/













































































Текст
В.В. ЗЛАКОМАНОВ, Б.С. ЯКОВЛЕВ
ВЗАИМОДЕЙСТВИЕ
ДИНАМИЧЕСКИХ
СИСТЕМ
С ИСТОЧНИКАМИ
ЭНЕРГИИ
В.В. ЗЛАКОМАНОВ,|б.С. ЯКОВЛЕВ
ВЗАИМОДЕЙСТВИЕ
ДИНАМИЧЕСКИХ
СИСТЕМ
С ИСТОЧНИКАМИ
ЭНЕРГИИ
МОСКВА
• Э II Е Г Г И Я •
1980
bill1 Г? film
I и/
•V 'll' Il I III GN | i> 14
30501-435
051(0Tj-80 163-80. 1502010000
© Издательство «Энергия», 1980 г.
ПРЕДИСЛОВИЕ
Массовое внедрение вычислительной техники и сис-
тем автоматики во все отрасли народного хозяйства
предопределило актуальность двух известных взаимо-
связанных проблем: 1) назначения требований к каче-
ству электроэнергии, используемой при работе устройств
автоматики и вычислительной техники; 2) обеспечения
этих требований при производстве и эксплуатации ап-
паратуры автоматики.
Назначение требований к качеству электроэнергии
производится разработчиками аппаратуры автоматики
и обусловливается точностью устройств. По мере услож-
нения задач, решаемых электронной аппаратурой,
происходит повышение требований к ее точности и, сле-
довательно, к качеству электроэнергии. В связи с этим
в настоящее время наметилась тенденция дальнейшего
повышения требований к качеству электроэнергии. Для
устройств автоматики и вычислительной техники посто-
янного тока эти требования сводятся в основном к ста-
бильности напряжения питания в статических и динами-
ческих режимах работы.
Обеспечение требуемой стабильности напряжения
питания производится за счет разработки соответствую-
щих преобразователей электроэнергии. Повышение тре-
бований к стабильности напряжения приводит к услож-
нению схем преобразователей, что вызывает ухудшение
массогабаритных, энергетических и других показателей.
Особо сложной и трудноразрешимой является задача
обеспечения стабильности напряжения в автономных
подвижных объектах, где всегда имеют место жесткие
ограничения на массогабаритные показатели оборудо-
вания.
В настоящей книге излагается один из инженерных
подходов совместного решения задач по назначению и
обеспечению требований к качеству электроэнергии
с учетом взаимодействия информационных и энергети-
3
ческих процессов в динамических спеюмах с источника^
ми энергии. Процесс ваапмо цчк ншя имеет сложный и
нелинейный характер, что еощ.кт ryni.ee 1 ценные труд-
ности его математического описания п ра(работки мето-
дов исследования. Одной из первых работ, посвященных
систематическому изложению методов математического
описания и исследования взаимодействия информацион-
ных и энергетических процессов, является монография
В. Н. Прокофьева, В. Ф. Казмиренко «Проектирование
и расчет автоматических приводов» (М., Машинострое-
ние, 1978), в которой приведены нелинейные математи-
ческие методы взаимодействия и даны условия приме-
нимости линейных методов для исследования рассмат-
риваемых явлений.
Настоящая книга посвящена изучению основ взаимо-
действия информационных и энергетических процессов
и разработке инженерных методов анализа с привлече-
нием линейных математических моделей. Применимость
линейных методов при исследовании рассматриваемого
класса объектов обосновывается тем, что функциониро-
вание регулируемых источников энергии характеризует-
ся постоянством их выходных координат в статических
и относительно малыми изменениями в динамических
режимах работы. Применение линейных методов позво-
лило расширить круг исследуемых проблем и получить
ряд новых результатов, которые могут использоваться
при разработке аппаратуры автоматики и проектирова-
нии автономных систем электроснабжения. Практика
эксплуатации и экспериментальные исследования авто-
номных электроэнергетических систем полностью под-
тверждают результаты, полученные при анализе линей-
ными методами, а следовательно, доказывают
применимость и приемлемую точность линейного мате-
матического описания взаимодействия информационных
и энергетических процессов. Приведенные в книге ма-
тематические модели взаимодействия информационных
и энергетических процессов, по мнению авторов, могут
использоваться при разработке систем автоматизиро-
ванного проектирования электрооборудования, которые
позволят существенно сократить сроки разработки и по-
высить эффективность функционирования подвижных
объектов.
Авторы выражают благодарность и искреннюю при-
знательность рецензенту заслуженному деятелю науки и
4
техники РСФСР, проф., доктору техн, наук А. С. Шата-
лову, научному редактору книги канд. техн, наук
В. К- Герасимову за ценные критические замечания,
позволившие избавиться от ряда недостатков при напи-
сании книги.
Авторы выражают также благодарность и призна-
тельность сотрудникам и коллегам по работе, предоста-
вившим некоторые данные для написания книги.
Аналитические методы исследования, математиче-
ские модели взаимодействия сложных динамических
комплексов и методы анализа и синтеза автономных
электроэнергетических систем, изложенные в гл. 3, 4,
разработаны В. В. Злакомановым, гл. 1, 2, 5 написаны
авторами совместно.
Авторы сознают, что книга не свободна от недостат-
ков, и просят все замечания и пожелания направлять
по адресу: 113114, Москва, М-114, Шлюзовая наб. 10,
изд-во «Энергия».
Авторы
Глава первая
МЕТОДЫ ИССЛЕДОВАНИЯ ВЗАИМОДЕЙСТВИЯ
СИСТЕМ И ТЕХНИЧЕСКИХ УСТРОЙСТВ
С ИСТОЧНИКАМИ ЭНЕРГИИ СОИЗМЕРИМОЙ
МОЩНОСТИ
1. КРАТКАЯ ХАРАКТЕРИСТИКА ЯВЛЕНИЙ,
ОБУСЛОВЛЕННЫХ ВЗАИМОДЕЙСТВИЕМ ИСТОЧНИКОВ
ЭНЕРГИИ И ПРИЕМНИКОВ
Развитие современной техники характеризуется ши-
роким распространением автономных объектов, способ-
ных решать различные производственные задачи при
разнообразных условиях эксплуатации. Как правило,
подобные объекты оснащаются автономными системами
энергоснабжения, более или менее развитыми система-
ми управления и различными техническими устройства-
ми, реализующими требуемые производственные про-
цессы. Осуществление последних всегда связано с по-
треблением определенных видов энергии, поэтому
в зависимости от характера функциональных задач, ре-
шаемых автономными объектами, их системы энерго-
снабжения содержат ряд источников соответствующих
видов энергии.
Так как технические устройства (ТУ), реализующие
производственные процессы, предъявляют вполне опре-
деленные требования к качеству энергии, то соответст-
вующие источники энергии (ПЭ) снабжаются система-
ми стабилизации выходных координат (напряжения,
тока, частоты, мощности), обеспечивающими требуемое
качество энергии. В свою очередь ТУ часто снабжаются
соответствующими регуляторами и образуют вместе
с ними замкнутые динамические системы.
Поскольку проектирование любого ТУ производится
при условии обеспечения номинальных значений энерге-
iii'iei'Kiix координат, то отклонения последних при рабо-
|с ГУ и составе динамической системы воспринимаются
сю как возмущения, действующие на определенные
vicmciith системы |1, 2]. Отклонение энергетических
координат от номинальных значений в ряде случаев
приводит к некоторому эквивалентному изменению ди-
намических свойств ТУ и. следовательно, изменению ди-
намических свойств всей системы.
Оба отмеченных фактора обусловливают изменение
качества функционирования динамических систем и тре-
буют разработки методов учета или устранения указан-
ных явлений при проектировании подобных систем.
Очевидно, степень влияния указанных факторов на ка-
чество функционирования системы будет определяться
значениями и характером отклонений энергетических
координат от их номинальных значений а также конст-
руктивными особенностями ТУ. Отклонение энергетиче-
ских координат от номинальных значений в процессе
работы ТУ обусловлено неидеальностью, т. е. ограниче-
нием по мощности, соответствующих ИЭ.
Известно [3], что повышение мощности ИЭ при про-
чих равных условиях практически всегда ведет к увели-
чению габаритов и массы соответствующего оборудова-
ния, повышению непроизводительных затрат энергии,
например при увеличении потерь холостого хода и т. п.)
и, следовательно, к ухудшению общего КПД энергообо-
рудования. В силу указанных причин излишнее увели-
чение мощности ИЭ на автономных объектах и особенно
на подвижных крайне нежелательно, поэтому мощность
ИЭ автономных объектов на практике всегда ограниче-
на и часто бывает соизмерима с мощностью приемни-
ков. Следствием ограниченности мощности ИЭ является
зависимость значений их выходных координат от режи-
ма и характера работы приемников (нагрузки), кото-
рая, например, для источников электрической энергии
определяется внутренним сопротивлением источника пи-
гапия. В свою очередь характер и режимы работы
приемников определяются режимами работы соответст-
вующих динамических систем, в состав которых они
входят.
Таким образом, при соизмеримости мощности ИЭ
с мощностью приемников, с одной стороны, происходит
влияние режимов работы динамических систем на ха-
рактер изменений и значения выходных (энергетиче-
7
ских) координат ИЭ, с другой стороны, следствием от-
клонений энергетических координат ИЭ от их номиналь-
ных значений является изменение (обычно ухудшение)
качества функционирования динамических систем, по-
лучающих энергию от данного ИЭ. Если от одного
(общего) ИЭ получают энергию ряд динамических
систем, то вследствие указанных факторов может воз-
никнуть взаимосвязь между процессами в различных
системах через общий ИЭ. Для устранения этого явле-
ния можно производить раздельное энергоснабжение
различных систем от нескольких автономных ИЭ. Одна-
ко подобное решение проблемы в общем случае не всег-
да удовлетворительно, поскольку применение целого
ряда автономных ИЭ одной и той же физической при-
роды приводит к ухудшению массогабаритных и энерге-
тических показателей качества электрооборудования.
Поэтому в настоящее время наиболее широкое распро-
странение получили системы централизованного энерго-
снабжения подвижных объектов, предполагающие ис-
пользование одного общего ИЭ, от которого и получают
энергию все системы подвижного объекта.
По мере усложнения задач, решаемых подвижными
объектами, происходит дальнейшее увеличение числа
разнообразных систем, устанавливаемых на них, даль-
нейшее усложнение этих систем и существенное повы-
шение требований к качеству и надежности их функцио-
нирования. Разработка сложных систем с применением
новых совершенных ТУ и электроприборов сопровож-
дается предъявлением более жестких требований к ка-
честву энергии и надежности систем энергоснабжения.
Так как в состав систем объекта входят самые раз-
нообразные ТУ различные по своей физической природе
и принципу действия, работа которых предполагает
потребление энергии разных видов и номиналов, то
системы энергоснабжения по необходимости должны со-
держать преобразующие устройства, обеспечивающие
получение энергии требуемого вида и качества. По-
скольку удельный вес мощности приемников, предъяв-
ляющих наиболее жесткие требования к качеству энер-
гии, относительно невелик, то рационально производить
качественное регулирование только части энергии дан-
ного вида, которая и используется для энергоснабже-
ния этих приемников. Осуществление качественного ре-
гулирования только части энергии встречает меньшие
8
K'Xini'K'CKiic трудности при реализаций, и поэтому ука-
шипып принцип находит широкое применение при пост-
роении современных систем энергоснабжения. Таким
образом, система централизованного энергоснабжения,
кроме первичного ИЭ, содержит ряд преобразователей
Hieprmi, снабженных регуляторами соответствующих
выходных (энергетических) координат, являющихся по
существу замкнутыми управляемыми (регулируемыми)
ши шпческими системами.
Очень часто в качестве первичных ИЭ используются
ж гопники электрической энергии, называемые в дальней-
шем источниками питания (ИП), в которых происходит
преобразование какого-либо вида энергии в электро-
энергию с заданными параметрами (электромашпнные
1111, химические, электрохимические и т. п.). Для обес-
печения требуемого качества электроэнергии первичные
1111 часто снабжаются регуляторами выходных коорди-
нат (напряжения, частоты). Поскольку число приемни-
ков электроэнергии обычно велико и они расположены
некомпактно, то между ПЭ и приемником необходимо
организовать распределительную сеть (например, коль-
цевого типа), включающую в себя устройства канали-
зации (передачи) энергии, устройства коммутации кана-
лов ее передачи и ряд вспомогательных устройств
(фильтры, ограничители, датчики контроля и индика-
ции и т. п.).
Таким образом, первичные ИП совместно с распре-
делительной, коммутационной регулирующей аппарату-
рой и всеми преобразователями энергии образуют сис-
тему электроснабжения (СЭС), от которой получают
энергию все динамические системы и ТУ объекта.
На рис. 1 для примера приведена одна из возмож-
ных схем построения централизованной СЭС автономно-
го объекта. Здесь от первичного ИЭ — приводного дви-
гателя ПД (например, двигателя внутреннего сгорания,
снабженного регулятором скорости Рп.д), получает энер-
гию генератор постоянного тока — первичный ИПЬ яв-
ляющийся преобразователем механической энергии, ха-
рам еризуемой моментом М на валу ПД и его скоростью
12, в электрическую и имеющий регулятор напряжения
/’иль От генератора постоянного тока ИП\ получают
глсктроэнергию как различные приемники электро-
шергии, например силовые технические устройства П\,
в том числе исполнительные устройства и объекты регу-
9
ЛироВания различиях систем автоматического управлс*
ния СЛУЬ так и разнообразные преобразователи элек-
троэнергии, например гидронасосы ГН с регуляторами
по расходу Р'г.н и давлению Р"г.н, от которых получают
энергию гидродвигатели ГД и другие потребители гид-
роэнергии, или, например, вторичные источники элек-
троэнергии ИП2. Последние являются преобразователя-
ми электроэнергии первичного ИП в электроэнергию
1. Функциональная схема автономной централизованной СЭС.
Рис.
с требуемыми показателями качества. Как правило, они
снабжаются регуляторами соответствующих энергетиче-
ских координат (например, напряжения Рц.пг) или на-
пряжения и частоты.
От вторичных ИП (например, умформеров) полу-
чают электроэнергию элементы измерительной и вычис-
лительной техники П2, входящие в состав различных
систем автоматического управления САУ2, предъяляю-
щие обычно более жесткие требования к качеству элек-
троэнергии. В силу ограниченности мощностей первич-
ного ИП и преобразователей в рассмотренной схеме
построения СЭС может происходить влияние процессов
в приемниках (ТУ) на процессы преобразования и регу-
лирования энергии в ИП и преобразователях, что при-
водит к взаимосвязи процессов в различных динамиче-
ских системах через общий ИП или преобразователь.
Очевидно, в наибольшей степени указанная взаимо-
связь проявляется в динамических режимах работы и
10
oi'\। ><j или чается появлением переходных процессов
uni и hi иной интенсивности в цепях питания при изме-
не пин режимов работы отдельных приемников, что
и свою очередь приводит к появлению переходных про-
шве он по выходным координатам соответствующих ди-
ii.iMii'm них систем. Поскольку ИП с приемниками обра-
|\|о1 ппикнутую динамическую систему [4], то интен-
сивном!, указанных переходных процессов будет
Риг 2. Эквивалентная схема
ш-ктрпчсской цепи для откло
пенни
Рис. 3. Динамическая модель
системы «ИП приемник».
определяться динамическими свойствами замкнутой ди-
намической системы «ИП — приемник» и характером
изменения режимов ее работы. Действительно, для лю-
бой цепи, состоящей из ИП, представленного источни-
ком ЭДС, с внутренним операторным сопротивлением
по переменной (динамической) составляющей Z,(p) и
приемника с операторным сопротивлением по перемен-
ной составляющей ZH (р) (рис. 2), справедлив закон
Ома для полной цепи, который для приращений пере-
менных относительно рабочего режима по току и напря-
жению можно записать в операторной форме:
AE(p)=A7(p)[Z,(p)+ZH(p)]. (1)
После очевидных преобразований уравнение (1)
приводится к виду
4/(р)_ 1 _ YH(p)
ЫЦр) Zi(p)+ZH(p) \+Zl(p)YH(p)- 1 >
Уравнение (2) есть уравнение замкнутой динамиче-
кон системы, динамическую модель которой можно
представить схемой, изображенной на рис. 3. Для ана-
ЛИ.П1 процессов в системе «ИП — приемник» могут ис-
пользоваться все методы исследований динамических
< не гем, в том числе и методы теории автоматического
управления. Увеличение числа приемников, подключае-
мых параллельно к ИП, приводит не к качественному
изменению уравнений (1) и (2) и динамической модели
на рис. 3, а к изменению энергетических координат сис-
темы в статическом режиме и суммарной проводимости
приемников, которая при их параллельном включении
определяется суммой проводимостей отдельных прием-
ников.
На основании изложенного можно утверждать, что
любой ИГ1 вместе со всеми своими приемниками обра-
зует замкнутую динамическую систему, динамические
свойства которой определяются как свойствами ИГ1,
так и свойствами всех его приемников. Поскольку лю-
бой преобразователь энергии является ИП для его соб-
ственных приемников и приемником по отношению
к первичному ИП, то в соответствии с изложенным все
технические устройства и динамические системы объек-
та при ограниченной мощности первичного ИП связы-
ваются в единый динамический комплекс — сложную
электроэнергетическую систему (ЭЭС) автономного
объекта. Схема, представленная на рис. 1, по своей
сложности (числу элементов, количеству и разнообра-
зию типов дифференциальных уравнений) приближает-
ся к классу так называемых больших систем. Вместе
с тем схема на рис. 1 отнюдь не является максимально
сложной. Число источников, преобразователей и стаби-
лизаторов электроэнергии на современных многомотор-
ных самолетах, например, может составлять несколько
десятков. По данным [5] трудоемкость разработки
подобной СЭС может составить 25% и более общих
затрат на разработку современного самолета (суммар-
ной стоимости разработки планера, двигательной уста-
новки и другого оборудования), и в то же время СЭС
или ее элементы оказываются наименее надежными,
требующими наиболее частого контроля или замены;
это относится, например, к приводам постоянной скоро-
сти (ППС) в самолетах [5].
Исследование физики процессов взаимовлияния ИП
и приемников в столь сложной системе, как ЭЭС, и вза-
имосвязи в различных динамических системах через
общий ИП, разработка методов экспериментальных ис-
следований, выявление общих закономерностей процес-
сов взаимосвязи и разработка математических методов
анализа указанных явлений, имеющих целью создание
достаточно общих инженерных методов проектирования
сложных ЭЭС автономных объектов, составляют сущ-
ikh и. и содержание чрезвычайно сложной задачи ана-
1(1 hi подобных динамических комплексов.
11 шскание наиболее рациональных методов произ-
подстпа, преобразования и регурирования электроэнер-
। ни. разработка методов построения оптимальных
структур СЭС из условий минимизации массогабарит-
||ы\ и стоимостных показателей электрооборудования
и потерь энергии в СЭС с отысканием путей их аппа-
рат рной реализации, создание комплексных и, жела-
тельно, автоматизированных методов проектирования
автономных ЭЭС с учетом взаимосвязи процессов раз-
личных динамических систем через общий ИП составля-
ют сущность и содержание еще более сложной зада-
чи— задачи синтеза ЭЭС автономных объектов.
2. ОСОБЕННОСТИ ИССЛЕДОВАНИЯ ДИНАМИЧЕСКИХ
СИСТЕМ, РАБОТАЮЩИХ С ИСТОЧНИКАМИ ПИТАНИЯ
СОИЗМЕРИМОЙ МОЩНОСТИ
Приведенные ранее уравнение и динамическая мо-
дель взаимодействия ИП и приемников энергии показы-
вают, что любой приемник образует с ИП замкнутую
динамическую систему. Однако подобная модель еще
не отражает взаимодействия динамической системы
с ИЭ, потому что в ней не отражается связь информа-
ционных процессов, характеризующих качество работы
динамической системы, с энергетическими процессами
в ИП и приемнике, а следовательно, не отражается вли-
яние ИЭ на качество функционирования системы. Оче-
видно, эта связь осуществляется через те элементы
системы, называемые в дальнейшем активными элемен-
тами динамических систем, которые непосредственно по-
лучают энергию для работы от того или иного ИЭ.
Проанализировав работу ТУ любой физической при-
роды, всегда можно найти зависимость выходных коор-
динат (информационных сигналов) от координат, ха-
рактеризующих энергию, используемую устройством для
гноен работы. Поэтому в общем случае всегда имеется
i.iHiiciiMOCTb информационных сигналов активных эле-
ментов от изменения энергетических координат ИЭ, для
устранения (по крайней мере, частичного) которой
обычно применяется стабилизация выходной координа-
1ы ПЭ (напряжения, частоты, давления и т, ц.). Так
как физически неосуществима идеальная стабилизация
13
выходной координаты ИЭ, то невозможна и абсолютная
инвариантность информационных сигналов активных
элементов по отношению к энергетическим процессам
замкнутой системы «ИЭ — приемники».
Практика показывает, что при соизмеримости мощ-
ностей ИЭ и приемников ситуация осложняется тем,
что изменение самих энергетических координат зависит
от изменения информационных сигналов ТУ, которые
получают энергию от данного ИЭ, т. е. в этом случае
взаимосвязь информационных и энергетических про-
цессов осуществляется по принципу обратной связи.
Указанное обстоятельство является главной и основной
особенностью. Она должна учитываться при исследова-
нии работы динамической системы, элементы которой
получают энергию от ИЭ ограниченной мощности.
Из элементарных физических представлений следу-
ет, что наибольшее количество энергии в единицу вре-
мени (мощность) любое ТУ потребляет (или отдает
ИЭ) в переходных динамических режимах работы (в ре-
жимах разгона, форсировки, торможения и т. п.), по-
этому соизмеримость мощностей ИЭ и приемников, а
следовательно, и указанная обратная связь в наиболь-
шей степени проявляются в динамических режимах ра-
боты ТУ и систем. Таким образом, необходимость ана-
лиза динамики взаимодействия информационных и
энергетических процессов и степени ее влияния на ка-
чество функционирования динамических систем явля-
ется второй основной особенностью исследования дина-
мических систем, работающих с ИЭ соизмеримой мощ-
ности.
Соизмеримость мощностей ИП и его приемников
обусловливает зависимость энергетических координат
системы «ИП — приемники» от характера и режима
работы приемников. В общем случае эта зависимость
имеет сложный и нелинейный характер и определяется
как внутренним строением (конструкций и принципом
действия) ИП и приемников (активных элементов), так
и свойствами динамических систем, в составе которых
работают приемники. Отклонения энергетических коор-
динат ИЭ от их номинальных значений приводят к бо-
лее или менее существенным отклонениям или искаже-
ниям сигналов в контурах регулирования соответствую-
щих динамических систем. Искажения информационных
сигналов активных элементов зависят как от свойств
И
не।пнпыХ элементов и динамических систем, в состав
юнорых они входят, так и от значений и характера от-
клонении шгргетнческих координат ИЭ.
В ряде случаев взаимосвязь информационных и энер-
кчнческнх процессов выражается в виде произведения
информационных координат активных элементов и
нк рц'1 нтткнх координат ИЭ [6], что допускает при-
менение методов линеаризации в малом и исследование
поведения динамической системы в окрестностях ее ра-
бочего режима. В общем случае взаимосвязь имеет бо-
не сложный нелинейный характер, что обусловливает
привлечение методов анализа существенно нелинейных
iiicicm. Данное обстоятельство является третьей харак-
lepnoii особенностью исследования динамических сис-
|см, работающих с ИЭ ограниченной мощности.
Любая динамическая система содержит ряд актив-
ных элементов, получающих энергию от одного общего
и in нескольких ИП. Так как каждый активный элемент
сне гемы охватывается через ИП обратной связью и
в большинстве случаев ИЭ снабжаются системами ста-
билизации выходных координат, то исследование взаи-
модействия динамической системы с ИЭ неизбежно при-
ведет к анализу многоконтурной многосвязной (по
крайней мере, двусвязной) динамической системы.
Гак как взаимосвязь между информационными и
шергетическими процессами осуществляется через ак-
i явные элементы различной физической природы, то
н общем случае связи между информационными и энер-
к П1ческими контурами не обладают свойствами ни
апгисимметрии, ни симметрии, что чрезвычайно услож-
ни! г анализ подобных систем. В настоящее время не
Р । 1р.|богапы достаточно общие и удобные инженерные
Met оды исследования подобных систем. Если от одного
общею ИП получает энергию ряд активных элементов
p i (личных динамических систем, например, на подвиж-
ных объектах, то при анализе эффективности функци-
онирования подобных систем приходится решать зада-
чи декомпозиции, а при синтезе — задачи по обеспече-
нию автономности отдельных систем.
Ежим образом, многосвязность взаимодействия ин-
формационных и энергетических процессов является
hi 1 пергой характерной особенностью исследования ди-
намических систем, работающих с ИЭ ограниченной
мощное ги.
15
3 МЕТОДЫ ИССЛЕДОВАНИЯ ДИНАМИКИ
ВЗАИМОДЕЙСТВИЯ ИСТОЧНИКОВ ЭНЕРГИИ
И ПРИЕМНИКОВ СОИЗМЕРИМОЙ МОЩНОСТИ
При исследовании взаимодействия Динамических
систем с НП ограниченной мощности рационально раз-
делить все активные элементы систем на следующие два
класса:
1. Технические устройства, информационные сигналы
которых не оказывают существенного влияния на энер-
гетические процессы в системе «ИП — приемники».
Характер изменения энергетических процессов этих
устройств существенно влияет на ход информационных
процессов динамических систем, в составе которых они
работают. К таким устройствам относятся все маломощ-
ные приемники энергии — измерительные и вычисли-
тельные устройства САУ, датчики и т. п.
2. Технические устройства, информационные сигналы
которых оказывают существенное влияние на энергети-
ческие процессы системы «ИП — приемники», а энерге-
тические процессы не оказывают влияния на информа-
ционные сигналы. К подобным устройствам относятся
мощные приемники, являющиеся обычно в САУ или
усилителями мощности, или объектами управления
(сервопривод, электропривод и т. д.).
В соответствии с отмеченными обстоятельствами и
указанными выше особенностями взаимосвязи инфор-
мационных и энергетических процессов к настоящему
времени сложились следующие методы исследования
взаимодействия динамических систем с ИП ограничен-
ной мощности.
В информационно-измерительных системах, функци-
онирование которых характеризуется относительно не-
большим потреблением энергии, обычно используются
ИП завышенной мощности, поэтому обратная связь
через ИП проявляется при работе системы в слабой
степени. Исследование и учет влияния ИП на функцио-
нирование активных элементов систем сводится в этом
случае к определению степени влияния энергетических
координат на выходные сигналы устройств системы,
определению искажений функциональных зависимостей
соответствующих ТУ от требуемых при отклонении
энергетических координат ИЭ от их номинальных зна-
чений в статических режимах и выбору соответствую-
щих методов устранения указанных искажений [7, 8].
16
II ряде случаев, когда требуемое качество энергии ИЭ
in nix гнечлнается, а отклонения энергетических коорди-
н.н ока пинают существенное влияние на качество функ-
ционирования системы, используются специальные ме-
|оды для устранения влияния отклонений выходной
коордннагы ИЭ.
Все существующие методы учета и устранения влия-
ния 1111 на качество функционирования информацион-
но н iMt piiтельных систем и систем автоматического уп-
равления можно разделить на две группы.
К нерпой группе относятся методы по дополнитель-
ной стабилизации выходных энергетических координат
I К-) с использованием специальных стабилизирующих
устройств [9, 10]. Этот же принцип используется при
применении стабилитронов в измерительных цепях дат-
чиков разнообразных систем автоматического управле-
ния [11, 12], а также при использовании развязываю-
щих фильтров и построении многокаскадных электрон-
ных и полупроводниковых усилителей [8, 13].
Ко второй группе относятся методы по построению
систем и ТУ, инвариантных к отклонениям энергетиче-
ских координат ИЭ. Отклонения энергетических коорди-
нат ИЭ в этом случае представляются возмущениями
(помехами), действующими на входы активных элемен-
тов системы, а обратным воздействием системы на энер-
гетические процессы ИЭ пренебрегают. Как известно
|11, 15, 16], теория автоматического управления дает
ряд способов уменьшения влияния помех на качество
функционирования динамических систем. К ним отно-
сятся охват соответствующих звеньев обратными свя-
1ями [17, 18, 19], увеличение коэффициента усиления
системы по контуру [20, 21], введение в контур регули-
рования астатических звеньев [22, 23], введение ком-
пенсирующих связей, обеспечивающих инвариантность
динамической системы к соответствующим возмущени-
ям [24—27].
Хотя перечисленные методы и находят в настоящее
время самое широкое применение при построении ин-
формационно-измерительных систем и систем автомати-
ческого управления, однако они не решают проблемы
тапмодействия ИЭ с динамическими системами и в ря-
де случаев не дают должного эффекта. Так, применение
нерпой группы методов при проектировании информа-
ционно-измерительных систем неизбежно ведет к их
2- G77
17
усложнению, дополнительным потерям энергий и, как
следствие, к ухудшению энергетических и массогабарит-
ных показателей.
Применение методов второй группы имеет ограниче-
ния как принципиального характера, например ограни-
чения по условиям устойчивости при увеличении коэф-
фициента усиления по контуру и включении в контур
регулирования астатических звеньев, так и ограничения,
обусловленные условиями физической реализации, на-
пример при применении методов компенсации.
Кроме того, указанные методы дают удовлетвори-
тельные результаты лишь в том случае, если отсутству-
ет влияние информационных процессов динамических
систем на энергетические процессы ИЭ. Это в свою
очередь предполагает несоизмеримость мощностей ИЭ
и их приемников, в том числе и в динамических режи-
мах, что редко имеет место на практике.
В системах электроснабжения подвижных объектов
и электроприводе, где часто имеет место соизмеримость
мощностей ИЭ и его приемников, взаимодействие ИЭ
с динамическими системами проявляется в наибольшей
степени и поэтому учет влияния ИП на работу динами-
ческих систем становится необходимым условием их
проектирования. В принципе работу любого конкретно-
го ТУ всегда можно описать системой дифференциаль-
ных уравнений, в число которых входят уравнения, от-
ражающие взаимодействие ИП с приемниками (ТУ).
Подобный подход предполагает включение свойств ИП
в число динамических свойств соответствующих ТУ
[28], а задача по учету влияния ИП на качество рабо-
ты системы сводится к определению влияния свойств
ИП на динамические свойства всей системы [28, 29].
Как правило, включение свойств ИП в число дина-
мических свойств ТУ приводит к повышению порядка
характеристического уравнения системы и, следователь-
но, усложнению ее анализа. Очевидно, наиболее просто
учет влияния ИП по указанной методике можно произ-
вести для простейших случаев и, в частности, для сис-
тем, каждый элемент которых получает энергию от соб-
ственного автономного ИП. При известном допущении
к частному случаю подобных систем приводится, элек-
тропривод, электродвигатель которого получает энергию
от собственного и автономного ИП [28]. Учет взаимо-
действия ИП с системой в этом случае сводится к оп-
18
|>< к n'linio отклонений динамических свойств системы,
и>п. ниных влиянием ИП, и учету их при проектиро-
и.шип |'?!>, 301.
II Полое сложных случаях, когда от общего ИП по-
мучано шергню ряд ТУ системы, учет влияния ИП пу-
тем включения его свойств в динамические свойства
соонн tcmyiomiix ТУ вызывает существенные затрудне-
ния |1, 31 | и при значительном числе динамических
cih к м, 1лсмснты которых получают энергию от общего
НИ nt р.шпчеппой мощности, например, в системах энер-
Ю1 наПжепня подвижных объектов, подобный путь учета
влияния ПИ на качество функционирования динамиче-
ских систем становится практически неприемлемым.
В последние годы появилось .немало работ [28,
32 35 и др.], в которых при исследовании взаимо-
дс|к uulu динамических систем с ИЭ ограниченной мощ-
ности находит отражение.и принцип обратной связи.
В ря те указанных работ [28, 32, 34] исследуется и учи-
тывается только статика взаимосвязи информационных
и ин'ртегнческих процессов, в то время как в наиболь-
шей и существенной степени взаимосвязь проявляется
в динамических режимах работы. Очевидно, сложивша-
яся ситуация объясняется тем, что динамика взаимосвя-
ш процессов имеет довольно сложный и во многом еще
не изученный характер. Так как взаимосвязь процессов
в существенной степени влияет на качество функциони-
рования различных систем, то разработка методов ана-
лта динамики взаимосвязи информационных и энерге-
тических процессов и создание инженерных методов
проектирования динамических систем с учетом взаимо-
сня in являются важной и актуальной проблемой.
I л а на вторая
ДИНАМИКА ВЗАИМОДЕЙСТВИЯ ПРОЦЕССОВ
ПРОИЗВОДСТВА, ПРЕОБРАЗОВАНИЯ
II ПОТРЕБЛЕНИЯ ЭНЕРГИИ
I ОЬОЫЦЕННАЯ ДИНАМИЧЕСКАЯ МОДЕЛЬ АКТИВНОГО
>Л1 Ml ПТА ДИНАМИЧЕСКОЙ СИСТЕМЫ
Работу любого управляемого элемента динамиче-
(кий системы можно рассматривать как преобразование
одного вида энергии в другой. Существенным при этом
пи |яегся то обстоятельство, что в соответствии с прин-
U
ципом сохранения энергии процесс преобразования мо»
жет происходить лишь в том случае, если ТУ получает
энергию от ИЭ и преобразованная энергия расходуется
(рассеивается) или накапливается, т. е. потребляется.
С количественной стороны преобразованная энергия
обычно характеризуется выходной координатой ТУ*,
определяемой управляющим воздействием и скоростью
преобразования энергии. Последняя же зависит от
мгновенной мощности, т. е. количества энергии, которое
может получить ТУ за единицу времени от ИЭ, что
в свою очередь определяется принципом действия уст-
ройства и его конструкцией. Обычно технически реали-
зуемые ИЭ характеризуются постоянством одной из
энергетических координат, чаще всего связанной с по-
тенциалом поля (напряжение, напряженность и т. п.).
В этом случае мощность, потребляемая ТУ, опреде-
ляется второй энергетической координатой, например
током для ТУ и ИЭ электрической природы. В послед-
нем случае регулирование потребляемой энергии ТУ,
а следовательно, и его выходной координаты заключа-
ется в регулировании тока, потребляемого им от ИЭ,
что при постоянстве напряжения сводится к регулирова-
нию проводимости ТУ и осуществляется за счет соот-
ветствующих изменений его входного (управляющего)
сигнала. Подобный принцип регулирования широко ис-
пользуется в технике и обеспечивает однозначное соот-
ветствие между входным — управляющим и выход-
ным— управляемым сигналами лишь в том случае,
если напряжение питания ТУ остается неизменным во
всех режимах его работы. Очевидно, при изменении на-
пряжения питания при неизменном управляющем сиг-
нале (т. е. постоянной проводимости) будут изменяться
ток ТУ, потребляемая им мощность, а следовательно,
и выходной сигнал устройства.
В общем случае ток, потребляемый ТУ от ИЭ, и его
выходной сигнал зависят не только от управляющего
сигнала и напряжения питания, но и от их соответству-
ющих производных, поэтому информационные и энерге-
тические процессы в ТУ и их взаимовлияние описыва-
* Следует заметить, что количество преобразованной энергии
должно характеризоваться двумя координатами (величинами), од-
нако если одна из координат постоянна, что обычно имеет место
на практике, то преобразованная энергия однозначно характера
зуется одной координатой устройства,
20
юн я следующей системой нелинейных дифференциаль-
ных уравнений:
} (3)
J
''пых (О = F к'ЕХ (/), A-fBX (/), a^> (/), ип (/), ...
:;^Г) (<).«
i (t) = Ф [Хвх (/), л'вх (/), х™ (/), ии (/),...
...,n'Z)(/),/'(/),
где *вых(0, Wn(0 И i(t) являются произвольными
функциями времени, как непрерывными (в непрерывных
ишамических системах), так и дискретными (в им-
пульсных и цифровых системах).
Далее для простоты рассматриваются ТУ только не-
прерывных динамических систем, для которых все рас-
сматриваемые функции являются непрерывными и глад-
кими. Будем также полагать, что нелинейные отображе-
ния P(xs, л£’), где xs = {хвых, хвх, Цп} и Ф(хг
л"’,..., где х£ = {«, хвх, ып} являются непрерывны-
ми и гладкими в некоторой малой ббла.сти изменения пе-
ременных и л'^’ и, следовательно, дифференцируе-
мыми в этой области по всем своим аргументам функци-
ями. Применив при принятых ограничениях обычную ли-
неаризацию в малом в окрестности рабочего режима ТУ,
например по методике, изложенной в [30], систему урав-
нений (3) относительно приращений переменных можно
записать в виде
z п
Д-^вых (0 = V д ДхВыХ (0 +
^вых
г—I
(4)
k q
/=1 /=0
О1Л" 11
1^0
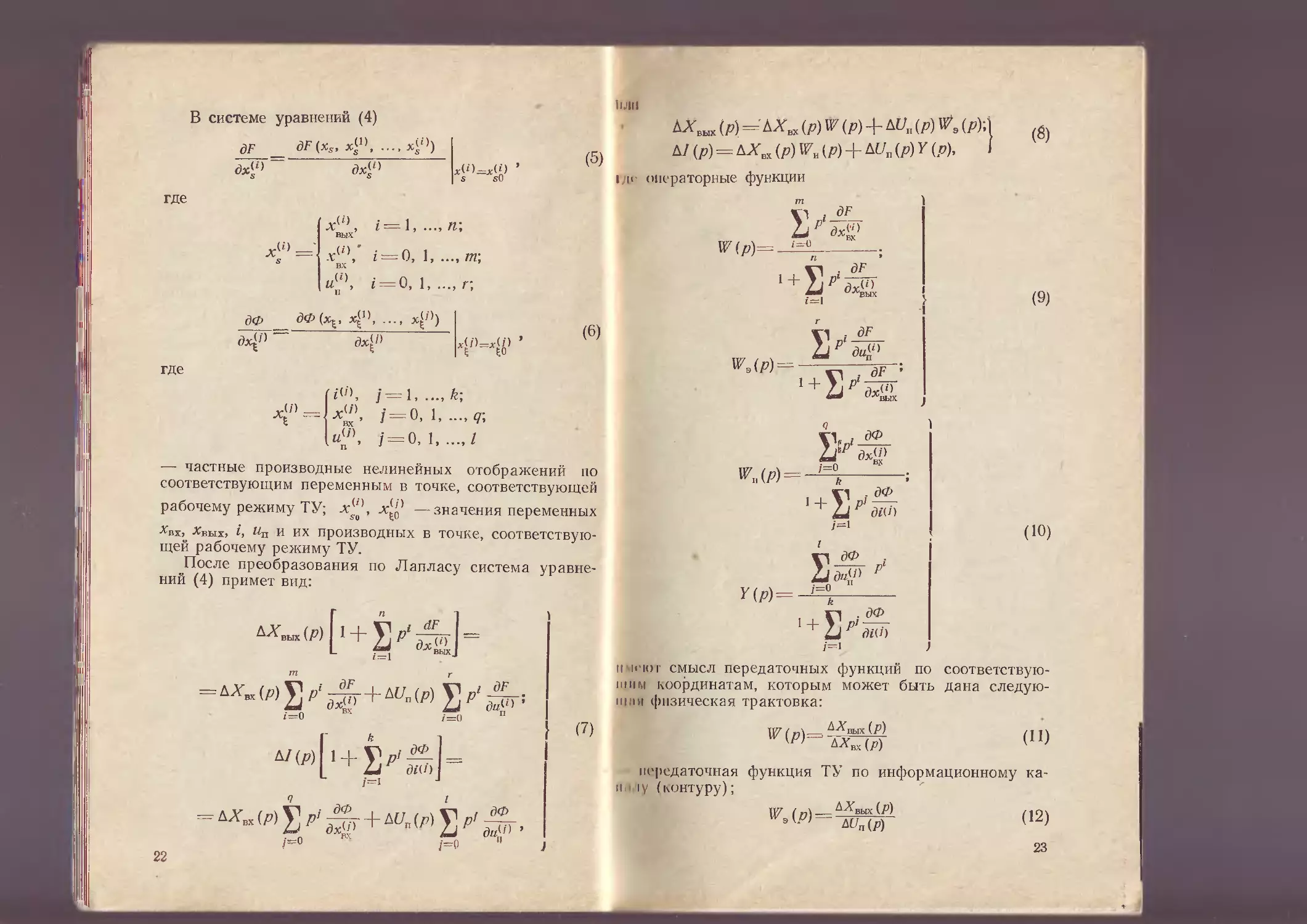
21
В
системе уравнений (4)
dF _ dF(xs, .
<Ъс*г) дх^
(5)
lull)
J * п
s s0
ГД.
где
Л*БЫХ (Р) = АХвх (р) W (Р)+ДПп (р) w5 (Р);1
Д/ (р) = дхЕХ (р) WK (р) + днп (р) Г (р), 1
операторные функции
т [
ТЛ - dF
(6)
дФ
где
М •='
S
вых'
i — 1, ..., п\
ВХ
(О
1Г \ i
п
дФ(х^, ^|1),
дх^
1 = 0, 1
ГП\
(6)
АП___
I
x(i), / = 0,1,..., 9;
вх J у
u(i\ i =
П J ’
— частные производные нелинейных отображений
соответствующим переменным в точке, соответствующей
рабочему режиму ТУ; xj'*, х^1 —значения переменных
-^вх, %ых, i, Uti и их производных в точке, соответствую-
щей рабочему режиму ТУ.
После преобразования по Лапласу система
ний (4) примет вид:
по
уравне-
= Д^вх (P)J]pZ
8.^
т г
i~ 0 7=0
д/Л1'1 ’
г k 1
<1 I
1-0
дФ
д,1»} ’
)
(7)
Lр
W(p)=_Jx!L-—
S. dF
Р‘^
^э(р) =
dF ’
Рд^
ихвых
)
1
(9)
WAP)
к
k
У(р)=-^—
S. дФ
Р’^П
(Ю)
)
по соответствую-
к и юг смысл передаточных функций
Шим координатам, которым может быть дана следую-
III in физическая трактовка:
w W ДХвх (р)
передаточная функция ТУ по информационному ка-
и iy (контуру);
э Д[7П (р)
(П)
(12)
23
22
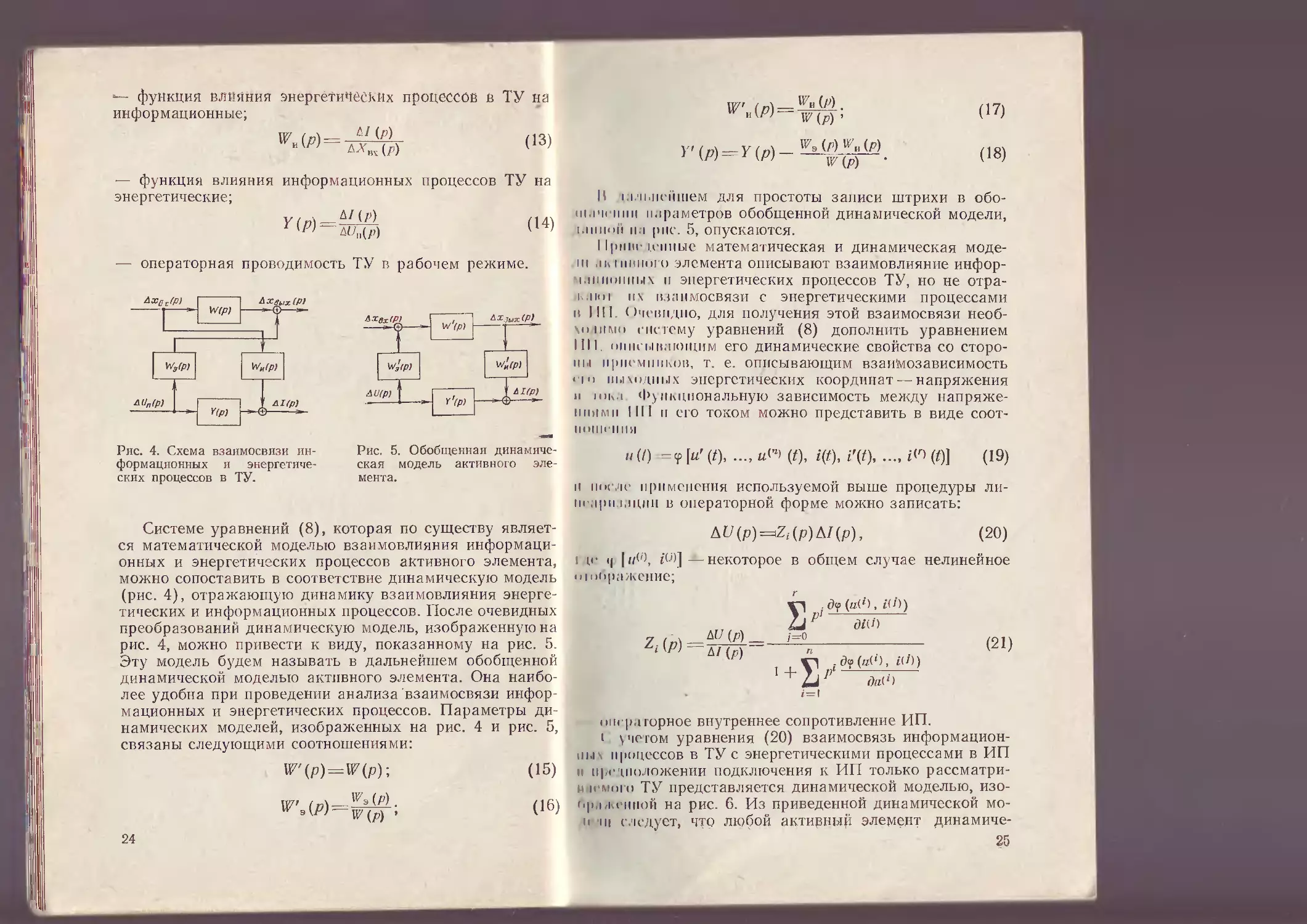
— функция влияния энергетических процессов в ТУ на
информационные;
<‘3)
— функция влияния информационных процессов ТУ на
энергетические;
!'«=ад ел
— операторная проводимость ТУ в рабочем режиме.
Рис. 5. Обобщеннаи динамиче-
ская модель активного эле-
мента.
Рис. 4. Схема взаимосвязи ин-
формационных л энергетиче-
ских процессов в ТУ.
Системе уравнений (8), которая по существу являет-
ся математической моделью взаимовлияния информаци-
онных и энергетических процессов активного элемента,
можно сопоставить в соответствие динамическую модель
(рис. 4), отражающую динамику взаимовлияния энерге-
тических и информационных процессов. После очевидных
преобразований динамическую модель, изображенную на
рис. 4, можно привести к виду, показанному на рис. 5.
Эту модель будем называть в дальнейшем обобщенной
динамической моделью активного элемента. Она наибо-
лее удобна при проведении анализа взаимосвязи инфор-
мационных и энергетических процессов. Параметры ди-
намических моделей, изображенных на рис. 4 и рис. 5,
связаны следующими соотношениями:
Г'(р) = Г(р); (15)
<16>
<17)
У'(р) = Г(р)-Ь<ГИЩЙ. (18)
В и н.непшем для простоты записи штрихи в обо-
(П.1Ч1 пни параметров обобщенной динамической модели,
I.ninon и.। рис. 5, опускаются.
I Ipiinr цч|цые математическая и динамическая моде-
||| ак I ииипго элемента описывают взаимовлияние инфор-
|.1И1||>|||ц.1\ п энергетических процессов ТУ, но не отра-
г. iioi их взаимосвязи с энергетическими процессами
в IIII Очевидно, для получения этой взаимосвязи необ-
\niiiMo спсгему уравнений (8) дополнить уравнением
Illi. oiiiiei.iHaioimiM его динамические свойства со сторо-
ны приемников, т. е. описывающим взаимозависимость
• io выходных энергетических координат — напряжения
и ioK.il Функциональную зависимость между напряже-
ниями IIII п его током можно представить в виде соот-
п<>111< 1111 я
и (I) =<?[и' (/), ..., иС2) (/), iff), i'(t), .... i<'> (/)] (19)
и после применения используемой выше процедуры ли-
||| .ipni.iHiiii в операторной форме можно записать:
AI7(p)^Z,-(p)A7(p), (20)
I щ ч |п« —некоторое в общем случае нелинейное
• и пора цгепие;
Z. (р) = ^4=—------------------- (21)
_L V i ду(и(,)- г(/))
+ L р ди(‘)
«=|
операторное внутреннее сопротивление ИП.
i учетом уравнения (20) взаимосвязь информацион-
ны процессов в ТУ с энергетическими процессами в ИП
и |||,с'отложении подключения к ИП только рассматри-
ваемого ТУ представляется динамической моделью, изо-
браженной на рис. 6. Из приведенной динамической мо-
|| hi < к’дует, что любой активный элемент динамиче-
25
24
ской системы через ИП охватывается обратной связью
Действительно, в соответствии со схемой связь межд,
входным — управляющим и выходным — управляемы
сигналами активного элемента определяется соотношу
нием
ДА-ЕЫХ(^)=дхвх(р) --------------~(4г(д----------—
1 + W (Р) К'и (Р) 1 + у (р) Z[ (р)
(21
Знак обратной связи определяется знаками статичс
ских коэффициентов передачи соответствующих опера
торных функций, входящих в знаменатель (22). Есл,
предположить, что активный элемент не производит ип
вертирования сигнала, имеет положительную проводи
мость в рабочем режиме, а функции влияния имеют оди
и тот же знак, то знак обратной связи в статическо!
режиме будет определяться знаком статической состав
ляющей внутреннего сопротивления ИП.
Известно, что значение и знак активной (статиж
ской) составляющей внутреннего сопротивления И1
Рис. 6. Схема взаимосвязи инфор-
мационных и энергетических про-
цессов ТУ и ИП.
и*г отрицательной. Если выходная характеристика ИГ1
и каких-либо режимах по току имеет положительный
И.1КЛОП (подъем статической характеристики — кривая
'), го активная составляющая внутреннего сопротивле-
ния ПП отрицательна, а обратная связь ТУ, замыкаю-
щаяся через ИП, будет положительной.
Наконец, если статическая характеристика ИП в ка-
ких либо режимах будет иметь нулевой наклон, то через
1111 будет осуществляться только гибкая обратная связь,
'h но, чго обратная связь через ИП в определенной сте-
пени изменяет динамические, а следовательно, и переда-
।очные свойства ТУ, что, как правило, ведет к изменению
качества функционирования последних. Очевидно, сте-
пень указанных изменений определяется характером и
। чубиной обратной связи, т. е. значением и характером
нн\греннего сопротивления ИП. В частности, известно
что жесткая отрицательная обратная связь (ООС)
in i i та ведет к уменьшению коэффициента передачи ТУ
по информационному каналу. В ряде случаев, а имение
при достаточной стабильности параметров и характери-
II нк элементов ООС, она уменьшает действие дестаби-
пипрующих факторов на рабочие характеристики (функ-
циональные зависимости) ТУ, обусловленных, например,
производственным разбросом и эксплуатационным ухо-
|ом конструктивных и технологических параметров от-
II и.пых его элементов. Таким образом, стабилизирую-
ц[1Ч' действие ООС через ИП будет проявляться лишь
и him случае, если внутреннее сопротивление ИП доста-
1очно стабильно.
В приведенных рассуждениях предполагалось, что
1111 подключен только один приемник — активный эле-
iiiii, анализ влияния свойств ИП на эксплуатационно-
iiхпические характеристики которого и проводился. На
|1|>.1К1ике же к ИП обычно подключается ряд приемни-
„ „ п „ 'in, как управляемых, т. е. входящих в состав динамиче-
Рис. 7. Внешние характерисп > 1 ’ гг
ки pjn । их систем, так и неуправляемых. Для простоты далее
/-положительный статазм; 2 1ш шале рассматривается случай, когда к ИП подключа-
войИс?атизмЬ1й статизм: 3 —11у " । ряд неуправляемых приемников (ТУ), которые
п । ппюм случае полностью описываются их динамиче-
внешней характеристик" проводимостями в рабочем режиме (например,
определяются наклоном его ип^шлш лаь-ш. - -
(рис 7) В частности, если внешняя характеристика IH ” " (’-•нательные и осветительные приборы, «неуправляе-
имеет падающий характер (отрицательный наклон электродвигатели и т. п.). С учетом этих приемни-
/С г ™ тл оп-т.. •" шпамическая модель, отражающая влияние свойств
коивая 1} во всем рабочем диапазоне по току, то акти « ’ 1 щ
1 ' ' „ „ ллгплтплпмг .о nnnnwl I I па эксплуатационные характеристики активного эле-
ная составляющая внутреннего сопротивления полож! j г г
тельна, а обратная связь ТУ, действующая через 141 27
Мента, Дана на рис. 8. С учетом обратной связи через
ИП выходная координата активного элемента определя-
ется соотношением
Л^БЫХ(/>) =
=д2бвх(р) ~ ,-(д)Шэ(Р) > (23)
которое также можно записать в виде
ЬХвьМ=ЬХвк(р)----------- (р
1 + W7 (Р) (Р) 1 + г,э (р) Y (р) W 3
(24)
где
Z'13 (= l+VE'(p)Z,-(p) (25)
— операторное внутреннее сопротивление эквивалентного
ИП; У, (р) — суммарная операторная проводи-
i
мость неуправляемых приемников, подключенных к дан
ному Р1П.
Из (23) и (24) следует, что характер и глубина об-
ратной связи (ОС) активного элемента по цепям пита-
ния зависят не только от свойств ИП, но также и от ди-
намических свойств всех его приемников. В соответствии
с этим ИП вместе со всеми приемниками по отношению
к рассматриваемому ТУ представляется эквивалентным
ИП с операторным внутренним сопротивлением, опреде
ляемым по (25). Из соотношения (25) следует, что при
отрицательном статизме внешней характеристики ИП
статическое сопротивление эквивалентного ИП будет
меньше статического сопротивления собственно ИП, т. е
реализуется ООС. Если же рассматривать частотную ха-
рактеристику внутреннего сопротивления эквивалентно-
го ИП, т. е.
= <26>
то из (26) следует, что по мере роста частоты возрастает
фаза второго слагаемого в знаменателе (26), в частно-
сти при определенных сочетаниях свойств ИП и прием-
28
инков, например ийДуктиЁном характере внутреннего со-
противления ИП и емкостном характере приемников,
। е. при подключении на выход ИП емкостного фильтра.
< ледствием этого является уменьшение модуля знамена-
геля в (26) с ростом ча-.
с готы, что ведет к увели-
инию модуля сопротив-
ления эквивалентного
ИП. После некоторой ча-
стоты модуль знаменате-
ля становится меньше
с ушицы, а это означает,
что модуль сопротивления
жвпвалентного ИП на
ушных частотах больше
модуля сопротивления
собственно ИП. Отсюда
следует, что при работе
Illi па ряд параллельно
по цс/поченных приемни-
ков происходит ослабле-
ние жесткой ОС и усиле-
ние гибкой ОС ТУ через
псин питания, т. е. влия-
ние свойств ИП проявля-
ли я в наибольшей степе-
ни в динамических режи-
мах, и этот случай явля-
йся наиболее часто встре-
ч ।ющимся на практике.
Если же внешняя харак-
нрпстика ИП имеет по
ложптельный статизм, то
происходит усиление и
жесткой ОС ТУ через це-
ни питания.
Из изложенного сле-
Рис. 8. Динамическая модель
взаимосвязи ТУ и ПП.
Рис. 9. Динамическая модель
СЭС.
густ, что на основе приве-
к иной динамической модели активных элементов можно
производить достаточно полный анализ влияния свойств
I III па эксплуатационно-технические характеристики ТУ.
< > inако указанным влиянием не исчерпывается зависи-
те гь качества функционирования динамических систем
oi характера протекания энергетических процессов в ИП.
29
Практика показывает, что в выходном напряжений
ИП всегда имеются помехи, обусловленные как принци-
пом действия и конструкцией самого ИИ и его приемни-
ков, так и влиянием внешней среды. Примерами таких
помех, обусловленных принципом действия ИП и его
приемников, являются следующие: коллекторные гармо-
ники при работе электрических машин постоянного тока
(электродвигателей, генераторов), коммутационные гар-
моники и гармоники, кратные частоте питающей сети
в неуправляемых и управляемых выпрямительных уста-
новках, гармоники, кратные несущей частоте импульсных
ТУ, и т. п. Очевидно, интенсивность и спектральный со-
став колебаний напряжения СЭС, обусловленных ука-
занными причинами, зависят как от спектральных харак-
теристик отдельных составляющих указанных помех, так
и от динамических свойств системы «ИП — приемники».
Для отражения этого обстоятельства в динамической
модели СЭС указанные помехи представляются возму-
щениями Ащ(р), действующими на выходе ИП (рис. 9),
тогда колебания напряжения на входах цепей питания
приемников определяются соотношением
Д[/(М = Д</.(Н , + Fi(j‘)g(j5)-. (27)
Из последнего соотношения следует, что при извест-
ных спектральном составе, интенсивности помех опреде-
ленного класса и динамических свойствах ИП и всех его
приемников можно рассчитать интенсивность колебаний
напряжения на входах цепей питания приемников, а сле-
довательно, применить соответствующие методы их
устранения (например, использовать принципы компен-
сации или фильтрации).
Более сложную природу возникновения имеют коле-
бания напряжения, обусловленные изменением потреб-
ления тока управляемых ТУ динамических систем. Ха-
рактер изменения потребляемого тока определяется дву-
мя факторами: алгоритмом управления ТУ и влиянием
внешней среды на ТУ, которое чаще всего проявляется
за счет возмущений, действующих на ТУ со стороны на-
грузки. Механизм возникновения подобных помех рас-
смотрим на следующем простом примере. Пусть в схеме,
изображенной на рис. 6, управляющий сигнал активного
элемента [хвх(/)] является периодической функцией
времени, тогда выходной сигнал элемента, а следова-
30
тельно, и потребляемый им ток также будут периодиче-
скими функциями той же частоты. Очевидно, колебания
тока ИП вследствие конечности его внутреннего сопро-
тивления вызовут колебания напряжения на соответству-
ющих входах цепей питания всех приемников ИП, значе-
ние и спектральный состав которых в соответствии со
схемой определяются соотношением
Z-, (/и)
W (ia>) Ги( ко) гт-vT- \ 7 /• х
z,( /“) *
1 + W W Wtl (jo) Гэ (/ю)
которое можно переписать в виде
^U(im)=^X (т)______________ W °w) Zi (/w)_______________
U (’ 1+У (/«) Z(- (/<o)+r (/®)IT„ (/'>) Zi (jo) W3( jo)
(29)
Очевидно, колебания напряжения питания приводят
к появлению динамической ошибки в выходном (инфор-
мационном) сигнале ТУ. Предложенная динамическая
модель активного элемента позволяет при известных ее
параметрах и известном спектре колебаний напряжения
питания вычислить и значение указанной ошибки. Дей-
ствительно, в соответствии со схемой, изображенной на
рис. 6, ошибка на выходе ТУ, обусловленная колебания-
ми напряжения питания, определяется соотношением
___________W9(p)W(p)_____________
Z; (р)
1 + (Р) ] _|_ у (р) /. (р) (р) W (/_>)
(30)
Из (30) следует, что уменьшение указанной ошибки
может производиться за счет уменьшения колебаний на-
пряжения питания, т. е. обеспечения |А17п(/®)|—->0.
Ясно, что основным требованием при технической реали-
зации ТУ из условий получения минимальной ошибки от
колебаний напряжения питания является обеспечение
соотношения
| ^э(/(й) | >0, 0-С(0 <С(Ртах, (31)
которое обычно достигается за счет соответствующих
схемных решений.
^X'Bm(p) = ^U„(p)
Из проведенного анализа на основе соотношений
(23) — (30) можно дать физический смысл каждого из
параметров динамической модели. В частности, из (23)
следует, что W(p) есть передаточная функция активного
элемента по информационному каналу при отсутствии
колебаний напряжения питания и |Z,(/co) |~>0 при 0<
<<п<®тах- Физический смысл функции влияния инфор-
мационных процессов на энергетические процессы может
быть получен из соотношения (см. рис. 6)
Д/а=,(/“) = Д^вЫХ(/<«)Х * 1
__________________(fa)_________________________________ /оп\
Z- (/to)__________>
1 + У (/») Zf(/a>) 1,7(/'w) (/’и)
из которого следует, что й7и(/«) есть функция передачи
колебаний выходного сигнала ТУ в колебания потреб-
ляемого им от ИП тока при обеспечении |Z, (/fo) |—>0
в диапазоне 0<a<^max- Из (30) следует, что ^э(/со)
есть функция передачи колебаний напряжения по цепям
активного элемента к ошибке выходной координаты ТУ,
приведенной к его управляющему входу при [Z,- (/со) |—>
' >0 И 0<^i(D'<CcOmax*
Из уравнения
Д/а.э(/т)=Д£(/т)Х
[У (/со) + W3 (/со) W (/со) W„ (/со)]
1 + [Г (/со) + (/со) W (/со) (Гп (/СО)] Z; (/со)
(33)
следует физический смысл проводимости ТУ в рабочем
режиме при постоянстве хБК и |г1(/ю) |— 0 при 0<<о<
ГОпшх*
Методика определения соответствующих операторных
функций обобщенной динамической модели активных
элементов в зависимости от их конструктивных и схем-
ных параметров иллюстрируется на примерах нахожде-
ния параметров динамической модели транзисторного
каскада и двигателя постоянного тока.
Транзисторные каскады используются как в информационно-
измерительных, так и в силовых цепях различных ТУ и нашли са-
мое широкое применение в современной технике. Для простоты
далее рассматривается транзисторный каскад, собранный по схеме
с общим эмиттером и работающий в режиме усилителя постоянного
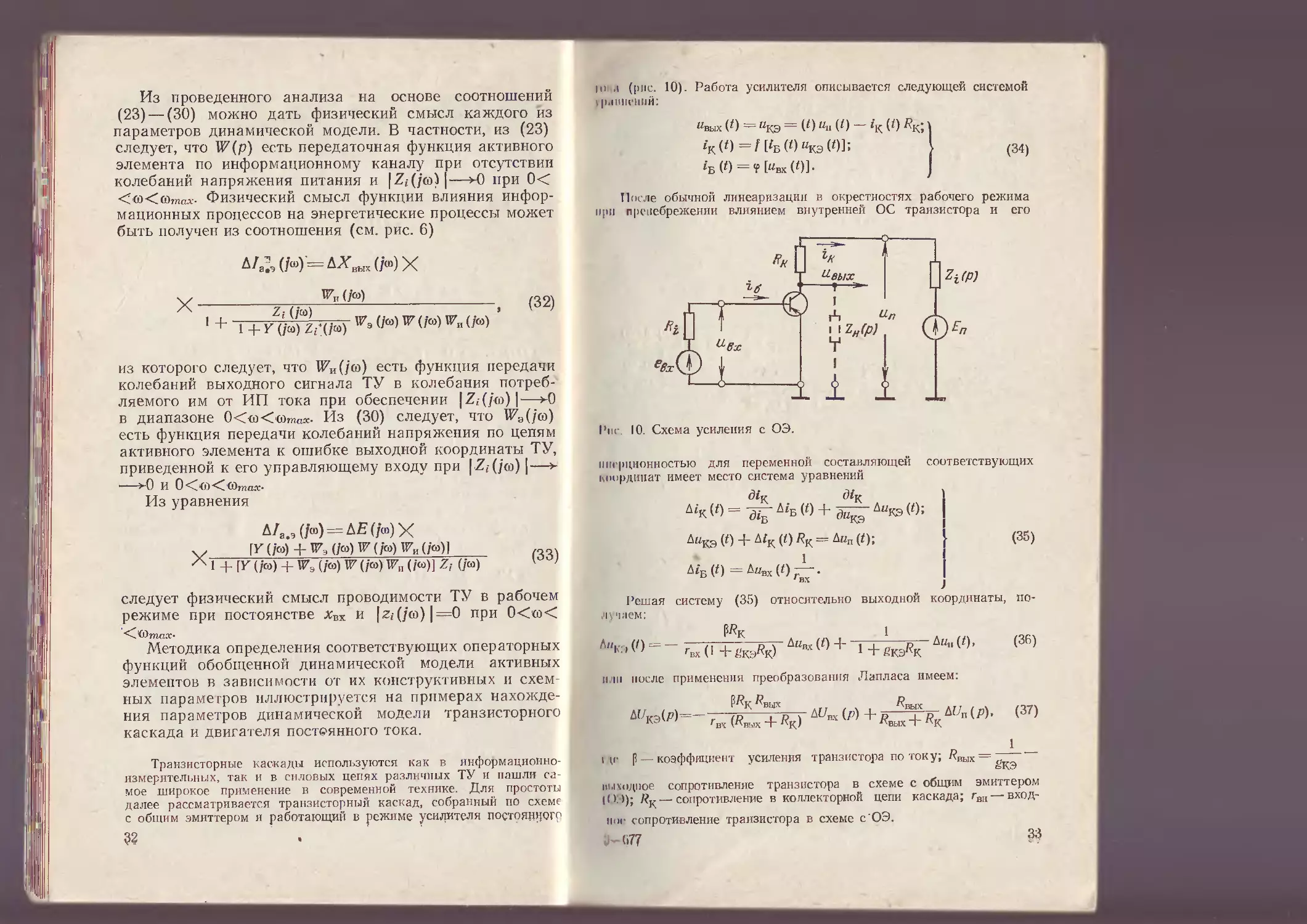
। । .1 (рис 10). Работа усилителя описывается следующей системой
। p.iniiciiin'i
ивых (0 — икэ — (О {1“ (О — *'к ^К>
1'к (^ = f [‘в (0 икэ (0]»
»Б (0 =¥ [«вх(0]-
(34)
После обычной линеаризации в окрестностях рабочего режима
при пренебрежении влиянием внутренней ОС транзистора и его
Риг 10. Схема усиления с ОЭ.
инерционностью для переменной составляющей соответствующих
координат имеет место система уравнений
^*К
А‘к (0 = Аг'Б + дй^ №
^кКЭ (0 + ^*К (0 *К — Амп (01
(35)
1
А*б (0 — (0 г
вх }
Решая систему (35) относительно выходной координаты, по-
л)чисм:
рЛц 1
Л"к-’(/) = “ rBX(i +екэКк) ЛКвх (0 + i+екэ^к Д“,! (0’ (36)
и in после применения преобразования Лапласа имеем.
Л^э(Р)=- гвх(/?17^)- +RBJ+RK^Un (р)’ (37)
1
IV р — коэффициент усиления транзистора по току; /?вых = ~
&КЭ
пыходпое сопротивление транзистора в схеме с общим эмиттером
• () )); ^ — сопротивление в коллекторной цепи каскада; гвн — вход-
ное сопротивление транзистора в схеме с ОЭ.
3-G77 33
Уравнение (37) можно сопоставить с динамической моделью
транзисторного каскада (рис. 11), которая является удобным ин-
струментом как для решения ряда задач анализа и синтеза тран-
зисторных схем, так, в частности, и для исследования влияния
энергетических процессов в ИП на информационные процессы уси
лителя. Если уравнение (37) дополнить уравнением тока, потреб
ляемого каскадом от ИП, то полученная система уравнений
Д^ВЫХ (₽) = (р) дивх (Р) + Уэ (р) (р);
Д/ (р) = U7B (р) Д17ю (р) + Y (р) ДЦ, (р)
(38)
описывает взаимовлияние информационных и энергетических процес
Р ^К^вых
сов в усилительном каскаде, где (р),=--------р- .-.р-----[коэффп
'вх /<К "т\лвых
Рис. 11. Динамическая модель усилителя с ОЭ.
р
циеит усиления каскада по напряжению; W9 (р) = —р—г'р—
''К ~г ''вых
коэффициент влияния энергетических процессов на информационные1;
^и(Р) = 7-----коэффициент влияния информационных процессов на
'вх
1
энергетические; Y (р) = -р----r-g—— динамическая проводимость
''вых ~г ''к
каскада в окрестностях рабочей точки.
Системе уравнений (38) соответствует динамическая модель
активного элемента (см. рис. 4); для перехода к обобщенной днна
мической модели следует произвести пересчет соответствующих
функций на основе соотношений (15)—(18). Параметры обобщеп-
1 Следует заметить, что для усилительных транзисторных каска-
дов, работающих в активной области, имеет место Рвых^^к- тогда
№э(р)^ т. е. колебания напряжения питания с коэффи-
^вых
циентом передачи, равным единице, передаются на выход усилителя,
84
Инн динамической модели для усилителя определяются из шит выражений: следую-
В ^К^вых W (Р) = — п ,~р • Г ВХ ' ^ВЫХ (39)
э (Р) - (р) - ₽/?к , (40)
Ги (Р) ”1" ^вых. - ^вых ’ (41)
№э(р)№И(Р) 2Кк + ₽вых У'(Р)-У(Р) рк(/?к+рВЬ1х)- (42)
Ill (39)—(42) следует, что параметры обобщенной динамяче-
кип модели для данного случая получились безынерционными, чго
инплось следствием пренебрежений инерционными свойствами тран-
tiicnipa при записи системы уравнений, описывающих работу уси-
ди ц-ля. Если учитывать инерционные свойства транзистора, то в си-
। н-му уравнений и динамическую модель усилителя (рис. 11) сле-
дует ввести соответствующие реактивные составляющие, т. е. учесть
инертность движения носителей заряда, которая обычно учитывает-
гн |3(>] инерционностью коэффициента усиления по току согласно
। отношению
нЬ?-- (43>
где io — граничная частота транзистора в схеме с ОЭ, и учесть
гм кость перехода эмиттер — коллектор, определяемую соотноше-
нием
^КЭ — П + ₽ (Р)] Ос. (44)
где =5= СКБ | / —-р- ’ а Скв — значение емкости перехода кол-
ivKiop-база в схеме с ОБ, измеренной прииКБ = Ен. Учет рас-
ширенных реактивностей в динамической модели усилителя (см.
inn II) и в соотношениях, определяющих параметры обобщенной
динамической модели, производится путем подстановки вместо р
• in шачения, определпемого соотношением (43), и вместо Т?ЕЫх —
ш.1ч<'11ия, определяемого соотношением
1
рСкч R
2вых (Р) — 1 1 рД Скэ
Г) | 1 * ЪЫА
I* 35
свойств усилителя по информационному контуру, йё изменяй Сте-
пени и характера ОС усилителя через ИП и характера взаимосвязи
информационных процессов в усилителе с энергетическими процес-
сами в ИП.
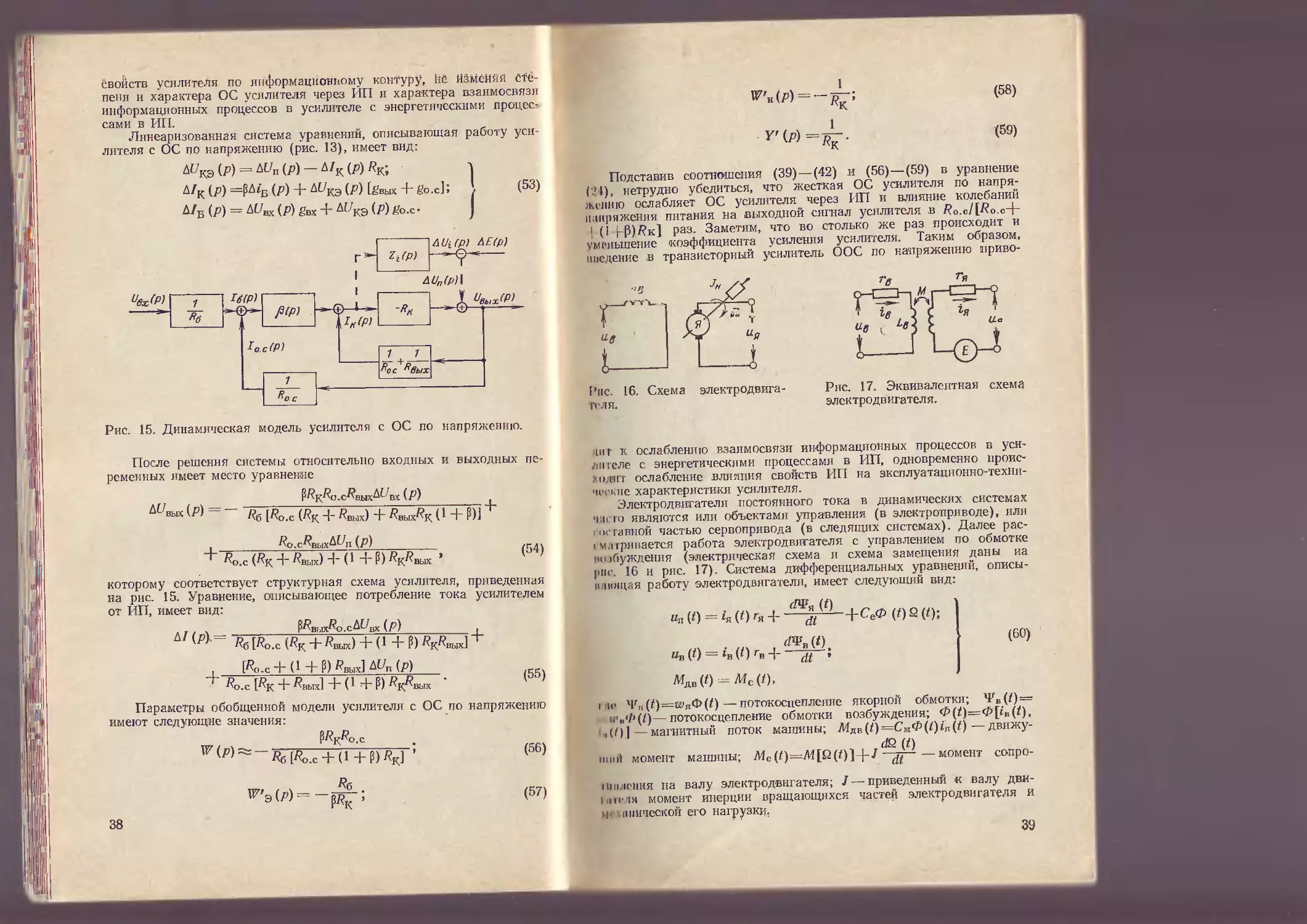
Линеаризованная система уравнений, описывающая работу уси-
лителя с ОС по напряжению (рис. 13), имеет вид:
^КЭ (р) ~ (/’) — (Р)
(Р) =РА‘б (Р) + (Р) [&ых + go.с]1
(Р) = AUBX (р) gBX -f- (р) go,C.
(53)
Рис. 15. Динамическая модель усилителя с ОС по напряжению.
После решения системы относительно входных и выходных пе-
ременных имеет место уравнение
Р-^К^о.с^вых^вх (Р)
ВЬК (Р) = ~ *б [«о.с (RK + Двых) + /?вых^к (1 + ₽)] +
I ________^О.С^вмхД^П (р)_________ г .
' Ro.C + ^вых) + О + ₽) РуРвых ’ °
которому соответствует структурная схема усилителя, приведенная
на рис. 15. Уравнение, описывающее потребление тока усилителем
от ИП, имеет вид:
л г, ч______________Р7?ВЫХ7?О-СД{7ВХ (р)_____ .
R6 [Ro.c (Рк + /?вых) + (!+₽) ДКДВЫХ] +
, [^о.с + (1 +Р)^вь,х] АПп (р)
Ro.c I^K + ^вых] + (1 + ₽) RyRaax '
Параметры обобщенной модели усилители с ОС по напряжению
имеют следующие значения:
^ (^) = - Дб [До.с + (1 + р) рк] ' (56)
^э(р) = -р^-; (57)
38
^«(p)=-^-;
(58)
(59)
Подставив соотношения (39)—(42) и (56)—(59) в уравнение
(Ч), нетрудно убедиться, что жесткая ОС усилителя по напря-
жению ослабляет ОС усилителя через ИП и влияние колебаний
напряжения питания на выходной сигнал усилителя в 7?о.с/|7?о.с+
| (1 | Р)/?к] раз. Заметим, что во столько же раз происходит и
уменьшение коэффициента усиления усилителя. Таким образом,
нпсдение в транзисторный усилитель ООС по напряжению приво-
Рис. 17. Эквивалентная схема
1'пс. 16. Схема электродвига-
теля.
электродвигателя.
ни г к ослаблению взаимосвязи информационных процессов в уси-
ди геле с энергетическими процессами в ИП, одновременно проис-
ходит ослабление влияния свойств ИП на эксплуатационно-техни-
ческие характеристики усилителя.
Электродвигатели постоянного тока в динамических системах
•исго являются или объектами управления (в электроприводе), или
составной частью сервопривода (в следящих системах). Далее рас-
i м.привается работа электродвигателя с управлением по обмотке
по >буждения (электрическая схема и схема замещения даны иа
рис. 16 и рис. 17). Система дифференциальных уравнений, описы-
1онощая работу электродвигатели, имеет следующий вид:
ЙФЯ (О
ип (0 = 1Я (0 Гя +-йА2“ + СеФ & Q
ив (О-1в (О гв + dt *
(60)
ые ’Ии (О =шпФ (t) — потокосцепление якорной обмотки; 4fB(/)=
«'„'/»(/)—потокосцепление обмотки возбуждения; Ф(/)=Ф[/В(<),
„(01—магнитный поток машины; —движу-
da (t)
пни! момент машины; Мс (7)=Л4[£2 (7) ] -|-J ——момент сопро-
।пиления на валу электродвигателя; J — приведенный к валу дви-
I целя момент инерции вращающихся частей электродвигателя и
М< чншческой его нагрузки,
39
С учетом соотношения
Ф(0----Ф[М0. Йч (0]~~Ф[1в-И, *Я.п]4""
-|-/гЕ'Дтв (/)-|-/гяЛя (0,
(61)
где Ф[(в.в, «я.н]=Фв — магнитный поток машины в рабочем ре-
жиме;
дФ[/в(0, >я(0]
. Ъ дФ[»в(0. »Я (01
Фн’ я ^‘я(0
fc«- diB(t)
Ф
н
— коэффициенты пропорциональности между магнитным потоком
и токами соответственно обмотки возбуждения и якорной обмотки;
Ai„(<)—отклонения токов обмотки возбуждения и якорной
Рис. 18. Структурная схема электродвигателя.
цепи от номинальных значении, линеаризованная в окрестностях ра-
бочего режима система уравнений (60) в приращениях и оператор-
ной форме имеет вид:
^^я (Р) [2Я + + р1.я] ф- Д/в (р) [СеАвйн ф- рМ] ф-
+ ДЙ(р)СеФн = Л17п(р);
Д/я (р) рМ + Д/в (р) [гв + pLB] + 0 = Д[7В (р);
ДДг (р) [СМФН ф" СмЙяГд.и] Д/в (/?) См^в^я.н 4~
4-Дй(р)[Лй4-р/] = 0,
(62)
где г'я.н, £2и, Фн— значения координат в рабочем режиме; L!t=
=w„kn, LB—wBkB—индуктивности соответственно якорной обмотки
н обмотки возбуждения; M=wBkBCe=wBkBCe — коэффициент вза-
имной индукции между обмотками электродвигателя; wB—число
витков обмотки возбуждения; шя — число витков якорной обмотки;
г „ . дМс (/)
Се, См — постоянные машины; ks=—-----------коэффициент вяз-
кого трения машины.
Систему уравнений (62) можно сопоставить с развернутой
структурной схемой электродвигателя (рис. 18), отражающей связь
его динамических своцстр q конструктивпо-техцодогпческимп и элек-
40
||инегк11мп параметрами. По схеме удобно проводить анализ влия-
нии йпцрдппат [«я.н, £2н, Фи] п конструктивных параметров на ди-
и|mii'ii кие свойства электродвигателя как объекта регулирования
....к.-ik составной части динамических систем, например, методами
мн шлпровапия на аналоговых машинах. В инженерных расчетах
। hi упрощения анализа динамики электродвигателя часто прене-
fipii.iior индуктивной связью между обмотками машины (что до-
I, (ими при пренебрежении влиянием реакции якоря машины) и
.'ini.ног 1{пя?0. В этом случае система уравнений (62) и дипамн-
11.| .г,| модель упрощаются.
11.1 рис. 19 представлена динамическая модель для данного
1У1ЯН, которая достаточно наглядно иллюстрирует и влияние
। in 1 III па динамические свойства электродвигателя по пнфор-
ч hi in шиому контуру. При принятых выше допущениях согласно
1< ’) передаточная функция электродвигателя по информационпо-
м\ кон гуру определяется соотношением
|. , . (Р)_______(ГЯ Ч~ РРя} 6?M0HCefeBSH
1П ; (Р) - [(гя + рЬя) (ks + р!) + СеСыФ\] [rB + pLB] >
(г:)
и nt ши ле соответствующих преобразований
тг -д___________^Д С1 + рТ«}_______
W{P} ~ (i + pTB)(\+a1P + a2p^ ’ (61>
I Н’
, __; GA ОяАт.н — бГеФцЦ^)
А (гя^й “Ь ПеСмФ3и) Гв
। ип нческий коэффициент передачи электродвигателя; 7*,=-——
41
постоянная времени обмотки возбуждения;
„____________^-Я*Я Н _______Тя_______t
0 'Уя.п — СеФв£2я 1 ’
Ся^я.н
1
^й’+ Гя^ _ 7Я —Ты__Ты_.
Я, == + СеСмФ2н~ j , СеСмФ2н реСмФ2н
ггя^й
L„J____________ТЯТМ
+ СеСмФ2н СеСмФ"н
1 т г ъ
'я«й
(65)
(66)
(67)
Tn=LP_lrF.—постоянная времени якорной обмотки двигателя; 7'м=
=Jjk й — механическая постоянная времени двигателя.
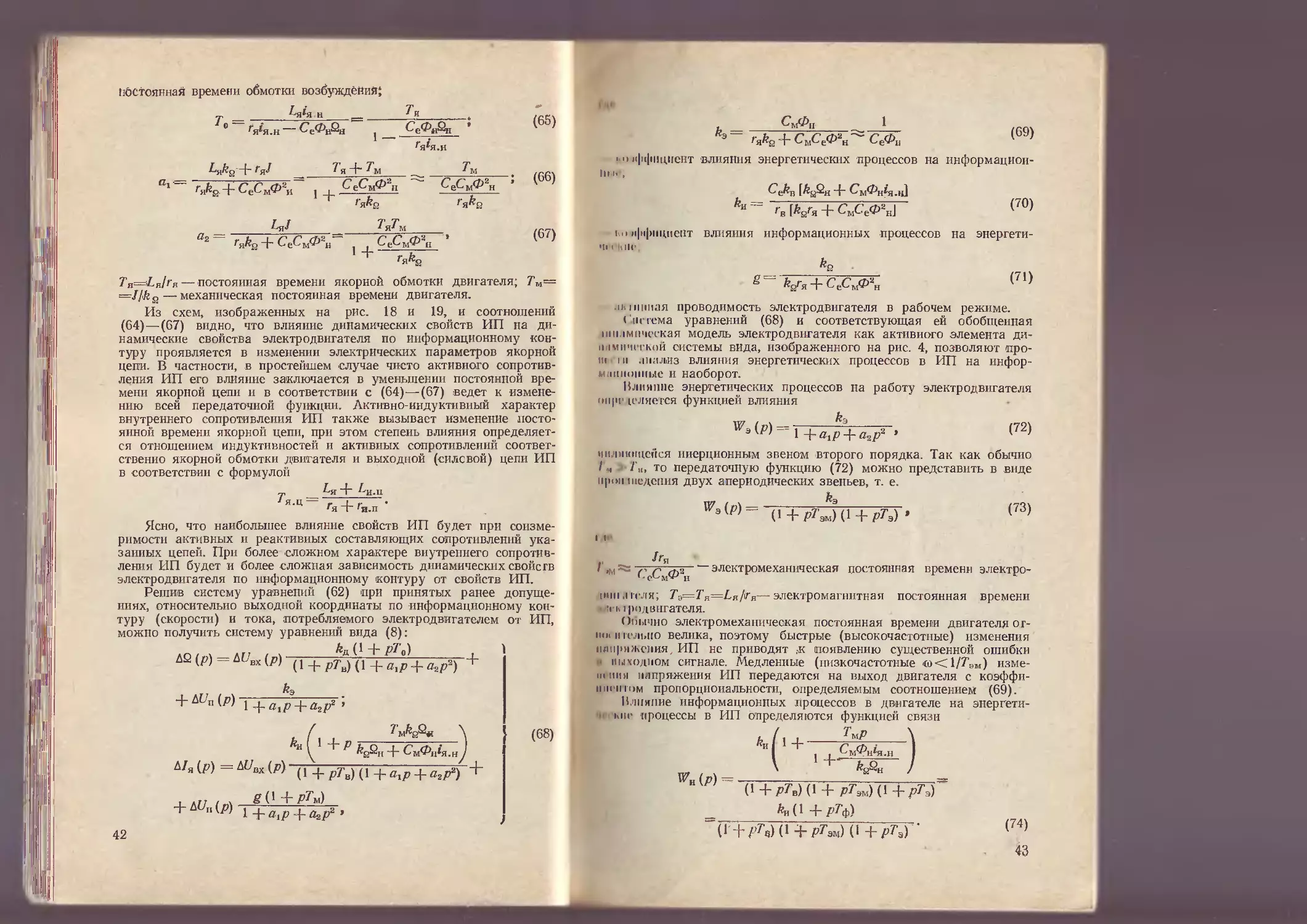
Из схем, изображенных на рис. 18 и 19, и соотношений
(64)—(67) видно, что влияние динамических свойств ИП на ди-
намические свойства электродвигателя по информационному кон-
туру проявляется в изменении электрических параметров якорной
цепи. В частности, в простейшем случае чисто активного сопротив-
ления ИП его влияние заключается в уменьшении постоянной вре-
мени якорной цепи п в соответствии с (64)—(67) ведет к измене-
нию всей передаточной функции. Активно-индуктивный характер
внутреннего сопротивления ИП также вызывает изменение посто-
янной времени якорной цепи, при этом степень влияния определяет-
ся отношением индуктивностей и активных сопротивлений соответ-
ственно якорной обмотки двигателя и выходной (силовой) цепи ИП
в соответствии с формулой
т ____7,я 7,и п
уя.ц — г I г
'я т 'я.п
Ясно, что наибольшее влияние свойств ИП будет при соизме-
римости активных и реактивных составляющих сопротивлений ука-
занных цепей. При более сложном характере внутреннего сопротив-
ления ИП будет и более сложная зависимость динамических свойств
электродвигателя по информационному контуру от свойств ИП.
Решив систему уравнений (62) при принятых ранее допуще-
ниях, относительно выходной координаты по информационному кон-
туру (скорости) и тока, потребляемого электродвигателем от ИП,
можно получить систему уравнений вида (8):
АО/ I —ЛГ7 I X________(' + рТ’о)_________,
Д2 (р) - ДС'ВХ (р) (1+рув)(1+й1р + Й2рЗ) +
+ (Р) 1 +«!/? +й2р2 ’
и у + Т7 А,2Н СмФд»я.ну
Д7Я (р) = Д17вх (р) (1+ррв)(1+а1р + а2р2) +
(68)
+ Д£4(Р)
£(1+рУм)
1 +«ip + a2pz ’
42
, СмФц 1 кэ “ rakB + СыСеФ\ - СеФи
14» >1 III ь . |х||цциент влияния энергетических процессов на информацнои- Се^в [/гй2н + СмФнгя,н] *и = rB [ksra + СмСеФ2н] (/0)
1\«1 »1 •II 1 \|Ц |»ф||циент влияния информационных процессов на энергети- g — k Г 4- С С Ф2 1)
л1ч пиная проводимость электродвигателя в рабочем режиме.
< псгема уравнений (68) и соответствующая ей обобщенная
п|||.|М11'1еская модель электродвигателя как активного элемента ди-
II iMii'ti-гкой системы вида, изображенного на рис. 4, позволяют про-
пс in .шализ влияния энергетических процессов в ИП на инфор-
мационные п наоборот.
Влияние энергетических процессов на работу электродвигателя
пире ц-ляегся функцией влияния
№э (р) = г-;-----, (72)
э 1 + a-ip + а2р* * ’ ' ’
пнлямицсйся инерционным звеном второго порядка. Так как обычно
I' Г„, то передаточную функцию (72) можно представить в виде
upon шедения двух апериодических звеньев, т. е.
Гэ {Р} = (1 + pfj (1 + рТэ) • (73)
СеСмФ\
электромеханическая постоянная времени электро-
нно .1 геля; 7’а=7’я=£я/гя - электромагнитная постоянная времени
*гк । родвигателя.
Опычио электромеханическая постоянная времени двигателя ог-
|«ц и гельпо велика, поэтому быстрые (высокочастотные) изменения
отряжения, ИП не приводят ,к появлению существенной ошибки
। выходном сигнале. Медленные (низкочастотные ®<1/Т’8М) изме-
1н пня напряжения ИП передаются на выход двигателя с коэффп-
iiiii'iiiom пропорциональности, определяемым соотношением (69).
Влияние информационных процессов в двигателе на энергети-
iiiir процессы в ИП определяются функцией связи
. ( . , ___________________________________\
И , .СмФнАьп
\ + /
(п) — .——----------_____ -----_---.=
(1+р7\1)(1 + />7’эм)(1+;,7’э)
(1 + РТф)
(74)
43
Произведем сравнительную оценку электромеханической по
стоянной времени и постоянной времени числителя в передаточной
функции (74). В соответствии с (66) электромеханическая посто-
янная
7. _______Ум______
/эм=а , , СмСеФ2н ’ >
1 -г г д
'я«я
В системе единиц СИ Се=См, тогда
СеФн=СмФв=^с=£н/Ян,
где £н — значение протпво-ЭДС двигателя в рабочем режиме; Пн—
скорость двигателя в рабочем режиме. С учетом этого, а также
.
соотношения «я.н =----------, имеем:
гя
т ___ Ум______.
* эм — р р ;
+ а3„ гяАй
т __ ______Ум_______________Ум ________
Ф . СыФн1пм Ен (цн £н)
2нйй 22нгяйй
Так как ип—ЕЯ<£ЕК, то справедливо
! I I I
+ 22нГя/гй < + Q2Braka
п, следовательно, Тф>Тям. Так как далее обычно выполняются со-
отношения 7а<Ув<7’ам, то из (74) следует, что нижний передний
участки спектра входного сигнала усиливаются. Это означает, что
низкочастотные и среднечастотные колебания входного сигнала
с некоторым усилением, определяемым амплитудно-частотной ха-
рактеристикой (74) (рис. 20), передаются в силовую цепь ИП, что
в свою очередь приводит к появлению помех (колебаний напряже-
ния) с указанным спектром на выходе ИП.
Полученные выводы справедливы при сделанном выше предпо-
ложении, что 7Г., 3>7’„. В некоторых случаях указанное условие не
соблюдается. В частности, если электродвигатель имеет компаунд
ную обмотку для компенсации реакции якоря, то при полной ком-
пенсации эквивалентное сопротивление якорной обмотки
Г я.п—я—СеЙяИн—>о. (75)
При выполнении (75) знаменатель (72) и знаменатели соот-
ветствующих членов системы (68) имеют комплексные корпи п
поэтому не могут быть представлены произведением двух аперио-
дических звеньев, т. е. соответствующие операторные функции
в (68) будут содержать колебательное звено вида
W = 1 + Ч\Тр -ф рЧ*
с параметрами
СеФн
УяУ
I
(76)
44
11ри выполнении условия 2£c 1 амплитудно-частотная характе-
pih гика звена будет иметь всплеск в окрестностях частоты среза
___1___СуФд____ Ед
Пн лой причине помехи по цепям питания с частотами, располо-
игппыми в окрестностях частоты среза колебательного звена, будут
проходить на выход двигателя, обусловливая динамическую ошибку
выходной его координаты. Наличие колебательного звена в функции
пчпяиия информационных про-
питой на энергетические обу-
. (опаивает существенное усиле-
ние колебаний входного сигна-
ли с частотами, лежащими
полит частоты среза звеиа и,
। 'юдонательио, колебаний то-
11 1111, что в свою очередь ве-
де г к усилению интенсив-
ности помех в напряжении ИП
п >гом частотном диапазоне,
ll.iiiiiijc обстоятельства приво-
ди к появлению взаимосвязи
и-жду информационными про-
Рис. 20. ЛАЧХ приводимости
электродвигателя.
пессами в электродвигателе
и шергстическими процессами
и ПН. Анализ указанной взаимосвязи можно провести, рассмо-
। реи динамическую систему, образованную ИП и электродвига-
ic.'ieM (см. рис. 3). Динамические свойства электродвигателя в этой
i iii i емс характеризуются его операторной проводимостью в рабо-
чем режиме, определяемой в соответствии с (68) соотношением
Уд(Р) =
Ян (1 ~Ь Р^м)
1 + «1Р + агрг >
(77)
ппымнческие свойства ИП — операторным сопротивлением Z;(p).
lull, потребляемый электродвигателем от ИП, однозначно харак-
п-ридусг информационные процессы в двигателе, а напряжение
iiirpi егические процессы в ИП.
I k-пользуя методы теории автоматического регулирования, мож-
но проводить качественный и количественный анализы взаимосвязи
информационных процессов в электродвигателе и энергетических
нропеггов в ИП. Заметим, что, как и всякая динамическая система,
ни ti'M.i «ИП — электродвигатель» может быть неустойчивой. Устой-
'iniioin, любой динамической системы, как известно, определяется
। .|рактеристическим уравнением, которое для данного случая
iimci'i вид:
14Zi(p)y„(p)=0. (78)
111 (78) следует, что при выполнении условия
1
6 (/<,>) ~ Уд (Я = -
PH(1 + <?,/<> —<о2пг)
1 4- /<оГм
(79)
45
система выходит на границу устойчивости, что обычно сопровож-
дается установлением устойчивых автоколебаний. Ток, потребляе-
мый электродвигателем, и напряжение ИП не зависят в режиме
автоколебаний от внешних возмущений и управлений и взапмо-
обусловлпвают друг друга. Взаимосвязь между информационными
процессами в электродвигателе и энергетическими процессами в ИП
в данном случае проявляется в наиболее полном и ясном виде.
Следует заметить, что выполнение соотношения (79) предпо-
лагает в качестве необходимого условия соизмеримость динамиче-
ских мощностей ИП и электродвигателя. При известных характере
и значении операторного сопротивления ИП на основе (79) можно
назначить требования к операторной проводимости электродвига-
теля из условий обеспечения устойчивой работы системы «ИП —
электродвигатель». Проведем оценку динамических свойств электро-
двигателя по энергетическому контуру, для этого представим трех-
член в (77) в виде произведения двух апериодических звеньев,
т. е.
v i у +
(1 + ртэм) (1 +рТя) >
гр.е
р ________Ум_______
7 эм —- рз
' + S2 г К
Так как 7«3>7'ам, то па нижних частотах сопротивление элек-
тродвигателя имеет емкостный характер. Это обстоятельство по-
зволяет использовать электродвигатель в качестве фильтра инфра-
низких и низких частот с регулируемой полосой подавления помех.
Динамическая модель электродвигателя и сделанные на основе
проведенного анализа выводы получены в предположении, что вы-
ходной координатой двигателя по информационному контуру яв-
ляется скорость. Однако с использованием двигателей постоянного
тока часто строятся следящие системы по положению. Выходной
координатой двигателя в этих системах является угол поворота
вала. Так как -скорость и угол поворота связаны интегральной за-
висимостью, то в передаточной функции двигателя по информа-
ционному контуру и функции влияния энергетических процессов
[см. (68)] появится интегрирующее звено. Так как физика процес-
сов .в электродвигателе при этом останется прежней, то для учета
указанной особенности достаточно включить в динамическую мо-
дель на выходе информационного контура интегратор (на рис. 19
показан пунктиром).
5. ДИНАМИЧЕСКАЯ МОДЕЛЬ УПРАВЛЯЕМОГО
ПРЕОБРАЗОВАТЕЛЯ ЭНЕРГИИ
В системах электроснабжения большинство преобра-
зователей, кроме функции преобразования энергии, дол-
жны выполнять функцию разделения движения, понима-
емую в том смысле, что изменения энергетических коор-
динат (например, колебательных) первичного ИЭ не
46
11Ж11Ы влиять на изменения выходных Энергетический
координат преобразователя, и наоборот. Очевидно, чем
uin.iiie степень этого влияния, тем качественнее преоб-
р । шпигель энергии. Эти задачи в преобразовательной
• чинке обычно решаются или за счет включения фильт-
ром па энергетических входах и выходах преобразовате-
ь и, отдельным реактивным элементам которых можно
приписать функции накопителей энергии, или за счет
применения систем автоматического регулирования вы-
•чцпых координат преобразователей, или совместным
применением указанных средств.
В автономных системах энергоснабжения проблема
Р 11 целения движений является одной из главных, отпол-
.... решения которой зависит степень автономности и
нпиарнантности отдельных динамических систем, а сле-
пни гельно, и качество их функционирования. Поэтому
инны из основных требований, предъявляемых к преоб-
р । шва гелям автономных систем энергоснабжения, явля-
гея наиболее полное обеспечение инвариантности вы-
тык энергетических координат преобразователя от
п< ргегических координат первичного ИЭ и наоборот,
и особенности в динамических режимах работы. Послед-
нее обстоятельство объясняется следующими причинами.
Нискольку любой процесс преобразования энергии по
। iitx'ii физической сути является динамическим (процесс
преобразования любых видов энергии всегда предпола-
I и* г определенные изменения, часто периодические, соот-
|'1сгнующих физических величин), то качество преоб-
р пинания будет в существенной степени определяться
шнамнческими свойствами устройств, его реализующих.
В соответствии с изложенным рационально разрабо-
hi. динамическую модель управляемого преобразовате-
ли. отражающую динамику процессов преобразования
iirpiiiu, а также динамику взаимовлияния первичных и
шчрпчпых энергетических координат и взаимосвязь их
информационными процессами, в качестве которых
• ii'rii могут рассматриваться процессы управления пре-
-пр । шпателем, а также процессы в приемниках. Заме-
ной, что в управляемом преобразователе выходной сиг-
н i t но информационному контуру и одна из энергетиче-
ски координат вторичного энергетического контура
и реальных устройствах совпадают и их разделение
... но производить только условно (в расчетах). Так
t in. ни отношению к первичному ИЭ преобразователь
47
является управляемым активным элементом, то динами-
ка взаимодействия его с первичным ИЭ отражается
обобщенной динамической моделью активного элемента.
Однако эта модель не отражает того факта, что преоб
разователь является ИЭ для собственных приемников,
образующих вместе с ним динамическую систему «ИЭ —
приемники», координаты которой, как было показано
выше, взаимосвязаны с информационными процессами
в этих приемниках. Следствием этого является то обсто-
ятельство, что энергетическая координата, характеризу-
ющая потребление преобразователем энергии от первич-
ного ИЭ, зависит не только от значения управляющего
сигнала преобразователя и выходной энергетической
координаты первичного ИЭ, но также и от мощности,
потребляемой вторичными приемниками от преобразова-
теля. Последняя при постоянстве выходрой координаты
преобразователя (являющейся со стороны приемников
энергетической) характеризуется значением второй его
энергетической координаты (например, для преобразо-
вателей электрической природы — суммарным током
вторичных приемников).
В соответствии с изложенным систему уравнений
описывающую работу преобразователя электрической
природы, по аналогии с (3) можно записать в виде
-VBUX (О = F [лвХ(t), ... х(в^ (t), иа (/),...
•••wn(0> 0(0’ 4 (О’ -^выхЮ’ ••• 'Гвь1Х(0]’ (gQ)
о(0=фквХ(0. - (О’ «п(0’ - [
...<г)(0. о (0.-’4 (0-^(0. - 4(0b )
После соответствующей процедуры линеаризации (см.
§ 1) система (80) примет вид:
ДХВЫХ (Р) = (Р) (Р) + ^'э.и (Р) Д^п (Р) +
+ ^'И.Э.И(ЙД/"(Р); (81)
д/' (р) = Г'и.э (р) дхЕХ (р)+Y' (р) дгд, (р) +
+ ^,э.;,(р)Д/"(/0-
В системах (80) и (81) хЕХ и Хвых — входной (управ-
ляющий) и выходной (управляемый) сигналы преобра-
зователя; иа — текущее напряжение первичного ИЭ (или
48
его аналог); ilt 1'(р) — ток, потребляемый преобразова*
гелем от первичного ИЭ (пли его аналог в общем слу-
чае), и его операторное изображение; i2, Г (р) —ток, по-
। ребляемый приемниками от преобразователя, и его
операторное изображение; W(p)—передаточная функ-
ция преобразователя по информационному контуру;
11'>.п(р)—функция влияния первичных энергетических
процессов на информационные процессы в преобразова-
нию; W'u.a.„(p)—функция влияния информационных и
люргетических процессов во вторичных приемниках на
информационные процессы в преобразователе; №'и.э(р) —
функция влияния информационных процессов в преобра-
шнателе на энергетические процессы в первичном ИЭ;
Г (р)—проводимость преобразователя; lV"3.3(p) —
функция влияния энергетических и информационных
процессов во вторичных приемниках на энергетические
процессы в первичном ИЭ.
Так как выходной величиной преобразователя явля-
ется одна из энергетических координат, а для преобра-
в жителей электрической природы регулируемой величи-
ной обычно является напряжение, то каждое из слагае-
мых первого уравнения системы (81) в этом случае име-
ет размерность напряжения. Из этого следует, что опе-
раторные функции W'a.u(p), W'g.a(p) являются безраз-
мерными величинами, а операторная функция U^VanCp)
имеет размерность сопротивления, при этом по физиче-
скому смыслу 1Г,ил.и(р) является выходным (внутрен-
ним) сопротивлением преобразователя как ИП для вто-
ричных приемников. В связи с этим в дальнейшем внут-
реннее сопротивление преобразователя обозначается
обычным способом, т. е. Z"i(p)—внутреннее оператор-
ное сопротивление преобразователя в рабочем режиме.
Хпалогично по физической природе управляющего (вход-
ного) сигнала преобразователя с учетом условий линеа-
рп тации может быть установлен физический смысл опе-
раторных функций W(p) и №"и.3(р). В частности, пере-
ы точная функция W (р) характеризует преобразователь
пак объект управления, поэтому в дальнейшем она обо-
III а чается №"и.п(р).
Систему уравнений (81) с учетом принятых обозна-
чений можно сопоставить с обобщенной динамической
моделью преобразователя энергии (рис. 21), удобной
при анализе динамики процессов преобразования и уп-
равления преобразованием энергии. В схеме на рис. 21
I (>77
49
во избежание однотипности в обозначении переменных
величин соответствующие слагаемые первого уравнения
системы (81) обозначены: AA'HX(/j) №'п.а(р)=Д£" (р)—
отклонения ЭДС преобразователя, обусловленные изме-
нением управляющего сигнала; EU'n(p) IV'/3.H(p)==
=A't7"n(p)—отклонения напряжения преобразователя,
обусловленные изменением выходной энергетической
координаты первичного ИЭ; &I" (p)Z"i(p)=&U"i(p) —
отклонения напряжения преобразователя, обусловленные
изменением потребляемого от него вторичными прием-
никами тока.
I-------
I
] ^Хвх(р)
----Н г’Ё(р)-----------J
I_______________
Ьхв1М.(р)=лип(р) I
1---------1
Ч Ырег(р) НЮ*-
Л1"(р)
^э„(р)
<,(Р>
А1'м1р --
:—Щз(Р)"
т
ы'(р)
Y'(p)
। AUn(P)
ЛЕ’(р) 1 ।
_ _ -Zi [р} к J
MJtfp) \________।
Рис. 21. Обобщенная динамическая модель преобразователя энергии.
Подобные обозначения имеют и очевидный физиче-
ский смысл. В инженерных расчетах ИП обычно пред-
ставляется эквивалентным генератором с ЭДС холосто-
го хода и внутренним сопротивлением, при этом считает-
ся, что регулирование напряжения на выходе ИП осу-
ществляется за счет изменения ЭДС холостого хода (что,
например, имеет место в электромашинных ИП — гене-
раторах постоянного и переменного тока). Поэтому есте-
ственно обозначить изменение выходного напряжения
преобразователя, вызванное изменением управляющего
сигнала, через приращение ЭДС, а отклонения напряже-
ния, обусловленные изменением потребляемого тока, —
50
'ii |n i и.|дение напряжения на внутреннем сопротивлении
преобразователя (вторичного ИП).
Дополняя систему уравнений (81) уравнениями ба-
i.iпса напряжений в выходных (силовых) цепях преоб-
р । и >п ггеля и первичного ИЭ, т. е.
Д/"С») = Д[7"(^)У"Г(^); |
W'n(p)=&l'(p)Z't(p), J
и \ равнением, описывающим алгоритмы управления пре-
пора юванием энергии в зависимости от изменения вы-
хнпноц величины преобразователя, т. е. уравнением ре-
шая юра преобразователя
Д-^вх (р) =И7рег(р) АД^вых (р) (р) /S.U" (р) ,
получаем замкнутую систему дифференциальных урав-
||| niiii, описывающую динамику процессов преобразова-
ния, потребления и управления преобразованием энер-
iiiii п взаимосвязь этих процессов. Динамическая модель
и ном случае (пунктир на рис. 21) будет моделью мно-
। пынпурной многосвязной динамической системы, состо-
iinieii из информационного и двух энергетических конту-
|пн|. Динамические свойства первичного контура опреде-
пнотся внутренним сопротивлением Z'i(p) первичного
II >, проводимостью преобразователя Y'(p) и соответст-
нупицнми энергетическими координатами ДП/п(р) и
\/'(/>), вторичного контура — внутренним сопротивлени-
ем преобразователя Z"i(p), суммарной проводимостью
in их вторичных приемников У"£ (р) и энергетическими
i «ординатами А(/"(р), А1"(р). Динамические свойства
информационного контура определяются передаточными
функциями преобразователя по каналу управления
II ин(р) и регулятора Wper(p). Взаимосвязь между пер-
вичным и вторичным энергетическими контурами отра-
1..1СТСЯ функциями связей (влияния) W's.a(p) и W'3.3(p),
между первичным энергетическим и информационным
кип гурами — функциями связей W'3.a(p) и W'a.3(p).
Заметим, что путем очевидных преобразований дина-
шческую модель преобразователя энергии (рис. 21)
•1ЮКПО привести к динамической модели активного эле-
н ига, т. е. к схеме, изображенной на рис. 4. Для этого
и|> мим из уравнения (82) ток, потребляемый вторич-
ны in приемниками, через выходную координату преоб-
ри шпателя и подставим в систему (81). После решения
Г ’ 51
относительно независимых переменных система (81) име-
ет вид:
Д^вых (р) = 1+Z"i (р) Д^нх +
+ 1+Z”f (р)У”£(р) д£7'п (/7);
w, (р) (83)
(Р) — 1+ z"t\p) Y'\(р) Д%вх (Р) +
1+2”, (^У”Е (р) Д^'"(Р)’
т. е. полностью подобна системе уравнений (8). Из аде-
кватности систем (83) и (8) следует:
W(p\=—Ц7'"п {Р) 1+2”,(р)У”г(р)’ П/ /го ^'э.и (Р) (84)
1+Z''z (Р)У”£(Р)’ W (р) = ^"я-э (Р) - \+Z”i(p)Y"r(pP
у / ,Л
Г(Р) l + Z"i(p)Y"z(p)>
где W(р)—передаточная функция преобразователя как
объекта управления.
Связь конструктивно-технологических и схемных параметров
преобразователя с параметрами обобщенной динамической модели
определяется системой уравнений (84). Далее для иллюстрации
приводится методика построения динамической модели генератора
постоянного тока, являющегося преобразователем механической
Рис. 22. Эквивалентная схема генератора постоянного тока.
5?
шергии в электрическую. Современные мощные электромашннные
1111 представляют собой машину постоянного тока с независимым
п.411 параллельным возбуждением н компаундной обмоткой. Регули-
рование напряжения генератора осуществляется изменением магнит-
ного потока в результате изменения тока возбуждения машины.
11ргисбрегая гистерезисом магнитной цепи машины для генератора
постоянного тока (эквивалентная схема приведена на рис. 22) со-
вместно с приводным двигателем, запишем следующую систему
урлпиеиий:
<7ФЯ (Л 1 ия (0 = СеФ (0 2 (0 - i„ (0 гя - —; <л₽в (0 ^(t)=rBiB(t)+—^;
Л-1д (/) = Л1с (0; (85)
Л1д (0 = Л1 [2 (0];
7ИС (0 = Л1„ + fer (2) 2 (/) +
<Z2(0 , + /г-йГ! + СмФ(<),’Я(/)- J
Система (85) является нелинейной. Применяя обычную линеа-
рн 1ЛЦИЮ в малом каждого из нелинейных уравнений в рабочем
режиме с учетом уравнений
Фя (0 = Ф (О ®я; )
Фв (0 = Ф (f) wB, /
'!• (О ' Ф И' (»я> »в)]; F (4г. »в) — «я (0 [К>я + ш'я] + h> (О Шв.
(86)
(87)
и । ши ношений
(0 АРМУ)] А (О , <№я[7я(0, 4(01 diB(t) .
.It ~ di„(t) dt diB(t) dt ’
,/'i‘„(0 <*Ш0. MQ] diK(t) , г>Фв [f„ (f), fB(Q] di„(t)
.11 “ diB(t) dt *" Л‘я(0 dt >
। in 1сму уравнений (85) относительно отклонений переменных в one-
р.норной форме можно записать в виде
Д«,. (р) [тя + СЛ&г + PL„] + Д«в (/') [CASH + рМ\ +
|- СсФп№ (/>) = ДС7Я (у/);
А (/?) рМ + Д1в (р) [rB + pLB\ + 0 = ДПВ (р);
Д4| (р) “Ь б?м^Я41.н) ^1В (р) ^-Г.Лв4т.Н 4“
I Д2(р) |7гг + р/г] = ДЛ4(р),
(90)
В системах (85) — (90): мя и ив— соответственно напряжения па
лоде генератора и иа входе его обмотки возбуждения; гя, rB, i„,
1 .наивные сопротивления и токи соответственно якорной и шун-
lonnii обмоток генератора; »я.и, 2И, Фа—значения тока якоря, ско-
53
рости вращения приводного двигателя и магнитного потока машины
, . дФя (‘я.
в рабочем режиме;
> —эквивалентная индуктив-
л т («я»
ность якорной цепи в рабочем режиме; La =------gr-
— экви-
Ф
Г н
валеитпая индуктивность обмотки возбуждения генератора в рабочем
„ ^я(»я, 4) I ^В(1Я, iB) .. ,
режиме; М = ---------~ коэффициент
взаимоиндукции якорной и шунтовой обмоток в рабочем режиме;
Ф (t) = -J- kKMB (t) + (/) — рабочий магнитный поток машины;
дФ [ZSI, tBJ дФ [iB, isl] I
*В=--------diB----- фн; fea= —JQ------ |ф(- коэффициенты пропор-
циональности магнитного потока соответственно току обмотки воз-
буждения и току якорной цепи; Се=См=С — электромеханическая
постоянная машины; kT—dMddQ, — коэффициент вязкого трения
генератора; Jr— приведенный момент инерции генератора; wfl, w'B—
эквивалентные витки якорной обмотки по продольной и поперечной
осям машины.
Линеаризованная система уравнений (90) описывает динами-
ческие свойства генератора в любом рабочем режиме и является
его математической моделью. При пренебрежении электромагнитной
связью между обмотками систему уравнений (90) можно записать
в виде
C/e„Q 1
ьия (р) = 7B~zj_ рц (р) + СФнДй (р) +
+(гя + СВД, + pL„) Д/я (р);
(91)
(^г Р-^г) AQ (р)+ (СФн-|- Скя1я н) Д/я (р)' .
где ЬМ (р) = Д2 (р) (ks + р/п.д) — движущий момент приводного дви-
<ШД
гателя; /п.д — коэффициент пропорциональности между
скоростью и моментом на валу ПД и его момент инерцин-
Система (91) полностью адекватна обобщенной системе урав-
нений (81), описывающей работу любого преобразователя энергии.
Так как первичным ИЭ в рассматриваемом случае является привод-
ной двигатель, то выходной его энергетической координатой являет-
ся скорость вращения (аналог напряжения первичного ИЭ), второй
энергетической координатой первичного ИЭ — момент на валу ПД
(аналог тока первичного ИЭ). Адекватность систем (91) и (81) по-
зволяет по аналогии с электротехническими терминами и понятия-
ми ввести понятие операторной механической проводимости. ПД —
Уп.д(р) 11 операторного механического сопротивления приемников
механической энергии — ZM(p) и рассматривать в качестве первич-
ного энергетического контура систему «ПД — приемники механиче-
ской энергии» Динамические свойства этой системы характеризу-
ются механической операторной проводимостью приводного двига-
54
hi, определяемой в соответствии с (91) величиной, обратной
ффицпепту трения и моменту инерции ПД, и операторным ме-
iiiii'iinкпм сопротивлением приемников, определяемым коэффици-
<п ими трения и моментами инерции соответствующих ТУ, частным
• । 4,11-м которых является генератор постоянного тока. При допол-
IIIIU системы (91) уравнением баланса напряжений выходной цепи
п'1 пора п уравнением регулятора напряжения получаем замкну-
.....пегому уравнений, описывающую процессы преобразования
ы< ыпнческой энергии в электрическую и процессы управления пре-
-tipa |<и|,11111ем, а также взаимосвязь между этими процессами.
<, учетом этих уравнений динамическая модель генератора яв-
iui.ii моделью трехконтурной взаимосвязанной системы, полностью
। (iiiinoii модели обобщенного преобразователя, изображенной на
Ч Зависимость между динамическими параметрами модели и
in |рукгивно-технолотпческпми параметрами генератора и ПД
и||| (слястся системой уравнений (91). Согласно (91) и рис. 21
«< hi мог вязь между контурами осуществляется за счет соответствую-
1П11Ч функций связи, определяемых соотношениями
Г'э.и (Р)=СФ„- (92)
Г'э.а(р)=СФв-|-САя1я.в, (93)
^и.Э(Р)=^, (94)
иторых следует, что значения функций связей обусловливаются
шочнм режимом генератора и по мере увеличения его нагрузки
iipiii каются, т. е. с увеличением тока генератора, потребляемого
• приемниками, усиливается взаимосвязь между процессами пре-
ii'p.i шпация, управления преобразованием и потреблением энергии,
по и.I практике ведет к усилению взаимовлияния динамических
ilirrii отдельных контуров друг на друга. Поскольку магнитный
инк машин (Фн) в основном определяется током возбуждения
и in р.1 гора, то характер взаимосвязи между энергетическими кон-
рнми в основном определяется постоянной составляющей вход-
n in (управляющего) сигнала генератора, зависящей, однако, от
и I'n iiiiii нагрузки последнего.
и ДИНАМИЧЕСКАЯ МОДЕЛЬ СЛОЖНОЙ
UII КТРОЭНЕРГЕТИЧЕСКОЙ СИСТЕМЫ С ИСТОЧНИКОМ
НН РГИИ ОГРАНИЧЕННОЙ МОЩНОСТИ
Вследствие взаимодействия ТУ с ИЭ и взаимосвязи
информационных и энергетических процессов динамиче-
. кис системы, активные элементы которых получают
ni pi Hio от ИЭ ограниченной мощности, связываются
и ' 1ППЫЙ динамический комплекс—• электроэнергетиче-
I । уи, систему. Очевидно, процессы взаимодействия меж-
динамическими системами и ИЭ носят более слож-
ный характер, нежели процессы взаимодействия отдель-
ных ТУ с ИЭ. Ранее отмечалось, что взаимодействие
мгкду активными элементами и ИЭ, происходящие по
55
Принципу ОС, и взаимосвязь энергетических и информа-
ционных процессов в наибольшей степени проявляются
в динамических режимах. Так как любая динамическая
система содержит ряд активных элементов, то указанная
закономерность будет иметь место и при взаимодействии
динамических систем с ИЭ, от которого получают энер-
гию их активные элементы. В соответствии с этим анализ
взаимодействия в наиболее полной степени может быть
проведен на основе динамической модели, отражаю-
щей динамику взаимодействия между ИЭ и динамиче-
ской системой. Подобная модель может быть построена
с использованием обобщенной динамической модели ак-
тивного элемента и динамических моделей соответству-
ющих систем.
Будем полагать, что от общего ИЭ получают энергию
активные элементы ряда динамических систем, среди
которых имеются соответствующие преобразователи
энергии, в свою очередь являющиеся ИЭ для активных
элементов одной или нескольких динамических систем.
Как уже отмечалось, подобную структуру построения
имеют централизованные системы электроснабжения
автономных объектов с ИЭ ограниченной мощности. По-
следние, как правило, содержат ряд преобразователей
энергии, выполняющих функции ИЭ, различающихся как
по физической природе (роду преобразуемых энергий),
так и по качественным и количественным характеристи-
кам при идентичном роде преобразуемых энергий. В свя-
зи с последним обстоятельством, обусловленным в основ-
ном различием требований к качеству электроэнергии,
предъявляемых разными ТУ, системы электроснабжения
являются ветвящимися многоканальными и многоступен-
чатыми системами преобразования энергии. Количество
последовательных ступеней преобразования энергии пер-
вичного ИЭ характеризует уровень преобразования, а
количество ветвящихся параллельных каналов — требо-
вания к качеству электроэнергии. Если активные элемен-
ты какой-либо динамической системы получают энергию
от преобразователей различной физической природы, то
при ограниченной мощности последних через данную си-
стему будет происходить взаимосвязь между энергетиче-
скими процессами параллельных каналов преобразова-
ния. Если же активные элементы системы получают
энергию от преобразователей разного уровня преобразо-
вания, то через нее будет осуществляться взаимосвязь
56
пи ргстических процессов разных уровней преобразова-
нии. В общем случае, часто встречающемся на практике,
имею г место оба вида взаимосвязи энергетических про-
цессов, и это чрезвычайно усложняет анализ взаимодей-
( 111ПЯ.
I аким образом, автономные системы энергоснабже-
ния представляют собой иерархические ветвящиеся си-
। к-мы, в которых через соответствующие динамические
inc гемы происходит взаимосвязь между каналами и
\ровнями иерархии. Анализ взаимосвязи процессов в по-
нятых системах встречает существенные трудности, по-
иому далее рассматривается один из возможных парал-
к и.пых каналов преобразования энергии первичного
II» 11ри этом для простоты полагается, что все актив-
ные июменты каждой динамической системы получают
•Персию только от одного, общего для этой системы пре-
inip.i.шпателя энергии, т. е. отсутствует взаимосвязь меж-
ц параллельными каналами преобразования и между
• и 1,ел1>пыми уровнями преобразования энергии через
минные элементы динамических систем. При принятой
и 1е.1лпзации задача взаимодействия динамической си-
омы с ИЭ представляется в «чистом» виде. Будем по-
i.n.iib, что первичным ИЭ является ПД, а преобразова-
нием механической энергии в электрическую служит
ii-iii ритор постоянного тока, кроме того, предполагается,
•ни or приводного двигателя получают энергию и ряд
ipvi iix ТУ и преобразователей, при этом мощность пер-
вичного ИЭ (ПД) соизмерима с суммарной мощностью
ж i-х его приемников, хотя мощность, потребляемая каж-
ым из пих, существенно меньше мощности ПД. Полага-
м также, что рассматриваемый канал преобразования
пирит содержит преобразователь электроэнергии гене-
p.нора постоянного тока в электроэнергию постоянного
|пка, но с другими качественными показателями. Подоб-
ными преобразователями в настоящее время часто явля-
|<нгя импульсные преобразователи, обеспечивающие по-
|\ч<|1нс электроэнергии с достаточно высокими показа-
н dim и качества [38], необходимой для работы некото-
рых ТУ и систем. В соответствии с принятыми допуще-
ниями и использованием динамических моделей преоб-
p.i шпателя энергии и активного элемента построена ди-
II iмпвеская модель (рис. 23) сложной электроэнергети-
!• скин системы с двухступенчатым преобразованием
Нп-ргни. В рассматриваемом случае ЭЭС состоит из трех
57
Рис. 23. Развернутая динамическая модель автономной ЭЭС с двух
ступенчатым преобразованием энергии.
58
шергетических контуров и ряда информационных, число
которых определяется в зависимости от количества ди-
намических систем, получающих энергию от первичного
II» п преобразователей. В качестве примера динамиче-
• iii\ систем здесь и далее рассматриваются сепаратные
гиг гемы автоматического управления, широко применяе-
мые в настоящее время во всех областях техники. Дина-
мические свойства информационных контуров САУ опре-
н- |як)тся передаточными функциями активных Wi(p) и
П.1С1ИВИЫХ Wni(p) элементов систем или передаточными
|цакциями регуляторов Wver(p), представляющих собой
•киивалентную передаточную функцию последовательно
и параллельно соединенных элементов, получающих
ип ргию от посторонних (автономных) ИЭ, а также сиг-
н । i;iми х3/(р), У3’г(р), циркулирующими в информацион-
ных контурах САУ. К информационным контурам по
принятой терминологии относятся и контуры систем ста-
<>п |цзации выходных энергетических координат преобра-
зи.нолей и первичного ИЭ (ПД). Динамика этих коп-
иров представляется в модели передаточными функци-
। hi преобразователей и ИЭ по информационному конту-
Р ^>п,п(р), передаточными функциями регуляторов
11 |п-! (р), представляющими собой произведение переда-
1ОЧПЫХ функций пассивных и активных элементов си-
тем стабилизации выходных координат, и сигналами
\l/J(p), kU^fp), А£Др), циркулирующими в этих кон-
p.ix.
Динамика энергетических контуров отражается в ди-
н.пчнческой модели операторными проводимостью и
цц\iрснними сопротивлениями соответственно первично-
||| ПЭ Уп.д(р) и преобразователей Z3,(p), суммарной
операторной проводимостью Y\ (р), представляющей
чму операторных проводимостей управляемых (актив-
ных элементов САУ) и неуправляемых приемников энер-
IHII, н энергетическими сигналами At73’(p), АС73‘;(р),
\/Др), циркулирующими в этих контурах. Заметим, что
тиснения режимов работы приемников, в том числе и
преобразователей энергии, обусловленные управляющи-
ми и возмущающими воздействиями, а также разнооб-
р.иными коммутациями приемников, сопровождаются
пиепением потребляемого от соответствующих преоб-
। шпателей и ИП тока. Эти изменения тока ИП в дина-
ической модели отражаются возмущениями тока
59
ktsi(p) (помехами co случайным спектром, действующи-
ми на входах соответствующих энергетических конту-
ров).
Взаимосвязь информационных и энергетических про-
цессов представляется в динамической модели двумя ви-
дами функций связей. Взаимосвязь информационных и
энергетических процессов преобразователей энергии
с энергетическими процессами первичных для этих пре-
образователей ИЭ отражается соответствующими функ
циями связей преобразователей и?Ч,>и(/?),
^’э.э(р)- Взаимосвязь информационных процессов САУ
с энергетическими процессами преобразователей отража-
ется функциями связей Wi3(p) и U73n(p), соответствую-
щими функциям влияния обобщенной динамической мо-
дели активного элемента динамической системы *.
Таким образом, за счет функций влияния информаци
онные контуры динамических систем и энергетические
контуры преобразователей энергии и ИЭ связываются
в единый энергоинформационный контур, динамические
свойства которого могут в существенной степени влиять
на качество функционирования как отдельных динамиче-
ских систем, так и преобразователей энергии. Очевидно,
для правильного и обоснованного проектирования как
отдельных систем и преобразователей, так и всего
комплекса в целом должны быть разработаны инже-
нерные методы анализа их динамических свойств. За-
метим, что применение традиционных методов для
исследования подобных комплексов с использованием
конструктивно-технологических параметров при расче-
те динамических свойств отдельных ТУ предполагает
чрезвычайно большой объем вычислительных и экспери-
ментальных работ уже для рассматриваемого идеализи-
рованного случая и затруднительно даже с применением
современных вычислительных машин. Разработка инже-
нерных методов исследования и проектирования динами-
ческих свойств подобных комплексов предполагает как
решение задач декомпозиции, позволяющих проводить
анализ и синтез динамических свойств сепаратных си-
стем, так и решение задач анализа и синтеза динамиче-
ских свойств всего комплекса в целом. Кроме того, ука-
занные задачи предполагают решение вопросов экспери-
1 Здесь предполагается, что активные элементы систем рабо-
тают на нагрузку с неизменными динамическими свойствами.
60
ептальной идентификаций динамических свойств как
in н'льных ТУ и составных частей ЭЭС, так и всей си-
> гемы в целом. В последующих главах излагается имми-
1.ШСПЫЙ метод исследования сложных динамических
комплексов, разработанный в Челябинском политехни-
ческом институте авторами и их сотрудниками.
I лава третья
ПММИТАНСНЫЙ МЕТОД АНАЛИЗА
ДИНАМИЧЕСКИХ СВОЙСТВ АВТОНОМНЫХ
)ЛГИДРОЭНЕРГЕТИЧЕСКИХ СИСТЕМ
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
•JII КГРОЭНЕРГЕТИЧЕСКОЙ СИСТЕМЫ
• МНОГОСТУПЕНЧАТЫМ ПРЕОБРАЗОВАНИЕМ ЭНЕРГИИ
каждый активный элемент любой системы образует
1111 замкнутый контур [31], динамические свойства
норого зависят от свойств ИП. Для упрощения задачи
“ рнопачально будем полагать, что динамические свой-
< inn J III со стороны его приемников известны и опреде-
1'п ‘М. Блок-схема следящей системы.
пшнся его выходными операторными сопротивлениями.
11* к-м полагать далее, что активные элементы исследуе-
н‘П динамической системы 1 получают энергию только от
ыпного ИП. Динамическая система для простоты при-
нимается состоящей из трех активных элементов—‘Дат-
iiih.i Д, усилителя У и объекта управления ОУ (рис. 24).
1пп,1М11ческая модель взаимодействия для рассматрива-
। м<н о идеализированного случая представлена на
•- •------
1 Как и ранее, под динамической системой здесь понимается
| । мл автоматического управления, например следящая.
61
Рис. 25. Динамическая модель следящей системы.
рис. 25. В соответствии со схемой на рис. 25 информаци-
онные и энергетические процессы в комплексе «ИП —
динамическая система» описываются следующей систе-
мой операторных уравнений:
X. (р) + О + X Л д) Wa (д) + О + 0 + о +
+ Д[7 (д) W* (д) Гэ.д (д) = Хвх (д) W д (д) +
+ %зд(д)Гд(д);
Л(д)1Ма) + ^(д)4-0 + 0+04-04-
+ ДП (д) Г8.у (д) IFV (д) = Xsy (д) Wy (д);
О + Х2 (д) Wo (д) + Х3 (д) + 0 4- 0 + 0 +
+ ДП (д) Г9.у (д) №у(д) = Xso (д)
0 + 04- 04-Д/д (д)+0+0+ ДП (д) Уд (д) =
Д4д(д);
(95)
0+0+0+ 0+ Д/у (д) + 0 + Д17 (д) Уу (д) = Д4У (д);
О4О + О + О + О + Д/о (д) +
+ ДП (д) Уо (д) = Д/в0 (д);
И. (Р) ^и.д (Р) + (Р) ^И.у (Р) 4- ^3 (Р) ^и.о (Р) +
+ Д7д (д) + Д/у (д) + Д/о (д)] zt (д) + ДП(д) = 0, .
где Xbx(p) —входной сигнал системы; Хг(р) —выходной
сигнал t-го активного элемента системы; ДА«—изменения
62
тока, потребляемого t-м элементом от ИП; Д(7 — измене-
ние напряжения ИП; XSi— помехи, действующие па вхо-
де i-ro активного элемента; A7st- — флюктуации тока «-го
элемента, обусловленные действием помех на его входе;
Wi(p), Wai(p), WKi(p), Yt(p)—соответственно переда-
точная функция по информационному контуру, функции
влияния и операторная проводимость t-го активного эле-
мента в рабочем режиме.
В матричной форме система (5) имеет вид:
«и «21 0 0 ^22 ^32 0 Д13 0 «33 0 rs Й ft & Й Й X X. (/>) xap) Хг(р) xAp) X (p) X6 (p) О Г) Ci Cj n (?) ® ел А ы M . (96)
й-44 0 0 0 «55 0 0 0 ^66
П-п 6Z72 6Z73 ^74 «75 ^76 ^77 Xf (p) C,
В общем случае, когда динамическая система содер-
1x111’ ц активных элементов, получающих энергию от об-
пито ИП, элементы матрицы уравнения вида (96) опре-
1еляются следующим образом: ае-3=1 при «’=/;
Wi(p) при «'=/+1 и при i=l и /=ц;
ai.2v+t=W^(P)wi(P) при 1<«<т]; (97)
«/.гч+1=^(Р) при 1j<«<2t!; (98)
%+i, l^WHi(P')Zi(P') при (99)
%+i,/ = Z«(P) при (100)
utl 0 во всех остальных случаях, где у — число актив-
ных элементов системы;
^+i (Р) = Д/«(РУ, Ч < i < 2т;;
^2ч+1(^) = ДП(^);
C^XMWAPY
Ci=Xai(p)Wi(p) при
Cf = bISi(P) при 7)4-1=/<2тг.
(Ю1)
(102)
63
где Xsi (р) — и входе i-го акт Матричное в блочном вщ где зображ ивного уравш ie: В 0 0 Е Рв РЕ В: ени( злел- щие Rb Re 1 1 J ; во гент ти X 0 0 змуг. а. па ( X Д1 ди 0 . 0 .. цен1 96) 1Я, д УДО св Г СЕ 1 0 1 Я17) 0 ействующего на бно записывать , (ЮЗ)
0 0 . .. • 44- 1 1
— главная матрица замкнутой системы по информаци-
онному контуру; X — вектор-столбец выходных коорди
нат активных элементов системы; AI — вектор-столбеп
токов активных элементов системы; Св — вектор-столбец
возмущений, действующих на входах активных элемен-
тов системы; Се — вектор-столбец возмущающих токов
активных элементов системы; Е —diag [1] — единичная
диагональная матрица размера т]Хц;
Рв=
«1, 2т]+1
Й2. 27)4-1
й7)—1,2т) + 1
«т], 21)4-1
—• столбец функции влияния энергетического контура на
информационный контур системы й. 21]+) =Wsi (р)
Y>(P)
Ys (/>)
Y^P)
— столбец проводимостей активных элементов системы,
рв—[%+1, Г’ %+1, 2’ %+1, J ~ стРока Функций влияния
информационного контура системы на энергетически!!
«27)+1,
РЕ= [а2т]4-1, 7)4-1’ ^27)4-1, 7)4-2’ •” «2т,4-1,27)Г’
64
Если от одного общего ИП получают энергию актив-
>.|г элементы ряда динамических систем, то система
шфференциальных уравнений движения ЭЭС запишется
виде
В, 0 0 .. 0 0 0 РВ1
(1 Е, 0 ... 0 0 0 ^Е1
1* 0 в2 ... 0 0 0 ^В2
О 0 0 • • Еп_1 0 0 РЕп—1
0 0 0 .. 0 0 Евм
1) 0 0 .. 0 0 Е„
*’hi РЕ1 РВ2 • • РЕп—1 РВп РЕп I
X,
Д1,
Хг
Д1П-,
Х„
Д1„
ди
СВ1
СЕ1
СВ2
СЕга—1
СВч
СЕп
О
(104)
Блочные матрицы в (104) определяются так же, как
н в системе (103).
< истема уравнений (104) описывает информационные
процессы в динамических системах и энергетические
|роцессы в комплексе «ИП — динамические системы»,
• 1,1кже их взаимосвязь и является математической мо-
II.ю этого динамического комплекса. Если же ИП
нв шегся стабилизируемым преобразователем энергии,
। пстему (104) необходимо дополнить уравнениями,
||||сывающими работу системы стабилизации выходной
. ординаты преобразователя, и уравнениями связи пре-
.ьр,1 ювателя с первичными ИП. При получении этих
рлпииний для простоты будем полагать, что система ста-
пнании преобразователя включает в себя датчик (из-
рнтель отклонения напряжения), усилитель с коррек-
• „реющим контуром на входе и сам преобразователь,
in рвичный ИЭ имеет электрическую природу. С ис-
• 1.77
пользованием обобщенных динамических моделей актив
ного элемента и регулируемого преобразователя энергии
(см. рис. 5 и 21) и с учетом принятых допущений дина-
мическую модель системы стабилизации напряжении
преобразователя можно представить в виде схемы, изо
браженной на рис. 26. В соответствии со схемой систему
уравнений, описывающую информационные процессы
в системе стабилизации напряжения преобразователя и
их взаимосвязь с энергетическими процессами, можно
записать в следующем виде:
1. X*(p) = UaWa(p)-- EU"(рУ{[1-±
+^8.д(/0Ж(а)};
2. Xy(p)= — XtL(p)Wy(p)~
-^U’'(p)W3,y(p)Wy(py,
3. i^E” (р)= Xy(p)W"^„(py,
4. Д/д(р) = Д£/"(р)Уд(р);
5. £Jy(p) = MJ" (p)Yy(p);
6. Д/"и.„ (р) = Ха (р) (р) + Ху (р) 1Ги.у (р) +
+ Д7а(/7) + Д/у(р) + Д/^(Л);
7. EU” (р)=ЕЕ" (р) - Д/"и.п (р) Z". (jn) +
+ д/"и.п (P) ^9.» (p) + Д1/' (p) уп (p)+(/>);
9. MP (p) •= — Д/'и.п (p) Z't (p) + Д7? (p),
(105)
где Хл(р), Xy(p) — соответственно сигналы на выходе-
датчика и усилителя; EI's^ — отклонения тока со-
ответственно преобразователя и первичного ИЭ, обус-
ловленные динамическими режимами работы их прием
ников; Д/"Ил, Д/'и.п — суммарные отклонения токов пре-
образователя и первичного ИЭ; 1Гд(р), lFy(p) —переда
точные функции датчика и усилителя; Wsi(p), Wui(p),
№%.и(р), W'^(p), W'g.s(p)—соответственно функции
связей активных элементов системы стабилизации и ре
гулируемого преобразователя энергии; lF/zH.n(p)—пере
даточная функция преобразователя по информационному
контуру,
Гт 26. Динамическая модель системы стабилизации напряжения
Н|» ьбразователя.
Выразив из третьего уравнения приращение ЭДС
нрепиразователя через входную его координату и под-
I inulin полученное значение в седьмое уравнение, систе-
(105) в матричном виде можно записать:
1 0 0 0 0 [1+^ д(р)]Гд(р) ... 0 0
MV(P) 1 0 0 0 -^э у(р) 17у (р) ..0 0
И 0 10 0 Уд (р) ... 0 0
II 0 0 10 уу(Р) — 0 0
п (/’> _Ги.у(^ 1 1 1 0 ...0 0
" ^"и.п 0 0 ~Z"i <*>> 1 - 0 ®"э.и
0 ^И.Э(Р) 0 0 ^'Э Э(Г) 0 1 0
1) 0 0 0 0 0 ... -Z'.(z>) 1
67
(р)
ху(р)
л/д W
Д/у (Р1)
д/"и.п
лУ'' (/>)
УЭ (Г) ^д (Р)
о
о
о
д'"пЕ (Р)
О
(106
д''„.п (Р)
Л1/' (р)
д/'пЕ (Р)
Д£' (р)
Дополняя систему (106) уравнениями, описывающи
ми информационные процессы в динамических системах,
элементы которых получают энергию от преобразователя
и первичного для него ИЭ, а также уравнениями, отра-
жающими взаимосвязь информационных процессов
с энергетическими процессами соответственно преобразо-
вателя и первичного ИЭ, получают полную замкнутую
систему уравнений, описывающую динамические свойст
ва ЭЭС с одноступенчатым преобразованием энергии.
Подобная система уравнений в блочно-матричном виде
для ЭЭС с двухступенчатым преобразованием энергии
представлена в виде системы (107) [39], в которой при-
няты следующие обозначения:
10,0 «1,
а, 1 • 0 0
0 0-1 о
0 0 • S’i-i 1
— главная матрица k-й динамической замкнутой систе-
мы по информационному контуру размера -^Хл, где т; —
число активных элементов системы, получающих энер-
гию от общего ИП; EJ\=diag{l ... 1} — единичная диа-
гональная матрица размера т^Хц; RjB/t=colon{a,;2m+1} —
столбец функций влияния энергетических процессов /-го
преобразователя энергии на информационные процессы
k-и динамической системы; К^еа=со1оп {У/(р)} —столбец
проводимостей активных элементов Л-й системы; Р'в/(“
={a2m+i,i, • • •> ^2m+i,mk} — строка функций влияния инфор-
мационных процессов А-й системы на энергетические
процессы j-го преобразователя энергии (ИП); Р-’еа—
={a2m+i,mii+j, mk+^ — строка функций влияния
68
69
Энергетических процессов активных элементов k-й систе-
мы на энергетические процессы /-го преобразователя
энергии (ИП).
^2m+i,mk+j= 1 при mk<j^Zmk-(-i],
где mk-j-1 —порядковый номер первого столбца единич-
ной диагональной матрицы fe-й системы в блочной ма-
трице системы (107).
Элементы блочных матриц Rba и Рва определя-
ются следующим образом:
аЦ = Wi (Р) WK (р) при / = /—!;
.г/л+1 == ^эг (Р) W 1-{р) при mk т] mk —|— 2tj;
«2т+1. / = ^иг- (р) при mk Т] < j < mk -|- 2т],
где т] — число активных элементов динамической систе-
мы, получающих энергию от /-го преобразователя;
Wi (р), W3i(p), WKi(p)—передаточная функция по ин-
формационному контуру и функции связей г-го актив-
ного элемента системы; Ц7к(р)—передаточная функция
корректирующих устройств (пассивных), включенных
между j-м и (7—|~1)-м активными элементами /г-й систе-
мы; 1Г4.и(р) — одноклеточная матрица функции влияния
энергетических процессов (/—1)-го преобразователя
энергии на процессы в /-м преобразователе; Wia,a(p) —
одноклеточная строка влияния энергетических процес-
сов в /-м преобразователе энергии на энергетические
процессы в (/—1)-м преобразователе; ^и.э(р)={0, 0, ...
..., 0, Wiu.a(p)} — строка влияния информационных про-
цессов /-го преобразователя энергии на энергетические
процессы (/—1)-го преобразователя; 1Сзи.п(р) ={0, 0, ...
Whiji(p)} — строка функции влияния информацион-
ных процессов в /-м преобразователе энергии на его
энергетические процессы; Zjt(p) и ^и.ц(р)—соответст-
венно операторное сопротивление (или его аналог) вы-
ходной силовой цепи /-го преобразователя энергии и его
передаточная функция по информационному контуру.
Система уравнений (107) получена при следующих
допущениях:
рассматривается только одна ветвь (канал) преоб-
разования энергии в ЭЭС;
70
каждый преобразователь энергии снабжен системой
стабилизации его выходной энергетической координаты;
все активные элементы соответствующих динамиче-
ских систем получают энергию только от одного преоб-
разователя, т. е. считается, что отсутствует взаимосвязь
через динамические системы между уровнями и канала-
ми преобразования энергии.
Последнее ограничение весьма жесткое и на практи-
ке не всегда выполняется. Однако принятая форма запи-
(и дифференциальных уравнений позволяет весьма про-
. го получить систему уравнений и для случая, когда
на ивные элементы динамических систем получают энер-
гию от преобразователей разного уровня преобразования
ц|сргии. Очевидно, если активные элементы каких-либо
систем получают энергию от различных по уровню пре-
образования преобразователей (что обычно имеет место
и.। практике), то взаимосвязь между процессами соответ-
< снующих энергетических контуров будет осуществлять-
ся не только непосредственно через преобразователи
шсргии (как в рассмотренном выше идеализированном
случае), но также и через активные элементы этих дина-
мических систем. Принятая форма записи уравнений
и виде системы (107) может быть применена и для этого
случая.
Для примера положим, что один из активных элемен-
п ж системы (например, датчик) получает энергию
г>г третьего преобразователя, а другой (например, объ-
кг управления)—от первого преобразователя, все ос-
, тлитые активные элементы (усилители и т. п.)—от вто-
рого преобразователя. В этом случае главная матрица
системы B"h и соответствующая ей единичная диаго-
тыльная матрица Е'Д в системе (107) останутся без из-
менения, а в столбце R"ba функций влияния энергетиче-
UIX процессов на информационные и в столбце Е"к/г
приводимостей активных элементов, а также в строках
и Р"еь функций влияния информационных и энер-
и гнческих процессов /г-й динамической системы на энер-
птнческие процессы второго преобразователя члены, co-
in нетствующие порядковым номерам рассматриваемых
пкгпвных элементов, равны нулю. В столбцах же функ-
ций влияния энергетических процессов на информацион-
ные первого и третьего преобразователей на позициях,
। иотпетствующих порядковым номерам клеточных ма-
ipini. B"h и Е'Д в матрице левой части (107), должны
71
быть записаны столбцы вида
Z?'Bft=colon{0............О, Wke.o(p)Wko(p)}
и
Я'ел=со1оп{О, О, Yh0(p)}
в столбце связей первого преобразователя и
С = colon{Wks^p)WkM 0, .... 0}; /?"' =
= colon {У\(^),0, 0}
в столбце связей третьего преобразователя. Аналогично
в строках функций влияния информационных процессов
на энергетические указанных преобразователей на пози-
циях, соответствующих порядковым номерам столбцов
клеточных матриц B"k и E"h, должны быть записаны ма
трицы связи вида P'Bft={0, ..0, №ки.0(р)}, Р'ей={0, ...
..., 0, 1) в строке связей первого преобразователя и
Р"'в^{№*и.д(р), 0, ..., 0} и Р"'еь={1, 0, ..., 0} в строке
связей третьего преобразователя ’. Аналогичным обра-
зом следует поступать и в тех случаях, когда любые эле-
менты любых динамических систем получают энергию от
различных преобразователей и ИП.
Таким образом, принятая алгоритмизированная фор-
ма записи дифференциальных уравнений является мате
магической моделью с определенной идеализацией, опи-
сывающей процессы в сложных ЭЭС. Она позволяет фор
мализовать процесс получения дифференциальных урав-
нений ЭЭС с многоступенчатым преобразованием энер-
гии с учетом взаимосвязи информационных процессов
в различных динамических системах с энергетическими
процессами в преобразователях энергии и ИЭ любой
физической природы при любом количестве уровней пре-
образования энергии и любом числе динамических си-
стем с любым числом активных элементов, получающих
энергию от одного или нескольких преобразователей и
ИП. Кроме того, принятая форма записи удобна при
анализе подобных сложных динамических комплексов
как численными методами с использованием цифровых
вычислительных машин, так и при анализе аналоговыми
1 Данные построения показаны в системе (107) пунктиром,
7?
не годами с использованием экспериментальных данных;-
Пи этим причинам полученная математическая модель
1 >С может быть названа универсальной.
К ОБОБЩЕННАЯ ИММИТАНСНЛЯ ДИНАМИЧЕСКАЯ МОДЕЛЬ
I.IU КТРОЭНЕРГЕТИЧЕСКОЙ СИСТЕМЫ
Использование систем уравнений (104) и (107) для
иылиза динамических свойств отдельных динамических
но юм и всей ЭЭС предполагает определение коэффици-
IHOB блочных матриц, а так как число их при большом
количестве динамических систем, образующих ЭЭС, мо-
В'.'т быть велико, то задача идентификации динамиче-
них свойств подобных ЭЭС представляет собой доволь-
но сложную техническую проблему. Поскольку работо-
нособность любой замкнутой системы определяется
прежде всего ее устойчивостью, то наибольший интерес
|редставляет исследование устойчивости отдельных ди-
намических систем и всей ЭЭС в целом. Так как устой-
шность линеаризованной системы определяется решени-
I и уравнений свободного движения, то анализ устойчи-
'и hi сводится к исследованию характеристического
р имения системы, т. е.
Д=0,
|< А — главный определитель системы /г-го порядка,
причем
т
*=£ зп+тЛ
/=i
Здесь т — число последовательных преобразований
икргпи; у,- — число активных элементов динамических
1ем, получающих энергию от соответствующих преоб-
М шпателей (ИЭ).
I аким образом, анализ устойчивости ЭЭС сводится
л вычислению ее главного определителя и его исследо-
• пино. Вычисление определителя ЭЭС произведем сна-
•• для системы (104), которую предварительно при-
W ч к общему виду блочных матриц системы (107),
К «и чего система (104) должна быть дополнена уравне-
*»•* м закона Ома
MJ{p) = M^p)Zt(p).
Ё этом случае главный определитель системы (104)
Имеет вид:
0 ... 0 0 0 0 0 0 Rfirn
0 Е/п 0 0 0 0 0 0 Rfim
0 0 Е3 0 0 0 0 0 Re3
д= 0 0 0 0 0 0 в2 0 0 Е2 0 0 0 0 0 0 гч to ьэ to • (108)
0 0 0 0 0 В, 0 0 Rbi
0 0 0 0 0 0 Е, 0 Rei
РВт РЕт ••• РЕЗ РВ2 РЕ2 РВ1 РЕ1 1 0
0 0 0 0 0 0 0 2/(д) 1
На основании свойств определителей
к
^=^аГ1Аф (109)
I
где aTj — элементы r-й строки определителя; Arj— алге-
браические дополнения элементов r-й строки. Если в ка-
честве r-й строки принять нижнюю строку1 в (108), то
определитель запишется в виде
Д (р)=1 -Ал (Р) A-Zi (p)Ax,h_x (р).
Алгебраическое дополнение AXfk является блочным
треугольным определителем (k—1)-го порядка; из
свойств определителей следует, что
1
Aft = II|Bn(p)|-|E„|; (ПО)
т
поскольку | Е„ | — 1, то Аб = ПI Вп (р) |, где Л — число
динамических систем, активные элементы которых полу-
чают энергию от данного ИП.
Алгебраическое дополнение Ai,k-i является блочным
определителем (k—1)-го порядка, на главной диагонали
которого расположены определители основных матриц
систем и определители соответствующих им единичных
матриц, а окаймляющие строка и столбец являются
1 Для удобства записи в (108) принята нумерация строк снизу
вверх.
74
строкой и столбцом соответствующих функций связей
активных элементов. Используя (109) и принимая в ка-
честве r-й строки строку связей, получаем:
/г—1
А, к-1 — 2 °»/А/» (111)
/=1
где Azj является блочным определителем (k—2)-го по-
рядка; на его главной диагонали расположены определи-
тели основных матриц систем, определители единичных
матриц и прямоугольный определитель размера т]Х
Х(т)—1) r-й системы, активный элемент которой зани-
мает /-ю позицию в определителе (108). Поскольку при
перестановке строк и столбцов определитель с точностью
«> знака не изменяется, то последовательной перестанов-
кой столбцов и строк можно привести к блочному
определителю треугольного вида, в одной из вершин ко-
loporo будет расположен определитель r-й системы
IМр) I размера цХл; первый столбец определителя
1 шенен столбцом связей активных элементов r-й систе-
мы. В соответствии с этим уравнение (НО) запишется
। ледующпм образом:
ft—I 1
Aft-.=2 М/Ж-(Р)1П (П2)
/=1 П^г
Так как при замене какого-либо столбца любой еди-
ничной матрицы Ег столбцом функции влияния REr по-
учается треугольная матрица, в вершине которой рас-
положена соответствующая функция связи, то определи-
|ель такой матрицы
I Erj(Р) I~aik(р) • 1 • (ИЗ)
С учетом (ИЗ) уравнение (112) можно записать
н ннде
А. *-,(/0=3 l*wi+
/•=’ Пт^Г
4- П f в« W 13 a‘k (!,4)
/=1
( ц. у — число активных элементов, получающих энергию
ш данного ИП. Так как элементы второй снизу строки,
75
соответствующие номерам столбцов единичных матриц,
равны единице, а все элементы k-ro столбца, соответст-
вующие строкам единичных матриц, определяются соот-
ношением то с учетом этого уравнейие
(114) примет вид:
к т—1
А, 1 (р)=2 asi I вг/- (д) IЦ (р) IА
/=1 Г&г
+riiB„(/’)ii а(р).
7=1
(115)
С учетом (ПО) и (115) характеристическое уравне-
ние ЭЭС имеет вид:
S «2/(р)|вг/(/7)1п is„(^)i+
.;=] п¥=г
> 7
+П1вп(^)12 гд/7)
(не)
Если ни один из главных определителей одномерных
систем не равен нулю (каждая система по информаци-
онному контуру устойчива), то (116) можно привести
к виду
1 + Z, w A a., (rt +£j Г, (Д=0. (117)
I /=1 <•—1 '
Вычисление определителя блочной матрицы системы
(107) может быть произведено методом понижения по-
рядка и получения в процессе понижения такого канони
ческого алгебраического дополнения, которое бы просто
определялось через определители одномерных систем,
входящих в ЭЭС. Далее для примера вычисляется опре
делитель блочной матрицы вида (107), состоящий из
двух определителей типа (108). Путем последовательной
перестановки столбцов и строк определитель можно при
вести к виду
76
77
На основании свойств определителей справедливо
Д (р)^= (p) + Z'i(p)A^ (р) +
+ W'BMA^(p), (119)
где Zjj-° , Л|2-1), Л^-,) — алгебраические дополнения
элементов первой строки1 *, представляющие собой квад-
ратные определители (k— 1)-го порядка.
(^) = 1 ’ А22~2) (/’)=’• ^З"3’ (/>) +
+ Z"i (р) + 1Г"и.п(р) (р), (120)
где Л’*-3’, Л*4~3), Л^-3* — алгебраические дополнения
элементов первой строки определителя Л**-2’ (3-й строки
главного определителя) являются квадратными определи-
телями (k—3)-го порядка.
^з“3,(/’)=1-л‘Г,(/’)=1П*|В'„(/’)1 1£'»Н в'Р(д) I х
Х1В''„(р)Н^НВ"Рш
Определитель | Л^”4) (р) | является блочным диаго-
нальным определителем (k — 4)-го порядка. Поскольку
|£„|= 1, то
4^’(р)="пХш (121)
где Аь Хг —число систем, элементы которых получают
энергию от соответствующих ИЭ.
„ /=2Ы-4
4 ’(/')= 2 <122)
/=5
Путем последовательной перестановки столбцов и
строк определитель A4j для любого j можно привести
к треугольному виду, в одной из вершин которого будет
1 Для удобства и компактности записи в (118) принята нуме-
рация строк снизу вверх.
78
расположен определитель r-й системы, и /-й столбец его
ну дет заменен элементами первого столбца определите-
ля <“3’ (элементами третьего столбца главного опре-
кмителя). Так как блочный треугольный определитель
p.iiieH произведению элементов его главной диагонали,
io (122) имеет вид:
2у2+4 li+l»—1
4 ’W= 2^WB"r/(P)l П 1В"»« (123)
/=Б п^г
Так как все элементы четвертой строки главного
определителя (118) при />2у2 равны нулю (где у2— чис-
|<| активных элементов всех динамических систем, полу-
чпощих энергию от вторичного ИП), то уравнение (123)
ю/кно представить в виде
^1 2у,+4
4-3)о*)=П 1В''^)1 2
7=5
X П *1В"лШ (124)
п*г\
ГЛЧ число членов произведения |В"„ (р)| равно
• |Ч1и порядковый номер элемента в (118) соответст-
iiyi-i столбцу единичной матрицы ||Е"Г|| и равен Х2—1,
•тли позиция а4з- в (118) соответствует столбцу главной
м.прицы системы ||Вг(р)||. Определитель можно
представить в виде
/~2уа+3
<*(₽)= S (125)
j=4
III (118) видно, что алгебраическое дополнение A(k~i}
1> пню пулю при всех /, кроме / = 4. В последнем случае
/I I 1 представляет собой квадратный определитель
<• 1)-го порядка, который путем последовательной пе-
< 1.Ш0ВКИ столбцов и строк можно привести к блочно-
1рсугольному определителю, на диагонали которого
wnv г расположены главные определители динамических
4> 1ем и соответствующие им определители единичных
79
матриц, а в верхней вершине его определитель системы
стабилизации напряжения вторичного ИП, при э^ом
столбец, соответствующий позиции у2 в (118), будет за-
менен столбцом функции связей активных элементов си-
стемы стабилизации выходной координаты вторичного
ИП и одновременно будет являться окаймляющим', т. е.
первым столбцом в полученном таким образом блочном
определителе. В соответствии с изложенным (125) мож-
но записать:
(Р) = 14Г> (Р) = |В"рь (р) | д' |В"„ (/7)| Д |В'„ (/?)|,
(125а)
где |B"pJ — определитель разомкнутой систёмы регули-
рования напряжения вторичного ИП, в котором послед-
ний столбец (соответствующий выходной координате)
заменен столбцом функций связей ее активных элемен
тов.
С учетом (121), (124) и (125) соотношение (120) за-
пишется в виде
(р)=п I в'« I {п и +
2f,+4 Т3, Xr —1
+ 2”(Р) 3 ^(/7)|B"r/(/,)| [J |B"„(/7)I +
;=5 п=£г
+^"и.п(^)|В"ръ(/2)1 п’/в'^^)!
(126)
Следуя изложенной методике вычисления определи-
телей, получаем.
С4’ (Р)=W'r3.K (р) 1^"э.э (р) П 1В'« (р) IX
{2"[а+4 Ха, Ха—1
2 atl(p)B"r](p) [J |В"„(/7)| +
/=5
+ ^"и.э (Р) П* 1В"« 1ВРТ» м| + 1Й 1В"« +
80
^Tfs+4 X2| X2—1
+ *"/(/0 2 a*/(/01BX(/0l П lB"X/0l +
/=5 n=#r
+ ^(/0|В№(/0| д1 |В"пЦх
П=Рр )
x w iB'r«- (/oi П 1 iB'n (/01. (127)
i—5 n+r
i де [В'гДр) | —определитель одномерной системы, в ко-
тором i-я строка заменена строкой связей активных эле-
ментов системы, получающих энергию от первичного ИП;
У2 — число активных элементов всех динамических си-
стем, получающих энергию от вторичного ИП;
11—1 ( i5
(р) = iB'Pfe (р)| п в'« (р) {П 1в"« М +
П^р I
2fa+4 12, Х2—1
+z"i(P) 2 «</(/oiB'W п iB"X/oi +
7=5 л#=г
+ ^"И.П (р) 1В”РЪ (/0| П* |Б"„ (/>)| I. (128)
Если для компактности принять обозначения
21(1+4 1R" Г \1
д,(р)=1+2",(р) £ 1^^+
/=5
+ (129)
го с учетом (119), (126) — (128) характеристическое
уравнение ЭЭС запишется в виде
А (Р) = П2 |В„ (/01 А, (Р) + (р) W"3,tl (А) X
х^"э.э(/оп iB'„(/oi 24«4/(р)1в”гД/?)1х
7=5
(.77
81
хк п1 |в"п (р)\+м ^"э.н (р) (р). х
п^г
\+^s—1 24,4-4
х П 1вЛ/01|В'^1+Л-(/>) 2 аг>(/0|ВХ(/01Х
п^=р 1=5
X rf lB'« Ml М + ги.п (р) |В'Р* (р)1 X
л^ьг
ХП1В'лМ|а2М=о,
п^р
(130)
или после соответствующих преобразований имеем:
| Д. (р) Д, (р) + Z',. (р) W3,„ (р) [№"э.э (р) X
X V а (р)1 г/(р)1 I W" (о) 1 № Р)1 11/
X 2j а*1 (Я |В"Г (р) | + w и.э (Р) |В„р {р) । Д X
/=5
^1 + ^S
xIIibj^^o.
(131)
где
2fi+4
i=5
+ ^'П«,(Р)
|В'рА(Р)|
|Вр(^)| •
(132)
Используя изложенную методику, можно найти ха-
рактеристическое уравнение сложной ЭЭС автономного
объекта при любом числе преобразователей энергии и
любом числе динамических систем, активные элементы
которых получают энергию от соответствующих ИЭ, од-
нако сложность и объем вычислений при этом сущест-
венно возрастают.
82
Характеристическое уравнение ЭЭС (131) распадает-
ся на два уравнения:
^1+^S
п |B„(Z2)1 = O; (133)
А, (Р) (р) 4-2'.- (р) (р) к"э.э(р) £ atj (р)Х
,_,г, / pVlB,,Pb(P)l
А |Br(p)| |В"р(р)|
==0, (134)
которые могут быть использованы соответственно для
исследования устойчивости соответствующих одномер-
ных систем по информационным контурам и устойчиво-
11 и всей ЭЭС в целом как сложного динамического ком-
плекса. Каждое слагаемое под знаком суммы в соотно-
шениях (131) и (132) имеет размерность проводимости,
и сомножитель в третьем слагаемом в (132)—размер-
ность, обратную размерности передаточной функции ИП
по информационному контуру. В соответствии с этим
и дальнейшем принимаются следующие обозначения:
2Ts+4 [R,/ / И
S “»w₽w=2r''w=p‘w; <1з5>
/=5 /=1
2Т.-М г
S a‘*^^^]-=YiY'ot{p)=Y'^py (136)
i=5 1—1
где
Л |в"г/(р)| , Л
у (137)
/=1 /=1
1"м Ш (р) у, (р)- (138)
1=1 1=1
Соотношения (137) и (138) получены исходя из того,
(> для всякой единичной треугольной матрицы спра-
Ндливо Еп=щр1, Ег=1, но поскольку столбец связей
•нисдой единичной матрицы есть столбец проводимостей
83
активных элементов r-й системы, а строка связей есть
единичная строка, то имеет место
Ч> ’ll
1=1 1=^1
/=1 1=1
где к;,, т]г — число активных элементов соответствующих
систем.
Введем следующие обозначения:
Y"oi (Р)> Y'oi (Р) — обобщенная проводимость динами-
ческой системы, активные элементы которой получают
энергию соответственно от вторичного и первичного ИП;
У\ (Р) — суммарная проводимость всех приемников, полу-
чающих энергию от первичного ИП; У"Е (р) — суммарная
проводимость всех приемников, получающих энергию от
вторичного ИЭ; (р) = |B'pfc (/?)|/|В'р (/?)| — передаточ-
ная функция регулятора первичного ИЭ; W"per(p) =
= |B"Wi (р)|/|В"р (р)| — передаточная функция регулятора
вторичного ИЭ.
С учетом принятых обозначений характеристическое
уравнение (134) имеет вид:
] 1 + Л (р) Y's (р) + Т7'и.п (р) W'per (/,)] 11 + Z". (р) Y'\ (/0-1-
+ ^"и.п (Р) ^"рег (рЯ + Z'i (р) Г"э.и (Р) Г"9.9 (Р) У'^ (Р) +
+ Z'z (р) W"9M (р) Г"рег (р) Г"и.9 (р)=0. (139)
Характеристическое уравнение (139) может быть
представлено одним из следующих уравнений:
{1 + У”,. (/,) Z"a (р) + Г"рег (р) W\, п,9 (/,)] [1 +
+ Z'/ (Р) у\ (Р) + ^'рег (р) Г'и.п (/,)] = о (140)
или
{1 + Л- (Р) ^'/(Р) + Y'o. (Р) + У'о. (р)] +
+ ^'per (Р) «’"н.п (Р)} П + У'\ (Р) Z"(р) +
+ ^"рег(р)^''и.п(рЯ = 0, (141)
84
В уравнении (140) Z",(p)—операторное сопротивле-
ше эквивалентного вторичного ИП:
Z"s(p)=Z"i(p) + W"B.B(p)Z'a(p)W"M(p)-, (142)
11"'/1т.п.я((>) — передаточная функция эквивалентного вто-
ричного ИП по каналу управления:
№"и.п.3 (р) = №"и.п (р) + №"э.и (р) Z'e(p) №'и,3 (р), (143)
। к* Z'a(p)—операторное сопротивление эквивалентного
первичного ИП:
Z’3 = 1 + Z't (р) У'Е (р) + ^'и.п (р) ^'рег (Р) (144)
В уравнении (141) У'О1 (р)—обобщенная проводи-
пегь вторичного преобразователя энергии:
(Р)
1 = UZ”S-H1 + Y". (р) Z"t (р)+Г"и.п (р) 1У"рег (Р) Х
Х^'ХЛр); (145)
> .,.(р)—обобщенная проводимость системы регулиро-
шня напряжения преобразователя:
W"Der (Р)
’(р) = ^"9.и (Р) 1 + (р) Z"z (р) + Г"и.п (р) Г"рег (р) Х
Х^"и.9(р)- (146)
Исследование устойчивости и динамических свойств
>С может проводиться на основе уравнений (140) или
II), каждое из которых в свою очередь распадается
। ща уравнения. При использовании (140) имеют
Мес го уравнения:
1 + У'\ (Р) 2"э (Р) + ^'per (Р) п.э (Р) = 0; (147)
1 +Y\(p)Z'i(p) + W'per(p)W'^(p) = b. (148)
11 а основе (148) может быть проведен анализ устой-
чнкчти первичного контура динамического комплекса,
>р.кованного первичным ИЭ с регулятором и его при
Циниками, а по (147)—анализ устойчивости и динами-
|| ких свойств всей ЭЭС в целом. Динамические свой-
|| на «низших» энергетических и информационных кон-
туров в этом случае представляются операторным сопро-
85
тивлением эквивалентного ИЭ, определяемым по урав-
нению (144). При использовании уравнения (141) имеют
место уравнения:
1 (р) + ^рег(р)^и.п(р) = 0; (149)
I + (Р) [Гг (р) + Го, (Р) + (р)] +
+ ^рег(/?)^,и.п(Р) = 0. (150)
По (149) производится анализ устойчивости вторич-
ного контура, а по (150)—анализ устойчивости всей
ЭЭС в целом; в последнем случае динамические свойст-
ва «высших» энергетических и информационных конту-
ров представлены обобщенной операторной проводи-
мостью вторичного преобразователя:
Го.п (р) = П] (р) + Уло2(р) >
где У'о] (р) и У'о2(р) определяются согласно (145).
(146).
Уравнения (147) и (150) полностью определяют ди-
намические свойства сложной ЭЭС автономного объекта
и являются адекватными, поэтому для исследования
устойчивости ЭЭС может использоваться любое из этих
уравнений. На основе (147) и (150) может быть полу-
чена обобщенная динамическая модель сложной ЭЭС
автономного объекта для любой стадии преобразования
энергии при любом числе стадий преобразования и лю-
бом числе систем, получающих энергию от соответству-
ющих ИЭ (преобразователей энергии), объективно от-
ражающая динамические свойства реальной ЭЭС. При
этом, как следует из (147), динамические свойства всех
«низших» по отношению к рассматриваемой стадии пре-
образования энергии контуров, образованных соответст-
вующими преобразователями энергии с регуляторами и
первичными для них ИЭ и приемниками, могут быть
представлены динамическими свойствами эквивалентно-
го ИП, определяемыми рекуррентными соотношениями
Z',-, (р) = Щ + ^э.э (р) (р) Г'э.и (р); (151)
П.п.э (P^W^M + W^M Z}~] (р)Г'8.в(р);-(152)
7/—1 , \_________________^3 (р)_______________ , < ГЛ ,
° {Р) yi-i (р) + (р) (р) •
86
Динамические свойства 'Приемников данного вида
шсргии (приемников, получающих энергию от данного
феобразователя) представляются их суммарной обоб-
щенной проводимостью, определяемой соотношениями
(145) и (136), а динамические свойства «высших-» по
и ношению к рассматриваемой стадии преобразования
ш-ргии контуров, образованных соответствующими пре-
шразователями энергии с регуляторами и их прием-
никами, обобщенными операторными проводимостями
Вне. 27. Обобщенная динамическая модель автономной ЭЭС.
определяемыми со
чипветствующих преобразователей,
нп-ио (145) и (146) рекуррентным соотношением
, / Z X _ w&' ^о+1(р) +П7/Р?г1 (Р) nt1 (Р) Ц7/+1 ,
\+Z^l(p)YiL^(p)+Wi+l(p)Wi+rl(p) *•« Р’’
В соотношениях (154) и (153)
1'£,(р)=Ф,(/»+2 г'7.(й;
/=1
(154)
(155)
^1(^) = 1/Г1(Р)+2 С ^)’ <156)
z=i
ni<’ У'+1(/?), У^1 (р) определяются из уравнений (135)
и (136).
Па основе (147) с учетом (151), (152) и соотноше-
ний (154) — (156) динамическая модель автономной ЭЭС
может быть представлена в виде обобщенной модели,
и (пораженной на рис. 27. Представление динамической
модели ЭЭС в таком 'виде позволяет, во-первых, приме-
87
Пять обобщенную Модель для Исследования динамики
ЭЭС на любой стадии преобразования энергии, при
любом числе преобразователей и любом числе динами
ческих систем, получающих энергию от соответствую
Рис. 28. Динамическая модель
информационного контура ЭЭС
Рис. 29. Динамическая модель
энергетического контура ЭЭС.
щих преобразователей, и,
во-вторых, дает явную за
висимость динамики ЭЭС
от динамических свойств
приемников (нагрузки)
соответствующих ИЭ, ди-
намики преобразователей
и динамики контуров ре
гулирования энергии, и
частности динамических
свойств регуляторов соот
ветствующих ИЭ.
Динамическая модель
на рис. 27 путем сверты
вания приводится к виду,
изображенному на рис.
28 или 29. В схеме на рис.
28 выделены в явном ви-
де элементы, характери-
зующие динамические
свойства регулятора пре-
образователя энергии
И%ег(р), а динамические
свойства ИП как объекта
регулирования и динамические свойства «низших» кон
туров представлены соответственно передаточными
функциями
где &1э(р), Wi„^3(p) и Y^lp) определяются из (151),
(152) и (155). При представлении динамических свойств
«низших» контуров обобщенной передаточной функ
цией ИП
^'и.л.оСЛ)
М1.П.Э (р)_
1 +^ео(Р)2Лэ(Р)
(157)
Динамическая модель приводится к схеме на рис. 30
которая может использоваться при экспериментальном
исследовании динамических свойств, например, частот-
ными методами [40], а также для синтеза (коррекции)
динамики ЭЭС и выбора регулятора энергии, используя,
88
•пример, метод желаемых логарифмических частотных
•рактеристик [41].
Поскольку функционирование автономных ЭЭС ха-
||пк|сризуется коммутациями разнообразных ТУ, то це-
пообразнее использовать схему, данную на рис. 29,
<0. Динамическая модель
| мы регулирования напря-
ли.
Рис. 31. Иммитансная динамиче-
ская модель ЭЭС.
» io норой динамические свойства нагрузки (в общем
г’1,10 ТУ) представлены в явном виде. В этом случае
И*цмика контура (регулирования представляется пере-
оичпой функцией------—----?----------, а применение
1+^г(Р)^и.п..(Р) ’
fi> пи гора может трактоваться как коррекция динамн-
п\- свойств энергетического контура. Так как дина-
|»екие свойства приемников в линеаризованной моде-
•о in зависят от свойств ИП и его регулятора, а динами-
Ьа кис свойства регулятора в известной мере не зависят
нойств нагрузки, то со стороны приемников ИП
»iMi Cino с регулятором целесообразно представить
щепным ИП (рис. 31) с операторным сопротивле-
м определяемым по формуле
Z!io(p)=------~^а(рК—-------, (158)
1+Г/1ет(р)^и.п.э(Д)
(юльзовать полученную обобщенную модель при экс-
1»нм1Ч1гальных исследованиях, анализе и синтезе ди-
Мпчоских свойств ЭЭС [31, 42, 43]. Уравнение (158)
И11п;|мические модели на рис. 29 и 31 позволяют на-
III, обоснованные требования к динамическим свой-
йнм регулятора энергии и проводить коррекцию ди-
мн к и ЭЭС с учетом изменения (вследствие коммута-
III ГУ) динамических свойств приемников.
59
9. АНАЛИЗ ДИНАМИЧЕСКИХ СВОЙСТВ
ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ СИСТЕМЫ НА ОСНОВЕ
ОБОБЩЕННЫХ ИММИТАНСНЫХ ХАРАКТЕРИСТИК
Для исследования устойчивости ЭЭС, как и любой I
динамической системы, могут применяться как алгебраи
ческие, так и частотные методы (критерии), для чего I
необходимо произвести вычисление или эксперименталь
ное определение соответствующих обобщенных динами
ческих характеристик в (147) или (150). Так как каж I
дая из указанных обобщенных характеристик зависит I
от большого числа конструктивно-технологических, энер
гетических и динамических параметров, то расчетно |
экспериментальный метод их определения, например, па I
основе соотношений (135), (136), (144) —(146) и (153) I
при предварительном экспериментальном определении I
динамических параметров и характеристик отдельных!
ТУ и динамических систем становится нерациональным!
вследствие чрезвычайно большого количества эксперп I
ментов по определению этих параметров и большого!
объема вычислений. Более рациональным представляет!
ся использование частотных методов экспериментально I
го определения обобщенных динамических характери
стик уравнений (147) и (Г50) и частотных методой
исследования устойчивости. Согласно схеме на рис. 31
характеристическое уравнение ЭЭС имеет вид:
i+z,.o(jP)ySo(/>)=0.
(15" I
В соответствии со схемой на рис. 31 и уравнением
(159) для анализа устойчивости ЭЭС необходимо имен,
две частотные характеристики: внутреннего сопротивле
ния — импенданса — эквивалентного ИП и эквивалеп
ной проводимости-—адмптанса — всех приемников энс;м
гии ИП. В дальнейшем обе указанные частотные xapnid
теристики для компактности называются, следуя Боди
• В отечественной литературе термин «иммитанс», по-видимог i
впервые был введен в работе [44] для обозначения и обобщен"!
понятий «нмпенданс» и «адмитанс». В настоящее время термн -
«иммитанс», «иммитансные частотные характеристики», «иммит >
ный метод анализа» находят все большее признание и употреб ,•
ние как в отечественной [39, 42, 45], так и в зарубежной литер
туре [46, 47].
90
пммитайсныМй частотными характеристиками (ЙЧХ),
। метод анализа динамических свойств, основанный иа
использовании этих характеристик, — иммитансным ме-
тлой 1 анализа динамических свойств сложных динами-
нских комплексо1в. Так как наиболее удобным инженер-
ным методом анализа и синтеза динамических систем
шляется частотный метод с использованием логарифми-
ческих амплитудно-фазовых частотных характеристик
1ЛАФЧХ), то рационально его применить и для анализа
, нжчивости ЭЭС. Для этого, очевидно, необходимо
•мперименталыю (или расчетно, если это возможно)
иределить логарифмические амплитудно-частотные
(ЛАЧХ) и фазо-частотные (ЛФЧХ) характеристики
жннвалентного ИП и его приемников.
Имея экспериментально полученные ЛАФЧХ УЕ(]«>) и
>(/ш), удобно оценивать устойчивость системы в соот-
•н1сгвии с критерием Найквиста по частотной характе-
рнчике условно разомкнутого контура
wrP(M)=ys(/»)2f0(/®)»
шрую, очевидно, нетрудно получить в виде ЛАЧХ и
i'1'ЧХ, графически складывая соответствующие харак-
истики для приемников и источника питания.
Важно отметить, что возможны случаи, когда в им-
’ плпсной передаточной функции [особенно для Zj0(p)]
рядок числителя превышает порядок знаменателя,
ч-п лом подобное же соотношение порядков может co-
il питься и для передаточной функции Wv(p). В этом
llyi.ie для исследования устойчивости комплекса может
| пользоваться критерий Найквиста применительно
• инверсной передаточной функции . Однако мож-
I получить критерий Найквиста, применимый к иссле-
Kiuiiiiiio устойчивости систем непосредственно по виду
и рафа Wp(ju), независимо от соотношений порядков
ппомов числителя и знаменателя. Применение кри-
II более широком смысле в дайной работе под иммитансным
* vim понимается метод исследования динамических свойств и
| | нс.) функционирования динамических систем, основанный на
tu ц-пиц обобщенных динамических характеристик (не обяза-
но чистотных), н обобщенных динамических моделей, отражаю-
пиимосвязь информационных и энергетических процессов
)• милых 'ГУ и системах.
91
герия Найквиста в таком виде позволит несколько
упростить анализ и сохранить его общность.
Пусть задана передаточная функция разомкнутоп
системы
Wp(p)—M(p)/Q(p),
где М(р)—полином от р степени т\ Q (р)—полином
от р степени q.
Образуем сумму
i + (160)
Очевидно, рто полином D(p) имеет степень
{т при tn>q-,
q при m<q.
В выражении (160) D(p~) — характеристический по
липом замкнутой системы, Q(p)—характеристический
полином разомкнутой системы. Из критерия Михайлова
следует, что замкнутая система будет устойчива, если
Д arg [D (/«>)] = при 0<о><оо. (161
В общем случае полином Q (р) может иметь I корны!
в правой полуплоскости и i корней на мнимой оси, тогд'
Д arg [Q (/<»)] = (q — 2/ — t) 4г при 0<w<oo. (16'2/
Используя (160), (161) и (162), получаем:
Д arg [ 1 + 1Гр (/со)] = Д arg [D (/со)] — Д arg [Q (/со)] =
= 44 ]d— q-^-21-j-i] при 0<со<оо. (]6л|
Выполнение равенства (163) и есть условие устойчп |
вости замкнутой системы. Но, очевидно, что приращен и
аргумента вектора [l + lFp(/co)] относительно начал)
координат комплексной плоскости равно приращешп
аргумента вектора (назовем его N-вектором), начал
которого находится в точке —1, j0, а конец скользит и
годографу 1^р(/со) при изменении со от 0 до оо.
Поэтому окончательно критерий Найквиста для о(и
щего случая можно сформулировать следующим обря
92
зом: для того чтобы замкнутая система была устойчи
ной, необходимо и достаточно, чтобы N-вектор при из
менении ы от 0 до оо повернулся в положительном на-
правлении (против часовой стрелки) на угол
A?=^-(d-9) + -^(2/ + 0.5
Здесь d—q определяется из (160), а I и i —соответ
сгвенно число правых и нейтральных корней полино
ма Q(p).
32. Экспериментальные логарифмические ИЧХ ИП
Для передаточных функций, полученных на основе
•ммчтансной модели ЭЭС, характерным является отсут-
। нпе правых и нейтральных корней. В этом случае
«и|лиз устойчивости упрощается. Так, если порядок
93
в положи-
несколько
32 приве-
Числителя й^р(р) не превышает порядка знаменателя,
необходимым и достаточным условием является нулевое
приращение аргумента N-вектора. Применительно
к ЛАФЧХ это значит, что разность между числом поло-
жительных и отрицательных переходов линии л±2л/?
при Е>0 должна быть равна нулю. Если же порядок
числителя превышает порядок знаменателя на значение
d—q, то условием устойчивости замкнутой системы яв-
ляется поворот вектора N на угол (d—q}-x
тельном направлении.
Для примера исследуем на устойчивость
реальных динамических комплексов. На рис.
дены экспериментально полученные ИЧХ Z<0(/(o) источ-
ников питания, на рис. 33 — ИЧХ У8(/®) соответствую
Рис. 33. Экспериментальные логарифмические ИЧХ приемников
энергии.
94
щих приемников и на рис. 34 — ЛАФЧХ условно ра-
зомкнутых комплексов «ИП — приемники». Для каждо-
го конкретного комплекса кривые на рисунках обозначе-
ны тем же индексом.
Как видно из приведенных рисунков, передаточные
функции иммитансов Zio(p) и УЕ(р) не содержат правых
п нейтральных полюсов. Для иммитансов Zlo(p) комплек-
сов 1,&2, #Дрис...32, кривые 1, 2, 4) порядек числителя
Гиг 34. ЛАФЧХ условно разомкнутого комплекса «ИП-приемники»
95
превышает на единицу порядок знаменателя, иммитанс
ZM комплекса 3 и передаточные функции Ys(p) вСех
потребителей (рис. 33) имеют равные порядки числителя
и знаменателя. В соответствии с этим условием устой-
чивости замкнутого контура для комплексов 1, 2, 4
будет выполнение равенства Д<р=-^-, а для комплекса 3
Д<р = О. Обратимся к рис. 34. Для кривых 1, 2, 4 при
ю—>0 £<0, а при ci—>ео L—*оо, ср—Кроме того,
все кривые не имеют перехода через линию ± it-1~пт
при £>0. Из этого следует, что для кривых /, 2, 4
by для кривой 3 Д<р = 0. Условие устойчивости
выполняется. Следовательно, рассматриваемые в при-
мере системы в замкнутом состоянии устойчивы.
Следует заметить, что все приведенные выше рас
суждения проведены для дробно-рациональных переда-
точных функций. Однако могут встретиться случаи, ког-
да в составе системы имеются звенья с иррациональной
относительно р передаточной функцией (например,
звенья с распределенными параметрами). При измене-
нии <й от 0 до со фазовая характеристика такого звена
может измениться на угол Дф, не кратный л/2. В этом
случае нужно ввести поправку для значений Дф, а имен-
но Дф=1Дф/+Дф", здесь Дф" подсчитывается для ирра
циональной части передаточной функции, Дф' — для ра-
циональной части.
В заключение отметим, что на основе характеристи
веского уравнения (159) и соответствующей ему обоб
щепной динамической модели ЭЭС можно произвести
оценку влияния динамических свойств отдельных систем,
образующих ЭЭС, на ее динамику и анализ влияния
информационных процессов отдельных систем на качест
во напряжения соответствующих преобразователей или
ИП1. Для этого представим уравнение (159) в виде
1 + Zl0 (р) [Y'^p) + Yor (р)] = 0, (164)
1 Подобные задачи часто возникают на практике при проекта
ровании, наладке и эксплуатации автономных систем электроснтб
ження, работающих на сложную динамическую нагрузку, например,
на ряд динамических систем.
96
in' У'у(р)— суммарная обобщенная проводимость всех
приемников данного вида энергии, за исключением актив-
ах элементов r-й системы;
^w=S1''</”+S’r''(",wwr
(=1 /=1
обобщенная проводимость г-й динамической системы;
i| число активных элементов системы.
По уравнению (164), имея соответствующие имми-
niciibie частотные характеристики, производят оценку
н вменения условий устойчивости (например, запасов
1ОЙЧИВОСТИ по фазе и амплитуде) ЭЭС при подключе-
нии или отключении г-й сепаратной системы.
Анализ влияния информационных процессов отдель-
। .lx сепаратных систем на качество напряжения ИП
/кно произвести на основе дифференциальных уравне-
ний, описывающих информационные и энергетические
нщессы и их взаимосвязь в отдельной сепаратной си-
п’ме, т. е. с использованием систем уравнений вида
С»Г.) или (96), в которых под иммитансом ИП пони-
нтся иммитапс обобщенного ИП, определяемый соот-
н<||пением
<|65>
к- Zi0(p) определяется уравнением (158).
В соответствии с системой (96) колебания напряже-
ния обобщенного ИП, обусловленные работой r-й систе-
IJ, определяются по формуле
<166)
1г Аг(р)—главный определитель системы (96). Про-
|| июля вычисления по алгоритму, использованному для
ычисления определителя (108), получаем:
Дг (Р) = I вг (Р) I
Wwj(p)
1+^/о(^)
I (р) |
I Br (р) I +
• 677
97
или
Д'(р) = |Вг(р)|{1 +2,о(/7)Уог(/>)}; (167)
— дополнительный определитель, получаемый ия
главного при замене столбца 2tj—(- 1 в (96) столбцом воя
мущаюпшх и управляющих воздействий. Вычисляя опрс I
делитель Дг2ч+1 (р), при отсутствии колебаний выходной
энергетической координаты первичного ИЭ, т. е. при]
С>ч+1 (ру— &U (рУ= 0, получаем:
ц 2ч
Д'2ч+Ж=3 с^)|ВГ1.(/0|+ 3 Сч+1(^Х
i=l Z=4+l
Х|Егг(/01|Вг(р)|,
или
ЛГ2,+1 (Р) = I Вг (р) | |*вх (Р) гд (р)
+J (р) (р) -ттат+Sд/* z'*> }1 <’68)
/яг! /=1
где Хвх(р) —входной управляющий сигнал r-й системы;
X8l(p) —возмущения, действующие на i-й активный эле-
мент системы, приведенные к его входу; Msi(p) —воз-
мущения тока i-го активного элемента, вызванные, на-
пример, коммутациями схемных его элементов; | Вг(р) | -
главный определитель r-й системы по информационному
контуру; | В„ (р) | —1 дополнительный определить r-й си-
стемы, получаемый из главного при замене i-й строки
в (96) строкой функций влияния информационных про
цессов на энергетические. В соответствии с системой
(95) элементы строки влияния
(/>) -= Ло (Р) (Р)-
Для идеализированного случая упрощенной сепарат-
ной системы, которой соответствуют системы уравнений
(95) и (96), дополнительные определители
Z'io(P) [WK.д (p) - №й.у (p)'Wy (p) 4- Ги.о (p) Wy (P) Wo (jp)j;
Bri(p)'= Z'lo(p)
1 0
^и.д(Р) ^н.у(р)
0 Wo (p)
wa(P)
^H.O (P)
1
-^о(р)Лд(р)^(р)^о(р)4-^уИ - ^„.o Wo(p)];
|Br.(/2)| = Z'/0(/>)
1 0
^y(P) 1
^u.a (P) ^„.y (P)
^(P)
0
^H-.(P)
Z'M [-^и.д (P) Гд (p) +w^y(p) w* (p) wy (/WM
Из -определения и физического смысла функций влия-
ния информационных процессов на энергетические сле-
' '*г, что | 1Ри.д (/со) | < 11Ги.у (/со) | < 11ГИ.О (/со) |. В соот-
Й1ствии с этим соответствующие дополнительные опре-
и-л и гели
I Вг. (Р) I = Z'M 1ГИ.О (р) wyr(p) Wo (р) =
l=^Zo(p)|B'r,(p)|IFB.0(p);
В„ (р) I Z' i0 (р) WB,O (р) Wo (р)=Z'to (р)Х
Х|В'г1(р)|17и.о(р);
|Brs(/2)|sZ'(.o(/2)U7H,o(^) =
=2'Zo(p)|B'r,(p)|iF;.o(/7).
(169)
С учетом соотношений (167)—(169) колебания на-
ряжения обобщенного ИП, обусловленные работой (ин-
формационными процессами) r-й системы,
^вх(Р)^И.о(Р)1>7г(Р) +
ьиг(ру=
1Де
+2 w»-° (/>)+А/^ z'i°(р)
1 + Z'io (Р) Yor (Р)
, (170)
1ГД (р) I B'fl (р) I _ т^рСР)
|В,.(Р)1
^(Р) =
99
—передаточная функция замкнутой r-системы по управ-
ляющему воздействию;
Wsi(P)~ 1В(/))| Ц-Гр(р)
— передаточная функция замкнутой системы по возму-
щению, действующему на входе i-ro активного элемента
По уравнению (170) с учетом соотношений (169)
можно произвести количественную оценку влияния воз-
мущающих и управляющих воздействий на качество
напряжения обобщенного ИП. В частности, так как
| W'sifja) | < | l^p(jio) то наибольшее влияние на ка
чество напряжения обобщенного ИП оказывают bosmj
щения, действующие на входе датчика системы. По
скольку входной сигнал системы обычно существенно
больше помех, действующих на входе датчика, то на
ибольшее влияние на качество напряжения оказывает
управляющий сигнал сепаратной системы. С учетом сде-
ланных замечаний уравнение (170) можно переписать
в виде
д„г, ч [ЛГ^ (р) ИГИ.О (р) (р)-4-AZSs (z?)J (^)
---------1 + ЗД)Н,ЛЙ
Д^Ег (Р) % io (Р)
— l + Z'io(p)VQr(p) ’
(171)
где Д/1г (р) — колебания тока обобщенного ИП, обуслов-
ленные информационными процессами r-й системы.
С учетом соотношений (165) и (158) уравнение (171)
имеет вид
А£Л (р) — Д/1г (р) j + (р) п + (р) Zis (р) • (17
Решив систему уравнений (104) относительно коле
баний напряжения ИП при отсутствии колебаний на
пряжения первичного ИЭ, т. е. С25]+/(р) =1Д£7(р) =0,
несложно показать, что колебания напряжения ИП,
обусловленные информационными процессами всех ди
намичеоких систем, активные элементы которых полу
100
•илот энергию от данного ИП, определяются уравнением
х
ДгШ = £д£Л(р)=
1=1
X
= 1 + Wp (р) WK.n.9\p) + Zia (р) УЕ (р) 2
(=1
Решив систему уравнений (107) относительно коле-
члний напряжения соответствующего преобразователя
\//"(р) или Д£7"'(р) с учетом отклонений выходной
координаты соответствующего первичного ИЭ, несложно
показать, что в этом случае отклонения напряжения
преобразователя, обусловленные информационными про-
весами динамических систем данного и нижеследую-
щих уровней преобразования энергии, будут опреде-
ли ься уравнением
Д<7'(/>)= г1э
<=i|
_____________________i_____________
1 + ^рег (P) W'n.n.a (P) + (P) Z/zs(P) ’
(173)
'e Zfa(p) h U7H.n.3(p) определяются рекуррентными co-
iношениями (151) — (153), а колебания выходной коор-
шпаты первичного ИЭ определяются уравнением вида
(173), приведенным для последующей стадии преобра-
нтапия энергии.
11з условий обеспечения требуемого качества элек-
(рошергии или требуемого качества напряжения дан-
'|но преобразователя при известных динамических ха-
1'нмеристиках всех сепаратных систем ЭЭС и известном
иекгральном составе их управлений уравнение (173)
кинется исходным для расчета и синтеза динамических
ишств преобразователя энергии и системы регулиро-
। ппня его выходной координаты.
101
10. АНАЛИЗ ПРОЦЕССОВ РЕГУЛИРОВАНИЯ
ОТДЕЛЬНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
С УЧЕТОМ ИХ ВЗАИМОСВЯЗИ ЧЕРЕЗ ОБЩИЙ ИСТОЧНИК
ЭНЕРГИИ
Исследование свободного движения и динамических
свойств информационных контуров сепаратных систем
можно провести, используя уравнение (133), которое
перепишем в виде
|Вг(р)|=1 + ^р(р)=0, (174)
где Wrv(p) —передаточная функция разомкнутой систе-
мы по информационному контуру.
На основе уравнения (174) может производиться
анализ динамических свойств информационных контуров
сепаратных систем обычными методами теории регули-
рования. Однако подобный подход не учитывает взаимо-
связи информационных процессов сепаратных систем,
работающих в составе ЭЭС, с энергетическими процес-
сами в ИЭ, и по существу уравнение (174) является
усеченным.
Оценку влияния свойств ЭЭС на динамику сепарат-
ной системы можно произвести на основе характеристи
ческого уравнения ЭЭС (159) или уравнения (164).
Если ввести обозначения
ч
= Yt(p)i
Z'io= 1+/ХУу' (рГ <175)
1 г LiO \Р) г Jo (Р)
то уравнение (164) запишется следующим образом:
Г=1
или
ч
I Br (р) I + Z'io(р) 2 аъ+х (р) I Br/ (р) I = 0
/=1
и с учетом левой части (174) представляется в виде
ч
l+^P(/0+Z'.o(P)£ ач+ь/(р)|Вг/(р)| = 0. (176)
/=»
102
♦
Если выполняется условие
ч
l+^o(P)S V/WlBr/WH°
/=>
(что имеет место при устойчивости ЭЭС), то уравнение
(176) можно переписать в виде
1 4-____________Wrp(р)__________=0 (177)
ч
1+z' ,-о (д) 2 4+1.7 । ^)1
/=!
н использовать (177) для оценки влияния динамических
свойств ЭЭС на динамические свойства сепаратных си-
стем, работающих в ее составе. Из (177) следует, что
рассматриваемое влияние будет тем больше, чем строже
выполняется неравенство
|Z'/o(/w) S ПРИ
(178)
На основе последнего соотношения можно сделать
количественную оценку влияния свойств ЭЭС на дина-
мику сепаратных систем. Для этого представляем его
и развернутом виде, полагая для простоты, что система
• остоит из датчика, усилителя с корректирующим
• геройством и объекта управления. С учетом этого сум-
ма левой части (178) имеет вид:
ч з
Т V,t/’(p)|Br/^)|=3 ач+1>/(р)|Вг/(^)| =
;=1 i=i
= %+1, д (Р) ! ВГД (Р) I + %.«, У № I Вгу (Р) I +
+ йч+1.о^)1В-^)1- (179)
гП'' ? (д)==1^и/ (р) —Функция влияния информацион-
ных процессов на энергетические г-го активного элемен-
III. |В,,(р) | —определитель системы, в котором соответ-
। кующий столбец заменен столбцом функций влияния
ЮЗ
где
С1(р) = ^(р)НвХ(р)+Х1(Р)];
Cl(p)=X8i(p) Wt(p)-,
c24+l(p)=ws(p)l
Д. (Z7) ~ алгебраическое дополнение ц-го столбца опреде-
лителя
Уравнение (182) может использоваться для анализа
и синтеза динамических свойств сепаратной системы.
В частности, соотношение
(183)
является условием в-инвариантности сепаратной систе-
мы по отношению к собственным возмущениям, а соот-
ношение
— условием е-точности воспроизведения системой управ-
ляющего сигнала. Соотношение
SH&HWr4?-----------------д1/'«т^мг“6 <186)
является условием е-инвариантности сепаратной систе-
мы к колебаниям напряжения питания активных ее
элементов и с учетом соотношения (173) —условием
е-инвариантности системы к информационным процес-
сам остальных динамических систем ЭЭС. С учетом
уравнения (167) соотношение (185) можно записать
в виде
I, ______________Л(/ю) |<е. (186)
I 1+2'10(/(о)Уог(/со) Br (ja>) I*- U >
Из условий обеспечения автономности работы от
дельных систем в составе ЭЭС соотношение (186) с уче
том (173) является исходным при расчете и синтезе
динамических свойств сепаратных систем и динамиче
ских свойств ИП или преобразователей и их систем
стабилизации.
106
11. ОСОБЕННОСТИ АНАЛИЗА ДИНАМИКИ
ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ СИСТЕМЫ
ПРИ ПАРАЛЛЕЛЬНОЙ РАБОТЕ ИСТОЧНИКОВ ЭНЕРГИИ
НА ОБЩУЮ НАГРУЗКУ
В проведенном анализе предполагалось, что ИЭ ра-
ботает на группу приемников, что широко применяется
в технике, в частности в автономных ЭЭС. Однако из-
ложенная выше методика исследования динамических
свойств сложных комплексов справедлива и для более
широкого класса задач, например для анализа совмест-
ной работы группы ИЭ на общую нагрузку. В этом слу-
чае одна из энергетических координат оказывается об-
шей для всех ИЭ. Со стороны приемников группу ИП
(с индивидуальными регуляторами) можно представить
жвивалентным источником питания (ЭИП) с соответст-
вующими ЭДС и внутренним операторным сопротивле-
нием. При параллельном соединении ИП операторное
сопротивление эквивалентного ИП определяется урав-
нением
* 2э.и.п(/’)= уэнп(р)» О87)
где
п п
= (188)
> 1 = 1 1=1
ii Z,(p)—операторное сопротивление i-ro ИП с регуля-
гором напряжения или 'без него.
Если известна операторная проводимость нагрузки,
Ил которую работает группа ИП, и известны оператор-
ные сопротивления отдельных ИП, то на основании
'.равнения 1 + Ун(р)7э.и.п(р) =0 с учетом (187) можно
провести анализ динамических свойств комплекса
•I руппа ИП — общая нагрузка». Основная особенность
"ри этом обусловливается тем обстоятельством, что ток
' нрузки (для ИЭ электрической природы) равен сум-
токов через каждый ИП, а последние определяются
шачениями и характером операторных сопротивлений
них ИП. Поэтому при анализе работы группы нерегу-
шруемых ИП на общую нагрузку рациональнее исполь-
|>магь динамическую модель комплекса, изображенного
«и рис. 35, в которой ZB (р) — операторное сопротивле-
107
ние нагрузки, a Yni(p)—операторная проводимость
п-го обобщенного ИП.
Одной из основных задач, решаемых при исследова-
нии параллельной работы группы ИП на общую на-
грузку, является задача по обеспечению равномерной
или пропорциональной загрузки отдельных ИП [48, 49].
Обычно это осуществляется за счет 'включения в измери-
тельную цепь регулятора дат-
чика тока, который формирует
сигнал, пропорциональный от-
клонению тока данного ИП от
значения, пропорционального
току нагрузки [48], поступаю-
щий затем на вход регулятора
напряжения ИП.
Традиционный метод реше-
ния этой задачи заключается
в исследовании так называемо-
Рис. 35. Иммитансная мо-
дель автономной СЭС при
параллельной работе ИП на
го относительного движения
системы, в частности устойчи-
вости этого движения, и доста-
общую нагрузку. точно полно отражен в литера-
туре [48—50].
Привлечение иммитансного метода позволяет ре-
шить эту задачу обычными методами теории регулиро-
вания без привлечения понятий относительного движе-
ния. На рис. 36 для примера приведена функциональная
схема СЭС при работе двух ИП на общую нагрузку
с регулированием напряжения, измеряемого датчиками
ДН{ и ДН2, на выходе каждого ИП и с автоматическим
Рис. 36. Функциональная схема СЭС при работе двух регулируемых
ИП на общую нагрузку.
108
распределением нагрузки между ними, осуществляемым
Рег. 1 и Рег. 2 в результате включения датчиков тока
Д7\, ДТ2 и выявителя отклонений токов ВОТ ИП от
значения, пропорционального току нагрузки. Линеаризо-
ванная иммитансная модель системы, соответствующая
этому случаю, приведена на рис. 37, которую после со-
ответствующих преобразований можно привести к схеме,
изображенной на рис. 38. Параметры схемы на рис. 38
определяются соотношениями
у 1 + №д.Н1 (р) ^Р1 (р) Н89)
Л 01 ли (р) Zi (Р) 4" ^д.т1 (Р) ^pi (Р)
у 1 4“ ^Д.Н2 (Р) ^р2 (Р) И 90)
1 02 ~' MJ (р) (Р) + ^д.та (Р) ^рг(Р)
W'b.o.tO’) ^р> (Р) .
1 + гц.н1 (р) ГР1 (р) '
™ . . ®В.О.Т (р) Wpz (р)
^о.с.(Л = »+1Уд.м(р)1Ур8(р) ’
|де У01(р) и У02(р)—операторные проводимости обоб-
щенных источников питания ИП\ и ИП2 (с учетом
гпойств регуляторов); Zi(p) и Z2(p)—операторные со-
Рнс. 37. Динамическая модель СЭС с двумя регулируемыми ИП.
10S
противления собственно ИП{ и ИП2; WPi(p), Wp2(p) —
передаточные функции каналов систем регулирования
напряжения ИП\ и ИП2 соответственно; WR.m(p),
^мв(р), ^д.т1(р), ^д.тг(р) — передаточные функции со-
ответственно датчиков напряжения и датчиков токов
первого и второго ИП; ^в.0.т1(р), ^в.о.м(р)—переда-
точная функция выявителя отклонения токов то соответ-
ствующим каналам.
Рис. 38. Иммитансная динамическая модель СЭС с двумя регули
руемыми параллельными ИП.
Динамическая модель на рис. 38 является исходной
для исследования загрузки ИП в статических и дина
мических режимах работы СЭС (например, при возму-
щениях первичных энергетических координат соответ-
ствующих ИП или возмущениях тока нагрузки), а также
для анализа и синтеза динамических свойств регулято
ров (систем регулирования) напряжения соответствую
щих ИП. Для оперативного анализа устойчивости ЭЭС
и качества напряжения СЭС динамическую модель на
рис. 38 рационально привести к обобщенной динамиче-
ской модели ЭЭС, изображенной на рис. 31. Оператор-
ное сопротивление эквивалентного ИП в этом случае
будет определяться соотношением
7 . . 1 ~Ь Koi (Р) l^o.ei (Р) 4" И^о.сг (Р) Уог (Р) /109\
А.и.п(/’)= Уо> (Р) + У™ (Р) ’ U ’
где У01(р), УО2(Р), ^о.«1(р), W0.c2(p) определяются из
(189) —(191).
119
Если id СЭС используются одинаковые ИП с идентИЧ-
ними регуляторами, датчиками тока и напряжения, то
(192) имеет вид;
7 “ ,2^в-°-т (р) + 2. (р) + К'л.т (р) Wp (р) ,1QQi
С ^1-г^д.и(Р)^р(РЯ (1Уд)
Характеристическое уравнение ЭЭС для данного
(упрощенного) случая запишется в виде
2U + ^Д.«(Р) +^^ЖО.1(₽) ^р(р) +
+*Ц>) +
|де ^н(р) —операторная проводимость нагрузки (при-
емников СЭС).
На основе последнего уравнения можно провести
качественный и количественный анализ влияния дина-
мических свойств Эс?С на устойчивость и эффективность
се функционирования. При оперативном анализе устой-
чивости ЭЭС и качества напряжения СЭС рациональнее
использовать экспериментальные ИЧХ эквивалентного
1111 и нагрузки. Изложенная методика исследования
динамики и качества раОоты группы ИН на общую на-
грузку применима при любом числе параллельно рабо-
Чпощих ИН различной физической природы.
Одной из наиболее интересных в практическом от-
ношении задач по исследованию влияния динамических
i во ист в отдельных ИН ООО на эффективность ее функ-
ционирования является анализ влияния свойств акку-
муляторной батареи, раоотающеи в буфере с основным
НИ. Для этой цели можно использовать методику, из-
ложенную выше. Однако поскольку аккумуляторная
иагарея в буферном режиме работает на подзаряд, то
целесообразнее представить ее приемником электроэнер-
пш, постоянно подключенным к ИН, и характеризовать
динамические свойства операторной проводимостью
>ак(р) (рис. 39,а). По отношению к остальным прием-
никам ИП с буферной батареей можно представить
в виде эквивалентного операторного сопротивления,
уиределяемого по формуле
7 / п\_____(Р)_______2.l{p)ZaK(p)
" " {Р) ~ 1 + Л ( р) Уак (р) Ж Дк (р) + А (р) • (1 У4)
Операторное сопротивление аккумуляторной батареи
I достаточной для инженерных расчетов точностью мож-
111
но аппроксимировать операторной функцией вида [51 [
z.,(ri= . (195)
Поскольку комплексное сопротивление аккумулятор
ной батареи имеет емкостный характер, то T2Z>T\, азна
чение статического (активного) сопротивления доста
точно мало. Для примера на рис. 39,6 приведены ИЧХ
внутреннего сопротивления свинцового аккумулятор i
Рис. 39. Автономная СЭС с буферной аккумуляторной батареей.
а—иммитансная модель; б — логарифмические ИЧХ в буферном режиме.
емкостью 128 А-ч [51], из которых видно, что аккум\
ляторная батарея имеет достаточно малое сопротивлс
«ие в статическом режиме, а ИЧХ аппроксимируется
операторной функцией вида (195), при этом соответст
вующие коэффициенты принимают значения:
k=0,032 Ом; Т^ДСИЗ с; 7’2=0,056 с.
Так как операторное сопротивление большинства ИП
(в частности, электромашинных и выпрямительных)
в первом приближении аппроксимируется операторными
функциями вида
2Др)=й(1+рТ),
то из (194) следует, что подключение аккумуляторной
батареи параллельно основному ИП существенно умепь
шает амплитудную ИЧХ эквивалентного ИП в сущео
венном диапазоне частот. По этой причине аккумуля
торная батарея часто используется в качестве весьм i
эффективного фильтра средних и низких частот. По
скольку далее — в буферном режиме аккумуляторная
112
оагарёя йо существу Является приемником электроэнер*
I ни с противо-ЭДС, значение которой равно номиналь-
ному значению напряжения ИП, то подключение акку-
мулятора в буферном режиме не снижает КПД электро-
ооорудования, а наоборот, за счет свойств его как
накопителя энергии в ряде случаев происходит улучше-
ние этого показателя. Кроме того, аккумуляторная ба-
(арея может выступать весьма надежным аварийным
1111. По этим причинам аккумуляторные батареи нахо-
чяг самое широкое применение при построении
автономных систем электроснабжения в самых различ-
ных областях техники [52, 53].
Глава четвертая
ВОПРОСЫ ПРОЕКТИРОВАНИЯ СЛОЖНЫХ
ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМ
( ИСТОЧНИКОМ ЭНЕРГИИ ОГРАНИЧЕННОЙ
МОЩНОСТИ
12. ВЫБОР ИСТОЧНИКА ПИТАНИЯ И ЕГО ПАРАМЕТРОВ
ДЛЯ ЗАДАННОЙ ГРУППЫ ПРИЕМНИКОВ
Выбор источника питания автономных ЭЭС является
>дпой из центральных задач при их проектировании.
i шение ее предполагает расчет и обоснование требуе-
Mi в мощности ИП по заданной мощности приемников,
। 1акже синтез динамических свойств ИП, при обеспе-
< вии которых ЭЭС как сложная динамическая система
ювлетворяет такому критерию качества, который в на-
нюлее полной степени отражает эффективность ее
|»ункционирования. Решение обеих задач в настоящее
|нмя осуществляется раздельно, при этом расчет не-
оходимой мощности ИП обычно производится на осно-
статических режимов работы приемников с учетом
'килограмм загрузки последних.
Выбор и обоснование критерия эффективности или
|>игерия оптимальности ЭЭС являются довольно слож-
н и задачей, и обоснованное ее решение зависит от
1 >гих факторов, среди которых основными являются
и нпачение ЭЭС и условия ее эксплуатации. Обычно
империем эффективности ЭЭС принимается качество
• Щ7 113
^Л&КТроЭнергии ИП [53j. Подобный 'подход достаточно
обоснован и диктуется в основном требованиями устра-
нения влияния свойств ИП на качество работы сепарат-
ных систем. Ранее уже отмечалось, что работа сложных
ЭЭС характеризуется коммутациями разнообразных
приемников, в результате которых происходит изменение
потребления ими энергии от ИП. Известно, что потреб-
ление мощности приемниками от ИП зависит от их ди-
намических свойств, при этом мгновенная мощность,
потребляемая приемником от ИП в переходном режиме,
может существенно отличаться (как в большую, так и
в меньшую сторону) от мощности, потребляемой им
в стационарном режиме. Как уже отмечалось, это об-
стоятельство приводит к взаимосвязи информационных
и производственных процессов сепаратных систем через
общий ИП и ухудшению их качества работы. Очевидно,
для устранения взаимосвязи необходимо должным обра-
зом, т. е. с учетом динамических режимов работы при-
емников, рассчитать и выбрать мощность ИП, что в свою
очередь можно сделать при известных законах измене
ния мгновенной мощности приемников в переходных
режимах. Для решения этой задачи установим связь
между мгновенной мощностью приемника и его имми-
тансной- частотной характеристикой, при этом ограни-
чимся рассмотрением наиболее распространенного и
сложного случая коммутации приемников — их подклю
чением к ИП, для простоты полагая, что коммутация,
т. е. подключение приемника к ИП, происходит мгно-
венно. Мгновенная мощность, потребляемая приемником
от ИП, определяется соотношением
(196)
Если в первом приближении считать, что при ком
мутациях приемников напряжение ИП изменяется не-
значительно, т. е. имеет место
U0^> | A Umах|,
где «о — стационарное (номинальное) значение напря-
жения ИП; Антах — максимальное отклонение напряже-
ния ИП в динамических режимах, то мгновенная мощ
ность приемника в период переходного процесса опре-
делится соотношением
Р(О=«оФ)»
(197)
114
* е. мгновенная мощность приемника определится мгно-
мснным током приемника в переходном режиме, послед-
ний же может быть найден из соотношения
i(t)=L"{U(p)Y(p)},
где U{p) = L[u(t)] = ~-t так как u(t) = fu° ПРИ
р (0 при f<0.
С использованием иммитансной частотной характе-
ристики мгновенное значение тока приемника
'(*)=£- (198)
* мгновенная мощность приемника в переходном режиме
P(0=f^Jrw_^da). (199)
о
Уравнение (199) дает явную зависимость мгновенной
щности приемника в переходном режиме от его ди-
намических свойств (ИЧХ) и может использоваться для
(Нечета необходимой мощности ИП. На основе (199),
“'льзуясь теоремой о предельных переходах преобра-
шания Лапласа или преобразования Фурье [54], про-
видится оценка мощности, потребляемой приемником
• начале и конце переходного процесса. В соответствии
• <той теоремой имеет место
₽(0)) (200)
Р(со) = и’.Г(0), I '
11г ₽(0) и Р(оо) —соответственно мощности, потребля-
ло приемником от ИП в начале и конце переходного
*-чцесса, при этом Р(оо)—есть мощность приемника
11 гационарном режиме;
У (оо) = lira [У (/«>)];
°"*00 (201)
У (0) = lini [У (/<о)].
ю->0'
Используя циклограммы работы приемников и ста-
шческие данные об их коммутациях, на основе
Р>9) — (201) с привлечением методов ТАУ, например
115
метода трапеции для расчета переходных процессов ди
намических систем, по известным ИЧХ приемников с до
I статочной для практических целей точностью произво
дят расчет и обоснованный выбор мощности ИП.
Как уже отмечалось, кроме требований к мощности
при выборе или синтезе ИП должны быть предъявлены
и требования к его динамическим свойствам, получае-
мые обычно на основе критерия качества работы ЭЭС
Очевидно, первым требованием к ИП должно быть тре-
бование устойчивой работы его на заданную группу
приемников. Исходя из этого условия при известных
динамических свойствах приемников назначаются тре-
бования к динамическим свойствам ИП, в частности
к его иммитансной частотной характеристике или опера
торному сопротивлению. В соответствии с обобщенной
динамической моделью, изображенной на рис. 31, ха
рактеристическое уравнение ЭЭС имеет вид:
| l+yro(p)Zfo(p)-0, (20?)
где
Г Z'°= 1 + ^и.п.эЙ^рсг(д) * (20Л)
На основе (202) назначаются требования к опери
торному сопротивлению эквивалентного ИП, а на основе
(203)—требования к динамическим свойствам его со
ставных частей. Из (202) следует, что урав-ненш
Уг (/®)Хг0(/®) =—1 определяет границу области устой
чивой работы ЭЭС. При известных ИЧХ приемпикои
можно назначить требования к ИЧХ ИП. Для этого
перепишем последнее уравнение в следующем -виде:
I Z!o(<x>)e = —1, (204,
отсюда
7 , ч /fz (®) 1 7 , x — I (Ч>У (“)+’>
I 7"Me =~
(20.',>
Уравнение (204) можно переписать в виде
i (Z,.0(®)y„ («,)=!; )
i) oV 1 7 I (20(11
‘Pz(0’)+<M'e)=±,4
116
1 _______________________________________________________ Д
и на основе (205) и (206) сформулировать требования
। динамическим свойствам ИП исходя из условий устой-
чивой его работы на заданную группу приемников. Для
стойчивой работы ИП на группу приемников необхо-
шмо, чтобы во всем частотном диапазоне его импеданс
как комплексная величина не был равен суммарному
импедансу приемников, фа-
ювая характеристика кото-
рого сдвинута на значение
1 л, или, иными словами,
для устойчивой работы ИП
на группу приемников необ-
ходимо, чтобы во всем ча-
готном диапазоне не вы-
аолнялись одновременно (на
одних и тех же частотах)
i6a условия (206). По урав-
нениям (206) можно непо-
редственно назначить тре-
бования к амплитудной и
фазовой логарифмическим
ИЧХ ИП. Методика назна-
чения этих требований ил-
ппстрируется кривыми на
Вне. 40. Здесь кривым / со-
ипчетствуют логарифмиче-
ские суммарные ИЧХ при-
Вмпиков, а кривым 2 — ог-
г шиченныс области распо-
|нжения логарифмических
ИЧХ ИП. В соответствии с
риведенными выше услови-
ем и устойчивой работы
1 X’ необходимо, чтобы ло-
Рис. 40. Области допусти-
мых изменений динамических
свойств ИП при работе на за-
,„„данную группу приемников.
1 — ЛАФЧХ приемников; 2 — грани-
цы устойчивой работы; 3 — ЛАФЧХ
ИП, обеспечивающего устойчивую
работу; 4 — ЛАФЧХ ИП, не обес-
печивающего устойчивую работу;
5 —• граница заданного запаса
рпфмические амплитудная
фазовая ИЧХ ИП не вы-
устойчивости по фазе и ампли-
туде.
•" шли одновременно из заштрихованных областей. На
«ЧП 40 для примера приведены логарифмические ИЧХ
индексом 3, соответствующие ИП, обеспечивающему
юпчивую работу с приемниками, логарифмическим
|Г1Х которых соответствуют кривые 1. Логарифмическим
И1 IX кривым 4 соответствует ИП, не обеспечивающий
। кшчивую работу с данными приемниками. Аналогич-
ным образом назначаются требования к динамическим
117
свойствам ИП исходя из условия его работы на задан-
ную группу приемников с заданными (требуемыми) за
пасами устойчивости по амплитуде AL=201g р и фазе
Дф. Соотношения (206) для этого случая должны быть
записаны в следующем виде:
Д-о(®)уЕ(®)=₽;
Фг (ю) +фу (ю) — ±п ± Дф.
Допустимые области расположения логарифмических
ИЧХ ИП для данного случая на рис. 40 ограничиваются
кривыми 5.
Следует заметить,' что все расчеты по назначению
требований к динамическим свойствам ИП производи
лись выше, исходя из предположения, чтр ИП работает
на группу приемников. Однако на практике происходят
постоянные коммутации приемников, вследствие чегч
изменяется УЕ (/со), а следовательно, и условия устой
чивости. Хотя в общем случае увеличение УЕ (/со) и во
дет к ухудшению условий устойчивости, однако это нс
означает, что случай с максимальным числом одновре
менно работающих приемников является наиболее крн
тичным по устойчивости. Может оказаться, что при ио
котором промежуточном числе одновременно включен
ных приемников условия устойчивости ухудшаются
Поэтому назначение требований к динамическим свой
ствам ИП должно производиться с учетом режимов рн
боты его со всеми возможными (или, по крайней мерс,
главными) промежуточными группами приемников.
При известной структуре ИП с учетом соотношенп i
(203) характеристическое уравнение ЭЭС можно запн
сать в виде
1;+ ^и.П.Э (Р) ^рег (р) (Р) = 0 (207)
и использовать его для назначения требований к дипл
мическим параметрам составных частей эквивалентно! и
ИП (например, требования к параметрам регулятор.!)
Если в качестве критерия эффективности ЭЭС по-преж
нему принять условия устойчивой работы или рабо, »
ИП с заданными запасами устойчивости на группу при
емников, то для назначения требований к параметрлм
регулятора можно воспользоваться амплитудно-фазоинЙ
модификацией метода П-разбиения [55]. Для этою
|18
редставим характеристическое уравнение ЭЭС в вйДё
=° ‘<208>
। для определенности положим, что в первом прибли-
В<нии динамические свойства регулятора описываются
редаточной функцией вида
[ i Й <20в>
Из условий устойчивости работы ИП на группу при-
емников назначают требования к величинам йрег и 7рег>
иная, что ИЧХ ИП без регулятора, т. е. ZiB(ja), ИЧХ
рпсмников, т. е. (/®) и 1^и.п.э(/ы), известны. Перепи-
см (208) в следующем виде:
^рег
_________W ((0\ J^-n.o <“>-----Q
1 + jWper --- 1
и
1 -Ь/ш^реГ + ^per Fiun-oWcOSfl,
•п*о ((0) Н
+ Ж.п.о (®) sin ?и.п.о (со)] = о, (210)
^и-п.о('«) =
I Ц^и.п.э (Л0) I__
|1+2/э(/‘»)Ге(/<0)| ’
£(211)
уи.п.о(») - arg FH,n.3 (Ml - arg [1 + 2/э (M (Mb (212)
Приравнивая нулю отдельно вещественную и мнимую
•гin в (210) и проводя соответствующие преобразова-
ны, получаем следующие уравнения, определяющие
•мпицу области устойчивости в параметрах регулятора:
& — ________________!__________
рег 11/и.п.о (“) cos ?и.п.о(<0) ’
По известным ИЧХ ИП и приемников и известной
потной характеристике №и.п.з(/ы) несложно вычис-
" |ь 1^и.п.о(ы) и Фи.п.о(ы) для ряда частот в диапазоне
• и)<оо и, следовательно, построить области устойчи-
В hi в плоскости параметров регулятора, а по ним на-
ычнгь требования к значениям и допускам последних.
119
Как и в предыдущем случае, вычисления следует ttpoii.i
водить для ряда групп совместной работы приемников
Аналогичным образом по уравнению вида
--—----W
Ц-^Грег 1кип-°
i ^и.п.о (“)+д*1
строятся области равных запасов устойчивости по фа . .
а по уравнению
1 + -I=0
— по амплитуде. На основе построенных таким образом
областей назначаются требования к значениям парамоi
ров регулятора.
Рис. 41. Области устойчивости ЭЭС в параметрах регулятора.
1—область устойчивости; 2— область равных запасов устойчивости по ампчи
туде ДГ=201g Р=10 дБ; 3— область равных запасов устойчивости по ф
(Дф-30°).
Для примера на рис. 41 приведена область устойчивости Э ><
в параметрах регулятора для ИП, снабженного регулятором и i
пряжения с передаточной функцией вида (209) и динамическим <
характеристиками ИП и приемников, описываемых соответственно
операторными функциями
/ги.п 36
^и-п.э (Р) = 1 + рГи п= 1 + 0 7р ;
7 , ' М»+РЛ) 0,03(1 + 0, 1д) . ,QI|,
1 рт,г ~ 1 + 0,02р ’ v
v . . gQ+рЛ) 7,5(1+0,2р)
(Р) - 1 + ~ 1 + 0,07/? •
120
Пунктиром на рис. 41 обозначены области равных запасов
.ойчивости по фазе и амплитуде. По полученным областям не-
|ижно назначить требования к параметрам регулятора, при обес-
• сини которых ЭЭС будет обладать заранее заданными (требуе-
,|\ч|) запасами устойчивости.
Н КОРРЕКЦИЯ ДИНАМИЧЕСКИХ СВОЙСТВ
Н( ГОЧ НИКА ПИТАНИЯ
Основным критерием эффективности работы ЭЭС,
ходя из которого производится назначение требований
нгнамическим свойствам ее составных частей, являет-
III качество энергии па какой-либо стадии ее преобра-
о.чания. Под качеством электроэнергии постоянного то-
и понимается совокупность требований к выходным
>рдинатам ИП или преобразователей, при обеспече-
11И которых приемники (ТУ и динамические системы)
реализуют предписанные им функции (информационные
I in производственные процессы) с заданной точностью.
• 'пычно эти требования предъявляются к качеству на-
пряжения ИП или преобразователей [52, 53] и сводятся
сто к ограничению (сверху) значения колебаний (из-
‘псний) напряжения в статических и динамических
режимах, а также к длительности и характеру этих
лебаний напряжения в динамических режимах. Ис-
пя из требований к качеству напряжения, назначают-
I требования к аппаратурной реализации ИП или пре-
образователей, в том числе и требования к динамнче-
। им свойствам отдельных их элементов. Колебания
пряжения на выходе ИП, обусловленные работой ди-
11мических систем, входящих в ЭЭС, и колебаниями
ыходной координаты первичного ИЭ, определяются
равнением (173) (см. § 9), которое запишем в виде
ДП"(/<») = R Л7& (/со) + ДС7'П (/«,) Г"9.п (/<»)1 X
I I . I
и.п.э
X-----------------,э _______________ /’214’1
Л1 + ГРег (/») №„.п.э (/»)+ Z19 (я)Уг (/со) •
Па основе (214) и требований к качеству напряже-
•»i»i преобразователя можно назначить требования к ди-
омическим свойствам составных частей преобразовате-
II Заметим, что динамические характеристики И7и.п.э(/й)
> Zo(/co) определяются конструкцией и принципом дей-
|цвя преобразователя и динамическими свойствами
121
первичных контуров, и поэтому коррекция или целена
правленное изменение этих характеристик
сопряжен
с известными техническими трудностями и часто неосу
ществимы. Поэтому обеспечение требуемого
качеств
напряжения осуществляется за счет синтеза динамиче
ских свойств регулятора TFIier(/m),
приемников
или целенаправленного изменения
функции
влияния
энергетических процессов первичного ИЭ на
процесса
преобразователя Ж>.и (/ю). Кроме того, как следует и
(214), улучшение качества напряжения может произпп
литься за счет целенаправленного синтеза спектрально
го состава колебаний тока приемников. Все перечислен
ные методы применяются в настоящее время при проок
тировании ИП и преобразователей для обеспечения трс
буемого качества электроэнергии. Рассмотрим вкратп
каждый из указанных методов.
В соответствии с уравнением (214) одним из рани
кальных путей повышения качества электроэнергп
является обеспечение максимума функции
ы
1
К, (М
п
ГФ» 1=11 ги.пл (/<») Ч- г,9» у. (МI.
(91.11
Второе и третье слагаемые в (21 б) являются комп
лексными функциями, амплитудная и фазовая характг
ристики которых меняются с изменением частоты. С уч
том этого обеспечение максимума функции (215) сг
дится к выполнению условия
№ wv „ 9 » 4- 7;, » У?» | > | I. (21 f
Следует заметить, что в силу инерционных свойю
реальных технических устройств порядок полином, ।
числителя первого слагаемого и проводимости прием in,
ков во втором слагаемом меньше порядка полиномов и
знаменателей. Следствием этого является уменьшен!»
амплитудных характеристик обоих слагаемых с рост,"
частоты. Данное обстоятельство обусловливает уменьпи
ние функции (215) с ростом частоты, а следователыг
согласно (214) вызывает увеличение амплитуды колеб)
ний напряжения на высоких частотах при наличии пн
сокочастотных составляющих в спектре тока приомп»
ков. Для устранения этого обычно увеличивают коэФФи
Циент усиления регулятора, однако подобный путь чп< ,
приводит к ухудшению условий устойчивости ЭЭС П,
этому одновременно с увеличением коэффициента угг
122
юния должна производиться коррекция динамических
ионегв системы регулирования напряжения, что обычно
(сдается путем введения в регулятор корректирующего
нюна. Определение структуры корректирующего контура
производится обычными методами теории автоматиче-
кого регулирования с учетом того, что динамические
свойства объекта управления, т. е. ИП иди преобразо-
згеля, не остаются постоянными во всех режимах их
•*<с. 42. Область устойчивости в параметрах корректирующего кон-
,р<1 регулятора.
• область устойчивости; б — область устойчивости при малых значениях
метров.
гвооты, а в соответствии с (214) меняются с изменением
Ьличества и характера подключенных приемников. По-
ииму выбор корректирующего контура и расчет его
раметров должны производиться для всех возможных
7унн совместной работы приемников. Для сокращения
Вьем а вычислений при расчете динамических нарамет-
№ корректирующего контура можно рекомендовать
Ьимянутый выше метод амплитудно-фазовой модифика-
| в D-разбиения, который по сравнению с обычным ме-
<>м D-разбиения требует гораздо меньших вычисле-
нии.
Известно [22], что при увеличении коэффициента
Анления динамической системы для улучшения условий
Люичивости следует включать в систему корректиру-
"иц контур, содержащий дифференцирующие или фор-
мующие звенья, за счет динамических свойств которых
нисходит уменьшение модуля фазовой характеристики
• 1смы. Аналогичная ситуация имеет место и в систе-
I» I регулирования напряжения, поэтому часто регуля-
'гор системы содержит форсирующие или дифференциру
ющие звенья. Для иллюстрации влияния динамических
параметров корректирующего контура на устойчивость
ЭЭС и в качестве примера расчета требуемых величин
его динамических параметров на рис. 42 приведена об
ласть устойчивости ЭЭС в параметрах регулятора kvtl
и 7$ с ИП, снабженным регулятором с передаточноп
функцией вида (см. рис. 41)
(/<«) =
^рег (1 + /®7ф)
1 + JwT’iрег
при Трег = То = О,5 с
и динамическими свойствами ИП и приемников, опрс
деляемыми соотношениями (213). Расчетные формулы
для построения области устойчивости в данном случ к
имеют вид:
____ _________cos •
0 wp (w) cos 2fp (w)
(217}
где
гр- zm\--------_J____________________________________!_____________
p( > “| 1 + /«T’per I I 1 + /шТ’и.п I I 1 + У, (/co) zi3 (/co) I ’
Tp(‘°) = —
arctg + arcfg ч>Ти.п +
Jm {1 + УЕ (/co) Zi3 (jw)} |
+ arCtg Re {i + (jw) Zis (jco)} I •
Из рис. 42 видно, что включение форсирующего знсчм
позволило увеличить коэффициент усиления регулян>| м
а следовательно, в соответствии с (214) уменьшить мп!
дуль иммитанса эквивалентного ИП на высоких час i I
тах. Следует, однако, заметить, что возможности д i
ного метода коррекции динамики регулятора огра i|
чены условиями аппаратурной реализации. Извес i и
[56], что при технической реализации дифференциру i<J
щих или форсирующих звеньев всегда получаются ин!
тегродифференцирующие звенья, т. е. звенья с перс nJ
124
i очной функцией
НЛП
(218)
k(l+,pT&)
ь К UOI » | I „т
• Де Т0<7ф.
Из последнего соотношения видно, что при исполь-
нании данного метода корректирующее действие
hi гура проявляется только в определенном частотном
иыпазоне, ограниченном частотой среза апериодическо-
•ч звена ыо—11То. В связи с этим представляет интерес
шчодика выбора этой частоты при синтезе регулятора.
Вследствие указанного выше соотношения порядков по-
пномов числителей и знаменателей в слагаемых функ-
пш (215) с ростом частоты уменьшаются амплитудные
.ц)актеристики этих слагаемых. Включение корректиру-
шсто звена с передаточной функцией вида (218) за-
трагивает убывание амплитудной характеристики вто-
Ьги слагаемого до частоты соо, однако при частотах
пипе о»о начинается уменьшение амплитудной характе-
ристики второго слагаемого с соответствующим ростом
•чдуля фазовой характеристики, что ведет к ухудшению
Лтойчивости системы. Очевидно, критическим является
< 1 случай, когда имеет место уравнение
U+ ^рег (» ^и.п О) + Ц<о) (» - О,
С|«1 выполнении которого ЭЭС выходит на границу
1ОЙЧИВОСТИ и практически становится неработоспособ-
< II В инженерной практике, как известно [22], мерой
пшчивости динамических систем являются запасы
ншчивости по фазе и амплитуде. Применительно
I ).-)С запасы устойчивости по фазе и амплитуде слу-
* । > мерой наибольшего влияния колебаний тока при-
шков на качество напряжения ИП. В частности, при
•«юге, соответствующей запасу устойчивости комнлек-
• но фазе (частоте среза ЭЭС), связь между амплиту-
И колебаний тока приемников и амплитудой колеба-
&1! напряжения ИП (коэффициент передачи) опреде-
ш Гея соотношением
Д(/(шср)=Д/(Шср) (219)
V 2 (1 — cos Ду)
125
а при частоте, соответствующей запасу устойчивости по
амплитуде (критической частоте ЭЭС), имеет место
уравнение вида
Л1/(<%>)=Д/(«^ |2^Lt (220)
где Д<р и р — соответственно запасы устойчивости по фа
зе и амплитуде, при этом запас устойчивости по ампли-
туде определяется из соотношения
lA/l=201g₽ при р^1.
Из (219) и (220) следует, что частотный диапазон
&»с₽—соКр характеризуется наибольшим коэффициентом
передачи колебаний тока приемников в колебания на
пряжения ИП. В соответствии с этим проектирование
динамических свойств ИП и его регулятора должно
производиться из условия расположения частот мер—
в том частотном диапазоне, в котором спектральная
характеристика тока приемников имеет наименьшее зна
чение, что может достигаться за счет выбора частоты
о>о и синтеза регулятора. Удовлетворение указанных
требований иногда сопряжено с преодолением сущест-
венных технических трудностей, обусловленных, с одной
стороны, достаточно широким спектром колебаний тока
приемников (например, их коммутаций) и, с другой
стороны, сложностью расчетных корректирующих кон-
туров по указанным выше причинам.
Увеличение модуля функции (215) на высоких час-
тотах (ы>шо) может осуществляться за счет увеличе
ния третьего слагаемого, т. е. увеличения иммитансноя
характеристики Zia(j(o)Bs (/со). Так как в соответствии
с (214) для улучшения качества напряжения следу
уменьшать модуль ИЧХ ИП, то третье слагаемое можп
увеличиваться только за счет роста модуля ИЧХ при
емников. Это можно осуществить путем подключении
на выход ИП таких приемников, динамическая прово
димость которых в заданном режиме по напряжению и
в заданном частотном диапазоне достаточно велика. Как
известно [57], подобными свойствами обладают стаби
литроны, конденсаторы на высоких частотах, разнопб
разные фильтры, а также аккумуляторные батареи [51],
в силу чего указанные устройства1 и находят широко»
1 Подобными же свойствами, как было показало в гл. 2, облд
дают и двигатели постоянного тока.
126
применение в технике стабилизации напряжения пита-
ния [11, 12, 58]. Здесь следует заметить, что применение
стабилитронов для целей стабилизации напряжения су-
щественно снижает КПД преобразователя, поскольку
стабилитроны имеют большую проводимость и в стати-
ческих режимах, что обусловливает большой ток в ста-
тике и, следовательно, большие непроизводственные
(паразитные) потери мощности со всеми вытекающими
отсюда последствиями. В силу указанных причин стаби-
литроны применяются для стабилизации напряжения
только в маломощных цепях (предварительные каскады
маломощных усилителей в цепях датчиков [7, 8] и т.п.).
В мощных же цепях, как правило, применяются емкост-
ные фильтры и аккумуляторные батареи [9, 10, 58],
проводимость которых в статических режимах доста-
точно мала (практически стремится к нулю), а емкость
и, следовательно, проводимость на высоких частотах
достаточно велики.
Таким образом, если при обеспечении условий устой-
чивости за счет синтеза динамики регулятора обеспе-
чить выполнение условия
| ^рег(/<о) И7ип.а(/<й) | ^C'q (221)
и диапазоне частот и условия
|Zte(/«)ys(/(0)|>C"0 (222)
* диапазоне частот (1)о^<о^ытах, где Umax— ширина
< нектра колебаний тока приемников за счет включения
|>ильтра на выход ИП или преобразователя, то в данном
niCTOTHoM диапазоне будет выполняться соотношение
7 __ Zi Э (®)
1 I Ct I z
—при 0<ш<то;
(223)
при
и. следовательно, будет обеспечено требуемое качество
•ипряжения ИП. Соотношения (221) — (223) являются
исходными для синтеза регулятора и расчета его дина-
мических параметров, а также синтеза фильтра ИП
(расчета номиналов конденсаторов или динамической
емкости аккумуляторной батареи).
127
Из уравнения (214) следует, что значение амплитуды
колебаний напряжения ИП и их спектральный состан
в существенной степени определяются характером и
спектральным составом колебаний тока приемников. По
этому, очевидно, улучшение качества напряжения пита
ния можно производить за счет целенаправленного и ।
менения спектрального состава колебаний тока прием
ников. В предыдущей главе было показано, что характер
колебаний тока приемников зависит от вида возмущения
и управлений, действующих на динамические системы,
и динамических свойств последних, а также от хараь
тера коммутаций отдельных приемников энергии при
работе сепаратных систем. В зависимости от характер.!
управлений и коммутации изменение во времени ток.ч
приемников приближенно можно аппроксимировать сл<
дующими способами: линейным в определенных интср
валах; скачкообразным (ступенчатым); периодическим
Линейные изменения тока с большой крутизной на
растания или убывания и скачкообразные его изменения
имеют довольно интенсивный и широкий спектр. Поэта
му устранение влияния подобных изменений тока и i
качество напряжения ИП встречает наибольшие техпи
ческие трудности, обусловленные указанными выше при
чинами. Подобные изменения тока обычно вызываются
коммутациями отдельных особенно мощных приемником
Крутизна нарастания тока определяется динамическими
свойствами приемника (его ИЧХ) и конструкцией ком
мутирующих устройств. Заметим, что для работы боль
шинства ТУ несущественно, по какому закону изменясг
ся напряжение на силовых зажимах при его коммут i
циях. Поэтому, если с помощью каких-либо устройстп
осуществлять плавное изменение напряжения питании
от нуля до номинального значения при подключении
приемника к ИП, очевидно, и ток приемника также бу
дет нарастать плавно, т. е. при подобном включении
приемника можно существенно уменьшить ширину спек
тра тока. Аналогичным образом можно поступить и при
отключении приемника от ИП. В качестве указанны'
устройств могут с успехом применяться силовые полу
проводниковые ключи с автоматическим управлением
Подобный путь улучшения качества напряжения nin.i
ния в автономных ЭЭС в настоящее время находит шт
более широкое применение [59, 60].
На рис. 43 для примера приведена одна из возмож
128
пых схем устройства, реализующего данный метод улуч-
шения качества напряжения питания в автономной ЭЭС.
)десь управление полупроводниковым ключом, выпол-
ненном на транзисторе Т4 и включенным параллельно
механическому контактному переключателю1 * * 4 1Р2, про-
н вводится усилителем мощности, выполненным на тран-
пгсторе Т3, в коллекторную цепь которого включена
Смотка контактора Р2, а управление им осуществляет-
I нс. 43. Управляемый переключатель силовых приемников.
<-я каскадом с распределенной нагрузкой, в параллель
t эмиттерным резистором которого включен конденсатор
|»держкп С. Управление ключом осуществляется кноп-
ками Р2, Ki, включенными во входную цепь предвари-
П'льного каскада транзистора 1\. За счет выбора номи-
налов конденсатора С и резистора Р4 можно обеспечить
гребуемый закон нарастания управляющего напряжения
10 входной цепи усилителя мощности, а следовательно,
* требуемый закон нарастания тока через транзистор Т4
при подключении приемника к ЭЭС. Значение тока на-
< мщения транзистора Т3 выбирается таким образом, что
при его насыщении срабатывает контактор и подклю-
ыстся приемник контактами 1Р2 к СЭС. Поэтому при
включении ключа сначала размыкаются контакты 1Р2
I окончательное отключение приемника от СЭС проис-
। щт по закону, определяемому законом изменения
и шряженпя на конденсаторе С при закрытом транзи-
1 Применение механического контактного переключателя обу-
। «шлено тем обстоятельством, что статические потери мощности
(•' установившемся режиме) в подобных переключателях суще-
• ренцо меньше потерь в полупроводниковых ключах, построенных
Ь основе современных полупроводниковых приборов (транзисто-
< >11).
4 677 |29
сторе Т2\ последний же закрывается при размыкании
кнопки Ki во входной цепи предварительного каскада
Таким образом, как нарастание тока приемника при
его включении, так и убывание его при отключении при
исходят по заранее заданным законам. По требуемым
законам изменения тока приемника несложно рассчитан,
параметры цепи задержки во входной цепи усилители
мощности и, следовательно, при использовании полон
него устройства произвести необходимую коррекции»
спектрального состава тока приемника при его комму iа
циях. Очевидно, подобные устройства могут работа и.
в автоматических режимах управления.
14. КОРРЕКЦИЯ ДИНАМИЧЕСКИХ СВОЙСТВ
ОТДЕЛЬНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ СИСТЕМЫ
Системы автоматического управления, входящие
в состав автономной ЭЭС, выполняют самые различны
функции и задачи. Поэтому и требования к их динами
ческим свойствам также разнообразны. Прежде bccihJ
к любой сепаратной системе предъявляется требований
устойчивости ее работы в составе ЭЭС, которое обычшЛ
является необходимым, но недостаточным условием 1>н1
лее жесткие требования к динамическим свойств im
предъявляются исходя из обеспечения необходима
критерия качества СЛУ, определяемого целевым наш
чением системы. Очень часто подобным критерием и»
чества является точность воспроизведения системой J
входного (управляющего) сигнала (например, системно
стабилизации и следящими системами) или точной!
отображения управления в соответствии с заданные
алгоритмом (точность воспроизведения заданной фу пн
циональной зависимости между входом и выходом < и
стемы по информационному контуру). В этом случ.и1
качество работы САУ определяется отклонениями вы 4
хрдной координаты системы от заданного закона ei • I
менения во времени. Поэтому на закон изменения пы |
ходной координаты системы накладываются ограшип I
ния, которые в ряде случаев можно представить в пн i«l
функционала
Ф (/) :=:ЛГвых (О k (t) Хвх (^) S=~E0, (2/1)1
где хвх(/)—известная априори или неизвестная npoiu I
вольная функция времени, которая определяется цек
130
вым назначением САУ и является ее управляющим сиг-
налом; k(t)—оператор управления; хВых(0—текущее
значение выходной координаты САУ; е<> — некоторое по-
стоянное значение, назначаемое из условий выполнения
САУ предписанной задачи.
В предположении идеальности воспроизведения
управляющего сигнала функционал качества САУ бу-
дет определяться точностью воспроизведения выходной
се координаты. Изменение последней будет всегда от-
личаться от изменения управляющего сигнала, что обу-
словливается как погрешностями работы элементов
, САУ, так и влиянием внешней среды. Влияние погреш-
ностей работы элементов САУ ведет к отклонению не-
1 которых промежуточных координат системы от предпи-
санного закона изменения и, в конечном итоге, к откло-
нению закона изменения выходной координаты от
требуемого. Указанные отклонения в основном обуслов-
ливаются энергетическими ограничениями в работе эле-
ментов системы и проявляются в инерционности послед-
них. Другой существенной причиной, обусловливающей
отклонение координат системы от их заданных значе-
ний, является неидеальность качества электроэнергии
СЭС. Учет инерционных свойств производится традици-
онными методами за счет введения передаточных функ-
ций элементов по информационным каналам, учет же
влияния неидеальности качества электроэнергии на из-
менение выходной координаты САУ может быть произ-
веден на основе уравнения (182) (см. § 10), которое
запишем в виде
Авь,х (а) = А'Г1ЫХ (А) + А"'вых (А) + Ал,,,вых (р) =
Авх(А)^а(А)^^
1 +Z'io(p) J^+1,
1 + Z'io (р) Yr {р)
+ ]^(aWa)X
1=1
I B,-, (А) I
ж 1 I В’ (р)
1 + Z'io (р) a^+h t (Р)
|В(р)| [1 +Z'lo (p)Yr(p)\
131
ДС/(рНВч(/7)|
г I В (Р) I [1 +Z'it> (р) Yr (p)J ’
(225)
где | В (р)| — минор главного определителя информацпон
ного контура системы по i-й строке и тд-му столбцу,
— дополнительный минор, получаемый из |BZ4(/7)I
при замене его /-го столбца столбцом функций влияния,
| В (р) | — главный определитель замкнутой системы по ин
формационному контуру; | В^ (р) | — дополнительный опре
делитель, получаемый из главного при замене его трго
столбца столбцом функций влияния; Zi0(p)—оператор
ное сопротивление обобщенного ИП, определяемое из
уравнения (175);
I В (Г}} I
yr (Р)= у„(Pl - 5 г,(Р) = £<г,+,., (Р) тоет (226)
i=l /=1
— операторная проводимость системы.
Первое слагаемое в (225) есть изображение полезной
составляющей выхода системы, обусловленной управ
ляющим'"сигналом. Из (225) следует, что отображение
управления системы будет тем точнее, чем с большей
строгостью выполняется равенство
—I
1+ето(м J] i+zw-w-
7=1
(227)
Равенство (227) будет выполняться, если имеет ме
сто одно из условий:
VI /• ч 1В1чД®)1_ V /; \_______________.ЯП „ J В/ I
2j ач+1. i । в. (/<») । ~ Уг ^ч-п. I । в (/») ।:
7=1 7=1
(228)
7=1
1.32
Левая часть в (228), а также соответствующие со-
ставляющие во втором слагаемом (227) имеют размер-
ность проводимости и являются частичными проводимо-
стями системы *. Поскольку частичная проводимость
системы всегда меньше ее полной проводимости, то
строгое выполнение (228) в принципе невозможно. Усло-
вие (229) обеспечивается при ограничении модуля ИЧХ
эквивалентного ИП или модуля ИЧХ управляемой (ре-
гулируемой) проводимости системы. Ограничение моду-
ля ИЧХ эквивалентного ИП производится методами,
рассмотренными в предыдущем параграфе. Уменьшение
модуля ИЧХ проводимости системы может производить-
ся как за счет синтеза соответствующей структуры, так
и за счет конструкций и схемных реализаций активных
элементов системы. В частности, одним из возможных
методов уменьшения проводимости системы в соответ-
ствии с (137) и (164) может быть уменьшение функций
связей активных элементов, т. е. | И7э, (/ю) |->-0,
|^иЯ/<о)Но.
Интересно отметить, что так как регулируемая про-
водимость системы в основном определяется [см. (137),
(164), (180)] соответствующими операторными харак-
теристиками объекта управления (самого мощного
активного элемента), то ограничение модуля ИЧХ си-
стемы предполагает и ограничение изменений тока, по-
требляемого объектом регулирования от ИП, а следо-
вательно, и ограничение изменений выходной координа-
ты системы, т. е. предела регулирования выходной ее
координаты. Из этого следует, что имитансный метод
1ает энергетическую трактовку известного в технике
автоматических систем [22, 61] положения о том, что
увеличение точности системы неизбежно ведет к ограни-
чению пределов регулирования ее выходной коорди-
наты.
Второе слагаемое в (225) есть изображение ошибки
системы, обусловленной действием помех (возмущений)
на соответствующие элементы системы. Формально из
1 В соответстви с (227) и (228) частичная проводимость есть
проводимость системы при искусственном размыкании канала влия-
ния энергетических процессов ИП на работу i-ro элемента, т. е.
при Ц7э4(/<о) =0, и канала влияния информационных процессов объ-
екта управления на энергетические процессы в ИП, т. е. при
1Гя.о(/®)=0. ’ ' ‘
133
достигаемого за счет применения соответствующих кон
структивных и схемных решений при проектированш
системы и ее активных элементов. Так как обычно име
ет место неравенство
|^д(/«)^у(/ш)|>|^у(/И)|>1>
то из (235) следует, что наибольшая часть рассматрп
ваемой ошибки обусловливается колебаниями напря
жения в цепях питания датчика и усилителя системы
Рис. 44. Схема включения фильтра в цепь питания усилителя.
Поэтому обеспечение условия (237) должно произно
диться в первую очередь для измерительных и усили
тельных элементов системы при ее проектировании. Как
уже отмечалось в технике, аппаратурная реализации
условия (237) производится путем включения на вхо щ
цепей питания указанных устройств стабилитронов или
развязывающих фильтров [8, 9, 62]. На рис. 44 дли
примера показана схема включения одного из возмож
ных фильтров на входе цепи питания усилительного
каскада. Функция влияния энергетических процессов п.|
информационные для данной схемы усилителя при
определяется по формуле
VW /• \ ___ А-^ВЫХ (ft0)_ ^-^ВЫХ (ft0) (У<о)
«'э.уЧ ) — - ДГ7'(/<°) Д(7 (/со) ~
= ^э.у (Я (/“>).
и с учетом формулы (37) имеем:
136
Из последнего соотношения видно, что высокоча-
стотные колебания напряжения ИП подавляются филь-
тром, что, естественно, приводит к уменьшению ошибки
системы. Нетрудно заметить, что при включении вместо
емкости стабилитрона функция влияния усилителя
где Гст — динамическое сопротивление стабилитрона
в рабочей точке.
Выбрав номинал балластного резистора из условия
можно обеспечить требуемую степень по-
давления колебаний напряжения питания усилителя.
Если вместо резистора /?ф включить дроссель индуктив-
ности, то функция влияния энергетических процессов на
информационные определится из соотношения
^э.у (/®) = J + /ШГдрс —<o2LC>
т. е. при включении LC-фильтра производится сущест-
венное подавление колебаний напряжения ИП. С энер-
гетических позиций включение LC-фильтров предпочти-
тельнее, так как уменьшаются потери энергии и увели-
чивается КПД устройства. Следует, однако, заметить,
что при включении на входах цепей питания соответ-
ствующих корректирующих устройств изменяется дина-
мическая проводимость активного элемента, а следова-
тельно, и обобщенная проводимость системы, что, есте-
ственно, приводит к изменению условий устойчивости
комплекса «эквивалентный ИП — динамическая систе-
ма». Поэтому при коррекции динамических свойств
активных элементов системы должна производиться
оценка изменений условий устойчивости комплекса по
изложенной ранее методике (см. § 9).
При рассмотрении спектра колебаний напряжения
ИП (см. предыдущий параграф) отмечалось, что наи-
большее влияние на спектральный состав колебаний
напряжения оказывают коммутации наиболее мощных
приемников. Данное обстоятельство и отмеченное выше
доминирующее влияние колебаний напряжения питания
измерительных и усилительных устройств на качество
функционирования САУ приводят к необходимости при-
менения раздельных (автономных) ИП (маломощных —
для питания измерительных и усилительных устройств
137
и мощных — для снабжения электроэнергией мощных
приемников) или же специальных преобразователей для
•снабжения электроэнергией маломощных приемников
Указанные обстоятельства обусловили широкое приме
пение в современной технике систем электроснабжения
с многоступенчатым преобразованием и регулированием
электроэнергии. Наибольшее распространение в настоя-
щее время получили СЭС с двухступенчатым преобра
.зованием энергии. Первая ступень преобразования и ре
гулирования электроэнергии (первичная система элек-
тропитания СЭП) служит для снабжения электроэнер-
гией только мощных приемников, что дает возможность
снизить требование к качеству электроэнергии. Измери
тельные устройства и элементы вычислительной техники
получают электроэнергию от соответствующих преобра
зователей, образующих вторичную СЭП. Из изложенно-
го следует, что требования к качеству электроэнергии
вторичной СЭП должны быть гораздо выше, чем тре
бования к качеству электроэнергии первичной СЭП. Как
и ранее, требования к качеству электроэнергии первич
ной и вторичной СЭП в СЭС с двухступенчатым преоб
разованием могут быть назначены исходя из обеспече
ния необходимого качества функционирования раз
личных САУ, активные элементы которых получают
энергию от СЭС. Для случая раздельного снабжения
электроэнергией маломощных и мощных приемников
ошибка функционирования системы, обусловленная
влиянием напряжения питания активных ее элементов,
•определяется уравнением (235), причем составляющие
«ошибки от влияния напряжения питания составных эле-
ментов САУ определяются соотношениями
QO
о
Х 1|В(/<0)|[14-/"1О(/<0)УГ2(/<0)] е d'n' <238)
00
^аых.у W = Т J Д^2 X
о
ХI В (/to) Ц1 + Z"io (/to) Yr, (/«)] e d<°' (23
J 38
00
/" (/) = —f Д(7,(/в>)Х
ВЫХ.О v ' 7Г 1 1 Ч / / \
6
XГк/. TTTi l(y ^(x v 7-м- е'“'(240)
IB(J«)|[1 + 2'io (/<о) yrl (/co)J '
где Z'i0(/<b), Ai7i(/i(i))—комплексное сопротивление
обобщенного первичного ИП и спектральная характе-
ристика напряжения первичной СЭП; Z"-O(j(o),
ЛС72(/со)—комплексное сопротивление обобщенного вто-
ричного ИП и спектральная характеристика напряжения
вторичной СЭП; Уп(/<о), Уг2(/а»)—соответствующие ча-
стичные проводимости системы.
Исходя из условия
х" (/)-|-х"' (/)4-Л-'" (0<Ео>
v учетом уравнений (238)—(240) назначаются требова-
ния к качеству электроэнергии первичной и вторичной
СЭП. Приведенное условие реализует так называемый
экстремальный метод назначения допусков на качество
электроэнергии СЭС, исходя из допустимой ошибки си-
темы. Так как колебания напряжения ИП и преобра-
зователей, а также и соответствующие параметры
используемых динамических моделей являются случай-
ными величинами, то более обоснованно назначение
ребований к качеству электроэнергии следует произво-
дить с привлечением вероятностных методов, изложен-
ных, например, в [63—65].
I лава пятая
МЕТОДЫ ЭКСПЕРИМЕНТАЛЬНОГО
ОПРЕДЕЛЕНИЯ И КОНТРОЛЯ ДИНАМИЧЕСКИХ
ХАРАКТЕРИСТИК СОСТАВНЫХ ЧАСТЕЙ
ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМ
1>. ЭКСПЕРИМЕНТАЛЬНОЕ ОПРЕДЕЛЕНИЕ
ИММИТАНСНЫХ ЧАСТОТНЫХ ХАРАКТЕРИСТИК
ИСТОЧНИКОВ ЭНЕРГИИ И ИХ ПРИЕМНИКОВ
Основные особенности применения частотных мето-
ц)в для экспериментального определения динамических
< нойств ЭЭС обусловлены самим родом определяемых
139
характеристик — частотной характеристикой внутренне
го сопротивления обобщенного ИЭ и частотной харак
теристикой обобщенной проводимости приемников (им
митансных частотных характеристик ИЧХ [31, 66])
Так как операторное сопротивление обобщенного ИЭ по
отношению к собственным приемникам определяется
динамическими свойствами всех «низших» контуров
в том числе и динамическими свойствами их приемки
ков, и значениями соответствующих энергетических ко
ординат, то при определении ИЧХ обобщенного ИЭ по
следний должен быть введен в рабочий режим по соот
ветствующим энергетическим координатам. Поскольку
выведение в рабочий режим может быть достигнуто
только при подключении приемников (нагрузки) или
эквивалента нагрузки, то практически при эксперимен
тах всегда имеется замкнутый контур «обобщенныи
ИЭ — приемники», который обусловливает определенные
особенности измерения частотных характеристик. Так
как обобщенная операторная проводимость приемников
определяется динамическими свойствами «высших» кон
туров, в том числе и их приемниками, и нагрузкой cooi
ветствующих силовых устройств САУ, то ИЧХ приемки
ков должна измеряться при подключении к соотве!
ствующим ТУ и САУ их нагрузок и выведении их в с<>
ответствующие рабочие режимы по энергетическим
координатам. Из изложенного следует, что при эксперн
ментальных исследованиях должны применяться мето
ды определения частотных характеристик элементов
замкнутых систем. Для получения частотных характе
ристик элементов замкнутой системы необходимо вво
сти в систему гармонические колебания и измерить со-
отношения амплитуд и фаз входного и выходного сш
налов элемента в существенном для данной системы
диапазоне частот. Для ЭЭС гармонические колебании
удобнее вводить путем подсоединения к СЭС управляй
мой нагрузки (УН) (рис. 45, 46), сопротивление которой
изменяется по гармоническому закону, в результан
чего при достаточной амплитуде колебаний сопротив
ления УН в ЭЭС установятся колебания всех коордии.н
той же частоты. Измеряя соотношения амплитуд и фа i
соответствующих энергетических координат, можно
определить ИЧХ обобщенного ИЭ и его приемников
В качестве управляемой нагрузки может быть при
нято активное сопротивление, управляемое по гармони
140
ческому закону [67, 68], например мощный транзистор-
ный каскад или несколько каскадов, соединенных па-
раллельно, и управляемых генератором низкой частоты
(ГНЧ), а для получения обобщенных динамических
характеристик необходимо измерить соотношения прира-
щений напряжения и токов. Так как динамические свой-
ства ИП (обобщенное операторное сопротивление)
Рис. 45. Схема измерений ИЧХ Рис. 46. Схема измерений ИЧХ
ИП. приемников.
в первом приближении не зависят от динамических
свойств приемников, то для выведения ИП в рабочий
режим может использоваться эквивалент нагрузки
(в частности, мощное регулируемое активное сопротив-
ление /?н). Аналогично, поскольку динамические свой-
ства приемников не зависят от динамики ИП, при экс-
периментальном определении обобщенной проводимости
приемников может использоваться любой ИП постоян-
ного тока, обеспечивающий требуемую для нормальной
работы приемников мощность. Данное обстоятельство
упрощает экспериментальные исследования и позволяет
производить их как в эксплуатационных, так и в лабо-
раторных условиях. Таким образом, для определения
ИЧХ обобщенного ИП в рабочем режиме необходимо
измерить колебания напряжения на выводах ИП и ко-
лебания тока относительно их номинальных значений,
а для определения обобщенной ИЧХ приемников — ко-
лебания напряжения на его силовых клеммах и коле-
оания тока приемника около его номинального зна-
чения.
Для получения сигнала, пропорционального току ИП
пли току приемника, достаточно включить последова-
;сльно ИП (рис. 45) или приемнику П (рис. 46) шунт,
с клемм которого можно снимать сигнал, пропорцио-
нальный току. Если в качестве обобщенного ИП при-
нимается ИП совместно с рядом своих приемников
141
(операторное сопротивление определяется соотношением
175), то измерительный шунт следует включать после
довательно этому эквивалентному ИП (на рис. 45
включение приемника П ИП для данного случая пока
зано пунктиром). Для автоматизации процесса измере
ния в научно-исследовательской лаборатории систем
автоматического управления Челябинского политехниче
ского института разработан измеритель иммитансных
частотных характеристик (ИИЧХ) [68], с помощью ко
торого за весьма краткое время (20—30 мин) измеря
ются логарифмические ИЧХ обобщенного ИП и обоб
щенной нагрузки. На их основе при соответствующе!i
аппроксимации могут быть получены и соответствующш
операторные характеристики. Согласно схемам ил
рис. 45 и 46 для измерения падения напряжения пл
внутреннем сопротивлении ИП (или на нагрузке) и
напряжения, пропорционального току, на шунте доста
точно иметь три потенциальные точки, т. е. измеряемы!
сигналы могут иметь общую шину. Вследствие этою
ИИЧХ имеет три входные клеммы, на которые подаю,
ся соответствующие сигналы, при этом общая шипа
является нулевой и относительно нее в схеме прибор.,
производится измерение напряжений. На рис. 45 и -16
иллюстрируется способ подключения потенциальных то
чек к ИИЧХ при определении ИЧХ.
16. ЭКСПЕРИМЕНТАЛЬНОЕ ОПРЕДЕЛЕНИЕ ЧАСТОТНЫХ
ХАРАКТЕРИСТИК СОСТАВНЫХ ЧАСТЕЙ
ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ СИСТЕМЫ
С помощью ИИЧХ могут быть определены и обыч
ные частотные характеристики элементов и систем авт
матического регулирования по информационным кошу I
рам, а также и соответствующие функции связей актин I
ных элементов САУ [31, 68]. При измерении частотных I
характеристик активных элементов САУ по информанп I
онным контурам на измерительные входы ИИЧХ щи
дует подавать напряжения, пропорциональные входным
и выходным сигналам исследуемых объектов, при этом,
поскольку значения колебаний входных и выходных
сигналов зависят также от колебаний энергетических |
координат (в частности, от колебаний напряжения), дли]
устранения влияния динамики энергетического контур! I
на результаты измерений, для питания исследуемого щ<
142
мента должен применяться ИП несоизмеримой с мощно-
стью приемника, т. е. Z<(/a>) <^Zh(/<o). Гармонические
колебания в этом случае следует вводить в информаци-
онный контур (например, изменять по гармоническому
закону входной сигнал активного элемента). Если на
измерительные входы ИИЧХ подавать сигналы, пропор-
циональные выходному сигналу элемента и потребляе-
Рис. 47. Схема измерений частотных характеристик составных ча-
стей ЭЭС.
мому им току, то можно определить частотную харак-
теристику функции связи (влияния) информационного'
контура активного элемента. Если на измерительные
клеммы ИИЧХ подавать сигналы, пропорциональные
колебаниям напряжения питания и выходной координа-
те исследуемого элемента, то при известной передаточ-
ной функции активного элемента по информационному
контуру после соответствующих вычислений можно-
определить частотную характеристику функции связи
(влияния) энергетического контура активного элемен-
та. Гармонические колебания при этом вводятся в энер-
гетический контур. Методика определения указанных
частотных характеристик иллюстрируется рис. 47, где
ИО — исследуемый объект; ГНЧ — генератор низкоча-
стотных колебаний; УН — управляемая нагрузка; Пр1 и
Пр2 — соответственно преобразователи электрической
величины во входную величину объекта и выходной
величины объекта в напряжение; 01—03, Ц—/3, щ—и3 —
точки съема измеряемых сигналов при определении ча-
стотных характеристик; индексу 1 соответствует измере-
ние частотной характеристики активного элемента по
информационному контуру (схема измерений набирает-
ся при замыкании переключателя и тумблера Л),,
индексу 2 — измерение частотной характеристики функ-
143
ции связи информационного контура (схема измерений
набирается при замыкании переключателя Пх и тумбле-
ра Т2), индексу 3 —измерение частотной характеристи-
ки функции связи энергетического контура (схема изме-
рений набирается при замыкании переключателя Л2 и
тумблера Т3). По полученным логарифмическим частот-
ным характеристикам несложно найти соответствующие
передаточные функции, которые могут в дальнейшем
использоваться для анализа и синтеза динамики ЭЭС.
Определение динамических характеристик преобразова-
телей энергии Z"i(p), Y'(p), W'3.n(p), W'3.3(p), W'u.0(p)
(см., рис. 21) связано с некоторыми экспериментальными
трудностями. Основная причина этого состоит в том, что
оба энергетических контура преобразователя (первич
ный и вторичный) должны быть замкнуты, так как это
необходимое условие работы преобразователя и питае
мой им нагрузки. Кроме того, в обоих контурах должны
быть установлены номинальные режимы по току и на
пряжению.
Операторное сопротивление Z"i(p) преобразователя
описывает его как ИП по отношению к приемникам
Соответствующая иммитансная частотная характеристп
ка преобразователя Z"i(ja) определяется обычными ча
стотными методами с применением известной аппарату
ры (ИИЧХ-4, вольтметра-векторометра В5-1, и т. д.)
Чтобы избежать влияния посторонних факторов на точ
ность эксперимента, необходимо использовать мощный
стабилизированный ИП для питания преобразователя и
отключить регулятор выходной координаты преобразо
вателя. Этим достигается выполнение необходимых
условий
Дн'п=0; А£"«0.
Операторная проводимость Y'(p) характеризует дн
намические свойства преобразователя со стороны пер
вичного ИП. Частотная характеристика У'(/го) преоб
разователя определяется обычным способом при уело
виях Д7"=0, Д/'и=0, первое из которых выполняется
путем стабилизации вторичного тока преобразователя,
а второе — путем отключения регулятора выходной ко
ординаты преобразователя.
Передаточная функция W's.H(p) характеризует влия
ние координат первичного энергетического контура
Д£7'п(р) на координаты вторичной СЭП \U"(p). Экспе
144
риментальное определение соответствующей ей частот-
ной характеристики ^'э.и(/<в) производится аналогично
вышеизложенному, т. е. частотными методами. Пробный
сигнал можно ввести в первичный энергетический кон-
тур с помощью управляемой нагрузки. Измерению под-
лежат сигналы Ди'п и Аи"п (рис. 21). Эксперимент про-
водится при условиях ЛЕ" (р)=0, А и",—О, что дости-
гается отключением регулятора напряжения йурег(/7) и
стабилизацией тока во вторичном энергетическом кон-
туре.
Влияние тока ЛЕ'(р) на ток ЛЕ (р) характеризует
передаточная функция Й7'эа (р). Эксперимент по опре-
делению соответствующей ей частотной характеристики
осуществляется при условиях Ди'п=0, Д/'и=0,
что обеспечивается стабилизацией напряжения первич-
ного ИП и отключением регулятора напряжения вторич-
ного напряжения.
Характер влияния управляющей координаты хвх(р)
на ток ЛГи(р) учитывается передаточной функцией
W'n.3(p) (рис. 21). Частотная характеристика 1^'и.э(/&»)
этой функции связи определяется любым частотным ме-
тодом. Пробный сигнал может подаваться на вход регу-
лятора. Измеряются сигналы Д/„ и Дхвх. Условиями при
определении данной характеристики являются Ды'п=0,
ЛЕ'—О. Эти условия обеспечиваются при стабилизации
первичного напряжения и вторичного тока. Передаточ-
ная функция преобразователя по каналу управления
№'и.п(р) описывает его динамические свойства как объ-
екта управления, входным сигналом которого является
сигнал управления хвх, а выходным — изменение напря-
жения на выходе преобразователя ЛЕ"(р). Частотная
характеристика ТГ'и.п(/®) определяется при тех же усло-
виях, что и , т. е. Д/Уп=0, Л1"=0. Измерению
при эксперименте подлежат выходное напряжение пре-
образователя и сигнал управления.
17. АВТОКОЛЕБАТЕЛЬНЫЙ МЕТОД
ЭКСПЕРИМЕНТАЛЬНОГО ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ
ХАРАКТЕРИСТИК ЭЛЕМЕНТОВ И СИСТЕМ ЭЭС
Частотные методы, в частности иммитансный, дают
достаточную точность и оперативность и являются пер-
спективными, однако они имеют и известные недостатки,
обусловленные в основном их аппаратурной реали-
10-677 И5
задней, которая предполагает применение низкочастот-
ных генераторов гармонических сигналов, низкочастот-
ных фильтров, фазовращателей и т. п. Кроме того, и это
существенно, время, необходимое для определения ча
стотных характеристик, иногда оказывается значительно
большим времени номинальной работы ряда элементов
и ТУ современной техники, вследствие чего частотные
методы не могут быть использованы для идентификации
Рис. 48. Структурная схема измерительной
нелинейной системы.
динамических свойств подобных объектов. В этом смыс
ле автоколебательный метод [69] —[71] имеет ряд пре
имуществ, так как при его использовании не требуется
специальных устройств, кроме специального нелинейного
элемента (НЭ) и простой корректирующей цепи. Авто
колебательный метод определения динамических свойстп
объектов основан на свойстве замкнутой нелинейной
системы, в контур которой включается исследуемый
объект (рис. 48), генерировать незатухающие колебания
при определенных значениях параметров корректирую
щей цепи и НЭ [69], [70].
В автоколебательном режиме движение нелинейной
системы согласно принципу гармонической линеариза
ции описывается уравнением
№ЛЧ(/Й) 1Ги.о (/Й) 7 (А) Ц-1=0, (241)
где Й, А— частота и амплитуда автоколебаний
№ЛЧ(/Й)—комплексный коэффициент передачи линей
пой части системы на частоте автоколебаний; 1ГИ.О(/Й)
комплексный коэффициент передачи исследуемого обь
екта на частоте автоколебаний; 7(A)—комплексны!,
коэффициент передачи нелинейного элемента при ампли
туде автоколебаний.
Модуль и аргумент комплексного коэффициента пс
редачи исследуемого объекта из (241) при известит
частоте и амплитуде автоколебаний определяются соот-
ношениями
I , ^и.о (Я) I = । Гл.ч (/Ц)| । j (л) | • (242>
4>и.о(/й)=л—[ч>л.ч(/й)+фн.э(/й, Д)]. (243)
Если в качестве НЭ применен нелинейный элемент
с однозначной характеристикой, то фи.э(/П, Д)=0. Из
(242) и (243) следует, что при известных амплитудной
и фазовой частотных характеристиках линейной части
системы и амплитудной характеристике НЭ по измерен-
ным частоте и амплитуде автоколебаний находятся мо-
дуль и фаза комплексного коэффициента передачи
исследуемого объекта на частоте автоколебаний. Изме-
няя параметры линёйной части или характеристику НЭ,
измеряют параметры автоколебаний и для их новых зна-
чений находят следующую точку частотной характери-
стики исследуемого объекта; поступая аналогичным об-
разом, определяют интересующий участок частотной ха-
рактеристики исследуемого объекта.
Определенные модификации автоколебательного ме-
тода позволяют оперативно определять обобщенные ди-
намические характеристики элементов и систем автома-
тического управления [72, 73].
Известно, что передаточная функция объекта являет-
ся наиболее обобщенной и универсальной характери-
стикой динамических свойств, и поэтому определение
последних по коэффициентам передаточной функции
является вполне приемлемым и обоснованным. Большин-
ство электромашинных элементов (двигатели и генера-
торы постоянного тока, электромашинные преобразова-
тели постоянного тока в переменный и др.) с достаточ-
ной для практических целей точностью описываются
дифференциальными уравнениями второго порядка и,
следовательно, характеризуются передаточной функцией
вида
(Р) = (1 + рТх) + pTt}, (244)
или
№э(Р) = тг --------г, (245)
10*
147
Где ks — статический коэффициент усиления элемента,
Т\, Т2— постоянные времени; ai^=7'1-|-72, а2—Т}Т2— ко
эффициенты передаточной функции.
Из (244) и (245) видно, что передаточная функция
элемента характеризуется тремя коэффициентами: k3,
Ti и Т2 или /гГ), Ц] и а2. При включении подобного эле-
мента в астатическую релейную систему, содержащую
Рис. 49. Структурная схема релейной автоколебательной системь
усилитель и датчик с коэффициентами передачи /гу, kn,
интегратор и релейный элемент (рис. 49), в последнен
возникают автоколебания. Амплитуда и частота симмет
ричных автоколебаний согласно методу гармоническон
линеаризации определяются выражениями
. ACkk^ 4Ckk3 (Г, + Тг)
1 пОг г'Т\Тг
Q = - 1 1__
* V аг У1\Тг'
(246)
(247)
где С—-настройка релейного элемента; k—kyk^ — стати
ческий коэффициент передачи линейной части релейной
системы.
Если в релейную систему последовательно с исслс
дуемым объектом включить форсирующее звено с nepi
даточной функцией №ф(р)=1-\-рТф, то в этом случае
частота автоколебаний системы будет определяться при
7’(j=const по формуле
£4 = 7='^
г л2
(248)
Решение системы уравнений (246) — (248) дает ана
литические выражения для коэффициентов передаточ
148
ной функции объекта
~ Q2, 5
1 1
!
2
1
а, —гФ (а2, а2,
«.Кэ —4С*гф а%
(249)
(250)
(251)
При замене в (249) — (251) частоты на период авто-
колебаний согласно соотношению Q=— и времени пе-
риода автоколебаний, выражения для коэффициентов пе-
редаточной функции принимают вид:
(252)
1 г2, — Л
а‘ — Гф 4л2
пЛ, /. г2г
~4С1гТф т2,
[(253)
(254)
где Ti и Т2 — период автоколебаний системы без форси-
рующего звена с включенным форсирующим звеном.
Численные значения а, и л2 могут быть также получены графи-
т2
ческим методом. Если построить кривую л = ^г, то, отложив по
оси абсцисс г,, по оси ординат можно сразу получить значение аг =
т2
= 4^s, а отложив по оси абсцисс т, и т2 и определив с помощью
^2 TS __, т2
кривой а = разность Y — —, можно получить значение
______L v_____L г2> ~ т2г
а' - 7ф У - Тф 4я2 •
Номограмма для определения коэффициентов at и а2 приведена
на рис. 50. Из изложенного следует, что для определения коэффи-
циентов передаточной функции объекта необходимо двукратное (без
форсирующего звена и с включенным в систему форсирующим зве-’
ном) измерение параметров автоколебаний специально созданной
релейной системы, в которую включается исследуемый объект. Со-
отношения (252)—(254) справедливы при симметричности автоко-
лебаний в системе (скважность импульсов равна 2, т. е. отсут-
сутствует постоянная составляющая на входе релейного элемента)
и при идеальной релейной характеристике (отсутствии петли гисте-
резиса и зоны нечувствительности) релейного элемента.
149
Изложенную методику можно распространить для определения
постоянных времени объектов, описываемых передаточной функ-
цией вида
W3(P} =
IB1 +^)’
i= I, 2, 3 ...
(255)
n
Для случая i=l последовательно исследуемому элементу вклю-
чается инерционное звено с известной передаточной функцией
^и(р)= т+/>г7- (256>
Рис. 50. Номограмма для определения коэффициентов передаточных
функций.
Постоянная времени исследуемого элемента согласно соотно-
шениям (247), (249), (252) по параметрам автоколебаний опреде
ляется по формуле
_ Я2 т8!
Г/=ЛГ <257)
Для случая /г >2 можно применить метод последовательной
компенсации первых инерционных звеньев (7’1>7’2>7'з>7'4>7’5).
После двукратного измерения параметров автоколебаний и опреде-
ления коэффициентов и а2 по изложенной выше методике вычис-
ляются постоянные времени первых инерционных звеньев по урав-
нению
Л,1 = 4~ (Й1±К«21 — 4й2 )
(258)
или номограмме на рис. 51, построенной на основе (258).
150
При конструировании, наладке и эксплуатации раз-
нообразных систем часто ставится задача эксперимен-
тального определения динамических свойств всей систе-
мы и, в частности, определения некоторых ее показате-
лей качества. В инженерной практике часто применяется
оценка динамических свойств системы по ее запасам
устойчивости, которые, косвенно характеризуя такие
важнейшие показатели качества, как перерегулирование
и время регулирования, в то же время определяют «гру-
бость» системы по отношению к воздействиям помех и
отклонениям собственных динамических параметров,
т. е. являются косвенной характеристикой надежности
динамической системы. При использовании автоколеба-
тельного метода можно оперативно и просто определять
запасы устойчивости системы [72].
Процесс установления автоколебаний в замкнутой
динамической системе, содержащей НЭ с существенно
нелинейной характеристикой, можно рассматривать как
процесс самоподстройки коэффициента передачи НЭ:
I •
15|
В частности, НЭ с однозначной нелинейной характе-
ристикой можно рассматривать как эквивалентный уси-
литель с управляемым амплитудой входного сигнала
коэффициентом передачи. Если при включении такого
НЭ в динамическую систему в ней устанавливаются
устойчивые колебания, то имеют место соотношения
|ГЛ.Л(/Й)||/(Д)|=1; (259)
arg[^.4(jfi)]+arg[/(>4)]=—л. (260)
Так как фазовая характеристика НЭ с однозначной
характеристикой равна нулю, а фазовая характеристи-
ка линейной части системы не зависит от амплитуды
автоколебаний, то автоколебания будут происходить на
критической частоте системы, т. е. й=ад1(р.
Запас устойчивости системы по амплитуде, опреде-
ляемый соотношением р= 1 / 1ГЛ.Ч (/ол?р), находится по
параметрам автоколебаний при включении в контур си-
стемы НЭ с однозначной характеристикой по отноше-
нию
Д£ = 201g р = 201g Ж-^(Ж - 201g | J (Д) (261)
где AL — запас устойчивости системы по амплитуде, дБ;
|И7л.ч(/Н)|—значение амплитудно-частотной характе-
ристики линейной части системы на частоте автоколеба-
ний (критической частоте системы); /(Ло) —значение
амплитудной характеристики НЭ при амплитуде авто-
колебаний нелинейной системы.
Из (261) следует, что, измерив амплитуду автоколе-
баний в системе, по известной характеристике НЭ не-
сложно определить |/(Л0)|, а следовательно, и запасы
устойчивости динамической системы по амплитуде.
Если в качестве НЭ принять релейный элемент с иде-
альной релейной характеристикой, то коэффициент пере-
дачи НЭ определяется соотношением
(262)
где С — настройка релейного элемента; А—амплитуда
автоколебаний.
С учетом (262) запас устойчивости динамической си-
стемы через параметры автоколебаний нелинейной СИ'
152
СТеМЫ и Параметры характеристики релейного эЛеМеН'М
определяется из соотношения
A£ = 201g₽=201g^-.
Способ определения запасов устойчивости динами-
ческой системы по амплитуде автоколебаний при вклю-
чении в ее контур НЭ иллюстрируется кривыми на
Рис. 52. Определение запасов
устойчивости по амплитуде.
/ — ЛАЧХ системы; 2 — ЛАЧХ си-
стемы с включением в ее контур
НЭ; 3 —> ЛФЧХ системы.
Рис. 53. Определение запасов
устойчивости по фазе.
1 — ЛАЧХ системы; 2 — ЛФЧХ си-
стемы без НЭ; 3—ЛФЧХ системы
с включением в ее контур НЭ.
рис. 52, где кривая 1 — логарифмическая амплитудная
частотная характеристика разомкнутой динамической
системы без НЭ, 2 — амплитудная частотная характери-
стика разомкнутой динамической системы при включе-
нии в ее контур НЭ, 3 — фазовые частотные характери-
стики разомкнутой динамической системы с включением
в ее контур НЭ и без него.
Для определения запасов устойчивости по фазе не-
обходимо, чтобы автоколебания в нелинейной системе
происходили на частоте среза разомкнутой линейной
системы. В этом случае по амплитуде автоколебаний
находится фазовый сдвиг НЭ, который и является со-
гласно (260) запасом устойчивости линейной системы
по фазе, при этом коэффициент передачи НЭ (модуль
эквивалентной передаточной функции) на частоте авто-
колебаний должен быть равен единице. Так как ампли-
153
Туда и Частота автоколебании в Нелинейной сйсТёМё
взаимосвязаны, то наиболее просто указанное требова-
ние осуществляется при выполнении условия
|/(Л)|^1, (263)
т. е. НЭ должен иметь эквивалентную передаточную
функцию вида [74]
7 (Л)= le-'4’<Л). (264)
Подобный НЭ несложно получить на основе релейно-
го элемента с эквивалентной передаточной функцией
J{A)=^[V7T^-jB} = ^e (265)
где С и В — соответственно высота и ширина гистере-
зисной петли, если высоту гистерезисной петли изменять
пропорционально амплитуде автоколебаний, причем ко-
эффициент пропорциональности согласно (265) /?=л/4.
На рис. 53 приведены логарифмические частотные
характеристики системы, поясняющие способ определе-
ния запасов устойчивости САУ по фазе.
Наряду с запасами устойчивости важной характери-
стикой качества замкнутых динамических систем являет-
ся показатель колебательности, который физически ха-
рактеризует резонансные свойства системы при гармони-
ческих воздействиях. Использование автоколебательного
метода позволяет оперативно определять показатель
колебательности без предварительного измерения АФЧХ
системы непосредственно в результате эксперимента.
Если последовательно с исследуемой системой включить
НЭ с эквивалентной передаточной функцией вида [72]
J(A)=ReivW, (266)
где /?=const (т. е. не зависит от амплитуды и частоты
автоколебаний, а является функцией параметров НЭ) и
обеспечить в созданной таким образом нелинейной си-
стеме (рис. 54) автоколебательный режим, то при ча-
стоте автоколебаний
"7.(» = 7ТЧ- <267)
При этом для получения автоколебаний на резо
нансной частоте, соответствующей максимуму W3(jcn)
154
Рис. 54. Структурная схема автоколебательной системы при опре-
делении показателя колебательности САУ.
а — схема подсоединения НЭ к САУ; б — эквивалентная схема нелинейной
системы.
Рис. 55. Подстройка НЭ при определении показателя колебатель-
ности.
Рис. 56. Подстройка НЭ при определении показателя колебатель-
ности в системе с двумя резонансными частотами.
155
замкнутой системы, должна производиться подстройка
НЭ по минимуму модуля эквивалентной передаточной
функции. Алгоритм этой подстройки иллюстрируется
кривыми на рис. 55. Если 7?=1, то в нелинейной системе
установятся автоколебания, определяемые точкой пере-
сечения 1 АФЧХ замкнутой САУ (кривая /) и АФХ НЭ.
Если далее за счет изменения параметров НЭ умень-
шить R, то автоколебания будут определяться точкой
пересечения 2 АФХ НЭ с АФЧХ САУ. При последова-
тельном уменьшении R автоколебания нелинейной систе-
мы переместятся в точку 3, соответствующую максиму-
му АФЧХ замкнутой САУ, дальнейшее уменьшение R
ведет к срыву автоколебаний. Частота автоколебаний
нелинейной системы в точке 3 соответствует резонансной
частоте, а величина, обратная модулю эквивалентной
передаточной функции НЭ, является показателем коле-
бательности линейной замкнутой САУ.
Если АЧХ замкнутой САУ имеет несколько максиму-
мов (рис. 56), то в нелинейной системе может существо-
вать несколько устойчивых режимов автоколебаний
(точки 1 и 2). Если после включения нелинейной си-
стемы будет реализован автоколебательный режим,
соответствующий точке 2, то после увеличения модуля
обратной АФХ НЭ до значения 1 /R3 в системе устано-
вятся автоколебания, определяемые точкой 3, соответ-
ствующей локальному максимуму 1У3(/ы), при этом пре-
дельный цикл будет полуустойчивым и незначительное
увеличение 1/R3 приведет к скачкообразному переходу
системы в автоколебательный режим, определяемый
точкой 4. При дальнейшем увеличении 1//?3 автоколеба-
тельный режим переместится в точку 5, соответствую-
щую максимуму-максиморуму АЧХ замкнутой линейной
САУ. Поскольку точность определения параметров
автоколебаний в точках 3 (рис. 55) и 5 (рис. 56) вслед-
ствие параллельности годографов АФЧХ САУ и обрат-
ной АФХ НЭ может быть невысокой, то для улучшения
точности измерений целесообразно включать такой НЭ,
годограф обратной АФХ которого будет пересекать
АФЧХ САУ в точке, соответствующей резонансной ча-
стоте под углом, близким к прямому. Наиболее подхо-
дящим в этом смысле является НЭ с эквивалентной
передаточной функцией вида
J(A)= 1/^)1?*, (268)
156
Рис. 57. Характеристики НЭ с постоянным фазовым сдвигом.
а — статическая; б — амплитудная; в - фазовая; г — АФХ НЭ.
(где <p=const и зависит только от параметров ИЭ), ко-
торый несложно получить на основе релейного элемента
с гистерезисом, если ширину гистерезисной петли в нем
изменять пропорционально амплитуде автоколебаний.
На рис. 57,а—в соответственно приведены статическая,
157
амплитудная и фазовая характеристики НЭ вида (268).
Обратная эквивалентная передаточная функция такого
НЭ определяется соотношением
71Л\ 1 J*{A) — + ik ,9KQx
Z(A^TTA) = TWP ------------«с------’ (269)
где J* (Л)—оператор, сопряженный с эквивалентной
передаточной функцией НЭ; С—const — настройка ре-
лейного элемента,------коэффициент пропорциональ-
ности, или
Z(A)=^c[ (270)
Из (270) следует, что модуль обратной АФХ НЭ при
C=const пропорционален амплитуде автоколебаний.
Данное обстоятельство позволяет просто определять
максимум |Z(A)|, а следовательно, согласно (267) и
максимум |1У3(/со)|, т. е. показатель колебательности.
Если изменять параметр k НЭ, то точка пересечения
годографов будет перемещаться по АФЧХ САУ
(рис. 57), при этом большему значению модуля 1^3(/ф)
будет соответствовать и наибольшая амплитуда авто-
колебаний, откуда следует, что рсякое отклонение точки
пересечения годографов от точки, соответствующей резо-
нансной частоте (точка 2, рис. 57,г), приводит к умень-
шению амплитуды автоколебаний. Таким образом, при
использовании НЭ вида (268) максимум-максиморум
АЧХ замкнутой САУ соответствует наибольшей из всех
возможных при данной настройке параметра С НЭ
амплитуде автоколебаний, а показатель колебательно-
сти в этом случае определяется соотношением
М = max | W3 (/«>) | £ А (271)
Пропорциональная зависимость модуля обратной
эквивалентной передаточной функции нелинейного эле-
мента вида (268) может использоваться для измерения
амплитудно-фазовых частотных характеристик элемен-
тов и систем автоматического регулирования. В режиме
устойчивых автоколебаний в нелинейной системе, со-
стоящей из исследуемого объекта и НЭ с передаточной
158
функцией вида (268), имеют место соотношения (241),^^®*
(259), (260), из которых следует
I roG^)l = (272)
h
% (JQ) =71 — arg [z И)!=* — arctg j/p—p . 1,(273)
На основе (272) и (273) производится определение
амплитудной и фазовой частотных характеристик иссле-
дуемого объекта по измеренным параметрам автоколе-
баний (амплитуде и частоте) нелинейной системы, изме-
нение которых в существенном диапазоне частот произ-
водится за счет изменения параметра k нелинейного
элемента.
На основе изложенного принципа может быть по-
строена серия устройств для оперативного определения
динамических характеристик, которые позволяют про-
изводить полуавтоматическое измерение и контроль ко-
эффициентов передаточных функций элементов и ука-
занных динамических характеристик динамических си-
стем.
18. КОНТРОЛЬ ДИНАМИЧЕСКИХ СВОЙСТВ ЭЛЕМЕНТОВ
И СИСТЕМ АВТОНОМНЫХ ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ
СИСТЕМ
Контроль динамических свойств элементов ЭЭС тес-
но связан с вопросом расчета и назначения допусков на
их отклонение, который является одним из основных при
проектировании ЭЭС. Поскольку в процессе производст-
ва типовых ТУ вследствие разброса технологических
параметров всегда имеет место разброс и их динамиче-
ских параметров, то при серийном производстве дина-
мические характеристики, а следовательно, и качество
системы будут отличаться от расчетных. Устранение это-
го нежелательного явления производится за счет нала-
док и настроек систем перед их эксплуатацией, при этом
компенсация отклонений динамических параметров
элементов (датчиков, усилителей, исполнительных
устройств, объектов управления) осуществляется за
счет подбора параметров регулятора и, в частности, его
корректирующего контура. Так как при настройках ди-
намические параметры отдельных элементов в точности
неизвестны, то это часто приводит к необходимости
159
дополнительных экспериментальных исследований по их
определению (равно как и при проектировании типовых
систем), что существенно увеличивает трудозатраты,
затягивает время настройки, удорожает производство
ЭЭС. Кроме того, так как разброс динамических пара-
метров элементов ЭЭС может быть существенным,
а компенсация отклонений за счет параметров регуля-
торов отдельных систем всегда ограничена определен-
ным диапазоном, то в ряде случаев система не может
быть приведена в работоспособное состояние и в ре-
зультате настройки, что ведет к отбраковке ее или к бо-
лее серьезным последствиям в процессе эксплуатации.
Одним из возможных и перспективных путей реше-
ния поставленной задачи является применение автоко-
лебательного метода контроля динамических свойств
[71]. Сущность метода заключается в том, что допуски
на отклонение динамических параметров ТУ назнача-
ются исходя из заданной работоспособности системы,
а сам критерий контроля получается на основе одного
из критериев качества системы, например САУ. В част-
ности, одним из возможных критериев является область
устойчивости или равного запаса устойчивости САУ
в пространстве динамических параметров контролируе-
мого ТУ. Так как число контролируемых параметров
при этом невелико (два, три), то подобная область всег-
да может быть построена графически и аппаратурно
реализован контроль с выходом типа «да», «нет» для
систем любого порядка и любой сложности.
Данный метод назначения допусков и выбранный
функционал контроля предполагают, что динамические
свойства и отклонения от номинальных значений осталь-
ных элементов системы известны, а взаимовлияние ин-
формационного и энергетического каналов для САУ,
входящих в состав ЭЭС, учтено при получении функцио-
нала контроля, т. е. при расчете областей устойчивости
в параметрах контролируемого элемента. С учетом этого
будем полагать, что характеристическое уравнение си-
стемы имеет вид:
l + №Ka(p)W)=0, (274)
где W(р) — передаточная функция известной части си-
стемы, частотную характеристику которой можно пред-
ставить в виде
(275)
160
или
№(j<o)=P(<o)-hQ(co), (276)
где А (со) и <р(со)—соответственно амплитудная и фазо-
вая частотные характеристики, а Р(со) и Q (со) — веще-
ственная и мнимая частотные характеристики известной
части системы.
Уравнение (274) с учетом (275) можно представить
1 + ^к.э(/“)^(“)е/,₽(ш)-0, (277)
или
1~Ь^к.э(/<о) [P(w)4~/’Q(co)]=0. (278)
При заданном виде передаточной функции контро-
лируемого элемента (известной его структуре) уравне-
ния (277), (278) являются исходными для построения
областей устойчивости в параметрах элемента с W(p).
Например, для ТУ с передаточной функцией
(Р) = j _^ртк э <279)
уравнение (278) запишется в виде
1 + "г+ЬкГ,р (о>)+iQ (“я = 0 (280)
или при выделении вещественной и мнимой частей
1 Ч~^к.эР (ко) =0;
Тк.псо~|-/гк.эС (со) =0,
откуда следует
^к.э“ —(281а)
гр ____kQ (W) Q (со)
2к.э— ы —ЫР(Ы)-
(2816)
Уравнения (281а, б) определяют границу области
устойчивости САУ в параметрах контролируемого эле-
мента.
Аналогично для ТУ, описываемого по каналу регули-
рования передаточной функцией
^к.э(р) = Г+а р2> (282)
* г ак.эР г агк.эР
11—677
161
имеет место
а __ &к.э<2(<->) .
1 со ’
(283а)
__ 1 +*«.э^ (“)
“S — W2
(2836)
В данном случае для различных значений коэффи-
циента усиления звена kK.a может быть построено семей-
ство областей устойчивости. В качестве примера па
Рис. 58. Области устойчивости ПСРЧ в параметрах электромашин-
ного преобразователя частоты.
рис. 58 приведены семейства областей устойчивости пре-
цизионной системы регулирования частоты [ПСРЧ] [70]
в параметрах электромашинного преобразователя, опи-
сываемого передаточной функцией
----------г
1+«]/? +л2д2'
Области устойчивости в параметрах исследуемого
элемента могут быть использованы при контроле, хотя
такая методика потребовала бы предварительного опре-
деления значений динамических параметров. Подобный
метод контроля следует признать нецелесообразным
ввиду его трудоемкости, необходимости проведения
162
расчетов, возможности субъективных ошибок и мень-
шей точности. Выразим интересующие параметры эле-
мента (279), в данном случае kv.3 и Т, через параметры
автоколебаний Ai и Qi специально создаваемой релей-
ной системы, в которую включается контролируемый
элемент [71]. В этом случае с учетом (281) после не-
сложных преобразований получим уравнения границы
области устойчивости системы управления непосредст-
венно в параметрах автоколебаний измерительной ре-
лейной системы
Й’-=<Ж; ,284)
t А'= ~ P(<o)(l +VaKjB*,)» (285)
где
(286)
Следовательно, могут быть построены области устой-
чивости в параметрах Aj, ti, непосредственно измеряе-
мых при использовании автоколебательного метода.
Подобные области устойчивости являются контрольны-
ми, на основании которых может проводиться контроль
динамических свойств элемента, в данном случае
с целью обеспечения устойчивой работы системы, воз-
можно, с требуемыми запасами устойчивости.
Аналогично для звена с передаточной функцией вида
(282) получают области устойчивости САУ в парамет-
рах автоколебаний
+ (287)
А = — q (С0) Q2j , (288)
что позволяет отобразить области устойчивости САУ
(рис. 58) на плоскость параметров автоколебаний Аь
представленные для примера на рис. 59 при различных
коэффициентах усиления.
Контроль динамических свойств элементов вида
(282) на основании подобных областей устойчивости
предполагает, что коэффициент усиления элемента опре-
делен заранее
11* 163
Методика контроля динамических свойств элементов
с помощью областей устойчивости дает возможность
производить отбор элементов, обеспечивающих задан-
ные запасы устойчивости по амплитуде и фазе, способ-
ствуя тем самым обеспечению требуемого качества про-
цессов в динамических системах. В этом случае на обла-
сти устойчивости должны быть нанесены линии равных
запасов устойчивости по амплитуде и фазе.
О 10 20 30 40 50 60 70 80 30 100 110 1ZO С
Рис 59. Области устойчивости ПСРЧ в параметрах автоколебаний
релейной измерительной системы.
Методика расчета подобных линий равных запасов изложена,
например, в [70] и основана на представлении известной части
системы в виде
W* М (ш) е> (“>+4fI - [i/1 (и) cos [¥ (со) + й<р] р.
+ /М (<о) sin [¥ (со) + Д?] = Р* (со) + jQ* (со),
где коэффициент Р характеризует требуемый запас устойчивости
САУ по амплитуде A/-=20igp дБ; Лер—-запас устойчивости по
фазе; Q*(b>) — соответственно вещественная и мнимая части
частотной характеристики IF* (/со) с учетом заданных запасов устой-
чивости.
Таким образом, формулы для расчета областей устойчивости,
приведенные выше, сохраняют свой вид при соответствующей за
мене Р(со) и Q(co).
Эксплуатация любых САУ всегда сопровождается
износом и старением ее элементов, что приводит к изме
нению ее динамических свойств. Поэтому при эксплуа
164
тации САУ, а также при серийном производстве часто
ставится задача оперативного контроля их работоспо-
собности, который в качестве одной из основных целей
предусматривает контроль динамических свойств. Подоб-
ный контроль не предполагает строгого ограничения от-
клонений динамических параметров отдельных элемен-
тов, но существенным является то, чтобы отклонения
динамических свойств всей системы или всего комплекса
были не больше заданных.
Гарантия динамических свойств всего комплекса
обеспечивает нормальную его работоспособность при
выполнении той задачи, которая на него возложена.
Подобный контроль имеет особо важное значение в си-
стемах и установках, которые в силу определенных
условий при выполнении основной задачи работают
в автономном режиме, в частности для большинства
автономных подвижных объектов. Поскольку ЭЭС авто-
номного объекта является наиболее важной функцио-
нальной системой, от качества работы которой сущест
венно зависит работоспособность ряда САУ автономного
объекта, то контроль работоспособности комплекса
прежде всего должен предусматривать контроль дина-
мических свойств ЭЭС.
В соответствии с иммитансным методом динамиче-
ские свойства ЭЭС можно. представить в виде обобщен-
ных динамических моделей (см. рис. 29 или 31) и кон-
троль ее динамических свойств свести к контролю дина-
мики соответственно замкнутых динамических систем
«обобщенный ИП — обобщенный потребитель» или «ре-
гулятор напряжения — обобщенный ИП». Так как каж-
дая из этих систем однозначно отражает динамические
свойства ЭЭС, то выгоднее проводить контроль динами-
ки той системы, в которой легче его реализовать аппа-
ратурно. Назначение допусков на отклонение динамиче-
ских свойств всей системы в этом случае производится
исходя из обеспечения заданного качества работы си-
стемы, а функционал контроля может быть получен на
основе этого критерия качества.
В инженерном плане наиболее подходящий в указан-
ном смысле функционал качества работы ЭЭС — это ее
запасы устойчивости по фазе и амплитуде, которые
являются и косвенными показателями надежности. В ря-
де случаев может быть дополнительно введено ограни-
чение на зйачение перерегулирования и время регулиро-
165
вания (например, на значение и длительность провалов
напряжения). Контроль динамических свойств ЭЭС на
основе указанных функционалов качества просто реали-
зуется с помощью автоколебательного метода, при этом
аппаратурная реализация будет наиболее простой и
удобной в эксплуатации, если в качестве динамической
модели ЭЭС принята модель замкнутой системы «регу-
лятор напряжения — обобщенный ИП» (см. рис. 29).
В этом случае для контроля соответствующей динами-
ческой характеристики (запасов устойчивости, перерегу-
лирования) достаточно включить в канал регулирова-
ния (последовательно регулятору) один из НЭ и по ме-
тодике, описанной выше, определить соответствующий
показатель качества. Аналогичным образом при выборе
тех же функционалов качества можно проводить опера-
тивный контроль динамических свойств любой САУ
автономного объекта.
Ранее отмечалось, что эффективность функциониро-
вания ЭЭС автономных объектов характеризуется набо-
ром показателей качества электроэнергии, среди кото-
рых наиболее важными для СЭС постоянного тока яв-
ляются: показатели динамических режимов — амплитуда
и длительность провалов и выбросов напряжения в пере-
ходных режимах и при изменении нагрузки; коэффици-
ент пульсаций, определяющий спектральный состав
колебаний напряжения; статические отклонения напря-
жения при изменении нагрузки. В силу взаимосвязи ин-
формационных и энергетических процессов в автоном-
ных ЭЭС эти показатели качества в существенной сте-
пени определяют эффективность функционирования
сепарантных систем объекта. По этой причине перечис-
ленные показатели качества электроэнергии автоном-
ных СЭС в настоящее время регламентируются (норми-
руются) ГОСТ [52, 53].
Разработка и внедрение ГОСТ на качество электро-
энергии автономных СЭС являются комплексной проб-
лемой и предполагают решение целого круга задач, в том
числе и задач по назначению и контролю показателей
качества электроэнергии и допусков на их отклонение.
Следовательно, при проектировании, серийном произ-
водстве и эксплуатации автономных ЭЭС должен преду-
сматриваться контроль указанных показателей качества
и допусков на их отклонение.
Следует заметить, что показатели динамических ре-
166
жимов определяются не только динамическими свой-
ствами ЭЭС и начальными условиями, но и характером
управлений и возмущений, обусловливающих эти режи-
мы, поэтому контроль этих показателей предполагает
обеспечение строго определенных режимов измерений.
В частности, в гл. 4 (см. § 13) было показано, что
амплитуда выбросов и пробелов напряжения при под-
ключении приемников к СЭС зависит также и от зако-
нов коммутации. В связи с этим контроль рассматри-
ваемых показателей качества должен производиться
при использовании штатных приемников и штатной ком-
мутирующей аппаратуры СЭС.
В условиях серийного производства и при проекти-
ровании, когда еще полностью неизвестен штатный со-
став аппаратуры ЭЭС, эти требования не всегда удается
выполнить. Контроль и измерение показателей качества
электроэнергии в этих случаях можно производить
с использованием аналого-физических моделей состав-
ных частей ЭЭС.
Подобные модели, реализующие в реальном масшта-
бе мощности статические и динамические свойства со-
ставных частей ЭЭС, могут быть разработаны на осно-
ве динамических моделей основных устройств ЭЭС, опи-
санных в гл. 2. Для обеспечения требуемых законов ком-
мутации приемников при моделировании на основе
принципов, изложенных в гл. 4 (§ 13), могут быть со-
зданы универсальные коммутирующие устройства, реа-
лизующие любой закон коммутации приемников и со-
ставных частей ЭЭС.
На основе указанных моделирующих и коммутирую-
щих устройств могут быть созданы универсальные мо-
делирующие стенды, на которые при использовании со-
временной вычислительной техники можно производить
комплексное проектирование автономных ЭЭС, а также
решать задачи контроля показателей качества состав-
ных частей ЭЭС при их серийном производстве.
СПИСОК ЛИТЕРАТУРЫ
1. Иваненко В. И. О влиянии связей через общий источник пи-
тания на поведение систем автоматического управления. — Изв.
АН СССР, Техническая кибернетика, 1963, № 5, с. 7—13.
2. Яковлев Б. С. Вопросы взаимодействия систем автоматиче-
ского управления с источниками питания. — В кн.;' Устройства элек-
тропитания и электропривода малой мощности. — М.: Энергия, 1969,
т. 1, с. 5—22.
3. Следящие приводы/ Под ред. Б. К. Чемодаиова, кн. И. — М.:
Энергия, 1976, с. 396—474.
4. Яковлев Б. С. Динамический комплекс «Источник питания —
системы автоматического управления» и вопросы его проектирова-
ния. — В кн.: Вопросы динамики систем управления. — Челябинск:
ЧПИ, 1970, вып. 64, с. 211—220.
5. Злочевский В. С. Системы электроснабжения пассажирских
самолетов.—М.: Машиностроение, 1971. — 376 с.
6. Ширяев В. И., Яковлев Б. С. Связь элементов систем авто-
матического регулирования через общий источник питания. — В кн.:
Электронные устройства. Динамика систем электропривода. — М.:
Энергия, 1973, с. 31—34.
7. Боде Г. Теория цепей и проектирование усилителей с обрат-
ной связью/ Под ред. Колосова А. А., Мееровича П. А. — М.: Изд-
во иностр, литературы, 1948. — 641 с.
8. Цыкин Г. С. Электронные усилители. — М.; Связь, 1963.—
509 с.
9. Источники электропитания на полупроводниковых приборах.
Проектирование и расчет/ Под ред. С. Д. Додика, Е. И. Гальпери-
на.— М.: Советское радио, 1969. — 448 с.
10. Рогинский В. Ю. Расчет устройств электропитания аппара-
туры электросвязи. — М.: Связь, 1972. — 360 с.
11. Додик С. Д. Полупроводниковые стабилизаторы постоянного
напряжения и тока. — М.: Советское радио, 1962. — 352 с.
12. Исаков Ю. А. Тиристорные системы электропитания. — Киев:
Техника, 1974.—432 с.
13. Виноградов Ю. В. Основы электронной и полупроводнике
вой техники. — М.; Энергия, 1972. — 535 с.
14. Фельдбаум А. А. Электрические системы автоматического
регулирования. — 2-е изд. — М.: Оборонгиз, 1957. — 807 с.
15. Техническая кибернетика. Кн. 1. Теория автоматического
регулирования/ Под ред. Солодовникова В. В. — М.: Машинострое-
ние, 1967. — 770 с.
16. Воронов А. А. Основы теории автоматического управления.
Ч. 1. — М.: Энергия, 1965. — 396 с.
17. Расчет следящего привода/ Д. В. Васильев, В. А. Митрофа-
нов, А. В. Фатеев, В. П. Чуич. — Л.: Судостроение, 1964.— 606 с.
168
18. Васильев Д. В., Чуич В. П. Системы автоматического управ-
ления. Примеры расчета.—М.: Высшая школа, 1967. — 418 с.
19. Горовец А М. Синтез систем с обратной связью: Пер.
с англ./ Под ред. М В. Меерова.— М.: Советское радио. 1970.—
600 с.
20. Чинаев П. И. Критерий устойчивости многомерных систем
с неограниченно возрастающим коэффициентом усиления. — Авто-
матика, № 3, 1964, 15—20 с.
21. Мееров М. В. Синтез структур систем автоматического ре-
гулирования высокой точности. — М.: Наука, 1967. — 423 с.
22. Бессекерский В. Л., Попов Е. П. Теория систем автоматиче-
ского регулирования.— М.: Наука, 1975. — 767 с.
23. Зайцев Г. Ф. Коррекция систем автоматического управления
постоянного и переменного тока. — М.: Энергия, 1969. — 384 с.
24. Петров Б. Н. Принцип инвариантности и условие его при-
менения при расчете линейных и нелинейных систем.— В кн.: Тр.
ИФАК. Теория непрерывных систем. — М.: Изд-во АН СССР, 1961,
с. 259—271.
25. Петров Б. Н., Кухтенко Л. П. Структура абсолютно инва-
риантных систем и условия их физической осуществимости. — В кн.:
Теория инвариантности в системах автоматического управления. —
М.: Наука, 1964, с. 26—48. »
26. Ивахненко А. Г. Электроавтоматика. Ч. I, —Киев: Гостех-
издат УССР, 1954. — 291 с.
27. Кухтенко А. П. Проблемы инвариантности в автоматике. —
Киев, Гостехиздат УССР, 1963.— 376 с.
28. Лыщинскнй Г. П., Ельсуков В. Н. Свойства системы стаби-
лизации скорости двигателя постоянного тока с источниками пита-
ния ограниченной мощности.-—Электричество, 1966, № 10, с. 22—26.
29. Кириченко А. Г., Яковлев Б. С. Учет влияния и выбор дина-
мических свойств источников питания систем автоматического управ-
ления.— Электричество, 1967, № 10, с. 75—76.
30. Шаталов А. С. Структурные методы в теории управления и
электроавтоматике. — М.—Л.: Госэнергоиздат, 1962. — 406 с.
31. Злакоманов В. В., Яковлев Б. С. Экспериментальное иссле-
дование влияния связей элементов систем автоматического регули-
рования через общий источник питания. — В кн.: Вопросы проек-
тирования устройств электропитания и электропривода. Том I. — М.:
Энергия, 1972.—с. 72—78.
32. Кохенбургер Р. Дж. Влияние наклона внешних характери-
стик источника питания на динамические характеристики усилите-
лей, применяемых в системах регулирования. — В кн.: Тр. ИФАК.
Теория непрерывных систем. — М.: Изд-во АН СССР, 1961,
с. 440—458.
33. Кононенко В. О. Колебательные системы с ограниченным
возбуждением. — М.: Наука, 1964. — 254 с.
34. Ельсуков В. П., Кошкин Ю. Н„ Репин С. В. Анализ стати-
ческих свойств системы, получающей питание от источника ограни-
ченной мощности. — Новосибирск: НЭТИ, 1969, вып. 6, с. 38—46.
35. Бертинов А. И., Мизюрин С. Р., Аветисян Д. А. К динамике
преобразователей, 'питающихся от источников соизмеримой мощно-
сти.— Изв. вузов. Электромеханика, 1964, № 1, с. 34—42.
36. Степаненко И, П. Основы теории транзисторов и транзи-
сторных схем. — М-: Энергия, 1975. — 608 с,
169
37. Борисов К. Н., Нагорский В. Д. Электропривод летательных
аппаратов. — М.: Машиностроение, 1967.— 436 с.
38. Александров Ф. И., Сиваков А. Р. Импульсные полупровод-
никовые преобразователи и стабилизаторы постоянного напряже-
ния.—Л.: Энергия, 1970.-— 188 с.
39. Злакоманов В. В., Яковлев Б. С. Взаимосвязь информа-
ционных и энергетических пропессов в автономных электроэнерге-
тических системах. — В кн.: Вопросы управления в автономных
электроэнергетических системах. — Челябинск: ЧПИ, 1974, вып. 157,
с. 36—43.
40. Попов Д. А. Частотные характеристики автономных электро-
энергетических систем. — Электричество, 1963. № 6, с. 14—20.
41. Дашенко А. А., Яковлев Б. С. О выборе параметров регу-
лятора ЭДС источника питания систем управления. — Изв. вузов.
Приборостроение, 1967, № 9, с. 29—34.
42. Кузнецов В. Ф., Яковлев Б. С. Устойчивость процессов элек-
тропитания систем управления при ограниченной мощности первич-
ного источника постоянного тока. — В кн.: Вопросы динамики си-
стем управления. — Челябинск: ЧПИ, 1970, вып. 64, с. 221—229.
43. О проектировании динамических свойств выпрямительных
установок, работающих на сложную динамическую нагрузку/
А. Г. Киричиенко, Е. И. Любин, В. Б. Червяков, Б. С. Яковлев. —
В кн.: Устройства электропитания и электропривода малой мощно-
сти.—-М.: Энергия, 1969, т. 1, с. 47—58.
44. Куликовский А. А. Устойчивость активных линеаризованных
пеней с усилительными приборами новых типов. — М.: Госэнерго-
издат, 1962.— 192 с.
45. Кузнецов В. Ф. Выбор источников энергии постоянного тока
по критерию максимальной вероятности требуемых динамических
свойств комплекса «источник — потребитель». — В кн.: Устройства
электропитания и электропривода малой мощности. — М.: Энергия,
1969. т. 1. с. 58—70.
46. Richard S. Far. Power supplies need exercise, TOO. — EDW
EEE. 1970, vol. 15, № 16, p. 63.
47. Kroupa J. .Prochazka B. Imitan6hi kriteria stability repula
toru proudu a napeti. — Slaboproudfi obzor, 1974, sv. 35, № 6,
s. 265—270.
48. Морозовский В. Г., Синдеев И. М., Рунов Н. Д. Системы
электроснабжения летательных аппаратов. — М.: Машиностроение
1973. —420 с.
49. Попов Д. А. Исследование устойчивости параллельной па
боты однотипных генераторов постоянного тока. — Изв. АН СССР
Энергетика и автоматика. 1960, № 5, с. 18—25.
50. Морозовский В. Т. Об устойчивости параллельной работы
однотипных генераторов. — Изв. АН СССР. Энергетика и автома
тика. 1959, № 2, с. 77—86.
51. Голощапов С. С. Методика экспериментального определения
иммитансиых динамических моделей химических источников тока.
В кн.: Вопросы управления в автономных электроэнергетических
системах. — Челябинск: ЧПИ, 1974, вып. 157, с. 124—127.
52. Характеристики переходных режимов 28-вольтовой электро
сети постоянного тока для военных транспортных средств. Военный
стандарт. Mil STD—1275 (AT) USA. Введ. VII, 1966.
53. ГОСТ 19705-74. Системы электроснабжения самолетов и
вертолетов. Классификация, Требования к качеству электроэнергии.
170
54. Корн Г. и Корн Т. Справочник по математике. — М.: Наука,
1968. — 720 с.
55. Дудников Е. Г. Основы автоматического регулирования теп-
ловых процессов. — М.: Госэнергоиздат, 1956. — 264 с.
56. Круг Г. К., Круг Е. К. Электрические корректирующие эле-
менты в схемах автоматического контроля и регулирования. — М.:
Госэнергоиздат, 1959. — 84 с.
57. Справочник по полупроводниковым диодам, транзисторам и
интегральным схемам/ Под ред. И. Н. Горюнова, 3-е изд. — М.:
Энергия, 1972. — 568 с.
58. Агеев И. 3. Неустойчивая работа н автоколебания в систе-
мах автоматического управления машин постоянного тока с иска-
женными характеристиками. — Электричество, 1964, № 5, с. 56—60.
59. Спиридонов В., Ткаченко Ю., Чалый М. Включение шунти-
рующего вентиля в системе бездугового разрыва цепей. — Электро-
техническая промышленность, 1968, вып. 305, с. 12—13.
60. Марактанов В. А., Пивненко А. Д. О возможности создания
выключателя, работающего с заданным законом коммутации. —
Электротехническая промышленность. Аппараты низкого напряжения,
1971. вып. 300, с. 7—8.
61. Бессекерский В. А. Динамический синтез систем автоматиче-
ского регулирования. — М.: Наука, 1970. — 575 с.
62. Головицкий В. А. Транзисторные импульсные усилители и
стабилизаторы постоянного напряжения.—М.: Связь, 1974.— 160 с.
63. Черноруцкий Г. С. Стохастический подход к анализу дина-
мики автоматических систем. -— Изв. вузов. Приборостроение, 1965,
№ 6, с. 39—44.
64. Черноруцкий Г. С. Динамические свойства систем управле-
ния со случайными параметрами. — В кн.: Вопросы динамики систем
управления. — Челябинск: ЧПИ, 1970, № 64, с. 7—14.
65. Черноруцкий Г. С., Червяков В. Б. Системы автоматического
управления со случайными вариациями параметров. Учебное посо-
бие. — Челябинск: ЧПИ, 1974. — 108 с.
66. Кузнецов В. Ф., Яковлев Б. С. Исследование динамики ком-
плекса «источник питания — система автоматического управления»
частотными методами. — Приборы и системы управления, 1968, №9,
с. 26—28.
67. А. С. № 332442 (СССР). Устройство для определения имми-
тансных частотных характеристик источников питания и потребите-
лей/ Г. И. Волович, В. Ф. Кузнецов, Б. С. Яковлев. Опубл, в Б. И.,
1972, № 3.
68. Велин А. В., Крылов П. А., Ямщиков Л. В. Измеритель ча-
стотных характеристик на интегральных операционных усилителях,—
В кн.: Вопросы управления в автономных электроэнергетических си-
стемах.— Челябинск: ЧПИ, 1974, вып. 157, с. 150—157.
69. Ротач В. Я., Плетнев Г. П., Беляев Г. Б. Применение мето-
да Гольдфарба при определении частотных характеристик промыш-
ленных объектов. — В кн.: Метод Гольдфарба в теории регулиро-
вания.—М.—Л.: Госэнергоиздат, 1969, с. 211—223.
70. Любин Е. Н. Метод автоколебаний для контроля динами-
ческих свойств электромашннных преобразователей. — В кн.: Вопро-
сы динамики систем управления. — Челябинск: ЧПИ, 1972, вып. 88,
с. 33—39.
171
71. Злакоманов В. В., Любин Е. Н., Яковлев Б. С. Определение
и контроль динамических свойств электромашинных элементов си-
стем управления. — Электричество, 1972, № 12, с. 33—37.
72. Злакоманов В. В., Озеров Л. А., Яковлев Б. С. Автоколе-
бательный метод определения и контроля динамических свойств эле-
ментов н систем автоматического управления. — В кн.: Вопросы
управления в автономных энергетических системах. — Челябинск:
ЧПИ, 1974, вып. 157, с. 56—62
73. А. с. № 289396. Устройство для определения и контроля
постоянных времени/ В. В. Злакоманов, Е. Н. Любин, Б. С. Яков-
лев. Опубл, в Б. И., 1971, № 1.
74. А. С. 428354. Нелинейное фазосдвигающее устройство/
В. В. Злакоманов, Л. А. Озеров, Б. С. Яковлев. — Опубл, в Б. И.,
1974, № 18.
ОГЛАВЛЕНИЕ
Предисловие................................................... 3
Глава первая. Методы исследования взаимодействия си-
стем и технических устройств с источниками энергии со-
измеримой мощности........................................ 6
1. Краткая характеристика явлений, обусловленных взаи-
модействием источников энергии и приемников . . 6
2. Особенности исследования динамических систем, рабо
тающих с источниками питания соизмеримой мощности 13
3. Методы исследования динамики взаимодействия источ-
ников энергии и приемников соизмеримой мощности 16
Глава вторая. Динамика взаимодействия процессов про-
изводства, преобразования и потребления энергии . 19
4. Обобщенная динамическая модель активного элемента
динамической системы......................................19
5. Динамическая модель управляемого преобразователя
энергии...................................................46
6. Динамическая модель сложной электроэнергетической
системы с источником энергии ограниченной мощности 55
Глава третья. Иммитансный метод анализа динамических
свойств автономных электроэнергетических систем . 61
7. Дифференциальные уравнения движения электроэнерге-
тической системы с многоступенчатым преобразованием
энергии...................................................61
8. Обобщенная иммитансная динамическая модель элек-
троэнергетической системы.................................73
9. Анализ динамических свойств электроэнергетической
системы на основе обобщенных иммитансных характе-
ристик ...................................................90
10. Анализ процессов регулирования отдельных систем
автоматического управления с учетом их взаимосвязи
через общий источник энергии..............................102
Г1. Особенности анализа динамики электроэнергетической
системы при параллельной работе источников энергии
на общую нагрузку......................................107
Глава четвертая. Вопросы проектирования сложных
электроэнергетических систем с источником энергии огра-
ниченной мощности ........................113
12. Выбор источника питания и его параметров для задан-
ной группы приемников....................................113
173
13. Коррекция ДйнамИческйх свойств источника питания 121
14. Коррекция динамических свойств отдельных систем
автоматического управления электроэнергетической си-
стемы .................................................. .130
Глава пятая. Методы экспериментального определения и
контроля динамических характеристик составных частей
электроэнергетических систем .... 139
15. Экспериментальное определение иммитансных частотных
характеристик источников энергии и их приемников 139
16. Экспериментальное определение частотных характери-
стик составных частей электроэнергетической системы 142
17. Автоколебательный метод экспериментального опреде-
ления динамических характеристик элементов и систем
ЭЭС . 145
18. Контроль динамических свойств элементов и систем
автономных электроэнергетических систем . 159
Список литературы............................................168
Злакоманов В. В., Яковлев Б. С.
3-67 Взаимодействие динамических систем с источ-
никами энергии. — М.: Энергия, 1980.— 176 с., ил.
45 к.
Рассматриваются инженерные методы математического описания,
экспериментальных исследований, анализа и контроля динамических
свойств’ многоэлементных комплексов — автономных электроэнергети-
ческих систем с 'многоступенчатым преобразованием энергии. Разра-
ботка указанных вопросов базируется на представлении процессов
взаимодействия приемников с источниками энергии и . взаимосвязи
разнообразных динамических систем через общий источник энергии
единой многосвязной динамической моделью, для описания которой
применены матричные уравнения. Исследование динамики подобных
систем производится на основе экспериментальных иммитансных ча-
стотных характеристик.
Для инженерно-технических работников, занимающихся разработ-
кой автоматических систем и средств’ управления, а также систем
электроснабжения различного назначения.
30501-435
05Ц01)-80 163”80» 1502010000
ББК 32.965
6Ф6.5
ВЕНИАМИН ВАСИЛЬЕВИЧ ЗЛАКОМАНОВ
[БОРИС СЕРГЕЕВИЧ ЯКОВЛЕВ)
ВЗАИМОДЕЙСТВИЕ ДИНАМИЧЕСКИХ СИСТЕМ
С ИСТОЧНИКАМИ ЭНЕРГИИ
Редактор В. К- Герасимов
Редактор издательства Л. Д. Никулина
Обложка художника В. П. Осипова
Технический редактор Л. В. Иванова
Корректор И. Л. Володяева
ИБ 52
Сдано в набор 16.05.80 Подписано в печать 26.08.80 Т-12475
Формат 84 X 1О8'/32 Бумага типографская № 2 Гарн. шрифта литературная
Печать высокая Усл. печ. л. 9,24 Уч.-изд. л. 9,15
Тираж 2600 экз. Заказ 677 Цена 45 к.
Издательство «Энергия», 113114, Москва, М-114, Шлюзовая наб., 10
Московская типография № 10 Союзполиграфпрома при Государствен-
ном комитете СССР по делам издательств, полиграфии и книжной
Торговли- 113И4, Москва, М-114, Шлюзовая наб-» 10