ ДВИГАТЕЛЯ
НА ДИНАМИЧЕСКИЕ НАГРУЗКИ
Динамическая нагруженность элементов МТУ на установивших-
ся режимах. В результате расчета свободных и вынужденных кру-
тильных колебаний могут быть определены абсолютные амплитуды
Ак колебаний масс динамической модели и моменты сил упругости
на различных участках МТУ е^,\^ \(Ак — Ak^). Обычно
результаты расчета крутильных колебаний представляются в виде
зависимости амплитуд моментов от частоты вращения вала для
различных порядков возмущающих воздействий.
Общая картина вынужденных колебаний в реальной МТУ весь-
ма сложна (рис. 3.3). Моменты сил упругости крутильных колеба-
Рис. 3.3. Осциллограмма вынужденных колебаний в танке Т-72:
1.7 — частоты вращения правого (лв.кп ) « левого (% кд ) ведущих колес; ?. 9 — частота
вращения внутренних барабанов правой (лп ) и левой (лд ) БКП; J—б — моменты на Валах
торсиона входного редуктора (Л*ир ), правой п > ” ле,оЯ <А,|<Пл) БКП> водила л*"®го
бортового редуктора 8 частота вращения входных валов БКП (лД1)
46
ний на различных участках системы могут значительно превышать
средний крутящий момент двигателя Л1кр. При наличии зазоров
в кинематических парах колебания носят нелинейный характер.
Кроме того, в этом случае развиваются полигармоничсские коле-
бания, а действительные динамические процессы в многомассовых
системах не являются строго периодическими.
Результаты расчетного и экспериментального анализа кру-
тильных колебаний в силовой цепи танка Т-72 приведены на
рис. 3.4, 3.5. Из графиков следует, что в механической трансмиссии
Рис. 3.4. Экспериментальная зави-
симость амплитуд моментов сил
упругости от частоты вращения
вала двигателя в танке Т-72 на
IV (черный треугольник) и VII
(светлый кружок) передачах:
Л -МВР: в~*кПп: "-ЛГКПд
уровень динамических нагрузок наиболее высок в зоне низких (не-
рабочих) значений частоты вращения (350—450 об/мин) от возму-
щающих воздействий двигателя шестого порядка. В рабочем диа-
пазоне частоты вращения вала двигателя располагается несколько
резонансных зон: с v = 3; 6; v = 3; v = 1,5; v = 6; 1,5. Наиболь-
шие нагрузки испытывает торсион входного редуктора, меныине —
вал на входе в левую БКП. Влияние крутильных колебаний, воз-
буждаемых двигателем, на динамическую нагруженностьустройств,
расположенных за БКП, в частности бортовых редукторов, сказы-
вается лишь при развитии в системе низкочастотных форм колеба-
ний с узловыми точками в бортовом редукторе или гусеничных вет-
вях. Например, на валу водила БР (см. рис. 3.5) резонансное из-
менение амплитуд моментов сил упругости достигает 7,5—10 кН м.
47
В МТУ с гидромеханическими трансмиссиями (ГМТ) макси-
мальное изменение амплитуд моментов сил упругости на торсионс
при сблокированном фрикционе гидротрансформатора в зоне низ-
кочастотного резонанса на 10—20 % выше, чем в МТУ с БКП, а в
зоне рабочих частот вращения вала двигателя — на 25 % ниже.
Рис. 3.5. Расчетное изменение амплитуд момента сил упругости (/) и крутящего
момента (2) на водиле бортового редуктора в зависимости от частоты вращения
ведущего колеса п».« и скорости и» танка Т-72 (IV—VII передачи)
При работе ГМТ с разблокированным гидротрансформатором
уровень крутильных колебаний в «насосной» части системы умень-
шается в 1,3—1,5 раза (рис. 3.6); в «турбинной» части системы кру-
тильные колебания, возбуждаемые двигателем, практически отсут-
ствуют. Это свидетельствует о том, что ГМТ при разблокированном
гидротрансформаторе разделяет всю силовую цепь системы на две
части (насосную и турбинную), практически изолированные друг
от друга в динамическом отношении. Передача крутильных коле-
баний от насосной части МТУ турбинной заметна лишь при малых
частотах колебаний, при этом сам гидротрансформатор оказывает
некоторое демпфирующее действие на колебания в силовой цепи.
Несмотря на различие дизельных двигателей и трансмиссий,
шасси ВГМ имеют общие динамические свойства. Многоцилиндро-
вые дизельные двигатели имеют, как правило, равномерный поря-
док чередования вспышек и, как следствие этого, только одну силь-
ную гармонику «главного» порядка (например, для танка Т-72
v = 6, для танка Т-64 v = 5). Все прочие гармонические составля-
ющие возмущающих моментов имеют симметричные векторные
48
диаграммы и при соответствующем подборе динамических пара-
метров соединения двигателя с трансмиссией не представляют
опасности. Выбор конструкции соединения двигателя с трансмис-
сией обусловливается необходимостью выведения резонанса от
главной гармоники в нерабочую зону, что можно обеспечить уста-
новкой на входе в трансмиссию торсиона с податливостью
(5. ..10) MH’'-м’1. Такое соединение фактически приводит к ди-
намической изоляции источника возмущения и сохранению в рабо-
чем диапазоне пологой формы колебаний масс двигателя. При
этом существенно ослабляется суммарный возбудитель от «неглав-
ных» гармоник. Если в двигателе полностью уравновешены центро-
бежные силы инерции первого и второго порядков, а также момен-
ты от этих сил, то прочие параметры МТУ не оказывают заметного
влияния на характер динамических нагрузок.
М,кН м
500 1000
Рис 3.6. Изменение амплитуд момента сил упругости (-----) и крутящего мо-
мента (------) в зависимости от частоты вращения вала двигателя танка с ГМТ:
/, 4 на торсионе входного редуктора; 2. 3 — на валу насосного колеса гндротрапсформато
ра во всем диапазоне и при остановленной турбине соответственно
Крутильные колебания при проходе через зону резонансных
колебаний. При пуске, остановке двигателя, а также при переход-
ных режимах работы МТУ проходит через зону резонансных коле-
баний; при этом наибольшие амплитуды колебании имеют место не
49
в момент совпадения частоты возмущающих моментов с собствен-
ной частотой системы, а несколько позже. Наступление максимума
колебаний запаздывает по времени и проявляется на больших ча-
стотах вращения вала двигателя при разгоне системы и на мень-
ших—при замедлении. Максимальные амплитуды колебаний
уменьшаются при увеличении скорости прохода через резонансную
зону. Колебания в послерезонансной зоне носят характер затухаю-
щих биений.
Если торможение или разгон двигателя происходит с постоян-
ным угловым ускорением е = уМК91 2 Л • т0 изменение v-й гармо-
ники возмущающего момента, приложенного к каждой из масс ци-
линдров двигателя, можно представить в виде М, (t) =
= Af, sin (в/2/2 4- 4е.), где V» — начальная фаза этого момента.
В результате действия на систему возмущающих моментов та-
кого вида возникает колебательное движение масс:
<₽Д = Л*8П1 (в/2/2 +ЧМ.
где Ал и V* — амплитуда и начальная фаза колебаний Л-й массы.
Задача расчета прохода через резонансную зону сво-
дится к определению максимальных амплитуд колебаний. Если
воспользоваться разложением колебаний по собственным формам,
то для р-й главной формы амплитуда колебаний k-й массы системы
от v-й гармоники возмущающего момента рассчитывается по
формуле
, t
м^л1р f п
Л». = -Jе-'sln2,(f -1)sin (£ + Л,
где и 'И*, — частота н фаза колебаний р-й формы.
Амплитуда колебаний Л-й массы с учетом всех форм свободных
колебаний А = V аАрА*,. Для разных ускорений можно полу-
чить семейство огибающих и по ним определить наибольшую
амплитуду.
Если резонансная мощность осцилляционных сопротивлений
превышает максимальную свободную мощность двигателя, то по-
следний не в состоянии преодолеть резонанс, поскольку вся его
свободная мощность расходуется на преодоление осцилляционных
сопротивлений при околорезонансной частоте вращения. В резуль-
тате в резонансной зоне будет происходить исключительно медлен-
ное изменение средней угловой частоты вращения при значитель-
ном увеличении подводимой мощности и одновременном росте уров-
ня колебаний. Это явление носит название эффекта Зоммерфельда.
50
Как правило, в рабочем скоростном диапазоне мощность двига-
теля настолько велика, что фактически можно не считаться с энер-
гетическим балансом при резонансе, в пусковой же зоне развивае-
мая мощность двигателя относительно невелика. Если двигатель не
может преодолеть резонансную зону и выйти в диапазон рабочих
частот вращения, то установка оказывается непригодной к эксплуа-
тации. Но и в некритических
случаях силовое взаимодейст-
вие вращательного и колеба-
тельного движений весьма па-
губно отражается на пусковых
динамических характеристи-
ках установки: резонансные
колебания при пуске двигате-
ля развиваются до уровня, со-
ответствующего установивше-
муся характеру колебаний, что
может сказаться на прочности
отдельных деталей МТУ.
Динамическая модель мо-
торно-трансмиссионной уста-
новки (рис. 3.7, б), структура
связей которой с достаточной
точностью отображает энер-
гетическое взаимодействие
а
Рис 3.7 Стоухтурная (и) и дина-
мическая (б) схемы моторно-транс-
миссионной установки, а также схе-
ма с динамическим гасителем (в):
Т. Д приведенные массы трансмиссии и
двигателя: d, р —ведущая и ведомая час
ти антнвнбратора
вращательного и колебательного движений, может быть описана
следующим образом:
I <?0 - Л 11/ (q,, q,),
I Я. -I Л»Г' Я, + '^Я, = Л*' V(q„, ?,),
где V, qs) = — (!-*-£ (0/2 m*)| - Mc (q0) f Af, sin v (q„ + qx);
0 = <7o + (1 + sgn qs)l2 ;
Zu — число цилиндров; m — тактность двигателя; qo, q» — главные координаты
исследуемой динамической системы, которые определяют соответственно се вра-
щение и колебательное движение с частотой Q,. Dt — добротность s-й собствен-
ной формы колебаний системы; Af,P, Мс, —средний крутящий момент дви-
гателя, момент сопротивления вращению установки в пусковом скоростном диа-
пазоне, возмущающий момент v-ro порядка; £(х — 0/2тл) — целая часть х; Jo,
Л— 1-й и (s+ 1 )-й диагональные элементы приведенной к главным координатам
инерционной матрицы полной динамической модели крутильной системы иссле-
дуемой установки.
51
Уравнения (3.15) можно заменить следующей системой диффе-
ренциальных уравнений первого порядка:
das________1 /(А/Л-Л<с , ,
dt 2<*>ср 1 ’
+ M, (-HB. + fl.) + sin V};
‘ (M - M, + M.B, sin »•); (3.16)
a/
</4 I / 1 I(»2 / \o I I *4 (-f- /Т| Bq ----------- Hrl
W ~ 7^ (vlL>* - ('•<»)-! + *<- {—.----------------------=jsr)cos 4}:
dq
dt “<=₽ ’
где <Осл a», 'F —средняя частота вращения коленчатого вала двигателя, огиба-
ющая колебательного процесса по координате q, и ее фата относительно возму-
щающего момента; В/— функция Бесселя первого рода /-го порядка от аргумен-
^*1» f / 0z„ \1
Tav; [1+£(^-)] •
На основе системы уравнений (3.16) вычисляется критерий для
оценки характера резонансных колебаний в пусковых зонах:
Ф = (Мд,т — Мс)7л[2КдСд, г(1 + Jt-Гд) +
+ »(Л1Л- Mc)J37rl/(vJrM?),
где Сд г, Зд, Jjr— упругоинерционные характеристики расчетной динамической
схемы (рис. 3.7, б); Кд = 0,18. ..0,25 (в зависимости от типа двигателя и темпе-
ратурных условий пуска).
При Ф > 1 будет иметь место некритический характер эффекта
Зоммерфельда. С помощью критерия Ф можно определить влияние
различных параметров моторно-трансмиссионной установки на пуск
двигателя.
С помощью пассивной корректирующей динамической системы,
связанной с коленчатым валом двигателя, можно добиться увели-
чения частоты резонансных колебаний и обеспечить некритический
характер эффекта Зоммерфельда в пусковой резонансной зоне.
Корректирующая система представляет собой простейший линей-
ный динамический гаситель с одной степенью свободы (рис. 3.7, в),
параметры которого должны удовлетворять условию
Cd, р ^р ~ 4и »
где Сд, Р; /р —приведенная крутильная жесткость упругой связи и момент инер-
ции маховика динамического гасителя соответственно; QOi — антирсзонансная ча-
стота колебаний исходной системы.
При такой настройке динамического гасителя одноузловая соб-
ственная форма колебаний исходной системы вырождается. Реа-
лизуемая низшая резонансная зона в МТУ при наличии связи
Д—d—p определяется второй формой собственных колебаний с ча-
стотой, превосходящей частоту резонирующей собственной формы
52
колебаний исходной установки. Динамический гаситель воздейству-
ет на пусковые динамические характеристики установки при усло-
вии, что отношение /₽//д не слишком мало в сравнении с единицей.
Критический характер резонансных крутильных колебаний в МТУ
гусеничного снегоболотохода при пуске двигателя (рис. 3.8, а) был
устранен за счет установки на носке коленчатого вала антивибра-
тора с резиновыми кольцами между ступицей и маховиком, что
позволило снизить динамические нагрузки от резонансных колеба-
ний в пусковой зоне до допустимого уровня (рис. 3.8, б).
Рис. 3.8. Пусковые динамические характеристики МТУ гусеничного сиегоболото-
хода исходной конструкции (а) и с динамическим гасителем (б) :
/ отметка времени; 2 — частота вращения коленчатого вала двигателя; 3 — момент упру-
гой связи двигателя с трансмиссией (см. участок Д—Т на рис. 3.7)
3.3. ВЛИЯНИЕ НА НАГРУЖЕННОСТЬ ТРАНСМИССИИ
ВОЗМУЩАЮЩИХ ВОЗДЕЙСТВИИ агрегатов И
МЕХАНИЗМОВ ШАССИ
Крутильные колебания, возбуждаемые гусеничным движителем.
Колебания, возникающие в зацеплении зубьев ведущего колеса с
траками гусеницы, по данным исследований проф. В. А. Иванова,
обусловлены их соударением при входе в зацепление вследствие
звенчатости гусеницы.
Вход и выход траков из зацепления с ведущим колесом, а также
высвобождение их из-под последнего опорного катка также сопро-
вождаются инерционными нагрузками. С. Е. Бурцевым предложено
выражение для расчета возмущающего инерционного момента ос-
новной гармоники vb k=zb k(?b k — число зубьев ведущего колеса)
гусеничного движителя танка:
/.,ж = К2ЛKml /(/&к + /3)(а2+*2) sin (\л. J + Ч‘).
Формула выведена для условий движения танка на скорости более
15—20 км/ч и требует экспериментального уточнения.
Возмущающие воздействия от гусеничного движителя опреде-
ляются кинематическими (К«, /, R„ к, а, Ь) и инерционными (т)
параметрами элементов ходовой части и частотой вращения веду-
щего колеса (<>,. ж). Для левого и правого ведущих колес можно
полагать амплитуды колебаний моментов при прямолинейном
движении одинаковыми, но имеющими различные фазы Т, а при
повороте— различными по фазе и частоте.
53
Экспериментально установлено, что с ростом скорости танка
общий уровень динамических нагрузок возрастает (см. рис. 3.5).
Наблюдается также заметный разброс значений амплитуд момен-
тов упругих сил (заштрихованная область), что обусловлено, в ча-
стности, непостоянством амплитудно-фазовых соотношений для
обоих ведущих колес танка. Влияние включенной передачи на сопо-
ставимых скоростях движения танка несущественно. Порядок ко-
лебаний относительно частоты вращения ведущего колеса v,.K со-
ответствует числу его зубьев z„ к. В зоне малых частот проявляют-
ся колебания от возмущающих моментов главной гармонической
составляющей крутящего момента двигателя viB = 6 относительно
частоты вращения его вала. При работе МТУ с неполной загрузкой
на высших передачах колебательная составляющая процесса пре-
вышает средний крутящий момент, что свидетельствует о значи-
тельной динамической нагруженности бортовых редукторов.
Влияние гусеничного движителя на динамическую нагружен-
ность трансмиссий танков с ПД и ГТД различно. В первую очередь
это обусловлено различием динамических свойств систем из-за от-
носительно тяжелой приведенной массы (ротора силовой турбины
в танке с ГТД), что предопределяет существенный суммарный воз-
будитель со стороны гусеничного движителя. Колебания с поряд-
ком v..B = z1.lc относительно частоты вращения ведущих колес
проявляются не только в бортовых редукторах, но и в БКП и даже
в редукторной части ГТД (рис. 3.9).
Вынужденные крутильные колебания, возбуждаемые зубчаты-
ми зацеплениями и соединениями. Вследствие неточностей изготов-
ления (погрешности основного шага, профиля и др.) и резкого из-
менения жесткости зацепляющихся зубьев при их пересопряжении
зубчатые передачи могут стать источниками крутильных колебаний.
За каждый оборот колесо с z зубьями воспринимает z импульсов
переменных нагрузок. Их интенсивность зависит от соотношения
основных шагов пар зубьев, деформации их под нагрузкой и коэф-
фициента перекрытия, определяющего относительную продолжи-
тельность одновременной работы двух пар зубьев. Пересопряжение
зубьев сопровождается их собственными колебаниями. Возникаю-
щая при этом суммарная динамическая нагрузка может существен-
но отличаться от статической, определяемой крутящим моментом.
Полный расчет динамических процессов в зубчатых передачах весь-
ма сложен, поэтому динамические нагрузки на зубьях определяют-
ся экспериментально или на основе упрощенных расчетных схем. Как
правило, динамические процессы в зубчатых передачах могут по-
влиять на другие участки силовой цепи лишь в резонансных режи-
мах, когда одна из собственных частот системы Q, совпадает с ча-
стотой <оя. Так как колеса в трансмиссиях в среднем имеют по
20.. .40 зубьев, то частота возбуждения - кд3г/ЗО составляет
(!...5)-103 с"*. Возбуждение резонансных колебаний в МТУ в этих
случаях происходит лишь при таких формах колебаний, при кото-
рых относительные амплитуды колебаний на зубчатых колесах до-
54
статочно велики. В стендовых условиях были зарегистрированы
высокочастотные колебания (wj = 2850 с-1) на валу силового ре-
дуктора ГТД с амплитудой момента сил упругости 70—80 Нм,
возбуждаемые ведущей шестерней (г = 17), вращающейся с часто-
той пш = 3,06 лкп(лкп = 550 об/мин).
Рис. 3.9. Изменение амплитуды момента сил упругости н зависимости от частоты
вращения входного вала БКП в танке с ГТД:
а — на входных валах правой </) н левой (2) БКП: б — на водиле бортового редуктора (3)
при прямолинейном движении (-----------) и повороте (----) на IV передаче
55
Передача крутящего момента через зубчатые передачи и зубча-
тые муфты из-за биений или расцентровки соединяемых деталей
происходит неравномерно, с частотой, кратной частоте вращения
зубчатого колеса или соединяемых валов. Особенно сильным воз-
будителем к/рутильных колебаний может оказаться коническая
зубчатая передача. Так, по данным тензометрических исследований
в ходовых условиях танка с ГТД, при частоте вращения входного
вала БКП лкп « 16,6 с-1 (1 000 об/мин) возникает резонанс с соб-
ственной частотой й = 210 с-1 при уровне амплитуд момента сил
упругости на входном валу правой БКП 1 700.. .2 900 Н-м. Частота
этих колебаний, равная »Р*якп при iv = 2,03, подчеркивает возму-
щающее воздействие ведущей шестерни конической пары силового
редуктора ГТД.
Полужесткие зубчатые муфты и карданные соединения явля-
ются, с одной стороны, практически жесткими на кручение, а с дру-
гой— в силу конструктивных особенностей или вследствие техно-
логических погрешностей изготовления и монтажа — допускают
перидоическое относительное смещение ведущей и ведомой частей.
Применение этих соединений обусловлено как требованиями удоб-
ства сборки агрегатов, так и необходимостью компенсации расцен-
тровок между ними. Полужесткие зубчатые муфты обычно выпол-
няются в виде двух или трех элементов: ведущей и ведомой полу-
муфт и соединительного звена. По существу зубчатая полужесткая
муфта является своего рода карданным соединением, в котором
необходимые степени свободы осуществляются за счет скольжения
и перекоса зубьев относительно друг друга (рис. 3.10).
Рис. 3.10. Схема соединения элемен-
тов в полужесткой зубчатой муфте:
ft. fi. f, — углы поворота; л,. л,, л,—
частоты вращения соответственно ведущей,
промежуточной и ведомой частей (звень-
ев) зубчатой муфты; у(1. т« — углы меж
ду осями соответствующих звеньев
Для угла фг ведомой части на основе геометрических соотноше-
ний можно записать
tg = tg ?i/cos т12, п2 = л, cos Tl2/(1 - sin2?,, sln2^),
откуда следует, что при работе одного зубчатого (или карданного)
соединения даже при равномерном вращении ведущего звена углы
поворота ф] и <р3 неодинаковы, а частота вращения ведомого звена
л2 относительно частоты вращения ведущего звена П| изменяется
с удвоенной частотой 2wi ((•>! = ЛЛ|/ЗО). Для трехэлементного
соединения можно записать
tg?a = tg(<pa + <p0)/COS
_ _________________________________niCOSlnCOSTn________________________________
3 (sin'f| COS TuCOSfo-h COSf! Sinf(,)’-r COS’7a3(sinifiCOS TijSinf,, -COSfiCOSffn)’ *
где фо —угол, образующийся между диаметрами зубчатых венцов промежуточ-
ного звена, по которым происходит основной контакт зубьев соответственно в
первой и второй полумуфтах.
56
Если углы перекоса Y12 —Угз. а фо=0, то о>з == «м; напротив,
если фо = л/2, то п3« niCOSYi2COSY23/[l — sin2<pi (I — cos^ijcos-у2з)]-
Если у12 и у23 достаточно малы, то при ф0 = л/2 n3^ni [ 1 — (7|2“h
+ 7^)со82(0|//2], где(7*2 + 7’3)/2—амплитуда колебания частоты
вращения п3 относительно Л|. Из этой формулы следует, что кар-
данное соединение, а следовательно, и полужссткая зубчатая муф-
та, при наличии углов перекоса у12 и у23 и угла фо. отличного от
нуля, не обеспечивают равномерное вращение ведомого звена.
Влияние возмущающего воздействия неравномерно работающих
зубчатых зацеплении и полужесткой муфты на вал силового редук-
тора ГТД в стендовых условиях показано на рис. 3.11. Несколько
Рис. З.Н. Изменение амплитуды момента сил упругости на валу силового редук-
тора ГТД в зависимости от частоты вращения входного вала:
I при исходной положении агрегатов; 2 — при изменении расцентровкн ГТД и БКП
резонансных зон с одной и той же собственной частотой Q « 100 с-',
но различных порядков (v = 1,2,3) свидетельствуют о наличии
источника возмущающих воздействий с сильными гармониками
1—3-го порядков относительно частоты вращения входного вала
БКП. В рабочем диапазоне частот вращения входного вала БКП
реализуются еще два резонансных режима:
2=700c-»(v»3) и 2= 1350 с"’7).
При изменении угла перекоса бортовой коробки передач на 23'
относительно ГТД общий уровень колебаний в системе возрастает
во всем диапазоне частот вращения входного вала БКП, а ампли-
туды момента сил упругости в резонансных режимах увеличива-
ются примерно в два раза.
Вынужденные и резонансные крутильные колебания, возбуждае-
мые вспомогательными агрегатами. К вспомогательным агрегатам
шасси относятся поршневые воздушные компрессоры, масляные и
топливные насосы и др. Как правило, вспомогательные агрегаты с
динамической точки зрения представляют собой малоннерционные
57
системы, и возбуждаемые ими крутильные колебания локализуются
только в элементах, примыкающих к агрегату.
Например, в силовой цепи танка Т-72 имеется воздушный ком-
прессор АК-150СВ, подсоединенный к ведущей шестерне входного
редуктора через нелинейную упругую муфту, выполненную с пред-
натягом (Мп) и ограничителями хода, т. е. упорами (Afу). Резуль-
таты экспериментального исследования динамических процессов в
приводе компрессора с торсионом (аналог линейной упругой муф-
ты) представлены на рис. 3.12. На основании этих данных были
Рис. 3.12. Изменение момента сил упругости в приводе компрессора АК-150СВ
в зависимости от частоты вращения вала двигателя п*» или компрессора пл:
/ — с упругой муфтой; 2 —с рессорой; М^р. Лп, Иу—моменты крутящий, преднатягл.
предельный
определены приведенный к валу компрессора момент инерции его
кривошипно-шатунной и поршневой группы JK = 0,1 кг-м2 и
амплитуды Mff. гармонических составляющих возмущающего мо-
мента ц-х порядков относительно частоты вращения вала компрес-
58
сора (М, = 12,6 Н м; М3 = 4,6 Нм; М3 = 8,9 Н м; М< = 2,8Н м;
Ms = 5,2 Н м), а также коэффициент демпфирования 26 =
= (21,4. . .51,2) с~*. Методом прямой линеаризации определена
зависимость собственной частоты 12 от деформации упругой муф-
ты ф:
2‘ = -^г! /(? +Л)
’'mln
где а = («fmix — (pmin)/2 — амплитуда колебаний; Д — (фт1Х 4- фтш)/2 — центр
колебаний; /(ф+Д) — кусочно-линейная характеристика упругой муфты
Используя эту формулу, можно построить «скелетную» кривую,
определяющую зависимость максимальной амплитуды момента
сил упругости Л4таж от частоты свободных колебаний 12 с учетом
передачи приводом номинального крутящего момента Мкр. Вынуж-
денные колебания в приводе могут быть определены при фиксиро-
ванных значениях 12/, а следовательно, и AfmeI из линеаризованно-
го уравнения
? + 28f + 2? (ф — = V Л1» sin ,
где JK — момент инерции компрессора с ведомой частью упругой муфты;
“ ллкц/30 — частота возмущения ц-й гармонической составляющей
Расчетно-теоретический анализ с учетом данных тензометриче-
ских исследований привода компрессора с упругой муфтой в ходо-
вых условиях на танке
Т-72 показал, что в ра-
бочей зоне имеют место
резонансные режимы
практически постоян-
ной частоты второго и
высших порядков. Во
всем скоростном диа-
пазоне наблюдаются
составляющая первого
порядка и периодичес-
кие удары элементов
муфты в ограничители,
что существенно повы-
шает динамическую на-
груженность привода
(рис. 3.13). Если номи-
нальный крутящий мо-
мент компрессора ра-
вен 12 Н-м, то при па-
раметрах упругой муф-
ты (момент преднатяга
Рис. 3.13. Осциллограммы колебаний в приводе
компрессора:
а — С рессорой; б с упругой муфтой; 1.5 — частоты
вращения вала компрессора; 1. 4 — моменты сил упруго
сти на валу; 3 — отметка времени
Л4п = 16 Н м, ход Дф = 4 мм, момент
при выборе хода и упоре в ограничитель А4У = 36,5 Н м) в диапа-
зонах ллв > 1 900 об/мин и 400 < пдв < 1 250 Afmax значительно
превышает /Иу и достигает десятикратных значений А)Кр •
59
3.4. ВИБРОУДАРНЫЕ ПРОЦЕССЫ В ЗУБЧАТЫХ
И ШЛИЦЕВЫХ СОЕДИНЕНИЯХ
Дисковые фрикционные элементы, применяемые для изменения
кинематических связей в трансмиссиях ВГМ, при включении долж-
ны свободно перемещаться вдоль шлицев барабанов, для чего пре-
дусматривается боковой зазор между зубьями. При достаточно ин-
тенсивных крутильных колебаниях барабанов происходит их виб-
роудариое взаимодействие с дисками (рис. 3.14), в которых нояв-
Рис. 3.14. Осциллограмма внброударного режима в выключенном фрикционном
элементе:
/ относительное псремсщсннс 2 - относительна» скорость vOT|,; 3 - сила удара Гуд :
4 — Л (In («о») (Л — перемещение барабана)
ляются динамические напряжения, нередко превышающие предел
материала, что в конечном итоге вызывает усталост-
выпоеливост»
ное разрушение дисков.
Динамическая модель си-
стемы барабан—диски тре-
ния—барабан с упругой связью
в выключенном состоянии по-
казана на рис. 3.15. Барабан
с зубчатым венцом (момент
инерции / J соединен упругой
связью (жесткость Сб) с ва-
лом. На зубчатом венце каж-
дого барабана размещаются
диски трения (момент инерции
/*); диски входят в шлицы ба-
рабана с угловым зазором 2р
Рис. 3.15. Динамическая модель си-
стемы барабан (/)—диски трения
(3) —барабан (2) с упругой
связью (4)
(20')- Со стороны трансмиссии на барабаны действуют возмущаю-
щие моменты М и М', приводящие их в движение. К дискам прило-
жен момент сопротивления вращению Afc. Вся система имеет угло-
60
вую частоту вращения (о0. Виброударные процессы вызываются пе-
ременными крутящими моментами или угловыми колебаниями
звеньев, которые считются периодическими функциями времени f (/).
Поскольку продолжительность удара мала, процесс удара не рас-
сматривается; удар оценивается на основе закона сохранения им-
пульса, действующего мгновенно. Считается, что мгновенно и одно-
временно происходит соударение всех дисков, связанных с одним
барабаном. Соударяющиеся тела не успевают заметно переместить-
ся в пространстве, но их относительная скорость после удара ме-
няет знак и значение. На основании закона сохранения энергии с
учетом ее рассеяния при ударе можно записать
где фд и ф« — угловые скорости соответственно диска и барабана перед соударе-
нием; R— коэффициент восстановления относительной скорости соударения
1), отражающий соотношение кинетической энергии до и после удара;
штрихом обозначена относительная послеударная угловая скорость.
Применив при исследовании соударения диска и барабана тео-
рему об изменении импульса, выразим послеударные значения угло-
вых скоростей ф' через их значения непосредственно до удара ф:
<^ = 1(*дЦ —+ +Я)<?б1 0+l«a); /Q
• f • • * • /
?б = кдН (1 +₽)?* + (!- <г^Я) <Рв1/(1 + Н*д)»
где гл— число дисков, связанных с одним барабаном; ц — /д//с.
Дифференциальные уравнения движения дисков и барабана в
промежуток времени между соударениями имеют следующий вид:
[ = - Afc;
4й + С,[Т.-/(0) = 0; (3-18)
I |?д-?б| <?.
В моменты времени, когда |<рж— срб| = 0, в системе происходят
соударения, при этом скорость соударяющихся тел изменяется со-
гласно выражениям (3.17). При включенном фрикционном элемен-
те для расчета используются эти же формулы с условием, что
?д = 0. ?* = 0, ц->- о°.
Неавтономные системы уравнений (3.17), (3.18) являются су-
щественно нелинейными и могут быть решены методом точечных
отображений, использующим некоторые топологические свойства
динамической системы и являющимся удобным приемом анализа
сложных существенно нелинейных систем. Сущность метода сво-
дится к тому, что состояния системы отображаются в пространстве
переменных t точкой А (<?,, t). Здесь переменные идентифици-
рованы с угловыми координатами и угловыми скоростями элемен-
тов механической системы (i = 1, 2,..., П/; / = 1, 2,..., ЛГ, где N—
число качественно различных состояний системы, в которых она
может находиться). Каждому движению механической системы
61
взаимно однозначно и взаимно непрерывно соответствует опреде-
ленная траектория. При любом движении, вызываемом возмущаю-
щим воздействием периодического характера, возможны периоди-
ческие решения исходной системы уравнений. В соответствии с ме-
тодом точечных отображений периодическому движению в фазовом
пространстве переменных соответствует некоторая замкнутая кри-
вая, и существует единственная неподвижная точка А* некоторого
преобразования /7Т, определяющего закон соответствия координат
точки А при ее движении по замкнутой траектории. Возможные
периодические решения сводятся к отысканию неподвижных точек
Л* преобразования /7Т. Затем исследуется динамическая устойчи-
вость периодических решений с целью выявления тех видов движе-
ния, которые могут быть осуществлены в действительности. Дви-
жение устойчиво, когда все корни X характеристического полинома
Х(^. Ь. • ••» £«) Для преобразования Пт по модулю меньше еди-
ницы. Характеристическое уравнение имеет вид
Х(М,Л..U = * ‘ =0,
где 4ri (ф/, ф«) — 0 — функция соответствия для преобразования Пт; < —
— 1, 2,.... п*; п*— размерность подпространства, на котором исследуется пове-
дение точки Л*; <р< — /7тф< — отображение координаты ф<; .^ — парамет-
ры системы, определяющие ее качественно различные состояния; т — число па-
раметров; * — индекс, указывающий, что все частные производные подсчитыва-
ются в точке А*.
Полагая возмущающее воздействие, приложенное к концу упру-
гой связи, гармоническим с угловой амплитудой а и частотой о» =
= 2л/Т и опуская при рассмотрении в первом приближении мо-
мент силы сопротивления Мс, перейдем в системе (3.18) к без-
размерным переменным:
х — а~’х“2фя; у = а_,к“2фв; = С^6~^~2; а = а~ф; т = mt, (3.19)
и запишем уравнения движения в виде
х = 0; у + х’у = sin т; | х — у | < , (3.20)
где дифференцирование переменных хну ведется уже по безраз-
мерному времени т. Фазовое пространство системы (3.20) пятимер-
но (координаты х, у, х, у, т) и разделено на три области двумя по-
верхностями ударных состояний S, = (х — у = — ех-’} и S2 =
= {х — у = ех-’} (рис. 3.16, а). Попадание точки А на поверхности
Si и Sj соответствует соударению деталей.
62
За начало отсчета примем момент симметричного расположения
дисков относительно барабана. Тогда в момент времени Т| в систе-
ме происходит соударение, при котором из области 11 на поверх-
ность S| попадает точка Д|. Скорости соударяющихся тел изменя-
ются, поэтому точка Л| по поверхности Si перемещается в положе-
ние Дг, при этом преобразование скоростей производится но форму-
ле (3.17) с учетом (3.19).
а
Рнс. 3.16. Фазовое пространство (I—III) неавтономной системы и предельные
циклы двухударного (а), скользящего (б) и четырехударного (в) режимов коле-
баний в выключенном фрикционном элементе:
5,. 5,- поверхности соударений; / — предельные циклы; » — х — У. Г — х - у + г., « — »»/-
цилиндрические координаты (остальные обозначения см. в тексте)
В момент размыкания контактирующих поверхностей отобра-
жающая точка с поверхности Sj переходит в область II, а при сле-
дующем соударении в момент времени Т2 попадает в какую-либо
точку Д2. При условии, что |х—у| < ex ’, покинуть область II
точка Л не может. Функции соответствия Чг точечного отображения
поверхности St в S2 или в себя определяются интегрированием си-
стемы (3.20) при начальных условиях т = Т|, х = хь у — у\, к = xj,
У = У\-
63
Преобразование отображения с учетом условий задачи записы-
вается в следующем виде:
V, = - х2 + (гд|1 - R) Л/(1 + {**>) + (1+Я) У,/(1 + ргд) = 0;
цг, = - у., 4- у, - 2 «г« + (гд|* /?) (х3 — т,) х,/(1 + ji’J -f-
+ (1+ Я) (’2 - -Ч) У./( 1+ Н2*) = 0;
<Г3= -xy,slnx(x2 —x1)4-z*p(l 4 /?)^icosx[x, —t,)/(l 4-^д)-
—Я + 0 — I12 Л) у, cos х (х2 — х,)/( 1 4- pzM) — a cos х, х
X cosx(x2 — х,) 4- ах sin X, Slnx(x2 — xf) 4- acosx2 = 0;
4\ — (I 4- Я) sin x (x2 - x,)/(x (1 4- |izA)] _ y2 4- yt x
X COS x(x2 — T|) 4~ (1 — ргд^)У1 slnxfx, —x,)/(x(l 4-jizJ] —
— a COS a, Slnx(x2 — xj x —aslnx, cosx(x2 — xt) 4- aslnx2 —0, ।
(3.21)
где a - l/(x*— 1).
Для рассматриваемого типа периодического движения точка At
является неподвижной точкой Л* преобразования (3.21), дважды
примененного к переменным х, у, х, у. В силу симметричности меха-
нической системы периодический режим движения соответствует
условиям:
х2 = - х,; Уз = - yr, X, = — Xt; у2 = - у,; х2 = х, 4- kr.. (3.22)
Показатели движения (координаты неподвижной точки Л*)
являются линейными функциями величины хи
х, =» bcxt/2; у, = вх~’ 4- y-Xj; cosxt =—1 Г+"₽ ’
1 (№л I хАг. , • . «*•’
s'"’- = — Uv's— + -?)х' + —:
у,- * = 2« + 1: » = о.1,2...
Используя равенство sin2xt 4-cos’xj = 1, находим
_ 1 + Я 1 _уи-»±у«ц^+|)-«н*
1+^ж !4-№
(1 4 R)kn (2f^a жАк \
где 7“ 4-ри?д) \хЛх ‘8 2 +U-
(3.23)
(3.24)
Скорость соударения <руд дисков с барабанами равна модулю
разности их скоростей непосредственно перед ударом. Используя
выражения для Х| и yi с учетом обратного перехода к размерным
переменным, получаем
2аш ±/х‘(1+7’)/(х’-1)’-е»
?уж - 1 _ R I +
(3.25)
64
Неоднозначность полученного решения является характерной
особенностью нелинейных колебаний и свидетельствует о необхо-
димости анализа устойчивости движения. Для этого составляется
характеристический полином х(Х). Подставив в него значения
X = ±1, X = e±/v(y = К — 1. 0^<р^2л), получаем некоторые
соотношения для параметров системы и возмущения pz,, R, е, х,
определяющие в неявном виде границы областей, для которых ха-
рактерны качественно одинаковые состояния системы (устойчивые
и неустойчивые). Решение вещественно (условие существования),
если в С | х> |К1 + т*. Движение с меньшими скоростями соуда-
рения происходит в очень узкой зоне изменения параметоа х=2л-|-
+ 1 при л = 0 и е>0, а также при п= 1, 2... и e> 1. Движение с
большими скоростями соударения реализуется в более широких
областях изменения параметров хне, которые могут быть умень-
шены лишь при отсутствии неучитываемых соударений. Скорость
соударения фуд прямо пропорциональна величине аы. Более слож-
ная зависимость связывает фу1 с параметром х, определяющим со-
отношение между собственной частотой системы Q = УСЛЦ(, и ча-
стотой возмущения <о. При малых значениях параметра х (очень
податливая связь) скорость соударения практически прямо пропор-
циональна параметру в. Если х= 1 (резонанс), скорость соударе-
ния из-за диссипации при не вполне упругих соударениях ограни-
чена и соответствует фуж|ж_ , = fcnaw(1 + |ь?я)/[2цгд(1 +/?)]. При
х-*2л 4-1 (п = 1, 2,...) скорость соударения фуя-*0. Такие режи-
мы могут быть реализованы в очень узкой зоне изменения пара-
метра х. Можно отрегулировать параметр х виброударпой системы
для заданной частоты возмущения таким образом, чтобы скорость
соударения дисков с барабаном была наименьшей. Функция ?уя (е)
достигает максимума вблизи границы вещественности.
В наиболее распространенной конструкции фрикционного эле-
мента податливость упругой связи барабана пренебрежимо мала.
Считая х-юои ргд-*0, из выражения (3.25) получаем
f= 4аю /<' (326)
,<• + '’)[**” +4 (т+Т?)|
где а — /Л 1 — Ma |; Afa, М' — амплитуды переменных составляющих
моментов М, М'.
На рис. 3.16, а в цилиндрических координатах г = х — у ~Ь Го»
(го>О), 2 — х — у, 9=т показан предельный цикл движения,
когда за период возмущения происходит два соударения. Харак-
терной особенностью этого виброударного процесса является не-
зависимость скорости соударения от параметра цгд; функция <?уд
вещественна (условие существования), если соблюдается неравен-
ство в <У 1 4 Л2 к2/[4 (. которое одновременно определяет
5 Зак. 20с
65
и верхнюю границу в пространстве параметров е, R для разных k.
Заведомо устойчивыми оказываются режимы движения, при кото-
рых соударение происходит с большей скоростью, что соответству-
ет знаку «4-» перед радикалом в формуле (3.26). Максимальных
значений функция <руд, равная 2ао)/(1 —/?), достигает при
Если контактирующие поверхности в шлицевом соединении вы-
полнены так, что соударения носят абсолютно неупругий характер
(/? = 0), то возможна относительная остановка элементов систе-
мы после соударения, при которой точка А скользит по окружности
на поверхности S( или поверхности S2 (рис. 3.16, б). Показатели
этого виброударного процесса определяются из уравнений:
I Sint, = х, — 2е. ' '
Виброударный процесс является динамически устойчивым, так
как после каждого соударения движение возобновляется при одних
и тех же начальных условиях. В этом случае максимальное значе-
ние скорости соударения <руд зависит только от параметров возму-
щения и равно 2а<». При значениях параметра е>Ъс/2 движение
будет происходить со скоростью соударения, определенной форму-
лой (3.25) при R — 0.
При малых значениях относительного зазора е могут устано-
виться более сложные режимы движения, когда за период колеба-
ний происходит более двух соударений. Предельный цикл движе-
ния, характеризуемого четырьмя соударениями за пе-
риод возмущения, показан на рис. 3.16, в. На фазовой траектории
точка Л1 соответствует первому соударению правых поверхностей
в шлипсвом соединении дисков с барабаном, точка А2 — первому
соударению левых поверхностей, а точки Л3 и Л< — вторым соуда-
рениям. С помощью метода точечных отображений, используя фор-
мулы преобразования поверхности Si в S2 и обратно, получаем си-
стему трансцендентных уравнений:
- Ъи + Я?уж2 + аш (cos xi + cos х2) = 0;
/?<руд2 (« + xi — xi) + аш lsln х» + cos xr(* + xi — х») +
+ slnt, + 2«) = 0; <3.28)
?уж 1 + Я?уд 2 + а<*> (cos х, — cos t2) = 0;
— ^?yn(x2 — Xt) + <M— slnx, 4-cosx,.(xj — xj +
4- slnxa] = 0.
Эта система может быть решена одним из методов численного
интегрирования. Считая величину 6 в выражении т2 = ti 4-л/2 4-б
достаточно малой, разложим sin 6 и cos6 в ряды по степеням б и,
оставляя члены с 6 в первой степени, преобразуем уравнения
66
(3.27) в линейную неоднородную алгебраическую систему относи-
тельно неизвестных <руж1, <руж2 , sinxi, costi.
Величина 6 определяется из очевидного равенства sin^ci 4-
4-cos^ti = 1. Границы области существования формально найден-
ного решения можно определить, приравняв определитель системы
нулю.
В реальных условиях на фрикционный элемент наибольшее
влияние оказывают силы сопротивления вращению дисков, возни-
кающие из-за так называемых барботажных потерь. Такая вибро-
ударная система несимметрична; величина Л4С зависит только от
переносной угловой скорости вращения дисков (относительная
угловая скорость дисков |х|, как правило, много меньше перенос-
ной); уравнения движения в безразмерной форме имеют вид
J X — У -= S — 81П t;
где
Интервалы между соударениями правых и левых поверхностей
неодинаковы, поэтому относительные скорости соударения также
неодинаковы. С помощью метода точечных отображений решение
системы (3.29) получаем в виде системы трансцендентных уравне-
ний относительно показателей системы <руд, «уд, ть т2; приближен-
ное аналитическое решение этой системы возможно, если по анало-
гии с предыдущим случаем принять величину б в выражении т2 =
= ti 4- kn 4- б достаточно малой:
•' _ 4*" *«S(l-₽)/|i(1+ /?)! + • k*S 1.
?уж И + ₽ -4 1 + Ri ’
•• - 4Лк *^(!-₽)/|Н1 Я)Н « I
?уж - а« (д------------------------4- J.
где ft определяется из очевидного равенства sin’ri + cos*Ti — 1
Движение в системе несимметрично, так как относительные ско-
рости соударения различаются на величину 2knS/(1 4-/?), которая
обусловлена силами сопротивления Afv.
При включенном фрикционном элементе из-за бокового зазора
в шлицевом соединении при интенсивных крутильных колебаниях
зубья ведущего барабана отрываются от зубьев дисков трения и
опять вступают с ними в контакт с ударом. Такой режим работы
фрикционного элемента аналогичен виброударным процессам
в несимметричной системе с ограничителем. Для этого случая спра-
ведливо уравнение движения
{х<хХ=51П*: (3.30)
где х0 = — х = (Уб«°3?б — Сба0*“3)/(Сбаг): Рп = Oolav: а0 = аи + |*Afc/Ce;
uM — угловая деформация упругой связи, вызванная полезной нагрузкой, переда-
ваемой фрикционным элементом; ао — амплитуда угла закрутки конца упругой
связи переменной составляющей крутящего момента; Мс — момент сопротивле-
ния движению ведомых частей фрикционного элемента.
5*
67
При достижении координатой х значения х0 в системе происхо-
дит соударение, при этом согласно (3.17) х\ = —Rx\. Фазовое
пространство системы (3.30) трехмерно в координатах г —
= П,-!- х0 — х, z = х, 0 = т (рис. 3.17, а). Поверхность цилиндра
S = {г = го) соответствует ударным состояниям системы, а движе-
ние точки А в области II—движению частей фрикциона при ра-
зомкнутом шлице-
вом соединении. При
этом предполагает-
ся, что двусторон-
них соударений зубь-
ев не происходит.
Движению системы
с чередующимися
соударениями соот-
ветствует в фазовом
пространстве точеч-
ное отображение по-
верхности цилиндра
S в себя.
Рис. 3.17. Фазовое прост-
ранство (I—II) неавто
ном ной системы одно-
ударного (о) и скользя-
щего (б) режимов вклю-
ченного фрикционного
элемента:
I — предельные циклы; 3 —
поверхности соударений
Для одноударного периодического движения с периодом Т =
= 2лп (п = 1, 2,... j *2 = Х|, т2 = Ti + 2 л п. При условии х =# k/n
(k = 0, 1,2,...) определяется основной показатель виброударного
процесса:
2 — *о7 ± V«*(l + т’) -х?
х' ~ \-R ГТ7 ’
где у - (1 4- R) ctgxK«/(x (1 - /?)]
При устойчивых режимах корни к характеристического полино-
ма х(М по модулю меньше единицы. Подставив в уравнение
х(А.) = 0 значения к = ±1, к = е±у*(У = V— 1,0<<р<2к), полу-
чаем границы области устойчивого движения в пространстве пара-
метров R, х, ро для различных п. В большинстве случаев реализу-
ются режимы с большей скоростью соударения. Достаточным ус-
ловием существования и устойчивости является неравенство
—2е<хС*о, где е = Сё 'аё*(Л«»2?—Сьа&с2). Переходя к размер-
68
ным переменным, получаем выражение для скорости соударения
зубьев в шлицевом соединении:
2 1Р» ± V (1 + 7’) *♦/(*»— 1>»
т уд = а*<°-----------г+7-------------•
При резонансе (х = 1) в системе <руд = пп (1 4- R). Если виб-
роударный процесс происходит с относительными остановками
(R = 0), т. е. после соударения в шлицевом соединении зубья про-
должают контактировать до момента времени т2, то этому случаю
соответствует отображение окружности 0 = {г = r0, z = 0}
(рис. 3.17, б). Основные показатели этого виброударного процесса
Ti и Xi определяются при условии х3 = хь т3 = ti + 2лп по фор-
мулам:
4- cos % sin х (2 т.п 4- ч — %) — (*о — « sin ”«) X
X cos х (2 т.п 4- т, — т2) — a sin т, = 0;
Х| =acOSTl [1 — COSх(21ГЛ 4-—-2)] —
— *(*о — «sln-l)slnx(2irn 4- Xj — -.2),
где т, -= arccos}^ 1 -р*, * < т, < 3 х/2.
Для таких режимов колебаний не может быть за период Т =
= 2лп более одной длительной остановки, а сам виброударный
процесс является устойчивым. Условием существования такого ре-
жима является неравенство |р01 < 1.
При отсутствии податливой связи в барабане фрикционного
элемента (х-*оо) его движение относительно ведомых частей меж-
ду двумя соударениями описывается уравнением
х = р<> 4- sin -,
х <0,
где х = J&obfblMv ; р0 = с + Мкр)/Мv; МЛР — крутящий момент, передавае-
мый шлицевым соединением; Мо — переменная составляющая крутящего момента
в зацеплении.
Вышеизложенными способами для одноударного периодическо-
го режима колебаний барабана с периодом Т = 2лп (п = 1, 2,
3, ...) определяется скорость соударения зубьев в шлицевом сое-
динении фуд-= 2ппроам/(\ 4- R), где а = Mv/(J6 w2). Максималь-
ное значение скорости, равное 2аш/(1 —R), достигается при Ро =
» (1 4-/?)/[ли(1-/?)].
Движение системы с большим числом соударений за период Т
возможно при достаточно больших значениях р0 и малых R. При
неупругих соударениях (R = 0) появляются относительные оста-
новки.
Из приведенных данных следует, что относительное движение
дисков и барабана характеризуется двумя основными параметра-
ми: кратностью k периодов движения и возмущающего воздействия
(3.31)
6Э
(k = 2n 4- 1, n = О, 1, 2,...), а также числом соударений за период
движения и их скоростью фуд; остальные показатели виброударно-
го процесса (фазы соударений, перемещения, скорости и ускорения)
являются линейными функциями безразмерной скорости соударе-
ния. Результаты исследования крутильных колебаний в силовой
цепи танка Т-64А и данные расчетного анализа виброударных про-
цессов в шлицевом соединении дисков с барабаном наиболее на-
груженного фрикционного узла БКП приведены на рис. 3.18. Ско-
рость соударений фуд и их частота являются исходными данными
Рис. 3.18. Зависимость основных параметров виброуларного процесса <руд и k
в БКП >:а II—VII передачах от частоты вращения вала двигателя
для определения спектра динамических нагрузок. Снижение дина-
мической нагруженное™ фрикционных дисков возможно за счет
уменьшения амплитуд крутильных колебаний и локальной защиты
фрикционов посредством введения в барабан дополнительных сое-
динений с зазором. Регулирование параметров соединений с зазо-
ром позволяет снизить скорость соударения и частоту ударов, а
также нарушить периодичность их следования, что дает возмож-
ность избежать резонанса.
70
3.5. ПРЕЦЕССИЯ БАРАБАНОВ И ДИНАМИЧЕСКАЯ
НАГРУЖЕННОСТЬ ПОДШИПНИКОВЫХ ОПОР
В ПЛАНЕТАРНЫХ ПЕРЕДАЧАХ
Кинематическая схема входной вал—барабан БКП показана на
рис. 3.19. Экспериментально установлено, что в процессе работы
БКП входной вал не только вращается вокруг своей оси, но и дви-
жется вокруг геометрической оси 00 опорных подшипников по
Рис. 3.19. Кинематическая схема системы входной вал—барабан БКП:
/ - барабан в момент времени t — tQ ; 3 барабан в момент времени <“/<» + в/шв ; t>b
ось входного вала; Л* — расстояние до точки замера колебаний (остальные обозначения
см. в тексте)
поверхности, близкой к конической с углом 20; такое прецессион-
ное движение вала вокруг оси 00 происходит в том же направле-
нии,что и собственное вращение. Прецессионное движение вала
экспериментально наблюдалось как радиальные колебания z =
= Ав sin со/ одной из его точек относительно корпуса БКП. Ампли-
туда Ав этих колебаний фактически не изменяется во всем диапа-
зоне частот вращения лв входного вала на всех передачах в БКП.
При этом угловая частота колебаний <о (а следовательно, и угло-
вая скорость прецессии) равна угловой частоте вращения ю, —
= глв/30 входного вала. Прецессионное движение вала обуслов-
лено, с одной стороны, допустимыми по чертежам отклонениями
71
размеров деталей от номинальных, биеннями и люфтами сопрягае-
мых деталей, а также их податливостью, что допускает радиально-
угловое смещение вала в подшипниковых опорах. С другой сто-
роны, на входной вал воздействует соединительная зубчатая муф-
та между двигателем и БКП, через которую передается крутящий
момент. Вследствие неравномерности распределения усилий по
зубьям из-за расцентровки и погрешности изготовления одновре-
менно на вал передается изгибающий момент, заставляющий его
двигаться по конической поверхности относительно оси 00.
Экспериментально доказано, что в спектре колебаний вала прак-
тически отсутствуют составляющие с частотами, равными или крат-
ными частотам вращения движущихся масс в БКП, что свидетель-
ствует об отсутствии заметного влияния на колебательный процесс
неуравновешенности вращающихся масс или неравномерности рас-
пределения усилий в зубчатых зацеплениях планетарных рядов.
Прецессионное движение входного вала БКП неизбежно вызы-
вает аналогичное движение расположенного на нем барабана. Ко-
лебания барабана исследовались посредством измерения торцевых
биений в продольном направлении относительно корпуса БКП на
радиусе R(t: х = sincn/. При этом ось барабана аа движется по
конической поверхности с углом 2а относительно оси 00. Угловая
частота этих колебаний (а следовательно, и угловая скорость
прецессии барабана) равна частоте вращения входного вала % и
не зависит от частоты вращения самого барабана относительно
его оси we. Заметим, что последняя на различных передачах БКП
изменяется в широких пределах. Амплитуда колебаний
барабана Ав с ростом угловой частоты вращения входного вала ш,
вначале плавно растет, а затем при определенной частоте ы* резко
Рис. 3.20. Изменение амплитуды (раз-
маха 2Дв) колебаний прецессирую-
щего барабана БКП танка Т-64 в за-
висимости от частоты вращения
входного вала с одним (/) и двумя
(2) подшипниками
падает и остается в дальней-
шем почти на одном уровне.
При уменьшении ш, амплиту-
да А6 вначале не изменяется
(рис. 3.20), а затем при «>** <
< и)‘ резко возрастает до оп-
ределенного уровня и затем
плавно уменьшается. Такая
амплитудно-частотная харак-
теристика свидетельствует о
резонансном режиме, свойст-
венном нелинейной системе с жесткой связью вала с барабаном в ра-
диальном направлении. Данные, приведенные на рис. 3.20, получены
72
для нескольких десятков БКП. При этом установлено, что располо-
жение резонансных зон во всех случаях мало изменяется, а ампли-
туды колебаний (особенно барабана) изменяются, достигая наи-
больших значений на заднем ходу, нейтрали, I передаче и при
торможении, когда <об отрицательна по отношению к юв. Таким
образом, входной вал и связанный с ним барабан прецессируют
с одной и той же частотой <о, независимо от их относительной часто-
ты вращения Q = «>б — <•>,. Опорные торцевые поверхности ба-
рабана при выключенном фрикционе начинают ограничивать
в осевом направлении зону расположения дисков трения. При вы-
борке зазора между опорными поверхностями барабана и дисками
начнается поджатие пакета дисков. Если скорость скольжения до-
статочно велика, то выключенные диски выключенного фрикциона
начинают буксовать, что приводит к дополнительным потерям мощ-
ности, а в ряде случаев к чрезмерному их нагреву и выходу их из
строя. Кроме того, смещение барабана на угол у = а —0 (см.
рис. 3.19) относительно вала приводит к дополнительному нагруже
нию подшипниковых опор. Абсолютное движение барабана можно
представить как вращение вокруг неподвижной точки Оь, склады-
вающееся из прецессии оси аа относительно оси 00 с угловой ча-
стотой io и собственного вращения барабана относительно оси аа
с угловой частотой о)б. Такое сложное движение барабана сопро-
вождается возникновением центробежной силы Fa и гироскопиче-
ского момента Мг.
В неподвижной системе ко-
ординат XYZ свяжем с бара-
баном подвижную систему ко-
ординат Охуг, при этом Ох
примем за ось симметрии
(рис. 3.21). Обозначим эйле-
ровы углы (прецессии — ф, ну-
тации — 0 , собственного вра-
щения—<р), которыми пол-
ностью определяется положе-
Рис. 3.21. Схема регулярной прецес-
сии гироскопа (обозначения см.
в тексте)
ние барабана как тяжелого ги-
роскопа в пространстве. Кине-
тическая энергия барабана
Г = (J, (i>2 sln’8 + J2) + Jp (i cos 0 + ?)=|/2,
где /„ Jp — соответственно экваториальный и полярный моменты инерции бара-
бана относительно осей Оу и Oz(Ox).
Потенциальная энергия поля сил упругости в подшипниковых
опорах без учета силы тяжести барабана выразится через момент
Afy , действующий в продольной плоскости, и угол 0: // = Л1у0/2.
Функция Лагранжа для исследуемой системы L = T — П при уста-
новившемся вращении прецессирующего барабана имеет две цик-
6 Зак. 20с 73
лнческие координаты: ф и <р. Из дифференциальных уравнений дви-
жения Лагранжа второго рода легко получить два первых инте-
грала:
= ЛФ sin 9 +/Р(Ф cos 9 4- <р) cos 9 = const;
ct = Jp (<j> cos 9 -f- <?) = const.
С учетом этих выражений от функции Лагранжа перейдем к
функции Рауса:
R = [ J, (ф’ sin’9 4- 92) 4- Jp (ф cos 9 + ?)’ - Му9J/2 - с,ф - с2? .
При регулярной прецессии 9 = const, = const и = const,
т. е. барабан вращается с постоянной угловой частотой Q = — <“
относительно вала, в то время как его ось аа (см. рис. 3.19) дви-
жется по конической поверхности под углом 29 = 2а с постоянной
угловой скоростью ф = ш, I". Из уравнения регулярной прецес-
сии dR/db = 0 с учетом схемы, приведенной на рис. 3.19, получим
Му = — о»в sin а • | Jp'J 4- (J9 — JJ «о. cos а] .
С другой стороны, при достаточно малых величинах a (sin а «а,
cos a * 1) гироскопический момент Мг = аш2 (/, — Jpw6l«>„).
Центробежная сила согласно схеме определяется из выражения
F.=-f-a.+<o«»L
где G —вес барабана; d, h — расстояния от первой подшипниковой опоры до
центра тяжести С барабана и до неподвижной точки Об соответственно.
Подшипниковые опоры подвергаются суммарному воздействию
гироскопического момента Мт, центробежной силы гц и веса бара-
бана G. С учетом того, что Мг = —Afy, из схемы, приведенной на
рис. 3,19, могут быть определены максимальные нагрузки Qi и Q2,
действующие на соответствующие опоры:
Q, = {|МГ 4- Л.(/ + rf)]cos«>BZ - 0(1 4- d)]jl;
Q., = IM 4- М) cos 4- Gd]!l.
Из выражения для определения Afr следует, что при
м,й °’в < JJJp - а также при противоположных направлениях враще-
ния вала и барабана гироскопический момент действует в направ-
лении увеличения угла а, что приводит к снижению динамической
жесткости системы, а следовательно, и критической угловой часто-
ты вращения вала шв, при которой амплитуда колебаний Л6 макси-
мальна, a w* < швО(шво — собственная частота системы вал—бара-
бан при = Этому случаю соответствуют режимы обрат-
ной прецессии (<»e/u*B < 0) и некоторые режимы прямой прецес-
сии при малых значениях угловой частоты вращения барабана
(О < ®6/<йв < J9jJp).
74
При ш6 а>в>Д/Ур будут наблюдаться режимы прямой прецес-
сии, когда гироскопический момент Afr стремится уменьшить угол
а, т. е. действовать, как восстанавливающий момент. В этом слу-
чае динамическая жесткость системы повышается, а следовательно,
возрастает и угловая критическая частота вращения ш* по срав-
нению с й)в0» что подтверждено экспериментально. Причем угловая
критическая частота на высших передачах, как правило, превышает
рабочие частоты вращения вала БКП исследованных МТУ.
Зависимость амплитуды колебаний барабана Л6 и связанного
с ней угла а от угловой частоты вращения входного вала БКП
может быть определена в первом приближении по жесткостиой
характеристике для подшипниковых опор из нелинейного уравне-
ния Л4Г 4- (Fu -р О) /1 == Му.
В БКП танка Т-64А на передачах заднего хода, нейтрали и
в режиме торможения при амплитуде барабана ЛЛ = 0,15 см
</?6= 21,5 см), установочных размерах подшипников / = 5,35 см,
/i = 2,92 см, d = 4,2 см и характеристиках массы G = 380 Н,
Д = 0,77 кгм2, /р = 1,37 кгм2 максимальные нагрузки равны
Qi = 30,67 кН и Qi = 28,56 кН. При этом частота относительного
вращения наружных и внутренних колец подшипников лП11х
“30|а>б — и>|/к ж 101 с“' (6050 об/мин). Допустимая при этой
частоте вращения нагрузка на подшипники соответственно
равна 23 и 12 кН, а предельная быстроходность подшипников при-
близительно 83,3 с“‘ (5 000 об/мин). Приведенные данные свиде-
тельствуют о возможности выхода из строя подшипников.
6*
75
Глава 4 ПЕРЕХОДНЫЕ ДИНАМИЧЕСКИЕ ПРОЦЕССЫ
4.1. РАСЧЕТНЫЕ ДИНАМИЧЕСКИЕ СХЕМЫ
Переходные динамические процессы в МТУ возникают при из*
менении воздействий в системе управления движением, т. е. при
изменении положения педали подачи топлива и регулируемого соп-
лового аппарата двигателя; рабочего давления в системе гидро-
управления или осевых сил, сжимающих пакеты фрикционных
дисков; положения органа управления гидротормозом с регулируе-
мым заполнением полости.
Исследование переходных процессов осуществляется на разомк-
нутой динамической модели (без участия водителя), в которой
управляющие воздействия представлены в виде заданных функций
времени. В процессе исследования определяются законы изменения
частоты вращения вала двигателя и отдельных звеньев трансмис-
сии, а также рассчитывается динамическая нагруженность элемен-
тов МТУ и параметры буксования фрикционных устройств, что по-
зволяет оценить их долговечность. Типичными переходными режи-
мами работы являются трогание машины с места, переключение
передач, торможение, повороты и специальные работы (рытье кот-
лованов бульдозером, включение винторедукторных установок при
преодолении водных преград и др.). Моделирование переходных
процессов позволяет оценивать разгонные и тормозные характери-
стики машины, исследовать поворотливость машины, се устойчи-
вость в повороте на различных скоростях и грунтах и др.
Рис. 4.1. Динамический граф жестко-
го соединения:
Чп — сосредоточенные массы, связан
ные л-м соединением
Динамическая схема МТУ представляется в виде совокупности
элементарных структурных звеньев: независимых сосредоточенных
масс, дифференциальных и простых редукторных устройств, свя-
занных между собой упругими, фрикционными и гидравлическими
соединениями. Дополнительно вводится условно жесткое соедине-
ние (жесткая связь) между двумя какими-либо элементами дина-
мической схемы (рис. 4.1).
76
Уравнение связи, накладываемой жестким соединением, имеет
вид
Ч“Ч = 0 нли (41)
где , у . ? — скорости и ускорения масс рп и qn.
В динамическом отношении жесткое соединение аналогично
постоянно замкнутому фрикциону. С помощью этого соединения
кинематически сложная трансмиссия может быть схематизирована
с использованием простейших структурных элементов (рис. 4.2).
Массы 1 и 2 связаны между собой постоянной кинематической
связью, однако если каждую из масс необходимо рассматривать
как независимую, то используется жесткое соединение, условно
разобщающее эти массы (рис. 4.2, а); жесткое соединение, приве-
денное на рис. 4.2, б, используется в случае, когда масса 1 являет-
ся зависимой массой дифференциального механизма.
Рис. 4.2. Примеры использования жесткого соединения в динамических моделях
МТУ:
а соединенные массы I н 2 независимы; б — масса / зависима; 3 — кинематическая точка
на входе в редуктор
Жесткие соединения применяются также в случаях, когда тре-
буется определить динамические нагрузки в элементах валопрово-
да трансмиссии, податливость которых мала и поэтому не учиты-
вается (рис. 4.3). В этом случае время расчета сокращается посред-
ством увеличения шага интегрирования. На рис. 4.3, а жесткое
Рис. 4.3. Примеры использования жесткого соединения для расчета динамических
нагрузок:
а —в элементах валопровода; б — на зубьях центрального колеса дифференциального меха
низма; 1—3, 3’ — сосредоточенные массы
соединение связывает две сосредоточенные массы (при необходи-
мости фиксирования расчетных нагрузок в соответствующем эле-
менте системы), иначе вместо двух масс была бы одна
77
сосредоточенная масса с суммарным моментом инерции. При оп-
ределении момента на одном из центральных зубчатых колес
дифференциального механизма следует ввести условную нулевую
дифференциальную массу 3Z (рис. 4.3, б), с которой зубчатое коле-
со 3, являющееся независимой массой, нужно жестко соединить.
Полученная динамическая модель дифференциального механизма
эквивалентна исходной, но имеет другую структуру.
Введение жесткого соединения увеличивает на единицу число
независимых сосредоточенных масс динамической схемы и соответ-
ственно число дифференциальных уравнений движения. Одновре-
менно математическая модель дополняется уравнением связи, что
оправдывается общим упрощением структуры математической мо-
дели и алгоритма ее формирования.
На рис. 4.4 приведен пример расчетной динамической схемы
МТУ танка с ГТД, включающей в себя, кроме газотурбинного дви-
гателя (масса /), две трехстепенные бортовые коробки передач
Рис. 4.4. Расчетная динамическая схема МТУ танка с ГТД:
1—9, /д—6д номера сосредоточенных и дифференциальных масс; Ф, - Ф,„ - управляемые
фрикционы; 10. II — кинематические точки
(БКП), бортовые редукторы и ведущие колеса (массы 8 и 9).
Учтены два упругих соединения между двигателем и БКП (1—2 и
/—3); введены два жестких соединения между БКП и бортовыми
редукторами (6—8 и 7—9). Всего в схеме девять основных незави-
симых масс, шесть дифференциальных механизмов и две простые
редукторные связи. В бортовых коробках передач в качестве неза-
78
висимых масс приняты входные (2 и 5), выходные (6 и 7) и про-
межуточные (4 и 5) звенья, являющиеся общими для всех диффе-
ренциальных механизмов соответствующей коробки передач. В ка-
честве простых редукторных связей приняты бортовые редукторы;
кинематические точки 10 и 11 соответствуют входу в правый и ле-
вый бортовой редукторы. Каждая БКП имеет пять управляемых
фрикционов: Ф1—Ф5— правая и Ф6—Фщ—левая.
Инерционные параметры элементов динамической схемы МТУ
танка приведены в табл. 4.1. Податливость упругих соединений
1—2 и 1—3 ei = е2 = 4 МН~,-м"', коэффициент поглощения энер-
гии в упругих соединениях ЧЛ = Ч^ = 0,2. Кинематические соот-
ношения для дифференциальных механизмов следующие:
©Д1 1,156 -|-2,156 ср*; <Рд4 —— 0,5?3 + 1,5<рь;
?*>= - 1,156 4-2,156 ?4; ^ = -2,18?» 4-3,18^.,;
?дз — — 0,5 4-1,5 'f4; ф1в = — 2,18 4- 3,18 ,
а для простых редукторных связей
?ю = 5,45?8; = 5,45 .
Основные параметры фрикционных устройств приведены в
табл. 4.2.
Таблица 4 I
Инерционные параметры динамической схемы МТУ танка с ГТД
Момент инерции Номер массы
1 2 3 1 ’ 1 5 1 6 7 8 9
Л, кг-м2 Лл, кг-м2 8,5 1.6 0,015 1.6 Независимой 0.0151 2,5 | 2.5 | 0,12 Дифференциальной 0.94 | 0,94 | 2.0 | 2,0 0,12 Тг 27,5 1 бл и п 27,5 L а 4. 2
Параметры фрикционных устройств
Параметр Ф„ Ф, Ф,. Ф, Фа. Ф. Ф., Фа Ф3, Ф.о
Число пар трения 1 8 12 12 12 18
Площадь бустера Ft, см2 318 275 275 313 313
Средний радиус трения RCj>, м 0.236 0,192 0,192 0,236 0,236
Эффективная площадь буксо- вания одной поверхности тре- ния см2 192 157 157 192 192
Противодавление в бустере фрикционного устройства р6, МПа 0.050 0,13 0,13 0,09 0,11
Максимальное давление уп- равления Ртах, МПа 1.4 1.4 1.4 1.4 1.4
79
Максимальная рабочая частота вращения вала двигателя, при-
веденная к входу в БКП, пртах = 3 150 об/мнн (52,5 с"‘). Расчет-
ная максимальная мощность на входе в БКП (за вычетом потерь
на вспомогательные агрегаты) N = 575 кВт, тормозная мощность
,VT = 170 кВт при = 2 400 об/мин (40 с~‘).
Основные общемашинные параметры танка с ГТД
Масса т, кг....................................... 40 000
Ширина колеи В, м.............................. 2,855
Длина опорной поверхности гусениц L, м............ 4,29
Высота центра тяжести машины над опорной поверхностью
гусениц Н, м....................................... 1,03
Момент инерции машины относительно центра тяжести J,
кгм»................................................ 10й
Радиус ведущего колеса Яа.к, м.................... 0,313
Масса одной гусеницы тТ, кг........................... 2300
Жесткость рабочей ветви гусеницы с РМШ Сг, МН/м .... 12
4.2. МЕТОДИКА МОДЕЛИРОВАНИЯ ПЕРЕХОДНЫХ
ДИНАМИЧЕСКИХ ПРОЦЕССОВ
В режимах переключения передач и поворота структура дина-
мической модели трансмиссии меняется при замыканиях и срыве
фрикционов.
При расчете методом численного интегрирования системы диф-
ференциальных уравнений движения и уравнений связи, наклады-
ваемых замкнутыми фрикционами и жесткими соединениями,
должны быть совместно разрешены относительно вторых производ-
ных обобщенных координат и реактивных моментов в замкнутых
соединениях. Максимальное число степеней свободы, равное числу
независимых сосредоточенных масс z0, система имеет в случае,
когда разомкнуты все жесткие соединения. Пусть <р* (k = 1,
2....z0) — перемещения независимых масс, а <р* и — их ско-
рости и ускорения. Дифференциальные массы кинематически за-
висимы, а их характеристики ?ля, <рлж являются линейными
функциями обобщенных координат, их первых и вторых произ-
водных.
В общем случае уравнения связи имеют вид
(4.2)
где »-1, 2,..., гд; а»* — некоторые кинематические коэффициенты, причем
atk — i«i для k — 5|. а,* — ilt для k — st и a,t = 0 для остальных значений (см.
разд. 2.3); 2Д—общее число дифференциальных механизмов.
80
В матричном виде система дифференциальных уравнений дви-
жения масс МТУ может быть представлена в виде
A = Q, (4.3)
где го — [<р|, ср2. <Рго]т — вектор-столбец ускорений обобщенных координат;
Q — (Qi. .. Q»o]T — вектор-столбец обобщенных сил (моментов); / — сим
мстрнчная инерционная матрица размера z0 X z0
Диагональные члены инерционной матрицы определяются по
формуле
Л* - Л 4"
недиагональные
Л/ = Jji — •
j—i
Под обобщенной силой (моментом) Q* здесь понимается сум-
марный момент, действующий на Л-ю массу. При формировании век-
тора обобщенных сил учитываются следующие силовые параметры:
момент двигателя, моменты на ведущих колесах со стороны гусе-
ниц, моменты на насосных и турбинных колесах гидротрансформа-
тора и гидромуфты, момент на роторе гидрозамедлителя, упруго-
диссипативные моменты в упругих соединениях, моменты буксова-
ния в незамкнутых фрикционах, моменты потерь и сопротивления
на различных агрегатах и звеньях трансмиссии (см. гл. 2).
Все моменты, действующие на независимые сосредоточенные
массы, непосредственно учитываются при расчете соответствующих
обобщенных сил. Моменты, действующие на зависимые массы диф-
ференциальных механизмов и зависимые входы простых редуктор-
ных связей с учетом передаточных чисел и КПД, приводятся к со-
ответствующим независимым массам.
Система дифференциальных уравнений движения (4.3) разре-
шается относительно старших производных обобщенных коорди-
нат: ср = J~'Q (здесь J ’ — обратная матрица по отношению к /).
Общее число соединений в динамической схеме обозначим гв.
В первую очередь, это жесткие соединения и фрикционы, т. е. в
простейшем случае ±= + гж. Уравнение связи, накладываемое
соединением, имеет вид
^₽“^р = 0’ (4*4)
где р — I, 2, 3,...,
Массы рр и qp могут быть независимыми, дифференциальными
или кинематическими точками простых редукторов. В общем слу-
чае уравнение (4.4) может быть записано в виде
= или = (4.5)
где bfk —кинематические коэффициенты.
81
Рассмотрим метод построения математической модели, при ко-
тором структура модели и число уравнений постоянны при измене-
нии структурного состояния трансмиссии. Метод базируется на
уравнениях Лагранжа первого рода.
Для каждого р-го соединения введем структурный коэффициент
tp, принимающий следующие значения:
е? = 1, если соединение р накладывает связь (замкнутое соеди-
нение) ;
tj = 0, если соединение р не накладывает связи (разомкнутое
соединение).
Уравнение (4.5), записанное в виде
«, 2 + (>-«,)Л«|>Р = 0. (4.6)
справедливо для обоих состояний соединения (здесь Мрр— реак-
тивный момент соединения).
Математическая модель системы независимо от структурного
состояния трансмиссии представляется в виде zo + zb уравнений
czo + ^e неизвестными и Л4РР:
,£/»*> +
2d «1*1 »?» + (• =0;
— + 0 ч) ^р23 0;
(4-7)
i + U — •<.) ~~ о •
Я—I " ’ в в
При изменении структурного состояния трансмиссии, т. е. при
срыве или замыкании какого-либо фрикциона, меняются лишь
численные значения коэффициентов еР, поэтому систему уравнений
(4.7) можно записать в следующем виде:
А + 1
в7 + лмр = 0. (
где Мр — (Мрь МР2,.... Мр,»]т — вектор-столбец реактивных моментов в соедине-
ниях; А — квадратная диагональная матрица коэффициентов (I —вр); 8-
— прямоугольная матрица размера zB X z«; IF —матрица, транспо-
нированная по отношению к матрице В.
82
Решение имеет вид
Aip= r-Q,
(4.9)
где У - (ZB'-A)-'Z, Z - BJ-'.
Матрицы X и У в пределах каждого структурного состояния
трансмиссии постоянны и вычисляются заново лишь при срыве или
замыкании какого-либо фрикциона.
4.3. ОСОБЕННОСТИ РАСЧЕТА И ЭКСПЕРИМЕНТАЛЬНОГО
ИССЛЕДОВАНИЯ ХАРАКТЕРНЫХ ПЕРЕХОДНЫХ
ПРОЦЕССОВ
Режим трогания машины с места (трансмиссия механическая)
является одним из наиболее тяжелых переходных режимов работы,
характеристика которого показана на рис. 4.5.
В момент времени ta одновременно начинается включение пере-
дачи и увеличение подачи топлива в двигатель. В момент t\ сраба-
тывает бустер и начинается буксование фрикциона. При наличии
устройства регулирования плавности, введение которого целесо-
образно, если при приведенный к двигателю момент
трения во фрикционе более чем в 1,5—2,0 раза превышает момент
двигателя, процесс нарастания давления в бустере от р0 до pmtx
можно аппроксимировать кусочно-линейной функцией. В гидроме-
ханических трансмиссиях режимы трогания машины с места не
опасны для фрикционов, если трогание начинается при минималь-
ных частоте вращения двигателя и подаче топлива (ат = 0). Что-
бы процесс включения передачи сделать плавным, без рывков, р0
должно быть минимально возможным.
Рис. 4.5 Характеристика режима тро-
гания машины с места (пояснения
см. в тексте)
Рис. 4 6. Законы управления псреклю
ченнем передач с низших на высшие
Переключение передач с низшей на высшую обычно происхо-
дит по законам управления, показанным па рис. 4.6. При постоян-
ной подаче топлива (автоматическое переключение передач) обес-
печивается наибольшая динамичность машины при разгоне, однако
83
этот вариант управления является наиболее тяжелым для фрикцио-
нов. При уменьшении подачи топлива облегчаются условия работы
фрикционов (примерно на порядок снижается их износ). Измене-
ние подачи топлива при переключении передач, показанное на
рис. 4.6, обычно имеет место при ручном управлении.
В танке с ГТД при переключении передач управление двига-
телем осуществляется не только за счет изменения подачи топлива,
но и при помощи регулируемого соплового аппарата (рис. 4.7).
Рис. 4.7. Расчетные динамические характеристики на режиме переключения
со II на 111 передачу в танке с ГТД:
/, 2. 3. 4 — частота вращения элементов МТУ (соответственно 1, 4, 1д, 5д на рнс. 4.4); 5
скорость машины t»T; 6 давление управления РуПр'. 7 —арсд; 8~ "а входе в БКП
^КП' 9~ моме,,т на входе в бортовой редуктор Mgp; заштрихованы зоны буксования фрик
цнонов Ф, и Ф1
При переключении со II передачи на III в КП включаются два
новых фрикциона, при этом до окончания буксования фрикциона
Ф4 на машину действует отрицательное ускорение, затем ускорение
меняет знак, достигая максимальных значений 5.. .6 м/с2.
Значения максимальных нагрузок на элементы МТУ танка
с ГТД при переключении передач приведены в табл. 4.3.
Одним из параметров, существенно влияющих на динамику КП,
является время разрыва потока мощности —/0 (см. рис, 4.6): чем
больше это время, тем выше износ фрикционных элементов КП и
хуже разгонные характеристики машины.
84
Таблица 4. 3
Динамический (Л4„ Л1₽) и максимальный статический (Мс,) моменты
в элементах МТУ танка с ГТД при переключении передач, кН м
Режим переключения На входе в БКП На водиле бортового редуктора
Л, % *ст Л, "р Лст
I—II 2,3—3.6 4,3 2.3 24—31 38 24
II—III 3,6—5,4 5.4 2.3 18-28 32 17,5
III—IV 4.3—6.0 5.1 2,3 18-30 24 12
IV—II! 5.5—6.0 5,2 2.3 24—56 42 17.5
Ill—II 1.2-5,5 4.2 2.3 12-23 28 24
Примечания: 1. М„ Мр — экспериментальное и расчетное значения
2. Приведенные для сравнения значения максимального статического момента
соответствуют моменту двигателя в режиме «стоп».
В машинах с ГМТ и поршневым двигателем при построении
разгонной характеристики между режимами переключения передач
добавляются режимы включения блокировочного фрикциона, зави-
сящие от характера совмещения характеристик двигателя и ГТ:
чем левее совмещение, тем условия работы блокировочного фрик-
циона легче, причем повышение энергоемкости ГТ в два раза сни-
жает уровень износа блокировочного фрикциона на порядок и бо-
лее. Для фрикционов КП характерна обратная зависимость износа
от совмещения характеристик двигателя и ГТ.
Законы управления переключением передач с высших на низ-
шие такие же, как и с низших на высшие (см. рис. 4.6), однако
влияние их на характеристики динамических процессов несколько
иное. Максимальные значения параметры буксования и износостой-
кости фрикционных элементов имеют место при уменьшении пода-
чи топлива. Условия работы фрикционов КП при переключении пе-
редач с высших на низшие значительно легче, чем при переключе-
нии с низших на высшие, особенно в гидромеханических трансмис-
сиях.
Динамическая нагруженность элементов механических транс-
миссий в ряде случаев при переключении передач с высших на низ-
шие может быть выше из-за ударов в зазорах при перемене знака
моментов (см. табл. 4.3).
Расчетные режимы торможения машины остановочным тормо-
зом выбираются на основе анализа эксплуатационных режимов
торможения. В машинах с гидрозамедлителем могут одновремен-
но использоваться остановочный тормоз и гидроз а медлитель.
Динамика торможения машины двигателем без использования
тормозов может быть определена посредством последовательного
расчета режимов переключения передач с высших на низшие при
минимальной подаче топлива (ат = 0) вплоть до остановки маши-
ны либо до заданной скорости (режим подтормаживания).
85
При расчете динамики поворота ВГМ вся совокупность возмож-
ных эксплуатационных режимов его на различной скорости дви-
жения машины заменяется эквивалентными по некоторым инте-
гральным показателям расчетными режимами, например, подби-
рается эквивалентное давление в бустере фрикциона механизма по-
ворота р9кв, при котором обеспечивается заданный суммарный угол
поворота. Обычно начальное значение выбирается на основе
экспериментальных исследований, а затем по результатам расчета
производится коррекция этого значения.
Как правило, для современных танков с относительно большой
удельной мощностью нет необходимости увеличивать подачу топ-
лива при повороте. При большой скорости движения (о >
>25.. .30 км/ч) в механизмах поворота, обеспечивающих сохра-
нение скорости забегающей гусеницы, увеличение подачи топлива
приводит к неустойчивости поворота, заносу машины. При наличии
подобных механизмов поворота необходимо рассматривать не толь-
ко динамику самого поворота, но и режим выхода из него. При
этом возможны значительный износ фрикциона и высокий уровень
динамической нагрузки элементов МТУ. В танках с БКП именно
на выходе из поворота, как правило, максимально нагружены
входные элементы коробки передач (табл. 4.4).
Таблица 4.4
Максимальные динамические нагрузки (кН м) на входе в БКП танка
с ГТД при выходе из поворота
Номер передачи На отстающем борту На забегающем борту
.И, МР И» ИР
I 2-3 1,8—2 1,5—2,5
11 2-8,5 2,5-7,5 3-6,5 2,5-5,5
111 3,2-И 4.5-11 4,5—6,8 4-8,5
IV 3-9 5,4-11 5,6—7,6 4-8
Примечание. М„ Мг — экспериментальные и расчетные значении динами-
ческих моментов для нескольких поворотов, отличающихся радиусом, продолжи
тельностью, характеристиками грунта и др
На рис. 4.8 дан пример расчета динамических процессов при по-
вороте на II передаче танка с ГТД. Эквивалентное давление в бу-
стерах фрикционов Ф3 и БКП отстающего борта при повороте
= 0,35 МПа. Суммарный угол поворота машины О за время
t « 3,5 с на грунте с максимальным коэффициентом сопротивления
повороту Цсш.х =0,65 равен 55°. В течение всего времени поворо-
та педаль подачи топлива должна быть частично отжата («т =
= 0,8), а РСА должен находиться в рабочем положении (арСА = 1).
Дифференциальный механизм улучшает устойчивость поворота,
дает возможность регулировать его радиус в широком диапазоне
86
значений, но режим движения на повороте в этом случае является
тяжелым для фрикционов .МП.
Рис. 4.8. Расчетные динамические характеристики прн повороте на II передаче
танка с ГТД:
I— время; /, 2. 3. 4 — то же. что на рис. 4.7; 5 — скорость t’T; 6 - угол поворота • ; 7 —
действительный радиус поворота R'; « — давление управления Pvnp: 9 — момент на входе
в БКП Мр
В машинах с механизмом поворота, обеспечивающим сохране-
ние скорости забегающей гусеницы, поворот чаще всего является
кратковременным процессом. При этом один борт на некоторое вре-
мя отсоединяется, а фрикционы поворота в большинстве случаев
не включаются (режим подворота). В этом случае при расчете
таких режимов принимается
Для оценки максимальных динамических нагрузок при входе
в поворот необходимо рассчитать предельно интенсивный поворот
С Рэкв == Рты. •
По рассмотренной выше методике можно смоделировать любые
реальные процессы (так как можно задавать законы изменения
давления для всех фрикционов, а также другие управляющие воз-
действия) :
работу танка или другой машины в качестве бульдозера;
работу тяжелоинерционных приводов прн помощи управляемых
соединительных фрикционных муфт;
резкое изменение частоты вращения вала двигателя;
подключение винторедукторных установок (ВРУ), плавсредств
и др.
87
Глава 5. ДИНАМИКА ПРИВОДОВ
ВСПОМОГАТЕЛЬНЫХ АГРЕГАТОВ
5.1. ОСНОВНЫЕ ЗАДАЧИ ИССЛЕДОВАНИЯ.
КЛАССИФИКАЦИЯ ПРИВОДОВ
В танке имеется большое количество вспомогательных агрега-
тов, привод к которым осуществляется от коленчатого вала двига-
теля или от валов трансмиссии — агрегаты, обеспечивающие рабо-
ту двигателя и трансмиссии (водяные, масляные, топливные насо-
сы, механизмы газораспределения и воздухозапуска и др.), агрегаты
энергопитания танка в целом (генераторы электрического тока,
воздушный компрессор), а также агрегаты инженерного и другого
специального оборудования.
На приводы к агрегатам воздействуют нагрузки от передавае-
мого на агрегаты крутящего момента, периодических возмущаю-
щих воздействий со стороны двигателя, движителя и самих агрега-
тов, а также инерционные нагрузки, возникающие при переходных
(неустановнвшихся) режимах работы. Приводы к вспомогатель-
ным агрегатам являются специфическими системами, характер ди-
намических процессов в которых определяется не только работой
всей силовой цепи, но и характеристиками этих агрегатов.
Исследование динамики приводов проводится на динамических
моделях с сосредоточенными массами с учетом нелинейности харак-
теристик упругодиссипативных связей и движения рабочего органа
самого агрегата.
Для схематизации реальных приводов и построения соответст-
вующих расчетных динамических моделей целесообразно произве-
сти их классификацию. Важно установить, имеют ли место в приводе
крутильные колебания от периодических возмущающих воздейст-
вий, а также учесть нелинейность упругодемпфирующих характе-
ристик привода. Нелинейность определяется наличием зазоров,
различных муфт и соединительных звеньев. Основным критерием
классификации приводов является степень смещения собственных
частот колебаний основной системы в результате присоединения к
ней приводов; при оценке этого параметра можно ограничиться
88
расчетом свободных колебаний без затухания для упрощенных ли-
неаризованных моделей четырех видов (рис. 5.1), которых вполне
достаточно для классификации приводов по упругоинерционным
параметрам.
Рис. 5.1. Виды динамических моделей для оценки взаимного влияния упруго-
ннсрцицнных параметров привода и основной силовой цепи:
а МТУ с жестким соединением двигателя с МТ; б — МТУ с ГМТ; и — МТУ с упругим сое-
динением двигателя с МТ; г приводы к вспомогательным агрегатам трансмиссии. I при
воднмыЛ агрегат; 2 двигатель; 3 — ведущие элементы трансмиссии (на виде б насосное
колесо ГТ); 7^—момент инерции масс (Л — I. 2. 3); Ст - крутильная жесткость соедине-
ний ( m—I. 2, 3)
Решая систему уравнений движения двухмассовой модели
(рис. 5.1, а), получим
(•СТ = (1 + Н + р’)/2 ± /(l+f + pW-p2; (5.1)
= (1 -fix + ₽’)/(2р!) ± И(1 +Р‘ + Р,)/(2Р2)1*- 1'Р1- (5.2)
Здесь «/Pi, ш/Pi — отношения частот колебаний системы с приводом и> соответ-
ственно к парциальным частотам колебаний привода Р\ и основной системы Р»;
Ц-Л/Л— отношение моментов инерции масс приводимого агрегата н основной
системы; р — Рг/Pi — отношение парциальных частот.
В формуле (5.1) знак «+» берется при р<1 н соответствует о», знак «—»—
при р > 1 и соответствует шц в формуле (5.2) знак <+» берется при р >1 и со-
ответствует «о», знак «—» — при р < 1 и соответствует ю(.
Примем, что W1 < юг, тогда справедливо соотношение
< min IP,, Р2| •Сmax {Рь Р,| < ш2.
Введем функцию упругоинерционных параметров привода вида
•$иР : Igl 2 СгЛЛс’1Л)1 lg(l + Р2/^’), которая показывает, ка-
кую долю составляют эти параметры в упругоинерционных харак-
89
теристиках всей системы. Соотношение величин ш/Рь о)/Р2 и $лр
может быть представлено в виде номограмм (рис. 5.2).
Рис. 5.2. Зависимость собственной частоты привода (а) и основной системы (б)
от функции Snp для динамической модели МТУ с механической трансмиссией
Момент инерции приводимого агрегата /| обычно определяется
его конструкцией, а крутильная жесткость привода Ci может варь-
ироваться в определенных пределах. Выбирая допустимый уровень
отношений о)/Р| или м/Р2 и задавая р, найдем значение
С. = -%!*. (5.3)
90
где из формул (5.1) и (5.2)
, (ЧЛ)ЧНЛ)а-(Н ц)| (ЧАНЧ1 + И) -1 ,е 41
₽ (ш/р.р-1 “ (-№)’1("/Ра)э - II ' ' '
Параметры основной системы /2, С2 полагаются известными.
Для динамической модели, представленной на рис. 5.1, б, за-
пишем
±>/r--V<,+7-p2l1+^l: <5-5)
(5.6)
где v — Л/Л— отношение моментов инерции масс основной системы (масс дви-
гателя и насосного колеса ГМТ); р = Ps/P,; ц - Л/Л Л “ ЛЛЛА+Л) —
эквивалентный момент инерции масс основной системы; Р,« V C2lJt — пар-
циальная частота колебаний основной системы; знаки выбираются так же, как
в формулах (5.1) и (5.2).
По формулам (5.5) и (5.6) определяется одно из ненулевых зна-
чений частоты системы с приводом (w2 или (о3); другое может
быть найдено из соотношения
^Г = 1 + (ГТ^- <5-7>
Из формулы (5.7) следует, что при определенных соотношениях
величин ц и v возможны случаи, когда при подсоединении привода
к основной силовой цепи значения обеих частот системы увеличи-
ваются (рис. 5.3), т. е. (»2/Р1 > 1 и (оз/Р, > 1.
Крутильную жесткость привода С| при известных параметрах
основной системы /2, /3, С2 и известном моменте инерции приво-
димого апрегата Ji можно определить по формуле (5.3), в которой
2= (u>/A)>(WP.)a-|l-H</(l+v)D _ (ЧР»)ЧН н/(1 1-у)1 И 1И(1 Н)Ч. /= ох
р НР1)’ - П + н*/(1 + *)’| “ (•»/₽»)’ |(<»;Рэ)’ - 1| ’ v '
при этом при р > 1 берется to2/pi или шз/р». а при р <С 1 берется
(Оз/Pi или юг/Р».
В динамических моделях, показанных на рис. 5.1, в, г, ос-
новная силовая цепь представлена двумя инерционными массами
2 и 3. Собственные частоты Q2 и S23 основной системы (без при-
вода) определяются из частотного уравнения для этой системы или
по формулам (5.1) и (5.2). Парциальную частоту привода обо-
значим через Й| = Р|.
91
Собственные частоты со, системы с приводом определяются из-
вестными классическими методами или путем решения кубических
уравнений относительно (<о//Р«)2.
си//?
Рис. 5.3. Зависимость собственной частоты привода от параметров основной си-
стемы для динамической модели МТУ с ГМТ прн v = 1:
Если выполняются неравенства
где <0| < о>2 < о)3, то привод можно считать малоинерционным (ма-
лым). Если хотя бы одно из неравенств (5.9) не выполняется, при-
вод следует считать высокоинерционным (тяжелым).
92
5.2. МЕТОДЫ РАСЧЕТА ПРИВОДОВ
При расчете крутильных колебаний и переходных процессов в
силовой цепи в расчетную схему включают только те приводы
к вспомогательным агрегатам, влияние которых сказывается на
динамике основной силовой цепи (тяжелые приводы), а также те
малые приводы к вспомогательным агрегатам, динамику которых
необходимо исследовать. В случаях, когда требуется более подроб-
ное исследование динамики привода (прежде всего для тяжелых
приводов и приводов с собственным возбуждением), расчеты про-
изводятся по методикам, отличным от изложенных в гл. 3 и 4.
Тяжелые приводы обычно обеспечиваются средствами защиты
приводимого агрегата от нагрузок, возникающих при переходных
режимах работы МТУ (муфты, демпферы и др.). Такие элементы
чаще всего имеют нелинейные упругие характеристики.
В приводах, для которых по критерию (5.9) |ы*/Й/ — 11 < 0,005,
при большом количестве элементов, соединяющих их с основной
системой, имеют место значительные зазоры; малые значения кру-
тящего момента, передаваемого такими приводами к соответствую-
щим агрегатам, не обеспечивают их линеаризации; динамические
процессы в них носят явно выраженный нелинейный характер.
У малых приводов, для которых по критерию (5.9) 0,005^
с | /Q,— 11^0,03, зазоры обычно меньше, а передаваемый кру-
тящий момент больше, чем у приводов предыдущей группы, так что
в малых приводах может происходить полная выборка зазоров.
Таким образом, динамические процессы в приводах к вспомога-
тельным агрегатам МТУ могут быть исследованы:
одновременно с исследованием динамических процессов в основ-
ной силовой цепи, вызываемых периодическими возмущениями от
двигателя (линейные приводы малые и тяжелые, не имеющие соб-
ственного возбуждения), по методике, описанной в гл. 3;
одновременно с исследованием переходных динамических процес-
сов в основной силовой цепи (линейные тяжелые приводы) по ме-
тодике, описанной в гл. 4;
по специальной методике для тяжелых приводов (нелинейные,
а также линейные тяжелые при необходимости более подробного
их изучения);
по специальной методике для малых приводов (малые нелиней-
ные приводы и приводы с собственным возбуждением).
Главной отличительной особенностью специальных методик ис-
следования приводов является применение усеченных динамических
моделей.
5.3. ДИНАМИКА ТЯЖЕЛЫХ ПРИВОДОВ
Динамические модели для исследования тяжелых приводов
должны включать в себя элементы двигателя, трансмиссии и массу
машины и учитывать периодические возмущения со стороны дви-
гателя, а также нелинейность упругих и диссипативных сил как в
93
исследуемом приводе, так и в основной силовой цепи. В МТУ тя-
желые приводы подсоединяются к основной силовой цепи со сво-
бодного конца двигателя, со стороны отбора мощности от двигате-
ля на трансмиссию или от первичных элементов трансмиссии. В ди-
намической модели двигатель как источник возмущения должен
быть схематизирован достаточно подробно, а трансмиссия может
представляться упрощенно, чаще всего в виде простой неразветв-
ленной системы. Малыми приводами при исследовании динамики
тяжелых приводов, как правило, пренебрегают.
Динамическая модель для исследования одного тяжелого при-
вода, подсоединенного со стороны отбора мощности от двигателя
на трансмиссию, представлена на рис. 5.4. Соответствующая ей ма-
Рис. 5.4. Полная динамическая модель для исследования динамики тяжелого
привода
тематическая модель имеет вид (без учета демпфирования в линей-
ных соединениях):
4?/ + c>-i (?/ - ?/->) + *);
4?» + Ср (?, - <рр) + (<pff - <pr, - уг) +
Mr 4- Fr - Ъ» Ъ) = 0;
4<Ь + Cs (<h - ?r) - Fr (<pr - ?r - ?,) = 0;
Мл 4- G-i - t*-i) 4- Ck (?ft - ?*+1) = 0;
4. К 4- G._i (<pXw — ) = - Mz„ (0;
ЛЛ» + \+,<4 - ’w 4 - KJ -
— Ffk <?r*’ — J“ 0 ’
4 — Fr (?r — ?,. ?, — ?,) = — мг (n),
z rt rx x-i * a-i г t
(5.10)
94
где / = 1, 2. р; А — , (z0 — 1); г* =- г(, ..., rt_(; Mt (/, л) — возмущаю-
щие моменты на массах двигателя; М ,о(О— момент сопротивления движению со
стороны дороги; Af, (л) — момент сопротивления на массе тяжелого вспомога-
тельного агрегата; Fq, Fr, Frk — нелинейные упругодемпфирующие характери-
стики соединений; <р — угловое перемещение масс.
Математическая модель (5.10) представляет собой систему
обыкновенных дифференциальных уравнений второго порядка со
многими нелинейными элементами. Колебания тяжелых приводов
носят полигармонический характер (при установившихся режимах
работы МТУ) или являются непериодическими функциями (при пе-
реходных режимах работы). Решение системы уравнений (5.10)
осуществляется методами численного анализа, для чего она сводит-
ся к системе дифференциальных уравнений первого порядка:
У/-//(У.. Уз.... Узл+i). 7-1. 2... 2/1 4-1,
где у* = <рА; уп¥к = <р*; у, л+1 = /; k = 1, 2....» л.
Для решения целесообразно применять классический метод
Рунге—Кутта с постоянным шагом интегрирования [16], позволяю-
щий получить результаты при разумных затратах машинного вре-
мени. *
При неустановившихся режимах работы МТУ приводы испы-
тывают дополнительные инерционные нагрузки, вызванные изме-
нениями скоростного режима и структурными изменениями в транс-
миссии, происходящими при переключениях передач, поворотах и
других переходных режимах. Для оценки нагруженности приводов
при этих режимах динамическая модель упрощается посредством
отсечения массы машины и той части трансмиссии, в которой при
переходных режимах происходят структурные изменения. Одна из
масс трансмиссии, выбранная на основе расчета на крутильные ко-
лебания линеаризованной системы (см. гл. 3), принимается в ка-
честве заделки. Задача сводится к решению системы дифференци-
альных уравнений движения относительно положения равновесия.
Средняя частота вращения и среднее угловое ускорение задаются
для расчета в виде функций времени п(0 и «(/). Инерционные на-
грузки, возникающие при переходных режимах работы, учитыва-
ются посредством приложения ко всем массам системы инерцион-
ных моментов
Мш,(0=-(/)/,. (5.11)
95
Упрощенная динамическая модель для исследования динамики
тяжелого привода будет иметь вид, представленный на рис. 5.5. Для
Рис. 5.5. Упрощенная динамическая модель для исследования динамики тяжелых
приводов
подтверждения корректности перехода от полной модели к упро-
щенной введем следующие обозначения:
7=1. 2......р\
Ч‘г = гЛ = г,,..., гг;
Ч'г - <F, — &;
= Ъ -
Тогда система уравнений (5.10) примет следующий вид:
<¥/ + См (Vy - ЧГу_.) + С, (V, - 4%) = Mj (Л п) - J^t;
J^q + Ср (Ч^ - Чу ч- Fq Wq - - V,) + Fr, (T, -
-4% ЧГ,_ЧГИ)«_У^;
JrW, + Fr ~ “ F< ~ Vr.
/X + ex - Fr - чу Ч-; - * ,) = - ;
J V 4- F, (V, - Ч-, , Г V ) _
rk r* r*+t * *+t * *+•
_ /Г pp_ qr ф I _ qr ;
4 qrr - Fr , - ч\’ = — Mr<n) -Jr?t.
где j - 1, 2,.... p; r* - и.r.-j; при этом <pt (/) - e(Q.
(5.12)
(5.13)
96
Из равенства (5.12) следует, что <р/ = Ф/ + ф/. тогда
Ъ = + j ?, (О л = ^ + j е (О Л + тА. (5.14)
где / — I. 2,..., р; ¥i, Tj,..., ФР — динамические составляющие относительной
скорости отдельных масс.
Полагая, что <р,0 = <рго = ... = = <?0, получаем
= Фо + J6 (0 dt, откуда
л-Ло+*|*(ОЛ’ (5.15)
Все факторы и параметры, определяющие среднее ускорение си-
стемы, учитываются при соответствующих режимах работы зависи-
Рнс. 5.6. Прииод нагнетателя двигателя В-46:
I- блок-шестерня с УМ; 2 — промежуточная шестерня; 3 — малая шестерня перебора: 4 —
большая шестерня перебора с УФМ; 5 — крыльчатка нагнетателя; 6 — шестерня на роторе
нагнетателя
7 Зак. 20с
97
мостью «(/), которая может быть получена экспериментально или
по результатам расчета переходных процессов (см. гл. 4).
Возмущение системы от двигателя задается; момент сопротив-
ления на массе приводимого агрегата Мг определяется по мощно-
сти, затрачиваемой на привод. Учет демпфирования как в приво-
де, так и в основной системе производится в соответствии с реко-
мендациями гл. 2.
В качестве примера рассмотрим динамику привода нагнетателя
двигателя В-46 в танке Т-72. Привод нагнетателя (рис. 5.6) пред-
ставляет собой двухпоточный редуктор, в шестерни которого вмон-
тированы упругая муфта (УМ) и две упругофрикцпопные муфты
(УФМ), расположенные в параллельных потоках мощности. Так
как фрикционные элементы в УФМ замыкаются при частоте вра-
щения коленчатого вала 600. ..800 об/мин, будем считать
УФМ упругими (рис. 5.7).
Рис. 5.7. Динамическая модель для исследования привода нагнетателя двигателя
В-46 в танке Т-72:
J — моменты инерции ма£с: е — податливость упругих соединений; М — упругие моменты
в соединениях; с —углы закрутки масс (относительно положения равновесии); 1 6 криво
шипно шатунные механизмы двигателя; 7-10 — привод нагнетателя; II — трансмиссия (вход
ной редуктор и первый ряд БКП); 17 — часть трансмиссии и масса машины
Оценим привод по критерию (5.9), используя следующие дан-
ные:
парциальная частота привода й2 = 162 с-’;
собственные частоты «трансмиссионной» и «моторной» форм
колебаний основной системы = 60,1 с-1, й3 = 859,7 с"‘;
собственные частоты колебаний системы с приводом о» =
= 53,9 с-1, й>2= 180,6 с-1, 0)3 = 860,1 с-1. Так как неравенства
(5.9) не выполняются для двух из трех форм колебаний, привод
98
следует считать тяжелым. В динамической модели для исследова-
ния привода нагнетателя учитываются нелинейные упругие харак-
теристики УМ и УФМ, а также зазоры в зубчатых муфтах между
двигателем и трансмиссией и также во входном цилиндрическом
редукторе. Все учитываемые нелинейные упругие характеристики
кусочно-линейного типа.
На основе расчета свободных колебаний линеаризованной си-
стемы определим спектр собственных частот и выберем существен-
ные гармоники возмущающих моментов двигателя. Кроме переда-
ваемого крутящего момента, обеспечивающего закрутку системы,
учитываются возмущающие моменты с v = 1,5; 3; 3,5; 6 и 7,5. При
расчете резонансных колебаний линеаризованной модели опреде-
ляем амплитуды и фазы гармонических составляющих возмущаю-
щих моментов на массах двигателя, демпфирующие коэффициенты
на массах двигателя и в соединениях в пределах частоты вращения
двигателя л=0. ..3000 об/мин. По полученным данным строятся
аппроксимирующие зависимости демпфирующих характеристик на
массах двигателя от частоты вращения. По результатам экспери-
ментальных исследований МТУ с аналогичными двигателями для
расчета выбираются следующие режимы:
разгон танка на V передаче
от 800 до 2 300 об/мин (с мак-
симальным угловым ускорени-
ем вт.х = 63,5 с’’);
переключение с VI на V пе-
редачу (резкое увеличение ча-
стоты вращения от 1 840 до
2 300 об/мин);
переключение с VI на V пе-
редачу без уменьшения подачи
топлива (чрезмерное увеличе-
ние частоты вращения от 2 100
до 2 700 об/мин);
переключение с VII на V
передачу без уменьшения по-
дачи топлива (чрезмерное уве-
личение частоты вращения от
I 750 до 3 000 об/мин).
Рис. 5.8. Законы изменения углового ус-
корения е(/) в силовой цепи танка Т-72
для различных расчетных режимов:
I— район на V передаче; 2 — переключение
с VI на V передачу; 3 переключение с VI
на V передачу без уменьшения подачи топли-
ва; 4 — переключение с VII на V передачу без
уменьшения подачи топлива
Законы изменения углового ускорения e(f) для всех расчетных
режимов представлены на рис. 5.8.
99
Исследование подтвердило хорошую гтепень соответствия ре-
зультатов расчета на модели и экспериментальных исследований
(рис. 5.9).
Рис. 5.9. Результаты расчетных и экспериментальных исследований в приводе
нагнетателя двигателя В 46 при разгоне танка на V передаче (а) н при переклю-
чении с VI на V передачу (б) :
/ — расчет; 1 — эксперимент; - УФМ;--------УМ
Суммарный момент, действующий на элементы привода нагне-
тателя Mr, слагается из момента, передаваемого на преодоление
аэродинамического сопротивления крыльчатки нагнетателя Мн,
инерционного момента М11Н, возникающего за счет действия угло-
вого ускорения е(0 при переходных режимах работы МТУ, дина-
мических нагрузок от вынужденных крутильных колебаний Л
и момента от ударов в упоры УФМ и УМ Гуж:
М£ = Мн 4- Мня 4- F«4* Fуж.
Особенно сильные нагрузки испытывают зубья шестерен приво-
да в режимах переключения с высших на низшие передачи (без
изменения подачи топлива), сопровождающихся кратковременным
повышением частоты вращения вала двигателя выше максимальной
(2 300 об/мин). Правильный выбор упругих характеристик УМ и
УФМ и соотношений между моментами выхода на упоры для
обоих видов муфт обеспечивает отсутствие ударов в упоры на всех
режимах работы танка, не связанных с переключением с высших
на низшие передачи, а также уменьшение числа ударных импуль-
сов и снижение суммарного динамического момента Ms в приводе
до уровня, допустимого с точки зрения прочности его элементов при
последовательном переключении передач (с резким увеличением
частоты вращения до 2 700 об/мин).
5.4. ДИНАМИКА МАЛЫХ ПРИВОДОВ
Малые приводы весьма разнообразны. Общим является их не-
значительное влияние на амплитудно-частотные характеристики
100
основной динамической системы МТУ. Линейные малые приводы,
не имеющие собственного возбуждения, целесообразно исследовать
одновременно с основной системой при установившихся (см. гл. 3)
и переходных (см. гл. 4) режимах работы всей силовой цепи.
Для нелинейных малых приводов и приводов с собственным
возбуждением (например, компрессор, топливный насос и др.) не-
обходим учет как нелинейных упругодемпфирующих характери-
стик, так и возбуждения на массах приводимых агрегатов, что не-
возможно при исследовании динамики основной системы из-за
слишком грубой схематизации приводов и линеаризации их харак-
теристик. Поэтому расчетные модели для исследования малых при-
водов могут быть ограничены заделкой в месте подсоединения при-
вода к основной системе с кинематическим возбуждением, прило-
женным в месте заделки. Закон движения точки заделки задается
в виде углового перемещения <ро(О, угловой скорости фо(0 и угло-
вого ускорения фо(0 или их совокупности. Особое место занимают
приводы с собственным возбуждением, для которых необходимо
задать также возмущающий момент на массах приводимого агре-
гата Afc(O Ин -f- У Af,sin (»ш t +,ф»). Основным источником не-
линейности упругих характеристик малых приводов являются за-
зоры, которые зачастую не выбираются при передаче крутящего
момента на приводимый агрегат. В приводах, для которых
0,005 < |(i)//Q/— 1| <0,03, также встречаются упругие муфты с
нелинейными характеристиками.
Рнс. 5.10. Расчетные динамические схемы привода генератора Г-10 в трансмиссии
многоцелевого транспортера-тягача:
а —полная линейная динамическая модель; б — парциальная динамическая модель исходно-
го варианта с учетом затора; в — парциальная динамическая модель привода с упругой муф-
той; I-6 — двигатель; 7 — венец стартера; в — насосное колесо гидромуфты привода генера-
тора; 9 — агрегаты трансмиссии
101
В качестве примера рассмотрим динамику привода генератора
многоцелевого транспортера-тягача. Генератор Г-10 приводится во
вращение от ведущей шестерни цилиндрического редуктора, связан-
ной с коленчатым валом через зубчатую муфту. Привод генератора
включает в себя цилиндрическую и коническую пары зубчатых ко-
лес и гидромуфту, которая через зубчатую муфту связана с валом
генератора. Суммарное передаточное отношение (отношение час-
тот вращения насосного колеса ГМ и коленчатого вала) i = 2,82.
На носке коленчатого вала двигателя жестко установлен венец
стартера с моментом инерции J7= 1,3 кг-м2 (вместе с зубчатой
муфтой и ведущей шестерней цилиндрического редуктора).
Прежде всего производится расчет линеаризованной модели
привода генератора на крутильные колебания при установившихся
режимах работы МТУ (рис. 5.10, а). Так как гидромуфта оказыва-
ет фильтрующее воздействие на крутильные колебания, возбуж-
даемые двигателем, массы турбинной части, в том числе и масса
ротора генератора, не включаются в динамическую модель. Осталь-
ные агрегаты трансмиссии условно объединены в массу 9. Крутиль-
ная податливость привода генератора е,,я получена эксперимен-
тально посредством статической закрутки привода. Результаты
расчета (рис. 5.11, а) пока-
зывают наличие в приводе
двух форм главных резонан-
сных колебаний от возмуща-
ющих моментов шестого по-
рядка: низшей формы, опре-
деляемой динамическими
параметрами привода, и мо-
ЧЮ 1000
1600 п, од/кин
Рис. 5.11. Результаты расчета ли-
неаризованпой модели привода
генератора Г-10 (а) и исследова-
ний его динамической нагруженно-
сти с учетом зазора (б) при рез-
ком увеличении подачи топлива
(, ) и в режиме стационарной
работы (-------):
1,2 — динамические нагрузки в исход-
Hurt конструкции приводи и привода
с УМ соответственно; 3, 4 — амплитуд-
но-частотные характеристики массы
7 (см. рис. 5.10, а) от возмущающих
моментов шестого и третьего порядков
соответственно; 5 — экспериментальные
данные; 6,7 — данные расчета исходной
конструкции привода и привода с УМ
соответственно
торной, определяемой параметрами основной силовой цепи. Для
классификации привода по критерию (5.9) динамическая
модель может быть упрощена до трехмассовой, вклю-
чающей в себя двигатель, привод генератора, венец стартера и
102
трансмиссию в виде заделки. На этой модели определяем собствен-
ные частоты со системы с приводом, парциальную частоту Qi приво-
да и собственные частоты Q2. йз системы без привода:
(hi/y,- 1| =0,0128) <0,03:
(I "г/Mt - 11 = 0,0052) < 0,03;
(I »>/Мз - 11 == 0,0079) < 0,03 .
По критерию (5.9) привод является малым, и его исследование
с учетом зазоров может производиться на одномассовой нелиней-
ной динамической модели с заделкой привода в месте его подсое-
динения к основной цепи (на массе 7, см. рис. 5.10, а) и кинемати-
ческим возбуждением ф0(0 в месте заделки. В качестве кинемати-
ческого возбуждения задается закон движения массы 7, получеи-
в(ый из линейного расчета полной системы. Собственное возбужде-
ние в данном приводе отсутствует. Уравнения движения системы,
представленной на рис. 5.10, в, имеют вид
/? + ^+/(В)-Мжр;
0, если |М<4’
если
5 = ср - ф0 (/);
<Ро(О = 2^sin(-^-/ + 4%),
/(«) =
(5.16)
где ф, ф, ф — угловое перемещение, скорость и ускорение сосредоточенной массы;
AfKP — средний крутящий момент, передаваемый приводом; 1, е. Ь — момент инер-
ции сосредоточенной массы, податливость упругого соединения и эквивалентный
линейный коэффициент демпфирования соответственно; А —0,017 рад — суммар-
ный зазор в приводе (по результатам статической закрутки); л, (лдн). Ч\(лдВ) —
амплитудно-частотные и фазо-частотные характеристики колебаний массы 7
основной силовой цепи (см. рис. 5.10, а).
Решается уравнение (5.16) методом численного интегрирования
для двух расчетных режимов:
медленное увеличение частоты вращения от 700 до 2 100 об/мин
с угловым ускорением е = 40 с~’ (при этом AfBp = 62 Н м, а мо-
мент на валу ГМ равен 22 Н м);
быстрое увеличение п. от 1 300 до 2 100 об/мин с угловым уско-
рением е = 200 с-* (режим резкого изменения подачи топлива в
цилиндры двигателя, при котором А!кр = 200 Н м, момент на валу
ГМ равен 71 Н-м).
Результат решения уравнения (5.16) хорошо совпадает с ре-
зультатами экспериментального исследования и сильно отличается
от результатов линейного расчета. При медленном проходе резонан-
сной зоны частот вращения (1 600—1 800 об/мин) в приводе наблю-
даются субгармонические колебания третьего порядка от возмуща-
ющих моментов шестого порядка. При быстром проходе этой же зо-
ны развиваются резонансные колебания шестого порядка. Такой же
характер развития колебаний и такой же уровень амплитуд дина-
103
мических моментов в приводе дают результаты эксперименталь-
них исследований (рис. 5.12). Субгармонические колебания обус-
ловлены наличием зазоров в приводе, а их частота зависит от соот-
ношения максимального упругого (Л4тах) и среднего крутящего
Рис. 5.12. Характерные процессы изменения динамических нагрузок в приводе
генератора:
а, б — экспериментальные данные; в, ( — результаты расчета исходного варианта: <?. е —
результаты расчета варианта с УМ, (а. в. д — при резком увеличении подачи топлива; б, г,
в — при частоте вращения 1700 об/мин)
(Af^p) моментов. При МШ1Х < 2 Л4кр зазор не раскрывается, имеют
место линейные колебания с частотой /== 1/(2 к}/eJ)\ при >
>27Имр, но при отсутствии двустороннего изменения момента,
/ = 1/{2к/ё7[1 + (-7^-1) X
Х j/1 («„„-«„) ~ arCC0S - Л«,р ]}
При различных соотношениях и Л4жр в системе с зазором
могут возникать колебания с частотой, в два (как в исследуемом
случае), три, четыре и т. д. раз меньшей частоты возмущения. Выб-
ранный метод исследования привода генератора как нелинейного
малого привода не только объясняет характер явлений, происходя-
щих в нем, но и позволяет оценить эффект снижения динамической
нагруженное™ привода за счет введения в него упругой муфты.
104
Глава 6. АВТОКОЛЕБАТЕЛЬНЫЕ ПРОЦЕССЫ
6.1. АВТОКОЛЕБАТЕЛЬНЫЕ ПРОЦЕССЫ.
ОБУСЛОВЛЕННЫЕ РАБОТОЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО
РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ
В системе автоматического регулирования частоты вращения
коленчатого вала танковых поршневых двигателей применяются
быстродействующие высокочувствительные регуляторы, имеющие,
как правило, нелинейные характеристики, что при определенных
условиях вызывает развитие крутильных автоколебаний, определяе-
мых воздействием регулятора па рейку топливного насоса. Автоко-
лебания могут привести к потере устойчивости объекта регулиро-
вания, существенно зависящей от резонансных свойств его ампли-
тудно-частотной характеристики. Для учета этих свойств необходи-
мо представить объект регулирования нс в виде инерционного зве-
на, как это принято в литературе, а в виде динамической модели
с упругими связями (рис. 6.1).
Рис. 6.1. Расчетная динамическая схема системы автоматического регулирования
частоты вращения двигателя 5ТДФ:
1—13 —сосредоточенные массы; г — цоитробежный измеритель; С . гидравлические
сервомоторы первого и второго каскадов усиления; Р — статическое звено, характеризующее
процесс управления цикловой подачей топлива в цилиндры двигателя рейкой топливного на
coca; At —звено управления крутящими моментами, действующими на сосредоточенные мае
сы коленчатых валов двигателя; 0— ///«, Я - е е, относительные момент инерции и подат
ливость; Л—0.054 кг м1, е, — 0,55 МН-1-и*1 — постоянные динамической схемы
8 Зак. 20с
105
Сосредоточенные массы коленчатого вала двигателя являются
входными звеньями модели, на которые действуют крутящие мо-
менты, развиваемые в цилиндрах двигателя.
Выходным сигналом динамической модели объекта регулирова-
ния служит угловая частота сосредоточенной %-й массы, в которую
встроен чувствительный элемент регулятора (масса 3 на рис. 6.1).
Поскольку регулятор по своим частотным свойствам является
фильтром низких частот, оценка устойчивости системы регулирова-
ния производится в узком частотном диапазоне, верхняя граница
которого <omax может быть определена на основе мажорантной
амплитудно-частотной характеристики разомкнутой САР из условия
KM = A,aJA„=i, (6.1)
где Л,ыж — амплитуда выходного сигнала; Л,х — амплитуда гармонического
входного воздействия.
С учетом этого условия
..„««Г,-1, (6.2)
Где Тг — постоянная времени центробежного измерителя при максимальном ско-
ростном режиме холостого хода двигателя, с; % — коэффициент, определяемый в
зависимости от типа регулятора.
Для регулятора прямого действия х определяется из уравнения
ofe (6-3)
для однокаскадного регулятора непрямого действия —
0& = ’(«’-1)/Г+755; (6.4)
для двухкаскадного регулятора непрямого действия —
-«(«’- 1) И(1 +«’В?Х1 +«’Bi). (6.5)
Здесь Af„p — средний крутящий момент двигателя в максимальном скоростном
режиме; б, — степень неравномерности центробежного измерителя в максималь-
ном скоростном режиме; ш — угловая частота вращения коленчатого вала двига-
теля на максимальном скоростном режиме холостого хода; / — суммарный мо-
мент инерции сосредоточенных масс коленчатого вала двигателя; В = Тс/Т,; Тс—
постоянная времени соответствующего сервомотора, с.
Для определения исследуемых частотных областей динамиче-
ской модели объекта регулирования используются расчетные ха-
рактеристики форм собственных колебаний, удовлетворяющих ус-
ловию (О< <О(пах •
Оценка устойчивости системы регулирования может быть про-
изведена на основе критерия Найквиста:
при Кк cos Tn, л > — 1/АСуст — система устойчива;
при Кг. cos Ч‘г.,» < — 1/^уст — система неустойчива,
где Кк — амплитудно-частотная характеристика разомкнутой системы автомати-
ческого регулирования при частотах <*»г , удовлетворяющих уравнению Чг((о) —
106
— л; Т(ш) — фазовая частотная характеристика разомкнутой системы; Кус» —
коэффициент, характеризующий запас устойчивости системы (Куст > !)
Графически оценка устойчивости системы может быть выпол-
нена построением в координатах (К, Т) вектора с модулем Кк,3
и аргументом Y«.*. В устойчивой системе у фазы, равной—л,
Kr,s < 1. Точка (—1, 0) является критической. Чем дальше вектор
в устойчивой системе удалей от критической точки, тем сильнее
затухание свободных колебаний. Удаление вектора от критической
точки характеризует запас устойчивости системы.
Динамические нагрузки в элементах моторно-трансмиссионной
установки при автоколебаниях. Амплитуда упругих моментов в сое-
динениях объекта регулирования в частотной области автоколеба-
ний 5-й собственной формы
ЛЦ?»+, =
- -----«х./. (6.6)
е^И, *+1%вх, 4
где &*У* + | — относительная амплитуда моментов сил упругости в соединении
k, k + 1 при Х-й собственной форме колебаний; е0 — упругая постоянная динами
ческой модели объекта регулирования, Ц-'-м1; »'*. * 4 i— передаточное отноше-
ние между соединением k. k + 1 и основным звеном динамической модели;
24 — круговая частота автоколебаний системы автоматического регулирования
в частотной области s-й собственной формы, с-1; ах>4— относительная амплиту-
да колебаний сосредоточенной массы %. в которую встроен центробежный изме-
рнтель; «* = »----——та же амплитуда при автоколебаниях; /G(Q5 .
* Kr (Uj. *<»)
со)—значение амплитудно-частотной характеристики центробежного измерителя,
соответствующей частоте автоколебаний t и максимальному скоростному
режиму ш объекта регулирования; — безразмерная амплитуда максималь-
ного возмущающего входного воздействия первого нелинейного звена регулятора,
МК9ТГ
при s — 0 ;
»70ftr 2 ft*
i«1Vl
'<икр(1 -5)
-------------------------при s > 1;
x<m.j
ft* — относительный момент инерции k-A сосредоточенной массы; £ — коэффициент
распределения мощности между коленчатыми валами в двухвалыюм двигателе
с расходящимися поршнями (для одновального двигателя £«0),
&+<?-! £ л+«-1
в, a 4--rZt а* Ч — число кривошипов коленчатого вала дви
гателя; Ь — номер первой сосредоточенной массы коленчатого вала в расчетной
схеме.
Источником возникновения опасных автоколебаний в двухтакт-
ном пятицилиндровом двигателе 5ТДФ танка Т-64А может быть
привод турбокомпрессора. Самовозбуждение автоколебаний в замк-
нутой системе этого привода наблюдалось при отключении от дви-
гателя масс потребителя. Привод представляет собой .низкочастот-
8*
107
пую, слабодемпфирова1шую часть динамической цепи. Роль обрат-
ной связи в нем выполняет быстродействующий, высокочувстви-
тельный всережимный регулятор скорости непрямого действия с
двумя каскадами усиления и с существенно нелинейной характери-
стикой рабочего сервомотора, определяемой профилем его распре-
делительных окон.
Исследования показали, что система регулирования частоты
вращения двигателя неустойчива в частотной области первой соб-
ственной формы (ы| — 88,5 с"’ при круговой частоте автоколеба-
ний Qi = 100 с*')', при этом максимальная амплитуда момента сил
упругости в рессоре привода нагнетателя (см. соединение 2—3 на
рис. 6.1) достигает 2 кН • м (рис. 6.2), что приводит к ее разрушению.
Рис. 6.2. Зависимость амплитуды
упругих моментов при автоколеба-
ниях в рессоре привода нагнетателя
старой (/) н измененной (2) конст-
рукции от частоты вращения дви-
гателя
Обнаружена существенная зависимость амплитуды автоколеба-
ний от коэффициента усиления обратной связи. За счет уменьшения
диаметра перепускных отверстий топливного сервопоршня регуля-
тора с 4,2 до 2 мм, а также некоторого изменения частотных харак-
теристик привода и введения ограничительной муфты, уровень на-
грузки удалось снизить в 3—4 раза (см. рис. 6.2). Автоколебания
исчезают при отключении регулятора, при введении в измеритель
регулятора динамического корректора, а также при подсоединении
к двигателю других агрегатов.
6.2. АВТОКОЛЕБАТЕЛЬНЫЕ ПРОЦЕССЫ ПРИ БУКСОВАНИИ
ФРИКЦИОННЫХ ЭЛЕМЕНТОВ
МТУ с главным фрикционом (ГФ), предназначенным для син-
хронизации угловых частот вращения звеньев двигателя и транс-
миссии при трогании и переключении передач, можно представить
в виде двух крутильных цепных динамических схем, соответствую-
щих ведущей и ведомой частям главного фрикциона (рис. 6.3),
имеющего нелинейную диссипативную характеристику следующего
вида:
*'фв,₽;гфзеп^гф. (6.7)
где МГФ — момент сил трения при буксовании главного фрикциона; 0ГФ — ко-
эффициент запаса передаваемого момента главного фрикциона; £ГФ — отноше-
ние коэффициента трения покоя в главном фрикционе к коэффициенту трения
скольжения (£( ф т1Х “ 1,5.. .2,0); <р( ф = <fi — <р' — угловая скорость буксова-
ния; — максимальный средний крутящий момент двигателя; -
2 ^гф — г'гф
= ~а~ ~ ~ средний радиус
кГф ~ Г1 Ф
ж 0,025 с/м.
трения дисков главного фрикциона; А.ГФ
Рис 6.3. Динамическая схема моторно-трансмиссионной установки плавающего
транспортера ПТС-М в переходном режиме:
Е ее„. где „=0.17 кг-м’; 0.46 МН-|м~’; /—Я (ведущей части) — массы дни
гателя и ведущих элементов главного фрикциона (ГФ); 1—13 (ведомой части) массы всдо
мых элементов ГФ и трансмиссии; .МГф — / (,кгф) — характеристика ГФ
Колебательные явления в ведущей и ведомой частях главного
фрикциона прн его буксовании функционально независимы и пред-
ставляют собой сложные апериодические колебательные процессы,
которые можно описать на основе простейшей динамической мо-
дели, соответствующей нулевым формам колебаний.
Колебательные процессы могут иметь затухающий или расхо-
дящийся характер. В первом случае переходный процесс считается
устойчивым или монотонным апериодическим процессом. Если
одна из собственных форм колебаний ведущей и ведомой частей
МТУ в исследуемом частотном диапазоне имеет расходящийся ха-
рактер, то переходный процесс считается неустойчивым.
Собственная форма колебаний считается устойчивой, если вы-
полняется неравенство
^ = П,-6/гфл>0, (6.8)
где U, — фактор устойчивости s-й собственной формы, с-1; D, и £/Гф4 — Фак-
торы затухания и фрикционного возбуждения, с“‘.
10b
109
Собственная форма колебаний считается неустойчивой, если
Л/ж<0. Неустойчивость переходного процесса определяется тон
неустойчивой собственной формой колебаний, для которой фактор
устойчивости имеет наименьшие значения.
Факторы затухания и фрикционного возбуждения определяются
по формулам
X — (bmsMame'n)
D, - —---------; (6.9)
м-ф ,-= _ (6. |0)
где Zo. *• — общее число сосредоточенных масс и соединений в каждой части ди-
намической схемы системы соответственно; Ьы, Ьт1 — коэффициенты демпфиро-
вания на массах и в соединениях соответственно; и>, — относительная амплитуда
колебаний А-й массы; Л11П) амплитуда момента сил упругости в /и м соедине-
нии; /*, ет— момент инерции А-й массы и податливость m-го соединения соот-
ветственно.
Максимальные значения моментов сил упругости при затухаю-
щем переходном процессе для участков ведущей и ведомой частей
системы определяются соответственно по формулам
= (6.11)
— ^ГФ^ГфМкр/т’Е* , (6.12)
где е — 1 — для соединений в основной силовой цепи ведущей части МТУ (меж-
ду коленчатым валом и ведущей частью главного фрикциона); е-0 —для соеди-
нений в ответвлениях от основной силовой цепи в ведущей части МТУ; в — Ыд~~
для участков коленчатого вала двигателя (b — 1, 2,..., q — 1 — номер криво-
шипа) ; е* — 1 — для соединений, принадлежащих к некольцевой части основной
силовой цепи ведомой части МТУ; е* — 1/2 — для соединений, принадлежащих
к кольцевой части; е* — 0 — для соединений, принадлежащих к ответвлениям от
основной силовой цепи ведомой части МТУ; — сумма моментов инерции со-
*>т
средоточенных масс за m-м соединением.
При неустойчивом переходном процессе с собственной /й фор-
мой колебаний к приведенным значениям моментов сил упругости
добавляется величина определяемая по формуле
Л1М - 0.4;ГФ?гфМГфЯ,„ X
х(—***•;-' (6.13)
\ ₽ Я , _е ГФ*тр₽ГФи I
\ *ГфРГФг« е '
по
начальная угловая скорость буксования главного фрикциона: лП1ах максималь-
ная частота вращения коленчатого вала двигателя; /jV, /<v_[ передаточные
отношения на N-R и (N — i)-;i передачах; r0 = 1 Н У, У j — 1 ь
суммарные моменты инерции соответственно ведущей и ведомо ! частей МТУ;
А = Jk
Временной закон изменения упругих моментов в соединениях
ведущей (ведомой) части МТУ при неустойчивом переходном про-
цессе имеет вид
м. (fl = м(Z) - м1т (/) cos a.z. (6.14)
где функция М>Л1(/) является временным законом изменения моментов сил упру-
гости при затухающем переходном процессе.
Для ведущей и ведомой частей системы
(6.15)
м, . (о---_
•"(. r*"’’r*- -5r0W.)Hr,W.
(6.16)
, <ГфЗгФг*> 1
гле ' кГФЯТрМкр Лф^гф,
*гф”гфго е
Закон амплитудной модуляции колебательной составляющей
момента сил упругости в соединении выражается функцией
(О ~ 0,4 'ГФ?| фМКрН/т ехр (— ХГф/?тр®гф. ”
— л«<)Л1 +ЕгФ?гФГ«е-к*,’*г*.(е-‘'_1)]«. (6.17)
Расчетные значения факторов устойчивости системы, приведен-
ной на рис. 6.3, следующие: для ведущей части МТУ £/=49,2; для
ведомой части МТУ (Л=1; (/2=14,5; (/3=9,0.
Переходный процесс в ведущей части МТУ устойчив, а в ведо-
мой неустойчив (с индексом /=2).
Расчетное максимальное значение момента сил упругости в
заднем карданном вале ведущей части МТУ прн буксовании глав-
ного фрикциона составляет 4,5 кНм. Максимально нагруженным
элементом ведомой части МТУ при неустойчивом переходном про-
цессе является передний карданный вал (соединение 2,3 на
рис. 6.3), где момент сил упругости достигает 13,7 кН м
(рис. 6.4).
Рис. 6.4. Временные законы изменения момента сил упругости в переднем кар-
данном вале МТУ при буксовании главного фрикциона:
I — расчетный; 2 экспериментальный; J — (Му + Mj); 4 - /Му ; 5 — (Му — Mj)
Динамическая нагруженность переднего карданного вала при
неустойчивом переходном процессе почти в два раза превышает
расчетный предельный момент, при котором возникает остаточная
деформация трубы вала, изготовленной из стали 20, что приводит
к ее скручиванию.
112
Глава 7 МЕТОДЫ И СРЕДСТВА СНИЖЕНИЯ
ДИНАМИЧЕСКИХ НАГРУЗОК
С целью защиты МТУ от динамических перегрузок применяют
двигатели, которые при полной их динамической уравновешенности
можно было бы разместить в МТО без специальных демпферных
или антивибрационных устройств. При использовании много-
цилиндровых двигателей допустимый уровень динамических нагру-
зок от крутильных колебаний поддерживается варьированием уп-
ругоинерционных параметров системы. При этом стремятся зону
опасных резонансных колебаний сместить в нерабочую область, а
также устранить возможные автоколебательные процессы и сни-
зить динамические нагрузки при переходных режимах работы. Ес-
ли это не удается, применяют специальные корректирующие уст-
ройства (различного типа антивибраторы) или демпферы. Анти-
вибраторы динамически воздействуют на систему без поглощения
энергии, а демпферы существенно влияют на рассеяние энергии
внешних возмущающих моментов на резонансных режимах. Конст-
рукция демпферов весьма разнообразна; общим для них является
наличие между маховиком и ступицей фрикционного или упругого
элемента, т. е. демпферы могут быть чисто фрикционными или уп-
ругофрикционными. Среди фрикционных демпферов наибольшее
распространение получили силиконовые демпферы и фрикционные
муфты.
7.1. ВЫБОР ОПТИМАЛЬНОЙ СХЕМЫ ДВИГАТЕЛЯ
К двигателю как динамической системе предъявляются следую-
щие требования:
полная динамическая уравновешенность по центробежным си-
лам инерции, силам инерции первого и второго порядков и момен-
там этих сил;
равномерность чередования вспышек в цилиндрах;
высокая собственная частота колебаний коленчатого вала.
При равномерном чередовании вспышек фазовые диаграммы
возмущающих моментов симметричны для всех гармоник главных
порядков v, равных 2гц/т; 4гц/т; 6zu/m и т. д., где zn — число
цилиндров; т — тактность двигателя.
В двигателях с гц >8 представляет интерес лишь первая глав-
ная гармоника v = 2za/m, остальные гармоники, имеющие незиа-
113
читальные амплитуды, при анализе могут не учитываться. Таким
образом, в МТУ с таким двигателем возможен лишь один ярко
выраженный резонанс от возмущающих моментов гармоники глав-
ного порядка, который при помощи простых конструктивных ме-
роприятий может быть выведен в зону низших частот вращения
коленчатого вала двигателя. Чем больше гц, тем выше порядок
главной гармоники и тем проще выводится резонанс в нерабочую
зону. С увеличением числа цилиндров уменьшается также модуль
геометрической суммы составляющих суммарного возбудителя
-►
крутильных колебаний |М, aj и главной гармонической состав-
У—I
ляющей возмущающего момента. С возрастанием v амплитуда М,
уменьшается в большей степени, чем возрастание числа цилиндров.
Характерный пример неравгномерного чередования вспышек —
случай, когда коленчатый вал между вспышками в цилиндрах по-
следовательно поворачивается на углы а(1—Л); а(1 4-Л);
а(1 — Л); а(1 + k) и т. д., где а = 180° т/гц; k — коэффициент не-
равномерности чередования вспышек. При равномерном чере-
довании вспышек k = 0. При k 0 могут иметь место гармониче-
ские составляющие возмущающих моментов порядков z^/m; Зги/т ;
5ги/гп и т. д. Особую опасность при этом представляет гармоника
v — za/m.
Приближенные значения суммарных возбудителей для гармо-
ник у> = 2гц/т и V2 = za/m можно определить по следующим
формулам:
= zuMvi cos (180° k);
ЕМ,2=±гиМ,2 8!п(9(ГД). (7Л)
Последовательность чередования вспышек влияет только на воз-
будители гармонических составляющих дробных порядков, что поз-
воляет в некоторых компоновочных схемах с маховиком на носке
коленчатого вала существенно снизить уровень резонансных коле-
баний варьированием последовательности чередования вспышек.
Высокая собственная частота колебаний коленчатого вала дви-
гателя снижает, с одной стороны, нагруженность элементов транс-
миссии в зоне рабочих частот вращения в резонансах, соответст-
вующих низкочастотным формам колебаний от неглавных гармо-
ник, а с другой стороны, выводит за максимальные частоты вра-
щения резонансы, соответствующие моторной форме колебаний от
наиболее сильных гармоник низких порядков (v = 6), что приво-
дит к снижению динамической нагруженности коленчатого вала.
Оптимальным по динамическим критериям многоцилиндровым
двигателем является четырехблочный Х-образный 16-цилиндровый
оппозитный двигатель, выполненный на основе симметричного
114
8-кривошипного коленчатого вала (рис. 7.1). Такой двигатель мо-
жет рассматриваться как сочетание двух V-образных 8-цили>мдро-
вых двигателей, работающих на единый коленчатый вал. Шатуны
одного из них при этом связа-
ны с нечетными кривошипа-
ми коленчатого вала, а шату-
ны другого —с четными. Сим-
метричный вал обеспечивает
динамическую уравновешен-
ность двигателя от сил инерции
первого порядка и центробеж-
ных сил. Х-образная схема
расположения блоков цилинд-
ров приводит к полной урав-
новешенности их по силам и
моментам от сил инерции вто-
рого порядка, так как при лю-
бом угле поворота коленчато-
го вала векторы сил инерции
второго порядка на всех криво-
шипах равны между собой и
расположены в одной плоско-
"-а
Рис. 7.1. Схема оппозитного Х-обра<
кого 16-цилиндрового двиган-, in <
симметричным в-кривошипным колен-
чатым валом:
1—6 — номера крнвошипоп; I IV — номера
блоков
сти, причем векторы на 1, 4, 6 и 7-м кривошипах направлены в
одну сторону, а на 2, 3, 5 и 8-м — в противоположную. При угле
развала блоков а = 45® порядок чередования вспышек равномер-
ный (через 45°):
Ip 2IV, 6llt, 5|р 7|t 8IV, Зр 4IV, 21и, 1н, 6|V, 81Н, 7Н, 41Н, Зн -
Главными гармониками возмущающих моментов, при которых
все восемь векторов совпадают по фазе, являются v — 4 и v = 8
(рис. 7.2). Для двигателя с равномерным порядком чередования
вспышек возбудитель гармоники v = 4 равен нулю. Таким обра-
зом, двигатель имеет лишь одну гармонику со значительным сум-
марным возбудителем . Резонансные колебания от возмущаю-
щих моментов 8-й гармонической составляющей можно вывести в
зону низких частот вращения коленчатого вала двигателя за счет
торсионной связи двигателя и трансмиссии с податливостью е =
= (3...6) МН '-м '.
Для всех дробных гармоник векторы возмущающих моментов
на соседних коленах вала (I и 2, 3 и 4, 5 и 6, 7 и 8) направлены
в противоположные стороны, в результате чего их суммарные воз-
будители при любых реальных формах колебаний близки к нулю.
Поскольку коленчатый вал выполнен на опорах качения и доста-
точно жестким, в зоне рабочих частот вращения возбуждение форм
колебаний от гармонических составляющих порядков v = 2; 6;
10... невозможно.
Моторные формы колебаний могут возбуждаться моментами
целых нечетных гармоник (1,3, 5-й), которые находятся за преде-
115
лами максимальных частот вращения вала двигателя. Практически
могут быть реализованы лишь резонансные колебания от возмуща-
ющих моментов 7-й и 9-й гармоник, но их амплитуды относительно
невелики.
Рис. 7.2. Векторные диаграммы суммарных возмущающих моментов от двух ци-
линдров, работающих на один кривошип:
а —« —4;8; б-»- 1;5;9; в-0,5; 4.5; 8.5; г-»-2,5;6.5; д-»-2;6;10;
t — » - 3; 7; ж — » — 8,5; 7,5; а — » — 1,5; 5.5; 9,5 (остальные обозначения см. па рис. 7.1)
Поэтому указанный двигатель имеет удовлетворительные кру-
тильные динамические свойства и может быть установлен в МТУ
Рис. 7.3. Схемы семейст-
ва оппозитных двигате-
лей:
а — 1в-цилиндровый X-образ-
ный; б — 12-цилиндровый
X образный; в — 8-цнлннд-
ровый двухрядный; г — в ци-
линдровый двухрядный (ос-
тальные обозначения см.
на рис. 7.1)
без специальных
демпфирующих уст-
ройств. По оппозит-
ной схеме с Х-образ-
ным расположением
блоков на 6-крнво-
шипном коленчатом
валу может быть выполнен и 12-цилиндровый двигатель, а так-
же 8- или 6-цилиндровый двигатель, если снять пару противопо-
ложных блоков цилиндров (рис. 7,3).
116
7.2. ВАРЬИРОВАНИЕ УПРУГОИНЕРЦИОННЫХ ПАРАМЕТРОВ
ОСНОВНОЙ СИСТЕМЫ
Известно, что при увеличении (уменьшении) моментов инерци-
онных масс системы без изменения податливости участков силовой
цепи уменьшается (увеличивается) частота свободных колебаний
системы, а при увеличении (уменьшении) податливости участков
валопровода уменьшается (увеличивается) частота свободных ко-
лебаний при постоянных значениях моментов инерции.
Частота каждой формы свободных колебаний многомассовой
системы определяется главным образом теми массами и соедине-
ниями, которые имеют при этой форме наибольшие амплитуды.
Варьирование массами, расположенными вблизи узловых точек и
имеющими поэтому небольшие амплитуды свободных колебаний,
а также соединениями с пологими участками формы свободных ко-
лебаний, малоэффективно. При варьировании может оказаться,
что удаление какого-либо опасного резонанса из рабочего диапазо-
на одновременно перемешает туда резонансы с другими собствен-
ными частотами колебаний, которые могут стать опасными.
В МТУ танков можно, как правило, изменять параметры толь-
ко отдельных элементов между двигателем и трансмиссией: мо-
менты инерции маховика двигателя, податливость соединения дви-
гателя с трансмиссией, а также параметры входного редуктора, об-
ладающего в целом существенной податливостью.
При установке на носок коленчатого вала двигателя какой-либо
массы с моментом инерции, значительно большим момента инерции
приведенных масс кривошип-
но-шатунных механизмов, кру-
тильные колебания моторной
формы в основном локализу-
ются в пределах коленчатого
вала. В двигателях типа В-2
при любом значении момента
инерции маховой массы глав-
ные резонансные колебания от
возмущающих моментов шес-
того порядка будут иметь мес-
то в зоне рабочих частот вра-
щения вала. При этом напря-
жения от таких колебаний в
коленчатом вале превышают
допустимые (рис. 7.4). При
сравнительно небольшом зна-
чении момента инерции махо-
вика уровень вынужденных крутильных колебаний в трансмиссии
при моторных формах заметно возрастает.
О 'ПО BOU 1200 П00 n.mf/Mun
Рнс. 7.4. Напряжения от вынужден-
ных крутильных колебаний на седь-
мой коренной шейке коленчатого ва-
ла двигателя В-2 в танке ИС-3
117
Прн нежестком соединении двигателя с маховой массой (танки
Т-10, Т-55, Т-62, Т-72 и др.) значительно повышается частота коле-
баний моторной формы, что позволяет вывести опасные для дви-
гателя резонансные колебания за максимальные значения частоты
вращения коленчатого вала. Главные резонансные колебания низ-
кочастотной формы при соответствующем подборе податливости
можно сместить в золу низших частот вращения коленчатого вала
двигателя (рис. 7.5). t
Рис. 7.5. Напряжения от вынужденных крутильных колебаний на седьмой корен-
ной шейке коленчатого вала двигателя В 2 в танке Т-55 в различных режимах
работы:
Z — пуск двигателя; 2 — заглохание двигателя при чрезмерной нагрузке; 3 - плавное новы
шенне частоты вращения вала двигателя на высшей передаче
Ослабить опасные резонансные режимы иногда можно, исполь-
зуя взаимодействие двух соседних форм свободных колебаний с
близкими частотами. Наложение друг па друга колебаний с суще-
ственно несовпадающими фазами делает резонанс неустойчивым.
7.3. АНТИВИБРАЦИОННЫЕ УСТРОЙСТВА
Простейший антивнбратор—маховая масса, присоединенная па-
раллельно основной цепи с помощью упругой связи; в пределах огра-
ничителен деформации упругих элементов характеристика такого
118
антивибратора линейна (рис. 7.6), что позволяет при расчете заме-
нить момент инерции (/,) массы, к которой присоединен аитивиб-
ратор, эквивалентным моментом инерции
/» = J, + /а<о’/(<«2 - SJ) ,
где /«— момент инерции антивибратора; ш, — его парциальная собственная ча-
стота; О, —частота настройки.
Рис 7.6. Схема (а) и характеристи-
ка (б) пружинного антивнбратора:
/ — маховая масса; 2 — пружина; 3 — сту-
пица; /|—ход ограничителей до упорй;
fi “ /i/Л
Зона частот, в которой по-
давляется резонанс с помощью
антивнбратора, определяется
его моментом инерции, соотно-
шением частот о*а и Q«, а так-
же местом присоединения анти-
внбратора к основной силовой
цепи. Наибольший эффект достигается, если антивибратор под-
соединяется к массе с наибольшей относительной ампли
тудой той собственной формы колебаний, на частоту которой он
настраивается. Резонансные режимы на других частотах смеща-
ются: для всех Q* < Qs (k = 1, 2,.... s— 1) —в сторону умень-
шения, а для всех Q/ > (/ = 5 -|- 1, s 2,..., п — 1) — в сторону
увеличения частот.
Пружины антивнбратора устанавливаются обычно с предвари
тельным натягом; можно использовать также резиновые упругие
элементы. В обоих случаях характеристика антивибратора стано-
вится нелинейной.
Маятниковый антивибратор. Действие маятникового антивибра-
тора основано на принципе следящей настройки собственной час-
тоты о)а по частоте вращения валопровода ю:
«>, = ш У R}1,
где R— расстояние от оси вращения до точки подвеса маятника, I — длина
маятника; ш = <»Jv; <*>„ — частота гармонической составляющей момента, при-
ложенного к массам системы.
Если подобрать R и I так, чтобы v = У R/1, то частота колеба-
ний маятника ша во всем диапазоне частоты вращения вала будет
совпадать с частотой возмущающего момента , т. е. маятник
будет настроен на v-й порядок. Если при (настройке подавляется
119
резонанс v2-ro порядка, то резонанс vi-ro порядка сдвигается впра-
во, a va-ro — влево (рис. 7.7).
Рис .7.7. Амплитуды крутильных колеба-
ний:
а — без антивибратора; б —с маятниковым
антивнбратором
Маятник эквивалентен махо-
вику с моментом инерции (при
малых колебаниях)
, «(/? + /)’ m (/? + /)’
" 1+ (->.)» !-(*/*м)» ’
(7-2)
где т— масса маятника.
Из равенства (7.2) видно, что
эквивалентный момент инерции
Л зависит от настройки маятни-
ка и от частоты возмущения.
При острой настройке (vM = v)
перемещение системы в месте ус-
тановки маятника равно нулю, и
он становится эквивалентным маховику с моментом инерции
Л » оо. При верхней настройке (v* > v) маятник эквивалентен
маховику с большим положительным моментом инерции, а при
нижней настройке (vM <v) — маховику с большим отрицательным
моментом инерции, что позволяет повысить собственную частоту
Рис. 7.8. Маятниковые антивибраторы с бифилярным подвесом (/) на щеках (2)
коленчатого вала двигателя В-2
Наибольшее распространение получил маятниковый антивибра-
тор с бифилярным подвесом (рис. 7.8). Такой антивибратор обла-
120
даст нс только динамическим, ио и демпфирующим эффектом,
обусловленным трением, возникающим при протекании масла че-
рез зазоры между торцевыми поверхностями маятника и ступицы,
качением пальца по поверхности отверстий в маятнике и ступице,
ударах в ограничители. Диссипация энергии в маятниковом анти-
вибраторе уменьшает резонансные колебания в основной силовой
цепи. Этот эффект может быть усилен за счет развития поверхно-
сти трения и использования более вязкого масла, для чего анти-
вибратор помещается в специальный кожух. Эти мероприятия поз-
воляют увеличить трение приблизительно в два раза.
Для устранения резонансных колебаний различных порядков
к системе присоединяется несколько маятниковых масс, каждая из
которых настраивается на соответствующий порядок колебаний.
Маятниковые антивибраторы имеют следующие недостатки,
ограничивающие их применение в силовых установках транспорт-
ных машин:
необходимость высокой точности изготовления деталей антивиб-
ратора при повышенной износостойкости пальцев и опорных по-
верхностей;
невозможность настройки на низкие порядки колебаний
(%<3);
снижение эффективности в переходных режимах работы сило-
вых установок.
Для двигателя В-2 с главным фрикционом на носке коленчатого
вала (см. рис. 1.4) снижение нагрузок от крутильных колебании
до допустимого уровня обеспечивается постановкой на щеки колен-
чатого вала девяти маятниковых масс с настройкой трех маятни-
ков на 6-й порядок колебаний, трех—на 4-й и 5-й, двух — на 3-й
и 5-й и одного — на 3-й. При этом остаются резонансные колеба-
ния от возмущающих моментов 2, 5-го порядка в области макси-
мальных частот вращения коленчатого вала двигателя (рис. 7.9),
устранить которые практически невозможно.
Рис. 7.9. Напряжения от вынужденных крутильных колебаний на седьмой корен-
ной шейке коленчатого вала двигателя В-2 с 9-маятннковым антивнбратором
в танке ИС-3:
/ — на VIII передаче; 2 — на нейтрали
121
7.4. ДЕМПФИРУЮЩИЕ УСТРОЙСТВА
Упругофрикционный демпфер оказывает <на систему динамиче-
ское воздействие за счет упругоинерционных параметров демпфера
и демпфирующее воздействие за счет трения во фрикционных эле-
ментах. Максимально динамическое воздействие проявляется при
размещении демпфера между двигателем и трансмиссией, а демп-
фирующее—при размещении в местах с наибольшей амплитудой
колебаний. При соответствующем выборе демпфера опасные резо-
нансные колебания моторной формы можно сместить за макси-
мальные частоты вращения коленчатого вала двигателя, а формы
с узлом в демпфере — в нерабочую зону.
Рис. 7.10. Характеристика (а), конструктивная схема (б) упругофрнкциониого
демпфера (УФД) и напряжения в коленчатом вале двигателя В-2 с различными
конструкциями УФД на носке (в):
I — замкнутый демпфер с Jr + “ 2 кгм’: 2 — замкнутый демпфер с Jf + J - I кг-м’;
J — конструкция Курганского завода с Jf = 1.5 кг-м’, Vf+|—0,5 кг-м*, ,М0— 2200 Нм. .Иф —
— 600 Н-м, .М, — 3800 Н-м, г, — 0.036 рад: 4 — конструкция Ворошиловграде кого завода с
Jf - 0,16 кгм», 7^-0,84 кгм1. Л4.- 1000 Н-м, .Мфр-850 Н-м, .И, - 9000 Н-м.р.-О.Об рад;
5 — конструкция Минского автозавода с Jf — 0,75 кгм’, Jf+l - 0,44 кгм’, .И, — 1400 Н м.
Л4фр — 600 Н м , -И, — З.тОО Н-м, р, — 0,03 рад ; 6 — конструкция завода «Звезда» с Jf —
-0.5 кг-м‘, 7<+| - 12 кгм’, ЛГ, — 2300 Н-м, ЛГ, - 4600 Н-м. р, - 0.01Я рад
122
Обе части демпфера — ведущая (г) и ведомая (r-f- 1) — колеб-
лются вместе, пока суммарный реактивный момент не превышает
момент трения фрикциона. Оптимальное значение момента трения
в демпфере
J2,j
Л1фр. опт = 0,394-^-------1—,
где ~ Jr*+| = — //ЗД/ю*; Wj**» ^(*+1)—динамическая жесткость
ведущих и ведомых частей системы при надломе на местах г и г-f- 1.
Обычно выбирают момент трения во фрикционных элементах
Мфр - (0,15... 0,35)/Ити,
где Мт1Ж — максимальный крутящий момент двигателя.
Установка упругофрикционного демпфера в двигателе В-2 сни-
жает резонансные колебания коленчатого вала только при относи-
тельно небольшом значении момента инерции ведущей части
(рис. 7.10).
Установка пружинной муфты в главный фрикцион танка Т-34
приводит к смещению главных резонансных колебаний моторной
формы от возмущающих моментов шестого порядка за максималь-
ные частоты вращения вала двигателя, а низкочастотной формы
колебаний (с узлом в упругой муфте
главного фрикциона) — в зону пуско-
вых частот вращения. При этом в рабо-
чей зоне частот динамическая нагру-
жснность коленчатого вала от вынуж-
денных крутильных колебаний стано-
вится значительно ниже допустимой.
Наибольшее применение в послед-
нее время находят демпферы вязкого
трения и в первую очередь силиконо-
вый демпфер (рис. 7.11). Вязкость си-
ликоновой жидкости, заполняющей
полость между маховиком и ступицей,
мало зависит от температуры. Если
двигатель, а вместе с ним и ступица
Рис. 7.11. Силиконовый демпфер на хвостови-
ке коленчатого вала двигателя В-2:
1 — махэвнк; 2 — силиконовая жидкость; 3 — ступица
демпфера совершают равномерное вращение, то маховик демпфера
увлекается жидкостью и вращается вместе со ступицей. Если же
ступица совершает крутильные колебания, то движение маховика
зависит от трения между маховиком и ступицей.
123
Для получения наибольшего эффекта демпфирования колебаний
практикуется установка демпфера через податливую связь с одной
из r-х масс основной системы.
При жестком креплении эффективность демпфера определяется
тремя параметрами: моментом инерции массы со ступицей
(Л + Лт), моментом инерции маховика /м, трением силиконовой
жидкости; при нежестком — четырьмя параметрами: моментом
инерции ступицы, моментом инерции маховика, трением и подат-
ливостью соединения ступицы демпфера с r-й массой системы.
В системе с демпфером имеются неуправляемые инвариантные
частоты £2', не зависящие от параметров демпфера, и управляемые
инвариантные частоты £2", зависящие от параметров демпфера.
Амплитудно-частотная характеристика системы всегда проходит
через все точки с управляемыми и неуправляемыми инвариантными
координатами (£2', £2", А,). Если все амплитуды, соответствующие
инвариантным частотам, ниже допустимых, то выбирают ту часто-
ту, которой соответствует наибольшая амплитуда, и трение в демп-
фере должно обеспечить оптимальное затухание именно на этой
частоте. Если на какой-либо из управляемых инвариантных частот
амплитуда колебаний А, превышает допустимую, следует изменить
Рис. 7.12. Амплитуды вынужденных
колебаний хвостовика коленчатого
вала двигателя В-2:
/ — без демпфера; 3 — с демпфером
Рнс. 7.13. Моменты сил упругости от
вынужденных крутильных колебаний
в шлицевых муфтах 10-цилиндрового
двигателя ДТН-10:
/ — без ударного демпфера; 3—с ударным
демпфером
параметры демпфера. В случае превышения допустимой амплиту-
ды колебаний r-й массы на какой-либо из неуправляемых инвари-
антных частот необходимо изменить место подсоединения демп-
фера.
124
При правильном выборе параметров силиконовый демпфер явля-
ется эффективным средством борьбы с опасными резонансными
крутильными колебаниями. Так, например, установка его на хвос-
товик коленчатого вала двигателя В-2 приводит к снижению ампли-
туды главных резонансных колебаний приблизительно в два раза
(рис. 7.12).
Среди демпфирующих устройств особое место занимают так на-
зываемые демпферы ударного действия, в которых свободная удар-
ная масса размещается на колеблющейся детали основной силовой
цепи без дополнительных с ней связей. При достаточно больших
колебаниях эта масса приходит в виброударное взаимодействие
с колеблющейся массой системы. При этом часть энергии колебаний
тела переходит в кинетическую энергию движения свободной удар-
ной массы, а другая часть затрачивается на совершение не вполне
упругих ударов. Вследствие этого энергия колебаний тела стано-
вится меньше и снижает уровень колебаний (рис. 7.13). Колеба-
тельная система с виброударным механизмом является существен-
но нелинейной.
Основными параметрами, влияющими на эффективность рабо-
ты демпфера, являются масса (момент инерции) свободного тела,
зазор и место установки. При оптимальных значениях указанных
параметров виброударный процесс устойчив (с двумя противофаз-
ными ударами за период колебания детали) в широком диапазоне
частот. Наибольшая эффективность демпфирования достигается
при установке демпфера в то место, где амплитуда колебаний мак-
симальная.
125
Глава 8 НАГРУЗОЧНО-СКОРОСТНЫЕ СПЕКТРЫ
ДИНАМИЧЕСКИХ ПРОЦЕССОВ В МТУ
8.1. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Динамические нагрузки являются одной из причин усталостного
разрушения отдельных деталей моторно-трансмиссионной уста-
новки.
Основными путями повышения надежности элементов, участву-
ющих в передаче мощности от двигателя к ведущим колесам ВГМ,
являются повышение их несущей способности, а также изменение
структуры силовой цепи или условий функционирования передачи,
обуславливающие снижение динамических нагрузок. Различают
рабочие нагрузки, воспринимаемые элементами МТУ как сопротив-
ления в процессе эксплуатации, и дополнительные, определяемые
динамическими процессами и локальной концентрацией нагрузок.
По характеру изменения во времени и по направлению дейст-
вия различают нагрузки постоянные — знакопостоянные и знакопе-
ременные; переменные — апериодические и циклические (колеба-
тельные) явно выраженного периодического характера;
при этом переменные нагрузки могут включать постоянную состав-
ляющую. а колебательная нагрузка, в свою очередь, может быть
моногармонической и полигармонической.
Постоянной можно считать нагрузку, изменением которой за
цикл нагружения элемента допускается пренебрегать (например,
для быстроходных зубчатых передач, подшипников и валов посто-
янной нагрузкой является крутящий момент, передаваемый от дви-
гателя на заданном режиме работы; сопротивление движению,
преодолеваемое на заданной скорости ВГМ и др.). Переменной на-
грузкой будем считать такую, изменение которой за цикл нагруже-
ния определяется параметрами динамического процесса (макси-
мальным и минимальным значениями нагрузок, частотой колебаний,
временем действия), например, момент сил упругости от крутиль-
ных колебаний, реакцию связей, ударное взаимодействие и др. Для
зубчатых передач, подшипников и дисков трения необходимо знать
нагрузки, действующие не только на сам элемент, но и па его
часть, непосредственно воспринимающую усилия, т. е. зуб колеса
или диска, кольцо подшипника и др.
126
Нагрузочные режимы существенно зависят от схемы включения
элемента и от характера его соединения с источником возмущаю-
щих воздействий, а повреждение деталей определяется напряже-
ниями в опасных местах, поэтому для каждого элемента необходи-
мо знать правила (формулы) перехода от нагрузки к действующим
напряжениям, что является одним из сложных вопросов теории
упругости и динамики механических устройств.
Цикл изменения динамической нагрузки (напряжения) харак-
теризуется максимальным Smax и минимальным Snitn или средним
S и амплитудным 5а_значениямн. Введение коэффициента асиммет-
рии r = 5min/Smax = (S — 5,)/(^4-5а) позволяет записать следующие
соотношения между параметрами цикла:
Число циклов нагружения в периодических процессах с одной
гармонической составляющей для валов и дисков трения определя-
ется частотой колебаний, а для зубчатых колес и подшипников —
частотой их вращения. Для периодических полигармонических про-
цессов число циклов нагружения зависит от соотношения между
отдельными составляющими нагрузки и от частоты вращения эле-
ментов. Для стационарных узкополосных случайных процессов ос-
новным параметром напряжения обычно является Smax условного
цикла, а для широкополосных случайных процессов выбор парамет-
ров зависит от принимаемых способов схематизации динамического
процесса.
Схематизация динамического процесса заключается в пред-
ставлении его в удобной для последующего анализа форме с со-
хранением информации о реальных параметрах и эквивалентности
определяемых ими и вносимых усталостных повреждений. Реаль-
ный случайный процесс заменяется эквивалентным ему узкополос-
ным с учетом физической природы повреждения, характера дейст-
вующих нагрузок и закономерностей формирования напряженного
состояния каждого элемента. Существуют следующие методы схе-
матизации: выбросов (число циклов равно среднему числу нулей
-нормированного процесса), максимумов (число циклов равно сред-
нему числу максимумов), размахов (число циклов равно половине
числа всех учитываемых приращений между соседними экстре-
мумами), полных циклов (число циклов равмо сумме всех проме-
жуточных и укрупненных размахов в порядке их возрастания),
а также двухпараметрические (число циклов равно всей совокуп-
ности учитываемых пар максимумов и минимумов, систематизируе-
мых в корреляционные таблицы) и методы, основанные на теории
случайных процессов.
Поскольку реальный динамический процесс нагружения в боль-
шинстве случаев характеризуется случайным чередованием различ-
ных амплитуд, при схематизации принимаются определенные допу-
127
щения, на которых основываются выделение законченных циклов
и обеспечение эквивалентности схематизированного режима реаль-
ному.
Так, повреждающее действие одинаковых циклов (полуциклов)
принимается равным и не зависящим от порядка их чередования и
перерывов в нагружении, поэтому такие циклы могут быть упоря-
дочены в любой последовательности.
В области упругих деформаций характер изменения нагрузки
между смежными экстремумами не должен оказывать влияния на
усталостную прочность материала детали, т. е. в этом случае мож-
но пренебречь влиянием формы цикла; влияние частоты измене-
ния нагрузки и скорости деформирования (до /<300 Гц) на несу-
щую способность детали получается несущественным. Накопление
повреждений в основном определяется действием напряжений, пре-
вышающих предел выносливости материала; эквивалентное преоб-
разование параметров нагружения должно основываться на пре-
дельных характеристиках несущей способности деталей.
В расчетах деталей моторно-трансмиссионной установки и хо-
довой части на прочность и долговечность используются статисти-
ческие данные о распределении характерных параметров циклов на-
гружения (Smax. Smin ИЛИ S, ) И ЧИСЛе ЭТИХ ЦИКЛОВ В НСКОТОрЫХ
вполне конкретных условиях, а также данные о вероятности про-
явления этих условий в течение всего периода предполагаемой
эксплуатации. Совокупность упорядоченных по значению парамет-
ров нагружения с учетом частоты их появления в процессе называ-
ется нагрузочным спектром, или спектром нагружения. Упорядочен-
ная совокупность спектров по всем возможным условиям эксплуа-
тации с учетом вероятности их проявления составляет полный (сум-
марный) спектр нагружения данного элемента. В общем случае
спектры нагружения являются двухпараметрическими и должны
описываться совместной функцией распределения вероятностей
двух параметров (5т„, 5ш1п или S, Sa). С другой стороны, несу-
щая способность детали описывается однопараметрической зави-
симостью для определенного значения коэффициента асимметрии.
Поэтому исходные спектры целесообразно преобразовывать к од-
нопараметрическим с соблюдением обязательного условия — со-
хранить в преобразованном спектре информацию о повреждающем
воздействии, одинаковом для реального и эквивалентного процес-
сов нагружения.
8.2. ОСНОВЫ СХЕМАТИЗАЦИИ ДИНАМИЧЕСКОГО ПРОЦЕССА
С АСИММЕТРИЧНЫМ ЦИКЛОМ НАГРУЖЕНИЯ
Спектры нагружения элементов МТУ являются исходными дан-
ными для расчетов деталей трансмиссии на долговечность (см. т.5,
гл. 8), когда необходим учет реально действующих динамических
процессов, связанных с крутильными колебаниями в установив-
шихся и переходных режимах работы. Эти спектры позволяют уточ-
128
нить напряженное состояние деталей, испытывающих воздействие
динамических нагрузок.
Сущность преобразований заключается в том, что параметры
нагрузки 5, и Smax циклов с различными коэффициентами асим-
метрии заменяются эквивалентными им по оказываемому повреж-
дающему воздействию и Smax» циклов нагружения с оди-
наковым коэффициентом асимметрии, например, все циклы при-
водятся к симметричным (r = —1) или пульсирующим (г = 0).
Характеристики сопротивления усталости могут быть представ-
лены в виде диаграмм предельных нагрузок (рис. 8.1), построенных
Рис. 8.1. Диаграммы предельных максимальных (а) и амплитудных (б) значе-
ний нагрузки деталей при различных ее средних значениях S в цикле
по результатам усталостных испытаний серий образцов или дета-
лей прн различных сочетаниях Smax и Smin. В одних сериях при
этом выдерживается S = const и меняется амплитуда Sa, в других
сохраняется г = Sinln/Sroax = const и меняются S, и S для каждого
из сочетаний и 5m(n. Предельными считаются те наибольшие
значения Smax г и Sar, которые при заданном значении S или г не
вызывают разрушения детали в продолжение No циклов, выбран-
ных в качестве базы испытаний (для легированных сталей прини-
мают No « 107 циклов). Кривые, приведенные <на рис. 8.1, имеют
три характерные точки: А — симметричный цикл (Sa — Smax =
= — ^nnn = 5-i 5 r — ~ О 5 — пульсирующий цикл (Sa =S =
= 0,5= O,5So; S'min - 0; r = 0); D — нагрузка, разрушающая
деталь при однократном приложении (S, = 0; S — 9тах = S,nln = Sb\
r= !)•
Ниже кривых ABCD разрушения в пределах базового числа
циклов N0fHe происходит. Нагрузки, лежащие на любом луче, исхо-
дящем из точки О, например ОС, имеют постоянный коэффициент
асимметрии. Кривая предельных амплитуд нагрузок Sa, в каждом
из диапазонов изменения 0<Sr^So/2 и 50/2С5г^5<, может быть
линеаризована с достаточной для инженерных расчетов точностью.
9 Зак. 20с
129
Если известны экспериментальные данные для каких-либо двух то-
чек Si и S2 каждого участка кривой ABCD, то можно_ определить
предельную амплитуду для любой средней нагрузки S, воспользо-
вавшись уравнением прямой Sar — [(Slrt52 — Si/.2S|) — (Sar2 —
-S.ri)3r]/(32-St). Так какЗ,= }4^$аг, то можно получить зави-
симость S,, от г:
$ ______________(Sirica — (1 — г)_________<8 п
л'~ (Sj-Si-S.rj + S,,,)-(Sj-S. + S.rj-S.,,)!-’ ' ' '
Если в качестве исходных экспериментальных точек использу-
ются характерные точки симметричного и пульсирующего циклов,
то с учетом введенной академиком С. В. Серенсеном чувствитель-
ности материала к асимметрии Чг$ — ——1 получим для участ-
ка АВ (—1<г<0)
'= (I + i'j) -го’- *s) ’ (8'2)
а для участка BD (0^ 1). обозначив 4*$ = S0/(2Se» — So),
(1 + 4\)(1 -r).Sn/2
(1 + 4^) - г (I +Vj) ’
(8-3)
Аналогично
c 2 jS} — Sma«r»$i) /а дх
откуда для участка AB (—1 < г < 0)
(8-5)
и для участка BD 1)
(8.6)
Кроме предельных характеристик несущей способности элемен-
тов в расчетах используют уравнение кривой усталости для г =
= const в виде
$."Х, (8.7)
где S, и N— соответственно амплитуда н число циклов изменения нагрузки S,
приводящие деталь к разрушению; т— показатель степени кривой усталости.
При нагружении детали на различных уровнях Sa/ (с числом
циклов п, < Ni) в соответствии с основным допущением теории рас-
четов на усталость принимается, что на каждом t-м уровне деталь
накапливает относительную долю повреждения, равную ni/Ni, где
130
Ni определяется по кривой усталости. Согласно гипотезе линейного
суммирования усталостных повреждений Пальмгрена—Майера
накопленная сумма D относительных повреждений для данного
спектра нагрузок, состоящего из z отдельных блоков с определен-
ной асимметрией циклов, определяется по формуле
D = 2 (8.8)
/-1
Если в эту формулу подставить выражение Ni из (8.7), считая
= то
D = Kz2(3i;)”«r <8-9)
Если амплитуда S, изменяется непрерывно с плотностью рас-
пределения p(Sa ) при суммарном числе циклов в спектре М, то
формулу (8.9) можно записать в интегральной форме:
N St mix
° = (£)”/’(8I0>
5amin
где S, min, S. пи — минимальное и максимальное значения амплитуды в спектре.
Из формул (8.9) и (8.10) следует, что накопление повреждений
зависит не от самой амплитуды Sa, а от ее отношения к предель-
ной амплитуде Sar в степени т и закона распределения амплитуд
в спектре. Это позволяет заменять исходный спектр 4-х нагрузок
с различной асимметрией циклов (г, = var) эквивалентным спект-
ром с выбранным коэффициентом асимметрии г* при соблюдении
следующих условий:
= ^а.е/^ar* = COOSt', ^tnaxl/^naxrl = '^maxa/’^maxr* = COHSt, (8.11)
где S. i, Хи,»/ —текущие амплитудные и максимальные нагрузки в исходном
спектре для i-ro цикла; S, ri, 5mtM ri, Str,, Smaxr»—предельные амплитудные и
максимальные нагрузки, приводящие деталь к разрушению через No циклов при
rt и г*, S, „ Smix»— амплитудные и максимальные нагрузки эквивалентного
спектра с г*, оказывающие такое же повреждающее воздействие, как и нагрузка
исходного спектра.
Таким образом, формулы преобразования нагрузок любого
спектра в эквивалентные нагрузки спектра с постоянным г* имеют
следующий вид:
для участка ЛВ (— 1 <г<0; >1г5-=
с (l-r*)H-G(l-Ts)/(l+v$)i с (
-(1+ = (8.12)
9*
131
l-n(l-Vs)/(l + Vs) . /
°"И» e । —/* (i — чг5)/(| + vs) °«'• -o V
o 2n
(l+n)(l + Vs)
1 + *'s Г')$т«/ -
(8.13)
для участка BD (0<г<1, Vs— 2*у~
Sa_.
(1 - П) и — r*(l — Ч<)/(1 4 Vs)| 5>1I - I + Sl-rjx
(8.14)
l-r/(l-*s)/(H-*\) c .
i_r*u-nr^/d + q^)
-s 2r‘(1
(8.15)
Точность замены нагрузок исходного спектра эквивалентными
определяется величинами Vs и Vs , характеризующими чувстви-
тельность предельных нагрузок к асимметрии цикла.
Одномерные методы схематизации динамических процессов
(эктремумов, размахов, полных циклов и их модификаций) не учи-
тывают средние значения нагрузки в цикле. Наибольшее соответ-
ствие по повреждающему воздействию между схематизированным
и реальным случайными процессами получается при двухмерных
методах схематизации. Среди них заслуживает внимания метод
полных циклов с использованием корреляционной таблицы. По
этому методу из процесса вначале выделяются циклы с наимень-
шими размахами и для них фиксируются среднее значение Si и
размах 2Sa1 либо максимальное SmaX| и минимальное Smint значе-
ния. Далее процедура повторяется для все больших размахов; за-
писываются соответствующие параметры S3 и 2Sa3 или Smlx2 и Smin2
и так далее вплоть до наибольших циклов. Данные заносятся в
треугольную таблицу: слева направо располагаются максималь-
ные значения Smax, сверху вниз — минимальные значения Sfflln.
В пересечениях столбцов и строк помещают значения частости nt
встречаемости в процессе циклов с i-м сочетанием экстремумов
Smaxl/Smtnr По таблице определяется суммарное число циклов в / м
процессе = Y.nt, а также частные распределения при
суммировании частости по столбцам, P/(Smln) — при суммировании
частости по строкам, P,(2Sa)—по диагоналям слева вниз и на-
право и РД5) — по диагоналям справа вниз и налево (здесь Р( =
По данным таблицы_можно определить плотность распре-
деления p(Smax, Smln) или p(Sa, S), а также ее можно использо-
вать для преобразования исходного спектра в эквивалентный с за-
данным коэффициентом асимметрии г* по формулам (8.12) —(8.15).
132
Если для k различных /-х реализаций одного и того же процесса
с суммарным числом циклов N/ построить соответствующие кор-
реляционные таблицы, то в принципе должны получиться одни и те
же распределения. Однако из-за неучтенных случайных факторов
параметры распределения (средняя амплитуда SaJ и ее средне-
квадратичное отклонение StJ) для различных выборок различны.
В случае статистической достовср'ности выборок можно определить
для всей генеральной совокупности среднее значение амплитуды
нагрузки, ее среднеквадратичное отклонение и коэффициент вариа-
ции; при этом полное суммарное число циклов =
8.3. ПРИНЦИПЫ И ЗАДАЧИ СПЕКТРАЛЬНОГО АНАЛИЗА
динамической нагруженности ДЕТАЛЕЙ МТУ
Прочность элементов конструкций можно оценивать, сопостав-
ляя возникающие в них усилия с теми, которые приводят эти эле-
менты в предельное состояние. Предельному состоянию соответст-
вуют предельные усилия, моменты, числа циклов и время, которые
характеризуют несущую способность детали.
Однократные пиковые нагрузки сопоставляются с предель-
ной для детали статической или динамической несущей способ-
ностью S„.£ и оцениваются коэффициентом запаса по пределу проч-
ности nnp=-SM.c/5niax• В основе детерминистических методов расчета
на усталость при регулярном переменном нагружении лежит фор-
мула академика С. В. Соренсена ns = S_il(SaKll + , где Кл —
коэффициент концентрации напряжений в опасном месте детали.
Условие прочности выполняется, если ns не ниже допустимого
для данного типа механической системы значения [п$] =
= 1,5. ..2,5, которое выбирается по результатам анализа отказов
в реальных условиях эксплуатации.
При нерегулярном характере нагружения, когда амплитуды
или средние значения напрузок изменяются случайно, условие
прочности записывается в виде
D^A^-=-------------=
•Jatnax ^amln 'Jatnax ^amln / ^amax
(8.16)
где A—скорректированное значение суммы относительных наработок, отража-
ющее состав спектра нагруженности, нелинейности при суммировании повреж-
дений, влияние на повреждаемость детали амплитуд ниже S-i, а также влияние
рассеяния наработок и их средних значений; S. т1Х — максимальная амплиту-
да в спектре; S. тщ — минимальная амплитуда в спектре, выше которой нагрузка
оказывает повреждающее действие (S. пип — А»5» „ 0<К»< I—постоянное число,
определяющее нижнюю границу повреждающих нагрузок по опытным данным
и обычно равное 0,5. ..0,7).
Сумма относительных значений характеризует полно-
ту спектра и определяет степень снижения величины А в завнеи-
133
мости от наполнения спектра нагрузками различного уровня, при
этом для £ = 1 спектр соответствует регулярному нагружению
с постоянной амплитудой Sal = Samai. Если амплитуды нагрузок в
спектре изменяются непрерывно, то величина, характеризующая
полноту спектра, может быть выражена в интегральной форме с
учетом нормирования:
$ s
a max a max
^imln ^amln
Формулу (8.16) можно использовать при условии, что
S.m.x/o., > • Аля спектров, у которых А>0,1, в противном случае
необходимо полагать А = 0,1. Из условия D = А можно определить
ресурс детали, выраженный числом циклов нагружения. Вероятно-
стные методы расчетов на прочность позволяют определять функ-
цию распределения ресурса детали, выражающую связь между
ресурсом и вероятностью разрушения. Эта функция является ха-
рактеристикой надежности (долговечности) детали и необходима
для определения среднего и у %-ного ресурса, обоснования норма-
тивных коэффициентов запаса и др.
Если предельная несущая способность детали Sar является слу-
чайной величиной, распрсделонной по нормальному закону (среднее
значение Sar, среднеквадратичное значение коэффициент
вариации Vs яSstr/Sar)t а нагрузка задана парами чисел St/
и Pi (при этом известны также Simix, V$, и суммарное число цик-
лов в спектре Ni), то условие прочности можно записать в виде
S IS
*г-—>n's, где ns — относительный коэффициент запаса. Ве-
max/^amu
роятность разрушения при этом определяется по квантилю нор-
мального распределения, отвечающего вероятности разрушения Р:
uP=(\-ns)i |/Wi/jir+ Vj.
Более доступна прн переменном характере нагружения сравни-
тельная оценка долговечности, основанная на анализе реальных
спектров нагружения с учетом их статического характера и основ-
ных параметров, характеризующих несущую способность деталей.
При этом принимается допущение о равенстве накопленных пов-
реждений в детали на определенной стадии эксплуатации с учетом
соответствующих каждому оцениваемому случаю скорректирован-
ных значений сумм относительных наработок А\ и Л2:
DtMi = D2M2. (8.17)
На основе этого равенства можно оценить эффективность меро-
приятий по повышению несущей способности отдельных элементов
конструкции, сопоставляя накопленные повреждения при одинако-
134
вых спектрах нагружения Pi(St)~p.,(Sa) = p(Sa). В этом случае
согласно формулам (8.10) и (8.17)
5»тм
#s 2Mn J (S,/Sa г,)т'р (S,) dSa
[Уч .At «
a max Л|
J (S,IStf,)m‘/’(S,)dSe
5atnlni
где индексы «I» и «2> соответствуют исходной и упрочненной деталям (ма-
териалу).
Из выражения (8.18) можно определить, насколько возрастает
ресурс упрочненной детали по сравнению с Wn при заданных
условиях эксплуатации танка.
Не менее важным является расчет изменения ресурса наиболее
нагруженных деталей при изменении условий их эксплуатации
вследствие форсирования мощности двигателя, увеличения массы
машины, изменений в динамической схеме, конструктивно не затра-
гивающих данную деталь. Несущая способность детали остается
той же, а изменяется спектр нагружения. В этом случае согласно
формулам (8.10) и (8.17)
ЛТХ2Г" (S.)mpa(S.)dSt
e------Г*"!»»---------------= -ф- 1 , (8.19)
‘'a max
(S.)"A(S.MS.
^amlni
откуда можно определить изменение ресурса детали ЛГХ2 по срав-
нению с ЛГц вследствие изменения условий нагружения. Для реше-
ния сформулированных ранее задач требуется знание функций
плотности распределения амплитуд p(Sa), являющихся спектрами
нагрузок для элементов МТУ, а также основных параметров несу-
щей способности деталей Sar, т и No.
8.4. СПЕКТРЫ НАГРУЖЕНИЯ ТРАНСМИССИОННЫХ ВАЛОВ
В МТУ шасси ВГМ на валы воздействуют переменные нерегу-
лярные нагрузки, которые вызывают в них напряжения кручения
т, изгиба о и в ряде случаев одновременно изгиба с кручением at.
Касательные напряжения в любом сечении вала при кручении
не зависят от направления вращения вала относительно корпуса
коробки передач и определяются характером изменения нагрузки
во времени (в общем случае асимметричные циклы, рис. 8.2). Для
определения параметров динамических нагрузок эксперименталь-
ные осциллограммы обрабатываются по методу полных циклов с ис-
пользованием корреляционной таблицы. Если продолжительность
воздействия нагрузок не превышает I03 циклов, валы рассчитыва-
ются на статическую прочность по максимальной нагрузке. При
135
большей цикличности расчет ведется на усталостную прочность по
эквивалентным амплитудам S, ,, определяемым из корреляцион-
ной таблицы по формулам (8.12) ,и (8.14). Полученные данные по
Рис. 8 2. Осциллограмма колебаний момента сил упругости в торсионе входного
редуктора (/), входных валах левой (2) и правой (3) БКП, на водиле бортовой
передачи (4)
5,., систематизируются в виде гистограмм частостей Р, = NJNi
для Sa.a (рис. 8.3, а); последние могут быть преобразованы в сту-
пенчатый график плотности распределения вероятности нагрузки
= Где Д, = — интервал t-ro разряда при
квантовании величины S, , (рис. 8.3, б). Эта ступенчатая зависи-
Рис. 8.3. Гистограмма частостей эквивалентных амплитуд (а) и плотность их
распределения (б)
136
мость может быть аппроксимирована кривой, выражающей плот-
ность распределения эквивалентных амплитуд Slt3 в спектре нагру-
жения вала.
Экспериментально можно определить нагрузку на конкретном
валу с учетом взаимосвязей между средней и колебательной сос-
тавляющими процесса, их амплитудные, фазово-частотные характе-
ристики, а также учесть вероятность их появления в динамичес-
ком процессе. Недостатком этого способа является большая трудо-
емкость, невозможность получения необходимых данных в должном
объеме, сложность их использования для других изделий.
Для расчета средней и колебательных составляющих нагрузки
необходима дополнительная информация об их взаимосвязи и о
вероятности их появления в динамическом процессе. Как правило,
вал передает среднюю нагрузку, определяемую потребной мощ-
ностью на совершение полезной работы. Изменение средней состав-
ляющей принимается статистически независимым от колебательных
Рис. 8.4. Зависимость средней Sc (/)
и амплитудных S„ (2, 3) составляю-
щих нагрузки, а также плотности рас-
пределения частоты вращения вала
двигателя р(пл,) (4) от значений плл
процессов в МТУ; ее значение
в общем случае определяется
тягово-динамической характе-
ристикой танка (рис. 8.4). Если
принять коэффициент исполь-
зования тягово-динамической
характеристики аж= 1, то для
дальнейшего анализа до-
статочно знать плотность рас-
пределения p(Mjib) Для каждого структурного состояния трансмис-
сии (например, для любой передачи в трансмиссии). Колебатель-
ные составляющие нагрузок S, определяются посредством ана-
лиза вынужденных крутильных колебаний от раздельно учитывае-
мых возмущающих воздействий двигателя или другого источника
возмущающих воздействий.
В общем случае суммарный процесс S(t) на установившемся
скоростном режиме работы МТУ носит асимметричный характер
с колебательной составляющей в виде суммы гармоник v-ro по-
рядка:
S (/) — Se + 2 5, sin (<М Ц- Ч\),
(8.20)
где &)„—круговая частота колебаний v-ro порядка; Ч\— фаза v-fl колебатель-
ной составляющей.
Для схематизации циклов такого процесса и систематизации
нагрузок в спектр весь рабочий диапазон изменения частоты вра-
10 Зак. 20с
137
щен и я двигателя разбивается на достаточно малые интервалы; в их
середине фиксируются значения лдв/, для которых определяются
величины SC1 = Sc (плв1), S,t — S, , «»,/ = kv</?ib/'3O, Ч\/ и
PMdn„,
принимаемые постоянными в интервале Дпи.
В простейшем случае, когда в процессе наряду со средней 5С
имеется только одна гармоническая составляющая 5„ с периодом
Г, = 2л/(0м, за параметры нагружения ла t-м режиме принимаются
величины 5| — 5с(лм/) и которые систематизируются
в корреляционную таблицу, где одинаковым разрядам 5 и S, со-
ответствуют суммы величин = ti/T, (tt —время работы на t-м
режиме, ti = t/Pi, где t/ — время работы трансмиссии при / м струк-
турном состоянии). Далее обрабатывают корреляционную табли-
цу с помощью ЭВМ по формулам (8.12) или (8.14), получая гисто-
грамму частот или плотность распределения эквивалентных
амплитуд нагрузок за время работы при /-м структурном состоянии.
Суммарное число циклов на рассматриваемом /-м режиме N/ =
= '•t^P[Пщ/бО.
Схематизировать циклы и систематизировать спектр нагрузки
существенно труднее для полигармонического процесса. Если коле-
бательная составляющая суммарной нагрузки является периодичес-
кой и содержит не более двух амплитуд разных частот ш и фаз Т,
то в подавляющем большинстве случаев для частот характерно от-
ношение 1 : 2 или 1 : 4. Аналитическое исследова/ние суммы двух
гармонических составляющих 51ф2 (0 = Sal sin (o)i/+ ЧМ Ц-
4-5а.>sin (<о^4-Ч,2) прн различных соотношениях амплитуд Kt
= 5а2/5а1 и частот колебаний АС» = <о2/«>, для различных фаз Чг|
и Ч;2 показывает, что прн схематизации процесса по методу полных
циклов за период 74.2 суммарного процесса S|,2(/) (для опреде-
ленности примем Ш| < (о2 и Т112 = 2л/о)1) можно выделить соот-
ветственно q законченных циклов, амплитуды которых выражаются
с погрешностью 5—10 % в виде
5а,(5а1, 5а2, •>,. ш2, 4r1f Ч'2)^^(/Са, /С)(5а1 4-Sa2),
где К,„)—некоторый коэффициент, зависящий от отношений амплитуд К,
и частот К,„, осредненпый по сдвигу фаз ДЧ' = |Ч'2—4rJ| в пределах от 0 до
л/2; 1, 2. Км. Частота повторения нагрузки с амплитудой Stq на каж-
дом t-м режиме равна Ni — ///Г)ф2.
На рис. 8.5 приведены зависимости коэффициента амплитуд
полных циклов полигармонического процесса от величины 1/К,
при К™ = 2 и К,„ = 4. Заштрихованные зоны показывают диапазон
изменения Kq в зависимости от сдвига фаз 0^ |VF2 — 4*11 ^л/2.
В общем случае прн полигарманнческом или любом переход-
ном процессе строится суммарная кривая за промежуток времени ее
138
реализации /< для каждого значения пм/. Эта кривая обрабатыва-
ется по методу полных циклов, в результате чего на каждом 1-м
режиме для периодических функций (для непериодических за вре-
мя переходного процесса fn.„) определяется полная совокупность
учитываемых парных значений параметров (5m)n, 5m,x или 5, 5.)
и частота их появления в процессе. Данные заносятся в корреля-
ционную таблицу и обрабатываются по изложенному выше методу.
Рис. 8.5. Зависимость коэффициента
амплитуд полных циклов полнгармо-
нического процесса от величины \/К,
при Кш - 2 (/) и - 4 (2)
Напряжения изгиба в сечениях валов зависят от изгибающих
моментов, которые в общем случае могут действовать в разных
плоскостях, и от характера вращения. Если вектор нагрузки S(t)
вращается синхронно с валом или действует на неподвижную ось,
то напряжения изгиба изменяются во времени по тому же закону,
что и нагрузка. В этом случае схематизация циклов и системати-
зация нагрузок в спектр производятся, как при кручении вала.
Если вал вращается относительно нагрузки (например, в зубча-
тых передачах), то изменение напряжений изгиба будет определять-
ся как законом изменения нагрузки S(t), так и частотой вращения
вала л„. н(0 относительно нагрузки. Пусть между круговыми ча-
стотами колебаний вектора нагрузки <о, и вращения вала относи-
тельно нагрузки (ов.н существует зависимость С, = <o/<i)BH. Если
С = I, то в опасном сечении вала будет одна пара точек, в кото-
рых наибольшие напряжения изгиба пропорциональны нагрузке
эивх. Если С, < 1, то за один оборот вала таких пар точек будет
несколько. При значительном уменьшении С,, а также в случае,
когда вал в процессе работы кинематически многократно рассоеди-
няется с источником, формирующим нагрузку 5(0, все концентр и-
чески расположенные в сечении вала точки будут практически рав-
новероятно напряжены. В общем случае напряженное состояние
вала при изгибе на установившемся скоростном режиме определя-
ется законом изменения изгибающей нагрузки в наиболее нагру-
женных точках опасного сечения:
5„г(0 = [5с + S5.,sin(<M + sin(«>. Hz + ч;.и).
УсловисС, 1 11 изменение ДЧ\_ Ч\ Ч*в я по случай-
ному закону предопределяют равновероятное напряженное состоя-
ние опасного сечения вала.
10е
139
При (й.,и=0 (для наиболее напряженного состояния вала по-
лагаем = л/2) или юв.н ¥= 0, но = 0(Ч\ =0), схематизация
нагрузок в спектр производится аналогично чистому кручению. Для
полигармонического процесса схематизация может быть проведена
по методу полных циклов с использованием корреляционной таб-
лицы и выделением наиболее напряженного состояния в опасном се-
чении вала для каждого скоростного режима.
Если фазы гармонических составляющих и Y, и изменяются
во времени произвольным образом, то схематизация может быть
выполнена с применением метода статических испытаний. При этом
целесообразно допустить равновероятность распределения фазо-
вых сдвигов между составляющими процесса нагружения и враще-
нием вала.
В случаях, когда вал испытывает одновременно напряжения
изгиба и кручения, для определения суммарной нагрузки можно
воспользоваться выражением Si (Z) = (/) 4- $2ЗГ(/)- Полагая, что
законы изменения крутящей SKp(0 и изгибающей SB3r (/) нагрузок
одинаковы, получим
(О-+ SSavsin(<М 4- 4\)|/l +sln2(0>B.^4-VB.H)•
8.5. СПЕКТРЫ НАГРУЖЕНИЯ ЗУБЧАТЫХ ПЕРЕДАЧ
Особенностью зубчатой передачи является импульсное нагруже-
ние зубьев сопрягаемых колес при любом законе изменения пере-
даваемой нагрузки. В общем случае напряженное состояние каждо-
го зуба определяется числом одновременно находящихся в зацеп-
лении пар, кинематическими и геометрическими характеристиками
зацепления и законом изменения нагрузки S(t). Так, для прямозу-
бого некорригированного зацепления угол поворота колеса за
время нагружения одного зуба ?a“2irts/z,.B, а время
воздействия нагрузки Г, = 60e5/(z3«3. к), где л3.к — частота враще-
ния зубчатого колеса, об/мин; z3tW— число зубьев колеса; — ко-
эффициент перекрытия (I <es< 2).
При этом в течение времени
1)Г3 нагрузка передает-
ся только одной парой зубьев, а в течение времени /3 - (2 —2 г3)Г3
двумя. В реальных передачах вследствие упругих деформаций скач-
кообразное изменение нагрузки на зубьях при пересопряжениях не-
сколько сглаживается. Геометрические и кинематические характе-
ристики зацепления и зубчатых колес (коэффициент формы, радиус
кривизны в точке контакта и др.) также меняются в течение време-
ни Т3, что обуславливает сложный закон изменения напряженного
состояния зубьев. Для подавляющего большинства зубчатых пере-
дач этот закон за время Т3 имеет по крайней мере один явно вы-
раженный максимум, по которому и оценивается максимально на-
пряженное состояние зуба.
140
Напряжения изгиба оиэг, определяющие нзгибную выносливость
зубьев, и сжатия ок. определяющие контактную выносливость их
рабочих поверхностей, можно определить по формулам
. .. '<„?:(/. лэ,.): в, »,
где суммарная нагрузка Sz(t, п*. к) — S(t, п». к) + S*(n,. „) sgnS, а передавае-
мая зубчатым колесом S(t, п,.,) -Sc(n,.,) +<Sv(f); S«(n>. .) — const, Sw(0 e
— var — постоянная и колебательная составляющие внешней нагрузки; $д(л3 «) —
дополнительная внутренняя динамическая нагрузка, обусловленная локальными
ударами и колебательными процессами, вызванными неточностью изготовления
колес и их упругоннерционнымн свойствами; Кни, К* — постоянные коэффициен-
ты, характеризующие размеры, качество изготовления зубчатого зацепления и
распределение нормальной составляющей нагрузки по ширине зуба и между
контактирующими парами.
На рис. 8.6 показан характер изменения нагрузок в зубчатом за-
цеплении в зависимости от частоты вращения пз кзубчатого колеса.
Рис. 8.G. Изменение постоянной Sc (/), пе-
ременной S, (3) и дополнительной динами-
ческой S* (2) составляющих нагрузки в
зубчатом зацеплении и плотности распреде-
ления р (4) в зависимости от частоты вра-
щения зубчатого колеса
В общем случае напряжения изгиба и сжатия зависят как от
законов изменения нагрузок, так и от схемы сопряжения зубчатых
колес, а также от характера связи зубчатого колеса с источником
колебания. При однополюсном зацеплении за один оборот каждого
из сопрягаемых колес зубья испытывают по одному импульсу на-
пряжения 5иаг и ак. Если зубчатое колесо имеет несколько полю-
сов зацепления, то за один его оборот число аналогичных нагруже-
ний зубьев будет равно числу полюсов. При реверсивной передаче
зубья колес испытывают изгибные напряжения противоположных
знаков, а контактные напряжения возникают на разных рабочих
сторонах зубьев. При этом накопление повреждений от изгибаю-
щих нагрузок для каждого зуба подсчитывается также по обеим
сторонам, а от контактных нагрузок — только по той стороне, где
больше повреждений.
При n3.K=const нагрузку S (/) можно считать постоянной, так как
ее изменение за время ta несущественно по сравнению с номиналь-
ным значением. В течение же времени Тз м, равного одному оборо-
ту колеса, нагрузка S(t) может существенно изменяться как по
значению, так и по знаку.
141
Различают регулярное и нерегулярное нагружение зубчатых пере-
дач. Регулярный режим создается постоянной 5 или квазипостоян-
ной 5(/) медленно изменяющейся нагрузкой, колебательной на-
грузкой с постоянной или квазипостоянной амплитудой 5, и угло-
вой частотой изменения со, полигармоническими процессами
5(0 = 5С + S^«’Cos(<»J4-V») и др. Нерегулярные режимы нагру-
жения имеют место при непериодических и переходных процессах,
происходящих при трогании машины с места, разгонах с переклю-
чением передач, неустановившихся поворотах, торможениях, а так-
же при других состояниях, сопровождающихся случайными изме-
нениями параметров нагружения. При изменении скорости враще-
ния изменяется фаза зубчатого колеса относительно нагрузки, по-
этому на разных скоростных режимах наиболее нагруженным мо-
жет быть не один и тот же зуб. Переменные фазовые сдвиги обус-
ловливаются изменением фазовых углов Ч', функции 5(0 в систе-
мах с трением при изменении частоты вынужденных колебаний
и в резонансных режимах; упругими деформациями участков си-
ловой цепи от источника возмущения до зубчатого колеса, приво-
дящими при изменении суммарной величины 5х (/) к переменному
угловому положению колеса относительно выбранной точки отсче-
та; накоплением в течение эксплуатации остаточных деформаций
и увеличением суммарного зазора вследствие износа и приработки;
прерыванием жесткой кинематической связи за счет выключений
и последующих включений фрикционных элементов и др.
Поскольку продолжительность оборота зубчатого колеса 7\. к
много меньше времени, за которое происходит заметное изменение
составляющих нагрузки, в дальнейшем будем считать, что зубья
колес равновероятно нагружены суммарной нагрузкой 5Е(/)
в каждом скоростном режиме.
В простейших случаях спектр нагружения определяется в ос-
новном схемой включения зубчатого колеса в кинематическую схе-
му трансмиссии. Если зацепление однополюсное, то наряду с номи-
нальным значением нагрузки 4-го уровня необходимо знать сум-
марное число циклов Ni, которое испытывает каждый зуб колеса
за время Значение Ni определяется числом полных оборотов зуб-
*1
чатого колеса: = 60 j п3 к (t)dt, или в более общем случае,
и
когда задастся плотность распределения р(лэ ,к): — 60 л,. =
п.з. к max
= 6O/43 п3 ,Kp(n3K)dn3)l-
з. кпНп
Совокупность величин 5в/, Ni составляет спектр пульсирую-
щих (г = 0) нагрузок передачи, работающей без реверса.
Если в передаче совершается Np реверсов, то полный спектр
будет состоять из пульсирующих нагрузок при прямом ходе (5s/,
Ni) и реверсировании (5s/, N/) и симметричных (г = — 1) нагру-
зок при реверсировании (5s/, 5s/, /Vp/2), которые по формулам
142
(8.13), (8.15) также приводятся к пульсирующим нагрузкам. Для
оценки контактной выносливости зубьев спектры , Ni и М/
не объединяются, так как накопление повреждений происходит на
различных сторонах зуба.
В двухполюсной передаче (зубья промежуточной шестерни)
симметричные или асимметричные (при отборе мощности) циклы
преобразуются в пульсирующие по формулам (8.13) и (8.15). Не-
сколько сложнее обстоит дело, если полюсов зацепления у проме-
жуточной шестерни более двух. В этом случае необходимо пост-
роить диаграмму чередования нагрузок по ходу вращения зубча-
того колеса и схематизировать их по методу полных циклов с по-
следующим преобразованием асимметричных циклов в пульсирую-
щие. Для оценки контактной прочности нагрузки с разными знака-
м.и суммируются в раздельные спектры.
Если изменение ^нагрузки Se на t-м скоростном режиме за вре-
мя Г,.м пренебрежимо мало по сравнению с ее средним значением,
то формирование спектра производится одним из рассмотренных
методов. Если же известны закон или осциллограмма изменения
нагрузки па t-м скоростном режиме, то производят квантование
через достаточно малый интервал AS по k-м уровням, для которых
определяют интервалы времени /4, в течение которых нагрузка по
выходит за предел каждого из них. Для соответствующих интерва-
лов определяется число совершенных колесом оборотов. Объеди-
нение в спектр нагрузок и частоты их повторения для зубьев при
этом не представляет трудности.
Если нагрузка является некоторой функцией частоты вращения
зубчатого колеса Sx(ft3.K), то должна быть задана или определена
плотность распределения р(пл.к). Спектр нагрузок определяется
с использованием известной формулы преобразования распределе-
ний монотонных функций
Р (Si) = Р |л,.«(S.)| |<J [И,. «(SOJ/dSvl.
где Лэ. «(Sv ) —функция, обратная S£ (л,. «).
Далее вопрос построения спектра сводится к рассмотренным
выше случаям. Колебательную нагрузку S целесообразно привести
к условно постоянной S3, обеспечив эквивалентность накопленного
повреждения (рис. 8.7).
При фиксированной фазе А'И изменения нагрузки относительно
угла поворота колеса процесс нагружения любого зуба представля-
ет собой функцию, квантующую нагрузку на ее отдельные значе-
ния, равноотстоящие по времени Т3.к:
$х* \Р -I Sacos(o5fK +АТ).
где Sep — Sc + Sa sgn S — средняя нагрузка за период Ts; S - Sc + Sacos((os/ +
+ AT); /* = , = *2n/W1. ц (k = 0, 1, 2,...).
143
Нагрузка Ss (0 распределяется во времени по закону арккоси-
нуса. Однако, как указывалось выше, в реальных трансмиссиях
соотношения фаз ДТ, а также значения частот <оэ и ‘"эк в процессе
Рис. 8.7. Изменение нагрузки на зубьях и плотность ее распределения p(S) при
равномерном законе нагружения:
Т3 к— период для быстроходного колеса; —период для тихоходного колеса; — пе-
риод эквивалентной нагрузки
работы зубчатой передачи не остаются постоянными даже при по-
стоянных параметрах суммарной нагрузки Scp и S,. Полагая рав-
новероятным характер нагружения каждого зуба в течение всего
времени работы зубчатой передачи на i-м скоростном режиме
(Лэ.к» = const), выражение для эквивалентной нагрузки за период
Ts можно записать в виде j гя
ST = 77 J (SCp + S. cos dt. (8.21)
На рис. 8.8 показаны возможные случаи соотношения этой на-
грузки с нижним пределом повреждающей нагрузки KqS0 пульси-
Рис. 8.8. Изменение во времени нагрузки на зубьях S2 и зоны ее осреднения
в зависимости от порога чувствительности детали к повреждению:
a K,S,< (5ср - 5.); б - ($ср- < А'..% < $ср: в - S£p < A., s’., < (S£p + $,)
144
(8.22)
(8.23)
рующнх циклов. В силу симметричного характера изменения на-
грузки за время Ts и необходимости учета при осреднении только
S(t) KoSo, выражение (8.21) можно записать в следующем виде:
(Wfd | .
о ,к. = Н1 + а cos х) ’
где а = S,/Scp = (1 - г)(1 + г); г = (Se + S* sgn S - Sa)/(SC + SA sgn S + Sa);
x = <-5 = 2*irs-, 0 < t < TSI2; 4 arccos |(K0% Scp)/S.|; 0 < V < я.
Введем безразмерную функцию
/('!-*, т) = (1 4- a cos x)mdx,
которая, изменяясь в пределах 1 < / < (1 4- а)т, характеризует
увеличение нагрузки Scp за счет колебательной составляющей. Без-
размерная величина V/л определяет на Лм скоростном режиме за
время t, полное число циклов нагружения зубьев, приводящих к на-
коплению повреждений:
= У (60 л3.к
Нетрудно показать, что интеграл (8.23) может быть представ-
лен в зависимости от значения V:
для 0 < 4f С л/2, когда \р . KOSU < (Scp -f- Sa),
а* П (т р + 1) < 2 > I
Р-' Р 1 У sin (Л-2 <7)4- |
2*-» <7)!<7М*-2<?)|.
о* 11 (т — р | 1)
(8.24)
где Л-0, 1, 2. . . , <7=0, I, 2,
, Л; <Л/2>—целая часть числа Л/2;
я lx/Ji, kwi да v^cp — AqOq \ ofp,
/. (’Г) = -^-( f (l +ac°sx)'nJ.v f (1 — acosx)mtfx| —
4 и 0
2k k
1« a-k П (m — 2p -| 1) (— l)*a* H (m — p + 1)
к V____________________2 У ____________________
Й-о 2=*(*!)« 2*
2*
а1* П (m — 2p+ 1)
X
у sin (fe-2g)(K—Т)1
(8.25)
выра-
2-* (А!)>
Если т — нецелое число, то произведения П могут быть
р
жены через гамма-функцию, табулированную для любого положи-
145
тельного аргумента в пределах от 1 до 2. Анализ формул (8.24)
и (8.25) показывает, что с увеличением Ч' эквивалентная нагрузка
уменьшается, но в то же время возрастает число циклов ее воздей-
ствия на зубья. Несмотря на относительную громоздкость этих
формул, вычисление интегралов /> и /2 не представляет особого
труда. С погрешностью менее 1 % можно ограничить число членов
сумм k = 3. ..4. По приведенным формулам определяется
Расчет можно существенно упростить, если суммарную кривую
Se (/) с произвольной асимметрией на участке, где (/, п3, к) >
Жо5о, заменить пульсирующей кривой (г = 0) с Зср - 5, -
= 1/2(3,р + SJ и Ts, проходящей через характерные точки ис-
ходной суммарной кривой: 3*==3тах, = KqS0 (рис. 8.9). В этом
случае а = S./S = I ; формулы (8.24), (8.25) упрощаются, что поз-
воляет интегралы /ь /2 протабулнровать для различных показате-
лей степеней т и величины Y. Вследствие аппроксимации исходной
кривой из условия Scp + За cos 'И = KqSq получаем Чг =
= arccos| (KitSo — Scp) So], прн этом Зэ = Stp > /(Ч*. /и) .
Рис. 8.9. Аппроксимация асимметричной нагрузки (/) пульсирующей кривой (2)
Эквивалентные нагрузки зубчатых передач в общем случае оп-
ределяются численными методами с использованием ЭВМ. Пара-
метры нагружения задаются в виде корреляционной таблицы значе-
ний п3.-к4/Зс/ с вероятностью Р(/ их появления. При этом должны
быть известны зависимости 3, (пз к), Зд(л3 к) и плотность распре-
деления вероятности р(лзж) или гистограмма частостей
= Длительность работы на i, / м режиме будет рав-
на tif = Pi/t, а соответствующее число нагружений каждого зуба
однополюсной передачи Ny = 60«3.hj/v.
146
Прн мопогармоннческом характере изменения колебательной
составляющей любому t-му значению п ч соответствуют парамет-
ры нагружения Sa/ и Sai, которые в совокупности с каждым /-м
значением Scj образуют суммарную нагрузку
5s // (0 — Sc/ + Sa< cos <»S7/ $Ж1 sgn S,7(Г),
где (uv/« лпэ ,*v/(30 i,. к) — частота колебаний; i,. я — передаточное число от
источника возмущения до рассматриваемого зубчатого колеса; v — порядок ко-
лебаний; Si] (t) — Scj cos «uS(/ .
Разобьем изменение величины <osit за период Tsi = 2«/<ost на п
равноотстоящих малых интервалов Дх = 2л/л, которым будет со-
ответствовать суммарная нагрузка
Ss Sc/ 4- Stl cos (Mx) Ц- Sa< sgn Sull
и число циклов ее повторения для каждого зуба У//* = Ыц/п, k =
= 1, 2.....п.
Если значения S:llt знакопостоянные, то для ijk-x пар Sty* и
Nijtt строим однопарамстрнческое распределение, суммируя на каж-
дом 1-м уровне St/ с выбранным интервалом ASs все значения М/*,
для которых
(Su - ДЗД2) <Sv i/k <(S*i + ASx/2).
В результате получаем для каждого значения Sn суммарное число
циклов повторения нагрузки этого уровня АА/ или гистограмму ча-
стостей P/(S'.) = Ni/N'., где Nt- VA'^, ~ =
-Ч/ 1 1 к 1 ’
а минимальный уровень St/ определяется значением порога чувст-
вительности KqS0.
Если значения St знакопеременные, то для быстроходных ко-
лес (Гз к < Ts) при всех St uk -= Sc, 4- Sa/ cos (ЛДх) — SA( = Simin <0
через оборот колеса
Sv i k — S/j 4 <Sa< COS (k\X -j- 01$ 73 K) —= Sj max •
Пары нагрузок Simin и Stmaxi имеющие произвольное г <0 для
каждого текущего k, преобразуем по формулам (8.13) и (8.15)
к виду нагрузки с г = 0, соответствующей половине числа циклов
Ni/it. Далее суммируем числа циклов Ыц* для /-х уровней Si/ с уче-
том того, что
$t>0 2 о
где суммирование по St > 0 ведется для значений St//* > 0, за
исключением числа циклов, для которых составлены соответству-
ющие пары (Sso*<O, St/,*>()). Если зубчатые колеса тихоход-
ные (T3,K>TS) или ТЗКях Ts, то схематизация нагрузок в циклы
должна проводиться при детальном рассмотрении диаграмм их
нагружения с учетом соотношения Ts, Т3 К и промежутков време-
ни, когда St (0 = 0.
147
Исходные данные о нагружении зубчатой передачи могут зада-
ваться не только в виде корреляционной таблицы, но и функцио-
нальной зависимостью З'с(л3. к), например, в виде внешней характе-
ристики двигателя, приведенной к зубчатому колесу. В этом случае
схематизация циклов и систематизация их в спектр производятся
для каждого «го значения пэ.к определением Зс, За и З’д, с учетом
квантования по интервалам времени А/ и последующего суммиро-
вания числа циклов для St по / уровням. Аналогично производятся
схематизация циклов и систематизация их в спектр произвольных
периодических процессов нагружения за полный период Ts, соот-
ветствующий скоростному режиму работы. Возможна системати-
зация нагрузок по их эквивалентным значениям за полный пе-
риод Ts. Для этого необходимо в полном периоде процесса выде-
лить зоны тЕ, для которых Sv(t)^KoSo. Выбрав достаточно ма-
лый шаг квантования нагрузки по времени Л/ в этих зонах, опре-
делить среднее значение всех величин Зе*(/£ 4-Д/А) по формуле
где л — полное число интервалов в каждой учитываемой зоне, в которой
(Л^ KoS0; h— момент времени, начиная с которого (/) > KoSo в каждой
зоне.
Число циклов действия эквивалентной нагрузки 39 на данном
скоростном режиме определяется по формуле
А'=2-е/Л...
где £ — число зон.
Если непериодический процесс является переходным, то схема-
тизация нагрузок в спектр должна проводиться за все время ^дей-
ствия каждого q-ro переходного процесса за вычетом времени,
когда Sv(/)^KqSo. В этом случае исходные параметры нагруже-
ния задаются в виде временных зависимостей Sq(t) и п3 „(/),
а также в виде функциональной зависимости Зя(л3<ж), которая пе-
рестраивается во временную Зд(0 = Зд|л3 к(0| и суммируется с
величиной 3,(0 для получения суммарной нагрузки 3Е(0 -
= 3,(0 +3Д (0 sgnS,(0.
Далее для знакопостоянного процесса выделяются зоны, в ко-
торых Sv(0> К030. Зоны разбиваются на п интервалов А/, и для
каждого из них определяются
Зе* = Si (/6 + Д/А);
**-•^2 Ул..««)Л-
Для нагрузок Зе* одинакового уровня S/ число цикловсумми-
руется, в результате переходный процесс систематизируется в
148
одномерное распределение pi(S). Если процесс S*(/) знакопере-
менный, то вначале выделяем зоны асимметричных циклов
(г<0), приводим их по формулам (8.13) и (8.15) к пульсирую-
щим, а затем для них и оставшихся пульсирующих циклов, где
$z (О > 0, проводим систематизацию нагрузок в спектр, как изло-
жено выше.
Определение эквивалентных нагрузок многополюсных зубчатых
передач имеет ряд особенностей. Учитывая слабое влияние чере-
дования нагрузок на суммарную величину накопленного поврежде-
ния, можно считать, что при двухполюсном зацеплении циклы на-
гружения зубьев будут симметричными за каждый оборот зубча-
того колеса. Закон изменения процессов нагружения в обоих по-
люсах считается одинаковым; любой зуб нагружается знакопере-
менной нагрузкой:
$s(0e *' |SC + Sacosx-f-SasgnS(f)|.
Такой режим нагружения с г = —1 можно привести к эквива-
лентному пульсирующему режиму с г = 0 по формулам (8.13) или
(8.15), а затем интегрально осрсдннть по формуле (8.22) с учетом
порога чувствительности зубьев к повреждению:
s» = 5c.np?r7(VP|>m),
2 о о KoSo ^*с.пр 2
где 5С. пр = । (^с Ь 5Д); Ч пр = arccos : •£«. пр ~ •
/ = U- ГО + а cos а = + «>)•
• пр О
Число циклов нагружения при этом равно числу совершенных
зубчатым колесом оборотов. Для сложных схем зубчатых передач
с многополюсным зацеплением, когда еще имеется отбор мощности
от ступицы колеса и нагрузки в полюсах неодинаковы, численные
методы решения являются единственно возможными. Для этого
необходимо построить диаграммы нагружения зубьев и обработать
их по методу полных циклов. Так как характеристики нагружения
зубьев зависят от фазового соотношения между изменением на-
грузки во времени и положением зубьев, то для определения спект-
ра нагрузок потребуется большой объем расчетно-графических ра-
бот. В этом случае целесообразно применять метод статистическо-
го моделирования на ЭВМ. С этой целью на ЭВМ реализуется за-
кон изменения суммарной нагрузки в виде
Sip (О = Scp + Stp cos (u>s7 + Vp) + Sap sgn Sp,
где — случайно изменяющаяся в заданных пределах фаза; р— номер полюса.
Отсчет значений нагрузок производится последовательно через
промежутки времени tp, определяемые частотой вращения п3.к
и межоссвыми углами yip расположения сопрягаемых колес по ходу
вращения зубчатого колеса: tp — 30у1р'(т:Лз „). Полученные значе-
ния нагрузок Ssp(/) схематизируются по методу полных циклов
149
в корреляционную таблицу Si max — Ssmin или Scp — Sa, затем
производится преобразование асимметричных циклов в пульсиру-
ющие по формулам (8.13) или (8.15). Для пульсирующих циклов
строится одномерное распределение Pi(Ss), которое может быть
в конечном итоге аппроксимировано непрерывной кривой или пре-
образовано в плотность распределения вероятности p(S*).
8.6. СПЕКТРЫ НАГРУЖЕНИЯ ПОДШИПНИКОВ
Несущая способность подшипников качения определяется их
статической и динамической грузоподъемностью, а также предель-
ной быстроходностью. Статическую грузоподъемность подшипни-
ков проверяют при качании колец или их вращении с п^1 об/мин,
а также при действии значительных кратковременных перегрузок.
Допускаемая статическая грузоподъемность каждого подшипника
указывается в соответствующих каталогах и определяется из усло-
вия, что суммарная остаточная деформация деталей подшипника
(колец, тел качения) в зоне контакта не превышает 0,0001 диамет-
ра тел качения. Условие работоспособности радиальных и ради-
ально-упорных шарнко- и роликоподшипников по статической гру-
зоподъемности записывается в виде Slip < Ct, где Slip — максималь-
ная приведенная постоянная радиальная нагрузка, определяемая
с учетом действия радиальной и осевой S* составляющих,
Snp = max {KySy 4- KXSX, Sp); коэффициенты Kx, Kv выбираются
по таблицам. Величина Сс характеризует допустимую величину
грузоподъемности с учетом неравномерного распределения на-
грузки на тела качения в подшипнике. Согласно теории Штрибока
максимальная нагрузка наиболее нагруженного тела качения
Smtx^KnSnplz„, где za— число тел качения.
Наибольшая частота вращения подшипника nm„ ограничивает-
ся его предельной быстроходностью:
где p/срл] — постоянный ДЛЯ данного типа подшипника скоростной параметр
(предельная быстроходность): dcr — средний диаметр подшипника по наружному
и внутреннему диаметрам соответствующих колец; — коэффициент вращения,
учитывающий влияние конструкции и размеров подшипника, а также характера
нагружения на его предельную быстроходность.
Динамическая грузоподъемность Сд радиальных и радиально-
упорных подшипников определяется как приведенная радиальная
нагрузка Snp, кигорую подшипник с неподвижным наружным коль-
цом сможет воспринять в течение расчетного срока службы L. До-
пустимое значение Сл, определяемое эмпирически для каждого ти-
поразмера подшипника в зависимости от его параметров, техноло-
гии изготовления, материала, сводится в таблицы каталогов. Срок
службы подшипника L может задаваться либо в виде полного
числа оборотов N, либо в виде продолжительности работы в часах
Т = N/(60 п) (п в об/мин) и определяет его долговечность до по-
явления признаков усталости материала любого кольца или тела
150
качения. Номинальная долговечность подшипника численно равна
сроку службы не менее 90 % группы идентичных подшипников
(при одинаковых условиях) до появления характерных признаков
усталости.
При оценке долговечности подшипников следует учитывать
значение, направление и характер нагрузки, частоту вращения
подшипника, а также особые условия эксплуатации. Эксперимен-
тально установлена зависимость между сроком службы L, приве-
денной нагрузкой Snp и динамической грузоподъемностью Сж:
£ —(Ся/5Пр)ж- Приведенная нагрузка Snp для шарико- и роли-
коподшипников принимается как постоянная радиальная нагруз-
ка, которая вызывает в них те же повреждения, что и при одно-
временном действии радиальной Su и осевой Sx составляющих в
реальных эксплуатационных условиях:
Snp = (ЛГуЛГЛу + KXSX) К fa, (8.26)
где Ко•« I при вращении внутреннего кольца и Ко = 1,2 при вращении на-
ружного кольца; Kt — температурный коэффициент при температуре 125—150 °C,
равный 1,05—1,1; Кб — коэффициент безопасности, учитывающий характер рабо-
ты подшипников (для зубчатых передач из-за вибраций и умеренных ударов
принимается Кб » 1,3. ..1,5).
Число циклов N„ изменений контактных напряжений в подшип-
нике при постоянной нагрузке можно выразить через частоту вра-
щения подшипника п (об/мин) и время его работы I (ч). При вра-
щении внутреннего кольца
= V )60 =г" 60 п‘-
а при вращении наружного кольца
)б0л< - (-^)б0»<,
где (/ш, dv, Do — диаметры шарика или ролика и окружности, проходящей через
центры тел качения соответственно.
Цикличность изменения контактных напряжений учитывается
коэффициентом динамической грузоподъемности Сл Метод расче-
та подшипников на долговечность по динамической грузоподъем-
ности учитывает весь спектр нагрузочно-скоростных режимов.
.Если действующая нагрузка Slip и частота вращения п подшип-
ника изменяются во времени, то рассчитывать долговечность под-
шипника необходимо по эквивалентной 'нагрузке S, и условной ча-
стоте вращения п». В этом случае в качестве эквивалентной при-
нимается условная нагрузка, которая вызывает в подшипнике на
частоте вращения лэ такое же повреждение, как при работе. При
ступенчатом изменении Slip и п на каждом t-м режиме доля накоп-
ленного повреждения Di = Li/L, где L, — фактическая наработка
подшипника на t-м режиме, выраженная через число циклов Л/4 —
= 60л4< или время работы Л на частоте вращения п4. Используя
151
это выражение и усталостную кривую, запишем условие эквнва
лентности для нагрузок на z различных режимах:
< i
А\ который сопоставляется с суммарным
лнонах оборотов). По значениям S,, л9
откуда получаем выражение для эквивалентной нагрузки, дейст-
вующей при частоте вращения п9 подшипника:
$Г 2 <“№>')/2 («А>! ". = N-.lti, (8.27)
где а2 - У, tt = ttltt; — niln,-. tz —суммарное число циклов и время
работы подшипника на всех г нагрузочно-скоростных режимах.
Из каталогов подшипников по эквивалентным величинам S,
и л, может быть определен предельный срок службы подшипника
числом циклов Nt (в мил-
и М может быть выбран
типоразмер подшипника,
обеспечивающий требуе-
мую работоспособность.
Параметры Snpl, а/ и
характеризуют нагрузоч-
ный спектр. В более об-
щем случае накопление
повреждений в подшип-
нике определяется на-
грузкой от суммарного
вектора всех действую-
щих на подшипник сил
Sn (/) и частотой враще-
ния подшипника относи-
тельно этого вектора.
В отличие от валов н
зубьев характер напря-
женного состояния колеи
всегда остается пульсиру-
ющим. Тела качения ис-
Рис. 8.10. Схема действия на-
грузок в зубчатом зацеплении
(5,.«) и подшипниковой опоре
(Sn) однополюсной (а) и двух-
полюсной (б) передач:
5Э.К1“5П1' 5э.к»"5пз
пытывают знакопостоянную, переменную во времени нагрузку
сжатия. При построении спектров переменная нагрузка Sn (0 при-
водится к условно постоянной S„p на любом скоростном режиме,
152
при этом полагается, что Snp является линейной функцией Sn(0-
В случае действия на подшипник нагрузки от зубчатого одно-
полюсного зацепления (рис. 8.10, а) при лэ=л/ = const эквива-
лентная нагрузка определяется по формуле
$?-=£(»«.)•
1-1
Если за время h прн уровне S„pj изменяется частота вращения
подшипника, т. е. П/ = var, то эквивалентная нагрузка
•$» — (®1Р//^пр /)/ »
где для определения 0/, частота вращения подшипника Пц берется на i-м уровне
нагружения Sn₽i при / м скоростном режиме; Z/—число j-x скоростных режимов
на <м уровне нагружения.
При реверсировании вращения и в тормозном режиме направ-
ление действии нагрузки на подшипник изменяется в пределах
угла, равного 2а (а — угол зацепления зубчатой передачи).
Если нагрузка в зубчатом зацеплении носит колебательный ха-
рактер, то подшипник на установившемся скоростном режиме бу-
дет испытывать нагрузку, изменяющуюся по закону
Sn (/) \ Sal cos (<i>s tf 4- Ч\) -f- sgn 5,
i
где S — Sc 4-S cos 4-4j); Sc, Sa/, приведенные к радиальным
соответственно статическая, амплитудная и динамическая составляющие нагруз-
ки в зубчатом зацеплении, определяемые по формуле (8.26).
Замена переменной величины S„ (/) условно постоянной нагруз-
кой S, может быть осуществлена интегральным осреднением мо-
дуля величины Sn(/):
ST— 4-1 f [Sc + 2 s„ cos (»s ,t + *',) + s, sgn S\mdt 4-
• s и «
Tt
+ + COS (<!»,./ + M^ + S^gnSpdd , (8.28)
4* I
где I' — значение переменной /, при которой Sn(0 меняет знак (таких участков
в общем случае может быть нс один); 7\ — полный период изменения функции
Sn(0 либо время работы подщипннка, в течение которого производится осред-
нение колебательной нагрузки и допустимо постоянство скоростного режима.
Для простейших случаев вычисление S, по формуле (8.28) не
представляет особых трудностей. В случае нагружения подшипни-
ков ведущего колеса гусеничной машины при постоянной скорости
ее движения наряду с постоянной составляющей Sc усилия, обеспе-
чивающего необходимую силу тяги (которую будем полагать ква-
зипостоянной), в зацеплении ведущего колеса с гусеницей будет
действовать импульсная нагрузка So, основная составляющая кото-
рой имеет частоту <%. к?в к (%. к, zB к — соответственно частота
153
вращения и число зубьев ведущего колеса). Проведя квантование
по времени М экспериментального значения Ss(/) = Sc-f- Sv(t), «о
формуле (8.27) получим
s; = z
где = IM (i 1, 2...z), n9 = 30<>iB. ю'я.
Если процесс Sv(t) моногармонический с амплитудой S,, то ве-
личину S? можно определить по формуле (8.22).
В переходных процессах, когда в зацеплении изменяются и ча-
стота вращения,и нагрузка, определение п, и S* проводится по-
средством их осреднения за все время переходного процесса /п.п
по формуле (8.27), при этом частота вращения на каждом /-м шаге
квантования n4 = Заметим, что в этом случае шаг квантова-
ния Л/ выбирается так, чтобы величины Snpj и можно было при-
нимать постоянными в течение времени Л/. Функции Snp(/) и n(/j
могут быть заданы аналитически, графически или в виде числен-
ных значений через определенные интервалы времени.
В многополюсных зубчатых передачах подшипники нагружают-
ся одновременно усилиями со стороны всех полюсов зацепления.
В общем случае суммарный вектор нагрузки на подшипниковую
опору является переменным как по уровню, так и по направлению
действия. На рис. 8.10, б показан характер действия нагрузок в
двухполюсной передаче, когда
$2 : (0 -Sji (0 + 2S„, (/) S„2(«) cos 7+ Si, (о,
где ф = л 4- у — 2“ — угол, образуемый двумя составляющими нагрузки от уси-
лий в каждом зацеплении; у—угол между линиями центров сопрягаемых зуб-
чатых колес (на рисунке у — —л); а — угол зацепления.
Приведение переменной величины SnI (/) к постоянной (на
установившемся скоростном режиме) эквивалентной нагрузке 5,
в этом случае требует большого объема вычислений. Если режим
нагружения является квазистационарным по параметрам, в част-
ности периодическим, то, пренебрегая малым сдвигом фаз в коле-
бательных составляющих и считая динамические процессы в
обоих зубчатых зацеплениях идентичными, получим
Sg х = 2 (5С + S cos «»5 4- S* sgn S) sin (-|— a).
Осреднение этой нагрузки за полный период ТЕ можно выполнить
по формуле (8.28).
В других случаях необходимо представить в той или иной фор-
ме обе функции Snl (/) и Sn2(0. произвести квантование их по до-
статочно малым интервалам А/, в которых величины £„,(/,) и Srt(/|)
могут быть приняты постоянными, причем /, = /o4-iAO. вычислить их
геометрические суммы Snx(/«) и осреднить по степени т. Опреде-
ление S, и яэ подшипниковых опор зубчатых колес с двумя полю-
154
сами зацепления и более производится на основе совместного рас-
смотрения временных диаграмм нагружения опоры от каждого по-
люса. В итоге совокупность эквивалентных нагрузок и частот
вращения п» подшипников во всех рассматриваемых режимах со-
ставит их нагрузочно-скоростной спектр.
8.7. ОЦЕНКА ДИНАМИЧЕСКОЙ НАГРУЖЕННОСТИ ДИСКОВ ТРЕНИЯ
Диски трения, выполняя функцию синхронизирующих элемен-
тов при включении передач, одновременно подвергаются вибро-
ударным воздействиям за счет вынужденных крутильных колебании
барабана. Соударение дисков с барабанами фрикционных устройств
характеризуется двумя основными показателями: скоростью фуд
и частотой соударения vyjt<o (ш — круговая частота крутильных ко-
лебаний барабана; vyi = //К; I — число ударов за период процес-
са; К — кратность периода внброударного процесса периоду коле-
баний барабана).
Рис. 8.11. Схема действия на элемент
диска трения импульсных нагрузок:
5 — сила удара; — нормальная н тан-
генциальная составляющие силы -V относи-
тельно поверхности соударения; S’p. Sf — ра-
диальная и окружная составляющие силы 5
относительно диска; Р . - тангенциальная
и нормальная составляющие окружной скоро
сти диска t>
Момент импульса сил, действующих на диск при ударе
(рис. 8.11),
= Луд К1 + fl')JCOS2a 4-(1 — /*)* sin2et]’\
где J — /д(1 + ргд); )» — Л/Д; /д, /в — моменты инерции диска и барабана;
?д — число дисков, связанных с барабаном; R'—коэффициент восстановления
нормальной составляющей линейной скорости соударения в зацеплении диска с
барабаном; /' — коэффициент мгновенного трения, и — профильный угол в за-
цеплении.
Полагая коэффициент трения в зацеплении малым и принимая
во внимание, что ранее введенный коэффициент восстановления
R = /?'cos2a, можно определить изменение линейной скорости ди-
ска за время удара в направлении по касательной к окружности
диска
А^ = Рк?у*(1 + Н^д)"1 (1 + R cos a 4- R-)V2
и в радиальном направлении
Л'Ир = РкФуд (1 + ^д)~' (1 + ₽cosa |- Z?2)1 2tga ,
где р« — радиус диска в точке контакта.
155
Моменты импульса ударов, касательного по окружности S/ =
— Jn&vt/p* и радиального Sp =/жДт;ррк, вызывают в диске как
упругом теле продольные и радиальные (радиально-изгибные) за-
тухающие колебания с соответствующими периодами собственных
колебаний Л, Л. Ттт, значения которых не превосходят 10“ с.
Период собственных колебаний зубьев диска Т3 порядка 10“ с.
Учитывая, что время соударения Тул — 10 “...10 4 с, можно счи-
тать ударное нагружение зубьев квазистатическим при динамиче-
ском нагружении диска, предполагая, что в момент удара элемен-
ты диска изменяют лишь свою скорость соответственно на
и Дгр при пренебрежимо малых смещениях.
Квазистатическое нагружение зубьев шлицевого соединения
диска при ударах приводит к их изгибу и сдвигу, а также к дефор-
мации контактирующих поверхностей. Если известна суммарная
угловая жесткость соединения диска с барабаном Сг(ф), завися-
щая от их относительного смещения, то из уравнения относитель-
ного движения /<р = —С» (ф)ф можно определить с учетом на
чальных условий (t = 0; ф = 0; ф = фуж) закон изменения относи-
тельной скорости сближения
В момент наибольшего сжатия скорость диска относительно ба-
рабана равна нулю, при этом максимальная сила, действующая
на каждый контактирующий при ударе зуб по нормали к его по-
верхности
5 = 1/ _ АС
Я V А(1 cose ’
где С — усредненная жесткость пары зубьев диска н барабана; z,— среднее чис-
ло одновременно контактирующих при ударе зубьев (z, « 0,2z,; z, — полное
число зубьев в зацеплении диска с барабаном).
В качестве примера для наиболее нагруженного крутильными
колебаниями тормоза бортовой коробки передач серийного танка
рассмотрим зависимость нормальной силы удара S„, построенную
по данным скоростей соударения (см. рис. 3.18) в функции от ча-
стоты вращения вала двигателя (рис. 8.12). Оценка динамической
прочности зубьев диска производится по максимальной нагрузке
5*лтжх, а усталостной от изгиба — по совокупности переменных ве-
личин S„(n„). На каждом <-м скоростном режиме для рассматри-
ваемого структурного состояния трансмиссии определяются удар-
ная нагрузка Snl и число циклов нагружения за определенный
промежуток времени. При этом цикл нагружения зубьев выключен-
ного фрикционного элемента полагается симметричным, а частота
нагружения—равной 0,1 vyMo> в силу равновероятности и равно-
мерности контактирования г, зубьев при каждом ударе. Совокуп-
156
ность величин SHl и М на всех i-x режимах составляет спектр удар-
ных нагрузок для зубьев дисков трения. Вызываемые ими напря-
жения могут приводить к появлению усталостных трещин во впа-
динах зубьев.
Рис. 8.12. Зависимость нормальной силы удара S„ в шлицевом соединении тор-
моза Г5 БКП танка Т-64А на il—VII передачах (кривые II—VII) от частоты
вращения вала двигателя ля» и параметра К
Вследствие колебаний фрикционных дисков под действием удар-
ных импульсов в них возникают напряжения сдвига, растяжения
в радиальных сечениях и нормальные в окружных сечениях полот-
на. В ряде случаев эти напряжения могут ускорить развитие уста-
лостных трещин и привести к разрушению диска.
8.8. СУММАРНЫЕ СПЕКТРЫ НАГРУЖЕНИЯ
В ДИНАМИЧЕСКИХ ПРОЦЕССАХ
Для определения напряженности детали в реальных условиях
эксплуатации необходимо построить полный спектр нагрузок,
объединяя частные спектры с учетом статистических данных о вре-
мени работы на каждом эксплуатационном режиме в различном
структурном состоянии трансмиссии.
Рассмотрим вначале стационарные режимы. Пусть Р(/)—от-
носительное время работы трансмиссии в / м структурном состоя-
нии (например, на /-й передаче), для которого известен частный
спектр Pj(St) в виде распределения плотности вероятности эквива-
лентных амплитуд во всем j-м нагрузочно-скоростном диапазоне.
157
Каждый частный /-й спектр характеризуется средним значением
амплитуды
max
{ S,Pj(S,}dSa,
Лаш1п
дисперсией или среднеквадратичным отклонением
~ $а max
DS„ = (S.,y= f |S. -Ъ./Гр, (S.) dS.
\mln
и связанным с ним коэффициентом вариации V/= Sa/lSaj.
Величина 5am(n = ^Sar определяет нижний предел амплитуд, дей-
ствие которых оказывает повреждающее воздействие. Величину
Sam„ в технической литературе рекомендуется определять экстра-
поляцией функции распределения в область высоких нагрузок до
Pmln = 10'* по формуле Pj(SJ = Ке-Х5*, где Л= 1/S., в результа-
те чего получаем 5атах» 11,55'а.
Объединение /-х частных спектров в результирующий произво-
дится по формуле
(8.29)
Для этого спектра также могут быть определены следующие
основные параметры:
общее среднее значение амплитуды Sa.cp = 2jP(/)Sap
общая дисперсия или среднеквадратичное отклонение
DS.< = (S. .)• = 2(Р(/)($.,«1 + «?)| - =
/
= 2 р U) l(S.y)’ + ($./ - s. «)’|
и связанный с ними коэффициент вариации vc 5a,c/Sac.
Общее число циклов нагружения Vc для всех передач опреде-
ляется в виде суммы М —УЛ/). В свою очередь, Л^ = ХЛ/)/.
где Nti — число циклов действия нагрузки на i-м нагрузочно-скоро-
стном режиме для /-й передачи. При этом = Рц— частость
(-го режима, которая находится по распределению плотности веро-
ятности
\+1
Р„ = = .( P,(S.)dS..
stl
Знание /»c(Sa) и Л/с позволяет оценить эффективность меро-
приятий по повышению несущей способности детали по форму-
ле (8.18) или определить влияние изменившихся условий эксплуа-
156
тации на ресурс детали но формуле (8.19) для стационарных на-
грузочно-скоростных режимов. Предельное накопление повреж-
дения А определяется по формуле (8.16) с учетом нормированного
показателя полноты спектра прн нерегулярном нагружении. Ве-
личина А, как указывалось выше, вводится для корректировки ги-
потезы линейного суммирования повреждений и при логарифми-
чески нормальном законе распределения долговечности детали
дает с вероятностью 95 % ошибку в три раза. Для £ > 0.5 выра-
жение А может быть заменено более простым А = 1,5 £ — 0,5.
Результирующие спектры переходных процессов требуют зна-
чительно большей исходной статистической информации по усло-
виям эксплуатации. Каждый из переходных режимов является реа-
лизацией случайного процесса, характеристики которого зависят от
начальных значений нагрузочно-скоростных параметров. Наиболее
полная статистическая информация о переходных процессах мо-
жет быть получена экспериментально (по обобщенным расчетно-
экспериментальным данным) либо методом натурно-математиче-
ского моделирования режимов движения машин на исследователь-
ско-моделирующем комплексе. В общем случае параметры пере-
ходного процесса могут быть заданы в виде распределений по пути
или по времени. Например, число включений передач задается
гистограммой P(Nj) и числом включений на 1 км пути. Аналогич-
но задаются и другие параметры переходного процесса. Особенно
большое число начальных параметров требуется задавать для пере-
ходных процессов при поворотах и торможении. В этих случаях на
основе статистического анализа данных для конкретных типов
танков устанавливают типовые режимы с определенным сочета-
нием начальных условий, которым приписывают определенную ве-
роятность реализации. Частные спектры нагрузок для каждого из
типовых режимов могут быть объединены с учетом их вероятности
в результирующий спектр по формуле (8.29).
В настоящее время, несмотря на обширные экспериментальные
исследования и накопленный статистический материал, получение
достоверной информации о переходных процессах является слож-
ной задачей. Внешние условия и их существенное влияние на уро-
вень динамической загруженности МТУ различных гусеничных
машин требуют дальнейших фундаментальных исследований, осно-
ванных на методах натурно-математического моделирования.
В конечном итоге частные спектры переходных процессов, как и
стационарных, представляются в виде распределения плотности
вероятности эквивалентных амплитуд p0(Sa) и суммарного числа
циклов Л\>. Объединяя оба спектра pc(Sa), Nt и ро(5»)« М- полу-
чаем смешанный спектр pz(Sa) рс(5а)iVc/A\ + pv(Sa)Nv № с
суммарным числом циклов , что является ис-
ходной информацией для уточненных расчетов прочности и долго-
вечности деталей (см. т. 5, 8). Отметим, что no pv(Sa) и Nv, как
и для стационарных процессов, можно оценить эффективность ме-
роприятий по повышению несущей способности деталей или влия-
159
нис изменившихся условий эксплуатации на их ресурс по форму-
лам (8.18) и (8.19). Кроме того, сопоставляя результаты оценок
по стационарным и переходным режимам с результатами оценки
по смешанному спектру, можно выявить долю повреждений, вно-
симых на каждом из режимов, и тем самым оценить важность тех
или иных мероприятий по обеспечению работоспособности детали.
Отметим стохастический характер получаемых спектров: вели-
чины p(S.) и TV по существу являются фиксированными спектраль-
ными характеристиками напряженности определенной конкретной
машины. Случайные вариации спектров нагрузок могут быть оха-
рактеризованы функциями распределения их параметров. Если для
некоторых условий в пределах известной их группировки и сочета-
ния получены некоторые значения S, и S,, то в общем случае их
следует рассматривать как случайные величины, так как при пост-
роении спектров такими же способами для других машин в усло-
виях эксплуатации, которые не учтены в предыдущей ситуации,
получаются другие значения S, и 51# Следовательно, можно рас-
сматривать плотности распределения p(Sa) с параметрами Sa,
a p(Sa) —с параметрами Sa, Эти величины определяют
соответствующие им коэффициенты вариации vSae Vj, =
Надежная оценка этих параметров слож-
на, так как требуется наличие большого объема информации и ус-
ловий, обеспечивающих статистическую достоверность получаемых
данных. В первом приближении обычно пренебрегают изменчи-
востью т>51, полагая неизменной форму спектра, и осредняют т>5а
для однотипных условий; при этом величину не рассматривают.
Напротив, величине придается наибольшее значение, так как
она характеризует изменчивость средней амплитуды спектра,
а следовательно, и уровень нагруженности детали. Зная v§t, можно
учесть стохастический характер амплитуд спектра посредством
введения параметра е = 1 4- позволяющего определить по
заданной вероятности Р и отвечающему ей квантилю UP фактиче-
ские значения амплитуд Sa. ф/ =Sa/e, считая St/ в исходном спект-
ре их средними значениями.
160
Глава 9 ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ
КРУТИЛЬНЫХ КОЛЕБАНИЙ
9.1. МЕТОДИКА НАТУРНОГО ЭКСПЕРИМЕНТАЛЬНОГО
ИССЛЕДОВАНИЯ
Натурный эксперимент позволяет определить динамическую на-
груженность составных частей МТУ в реальных условиях эксплуа-
тации танка с учетом конкретных характеристик местности и инди-
видуальных особенностей водителя.
Экспериментальное исследование составных частей МТУ произ-
водится не только в пробеговых, но и в стационарных условиях: на
объекте (со снятыми гусеницами); на грузовых стендах; на мотор-
ных и моторно-трансмиссионных стендах; на специальных динами-
ческих стендах для исследования отдельных агрегатов и их при-
водов.
Определение динамических нагрузок в трансмиссии, приводах
и других агрегатах в пробеговых условиях, а также формирование
их спектра — наиболее трудоемкие процессы, требующие примене-
ния сложной аппаратуры.
В стационарных условиях на объекте или моторно-трансмисси-
онных стендах исследования проводятся в тех случаях, когда разли-
чие в реализации динамических процессов в пробеговых и стендо-
вых условиях несущественно.
Для исследования характера возбуждаемых форм резонансных
и вынужденных колебании в элементах трансмиссии танка, а также
различных антивибрационных и демпфирующих устройств приме-
няются стенды, в которых должна быть обеспечена динамическая
эквивалентность объектовой системы и стендовой установки.
В процессе подготовки к эксперименту необходимо:
выбрать места установки первичных преобразователей (ПП) и
токосъемных устройств (ТСУ); обеспечить прокладку измеритель-
ных трасс, исходя из возможностей компоновки ПП и ТСУ на объ-
екте исследования без нарушения его функционирования;
выбрать типы преобразователей, устройств передачи информа-
ции, усилительной и регистрирующей аппаратуры;
разработать конструкторскую документацию на установку пре-
образователей и ТСУ, дообработку исследуемых механизмов и ус-
тановку измерительной аппаратуры на борту танка;
изготовить и дообработать соответствующие сборочные единицы
и детали;
собрать, подготовить, проградуировать и установить преобразо-
ватели, ТСУ и аппаратуру;
11 Зак. 20с
161
собрать и установить на стенде или объекте препарированные
сборочные единицы МТУ;
проложить измерительные трассы, установить вторичную изме-
рительную аппаратуру;
провести отладку всего измерительного комплекса.
Номенклатура контролируемых параметров, выбор типа средств
измерений. При экспериментальном исследовании динамических
процессов в МТУ большое значение имеет точное измерение пара-
метров, определяющих динамическую нагруженность элементов
двигателя, трансмиссии и приводов к вспомогательным агрегатам.
Условия в зоне размещения ПП в МТУ специфические: повышенная
температура (до 100—120 °C); масляный туман, пыль, продукты из-
носа трущихся деталей; вибрация и относительное смещение состав-
ных частей МТУ; широкий спектр электрических помех большой
интенсивности. На элементы МТУ воздействует широкий спектр
нагрузок с частотой от 0 до 3 кГц при относительной деформации
т] = 0,5- 10s... 1• 10* еод*, что соответствует напряжениям кручения
стальных валов т=8,0... 1,6-103 МПа. Частота вращения валов
изменяется, как правило, от 0 до 100 с-1 (на валах двигателей,
трансмиссий и приводов к большинству агрегатов), но может до-
стигать и 500 с”' (в приводе к нагнетателю и на валах ГТД).
О характере динамических процессов в МТУ и о динамической
нагруженности ее элементов можно судить по результатам измере-
ния упругих деформаций и угловых колебаний валов, мгновенных
угловых скоростей и ускорений элементов с последующим пересче-
том на динамические моменты, действующие на отдельные эле-
менты.
Измерение упругих деформаций элементов производится с по-
мощью первичных преобразователей различного типа (тензорезис-
торных, магнитоупругих, индуктивных и др.). Наиболее широко
распространены тензорезисторные преобразователи, обеспечиваю-
щие линейную зависимость деформации вала т] от изменения сопро-
тивления тензорезистора Л/?.
Переход от деформации к силовому параметру (например,
к моменту на валу или силе в кинематической паре) осуществля-
ется по формуле
м _ 2 ikpGJp
г sin 2 р
(9-1)
где Мкр —динамический момент кручения; Т)жР — деформация кручения; G — мо-
дуль упругости при сдвиге; Jp — полярный момент инерции сечения вала; г—ра-
диус вала; 0 — угол наклона тензорезистора к оси вала.
Измерение угловых колебаний производится с помощью меха-
нических или электрических торсиографов, регистрирующих отно-
сительные колебания сейсмической массы, свободно сидящей на
оси вала, относительно корпуса торсиографа, жестко связанного с
исследуемым сечением вала.
* Единица относительной деформации (1 еод - 1-10"®).
162
Доступ к местам максимальных угловых колебаний в танковых
МТУ ограничен, а сами торсиографы имеют узкий частотный диа-
пазон. В силу этих причин торсиографы применяются крайне
редко.
Измеряя угол закручивания а между двумя сечениями вала с
известной крутильной жесткостью С этого участка вала, можно
определить динамический момент: М^р = Са = С(ф|—<р2),
где ф|, ф2 — угловые колебания в контрольных сечениях вала. Для
измерения угла закручивания вала а можно использовать фазовые
и временные методы.
9.2. ИЗМЕРИТЕЛЬНАЯ АППАРАТУРА
Первичные тензорезисторные преобразователи (ТРП). Принцип
работы этих преобразователей основан на тензорезнстивном эф-
фекте — изменении удельного электрического сопротивления прово-
дящих материалов под действием деформаций растяжения или
сжатия. Тензорезисторы наклеиваются на поверхность исследуе-
мой детали. Изменение сопротивления регистрируется специальны-
ми приборами и может быть переведено в значения деформации,
от которых по закону Гука можно перейти к напряжениям, а по
формулам вида (9.1) — к моментам или силам. Благодаря малым
размерам и массе ТРП можно разместить практически в любом
месте конструкции.
При исследовании МТУ применяются в основном проволочные
и фольговые тензорезисторы с базой 3—10 мм [15] и коэффициен-
том тензочувствительности
ь» - __ &RIR .q д,
Лт “ AZ./Z. ~ ~
где А/?//? — относительное изменение сопротивления ТРП; AL/L — относитель-
ное изменение базы (.глины решетки) ТРП; т] — относительная деформация ис-
следуемой детали; обычно Кт — 1,8. ..2,2.
Измерительные схемы. Для регистрации изменения электричес-
кого сопротивления ТРП при деформации исследуемых деталей
его необходимо преобразовать в пропорциональное изменение силы
тока или напряжения, для чего ТРП включается обычно в схему
моста Уинстона (рис. 9.1). Если мост не находится в положении
равновесия, т. е. нс сбалансирован, его выходное напряжение
(9.3)
При измерении деформаций, а также моментов кручения и изги-
ба могут быть применены следующие схемы тензомостов:
с одним активным плечом /?, = /?-]- Д/? и одним компенсацион-
ным R2 = R (четвертьмост); R3 = R4 = R6 (балластные сопротив-
ления); » AR/4R-,
с двумя активными одинаково изменяющимися плечами (полу-
мост) . R{ = R + bR- R2 = R- bR, R3 --=R4 = Rb- ±R 2R
(рис. 9.1, a);
11*
163
с четырьмя активными одинаково изменяющимися плечами
(полный мост): Ri = R3 = R + AR; R2 = Rt = R — AR; UM3JUU^
» \R/R (рис. 9.1, e).
Рис. 9.1 Схемы размещения и соединения тензорезнсторов для измерения дефор-
маций кручения:
а — полумостовая; б — полумостовая с полной компенсацией изгиба; в — мостовая; /, 2, 3.
4 — тензорезисторы; t7BX, l,am~ входное и выходное напряжения тензомоста
Измерение деформации кручения. Максимальное и минимальное
нормальные напряжения т при кручении вала испытывают тензо-
резисторы, расположенные соответственно под углами 0 = 45 и
135° к оси вала. В этом положении чувствительность ТРП макси-
мальна, а изменение сопротивления AR/R = Кх Tjm„ = Кх*тах 2G,
где G — модуль упругости при сдвиге.
При размещении и соединении тензорезнсторов по схе-
мам 9.1, а—з обеспечивается полная компенсация деформации
тензодатчиков при температурных изменениях объекта измерения,
а по схемам 9.1, б, в — компенсация деформации от изгиба.
Выходное напряжение тензомоста при полумостовой схеме
включения
- 2 GWrp ^вх .
при мостовой схеме включения
11 — К ! J
с/влх— г'т '-/вх »
где МЖР — крутящий момент, передаваемый на исследуемую деталь; — поляр-
ный момент сопротивления поперечного сечения.
164
Промежуточные преобразователи. Эти преобразователи пред-
назначены для обеспечения постоянства параметров напряжения,
питающего тензомост; преобразования сопротивления ТРИ в элек-
трический параметр постоянного, переменного или импульсного
тока с заданной погрешностью в рабочем диапазоне частот; перо
дачи информативного сигнала с вращающихся деталей на регистра-
тор.
В выходной диагонали измерительного моста с ТРГ1 образуется
амплитудно-модулированный сигнал (AM-сигнал), огибающая ко-
торого несет информацию об измеряемой величине. Этот сигнал
обычно подается на устройство съема информации. При этом на
полезный сигнал может накладываться сигнал шума (помех, свя
заиных с передачей сигнала от вращающегося вала к неподвижной
части измерительной аппаратуры).
Для уменьшения влияния шума на полезный сигнал целесооб-
разно включать ТРП по схеме полного моста (см. рис. 9.1, в) или
предварительно усиливать информативный сигнал на вращающем-
ся валу, что повышает помехоустойчивость выходного АМ-сигнала.
Целесообразно применять дополнительное помехоустойчивое
преобразование выходного АМ-сигнала в частоту (ЧМ-сигнал) пли
в один из параметров импульсной последовательности (период, ча-
стота или длительность импульса) — временной импульсно-моду-
лированный сигнал (ВИМ-сигнал). При таких преобразованиях от-
ношение полезного сигнала к шуму возрастает на 1—3 порядка за
счет расширения спектра частот передаваемых сигналов. Устрой-
ства с преобразованием AM—ЧМ имеют узкий рабочий интервал
(несколько килогерц), значительную погрешность (до 3—5 %) и
применяются для измерения деформаций в узком диапазоне ча-
стот. Устройства с преобразованием AM—ВИМ обеспечивают не-
линейность преобразования 0,1—0,2 % до частот в несколько ки-
логерц.
Токосъемные устройства (ТСУ) применяются как для передачи
тока на тензомост, так и для съема информативного сигнала с вра-
щающихся деталей. Наиболее широко применяются контактные
ТСУ, но они вызывают помехи, обусловленные изменением пере-
ходного сопротивления токосъема и возникновением термоэлсктро-
движущей силы в контактных парах. Наименьшие значения пере-
ходного сопротивления обеспечивает применение ртутных ТСУ
(тысячные доли ома). Эти ТСУ имеют малые габаритные размеры;
некоторые их виды выпускаются серийно и широко применяются
при исследовании динамических процессов. Однако они токсичны
при изготовлении, сложны по конструкции, имеют ограниченный
ресурс работы, чувствительны к вибрации и попаданию в их ртут-
ные камеры влаги и масла.
Щеточные и струнные ТСУ применяются только в соче-
тании со стабилизаторами напряжения тензомоста и помехоустой-
чивым промежуточным преобразователем информационного сигна-
ла или при наличии токостабилизирующих элементов в цепи пита-
165
ния и дифференциального усилителя с высоким выходным сопро-
тивлением.
В последние годы нашли применение бесконтактные ТСУ. В ка-
честве индуктивного канала в них используются вращающиеся
трансформаторы на ферритовых сердечниках. За рубежом широко
применяются индуктивные ТСУ, требующие стабилизации на-
пряжения питания и обеспечения устойчивого преобразования сиг-
нала (AM—ЧМ, AM—ВИМ) на вращающейся части ТСУ (рис. 9.2).
Для передачи информации используются также емкостный или оп-
тический каналы (индуктивно-емкостные и индуктив-
но-оптические ТСУ).
Рис. 9.2. Структурная схема бескон-
тактного токосъемного устройства
с ЧМ преобразователем:
/ — исследуемый вал: 3 — выпрямитель-
стабилизатор; 3 — управляемый генератор;
1 — тензомост; 5 - градуировочный резне
тор; б — регистратор; 7 — демодулятор уси
литсль; в источник тока; 9 — ТСУ; 10 —
питающий трансформатор; // — измери-
тельны* трансформатор
Измерительные трассы на вращающихся валах. Прокладка из-
мерительных трасс от первичных преобразователей к усилительной
и регистрирующей аппаратуре прн исследовании МТУ ВГМ —
сложная конструкторская задача, требующая дообрабогки ряда де-
талей, прокладки проводов по масляным каналам, нарушения гер-
метичности устройств и др. При этом моменты инерции и податли-
вость вращающихся частей первичных и промежуточных преобра-
зователей, ТСУ и деталей не должны заметно изменять упругоинер-
ционные характеристики исследуемой системы. Для измерительных
трасс используется экранированный кабель (при передаче АМ-сиг-
нала) или высокочастотный типа РК или АВК (при передаче ЧМ-
или ВИМ-сигнала). Длина кабеля должна быть минимальной; он
не должен перемещаться относительно тех валов, вдоль которых
проложен. Пример измерительной трассы для исследования при-
вода к нагнетателю и турбине двигателя 5ТДФ показан на рис. 9.3.
Усилительная и регистрирующая аппаратура. Тензоусилитель-
ная аппаратура позволяет измерять параметры быстроменяющихся
процессов и применяется в комплекте с регистрирующими прибо-
рами: светолучевыми осциллографами, магнитографами, реже
с аналого-цифровыми преобразователями (АЦП), электронными
осциллографами, высокочастотными самописцами, различными
анализаторами. Существуют усилители постоянного тока (УПТ),
166
переменного напряжения (УПН) и переменного напряжения на не-
сущей частоте (УННЧ). Последние наиболее широко распростра-
нены, выпускаются серийно, отличаются стабильностью коэффи-
циента усиления.
Я тензостонции
Рис 9.3. Установка преобразователей и вывод тснзопроводкн в приводе к нагне-
тателю (а) и турбине (б) двигателя 5ТДФ:
/ — токосъемники; 2 - рессоры; 3 — тензорсзнсторы
Стационарная тензоаппаратура для ВГМ должна включать в
себя (рис. 9.4) демодулятор (преобразователь ЧМ- или ВИМ-сиг-
нала в напряжение), состоящий из формирователя импульсов, син-
хродетектора и У ПТ.
Рис. 9. 4. Структурная схема тензо-
нзмерительного канала с индуктивно-
емкостным ТСУ:
I — генератор и усилитель мощности; 2
вращающийся трансформатор; 3 — ныпря
мнтель; 4 стабилизатор; 5 — генератор:
6 тензомост; 7. 14 — усилители; в — пр.-
обраюватсль напряжение—частота; 9
подвижная часть аппаратуры; /0 —враща-
ющийся конденсатор; II - преобразователь
частота—напряжение; 12 — формирователь
импульсов; 13 — синхродетектор; IS -ре-
гистратор
Большое число парамет-
ров позволяют регистрировать
светолучевые осциллографы.
В пробеговых условиях широко
применяются осциллографы
типа К12-22, К20-21, в которых
блок гальванометров обладает
необходимой виброустойчи-
востью.
Градуировка средств измерений. Цель градуировки средств из-
мерений с ТРП — определение масштаба записи, получаемой на
ленте регистратора. Градуировка производится посредством за-
167
Крутки составной части МТУ с наклеенными ТРП на специальном
стенде (рис. 9.5, а). При любом способе нагружения желательно
обеспечить значение и характер приложения чистого крутящего
момента, соответствующие ожидаемому при исследовании.
Рис. 9.5. Схемы градуировки тенэорсзнсторов:
а--принципиальная схема стенда: / — редуктор; 2 - испытуемый объект; 3 — рычаг; 4 -
подстанка; 5 — динамометр; 6 — опора для закрепления рычага; 7 фундаментальная плита;
6 - структурная схема прямой градуировки: 1 — тензомост; 2 - усилитель; J — регистратор;
в — структурная схема компенсационного метода градуировки: I - полумост на валу; 2 -
полумост на тарировочной балке; 3 источник тока; / — регистратор; г тарировочная бал-
ка н эпюра ее нагибающего момента .W; Р — нагружающие силы; R& , /?д реакции опор;
I —пролет балки для размещения тензорезисторов; rf — пролет балки от места приложения
силы до опоры
Возможны следующие способы градуировки: прямой —по конт-
рольно-тарировочному импульсу тензоусилителя; компенсацион-
ный; с помощью «масштабного сопротивления», подключаемого
через ключ параллельно одному из рабочих ТРП и шунтирующего
одно из плеч тензомоста.
При закрутке детали (прямая градуировка) определяется цена
контрольно-гарировочного импульса в Н-м, а при проведении из-
мерений - масштаб записи в Н-м/мм.
При компенсационном способе сигнал от тензомоста поступает
на гальванометр, отклонение стрелки которого за счет деформации
рабочих ТРП под действием приложенного момента компенсирует-
ся посредством деформации компенсационных ТРП, наклеенных
па специальную тарировочную балку (рис. 9.5, в) и подключенных
J68
параллельно рабочим ТРП. Закруткой детали оценивается прогиб
тарировочной балки в единицах крутящего момента, а при прове-
дении измерений — масштаб записи. На точность градуировки в
этом случае не влияют погрешности, вносимые вторичной аппара-
турой.
При градуировке последним способом роль контрольно-тариро-
вочного импульса играет сигнал, полученный за счет включения
масштабного сопротивления.
Применение любого вида бесконтактных токосъемных устройств
обуславливает включение в градуировочную схему самого ТСУ.
При тензометрировании динамических нагрузок элементов вра-
щающихся деталей МТУ чаще всего невозможно точно повторно
воспроизвести условия нагружения объекта исследования, и одно-
кратные наблюдения приходится принимать за результат измере-
ний, вводя поправки на систематические погрешности средств изме-
рения и отклонение условий проведения эксперимента от нор-
мальных.
Дополнительные параметры. При исследовании динамических
процессов в МТУ приходится измерять целый ряд параметров: час-
тоту вращения исследуемого элемента; частоты вращения вала
двигателя и ведущих колес обоих бортов (при объектовых иссле-
дованиях); время; номер включаемой передачи и положение дру-
гих органов управления двигателем и трансмиссией (педали тор-
моза и подачи топлива, рычага переключения передач и др.); дав-
ление в системе управления фрикционными элементами; относи-
тельные колебания отдельных элементов МТУ и др. Номенклатура
дополнительных параметров зависит от характера исследований,
особенностей конструкции и режимов работы объектов исследо-
вания.
Отметка времени на ленте регистратора необходима для обра-
ботки результатов измерений, в частности для определения частот
регистрируемых процессов и построения временных зависимостей.
В современных регистраторах (светолучевых осциллографах и
магнитографах) применяются отметчики прямоугольных или сину-
соидальных импульсов, либо отметчики линующего типа. В качест-
ве измерителей частоты вращения могут применяться индукцион-
ные датчики, а также фотоэлектрические датчики, магнитные го-
ловки, датчики Холла и другие, которые дают дискретные сигналы,
пропорциональные частоте вращения исследуемого вала.
Частота вращения ведущих колес обычно измеряется с помощью
контактных преобразователей. При исследовании кинематики всех
звеньев МТУ ВГМ с трехстепенными коробками передач необходи-
мо измерять частоту вращения, в том числе входного вала (обычно
вала двигателя), выходных валов (ведущих колес) и одного из
промежуточных звеньев. Частоту вращения приводов вспомогатель-
ных агрегатов можно определить по передаточному отношению
привода. При наличии фрикционных или гидравлических муфт, ко-
12 Зак. 20с
169
торые могут проскальзывать в процессе эксплуатации, частота вра-
щения ведомых частей измеряется дополнительно.
Номер включенной передачи определяется с помощью реостат-
ного датчика, устанавливаемого на рычаге переключения передач
(кулисе). Ход педали газа, перемещение рейки топливного насоса,
положение рычагов поворота, давление в системе управления
трансмиссией и другие параметры измеряются с помощью реостат-
ных датчиков, включаемых по потенциометрической или мостовой
схеме (рис. 9.6). Линейная зависимость силы тока от перемещения
(угла поворота) обеспечивается только при мостовой схеме вклю-
чения потенциометра.
Рис. 9.6. Электрические схемы включения реостатных датчиков:
а — потенциометрическая без нулевой точки; б — потенциометрическая с нулевой точкой; и
мостовая; //добавочное сопротивление; #п~ полное сопротивление потенциометра; R.
R", R" — балластные сопротивления
9.3. СТЕНДОВЫЕ УСТАНОВКИ ДЛЯ ДИНАМИЧЕСКИХ
ИССЛЕДОВАНИИ
Специальный нагрузочный стенд для исследования стационар-
ных процессов в МТУ состоит из двух динамометрических тележек,
двух подъемников, установленных между тележками, водяной цир-
куляционной системы для охлаждения верхнего рабочего листа те-
лежек и гусениц танка, а также кабины с пультом управления и
измерительной аппаратурой. Танк устанавливается на тележки и
крепится четырьмя расчалками к фундаменту стенда. После пуска
двигателя и приведения в движение гусениц между поверхностями
грунтозацепов и рабочими листами тележек возникает сила трения,
которая изменяется при подъеме и опускании танка. Стенд позво-
ляет имитировать установившиеся и многие переходные режимы
работы ВГМ. Имитировать процессы переключения передач на
стенде не удается, так как нельзя учесть полностью инерцию массы
машины.
170
Схема безгусеничного стенда для исследований и испытаний
моторно-трансмиссионных установок в объектовых условиях при-
ведена на рис. 9.7. Входной повышающий редуктор стенда соединя-
ется зубчатой муфтой с ведущим колесом испытуемого объекта, а
система управления стендом
воспроизводит условия движе-
ния объекта по местности. Спе-
циальное законозадающее уст-
ройство содержит блоки вос-
произведения сопротивления
движению, инерционных нагру-
зок, затрат мощности в гусе-
ничном движителе, в силовых
установках стенда, а также
блоки воспроизведения мощ-
Рис. 9.7. Схема безгусеничного стен-
да для исследований и испытаний
танковых МТУ:
/ — мотор генератор; 2 — коробка передач;
3 — инерционные диски; 4 — редуктор; 5 —
подъемник
мости мотор-генератора. Электрический сигнал, пропорциональный
скорости движения испытуемого объекта, подается в законозадаю-
щее устройство, с помощью которого формируются сигналы, пропор-
циональные мощности, затрачиваемой на преодоление сопротивле-
ния движению объекта, соответствующего реальным условиям дви-
жения по местности.
Моторно-трансмиссионные и моторные стенды используются
для определения динамических нагрузок в МТУ и для исследования
отдельных их элементов, в частности для испытаний дисков трения
на усталостную прочность (рис. 9.8).
Рис. 9.8. Схема стенда с дизель-
ным генератором крутильных коле-
баний:
/—дизель; 2 соединительная муфта;
3 — упругий иал; 4 — тензорезисторы;
5 — датчик оборотов; 6 — установка для
испытаний дисков трения на усталост-
ную прочность; 7 привод к токосъем-
нику; 8 — токосъемник
Основным элементом лабораторных стендов для исследования
динамических нагрузок является генератор крутильных колебаний
(вибратор), обеспечивающий определенное динамическое соответ-
ствие одному из типов двигателей и позволяющий исследовать ха-
рактер возбуждаемых форм, амплитуд вынужденных и резонанс-
12*
171
ных колебаний, а также оценить влияние различных соединитель-
ных, антивибрационных и демпферных устройств на характер вы-
нужденных крутильных колебаний.
Стендовые установки для исследования динамики малых при-
водов могут состоять из элементов самого привода и маховой мас-
сы, имитирующей основную силовую цепь ВГМ. В качестве возбу-
дителей колебаний используются пульсаторы или генераторы кру-
тильных колебаний.
172
Глава 10. РАСЧЕТНЫЕ МЕТОДЫ ИССЛЕДОВАНИЯ
ВИБРАЦИЙ И УДАРОВ
10.1. ВИБРАЦИОННЫЕ НАГРУЗКИ В ДВИЖУЩИХСЯ ВГМ
Вибрации в ВГМ возникают из-за неуравновешенности сил и
моментов в МТУ и от динамических нагрузок в элементах ходовой
части. Поршневой двигатель внутреннего сгорания является мощ-
ным источником вибраций с насыщенным спектром частот. На
рис. 10.1 представлено распреде-
ление ускорений на корпусе дви-
гателя, полученное в результате
исследования его вибронагружен-
ности при движении с разной ско-
ростью по каменистой трассе тан-
ка с гусеницами с различной из-
гибной жесткостью траков. Как
видно, влияние ходовой части
танка на ускорение корпуса дви-
гателя менее существенно, чем
влияние его неуравновешенности,
возрастающее с увеличением ча-
стоты вращения коленчатого вала
двигателя плв.
Рис. 10.1. Распределение вертикального
ускорения корпуса двигателя 5ТДФ в
танке Т 64А при лд.-»1800 . .2800 об/мин:
— серийный трак; - — и-----------пя-
тнпроушейный и семнпроушснный штампован
ные траки соответственно; IV — VII номера
передач в бортовых коробках
Многократные исследования показали, что вибрацию корпуса
танка формируют в основном элементы ходовой части, взаимодей-
ствующие между собой и с трассой. Для примера приведем данные
исследования виброакустического состояния американского танка
M-60AI (табл. 10.1).
Вибрации двигателя могут вызывать резонансные колебания
кормового листа танка в продольном направлении.
При формировании вибронагруженности несущих конструкций
ВГМ за счет ходовой части преобладает силовое взаимодействие
опорных катков с беговой дорожкой. При качении по неровной по-
верхности происходит не только вертикальное перемещение центра
173
Таблица 101
Превышение (в т раз) уровня вибраций танка М-60А1, движущегося
со скоростью 20 км/ч (по сравнению с неподвижным)
Месю намерения ускорений т «ю всем диапазоне частот т по октавам
31 Гц 63 Гц 125 Гц 271 Гц
Правый борт 6,5 14 8 10 4
Башня сверху 6,5 25,3 10 1.3 4
Левый борт 7 20 6,5 11 3.2
Днище в боевом от- делении 3,5 25,3 3.2 5 4
Крыша 5,6 15.8 1 3 5 2,6
тяжести опорного катка, но и соизмеримое с ним горизонтальное
смещение, что обуславливает знакопеременное вращательное дви-
жение катка. При описании вращательного движения тела наибо-
лее трудно определить момент инерции, который зависит от поло-
жения мгновенного центра поворота тела. Мгновенный центр знако-
переменного поворота опорного катка находится в точке пересече-
ния линии действия балансирной связи с касательной плоскостью,
проведенной через точку контакта катка с беговой дорожкой, а мо-
мент инерции
— mhr-’ (0,5 + sin ’a),
где тк — масса опорного катка радиусом г; а — угол наклона балансира к го-
ризонтальной плоскости.
При рассмотрении равномерного и прямолинейного движения
ВГМ по относительно ровным и твердым трассам вертикальные от-
клонения профиля от прямоли-
Рис. 10.2. Кинематическая схема
подвески
кальное ускорение центра катка
щис обозначения:
ценного (микропрофиля опор-
ной поверхности) можно счи-
тать малыми в сравнении с ра-
диусом г катка и длиной /б ры-
чага балансира. Статическое
поджатие за счет момента Л1Г
торсионной подвески в таком
случае практически постоянно.
Для определения сил, действу-
ющих на корпус ВГМ от ко-
леблющегося опорного катка
при равномерном движении,
будем считать заданным верти-
„ (рис. 10.2). Примем следую-
174
F — сила взаимодействия катка с гусеницей;
Рст —сила статического поджатия катка за счет момента Л4Т;
Рк— сила тяжести катка;
Рй— сила тяжести балансира с равномерно распределенной по
его длине массой;
JK— момент инерции катка относительно мгновенного центра
поворота (в точке Р);
Jb—момент инерции балансира относительно его мгновенного
центра поворота (в точке Р').
Прн колебаниях положение рычага балансира изменяется не-
существенно, поэтому для определения момента инерции /к можно
считать a=const, а связь между вертикальным отклонением
центра тяжести катка (точка 4), его горизонтальным перемещени-
ем хг и соответствующими ускорениями можно выразить прибли-
женной линеаризованной зависимостью
где хг — горизонтальный компонент ускорения точки А.
Формальный учет силы трения Ртр (при незначительном момен-
те трения в опоре) позволяет рассматривать схему, приведенную
на рис. 10.2, как систему с идеальными связями, для которой спра-
ведлив принцип равенства нулю суммы работ всех сил и моментов
при виртуальных перемещениях:
e fig, Л» . (ЮЛ)
‘ 1 г ’ • - /б cos а
Виртуальное перемещение бг соответствует силам F, Рст, Рк и
Ртр. Для силы тяжести балансира бго =0,56г. Виртуальные пере-
мещения бф1 и бф2 соответствуют моменту инерции /к катка отно-
сительно точки Р и моменту инерции /6 балансира относительно
точки Р'. Работа силы трения Frv на перемещении бг равна нулю.
Следовательно,
Fir - (Рк 4- Рст) Ъг - Рб3гб - Дек8?, - = 0, (10.2)
где еж и — угловые ускорения катка и балансира,
*>tg а/г , еб = .vB/(Z6COS a). (10.3)
Подставив (10.1) и (10.3) в (10.2), получим
Г Р„ + ₽. + 0.5Рв + ^_(1 + ^ + Д),
где g — ускорение свободного падения.
175
Рассмотрим условие динамического равновесия катка
(рис. 10.3):
ЕМр 4ек = 0; £/Ио-Лдв = 0,
где Jо— момент инерции катка относительно точки О контакта с гусеницей.
Рис. 10.3. Схема сил, действующих на
опорный каток
Заменив двумя неизвестными
реакциями Fr и F\ силовое воздей-
ствие на корпус ВГМ в точке задел-
ки балансира, получим
F^-t-^rctga -p^etga /?Brctga = (0,5PBr2 Г PZ’sin .-’a)xBtga/(gf);
Frr= l,5PKr2ABtga/(g7j,
откуда
/•=0.15^,; I (104)
= PCT 4- 0,5 Pe 4- 0,15 PhxB tg2a 4- P6XB/(3O cos2a). J
Кроме того, на корпус действуют моменты этих сил Frh и Рвй,
где Л — расстояние от точки заделки балансира в корпусе до плос-
кости, в которой происходит вертикальное перемещение центра тя-
жести опорного катка (из-за консольности подвески). Полученные
зависимости определяют инерционные свойства и геометрические
параметры подвески, а также характер (микропрофиль) опорной
поверхности беговой дорожки гусеницы.
Аппроксимируя микропрофиль гармонической функцией и учи-
тывая (10.4), получим выражения для динамических составляю-
щих сил Fr и F\ от i-ro катка:
Гг/ = 0,15 Рк tg sin ;
= (0.15 Р. tg’a, + “гНs,n - ?<> •
где о» — 2ли/1— круговая частота вертикальных колебаний катка; и —скорость
2 к
движения машины; ft = —j~ (х, — Xj— /) фазовый угол воздействия микро-
профиля на l-й каток; I — расстояние между соседними впадинами или верши-
нами микропрофиля, Xi, Xi — горизонтальная проекция расстояния между осью
первого и i-ro катков и центром тяжести машины; Н — половинное значение рас-
стояния между вершинами и впадинами идеализированного (аппроксимирован-
ного) мнкропрофнля; (1,2,..., k — число опорных катков на один борт.
Представим подрессоренную часть машины как систему с тремя
степенями свободы: по продольной оси X, по вертикальной оси Y и
вокруг поперечной оси Z.
176
Мгновенные значения кинематических параметрон колебаний
подрессоренной части машины
?ы(0 ~ 2S —/(.cose,)]:
где <рц — угловое ускорение подрессоренной части; х„ и у„ — соответственно го-
ризонтальное и вертикальное ускорения центра масс подрессоренной части; /м —
момент инерции подрессоренной части вокруг осн, проходящей через центр тя-
жести; b — проекция на ось У расстояния между центром тяжести и точками
приложения сил от катков к корпусу; ш,— масса подрессоренной части машины.
При движении по пахоте и культивированным полям (поперек
борозд) принимаются следующие параметры микропрофиля: //
= 30.. .40 мм,/—400 (800) мм. Микропрофиль ровных твердых
трасс (за счет звенчатости гусениц и волнистости опорных повер-
хностей беговых дорожек) имеет параметры Н=\.. .3 мм и / = /тр,
где /тр — шаг гусеницы.
10.2. УДАРНЫЕ НАГРУЗКИ ПРИ СТРЕЛЬБЕ ИЗ ТАНКОВОГО ОРУДИЯ
Для расчета ударных нагрузок используются данные динамиче-
ского расчета орудия при выстреле. В большинстве случаев при
исследовании нагруженности танкового артиллерийского вооруже-
ния и танка в целом учитывают только импульс силы отдачи, что
существенно упрощает задачу; текущие воздействия ввиду их крат-
ковременности нс рассматриваются. Однако для определения
ударных ускорений импульсный подход не пригоден. Так как уско-
рение отката частей орудия, башни и корпуса танка достигает мак-
симального значения именно в момент отдачи, необходим одновре-
менный учет мгновенных значений действующих сил.
Воздействие выстрела при откате передается на корпус через
противооткатное устройство, люльку, цапфу, башню и погонное
устройство башни. Погонное устройство состоит из верхнего и ниж-
него потоков со сферическими проточками с радиусом R„, внутри
которых находятся шары диаметром 2гш. Нижний погон жестко
крепится к корпусу, а верхний —к башне через резиновые амор-
тизаторы. Через внутренние металлические втулки амортизаторов
проходят крепежные болты с радиальным зазором 1 мм. Высота
втулок выбирается так, чтобы при полной затяжке болтов обеспечи-
валось за счет радиальной податливости амортизаторов перемеще-
ние только верхней части погона без поворота. Шаровое устройство
позволяет башне смещаться в плоскости погона и поворачиваться
относительно корпуса. Если рассматривать поворот башни только
вокруг поперечной оси танка (в малом угловом диапазоне), то по-
гонное устройство можно представить в виде звена с некоторой по-
177
датливостью в плоскости шаров, обеспечивающего одновременно
возможность относительного поворота башни. На схеме колебаний
башни и корпуса (рис. 10.4) введены следующие обозначения:
Рис. 10.4. Расчетная схема колебаний башни и корпуса:
/ — корпус; t — башня; 3 — упругое звено погонного устройства; 4 — фрикционный элемент
погона; 5 верхний погон; 6 - шары погона
^отк.г и /?0Th B— соответственно горизонтальная и вертикаль-
ная составляющие силы сопротивления откату, приложенной к оси
цапф;
у — угол возвышения или склонения орудия;
г, — восстанавливающая сила погонного устройства, действу-
ющая в плоскости шаров погона на башню и корпус;
W и М— соответственно реактивные сила и момент в погонном
устройстве;
момент инерции башни относительно поперечной оси тан-
ка, проходящей через центр тяжести башни (ЦТбш):
7кр — момент инерции корпуса относительно поперечной оси
танка, проходящей через центр тяжести корпуса (ЦТкр):
h\ и ha—расстояние от плоскости шаров погона до оси цапф и
до ЦТмр корпуса соответственно;
лйш и ©rt,u — линейный и угловой компоненты абсолютного пере-
мещения башни соответственно;
хкр и ?к₽—линейный и угловой компоненты абсолютного пере-
мещения корпуса соответственно;
d — диаметр поворотного устройства (погона).
Пусть также (?в1П —сила тяжести башни, a —сила тяжести
корпуса с их внутренним оборудованием; хвш—хкр — перемещение
башни относительно корпуса.
Силы трения в шаровом устройстве попона и между стволом и
люлькой, а также силы сопротивления движению корпуса со сто-
роны ходовой части тапка нс учитываются: первые из-за малости,
178
а последние из-за кратковременности рассматриваемых воздейст-
вий (до 0,05 с с момента воспламенения пороха), что не приводит
к ощутимой деформации подвески. Масса верхнего погона приня-
та равной нулю; танк установлен на горизонтальной площадке.
Линейное ускорение башни в направлении максимальных на-
грузок по продольной оси тайка определяется равнодействующей
горизонтальных сил:
Л Ош ‘ (^?отк.г в)/^0ш ?
аналогично для корпуса
где глвш и /л*р — массы башни и корпуса соответственно.
Угловое ускорение корпуса
?«р ~ Ар »
где М^3 — результирующий момент сил, действующий на корпус.
Угловое ускорение <ркр можно рассчитать с допустимым прибли-
жением, если пренебречь в начальный момент времени влиянием
кратковременного относительного поворота башни на шарах по-
гона:
. (Ю.5)
Аш + Ар
В приведенных формулах силы /?1)ТК и Fa являются переменны-
ми. Значения /?отк берутся из артиллерийских расчетов танковых
орудий для соответствующих типов снаряда и противооткатного
устройства и определенной температуры тормозной жидкости. Для
определения силы Fa можно воспользоваться характеристикой со-
противления погонного устройства (табл. 10.2), которая получена
экспериментально при стрельбе из орудий современных танков.
Фаза нагружения имеет несколько характерных участков
Д'б111А'кр; на >час1ке от 0 до 0,5 мм сила сопротивления FB плавно
нарастает до 70 кН; на участке от 0,5 до 1,5 мм FB практически
постоянна и составляет в среднем 70—80 кН; на участке от 1,5 до
2,7 мм F, линейно возрастает, жесткость погона при этом равна
примерно 450 кН/мм; на участке от 2,7 до 3,25 мм /?в возрастает
нелинейно, характеристика нелинейности жесткая. При снятии на-
грузки F, ветвь характеристики расходится с нагрузочной ветвью,
что свидетельствует о наличии гистерезиса, сопровождающего де-
формацию погона.
Скорость деформации погона при нагружении, как показывают
расчеты, может достигать 0,35 м/с, а при разгрузке 0,15—0,2 м/с,
поэтому характеристику сопротивления погона при деформации
следует считать полученной в условиях динамического нагружения.
179
Таблица (0.2
Характеристика сопротивления погонного устройства танка
Нагружение Снятие нагрузки
М|1 Чш " *жр- мм Fv кН Л6ш ~ 'кр-
20 0,2 1150 3,25
60 0,45 950 3,24
72 0,5 850 3.2
72 0,8 780 3,15
74 1.0 700 3.1
75 1.2 650 3,05
80 1.5 600 3,0
100 1.6 550 2,95
170 1.7 510 2,9
215 1.8 470 2,85
300 2.0 430 2,8
420 2,25 380 2,75
530 2.5 330 2,7
620 2.7 310 2,65
690 2.8 280 2,6
760 2,9 260 2,55
850 3,0 240 2.5
1000 3,1 200 2,45
1150 3,15 170 2.4
1220 3,2
1230 3,25
Представим перемещения башни в вертикальной плоскости в
виде эквивалентного четырехзвснника, имеющего одно неподвижное
Рис. 10.5. Кинематическая схема по-
гонного устройства
звено ВС, связанное с нижним
погоном и корпусом, и три под-
вижных: два из них (АВ и CD)
связаны с шарами, а одно
(AD) —с верхним погоном и
башней (рис. 10.5). При этом
АВ = СП = 2(/?п-гш)—г;
cos а + cos р = L ,
гле L — конструктивный параметр (константа) погонного устройства, который
теоретически может принимать значения от 0 до 2.
180
Для погонных устройств современных танков г = 2,5 мм. Когда
погон не нагружен, можно считать (в соответствии с чертежами),
что а = 0 = 45°. Тогда L = 1,4. Центр тяжести башни с оборудо-
ванием боевого отделения смещается на одну треть диаметра d по-
гона в сторону цапф, поэтому она самоустанавливается так, что
а =А 0 (а = 37° и 0 = 53°). При этом дифферент (фбшо) башни со-
ставляет 50".
Если приложить к башне силу Q под углом у к горизонту, баш-
ня сместится от статического положения на величину б = 6л = 6О,
ее носовая часть (точка D) опустится, а кормовая (точка А и
ЦТЛ|Ц) поднимутся соответственно на hD, hA и Д. Снятие нагруз-
ки Q приводит к возврату башни в исходное положение.
Найдем эквивалентную восстанавливающую силу погонного
устройства на участке перекатывания шаров. Из геометрических
соотношений в четырехзвеннике ABCD можно получить с хорошим
приближением:
ftA = » (1,5 4-7,5 8/г):
hn = 0,6 8;
Д = (Лл - 2 6О)/3 = 8 (0,1 4- 2,5 8/г);
- (Ал + ло) а - « (2.1 + 7,5 -J-) d.
В соответствии с принципом виртуальных перемещений (при
отсутствии трения реактивные силы в шарнирах не учитываются):
ОбшД - да (0,6 tg 7 + I) или R - Обш •
Так как при а = 37° 8гоах = 0,2 г,
то =» 0,6 G6ui/(0,6 tg 7 4- 1).
Наибольшее угловое ускорение башни можно рассчитывать по
основному уравнению динамики. Для этого рассмотрим движение
башни как вращательное относительно ее мпновенного центра по-
ворота (МЦП), координаты которого определяются точками пере-
сечения линий, исходящих из подвижных звеньев АВ и CD. Годо-
граф МЦП представляет собой сложную кривую на вертикальной
плоскости, однако в пределах рассматриваемых углов поворота
звеньев АВ и CD расстояние от ЦТ6ш до МЦП можно считать прак-
тически постоянным и равным 0,07 м. Ошибка в определении мо-
мента инерции башни относительно МЦП за счет этого приближе-
ния не превышает ±8 %. Тогда
Яотк. 3 - G61U8 (0,1 + 2,5 8/г) 4- /?о«.г (2,1 4- 7,5 8; г) X
х (4 *g 7 - *>) 4- - у*-+°-45 (2>!+7>5 4) 4 =°-
181
Угловое ускорение башни максимально при а->0 (звенья АВ
и AD располагаются на одной линии, а значение <p6,-.mix = 0,8мрад
мало и не может повлиять на значение угла а). Следовательно,
max « 3 6 (убш + о 45 тбш) (floixCOS f — 0,6 Ош — ЯоткСОЗ^Л, -у) .
10.3. СИЛОВОЕ воздействие снарядов
НА БРОНЕКОНСТРУКЦИЮ ТАНКОВ
Силовое взаимодействие с преградами бронсбойно-подкалибер-
ных (БПС), осколочно-фугасных (ОФС), бронебойно-фугасных
(БФС) и кумулятивных (КС) снарядов, несмотря на различный ха-
рактер их действия, может быть рассмотрено на основании общих
законов механики — сохранения количества движения, энергии,
а также соотношений, связывающих напряжения и деформации
при различных скоростях нагружения.
Сила сопротивления внедрению снарядов является функцией
свойств материала, толщины преграды, скорости, угла встречи, па-
раметров снаряда, поэтому получить единое аналитическое выраже-
ние, учитывающее многообразие условий внедрения, сложно.
Соударение с преградами недеформируемых БПС с карбидо-
вольфрамовым наконечником можно рассматривать как дви-
жение в пластической среде жесткого тела, деформациями которо-
го можно пренебречь. При соударении срабатывающихся цельно-
корпусных БПС с металлическими преградами напряжение в зоне
контакта выше предела прочности, поэтому происходит деформиро-
вание взаимодействующих тел, при этом скорость проникания сна-
ряда (границы контакта) меньше скорости движения оставшейся
недеформироваиной части.
Движение снарядов в преграде можно разделить на два этапа:
первый (нестационарный)—внедрение с образованием кратера, при
котором возникающие ударные волны быстро затухают; второй
(стационарный) — проникание снаряда в преграду без выброса ма-
териала.
При давлении, вызывающем напряжения, значительно превы-
шающие предел прочности на сдвиг, состояние материала близко
к всестороннему гидростатическому сжатию, что позволяет рас-
сматривать пластическое течение в твердых телах при помощи
гидродинамических методов. Для определения ударной сжимаемо-
сти вещества строится ударная адиабата p = f(p). При давлении,
приблизительно равном 50 ГПа, когда можно пренебречь повыше-
нием энтропии на фронте ударной волны (УБ), можно использовать
уравнения сохранения массы и импульса
p0D = р (D — и); р — — Ро«^, (10.6)
где ро, р — плотность вещества начальная и па фронте УВ; р0, р —давление пе-
ред волной и на ее фронте; и. D — скорость частицы на фронте УВ (массовая
скорость) н скорость самой УВ.
182
Приведенные соотношения позволяют построить график удар-
ной адиабаты в координатах р = f (и).
Закон ударной сжимаемости представим в виде
О + (10.7)
где индекс i - 1 относится к снаряду, i - 2 — к преграде; с0 и к — постоянные
(для стали со — 3800 м/с, X — 1,58 при и > 825 м/с).
В соответствии с теорией ударных волн в момент удара на гра-
нице раздела
и = г>с — их,
где 1>е — скорость снаряда в момент удара; и* —скорость на границе раздела.
Используя вторую часть выражения (10.6) и формулу (10.7),
можно составить систему уравнений
I рх - fol - «ж) ко. + kc - «.г) I;
1^ = Рогкы + Мж) «ж-
Исключив из системы рх, получим квадратное уравнение относи-
тельно их:
Л«2г + ^«г + С = 0,
где А = Poj^s Poi^i ! В = poiAn 4" 2 PoPivc + Pos^oi I С - — poit’c (roi + Mvc) •
Если снаряд и преграда состоят из одного и того же материа-
ла, то их = 0,5 у, . При соударении с преградой БПС, имеющих
= 1500 и 2000 м/с, давление рх на границе раздела приблизи-
тельно равно 30 и 42 ГПа соответственно. При ударе кумулятив-
ной струей сис» Ю км/с давление достигает 300 ГПа.
Определение импульса силы, переданного бронеплитам броне-
бойными снарядами. Импульс силы /„, переданный элементу броне-
конструкции БПС, и его нормальная к преграде составляющая 1п
определяются суммой импульсов снаряда (/„ m(vr), выброшен
ного из кратера материала (/,, = т,д\) и отскока (рикошета)
(Л = Wpt>p):
/о = 4- ;
i n (lU-ol
/„ ж cos a 4- ntKvK cos 3 4- cos 7 ,
где mc, rnf, — массы снаряда до удара, после рикошета и масса выброшен-
ного материала из кратера; ес, цр, vK — скорости встречи, рикошета снаряда и
средняя скорость потока выброшенного материала нз кратера, а, у. Р — соответ-
ственно углы (от нормали) встречи снаряда с преградой, рикошета, основного
потока выброшенного металла.
Определение первой и третьей составляющих импульса для пе-
деформируемых снарядов не вызывает особых трудностей, тогда
как сложность процесса кратсрообразования не позволяет рассчи-
тать реактивный импульс выброшенного металла.
Процесс кратсрообразования и выброса материала на началь-
ном этапе внедрения снаряда связан с распространением упруго-
пластических волн сжатия, которые в момент удара близки к сфе-
рическим. При дозвуковой (для металла) скорости удара упругая
183
волна сжатия опережает пластическую и затухает. Пластическая
волна за счет догоняющих и боковых волн разгрузки также быст-
ро затухает по мере ее распростра-нения к тыльной поверхности,
а на свободной лицевой поверхности происходит разгрузка сжато-
го материала, вызывающая его пластическое течение и выброс из
кратера со скоростью, определяемой интенсивностью и крутизной
профиля волны разгрузки (растяжения). Выбрать расчетную мо-
дель чрезвычайно сложно, а для приближенной количественной
оценки можно использовать полуэмпирический метод, базирую-
щийся на экспериментальных данных по обстрелу бронеплит сред-
ней твердости, закрепленных на штатных тюбингах.
Например, реактивный импульс выброшенного из кратера ма-
териала можно определить по количеству движения, сообщенного
потоком осколков (частиц) материала специальным мерным пли-
там из стали средней твердости или сплава АМГ (рис. 10.6), уста-
новленным в вертикальной плоскости на расстоянии I —
= 250.. .300 мм от предполагаемой точки удара. Размеры мерных
плит и их ориентация выбираются опытным путем, исходя из необ-
ходимости обеспечения захвата ими основной массы выброшенных
частиц.
Рис. 10.6. Схема для определения реак-
тивного импульса выброшенных частил
металла при ударе по броневой плите
бронебойно-подкалнберным снарядом
под углом а к нормали:
I — броневая плита; 1 — мерная плита; —
средний угол потока частиц; средняя ско
рость частиц
По измеренной дальности н направлению полета мерных плит
на основе известных физических зависимостей для движения го-
ризонтально брошенных тел при заданной начальной высоте их
установки определяется начальная скорость их движения, а затем
по скорости и массе — реактивный импульс.
Скорость выброшенных частиц преграды оценивалась по совер-
шенной ими работе, т. е. по глубине выбоин в плите; при этом ча-
стицы представлялись шаровыми элементами с коэффициентом
формы К = 0,7.
Обстрел производился 125-мм целыюкорпусным и другими БПС
под углом а = 60° к нормали со скоростью снаряда ос = 1 600 м/с;
был произведен обмер 200 выборочных выбоин. Установлено, что
частицы металла массой до 10 г, составляющие около 20 % от
общей массы выброшенного металла, имеют скорость 400—1 700 м/с,
а частицы массой от 10 до 60 г — 300.. .1 300 м/с.
Средняя скорость потока частиц, определенная из равенства ко-
личества движения этого потока суммарному импульсу частиц, со-
ставила приблизительно 820 м/с. Масса выброшенного материала
184
определялась по результатам обмера объема кратеров на броне-
вой плите от уровня лицевой поверхности плиты до начала цилинд-
рического канала. Зависимость массы тк выброшенного из кратера
материала от скорости удара vc и от угла встречи а показана на
рис. 10.7.
Рис. 10 7 Зависимость массы выброшенного материала от скорости нелеформнру-
емого (и) н деформируемого (б) бойков, а также от угла встречи снаряда с пре
градой (в):
1 - а — 70 ; 2 - а - 60°; 3 а О; 4 недеформирусмыЛ боек (100 мм БПС); 5 дсформн
руемыЛ боек (125 мм БПС)
Результаты экспериментального исследования и расчета реак-
тивного импульса силы /р приведены в табл. 10.3.
Таблица 103
Реактивный импульс силы, действующей на бронеплиты при обстреле БПС
Тип БПС гс, M ,'С (угол встречи снаряди с преградой) кН-с к* /р. кН с
эксперимент | расчет
нормальная составляющая полное .31 пачеи не
125-мм (цельнокор пусный) 1650 ±50 (а-60°) 6,0 4,5 40±5 2.4 3,2 ±0,6 3,7
125-мм 1630 ±30 (а-60°) 7,4 5,0 40 3.1 4.1 ±0,12 4,05
122-мм 1430 ±35 (а-50°) 6.4 4,0 45 2.0 2.9 ±0.1 2.8
122 мм 1550± 15 (а-50°) 7.0 5,5 50 2,4 3,8 ±0,4 4.2
Как показали исследования, угол 0 между направлением реак-
тивного импульса и нормалью к преграде незначительно зависит
от угла встречи снаряда с преградой, конструкции и свойств мате-
185
риала снаряда и плиты, а также скорости встречи. Так, при обстре-
ле 125-мм БПС со скоростью 1500—1 600 м/с и 100-мм БПС со
скоростью 1 400 м/с при углах встречи от 0 до 60° угол Д изменяет-
ся соответственно от 60 до 40°.
Для определения импульса силы рикошетирующего снаряда /т
скорость рикошета принимается равной ор ~ (0,7.. .0,8) ис, а угол
рикошета у « 0,9а.
Полученные данные позволяют определить полный импульс си-
лы /0, действующий на элементы бронеконструкции танков.
Определение импульса силы, переданного бронеплитам снаря-
дами осколочно-фугасного действия. Действие многоцелевых сна-
рядов взрывного типа (ОФС, КС, БФС) определяется бризантным
действием пластического взрывчатого вещества (ВВ) и осколоч-
ным потоком.
Импульс силы, переданный преграде ОФС, определяется сум-
мой импульсов от бризантного действия ВВ (с учетом влияния
оболочки снаряда) /вв и осколочного потока /0. Импульс бризант-
ного действия
/вв - phnSD„ (8/81 + 0,104 VmJmJ , (10.9)
где р, Лп — плотность и приведенная высота заряда, определяющая его активную
массу т, (прн полной высоте заряда Л > 2.25J, Лп ® d, где d — диаметр заряда);
DH — скорость детонации; то—масса оболочки снаряда; S — площадь контакти-
рования с преградой деформированной головной части снаряда в момент дето-
нации ВВ.
Импульс силы осколочного потока зависит от закона разлета
осколков, т. с. распределения б их массы по сферическому углу ф
относительно оси симметрии снаряда (О^ф^л) в каждом i-м
сферическом секторе (i = 18) с углом Дф = 10° при вершине О
в центре масс; от средней скорости осколков ир; от скорости встре-
чи vc и угла встречи а (от нормали) снаряда с преградой.
Средняя скорость потока осколков пр и их относительное рас-
пределение б определяются экспериментально при статическом
подрыве снарядов (ос = 0), затем графическим методом определя-
ется максимальная скорость осколков О/ в каждом секторе ф,
(рис. 10.8).
Для этого из центра в точке О проводится окружность с ра-
диусом ОК = пр; откладывается вектор скорости снаряда ©с =
= ОО', затем с центром в точке О' строится вспомогательная
окружность с радиусом ир = ОК = О'К' и из конца вектора vp —
= ОК для каждого угла ф/ проводятся параллельные вектору vc
прямые до пересечения с окружностью радиусом О'К'. Соединив
полученные точки пересечения с центром О, имеем скорость ос-
колков и, как сумму векторов v. и vp , а также угол их разлета
2р, относительно осн симметрии.
186
Из рис. 10.8 находим
v{ (v‘c + Vp I 2 upuc cos ft)12;
ft = arccos [(uc + cos ft)/u,|.
Рис 10.8. Годограф скорости и углы разлета осколков осколочно-фугасных
снарядов:
t’c ОО‘ — скорость встречи; — ОК •» О' К' — скорость разлета осколков; 4 огносвтель
нос распределение массы оболочки снаряда в элементарном конусе — Ю'
Рассмотрим общий случай удара ОФС по нормали в вертикаль-
ную плоскость цели а (башня танка) в точке С с превышением
над плоскостью цели Ъ (верхний лобовой лист) на АЛ =
= ЕЕ' = СD (рис. 10.9).
Рис. 10.9. Схема распределения осколков ОФС на взаимно перпендикулярных
плоскостях целей а и Ь:
Y„EXa — плоскость цели ft; АА' — линия пересечения плоскостей ан ft; РЕХ„ — плоскость
стрельбы, перпендикулярная к плоскости ft; Р — центр массы снармда; PC — продольная ось
снаряда; в угол встречи снаряда с плоскостью цели ft; а* вспомогательная плоскость
цели, перпендикулярная к плоскости стрельбы; — половина угла разлета осколков; С —
точка встречи снаряда с плоскостью цели а; /ЬМО'.И’Д* линия пересечения конуса разлета
С плоскостью цели ft; С — точка пересечения вектора скорости снаряда с осью Л
187
Каждый i-й конус с углом при вершине 20, пересекает плос-
кость b по кривой АМО'М'А', а с плоскостью а образует неполную
окружность, т. е. на плоскость цели а попадает лишь часть оскол-
ков, заключенная в углах ул и у|2 относительно вертикальной пло-
скости РЕХ, проходящей через точку С' встречи снаряда с пло-
скостью а.
При этом каждый осколок встречается с плоскостью цели b под
углом ф, = f(a, 0„ у) от нормали EZ. Угол встречи снаряда с плос-
костью b определяется по формуле
а = arccos (cos a, COSao),
где at — курсовой угол снаряда; во — конструктивный угол наклона плоскости Ь.
Принимая во внимание, что элементарная масса осколков, со-
средоточенная в угле с/у,
dm,
где т, — масса оболочки снаряда,
можно определить нормальную составляющую импульса силы по-
тока осколков, находящихся в <-м конусе разлета:
«о 8 т У*
- г», f cos ~ V1 J cos ^7 • (10.11)
0 ~Ъ1
Суммарный импульс осколочного потока
18
(10.12)
l-l
где К — поправочный опытный коэффициент, учитывающий реактивный импульс
материала преграды и отскок осколков (К 1,5).
Поскольку осколочный поток распределяется равномерно по
углу у, можно найти функциональную зависимость угла ф, от коор-
динат х, у, а затем по предельным координатам х0, у0 заданной зо-
ны поражения определить пределы интегрирования у,.
Кривая АМО'М'А" описывается уравнением
у2 + _ рм* - Р£2 = ЕМ*, (10.13)
где РМ — образующая конуса разлета осколков;
РЕ «= Л = {PC + Д/rcos a) cos a .
После преобразования получим
у* = (х sin a + A cos a)’ tg2& — (x cos a — h sin a)2;
- arclg|Zjt\+)" (10.14)
Из треугольников PCE, POM, OMK, OCK ( OKM = 90°,
MOK = у) после преобразования получим зависимость
cos ф/ = COS a cos 3, -|- COS 7, sin sin a. (10.15)
188
COS li — COS a COS 8/
откуда ъ = arccos---5ln„ln^---•
Используя полученные выражения, приведем (10.11) к виду
/( = _}_ -у/;!) cos a cos + sin Э/sin a (sin -1 sin 7i2)]. (10.16)
На рис. 10.10 показано пересечение конуса разлета осколков
ОФС с вертикальной а и наклонной b плоскостями цели при ударе
по нормали к плоскости цели а; основной поток осколков (/0) со-
средоточен в сравнительно узком кольце с углом при вершине ко-
нуса 2р. В основном потоке собрано около 80 % осколков, принад-
лежащих к секторам i = 7.. .12.
Рис. 10.10. Схема распределения потока осколком ОФС на вертикальной а и на
клонной b плоскостях цели:
/0 — основной поток осколков с углом 23 при вершине конуся; 1п — огибающая нормально-)
составляющей распределения импульса на плоскости цели а
Импульс силы, переданный башне, зависит от скорости снаря-
дов ие и фактически определяется отношением проекции башни
к площади кольцевой зоны распределения осколков. Импульс силы,
переданный наклонной поверхности, зависит в основном от скоро-
сти разлета осколков ор и в меньшей степени от скорости снаря-
да vc.
Следует отметить, что в случае встречи ОФС под углом с пре-
градой точность оценки импульса силы уменьшается ввиду неоп-
ределенности площади контактирования В В с преградой. Время
взаимодействия ОФС с бронеэлементами определяется с учетом
времени полета осколков после удара снаряда о преграду ti =
189
= PMt/Vi (см. рис. 10.9). При этом необходимо учитывать только
эффективный поток осколков, попадающий в проекцию бронеэле-
мента. Так, при обстреле лобовой части башни танка и верхней ло-
бовой детали корпуса (а « 65°) время взаимодействия снаряда
с плоскостями цели составляет 400—500 мкс.
При расчете импульса силы КС необходимо учитывать импуль-
сы осколочного потока /о, струи /с — meve и песта /п = mnvn. При
этом по опытным данным принимаются масса песта тп~0,75/лк,
масса струи тс «0,25тк, где — масса кумулятивной воронки.
Отличительной особенностью действия БФС является расплю-
щивание пластического ВВ на большой площади после деформи-
рования корпуса снаряда при ударе о преграду, усложняющее оп-
ределение импульса силы /вв по формуле (10.9). Поэтому предва-
рительно необходимо определить среднюю высоту расплющенного
ВВ Лр по известной из опыта площади зоны контактирования 5(a),
диаметр которой dK« (2.. .2,5) d, где d — калибр снаряда.
Нормальная составляющая импульса силы БФС при ударе под
углом а от нормали
/я =/вв + cos a, (10.17)
где тс — масса активной части оболочки снаряда, зависящая от угла встречи
с преградой; /вв — удельный импульс ВВ с учетом влияния оболочки снаряда.
Экспериментально импульс силы определяется при снарядном
обстреле бронеплит по реакции (ускорению) низкочастотных изме-
рительных преобразователей (ИП), являющихся динамическим
аналогом амортизированных приборов; при этом реакция ИП про-
порциональна сообщенному бронеплите импульсу силы (табл. 10.4).
Таблица 10 4
Расчетные значения импульсов силы, переданных элементу бронеконструкции
при снарядном обстреле
Калибр и тип снаряда v . м/с V яН-с
100 мм ОФ 412 900 0 19,5
115-мм ОФ-18 780 0 19,0
125-мм ОФ 19 850 0 23,0
100 мм ОФ 412 900 60 11,0
115-мм ОФ-18 780 60 13,0
125-мм ОФ-19 850 60 16,0
125-мм БПС 1630 60 6,0
Силовое воздействие снарядов на элементы бронеконструкций
танков. Для определения параметров движения элементов конст-
рукций необходимо знать функцию силового нагружения, которая
190
может быть задана либо в виде сосредоточенной в точке силы, за-
висящей от времени, либо в виде распределенной по поверхности
конструкции нагрузки (в случае, например, осколочного воздейст-
вия).
Приближенно основные параметры силового воздействия мож-
но определить из закона сохранения количества движения системы
/ = | F (t)dt = mvn.
(10.18)
В установившемся режиме параметры движения недеформируе-
мого снаряда с массой т определяются интегрированием диффе-
ренциального уравнения движения
S(Z4 + *px>«) m-^-, (10.19)
где р, //я — соответственно плотность и динамическая твердость материала пре-
грады (равная для стали средней твердости 3 200. ..3 500 МПа и для стали вы-
сокой твердости 4 200 МПа); и —мгновенная скорость внедрения; S — текущая
площадь головной части (ГЦ) снаряда; k — коэффициент, учитывающий форму
головной части.
Соотношение (10.19) справедливо при внедрении ГЧ в плиты
толщиной 1—2 калибра, со скоростью, превышающей критическую
V. Г(в - «,) (*₽).
где а — удельная работа вытеснения объема материала преграды, измеренная
при глубоком внедрении в полупространство.
Коэффициент k определяется из условия обтекания снаряда в
установившемся режиме несжимаемой жидкостью: для тел с кони-
ческой ГЧ (с углом при вершине 20) k = sin26, для цилиндра
k= 1.
Для полусферы коэффициент k является переменной величиной
(от 1 до 0,5); для приближенных вычислений параметров внедре-
ния снарядов с оживальной ГЧ, разделенной на п элементарных
участков, принимается
k = (8 л- 1)/(24ла),
где п — R0/d\ d — диаметр снаряда.
Для перемещения х(о), времени t(v) и силы F(0 внедрения
получим следующие зависимости:
(10.20)
где п = 0, I, 2,...; t0 « 0.
191
После внедрения снаряда на высоту ГЧ (Л) принимается S =
= So = const.
Для плит с Л > 2d при достижении снарядом критической ско-
рости v = (путь хж) мгновенная скорость определяется по за-
тратам кинетической энергии «а конечном пути:
X — Хк > 0;
откуда о — (х — х.)]'' I
x = x, + [t>«-^
Определение параметров силового взаимодействия срабатываю-
щихся БПС с преградами представляет собой более сложную зада-
чу, так как законы сопротивления и эффективной площади проника-
ния тел переменной массы требуют ряда допущений.
Приближенно параметры внедрения по нормали цельнокорпус-
ных деформируемых (срабатывающихся) снарядов в полубеско-
нечную преграду в установившемся режиме определяются по сле-
дующим зависимостям:
х = Л>Т-тт[1-ехр[--у^;(1~ ПРИ
®„ = VW —«, , если Н, > в. ,;
— /(з,* - А7д)/(£р) * если
где рс. р—плотность материалов снаряда н преграды; о, я—временное динамиче-
ское сопротивление разрушению материала снаряда; /0—эффективная длина (про-
никающая часть) снаряда; X — u0/u0; v — скорость проникания недеформируемой
части снаряда; t'o, ufl — начальные значения скоростей недеформнруемой и де-
формируемой частей снаряда при встрече с преградой; р» — скорость, при кото-
рой проникание начинается (заканчивается). Прн прекращении проникания
(и = 0) Нл = о. д.
Скорость проникания и деформируемой части снаряда (грани-
цы раздела)
- /р/р. А*+и - р/р.)] •
Время внедрения снаряда в преграду
pv’(l - А)
ГЛе А " 2з,д ‘
192
Напряжение на глубине внедрения
о = Нл 4- . если ик < и < «0;
о - а , если 0 и < ик;
и, = К(а-«,)/(Лр).
На последнем этапе при о^о.х снаряд движется как недефор-
мирусмое тело, но ввиду малости неизрасходованной массы этим
этапом можно пренебречь.
Нестационарность процесса внедрения снаряда и составляющая
реактивного импульса материала, выброшенного из кратера, уве-
личивает крутизну импульса силы по сравнению с установившим-
ся режимом, а тыльный эффект разгрузки приводит к плавному
спаду кривой на заднем фронте, поэтому закон изменения силы
внедрения БПС можно описать обобщенной функциональной зави-
симостью
F, (/) = Оехр(— а п/ t/tu) sin (14/ ///”), (10.22)
expta»^) „ к
где D-------—Л,,, д =-------; ч Тф//И: Ли — пиковое значение си-
лы; Тф — длительность нарастания переднего фронта силы; /„— длительность им-
пульса нагрузки; л — 1.. .3 в зависимости от характера воздействия.
При заданных импульсе /, времени /и и 'ф из выражения
(10.22) при n= 1 можно в явном виде определить пиковое значе-
ние силы
с _ к/exp (— кд/tg хд)
°* /и 11 + exp (-x/ig sinni]'
При других значениях показателя п пиковое значение силы
где Ks — Л (/) dt; /\ (0 = (0/FOi = К — уровень силы (отношение к
пиковому значению).
Эффективная длительность силы F|(/) на заданном уровне
существенно зависит от параметров п и т]. Так, при К = 0,05, п = 1
и т) = 0,25; 0,2; 0,1; 0,05 эффективная длительность /„ ,э= (0,9;
0.Н4; 0,52; 0,26)/и, а относительная площадь Ks = 0,55; 0,44; 0,27;
0,15 соответственно; прн п = 2 и т) = 0,1 /и э = 0,89/,., Ks = 0,47;
при п = 3 и т) = 0,04/н э = 0,88/н и Ks = 0,39.
С учетом малого времени нарастания переднего фронта (около
60—100 мкс) при определении пикового значения силы по формуле
(10.22) принимают п = 1 и л ®i0,2.
Силовое воздействие ОФС можно представить также в виде
суммы двух функций — осколочного потока F|(/) (при п = 1; ц =
— 0,25) и бризантного действия ВВ:
F2(0 = Fo2e’% (10.23)
)3 Зак. 20с
193
где Foi — пиковая сила, определяемая через импульс
/ = Ла J е t!~dt =
о
т —постоянная времени, характеризующая время спада пиковой силы Ла до
уровня К = 0,37.
Эффективная длительность силы на уровне К = 0,05 /„.,^3-.
Таблица 10.5
Расчетные значения параметров силового воздействия снарядов
на элементы бронеконструкцин танков
Зона поражения Калибр и тип снаряда »с. м/с .'н-; К тф//и.мкс К. МН
Лобовая 100 мм БПС 1360 7,5 1 80/400 43
часть башни 100 мм ОФ 412 890 8,5 1.2 100/500 39
115 мм БПС 1480 7.4 1 80/400 42
115 мм ОФ 18 680 8 1.05 100/500 37
122 мм БПС 1500 9 1.2 80/400 51
122 мм ОФ 472 780 11,5 1.5 100/500 52
125-мм БПС (БМ9) 1650 8 1,05 80/400 46
125-мм ОФ 19 850 11 1.5 100/500 50
105-мм БФС 520 7,5 1.0 80/400 43
105 мм БПС 1400 8 1,05 80/400 46
120 мм БФС 620 12,5 1.7 100/500 57
120 мм БПС 1500 10 1,25 80/400 57
Подбашен- 100 мм ОФ-412 890 5 1.0 80/400 28
ный лист 115 мм ОФ-18 800 8 1.6 80/400 46
(удар в башню) 125 мм ОФ 19 850 9 1.8 80/400 51
Верхний 100-мм БПС 1350 5,5 1 60/300 42
лобовой лист 100-мм ОФ 412 890 9.5 1.7 80/400 54
115-мм БПС 1180 5.3 1 80/400 30
115 мм ОФ 18 680 11 2 80/400 62
122-мм БПС 1500 6.4 1.15 80/400 36
122-мм ОФ 472 780 15 2.5 80/400 85
125-мм БПС (БМ9) 1650 6 1.1 80/400 34
125-мм ОФ 19 850 14 2.5 80/400 80
105-мм БФС 520 7.0 1.3 80/400 40
120-мм БФС 620 12,0 2.2 80/400 68
Примечание. К — отношение импульса силы снарядов разного калибра
к импульсу силы 100-мм БПС.
194
При определении действия БФС сила Fa(0 суммируется с си-
лой F|(/), определяемой ударным действием корпуса, со сдвигом
по времени /, обусловленным запаздыванием детонации ВВ (около
400 мкс).
Расчеты (табл. 10.5) и экспериментальное исследование
(рис. 10.11) показывают, что переданный бронсэлсменту танка им-
пульс ОФС существенно зависит от угла встречи и площади пора-
жения, а также от угла разлета основного потока осколков. Так,
несмотря на применение взрывчатого вещества А1Х-2 в 115-мм
снарядах ОФ-18, импульс силы, переданный по нормали лобовой
части башни, почти не отличается от импульса 100-мм ОФС, а пе-
реданный подбашенному листу импульс 115-мм ОФ-18 существенно
превышает импульс 100-мм снаряда ОФ-412.
Рис 10 II Расчетные кривые силового воздействия 125-мм БПС (/, 2) при ударе
под углом а=60° от нормали и 125-мм ОФС (3, 4) на бронеплиты:
I — при установившемся движении; 2 — с учетом составляющей реактивного импульса час-
тиц металла; 3- воздействие осколков; 4 — с учетом бризантного действия ВВ
Силовое воздействие бронебойно-подкалибериых снарядов на
бронеэлементы существенно зависит от реактивного импульса вы-
брошенного из кратера материала.
10.4. ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ КОЛЕБАНИИ ЭЛЕМЕНТОВ
БРОНЕКОНСТРУКЦИИ ТАНКОВ ПРИ СНАРЯДНОМ ОБСТРЕЛЕ
Несущая конструкция танка представляет собой пространствен-
ную систему, состоящую из сопряженных под различными углами
монолитных и слоистых плит (корпус) и оболочки (башни) с пере-
менными параметрами. Расчетно-теоретическое определение пара-
13*
195
метров колебании элементов бронсконструкций при снарядном об-
стреле, а также закрепленного на них внутреннего оборудования
основано на решении контактной упругой и упруговязкопластиче-
ской задач теории плит и оболочек. Для исследования взаимодей-
ствия снарядов с элементами конструкции используются прибли-
женные методы, достаточно полно отражающие физическую карти-
ну процесса.
При расчете параметров колебаний отдельные элементы конст-
рукции танка (верхний лобовой лист, борт корпуса, подбашенный
лист) рассматриваются как слоистые с ортотропными заполнителя-
ми или монолитные плиты. Ввиду того, что зона внедрения снаряда
в бронеплнту мала по сравнению с упругодеформируемой об-
ластью элемента конструкции, преграду можно считать сплошной
средой. Сам элемент конструкции можно считать работающим
упруго при снарядном воздействии. В различных вариантах рас-
четных схем элементов конструкции танка на ударное воздействие
башня аппроксимируется в виде толстой упругой ортотропной не-
замкнутой сферической оболочки переменной толщины или в виде
тонкой сферической оболочки переменной толщины.
Колебания толстых плит и оболочек. Для получения дифферен-
циальных уравнений движения в частных производных использует-
ся метод начальных функций. Уравнения движения элемента обо-
лочки в ортогональной криволинейной системе координат офу с
учетом вязкости имеют вид
(Нр2).. + + (W.«24,)., - 0/4. +
д*и да
+ (^).«- ’Л.р +
+ 43^1^2, т + » = + ^2”37" I
(^1^т).т-1-(^2М.» + №7Др -
- ’Л,//,., - ьн,н2. , = ?Н,Н2^ + К2^-.
(10.24)
'«;» — . *«т — хт« ’ xf»i — 1
где //,. Нг — коэффициенты Ляме, Ht = 4(1 + kt\), Н3 » В(1 + ft2y), А, В — ко-
эффициенты первой квадратичной формы срединной поверхности; %, ар, в —
тензор напряжений (компоненты тензора напряжений связаны с компонентами
тензора деформаций еа, .....уравнениями обобщенного закона Гука);
иа, °р> компоненты перемещения точки; ki, k3 — значения главной кривиз-
ны координатной поверхности оболочки; р —плотность материала оболочки; К\,
К3, Кэ — коэффициенты вязкости материала; т — касательные напряжения; t —
время; запятая перед координатами а, Ц, у в индексе характеризует частную
производную переменных величин по этим координатам.
В результате ряда преобразований получим систему дифферен-
циальных уравнений, разрешенных относительно первых произ-
водных от функций аг т.т, -!Эт, ир иа, ир по координате у.
196
Общее решение полученных уравнений можно представить в ви-
де рядов Маклорена ио переменной у:
Окончательное решение имеет вид
М, - + ^|2«ЗО 4“ + ^Н3т|0 + + £|в'ио!
«3 - ^21««0 4- L2.,UtO 4" ^23«l0 4- ^243i0 4“ ^2ЬХ»ТО 4~ ^2g”, vO;
Ut - ^;nM«0 4" ^S2W3O 4- ^-33MtO 4" 43t0 4~ ^-aVajO 4' ^36‘frO I
°I = ^-4l«a0 + ^42M3O 4" ^43«7<) 4“ ^-44310 + ^4b*«l0 4“ ^46*310 i
“»I = Z-ai^aO 4“ ^52W3» 4* Л.ЗйтО 4- ^&45t0 4" 4“ ^’5e'lh°»
T₽7 = ^-eiw«o 4“ ^-G2M3O 4“ ^63«T0 4- ^C,431O 4- ^Gi%10 4* ^-Ge'PlO •
Здесь через Li, обозначены относящиеся к начальным функциям
линейные дифференциальные операторы. Начальные функции
ил0. «ро, «io, <м, %10, т3то играют роль шести произвольных двух-
мерных функций, определяемых граничными условиями на плоско-
стях. Одна из поверхностей оболочки принимается за начальную
(у = 0), на ней задаются три начальные функции (статического,
геометрического или смешанного типа), а три другие определяют-
ся из условий на другой поверхности: у = /i(a, р).
Граничные условия на начальной плоскости и на поверхности,
где y = ft(a, 0), удовлетворяются в процессе приведения трехмер-
ной задачи к двухмерной; граничные условия на торцевой цилинд-
рической поверхности выполняются при интегрировании двухмер-
ных дифференциальных уравнений.
Из полученных дифференциальных уравнений реализацией эф-
фективных методов решения краевых задач на ЭВ1М можно опре-
делить характеристики напряженно-деформированного состояния
и параметры движения элементов конструкции.
Так, для определения параметров движения башни методом
Фурье решается краевая задача для толстой оболочки постоянной
197
толщины h = (Лга1Х 4-Л„11п) 2. При этом система уравнений дви-
жения (10.24) с учетом объемных сил в перемещениях будет иметь
вид
7. ।, 4“ ^*12^3 4~ 4- — P^«l. II 4~ у у у у. Uj, I >
7..>)Иа 4- L22U^ !' ^-ЗЗ^Т 4- — Р®?1» И 4“ у у у у t i
^3i«« 4~ Т.32«₽ + ^зз^т 4* Р-{ = ₽«Ti. н 4- 7777, мт.1 •
(10.27)
где Li/ — различные дифференциальные операторы; Ра, Р$, Р^~ компоненты
объемной силы.
В случае однородной задачи (Р« = Рз -- Рт = 0) для /*-й формы
системы без затухания получим
£пиву 4- £1а«з < 4- /-»з«т, = — р«>у2«яУ;
£21иа} 4- L22u9i Ь J ——
L3iut) 4- Д32«? J 4- ^зз«т i = - Ршу «Т /.
(10.28)
где <О) — круговая частота собственных колебании оболочек.
Компоненты перемещения ««;, «р;, ил j удовлетворяют усло-
вию ортогональности:
4- iiif 4- «т jU2t)dV — 0 при j i,
где d V — элемент объема.
Решение неоднородной задачи представим в следующем виде:
2в.уТД<); «f-g»WT,(0; «,= §«,/Л (/). (10.29)
Подставив выражения (10.29) в (10.27), умножив каждое урав-
нение на UaidV, u$idV, u^idV соответственно, а затем, сложив
полученные уравнения и проинтегрировав их по массе и объему,
получим дифференциальное уравнение для определения
Из решения этого уравнения получим
Л(0 = 4-1е ;r>'' ”Q(t)slniy(t-T)A, (10.30)
“/ °
где ш/ = <«)// + tj; 7у — безразмерный коэффициент затухания.
Продифференцировав по t выражение (10.29) с учетом (10.30),
получим формулы для определения скорости и ускорения элемен-
тов оболочки при динамическом нагружении.
Колебания оболочек переменной толщины с учетом сдвига и
инерции вращения. Систему дифференциальных уравнений затуха-
ющих колебании ортотропных оболочек переменной толщины
198
с учетом сдвига и инерции вращения в вариационной записи мож-
но представить следующим образом:
х рЛ (^ + 2е ^)] »«,d«,d«u - О;
^»2М2+^23«' + ^24Tt + + — Лр/LX
X ₽Л (тй? + 2е wO 1 = О;
Jf 4* ^x>lh “г ^зз® “b^-34Tfi ~Ь ^-з.-Лг 4" Л|Л2<7з — Л|Л2 X
X рл 4- 2в 77г)] ^datda., о;
ПI £<i«i 4 LKlu2 I- L^w + £44j 4- L^2 — AtA2 X
ХР-т(^ + 2’^г)]»Т«Л|Л1-0;
fj[4u«i 4- 4и»> 4- £13® 4- £МЪ 4- - Л»Л2 X
х р-т(ж + 2е = 0’
где U| = Ui (аь а2, t); и2 — и2 (аь а2, /); w — w (а1( а2, t) — перемещения точек
координатной поверхности оболочки соответственно по тангенциальным направле-
ниям и по направлению внешней нормали к поверхности; yi = Yi («ь аг> 0. Y» =
= у2 (<Х|, аг, /) — углы поворота нормальных волокон в плоскостях (оцг) и (а2г);
«I, а2 — криволинейные ортогональные координаты, совпадающие с линиями кри-
визны координатной поверхности оболочки; / — время; ,4|-Л|(«|, а2), Д2 -
— Л2(а|, а2) — коэффициенты первой квадратичной формы координатной поверх-
ности; р — плотность материала оболочки; h — толщина ее; qi (i — 1, 2, 3) —
компоненты вектора интенсивности заданной поверхности нагрузки; qi, ^ — про-
екции нагрузки на направление положительных касательных к координатным
линиям U| и а2 соответственно; ft —проекция нагрузки на направление внешней
нормали; г — коэффициент затухания колебаний; LI( (i, / — I, 2... 5) — различ
ные линейные дифференциальные операторы, отнесенные к линиям кривизны ко-
ординатной поверхности; S — площадь срединной поверхности оболочки.
Представляя искомые величины ut, «2. и», Уь № в виде степен-
ных рядов по малому параметру, получим систему зацепляющихся
уравнений, первые пять из которых являются уравнениями вынуж-
денных колебаний оболочек постоянной толщины Лср = (Л1П1п i
4-ArnaJ/2, а остальные являются уравнениями движения оболочек
с постоянными параметрами. Уравнения решаются последователь-
но при соответствующих граничных условиях.
Для ортотропных оболочек постоянной толщины с произволь-
ными граничными условиями решение системы (10.31) можно
представить как сумму общего (при qi = q2 = <h = 0) и частного
решений.
199
Общее решение запишем в форме
«1= V‘ А/ч/".,; 7i = S A/h/j» wj — 2 AijU.jFj}
. (Ю.32)
7г SA/h//» w = 2 Ai/WyFy,
где «и. ulit w,, у,/, у?/ —функции собственных колебаний, не зависящие от вре-
мени; Aij (i= 1, 2,..., 5) - постоянные, имеющие амплитудные значения, /•’,—
функция времени, Fj е i sin u>jt + D^cos : ш/ — круговая частота
собственных затухающих колебаний; и D*2> — постоянные.
Выразим вариации функции перемещений и поворота в виде
; <>w 2 FjwftA.j; 2/ун/Л*/. (10.33)
»-i /-1
где 1=1; 2; Л = 4; 5.
Вариации коэффициентов разложения произвольны и между
собой нс связаны. Учитывая, что ряд функций собственных колеба-
ний должен быть полным и ортогональным, при его построении
получим бесконечную последовательность систем уравнении для
определения коэффициентов Л<7*. Приравнивая определитель си-
стемы нулю, получим частотное уравнение ортотропных плит и
оболочек.
Частное решение системы (10.31) представим в виде
//1 = У «| jFj; и2 = У «2 jFj\ W У
(1°.34)
где ни - Д/71/: u.j A.jiijj. Wj \sjWj, (t/ А^;. = Л.,р..7 .
При этом компоненты внешних сил представляются в виде
71 ~ 2«i//,o; 7г ~ 2 «•-•//.«; 7.=
>=1 >=>! 3-1
где F/, F/ а —функции времени; щ/, u7j. Wj. у(/, у2/— собственные функции зада-
чи, удовлетворяющие однородным граничным условиям.
Учитывая условия ортогональности собственных функции и при-
нимая во внимание решение однородной системы без учета затуха-
ния, а также произвольность вариации коэффициентов разложения
функции перемещения, получим
= (10-35)
200
Предполагая, что компоненты внешней нагрузки ф (< = 1, 2,3)
во времени изменяются по одинаковому закону:
«>. 0 = «.»)/’(О.
введем новую функцию времени
(( (7i«U 4 <Ь«9/+9з»/)
где й/'----F7--~~~~—]--------------------- •
рл И [ «iy + «2/ + т (т?j + 7?/) I
Уравнение (10.35) перепишем в виде
d-Ф! йФ1 ~
Решение этого уравнения при нулевых начальных условиях
можно представить следующим образом:
./Г
Фу - -z- е i I е*/' Р (-) siп шу (/ - т) dz; t < t„,
где /„ — длительность действия нагрузки (импульса).
После прекращения действия внешней нагрузки оболочка со-
вершает свободные затухающие колебания, для которых запишем
(.,2 -- (10.36)
Фу — е~г/ J е‘/Р(т) sin Шу (/ — х) Jt; t > t„.
“’У 0
В этом случае
«1 V и: ij ll2jFj'4 w
~ <1О-37>
Следует иметь в виду, что в разложениях по собственным
функциям искомых величин н,. w2, u>3, уь у2 индекс «/» принимает
значения п и т.
14 Зак. 20с
201
Таким образом, частное решение системы уравнений (10.31)
примет вид
«1 (ot| , «з» 0 2 u\rim (2i • яа)^?лт(^);
л. т
^2 (Я1 ♦ а2» С ~ 2 ^2лш (®1, ®2)^лт(0»
л, т
w(alt «2. ®2)^лт(0‘.
л, т
11 (®I. ®2 . С 2 А (®| , »2) Лй (0;
п, т
7 . («| » «2. t) 2 2 72Л"»(«1. а2)^лт(0;
(10.38)
Одинарным и двойным дифференцированием по времени рядов
этих уравнений определяем соответственно скорость и ускорение
элементов оболочки в пределах и за пределами действия силы.
Динамика слоистых плит и оболочек при ударных нагрузках.
Рассмотрим многослойную оболочку постоянной толщины ft, со-
бранную из произвольного числа однородных анизотропных слоев
толщиной ft( каждый (рис. 10.12).
Рис. 10.12. Сечение слоистой оболочки (обозначения см. в тексте)
202
Предположим, что в каждой точке слоя оболочки имеется лишь
одна плоскость упругой симметрии, параллельная координатной
поверхности, которая в свою очередь параллельна внешним поверх-
ностям оболочки и проходит внутри каждого i-го слоя. В частности,
координатной поверхностью оболочки может быть какая-либо из
поверхностей контакта слоев или граничная поверхность оболочки.
На рис. 10.12 за координатную принята плоскость MN. Обозна-
чим через А расстояние между координатной и нижней поверхно-
стями оболочки (при их совладении А = 0), через 6$ — толщину
исследуемого слоя оболочки. Индекс «s> может изменяться от 1 до
(ш 4- п), где т — число слоев, расположенных ниже координатной
поверхности; п — число остальных слоев (если координатная по-
верхность внутри слоя, то п — число слоев выше этой поверхности
плюс один; если координатная поверхность совпадает с поверх-
ностью контакта слоев, то п — число слоев выше координатной по-
верхности).
Теория тонких анизотропных слоистых оболочек строится на
гипотезе недеформируемых нормалей и утверждении о том, что нор-
мальными напряжениями на площадках, параллельных координат-
ной поверхности тонкой оболочки, а также перемещениями и де-
формацией каждого слоя в отдельности можно пренебречь.
Рассмотрим свободные колебания плит и оболочек с различны-
ми граничными условиями. Система дифференциальных уравнений
собственных колебаний оболочек различных форм (сферическая,
коническая и др.) с наибольшим приближением может быть реше-
на энергетическим методом, позволяющим отказаться от удовлет-
ворения статических краевых условий аппроксимирующими функ-
циями перемещений. С целью определения собственных частот ко-
лебаний оболочки составляются выражения для потенциальной и
кинетической энергий и отыскиваются функции, реализующие ми-
нимум полного потенциала.'
Потенциальная энергия деформации анизотропной слоистой
оболочки
П = 4-Я [С,2 С,.4,6.» | С,.,е2 4- С0>-’4- 2 C1(1»»s( 4-
4- 2 C26<i>s.j 4- К\,e,«i 4- Kvi (б|*2 4- Mi) 4- 4- + (10.39)
4- Kl6(M 4- ш*|) 4- Км (e2t 4- wx2) 4- Dogt2 4- 2Dl0«, 4-
4- 2 D2g«2 4“ 4- 2 A)|.,x1x2 4- D22»|] ABd<id$ ,
где (8Л-v,); K)k~ -j" l(^-^_,) 2A(S5 :
Djk 4" X- *L|) - 3 Д (ft?- + 3 Д» (8f »5 l)l; (1 °’40)
1 ~ hs — ^s-i До — ®o 0 .
14*
203
I ди I d.4 1 dv 1 dB
•« A da + AB ° + *'w : В dp + AB da v + k-w :
A d ( и \ В d / v \ 1 d ( 1 dw \
-•= ТГ^Кл-Нл* d7VBJ: X| d7rTd^ -*")-
I dA ( 1 dw \ 1 d / 1 dw \ 1 dB
" AB “dT\7Г dp *2vJ;«s-- В \ В d'f k^> ~ ABdi'x
(10.41)
1 dw \ 2 ( dPw 1 dA dw I dBdw\
TTdl-k,V) ' X ~HBXdadp A dp" da ~ ~B da dT/ +
7 I du 1 dA \ fl dv 1 OB
~кПВ dp “ ABd? UJ +2M A da- AB da
В приведенных формулах kit k2— главная кривизна координат-
ной поверхности оболочки при 0 = const и a = const соответствен-
но; Cjk. K,k и Dy* — жесткости; Си и С22—жесткости растяжения-
сжатия по координатным линиям 0 = const, a = const; См — жест-
кость сдвига в плоскости, касательной к координатной поверхности;
Du и D&— жесткости изгибов вокруг осей, касательных коорди-
натным линиям; Dee — жесткость кручения; Кц п —жесткости
взаимного влияния растяжения и изгиба по линиям 0 = const,
a = const; Кел — жесткость взаимного влияния кручения и сдвига;
Ki6, Кгб — побочные жесткости взаимного влияния изгиба на сдвиг
и удлинения на кручение; и, v, w — компоненты вектора смещения.
Для сферической оболочки
A=R\ В R sin a; kt = k, — 1, 7?,
где R — радиус срединной поверхности; a — географическая широта; 0 — дол-
гота.
Для конической оболочки
Л-1; e = dcos8; *,=0; 4= = -^,
где 0 —угол между основанием конуса и его образующей; d—расстояние от
вершины конуса до основания.
Для цилиндрической оболочки
А = В = 1; =0; Л, = 1 /?.
Для плиты А = В = 1; ki = k2 = 0.
Максимальное значение кинетической энергии оболочки
Г1пах = -у ш’ ff ’ (1 °-42)
т 4- п
где - У р/Л/; р, — плотность материала i-ro слоя плиты (оболочки).
Полный потенциал оболочки равен разности потенциальной и
кинетической энергии
^Лпах — В1так Т'тах
(10.43)
204
Подставив в эту формулу собственные функции задачи
п(а, ?)вА*«(«, ?); ?) B*v(a, 3); w(a, ^) = C|!w(a, p).
и произведя интегрирование, получим выражение максимума пол-
ного потенциала
/7т„=Л*2а, 4- В*-а. + С*-а3 + А* В 'Ьх 4- В*С*Ь. + А*С**„ (10.44)
где а(, а2,..., ft3—коэффициенты при искомых постоянных величинах, которые
определяются из условия экстремума полного потенциала, т. е. приравнивания
нулю его частных производных по каждой из этих величин.
В результате получим следующую систему уравнений:
2А*ах + В*ЬХ 4-С*£3 0;
А*ЬХ 4- 2В*а., 4- С*Ь2 0; (10.45)
, A*fr, + Я**..4-2С*а3 = 0.
Приравнивая нулю определитель системы, получим характери-
стическое уравнение для определения частоты собственных колеба-
ний оболочки:
4а|а_.а3 4- ЬХЬ,ЬЛ - а,Ья — а ХЬ2 — алЬ\ = 0. (10.46)
Полученное уравнение является кубическим относительно квад-
рата частоты. Частотное уравнение позволяет определить три раз-
личные собственные частоты для каждой формы колебании, т. с.
для любой возможной конфигурации упругих линий па поверхно-
сти оболочки. Наименьшая частота колебаний соответствует ради-
альным, а остальные две — тангенциальным колебаниям оболочки.
В этом легко можно убедиться, если определить соотношения
амплитуд, соответствующие данной форме колебаний. Из уравне-
ний (10.45) получим следующие соотношения:
Л* — 2 Н* — 2 й\Ь< /10 471
- Ta(fl,~ 4а,а1-^ ’ ' 1
а коэффициент С* при расчете вынужденных колебаний оболочки
определим из условия нормирования собственных функций задачи.
Если привести многослойную оболочку к эквивалентной одно-
слойной, то собственные частоты се колебаний можно рассчитать
так же, как частоты колебаний однослойной оболочки, но с приве-
денными коэффициентами жесткости.
Можно подобрать такое расположение координатной поверхно-
сти оболочки, когда некоторые из жесткостей взаимного влияния
205
превратятся в нуль. Например, для определения приведенных жест-
костей изотропных пластин и оболочек можно использовать следу-
ющие формулы:
V £/Л/ v El I(Д . V Лл)з _ (Д V ЛлР1
в = т-т °------------)— :
_ Е . <10-48)
’ = : f« = i—5г!
V£,A, 1 ‘
6=1
где Д — расстояние координатной поверхности от верхней граничной поверхности,
п I
^(£Л)(2 Хй*-й,)
л = —-------;
2^£/Л/
£/, V/ — модуль упругости и коэффициент Пуассона материала слоев.
При этом расположение t-ro слоя определяется координатами
। «
А 2 <z- (i — 1, 2,..., л).
«—I А=I
Гипотеза о недеформируемых нормалях, распространяемая на
весь пакет оболочки в целом, позволяет определять собственные
функции задачи так же, как для однослойных оболочек. При этом
предполагается, что модуль упругости материала всех слоев пример-
но одного порядка, т. е. межслоевые сдвиги невелики и их влиянием
можно пренебречь.
Представляет интерес определение приведенных жесткостных
характеристик для трехслойных конструкций с различными крае-
выми условиями. В случае с легким заполнителем цилиндрическая
жесткость трехслойной преграды (с учетом сдвига заполнителя)
определяется следующей формулой:
г. п । п £(‘ + Л^₽)3 А А А
^Л1р ~Ь ^2 “Ь 2(1 _______ <-’) ^1^3^ср I
где йСр — 0,5 (й] + й3) — средняя толщина несущих слоев; й2 — толщина заполни-
теля; О), D2 — собственные изгибныс жесткости отдельных несущих слоев,
ЕЛ:} „ £й|
D' " 12(1 — Я ’ °2 = 12(1 - Я •
В случае с жестким заполнителем
D„p = D, • D., i 2(j_^ (’ + 7^) МЛр + 12(, •
где £3 и v2 — модуль упругости и коэффициент Пуассона заполнителя.
20G
Приведенная плотность материала трехслойной конструкции
з з
Рп₽= 2 РД/ 2 Л/.
Если пространство между несущими слоями трсхслойной кон-
струкции свободное, но слои скреплены между собой рав.номерно
распределенными точечными связями, то приведенная цилиндри-
ческая жесткость
£>,„ - <3 ~ 3 + 77^77 <3 3 + Л’>'
J(l—V|) J(l—V3)
Положение срединной поверхности при заданных толщинах
слоев и общей толщине // определяется но формуле
н1 = [л; + ^!^(2нла-л1)]/[2(л, + ла^^)|.
Приведенная плотность в этом случае
Pnp = (рЛ + + РзАя),7/,
где плотность заполнителя (>2 = pcV; ре — средняя плотность материала связей;
V — отношение объема связей к объему заполненного пространства.
Для слоистой конструкции с незакрепленными между собой
слоями (без зазора) суммарная цилиндрическая жесткость
[\= V -2 .
112(1-у?)
Колебания тонких плит при ударном нагружении. Рассмотрим
изгибные колебания прямоугольной плиты с произвольными гра-
ничными условиями, вызванные ударом. Уравнение движения пли-
ты в вариационной записи имеет вид
У У [ Dv2AwfpA 4- 2 s — F(x, у, /)J Iwdxdy = 0, (10.49)
ЕЛ3
где = ш(х, у, /) — прогиб плиты; Л — толщина плиты; D = ци~
линдрическая жесткость на изгиб; Е—модуль Юнга; v — коэффициент Пуассо-
д- д-
на; е — коэффициент затухания; р —плотность материала плиты*, —
оператор Лапласа; F (х, у, 1) — внешняя нормальная нагрузка.
Граничные условия при упругой заделке имеют следующий вид:
bQt = ± C/W , — ± 0,41, (г = 1 при х = 0, i — 2 при х — а);
aQ. - ± CjW, ~ = ± М, (Jf = 3 при у = 0, j = 4 при у = Ь),
здесь Ct, Cj — коэффициенты пропорциональности между перерезывающими уси-
лиями Qi, Qt и прогибами плиты на контуре; р,. р, — коэффициенты пропорцио-
нальности между изгибающими моментами М। и М2 и углами поворота нормали
к срединной поверхности на контуре.
207
Начальные условия:
Т£) — 0, = 0 при t = О.
В результате решения уравнения (10.49), удовлетворяющего
заданным граничным и начальным условиям, получаем формулы
для определения кинематических параметров движения плиты при
ударном нагружении:
торг,у,0 V *«|х)'-”()|) /P>/g при Л.7.; (10.50)
|<1>,ж(0 прн О/.;
МиЛИЦУ /<*/»> fe,(0 при (10.51)
' “"„Х Wln(l) при />/„;
= ЛА V In'lS'!*»«(<) при «/„; (Ю.52)
«г рЛЛ|С/| X J /<*)/(•) I .ли
л-ТЙ-l П т 1<т(0 при />/и,
1 /~~О Г / а \4 1’* 1 2 * * * * * В
где «Ояя = JJF р [(кп«)' + (Am*)‘ (v) + 2 (Хл«)-‘ J '
1л, Хт — собственные числа, определяемые из частотного уравнения; хп(х),
''т(у) — фундаментальные функции решения уравнения движения,
е е #’ 'й>. ж к - Фуки"». зависящие от геометрических и механиче-
ских параметров задачи; ah fri — размеры нагруженной части плиты.
Для численной реализации полученных зависимостей на ЭВМ
были составлены специальные программы. Результаты расчета по
этим программам параметров колебаний бронеплиты с размерами
а = 2,3 м, b = 2,2 м, Л = 0,16 м в случае ее обстрела 105-мм БПС
с начальной скоростью 1 500 м/с под углом 60° приведены
в табл. 10.6. При этом длительность снарядного воздействия /и^=
= 0,5 мс, /ф =0,1 мс, Ро = 31 МН.
В табл. 10.6 приведены максимальные значения прогибов w, ско-
ростей w, ускорений w. Степень влияния граничных условий на па-
раметры колебаний бронеплиты можно определить по разнице зна-
чений параметров при различных условиях, выраженной в процен-
тах.
Как следует из таблицы, влияние упругой податливости на осе-
дание опорного контура в случае свободного поворота краев плиты
по сравнению с его жесткой заделкой (С, = оо, р, = 0) достигает
120 % по прогибу, 72 % по скорости и 66 % по ускорению (в расче-
тах принята жесткость на оседание С,- = 1 ГН/м, что соответствует
креплению бронеплиты к опоре с помощью болтов).
208
Таблица 10.6
Параметры колебания бронеплиты в зависимости от граничных условий
Координаты точек Параметры движения Варианты граничных условий Разница параметров движения, %
удар» расчетных ж. у свободно опертые край (1) жест- кая идслка (И) Края, изги- бающиеся при свобод- ном пово- роте (111) между III и II вариан- тами между II и 1 вариан- тами между III и 1 вари- антами
«max, ММ 4,68 3.59 4,84 35 23 3.3
а b ц b «max, М/С 11.71 12,49 11,71 6.3 6,7 0
2 ’ 2 2 ' 2 «max, КМ/С2 132,3 212,3 86,5 59 60 35
«п„к, ММ 2,97 2,18 2,81 29 26 5.3
a h a h «max, М/С 4.68 4,87 5,65 16 4 21
2 ’ 2 4 * 2 «max. КМ/с2 35,9 34,3 57,0 66 4.4 59
«max, ММ 2,34 1,56 2.34 50 33 0
а Ь а Ь «max, М/С 6,09 5,46 1,55 72 10 75
2 ' 2 4 * 4 «max, КМ/С2 32,8 40,6 38,6 5 24 18
«max, ММ 2.97 2,81 3,90 39 5,3 32
а Ь « А «max, М/С 11,71 12,49 16,61 33 6,7 42
4 • 2 4 ’ 2 «’max, КМ/С2 196,7 215,4 173,7 19 9,5 12
«max. ММ 2,497 1.53 2,50 63 39 0
а b а Ь «max, М/С 4,995 5,78 6,49 19 15,6 30
4 1 1 4 ’ 2 «'max. К М/С2 37,5 39,0 48,4 24 4,4 29
«max, ММ 3.28 2,65 3,28 23 19 0
а b а b «max, М/С 11,71 12,8 14,2 11 9,3 21
•1 ’ 4 4 ' 1 «тах, КМ/С2 173,3 279,4 125 55 61 28
«тах, ЧМ 2,34 1,56 3,43 120 33,3 47
а b а b «тах, М/С 12,18 11,71 13,58 ‘ 16 3,8 12
8 ’ 4 > ' -1 «тах, К М/С2 103 128 122,5 4 24 19
Наибольшее влияние упругих внешних связей, препятствующих
повороту краев плиты при отсутствии упругой податливости па
оседание, достигает соответственно 39; 15,6 н 61 %. Влияние упру-
гой податливости на оседание опорного контура при отсутствии
внешних связей, препятствующих повороту краев плиты, достигает
47, 75 и 59% соответственно (числа могут увеличиваться при жест-
кости С(—*()).
В табл. 10.7 приведены максимальные значения параметров
движения точек верхнего лобового листа корпуса основного танка
при попадании в различные его зоны 100-мм ОФС со скоростью
890 м/с. Расчетной моделью листа является трехслойная (с неза-
крепленными между собой слоями, допускающими проскальзыва-
209
нис) плита с жестко заделанными краями. Степень возмущения
точек листа при попадании снаряда в различные его зоны неодина-
кова: наиболее интенсивно колеблется центральная зона листа.
Таблица 107
Параметры колебания верхнего лобового листа корпуса основного танка
Координаты точек “max' мм “max' м с “'max- *м;с’
удара Уо расчетных л. У
а b У’ 2 а b 2’ 2* 14,6 32,1 184
а b т* т а Ь_ 2’ 2 П.4 19,3 70
а Ь у, ~2 а Ь 4’ 2 11.4 19,3 70
а — 4 * 2 а Ь *4 ’ 2 12,4 30,8 188
Максимальные значения параметров колебания борта корпуса
при попадании в его центральную часть под углом 60° 115-мм
ОФС со скоростью 800 м/с рассчитывались по приведенной экви-
валентной одномассовой схеме, а также без приведения с учетом
высокочастотных составляющих колебаний борта. Результаты рас-
чета (табл. 10.8) показывают, что параметры колебаний борта зна-
Та бл н ца 10.8
Влияние затухания колебаний на параметры движения борта корпуса танка
Коэффициент затухания • мм max* max “ max' км-с<
п ,т = 15 | п.т — 1 п.т — 15 п,т — 1 п.т — 15 п.т — 1
0 9,63 9,4 17,73 34 32,6 345
0,1 8,27 8,3 17,73 30,7 32,6 324
0,2 7,18 7,5 17,73 28,3 32,6 306
0,3 6,3 6,97 17,73 26,5 32,6 290,2
чительно зависят от затухания
высокочастотных составляющих,
особенно скорость и ускорение. Влияние размера площади (радиу-
са зоны) нагружения бронеэлемента на параметры его колебания
покажем на примере расчета попадания 115-мм ОФС в зону, коор-
динаты центра которой х0 = 2,5 м; уо = 0,2 м; х = 2,5 м; у = 0,4 м;
210
коэффициенты затухания е = 0,1; й = 0,08 (табл. 10.9). Результаты
расчета показали, что более интенсивное движение борта происхо-
дит при сосредоточенном ударе.
Таблица 109
Влияние радиуса зоны удара на параметры движения
борта корпуса танка
Радиус зоны удара г. м a mix’ мм “’max’ м,с •шаж* км с’
0,3 4,35 12,9 7,95
0,2 4,97 18,2 11,26
0,07 5,45 24,4 17,89
0.0 5,7 26,2 20,05
Из данных табл. 10.8 следует, что приближенный расчет пара-
метров изгибных колебаний элементов конструкции при ударном
воздействии можно производить по приведенной одномассовой
схеме, в которой прогиб и сосредоточенная нагрузка связаны урав-
нением
w = PC,
где С- жесткость элемента конструкции; Р — приложенная к элементу сосредо-
точенная нагрузка.
С другой стороны, частота свободных колебании конструкции
»„ = Гс7?;.
где Млр=аЛ(—масса элемента, приведенная к рассматриваемой точке; М — пол-
ная масса элемента; а — коэффициент приведения.
Зная приведенную массу, можно проинтегрировать уравнение
движения эквивалентной одномассовой системы:
d3w , о dw , 1
—.+2«-5г + «;1®=я-/></),
откуда при нулевых начальных условиях
W (X, у, t) = -— ,
Je *>Р(т)sindt, t>t*.
' 0
Продифференцировав эти уравнения, получим
211
Ow [х, у, I) 1
— Л11|р
(10.53)
dw- (х. у, t) 1
(>/-' М пр
Je -т)4-
4 COS «»и (Z — т)| dx, i < Z„ ;
у е _71|8|п«>|1(/_-)4-
4- cos ш,i (/ - т)] d~, t^t№;
''"/’WKl -J?,) X
X sin Wlt (Z — x) 4 28|, cos<»u (Z — z)]d~, Z <ZH;
'h ~
If P0)|(1 —«») x
X sin«>,, (Z — ') 4- 2e(l cos U>n (Z — t)] d~,
Если длительность ударного воздействия /„<то парамет-
ры движения элементов конструкции, соответствующие основной
форме колебания, можно представить следующим образом:
w(Z) = —Af------( — 5и sin witZ 4- cos W||Z);
Л1пр
s ~ ~
" 1(1 — £n)sln O)|^ — 2ги cosi«>nZ|,
где S = f P(i)dt — нормальная составляющая импульса силы,
и
Коэффициент приведения для прямоугольной плиты постоянной
толщины рассчитывается по формуле
а = 1 /I /Ио»}, Уя '*т (у,,) 1 (>) I •
п т D И (Л) (>) dxdy
где j (! 7я (Л) <Уя (х) dxdy' :
Входящие в эту формулу собственные функции и частоты коле-
баний определяются по формулам, предложенным Ш. И. Нанавой.
Результаты расчета приведены в табл. 10.10.
212
Таблица 10.10
Коэффициенты приведения масс бронеплит для различных граничных условий
Соотноше- ние разме- ров броие- П.1НГ alb Jf - у-у.-т -г - Г, - J ь у - у- - — ь у=у.—g-
при свободно опертых краях при жесткой заделке при свободно опертых краях при жесткой заделке при свобод- но опертых краях при жест- кой заделке
1.0 0,22249 0,13226 0,45541 0,36063 1,63190 1,63553
1.1 0,22211 0,13183 0,45336 0,35746 1.62220 1.62001
1.2 0,22110 0,13068 0,44802 0,34929 1,59689 1,58025
1.3 0,21961 0,12897 0,44034 0,33797 1,56075 152538
1.4 0,21771 0,12683 0,43106 0,32494 1,51755 1,46253
1.6 0,21295 0,12166 0,40992 0,29755 1,42068 1,33127
1.8 0,20726 0,11579 0,38767 0,27175 1,32108 1,20856
2.0 0,20094 0,10970 0,36597 0,24909 1,22614 1,10104
5.6 0,10918 0,05253 0,17854 0,11331 0,51922 0,50532
Нелинейные колебания центра массы башни при ударном на-
гружении рассчитываются по формуле движения одномассовой
нелинейной системы с кусочно-линейной характеристикой:
w 4- 2 + «nW Alwo.Wy-i 4- F (/) m (n — 0, 1, 2,...),
r c, n I o. |v| < v0 ; n = 0 ;
где «J- V = “о/ = ~: **>« = wo + ; 11 7> Wn~':
I — 1, w < — ®я-|;
tn — масса башни; = PuP(t)', Po—максимальное значение силы удара;
P(t) —закон изменения силы удара во времени.
Нулевые начальные условия:
л = 0; t = = 0, w =- w_i = 0, w = w_t — 0.
Параметры движения при п = 0, | w | о»0 определяются по
формулам:
но-р./(т^)х[*ю-
»W=а/мх|®“; <<>•'<<«’
здесь о>н = юп/ /1 ё;’ ; остальные величины определяются по
формулам, приведенным выше.
213
При п > 1
wy(0 = 4- ^-jsln<%(/-/„_,) + wn_iCOS<o„(/ —
- -------11 -e_‘«“-</"_r«-‘>hesln
wy (/) = < шя |^ятоя_, + j | - ёя sin шя (/ - /я_, +
+ COS U>„ (t - - W„_, [£„ COS(O„ (t - tn_t) + sin W„ (i - /„_,)]} +
+ ^i(<02w;_,)—e^^'-^sln шя(/-/я_,) > ;
w(/) = e -в-«(Мм’<.^_(1Ли4-!^1)((1 sin «>„(/-*„.,) 4-
+ 2»„cosu>„(/ - /,_,)] 4- w„_j [- (1 - <2)cos w„U — +
4- 2 гя sin «>я (/ — /я)|} 4- k 2 [ - in sin шя (t 4-
4- cos w„(t - /„_,)] > .
Следует отметить, что общее движение башни можно предста-
вить в виде наложения колебаний центра массы и изгиба самой
башни (свободно опертой сферической оболочки переменной тол-
щины), так как жесткость погонного устройства мала по сравне-
нию с жесткостью башни.
Колебания пластин, подкрепленных ребрами жесткости. Ис-
пытания танков при снарядном обстреле выявили, что при интен-
сивном ударном нагружении подбашенный лист получает значи-
тельные упругопластические прогибы, которые снижаются исполь-
зованием подкрепляющих ребер жесткости. Эффективность ребер
жесткости на подбашенном листе при статическом и динамическом
нагружении оценивается посредством решения уравнения изгиба
пластинки с учетом дискретности расположения ребер:
D\7k,w + 2( ^i.i rt (х — at) 4- 2^2,/ Г, (у — bj) 4-
+ 7F I <Л- »<) ] + ^ [ г> <У -*>)] =
= ?(*. У). (10.54)
где w = ш(л, у)—прогиб пластинки; D — цилиндрическая жесткость; q(x, у)—
интенсивность внешней нагрузки; х - at, у - bt— координатные линии, вдоль ко-
214
тор их расположены ребра; М, N — число ребер, параллельных соответственно
осям х и у; Вн: Вщ — жесткость ребер прн изгибе; Кн; Л'г, — жесткость ребер прн
закручивании; Г, — импульсная функция первого порядка.
^* = ^г + 2^ + ^--
Граничные условия имеют следующий вид:
bQt = - C’w: , (Z - 1 при х = 0: i 2 при х = а);
aQ-, - -г- C’w: = ± (/ = 3 при у 0: j = 4 при у — Ь),
где С/. С]—коэффициенты пропорциональности между перерезывающими си-
лами и прогибами пластинки на контуре; 0„ 0/ — коэффициенты пропорциональ-
ности между углом поворота нормали к срединной поверхности и изгибающим
моментом на контуре; а, b — размеры пластинки в плане.
Представим прогиб пластинки и внешнюю нагрузку в виде бес-
конечных рядов:
^(Х, у)= 2 V О0-55)
Я (Jf, У) = S 2 <7«mZa Ю (у) , (10.56)
a—t m-l
где Хл(х). фм(у)—собственные функции, удовлетворяющие заданным гранич-
ным условиям
Внеся эти'выражения в формулу (10.54) и проинтегрировав по
прямоугольнику [0, а; 0, fr], придем к бесконечной системе алге-
браических уравнений относительно коэффициентов wnm, откуда
коэффициент внешней нагрузки
а Л
f 1 Я (*. У) Ха (х) im (y)d*dy
qnm = ------------------• (Ю-57)
f f Хл (х) Ут (у) dxdy
В случае распределенной нагрузки ио площади прямоугольника
со сторонами ао, Ьо
7 (3)7(3)
qnm - 16<7о тЧЧ . q (X, у) = qu = const. (10.58)
/?>/£>
С учетом (10.58) получим
[-~г“$ + «V& + 2rfo Z< ] 4- (Eps)‘ J-2 wsn i ?i.<Zz X
I Mr 4°4°-I ^я"‘
X w z„ (at) 2- + Z3 V Wm/ у p2 Л {b } K (b } _L =
/(I) m-l ,-l /(I) Dp,// /(f /J
(s, /==1, 2,...), S (10-59)
215
здесь ?.t, gs — собственные числа задачи;
X, = Х^; ; = Л..
X» («) — sin X, -j- + d, sh X,-i- + d2 cos X,-j- 4- d, ch X, ;
(У) = sin h. - j- + </< sh i*. -f- + d, cos |i„ -J- + dt ch
величины /1’, /Iя, /.!'* определяются no специальным формулам
и здесь не приводятся.
Расчеты показали, что, отбросив в (10.59) недиагональные чле-
ны, получим
доЯЯ| =
7<з)
/ т I
(ОТО) |
~ -----7(2) 7(2)
Подставив wnm в (10.55), получим значение прогиба в любой
точке пластинки при равномерном нагружении по части срединной
поверхности. Для пластинки со свободно опертыми краями прогиб
определяется по формуле
w У)= Д Ятп sln Х« sln У 11"2 + <а«)Т +
N .И
+ («м)2 2i[₽u(6m)2sIn2Xlla<4-xlwl/i:!cos2X<laJ + ft2 SlP-j./X
X л2 sin- Am b, I- x,y (гж)-’ cos- i*m bj\ |-\
где = m ^b; Z„ - п к I a; gmn sln Z„x0 sin Xmy„ sin X„ -y- sinjxOT -y-.
В случае сосредоточенной нагрузки
4Р.>
<7-.« = “3F-sink<lx0slnHmy0.
Результаты расчета статического изгиба оребренного подбашен-
ного листа при различном расположении ребер показали, что с их
помощью можно повысить жесткостные характеристики подба-
шенного листа минимум в два раза.
Частота свободных колебаний ребристой пластины определяет-
ся по формуле
. ». ___7(2) 7(2) ,у ~ _
216
.М ~ , Л' ~ _ 7<2)
+ S М’л 7^ ?;.(*,)- V -
•'“* 1т /л !т
Л1 ~~ ~ 7(2) Л' ~ .
S (Фт)- Нт ^0Д(|) (Ml 1РА + £ Н<.Л— Z«(M +
/п /т ‘ ’ * /и
•Й(М1.
где р — плотность материала пластины; Л — толщина пластины; сол<п — круговая
частота собственных колебаний пластины;
2л»|,/ 2л/о« 2КЬ| 2К21>
mi.l «г,/—погонная масса ребер.
Параметры движения элементов ребристой пластины в случае
ударного нагружения определяются по формулам (10.53), (10.54),
в которых под двойную сумму вводится множитель
Полученные расчетные зависимости обобщаются и в случае по-
датливых точечных опор в пределах поверхности пластинки.
Результаты сравнительных расчетов показывают, что при дина-
мическом нагружении подбашенного листа эффективность ребер
жесткости такая же, как при решении статической задачи.
217
Глава 11. ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ
ВИБРАЦИЙ И УДАРОВ
11.1. МЕТОДЫ ОПРЕДЕЛЕНИЯ ВИБРАЦИОННЫХ УСКОРЕНИЙ
ПРИ ДВИЖЕНИИ ВГМ
Основные положения экспериментального исследования вибро-
нагруженности ВГМ регламентированы действующим ОСТ
B3-1683—73. Этим стандартом устанавливается методика опреде-
ления вибрационных и ударных ускорений в стационарных усло-
виях, при движении ВГМ и стрельбе из штатного оружия. Рекомен-
дуется применять пьезоэлектрическую и индуктивную виброизме-
рительную аппаратуру (табл. 11.1), в которую входят вибропреоб-
разователи (акселерометры), усилительные и согласующие устрой-
ства, регистраторы, полевые и калибровочные устройства, бло-
ки питания и соединительные кабели. При необходимости
измерительный комплекс дополняется пультами управления, филь-
трами, устройствами для отметки и синхронизации явлений, микро-
фонами для речевого сопровождения записей и др,
В последние годы в бронетанковой технике получили широкое
распространение магнитографические методы измерения вибраций
с использованием бортовых магнитографов или стационарных
магнитофонов с телеметрической передачей информации с подвиж-
ного объекта, а также универсальная виброизмерительная аппара-
тура датской фирмы «Брюль и Къер». Например, в состав одного
из таких измерительных комплексов входят пьезоакселерометры,
шесть усилителей ИС-943А, автономный бортовой магнитограф
ИС-1135А со специальным пультом управления, электронный ос-
циллограф транспортного исполнения С1-49, блок питания и ка-
бельные линии связи. Эта аппаратура обеспечивает одновременную
запись 24 процессов в режиме модуляции (0—250 Гц) или непо-
средственной записи (100—15000 Гц). Неслужебному каналу про-
изводится речевое сопровождение записи.
Для удобства и безопасности виброизмерений аппаратуру раз-
мещают на верхней части башни или на крыше МТО и крепят с
помощью стальных бонок, привариваемых к броне, способных вы-
держать двадцатикратную перегрузку от массы аппаратуры. Уси-
лители, регистраторы, пульты управления и другие блоки комплек-
са устанавливаются в танках с помощью амортизаторов. В БМ11
аппаратуру можно располагать внутри десантного отделения. От
дождя, снега и грязи наружная аппаратура предохраняется чехла-
ми. Аккумуляторные батареи заключаются в металлические кожу-
хи и устанавливаются сзади операторов по ходу движения во избе-
жание травм от выплескивания электролита.
218
Технические характеристики виброизмерительной аппаратуры
Таблица 111
Тип акселерометра Тип усилителя Рабочий частотный диапазон, Гц Амплитудный диапазон ускорений. м/с1 Основ- ная по- греш- ность, Н Число кана- лов Тип регистратора Примечание
ИС-312 ИС-313 ИС-318 АВСО36-01 АВСО36-02 АВСО34-04 ИС-943А 20-10 000 1—6000 1—6000 1—6000 1-10 000 1-3000 1-3000 ±10 4 Магнитограф или ре- гистратор с /?вх=100 кОм Набор фильтров от Ф I до Ф-V
ИС-598 ИС-598А ИС-1269 0,5—400 5—500 ±10 4 То же Набор фильтров 01 0109-0 до 0113-0
ИС-318 ИС-313 ВИБ-ЗВМ 40—8000 3—1000 ±11 3 Магнитограф, светолу- чевой осциллограф Допускается одновре- менное использование регистраторов с высоким н низким сопротивлением
ДУ-5Д НИБ-ЗВМ 0-200 3—1000 ±11.5 3 Магнитограф, радио- телеметрический передат- чик Корректирующий фильтр 0—200 Гц
ДУ-5 ВИ6-5МА 0-200 До 450* ± з 6 Светолучевой осцилло- граф То же
ДУ-5С ДУ-5С-50 ДУ-5С-100 ВИ6-6ТН 0—200 До 1000* ±3 6 Магнитограф, светолу- чевой осциллограф Корректирующий фильтр 0—200 Гц и фильтр нижних частот 0-30 Гц
* Нижний предел измеряемого ускорения зависит от характеристики регистратора
По окончании эксперимента аппаратуру снимают и градуируют
в стационарных условиях на вибростендс. По результатам градуи-
рования до и после измерений определяется среднее значение ко-
эффициента чувствительности канала Ktp. Разность температур в
момент измерения и при градуировании в стационарных условиях
на лабораторных стендах для акселерометров типа ИС учитыва-
ется поправкой
K,-Kcf [1 +0,002 (/«-/„)],
где ta — температура в момент измерения; /0 — температура при градуировании
в стационарных условиях.
Результаты градуирования, снятия амплитудных и амплитуд-
но-частотных характеристик заносятся в журнал градуирования
измерительного комплекса, а необходимые сведения по программе
измерений (режим работы ВГМ, пределы измерения, температура,
номера используемых акселерометров и каналов и др.) —в журнал
натурных измерений; при магнитной регистрации эти сведения
фиксируются по речевому каналу.
11.2. МЕТОДЫ ИССЛЕДОВАНИЯ УДАРНЫХ ПРОЦЕССОВ
Агрегаты и приборы танков подвергаются ударному воздействию
при пробитии подвесок, стрельбе из танкового орудия, подрыве
мин и снарядном обстреле.
Ударные процессы бывают импульсные (однополярные) и зату-
хающие ударно-вибрационные, на фоне которых можно выделить
однократный импульс.
Каждому виду ударного нагружения соответствуют свои зако-
номерности перемещений, скорости и ускорения, длительности
ударного импульса и его нарастания, а также времени действия
всего затухающего процесса.
При стрельбе из танкового орудия, минном подрыве и пробитии
подвесок ударные процессы продолжаются от единиц до сотен мил-
лисекунд, а ускорения достигают 10—10 000 м/с2; при снарядном
обстреле длительность ударного импульса составляет десятые доли
миллисекунды при общей продолжительности затухающего про-
цесса 10—100 мс, ускорение равно 104—105 м/с2, скорость —50 м/с
и более.
Измерение параметров ударных процессов средней интенсивно-
сти. Такими процессами являются: пробитие подвески, стрельба из
своего орудия, минный подрыв. Для измерения параметров этих
процессов применяется аппаратура типов ВИ6 и ИС.
При исследовании ударных нагрузок от выстрела своего орудия
аппаратуру обычно располагают рядом с объектом исследования
(сзади по направлению выстрела), а при подрыве мин —в специ-
альном бронетранспортере, установленном на расстоянии 20—30 м
от места подрыва. В обоих случаях запись процессов начинается на
1 с раньше ударного воздействия; управление аппаратурой и огне-
выми целями — дистанционное.
220
Для определения знака ударного ускорения перед окончатель-
ным закреплением акселерометра устанавливается полярность из-
мерительного тракта (легким постукиванием по акселерометру в
требуемом направлении). Если ожидаемый уровень ускорения пре-
вышает 100. ..150 м/с2, акселерометры и их переходники крепятся
с помощью сварки, клея «Циакрин» или клея на основе эпоксидных
смол. При меньших воздействиях можно использовать пластилин
или мастику из воска и канифоли.
Измерение параметров ударных процессов высокой интенсивно-
сти. В лабораторных исследованиях для непрерывной регистрации
скорости свободной поверхности применяются емкостные и электро-
магнитные преобразователи, а также преобразователи давления,
принцип действия которых заключается в регистрации изменения
электрических параметров чувствительного элемента (сопротив-
ление манганина, ударная поляризация диэлектриков, пьезоэффект
кварца, турмалин и др.). В полигонных условиях эти устройства
малопригодны из-за недостаточной помехоустойчивости.
Большие преимущества имеет метод регистрации параметров
ударных волн с помощью диэлектрического преобразователя давле-
ния, основанный на явлении изменения емкости плоского конденса-
тора; процесс ударной поляризации в нем подавляется предвари-
тельной поляризацией диэлектрика в электрическом поле высокой
напряженности.
Конструктивно диэлектрический преобразователь выполнен в
виде плоского конденсатора, один электрод которого образован
двумя проводящими поверхностями (для неметаллических материа-
лов— двумя слоями металлической фольги), центрального элек-
трода в виде диска из тонкой металлической фольги с выводом и
двумя слоями диэлектрика. Преобразователь соединяется с источ-
ником высокого напряжения через зарядное сопротивление
« 4 МОм и двухкаскадный усилитель, обеспечивающий согла-
сование волнового сопротивления кабеля 75 Ом. Последний имеет
полосу пропускания до 5 МГц при входном напряжении до 25 В.
При этом должно соблюдаться условие RA /и (Со = Сп Ц-
+ Ск + Су — общая емкость, включающая в себя емкости преоб-
разователя Сп, соединительного кабеля Ск и предусилителя на входе
Су). При высоком сопротивлении входной цепи общий заряд мож-
но принять неизменным:
Q = CoU0 = const.
Изменение электрической емкости преобразователя АСП
Сп Сп0 при ударном сжатии определяется по измеренной раз-
ности потенциалов At/ = Un — Un на его электродах:
(11.1)
Ьпо Vo Vo \ ^Vo /
где Uo — начальная разность потенциалов на электродах преобразователя;
t/np — напряжение, приведенное к электродам преобразователя.
221
Для определения давления используется его зависимость от из-
менения емкости (или напряжения).
Изменение напряжения
Рис. 11 I Градуировочные кривые
для диэлектрических преобразова-
телей:
I. 2 — с триацетатной пленкой толщиной
соответственно 0.2 и 0.!4 мм; 3 с лавса
новой пленкой толщиной 0,06 мм
Градуировочные кривые для
диэлектрических измеритель-
ных преобразователей (ИП) с
различными пленками, приве-
денные на рис. 11.1, получены
экспериментально посредством
нагружения преобразователя
ударом стальной пластинкой
по стальному образцу со ско-
ростью до 1 000 м/с на пнев-
мопороховой установке ПК-90
(неплоскостность соударения
не более 0,02 мм). Давление
рассчитывается по формулам,
приведенным в предыдущей
главе.
2/2
2ЛТ
где £Д, 2Л, — градуировочное (действующее) напряжение, В, и соответствующий
ему размах колебаний иа экране осциллографа, мм; Лр — амплитуда рабочего
сигнала на экране, мм.
Начальный участок градуировочной кривой (до 3,0 ГПа) мож-
но аппроксимировать зависимостью
„ 2/2 ад. .
2л,;„ *>
где еп = 3.2 8(Х) 5 5 .
Здесь ^„—чувствительность преобразователя (иКл/Па) при рабо-
чем напряжении на его электродах Uo (В). Площадь электродов
Sn (см2) рассчитывается по эталонному преобразователю с $„ ,=
= 3,2 нКл/Па при $„= 5,5 см2 и Uo = 800 В.
Диэлектрический преобразователь может быть использован для
регистрации давления в нсплоских волнах и в плоскости, перпенди-
кулярной фронту волны. Как показал опыт, диэлектрический ИП
можно использовать при давлении не более 13 ГПа.
222
Для определения полного импульса силы и профиля волны на-
пряжения, переданных через бронеплиту при снарядном ударе,
применяются мерные стержни. Импульс силы определяется по изме-
ренному количеству движения I = mv. Удельный импульс
/У = 4- = Р^ = 4" (П-2)
6 6
где р, /, 5 — плотность, длина и площадь поперечного сечения стержня; v — мак-
симальная скорость отскока стержня; о — напряжение на границе стержня и
плиты; /н — длительность импульса.
Длина стержня должна быть больше полуволны сжатия:
‘ >(4
где D — скорость распространения упругой волны в стержне.
Мерный полуволновый стержень (рис. 11.2) подвешивается на
гибких нитях перпендикулярно тыльной поверхности преграды и
плотир поджимается к ней. К опорному торцу стержня крепится
диэлектрический ИП. Скорость стержня определяется по измерен-
ному с помощью секундомера времени пролета наконечником
стержня после прокола фольги мерной базы Ы/Ы.
Мерный стержень может использоваться для исследования про-
филя ударной волны интенсивностью до 3 ГПа.
Для увеличения разрешающей способности метода стержни сле-
дует изготовлять из материала, прочность которого равна прочно-
сти преграды или превосходит ее.
223
По скорости мерного стержня можно рассчитать максимальную
скорость тыльной поверхности преграды (плиты) в точке контакта
со стержнем:
2/v
^таж — •
Df 7 (t)dt
(11.3)
Рис Конструкция
акселерометра ПИ-431
где а(/) — <т(/)/<Го — закон изменения профиля ударной волны.
Методы определения ударных ускорений. При исследовании за-
висимости параметров нестационарного движения элементов броне-
конструкции и внутреннего оборудования танков от удар-ных воз-
действий чаще всего используются измерительные пьезоэлектриче-
ские преобразователи (акселерометры).
Низкая помехоустойчивость акселеромет-
ров обусловливает высокие требования к
усилительной аппаратуре.
Для исследования ускорений средних
уровней (от 104 до 105 м/с2) в настоящее
время серийно выпускаются акселеромет-
ры типа ЛВС серий 017, 034 и 036, имею-
щие большую деформационную чувстви-
тельность и недостаточную прочность.
Для регистрации ударных ускорений на
бронсконструкциях танков и внутреннем
оборудовании используются специальные
пьезоэлектрические ИП, которые по типу
крепления пьезокварцевых чувствитель-
ных элементов подразделяются на клее-
ные ПИ-320 и с предварительным поджа-
тием ПИ-431 (рис. 11.3). Уровень уско-
рений, регистрируемых этими акселеро-
метрами (табл. 11.2), существенно зави-
сит от характера ударного процесса.
недостатков акселерометров является их
Одним из основных
чувствительность к иеизмеряемым компонентам, т. е. при интенсив-
ных воздействиях (например, при обстреле бронсбойно-подкали-
берными или осколочно-фугасными снарядами) происходит раз-
грузка основания корпуса акселерометра (за счет частичного или
полного самоотвинчивания цилиндрической резьбы), и, следова-
тельно, его объемная деформация передается пьезоэлементу. Этот
недостаток может быть уменьшен предварительной
нировкой закрепленных ИП.
Коническое резьбовое соединение нс подвержено
ванию при ударе и локализует объемные нагрузки
Прочность таких акселерометров зависит от прочности пьезоэле-
ментов.
ударной трс-
самоотвинчи-
внутри себя.
224
Таблица 11.2
Технические характеристики ударных преобразователей ускорений
Параметр ПИ 320 ПИ-431
Чувствительность по заряду, пКл-с2/м 0,003—0.005 0,0023—0,003
Чувствительность по напряжению (амплитудное значение) при электрической емкости 2500 пФ, мВ-с2/м 0,0012-0,002 0,0009-0,0012
Собственная частота закрепленного преобразо- вателя, кГц ~ 40 ~ 50
Масса (без кабеля), г Технический ресурс при импульсном процессе (с обратной полуволной 0,3 хп): 20 12
пиковое ударное ускорение х„ длительностью до 200 мкс, м/с2 5-10* 50-10*
число ударов Технический ресурс прн ударно вибрационном (затухающем) процессе: 5 5
пиковое ускорение ха длительностью до 500 мкс, м/с2 2-10* 20-10*
число ударов 1-2 1-2
Широкое распространение получили также низкочастотные из-
мерительные преобразователи, позволяющие определять входное
воздействие по реакции ИП и контролировать результаты прямого
измерения динамических нагрузок на несущих конструкциях по-
средством расчета реакции ИП на них.
Низкочастотные ИП можно представить в виде одномассовой
линейной системы с тремя степенями свободы, имеющей в продоль-
ном направлении собственные частоты от 30 до 150 Гц, а в по-
перечном— от 45 до 200 Гц. ИП крепятся к броне через два
резиновых амортизатора; для записи трех составляющих вектора
ускорения к их инерционной массе с помощью эпоксидного ком-
паунда крепятся три пьезоаксслерометра типа АВС серин 036.
Регистрация параметров производится в диапазоне частот до
2 кГц через предусилители на светолучевые осциллографы.
11.3. ДИНАМИЧЕСКОЕ ИСКАЖЕНИЕ УДАРНЫХ ПРОЦЕССОВ
ИЗМЕРИТЕЛЬНОЙ аппаратурой
Измерительная аппаратура имеет, как правило, ограничения по
частотному рабочему диапазону сверху и снизу. Эти ограничения
определяют динамическое искажение ударных процессов. Усили-
телям пьезотоков и усилителям электронно-лучевых осциллографов
переменного тока свойственны ограничения по частоте снизу. Для
15 Зак. 20с
225
описания работы в области этих ограничений могут быть исполь-
зованы апериодические уравнения первого порядка (звенья перво-
го вида). Ограничения по верхней частоте обусловлены примене-
нием корректирующих фильтров и фильтров нижних частот (ФНЧ)
в усилителях и гальванометрах светолучевых регистраторов. Их
влияние может быть оценено с помощью уравнений второго поряд-
ка (звенья второго вида).
Так как анализ динамических искажений исследуемых процес-
сов проводится, как правило, посредством аппроксимации действи-
тельных воздействий некоторыми идеализируемыми функциями,
имеющими сравнительно простые аналитические зависимости, мож-
но ограничиться рассмотрением наиболее характерных форм им-
пульсов:
линсйно-нарастающсго
/|(О = -т*- = *Л *>0;
•и
(11.4)
смещенной косинусоиды
/.(/) = ^-(l-cos-O.
(11.5)
синусоидального затухающего
/,(/) = Doe',r sin <в/,
(Н.6)
где D,,
растения переднего фронта импульса.
Для звена первого вида
, dU df(t)
~dF t u - dt
(H.7)
где выходная функция U определяется интегралом свертки; т0 « RC — постоян-
ная времени звена.
Относительная погрешность воспроизведения сигнала
ЦЩ- /(<)
7W
(11-8)
Тогда для сигнала вида (11.4) выходная функция
(119)
а относительная погрешность
(11.10)
226
Для смещенной косинусоиды вида (11.5)
U= U" 2|l H^.ri <sll‘<u< — <*>тоСОэ4-<»Х(,е
8«~ |1 ' со~-7) (3|пю<- “'«cos»/ +<>-,,е
Для функции вида (11.6)
и«УТ+?
/1 ч (ц.'«)3
-|е e'sln(«>/ + ?)
U
/(1 + т*)11 + h/-)’l
(11.12)
у — тп/ы a 1
rM ' ,,c'8 yi+„i»
8, = .T ~ 'l‘‘=-[e~'1 sin(«/ 4 'f,) — >1 — ef’’J—----.
/1-НчН’ VI + (l/“)2 sln-/
здесь <pi = arctg *»/£70-
Для синусоидального сигнала (ш = 2nf) при установившемся
режиме (а = 0, t » то) относительная погрешность
/I + (1/2VM-*
Для согласующего усилителя пьезотоков с постоянной времени
то = RC = 0,05 с (R = 100 МОм, С = 500 пФ) при т0//и= Ю
(длительность импульса /и = 5 мс) погрешность регистрации коси-
нусоидального импульса за счет ограничения по нижней частоте
апериодическим звеном первого порядка будет составлять 3 %,
а для линейно нарастающего сигнала — 5 %, в то время как при
отношении тоЛи= 1 погрешность соответственно равна 25 и 50 %.
Для установившегося синусоидального процесса при [то = 1 по-
грешность б ® 2 %.
Для звена второго вида
U + 2t^U + ^U = ^/(t),
где е и <оо —степень успокоения и собственная частота колебаний звена.
Так как звено обладает инерционными свойствами, практиче-
ский интерес представляют ошибки воспроизведения амплитуд
входного воздействия и время задержки. Это видно на примере
воздействия (11.4), нормированного по амплитуде (В\ = 1):
(Jt (/) = ехр(—е<о01) (Д cos <og t -f- В sln « t) 4-1 — 2t/u>0.
где A = 2e/a>o; В = (2*3 — 1)/% ; = -о — <3.
В установившемся режиме реакция Ui имеет постоянное время
задержки 2e/<i)o.
227
15*
Для определения ошибок воспроизведения сигнала вида (11.4)
на рис. 11.4 представлена нормированная по амплитуде и по време-
ни реакция U\(K) колебательного звена на нормированное также
по амплитуде и времени входное воздействие f\(K) при различной
степени успокоения е колебательного звена. Масштаб безразмерно-
го времени К = eW-
Разность между U\(K) и Ь(К) на уровне горизонтальных сече-
ний определяет время задержки Л/ = ЛК/есоо, а по вертикальным
сечениям — амплитудную погрешность (К).
Для измерительной системы из нескольких звеньев второго вида
временная задержка определяется суммой задержек каждого звена.
Рнс. 11.4. Реакция гальванометра на
возмущение вида ft(t) при различных
значениях коэффициента затухания *
Рис. 11.5. Отношение пика реакции
колебательного звена к высоте им-
пульса для функции вида f2(t) при
различных значениях коэффициента
затухания е
При возмущении, за-
данном смещенной коси-
нусоидальной функцией
(11.5), амплитудную по-
грешность и задержку
импульса звеном второго
вида можно определить
из графиков, характери-
зующих отношение пика
Рис. 11.6 Отношение времени
задержки пика реакции к дли-
тельности импульса для функ-
ции вида ft(t) при различных
значениях г
реакции t/2m«x к максимальной амплитуде импульса Uo (рис. 11.5)
и времени’ задержки Л/ к длительности импульса /и= 2л/ш
(рис. 11.6).
228
Расчет ошибок при воспроизведении звеном второго порядка
импульсов вида (11.6) сложен. В этом случае применяют метод мо-
делирования измерительной системы на аналоговых вычислитель-
ных машинах.
11.4. МЕТОДЫ ОБРАБОТКИ ЗАПИСЕЙ ВИБРАЦИОННЫХ
И УДАРНЫХ ПРОЦЕССОВ
Сложная структура вибрационных и ударных процессов в ВГМ
затрудняет их математическое описание. Параметрированис виб-
раций и ударов осуществляется специальной обработкой носителя
экспериментальной информации (осциллограммы, магнитной ленты
и др.). В(ряде случаев достаточна визуальная (ручная) обработка,
при которой определяются средние абсолютные значения парамет-
ров процесса, а также частоты преобладающих компонентов и их
максимальные и средние значения. До недавнего времени такая
обработка была основной, так как регистрация процессов велась
преимущественно с помощью электронно-лучевых осциллографов.
При этом в зависимости от поставленной задачи обрабатывается
вся реализация либо лишь та ее часть, где процесс имеет наиболее
характерный вид или максимальные значения.
Определение гармонических компонентов полигармонической
вибрации выполняется методом огибающих, основанным на сложе-
нии нескольких синусоид с различными частотами, или методом
аппроксимации, являющимся комбинацией ручной и машинной об-
работки. В последнем случае процессы между двумя экстремума-
ми аппроксимируются полукосинусоидамн, координаты вершин ко-
торых, считываемые ручным или машинным способом, включают
в алгоритмы для определения характеристик процесса на ЭЦВМ.
Этот метод позволяет вычислить математическое ожидание, средне-
квадратичное отклонение, а также коэффициенты ряда Фурье (для
полигармонических и близких к ним моделей вибрационных про-
цессов) :
*(*)- £ |Л*81П-^£-/ + COS —у—- / ],
А= I
где Л», В* — коэффициенты ряда; I, Т — длительность обрабатываемого участка
реализации и период основной частоты.
Выделив основные компоненты, определив их частоты Ц = k/T
и амплитуды Ск, по зависимости
229
строят периодограммы (рис. 117), наглядно иллюстрирующие ре-
зультаты измерений.
При обработке экспериментальных данных с целью нормирова-
ния воздействий либо их сравнительного анализа используется
большой массив информации, отражающей вибрационное состоя-
ние многих точек ВГМ на различных режимах ее движения. Чаще
всего исследуются вибрационные процессы при равномерном дви-
жении ВГМ по трассам с твердым покрытием. В этом случае ко-
лебания имеют характер случайной широкополосной вибрации;
в спектрах конкретных реализаций встречаются регулярные либо
узкополосные составляющие. Обработка таких процессов осущест-
вляется на ЭЦВМ с вычислением статистических характеристик:
законов распределения, мгновенных-и максимальных значений, спек-
тральной плотности мощности и др. Ударные процессы, возникаю-
щие при стрельбе из орудия, а также при движении по неровной
дороге, относятся к категории нестационарных и обрабатываются
,т.Т, .T.kJL
Рис. 11.7. Периодограмма виб-
рационного процесса
Рис. 118 Импульсная форма
ударных процессов
отдельно. Они отличаются большим разнообразием форм.
Наиболее просты для описания и обработки выраженные импульс-
ные процессы, одиночные либо разделенные достаточным времен-
ным промежутком (рис. 11.8). Они характеризуются временем 'ф
нарастания первого импульса (фронтом импульса), длительностью
первого и последующих импульсов п, Tj,... и их амплитудными
значениями х||лах, л2пах.
Параметрирование ударно-вибрационных (затухающих) про-
цессов не является однозначным. При обработке осциллограмм
условно выделяют импульсную часть и сопутствующую вибрацию.
Когда импульсная часть отсутствует, процесс описывают совокуп-
ностью затухающих синусоид. Визуальный анализ позволяет выя-
вить только основные черты ударного процесса; для учета его осо-
бенностей необходим всесторонний анализ.
230
Глава 12. ОСНОВНЫЕ РЕЗУЛЬТАТЫ ИССЛЕДОВАНИЯ
ВИБРАЦИОННЫХ И УДАРНЫХ ПРОЦЕССОВ
В ТАНКАХ И БМП
12.1. ВИБРАЦИОННЫЕ ПРОЦЕССЫ
Количественной мерой вибронагруженности танков являются
среднеквадратичные отклонения виброускорений а и их спектраль-
ная плотность W, позволяющая установить частотный состав. Были
проведены исследования вибронагруженности основных серийных
танков в зависимости от скорости их движения и конструктивного
исполнения ходовой части, а именно сопряжения поверхностей
опорных катков и беговых дорожек (резина по металлу, металл по
металлу, резина по резине). Для танка Т-64А исследовались гусе-
ницы различного типа (с составными траками и резинометалличе-
скими шарнирами параллельного типа, с цельноштамповаиными и
резинометаллическими шарнирами последовательного типа) при
движении по бетонным и каменистым трассам (рис. 12.1, 12.2).
а д
Рис. 12.1. Виброускорение корпуса танков в носовой части (а) и центре (б) при
движении:
I — T 64А по бетону; 2 — Т-72 по бетону; 3 — T-SO по бетону; 4 — Т-64А по каменистой тран-
се (гусеницы с РМШ параллельною типа); 5 - Т 64А по каменистой трассе (гусеницы с
РМШ последовательного типа)
231
Из полученных данных можно сделать следующие выводы:
с увеличением скорости движения танка виброускорсние возраста-
ет; наибольшая вибрационная нагружснность характерна для тан-
ка Т-64А. При этом вибронагруженность танка Т-64А при движе-
нии по бетону со скоростью более 25 км/ч в 2—4 раза выше, чем
танка Т-80. Вибронагруженность башен танков существенно ниже,
чем корпусных элементов (борт, корма, лобовой лист, днище и др.);
при движении со скоростью выше 40 км/ч ускорения становятся
постоянными — сказывается стабилизирующее влияние погонною
устройства.
a j
Рис. 12 2 Виброускорсние днища танков под боевым отделением (а) н башни
(б) при движении:
1 —S — см. рис. 12.1; 6 — Т 72 по бетону; 1 — Т-64А по бетону (гусеницы с РМШ параллель-
ного типа)
Вибронагруженность танков, движущихся по бетону, в 1,5—2 ра-
за выше, чем при движении по каменистой трассе. Гусеницы различ-
ных типов при движении танков по бетону оказывают незначитель-
ное влияние на нх вибронагруженность; на каменистой трассе для
танка Т-64А с двумя типами гусениц получены различные резуль-
таты вибронагруженности. Снижение динамических нагрузок при
движении по грунтовым трассам можно объяснить податливостью
поверхности, позволяющей тракам изгибаться под действием кат-
ков.
Экспериментально установлено, что на осях опорных катков
танков соотношение виброускорений такое же, как на корпусе; эти
ускорения также возрастают при увеличении скорости движения.
В спектре ускорений доминирует шаговая частота или частоты,
кратные ей, что связано со звенчатостью гусениц:
/ш = V/^тр»
где и —скорость движения танка, м/с; /тр—шаг гусеницы, м; /ш — шаговая ча-
стота, Гц.
232
В танке Т-64А наиболее существенные (пр уровню) узкополос-
ные составляющие спектра соответствуют одинарной (/ш), двойной
(2/ш), тройной (3/ш) и т. д. шаговым частотам (рис. 12.3). В танке
Г-80 частотный спектр ускорений центра масс катков беднее: воз-
действия реализуются в основном на одинарной и двойной шаговых
частотах.
Рис 12.3 Спектральная плотность вертикальных ускорений четвертого опорного
катка танка Т-64А при движении по бетону:
/. 2. Л —скорость 30; 35; 37.5 км ч соотвстствеяво; /Гр =0.161 м
Вертикальные ускорения на осях катков содержат и широкопо-
лосную составляющую, которая совместно с аппаратурными поме-
хами образует «фоновый» уровень спектра, эта часть спектра мо-
жет быть вызвана непрерывными соударениями катков о беговую
дорожку при перекатывании.
Частотный состав вибрационных ускорений в различных точках
корпуса, башни, днища и других несущих элементов конструкции
танка сопоставим со спектром ускорений центра масс катков. Так,
для точек корпуса, башни и днища танка Т-64А по всем направ-
лениям измерений характерны узкополосные составляющие, соот-
ветствующие шаговым частотам (от одинарной до четверной вклю-
чительно). В танке Т-80 доминируют узкополосные составляющие
спектра на одинарной и двойной шаговых частотах, в танке Т-72—
три узкополосные составляющие (/ш, 2/„„ 3/ш), а в корпусе и баш-
не БМП—одна составляющая на шаговой частоте (двойная про-
является при скорости движения менее 30 км/ч).
Формирование спектра вибраций в какой-либо точке танка или
БМП при движении по трассе зависит и от частоты собственных
16 Зак. 20с
233
колебаний элемента конструкции, т. е. от изгибных колебаний лис-
тов корпуса, днища и башни. Данные экспериментальных исследо-
ваний показывают, что независимо от скорости движения ВГМ в
спектре вибраций всегда присутствуют составляющие частот изгиб-
ных колебаний преимущественно низших форм. Амплитуды этих
составляющих зависят от того, насколько близки частоты к крат-
ным шаговым и какова добротность конструкции. В спектре вер-
тикальных ускорений крыши башни БМП (рис. 12.4), например, в
Рис 124 Спектральная плотность вертикальных ускорений крыши башни БМП
прн движении со скоростью 17,5; 21; 30; 40 км/ч (/, 2, 3, 4 соответственно)
месте, где установлен прицел 1ПН22М, имеются узкополосные со-
ставляющие при частотах, соответствующих и 2fm (при скорости
40 км/ч —только /ш). Прн шаге гусениц /тр = 0,14 м можно счи-
тать, что fm = 2v (v измеряется в км/ч). Кроме зависящих от ско-
рости v узкополосных составляющих, в спектре есть две зоны со
стабильной средней частотой (25—26 и 68—70 Гц). Вторая зона
связана с собственной частотой изгибных колебаний крыши и
234
банши БМП. Максимальная спектральная плотность ускорений на
частоте 68—70 Гц зависит от интенсивности воздействия на шаго-
вых частотах. В БМП преобладает составляющая /ш, поэтому при
совпадении частоты изгиба крыши с частотой 2/ш (кривая /) спек-
тральная плотность возрастает не так заметно, как при v = 40 км/ч
(кривая 4), когда главная составляющая /ш= 80 Гц близка к соб-
ственной частоте изгибных колебаний.
Для экспериментального исследования частоты и формы изгиб-
ных колебаний элементов тонкобропных конструкций ВГМ на ба-
зе БМП разработана специальная методика, основанная на воз-
буждениизвуковых колебаний корпусных деталей с помощью
электродинамического громкоговорителя (динамика) мощностью
~25 Вт. Одновременно измеряются виброускорения во многих
точках выбранного сечения при плавном возбуждении частот от 25
до 600 Гц, строятся упругие линии изгиба сечения на резонансных
частотах. Обобщение данных по множеству сечений в двухкоорди-
натной системе позволяет получить упругую линию изгиба конст-
рукции. Например, частоте 65 Гц соответствует куполообразный
Рис. 12.5. Форма изгибных колебаний
верхнего листа (а) и конической час-
ти (б) башни БМП в двух взаимно
перпендикулярных направлениях прч
частоте вибрации 65; 300, 390—400 Гц
(соответственно /, 2, 3)
изгиб верхнего листа башни
БМП (рис. 12.5). Амплитуда
вертикальных колебаний этого
листа резко возрастает, когда
частота внешнего возмущения
совпадает с частотой изгиба
(см. рис. 12.4).
Вибронагруженность мест установки внутреннего оборудования
в танке и БМП неодинакова и, кроме того, зависит от режима дви-
жения и типа трассы. Многочисленные данные экспериментальных
исследований, обобщенные посредством последовательного нало-
жения друг на друга амплитудных спектров ускорений и построе-
ния огибающей спектров (по скоростям движения, типам трасс,
направлению измерений) с разбросом ±30 % в сопоставимых ча-
стотных интервалах, позволяют выделить в танках и БМП три ха-
рактерные зоны.
Первая зона охватывает минимально нагруженные места аппа-
ратуры внутреннего оборудования, т. е. боевое отделение. Вторая
зона объединяет наиболее нагруженную часть: днище, переборки,
стонки баков, МТУ, бортовые листы. В третью зону входят корпус
танка, лобовые листы и ребра жесткости корпуса БМП (в том чис-
ле поперечные балки коробчатого сечения под торсионными вала-
16*
235
ми, реданы и кормовой лист). Характеристики вибронагруженно-
сти этих зон, нормируемые комплексом стандартов «Мороз-5>,
приведены в табл. 12.1.
Таблица 12.1
Характеристика внбронагруженности зон в танке и БМП
Зона Вибропсремсщенне Внброускореннс
Амплитуда, мм Частотный диапазон, Гц Амплитуда, м с» (г) Частотный диапазон, Гц
Первая 0,5 5—39 29,43 (3) 39-500
Вторая 2,5 5-32 98,1 (10) 32-500
Третья 1.0 5-39 59,86 (6) 39-500
Нормирование по виброперемещению наряду с виброускорением
обусловлено тем, что в целом для всех измерительных точек зон
танка и БМП ускорения спектра уменьшаются с понижением ча-
стоты, начиная с 40 Гц. Частоты 32 и 39 Гц —это условные точки
спектра, обеспечивающие плавный переход от виброперемещения
к виброускорению.
Данные табл. 12.1 следует использовать при разработке при-
боров и внутреннего оборудования ВГМ как характеристику условий
их эксплуатации; они должны приниматься во внимание также при
выборе соответствующей системы амортизации и при формирова-
нии режимов стендовых испытаний оборудования.
12.2. УДАРНЫЕ ПРОЦЕССЫ СРЕДНЕЙ ИНТЕНСИВНОСТИ
При стрельбе из штатного орудия, пробитии подвесок и под-
рыве на минах танк подвергается многократному ударному нагру-
жению.
Наиболее интенсивно нагружены при стрельбе откатные части
орудия. Ускоренное движение откатных частей имеет импульсный
характер, форма которого в первом приближении может быть
аппроксимирована треугольником со смещенной к началу процесса
вершиной. Максимальная амплитуда импульсного воздействия за-
висит от массы откатных частей орудия, сил сопротивления откату
и давления Рп.г пороховых газов в каморе. Для серийного танко-
вого орудия типа 2А46 предельные значения импульсных ускоре-
ний хтах и их длительности т„ в фазе ускоренного движения ствола
и казенника в направлении линии выстрела, по данным многочис-
ленных экспериментов, составляют:
лтах = 2 300 м/с2, т„ = 11.. .13 мс (осколочно-фугасный снаряд,
Рп.г = 4,85 МН);
хт1х = 1 800. 1 м/с2» *и = Ю.. .11 мс (кумулятивный сна-
ряд, Рд.г = 3,85 МН);
236
•*п»зх — 3 100.. .3 200 м/с2, т„= 6.. .7 мс (бронебойно-подкали-
берный снаряд, Р„.г = 6,4 МН).
Эти данные хорошо совпадают с их расчетными значениями для
откатных частей весом более 20 кН. В этом случае сила Р1| Г дости-
гает максимума раньше, чем сила сопротивления откату, поэтому
только она и принимается в расчет при определении х1ПВХ.
Но вертикальной осн в зоне переднего торца казенника ускоре-
ние на порядок ниже: 250—300 м/с2 (длительность 10—12 мс);
в поперечном направлении оно нс превышает 100 м/с2.
Замедление движения откатных частей определяется мгновен-
ными значениями сил сопротивления откату и давления порохо-
вых газов. В направлении линии выстрела предельные значения
ускорений 250 м/с2 при общей длительности 50 мс, время на-
растания т„ = 4. ..5 мс, время спада тгп ~ 25 мс. Форма импульса
ускорения замедленного движения близка к трапецеидальной.
Рис 12 6. Продольное ускорение ба<п
ни танка при выстреле:
/ — эксперимент; 2 — расчет
Ударные ускорения башни
и корпуса определяются силой
сопротивления откату и жест-
костью погонного устройства
танка. Экспериментальные и
расчетные значения ускорений
башни серийных танков вдоль
линии выстрела в начальной
части совпадают (рис. 12.6).
Заметное расхождение после
35—40 мс объясняется неточ-
ностью жесткостных характеристик, взятых для расчета; схо-
димость данных можно повысить, например, прямым измерением
деформации погона под действием заданной силы.
Измерение ударных ускорений корпуса танка при выстреле по-
казывает, что восстанавливающая сила FB погонного устройства
вызывает ускоренное движение корпуса назад с одновременным
его поворотом относительно центра тяжести. Так, максимальное
ускорение в продольном направлении на лобовых листах, бортах,
корме (угол возвышения пушки 0°) достигает 55—58 м/с2, а по
вертикали в носовой и кормовой частях танка 12—15 м/с2. При
этом знаки (полярность) ускорений противоположны, что указы-
вает на моментное приложение нагрузки к корпусу танка. Форма
продольного ускорения корпуса в точности соответствует графику
изменения FB во времени.
Расчет параметров ударных процессов основан на представле-
нии башни и корпуса танка как абсолютно твердых тел. Экспери-
237
ментально установлено (искусственной периодизацией процесса),
что эта методика расчета вполне оправдывает себя до частот, рав-
ных 300 Гц. При более высокой частоте огибающие спектров рас-
ходятся, что указывает на проявление индивидуальных особенно-
стей каждой измеряемой точки, в частности, на наличие изгибных
колебаний той или иной части конструкции танка. Особенно это
характерно для тонкобронной конструкции БМП. Одинаковый
уровень максимальных ускорений и характер форм затухающих
ударно-вибрационных процессов сохраняются для многих точек
корпуса и днища только до частоты 60—70 Гц (в сопоставимых
направлениях измерений). Высокочастотные наложения, связан-
ные с проявлением индивидуальных особенностей пространствен-
ных колебаний данной точки, отличаются по уровням ускорений и
частотному составу. Так, при стрельбе по курсу из орудия ТКБ-04
осколочно-фугасными снарядами в большинстве точек днища, бор-
тов, крыши и перемычки между дверями десантного отделения в
продольном направлении действуют ускорения одинакового харак-
тера (затухающий процесс с частотой 65—75 Гц при х,пах —
= 15.. .17 m/cz) в ограниченном частотном спектре. В то же время
высокочастотные наложения на днище под боевым отделением
составляют 200—250 Гц с хшах = 75 м/с2; на днище за перегород-
кой МТУ 300—320 Гц при хтах = 45 м/с2; на бортах в зоне боевого
отделения 140—160 Гц при хтах = 15 м/с2, 230—240 Гц при
*т«1 = 90 м/с2 и т. д.
Коническая часть башни БМП испытывает при выстреле удар-
ные импульсные (хтах = 140 м/с2, тн= 10 мс) и ударно-вибрацион-
ные затухающие (300—350 Гц, хтах = 120 м/с2) воздействия. Мак-
симальные суммарные воздействия вызывают ускорения до 200 м/с2,
а общее время ударного воздействия достигает 0,14—0,16 с.
Пробитие подвесок вызывает импульсное ускорение корпуса и
башни танка в вертикальном и продольном направлениях. Наибо-
лее интенсивна вертикальная составляющая; для башен продоль-
ный и вертикальный компоненты соизмеримы. Процессы в танках
Т-64А, Т-72 и Т-80 по форме и длительности фактически однотип-
ны, различаются они только уровнем максимальных ускорений.
При пробитии передних подвесок наибольшие воздействия имеют
место в носовой части корпуса танка, по мере удаления точек к кор-
ме интенсивность удара падает. Общая длительность процесса со-
ставляет 0,28—0,30 с: на начальном участке (т1 = 0,1.. .0,13 с)
хт1х = 25.. .40 м/с2; на среднем (т2 = 0,04.. .0,05 с) лтах =
= 75.. .130 м/с2; на конечном участке (тз = 0,09.. .0,11 с) хт„ =
= 20. ..25 м/с2. На среднем участке меньшее значение ускорения
наблюдается в танке Т-80, а большее — в танке Т-64Л; в танке
Т-72 оно равно 95. ..100 м/с2. На башнях интенсивность ударов
меньше примерно вдвое, а на кормовой части — в три раза по
сравнению с носовой частью (при пробитии передних подвесок).
238
При пробитии только задних подсосок 0 первом приближении мож-
но считать картину распределения ускорений по длине танка обрат-
ной: кормовая часть нагружена сильнее, чем носовая.
При подрыве танков на минах характер ударного процесса за-
висит от массы взрывчатого вещества мины, места подрыва, сте-
пени перекрытия мины траком гусеницы и др.
12.3. УДАРНЫЕ ПРОЦЕССЫ БОЛЬШОЙ ИНТЕНСИВНОСТИ
Некоторые результаты воздействия снарядного обстрела на
броневые плиты и лобовую часть башни танка при угле встречи
снаряда а = 0 приведены в табл. 12.2, а также па рис. 12.7.
Таблица 122
Параметры ударной волны, переданной мерному стержню через броневые плиты
Тип и калибр снаряда Толщина панты, мм Скорость снаряда г»с> мс Максималь- ный удель- ный импульс /у. кПа-с На пря- жение ». ГПа Длитель- ность нара- стания фронта ударной волны ф- “кс Длитель- ность импульса 'и мкС Ско- рость плиты г, м
122-мм БС 200 750 420 1.6 100 450—500 80
122 мм БС 200 565 220 0,75 100 500 40
100-мм ОФС 160 880 100 0.7 60 450-600 35
100 мм БПС Левая лобовая часть башни 1350 40 0,15 200 780 75
Рис 12.7. Результаты обстрела лобовой части башни 100 мм БПС (--------) и
броневой плиты толщиной 150 мм 100 мм ОФС (------ ):
/, 2 профиль ударной волны (напряжение • и скорость перемещения поверхности V ); 3,
4— ускорение плиты ж, и башни д3
Профиль волны (напряжение о) характеризует закон измене-
ния скорости v тыльной поверхности плиты в фазе сжатия и се
239
отражение от тыльной поверхности. Пиковое значение скорости
тыльной поверхности определяется через массовую скорость и:
v = 2и = a/(pD).
Дифференцированием можно получить функцию ускорения
x(t), аппроксимированную зависимостью (10.21) при п = 2, п =
тф /и = 0,15.
Сравнение различных снарядов по импульсу, переданному тыль-
ной поверхности плиты прн обстреле, позволяет судить об их эффек-
тивности до экспериментов на танках (табл. 12.3, рис. 12.8).
Таблица 12.3
Параметры ударной волны, переданной мерному стержню через
броневую плиту различными снарядами
м по пор Тнп и калибр снаряда Скорость снаряда г, м/с Угол встречи «♦ . . л Максималь- ный удельный импульс / , кПа-с Отношение /у к импульсу 100 мм БПС
Плита 200X1200X1500 мм
1 122-мм БС 780 0 520 7,5
2 122-мм БС 575 0 240 3,4
3 122 мм БС 780 60 190 2,7
4 122-мм ОФС 780 60 130 1.9
5 122-мм ОФС 780 0 140 2
6 115 мм БПС 1350 60 100 1,4
7 100-мм БПС 1250 60 70 1
8 100 мм КС 530 60 41 0,6
9 100-мм БС 785 0 360 5,1
10 100-мм ОФС 860 0 180 2,6
11 122-мм ОФС 0 0 14 0,2
Плита 130X1200X1500 мм
12 100-мм БС 610 0 390 2,2
13 122-мм БС 575 0 490 2,8
14 100-мм БС 750 60 220 1,75
15 122-мм БС 780 60 450 2.6
16 100-мм БПС 1250 60 175 1
17 115-мм БПС 1350 60 250 1,4
18 115-ми ОФС 780 60 270 1.5
19 122-мм ОФС 780 60 280 1.6
По полученным данным, эффективность ОФС и БС превосходит
эффективность БПС и КС. При этом на бризантное действие ОФС
затрачивается 10—15 % общего импульса.
240
Исследование динамической нагружснности несущих конструк-
ций танков и их внутреннего оборудования проводилось посредст-
вом обстрела 100-мм БПС с приведенной к дальности 1 000 м ско-
ростью и 100-мм ОФС с максимальной скоростью 890 м/с.
Рис. 12.8. Зависимость удельного
импульса, переданного мерному
стержню прн обстреле плит разме-
ром 200X1200X1500 мм, от рас-
стояния R до точки удара (номера
кривых соответствуют порядко-
вым номерам табл. 12.3)
Измерение ударных уско-
рений на конструкциях про-
изводилось с помощью пье-
зокварцевых акселеромет-
ров (типа ПИ-320 и ПИ-431)
и косвенным методом по ре-
акции (ускорению) низкоча-
стотных измерительных пре-
образователей. Осциллогра-
фические записи ускорений
заменялись сглаженными от
высокочастотных составля-
ющих кривыми; по этим кри-
вым определялись пиковые
значения нормальных к по-
верхности брони составляю-
щих вектора ускорений (тангенциальные составляющие значитель-
но меньше, поэтому ими можно пренебречь).
По результатам выполненных исследований получены обобщен-
ные параметры динамической нагружснности элементов танка
(табл. 12.4); прн этом скорость и перемещение брони определя-
лись интегрированием опытных данных.
Как показали результаты экспериментов, высокочастотные со-
ставляющие спектра колебаний (до 10 кГц и более) быстро зату-
хают; коэффициент затухания основной формы колебаний на баш-
не е = 0,4. . .0,5, а на верхнем лобовом листе корпуса е = 0,2.. .0,3.
При этом длительность затухающего нестационарного процесса
составляет 10—20 мс.
Низкочастотные перемещения башни относительно корпуса
танка при обстреле 100-мм БПС измерялись с помощью индуктив-
ных преобразователей. Башня перемещается в продольном (ампли-
туда достигает 5—6 мм) и в вертикальном (амплитуда до 2 мм)
направлениях при длительности нарастания переднего фронта
продольного перемещения 15 мс и длительности всего импульса от
241
Таблица 124
Обобщенные параметры динамической нагружениости отечественного
основного танка при снарядном обстреле
Зона танка Тип снаряда; его скорость »с. м/с; угол встречи в, . . Нормаль- ная состав- ляющая вектора ускорении X, км/с’ Продолжи- тельность ускоренно- го движения 'и- мс Скорость перемеще- ния брони V, м/с Перемеще- ние зон обстрела х. мм Низшая составля- ющая частотного спектра
Централь- ная зона нерхнего ло- бового листа 100 мм ОФС; рс = 890; а-0 100 0.5 25 14...20 170... 300
То же 100 мм БПС; ис-1340; а-0 65 0,5 16 9...14 17О~ЗОО
Борт кор- пуса (у бое- вого отделе- ния) 100 мм БПС; це=1310; а —20 50 0.4 11 8... 10 250... 300
Лобовая часть башни 100 мм ОФС; 100-мм БПС; а-0...15 50 0,4 10 4...6 200... 800
То же 100-мм БПС (удар с выпучива- нием на тыльной стороне) 150 0,25 20 8 200... 800
Борт баш- ни 100 мм ОФС; 100 мм БПС; а = 0. .15 15 0.8 6,5 8 200... 300
Корма башни То же 10 1 4,5 7 160... 300
Подбашен- ный лист корпуса 100 мм ОФС 50 0,5 13 8...Ю 350... 500
Нижний лист ограж- дения пуш- ки 100 мм ОФС; 100 мм БПС 2 1.5 1.6 5...7 100... 150
Днище ка- бины боево- го отделения То же 0,65 3,5 1 3...5 100.. 150
Полка ка- бины боево- го отделения » 0,8 3,5 1.3 3...4 100... 150
242
29 до 38 мс, с последующим быстрым затуханием продольных ко-
лебаний с частотой 18—20 Гц и амплитудой до 0,6 мм. Этому пе-
ремещению соответствует пиковое ускорение 80 м/с2.
Результаты тензометрических измерений деформации борта,
кормы и крыши башни при обстреле 100-мм БПС показали, что
эти элементы испытывают колебания в основном в полосах частот
80—120, 220—300, 500—700 Гц. В качестве примера на рис. 12.9
приведены обобщенные опытные и расчетные значения параметров
движения при поражении передней лобовой части башни без вы-
пучивания тыльной поверхности 100-мм БИС и движения верхнего
лобового листа корпуса танка npir обстреле 100-мм ОФС. На осцил-
лографической записи ускорений можно выделить сглаженную от
высокочастотных составляющих кривую с выраженным ударным
импульсом длительностью /н. Следует отметить, что при обстреле
100-мм БПС лобовой части башни непосредственно в точке удара
ускорение определяется импульсом волны напряжения, возникаю-
щим при внедрении снаряда в броню, с последующим затуханием
колебаний с частотой 500—800 Гц, а вне зоны удара (на расстоя-
нии более 3—5 калибров и в более тонкостенных частях башни) и
при обстреле ОФС — с частотой 200—300 Гц.
Рис. 12.9. Опытные (----- ) и расчетные (—------) параметры продольного дви
женин лобовой части башни основного танка при ударе 100-мм БПС (а) и ло
бового листа корпуса (fi — 250 Гц) при ударе 100 мм ОФС (б):
1.3 — ускорение; 3. 4 — скорость; 5, 6 — перемещение
При этом длительность первого импульса ускорения для БПС
и ОФС составляет 0,2—0,5 мс (при средней скорости в импульсе
10 м/с), что соответствует ускорению от 100 до 40 км/с2.
В удаленных от точки попадания зонах башни (борт, корма,
крыша) уровень ускорения падает до 7—9 км/с2 при длительности
импульса 0,8—1 мс.
243
В случае выпучивания тыльной поверхности башни (с остаточ-
ной деформацией) скорость импульса достигает 20 м/с и более при
ускорении порядка 200 км/с2.
При обстреле 100-мм ОФС верхнего лобового листа корпуса не-
зависимо от толщины нижнего слоя скорость брони достигает
25 м/с, при этом среднее (сглаженное) значение ускорений состав-
ляет НО км/с2, а длительность импульса 0,4 мс.
При обстреле 100-мм БПС верхнего лобового листа корпуса с
относительно тонким нижним слоем (ft = 170.. .200 Гц) возникаю-
щие ускорения на тыльной поверхности несколько ниже, чем при
обстреле 100-мм ОФС, а в более толстом нижнем слое (fi =
= 230. . .250 Гц) такие же. Нормальная составляющая вектора
ускорений на поверхности верхнего лобового листа и борта прево-
сходит примерно в четыре раза тангенциальную составляющую,
а на лобовой части башни — в 1,5 раза.
Дно боевого отделения при снарядном обстреле башни испыты-
вает нестационарные затухающие колебания частотой 100—115 Гц
длительностью около 100 мс и амплитудой первого импульса
650 м/с2.
Средняя квадратическая погрешность результатов измерения
ускорений составляет около 10 %.
Сопоставление расчетных значений реакции низкочастотных
измерительных преобразователей с опытными значениями ускоре-
ний показало их удовлетворительную сходимость, что косвенно
подтверждает правильность полученной информации о динамиче-
ской нагруженности элементов танка при снарядном обстреле без
пробития брони.
244
Глава 13. ВИБРОУДАРОЗАЩИТА ВНУТРЕН НЕГО
ОБОРУДОВАНИЯ ВГМ
13.1. ОСОБЕННОСТИ ТАНКОВЫХ СИСТЕМ АМОРТИЗАЦИИ
Реальные вибрации и удары в местах крепления внутреннего
оборудования ВГМ могут приводить к отказам в виде нарушения
стабильности функционирования и разрушения изделий (приборы,
отдельные детали).
В предыдущих томах монографии рассматривались отдельные
проблемы обеспечения стабильного функционирования систем и
агрегатов танков в условиях механических воздействий при дви-
жении и снарядном обстреле (например, вопросы виброустойчиво-
сти стабилизированных приборов систем управления огнем в т. 2;
способы крепления силовой установки на эластичных опо-
рах в т. 4; расчет долговечности зубчатых передач в т. 5; пробле-
мы обеспечения плавности хода ВГМ в т. 6; способы амортизации
сидений членов экипажей в т. 7).
Обеспечить работоспособность внутреннего оборудования ВГМ
в условиях виброударных воздействий можно различными спосо-
бами: использованием наиболее устойчивых к механическим воз-
действиям комплектующих элементов; устранением резонансных
явлений или уменьшением их уровня; изоляцией приборов или их
элементов от источников механических воздействий и др. Первые
два способа используют разработчики приборов (комплектующих
изделий), третий — и разработчики приборов, и разработчики ВГМ.
В отдельных случаях достаточно разместить прибор в таком месте,
где виброударные нагрузки не представляют для него опасности.
Основной способ изоляции приборов от источников механиче-
ских воздействий заключается в использовании специальных
средств крепления амортизаторов, которые вместе с защищае-
мыми изделиями образуют систему амортизации. Обычно при вы-
боре амортизаторов стараются удовлетворить два основных свя-
занных между собой и часто вступающих в противоречие требова-
ния: обеспечение эффективности и малогабаритности. Основная
задача внброударозащигы — обеспечить (при заданных ограничен-
ных габаритах) передачу ускорений, не превышающих допустимые.
Габаритные размеры системы амортизации определяются размера-
ми самих амортизаторов и их свободным ходом, который не дол-
жен превышать допустимое при механическом воздействии пере-
мещение оборудования.
245
Систему внброударозащиты принято считать оптимальной, если
она обеспечивает в заданных габаритах передачу на оборудование
наименьших ускорений или в наименьших габаритах передачу на
оборудование ускорений, не превышающих допустимые.
Условно различают амортизаторы низкочастотные (собствен-
ная частота колебаний ft <40 Гц) и высокочастотные (/с>40Гц).
Низкочастотные длинноходовые амортизаторы называют мягкими,
а высокочастотные короткоходовые — жесткими. В танках более
эффективны мягкие амортизаторы.
Особенности монтажа оборудования в современных танках
обуславливают жесткие компоновочные требования к амортизато-
рам. Поскольку для крепления оборудования в отечественных тан-
ках используются специальные переходные детали — бонки, пред-
ставляющие собой цилиндрический стержень, привариваемый од-
ним концом к броне и имеющий на другом конце резьбовое отверс-
тие для крепления оборудования, — каждый амортизатор должен
крепиться к танку в одной точке.
Из-за неровности внутренних поверхностей в танке система
амортизации должна позволять крепить оборудование в двух-трех
точках вместо традиционных четырех (две или три точки всегда
лежат в одной плоскости); нежелательно наличие на корпусах
приборов выст}пов для крепления амортизаторов.
Центр тяжести амортизатора должен совпадать с плоскостью
симметрии системы амортизации; габаритные размеры системы
амортизации должны быть минимальными, а они определяются, как
правило, шириной амортизатора, которая, следовательно, должна
быть минимально возможной.
13.2. КЛАССИФИКАЦИЯ АМОРТИЗАТОРОВ
Любой амортизатор представляет собой совокупность соединен-
ных между собой податливых и жестких элементов крепления.
Эффект защиты обеспечивают податливые элементы, а надежное
крепление — жесткие. Среди податливых элементов в зависимости
от способности рассеивать энергию при деформировании и восста-
навливать размеры после исчезновения нагрузки различают демп-
фирующие и недемпфирующне, упругие и нсупругие. По их числу
различают одно-, двух- и многоэлементные системы, а но структу-
ре— однородные (например, упругие или фрикционные) и неодно-
родные (например, упругофрикционные). Различают амортизато-
ры с последовательным и параллельным соединением, а прн числе
элементов больше двух — и со смешанным (параллельно-последо-
вательным).
246
По способу установки различают амортизаторы встраиваемые
(для них нужно предусматривать в приборах и оборудовании спе-
циальные выступы) и пристраиваемые (монтируются снаружи).
Последние делятся на пьедестальные (крепление под амортизиру-
емым объектом) и боковые.
Таблица 13.1
Характеристика серийных резиновых, резинометаллических и сетчатых
амортизаторов типа втулки для крепления внутреннего оборудования танков
Позиция на рнс. 13.1 Статическая нагрузка. Н Размеры, мм Материал упругого элемента
наружный диаметр высота
а 320 35 50 Резина 9086
62 34 62 Резина 8075
б 8 27 40 Сплав ЭИ708
43 29 37 Резина 8075
в 31 29 44 Резина 2959
г 60 39 47 Сталь Х18Н9Т
0 25 21 24 Резина 1432
43 25 25,5 Резина 1432
20-30 21 25 Резина 2959
10-20 20 16 Резина 98-1
15-20 20 21 Резина 98-1
30-45 26 24 Резина 1432
20-25 IB,5 22 Резина 2959
е 45 42 71 Резина 9086
ж 70 30 38 Резина 8075
3 30 45 54 Проволока 0,2 Н-П
70 45 54 Сталь 12XI8H9T
Проблеме внброударозащиты большое внимание всегда уделя-
лось в судо-, ракетостроении и авиации. Поэтому в этих отраслях
машиностроения хорошо разработана теория виброзащиты, серий-
но выпускаются амортизаторы из различных материалов, различ-
ного устройства и назначения.
В отечественном танкостроении наибольшее распространение
получили резиновые и резинометаллические амортизаторы типа
247
втулки, обеспечивающие частоту собственных колебаний амортизи-
рованного оборудования 100. ..200 Гц. Некоторые танковые прибо-
ры устанавливаются с помощью сетчатых амортизаторов (напри-
мер, приборы типа АВС), упругодемпфирующий элемент которых
изготавливается из спресованных мелконавитых и определенным
образом уложенных стальных спиралей. Основные преимущества
сетчатых амортизаторов по сравнению с резиновыми и резиноме-
таллическими заключаются в том, что на их свойства температура
и агрессивная среда влияют значительно меньше. Характеристики
амортизаторов типа втулки приведены в табл. 13.1; конструкция
их показана на рис. 13.1.
Рис. 13.1 Амортизаторы внутреннего оборудования отечественных танков типа
втулки (см. табл. 13.1)
Довольно широко применяются авиационные встраиваемые ре-
зинометаллические амортизаторы тина АП—так называемые «Лор-
ды», реже—судовые пьедестальные резннометаллнческие аморти-
заторы типа АКСС, авиационные пружинно-фрикционные пьеде-
стальные типа АПН, ракетные сетчатые типа ДКУ и др.; эти амор-
тизаторы при номинальной нагрузке обеспечивают частоту собст-
венных колебаний амортизированных объектов 10—30 Гц.
Характеристика амортизаторов внутреннего оборудования за-
рубежных танков приведена в табл. 13.2, конструкция некоторых
из них показана на рис. 13.2.
248
Таблица 13.2
Характеристики амортизаторов внутреннего оборудования зарубежных танков
Пози- ция на рис. 13.2 Тип амортизатора Статическая нагрузке, Н Частота соГктв н- ных ке.теб i- ни1 под нагр.’зкой, Гц Размеры, мм
ЛАИИЭ ширина высота
а WB1-WBI 18-54 6,5 21 21 29
WB3-WB3 90- 160 6,5 .5 : S 33
WB4-WB4 160- 340 6.5 48 48 45
WB6-WB6 580-1600 6 5 52 55 90
б WRI-WB1 18-54 6.5 21 21 21
WR3-WB3 90-160 6,5 35 35 25
WR4 WB4 160-340 6.5 48 48 35
WR6WB6 580—1600 6,5 52 52 66
в С-1000 36-270 17 60 60 29
С-2000 68—470 17 76 76 38
С-4000 295 -1300 17 133 133 64
С 3000 1300-2400 13 175 175 99
г 5820 2-4,5 10 32 32 13
5821 9-45 10 45 45 16
5822 90-270 10 57 57 25
д 990 12-120 10 60 69 40
е W-302-1 136-540 18 — — —
W 302 3 540-1090 18 76 76 51
Эти амортизаторы соответствуют американскому военному стан-
дарту; большинство из них резинометаллические, пристраиваемые.
В американском танке М-60А1 и в английском «Чифтен» исполь-
зуются амортизаторы с упругими элементами из резины, пропи-
танной ткани и металлической проволоки. С целью рационального
монтажа амортизаторов в зарубежных танках используются раз-
личного рода металлические переходные детали (планки, кронш-
249
тейны, рамки), что способствует уменьшению внбронагруженности
приборов, но увеличивает габаритные размеры системы амортиза-
ции.
г д е
Рис. 13.2. Амортизаторы внутреннего оборудования зарубежных танков (см.
табл. 13.2)
13.3. ИСПОЛЬЗОВАНИЕ В ТАНКАХ РАЗЛИЧНЫХ
ПРИБОРНЫХ АМОРТИЗАТОРОВ
Динамические модели виброударозащиты. Внутреннее оборудо-
вание танков и применяемые в технике амортизаторы чрезвычайно
многообразны по устройству. Реальные возмущения на местах их
установки в танке также существенно различны, даже в близко
расположенных точках. Поэтому при анализе систем амортизации
и динамических воздействий прибегают к упрощениям с помощью
специальных моделей.
Рациональный монтаж амортизаторов (при котором центр тя-
жести оборудования оказывается в центре жесткости системы
амортизации) позволяет устранить взаимосвязь колебаний и упо-
добить амортизированный объект одностепенной одномассовой си-
стеме, уравнение движения которой имеет вид
т(у + *)+Пу, у) = 0. (13.1)
где у + |(/, ш) — х; х — абсолютное ускорение амортизируемого объекта (при-
бора); т масса объекта; Y (у, у) — реакция системы амортизации; у. у пе-
ремещение и скорость амортизированного прибора относительно точки крепления
250
в танке; £(/. <о) — абсолютное перемещение точки крепления системы амортиза-
ции; / — время, ш—частота колебаний точки крепления
Выбор системы амортизации должен производиться в соответст-
вии с неравенством
|-^|<^ ('3.2)
где х0 — ускорение, допустимое функциональными и прочностными характеристи-
ками танкового оборудования.
Ограниченные габаритные размеры обуславливают дополни-
тельное условие к системе амортизации:
|у|<Уо. (13.3)
где уа — максимально допустимый свободный ход системы амортизации (до упо-
ра)
В качестве модели систем амортизации используются их прин-
ципиальные схемы (рис. 13.3). Для одного и того же амортизато-
ра число элементов в принципиальной и конструктивной схемах
может быть разное, например, в принципиальной схеме несколько
однородных податливых элементов, связанных друг с другом, мож-
но заменить одним эквивалентным.
V Р7
а
6
6
Рис. 13.3. Принципиальные схемы систем амортизации
а — одноэлементные; б- двухэлементные; в трехэлементиыс; / амортизируемый привоз;
2 подвижное основание (танковая конструкция), 3 упругий элемент без демпфирования;
4 упругий элемент с внутренним демпфированием; 5 — вжкий демпфер: 6 фрикционный
элемент (с сухим трением); 7 фиксатор; «—хрупкий фиксатор; /—V/ порядковые
номера схем
Реальные возмущения в местах установки внутреннего обору-
дования заменяются моделью воздействий. В процессе испытаний
251
амортизаторов используется модель воздействий при движении
танка, принятая в комплексе стандартов «Мороз-5». Вибра-
ционные возмущения считаются гармоническими и изменяющими-
ся по закону
£ = &0 Sin (<о/ + в) ,
где So —амплитуда колебаний стола стенда; 0—фазовый угол.
Испытания производятся в двух диапазонах частот: в первом
поддерживается постоянная амплитуда перемещения (So = const),
а во втором — постоянное ускорение (Sow2 = const).
Для оборудования, устанавливаемого в зонах башни и корпуса,
граница между поддиапазонами расположена на частоте 39 Гц,
а для оборудования, предназначенного для зоны МТО и днища,
на частоте 32 Гц.
При выборе амортизаторов предлагается использовать в каче-
стве осредненной линеаризованной модели воздействий, пригодной
для всех зон движущегося танка, зависимость
Sow = Vo = const,
которая на самой опасной для системы амортизации частоте (ре-
зонансной) совпадает с режимом испытаний, заданным комплексом
стандартов «Мороз-5».
Характер механических возмущений, возникающих в местах
установки танкового оборудования при стрельбе из пушки, также
существенно зависит от зоны установки оборудования. Так, напри-
мер, на казенной части ствола возмущения носят явно выражен-
ный ударный или ударно-вибрационный характер. Для этих точек
ударные процессы характеризуются пиковым значением ускорения
I 480 м/с2 и длительностью 1—5 мс. В отдельных точках (преиму-
щественно в башне) в непосредственной близости от пушки заре-
гистрированы ударные процессы с пиковым значением ускорения
до 196 м/с2 при длительности 5—15 мс.
Характер возмущений в остальных точках танка, где в основ-
ном и устанавливается оборудование, ударно-вибрационный и виб-
рационный, причем по амплитуде ускорения воздействия в этих
точках, как правило, не превосходят максимальных ускорений, за-
регистрированных при движении.
Ускорения, возникающие в местах крепления внутреннего обору-
дования танков при снарядном обстреле, носят особенно сложный
характер. Наиболее нагруженными являются верхний лобовой
лист, подбашенный лист, борт корпуса и лобовые части башни. Ме-
нее нагружены внутренние конструкции боевого отделения танка:
кабина, ограждение пушки, моторная перегородка. Интенсивность
процесса нагружения зависит от места попадания снаряда и зоны
установки оборудования. Максимальные ускорения броневых де-
талей корпуса танка при снарядном обстреле приведены в преды-
дущей главе.
252
Расчет виброзащиты. Для системы амортизации с одноэлемен-
тными упруголинейными амортизаторами с внутренним демпфиро-
ванием (см. рис. 13.3, а, схема II) функцию У (у, у) в выражении
(13.1) можно представить в виде суммы упругой и диссипативной
составляющих:
г (У, У) = Г,(у)+ Г, (у, у). (13.4)
где Уу(у) — Су; С—жесткость амортизатора.
Диссипативные силы, исходя из гипотезы Фойгта, часто прини-
мают пропорциональными скорости деформации. Установлено, что
при деформации упругих элементов по гармоническому закону
внутреннее трение зависит от амплитуды колебаний. Наиболее
удачно выражает эту зависимость формула Е. С. Сорокина и
Я. Г. Пановко
Гя(у, y) = ^Dy,
где D = qB1 1 /ыд — коэффициент демпфирования; т), ц — параметры, характе-
ризующие свойства материала амортизатора; В — амплитуда гармонических ко-
лебаний; ш — частота; (о0 = VC/m— частота собственных колебаний.
Для мягких амортизаторов (fc<40 Гц) решение уравнения
(13.1) имеет вид
G = p(l+</2).
где G = | х |/(v„<-0); 3 - /; „ ==•; d = Dm. vn const; г =
r (I — z-y + d-
Безразмерные коэффициенты G, 0 и z характеризуют соответст-
венно абсолютное ускорение амортизированного оборудования, его
относительное перемещение и частоту.
На резонансной частоте грез -- | ' 1 d- коэффициенты G и 0
принимают максимальные значения:
8 — 1/ 1 • (J — лГ 1
Рт.х-Г j)’ 2(/ГТ^ О’
Для реальных значений d 1 получим 0Mmax = OMmax = 1 d.
Для жестких амортизаторов также
Зжтах ~ ^жтах ~ l;d.
Поскольку в этом случае
0 = 5 ю2/а0, G = | х I а„,
где а« — ускорение стола испытательного стенда, оговоренное комплексом стан-
дартов «Мороз-5»,
получим »мт— = г'о «о «о; -gM"*** • «о/(®о®о)•
«жтах хжтах
253
Поскольку Ood)o всегда меньше а,,» максимальные абсолютные
ускорения оборудования, установленного с помощью мягких амор-
тизаторов, меньше, а максимальные относительные смещения боль-
ше, чем оборудования, установленного с помощью жестких амор-
тизаторов. Таким образом, мягкие амортизаторы эффективнее
жестких, по требуют обеспечения большего свободного хода.
Одноэлементные упругие амортизаторы могут быть использо-
ваны для решения основной задачи виброзащиты внутреннего
оборудования танков—обеспечения при заданных ограниченных
габаритах передачи ускорений, не превышающих допустимые.
Уравнение движения двухэлементного упругофрикционного
амортизатора (d = 0, см. рис. 13.3, б, схема V) имеет вид
у 4- Лsgn у + шоу = — £(/, ю). (13.5)
Решается это уравнение методом гармонической линеаризации.
Обозначим h sgn у через h^y.
Очевидно, что
= ..g^ — £ hx sgn (Л u> cos (шt)\dt =
где ft — H/m\ W —сила сухого трения.
В принятых обозначениях решение исходного уравнения запи-
шем следующим образом:
0 = (13.6)
О ~ -|4тгИ1-»2(2-г2), (13.7)
где безразмерный коэффициент б = 4й/(лооо)о) характеризует су-
хое трение, обеспечиваемое фрикционным устройством амортиза-
тора.
Из (13.6) следует, что коэффициент 0, характеризующий относи-
тельное смещение амортизируемого объекта, при z<6 действи-
тельных значений не имеет. Это говорит о том, что при частоте,
меньшей 6, относительное движение амортизируемого прибора от-
сутствует, т. е. амортизатор заперт.
С другой стороны, условие запирания амортизатора имеет вид
mi<H или z < лб/4. Это объясняется тем, что в диапазоне час-
тот лб/4 < z < б происходит движение амортизируемого прибора
с остановками.
Из анализа выражений (13.6) и (13.7) видно, что коэффициенты
0 и G при б < 1 и относительной частоте z = 1 становятся макси-
мальными. При этом амплитуды относительных колебаний могут
теоретически стать бесконечно большими и превысить допускаемые
конструкцией прибора.
254
Из выражения (13.7) следует, что при частоте г= VЧ коэффи-
циент G не зависит от Л и может принять максимальное значение
при 8 — 50ПТ — |/1,5 (рис. 13.4).
Следовательно, (C7max)mln = /2"; = 1 УТ.
Рис. 13.4. Характеристики упругофрнк
ционных двухэлементных амортизато-
ров при </ = 0,1
Таким образом, двухэле-
ментные упругофрикционные
амортизаторы позволяют ре-
шить прямую задачу оптими-
зации виброзащиты, но не при-
годны для решения обратной
задачи. Отметим, что для оп-
тимизации серийных амортиза-
торов типа АПН необходимо
увеличить силу сухого трения
в 5—10 раз.
Возможность создания трех-
элементных амортизаторов
(см. рис. 13.3, в, схемы II и V)
впервые исследована М. 3. Ко-
ловским. Массой демпфера
и упругих элементов по срав- *
нению с массой амортизируемого объекта можно пренебречь. Урав-
нения движения при d = 0 в этом случае примут следующий вид:
для схемы П
т(у4-$) + С,(у-«) = 0, (138)
С>« + sgn и = Ct (у — «);
для схемы V
т (У + £) + (С3 + С<) у - С.и = 0,
С< (и — у) 4- Н2 sgn и — 0.
Примем Citm = ; (С3 4- С,) т ~ ; Н^т — ; С Сх — т(;
С,/С4 = Т2;
Приближенное решение с использованием метода гармониче-
ской линеаризации запишем в виде
и = А sin ш/,
у — В sln 4- ?),
(13.10)
где q> — фазовый угол.
255
Подставив (13.10) в (13.8) и (13.9), получим две идентичные
системы уравнений. Первая система уравнений имеет вид
Вш2( (1 — ш2 ш2,) cos 9 — Ла)2( ;ow2 cos 0 ;
5а>2( (1 — <oI/u>2|)sln ф = Е00>2 Sin 9 ;
А»*, (1cos ? = 0; <1311)
4 Л,/к — Вш^ sin <р — 0;
вторая получится, если в (13.11) заменить индекс «01> на <02>, ко-
эффициент А на Лпр„в= А/(\ 4- у2) и А| на Л2прив = Л2(1 4- у2)•
Нет необходимости в отдельном исследовании каждой схемы;
достаточно рассмотреть одну из них, например, схему II. Аморти-
заторы могут работать при неподвижных и движущихся фрикцио-
нах. Второй режим реализуется только при возникновении резо-
нансных колебаний, а при неподвижном фрикционе трехэлемент-
ный амортизатор идентичен одноэлементному упругому. Введем
следующие обозначения:
х (Voi)“Gi; * Pi; e «I; (1з 12)
4 А|/(х^0а)0|) = 8, ; w/u)ol = ,
где ojoi < 80л — собственная частота колебаний амортизатора.
Безразмерный коэффициент G| характеризует ускорение, пере-
данное на прибор, а коэффициенты 0( и а« позволяют оценить тре-
буемые для его защиты свободный ход амортизатора,
системы амортизации и габариты самого амортизатора,
нений (13.12) получим
7t-z?(l+Ti) ’
V г2(1 + -Г,Р-^|(14-27,)-2г2(14-Т)Г
™ ~ Ъ—*i(I +ъ)
Эти выражения действительны при наличии движения демпфе
ра, которое возможно только при условии лб|/4 < 0|.
Из формулы (13.14) следует, что движение демпфера про-
исходит в диапазоне частот г, н <zx ~1В, где с1н -( 1 I
+ /1 -f- 4Sf) (2&,); z1B = (1 4- Vl +482)/(28,), причем возможно
ОНО при условии 8, <Z1((1 — Z|) = ₽1.
При значениях лб|/4 < 0i < б| демпфер движется с остановка-
ми. Это движение здесь не рассматривается, так как оно осуществ-
ляется в относительно узком диапазоне частот. ___________
При движущихся фрикционах на частоте г /у, (14-ft) возмо-
жен резонанс. Его можно избежать при условии -гг1и > ?, (1 4- т(),
которое удовлетворяется при
г,>Гь(1 + ъ). (13.15)
габариты
Из урав-
(13.13)
25G
При неподвижных фрикционах на частоте Zj = 1 также может
возникнуть резонанс, для предупреждения которого требуется вы-
полнение условия z1n < 1, z)B> 1, что возможно при любом дейст-
вительном значении бь
Следовательно, применение в танках трехэлементных амортиза-
торов при выполнении условия (13.15) может обеспечить безрезо-
нансную эксплуатацию оборудования во всем исследуемом диапа-
зоне частот.
Такой же вывод может быть сделан и в отношении амортизато-
ров, построенных по схеме V, приведенной на рис. 13.3, в, примени-
тельно к которой неравенство (13.15) запишем в виде
82 > Уъ/(1 +ъ).
Можно подобрать фрикционные характеристики амортизатора
так, чтобы максимальное ускорение, переданное на прибор, или
максимальное относительное его перемещение стали минимально
возможными.
Для решения прямой задачи оптимизации виброзащнты иссле-
дуем выражение _________________________
д ^7?-»Н^-40±2ъ>1 (Ш6)
Заметим, что на частоте с! |/2-[,/(1 4-2 f,) величина G| не
зависит от и равна 2yi(l + 2у() —это и есть минимально воз-
можное значение максимального ускорения. Подставив значения 6'
и z', при которых коэффициент G\ достигает максимума, в выра-
жения (13.13) и (13.14), получим максимальные относительные пе-
ремещения амортизируемого объекта и демпфера:
✓(1+4т,)/(йт,)-,
- (1 + 21()/(1 +2Т1)/(27,).
Для исследования обратной задачи виброзащнты рассмотрим
выражение (13.14). _______
На частоте z" = Kl + 2т, /)/2(1 -f- т,) величина Pi не зависит
от 6| и, следовательно, имеет минимально возможное максималь-
ное значение:
= /2(1 +271)(1 + 11) .
Оптимальное значение
«I -/(1 + ЪХ1 +4Т,)/2 .
Подставив г' и о' в выражения для он и получим амплиту-
ду максимальных колебаний демпфера и максимальное ускорение,
переданное на оборудование:
- /(3 + 4Т1) [2(1 +7,)1;
= (1 + 2Ъ)У(1+2т,)/12(1 + Т1И .
257
17 Зак. 20с
Анализ полученных зависимостей показывает, что обратная за-
дача оптимизации виброзащиты танковых приборов с применением
упругофрикцнонных трехэлементных схем целесообразна только
для yi > 1.
В некоторых случаях, например, когда неизвестны допускаемые
ускорения или габариты, коэффициент, характеризующий трение,
целесообразно выбирать по формуле
*нР = 1Й)2 + (»1)2]/2.
В этом случае даже при у> = 0 (Pimax)cp отличается от
только на 6'%, а с увеличением yi эта разница уменьшается. При
Yi = 0,33 разница между и (Glm„)mi„ нс превышает 10 %,
с увеличением yi эта разница уменьшается.
Считая 10 %-ное расхождение допустимым, можно сказать, что
при Yi > 0,33 нет необходимости строго формулировать задачу оп-
тимизации виброзащиты.
Характеристики трехэлементных упругофрикционных амортиза-
торов приведены на рис. 13.5.
258
Расчет ударозащиты. Известно, что при однополярном ударном
воздействии фрикционные амортизаторы обеспечивают допустимое
ускорение приборов при меньшем свободном ходе, чем упругие.
В связи с этим целесообразно исследовать систему амортизации,
состоящую из последовательно или параллельно соединенных упру-
гого амортизатора, гасящего вибрационные нагрузки, и фрикцион-
ного с относительно высоким уровнем настройки, срабатывающего
при интенсивных ударах, сопровождающих снарядный обстрел.
Рис 13.6. Двухмассоная система амортизации с
упруголннейными и фрикционными элементами су-
хого трения:
т,, л», — амортизированные массы; С,, (« жесткость
пружин; Л,, п„ — коэффициенты затухания; — сила
трения
В этом случае пренебрежение массой
фрикциона может привести к значитель-
ным погрешностям, поэтому обобщенная
расчетная схема системы амортизации
должна быть двухмассовой (рис. 13.6).
/7?2
Уравнения движения такой системы имеют следующий вид:
у, 4- 2Л0 ш0 у, - 2Л, и»! -^2. у, 4- и>оУ| — -Jb- ю? у2 = - U7—
(1 + ^r)s^n Vi*
у., 4- 2Л,«>, у, 4- и>| у2 = — Ц/ у,,
(13.17)
где mi — масса фрикционного элемента; т2 —масса амортизированного прибора;
i/i, yi — перемещение н скорость массы /т»| относительно брони танка; у2, yt —
перемещение и скорость массы тг относительно mt; Aq.i— безразмерные коэффи-
циенты затухания колебаний; w0 ]-= Co.i/m, , — 2nf0,i — парциальные круговые
частоты системы (в с_|); fa1 парциальные круговые частоты системы (в Гц);
Co.i — жесткость амортизаторов; аи » KFTP/[mi(l + m2/mi)]— минимальное уско-
рение, при котором должно сработать фрикционное устройство амортизатора
(настройка фрикциона); £тр —сила сухого трения прн движении массы т,;
К — Ftpi/FtP; FTPi—сила сухого трения прн застое массы m,; W — закон измене-
ния во времени ускорения элемента бронеконструкции в точке закрепления при-
бора.
В уравнениях (13.17) у Ф 0.
При у\ = 0 и
| - 2Л>..,у, + 2*,«, ^-у.- «2у, +-^-«?у2- IF| <а.(1 + ^-)
(13.18)
уравнения движения принимают следующий вид:
у, “ Ф У2 4 24,»! у, 4 «>i У2 — — U7, (13.19)
что и соответствует застою массы
17*
259
Если левая часть уравнения (13.18) больше правой, то уравне-
ния движения будут иметь вид
у, + 2 Л0<й0У1 — 2 lix w, у, + у. — У2 = — W —
— ан (1 + ^-) sgn (— 2Л’ошоУ1 + 2^и)1 —шоУ» +
+ ^_w]y2-U7);
у._,-I-2Л1Ш|у2 4-очу2 = — 1^ —У(-
Запишем условия начала движения:
у(0 = Уп(0); у.(0 = Ун(6); у2(0 = у2<М; (/=1,2).
(13.21)
Следует отметить, что при тх = 0 и открытом фрикционе двухмас-
совая схема вырождается в одномассовую фрикционную; резуль-
таты расчета по такой схеме существенно отличаются от реальных.
(13.20)
стемс
такой
Рис. 13. 7. Кусочно-линейная харак-
теристика амортизатора
Практический интерес пред-
ставляют также амортизаторы
с нелинейной характеристикой
(типа втулки, линейные с огра-
ничителями хода и др.)- Их
расчетная схема может быть
приведена к одномассовой си-
с кусочно-линейной характеристикой. Уравнения движения
системы в случае кинематического воздействия имеют вид
п
у -J- 2 A_u)_у 4" ш„у = k u>0.y._i W, (13.22)
где <*>: „ . _
J-1
линейной характеристики
....... /=1 ' '
п
,2 _|_ VJuL: Wq = Qm; = Cj'in ; п— номера участков кусочно-
(рис. 13.7);
0 при | у | < у,,, л ~ 0;
1 при у > уя_1;
- 1 при у < — уя_,;
Cj, too/, у, — соответственно жесткость, парциальная частота и заданное относи-
тельное перемещение /-го участка; hn — безразмерный коэффициент затухания
колебаний n-го участка.
Запишем начальные условия:
У==Уя-1 и y = y«-t при / = /я_1, п = 0, 1, 2,... (13.23)
(при п = 0 / = /_,= 0, у = y_t = 0, у = y_t = 0;
при / = 0 у, (/)=0, у, (0 = 0, у2(0=0, у2(0 = 0).
260
Параметры колебаний приборов с различными системами амортизации
с учетом демпфирования (до косой черты) и без него (за косой чертой)
Таблица 13.3
Собствен- ная частота колебаний прибора /и Га Упруголинейный амортизатор Упругофрикционный параллельно соединенный амортизатор УпругофрнкционныЛ последовательно соединенный амортизатор (К= ^тр1/^тр - 1)
Утах- мм X , м/с* max’ «*• Утах- мм гтах’ м с1 т3 т, — 10 та т, = - 100
Утах- мм •«'max- м/с* Утах- мм Лтах-
15 14,6/14,6 530/130 100 145 630 14,6/14,6 26/13 14,6/14,6 110/68
1000 14,0 500 14,6/14,7 120/60 14,1/13,9 500/110
2 000 13,4 2500 14,5'14.7 260/80 13,8/14,6 510/130
5 000 12.0 5 500 14,5/14,7 260/100 14,7/14,6 530/130
25 14,4/14,6 940/360 100 14,4 1 000 14,6 60 14,5 390
1 000 13,9 1 900 14,6 220 14,0 870
2 000 13,4 2 700 14,5 460 13,6 910
5 000 12,0 5900 143 460 14,5 940
100 13,9/14,4 5950/5700 100 13,8 5 800 14,6/14,6 320/570 14,5/14,6 240/250
1 000 13,6 6 900 143/14,4 2900/3500 13,7/14,0 1800'2000
2 000 13,2 7 800 14,1/14,3 5200/5500 13,0/13,6 3500/4000
5 000 11,9 10 600 13,6/14,3 6000’6300 15,4 14,4 5800 5700
150 18,3/22,0 16 600/19 500 100 18.1 16 600 14,6/14,6 310390 14,6/14.6 260/350
1 000 17,6 17000 14,2/14,3 3200 4000 13,7/14,1 1800/2300
2 000 16,8 17 300 13,8/13,9 6200 7500 13,0/13,6 3500/4000
5 000 140 17 800 12,8/14 1 11000 12 100 13,6/13,3 8500/7900
Аналитическое решение систем уравнении (13.17), (13.19),
(13.20), (13.22), удовлетворяющее условиям (13.21) и (13.23),мож
но получить, например, операционным методом с использованием
преобразования Лапласа—Хевисайда.
По разработанным алгоритмам выполнен численный расчет
(ЭВМ ЕС-1033, язык Фортран-1 V) различных систем амортизации,
размещенных в центральной зоне верхнего лобового листа основ-
ного танка, при воздействии 100-мм ОФС (ос = 890 м/с). Резуль-
таты расчета приведены в табл. 13.3 и 13.4.
Таблица 13.4
Параметры колебаний приборов при различной настройке
фрикциона амортизатора
Собственная частота колебаний прибора /„ Ги На- стройка «н. м С’ Упругофрикннонный последовательно соединенный амортизатор (К—5) Фрикционный амортизатор
яц'т, = 10 = 50 - 100 утах' хти- “ с‘
утаж’ x^naж, м/с» vmax’ мм хтах’ М/С* утах' хти’ м/с»
15 100 14.6 30 11.6 120 14.5 280
1000 14.6 320 14.5 530 14,5 530 14,1 1000
2000 — — — — - — 13,5 2000
25 100 14,6 50 14.6 250 14,6 430
1000 11.-. 620 14,5 940 14,5 940 — —
5000 — — — — — *- 12.0 5000
10 000 — — — — — — 10,5 10000
100 100 14.6 480 14,6 5.30 14,5 490
1000 21,0 200 16,1 5200 13,1 4900 - —
150 100 14.6 570 14,6 500 14,5 510 —
1000 14.2 5500 13,8 5200 13,5 5100 — —
2000 19,8 12 500 13.6 12 400 11.9 10 900 — —
Полученные данные показывают, что наиболее эффективно мо-
гут защитить приборы от виброударного воздействия низкочастот-
ные (/i/fii^l/З, /и—основная частота собственных колебаний эле-
ментов конструкции изделия) упруголинейные амортизаторы.
Фрикционные и параллельно соединенные упругофрикционные
амортизаторы при аи М/таж >0,1 (UZIIiax—максимальное ускорение
основания прибора) позволяют в 1,5 раза снизить относительные
262
перемещения приборов, но при этом передаваемые ускорения воз-
растают десятикратно (в сравнении с упруголинейными низкочас-
тотными амортизаторами).
Параметры движения приборов с последовательным соедине-
нием упругофрикционных амортизаторов являются функциями мно-
гих переменных; какого-либо их преимущества по сравнению с
упруголинейными амортизаторами (по относительным перемеще-
ниям) не установлено.
Кусочно-линейные с жесткой характеристикой амортизаторы
(типа втулки, упруголинейные с ограничителем хода) могут обес-
печить при интенсивном воздействии минмалыю возможные пере-
мещения приборов, но ускорения на них при этом достигают доста-
точно высоких значений.
При выборе системы амортизации следует исходить из ударо-
стойкости приборов и уровня нагрузок, испытываемых элементами
конструкции в местах установки. К сожалению, среди серийных
амортизаторов нет ни одного, который полностью удовлетворял
бы требованиям по габаритным размерам и компоновке, что пред-
определило необходимость разработки специальных танковых
амортизаторов.
13.4. СПЕЦИАЛЬНЫЕ ТАНКОВЫЕ АМОРТИЗАТОРЫ
Конструкция амортизаторов. Наиболее полно удовлетворяют
требованиям по габаритно-компоновочным параметрам упругие
резинометаллические амортизаторы АТР (амортизатор танковый
резиновый) и АТРМ (амортизатор танковый резиновый маслобен-
зоморозостойкий).
АТР (рис. 13.8) состоит из резинового массива в виде кривого
бруса / и трех металлических втулок 2, 3, завулканизированных
в него.
Разработаны два типа амортизаторов: плоские, в которых осп
упругих элементов лежат в одной плоскости (см. рис. 13.8, а), и
пространственные (рис. 13.8,6). Преимуществом пространственных
амортизаторов перед плоскими является их равножесткость в трех
основных взаимно перпендикулярных направлениях.
Крепление амортизаторов к защищаемому оборудованию осу-
ществляется при помощи болтов, пропущенных внутри втулок 2,
а к танку—прн помощи болта и втулки 3. Втулки зэвулканизирова-
ны в резину так, что их оси взаимно перпендикулярны. Такая ори-
ентация втулок позволяет осуществлять рациональный монтаж
АТР.
Для предотвращения проворачивания втулок относительно обо-
рудования и скручивания резинового массива при монтаже аморти-
затора, а также для фиксации втулки 3 относительно бонки на тор
цах втулки 2 имеются прорези.
ATP могут монтироваться как в один, так и в несколько рядов
(см. рис. 13.8, г), при этом посредством сменных соединительных
планок 4 можно собирать амортизаторы с разным межцентровым
расстоянием.
О
Рис. 13.8. Амортизаторы танковые резиновые:
а — плоский; б — пространственный; в сборная конструкция; г пример трехрядного крет
лепил; /- кривой брус; 2. 3 — металлические втулки; 4 — сменная соединительная планка;
5 — распорная шайба; 6 — амортизированный прибор
Рнс. 13.9. АТР с тросовым (а) и пластинчатым (6) ограничителями хода
На рис. 13.9 представлены конструкции АТР с ограничителями
хода, предотвращающими чрезмерное относительное смещение
264
оборудования. Ограничительное устройство необходимо также для
предотвращения отрыва оборудования при разрушении аморти-
затора. Ограничительное устройство, приведенное на рис. 13.9, а,
состоит из трех шайб (двух крайних и центральной), собираемых
на крайних и центральной втулках амортизатора и связанных друг
с другом отрезком троса. Длина троса выбрана такой, чтобы он не
мешал колебаниям амортизируемого оборудования в пределах за-
данного зазора. В крайних шайбах трос укреплен таким образом,
чтобы при его выборке за счет сил трения при продергивании
улучшить ударозащитные свойства АТР.
Ограничительное устройство, приведенное на рис. 13.9, б, со-
стоит из упругой пластины, которая средней частью крепится на
центральной втулке амортизатора, и накладок, размещенных на
крайних втулках амортизатора и фрикционно взаимодействующих
с упругой пластиной.
АТР с пластинчатым фрикционным демпфером получил назва-
ние АТРФ.
Двухэлементные упругофрнкционные и упругостопорные амор-
тизаторы, разработанные на базе АТР, получили название АТО
(амортизаторы танкового оборудования). Они отличаются от АТР
тем, что оборудование крепится к ним через дополнительное фрик-
ционное или стопорное устройство.
Рис. 13.10. Амортизаторы танкового
оборудования:
а ре.ип(офрикцнонный (РФ); 6 — пружин
иофрикцнонный (ПФ); в резнностопор
ный (PC); 1.5 — втулки; 2 — подвижный
упор; 3 полый стержень с неподвижным
упором; 4 — упругий элемент; ({ — резино-
вое кольцо; 7 — фрикционная шайба; 8 —
фиксатор; 9 — пружина
В резннофрикцнонном амортизаторе (АТОРФ, рис. 13.10, а)
фрикционное устройство собрано на полых стержнях между под-
вижным и неподвижным упорами и взаимодействует с торцевыми
18 Зак. 20с
265
поверхностями втулок /. Вместо резиновых можно использовать
металлические упругие элементы (АТОПФ, рис. 13.10, б).
Параметры колебаний основания, жесткость упругого элемента,
характеристика трения, масса оборудования определяют реакцию
ЛТО: если втулки его неподвижны относительно крепежных стерж-
ней, амортизатор подобен балке с защемленными концами; если же
втулки проворачиваются относительно крепежных стержней, реак-
ция амортизатора подобна реакции балки со свободно опертыми
концами.
Эффект виброзащиты возникает при изменении жесткости амор-
тизатора в момент его открытия; при этом дорезонансные колеба-
ния сразу становятся зарезонансными.
Наличие в АТОРФ и АТОПФ фрикционного взаимодействия
приводит к увеличению передаваемых на оборудование нагрузок
при открытом амортизаторе. Этот недостаток устранен в АТОРС
(рис. 13.10, в), где фиксация соосных втулок, образующих крепле-
ние, производится при помощи подпружиненного шарика, трением
которого по втулке можно пренебречь.
Амортизаторы танкового оборудования состоят из двух после-
довательно соединенных (упругого и фрикционного) элементов,
однако непостоянство жесткости сближает их с трехэлементными
упругофрикционными (у — 1/3) амортизаторами.
Рис. 13.11. Трехэлементный упруго-
фрикционный амортизатор на базе
АТР
Рис. 13.12. Амортизатор танковый
пружинный
Трехэлементный упругофрикционный амортизатор можно полу-
чить, смонтировав параллельно один под другим два АТР и закре-
пив их в одной точке (рис. 13.11). Одни АТР устанавливается жест-
ко, а второй — с помощью фрикционного устройства, представля-
266
ющего собой втулку, разрезанную по образующим и завулканизи-
рованную в резину.
В некоторых случаях, когда применение резины в качестве упру-
гого материала нежелательно, могут быть использованы двух- и
трехэлементные пружинно-фрикционные амортизаторы (рис. 13.12).
Такой амортизатор применяется, например, в системе амортизации
датчика крена во всех основных отечественных танках.
а л
Рис. 13.13 АТБ (а) и АТБУ (<5):
/ — основание; 2 — корпус; 3 — ко-
нусные детали; 4 фрикционное
устройство; 5 — гайка; 6 опорный
стержень: 7 — упругая прокладки
Принятая в танкостро-
ении система крепления
внутреннего оборудова-
ния состоит из двух пос-
ледовательно соединен-
ных элементов: упругого
амортизатора и жесткой
бонки — стального стерж-
ня. В настоящее время
разработана опытная
конструкция амортизато-
ра АТБ (амортизатор танковый—бонка), который совмещает функ-
ции крепления и ударозащиты (рис. 13.13, а). Основание амортиза-
тора приваривается к танку, а корпус ввинчивается в основание.
Фрикционное устройство представляет собой кольцо трапецеидаль-
ного сечения, разрезанное по радиусам на несколько частей. Защи-
щаемое оборудование крепится непосредственно или через свои
амортизаторы на опорном стержне. Затяжкой гайки 5 конусных
деталей 3 можно регулировать силу сухого трения между фрикци-
онным устройством и корпусом, а следовательно, и ускорения, пе-
редаваемые на оборудование.
Для стабилизации фрикционного взаимодействия между опор-
ным стержнем и фрикционными элементами ставится упругая про-
кладка (см. рис. 13.13, б), что делает одноэлементный фрикцион-
ный амортизатор двухэлементным упругофрикционным, однако не-
значительность возможной деформации прокладки (толщина ее
около 0,5 мм) в сравнении со свободным ходом бонки (около 15 мм)
позволяет считать АТБУ (амортизатор танковый — бонка упругая)
одноэлементным фрикционным амортизатором.
Экспериментальное исследование амортизаторов. Эксперимен-
тальное исследование средств виброударозащиты при возмуще-
ниях, сопутствующих движению танка и стрельбе из его орудия,
проводилось на вибрационных и ударных стендах, а также в тан-
ках посредством сопоставления ускорений на входе и выходе си-
стемы амортизации.
18*
267
Поскольку при обстреле измерение параметров механических
воздействий на броне, особенно в точках, близко расположенных
к местам попадания снарядов, — весьма сложная задача, а исполь-
зовать танки для этой цели нерентабельно, исследование проводи-
лось на специальном сварном стенде-тюбинге со сменными броне-
выми плитами. Воздействие на тыльную сторону плиты попадаю-
щих в нее снарядов оценивалось по реакции одинаково нагружен-
ных (fc = 45 Гц) амортизаторов типа «Лорд» (АП-2-0,9). Воздей-
ствия считались одинаковыми или разными в зависимости от того,
одинаковыми или разными оказывались реакции.
Исследование подтвердило расчетные данные о том, что при
движении и стрельбе из танковой пушки одноэлементные упругие
мягкие амортизаторы существенно эффективнее жестких. Так, уско-
рения при движении приборов, установленных с помощью жестких
амортизаторов типа втулки, достигают 500 м/с2 в диапазоне частот
от 100 до 300 Гц, а ускорения приборов, установленных с помощью
мягких амортизаторов типа «Лорд» или танковых резиновых, не
превышают 60 м/с2 на частоте до 50 Гц и 5 м/с2 на частоте выше
100 Гц.
Оказалось также, что эффективность штатных двухэлементных
упругофрикционных амортизаторов типа АПН близка к эффектив-
ности «Лорд», а трехэлементные упругофрикционные амортизато-
ры типа танковых пружинных эффективнее «Лорд» на частоте ни-
же 30 Гц и не уступают им в эффективности на более высоких ча-
стотах. Каких-либо разрушений амортизаторов в процессе иссле-
дования нс произошло.
При снарядном обстреле без пробития брони мягкие амортиза-
торы («Лорд», АТР) значительно (на два порядка) эффективнее
жестких амортизаторов типа втулки, при этом мягкие амортизато-
ры пропускают на танковое оборудование ускорения, не превышаю-
щие 300 м/с2.
Жесткие амортизаторы тина втулки разрушаются после 1-2
снарядных попаданий; мягкие («Лорд», АТР) выдерживают
без разрушения трехкратный обстрел; АТБ и АТБУ выдерживают
3—4 снарядных попадания. Максимальные ускорения на макетах,
установленных с помощью АТБ, в том числе и непосредственно в
зоне удара, не превышают 8 000 м/с2, а с помощью АТБУ —
2 000 м/с2. Большая эффективность АТБУ достигается за счет луч-
шей защиты от высокочастотных вибрационных составляющих.
Колебания макетов, установленных на двухэлементных упруго-
фрикционных амортизаторах (типа втулки-f-АТБУ; «Лорд»-f-
+ АТБУ), зависят в основном от упругих элементов, а ускорения—
н от фрикционных. Так, максимальные ускорения макетов, уста-
новленных с помощью амортизаторов типа втулки 4- АТБУ, не пре-
вышают 4 000 м/с2, а макетов с использованием «Лорд» — 300 м/с2.
268
Таким образом, применение фрикционных бонок-амортизаторов
на порядок превышает ударозащитные свойства жестких аморти-
заторов и не оказывает заметного влияния на эффективность мяг-
ких.
Все испытанные амортизаторы обеспечивают виброударозащи-
ту внутреннего оборудования от воздействия снарядного обстрела
без пробития брони при сравнительно больших значениях свобод-
ного хода, т. е. и специальные танковые амортизаторы не вполне
соответствуют требованиям конструкторов к компоновке.
Имеющихся данных пока недостаточно, чтобы дать исчерпываю-
щие рекомендации по оптимальным способам внброударозащиты
приборов в различных зонах танков при всех видах механических
воздействий (включая непробитие брони при снарядном обстреле).
Необходимо продолжать поиск по всем направлениям: теория и
расчет, разработка реальных конструкций виброударозащитных
устройств, а также методов их контроля и испытаний.
269
Глава 14 МЕТОДЫ СТЕНДОВЫХ ИСПЫТАНИЙ
ВНУТРЕННЕГО ОБОРУДОВАНИЯ
НА ВИБРАЦИЮ И УДАР
14.1. КЛАССИФИКАЦИЯ ИСПЫТАНИИ
Внутреннее оборудование танков (в том числе все приборы) в
процессе разработки и производства многократно подвергается
испытаниям на вибрационных и ударных стендах. Цель испытаний
опытных образцов—определение работоспособности при заданных
механических нагрузках; серийные изделия испытываются для
контроля качества их изготовления. Различают испытания на виб-
рационную (ударную) прочность—способность противостоять
внешним воздействиям не разрушаясь, и на устойчивость — способ-
ность нормально функционировать во время действия вибрации и
ударов.
Опытные образцы подвергают испытаниям на функционирова-
ние, при которых имитируются воздействия, эквивалентные усло-
виям эксплуатации. Если изделие предназначено для нового танка
(т. с. сведения о реальных воздействиях отсутствуют), то использу-
ются данные по эксплуатации однотипных ВГМ и общие представ-
ления о механизме формирования вибраций и ударов.
Режимы периодических испытаний серийной продукции могут
корректироваться на основе сопоставления отказов при них и в
эксплуатации (если они имеются).
Специфическими являются испытания по обнаружению резонан-
сов вибраций конструктивных элементов. Эти испытания помогают
выявить динамические свойства изделий и избежать совпадения
собственных частот их элементов с наиболее выраженными часто-
тами эксплуатационного воздействия, а также с собственными ча-
стотами амортизации изделия. Кроме того, резонансная частота
является своеобразным индикатором жесткости изделия или жест-
кости его закрепления, поэтому нормативными документами огра-
ничивается минимальное значение этой частоты (для танкового
внутреннего оборудования, например, она должна быть не ниже
40 Гц).
При приемо-сдаточных стендовых испытаниях каждое изделие
подвергается обычно синусоидальной вибрации в течение 30 мин
на одной из частот диапазона 20—30 Гц с амплитудой ускорения
20 м/с2. Этот режим давно используется в отечественной и зару-
бежной практике для выявления грубых производственных дефек-
тов. Следует отметить его недостаточность, так как в изделии име-
270
ются разнородные по собственным частотам элементы. К тому же
в последние годы эти частоты сместились в сторону более высоких
значении. Поэтому при испытаниях следовало бы возбуждать ко-
лебания на собственных частотах всех элементов изделия, исполь-
зуя широкополосную случайную вибрацию типа белого шума либо
многократные удары.
Сравнительные испытания проводятся для выявления преиму-
ществ одного из нескольких вариантов однотипных изделий по их
способности противостоять механическим нагрузкам в одинаковых
условиях нагружения. Эти испытания являются основными в про-
цессе разработки опытных изделий и мероприятий по их виброудар-
нои защите. Режимы сравнительных испытаний обычно не имити-
руют эксплуатационные воздействия, а назначаются из условия
максимального ускорения испытаний.
14J. ОСОБЕННОСТИ СТЕНДОВОГО ОБОРУДОВАНИЯ
Многочисленные экспериментальные исследования свидетель-
ствуют о сложности и многообразии вибрационных и ударных про-
цессов на несущих и внутренних элементах конструкции ВГМ в
условиях движения и боевой эксплуатации. Вибрация чаще всего
представляет собой случайный процесс механических колебаний
с непрерывным широкополосным спектром от единиц герц до частот
акустического диапазона в несколько килогерц. В спектрах конк-
ретных реализаций сочетаются полосные и равномерные шумовые
компоненты в различных соотношениях: от узкополосных (иногда
почти гармонических) до широкополосных с равномерным
спектром (белый шум). Амплитуды ускорений в зависимости от
типа ВГМ, режима движения, местоположения прибора изменяют-
ся в широких пределах от единицы до сотен метров в секунду в ква-
драте. Большей частью вибрация носит пространственный характер
с линейными и угловыми колебаниями. Соотношение компонентов
бывает различным: от равноценного до явно доминирующего, при
этом спектральный состав также может быть разным.
Вибрация, которую можно воссоздать на стенде, имеет мало
общего с приведенным выше описанием. Подавляющее большинст-
во современных электродинамических стендов способно воспроиз-
вести моногармоническую одиокомпонентиую (преимущественно
вертикальную) вибрацию в широком диапазоне частот от 5 Гц до
5 кГц. Именно такими стендами оснащены в основном КБ и заво-
ды танковой и многих других отраслей промышленности. Часть из
этих стендов имеет поворотный вибратор, а устройства контроля и
автоматики позволяют плавно изменять (качать) частоту вибраций
в требуемом диапазоне, одновременно поддерживая постоянной
амплитуду ускорения или перемещения платформы стенда.
Установка СУВУ-УСВ позволяет создавать узкополосную слу-
чайную вибрацию с шириной спектра 3, 10, 30 и 100 Гц и плавной
перестройкой центральной частоты полосы в диапазоне от 5 до
10 000 Гц.
271
Значительно большими возможностями обладают стенды слу-
чайной широкополосной вибрации, на которых можно сформировать
с помощью набора фильтров ступенчатый спектр, близкий по фор
ме к требуемому. Формирование спектра осуществляется по пара-
метру спектральной плотности в отдельных частотных полосах. Их
ширина определяется шириной полосы фильтров. В обычном на-
боре—это 1/3. ..1/6 октавы, но встречаются стенды с более узко-
полосными фильтрами. Поддержание заданного уровня спектраль-
ной плотности в каждой из полос выполняется ручной подстройкой
или автоматически системой обратной связи. Эти стенды также
однокомпонентные. На отдельных предприятиях созданы установ-
ки для создания двух-, трехкомпонентной случайной вибрации. Вы-
пускается также серийная аппаратура СПВ-ЗПМ-М (с ручной под-
стройкой) для формирования случайных вибраций на существую-
щих электродинамических стендах. Стенды для создания случай-
ной вибрации сложны в эксплуатации, дороги, требуют высокой
квалификации обслуживающего персонала, однако испытания на
базе таких стендов наиболее достоверны.
Нагрузки в танке, связанные с его движением по местности,
стрельбой из штатного вооружения и снарядным обстрелом, пред-
ставляют собой в общем случае затухающий ударно-вибрационный
процесс. Этот процесс может иметь выраженную импульсную сос-
тавляющую с наложенной вибрацией или без нее; иногда в вибро-
ударе преобладает одна частота, но чаще наблюдаются колебания
с разными частотами, дающими в совокупности затухающий про-
цесс сложной формы. Как и вибрация, ударные нагрузки в танках
большей частью являются пространственными и носят выраженный
местный характер, значительно различаясь по форме и уровню.
Ударные нагрузки колеблются в очень широких пределах и могут
вызывать ускорения от нескольких (при длительности импульса до
200 мс в случае пробоя подвески) до сотен тысяч метров в секунду
в квадрате (при длительности импульса несколько долей милли-
секунд в случае попадания снаряда в броню). Возможности стендо-
вого оборудования в воспроизведении ударов еще скромнее, чем в
воспроизведении вибраций. По существу серийно выпускается лишь
одна разновидность ударных стендов — со свободно падающей
платформой. На них получают однополярные импульсы, близкие по
форме к полуволне синусоиды либо к треугольнику с длитель-
ностью импульсов от 0,5 до 20 мс и максимальной амплитудой до
8 000 м/с2.
14.3. ПРИНЦИПЫ ЭКВИВАЛЕНТНЫХ ИСПЫТАНИИ
Поскольку воспроизведение на стендах эксплуатационных воз-
действий в настоящее время невозможно, их заменяют эквивалент-
ными стендовыми.
Замена эксплуатационных воздействий обобщенными стендо-
выми осуществляется на различных принципах эквивалентности,
272
основными из которых являются установление эквивалентности по
нагрузкам (при этом предполагается, что лишь некоторые характе-
ристики воздействий определяют работоспособность изделий, на-
пример, спектральная плотность при случайной вибрации) и уста-
новление эквивалентности эксплуатационной и стендовой нагрузок
по одинаковости вызываемых ими повреждений и нарушений функ-
ционирования. Соответственно методы испытаний, построенные по
первому принципу, основаны на равенстве указанных характеристик
в исходных и моделирующих воздействиях (испытания широкопо-
лосной случайной вибрацией, метод комплексных циклов, испыта-
ния узкополосной свипирующей вибрацией и др.). Этот принцип
эквивалентности применяется по отношению к изделиям особой
сложности, например, к современным танковым прицелам.
Полная реализация второго принципа затрудняется тем, что от-
казы из-за механических воздействий (усталостные разрушения,
износ, ослабление клеммовых и резьбовых соединений, ложные
срабатывания реле и др.) относятся к совершенно разнородным
явлениям. Поэтому эквивалентность воздействий в этом случае
может быть установлена по одному из показателей работоспособ-
ности изделия либо в лучшем случае по двум-трем (в испытаниях
на вибрационную и ударную устойчивость).
Механические воздействия наиболее часто приводят к разру-
шению изделий. Механические напряжения, возникающие в мате
риале изделий под действием вибраций и ударов малой и средней
интенсивности, как правило, находятся в зоне упругой деформа-
ции, поэтому вызываемые ими разрушения в основном имеют уста-
лостный характер.
Действие вибрационной нагрузки с изменяющимися во времени
амплитудами напряжений можно оценить на основе линейной ги-
потезы Пальмгрена Майнера, согласно которой результирующее
повреждение определяется простым суммированием элементарных
повреждений £>„ вызванных гц циклами напряжений с амплиту-
дой а0|:
L> = V D, = £ ,
где М —число циклов напряжений о0. до разрушения.
Возможность использования приведенной гипотезы при исследо-
ваниях вибрационных процессов подтверждена экспериментально.
Как известно, вибрационное разрушение элементов происходит
преимущественно в резонансном или близком к нему режимах на-
гружения. Поэтому в задачах виброударопрочности принято пред-
ставлять изделие как набор независимых и не влияющих друг на
друга элементов (резонаторов) в виде одномассовых систем
с одной степенью свободы. Параметры систем — собственная час-
тота f0 и добротность Q—у разных элементов различны. Для ли-
нейных систем амплитудно-частотная характеристика по ускоре-
273
нию массы (Ам) и основания (Яо) с достаточно хорошим прибли-
жением в зоне резонансной частоты описывается формулой
н - Л.ц/|Л„У1 +12Q(z- !))- I, (14.1)
где г — f/fo', f — частота вибрации; // — передаточный коэффициент.
Добротность элемента является одной из важнейших характе-
ристик, однако она зависит от большого числа трудно учитываемых
факторов: рассеяния энергии в материале, конструкционного демп-
фирования, характера напряженного состояния, геометрических
параметров элемента и др. Для большинства элементов числовые
значения добротности колеблются от нескольких до сотен единиц.
Прн высоких динамических нагрузках в элементах возникает
нелинейная зависимость добротности от нагрузки. Собственная ча-
стота при любых нагрузках оказывается практически неизменной,
а реакция элемента на синусоидальное воздействие — синусоидаль-
ной вплоть до амплитуд, прн которых напряжения в материале
элемента достигают предела текучести. Экспериментально выве-
дена следующая зависимость:
-з— = — arctg —г-------,
лмО * Я*Г>
где Ли0 и Qo — ускорение массы и добротность при напряжениях в элементе, до-
стигающих предела усталости [14].
С учетом соотношений А. Ленка и пропорциональности напря-
жений в элементе его ускорению Аы суммарное повреждение от
действующей нагрузки
(14.2)
где ®(ЛМ) — плотность распределения пиков ускорений в элементе прн заданной
вибрации; ГД(ЛМ) = f (A IA ~ РКУРС элемента при синусоидальной на-
грузке с постоянной амплитудой Ли (которая должна превышать амплитуду
Лмо, соответствующую напряжениям предела усталости оо); t, Т— соответствен-
но время действия заданной вибрации и ресурс элемента; m здесь и в дальней-
шем принято равным 8.
Интеграл в выражении (14.2) представляет собой скорость на-
копления повреждений, а подынтегральная функция, называемая
плотностью распределения повреждения D, дает представление о
значимости различных уровней нагрузок в формировании резуль-
тирующего повреждения. Для каждого типа воздействия и соот-
ветствующего ему распределения w(AM) существует нагрузка
Атах, обладающая наибольшим повреждающим эффектом.
274
Сроки службы 7 и Ts связаны соотношением
где К j ( л М~) w (~ ") d (-) — коэффициент повреждения, учи-
тывающий отличие фактической нагрузки элемента от синусоидальной (для линей-
ной модели при значительных уровнях нагружения К-const); некоторое
нормирующее ускорение (например, среднее квадратическое1 значение ускорения
при случайных колебаниях или максимальное при синусоидальных колебаниях
с качанием частоты).
Эквивалентность двух вибрационных воздействий на прочность
предполагает равенство создаваемых ими в элементе поврежде-
ний. Понятия ресурса и степени повреждения позволяют сравни-
вать между собой различного вида вибрационные воздействия и
устанавливать их эквивалентность. Например, если ресурс некото-
рого элемента, подвергающегося действию вибраций I, больше
(меньше) ресурса того же элемента при действии вибрации II, то
вибрацию I следует считать слабее (сильнее) вибрации II. Равен-
ство ресурсов свидетельствует о равной интенсивности этих вибра-
ций. В более общем виде эквивалентность формулируется через
степень повреждения: два вибрационных воздействия эквивалент-
ны, если одинаковы степени повреждения, вызываемые ими в од-
ном и том же элементе:
(»4-3)
Результирующую степень повреждения элемента можно выра-
зить через коэффициент повреждения К, время действия вибрации
/, нормирующее ускорение Аок и связанное с ним Лм>:
Введя понятия параметра эквивалентных уровней воздействия
г = Доап/ЛоА'1 и параметра эквивалентного времени воздействия
q — и объединив коэффициентом С« Кц //»и/(Ki //*1) сомно-
жители, отображающие специфические свойства воздействий и
элемента, основное условие эквивалентности (14.3) можно запи-
сать в виде
r*qC = 1. (14.4)
На рис. 14.1 графически воспроизведено (на основе работ
А. Ленка и Ю. Ренитца) условие эквивалентности испытаний сину-
соидальной вибрацией с качающейся частотой 1 и стационарной
широкополосной вибрацией II. Ход кривых эквивалентности зави-
сит от отношения Am*/Amd , но в большинстве случаев это отноше-
ние неизвестно. Полученные данные показывают, что имеется об-
ласть, где параметры г и q слабо зависят от относительного уровня
воздействий и линейности модели. Значения параметров в этой
275
области будут оптимальными при выполнении второго условия
эквивалентности: Лт1Х । = Лтах и •
На рис. 14.1 оптимальными являются значения Гопт-"!7С^О.ЗЗ;
*7опт (?z ^о) ~ 5.
Рис. 14.1. Параметры условия эквивалентности испытаний качающейся частотой
и стационарной широкополосной вибрацией:
---- линейная модель;---нелинейная модель; /. 2, 3, 4 -- отношение
— 1.11; 1,25; 1.43 н 1.67 соответственно; С — «Л'(2 Q 3/; Л/^ —ширина полосы широко-
полосной пнбрацнн; время прохождения резонансной зоны и всего заданного Диана
эона качающейся частотой
Второе условие эквивалентности существенно ограничивает вы-
бор испытательных нагрузок и соответственно время испытаний.
Между тем, жесткой необходимости в этом нет. Как показали ис-
следования, величину г можно брать в 1,5—2 раза меньше опти-
мальной, при этом погрешность в выборе режима испытаний не
превышает 25 %.
Реальные случайные процессы имеют усеченный закон распре-
деления, т. е. максимальные ускорения элемента ограничены неко-
торым значением ЛмПтах В стационарных вибрационных
процессах, характерных для танков, можно считать п = 3. ..4.
Если эксплуатационная вибрация оказывает на элемент повреж-
дающее действие (лЛм*н то для испытательной вибрации
необходимо выбирать параметры с соблюдением условия
• Из изложенного выше следует достаточное условие
выбора параметра нагрузки:
г0<1/я. (14.5)
Если эксплуатационная вибрация не повреждает элемент, т. е.
/гЛи*п < Лмд, то при испытаниях необходимо соблюдение неравен-
ства Лм*1< А*!). Достаточным условием этого является выполне-
ние требования
г0>1/л. (14.6)
276
Обычно неизвестно, является эксплуатационное воздействие
повреждающим или нет, поэтому требования (14.5) и (14.6) необхо-
димо объединить, что возможно только при г0 = 1/л. Таким обра-
зом, если величина Дмо неизвестна, следует добиваться равенства
максимальных (а не максимальных повреждающих, как рекомен-
дует А. Ленк) ускорений элемента от действия эксплуатационной
и испытательной вибраций; коэффициент нагрузки при этом будет
близок к оптимальному.
Реальное изделие состоит из многих элементов с различными
собственными частотами и добротностями, а эти параметры входят
в эквивалентные соотношения как для линейной, так и для нели-
нейной моделей. Зависимость приведенных выше соотношений от ча-
стоты в принципе можно исключить, сделав, например, частотно-
зависимым уровень воздействия (при испытаниях качанием часто-
ты). Однако реализовать это трудно, так как стандартная аппара-
тура управления большинством электродинамических стендов та-
кой возможности не предоставляет. Из отечественных установок
лишь СУВУ-УСВ работает на принципе поддержания постоянным
градиента ускорения платформы, в том числе и в режиме качания
синусоидальным сигналом,что соответствует возрастанию ускоре-
ния на платформе стенда пропорционально частоте в степени 1/2.
Добротность, как правило, неизвестна для большинства элемен-
тов изделия. Рассчитывая эквивалентные режимы, большей частью
ориентируются на некоторое среднее значение добротности Q = 20.
И хотя в силу нелинейных свойств элементов зависимость соотно-
шений эквивалентности от добротности выражена слабее, чем в
рассмотренной линейной модели, невозможность учитывать при
испытаниях истинное значение добротности снижает их достовер-
ность.
Известны попытки положить в основу принципов эквивалентно-
сти режимов испытаний равенство рассеянной энергии при различ-
ных воздействиях. Получаемые при этом соотношения эквивалент-
ности существенно отличаются от соотношений, найденных по усло-
вию равенства повреждений. Так, по энергетической теории соот-
ношение времени однотипных воздействий обратно пропорциональ-
но квадрату соотношения их уровней, а по теории эквивалентных
повреждений — соотношению их уровней в степени т. Некоторые
зависимости энергетической теории отображены в нормативных
документах, например, в рекомендации по расчету режимов уско-
ренных испытаний («Мороз-2» и «Мороз-5»).
14.4. МЕТОДЫ ИСПЫТАНИЙ НА ВИБРОПРОЧНОСТЬ
Метод фиксированных частот заключается в испытаниях эле-
ментов синусоидальной вибрацией последовательно па нескольких
фиксированных частотах. Первоначально он применялся для ими-
тации вибрационных воздействий, имеющих линейчатый спектр,
например, от двигателя ВГМ, работающего в режиме стационара
277
(на стоянке). Реальные вибрационные воздействия обычно непе-
риодические, однако при удалении от зоны возникновения их
спектр из-за фильтрующих свойств элементов конструкции транс-
формируется в ряд узкополосных процессов, действующих на неко-
тором широкополосном фоне. В процессах, где интенсивность фона
относительно мала, при обработке осциллограмм вручную можно ус-
ловно выделить гармонические компоненты и построить табличные
либо графические зависимости амплитуд вибрационного парамет-
ра (ускорения, скорости, перемещения) от частоты этих гармоник.
В испытательные режимы по методу фиксированных частот, как
правило, закладываются максимальные амплитуды указанных час-
тотных составляющих.
Обобщение данных по совокупности вибрационных процессов (с
учетом приближенности ручной обработки) приводит к сплошному
заполнению некоторого частотного диапазона от низших до выс-
ших значений (/«.../,). Собственные частоты элементов изделий
могут находиться в любой точке указанного диапазона, а режим
испытаний должен обеспечить возбуждение каждого элемента
(с параметрами fnl, Q,) в его резонансной зоне, поэтому необходи-
ма следующая последовательность испытательных частот:
/.-А;
f f Q, 2(?, + 1 .
Q, 2Q--I ’
Л Л Qi ",2Ql+1-r
Так как обычно ориентируются на некоторое среднее значение Q,
одинаковое для всех элементов, то
f - f (2Q+1 У'1
Отсюда число требуемых фиксированных частот в диапазоне
равно
п = in |(2Q Jnw- 1)| + 1 - Q ln + 1 . (14.7)
однако в нормативных документах их гораздо меньше. Так, по от-
раслевому стандарту испытания в диапазоне 10—120 Гц проводят-
ся на девяти фиксированных частотах, а согласно формуле (14.7)
их должно быть (при Q = 20) более 50. Увеличение интервала
между испытательными частотами вызвано стремлением миними-
зировать время испытаний. Испытания методом фиксированных
частот поэтому не являются эквивалентом реальных воздействий;
они используются для сравнительной оценки, притом с ограничен-
ной достоверностью.
Более точным является вариант метода фиксированных частот-
метод полигармонических вибраций, который предусматривает од-
278
повременное воспроизведение нескольких гармонических колебаний
разной частоты. При этом преследуются две цели: сокращение вре-
мени испытаний и одновременное возбуждение нескольких возмож-
ных резонансов, что позволяет учесть их взаимное влияние. Этот ме-
тод из-за сложности фазировки сигналов параллельно работающих
генераторов, синхронного поддерживания нескольких резонансов
и некоторых других проблем не используется, хотя и допущен стан-
дартами к применению.
Более распространен другой вариант метода фиксированных
частот — испытание на резонансных частотах. Этим методом испы-
тываются обычно изделия, имеющие не более 4—6 резонансов по
каждой координатной оси. При большем числе резонансов испыта-
ния становятся громоздкими. Они затрудняются еще и тем, что не-
легко выявить все резонансы сложного изделия и поддерживать их
во время испытаний, особенно если элемент обладает высокой доб-
ротностью и малейшее отклонение от резонансной частоты вызыва-
ет существенное снижение амплитуды реакции. В силу указанных
причин метод испытаний на фиксированных резонансных частотах
используется редко.
Метод качающейся частоты. Охватить при испытаниях весь за-
данный диапазон частот воздействий можно, используя в цепи уп-
равления электродинамическим вибростендом генератор синусои-
дальных колебаний с непрерывным плавным изменением частоты
от нижнего /н До верхнего значения и обратно. Широко распро-
странены генераторы с логарифмической разверткой частоты:
/=/не0/, (14.8)
где р — параметр, определяющий скорость качания, пропорциональную текущей
частоте. При такой развертке время А/о прохождения резонансной зоны не зави-
сит от значения резонансной частоты f0.
Вибрация с качающейся частотой редко встречается в эксплуа-
тации ВГМ; ее, например, создают двигатели ВГМ при равномер-
ном увеличении или замедлении скорости движения. Обычно ре-
альная вибрация с непрерывным спектром имитируется широкопо-
лосной нормальной случайной вибрацией с равномерной спектраль-
ной плотностью w. Реакция на нес линейного элемента (резонато-
ра) представляет собой сосредоточенный в зоне собственной часто-
ты узкополосный процесс с распределением амплитуд по закону
Рэлея:
Рл = ехр|-Л-7(2?м/г)|. (14.9)
где А — текущая амплитуда вибрационных ускорений массы резонатора; а*к—
среднее квадратическое значение ускорений,
амЛ = VirwQ/,/2 . (14.10)
Поскольку предполагаемые повреждения носят усталостный ха-
рактер, можно считать, что вибрация качанием частоты моделирует
279
широкополосную случайную вибрацию, если действие каждой из
них вызывает в резонаторе одинаковое число циклов деформаций
на равных уровнях. Число колебаний резонатора NA выше некото-
рого уровня А прн воздействии с качающейся частотой и постоян-
ной амплитудой ускорения Л* определим из амплитудно-частотной
характеристики
амплитуда ускорения До* будет больше А при частоте zjo < f <
< 2а/о,
где - U(2 О’) Т V(I - I /(2 О’)I* Ч- . (14.12)
С учетом формул (14.8) и (14.12)
ЛС. “ "г)/2 -,/<г’ “ >-«4^ . (14.13)
где р = Аоь/а„и — безразмерный параметр, определяющий ускорение платформы
стенда Ло».
С учетом выражения (14.10)
He* = ₽yitwQ/o/2. (14.14)
Обозначим характеристику, аналогичную Рл в формуле (14.9),
для резонатора, подвергающегося действию вибраций с качающей-
ся частотой, Pas- Если отнести число колебаний резонатора выше
уровня А к общему числу циклов foTR за время ТК действия слу-
чайной вибрации, то получим
Рд$ = аЛГл, (14.15)
где а — безразмерный параметр, определяющий число циклов качаний k —
- арТУ
Варьируя параметры а и р, можно изменять вид кривых на
рис. 14.2. В случае совпадения Рд и Pas, определяемого совмеще-
нием их кривых для всех уровней A/uur (либо наиболее существен-
ного диапазона их значений), можно было бы считать, что вибра-
ция качанием частоты действительно моделирует широкополосную
вибрацию.
Однако удовлетворительное совмещение указанных кривых
лаже в ограниченной области аргумента Д/ам₽ невозможно, так
как они существенно зависят от добротности Q. Например, при од-
ном из возможных оптимальных вариантов совмещения PAs и РА
(соответственно а = 0,08; р = 0,3) в зоне наиболее значимых уров-
ней аиц = 2.. .3 Pas отличается от Рд в 2,4 раза, а для изделия,
состоящего из элементов с различной добротностью, расхождение
будет еще больше. Согласно формуле (14.14) амплитуда ускорения
280
платформы стенда зависит еще и от собственной частоты и доброт-
ности элемента, и, следовательно, режим испытаний должен назна-
чаться отдельно для каждого элемента. Реальные испытания про-
водятся не поэлементно — изделие испытывается в целом, при-
чем амплитуда ускорений (либо перемещений) платформы стенда
Рис. 14. 2 Согласование кривых закона распределения Рэлея (/) и пиковых ус-
корений резонаторов при Q—10 (2) и 20 (.?)
остается постоянной в довольно широком диапазоне качания часто-
ты. При этом режимы испытаний рассчитывают, ориентируясь на
средние либо присущие большинству элементов параметры, что
также определяет отклонение PAS от Рд. Если, например, согласо-
вание кривых распределения на рис. 14.2 выполнено для элемента
с параметрами Qi=IO и /Оь то испытывать изделие нужно прн ус-
корении платформы стенда
Л*1 - Pi /kwQi/oi -2 •
Другой элемент изделия, например, с добротностью Q2=20 и собс-
твенной частотой fo2=foi. необходимо испытывать при ускорении
Л,,. - ₽, .
281
тогда для него кривая распределения будет иметь другой вид (см.
рис. 14.2, кривая 3). Но поскольку при испытании этого элемента в
составе изделия на платформе стенда поддерживается Aoai <Ло*2.
выражение кривой распределения принимает вид
^45 2 = »!^/^ 2— I/Q2 — V 1 — Р? Ло*|/(ЛМо*2) »
т. е. она смещается влево, приближаясь к исходному распределе-
нию Рэлея. К подобному же эффекту привело бы увеличение соб-
ственной частоты /о» элемента по сравнению с расчетной /о». В об-
щем случае расчета режима испытаний на параметры Qb fot и ус-
корение платформы i40JH=p|aM#i, исходная (при 0 = 01) кривая
распределения элемента с параметрами Q2. /02 перемещается в по-
ложение, соответствующее
-
Так как при неизменной амплитуде входного ускорения элементам
с большими собственными частотами присуща большая доброт-
ность, указанное перемещение может быть значительным.
Несмотря на перечисленные ограничения, метод качающейся
частоты в силу своей простоты и доступности оборудования широко
используется в испытаниях на вибропрочность и виброустойчи-
вость, а также для определения резонансных частот конструктив-
ных элементов изделий.
Метод комплексных циклов, являющийся модификацией метода
испытаний качающейся частотой, позволяет моделировать распреде-
ление амплитуд колебаний элементов Р3 для любого вида эксплуа-
тационной вибрации. В процессе испытаний амплитуда ускорений
платформы стенда изменяется по закону, обеспечивающему выпол-
нение условия эквивалентности в виде
ЛГ.(Л) = /УЭ(Л), (14.16)
где N»(A) и Л\(/4) — число колебаний с амплитудой выше заданного уровня А
при испытаниях и эксплуатации.
При этом условие (14.16) должно выполняться в пределах каж-
дого или нескольких циклов качания. Проще осуществить испыта-
ния этапами (комплексными циклами), каждый из которых вклю-
чает v циклов качаний частоты с переменной от цикла к циклу
амплитудой ускорения платформы вибростснда. Закон изменения
амплитуды при этом определится из условия
* ЛГ.(ЛШ) = Л'А(Л). (14.17)
I = I
где N»(Aoi)—число колебаний элемента, превышающих уровень А в ьм цикле
с амплитудой ускорения 40/ платформы стенда; N» — общее число колебаний
элемента в эксплуатации в течение заданного времени; k — число этапов испыта-
ний (комплексных циклов).
282
Определить закон изменения амплитуд Д|(. позволяющий вы-
полнить условие (14.17), очень сложно. Р. Д. Тетельбаумом пред-
ложено следующее приближенное решение: в некотором интерва-
ле относительных амплитуд £= Д/а (а — среднее квадратическое
значение амплитуды эксплуатационной вибрации) условие (14.17)
выполнять точно, а в остальных — с небольшим отклонением. На-
пример, для комплексного цикла, эквивалентного эксплуатацион-
ной вибрации в виде широкополосного случайного шума, ампли-
туды
Aoi = I1/ Vrr.wfJ(2Q) ,
где — Ai гаах/«; .'•/шах—относительная максимальная амплитуда текущего
цикла.
При этом считается, что определен набор р„ обеспечивающий
выполнение условий эквивалентности вибраций в интервале отно-
сительных амплитуд от 0,8 до 4 со среднеквадратичным отклоне-
нием от закона Рэлея в 4,3 %. Установлено, что составляющие р,
комплексного цикла одинаковы для элементов с любой доброт
ностью, однако требуемое число комплексных циклов от нес зави-
сит. Законы распределения реальных процессов усеченные. Все
это учтено в полученном решении, которое базируется на равенст-
ве максимальных реакций элемента на эксплуатационную и испы-
тательную вибрации, в то время как при обычных испытаниях ка-
чанием частоты может наблюдаться их значительное расхождение.
Метод комплексных циклов дает возможность достаточно точно и
сравнительно просто воспроизводить в элементе с известной доб-
ротностью любой закон распределения амплитуд его колебаний.
Метод широкополосной случайной вибрации позволяет воспро-
извести с наибольшей точностью реальные эксплуатационные воз-
действия, которые имеют обычно вид хаотических колебаний. Мо-
делируемая вибрация рассматривается как процесс нормальный и
стационарный с неизменяющимися во времени статистическими
характеристиками. В качестве основной характеристики использу-
ется спектральная плотность, поскольку вероятность возникновения
отказа находится в прямой зависимости от ее уровня.
Кривые исходной спектральной плотности имеют различные
очертания. Для их воспроизведения используются электродинами-
ческие стенды, оснащенные специальной аппаратурой. К сожале-
нию, не всегда удается полностью компенсировать влияние резо-
нансов испытуемого изделия на движение платформы вибростенда.
Компенсация считается удовлетворительной, если находится в пре-
делах ±3 дБ, что отражено в нормах испытаний (ГОСТ
В20.57.305—76). Очертания спектра воспроизводятся приближенно
по полосам частот, и степень приближения зависит от их ширины.
Таким образом, на стендах случайной широкополосной вибрации
воспроизводится не реальное воздействие, а его модель по спек-
тральной плотности, позволяющая подвести к испытуемому изде-
283
лию весь спектр частот одновременно, учесть взаимное влияние ре-
зонансов отдельных элементов и сократить продолжительность ис-
пытаний. Недостатком метода является использование сложного
дорогостоящего оборудования, требующего высококвалифициро-
ванного обслуживающего персонала.
В методе узкополосной случайной качающейся вибрации широ-
кополосное случайное возбуждение с относительно низким уровнем
спектральной плотности заменяется интенсивным узкополосным с
медленно изменяющейся (качающейся) средней частотой в необхо-
димом диапазоне (так называемой узкополосной свипирующей виб-
рацией — УСВ). Установлено, что при определенных условиях
УСВ может вызвать в элементах испытуемых изделий реакцию
с таким же распределением пиков напряжений, как и при широко-
полосной вибрации. Последняя вызывает в линейном резонаторе
случайные колебания с распределением пиковых значений по зако-
ну Рэлея. Ожидаемое число пиков, превышающих уровень А, за
время ТR действия широкополосной вибрации А’д = /{1ТрРл .
Сроднее квадратическое значение ускорения реакции того
же резонатора на возбуждение случайной узкополосной вибрацией
«п в ,
где аоп — среднее квадратическое значение ускорения узкополосного возбужде-
ния; Н — передаточный коэффициент.
По мере приближения центральной частоты свипирующего слу-
чайного воздействия к частоте fo отклик резонатора возрастает,
приближаясь к максимальному значению Qaon. Если резонанс успе-
вает полностью развиться, а скорость регулирования обратной
связи между платформой стенда и задающим генератором столь
мала, что не искажается амплитудное распределение возбуждения
(которое также подчинено закону Рэлея), то вероятность превыше-
ния отдельным пиком некоторого уровня А
Рл. = ехр[-Л’/(2Я’Й.)].
Используя приближенное выражение (14.1) для Н и логариф-
мический закон изменения скорости качания (14.8), можно полу-
чить следующее выражение для числа пиков отклика Ыл, превыша-
ющих уровень А и пронормированных общим числом Nr циклов
ускорений в полосе резонанса:
284
Чтобы методы узкополосной и широкополосной вибраций были
эквивалентными, кривая, построенная по формуле (14.18), должна
совпадать с кривой распределения (14.9). Однако точного совпаде-
ния достичь не удается. Варьируя уровень нагрузки а«я и продол-
жительность ТЯп узкополосных испытаний, Б. Бус и Г. Брох доби-
лись приближенного совпадения кривых в зоне наиболее сущест-
венных для повреждения уровней нагрузки (2.. .3) аиц
(рис. 14.3) и получили следующие формулы:
a„a = q„V^M2Q)-, (14.19)
Г». = S.QFs In (/,</,), (14.20)
где /. и / „ - верхняя и нижняя частоты диапазона свипнрующей вибрации;
qn — 1,2; S„ - 0,65; расхождение законов распределения в указанной зоне нс
превышает ±1 дБ.
Рис. 14.3. Согласование кривых закона распределения Рэлея (/) и пиковых уско-
рений резонатора (2) при узкополосной свипнрующей вибрации
Уровень нагрузки аОп зависит от частоты и добротности. Влия-
ние частоты учтено: входящее в аппаратуру для воспроизведения
УСВ устройство регулирования поддерживает во время испытаний
постоянный градиент ускорений
7 = аоп/К2«Л
285
Расчет рекомендуется вести по Qe, = 20. При этом точность
отклика находится н пределах ±3 дБ для значений Q от 10 до 40
и в пределах ±7 дБ для значений Q от 4 до 100. Резонаторы с
Q > 20 во время испытаний оказываются перегруженными, а с
Q < 20—недогруженными. Так как добротность металлических
элементов изделий обычно больше 20, такие испытания будут уже-
сточенными.
Длительность испытаний УСВ значительно превышает время
действия широкополосной вибрации. Экспериментально установле-
но, что они могут быть сокращены варьированием скорости обрат-
ной связи (дБ/c), прн увеличении которой увеличивается ее отно-
шение р* к ширине полосы качающейся вибрации (Гц). Совмеще-
нием кривых, построенных прн различных значениях р*, определя-
ются соответствующие коэффициенты уровня воздействий q„ и
длительности S„ испытаний. При сокращении времени испытаний
необходимый уровень воздействия возрастает и ухудшается точ-
ность воспроизведения закона распределения Рэлея. Так, при
0*^33 (медленные испытания) желаемое распределение пиков
достигается в довольно широком диапазоне амплитуд с точностью
±1 дБ; S„= 0,65; qn = 1,2. Доведя р* до 300, можно сократить вре-
мя испытаний в три раза (S,, = 0,21) по сравнению с временем
медленных испытаний, но одновременно возрастает в 1,5 раза тре-
буемый уровень нагрузки {qn= 1,8), и совпадение распределения
пиков с точностью ±1 дБ будет достигнуто только в зоне амплитуд
(2—3) а„/?. Небольшим дополнительным увеличением уровня на-
грузки (qa = 1,96) можно еще почти вдвое сократить время испы-
таний (Sn = 0,11), но точность совпадения распределений пиков в
зоне амплитуд (2—3)ам/? снизится прн этом до ±3 дБ. Дальней-
шее сокращение длительности испытаний за счет увеличения ско-
рости обратной связи -и уровня нагрузки влечет за собой сущест-
венное ухудшение точности воспроизведения. Если, например,
/„=500 Гц,/Н = 10 Гц (нормы испытаний аппаратуры ВГМ пи
ГОСТ В20.57.306-76), Q = 20, то согласно (14.20) 7₽п = 78,2 X
Х$п7я, откуда при медленных испытаниях Тра «51 Тк, а прн
максимально ускоренных — Tr„ = 8,6 TR.
Таким образом, даже максимально ускоренные узкополосные
испытания займут почти в девять раз больше времени, чем широко-
полосные.
14.5. ИСПЫТАНИЯ НА УДАРНУЮ ПРОЧНОСТЬ
Многократные удары малой и средней интенсивности, возника-
ющие при преодолении танком различных дорожных препятствий
и стрельбе из его орудия, вызывают усталостные поломки. Из-за
сложности и многообразия форм ударных нагрузок режимы удар-
ных испытаний условно базируются на импульсной составляющей
виброудара, а прн ее отсутствии — на воспроизведении максимума
процесса. Форма ударного импульса (приближенно полуволна
266
синусоиды) диктуется возможностями ударных стендов; число уда-
ров рассчитывается по исходным данным об условиях эксплуата-
ции ВГМ.
Стендовые испытания на одиночные удары большой интенсив-
ности, связанные со снарядным обстрелом танков без пробития
брони, являются сложной научно-технической проблемой, не на-
шедшей пока решения. Поэтому о работоспособности изделий в
этом случае судят по результатам их натурных испытаний—пери-
одических контрольных снарядных обстрелов укомплектованных
танков.
14.6. СРАВНИТЕЛЬНЫЕ ИСПЫТАНИЯ
Эти испытания служат для оценки эффективности и совершен-
ства изделий либо для выявления наиболее надежного варианта
конструкции, для чего подбирают способы и режимы нагружения
конструкции, которые вызывают в ней отказы, аналогичные эксплуа-
тационным, либо воссоздают нагружение, близкое к эксплуатаци-
онному. Затем сопоставляют результаты испытаний.
Получение отказа по крайней мере в одном из сравниваемых
вариантов обязательно. Заключение делается по времени наработ-
ки до отказа. Теоретически можно вести сравнение и по предель-
ным уровням, вызывающим отказ при одинаковой наработке, одна-
ко реально такой способ неосуществим. С целью сокращения време-
ни испытаний интенсивность нагружения должна быть максималь-
но высокой, но в таких пределах, чтобы не искажалась физическая
природа отказов и они не отличались бы от эксплуатационных.
Наиболее целесообразен резонансный режим испытаний, позволя-
ющий достичь значительных уровней нагружения на стендах срав-
нительно небольшой мощности.
Для сопоставимости полученных результатов необходимо, что-
бы были созданы одинаковые условия возникновения отказов, что
возможно при испытаниях по некоторому постоянному для всех
образцов параметру.
Таким испытаниям подвергались, например, воздухоочистители
танков Т-64А, соединения трубопроводов высокого давления дви-
гателя 5ТДФ и ряд других конструкций.
14.7. ИСПЫТАНИЯ НА ВИБРАЦИОННУЮ И УДАРНУЮ
УСТОЙЧИВОСТЬ
Понятие устойчивости изделия к вибрациям или ударам подра-
зумевает его нормальное функционирование в условиях действия
этих механических факторов. В отличие от нарушений прочности
потеря вибрационной или ударной устойчивости носит обратимый
характер: явление неустойчивости исчезает с прекращением дейст-
вия нагрузок. В процессе испытаний функционирование изделия
контролируется по заданным параметрам. Их номенклатура и пре-
дельные значения приводятся в ТУ на изделия либо вносятся в
287
программу испытаний. Испытания на устойчивость кратковремен-
ны; в их методике должны учитываться конкретные свойства изде-
лия, особенности действия на него вибрации и удара, характери-
стика самого воздействия. Критериями эквивалентности стендо-
вых испытаний условиям эксплуатации могут быть совпадение ка-
чественных н количественных показателей функционирования либо
одинаковость нагрузок по выбранным признакам. Два приведен-
ных ниже примера иллюстрируют указанные положения.
Стендовые испытания прицелов 10П73 на виброустойчивость.
Разработка методики этих испытаний началась с подробного изу-
чения динамических характеристик прицела тестовыми синусои-
дальными сигналами. Под динамическими характеристиками в дан-
ном случае понималась зависимость интенсивности колебаний
зеркал, корпуса стабилизатора, элементов кинематики и колебаний
линии визирования от параметров передаваемой на корпус прицела
вибрации. Было выявлено, что прицел чувствителен к ней в широ-
ком диапазоне частот и по всем трем осям примерно одинаково.
Выяснилось также, что колебания прицела в вертикальном направ-
лении приводят к вибрации поля зрения как по вертикали, так и по
горизонтали; аналогичная картина сохраняется при колебаниях в
двух других направлениях; колебания линии визирования нелиней-
но зависят от амплитуды колебаний корпуса прицела.
*г/с3
Рис. 14.4 Спектральные плотности процесса в мес-
те установки прицела 10П73 в различных направ-
лениях:
I — вертикальном; 2 поперечном; 3 — продольном
Перечисленные особенности прицела
как динамической системы требуют вос-
произведения на стенде одновременно
по трем главным осям всего спектра фак-
тической вибрации, т. е. стенд должен
быть трехкомпонентным, достаточно
большой мощности. Анализ внешних на-
грузок помог найти приближенное ре-
шение. На каждом из режимов движения
по бетону (наиболее характерной для
проверки виброустойчивости трассе) виб-
рационное воздействие в месте установ-
ки прицела представляет собой стацно-
0 w во fjn парный случайный процесс с двумя-тре-
мя преобладающими по энергии полоса-
ми в диапазоне частот до 120 Гц примерно равномерным спектром в
остальном (до 300 Гц) диапазоне. При этом оказалось, что спек-
тральные плотности процессов по вертикалыгому, продольному и
поперечному направлениям близки по внешнему виду (рис. 14.4) и
их можно характеризовать отношениями к составляющим некото-
288
рого вектора вибрации с. дисперсией D; эти отношения для дви-
жения со скоростью 10—30 км/ч имеют вид Dtepr /D = 0,3;
^поп/^ = 0,85; Dtp/D = 0,4. Все это позволяет производить испы-
тания на однокомпонентном стенде случайной вибрации. Было соз-
дано специальное приспособление для установки прицела в эксплуа-
тационное положение; вибрация подводится к приспособлению под
углами, обеспечивающими соблюдение соотношений компонентов
дисперсий.
Виброустойчивость в этом случае оценивается среднеквадратич-
ным значением размытия изображения в поле зрения прицела, оп-
ределяемым с помощью аппаратуры, что позволяет исключить
субъективность результатов, имеющую место при оценке виброус-
тойчивости прицелов по разрешающей способности. Этот метод
используется заводами отрасли при приемо-сдаточных испытаниях
серийных прицелов.
Стендовые испытания дальномера 1Д9 на ударную устойчи-
вость. Отработка танкового дальномера 1Д9, размещенного на мас-
ке пушки, потребовала разработки специальной методики испыта-
ний на виброудар.
Рис. 14.5. Графически совмещенные осциллограммы виброударных нагрузок на
маске пушки при стрельбе кумулятивными (/), осколочно-фугасными (2) и
бронсбонно-подкалибсрнымн (3) снарядами в различных направлениях:
а — поперечном; б - продольном; « вертикальном (в этом направлении масштаб записи
для ОФС в три раза меньше, чем для других снарядов)
Спектральный анализ процессов, зафиксированных в месте ус-
тановки дальномера при стрельбе различными снарядами, выявил
их основные частотные зоны: доминирующую со средней частотой
350 Гц и слабо выраженную в диапазоне 1 000—2 500 Гц. Система
19 Зак. 20с
289
амортизации дальномера эффективно (почти иа порядок) гасит ко-
лебания второй частотной зоны, что дает основания не воспроиз-
водить эти колебания при стендовых испытаниях. Наложение осцил-
лограмм виброударных нагрузок (рис. 14.5) выявило их подобие
как по координатным осям, так и по типу применяемых снарядов,
поэтому в основу режима стендовых испытаний был положен удар-
но-вибрационный затухающий процесс со средней частотой около
350 Гц. Абсолютное значение вектора ускорений и его пространст-
венная ориентация находятся, как и в предыдущем примере. Требу-
емый показатель затухания процесса определяется по осцилло-
граммам. Испытания производятся на обычном серийном оборудо-
вании (ударном стенде с падающей платформой) с помощью спе-
циального упругого формирователя, который устанавливается меж-
ду дальномером и платформой стенда и преобразует ударный им-
пульс стенда в вибрационно-затухающий процесс с нужными пара-
метрами. Данная методика используется на оптико-механических
заводах.
290
ЗАКЛЮЧЕНИЕ
В настоящей книге изложены вопросы динамики ВГМ, необхо-
димость решения которых возникла в процессе создания и отработ-
ки новых образцов. Исследование динамических процессов способ-
ствует выявлению причин дефектов и недостаточной работоспособ-
ности создаваемых конструкций, помогает поиску путей их устра-
нения и обеспечения заданного ресурса.
Полученные результаты позволяют не только доработать новые
конструкции, но и накопить опыт решения расчетно-теоретических
вопросов динамики ВГМ с целью определения возможных де-
фектов и установления допустимых пределов варьирования пара-
метров конструкции еще на этапе ее проектирования для обеспече-
ния надежности отдельных деталей и составных частей.
В настоящее время уже на этапе выбора концепции и компо-
новки новой машины проводится динамический анализ МТУ на
крутильные колебания и исследование переходных процессов. Ко-
нечной целью такого анализа является вывод главных резонансных
колебаний в зону нерабочих частот вращения коленчатого вала
двигателя или других агрегатов, возбуждающих крутильные коле-
бания в МТУ.
В результате динамического анализа были разработаны принци-
пиально новые схемы конструкции коленчатых валов для серии
поршневых многоцилиндровых двигателей мощностью от 290 до
1 100 кВт (400—1 500 л. с.). В этих двигателях вся зона рабочих
частот вращения коленчатого вала свободна от ярко выраженных
резонансных колебаний, а уровень вынужденных колебаний сущест-
венно ниже допустимого по условиям динамической прочности. Для
надежного пуска современных танковых поршневых двигателей ис-
пользуются система автоматического регулирования и специальные
антивибраторы, исключающие явления чрезмерно высоких осцилля-
ционных потерь и гарантирующие смещение низкочастотных резо-
нансов в нерабочую зону.
Выбор оптимальных законов управления процессами переклю-
чения передач гарантирует обеспечение допустимого износа метал-
локерамических дисков в коробках передач трансмиссий, в их ме-
ханизмах поворота и тормозах. При этом обеспечиваются нс только
19*
291
требуемая износостойкость переключающих устройств, но и допу-
стимый уровень перегрузок в валах, зубчатых зацеплениях
и других силовых элементах МТУ.
Знание фактических значений крутильных колебаний в рабо-
чем скоростном диапазоне двигателя позволяет правильно выбрать
конструкцию фрикционных элементов, ввести специальные устрой-
ства в барабаны коробки передач, обеспечивающие допустимый
уровень виброударного нагружения дисков трения. На основе изу-
чения виброударных процессов используются технологические ис-
пытательные стенды для отработки металлокерамических дисков
трения на усталостную прочность и проверки эффективности
конструкторско-технологических мероприятий, направленных на
повышение их несущей способности.
Прецессионные колебания барабанов в планетарных коробках
передач, приводящие к чрезмерному износу и перегреву дисков тре-
ния, а также разрушению подшипников, практически исключаются
правильным выбором схемы опор входных и промежуточных валов
трансмиссии и ужесточения допусков на их центровку с сопрягае-
мыми агрегатами.
Разработанные в виде отраслевых стандартов методы динами-
ческого анализа помогают конструкторам создавать образцы ВГМ,
составные части которых способны противостоять при эксплуата-
ции более интенисвным нагрузкам, обусловленным ростом удель-
ной мощности, массы и скорости движения машин. Зная динами-
ческую нагруженность МТУ, можно разработать надежные конст-
рукции механических агрегатов и систем управления ими, удовлет-
воряющие в то же время объемно-массовым требованиям. Динами-
ческий анализ позволяет на сталии проектирования получить доста-
точную информацию о нагрузочно-скоростных спектрах с учетом не
только крутящего момента, передаваемого на ведущие колеса ВГМ,
но и действующих в МТУ крутильных колебаний и пиковых пере-
грузок при нестационарных режимах работы всей силовой цепи от
двигателя до гусениц. Это дает возможность заранее формировать
режимы стендовых испытаний отдельных элементов МТУ и прово-
дить их отработку на заданный ресурс до изготовления опытных
образцов ВГМ.
Практическая ценность исследования вибрационного состояния
ВГМ заключается, в первую очередь, в возможности определения
фактических перегрузок в широком частотном диапазоне (до
500 Гц) в местах установки приборов в корпусе и башне, а также
перегрузок самих приборов и внутреннего оборудования с целью
проверки их соответствия нормам действующих технических усло-
вий на комплектующие изделия. Накопленный опыт и системати-
зация информации о фактическом вибрационном состоянии всех
292
серийных танков и БМП позволяют согласовать и привести в соот-
ветствие с фактическим состоянием техники технические условия
на вибрацию и удар большинства применяемых в ВГМ приборов,
аппаратуры и внутреннего оборудования и тем самым обеспечить
достаточную их надежность.
С целью повышения виброустойчивости сложных оптических
приборов (прицелов, приборов наблюдения) разработаны и внед-
рены методика испытаний их в стендовых условиях и руководящие
технические материалы по эксплуатационным механическим воз-
действиям на них в составе танков и БМП.
Практически полностью обеспечена виброударозащнта внутрен-
него оборудования ВГМ в условиях движения по жесткому грунту
или бетону, а также при стрельбе танков с ходу или с места. До-
стигнуто это созданием и отработкой резинометаллических аморти-
заторов трех основных типоразмеров, которые успешно прошли
весь цикл необходимых испытаний и внедрены в серийное произ-
водство. На эти амортизаторы разработана нормативная докумен-
тация в виде отраслевого стандарта и технических условий.
Возникающие при снарядном обстреле интенсивные ударно-ви-
брационные нагрузки на несущие конструкции корпуса и башни
могут вызывать перемещение закрепленных на них приборов
и приводить к поломке или выходу из строя внутренние
элементы. Существующие расчетно-теоретические и эксперимен-
тальные методы исследования позволяют определять параметры
силового нагружения при попадании в танк или при подрыве сна-
ряда у брони, а также параметры движения корпуса и башни и
связанных с ними приборов.
Так как интенсивные ударные воздействия (без пробития бро-
ни) не постоянны, требования к стойкости оборудования в этом
случае сводятся к недопустимости поломок и сохранению его рабо-
тоспособности и функциональных характеристик после нескольких
снарядных попаданий. Это определяет особые требования к внбро-
ударозащитным элементам, средствам крепления и способам раз-
мещения в танке оборудования, непосредственно связанного с ло-
бовыми листами корпуса и частью башни.
Динамика ВГМ при интенсивных ударах остается все еще мало-
изученной. Дальнейшие успехи в этой области зависят, в первую
очередь, от совершенствования методов и средств эксперименталь-
ного исследования: создания высокопрочных датчиков ускорений
н перемещений, высокочувствительной аппаратуры с автоматически
перенастраиваемыми фильтрами и адаптивными способами записи
быстротекущих процессов с достаточной степенью дискретизации
во времени (например, автоматизированная система с цифровыми
вычислительными осциллографами).
293
Дальнейшее развитие динамических исследований и повышение
их роли в создании ВГМ зависят также от развития методов и
средств построения достоверных динамических моделей изучаемых
процессов, адекватно отражающих с достаточной полнотой и объек-
тивностью реальные процессы, разработки теоретических методов
анализа и синтеза сложных динамических структур. Большие воз-
можности заложены в методах имитационного натурно-математи-
ческого моделирования, с помощью которых можно решить ряд
проблемных задач как в области крутильных колебаний электро-
гидромеханических систем с учетом их нелинейных характеристик
и многообразия взаимосвязей, так и в области вибрационной диаг-
ностики и виброударозащиты. Решение этих вопросов должно суще-
ственно повлиять на совершенствование методов и средств испыта-
ний различных систем и внутреннего оборудования ВГМ с приме-
нением автоматизированных стендов, имитирующих условия, мак-
симально приближенные к реальной эксплуатации.
294
СПИСОК ЛИТЕРАТУРЫ
1 Амбарцумян С. А. Общая теория анизотропных оболочек М Наука,
1974. 446 с
2 . Арнольд В. И. Математические методы классической механики. М :
Наука, 1979 431 с
3 Баум Ф. А., Орленко Л. П„ Станюкович К. II. и др Физика взрыва/
Нол ред. К П Станюковича М : Наука, 1975 704 с.
4 Бидерман В. Л. Прикладная теория механических колебаний. М.: Выс
тая школа, 1972. 416 с.
5 . Бурлаченко Н. И. и др. Виброударные воздействия на экипажи танков
и БМП М : ЦНИИ информации, 1981. 200 с
6 . Бусленко Н. П. Моделирование сложных систем М : Наука, 1978.
399 с.
7 Вайнберг Д. В.. Ройтфарб И. 3. Расчет пластин и оболочек с разрыв
нымн параметрами - В сб : Расчет пространственных конструкций. Вин 10.
Харьков М.: Госстройиздат, 1965, с. 39—80
8 Вейц В. А., Кочура А. Е. Динамика машинных агрегатов с двигателя-
ми внутреннего сгорания. Л.: Машиностроение, 1976. 383 с
9 Дрейпер Ч. С., Маккен В.. Лис С. Измерительные снстемы/Под ред
В А. Боднера. М.: Машгиз, 1960. 783 с.
10 . Кан С. Н. Строительная механика оболочек. М: Машиностроение,
1966. 508 с
11 . Когаев В. П. Расчеты на прочность при напряжениях, переменных во
времени. ММашиностроение, 1977. 232 с.
12 . Коловский М. 3. Нелинейная теория виброзащитных систем. М.: Наука,
1966. 318 с
13 . Королев В. И. Упругопластнческие деформации оболочек. М: Машино-
строение, 1971. 303 с.
14 . Ленк А., Реннтц Ю. Механические испытания приборов и аппаратов/
Под ред. П. И. Булонского. М : Мир, 1976. 270 с
15 . Макаров Р. А., Ренский А. Б., Боркунскнй Г. X., Этинюф М. И. Тензо-
метрия в машиностроении. М : Машиностроение, 1975 287 с.
16 . Мак-Кракен Д., Дорн У. Численные методы и программирование на
ФОРТРАНЕ/Под ред. Б. М. Наймарка. М : Мир, 1977. 584 с.
17 Пановко Я. Г. Внутреннее трение при колебаниях упругих систем М :
Фн.зматгиз, 1960. 190 с.
18 Пеллинец В. С. Измерение ударных ускорений М : Изд-во стандартов,
1975 287 с.
19 Платонов В. Ф. Динамика и надежность гусеничного движителя. М :
Машиностроение, 1973. 232 с.
20 Повышение несущей способности механического привода/11од ред.
В. 11. Кудрявцева. Л.: Машиностроение. Ленингр. отд-иие, 1973. 223 с
295
21 Полежаев Л. Л. и др. Броневая защита корпусов и башен самоходных
боевых машин. М.: ЦНИИ информации. 1976 412 с
22 Сагомонян А. Я. Проникание М : Изд. МГУ, 1974 300 с.
23 Сервисен С. В., Когаев В. П., Шнейдерович Р. М. Несущая способность
и расчет деталей машин на прочность/Под ред. С. В. Серенсена. М.: Машино-
строение, 1975. 488 с.
24 Сервисен С. В., Громан М. Б., Когаев В. П., Шнейдерович Р. М. Валы
и оси Конструирование и расчет. М.: Машиностроение, 1970. 319 с.
25 . Силаев А. А. Спектральная теория подрессорнвання транспортных ма-
шин М.: Машиностроение, 1972 192 с.
26 . Случайные колебання/Под ред. Креиделла. М.: Мир, 1967. 356 с.
27 Станюкович К. П. Неустановившееся движение сплошной среды. М.:
Наука, 1971. 854 с.
28 . Тетельбаум И. М., Тетельбаум Я. И. Модели прямой аналогии. М:
Наука, 1979. 383 с.
29 Хронин А. В. Теория и расчет колебаний в двигателях летательных
аппаратов. М.: Машиностроение, 1970. 412 с.
30 . Эрлер В., Вальтер Л. Электрические измерения неэлектрическнх вели-
чин полупроводниковыми тензорсзнсторами/Под ред. Я. В. Малова М: Мир.
1974. 285 с.
296
ОТДАВЛЕНИ Е
Стр.
Предисловие........................................................
Глава I Динамические процессы в моторно-траисмиссиоиных установ-
ках .................................................................. 5
I I. Характер динамических процессов............................... ”
1.2. Особенности исследования динамических процессов............... ‘
1.3. Моделирование динамических процессов ......................... 8
Глава 2. Динамическая схематизация силовых передач.................... Н
2 1. Основные понятия и определения...........................
2.2. Динамические характеристики двигателей и их систем........
2.3. Схематизация зубчатых передач.............................. (1у
2.4. Динамические характеристики гидроагрегатов трансмиссии . 27
2.5. Характеристики фрикционных элементов и их систем управлении 28
2.6. Динамическая схематизация гусеничного движителя............. 29
2.7. Модель движения ВГМ на местности............................ 30
Глава 3. Стационарные динамические процессы в МТУ.................... 34
3.1. Основы расчетного анализа стационарных динамических процес-
сов .............................................................. 34
3.2. Возмущающее воздействие двигателя........................... 45
3.3. Влияние на нагруженность трансмиссии возмущающих воздейст-
вий агрегатов и механизмов шасси............................ 53
3.4. Виброударные процессы в зубчатых и шлицевых соединениях Ь0
3.5. Прецессия барабанов н динамическая нагруженность подшипни-
ковых опор в планетарных передачах................................ 71
Глава 4 Переходные динамические процессы............................. 76
4.1. Расчетные динамические схемы................................. 76
4.2. Методика моделирования переходных динамических процессов 80
4 3. Особенности расчета и экспериментального исследования харак
терных переходных процессов ................................... 83
Глава 5. Динамика приводов вспомогательных агрегатов................. 88
5.1. Основные задачи исследования. Классификация приводов .... 88
5.2. "Методы расчета приводов.................................. 93
5.3. Динамика тяжелых приводов .................................. 93
5.4 Динамика малых приводов.................................... 100
20 Зак. 20с 297
Глава 6. Автоколебательные процессы................................. 105
6.1. Автоколебательные процессы, обусловленные работой системы
автоматического регулирования частоты вращения............... КЬ
6.2. Автоколебательные процессы при буксовании фрикционных эле-
ментов ..................................................... 108
Глава 7. Методы и средства снижения динамических нагрузок .... ИЗ
7.1. Выбор оптимальной схемы двигателя.......................... JJ3
7.2 Варьирование упругоинерционных параметров основной системы И7
7.3 Антивибрационные устройства ............................... J13
7.4 Демпфирующие устройства.................................... 1-'-
Глава 8. Нагрузочно-скоростные спектры динамических процессов
в МТУ............................................................... 126
8.1 Основные понятия и определения.............................. >26
8.2. Основы схематизации динамического процесса с асимметричным
циклом нагружения................................................ 128
8.3 Принципы и задачи спектрального анализа динамической нагру
женности деталей МТУ ............................................ 133
8.4. Спектры нагружения трансмиссионных валов................... 135
8.5. Спектры нагружения зубчатых передач........................ 140
8.6. Спектры нагружения подшипников............................. 150
8.7. Оценка динамической нагруженности дисков трения............ 155
8.8. Суммарные спектры нагружения в динамических процессах . . 157
Глава 9. Экспериментальное исследование крутильных колебаний . . 161
9 1. Методика натурного экспериментального исследования . . 161
9.2. Измерительная аппаратура................................... 163
93. Стендовые установки для динамических исследований .... 170
Глава 10. Расчетные методы исследования вибраций и ударов . . . 173
10.1. Вибрационные нагрузки в движущихся ВГМ.................... 173
10.2. Ударные нагрузки при стрельбе из танкового орудия ... 177
10 3. Силовое воздействие снарядов на бронеконструкцню танков 182
10.4. Определение параметров колебаний элементов бронеконструкцнй
танков при снарядном обстреле .............................. 195
Глава II. Экспериментальное исследование вибраций и ударов . . . 218
11 1. Методы определения вибрационных ускорений при движении
ВГМ......................................................... 218
11.2. Методы исследования ударных процессов..................... 220
11.3. Динамическое искажение ударных процессов измерительной
аппаратурой................................................. 225
114. Методы обработки записей вибрационных и ударных процессов 229
Глава 12. Основные результаты исследования вибрационных и удар
ных процессов в танках и БМП........................................ 231
12.1. Вибрационные процессы .................................... 231
12.2. Ударные процессы средней интенсивности.................... 236
12.3. Ударные процессы большой интенсивности.................... 239
Глава 13. Внброударозащита внутреннего оборудования ВГМ . . . 245
13.1. Особенности танковых систем амортизации.................. 245
13.2. Классификация амортизаторов .............................. 246
13.3. Использование в танках различных приборных амортизаторов 250
13.4. Специальные танковые амортизаторы......................... 263
298
Глава 14. Методы стендовых испытаний внутреннего оборудования на
вибрацию и удар.................................................... 270
14.1. Классификация испытаний .................................. 270
14 2 Особенности стендового оборудовании........................ 271
14.3. Принципы эквивалентных испытаний ......................... 272
14 4 Методы испытаний на внбропрочность......................... 277
14 5. Испытания на ударную прочность............................ 286
14.6 Сравнительные испытания.................................... 287
14 7 Испытания на вибрационную н ударную устойчивость 287
Заключение.......................................................... 291
Список литературы
295
299
Редактор В. Н. Махова
Технический редактор Н. Н. Скотникова Корректор Л. Е. Сонюшкина
Сдано в набор 15.05.87. Подписано в печать 02.03.88.
Формат 60х90'/16. Бумага типографская № 1. Гарнитура литературная.
Печать высокая. Усл. печ. л. 18,75. Усл. кр.-отт. 18,75. Уч.-изд. л. 20.7.
Заказ 20 с
Ордена Трудового Красного Знамени издательство «Машиностроение»
107076, Москва, Стромынский пер., 4.
Типография ведомственная
300