

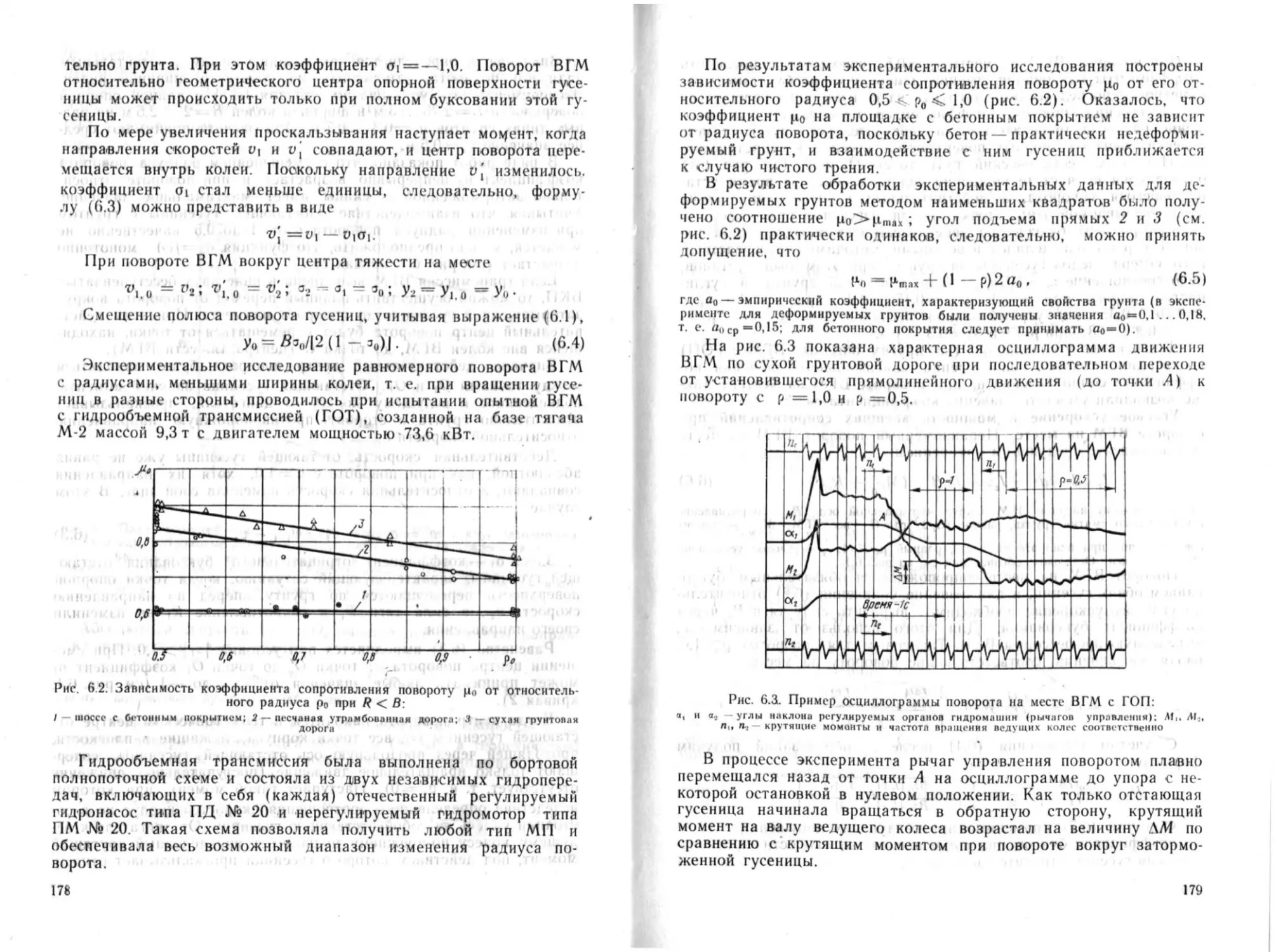



Автор: Исаков П.П.
Теги: оружие вооружение артиллерийско-техническое имущество бронированные машины и специальные средства транспорта стрелковое оружие личное оружие боеприпасы и боевые отравляющие вещества управляемые и неуправляемые ракеты и реактивные снаряды инженерия военная техника военное дело инженерное дело издательство машиностроение серия теория и конструкция танка
Год: 1985




Инв. № 7 .Ж
Экз. №-
ТЕОРИЯ
И КОНСТРУКЦИЯ
ПЕ?В!?!fl ОТДЕЛ
вдЕдачВ’лдо . . F
*Лод редакцией
Д-ра техн, наук проф. П. П. ИСАКОВА
Т о м 5
ТРАНСМИССИИ ВОЕННЫХ ГУСЕНИЧНЫХ МАШИН
Редакторы тома В. А. Иванов,
канд. техн, наук В. А. Колесов
Москва «МАШИНОСТРОЕНИЕ» 1985
УДК 623.438.3—585.001.2(087.23)
Теория и конструкция танка. — Т. 5. Трансмиссии
военных гусеничных машин. — М.: Машиностроение,
1985, 367 с.
Книга посвящена вопросам теории, выбора, расчета и проекти-
рования трансмиссий и систем управления движением современных
военных гусеничных машин (ВГМ). Приведены данные о влиянии
трансмиссий и систем управления на подвижность В ГМ, основы
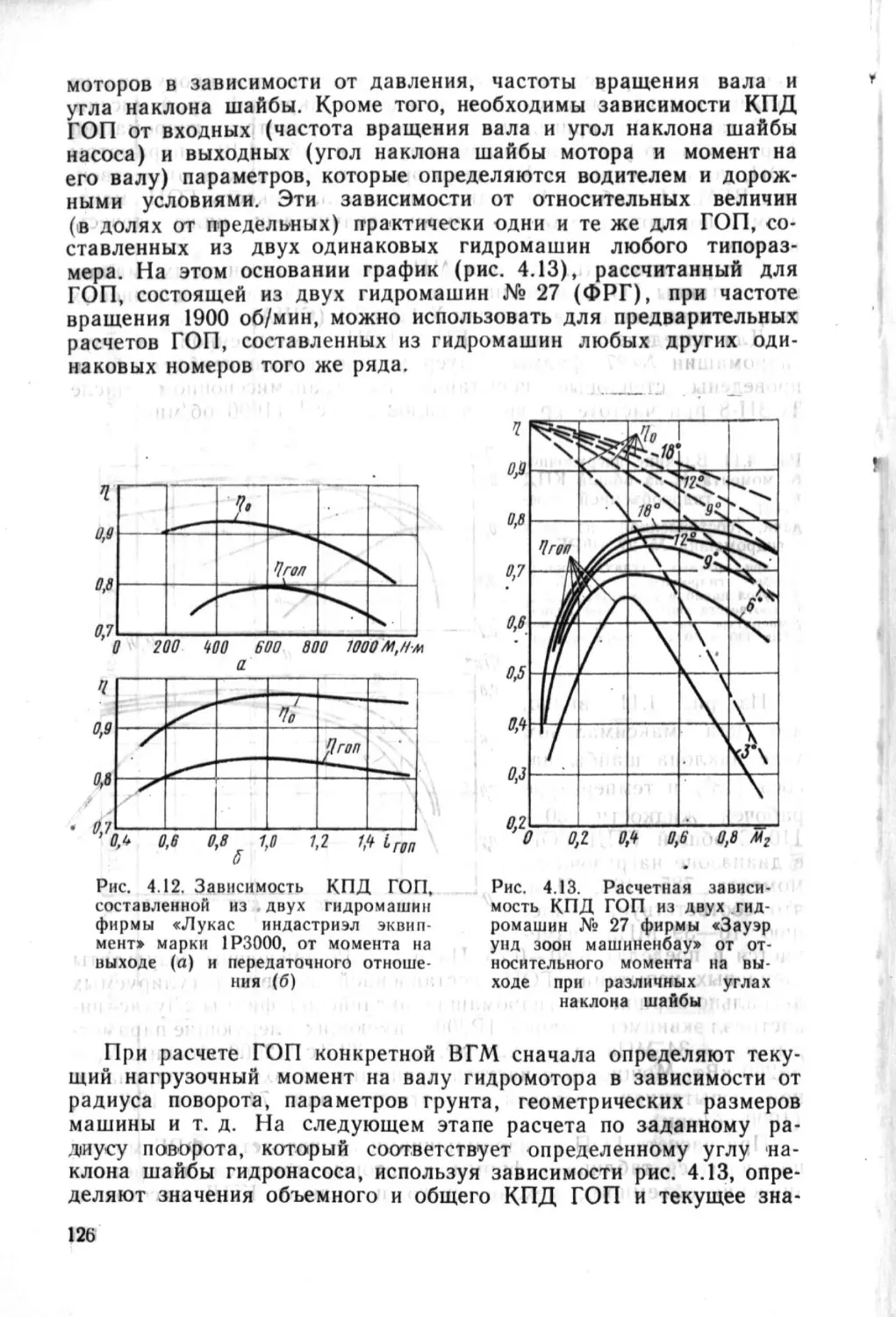
теории и расчета гндрообъемных механических передач, методики
расчета основных составных частей трансмиссий и систем управле-
ния движением.
Книга предназначена для руководителей научно-исследователь-
ских и испытательных организаций оборонной промышленности
и Министерства обороны, конструкторов, научных работников,
преподавателей, студентов вузов, слушателей и курсантов военных
учебных заведений соответствующего профиля.
Ил. 139, табл. 53, список лит. 16 назв.
В книге пронумеровано 367 страниц. Кроме того, имеется шесть
вклеек:
Вклейка № I (рис. 2.2). Секретно. Конструкция БКП в сборе
с БР танка Т-64А (между стр. 20—21).
Вклейка -М 2 (рис. 2.8). Секретно. Конструкция ГМТ-69021
(между стр 28—29).
Вклейка № 3 (рис. 2.12). Секретно. Конструкция УГМТ без
МП (между стр. 34—35).
Вклейка № 4 (рис. 2 18). Секретно. Конструкция трансмиссии
4НР-250 танка «Леопард !» (между стр. 40—41).
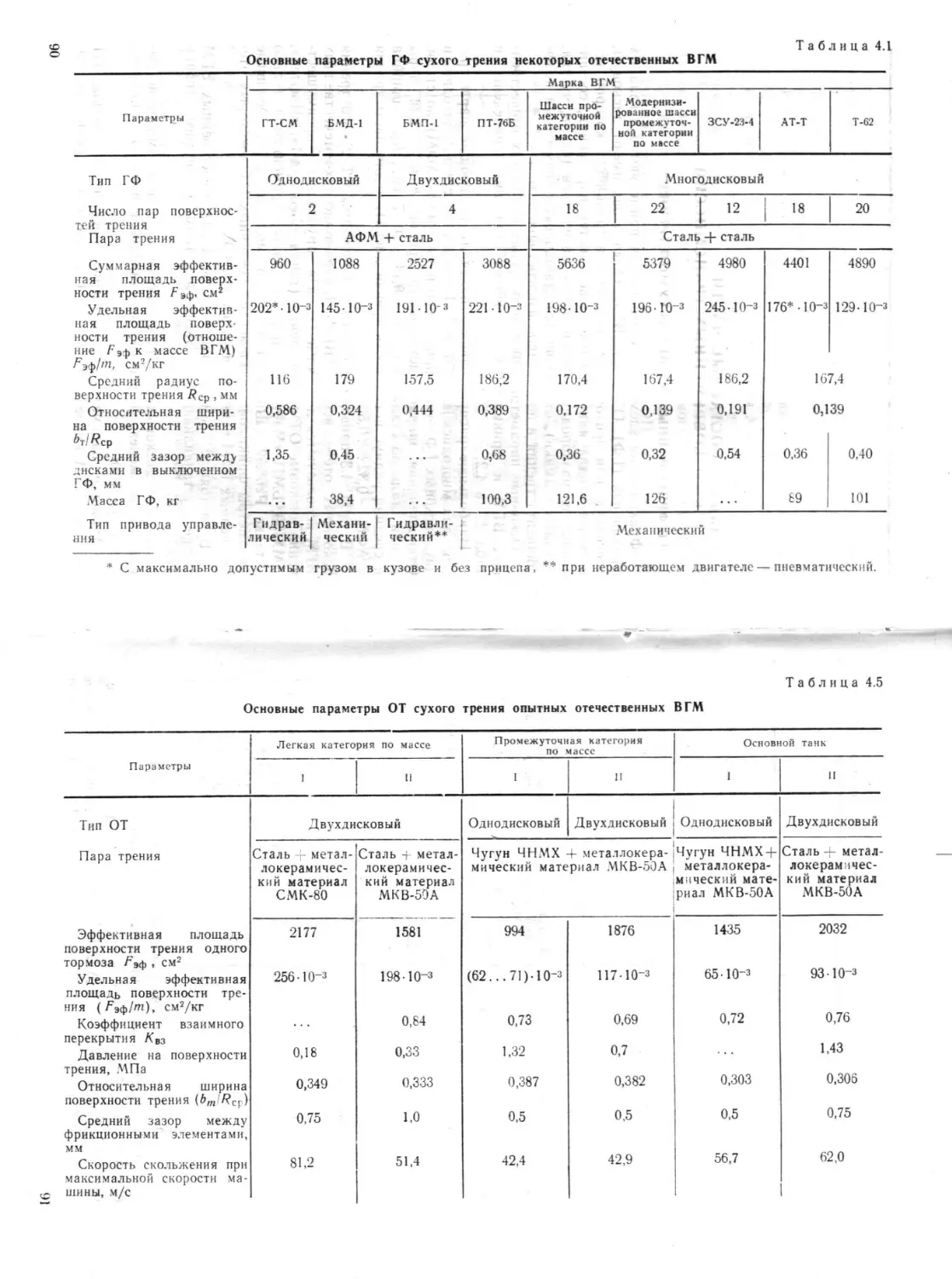
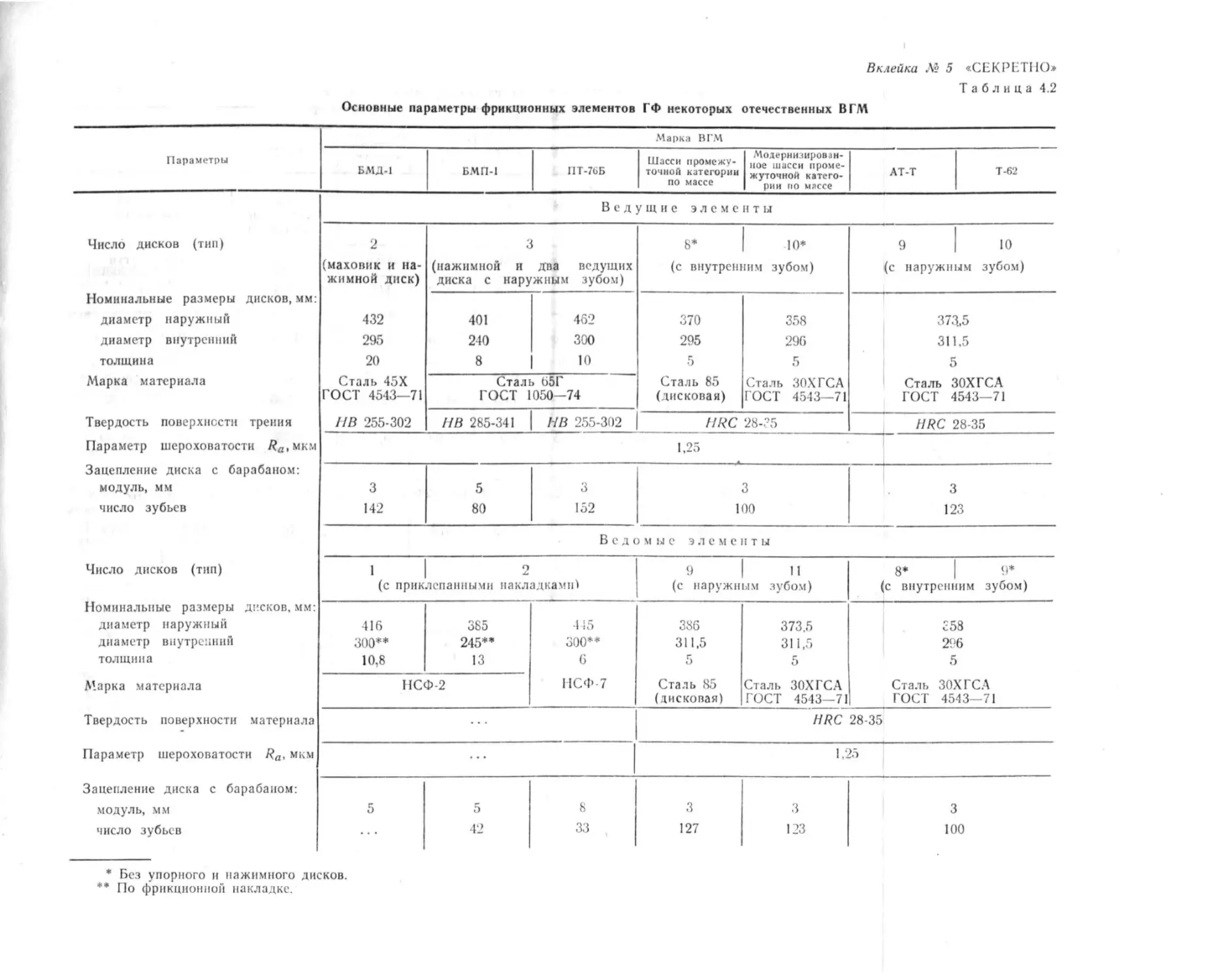
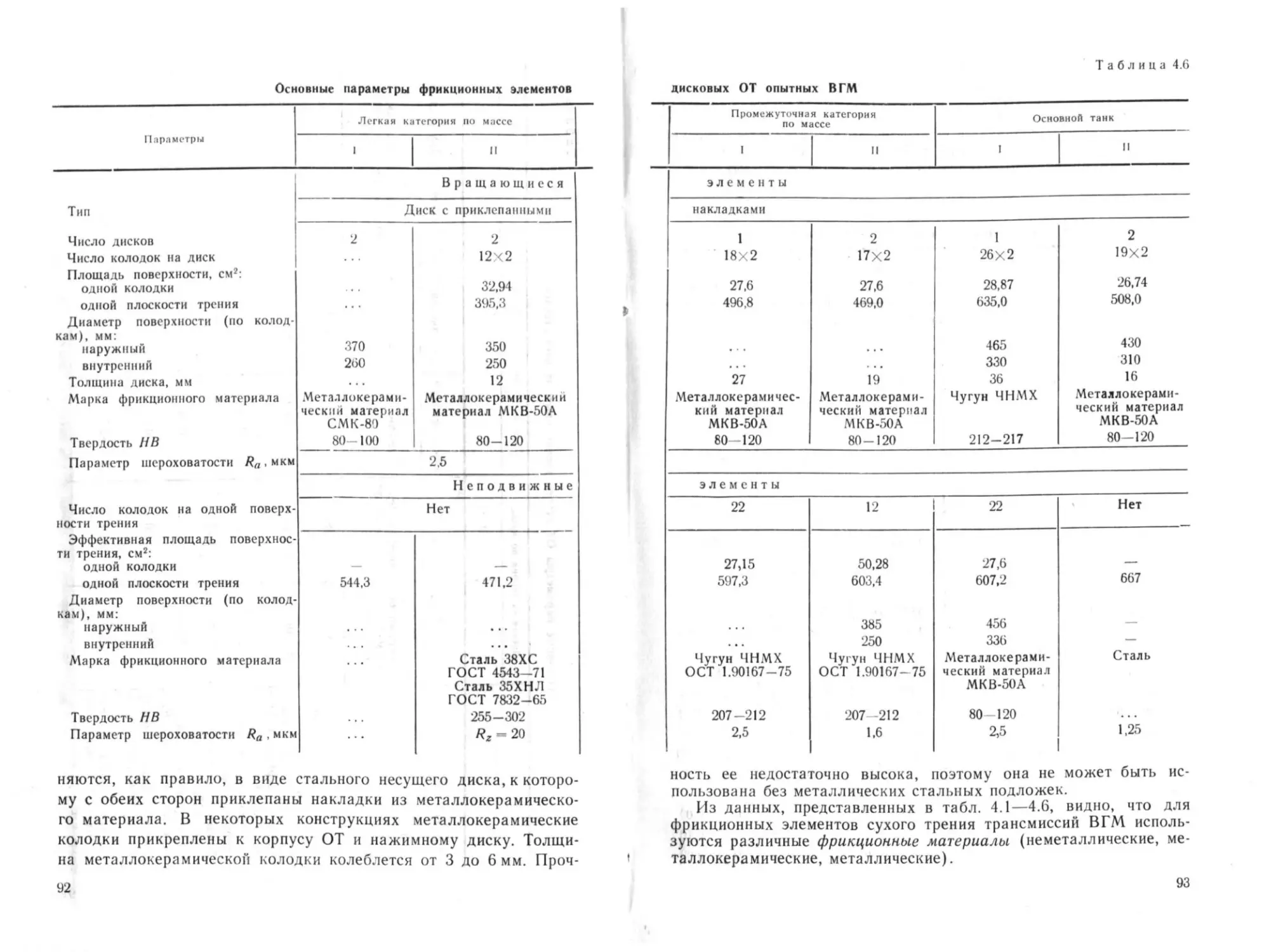
Вклейка Л® 5 (табл. 4.2)). Секретно. Основные параметры фрик-
ционных элементов ГФ некоторых отечественных ВГМ (между
стр. 90—91).
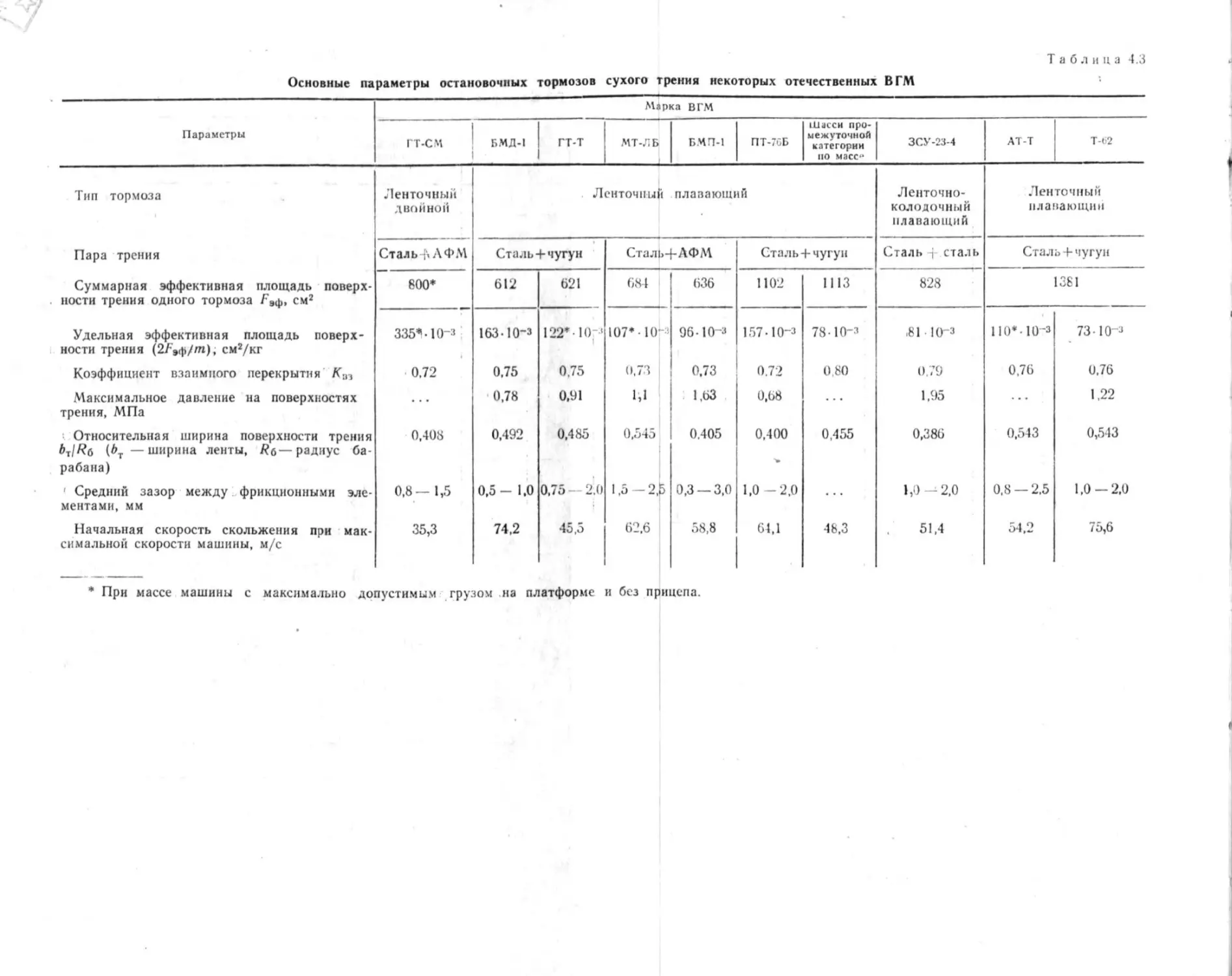
Оборот вклейки Л® 5 (табл 4.3). Секретно. Основные парамет-
ры остановочных тормозов сухого трения некоторых отечествен-
ных ВГМ.
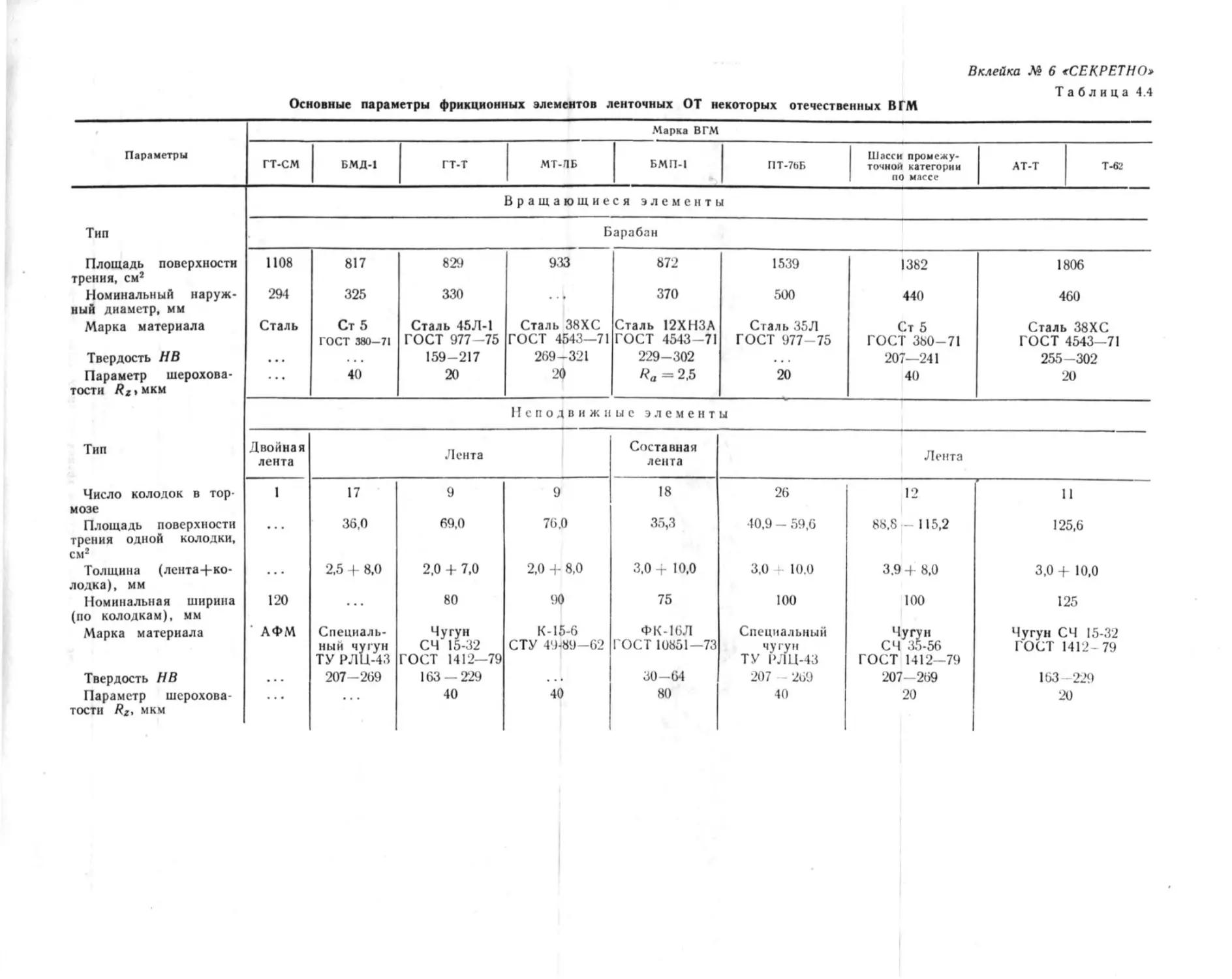
Вклейка № б (табл. 4.4). Секретно. Основные параметры фрик-
ционных элементов ленточных ОТ некоторых отечественных ВГМ
(между стр. 90—91).
ПРЕДИСЛОВИЕ
Современные трансмиссии — сложные механизмы, включаю-
щие в себя передачи (механические, электрические, гидродинами-
ческие или гидрообъемные), фрикционные элементы (диски тре-
ния), гидросистемы, органы и приводы управления (механические,
механогидравлические и электрогидравлические). В настоящее
время широкое распространение получила автоматизация управ-
ления движением ВГМ.
В книге рассматриваются особенности работы трансмиссий и
их составных частей, которые должны учитываться при проекти-
ровании.
Основные положения теории прямолинейного движения и по-
ворота транспортных машин, разработанные ведущими советски-
ми учеными, опубликованы в многочисленных трудах и широко
известны. Вопросы конструкции и расчета трансмиссий и их со-
ставных частей менее освещены в литературе. Мало материалов
по новым трансмиссионным элементам: гидродинамическим и
гидрообъемным передачам, гидросистемам, дискам трения, си-
стемам управлении и автоматики. В то же время существует
много конструкций трансмиссий, отдельных их сборочных единиц
и систем. Разработано много новых, более совершенных методик
расчета, позволяющих проектировать основные элементы транс-
миссий не только с учетом их прочности, но и долговечности.
В настоящем труде обобщен многолетний опыт научно-исследо-
вательских организаций, заводов и конструкторских бюро отрасли
по расчету и проектированию трансмиссий ВГМ. Особое внима-
ние уделено вопросам влияния трансмиссий и их систем на под-
вижность танка. Эти сведения должны учитываться конструкто-
рами при выработке компромиссных решений, направленных на
упрощение конструкции, экономию массы или объема трансмис-
сии. В отдельной главе рассмотрены разработанные в последнее
время основы теории гидрообъемно-механических передач.
1* 3
Ввиду ограниченности объема в книге не излагаются некото-
рые вопросы теории и расчета, достаточно полно освещенные в
фундаментальных трудах известных советских ученых (Л. В. Сер-
геева, В. И. Красненькова, Н. А. Забавникова, С. С. Бурова и др.),
но авторы стремились дополнить эти труды новыми материалами,
полученными в результате научно-исследовательских, опытно-кон-
структорских работ, опубликованных в периодической печати за
последние 20 лет.
В книгу включено описание наиболее интересных трансмиссий
и систем управления современных танков, подробные сведения
о которых ранее не публиковались. Приводятся данные о новых
трансмиссионных элементах; особое внимание уделено методике
расчета долговечности основных составных частей трансмиссии:
фрикционов, зубчатых зацеплений и подшипников.
В целом книга дает представление о современном состоянии
трансмиссионной техники и перспективах ее развития, сведения
о достигнутом уровне развития отдельных элементов, систем и
агрегатов, расчетных методиках и о некоторых вопросах теории.
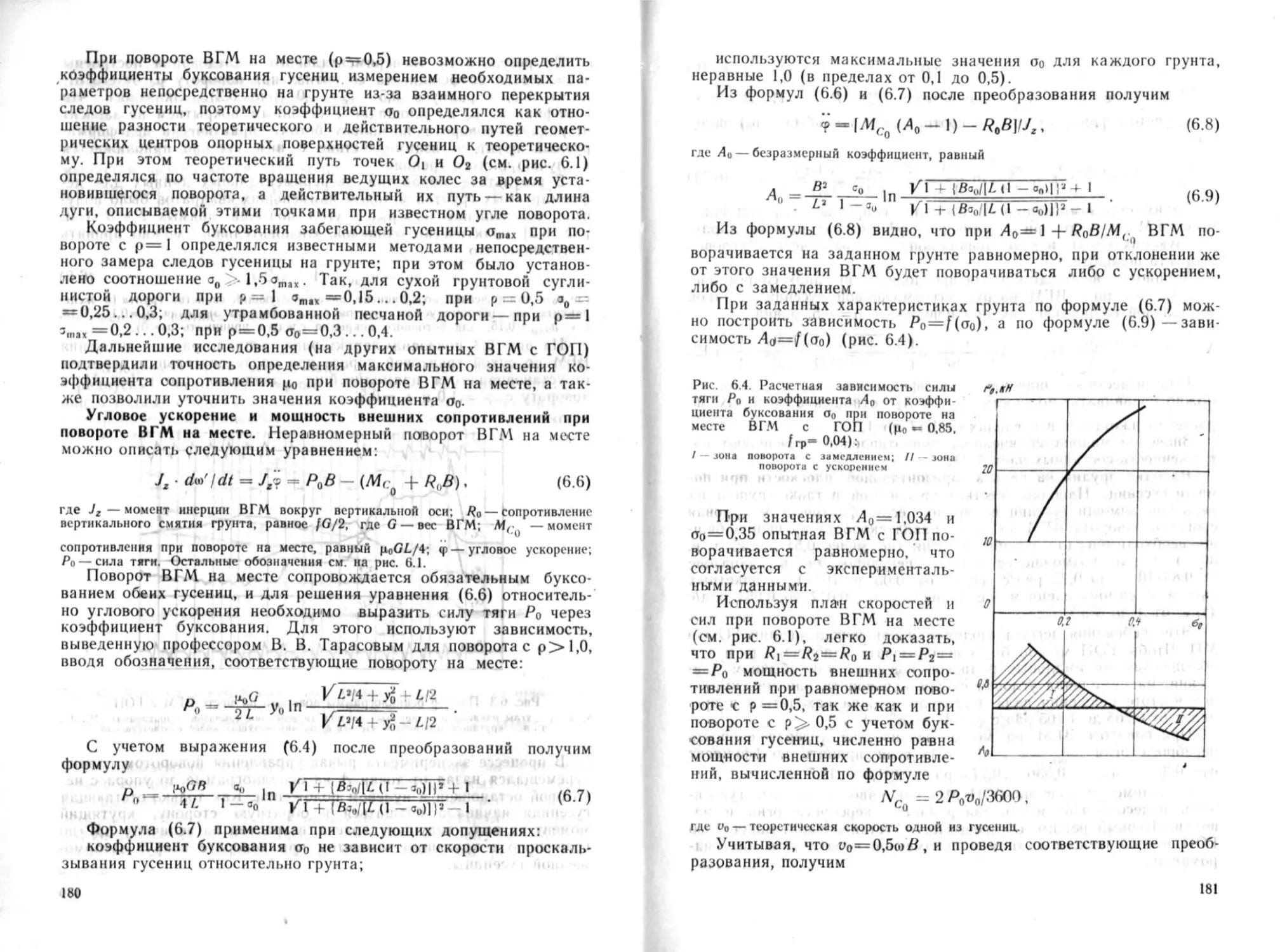
Авторами 5-го тома являются В. М. Антонов, А. Д. Вашец,
М. Г. Жучков, В. А. Колесов, А. П. Крюков, О. С. Петров,
Е. Г. Самарин, А. Д. Травкин.
Глава 1. ВЛИЯНИЕ ТРАНСМИССИИ И СИСТЕМЫ
УПРАВЛЕНИЯ ДВИЖЕНИЕМ НА
ПОДВИЖНОСТЬ ТАНКА
1.1. ОБЩИЕ ПОЛОЖЕНИЯ
Трансмиссия обеспечивает передачу мощности от двигателя
к ведущим колесам, изменение тягового усилия в зависимости от
сопротивления движению и управление движением (скоростью
движения, торможением и поворотом).
Основными составными частями трансмиссии являются короб-
ка передач (КП), механизм поворота (МП) и система управле-
ния. Конструктивно КП и МП часто представляют собой единый
агрегат, который называется механизмом передач и поворота
(МПП).
В трансмиссию кроме КП и МП или МПП входят остановоч-
ные тормоза (ОТ) с системой управления, дополнительные и
вспомогательные редукторы — бортовые (БР), входные (ВР),
а также приводы (к вентиляторам, стартерам и т. д.).
В настоящее время кроме простых механических КП с глав-
ным фрикционом (ГФ) применяются планетарные КП (борто-
вые— БКП или центральные), а также КП с гидротрансформато-
ром (ГТ).
В отличие от механических трансмиссии с ГТ называются
гидромеханическими (ГМТ). В последнее время создаются также
гидрообъемно-механические трансмиссии (ГОМТ), в которых
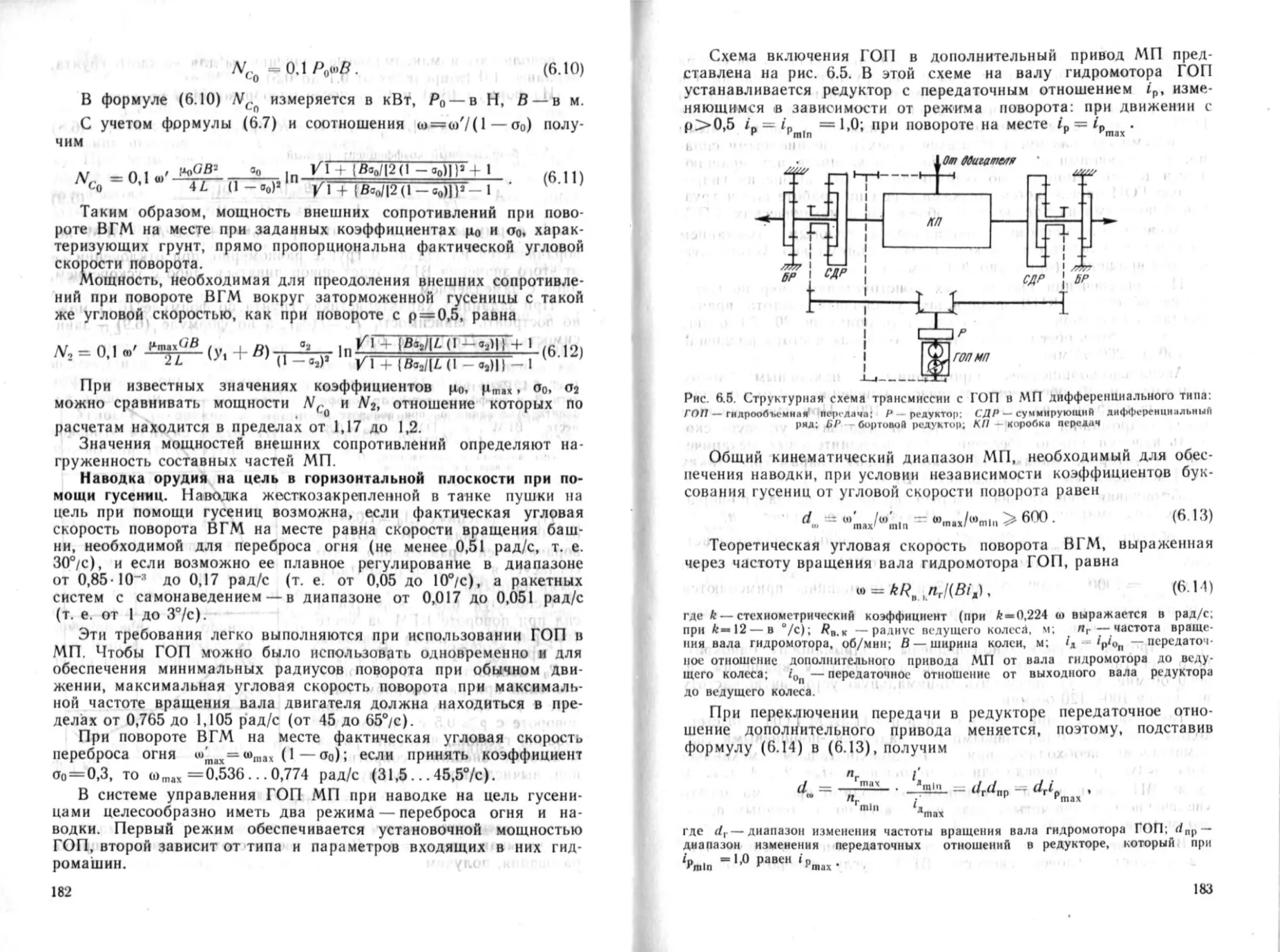
применяются гидрообъемные передачи (ГОП). Такие передачи
часто используются и в МП для бесступенчатого регулирования
радиуса поворота.
Электрические и электромеханические трансмиссии в настоя-
щее время в ВГМ не используются из-за больших объемов и мас-
сы. Наряду с механическими тормозами применяются гидродина-
мические (так называемые гидрозамедлители — ГЗ).
Система управления движением включает в себя системы
управления КП, МП и ОТ. В конструкциях систем управления
КП, блокировки ГТ ГМТ в последние годы все чаще предусмат-
ривают автоматический режим. Существуют механические, меха-
ногидравлические, электрогидравлические и смешанные системы
управления. Исполнительным органом управления обычно яв-
5
ляется трансмиссионная гидросистема, осуществляющая также
смазывание и охлаждение редукторной части.
Для оценки влияния параметров трансмиссии и ее составных
частей на подвижность танка целесообразно отдельно рассматри-
вать танк как транспортну*к> и как боевую машину на поле боя при
непосредственном соприкосновении с противником. Некоторые
специалисты подвижность танка как транспортной машины назы-
вают оперативной, а как боевой машины — тактической, а также
считают, что оперативная подвижность характеризует способность
танков в составе подразделений совершать марши в колонне по
заданному маршруту, а тактическая — возможности одиночного
танка маневрировать на поле боя.
Для обеспечения высокой подвижности в колонне танки, как
и другие ВГМ, должны обладать высокой средней скоростью дви-
жения, топливной экономичностью и хорошей проходимостью.
Для маневрирования на поле боя танк должен также иметь
способность разворачиваться на месте вокруг своего центра
тяжести, быстро останавливаться и набирать скорость с места,
менять режим и направление движения.
Составные части трансмиссии существенно влияют на показа-
тели подвижности. Они определяют управляемость прямолиней-
ным движением и поворотом, формируют тяговую и тормозную
характеристики, влияют на утомляемость водителя и расход
топлива.
Влияние параметров трансмиссии на показатели тактической
подвижности иллюстрируется тем, что танки, имеющие высокую
скорость на заднем ходу, хороший разгон с места и поворотли-
вость, лучше маневрируют на поле боя и, следовательно, имеют
небольшие боевые потери и высокую боевую эффективность.
Влияние параметров трансмиссии на оперативную подвиж-
ность неравноценно и может проявляться по-разному. Например,
на среднюю скорость и топливную экономичность влияют такие
факторы, как управляемость при повороте, разбивка передач и т. д.
Есть факторы (например, автоматизация управления), влияние
которых проявляется только в особых условиях (при движении в
горах, по болотам и в случае управления танком неопытным во-
дителем).
При создании нового танка необходимо знать влияние транс-
миссии на его подвижность, чтобы облегчить поиск компромисс-
ных конструктивных решений при выполнении нередко противоре-
чивых и взаимоисключающих требований. Иногда приходится
сознательно игнорировать некоторые требования, чтобы выпол-
нить наиболее важные.
1Л. ПРЯМОЛИНЕЙНОЕ ДВИЖЕНИЕ
Скоростные возможности танка определяются его тяговой
характеристикой. На формирование тяговой характеристики ока-
6
зыьают влияние Характеристики двигателя, масса танка, конст-
рукция и основные параметры трансмиссии и ходовой части. Осо-
бое влияние на эту характеристику оказывает приспособляемость
двигателей к изменению внешней нагрузки.
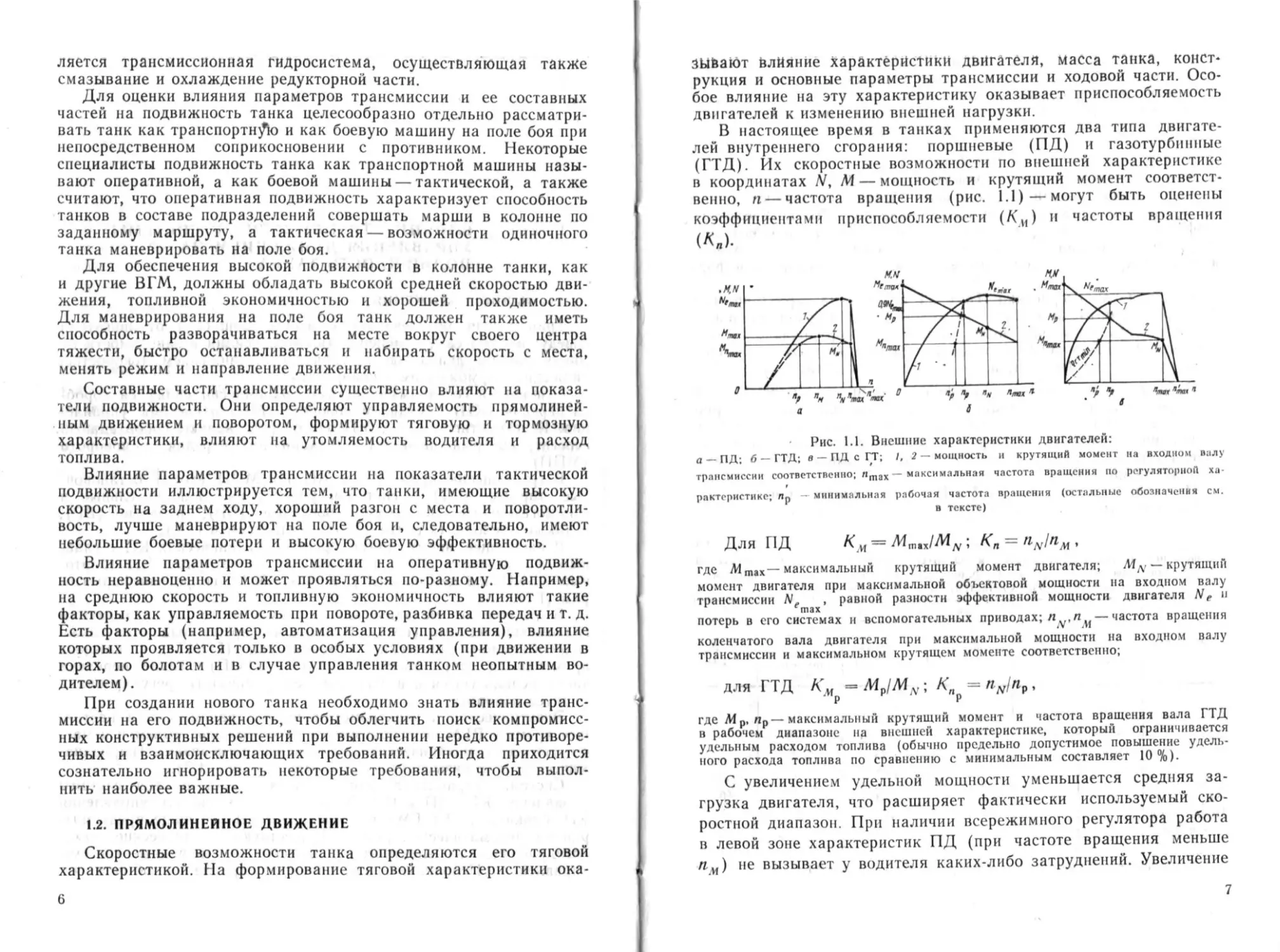
В настоящее время в танках применяются два типа двигате-
лей внутреннего сгорания: поршневые (ПД) и газотурбинные
(ГТД). Их скоростные возможности по внешней характеристике
в координатах N, М — мощность и крутящий момент соответст-
венно, « — частота вращения (рис. 1.1) — могут быть оценены
коэффициентами приспособляемости (Л'и) и частоты вращения
(Ая).
Рис. 1.1. Внешние характеристики двигателей:
а — ПД; б — ГТД; в — ПД с ГТ; 1.3 — мощность и крутящий момент на входном валу
трансмиссии соответственно; ятах — максимальная частота вращения по регуляторной ха-
рактеристике; Яр - минимальная рабочая частота вращения (остальные обозначения см.
в тексте)
ДЛЯ ПД К ц — » А я — *
где Мт„— максимальный крутящий момент двигателя; Мл — крутящий
момент двигателя при максимальной объектовой мощности на входном валу
трансмиссии Nf , равной разности эффективной мощности двигателя Ne и
потерь в его системах и вспомогательных приводах; п ,п* — частота вращения
коленчатого вала двигателя при максимальной мощности па входном валу
трансмиссии и максимальном крутящем моменте соответственно;
для ГТД А\ =/Wp/Mv; К = nNjn9,
₽ ' р
где Мр, Яр—максимальный крутящий момент и частота вращения вала ГТД
н рабочем диапазоне на внешней характеристике, который ограничивается
удельным расходом топлива (обычно предельно допустимое повышение удель-
ного расхода топлива по сравнению с минимальным составляет 10%).
С увеличением удельной мощности уменьшается средняя за-
грузка двигателя, что расширяет фактически используемый ско-
ростной диапазон. При наличии всережимного регулятора работа
в левой зоне характеристик ПД (при частоте вращения меньше
ли) не вызывает у водителя каких-либо затруднений. Увеличение
7
скоростного диапазона при частичной загрузке улучшает управ-
ляемость. позволяя избежать лишних переключений передач, что
особенно важно при движении на высших передачах.
Оценить скоростной диапазон ПД и ГТД при частичной за-
грузке можно коэффициентом частоты вращения
Кп = Лт1К//1р,
где Л max — максимальная частота вращения вала двигателя.
Чем больше коэффициенты приспособляемости и рабочих час-
тот вращения двигателя, тем легче управлять ВГМ. Увеличить
коэффициенты Км и Кп ПД можно совершенствованием его кон-
струкции, применением совместно работающего с ним гидродина-
мического преобразователя крутящего момента — гидротрансфор-
матора.
Внешняя характеристика ПД с ГТ аналогична характеристике
ГТД (рис. 1, б, в), но отличается от нее более высокой топливной
экономичностью. Рабочий диапазон ПД с ГТ ограничивается зна-
чением КПД ГТ, минимально допустимым по эффективности сис-
темы охлаждения (i)rT ), а не расходом топлива, как у ГТД.
Работы по увеличению коэффициента приспособляемости и
расширению скоростного диапазона ПД позволили создать порш-
невой двигатель с улучшенной характеристикой, сохраняющий
постоянную мощность в широком диапазоне частот вращения
коленчатого вала..Иногда такие двигатели называют двигателями
постоянной мощности.
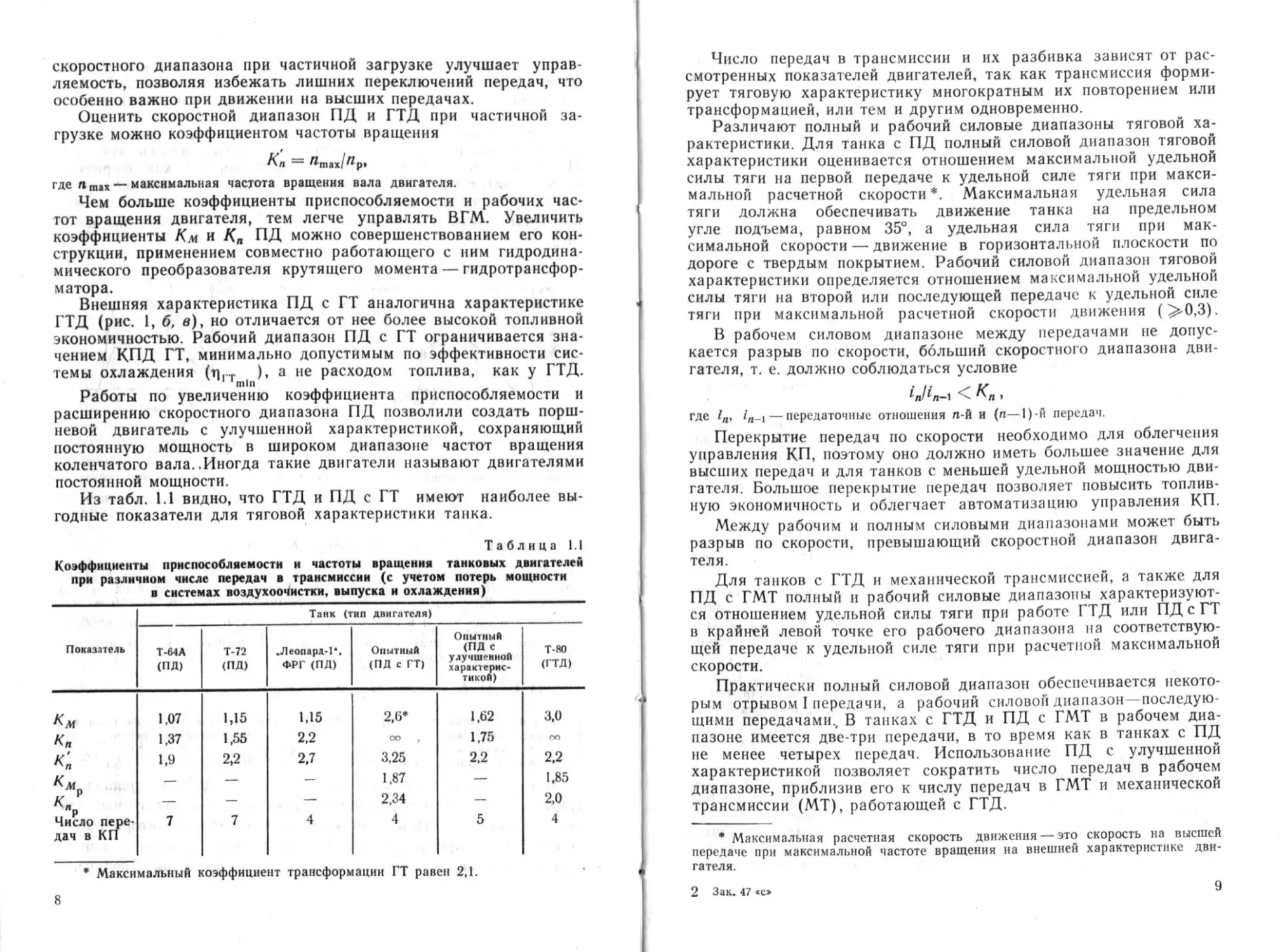
Из табл. 1.1 видно, что ГТД и ПД с ГТ имеют наиболее вы-
годные показатели для тяговой характеристики танка.
Таблица 1.1
Коэффициенты приспособляемости и частоты вращения танковых двигателей
при различном числе передач в трансмиссии (с учетом потерь мощности
в системах воздухоочистки, выпуска и охлаждения)
Показатель Танк (тнп двигателя)
Т-64А (ПД) Т-72 (ПД) .Леопард-1*. ФРГ(ПД) Опытный (ПД с ГТ) Опытный (ПД с улучшенной характерис- тикой) т-яо (ГТД)
Км 1.07 1,15 1,15 2,6* 1,62 3.0
к„ 1,37 1,55 2,2 оо 1,75 по
*'П 1.9 2,2 2,7 3.25 2,2 2,2
— — — 1.87 — 1,85
— — — 2,34 — 2,0
Число пере- дач в К11 7 7 4 4 5 4
* Максимальный коэффициент трансформации ГТ равен 2,1.
8
Число передач в трансмиссии и их разбивка зависят от рас-
смотренных показателей двигателей, так как трансмиссия форми-
рует тяговую характеристику многократным их повторением или
трансформацией, или тем и другим одновременно.
Различают полный и рабочий силовые диапазоны тяговой ха-
рактеристики. Для танка с ПД полный силовой диапазон тяговой
характеристики оценивается отношением максимальной удельной
силы тяги на первой передаче к удельной силе тяги при макси-
мальной расчетной скорости*. Максимальная удельная сила
тяги должна обеспечивать движение танка на предельном
угле подъема, равном 35°, а удельная сила тяги при мак-
симальной скорости — движение в горизонтальной плоскости по
дороге с твердым покрытием. Рабочий силовой диапазон тяговой
характеристики определяется отношением максимальной удельной
силы тяги на второй или последующей передаче к удельной силе
тяги при максимальной расчетной скорости движения (>0,3).
В рабочем силовом диапазоне между передачами не допус-
кается разрыв по скорости, больший скоростного диапазона дви-
гателя, т. е. должно соблюдаться условие
где 1Я, — передаточные отношения л-й и (п— 1)-й передач.
Перекрытие передач по скорости необходимо для облегчения
управления КП, поэтому оно должно иметь большее значение для
высших передач и для танков с меньшей удельной мощностью дви-
гателя. Большое перекрытие передач позволяет повысить топлив-
ную экономичность и облегчает автоматизацию управления КП.
Между рабочим и полным силовыми диапазонами может быть
разрыв по скорости, превышающий скоростной диапазон двига-
теля.
Для танков с ГТД и механической трансмиссией, а также для
ПД с ГМТ полный и рабочий силовые диапазоны характеризуют-
ся отношением удельной силы тяги при работе ГТД или ПД с ГТ
в крайней левой точке его рабочего диапазона на соответствую-
щей передаче к удельной силе тяги при расчетной максимальной
скорости.
Практически полный силовой диапазон обеспечивается некото-
рым отрывом I передачи, а рабочий силовой диапазон последую-
щими передачами., В танках с ГТД и ПД с ГМТ в рабочем диа-
пазоне имеется две-три передачи, в то время как в танках с ПД
не менее четырех передач. Использование ПД с улучшенной
характеристикой позволяет сократить число передач в рабочем
диапазоне, приблизив его к числу передач в ГМТ и механической
трансмиссии (МТ), работающей с ГТД.
• Максимальная расчетная скорость движения —это скорость на высшей
передаче при максимальной частоте вращения на внешней характеристике дви-
гателя.
2 Зак. 47 «о
9
Механические и гидромеханические трансмиссии не позволяют
получить идеальную тяговую характеристику, т. е. обеспечить во
всем скоростном диапазоне постоянное значение мощности на
выходе из трансмиссии. Такая тяговая характеристика может
быть получена с гидрообъемно-механической или электромехани-
ческой трансмиссией, имеющей автоматическое управление и по-
зволяющей загрузить двигатель при максимальной мощности,
обеспечивая изменение скорости движения за счет автоматиче-
ского изменения передаточного отношения в трансмиссии.
Тяговая характеристика танка с МТ и ГМТ имеет «провалы»
по удельной силе тяги из-за неполного использования мощности
двигателя. Однако в настоящее время это не имеет решающего
значения, так как с увеличением удельной мощности скорость
движения ограничивается управляемостью, возможностью пробоя
подвески и условиями движения. После достижения удельной
мощности 18,0—23,5 кВт/т прирост средней скорости движения
незначителен.
Тяговая характеристика танка оказывает существенное влия-
ние на его динамические свойства. Разгонная характеристика
зависит от трансмиссии, двигателя, изменения крутящего момента
M=f(n), системы управления КП.
Анализ разгонных характеристик танков показывает, что на
переключение передач может затрачиваться до 25 % времени,
необходимого для разгона. Потери времени на переключение пе-
редач при разгоне можно оценить коэффициентом использования
времени при разгоне танка
Л'.р-(Тр-Е7'.)/7',.
где Тр—общее время разгона; SГп—суммарное время, затраченное на пере-
ключение передач с момента начала потерн скорости до момента достижения
этой же скорости на высшей передаче.
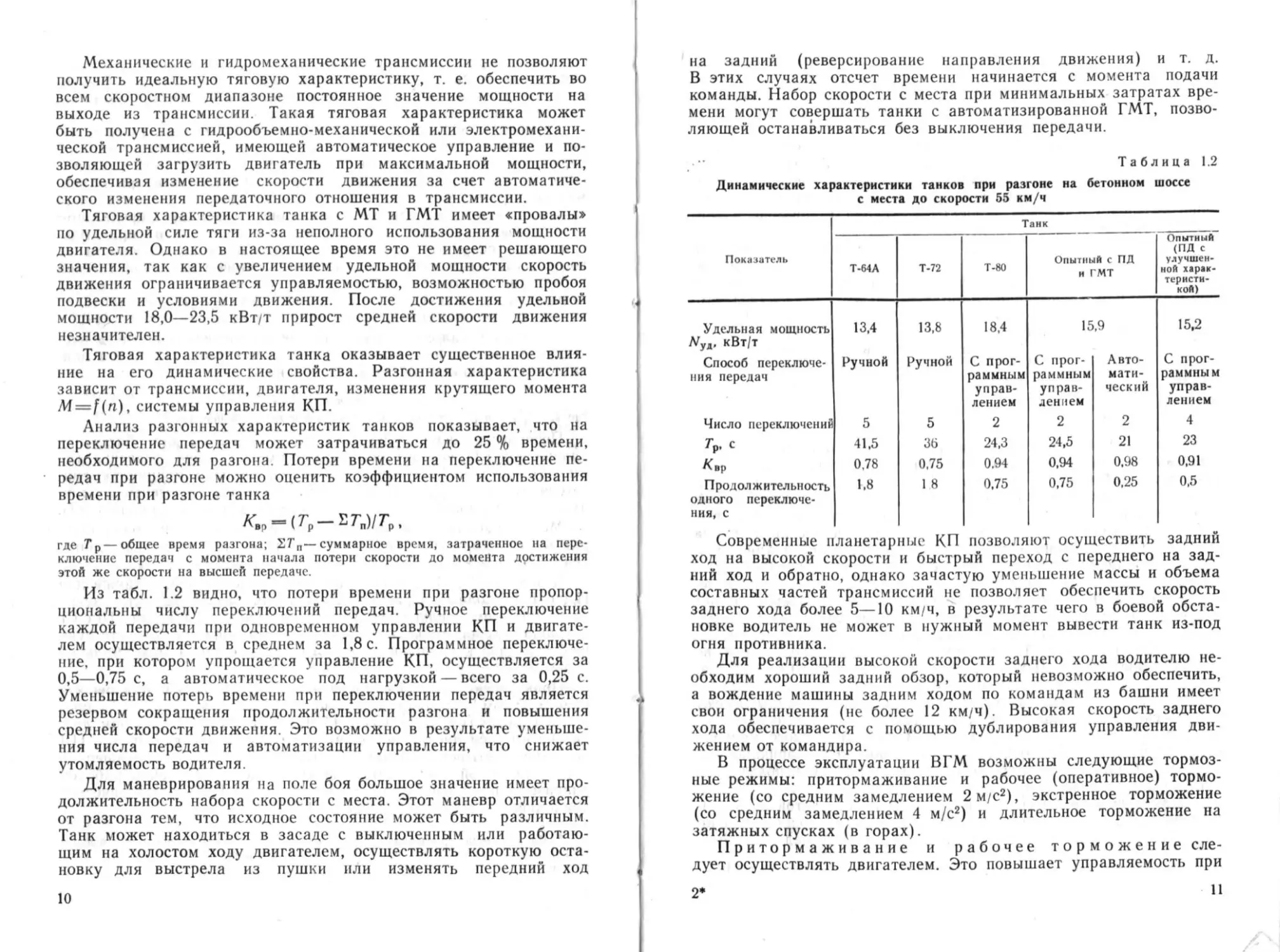
Из табл. 1.2 видно, что потери времени при разгоне пропор-
циональны числу переключений передач. Ручное переключение
каждой передачи при одновременном управлении КП и двигате-
лем осуществляется в среднем за 1,8 с. Программное переключе-
ние, при котором упрощается управление КП. осуществляется за
0,5— 0,75 с, а автоматическое под нагрузкой — всего за 0,25 с.
Уменьшение потерь времени при переключении передач является
резервом сокращения продолжительности разгона и повышения
средней скорости движения. Это возможно в результате уменьше-
ния числа передач и автоматизации управления, что снижает
утомляемость водителя.
Для маневрирования на поле боя большое значение имеет про-
должительность набора скорости с места. Этот маневр отличается
от разгона тем, что исходное состояние может быть различным.
Танк может находиться в засаде с выключенным или работаю-
щим на холостом ходу двигателем, осуществлять короткую оста-
новку для выстрела из пушки или изменять передний ход
10
на задний (реверсирование направления движения) и т. д.
В этих случаях отсчет времени начинается с момента подачи
команды. Набор скорости с места при минимальных затратах вре-
мени могут совершать танки с автоматизированной ГМТ, позво-
ляющей останавливаться без выключения передачи.
Таблица 1.2
Динамические характеристики танков при разгоне на бетонном шоссе
с места до скорости 55 км/ч
Показатель Танк
Т-МА Т-72 Т-80 Опытный с ПД и ГМТ Опытный (ПД с улучшен- ной харак- теристи- кой)
Удельная мощность ЛГуд, кВт/т 13,4 13,8 18,4 15,9 15.2
Способ переключе- ния перс i и Ручной Ручной С прог- раммным управ- лением С прог- раммным управ- лением Авто- мати- ческий С прог- раммным управ- лением
Число переключений 5 5 2 2 2 4
Гр. с 41Л 36 24,3 24,5 21 23
Кар 0,78 0.75 0.94 0,94 0,98 0,91
Продолжительность одного переключе- ния, с 1.8 1 8 0,75 0,75 0,25 0.5
Современные планетарные КП позволяют осуществить задний
ход на высокой скорости и быстрый переход с переднего на зад-
ний ход и обратно, однако зачастую уменьшение массы и объема
составных частей трансмиссий не позволяет обеспечить скорость
заднего хода более 5—10 км/ч, в результате чего в боевой обста-
новке водитель не может в нужный момент вывести танк из-под
огня противника.
Для реализации высокой скорости заднего хода водителю не-
обходим хороший задний обзор, который невозможно обеспечить,
а вождение машины задним ходом по командам из башни имеет
свои ограничения (нс более 12 км/ч). Высокая скорость заднего
хода обеспечивается с помощью дублирования управления дви-
жением от командира.
В процессе эксплуатации ВГМ возможны следующие тормоз-
ные режимы: притормаживание и рабочее (оперативное) тормо-
жение (со средним замедлением 2 м/с2), экстренное торможение
(со средним замедлением 4 м/с2) и длительное торможение на
затяжных спусках (в горах).
Притормаживание и рабочее т о р м о ж е н и е сле-
дует осуществлять двигателем. Это повышает управляемость при
2* 11
прямолинейном движении, так как разгон и торможение можно
осуществлять одной педалью.
Экстренное торможение осуществляется механически-
ми ОТ. Оснащение привода к ОТ сервоустройством и удобные для
использования расположение и ход тормозной педали обеспечи-
вают высокую управляемость. В современных трансмиссиях она
обеспечивается раздельными приводами к ОТ: рабочим (дистан-
ционным и полностью сервированным) и горным (механическим).
Введение более совершенной системы управления ОТ сущест-
венно повышает среднюю скорость движения (например, в тан-
ке Т-72 средняя скорость повысилась на 4 %).
Длительное торможение на затяжных спусках при
достаточно высокой скорости движения не может быть обеспечено
механическими ОТ (они перегреваются) и должно осуществляться
двигателем или гидродинамическим тормозом — гидрозамедлите-
лем, для интенсивного охлаждения которого обычно используется
водо-масляный теплообменник системы охлаждения ПД.
Гидрозамедлители часто используются в трансмиссиях зару-
бежных ВГМ (БМП «Мардер», танк «Леопард-2», многие транс-
миссии фирмы «Аллисон»*).
1.3. ПОВОРОТ
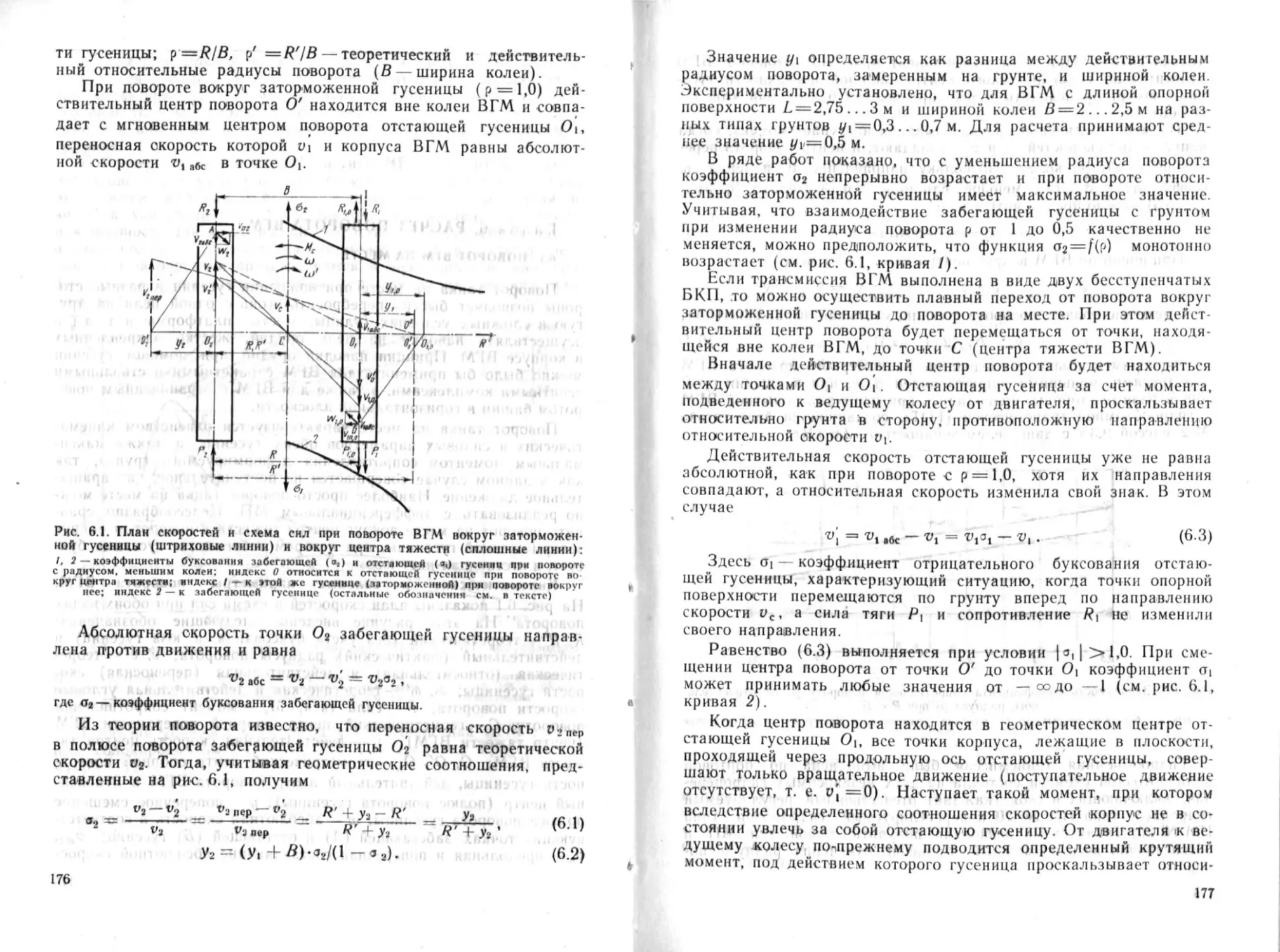
Поворот ВГМ осуществляется за счет разницы скоростей пере-
мещения гусениц. Гусеница, обладающая большей скоростью,
называется забегающей, а гусеница, обладающая меньшей ско-
ростью и находящаяся ближе к центру поворота, — отстающей.
В настоящее время в танке применяются два типа МП: при
МП первого типа скорость центра тяжести на повороте равна
скорости прямолинейного движения, при МП второго типа ско-
рость забегающей гусеницы равна скорости прямолинейного дви-
жения. Поворот может осуществляться силовым или кинематиче-
ским способом. При силовом способе танк поворачивается за счет
создания момента фрикционными элементами МП, радиус пово-
рота является результатом взаимодействия этого момента и со-
противления повороту. Такой способ поворота используется во
многих современных ВГМ (отечественные танки Т-64Л, Т-72, за-
рубежные— «Леопард-1», М-60А1, М-551 и др.).
Кинематический способ основан на том, что гусеницы имеют
разную скорость вращения за счет жесткого бесступенчатого ре-
гулирования специальным приводом. В качестве такого привода
могут применяться гидрообъемные, электро- или фрикционные
передачи. Однако в настоящее время в МП ВГМ используются
только гидрообъемные передачи.
Кинематический способ позволяет получить устойчивый ра-
диус поворота танка, что не всегда возможно при силовом спо-
собе. Для получения устойчивого промежуточного радиуса пово-
* Впоследствии влилась в фирму «Детройт днзел Аллисон дивижн» (США).
12
рота силовым способом необходимо, чтобы фрикционные диски
МП имели стабильный коэффициент трения в широком диапазоне
скоростей скольжения, гидросистема управления позволяла уста-
навливать и поддерживать необходимое давление рабочей жид-
кости в полости бустера фрикционного элемента, а сопротивление
повороту и прямолинейному движению было постоянным.
Этого можно добиться применением дисков трения с металло-
керамическими накладками, работающих в паре со стальными
дисками в масле, если танк без заметного запаздывания будет
реагировать на отклонение органа управления. Необходимо, чтобы
радиус поворота монотонно изменялся в зависимости от переме-
щения органа управления, т. е. чтобы танк следовал за переме-
щением органа управления. Если это будет обеспечено, то отсут-
ствие однозначной связи между положением органа управления
и получаемым радиусом поворота танка и самопроизвольное из-
менение радиуса в процессе поворота заметно не ухудшают
управляемость поворотом, так как водитель всегда сможет скор-
ректировать отклонение танка от выбранной траектории движения.
Кинематический способ обеспечивает высокую управляемость
при любом типе МП, а силовой — при дифференциальном МП,
так как управление поворотом в этом случае обеспечивается
одним фрикционным элементом (с одним расчетным радиусом на
каждой передаче). В планетарном механизме поворота (ПМП)
управление поворотом обеспечивается двумя фрикционными эле-
ментами, что вызывает разрыв функции управления, который
имеет место при переходе с одного фрикционного элемента на
другой и повороте танка со свободным радиусом. При ПМП изме-
нение радиуса поворота от оо до свободного pt соответствует
очень малому углу отклонения органа управления, что затрудняет
управление танком при его движении по дорогам с высокой ско-
ростью.
Танковые системы управления поворотом отличаются высокой
чувствительностью, так как имеют малые максимальные углы
отклонения органов управления поворотом (60—80°) из-за плот-
ной компоновки места водителя. В колесных машинах с такой же
скоростью движения угол поворота руля достигает нескольких
сотен градусов (до 1000°). Для получения высокой управляемости
необходимо рационально использовать угол отклонения органа
управления поворотом танка. Большое значение в управлении
поворотом имеет также быстродействие гидросистемы.
Задержка реакции танка на перемещение водителем
органа управления поворотом должна быть нс более 0,3 с, следо-
вательно, быстродействие гидросистемы МП должно составлять
0,2—0,25 с. В противном случае исключается возможность исполь-
зования водителем следящей системы управления.
13
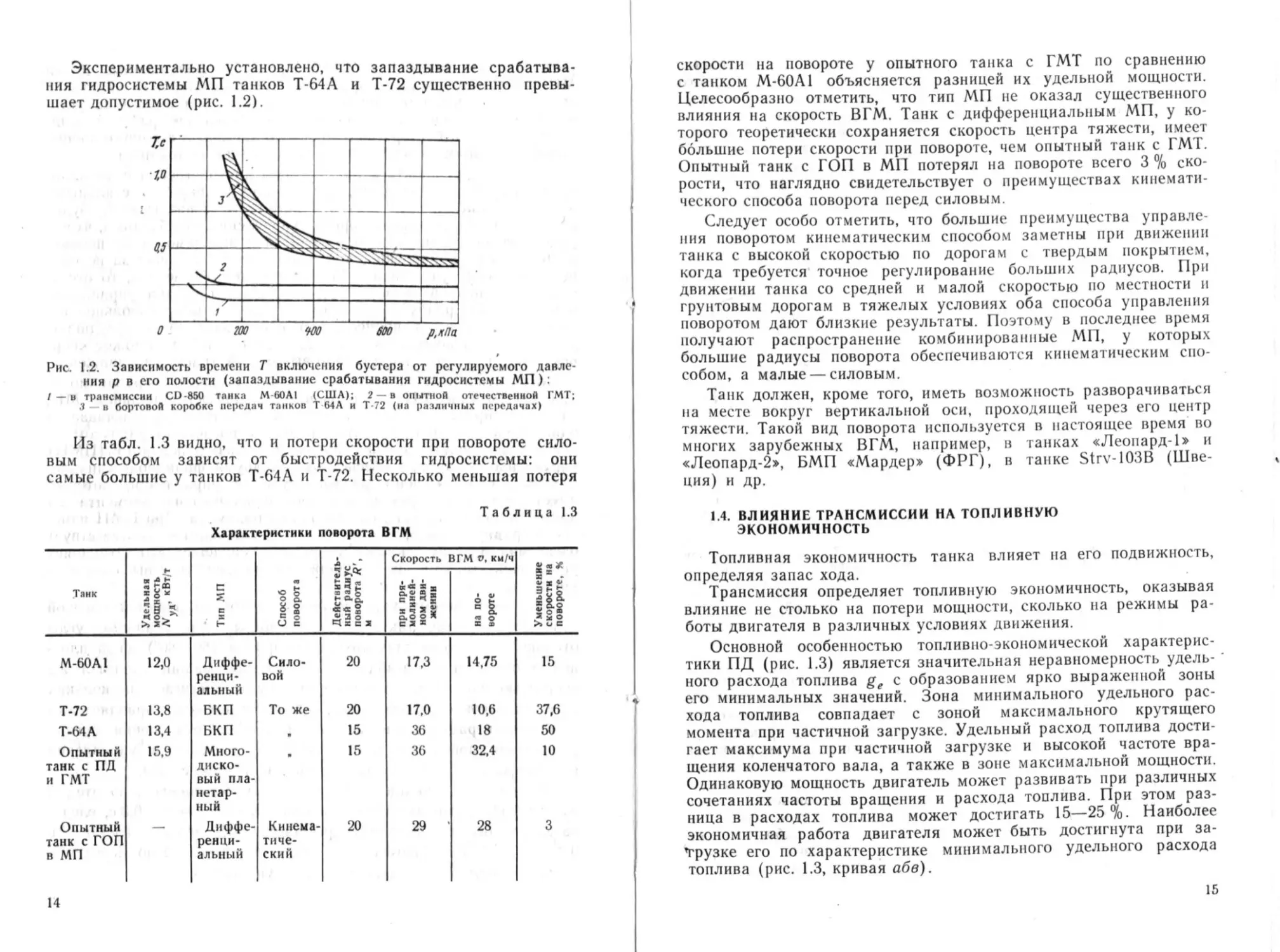
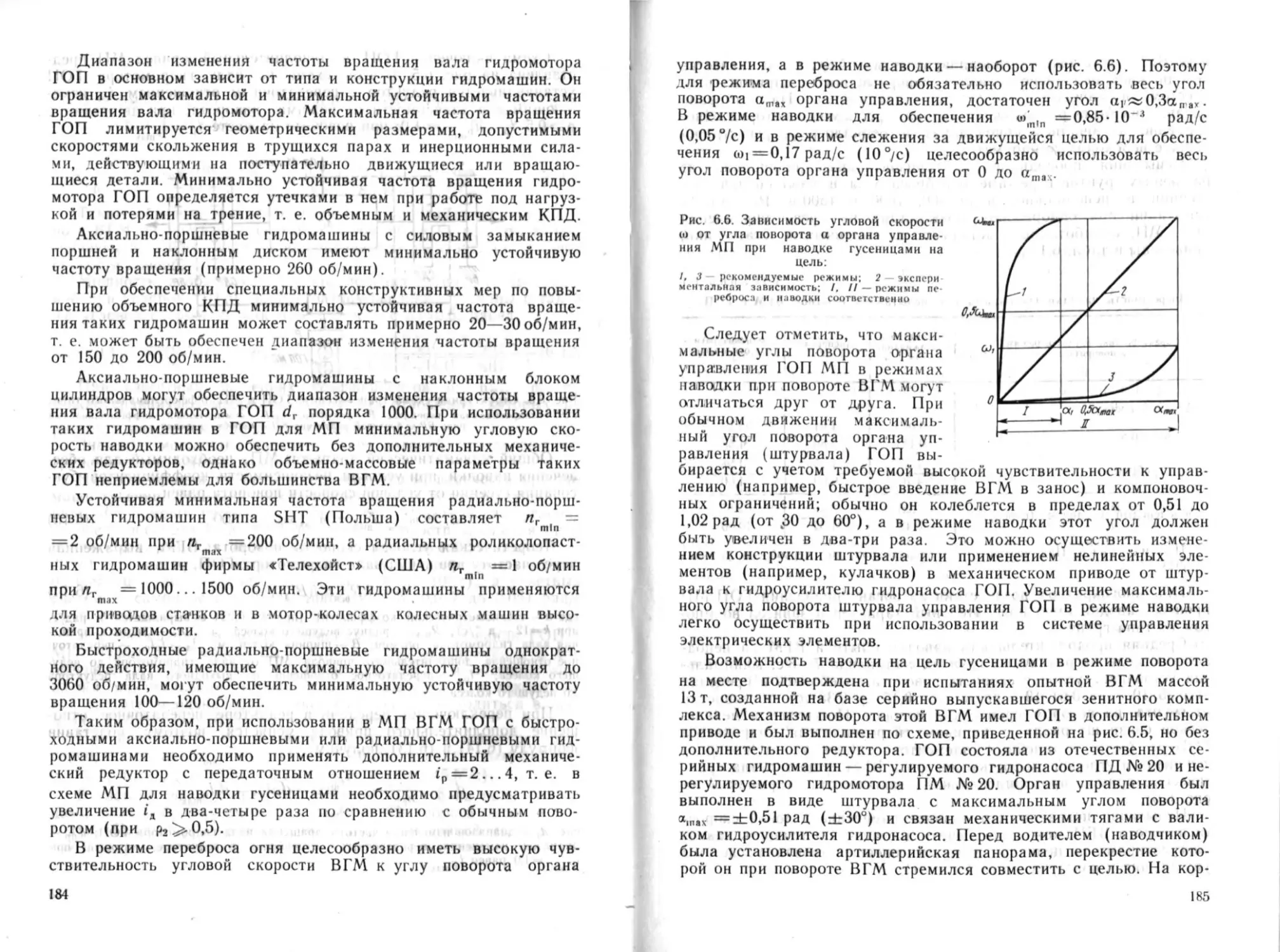
Рис. 1.2. Зависимость времени Т включения бустера от регулируемого давле-
ния р в его полости (запаздывание срабатывания гидросистемы МП):
/ - и трансмиссии CD-86O тайка М 60АI (США); 2 в опытной отечественной ГМТ;
3 н бортовой коробке передач танков Т 64А н Т-72 (на различных передачах)
Из табл. 1.3 видно, что и потери скорости при повороте сило-
вым способом зависят от быстродействия гидросистемы: они
самые большие у танков Т-64А и Т-72. Несколько меньшая потеря
Характеристики поворота В ГМ
Таблица 1.3
Танк is- 11г н 1 i 1! 5 К* Й1. Скорость ВГМ V. км/ч !«• ш >1 V =
Ни 111 м н
М-60А1 12,0 Диффе- ренци- альный Сило- вой 20 17,3 14,75 15
Т-72 13,8 БКП То же 20 17,0 10,6 37,6
Т-64А 13,4 БКП 15 36 18 50
Опытный танк с ПД и ГМТ 15,9 Много- диско- вый пла- нетар- ный • 15 36 32,4 10
Опытный танк с ГОП в МП — Диффе- ренци- альный Кинема- тиче- ский 20 29 28 3
14
скорости на повороте у опытного танка с ГМТ по сравнению
с танком М-60А1 объясняется разницей их удельной мощности.
Целесообразно отметить, что тип МП не оказал существенного
влияния на скорость ВГМ. Танк с дифференциальным МП, у ко-
торого теоретически сохраняется скорость центра тяжести, имеет
большие потери скорости при повороте, чем опытный танк с ГМТ.
Опытный танк с ГОП в МП потерял на повороте всего 3 % ско-
рости, что наглядно свидетельствует о преимуществах кинемати-
ческого способа поворота перед силовым.
Следует особо отметить, что большие преимущества управле-
ния поворотом кинематическим способом заметны при движении
танка с высокой скоростью по дорогам с твердым покрытием,
когда требуется точное регулирование больших радиусов. При
движении танка со средней и малой скоростью по местности и
грунтовым дорогам в тяжелых условиях оба способа управления
поворотом дают близкие результаты. Поэтому в последнее время
получают распространение комбинированные МП, у которых
большие радиусы поворота обеспечиваются кинематическим спо-
собом, а малые — силовым.
Танк должен, кроме того, иметь возможность разворачиваться
на месте вокруг вертикальной оси, проходящей через его центр
тяжести. Такой вид поворота используется в настоящее время во
многих зарубежных ВГМ, например, в танках «Леопард-1» и
«Леопард-2», БМП «Мардер» (ФРГ), в танке Strv-ЮЗВ (Шве-
ция) и др.
1.4. ВЛИЯНИЕ ТРАНСМИССИИ НА ТОПЛИВНУЮ
экономичность
Топливная экономичность танка влияет на его подвижность,
определяя запас хода.
Трансмиссия определяет топливную экономичность, оказывая
влияние не столько на потери мощности, сколько на режимы ра-
боты двигателя в различных условиях движения.
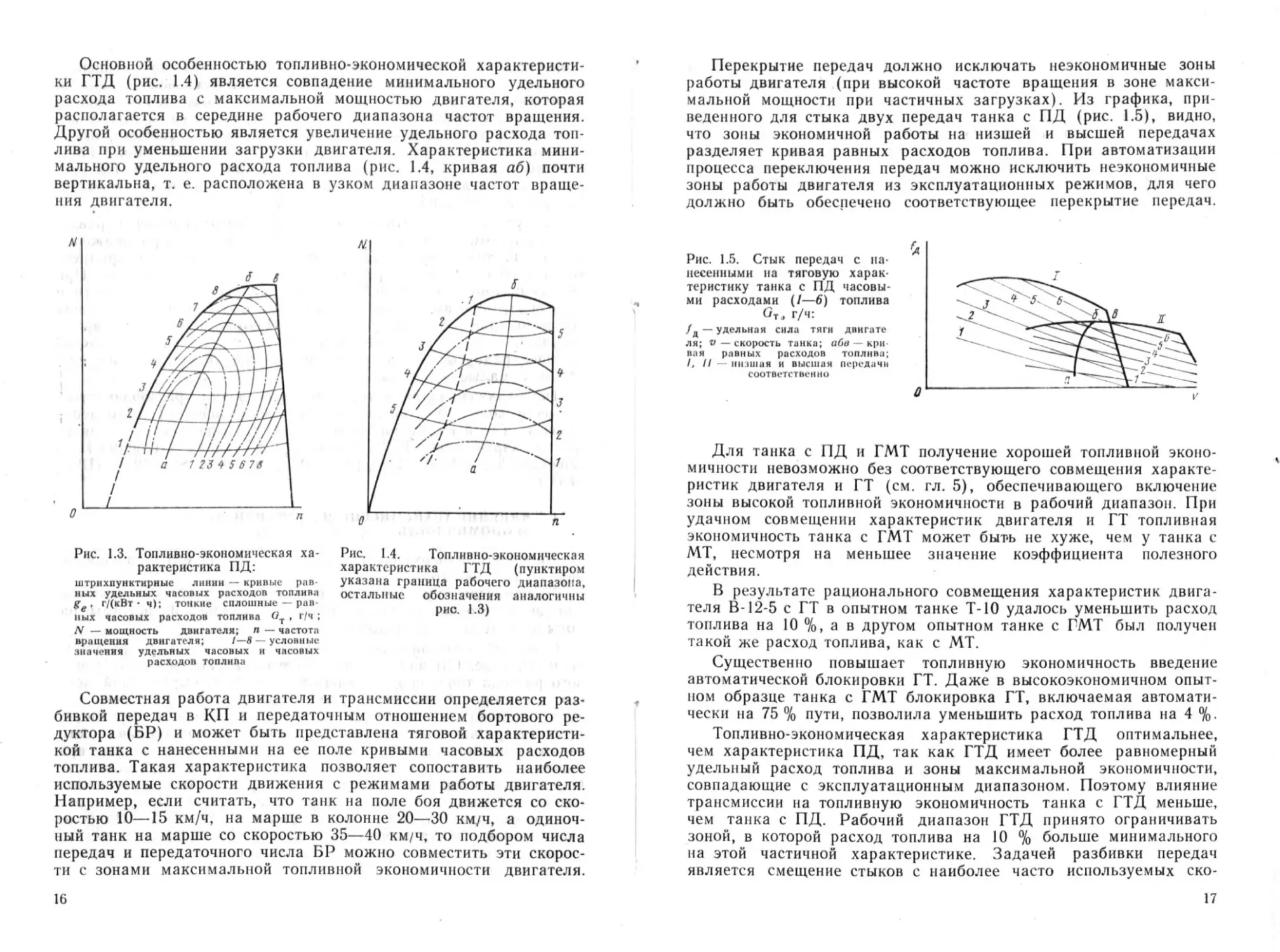
Основной особенностью топливно-экономической характерис-
тики ПД (рис. 1.3) является значительная неравномерность удель-
ного расхода топлива с образованием ярко выраженной зоны
его минимальных значений. Зона минимального удельного рас-
хода топлива совпадает с зоной максимального крутящего
момента при частичной загрузке. Удельный расход топлива дости-
гает максимума при частичной загрузке и высокой частоте вра-
щения коленчатого вала, а также в зоне максимальной мощности.
Одинаковую мощность двигатель может развивать при различных
сочетаниях частоты вращения и расхода топлива. При этом раз-
ница в расходах топлива может достигать 15—25%. Наиболее
экономичная работа двигателя может быть достигнута при за-
Трузке его по характеристике минимального удельного расхода
топлива (рис. 1.3, кривая абв).
15
Основной особенностью топливно-экономической характеристи-
ки ГТД (рис. 1.4) является совпадение минимального удельного
расхода топлива с максимальной мощностью двигателя, которая
располагается в середине рабочего диапазона частот вращения.
Другой особенностью является увеличение удельного расхода топ-
лива при уменьшении загрузки двигателя. Характеристика мини-
мального удельного расхода топлива (рис. 1.4, кривая аб) почти
вертикальна, т. е. расположена в узком диапазоне частот враще-
ния двигателя.
Рис. 1.3. Топливно-экономическая ха-
рактеристика ПД:
штрихпу актирные линии — кривые рав
ных удельных часовых расходов топлива
ge , г/(кВт • ч); тонкие сплошные — рав
ных часовых расходов топлива GT , г/ч ;
N — мощность двигателя; л — частота
вращения двигателя; /—в - условные
значения удельных часовых и часовых
расходов топлива
Рис. 1.4. Топливно-экономическая
характеристика ГТД (пунктиром
указана граница рабочего диапазона,
остальные обозначения аналогичны
рио. 1.3)
Совместная работа двигателя и трансмиссии определяется раз-
бивкой передач в КП и передаточным отношением бортового ре-
дуктора (БР) и может быть представлена тяговой характеристи-
кой танка с нанесенными на ее поле кривыми часовых расходов
топлива. Такая характеристика позволяет сопоставить наиболее
используемые скорости движения с режимами работы двигателя.
Например, если считать, что танк на поле боя движется со ско-
ростью 10—15 км/ч, на марше в колонне 20—30 км/ч, а одиноч-
ный танк на марше со скоростью 35—40 км/ч, то подбором числа
передач и передаточного числа БР можно совместить эти скорос-
ти с зонами максимальной топливной экономичности двигателя.
16
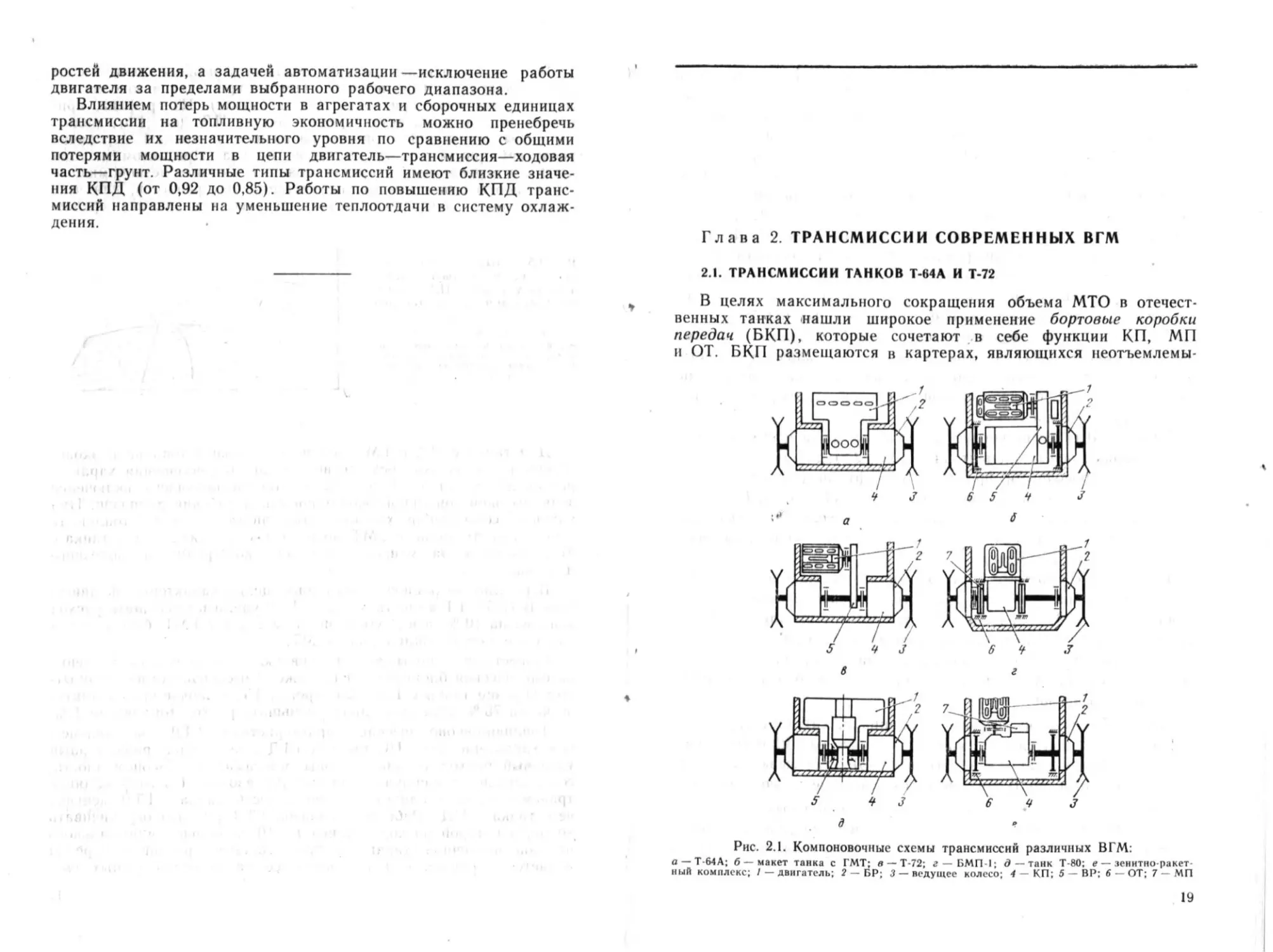
Перекрытие передач должно исключать неэкономичные зоны
работы двигателя (при высокой частоте вращения в зоне макси-
мальной мощности при частичных загрузках). Из графика, при
веденного для стыка двух передач танка с ПД (рис. 1.5), видно,
что зоны экономичной работы на низшей и высшей передачах
разделяет кривая равных расходов топлива. При автоматизации
процесса переключения передач можно исключить неэкономичные
зоны работы двигателя из эксплуатационных режимов, для чего
должно быть обеспечено соответствующее перекрытие передач.
Рис. 1.5. Стык передач с на-
несенными на тяговую харак-
теристику тапка с ПД часовы-
ми расходами (/—6) топлива
От, г/ч:
/д — удельная сила тяги двнгате
ля; V — скорость танка; обе - при
иля равных расходов топлива;
/, // - низшая и высшая передачи
соответственно
Для танка с ПД и ГМТ получение хорошей топливной эконо-
мичности невозможно без соответствующего совмещения характе-
ристик двигателя и ГТ (см. гл. 5), обеспечивающего включение
зоны высокой топливной экономичности в рабочий диапазон. При
удачном совмещении характеристик двигателя и ГТ топливная
экономичность танка с ГМТ может быть не хуже, чем у танка с
МТ, несмотря на меньшее значение коэффициента полезного
действия.
В результате рационального совмещения характеристик двига-
теля В-12-5 с ГТ в опытном танке Т-10 удалось уменьшить расход
топлива на 10 %, а в другом опытном танке с ГМТ был получен
такой же расход топлива, как с МТ.
Существенно повышает топливную экономичность введение
автоматической блокировки ГТ. Даже в высокоэкономичном опыт-
ном образце танка с ГМТ блокировка ГТ, включаемая автомати-
чески на 75 % пути, позволила уменьшить расход топлива на 4 %.
Топливно-экономическая характеристика ГТД оптимальнее,
чем характеристика ПД, так как ГТД имеет более равномерный
удельный расход топлива и зоны максимальной экономичности,
совпадающие с эксплуатационным диапазоном. Поэтому влияние
трансмиссии на топливную экономичность танка с ГТД меньше,
чем танка с ПД. Рабочий диапазон ГТД принято ограничивать
зоной, в которой расход топлива на 10 % больше минимального
на этой частичной характеристике. Задачей разбивки передач
является смещение стыков с наиболее часто используемых ско-
17
ростей движения, а задачей автоматизации —исключение работы
двигателя за пределами выбранного рабочего диапазона.
Влиянием потерь мощности в агрегатах и сборочных единицах
трансмиссии на топливную экономичность можно пренебречь
вследствие их незначительного уровня по сравнению с общими
потерями мощности в цепи двигатель—трансмиссия—ходовая
часть—грунт. Различные типы трансмиссий имеют близкие значе-
ния КПД (от 0,92 до 0,85). Работы по повышению КПД транс-
миссий направлены на уменьшение теплоотдачи в систему охлаж-
дения.
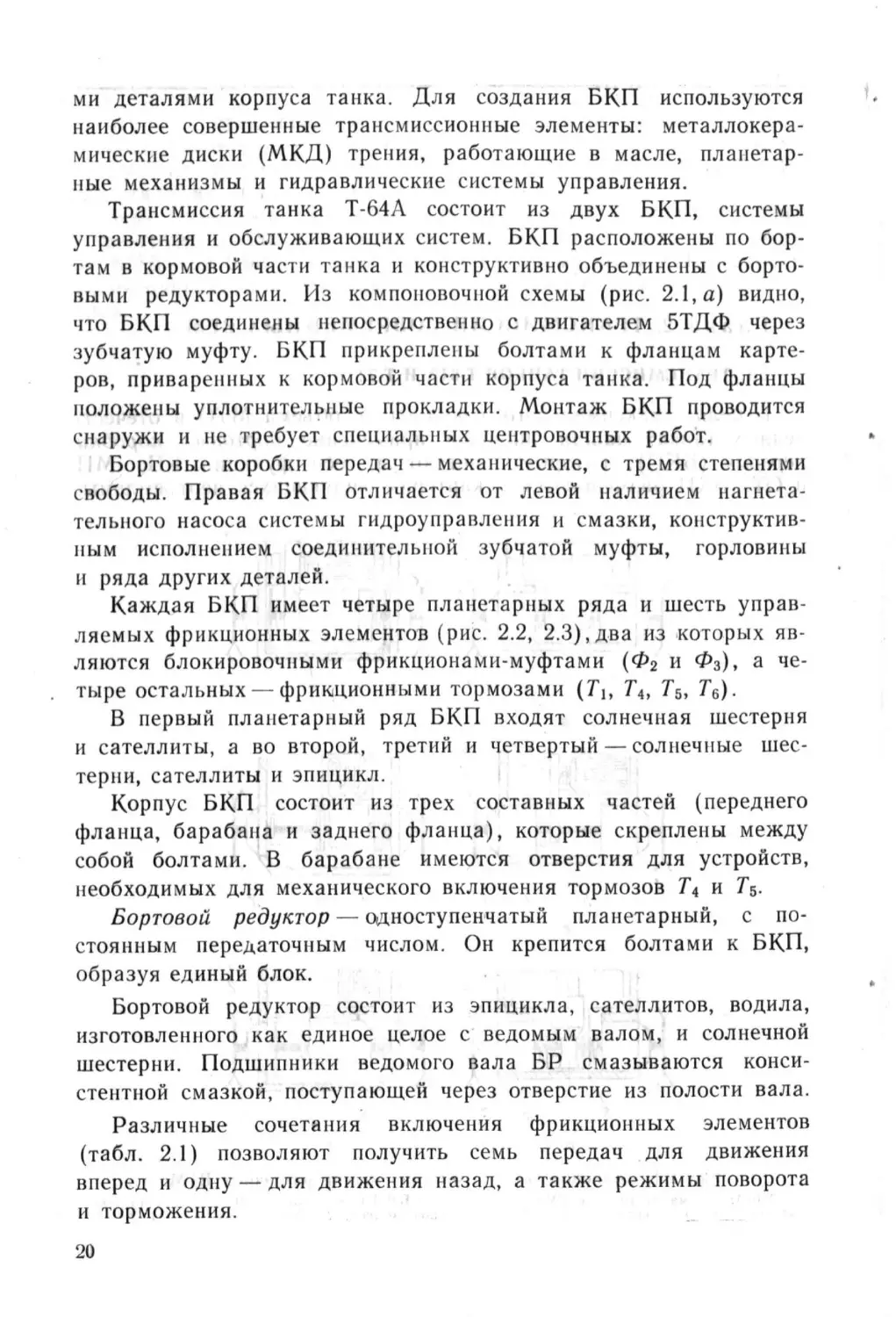
Глава 2 ТРАНСМИССИИ СОВРЕМЕННЫХ ВГМ
2.1. ТРАНСМИССИИ ТАНКОВ Т-64А И Т-72
В целях максимального сокращения объема МТО в отечест-
венных танках нашли широкое применение бортовые коробки
передач (БКП), которые сочетают в себе функции КП, МП
и ОТ. БКП размещаются в картерах, являющихся неотъемлемы-
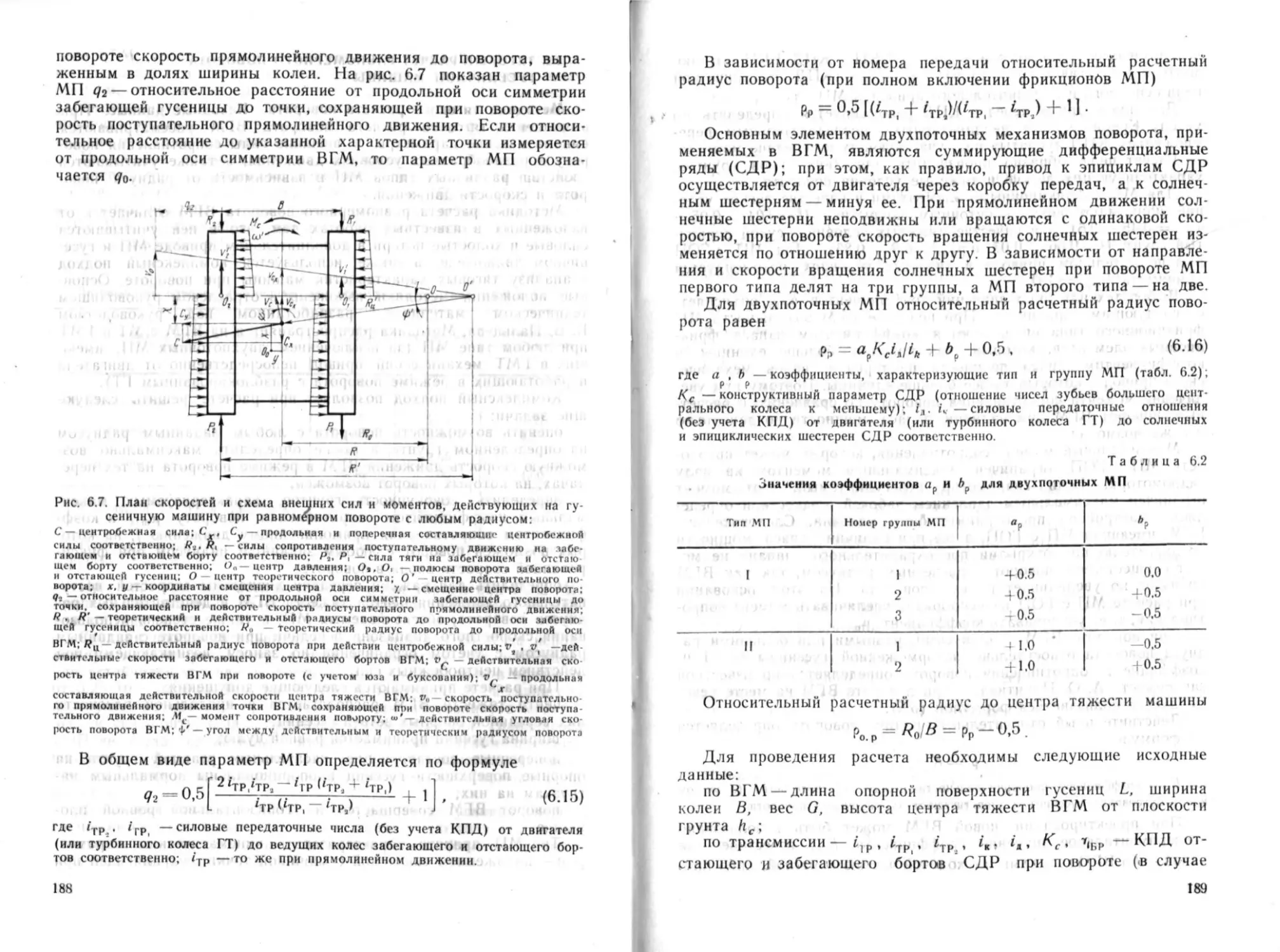
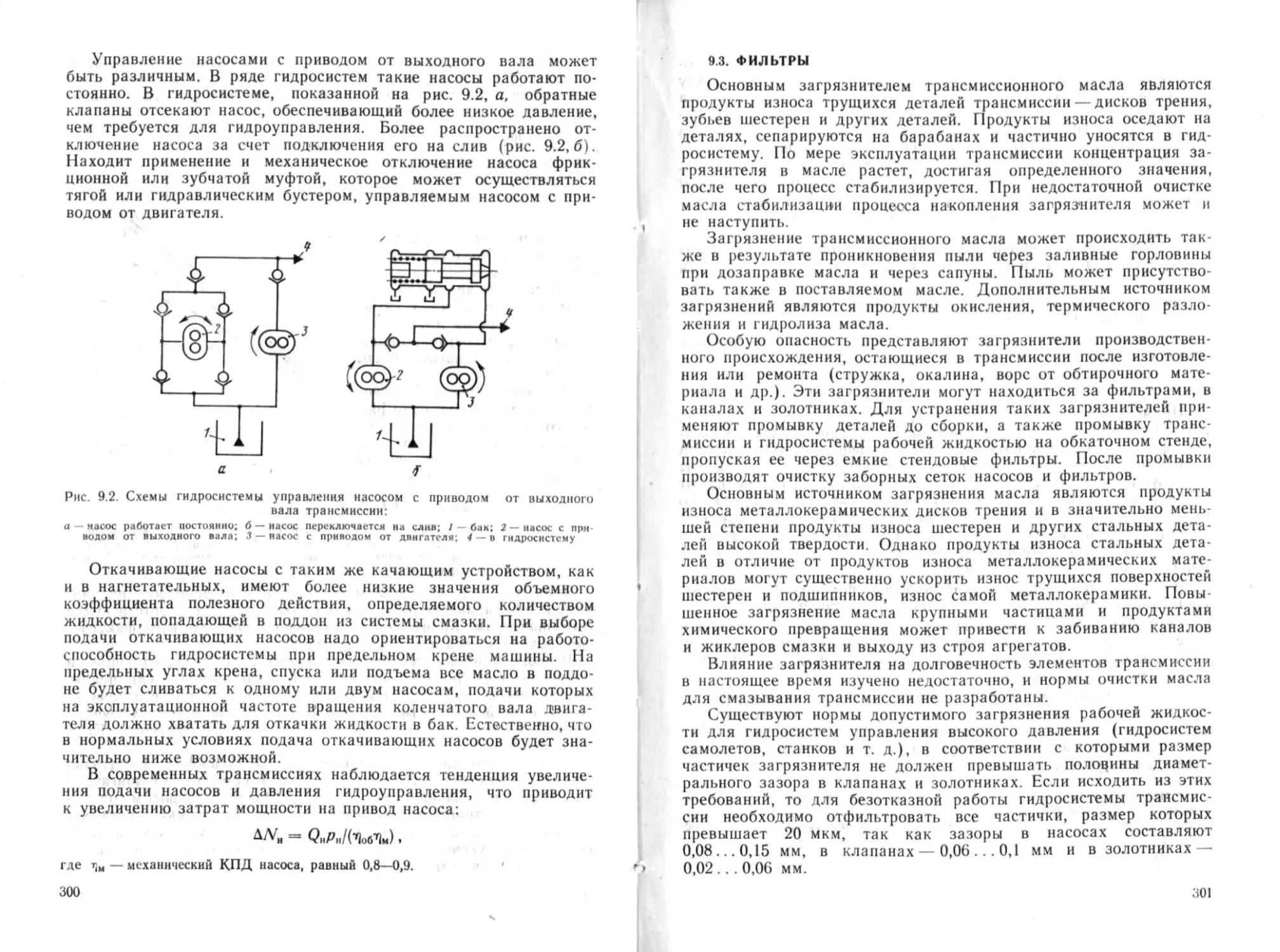
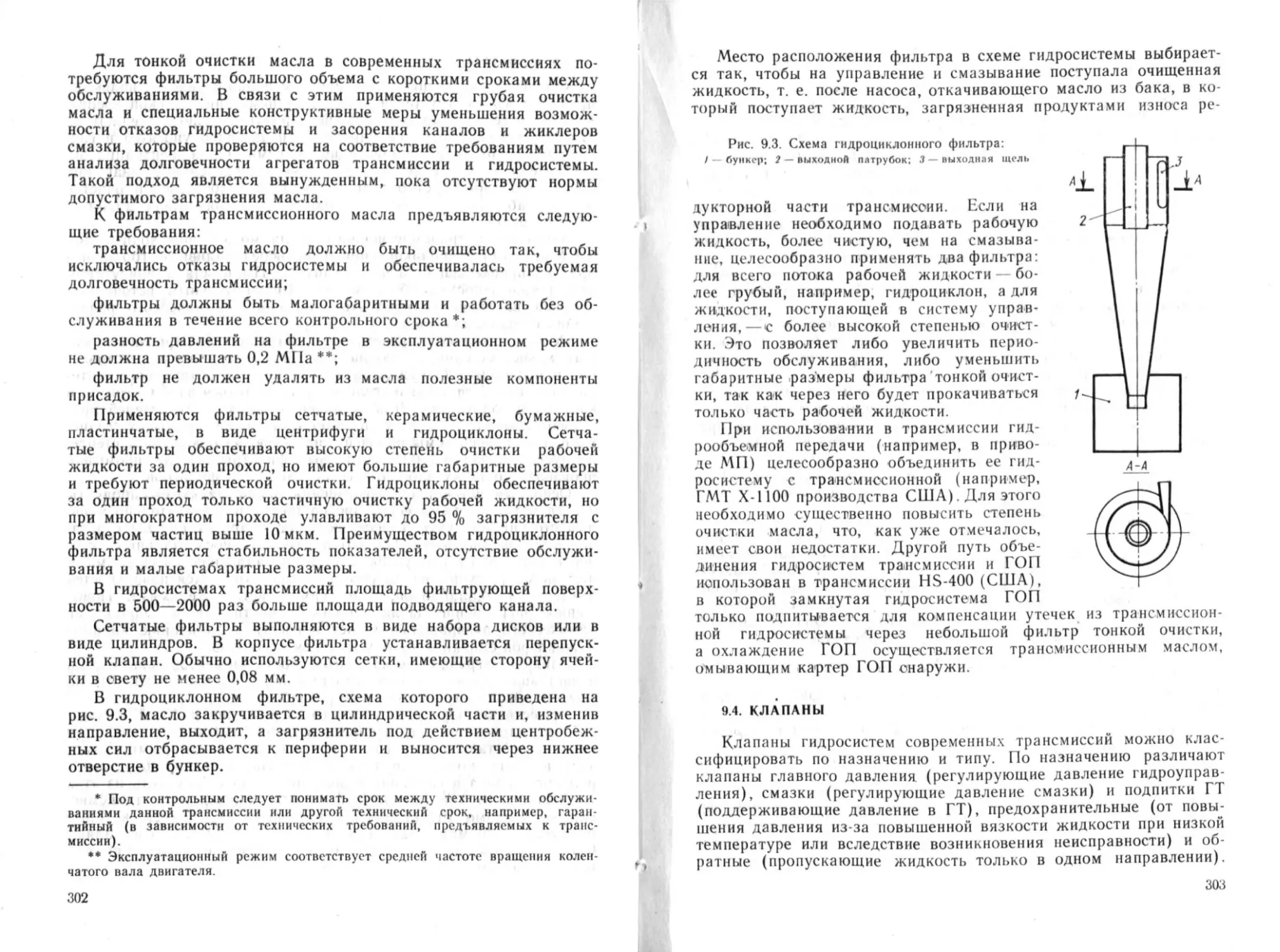
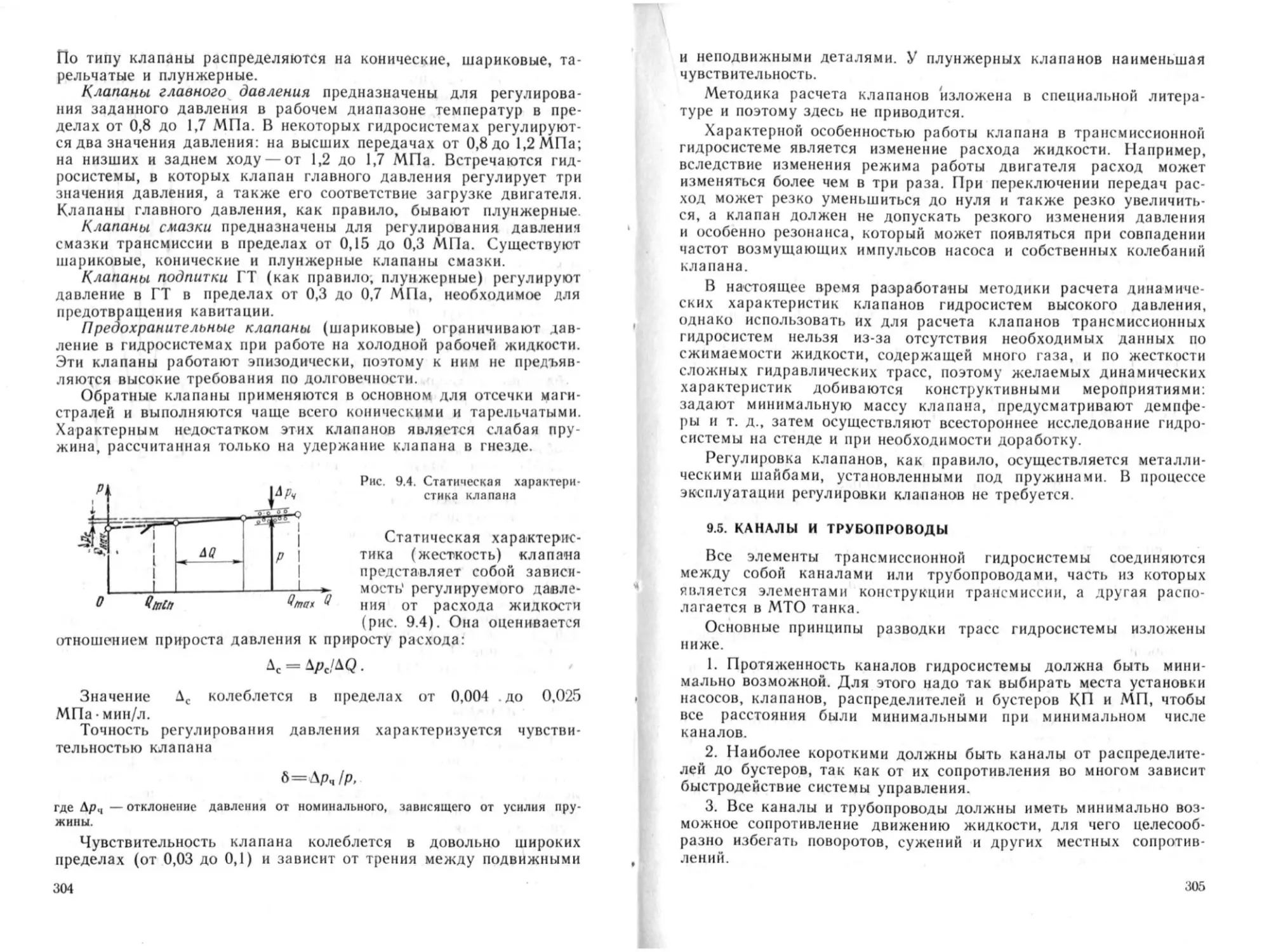
Рис. 2.1. Компоновочные схемы трансмиссий различных ВГМ:
а —Т-64А; 6 — макет танка с ГМТ; в —Т-72; г — БМП1; д — танк Т-80; е — зеннтно ракет
ный комплекс; I — двигатель; 2 — БР; 3 — ведущее колесо; 4 — КП; 5 — ВР; 6 — ОТ; 7 — МП
19
ми деталями корпуса танка. Для создания БКП используются
наиболее совершенные трансмиссионные элементы: металлокера-
мические диски (МКД) трения, работающие в масле, планетар-
ные механизмы и гидравлические системы управления.
Трансмиссия танка Т-64А состоит из двух БКП, системы
управления и обслуживающих систем. БКП расположены по бор-
там в кормовой части танка и конструктивно объединены с борто-
выми редукторами. Из компоновочной схемы (рис. 2.1, а) видно,
что БКП соединены непосредственно с двигателем 5ТДФ через
зубчатую муфту. БКП прикреплены болтами к фланцам карте-
ров, приваренных к кормовой части корпуса танка. Под фланцы
положены уплотнительные прокладки. Монтаж БКП проводится
снаружи и не требует специальных центровочных работ.
Бортовые коробки передач — механические, с тремя степенями
свободы. Правая БКП отличается от левой наличием нагнета-
тельного насоса системы гидроуправления и смазки, конструктив-
ным исполнением соединительной зубчатой муфты, горловины
и ряда других деталей.
Каждая БКП имеет четыре планетарных ряда и шесть управ-
ляемых фрикционных элементов (рис. 2.2, 2.3),два из которых яв-
ляются блокировочными фрикционами-муфтами (Ф2 и Ф3), а че-
тыре остальных — фрикционными тормозами (Гь Т4, Т5, Т6).
В первый планетарный ряд БКП входят солнечная шестерня
и сателлиты, а во второй, третий и четвертый — солнечные шес-
терни, сателлиты и эпицикл.
Корпус БКП состоит из трех составных частей (переднего
фланца, барабана и заднего фланца), которые скреплены между
собой болтами. В барабане имеются отверстия для устройств,
необходимых для механического включения тормозов Т4 и 7$.
Бортовой редуктор — одноступенчатый планетарный, с по-
стоянным передаточным числом. Он крепится болтами к БКП,
образуя единый блок.
Бортовой редуктор состоит из эпицикла, сателлитов, водила,
изготовленного как единое целое с ведомым валом, и солнечной
шестерни. Подшипники ведомого вала БР смазываются конси-
стентной смазкой, поступающей через отверстие из полости вала.
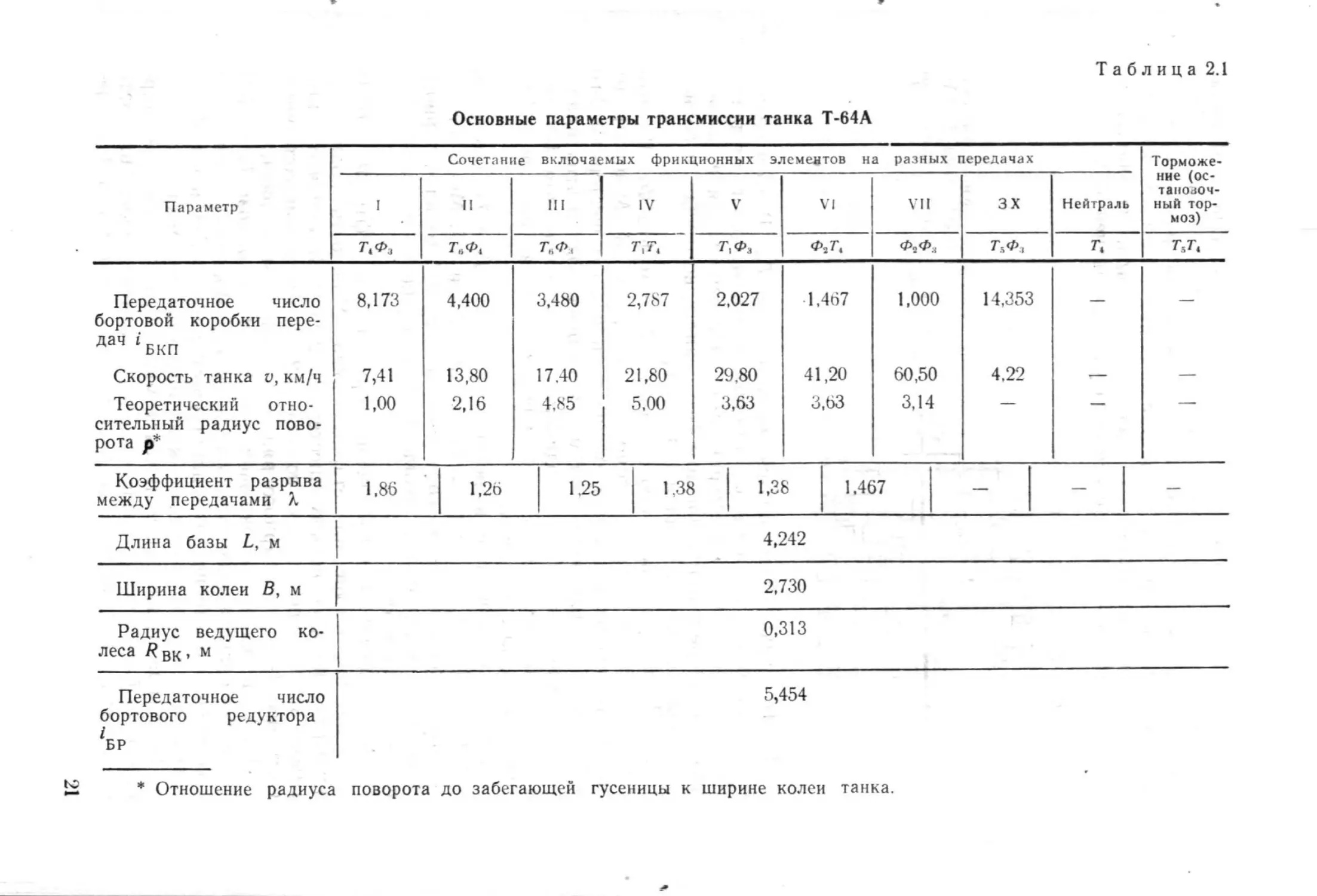
Различные сочетания включения фрикционных элементов
(табл. 2.1) позволяют получить семь передач для движения
вперед и одну — для движения назад, а также режимы поворота
и торможения.
20
Таблица 2.1
Основные параметры трансмиссии танка Т-64А
Параметр Сочетание включаемых фрикционных элементов на разных передачах Торможе- ние (ос- тановоч- ный тор- моз)
1 П in IV V VI VII зх Нейтраль
Т.Ф. ТЛФ, Г, Г, Г.Ф. Ф,Г. Ф,Ф4 Г.Ф, Л т.г.
Передаточное число бортовой коробки пере- дач 'бкп Скорость танка и, км/ч Теоретический отно- сительный радиус пово- рота р 8,173 7,41 1,00 4,400 13,80 2,16 3,480 17.40 4,85 2,787 21,80 5,00 2,027 29.80 3,63 1,467 41,20 3,63 1,000 60,50 3,14 14,353 4,22 —
Коэффициент разрыва между передачами А. 1.86 1,26 125 1.38 1.28 1,467 -
Длина базы L, м 4,242
Ширина колеи В, м 2.730
Радиус ведущего ко- леса /?вк, м 0,313
Передаточное число бортового редуктора *БР 5,454
Отношение радиуса поворота до забегающей гусеницы к ширине колеи танка.
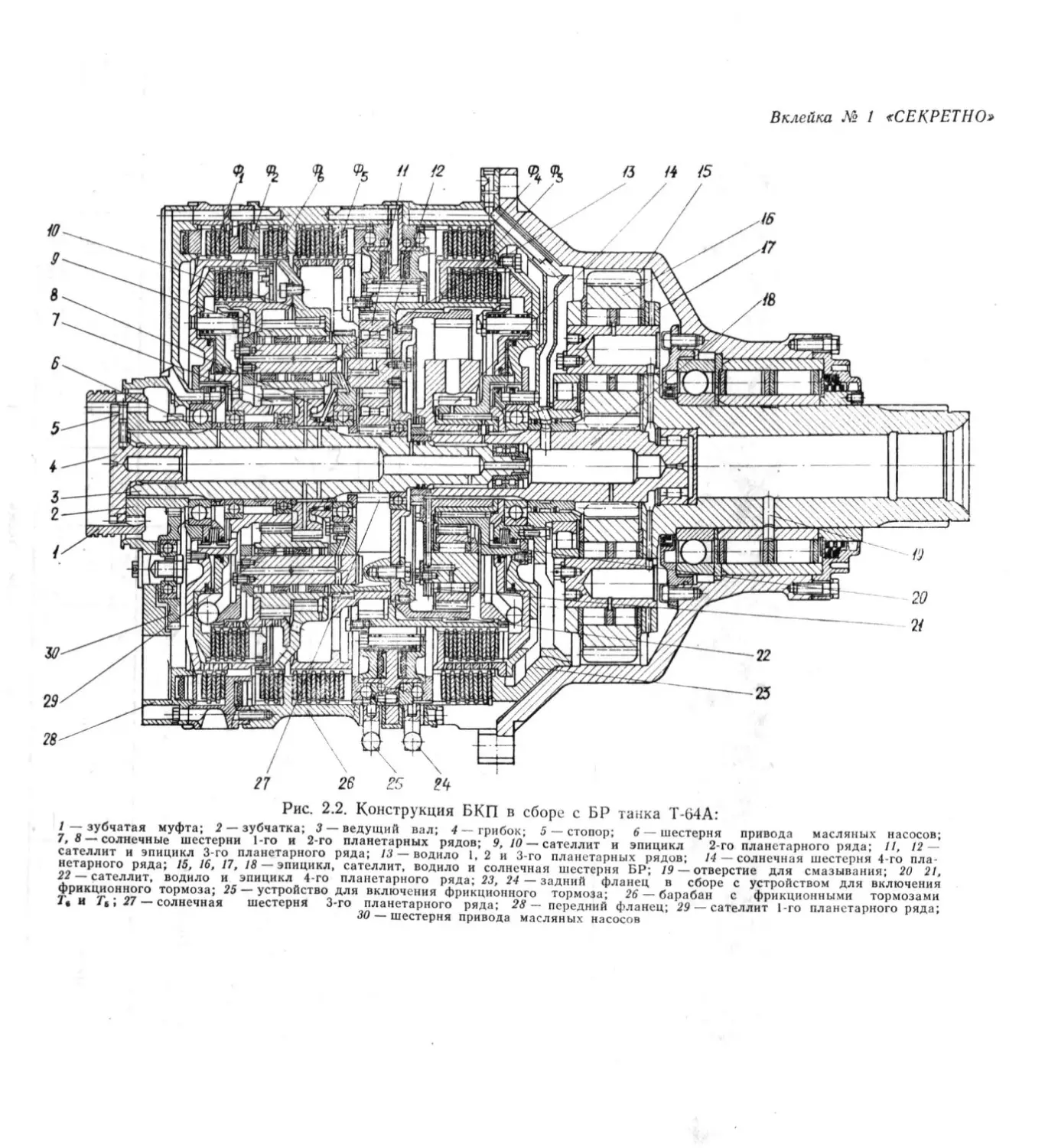
Вклейка Л£ / ^СЕКРЕТНО»
Рис. 2.2. Конструкция БКП в сборе с БР танка Т-64А:
/ — зубчатая муфта; 2 — зубчатка; 3 — ведущий вал; 4— грибок; 5 — стопор; 6 — шестерня привода масляных насосов;
7, 8 солнечные шестерни 1-го и 2-го планетарных рядов; 9, 10 — сателлит и эпицикл 2-го планетарного ряда; II, 12
сателлит и эпицикл 3-го планетарного ряда; 13 — водило 1. 2 и 3-го планетарных рядов; 14 — солнечная шестерни 4 го пла
нетарного ряда; 15, 16, 17, 18 — эпицикл, сателлит, водило и солнечная шестерня БР; /9 — отверстие для смазывания; 20 21,
22 сателлит, водило и эпицикл 4-го планетарного ряда; 23, 24 — задний фланец в сборе с устройством для включения
фрикционного тормоза; 25 устройство для включения фрикционного тормоза; 26 — барабан с фрикционными тормозами
7* и 7g; 27 — солнечная шестерня 3-го планетарного ряда; 28 — передний фланец; 29 — сателлит 1-го планетарного ряда;
30 — шестерня привода масляных насосов
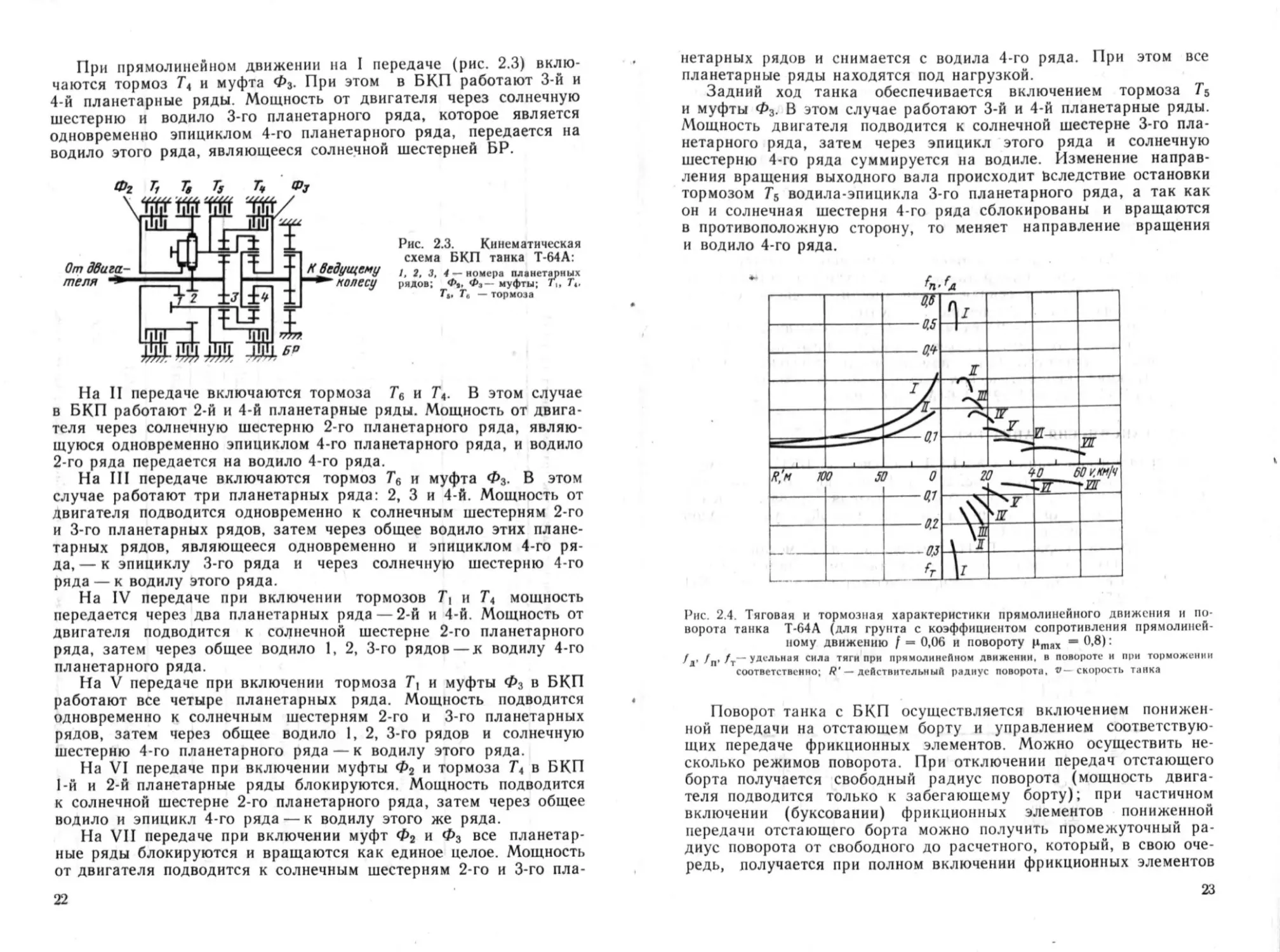
При прямолинейном движении на I передаче (рис. 2.3) вклю-
чаются тормоз Т< и муфта Ф3. При этом в БКП работают 3-й и
4-й планетарные ряды. Мощность от двигателя через солнечную
шестерню и водило 3-го планетарного ряда, которое является
одновременно эпициклом 4-го планетарного ряда, передается на
водило этого ряда, являющееся солнечной шестерней БР.
Рис. 2.3. Кинематическая
схема БКП танка Т-64А:
/, 2. 3. 4—номера планетарных
рядов; Ф„ Ф, - муфты; Т„ Tt.
Г*. Г, — тормоза
На II передаче включаются тормоза Т6 и Г4. В этом случае
в БКП работают 2-й и 4-й планетарные ряды. Мощность от двига-
теля через солнечную шестерню 2-го планетарного ряда, являю-
щуюся одновременно эпициклом 4-го планетарного ряда, и водило
2-го ряда передается на водило 4-го ряда.
На III передаче включаются тормоз Тв и муфта Ф3. В этом
случае работают три планетарных ряда: 2, 3 и 4-й. Мощность от
двигателя подводится одновременно к солнечным шестерням 2-го
и 3-го планетарных рядов, затем через общее водило этих плане-
тарных рядов, являющееся одновременно и эпициклом 4-го ря-
да, — к эпициклу 3-го ряда и через солнечную шестерню 4-го
ряда — к водилу этого ряда.
На IV передаче при включении тормозов Т| и Т4 мощность
передается через два планетарных ряда — 2-й и 4-й. Мощность от
двигателя подводится к солнечной шестерне 2-го планетарного
ряда, затем через общее водило 1, 2, 3-го рядов — к водилу 4-го
планетарного ряда.
На V передаче при включении тормоза и муфты Ф3 в БКП
работают все четыре планетарных ряда. Мощность подводится
одновременно к солнечным шестерням 2-го и 3-го планетарных
рядов, затем через общее водило 1, 2, 3-го рядов и солнечную
шестерню 4-го планетарного ряда — к водилу этого ряда.
На VI передаче при включении муфты Ф2 и тормоза в БКП
1-й и 2-й планетарные ряды блокируются. Мощность подводится
к солнечной шестерне 2-го планетарного ряда, затем через общее
водило и эпицикл 4-го ряда — к водилу этого же ряда.
На VII передаче при включении муфт Ф2 и Ф3 все планетар-
ные ряды блокируются и вращаются как единое целое. Мощность
от двигателя подводится к солнечным шестерням 2-го и 3-го пла-
22
нетарных рядов и снимается с водила 4-го ряда. При этом все
планетарные ряды находятся под нагрузкой.
Задний ход танка обеспечивается включением тормоза Г5
и муфты Ф3. В этом случае работают 3-й и 4-й планетарные ряды.
Мощность двигателя подводится к солнечной шестерне 3-го пла-
нетарного ряда, затем через эпицикл этого ряда и солнечную
шестерню 4-го ряда суммируется на водиле. Изменение направ-
ления вращения выходного вала происходит вследствие остановки
тормозом Ть водила-эпицикла 3-го планетарного ряда, а так как
он и солнечная шестерня 4-го ряда сблокированы и вращаются
в противоположную сторону, то меняет направление вращения
и водило 4-го ряда.
Рис. 2.4. Тяговая и тормозная характеристики прямолинейного движения и по-
ворота танка Т-64А (для грунта с коэффициентом сопротивления прямолиней-
ному движению f — 0,06 и повороту цтах — 0,8):
/д. /п> fv— удельная сила тягн при прямолинейном движении, в повороте и при торможении
соответственно; R'— действительный радиус поворота. ®— скорость танка
Поворот танка с БКП осуществляется включением понижен-
ной передачи на отстающем борту и управлением соответствую-
щих передаче фрикционных элементов. Можно осуществить не-
сколько режимов поворота. При отключении передач отстающего
борта получается свободный радиус поворота (мощность двига
теля подводится только к забегающему борту); при частичном
включении (буксовании) фрикционных элементов пониженной
передачи отстающего борта можно получить промежуточный ра-
диус поворота от свободного до расчетного, который, в свою оче-
редь, получается при полном включении фрикционных элементов
23
пониженной передачи. Управление поворотом танка на I передаче
переднего и заднего хода осуществляется включением тормозов
Г5 и Т< на отстающем борту при одновременном отключении вы-
ходного вала БКП от двигателя; при этом танк поворачивается
вокруг заторможенной гусеницы.
Торможение танка осуществляется одновременным включе-
нием многодисковых тормозов Т5 и Т« при помощи механического
привода; при этом БКП отсоединены от двигателя. При букси-
ровке танка воздействием на тормоза Т& и Т< левой или ггравой
БКП можно управлять направлением его движения.
Основные параметры трансмиссии танка Т-64А представлены
в табл. 2.1.
На рис. 2.4 приведены тяговая и тормозная характеристики
прямолинейного движения, а также тяговая характеристика пово-
рота танка Т-64А, построенная в зависимости от действительного
радиуса поворота на сухом дернистом грунте.
Трансмиссия танка Т-72 отличается от трансмиссии Т-64А (см.
рис. 2.1, в) тем, что двигатель В-46, расположенный поперек кор-
пуса танка, соединен с БКП при помощи в ходкого редуктор а (ВР)
Конструкция, кинематическая схема, функциональные харак-
теристики БКП танков Т-72 и Т-64А аналогичны.
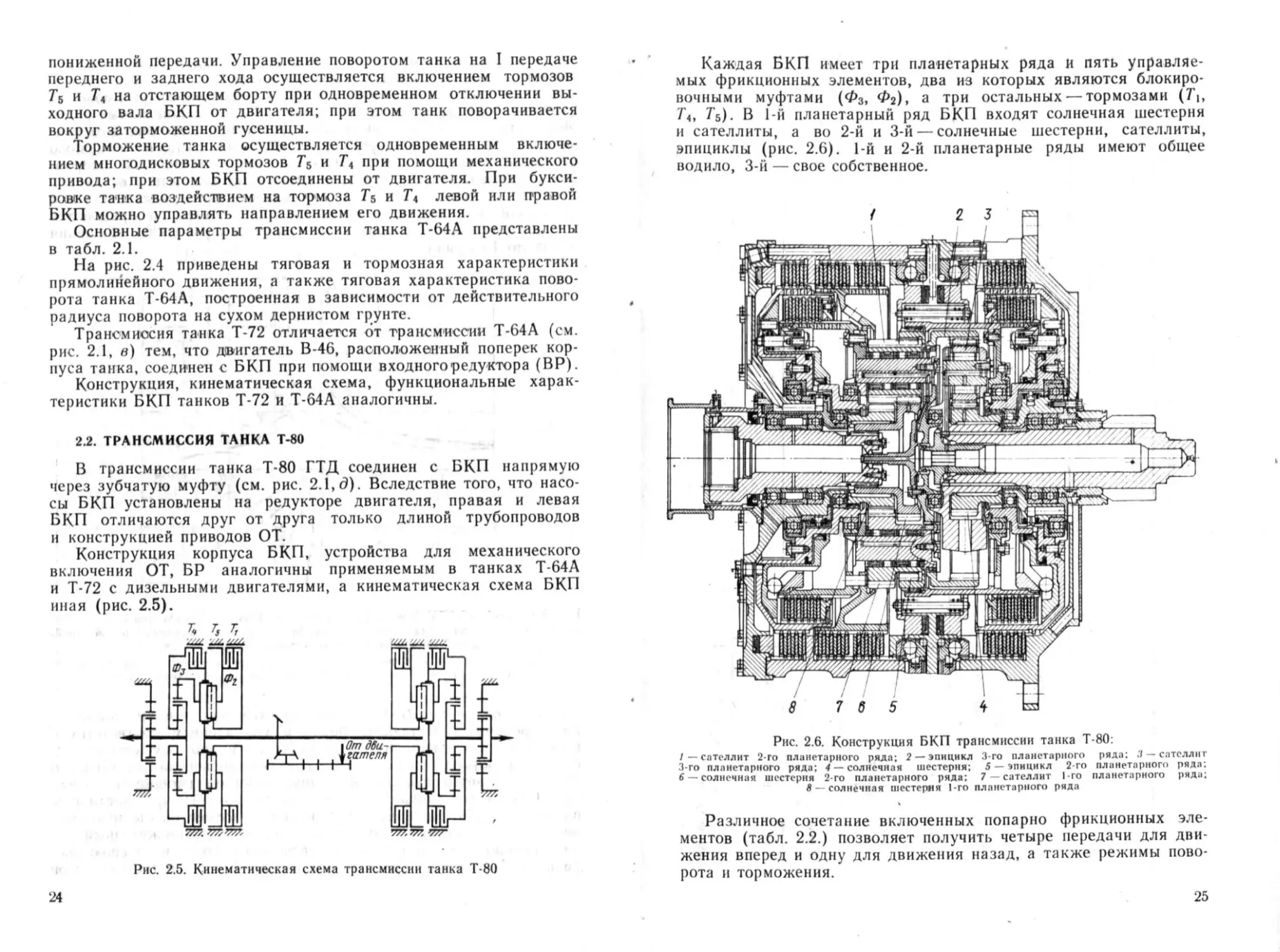
2.2. ТРАНСМИССИЯ ТАНКА Т-80
В трансмиссии танка Т-80 ГТД соединен с БКП напрямую
через зубчатую муфту (см. рис. 2.1, д). Вследствие того, что насо-
сы БКП установлены на редукторе двигателя, правая и левая
БКП отличаются друг от друга только длиной трубопроводов
и конструкцией приводов ОТ.
Конструкция корпуса БКП, устройства для механического
включения ОТ, БР аналогичны применяемым в танках Т-64А
и Т-72 с дизельными двигателями, а кинематическая схема БКП
иная (рис. 2.5).
Рис. 2.5. Кинематическая схема трансмиссии танка Т-80
24
Каждая БКП имеет три планетарных ряда И пять управляе-
мых фрикционных элементов, два из которых являются блокиро-
вочными муфтами (Ф3, Ф2), а три остальных— тормозами (Т|,
Т4, Т&). В 1-й планетарный ряд БКП входят солнечная шестерня
и сателлиты, а во 2-й и 3-й — солнечные шестерни, сателлиты,
эпициклы (рис. 2.G). 1-й и 2-й планетарные ряды имеют общее
водило, 3-й — свое собственное.
Рис. 2.6. Конструкция БКП трансмиссии танка Т-80:
/ — сателлит 2-го планетарного ряда; 2 — эпицикл 3 го планетарного ряда; 3 —сателлит
3-го планетарного ряда; 4 — солнечная шестерня; 5 — эпицикл 2 го планетарного ряда;
6— солнечная шестерня 2 го планетарного ряда; 7 сателлит 1-го планетарного ряда;
Л солнечная шестерня 1-го планетарного ряда
Различное сочетание включенных попарно фрикционных эле-
ментов (табл. 2.2.) позволяет получить четыре передачи для дви-
жения вперед и одну для движения назад, а также режимы пово-
рота и торможения.
25
8
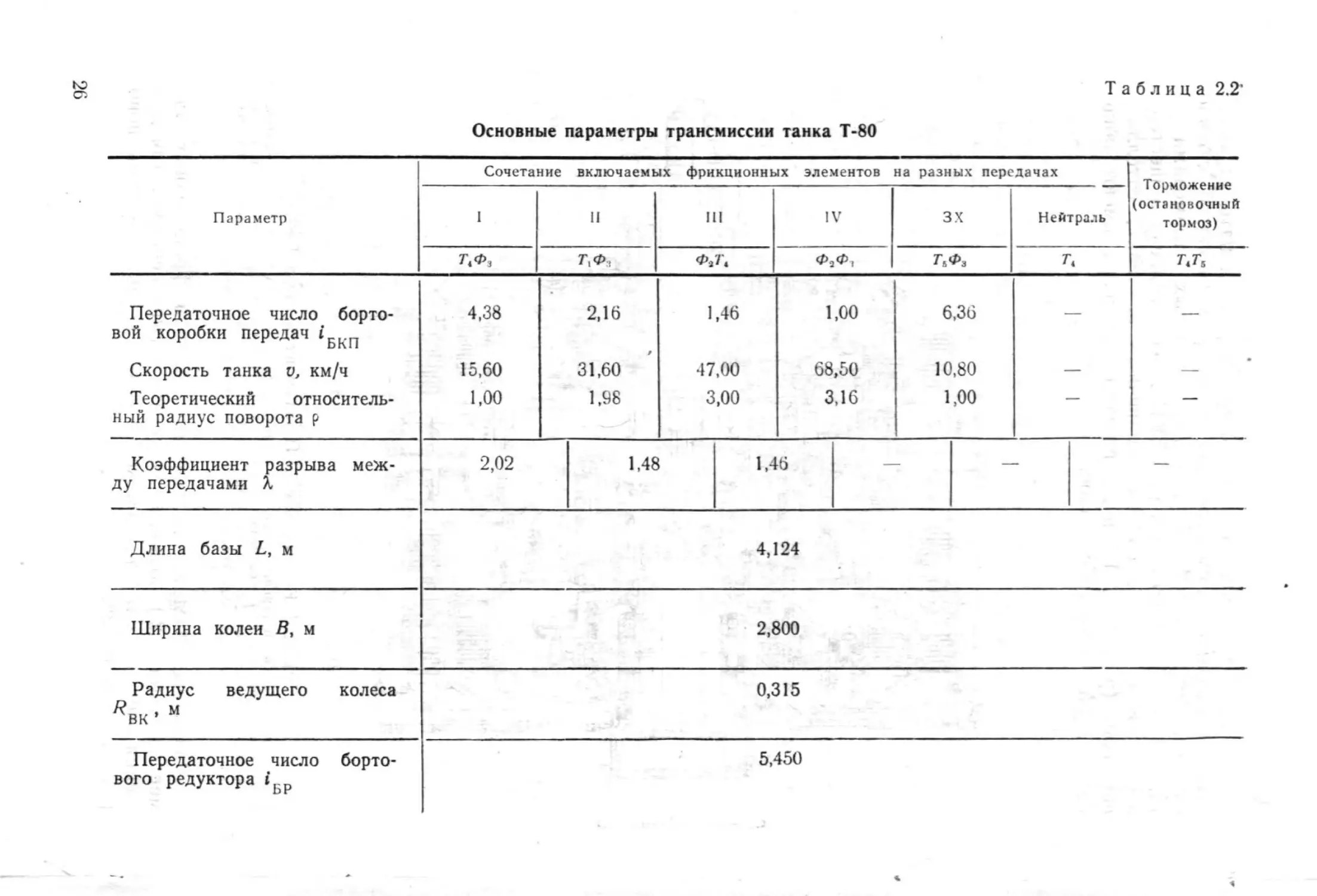
Таблица 2.2’
Основные параметры трансмиссии танка Т-80
Параметр Сочетание включаемых фрикционных элементов на разных передачах Торможение (остановочный тормоз) г«г,
1 Т,Ф, П Г,Ф III Ф.Г* IV фаф, зх т,фл Нейтраль Г.
Передаточное число борто- вой коробки передач / Скорость танка v, км/ч Теоретический относитель- ный радиус поворота р 4.38 15,60 1,00 2,16 31,60 1,98 1,46 47,00 3,00 1,00 68,50 3,16 6,36 10,80 1,00 — —
Коэффициент разрыва меж- ду передачами л 2,02 1,48 1,46 — — —
Длина базы L, м 4,124
Ширина колеи В, м 2,800
Радиус ведущего колеса #вк ’ м 0,315
Передаточное число борто- вого редуктора <Бр 5,450
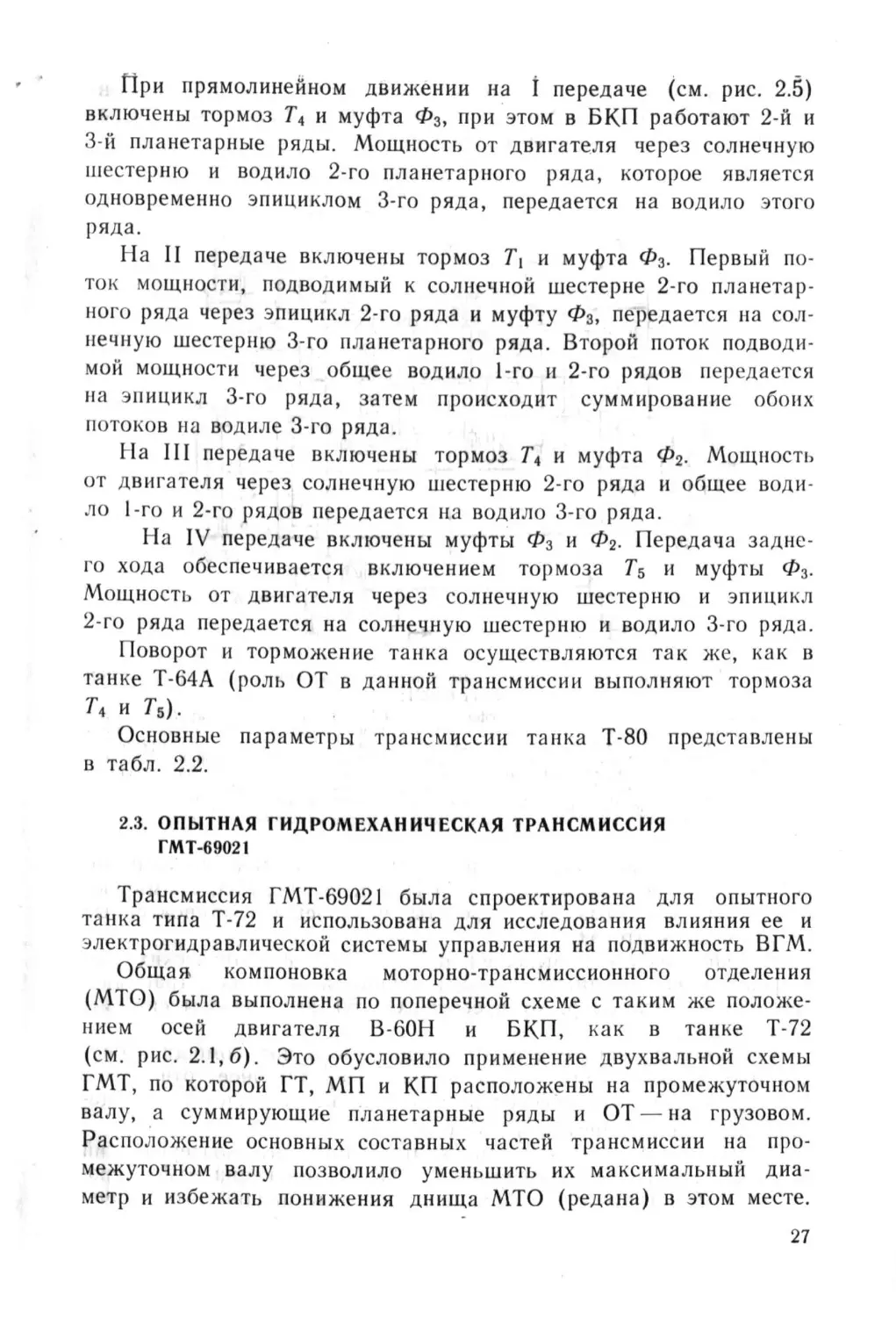
При прямолинейном движении на 1 передаче (см. рис. 2.5)
включены тормоз Т4 и муфта Ф3, при этом в БКП работают 2-й и
3-й планетарные ряды. Мощность от двигателя через солнечную
шестерню и водило 2-го планетарного ряда, которое является
одновременно эпициклом 3-го ряда, передается на водило этого
ряда.
На II передаче включены тормоз Т\ и муфта Ф3. Первый по-
ток мощности, подводимый к солнечной шестерне 2-го планетар-
ного ряда через эпицикл 2-го ряда и муфту Ф3, передается на сол-
нечную шестерню 3-го планетарного ряда. Второй поток подводи-
мой мощности через общее водило 1-го и 2-го рядов передается
на эпицикл 3-го ряда, затем происходит суммирование обоих
потоков на водиле 3-го ряда.
На III передаче включены тормоз 7\ и муфта Фг. Мощность
от двигателя через солнечную шестерню 2-го ряда и общее води-
ло 1-го и 2-го рядов передается на водило 3-го ряда.
На IV передаче включены муфты Ф3 и Фг. Передача задне-
го хода обеспечивается включением тормоза Т5 и муфты Ф3.
Мощность от двигателя через солнечную шестерню и эпицикл
2-го ряда передается на солнечную шестерню и водило 3-го ряда.
Поворот и торможение танка осуществляются так же, как в
танке Т-64А (роль ОТ в данной трансмиссии выполняют тормоза
Л и Т5).
Основные параметры трансмиссии танка Т-80 представлены
в табл. 2.2.
2.3. ОПЫТНАЯ ГИДРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ
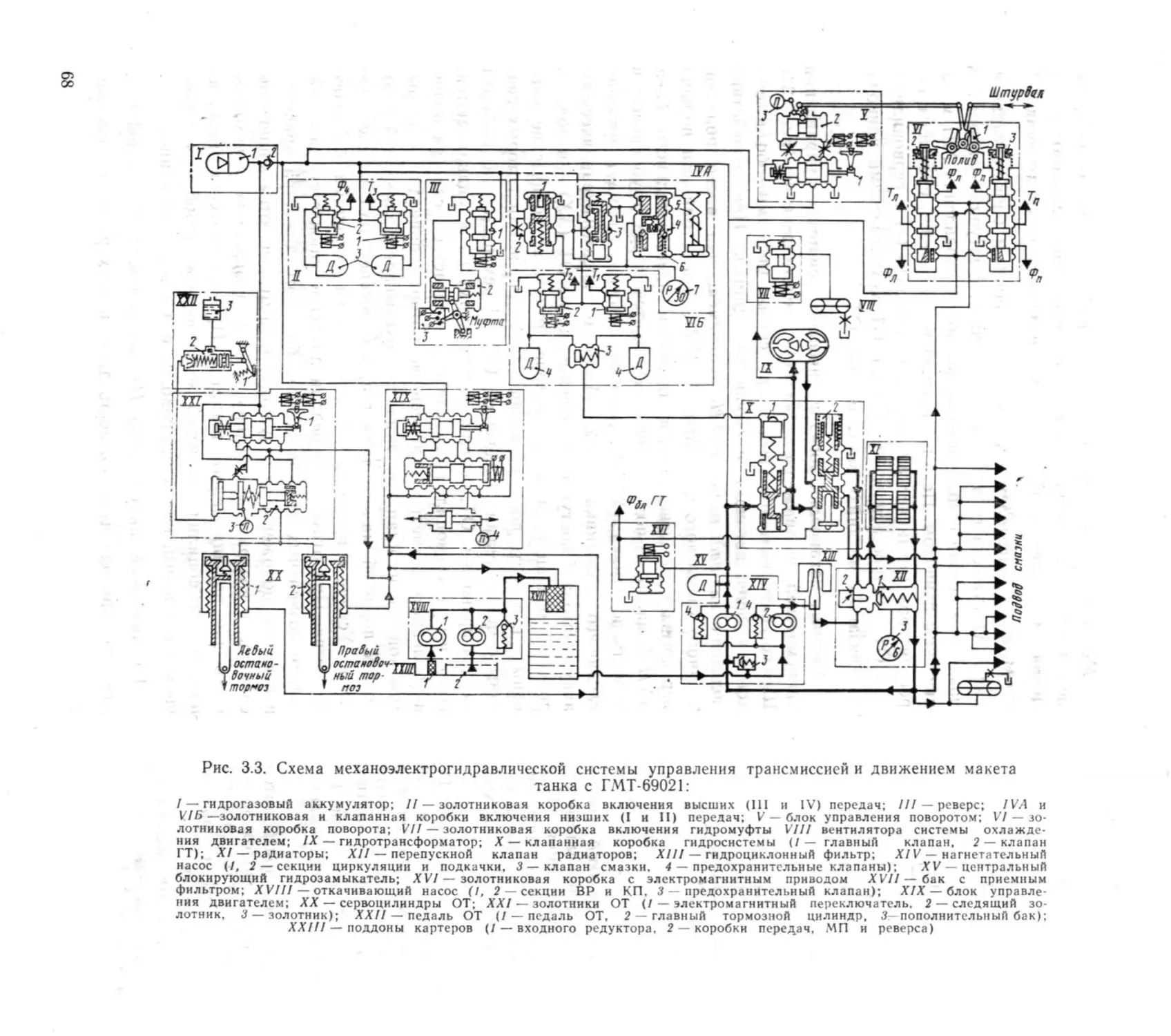
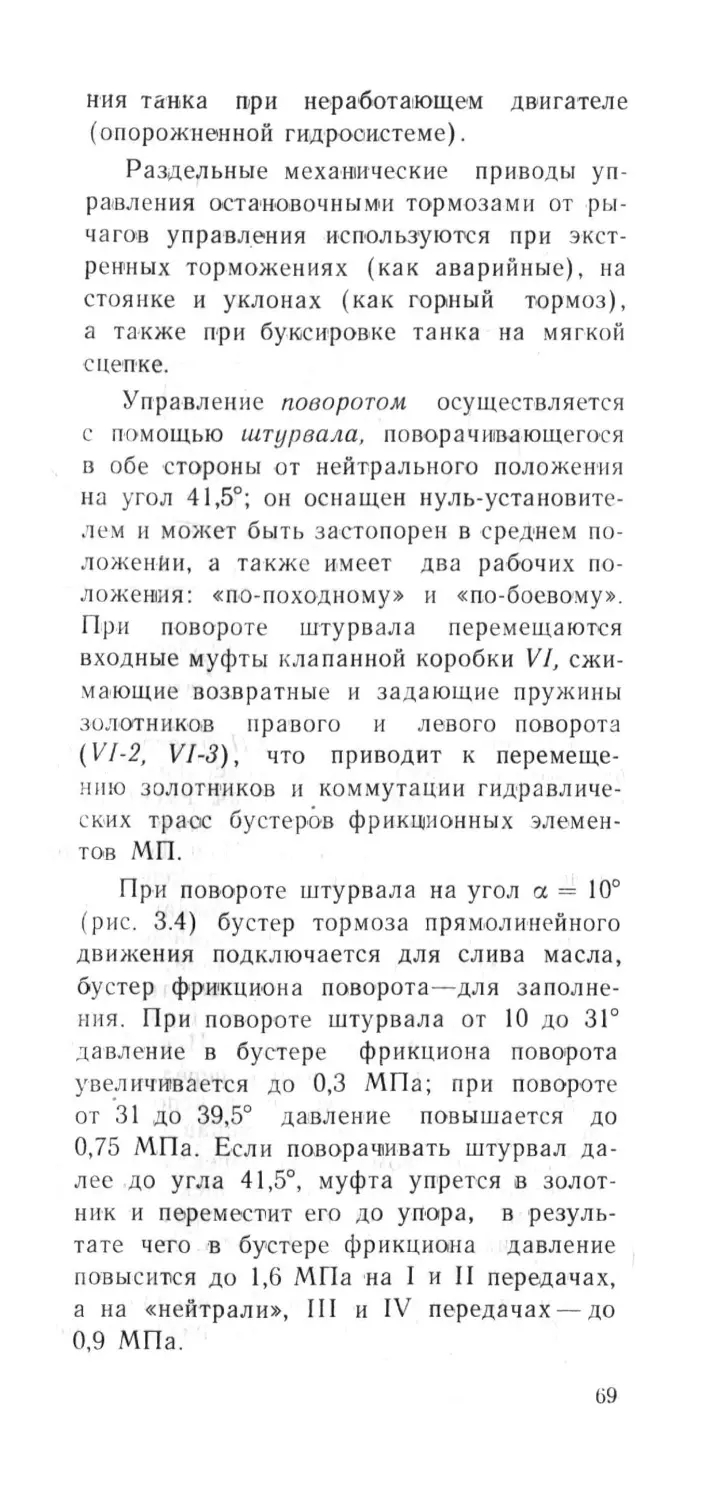
ГМТ-69021
Трансмиссия ГМТ-69021 была спроектирована для опытного
танка типа Т-72 и использована для исследования влияния ее и
электрогидравлической системы управления на подвижность ВГМ.
Общая компоновка моторно-трансмиссионного отделения
(МТО) была выполнена по поперечной схеме с таким же положе-
нием осей двигателя В-60Н и БКП, как в танке Т-72
(см. рис. 2.1,6). Это обусловило применение двухвальной схемы
ГМТ, по которой ГТ, МП и КП расположены на промежуточном
валу, а суммирующие планетарные ряды и ОТ — на грузовом.
Расположение основных составных частей трансмиссии на про-
межуточном валу позволило уменьшить их максимальный диа-
метр и избежать понижения днища МТО (редана) в этом месте.
27
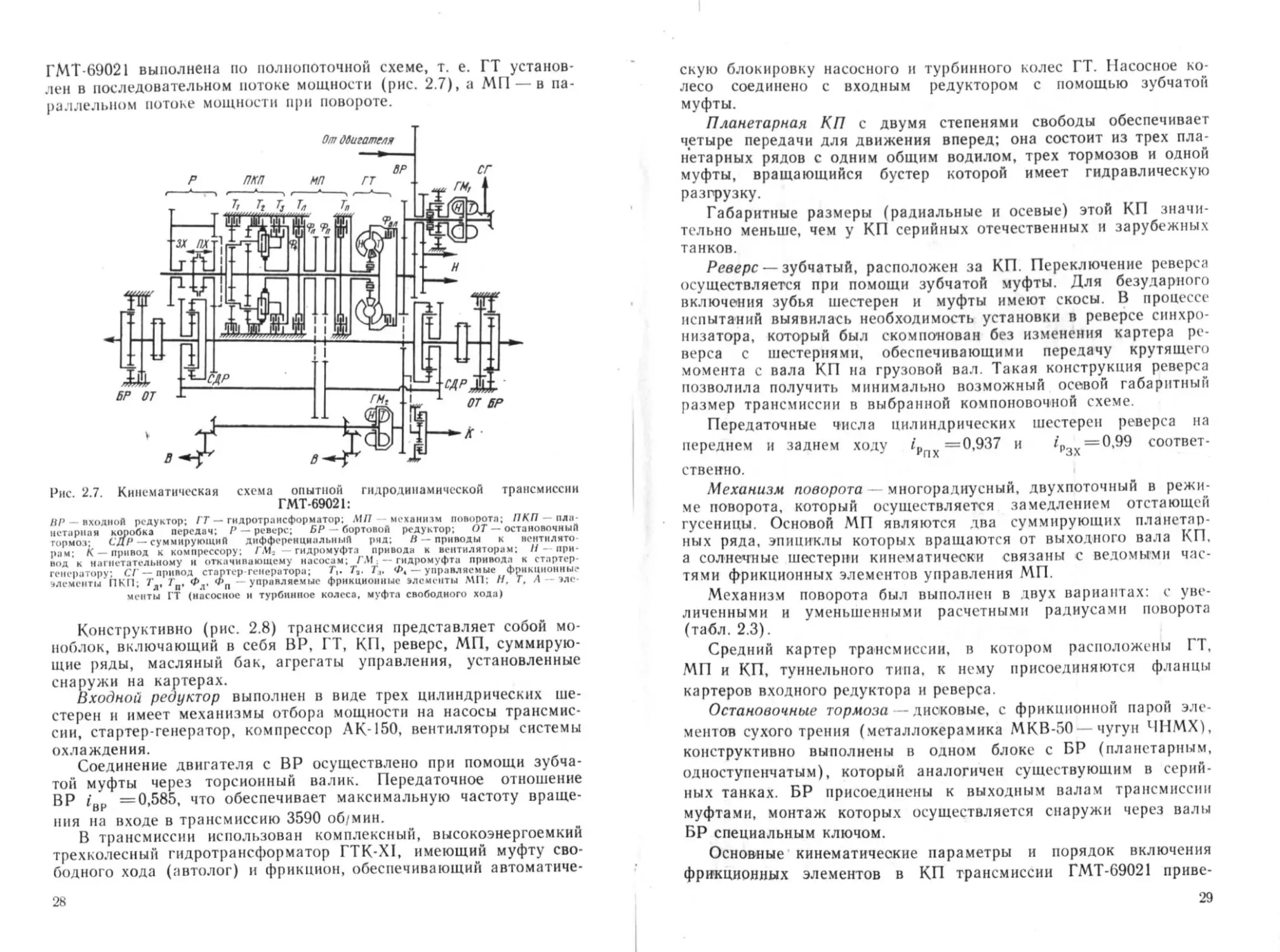
ГМТ 69021 выполнена по полнопоточной схеме, т. е. ГТ установ-
лен в последовательном потоке мощности (рис. 2.7), а МП — в па-
раллельном потоке мощности при повороте.
Рис. 2.7. Кинематическая схема опытной гидродинамической трансмиссии
ГМТ-69021:
Н1‘ входной редуктор; ГТ — гидротрансформатор; МП — механизм поворота; ПКП пла-
нетарная коробка передач; Р -реверс; БР бортовой редуктор; ОТ — остановочный
тормоз; СДР — суммирующий дифференциальный ряд; Н — приводы к пентилмто
рам; К- привод к компрессору; Г.М. — гидромуфта привода к вентиляторам; Н при
иод к нагнетательному и откачивающему насосам. Г.М. - гидромуфта привода к стартер
генератору, СГ — привод стартер Генератора; Т,. Tt. Г„ Ф, управляемые фрикционные
элементы ПКП; 7Д, 7'п, Фд. «Р(1 — управляемые фрикционные элементы МП; Н, Т, Л эле-
менты ГТ (насосное и турбинное колеса, муфта свободного хода)
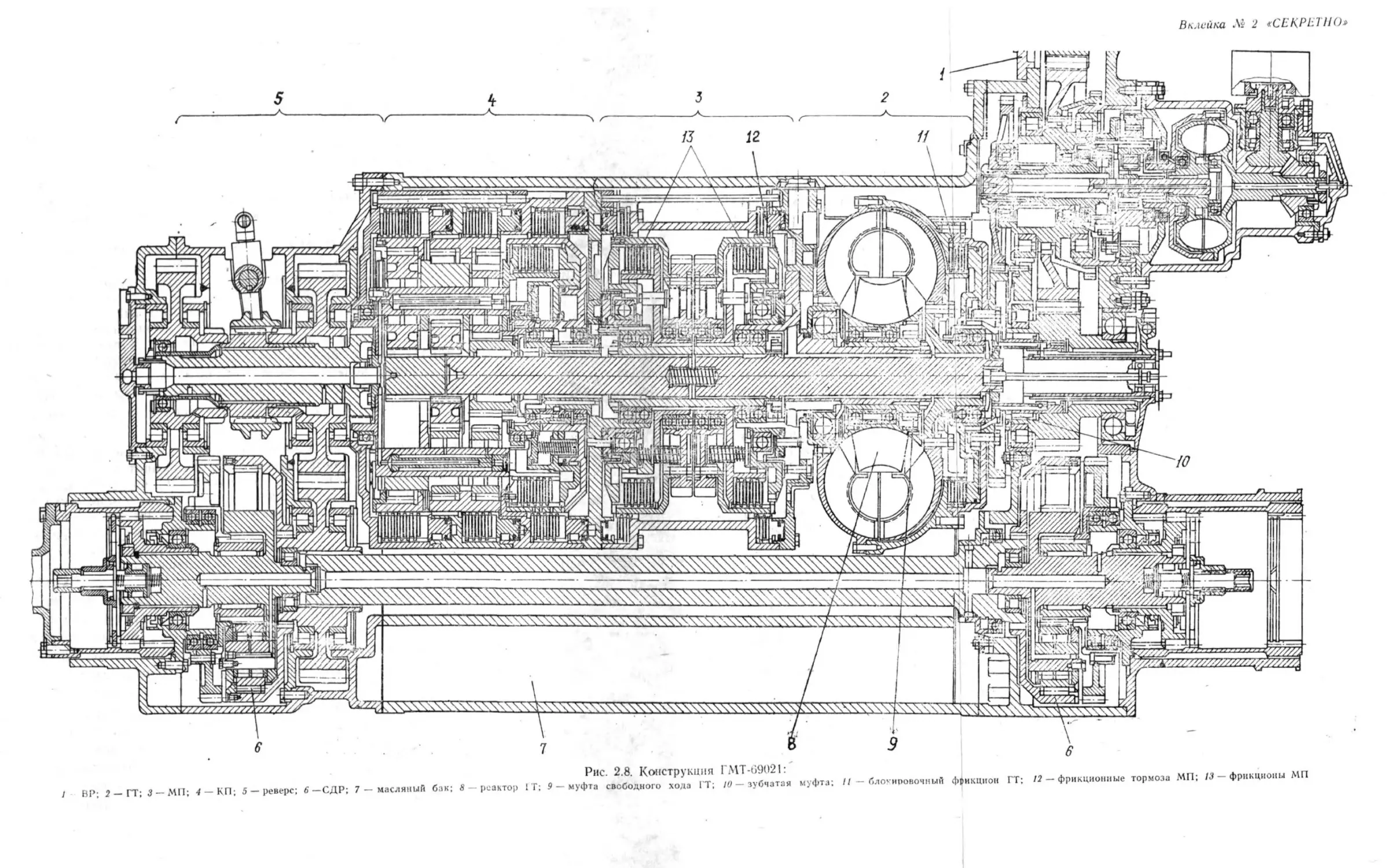
Конструктивно (рис. 2.8) трансмиссия представляет собой мо-
ноблок, включающий в себя ВР, ГТ, КП, реверс, МП, суммирую-
щие ряды, масляный бак, агрегаты управления, установленные
снаружи на картерах.
Входной редуктор выполнен в виде трех цилиндрических ше-
стерен и имеет механизмы отбора мощности на насосы трансмис-
сии, стартер-генератор, компрессор АК-150, вентиляторы системы
охлаждения.
Соединение двигателя с ВР осуществлено при помощи зубча-
той муфты через торсионный валик. Передаточное отношение
ВР / =0,585, что обеспечивает максимальную частоту враще-
ния на входе в трансмиссию 3590 об/мин.
В трансмиссии использован комплексный, высокоэнергоемкнй
трехколесный гидротрансформатор ГТК-XI. имеющий муфту сво-
бодного хода (автолог) и фрикцион, обеспечивающий автоматиче-
28
скую блокировку насосного и турбинного колес ГТ. Насосное ко-
лесо соединено с входным редуктором с помощью зубчатой
муфты.
Планетарная КП с двумя степенями свободы обеспечивает
четыре передачи для движения вперед; она состоит из трех пла-
нетарных рядов с одним общим водилом, трех тормозов и одной
муфты, вращающийся бустер которой имеет гидравлическую
разгрузку.
Габаритные размеры (радиальные и осевые) этой КП значи-
тельно меньше, чем у КП серийных отечественных и зарубежных
танков.
Реверс —зубчатый, расположен за КП. Переключение реверса
осуществляется при помощи зубчатой муфты. Для безударного
включения зубья шестерен и муфты имеют скосы. В процессе
испытаний выявилась необходимость установки в реверсе синхро-
низатора, который был скомпонован без изменения картера ре-
верса с шестернями, обеспечивающими передачу крутящего
момента с вала КП на грузовой вал. Такая конструкция реверса
позволила получить минимально возможный осевой габаритный
размер трансмиссии в выбранной компоновочной схеме.
Передаточные числа цилиндрических шестерен реверса на
переднем и заднем ходу /₽пх =0,937 и (Рзх=0,99 соответ-
ственно.
Механизм поворота - многорадиусный, двухпоточный в режи-
ме поворота, который осуществляется замедлением отстающей
гусеницы. Основой МП являются два суммирующих планетар-
ных ряда, эпициклы которых вращаются от выходного вала КП,
а солнечные шестерни кинематически связаны с ведомыми час-
тями фрикционных элементов управления МП.
Механизм поворота был выполнен в двух вариантах: с уве-
личенными и уменьшенными расчетными радиусами поворота
(табл. 2.3).
Средний картер трансмиссии, в котором расположены ГТ,
МП и КП, туннельного типа, к нему присоединяются фланцы
картеров входного редуктора и реверса.
Остановочные тормоза -дисковые, с фрикционной парой эле-
ментов сухого трения (металлокерамика МКВ-50—чугун ЧНМХ),
конструктивно выполнены в одном блоке с БР (планетарным,
одноступенчатым), который аналогичен существующим в серий-
ных танках. БР присоединены к выходным валам трансмиссии
муфтами, монтаж которых осуществляется снаружи через валы
БР специальным ключом.
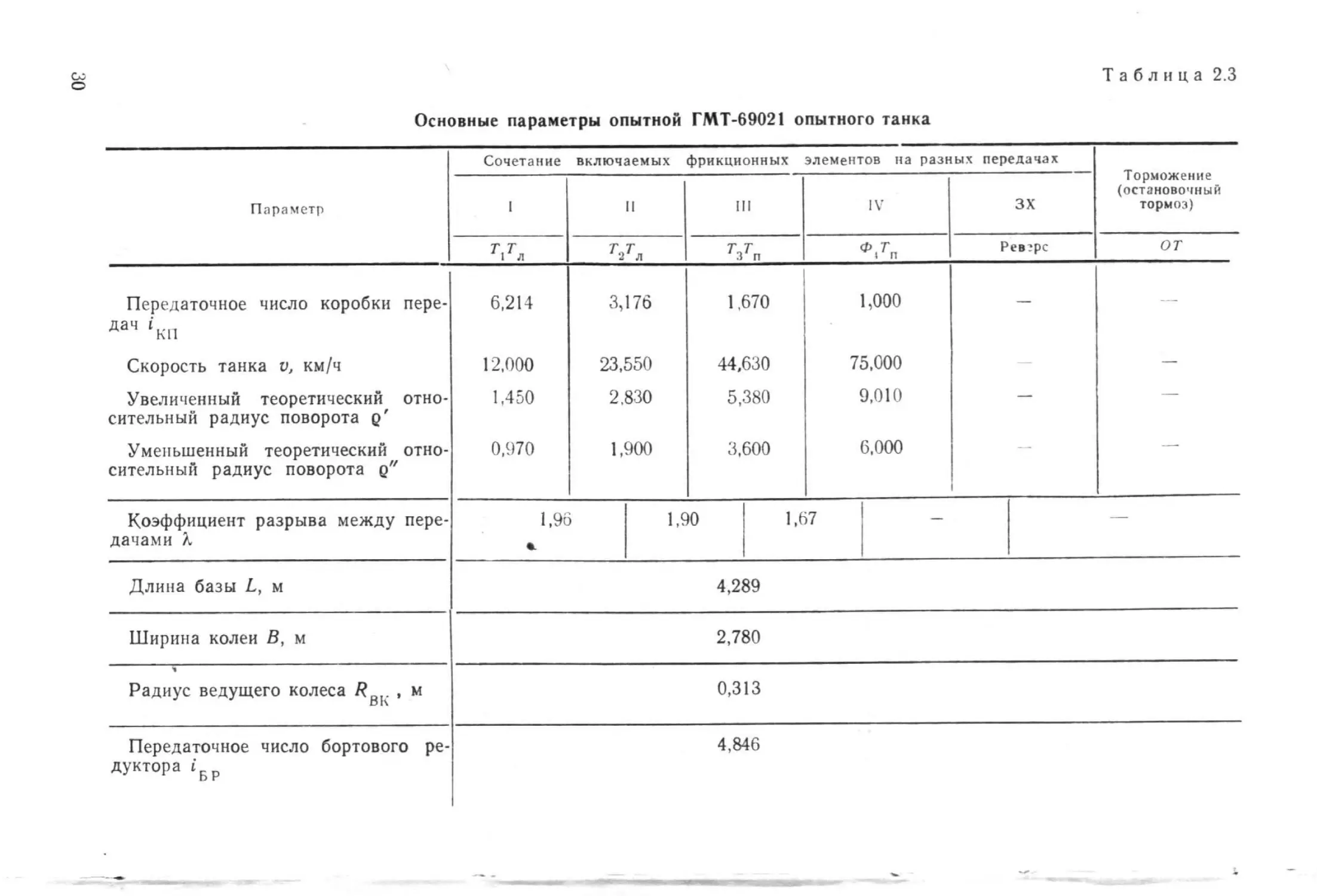
Основные кинематические параметры и порядок включения
фрикционных элементов в КП трансмиссии ГМТ-69021 приве-
29
Вклейка As 2 ^СЕКРЕТНО»
о
Таблица 2.3
Основные параметры опытной ГМТ-69021 опытного танка
Параметр Сочетание включаемых фрикционных элементов на разных передачах Торможение (остановочный тормоз)
1 II III IV зх
^/л Г2Гл 3 П Ревгрс ОТ
Передаточное число коробки пере- дач % 6,214 3,176 1,670 1,000 -
Скорость танка V, км/ч 12.000 23,550 44,630 75.000
Увеличенный теоретический отно- сительный радиус поворота q' 1.450 2.830 5,380 9,010 — —
Уменьшенный теоретический отно- сительный радиус поворота q" 0,970 1,900 3.600 6,000 —
Коэффициент разрыва между пере- дачами Л 1,96 1,90 1,67 - —
Длина базы L, м 4,289
Ширина колеи В, м 2,780
Радиус ведущего колеса Янк , м 0,313
Передаточное число бортового ре- дуктора irp 4,846
Рис. 2.9. Трансмиссия ГМТ-69021 в сборе
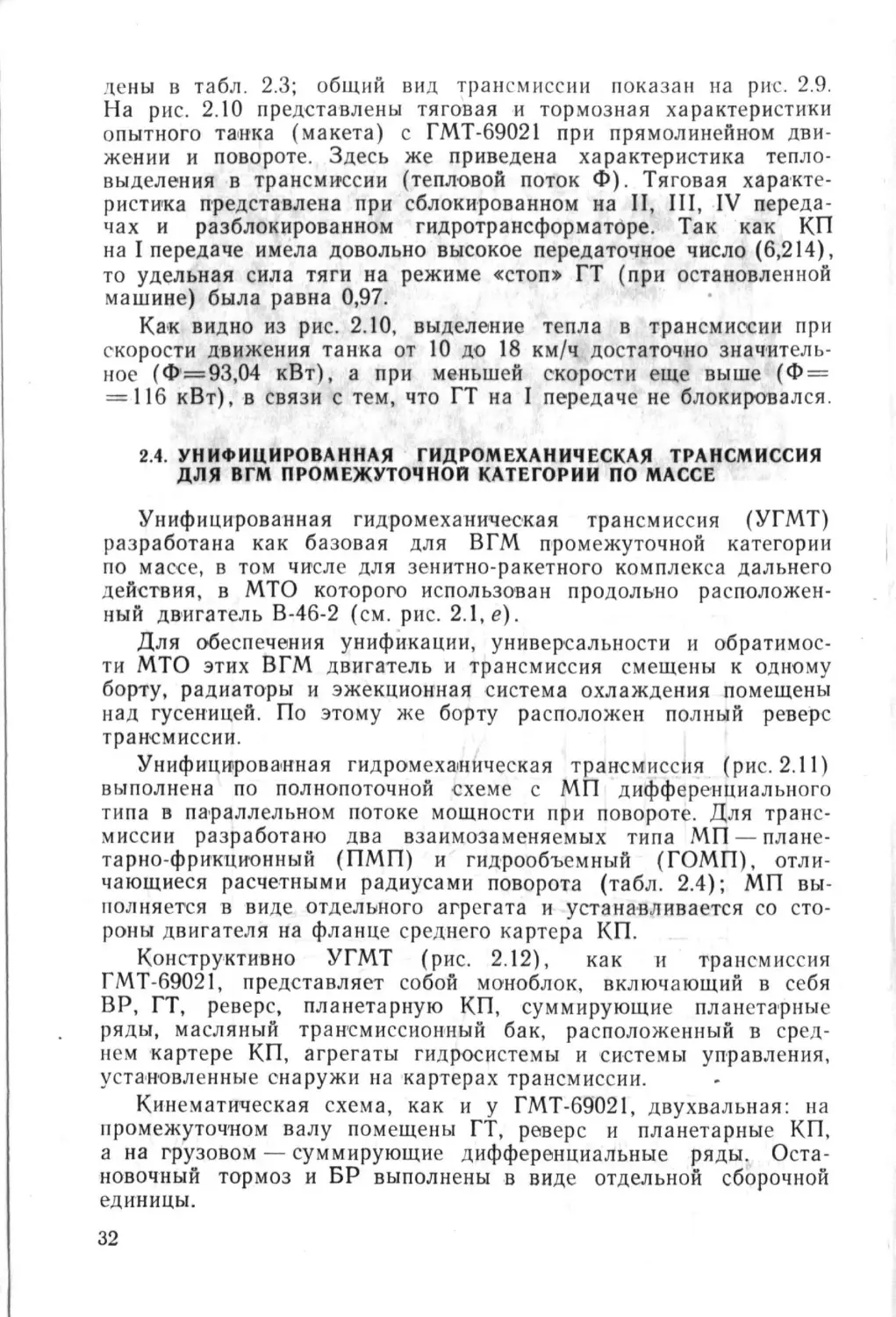
Рис. 2.10. Тяговая и тормозная характеристики опытного танка с ГМТ-69021
(при прямолинейном движении и повороте для грунта с f = 0,06, tAmax = 0,8):
/—IV, II— /J/^ —номера передач; индекс «сб»—при сблокированном ГТ (остальные
t обозначения см. на рис. 2.4)
31
дены в табл. 2.3; общий вид трансмиссии показан на рис. 2.9.
На рис. 2.10 представлены тяговая и тормозная характеристики
опытного танка (макета) с ГМТ-69021 при прямолинейном дви-
жении и повороте. Здесь же приведена характеристика тепло-
выделения в трансмиссии (тепловой поток Ф). Тяговая характе-
ристика представлена при сблокированном на II, III, IV переда-
чах и разблокированном гидротрансформаторе. Так как КП
на I передаче имела довольно высокое передаточное число (6,214),
то удельная сила тяги на режиме «стоп» ГТ (при остановленной
машине) была равна 0,97.
Как видно из рис. 2.10. выделение тепла в трансмиссии при
скорости движения танка от 10 до 18 км/ч достаточно значитель-
ное (Ф=93,04 кВт), а при меньшей скорости еще выше (Ф =
= 116 кВт), в связи с тем, что ГТ на I передаче не блокировался.
2.4. УНИФИЦИРОВАННАЯ ГИДРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ
ДЛЯ ВГМ промежуточной категории по массе
Унифицированная гидромеханическая трансмиссия (УГМТ)
разработана как базовая для ВГМ промежуточной категории
по массе, в том числе для зенитно-ракетного комплекса дальнего
действия, в МТО которого использован продольно расположен-
ный двигатель В-46-2 (см. рис. 2.1, е).
Для обеспечения унификации, универсальности и обратимос-
ти МТО этих ВГМ двигатель и трансмиссия смещены к одному
борту, радиаторы и эжекционная система охлаждения помещены
над гусеницей. По этому же борту расположен полный реверс
трансмиссии.
Унифицированная гидромеханическая трансмиссия (рис. 2.11)
выполнена по полнопоточной схеме с МП дифференциального
типа в параллельном потоке мощности при повороте. Для транс-
миссии разработано два взаимозаменяемых типа МП — плане-
тарно-фрикционный (ПМП) и гидрообъемный (ГОМП), отли-
чающиеся расчетными радиусами поворота (табл. 2.4); МП вы-
полняется в виде отдельного агрегата и устанавливается со сто-
роны двигателя на фланце среднего картера КП.
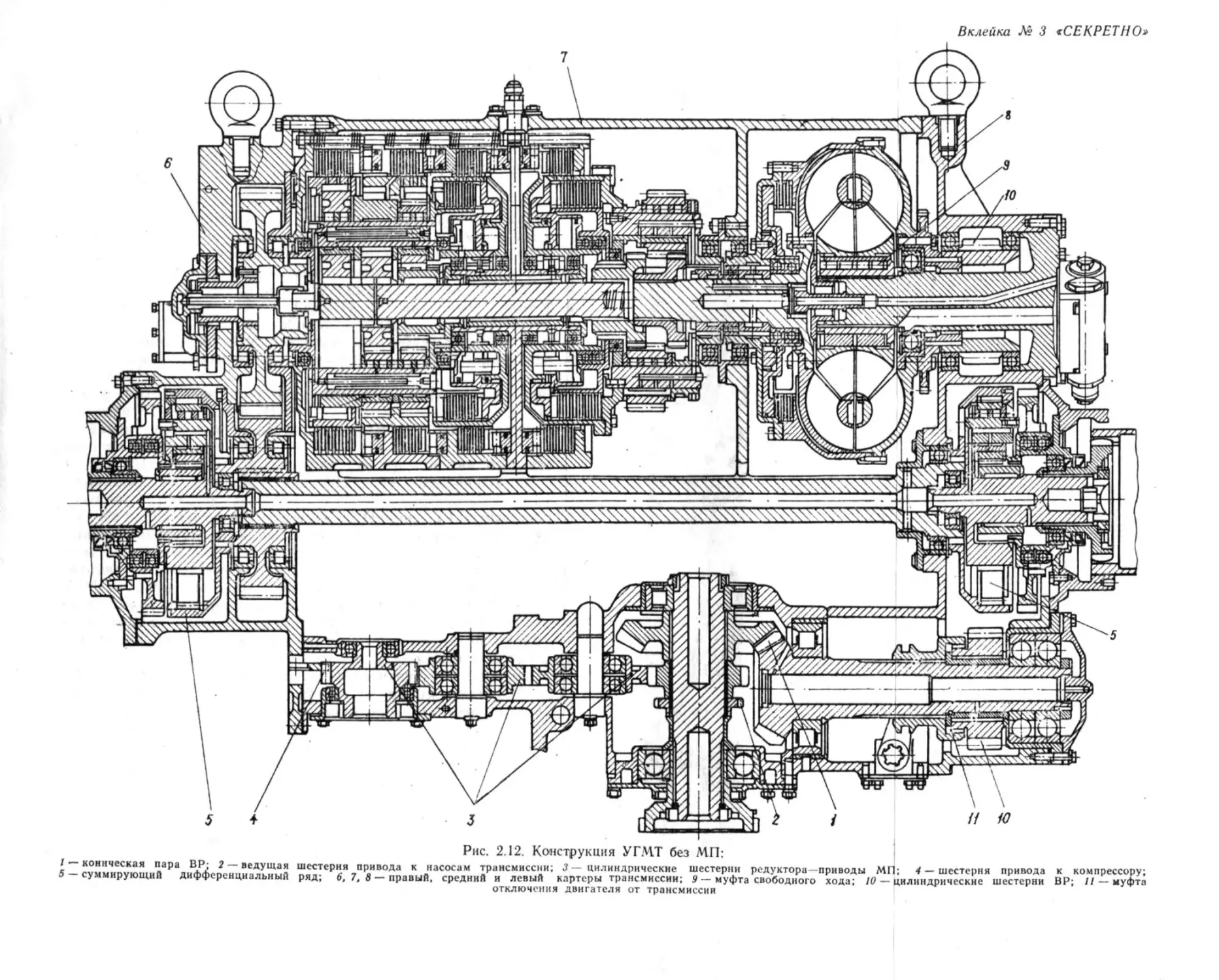
Конструктивно УГМТ (рис. 2.12), как и трансмиссия
ГМТ-69021, представляет собой моноблок, включающий в себя
ВР, ГТ, реверс, планетарную КП, суммирующие планетарные
ряды, масляный трансмиссионный бак, расположенный в сред-
нем картере КП, агрегаты гидросистемы и системы управления,
установленные снаружи на картерах трансмиссии.
Кинематическая схема, как и у ГМТ-69021, двухвальная: на
промежуточном валу помещены ГТ, реверс и планетарные КП,
а на грузовом — суммирующие дифференциальные ряды. Оста-
новочный тормоз и БР выполнены в виде отдельной сборочной
единицы.
32
С*5
Таблица 2.4
Зак. 47 «с»
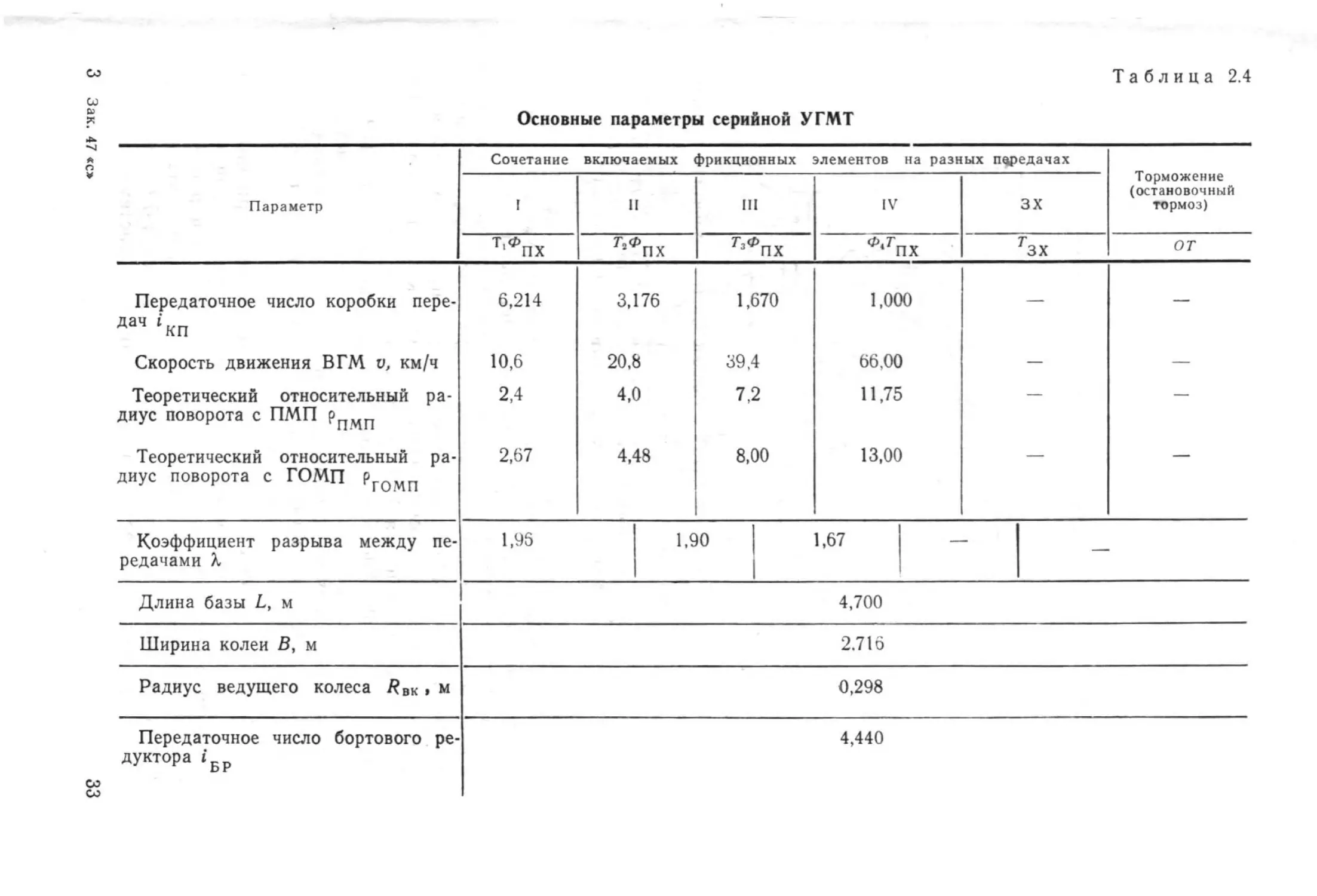
Основные параметры серийной УГМТ
Параметр Сочетание включаемых фрикционных элементов на разных передачах Торможение (остановочный тормоз)
I 11 III IV зх
т,фпх Г,Ф ’ пх г’*пх ф т *'пх гзх ОТ
Передаточное число коробки пере- дач 'кп 6,214 3,176 1,670 1,000 — —
Скорость движения ВГМ v, км/ч 10,6 20,8 39,4 66,00 — —
Теоретический относительный ра- диус поворота с ПМП Рпцп 2,4 4,0 7,2 11,75 — —
Теоретический относительный ра- диус поворота с ГОМП Ргомп 2.67 4,48 8,00 13,00 — —
Коэффициент разрыва между пе- редачами X 1,95 1.90 | 1 1,67 —
Длина базы L, м 4,700
Ширина колеи В, м 2.716
Радиус ведущего колеса /?вк » м 0,298
Передаточное число бортового ре- дуктора <Бр 4,440
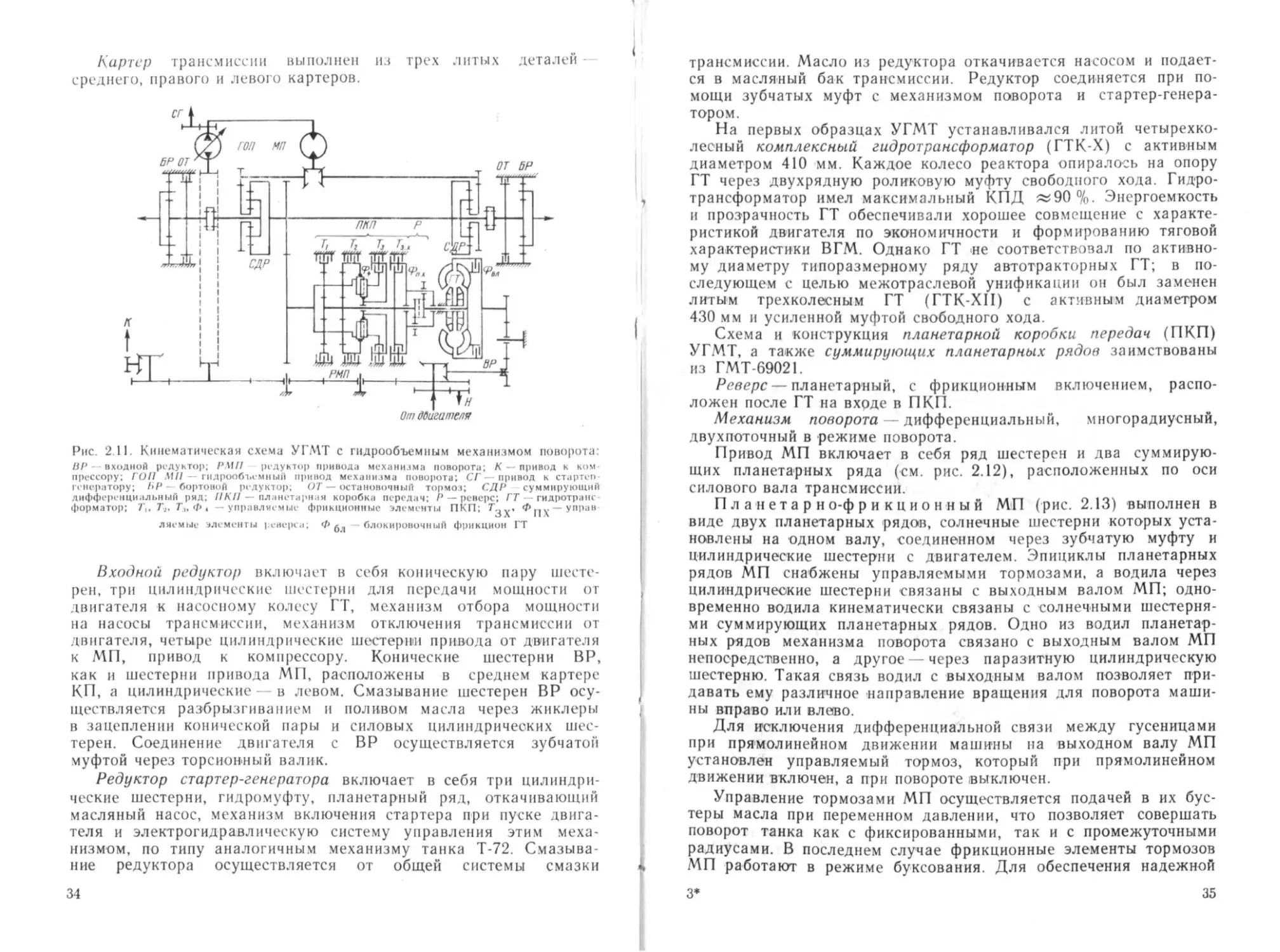
Картер трансмиссии выполнен из трех литых детален
среднего, правого и левого картеров.
От Мига теля
Рис. 2.11. Кинематическая схема УГМТ с гндрообъемним механизмом поворота:
ВР — входной редуктор; PMII редуктор привода механизма поворота; К - привод к ком
прессору; ГОП МП гндрооПъемный привод механизма поворота; СГ привод к стартеп
генератору; 1>Р бортовой редуктор. ОТ — остановочный тормоз; СДР суммирующий
дифференциальный ряд; IIKII — планетарная коробка передач: Р — реверс; ГТ гидротранс
форматор; Г„ Т,. Тя, Ф, управляемые фрикционные элементы ПКП; управ
ляемые элементы реверса. Ф блокировочный фрикцион ГТ
Входной редуктор включает в себя коническую пару шесте-
рен, три цилиндрические шестерни для передачи мощности от
двигателя к насосному колесу ГТ, механизм отбора мощности
на насосы трансмиссии, механизм отключения трансмиссии от
двигателя, четыре цилиндрические шестер-ни привода от двигателя
к МП, привод к компрессору. Конические шестерни ВР,
как и шестерни привода МП, расположены в среднем картере
КП, а цилиндрические--в левом. Смазывание шестерен ВР осу-
ществляется разбрызгиванием и поливом масла через жиклеры
в зацеплении конической пары и силовых цилиндрических шес-
терен. Соединение двигателя с ВР осуществляется зубчатой
муфтой через торсионный валик.
Редуктор стартер-генератора включает в себя три цилиндри-
ческие шестерни, гидромуфту, планетарный ряд, откачивающий
масляный насос, механизм включения стартера при пуске двига-
теля и электрогидравлическую систему управления этим меха-
низмом, по типу аналогичным механизму танка Т-72. Смазыва
ние редуктора осуществляется от общей системы смазки
34
трансмиссии. Масло из редуктора откачивается насосом и подает-
ся в масляный бак трансмиссии. Редуктор соединяется при по-
мощи зубчатых муфт с механизмом поворота и стартер-генера-
тором.
На первых образцах УГМТ устанавливался литой четырехко-
лссный комплексный гидротрансформатор (ГТК-Х) с активным
диаметром 410 мм. Каждое колесо реактора опиралось на опору
ГТ через двухрядную роликовую муфту свободного хода. Гидро-
трансформатор имел максимальный КПД «90%. Энергоемкость
и прозрачность ГТ обеспечивали хорошее совмещение с характе-
ристикой двигателя по экономичности и формированию тяговой
характеристики ВГМ. Однако ГТ не соответствовал по активно-
му диаметру типоразмерному ряду автотракторных ГТ; в по-
следующем с целью межотраслевой унификации он был заменен
литым трехколесным ГТ (ГТК-ХП) с активным диаметром
430 мм и усиленной муфтой свободного хода.
Схема и конструкция планетарной коробки передач (ПКП)
УГМТ, а также суммирующих планетарных рядов заимствованы
из ГМТ-69021.
Реверс—планетарный, с фрикционным включением, распо-
ложен после ГТ на входе в ПКП.
Механизм поворота дифференциальный, многорадиусный,
двухпоточный в режиме поворота.
Привод МП включает в себя ряд шестерен и два суммирую-
щих планетарных ряда (см. рис. 2.12), расположенных по оси
силового вала трансмиссии.
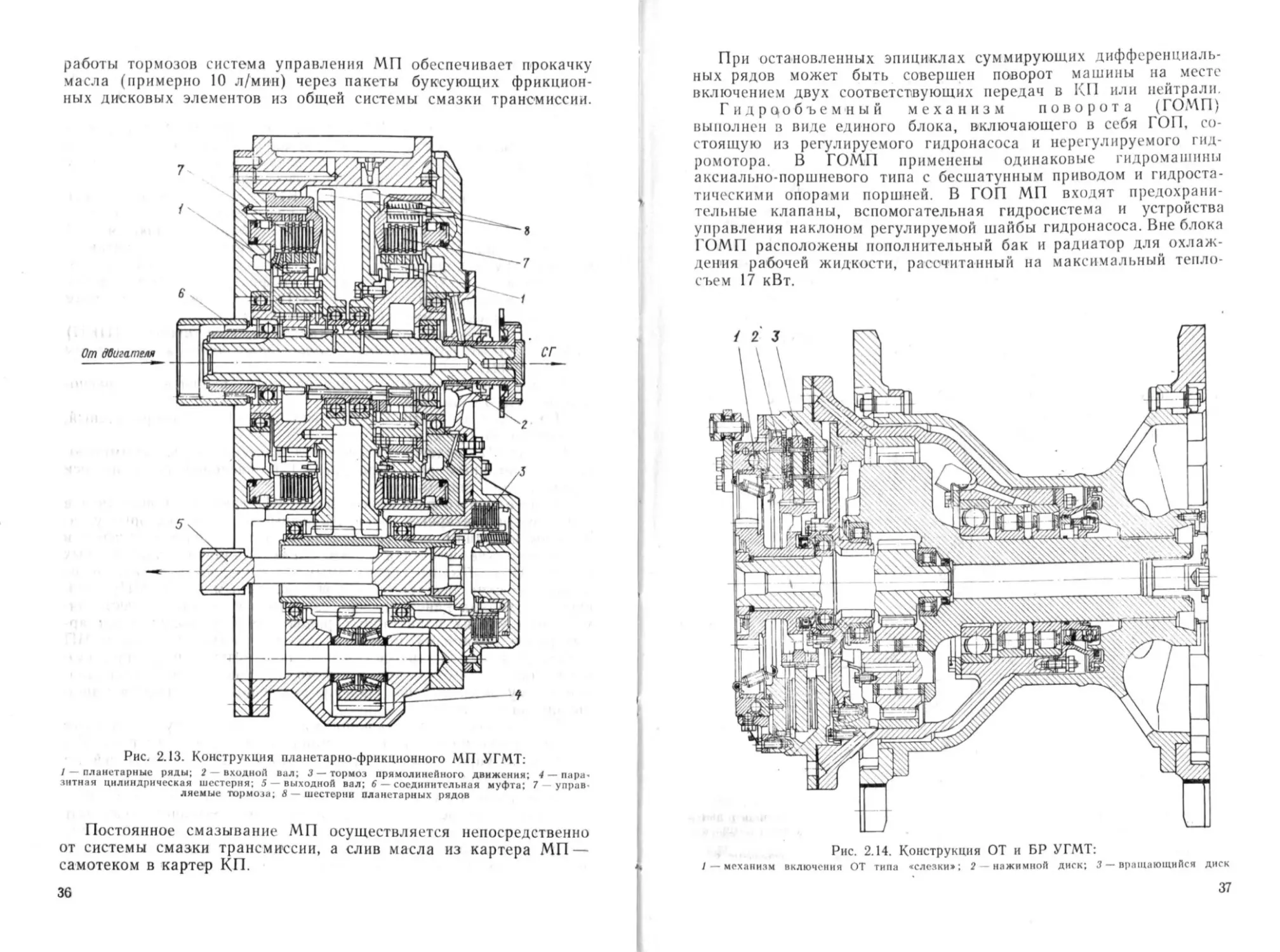
Планетарно-фрикционный МП (рис. 2.13) выполнен в
виде двух планетарных рядов, солнечные шестерни которых уста-
новлены на одном валу, соединенном через зубчатую муфту и
цилиндрические шестерни с двигателем. Эпициклы планетарных
рядов МП снабжены управляемыми тормозами, а водила через
цилиндрические шестерни связаны с выходным валом МП; одно-
временно водила кинематически связаны с солнечными шестерня-
ми суммирующих планетарных рядов. Одно из водил планетар-
ных рядов механизма поворота связано с выходным валом МП
непосредственно, а другое —через паразитную цилиндрическую
шестерню. Такая связь водил с выходным валом позволяет при-
давать ему различное направление вращения для поворота маши-
ны вправо или влево.
Для исключения дифференциальной связи между гусеницами
при прямолинейном движении машины на выходном валу МП
установлен управляемый тормоз, который при прямолинейном
движении включен, а при повороте выключен.
Управление тормозами МП осуществляется подачей в их бус-
теры масла при переменном давлении, что позволяет совершать
поворот танка как с фиксированными, так и с промежуточными
радиусами. В последнем случае фрикционные элементы тормозов
МП работают в режиме буксования. Для обеспечения надежной
3*
35
Вклейка Л& 3 «СЕКРЕТНО»
работы тормозов система управления МП обеспечивает прокачку
масла (примерно 10 л/мин) через пакеты буксующих фрикцион-
ных дисковых элементов из общей системы смазки трансмиссии.
Рис. 2.13. Конструкция планетарно-фрикционного МП УГМТ:
I планетарные ряды; 2 — входной вал; 3 — тормоз прямолинейного движения; < —пара-
зитная цилиндрическая шестерня; 5 выходной вал; 6- соединительная муфта; 7 управ
ляемые тормоза; в — шестерни планетарных рядов
Постоянное смазывание МП осуществляется непосредственно
от системы смазки трансмиссии, а слив масла из картера МП —
самотеком в картер КП.
36
При остановленных эпициклах суммирующих дифференциаль-
ных рядов может быть совершен поворот машины на месте
включением двух соответствующих передач в КП или нейтрали.
Г идрообъемный механизм поворота (ГОМП)
выполнен в виде единого блока, включающего в себя ГОП, со-
стоящую из регулируемого гидронасоса и нерегулируемого гид-
ромотора. В ГОМП применены одинаковые гидромашины
аксиально-поршневого типа с бесшатунным приводом и гидроста-
тическими опорами поршней. В ГОП МП входят предохрани-
тельные клапаны, вспомогательная гидросистема и устройства
управления наклоном регулируемой шайбы гидронасоса. Вне блока
ГОМП расположены пополнительный бак и радиатор для охлаж-
дения рабочей жидкости, рассчитанный на максимальный тепло
съем 17 кВт.
Рис. 2.14. Конструкция ОТ и БР УГМТ:
/ — механизм включения ОТ типа «слезки»; 2 — нажимной диск; 3 — вращающийся диск
37
Техническая характеристика ГОП МП
Рабочий объем гидромашин, смэ.................................. 300
Максимальная частота вращения валов гидромашин, об/мин 2100
Максимальное рабочее давление, МПа.............................31.4
Максимальная мощность на валу гндромотора, кВт..................243
Масса ГОП, кг.................................................. 235
Остановочные тормоза—>дисковые, с фрикционной парой эле-
ментов сухого трения (металлокерамика МКВ-50—чугун ЧНМХ).
Конструктивно ОТ выполнен в одном блоке с БР, имеет один вра-
щающийся диск (рис. 2.14) с двумя поверхностями трения. В на-
стоящее время разработана и испытана конструкция ОТ с двумя
вращающимися дисками, т. е. с четырьмя поверхностями трения.
Бортовой редуктор — планетарный, одноступенчатый; эпицикл
планетарного ряда плавающий. Смазывание БР осуществляется
разбрызгиванием масла, которое заливается в картер. Бортовой
редуктор соединяется с выходным валом трансмиссии при по-
мощи зубчатой муфты, выполненной с бочкообразными зубьями.
Отключение БР от трансмиссии (например, при буксировке) осу-
ществляется специальным ключом снаружи машины через цент-
ральное отверстие в БР.
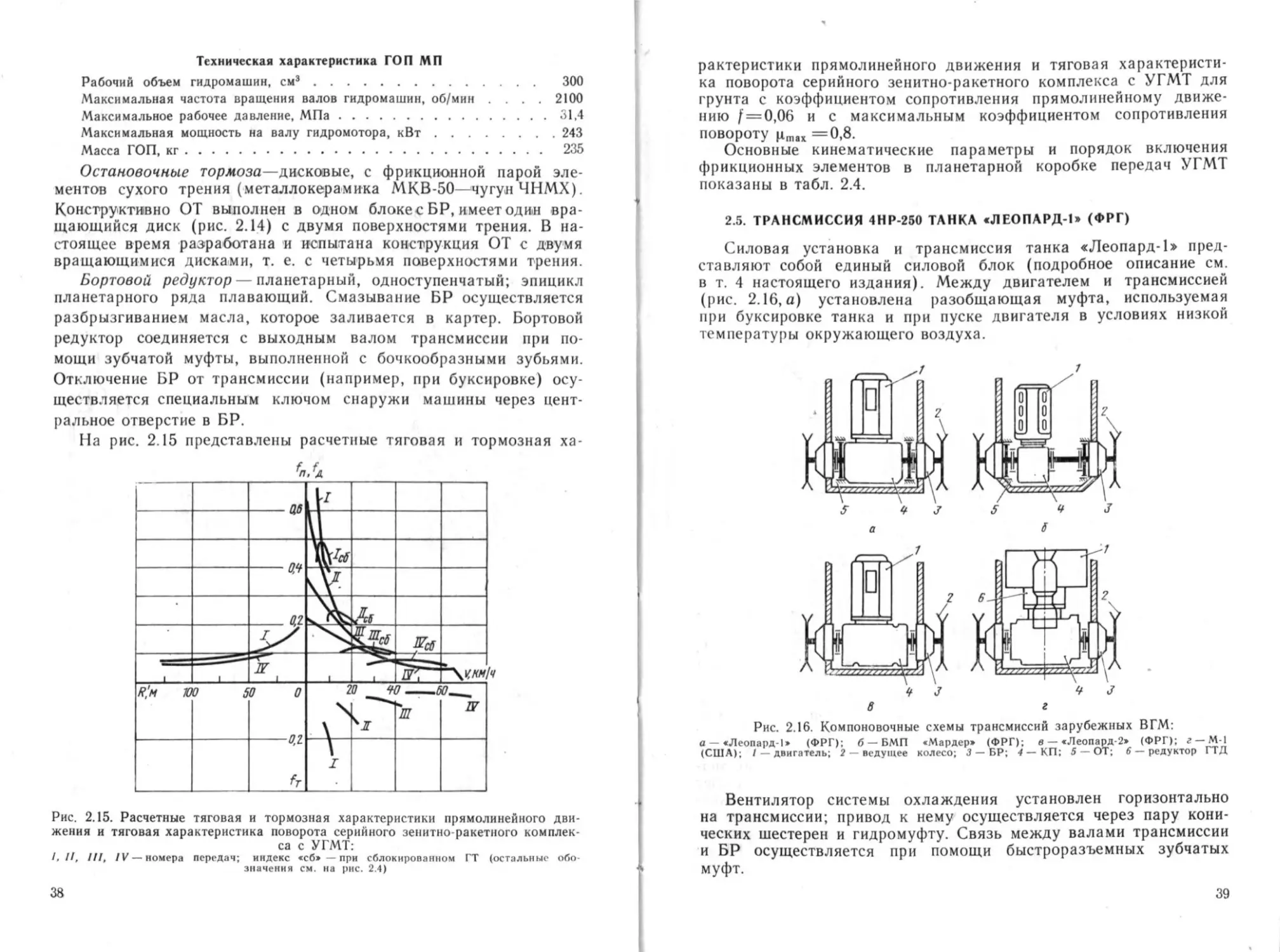
На рис. 2.15 представлены расчетные тяговая и тормозная ха-
Рис. 2.15. Расчетные тяговая и тормозная характеристики прямолинейного дви-
жения и тяговая характеристика поворота серийного зеннтно ракетного комплек-
са с УГМТ:
1,11, III, /V —номера передач; индекс «сб» — при сблокированном ГТ (остальные обо
значения см. на рис. 2.4)
38
рактеристики прямолинейного движения и тяговая характеристи-
ка поворота серийного зенитно-ракетного комплекса с УГМТ для
грунта с коэффициентом сопротивления прямолинейному движе-
нию [=0,06 и с максимальным коэффициентом сопротивления
повороту |iee =0,8.
Основные кинематические параметры и порядок включения
фрикционных элементов в планетарной коробке передач УГМТ
показаны в табл. 2.4.
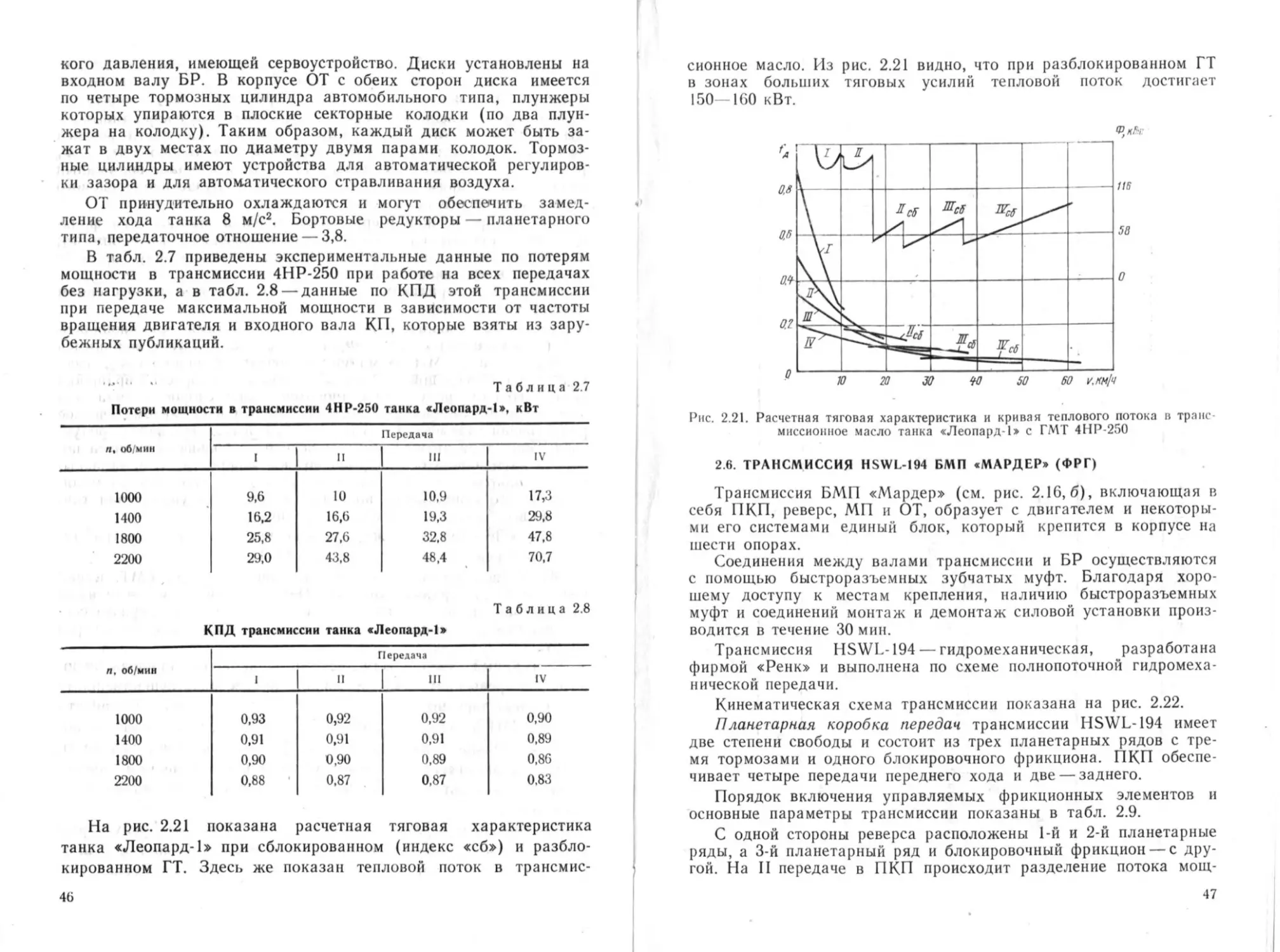
2.5. ТРАНСМИССИЯ 4НР-250 ТАНКА «ЛЕОПАРД-1» (ФРГ)
Силовая установка и трансмиссия танка «Леопард-1» пред-
ставляют собой единый силовой блок (подробное описание см.
в т. 4 настоящего издания). Между двигателем и трансмиссией
(рис. 2.16, а) установлена разобщающая муфта, используемая
при буксировке танка и при пуске двигателя в условиях низкой
температуры окружающего воздуха.
Рис. 2.16. Компоновочные схемы трансмиссий зарубежных ВГМ:
в — «Леопард-1» (ФРГ); б — БМП «Мардер» (ФРГ); а — «Леопард-2» (ФРГ); г —М-1
(США); / двигатель; 2 — ведущее колесо; 3 — БР; 4— КП; 5 —ОТ; 6 — редуктор ГТД
Вентилятор системы охлаждения установлен горизонтально
на трансмиссии; привод к нему осуществляется через пару кони-
ческих шестерен и гидромуфту. Связь между валами трансмиссии
и БР осуществляется при помощи быстроразъемных зубчатых
муфт.
39
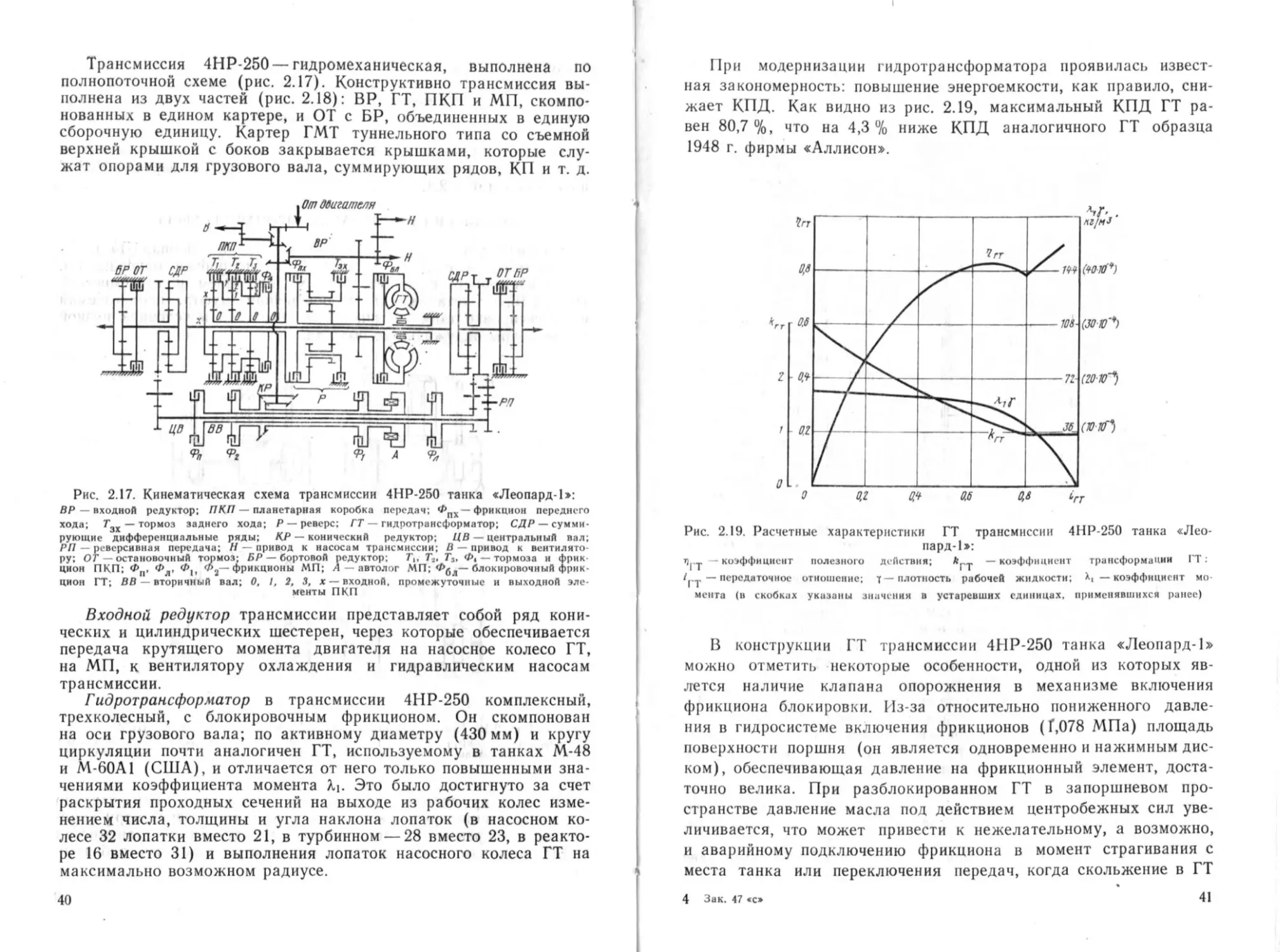
Трансмиссия 4НР-250 —гидромеханическая, выполнена по
полнопоточной схеме (рис. 2.17). Конструктивно трансмиссия вы-
полнена из двух частей (рис. 2.18): ВР, ГТ, ПКП и МП, скомпо-
нованных в едином картере, и ОТ с БР, объединенных в единую
сборочную единицу. Картер ГМТ туннельного типа со съемной
верхней крышкой с боков закрывается крышками, которые слу-
жат опорами для грузового вала, суммирующих рядов, КП и т. д.
Рис. 2.17. Кинематическая схема трансмиссии 4НР-250 танка «Леопард-1»:
ВР входной редуктор; ПКП — планетарная коробка передач; Фпх — фрикцион переднего
хода; Гзх — тормоз заднего хода; /’ — реверс; ГТ — гидротрансформатор; СДР —сумми-
рующие дифференциальные ряды; КР — конический редуктор; ЦВ центральный вал;
PH реверсивная передача; Н — привод к насосам трансмиссии; fl — привод к вентилято
ру; ОТ остановочный тормоз: ВР — бортовой редуктор; Г,, T,. Г3, Ф, — тормоза и фрик
цион ПКП; Фп, Фд. Ф|, Фа— фрикционы МП; /1 — автолог МП; Фбл—блокировочный фрик
циоп ГТ; ВВ — вторичный вал; О, I. 3, 3, х — входной, промежуточные и выходной эле-
менты ПКП
Входной редуктор трансмиссии представляет собой ряд кони-
ческих и цилиндрических шестерен, через которые обеспечивается
передача крутящего момента двигателя на насосное колесо ГТ,
на МП, к вентилятору охлаждения и гидравлическим насосам
трансмиссии.
Гидротрансформатор в трансмиссии 4НР-250 комплексный,
трехколесный, с блокировочным фрикционом. Он скомпонован
на оси грузового вала; по активному диаметру (430 мм) и кругу
циркуляции почти аналогичен ГТ, используемому в танках М-48
и М-60А1 (США), и отличается от него только повышенными зна-
чениями коэффициента момента Хь Это было достигнуто за счет
раскрытия проходных сечений на выходе из рабочих колес изме-
нением числа, толщины и угла наклона лопаток (в насосном ко-
лесе 32 лопатки вместо 21, в турбинном —28 вместо 23, в реакто-
ре 16 вместо 31) и выполнения лопаток насосного колеса ГТ на
максимально возможном радиусе.
40
При модернизации гидротрансформатора проявилась извест-
ная закономерность: повышение энергоемкости, как правило, сни-
жает КПД. Как видно из рис. 2.19, максимальный КПД ГТ ра-
вен 80,7 %, что на 4,3 % ниже КПД аналогичного ГТ образца
1948 г. фирмы «Аллисон».
Рис. 2.19. Расчетные характеристики ГТ трансмиссии 4НР-250 танка «Лео-
пард-1»:
Чру коэффициент полезною действия; —коэффициент трансформации ГТ;
/рТ — передаточное отношение; т — плотность рабочей жидкости; — коэффициент мо-
менте (в скобках указаны значения в устаревших единицах, применявшихся ранее)
В конструкции ГТ трансмиссии 4НР-250 танка «Леопард-1»
можно отметить некоторые особенности, одной из которых яв-
лется наличие клапана опорожнения в механизме включения
фрикциона блокировки. Из-за относительно пониженного давле-
ния в гидросистеме включения фрикционов (Г,078 МПа) площадь
поверхности поршня (он является одновременно и нажимным дис-
ком), обеспечивающая давление на фрикционный элемент, доста-
точно велика. При разблокированном ГТ в запоршневом про-
странстве давление масла под действием центробежных сил уве-
личивается, что может привести к нежелательному, а возможно,
и аварийному подключению фрикциона в момент страгивания с
места танка или переключения передач, когда скольжение в ГТ
4 Зак. 47 <с>
41
Вклейка № 4 «СЕКРЕТНО»
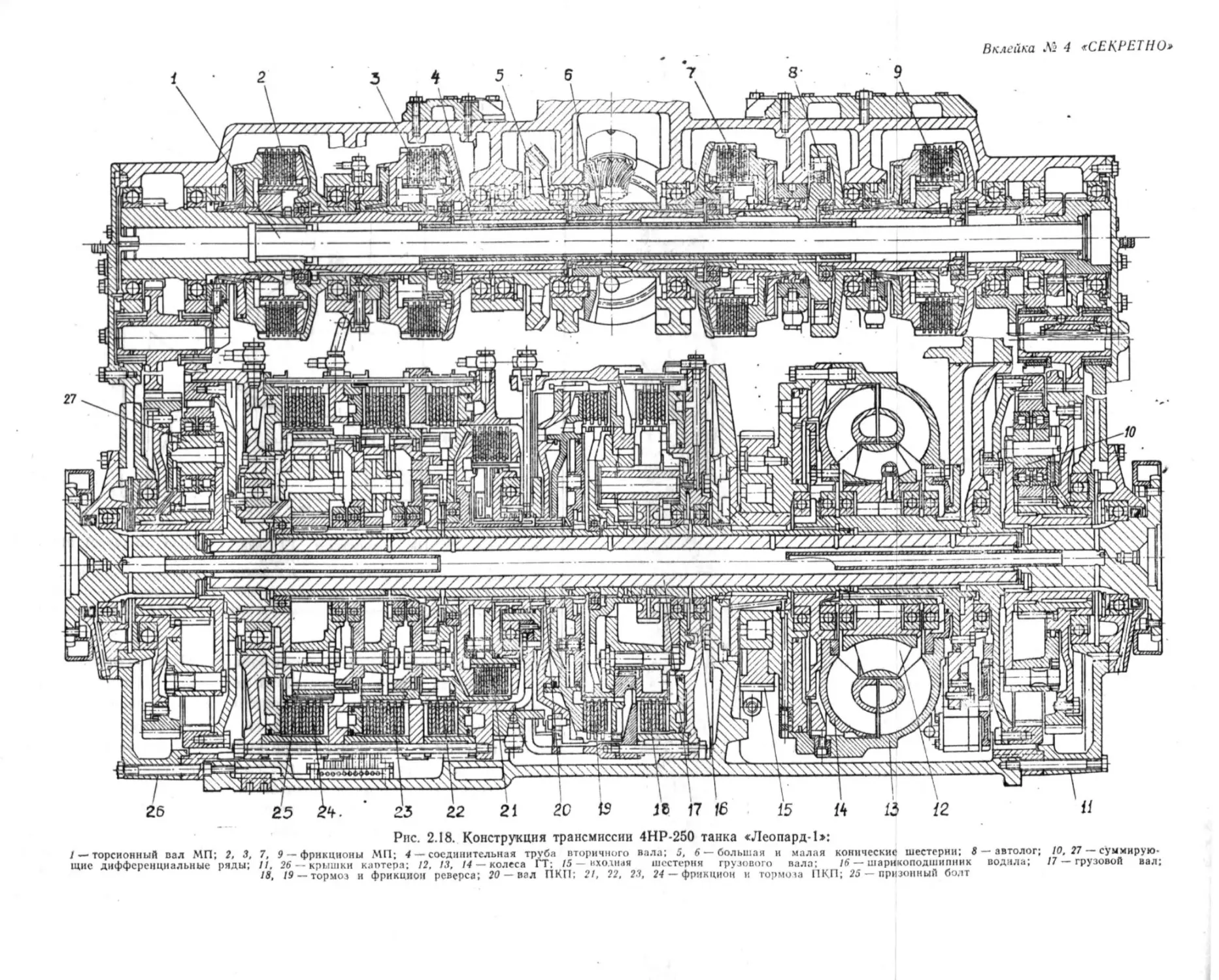
Рис. 2.18. Конструкция трансмиссии 4НР-250 танка «Леопард-1»:
/ — торсионный вал МП; 2. 3, 7, 9 — фрикционы МП; 4 — соединительная труба вторичного вала; 5, 6 — большая и малая конические шестерни; 8 — звтолог; 10. 27 — суммирую-
щие дифференциальные ряды; II. 26 крышки каптера; 12. 13. /4 — колеса ГТ; /5 входная шестерня грузового вала: 16 — шарикоподшипник водила; 17 — грузовой вал;
18, /9 —тормоз и фрикцион реверса; 20 — вал ПКП; 21, 22, 23, 24 — фрикцион и тормоза ПКП; 25 — призонный болт
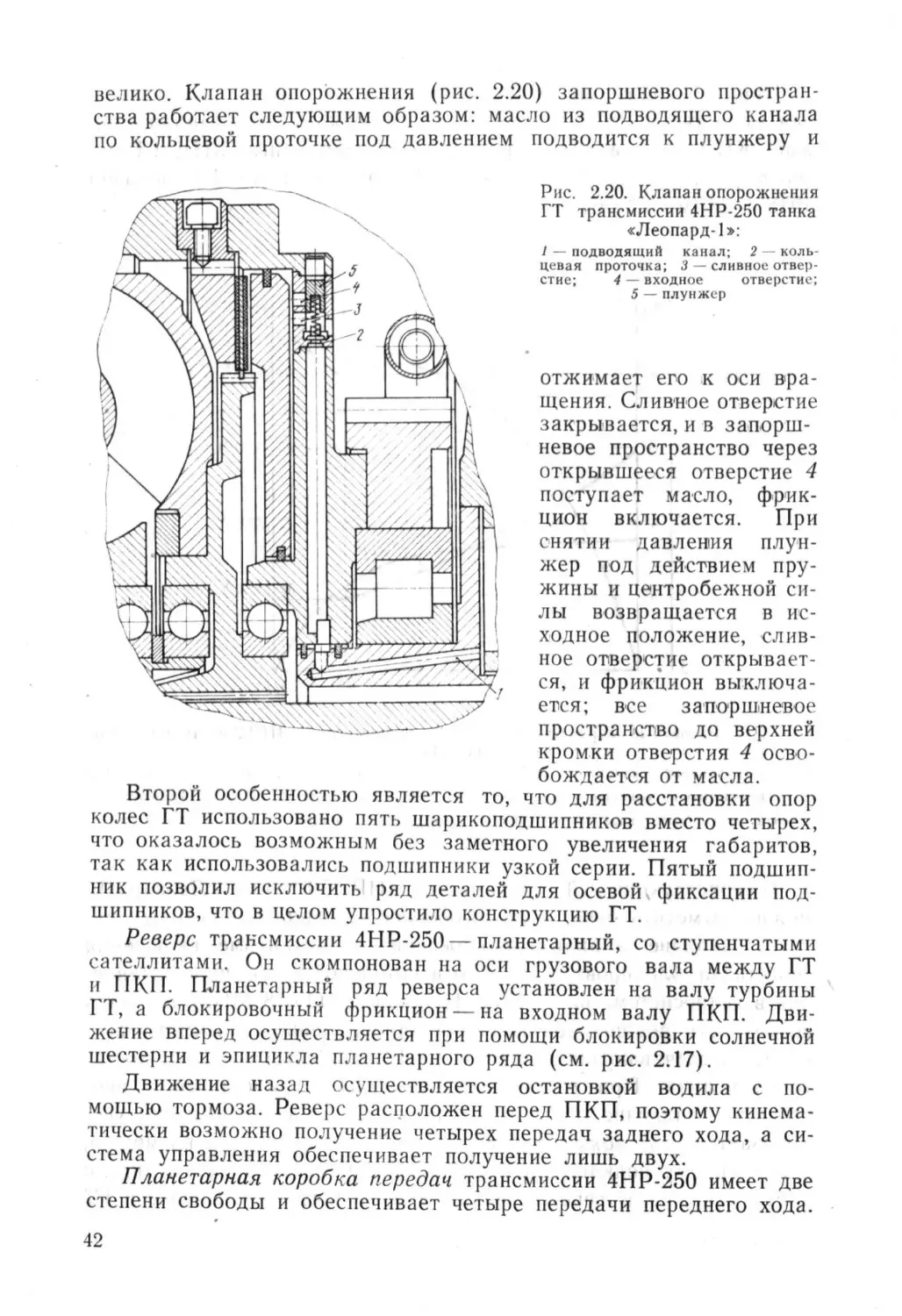
велико. Клапан опорожнения (рис. 2.20) запоршневого простран-
ства работает следующим образом: масло из подводящего канала
по кольцевой проточке под давлением подводится к плунжеру и
Второй особенностью является то,
Рис. 2.20. Клапан опорожнения
ГТ трансмиссии 4НР-250 танка
«Леопард-1»:
1 — подводящий канал; 2 — коль-
цевая проточка; 3 — сливное отвер-
стие; 4 — входное отверстие;
5 — плунжер
отжимает его к оси вра-
щения. Сливное отверстие
закрывается, и в запорш-
невое пространство через
открывшееся отверстие 4
поступает масло, фрик-
цион включается. При
снятии давления плун-
жер под действием пру-
жины и центробежной си-
лы возвращается в ис-
ходное положение, слив-
ное отверстие открывает-
ся, и фрикцион выключа-
ется; все запоршневое
пространство до верхней
кромки отверстия 4 осво-
бождается от масла.
что для расстановки опор
колес ГТ использовано пять шарикоподшипников вместо четырех,
что оказалось возможным без заметного увеличения габаритов,
так как использовались подшипники узкой серии. Пятый подшип-
ник позволил исключить ряд деталей для осевой фиксации под-
шипников, что в целом упростило конструкцию ГТ.
Реверс трансмиссии 4НР-250 — планетарный, со ступенчатыми
сателлитами. Он скомпонован на оси грузового вала между ГТ
и ПКП. Планетарный ряд реверса установлен на валу турбины
ГТ, а блокировочный фрикцион —на входном валу ПКП. Дви-
жение вперед осуществляется при помощи блокировки солнечной
шестерни и эпицикла планетарного ряда (см. рис. 2.17).
Движение назад осуществляется остановкой водила с по-
мощью тормоза. Реверс расположен перед ПКП, поэтому кинема-
тически возможно получение четырех передач заднего хода, а си-
стема управления обеспечивает получение лишь двух.
Планетарная коробка передач трансмиссии 4НР-250 имеет две
степени свободы и обеспечивает четыре передачи переднего хода.
42
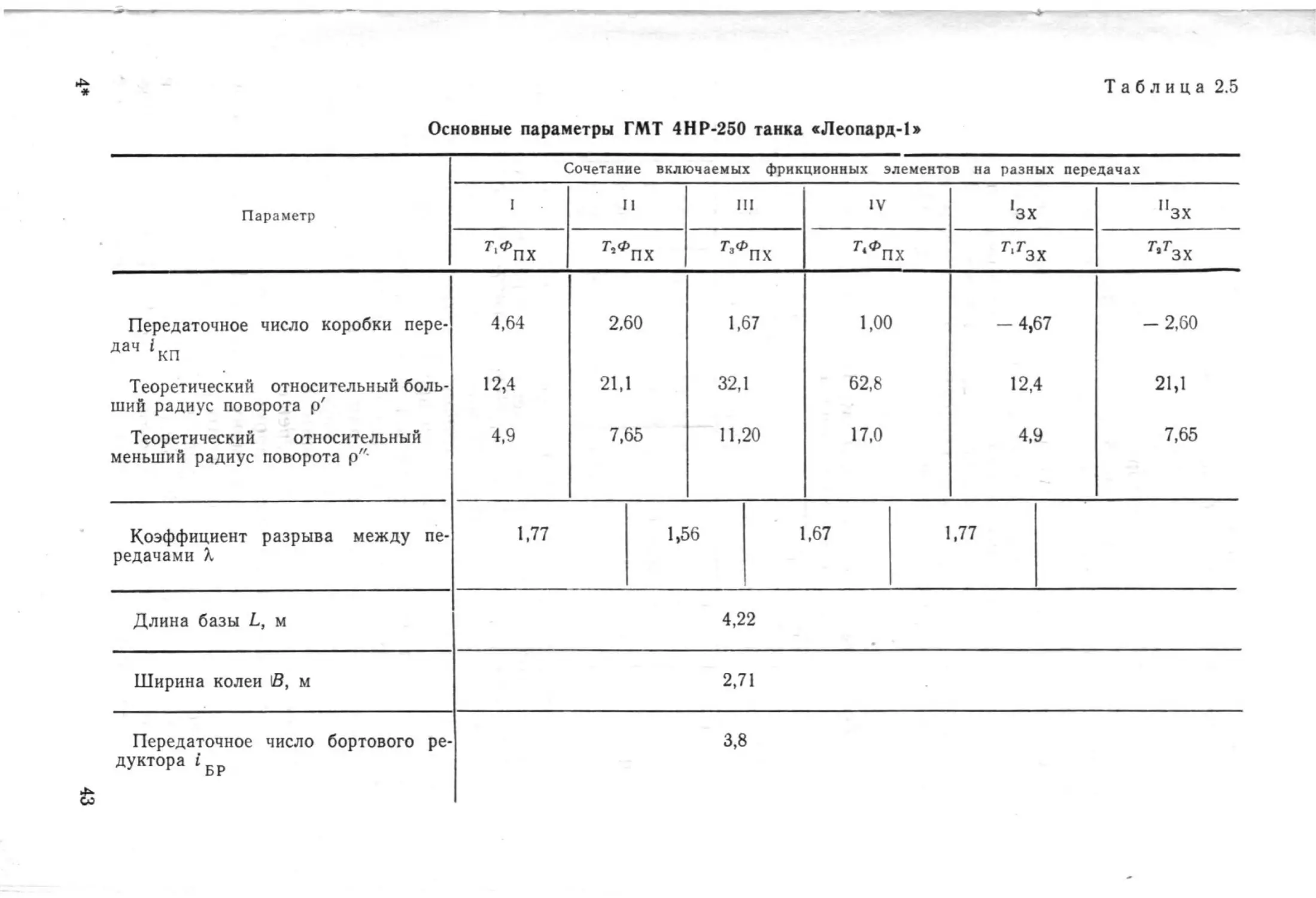
Таблица 2.5
Основные параметры ГМТ 4Н Р-250 танка «Леопард-1»
Параметр Сочетание включаемых фрикционных элементов на разных передачах
I И in IV ’зх пзх
Т,Ф * пх г'фпх г,фпх тф ‘пх г,7зх г«гзх
Передаточное число коробки пере- дач ‘кп 4,64 2,60 1,67 1,00 -4,67 -2,60
Теоретический относительный боль- ший радиус поворота р' 12,4 21.1 32,1 62,8 12,4 21,1
Теоретический относительный меньший радиус поворота р" 4,9 7,65 11,20 17,0 4,9 7,65
Коэффициент разрыва между пе- редачами X 1,77 1,56 1,67 1,77
Длина базы L, м 4,22
Ширина колеи В, м 2,71
Передаточное число бортового ре- дуктора хБр 3,8
Со
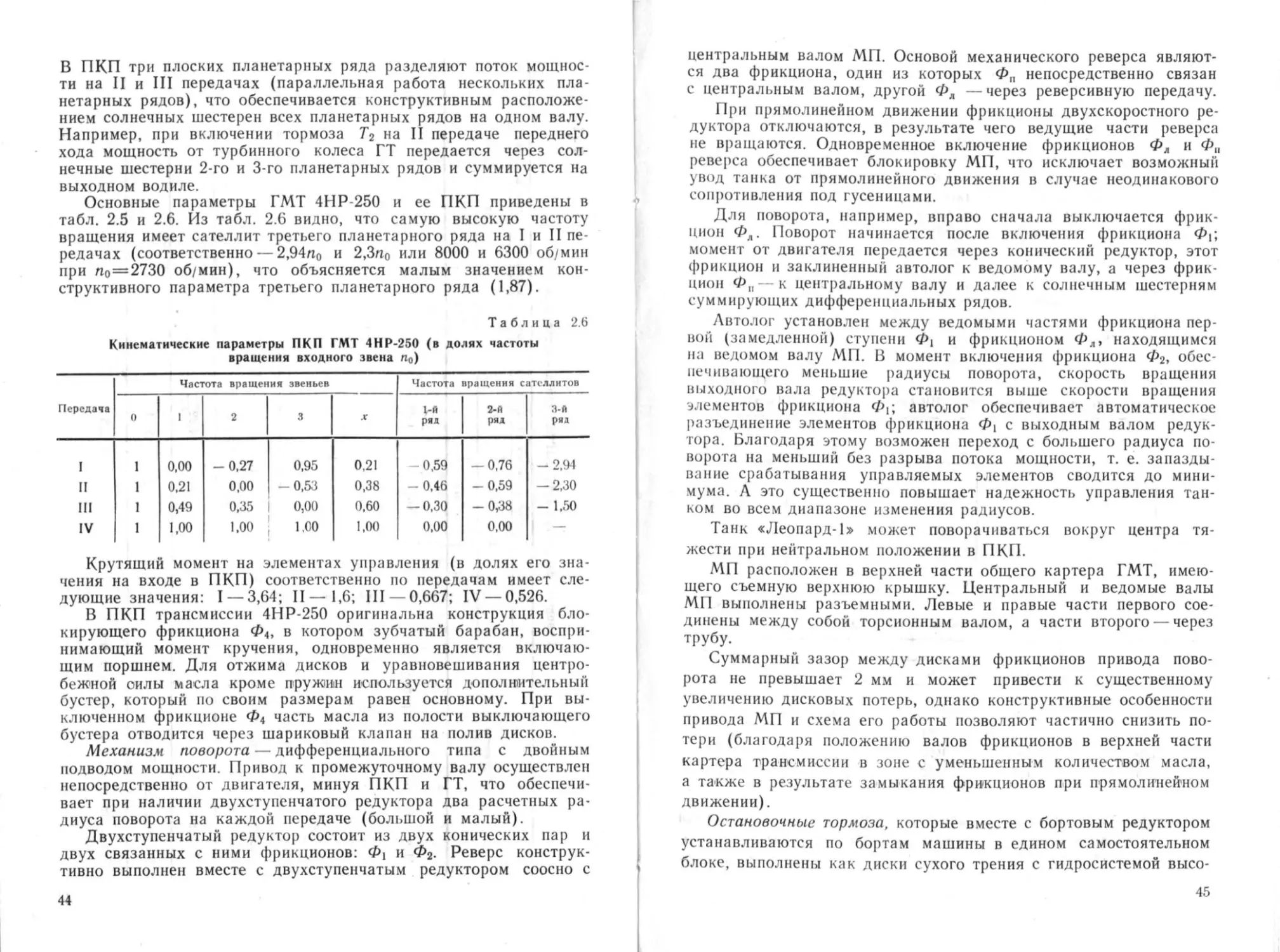
В ПКП три плоских планетарных ряда разделяют поток мощнос-
ти на II и III передачах (параллельная работа нескольких пла-
нетарных рядов), что обеспечивается конструктивным расположе-
нием солнечных шестерен всех планетарных рядов на одном валу.
Например, при включении тормоза Т2 на II передаче переднего
хода мощность от турбинного колеса ГТ передается через сол-
нечные шестерни 2-го и 3-го планетарных рядов и суммируется на
выходном водиле.
Основные параметры ГМТ 4НР-250 и ее ПКП приведены в
табл. 2.5 и 2.6. Из табл. 2.6 видно, что самую высокую частоту
вращения имеет сателлит третьего планетарного ряда на I и II пе-
редачах (соответственно — 2,94л0 и 2,3по или 8000 и 6300 об/мин
при л0=2730 об/мин), что объясняется малым значением кон-
структивного параметра третьего планетарного ряда (1,87).
Таблица 2.6
Кинематические параметры ПКП ГМТ 4НР-250 (в долях частоты вращения входного звена п0)
Частота вращения звеньев Частота вращения сателлитов
Передача 0 1 2 3 X Ьй ряд 2-й ряд 3-й
I 1 0,00 — 0,27 0,95 0,21 0.59 — 0,76 -2,94
II 1 0,21 0,00 -0,53 0,38 -0,46 -0,59 — 2,30
III 1 0,49 0,35 0,00 0,60 — 0,30 -0,38 - 1,50
IV 1 1,00 1,00 1.00 1,00 0,00 0.00 1 —
Крутящий момент на элементах управления (в долях его зна-
чения на входе в ПКП) соответственно по передачам имеет сле-
дующие значения: I — 3,64; II — 1,6; III — 0,667; IV — 0,526.
В ПКП трансмиссии 4НР-250 оригинальна конструкция бло-
кирующего фрикциона Фч. в котором зубчатый барабан, воспри-
нимающий момент кручения, одновременно является включаю-
щим поршнем. Для отжима дисков и уравновешивания центро-
бежной силы масла кроме пружин используется дополнительный
бустер, который по своим размерам равен основному. При вы-
ключенном фрикционе Ф4 часть масла из полости выключающего
бустера отводится через шариковый клапан на полив дисков.
Механизм поворота — дифференциального типа с двойным
подводом мощности. Привод к промежуточному валу осуществлен
непосредственно от двигателя, минуя ПКП и ГТ, что обеспечи-
вает при наличии двухступенчатого редуктора два расчетных ра-
диуса поворота на каждой передаче (большой и малый).
Двухступенчатый редуктор состоит из двух конических пар и
двух связанных с ними фрикционов: и 02. Реверс конструк-
тивно выполнен вместе с двухступенчатым редуктором соосно с
44
центральным валом МП. Основой механического реверса являют-
ся два фрикциона, один из которых Фп непосредственно связан
с центральным валом, другой Фл —через реверсивную передачу.
При прямолинейном движении фрикционы двухскоростного ре-
дуктора отключаются, в результате чего ведущие части реверса
не вращаются. Одновременное включение фрикционов Фл и Ф„
реверса обеспечивает блокировку МП, что исключает возможный
увод танка от прямолинейного движения в случае неодинакового
сопротивления под гусеницами.
Для поворота, например, вправо сначала выключается фрик-
цион Фл. Поворот начинается после включения фрикциона Ф(;
момент от двигателя передается через конический редуктор, этот
фрикцион и заклиненный автолог к ведомому валу, а через фрик-
цион Ф„— к центральному валу и далее к солнечным шестерням
суммирующих дифференциальных рядов.
Автолог установлен между ведомыми частями фрикциона пер-
вой (замедленной) ступени Ф1 и фрикционом Фл, находящимся
на ведомом валу МП. В момент включения фрикциона Ф2, обес-
печивающего меньшие радиусы поворота, скорость вращения
выходного вала редуктора становится выше скорости вращения
элементов фрикциона Ф(; автолог обеспечивает автоматическое
разъединение элементов фрикциона Фх с выходным валом редук-
тора. Благодаря этому возможен переход с большего радиуса по-
ворота на меньший без разрыва потока мощности, т. е. запазды-
вание срабатывания управляемых элементов сводится до мини-
мума. А это существенно повышает надежность управления тан-
ком во всем диапазоне изменения радиусов.
Танк «Леопард-1> может поворачиваться вокруг центра тя-
жести при нейтральном положении в ПКП.
МП расположен в верхней части общего картера ГМТ, имею-
щего съемную верхнюю крышку. Центральный и ведомые валы
МП выполнены разъемными. Левые и правые части первого сое-
динены между собой торсионным валом, а части второго — через
трубу.
Суммарный зазор между дисками фрикционов привода пово-
рота не превышает 2 мм и может привести к существенному
увеличению дисковых потерь, однако конструктивные особенности
привода МП и схема его работы позволяют частично снизить по-
тери (благодаря положению валов фрикционов в верхней части
картера трансмиссии в зоне с уменьшенным количеством масла,
а также в результате замыкания фрикционов при прямолинейном
движении).
Остановочные тормоза, которые вместе с бортовым редуктором
устанавливаются по бортам машины в едином самостоятельном
блоке, выполнены как диски сухого трения с гидросистемой высо-
45
кого давления, имеющей сервоустройство. Диски установлены на
входном валу БР. В корпусе ОТ с обеих сторон диска имеется
по четыре тормозных цилиндра автомобильного типа, плунжеры
которых упираются в плоские секторные колодки (по два плун-
жера на колодку). Таким образом, каждый диск может быть за-
жат в двух местах по диаметру двумя парами колодок. Тормоз-
ные цилиндры имеют устройства для автоматической регулиров-
ки зазора и для автоматического стравливания воздуха.
ОТ принудительно охлаждаются и могут обеспечить замед-
ление хода танка 8 м/с2. Бортовые редукторы — планетарного
типа, передаточное отношение — 3,8.
В табл. 2.7 приведены экспериментальные данные по потерям
мощности в трансмиссии 4НР-250 при работе на всех передачах
без нагрузки, а в табл. 2.8 — данные по КПД этой трансмиссии
при передаче максимальной мощности в зависимости от частоты
вращения двигателя и входного вала КП, которые взяты из зару-
бежных публикаций.
Таблица 2.7
Потери мощности в трансмиссии 4НР-250 танка «Леопард-!», кВт
л, об/мин Передача
I и III IV
1000 9.6 10 10,9 17,3
1400 16,2 16,6 19,3 29,8
1800 25,8 27,6 32,8 47,8
2200 29.0 43.8 48,4 70.7
Таблица 2.8
КПД трансмиссии танка «Леопард-1»
п, об/мин Перелача
1 и in IV
1000 0,93 0,92 0,92 0,90
1400 0,91 0,91 0,91 0,89
1800 0,90 0.90 0,89 0,86
2200 0,88 0,87 0,87 0,83
На рис. 2.21 показана । расчетная тяговая характеристика
танка «Леопард-1» при сблокированном (индекс «сб») и разбло-
кированном ГТ. Здесь же показан тепловой поток в трансмис-
46
сионное масло. Из рис. 2.21 видно, что при разблокированном ГТ
в зонах больших тяговых усилий тепловой поток достигает
150-160 кВт.
2.6. ТРАНСМИССИЯ HSWL-194 БМП «МАРДЕР» (ФРГ)
Трансмиссия БМП «Мардер» (см. рис. 2.16,6), включающая в
себя ПКП, реверс, МП и ОТ, образует с двигателем и некоторы-
ми его системами единый блок, который крепится в корпусе на
шести опорах.
Соединения между валами трансмиссии и БР осуществляются
с помощью быстроразъемных зубчатых муфт. Благодаря хоро-
шему доступу к местам крепления, наличию быстроразъемных
муфт и соединений монтаж и демонтаж силовой установки произ-
водится в течение 30 мин.
Трансмиссия HSWL-194— гидромеханическая, разработана
фирмой «Ренк» и выполнена по схеме полнопоточной гидромеха-
нической передачи.
Кинематическая схема трансмиссии показана на рис. 2.22.
Планетарная коробка передач трансмиссии HSWL-194 имеет
две степени свободы и состоит из трех планетарных рядов с тре-
мя тормозами и одного блокировочного фрикциона. ПКП обеспе-
чивает четыре передачи переднего хода и две — заднего.
Порядок включения управляемых фрикционных элементов и
основные параметры трансмиссии показаны в табл. 2.9.
С одной стороны реверса расположены 1-й и 2-й планетарные
ряды, а 3-й планетарный ряд и блокировочный фрикцион — с дру-
гой. На II передаче в ПКП происходит разделение потока мощ-
47
оо
Таблица 2.9
Основные параметры трансмиссии HSWL-194 БМП «Мардер»
Сочетание включаемых фрикционных элементов на разных передачах
Передний ход Задний ход
Параметр 1 П Ш IV Г II
Г, Г. г,г Г.Т, Г, Л т3т.
Передаточное число коробки редач /кп пе- 4,37 2,26 1,49 1,00 — 4,37 -2,26
Скорость БМП v, км/ч 16 31 47 70 16 31
Теоретический относительный диус поворота q ра- 4,26 10,6 15,5 23,2 4,26 10,60
Коэффициент разрыва между редачамн X пе- 1,94 1,52 1,49 1,94
Длина базы L, м 3,9
Ширина колеи В, м 2,62
Передаточное число бортового дуктора /Бр Ре- 4,0
ности между 1-м и 2-м планетарными рядами; на других переда-
чах ПКП является однопоточной.
От ООигателя
Рис. 2.22. Кинематическая схема трансмиссии HSWL-194 БМП «Мардер»:
Фдл — Фрикцион блокировочный ГТ; ГТ — гидротрансформатор; ГМ — гидродинамическая
муфта; ГОП МП — гндрообъемная передача механизма поворота; Н — приводы на насосы
гидросистемы трансмиссии; ПКП — планетарная коробка передач; СДР суммирующие
дифференциальные ряды; ОТ — остановочный тормоз; БР — бортовой редуктор; Ф» » ,
Та» ТЛ — фрикцион и тормоза ПКИ; 7\, Л - тормоза реверса; Р — реверс
Расчеты показали, что максимальный момент на водиле 1-го
планетарного ряда при включенной I передаче превышает
момент двигателя в 2,88 раза, а в остальных звеньях имеет мень-
шие значения. Суммарный момент на управляемых элементах на
I передаче равен 3,86 момента двигателя (при сблокированном
ГТ), на остальных передачах соответственно — 3,63; 1,96; 1,96
(в ПКП трансмиссии 4НР-250 танка «Леопард-1» на I передаче
суммарный момент на управляемых элементах составляет 4,54 мо-
мента двигателя).
Между I и II передачами существует разрыв, в котором ГТ
разблокирован (диапазон АВ на рис. 2.2#). На I передаче ГТ
разблокирован в диапазоне скоростей, соответствующих CD.
Максимальный динамический фактор на режиме «стоп» в точ-
ке D составляет приблизительно 0,9.
Гидротрансформатор трансмиссии БМП «Мардер» — комплекс-
ный, с блокировочным фрикционом. Он расположен вдоль оси дви-
гателя и состоит из насосного колеса, направляющего аппарата и
двухступенчатой турбины. Его максимальный КПД составляет
86—87 %, а в точке перехода на режим ГМ — 82—83 %.
Приводы на МП и вспомогательные гидронасосы, состоящие
из цилиндрических шестерен, расположены за ГТ.
Маслонасос, обеспечивающий смазку ПКП при буксировке
БМП, имеет привод от эпицикла суммирующего планетарного
ряда (см. рис. 2.22). Этот маслонасос выключается через гидрав-
49
лическую систему клапанов, а при падении давления масла в
ПКП включается и обеспечивает смазку фрикционных узлов.
Рис. 2.23. Расчетная тяговая характеристика БМП «Мардер» с ГМТ HSWL-194:
I, II, III, IV номера передач; индекс «сб» — при сблокированном ГТ;/д -удельная сила
тяги двигателя; р — скорость БМП
Реверс — конический, состоит из двух планетарных рядов с
двумя дисковыми тормозами и обеспечивает четыре передачи
переднего и заднего ходов, а система управления обеспечивает
только две передачи заднего. Ведущая коническая шестерня свя-
зана с турбинным колесом ГТ, ведомые шестерни являются води-
лами планетарных рядов. Реверс расположен на грузовом валу
внутри КП.
Механизм поворота —дифференциального типа с двойным под-
водом мощности, имеет комбинированный привод: ГОП и гидро-
муфты (ГМ). Вал гидромотора ГОП с помощью конической пары
связан с промежуточным валом, через который крутящий момент
передается на солнечные шестерни суммирующих планетарных
рядов, минуя ПКП. С промежуточным валом также связаны две
ГМ, образующие единый агрегат (см. рис. 2.22).
Гидрообъемная передача МП состоит из регулируе-
мого аксиально-поршневого гидронасоса с наклонным цилиндро-
вым блоком и нерегулируемого гидромотора аналогичной кон-
струкции. Максимальное давление в ГОП составляет 39 МПа.
Для увеличения эффективности поворота БМП установлены
автоматически управляемые гидромуфты, которые должны вос-
принимать большую часть нагрузки на малых радиусах поворота.
Они подключаются автоматически от датчика давления ГОП, при-
50
чем в зависимости от направления поворота заполняется соот-
ветствующая (правая или левая) гидромуфта, что позволяет
уменьшить установочную мощность ГОП и ее габариты. Меха-
низм поворота обеспечивает поворот БМП вокруг центра тяжес-
ти на 360° за Юс (на площадке с бетонным покрытием).
Остановочный тормоз — комбинированного типа, с механичес-
кими дисковыми тормозами и гидрозамедлителем. Механические
дисковые ОТ сухого трения расположены по бортам машины на
ведущем валу бортового цилиндрического редуктора. Нагрузки от
дисковых ОТ замыкаются на корпусе БМП. Следовательно, уси-
лия от неуравновешенности тормозных дисков и от действия ра-
диальных дополнительных сил из-за неравномерности тормозного
момента ОТ не передаются на шестерни БР.
ГЗ предусмотрен для облегчения работы дисковых тормозов
и представляет собой две гидромуфты МП. Совместное действие
гидрозамедлителя с механическими дисковыми тормозами комби-
нированных ОТ обеспечивает замедление до 6,8 м/с2.
Бортовой редуктор — двухступенчатый, с цилиндрической пере-
дачей и планетарным рядом, размещен в передней части корпуса.
В цилиндрическом редукторе ведомая шестерня имеет свои
опоры и подвижное шлицевое соединение с плавающей солнеч-
ной шестерней выходного планетарного ряда. Плавающий эпи-
цикл замыкается на картер при помощи подвижного зубчатого
соединения. Эта система с двумя степенями свободы повышает
работоспособность планетарного ряда.
2.7. ТРАНСМИССИЯ HSWL-354/3 ТАНКА «ЛЕОПАРД-2» (ФРГ)
Трансмиссия танка «Леопард-2» (см. рис. 2.16, в) через про-
межуточный фланец соединяется с двигателем, а с маховиком
двигателя — через зубчатую муфту, образуя с двигателем и его
системами единый блок, который может быть сравнительно быст-
ро заменен в полевых условиях при помощи ремонтно-эвакуа-
ционной машины.
Трансмиссия HSWL-354/3— гидромеханическая, разработана
фирмой «Ренк», выполнена по схеме полнопоточной гидромехани-
ческой передачи. При прямолинейном движении мощность двига-
теля передается через ГТ, реверс и ПКП к эпициклам суммирую-
щих планетарных рядов.
В этом случае гидрообъемная передача МП удерживает сол-
нечные шестерни от вращения, стабилизируя прямолинейное дви-
жение. Трансмиссия является одновальной, т. е. реверс, ПКП, ГЗ,
суммирующие планетарные ряды МП и механические ОТ распо-
ложены соосно (рис. 2.24).
Планетарная коробка передач с двумя степенями свободы
содержит четыре передачи для движения вперед, две — для дви-
жения назад. Она состоит из трех планетарных рядов с дисковы-
ми тормозами, обеспечивающими включение I, II, III передач, и
дискового фрикциона, обеспечивающего включение IV передачи.
51
Передаточные числа в ПКП трансмиссии HSWL-354/3 при
движении вперед отличаются от передаточных чисел трансмиссии
танка «Леопард-1» и составляют на I передаче 4,47; на II —
2,19; на III — 1,51; на IV — 1,0.
От ООигателя
Рис. 2.24. Кинематическая схема трансмиссии HSWL-354/3 танка «Леопард-2»:
ГГ гидротрансформатор; Фвл фрикцион блокировочный ГТ; Н — привод к вспомоги
тельным насосам; В — привод к вентиляторам; ГОП МП гидрообъемная передача меха
низма поворота; ГМ гидромуфта механизма поворота; Р - реверс; ГЗ — гидрозамедли-
тель; СДР суммирующие дифференциальные ряды; ОТ остановочный тормоз; ВР — бор
товой редуктор; ПКП—планетарная коробка передач; Т,. 11, Г,. Ф, тормоза и фрикцион
ПКП; Гзх> Тпх—тормоза реверса
Гидротрансформатор трансмиссии HSWL-354/3— комплексный,
с блокирующим фрикционом. Он скомпонован по оси двигателя.
Сразу за ГТ размещены цилиндро-конические раздаточные ре-
дукторы, которые обеспечивают подачу мощности на вспомога-
тельные гидронасосы и на МП. От валов гидронасоса и ГМ идет
привод к двум вентиляторам системы охлаждения.
Реверс в трансмиссии HSWL-354/3 — конический, с дисковы-
ми тормозами. Ведущая коническая шестерня расположена по оси
двигателя, тормоза — на входном валу КП. Место расположения
реверса (перед КП) позволяет обеспечить равенство числа пере-
52
дач переднего и заднего ходов, а за счет системы управления
обеспечиваются две передачи заднего хода.
Механизм поворота — дифференциального типа, с двойным
подводом мощности. Он имеет комбинированный привод с ГОП
Гидрообъем пая передача МП и гидромуфты имеют
привод от двигателя (от насосного колеса ГТ); они связаны с об-
щим промежуточным валом, соединенным, в свою очередь, с сол-
нечными шестернями суммирующих планетарных рядов обоих
бортов. Гидрообъемная передача МП состоит из регулируемого
гидронасоса с наклонным цилиндровым блоком и нерегулируемо-
го гидромотора аксиально-поршневого типа. Назначение ГОП в
МП такое же, как в МП БМП «Мардер».
Автоматически регулируемые ГМ, создающие дополнительный
крутящий момент на промежуточном валу при малых радиусах,
используются только для формирования поворота (в БМП «Мар-
лер» ГМ используются и для увеличения эффективности торможе-
ния). Радиусы поворота (в метрах) в соответствии с передачей
ПКП следующие: на I передаче — 7,0; на II — 13; на III—18,0;
на IV —27,0.
Танк «Леопард-2» может поворачиваться вокруг центра тя-
жести при установке нейтрали в ПКП (например, на площадке
с бетонным покрытием за Юс), что повышает его боевую эффек-
тивность.
Остановочные тормоза трансмиссии HSWL-354/3 — комбиниро-
ванные с ГЗ и двумя механическими дисковыми тормозами, рабо-
тающими в потоке масла.
Гидрозамедлитель расположен на грузовом валу после ПКП,
что позволяет осуществлять торможение за его счет и в режиме
поворота (в отличие от БМП «Мардер»). Дисковые тормоза рас-
положены также на грузовом валу после суммирующих планетар-
ных рядов, т. е. внутри картера трансмиссии (в отличие от танка
«Леона рд-1»).
На I и частично на II передачах ГЗ малоэффективен из-за не-
высокой частоты вращения грузового вала. Поэтому в танке «Лео-
пард-2» торможение осуществляется автоматическим подключе-
нием на нижнем диапазоне скоростей дисковых тормозов, что соз-
дает дополнительный момент. Таким образом, формируется необ-
ходимый тормозной момент, который задается водителем при воз-
действии на педаль ОТ. При таком конструктивном выполнении
износ дисковых тормозов незначителен, и вследствие этого можно
реже проводить их техническое обслуживание и ремонт.
Комбинированные остановочные тормоза танка «Лсопард-2»
обладают высокой эффективностью и могут обеспечить останов-
ку танка, движущегося со скоростью 18 м/с, в течение 3,6 с.
Бортовой редуктор — планетарный, разработанный фирмой
«Рейншталь»*. Барабан ведущего колеса самоочищающийся.
* С 1976 г. преобразована в фирму «Тисссн-Хеншель».
53
По оценке специалистов ФРГ, двигатель, ГМТ, БР танка «Лео-
пард-2» имеют достаточный резерв по мощности и прочности, что
позволяет не только сохранять удельную мощность на прежнем
уровне, но и увеличивать ее при возможном утяжелении танка в
процессе доработки его конструкции.
2.8. ТРАНСМИССИЯ Х-ПОО-ЗВ ТАНКА М-1 (США)
Существует несколько модификаций трансмиссии Х-1100 для
работы с поршневыми и газотурбинными двигателями. Так, для
танка М-1 с дизельным двигателем предусмотрен вариант транс-
миссии X-1100-1 А; для танка с ГТД AGT-1500, расположенным
вдоль продольной оси корпуса танка — трансмиссия Х-ПОО-ЗВ,
разработанная фирмой «Детройт дизел Аллисон дивижн»*. Дан
ная трансмиссия с двигателем и его системами объединяется в
единый силовой блок (см. рис. 2.16,г), расположенный в кормо-
вой части корпуса.
Все модификации трансмиссия Х-1100 построены по схеме
полнопоточной гидромеханической передачи (рис. 2.25) и отли-
чаются друг от друга только конструкцией входного модуля, кото-
рый состоит из ГТ, соединенного непосредственно с двигателем, и
пары цилиндрических зубчатых колес, связывающих ГТ с веду-
щей конической шестерней центрального модуля.
Во входном модуле имеются механизмы отбора мощности для
привода вспомогательных агрегатов: вентилятора системы охлаж-
дения, масляных насосов и др. Центральный модуль (одинаковый
для всех модификаций трансмиссии Х-1100) состоит из кониче-
ской передачи, ПКП, ГОП, МП, двух суммирующих дифферен-
циальных рядов (СДР), на барабанах водил которых установле-
ны ОТ. В центральном модуле предусмотрен маслонасос, имею-
щий привод от выходного вала, для обеспечения пуска с букси-
ра, а также поворота и торможения при неработающем двигателе.
Применение различных входных модулей позволяет распола-
гать двигатель наиболее рационально по отношению к оси грузо-
вого вала трансмиссии, что помогает в каждом варианте опти-
мально использовать объемы МТО для размещения радиаторов,
топливных баков, систем воздухоочистки и выпуска.
Гидротрансформатор — одноступенчатый, комплексный, с авто-
матически управляемым блокировочным фрикционом. Коэффи-
циент преобразователя момента ГТ на режиме «стоп» составляет
примерно 1,9 (в ранних ГМТ серии «X» фирмы «Аллисон» этот
коэффициент примерно равен 3,4).
Входной редуктор расположен за ГТ во входном модуле и со-
стоит из пары цилиндрических шестерен. Он позволяет согласовы-
вать .частоту вращения вала двигателя со скоростью танка.
* Далее для краткости — «Аллисон».
54
Планетарная коробка передач имеет три степени свободы,
обеспечивает четыре передачи для движения вперед и две —для
движения назад. В ПКП имеется пять управляемых элементов
(две фрикционные муфты и три тормоза) и три трехзвенных диф-
ференциальных механизма, выполненных в виде простых плоских
рядов. Конструкция планетарных рядов ПКП заимствована из
других трансмиссий фирмы сАллисон».
От Писателя
Рнс. 2.25. Кинематическая схема трансмиссии X-1100-ЗВ танка M l:
ГТ гидротрансформатор; Фбд— фрикцион блокировочный ГТ; ВР - входной редуктор;
ПКП планетарная коробка передач; ГОП М/7 — гидрообъем на я передача механизма по-
ворота; СДР — суммирующие дифференциальные ряды; ОТ — остановочный тормоз;
БР — бортовой редуктор; Ф,. Фг. Т„ Т, Т., — фрикционы и тормоза ПКП; Н — привод
к насосам гидросистемы трансмиссии
В трансмиссии Х-1100-ЗВ из десяти возможных используются
всего шесть ступеней. Входное звено подключается поочередно
с ПОМОЩЬЮ двух фрикционных муфт ф| и Ф2 к блоку с двумя
степенями свободы, состоящему из трех тормозов и трех плане-
тарных рядов. Это позволяет, например, при движении вперед с
постоянно включенной фрикционной муфтой Фь переключать
55
только тормоза Т3, Т2 н Т| (табл. 2.10), превращая трехстепенную
ПКП в двухстепенную, в результате чего улучшается процесс пере-
ключения передач.
Таблица 2.10
Порядок включения управляемых элементов в трансмиссии X-1IOO-3B
Передача Передний ход Задний ход
1 II III IV 1 II
Сочетание включае- мых элементов 0,Т3 0,73 Ф,Г, 0,02 Фз 73 0,Т2
Механизм поворота — дифференциального типа, с ГОП в до-
полнительном приводе, который ответвляется от турбины ГТ
(см. рис. 2.25). Привод ГОП осуществляется от вала турбины ГТ,
а не от вала двигателя, как в танке «Леопард-2» и БМП «Мар-
дер», что, по мнению специалистов США, имеет следующие пре-
имущества: исключены заглохание двигателя при повороте танка
н случае малой подачи топлива и потеря управляемости при дви-
жении танка накатом или остановке двигателя; уменьшена мощ-
ность, необходимая для пуска двигателя.
Гидрообъемная передача МП состоит из гидронасоса
регулируемой подачи и нерегулируемого гидромотора. В ней
применены быстроходные радиально-поршневые гидромашины
оригинальной конструкции. Максимальная удельная подача ГОП
составляет 575 см3/об, максимальное давление — 34 МПа. ГОП
может передавать практически полную объектовую мощность дви-
гателя порядка 950—1000 кВт при повороте танка на месте на
тяжелом грунте с максимальной угловой скоростью. Эта скорость
регулируется только подачей гидронасоса ГОП, изменяющейся
с помощью механогидравлической системы управления, на кото-
рую водитель воздействует через штурвал мотоциклетного типа.
Конструкция гидромашин ГОП позволяет использовать в ка-
честве рабочей жидкости трансмиссионное масло, очищенное от
примесей с размером частиц более 25 мкм.
Гидрообъемная передача МП обеспечивает поворот танка
вокруг центра тяжести на 360° за Юс.
Остановочные тормоза — многодисковые, работают в масле.
Диски с внутренними шлицами, снабженные с обеих сторон ме-
таллокерамическими накладками на бронзовой основе, связаны
с барабаном выходного вала. Неподвижные стальные диски сто-
порятся с помощью хвостовиков, опирающихся на большие заде-
ланные в картер шпильки.
56
При создании ОТ трансмиссии ХМ-ПОО-ЗВ были проведены
экспериментальные исследования, направленные на оптимизацию
следующих факторов:
характера нарастания давления в полости бустера ОТ;
материала металлокерамических дисков трения;
профиля канавок на металлокерамических дисках;
площади общей поверхности трения.
В результате были разработаны ОТ, способные остановить
60-тонный танк с замедлением 4,8—6,0 м/с2.
Глава 3. СИСТЕМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ
СОВРЕМЕННЫХ ВГМ
3.1. ОБЩИЕ ПОЛОЖЕНИЯ
Системы управления движением состоят из подсистем, управ-
ляющих коробкой передач, механизмом поворота, тормозами, а
также двигателем и другими составными частями силовой уста-
новки.
Традиционными для отечественного танкостроения до середи-
ны 60-х гг. были системы управления движением, конструктивно
базирующиеся на механических приводах непосредственного дей-
ствия. Управление двигателем, переключением передач в КП,
главным фрикционом, МП и ОТ производилось за счет мышеч-
ной энергии водителя. Сервирование приводов осуществлялось
механическими средствами. Передаточные функции, отражающие
связь управляющего воздействия и эффекта управления, форми-
ровались произвольно, с учетом возможности компоновки и при-
нятых конструктивных решений. Автоматизация практически не
применялась.
В настоящее время системы управления современных отечест-
венных и зарубежных танков механогидравлические и механо-
электрогидравлические. Широко применяются системы автомати-
ческого управления и блокировок аварийных режимов на основе
электронных программно-логических схем и электрогидравличе-
ских исполнительных органов. Эти системы позволяют существен-
но снизить утомляемость водителя, исключить аварийные режи-
мы работы МТУ, повысить среднюю скорость движения, улучшить
топливную экономичность, снизить зависимость этих показателей
от квалификации водителя и тем самым поднять боевую эффек-
тивность танков.
Основное внимание при совершенствовании систем, автомати-
ческого переключения передач (САПП) уделяются исключению
цикличности передач и уменьшению числа неоправданных пере-
ключений.
Механогидравлическая система управления движением со-
стоит из механических органов управления, приводов и гидрав-
лической исполнительной части.
58
Механоэлектрогидравлическая система состоит из механиче-
ских органов управления, электронной или электрической части,
обеспечивающей формирование алгоритмов управления, и элект-
рогидравлических исполнительных устройств.
Требования к подсистеме управления КП сводятся к следую-
щему:
система должна обеспечивать переключение передач, переход
с переднего хода на задний и обратно за кратчайшее время, с тем
чтобы продолжительность разрыва потока мощности и потеря вре-
мени на переключение передач были минимальными!;
действия водителя при управлении КП не должны быть обре-
менительными и требовать больших навыков; они должны сво-
диться только к манипулированию рычагом избирателя передач;
система должна блокировать неправильные действия водите-
ля, которые могут привести к поломке трансмиссии или двига-
теля;
при трогании с места и переключении передач в трансмиссии
не должны возникать высокие динамические нагрузки.
В существующих конструкциях подсистем управления КП эти
требования обеспечиваются блокировками на избирателе передач,
исключающими переключение «вниз» через передачу, несвоевре-
менное включение низшей передачи и случайное включение задне-
го хода. Для повышения быстродействия гидравлический распре-
делитель устанавливается непосредственно на КП, рассчитываются
необходимые подача насоса и сопротивление гидравлических
трасс. Уменьшение динамических нагрузок достигается примене-
нием гидравлических устройств плавного включения фрикционных
элементов в КП.
Требования к подсистемам управления МП с фрикционными
элементами, работающими в масле, сводятся к следующему:
изменение радиуса поворота ВГМ должно быть плавным и
пропорциональным перемещению органа поворота;
система управления должна обладать быстродействием, ис-
ключающим ощущаемое водителем запаздывание реагирования
ВГМ на перемещение органа управления;
чувствительность ВГМ к перемещению органа управления не
должна быть чрезмерной, затрудняющей управление;
усилие, действующее на органы управления, должно соответст-
вовать установленным нормам и монотонно возрастать по мере
отклонения этих органов.
Выполнение этих требований обеспечивается средствами, повы-
шающими быстродействие гидросистемы, конструкцией следящего
золотника, рациональным выбором органа управления, его пол-
ного хода и характеристики усилия в зависимости от переме-
щения.
59
Т ребования к системам управления тормозами танка сводятся
к следующему:
рабочий привод должен обеспечивать удобное и быстрое поль-
зование тормозами, для чего ход педали должен быть не более
180 мм, а усилие должно монотонно возрастать по ходу от 45 до
300 Н, но не более;
горный тормоз должен обеспечивать надежное удержание тан-
ка на предельном подъеме (спуске), усилие при этом не должно
превышать 800 Н на педали или 400 Н на рычаге;
запаздывание срабатывания привода должно быть минималь-
ным.
Полностью эти требования могут быть выполнены с помощью
дистанционного механо- или электрогидравлического рабочего
привода и механического горного тормоза.
В электрогидравлическом рабочем приводе гидравлический за-
медлитель применяется для рабочего притормаживания, а меха-
нический тормоз при его совместной работе с гидродинамичес-
ким— для экстренного торможения. Подсистема управления гид-
равлическим замедлителем одновременно обеспечивает также и
его охлаждение.
Создание системы дублирования управления движением ко-
мандиром следует считать этапом развития систем управления
движением. Их появление обусловлено необходимостью повыше-
ния эффективности маневрирования при решении боевых задач.
Создание этих систем требует практически полной автоматизации
процессов управления и обеспечения безусловного приоритета
командира в управлении движением.
Оборудование танков такими системами позволяет решать за-
дачи дистанционного и телеуправления, использовать для решения
частных боевых задач безэкипажные танки.
3.2. ТАНКИ Т-64А И Т-72
Танк Т-64А оборудован механогидравлической системой управ-
ления движением, особенности которой обусловлены применением
в трансмиссии БКП, выполняющих четыре функции (главного
фрикциона, коробок передач, механизма поворота и остановоч-
ных тормозов). Для гидравлического управления фрикционными
элементами БКП разработаны механизмы распределения, приме-
няемые во всех отечественных танках с БКП.
Место водителя оборудовано избирателем передач, правым и
левым рычагами управления поворотом, педалями управления
двигателем, отключения трансмиссии и ОТ.
Приводы управления двигателем и ОТ — механические, а при-
воды переключения передач, управления поворотом и отключения
трансмиссии — механогидравлические.
Избиратель передач связан с механизмами распределения и
оборудован электромеханической блокировкой рычага, исключаю-
60
щей увеличение частоты вращения коленчатого вала двигателя
сверх допустимой при несвоевременном переключении передач
с VII на VI, с VI на V, с V на IV и переключении «вниз» через
передачу.
Тахогенератор, имеющий привод от направляющего колеса,
выдает в схему электроблокировки сигнал о скорости движения
танка. Пока скорость танка не снизится до скорости движения
на низшей смежной передаче с максимальной частотой вращения
коленчатого вала двигателя, автоматическая блокировка «запи-
рает» перемещение рычага избирателя в сторону включения низ-
ших передач.
Педаль отключения трансмиссии связана с механизмами рас-
пределения. Функциональное назначение привода аналогично на-
значению главного фрикциона. При воздействии на педаль (одно-
временно в обеих БКП) давление в бустерах фрикционных эле-
ментов изменяется от нуля (педаль полностью выжата) до мак-
симального значения (педаль полностью отпущена).
Рычаги управления поворотом связаны с механизмами распре-
деления БКП. При перемещении рычага управления поворотом
в БКП отстающего борта вначале происходит резкое уменьшение
давления в бустерах фрикционов до нуля и затем переключение
на смежную низшую передачу. Одновременно при помощи меха-
нического привода, соединяющего левый и правый механизмы
распределения, давление в бустерах фрикционных элементов за-
бегающего борта повышается до максимума. Танк будет переме-
щаться со свободным радиусом поворота, так как мощность от
двигателя не передается через БКП отстающего борта. Пропор-
ционально дальнейшему отклонению рычага давление в бустерах
фрикционных узлов отстающего борта изменяется от нуля до мак-
симума. Этим обеспечивается силовое регулирование радиуса по-
ворота от свободного до расчетного, определяемого разностью
передаточных чисел n-й передачи забегающего борта и (п—1)-й
отстающего.
Привод управления ОТ имеет сервомеханизм и уравнитель,
предназначенные для снижения усилий, возникающих в нем, а так-
же для синхронного и одинакового силового воздействия на тор-
моза БКП. Педаль оснащена защелкой, позволяющей оставлять
привод в рабочем состоянии, т. е. затормаживать танк на стоянке.
Защелка включается вручную.
Механизмы распределения (левый и правый) аналогичны по
конструкции и функционированию и устанавливаются непосредст-
венно на правой и левой БКП.
61
Конструктивная схема механизма распределения БКП приве-
дена на рис. 3.1. Рычаг привода переключения передач жестко
соединен с валом 3, на противоположном конце которого имеются
шлицы для связи с синхронизирующим валом, обеспечивающим
одновременное включение передач в правой и левой БКП. Вал-
шестерня жестко соединяется с профильным кулаком 5 и через
сухарное соединение — с золотником переключения передач. Зо-
лотник поворота выполнен в виде втулки и надет на золотник
переключения передач.
Рис. 3.1. Конструктивная схема механизма распределения БКП:
I рычаг привода переключения передач; 2 вал-шестерня; 3— вал. связанный с снн
иронизирующим валом; I - зубчатый сектор; 5, 6. 13 - профильные кулаки; 7,3.10, II,
/7 —втулки; 9. /2—валы; Н — тарель; 15 - пружина; /6- -следящий золотник; 18 зо-
лотник поворота; 19 — золотник-боном; 20 — золотник переключения передач; А— Г — поло-
сти внутри втулки 17
Внутри втулки 17 имеется следящий золотник (регулятор дав-
ления в бустерах фрикционных элементов БКП) с каналом обрат-
ной связи, соединяющим полости В и Г. На золотник действует
пружина, настройка которой осуществляется подвижным упором
и регулируемым блоком пружин тарели.
Масло из магистрали управления гидросистемы трансмиссии
через полости В и Б втулки 17 и отверстия золотников 18 и 20
поступает во внутреннюю полость золотника переключения пере-
дач, а из нее — в соответствующие бустеры фрикционных элемен-
тов БКП. Остальные бустеры через отверстия золотника поворо-
та и пазы на поверхности золотника переключения передач сое-
диняются со «сливом». Канал бустера тормоза Т$ (см. рис. 2.3)
перекрыт подпружиненным золотником-бономом.
Масло в полость В поступает под давлением 1,7—1,8 МПа.
Настройка пружины 15 обеспечивает поддержание давления в по-
62
лости Б и, соответственно, в бустерах БКП в пределах от 1,0 до
1,1 МПа. Через вилку втулки Ю к пружине 15 может быть под-
ключен пружинный упор втулки 7, что обеспечивает повышение
давления до 1,7 МПа.
При перемещении рычага избирателя передач
привод поворачивает рычаг 1, вал с зубчатым сектором, который
в свою очередь поворачивает вал-шестерню; вместе с последней
поворачиваются профильный кулак 5 и золотник переключения
передач. Профильный кулак 5 на участке II—VII передач имеет
профиль постоянного радиуса и поэтому не оказывает воздейст-
вия на втулку 7. Золотник переключения передач подключает для
заполнения маслом бустеры фрикционных элементов включаемой
передачи (через сквозные отверстия) и для слива — бустеры вы-
ключаемой передачи (через пазы, выведенные на торцы). Когда
бустеры опорожнены, давление в них и в полостях Б н Г также
равно нулю, и следящий золотник под действием пружины 15
опускается вниз, открывая проход маслу через полости В и Б к
заполняемым бустерам. В заполненных бустерах и, следовательно,
в полостях Б и Г давление повышается. Золотник поднимается
вверх и занимает равновесное положение (под действием пружи-
ны 15 и давления в полости Г) на кромках втулки 17, поддержи
вая в бустерах включенной передачи давление, заданное на
стройкой пружины 15.
При включении I передачи и заднего хода про-
фильный кулак 5 через ролик и рычаг поворачивает втулку 7. пру-
жинный упор ее действует на втулку 10, вилка которой передает
его усилие дополнительно к усилию пружины 15 на следящий
золотник, что обеспечивает повышение давления до 1,7 МПа. Этим
исключается буксование фрикционных элементов БКП при высо-
ких нагрузках на I передаче и заднем ходу.
При включении I передачи золотник-боном западает в лунку
профильного кулака 5, открывая проход маслу к бустеру тормо-
за /5. Так как тормоз Т5 работает на I передаче только в режиме
поворота танка, проход для масла остается перекрытым золотни-
ком поворота, который поворачивается лишь при воздействии на
рычаг поворота. При включении заднего хода тормоз Т5 работает
постоянно, поэтому проход для масла к нему открыт.
При воздействии на педаль отключения
трансмиссии привод через рычаг поворачивает втулку //.
Эта втулка своим упором поворачивает другую 10, вилка кото-
рой поднимает тарель, сжимая блок пружин и освобождая пру-
жину 15. Следящий золотник поднимается вверх, масло из кана-
лов бустеров через полости Б и А сливается, давление при этом
снижается (при предельном отклонении педали — до нуля). При
отпускании педали происходит обратный процесс. Таким образом,
давление в бустерах БКП соответствует положению педали. При
выжиме педали отключения трансмиссии привод одновременно
воздействует на рычаг вала 9, который поворачивает профильный
63
кулак 6, а через ролик и рычаг на втулку 7, которая поднимает
ролик копира профильного кулака 5 на высоту, достаточную для
включения I передачи или заднего хода.
При отклонении рычага управления поворо-
том привод через рычаг поворачивает вал с профильным кула-
ком 13. Ролик, обкатываясь по профилю, поворачивает втул-
ку 10, вилка которой сжимает блок пружин тарели и освобождает
пружину 15, что приводит к снижению давления в бустерах вклю-
ченной передачи. Одновременно поворачивается втулка 8, ведомая
пазом профильного кулака 13, и воздействует на золотник пово-
рота, обеспечивая включение низшей смежной передачи на от-
стающем борту. Наружный профиль кулака 13 при дальнейшем
повороте вала 12 обеспечивает догрузку пружины 15 и, следова-
тельно, регулирование давления в бустерах БКП в соответствии
с положением рычага управления поворотом танка, а также ра-
диус поворота.
Одновременно привод .воздействует на механизм распределе-
ния БКП забегающего борта. Поворачиваются вал 9 с профиль-
ным кулаком 6 и втулка 7, пружинный упор которой через упор
и вилку втулки 10 догружает следящий золотник, что обеспечи-
вает повышение давления в бустерах БКП забегающего борта и
исключает буксование фрикционных дисков при увеличении на-
грузки.
Таким образом, по мере отклонения водителем рычага управ-
ления поворотом вначале происходит снижение давления в БКП
отстающего борта и включение в ней низшей смежной передачи;
при этом танк выходит на режим поворота со свободным радиу-
сом. Затем давление в буксующих фрикционных элементах повы-
шается и танк продолжает движение уже с регулируемым радиу-
сом поворота, а когда фрикционные элементы замыкаются, танк
поворачивается с расчетным радиусом.
На рис. 3.2 представлена схема гидросистемы трансмиссии
танка Т-64А. Через заборный 14 и гидроциклонный 6 фильтры
масло из бака подается нагнетательным насосом 10 в механизмы
распределения БКП. Клапан 17 поддерживает в гидросистеме
давление 1,6—1,7 МПа. Избыток масла, перепускаемый им, попа-
дает в полость клапана смазки 16, который настроен на давление
0,20—0,25 МПа, а от него в БКП. Масло из картеров БКП отка-
чивается через фильтры грубой очистки насосами 9 и 11, затем
через основной фильтр 15 подается в радиатор и возвращается
обратно в бак. Для предотвращения разрушения шлангов и тру-
бопроводов при засорении фильтров, радиатора или загустевании
масла создана система предохранительных клапанов. Перед оста-
новкой двигателя электромагнитом / включается клапан 18, через
который масло от нагнетательного насоса 10 поступает в бак,
минуя полость клапана смазки 16. В зимнее время масло в баке
разогревается встроенной жаровой трубой подогревателя.
64
Для пуска двигателя с буксира включается маслозакачиваю-
щий насос 2. который через обратный клапан подает масло из
бака в полость золотникового устройства 3 и затем в механизмы
распределения, что обеспечивает переключение передач и позво-
ляет осуществить пуск двигателя.
Рис. 3.2. Схема гидросистемы трансмиссии танка Т-64А:
/ — электромагнит; 2 — маслозакачивающий насос с электроприводом; 3 клапанная
коробка; 4 — маслобак; 5 — радиатор; 6 — гидроциклонмый фильтг»; 7, /2 — механизмы
распределения правой и левой БКП; 8. /3 — картеры БКП: 9. II откачивающие насосы;
/О — нагнетательный насос; 14— заборный фильтр; 15 основной фильтр; 16- клапан
смазки; 17 — клапан давления управления; 18 клапан откачки масла из БКП
В танке Т-72 вместо кинематических связей между механизма-
ми распределения, обеспечивающих повышение давления в бусте-
рах фрикционных элементов забегающего борта при повороте
танка, имеются специальные гидромагистрали (а и б на рис. 3.2),
которые выполняют ту же функцию.
Для улучшения эргономических свойств привода управления
тормозами применено полуавтоматическое подтормаживание. На
рычаге управления поворотом размещена кнопка электрического
5 Зак. 47 «с»
65
управления. При нажатии на нее включается электропневмосер-
вопривод, который осуществляет перемещение всего (включая
педаль) привода управления ОТ. В этом случае педаль управле-
ния тормозом приводится в положение, удобное для пользования,
создания необходимого усилия торможения.
3.3. ТАНК Т-80
Система управления движением танка Т-80 имеет особенности,
обусловленные применением газотурбинного двигателя и четырех-
скоростных БКП.
В гидросистеме управления установлено постоянное давление
1,4 МПа, что исключает необходимость кинематической (в танке
Т-64А) или гидравлической (в танке Т-72) связи между механиз-
мами распределения для повышения давления в бустерах фрик-
ционных элементов БКП забегающего борта при повороте танка.
На месте водителя установлена педаль управления регулируе-
мым сопловым аппаратом. Педали управления трансмиссией нет.
Управление сливом масла из бустеров БКП автоматическое. При
выключении передачи включается электромагнитный клапан,
предназначенный для уменьшения давления в гидросистеме управ-
ления до нуля и наоборот.
Устройство плавности, установленное в гидросистеме, позво-
ляет увеличивать давление постепенно, а это, в свою очередь, обес-
печивает плавное трогание танка с места и безударное переклю-
чение передач.
В трансмиссии используется синтетическое масло БЗ-В. В гид-
росистеме установлены сетчатые фильтры с размером ячейки
85 мкм. В приводе управления ОТ установлен гидравлический сер-
вомеханизм.
3.4. МАКЕТ ОПЫТНОГО ТАНКА С ГМТ-89021
Макет танка оснащен механоэлектрогидравлической системой
управления движением, включающей в себя подсистемы автома-
тического переключения передач, реализации алгоритма * «Ре-
верс», автоматической блокировки гидротрансформатора и дуб-
лирования управления движением командиром.
* Алгоритм управления — строго дозированная по амплитуде, скорости
и фазе программа управляющих воздействий (операций управления).
66
Место водителя оборудовано электрифицированным избирате-
лем передач, штурвалом управления поворотом, педалями управ
ления двигателем и ОТ, рычагами раздельного управления ОТ.
Между избирателем передач и электронным блоком управле-
ния ГМТ существует электрическая связь, а штурвал управления
поворотом связан с золотниковой коробкой управления МП меха-
ническим приводом. Педаль управления двигателем связана с его
регулятором механическим приводом, а педаль ОТ с сервоцилинд-
ром ОТ — гидростатическим. Рычаги ОТ механическими привода-
ми связаны с механизмами включения ОТ.
Схема механоэлектрогидравлической системы управления
трансмиссией и движением макета представлена на рис. 3.3.
111трихпунктнрным контуром с римскими цифрами обозначены
конструктивно автономные сборочные единицы. При воздействии
водителя на педаль ОТ (ХХН-1) перемещается влево поршень
главного тормозного цилиндра (XXI1-2). Когда манжета поршня
перекрывает компенсационное отверстие пополнительного бака
XXII-3, масло из-под поршня вытесняется через трубопровод в
полость золотника (XXI-3), поршень которого сжимает пружину
следящего золотника XXI-2. Масло от пневмогидравлического
аккумулятора / поступает в сервоцилиндры ОТ (XX)—в полость
поршней большого диаметра и через открытые конические кла-
паны— в полость поршней малого диаметра, штоки которых свя-
заны с механизмами включения ОТ. Перемещаясь и выбирая
зазоры привода и ОТ, поршни малого диаметра останавливаются,
после чего в сервоцилиндрах давление возрастает, сдвигая порш-
ни большого диаметра, перемещение которых приводит к закры-
тию конических клапанов. Жидкость оказывается замкнутой в по-
лостях поршней малого диаметра, что обеспечивает их жесткую
связь. Усилие в приводах ОТ определяется поршнями большого
диаметра. При отпускании педали давление снижается; под дей-
ствием возвратных пружин поршни большого диаметра приходят
в исходное положение, в результате чего открываются конические
клапаны, и возвратные пружины привода возвращают в исходное
положение поршни малого диаметра. Привод, вытеснив масло из
полостей сервоцилиндров через золотниковую коробку и трубо-
провод в главный цилиндр, приходит в исходное состояние.
Гидрогазовый аккумулятор (/) обеспечивает быстродействие
рабочего привода и возможность двух- и трехкратного торможе-
5*
67
Рис. 3.3. Схема механоэлектрогидравличсской системы управления трансмиссией и движением макета
танка с ГМТ-69021:
/ — гидрогазовый аккумулятор; // — золотниковая коробка включения высших (Ш и IV) передач; /// — реверс; /УЛ и
V/6 —золотниковая и клапанная коробки включения низших (I и II) передач; V — блок управления поворотом; VI — зо-
лотниковая коробка поворота; VII — золотниковая коробка включения гидромуфты VIII вентилятора системы охлажде-
ния двигателем; IX — гидротрансформатор; X — клапанная коробка гидросистемы (/— главный клапан. 2 — клапан
ГТ); XI — радиаторы; XII — перепускной клапан радиаторов; XIII — гидроциклонный фильтр; XIV — нагнетательный
насос (/, 2 — секции циркуляции и подкачки, 3— клапан смазки. 4 — предохранительные клапаны): XV — центральный
блокирующий гидрозамыкатель; XVI — золотниковая коробка с электромагнитным приводом XVII — бак с приемным
фильтром; XVII! — откачивающий насос (I, 2 секции ВР и КП. 3 - предохранительный клапан); XIX — блок управле-
ния двигателем; XX — сервоцилиндры ОТ; XXI — золотники ОТ (/ — электромагнитный переключатель. 2 — следящий зо-
лотник. 3— золотник); ХХП — педаль ОТ (/ — педаль ОТ. 2 — главный тормозной цилиндр. 3— пополнительный бак);
XXIII — поддоны картеров (/ — входного редуктора. 2 — коробки передач. МП и реверса)
ния танка при неработающем двигателе
(опорожненной гидросистеме).
Раздельные механические приводы уп-
равления остановочными тормозами от ры-
чагов управления используются при экст-
ренных торможениях (как аварийные), на
стоянке и уклонах (как горный тормоз),
а также при буксировке танка на мягкой
сцепке.
Управление поворотом осуществляется
с помощью штурвала, поворачивающегося
в обе стороны от нейтрального положения
на угол 41,5°; он оснащен нуль-установите-
лем и может быть застопорен в среднем по-
ложении, а также имеет два рабочих по-
ложения: «по-походному» и «по-боевому».
При повороте штурвала перемещаются
входные муфты клапанной коробки VI, сжи-
мающие возвратные и задающие пружины
золотников правого и левого поворота
(V7-2, VI-3), что приводит к перемеще-
нию золотников и коммутации гидравличе-
ских траос бустеров фрикционных элемен-
тов МП.
При повороте штурвала на угол а = 10°
(рис. 3.4) бустер тормоза прямолинейного
движения подключается для слива масла,
бустер фрикциона поворота—для заполне-
ния. При повороте штурвала от 10 до 31°
давление в бустере фрикциона поворота
увеличивается до 0,3 МПа; при повороте
от 31 до 39,5° давление повышается до
0,75 МПа. Если поворачивать штурвал да-
лее до угла 41,5°, муфта упрется в золот-
ник и переместит его до упора, в резуль-
тате чего в бустере фрикциона давление
повысится до 1,6 МПа на I и II передачах,
а на «нейтрали», III и IV передачах — до
0,9 МПа.
69
Рис. 3.4. Характеристика управления ГМТ-69021:
/, // III. /V - номера передам; Н нейтраль, р и * давление и угол попоре.та соот-
вект ей н>
Подсистемы управления КП, реверсом и блокировкой транс-
форматора — электрические (рис. 3.5). Электрифицированный из-
биратель переключения передач имеет рычаг управления КП и
тумблер управления реверсом. Рычаг управления имеет пять по-
ложений — «нейтраль», I, II, 111 и IV («автомат»). Тумблер уп-
равления реверсом имеет два положения передний и задний ход.
При установке рычага в положения 1, II, Ill включается соот-
ветствующая передача. При установке рычага в положение IV
(«автомат») включается II передача, если танк неподвижен, а если
танк движется — передача, соответствующая режиму движения и
положению органов управления. При этом происходит автомати-
ческое переключение передач со II на III, с III на IV и обратно.
Программы переключения передач реверса, блокировки ГТ
формируются электросхемой, а исполняются электрогидравличе-
скими устройствами системы управления.
Выполнение команд на переключение передач производится
золотниковыми коробками с электромагнитным приводом к зо-
лотникам, скомпонованным в трех составных частях системы
управления: II, IVА и IVB (см. рис. 3.3). Клапаны в коробке
IVА обеспечивают плавное включение низших передач.
При включении I или II передачи срабатывают золотники
IVB-1 ил)и IVB-2 и через разделительный клапан IVB-3
масло подводится к главному клапану гидросистемы Х-1.
70
В результате подачи масла для заполнения бустеров фрик-
ционных элементов низших передач снижается давление за жик-
лером IV Л-2 клапана заполнения IVA-1, и заполнение бустера
Рис. 3.5. Электросхема управления ГМТ-69021:
/—блок управления с рычагом переключения передач и тумблером реверса; 2 — блок до
гики и программ переключения передач н реверса; 3, 4, 5. 6 электромагниты привода
золотников включения передач; 7 — электромагнит включения реверса. 8 электро магнит
привода золотника блоки]ювкн ГТ; 9 — блок управления приводами при дублировании;
10, II, 12 — электрогндравлически. приводы управления двигателем, поворотом и тормози
ми при дублировании; 13 — пульт системы дублирования управления движением; //--дат
чик положения переключающей муфты реверса; 15. 16, 17, 18 датчики давления масла
в бустерах фрикционных элементов; 19, 32 блоки коррекции законов переключения пере
дач по скорости движения; 20 — система разблокировки ГТ при переключении передач;
21, 22 —II и I варианты управления блокировкой ГТ: 23- ктчик скорости танка (уста-
новлен на валу турбинного колеса гидротрансформатора); 24, 25. 26 I. II и III варианты
системы САПП; 27, 29 блоки задержек исполнения ' команд переключения передач;
28 — блок прохождения команд <да» «нет» на переключение передач вверх; 30 — переклю
чатель схем коррекции; 31 датчик нулевой скорости; 33, 34 схемы коррекции сигналов
управления по положению привода управления двигателем; 35 — датчик положения при-
вода управления двигателем
происходит одновременно через жиклер и другие каналы. Золот-
ник аккумулятора IVA-3 перемещается и переключает пружин-
ную полость аккумулятора VIA-5 на слив. Установочное усилие
пружин исключает преждевременное срабатывание аккумулятора.
После заполнения бустера давление в нем и за жиклером увели-
чивается, перепад давлений в жиклере уменьшается и клапан за-
полнения закрывается. тМасло через жиклер аккумулятора в кла-
пане слива IVA-4 поступает в гидроаккумулятор, после сраба-
тывания которого давление в бустере скачком возрастает до дав-
ления, равного давлению в магистрали управления (1,6 МПа).
После того как давление в жиклерах уменьшится до нуля, кла-
пан слива закрывается, полость аккумулятора со стороны пружин
соединяется с магистралью управления, золотник аккумулятора
и поршень гидравлически уравновешиваются, и пружины возвра-
щают их в исходное положение. Открывается обратный клапан
(в клапане слива), и масло проходит в магистраль управления,
71
минуя жиклер аккумулятора. При выключении передачи масло из
бустера сливается через золотник, минуя устройство плавности.
Включение III и IV передач, осуществляемое золотниками II,
не вызывает повышения давления, гидрозамыкатели бустеров (ре-
ле давления; на рис. 3.3, // обозначены «Д») являются электриче-
скими датчиками, которые подают сигнал о выполнении заданной
программы и переводе электромагнитов с режима включения
на режим удержания.
Тумблер реверса может быть переключен при любой скорости
танка, но программа управления начнет отрабатываться только
пос.^ снижения скорости до 3 км/ч. При движении вперед элект-
ромагнит золотника ///-/ выключен, золотник отжат пружиной в
положение, при котором полость переднего хода бустера соедине-
на с магистралью управления, а полость заднего хода—со «сли-
вом». При включении электромагнита золотник коммутирует по-
лости бустера. Масло воздействует одновременно на плунжер и
поршень бустера 111-2, суммарное усилие которых обеспечивает
вывод муфты реверса из зацепления. При этом поршень бустера
упирается в корпус, а плунжер доводит муфту до зацепления
с другим валом. Обратный процесс аналогичен.
В случае отказа электросистемы управления используются
аварийные механические приводы переключения реверса и вклю-
чения II передачи.
Включение и выключение блокирующего фрикциона гидро-
трансформатора IX осуществляется только по командам электро-
системы управления золотниковой коробкой XVI, а включение ГМ
вентилятора системы охлаждения — золотниковой коробкой VII.
Гидротрансформатор разблокируется на необходимые промежут-
ки времени при переключении передач и реверсировании транс-
миссии, а также на режимах движения и работы МТУ, обуслов-
ленных выбранными и заложенными в электросистему законами
управления.
Управление, смазка* и охлаждение трансмиссии обеспечивают-
ся гидросистемой, в состав которой входят: бак с приемным
фильтром, радиаторы, нагнетательный и откачивающий насосы,
клапанная коробка, гидроциклонный фильтр, перепускной клапан
радиатора, центральный блокирующий гидрозамыкатель.
При помощи откачивающего насоса масло из картеров транс-
миссии возвращается через приемный фильтр в маслобак, из кото-
рого нагнетательным насосом через гидроциклонный фильтр по-
дается в контур циркуляции. Главный клапан настроен на давле-
ние 0,9 МПа. При включении I и II передач главный клапан
настраивается на давление 1,6 МПа. Клапан ГТ поддерживает
давление на входе в гидротрансформатор 0,4—0,7 МПа. Когда
блокировочный фрикцион ГТ включен (ГТ сблокирован), клапан
полностью открывается — часть масла идет от входа в ГТ к кла-
пану смазки. Давление в ГТ снижается, что необходимо для вклю-
чения блокировочного фрикциона, так как на диски действует
72
усилие от разности давлений в магистрали управления и в конту-
ре циркуляции ГТ. Клапан смазки поддерживает давление 0,15—
0,3 МПа.
На напорной магистрали контура циркуляции установлен цент-
ральный блокирующий электрогидрозамыкатель Д, который пол-
ностью выключает электросистему управления при снижении
давления ниже 0,2 МПа.
Макет оборудован системой дублирования управления дви-
жением от командира танка (рис. 3.6), которая в схеме (см.
рис. 3.3) представлена блоками V, XIX и XXL Эта система может
быть использована для дистанционного и радиоуправления.
Рис. 3.6. Структурная схема дублирования управления движением от коман-
дира танка с ГМТ-69021:
/ пульт управлении движением; 2 — вращающееся контактное устройство; 3 — блок
элсктросхсмы; 4 исполнительные электрогидравлнческис органы
На месте командира размещается пульт управления движе-
нием /. Сигналы управляющих воздействий командира на органы
пульта передаются через вращающееся контактное устройство 2.
Электросхема смонтирована в блоке 3. Исполнительные электро-
гидравлические органы системы 4 связаны с рабочими органами
двигателя и трансмиссии.
6 Зак. 47 «с»
73
При охватывании и сжатии рукоятки пульта нажимается тан-
геита 4 отбора и возврата управления (рис. 3.7). Режим работы
двигателя регулируется перемещением курка 5 указательным
пальцем; интенсивность торможения регулируется перемещением
Рис. 3.7. Пульт управления (а) и схема исполнительного механизма (б) систе-
мы дублированного управления движением:
/ — рычаг; 2 — тумблер «передний ход—нейтраль—задний ход»; 3 тумблер «автомат -
1 передача»; 4 — тангеита отбора и возврата управления; 5 курок; ЭМ1, ЭМ2 — элекгро
магниты; ПОС потенциометр обратной связи
рычага 1 большим пальцем. Управление поворотом осуществляет-
ся поворотом всего пульта за рукоять вокруг оси вправо и влево.
Углы отклонения органов управления пульта: курка — 60°, рыча-
га— 60°, всего пульта — ±30. На пульте размещены два тумбле-
ра, один из которых (2) перемещается горизонтально из исходно-
го положения «нейтраль», а другой (3) — вертикально из исход-
ного положения «автомат». Это сделано для исключения случай-
ной подачи команд при воздействии на один из этих тумблеров.
В заданном положении тумблеры фиксируются при нажатой тан-
геите отбора управления; при ее отпускании тумблеры возвра-
щаются в исходное положение.
Коммутация системы управления и алгоритмы управления
формируются электронной системой управления, переключение
передач — САПП танка.
Исполнительные механизмы представляют собой силовые гид-
роцилиндры, управляемые трехпозиционными распре дел ительным<и
золотниками с электромагнитным приводом. Штоки силовых ци-
линдров связаны с потенциометрами обратной связи. Золотник
электрогидропреобразователя удерживается в среднем положении
пружинами; при этом обе полости гидроцилиндра закрыты и пор-
шень неподвижен. При воздействии на орган управления пульта
появляется сигнал рассогласования потенциометров — задающего
и обратной связи. По сигналу рассогласования привода управле-
ния включается один из электромагнитов, который перемещает
золотник в крайнее положение и соединяет одну из полостей гид-
роцилиндра с напорной магистралью гидросистемы ГМТ, дру-
74
гую —со Сливом. Поршень гидроцилиндра перемещается до лик-
видации рассогласования. Электромагнит выключается, под дей-
ствием пружин золотник перемещается в среднее положение,
запирая гидролинии силового цилиндра, и поршень гидроцилинд-
ра фиксируется в новом положении. Силовое совмещение приво-
дов управления двигателем командира и водителя осуществляется
вторым электромагнитом. При управлении движением водителем
полости по обе стороны поршня гидроцилиндра соединены между
собой золотником, и гидроцилиндр не препятствует перемещению
тяги от органа управления. При управлении командиром срабаты-
вает электромагнит отбора и возврата управления, золотник
которого разобщает полости гидроцилиндра.
3.5. ВГМ промежуточной категории по массе
С УНИФИЦИРОВАННОЙ ГИДРОМЕХАНИЧЕСКОЙ
ТРАНСМИССИЕЙ
Система управления движением ВГМ промежуточной катего-
рии по массе отличается от системы управления движением ма-
кета танка с ГМТ-69021 отсутствием в МТУ управляемой гидро-
муфты привода вентилятора систем охлаждения, автоматического
переключения передач и автоматической блокировки ГТ, системы
дублирования управления движением, двух уровней давления в
гидросистеме и клапанной коробки для плавного включения
передач.
Унифицированная гидромеханическая трансмиссия (УГМТ)
имеет два варианта механизма поворота: гидрообъемный и диф-
ференциальный с управляемыми фрикционными элементами. При-
вод управления (штурвал, тяги и рычаги) в первом случае воз-
действует непосредственно на следящий привод регулирования
подачи, а во втором — на золотниковую коробку, аналогичную
показанной на рис. 3.3.
Механизм реверса УГМТ — планетарный, с управляемыми
фрикционными элементами. Золотниковая коробка управления ре-
версом аналогична коробкам переключения передач.
Управление блокировкой ГТ осуществляется водителем с по-
мощью специального тумблера и обеспечивается на любых режи-
мах и передачах, включая I.
Привод управления ОТ представляет собой систему тяг и ры-
чагов, соединяющую педаль с золотниковой коробкой управления
тормозом. Силовые гидроцилиндры тормозов одноступенчатые.
3.6. ТАНК «ЛЕОПАРД-Ь (ФРГ)
Танк «Леопард-1» оснащен механоэлектрогидравлической си-
стемой управления движением, электросистемой автоматического
управления ГМТ и автономной гидросистемой высокого давления
для управления ОТ. Танк может быть оборудован системой дуб-
лирования управления движением командиром.
6*
75
Под правой ногой водителя размещена педаль управления
двигателем. Один из элементов привода оснащен электрическим
датчиком положения, сигнал которого вводится в электросистему
автоматического управления ГМТ. При отпущенной педали регу-
лятор обеспечивает частоту вращения коленчатого вала двигателя
порядка 850 об/мин. Остановка двигателя производится нажа-
тием кнопки на щитке, соединенной с электромагнитным краном,
отсекающим подачу топлива. Рядом с педалью управления дви-
гателем размещена широкая педаль управления ОТ, на которую
водитель может воздействовать любой ногой. Педаль соединяется
гидростатическим приводом с автономной гидросистемой высо-
кого давления (15 МПа).
Слева и справа от сиденья водителя размещены рычаги раз-
дельного ручного управления ОТ; они используются как аварий-
ные (при отказе рабочего привода), как горные и для управления
при буксировке на мягкой сцепке. Штурвал управления поворо-
том оснащен пружинным нуль-установителем и стопором, фикси-
рующим штурвал в положении «прямо. Штурвал поворачивает-
ся в обе стороны на 22,5° и жестким приводом связан с золотни-
ковой коробкой управления механизмом поворота.
Справа от водителя размещен блок управления ГМТ. В блоке
помещены все элементы электросхемы, кроме датчиков и испол-
нительных электромагнитов, которые имеют с блоком кабельную
связь. На блоке расположены два рычага управления: коробкой
передач и механизмом реверса.
Рычаг управления КП имеет четыре положения:
1-е — включена I передача, ГТ разблокирован;
2-е —включена II передача, ГТ блокируется и разблокируется
автоматически;
3-е — включена система автоматического переключения пере-
дач со II на III и обратно, ГТ блокируется и разблокируется
автоматически, при переключении передач ГТ принудительно раз-
блокируется;
4-е —включена система автоматического переключения пере-
дач со II на III, с III на IV и обратно; на II передаче ГТ блоки-
руется и разблокируется автоматически, на III и IV передачах
ГТ заблокирован, при переключениях передач ГТ разблокируется.
В сторону высших передач рычаг управления перемещается
беспрепятственно, в сторону низших — только при частоте враще-
ния коленчатого вала двигателя не более 25 с-’ (1500 об/мин).
Рычаг управления механизмом реверса имеет четыре поло-
жения:
UZ — включен передний ход;
R — включен задний ход; если рычаг управления КП находит-
ся в положении 2,3 или 4-м — включена II передача и ГТ остает-
ся сблокированным постоянно;
N — все передачи и реверс выключены, замкнута цепь питания
электростартера пуска двигателя;
761
V — танк разворачивается на месте (реверс выключен, вклю-
чены одновременно I и IV передачи независимо от положения ры-
чага управления КП).
Переключение рычага управления механизмом реверса воз-
можно только при частоте вращения коленчатого вала двигателя
не более 1500 об/мин. На блоке установлены лампы-индикаторы
давления в магистралях управления.
Многофункциональная электросистема управления движением
танка обеспечивает: переключение передач в режимах ручного
и автоматического управления; переключение реверса; разворот
на месте; блокирование и разблокирование ГТ; разблокирование
ГТ на режимах переключения передач и реверса; блокирование
несвоевременных переключений передач и реверса для исключе-
ния аварийных ситуаций в МТУ; блокирование пуска двигателя
при несоответствующем положении органов управления; пуск и
остановку двигателя по единичному управляющему воздействию
командира; информацию водителя о состоянии гидросистемы
ГМТ и ОТ, включенной передаче, тепловом состоянии трансмис-
сии; функционирование системы дублирования управления дви-
жением с места командира.
На рис. 3.8 приведена схема электрогидравлической системы
управления ГМТ и движением танка «Леопард-1». Масло из под-
дона / картера ГМТ через фильтр грубой очистки 2 нагнетается
насосом 6 в открытый круг циркуляции ГТ (14). Давление на
входе в ГТ регулируется клапаном 12, настроенным на 0,7МПа, на
выходе — клапаном 13, настроенным на 0,4 МПа. Избыток масла
от клапана 12 поступает к насосам 7 и 8. Избыток масла от кла-
пана 13 поступает в водомасляный радиатор 16, имеющий связь с
системой охлаждения двигателя, и далее в закрытый бак 19. На
выходе из ГТ установлено термореле 15 для световой сигнализа-
ции водителю о перегреве ГМТ, которое включается при темпера-
туре более 130°С, выключается при температуре менее 120°С.
Насос 5 через фильтр тонкой очистки 11.1 подает масло в систему
управления КП и реверсом, давление в которой (1,1 МПа) обеспе-
чивается клапаном 22.2. Избыток масла от этого клапана сливает-
ся в канал грузового вала для смазывания ГМТ. На магистрали
управления установлен релейный датчик (Д) давления 30.2, кото-
рый сигнализирует о снижении давления ниже 0,75 МПа. По этой
магистрали масло подводится к золотнику управления реверсом
бустеров механизма поворота (36) и к золотнику 34 аварийного
питания. К золотникам (37—42) управления КП и реверсом масло
проходит через переключающий клапан 31. Если есть давление
в магистрали управления КП, но нет в магистрали управления
поворотом, через клапан переключения 31.1 масло идет к золотни-
ковой коробке механизма поворота 35 от магистрали управления
КП и реверсом. При наличии давления в обеих магистралях зо-
лотники КП питаются через клапан 31.1, а золотники управления
поворотом — через клапан 31.2.
77
В магистраль управления поворотом масло подается из ба-
ка 19 насосом 7 через фильтр тонкой очистки 11.2. Через жик-
лер 10.1 часть масла отводится для смазывания ГМТ. Давление
в магистрали регулируется клапаном 22.1, настроенным на давле-
ние 1,1 МПа. Избыток масла сливается для смазывания ГМТ.
К магистрали управления поворотом подключен датчик давления
30.1 для световой индикации снижения давления менее 0,75МПа.
Рис. 3.8. Схема электрогндравлической системы управления ГМТ и движением
танка «Леопард 1»:
/ — поддон; 2 — фильтр грубой очистки; 3. 5. 6. 7, 8 — насосы; 9 — магистрали смазки;
10.1. 10.2, 24. 27 — жиклеры; //./. 11.2. 11.3 фильтры тонкой очистки; 4. 12, 13, 20, 21.1,
21.2, 22.1, 22.2, 22.3, 33 — клапаны; 14 — ГТ; 15 — термореле; 16 — радиатор; 17 вход
и выход из радиатора; /8 —датчик давления (частоты вращения турбинного колеса ГТ)
трубка Пито; /9 —закрытый бак; 25 - золотник; 26 — термостат; 28. 29 — магистраль управ-
ления и ГМ привода вентилятора; 30.1, 30.2 датчики давления; 31.1, 31.2 — переключающие
клапаны; 32, 33, 34 — золотники включения автомата блокировки, управления блокировкой,
аварийного питания ГТ соответственно; 35 — золотниковая коробка управления МП. 36 —
золотник реверса бустеров МП; 37 42 золотники с электромагнитным приводом управ-
ления КП и реверсом; 43 — золотник разблокировки; 44 блок управления блокировкой
ГТ; 45 — клапан опорожнения ГТ; <6 - бустер блокирующего фрикциона; 47 — шариковый
клапан; 48—53 бустеры КП; 54—57 — бустеры МП
Насос 8 нагнетает масло из бака 19 через фильтр тонкой
очистки 11.3 в блок 44 управления блокировкой ГТ к золотникам
включения автомата (32), управления блокировкой ГТ (33) и
аварийного питания (34). Давление в магистрали (1,1 МПа) ре-
гулируется клапаном 22.3, от которого избыток масла сливается
в магистраль управления гидромуфтой привода вентилятора си-
78
стемы охлаждения двигателя (28, 29) через жиклер 24 и золот-
ник 25. На «сливе» из ГМ установлен жиклер 27. Давление
в магистрали (0,5 МПа) обеспечивается клапаном 23, избыток
масла сливается в основную систему смазки. Золотник 25 управ-
ления ГМ приводится в действие термостатом 26, расположенным
в выходном трубопроводе системы охлаждения двигателя.
Золотник открывается при температуре охлаждающей жидкости
двигателя более 82°C и закрывается при температуре менее 78°C.
Смазывание КП ГМТ, механизма реверса и суммирующих рядов
МП (через выходной вал КП) осуществляется сливом избытка
масла через клапаны 22 и 23, необходимое давление масла
(0,25 МПа) обеспечивается клапаном 21.2, избыток масла из
которого возвращается в бак 19. Смазывание также осуществ-
ляется и через клапан 22.1. Давление в баке 19 (0,12 МПа)
регулируется клапаном 20, избыток масла используется для сма-
зывания ГМТ.
Включение передач и реверса обеспечивается бус-
терами 48—51 и 52—53 фрикционных элементов ГМТ через золот-
инки 37—42 с электромагнитным приводом. Все бустеры КП
одностороннего действия (включаются под действием давления
масла, выключаются пружинами), кроме бустера 48 IV передачи:
он двусторонний, принудительного действия, коммутируется золот-
ником 42 («или-или»). Часть масла из магистрали выключения
бустера через жиклер 10.2 поступает для смазывания ГМТ, остав-
шееся масло используется для полива фрикционных элементов
через шариковый клапан 47. Этот клапан, уравновешенный от
центробежных сил масла во вращающемся бустере, размещен
непосредственно в бустере IV передачи и обеспечивает ее вы-
ключение.
Золотниковая коробка управления КП и реверсом выполнена
в виде набора модулей и имеет рычажную систему блокировок,
которые обеспечивают одновременное включение одного бустера
КП и одного бустера реверса («вперед» или «назад») или при
включенном бустере реверса одновременное включение I и IV пе-
редач для разворота танка на месте.
Гидросистема управления поворотом включаете
себя переключающий клапан 31, золотниковую коробку управле-
ния МП 35, четыре бустера управляемых фрикционных элемен-
тов 54—57 и золотник изменения направления поворота 36, ко-
торый обеспечивает такую же реакцию танка на отклонение штур-
вала, как у автомобиля на поворот рулевого колеса. В золотнико-
вой коробке 35 имеются еще два золотника для коммутации бус-
теров и два золотника для регулирования давления в бустере
79
Рис. 3.9. Характеристика управления поворотом танка «Леопард-1»:
F, . Ft — усилия иа штурвале при отклонении от положения сдвижение прямо» и при воз-
врате к нему: р, (—• —) —давление (в бустере) прямого хода; р, (- ) давление при по
вороте с большим радиусом; ₽>(—•—) давление при переходе на малый (нерегулируе-
мый) радиус поворота: а- угол поворота штурвала
В систему управления блокировкой ГТ (см.
рис. 3.8) входят: золотники включения автомата блокиров-
ки (32), управления блокировкой (33), аварийного питания (34)
и разблокировки (43); датчик 18 частоты вращения турбинного
колеса ГТ (трубка Пито); бустер блокирующего фрикциона 46
и разгрузочный клапан 45.
Бустер блокирующего фрикциона — одностороннего действия.
Разгрузочный клапан расположен внутри бустера на внутренней
поверхности обода барабана. При отсутствии давления в подво-
дящем канале клапан отжат усилием пружин и прижат под дей-
ствием центробежных сил к внешнему краю корпуса бустера,
полость бустера открыта для слива. При подаче масла под дав-
лением от золотника 43 бустер подключается к магистрали. Основ-
ное назначение клапана—быстрое опорожнение бустера.
Система автоматической блокировки ГТ может работать по-
разному.
Принудительная блокировка для пуска двигателя с буксира
осуществляется следующим образом: золотник 32 выключается,
канал от датчика давления 18 перекрывается. Подаваемое насо-
сом 9 масло отжимает золотники 33 и (по второй ветви магистра-
ли) 34, пройдя золотник 43, заполняет бустер блокирующего
фрикциона.
Автоблокировка ГТ в процессе движения танка способствует
повышению топливной экономичности. При включенном золотни-
ке 32 масло, поступающее от датчика 18, отжимает золотники 33
и 34. Полость бустера блокирующего фрикциона через золотник
80
43 соединена Со сливом (ГТ разблокирован). С повышением час-
тоты вращения турбины ГТ растет давление, действующее на то-
рец золотника 33, открывается магистраль управления, и благо-
даря разности площадей поверхности поясков золотник изменяет
положение. Из магистрали управления масло поступает в бустер
и блокирует ГТ. Если при этом давление в магистрали управле-
ния понижается, золотник 34 подключает к бустеру магистраль
управления КП и реверсом. При снижении частоты вращения ГТ
давление под торцом золотника 33 снижается, но из-за давления
в магистрали управления возврат золотника в исходное положе-
ние происходит при более низкой частоте вращения турбинного
колеса, чем выход из него. Как только кромки золотника пере-
кроют магистраль управления, пружина изменяет его положе-
ние. Полость бустера через золотники 33, 34 и 43 переключается
на «слив», и ГТ разблокируется.
Принудительная разблокировка ГТ обеспечивает процессы пе-
реключения передач и реверс. При включении электромагнита
перемещается золотник 43, который отсекает подвод масла к бус-
теру блокирующего фрикциона от магистрали управления и сое-
диняет его на «слив».
При буксировке танка насос 3 откачивает масло из поддона
ГМТ через фильтр грубой очистки 2 в магистраль управления КП
и реверсом. Остальные магистрали перекрыты неработающими
насосами 5 и 6. Давление ограничено предохранительным клапа-
ном 4, избыток масла сливается. Из магистрали масло через
клапаны переключения 31 подается в золотниковые коробки КП,
реверса и МП, а через золотники 34 и 43 — в бустер блокировки
ГТ; насос 3 разгружается, так как клапан 4 под действием
давления, создаваемого насосом 5, переключает его на «слив».
Быстродействие гидросистемы управления обеспечено боль-
шой суммарной подачей насосов (более 400 л/мин) и подключе-
нием других магистралей к действующей, если давление в ней
станет ниже допустимого предела. Надежность функционирова-
ния системы управления обеспечена взаимным дублированием
всех магистралей.
На рис. 3.10 представлена схема автономной гидроси-
стемы высокого давления управления ОТ. Насос 2.1
через фильтр 1.1 забирает масло из бака и подает его в блок 3.
Давление 15,0—17,0 МПа обеспечивается клапанами 2.2 и 3.1,
перепускающими масло на вход в насос. Через обратный клапан 3.5
масло поступает в гидрогазовый аккумулятор 3.7. При повышении
давления до 8,5 МПа датчики давления 3.8 и 3.9 сигнализируют о
рабочем состоянии системы. При повышении давления до 13,5 МПа
клапан 3.2 переключает насос через обратный клапан 3.6 на ра-
бочие цилиндры ОТ, а через клапан 3.4 всю магистраль на «слив».
Обратный клапан 3.5 запирает гидроаккумулятор, а клапан 3.3
обеспечивает в нем давление (15±1)МПа При снижении давле-
81
ния в гидроаккумуляторе менее 10,5 МПа клапан 3.2 подключает
насос для зарядки гидроаккумулятора.
Рис. 3.10. Схема автономной гидросистемы высокого давления управления ОТ:
I — масляный бак; 2 — лопастной насос; 3 - блок регулирования давления; 4 — рабочие
цилиндры ОТ; 5 — главный цилиндр гидростатического привода; 6 — пополнительный бак;
7 — педаль управления ОТ
При нажатии на педаль управления тормозами 7 переме-
щаются поршни цилиндров 5 и 3.10. Поршень цилиндра 3.10 воз-
действует на клапан 3.4. включающий насос 2.1, который через
клапаны 3.2 и 3.6 подает масло в рабочие цилиндры ОТ (4).
Давление в магистрали рабочих цилиндров ОТ изменяется
пропорционально перемещению поршня цилиндра 3.10, т. е. пере-
мещению педали управления тормозами. Назначение гидроакку-
мулятора— повысить быстродействие системы и обеспечить два-
три торможения танка при неработающем двигателе.
Бак, фильтр, гидрогазовый аккумулятор, регулятор давления,
клапаны и реле давления системы выполнены в едином блоке,
а главный цилиндр гидростатического привода, рабочие цилинд-
ры тормозов и лопастной насос вынесены из него.
Танк «Леопард-1» может быть дооборудован системой дубли-
рования управления движением от командира, позволяющей
ему управлять движением, пускать и останавливать двигатель,
реверсировать трансмиссию, управлять ОТ, поворачивать танк с
любым из двух расчетных радиусов, задавать три режима рабо-
ты двигателя. Переключение передач осуществляется САПП.
Командир нажимает тангеиту отбора управления движением.
При этом во все цепи системы подается электрический
ток, срабатывают электромагнитные муфты, подключая испол-
нительные механизмы приводов командира (электромоторы с ре-
82
дукторами) к органам управления водителя; включается САПП
(при любом положении рычагов и тумблеров управления пере-
ключением передач у водителя), подготавливаются к работе схе-
мы пуска—остановки двигателя и реверса трансмиссии, имеющие
кнопочное управление и собственные схемы алгоритмов управле-
ния. Перемещая пульт «от себя» на один шаг, командир перево-
дит двигатель с режима холостого хода на среднеэксплуатацион-
ный режим, еще на один шаг (до упора) — на режим максималь-
ной подачи топлива. При перемещении пульта «на себя» приво-
дится в действие электромеханический привод ОТ. Командир
управляет поворотом танка с первым или вторым расчетным ра-
диусом поворота, соответственно отклоняя пульт от нейтрального
положения вправо или влево, в первое или второе положение.
Вместо пульта командира можно установить блок-дешифра-
тор, связанный с радиостанцией. Радиоуправление, осуществляе-
мое при безэкипажном вождении, производится по схеме вынос-
ной пульт управления —шифровальный блок—радиостанция опе-
ратора-радиоканал связи—бортовая радиостанция—блок-де-
шифратор—система дублирования управления танком.
3.7. БМП «МАРДЕР» (ФРГ)
БМП «Мардер» оснащена многофункциональной механоэлект-
рогидравлнческой системой управления движением. Органы уп-
равления по конструкции, расположению, усилиям и ходам, ха-
рактеру воздействия на них и алгоритмам управления прибли-
жаются к автомобильным.
Место водителя оборудовано рулевым колесом, блоком управ-
ления ГМТ с рычагами, педалями управления двигателем и ОТ,
правым и левым рычагом управления ОТ. Руль связан с золотни-
ком гидроусилителя управления наклонной шайбой насоса ГОМП
и оснащен электровыключателями предельных отклонений и бло-
кировки стартера. При повороте рулевого колеса в крайнее поло-
жение электровыключатели предельных отклонений включают
в КП ГМТ смежную низшую передачу и этим позволяют осуще-
ствить поворот БМП с меньшим радиусом. Электровыключатели
блокировки стартера позволяют запустить двигатель только при
установке рулевого колеса в нейтральное положение, соответст-
вующее прямолинейному движению БМП.
Педаль управления двигателем оснащена датчиком положе-
ния, сигнал с которого поступает в автоматическую систему. Тра-
диционный ручной привод управления подачей топлива отсутст-
вует. При отпущенной педали регулятор двигателя обеспечивает
вращение коленчатого вала двигателя с частотой 850 об/мин.
Остановка двигателя производится электромагнитным клапаном,
отсекающим подачу топлива и управляемым кнопкой, располо-
женной на щитке водителя. При отказе электросистемы водитель
может остановить двигатель, оттягивая пяткой педаль управления
83
назад за положение, устанавливаемое возвратной пружиной при-
вода.
Воздействие на педаль ОТ возможно любой ногой. При откло-
нении педали на 15° происходит включение гидрозамедлителей,
затем автономной гидросистемы высокого давления. Тормозной
эффект на этом этапе пропорционален перемещению педали.
Справа и слева от сиденья водителя находятся рычаги ручно-
го управления ОТ, которые используются как аварийные, гор-
ные, а также при буксировке на мягкой сцепке. Рычаги могут
быть застопорены в «затянутом» положении включенного ОТ.
Под правой рукой находится блок управления ГМТ. Рычаг
избирателя имеет четыре положения — I, II, III и А (автомати-
ческое управление). При установке рычага в положение I, II
или III в КП ГМТ включается соответствующая передача. При
установке в положение А при трогании включается II передача,
при движении происходит автоматическое переключение передач
со II на III, с III на IV и обратно. Рычаг реверса имеет три
положения: «вперед», «нейтраль», «назад». При положении рыча-
га реверса в позиции «нейтраль» реверс выключен, т. е. КП от-
ключена от ГТ и, следовательно, от двигателя. Из положения
«нейтраль» рычаг может быть переведен в положение «вперед»
или «назад» в течение Зс после нажатия кнопки стопора. Если
в этот период рычаг не перевести в новое положение, он вновь
блокируется. Назначение блокировки с временной выдержкой —
исключить непреднамеренное перемещение рычага при случайном
задевании. Рычаг управления реверсом автоматически блокирует-
ся в заданном положении при частоте вращения двигателя более
21 с“* (1300 об/мин) и скорости движения БМП более 15 км/ч.
Предусмотрена вторая блокировка цепи включения электростар-
тера, обеспечивающая пуск двигателя только при положении ры-
чага реверса в позиции «нейтраль».
Справа от водителя на моторной перегородке находится груп-
па рычагов аварийного управления трансмиссией. Рычаги обеспе-
чивают включение II передачи переднего или заднего хода и I пе-
редачи переднего, имея механическую связь с золотниками управ-
ления ГМТ.
Работа системы управления определяется ее электрической
частью, особенностью которой является многофункциональность
ее компонентов.
Кроме ручного и автоматического переключения передач и
реверса, блокирования ГТ и опасных для трансмиссии и двигате-
ля режимов работы, электрическая схема системы управления
БМП позволяет: уменьшать радиус поворота (переключением
ГМТ на смежную низшую передачу при предельном отклонении
рулевого колеса); осуществлять разворот БМП на месте с фикси-
рованным радиусом (в реверсе включается «нейтраль», в КП —
1 передача, а при отклонении рулевого колеса еще и IV передача,
после чего КП блокируется); сохранять управляемость БМП при
84
остановке двигателя (при снижении частоты вращения двигателя
менее 600 об/мин автоматически включается блокировка ГТ и
производится переключение передач до I включительно; двига-
тель, насосы, гидросистема нормально функционируют до пол-
ной остановки БМП); блокировать пуск двигателя при несоответ-
ствующем положении органов управления движением — рулевого
колеса и рычага реверса, что исключает самопроизвольное трога-
ние БМП в момент пуска двигателя, т. е. обеспечивает безаварий-
ность и безопасность эксплуатации.
На рис. 3.11 представлена схема механоэлектрогидравлической
системы управления трансмиссией и движением. Она позволяет
создать единую гидросистему ГОП и ГМТ, замкнутый главный
контур циркуляции, два режима управления и использования
Рис. 3.11. Схема механоэлектрогидравлической системы управления трансмис
смей и движением БМП «Мардер» (ФРГ):
/ редукционный клапан; 2 — гидроусилитель; 3. 4. 10, 12, 13. 24, 25. 26, 28. 29 клапаны;
5. 9 — клапаны «или»; 6 — гидронасос; 7 — гидромотор; 8 клапан предохранительный:
II золотник ОТ; 14. 15, 36 дроссели; 16 17 ГМ; 18. 41 золотники: 19- вход в ГТ;
20 - клапан давления; 21, 34. 35, 40. 43. 53 обратные клапаны: 22 — Фильтр тонкой очнст
ки; 23 водомасляный радиатор; 27, 3/ - насосы; 30, 32 — фильтры; 33 — бак; 37 сдвоен
иый гндрояккумулятор; .'И—клапан ограничения давления; 39 — бортовой насос; 42 авто
магический золотник; « — Патрубок; 45 -52 золотники I каскада; 54—61 — золотники
II каскада
ГМ (при повороте и при торможении), гидросистемы ОТ.
Система имеет двухкаскадное золотниковое управление бустера-
ми. В нее входят фильтр тонкой очистки только в магистрали
управления и ГОП, а также гидроаккумуляторы и обратные кла-
паны для обеспечения быстродействия гидросистемы управления.
В главном контуре циркуляции масло охлаждается; оно по-
дается насосом 27 через водомасляный радиатор 23, обратный
85
клапан 34, клапан давления 20 на вход ГТ (19), а оттуда через
клапан выхода 24 поступает в систему смазки ГМТ.
Регулирование давления в магистралях управления обеспечи-
вается клапанами 20 (1,3—1,6 МПа), 25 (0,4—0,7 МПа) и 24
(0,5 МПа), а в системе смазки — клапаном 26 (0,2 МПа).
Двухкаскадное золотниковое включение и выключение бусте-
ров фрикционных элементов ГМТ осуществляется подачей масла
по первой линии из главного контура циркуляции через фильтр
тонкой очистки 22, обратный клапан 21, дроссель 36 и обратный
клапан 53 к золотникам 45—52 I каскада управления с приводом
от электромагнитов, а по второй линии —к золотникам 54—61
П каскада управления с гидроприводом от золотников I каскада.
Каждый золотник I каскада управляет своим золотником II кас-
када; каждый золотник II каскада управляет своим бустером
ГМТ, осуществляя блокировку ГТ (золотниками 52 и 54), перед-
ний ход (золотниками 51 и 55), задний ход (золотниками 50
и 56), блокировку КП для разворота БМП на месте (золотника-
ми 49 и 57) и включение передач (золотниками 48 и 58, 47 и 59,
46 и 60, 45 и 61).
Сдвоенный гидроаккумулятор 37 обеспечивает быстродействие
в переходных процессах управления КП. Золотники I и II каска-
дов управления оснащены рычажными системами блокировки,
исключающими возможность неправильного включения и обеспе
чивающими быстрое выключение бустеров.
В линии обслуживания ГОП МП масло из главного контура
циркуляции через фильтр тонкой очистки (22) поступает к кла-
панам 3 и 4, затем через клапаны «или» (5) и редукцион-
ный (1) — к гидроусилителю 2 привода управления гидронасосом
6. От контура ГОП, включающего гидронасос 6 и гидромотор 7,
масло поступает к клапанам «или» (9) и предохранительному (5)
и через клапаны 10 и 18 возвращается в главный контур цирку-
ляции для охлаждения и очистки.
Линия одновременного включения ГМ обеспечивает приторма-
живание БМП. Через фильтр тонкой очистки 22 масло из главно-
го контура циркуляции поступает к золотнику //, который пере-
мещается при воздействии на педаль ОТ. Масло поступает
к клапанам 12 и 13, одновременно открывающим магистраль от
бака 33 к ГМ (16 и 17). При повышении давления в напорной
магистрали ГОП МП до уровня, близкого к предельному (40 МПа),
заполняется одна из гидромуфт, обеспечивая разгрузку ГОП.
В систему смазки ГМТ масло поступает из главного контура
циркуляции в промежутке между клапанами 25 и 24\ необходи-
мое давление в системе смазки устанавливается клапаном 26.
При пуске двигателя с буксира бортовой насос 39 через золотник
41 и обратный клапан 40 подает масло к золотникам I и II кас-
када управления бустерами ГМТ, а через клапан ограничения
давления 38 и обратный клапан 35 — в линию обслуживания ГОП
МП, минуя главный контур циркуляции. Автоматический золот-
86
ник 42 отключает насос, как только в главном контуре циркуля-
ции появится давление, т. е. после пуска двигателя.
3.8. ТАНК М-1 (США)
Танк М-1 оснащен автоматизированной механоэлектрогидрав-
лической системой управления. Место водителя оборудовано
штурвалом управления поворотом мотоциклетного типа, двумя
педалями и рукояткой управления тормозом. На штурвале
между рукоятками размещен пульт выбора режимов движения.
Рукоятки пульта жестко связаны между собой, вращаются синх-
ронно любой рукой и служат для управления скоростью движения
танка. Вращением рукояток пульта «на себя» в электросистему
автоматики вводится команда на повышение скорости движения.
Управление поворотом танка осуществляется вращением рулевой
колонки за рукоятки пульта. Связь рулевой колонки с механиз-
мом поворота механическая.
Рукоятка пульта выбора режимов движения имеет следующие
положения: N — «нейтраль»; R — задний ход; D — нормальный ре-
жим движения вперед; L режим движения вперед на низших
передачах; RVT — поворот танка на месте вокруг вертикальной
оси.
Электрические команды с пульта поступают в блок управле-
ния двигателем и трансмиссией.
На режиме R танк движется задним ходом, переключение
передач от низших к высшим и наоборот — автоматическое. На
режиме D танк начинает движение на II передаче; переключение
передач автоматическое. На режиме L танк начинает движение
на I передаче; переключение передач автоматическое. На режи-
ме RVT танк поворачивается на месте вокруг вертикальной оси
в сторону, заданную штурвалом управления поворотом.
Педаль управления ОТ механическим приводом связана с
сервогидроприводом механизма включения тормозов. Педаль
стояночного (по отечественной терминологии горного) тормоза
снабжена гидроусилителем и механически связана с механизмом
включения тормозов. При нажатии педали стояночного тормоза
привод фиксируется в рабочем положении. Для выключения тор-
моза используется специальный рычаг, размещенный рядом с пе-
далью. Стояночный тормоз используется при стоянке на месте
или для торможения танка при скорости менее 5 км/ч; при дви-
жении им можно пользоваться только в аварийных ситуациях,
т. е. при отказе основного привода ОТ.
Управление поворотом танка и приводом ОТ возможно только
при работающем двигателе; привод стояночного тормоза работает
независимо.
Электрогидравлическая система автоматического управления
обеспечивает:
регулирование режимов работы двигателя с учетом команд
водителя;
87
автоматическое переключение передач на всех режимах дви-
жения вперед и назад;
фиксацию заданных режимов движения при остановке дви-
гателя до полной остановки танка, после чего в КП включается
«нейтраль»;
блокировку и разблокировку ГТ;
регулирование давления в бустерах фрикционных элементов
при переключении передач с учетом режима работы двигателя;
блокирование аварийных режимов работы МТУ;
пуск и остановку двигателя при нажатии водителем соответст-
вующих кнопок на щитке контрольных приборов.
При отказе электрогидравлической системы управления с по-
мощью аварийных механических приводов могут быть включены
II передача и передний ход.
Единая гидросистема трансмиссии и ГОП МП (рис. 3.12)
Рис. 3.12. Схема гидросистемы танка
М-1:
/ — нагнетательный насос; 2 бак; 3 — пе
репускяой клапан фильтра; 4 блок уп
равлении переключением передач; 5 на
сое с приводом от турбины гидротранс
форматора; 6 блок управления ГОП;
7 - радиатор; 8 — терморегулятор; 9 — пе
репускной клапан ГТ; /О клапан смазы-
вания трансмиссии; I/ — регулятор глав
кого давления; 12 — насос с приводом от
двигателя; /3 — жиклер смазывания;
14 на смазывание; /5 — на полив дне
ков тормозов; 16 — общий фильтр; 17
обратный клапан; /8 — перепускной кла-
пан насоса; 19 — насос для пуска двнга
теля при буксировке; 20 — защитная сет
ка; ГОП — гндрообъемная передача; ГТ —
гидротрансформатор
имеет вместимость 150 л, тон-
кость фильтрации 25 мкм и тер-
морегулирование. Обеспечен
приоритет ГОП МП при пода-
че масла, которое может быть
двух типов в зависимости от
сезона эксплуатации.
Гидросистема и приводы оснащены датчиками информации
о перегреве масла трансмиссии, об уменьшении уровня масла
ниже допустимого предела, о засорении фильтров гидросистемы;
о пуске, работе, остановке двигателя; о включении стояночного
тормоза. Информация выведена на щиток водителя цветовыми
индикаторами.
Глава 4. СОСТАВНЫЕ ЧАСТИ
СОВРЕМЕННЫХ ТРАНСМИССИЙ
4.1. ФРИКЦИОННЫЕ ЭЛЕМЕНТЫ СУХОГО ТРЕНИЯ
Фрикционные элементы сухого трения применяются в главных
фрикционах (ГФ), ОТ и МП ВГМ. Обычно они имеют дисковую,
ленточную или ленточно-колодочную конструкцию, в которой ис-
пользуется одна или несколько поверхностей пар трения, состав-
ленных из разнородных фрикционных материалов (стали, чугуна,
металлокерамики), отличающихся стабильными значениями коэф-
фициента трения и повышенной износостойкостью.
Основные параметры ГФ сухого трения некоторых отечествен-
ных ВГМ и фрикционных элементов для них приведены в
табл. 4.1 и 4.2.
Наибольшее распространение получили следующие пары тре-
ния: для многодисковых ГФ и МП сталь по стали, для одно- и
двухдисковых ГФ — асбофрикционный материал (АФМ) по стали.
Относительная ширина поверхности трения b.,iR(p для пары
трения сталь по стали составляет 0,14... 0,17 (6Т, /?ср ширина
и средний радиус поверхности трения диска), а для пары трения
с АФМ — 0,32 ... 0,59.
В табл. 4.3 приведены основные параметры ОТ сухого трения
некоторых отечественных ВГМ. В трансмиссиях отечественных
ВГМ используются ленточные ОТ, а в зарубежных — преимущест-
венно дисковые ОТ сухого трения (танки «Леопард-1», «Чифтен»,
АМХ-30, БМП «Мардер» и др.), ленточные применяются только
в танке Pz68A2 (Швейцария) и его модификациях. Основные
параметры фрикционных элементов ленточных ОТ некоторых оте-
чественных ВГМ представлены в табл. 4.4.
В настоящее время на опытных образцах отечественных ВГМ
также устанавливаются дисковые тормоза сухого трения
(табл. 4.5).
Во всех дисковых ОТ используются металлокерамические на-
кладки на железной основе, работающие в паре со стальными
или чугунными.
Основные параметры фрикционных элементов дисковых ОТ
опытных ВГМ приведены в табл. 4.6. Элементы трения выпол-
89
Таблица 4.1
Основные параметры ГФ сухого трения некоторых отечественных ВГМ
Параметры Марка ВГМ
ГТ-СМ БМД-1 БМП-1 ПТ-76Б Шасси про- межуточной категории по массе Модернизи- рованное шзсси промежуточ- ной категории по массе ЗСУ-23-4 АТ-Т Т-62
Тип ГФ Число пар поверхнос- тей трения Пара трения Суммарная эффектив- ная площадь поверх- ности трения ЛЭф. см’ Удельная эффектив- ная площадь поверх пости трения (отноше- ние ГЭф к массе ВГМ) см2/кг Средний радиус по- верхности трения ₽ср, мм Относительная шири- на поверхности трения ^т/7?ср Средний зазор между дисками в выключенном ГФ, мм Масса ГФ, кг Тип привода управле- ния Однодисковый Двухдисковый Многодисковый
2 4 18 22 12 18 20
АФМ 4- сталь Сталь сталь
960 202* 10-з 116 0,586 1,35 1088 145 10-з 179 0,324 0,45 38,4 2527 191-Ю-3 157,5 0,444 3088 221-10-з 186,2 0,389 0,68 100,3 5636 198- Ю-з 170,4 0,172 0,36 121,6 5379 196 IO"3 167,4 0,139 0.32 126 4980 245-Ю-з 186,2 0,191 0,54 4401 176* 10-з 16' 0,1 0,36 69 4890 129-Ю-з 7,4 39 0,40 101
Гндрав- I лический Механи- ческий Гндравли- । ческий** ; Механический
* С максимально допустимым грузом в
кузове и без прицепа, ** при неработающем двигателе — пневматический.
Основные параметры ОТ сухого трения опытных отечественных ВГМ
Таблица 4.5
Параметры Легкая категория по массе Промежуточная категория по массе Основной танк
1 и 1 и 1 п
Тип ОТ Двухдисковый Однодисковый Двухдисковый | Однодисковый Двухдисковый
Пара трения Сталь метал- Сталь 4- метал- Чугун ЧНМХ 4- металлокера- Чугун ЧНМХ + Сталь -и метал-
локерамичес- локерамичес- мический материал МКВ-50А металлокера- локерамичес-
кий материал кий материал м «ческий мате- кий материал
СМК-80 МКВ-59 А риал МКВ-50 А МКВ-50А
Эффективная площадь 2177 1581 994 1876 1435 2032
поверхности трения одного
тормоза Т^эф » см2
Удельная эффективная 256-Ю-з 198-10-з (62... 71).Ю-з 117-Ю-з 65-Ю-з 93-Ю-з
площадь поверхности тре-
ния (Гэф/ги), см2/кг
Коэффициент взаимного 0,84 0,73 0,69 0,72 0,76
перекрытия ХВз
Давление на поверхности 0,18 0,33 1,32 0,7 1,43
трения, МПа
Относительная ширина 0,349 0,333 0,387 0,382 0,303 0,305
поверхности трения (Ьт 7?С|)
Средний зазор между 0,75 1.0 0,5 0,5 0.5 0,75
фрикционными элементами,
мм
Скорость скольжения при 81,2 51,4 42,4 42,9 56,7 62,0
максимальной скорости ма-
шины, м/с 1
Вклейка № 5 «СЕКРЕТНО»
Таблица 4.2
Основные параметры фрикционных элементов ГФ некоторых отечественных ВГМ
Марка ВГМ
Параметры БМД-1 БМП-1 ПТ-76Б Шасси промежу- точной категории по массе Модернизирован- ное шасси проме- жуточной катего- рии по массе АТ-Т Т-62
Ведущие элементы
Число дисков (тип) 2 (маховик и на- жимной диск) 3 (нажимной и два ведущих диска с наружным зубом) 8* | 10* (с внутренним зубом) 9 | 10 (с наружным зубом)
Номинальные размеры дисков, мм: диаметр наружный диаметр внутренний толщина 432 295 20 401 240 8 462 300 10 370 295 5 358 296 5 373,5 311,5 5
Марка материала Сталь 45Х ГОСТ 4543-71 Сталь ь5Г ГОСТ 1050-74 Сталь 85 (дисковая) Сталь ЗОХГСА ГОСТ 4543—71 Сталь ЗОХГСА ГОСТ 4543—71
Твердость поверхнсстн трения ИВ 255-302 НВ 285-341 | НВ 255-302 HRC 28-35 HRC 28-35
Параметр шероховатости /?д,мкм 1,25
Зацепление диска с барабаном: модуль, мм число зубьев 3 142 5 80 3 152 3 100 3 123
Ведомые элементы
Число дисков (тип) 1 1 2 (с приклепанными накладками! 9 | 11 (с наружным зубом) 8* | 9* (с внутренним зубом)
Номинальные размеры дисков, мм: диаметр наружный диаметр внутренний толщина 416 300** 10,8 385 245** 13 445 300** 6 386 311,5 373,5 311,5 5 с 58 296 5
Марка материала НСФ-2 ПСФ-7 Сталь 85 (дисковая) Сталь ЗОХГСА ГОСТ 4543 71 Сталь ЗОХГСА ГОСТ 4543—71
Твердость поверхности .материала HRC 28-35
Параметр шероховатости Ra, мкм 1.25
Зацепление диска с барабаном: модуль, мм число зубьев 5 5 42 8 33 3 127 3 123 3 100
Без упорного и нажимного дисков.
По фрикционной накладке.
Т а б .1 и и а 4.3
Основные параметры остановочных тормозов сухого трения некоторых отечественных ВГМ
Параметры Марка ВГМ
гт-см Г.МЛ-1 гт-т мт-лв БМП-1 ПТ-7СБ Шасси про- межуточной категории по масс- ЗСУ-23-4 АТ-Т Т-<>2
Тип тормоза Ленточный двойной Ленточный плавающий Ленточно- колодочный плавающий Ленточный плавающим
Пара трения Сталь АФМ Сталь+чугун Сталь+АФМ Сталь+чугун Сталь 1- сталь Сталь+чугун
Суммарная эффективная площадь поверх- ности трения одного тормоза F^, см2 800* 612 621 684 636 1102 1113 828 1381
Удельная эффективная площадь поверх- ности трения (2г»ф/т), см2/кг 335*-1О"’ 163-Ю-з 122* 10-1 107* 10- ’ 96-10-з 157-10-3 78-Ю-з .8110-3 ПО*-10“3 73-IO"3
Коэффициент взаимного перекрытия К31 0,72 0,75 0.75 0,73 0,73 0.72 0.80 0.79 0.76 0.76
Максимальное давление на поверхностях трения, МПа 0,78 0.91 1,63 О.Ь8 1.95 1,22
Относительная ширина поверхности трения £т//?б (^т — ширина ленты, —радиус ба рабана) 0,408 0,492 0,485 0.405 0.400 0,455 0,386 0,543 0,543
Средний зазор между фрикционными эле- ментами, мм 0,8—1,5 0,5- 1.0 0,75-2.0 12.Г 0.3 —3.0 1.0-2.0 1,0 -2,0 0.8 —2.5 1.0-2,0
Начальная скорость скольжения при мак- симальной скорости машины, м/с 35,3 74,2 45,5 62,6 58,8 64.1 48,3 51,4 54,2 75,6
* При массе машины с максимально допустимым грузом на платформе и без прицепа.
Вклейка № 6 «СЕКРЕТНО»
Основные параметры фрикционных элементов ленточных ОТ некоторых отечественных ВГМ Таблица 4.4
Марка ВГМ
Параметры ГТ-СМ БМД-1 ГТ-Т МТ-ЛБ БМП-1 ПТ-76Б Шасси промежу- точной категории по массе АТ-Т Т-62
Вращающиеся элементы
Тип Барабан
Площадь поверхности трения, см2 Номинальный наруж- ный диаметр, мм Марка материала Твердость НВ Параметр шерохова- тости /?Ж|МКМ 1108 294 Сталь 817 325 Ст 5 ГОСТ 380- 71 40 829 330 Сталь 45Л-1 ГОСТ 977-75 159-217 20 933 Сталь 38ХС ГОСТ 4543-71 269 - 321 20 872 370 Сталь 12ХНЗА ГОСТ 4543 -71 229-302 А?д=2,5 1539 500 Сталь 35Л ГОСТ 977-75 20 1382 440 Ст 5 ГОСТ 380-71 207—241 40 1806 460 Сталь 38ХС ГОСТ 4543—71 255-302 20
Неподвижные элементы
Тип Двойная лента Лента Составная лента Лента
Число колодок в тор- мозе Площадь поверхности трения одной колодки, см2 Толщина (лента-{-ко- лодка), мм Номинальная ширина (по колодкам), мм Марка материала Твердость НВ Параметр шерохова- тости Яг, мкм 1 120 АФМ 17 36.0 2,5 + 8,0 Специаль- ный чугун ТУ РЛЦ-43 207-269 9 69.0 2.0 + 7,0 80 Чугун СЧ 15-32 ГОСТ 1412—79 163 - 229 40 9 76.0 2,0 + 8,0 90 К-15-6 СТУ 49489-62 40 18 35,3 3,0 +10,0 75 ФК-16Л ГОСТ 10851-73 30-64 80 26 40.9 - 59,6 3,0 + 10.0 100 Специальный чугун ТУ РЛЦ-43 207 269 40 12 88,8—115,2 3.9 4- 8.0 100 Чугун СЧ 35-56 ГОСТ 1412-79 207-269 20 11 125,6 3,0 + 10,0 125 Чугун СЧ 15-32 ГОСТ 1412- 79 163 -229 20
Основные параметры фрикционных элементов
Параметры Легкая категория по массе
1 II
Вращающиеся
Тип Диск с приклепанными
Число ДИСКОВ Число колодок на диск Площадь поверхности, см2: одной колодки одной плоскости трения Диаметр поверхности (по колод- кам), мм: наружный внутренний Толщина диска, мм Марка фрикционного материала Твердость НВ 2 370 260 Металлокерами- ческий материал СМК-8') 80-100 2 12x2 32,94 395,3 350 250 12 Металлокерамический материал МКВ-50А 80-120
Параметр шероховатости /?я . мкм 2.5
Неподвижные
Число колодок на одной поверх- ности трения Нет
Эффективная площадь поверхнос- ти трения, см2: одной колодки одной плоскости трения Диаметр поверхности (по колод- кам), мм: наружный внутренний Марка фрикционного материала Твердость НВ Параметр шероховатости Ra , мкм 544,3 471,2 Сталь 38ХС ГОСТ 4543 -71 Сталь 35ХНЛ ГОСТ 7832-65 255 —302 = 20
няются, как правило, в виде стального несущего диска, к которо-
му с обеих сторон приклепаны накладки из металлокерамическо-
го материала. В некоторых конструкциях металлокерамические
колодки прикреплены к корпусу ОТ и нажимному диску. Толщи-
на металлокерамической колодки колеблется от 3 до 6 мм. Проч-
92
Таблица 4.6
дисковых ОТ опытных ВГМ
Промежуточная категория по массе Основной танк
1 II 1 II
элементы
накладками
1 2 1 2
18x2 17x2 26x2 19x2
27,6 27,6 28.87 26,74
496.8 469,0 635,0 508,0
465 430
330 310
27 19 36 16
Металлокерамичес- кий материал МКВ-50А Металлокерами- ческий материал МКВ-50А Чугун ЧНМХ Металлокерами- ческий материал МКВ-50А
80—120 80-120 212-217 80-120
элементы
22 12 22 Нет
27,15 50.28 27,6
597,3 603,4 607,2 667
385 456 —
250 336 —
Чугун ЧНМХ ОСТ 1.90167-75 Чугун ЧНМХ ОСТ 1.90167- 75 Металлокерами- ческий материал МКВ-50 А Сталь
207 -212 207-212 80-120
2,5 1.6 2,5 1,25
ность ее недостаточно высока, поэтому она не может быть ис-
пользована без металлических стальных подложек.
Из данных, представленных в табл. 4.1—4.6, видно, что для
фрикционных элементов сухого трения трансмиссий ВГМ исполь-
зуются различные фрикционные материалы (неметаллические, ме-
таллокерамические, металлические).
93
В табл. 4.7 представлены характеристики некоторых асбо-
фрикционных материалов, применяемых в ГФ и ОТ. Это
неметаллические материалы, изготавливаемые на основе асбеста
с различными связующими и наполнителями. В зависимости от
типа связующего различают асбокаучуковые материалы (связую-
щее — синтетический каучук), асбосмоляные (связующее — смо-
лы) и комбинированные (синтетический каучук и смолы).
Таблица 4.7
Характеристики асбофрикционных материалов
Компонент, параметр Марка материала
НСФ-2 ФК-18Л ФК-24А
Химический с о с т ; 1в (массой а я дол я, % )
Окись цинка 1 — —
Латунная проволока 13 15 —
Графит 4 — —
Регенерат 6 — —
Каучук 13 — —
Смола 9 20 25
Сера 3 — —
Ускорители 0.3 — —
Барит — | 65 35
Асбест Остальное 40
Ф и з и к о-м е х а и ические св о ii с т в а
Твердость НВ 18,0 ±5.0 48.0 ± 15,2 47,0 ±16.8
Плотность, г/см1 1,90 ±0,07 2,50 ±0,21 2.30 ± 0,09
Предел прочности, МПа:
при растяжении 17.8 ±11,2 24,6x9.1 21.4 + 9.3
при сжатии 73.2 ±15.0 73,6 ±27,1 76,7 ±32.4
при изгибе 45.5 ±15Д 21.6 ±6,9 41,5113,2
при срезе 40.8 ±16,3 33.4 ±14,9 27.5 ±8,9
Модуль упругости при изгибе, МПа 4120± 2380 7350 ±3780 6770 ± 3400
Ударная вязкость, кДж/м1 580 ±325 630x305 245x125
Поглощение, %:
воды 0,40 0,20 0.30±0,13 0,20 ±0,09
масла 0,40±0,19 0,30 ±0.18 0,15±0,10
бензина 0.70 ±0,30 0,30 ±0,20 0,20 ±0,09
94
Асбест — минерал, представляющий собой водный силикат
магнезии, обладает малыми плотностью и теплопроводностью.
Он используется в качестве основы АФМ и компонента металло-
керамических материалов, повышающего коэффициент трения и
сопротивление схватыванию сопряженных поверхностей трения.
Асбокаучуковые материалы выдерживают длительный нагрев
до 250°C и кратковременный до 400°C, так как при более высо-
ких температурах каучуковое связующее разлагается; материалы
на смоляном и комбинированном связующих более термостойки.
Основным преимуществом АФМ является достаточно высокий
и стабильный коэффициент трения во всем допустимом диапазоне
рабочих температур.
Металлокерамические материалы изготавливают-
ся методами порошковой металлургии, позволяющими спекать
псевдосплавы из металлических и неметаллических компонентов
для получения материалов с требуемыми свойствами.
Компоненты, вводимые в спеченные материалы, условно можно
разделить на три группы:
металлы, образующие основу материала и способствующие
формированию определенных физико-механических свойств (медь,
железо, никель);
компоненты, регулирующие величину адгезионных связей и
уменьшающие или устраняющие схватывание и заедание (их час-
то называют антизадирными или твердыми смазками). К ним
относятся, например, графит, сульфиды молибдена, меди, цинка,
нитрид бора, легкоплавкие металлы (свинец, олово, висмут, сурь-
ма и т. п.);
компоненты, регулирующие механическое взаимодействие по-
верхностей трения (фрикционные добавки). Они повышают и ста-
билизируют коэффициент трения без существенного увеличения
износа, уменьшают склонность поверхностей трения к схватыва-
нию и заеданию. К ним относятся: окислы кремния, алюминия,
хрома; карбиды кремния, бора; сложные соединения минералоги-
ческого происхождения (асбест, муллит, кланит, валластонит
и т. д).
Металлокерамические материалы на железной основе приме-
няются в тяжелонагруженных муфтах и тормозах, когда темпера-
тура на поверхности трения может достигать 1200—1300 °C. Ме-
таллокерамические материалы на медной основе используются
в более легких условиях как при сухом трении, так и при работе
со смазкой.
95
Характеристики некоторых металлокерамических материалов
на медной основе приведены в табл. 4.8, на железной основе —
в табл. 4.9.
Таблица 4.8
Характеристики некоторых металлокерамических материалов на медной основе
Компонент. параметр Марка материала
MK-5 м-но .263- ИПМ (опытный) Диафрнкт SI (ЧССР)
Химическ ий с о с т а । и (массов а я доля,1 %)
Медь 68-76 73,5 73,3 71.9
Олово 8—10 9 6,4 8.4
Свинец 7-9 8 4.2 7.5
Углерод 6-8 4 6,6 6,7
Железо 3-5 4 3.8 0,7
Другие добавки — Муллит— 1,5 S1O3 - 5.2 Zn -0,5
TiBr - 0.5 SiOj - 4.3
Ф из и ко-м е х а н и ч е с к ие свойст в а
Предел прочности при растяжении, МПа 24 59-64
Твердость НВ 25-28 45—50 25-65 35-50
Ударная вязкость, кДж/м2 30-50 42-59
Плотность, г/см* 6,0-6,2 6,6 5,4-5.8
Железо обеспечивает матрице материала необходимые проч-
ность, твердость, пластичность, жаропрочность и жаростойкость;
медь увеличивает теплопроводность.
Свойства фрикционных материалов существенно зависят от
температуры. Так, металлические пары трения при высокой тем-
пературе отличаются нестабильным коэффициентом трения, схва-
тыванием и очень интенсивным износом. АФМ при достижении
критической температуры обугливаются, теряют стабильность
фрикционных свойств и интенсивно изнашиваются; низкая тепло-
проводность приводит к тепловой перегрузке и разрушению со-
пряженных металлических элементов пары трения. Металлокера-
мические материалы на железной основе имеют по сравнению с
материалами на медной основе более широкие пределы нагрузоч-
ных и температурных режимов эксплуатации при наличии допу-
стимых значений фрикционных свойств и износостойкости.
96
Таблица 4.9
Характеристики некоторых фрикционных материалов на железной основе
Компонент, параметр Марка материала
МКВ 50 CMK-80 СМК-105 | емк-пз
Химический состав । (массовая доля, %)
Железо 64 48
Медь 10 23
Графит 8 —
Марганец — 6.5
Асбест 3 —
Карбид кремния 5 3,5
Карбид бора 5 10
Сульфат железа 5 —
Нитрид бора — 6,5
Дисульфид молибдена — 2,5
Ф и з и к о-м е х а тнческие свойства
Плотность, г/смя Предел прочности, МПа: 5,0-5,3 5,7 5,17 5,34
при растяжении 30-39 — — —
при сжатии 145-205 195-245 До 215 147 496
при срезе 66-83 64-78 78 60-78
Твердость НВ 80-120 80-100 60-75 40-60
В табл. 4.10 представлены результаты испытаний фрикцион-
ных пар сухого трения на железной основе в режимах трогания
и переключения передач танка Т-62. Из таблицы видно, что пары
трения с металлокерамическим материалом на железной основе
при высокой нагрузке превосходят пару сталь+сталь как по
фрикционным свойствам, так и по износостойкости.
В табл. 4.11 приведены данные по испытаниям различных
фрикционных пар сухого трения в режиме ОТ.
Пара трения графитизированная сталь+сталь 38ХС была
снята с испытаний из-за разрушения диска из графитизированной
стали (образовались температурные трещины). При испытаниях
пары трения чугун (ТУ ЧЛ-355)-(-сталь 38ХС наблюдалось
интенсивное наволакивание чугуна на поверхность стального дис-
ка и схватывание поверхностей трения, а в процессе испытаний
7 Зак. 47 «с»
97
Результаты испытаний различных фрикционных пар сухого трения на режимах
Режим, параметр Переключение
MKB-flOA + + ЗОХГСА СМК-106 + Ь ЗОХГСА
Режим испытаний Удельная работа тре- ния АуЯ, Дж/см1 11,3
Начальная скорость скольжения ин, м/с 14,9
Давление р, МПа 0,31
Средний линейный из- нос за одно буксование, мм (доверительный ин- тервал 95 %) Металлокерамический диск 0.0120 1 0.0044 0.0087± 0,0014
Стальной диск 0.0073 1 0,0036 0.0044 X 0.0007
Пара трения 0.0096 х. 0.0040 0.0066 ±0.0010
Средний за буксование коэффициент трения скольжения ц.р (доверительный интервал 95%) 0.413 ±0,007 0.282 x 0.014
Коэффициент стабильности трения аст, % 85.7 76,6
• Стальной диск с внутренним зацеплением.
пары ретинакс ФК-16Л-|-сталь 38ХС на тяжелых режимах —
интенсивное дымление колодок из ретинакса, сопровождавшееся
в отдельных случаях открытым пламенем.
Из всех испытуемых пар трения наиболее высокие фрикцион-
ные свойства имеет пара МКВ-50А+ФМК-845. Коэффициент
трения скольжения за одно торможение у этой пары в 1,5 раза
выше, чем у пары МКВ-50А-f-сталь во всем исследованном
диапазоне нагрузок, а на тяжелых режимах в 1,5—2,0 раза выше,
чем у пары СМК-80В4-сталь.
Пары трения ретинакс ФК-16Л4-сталь 38ХС и МКВ-50А+
+ФМК-845 превосходят все остальные по коэффициенту стабиль-
ности трения в 1,5—2 раза. Наиболее низкой стабильностью тре-
ния обладают металлические пары и пара CMК-80В+сталь.
Анализ полученных данных позволяет сделать вывод: металло-
керамические материалы на железной основе являются перспек-
тивными для тяжело нагруженных ОТ.
4.2. ФРИКЦИОННЫЕ ЭЛЕМЕНТЫ ДЛЯ РАБОТЫ СО СМАЗКОЙ
Для работы со смазкой в трансмиссиях танков и колесных ма-
шин высокой проходимости используется пара металлокерамика
МК-5 по стали, которая в условиях полужидкостного и граничного
трения характеризуется достаточно высокой износостойкостью,
98
Таблица 4.10
переключения передач и трогания с места танка Т-«2
передач Трогание с места
CMK-I13 + + ЗОХГСА ЗОХГСА х + ЗОХГСА MKB-50A + 1 ЗОХГСА CMK-I05 + + ЗОХГСА CMK-II3 + + ЗОХГСА ЗОХГСА + + ЗОХГСА
5.6 100 50
14.2 28
0.26 0,31 0,26
0,007.1 ±0.0026 0.0038 1 0,0013* 0,0767 10,0228 0.0642 1 0.0047 0,0948 < 0 0118 0.1188 ± 0,0239*
0,0028 L 0.0007 0.0041 ± 0,0009 0,0761 ±0,0099 0.0983 1 0.0076 0.0654 1 0.0021 0 1094 ± 0.0302
0,0050 1 0.0016 0.0040 : 0,0011 0.0764 ±0.0164 0,0762 ± 0,0062 0,0801 0.0084 0.1141 10.0270
0.257± 0,014 0,304 1 0,008 0.251 ±0.006 0.30610,007 0.325 ±0.006 0.183 1 0.008
70,2 86,6 69,0 89,2 86.0 33,4
устойчивым коэффициентом трения, хорошо прирабатывается и
допускает применение высоких поверхностных нагрузок (дав-
.лений).
Фрикционные элементы выполняются в виде стальных и ме-
таллокерамических дисков трения и применяются в серийных и
опытных ВГМ, тяжелых колесных машинах специального назна-
чения (МАЗ-535, МАЗ-537, МАЗ-543, МАЗ-544 и др.) и транс-
портных машинах народного хозяйства (автомобиль БелАЗ-540,
тракторы Т-150, Т-160 и др.).
В танковых трансмиссиях МКД, работающие в масле, исполь-
зуются в конструкции многодисковых фрикционов и тормозов
с механогидравлическим управлением, в которых включение
фрикционного устройства и создание нажимного усилия осуществ-
ляются с помощью гидравлического бустера, заполняемого мас-
лом, а выключение — цилиндрическими витыми пружинами. В
некоторых фрикционных устройствах (фрикционы планетарного
механизма поворота, опытные варианты главного фрикциона)
включение осуществляется с помощью пружин, а выключение —
гидравлическим способом. Витые цилиндрические пружины ис-
пользуются для создания нажимного усилия в некоторых фрик-
ционных предохранительных муфтах.
Давление масла в системе гидроуправления фрикционными
элементами современных танковых трансмиссий колеблется в пре-
делах от 0,8 до 1,4 МПа.
7*
99
Результаты испытаний различных фрикционных пар
Пара трения Режим испытаний
УЖСЛЬИМ работа трения Луд, Дж/см’ Начальная ско- рость скольжения м'с Время буксования ’л’ с Давление р, МПа
Чугун (ТУ ЧЛ-355)4- + 38ХС МКВ-50А+ЧНМХ МКВ-50А 4-чугун (ТУ ЧЛ-355) МКВ-50А4-38ХС МКВ-50А + ФМК-845 СМК-8ОВ4-38ХС 2830 55,0 61,3 55 4,0-4,5 1.94 1.17 1.27 1,35 1,09 2,27
МКВ-50А4-38ХС МКВ-50А4-ФМК-845 СМК-80В4-38ХС ФК-16Л4-38ХС 1850 59 4,0-4,5 0,82 0,49 0,62 0,65
МКВ-50А4-38ХС МКВ-50А + ФМК-845 СМК-80В4-38ХС ФК-16Л4-38ХС 1120 46,4 3,2—33 0,82 0,61 1,13 0,65
МКВ-50А4-38ХС МКВ-50А4-ФМК-845 СМК-80В4-38ХС ФК-16Л4-38ХС 600 33,7 23-2,6 0,82 0,57 0,68 0,65
МКВ-5ОА4-38ХС МКВ-50А4-ФМК-845 СМК-80В4-38ХС ФК-16Л4-38ХС 1850 59 9-10 0,34 0,30 0,41 0,23
МКВ-50А4-38ХС МКВ-5ОА4-ФМК 845 СМК-80В4-38ХС ФК-16Л4-38ХС 1120 46,4 7.2-7,9 0,34 0,20 0,29 0,23
МКВ 50А4-38ХС МКВ-50А4-ФМК-845 СМК-80В4-38ХС ФК-16Л4-38ХС 600 33,7 5,2-5,8 0,34 0.22 0,24 0,23
100
Таблица 4.11
сухого трения на режимах нагружения ОТ ВГМ
Результаты испытаний
Начальная Объемная тем- пература t v. С Линейный износ пары за одно торможе- ние Н. мкм Средний за торможе- ние коэффициент тре- ния ^жср Коэффициент стабильности тре- ния «ст. н Примечание
85,5 0,106 28.6
26,9 0,175 55.0 Замедление ма-
28.9 0,163 57,0 шины 4,0—4,5 м/с2
140-150 24,5 0,153 51,2
78,1 0,208 84,9
9.5 0,111 36,3
23.5 0,177 62.1
40,2 0,325 81,9
8.7 0.247 47,5 Замедление ма-
110-120 136.6 0,210 93,3 шины 4,3—4,85 м/с2
11,5 0,179 58,3
9.6 0,253 69,3
3,9 0,132 36,5
52,0 0,220 80,6
2.3 0,182 56,9
110-120 2.8 0,271 72,3
1.7 0,222 49,6
14.6 0,236 86,4
28,8 0.186 46,5
110-120 22.5 0,242 76,6 Замедление ма-
8,0 0,168 42,2 шины 1,9—2,15 м/с2
208.8 0,248 93,9
8.3 0,192 49,7
110—120 5.2 0,340 76,4
4.1 0,225 48,8
59,0 0,255 87,3
1.9 0,217 51,9
110-120 1,2 0,306 84,5
2.3 0.282 65,9
14,0 0,278 83,7
101
Для выключения фрикционных устройств с невращающимся
гидравлическим цилиндром (тормозов) суммарное усилие отжим-
ных пружин должно быть в пределах от 1000 до 3000 Н. Для
фрикционных муфт с вращающимися ведущей и ведомой частями
(фрикционами) приходится предусматривать специальные меро-
приятия по их разгрузке от центробежных сил, создаваемых мас-
лом во вращающемся гидравлическом цилиндре.
Существуют конструкции, в которых передача нажимного уси-
лия от неподвижного силового цилиндра на вращающийся на-
жимной диск осуществляется через упорный подшипник или при-
меняется силовой цилиндр с двусторонним гидравлическим давле-
нием на поршень. В других конструкциях устанавливаются спе-
циальные клапаны, золотник опорожнения или сверлятся разгру-
зочные отверстия. Хорошо зарекомендовал себя в эксплуатации
(в бортовых коробках передач) шариковый механизм разгрузки,
состоящий из отжимного кольца со скосом и шариков, располо-
женных в канавках на нажимном поршне.
В современных танковых трансмиссиях смазывание поверх-
ностей трения фрикционных устройств осуществляется обычно
маслом, попадающим в полость вращающегося барабана в ре-
зультате утечки через уплотнительные устройства, а также посту-
пающим на смазывание подшипниковых устройств и зубчатых
зацеплений трансмиссии.
В некоторых случаях в процессе включения фрикционного
устройства (или постоянно) осуществляется дополнительный
полив поверхностей трения из систем смазки или гидроуправ-
ления.
Одним из путей повышения работоспособности тяжелонагру-
женных фрикционных устройств с большой скоростью вращения
дисков является подача масла к поверхностям трения под дав-
лением («подпор» масла).
Параметры, характеризующие нагруженность дисков трения,
могут колебаться в широких пределах: давление на поверхности
трения — от 1,4 до 6,0 МПа; начальная скорость скольжения —
до 75 м/с; удельная работа трения—до 1,76 кДж/см2; время бук-
сования—от нуля до 4,5 с.
Основные конструктивные параметры некоторых серийных ме-
таллокерамических дисков трения отечественных и зарубежных
ВГМ приведены в табл. 4.12 и 4.13.
При проектировании танковых фрикционных устройств диа-
метр D дисков трения выбирается, как правило, по компоновоч-
ным соображениям с учетом их расположения над планетарными
рядами (планетарные КП) или между зубчатыми колесами
(простые КП). Этот параметр является основным, поскольку он
определяет габаритные размеры фрикционных устройств и макси-
мально допустимый передаваемый момент, т. с. работоспособность
устройства на заданном режиме. Остальные конструктивные па-
102
Таблица 4.12
Основные конструктивные параметры серийных металлокерамических дисков трения отечественных ВГМ
Параметр Марка ВГМ
БМП-1 T-64A Т-72
Диаметр поверхности тре* ння, мм:
наружный 290 497 407 497 407
внутренний 240 449 359 449 359
Толщина, мм:
диска 4.2 6.0 5,5 6,0 5.5
стального каркаса 2.2 4.0 3,5 4,0 ЗЛ
металлокерамической на- 1.0 1.0 1,0 1.0 1.0
кладки
Модуль шлицевого зацепле- 5 3 3 3 3
ния, мм
Размеры спиральных сма-
зочных канавок, мм;
шаг 2,95 5 5 5 5
ширина 1.45 2 2 2 2
глубина 0.55 0,60 0,60 0,60 0,60
Размеры радиальных смазоч- ных канавок, мм:
длина 21 20 20 20
ширина 3 3 3 3 3
глубина 0,55 0,(50 0,60 0,60 0.60
Число радиальных канавок:
наружных 12 24 18 — —
внутренних 12 24 18 12 8
раметры (за исключением формы и размеров смазочных канавок
на поверхностях трения) могут быть выражены через диаметр.
Ширина поверхности трения оказывает двоякое влияние на
работоспособность дисков: с одной стороны, увеличение площади
поверхности трения при сохранении осевых габаритных размеров
и числа дисков в пакете позволяет снизить удельные нагрузки и
повысить срок службы дисков, с другой — увеличивается раз-
ность скоростей скольжения на наружном и внутреннем диамет-
рах, а следовательно, возрастают разность температур по радиусу
дисков и их склонность к короблению.
В танковых трансмиссиях ширина поверхности трения колеб-
лется от 10 (при D= 100... 150 мм) до 32 мм (при D =
103
о Таблица 4.13
Основные конструктивные параметры зарубежных металлокерамических дисков, работающих в масле
Параметр Марка ВГМ (фирма)
М-48 (.Аллисон*) М-60А1 (.Аллисон*) Опытные танки ФРГ («Юрнд>)
Диаметр поверхности трения, мм:
наружный 453 318 453 319 417 400
внутренний Толщина, мм: 389 267 389 270 354 340
диска 4,2 4,2 4,2 4,15 4 5
стального каркаса 2,4 2.6 2,2 2,4 2,5 3,5
металлокерамической накладки 0,9 0,8 0,9 0,9 0,8 0,8
Размеры спиральных канавок, мм: смазочных
шаг 1,95 2-2,1 9,6-10,4 10,5 9-9,3 10,6—10,8
число заходов 1 1 4 2 3 2
ширина 0,75 0,7 °*7 1.1 0,45 0,65
глубина Размеры радиальных смазочных 0,5 0,5 6,4-0,5 0,65 0.4-0,5 0.5
канавок, мм:
длина 25,5 25,5 25 21 22.5-25,0 26-27
ширина 3 7 8 6,5 6.7 3.1-3,2
глубина 0,6 0,6 0,6 0,65 0.55-0,75 0,55-0,70
Число радиальных канавок:
наружных 24 24 (сквозные) 24 18 —
внутренних 24 24 18 12 12
= 250...500 мм). Принято задавать ширину поверхности трения
отношением ее внутреннего диаметра к наружному D: это от-
ношение может изменяться от 0,73 (при 75=100 мм) до 0,90
(при 75 = 500 мм).
Толщина стальной подложки металлокерамического и сопря-
женного стального дисков влияет не только на прочность зуба, но
и на нагрев, коробление и усадку дисков. В современных транс-
миссиях ВГМ отношение толщины стальной подложки МКД к
толщине сопряженных стальных дисков изменяется от 0,75 до 1,0.
Проведенные исследования показали, что при использовании
одной марки стали для обоих типов дисков оптимальным являет-
ся отношение толщин дисков в паре трения 0,65—0,75, которое
обеспечивает одинаковое коробление дисков в пакете. При таком
соотношении толщин диски выдерживают более интенсивную теп-
ловую нагрузку, что является одним из резервов повышения пре-
дельной нагрузки.
Толщина металлокерамических накладок практически на всех
дисках диаметром более 250 мм равна 1 мм (для меньших диамет-
ров колеблется от 0,5 до 0,75 мм).
Стандартный химический состав и физико-механические ха-
рактеристики металлокерамического материала МК-5 приведены
в табл. 4.8. Медь совместно с оловом в процессе спекания обра-
зует оловянистую бронзу, являющуюся основой фрикционного
материала.
Прочность металлокерамического материала выше при макси-
мальном содержании олова в матрице, а способность к прира-
ботке— при минимальном. Экспериментально установлено, что
оптимальное сочетание фрикционных свойств, износостойкости и
технологичности МКД танковых трансмиссий может быть полу-
чено при изменении химического состава МК-5 (уменьшении
содержания олова, увеличении содержания свинца, графита и же-
леза в шихте). Резервом повышения фрикционных свойств яв-
ляется совершенствование технологии изготовления дисков (под-
прессовка металлокерамики после спекания, повторное спекание).
Стальные каркасы МКД изготавливаются обычно из конструк-
ционной стали марок 65Г, 85, 30ХГСА и др.
Существуют две разновидности формы поверхности трения
МКД: комбинированная (образованная спиральными и радиаль-
ными смазочными канавками) и сетчатая (представляющая собой
квадратные или ромбовидные решетки).
Сравнительно низкие значения коэффициента трения дисков
с сетчатой формой смазочных канавок ограничивают их использо-
вание во фрикционных устройствах трансмиссий, к которым
предъявляются жесткие требования по объемно-массовым пара-
метрам.
В трансмиссиях ВГМ распространена комбинированная форма
поверхности трения. Относительная площадь радиальных канавок
выбирается из условия обеспечения минимальных потерь мощ-
8 Зак. 47 «с»
105
кости в дисках и обеспечения максимальной прокачки масла через
диски, что необходимо для тяжелонагруженных фрикционных
устройств с принудительным охлаждением дисков.
В последние два десятилетия совершенствование конструкции
поверхности трения отечественных и зарубежных дисков происхо-
дило в направлении увеличения шага и относительной ширины вы-
ступов спиральных смазочных канавок.
В табл. 4.14 и 4.15 приведены результаты стендовых и натур-
ных (ходовых) испытаний МКД с различными значениями шага
образующей спирали смазочных канавок.
Таблица 414
Результаты стендовых испытаний на функционирование металлокерамических
дисков тормоза Т5 танковой бортовой коробки передач
Параметр Шаг спиральной смазочной канавки, мм
2.24 5
Наработка, соответствующая пробегу тан-
ка, км 9 000 15 (ХЮ
Среднее время буксования за одно торможе- ние, с:
IV передача 3,2 2,6
V передача 3,7 3,1
VI передача 5.4 3,8
Суммарный износ пакета дисков, мм 4,22 2.91
Износ одного диска, мм:
пределы изменения 0,625 -0,795 0,332-0.665
среднее значение 0,703 0,485
Средний износ за 1000 км пробега, мм;
пакета в целом 0,169 0.194
одного диска 0,078 0,032
Коробление МКД. мм:
пределы изменения 0,15 1.25 0.1 0,4
среднее значение 0,49 0.26
Коробление сопряженного стального диска, мм:
пределы изменения 0.45 1,9 0,25-1,48
среднее значение 0.85 0,65
Усадка МКД, мм:
пределы изменения максимальных значений 0.2-0,7 0.4-0,7
среднее значение 0.4 0,3
Усадка сопряженного стального диска, мм:
пределы изменения максимальных значений 0,8-1,6 0,6-2,9
среднее значение 0,8 1,2
106
Таблица 4.15
Линейный износ МКД (в мм) за 10 000 км наработки,
рассчитанный по результатам ходовых испытаний БКП танка Т-72
Фрикционный элемент Шаг спиральной смазочной канавки, мм
5 2,21
Пределы изменения Среднее значение П редели изменении Среднее значение
Ф, 0,130—0,244 0,161 0,870 0,240 0.550
Ф1 0.02.3—0.122 0,049 0,095 - 0,314 0,170
Фз 0,053 0,130 0.088 0,055-0,296 0,150
г, 0.036 -0,234 0,139 0,066-0,630 0,260
Л 0,060 -0,260 0.128 0,150-0 920 0.370
ф„ 0,076-0,212 0,153 0,080—0.420 0,240
4.3. ГИДРОДИНАМИЧЕСКИЕ ПЕРЕДАЧИ
В современных трансмиссиях ВГМ широко используются сле-
дующие гидродинамические передачи: гидротрансформаторы, гид-
ромуфты и гидрозамедлители.
Гидротрансформаторы. Современные ГТ состоят из насосного
и турбинного колес и одного или двух неподвижных колес (реак-
торов), установленных на муфты свободного хода (МСХ). Такие
ГТ при определенном передаточном отношении могут переходить
с режима ГТ на режим ГМ и обратно и называются комплексны-
ми (ГТК).
Крутящий момент Мн (в Н м) на насосном колесе ГТ может
быть вычислен по формуле
5fH = кпд’ DJ/3600,
где D,— активный диаметр ГТ, м; л,, — частота вращения насосного колеса
ГТ, об/мин: у - плотность жидкости, кг/м3; X, безразмерный коэффициент
момента на насосном колесе, численно равный моменту на насосном колесе
геометрически подобного ГТ с Da = 1 м при л = 100 об/мин и условной плот-
ности рабочей жидкости, равной O,34i кг/м3.
Зависимость момента М„ от частоты вращения насосного ко-
леса при irT=const (где /гт = лт//1н — передаточное отношение
гидротрансформатора; пг —частота вращения турбинного коле-
са) называется нагрузочной параболой. Зависимость КПД гидро-
трансформатора т]гт, коэффициента трансформации ЛГТ = Л4Т/Л4Н
(где Л4Т — момент на турбинном колесе) и величины Му от пере-
8*
107
даточного отношения t)T называется внешней характеристикой
ГТ (рис. 4.1).
Рис. 4.1. Внешняя характеристика гидротрансформатора типа ГТК XI:
КПД; ? —коэффициент трансформации; < Величина М; в скобках справа указаны
значения в устаревших единицах, исполыовавшнхси ранее, т. е. в кге • мнн‘/(об*• м‘)
При нормальной работе ГТ через его полость должно прохо-
дить определенное количество жидкости для охлаждения. В этой
полости должно поддерживаться определенное давление для
исключения кавитации. При снижении давления возникает кави-
тация вначале на режимах г| Г =0 ... 0,4 (рис. 4.2), так как в
этой зоне вследствие возрастания расхода циркуляции рабочей
Рис. 4.2. Зависимость критического давле-
ния на входе в насосное колесо ГТК I
Рвх. кр (мощность 114 кВт. Da 466 мм)
от передаточного отношения i
жидкости статическое давление на входе в насосное колесо резко
падает. Опасность возникновения кавитации увеличивается с по-
вышением загрузки ГТ. Для ее ликвидации под насосное колесо
ГТ подводится жидкость, т. е. производится подпитка ГТ. Гидрав-
лическая энергия из круга циркуляции ГТ при отводе жидкости
из межлопаточного канала турбинного колеса частично пере-
дается в поток подпитки. Это проявляется в виде качающих
свойств, характеризуемых разностью давлений Лр между отвод-
108
ным и подводящим каналами. При отводе жидкости из зазора
между турбинным и реакторным колесами (типичное явление в
существующих конструкциях )качающие свойства ГТ проявляют-
ся в меныпей степени.
Экспериментальное исследование показало, что разные ГТ об-
ладают различными качающими свойствами, которые «подав-
ляются» прокачкой рабочей жидкости (рис. 4.3) и характеризуют-
ся зависимостью ДрГ1 /(*гт« Q) ’ где Лргт = рвых - Ах (Лых —
давление на выходе ГТ, рах —давление на входе ГТ), Q — рас-
ход жидкости для ГТ. Если величина Ар( , положительна, то ГТ
активно прокачивает жидкость.
а - ГТК I (0,-466 мм}; 6 ГТК XI (О, = 410 мм): в \рУ-------------------ГТК XI:
-------ГТК I (в скобках указаны значения н устаревших единицах. использовавшихся
рамсе)
Гидротрансформатор ГТК-1 обладает высокими качающими
свойствами: давление на выходе при расходе Q= 100 л/мин может
превышать давление на входе на 180 кПа при /|Т =0,4. Это
значит, что для исключения кавитации в насосе давление подпит-
ки должно быть тоже весьма высоким.
В гидротрансформаторе ГТК-XI при прокачке 100 л/мин пре-
вышение давления на выходе составляет не более 80 кПа во всем
диапазоне передаточных отношений.
Качающие свойства лопастной системы ГТ можно рассчитать
по методу подобия.
Приведенное давление, или безразмерный коэффициент давле-
ния , численно равно разности давлений Ар, которую создала
бы лопастная система ГТ, подобного испытанному, но с активным
диаметром D, = 1 м и частотой вращения насосного колеса
лн = 1()0 об/мин на выбранном передаточном отношении при от-
сутствии подпитки. Качающий перепад давлений (в кПа) геомет-
рически подобного ГТ при любых значениях частоты вращения
109
насосного колеса (в об/мин) и диаметра круга циркуляции (в м)
может быть вычислен по формуле
Др = О’'3600,
где значение 7 должно быть взято из соответствующей ха-
рактеристики, полученной экспериментально (см. рис. 4.3, в).
Кавитационные характеристики и качающие свойства ГТ ис-
следованы недостаточно. Для большинства применяемых ГТ они
неизвестны, что затрудняет расчет и проектирование гидроси-
стемы.
При проектировании ГТ необходимо учитывать осевые на-
грузки А (в II), возникающие на его рабочих колесах (частота
вращения насосного колеса в об/мин, активный диаметр в м):
А DJ/3600,
где Хд безразмерный коэффициент осевых сил; значение • д Т должно быть
взято из соответствующей характеристики, полученной экспериментально
(рис. 4 4, и)
Рис. 4.4. Экспериментальные значения осевых сил в ГТК-XIV с Da — 410 мм:
а осевые силы при я(| ” 1500 об мин; / насосное колесо; 2 турбинное колесо;
Я — колесо реактора
Вычисление осевых сил достаточно произвести для двух колес
ГТ, на третьем осевая сила определяется из равенства Дн 4-Лт-г
-}-Лр=0, где индексы «н», «т» и «р» относятся к насосу, турбине
и колесу реактора соответственно. Для установки насосного коле-
са ГТ обычно требуется мощный подшипник, поскольку в нем
сочетаются значительная осевая сила и большая частота враще-
110
ння (рис. 4.4,6). Колесо реактора может испытывать также боль-
шие осевые нагрузки, однако, вследствие их статичности, они
удерживаются шарикоподшипниками относительно небольших
размеров.
По эксплуатационным свойствам ГТ условно можно разделить
на две группы. К первой группе относятся ГТ, обладающие вы-
сокими преобразующими свойствами и сравнительно низким зна-
чением КПД. Коэффициент трансформации k0 у этих ГТ при
остановленной турбине более 3, а максимальное значение КПД
редко выше 0,85. Во вторую группу входят ГТ, обладающие невы-
сокими преобразующими свойствами (fc0<3,0), но более высоким
КПД (Пп >0,9).
Если ГТ имеет узкий спектр нагрузочных парабол, то принято
считать, что он обладает непрозрачной характеристикой входа.
Такие ГТ в отличие от ГТ с прозрачной характеристикой не ис-
пользуют силовой и скоростной диапазоны двигателя.
Коэффициент прозрачности характеристики входа ГТ пред-
ставляет собой отношение коэффициента момента насоса при
остановленной турбине (Х|„) к его значению при переходе на ре-
жим ГМ (Х1Ч):
У ГТ с прозрачной характеристикой входа 1,5, с непро-
зрачной — kH <1,5.
Большое значение имеет энергоемкость ГТ, которая может
характеризоваться величиной Х|М у, изменяющейся в пределах
от 36 до 90 кг/м3, т. е. 10...25 кгс-мин2/(об2-м4).
В табл. 4.16 приведены основные показатели некоторых се-
рийных зарубежных и опытных отечественных ГТ.
Для новых отечественных ВГМ разработан ряд совершенных
ГТ, позволяющих удовлетворять самые различные требования;
основные показатели двух из них приведены в табл. 4.17.
Гидромуфты (ГМ) применяются в основном в приводах к ге-
нераторам и вентиляторам для устранения жесткой связи их с
двигателем и повышения надежности. В отличие от гидротранс-
форматора ГМ состоит только из двух колес — насоса и турбины.
Внешняя характеристика ГМ, так же как и ГТ, может быть задана
в форме приведенной величины /.iy=f(<rM)-
КПД в виде функции ijrM = /(ZrM ) обычно не задается, так
как эта зависимость представляет собой прямую, ограниченную
началом координат и точкой т]гм 1, сгм =1, что является
следствием равенства крутящих моментов, действующих на
колеса ГМ: М„ =МТ, поэтому Лгм=|гм •
Работа ГМ характеризуется скольжением srM=l — ir4 , вы-
раженным в процентах. Обычно хгм =3...5%.
111
Таблица 4.16
Основные показатели некоторых серийных зарубежных и опытных отечественных ГТ
Тип ГТ или фирма 1ГТ- * *0 'гм Х1М Ъ кг м’ *п Примечание
«Аллисон» 84,0 3,80 0,817 45,7(12,7-10-4)** 1,16 ГМТ CD-850 танка М-48 (США)
«Аллисон» 86,0 3,30 0,840 50,4( 14,0-10 "4) 1,65 TMTCD-850-6A танка М-60А1 (США)
«Форд» 91.0 2,10 0,890 — — ГМТ «Фордоматик» авто.мобиля(США)
«Крайслер» 90,0 2,60 0,885 72,0(20,0-10-4) — ГМТ «Пауэрфлайт» автомобиля (США)
ГТК-1 83 3,76 0,817 45,7(12,7-10 ~4) 1,18 ГМТ опытного танка
гтк-п 86 3,70 0,830 43,2(12,0-10~4) 1.25 Модернизированная ГМТ опытного танка
ГТК-Ш 88,3 2,67 0,870 86,7(24,1-10 "4) 2,62 Опытная ГМТ тяжелого танка
ГТК-Шс 89,7 2,50 0,884 72,0(20,0-10 ~4) 2,39 Опытная ГМТ основного танка
ГТК-VI 87 4,54 0,844 38(10,6-10“4) 1,04 ГМТ армейских колесных машин
ГТК-Х1 92,9 2,02 0.912 63,0(17,5-10 ~4) 1,85 Опытная ГМТ основного танка
ГТК-ХП 90,0 2,75 0,865 63,7(17,7-10 ~4) 1,36 Серийная ГМТ ВГМ промежуточной категории по массе
гтк-xv 92,8 2.00 0,915 91,8(25,5-10 “4) 2,24 Опытная ГМТ машины легкой кате- гории по массе
гтк-xvn 92,0 1,90 0,895 71,3(19,8-10-4) 1,87 Проект ГМТ повышенной мощности
«Ренк» 81,0 2,96 0,790 60,8(16,9-10“4) 1.41 ГМТ 4НР-250 танка «Леопард-1» (ФРГ) ГМТХ-1100 танка М-1 (США)
«Аллисон» 93,0* 1,90 0,915* — —
* Ориентировочно.
* * В скобках приведены значения в устаревших единицах.
Таблица 4.17
Основные показатели гидротрансформаторов ГТК-XIV (над чертой)
и ГТК-XV (под чертой)
'ГТ *ГТ чгт« * ч /КГС МИН2 Л.т.кг м'(—-—— 10 1 v об- м4 '
2,50 0,0 190,4 /52,9 >
0,00 2,00 0,0 205,2 *57,0)
2,32 23,2 187,2 , 52,0 1
0,10 1,95 19,5 202,6 \56,3 '
2,15 43,0 181,4 /50,4 \
0 20 -
1,86 37,0 198,0 \55.u/
1,98 59,4 173,8 /48,3 ।
0,30
1,76 53,0 190,8 \53,0/
А ЛА 1,80 72,0 163,8 f 45,5 )
иди . — —
1,65 66,0 180,0 \ 50,0 7
СА 1,62 81,0 151,2 / 42,0 \
0,50 1 — - - -
1,52 76,0 167,4 V 46,5 /
Л £Л 1,44 86,7 133,5 /37,1 )
—
1,40 84,0 149.7 U1.6/
А *7Л 1,28 90,0 115,9 (32.2 \
о, /и
1,27 89,5 131,4 ’ 36,5 /
A QA М4 91,0 97,2 / 27,0 \
и,оП .____ ——
1,16 92,8 113,4 \31,5/
Л ОЛ 0,99 89,6 73,8 ( 20,5 \
v, Jv
1,02 92,0 95,4 \26,5/
Л 0,99 94,0 50,7 / 14.1 \
- 1 ё 1
0,99 94,0 64,8 48,0 /
Так как КПД ГМ численно равен передаточному отношению
/гм , то, зная скольжение, можно его определить как
^гм = 1 5гм •
Иногда ГМ характеризуют безразмерным коэффициентом
мощности, который можно определить по формуле
где jVh—мощность на насосном колесе, кВт; у — плотность рабочей жидкос-
ти, кг/м3; Пн—частота вращения насосного колеса, об/мин; Оа — активный
диаметр ГМ, м.
Отсюда
113
Зависимость величины у от скольжения называется внешней
характеристикой ГМ (рис. 4.5). Чем меньше изменяется скольже-
ние при возрастании передаваемого момента, тем более жесткой
является характеристика ГМ и тем выше КПД. Однако для вспо-
могательных приводов с большим моментом инерции целесооб-
разно иметь гидромуфту с невысокой жесткостью, так как при
этом динамические нагрузки меньше.
Рис. 4.5. Внешняя характеристика (а)
ГМ трех типов, отличающихся геомег
рическими соотношениями кругов цир-
куляции (б) при D, — 1 м (в скобках
указаны значения в устаревших еди-
ницах)
Для ГМ как основного пере-
дающего агрегата большое зна-
чение имеет характеристика в
зоне больших скольжений, осо-
бенно при остановленной турби-
не. При жесткой характеристике
в этой зоне крутящий момент
двигателя будет меньше крутя-
щего момента ГМ, и двигатель
не сможет работать на холостом
ходу при включенной передаче.
Для уменьшения значения ЛЛ. в
приостановленной турбине приме-
няют специальные устройства в
круге циркуляции. Во вспомога-
тельных приводах танковых силовых установок такие ГМ не при-
меняются.
В последнее время разработаны управляемые ГМ, у которых
передаваемый момент регулируется заполнением полости. Так, в
приводе вентилятора системы охлаждения танка «Деопард-1»
(ФРГ) применена ГМ с дискретным управлением: электропри-
вод включает заполнение ГМ или выключает в зависимости от
температуры на выходе из радиатора. В отечественном опытном
танке с ГМТ применены две ГМ в приводе к двум вентиляторам
системы охлаждения, скольжение которых регулируется заполне-
нием в зависимости от температуры в радиаторе двигателя. Ско-
рость вращения вентиляторов изменяется при этом в широких пре-
делах, что в зимних условиях обеспечивает существенную эконо-
мию мощности, облегчает эксплуатацию танка и улучшает тем-
пературный режим двигателя. Низкий КПД ГМ привода вентиля-
тора вследствие ее частичного опорожнения при работе в мороз-
ную погоду не имеет решающего значения в балансе мощности.
114
Так, если условно принять, что при минимальном скольжении
srM =4 % к ГМ подводится 100 кВт, отводится к вентилятору
96 кВт и теряется 4 кВт (КПД 0,96), то при переходе ее на сколь-
жение в 30 % (КПД 0,7) мощность, передаваемая вентилятору,
снизится в (0,96/0,7) 3 = 2,6 раза и станет равной 37 кВт, а мощ-
ность, потребляемая ГМ, и тепловая потеря будут 53 и 16 кВт
соответственно.
С теплорассеиваниеыь дополнительных 12 кВт система охлаж-
дения легко справляется, но привод разгружается на 47 кВт, или
в 1,9 раза. В ходовых условиях в опытном танке с ГМТ при на-
ружной температуре воздуха до —18°C наблюдалось снижение
затрат мощности на вентилятор в два раза и уменьшение расхода
топлива двигателем до 5 % по сравнению с нерегулируемым при-
водом.
Рабочая жидкость в ГМ подается из системы смазки, а дав-
ление в ней поддерживается жиклером, расположенным в кожухе
ГМ. Расход масла через жиклер составляет 3—5 л/мин, что до-
статочно для охлаждения ГМ.
Гидрозамедлители. Наибольшее распространение получил ГЗ,
состоящий из двух ГМ с заторможенными турбинами. Такое ис-
полнение позволяет получить высокую энергоемкость ГЗ при
сравнительно малых диаметре и объеме кругов циркуляции, что
важно для танковых трансмиссий.
Для обеспечения быстродействия ГЗ рабочая жидкость долж-
на подводиться в круг циркуляции по центру или по его внутрен-
нему диаметру, а отводиться — по наружному диаметру через
улитку. Объем ГЗ должен быть минимальным, а полость цирку-
ляции в момент слива должна соединяться с атмосферой. Полость
циркуляции тормоза можно не уплотнять, так как центробежные
силы препятствуют выходу рабочей жидкости в картер трансмис-
сии через неуплотненные зазоры между ротором и корпусом, а
избыточное давление, как правило, внешним насосом не создается.
Если ГЗ компонуется в виде отдельного агрегата и утечки из него
могут приводить к потере масла, то устанавливаются кольцевые
уплотнения.
Поскольку тормозной момент пропорционален квадрату часто-
ты вращения ротора, эффективность ГЗ быстро уменьшается по
мере замедления ВГМ в процессе торможения.
Совершенствование конструкций гидрозамедлителя идет в на-
правлении уменьшения их габаритных размеров с сохранением
достаточной энергоемкости. Из новых зарубежных разработок
представляет интерес ГЗ трансмиссии НР-500 фирмы «Ренк»
(ФРГ). Гидрозамедлитель установлен между ГТ и КП на валу
турбинного колеса ГТ; малогабаритный круг циркуляции харак-
теризуется соотношением Do=O,84Z>.1 и /t=0,16D,, где Do —
внутренний диаметр круга циркуляции, D,—его активный диа-
метр и h—осевой размер. Гидрозамедлитель — однополостной,
в статоре его имеется подвижное кольцо с предлопатками, позво-
115
ляющими на холостом ходу соединять рабочую полость с атмо-
сферой для уменьшения потерь мощности. Максимальный тормоз-
ной момент ГЗ равен 1400 Нм. При максимальном входном
моменте, равном 950 Н-м, и коэффициенте трансформации 2,5—
2,8 ГЗ реализует тормозную мощность, равную приблизительно
половине установочной мощности трансмиссии: 1400/[ (2,5... 2,8)Х
X950] =0,53... 0,59 (установочная мощность равна произведению
максимальных момента и частоты вращения на входе в трансмис-
сию). Следовательно, ГЗ мог бы быть более мощным, если бы
не ограничения по объему. Этот ГЗ имеет в роторе 50 лопаток,
а в статоре 43, установленные под углом 30°. Теоретический недо-
бор мощности компенсируется такими положительными свойства-
ми, как быстродействие и малые холостые потери. Гидрозамедли-
тель может быть включен за 0,3 с, а холостые потери в нем со-
ставляют, по данным фирмы, всего 20 % потерь, имеющих место
в крупногабаритных ГЗ.
На рис. 4.6 показана конструктивная схема ГЗ меньших раз-
меров, прошедшего стендовые и ходовые испытания в отечествен-
ной ВГМ с ГТД и БКП. В этом ГЗ как осевой, так и радиальные
размеры полости циркуляции меньше, чем в трансмиссии НР-500
(£)а =0,4 м; число лопаток в роторе 35, в статоре — 34; угол на-
клона лопаток 45°).
Рис. 4.6. Конструктивная схема малогабаритного
отечественного гидрозамедлителя:
/ — левая половина статора; 2 правая половина ста
тора; ./ ротор; /), —активный диаметр; О0 — внутрен
ний диаметр ( 0^ — 0,850,); Л — ширина круга циркуля-
ции (Л- 0.05/),)
Стендовые испытания позволили установить, что в ГЗ Му=
= 252 кг/м3, т. е. 70-10~* кгсмин2/(об2-м4).
Испытания были проведены при следующих условиях: входная
мощность не более 100 кВт; температура масла МТ-8П на входе
в ГЗ 80 °C, а на выходе 120—130 °C; частота вращения ротора не
более 1100 об/мин. В результате установки ГЗ на входные валы
БКП осевой габаритный размер каждой из них был увеличен
на 62 мм, что, однако, не привело к существенным переделкам
МТО и увеличению массы ВГМ. Максимальная тормозная мощ-
ность ограничивалась специальным клапаном для интенсивного
опорожнения полости ГЗ при повышенной скорости вращения
ротора и не превышала 600 кВт, что свидетельствует о большом
запасе фрикционных элементов БКП по тормозной мощности.
Однако суммарный эффект от двух ГЗ позволил заметно улуч-
116
шить тормозные свойства ВГМ, особенно на спусках; одновремен-
но было достигнуто уменьшение износа дисков ОТ.
4.4. ГИДРООБЪЕМНЫЕ ПЕРЕДАЧИ
Гидрообъемные передачи состоят из двух гидромашин, одна
из которых выполняет роль объемного насоса, а вторая — объем-
ного гидравлического двигателя (гидромотора).
В трансмиссиях транспортных машин в основном применяются
быстроходные роторно-поршневые гидромашины двух типов:
аксиально-поршневые и радиально-поршневые. Другие типы гид-
ромашин (лопастные, шестеренные, винтовые и др.) обычно при-
меняются в качестве вспомогательного оборудования.
Аксиально-поршневые гидромашины по характерным конст-
руктивным признакам можно разделить на три группы:
с наклонным блоком цилиндров и шатунной кинематической
схемой;
с наклонной шайбой и непосредственным контактом поршней
и шайбы;
с наклонной шайбой и гидростатической разгрузкой опорных
башмаков поршней.
Гидромашины первой группы бывают с двойным несиловым
карданом и бескарданные. Прототипом машин с двойным неси-
ловым карданом чаще всего принято считать гидроагрегаты
фирмы «Виккерс инкорпорэйтед» (США), выполненные по извест-
ной схеме профессора Г. Тома; к ним же относятся серийно вы-
пускаемые отечественной промышленностью гидромашины гам-
мы II, подробно описанные в работе [6].
Гидромашины типа ПД (дистанционного управления) или ПР
(ручного управления), предназначенные в основном для работы
в качестве силовых исполнительных агрегатов в различных схе-
мах автоматического и полуавтоматического дистанционного
управления, использованы в трансмиссиях ряда опытных гусенич-
ных машин (рабочее давление 10 МПа, допускается 16 МПа).
В настоящее время отечественной промышленностью освоен вы-
пуск гидромашин гаммы III, имеющих более высокие значения
рабочего и максимального давлений (соответственно 16 и 25 МПа).
Типичной конструкцией гидромашин с шатунной
кинематической схемой бескарданного типа
являются агрегаты фирмы «Константин Раух» (ФРГ), представ-
ляющие собой семейство гидромашин семи типоразмеров с пода-
чей от 52 до 1025 л/мин и частотой вращения вала от 18,6 с
(1120 об/мин) до 75 с 1 (4500 об/мин) соответственно. Некоторые
гидромашины из этого семейства освоены отечественной промыш-
ленностью и выпускаются по лицензии.
Рабочее давление в этих гидромашинах составляет 10—
25 МПа, максимальное достигает 25—34 МПа. а у гидромашин
фирмы «Брюнингхаус» (ФРГ)—39 МПа; рабочий объем изме-
няется от 10 до 3700 см3.
117
Большинство зарубежных изготовителей гидрооборудования
считает гидромашины второй группы с наклонной
шайбой и непосредственным контактом порш-
ней и шайбы устаревшими. Они выпускаются в ограничен-
ном объеме. Это связано с необходимостью резкого увеличения
рабочего давления в гидромашинах (10—17 МПа), что привело
к значительному росту нагрузок (максимально 29 МПа) в деталях
и особенно контактных напряжений в местах соприкосновения
поршней и наклонной шайбы. У этих гидромашин диапазон рабо-
чих частот вращения составляет 1000—3000 об/мин, а объем —
от 10 до 270 см3.
Конструкция аксиально-поршневых гидромашин третьей
группы с наклонной шайбой и гидростатической
разгрузкой опорных башмаков поршней отли-
чается способом установки ротора в гидромашине. Принято два
варианта установки ротора.
Первый вариант: ротор опирается через подшипник качения
непосредственно на корпус гидромашины, т. е. в нем закреплен
один конец вала, а другой опирается на подшипник со стороны
приводного конца. Такая схема использована в гидромашинах
фирмы «Лукас индастриэл эквипмент» (Великобритания).
Второй вариант: ротор опирается на вал гидромашины (или
ротор и вал выполняются в виде одной детали); вал имеет две
опоры в корпусе. Такая схема использована в гидромашинах
фирм «Сандстрэнд корпорейшн» (США), «Зауер унд зоон маши-
ненбау» (ФРГ) и др.
Существуют также разные способы установки в гидромашине
опорной шайбы: она устанавливается на цапфах в корпусе (гид-
ромашины фирм «Сандстрэнд корпорейшн» и «Зауер унд зоон
машиненбау») или опирается на цилиндрическую (сферическую)
поверхность в нем (гидроагрегаты фирмы «Лукас индастриэл
Эквипмент»).
Рабочее давление в гидромашинах третьей группы 18—29 МПа,
а у отдельных образцов оно достигает 39 МПа. Максимальное
давление изменяется от 25 до 39 МПа, у отдельных образцов от
49 до 69 МПа (гидромашины фирм «Ледюк», «Сигла-Хранце»,
Франция). Диапазон рабочих частот вращения вала таких гидро-
машин составляет 25—66,6 с“‘ (1500—4000 об/мин), рабочий
объем — от 20 до 860 см3.
Быстроходные радиально-поршневые гидромашины в основном
выпускаются зарубежными фирмами. Так, фирма «Лукас Гэс
Тобин эквипмент» (Великобритания), имея большой опыт и тра-
диции в производстве аксиально-поршневых гидромашин, разра-
ботала компактный и быстроходный радиально-поршневой насос.
Имеются модификации насоса с постоянным и регулируемым ра-
бочими объемами.
По данным фирмы, масса радиально-поршневой гидромашины
составляет 0,6 массы аксиально-поршневой гидромашины той же
118
мощности. Фирма уже создала образцы гидромашин, работающие
с частотой вращения вала 15000 об/мин. Разрабатываются насо-
сы для работы при частоте вращения вала 20000 об/мин, что
позволяет подводить к ним мощность непосредственно от газовой
турбины.
Рабочее давление радиально-поршневых гидромашин состав-
ляет 14—25 МПа, максимальное 25—34 МПа, а гидромашин фир-
мы <Р. Поль» (Франция) — до 7 МПа.
Большинство гидромашин имеет частоту вращения 700—
3000 об/мин и рабочие объемы от 10 до 4000 см3.
Из анализа основных параметров гидромашин следует, что
наибольшее давление выдерживают аксиально-поршневые гидро-
машины с наклонной шайбой и гидростатической разгрузкой
опорных башмаков поршней. Гидромашины с наклонным блоком
и шатунной кинематической схемой, а также радиально-поршне-
вые гидромашины более быстроходны и имеют более широкий
диапазон частот вращения вала.
Рис. 4 7 Зависимость удельной массы не-
которых зарубежных регулируемых акси-
ально-поршневых гидронасосов от удель-
ного рабочего объема:
---- бес карда иные с наклонным блоком и
шатунным велением поршней (/ — НАР «Маннес-
ман олмеханик»: 6 А2 «Константин Раух».
ФРГ): —X с двойным нсенлочым ми»д чом II
наклонным блоком (2 — PAV «Сошлем». Фран
ция); ---- с наклонной шийбой н гидро-
статической разгрузкой опорных башмаков
(3 SPV «Зауэр унд зоон мишиненбяу». ФРГ;
4 — «Сандстрэнд корпорейшн». США; 5 JV
«Лукас индастриэл эквипмент». Великобритания)
Наиболее крупные образцы
аксиально-поршневых гидромашин с
наклонным блоком и шатунной ки-
нематической схемой, а также
радиально-поршневые гидромашины
имеют большие рабочие объемы.
На рнс. 4.7 приведен график,
характеризующий удельную массу
регулируемых аксиально-поршневых гидронасосов различных ти-
пов, т. е. отношение их массы т к установочной мощности <Vy.
в зависимости от удельного рабочего объема.
Гидрообъемная передача с двумя гидромашинами аксиально-
поршневого типа фирмы «Зауэр унд зоон машиненбау» (рис. 4.8)
выполняется в едином корпусе. Валы гидромашины жестко свя-
заны с блоками цилиндров, в которых перемещаются поршни,
связанные шарнирно с опорными башмаками (рис. 4.9). Поршни
через башмаки опираются на шайбы. Шайба (см. рис. 4.8) может
поворачиваться на подшипниках и фиксироваться в корпусе с по-
мощью органов управления. При среднем положении ее плос-
119
кость перпендикулярна валу 9. при этом расстояние между плос-
костью шайбы и блоком цилиндров одинаково по всему кругу,
и при вращении вала поршни не будут перемещаться в цилинд-
рах. При наклонных положениях шайбы поршни перемещаются
в цилиндрах, выталкивая рабочую жидкость. Предельный угол
наклона шайбы в гидромашинах такого типа составляет 18—20°,
в специальных гидромашинах угол наклона шайбы достигает 30°.
Шайба второй гидромашины жестко связана с корпусом.
Рис. 4.8. Конструктивная схема ГОП с двумя гидромашннамн фирм и «Зауэр
унд зоон машиненбау»:
/. /9 опорные крышки с распределителями; 2. /в —накладные диски; 3 — корпус ГОП;
4. 17 — блоки цилиндром. 5, 14 — поршни; 6 опорные башмаки; 7, 10 — подшипники на
клонной шайбы; в корпус наклонной шайбы; 9, 13 входной и выходной валы ГОП;
// — прижимной диск; /2 — прижимная сфера; /5 — корпус шайбы гндромотора; 16 — при
жимные пружины
Блоки цилиндров опираются своими торцами на накладные
диски, которые имеют ряд серповидных отверстий напротив каж-
дого из цилиндров. В их крышках выполнены распределители,
имеющие два серповидных отверстия с перемычками напротив
мертвых точек. Двумя внутренними каналами серповидные отвер-
стия одной гидромашины связаны с такими же отверстиями вто-
120
рой. При раздельном исполнении гидромашин эта связь осущест-
вляется металлическими трубопроводами или шлангами.
Для обеспечения постоянного контакта вращающихся деталей
с невращающимися башмаки поршней находятся в отверстиях
дисков, которые, в свою очередь, прижимаются сферическими
головками с помощью пружин, обеспечивающих также силовое
замыкание блока цилиндров с распределителем.
Рис. 4.9. Основные составные части ГрП:
I — палы ГОП; 2 — опорная крышка распределителя; 3 — коробка управления; 4 — блок
цилиндров с поршнями; 5 корпус ГОП; 6 — поршни с опорными башмаками; 7 — рас-
пределители
Пары поршень—цилиндр представляют собой секции перемен-
ного объема, а пары поршень—наклонная шайба — это преобра-
зованный кривошипно-шатунный механизм с изменяемой длиной
кривошипа. При вращении вала насоса объем секций изменяется
по синусоидальному закону. Рабочая жидкость, вытесненная на-
сосом в магистраль высокого давления, поступает под поршни
мотора; поршни скользят по наклонной шайбе, заставляя вра-
щаться блок цилиндров мотора вместе с его валом. Достигнув
перемычек распределителя, секции переходят к магистрали низ-
кого давления и вытесняют в нее рабочую жидкость, которая
затем поступает в секции насоса, переносится в мертвой точке
через перемычку распределителя и снова вытесняется под давле-
нием в гидромотор.
Кроме основных гидромашин в ГОП входит вспомогательное
оборудование (рис. 4.10). Для предохранения гидромашин от
перегрузок между связывающими их магистралями встраиваются
предохранительные клапаны.
Для поддержания в магистралях давления выше атмосферно-
го и компенсации утечек рабочей жидкости ГОП снабжается
121
системой подпитки (см. позиции 1, 4, 5, 7, 8, 9 и 13 на рис. 4.10),
гидравлически связанной с магистралью низкого давления при
всех условиях работы, что предохраняет эту систему от пере-
грузок.
Рис. 4.10. Гидравлическая схема ГОП:
/—фильтр; 2 — предохранительные клапаны; 3 — основной гидромотор с золотниками;
'/ — распределительный золотник; 5 — клапан управления; 6 — нерегулируемый гидромотор;
7 — холодильник; 8 — бак; 9 — вспомогательный насос; 10 — регулируемый гидронасос;
//—основной гидронасос; 12 — система управления; 13 — переливной клапан
Основной гидронасос снабжен системой управления с гидрав-
лическими усилителями и магистралью обратной связи, в кото-
рую рабочая жидкость поступает либо от системы подпитки, либо
из основных магистралей.
Масса вспомогательного оборудования ГОП пропорциональна
массе основных гидромашин. С целью унификации применяют
одни и те же вспомогательные элементы для гидромашин не-
скольких типоразмеров; часто вспомогательное оборудование вы-
полняют конструктивно вместе с гидромашинами.
В СССР налаживается производство аксиально-поршневых
гидромашин различной мощности с наклонной шайбой и гидро-
статической разгрузкой опорных башмаков поршней (по лицен-
зии западногерманской фирмы «Зауер унд зоон машиненбау») и
ГОП в целом. По данным фирмы, эти гидромашины при макси-
мальном давлении рабочей жидкости 34 МПа имеют срок служ-
бы до 10 000 ч. Но в фирменном исполнении по объемно-массо-
вым параметрам они не подходят для трансмиссий ВГМ. Умень-
шить эти параметры можно путем форсирования по давлению и
частоте вращения, сократив при этом срок службы. В отечествен-
ных гидромашинах и ГОП предполагается использовать фирмен-
ные распределители, блоки цилиндров, поршневые группы и другие
122
Таблица 4.18
Основные параметры гидромашин фирмы «Зауер унд зоон машиненбау»
Номер гидромашины Рабочий объем q, см’ Максимальная час- тота вращения вала "max' Масса поршневых групп, кг Установочная мощность А’у , кВт Мощность ЛГМ на валу гидро- трансформатор < ГОП* "Рм 'т.х“45МПа’ кВт
регулируемой гидромашины нерегулируе* мой гнлрома- шнны "шах- 34 МПа '«аж- 39 МПа 'max" 45 МПа
20 33,3 63,3(3800) 8 6 73 85 93 66
21 51,6 58,3(3500) 12,5 9 103 117 132 93
22 * 69,8 53,3(3200) 17 12 128 146 165 115
23 89,0 48,3(2900) 22 15,4 147 177 190 133
24 118,7 45,0(2700) 29 20,7 181 208 234 164
25 165,8 40,0(2400) 40,5 29 228 261 294 206
26 2273 35,0(2100) 54 40 274 313 351 246
27 333,7 31,6(1900) 82 58,5 362 412 466 326
28 558,0 30,0(1800) 138 99 574 655 736 515
* КПД ГОП, составленной из двух гидромашин одного номера, равен 0,7.
г
Таблица 4.19
Параметры ГОП, установленных в МП некоторых зарубежных и отечественных ВГМ
ВГМ (страна) Тип транс- миссии Тип гидромашин Установочная мощность кВт Максимально? давление ^тах ♦ МПа Рабочий объем ^тах» см’/об Максимальная частота враще- ния вала Лшах • об/мин Масса ГОП тгоп» кг Удельная масса т ГОП**
ШУД
БТР LVTP-7 (США) ГМТ HS-400 Аксиально-пор- шневые с шатун- ной кинематикой 268 41 Нет снедений 1 3800 71 0,27
Танк М-1 (США) ГМТ х-ноо Радиально- поршневые 809 -957* 34 575 3000 -300* 0,37-0,31*
• ВГМ промежу- точной категории по массе (СССР) УГМТ Аксиально-пор- шневые с гидро- статической раз- грузкой 309 31 300 2100 235 0,76
Опытная БМП (СССР) ГМТ То же 139 89 2900 105 ' 0,76
Опытная БМП (СССР) мт » 63 41 j 32 3000 59
1 ИЧ
• Расчетные значения.
* Масса ГОП отнесена к Ny ГОП, а не к ZNy , поскольку мощность обеих гидромашин одинакова.
элементы, а корпус, управление и вспомогательное оборудование
должны разрабатываться для каждой конкретной трансмиссии.
В табл. 4.18 приведены основные параметры гидромашин
фирмы «Зауер унд зоон машиненбау», а в табл. 4.19— параметры
ГОП, установленных в МП некоторых зарубежных и отечествен-
ных ВГМ. Из табл. 4.19 видно, что металлоемкость ГОП меха-
низмов поворота зарубежных машин значительно ниже отечест-
венных.
Следует отметить, что для МП тяжелых гусеничных машин
перспективны ГОП, выполненные на базе радиально-поршневых
гидромашин, как в трансмиссии Х-1100-ЗВ (США).
Для определения общего КПД ГОП, составленной из двух
гидромашин №27 фирмы «Зауер унд зоон машиненбау», были
проведены стендовые испытания на трансмиссионном масле
ТСЗП-8 при частоте вращения валов 26,6 с_| (1600 об/мин).
Рис. 4.11. Влияние нагрузочно-
го момента М на общий КПД
гидрообъемной пере-
дачи, составленной из двух
гидромашин № 27 (ФРГ):
а — при разных углах наклона
шайбы гидронасоса {1, 2, 3,
I угол наклона ранен 18, 12, 9 и
6° соответственно); б — при разной
температуре масла (5, 6, 7 — при
НО, 130 и 50 с С соответственно)
Из рис. 4.11 видно,
что при максимальном
угле наклона шайбы на-
соса (18°) и температуре
рабочей жидкости 50 —
110 °C общий КПД ГОП
в диапазоне нагрузочного
момента 785—1962 Н-м,
что соответствует давле-
нию 16—39 МПа, изме-
няется в пределах 0,80—0,75. На рис. 4.12 приведены результаты
стендовых испытаний ГОП, составленной из двух регулируемых
аксиально-поршневых гидромашин английской фирмы «Лукас ин-
дастриэл эквипмент» марки 1Р3000, имеющих следующие парамет-
ры- Апах~=34 МПа, 7„1ах =225 см3, птл* = 33,3 с-1 (2000 об/мин), /Уу=
=260 кВт. Мощность и частота вращения на входе в гидронасос
при испытаниях составляли соответственно 74 кВт и 16,6 с-1
(1000 об/мин).
При расчете ГОП с гидромашинами производства ФРГ можно
пользоваться таблицами фирмы, в которых имеются дискретные
значения объемного, механического и полного КПД насосов и
125
моторов в зависимости от давления, частоты вращения вала и
угла наклона шайбы. Кроме того, необходимы зависимости КПД
ГОП от входных (частота вращения вала и угол наклона шайбы
насоса) и выходных (угол наклона шайбы мотора и момент на
его валу) параметров, которые определяются водителем и дорож-
ными условиями. Эти зависимости от относительных величин
(в долях от предельных) практически одни и те же для ГОП, со-
ставленных из двух одинаковых гидромашин любого типораз-
мера. На этом основании график (рис. 4.13), рассчитанный для
ГОП, состоящей из двух гидромашин № 27 (ФРГ), при частоте
вращения 1900 об/мин, можно использовать для предварительных
расчетов ГОП, составленных из гидромашин любых других оди-
наковых номеров того же ряда.
Рис. 4.12. Зависимость КПД ГОП,
составленной из двух гидромашнн
фирмы «Лукас индастриал Эквип-
мент» марки 1Р3000, от момента на
выходе (а) и передаточного отноше-
ния (б)
Рис. 4.13. Расчетная зависи-
мость КПД ГОП из двух гид-
ромашин № 27 фирмы «Зауэр
унд зоон машиненбау» от от-
носительного момента на вы-
ходе при различных углах
наклона шайбы
При расчете ГОП конкретной ВГМ сначала определяют теку-
щий нагрузочный момент на валу гидромотора в зависимости от
радиуса поворота, параметров грунта, геометрических размеров
машины и т. д. На следующем этапе расчета по заданному ра-
диусу поворота, который соответствует определенному углу на-
клона шайбы гидронасоса, используя зависимости рис. 4.13, опре-
деляют значения объемного и общего КПД ГОП и текущее зна-
126
Таблица 4.20
Время работы ГОП в МП на различных режимах, %
Относительный расход рабочей жидкости Относительное давление рабочей жидкости £, s
0,1 0,2 0,3 0.4 0.5 0.6 0,7 0.8 0.9 1.0
0,1 10 10 — — — — —4 — — — 20
0.2 2,8 5,8 5.7 5.7 3,0 — — — — — 23
0,3 2,8 3,8 3.8 3.8 3.8 — - — . — — 18
0.4 - 1,3 2,4 24 2.4 2.4 2,1 — — — 13
0,5 — 0,6 1.5 1,5 1.5 1.5 1.5 0,9 — — 9
0,6 — 0,2 1,0 1.1 1 1 1.1 1.1 1.1 0.3 — 7
0.7 — — 0.5 0,6 0.6 0.6 0.6 0,6 0,5 — 4
0,8 - — 0.3 0.4 0.4 0,4 0,5 0.5 0.5 - 3
0,9 — — 0,2 0.2 0,2 0.2 0,3 0,3 0.3 0,3 2
1,0 — — 0.1 0,1 0,1 0,1 0.1 0,1 0.2 0,2 1
Примечания. 1. Относительные величины даны в долях от максимальных значений.
, , 2._Данные приведены для 100 циклов работы: 20 из них — при со=0,7; 20 — при ю=0,2; 40—при ш«0,9 и 20
при ю=1,0, где (о = (о/(отах—относительная угловая скорость вращения вала гидронасоса.
чение расхода рабочей жидкости. Используя эти величины, можно
определить требуемую мощность на входе в ГОП.
На предельных режимах ГОП в МП ВГМ работают незначи-
тельную часть времени; средняя частота вращения вала двига-
теля и средний его момент ниже максимального, расчетные пре-
дельные характеристики грунта также встречаются редко.
Время работы ГОП на различных режимах (табл. 4.20) за-
дается в тактико-техническом задании (ТТЗ) на их разработку.
Кроме того, в ТТЗ на ГОП механизма поворота включаются
следующие показатели: мощность и момент на валах гидрома-
шин; масса ГОП; габаритные размеры; максимальная частота
вращения входного вала гидропередачи и допустимое кратковре-
менное ее повышение (обычно не более 5%); угол поворота
валика ручного управления гидронасосом (±30°) и момент на
нем (0,049 Н м); максимальное время перевода валика на макси-
мальный угол (0,3 с) и минимальное время достижения мотором
максимальной частоты (0,7с); марка рабочей жидкости; темпера-
тура окружающей среды (от 40 до 100°C) и рабочей жидкости
(от 40 до 120 °C) с кратковременным (в течение 1 мин) повы-
шением (до 130°С); гарантийная наработка (500 ч) и общий
ресурс (около 1000 ч); КПД ГОП — максимальный (0,8) и на
основных режимах (0,7, со снижением при температуре более
100°C и давлении, близком к максимальному, до 0,6).
Глава 5 РАСЧЕТ ПРЯМОЛИНЕЙНОГО
ДВИЖЕНИЯ ВГМ
5.1. ОБЩИЕ СВЕДЕНИЯ
Тяговый расчет ВГМ является олним из важнейших этапов
проектирования трансмиссий и МТУ. Как известно, задачи тяго-
вого расчета зависят от того, для какой ВГМ он производится —
для существующей или вновь проектируемой.
Общая задача тягового расчета проектируемой ВГМ —при
заданной мощности двигателя определить диапазон скоростей,
число и разбивку передач в трансмиссии с учетом ее типа, а также
тип и параметры МП, чтобы обеспечить наилучшие динамиче-
ские свойства ВГМ.
Общая задача поверочного тягового расчета ВГМ известной
конструкции — определение и оценка ее динамических свойств.
Обе задачи решаются путем построения тяговых и тормозных
характеристик прямолинейного движения при работе двигателя
по внешней характеристике или при любых заданных режимах
(универсальная тяговая характеристика); поворот характеризует-
ся кривизной траектории на разных грунтах с учетом допустимых
скоростей движения.
По результатам тягового расчета можно ориентировочно оце-
нить топливную экономичность ВГМ и задать законы автоматиче-
ского управления движением.
5.2. ОПРЕДЕЛЕНИЕ МОЩНОСТИ ДВИГАТЕЛЯ НА ВХОДЕ
В ТРАНСМИССИЮ
Мощность двигателя определяется по его внешней характерис-
тике, полученной на стенде при полной подаче топлива:
.V, = Мкрл/9550, (5.1)
где N, эффективная мощность двигателя в стендовых условиях, кВт; AfKp
крутящий момент двигателя на режиме внешней характеристики, Нм; л —ча
стота вращения коленчатою вала двигателя, об/мин.
Мощность двигателя в условиях объекта
N? = Л. - лго„ - N„ - ЛГ.ЫЯ - ЕЛ(„. (5.2)
9 Зак. 47 «о 129
где Not»- ^во. ^вып — потерн мощности в системах охлаждения, воздухоочист-
ки и выпуска, соответственно; 2Л/ВСП — затраты мощности на привод вспомо-
гательных и специальных агрегатов (стартер-генератора, компрессора и др.).
При использовании эжекционной системы охлаждения в фор-
мулу (5.2) вместо NO1UI и 7VBbin вводится член учитываю-
щий суммарные потери мощности в этой системе при максималь-
ной мощности двигателя. Для поршневых двигателей
А’.ж = (0,03...0,08)/V%ihx,
где — максимальная эффективная мощность двигателя в стендовых
условиях.
При использовании вентиляторной системы охлаждения за-
траты мощности на привод вентилятора /V, . при максимальной
мощности рекомендуется принимать равными
^-(0,06...0,12)Л<.ИК.
Для других частот вращения вала двигателя
Потери мощности на преодоление сопротивления выпуску во
всем диапазоне от п и до nN
N»m = (0.02... 0,03) >Чшах.
Затраты мощности на очистку воздуха в точке максимальной
мощности
(0,04 ...0,06) ^max.
Для других значений частот вращения вала двигателя
Затраты мощности на привод вспомогательных и специальных
агрегатов
S7VBCn = (0,03... 0,04) Л/,тах.
5.3. ОПРЕДЕЛЕНИЕ КПД ТРАНСМИССИИ
Передача мощности двигателя через трансмиссию сопровож-
дается потерей части энергии в отдельных ее составных частях.
Для современных трансмиссий ВГМ со сложной кинематиче-
ской схемой потери мощности можно представить в следующем
виде:
ДЛтр = ДА/вр 4" ДЛ/кп + ДЛ^р 4- ДЛ/у 4- »
130
где ДЛ/ТР —потери мощности в трансмиссии на <-й передаче; Л Afyp—потери
мощности во входном редукторе; Д jVgn — потери мощности в КП на i й пере-
даче (для трансмиссий с БКП ДЛ^п = ДЛкплев + ДЛГкпп?1В> ДА^р — потерн
мощности в БР на i-й передаче, равные Д#БР == ДЛ,БРл..в + Д^БРправ : ДЛ^у —
суммарные затраты мощности в откачивающих и нагнетательных насосах
системы управления; 2ДЛ/пр — суммарные затраты мощности в некоторых при-
водах вспомогательного оборудования.
Для расчета уравнение баланса потерь мощности в трансмис-
сии удобно представить в виде
ДЛ/тр — A/VH 4- A.VC 4- A/Vy,
где Л Nc — суммарные скоростные потери мощности в ненагруженной транс
миссии, т. е. потеои в выключенных (разомкнутых) фрикционных элементах,
планетарных и зубчатых передачах, подшипниках, уплотнениях, зависящие от
частоты вращения деталей и узлов; Д N„ — суммарные нагрузочные потери
мощности в трансмиссии, т. е. потерн мощности в зубчатых зацеплениях, ГТ
и других элементах, не зависящие от скорости движения.
Коэффициент полезного действия, учитывающий все потери
в трансмиссии на данной передаче, определяется по формуле
т? - У»ых
— ДУ'Г
—
Д^р
(5.3)
где Л^вых — мощность на выходе из трансмиссии; —мощность на входе в
трансмиссию (объектовая мощность двигателя с учетом потерь в его системах).
Определение холостых потерь мощности в трансмиссии. Ско-
ростные потери мощности (АЛ^С) складываются из потерь в ра-
зомкнутых фрикционных элементах (ЛЛ/ф) и потерь в механиче-
ской части трансмиссии (AVM), т. е. в планетарных рядах и зуб-
чатых передачах, подшипниках и уплотнениях:
ДА; = Щ 4- A'Vm •
Скоростные потери мощности в разомкнутых фрикционных
элементах Д/Уф рассчитываются как сумма потерь мощности в
отдельных пакетах дисков на данной передаче ЛЛ/Ф, которые
определяются из выражения
где Л Af, . — потери мощности на один эталонный металлокерамический диск
трения (МКД) с наружным диаметром 497 мм (две поверхности трения); D —
наружный диаметр МКД л-го фрикционного элемента, м; ар — коэффициент,
учитывающий расход масла на смазывание МКД л-го фрикционного элемента
(табл. 5.1); р„ — коэффициент, учитывающий вязкость масла (табл. 5.2);
*п. г — число поверхностей трения в n-м фрикционном элементе.
131
Таблица 5.1
Коэффициенты, учитывающие расход масла на смазывание трансмиссии
и ее составных частей
Объект смазывания Расход масла, л мнн Обозначение коэффициента Эксперимен- тальные значения
0,00—1,40 0.6
Поверхности трення 1,40-1,80 0,7
дисков (две поверхнос- 1,80—2,20 0.8
ти) 2,20—2,60 «р 0,9
2,60—3,00 1.0
3.00-3,40 1.1
3,40-3,80 1,2
3,80-5,00 U
20-30 0,9
30-45 1.0
Коробка передач цент- 45-60 1.1
ралыюй трансмиссии 60-80 1.2
Свыше 80 1.3
15-25 0.9
25—35 1,0
БКП 35-45 1.1
о ) ИМЭзН»’ ' • 45—60 1.2
н .., j<r> । V Свыше 60 1,3
Т а б л и ц а 5.2
Коэффициенты, учитывающие вязкость масла
Низкость масла при 100 "С , ММ-/С и разомкнутых фрик- ционных элементах в механической части трансмиссии
5,00—8,00 0,80 0,75
8,00—10,00 1,00 0.80
10,00—12,00 0,85
12,00—16,00 1,15 0,90
16,00—18,00 1,25 1,00
18,00—22,00 1,15
132
За эталонный принят большой МКД трансмиссий танков Т-64А,
Т-72, Т-80, для которого получена экспериментальная характе-
ристика, приведенная на рис. 5.1 (пунктирная кривая). Эти дан-
ные справедливы в диапазоне температур от 50 до 150 °C при
осевых зазорах между дисками от 0,5 до 1.0 мм.
Рис. 5.1. Зависимость ско-
ростных потерь мощности,
приходящихся на один
МКД (----------), и потерь
мощности в редукторах
трансмиссии от частоты
вращения входного вала КП
1 — четырехступенчатый редук
тор; 2 трехступенчатый ре-
дуктор с коническими тестер
нами; 3 днухстуиенчатый ре-
дуктор
При расчете холостых потерь учитывается частота вращения
соответствующего МКД. При отсутствии данных о расходе масла
на смазывание одной пары трения рекомендуется брать среднее
арифметическое от деления суммарного расхода масла для сма-
зывания КП на число пар трения, работающих без нагрузки на
данной передаче.
Скоростные потери мощности в механической части трансмис-
сии WM (без учета редукторов) определяются по формуле
Д.Ум = ДЛ^р,
где АЛ’’ —скоростные потерн мощности в механической части трансмиссии
для эталонных значений вязкости и расхода масла (рис. 5.2); /в —коэффи-
циент, учитывающий вязкость масла (см. табл. 5.2); ф(, — коэффициент факти-
ческого расхода масла на смазывание (см. табл. 5.1).
В БР скоростными потерями мощности можно пренебречь в
связи с малой частотой вращения их деталей. Зависимость ско-
ростных потерь мощности в редукторах, выполненных в отдель-
ных картерах (например, ВР танков Т-62, Т-72), от частоты вра-
щения входного вала КП показана на рис. 5.1.
Затраты мощности на привод масляных насосов системы
управления движением определяются по формуле
A;Vy 167 QHp
max /’in.
где Q(1 — подача насоса, дм3/мнн; р—давление масла в магистрали, МПа;
Чн — КПД насоса, равный 0,5—0,6.
133
Полные скоростные потери мощности в трансмиссии и затраты
мощности на привод масляных насосов составляют холостые по-
тери мощности в трансмиссии
Мс.пТр = + ATVy .
Определение нагрузочных потерь мощности в трансмиссии. На-
грузочные потери мощности в трансмиссии, т. е. потери в зубча-
тых зацеплениях, ГТ, электромашинах, гидромашинах и других
Рис. 5.2. Зависимость потерь мощности в механической части трансмиссии от
частоты вращения входного вала КП:
/ — центральная планетарная трансмиссия (танк Т-10) и ГМТ; 2 — центральная простая
трансмиссия (танк Т 62, БМП-1); 3 — БКП;----------для двух высших передач:
----------для остальных передач
элементах, не зависящие от скорости, учитываются с помощью
КПД, определяемого по формуле
Чтр = -'Ъ,.
’Г1 • i ' Ы I/ И 1 [О/ГЭ <♦*
где т]|( т]2.т)„ — КПД составных частей трансмиссии.
Значения этих КПД для планетарных передач определяются
по методу М. А. Крейнеса, для простых передач — последова-
тельным перемножением значений КПД зубчатых пар, участвую-
щих в передаче крутящего момента.
Для трансмиссий ВГМ совпадение расчетных и эксперимен-
тальных данных (табл. 5.3) достигается при следующих значе-
ниях КПД зубчатых пар, работающих на двух подшипниках
качения: для внешнего зацепления т]в|1 =0,985; для внутреннего
зацепления т]в =0,990; для конических шестерен т]„0„ =0,980.
134
Таблица 5.3
Некоторые расчетные и экспериментальные данные по потерям мощности и КПД трансмиссии танка Т-80
Передача п, об/мин Расчетные значения Экспериментальные данные
1Л1п кп • кВт П . ТР ‘ кВт 4р ДЛ’-ур t кВт т-ТР А^х п КП ’ кВт АЛГхп ПТР ’ кВт Зтр ДЛ’ТР кВт 1 7JTP
1550 3,4 5.9 29,4 0,935 2.2 3.3 25,0 0,945
2300 4.85 9.7 37,5 0.930 3.7 5.9 31.6 0,942
II 2594 5.89 11.8 0,053 40.5 0,928 4,3 8,1 0,048 34,6 0.938
2843 7.0 14,0 41,7 0,923 5.0 9.8- 35,3 0,935
1550 5.37 10.7 24,1 0,947 5,9 9,7 26,0 0,943
2300 10,5 21.0 0,030 36,6 0,932 8.8 16,2 0,037 35,6 0,934
III 2596 13,2 26,5 42,3 0,924 10.7 21,0 40,9 0,927
2800 15,8 30,5 45,7 0,916 12,1 25,8 44,8 0.917
1550 5.4 10,9 19.9 0,956 6,2 11,8 26,0 0,943
2300 10.7 21,3 0.020 31,7 0,941 11,0 22.1 38,7 0,928
IV 2633 14,0 28,1 38,7 0,931 14,0 29.8 0,032 46,7 0,916
2864 16.2 32.4 0,921 16,9 36,8 52,8 0,902
Примечание. Ртр — коэффициент нагрузочных потерь в трансмиссии.
Анализ потерь мощности в гусеничном движителе. При тяго-
вом расчете прямолинейного движения и поворота ВГМ потери
мощности в ходовой части делятся на три основные составляю-
щие, связанные с перематыванием гусениц, трением в зацеплении
гусеницы с ведущим колесом и перекатыванием катков по гусе-
нице.
Потери мощности иа перематывание гусениц не зависят от
передаваемой мощности и могут рассматриваться как холостые
потери (AVi.nr). прямо пропорциональные скорости движения
ВГМ (до и=50 км/ч), что значительно упрощает расчеты.
Потери мощности в зацеплении гусеницы с ведущим колесом,
как и потери в зубчатых и цепных передачах, зависят от пере-
даваемой мощности и выражаются коэффициентом полезного
действия т|г =0,9 ... 0,92.
Составляющая потерь мощности на перекатывание катков по
гусенице пропорциональна подрессоренной массе, а также ско-
рости движения ВГМ во всем диапазоне и обычно представляется
в виде коэффициента сопротивления качению катка по гусенице
(/к) с учетом приведения подрессоренной массы к полной.
Значение fK, как показывают опытные данные, зависит от диа-
метра катка и типа беговой дорожки гусениц (табл. 5.4). Для
диаметров, не указанных в табл. 5.4, определяется интерполя-
цией (или экстраполяцией) приведенных значений.
Коэффициент сопротивления качению опорных катков /к
Тил беговой дорожки Диаметр катка, мм
810 750 670 63(1 600
Металлическая Обрезиненная Коэффициент входи ния прямолинейному дви» где /гр — коэффициент сопротш Экспериментальные зи 0.0135 IT в со< ;ению В] / А 1 зления rpj >ачения 0,014 0,019 ?тав коз ГМ: /гр » гита. коэфф И 0,015 0.023 >ффииие1 циентов 0 0 ита / ,016 ,024 conj н /гр. 0,017 0.028 ютивле- , полу-
ченные в результате многочисленных ходовых испытаний ВГМ,
приведены в табл. 5.5. Величина f используется при определении
суммарного коэффициента сопротивления прямолинейному дви-
жению (fc) на подъеме с углом а:
А e /cos а + sin а .
Приведенные формулы показывают, что силы сопротивления
прямолинейному движению ВГМ, возникающие в рёзулыате пе-
136
ремещения по грунту и качения катков по гусенице, зависят от
нормальной составляющей веса ВГМ, действующей на опорную
поверхность гусениц.
Таблица 5.5
Коэффициенты сопротивления прямолинейному движению f и грунта
/гр (при /к-0,03)
Тип грунта / /Гр
Дорога с твердым покрытием (ас- фальт, бетон) 0,03—0,05 0-0,02
Сухая грунтовая, булыжная, снеж- ная укатанная дорога 0,06—0,07 0,03—0,04
Сухой луг, влажный песок, сухое бо- лото, целина 0,08-1,0 0,05—0,07
Сырой луг, свежая пахота 0,1—0,16 0,07—0,12
Сухой песок, сырое болото, снежная целина 0,15—0,25 0,12—0,22
Ля НОТ. - . 1Г .(н
5.4. ТЯГОВЫЙ РАСЧЕТ ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ
ТАНКА С МТ
Тяговой характеристикой прямолинейного движения ВГМ на-
зывается зависимость удельной силы тяги на грунте от скорости
равномерного движения ВГМ на различных передачах при рабо-
те двигателя по внешней характеристике.
Скорость ВГМ (в км/ч) на каждой передаче для конкретных
значений частоты вращения вала двигателя п (в об/мин) вычис-
ляется по формуле
v «= 3,6 z/rn/(iTP • 60).
где г —число зубьев ведущего колеса; te — шаг гусеницы, м; |'тр — переда-
точное число трансмиссии от вала двигателя до ведущего колеса.
Передаточное число трансмиссии на каждой передаче пред-
ставляет собой произведение передаточных чисел составных час-
тей, участвующих в преобразовании момента (для однопоточных
передач):
^тр ~ *рр^кп ••• ^БР ’
где /вр , — передаточные числа ВР, КП и т. д.
При определении скорости ВГМ рекомендуется брать пять
или шесть расчетных точек через каждые 200 об/мин в пределах
скоростного диапазона двигателя.
10 Зек. 47 «с»
137
Удельная сила тяги в плоскости грунта определяется (при
выраженной в кВт, G в Н и v в км/ч) по формуле
3600 И Л*ж.п1Чг
Л ----------------%-----------— • (5Л)
Расчет тяговой характеристики прямолинейного движения
ВГМ рекомендуется проводить не менее чем для пяти значений
скорости машины.
Результаты расчета тяговой характеристики прямолинейного
движения ВГМ представляются в виде графиков в общих коорди-
натах vOf„. В дополнение к графику тяговой характеристики
прямолинейного движения ВГМ в координатах fOft для задан
ных углов подъема строят номограмму суммарного коэффициента
сопротивления прямолинейному движению fc =/cos аsin а.
Масштаб ординат обоих графиков выбирают одинаковым (/ж =-'/«),
что соответствует условию равномерного прямолинейного дви
жения.
Определение скоростного и силового диапазонов МТ и раз-
бивка передач. Общее передаточное число механической транс-
миссии зависит от силового и скоростного диапазонов, которые
выбираются исходя из необходимости обеспечения .движения тан
ка или любой другой ВГМ в требуемом диапазоне сопротивления
движению и скоростей.
Скоростным (кинематическим) диапазоном
трансмиссии называется отношение максимальной скорости на
высшей передаче к максимальной скорости на I передаче
(рис. 5.3, а):
.
Для МТ, в которой вся мощность двигателя передается после-
довательно одним потоком через планетарную коробку передач,
= г,тах/‘п1 = ^TP,^TPM = ^ПКП( ^ПКП* * ^ПКП ’
где /гр , /гр*, /пкп. *пкп — передаточные числа трансмиссии и ПКП на I
и высшей передачах соответственно; (1пкп — диапазон ПКП.
При заданной максимальной объектовой мощности двигателя
значения vt и определяются из известных выражений:
v, = 3600 АХ /(Д О), (5.5)
^„ = 3600^/(7^0). (5.6)
где /д . /д — удельная сила тяги на 1 и высшей передачах при частоте вра-
щения, соответствующей максимальной мощности двигателя; , 1тм
КПД танка при скоростях vf и vmai[.
Силовой диапазон трансмиссии характеризуется отно
шепнем удельной силы тяги на I передаче (максимальная мощ-
ность двигателя) к минимальной удельной силе тяги.
138
Используя выражения (5.5) и (5.6), можно выразить скорост-
ной диапазон Dn через силовой Dc:
D* “ Д //, , •‘Чг Ч = D<b Ч, •
f 'mln m i Ml
Рис. 5.3. Тяговые характеристики прямолинейного движения ВГМ с ЛИ (а)
и ГМТ (б):
I, II, III, IV, V — номера передач (индекс «сб» — при сблокированном ГТ)
При учете характеристик двигателя (коэффициентов приспо-
собляемости и частот вращения) можно определить полные ско-
ростной и силовой диапазоны трансмиссии:
Dnn -= - D„K„;
D = f, If, /r. ^DCKM\ /Tjr ,
сп Amix J *mln д| Amln M ’’'mln T1 mln I
где /дяи — максимальная удельная сила тяги при максимальном моменте
на I передаче; ЧРп1|п — КПД ганка при скорости «И|П,
Разность между величинами и цг невелика, поэтому
их отношение можно принять равным единице, а следовательно,
10* 139
выражение для определения D можно представить в следую-
сп
щем виде:
\ - DCKM = . (5.7)
Используя формулу (5.5), можно удельную силу тяги на выс-
шей передаче выразить через удельную мощность:
/ = 0,36 Tj Луд/^шах .
дш1п м
Тогда получим
D = /. «„.,/(0.36 г Л7„). (5.8)
п max м J
Величины Д и /, задаются на основании опыта эксп-
луатации и расчетных данных.
Для достижения максимальной скорости танка на дороге с
твердым покрытием рекомендуется принимать Д =0,05. Для
преодоления подъема (угол 35°) при движении на сухом дернис-
том грунте с коэффициентом сопротивления движению /=0,07
необходимо обеспечить максимальную удельную силу тяги в
пределах от 0,61 до 0,63.
У существующих серийных ВГМ с МТ [Я(п х =0,58... 0,62
(табл. 5.6).
Согласно тактико-техническим требованиям к новым ВГМ,
одиночная машина должна преодолевать подъем не более 35°; это
требование обеспечивается при максимальной удельной силе тяги,
равной 0,65. Для ВГМ с МТ это значение соответствует макси-
мальному моменту двигателя на I передаче; для ВГМ с ГТД —
допустимому расходу топлива; для ВГМ с ГМТ — левой границе
рабочей зоны системы двигатель—ГТ.
При /дтах =0,65 имеется некоторый запас по тяге, который
несколько уменьшает полный силовой диапазон трансмиссии, но
целесообразен в случае повышения массы ВГМ (при ее модерни-
зации) без изменения мощности двигателя.
Опыт эксплуатации ВГМ показывает, что трансмиссия должна
обеспечивать длительное устойчивое движение на малой скорости
(порядка 3—5 км/ч) при работе двигателя на частичных нагрузках
(движение по свежей пахоте с //> 0,15); в боевой обстановке
возможно движение с минимальной скоростью и при полной за-
грузке двигателя. Анализ экспериментальных данных по отечест-
венным и зарубежным ВГМ подтверждает, что для вновь проек-
тируемых ВГМ с учетом характеристик двигателя целесообразно
принять omtn в указанных пределах. Выбор значения v,nax свя-
зан с располагаемой удельной мощностью и необходимостью
обеспечения высоких значений средней скорости движения. Если
заданы масса ВГМ и объектовая мощность двигателя, то макси-
мальная скорость определяется по формуле (5.6). При заданном
значении итах (например, в соответствии с ТТТ) удельную мощ-
140
Таблица 6.6
Скоростной диапазон некоторых отечественных ВГМ
Сар анче ВГМ Опытные ВГМ с ГМ Г
Пар метр Г-64 А с МТ Т-72 с МТ т-чо с МТ БМП-1 с МТ ЗРК с ГМТ Макет с ГМТ-В9Э21 Основной танк БМП
Диапазон ПКП 8,17 8.17 4,38 6,14/6,8 6,21 621 3,73/5,3 5
Коэффициент рабочих частот вра- щения двигателя Кп 1,37 1,55 2,2 1,6 1,66 1,61 1,57 1,66
Коэффициент приспособляемости двигателя К и 1,07 1,15 2 1,3 1,19 1,335 1,2 1.21
Максимальная скорость движения Umax, км/ч 60 60 68 65 G5 70 70 70
Максимальная скорость на I пе- редаче 1»] , км/ч 7,3 7,3 15.5 10,6/7,4 10,4 п.з 18,1/12,7 14
Минимальная скорость vmint км/ч 5,3 4.7 7 6,63/4,62 3,8 4,7 9,6/6,43 6,73
Полный скоростной диапазон Dc П ' 113 12,7 9.65 9,8/14.1 17 14,9 7,3/10,9 11,1
Удельная сила тяги А max "PH Vmin 0,58 0,58 0,62 0.5/0.7 0,825 0,687 0,452/0,644 0,623
Примечания. 1. В знаменателе указаны значения для ПМП с использованием редукции.
2. Для ВГМ с ГМТ значения vmin и /, ограничены т] =0,85.
max *1»
Hocib в стендовых условиях можно определить по выражению,
предложенному С. В. Дорогиным:
= 10,0 - 0,03 4- 0,003 .
Это выражение справедливо при изменении удельной мощ-
ности и максимальной скорости в диапазонах 5<.7Vyjl<29 кВт/т
и 15<г»тах<75 км/ч.
Установлено, что увеличение максимальной скорости движе-
ния более 75 км/ч не приводит к существенному повышению
средней скорости даже на дорогах с наименьшим сопротивле-
нием движению (с бетонным покрытием), поэтому для новых
машин ош„ задается в пределах от 70 до 80 км/ч.
Максимальное сопротивление движению, которое ВГМ преодо-
левает на I передаче, характеризуется коэффициентом сопротив-
ления /с =0,5... 0,65 и встречается весьма редко; чаще встречает-
ся сопротивление порядка /с =0,04... 0,3. Это учитывают при раз-
бивке передач в МТ и ГМТ отделением 1 передачи от II за счет
увеличения разрыва между ними.
На основании анализа опытных данных по эксплуатации
ВГМ (с МТ) величину =0,28... 0,3 рекомендуется выбирать
в точке тяговой характеристики, соответствующей максимально-
му моменту двигателя (ранее рекомендовалось ее выбирать в
точке максимальной мощности).
Коэффициент разрыва между I и II передачами, равный отно-
шению их передаточных чисел, можно выразить через скорости
и удельные силы тяги:
\ или *1 = "т; " тр • (5-9)
где — КПД ВГМ на скорости &ц.
При принятых значениях удельных сил тяги и КПД ВГМ
коэффициент разрыва X, =2,0.
Выделением I передачи получают рабочие скоростной и сило-
вой диапазоны трансмиссии, которые характеризуются следую-
щими соотношениями:
Используя соотношение (5.7), получаем
о-,~тт!я1г--гк- <5,0>
Р л|^ш1пКя А|
Z) = (5.11)
Р Щм 1т, *1 Чтм
Из формул (5.9—5.11) видно, что при заданных значениях
полных скоростного и силового диапазонов трансмиссии увеличе-
142
и не коэффициента разрыва между I и II передачами, а также
коэффициентов приемистости и частот вращения двигателя при-
водит к уменьшению рабочих скоростного и силового диапазонов
трансмиссии. Это, в свою очередь, приводит к уменьшению числа
передач в ПКП, необходимых для перекрытия рабочего диапа-
зона.
Рабочий силовой диапазон можно выразить через удельную
мощность ВГМ, используя выражение для /Яда|п и формулу (5.10):
• (512)
Как видно из формул (5.8) и (5.12), повышение удельной
мощности ВГМ при заданной максимальной скорости ведет к
уменьшению полного и рабочего силовых диапазонов.
Для обеспечения высокой средней скорости движения очень
важно не только уменьшать с ростом номера передач разрыв
между ними, но и иметь их перекрытие. Для уменьшения числа
передач в рабочем диапазоне разбивку стремятся проводить по
геометрической прогрессии с корректировкой на высших переда-
чах, чтобы иметь перекрытие кривых тяговой характеристики на
смежных передачах.
Для этого должно выполняться условие
*1 > *н >
где Хц, Хц| — коэффициенты разрыва между промежуточными передачами;
— коэффициент разрыва на последнем стыке передач.
Отношение коэффициента разрыва между смежными переда-
чами к коэффициенту частот вращения коленчатого вала двига-
теля называется коэффициентом перекрытия передач:
1я — ^п/Кп'
где индексом п (для величин и Ал) обозначен номер стыка передач.
Перекрытие передач по скорости на тяговой характеристике
можно выразить разностью между скоростью uv , соответст-
вующей максимальной мощности на предыдущей передаче, и
скоростью т>и , соответствующей максимальному моменту дви-
гателя на последующей передаче.
В соответствии с обозначениями на рис. 5.3, о перекрытие по
скорости на последнем стыке передач равно
= <513>
где 7* — коэффициент перекрытия передач на последнем стыке.
143
Аналогично можно определить перекрытие по скорости для
любого стыка. Например, для предпоследнего стыка передач
~г~ (!-(»-,). (5.14)
В общем виде формула перекрытия передач по скорости на
тяговой характеристике имеет вид
= vx (1 - 7„) = vx (1 - Л„/А7„). (5.15)
п п
Из приведенных формул видно, что для гарантированного
перекрытия передач по скорости необходимо выполнять условия
Хл<Ая или 7Я <1,0.
Для этого целесообразно процесс переключения передач в МТ
(например, с IV передачи на V) заканчивать на скорости х,/П( ,
большей скорости имт, соответствующей частоте вращения при
максимальном моменте (см. рис. 5.3, а).
В табл. 5.7 приведены значения коэффициентов лиу для ряда
отечественных и зарубежных ВГМ: практически у всех ВГМ —
= 1,8...2,0, что обусловливает значение у, >1,0, т. е. отрыв I пе-
редачи; в рабочем диапазоне практически у всех ВГМ имеется
перекрытие передач по скорости, т. е.- у<1,0. У танка Т-64А на
высших передачах наблюдается разрыв, что объясняется малым
значением коэффициента частот вращения двигателя. Самое
большое перекрытие по скорости имеют танки «Леопард-1» и
«Леопард-2», что обусловлено блокировкой ГТ в рабочем диапа-
зоне и наличием большого коэффициента частот вращения двига-
теля, причем чем меньше номер передачи, тем ниже перекрытие
по скорости.
Опытные данные по эксплуатации серийных ВГМ позволяют
рекомендовать для МТ перекрытие передач в рабочем диапазоне
3—4 км/ч. Перспективные трансмиссии с минимальным числом
передач для получения такого перекрытия должны работать с
двигателями, коэффициент частот вращения которых К„ —
= 1,8... 2,0.
Силовой диапазон трансмиссии всегда больше скоростного;
выбор числа передач в ПКП ведут по скоростному диапазону,
поскольку силовой в большинстве случаев перекрывается с раз-
рывами. Если при движении на II передаче сопротивление дви-
жению находится между точками А и Б (см. рис. 5.3,а), то это
сопротивление преодолевается при работе двигателя на предель-
ной регуляторной характеристике.
При отрыве I передачи минимальное число передач опреде-
ляется по формуле
^nin = lg^P/Ig<?n+2, (5.16)
где q„ — знаменатель геометрической прогрессии, равный коэффициенту разры-
ва между смежными передачами.
144
Таблица 5.7
Коэффициенты разрыва между передачами некоторых ВГМ
Марка ВГМ Кп Стык передач
1-П 11-111 111-IV IV-V V-VI VI-VII
Ь 'и *wi 7ш Sv 7iv xv XVI 7VI
Т-55 1,55 6,6 2,14 1,38 1.4 0,9 1.4 °-9 1,57 1.01 — — — —
Т-64А 1,37 8,17 1.86 1,36 1.26 0,92 1,25 0,91 1,37 1.0 1,39 1.01 1.47 1,07
Т-72 1,55 8,17 1,86 1.2 1,26 0,813 1,25 0,807 1,37 0,884 1,39 0,897 1,47 0,95
БМП! 1.6 8,8*; 6,13 1,85 1,16 1,48 0,925 1,5 0,937 1,49 0,93 — — — —
Опытный танк (двига- тель с улучшенной ха- рактеристикой) 1,75 5,С8 1,89 1,08 1.3 0,743 1.41 0.805 1,46 0,835 — — —
Опытный танк с ГМТ-69021 1,61 6.2 1.96 1.22 1.9 1,18 1,67 1,04 — — — — — —
«Леопард-1» (ФРГ) 2 4,64 1,785 0,892 1,557 0,776 1,67 0,835 — — — — — —
«Леопард-2» (ФРГ) 2 4,47 2,04 1,02 1,45 0,725 1,51 0,753 — — - — — —
* С учетом I замедленной передачи.
Для последнего стыка передач (см. рис. 5.3,а), например, с
учетом необходимого перекрытия знаменатель геометрической
прогрессии определяется из формулы (5.13):
• (МП
Из формул (5.13) и (5.14) видно: чем меньше заданное пере-
крытие по скорости и больше коэффициент рабочих частот вра-
щения двигателя, тем меньше требуемое число передач. Напри-
мер, в танке Т-55 для сокращения числа передач в рабочем диа-
пазоне трансмиссии с четырех до трех необходимо использовать
двигатель с коэффициентом Л'„ = 2 ... 2,2, чтобы обеспечить тре-
буемое перекрытие передач по скорости. При одновременном уве
личснии коэффициента приемистости двигателя (Диапазон от 1,6
до 1,75) достигается перекрытие передач и по силовому диапазо-
ну, что в свою очередь приводит к повышению средних скоростей
движения.
Выбор схемы планетарной коробки передач. 11К.Г1 в современ-
ных трансмиссиях применяются для реализации трех—восьми пе-
редаточных чисел, для чего используются схемы с двумя и тремя
степенями свободы. Выбор схемы ПКП производится путем ис-
пользования соответствующего метода синтеза, оценки получен-
ных схем и выбора направлений поиска.
Методы синтеза схем ПКП. Известные в настоящее время мно-
гочисленные методы синтеза схем ПКП можно разделить на
структурные и функциональные. По структурным методам сна-
чала формируется структура схемы, а затем проверяется возмож-
ность реализации ею заданных передаточных чисел; по функцио-
нальным — сначала проверяется возможность удовлетворения
функциональных требований, затем строится структура.
Первый структурный метод разработан Вильсоном, который
предложил принцип наращивания структуры ПКП
с двумя степенями свободы трехзвенными планетарными меха-
низмами (ТПМ). Полученные таким методом ПКП устанавлива-
лись в танках «Чифтен» (Великобритания), «Леопард-1», в БМП
«Мардер» (ФРГ), а также в танковых трансмиссиях серии XT
(США).
Развитию этого метода посвятили свои работы Бревер и ряд
советских ученых (В. Н. Кудрявцев, Н. И. Струков, Ю. Н. Кирдя-
шев и др.). Недостатком метода наращивания является непол-
ный охват всего множества возможных схем.
К структурным относятся метод синтеза, базирующийся на
теории силового потока, и эмпирический метод составле-
ния кинематических схем ПКП, нашедший распро-
странение в транспортном машиностроении США. Этот метод
базируется на использовании отработанных схемных блоков. Так,
фирмой «Аллисон» в начале 70-х гг. была разработана автома-
тическая ГМТ для большегрузных автомобилей, скреперов и дру-
140
гих машин, работающих в тяжелых условиях. Схема ПКП этой
ГМТ (рис. 5.4) основана на использовании блока из первых двух
трехзвенных планетарных механизмов, широко применявшихся
в автоматических трансмиссиях «Торкфлайт» легковых автомо-
билей. Схема позволяет реализовать пять передач переднего и
Рис. 5.4. Схема планетарной ко
робки передач ГМТ фирмы «Ал-
лисон» с тремя степенями сво-
боды:
> А, , >,, Й, — конструктивные пара
метры трехзвенных планетарных мс-
хяннчмов; Г,. Г,. Г». Г, тормола;
Фг, Ф, Фрикционы
kj=1,66-, к2-2,5] к-2,19; к^-4,18
три заднего ходов (табл. 5.8); остальные шесть вариантов вклю-
чения элементов управления приводят к торможению выходного
звена ПКП и один вариант — к торможению входного, но в рас-
сматриваемой ГМТ использовались пять передач переднего и одна
заднего ходов.
Таблица 5.8
Характеристика ПКП с тремя степенями свободы
Перед 14* Передний ход Задний ход
Включаемые элементы управления Передаточное число Включаемые элементы управиеннл Передаточное число
1 7,Ф, 5.18 ЛФу -9,42
II Т3Ф, 3,19 Т,Ф3 -4,47
III Т4Ф4 2,07 7*»Ф3 -1.68
IV 1,40 . — —-
V Фзф4 1,00 — —
В ПКП трансмиссии танка М-1 (см. рис. 2.25) к основному
блоку присоединен только один простой ТПМ (с тормозом), обес-
печивающий четыре передачи переднего и две заднего ходов. Все
ТПМ подобраны из числа используемых в других трансмиссиях,
разработанных этой же фирмой.
Фундаментальным вкладом в теорию синтеза явился разрабо-
танный в 40-х гг. сотрудниками кафедры гусеничных машин
МВТУ им. Н. Э. Баумана (М. А. Крейнесом, М. К. Кристи,
Н. С. Мюнстером, М. С. Розовским и др.) функциональный
графоаналитический метод выбора схем ПКП с двумя
и тремя степенями свободы (метод плана отношений угловых
скоростей или просто метод плана). Его преимущество со-
147
стоит в том, что он обеспечивает полноту множества схем ПКП и
позволяет проводить коррекцию их передаточных отношений в
нужном направлении (с целью улучшения структуры ТПМит. д.).
Последующие работы С. С. Бурова, И. М. Зельцермана,
Л. И. Иванова, В. И. Красненькова, М. Л. Креннеса, М. К- Крис
ти, А. Д. Крюкова, М. С. Розовского, К. А. Талу, А. П. Харченко,
В. П. Черенина н других ученых были посвящены совершенство-
ванию и распространению этого метода, однако авторы ограничи-
вались рассмотрением схем с минимальным числом элементов
управления (ЭУ) и ТПМ (с полным использованием ступеней).
Синтез метолом плана схем ПКП, пригодных для использова-
ния в конкретных ВГМ, впервые был осуществлен А. П. Крюко-
вым, А. Д. Вашецем и В. Ф. Драницей. Так, для ГМТ опытного
тяжелого танка была получена схема ПКП с двумя степенями
свободы, реализующая три передачи переднего хода, а для экспе-
риментального четырехгусеничного тяжелого танка—схема ПКП
с тремя степенями свободы, обеспечивающая три передачи перед-
него и одну заднего ходов. Схема ПКП с тремя степенями сво-
боды (с неполным использованием ступеней) на четыре пере-
дачи переднего и одну заднего хода была получена для
основного танка с ГТД. Для опытного танка с ГМТ-69021 была
получена схема ПКП с двумя степенями свободы, которая исполь-
зована и в серийной трансмиссии ВГМ промежуточной категории
по массе.
Метод плана нашел дальнейшее развитие и совершенствование
в работах А. Д. Вашеца, К. Н. Воронкова, А. П. Крюкова. Впер-
вые был разработан способ применения четырех- и пятизвенных
планетарных механизмов для создания компактных структур.
Для синтеза рациональных схем с неполным использованием сту-
пеней требуется исследование множества вариантов. Очень трудо-
емкими являются проверка возможности реализации заданных
передаточных чисел, расчет основных параметров каждой схемы
по передачам (уточненных значений передаточных чисел, КПД,
частоты вращения основных звеньев и сателлитов, моментов на
звеньях и элементах управления), проверка геометрической сов-
местности. С целью автоматизации процедуры синтеза и анализа
схем ПКП П. Н. Иванченко, Ю. А. Сушковым, А. Д. Вашецем
был разработан м а т р и ч н о-к одовый метод синтеза схем
ПКП на ЭВМ.
Благодаря формализации синтеза конструктор производит
только оценку схем и выбор рациональных вариантов для кон-
структорской проработки.
Критерии оценки схем ПКП. Оценивать схемы ПКП целесо-
образно с помощью функциональных и конструкторско-технологи-
ческих критериев. Функциональные критерии связаны с парамет-
рами ПКП, влияющими на подвижность ВГМ и показатели транс-
миссии в целом (степень отклонения от оптимальных передаточ-
ных чисел, КПД по передачам, возможность перехода с пере-
148
дачи на передачу с сохранением одного включенного элемента
управления—для ПКП с тремя степенями свободы). Конструк-
торско-технологические критерии связаны с конструктивными,
технологическими, экономическими показателями и эксплуата-
ционными параметрами.
К критериям оценки схем, приемлемых по конструктивным по-
казателям, относятся частота вращения сателлитов, разность
частот вращения звеньев, блокируемых фрикционной муфтой
перед ее включением, моменты на звеньях и ЭУ.
Дополнительными критериями являются (для ПКП с тремя
степенями свободы) равномерность нагружения каждого ЭУ по
передачам и нагружение двух тормозов, включающих передачу
(особенно низшую), моментами одного знака.
Целесообразно отметить, что любая рациональная схема пред-
ставляет собой компромиссное удовлетворение функциональных
и конструктивно-технологических требований. При окончательном
выборе схемы учитывается возможность преодоления ее недо-
статков.
Рекомендации по выбору направлений синтеза схем ПКП.
При реализации заданного числа передач (как переднего, так
и заднего хода) необходимо прежде всего выбрать число сте-
пеней свободы ПКП. Установлено, что реализацию трех передач
следует осуществлять с помощью схем с двумя степенями сво-
боды, четырех и пяти передач — с двумя и тремя степенями
свободы, а шести-восьми передач — только с тремя степенями
свободы.
В качестве примера проиллюстрируем выбор схемы ПКП для
опытного танка с ГМТ-69021, у которой (при наличии отдельного
реверса) должно быть четыре передачи переднего хода со следую-
щими значениями передаточных чисел: /(=5,5...6,5 (в среднем
6,0); =3,0... 3,5 (3,3); i(|| = 1,65... 1,99 (1,75); ilv = 1 (прямая
передача).
Синтез проводился по двум направлениям, характеризуемым
следующими данными:
Число Число Состав Число
степеней элементов элементов ТПМ
свободы управления управления
3 4 Два тормоза, две муфты 2
2 4 Три тормоы. одна муфта 3
Из-за малочисленности возможных вариантов синтез схем вы
полнился вручную с помощью метода плана; среди схем с двумя
степенями свободы отбирались только такие, в которых три трех-
звенных планетарных механизма имели одно общее водило.
149
В результате было получено четыре схемы с тремя степенями
свободы и 13 схем —с двумя степенями свободы. Оказалось, что
лучшими среди них являются схемы, представленные на рис. 5.5
(табл. 5.9).
Рис. 5.5. Рациональный схемы ПКП с тремя (а) н двумя (б) степенями свобо-
ды для опытного танка с ГМТ-69021 (обозначения аналогичны рис. 5.4)
Таблица 5.9
Характеристики схем ПКП, представленных на рис. 5.5
Передачи Схема с тремя степенями свободы (рис. 5.5. о) Схема с двумя степенями снободы (рис. 5.5.6)
Включаемые ЭУ Передаточное число Включаемые ЭУ Передаточное число
1 7,7, 6,21 Г, 6.21
II Г,Ф3 3,27 Л 3.16
III Г.Ф4 1.90 т3 1,68
IV Ф3Ф, 1.00 1,00
Для изготовления образца ПКП была отобрана схема с двумя
степенями свободы благодаря следующим положительным ее осо-
бенностям:
каждый ЭУ работает только на одной передаче;
общее водило с надежными опорами обеспечивает минималь-
ный осевой габаритный размер и позволяет центральные колеса
ТПМ выполнить плавающими;
150
эпициклы первого и второго трехзвенных планетарных меха-
низмов принадлежат одному и тому же звену;
частота вращения звеньев и сателлитов невелика;
разница частот вращения блокируемых фрикционной муфтой
звеньев перед ее включением незначительна.
Недостатком этой схемы является необходимость усиления
опор сателлитов первого ТПМ (двух сцепляющихся друг с другом
зубчатых колес), обусловленная возможным изменением направ-
ления вращения входного вала ПКП (при установке реверса
перед ПКП).
Большое значение конструктивного параметра (Л=5,21)
третьего трехзвенного планетарного механизма удалось реализо-
вать нарезанием солнечной шестерни с минимальным числом
зубьев (14) непосредственно на входном валу ПКП. Это стало
возможным благодаря компоновке ГМТ, не требующей прохожде-
ния грузового вала трансмиссии внутри ПКП (см. рис. 2.7).
Испытания подтвердили правильность выбора схемы ПКП.
При реализации четырех передач не всегда предпочтение от-
дается схемам с двумя степенями свободы. Например, ПКП с
тремя передачами переднего и одной заднего хода одновальной
ГМТ опытного основного танка (оси ПКП и грузового вала сов-
мещены) была выполнена по схеме с тремя степенями свободы
(как в экспериментальном четырехгусеничном тяжелом танке).
Конструктивный параметр k ТПМ не превышал 2,72, что по-
зволило создать конструкцию ГМТ допустимых радиальных габа-
ритных размеров с грузовым валом, проходящим внутри ПКП.
Полученные для тех же передаточных чисел схемы ПКП с двумя
степенями свободы имели трехзвенные планетарные механизмы
с конструктивным параметром 6>3,6, что не позволило скомпо-
новать одновальную ГМТ допустимых габаритных размеров.
Исследования показали, что при реализации заданного числа
передач поиск схем ПКП с тремя степенями сво-
боды при минимальном составе ЭУ и ТПМ (что, на
первый взгляд, способствует получению небольших габаритных
размеров) практически не рационален.
Любая ПКП с тремя степенями свободы характеризуется
коэффициентом использования ступеней, т. е. отношением числа
применяемых для образования передач вариантов включения ЭУ
к числу всех возможных вариантов (ступеней).
Коэффициент использования ступеней в конструкциях ПКП
с тремя степенями свободы большинства современных отечест-
венных и зарубежных танков колеблется в пределах от 0,50 до
0,67 (табл. 5.10). При минимальном числе ЭУ и ТПМ этот коэф-
фициент близок к единице.
При полном использовании ступеней мала вероятность полу-
чения передаточных чисел ПКП в заданных пределах. В редких
случаях, когда это удается, схемы, как правило, имеют следующие
недостатки;
151
неприемлемые значения конструктивного параметра k, обус-
ловливающие высокую частоту вращения сателлитов и сложности
с размещением их подшипников (при малых k) или значительные
радиальные размеры (при больших k);
сложную конфигурацию звеньев ПКП;
многослойность валов и барабанов;
нерациональное расположение блокирующих муфт (по под-
воду управляющего давления) и размещение их внутри бараба-
нов, что вызывает повышенные холостые потери;
перегрузку звеньев и ЭУ;
низкий КПД.
Таблица 5.10
Характеристика ПКП современных танков
Танк Число возможных вариантов включения ЭУ (ступеней) Число используемых ступеней Коэффициент ИСПОЛЬЗОВАНИИ ступеней
Экспериментальный четырех- гусеничный тяжелый (СССР) 6 4 0,67
Основной с ГТД (tjCCP) 10 5 0.50
Экспериментальный, имею- 10 6 0.G0
щий двигатель с улучшенной характеристикой (СССР)
М-1 (США) 10 6 0.60
Т-64А, Т-72 (СССР) 15 8 0,53
«Чифтен» (Великобритания) 15 9 0.60
Несмотря на минимальное число ЭУ и ТПМ, конструкция
ПКП в этом случае получается громоздкой.
При неполном использовании ступеней значительно повышает-
ся вероятность реализации заданных передаточных чисел, так
как в этом случае имеется большое количество возможных ва-
риантов схем. Такие схемы позволяют также осуществить тормо-
жение выходного вала, что используется в трансмиссиях с БКП.
Несмотря на большее число ЭУ и ТПМ в конструкции этой ПКП,
она имеет меньшие габаритные размеры благодаря возможности
создания одноводильных блоков с двумя степенями свободы.
Недостатком схем ПКП с неполным использованием ступеней яв-
ляется большее число вращающихся вхолостую ЭУ.
Имеющиеся данные позволяют сформулировать рекомендации
по выбору направлений синтеза рациональных схем ПКП с тре-
мя степенями свободы (табл. 5.11).
Тормозная характеристика ВГМ. Мотор>но-трансмиссионные
установки обеспечивают удержание ВГМ на месте при стоянке
на уклонах до 35°, а также следующие режимы торможения при
прямолинейном движении: притормаживание, рабочее торможе-
152
Таблица 5.II
Рекомендации по выбору направлений синтеза рациональных схем ПКП
с тремя степенями свободы
Общее число перед.) >1 Число ЭУ Коэффипиеиг использования ступеней Число ТПМ
минималь- ное рекомен- дуемое при минималь- ном числе ЭУ при рекомен- дуемом числе ММШМ -1 ное рекомен дуемое
4 4 1 0.67 0.67 2 2 -3
4 5 0,83 0.50 2 2-3
6 4 5 1.00 0.60 3 3
7 5 5 0.70 0,70 3 4
7 к 6 0,70 0.47 3 3
8 5 6 0.80 0.53 3 3—4
ние (с замедлением менее 3,5 м/с2), экстренное торможение (с за-
медлением не менее 5,5 м/с2) и длительное торможение на затяж-
ных спусках.
Простейшим способом осуществления притормаживания или
остановки ВГМ является накат. Торможение накатом производит-
ся в результате отсоединения двигателя от трансмиссии и после-
дующего рассеивания кинетической энергии в составных эле-
ментах трансмиссии, ходовой части и затрачивания ее на преодо-
ление сил сопротивления движению при свободном выбеге
машины. По опытным данным, серийные танки Т-64А, Т-72 и
опытный с ГМТ-69021 при движении накатом имеют замедление
порядка 0,4—0,5 м/с2.
Другой способ торможения — торможение двигателем—осу-
ществляется переводом поршневого двигателя на режим холосто-
го хода при включенной передаче в трансмиссии установкой рей
ки топливного насоса в положение нулевой подачи. Тормозной
момент возникает благодаря внутреннему сопротивлению в двига-
теле и затратам мощности в его системах. Дополнительную тор-
мозную мощность создают приводы нагнетателя, компрессора,
генератора, вентилятора и другие элементы.
Торможение газотурбинным двигателем осуществляется с по-
мощью реактивного соплового аппарата (РСА), изменяющего
направление движения потока газов на лопатки силовой турбины.
Тормозная мощность Л/т двигателей достигает больших чис-
ленных значений (до 0,5У,) и зависит от их типа и конструкции.
Для повышения тормозной мощности ПД разрабатываются
различные конструктивные мероприятия (установка в двигателе
с газотурбонаддувом дросселирующего устройства на выпуске,
применение специальных тормозных клапанов и т. д.).
153
Для повышения интенсивности рабочего и экстренного тормо-
жений вводятся специальные тормозные устройства, наиболее рас-
пространенные из которых механические ОТ.
При анализе и оценке движения ВГМ в тормозных режимах
необходимо учитывать, что на реакцию водителя требуется опре-
деленное время (0,5—0,7 с); процесс торможения накатом или
двигателем во время подготовки привода ОТ длится от 0,2 до
2,0 с. В процессе торможения, когда одновременно с ОТ исполь-
зуется двигатель и другие составные части МТУ, доля тормозного
момента ОТ составляет 70—80 % общего тормозного эффекта.
Известно, что при переключении передач с высших на низшие
и перед прохождением поворотов и неровностей, как правило,
производится предварительное торможение. Перед прохождением
неровностей, например, средняя интенсивность торможения состав-
ляет 0,2—0,4 торможения на 1 км пути. По опыту эксплуатации,
ВГМ находится в режимах торможения 10—15 % общего времени
движения.
Расчетные исследования показали, что с повышением удель-
ной мощности ВГМ до 22 кВт/т, их массы до 45—50 т и средней
скорости движения до 40—45 км/ч значительно возрастает интен-
сивность использования ОТ вследствие увеличения частоты их
включения, а также значений требуемых замедлений, для обеспе-
чения которых необходимо дополнительное использование неиз-
нашиваемого элемента, например РСЛ или ГЗ.
Принципиально возможно торможение с применением ГЗ без
включения ОТ. При этом только за счет ГЗ должно обеспечи-
ваться замедление танка до 2 м/с2. Применение ГЗ позволяет уве-
личить скорость движения на затяжных спусках, причем предпоч-
тительно располагать ГЗ перед ПКП, а не после нее.
Анализ и обработка статистических данных по испытаниям
различных ВГМ показали следующее:
рабочее притормаживание осуществляется обычно в зоне ско-
ростей от максимальной до 15 км/ч;
при экстренном торможении с замедлением 5 м/с2 тормозная
мощность достигает 3680 кВт;
на спусках с уклоном до 6° ВГМ двигаются со скоростью
10—40 км/ч, под уклоны около 10° — со скоростью 10—20 км/ч,
а под уклоны от 20 до 35° — 3,5 км/ч, для чего необходима тор-
мозная мощность от 75 до 370 кВт.
Расчет тормозной характеристики танка. Тормозная характе-
ристика танка — это зависимость удельной силы торможения /т,
приведенной к плоскости грунта, от скорости движения на раз-
личных передачах:
/т== 3600^(0^). (5.18)
Суммарная мощность внутренних сопротивлений в танке
= А', + ДА',.• (5-19)
|М
Тормозная мощность двигателя (экспериментальная или рас-
четная) обычно задается для тягового расчета в виде графика
функции Nr =f(и) или в виде таблицы.
Если определяется тормозная характеристика танка при ра-
боте двигателя в тормозном режиме без учета ГЗ и ОТ, то до-
полнительная тормозная мощность за счет холостых и нагрузоч-
ных потерь в трансмиссии должна быть равна
= лг,(-±- - 1) + № ,вр/Чгр +
+ Лгх.пкп/(^кпт|Бр) + ЛГх.п0ТЛ1БР + М.пБр/-ПВР , (5.20)
где /V, _ , N. п , N. „ . N. _ — мощность холостых потерь во входном
* ПВР 1 пкп “•от ж "бр
редукторе, коробке передач, остановочных тормозах и бортовом редукторе;
1)р — КПД механической цепи от выходного вала КП до входного вала борто-
вого редуктора.
На практике холостые потери в трансмиссии и ее КПД опре-
деляются экспериментально в целом, а не для каждой составной
части в отдельности, поэтому формулу (5.20) с некоторым при-
ближением можно представить в виде
= Л,(1/чгр - 1) + • (5.21)
Удельная сила торможения двигателем
= 3600 (Л/, + A/VT% + Nt . (5.22)
При подключении специальных устройств для торможения
(ГЗ, ОТ или совместно ГЗ и ОТ) полная удельная сила тормо-
жения
Лп = /,, + 3600 (ДЛГгзЛ|гз + АЛГот/7)6Р)/(От>ч,) = 3600((Л/, +
+ Мл*р) / Чгр + дЛГгз/>з + ЯЛр + *,.,1/(0^), (5.23)
где т1| 3 ~ КПД механизмов, расположенных от места установки ГЗ до вы-
ходного вала БР.
Тормозная мощность гидрозамедлителя
4Vr3 = МГЗ®1ЬР / (3600 R.,.). (5.24)
Тормозная мощность ОТ зависит от тормозного момента, кото-
рый, в свою очередь, определяется рядом конструктивных пара-
метров:
^от = Рот^тр^'*2 ’
где Рот — коэффициент трения при буксовании дисков ОТ; F^, — площадь
поверхности трення с учетом канавок, см1; г —число пар поверхностей трения.
Тормозную мощность ОТ можно определить по формуле
АЛ^ОТ-Л1ОТ^ЕР/(3600/?..). (5.25)
155
Удельная сила торможения зависит от угла спуска а и сопро-
тивления грунта:
/т = sin а — /cos в <. (5.26)
Во многих случаях можно считать cosa=l, тогда угол спуска
(подъема)
a = arcsin(/t4- /).
Требуемая тормозная мощность при равномерном движении
на спуске, приведенная к ведущему колесу, определяется с по-
мощью зависимости
^’потр = Ttr (8in “ ~ /C0S / 3600 ~ ^"Г1 •
Экспериментально установлено, что для движения танка с ПД
со скоростью 10 км/ч на длительных спусках пол углом менее 20°
достаточно тормозного эффекта от двигателя и ГЗ, а под углом
более 20° при скорости 2—3 км/ч необходимо дополнительно
подключать ОТ с металлокерамическими дисками, работающи-
ми в масле.
Тепловой поток от трансмиссии в систему охлаждения при
торможении двигателем определяется по зависимости
Фтр =ДЛТРж. (5.27)
При расчете ANTP необходимо учитывать конструкцию транс-
миссии. Если ОТ и БР связаны с общей системой смазки транс-
миссии, то AjVtp определяется по формуле (5.20); в случае
если ОТ находится в картере трансмиссии, а БР выделен в авто-
номный механизм (например, трансмиссия танка «Леопард-2»),
то в этой формуле принимают Л\.пБр - 0.
При выполнении ОТ с дисками сухого трения и объединении
его с БР (трансмиссии УГМТ и ГМТ-69021) в формуле (5.20)
приравнивают нулю и А^х.пот-
Если (известна удельная сила торможения двигателем, тепло-
вой поток от трансмиссии в систему охлаждения определяется
по формуле
фтр = ^/T/ir/3600 - АГТ - Пр. (5.28)
Тепловой поток в масло при буксовании одного тормоза с уче-
том ограничений по температуре может быть рассчитан по фор-
муле
фот = ^от^ ~ ^огм) гм7м7м^тр < (5.29)
где 61Т . tar — максимальная и минимальная температура масла на выходе
v вых вх
из тормоза и на входе в него. ’С; гм7м — объемная теплоемкость масла,
Дж/(м’-оС); — объемный расход масла, необходимый для образования
устойчивой масляной пленки на поверхности трения, ма/(м*-с).
156
Для ОТ с МКД, работающими в масле, максимально допу-
стимая температура масла на выходе из тормоза может быть
принята 140°С, а минимальная на входе —90°C. Потребный рас-
ход масла <7м=810-4 м3/(м2-с), а объемная теплоемкость масла
=1,68-10е Дж/(м3-°С).
Аналогичная зависимость может быть использована и для
определения теплового потока от ГЗ при заданной температуре
масла на выходе (/гч ) и входе (/гч ):
вых 1 вх
фгз — (/гзвых ~ ’
Где AQ|3 — расход рабочей жидкости через ГЗ, м’/с.
Указанные расчетные зависимости используются для предва
рительных приближенных расчетов тормозных устройств; на ко-
нечных стадиях проектирования применяются более точные мето-
дики расчета с помощью ЭЦВМ.
5.5. ТЯГОВЫЙ РАСЧЕТ ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ
ТАНКА С ГМТ
Особенности расчета. При тяговом расчете прямолинейного
движения танка с ГМТ учитываются свойства ГТ, обусловливаю-
щие нижеперечисленные особенности.
1. При работающем ГТ отсутствует жесткая кинематическая
связь между двигателем и ведущими колесами танка. Скоростное
(кинематическое) передаточное отношение трансмиссии опреде-
ляется не только механическими элементами, но и скоростным
передаточным отношением ГТ.
2. Каждому скоростному передаточному отношению ГТ соот-
ветствует свой режим работы двигателя, который должен быть
определен при построении тяговой характеристики танка.
3. Гидромеханическая трансмиссия является системой по
меньшей мере с двумя степенями свободы, что следует учитывать
при анализе разгона танка.
4. Силовое передаточное отношение ГМТ значительно отли-
чается от скоростного и на каждом режиме определяется не толь-
ко параметрами механических элементов, но и силовым переда-
точным отношением ГТ, зависящим от соотношения частоты вра-
щения рабочих колес последнего.
5. Блокировку ГТ следует учитывать при определении диа-
пазона скоростей и разбивке передач в КП.
Совмещение характеристик двигателя и ГТ. Гидротрансформа-
тор может использоваться различно. У некоторых ГМТ ГТ рабо-
тает на всех передачах (например. ГМТ CD-850); более широко
распространены ГМТ, у которых ГТ автоматически блокируется
на всех или на высших передачах (например, ГМТ ТХ-411,
ТХ-100 и др.), и, наконец, ГМТ, у которых ГТ используется только
для трогания с места и при переключении передач, а в режиме
движения постоянно блокирован (ГМТ 4НР-250).
157
При проектировании ГМТ существенное значение имеет выбор
типа ГТ и совмещение его характеристик с характеристикой дви-
гателя.
Выбор ГТ для танковой ГМТ, в которой он не блокируется
или блокируется автоматически на некоторых передачах, опре-
деляется минимально допустимым значением КПД в рабочем
диапазоне, которое для большинства ВГМ ограничивается воз-
можностями системы охлаждения и равно 0,85. Для танковых
ГМТ эта величина может быть более высокой. Таким образом,
танковый ГТ отличается высоким КПД (максимальное значение
КПД не ниже 0,9) и сравнительно низкими преобразующими
свойствами. Понижение КПД в точке перехода на режим ГМ
допускается только при автоматической блокировке ГТ на всех
передачах. Для танковых ГМТ рекомендуются комплексные ГТ
типа ГТК-XI, ГТК-ХП (с блокировкой), ГТК-XV и другие с ана-
логичными характеристн1кам1И.
Характеристика входа ГТ может быть совмещена с внешней
характеристикой двигателя подбором передаточного отношения
согласующего редуктора, расположенного между двигателем и
ГТ, или подбором диаметра ГТ.
Пересечение нагрузочных парабол насоса ГТ с внешней харак-
теристикой двигателя определяет характеристику их совместной
работы. Для получения максимального значения момента на тур-
бине ГТ во всем диапазоне нагрузочная парабола с Ко должна
пересекать внешнюю характеристику двигателя в точке МКртях.
так как
а парабола с Пгттах Должна пересекать внешнюю характеристи-
ку двигателя в точке УГт1Х, так как
Чгт =^т >
mix 'mix mix
где Ко — коэффициент трансформации ГТ; Л1Т(пм, ЛГТт1К — максимальный
момент и мощность на турбине ГТ.
Остальные нагрузочные параболы должны пересекать внеш-
нюю характеристику двигателя также в определенных точках.
Следует иметь в виду, что максимальное значение момента
на турбине ГТ имеет чисто теоретический смысл, так как с реаль-
ными характеристиками входа ГТ получить невозможно, поэтому
при любом совмещении получают пониженные значения момента
на турбине ГТ по сравнению с максимально возможными в той
или иной зоне.
Для танковых ГМТ имеет большое значение запас силы тяги
в пределах каждой передачи. Влияние совмещения характеристик
двигателя и ГТ на скоростной и силовой диапазоны показано на
158
рис. 5.6: при сдвиге пучка нагрузочных парабол влево (см. штри-
ховую линию) диапазоны существенно расширяются, хотя и имеет
место «провал» по тяге в середине рабочего диапазона.
Рис. 5.6. Влияние совмещения характеристик двигателя и ГТ на скоростной (и)
и силовой (б) диапазоны
Следовательно, при высокой удельной мощности ВГМ, когда
нет оснований стремиться получить максимальное значение силы
тяги, имеет смысл сдвиг пучка нагрузочных парабол ГТ влево
для увеличения запаса по силе тяги в пределах одной передачи.
С двигателем, имеющим больший коэффициент приспособляе-
мости, можно получить лучшую тяговую характеристику, если
ГТ имеет прозрачную характеристику входа.
Расширение скоростного и силового диапазонов при высоком
значении КПД ГТ имеет большое значение для ГМТ, в которых
ГТ не блокируется или блокируется с использованием его при
движении ВГМ в рабочем диапазоне.
Применение ГТ только для трогания с места и при переключе
нии передач совершенно меняет подход к его выбору и совмеще-
нию характеристик.
В связи с увеличением мощности танковых двигателей без су-
щественного увеличения максимальной частоты вращения вала,
возникает проблема обеспечения устойчивой работы двигателя
на холостом ходу при включенной в КП ГМТ передаче и затор-
моженном танке. Этот режим очень важен при трогании с места,
так как в ГМТ передача включается раньше, чем начинается уве-
личение подачи топлива в двигатель. Чтобы совместить характе-
ристики ПД и ГТ при увеличении мощности двигателя, для
сохранения силового и скоростного диапазонов приходится сдви-
гать пучок нагрузочных парабол ГТ дальше влево, что увеличи-
вает загрузку двигателя при низкой частоте вращения его вала.
На режиме холостого хода при остановленной турбине двигатель
159
развивает большой момент, а это приводит к тряске, дымлению
и затрудняет удержание танка на месте. Учитывая это, прихо-
дится сдвигать пучок нагрузочных парабол вправо от оптималь-
ного положения или использовать ГТ с невысокой или даже об-
ратной прозрачностью в нерабочей зоне передаточных отношений
(от irT = 0 до ip =0,5... 0,6). Окончательный выбор ГТ и совме-
щение характеристик надо производить на основании анализа
всех показателей и в том числе работы двигателя на холостом
ходу с включенной передачей.
Рассмотрим влияние совмещения характеристик двигателя и
ГТ на топливную экономичность ВГМ, которая может быть оце-
нена отношением удельного расхода топлива к КПД ГТ:
gi - «Лт •
Здесь gt —удельный часовой расход топлива, отнесенный к мощ-
ности на турбине ГТ.
Получение максимальной топливной экономичности двигателя
с ГТ требует совмещения зон высокого КПД ГТ и двигателя.
Наивысшая топливная экономичность характеризуется отно-
шением
g, , = ge . /^гт •
mln mln 'max
Зона минимального удельного расхода топлива соответствует
частичной загрузке двигателя (зоне максимального момента);
в зоне максимальной мощности удельный расход топлива гораздо
выше (почти на 25%).
Характер изменения КПД ГТ также неравномерен. Рабочий
диапазон ГТ, определяемый допустимым значением КПД, закан-
чивается при передаточном отношении tIT =0,7... 0,5. При этом
правая зона его характеристики перекрывается режимом ГМ или
автоматической блокировкой, что предопределяет высокое значе-
ние КПД, а в левой зоне КПД резко падает.
Таким образом, топливно-экономическая характеристика ПД
и кривая изменения КПД ГТ имеют противоположно располо-
женные зоны высоких значений; для их совмещения требуется
большой сдвиг пучка нагрузочных парабол ГТ влево.
Для анализа топливной экономичности при совместной работе
двигателя и ГТ могут быть использованы тяговые характеристи-
ки танка с нанесенными на их поле часовыми расходами топлива,
но на стадии выбора ГТ и совмещения его характеристики с ха-
рактеристикой двигателя удобнее строить кривые gT *=f(n) непо-
средственно на характеристике совместной работы двигателя
и ГТ (рис. 5.7).
Из данных, представленных на рис. 5.7, видно, что сдвиг пучка
нагрузочных парабол ГТ влево привел к значительному повыше-
нию топливной экономичности.
160
Большое влияние оказывает характеристика входа ГТ и ее
совмещение с характеристикой двигателя на работу трения фрик-
ционных узлов КП и блокировочного фрикциона ГТ
Рис. 5.7. Влияние совмещения характе-
ристик двигателя и ГТ на удельный
расход топлива, отнесенный к мощности
на турбине:
а — характеристика двигателя; б - правое
совмещение характеристик; в — левое совме-
щение характеристик
При использовании ГТ толь-
ко для трогания с места и при
переключении передач надо со-
вмещать характеристики так,что-
бы износ фрикционных элементов
КП и блокировочного фрикциона
был минимальным. Преобразую-
щие свойства ГТ и КПД в дан-
ном случае имеют второстепенное
значение.
Момент трения фрикционных
узлов КП при переключении пе-
редач зависит от соотношения
угловых ускорений <ож (двигате-
ля и насоса ГТ) и a»fT (турби-
ны ГТ и ведущих частей фрик-
ционного устройства), а это со-
отношение зависит от вида ха-
рактеристики входа ГТ и от ее
совмещения с характеристикой
двигателя.
При непрозрачной характе-
ристике входа и ее совмещении с
^*шях ш* =0» а момент трения
фрикционного узла КП при пе
реключении с низшей передачи
на высшую будет минимальным.
При совмещении непрозрачной характеристики входа ГТ с
(диапазон двигателя от Мкртах до пт1х перекрывается режимом
ГМ) (ож приобретает максимальное значение, что дает макси-
мальный момент трения.
Работа и момент трения блокировочного фрикциона ГТ про-
порциональны разности угловых скоростей ведущих частей двига-
теля и ведомых частей фрикциона, а также угловому ускорению
двигателя и насоса ГТ (<ож).
П Зам. 47 «с»
161
Значения разности ша — шт и «ж будут минимальными, если
при переключении передачи их уменьшить за счет изменения
передаточного отношения ГТ. Это будет иметь место, если харак-
теристика двигателя перекрыта режимом ГМ, т. е. в случае край-
не левого совмещения характеристик. При этом разность угловых
скоростей перед блокировкой ГТ составит 10—12% (максималь-
ное скольжение на режиме ГМ), а работа трения блокировочного
фрикциона будет минимальной.
В случае когда после переключения передачи разность угло-
вых скоростей полностью компенсируется изменением передаточ-
ного отношения ГТ (непрозрачная характеристика входа и совме-
щение ее с Л!К|)Я111Х), разность угловых скоростей при блокировке
ГТ будет близка к величине разрыва между передачами. Работа
трения блокировочного фрикциона будет максимальной.
Влияние совмещения характеристик двигателя и ГТ на дина-
мические и топливно-экономические показатели танка с ГМТ
может быть проиллюстрировано примерами. Так, в опытной
ГМТ для танка Т-10 с ГТ в параллельном потоке мощности
парабола с =0 первоначально пересекала внешнюю ха-
рактеристику двигателя типа В-2 (nm„ =2100 об/мин) при
п = 1500 об/мин (см. рис. 5.7). Танк расходовал топлива на 15 %
больше, чем при наличии МТ. После смещения характеристики
входа ГТ влево ((^=0 при п=1300 об/мин) перерасход соста-
вил всего 4 %, динамические свойства также не изменились.
В целях повышения топливной экономичности и разгрузки
блокировочного фрикциона ГТ опытной ГМТ для танка типа Т-72
было предусмотрено более левое совмещение характеристики
При этом удалось добиться такого же расхода топлива, как с МТ,
при высоких динамических показателях (разгон до 40 км/ч на
бетоне за 12 с); блокировочный фрикцион работал надежно,
несмотря на большое количество включений (4,8 на 1 км пути).
Автоматическая блокировка ГТ повысила топливную экономич-
ность танка на 4 %.
Определение входных и выходных параметров, расчет тяговой
характеристики. Определение входных параметров совместной
работы двигателя и ГТ сводится к расчету для ряда конкретных
значений передаточных отношений соответствующих значе-
ний частоты вращения вала и момента двигателя ВГМ, приве-
денных к валу насоса ГТ, по формулам:
= ял//вр; (5.30)
= (5.31)
162
Значения Л1 в р задаются в табличной форме в зависимости
от частоты вращения вала двигателя; КПД ВР принимают в за-
висимости от его типа (конический или цилиндрический) и коли-
чества полюсов зацеплений.
Передаточное число ВР на первом этапе расчета выбирается
из условия, чтобы максимальная частота вращения насосного
колеса ГТ была меньше предельно допустимой частоты вращения
для выбранного ГТ:
Лм = ^max//gp <С. п .
"mix доп
В комплексных ГТ, которые могут быть использованы в тан-
ковых ГМТ, предельно допустимая частота вращения выбирается
из условия прочности колокола насосного колеса при окружной
скорости не более 70 м/с и выбранном активном диаметре.
Так, при изменении активного диаметра насосного колеса от
0,38 до 0,43 м предельно допустимая частота вращения насос-
ного колеса уменьшается от 58,3 с“* (3500 об/мин) до 50 с~*
(3000 об/мин).
Значение /вр подбирается из условия обеспечения требуемо-
го совмещения характеристик ГТ и двигателя по топливной эко-
номичности или максимальных тяговых свойств. При этом допус-
кается максимальное отклонение скорости вращения насосного
колеса от первоначально выбранного на 30 %. Если ограничиться
отклонением скорости на 15%, то путем изменения передаточ-
ного числа ВР можно один и тот же ГТ использовать для двига-
телей, отличающихся по мощности в 1,5 раза.
Окончательно передаточное число ВР при выбранном ГТ
определяется из условия совмещения его характеристик с двигате-
лем: например, при совмещении нулевой параболы ГТ ( /гт — 0)
с максимальным моментом двигателя это значение определяется
из уравнения
М. = • (5.32)
откуда
где «о“"гаах — частота вращения вала двигателя, соответствующая максималь-
ному моменту.
Характеристика совместной работы ГТ и двигателя опреде-
ляется графически (рис. 5.8). В левой части графика строится
кривая yXi=f(irT ), а в правой — зависимость момента двигате-
ля (или момента, приведенного к насосному колесу ГТ) на внеш-
ней характеристике от частоты вращения вала, т. е. кривая
М*р=[(п). Под этой кривой в том же масштабе наносится кри-
11»
163
вая изменения условной величины укг, которая определяется но
формуле
fa = M„/(Ds.nl) I5-33*
Задаваясь значениями ZrT, через кривые уХ| и ул2 можно
определить соответствующие значения Л1кр и п. Значения Z^
рекомендуется брать с интервалом 0,2, причем первое значение
/гт =0, а последнее — Z^ , соответствующее максимальной
расчетной скорости ВГМ.
Рис. 5.8. Безразмерная характеристика ГТ (а) и характеристика совместной
работы ГТ и двигателя (б)
Полученная совокупность значений п, Mhf или п„, Л4И и яв-
ляется входными параметрами совместной работы двигателя и ГТ.
При определении выходных параметров ГТ для каждого зна-
чения ZrT вычисляются частота вращения, момент и мощность
на валу турбинного колеса ГТ (по формулам, приведенным в
гл. 4).
Значения коэффициента трансформации для каждого зна-
чения Zj-j. берутся по характеристике выбранного ГТ, заданной
графически (см. рис. 4.1), или из таблицы (см. табл. 4.21).
Таким образом, определяются значения ЛКР. Л'д. Л1и. Л4Т. лт.
т(гт, 7k,, ZrT в зависимости от частоты вращения вала двига-
теля для характерных режимов ГТ со значениями передаточных
отношений Z^, , Z^, ^rrmtx» *гт • где *гт„— передаточное от-
ношение при остановленном вале турбинного колеса (пт —0, ре-
жим «стоп>); ZrT —передаточное отношение, соответствующее
минимально допустимому КПД длительной работы ГТ (левая
граница рабочего диапазона ГТ); ZrTij — передаточное отноше-
ние, соответствующее максимальному КПД комплексной гидро-
164
передачи при ее работе на режиме ГТ; ZrT — передаточное от-
ношение, соответствующее работе ГТ в режиме ГМ; /гт —пере-
даточное отношение, соответствующее расчетному максимальному
КПД при работе ГТ на режиме ГМ.
Расчет тяговой характеристики танка с ГМТ проводится с ис-
пользованием этих данных, к которым добавляются значения ско-
рости движения и удельной силы тяги для соответствующих зна-
чений rij и Мг.
Скорость танка рассчитывается по формуле
г/= 0,06г/глт/7тр ,
где /тр — передаточное число трансмиссии (механических элементов от вала
турбинного колеса ГТ до ведущих колес).
Удельная сила тяги в плоскости грунта определяется по той же
формуле, которая приведена для МТ (на режиме «стоп ГТ» зна-
чение /1Т должно быть близко к нулю).
Скоростные и силовые диапазоны ГТ и системы «двигатель—
ГТ». Для определения скоростного и силового диапазонов ГТ, ис-
пользуемых диапазонов двигателя и системы двигатель—ГТ на
внешнюю характеристику двигателя наносятся нагрузочные пара-
болы (см. рис. 5.8, б), а в дополнение к кривой vXi=f(zrT)
строится безразмерная характеристика ГТ (см. рис. 5.8, а).
Условимся всем параметрам совместной работы ГТ с двига-
телем при определенном передаточном отношении присваивать
индекс, соответствующий этому отношению.
Например, передаточному отношению iTP (см. рис. 5.6) соот-
ветствуют КПД ГТ т)|Т и коэффициент трансформации Кгт ,
нагрузочная парабола на совместной характеристике /|Т ,
р
момент Л1кРр и частота вращения двигателя лр.
Скоростной и силовой диапазоны системы двигатель—ГТ
слева ограничены передаточным отношением /гт , а справа —
р
максимальной скоростью ВГМ, соответствующей исходным
данным.
При расчете так подбирают величины Dt и /ВР, чтобы нагру-
зочная парабола, соответствующая максимальной скорости, пере-
секала внешнюю характеристику двигателя в точке перехода на
предельную регуляторную характеристику. На рис. 5.8 такая
парабола отмечена /Гт » и соответствуют момент М<рШ1Х и
частота вращения двигателя nmax.
Заданная точка перехода на предельную регуляторную харак-
теристику у обычных поршневых двигателей может соответство-
вать максимальной мощности, т. с. имеет место равенство nmax
= лЛ.; для двигателей с улучшенными характеристиками макси-
мальная мощность располагается левее nmax-
165
Нагрузочная парабола, соответствующая передаточному отно-
шению ГТ при переходе на режим ГТ, должна быть расположена
на внешней характеристике в районе максимальной мощности.
От точки перехода на режим ГМ до нагрузочной параболы с
/гт =1,0 энергоемкость ГТ падает до нуля. Поэтому совмещение
с максимальной мощностью параболы с передаточным отноше-
нием большим, чем , приводит к увеличению активного диа-
метра ГТ и к определенным компоновочным трудностям. К то-
му же при резком смещении нагрузочных парабол ГТ влево су-
щественно уменьшается диапазон преобразующих свойств ГТ.
Бели расчетная максимальная скорость соответствует макси-
мальной частоте вращения вала двигателя, то фактическая, соот-
ветствующая суммарному коэффициенту сопротивления прямо-
линейному движению fe=0,05 при высоком значении удельной
мощности, может быть несколько выше расчетной; она будет
соответствовать параболе, например с /п , пересекающей пре-
дельную регуляторную характеристику (см. рис. 5.8).
Скоростной диапазон системы двигатель ГТ характеризуется
коэффициентом
Кп = Пт 1Пт •
р 'max р
где Ятюм. лТр—частота вращения вала турбинного колеса ГТ (максималь-
ная н на границе рабочей зоны соответственно).
Если выразить частоту вращения турбины через частоту вра-
щения вала двигателя и передаточные отношения ГТ, получим
= я"'»«^гтм^яр^гтр) “ •
где К'п — используемый коэффициент рабочих частот вращения двигателя:
drT — рабочий скоростной диапазон ГТ.
Силовой диапазон системы двигатель—ГТ характеризуется
коэффициентом
г -K'dc ,
*р V T-m„ м |Т
где Мт — момент на колесе турбины на границе рабочей зоны; Мт —
Р "шах
момент на колесе турбины, соответствующий максимальной частоте вращения
вала двигателя (и максимальной скорости движения машины); Л— исполь-
зуемый коэффициент приспособляемости двигателя, равный отношению
Л4кртах^*Р>' ^гт — рабочий силовой диапазон ГТ. равный отношению
*гтр/*гтм-
Указанные параметры для некоторых образцов ГМТ пред-
ставлены в табл. 5.12, из которой видно, что скоростные диапа-
зоны системы двигатель—ГТ характеризуются коэффициентами,
равными 2,04 2,74, а силовые — 1,7—3,42.
166
Таблица 5.12
Коэффициенты, характеризующие скоростной и силовой диапазоны системы
двигатель — ГТ некоторых отсчитвенных ВГМ при т|гт > 0,85
Параметр Серийный 3PK даль- него действия Опытные HI М
Макет с ГМТ-€9021 Основной танк с 1 МТ БМП
Передаточное отношение ГТ /j-j- 0,5 0.6 0,6 0,6
Используемый коэффициент рабо- чих частот вращения двигателя К„ 1,445 1.4G 1.3 1,39
Используемый коэффициент при- способляемости двигателя Км 1,55 1.3 1,16 2,43
Рабочий скоростной диапазон ГТ </(-Г 1.9 1.61 1,57 1.6
Рабочий силовой диапазон ГТ </,гт 1.74 1.45 1.47 1,41
Коэффициент частоты вращения системы двигатель — ГТ К„ 2,74 2.36 2,04 2,22
Коэффициент приспособляемости системы двигатель — ГТ 2,7 1.885 1.7 3,42
Скоростные и силовые диапазоны ГМТ. Если ГМТ выполнена
с последовательным потоком мощности, то ее скоростной диапа-
зон, как и в механической трансмиссии, равен диапазону ПКП,
а силовой диапазон можно определить по формуле
— ^ПКПТ*т,^гм ’
Полный скоростной и силовой диапазоны ГМТ ограничены
величинами ®mm и /Лтах.
При расчете ГМТ, как уже упоминалось, на i передаче при-
нимают /1(пах =0,65 на левой границе рабочего диапазона систе-
мы двигатель — ГТ. В практике значение /Дтах на границе рабо-
чего диапазона может быть и больше 0,65. Минимальная ско-
рость движения, соответствующая указанному значению дина-
мического фактора, для ВГМ с ГМТ колеблется в пределах от 3,8
до 6,4 км/ч.
При работе ГТ на всех передачах полный скоростной диапа-
зон ГМТ равен
^пп — ~ «шн /Яр ^ГТм^ГТр' fTP^TPm ’
167
полный силовой диапазон —
*гт„ 'тр. г
£>с = /, //. = И-----— А “ Т—L ^ПКгЛг Ч .
С J дшах 7*mln ™кр„ ^ГТ *ТР 1г Р ПКП Г| м
"max м m м
где /тр — передаточное отношение трансмнсснн на высшей передаче.
При блокировке ГТ на высшей и его работе на I передачах
полный скоростной диапазон ГМТ
D"6 = ^«^пчп = /fT ТГ *Ч/ПКП ’
а полный силовой диапазон
^с6 ^*max^*mln ^*РМ ^ГТР /-j-p Чг ^Л,Рб^П1'П 1|ти ’
Из полученных выражений видно, что полный скоростной диа-
пазон ГМТ при блокировке ГТ больше, чем при ее работе на всех
передачах:
Это говорит о том, что при блокировке на высшей передаче из-за
отсутствия скольжения в ГТ заданную максимальную скорость
можно получить при частоте вращения вала двигателя, меньшей
«mix. соответствующей нагрузочной параболе /1Л- .
Блокировка ГТ на высшей передаче несколько сужает полный
силовой диапазон ГМТ:
D4<DC.
Таким образом, при прочих равных условиях можно при мак-
симальной скорости движения с сблокированным ГТ реализовать
несколько большую удельную силу тяги, чем при работе ГТ на
всех передачах (см. рис. 5.3,6).
При проектировании ГМТ, так же как и МТ, стараются выде-
лить I передачу и рабочий силовой диапазон трансмиссии.
Рабочий силовой диапазон ГМТ характеризуется значением
удельной силы тяги на II передаче =0,28...0,3 (на левой
границе рабочего диапазона системы двигатель—ГТ). На прак-
тике удельная сила тяги /*|( , соответствующая максимальному
моменту двигателя при сблокированном ГТ на II передаче, мень-
ше этого значения (см. рис. 5.3,6).
Отношение передаточных чисел между I и II передачами
в ГМТ выражается формулой (5.9), а скоростной и силовой
рабочие диапазоны — формулами (5.10) и (5.1). При расчете
ГМТ в эти формулы вместо коэффициентов частоты вращения и
168
приспособляемости двигателя подставляют значения этих же
коэффициентов для системы двигатель—ГТ.
Разбивка передач в ГМТ. В ГМТ (если ГТ работает на всех
передачах) понятие «перекрытие передач по скорости» несколько
меняется. Как видно из рис. 5.3,6 (пунктирные кривые), тяговая
кривая последующей передачи полностью перекрывает тяговую
кривую предыдущей.
В этом случае для получения минимального количества пере-
дач в ПКП стараются обеспечить отношение скоростей движения
или передаточных чисел между смежными передачами на любом
стыке передач (т. е. коэффициент разрыва), равное скоростному
диапазону системы двигатель—ГТ. Например, для последнего
стыка должно быть соблюдено условие равенства скоростей: мак-
симальной на предпоследней передаче vN (точка А на
рис. 5.3, б) и на последней передаче, соответствующей точке Б
на левой границе скоростного диапазона системы двигатель ГТ.
При такой разбивке передач минимальное их количество опре-
делится по формуле (5.16), если знаменатель геометрической про-
грессии равен скоростному диапазону системы двигатель—ГТ.
В отличие от МТ в ГМТ допускаются коэффициенты разрыва
между передачами на последнем и предпоследнем стыках (Х« и
*•*-1) меньше, равные или даже больше коэффициента рабочих
частот вращения двигателя.
При X* < Кл и < Кп в рабочем диапазоне тяговой харак-
теристики ГМТ имеется перекрытие передач по скорости при сбло-
кированном ГТ и обеспечены наиболее рациональные условия
для автоматического переключения передач и минимального вы-
деления тепла в трансмиссии, что позволяет снизить максималь-
ный КПД ГТ, так как он используется в рабочем диапазоне
только в процессе переключения передач.
Примером может служить ГМТ 4НР-250 (см. рис. 2.11) за-
падногерманского танка «Леопард-1». В этой трансмиссии в лю-
бом стыке передач коэффициент разрыва между передачами
меньше коэффициента рабочих частот вращения двигателя
(см. табл. 5.7).
При равенстве коэффициентов разрыва между передачами
скоростному диапазону двигателя (коэффициент перекрытия пе-
редач равен единице) в рабочем диапазоне тяговой характеристики
также наблюдаются минимальное выделение тепла в трансмис-
сии и устойчивая работа двигателя в процессе переключения
передач.
Если коэффициенты разрыва между передачами меньше или
равны коэффициенту частот вращения двигателя при блокировке
ГТ в рабочем диапазоне, совместная работа двигателя с ГТ (вход-
ные и выходные параметры) оценивается работоспособностью
блокировочного фрикциона при включении I передачи, когда
ВГМ стоит, а двигатель работает вхолостую.
12 Зак. 47 «с»
169
Если ГМТ работает в сочетании с двигателем, у которого
коэффициент частот вращения невелик, а в рабочем диапазоне
тяговой характеристики применены три передачи с блокировкой
ГТ, коэффициенты разрыва между передачами могут быть боль-
ше этого коэффициента. Разрывы по скорости на тяговой харак-
теристике между передачами с сблокированным ГТ перекрывают-
ся за его счет ори переключении передач.
Значительного падения скорости не происходит, и двигатель
при переключении передач не останавливается, но может уси-
литься выделение тепла. Учитывая этот фактор, следует применять
высокоэффективные ГТ. Процесс переключения передач должен
происходить в зоне максимального значения КПД ГТ.
В результате выделения большого количества тепла на стыке
передач в ГМТ необходимо производить переключение передач
при достаточно высокой частоте вращения вала двигателя, опре-
деляющей эффективность эжектора системы охлаждения двига-
теля. Совместная работа ГМТ и эжекционной системы охлажде-
ния мало изучена, но при рациональном сочетании параметров
ГМТ и эжекционной системы охлаждения можно получить мини-
мальные габаритные размеры МТО при повышенной мощности
двигателя.
Примером ГМТ, в рабочем диапазоне которой коэффициент
разрыва передач три сблокированном ГТ больше коэффициента
частот вращения двигателя, может служить опытная ГМТ-69021
(см. табл. 5.7). В этой трансмиссии подключение ГТ на стыках
передач осуществляется автоматом, реагирующим на номер пере
дачи и частоту вращения вала двигателя. При автоматической
блокировке ГТ переключение передач осуществляется за 0,8 с, и,
как установлено при испытаниях, даже при частом переходе
с II1 на IV передачу и обратно тепловой режим трансмиссии не
меняется. Это объясняется не только кратковременностью пере-
ключения передач, но и высоким КПД комплексного гидротранс-
форматора ГТК-Х1.
Разбивка передач существенно влияет на долговечность
фрикционных элементов ПКП и уровень динамических нагрузок
в них. При изменении разбивки передач неизбежно износ одних
фрикционов увеличивается, а других уменьшается.
В каждом конкретном случае требуется специальное исследо-
вание для выбора оптимальной в динамическом отношении раз-
бивки передач.
5.6. КОМПЛЕКСНЫЙ АЛГОРИТМ РАСЧЕТА УНИВЕРСАЛЬНОЙ
ТЯГОВОЙ ХАРАКТЕРИСТИКИ ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ
(ТЯГОВАЯ ХАРАКТЕРИСТИКА ПО ПОЛЮ)
Универсальная тяговая характеристика прямолинейного дви-
жения ВГМ представляет собой графическое изображение зави-
симости удельной силы тяги /д в плоскости грунта, соответст-
170
вующей нормированным значениям теплового потока Фтр от
трансмиссии в масло, часового 6Т и путевого Gn расходов
топлива при работе двигателя и ГТ на каждой передаче от
скорости прямолинейного движения ВГМ. Для построения такой
тяговой характеристики требуется множество расчетных точек по
полю, для чего используется ЭВМ.
Комплексный алгоритм тяговых расчетов разработан для тан-
ков с ПД или ГТД с различными типами трансмиссий. Напри-
мер, для танков с МТ и ГМТ комплексный алгоритм включает
в себя расчет совместной работы двигателя с ГТ, тяговой харак-
теристики прямолинейного движения, теплового потока в масло
трансмиссии, часового и путевого расходов топлива двигателем,
тормозных характеристик двигателя
В комплекс должен входить и расчет разгонных характерис-
тик, но он в данной работе не рассматривается, так как подробно
изложен в литературе [4, 10, 15, 16].
Исходные данные. Исходные данные для комплексного алго-
ритма тягового расчета прямолинейного движения определяются
в порядке, изложенном ниже.
1. Параметры двигателя (максимальный крутящий момент,
мощность, путевой расход топлива) задаются в виде таблиц как
функции от частоты вращения вала двигателя так, чтобы обеспе-
чивалось равномерное заполнение поля универсальной тяговой
характеристики.
Для этого строятся кривые, эквивалентные внешней скорост-
ной характеристике двигателя по Мкп и Оп, но в долях от этих
параметров (например, 1,0; 0,8; 0,6; 0,4; 0,2) и несколько (напри-
мер, восемь) регуляторных характеристик для ПД или сечений,
параллельных предельной регуляторной характеристике для ГТД.
Разбивка поля внешней характеристики двигателя должна
обеспечивать погрешность при линейной интерполяции по любо-
му аргументу не более 3 % в пределах всего поля.
2. Для ГМТ безразмерная характеристика ГТ задается в
виде таблицы, в которой указаны значения Кгт, чгт. уХ для
0</гт< 1, в том числе для /«. . ^гт » Л-т ’ 'гт Каждая без-
11 11р 11ц 1 1М
размерная характеристика задается так, чтобы была возможность
линейной интерполяции параметров с погрешностью не более 3%.
3. Холостые потери мощности в агрегатах трансмиссии М пвр»
М,пкп* "от’ А* пбр задаются в виде таблиц для десяти зна-
чений частоты вращения на входе в эти агрегаты, охватывающих
весь диапазон изменения частоты вращения. Погрешность линей-
ной интерполяции величин должна быть не более 3 %.
4. Холостые потери мощности в гусеничном движителе задают-
ся в виде таблицы для значений скорости прямолинейного
движения ВГМ от 0 до с таким расчетом, чтобы обеспе-
чить линейную интерполяцию с погрешностью не более 3 %.
12*
171
5. Определяются передаточные числа ПКП и КПД.
6. Задается нормированный ряд значений теплового потока
в масло трансмиссии (в кВт), кратных пяти. Рекомендуется
выбирать не более десяти значений от 70 до 20 кВт для МТ
и от 150 до 20 кВт для ГМТ. Например, нормированный ряд
значений Фтр для ГМТ: 150, 120, 100, 80, 60, 40 кВт.
7. Задаются нормированные ряды из десяти значений расхода
топлива двигателем в диапазоне их изменения.
Значения GT принимаются ориентировочно от 200 до 50 кг/ч
для ПД и от 350 до 100 кг/ч для ГТД (одинаково для всех
передач).
Значения Gn принимаются ориентировочно от 30 до 5 л/км
для передач, используемых на режимах трогания с места и при
движении в особо тяжелых дорожных условиях, и от 15 до
1 л/км для остальных передач.
Алгоритм расчета характеристики совместной работы двига-
теля и ГТ. Расчет характеристик совместной работы двигателя
с ГТ для заданных режимов состоит в определении для каждого
заданного значения частоты вращения вала двигателя значений
Л/д, Л/„, лн, яи, /И„, ул2 по формулам, приведенным в гл. 4 и 5.
При расчете тяговой характеристики ВГМ с ГМТ по найден-
ным значениям vk2 определяют параметры Км, т|гт ме-
тодом линейной интерполяции табличных значений безразмерных
характеристик ГТ. Далее определяют значения ят, Л4Т, по
формулам, приведенным в гл. 4.
Результаты расчета оформляют в виде таблицы для разных
значений частоты вращения вала двигателя.
Расчет характеристик совместной работы двигателя с ГТ для
заданных режимов работы ГТ состоит в определении парамет-
ров п, Мкр, GT методом линейной интерполяции табличных зна-
чений уЛ, исходя из условия равенства уХ|=уХ2.
Расчет для каждого из заданных режимов работы ГТ целесо-
образно проводить в два этапа. Сначала определяются характе-
ристики совместной работы ГТ с двигателем для каждого пара-
метра его внешней скоростной характеристики, потом для каждой
его регуляторной характеристики.
Таблица дополняется значениями Л/т, которые определяются
методом линейной интерполяции их соседних табличных значе-
ний по уХ2.
Алгоритм расчета универсальной тяговой характеристики пря-
молинейного движения ВГМ. Универсальная тяговая характерис-
тика прямолинейного движения рассчитывается в следующем по-
рядке:
1. По кинематической схеме определяется частота вращения
входных звеньев агрегатов трансмиссии и методом линейной ин-
терполяции исходных данных вычисляются соответствующие
холостые потери в агрегатах трансмиссии.
172
2. Определяется значение суммарных потерь мощности в
трансмиссии, приведенных к ведущим колесам:
= (1 — т||р) + nBp7lrP + ^ж.пкп71кп^р71ьр “Ь
+ АГ,..оЛр + ^.бЛ1>. (5.33)
гдст)р—К11Д механической цепи от выходного вала ПКП до ведущего
вала БР.
3. С учетом потерь мощности во всех составных частях транс-
миссии, а также связи отдельных агрегатов трансмиссии (в основ-
ном ОТ и БР) с общей системой ее смазки определяется" тепло-
вой поток в трансмиссионное масло:
Ф,Р " Ч* ~ vO + (К"кЛпМв|. + № ",р’1тг +
+ СОТ^х.потТ<БР + СБР^х.пБр^Бр) / 1ГБР + 0 — ГБр) Т^р1 • (5.35)
Если БР или ОТ связаны с общей системой смазки трансмис-
сии (как у трансмиссий с БКП), то сБР =1,0 и сот =1,0.
Если БР или ОТ не связаны с общей системой смазки транс-
миссии, то эти коэффициенты равны нулю.
4. Далее определяются следующие параметры:
удельная сила тяги в плоскости грунта
/ж = 3600 (Л\ - ДЛ^ - 7VM ) / (Gv);
удельная сила тяги на ведущем колесе
/• к - Л/vfc + 3600 Лх. „/(От»);
скорость прямолинейного движения
-и-3,6гл/?и к/(30/тр);
путевой расход топлива
Gn = G,/v.
Результаты расчета представляются в виде таблицы, в кото-
рой параметры /ж, /, к, vjTP, Фтр, /гт, п, Кгт, Мкр представлены
в зависимости от скоростей, соответствующих параметрам со-
вместной работы двигателя и ГТ.
5. Расчет теплового потока в масло трансмиссии по полю
тяговой характеристики ведут при помощи линейной ин-
терполяции значений v0 и f\. взятых из расширенных таблиц
скоростных характеристик двигателя (для МТ) или параметров
совместной работы двигателя и ГТ (для ГМТ).
Полученные значения заносятся в сводные таблицы или нано-
сятся на график универсальной тяговой характеристики.
173
6. Для определения часового и путевого расходов топлива ис-
пользуются таблицы результатов предварительного расчета тяго-
вой характеристики прямолинейного движения. Для заданных
значений GT и 0п определяются значения [я и и0 и представ-
ляются в виде таблиц или зависимости от vQ на комплексном
графике.
7. Расчет тормозной характеристики ВГМ состоит в построе-
нии зависимости удельной силы торможения в плоскости грунта
от скорости движения ВГМ при полной загрузке двигателя по
внешней характеристике. Определяются дополнительная тормоз
ная мощность для компенсации скоростных и нагрузочных потерь
в трансмиссии и удельная сила торможения. Результаты расчета
для каждой передачи представляются в виде таблицы или гра-
фика зависимости удельной силы торможения от скорости дви-
жения.
Рис. 5.9. Универсальная тяговая характеристика ВГМ с ГМТ при сблокиро-
ванном ГТ:
II, III, IV, И', ИГ, >V — тяговая характеристика и тепловой поток на соответствующей
передаче; I. i, 3. I 5 - часовой расход топлива соответственно 50. 75. 100. 12S и 150 кг/ч:
--------------,----— ,--------загрузка двигателя 100. 80 и 60 Н соответственно
Типичная универсальная тяговая характеристика ВГМ с ГМТ
при сблокированном ГТ на II, III, IV передачах представлена
на рис. 5.9.
Глава 6. РАСЧЕТ ПОВОРОТА ВГМ
6.1. ПОВОРОТ ВГМ НА МЕСТЕ
Поворот танка на месте при вращении гусениц в разные сто-
роны позволяет быстро Перебросить огонь с одной цели на дру-
гую в сложных условиях (улицы, мосты, платформы и т. д.) и
осуществлять наводку на цель орудий, жестко закрепленных
в корпусе ВГМ. Принцип наводки орудий при помощи гусениц
можно было бы применить для ВГМ с ракетными и ствольными
зенитными комплексами, а также для ВГМ с ограниченным пово-
ротом башни в горизонтальной плоскости.
Поворот танка на месте характеризуется равенством кинема-
тических и силовых параметров обеих гусениц, а также макси-
мальным моментом сопротивления деформируемого грунта, так
как в данном случае совершается не поступательное, а враща-
тельное движение. Наиболее просто поворот танка на месте мож-
но реализовать с дифференциальным МП. Целесообразно срав-
нить поворот на месте вокруг центра тяжести с поворотом вокруг
заторможенной гусеницы, при котором забегающая гусеница бук-
сует, а отстающая идет юзом.
Кинематические и силовые параметры поворота ВГМ.
На рис. 6.1 показаны план скоростей и схема сил при обоих видах
поворота. На этом рисунке введены следующие обозначения
R, R' — теоретический (без учета буксования и юза гусениц) и
действительный (фактический) радиусы поворота; v, v' — теоре-
тическая (относительная) и действительная (переносная) ско-
рости гусеницы; ю, о/— теоретическая и действительная угловые
скорости поворота; Р — сила тяги; Л1с — момент сопротивления
повороту; С—геометрический центр опорной поверхности ВГМ
(центр тяжести ВГМ); vc — действительная скорость центра тя-
жести ВГМ; О, О', О|—геометрический центр опорной поверх-
ности гусеницы, действительный центр поворота ВГМ и мгновен-
ный центр (полюс поворота гусеницы); «/ — поперечное смещение
полюса поворота гусеницы; о/ -абсолютная скорость в соответст-
вующих точках забегающей (А) и отстающей (Б) гусениц; т>абс.
vn — продольная и поперечная составляющие абсолютной скорос-
175
ти гусеницы; p=R/B, pz = R'/B — теоретический и действитель-
ный относительные радиусы поворота (В —ширина колеи).
При повороте вокруг заторможенной гусеницы (р = 1,0) дей-
ствительный центр поворота О' находится вне колен ВГМ и совпа-
дает с мгновенным центром поворота отстающей гусеницы О|,
переносная скорость которой и корпуса ВГМ равны абсолют-
ной скорости »бс в точке О\.
Рис. 6.1. План скоростей и схема сил при повороте ВГМ вокруг заторможен-
ной гусеницы (штриховые линии) и вокруг центра тяжести (сплошные линии):
/. г — коэффициенты буксования забегающей (в,) и отстающей («<) гусениц при повороте
с радиусом, меньшим колеи; индекс 0 относится к отстающей гусенице при повороте во-
круг центра тяжести; индекс / — к этой же гусенице ^заторможенной) при повороте вокруг
нее; индекс 3 — к забегающей гусенице (остальные обозначения см. в тексте)
Абсолютная скорость точки 0я забегающей гусеницы направ-
лена против движения и равна
где <jt — коэффициент буксования забегающей гусеницы.
Из теории поворота известно, что переносная скорость о2пер
в полюсе поворота забегающей гусеницы Оя равна теоретической
скорости vt. Тогда, учитывая геометрические соотношения, пред-
ставленные на рис. 6.1, получим
„ - _ »»пер —<>з _ R' + уа - R’ _ у, .
Vj V, пар R' + У, R’ 4 Уг ’
= (6.2)
176
Значение у\ определяется как разница между действительным
радиусом поворота, замеренным на грунте, и шириной колен.
Экспериментально установлено, что для ВГМ с длиной опорной
поверхности £=2,75...3м и шириной колеи В = 2...2,5м на раз-
ных типах грунтов ^ = 0,3... 0,7 м. Для расчета принимают сред-
нее значение /л —0,5 м.
В ряде работ показано, что с уменьшением радиуса поворота
коэффициент а2 непрерывно возрастает и при повороте относи-
тельно заторможенной гусеницы имеет максимальное значение.
Учитывая, что взаимодействие забегающей гусеницы с грунтом
при изменении радиуса поворота р от 1 до 0,5 качественно не
меняется, можно предположить, что функция o2=f(p) монотонно
возрастает (см. рис. 6.1, кривая /).
Если трансмиссия ВГМ выполнена в виде двух бесступенчатых
БКП, то можно осуществить плавный переход от поворота вокруг
заторможенной гусеницы до поворота на месте. При этом дейст
вительный центр поворота будет перемещаться от точки, находя-
щейся вне колеи ВГМ, до точки С (центра тяжести ВГМ).
Вначале действительный центр поворота будет находиться
между точками Oi и О\. Отстающая гусеница за счет момента,
подведенного к ведущему колесу от двигателя, проскальзывает
относительно грунта в сторону, противоположную направлению
относительной скорости
Действительная скорость отстающей гусеницы уже не равна
абсолютной, как при повороте с р = 1,0, хотя их направления
совпадают, а относительная скорость изменила свой знак. В этом
случае
= V\ rtc — = ^131 • (6.3)
Здесь О| — коэффициент отрицательного буксования отстаю-
щей гусеницы, характеризующий ситуацию, когда точки опорной
поверхности перемещаются по грунту вперед по направлению
скорости vc, а сила тяги Р\ и сопротивление R\ не изменили
своего направления.
Равенство (6.3) выполняется при условии | <з, | >1,0. При сме-
щении центра поворота от точки О' до точки О] коэффициент о1
может принимать любые значения от —осдо —I (см. рис. 6.1,
кривая 2).
Когда центр поворота находится в геометрическом центре от-
стающей гусеницы Оь все точки корпуса, лежащие в плоскости,
проходящей через продольную ось отстающей гусеницы, совер-
шают только вращательное движение (поступательное движение
отсутствует, т. е. и]=0). Наступает такой момент, при котором
вследствие определенного соотношения скоростей корпус не в со-
стоянии увлечь за собой отстающую гусеницу. От двигателя к ве-
дущему колесу по-прежнему подводится определенный крутящий
момент, под действием которого гусеница проскальзывает относи-
177
тельно грунта. При этом коэффициент Oi = —1,0. Поворот ВГМ
относительно геометрического центра опорной поверхности гусе-
ницы может происходить только при полном буксовании этой гу-
сеницы.
По мере увеличения проскальзывания наступает момент, когда
направления скоростей О| и о, совпадают, и центр поворота пере-
мещается внутрь колеи. Поскольку направление oj изменилось,
коэффициент ел стал меньше единицы, следовательно, форму-
лу (6.3) можно представить в виде
Т», =0, — D1o1.
При повороте ВГМ вокруг центра тяжести на месте
vi.o = vi> Ко = К: °-.’ - *1 - ®о; У2 = у1>0 вУо-
Смещение полюса поворота гусениц, учитывая выражение (6.1),
Уо = ЛМ2(1 -MJ (6.4)
Экспериментальное исследование равномерного поворота ВГМ
с радиусами, меньшими ширины колеи, т. е. при вращении гусе-
ниц в разные стороны, проводилось при испытании опытной ВГМ
с гидрообъемной трансмиссией (ГОТ), созданной на базе тягача
М-2 массой 9,3 т с двигателем мощностью 73,6 кВт.
Рис. 6.2. Зависимость коэффициента сопротивления повороту Цо от относнтель
ного радиуса р0 при R < В
I - шоссе с бетонным покрытием; 2 — песчаная утрамбованная дорога; 3 — сухая грунтовая
дорога
Гидрообъемная трансмиссия была выполнена по бортовой
полнопоточной схеме и состояла из двух независимых гидропере-
дач, включающих в себя (каждая) отечественный регулируемый
гидронасос типа ПД № 20 и нерегулируемый гидромотор типа
ПМ № 20. Такая схема позволяла получить любой тип МП и
обеспечивала весь возможный диапазон изменения радиуса по-
ворота.
178
По результатам экспериментального исследования построены
зависимости коэффициента сопротивления повороту Цо от его от-
носительного радиуса 0,5 м» < 1,0 (рис. 6.2). Оказалось, что
коэффициент go на площадке с бетонным покрытием не зависит
от радиуса поворота, поскольку бетон — практически недеформи-
руемый грунт, и взаимодействие с ним гусениц приближается
к случаю чистого трения.
В результате обработки экспериментальных данных для де-
формируемых грунтов методом наименьших квадратов было полу-
чено соотношение po>pmaxугол подъема прямых 2 и 3 (см.
рис. 6.2) практически одинаков, следовательно, можно принять
допущение, что
l‘o = + (। — р) 2 а0 . (6.5)
где а0—эмпирический коэффициент, характеризующий свойства грунта (в экспе-
рименте для деформируемых грунтов были получены значения ао«О,1... 0.18.
т. е. а0Ср —0,15; для бетонного покрытия следует принимать а0 —0).
На рис. 6.3 показана характерная осциллограмма движения
ВГМ по сухой грунтовой дороге при последовательном переходе
от установившегося прямолинейного движения (до точки Л) к
повороту с р =1,0 и р =0,5.
Рис. 6.3L Пример осциллограммы поворота на месте ВГМ с ГОП:
«, и в.. углы наклона регулируемых органов гидромашнн (рычагов управления); .4,. Л(.,
л„ я, крутящие моменты и частота вращения ведущих колес соответственно
В процессе эксперимента рычаг управления поворотом плавно
перемещался назад от точки А на осциллограмме до упора с не-
которой остановкой в нулевом положении. Как только отстающая
гусеница начинала вращаться в обратную сторону, крутящий
момент на валу ведущего колеса возрастал на величину АА4 по
сравнению с крутящим моментом при повороте вокруг затормо-
женной гусеницы.
179
При повороте ВГМ на месте (р=0,5) невозможно определить
коэффициенты буксования гусениц измерением необходимых па-
раметров непосредственно на грунте из-за взаимного перекрытия
следов гусениц, поэтому коэффициент а0 определялся как отно-
шение разности теоретического и действительного путей геомет-
рических центров опорных поверхностей гусениц к теоретическо-
му. При этом теоретический путь точек О| и О2 (см. рис. 6.1)
определялся по частоте вращения ведущих колес за время уста-
новившегося поворота, а действительный их путь — как длина
дуги, описываемой этими точками при известном угле поворота.
Коэффициент буксования забегающей гусеницы от>х при по-
вороте с р=1 определялся известными методами непосредствен-
ного замера следов гусеницы на грунте; при этом было установ-
лено соотношение % • 1,5 <Jmix. Так, для сухой грунтовой сугли-
нистой дороги при р=1 =0,15... 0,2; при р: 0,5 д0
= 0,25... 0,3; для утрамбованной песчаной дороги —при р=1
Зтах =0,2 ... 0,3; при р=0,5 <то=0,3... 0,4.
Дальнейшие исследования (на других опытных ВГМ с ГОП)
подтвердили точность определения максимального значения ко-
эффициента сопротивления ц0 при повороте ВГМ на месте, а так-
же позволили уточнить значения коэффициента
Угловое ускорение и мощность внешних сопротивлений при
повороте ВГМ на месте. Неравномерный поворот ВГМ на месте
можно описать следующим уравнением:
Jt du'/dt = = Р0В - (Мс 4- R(IB), (6.6)
где Jt — момент инерции ВГМ вокруг вертикальной оси; Ro — сопротивление
вертикального смятия грунта, равное fO/2, где G — вес ВГМ; МСу —момент
сопротивления при повороте на месте, равный |м>б£/4; ф — угловое* ускорение;
Ро — сила тяги. Остальные обозначения см. на рис. 6.1.
Поворот ВГМ на месте сопровождается обязательным буксо-
ванием обеих гусениц, и для решения уравнения (6.6) относитель-
но углового ускорения необходимо выразить силу тяги Ро через
коэффициент буксования. Для этого используют зависимость,
выведенную профессором В. В. Тарасовым для поворота с р> 1,0,
вводя обозначения, соответствующие повороту на месте:
VW + ^^LI2
КЬ/4 + Э?-4/2
С учетом выражения (6.4) после преобразовании получим
формулу
р in К1 + + 1
4/. т-во,п + 1 •
(6.7)
Формула (6.7) применима при следующих допущениях:
коэффициент буксования о0 не зависит от скорости проскаль-
зывания гусениц относительно грунта;
1М>
используются максимальные значения о0 для каждого грунта,
неравные 1,0 (в пределах от 0,1 до 0,5).
Из формул (6.6) и (6.7) после преобразования получим
(6.8)
где — безразмерный коэффициент, равный
JL g° |П И -<М>|Р-Ь 1
L' 1-э» /1 + <Вз0.'|4 (I -МП3- ।
(6.9)
Из формулы (6.8) видно, что при 1 + R0B/M(:^ ВГМ по-
ворачивается на заданном грунте равномерно, при отклонении же
от этого значения ВГМ будет поворачиваться либо с ускорением,
либо с замедлением.
При заданных характеристиках грунта по формуле (6.7) мож-
но построить зависимость Po=f(<Jo), а по формуле (6.9)—завн
симость Д0=/(ст0) (рис. 6.4).
Рис. 6.4. Расчетная зависимость силы
тяги Ро и коэффициента Ао от коэффи
циента буксования о0 прн повороте на
месте ВГМ с ГОП (ц0 — 0,85.
/гр- 0,04):
/ зона поворота с замедлением; II — зона
поворота с ускорением
При значениях 40= 1.034 и
<то=0,35 опытная ВГМ с ГОП по-
ворачивается равномерно, что
согласуется с эксперименталь-
ными данными.
Используя пла-н скоростей и
сил при повороте ВГМ на месте
(см. рис. 6.1), легко доказать,
что при /?1=/?2=/?0 и Р| = Р2=
— Ро мощность внешних сопро-
тивлений при равномерном пово-
роте с р=0,5, так же как и при
повороте с р > 0,5 с учетом бук-
сования гусениц, численно равна
мощности внешних сопротивле-
ний, вычисленной по формуле
Л/-Со =2₽Л/360О.
где с»о — теоретическая скорость одной из гусениц
Учитывая, что о0=0,5<о£,и проведя соответствующие преоб-
разования, получим
181
NCo=OAP0wB. (6.10)
В формуле (6.10) NCn измеряется в кВт, Ро — в Н, В — в м.
С учетом формулы (6.7) и соотношения ю=ш'/(1 — о0) полу-
чим
ЛГс — рj w' » ш I . (6.11)
Со (I -«о)’ /1 f (Воо/|2(1 —3О)))’ I '
Таким образом, мощность внешних сопротивлений при пово-
роте ВГМ на месте при заданных коэффициентах Цо и а0. харак-
теризующих грунт, прямо пропорциональна фактической угловой
скорости поворота.
Мощность, необходимая для преодоления внешних сопротивле-
ний при повороте ВГМ вокруг заторможенной гусеницы с такой
же угловой скоростью, как при повороте с р = 0,5, равна
Л/, = 0,1 ®' (у, + Д)-п--? ъ- 1п^— ^8д/|£ (l 1 (6.12)
2L 171 (1—ва)’ /1 + (fi03/|£(l - оа)|| — 1
При известных значениях коэффициентов цо, pmiX, а0, оз
можно сравнивать мощности А/Со и У2, отношение которых по
расчетам находится в пределах от 1,17 до 1,2.
Значения мощностей внешних сопротивлений определяют на-
груженность составных частей МП.
Наводка орудия на цель в горизонтальной плоскости при по-
мощи гусениц. Наводка жесткозакрелленной в танке пушки на
цель при помощи гусениц возможна, если фактическая угловая
скорость поворота ВГМ на месте равна скорости вращения баш-
ни, необходимой для переброса огня (не менее 0,51 рад/с, т. е.
307с), и если возможно ее плавное регулирование в диапазоне
от 0,85- 10“я до 0,17 рад/с (т. е. от 0,05 до 107с), а ракетных
систем с самонаведением — в диапазоне от 0,017 до 0,051 рад/с
(т. е. от I до 37с).
Эти требования легко выполняются при использовании ГОП в
МП. Чтобы ГОП можно было использовать одновременно и для
обеспечения минимальных радиусов поворота при обычном дви-
жении, максимальная угловая скорость поворота при максималь-
ной частоте вращения вала двигателя должна находиться в пре-
делах от 0,765 до 1,105 рад/с (от 45 до 657с).
При повороте ВГМ на месте фактическая угловая скорость
переброса огня «^ax=®max (1 — 0о); если принять коэффициент
<Jo=O,3, то свт„ =0,536... 0,774 рад/с (31,5... 45,57с).
В системе управления ГОП МП при наводке на цель гусени-
цами целесообразно иметь два режима — переброса огня и на-
водки. Первый режим обеспечивается установочной мощностью
ГОП, второй зависит от типа и параметров входящих в них гид-
ромашин.
182
Схема включения ГОП в дополнительный привод МП пред-
ставлена на рис. 6.5. В этой схеме на валу гидромотора ГОП
устанавливается редуктор с передаточным отношением 1Р, изме-
няющимся в зависимости от режима поворота: при движении с
р>0,5 /р = 4Р|я п =1,0; при повороте на месте *р — (ртах •
Рис 6.5. Структурная схема трансмиссии с ГОП в МП дифференциального типа:
ГОП — гнлрообъемная' передача; Р редуктор; СДР — суммирующий дифференциальный
ряд; БР бортовой редуктор; КП — коробка передач
Общий кинематический диапазон МП, необходимый для обес-
печения наводки, при условии независимости коэффициентов бук-
сования гусениц от угловой скорости поворота равен
> 600 <6 ,3>
Теоретическая угловая скорость поворота ВГМ, выраженная
через частоту вращения вала гидромотора ГОП, равна
ш = Л/?влЯг/(5/ж), (6.14)
где k—стехиометрический коэффициент (при Л—0,224 <и выражается в рад/с.
при <?—12 — в °/с); /?в.к — радиус ведущего колеса, м; пг—частота враще-
ния вала гидромотора, об/мин; В — ширина колен, м; /д ipioB — псрсдаточ
ное отношение дополнительного привода МП от вала гндромотора до веду-
щего колеса; (OfJ—передаточное отношение от выходного вала редуктора
до ведущего колеса.
При переключении передачи в редукторе передаточное отно-
шение дополнительного привода меняется, поэтому, подставив
формулу (6.14) в (6.13), получим
- drdnp dTi
.- 1 Плах
дтах
где dr—диапазон изменения частоты вращения вала гндромотора ГОП; dnp —
диапазон изменения передаточных отношений в редукторе, который при
d = ------21^- •
" Лг
min
183
Диапазон изменения частоты вращения вала гидромотора
ГОП в основном зависит от типа и конструкции гидромашин. Он
ограничен максимальной и минимальной устойчивыми частотами
вращения вала гидромотора. Максимальная частота вращения
ГОП лимитируется геометрическими размерами, допустимыми
скоростями скольжения в трущихся парах и инерционными сила-
ми, действующими на поступательно движущиеся или вращаю-
щиеся детали. Минимально устойчивая частота вращения гидро-
мотора ГОП определяется утечками в нем при работе под нагруз-
кой и потерями на трение, т. е. объемным и механическим КПД.
Аксиально-поршневые гидромашины с силовым замыканием
поршней и наклонным диском имеют минимально устойчивую
частоту вращения (примерно 260 об/мин).
При обеспечении специальных конструктивных мер по повы-
шению объемного КПД минимально устойчивая частота враще-
ния таких гндромашин может составлять примерно 20—30 об/мин,
т. е. может быть обеспечен диапазон изменения частоты вращения
от 150 до 200 об/мин.
Аксиально-поршневые гидромашины с наклонным блоком
цилиндров могут обеспечить диапазон изменения частоты враще-
ния вала гидромотора ГОП dT порядка 1000. При использовании
таких гидромашин в ГОП для МП минимальную угловую ско-
рость наводки можно обеспечить без дополнительных механиче-
ских редукторов, однако объемно-массовые параметры таких
ГОП неприемлемы для большинства ВГМ.
Устойчивая минимальная частота вращения радиально-порш-
невых гндромашин типа SHT (Польша) составляет лГ|п|п ~
= 2 об/мин при =200 об/мин, а радиальных роликолопаст-
иых гидромашин фирмы «Телехойст» (США) яГт|1 = 1 об/мин
при пг = 1000... 1500 об/мин. Эти гидромашины применяются
для приводов станков и в мотор-колесах колесных машин высо-
кой проходимости.
Быстроходные радиально-поршневые гидромашины однократ-
ного действия, имеющие максимальную частоту вращения до
3060 об/мин, могут обеспечить минимальную устойчивую частоту
вращения 100—120 об/мин.
Таким образом, при использовании в МП ВГМ ГОП с быстро-
ходными аксиально-поршневыми или радиально-поршневыми гид-
ромашинами необходимо применять дополнительный механиче-
ский редуктор с передаточным отношением ip = 2... 4, т. е. в
схеме МП для наводки гусеницами необходимо предусматривать
увеличение ц в два-четыре раза по сравнению с обычным пово-
ротом (при ft > 0,5).
В режиме переброса огня целесообразно иметь высокую чув-
ствительность угловой скорости ВГМ к углу поворота органа
184
управления, а в режиме наводки — наоборот (рис. 6.6). Поэтому
для режима переброса не обязательно использовать весь угол
поворота а,пах органа управления, достаточен угол ai«0,3an,v.
В режиме наводки для обеспечения «mtn =0,85-10-л рад/с
(0,05 °/с) и в режиме слежения за движущейся целью для обеспе-
чения со] = 0,17 рад/с (10°/с) целесообразно использовать весь
угол поворота органа управления от 0 до ami .
Рис. 6.6. Зависимость угловой скорости
ш от угла поворота а органа управле-
ния МП при наводке гусеницами на
цель:
I. 3 рекомендуемые режимы; 2 экспсри
ментальная зависимость; I. II — режимы пе-
реброса и наводки соответственно
Следует отметить, что макси-
мальные углы поворота органа
управления ГОП МП в режимах
наводки при повороте ВГМ могут
отличаться друг от друга. При
обычном движении максималь-
ный угол поворота органа уп-
равления (штурвала) ГОП вы-
бирается с учетом требуемой высокой чувствительности к управ-
лению (например, быстрое введение ВГМ в занос) и компоновоч-
ных ограничений; обычно он колеблется в пределах от 0,51 до
1,02 рад (от .30 ДО 60°), а в режиме наводки этот угол должен
быть увеличен в два-три раза. Это можно осуществить измене-
нием конструкции штурвала или применением нелинейных эле-
ментов (например, кулачков) в механическом приводе от штур-
вала к гидроусилителю гидронасоса ГОП. Увеличение максималь
ного угла поворота штурвала управления ГОП в режиме наводки
легко осуществить при использовании в системе управления
электрических элементов.
Возможность наводки на цель гусеницами в режиме поворота
на месте подтверждена при испытаниях опытной ВГМ массой
13 т, созданной на базе серийно выпускавшегося зенитного комп-
лекса. Механизм поворота этой ВГМ имел ГОП в дополнительном
приводе и был выполнен по схеме, приведенной на рис. 6.5, но без
дополнительного редуктора. ГОП состояла из отечественных се-
рийных гндромашин — регулируемого гидронасоса ПД № 20 и не-
регулируемого гидромотора ПМ №20. Орган управления был
выполнен в виде штурвала с максимальным углом поворота
<х1П,х =±0,51 рад (±30°) и связан механическими тягами с вали-
ком гидроусилителя гидронасоса. Перед водителем (наводчиком)
была установлена артиллерийская панорама, перекрестие кото-
рой он при повороте ВГМ стремился совместить с целью. На кор-
185
пусе ВГМ установлен киноаппарат типа AKQ-2. В качестве
неподвижной цели использовался фанерный щит с нарисованным
крестом, в качестве движущейся — автомобиль. На штурвале
управления была расположена кнопка, при помощи которой одно-
временно включались киноаппарат и осциллограф, регистриро-
вавшие необходимые параметры.
Испытания проводились на горизонтальных площадках из
различных грунтов в режиме переброса огня и наводки при рас-
стоянии до неподвижной цели 500, 1000 и 1500 м. Результаты
испытаний при одноразовом воздействии на орган управления
ГОП МП, обработанные методами математической статистики,
приведены в табл. 6.1.
Таблица 6.1
Погрешность наводки гусеницами при испытаниях опытной ВГМ с ГОП
Характеристика грунта и режима поворота Математичес- кое ожидание тл Дисперсия О Среднеквадратич- иое отклонение в.
Мерзлый песок; 0,040 1.61 1,27
наводка 6.144 5.80 4,Ьб
переброс 1.22 1,65 1,28
4,40 6,00 4,60
Обледенелый суглинок (переброс) 0,95 8.70 2,95
3,42 31,32 10,60
Примечание. Над чертой—в мнллнраднанах. под чертой —в угловых
минутах.
При многократном воздействии на орган управления ГОП МП
процесс наводки имел колебательный характер и зависел во мно-
гом от типа грунта.
Средняя продолжительность найбдки опытной ВГМ на непод-
вижную цель на различных грунтах составляла 7—8 с; минималь
пая устойчивая угловая скорость поворота колебалась в пределах
от 0,25-10 - до 0,61 10 - рад/с (от 0,15 до 0,35 °/с) и зависела
от грунта, на котором происходил поворот. Поскольку в механи-
ческой связи штурвала с валиком гидроусилителя гидронасоса
ГОП не было нелинейных элементов, между углом поворота
штурвала и угловой скоростью поворота ВГМ существовала прак-
тически прямо пропорциональная зависимость (прямая 2 на
рис. 6.6).
Испытания показали, что плавное изменение угловой скорос-
ти поворота ВГМ может обеспечить достаточную точность навод-
ки гусеницами на цель при условии совершенствования системы
управления и конструкции МП с ГОП.
186
6.2. ТЯГОВЫЙ РАСЧЕТ РАВНОМЕРНОГО ПОВОРОТА
ГУСЕНИЧНОЙ машины
Методика тягового расчета поворота. Исходные данные. При
выполнении тягового расчета поворота ВГМ рассматриваются
кинематические параметры и внешние силы сопротивления пово-
роту в разнообразных условиях движения, а также учитываются
свойства различных типов МП в зависимости от радиуса пово-
рота и скорости движения.
Методика расчета равномерного поворота ВГМ отличается от
изложенных в известных работах тем, что в ней учитываются
силовые и холостые потери в дополнительном приводе МП и гусе-
ничном движителе, а также используется комплексный подход
к анализу тяговых характеристик машины при повороте. Основ-
ные положения методики изложены в отраслевом руководящем
техническом материале, разработанном под руководством
В. В. Пальцева Методика распространяется на ВГМ с МТ и ГМТ
при любом типе МП (за исключением двухпоточных МП, имею-
щих в ГМТ механический привод непосредственно от двигателя
и работающих в режиме поворота с разблокированным ГТ).
Комплексный подход позволяет при расчете решить следую-
щие задачи:
оценить возможность поворота с любым заданным радиусом
на определенном грунте, а также определить максимально воз-
можную скорость движения ВГМ в режиме поворота на тех пере-
дачах, на которых поворот возможен;
определить совокупность грунтов, характеризуемых макси-
мальным коэффициентом сопротивления повороту цт1К и коэф-
фициентом сопротивления прямолинейному движению f, на кото-
рых возможен поворот с любым заданным радиусом при фикси-
рованной скорости входа в поворот;
определить для каждой передачи диапазоны скоростей посту-
пательного движения центра тяжести ВГМ и действительных ра-
диусов поворота, обеспечиваемых МП, а также степень использо-
вания скоростного диапазона передачи при повороте с заданным
радиусом с учетом ограничений по заносу, возникающему под
действием центробежных сил.
При расчете принимаются следующие допущения:
центр тяжести ВГМ располагается в продольной плоскости
над серединой опорных ветвей гусениц;
ширина гусениц принимается равной нулю;
поперечные составляющие касательных реакции грунта на
опорные поверхности гусениц пропорциональны нормальным на-
грузкам на них;
поворот ВГМ совершается на горизонтальной ровной пло-
щадке.
Тип МП принято характеризовать кинематическим парамет-
ром— положением связанной с машиной точки, сохраняющей при
187
повороте скорость прямолинейного движения до поворота, выра-
женным в долях ширины колеи. На рис. 6.7 показан параметр
МП — относительное расстояние от продольной оси симметрии
забегающей гусеницы до точки, сохраняющей при повороте ско-
рость поступательного прямолинейного движения. Если относи-
тельное расстояние до указанной характерной точки измеряется
от продольной оси симметрии ВГМ, то параметр МП обозна-
чается q0.
Рис. 6.7. План скоростей и схема внешних сил и моментов, действующих на гу-
сеничную машину при равномерном повороте с любым радиусом:
С — центробежная сила; С С? - продольная и поперечная составляющие центробежной
силы соответственно; Rt. К, — силы сопротивления поступательному движению на забе-
гающем н отстающем борту соответственно; PQ. Pt — сила тяги на забегающем и Отстаю
щем борту соответственно; О„ — центр давления; Ot, О, - полюсы поворота забегающей
и отстающей гусениц; О - центр теоретического поворота; О’ центр действительного по
ворота; х. и - координаты смещения центра давления; I —смещение центра поворота;
?•. — относительное расстояние от продольной оси симметрии забегающей гусеницы до
точки, сохраняющей при повороте скорость поступательного прямолинейного движения;
К . /?' — теоретический и действительный радиусы поворота до продольной осн забегаю
щей гусеницы соответственно; — теоретический радиус поворота до продольной осн
ВГМ; Ru действительный радиус поворота при дсйствин центробежной силы;*,. о, дей
ствитсльны* скорости забегающего и отстающего бортов ВГМ; *с действительная ско
рость центра тяжести ВГМ при повороте (с учетом юза и буксования); г.. продольная
составляющая действительной скорости центра тяжести ВГМ; о. скорость поступательно
го прямолинейного движения точки ВГМ. сохраняющей ппи повороте скорость поступи
тельного движения; Мс— момент сопротивления повороту; •»' действительная угловая ско-
рость поворота ВГМ; ф’ —угол между действительным и теоретическим радиусом поворота
В общем виде параметр МП определяется по формуле
л п^Г2/тр/тр« zrp (/ТР, + ZTP,) , .1
Чг _ 0.5[-------,тр(<тр_;тр-|-------+ ф (615)
где 7ТР1, /Гр, —силовые передаточные числа (без учета КПД) от двигателя
(или турбинного колеса ГТ) до ведущих колес забегающего и отстающего бор-
тов соответственно; <ТР — то же при прямолинейном двнженнн.
188
В зависимости от номера передачи относительный расчетный
радиус поворота (при полном включении фрикционов МП)
Рр = 0,5 [(ZTP + /„,)/(/„,. - /ТР.) + 11.
Основным элементом двухпоточных механизмов поворота, при-
меняемых в ВГМ, являются суммирующие дифференциальные
ряды (СДР); при этом, как правило, привод к эпициклам СДР
осуществляется от двигателя через коробку передач, а к солнеч-
ным шестерням — минуя ее. При прямолинейном движении сол-
нечные шестерни неподвижны или вращаются с одинаковой ско-
ростью, при повороте скорость вращения солнечных шестерен из-
меняется по отношению друг к другу. В зависимости от направле-
ния и скорости вращения солнечных шестерен при повороте МП
первого типа делят на три группы, а МП второго типа — на две.
Для двухпоточных МП относительный расчетный радиус пово-
рота равен
рР - +- bp 4- 0,5, (6.16)
где а*. коэффициенты, характеризующие тип и группу МП (табл. 6.2);
Кс — конструктивный параметр СДР (отношение чисел зубьев большего цент
рального колеса к меньшему); — силовые передаточные отношения
(без учета КПД) от двигателя (или турбинного колеса ГТ) до солнечных
и эпициклических шестерен СДР соответственно.
Таблица 6.2
Значения коэффициентов ар и 6р для двухпоточных МП
Тип МП Нойер группы МП *Р
1 1 4-0.5 0.0
2 4 0.5 +0.5
3 4-0.5 -0.5
II 1 4-1.0 -0.5
2 + 1.0 4 0.5
Относительный расчетный радиус до центра тяжести машины
Ро.р = /?о/В = Рр-°.5.
Для проведения расчета необходимы следующие исходные
данные:
по ВГМ —длина опорной поверхности гусениц L, ширина
колеи В, вес G, высота центра тяжести ВГМ от плоскости
грунта he\
по трансмиссии — Zlp, tTp , /тр , , /ж, Kct т1БР — КПД от-
стающего и забегающего бортов СДР при повороте (в случае
189
использования трансмиссии с двумя БКП — КПД БКП отстаю-
щего и забегающего бортов); , iic,— КПД механической
цепи основного и дополнительного приводов МП, т(>, ти.
Для планетарных передач КПД рекомендуется определять по
методу Крейнеса, для непланетарных — последовательным пере
множением КПД зубчатых пар, участвующих в передаче момента.
Расчет целесообразно производить для двух типов грунтов,
характеризующих легкие и тяжелые условия поворота.
Для МП с фрикционными элементами в качестве легких усло-
вий принимают шоссе с бетонным покрытием (J = 0,04 ... 0,05 и
=0,45.. .0,5), а в качестве тяжелых условий—сухой дернис-
тый грунт ([=0,06.. .0,07 и 0,8... 0,85). Для МП с ГОП
в дополнительном приводе в тяжелых условиях рекомендуется
принимать Нш.х — 1.0.
Выбор тех или иных значений коэффициентов |*тах объясняет-
ся следующими причинами. При повороте ВГМ возможности МП
фрикционного типа определяются коэффициентом запаса фрик-
ционных элементов, который, как правило, больше единицы, и
коэффициентом запаса прочности шестерен и валов механиче-
ского привода, который также больше единицы. Поэтому при уве-
личении момента сопротивления повороту по сравнению с расчет-
ным поворот ВГМ при наличии запаса мощности по двигателю
все же возможен.
Максимальный момент сопротивления, который может преодо-
леть МП с ГОП, ограничен -Максимальным моментом на валу
гидромотора. Если гидромотор нерегулируемый, этот момент
ограничен максимальным давлением рабочей жидкости и опреде-
ляется настройкой предохранителЛого клапана. Следовательно,
ВГМ, имеющая МП с ГОП, даже при наличии запаса мощности
по двигателю при открытии предохранительного клапана не мо-
жет осуществлять поворот с расчетным радиусом, так как ВГМ
произвольно увеличивает радиус поворота. На этом основании
при расчете МП с ГОП целесообразно увеличивать момент сопро-
тивления, т. е. увеличивать коэффициент .
При повороте ВГМ с радиусами, равными или большими ра-
диуса поворота относительно заторможенной гусеницы (р >1,0),
коэффициент сопротивления повороту определяется по известной
зависимости А. О. Никитина, а при повороте ВГМ на месте реко-
мендуется пользоваться формулой (6.5).
Действительный относительный радиус поворота определяется
по формуле
где К If— коэффициент пропорциональности между действительным (с учетом
юза и буксования гусениц) и теоретическим (р) радиусами поворота.
При проектировании новой ВГМ может быть использовано
экспериментальное значение коэффициента KR, известное для
какой-либо ВГМ с такими же ходовой частью и массой, либо при-
190
ннмается KR—LIB, поскольку подобная зависимость получена
рядом исследователей для зоны малых скоростей и малых радиу-
сов поворота. По данным зарубежной печати, под влиянием цент-
робежных сил при повороте в зоне больших скоростей и больших
радиусов коэффициент KR увеличивается и становится больше
отношения LfB.
Из результатов тягового расчета прямолинейного движения
для каждой передачи выбираются значения скорости поступа-
тельного движения центра тяжести ВГМ в момент входа в пово-
рот (у0) и соответствующие им значения удельной силы тяги в
плоскости грунта ft. Составляются таблицы, которые должны
содержать не только текущие, но и характерные значения этих
величин, соответствующие частоте вращения вала двигателя на
режимах максимальной мощности, максимального момента и хо-
лостого хода.
Влияние центробежной силы на поворот. В общем случае
(см. рис. 6.7) действие центробежной силы С и ее продольной
(Сх) и поперечной (Су) составляющих вызывает смещение центра
поворота ВГМ на величину х. смешение центра давления (точ-
ки Оо) на величины х и у, а также перераспределение нормаль-
ных нагрузок на гусеницы. Эпюры касательных сил, действующих
на гусеницы, имеют вид трапеций.
Влиянием силы Сг на продольное смешение центра давления
пренебрегают, так как она может достигать существенных значе-
ний только при повороте с большой скоростью на малых радиу-
сах, что вызывает занос или опрокидывание ВГМ.
Относительное продольное смещение центра давления (рас-
стояние от поперечной оси симметрии корпуса ВГМ до центра
давления, выраженное в долях половины длины опорной поверх-
ности гусеницы) принято обозначать Xq=2xIL, а относительное
продольное смещение центра поворота (расстояние от попереч-
ной оси симметрии ВГМ до проекции центра поворота на про-
дольную ось, выраженное в долях половины длины опорной по-
верхности гусениц), обозначим Хо = 2х/£-
Для определения относительного смещения центра поворота
под действием поперечной составляющей центробежной силы
составляют уравнение проекций сил на поперечную ось ВГМ, из
которого после преобразования получают
Х,у = Су/(|1О). (6.17)
Используя обозначения рис. 6.7, получаем:
vc = vc cos У;
R' — Я/2 = /?'совф';
Су = С cos ф'.
191
Зная, что действительное расстояние от продольной оси сим-
метрии забегающей гусеницы до точки, сохраняющей при поворо-
те скорость прямолинейного поступательного движения, равно
q2 = q2B, определяем действительную скорость поступательного
движения центра тяжести ВГМ в процессе поворота (с учетом
юза и буксования):
% - (/ - о. w + ? А) (6.18)
где Kv — коэффициент пропорциональности между действительной (с учетом
юза и буксования гусениц) и теоретической скоростями поступательного дви-
жения.
Коэффициент Kv определяют экспериментально или прини-
мают равным единице.
Центробежная сила
с _ о J2. = 67_______
“ g R'u g cos (/?' - B’2) ’
ее поперечная составляющая
Z v2
‘6J9>
Подставляя (6.19) в (6.17) и выражая скорость в км/ч, полу-
чаем
Хоу = «V1127 (р' “ 0,5)1 (6J2O)
Продольная составляющая центробежной силы
Cx = C,tgt'.
Поскольку
tg*' = Х/(АГ - В/2) - ХоМ2 Л (/ - 0,5)),
то
Сх-С,ХоА/|2^(р'-0.5)).
Действительная скорость центра тяжести ВГМ при повороте
(с учетом юза и буксования гусениц)
vc = <^/cos = т^/cos | arctg^B(pz^o3y].
Относительное продольное смещение центра давления можно
выразить через продольную составляющую центробежной силы:
x9 = 2heCJ(OL).
Под действием поперечной составляющей центробежной силы
происходит перераспределение нормальных нагрузок на гусеницы,
192
и поэтому изменяются силы сопротивления поступательному дви-
жению /?| и R2.
Очевидно, что
/?1 = (б/2-СЛ/Я)/;
/?,-(а/2 + СуА^)/.
Соответствующие силы тяги определяются из уравнения мо-
ментов относительно полюсов поворота гусениц Oj и О2:
Р2 = (G/2 + C,hc/B) f 4- ^KMGL]{A В) + Сх/2 - С,М2 В); (6.21)
Р, = (0/2 - CyhJ2) / - ?KMGL/(4 В) + CJ2 - CyZ//(2 В), (6.22)
где Км = (1 Ч Хо> (I + *оХо) — 4х*о —поправочный коэффициент момента
сопротивления повороту.
Из формул (6.21) и (6.22) видно, что с увеличением скорости
ВГМ на повороте, т. е. при увеличении центробежной силы, силы
Р2 и Р| уменьшаются, облегчая выполнение поворота. При этом
продольное смещение полюсов увеличивается, и, когда полюса
поворота (точки О| и О2) сместятся к краю опорной поверхнос-
ти гусениц, начнется частичный занос ВГМ. Хотя полного
заноса ВГМ не происходит, так как дополнительное перемеще-
ние опорных ветвей гусениц в направлении поперечной оси вызы-
вает дополнительную поперечную деформацию грунта и соответ-
ствующее увеличение его касательной реакции, которая уравно-
вешивает поперечную составляющую центробежной силы. Однако
коэффициент сопротивления повороту возрастает; при полном
заносе максимальное значение касательной реакции грунта ха-
рактеризуется максимальным коэффициентом бокового сдвига,
который можно считать равным максимальному коэффициенту
сопротивления повороту цт„. При полном заносе Zo * и
Hmax<Zo!1- Эти соотношения показывают, что максимальные
касательные силы реакции грунта не могут уже удерживать ВГМ
на криволинейной траектории, и поэтому она движется только в
направлении поперечной оси. При полном заносе силы тяги Р2 и
Pi равны нулю.
Минимально возможный действительный радиус поворота, при
котором наступает полный занос, называют критическим (/?'р).
Его можно определить по формуле (6.20), если принять Zo =1Д
I1 = Hmax , R[9 - в М , 1>с - в КМ/Ч :
= ^1(127 В^„) + 0.5. (6.23)
Максимально возможное значение скорости поступательного
движения центра тяжести ВГМ в момент входа в поворот с за-
данным радиусом по условию полного заноса можно определить
по формуле
13 Зак. 47 «с»
193
Построение тяговой характеристики равномерного поворота.
Тяговая характеристика равномерного поворота — это сочетание
тяговой характеристики прямолинейного движения и зависимости
удельной силы тяги, необходимой для поворота, от его радиуса.
При построении этой характеристики необходимо, чтобы
удельные силы тяги (потребная для поворота на данном грунте
и обеспечиваемая двигателем) были равны, т. е. /п — /л. Потреб-
ная удельная сила тяги при повороте зависит от свойств грунта,
радиуса поворота и типа МП.
Для МП дифференциального типа (q2=— 0,5) при Pi>0
(сила тяги на отстающей гусенице является активной) удельную
силу тяги, потребную для поворота, в общем виде можно пред-
ставить формулой
+ + + (6-24)
где ft и fi — потребные удельные силы тяги соответственно на забегающей и
отстающей гусеницах (h—Pi/G; fi-Pi/G); /о. ж — коэффициент, учитывающий
нагрузочные потери в основном'-н дополнительном приводах МП; Л.пг—коэф-
фициент, учитывающий холостые потери в гусеничном движителе.
Для МП недифференциального типа (д2^—0,5) при Р|>0
/п = / + CJO 4- /о 1 + /х. пг •
Для МП любого типа при Р><0 (сила тяги на отстающей гу-
сенице является тормозной) необходимо учитывать потери мощ-
ности в контуре рекуперации
Л = Л 77+57 + 7ГП7 + f° *+ f'+Л'
где ip — КПД механической цепи контура рекуперации (’ip — Ч? Чбр’ЧсАЛ
/х.к—коэффициент, учитывающий холостые потери в БКП (подсчитывается
только для трансмиссий с БКП, в остальных случаях равен нулю).
Коэффициент /ОеЖ зависит от схемы МП, его типа и группы;
коэффициент fx.n зависит от конструкции гусеничного движи-
теля, и оба эти коэффициента зависят от направления силы тяги
на отстающей гусенице.
В общем виде коэффициент, учитывающий нагрузочные поте-
ри в основном и дополнительном приводах МП, можно предста-
вить в виде
А. = 0.5 [ (1 - -£) +1 /, К + тЛз) I •
Коэффициент, учитывающий холостые потери в гусеничном
движителе:
/х = + о,5да —4— 4-0,5 4-0,5
/X. пг q Vo \ ’ * Рр + 42 Рр + <7» P + 9jz
194
Коэффициенты а, и bt зависят от типа и группы МП, вычис-
ляются по формулам, приведенным в табл. 6.3.
Данные этой таблицы могут быть использованы при автомати-
зированном расчете указанных типов МП; для других типов МП
коэффициенты а( и bt определяются из мощностного балан-
са МП.
Коэффициент, учитывающий холостые потери в БКП, рассчи-
тывается по формуле
Мощность холостых потерь в БКП забегающего (Л\ п ) и от-
стающего (Л\ ) бортов определяется при расчете тяговой
характеристики прямолинейного движения и зависит от скорости
гусениц соответствующих бортов.
Учет коэффициентов /ож, /х „ ,/х к в энергетическом балансе
МП особенно целесообразен при автоматизированном расчете
тяговой характеристики поворота.
Результаты расчета тяговой характеристики поворота пред-
ставляют в виде таблиц значений и0, Р₽> Р (в зависимости
от действительного радиуса) с указанием номера передачи и ха-
рактеристик грунта f и Цппх- По результатам расчета строится
график тяговой характеристики поворота.
Расчет предельных характеристик равномерного поворота.
Для заданного режима равномерного поворота и выбранных ха-
рактеристик грунта и f равномерный поворот ограничивает-
ся заносом ВГМ, сцеплением гусениц с грунтом, тяговыми воз-
можностями двигателя. Для определения предельных характерис-
тик поворота целесообразно определить совокупность (область)
грунтов, на которых возможен равномерный поворот ВГМ. Эта
область строится графически в координатах f— цт1Х (рис. 6.8)
и вначале ограничивается сверху и снизу значениями коэффи-
циента сопротивления прямолинейному движению f, равными 0,25
и 0,03 соответственно, слева и справа значениями коэффициента
сопротивления повороту ртах, равными 0,25 и 1,3 соответственно.
Внутри указанного прямоугольника находятся все грунты, харак-
теристики которых приводятся в технической литературе
(табл. 6.4).
Заданный режим поворота характеризуется скоростью входа
ВГМ в поворот и действительным радиусом поворота. Скорость
входа ВГМ в поворот о0 рекомендуется выбирать следующим об-
разом:
для МТ с ПД на каждой передаче берется скорость, соответ-
ствующая частоте вращения вала двигателя на режиме макси-
мального момента;
для МТ с ГТД и ГМТ на I и II передачах эта скорость при-
нимается равной нулю (режим «стоп»), а на остальных переда-
13* 195
Коэффициенты «/
51 |Е Тип механизма —
1 (I) 1 (2) 1 (3) | 1 (4)
ф Сила торможения (тяги)
Р,<0 Р<>0 Л<0 Р,>0 Р, <0 Р..-0 Р,<0
~1р -1 0 0 -~2ip 0 0
Oj —1 1 2 0 0 0 2(1-1Д) 1а
«3 0 1 Л. 1к ~1*1р 1 1а 0 0 0
л» 0 0 1л1р . 1 1д 0 0 0
0 0 0 21гЬ'-1д) 1д
Л, 0 0 -о -2з)г 0 0
1-1? 1г = 1к ^.'+ч,5г 1а 1г 1а -1р 1г1а 0 0
А, 0 0 1а1р 1г _ 1г 1а 0 0 0
Примечание. 1(1), 1(2), 1(3), 11(1), II(2) — двухпоточные МП; 1(4),
механизм поворота соответственно).
196
Таблица 6.3
и Ь, для различных МП
поворота (группа)
| Н (»> | И (2) | II (3) | II (4)
на отстающей гусенице
Р,>0 Р, 0 P,<Q Р, о Р,<0 11 Р,<0 Р,>0
0 -2чР 0 0 0 0 0 0 0 0
2(1-Ъ) Чд 0 0 -2 2 0 0 0
0 -(*-*) 0 -(*-?) 0 -(-а 0 0 и
0 0 0 0 0 0 0 0 0
2Чг(1-Чд) Чд н 0 -(’-а 0 t-а 0 (- а 0
0 0 0 *(’-а -4Чг 0 0 0 0
0 _ 2>)р ч!ч? 0 2Чг Ча 2Чг Чд 0 0 0 0
0 0 0 0 0 0 0 0 0
11(3), 11(4)—однопоточные МП (простой дифференциал, БКП и планетарный
197
чах берется скорость, соответствующая точке пересечения тяго-
вых характеристик прямолинейного движения рассчитываемой
передачи и предыдущей.
Если известна и0, по формуле (6.23) с учетом (6.18) можно
определить значение рт„, ограничивающее область грунтов по
условию полного заноса ВГМ под действием центробежной силы:
Рт.х - (р' - 0,5)/{127 АВ (р' + *A'ff)21.
По найденному значению рт„ на рис. 6.8 проводят ограни-
чительную линию АЛ. Далее учитывается условие сцепления
гусениц с грунтом.
Сила тяги по сцеплению рассчитывается по формуле
^-(О/г+сд/В)^.,,
где Ртах - Тсц •
Рис. 6.8. Границы области грунтов, на которых возможен равномерный поворот
ВГМ
В диапазоне ргаахд < Рт.х Л 1.0 значения f из условия сцеп-
ления гусениц с грунтом (линия ОВ на рис. 6.8) определяются
из равенства Pa=PCu. а с учетом формулы (6.21)
pGLKMl(*B) + Сх/2 - CyL^I(2B)
/ов “ Нтаж G/2 + CyhcIB •
Если |Amtx >1,0 (линия ВС на рис. 6.8), то
pGLKMl(4B) + Сж/2-С/хо/(2В)
/вс “ 1 ’° G/2 + dyhcIB •
198
Таблица 6.4
Характеристики грунтов
Дорога (грунт) Коэффициент сопротивления прямолинейному движению / Коэффициент сцепления с грунтом ’сц Коэффицнст сопротивление повороту %11Х
Шоссе: с асфальтовым покрытием с бетонным покрытием 0.03—0,05 0,03—0,05 0,3-0,5 0.3-0,45 0,45 0,45
Дорога с бу- лыжным покры- тием сухая, гладкая 0,06-0,07 0,74-0,8 0.8
V и HUVI но рительная 0,06 0,6-0,8 0,8
Сухой дернистый грунт 0,06 0,8 0,8
Сухая грунтовая дорога 0.06-0.07 1.0 1.0*
Снежная дорога укатанная 0,06-0,07 0,17 0,17*
обледенелая 0,05-0,1 0,2-0,4 0,3*
। ледяная 0,03—0,04 0,5 0,5*
Пашня стерня 0,06—0,08 0,55-0,6 0,6*
свежая пахота 0,1-0,16 0.7 0,7*
слежавшаяся пахота 0,08 0.6—0,8 0.7*
Местность: сухой пылевидный суглинок 0,07 — 0.6
сухой луг со скошенной травой 0,08-1,00 0,7-0,95 0,8*
сухой дернистый суглинок 0,08 ' - 0,9
сырой луг со скошенной травой 0 1-0,16 0.9-1,0 1.0*
песок сухой 0.15-0.25 0.45 -0,6 0,5
влажный 0,08-0,1 0,74-0,9 0.8
болото 0,2-0,25 0.3-0,5 0,4
неукатанный снег 0.15-0,25 0,5 0,5*
Примечание. Значения |лтах со звездочкой ориентировочно взяты рав-
ными соответствующим значениям ф для данного грунта.
191)
Положение точки D на границе области грунтов соответствует
р1==0. Используя формулу (6.22), получим
_ ИО£КМ/(4В) -Сж/2-Су£Хо/(2В)
Jod— Gl2-CyhclB
На грунтах с f>fOD сила тяги отстающей гусеницы Р|>0
(зона Е на рис. 6.8), а для грунтов с f<fOD — сила тяги Pi<0
(зона Ж). Линии DtD и DQ2 ограничивают зону грунтов по тяго-
вым возможностям ВГМ. Значения fUD и //я, определяются
из соотношения /д — fn с учетом направления силы тяги Р\ и
типа МП.
Для МП дифференциального типа (д2=—0,5), используя
формулу (6.24), при Р|->0 имеем
f *aL К 4- Cjc — CyL ч Рр
Jdxd~~\j* |Д 4 В 2 2В (ь + *)О
(Рр + G
(Рр г
(Рр -г ЧА G
Для МП недифференциального типа (</2у —0,5) при Р|>0
имеем
fD.D = A-Cx/G.
Для МП любого типа при Р|<0 (линия DD2 на рис. 6.8)
/«О. - (А - - ^4- х«) („ о -
( ugl сх \ (рр — 1Ир ](.
\4В 2 2В (рр t q,)G J/*
.|7_g_ , £A \ Pp । / g _C?hc\ (Pp—Pip]
• |A 2 “Г в ) (Рр t ЧА c1 \ 2 8 bpp + q.) G J *
При определении fa по выведенным формулам для упрощения
расчетов коэффициенты /0 д, /х п , /д к не учитывались.
Если точки, изображающие определенные параметры грунтов,
лежат вне границ указанной области, то равномерный поворот с
заданной скоростью входа в поворот и заданным радиусом не-
возможен: например, в точках ah а2 поворот невозможен из-за
ограничений по сцеплению гусениц с грунтом; в точке b поворот
невозможен, так как удельная сила тяги, обеспечиваемая двига-
телем, меньше потребной при повороте (/д</п); в точке d по-
ворот невозможен из-за ограничения по заносу.
Предельные характеристики равномерного поворота позво-
ляют ограничить равномерный поворот ВГМ по расчетным радиу-
сам, определяемым кинематическими параметрами МП при пол-
ном заносе и опрокидывании ВГМ от действия центробежных сил.
200
Расчет полного заноса ВГМ рекомендуется производить для
двух значений коэффициента сопротивления повороту =0,45
(асфальт, бетон) и цт„ =0,8 (сухой дернистый грунт, целина
и др.); иногда расчет проводят для наиболее вероятного значе-
ния цтах =0,65.
Минимальные действительные относительные радиусы опреде-
ляются из условий полного заноса по формуле (6.23) и опрокиды-
вания ВГМ — по формуле
р' => &с Лс/(63,5 Я2) 4-0,5.
Расчет рекомендуется проводить для следующих значений ско-
рости поступательного движения центра тяжести при повороте
(км/ч): 10, 20, 30, 40, 50, 60, vc
xmax
Рис. 6.9. Предельные характеристики равномерного поворота ВГМ с двухпоточ-
ным МП и четырехскоростной ПКП:
а — зона, в которой возможен поворот на грунтах с 0,8 > Нщах >0,45; б--зона, в кото-
рой наступает полный занос на грунтах с р.т„>0,8 —эона, где движение невозможно
по условиям опрокидывания; штриховая. штрнхпункТнрная и фигурная линия — границы
зон скоростей и соответствующих нм действительных радиусов поворота по передачам 1,
II, 111 и IV; I. 2 кривые ограничений по заносу на грунтах с характеристиками
И-шах*- °’45 и ^гаах “ 0.8; 3 — кривая ограничений по опрокидыванию машины; заштрихо
вана зона, не обеспечиваемая кинематикой МП
Далее определяется предел скоростей и соответствующих им
действительных радиусов поворота на каждой передаче с исполь-
зованием формулы (6.18):
(₽' - °’5) Яр' + ;
•rmln vmln
Vex “ V0 <Р' “ °’5) / + *
Лпах wm*x
По результатам расчета строятся предельные характеристики
равномерного поворота ВГМ (рис. 6.9).
14 Зак. 47 «с»
201
Глава 7 ОСНОВЫ ТЕОРИИ И РАСЧЕТА
ГИДРООБЪЕМНО-МЕХАН ИЧ ЕСКИХ
ПЕРЕДАЧ 1
7.1. ОБЩИЕ СВЕДЕНИЯ
Гидрообъемно-механическая передача (ГОМП) представляет
собой совокупность гидрообъемной передачи (ГОП) и механиче-
ского элемента, составленного из зубчатых механизмов враща-
тельного движения, и является комбинированной передачей, в ко-
торой энергия от входного звена к выходному передается по
двум ветвям: гидравлической и механической. Такая передача
обеспечивает непрерывное (бесступенчатое) изменение передаточ-
ных отношений в некотором интервале и может быть использова-
на при определенных условиях в качестве коробки передач (КП)
трансмиссии ВГМ.
Рис. 7.1. Закон нагружения управляемых передач:
/ — текущее значение мощности на входе в управляемую передачу в области максимального
момента; 2 — текущее значение момента на выходе из управляемой передачи в области
максимальной мощности; — угловая скорость выходного эвена; >х— Текущее передаточное
отношение; индексом «т> отмечены параметры, соответствующие переходу от максималь
ного момента к максимальной мощности
Закон нагружения ГОМП, выполняющей функции КП, имеет
две области работы (рис. 7.1): максимальной мощности двигателя
на входе в передачу и максимального момента на выходе из пе-
202
редачи. В области максимального момента на выходе обеспечи-
вается трогание ВГМ с места при любом сопротивлении движе-
нию (в том числе и при максимальном) и движение ВГМ с малой
скоростью при неполной загрузке двигателя; в области макси-
мальной мощности — движение ВГМ в заданном диапазоне изме-
нения скорости и сопротивлений при любой загрузке двигателя и
в том числе при использовании его максимальной мощности.
Если ГОП применить в ВГМ в качестве КП по полнопоточной
схеме, обеспечивающей бесступенчатое изменение передаточных
отношений во всем требуемом диапазоне при передаче через нее
всей мощности двигателя, то для данного закона нагружения
необходимая сумма установочных мощностей гидромашин (насоса
и мотора), входящих в ГОП, должна составлять
Щ (d. + 4.). (7.1)
где Nyl — dnN(} —установочная мощность насоса; Nyi~dnNo —устано-
mix max
ночная мощность мотора; Na —максимальная мощность на входе в ГОП;
vmax
dn, dn — диапазоны изменения передаточных отношений в КП и регулирования
насоса по рабочему объему при AL * const.
"max
Установочной называется мощность каждой гидромашины,
которую она может реализовать при максимально допустимых
значениях основных параметров: избыточном давлении (перепаде
давлений) рабочей жидкости ргм, угловой скорости вала гидро-
машины и)гм и рабочем объеме 7ГМ, т. е.
•^у = 1^гм11шгм1•
Установочная мощность может быть больше или равна макси-
мальной передаваемой мощности. При использовании в качестве
КП удельная масса ГОП (приходящаяся на единицу передавае-
мой мощности) с учетом (7.1) определяется зависимостью
т>жГОП " тГОп/Л/°П1„ = тГ0П£ЛГу/(£Л^Л'<’таж^ = ^«ГОП
где т,.оп
ГОП.
— масса ГОП; mv, гпгоп/“^У—показатель
™гоп
удельной массы
При характерных для современных ГОП значениях тул,.О1|
= 0,25...0,4 кг/кВт удельная масса ГОП, выполняющей функции
КП трансмиссии, при dlt =3 и dn — 7 ... 9 составляет от 2,9 до
4,6 кг/кВт, что в три-четыре раза больше удельной массы соот-
ветствующих механических ступенчатых КП. Кроме того, КПД
такой ГОП значительно ниже (0,7—0,8).
Масса и объем МТО отечественных ВГМ ограничены, вслед-
ствие этого невозможно обеспечить необходимые характеристики
КП, если ГОП использовать по полнопоточной схеме. Поэтому
одной из основных задач разработки является отыскание таких
14*
203
схем применения ГОП в составе КП, при которых могут быть до-
стигнуты высокие характеристики всех показателей: диапазона
непрерывного изменения передаточных отношений, КПД, массы
и объема. Объединяя ГОП с передачами, лишенными присущих
ей недостатков, можно получить передачи с лучшими показате-
лями. Наиболее высокий КПД и наименьшие объем и массу
имеют в настоящее время механические зубчатые передачи.
Гидрообъемно-механические передачи позволяют передавать
энергию с более высоким КПД при одновременном уменьшении
необходимых установочных мощностей гидромашин.
7.2. ОДНОДИАПАЗОННЫЕ ГИДРООБЪЕМНО-МЕХАНИЧЕСКИЕ
ПЕРЕДАЧИ
Однодиапазонными называются комбинированные передачи,
состоящие из параллельно соединенных ГОП и механических эле-
ментов (зубчатых передач), передаточное отношение которых за-
дается и изменяется только с помощью ГОП.
Структурная схема и параметры однодиапазонной гидрообъем-
но-механической передачи. Все множество схем однодиапазопных
ГОМП с двумя гидромашинами можно представить в общем виде
как совокупность ГОП и механического элемента в виде четырех-
звенного дифференциального механизма с двумя степенями свобо-
ды (рис. 7.2). Входное звено дифференциального механизма свя-
зано с источником энергии (двигателем), выходное связано с
нагрузкой, звено / связано с гидромашиной ГМ|, а звено 2 —
с гидромашиной ГМг-
____ гоп ______
I I—гн2 I Рис. 72. Структурная схема ГОМП:
I..... J * I. ..I .1 О, х-- входное и выходное шенья: ГМ,. ГМ, — гид|юмп
Zj шины, нз которых состоит ГОП; ДМ — дифференциальный
«х механизм; 1,2 — звенья ДМ, связанные с гндромашннамн
г \ ш ГМ, и ГМ, соответственно
Для такой ГОМП при идеальных связях (без учета потерь в
ГОП и механическом элементе) справедливы следующие зависи-
мости:
агм,шгм, + ао% + ахшх = О J
^гм,шгм. + + bxwx = 0;
^ + ^ГМ1 + ЛГГМ, + ^ = О; (7.3)
^ГМ, + ^ГМ, “ 0 ♦
где <оГМ1 и <огм —угловые скорости валов гидромашин ГМ| и ГМ»; <"о и
<»х — угловые скорости входного и выходного звеньев ГОМП; дГМ(, *»•
£гм , —постоянные коэффициенты, характеризующие кинематические связи
204
в механическом элементе ГОМП; No и Nx — мощности на входном и выход-
ном звеньях ГОМП; WrM и WrM — мощности на валах гидромашин ГМ1
и ГМ,.
Из первых двух уравнений системы (7.3) выведем зависимости
скоростей валов гидромашин от скоростей входного и выходного
звеньев ГОМП:
wrMi = “>о(4г 01 ^x)lCi •
«гм,/3 «о «г 02 “G) . (7 4)
где ix 01 = ~ L о = -* ; 4г от = ~ L -о — bdbx •
” I М| Д’ I
1Х • ,лх1мо~ текущее передаточное отношение ГОМП;
f* “ ” ” Лгм'1а* ’ f« = “ "7/^ k-0 brnJbx •
Физический смысл параметров ГОМП ZxOi и 4г 02 состоит в
том, что они определяют передаточное отношение ГОМП при не-
подвижном вале соответствующей гидромашины; С] и с2— пере-
даточные отношения между выходным звеном ГОМП и валом
соответствующей гидромашины при неподвижном входном звене
ГОМП.
Из зависимостей (7.4) следует, что относительные угловые
скорости валов гидромашин (передаточные отношения) равны:
4м, в «гм,/«о = (4 01 4г)Ач 5
4м,ж «ГМ,/«0 ~ (4 02 4)^2 •
Если дифференциальный механизм ГОМП не имеет внешней
опоры момента, а между звеньями 1 и 2 и валами гидромашин
установлены согласующие зубчатые передачи с одной степенью
свободы, то на основании первых уравнений системы (7.3), при
условии замены скоростей валов гидромашин <о1М и ®гм скорое-
стями звеньев wi и щ2 и использовании свойств дифферен-
циального механизма без внешней опоры момента (сумма коэф-
фициентов при скоростях его звеньев равна нулю), найдем
^ = (4roi“l)4.;
С2 ~ Ух 02 ~ 1)4-2i
где - **ч/мгм, и /г2 <о2/«>ГМ1 — передаточные отношения согласующих пе-
редач.
Поэтому из зависимостей (7.4) следует:
шгм, = a>o(4roi — 4г)/|(4го> — 04t]; (7 6) *
«ГМ, = «О (4 02 4)/ 1(4 02 1) 4 |) •
205
Пример плана относительных угловых скоростей (передаточ-
ных отношений) звеньев дифференциального механизма без
внешней опоры момента при значениях параметров 0<Zxel<l
к О</хо2 <1 приведен на
рис. 7.3.
На плане скоростей i| =
=<i)i/wo, i2=<i)2/<oo; в точке е
угловые скорости всех звеньев
дифференциального механиз-
ма равны: j0=xx=/| = t2= 1,0.
Система уравнений (7.4)
при заданной скорости вход-
ного эвена содержит три не-
известных: «гм , «», м и
Для определения скоростей
всех звеньев ГОМП необходи-
Рнс. 7.3. План относительных угло
ных скоростей звеньев дифферент!
ального механизма одноднапа.зонной
ГОМП
мо третье уравнение связи, которое задается ГОП из ба-
ланса расхода рабочей жидкости (без учета объемных потерь
<7гм«Гм “Ь ^гм "гм,= 0) и может быть представлено в виде
Gon = "гм,/"гм, = ~~ ^гмУ^гм, * (7*7)
где дгм и <7ГМ —рабочие объемы гндромашин ГМ| н ГМ2.
Заменяя в (7.7) ш|М и выражениями из (7.4), полу-
чаем
Gon в ^гм/^гм, ж (Gw — G)®t/l(Goi “* G)^»l •
Для дифференциального механизма без внешней опоры мо-
мента
Gon = (G W - G>(G 01 -1) G/KG 01 - G) (G w - D G.l • <7-8)
Представим третье уравнение системы (7.3) в виде
4" Мх<ох 4" ^гм,"гм, 4* ^|м,"гм, = ®
и заменим шгм и о>1М< их выражениями из (7.4), в результате
после преобразований получим
Af()O>u -f- Мх*»х — <*>о( j^Jx(л1^2 ^Gm.Goi/^i) 4-
4-«>x(AfrMi/q 4-AfrM /c,).
Приравнивая коэффициенты при обобщенных угловых скорос-
тях ыо и ci)x, найдем обобщенные моменты и после преобразова-
206
ний определим зависимости крутящих моментов на валах гидро-
машин от крутящих моментов, действующих на входном и выход-
ном звеньях ГОМП:
^ГМ, “ (^9 4" G 02^x)/(G 02 ^х 01) »
МГМ. в (Мо 4- ix OiMx)/(ix 0, - ix 02),
где Мо и Мх — моменты, действующие на входном и выходном звеньях ГОМП.
Связь между моментами, действующими на входном и выход-
ном звеньях ГОМП, определяется нз последнего уравнения систе-
мы (7.3):
Afo‘"o + М/в,,. — 0,
откуда
мх-----М9ЦХ.
Из системы уравнений (7.9) следует:
^гм, “ (G — GojVKGos — Got) Gl 1 .у .g,
‘^1 М, ~ ^<A(G Goi)/l(Goi Gw)Gl .
или
^ГМ, ~ ^x^t (l‘x ?х 01)/(G 01 ^Х о») ’ (711)
М ^х^2 (G ^х 01), (G 02 G 01) •
Относительные моменты на валах гндромашин равны:
^гм, “ ^гм/^о ~ Goa) KGoa Got) Gl5 (7 12)
гм, ~ ^гм/^о £.*(G Goi)/((Got Go«)Gb
Из уравнений (7.4) и (7.10) определяются необходимые мощ-
ности гидрбмашин:
^гм,= ^гм,= (G G 01) (G оз G)/)G (G оз G oi) J • (?♦ 1
или в относительных величинах
^гм, “ ^гм/^о = ^гм, “ ^гм?^о —
= (G - Goi)(Go2 - G)/IG(Go2 - Got)) • (7 l4)
Как следует из уравнений (7.4), (7.10) и (7.13), угловые ско-
рости и моменты, характеризующие загрузку гидромашин, зави-
сят при заданных <оо и Мо от текущего значения передаточного
отношения ГОМП, а та-кже от конструктивных параметров диф-
ференциального механизма и согласующих передач G 01 • Go2’ f.
И с2.
Мощность, передаваемая гидромашиной, при заданной No за-
висит от текущего значения передаточного отношения ГОМП и
207
I
конструктивных параметров ix01 и 1хП дифференциального ме-
ханизма, а от параметров согласующих передач не зависит.
Найденные зависимости для определения скоростей, моментов
и мощностей имеют алгебраический смысл. Разные знаки скорос-
тей вращения некоторых звеньев означают, что они вращаются
в противоположные стороны. Разные знаки моментов означают,
что они воздействуют на звенья со стороны внешних по отноше-
нию к дифференциальному механизму потребителей и источников
энергии (двигатель, нагрузка, гидромашины) и направлены в
противоположные стороны. За положительное принято направле-
ние скорости и момента на входном звене ГОМП. Если мощность
некоторого звена ГОМП — величина положительная, то звено
связано с источником энергии, и к этому звену она подводится;
если мощность отрицательная, то звено связано с потребителем
энергии, и она от этого звена отводится.
На рис. 7.4 представлена зависимость мощности, передавае-
мой гидромашинами, от передаточных отношений в области мак-
симальной мощности двигателя.
Экстремальные мощности гидромашин для области макси-
мальной мощности на входе в ГОМП определяются по формуле
(7.13) при
d^M/dG —0;
соответствующие передаточные отношения lx = ix9 ± V ix9iiX02 •
Если обозначить d0 = Gоз/Get» 70 4» = ± 4 <4 •
Диапазон d0 делится одним из значений ix9 пополам, если
4ог/4о1>О. Если параметры iX9i и *хо2 имеют разные знаки,
то "мощность гидромашин не имеет экстремальных значений. Под-
ставив в уравнение (7.13) выражения передаточных отношений
для экстремальной мощности, определим
Л<, = - 1)/(F4 + 1);
При конечном положительном значении диапазона d0, не рав-
ном нулю,
Для того чтобы КПД ГОМП во всем рабочем диапазоне изме-
нения передаточных отношений был выше КПД ГОП, мощность
ГОП должна быть меньше мощности на входе в ГОМП, что воз-
можно при условии совпадения знаков параметров G01 и 1хог со
знаком передаточных отношений ГОМП в рабочем диапазоне;
или знаки параметров и 1хЛ2 должны быть разные; или же
один из этих параметров равен нулю, а знак второго параметра
208
совпадает со знаком передаточного отношения ГОМП. Если вы-
брать рабочий диапазон ГОМП таким образом, чтобы мощность
гидромашин в начале и конце диапазона была равна нулю, то,
например, при диапазоне dn=d0—9 по формуле (7.15)
Чм.» = (/9 — 1)М,/(К9 Г Г) = °-5 'vo-
л I
6
Рис. 7.4. Зависимость мощности гидромашин ГОМП от передаточных отноше-
ний ix в области максимальной мощности на входе:
° ' 'х<>1 0; ' <1; 6 0; 'г<ч 0; • Grot °* 1х<п ~ Лгм, “ ~ ЛГМ,
в области отрицательных передаточных отношений; 2 Л’„ на входе в ГОМП в области
отрицательных череда точных отношений; .7 /V,, на входе в ГОМП в области положи
тельных передаточных отношений; —'Vf-y области положительных переда
точных отношений
209
Если при этом принять, что потери в ГОМП определяются
только ГОП, то их максимальное значение
•^^max (I Т1гОц) М,» »
где Нгоп “ КПД ГОП;
отсюда минимальный КПД ГОМП
71| ОМП|П|П = W’ ^^max) Л» = I - (I Т1гОп) ^ГМ.»/^» *
При t|roi| =0,7 и </п=9 минимальный КПД ГОМП составит
0,85. Более высокое значение минимального КПД ГОМП можно
получить, если выбрать рабочий диапазон таким образом, чтобы
значения параметров ixOi и ix0, оказались внутри рабочего
диапазона, а мощности гидромашин в начале (N'} и конце (N")
рабочего диапазона были равны по абсолютному значению экст-
ремальной мощности. В этом случае при dn =9 получим
|Мх| = |Л£м,| а 1,0,886.
Если в уравнениях связи (7.3) аж=0 и Ь„=0. то
агм.шгм. + — 0’ Лгм,°‘гм, + 0 -
поэтому GoieO» Go2 = °°> ct = оо и с2 — ЬГ!^/Ьл.
В этом случае скорости вращения валов гидромашин ГМ| и ГМ2
пропорциональны скоростям вращения входного и выходного
звеньев ГОМП, т. е. имеем частный случай ГОМП — простейшую
ГОП.
В области максимального момента на выходе из ГОМП
Ло = - =
Тогда по формуле (7.13) получим
W|M, = ~~ ^гм, e ^пт»я.^х (**'* 0»)1 • (7.16)
Из этой зависимости следует, что мощность гидромашин —
величина конечная при всех значениях передаточных отношений
ГОМП, включая и передаточное отношение, равное нулю.
На рис. 7.5 показана зависимость мощности гидромашин от
передаточных отношений в области максимального момента на
выходе из ГОМП для тех же значений параметров 1х01 и /х02«
что и на рис. 7.4. При 0 . :х< /гт и соответствии минимального
и максимального передаточных отношений нулевым значениям
мощности гидромашин получим ixQi — 0, 1х0- = ^т и э =
~°’25}V«m.x-
Если однодиапазонная ГОМП должна обеспечивать наряду
с передним и задний ход, то мощность гидромашин в этом случае
будет больше мощности на входе в ГОМП, что вызовет суще-
1тлх<'г ljcm ’
210
ственное понижение общего КПД ГОМП и потребует увеличения
необходимых установочных мощностей гидромашнн. Следователь-
но, такой режим работы ГОМП нельзя считать целесообразным.
Рис. 7.5. Зависимость мощности гидромашин от передаточных отношений в об-
ласти максимального момента на выходе из ГОМП (обозначения аналогичны
рнс. 7.4)
Однодиапазонная ГОМП может обеспечить торможение ВГМ
двигателем и торможение, когда момент двигателя равен нулю.
Режим торможения ВГМ двигателем обеспечивается уменьшением
передаточного отношения ГОМП, при этом знаки мощности на
входе и выходе ГОМП меняются на противоположные. Режим
торможения при моменте двигателя, равном нулю, обеспечивается
при передаточном отношении ГОМП, также равном нулю. Мо-
менты на входе и выходе ГОМП определяются по формулам (7.10)
и (7.11) подстановкой заданных значений передаточного отноше-
ния ГОМП и максимальных значений моментов гидромашин,
соответствующих заданным значениям их рабочих объемов.
Необходимая установочная мощность гидромашины равна аб-
солютному значению произведения максимального момента на
максимальную угловую скорость вала в рабочем диапазоне пере-
даточных отношений. Как следует из уравнений (7.4) и (7.10),
угловая скорость и момент гидромашин изменяются монотонно в
зависимости от передаточного отношения ГОМП. Следовательно,
максимальный момент и максимальная скорость могут быть либо
при минимальном, либо при максимальном передаточных отно-
211
шениях, т. е. или в начале, или в конце рабочего диапазона
ГОМП. Поскольку произведения максимальных моментов и ско-
ростей гидромашин могут быть положительными и отрицательны-
ми, а установочная мощность гидромашин — величина положи-
тельная, то можно составить 32 выражения для предполагаемой
суммы установочных мощностей гидромашин (16 вариантов абсо-
лютных значений сумм одного из произведений для гидромашин
ГМ! и ГМ2 и 16 вариантов абсолютных значений разностей).
Часть выражений для предполагаемой суммы установочных мощ-
ностей гидромашин зависит только от рабочего диапазона, дру-
гая же часть зависит и от взаимного расположения его начала и
конца, а также от точек, соответствующих параметрам /х0| и *х0».
Минимальную сумму установочных мощностей гидромашин
можно получить, если параметры ГОМП выбрать таким образом,
чтобы сумма установочных мощностей, зависящая от взаимного
положения указанных точек, не превышала наибольшую из сумм,
зависящих только от заданного рабочего диапазона. Из всех ва-
риантов этому условию соответствует только одно выражение:
E/Vy = Л'у| 4- Nyi — МгмЛгм, -Г Л!гм,«гма. (7.17)
где Л1, м и — значения, соответствующие началу рабочего диапазона,
« '“гм, и "гм, ~ сго КОНЦУ-
Значения моментов и скоростей гидромашин определяются по
формулам (7.10) и (7.4) с учетом
|/Их| = |М0//х|<|Мх|т.х«|МЛхи|.
поэтому в знаменателе формулы (7.10) /х>/хж.
Если обозначить диапазон ГОМП в области максимального мо-
мента dm — lx annlijrm » в области максимальной мощности
dn =; /х тлх11хт, где Zxmin и /хт„— передаточные отношения ГОМП
в начале и конце рабочего диапазона, то сумму установочных
мощностей гидромашин ГОМП можно определить по формуле
(7.17) при использовании зависимостей (7.4) и (7.10): **
** (G mln G огХ^г 01 ix mex)/(Ar mfnci (G 02 G ot )1 H"
I M(,C2«o(, (<x mln G ui) (G ot ix max)/|G (G 01 ix («)) ~
- 4 (ix rn.x - ix nJ/U - «4 - dm). (7.18)
Сумма относительных установочных мощностей гидромашин
S/Vy = £Ny/N9 — dn — dm. (7.19)
Если начало рабочего диапазона ГОМП соответствует нуле-
вому значению передаточного отношения, т. е. ГОМП работает
как в области максимального момента, так и в области макси-
мальной мощности, то dm =0, следовательно:
(7.20)
212
Если ГОМП работает только в области максимальной мот
ности, то dm = 1 и
W, = N0(dn-\). (7.21)
Если же ГОМП работает только в области максимального мо-
мента, то dn =1 и dm =0, поэтому
S/Vy-JVe. (7.22)
Найденная сумма установочных мощностей гидромашин яв
ляется минимально возможной при заданных диапазонах макси-
мальной мощности dn и максимального момента dm.
Рассмотрим условия, при которых эта сумма является дейст-
вительной, т. е. при которых остальные варианты суммы устано-
вочных мощностей не превышают ее значения:
|Л!гм,|>|Л1гм4|; IAIpmJ >|Л!гм,1;
I шгм, | > | «>гм, |; | “>гм41 > I ®гм, |;
АТгм,«>гм, ^>0; /Игм^гм, >0 •
Подставляя в эти неравенства соответствующие выражения
для скоростей и моментов гидромашин из (7.4) и (7.10) и имея
в виду, что в знаменателе (7.10)
L* ~ Gm » ~ I ’ G ~ Gmax = *GGm •
получим
I G 01 G max | | G 01 G mln I» 23)
I G о2 G max I I G 02 G mln I »
I (G min G 02)/Gm I I (G max G 02)/(^nGm) I • .? 2Ц\
I (G mln G 0t)/Gm I l(G max — G Ot)/(*GGm) I J
(G min G 021 (G 01 G max)/!(G 02 G 01) Gm) ’ .j 251
(G mm — G 01) (G 02 — G max)/ KG «и — G 02) Gm) ® •
Из (7.23) следует, что на оси передаточных отношений точки
Got И 1х02 должны находиться либо ближе К Gmln» чем к G-max»
либо на равных расстояниях от них. Разделив в (7.25) первое
неравенство на второе, получим
(G mln G 02) (G max G 01V|(G max G 02) (G mln G 0»)l ® • (7.26)
Если точки ixni и /ЛО2 лежат в рабочем диапазоне, то
(G max Got)/'(G min ~ Got) < 0;
(G max — G 01)/(G mln — G 02) < 0 •
Если точки /\П| или хх02 находятся вне рабочего диапазона,
то это отношение будет положительным. Из (7.26) следует, что
213
если 1хП2 находится внутри рабочего диапазона, то Zx„i нахо-
дится вне рабочего диапазона и наоборот. Точки на оси переда-
точных отношений ГОМП должны располагаться в следующей
последовательности: ZxOt. Gmm- Агог» Ar mix-
Учитывая это, уравнения (7.24) для положительных значений
передаточных отношений можно представить в следующем виде:
(Аг 02 ^х min) *Ai (Ar max ^x oj) »
(Ar alii Ar 01) (Ar max Ar of) »
откуда
Ar 01 (Ar max ^nArraln)/(*Ai 1)»
Ar 02 (Ar met *AiAr mln)/(^n 4" 1) -
Если ГОМП работает в области максимальной мощности, то
Armil. = Arni И ^m.x = ^nGmin. а ПОЭТОМУ
Go. <0; (7.28)
Аг •! > 2 lx max/(^n 4- 1) •
ГОМП, работающие в области максимальной мощности, имеют
минимально возможную сумму установочных мощностей гндро-
машин при выполнении условий
2G„,x/(rfn+l)< Аг 02 (Ar max 4" Аг mi„) 2; (7.29)
G01/G02 о •
Если ГОМП работает в области максимального момента, то
Arfft ~ (Аттах 4" G mln) 2 J (7.30)
Gm - —
Для области отрицательных передаточных отношений ГОМП
знаки неравенств в (7.27) меняются на обратные, а положение
точек на оси абсцисс должно быть зеркальным отражением отно-
сительно нуля по сравнению с их положением при положитель-
ных значениях передаточных отношений.
Анализ схем однодиапазонных гидрообъсмно-механических
передач. В зависимости от вариантов соединения звеньев четы-
рехзвенного дифференциального механизма ГОМП с гидромаши
нами, которые однозначно определяются значениями параметров
Атт и Аг ад.» все множество однодиапазонных ГОМП можно раз-
делить на три характерные группы:
ГОМП с трехзвенным дифференциальным механизмом на вы-
ходе (один из двух параметров— ixо| или fro-j—равен бесконеч-
ности);
ГОМП с трехзвенным дифференциальным механизмом на вхо-
де (один из двух параметров — Аг <м или /л02 —равен нулю);
2 14
ГОМП с двумя трехзвенными дифференциальными механизма-
ми (параметры Zxol и Zx02 не равны нулю или бесконечности).
Схемы ГОМП с трехзвенным дифференциальным механизмом
на выходе.
Полагая в уравнениях (7.6), (7.8) и (7.10) ZxOI = оо , получаем
«гм. =“ «о/G»;
«гм, “ «о (Goa G)'l(Go2 — DGtl •
Gon = (G оо — G) G/KG оз — 1) G2I • (7.31)
^гм, “ ^oGa (1 G ot)/G »
^rM. = ^«G(Go2-G)/G.
откуда следует, что вал гидромашины ГМ| связан с входным зве-
ном ГОМП непосредственно или с помощью согласующей пере-
дачи, и поэтому четырехзвенный дифференциальный механизм
превращается в трехзвенный (рис. 7.6,а), а момент звена 2 про-
порционален моменту, действующему на выходном звене ГОМП.
Из уравнения (7.13) для области передаточных отношений
ix > ixm получим
Чч, = - Л/гм. - • (7-32)
Из уравнения (7.16) для области /х</х„ получим
•угм, - - ЛГГМ| - .Vo (ix - ix 02)/Zxm . (7.33)
При 0<ZX<ZXOI Мгм <0, a Мгм >0, следовательно,
гидро.машина ГМ2 работает в режиме насоса, а гидромашина
ГМ|—в режиме мотора. Мощность ГОП в указанной области
является циркулирующей внутри ГОМП. Эта область называется
областью циркуляции, а абсолютное значение максимальной мош
ности ГОП в ней — мощностью циркуляции отношение du
называется диапазоном циркуляции.
Если ix <0 при Zrn2>0, то мощность ГОП в такой области
передаточных отношений больше мощности на входе в ГОМП.
При 1Х >Zx02AfrM ^0 и ;^гм гидромашина ГМ2 работает
в режиме мотора, а гидромашина ГМ| — в режиме насоса.
В этой области мощность по обеим ветвям ГОМП передается от
входа к выходу. Эта область называется областью без циркуля-
ции. Введем для этой области соответствующие обозначения:
Л'б „—абсолютное значение максимальной мощности в области
без циркуляции; „ Zxm„/Zx02 — диапазон.
Если ГОМП работает только при максимальной мощности,
охватывая обе области (циркуляции и без нее), то
Mu-M0(rfu-1); 7Ve.u = Art(l- l/rfe.u).
Отсюда
du = Лц + 1; de.и - 1/(1 — М. ц) •
215
Общий диапазон ГОМИ
da - 1лплЛх и,п = 4Аа = (1 + Ч)/(1 - М.„).
Если ix mai ixm , то
Nb.a~dn-du,
(7 34)
(7.35)
где dn, da и dm меньше единицы.
Рис. 7.6. Структурная схема и план относительных угловых скоростей, а также
зависимости относительных моментов н мощностей гидромашнн от нередаточ
ных отношений для ГОМП с дифференциальным механизмом на выходе (а) и
на входе (б):
/-мощность Л',.„ - i — момент гндромашнны ГМ,; 3 — момент гидромашмны
I М, I Mj
ГМ,; /, — /р^ ; /, — /р^ — - 4/р^ при zc “ zc “И < отношение рабочих объемов
' гидром.шии </’м /«гм>
216
Если ix П|П ixm и ix maK ixm, to
Nu = du^-dm-,
М.Ц- l-1/^.ц.
Ранее было показано, что для обеспечения минимума устано-
вочных мощностей гидромашнн в области максимального момен-
та ГОМП должна иметь параметры -оо, >0. Следова-
тельно, ГОМП с дифференциальным механизмом на выходе удов-
летворяет этому условию. Для того чтобы минимально возможная
сумма установочных мощностей гидромашнн была действитель-
ной, действительными установочными мощностями обеих гидро-
машин должны быть произведения моментов в начале диапазона
на скорость в его конце.
Для области максимальной мощности:
(7.36)
Ау1 — ^ГМ|**ГМ, — Ао(/хо2 ^х mln)/Ar mln Ац i
Ау2 * МгмУгм, '-= A6)(Gmax — Аг 01)/Ar mln » Ао (rfn “ * ~ ^и) •
Отсюда относительные установочные мощности гидромашин
_ (7.37)
- (da- 1) -
а их сумма
Е Ау = Nyi + Ny2 = da - 1 . (7.38)
Минимально возможная сумма установочных мощностей гид-
ромашин получается при условии Аи>Л'в ц.
При ix max < ixm
Ayi — (Ar 02 Ar mln)/Arm •
Ay2 = (Ar mu Ar 02)/Arm •
Минимальная сумма установочных мощностей гидромашнн
для работы при максимальном моменте обеспечивается при усло-
вии Аг 02 (Аттах Агт1п)/2:
= (G ... - I, da — dm. (7.39)
При работе в областях максимального момента и максималь-
ной МОЩНОСТИ Gmln<Arm И Ar max > Атт» ПОЭТОМУ
Ау| - (Ar 02 Ar mln)/Arm = Ац e du dm ,
jVy2 = (Zx mlx ix du •
откуда
ZNy = dn-dm,
217
т. е. зависимость (7.39) является общей для всех случаев работы
ГОМП с дифференциальным механизмом на выходе.
Практический интерес представляет выбор параметров ГОМП
таким образом, чтобы обе гидромашины имели равные установоч-
ные мощности Ay, = Ny2 = ЛАЦ .
В этом случае /х02 — (/хт„ 4- Zxmin )/2 как в области макси-
мального момента, так и в области максимальной мощности,
а скорость гидромашины ГМ2 в рабочем диапазоне изменяется
от максимального значения одного знака до равного ему макси-
мального значения другого знака, поэтому
A7y, = ^y3=/V« = (dn-rfm)/2;
= (7.40)
bNy-da-dn.
Если ГОМП работает только в области максимальной мощ-
ности, то dm =1 и 7Vyl Лу2 = (du — 1)/2. Если ГОМП работает
только в области максимального момента, то dm =0, d0=l и
/VyJ Nr, =0,5. Если же ГОМП работает в областях и макси-
мального момента, и максимальной мощности, то dm 0 и Nyl
Для того чтобы максимальная мощность ГОП не превышала
при этом мощности на входе в ГОМП, необходимо выполнить
следующие условия:
для работы ГОМП в областях максимального момента и мак-
симальной мощности dn < 2;
для работы ГОМП только в области максимальной мощности
«„<3.
Для ГОМП с дифференциальным механизмом на выходе изме-
нить передаточное отношение можно управлением гидромашиной
ГМ! при неуправляемой гидромашине ГМ2.
Схемы ГОМП с трехзвенным дифференциальным механизмом
на входе. Полагая в уравнениях (7.6), (7.8) и (7.10) /г0| =0,
получаем:
°* гм,= woCr^ci;
ШГМ, “ “о 02 G)/1(G 02 — 1 ) ^ст\ ’•»
*ГОП = (^*02 — (г) 4rl/Rx (Аг 02 — 0^1; (7.41)
Л1ГМ| = м0/с, (Go2-G)/(^o2/x);
^гм, ~ M.ic2(I ix02)1 ix02 •
Из этих зависимостей следует, что вал гидромашины ГМ|
связан с выходным звеном ГОМП непосредственно или с по-
мощью согласующей передачи, и поэтому четырехзвенный диффе-
218
ренциальный механизм превращается в трехзвенный (см.
рис. 7.6,6), а момент звена 2 пропорционален моменту, дейст-
вующему на входном звене ГОМП. При мощность гид-
ромашин определяется по формуле
^гм, ~ ^гм,= (G Сг ©г)/(г 02»
а при — по формуле
М, ~ ^гм, = (Cr G 01)/(^ГиЛг <й) •
При 0<./х < *хо2^гм ^>0 и Л7м ®» поэтому гидромашина
ГМг работает в режиме насоса, а гидромашина ГМ|—в режиме
мотора; мощность передается через механическую и гидравличе-
скую ветви от входа к выходу ГОМП. При ixXxo> WrM>0 и
7VrM<0, поэтому режим работы гидромашин меняется на про-
тивоположный. Мощность ГОП в этой области является циркули-
рующей внутри ГОМП. Если знаки 1хи2 и 1Х противоположны,
то мощность ГОП больше мощности на входе в ГОМП.
ГОМП с (х1Л =0, как это следует из (7.29) и (7.30), может
удовлетворять условию минимума суммы установочных мощнос-
тей гидромашин только в области максимальной мощности:
Равные установочные мощности гидромашин
= (dn— 1)/2 могут быть получены при условии
G 02 = 2 ix шах/(^п 4“ 1) •
При этом в области максимального момента:
«lx mtJixm = dn,
EA^ = 2dn.
Эта сумма установочных мощностей гидромашин является
минимально возможной и обеспечивается при условии
Goa-Gm.x/2-
Таким образом, при использовании ГОМП с дифференциаль-
ным механизмом на входе для работы в областях максимального
момента и максимальной мощности или только в области макси-
мального момента требуется установочная мощность гидромашин
в два раза больше, чем при использовании ГОМП с дифферен-
циальным механизмом на выходе. Изменение передаточного отно-
шения можно осуществлять управлением гидромашины ГМ] при
неуправляемой гидромашине ГМ2.
Схемы ГОМП с двумя трехзвенными дифференциальными ме-
ханизмами. Для таких ГОМП параметры Goi и Gos являются
(7.42)
/Vyl = Луз =
(7.43)
219
конечными величинами, не равными нулю. Четырехзвенный диф-
ференциальный механизм ГОМП может быть заменен двумя трех-
звенными при попарном соединении двух звеньев одного трехзвен-
ного механизма с двумя звеньями второго трехзвенного механиз-
ма. Однако такое представление четырехзвенного дифференциаль-
ного механизма не является обязательным. Если по схемным или
конструктивным соображениям можно получить компактную
структуру этого механизма с единым водилом, то применение в
ГОМП такого механизма более целесообразно. Поэтому понятие
ГОМП с двумя трехзвенными механизмами вводится только для
отличия этой группы ГОМП от групп с одним трехзвенным диф-
ференциальным механизмом. Характеристики ГОМП с двумя диф-
ференциальными механизмами (рис. 7.7) приведены в начале раз-
Рис. 7.7. План относительных угловых скоростей, зависимости относительных
моментов н мощностей гндромашин от текущего передаточного отношения для
ГОМП с двумя дифференциальными механизмами:
/ — мощность гндромашин
'’-'гм, При 'с.-'с,-11
; 2 - момент гидромашины ГМи Л — •
3 — мом г нт гидромашины ГМ4; 4 — отношение рабочих объемов
гндромашин
дела; показано, что эта ГОМП может обеспечить наиболее высо-
кие значения минимального КПД в рабочем диапазоне, а следо-
вательно, и более высокое значение среднего КПД.
При работе такой ГОМП в области максимальной мощности
и при <г0, /ЖП1|П и ijrtri /хтахустановочные мощности гидромашин
составляют:
ЛГу1 = 4,-1; ЛГу2~ 1-1/4,; =- dn - 1 !dn . (7.44)
220
Следовательно, суммарная установочная мощность гидрома-
шин в этом случае больше минимально возможной. Если знаки
параметров /х0) и 1хт выбрать противоположными и тем самым
выполнить условие (7.29), то можно обеспечить минимум устано-
вочных мощностей гидромашин = dn — 1.
Поскольку ГОМП с двумя дифференциальными механизмами
в области максимального момента не обеспечивает условие (7.30),
то она не может иметь минимально возможную сумму установоч-
ных мощностей гидромашин. Изменение передаточного отноше-
ния необходимо осуществлять одновременным управлением двумя
гидромашинами.
Из анализа схем однодиапазонных ГОМП следует, что они
могут обеспечить выигрыш по установочным мощностям гидрома-
шин по сравнению с простейшей ГОП, работающей в тех же усло-
виях. Этот выигрыш равен отношению зависимостей (7.1) и
(7.18):
2*у ГОП /*^^У юмп = •
Так, для ГОМП с трехзвенным дифференциальным механиз
мом на выходе и ГОП, предназначенных для работы в областях
максимального момента и максимальной мощности и обеспечи-
вающих один и тот же диапазон dn =9 (при 3wdm=0),
roti/s^y гомп = <3 + В 9)/9 = I*33• Следовательно, выигрыш по
установочным мощностям гидромашин является незначительным.
Таким образом, однодиапазонные ГОМП по сравнению с про-
стейшей ГОП при прочих равных условиях обеспечивают замет-
ное повышение КПД при незначительном снижении установочных
мощностей гидромашин. Это не позволяет заметно уменьшить мас-
су и объем ГОП, что затрудняет возможность использования таких
передач в качестве КП, предназначенных для управления посту-
пательным движением ВГМ. Однодиапазонные ГОМП можно
применять в МП, т. е. для управления вращательным движением
ВГМ. В этом случае однодиапазонные ГОМП с трехзвенным диф-
ференциальным механизмом на выходе по сравнению с простей-
шей ГОП, используемой в МП, обеспечивают при прочих равных
условиях не только повышение КПД, но и существенное уменьше-
ние установочных мощностей гндромашин (не менее чем в два
раза).
7.3. МНОГОДИАПАЗОННЫЕ ГИДРООБЪЕМНО-МЕХАНИЧЕСКИЕ
ПЕРЕДАЧИ
В однодиапазонных ГОМП, используемых в качестве КП
трансмиссий, ротребные установочные мощности гидромашин,
а следовательно; Жассу и объем ГОП, можно уменьшить только
уменьшением общего диапазона регулирования. Никакое услож-
нение однодиапазонных ГОМП вследствие увеличения числа сте-
221
пеней свободы дифференциального механизма и числа гидрома-
шин не дает необходимого эффекта.
Наиболее очевидным способом уменьшения диапазона ГОМП
является установка последовательно за ней дополнительной сту-
пенчатой механической КП, однако в этом случае необходимо
производить перерегулирование ГОП в момент переключения пе-
редач в дополнительной КП и, как следствие этого, допускать
разрыв связи двигателя с гусеницами. В общее время разрыва,
помимо времени на перерегулирование ГОП, входит время на
включение и выключение передач в КП, и оно может быть значи-
тельным. Даже если удается обеспечить требуемое время пере-
ключения передач, все равно частично теряется одно из основных
качеств ГОМП — бесступенчатое изменение передаточного отно-
шения во всем заданном диапазоне. Следовательно, несмотря на
возможность применения такой схемы однодиапазонной ГОМП в
КП трансмиссии, она не является оптимальной.
Поиск схем ГОМП, наиболее полно удовлетворяющих требо-
ваниям их использования в качестве КП трансмиссии, должен
осуществляться исходя из условия отсутствия перерегулирования
ГОП и отсутствия разрыва связи двигателя с гусеницами.
Уменьшить диапазон регулирования ГОМП и обеспечить бес-
ступенчатое изменение передаточного отношения во всем задан-
ном общем диапазоне можно, объединив в одну многодиапазон-
ную ГОМП ряд однодиапазонных ГОМП, подключаемых пооче-
редно с помощью соответствующих устройств. При этом каждая
из однодиапазонных ГОМП должна обеспечить только часть об-
щего диапазона.
Структурные схемы многодиапазонных ГОМП. Для обеспече-
ния бесступенчатого перехода от одного частного диапазона к
другому максимальное передаточное отношение для низшего из
двух соседних частных диапазонов и минимальное для последую-
щего высшего должны быть равны между собой и обеспечиваться
при одних и тех же значениях рабочих объемов гидромашин, а
следовательно, при одном и том же положении органа управле-
ния ГОП.
Для обеспечения минимальных массы и объема многодиапа-
зонной ГОМП необходимо, чтобы каждая однодиапазонная
ГОМП содержала минимальное число элементов, максимально
используемых в работе других передач. Поскольку ГОП является
основной составляющей в объеме и массе однодиапазонной ГОМП,
в многодиапазонной ГОМП она должна быть одной общей для
всех однодиапазонных передач.
Кроме того, необходимо обеспечить равные установочные мощ-
ности гидромашнн в каждом частном диапазоне и при переходе
с одного из них на другой. Этому условию могут соответствовать
два варианта схем, в одной из которых обеспечивается минимум
установочных мощностей гидромашнн, а в другой — максимум
среднего КПД ГОМП.
222
Многодиапазонные ГОМП с минимумом установочных мощ-
ностей гидромашин. Условием обеспечения минимума уста новой -
ных мощностей гидромашин многодиапазонной ГОМП является
равенство установочных мощностей каждой из гидромашин и их
сумм для всех частных диапазонов. Если первый частный диапа-
зон относится к областям максимального момента и максималь-
ной мощности (или только к области максимального момента),
а последующие — только к области максимальной мощности, ми
нимум суммы установочных мощностей гидромашин определяется
при условии
rf,„ - d„, - 1 = d„ - 1 ... = d„„ - I. (7.45)
где индексы при dn обозначают порядковый номер частного диапазона на оси
передаточных отношений.
Общий диапазон регулирования многодиапазонной ГОМП
= G irix/^jrm в *А11^п2^п1 • • ^пп
ИЛИ
<4 - ' = «/„-!) . (7.46)
Так как ЕЛгу с1Лп — \ t то
J-I)"’1. (7.47)
По этим формулам можно находить необходимую сумму уста-
новочных мощностей гидромашин для любого числа частных диа-
пазонов, а также решать обратную задачу — находить необходи-
мое число частных диапазонов исходя из выбранных установоч-
ных мощностей гидромашнн и заданного общего диапазона регу-
лирования.
Из изложенного следует, что основными признаками рацио-
нальной многодиапазонной ГОМП с минимумом установочных
мощностей гидромашин являются следующие:
применение одноднапазонных ГОМП с трехзвенными диффе-
ренциальными механизмами на выходе;
разбивка общего диапазона регулирования на равные частные
диапазоны в области максимальной мощности и равенство пер-
вого частного диапазона, находящегося в областях максималь-
ного момента и максимальной мощности, частному диапазону,
находящемуся только в области максимальной мощности, минус
единица;
равенство параметра /х02 полусумме передаточных отноше-
ний для начала и конца частного диапазона, что означает ра-
венство скоростей гидромашины ГМ2 в начале и конце каждого
частного диапазона и соответствует максимальным рабочим объе-
мам гидромашин.
Указанным признакам соответствует план относительных ско-
ростей валов гидромашин ГМ| и ГМ2 многодиапазонной ГОМП,
223
приведенный на рис. 7.8, где по оси абсцисс отложены передаточ-
ные отношения многодиапазонной ГОМП, общий диапазон кото-
рой разбит на ряд частных диапазонов (в данном случае —на
четыре диапазона). Арабскими цифрами обозначены порядковые
номера частных диапазонов. Верхний индекс при передаточном
отношении на стыке двух частных диапазонов и при параметре
соответствует номеру диапазона, для которого характерно
это передаточное отношение. Одинаковые максимальные значе-
ния относительной скорости гидромашин показаны в предположе-
нии, что обе гидромашины имеют одинаковый максимальный ра-
бочий объем, а поэтому н одинаковую максимальную скорость.
Возможным и наиболее очевидным способом создания много-
диапазонной ГОМП с минимумом установочных мощностей гидро-
машин является объединение ряда однодиапазонных ГОМП с
трехзвенными дифференциальными механизмами на выходе в
одну общую кинематическую схему, имеющую только одну ГОП.
224
В этой ГОМП все звенья каждого трехзвенного дифференциаль-
ного механизма соединяются между собой, со входом и выходом
напрямую или через согласующие передачи, обеспечивая работу
ГОМП в одном частном диапазоне при помощи подключения
муфтой соответствующего трехзвенного дифференциального меха-
низма. Па рис. 7.8, б приведена структурная схема такой четырех-
диалазонной ГОМП. Указанный план относительных скоростей
гндромашин может быть обеспечен подбором передаточных отно-
шений дифференциальных механизмов и согласующих передач.
Для того чтобы число подключающих устройств было мини-
мальным, необходимо при каждом переключении изменять только
одну связь.
Минимальное число звеньев дифференциальных механизмов
многодиапазонной ГОМП может быть обеспечено, если одни и
те же звенья используются в возможно большем числе частных
диапазонов. Условием минимума числа согласующих передач
является максимальное использование возможности непосредст-
венного соединения звеньев ГОМП друг с другом.
Для выполнения этих условий все трехзвенные дифферен-
циальные механизмы могут быть объединены в один многозвен-
Рис. 7.9 Структурные схемы много-
диапазонной ГОМП с минимумом
установочных мощностей гндрома-
шин:
а, б — с переключением на выходе из
дифференциального механизма (одно
входное звено, три и два промежуточ
ных выходных соответственно); о — с пе-
реключением на входе н дифференцналь
иый механизм (одно выходное и два про
межуточных входных звена)
ный с двумя степенями свобо-
ды. При этом могут существо-
вать два варианта связи звень-
ев этого дифференциального
механизма с входным и выход-
ным звеньями ГОМП. В пер-
вом варианте одно входное
звено (0) связано с гидрома-
шиной ГМ|, другое (4) — с
гидромашиной ГМ2, а осталь-
ные звенья (промежуточные
выходные) через подключаю-
щие устройства и согласующие
передачи связаны с выходным
Во втором варианте одно звен
связано с гидромашиной ГМ2,
звеном ГОМП (рис. 7.9, а и б).
> является выходным, второе —
। остальные звенья (промежуточ-
ные входные) через подключающие устройства и согласующие
15 Зак. 47 «с»
225
передачи связаны с входным звеном ГОМП, а через него с гид-
ромашиной ГМ| (рис. 7.9, в).
Из плана скоростей видно, что знаки производных передаточ-
ных отношений G в двух соседних частных диапазонах должны
быть противоположны. Это означает, что повторное подключение
одного и того же промежуточного звена многозвенного дифферен-
циального механизма к выходному или входному звеньям ГОМП
через согласующую передачу не позволяет получить соседний
диапазон, поэтому необходимо подключение другого промежуточ-
ного звена.
Для образования л—1 частных диапазонов в области макси-
мальной мощности могут быть использованы только два проме-
жуточных звена многозвенного дифференциального механизма
ГОМП, которые поочередно связываются с выходным или вход-
ным звеньями многодиапазонной ГОМП: первое при четных,
а второе — при нечетных частных диапазонах. В этом случае диф-
ференциальный механизм ГОМП должен содержать только четы-
ре звена.
Для образования первого частного диапазона (включающего
в себя область максимального момента), скоростной диапазон
которого равен бесконечности, необходимо подключение третьего
промежуточного диапазона, т. е. многозвенный дифференциаль-
ный механизм должен содержать пять звеньев, или одно из двух
промежуточных звеньев четырехзвенного механизма должно ис-
пользоваться и в первом, и на высших частных диапазонах. Воз-
можные связи основных элементов многодиапазонной ГОМП
могут быть обобщены тремя структурными схемами, представлен-
ными на рис. 7.9.
Первая структурная схема (рис. 7.9, а) включает
в себя пятизвенный дифференциальный механизм с двумя степе-
нями свободы и три дополнительные ступенчатые КП, установ-
ленные последовательно между промежуточными выходными
звеньями хь х2 и х3 дифференциального механизма и общим вы-
ходным звеном х. Каждая дополнительная КП обеспечивает нейт-
раль (разрыв связи) и хотя бы одно фиксированное передаточное
отношение. В частном случае она может содержать только одно
подключающее устройство без согласующих передач. Промежу-
точные звенья х2 и х3 используются порознь в каждом из п— 1
высших частных диапазонов (в четных или нечетных), а в первом
частном диапазоне, равном бесконечности, включается третье
звено (Xi).
Вторая структурная схема (рис. 7.9,6) включает
в себя четырехзвенный дифференциальный механизм с двумя сте-
пенями свободы и две дополнительные ступенчатые КП на выходе
с общим звеном х, дополнительно связанные между собой. Про-
межуточные выходные звенья Xi и х2 используются в п—1 выс-
ших частных диапазонах. В первом частном диапазоне может
быть использовано одно из них, если при этом будут подобраны
226
соответствующие связи в дифференциальном механизме и допол-
нительной КП.
Третья структурная схема (рис. 7.9, в) включает
в себя четырехзвенный дифференциальный механизм с двумя
степенями свободы и две дополнительные ступенчатые КП на
входе с общим входным звеном 0. Промежуточные входные
звенья 0i и 02 используются для образования всех частных диа-
пазонов.
Первая структурная схема отличается от второй числом допол-
нительных КП и звеньев в дифференциальном механизме. Это
отличие является несущественным, так как не оказывает влияния
на установочную мощность гидромашин и диапазон регулирова-
ния ГОМП, но все-таки позволяет несколько упростить кинемати
ческую схему дифференциального механизма и дополнительных
КП по второй структурной схеме.
Отличие первых двух структурных схем от третьей состоит в
том, что в них переключение частных диапазонов осуществляется
в дополнительных КП, установленных на выходе из многозвенно
го дифференциального механизма, а в третьей схеме — на входе
в этот механизм. Это отличие является весьма существенным.
В первой и второй схемах может быть обеспечено п—1 равных
четных и нечетных высших частных диапазонов.
В третьей структурной схеме заданные интервалы изменения
передаточных отношений двух первых из п частных диапазонов
сохраняются в последующих п—2 четных и нечетных диапазонах,
поэтому уменьшаются значения этих диапазонов. При одной и
той же установочной мощности гидромашин и одном и том же
числе частных диапазонов получается меньший общий диапазон
регулирования. Третья схема может быть равноценна двум пер-
вым, если реализуется не более двух частных диапазонов. При
Л>3 частных диапазонов в третьей схеме необходимо применить
многозвенный дифференциальный механизм с п+2 звеньями и п
дополнительных КП, что может вызвать существенное усложне-
ние конструкции ГОМП в целом.
Все три схемы могут быть представлены очной обобщенной,
в которой многозвенный дифференциальный механизм и дополни-
тельные КП объединены в один общий механический элемент с
внешней опорой момента и числом степеней свободы не менее
трех, имеющий только три звена, одно из которых связано с гид-
ромашиной ГМ2, а два других — с входом и выходом ГОМП
(на рис. 7.9 этот элемент обведен пунктирной линией).
Задний ход (реверс) многодиапазонной ГОМП может быть
обеспечен либо реверсом промежуточного звена первого частного
диапазона (необходимо дополнительно иметь одно подключающее
устройство и одну согласующую передачу), либо реверсом общего
входа или общего выхода многодиапазонной ГОМП (необходимо
дополнительно иметь два подключающих устройства и одну со-
гласующую передачу).
15*
227
Согласующие передачи можно выполнить в виде пар шестерен
или планетарных передач. Минимальное число согласующих пе-
редач обеспечивается при условии, что максимально возможное
число частных диапазонов получается при непосредственном (без
согласующих передач) подсоединении промежуточных звеньев
с общим выходным или входным звеньями многодиапазонной
ГОМП с помощью подключающих устройств (например, фрик-
ционных элементов).
Минимальное число подключающих устройств равно числу
частных диапазонов. Конкретно схемы дифференциального меха-
низма и дополнительных КП с подключающими устройствами
выбираются при синтезе кинематической схемы многодиапазонной
ГОМП. Целесообразно отметить, что функции многозвенного диф-
ференциального механизма и дополнительных КП могут и не
иметь такого четкого разграничения, как в рассмотренных выше
частных структурных схемах. В некоторых случаях возможно их
объединение, которое позволяет упростить схему ГОМП.
Многодиапазонные ГОМП с максимумом среднего КПД. Наи-
более высокие значения среднего КПД можно получить в много-
диапазонной ГОМП, созданной на базе однодиапазонной с двумя
трехзвенными дифференциальными механизмами. Для этого каж-
дый частный диапазон многодиапазонной ГОМП должен выби-
раться в пределах передаточных отношений, обеспечиваемых при
остановленных валах гидромашнн ГМ! и ГМ2, имеющих одинако-
вые максимальные рабочие объемы. Этому условию соответствует
план скоростей, приведенный на рис. 7.10, а.
При равных частных диапазонах в области максимальной мощ-
ности могут быть использованы (как и в ГОМП с минимумом
установочных мощностей гидромашнн) только два промежуточ-
ных выходных звена пятизвенного дифференциального механизма
ГОМП. Эти два звена должны поочередно связываться через
подключающие устройства с общим выходным звеном ГОМП
(одно при четных, второе при нечетных частных диапазонах),
обеспечивая их равные значения. При этом в дополнительных сту-
пенчатых КП, установленных между промежуточными выходными
звеньями и общим выходным звеном ГОМП, должны быть обес-
печены соответствующие передаточные отношения.
В первом частном диапазоне, содержащем область максималь-
ного момента, один нулевой режим работы гидромашин соответ-
ствует /х=0, следовательно, параметр ГОМП /х01 =0. В этой
области ГОМП должна работать по схеме однодиапазонной
ГОМП с трехзвенным дифференциальным механизмом на входе,
а гидромашина ГМ) должна через подключающее устройство и
согласующую передачу соединяться с общим выходным звеном
ГОМП.
Таким образом, многодиапазонную ГОМП с максимумом сред-
него КПД и минимальным числом звеньев дифференциального ме-
ханизма при любом числе частных диапазонов в области макси-
228
мальвой мощности и одном частном диапазоне, содержащем об
ласть максимального момента, можно представить структурной
схемой (рис. 7.10,6). Эта схема состоит из одной ГОП и пяти-
звенного дифференциального механизма с двумя степенями свобо-
ды, у которого одно звено (0) связано со входом, два звена
(2 и 3) с гидромашинами ГМ| и ГМ2, промежуточные выходные
звенья х2 и х3 через дополнителные КП2 и КП3 с общим вы-
ходным звеном х ГОМП; вал гидромашины ГМХ через промежу-
точное звено Х| и дополнительную КП| должен быть соединен
с общим выходным звеном ГОМП.
Рис. 710 План скоростей (а) и структурная схема (б) многодиапазоиной
ГОМП с максимумом среднего КПД
В однодиапазонной ГОМП с двумя трехзвенными дифферен-
циальными механизмами при работе в области максимальной
мощности установочная мощность первой гидромашины больше,
чем второй. Однако в многодиапазонной ГОМП условия нагру-
жения гидромашнн в двух соседних частных диапазонах меняют-
ся. Если в одном диапазоне установочная мощность первой гидро-
машины составляет dn — 1, а второй 1 — l/dn, то в соседнем уста-
новочная мощность второй гидромашины составит dn — 1, а пер-
вой 1 — l/dn, поэтому для многодиапазонной ГОМП в области
максимальной мощности
229
Если первый частный диапазон содержит область максималь-
ного момента, а последующие — максимальной мощности, то из
условия равенства установочных мощностей гидромашин во всех
частных диапазонах на основании уравнений (7.43) и (7.48)
должна быть обеспечена следующая зависимость:
^ni = ^п2 1 = 1 = ... = dnn 1. (7.49)
Общий диапазон регулирования многодиапазонной ГОМП
da = dMda2dui... dun
или
< (7.50)
а с учетом уравнений (7.48)
—у SN, (4-ЕЛГу+ I)”'. (7.51)
Из сопоставления характеристик многодиапазонных ГОМП с
максимумом среднего КПД и с минимумом установочной мощнос-
ти гидромашин следует, что первая обеспечивает (при прочих
равных условиях) повышенный средний КПД, но требует в два
раза ббльшей установочной мощности двух регулируемых гидро-
машин, что вызывает увеличение массы и объема ГОМП в целом
и усложняет ее систему управления. В условиях ограничения
массы и объема трансмиссий современных ВГМ следует отдать
предпочтение многодиапазонным ГОМП с минимумом установоч-
ных мощностей гидромашин.
7.4. СИНТЕЗ КИНЕМАТИЧЕСКИХ СХЕМ МНОГОДИАПАЗОННЫХ
ГИДРООБЪЕМНО-МЕХАНИЧЕСКИХ ПЕРЕДАЧ
Синтез кинематической схемы многодиапазонной ГОМП про-
водится, когда известен ее тип (с минимумом установочных мощ-
ностей гндромашин или с максимумом среднего КПД) и заданы
следующие параметры: число частных диапазонов, значения об-
щего и частных диапазонов, максимальное передаточное отноше-
ние ГОМП. Задача выполняется с использованием известного
графоаналитического метода синтеза дифференциальных механиз-
мов по плану относительных угловых скоростей (передаточных
отношений) их звеньев.
Например, требуется синтезировать кинематическую схему
многодиапазонной ГОМП, структура которой показана на
рис. 7.9, а, чтобы она обеспечивала четыре диапазона переднего
хода, общий диапазон регулирования в области максимальной
мощности на входе в передачу dn=7,35 и максимальное переда-
230
точное отношение /жп,м = 1.84. Задаются четыре частных диапа-
зона: rfnl = 1,1; da — 1,84 и t/n3 =1,98. Неравномерная раз-
бивка высших частных диапазонов вызвана желанием достичь бо-
лее высокого КПД ГОМП в результате сужения четвертого диапа-
зона, что позволяет уменьшить мощность, проходящую через ГОМП
вначале этого диапазона. Сужение четвертого диапазона, а также
второго, который должен быть равен четвертому в соответствии
со структурной схемой, потребовало для обеспечения общего диа-
пазона регулирования увеличения первого и третьего диапазонов,
а следовательно, и некоторого увеличения установочных мощнос-
тей гидромашин, поскольку их сумма определяется значением
первого частного диапазона:
£^,-^, + ^„ = </„-1.1.
Для синтеза кинематической схемы ГОМП необходимо снача-
ла построить план относительных угловых скоростей всех ее
звеньев (рис. 7.11).
Рис. 7.11. План относительных угловых скоростей четырехдиапазонной ГОМП
с минимумом установочных мощностей гндромашин (заштрихована мощность
гндромашин в высших частных диапазонах)
Порядок построения. План относительных угловых скоростей
звеньев ГОМП в координатах / строится в следующем по-
рядке: на оси абсцисс отмечаются точки, определяющие границы
каждого из частных диапазонов--0; 0,274; 0,505; 1,0 и 1,84; про-
водятся горизонтальная прямая, соответствующая скорости вход-
ного звена ГОМП (t0=l), и прямая, соответствующая скорости
ее выходного звена /х, проходящая через начало координат и
точку *хпмх с координатами (1,84; 1,84). Затем в каждом из част-
ных диапазонов проводятся прямые скорости ц звена 4 диффе-
231
ренциального механизма (см. рис. 7.9,а), связанного с гидрома-
шиной ГМ2 в пределах от —1 до +1 на стыках диапазонов, где
скорости звена 4 равны между собой.
Положение линий относительных угловых скоростей проме-
жуточных выходных звеньев пятизвенного дифференциального ме-
ханизма ГОМП /х1,1х1 и ZxJ в каждом частном диапазоне опреде-
ляется из следующих соображений. Принимается допущение, что
третий и четвертый диапазоны обеспечиваются непосредственным
подключением с помощью фрикционов звена х3 в третьем диапа-
зоне и звена х2 в четвертом диапазоне к общему выходному зве-
ну х ГОМП. Следовательно, линия скорости /хз звена х3 должна
совпадать с линией скорости ix выходного звена х в третьем диа-
пазоне, а линия скорости tx. звена х2 с линией скорости ix вы-
ходного эвена х в четвертом диапазоне, а поэтому пределы их из-
менения следующие:
К iX2 < 1.84 ; 0,.505 < ix3 < 1.
Для любого пятизвенного дифференциального механизма
ГОМП с двумя степенями свободы и без внешней опоры момента
относительные скорости lxl, ix, и 1хЛ определяются скоростями i0
входного звена 0 и ц звена 4, так как все линии скоростей пере-
секаются при 10=<4=| вне зависимости от того, в каком частном
диапазоне работает ГОМП. На рис. 7.11 это пересечение имеет
место в двух точках, соответствующих двум значениям ix (0,274
и 1). При этом на стыках диапазонов значения ix2 и 1ХЛ двух
соседних диапазонов равны между собой.
При ix =0 (в момент трогания ВГМ с места) необходимо,
чтобы и ixX =0. Поскольку в конце первого частного диапазона
(/х =0,274) i0=t4=i, то ixi — 1. Следовательно, скорость ixi
должна изменяться в пределах от 0 до 1; на стыках значения ixt
двух соседних диапазонов равны между собой.
Как известно, отношение скорости вращения солнечной шес-
терни к скорости вращения эпицикла при неподвижном водиле
является внутренним передаточным отношением механизма, зна-
чение которого может быть как положительным, так и отрица-
тельным. Это отношение сохраняется и при любой скорости води-
ла. Отсюда следует, что если на плане скоростей в одной точке
пересекаются три луча, то при отрицательном внутреннем переда-
точном отношении средний луч соответствует водилу, а из двух
остальных лучей ближайший к среднему соответствует эпициклу,
дальний—солнечной шестерне. Внутреннее передаточное отноше-
ние равно отношению отрезков на любой вертикальной линии:
отрезка между точками пересечения этой линии с лучами солнеч-
ной шестерни и водила к отрезку между точками пересечения
этой линии с лучами эпицикла и водила. При положительном
передаточном отношении средний луч относится к эпициклу,
а водилу и солнечной шестерне соответствуют крайние лучи.
232
Знаки моментов одинаковы для звеньев, соответствующих
крайним лучам; у звена, соответствующего среднему лучу, момент
имеет противоположный знак. Если на плане скоростей крайние
лучи находятся по одну сторону от оси абсцисс, то мощности
звеньев, соответствующих этим лучам, имеют одинаковые знаки,
а мощность звена среднего луча имеет противоположный знак.
По приведенному на рис. 7.11 плану скоростей можно по-
строить несколько вариантов кинематических схем пятизвенного
дифференциального механизма ГОМП объединением звеньев О,
4, Х|, х2 и х3 по три. Промежуточный выход первого частного диа-
пазона может быть образован объединением звеньев Х|, 0, 4
с положительным внутренним передаточным отношением Клк =
= 2,0, при этом водилом является звено 0 солнечной шестер-
ней — звено 4 и эпициклом — звено Хь Промежуточный выход
второго и четвертого частных диапазонов можно получить объе-
динением звеньев 0, х2, 4 с отрицательным внутренним переда-
точным отношением 2,38; здесь водилом является зве-
но 0, солнечной шестерней — звено 4 и эпициклом — звено х2.
Промежуточный выход третьего частного диапазона образуется
объединением звеньев 0. х3, 4 с положительным внутренним пере-
даточным отношением Кмз =4,04. В этом механизме звено 0 яв-
ляется водилом, звено 4 — солнечной шестерней и звено х3 —
эпициклом.
Пятизвенный дифференциальный механизм ГОМП образуется
из трех указанных трехзвенных механизмов соединением одно-
именных звеньев (рис. 7.12, а), что позволяет получить компакт-
ную структуру с единым водилом. Возможны и другие варианты
трехзвенных дифференциальных механизмов. Далее синтезируют-
ся кинематические схемы дополнительных КП, обеспечивающих
связь промежуточных выходных звеньев хь х2, х3 с общим выход-
ным звеном ГОМП. По плану скоростей в первом частном диапа-
зоне луч Zr, звена Х| не совпадает с лучом Zr общего выходного
звена ГОМП, поэтому необходима установка согласующей пере-
дачи, которая может быть образована планетарным механизмом
из звеньев хь х, 7\ с отрицательным внутренним передаточным
отношением =—2,65. В соответствии со структурной схемой
(см. рис. 7.9, а) согласующая передача с тормозом 1\ выполняет
функции КП1 и обеспечивает одно фиксированное передаточное
отношение.
Во втором частном диапазоне также требуется установка со-
гласующей передачи, которая может быть образована планетар-
ным механизмом из звеньев х2, х, Т2 с внутренним передаточным
отношением KMS =—2,65.
По плану скорость ixi промежуточного выходного звена х2
в четвертом частном диапазоне совпадает со скоростью ix выход-
ного звена х, поэтому здесь связь этих звеньев может быть осу-
ществлена непосредственно с помощью муфты Фц. Согласующая
16 Зак. 47 «с»
23.3
передача с тормозом Т2 и муфтой Ф4 выполняет функции КПа
и обеспечивает два фиксированных передаточных отношения.
Скорость промежуточного выходного звена хз в третьем диа-
пазоне совпадает со скоростью i х выходного звена х, поэтому
связь этих звеньев может быть осуществлена с помощью муфты
Ф3, которая выполняет функции КП3 и обеспечивает одно фикси-
рованное передаточное отношение. Гидромашины ГМ( и ГМ2 свя-
зываются со звеньями О п4 соответствующими согласующими
передачами.
Рис. 7.!2. Кинематические схемы четырехдиапазонной ГОМП с минимумом ус-
тановочных мощностей гидромашнн:
а—из трех трсхзвснных дифференциальных механизмов, соединенных одноименными
звеньями; б —с уменьшенным числом планетарных рядов из-за сдвоенных сателлитов
Полученная четырехдиапазонная ГОМП работает следующим
образом. В первом частном диапазоне в момент трогания ВГМ
с места выходное звено х ГОМП, связанное с гусеницами, непод-
вижно. При работающем двигателе, с которым связано входное
звено О ГОМП, рабочий объем регулируемой гндромашины ГМ|
(гидромашина ГМ2— нерегулируемая) устанавливается в крайнее
234
максимальное положение соответствующего знака, поэтому ско-
рость звена 4, связанного с гидромашиной ГМ2, становится ц=
= — 1, а скорость промежуточного выходного звена Х| ixl = 0.
Скорость эпицикла планетарной передачи, связанной с тормозом
7|, становится равной нулю. После включения тормоза Т| в ре-
зультате изменения рабочего объема гидромашины ГМ( изме-
няется скорость звена 4, что приводит к увеличению скорости вы-
ходного звена ГОМП. Непрерывным изменением рабочего объе-
ма гидромашины ГМ( достигается непрерывное изменение ско-
рости звена 4 от ц = — 1 до 6=1, что приводит к непрерывному
изменению скорости выходного звена ГОМП в интервале
0 < 1Г < 0,274.
Согласно плану скоростей в первом частном диапазоне при
передаточном отношении ГОМП <\ = 0,274 скорость эпицикла, свя-
занного с тормозом Т2 планетарного ряда согласующей передачи
второго частного диапазона, становится равной нулю, что позво
ляет, не выключая тормоз 7, первого диапазона, включить без
пробуксовки тормоз Т2 второго диапазона. После выключения
тормоза Г| (тормоз Т2 остается включенным) непрерывным из-
менением рабочего объема гндромашины ГМ| обеспечивается
изменение скорости звена 4 от 4-1 до —1, чем достигается непре-
рывное изменение скорости выходного звена ГОМП в диапазоне
0,274 < 1Х < 0,505.
Во втором частном диапазоне при передаточном отношении
ГОМП /х=0,505 скорости звеньев х3 и х становятся равными,
поэтому, не выключая тормоз Т2, можно без пробуксовки вклю-
чить муфту Ф3. После выключения тормоза Т2 муфта Ф3 остается
включенной, плавным изменением рабочего объема гидромашины
ГМ1 достигается плавное изменение скорости звена 4 от —1 до
4-1, что обеспечивает непрерывное изменение передаточного от-
ношения ГОМП в интервале 0,505 •< I.
При передаточном отношении ГОМП £х= 1 скорости звеньев
х2 и х становятся равными, поэтому, не выключая муфты Ф3.
можно без пробуксовки включить муфту Ф4. После выключения
муфты Ф3 (муфта Ф4 остается включенной) непрерывным изме-
нением рабочего объема гидромашины ГМ( достигается измене-
ние передаточного отношения ГОМП в диапазоне 1 iT< 1,84.
При уменьшении передаточного отношения от максимального
до нуля ГОМП работает в обратном порядке.
Число планетарных рядов в пяти^венном дифференциальном
механизме ГОМП можно уменьшить применением сдвоенных са-
теллитов, общих для двух рядов (рис. 7.12,6). Принцип работы
такой схемы аналогичен вышеописанному.
Для разработки конструкции ГОМП необходимо знать мак-
симальные моменты, действующие на ее звеньях н во фрикционных
элементах. В данном случае на звеньях 0, х и 4 моменты задают-
ся; на других звеньях ГОМП и во фрикционных элементах они
определяются известными способами.
16*
235
Рассмотрим пример синтезирования кинематической схемы
четырехдиапазонной ГОМП по структурной схеме (см. рис. 7.9,6),
обеспечивающей общий диапазон регулирования dn=8, макси-
мальное передаточное отношение Gmax=2 и частные диапазоны
dn|= 1 , da<2—= dni =2. Для этой ГОМП сумма установочных
мощностей гидромашин должна составлять 2Wy — 4- Л/уз = 1.
Рис. 7.13. План относительных
угловых скоростей (а) и ки-
нематическая схема (б) че-
тыре хдиапазонной ГОМП с
минимумом установочных мощ-
ностей гндромашин (общий
диапазон регулирования dn =
Строим план относи-
тельных угловых скорос-
тей (рис. 7.13, а). На оси
абсцисс ijr отмечаются
границы диапазонов точ-
ками 0; 0,25; 0,5; 1,0 и
2,0. Проводятся горизон-
таль 10= I входного зве-
на 0 и линия скорости ix
выходного звена, прохо-
дящая через начало ко-
ординат И точку Gm.x С
координатами (2, 2). За-
тем в каждом из част-
ных диапазонов прово-
дятся линии скорости ц
звена 4 дифференциаль-
ного механизма, связан-
ного с гидромашиной ГМ2
(в пределах от 4-1 до
— 1). Положение линий
относительных угловых
скоростей 1Х\ и ix2 двух
промежуточных выход-
ных звеньев х\ и х2 задается следующими условиями. В четвертом
диапазоне линия скорости 1Х-, звена х2 должна совпадать с линией
скорости ix выходного эвена, поэтому в остальных частных диа-
пазонах 1 </Л<2 (на стыках значения двух соседних диапа-
зонов равны между собой).
В первом частном диапазоне при /х = 0 необходимо, чтобы и
zr1 =0. Поскольку в конце диапазона (ix =0,25) =1» то и
t и =1; поэтому во всех диапазонах O-CGi'C 1 (при этом на сты-
ках значения ixX двух соседних диапазонов равны между собой).
236
Соответствующий плану скоростей четырехзвенный дифферен-
циальный механизм образуется из двух трехзвенных: 0, хь х2 с
внутренним передаточным отношением КИ1 = 2и 4, х», х2 с КЛ2 =
= —2,0 (рис. 7.13,6).
В первом частном диапазоне для согласования скоростей »Ж1
и 1Х требуется установка согласующей передачи, которая может
быть образована планетарным механизмом из звеньев Т\, х, Х[
с тормозом 7| (внутреннее передаточное отношение Кмл= — 3).
Для второго частного диапазона может быть применен планетар
ный механизм из звеньев Г2, х, х2 с тормозом Т”2 (КМ4 =—3).
В четвертом диапазоне муфтой Ф4 можно связать звено х2 с вы-
ходным звеном х. Для третьего частного диапазона может быть
использован механизм из звеньев Г2, х, х2, если муфтой Ф3 соеди-
нить звенья х\ и Г2 при выключенном тормозе Г2.
В первом частном диапазоне включается тормоз Ть во вто
ром — Т2, в третьем — муфта Ф3, в четвертом--Ф4. В третьем
частном диапазоне используются два промежуточных выходных
звена Xj и х2, что соответствует по структурной схеме дополни-
тельной связи между КП1 и КП2.
Полученная кинематическая схема отличается от предыдущей
тем, что имеет на один трехзвенный дифференциальный механизм
меньше, но при этом входное и выходное звенья ГОМП должны
быть несоосными.
Аналогичным образом может быть проведен синтез кинемати-
ческих схем и других многодиапазонных ГОМП, в том числе
и многодиапазонных ГОМП с максимумом среднего КПД.
Из рассмотренных примеров следует, что построение плана
относительных угловых скоростей звеньев многодиапазонных
ГОМП является наиболее ответственным этапом в процессе син
теза их кинематических схем. Для успешного решения задачи
синтеза необходимо выполнение ряда заданных начальных и огра-
ничительных условий. Положение лучей скоростей основных
звеньев многозвенного дифференциального механизма на плане
должно быть таким, чтобы получились дифференциальные меха-
низмы с требуемыми связями основных звеньев и с приемлемыми
значениями внутренних передаточных отношений. Все составные
части ГОМП должны объединяться в единый механизм так, чтобы
обеспечивался вывод входного и выходного звеньев ГОМП; звена,
связанного с гидромашиной ГМ2; звеньев дополнительных КП,
связанных с тормозами, и т. д.
В каждой схеме ГОМП необходимо проверить соответствие
максимальных скоростей звеньев и максимальных моментов, дей-
ствующих на тормозах и муфтах, их допустимым значениям, а
также отсутствие циркуляционной мощности внутри ГОМП, кото-
рая может отрицательно повлиять на КПД и вызвать дополни-
тельную нагрузку звеньев.
237
Если ограничения не выполняются, то следует произвести кор-
ректировку максимального передаточного отношения или частных
диапазонов, или того и другого вместе, затем по новому плану
скоростей построить желаемую схему ГОМП. Необходимо доби-
ваться максимально возможной синхронизации относительных
скоростей всех звеньев ГОМП на стыках частных диапазонов
для обеспечения минимально возможного скачка скорости при
переходе с одного частного диапазона на другой.
Отличительной особенностью приведенных кинематических
схем многодиапазонных ГОМП является то, что они обеспечивают
непрерывное изменение передаточных отношений во всем задан-
ном интервале без разрыва силовой связи между входным и вы-
ходным звеньями, т. е. между двигателем и нагрузкой. В момент
переключения частных диапазонов не требуется осуществлять пе-
ререгулирование в ГОП и изменять относительные скорости всех
звеньев ГОМП, включая и скорость вала двигателя, благодаря
чему включение фрикционных элементов может осуществляться
теоретически без пробуксовки поверхностей трения.
Одновременно обеспечивается существенное повышение КПД
при значительном снижении потребных установочных мощностей
гидромашин, что способствует уменьшению массы и объема ГОП
и ГОМП в целом. По сравнению с однодиапазонными ГОМП в че-
тырехдиапазонной при одном и том же общем диапазоне, напри-
мер da = 8, необходимо в восемь раз меньшее значение устано-
вочных мощностей гидромашин, в трехдиапазонной — в 5,7 раза и
в двухдиапазонной — в 3,4 раза.
7.5. КОЭФФИЦИЕНТ ПОЛЕЗНОГО ДЕЙСТВИЯ ГИДРООБЪЕМНО-
МЕХЛНИЧЕСКИХ ПЕРЕДАЧ
Коэффициент полезного действия многодиапазонной ГОМП,
наряду с ее массой и объемом, является одним из главных оце-
ночных показателей передачи в целом. КПД многодиапазонной
ГОМП определяется по КПД отдельных однодиапазонных ГОМП,
входящих в эту передачу, и зависит от относительных потерь в
ГОП и механическом элементе, состоящем из зубчатых диффе-
ренциальных механизмов и согласующих передач. КПД ГОМП
в целом может быть определен только для конкретной кинемати-
ческой схемы; по структурной схеме ГОМП могут быть учтены
только потери в ГОП, поэтому учет потерь в ГОМП можно прово-
дить в два этапа: на стадии определения параметров структур-
ной схемы ГОМП —только в ГОП, после синтеза кинематической
схемы ГОМП — оценить все потери в ГОМП.
Для приближенной оценки КПД ГОМП можно использовать
зависимость
^гомп = l”(l “ ’iron) ^гоп» (7-52)
где ЛГгоп — относительная мощность, проходящая через ГОП.
238
Если учитывать потери только в ГОП, то моменты на звеньях
дифференциальных механизмов, связанных с гидромашинами,
являются при заданных параметрах 1х01 и /х02 функциями момента
ча выходном звене ГОМП. Относительный момент выходного зве-
на ГОМП определяется зависимостью
Af х = Atjr,»jrOMri = — ‘Лгомп^-г ’
где Л4 Г — относительный момент выходного звена при наличии потерь в ГОП;
/1Х — относительный момент выходного звена идеализированной ГОМП;
’гомп - - - М1Х — кпд ГОМП в целом.
С учетом уравнения (7.12) относительные моменты на валах
гидромашин
м, = И f-H/fGt* ~ Got); _
_ г (7.53)
где
Got = Goi’lroMii < Goi J
G 03 ~ G 02т1гомп < G 02 •
Относительные мощности гидромашин с учетом уравнения
(7.13)
^гм, ~ (G G oi)(G оз — G)/((G оз G oi) G1 ’•
^гм, ~ (G 02 G)(Got — G)/l(Go> Goi) G1 •
Так как КПД ГОП
“Чроп = ^гм/^гм, ’
то из (7.54) получим
_ ((G ~ Gо») Ч&п 4- (Go» G)l G «у
гомп (/х — Goi) Gwlron ‘l’ 01 К* 1,2 — G1
Показатель степени при т|гоп зависит от направления потока
энергии в ГОП, которое может быть определено аналитически
или графически. Так, если гидромашина ГМ2 работает в режиме
насоса (Агм <0)» а гидромашина ГМ| — в режиме мотора
(ЛГ1М >0), то показатель степени равен минус единице. Если же
режим работы гидромашин меняется, то показатель степени —
плюс единица.
239
На рис. 7.14 показана зависимость мощности гидромашин от
общего передаточного отношения однодиапазонной ГОМП с дву
мя трехзвенными дифференциальными механизмами с учетом по-
терь в ГОП и без них. При учете потерь в ГОП мощность гидро-
машин становится равной нулю не в точках ZxOI и /х02, а в точках
Goi ~~ ^ГОМП^лгО* И ^Jf02 — ^ГОМП^0-’’ ^Ри < G < АгО1 и АгО2 < ^х^х»'.
мощность имеет отрицательный знак, т. е. к гидромашинам под-
водится энергия, которая тратится на преодоление внутренних
потерь в ГОП.
Рис. 7 14. Зависимость мощ-
ности гидромашнн от обще-
го передаточного отноше
ння ГОМП:
сплошные линии — с учетом по
терь в ГОП. пунктирные — иде-
ализированная ГОП. / мош
ность гндромашнны ГМ»
2 — мощность гидрома hi н и ь
ГМ.
Определить моменты и мощность гидромашин и КПД однодиа-
пазонной ГОМП с трехзвенным дифференциальным механизмом
на выходе можно по формулам (7.53) —(7.55), полагая гх(П=оо,
а при расположении дифференциального механизма на входе —
/х0| =0. Если при выбранных значениях параметров txol и ixu2
задать КПД ГОП, соответствующий скоростному и нагрузочному
режимам работы гидромашин для заданного передаточного отно-
шения, то КПД ГОМП может быть определен достаточно точно
(до КПД механического элемента ГОМП). На режимах, при ко-
торых обе гидромашины потребляют энергию, КПД ГОМП опре-
деляется через сумму потерь в каждой гидромашине. Для этой
'цели может быть использована соответствующая математическая
модель, описывающая их формирование. Существуют математиче-
ские модели, оценивающие составляющие потерь момента и рас-
хода через соответствующие коэффициенты [14].
Упрощенная математическая модель потерь с постоянными
коэффициентами для аксиально-поршневых гидромашин предло-
жена М. П. Козловым.
В этой модели моменты насоса ГМ| и мотора ГМ2 опреде-
ляются с помощью зависимостей:
^гм. ~ Pi (^гм, + Лг) ’
Л*Гм.= Р* ^гм» ’
240
где pi и рг —давление жидкости под поршнями гидромашнн ГМ| и ГМ»;
Aq — коэффициент механических потерь.
Связь между давлением под поршнями гидромашин представ-
лена зависимостью
Рг Pt — ^р0>гм,^гм,.
где Ар — коэффициент потерь давления.
Связь между скоростями вращения валов гидромашин можно
представить в виде
шгма ~ ‘“гм, ?ГМ,/^ГМ, — У^гм/^гм, + •
где — коэффициент скоростных потерь.
На основании этих зависимостей определяется взаимосвязь
между моментами на валах гидромашин, а также скоростное
(/гоп) и силовое (<|ОП ) передаточные отношения ГОП:
^1М, = ^ГМ,^1М, — “^«^гм. + '‘М “ А^гм.^гм, (^гм, •
^ГОП "‘гмУШГМ, ~ ^ГМ, '^ГМ, ЛшИ^гмД^ГМ, “Ь Аг^гм,% м, • (7.56)
*гоп ~ ^гм/^гм, - (^гм, — ^»)/(^гм, Aq}
— ^/“гм.^гм, C^i гм, — ^/Л^М, •
Отсюда объемный и общий КПД ГОП равны
= ^гоп^гоп = 1 п ы ^гм/^гм, •
ид ’гм, гм,
^гоп “ ^гм“‘гм,/(^1 м,ш1 mJ = ^гоп^гоп » (7.57)
где /гоп м /<7ГМ — передаточное отношение идеализированной ГОП
ид 1 *
(без учета объемных потерь).
По результатам стендовых испытаний ГОП с английскими
гидромашинамн коэффициенты потерь Aq —0,03; Ар =0,2 и Л,,,
= 0,05.
В данной модели параметры гидромашнн (давление рабочей
жидкости, моменты, скорости и рабочие объемы) даны как отно-
сительные к их значениям, соответствующим давлению рабочей
жидкости р = 35 МПа, максимальным скоростям и рабочим
объемам гидромашин. Формулы записаны в арифметическом виде,
а все величины, входящие в эти формулы, — положительные.
Из формул (7.56) и (7.57) следует, что для определения КПД
ГОП по коэффициентам потерь необходимо задать значения
рабочих объемов гидромашнн, скорость гидромашины ГМ|, мо-
мент на валу гидромашины ГМ| или ГМ2, которые связаны между
собой первым уравнением системы (7.56). Сравнение расчетных и
241
экспериментальных данных для ГОП с гидромашинами произ-
водства Великобритании показало, что предложенная математи-
ческая модель позволяет получить достаточно точные результаты,
хотя она, например, не учитывает влияния температуры на изме-
нение вязкости рабочей жидкости.
Для определения потерь в аксиально-поршневых гидромаши-
нах производства ФРГ, которые в настоящее время находят при-
менение в трансмиссиях отечественных ВГМ, необходима разра-
ботка более совершенной модели.
Использование математической модели потерь в гидромаши-
нах является более общим методом расчета КПД ГОМП, чем
расчет по заданным значениям КПД ГОП.
Если известна кинематическая схема ГОМП, то можно рассчи-
тать потери в дифференциальных механизмах и согласующих пе-
редачах. Потери в дифференциальных механизмах определяют
известными методами, задавая потери в полюсах зацепления шес-
терен и определяя значения и направление передаваемой через
них энергии в относительном движении.
Выведем формулы для расчета КПД однодиапазонной ГОМП
с трехзвенным дифференциальным механизмом на выходе, ис-
пользуя в качестве примера стендовую установку с ГОМП, схема
которой приведена на рис. 7.15.
Рис 7.15. Структурная (а) и кинематическая (б) схемы однодиапазонной
ГОМП стендовой установки и план скоростей основных звеньев ГОМП (в):
z число зубьев шестерен дифференциального механизма и согласующих передач
В этой схеме гидромашины TMi и ГМ2 связаны с входным
звеном ГОМП и звеном 4 дифференциального механизма соответ-
ствующими согласующими передачами.
242
Для любого трехзвенного дифференциального механизма без
внешней опоры момента уравнение кинематических связей звеньев
можно записать в виде
(1 — Лз) 0,х = ~ ^4з<оа» (7.58)
где fa—ш4/шз|т „ о — внутреннее передаточное отношение механизма.
Параметр /х(|2 ГОМП составляет
G 02 = “ж/^З к = 0 = “ Лз/0 — <«) или = /х Ог/«г в2 — 1).
Соотношение между моментами на звеньях не зависит от того,
вращаются все звенья или одно из них неподвижно. Выражая
моменты с учетом их знака на звеньях х и 3 в зависимости от
момента звена 4, связанного с гидромашиной ГМ2, получаем:
4*)
Л13 - - М< —(jp а3,
"*з
(7.59)
где Ц3) I* «**х> — угловые скорости при шэ=0; и <»»^) — угловые скорости
при «»х =-U; ах и uj — коэффициенты, учитывающие потери в дифференциаль-
ном механизме.
Подставляя в эти формулы отношение угловых скоростей при
соответствующих неподвижных звеньях и выражая их через па-
раметр <х02, получаем:
Мх = — Л14 —;—7— лх;
1 -‘Ж 03
Взаимосвязь между коэффициентами лх и ал определяется с
учетом равновесия дифференциального механизма, для которого
Мх+Мз4-Л14 = 0.
Подставляя найденные выше выражения для Мх и М3, полу-
чаем
ах = 1 — ZxM(l — а3). (7.60)
Расчет КПД проводится для двух характерных областей ра-
боты ГОМП: с циркуляцией и без нее.
В области циркуляции (ГМ2 —насос, ГМ| —мотор) между мо-
ментами на звеньях х и 3 и моментом гидромашины ГМ2 суще-
ствует зависимость:
‘ж 03 Чз ’
Grta Яд
Л13 М. м I. з 7--г-----,
,м’г1'жоз 1 Чз
(7.61)
243
где Zf2 = u»rM /<i)4, t)j — передаточное отношение и КПД согласующей пере-
дачи.
Здесь и далее моменты на звеньях ГОМП даются без учета
их знака.
Момент на входном звене 0 меньше момента на звене 3,
так как гидромашина ГМ) работает в режиме мотора:
Мо — Ма — Л41М , (7.62)
где 1сХ »- <чгм /о>о. щ— передаточное отношение и КПД согласующей пере-
дачи.
Силовое передаточное отношение ГОМП в целом с учетом
всех потерь определяется по формуле
rf„ +1 -2 <
- 1 -2d,
«/п-1
(7.63)
X
где dx — lxlix min — текущий диапазон данной ГОМП при отсутствии утечек
рабочей жидкости в ГОП.
КПД, учитывающий потери только момента в ГОМП (в облас-
ти циркуляции), определяется по формуле:
~ . УгмЛ> ( </п +1 - 4dx\i( da+\ 2dx
/х _ No d„-l
х —• (7.64)
Силовое передаточное отношение ix при идеальных связях
в ГОМП рассчитывается по формуле (7.63) при т=п2=а3 =
= ах=1,0 и AQ — Ap = O.
КПД, учитывающий скоростные потери, обусловленные утеч-
ками рабочей жидкости в ГОП, определяется по формуле
, Ди (^п — 1) , / <rftl — I) Т1- , /~ М)1м. Ц /;сч
"2дГМ1шгм </х |/ 2«гм,М«гм, + 'М У • (765)
Аналогичные формулы для работы ГОМП в области без цир-
куляции (ГМ) — насос, ГМг — мотор) имеют вид:
244
Действительное значение кинематического передаточного отно-
шения ГОМП определяется по формуле
= <7-67)
гАе — КПД, учитывающий скоростные потери.
Общий КПД ГОМП в областях циркуляции и без циркуляции
составляет
Vomit — ‘г1и'г<«з ’
(7.68)
где ») и — КПД, учитывающий потери момента.
Как следует из приведенных формул, КПД однодиапазонной
ГОМП зависит от общего диапазона регулирования, текущего
передаточного отношения (текущего диапазона), загрузки ГОМП
по мощности, скорости вала гидромашины ГМ), рабочего объема
гидромашины ГМ2, а также от коэффициентов потерь в ГОП
(Лр, AQ и А., ), дифференциальном механизме и согласующих
передачах (ах, а3, г]| и т|2). Формулы связывают относительные
значения величин: мощность на входе в ГОМП приведена в долях
установочной мощности гидромашин (при равенстве установочных
мощностей гидромашин), скорость вала гидромашины ГМ) и
рабочий объем гидромашины ГМ2 — в долях их максимальных
значений.
В качестве примера рассчитаем КПД однодиапазонной ГОМП
с дифференциальным механизмом на выходе с гидромашинами
производства Великобритании; кинематическая схема такой
ГОМП представлена на рис. 7.15,6.
Дополнительные данные для расчета: установочная мощность
каждой из двух гидромашин N? =265 кВт, максимальная частота
вращения вала гидромашины ГМ) пгм =2000 об/мин и макси-
мальное давление рабочей жидкости 35 МПа.
Изменение передаточных отношений ГОМП обеспечивается ре-
гулированием рабочего объема гидромашины ГМ| при постоян-
ном максимальном рабочем объеме гидромашины ГМ2. При этом
отношение рабочих объемов гидромашин может изменяться от
4-1 до —1. Частота вращения входного звена ГОМП п0=
= 1500 об/мин.
245
Водилом дифференциального механизма является звено х,
солнечной шестерней — звено 4 и эпициклом—звено 3, поэтому
внутреннее передаточное отношение дифференциального механиз-
ма 143==—67/26=—2,58, а параметр ГОМП ixn2 = 0,72.
Передаточное отношение согласующих передач
ici = шгм /ш0 = 60/45 = 1,33 и ic2 — u>rM /u>4 39/61 = 0,64.
Максимальное и минимальное передаточные отношения ГОМП
определяются при скоростях входного звена и вала гидромашины
ГМ2, соответствующих крайним пределам регулирования рабочего
объема гидромашины ГМ] (от + ?гм т„ До — <71М гаях) и состав-
ляющих при идеальных связях в ГОП (ягм, =±2000 об/мин):
Gm.x =1,303 и /’rт|П =0,137, а общий диапазон регулирования
/„ = 9.48.
Для вычисления коэффициентов потерь ах и а3 в дифферен-
циальном механизме необходимо определить значение и направ-
ление потока энергии в относительном движении. В полюсах за-
цепления шестерен
— Л1< («>< — ®>х)/| М2 (<о3 — u)J|, (7.69)
где х—±1 — в зависимости от направления потока энергии.
КПД дифференциального механизма в относительном дви-
жении
Чр = ‘ЧашЪт,
не i|mu —КПД внешнего зацепления (солнечная шестерня — сателлит);
КПД внутреннего зацепления (сателлит — эпицикл).
Если принять Tj,l(1 - 0,985 и т%т = 0,99, то = 0,975.
При tx=0 мощность может передаваться только от звена 3
к звену 4, поскольку гидромашина ГМ2 должна работать в режи-
ме насоса. Следовательно, в области передаточных отношений
ГОМП 0</х <1, для которой согласно плану скоростей =
=юз —<ох >0 и =Ш4 — шх<0 мощность в относительном
движении передается от звена 3 к звену 4, и поэтому в (7.69) по-
казатель степени х=1.
Сопоставляя уравнения (7.59) и (7.69), определяем
а8 = 1/т]р= 1/0,975= 1,0255.
По формуле (7.60) определяется ах = 1,0184.
При ix>l меняются знаки скоростей звеньев 3 и 4 в относи-
тельном движении ((о((х> =(оз — шх <0 и =<d<— ®х>0), а зна-
ки моментов сохраняются, поэтому мощность в относительном
движении передается от звена 4 к звену 3. Следовательно, в урав
нении (7.69) показатель степени х=—1, поэтому а3='Чл =0,975.
а ах =0,982.
246
Если максимальную скорость входного звена ГОМП считать
величиной постоянной, то будет постоянной и максимальная ско-
рость вала гидромашины ГМЬ Регулирование передаточного отно-
шения ГОМП осуществляется при постоянном максимальном
рабочем объеме гидромашины ГМ2, поэтому относительные значе-
ния скорости вала гидромашины ГМ! и рабочего объема гидрома-
шины ГМ2 равны единице.
Рис. 7.16. Расчетные значения
КПД ГОМП при различных
значениях относительной мош
ности No - N-nINy на входе:
/—0,2; 3 0,4; 3-ОЛ; 4-1,0:
5 - 1.5, 6 - 2.0
Результаты расчета
КПД однодиапазонной
ГОМП приведены на
рис. 7.16.
Для эксперименталь-
ного определения КПД
однодиапазонной ГОМП
с дифференциальным ме-
ханизмом на выходе
была спроектирова-на и изготовлена специальная стендовая
установка; результаты ее испытаний при мощности на входном
эвене 200 кВт приведены на рис. 7.17 (кривая /).
Рис. 7.17. Экспериментальные значения
КПД одноднапазонной ГОМП (/) и полно
поточной ГОП (2)
Расчетная и экспериментальная характеристики КПД ГОМП
при одной и той же мощности на ее входе достаточно удовлетво-
рительно совпадают: при этом скачок в изменении КПД ГОМП
при переходе через нулевую точку незначителен.
Для оценки эффективности ГОМП на специальном стенде
экспериментально был определен КПД ГОП, состоящей из тех же
гидромашин, работающих в последовательном потоке мощности
(рис. 7.17, кривая 2).
Из рис. 7.17 видно, что ГОМП обеспечивает существенное
(на 15—20%) повышение КПД.
Если в ГОМП применены гидромашины, для которых еще не
разработаны математические модели потерь, для расчета КПД
ГОМП следует использовать экспериментальные данные по КПД
247
гндромашин или же ГОП в целом. Так, фирма «Зауэр унд зоон
машиненбау» приводит в своих каталогах достаточно подроб-
ные данные по КПД гидромашин для всего типоразмерного ряда.
Для заданных схемы и режима работы ГОМП следует опреде-
лить скорость, рабочий объем, давление рабочей жидкости и
крутящий момент на валу каждой гидромашины; затем по ката-
ложным данным оценить ожидаемый КПД с учетом режима ра-
боты (насос , мотор) и номера гидромашины в типоразмерном
ряду. Такой метод позволяет достаточно точно определить КПД
ГОМП при относительно большой загрузке ГОП по мощности в
областях передаточных отношений на границах частных диапазо-
нов, где следует ожидать наименьших значений КПД ГОМП.
В каталогах отсутствуют данные для передаточных отношений,
соответствующих работе гидромашины ГМ2 при малой скорости.
Для этой области следует использовать данные гидромашин,
близких по конструкции.
Объемные потери в ГОП оказывают влияние на процесс пере-
ключения частных диапазонов в многодиапаэонной ГОМП. Если
при отсутствии объемных потерь достигается полная синхрониза-
ция скорости второго подключающего устройства, обеспечиваю-
щего работу ГОМП в соседнем частном диапазоне, то при их
наличии действительное значение передаточного отношения мень-
ше заданного, и поэтому скорость элементов второго подключаю-
щего устройства будет синхронизирована неполностью, что вызо-
вет при его включении некоторое буксование фрикционного эле-
мента (тормоза или муфты).
Разница заданного и действительного передаточных отноше-
ний зависит от диапазона, загрузки ГОМП и объемных потерь и
в трех-и четырехдиапазонных ГОМП может составлять 2—3 %.
Выравнивание этой разницы может быть осуществлено практи-
чески мгновенно при незначительной работе трения фрикционного
элемента.
При полном включении второго подключающего устройства
(первое остается включенным) заданное и действительное переда-
точные отношения совпадут, давление в гидромашинах будет
уменьшено, а поэтому вся энергия от двигателя будет передавать-
ся только по двум механическим ветвям, причем мощности рас-
пределятся пропорционально моментам, обеспечиваемым каждой
ветвью отдельно. В этом случае ГОМП будет работать как меха-
ническая передача, т. е. с высоким КПД.
Другим способом обеспечения полной синхронизации скорос-
тей второго подключающего устройства является подбор значе-
ний рабочих объемов гидромашин, при которых в момент вклю-
чения заданное и действительное передаточные отношения совпа-
дут. При этом после включения второго подключающего устрой-
ства давление в гидромашинах не изменяется, и распределение
мощностей по ветвям ГОМП остается таким же, как до включе-
ния. Как в первом, так и во втором случаях переключение
248
частных диапазонов не вызывает разрыва силовой связи между
двигателем и нагрузкой.
Возможны и иные способы переключения частных диапазонов.
Вопрос об их выборе должен решаться при разработке системы
управления многодиапазонной ГОМП.
7.6. ТРАНСМИССИИ ВГМ С МНОГОДИАПАЗОННЫМИ
ГИДРООБЪЕМНО-МЕХАНИЧЕСКИМИ ПЕРЕДАЧАМИ
Трансмиссии, в составе управляемых передач которых исполь-
зуются ГОП, называются гидрообъемно/механическими (ГОМТ).
Все множество рациональных схем ГОМТ может быть разде-
лено на три характерные группы (центральные, бортовые и ком-
бинированные ГОМТ), отличающиеся числом и функциональным
назначением передач, а также их связями внутри трансмиссии.
Центральные ГОМТ содержат две управляемые передачи с
раздельными функциями: одна КП обеспечивает управление по-
ступательным движением ВГМ (при прямолинейном движении и
повороте), а вторая (в МП)—вращательным (при повороте).
Связи этих передач с выходными звеньями трансмиссии осуществ-
ляются механическим элементом с двумя степенями свободы.
Бортовые ГОМТ также содержат две управляемые передачи,
но их функции совмещены, и они совместно управляют поступа-
тельным и вращательным движением ВГМ. Бортовые ГОМТ со-
стоят из двух одинаковых КП, в качестве которых используются
многодиапазонные ГОМП.
Комбинированные ГОМТ содержат три управляемые переда-
чи, их функции не имеют четкого разграничения, а их связи с вы-
ходными звеньями трансмиссии осуществляются выходным меха-
ническим элементом с тремя степенями свободы.
Выбор конкретной кинематической схемы ГОМТ зависит от
ряда факторов, определяющих конструктивное исполнение транс-
миссии. К ним относятся удельная мощность ВГМ, компоновка
МТО (продольное или поперечное расположение двигателя), груп-
па схем ГОМТ, тип и характеристика двигателя, тип и характе-
ристика ГОП.
С учетом этих факторов выбираются общий диапазон ГОМП
и ее максимальное передаточное отношение, число и значения
частных диапазонов, установочная мощность гидромашины, поло-
жение входного и выходного валов трансмиссии, передаточные
отношения всех согласующих передач, скорость и нагруженность
всех элементов трансмиссии.
Выбор схемы ГОМТ зависит от характеристики совместной
работы трансмиссии и двигателя, которая должна быть подчине-
на задаче достижения наиболее высокой тяговой характеристики
ВГМ при работе двигателя на максимальной мощности и более
высокой топливной экономичности при частичной загрузке двига-
теля, что требует создания соответствующей системы автоматиче-
ского управления двигателем и трансмиссией.
249
В случае применения двигателя с повышенным коэффициен-
том приспособляемости (газотурбинного или поршневого) прин-
ципиально можно использовать его работу по внешней характе-
ристике. В этом случае может быть уменьшен необходимый диа-
пазон трансмиссии при управлении поступательным движением
ВГМ, что позволяет повысить КПД ГОМП при одном и том же
числе частных диапазонов или уменьшить их число. Однако при
этом нельзя уменьшить установочную мощность гидромашин, по-
нижается топливная экономичность двигателя и усложняется си-
стема управления двигателем и трансмиссией. Эти недостатки
могут превалировать над преимуществами, достигаемыми в ре-
зультате уменьшения общего диапазона ГОМТ. По этой причине
вопрос о выборе характеристик совместной работы ГОМТ и дви-
гателя должен решаться при выборе параметров многодиапазон-
ной ГОМП и системы автоматического управления двигателем и
трансмиссией.
На рис. 7.18 приведена кинематическая схема центральной
ГОМТ, разработанной для ВГМ массой 43 т с поперечным распо-
ложением ПД максимальной мощностью 1000 кВт. Четырехдиапа-
Рнс. 7.18. Кинематическая схема центральной ГОМТ:
Д — двигатель; .4 - зубчатая муфта; ГЗ - гндроза медлитель; Т тормоза; Ф - муфты
зонная ГОМП с минимумом установочных мощностей гидромашин
обеспечивает общий диапазон dn=7,35 при максимальном пере-
даточном отношении Gm., =1,84 и применяется в качестве КП.
Кинематическая схема ГОМП и ее план скоростей показаны на
рис. 7.12,6 и 7.11; принцип работы, значения частных диапазонов,
порядок включения фрикционных элементов и значения переда-
точных отношений дифференциальных механизмов приведены в
разд. 7.3. Суммарная относительная установочная мощность гид-
ромашин ГМ( и ГМ2 этой ГОМП равна 1,1.
250
В качестве механизма реверса на входе в ГОМП установлена
цилиндрическая зубчатая передача, включение которой осуществ-
ляется зубчатой муфтой. Для синхронизации угловых скоростей
зубчатой муфты и ее безударного включения при остановленной
ВГМ и включенном тормозе Т( первого частного диапазона ГОМП
объем регулируемой гидромашины должен соответствовать
<7ГМ max (в зависимости от знака передаточного отношения),
что обеспечивает полный реверс скоростей при переходе ВГМ с
переднего на задний ход.
Механизм поворота — дифференциальный, состоит из ГОП,
включающей гидромашины ГМ0 и ГМХ, двух выходных дифферен-
циальных механизмов и •согласующих зубчатых передач. Радиус
поворота определяется передаточными отношениями ГОП МП и
ГОМП, обеспечивающими непрерывное его регулирование от бес-
конечности до нуля. Необходимая суммарная относительная уста-
новочная мощность гидромашин ГМ0 и ГМХ определяется из
условия поворота и равна 1,1; при этом максимальная угловая
скорость поворота ВГМ составляет 0,8 рад/с («45°/с).
Суммарная установочная мощность гидромашин центральной
ГОМТ равна сумме установочных мощностей гидромашин ГОП
ГОМП и МП и по расчету достигает 2000 кВт. В ГОП при-
менены аксиально-поршневые гидромашины типа № 25 фирмы
«Зауер унд зоон машиненбау» с рабочим объемом 166 см3. Они
содержат по две параллельно работающие передачи, состоящие из
регулируемой и нерегулируемой гидромашин. Установочная мощ-
ность каждой из восьми гидромашин равна 250 кВт, максималь-
ная частота вращения валов гидромашин 2400 об/мин, а макси-
мально возможное давление рабочей жидкости в ГОП по расчету
не должно превышать 35 МПа.
Для повышения эффективности тормозной системы ВГМ в
ГОМТ установлен гидродинамический замедлитель, один элемент
которого соединен с входным валом ГОМП, а второй —с карте-
ром трансмиссии.
Расчетная тяговая характеристика прямолинейного движения
ВГМ и КПД центральной ГОМТ приведены на рис. 7.19.
Расчет удельной силы тяги [л проводился известными метода-
ми с учетом расчетных значений КПД ГОМТ и гусеничного дви-
жителя.
Из рис. 7.19 видно, что в интервале скоростей от 12 до 78 км/ч
расчетный максимальный КПД ГОМТ равен примерно 0,88, а ми-
нимальный — примерно 0,82 (на стыке между вторым и третьим
частными диапазонами).
В разработанном проекте ГОМТ расчетная масса двух ГОП
составляет 700 кг, а масса ГОМТ в целом (без бортовых пере-
дач) 1500 кг; удельная масса ГОМТ—1,5 кг/кВт.
Основные преимущества рассмотренной схемы ГОМТ заклю-
чаются в следующем:
251
бесступенчатое изменение передаточных отношении при управ-
лении поступательным и вращательным движением ВГМ обеспе-
чивается при достаточно высоких значениях КПД;
Рис 7 19 Расчетная тяговая характеристика прямолинейного движения ВГМ
и КПД центральной ГОМТ:
/ — удельная сила тяги; 2 КПД ГОМТ; 3 — КПД ГОМП
перестройка структуры ГОМП при трогании ВГМ с места,
переходе с одного частного диапазона на другой осуществляется
при помощи фрикционных дисков трения, включающихся при от-
носительной скорости, близкой к нулю, а следовательно, и работа
трения близка к нулю, т. е. условия работы фрикционных элемен-
тов в ГОМТ существенно легче, чем в МТ и ГМТ. Конструкция
таких фрикционных элементов ГОМТ может иметь небольшие
габаритные размеры при высокой надежности; в некоторых слу-
чаях эти элементы могут быть заменены зубчатыми муфтами
при соответствующей системе управления ими;
переключение частных диапазонов ГОМП обеспечивает во
всем диапазоне безразрывную передачу энергии от двигателя
к ведущим колесам, что не вызывает потери скорости ВГМ;
при переключении частных диапазонов скорость всех звеньев
ГОМТ (в том числе и вала двигателя) не изменяется, а поэтому
не возникают дополнительные динамические нагрузки, свойствен-
ные механическим и гидромеханическим трансмиссиям.
252
По совокупности основных технических характеристик (диапа-
зонам непрерывного регулирования передаточных отношений
при управлении поступательным и вращательным движением
ВГМ, топливной экономичности двигателя при частичной загруз-
ке, КПД, массе и габаритным размерам) ГОМТ достаточно полно
отвечают требованиям, предъявляемым к трансмиссиям с целью
повышения подвижности современных ВГМ.
Создание ГОМТ связано с решением ряда технических задач:
разработкой системы автоматического управления ГОМТ и двига-
телем, созданием малогабаритных конструкций ГОП и обеспече-
нием их работы при высокой температуре (до 130°С), соответст-
вующей фильтрацией масла для ГОП и др.
За рубежом также ведутся работы по созданию ГОМТ для
ВГМ. В настоящее время известны три конструкции ГОМТ: две
опытные (ХИМ-1500-1 и ХИМ-1500-2) фирмы «Аллисон» (США)
для нового основного танка М-1 и одна серийная (НМРТ-500)
фирмы «Джеперал электрик» для новой БМП М-2.
ГОМТ ХИМ-1500-1 разработана для ГТД мощностью 1100 кВт.
На основании структурной схемы можно сказать, что она содер-
жит две бортовые ГОМП, каждая из которых связана с ведущим
колесом танка через бортовой редуктор, т. е. это бортовая ГОМТ.
Механический элемент каждой бортовой ГОМП содержит два
трехзвенных дифференциальных механизма, согласующие зубча-
тые передачи и три фрикционных элемента (два тормоза и одну
муфту), при помощи которых осуществляется переключение
частных диапазонов; при включении одного из тормозов ГОМП
работает по полнопото<чной схеме.
При общем диапазоне регулирования du = 4 и ixin.x=2 план
скоростей основных звеньев одной ГОМП и ее кинематическая
схема должны быть такими, как показано на рис. 7.20. Схема
Рис. 7.20. Кинематическая схема трехднапазонной ГОМП трансмиссии
ХНМ-1500-1 фирмы «Аллисон» (а) и ее план скоростей (б):
.3,0— предполагаемые внутренние передаточные отношения дифференциальных механизмов
обеспечивает три частных диапазона. В первом диапазоне (вклю-
чен тормоз Г>) ГОП работает по полнопоточной схеме, во втором
253
(включена муфта Ф\) ив третьем (включена муфта Ф2) ГОП
работает в параллельном потоке мощности с дифференциальным
механизмом на выходе. Таким образом, трансмиссия ХНМ-1500-1
представляет собой бортовую трехдиапазонную ГОМП, в первом
частном диапазоне которой вся мощность передается через ГОП.
При этом переключение всех частных диапазонов обеспечивается
фрикционными элементами без разрыва потока энергии и без
перерегулирования гидромашин.
Основным недостатком данной схемы ГОМП является исполь-
зование ГОП по полнопоточной схеме в первом частном диапазо-
не, что обусловливает понижение КПД трансмиссии и увеличение
необходимых установочных мощностей гидромашин. Вторым не-
достатком является зависимость третьего частного диапазона от
первого, так как в этих диапазонах работает один и тот же диф-
ференциальный механизм из звеньев 2, х, Т\.
Предполагаемая полная кинематическая схема ГОМТ
ХНМ-1500-1 представлена на рис. 7.21. В такой схеме ГОМТ ре-
Рис. 7.21. Кинематическая схема ГОМТ ХНМ 1500-1
вере обеспечивается конической передачей с двумя муфтами Ф3
и Ф«, а для повышения эффективности тормозной системы танка
применяются два ГЗ. При прямолинейном движении танка пере-
даточные отношения двух бортовых ГОМП изменяются синхрон-
но. При повороте вводится соответствующее рассогласование пе-
редаточных отношений.
Кинематическая схема ГОМТ ХНМ-1500-2 для двигателя мощ-
ностью 1100 кВт приведена на рис. 7.22. Это центральная ГОМТ,
в КП которой применена четырехдиапазонная ГОМП, состоящая
из ГОП, пяти дифференциальных механизмов, четырех фрикцион-
ных элементов (тормозов 7*1, 7*2, 7*3 и муфты Ф4) и соответствую-
щих согласующих передач. ГОМП обеспечивает четыре частных
диапазона. В первом диапазоне (включен 7*]) ГОП работает
по полнопоточной схеме, в последующих трех (включаются по-
254
очередно Т2, Т3 и Ф<) ГОП работает в параллельном потоке
мощности с дифференциальным механизмом на выходе. Реверс
обеспечивается конической передачей включением муфт Ф| или
Ф2. Механизм поворота—дифференциальный и включает в себя
ГОП, состоящую из гидромашин ГМ0 и ГМХ, два выходных диф-
ференциальных механизма и соответствующие согласующие пере-
дачи. Радиус поворота регулируется от бесконечности до нуля.
Рис 7.22 Кинематическая схема ГОМТ ХНМ-1500-2:
—3.3; 3,0; —2,45; —2.57; —2.0 передаточные отношения планетарных рядов
Между входным звеном 0 ГОМП и звеньями 0\ и 02 двух
дифференциальных механизмов 2 х, 0 и 2, 02, х, образующих
четырехзвенный дифференциальный механизм, установлены две
дополнительные КП. Одна из них обеспечивает два фиксирован-
ных передаточных отношения при помощи дифференциального
механизма 0, 0\, Т2 и двух фрикционных элементов Т2 и Ф«,
а вторая — одно передаточное отношение (дифференциальный
механизм 0, 02, Т3 и тормоз Т3). В такой схеме ГОМП образо-
вание трех высших частных диапазонов осуществляется по струк-
турной схеме, показанной на рис. 7.9, в, с переключением диапа-
зонов на входе. Частные диапазоны в ней не могут быть равны:
второй и четвертый должны иметь одну и ту же разность переда-
точных отношений, поэтому значение четвертого диапазона долж-
255
но бить меньше второго н третьего. На рис. 7.23 приведен предпо-
лагаемый план скоростей такой ГОМП, построенный для диапа-
зона da =7,1 и irmax =0,85. Из плана скоростей следует, что при
^„,=0,32/0,12 = 2,66 и dni = 0,65/0,32 = 2,03 четвертый частный
диапазон составляет только dn} =0,85/0,65=1,3. При такой схеме
ГОМП четвертый диапазон определяется разностью передаточных
отношений второго диапазона (0,32—0,12=0,2), поэтому и для
четвертого диапазона 0,85—0,65=0,2, чем и объясняется умень-
шение его значения.
Рис. 7.23. План скоростей
чстырехднапазоннон ГОМП
трансмиссии ХНМ-1500-2
Такая ГОМП нс мо-
жет иметь минимум ус-
тановочных мощностей
гидромашин, так как их
сумма определяется зна-
чением второго диапазо-
на (du,=2,66) и равна
Е N у = dtl, — I = 1,66, что
в 1,5 раза больше, чем
для схемы ГОМП, пока-
занной на рис. 7.18. Не-
достатком ГОМП яв-
ляется также использование ГОП по полнопоточной схеме в пер-
вом частном диапазоне.
Сопоставление схем ГОМТ ХНМ-1500-1 и ХНМ-1500-2 показы-
вает, что вторая должна обеспечить при одном и том же общем
диапазоне регулирования более высокое значение КПД во вто-
ром, третьем и четвертом частных диапазонах при меньших зна-
чениях установочных мощностей гидромашин. Вероятно, по этой
причине предполагается использовать ГОМТ ХНМ-1500-2 для
основного танка М-1 (США).
Кинематическая схема ГОМТ НМРТ 500 фирмы «Дженерал
электрик» для БМП с двигателем мощностью 400 кВт приведена
на рис. 7.24. ГОМТ содержит две ГОП, пять дифференциальных
механизмов, четыре фрикционных элемента (Ть Т2, Ф3 и Ф4),
согласующие простые зубчатые передачи и два остановочных тор-
моза. В ГОМТ применена сложная четырехдиапазонная ГОМП с
двумя ГОП; с ее помощью осуществляется управление поступа-
тельным и вращательным движением ВГМ.
При прямолинейном движении две ГОП синхронно изменяют
передаточные отношения во всех диапазонах. В первом частном
диапазоне включен тормоз Ть Мощность от двигателя передается
к двум ГОП и далее подводится к выходным дифференциальным
256
механизмам, работающим как понижающие передачи, а затем —
к ведущим колесам; следовательно, в первом частном диапазоне
ГОП работают по полнопоточной схеме. Во втором частном диа-
пазоне включен тормоз Тъ в третьем — муфта Ф3, в четвертом —
Ф4- Следовательно, во втором, третьем и четвертом частных диа-
пазонах ГОП работают в параллельном потоке мощности с диф-
ференциальным механизмом на выходе.
Рис 7.24 Кинематическая схема ГОМТ НМРТ-500 фирмы «Дженерал элек-
трик»:
—4.0; + 2.0; -2.0 передаточные отношения планетарных рядов
Поскольку при прямолинейном движении передаточные отно-
шении двух ГОП одинаковы, то дифференциальный механизм из
звеньев 6, 5, 4 сблокирован, они вращаются с равными скоростя-
ми. Для обеспечения одинаковой загрузки двух ГОП во втором
и четвертом частных диапазонах внутреннее передаточное отно-
шение этого механизма должно быть равно 2, так как только в
этом случае обеспечивается равенство моментов на водиле и сол-
нечной шестерне. Реверс обеспечивается с помощью ГОП при ра-
боте по гюлнопоточной схеме, т. е. только в первом частном диа-
пазоне; отключение ГОМТ от двигателя осуществляется разъеди-
нительным фрикционом.
17 Зак. 47 «с»
257
Предполагаемый план скоростей основных звеньев ГОМП при
равных передаточных отношениях двух ГОП, dn 7. /хтах 1,4
и передаточных отношениях согласующих зубчатых передач, рав-
ных единице, приведен на рис. 7.25.
Рис 7.25. План скоростей четырехдиапазонной ГОМП трансмиссии НМРТ-500
Как видно из плана скоростей, четвертый частный диапазон
зависит от значения второго, а третий — от значения первого.
Второй и четвертый диапазоны имеют одну и ту же разность пере-
даточных отношений (0,6—0,2 = 0,4 для второго и 1,4—1,0=0,4 —
для четвертого). Разность передаточных отношений первого диа-
пазона составляет 0,2—0=0,2 и равна половине разности переда-
точных отношений третьего диапазона, поскольку в первом диапа-
зоне интервал изменения скорости гидромашин составляет только
половину интервала их изменения в третьем диапазоне. Это свя-
зано с тем, что образование всех четырех частных диапазонов
ГОМП осуществляется так же, как в трансмиссии ХНМ-1500-2.
Необходимая сумма установочных мощностей гидромашин опре-
деляется вторым частным диапазоном (d113 3,0) и равна S/Vy
daJ — 1 = 2, что в 1,83 раза больше, чем для ГОМП, схема ко-
торой показана на рис. 7.18.
ГОМП трансмиссии НМРТ-500 присущи те же недостатки, что
и ГОМП трансмиссии ХНМ-1500-2: использование ГОП по полно-
поточной схеме в первом частном диапазоне и уменьшенный чет-
вертый частный диапазон.
258
Поворот ВГМ осуществляется при помощи рассогласования
передаточных отношений двух ГОП.
ГОМТ — комбинированная, ее выходной механический элемент
имеет три степени свободы, ГОМТ включает в себя три управляе-
мые передачи (две ГОП и механическая КП с фрикционными эле-
ментами).
В ГОМТ НМРТ-500 применены две ГОП с радиальными гид-
ромашинами, имеющими девять цилиндров с шариками диамет
ром 50,8 мм и максимальную подачу 344 см3/об. Максимальный
КПД ГОМТ в высших диапазонах составляет 0,86.
Трансмиссия НМРТ-500 не отличается по массе и объему от
других типов трансмиссий, рассчитанных на передачу той же
мощности, но по данным сравнительных испытаний в армии США
с ГМТ Х-300 фирмы «Аллисон», обеспечивает ВГМ легкое вожде
ние, большую подвижность, лучшую топливную экономичность.
Следует отметить, что, несмотря на многие достоинства, ГОМТ
производства США имеют неоптимальные кинематические схемы
и не позволяют достигнуть минимума массы и объема при доста-
точно высоком КПД во всем диапазоне изменения передаточных
отношений.
17*
Глава 8 РАСЧЕТ ЭЛЕМЕНТОВ ТРАНСМИССИЙ
НА ДОЛГОВЕЧНОСТЬ
8.1. ОБЩИЕ ПОЛОЖЕНИЯ
Для расчета долговечности трансмиссий ВГМ с учетом много-
образия режимов их эксплуатации в реальных условиях требуется
решить следующие задачи:
статистически описать условия эксплуатации ВГМ, для кото-
рых предназначена трансмиссия;
выбрать параметры, характеризующие режимы работы транс-
миссии в определенных условиях эксплуатации ВГМ;
определить потери мощности и КПД трансмиссии;
рассчитать нагруженность элементов -трансмиссии, лимитирую-
щих ее долговечность;
определить прочность и износостойкость элементов трансмис-
сии с учетом их конструкции и условий работы;
определить показатели долговечности составных частей транс-
миссии, сопоставляя параметры, характеризующие их нагружен-
ность, прочность и износостойкость.
Показатели долговечности составных частей трансмиссии мо-
гут быть использованы для оценки ресурса трансмиссии, лимити-
руемого отдельными сборочными единицами (элементами), а так-
же для определения долговечности трансмиссии в целом.
Одним из путей определения долговечности является использо-
вание законов распределения, аппроксимирующих эмпирические
функции распределения ресурса сборочных единиц или отдельных
устройств трансмиссии.
Опыт разработки и эксплуатации современных ВГМ показы-
вает, что значительный объем доводочных работ по трансмиссии
связан с обеспечением требуемой долговечности зубчатых пере-
дач, подшипников, фрикционных элементов и устройств. Посколь-
ку конструктивные параметры этих составных частей влияют на
размеры и конструкцию других сборочных единиц и деталей,
а также на объемно-массовые показатели трансмиссии, особенно
важно уметь оценить их долговечность на ранних стадиях проек-
тирования. Основным видом повреждения зубчатых передач, как
показывает анализ результатов эксплуатации трансмиссий, являет-
260
ся усталостное разрушение зубьев вследствие действия цикличе-
ских изгибных или контактных напряжений. Существенные по-
вреждения вызывают динамические нагрузки, возникающие в
трансмиссии при переходных режимах работы. Несмотря на при-
нимаемые меры по снижению динамических нагрузок, роль пере-
ходных процессов в накоплении повреждений зубчатых передач
остается одной из главных.
Условия нагружения и повреждения большинства подшипни-
ков такие же, как у зубчатых передач.
Основными видами повреждения фрикционных элементов яв-
ляются коробление, усадка, а также износ рабочих поверхностей
дисков трения в процессе функционирования трансмиссии.
Условия эксплуатации трансмиссий описываются с помощью
статистической модели, сформированной таким образом, чтобы
наиболее полно выявлялись слабые стороны конструкции и каче-
ство изготовления трансмиссий. В основу модели положены усло-
вия периодических испытаний танка. Как показывает опыт, имен-
но в процессе таких испытаний выявляется наибольшее число
дефектов и неисправностей в трансмиссии, подтверждаемых дру-
гими видами испытаний и эксплуатацией.
Обобщенная характеристика принятой статистической модели
условий эксплуатации ВГМ выглядит следующим образом:
вид эксплуатации -периодические испытания;
режим движения — колонной, в светлое время суток,
по-походному, причем марш с максимально возможной по усло-
виям движения скоростью —92 %, а движение с ограничением
скорости — 8 % общей наработки по пути;
квалификация водителя — среднестатистическая (во-
дители 3-го класса — 70%, водители более высокой квалифика-
ции — 30 %);
внешняя среда на территории европейской части СССР
и Средней Азин 65 и 35 % общей наработки соответственно, в том
числе: дорог —60 %, местности— 40 %. Время года распреде-
ляется следующим образом: зима — 30 %, лето —30%, весна и
осень — 40 %. Рельеф — равнинный и холмистый.
Режимы работы и нагруженность элементов трансмиссии в
условиях эксплуатации ВГМ являются случайными величинами.
Расчет режимов работы трансмиссии состоит из следующих
последовательных операций: строится функция распределения
скорости движения исследуемой ВГМ в принятых условиях
эксплуатации; проводится ее анализ для определения обоб-
щенных эксплуатационных параметров (средних скоростей движе-
ния, коэффициентов использования передач и др.); определяются
параметры, характеризующие работу трансмиссии на отдельных
видах переходных режимов. Определяемые при таком подходе
параметры являются усредненными за длительный период эксп-
луатации большого числа ВГМ.
В основу методики построения функции распределения ско-
261
росги движения ВГМ положен метод, разработанный для анализа
быстроходности БТТ [4]. Этот метод доработан с целью исполь-
зования его для оценки долговечности трансмиссий (уточнены
параметры, характеризующие внешнюю среду, учтено влияние
квалификации водителя и переходных режимов на распределение
скорости движения ВГМ).
Значения обобщенных эксплуатационных параметров транс-
миссии определяются с использованием математической статисти-
ки и теории вероятностей; значения параметров переходных режи-
мов работы определяются по эмпирическим зависимостям, полу-
ченным на основании статистического анализа результатов испы-
таний серийных и опытных ВГМ различных категорий по массе
с разными двигателями, трансмиссиями и системами управления
движением.
Переходные режимы работы являются неустановившимися про-
цессами, однако их можно характеризовать параметрами, средне-
интегральными за время разового переходного режима, опреде-
ляемого одним включением передачи МП или ОТ. Число переход-
ных режимов каждого вида определяется как число включений
соответствующей составной части системы управления движе-
нием.
8.2. РАСЧЕТ ПАРАМЕТРОВ. ХАРАКТЕРИЗУЮЩИХ
РЕЖИМЫ РАБОТЫ ТРАНСМИССИИ
Исходные данные. Для расчета используются тактико-техни-
ческое задание (ТТЗ) или тактико-техническая характеристика
(ТТХ) ВГМ; тяговая характеристика ВГМ; зависимость холостых
потерь мощности в трансмиссии и в ходовой части ВГМ от ско-
рости движения; характеристика совместной работы двигателя и
гидротрансформатора; внешняя и тормозная характеристики дви-
гателя; характеристики гидротрансформатора, гидрозамедлителя,
систем автоматического управления блокировкой гидротрансфор-
матора и автоматического переключения передач.
Параметры, используемые в качестве исходных данных для
последующего расчета, приведены в табл. 8.1.
Построение функции распределения скорости движения ВГМ.
Тяговая характеристика ВГМ аппроксимируется гиперболической
зависимостью
= A/v + B,
где /* — условная удельная сила тяги при скорости движения о; А, В — коэф-
фициенты, определяемые методом наименьших квадратов с использованием
значений /д)/ - и v/max (см. табл. 8 1).
262
Таблица 8.1
Исходные данные для расчета
Параметр Примечания
Масса ВГМ т, т
База ВГМ L, м
'Лирина колен ВГМ В, м
Радиус ведущего колеса , м
Максимальный динамический ход катка Лд. м
Высота центра масс ВГМ he, м
Коэффициент сопротивления качению опорного
катм! но гусенице /к
Максимальная эффективная мощность двига-
теля Мет4Х , кВт
Частота вращения вала двигателя п и, соот-
ветствующая максимальному крутящему момен-
ту, об/мнн
Максимальная частота вращения вала двига-
теля при работе на внешней характеристи-
ке, сб/мин
Минимально допустимое передаточное отноше-
нис ГТ
Относительная ширина рабочего скоростного
диапазона двигателя Лр
Тормозная мощность двигателя при средней
скоростг движения ВГМ на /А передаче Мт/. кВт
Максимальная частота вращения вала двигате-
ля при его работе на внешней характеристике
с минимально допустимым передаточным отно-
шением ГТ п*и, об/мнн
Ориентировочная средняя скорость движения
ВГМ на /й передаче Vj , км/ч
Соответствует минималь-
но допустимому КПД
Для механических транс-
миссий 8р = I — «м.Лтях •
для ГМТ,
• о л Ло.5~(24р-Н>Л/<)
(Я) ~ vJnax'Vm»i^
Максимальная скорость У/т„ движения ВГМ
на /-Й передаче, км/ч
263
Продолжение табл. 8.1
Параметр
Примечания
Минимальная скорость движения ВГМ на /-Л
передаче и/п,|„ . км/ч
Скорость V6J, при которой происходит блоки-
ровка ГТ, км/ч
Скорость , при которой происходит раз-
блокировка ГТ, км/ч
Средняя скорость Идпш Движения ВГМ на
/й передаче, при которой происходит автомати-
ческое переключение на (/— 1)-ю передачу, км/ч
Средняя скорость 0дпп/ движения ВГМ на
/-Й передаче, при которой происходит переключе-
ние на (/+1)-ю передачу, км/ч
Максимальная удельная сила тяги /д1у на
/-Й передаче при скорости и(/-|)тах
Максимальная удельная сила тяги /д2т на
высшей передаче при скорости отах
При неавтоматической си-
стеме управления
v/mln в
1«дар-»*+оз|.уж,
При автоматической си-
стеме управления
17«п1п = vAnn/
Тормозная мощность ГЗ A/T|.3 при средней
скорости движения ВГМ на /-Й передаче, кВт
Средняя тормозная мощность ГЗ /V* при
,3/
торможении на /-Й передаче, кВт
мп
0.5 4 О,О723е*
Время выхода (запаздывание) Тма ГЗ на
внешнюю характеристику, с
Потери мощности холостого хода в трансмис-
сии при средней скорости движения ВГМ на /-Й
передаче AA/TP^ > к®т
Нагрузочный коэффициент потерь мощности
на / й передаче Л-го устройства трансмиссии,
участвующего в передаче мощности от ведущего
колеса к двигателю при торможении Р*у
Крутящий момент AMiy, соответствующий по-
терям мощности холостого хода ходовой части
и трансмиссии при средней скорости на / й пере-
даче, Н-м
264
Продолжение табл. 8.1
Параметр Примечания
Удельная мощность ВГМ Nya, кВт/т Суммарная дополнительная тормозная мощ ность на затраты в ГЗ н на холостые поте- ри в трансмиссии при частоте вращения вала двигателя, соответствующей средней скорости движения ВГМ на /-Й передаче Л/у. = N Im 'max = Л/* +ДМгР / ТГЗУ
Вероятность движения ВГМ со скоростью ит/ (без учета огра-
ничений по заносу и системе подрессоривания, а также условиям
движения в колонне) определяется по формуле
Г7С “4 = |п ;
аИ| = 0,95 In |(0,П -/,)/(0.057 4 А)] ;
/о/ = /L = Alvn + В •
-*Ь1 = 0,057 4- /к •
Здесь u j— нормированный параметр функции; Лщ, аи1—параметры лога-
рифмического нормального закона распределения, аппроксимирующего функцию
распределения обобщенного коэффициента сопротивления движению, учи
тывающего поворот и качение опорных катков по гусенице, а также
подъем дороги; /0<—обобщенный коэффициент сопротивления движению, при
котором возможно движение со скоростью vT/; vTj—условная скорость,
с которой могла бы двигаться ВГМ при отсутствии ограничений, связанных
с кинематикой МП и эргономическими факторами, от которых зависит факти-
ческая скорость VI.
2,5v|
Vu 1.5+М<М
= 1/|
скорости В1
OVv?*/ ] ~ коэффициент, учитывающий среднее снижение
повороте;
{0 — для МП первого типа;
1 — для МП второго типа;
о*р “ 60 (lg Nyt — 0,86) — приближенная средняя скорость движения; /к —
коэффициент сопротивления качению опорного катка по гусенице.
Относительный путь движения ВГМ со скоростью не более vt
вычисляется по формуле
18 Зак. 47 «с»
265
где Kni коэффициент, учитывающий ограничения скорости движения по за-
носу и системе подрессоривання, а также ограничения, обусловленные движе-
нием в колонне:
- (3,25 - 43 Л ) (0,01 v.y
Koi = е д *
Средняя скорость движения ВГМ в принятых условиях эксп-
луатации
/ »шах 1 — Fe (V) \
vcp = 11 (о,49475 - 0,985 f ------ dw )
или при дискретном определении значений величины Fs(vt)
vep= 1/10,00224 +
где 5 (Vi)=Fs (v4> Fs (vM).
Относительное время движения ВГМ со скоростью, соответст-
вующей <-му разряду скоростного диапазона от 2 км/ч до на
высшей передаче, разбитого с шагом dv, определяется по формуле
Т(Ч) = [0,9855 (к,) + *,d® (о, - 2 + | «„/(«, + ,
где vt — нижняя граница /-го разряда;
* _ | I, если- vi + dv < 10 км/ч;
1 I 0, если Vj + dv > 10 км/ч.
Вероятность движения ВГМ со скоростью не более о.
РГ(Ч) U P(vt) = V
По совокупности значений Р {v() при :=1, 2,.., л можно по-
строить функцию распределения скорости движения ВГМ.
Определение обобщенных параметров режимов работы транс-
миссии. Коэффициент использования j-й передачи по времени
(относительное время движения на / й передаче) определяется
по формуле
"/+•_
т,= 2 гд^),
где Т, (v<) — Sj (vj) A)/iVCp/(V| 4- dvy/2)—относительное время движения ВГМ
на / й передаче со скоростью V/, соответствующей /-му скоростному диапазону
на /й передаче от vyra|n до V; , разбитому на п разрядов с шагом dvy;
Vf — f/min + (/ — l)dvy — ннжняя граница / го разряда;
— 0015 ( ^VJ \
Sj (V/) = ?(V,) + —32“ М<7 I vl ~ 2 + “2~/ :
266
'max
v
V, V
;--------------.если Vj <1
*\nax Anin m п
1, если и, <1
('"Отах
— vi
---------, если V
/ш«х M+^mln m "
Средняя скорость движения на /-й передаче определяется
по формуле
vi-4-Z^W + iv/l2'
Tj 1-1 z
дисперсия скорости движения на j-й передаче
°/ (v) 2 (v,) — ;
Tj /-I
коэффициент использования j-й передачи по пути (относитель-
ный путь движения на /-й передаче) TjVj/vcp.
Среднее значение коэффициента сопротивления прямолинейно-
му движению на ;-й передаче определяется по формуле
m
S fc,
O' f । O' 1
'Ai+ 21~рлГс г
' max(/+l)
1
Sy
' * ' L cmax/ J
Sjy-5) — Si/; ,
ft, -1Л /</, ,*1Л<лт„(,+.,>-Г"м *’(/<> dAi/*y-
/I max/ max/ max(/+l) mix(/-f-l) /
^maxt/H)
среднее значение коэффициента сопротивления прямолинейному движению и
диапазоне от ДО Am„ у ; Лтаж (у+ „ • /ст„ Г максимальные зна-
чения коэффициента сопротивления движению, при котором возможно движение
на /-й передаче при работе двигателя в рабочем скоростном диапазоне;
/•-1,2....;
= ₽(Л„..
Вероятность соответствия коэффициента сопротивления прямо-
линейному движению значениям не более определяется по
формуле
Р(/с ,)- ?'е~~“'йи.
у2к
18*
267
ln(/c /0,052)
_______чх1________
где uet — q 62
Из анализа функции распределения скорости движения
ВГМ определяются также относительное время движения
ВГМ с разблокированным гидротрансформатором на /й переда-
че, средние скорости движения на /-й передаче при разблокиро-
ванном и сблокированном гидротрансформаторе, средние значения
коэффициента сопротивления прямолинейному движению на /-Й
передаче при разблокированном и сблокированном гидротранс-
форматоре.
Расчет параметров переходных режимов. Число переключений
j-u передачи подсчитывается для наработки, равной 1000 км пути:
ЛГ..., = 2.3- ?,
rw ПI = (1 - ;»»;- l»( 1/2;
*n n/-вероятностный коэффициент переключения передач; vn.nj — ориентиро-
вочное значение скорости при переключении с (/—1)-й передачи на /-ю.
При наличии САПП число переключений удваивается.
Начальная скорость движения при переключении с (/—1)-й
передачи на /-ю определяется по формуле
- Ю-85 + О.250Р - 1)4 .
начальная скорость движения при переключении с / й передачи
на (/— 1)-ю
’’ла-о = 1°'4 + 0’6(гр-
Суммарное число поворотов (в обе стороны) на / й передаче
также относится к наработке, равной 1000 км, и подсчитывается
по формуле
где 1—1, 2, 3 (номер вида поворота).
При этом число поворотов со средним радМусом, равным сво-
бодному или больше его (поворот 1-го вида), равно
Н.,, = 4,5 • 1 О’ - о? ty) /<4 *}л)] 3,.
Число поворотов со средним радиусом менее свободного при
промежуточном положении органа управления поворотом (пово-
рот 2-го вида)
= 7-10* [1 + 2,65 е" .
268
Число поворотов со средним радиусом, равным фиксированно-
му радиусу или меньше его (поворот Згго вида),
Nn/ = 3-10»11 + 0,17
Математическое ожидание продолжительности разового вклю-
чения МП на /-Й передаче
Средняя продолжительность разового включения МП в про-
цессе поворота I-го вида на /-й передаче определяется по формуле
ТиЧ = TajNaj!\Nu4 + 2 (iVn2/ + NaiJ) j,
а в процессе поворота 2-го и 3-го видов по формуле
Ла/ — Лз/ = 2 Taif •
Средняя (за одно разовое включение МП) кривизна (в м ')
поворота 2-го вида на / й передаче определяется по формуле
w (К,,) - к„ w(K,i) - f UZ (К) ак],
I 1 I0'875 „
где К3/ — J р | —верхняя граница кривизны. К,/ -
I 1 10,875 1 " —
* I In 1Г(К".у7 I — нижняя граница кривизны; VP (К2/) ~ *=““ X ^п/ 1
+ — вероятность значения кривизны К,р W (К3/) = W' (Л'з/) + — ве-
5П Sn
роятность значения кривизны Л'3,-; * --ГМ)21 _ —параметр масш-
7 / \0,о75 Ц
№)
таба распределения Вейбулла, аппроксимирующего распределение вероятности
средней кривизны поворота; Sa = V Snj — относительный путь движения ВГМ
на поворотах; Sn/— относительный путь движения ВГМ на поворотах (на / й
передаче), SnJ 0,25 • КГ» TnlVjNnl; 5щ/= 0.25 -10“« Гп1/Г/^1/• ^taj -
0,25 IO-»Tn3jVjNnij — относительные пути движения ВГМ при поворотах
1-го и 2-го видов на /-Й передаче.
Средний угол поворота 2-го вида на /й передаче (в градусах)
определяется по формуле
^i = 3\,8^TalJKcpif8lL.
Средняя кривизна (в м~*) поворотов всех видов на /-й пере-
даче определяется по формуле
К'„ = -J-1(Л- К,()+1) UZ (Kl(j+„) - f° uz (K)dK I.
«V L "1(7+1) J
200
г 1 ТО.В75
где Ktj = * | In । W(Kif) I ~~ мaкcимaЛьн0<- значение кривизны
на /-й передаче;
поворота
кривизны
W' (Kiy) = Sn<|SB —вероятность поворотов максимальной
на /й передаче.
Средний коэффициент сопротивления повороту на /-й переда-
че равен
Ру = 0,525/(0,930 + 0,07 К^В~1).
Средняя скорость движения ВГМ в начале поворота и средний
коэффициент сопротивления поступательному движению прини-
маются равными их средним значениям при движении на /-й пе-
редаче Vj и /су.
Средняя тормозная мощность двигателя на /-й передаче рас-
считывается следующим образом:
WT, если трансмиссия механическая;
A4T| 1 —|--=г^,если трансмиссия гидромеханическая,
где Tpj — относительное время движения на /-Й передаче с разблокирован-
ным ГТ.
Средняя удельная тормозная сила на /-й передаче
f-ч-
3 600 ь N„j)
8т^П(|-^у)(1-М
где б — коэффициент учета вращающихся масс ходовой части ВГМ; g-
= 9,81 м/с2 — ускорение свободного падения; 0, —нагрузочный коэффициент
потерь мощности в гусеничном обводе ходовой части ВГМ; 0ку —то же в
трансмиссии (см. табл. 8.1).
Математическое ожидание среднего замедления ВГМ при тор-
можении с применением ОТ
а„ =1,16 + 8,9 (2/„7, +/.).
Относительное число торможений ВГМ при использовании ОТ
(отнесенное к суммарному числу торможений любого вида) опре-
деляется по формуле
^от = П ^т(®от)М1 ^от(аот)1 ’
где Рт (аот) = 0,5 (I + erf Д/Т|/К2~) — вероятность торможения любого вида
с замедлением не более аот .
^т1 “ In 0,57 / 0,58 ;
270
Рот (вот) “ вероятность торможения ВГМ с замедлением не более аот
при торможении с применением ОТ.
Значение Кот определяется методом последовательного при-
ближения. Начальное Кот определяется при Р()Т (аит)^0,6.
Вероятность торможения машины с помощью ОТ со средним
замедлением а 3,5 м/с2
рот «.<«>=• -0,000847/Кот.
Значение нормированной нормально распределенной величины
соответствующей вероятности ^От(«-з.5)’ определяется
мз уравнения
ег(«/,.ь/И2)-2/’ОТ(Л_ЗЛ-1.
Значение нормированной нормально распределенной величины,
соответствующей значению Л^./от . вычисляется по формуле
Вероятность торможения при помощи ОТ со средним замедле-
нием менее аот
₽от(воТ) = 0,51И-егНУ,от/И1)|.
Значение Рот(аот ) используется для последующего прибли-
жения значения Кот к искомому. Среднеквадратичное отклоне-
ние нормированной нормально распределенной величины UOT
(первый параметр функции распределения вероятностей среднего
замедления при торможении с применением ОТ)
«u=2UMt,
rat UM — значение, найденное в последнем цикле приближения
Математическое ожидание нормированной нормально распре-
деленной величины £/от (второй параметр функции распределе-
на вероятностей среднего замедления при торможении с приме-
нением ОТ)
X -а е °’5eUi
л oi — аоте
Среднее время торможения машины (в с) при движении на
/й передаче
Гту = 0,5 + 0,0723 Vj.
Среднее время включения ОТ при торможении на /-й передаче
(в с)
ГОТ/ =^/-0,5.
271
Суммарное время (в с) работы трансмиссии в тормозном ре-
жиме на / й передаче за наработку 1000 км
| 3600(6,5Vj — 100) Тут)'.?, если -uMy>15,5 км/ч;
т'г ~ | 0, если vMi < 15,5 км ч .
Суммарное число торможений с применением ОТ на /-й пере-
даче, отнесенное к наработке 1000 км,
= KotTtjil Ту.
Расчетная скорость движения ВГМ в начале экстренного (т/н#
и рабочего (г>Нрр торможений с применением ОТ на /-й передаче
w = vH = гь + 1,8 Tlt (апт) = 1,088 v, -f- 0,61 .
"ат/ Р ’
Коэффициент сопротивления движению при торможении любо-
го вида
^сот/ '
8.3. РАСЧЕТ ДОЛГОВЕЧНОСТИ ФРИКЦИОННЫХ УСТРОЙСТВ
Расчет долговечности фрикционных устройств производится
для вновь спроектированных трансмиссий, а также для модерни-
зируемых ВГМ в случае изменения их массы, скоростных харак-
теристик, мощности двигателя, параметров трансмиссии и систе-
мы управления.
В процессе расчета определяются: коэффициент запаса фрик-
ционного устройства во включенном и буксующем состоянии; дол-
говечность, лимитируемая износом металлокерамических дисков
трения (МКД); поверхностная температура и температурное поле
в дисках трения; коробление дисков.
Исходные данные. Исходными данными для расчета являются
конструктивные параметры дисков трения, составляющих фрвк-
ционное устройство, а также вероятностные режимы их эксплуа-
тации в трансмиссии ВГМ.
Диски трения имеют следующие размеры:
/?и — наружный радиус поверхности трения, м;
/?вн — внутренний радиус поверхности трения, м;
Лмкд—толщина МКД, см;
Лмк — толщина металлокерамической накладки, см;
Лмк^— толщина стальной основы МКД, см;
Лмк — глубина смазочных канавок на поверхности трения МКД,
см;
йд —толщина сопряженного стального диска, см;
йс к — ширина спиральной смазочной канавки, мм;
272
tCK—шаг спирали спиральной смазочной канавки, мм;
лс м—число заходов спирали спиральной смазочной канавки;
Ь9 к—ширина радиальной смазочной канавки, мм;
/р. к—длина радиальной канавки, мм;
п9 к — число радиальных канавок на одну поверхность трения;
А?сР = (/?н + )/2 — средний радиус поверхности трения, м;
FT. о = «(/?* —) 104 — общая площадь поверхности трения
диска (без учета площади смазочных канавок), см2;
“ (1 - Лс. Л. //«. к)1Ю4* (Я* - - 10 2др к/р. «Лр Л ~ сум-
марная эффективная площадь поверхности трения МКД
без учета площади смазочных канавок ;
Км = ^эф/^т. о — коэффициент взаимного перекрытия поверх-
ностей трения.
Материалы для дисков трения имеют следующие показатели:
Хт- теплопроводность, Вт/(м2°С)—для металлокерамическо-
го материала МКВ-50 ^=27,2 Вт/(м2°С), а для МК-5
15,5 Вт/(м2.°С);
су—объемная теплоемкость, Дж/(м3 °C)—для металлокера-
мического материала МК-5 рекомендуется принимать
= 3,98-106, а для МКВ-50 — 2,73-10® Дж/(м3°С);
ат = kflCy — температуропроводность;
°и.2 — предел текучести;
Ё — модуль упругости;
|i — температурный коэффициент линейного расширения.
К конструктивным параметрам фрикционного устройства и
трансмиссии относятся число пар поверхностей трения (г) и осе-
вое сжимающее усилие на диски трения (Ро).
Для фрикционных устройств с гидравлическим включением и
механическим (пружинным) выключением
Р.-Р(Т)Р6-Р.Г + РЛ»-Р,.
где р(Т) — давление жидкости в полости бустера фрикционного устройства
(в системе гидроуправления), кПа; — площадь поверхности бустера, м2;
РПр— суммарное усилие разводящих пружин во включенном состоянии. кН;
Р„.б—суммарное усилие от центробежных сил жидкости в полости бустера
фрикционного устройства, кН; Рр— усилие от механизма разгрузки фрикцион-
ного устройства, кН.
Параметры эксплуатации фрикционных устройств:
М«оо — число включений на каждом из режимов в пересчете
на 1000 км пробега ВГМ;
Д , Af (Г) — работа трения в пересчете на эффективную
»Ф эф
площадь поверхности трения металлокерамического диска и
ее изменение в процессе буксования;
NF » Nr (D — средняя мощность трения в пересчете на
гэф. ер гэф
эффективную площадь поверхности трения металлокерамического
диска F^ и ее изменение в процессе буксования;
273
ptv, p(T)—среднее давление на поверхность трения (в пере-
счете на эффективную площадь поверхности трения металлокера-
мического диска Г,|)) и его изменение в процессе буксования;
-уср, средняя скорость скольжения поверхностей тре-
ния (по среднему радиусу поверхности трения /?тр ) и ее измене-
ние в процессе буксования;
ш(Т) — переносная угловая скорость вращения металлокера-
мических дисков в процессе буксования;
|iC(c <р — средний коэффициент трения скольжения;
/о — начальная температура масла, подаваемого на смазыва-
ние поверхности трения (при отсутствии экспериментальных или
расчетных данных рекомендуется принимать /о=Ю0°С);
У/ = - расход масла на смазывание поверхностей
трения (в расчете на эффективную поверхность металлокера-
мического диска), где — расход масла на рассчитываемое
фрикционное устройство.
Определение коэффициента запаса фрикционного устройства
во включенном и буксующем состоянии. Коэффициент запаса
фрикционного устройства во включенном состоянии определяется
по формуле
Рог/?сРРо/Л/ф шах •
где Л1ф пш—максимальное значение действующего на фрикционное устройст-
во крутящего момента; Цо— коэффициент трения покоя при срыве, зависящий
от давления на поверхности трения р—Ро/^эф-
Для фрикционных устройств, обеспечивающих трогание с мес-
та, переключение передач и поворот ВГМ, расчет ведется по мак-
симальному крутящему моменту двигателя и проверяется по сцеп-
лению гусеницы с грунтом.
Для фрикционных устройств, выполняющих функции горного
тормоза, учитывается условие удержания ВГМ на спуске под
углом, заданным в технических требованиях.
Для МКД с накладками из металлокерамического материала
МК-5, работающих в паре со ^Стальными дисками в масле типа
МТ-8П, go принимается по рис. 8.1, а; для МКД с накладками из
металлокерамики типа МКВ-50А при работе всухую в паре с со-
пряженными стальными дисками или с имеющими накладки из
чугуна или металлокерамического материала выбирается по
рис. 8.1, б.
Коэффициент запаса буксующего фрикционного узла опреде-
ляется по формуле
Р = PoZ/?fp|*et/M max »
где Нек — коэффициент трения скольжения.
Для фрикционных устройств, участвующих в торможении
ВГМ, коэффициент запаса определяется из условия обеспечения
требуемого замедления; в остальных случаях — рассчитывается
274
по максимальному крутящему моменту и проверяется по сцепле-
нию гусеницы с грунтом.
Рис. 8 1. Зависимость коэффициента трения покоя при срыве МКД Цо (сплош-
ные линии) и расчетной составляющей коэффициента трения скольжения рр
(штриховые линии) от давления на поверхности трения:
а — пара МК-5 +сталь при работе в масле (/ — шаг спиральной канавки 5 мм. 2 - 2.24 мм);
(> - металлокерамический материал на железной основе при работе всухую U пира
МК В 50А-• чугун ЧНМХ. 2 МКВ БОАэ сталь ЗНХС. 3 МКВ 50А 4 ФМК Я45. 4 МКВ-вОА ‘
4сталь .ЮХГСА. 5 МКВ5ОА+ФМК М5 или чугун по ТУ ЧЛ 355. 6 МКВ 50А +сталь
ЗОХГСА или 38л С)
Для МКД с накладками из МК-5, работающих в паре с сопря-
женными стальными дисками в масле типа МТ-8П, Б-ЗВ и
ТСЗП-8, цск определяется по формуле
Рек Рр4-(0,16-|Ар)е-ОДТС(’1-’’‘,
где р.р принимается по рис. 8.1, а; о, —скорости вращения ведомого и веду-
щего дисков трения, м/с.
Для МКД с накладками из металлокерамического материала
МКВ-50А, работающих всухую в паре с сопряженными стальны-
ми дисками и с имеющими накладки из чугуна или металлокера-
мического материала, цск определяется по формуле
14. = Ср +10,13 + 0,028 (•», - о.) 1 е-"’”
где нр ~ 0,09 + 0,32 е“037,р + .
Здесь — коэффициент, зависящий от материала сопряжен-
ных дисков (для металлокерамического материала ФМК-845, чу-
гуна ЧНМХ, чугуна по ТУ ЧЛ-355 dM=0,!0; для стали ЗОХГСА,
38ХС или 40ХНЛ =0).
Допускается определять составляющую по рис. 8.1,6.
275
Определение долговечности фрикционного устройства по износу
дисков трения. При работе МКД с накладками из МК-5 по сопря-
женным стальным дискам в масле, как правило, изнашиваются
только МКД; сопряженные стальные диски практически не изна-
шиваются.
Линейный износ одного МКД с двух сторон в зависимости от
Нисла включений пр на заданном режиме работы определяется
по формуле
Н = Ор(1 - е“ Vp ) + српр,
где Ьр, ср — постоянные для заданного режима коэффициенты.
Коэффициент ср характеризует износ за одно включение на
установившемся режиме эксплуатации фрикционного устройства,
а коэффициент ар представляет собой превышение износа за пе-
риод приработки поверхностей трения над износом за такое же
число буксований на установившемся режиме.
Коэффициент ар можно определить по формуле
аР = (с1м - ср)/(\ - е %),
где Gn — износ в процессе первого включения.
Для МКД с накладками из МК-5 (шаг штампованной спи-
ральной смазочной канавки 2,24 мм), изготовленных по принятой
в отрасли технологии, в результате проведенных стендовых испы-
таний при смазывании рабочих поверхностей маслом МТ-8П по-
лучены следующие эмпирические зависимости:
ср = 0,70- е°ЛЙ ;
П. = 0,16.
Для расчета фрикционных элементов, работающих на разных
режимах, используется интегральная зависимость для определе-
ния износа одного МКД (с двух сторон) h* (в мкм) за одно бук-
сование на заданном режиме при равномерном распределении
дополнительного износа ар в процессе приработки на весь допус-
тимый срок службы диска:
Л* = 0,5 • 10~5 j6е°'т 'cpd Т,
где То — продолжительность одного буксования, с.
Отличия в конструктивном исполнении МКД, технологии их
изготовления и условиях смазывания от тех, при которых опреде-
лялись вышеуказанные эмпирические зависимости, учитываются
с помощью специальных коэффициентов:
й = йкйтйрймйпй*,
276
где kK — коэффициент, учитывающий форму смазочных канавок на поверхнос-
тях трения МКД (для МКД со спиральными и радиальными смазочными ка
навками — 1 при шаге 2,24 мм и =0,8 при шаге канавки 5 мм); Лт — ко-
эффициент, учитывающий технологию изготовления МКД (для МКД со штам-
пованной спиральной смазочной канавкой Лт — 1; для МКД с нарезанной спи-
ральной канавкой Ат — 2); — коэффициент, учитывающий расход масла
на смазывание поверхностей трения (рис. 8.2); — коэффициент, учитываю-
щий марку масла (для масел МТ-8П, ТСЗП-8, БЗ-В = О *п — коэффн
циент, учитывающий вероятностное отклонение износа МКД от среднего зна-
чения, обусловленное колебаниями показателей свойств применяемых материа-
Рис. 8.2. Функция распределения МКД по коэффициенту Л„ (/) и зависимость
коэффициента kp от поверхностного расхода масла на смазку (2)
Допустимый износ определяется сопоставлением ограничений,
налагаемых конструкцией фрикциона и самого диска. Для МКД
с накладками толщиной 1 мм при глубине смазочных канавок
0,6—0,2 мм с учетом фрикционных свойств допускается износ
с двух сторон порядка 1 мм.
Среднее допустимое значение износа одного МКД по конструк-
тивным соображениям определяется по формуле
___ [//] = (Si-S2)/z,
277
где S| — допустимый ход нажимного диска рассчитываемого фрикционного эле-
мента; 5, — суммарный свободный ход новых металлокерамических и сопряжен-
ных стальных дисков.
Для расчета долговечности фрикционного узла принимается
меньшее из двух значений.
Износ одного МКД за наработку ВГМ, равную 1000 км, рас-
считывается по формуле
^1000 — 2-J Л/М ООО / •
где hj— износ одного МКД за одно включение на <-м режиме работы, мкм;
Viooo/—число включений рассчитываемого фрикционного устройства на Лм ре-
жиме на 1000 км пробега изделия; (—1, 2....т — варианты режимов использо-
вания рассчитываемого фрикционного устройства.
Долговечность фрикционного устройства (в тыс. км) по износу
МКД
Лф = |Н]/Я10О0.
При работе всухую МКД с накладками из металлокерамиче-
ского материала МКВ-50А по сопряженным стальным дискам или
по дискам с накладками из чугуна (металлокерамики) изнаши-
ваются как металлокерамические, так и сопряженные диски.
Износ одной сопряженной пары h (в мкм) за одно включение
состоит из износа одной поверхности трения МКД и одной поверх-
ности трения сопряженного диска и определяется по формуле
Л = 0,8- 1(Г2*С *k( ,
’ С ф' I C г#ф гЭф.ср»
где Лсф — коэффициент, учитывающий материал поверхности трения сопря
женного диска (для чугуна ЧНМХ, чугуна по ТУ ЧЛ-355, металлокерамическо-
го материала ФкМ-845 и стали ЗОХГСА Лс.ф — 1; для стали 38ХС или 40ХНЛ
*с.ф ”2); kr,с — коэффициент, учитывающий размеры поверхности трения и
способ крепления металлокера>ЛТческих накладок к стальной основе диска (для
дисков с приклепанными металлокерамическими накладками kr.c —1, если
(/?н /?вн)7?Гр—0,25... 0,40, а для дисков с припеченными металлокерамическими
накладками *, с — 0.35. если (/?и — ^ви)//?ср - 0,10.. .0,15).
Износ одной сопряженной пары трения за 1000 км пробега
ВГМ Н|П00 рассчитывается по
формуле, приведенной выше.
Допустимый износ определяет-
ся толщиной металлокерами-
ческой накладки и способом
ее крепления к основе. Долго-
вечность фрикционного эле-
мента £ф рассчитывается, как
указано выше.
Рис. 8.3. Границы допустимой по ко-
роблению области режимов работы
g 2 у $ 8 Tj С металлокерамических (/) и сопря-
женных стальных (2) дисков
278
Оценка коробления дисков трения. Оценка возможности ко
робления МКД и сопряженных стальных дисков производится по
эмпирическим зависимостям, представленным на рис 8.3. Для ре-
жимов работы, располагающихся под соответствующей кривой, ха-
рактерно отсутствие коробления дисков; над кривой ожидается
коробление дисков выше 0,5 мм. Для получения более точных
данных необходимо знать температуру на поверхности буксующих
дисков трения.
Для металлокерамических дисков, работающих в масле при
расходе 3—4 л/мин на диск, расчет поверхностной температуры
рекомендуется проводить по формуле
где — температура на поверхности дисков в процессе буксовании. /0 — сред-
няя начальная температура, которую при отсутствии расчетных и эксперимен-
тальных данных принимают равной 100'С, —работа трения, отнесенная
к поверхности МКД (за вычетом канавок), Дж/м1; Nr —мощность трения,
отнесенная к поверхности МКД (за вычетом канавок). Дж/(м’с); a. h —
эмпирические коэффициенты, полученные на одномассовом инерционном стенде
(рис. 8.4).
Уточненная методика и программа расчета с помощью ЭЦВМ
параметров процесса буксования, температурного режима и ко-
робления дисков трения приведены в отраслевых стандартах
(ОСТ ВЗ-1401-80—ОСТ ВЗ-1407-80).
8.4. РАСЧЕТ ЗУБЧАТЫХ ЗАЦЕПЛЕНИЙ
Метод расчета контактной долговечности зубьев. Расчетная
контактная долговечность, оцениваемая средним ресурсом до ка-
питального ремонта А/м в тыс. км, определяется по формуле
«/A/.<3//llm6/s//)""
£//* ^------;------------------£|
//mln
где ан— сумма относительных усталостных повреждений, при которой дости-
гается предельное состояние; —базовое число циклов перемены напря-
жений, соответствующее длительному пределу выносливости; o/nimft —предел
контактной выносливости поверхностей зубьев, соответствующий базовому
числу циклов перемены напряжений, МПа; SH — коэффициент безопасности;
тн — показатель кривой усталости; Lo — период эксплуатации (блок нагру-
жения), тыс. км; зН(П|П , aWmax — пределы суммирования расчетных контакт-
ных напряжений, МПа; з?/ — расчетное контактное напряжение в полюсе за-
цепления при Лй окружной силе, МПа; Nu —число циклов перемены напря-
жений за время действия i-Л окружной силы в долях от одного часа.
Расчетное контактное напряжение в полюсе зацепления при
t-й окружной силе определяется по формуле
= VШЫ + •
где гм , г„, — коэффициенты, учитывающие механические свойства материа-
ла, форму сопряженных поверхностей и суммарную длину контактных линий
соответственно; FHlbi — линейная расчетная окружная сила, Н/мм; W//v
линейная динамическая окружная сила, Н/мм; daf — приведенный диаметр
зацепления, мм.
Коэффициент (в Н|2/мм), учитывающий механические
свойства материалов Сопряженных зубчатых колес, определяется
по формуле
2EtE,
к(|-э>) (£, 4 £,)’
где v — коэффициент Пуассона; Е\, Et— модули упругости материалов шестер-
ни и колеса, МПа.
При v-0,3 и £,-£,-2.15-105 МПа = 275 Н1 2/мм.
Коэффициент, учитывающий форму сопряженных поверхностей
зубьев, определяется по формуле
z„ = /2/sin2a/w ,
где a/w — угол зацепления.
Коэффициент, учитывающий суммарную длину контактных ли-
ний, определяется по формуле
Z. = /(4-«,)/3,
где еа — коэффициент торцевого перекрытия.
Линейная расчетная окружная сила определяется по фор-
муле
Гшы - 2 7'i//iS2///(dw//e,inw),
280
где Т хщ - i-Л расчетный крутящий момент на ведущем зубчатом колесе, Н мм,
— коэффициент, учитывающий неравномерность распределения нагрузки
среди сателлитов планетарной передачи — I для цилиндрических зубчатых
передач внешнего зацепления); Ь* — рабочая ширина венца, мм; dw — на-
чальный диаметр шестерни, мм; nw —число сателлитов планетарного ряда
(nw —1 для цилиндрических зубчатых передач внешнего зацепления).
Диаметр начальной окружности шестерни
= mzx cos «e/cosa,w,
где m — модуль, мм; г( — число зубьев ведущей шестерни; do — угол профиля
исходного контура.
. Коэффициент, учитывающий неравномерность распределения
нагрузки среди сателлитов планетарного ряда, определяется по
формуле
1 +-|-(Ur- 1).
где — коэффициент, учитывающий неравномерность распределения нагрузки
средн сателлитов.
Линейная динамическая окружная сила определяется по фор-
муле
где 6Н — коэффициент, учитывающий влияние вида зубчатой передачи и моли
фикацнн профиля головок зубьев (для зубчатых передач трансмиссий ВГМ
—0,014 при твердости поверхности зубьев НВ2>350 и б,/ —0,06 при твер-
дости НВС350); £0 — коэффициент, учитывающий влияние разницы шагов за-
цепления зубьев шестерни и колеса (табл. 8.2); v0 — окружная скорость, м/с;
uv — межцентровое расстояние, мм; и — передаточное число (н>1); Ye —
коэффициент, учитывающий момент инерции; 1ГГО1Х — предельное значение
линейной динамической окружной силы, Н/мм (табл. 8.3).
Таблица 8.2
Значение коэффициента д',,. учитывающего влияние разницы шагов зацепления
зубьев шестерни и колеса
Модуль т, мм Степень точное» по нормам нла.-иостн (IOCT 1613 -81)
• 7 8 9
До 3,55 38 47 56 73
От 3,55 до 10 42 53 61 82
Окружная скорость определяется по формуле
v0 = (лм — лА)/60 • 103, (8.1)
где — диаметр начальной окружности центрального колеса, мм; пк — часто-
та вращения центрального колеса, об/мин. пА — частота вращения водила,
об/мин (для передач с неподвижными осями зубчатых колес nlt =0).
Если с шестерней жестко связана массивная деталь с момен-
281
Таблица 8.3
Предельные значения линейной динамической окружной силы 1ГП|ЛХ . Н/мм
Модуль т. мм Степень точности по нормам тайности (ГОСТ НИЗ—81)
6 7 8 9
До 3,55 160 240 380 700
От 3,55 до 10 194 310 410 880
том инерции в у Раз большим, чем у шестерни, то соответствую-
щий поправочный коэффициент (7 4- l)(«--f- i)/(l т «’* + U-
Приведенный диаметр определяется по формуле
4»р = ± z,),
где 2|, г, — число зубьев колес, находящихся в зацеплении (знак плюс ис-
пользуется для передач внешнего зацепления, знак минус —для передач внут-
реннего зацепления).
Предел контактной выносливости поверхностей зубьев, соот-
ветствующий базовому числу циклов перемены напряжений, опре-
деляется экспериментально. Для цементованных и нитроцементо-
ванных зубчатых колес с твердостью поверхности зубьев
можно принять a/fnma = 23///?С; для азотированных зубчатых
колес с твердостью^ поверхности зубьев HV=550... 750 э//)||Пд
= 1050 МПа.
Базовое число циклов перемены напряжений, соответствующее
длительному пределу выносливости, определяется эксперимен-
тально; его можно определять также по формуле Nh. =30 НВ1'*»
При HRC >56 принимается N нл =120-10®.
Показатель кривой усталости определяется эксперименталь-
но; при отсутствии опытных данных можно принимать ггн =6.
Коэффициент безопасности Sh для зубчатых колес с поверхност-
ным упрочнением зубьев равен 1,2.
Сумма относительных усталостных повреждений определяется
экспериментально; при отсутствии опытных данных принимается
а«=1. Пределы суммирования расчетных контактных напряже-
ний в формуле Lnh позволяют получить хорошее соответствие
опытных и расчетных данных.
Расчетные контактные напряжения меньше 0,6 э//цтЛ не ока-
зывают повреждающего воздействия и могут не учитываться при
расчетах на усталость, поэтому можно считать
ан mln = 0.6 Нт » •
Целесообразно взять такое значение з//п1„ , которое отвечает
достаточно малой вероятности появления больших расчетных кон-
тактных напряжений при условии, что напряжения выше з//тах
встречаются в течение срока службы очень редко и не оказывают
влияния на сопротивление усталости.
282
Метод расчета изгибной долговечности зубьев. Расчетная из-
гибная долговечность (в тыс. км) определяется по формуле
aFNp («^Hm h .
------,--------------*-0 ,
f-max m...,
2
'"Vmln
где ар —сумма относительных усталостных повреждений; V/.- —базовое чис-
ло циклов перемены напряжений; ь — предел выносливости зубьев при
изгибе, соответствующий базовому числу циклов перемены напряжений. МПа;
Sp — коэффициент безопасности; т t. — показатель кривой усталости; °лт1п •
3Лтах —пределы суммирования расчетных напряжений при изгибе, МПа;
Зр — расчетное напряжение при изгибе зубьев i-й окружной силой, МПа,
Л'ц — число циклов перемены напряжения за время действия i-й окружной
силы, в долях от одного часа.
Если действующие напряжения не превышают предела вынос-
ливости зубьев при изгибе, но достигают 60 % его значения, то
коэффициент запаса изгибной долговечности определяется по сле-
дующей формуле:
/г/’явянпв/|5г а,#?' V ]’
**"*F min
где Л — требуемый ресурс зуба в блоках нагружения, для которого вычисляется
коэффициент запаса; Зр — коэффициент безопасности.
Расчетное напряжение при изгибе зубьев i-й окружной силой
определяется по формуле
+ И’Ч) • <8-2’
где I'p/bi —линейная расчетная окружная сила, Н/мм; —линейная
динамическая окружная сила, Н/мм; — коэффициент, учитывающий форму
зуба.
Линейная расчетная окружная сила определяется по формуле
f^Flb' = 2Т|Л;2/=7(Ьв//|Ли,) ,
где Т|Я —i-й расчетный крутящий момент на ведущем зубчатом колесе,
Н • мм; —mZ| — диаметр делительной окружности шестерни, мм.
Удельная окружная динамическая сила определяется по фор
муле
Wpv = ^pguv0 Va^Ju < W'm.x,
где Ър — коэффициент, учитывающий влияние вида зубчатой передачи и мо-
дификацию профиля головок зубьев (для прямозубых передач без модификации
головки Ър -0,016).
Коэффициент, учитывающий форму зуба, представляет собой
величину, обратную максимальному местному напряжению, вызы-
283
ваемому линейной расчетной окружной силой, равной 1 Н/мм, на
переходной поверхности зуба прямозубого колеса с модулем т =
= 1 мм, изготовленного из упругого материала, и определяется
по формуле
Yf =mln(y./|*II, у,).
где ув . у, — коэффициенты, учитывающие форму зуба при приложении на-
грузки к его вершине и к верхней точке пересопряжения соответственно;
На 4- с,) 4- |/ f^bl 4. /JM/I(‘a + г.) Не I — Доля полной нагрузки, ко-
торую при двупарном зацеплении воспринимает одна пара зубьев; с,, с, -
коэффициенты суммарных линейных жесткостей зубьев при приложении нагру-
зок соответственно к вершине и верхней точке пересопряжения; ^—рас-
четная линейная нагрузка;/pftl./рЛ1 — абсолютные значения предельного от-
клонения шага зацепления шестерни и колеса соответственно, мм.
Можно принять с, =15 кН/мм2 и с, = 11 кН/мм2.
Коэффициенты yt и у„ для зубчатых колес внутреннего за-
цепления связаны следующей зависимостью:
у, = уЛя, -/?,)/(/?,
где Hi — радиус “'окружнос/и впадин, мм; Re — радиус окружности высту-
пов, мм; Ra — радиус приложения нагрузки, мм.
Предел выносливости при изгибе, соответствующий базовому
числу циклов перемены напряжений, определяется эксперимен-
тально. При отсутствии опытных данных для цементованных зуб-
чатых колес и отнулевого цикла перемены напряжений
— 820 МПа, для азотированных зубчатых колес ^||П1Ь = 300 +
+ 12 .
При симметричном цикле перемены напряжений
aFUiB* = 0 + Ф3)3гнт» 2’
где - (2яр’|тЬ —’%|т»)/’/гцта —коэффициент, характеризующий чувстви-
тельность металла к асимметрии цикла.
Для цементованных зубьев можно принять ф9=0,6.
При асимметричном цикле перемены напряжений
3FHm* " U 4" ?) I Г "Ь Фе (1 4 Н|.
Базовое число циклов перемены напряжений определяется
экспериментально; при отсутствии опытных данных принимается
ЛГд =4-10е.
Показатель кривой усталости определяется экспериментально;
при отсутствии опытных данных принимается т^=9.
При нагрузке с различным коэффициентом асимметрии цикла
существует следующая зависимость показателя mrF от коэффи-
циента асимметрии цикла г и показателя т~х, соответствующего
нагружению по асимметричному циклу:
284
тгр= т~'\' 4 (1 — r) 2 .
Коэффициент безопасности может быть принят равным еди-
нице.
Сумма относительных усталостных повреждений определяется
экспериментально; при отсутствии опытных данных она прини
мается равной единице.
Результаты испытаний изгибной выносливости цементованных
шестерен внешнего зацепления, изготовленных для трансмиссии
ВГМ по 7—8-й степени точности из хромоникелевых и хромони-
кельмолибденовых сталей с модулем 3—8 мм и твердостью зубьев
HRC >56, приведены в табл. 8.4.
Таблица 8.4
Данные по изгибной выносливости шестерен дли трансмиссий ВГМ
Особенности технологии изготовления шестерни То.пцина обоза Коэф- фициент асимметрии цикла г Базовое число циклов Лл> Показатель кривой усталости Предел выносливое! и
Полное* шлифование переходной поверхности < 3m -1,2 2.0-10“ 6,0 600
Шлифование с усту- пом. Дробеструйная об- работка зубьев > 3m - 1.2 2.5-10® 7.2 700
Шлифование после дробеструйной обработ- ки без выхода на пере- ходную поверхность (зуб с протуберанцем) > 3m 0 4 5-10“ 8.7 900
Метод определения параметров, характеризующих режимы на-
гружения зубчатых передач. Режимы нагружения зубчатых пере-
дач характеризуются гистограммами распределения крутящего
момента, позволяющими определить диапазон его значений, ока
зывающих повреждающее воздействие.
На /-Й передаче ьй расчетный крутящий момент на / м веду-
щем зубчатом колесе
Тя = «;1т.Гт„;, + Л'ДТ.
где —математическое ожидание максимального крутящего момента
на Л-м базовом элементе; Uj/ — передаточное число от Л-го базового элемента
трансмиссии до /го колеса на /-Й передаче; ДТ —шаг разряда гистограммы
крутящего момента; Л’-О, I, 2...
Вероятность каждого разряда гистограммы определяется по
формуле
/>('!„,) = Г,
285
где 1 у—относительное время работы на передаче; Рпл — вероятность нагруже-
ния зубчатого колеса максимальным крутящим моментом, соответствующим
n-му разряду; V/я — вероятность нагружения зубчатого колеса в i-м разряде
максимальным крутящим моментом n-го разряда.
Значения Р„3 определяются по функции нормального распре-
деления:
р ф (1 ~ max __ ф (Tfla — АТ/2 — nJtm-t wц д\
** \ и//^Тшах/* X “Л^Тпих/*
где 5Гп|„ tit —среднеквадратичное отклонение максимального крутящего мо
мента на А-м базовом элементе.
Значения Wtn определяются по функции косннус-распреде-
ления:
- ^/1 + ДТ/2. Т//я) - F(T1/f - ДТ/2, Ту,.).
Значения функции косинус-распределения:
О, если Т, < О
F(TW) - 1. если т;>Тп.
arccos (1—2 Т,/Т/1Я) при О < Т1 < Ту/Я,
где ДТ/2.
Число циклов перемены напряжений (нагружений) за время
действия ьй окружной силы (в долях от одного часа) опреде-
ляется по формуле
^-60(«/л/,)41ЧдвР(Т<Д.
где П) — средняя частота вращения ведущего колеса /-А прямозубой цилиндри-
ческой передачи внешнего зацепления (для планетарной передачи — средняя
частота вращения солнечной шестерни, а при остановленной солнечной шестер-
не—средняя частота вращения водила), об/мин; kпр — коэффициент прнведе
ния частоты вращения; nw — число сателлитов в планетарной передаче (для
передачи внешнего зацепления nw — 1).
Для цилиндрической пары внешнего зацепления коэффициент
приведения частоты вращения для ведущего колеса с числом
зубьев Zi
*np = = 1 .
для ведомого колеса с числом зубьев za
^пр = *.^з — Z\iZ2 •
Для трехвальной передачи внешнего зацепления с одним про-
межуточным зубчатым колесом (например, ВР) коэффициент при-
ведения частоты вращения для ведущего и промежуточного
(паразитного) колес с числом зубьев Zj и z2 соответственно
286
рассчитывается по этим же формулам, а для ведомого колеса
с числом зубьев г3
*пр — Мз - ZilZ.,-Z2iZ3 zti'z-d.
Для зацепления солнечная шестерня — сателлит планетарного
ряда с остановленным эпициклом коэффициент приведения час-
тоты вращения определяется следующим образом:
для солнечной шестерни с числом зубьев Z\
= л3/(1 4-М;
для сателлита с числом зубьев z2
£пр - М> = М»/[(1 + А3) z2n9] ,
где —параметр планетарной передачи; za — число зубьев эпицикла
Для сателлита зацепления сателлит—эпицикл
^пр “ Л2 — za'[z2nw(l А3)|;
для эпицикла
^пр ^2^3 ~~ 4" Ml • Z2nv'Z3 =*1/(1 4“ ^з) •
Для солнечной шестерни зацепления солнечная шестерня—са-
теллит планетарного ряда с остановленной солнечной шестерней
коэффициент приведения частоты вращения определяется по фор-
муле
^пр = = 1;
для сателлита
^пр = ^2^3 = •
'Для сателлита зацепления сателлит—эпицикл
^пр ~ ^2 — ^1/(^2^ ») »
для эпицикла
М Мз = г, 1(г2п„) • z2n z3 = z,/za.
При расчете окружной скорости по формуле (8.1) разность
частот вращения центрального колеса и водила
п — пл± kxnt,
где А| — коэффициент приведения окружной скорости.
Для передачи внешнего зацепления Л|=1; для планетарной
передачи с остановленным эпициклом k\=k3i(14-^з); Для плане-
тарной передачи с остановленной солнечной шестерней fe| = !/M
Расчет на прочность при действии максимальной нагрузки.
Расчетные максимальные контактные напряжения аНтя% и напря-
жение изгиба аЛ.тах определяются при действии на передачу мак-
симального крутящего момента Т1И„ , что имеет место при
287
режиме работы ГТ «стоп» (i^ =0), при подъеме ВГМ в гору
и полной нагрузке двигателя и при повороте вокруг заторможен-
ной гусеницы (пиковые нагрузки переходных процессов).
Расчетные максимальные напряжения не должны превышать
допустимые, зависящие от способа химико-термической обработ-
ки зубчатых колес и определяемые экспериментально. При отсут-
ствии опытных данных можно принять:
для цементованных зубьев aWpmjx 4&HRC, э^ртах = 2650/$Л-и;
для азотированных зубьев 3Нрт„ - ЗНИ, 3Fpnilx — 1750/$Л.и,
где SrM — коэффициент безопасности, который может быть принят равным 1,75.
8.5. РАСЧЕТ ДОЛГОВЕЧНОСТИ ПОДШИПНИКОВ КАЧЕНИЯ
V
Расчетная долговечность подшипников (в млн. об) опреде-
ляется по формуле
L ={С)Р,)я,
где С —динамическая грузоподъемность подшипников, Н; Рл — эквивалентная
динамическая нагрузка, Н; q — показатель степени, для шариковых подшипни-
ков ?-3, для роликовых — <7—3,33.
Расчетная долговечность подшипников (в тыс. км) опреде-
ляется по формуле
L„ = 1О8£т7<>/(6О«и).
где vcp—средняя скорость ВГМ, км/ч; пп—приведенная частота вращения
подшипника, об/мин.
Формулы справедливы для частоты вращения не менее
10 об/мин и не более предельной для данного подшипника. Если
1<пп<10, в формулы подставляется пп = 10 об/мин; при
п<1 об/мин рекомендуется проверять подшипник на статическую
грузоподъемность.
Расчет динамической грузоподъемности подшипников качения.
Динамическая грузоподъемность подшипников характеризуется
постоянной радиальной нагрузкой, которую подшипник (с непо-
движным наружным кольцом) может воспринимать в течение рас-
четного срока службы, равного 1 млн. об внутреннего кольца
Динамическая грузоподъемность радиальных и радиально-
упорных шарикоподшипников (за исключением подшипников с ка-
навкой для вставления шариков), у которых диаметр шариков не
превышает 25,4 мм, вычисляется по формуле
=/•„(/cos a)0Jr'W,
где /ск — коэффициент, зависящий от размеров подшипников, качества их изго-
товления, материала; i— число рядов тел качения в подшипнике; а —номн-
288
нальный (начальный) угол контакта; г—число тел качения в одном ряду;
Dw —диаметр тела качения.
Если диаметр шариков превышает 25,4 мм, то
С”а = 3,647 О1;7см (i cos a)°’7z2'3.
Динамическая грузоподъемность роликоподшипников радиаль-
ных с короткими цилиндрическими роликами, конических и сфе-
рических определяется по формуле
f ... ____„ „ч7/в .ЭМл29'27
—/ск COS a) z Dw ,
где Iff/ — эффективная длина зоны контакта ролика с кольцом, мм.
Динамическая грузоподъемность упорных и упорно-радиаль-
ных подшипников характеризуется чисто осевой нагрузкой, кото-
рую подшипник сможет воспринимать в течение расчетного срока
службы, равного I млн. об одного из колец подшипника.
Динамическая грузоподъемность однорядных одинарных и
двойных упорных и упорно-радиальных шарикоподшипников, у ко-
торых диаметр шариков не превышает 25,4 м, вычисляется по сле-
дующим формулам:
при a =£ 90° С = /с„ (cos a)0,7 tg az2 W -
Если диаметр шариков более 25,4 мм, то
при a = 90° С = 3,647 /„z2, W ;
при a 90 С - 3,64 7/еж (cos a)0,7 tg az1'W •
Рис. 8.5. Зависимость коэффициента fcx от
конструктивных параметров радиальных и
радиально-упорных шарнко- к роликопод-
шипников:
I — роликоподшипники; 2 - шарикоподшипники
радиальные (однорядные) и радиально-упорные
(однорядные и двухрядные); 3 — шарикоподшип
пики радиальные двухрядные; «—шарикопод-
шипники самоустанавлнвающисся; 5 шарикопод
шинники однорядные разъемные (магнитные)
Динамическая грузоподъемность
однорядных и двойных упорных и
упорно-радиальных роликоподшип-
ников определяется по формулам:
при а = 90 С =
при а Ф 90 С =
= /св (*♦// COS a)7/9 tg OZM .
Значения коэффициента fCK для
различных подшипников в зависи-
мости от конструктивных параметров Dw, a, dm (диаметр окруж-
ности, проходящей через центры тел качения, мм) приведены
на рис. 8.5, 8.6.
19 Зак. 47 «с»
289
Расчет эквивалентной динамической нагрузки. Эквивалентная
динамическая нагрузка радиальных и радиально-упорных под-
шипников — это постоянная радиальная нагрузка, при приложе-
нии которой к подшипнику с вращающимся внутренним кольцом
Рис. 8.6. Зависимость коэффициента fc* от конструктивных параметров Dwl(fm
и Dtt.cosa/dm упорных и радиально-упорных шарико- и роликоподшипников
при а-90е (а) и а=#=90°(б):
--------шарикоподшипники; — —--------роликоподшипники; I. 2, 3. 4 —«—50. 45. Ы1
н 75 соответственно
Для шарикоподшипников и радиально-упорных роликоподшип-
ников эта нагрузка определяется по формуле
РЖ = (*ЦЛ + YFa)KbK^
для подшипников с короткими цилиндрическими роликами по
формуле
где X, Y — коэффициенты фактических радиальной и осевой нагрузок; Ум -
коэффициент вращения; Fr. Fa — фактические радиальная и осевая нагрузки
на подшипник; — коэффициент безопасности; Кт —температурный коэф-
фициент.
Эквивалентной нагрузкой упорных и упорно-радиальных под-
шипников называется постоянная центральная, чисто осевая на-
290
грузка, при приложении которой к подшипнику с тугим кольцом,
вращающимся вместе с валом, и свободным, закрепленным не-
подвижно в корпусе, обеспечивается долговечность, какую под-
шипник имеет при фактических условиях нагружения и вращения.
Для упорно-радиальных подшипников эта нагрузка опреде-
ляется по формуле
YFa)KbKr,
для упорных по формуле
P^FaKbKr.
Значения коэффициентов X и У для различных типов подшип-
ников приведены в табл. 8.5.
Таблица 8.5
Значения коэффициентов радиальной (X) и осевой (У) нагрузок
Тип подшипника Однорядные Двухрядные
* 1 У X У
Шарикоподшипники радиальные 0,6 0,5 0.6 0.5
Шарикоподшипники упорные при а: радиально-
18° 19° 20° 25° 26° 30° 35е \ 36° 40е 0,5 0,43 0,43 0,42 0.38 0,37 0,33 0,29 0,28 0,26 1,0 0.86 0,86 0,84 0,76 0,74 0,66 0,58 0,56 0,52
Шарикоподшипники н конические сферические 0,5 0,22с Iga 1,0 0,44с Iga
Для однорядных подшипников при Fal(y,Fr) < / (/ — коэф-
фициент осевого нагружения) принимаются Х=1 и У=0. Для
радиальных сферических и конических ролико-подшипников при
ц=0 Fa =0 и Х=1. Для упорно-радиальных и упорных шарико-
и роликоподшипников при а=90° Fr =0 и У=1.
При вращении внутреннего кольца подшипника по направле-
нию нагрузки коэффициент вращения Ук = 1, а в случае враще-
ния наружного кольца Vk = l,2. Для радиальных сферических,
радиально-упорных и упорных шарико- и роликоподшипников в
любом случае VK = 1.
Значение коэффициента безопасности Кь зависит от характе-
ра нагрузки. Для зубчатых передач 7-й и 8-й степени точности,
редукторов всех конструкций К6 = 1,3... 1,5.
Ниже представлена зависимость температурного коэффициен-
та /Ст от рабочей температуры подшипника.
19*
291
Рабочая температура
подшипника, *С........125 150 175 200 225 250
Коэффициент Кг.......1.05 1,10 1,15 1,25 1,35 1,40
Для подшипниковых устройств трансмиссий ВГМ, где значе-
ния действующих нагрузок и частота вращения изменяются во
времен, подшипники выбираются по условной эквивалентной ди-
намической нагрузке Ря>, , которая определяется по формуле
р,)/
где Рц)—эквивалентная динамическая нагрузка на подшипник на /-й переда-
че; Nj— число циклов нагружения подшипника на / й передаче; /Уц —суммар-
ное число циклов нагружения подшипника; п, — число передач.
Для определения значений эквивалентных динамических на
грузок на подшипник на каждой передаче и вероятности
действия этих нагрузок определяются параметры режимов нагру-
жения, для чего необходимо построить гистограммы распределе-
ния крутящего момента на ведущем валу рассчитываемой пере
дачи, как описано выше. Эквивалентная динамическая нагрузка
определяется с учетом вероятности нагружения зубчатых колес
максимальным крутящим моментом во всех разрядах гистограмм.
Расчет частоты вращения подшипника. При переменной час-
тоте вращения подшипника рассчитывается приведенная частота
вращения
"г _
Лп—•
где П)—средняя частота вращения подшипника на /-й передаче; Tj
относительное время работы подшипника на /-Й передаче.
При известном числе циклов нагружения на каждой передаче
(^Vy) приведенная частота вращения
Расчет статической грузоподъемности подшипников качения.
Статическая грузоподъемность представляет собой нагрузку (ра-
диальную для радиальных и радиально-упорных подшипников,
центральную осевую — для упорных и упорно-радиальных под-
шипников), в результате которой возникает общая остаточная
деформация тела качения и кольца, равная 0,0001 диаметра тела
качения в наиболее нагруженной точке контакта.
Статическая грузоподъемность шариковых радиальных и ра-
диально-упорных подшипников определяется по формуле
Со = f0izD2wcosa,
292
где /о“0,34 для самоустанавливающихся шарикоподшипников; f о—1.25 для ра-
диальных и радиально упорных шарикоподшипников
Для радиальных подшипников с короткими цилиндрическими
роликами, конических и сферических роликоподшипников
Ce -2,2Zz/e//£)wcosa.
Для упорных и упорно-радиальных шарикоподшипников
Со — ozDwSlna.
Для упорных и упорно-радиальных роликоподшипников
Со = IOzZf//Dwsina.
Если подшипник должен воспринимать внешнюю нагрузку в
неподвижном состоянии или при вращении с частотой не более
1 об/мин, то его выбирают по статической грузоподъемности, не
зависящей от частоты вращения и необходимой долговечности,
поскольку на таком режиме не может возникнуть усталостное
выкрашивание.
Статическая грузоподъемность приводится в таблицах катало-
гов для всех стандартных подшипников.
Действие комбинированных статических сил характеризуется
эквивалентной статической нагрузкой, которая должна вызывать
такие же остаточные деформации, как при действительных усло-
виях нагружения.
Для радиальных и радиально-упорных подшипников эквива-
лентную нагрузку выбирают как чисто радиальную, направленную
перпендикулярно оси подшипника, а для упорных и упорно-ра-
диальных— как чисто осевую, направленную по оси подшипника.
Эквивалентная статическая нагрузка радиальных и радиаль-
но-упдрных шарико- и роликоподшипников определяется как наи-
большее значение из следующих двух:
Ро X0Ff 4- Y0Fa- P0 = Fr.
Эквивалентная статическая нагрузка для упорно-радиальных
и роликоподшипников определяется по формуле
Pe«2,3F,tga + Fa.
Оценка предельной быстроходности подшипников качения.
Предельной частотой вращения подшипника является такая, при
превышении которой не обеспечивается расчетная долговечность.
Предельная быстроходность характеризуется скоростным пара-
метром [dmn]=const, так как потери на трение и износ увеличи-
ваются пропорционально условной окружной скорости.
Рекомендуемые значения скоростного параметра подшипников
приведены в табл. 8.6.
Предельная быстроходность зависит от смазки подшипника:
желательны условия жидкостного трения с отводом тепла, разви-
вающегося в подшипнике при работе.
293
Таблица 8.6
Рекомендуемые значения скоростного параметра подшипников
мм • об мни
Тип подшипника Особенности сепаратора пластическая 1 жидкая смазка | смазка
Шарикоподшипники
Радиальный однорядный Стальной штам- повинный 4.5 105 5.5 105
То же — 30 10-5
Радиальный однорядный с защитными шайбами Стальной штам- пованный 4.0-10* —
Радиальный однорядный вы- сокого класса точности Металлический массивный 7,5-105 9,0-105
Радиальный сферический двухрядный Стальной штам- пованный 4,0-105 5,5 105
Радиально-упорный одно- рядный высокого класса точ- Металлический массивный 6,5-105 9.0-105
ности
То же Текстолитовый 7.5-105 10-105
Радиально-упорный одно- — 2,8-105
рядный
Радиально-упорный трех- н четырехточечный Металлический массивный 7,5-105 10-105
Радиально-упорный двухряд- ный Стальной штам- пованный 2,6-105 3,5-105
Упорный одинарный То же 1,3-105 1.8-105
То же — 0,7-105 10.105
Роликоподшипники
Радиальный с короткими ци- Металлический 4.0-10-5 5,0 105
линдрическими разиками массивный
Четырехрядный с короткими цилиндрическими роликами То же 2,0-105 2Д- IQ'
Радиальный сферический Металлический 2,4-105 3,0-105
двухрядный массивный
Игольчатый То же 3,0-105 3,5-105
» » 2.0-105 2,5-105
Двухрядный с короткими цилиндрическими роликами » 4,0 10-5 5,0-105
Упорный одинарный с ци- линдрическими роликами » 0,7 105 1,0-105
Упорный с коническими ро- » 0,5 105 0,7 1О>
ликами
Упорный сферический с боч- кообразными роликами » — 1.8-105
Радиальный с короткими ци- линдрическими роликами — — 2Л-105
Конический однорядный Стальной 2,5-105 ЗЛЮ-’
Конический двухрядный Чашечный 2,0-105 3.0 105
Конический четырехрядный » 1,8-105 2.5 105
294
Предельная частота вращения, при которой обеспечивается ре-
сурс подшипников различных конструкций при разных нагрузках,
определяется по формуле
Лрес = k\k2k2 ;lim ,
где kt — размерный коэффициент, учитывающий влияние габаритных размеров
подшипника на его предельную быстроходность; k3—коэффициент серийности,
учитывающий влияние площади «живого сечения» подшипника на его быстро-
ходность; k3 — коэффициент долговечности, учитывающий косвенное влияние
воспринимаемой подшипником нагрузки на быстроходность; dm — диаметр
окружности, проходящий через центр тел качения.
Значения коэффициентов и k3 следует определять по гра-
фикам, представленным на рис. 8.7, а коэффициента k2 по
табл. 8.7.
Таблица 8.7
Значения коэффициента серийности
Серна подшипников Коэффициент серийности к, Серия подшипников Коэффициент серийности С,
Сверхлегкая 1,20 Средняя 0,90
Особо легкая 1,10 Средняя широкая .0,85
Легкая 1,00 Тяжелая 0,80
Легкая широкая 0,95 — -
295
Глава 9. ТРАНСМИССИОННЫЕ ГИДРОСИСТЕМЫ
9.1. ОБЩИЕ ПОЛОЖЕНИЯ
Одной из особенностей гидросистемы трансмиссий современ-
ных ВГМ является совмещение в них функций обслуживания
(смазывание, охлаждение) и управления (коробкой передач,
механизмом поворота, тормозами, а также другими агрегатами).
Этим трансмиссионные гидросистемы существенно отличаются
от гидросистем, применяемых в общем машиностроении, авиации,
в сельскохозяйственных и инженерных машинах для управления
рабочими органами или навесным оборудованием. Такие гидро-
системы автономны, состоят из отдельных, обычно стандартных
сборочных единиц, устанавливаемых на элементы конструкции
машин, а трансмиссионная гидросистема является неотъемлемой
частью трансмиссии, конструктивно совмещенной с другими ее
составными частями, работающими на едином трансмиссионном
масле.
В зависимости от типа трансмиссии гидросистема может вы-
полнять различные функции и включать в себя следующие под-
системы:
смазки и охлаждения редукторной части;
подпитки и охлаждения ГТ;
управления коробкой передач, механизмом поворота и тормо-
зами;
управления и охлаждения гидродинамического тормоза;
управления вспомогательными агрегатами (например, венти-
лятором системы охлаждения).
В конструкцию трансмиссионной гидросистемы входят сле-
дующие составные части:
бак или другая емкость для рабочей жидкости;
насосная установка, состоящая из нагнетательных и откачи-
вающих насосов;
фильтры;
клапаны, распределители, каналы, трубопроводы и другие гид-
равлические элементы.
Основная часть гидросистемы, включающая в себя бак, насос-
ную установку и фильтры, осуществляющая подпитку ГТ, охлаж-
2%
дение рабочей жидкости и подачу ее в подсистемы смазки и
управления, называется основным контуром циркуляции.
Гидросистема должна иметь минимальное число гидравличе-
ских элементов, необходимых для выполнения возложенных на
нее функций, а их взаимное расположение должно быть таким,
чтобы длина каналов и трубопроводов была минимальной.
Давление и расход жидкости (прокачку) необходимо поддер-
живать в заданных пределах на всех режимах работы при рабо-
чей температуре, но не допускать чрезмерного повышения давле-
ния при работе на холодной жидкости (зимний пуск и разогрев).
Обслуживание гидросистемы трансмиссии должно быть мини-
мальным по объему работ и заключаться в основном в проверке
объема рабочей жидкости и дозаправке.
При выборе схемы трансмиссионной гидросистемы должен
соблюдаться еще один принцип, позволяющий повысить надеж-
ность трансмиссии. Он заключается в том, что схема гидросисте-
мы должна обеспечивать при аварийной утечке рабочей жидкости
уменьшение давления и расхода в первую очередь в наименее
чувствительных к этому подсистемах, чтобы танк некоторое время
сохранял подвижность, а повреждение, вызвавшее утечку рабочей
жидкости, подольше не переходило в отказ.
Из всех подсистем наиболее чувствительной к уменьшению
давления является подсистема управления. При уменьшении дав-
ления в бустерах КП и МП может произойти срыв фрикционных
элементов, их продолжительная пробуксовка под нагрузкой и
выход из строя. Подсистемы смазки и охлаждения значительно
менее чувствительны к уменьшению давления и расхода, поэтому
трансмиссия может довольно долго работать почти без смазыва-
ния или без охлаждения, не получая серьезных повреждений.
Вследствие этого схема трансмиссионной гидросистемы строит-
ся так, чтобы заданное в подсистемах управления давление под-
держивалось за счет остальных подсистем, а контроль за состоя-
нием гидросистемы осуществлялся по изменению давления в под-
системе смазки.
Все возможные схемы гидросистем можно разделить на две
группы: открытые, у которых рабочая жидкость после прохожде-
ния элементов гидросистемы сливается обратно в бак; замкну-
тые, у которых рабочая жидкость циркулирует в замкнутом кон-
туре, подпитываемом из бака. Открытые схемы предпочтительны,
так как они проще, могут иметь всего один нагнетательный насос
и два-три клапана. При наличии замкнутого контура схема ус-
ложняется, возрастает протяженность каналов и трубопроводов,
появляются дополнительные элементы; в этой схеме должно быть
не менее двух нагнетательных насосов.
9.2. БАК И НАСОСНАЯ УСТАНОВКА
Бак и насосная установка должны обеспечивать при движении
ВГМ необходимую подачу жидкости в трансмиссию при мини-
20 Зак. 47 «о 297
мальных затратах мощности на привод насосов, что возможно
при высоких значениях КПД насосов. Эффективность насосов во
многом зависит от вместимости и конфигурации бака, а также от
конструкции заборного устройства.
При проектировании бака следует учитывать, что важна не
только его вместимость, но и форма. Плоский горизонтальный
бак непригоден. Высота бака должна быть такой, чтобы заборное
устройство всегда находилось под поверхностью рабочей жидкос-
ти при максимально возможном ее напоре. Чем больше объем
и высота бака, тем лучше условия для работы нагнетательного
насоса, который забирает рабочую жидкость с некоторым напо-
ром на линии всасывания, что способствует повышению объем-
ного КПД насоса.
Объем бака часто оценивается при помощи частоты обмена
рабочей жидкости (табл. 9.1).
Таблица 9.1
Характеристика насосных установок некоторых отечественных трансмиссий ВГМ
Трансмиссия Вместимость' бака, л Нагнетлтгльный насос Частота обмена в баке, обмен/мин
Максимальная no 1 Ии, л ина Объемный КПД Чоб
Опытная ГМТ 12,6 271 0,555 21,7
То же 10,0 150 0,5 15
» 30,0 131 0,7 4.35
» 55.0 189 0,74 3.4
Серийная МТ 56,0 150 0.8 2,7
Из табл. 9.1 видно, что при большой частоте обмена жид-
кости в баке насосы имеют низкий объемный КПД. Так, при
15 обмен/мин объемный КПД насоса составляет 0,5. При увели-
чении КПД свыше 0,7 необходим такой большой бак, который
с трудом размещается в современном моторно-трансмиссионном
отделении танка. При т]об =0,7 требуется бак, в котором будет не
более 4—4,5 обмен/мин. В иностранной литературе даются та-
кие же рекомендации по ограничению частоты обмена рабочей
жидкости в баке (до четырех в минуту).
Конструкция заборного устройства должна исключать подсос
воздуха, для чего используются козырьки, образующие заборную
щель на самом дне бака. Предохранительные крупноячеистые
сетки предотвращают попадание в насосы посторонних предметов,
которые могут оказаться в картере (шайбы, болты, обломки
зубьев и др.).
В настоящее время конструкция насосов трансмиссий ВГМ
регламентирована отраслевым стандартом, по которому унифици-
ровано качающее устройство, что существенно облегчает проек-
тирование насосов и устраняет необходимость их доводки.
298
Подача нагнетательного насоса (с откачиванием из бака) в
условиях трансмиссии меньше, чем при испытаниях на стенде, что
обусловлено наличием неизбежных дополнительных сопротивле-
ний на входе (на линии всасывания).
Рис. 9.1. Универсальная характери-
стика насоса при давле
нии нагнетания 2 МПа и различных
значениях давления на входе:
О (/): 0.02 МПа (2): -0.03 МП. (3);
-0.04 МП. «) и 0.06 МП. (5)
Универсальная характерис-
тика насоса представляет со-
бой зависимость подачи насоса
от его частоты вращения Q„ =
=^(ли) при различных значе-
ниях давления на линии вса-
сывания рвс и постоянном дав-
лении на линии нагнетания р„
(рис. 9.1).
Для определения фактиче-
ской подачи насоса надо рас-
считать сопротивление на ли-
нии всасывания для заданных
значений подачи с учетом
напора жидкости в баке:
- 7<?.’ + WI2S> - gyh.
где Д/>вс — уменьшение давления на линии всасывания; у—плотность рабочей
жидкости; я —ускорение свободного падения; LK d, S —длина, диаметр и пло-
щадь сечения всасывающего канала; £ — коэффициент местного сопротивления;
Хг — коэффициент сопротивления трению; Л — напор жидкости в баке.
Зная Арвс для QH, охватывающих рабочий диапазон, на уни-
версальной характеристике легко найти точки, соответствующие
этим значениям. Кривая, соединяющая их, соответствует фактиче-
ской подаче насоса в данных условиях.
Широко применяются нагнетательные насосы, работающие в
замкнутом контуре с подпиткой от другого насоса. Если подпи-
точный насос подает жидкость на всасывание нагнетательного
насоса и этой жидкости достаточно для компенсации утечек в
контуре, то достигаются очень высокие значения объемного КПД
=0,95).
Для трансмиссионной гидросистемы ВГМ вполне достаточно
одного или двух нагнетательных насосов с приводом от двигателя
и нескольких откачивающих насосов. Насос с приводом от вы
ходного вала трансмиссии нужен только для пуска двигателя
с буксира. В некоторых гидросистемах он отсутствует, а пуск
двигателя с буксира осуществляется с помощью подкачивающего
насоса с приводом от электродвигателя.
20*
2<J9
Управление насосами с приводом от выходного вала может
быть различным. В ряде гидросистем такие насосы работают по-
стоянно. В гидросистеме, показанной на рис. 9.2, а, обратные
клапаны отсекают насос, обеспечивающий более низкое давление,
чем требуется для гидроуправления. Более распространено от-
ключение насоса за счет подключения его на слив (рис. 9.2,6).
Находит применение и механическое отключение насоса фрик-
ционной или зубчатой муфтой, которое может осуществляться
тягой или гидравлическим бустером, управляемым насосом с при-
водом от двигателя.
Рис. 9.2. Схемы гидросистемы управления насосом с приводом от выходного
вала трансмиссии:
а насос работает постоянно; 6 — насос переключается на слив; / — бак; 2 — насос с при
волом от выходного вала; 3 — насос с приводом от двигателя; 4 в гидросистему
Откачивающие насосы с таким же качающим устройством, как
и в нагнетательных, имеют более низкие значения объемного
коэффициента полезного действия, определяемого количеством
жидкости, попадающей в поддон из системы смазки. При выборе
подачи откачивающих насосов надо ориентироваться на работо-
способность гидросистемы при предельном крене машины. На
предельных углах крена, спуска или подъема все масло в поддо-
не будет сливаться к одному или двум насосам, подачи которых
на эксплуатационной частоте вращения коленчатого вала двига-
теля должно хватать для откачки жидкости в бак. Естественно, что
в нормальных условиях подача откачивающих насосов будет зна-
чительно ниже возможной.
В современных трансмиссиях наблюдается тенденция увеличе-
ния подачи насосов и давления гидроуправления, что приводит
к увеличению затрат мощности на привод насоса:
ДМ = QhPhII-'MJ .
где т]и — механический КПД насоса, равный 0,8—0,9.
300
9.3. ФИЛЬТРЫ
Основным загрязнителем трансмиссионного масла являются
продукты износа трущихся деталей трансмиссии — дисков трения,
зубьев шестерен и других деталей. Продукты износа оседают на
деталях, сепарируются на барабанах и частично уносятся в гид-
росистему. По мере эксплуатации трансмиссии концентрация за-
грязнителя в масле растет, достигая определенного значения,
после чего процесс стабилизируется. При недостаточной очистке
масла стабилизации процесса накопления загрязнителя может и
не наступить.
Загрязнение трансмиссионного масла может происходить так-
же в результате проникновения пыли через заливные горловины
при дозаправке масла и через сапуны. Пыль может присутство-
вать также в поставляемом масле. Дополнительным источником
загрязнений являются продукты окисления, термического разло-
жения и гидролиза масла.
Особую опасность представляют загрязнители производствен-
ного происхождения, остающиеся в трансмиссии после изготовле-
ния или ремонта (стружка, окалина, ворс от обтирочного мате-
риала и др.). Эти загрязнители могут находиться за фильтрами, в
каналах и золотниках. Для устранения таких загрязнителей при-
меняют промывку деталей до сборки, а также промывку транс-
миссии и гидросистемы рабочей жидкостью на обкаточном стенде,
пропуская ее через емкие стендовые фильтры. После промывки
производят очистку заборных сеток насосов и фильтров.
Основным источником загрязнения масла являются продукты
износа металлокерамических дисков трения и в значительно мень-
шей степени продукты износа шестерен и других стальных дета-
лей высокой твердости. Однако продукты износа стальных дета-
лей в отличие от продуктов износа металлокерамических мате-
риалов могут существенно ускорить износ трущихся поверхностей
шестерен и подшипников, износ самой металлокерамики. Повы
шейное загрязнение масла крупными частицами и продуктами
химического превращения может привести к забиванию каналов
и жиклеров смазки и выходу из строя агрегатов.
Влияние загрязнителя на долговечность элементов трансмиссии
в настоящее время изучено недостаточно, и нормы очистки масла
для смазывания трансмиссии не разработаны.
Существуют нормы допустимого загрязнения рабочей жидкос-
ти для гидросистем управления высокого давления (гидросистем
самолетов, станков и т. д.), в соответствии с которыми размер
частичек загрязнителя не должен превышать половины диамет-
рального зазора в клапанах и золотниках. Если исходить из этих
требований, то для безотказной работы гидросистемы трансмис-
сии необходимо отфильтровать все частички, размер которых
превышает 20 мкм, так как зазоры в насосах составляют
0,08... 0,15 мм, в клапанах — 0,06 ... 0,1 мм и в золотниках—
0,02 ... 0,06 мм.
301
Для тонкой очистки масла в современных трансмиссиях по-
требуются фильтры большого объема с короткими сроками между
обслуживаниями. В связи с этим применяются грубая очистка
масла и специальные конструктивные меры уменьшения возмож-
ности отказов гидросистемы и засорения каналов и жиклеров
смазки, которые проверяются на соответствие требованиям путем
анализа долговечности агрегатов трансмиссии и гидросистемы.
Такой подход является вынужденным, пока отсутствуют нормы
допустимого загрязнения масла.
К фильтрам трансмиссионного масла предъявляются следую-
щие требования:
трансмиссионное масло должно быть очищено так, чтобы
исключались отказы гидросистемы и обеспечивалась требуемая
долговечность трансмиссии;
фильтры должны быть малогабаритными и работать без об-
служивания в течение всего контрольного срока*;
разность давлений на фильтре в эксплуатационном режиме
не должна превышать 0,2 МПа **;
фильтр не должен удалять из масла полезные компоненты
присадок.
Применяются фильтры сетчатые, керамические, бумажные,
пластинчатые, в виде центрифуги и гидроциклоны. Сетча-
тые фильтры обеспечивают высокую степень очистки рабочей
жидкости за один проход, но имеют большие габаритные размеры
и требуют периодической очистки. Гидроциклоны обеспечивают
за один проход только частичную очистку рабочей жидкости, но
при многократном проходе улавливают до 95 % загрязнителя с
размером частиц выше 10 мкм. Преимуществом гидроциклонного
фильтра является стабильность показателей, отсутствие обслужи-
вания и малые габаритные размеры.
В гидросистемах трансмиссий площадь фильтрующей поверх-
ности в 500—2000 раз больше площади подводящего канала.
Сетчатые фильтры выполняются в виде набора дисков или в
виде цилиндров. В корпусе фильтра устанавливается перепуск-
ной клапан. Обычно используются сетки, имеющие сторону ячей-
ки в свету не менее 0,08 мм.
В гидроциклонном фильтре, схема которого приведена на
рис. 9.3, масло закручивается в цилиндрической части и, изменив
направление, выходит, а загрязнитель под действием центробеж-
ных сил отбрасывается к периферии и выносится через нижнее
отверстие в бункер.
* Под контрольным следует понимать срок между техническими обслужи
ваниямн данной трансмиссии или другой технический срок, например, гаран-
тийный (в зависимости от технических требований, предъявляемых к транс-
миссии).
** Эксплуатационный режим соответствует средней частоте вращения колен-
чатого вала двигателя.
302
Место расположения фильтра в схеме гидросистемы выбирает-
ся так, чтобы на управление и смазывание поступала очищенная
жидкость, т. е. после насоса, откачивающего масло из бака, в ко-
торый поступает жидкость, загрязненная продуктами износа ре-
Рис. 9.3. Схема гндроцнклонного фильтра:
/ — бункер; 2 — выходной патрубок; 3 — выходная щель
дукторной части трансмиссии. Если на
управление необходимо подавать рабочую
жидкость, более чистую, чем на смазыва-
ние, целесообразно применять два фильтра:
для всего потока рабочей жидкости — бо-
лее грубый, например, гидроциклон, а для
жидкости, поступающей в систему управ-
ления, — <с более высокой степенью очист-
ки. Это позволяет либо увеличить перио-
дичность обслуживания, либо уменьшить
габаритные размеры фильтра тонкой очист-
ки, так как через него будет прокачиваться
только часть рабочей жидкости.
При использовании в трансмиссии гид-
рообъемной передачи (например, в приво-
де МП) целесообразно объединить ее гид-
росистему с трансмиссионной (например,
ГМТ Х-1100 производства США). Для этого
необходимо существенно повысить степень
очистки масла, что, как уже отмечалось,
имеет свои недостатки. Другой путь объе-
динения гидросистем трансмиссии и ГОП
использован в трансмиссии HS-400 (США),
в которой замкнутая гидросистема ГОП
только подпитывается для компенсации утечек из трансмиссион-
ной гидросистемы через небольшой фильтр тонкой очистки,
а охлаждение ГОП осуществляется трансмиссионным маслом,
омывающим картер ГОП снаружи.
9.4. КЛАПАНЫ
Клапаны гидросистем современных трансмиссий можно клас-
сифицировать по назначению и типу. По назначению различают
клапаны главного давления (регулирующие давление гидроуправ-
ления), смазки (регулирующие давление смазки) и подпитки ГТ
(поддерживающие давление в ГТ), предохранительные (от повы-
шения давления из-за повышенной вязкости жидкости при низкой
температуре или вследствие возникновения неисправности) и об-
ратные (пропускающие жидкость только в одном направлении).
303
По типу клапаны распределяются на конические, шариковые, та-
рельчатые и плунжерные.
Клапаны главного давления предназначены для регулирова-
ния заданного давления в рабочем диапазоне температур в пре-
делах от 0,8 до 1,7 МПа. В некоторых гидросистемах регулируют-
ся два значения давления: на высших передачах от 0,8 до 1,2 МПа;
на низших и заднем ходу —от 1,2 до 1,7 МПа. Встречаются гид-
росистемы, в которых клапан главного давления регулирует три
значения давления, а также его соответствие загрузке двигателя.
Клапаны главного давления, как правило, бывают плунжерные
Клапаны смазки предназначены для регулирования давления
смазки трансмиссии в пределах от 0,15 до 0,3 МПа. Существуют
шариковые, конические и плунжерные клапаны смазки.
Клапаны подпитки ГТ (как правило, плунжерные) регулируют
давление в ГТ в пределах от 0,3 до 0,7 МПа, необходимое для
предотвращения кавитации.
Преоохранительные клапаны (шариковые) ограничивают дав-
ление в гидросистемах при работе на холодной рабочей жидкости.
Эти клапаны работают эпизодически, поэтому к ним не предъяв-
ляются высокие требования по долговечности.
Обратные клапаны применяются в основном для отсечки маги-
стралей и выполняются чаще всего коническими и тарельчатыми.
Характерным недостатком этих клапанов является слабая пру-
жина, рассчитанная только на удержание клапана в гнезде.
Рис. 9.4. Статическая характери-
стика клапана
Статическая характерис-
тика (жесткость) клапана
представляет собой зависи-
мость' регулируемого давле-
ния от расхода жидкости
(рис. 9.4). Она оценивается
отношением прироста давления к приросту расхода:
Дс = bpc!&Q.
Значение Дс колеблется в пределах от 0,004 до 0.025
МПа мин/л.
Точность регулирования давления характеризуется чувстви-
тельностью клапана
6=Лрч/р,
где Лрч — отклонение давления от номинального, зависящего от усилия пру-
жины.
Чувствительность клапана колеблется в довольно широких
пределах (от 0,03 до 0,1) и зависит от трения между подвижными
304
и неподвижными деталями. У плунжерных клапанов наименьшая
чувствительность.
Методика расчета клапанов изложена в специальной литера-
туре и поэтому здесь не приводится.
Характерной особенностью работы клапана в трансмиссионной
гидросистеме является изменение расхода жидкости. Например,
вследствие изменения режима работы двигателя расход может
изменяться более чем в три раза. При переключении передач рас-
ход может резко уменьшиться до нуля и также резко увеличить-
ся, а клапан должен не допускать резкого изменения давления
и особенно резонанса, который может появляться при совпадении
частот возмущающих импульсов насоса и собственных колебаний
клапана.
В настоящее время разработаны методики расчета динамиче-
ских характеристик клапанов гидросистем высокого давления,
однако использовать их для расчета клапанов трансмиссионных
гидросистем нельзя из-за отсутствия необходимых данных по
сжимаемости жидкости, содержащей много газа, и по жесткости
сложных гидравлических трасс, поэтому желаемых динамических
характеристик добиваются конструктивными мероприятиями:
задают минимальную массу клапана, предусматривают демпфе
ры и т. д., затем осуществляют всестороннее исследование гидро-
системы на стенде и при необходимости доработку.
Регулировка клапанов, как правило, осуществляется металли-
ческими шайбами, установленными под пружинами. В процессе
эксплуатации регулировки клапанов не требуется.
9.5. КАНАЛЫ И ТРУБОПРОВОДЫ
Все элементы трансмиссионной гидросистемы соединяются
между собой каналами или трубопроводами, часть из которых
является элементами конструкции трансмиссии, а другая распо-
лагается в МТО танка.
Основные принципы разводки трасс гидросистемы изложены
ниже.
I. Протяженность каналов гидросистемы должна быть мини-
мально возможной. Для этого надо так выбирать места установки
насосов, клапанов, распределителей и бустеров КП и МП, чтобы
все расстояния были минимальными при минимальном числе
каналов.
2. Наиболее короткими должны быть каналы от распределите-
лей до бустеров, так как от их сопротивления во многом зависит
быстродействие системы управления.
3. Все каналы и трубопроводы должны иметь минимально воз-
можное сопротивление движению жидкости, для чего целесооб-
разно избегать поворотов, сужений и других местных сопротив-
лений.
305
4. Диаметры каналов и трубопроводов должны быть такими,
чтобы жидкость двигалась со скоростью, не превышающей сле-
дующих значений:
для средненапорных циркуляционных трасс (охлаждение, под-
питка ГТ, управление) —6 м/с;
для низконапорных циркуляционных трасс (смазывание) —
3 м/с;
для трасс системы управления высокого быстродействия (ме-
ханизмы поворота, остановочные тормоза) —5 м/с;
для трасс системы управления среднего быстродействия (ко-
робка передач) — 10 м/с.
Подавляющее большинство современных трансмиссий имеет
внутреннюю разводку гидравлических трасс, которая повышает
надежность гидросистемы и не требует большого числа уплотне-
ний от внешней среды.
Наиболее простое конструктивное решение — выполнение ка-
налов сверлением отверстий в картере, однако оно вызывает
серьезные технологические осложнения, обусловленные качеством
отливок (наличием раковин и пористости) и усложнением их ме-
ханической обработки.
Если невозможно просверлить канал достаточно большого
диаметра, делают несколько каналов. Например, в одной из
трансмиссий производства США жидкость подводится к ГТ через
четыре отверстия диаметром 15 мм каждое. Уплотнение каналов
при переходе из одной детали в другую осуществляется проклад-
ками, втулками, трубками и резиновыми кольцами.
Разводка каналов внешними трубками не применяется, так
как трудно обеспечить необходимую герметичность и разместить
большое число трубок на картере трансмиссии. При разводке
внутренними трубопроводами удается совместить преимущества
обоих способов. Трубопроводы для разводки выполняются из бес-
шовных холоднотянутых цельных тонкостенных стальных труб с
толщиной стенок, обычно равной I мм. После гибки и сварки
трубы должны быть протравлены и очищены от окалины. В зару-
бежных трансмиссиях широко применяются трубы из коррозион-
ностойкой стали.
Трубопроводы необходимо крепить хомутами к деталям транс-
миссий или корпусу ВГМ через каждые 700—800 мм для исклю-
чения вибраций.
Гибка труб осуществляется по шаблонам. Подгибание при
монтаже недопустимо, так как это может вызвать течь в уплотне-
нии и образование трещин в процессе эксплуатации. Применяют-
ся специальные гибкие вставки в трубопроводы, позволяющие
компенсировать неточности изготовления, а также резиноткане-
вые шланги, которые должны выдерживать давление не менее
5 МПа.
Трассы всасывания должны выполняться из армированных
шлангов во избежание пережатия их давлением атмосферы. При-
306
соединительная арматура трубопроводов и шлангов выполняется
в соответствии с действующими отраслевыми и государственными
стандартами.
9.6. ГИДРОСИСТЕМА ПОДПИТКИ И ОХЛАЖДЕНИЯ ГТ
В круге циркуляции ГТ должно поддерживаться минимальное
избыточное давление, достаточное для предотвращения кавита-
ции. Увеличение давления подпитки не способствует улучшению
показателей ГТ, но сокращает долговечность уплотнений и под-
шипников.
Гидросистема должна поддерживать оптимальный температур-
ный режим работы ГТ, прокачивая необходимое для этого коли-
чество рабочей жидкости.
Рабочий диапазон ГТ ограничен, с одной стороны, максималь-
но допустимой температурой порядка 135...150°С, а с другой —
минимальной (8О...9О°С). Более низкая температура рабочей
жидкости нежелательна, так как приводит к понижению КПД ГТ.
Конструкция гидросистемы должна быть простой, с минималь-
ным числом каналов и клапанов. Схемы подпитки и охлаждения
ГТ бывают открытые и замкнутые. В открытых схемах давление
регулируется созданием подпора на выходе из ГТ либо созданием
подпора на выходе с одновременным ограничением давления на
входе, либо созданием зависимости давления на выходе от давле-
ния на входе, а также установкой перепускных клапанов между
выходом и входом.
При расчете гидросистемы подпитки и охлаждения ГТ нужно
определить расход рабочей жидкости через ГТ и характер изме
нения давления на входе и выходе из него при различных режи-
мах работы. Если ГТ имеет блокировочный фрикцион, то допол-
нительно надо рассчитать характеристики гидросистемы при ра-
боте и на режиме блокировки.
Расчетной точкой для определения потребной прокачки через
ГТ для его охлаждения является крайняя левая точка рабочего
диапазона, определяемая по тяговой характеристике ВГМ с уче-
том соответствующего перекрытия передач или преодоления пре-
дельного угла подъема. Эта точка, перенесенная на характерис-
тику совместной работы двигателя и ГТ, характеризуется опреде-
ленными значениями мощности, частоты вращения вала двига-
теля и КПД ГТ.
На рис. 9.5, а приведена простейшая открытая схема гидроси-
стемы подпитки и охлаждения ГТ, в которой на выходе из ГТ
поддерживается давление, близкое к постоянному. Положение
крайней левой точки рабочего диапазона (точка а) для этой схе-
мы показано на рис. 9.5,6.
Тепловой поток в точке а рассчитывается по формуле
Фа-(«-^гтв)^в«
307
Для охлаждения рабочей жидкости в радиаторе (разность
температур Л/= 15.. . 20 °C, что характерно для современных
систем охлаждения) требуется прокачивать через ГТ в точке а
количество жидкости
Qa = «W).
Рис. 9.5. Гидросистема подпитки и охлаждения ГТ с подпором на выходе:
а — гидравлическая схема; б — характеристика совместной работы двигателя с ГТ (<?„—по-
дача нагнетательного насоса); в — характеристика качающих свойств ГТ; г зависимость
давления на входе и выходе от
Зная Qa, легко рассчитать подачу нагнетательного насоса и
нанести ее на характеристику совместной работы двигателя и ГТ,
получив зависимость прокачки через ГТ от режима работы в диа-
пазоне от ZIT =0 до /[-!• - I при работе двигателя по внешней
и предельной регуляторной характеристикам.
При установке клапана на выходе из ГТ изменение давления
соответствует характеристике клапана:
Рвых — Рк I" 4“ ^^Рс »
где рл — начальное давление, регулируемое клапаном; QK1 — расход через
клапан; — суммарные потерн давления в каналах между выходом из ГТ
и клапаном.
308
Давление на входе в ГТ зависит от сопротивления прокачке
и определяется по формуле
4 Ръх — Ръы\ ^Ргт ’
где Дргт — разность давлений между входом и выходом из ГТ.
Так как сопротивление ГТ прокачке переменно и зависит от
режима работы, то для расчета надо воспользоваться характерис-
тикой качающих свойств ГТ.
Используя зависимость Q=f(irT ), найденную по графику
рис. 9.5,6, можно на рис. 9.5, в нанести разность давлений на вхо-
де и выходе из ГТ при реальной прокачке (пунктирная линия).
Характеристика клапана на выходе из ГТ должна быть такой,
чтобы на входе в крайней левой точке рабочего диапазона давле-
ние было достаточным для предотвращения кавитации. При
/гт =0 допустима незначительная кавитация. Минимальное дав-
ление на входе в ГТ не должно быть меньше 0,25 МПа.
Учитывая это условие, можно рассчитать характеристику кла-
пана и построить график изменения давления на входе в ГТ в за-
висимости от режима его работы (рис. 9.5,г). Давление на входе
в ГТ имеет минимальное значение в наиболее опасной зоне, где
может появиться кавитация, и максимальное в зоне, где ГТ рабо-
тает на режиме ГМ, что не соответствует требованиям, поэтому
такая схема гидросистемы подпитки ГТ имеет ограниченное при-
менение (например, в ГМТ легковых автомобилей).
Для улучшения характеристики давления на входе в ГТ в схе-
му гидросистемы вводят клапан, ограничивающий давление на
входе, в зоне, когда ГТ работает на режиме ГМ, и в зоне макси-
мального КПД (рис. 9.6).
Расчет гидросистемы с клапаном, ограничивающим увеличение
давления на входе в ГТ, аналогичен изложенному, однако тре-
буется дополнительно определить параметры клапана и количест-
во рабочей жидкости, перепускаемой клапаном и прокачиваемой
через ГТ.
Так как при работе ограничивающего клапана разность дав-
лений на ГТ постоянна, то кривая увеличения давления на входе
в ГТ почти параллельна оси /|Т (линия аб на рис. 9.6,6). В точ-
ке б через клапан проходит максимальное количество рабочей
жидкости. Положение точки а (начало открытия ограничивающе-
го клапана) зависит от уровня прокачки через ГТ на режиме ГМ,
так как, начиная с точки а, с увеличением /гт прокачка через
ГТ уменьшается. При неправильном выборе начала работы кла-
пана прокачка через ГТ в точке б может вообще отсутствовать.
Надо учитывать, что наклон кривых Лргт =/(‘гт ) к оси
на участке аб зависит от характеристики клапана pM=f(Q), ко-
торая рассчитывается по выбра-нному положению точки а. Положе-
ние точки б определяется по характеристике клапана. Затем
строятся графики p=f(in ) и Q=/('n )» приведенные на
309
рис. 9.6, в и г. Максимальный расход рабочей жидкости через
клапан соответствует отрезку бв. Рассмотренная гидросистема
подпитки вполне пригодна для ГТ с низкими качающими свойст-
вами, так как проста и, что самое главное, позволяет уменьшить
прокачку через ГТ на режиме, соответствующем правой зоне ха-
рактеристики, где подача нагнетательного насоса и КПД ГТ
достаточно высокие, поэтому для охлаждения не требуется боль-
шой прокачки.
Рис. 9.6. Гидросистема подпитки ГТ с подпором на выходе и ограничением
давления на входе:
а — гидравлическая схема; б — характеристика качающих свойств ГТ; в зависимость
давления на входе и выходе от'гт; J — зависимость расхода жидкости через ГТ от»|-т
Подобная гидросистема подпитки ГТ применена в ГМТ
4НР-250 производства ФРГ.
Наиболее широкое распространение получили схемы, обеспечи-
вающие постоянное давление на входе в ГТ, облегчающие устра-
нение кавитации (рис. 9.7). При расчете такой гидросистемы сле-
дует учитывать, что давление на входе в ГТ определяется харак-
теристикой клапана, а на выходе из ГТ зависит от расхода рабо-
чей жидкости и качающих свойств ГТ. Дополнительно надо про-
верить возможность клапана обеспечить постоянное давление на
входе в ГТ на режиме максимальной прокачки и максимального
сопротивления ГТ. Минимальное давление перед клапаном долж-
310
но быть меньше разности давлений в ГТ и гидравлического со-
противления между ГТ и клапаном, т. е.
значение минимального давления перед клапаном определяется
как суммарное гидравлическое сопротивление полностью откры-
того клапана, а также каналов, радиатора и других сопротивле-
ний, расположенных за клапаном.
Рис. 9.7. Схема гидросистемы с регули-
рованием давления на выходе в зависи-
мости от давления на входе в ГТ
Дополнительным средством
регулирования расхода и давле-
ния в рассмотренных схемах яв-
ляется установка перепускного
обратного клапана, направляю-
щего жидкость с выхода ГТ об-
ратно на вход, когда давление на
выходе становится больше, чем на
входе. Так как расход рабочей
определяется подачей насоса, то
чая жидкость образует контур ц
качку через ГТ. Это явление мо:
жидкости через ГТ и радиатор
перепускаемая клапаном рабо-
1ркуляции, увеличивающий про-
кет использоваться для умень-
шения возрастающего давления на выходе и для увеличения про-
качки через радиатор, для чего перепускной клапан устанавли-
вается не на выходе из ГТ, а после радиатора (рис. 9.8). Такое
решение применено в трансмиссии CD-850 производства США.
Чтобы существенно увеличить прокачку через радиатор за
счет качающих свойств ГТ, надо обеспечить минимальное гидрав-
лическое сопротивление между выходом и входом в ГТ на линии
радиатор—обратный клапан—трубопроводы и каналы.
Для определения расхода жидкости через ГТ—радиатор надо
рассчитать и построить зависимость \p=f(Q) на линии выход из
ГТ—радиатор—перепускной клапан—вход в ГТ с. учетом трубо-
проводов и каналов, по которым будет циркулировать рабочая
жидкость (рис. 9.8,6); надо также знать условия начала откры-
тия перепускного клапана, который должен иметь очень слабую
пружину. На характеристику качающих свойств без учета пере-
пускного клапана надо нанести точку его открытия и построить
характеристику действительной прокачки при работе перепускного
клапана (пунктирная линия на рис. 9.8, в). Затем мож>но построить
характеристику гидросистемы (рис. 9.8,г).
311
Замкнутые схемы подпитки ГТ (рис. 9.9) имеют контур цирку-
ляции, объединяющий насос, радиатор и ГТ. Подпитка контура
Рнс 9.8. Гидросистема подпитки ГТ с регулированием давления на выходе в
ia виси мости от давления на входе с перепускным клапаном, увеличивающим
прокачку через ГТ:
а — гидравлическая схема; б зависимость гидравлического сопротивления Ьр прокачке
на линии выход из ГТ — радиатор - перепускной клапан — вход в ГТ от расхода Q ;
в — характеристика качающих свойств ГТ; е — характеристика гидросистемы
ния давления. Если контур разобщить
Рис. 9.9. Варианты замкну-
тых схем подпитки ГТ:
а в ГМТ CD-MO; 6 в ГМТ
МАЗ 535 и ТХ 500
осуществляется от дру-
гого насоса. В замкну-
той схеме все элемен-
ты влияют друг на дру-
га, а ветвь подпитки
является единственным
средством регулирова-
клапанамн, он превра-
щается в открытую схему подпитки и охлаждения ГТ.
Шестеренчатый насос и ГТ делят контур на две части: вход-
ную и выходную. Радиатор создает только местное сопротивле-
312
ние, поэтому расположение в схеме не оказывает влияния на под-
питку .ГТ. Давление в ветви подпитки регулируется клапаном;
ветвь подводится между насосом и входом в ГТ, поскольку на
входе надо поддерживать постоянное давление.
Прокачка рабочей жидкости через ГТ и радиатор зависит от
подачи насоса, но при высоких качающих свойствах ГТ возмож-
но увеличение прокачки путем установки перепускного клапана,
через который рабочая жидкость идет мимо насоса.
Наибольшее распространение получила схема, приведенная на
рис. 9.9, а, так как в других схемах радиатор всегда нагружен
давлением подпитки. Эта схема применена в ГМТ МАЗ-535 и
ТХ-500, а схема, приведенная на рис. 9.9, б —в ГМТ CD-500.
Расчет гидросистем подпитки и охлаждения ГТ с замкнутым
контуром не отличается от рассмотренных выше.
Для нормальной работы контура надо обеспечить такое давле-
ние на входе в ГТ, при котором на линии всасывания насоса
всегда будет небольшое положительное давление, в противном
случае может существенно понизиться объемный КПД насоса, и в
результате уменьшится циркуляция рабочей жидкости в контуре.
Для решения этой задачи могут быть использованы перепускные
и обратные клапаны.
При блокировке ГТ сопротивление прокачке становится макси-
мальным, а тепловыделение в рабочую жидкость практически
отсутствует, поэтому в контур устанавливается перепускной кла-
пан, который управляется подводимым к блокировочному фрик-
циону ГТ давлением и большую часть жидкости перепускает
к радиатору и на смазку. Давление на входе в ГТ поддержи-
вается минимальным, а прокачка осуществляется через жиклер
в клапане подпитки, который при этом режиме остается закры-
тым. Расчет такой гидросистемы прост, так как ГТ здесь являет-
ся простым гидравлическим сопротивлением (tn = I во всем
диапазоне изменения расхода жидкости).
В трансмиссиях, использующих ГТ только для трогания с мес-
та и при переключении передач, к гидросистеме подпитки и
охлаждения предъявляются более низкие требования. Обычно это
гидросистема открытого типа с клапаном подпитки, установлен-
ным после ГТ и управляемым от блокировочного фрикциона.
КПД ГТ бывает весьма низким (цгт =0,8... 0,85). Все это допус-
тимо, так как здесь ГТ работает кратковременно и выполняет
роль защитного устройства, обеспечивая снижение динамических
нагрузок при трогании с места и при переключении передач.
9.7. ГИДРОСИСТЕМА СМАЗКИ И ОХЛАЖДЕНИЯ
РЕДУКТОРНОЙ ЧАСТИ
Современные трансмиссии имеют принудительную систему
смазки. Основная трудность при ее проектировании заключается
ИЗ
в правильном выборе количества рабочей жидкости для смазыва-
ния отдельных элементов: дисков трения, шестерен и подшипни-
ков. Недостаточное количество рабочей жидкости приводит к
преждевременному износу или даже выходу из строя этих элемен-
тов, а большое количество вызывает дополнительные барботаж-
ные потери, которые понижают КПД и увеличивают выделение
теплоты.
В трансмиссиях, передающих мощность 350—650 кВт, на сма-
зывание обычно подается следующее количество рабочей жид-
кости:
к опоре сателлита планетарного ряда —0,5... 1,6 л/мин;
к зацеплению солнечной шестерни и сателлита 1,0... 3,0 л/мин;
на каждую пару поверхностей трения МКД — 0,5 ... 1,3 л/мин.
Кроме этого, смазка подается к подшипникам, если они не
могут быть смазаны разбрызгиванием или очень нагружены, или
имеют высокую частоту вращения.
Для смазки планетарных рядов и подшипников рабочая жид-
кость подводится в центр вала; откуда через специальные отвер-
стия направляется к местам смазки. Фрикционные диски КП сма-
зываются жидкостью, выбрасываемой из планетарных рядов и
подшипников. Если этого количества недостаточно, то предусмат-
ривается подвод дополнительного количества жидкости.
Фрикционные элементы МП смазываются дополнительно во
время длительных пробуксовок. Масло подается через специаль-
ный клапан, управляемый нажимным диском или давлением в
бустере фрикционного элемента.
Давление в системе смазки выбирается минимально возмож-
ным для подвода масла к самым отдаленным точкам. Обычно оно
равно 0,15—0,25 МПа. Диаметр смазочных отверстий (для умень-
шения вероятности забивания продуктами износа) должен быть
не менее 2 мм.
Разводка и расположение каналов смазки в трансмиссии зави-
сят от конструкции редукторной части и картера. Зная расход
жидкости через каждое смазочное отверстие и каналы, можно
определить диаметры смазочных отверстий, используя для расче-
та общеизвестные формулы из гидравлики трубопроводов.
9.8. ПОСТРОЕНИЕ И РАСЧЕТ ГИДРОСИСТЕМ
Построение и расчет гидросистемы надо начинать с определе-
ния подачи насосов. Для этого надо проанализировать потреб-
ности всех основных подсистем: смазки, охлаждения и управления.
Расход рабочей жидкости на смазку определяется сопротивле-
нием каналов при давлении, поддерживаемом клапаном смазки
Так как сопротивление каналов изменяется в зависимости от
включенной передачи и частоты вращения вала двигателя, то и
расход на смазку будет переменным. Однако изменение расхода
на смазку не превышает 10 % от нормы, поэтому его можно счи-
тать постоянным.
314
Подача насоса в рабочем диапазоне частот вращения колен-
чатого вала двигателя должна превышать расход на смазку, т. е.
клапан смазки должен сбрасывать часть рабочей жидкости в бак.
При уменьшении частоты вращения вала двигателя подача умень-
шается, в результате чего может наступить момент, когда она
станет равной расходу на смазку, а затем уменьшится и расход
на смазку.
Подачу насоса следует выбирать так, чтобы она была равна
расходу на смазку при такой частоте вращения вала двигателя,
при которой уменьшение расхода на смазку не может повлиять
на работоспособность трансмиссии. Из рис. 9.10 видно, что это
Рим. 9.10. Подача насоса QH н
расход на смазку QCM в механи-
ческой трансмиссии в зависимо-
сти от частоты вращения вала
двигателя лд:
3*Kp— крутящий момент двигателя
происходит при частоте вращения вала двигателя nKf, которая
на 12 % ниже частоты вращения вала двигателя при максималь-
ном моменте пм. Следовательно, смазка трансмиссии будет обес-
печена в диапазоне от nmax до лкр. При более низкой частоте
вращения вала двигателя, и в том числе при частоте вращения
холостого хода, давление смазки будет меньше номинального,
а количество жидкости, поступающей на смазку, меньше рас-
четного.
Надо учитывать, что скоростной диапазон двигателя зависит
от удельной мощности ВГМ: чем больше удельная мощность, тем
больше скоростной диапазон, используемый при эксплуатации,
в пределах которого надо обеспечивать хорошую смазку транс-
миссии. Помимо этого в процессе эксплуатации могут возрасти
утечки и уменьшится подача насоса. В некоторых гидросистемах
МТ частота вращения вала двигателя, при которой подача
насоса становится равной расходу на смазку, ниже пи на 10—
30 %, но в большинстве гидросистем — на 25—30 %.
В МТ с ГТД нагнетательные насосы обычно имеют привод
от турбокомпрессорного блока двигателя, который работает на
внешней характеристике при постоянной частоте вращения, по-
этому подача нагнетательного насоса такой трансмиссии постоян-
на во всем диапазоне рабочих частот вращения вала двигателя.
При частичной загрузке ГТД частота вращения турбокомпрессор-
ного блока уменьшается, вследствие чего уменьшается и подача
315
насоса. Однако диапазон изменения частоты вращения турбо-
компрессорного блока существенно меньше диапазона изменения
частоты вращения вала ПД, что благоприятно влияет на систему
смазки.
У ВГМ с ГМТ рабочий диапазон частоты вращения вала дви-
гателя зависит от характеристики его совместной работы с ГТ.
При малопрозрачном ГТ, пучок нагрузочных парабол насоса ко-
торого совмещен с зоной максимальной мощности двигателя,
рабочий диапазон частоты вращения двигателя может быть суще-
ственно меньше, чем у ВГМ с МТ. При совмещении пучка нагру-
зочных парабол насоса ГТ с зоной максимального момента дви-
гателя рабочий диапазон частоты вращения вала двигателя мо-
жет быть очень большим, особенно если ВГМ располагает высо-
кой удельной мощностью. При расчете потребной для смазки
подачи насоса следует учитывать наличие в ГМТ блокировки ГТ,
а также необходимость движения ВГМ на подъеме в 30—35°,
когда возможна работа при низком КПД ГТ и при передаче через
трансмиссию большой мощности.
Рабочая жидкость, проходящая через радиатор, используется
также для охлаждения всей трансмиссии, включая редукторную
часть и ГТ, поэтому подача насоса должна рассчитываться с уче-
том этого обстоятельства.
В МТ и ГМТ наибольшее количество теплоты выделяется на
высшей передаче, когда элементы трансмиссии вращаются с высо-
кой скоростью. В МТ максимальная рассеивающая способность
радиаторов системы охлаждения соответствует максимальной час-
тоте вращения вала двигателя. Такое совпадение потребности в
отводе тепла с возможностями весьма выгодно. В ГМТ макси-
мальное выделение теплоты, как правило, имеет место также при
максимальной частоте вращения, но кроме этого еще в двух
зонах: в точке перехода на режим ГМ и в крайней левой точке
рабочего диапазона, где КПД ГТ резко уменьшается. Первая из
этих точек находится в самой середине рабочего диапазона, а вто-
рая — при низкой частоте вращения вала двигателя, где возмож-
ности системы охлаждения существенно уменьшаются.
Па подъеме 30—35° в некоторых трансмиссиях ВГМ с ГМТ
КПД ниже; система охлаждения в этом случае не может обеспе-
чить устойчивый температурный режим при предельно высокой
температуре окружающей среды. Поскольку движение в таких
условиях сравнительно кратковременно, температура не успеет
достичь опасных пределов. Для уменьшения габаритных размеров
системы охлаждения часто обеспечивают теплосъем не во всем
рабочем диапазоне двигателя, а только до начала следующей
передачи в КП, что отсекает зону пониженного КПД ГТ. Иногда
движение при максимальной температуре окружающей среды
обеспечивается только при сблокированном ГТ или при частичной
загрузке двигателя. При определении необходимой подачи насоса
следует учитывать указанные особенности.
316
Для быстрого заполнения бустеров коробки передач, МП и
ОТ гидросистеме управления трансмиссией требуется много
рабочей жидкости. Время заполнения бустеров исчисляется
от момента открытия проходного сечения в золотнике до момента
соприкосновения бустера с пакетом дисков трения и определяет
быстродействие системы управления, от которого во многом зави-
сит управляемость ВГМ. Экспериментально установлено, что
время заполнения полости бустеров МП и ОТ не должно превы-
шать 0,15—0,2с, для чего требуется соответствующая подача на-
соса:
Объем полости бустера, см3 . . 200 300 400 500
Подача насоса, л/мин .... 60—80 90—120 120—160 150—200
Указанная подача должна соответствовать минимальной час-
тоте вращения вала двигателя, а при максимальной частоте вра-
щения должна быть в 1,5—2 раза больше. Уменьшение потребной
подачи насоса может быть достигнуто применением в системе
управления гидроаккумуляторов.
Если время заполнения полости бустеров КП будет больше
0,2 с, то это вызовет запаздывание включения передач, что приве
дет к падению скорости движения при разгоне или при преодоле-
нии подъема, т. е. существенно понизит подвижность ВГМ.
Рис. 9.11. Схема гидросистемы
открытого типа:
I - главный насос; 2 откачиваю
шнй насос; 3 клапан смазки;
< — клапан подпитки ГТ; .5 — кла
пан главного давлении
Зная особенности трех
основных подсистем и их
в рабочей
жидкости, можно присту-
пить к проектированию
трансмиссионной гидро-
системы. Главное — стре-
миться создать наиболее
простую гидросистему с
наименьшим числом элементов.
Пример схемы открытой гидросистемы ГМТ показан на
рис. 9.11. Расход через радиатор и ГТ в этой схеме одинаков
и равен:
Qp = Qi t = Qut — Qyi Qy2 ’
где QrT—расход через ГТ; Qp — расход через радиатор; (Ли — подача
главного насоса; Qy( — расход на подсистему управления; Муз — утечка на
линии управления и в ГТ.
Подача откачивающего насоса
Qh2 = Qcm + Qyi + Qya ♦
317
гле QCM — расход на смазку.
Максимальный расход на управление (при заполнении бусте
ров)
Qvn - Qh. - Qyi •
Рис. 9.12. Схемы гидросистемы с замкнутым контуром ГМТ:
и -для подпитки и охлаждения ГТ; б для смазки и охлаждения ГТ и редукторной ча
СТН; в для охлаждения, смазки и управления; / насос подпиточной ветви; 2 откачи
кающий насос; 3 насос замкнутого контура; 4 клапан смазки; 5 клапан подпитки ГТ;
б — клапан главного давления
318
Условие нормальной работы гидросистемы, при соблюдении
которого все давления будут поддерживаться в пределах нормы,
имеет вид
Qh1 > Qvl + Qv2 + Qcm •
Подача насоса должна быть больше суммы утечек и расхода
на смазку в течение всего срока эксплуатации.
Открытые схемы применяются в ГМТ американских гусенич-
ных машин и в МТ.
Схемы гидросистем с замкнутым контуром приведены на
рис. 9.12. Одна из схем (см. рис. 9.12, а) позволяет получить раз-
личный температурный режим в ГТ и редукторной части. Она
состоит как бы из двух подсистем: подпитки и охлаждения ГТ
в замкнутом контуре и открытой гидросистемы, обеспечивающей
управление, подпитку контура и смазку. Недостатками такой гид-
росистемы являются большие габариты и масса.
Радиаторы охлаждения ГТ и редукторной части могут быть
совмещены (см рис. 9.12,6). В этой схеме управление не включе-
но в замкнутый контур, а в радиаторе охлаждается рабочая жид-
кость, поступающая из ГТ и редукторной части.
На схеме рис. 9.12, в контур образуется насосом подпиточной
ветви, ГТ и радиатором. Из контура рабочая жидкость подается
на управление и смазку. Подпиточный насос находится на входе
в радиатор, куда поступает горячая жидкость после смазки и
утечек. Бак рассчитан на меньшее количество рабочей жидкости,
чем в открытой схеме; через ГТ прокачивается также меньшее
количество жидкости.
Гидросистемы МТ, как правило, открытого типа. На рис. 9.13, а
представлен радиатор, разгруженный от дополнительного давле-
ния, создаваемого системой смазки.
Рис. 9.13. Схемы гидросистем МТ, отли'упощиеся местом установки радиатора:
а — радиатор между откачивающим насосом и клапаном смазки; 6 — радиатор между
МапанвММ смазки и главного давления; / - главный насос; 2 откачивающий насос;
J — клапан смазки; 4 - клапан главного давления
319
Затем разрабатывается конструкция элементов гидросистемы
(насосов, фильтров, клапанно-золотниковых устройств и др.), осу-
ществляется выбор места их установки на картере трансмиссии,
определяются диаметры трубопроводов и каналов и осуществ-
ляется их разводка по картеру.
Расчет гидросистемы делят на предварительный и полный.
Предварительный расчет производится на ранней стадии проекти-
рования и включает в себя определение параметров, необходимых
для расчета отдельных агрегатов, механизмов, деталей: подачи
всех насосов, диаметров трубопроводов и каналов, давления
рабочей жидкости. Расчет выполняется для одного режима —
максимальной частоты вращения вала двигателя.
Полный расчет гидросистемы начинается с определения пода-
чи нагнетательных насосов QM =/(л), которая должна быть рав
на выявленному расходу рабочей жидкости.
Гидросистема МТ должна быть рассчитана для трех режимов:
максимальной и минимальной частоты вращения вала двигателя;
работы двигателя на холостом ходу.
При максимальной частоте вращения вала двигателя полу-
чают предельные значения расходов и давления, при минималь-
ной проверяют, весь ли рабочий диапазон обеспечен необходимой
подачей.
Расчет подачи при работе двигателя на холостом ходу позво-
ляет выявить обеспеченность вращающихся элементов трансмис-
сии смазкой, а также решить вопрос о допустимости понижения
давления в некоторых подсистемах.
Расчет основного контура циркуляции гидросистемы МТ ведет-
ся по известным формулам с учетом того, что установленные
клапаны делят систему на ряд самостоятельных участков. Если
при максимальном расходе возрастающее за клапаном давление
не приводит к нарушению его работы и он продолжает регулиро-
вать давление в соответствии со своей характеристикой, то можно
считать, что взаимного влияния между отдельными участками си-
стемы нет. Значит, гидросистема сконструирована правильно.
Например, гидросистема МТ (рис. 9.13,6) делится на четыре
участка: от заборного устройства до насоса, от насоса до клапана
гидроуправления, от клапана гидроуправления до клапана смазки
и от клапана смазки до слива в бак. Последнего участка может
и не существовать, если слив от клапана смазки осуществляется
непосредственно в бак.
Первым должно быть рассчитано сопротивление на линии вса-
сывания насоса (первый участок гидросистемы) на всех расчетных
режимах. Затем по универсальной характеристике насоса можно
определить его подачу на расчетных режимах. Зная расход на
смазку и утечку на линии управления, можно определить про-
качку на всех участках гидросистемы.
Дальше расчет надо вести по участкам, начиная с последнего.
При максимальной прокачке надо рассчитать напор за клапаном
320
(если четвертый участок гидросистемы существует, то за клапа-
ном смазки; если нет, то за клапаном гидроуправления), прове
ряя, способен ли он при максимальной прокачке регулировать
давление. При нормальной работе клапана должно быть соблю-
дено условие:
Рк » ДРп + Д^к min .
где — давление, регулируемое клапаном; Арп —подпор за клапаном;
±рк min — минимальная разность давлений на клапане при полностью откры-
том проходном сечении.
Экспериментально mln определяется при полностью от-
крытом клапане, стоящем на упоре при снятой пружине. Цель
расчета потери давления на участке от насоса до клапана гидро-
управления заключается в определении давления на фильтре и на
нагнетательном насосе.
Гидросистема будет функционировать при условии, что имеют
ся минимально возможные сопротивления каналов и достаточная
разность давлений на клапанах.
При расчете гидросистемы ГМТ необходимо учитывать нали-
чие системы подпитки ГТ. Кроме того, должны быть учтены ре-
жимы блокировки ГТ.
21 Зак. 47 «С1
Глава 10 РАСЧЕТ И ПРОЕКТИРОВАНИЕ ЭЛЕМЕНТОВ
СИСТЕМ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ВГМ
10.1. МЕХАНОГИДРАВЛИЧЕСКИЕ СИСТЕМЫ УПРАВЛЕНИЯ
В механо!идравлической системе управления КП ГМТ меха-
ническая часть состоит из избирателя передач и механических
приводов; гидравлическая включает в себя источник гидравличе-
ской энергии (бак, насос, фильтр, клапаны, трубопроводы), меха-
низм распределения, исполнительные органы (гидроцилиндры,
бустеры) и другие гидравлические устройства, обеспечивающие
плавное включение передач, блокировку и т. д.
На современных ВГМ применяются избиратели передач с пе-
редвижным рычагом, имеющие один длинный продольный и не-
сколько коротких боковых пазов, фиксирующих рычаг в опреде-
ленных положениях.
препятствующие случайному включению
планка, стопор на рычаге или пружинный
Рис. 10.1. Схемы распреде-
лителей для управления ко-
робкой передач:
а пробкового типа; 6 — зо-
лотникового; 1. И, Ill номера
передач; ЗХ — передача заднего
хода
Иногда на избира-
теле передач имеются
устройства, препятст-
вующие продвижению
рычага в продольном
пазу без заведения его
в поперечные, что ис-
ключает случайное пе-
реключение через пе-
редачу. На рычаге
избирателя обычно
имеются устройства,
заднего хода (откидная
упор).
322
Гидравличсский распределитель устанавливается непосредст-
венно на КП.
В настоящее время для управления КП с механическим при-
водом от кулисы используются механизмы распределения золот-
никового или пробкового типов. При наличии более трех передач
применяется распределитель пробкового типа, если передач
меньше трех — золотникового типа (рис. 10.1).
Каждому шагу перемещения кулисы соответствует шаг пере-
мещения золотника или угол поворота пробки. Пробка имеет не-
сколько распределительных поясков, каждый из которых эквива-
лентен золотнику, поэтому с пробковым распределителем легче
решить задачу управления многоскоростной коробкой, чем с зо-
лотниковым.
Площади проходных сечений распределителей необходимо вы-
бирать максимально возможными для уменьшения времени вклю-
чения бустеров.
Коэффициент расхода для распределителей золотникового ти-
па находится в пределах от 0,57 до 0,8 (для чисел Re^>260);
диаметральные зазоры составляют 0,02—0,06 мм. Отклонение от
цилиндричности и круглости не более 0,005 мм. Диаметральные
зазоры в пробковых распределителях составляют 0,02—0,06 мм в
зависимости от диаметра пробки.
Пояски золотника должны слегка перекрывать пазы, поэтому
они должны быть шире паза на 0,5 мм на каждую сторону.
Золотниковые и пробковые распределители, как правило,
имеют фиксаторы для точной установки золотника или пробки по
отношению к корпусу. Иногда фиксатор располагают в избира-
теле передач.
Исполнительными органами управления фрикционами КП яв-
ляются бустеры — кольцевые рабочие цилиндры с относительно
малым ходом поршня. Бустеры имеют возвратные пружины, отво-
дящие поршень бустера в исходное положение, когда он выклю-
чается.
Усилие Р, развиваемое неподвижным бустером, может быть
определено по формуле (трением в уплотнениях пренебрегаем)
P = pS-EPnp,
где р — давление в бустере, S — площадь поверхности бустера; ХРпр — усилие
отжимных пружин.
В современных конструкциях при наружном диаметре бустера
от 400 до 500 мм и рабочей площади поверхности поршня от 100
до 400 см2 суммарное усилие возвратных пружин достигает
1—2,5 кН. У вращающихся бустеров усилие возвратных пружин
больше (2—6 кН), что объясняется необходимостью дополнитель-
ного преодоления центробежного давления жидкости.
Допустим, что угловая скорость вращения жидкости равна
угловой скорости вращения бустера ш. Тогда на единицу объема
жидкости действует центробежное давление
21*
323
dpu = 7«»2Z?dZ?,
где у — плотность жидкости; R — радиус расположения частицы жидкости
(рис. 10.2);
Рис. 10.2. Схема расчета центробежного дав-
ления жидкости во вращающемся бустере:
•» — угловая скорость вращения бустера; R - радиус
расположения частицы жидкости; М, — радиус пол
водящего канала; R, и R,— меньший и больший ра-
диусы полости бустера соответственно
отсюда
R
Р„ - f 7«.=PdА* = 7»г («’ - «6)/2 .
Усилие на поршне бустера от центробежного давления опреде-
ляется по формулам:
dPu = pudS, dS = 2n/?d/?,
р„=7-1£(/?’-я5)-2«/?<1я н«>гс/.</?;-/?!)-</,/й(/й-й)].
Конструктор должен стремиться уменьшить внешний диаметр
бустера, чтобы для компенсации центробежной силы не требова-
лось мощных возвратных пружин. Если усилие центробежных
сил не удается преодолеть отжимными пружинами, то следует
обеспечить автоматический слив рабочей жидкости из бустера,
когда снято давление управления, или уравновесить центробеж-
ную силу.
Слив жидкости из бустера может быть осуществлен через
жиклер или через специальный клапан. Наличие жиклера обус-
ловливает постоянный расход жидкости в системе управления до
тех пор, пока включен фрикцион. Выключение фрикциона затяги-
вается, что может привести к повышенному износу фрикционных
элементов. Засорение клапанов в бустерах фрикционов может
привести к отказам.
В последнее время широко применяется гидравлическое или
механическое уравновешивание центробежного давления встреч-
ной центробежной силой; применяются также и гидравлическое
324
включение и выключение вращающегося фрикциона (в этом слу-
чае специальных мер по уравновешиванию центробежного давле-
ния жидкости не требуется).
Для гидравлического управления КН по упрощенной схеме
необходимы источник питания, клапан, поддерживающий давле-
ние управления, распределительное устройство, бустеры. Основ-
ной недостаток упрощенной схемы управления — резкое включе-
ние бустеров, что вызывает повышенные динамические нагрузки
в деталях, их преждевременный износ и даже поломку. Плавное
включение КП достигается управлением процессом нарастания
давления в бустере включаемой передачи, а также главным дав-
лением.
Управление главным давлением может осуществляться в зави-
симости от включенной передачи, от загрузки двигателя и от того
и другого одновременно. В ВГМ находит применение управление
главным давлением от включенной передачи, которое позволяет
получить оптимальные коэффициенты запаса фрикционных эле-
ментов по максимальному значению передаваемого момента.
Чаще встречаются гидросистемы, у которых регулируются два
главных давления: высокое — на низших передачах и заднем
ходу, низкое —на высших передачах.
Широкое распространение получило управление процессом
нарастания давления во включаемом бустере.
По назначению устройства плавности можно разделить на
центральные и индивидуальные. Центральные управляют нарас-
танием давления во всех бустерах КП, индивидуальные только в
определенном бустере. По принципу действия устройства плавнос-
ти можно разделить на управляющие нарастанием давления пу-
тем ограничения подачи жидкости в бустер и путем слива жид
кости из магистрали через клапан.
Па рис. 10.3,а представлена конструктивная схема устрой
ства плавности «Гидро-Медиа» (США) для регу-
лирования давления в бустере путем слива
жидкости из магистрали через клапан.
В начале заполнения давление на входе в бустер существенно
ниже давления настройки клапана и поджатия поршней, поэтому
устройство не мешает заполнению бустера (линия А Б на
рис. 10.3,6). После заполнения давление в бустере и на входе
в устройство начинает возрастать (линия БВ). В точке В клапан
начинает сливать жидкость из магистрали, задерживая дальней-
шее нарастание давления.
Одновременно возрастает давление под поршнями клапана и
гидроаккумулятора. В зависимости от соотношения жесткости
пружин, их предварительного поджатия и площадей поршней
через жиклер начинается заполнение полостей под поршнями. Под-
жатие поршня клапана приводит к повышению давления, регули-
руемого клапаном, по линии BE. При полном поджатии поршня
клапан закрывается, и в магистрали восстанавливается давление,
325
регулируемое гидросистемой управления. При заполнении гидро-
аккумулятора может измениться зависимость p=f(T) или увели-
читься время нарастания давления. Для обеспечения работоспо-
а
Рис. 10.3. Конструктивная схема (а) и характеристика (б) устройства плавности
«Гидро-Медиа»:
I — поршень гндроаккумулятора; 2 — жиклер; 3 клапан; 4 поршень клапана (остпль
ные обозначения см. в тексте)
собности гидроаккумулятора в течение всего времени регулирова-
ния нарастания давления необходимо соблюдать следующие
условия:
^npl/^l прз 4“ и (^пр| ~Ь
где S|, /| щм> С|. Pnpi — члошадь поверхности, максимальное перемещение
поршня, жесткость и начальное усилие пружины гидроаккумулятора соответст-
венно; /’прз. С3 — начальное усилие и жесткость пружины клапана; ^—пе-
ремещение клапана до открытия слива; S< — площадь поверхности поршня кла-
пана; рн — номинальное давление в гидросистеме.
Регулирование устройством нарастания давления в гидроси-
стеме по линии BE можно представить в виде системы уравнений:
Q„dT = +
S,dp = (ЮЛ)
C^Z, = Stdp,,
где (?ж — расход через жиклер; Ss— площадь поверхности клапана; —
перемещение поршня клапана и гндроаккумулятора; р\ — давление в полости
гидроаккумулятора.
Подставив в первое уравнение системы выражения для d/4 и
d/ь полученные из двух других уравнений, и произведя преобра-
зования, получаем
С С S?
скйр'- (10‘2)
326
Расход через жиклер определяется по формуле
Q. = 1*5./2 (₽-₽,)/!,
где р — коэффициент динамической вязкости жидкости.
Связь между давлением в полости гндроаккумулятора и в гид*
росистеме можно представить в виде
pv=pS3/S^,
поэтому справедлива запись
= 1*5./2^(1 -5Л)/7.
Подставив выражение (?ж в уравнение (10.2), заменив пере-
менную dpi на dp и интегрируя по переменной р в пределах от
рн Д° Ре Р»» получим время регулирования
г _ 2s>(sfc,+s;c3Hy7;-rp^ t0 3)
где Pg (Сз/34-РПрз)|'5з.
Характер изменения давления в магистрали в процессе регу-
лирования определяется зависимостью
[_^С,5^.ГК2(1-.У5.»т +KZ-11. (10.4)
L 2SHS?CrTsfG)
Если гидроаккумулятор заканчивает работу раньше, чем за-
вершается регулирование нарастания давления, то на линии
p=f(T) появляется перегиб, после которого давление нарастает
быстрее (см. линию ГИ на рис. 10.3,6).
Условие завершения работы аккумулятора раньше окончания
регулирования давления клапаном можно представить в следую-
щем виде:
Рн > Р\- — (^npi 4“ max)/St.
Время регулирования нарастания давления на участке ВГ
определяется по формуле (10.3) с заменой ри на рг.
Процесс регулирования на участке ГИ может быть описан
системой уравнений:
S4d/4;
S3dp - C3d/4.
Решив ее, получим выражения для расчета времени регулиро-
вания и изменения давления:
_ 2 5;,5)(У^-/р7)
Сзн5ж /2(1 — 53/54)/т
п _ Г /2(I — 53/S4)/7 .i/rT
рги - [---------------------+ И Рг J •
327
а время регулирования давления в бустере в этом случае равно
Гр = Твг + Тги.
Если гидроаккумулятор начнет работать раньше начала под-
жатия поршня клапана, т. е. будет иметь место условие
PnpilS. < (Рп₽з + C3Z3)/S4,
то давление задержится на уровне рв до страгивания с места
поршня клапана (до точки К). Далее нарастание давления пойдет
по линии КМ, если гидроаккумулятор будет работать до конца,
или появится перегиб, если гидроаккумулятор закончит свою ра-
боту. раньше.
Задержка нарастания давления (по линии ВК) нерациональ-
на, так как приводит к увеличению времени переключения пере-
дач, поэтому надо рассчитывать устройство так, чтобы этой за-
держки не было.
На рис. 10.4 представлена конструктивная схема устройст-
ва плавности «Дайна-Флоу» (США) для регули-
рования давления путем ограничения подачи
жидкости.
Рис. 10.4. Конструктивная схема (а) и характеристика (б) устройства плав-
ности «Дайна-Флоу»:
/ — жиклер; 2 - обратный клапан; 3- золотник (поршень гндроаккумулятора); 4 ка-
нал (остальные обозначения см. в тексте.
При заполнении бустера жидкость проходит через канал мимо
поршня гндроаккумулятора. При нарастании давления в бустере
поршень опускается, сжимая пружину, и кромкой перекрывает
проход жидкости к бустеру по каналу, поэтому дальнейшее по-
ступление жидкости в бустер осуществляется через жиклер. Уве-
личение давления сдерживается заполнением аккумулятора.
После того, как поршень аккумулятора опустится до упора, дав-
ление будет регулироваться дросселированием через жиклер.
При опорожнении бустера под действием разности давлений на
328
жиклере обратный клапан опустится, открывая проход жидкости
из бустера на слив.
Регулирование давления можно описать уравнениями
Q^dT—Sdl-,
Sdp=Cdl,
решая которые, найдем
ar=-fS-dp, (Ю.5)
где Q* = |*5Ж/2(^И -р)/т.
Подставим выражение для QM в уравнение (10.5) и, интегри-
руя по переменной р в пределах от рв до рг, получим время
регулирования
Т = “ (-Рг-УгР‘-Рк'>-
где рв = (Р„, + С/,)/5; рг = (P,f + CZ.„)/S.
Характер изменения давления на участке ВГ можно предста-
вить в следующем виде:
Р = Р„ + (|*С5Ж УЗД? • 2 № / S‘).
После окончания работы гндроаккумулятора давление нарас-
тает круто (по линии ГЕ). Устройство плавности «Дайна-Флоу»
не может работать с бустерами, имеющими повышенные утечки.
В качестве центрального устройства плавности может приме-
няться любое устройство, но оно должно приходить в исходное
положение от кратковременного уменьшения давления в начале
заполнения бустера включаемой передачи. Для этого уменьшение
давления в магистрали в месте установки устройства плавности
должно быть достаточно продолжительным и глубоким. В случае
необходимости устройство плавности дополняют золотником, уп-
равляемым электроприводом от избирателя передач или от педа-
ли, который сливает жидкость из гндроаккумулятора устройства.
Средством борьбы с аварийным повышением частоты враще-
ния вала двигателя является блокировка несвоевременного вклю-
чения низшей передачи с помощью специального устройства, в ко-
тором выступы ограничительной пластины не позволяют перемес-
тить золотник, если шток не отжат пружиной (рис. 10.5).
Расчет устройства сводится к определению площади поверх-
ности поршня, жесткости пружины и конфигурации пластины.
Исходные данные для расчета можно получить из графика зави-
симости давления гидродинамического датчика * и частоты вра-
* Расчет гидродинамического скоростного датчика см. в. разделе 10.3.
22 Зак. 47 «с»
329
щения коленчатого вала двигателя от скорости ВГМ на всех пере-
дачах.
Схема гидросистемы управления КП ГМТ показана на рис. 10.6.
Рис. 10.5. Конструктивная схема (а) устройства, блокирующего включение низ-
шей передачи, и график (б) для его расчета:
I датчик скорости ВГМ; 2 — поршень со штоком. .1 ограничительная пластина; 4 ось
поводка золотинка; 5 — пружина; лд — частота вращения коленчатого вала двигателя
(сплошные линии); Рск — давление гидродинамического скоростного датчика (пунктир);
/, fl, /// — номера передач; // — нейтраль; ЗХ - передача заднего хода
Рис. 10.6. Схема гидросистемы управления КП ГМТ:
/ бак; 2 — насос; 3 — фильтр; 4 — клапан главного давления; 5 — устройство плавности;
6 распределитель; / — блокировочное устройство от датчика скорости; S золотник
распределитель; /, //, /// — номера передач переднего хода; И — нейтраль; ЗХ - переда-
ча заднего хода
330
Схема управления КП МТ включает в себя устройство, обеспе
чивающее трогание машины с места. Это устройство может быть
программным или управляемым водителем с помощью специаль-
ной педали. В качестве программного может применяться любое
центральное устройство управления нарастанием давления в бус-
терах. Управление программным устройством заключается в пода-
че сигнала для начала отработки программы.
При программном регулировании давления время буксования
фрикционных элементов при трогании с места в различных усло-
виях обеспечивается водителем в результате подбора режима ра-
боты двигателя.
Рис. 10.7. Варианты схемы
управления увеличением
давлении в бустерах МТ:
и управляет водитель; 6 уп
рлвляет устройство плавности
(стрелкой покатано воздействие
от педали управления); /
IV номера передач; ЗХ пе
редача заднего хода; /’ц — дав
леиие насоса
Схема устройства,
управляемого водите-
лем, представляет со-
бой простой следящий
золотник с приводом
от педали сцепления.
Зависимость давления
от угла наклона педа-
ли обычно линейная.
Эта схема очень прос-
та, но имеет сущест-
венные недостатки: во-
первых, неопытный во-
дитель всегда может
«сжечь» фрикционные
элементы КП, во-вто-
рых, при переключе-
нии передач водитель
не всегда может обес-
печить оптимальный режим нарастания давления.
На рис. 10.7 показаны оба варианта схемы управления увели-
чением давления в бустерах МТ.
Конструктору необходимо обеспечить минимальное время пере-
ключения передач и минимальные динамические нагрузки в эле-
ментах трансмиссии. Для этого нужно сократить время заполне-
ния бустеров КП, уменьшить число операций, выполняемых води-
22*
331
телем в процессе переключения, и исключить его субъективные
действия, которые могут привести к резкому нарастанию давле
ния в бустерах и динамическим перегрузкам. Наибольший
эффект можно получить с системой, позволяющей переключать
передачи без уменьшения подачи топлива в двигатель под на-
грузкой.
Расчет гидросистемы управления КП следует начинать с рас-
чета уравновешивания вращающихся бустеров. После этого мож-
но приступить к расчету процесса переключения передач; при этом
процесс выключения бустера предыдущей передачи не рассчиты-
вается, так как уравновешенный вращающийся бустер или бус-
тер тормоза выключается примерно за 0,05 с.
Рассмотрим процесс заполнения бустеров (рис. 10.8), приняв
следующие допущения:
Рис. 10.8. Гидравлическая схема бустера (а) и график изменения давления в
процессе его заполнения (б):
I — ход бустера; АБ БВ - линии заполнения и нарастания давления в бустере соотвстст
венно
подача насоса в процессе заполнения бустера постоянна;
инерцией подвижных деталей клапана и бустера можно пре-
небречь;
время перемещения распределителя не учитывается;
каналы от распределителя до бустера заполнены рабочей жид-
костью.
Определим снижение давления на трассе между клапаном и
бустером при расходе рабочей жидкости, равном подаче насо-
са QH:
др=8 т<?н | i (м/<л+| «2,
где L(. f-i, rf/— длина, коэффициент сопротивления трению, коэффициент
местного сопротивления и диаметр <-го канала соответственно.
Если Др<(ри — рБ), где рь — давление в бустере в конце его
заполнения, то время заполнения бустера
r=Sblb/QH.
332
Здесь 5б. /б — площадь поверхности и ход поршня.
Давление перед клапаном понижается:
Если Хр>(р„ рА), то давление перед клапаном сохраняется
постоянным, а заполнение бустера можно описать системой урав-
нений:
Qd7- $Б(1/Б;
Sbdp Cdlb,
где С —суммарная жесткость всех отжимных пружин.
Решив систему уравнений, получим время заполнения бустера.
В связи с тем, что зависимость p=f(t) близка к линейной, с до-
статочной для практики точностью можно принять
где Qcp — средний расход за время Т.
Для планетарных КП можно считать допустимым время запол-
нения бустеров до 0,3 с.
Выбор устройства плавности осуществляют на основании рас-
чета фрикционных элементов КП и анализа возможностей регули-
рования давления этим устройством. Обычно задаются общее
время нарастания давления и его значение в начале работы
устройства (см. точку В на рис. 10.3, 10.4).
Если между бустером и устройством плавности имеется боль-
шое сопротивление, то во время заполнения бустера (см. линию АВ
на рис. 10.3) давление в магистрали у устройства плавности мо-
жет оказаться выше заданного для точки Б. Следовательно,
расчет устройства плавности надо начинать с расчета процесса
заполнения бустера и построения графика изменения давления
устройством плавности.
Расчет устройства плавности типа «Гидро-Медиа», осуществ-
ляющего регулирование по линии ВЕМ (см. рис. 10.3), необходи-
мо начинать с определения диаметра клапана, через который
в процессе нарастания давления должна переходить вся рабочая
жидкость, подаваемая насосом.
Для уменьшения размеров клапана иногда в магистрали перед
устройством устанавливают сопротивление (жиклер), что приво-
дит к сбросу части рабочей жидкости через клапан главного
давления. Однако установка дополнительного сопротивления при-
водит к увеличению времени заполнения бустеров КП, что крайне
нежелательно.
Примем следующие условия:
работа клапана должна начинаться до страгивания поршня,
т. е. должно быть соблюдено равенство
Pff*\ e ^npl + ♦
333
усилие полностью поджатой пружины должно обеспечивать
надежное удержание клапана в закрытом состоянии, т. е.
Рн$1 < ^npl 4" max »
завершение регулирования должно наступать до полного под-
жатия пружины, т. е.
Ph^i = 4- С, (/| 4- /) ♦
где (А+/)</) т„;
площадь поверхности поршня должна обеспечивать полное
поджатие пружины, т. е.
Рн$2 > Рн$\ »
но не быть большой, потому что в этом случае в гидроаккумуля-
торе будет слишком низкое давление, поскольку p(=5ip/S2.
Размеры гидроаккумулятора должны обеспечивать одновре-
менное начало работы с поршнем клапана:
/>прз/5, = (Рир14-С,/1)/52.
Диаметр жиклера должен быть не менее 1,5 мм (для предот-
вращения засорения), жесткость пружины при этом должна обес-
печивать необходимое время регулирования давления Тр.
Жесткость пружины гидроаккумулятора выбирается с учетом
формулы (10.3):
2ЗДС.(/аГ- VpJ
с’ ~ -sjSjvV-asjS? '
Полный ход поршня гидроаккумулятора можно определить из
условия
Мз “ Рпрз 4* Сз^атвх> (10.6)
учитывая, что Pi=pHSi/S2:
Gmix = •
Аналогично могут быть определены основные зависимости для
выбора размеров и жесткости пружин других типов устройств
плавности.
Механическая часть системы управления МП состоит из орга-
нов управления (рычагов и штурвалов), соединенных механиче-
скими тягами с гидравлическим устройством, осуществляющим
регулирование давления в бустерах фрикционных элементов. Из-
вестно, что управление поворотом при помощи штурвала имеет
существенные преимущества перед управлением рычагами.
Необходимо рационально использовать ход органа управле-
ния, который в ВГМ значительно меньше, чем в автомашинах.
По этой причине система управления поворотом ВГМ имеет боль-
шую чувствительность, что ухудшает управляемость.
334
Максимально использовать полный угол отклонения органа
управления можно уменьшением нерабочих зон и выбором опти-
мальной характеристики гидросистемы.
В основе гидравлического устройства, осуществляющего регу-
лирование давления в бустерах фрикционных элементов МП, ле-
жит следящий золотник.
Схема следящего золотника для управления МП приведена на
рис. 10.9,а. В начальном положений кромки золотника перекры-
Рнс. 10.9. Схема следящего золотника (а) н характеристика его нлияния на
давление управления (б):
.1 начало регулирования давления; Б конец регулирования давления; И — конец на
раствния давления; а угол поворота органа управления (поводка)
вают паз, к которому подведено давление гидросистемы управле-
ния, и соединяют бустер со сливом. Давление в бустере равно
давлению в сливной магистрали. При перемещении вправо перед-
няя кромка золотника подойдет к подводящему пазу и откроет
щель, в которую начнет поступать рабочая жидкость, а задняя
кромка перекроет слив. При заполнении бустера будет увеличи-
ваться давление в полостях А и Б (перед золотником), соединен-
ных отверстием в золотнике. Под действием давления в полос-
ти Б золотник переместится, сжав пружину, перекроет подводя-
щий паз и откроет слив. Как только давление в полостях А и Б
уменьшится, золотник опять сдвинется вправо и откроет подвод
жидкости в полость А, т. е. золотник начнет совершать колебания
около равновесного состояния PJip =pS.
Чем больше поджата пружина, тем выше регулируемое давле-
ние. Предел регулируемого давления достигается, когда оно ста-
новится равным давлению в гидросистеме, или когда пружина
поджата до упора подвижной втулки в золотник, так как поводок
после этого будет перемещать золотник как одно целое, и давле-
ние в бустере увеличится скачкообразно и станет равно давлению
в гидросистеме.
335
Расчет золотника сводится к определению его диаметра и
усилия сжатия пружины. Жесткость пружины легко определить
из условия равновесия золотника в начале и конце регулирова-
ния давления:
^прА = Ра$ » СфБ = Рь$ •
откуда
С = S (рБ /?А)// •
Линейные размеры пит могут быть выполнены в вариантах
пет, п = т, п>т. Когда размер по золотнику меньше размера
по корпусу — перекрытие положительное, когда размеры равны —
перекрытие нулевое, когда размер по золотнику больше размера
по корпусу — перекрытие отрицательное.
Золотники с положительным перекрытием склонны к вибра-
циям, так как работают в колебательном режиме, но отличаются
минимальной утечкой. Золотники с отрицательным перекрытием
более устойчивы, но дают большую утечку. Золотники с нулевым
перекрытием трудоемки в изготовлении.
Для уменьшения утечки следящие золотники обычно выпол-
няются с положительным перекрытием. Для стабилизации работы
золотника с большим положительным перекрытием иногда соеди-
няют полости подвода жидкости к бустеру со сливом через две
симметричные лыски на цилиндрической поверхности золотника.
При положительном перекрытии от 0 до 1 мм глубина лысок со-
ставляет от 0,2 до 0,25 мм.
Дифференциальный МП может иметь блокировочный фрик-
ционный элемент, исключающий самопроизвольный увод ВГМ,
который включается в самом начале хода органа управ-
ления поворотом. Управление дифференциальным МП с
одним расчетным радиусом на каждой передаче аналогично пока-
занному на рис. 10.9. В точке А диски фрикциона сжаты, давле-
ние в бустере определяется усилием возвратных пружин. Точка Б
соответствует концу управляемой зоны включения фрикциона;
давление в бустере МП определяется расчетным радиусом пово-
рота в наиболее типичных условиях движения ВГМ (по условиям
сопротивления повороту и заданной скорости движения).
В двухступенчатом планетарном механизме поворота (ПМП)
управление от р —оо до свободного осуществляется фрикционом,
который при прямолинейном движении блокирует планетарный
ряд, а управление от свободного до расчетного радиусов осуще-
ствляется тормозом ПМП. От расчетного радиуса до р = 1 воз-
можно управление ОТ. В этом случае МП работает как бортовой
фрикцион.
Двухступенчатый ПМП может использоваться для получения
замедленной передачи. Управление поворотом на замедленной
336
передаче осуществляется только ОТ. На рис. 10.10, а, б приведены
схемы золотниковых устройств для управления двухступенчатым
ПМП с использованием ОТ.
Рис. 10.10. Схемы золотниковых устройств для двухступенчатых ПМП со следя-
щим (а) и дискретным (6) управлением ОТ и график изменения давления
в золотниковом устройстве со следящим управлением ОТ в повороте (я)
(обозначения см. в тексте)
Точка А (рис. 10.10, в), соответствующая перемещению рыча-
га на угол Qi, означает начало выключения фрикциона, точка Б —
начало управляемой зоны выключения фрикциона. Давление в
этой точке выбирают исходя из условий движения одиночной
ВГМ с высокой скоростью по хорошей дороге. Точка В соответ-
ствует концу управляемой зоны выключения фрикциона. Характе-
ризуется она отсутствием сжимающего усилия на дисках фрик-
циона, т. е. =0. Давление в бустере при этом
Р. = (^~Р^Б.
В точке Г давление в бустере тормоза ПМП определяется
условиями уравновешивания возвратных пружин:
337
Pr ^Ир/^Б •
В точке Д давление определяется типичными условиями дви-
жения, когда могут быть использованы радиусы поворота, близ-
кие к расчетному.
В точке Е тормоз ПМП должен быть полностью включен.
Если ПМП используется для прямолинейного движения как пони-
жающая передача, то тормоз рассчитывается на момент по сцеп-
лению с грунтом как фрикцион в точке А.
При перемещении поводка на угол от as до ae (ЕЖ) ВГМ
должна поворачиваться с расчетным радиусом. На этом участке
иногда предусматривается фиксатор, сигнализирующий водителю,
что тормоз ПМП включен полностью.
Остановочный тормоз подключается одновременно с выключе-
нием тормоза ПМП. На участке от а? до а8 происходит регулиро-
вание радиуса поворота от расчетного до р = 1. Давление в бус-
тере в точках 3 и И рассчитывается для наиболее типичных усло-
вий поворота (с расчетным радиусом и с р=1). В точке К дав-
ление в бустере ОТ максимальное. Остановочный тормоз должен
обеспечить поворот с радиусом р = 1 в наиболее тяжелых усло-
виях. При дискретном управлении ОТ в его бустер в точке И
подается полное давление управления.
Система управления МП должна обладать высоким быстро-
действием, чтобы водитель мог корректировать возникающие от-
клонения от выбранной траектории движения, не прибегая к спе-
циальным приемам управления поворотом, требующим навыков
и высокой квалификации.
Опытным путем установлено, что запаздывание гидроуправле-
ния и реагирования ВГМ на управляющее воздействие не должно
превышать 0,3 с. Запаздывание гидроуправления в основном за-
висит от быстроты заполнения бустеров.
Гидравлическое сопротивление следящего золотника при регу-
лировании низкого давления зависит от ширины щели между
кромкой золотника и пазом золотниковой коробки, через которую
поступает жидкость. Чтобы в точке Г (см. рис. 10.10, в) иметь до-
статочную ширину щели, нужно обеспечить начало регулирования
давления уже на угле поворота поводка aj . Если ширина щели
будет менее I мм, время заполнения заметно возрастет.
При проектировании гидросистемы управления МП необходи-
мо обеспечить минимальное гидравлическое сопротивление кана-
лов между золотником и бустером, чтобы золотник не прикрывал
проходное сечение кромкой при высоком давлении на выходе из
него. Подвод жидкости под торец следящего золотника (обратная
связь) лучше осуществлять не через золотник или канал в золот-
никовой коробке, а от бустера. Тогда золотник будет регулиро-
вать давление в самом бустере вне зависимости от давления в
подводящем канале.
338
Расчет механогидравлической системы управления остановоч-
ными тормозами. На месте водителя современной отечественной
ВГМ допускается установка тормозной педали с максимальным
ходом не более 180 мм. Если ход педали больше, то пользование
ею становится неудобным, так как для переноса ноги на педаль
водитель должен изменить позу. В то же время получение необ-
ходимого тормозного момента при приемлемом усилии на педали
возможно только при большом передаточном отношении механи-
ческого привода.
В связи с этим широко применяется гидравлическое сервирова-
ние механического привода управления ОТ и дистанционный
гидравлический привод (рис. 10.11).
Рнс. 10.11. Зависимость усилия отхо-
да тормозной педали танка
Т-64А с механическими приводами
(---------) и опытного танка с
дистанционным гидравлическим при
иодом (------------------)
Рис. 10.12. Характеристика экстрен-
ного торможения танка (обозначе-
ния см. в тексте)
Гидравлическое сервирование механического привода осущест-
вляется установкой сервогидроцилиндра, который воздействует
на тормозную тягу, уменьшая усилие, потребное для ее перемеще-
ния и создания тормозного момента. Сервирование может быть
полным или частичным. Полное сервирование требует, чтобы сер-
вогидроцилиндр создавал усилие, пропорциональное усилию или
перемещению педали, т. е. чтобы сервогидропривод обладал сле-
дящим свойством. При частичном сервировании допустимо диск-
ретное включение сервогидроцилиндра.
При дистанционном управлении ОТ представляется возмож
ным создать наиболее благоприятные условия для работы води-
теля, так как ход педали и усилие на ней могут быть любыми.
339
Применение дистанционной системы управления ОТ требует на-
личия горного и аварийного механических приводов, раздельных
с рабочим.
Процесс экстренного торможения танка складывается из не-
скольких этапов (рис. 10.12): психической реакции водителя
(Л); его физической реакции (Т2), состоящей в переносе ноги
с педали подачи топлива на тормозную педаль (Т'2) и выборе
свободного хода (7J); запаздывания срабатывания привода (Т3),
нарастания тормозного момента (Т4) и торможения с установив-
шимся замедлением а (Т3) за время Т.
Время психической реакции водителя в среднем равно 0,5—
0,6 с. Физическая реакция водителя зависит от хода, положения
и усилия на тормозной педали и может длиться от 0,15 до 0,5 с.
Запаздывание срабатывания привода зависит от его конструкции:
механические приводы его практически не имеют, а для гидравли-
ческих приводов считается допустимым время запаздывания, не
превышающее 0,18 с. Время нарастания тормозного момента зави-
сит от характеристики привода, его жесткости и быстродействия
и может достигать от 0,05 до 0,2 с.
Быстродействие тормозной системы может быть оценено пол-
ным временем ее срабатывания с момента начала действий води-
теля, т. е. суммой ЛЧ-^з+О.бЛ (вторая половина времени нарас-
тания тормозного момента относится ко времени торможения с
установившимся замедлением).
Полное время срабатывания современных механических приво-
дов составляет приблизительно 0,8 с, что считается допустимым
по условиям безопасности движения.
Сравнительные испытания показали, что при одной и той же
эффективности ОТ утомляемость водителя на танке с ГМТ и дис-
танционной гидросистемой управления существенно меньше, чем
на танке с МТ и механическими приводами, несмотря на более
частое использование ОТ и более высокую скорость движения,
что объясняется значительно меньшими усилиями и ходом педали.
Хотя запаздывание срабатывания гидропривода и время нараста-
ния тормозного момента в танке с ГМТ больше, удобное пользо-
вание педалью позволило уменьшить продолжительность тормо-
жения на 0,35с, что видно из следующих данных:
Танк Т'2 Т, Т3 7\
Т-64 А 0.4 0,4 — 0,05
Опытный 0,15 0,1 0.1 0,15
с ГМТ
Та +• Т3 4- Г,
0,85
0.5
Механический привод к тормозам, используемый как рабочий
или как горный, должен рассчитываться с учетом потерь при пе-
редаче усилия от педали (или рычага) к дискам тормозов.
340
Расчет сервогидроцилиндров. На рис. 10.13, а приведена схема
сервогидроиилиндра с двойной обратной связью. Сер-
вогидроцилиндр устанавливается в непосредственной близости от
тормозной тяги и соединяется трубопроводами с гидросистемой
управления и масляным баком.
Рис. 10.13. Схемы сервогндроцилнндров:
а - с двойной обратной связью; б —с механической обратной связью; Г тяга, соединенная
с тормозной педалью; 2 —тяга, соединенная с при подом к тормозам; 3- штоь золотника;
1 — следящий золотник; 5 — поршень цилиндр.)
Сервогидроцилиндр работает следующим образом. При пере-
мещении тяги, соединенной с тормозной педалью, кромка следя-
щего золотника подходит к пазу, через который подается рабочая
жидкость из гидросистемы. Следящий золотник начинает регули-
ровать давление под поршнем сервоцилиндра, жестко связанного
с тормозами. Поршень начинает двигаться вслед за следящим
золотником, выбирая зазоры в тормозах. Когда поршень остано-
вится, давление пол ним поднимется до полного сжатия пружины
(выбирается ход /3), следящий золотник откроет проходное сече-
ние— давление под поршнем сравняется с давлением в гидроси-
стеме, диски тормозов сожмутся.
При полностью выбранном зазоре Л между пальцем тормоз-
ной тяги и проушиной штока поршня усилие, развиваемое серво-
цилиндром, суммируется с усилием от тормозной педали. Этого
должно быть достаточно для экстренного торможения и удержа-
ния ВГМ на предельном угле подъема.
При расчете сервогидроиилиндра можно использовать зависи-
мость
/1=/2-Нз+ЛЛ
где G — зазор между следящим золотником и поршнем цилиндра; /3 —ход сле-
дящего золотинка; М — гарантированный зазор между пальцем тяги 1 и про-
341
ушиной штока, необходимый для полного использования пружины следящего
золотника.
Если после окончания регулирования давления в гидроцилинд-
ре предусмотрено скачкообразное повышение давления до его
значения в подводящей магистрали, то зазор должен быть около
1 мм.
Максимальное давление, регулируемое следящим золотником
Л.., с (/, + /,) (5,-5,).
где S| и — площади штока и следящего золотника; /0 — первоначальное под-
жатие пружины; С—жесткость пружины следящего золотника.
Минимальное (начальное) давление в гидроцилиндре
Pn.in = C/0/(S2-S1).
Это давление следует выбирать таким, чтобы усилие, развиваемое
гидроцилиндром, было примерно равно усилию сопротивления
привода к тормозам.
Усилие, развиваемое гидроцилиндром, без учета трения уплот-
нений определяется по формуле
Р = pS3,
где Sj — рабочая площадь поршня.
На рис. 10.13, б приведена схема сервогидроцилиндра с ме-
ханической обратной связью. Тяга, жестко соединен-
ная с тормозной педалью, перемещает золотник, а поршень
остается на месте из-за зазора в проушине. Золотник открывает
подводящий канал и перекрывает сливной, рабочая жидкость
устремляется в запоршневое пространство и перемещает поршень
вслед за золотником. Если быстродействие сервогидроцилиндра
достаточно, то поршень будет выбирать свободный ход, переме-
щая тягу 2, а зазор в проушине будет сохраняться. Если быстро-
действие недостаточно, то зазор в проушине будет выбран, тя-
ги 1 и 2 соединятся, нагружая педаль усилием, потребным для
выбора свободного хода в ОТ. Когда тяга 2 остановится, сжав
диски ОТ, а тяга / выберет зазор в проушине, усилие, развивае-
мое сервогидроцилиндром, будет суммироваться с усилием от
педали, обеспечивая необходимый тормозной момент.
Если бы привод к ОТ был абсолютно жестким и тяга 2 после
выбора свободного хода при возрастании усилия не перемеща-
лась, то усилие в сервогидроцилиндре нарастало и падало бы
скачкообразно в зависимости от взаимного положения поршня и
золотника. Реальные приводы не обладают большой жесткостью,
поэтому после выбора свободного хода давление в запоршневом
пространстве растет и продвигает поршень дальше за счет дефор-
мации привода и деталей ОТ (усилием возвратной пружины зо-
лотника пренебрегаем):
l=pSIC„(p).
342
где/ — перемещение поршня; р—давление в запоршневом пространстве; S —
площадь поверхности поршня; С„ (Р) — жесткость привода и деталей тормоза
как функция нагрузки.
Перемещение поршня прекратится, как только он, догнав зо-
лотник, перекроет подвод рабочей жидкости в за поршневое про-
странство кромкой золотника и откроет сливной канал. Часть
жидкости сольется, давление в запоршневом пространстве упадет,
поршень переместится назад, и золотник опять откроет подводя-
щий канал в запоршневое пространство и закроет слив. Поршень
начнет совершать колебательные движения вокруг равновесного
состояния, которое можно записать так:
pS=ICn.
Расчет сервогидроцилиндра нужно начинать с определения
потребного максимального усилия и диаметра поршня. При час-
тичном сервировании нужно ограничить усилие на педали при
выборе свободного хода. При полном сервировании усилие опре-
деляется потребным замедлением ВГМ при торможении и удер-
жанием ее на подъеме. Следует учитывать потери в механическом
приводе и деталях ОТ.
Гидравлический расчет cepeoi идроцилиндров сводится к расче-
ту быстродействия, зависящего от подачи рабочей жидкости.
Применение того или иного сервогидроцилиндра зависит от
жесткости механического привода и деталей ОТ. При жестком
приводе регулирование давления с сервогидроиилиндром, имею-
щим механическую обратную связь, может оказаться затрудни-
тельным, поэтому предпочтительнее применение сервогидроци-
линдра с двойной обратной связью.
При частичном сервировании (только для выбора свободного
хода и рабочего притормаживания) целесообразно применять
обычный гидроцилиндр с дискретным включением.
Расчет дистанционной гидросистемы управления ОТ. На
рис. 10.14, а показана схема дистанционной гидросистемы управ-
ления ОТ, являющейся частью трансмиссионной
гидросистемы, которая была применена на ВГМ с
ГМТ-69021. Высокое быстродействие системы обеспечивается ра-
бочим цилиндром дифференциального типа; выбор свободного
хода происходит при перемещении поршня малого диаметра, а в
создании усилия участвуют оба поршня, но большой поршень
имеет малый ход.
Расчет такого цилиндра сводится к выбору диаметров поршней
и усилия возвратной пружины. Диаметр малого поршня должен
быть достаточным, чтобы давление, передаваемое от следящего
золотника, могло в самом начале хода педали выбрать свобод-
ный ход в приваде к ОТ. Диаметр большого поршня должен быть
достаточным для создания усилия, способного обеспечить экстрен-
343
Рис. 10.14. Схема дистанционной гидросистемы управления тормозами:
и - в ход я те Л в трансмиссионную гидросистему (ГМТ-69021); б — автономной (танк «Лео-
пард (в); / — гидростатический привод к тормозной педали; 2 клапан, регулирующий
давление в тормозах; 3 — клапан разделитель; Г клапан, регулирующий давление в гид
росистеме; 5 — к тормозным цилиндрам
При расчете используются следующие основные зависимости:
Рцил
где РСи — усилие, необходимое для выбора свободного хода; Si, Sj— площадь
поверхности малого и большого поршней соответственно, р\ — начальное дав-
ление, создаваемое следящим золотником; Р,р,С,1 — начальное усилие воз
вратной пружины, ее жесткость и полный ход большого поршня соответственно;
Рцил ~ полное усилие гндроцилиндра; ра—полное давление в гидросистеме.
Размер I должен выбираться с учетом его увеличения из-за
износа дисков ОТ.
На рис. 10. 14,б приведена схема автономной дистан-
ционной гидросистемы управления ОТ танка «Лео-
пард-1». Гидросистема имеет свой бак с фильтром, гидроаккуму-
лятор и распределительно-регулирующие устройства. Когда пе-
даль ОТ отпущена, а гидроаккумулятор заряжен, насос через
клапаны подает рабочую жидкость обратно в бак. Когда педаль
344
выжата и слив через клапан 3 закрыт, рабочая жидкость из гид-
роаккумулятора и от насоса поступает к рабочим цилиндрам ОТ,
давление в которых регулируется поджатием клапана 2. Зарядка
гндроаккумулятора происходит при полностью выжатой педали,
максимальное давление в этом случае регулируется клапаном 2;
давления в гидроаккумуляторе хватает на четыре торможения
после остановки двигателя.
Расчет гидродинамических тормозов (гидрозамедлителей). На-
иболее распространенная схема гидросистемы управления с ГЗ
(рис. 10.15, а) применяется в американских автомобильных ГМТ.
Золотник управления ГЗ имеет механический привод от педали
ОТ. Если она отпущена, вход и выход из ГЗ соединены со сливом.
При нажатии на педаль выход из ГЗ соединяется с подводом к
радиатору, а вход —с магистралью подпитки ГТ. В тормозном
режиме через ГТ рабочая жидкость не прокачивается; она на-
правляется в ГЗ, а из него в радиатор и далее поступает в под-
систему смазки трансмиссии. Управление осуществляется кром-
кой золотника, имеющего большую фаску, открывающую подво
дящий канал.
Рис. 10.15. Схема гидросисте
мы управления с ГЗ:
а — автомобильной американской
трансмиссии XT 200 (/ - рсгулиру
ющнй золотник, соединенный с
тормозной педалью: 2 — на смазку;
J — из ГТ; 4 — ГЗ; 5 — от входа
в ГТ); б — американской трансмнс
сии ДР-8000 U — регулирующий
золотник, связанный с тормозной
педалью; 2 ГЗ; 3 — из ГТ;
4 клапан ГТ; 5 — клапан ГЗ)
На рис. 10.15,6 приведена другая схема управления с ГЗ, при-
меняемая в американской автомобильной трансмиссии ДР-8000
большой мощности. Здесь движение рабочей жидкости через ра-
диатор осуществляется самим ГЗ за счет качающих свойств.
Золотник управления ГЗ, как правило, соединяется с тормоз-
ной педалью; ГЗ начинает заполняться раньше, чем включаются
ОТ, что позволяет уменьшить износ ОТ.
345
Расчет гидросистемы управления ГЗ заключается в определе-
нии площади проходных сечений для обеспечения быстрого его
заполнения и прокачки (если она осуществляется насосом), пре-
дупреждающей перегрев рабочей жидкости. Если прокачка рабо-
чей жидкости осуществляется самим ГЗ, то нужно рассчитать
расход, зная напор, который может создать ГЗ.
10.2 СИСТЕМА АВТОМАТИЧЕСКОГО ПЕРЕКЛЮЧЕНИЯ
ПЕРЕДАЧ (САПП)
Задача создания САПП стала первоочередной потому, что в
танке процессы переключения передач являются наиболее трудо-
емкими из алгоритмов управления движением; они существенно
влияют на формирование динамических и топливно-экономических
характеристик танка, составляют значительную долю в спектре
динамического нагружения всех сборочных единиц трансмиссии.
Исследованя показали, что применение системы автоматического
переключения передач обеспечивает снижение энергозатрат води-
телей в 2—2,5 раза, повышение средней скорости движения
до 10 % и снижение расхода топлива до 20 %.
Общие технические требования к САПП. Система автомати-
ческого переключения передач должна обеспечивать:
выбор момента времени и направления («вверх» или «вниз»)
переключения передач;
регулирование режимов функционирования составных частей
МТУ в период переходного процесса переключения передач;
исключение аварийных режимов при переключении передач;
использование всего поля тяговой характеристики танка;
работу МТУ на экономичном режиме;
минимальное время разрыва потока мощности при переключе-
нии передач;
исключение цикличности;
уменьшение количества нерациональных переключений;
переход с автоматического режима управления на ручной (по-
луавтоматический) и обратно;
приоритет ручного управления.
Система автоматического переключения передач выбирает
моменты времени переключения передач, определяет направление
переключения (на высшую или на низшую передачу), выполняет
алгоритм переключения, исключает возможность аварийного раз-
рушения агрегатов МТУ, обеспечивает водителю ощущение уве-
ренности при управлении машиной, так как в любой момент вре-
мени можно перейти на режим ручного управления. Одновремен-
но эти свойства системы позволяют снизить требования к уровню
квалификации водителя, сократить сроки его обучения, снизить
объем тренировок для поддержания надлежащей степени адапта-
ции к машине.
Особого внимания требуют вопросы устранения цикличности
и нерационального переключения передач. Явление цикличности
346
заключается в возникновении непрерывно чередующихся переклю-
чений с высшей передачи на низшую и обратно. Нерациональным
или технически необоснованным переключением передач назы-
вается такое, которое в аналогичных условиях мастер вождения
не производит.
Формальная задача САПП — своевременное переключение пе-
редач в трансмиссии, для чего в нее необходимо ввести информа-
цию о режимах работы МТУ и движения танка (частоте враще-
ния коленчатого вала и нагрузке двигателя или о скорости дви-
жения танка и удельной силе тяги). Выходными сигналами САПП
являются команды-программы на выполнение алгоритма переклю-
чения передач.
Структурная схема двухпараметрической САПП представлена
на рис. 10.16.
Рис. 10.16. Структурная схема двухпарамет-
рической САПП:
/ — блок алгоритмов управления; 2 - блок выбора
программы управления; 3. 4 датчики информации
о скорости движения и удельной силе тяги; 5 - блок
коррекции управления; 6 блок формирования ко
манд; 7 исполнительные органы системы управ
Ленин; в — рабочие органы трансмиссии
Блок алгоритмов управления яв-
ляется библиотекой программ управ-
ления, предусмотренных САПП. Ин-
формация о скорости движения танка
поступает в блоки выбора алгоритма
управления и коррекции в виде сигна-
ла, который может быть двух видов:
полнодиапазоиный и внутридиапазон-
ный. Полнодиапазонный сигнал может
быть получен от любого
выходного звена трансмиссии до ведущей звездочки включитель-
но; внутридиапазонный от звеньев трансмиссии, связанных с
коленчатым валом двигателя, или от турбинного колеса ГТ, но
обязательно с учетом номера передачи.
Информация об удельной силе тяги, сопротивлении движению
или нагрузке двигателя также поступает в блоки выбора алго-
ритма управления и коррекции. Обычно эта информация отра-
жает регуляторную характеристику двигателя, заданную води-
телем.
Блок коррекции имеет логические схемы, которые учитывают
соотношения параметров управления или их изменение.
Блок выбора программ управления с учетом информации о
скорости, нагрузке и коррекции, а также обратных связей выби-
рает алгоритм управления и запускает его для реализации в блок
формирования команд, задачей которого является реализация
алгоритма управления. Управление движением и режимами ра-
боты агрегатов МТУ (с формированием переходных процессов)
347
многоканальное. В процессе могут участвовать несколько управ-
ляемых элементов. Блок выдает команды в исполнительные орга-
ны системы управления, которые приводят в действие рабочие
органы агрегатов МТУ.
Блок выбора программ «запирается по входу» до полного за-
вершения программы, что исключает наложение или утрату
команд. Если в момент реализации программы водитель перейдет
на ручной режим управления, то выполнение программы должно
быть прервано и начата отработка программы, заданной води-
телем.
Выбор законов переключения передач. Законы переключения
передач выбираются по комплексной тяговой характеристике тан-
ка, которая должна отражать внешнюю и регуляторные характе-
ристики двигателя и строиться для всех передач, стыки которых
автоматизируются.
При построении комплексной тяговой характеристики жела-
тельно использовать экспериментальные данные и нанести на гра-
фик линии равных часовых расходов топлива.
На рис. 10.17, а, б показано, как по точкам пересечения линий
равных часовых расходов может быть построена линия АБВ,
которая с точки зрения топливной экономичности является опти-
мальным законом переключения смежных передач. Однако рабо-
тать по оптимальному закону переключения САПП не может из-за
явления цикличности, сущность которого поясним с помощью
рис. 10.18. _____
Рис. 10.17. Комплексная тяговая характеристика для одного стыка передач тан
ка с ГМТ (а) и МТ (б) (цифрами указаны линии равных часовых расходов
топлива)
Линия АБВ на рис. 10.18 является оптимальным законом пере-
ключения передач. Пусть режим движения танка соответствует
работе двигателя на 7-й регуляторной характеристике. Изменение
сопротивления движению с уровня |я, до уровня fa2 обусловлю
вает разгон танка. На высшей передаче танк может двигаться со
скоростью не менее ю3. Разгон на низшей передаче продолжается
до линии БВ. На режиме движения, соответствующем точке Г,
САПП выполнит переключение на высшую передачу. Если не из-
348
менять режим работы двигателя, танк окажется на режиме дви-
жения Г|, который требует от САПП включения низшей пере-
дачи. Если низшая передача включается, танк оказывается на
режиме движения Г, требующем переключения на высшую пере-
дачу, т. е. цикл замыкается. Без применения специальных мер
водителем или изменения условий движения цикличность может
Рис. 10.18. Цикличность переключения смежных передач в танке с ГМТ и дви-
гателем со всережимным регулятором (оботначення см. в тексте)
продолжаться неопределенно долго. Она возникает потому, что
включенная высшая передача не фиксируется САПП, так как
скорость танка Ot в момент переключения меньше и2 (минимально
возможной скорости на высшей передаче при 7-й регуляторной ха-
рактеристике двигателя), а включение низшей передачи создает
избыточную силу тяги и разгон танка до скорости U|, требующей
переключения. Если танк двигается на режимах, соответствующих
3-й регуляторной характеристике, то, достигнув линии АБ, САПП
выполнит переключение на высшую передачу. На участке от точки
пересечения линии АБ регуляторной характеристикой низшей пе-
редачи до этой же характеристики, принадлежащей высшей пере-
даче, происходит разгон танка и одновременно выход двигателя
на внешнюю характеристику. Поскольку разгон осуществляется
по внешней характеристике и 3-й регуляторной, передача зафик-
сирована. Переключение передач с высшей на низшую аналогии
но, но цикличность может возникнуть и на линии АБ, за исклю-
чением режима движения с полной подачей топлива в двигатель.
Линии А К и БЕЖ определяют режимы работы двигателя после
переключения по оптимальному закону.
Разрыв потока мощности при переключении передач и соот-
ветственно снижение скорости движения танка и повышение час-
349
тоты вращения коленчатого вала двигателя являются второй при-
чиной возникновения цикличности.
Способ исключения цикличности, наиболее распространенный
в танковых САПП, получил название «раздвижка законов пере-
ключения передач». Он состоит в том, что переключение передач
осуществляется не по одному (оптимальному) закону, а по двум —
«вверх» и «вниз». Закон переключения «вверх» назначается при
более высокой скорости движения, а переключение «вниз» при
меньшей, чем та, которая соответствует оптимальному закону.
Раздвижка законов переключения передач ведет к снижению топ-
ливно-экономических и динамических характеристик танка и по-
этому должна быть минимальной, достаточной для исключения
цикличности. Она характеризуется максимальным значением ко-
эффициента возврата
где V| — скорость, при которой осуществляется переключение с низшей на выс-
шую передачу; —скорость, при которой осуществляется переключение с выс-
шей на низшую передачу.
Коэффициент возврата определяется при постоянных значе-
ниях остальных параметров регулирования.
Примеры применения метода «раздвижки законов переключе-
ния передач» показаны на рис. 10.19.
Точка А (см. рис. 10.19, а) определяется при построении комп-
лексной тяговой характеристики. Пользуясь принятым значением
Л,, определяют точку Г закона переключения с высшей на низ-
шую передачу. Участок ГД и точки регуляторных характеристик
на нем определяют настройкой САПП. Участок ДЕ строится как
линия, параллельная оптимальному закону переключения МН.
Затем определяется линия Е'Д'Г'Г' режимов работы при пере-
ключении с высшей на низшую передачу. Построением от обрат-
ного находится закон переключения с низшей на высшую пере-
дачу — линия АБВ. С учетом времени переключения передач
и соответствующего ему снижения скорости движения опре-
деляется положение линии Б'В', как линии режимов работы после
переключения с низшей на высшую передачу.
Запас скорости, обусловленный промежутком между характе-
ристиками режимов работы после переключения передач и зако-
нами переключения, обеспечивает устойчивость работы САПП и
отсутствие цикличности. При переключении передач от высших
к низшим образуется неиспользуемая зона тяговой характеристи-
ки АГГ'1.
Законы переключения могут корректироваться. Необходимо,
например, иметь в виду, что особенностью тяговой характеристи-
ки танка с ГМТ является наличие двух зон высоких путевых рас-
ходов топлива. Первая (в области высоких скоростей движения)
объясняется спецификой топливно-экономической характеристики
двигателя, в которой расход топлива увеличивается с повыше-
нием частоты вращения коленчатого вала и снижением нагрузки.
;i50
Вторая является следствием снижения КПД ГТ в зоне низких
частот вращения. Поэтому зона экономичных режимов работы
расположена в середине скоростного диапазона каждой передачи.
Положение точки А закона переключения от низших передач
к высшим на регуляторной характеристике низшей передачи тре-
бует высокой точности измерения параметров и влияет на интен-
сивность разгона танка. Поэтому закон целесообразно скорректи-
ровать переносом точки А в точку Г.
Рис. 10.19. Реальные законы переключения передач в танке с ГМТ (а) и в тан
ке с МТ и всережимным регулятором двигателя (б) (обозначения см. в тексте)
Аналогично формируются законы переключения передач для
МТ (см. рис. 10.19,6). Необходимо иметь в виду, что в этом
случае плотность размещения стыков передач по координате
скорости значительно выше, чем для ГМТ. Уменьшение перекры-
тия передач по скорости и увеличение разрыва по тяге требуют
особого внимания к точности и быстродействию САПП. Линии АБ
(закон переключения с низшей передачи на высшую) и ВГД
(обратного переключения) строятся аналогично. При переключе-
нии передач от высших к низшим образуется неиспользуемая зо-
на АВВ'1, При переключении передач от низших к высшим дви-
351
гатель выходит на внешнюю характеристику, при переключениях
«вниз» — на линию В'ГД'Д. Переносить точку А в точку I не ре-
комендуется, так как из-за разрыва силы тяги в точках А и В
при движении на этих режимах может возникнуть цикличность.
Для повышения общей устойчивости САПП законы переключения
рекомендуется сдвинуть в область более высокой частоты враще-
ния коленчатого вала двигателя.
Анализ топливно-экономических, динамических характеристик
ВГМ, структуры МТУ, конструктивных особенностей двигателя и
трансмиссии — не единственный источник информации для кор-
рекции законов переключения передач. Необходимо анализиро-
вать специфические технические требования к ВГМ, связанные
с требованиями к ее подвижности, типовые дорожные и эксплуа-
тационные ситуации, режимы работы МТУ и движения ВГМ,
приемы управления движением.
Параметры управления. Действие САПП по заданным законам
может быть обеспечено, если она реагирует, по крайней мере,
на два управляющих параметра, которые характеризуют ско-
рость движения танка и загрузку двигателя. При использовании
большего количества управляющих параметров САПП дополни-
тельно могут быть обеспечены следующие свойства: точность,
устойчивость, коррекция законов, формирование задержек и т. д.,
но при этом она усложнится, что не всегда оправдано.
На современном уровне развития техники в качестве управ-
ляющих можно использовать следующие параметры:
скорость ВГМ о (обычно используется частота вращения вы-
ходных звеньев трансмиссии или бортового редуктора);
частоту вращения коленчатого вала двигателя п, которая в
сочетании с номером включенной передачи характеризует ско-
рость ВГМ;
частоту вращения турбинного колеса пт. которая в ГМТ ис-
пользуется так же, как п\
положение рейки топливного насоса двигателя 5Р, определяю-
щее загрузку двигателя;
положение педали подачи топлива ат, определяющее скорост-
ной режим двигателя со всережимным регулятором, а при извест-
ной характеристике двигателя — предельные значения момента и
мощности.
Наибольшее распространение получило сочетание управляю-
щих параметров v и ат, так как они не подвержены резким и су-
щественным изменениям в процессе переходного режима переклю-
чения передач.
Общие рекомендации по проектированию САПП. Минималь-
ный автоматизированный диапазон тяговой характеристики танка
должен охватывать все нормальные условия движения по танко-
вым трассам и грунтовым дорогам; обычно он ограничен динами-
ческим фактором 0,25-0,3 для ГМТ, а для МТ не менее 0,28.
352
Система управления КП помимо САПП должна иметь привод
ручного управления, приоритет которого обеспечивается обяза-
тельно.
Законы переключения передач подбираются для каждого сты-
ка отдельно, поскольку k„ зависит от сопротивления движению.
Можно принять: для бетонной дороги £,=0,99. . . 0,97, для легких
и средних грунтов 0,94—0,82, для тяжелых 0,8—0,75.
Основным средством устранения цикличности является раз-
движка законов переключения по скорости движения. В танках
раньше цикличности проявляется эффект нерациональных пере-
ключений, основным средством борьбы с которым является за-
держка исполнения команд на переключение, что также является
коррекцией законов переключения. Задержку можно формировать
по трем принципам: как формальный сдвиг закона переключения;
как запрет, налагаемый водителем; как коррекцию законов пере
ключения, учитывающую динамику управляющих воздействий или
движения танка.
Задержка как формальный сдвиг закона
переключения основана на том, что САПП всегда быстрее
выполняет алгоритм переключения передач, чем водитель. Зная
время переключения передач «вверх» и «вниз», обеспечиваемое
САПП и водителем по разным стыкам, в САПП можно ввести
осредненную разность, как задержку исполнения команд на пере-
ключение. Задержка не превышает 1,5—2,0 с и не приводит к ощу-
тимому ухудшению топливно-экономических и динамических ха-
рактеристик танка.
Задержка как запрет на переключение, на-
лагаемый водителем, может формироваться только по параметру
®т, т. е. она связана с воздействием водителя на педаль управле-
ния режимом работы двигателя. Обычно переключение «вверх»
разрешается только приат >-0.9ат т„ , а при переключении «вниз»
назначаются два закона: упрежденного и нормального переклю-
чения. Закону упрежденного переключения для тяжелых продол-
жительных условий движения (затяжной подъем и т. д.) соответ-
ствует ат>0,9атт„ , а начало переключения соответствует ско-
рости на высшей передаче стыка с учетом ее снижения за время
переключения настолько, что включение низшей передачи про-
• изойдет в пределах заданной регуляторной характеристики дви-
гателя.
Задержки, учитывающие динамику управ-
ляющих воздействий водителя и изменение режима дви-
жения танка, основаны на оценке разбалансирования САПП по
параметрам как явления кратковременного и нс требующего пере-
ключения передач. Задерживается переключение передач «вверх»
при резком отпускании педали, характеризуемом параметром
— dor/dT, и переключение «вниз» при резком нажатии на педаль
(по daT/dT). Аналогично вводятся задержки по ±:dv/dT.
23* Зак. 47 ,С- 353
I
I
Увеличение количества переключений передач является неиз-
бежным следствием применения одно- и двухпараметричеоких
САПП. По основному контуру управления система оценивает
каждое текущее состояние как статическое и решает задачу под-
бора оптимальной передачи на данное состояние, т. е. функциони-
рует формально. Этот недостаток САПП можно считать несуще-
ственным, если не возникает угрозы повышенного износа деталей
или снижения надежности (долговечности и безотказности сбо-
рочных единиц МТУ).
Опыт показывает, что задача создания САПП для ГМТ легче,
чем для МТ, поскольку гидромеханическая трансмиссия имеет
меньшее количество автоматизируемых стыков; законы переклю-
чения передач располагаются достаточно далеко друг от друга,
чтобы без дополнительных средств и повышения требований к точ-
ности избежать сбоев в работе САПП. Демпфирующие качества
ГТ, его внутренняя автоматичность позволяют упростить требова-
ния к системам регулирования переходных процессов при пере-
ключении передач. Алгоритм переключения передач может иметь
равное с механической трансмиссией количество операций управ
ления, но, помимо сниженных требований к точности, в ряде слу-
чаев позволяет заменить аналоговое управление дискретным.
Электрогидравлические системы, у которых измерительная
(датчиковая), функционально-программная (логическая) и ко-
мандная части электрические, а исполнительная — гидравлическая,
имеют погрешность порядка 5 %. Гидравлические и механогидрав-
лические САПП, получившие широкое распространение в автомо-
бильном транспорте, имеют погрешность не менее 10 %. Следует
иметь в виду, что незначительные отклонения от заданных зако-
нов переключения приводят к существенным отклонениям режи-
мов работы МТУ от оптимальных.
Логическая, вычислительная и программная части САПП, а
также «память» системы создаются в виде схем с применением
обычных элементов электронной техники. В качестве датчиков
скорости применяются тахогенераторы. Основной недостаток их
состоит в том, что при замене тахогенератора необходимо перена-
страивать систему. В качестве датчиков перемещения обычно ис-
пользуются потенциометры, недостатками которых являются их не-
долговечность и наличие трущихся контактов. В качестве испол-
нительных элементов применяются электромоторы и электромаг-
ниты. При выборе элементов предпочтительно применять
устройства, не имеющие изнашивающихся частей и разрывающих-
ся контактов.
10.3. СИСТЕМА автоматической блокировки
ГТ В ГМТ
Автоматическая блокировка гидротрансформатора осуществ-
ляется для перевода гидромеханической трансмиссии на режим
354
механической с целью повышения топливной экономичности танка
на эксплуатационных режимах работы двигателя.
Выбор законов блокировки-разблокировки ГТ зависит от со-
вмещения его характеристик и двигателя, рабочего диапазона дви-
гателя и т. д. — от всех факторов, влияющих на формирование
тяговой характеристики танка (рис. 10.20).
Рис. 10.20. Законы блокировки-разблокировки ГТ (обозначения см. в тексте)
Законы блокировки-разблокировки ГТ на внешней характерис-
тике строят вблизи точки А, расположенной на тяговой характе-
ристике при меньших значениях 1/i, чем необходимо для перехода
ГТ на режим ГМ.
Выбор законов блокировки-разблокировки ГТ — тот же, что
при переключении передач, одна из которых гидромеханическая,
а другая — механическая. Линия БВ — характеристика сблокиро-
ванного ГТ. Линия Б'ДВ— характеристика двигателя после бло-
кировки ГТ. Линия ЖГ характеристика разблокированного ГТ,
ГЕЖ'— характеристика режимов работы двигателя после разбло-
кировки.
Поскольку процесс блокировки-разблокировки ГТ не требует
столь высокой точности, как САПП, применение гидроавтоматики
для решений этой задачи вполне приемлемо.
Гидравлическая схема автоматической блокировки ГТ вклю-
чает в себя переключающий золотник и измерительный преобра-
зователь частоты вращения турбинного колеса ГТ — однопарамет-
рическая система. Иногда в схему включается измерительный пре-
образователь положения педали управления режимом работы дви
гателя — двухпараметрическая система. Переключающий золот
ник представляет собой обычный плунжерный двухпозиционный
золотник. Под одним торцом золотник имеет пружину, под дру-
гой подводится под давлением рабочая жидкость от измеритель-
ного преобразователя частоты вращения турбинного колеса ГТ.
При достижении расчетной скорости золотник перемещается,
сжимая пружину, и включает фрикцион блокировки ГТ. При сни-
жении скорости танка (частоты вращения турбинного колеса)
происходит выключение фрикциона. Измеритель-преобразователь
положения педали управления режимом работы двигателя пред
ставляет собой обычный, следящий по давлению, золотник. Рабо-
355
чая жидкость от него под давлением, пропорциональным поло-
жению педали, поступает в полость пружины переключающего
золотника. В этом случае будет иметь место двухпараметрическое
управление блокировкой ГТ.
На рис. 10.21 представлена схема гидродинамического скорост-
ного измерительного преобразователя, являющегося датчиком час-
тоты вращения турбинного колеса ГТ. Он представляет собой
вращающееся жидкостное кольцо, в котором размещена заборная
трубка (трубка Пито). Жидкостное кольцо образуется во вра-
щающемся кольцевом желобе, имеющем радиальные лопатки для
уменьшения скольжения жидкости. Подпитка жидкостного коль-
ца осуществляется через трубку, устанавливаемую непосредствен-
но после заборной трубки, конструктивно оформленной в виде
ножа.
Рис. 10.21. Схема датчика частоты вращения турбинного колеса ГТ:
а — гидравлическая схема; б — характеристика преобразователя; // радиус расположения
отверстия заборной трубки; //„ — радиус поверхности жидкостного кольца; •• -угловая
скорость вращения жидкостного кольца; Рск - давление, создаваемое измерительным пре
образователем
Давление в заборной трубке складывается из скоростного на-
пора и центробежного давления:
рс - = Т”3 (Л2 - $)/2 •
Давление, создаваемое измерительным преобразователем,
представляет собой сумму:
Ак = Рс + Ри = Iе»’ (2 R* - /?о)/2 .
Для учета потерь в формулу вводится поправочный коэффи-
циент, который можно назвать КПД измерительного преобразо-
вателя:
/»„ = Т»,Ч(2Л,-Л?)/2.
Значение этого коэффициента находится в пределах от 0,6 до 0,8.
356
10.4. ПЕРСПЕКТИВЫ РАЗВИТИЯ СИСТЕМ УПРАВЛЕНИЯ
ДВИЖЕНИЕМ ТАНКА
Совершенствование систем управления движением танков обу-
словлено необходимостью решения задач:
реализации характеристик человека как звена управления при
движении машины в течение длительного времени;
максимального использования некоторых свойств танков (под-
вижности, надежности) при решении боевых задач в различных
обстоятельствах;
обеспечения специфических требований по управлению при со-
здании новых образцов бронетанковой техники.
Для решения этих задач требуется комплексный подход к рас-
чету и проектированию органов управления, приводов, алгорит-
мов, передаточных функций и характеристик управления, автома-
тизации, созданию новых подсистем и согласованию их с основной
системой управления.
Достаточно отчетливо наметилась тенденция «автомобилиза-
ции» органов управления водителя. Для автомобилей различных
назначения, типов и конструкций характерны единая номенклату-
ра и назначение органов управления; их расположение и кон-
струкция подобны; алгоритмы управления единообразны, что спо-
собствует быстрой адаптации всего контингента водителей к ма-
шине, сокращению сроков их обучения и повышению качества
управления.
Создание рабочего места водителя танка, полностью аналогич-
ного месту водителя автомобиля, вряд ли возможно, но прибли-
жение его к автомобильному по конструктивному исполнению,
взаимному расположению, назначению органов управления и
алгоритмам управления полностью себя оправдывает. В этом слу-
чае упрощается задача обучения водителей, расширяются возмож-
ности маневрирования личным составом в военных условиях.
Практически любая операция управления движением для до-
стижения высоких показателей подвижности требует выполнения
сложных алгоритмов с использованием нескольких органов управ-
ления. Если, например, к повороту отнести и те участки прямоли-
нейного пути, на которых водитель подготавливает машину к по-
вороту, то можно отметить три этапа в действиях водителя:
1)на подходе к повороту — водитель снижает пода-
чу топлива в двигатель (отпускает педаль), тормозит машину
(нажимает педаль), включает низшую передачу в КП (рычагом
переключения передач и педалью отключения трансмиссии);
2) при повороте — управляет движением машины, воз-
действуя на органы управления поворотом и двигателем;
357
3)на выходе из поворота — увеличивает подачу топ-
лива (разгон) и, как правило, включает высшую передачу в КП.
Если, например, педаль ОТ неудобна для воздействия на нее,
или получение тормозного эффекта требует значительных уси-
лий, то водитель ограничивается торможением двигателем, эф-
фективность которого значительно ниже действия ОТ. Значит, он
снижает скорость задолго до поворота, что предопределяет сни-
жение средней скорости движения.
Человек-оператор проявляет высокую чувствительность к ко-
личеству органов управления, их конструкции, расположению,
траектории их перемещения и к необходимому для этого усилию,
сложности алгоритма управления, передаточной функции привода
и его динамическим характеристикам От технического решения
этих вопросов существенно зависит качество управления и, следо-
вательно, боевые свойства танка.
Общие технические требования к органам и приводам управ-
ления:
конструкция и расположение органов управления должны спо-
собствовать выполнению алгоритмов управления и исключать
случайное воздействие на них;
выполнение управляющих воздействий (пользование органами
управления) не должно вызывать изменения лозы водителя;
при перемещении органа управления усилие должно изменять-
ся монотонно. Резкие увеличение и уменьшение усилия, «холостые
ходы» при перемещении органа управления не допускаются; до-
пускается изменение темпа роста усилия или «силовой уступ»
в качестве сигнала о скачкообразном изменении характеристики
управления;
реакция танка должна быть пропорциональна перемещению
органа управления или приложенному к нему усилию;
быстродействие привода должно допускать запаздывание реак-
ции танка на управляющее воздействие не более 0,2 с;
характеристики привода управления («мертвая зона», чувстви-
тельность, точность, статическая и динамическая погрешность
и т. д.) должны оставаться постоянными во всем диапазоне пере-
мещения органа управления;
переходный процесс — апериодический;
должна быть обеспечена устойчивость работы привода в диа-
пазоне частот возможных управляющих воздействий (до 10 Гц);
приводы должны исключать возможность наложения или утра-
ты команд;
конструкция и компоновка органов и приводов управления
должны исключать возможность травмирования водителя в про-
цессе управления.
При формировании конкретных технических требований к орга-
нам и приводам управления необходимо учитывать характеристи-
ки составных частей МТУ, компоновку и особенности танка. При
этом система управления движением не должна ограничивать воз-
358
можности водителя — мастера вождения, т. е. динамические ха-
рактеристики приводов и систем должны быть выше динамических
характеристик мастера при его работе в следящем режиме управ-
ления.
Совершенствование танков характеризуется повышением их
удельной мощности при ограничении объема и массы МТУ, что
приводит к увеличению динамической нагруженное™ их состав-
ных частей, усложнению условий и способов управления движе-
нием, влияющих на формирование переходных и динамических
процессов. Следовательно, долговечность составных частей МТУ
тоже зависит от качества управления движением.
Решающим фактором в проблеме повышения качества управ-
ления движением является автоматизация процессов управления.
Автоматизация позволяет:
упростить процессы управления движением и снизить уровень
психических и физических энергозатрат на их выполнение;
уменьшить зависимость эксплуатационных параметров танков
от уровня квалификации и степени адаптации водителей;
повысить динамические и топливно-экономические характерис-
тики ВГМ.
Как показано в гл. 3, практически на всех существующих
ВГМ автоматизированы отдельные операции управления. Так, в
танке Т-64 А в избиратель передач встроена электромеханическая
система автоматической блокировки низших передач, предотвра-
щающая их преждевременное включение. В танке Т-72 применена
полуавтоматическая система притормаживания, повышающая
эргономические свойства привода управления тормозами. В танке
Т-80 автоматизировано управление «сливом» (сцеплением), осво-
бождающее водителя от необходимости манипулирования двумя
ногами на четырех педалях. В опытном отечественном танке и в
западногерманском танке «Леопард-1» автоматизировано пере-
ключение передач.
Однако для существенного улучшения качества управления
необходимо создание комплексной автоматической системы управ-
ления, в которой функционально можно выделить следующие под-
системы:
реализации алгоритмов управления;
автоматического переключения передач и блокировки ГТ
(для ГМТ);
блокировки аварийных режимов работы составных частей
МТУ;
приоритета критериев оптимизации управления движением.
Подсистема реализации алгоритмов управ-
ления должна по простому единичному управляющему воз-
действию выполнять алгоритмы управления с оптимизацией пере-
ходных процессов по заданным критериям. Автоматизации под-
359
лежат алгоритмы, решающим образом влияющие на формирова-
ние динамических и топливно-экономических характеристик ма-
шины, являющиеся потенциальными источниками высоких дина-
мических нагрузок на детали МТУ и аварийных режимов работы
с потерей управляемости. К ним относятся: трогание с места и
разгон в заданном темпе, движение с переключением передач
«вверх» и «вниз», остановка «выбегом» и с торможением без
остановки двигателя, реверс «с ходу», устранение юза и буксова-
ния при торможении и разгоне, блокировка режимов неуправляе-
мого заноса при повороте машины, устойчивость прямолинейного
движения при внезапном одностороннем воздействии от грунта на
движитель. Критерии оптимизации могут быть различными: по
минимизации времени переходного процесса, по уровню динамиче-
ских нагрузок, по суммарному времени процедуры управления,
по параметрам машины и т. д. В ряде случаев они могут сущест-
вовать формально и быть характеристикой системы; иногда си-
стема должна выбрать критерий из характеристик управляющих
воздействий водителя и значений текущих параметров машины.
Подсистемы автоматического переключе-
ния передач (САПП) и блокировки ГТ в значи
тельной степени нивелируют эксплуатационные параметры ВГМ,
управляемых водителями различной квалификации, одновременно
повышая их средний уровень, и снижают загрузку водителей,
освобождая их от необходимости выбирать моменты переключе-
ния передач и включаемую передачу.
Подсистема блокировки аварийных режимов
работы МТУ должна реагировать на внезапные факторы:
ошибки водителя (особенно вероятные в экстремальных усло-
виях движения и стрессовых обстоятельствах), который может
выдать в систему управления команду или комбинацию команд,
не предусмотренную системой реализации алгоритмов управле-
ния, или вызвать сбой в системе, если новая команда поступает
до завершения программы отработки предыдущей;
резкие изменения условий движения, при которых процессы
в МТУ развиваются быстрее, чем водитель может прореагировать;
отсутствие надежной рефлекторной обратной сигнальной связи,
из-за чего водитель не реагирует на выход рабочих характеристик
за допустимые пределы, так как в данный момент занят, или
вообще его органы чувств не воспринимают этой информации;
отказы сборочных единиц МТУ, которые проявляются мгно-
венно, вне пределов нормальных реакций человека, и могут вы-
звать лавинообразный поток разрушений.
Подсистема приоритета критериев опти-
мизации является необходимой составной частью комплекс-
ной системы автоматического управления движением. В зависи-
мости от поставленных задач, условий движения и обстоятельств
водитель по-разному залает режим движения и формирует алго-
ритм управления. В одних и тех же условиях водителю может
360
быть поставлена задача, требующая частого и резкого маневри-
рования, или, наоборот, равномерного движения, или движения
с максимально возможной скоростью, т. е. отдается приоритет
различным свойствам подвижности машины. Информацией для
этой подсистемы являются не только управляющие воздействия
водителя, но и характеристики процессов в МТУ и условия движе-
ния машины. Необходимость подсистемы приоритета обусловле-
на не только тем, что она, не отменяя прочих критериев оптими-
зации, устанавливает главенство одного из них, но и тем, что она
должна установить порядок работы, если новая команда введе-
на до завершения отработки предыдущей и в случаях «наложе-
ния» команд, когда одним водителем или водителем и системой
автоматики выданы взаимоисключающие команды.
Комплексная автоматизация будет эффективной только в слу-
чае гармоничного согласования всех составных частей — инфор-
мационной (измерительной), логической (вычислительной) и «па-
мяти» формирования программы работы (алгоритмической) и ис-
полнительной (рабочей). Развитие электронной и вычислительной
техники позволяет создать такую систему, тем более что в машине
она является автономной. Наибольшие трудности при разработке
комплексной автоматизации выявляются на стыке управляющей
и исполнительной частей. От исполнительной части требуются
весьма высокие и стабильные статические и динамические ха-
рактеристики. В то же время она, как правило, является состав-
ной частью МТУ, и эти требования могут противоречить иным
соображениям и требованиям.
Определение состава комплексной автоматики, номенклатуры
автоматизируемых процессов, блокировок, приоритетов, критериев
оптимизации не может основываться на тезисе чем больше —тем
лучше, а должно учитывать доминирующие факторы: назначение
машины, основные способы ее использования, режимы эксплуата-
ции, численность парка и т. д.
Создание системы комплексной автоматизации управления
движением позволит снизить требования к квалификации и адап-
тации водителей, уменьшить их психофизиологическую нагрузку,
расширить контингент лиц, которые могут использоваться в ка-
честве водителей, снизить потребность в числе машин для обуче-
ния и тренировки, в значительной степени нивелировать показа-
тели машин (среднюю скорость движения, расход топлива, за-
пас хода, надежность), повысить их средний уровень и на этой
основе — боевую эффективность машин.
Дублирование управления движением. Необходимость повы-
шения подвижности танка и условиях боя поставила задачу
создания системы управления движением, дублированной коман-
диром. Командир танка имеет наилучшие условия наблюдения за
полем боя, наиболее информирован об общей ситуации и текущих
задачах.
361
В спокойной обстановке от подачи командиром команды до на-
чала ее исполнения водителем проходит обычно 1,5 с и более, в
течение которых танк сохраняет прежний режим движения; в
стрессовых ситуациях с учетом крайнего психологического напря-
жения это время может оказаться значительно больше.
Имея возможность вмешаться в управление движением и про-
извести маневрирование непосредственно в момент принятия ре-
шения, командир танка может обеспечить более эффективное ре-
шение боевой задачи и снизить вероятность поражения своего тан-
ка и экипажа.
Танк, оборудованный дублированной системой управления дви-
жением, имеет следующие преимущества:
появляется возможность активного противодействия огню про-
тивника путем маневрирования;
обеспечивается высокая скорость движения задним ходом, что
позволяет быстро выйти из.-под огня противника под защитой
лобовой брони и без прекращения стрельбы;
можно быстро заменить вышедшего из строя водителя без пе-
ремены мест членами экипажа и без выхода танка из боя;
при марше в колонне в условиях сильной запыленности мож-
но двигаться с более высокой скоростью без увеличения дистан-
ции между танками;
появляется возможность дистанционного (по электрокабелю
или радиоканалу) управления танком, что позволяет решать за-
дачи «слепого вождения и безэкипажного использования танков
для решения боевых задач.
Система дублированного управления движением должна соот-
ветствовать следующим техническим требованиям:
командир танка должен иметь возможность в любой момент
легко и просто взять управление движением на себя и немедлен-
но получить ожидаемый эффект, т. е. система должна обеспечи-
вать безусловный приоритет управления от командира;
командир танка должен иметь возможность управлять двига-
телем, поворотом танка, торможением, переключением передач,
реверсом, отбором и возвратом управления;
управляющие воздействия командира (в виде простых единич-
ных операций) не должны вызывать потерю управляемости и воз-
никновение аварийных режимов составных частей МТУ.
Получение немедленного эффекта управления затруднено,
когда органы управления расположены в разных местах и тре-
буется время на их поиск, что усугубляется напряженными и
сложными обязанностями командира. Поэтому его приоритет в
управлении танка должен быть обеспечен безусловно. Частичное
выполнение этого требования наиболее просто обеспечивается
при помощи ручного пульта, имеющего все органы управления
и позволяющего одной рукой воздействовать на них и, соответст-
венно, управлять движением танка.
362
Когда командир неожиданно для водителя вмешивается в уп-
равление, пуледний расценивает происходящее как потерю управ-
ляемости и пытается парировать действия командира. Следова-
тельно, необходима передача информации водителю о взятии ко-
мандиром управления на себя и его возврате.
Такие средства информации, как сигнальные лампочки, звуко-
вые сигналы и речевые команды по танковому переговорному
устройству, в стрессовых ситуациях неэффективны. Эта задача ре-
шается силовым совмещением приводов управления, при котором
приводы управления командира, встроенные в приводы управле-
ния водителя, развивают усилие, в 1,5—2 раза превышающее
усилия водителя. Орган отбора и возврата управления не должен
фиксироваться в положении «управление от командира», что обес-
печивает возврат управления водителю в любых случаях.
Для предотвращения потери управляемости и аварийных ре-
жимов работы МТУ в системе дублирования управления сле-
дует предусмотреть автоматическое переключение передач, реали-
зацию алгоритмов управления и блокировку аварийных режимов
работы МТУ и движения танка.
Программное, дистанционное и телеуправление. Повышенно
живучести танка на поле боя может быть достигнуто с помощью
активного маневрирования, т. е. резкого изменения скорости, на-
правления движения и отклонения танка вправо и влево от за-
данной траектории движения.
Система дублированного управления позволяет осуществлять
движение танка по заданной программе, введенной в электриче-
скую часть системы управления движением. Можно управлять
танком с помощью кабельной связи, по радио и с помощью теле-
визионной приемопередающей аппаратуры. Это позволяет исполь-
зовать безэкипажные танки для решения боевых задач.
СПИСОК ЛИТЕРАТУРЫ
1 Айзерман М. А. Автоматика переключения передач. М.: Машгиз, 1948.
140 с.
2 Аксиально-поршневой регулируемый гидропривод/Прокофьев В. Н., Да-
нилов Ю. А.. Кондаков Л. А. и др. М Машиностроение, 1969 490 с.
3. Буров С. G Конструкция и расчет танков. М.: ВАБТВ им. Р. Я. Мали-
новского, 1973. 601 с.
4 Быстроходность танков/Благонравов А. А., Дмитриев А. А., Камин-
ский Д. Н. и др. М.: ВАБТВ им. Р. Я. Малиновского, 1962, 189 с.
5. Вопросы оборонной техники (специальный выпуск), 1975, сер. XX,
выл. 59-60, 113 с.
6. Забавников Н. А. Основы теории транспортных гусеничных машин. М.:
Машиностроение, 1975. 448 с.
7. Иванченко П. Н., Сушков Ю. А., Вашец А. Д. Автоматизация выбора
схем планетарных коробок передач: Справочное пособие. Л.: Машиностроение,
1974. 231 с.
8. Колесов В. А. Гидросистемы трансмиссий гусеничных машин (кон-
струкция и расчет). М.: ЦНИИинформацнн, 1978. 192 с.
9. Крайнее М. А., Розовский М. С. Зубчатые механизмы (выбор опти-
мальных схем). М.: Наука, 1972. 427 с.
10. Кристи М. К., Красненьков В. И. Новые механизмы трансмиссий. М.:
Машиностроение, 1967. 216 с.
II. Кудрявцев В. Н. Планетарные передачи. М.-Л.: Машиностроение, I960.
307 с.
12. Петров В. А. Основы теории автоматического управления трансмиссией
автомобиля. М.: Изд-во АН СССР, 1957. 164 с.
13 Пономаренко Ю. Ф„ Рогов А. Я. Радиально поршневые высокомо-
ментные гндромоторы. М.: Машиностроение, 1964. 234 с.
14 Прокофьев В. Н. Основы функциональной взаимозаменяемости гидро-
передач. — В сб.: Взаимозаменяемость и технические измерения в машинострое-
нии. М.: Машиностроение, 1964, № 4, с. 173—225.
15. Сергеев Л. В. Теория танка. М.: ВАБТВ им. Р. Я. Малиновского, 1973.
493 с.
16. Сергеев Л. В., Кадобнов В. В. Гидромеханические трансмиссии быстро-
ходных гусеничных машин. М.: Машиностроение, 1980. 198 с.
364
О ГЛ A ВЛ£ Н И Е
Стр.
Предисловие .........................................................
Глава I Влияние трансмиссии и системы управления движением на
подвижность танка
1.1. Общие положения...........................................
1.2. Прямолинейное движение....................................... 6
1.3. Поворот ..................................................
1.4. Влияние трансмиссии на топливную экономичность............. 1*5
Глава 2. Трансмиссии современных ВГМ.................................. 16
2.1. Трансмиссии танков Т 64А и Т-72...........................
2.2. Трансмиссия танка Т-80....................................
2.3. Опытная гидромеханическая трансмиссия ГМТ-69021............. 27
2.4. Унифицированная гидромеханическая трансмиссия для ВГМ
промежуточной категории по массе ................................ «2
2.5. Трансмиссия 4НР-250 танка «Леопард-1> (ФРГ) ............... 39
2.6. Трансмиссия HSWL 194 БМП «Мардер» (ФРГ)..................... 47
2.7. Трансмиссия HSWL-354/3 танка «Леопард-2» (ФРГ) .... 51
2.8. Трансмиссия X I100 ЗВ танка М-1 (США)....................... 54
Глава 3. Системы управления движением современных ВГМ ... 58
3.1. Общие положения........................................... 68
3.2. Танки Т 64А н Т-72.......................................... 60
3.3. Танк Т-80................................................... 66
3.4. Макет опытного танка с ГМТ-69021 ......................... 66
3.5. ВГМ промежуточной категории по массе с унифицированной
гидромеханической трансмиссией .................................. 75
3.6. Танк «Леопард I» (ФРГ)..................................... 75
3.7. БМП «Мардер» (ФРГ)........................................ 83
3.8. Танк М-1 (США)............................................. 87
Глава 4. Составные части современных трансмиссий...................... 89
4.1. Фрикционные элементы сухого трения.......................... 89
4.2. Фрикционные элементы для работы со смазкой................. ‘*8
4.3. Гидродинамические передачи............................... *67
4.4. Гидрообъемные передачи .................................. * *'
Глава 5. Расчет прямолинейного движения ВГМ.......................... 129
5.1. Общие сведения............................................ 126
5.2. Определение мощности двигателя на входе в трансмиссию . 129
5.3. Определение КПД трансмиссии .................... {«О
5.4. Тяговый расчет прямолинейного движения танка с МТ . . 137
5.5. Тяговый расчет прямолинейного движения танка с ГМТ . 157
5.6. Комплексный алгоритм расчета универсальной тяговой харак-
теристики прямолинейного движения (тяговая характеристика
по полю)........................................................ 176
365
Глава 6. Расчет поворота ВГМ......................................... 175
6.1. Поворот ВГМ на месте......................................... 175
6.2. Тяговый расчет равномерного поворота гусеничной машины . . 187
Глава 7. Основы теории и расчета гидрообъемно-механических передач
7.1. Общие сведения.............................................
7.2. Однодиапазонные гидрообъемно-механнческие передачи . . .
7.3. Многодиапазонные гндрообъемно механические передачи . .
7.4 Синтез кинематических схем многодиапазонных гидрообъемно-
механических передач ...........................................
7.5. Коэффициент полезного действия гидрообъемно-механических
передач ........................................................
7.6. Трансмиссии ВГМ с многодиапазонными гндрообъемно-механи
ческими передачами .............................................
Глава 8. Расчет элементов трансмиссий на долговечность..............
8.1. Общие положения ...........................................
8.2 Расчет параметров, характеризующих режимы работы трансмиссии
8.3. Расчет долговечности фрикционных устройств.................
8.4. Расчет зубчатых зацеплений..................... ...........
8.5. Расчет долговечности подшипников качения ..................
Глава 9. Трансмиссионные гидросистемы...............................
9.1. Общие положения............................................
9.2. Бак и насосная установка...................................
9.3. Фильтры......................*.............................
9.4. Клапаны....................................................
9.5. Каналы и трубопроводы......................................
9.6. Гидросистема подпитки и охлаждения ГТ .....................
9.7. Гидросистема смазки и охлаждения редукторной части ....
9.8. Построение и расчет гидросистем ...........................
Глава 10. Расчет и проектирование элементов систем управления
движением ВГМ.......................................................
10.1. Механогидравлические системы управления....................
10.2. Система автоматического переключения передач (САПП) . .
10.3. Система автоматической блокировки ГТ в ГМТ.................
10.4. Перспективы развития систем управления движением танка
Список литературы ..................................................
Редактор Е. Е. Алленых
Технический редактор Н. Н. Скотникова Корректор Л. Е. Сонюшкина
Сдано в набор 18.10.84. Подписано в печать 06.06.85.
Формат 60х90*/|«. Бумага типографская № 1. Гарнитура литературная
Печать высокая. Усл. печ. л. 24,0, в т. ч. 6 внлеек. Усл. кр.-отт. 24,0. Уч. изд. л. 26,05.
Ордена Трудового Красного Знамени издательство «Машиностроение^
107076, Москва. Стромынский пер., 4
_________ Типография ведомственная
367