/




















Автор: Качурин В.К. Брагин А.В. Ерунов Б.Г.
Теги: висячие мосты вантовые мосты строительство строительное проектирование мосты мостостроение
Год: 1971

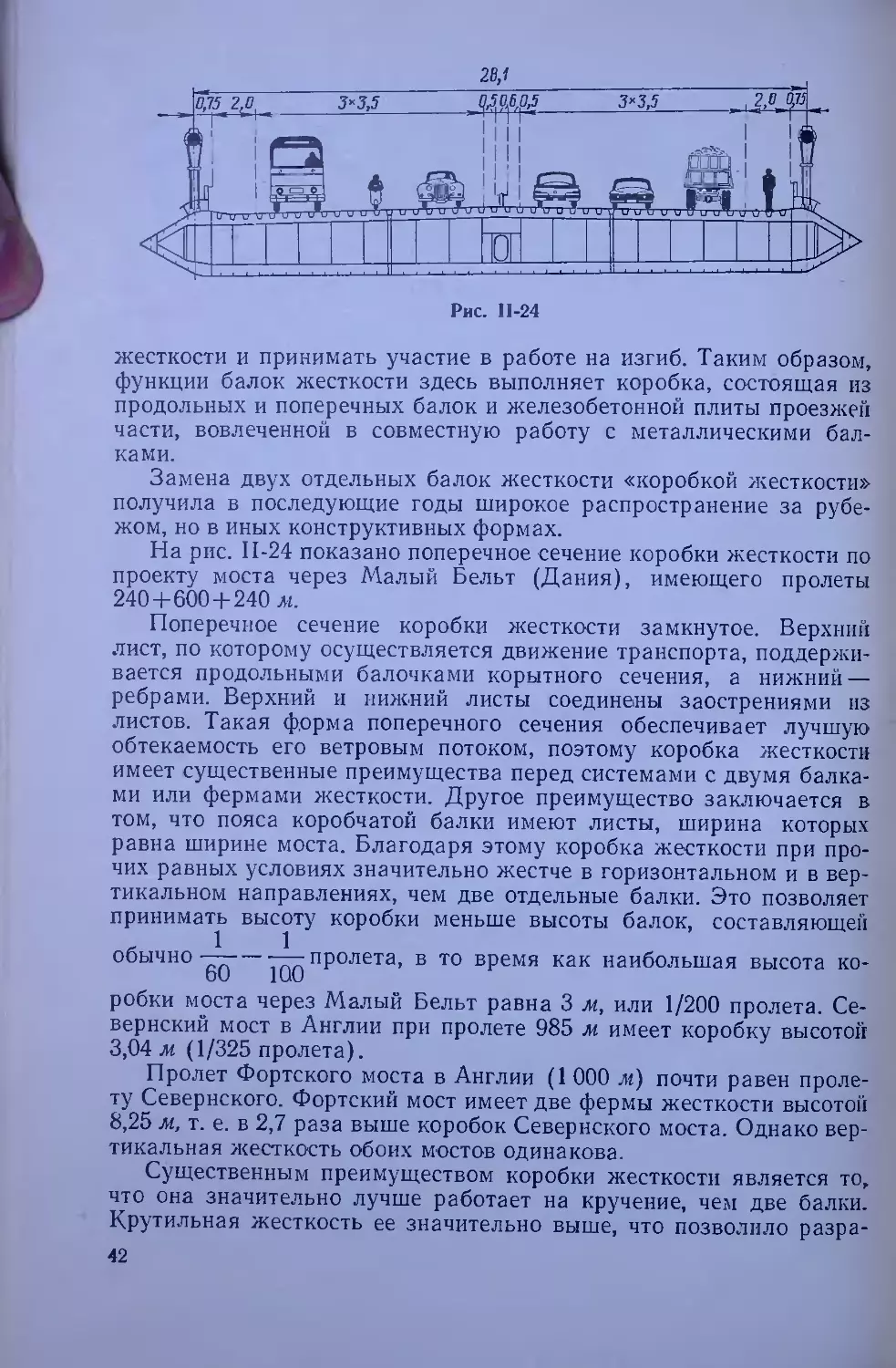
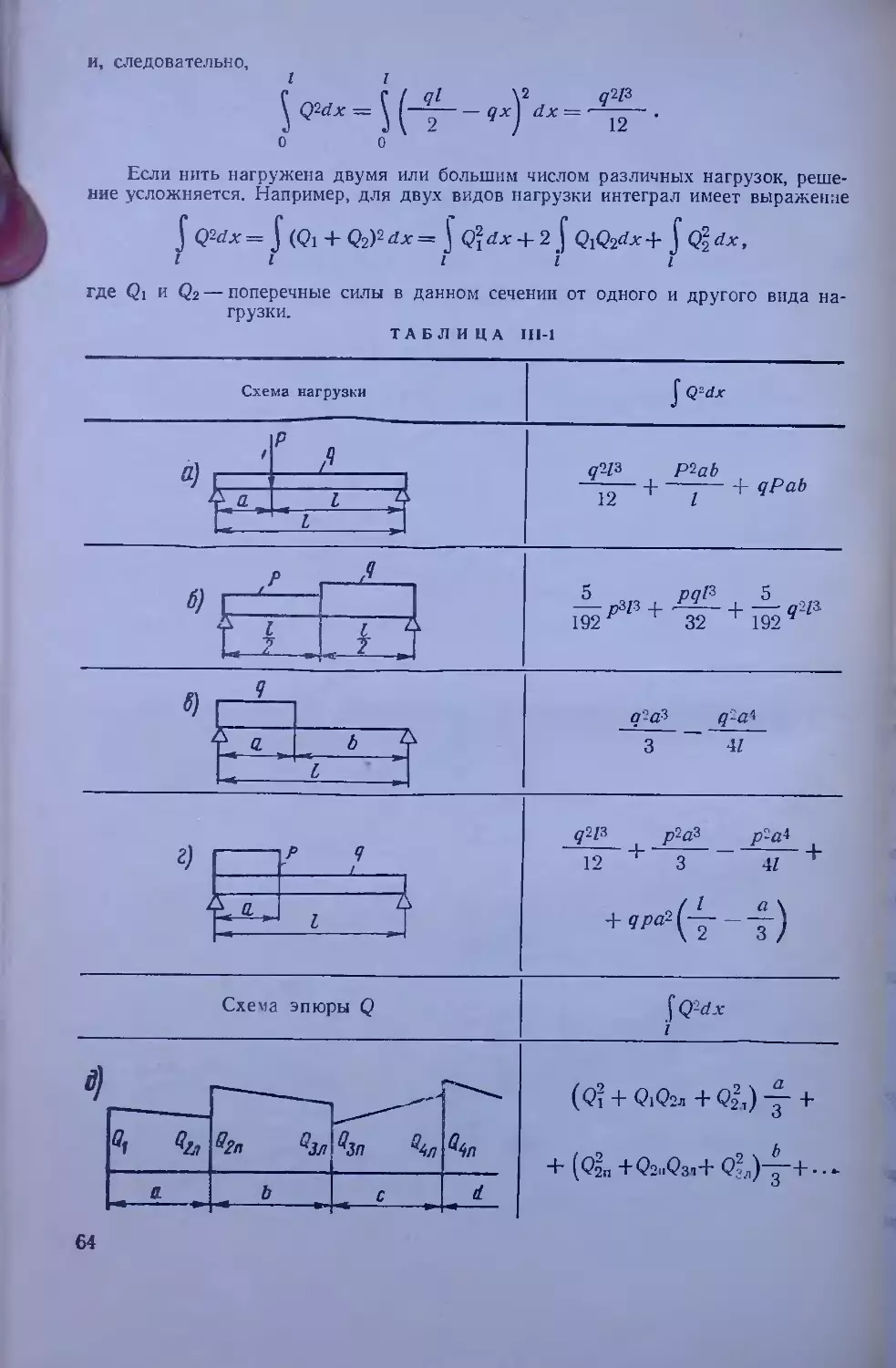
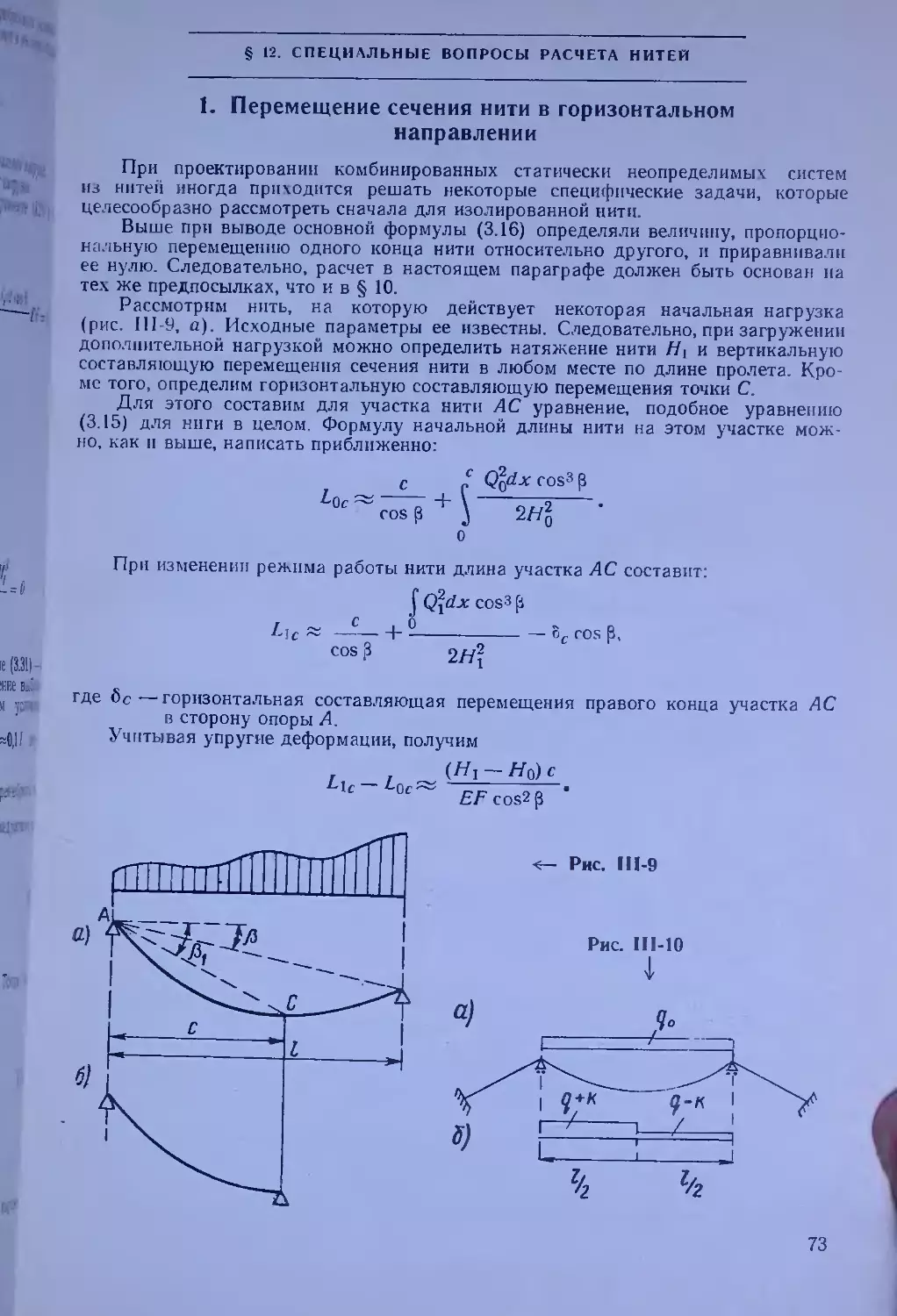
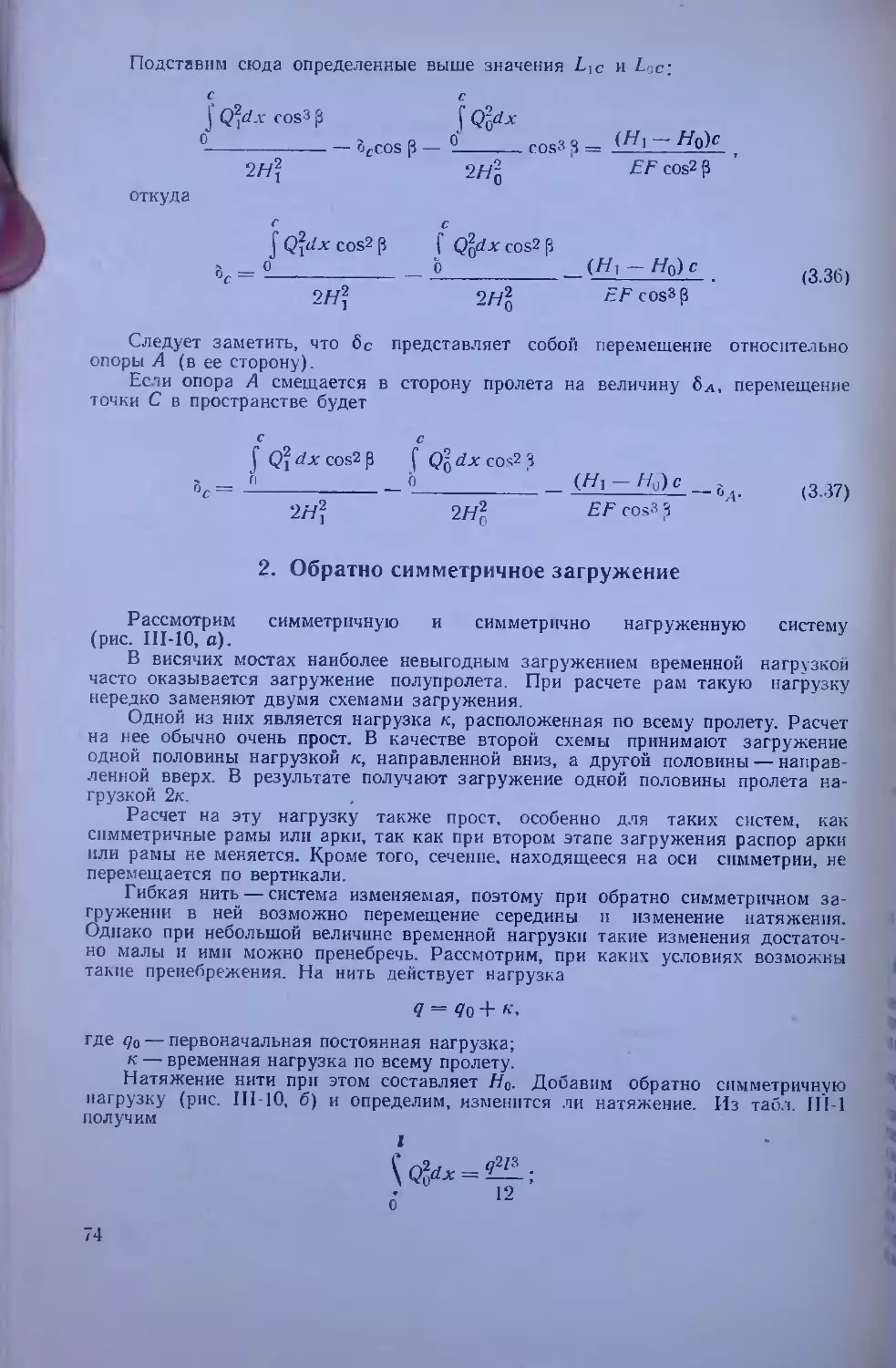
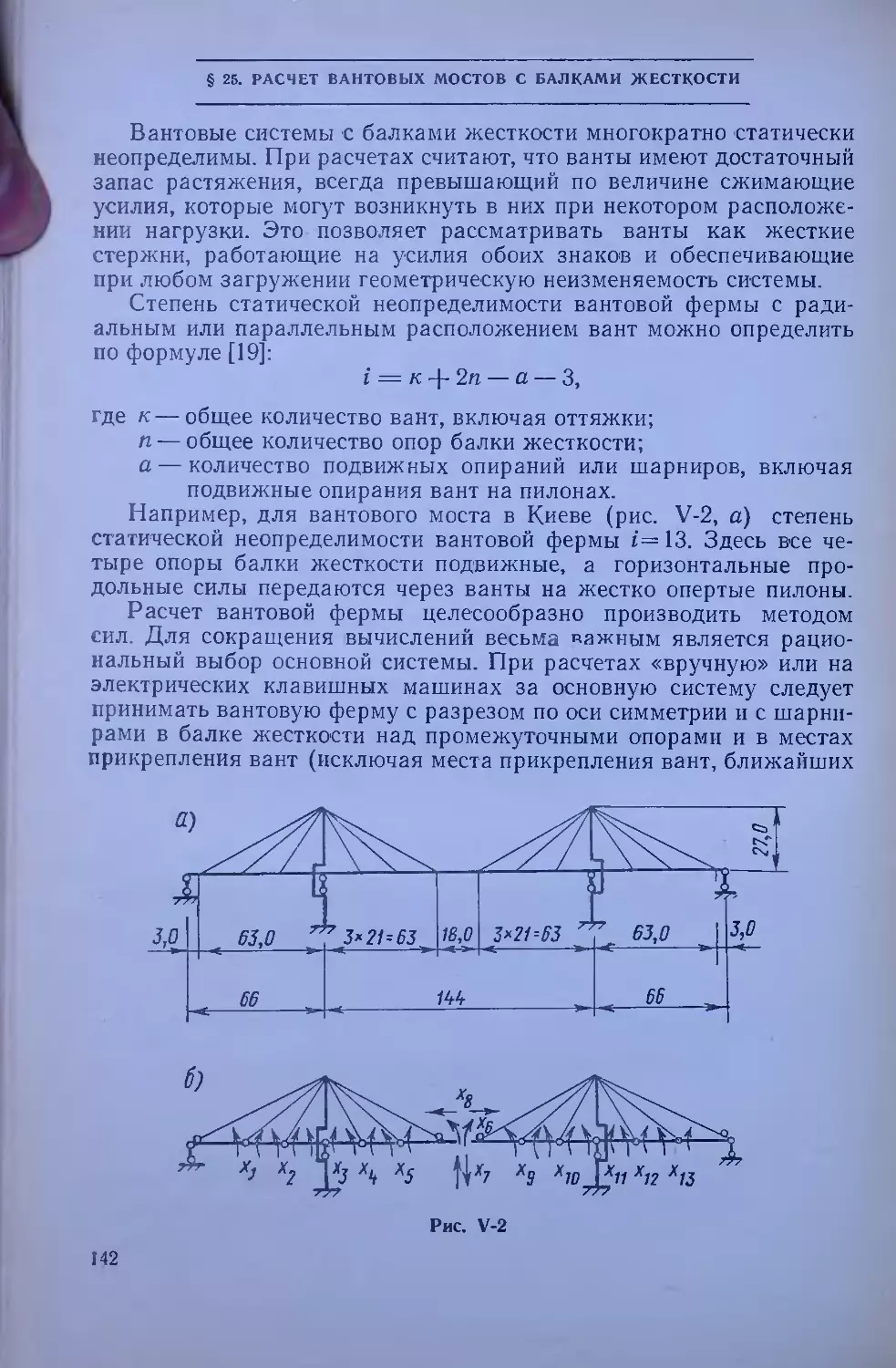
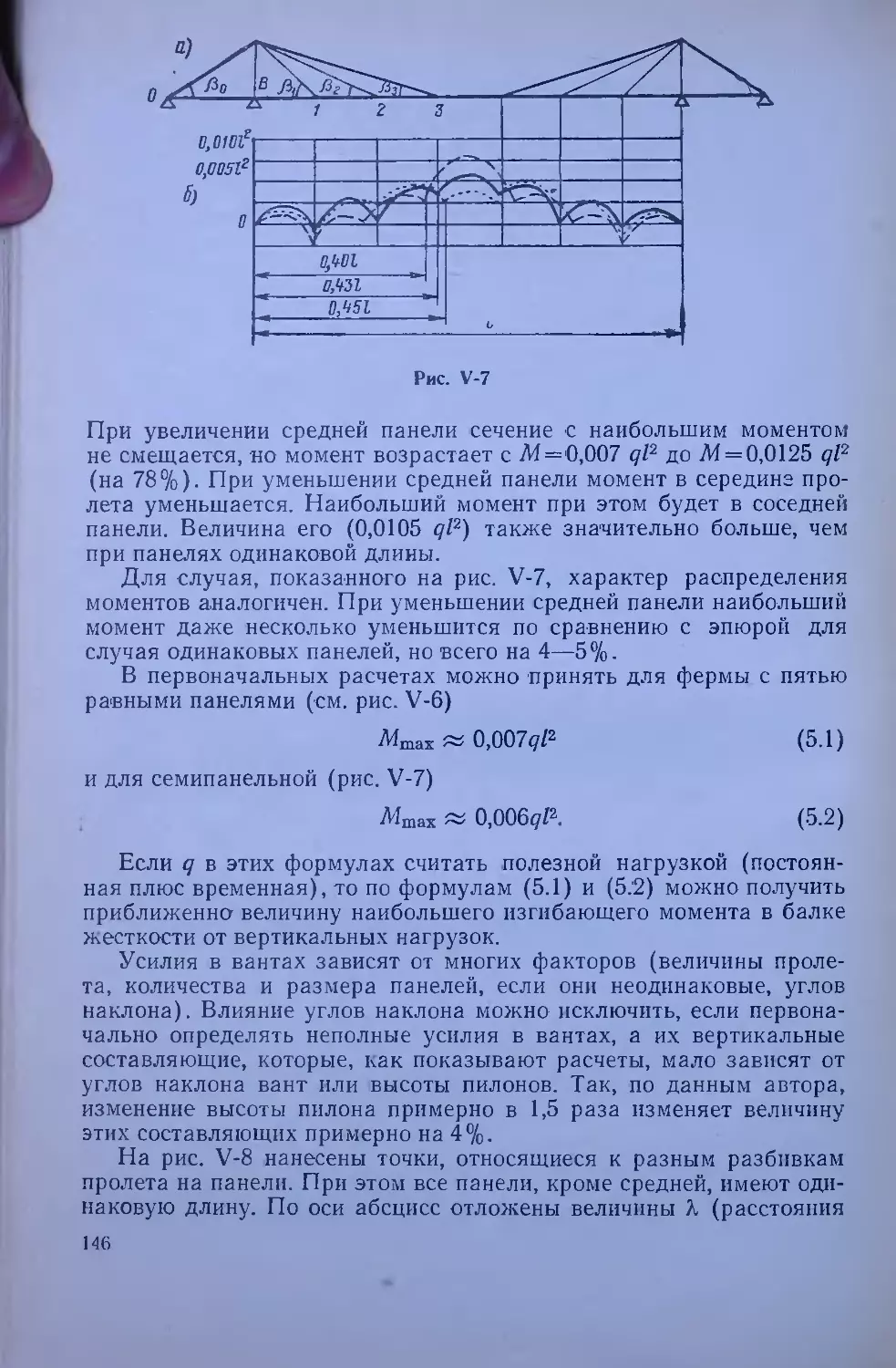
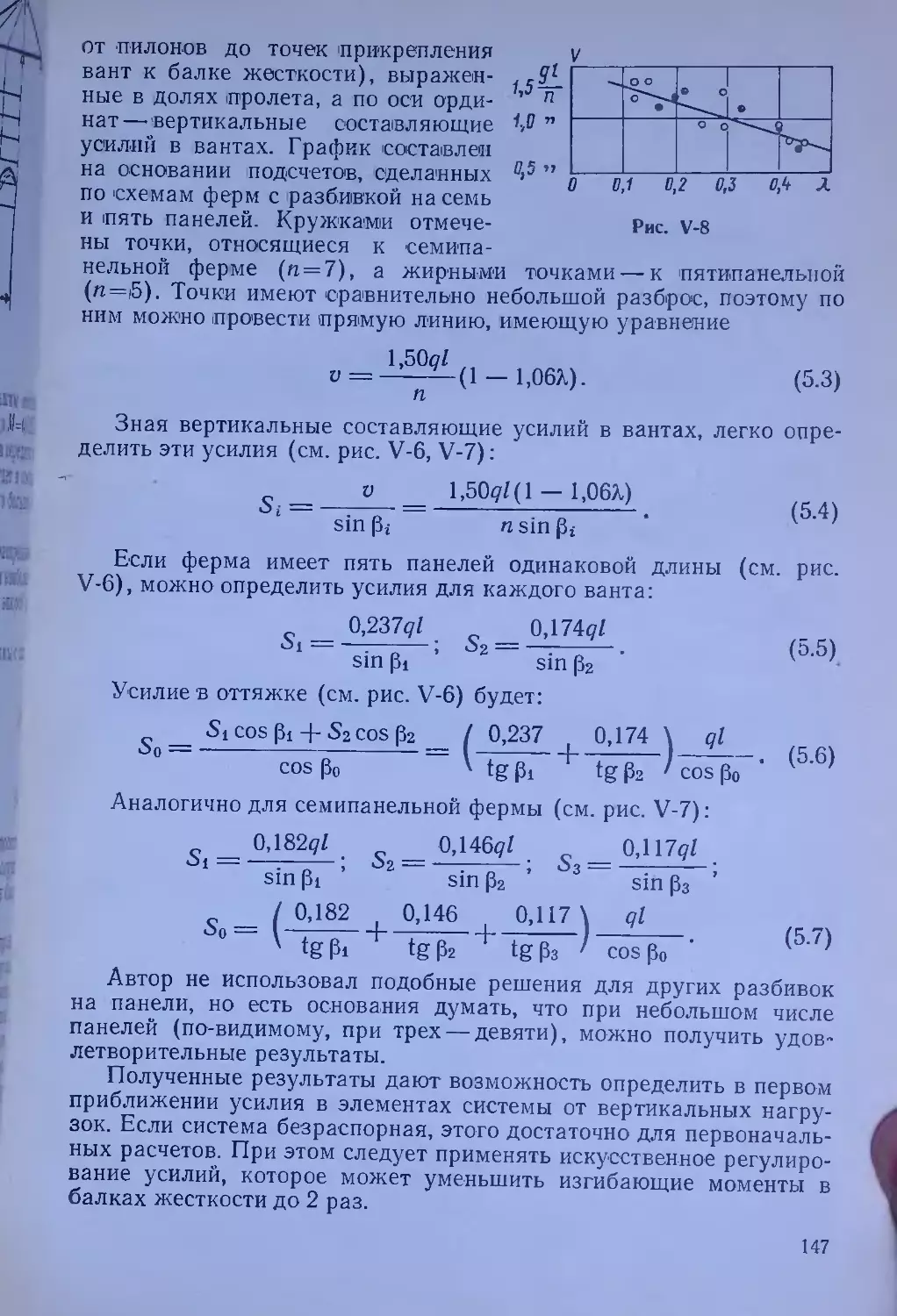
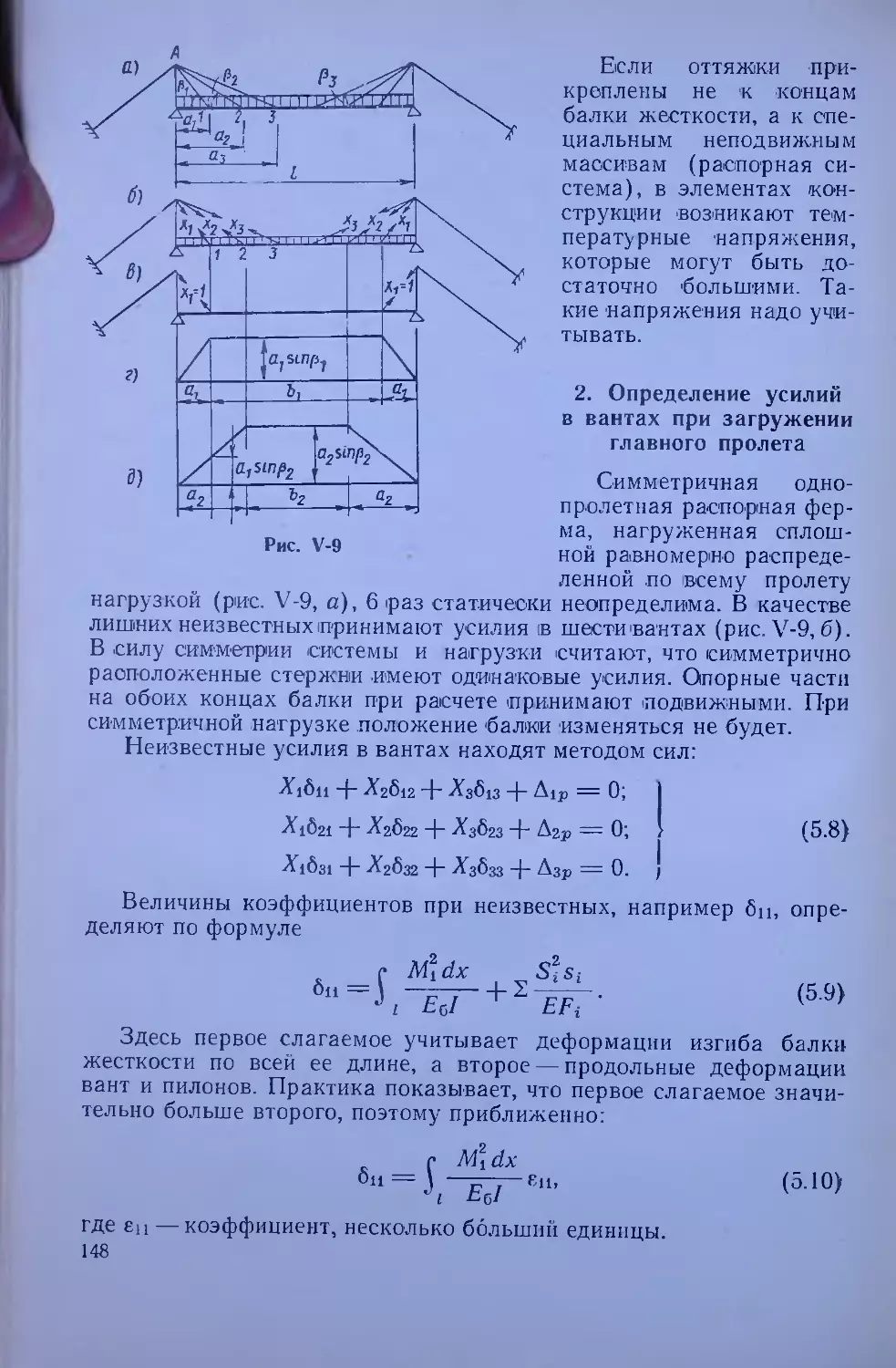
Текст
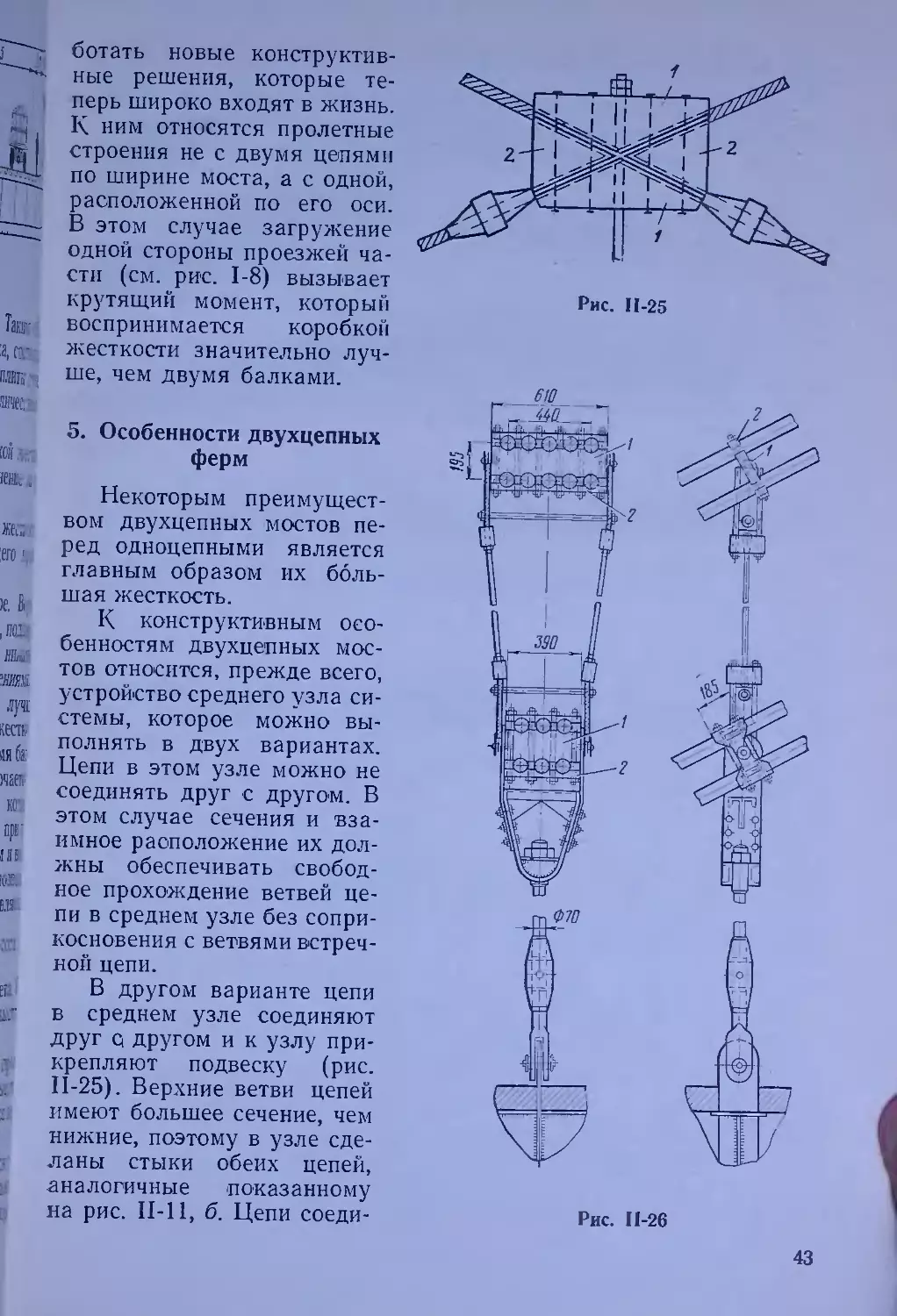
В.Н.КАЧУРИН А.В.БРАГИН, Б.Г.ЕРУНО
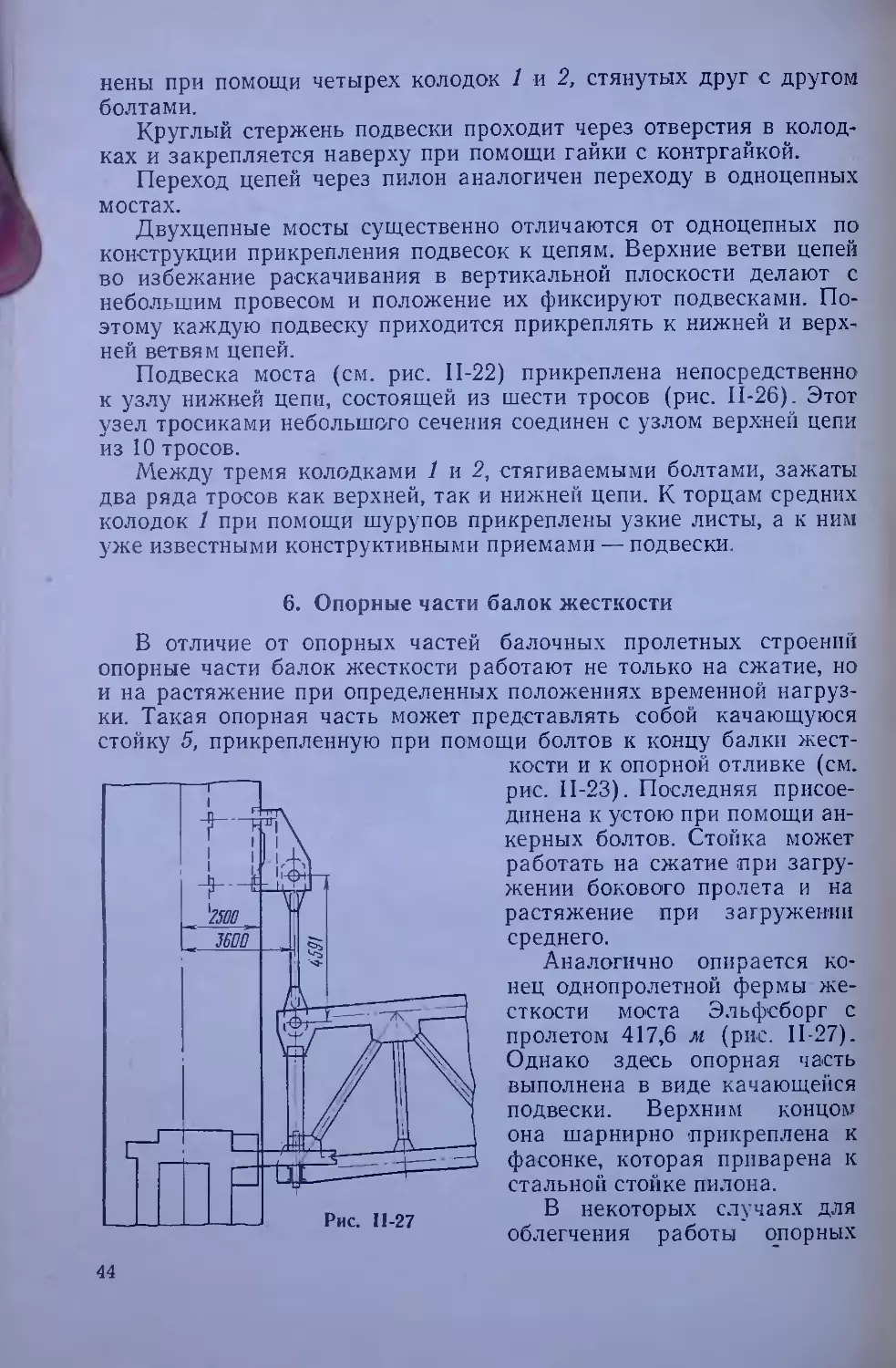
ПРОЕКТИРОВАВ
ВИСЯЧИХ
БАЙТОВЫХ
МОСТОВ
ИЗДАТЕЛЬСТВО -ТРАНСПОРТ • 1971
В. К. КАЧУРИН, А. В. БРАГИН, Б. Г. ЕРУНОВ
ПРОЕКТИРОВАНИЕ
ВИСЯЧИХ
И
БАЙТОВЫХ
МОСТОВ
под общей редакцией
Д-РА ТЕХН. НАУК ПРОФ. В. К. КАЧУРИНА
ИЗДАТЕЛЬСТВО «ТРАНСПОРТ» МОСКВА 1971
УДК 624.5.001.2
Проектирование висячих и вантовых мостов.
К а ч у р и н В. К., Б р а г и н А. В., Е р у-
нов Б. Г., Изд-во «Транспорт», 1971,
стр. 1—280.
В книге освещаются вопросы эскизного и
детального проектирования висячих и
вантовых мостов, в том числе способы расчета,
основные положения конструирования и
некоторые характерные вопросы, связанные с
производством работ и влияющие на приемы
конструирования и расчета.
Уделено внимание приближенным способам
расчета, необходимым для назначения
основных размеров статически неопределимых
систем, в том числе висячих.
Наряду с системами, распространенными в
отечественной и зарубежной практике, в работе
рассмотрены некоторые решения, не нашедшие
пока практического применения. Но они могут
помочь инженеру-проектировщику в
изысканиях новых путей и новых систем.
Книга предназначена для
инженеров-проектировщиков и студентов. Рис. 163, табл. 12,
библ. 64.
ОБОЗНАЧЕНИЯ
I—пролет фермы;
/ — стрелка цепи (нити, пояса);
q — постоянная погонная нагрузка;
р — погонная нагрузка,
заменяющая действие подвесок;
к — погонная временная нагрузка;
кв — погонная временная
нормативная нагрузка;
Е—модуль упругости материала;
F — площадь сечения стержня;
/ — момент инерции балки;
Y — вес единицы объема
материала;
■ф — конструктивный коэффициент;
g — ускорение силы тяжести;
т — погонная масса пролетного
строения;
о — частота свободных
вертикальных колебании пролетного
строения;
(Иг — частота свободных
горизонтальных колебаний;
Ыкр — частота свободных крутильных
колебаний;
0 — частота вынужденных
колебаний.
3-18-1
67-71
ПРЕДИСЛОВИЕ
Предлагаемая вниманию читателя работа посвящена вопросам
проектирования. Проектирование сооружений и, в частности,
мостов представляет собой чрезвычайно сложный процесс.
Современный проектировщик должен знать конструирование, способы
расчета сооружений и методы их строительства, а также свойства
применяемых материалов, их поведение в сооружении, условия
эксплуатации сооружения.
Ни один из вопросов проектирования нельзя исключить из
полного комплекса решения, но все же самым важным этапом
проектирования авторы считают рождение идеи сооружения. Уже здесь
в какой-то мере должны быть рассмотрены удобство эксплуатации
Митинг; сооружения, конструирование его узлов и элементов, строительство
;п11; ' и его организация, архитектурное оформление и экономика. Это
фолегного творческий этап проектирования, когда в наибольшей степени
нужны и широкий кругозор проектировщика, и знание обстановки и,
Твоя главное> 'инициатива и творчество.
Следует признать, что в отечественной специальной литературе
гор № существует довольно большое количество книг, носящих названия
«Проектирование» того или иного вида мостов. Однако в некоторых
ФУ11*1 книгах можно найти только конструктивные решения, в других —
Ь1Г„ - конструктивные решения и расчеты. Это ближе к проектированию,
но все же не проектирование, а только его этапы. Этапы очень
полезные и нужные, но, может быть, не самые важные.
Самым важным и самым главным этапом мы считаем этап
рождения идеи сооружения.
3
Но можно ли этот этап рождения идеи сооружения уложить в
рамки монографии? К этому нужно стремиться, это в какой-то
степени достижимо. Первые очень плодотворные пути в этом
направлении показал в своих работах акад. Г. П. Передерни. Его
работы были написаны в соответствии с требованиями того времени.
Теперь появились новые материалы, на основе которых 'и помимо
них разработаны новые конструктивные решения. Поэтому идеи,
высказанные Г. П. Передернем, стали требовать дополнения.
Авторы надеются, что этому в какой-то степени послужит предлагаемая
работа.
В заключение полезно сказать несколько слов о построении
книги.
Составление проекта начинается, как известно, с составления
вариантов и выбора решения. Казалось, с этого и следовало
начинать книгу. Между тем, эскизное проектирование помещено в самом
конце ее. Сделано это по той причине, что решения последнего
раздела основаны на выводах предшествующих глав. Чтобы данные
решения не оставались бездоказательными, эскизное
проектирование и дано последним.
Поэтому при полном комплексе проектирования следует
начинать с последнего раздела, затем переходить к вопросам расчета
и дальше к конструированию.
Необходимо отметить, что любое пролетное строение моста
является пространственной системой. В тех случаях, когда оно
имеет две фермы, расположенные в вертикальных плоскостях и
соединенные друг с другом проезжей частью и соответствующими
связями, предположение о распределении вертикальных нагрузок
по закону рычага дает, как известно, достаточно точные
результаты. Этот прием в дальнейшем использован в книге. Когда закон
рычага не может дать удовлетворительных результатов, сделаны
соответствующие оговорки и применены другие приемы передачи
вертикальных нагрузок на элементы пролетного строения.
Отдельные части книги написаны: § 6, 25 и гл. VII — А. В. Бра-
гиным, § 30 — Б. Г. Еруновым, остальной материал — В. К. Качу-
риным.
Авторы считают своим долгом выразить искреннюю
благодарность проф. К. Г. Протасову, доц. Ю. М. Сильницкому и проф.
Е. И. Крыльцову за ряд ценных замечаний, сделанных ими при
просмотре рукописи и с благодарностью использованных авторами.
РАЗДЕЛ I
СИСТЕМЫ И КОНСТРУКЦИИ
ГЛАВА I.
системы висячих и байтовых мостов
§ I. ОБЩИЕ СВЕДЕНИЯ
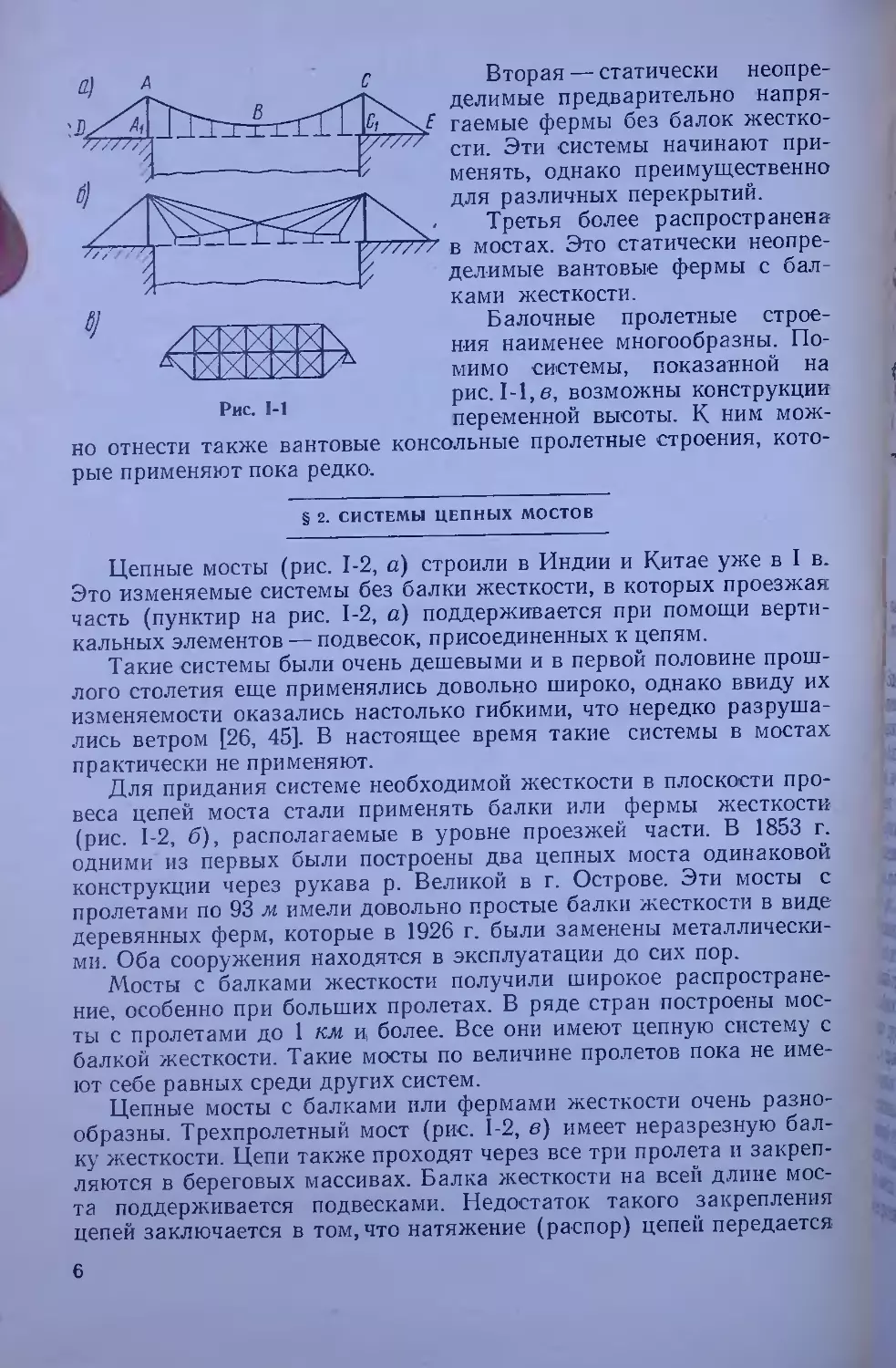
Висячие системы можно разделить на две основные группы.
К первой относятся мосты типа, показанного на рис. 1-1, а. Это
давно известная система, в которой элемент ABC изготавливали из
отдельных звеньев, объединенных в цепь.
Вместе с оттяжками AD и СЕ и пилонами АА\ и СС\ цепь
воспринимала всю нагрузку. Такие мосты называли цепными. В
настоящее время элемент ABC почти никогда не конструируют в виде
цепи, а делают из тросов, и удобное название «цепной» почти не
встречается. Однако элемент ABC по своему очертанию очень
близок к цепной линии, поэтому в данной работе термин «цепной» мост
сохраняется.
В отличие от цепных мосты второй группы (рис. 1-1, б) или им
подобные называют Байтовыми висячими или просто Байтовыми
мостами. Здесь вертикальную нагрузку воспринимает уже не цепь,
а совокупность раскосов и поясов, каждый из которых является
необходимым.
К невисячим системам (рис. 1-1, е) относятся Байтовые балочные
пролетные строения (система К. Г. Протасова). Она состоит из
горизонтальной жесткой распорки, жестких стоек и тросовых раскосов
и поясов.
Наиболее разнообразны (чем цепные) вантовые висячие мосты,
которые разделяют на три группы.
Первая — статически определимые вантовые фермы, не
отличающиеся многообразием. Сейчас их вытесняют другие системы.
5
Вторая — статически
неопределимые предварительно
напрягаемые фермы без балок
жесткости. Эти системы начинают
применять, однако преимущественно
для различных перекрытий.
Третья более распространена
J/V/WV в мостах. Это статически неопре-
^ делимые вантовые фермы с
балками жесткости.
Балочные пролетные
строения наименее многообразны.
Помимо системы, показанной на
рис. 1-1, в, возможны конструкции
переменной высоты. К ним
можно отнести также вантовые консольные пролетные строения,
которые применяют пока редко.
У
Рис. 1-1
§ 2. СИСТЕМЫ ЦЕПНЫХ МОСТОВ
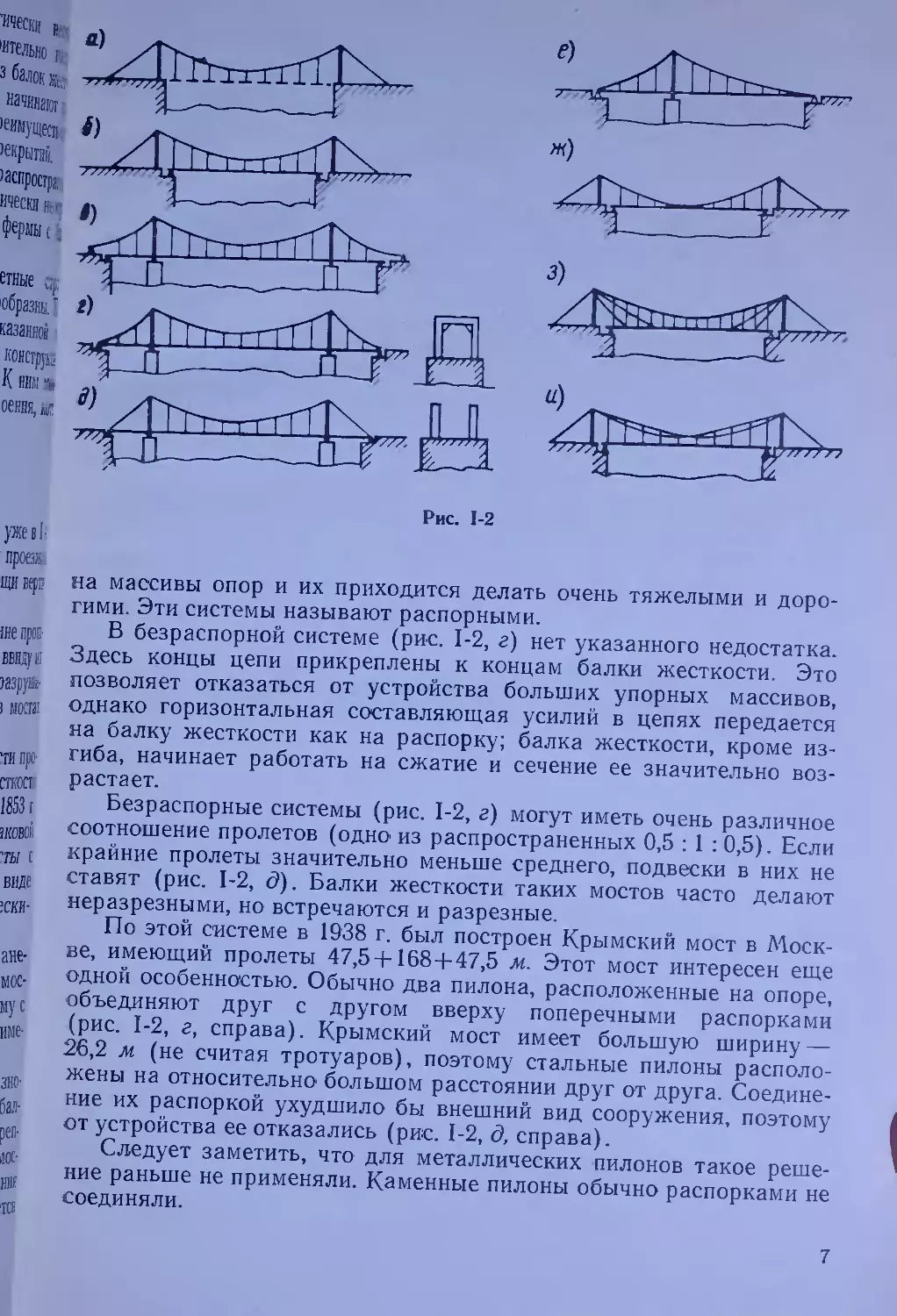
Цепные мосты (рис. 1-2, а) строили в Индии и Китае уже в I в.
Это изменяемые системы без балки жесткости, в которых проезжая
часть (пунктир на рис. 1-2, а) поддерживается при помощи
вертикальных элементов — подвесок, присоединенных к цепям.
Такие системы были очень дешевыми и в первой половине
прошлого столетия еще применялись довольно широко, однако ввиду их
изменяемости оказались настолько гибкими, что нередко
разрушались ветром [26, 45]. В настоящее время такие системы в мостах
практически не применяют.
Для придания системе необходимой жесткости в плоскости
провеса цепей моста стали применять балки или фермы жесткости
(рис. 1-2, б), располагаемые в уровне проезжей части. В 1853 г.
одними из первых были построены два цепных моста одинаковой
конструкции через рукава р. Великой в г. Острове. Эти мосты с
пролетами по 93 м имели довольно простые балки жесткости в виде
деревянных ферм, которые в 1926 г. были заменены
металлическими. Оба сооружения находятся в эксплуатации до сих пор.
Мосты с балками жесткости получили широкое
распространение, особенно при больших пролетах. В ряде стран построены
мосты с пролетами до 1 км и, более. Все они имеют цепную систему с
балкой жесткости. Такие мосты по величине пролетов пока не
имеют себе равных среди других систем.
Цепные мосты с балками или фермами жесткости очень
разнообразны. Трехпролетный мост (рис. 1-2, в) имеет неразрезную
балку жесткости. Цепи также проходят через все три пролета и
закрепляются в береговых массивах. Балка жесткости на всей длине
моста поддерживается подвесками. Недостаток такого закрепления
цепей заключается в том, что натяжение (распор) цепей передается
6
«рытй.
!h
етные i™
'образны."
казашки
KOHCTfc
К ШШ "и
оенвя, mi
3
>ГтттТТТТ>^
^тт-т-ггТТТК,
ГТтттггТГК^
«)
7777?
"С
/?///)
Рис. 1-2
на массивы опор и их приходится делать очень тяжелыми и
дорогими. Эти системы называют распорными.
В безраспорной системе (рис. 1-2, г) нет указанного недостатка.
Здесь концы цепи прикреплены к концам балки жесткости. Это
позволяет отказаться от устройства больших упорных массивов,
однако горизонтальная составляющая усилий в цепях передается
на балку жесткости как на распорку; балка жесткости, кроме
изгиба, начинает работать на сжатие и сечение ее значительно
возрастает.
Безраспорные системы (рис. 1-2, г) могут иметь очень различное
соотношение пролетов (одно из распространенных 0,5 : 1 : 0,5). Если
крайние пролеты значительно меньше среднего, подвески в них не
ставят (рис. 1-2, д). Балки жесткости таких мостов часто делают
неразрезными, но встречаются и разрезные.
По этой системе в 1938 г. был построен Крымский мост в
Москве, имеющий пролеты 47,5+168+47,5 м. Этот мост интересен еще
одной особенностью. Обычно два пилона, расположенные на опоре,
объединяют друг с другом вверху поперечными распорками
(рис. 1-2, г, справа). Крымский мост имеет большую ширину —
26,2 м (не считая тротуаров), поэтому стальные пилоны
расположены на относительно большом расстоянии друг от друга.
Соединение их распоркой ухудшило бы внешний вид сооружения, поэтому
от устройства ее отказались (рис. 1-2, д, справа).
Следует заметить, что для металлических пилонов такое
решение раньше не применяли. Каменные пилоны обычно распорками не
соединяли.
7
Рис. 1-3
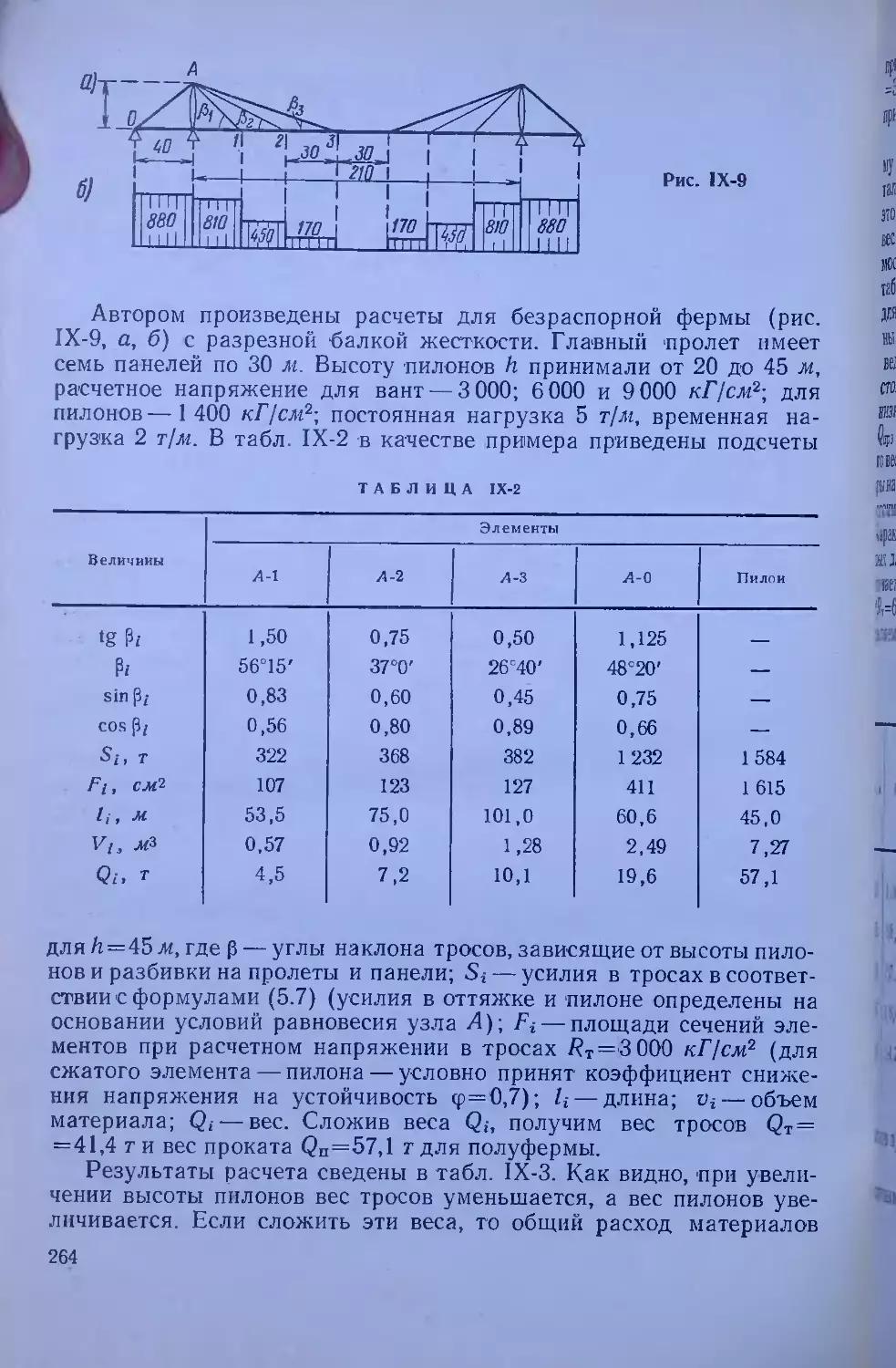
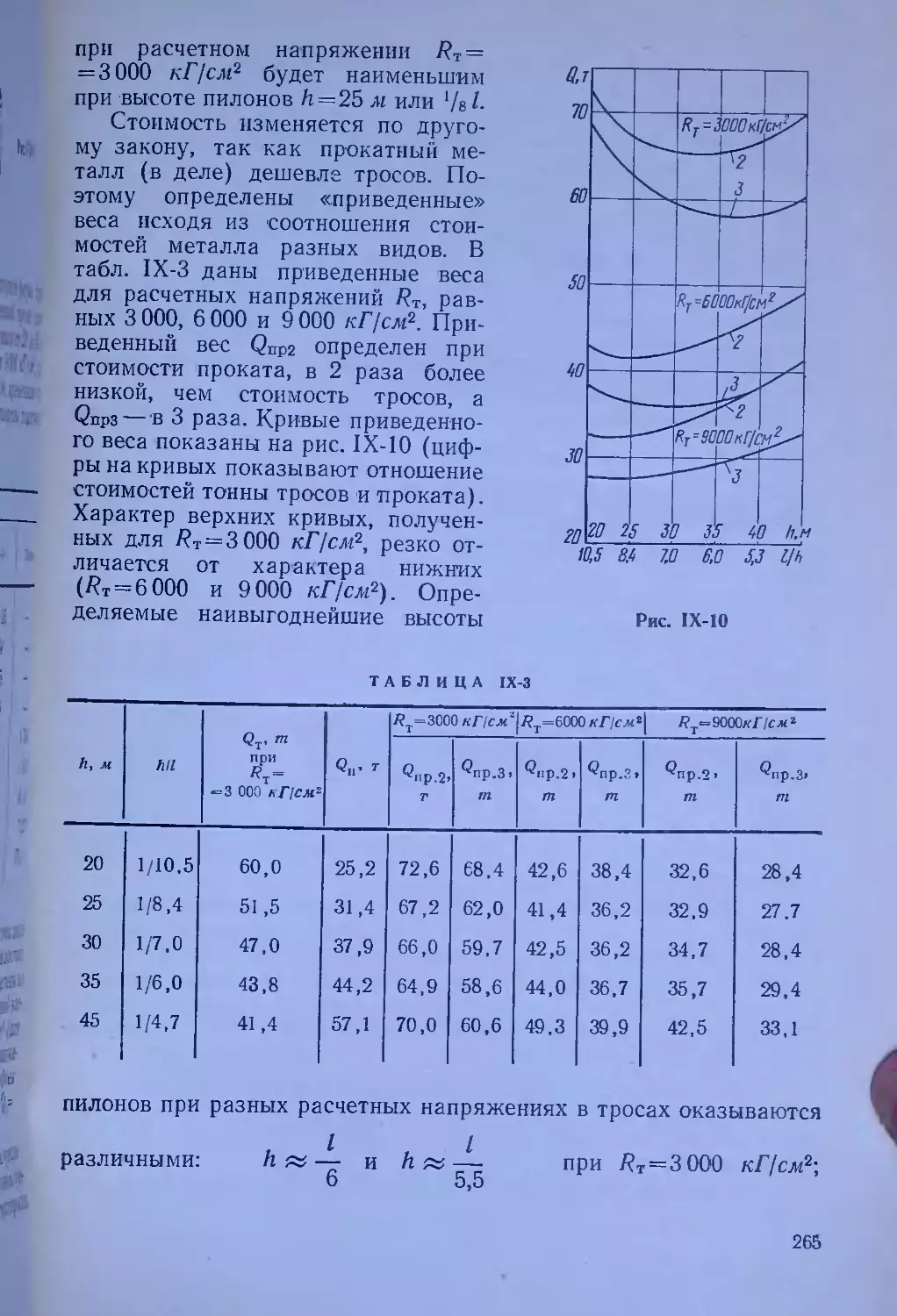
Иногда крайние пролеты имеют различную величину. Тогда
пилон, опирающийся на быки со стороны большего бокового пролета,
приходится делать выше другого. Сооружение оказывается
несимметричным. Системы с числом пролетов более трех и двухпролетные
(рис. 1-2, е) почти не встречаются. Существуют также системы, в
которых для повышения жесткости цепь в середине среднего
пролета прикрепляют к балке (рис. 1-2, ж).
Наибольшие прогибы цепных мостов получают при загружении
полупролета. При этом балка жесткости изгибается по S-образной
кривой и в четвертях пролета возникают большие перемещения. Для
уменьшения их можно применять наклонные ванты на участках
вблизи опор (рис. 1-2, з). Благодаря этому балки жесткости как
бы получают дополнительные упругие опоры вблизи точек
наибольших перемещений. Жесткость системы несколько увеличивается.
Такое решение применяли в прошлом столетии, но большого
распространения оно не получило, в частности, ввиду неблагоприятного
внешнего вида сооружения.
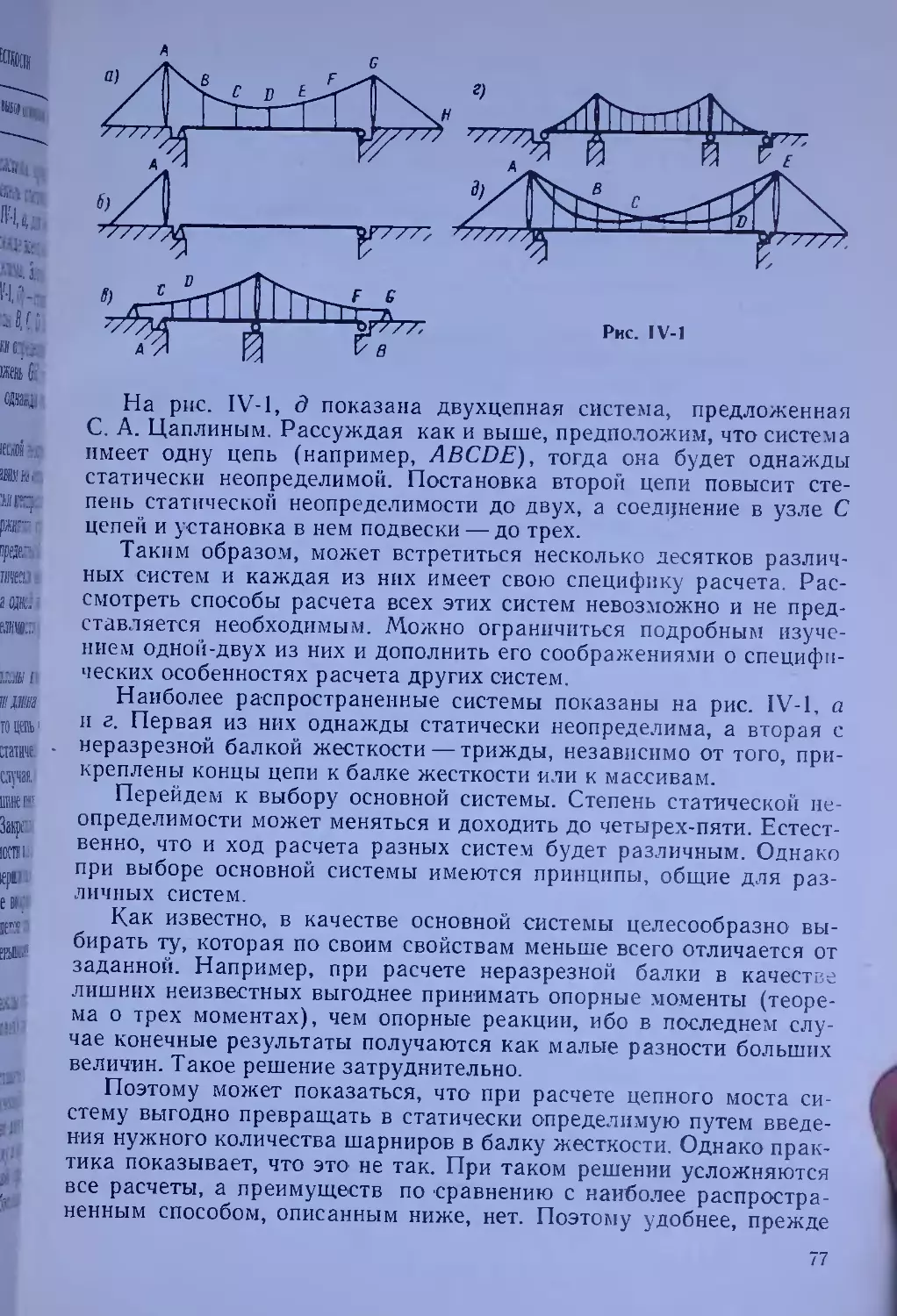
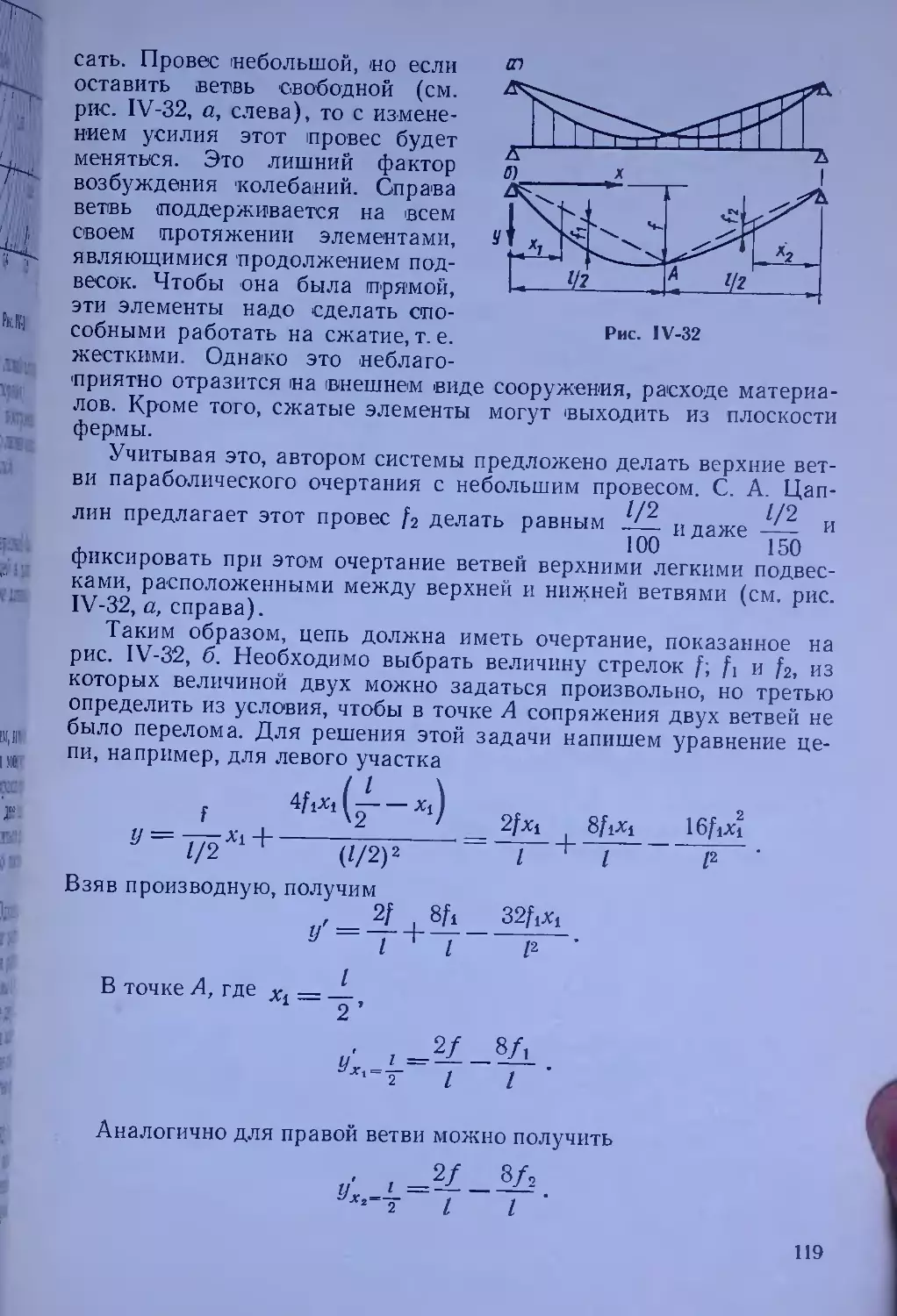
В СССР в 30-х годах С. А. Цаплиным была предложена
интересная система (рис. 1-2, и), которая называется двухцепной.
Очертание каждой цепи соответствует веревочному многоугольнику,
получаемому от загружения полупролета. Поэтому при таком
загружении большая часть нагрузки воспринимается одной из цепей.
Балка жесткости почти не работает и имеет небольшие прогибы,
поэтому выполняют ее легкой. Двухцепные системы могут быть и
трехпролетными [45].
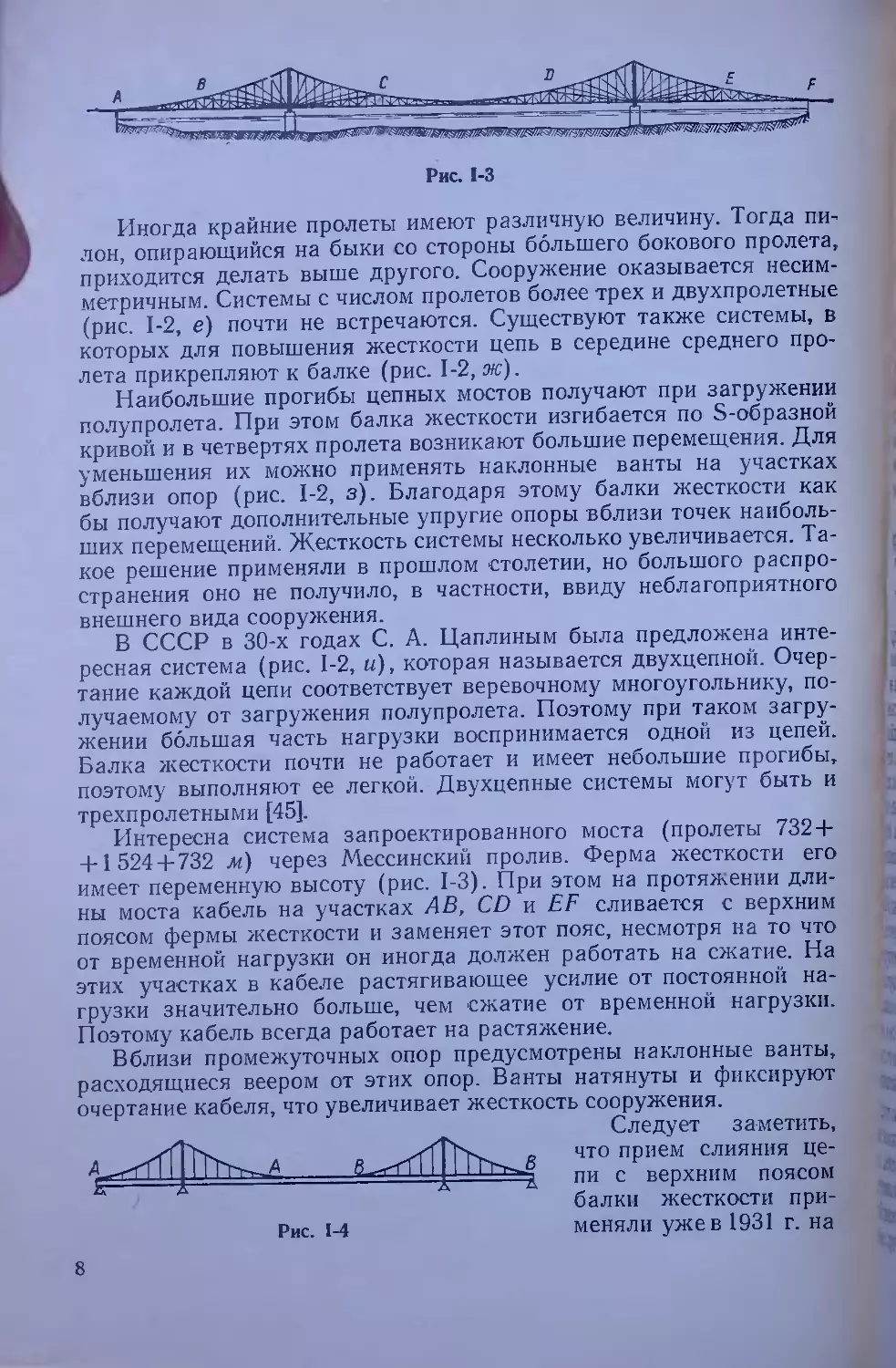
Интересна система запроектированного моста (пролеты 732 +
+ 1524 + 732 м) через Мессинский пролив. Ферма жесткости его
имеет переменную высоту (рис. 1-3). При этом на протяжении
длины моста кабель на участках АВ, CD и EF сливается с верхним
поясом фермы жесткости и заменяет этот пояс, несмотря на то что
от временной нагрузки он иногда должен работать на сжатие. На
этих участках в кабеле растягивающее усилие от постоянной
нагрузки значительно больше, чем сжатие от временной нагрузки.
Поэтому кабель всегда работает на растяжение.
Вблизи промежуточных опор предусмотрены наклонные ванты,
расходящиеся веером от этих опор. Ванты натянуты и фиксируют
очертание кабеля, что увеличивает жесткость сооружения.
^^ Следует заметить,
л ^и^ПТГь^ а р ^-flTtb^ я чт0 прием слияния це-
fri^N|llTh>^ 0^Tni|IITrW[ Пи ^верхним поясом
балки жесткости при-
Рис 1-4 меняли уже в 1931 г. на
8
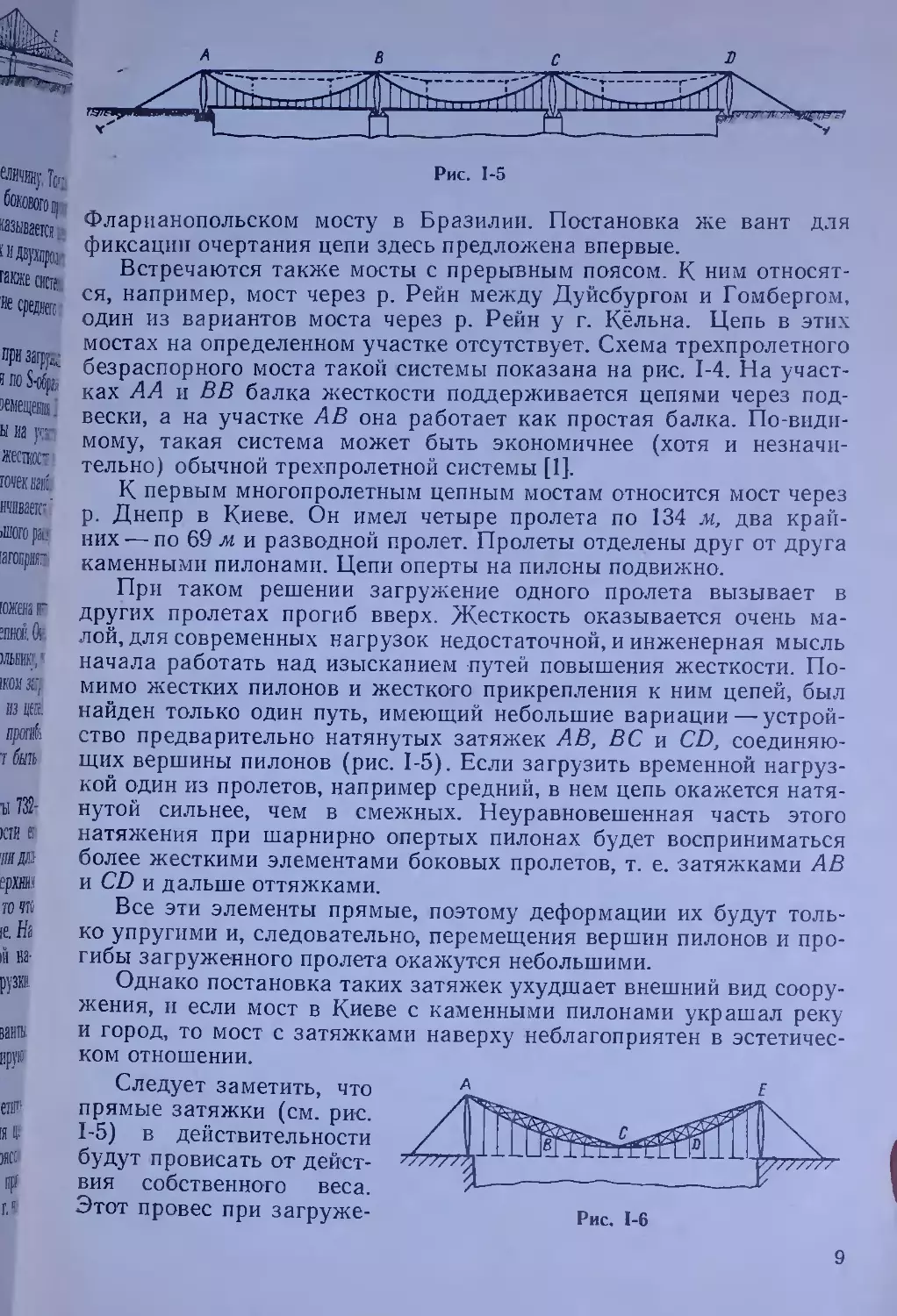
Рис. 1-5
Й.
Фларнанопольском мосту в Бразилии. Постановка же вант для
фиксации очертания цепи здесь предложена впервые.
Встречаются также мосты с прерывным поясом. К ним
относятся, например, мост через р. Рейн между Дуйсбургом и Гомбергом,
один из вариантов моста через р. Рейн у г. Кёльна. Цепь в этих
мостах на определенном участке отсутствует. Схема трехпролетного
безраспорного моста такой системы показана на рис. 1-4. На
участках АА и ВВ балка жесткости поддерживается цепями через
подвески, а на участке АВ она работает как простая балка.
По-видимому, такая система может быть экономичнее (хотя и
незначительно) обычной трехпролетной системы [1].
К первым многопролетным цепным мостам относится мост через
р. Днепр в Киеве. Он имел четыре пролета по 134 м, два
крайних— по 69 ж и разводной пролет. Пролеты отделены друг от друга
каменными пилонами. Цепи оперты на пилоны подвижно.
При таком решении загружение одного пролета вызывает в
других пролетах прогиб вверх. Жесткость оказывается очень
малой, для современных нагрузок недостаточной, и инженерная мысль
начала работать над изысканием путей повышения жесткости.
Помимо жестких пилонов и жесткого прикрепления к ним цепей, был
найден только один путь, имеющий небольшие вариации —
устройство предварительно натянутых затяжек АВ, ВС и СД
соединяющих вершины пилонов (рис. 1-5). Если загрузить временной
нагрузкой один из пролетов, например средний, в нем цепь окажется
натянутой сильнее, чем в смежных. Неуравновешенная часть этого
натяжения при шарнирно опертых пилонах будет восприниматься
более жесткими элементами боковых пролетов, т. е. -затяжками АВ
и CD и дальше оттяжками.
Все эти элементы прямые, поэтому деформации их будут
только упругими и, следовательно, перемещения вершин пилонов и
прогибы загруженного пролета окажутся небольшими.
Однако постановка таких затяжек ухудшает внешний вид
сооружения, и если мост в Киеве с каменными пилонами украшал реку
и город, то мост с затяжками наверху неблагоприятен в
эстетическом отношении.
Следует заметить, что * £
прямые затяжки (см. рис.
1-5) в действительности
будут провисать от
действия собственного веса.
Этот провес при загруже- Рис> \_q
9
нии моста временной нагрузкой несколько изменится, что явится
лишним фактором возбуждения колебаний сооружения.
Чтобы смягчить это явление, в двух-трех местах можно слегка
оттянуть вниз затяжку, как показано пунктиром на рис. 1-5. Это
почти полностью устранит колебания затяжек, но внешний вид
сооружения получится еще более неприглядным. По-видимому, в силу
этих причин многопролетные мосты практически не получили
распространения.
Имеются также некоторые разновидности висячих мостов,
которые можно отнести к цепным. Цепной мост должен иметь цепи,
которые воспринимают вертикальные нагрузки, и балки жесткости,
воспринимающие изгибающие моменты при неравномерном загру-
жении пролета. Очевидно, обе эти функции может выполнять один
элемент, т. е. жесткая цепь.
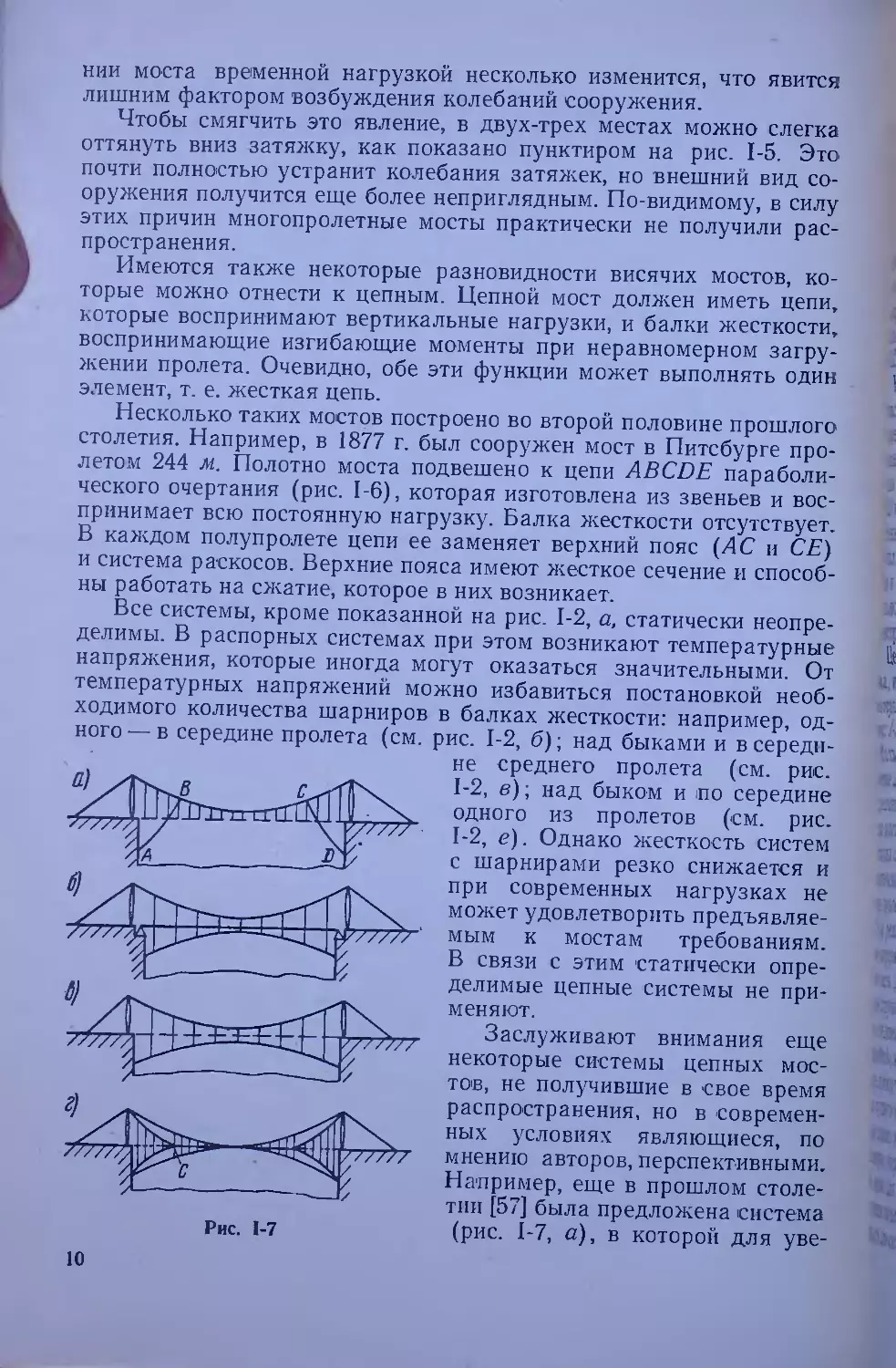
Несколько таких мостов построено во второй половине прошлого
столетия. Например, в 1877 г. был сооружен мост в Питсбурге
пролетом 244 м. Полотно моста подвешено к цепи ABCDE
параболического очертания (рис. 1-6), которая изготовлена из звеньев и
воспринимает всю постоянную нагрузку. Балка жесткости отсутствует.
В каждом полупролете цепи ее заменяет верхний пояс (АС и СЕ)
и система раскосов. Верхние пояса имеют жесткое сечение и
способны работать на сжатие, которое в них возникает.
Все системы, кроме показанной на рис. 1-2, а, статически
неопределимы. В распорных системах при этом возникают температурные
напряжения, которые иногда могут оказаться значительными. От
температурных напряжений можно избавиться постановкой
необходимого количества шарниров в балках жесткости: например,
одного — в середине пролета (см. рис. 1-2, б); над быками и в
середине среднего пролета (см. рис.
1-2, в); над быком и по середине
одного из пролетов (см. рис.
1-2, <?). Однако жесткость систем
с шарнирами резко снижается и
при современных нагрузках не
может удовлетворить
предъявляемым к мостам требованиям.
В связи с этим статически
определимые цепные системы не
применяют.
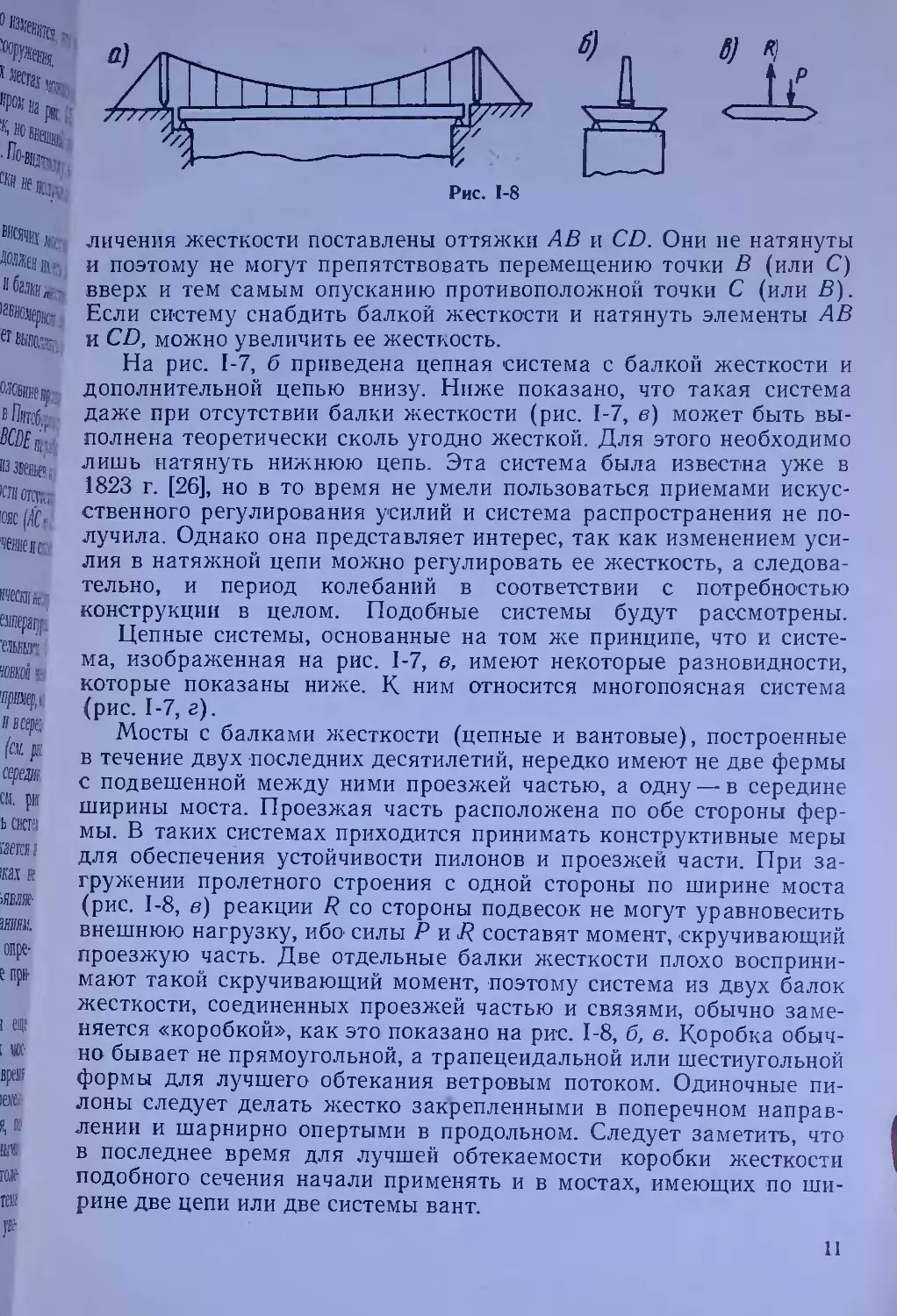
Заслуживают внимания еще
некоторые системы цепных
мостов, не получившие в свое время
распространения, но в
современных условиях являющиеся, по
мнению авторов, перспективными.
Например, еще в прошлом
столетии [57] была предложена система
Рис 1-7 (Рис- 1-7, а), в которой для уве-
10
a)
IГ
77777.
Г
i) ч
U
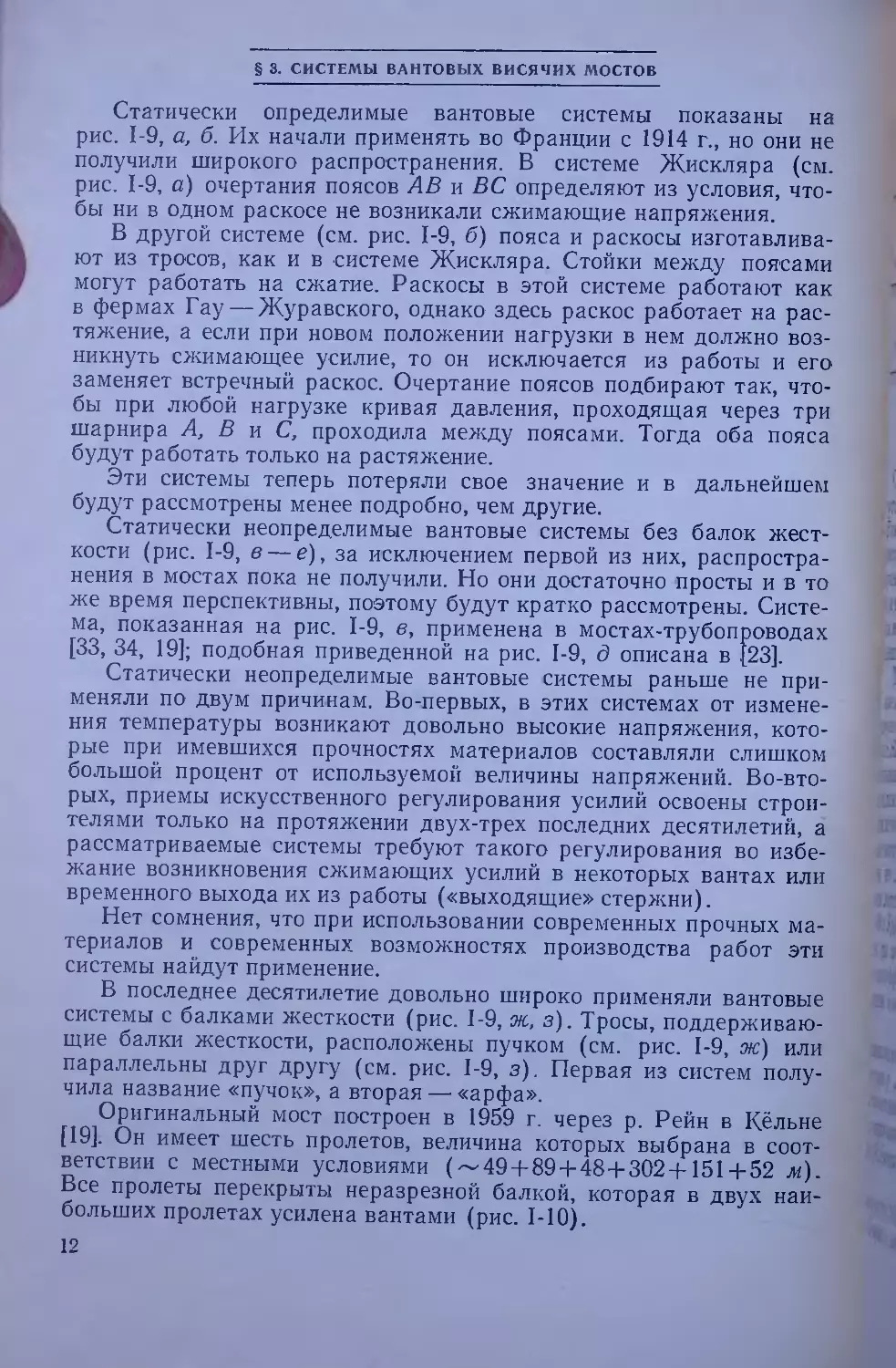
Рис. 1-8
i личення жесткости поставлены оттяжки АВ и CD. Они не натянуты
и поэтому не могут препятствовать перемещению точки В (или С)
вверх и тем самым опусканию противоположной точки С (или В).
Если систему снабдить балкой жесткости и натянуть элементы АВ
и CD, можно увеличить ее жесткость.
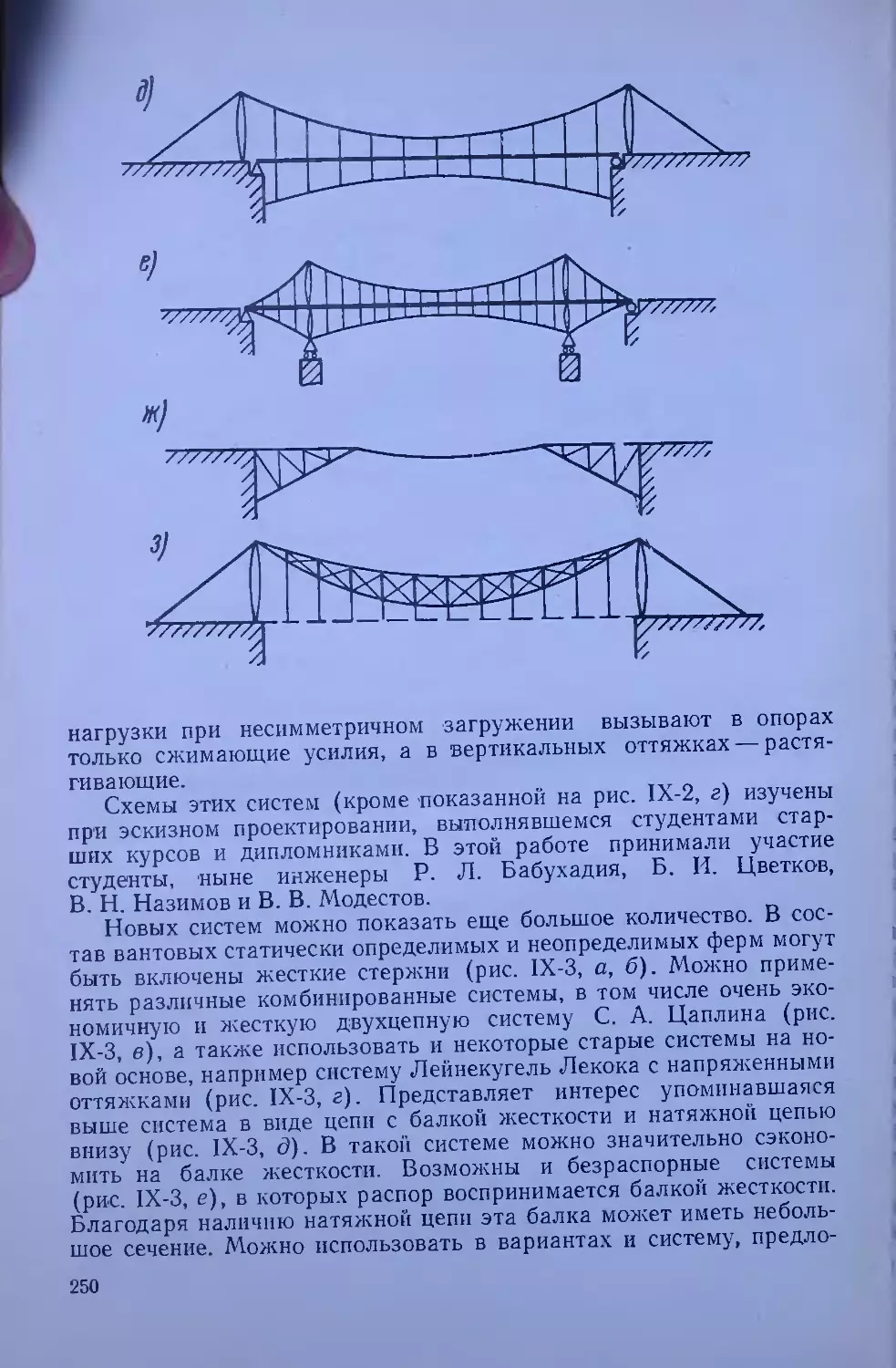
На рис. 1-7, б приведена цепная система с балкой жесткости и
дополнительной цепью внизу. Ниже показано, что такая система
даже при отсутствии балки жесткости (рис. 1-7, в) может быть
выполнена теоретически сколь угодно жесткой. Для этого необходимо
лишь натянуть нижнюю цепь. Эта система была известна уже в
1823 г. [26], но в то время не умели пользоваться приемами
искусственного регулирования усилий и система распространения не
получила. Однако она представляет интерес, так как изменением
усилия в натяжной цепи можно регулировать ее жесткость, а
следовательно, и период колебаний в соответствии с потребностью
конструкции в целом. Подобные системы будут рассмотрены.
Цепные системы, основанные на том же принципе, что и
система, изображенная на рис. 1-7, в, имеют некоторые разновидности,
которые показаны ниже. К ним относится многопоясная система
(рис. 1-7, г).
Мосты с балками жесткости (цепные и Байтовые), построенные
в течение двух последних десятилетий, нередко имеют не две фермы
с подвешенной между ними проезжей частью, а одну —в середине
ширины моста. Проезжая часть расположена по обе стороны
фермы. В таких системах приходится принимать конструктивные меры
для обеспечения устойчивости пилонов и проезжей части При
загружен™ пролетного строения с одной стороны по ширине моста
(рис. 1-8, в) реакции R со стороны подвесок не могут уравновесить
внешнюю нагрузку, ибо силы Р и i? составят момент, скручивающий
проезжую часть. Две отдельные балки жесткости плохо
воспринимают такой скручивающий момент, поэтому система из двух балок
жесткости, соединенных проезжей частью и связями, обычно
заменяется «коробкой», как это показано на рис. 1-8, б, в. Коробка
обычно бывает не прямоугольной, а трапецеидальной или шестиугольной
формы для лучшего обтекания ветровым потоком. Одиночные
пилоны следует делать жестко закрепленными в поперечном
направлении и шарнирно опертыми в продольном. Следует заметить что
в последнее время для лучшей обтекаемости коробки жесткости
подобного сечения начали применять и в мостах, имеющих по
ширине две цепи или две системы вант.
11
§ 3. СИСТЕМЫ БАЙТОВЫХ ВИСЯЧИХ МОСТОВ
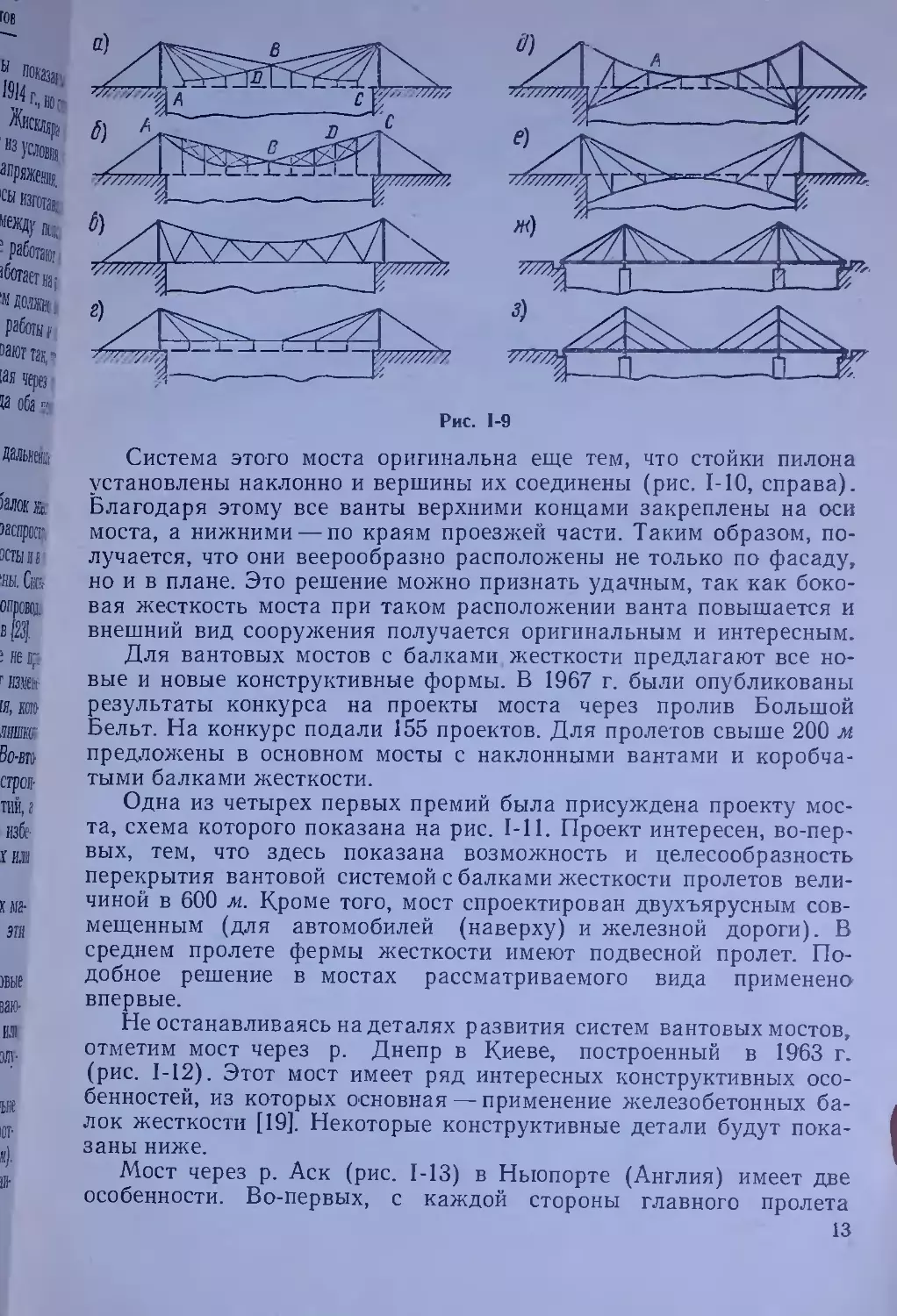
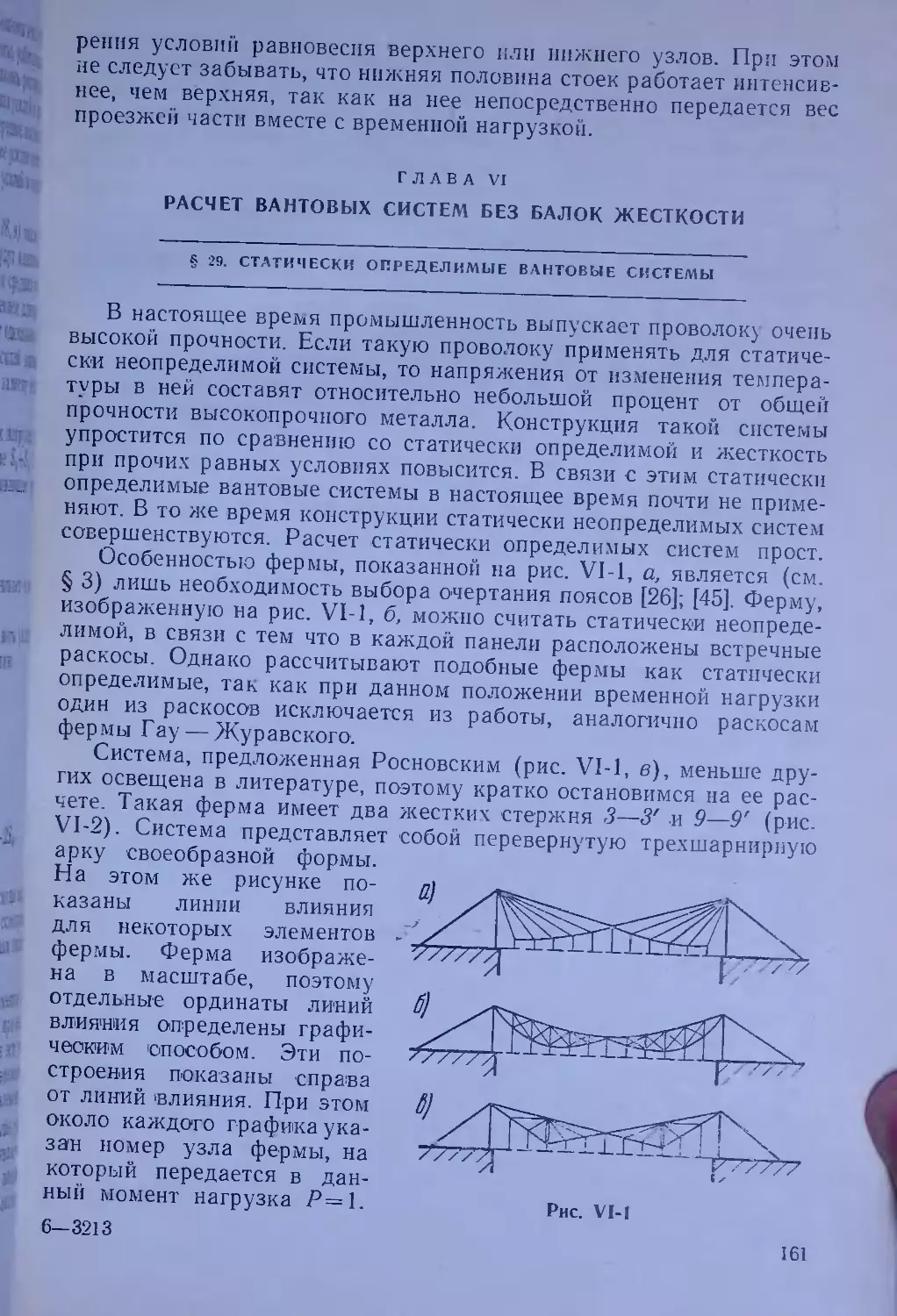
Статически определимые вантовые системы показаны на
рис. 1-9, а, б. Их начали применять во Франции с 1914 г., но они не
получили широкого распространения. В системе Жискляра (см.
рис. 1-9, а) очертания поясов АВ и ВС определяют из условия,
чтобы ни в одном раскосе не возникали сжимающие напряжения.
В другой системе (см. рис. 1-9, б) пояса и раскосы
изготавливают из тросов, как и в системе Жискляра. Стойки между поясами
могут работать на сжатие. Раскосы в этой системе работают как
в фермах Гау — Журавского, однако здесь раскос работает на
растяжение, а если при новом положении нагрузки в нем должно
возникнуть сжимающее усилие, то он исключается из работы и его
заменяет встречный раскос. Очертание поясов подбирают так,
чтобы при любой нагрузке кривая давления, проходящая через три
шарнира А, В и С, проходила между поясами. Тогда оба пояса
будут работать только на растяжение.
Эти системы теперь потеряли свое значение и в дальнейшем
будут рассмотрены менее подробно, чем другие.
Статически неопределимые вантовые системы без балок
жесткости (рис. 1-9, в — е), за исключением первой из них,
распространения в мостах пока не получили. Но они достаточно просты и в то
же время перспективны, поэтому будут кратко рассмотрены.
Система, показанная на рис. 1-9, в, применена в мостах-трубопроводах
[33, 34, 19]; подобная приведенной на рис. 1-9, д описана в [23].
Статически неопределимые вантовые системы раньше не
применяли по двум причинам. Во-первых, в этих системах от
изменения температуры возникают довольно высокие напряжения,
которые при имевшихся прочностях материалов составляли слишком
большой процент от используемой величины напряжений.
Во-вторых, приемы искусственного регулирования усилий освоены
строителями только на протяжении двух-трех последних десятилетий, а
рассматриваемые системы требуют такого регулирования во
избежание возникновения сжимающих усилий в некоторых вантах или
временного выхода их из работы («выходящие» стержни).
Нет сомнения, что при использовании современных прочных
материалов и современных возможностях производства работ эти
системы найдут применение.
В последнее десятилетие довольно широко применяли вантовые
системы с балками жесткости (рис. 1-9, ж, з). Тросы,
поддерживающие балки жесткости, расположены пучком (см. рис. 1-9, ж) или
параллельны друг другу (см. рис. 1-9, з). Первая из систем
получила название «пучок», а вторая — «арфа».
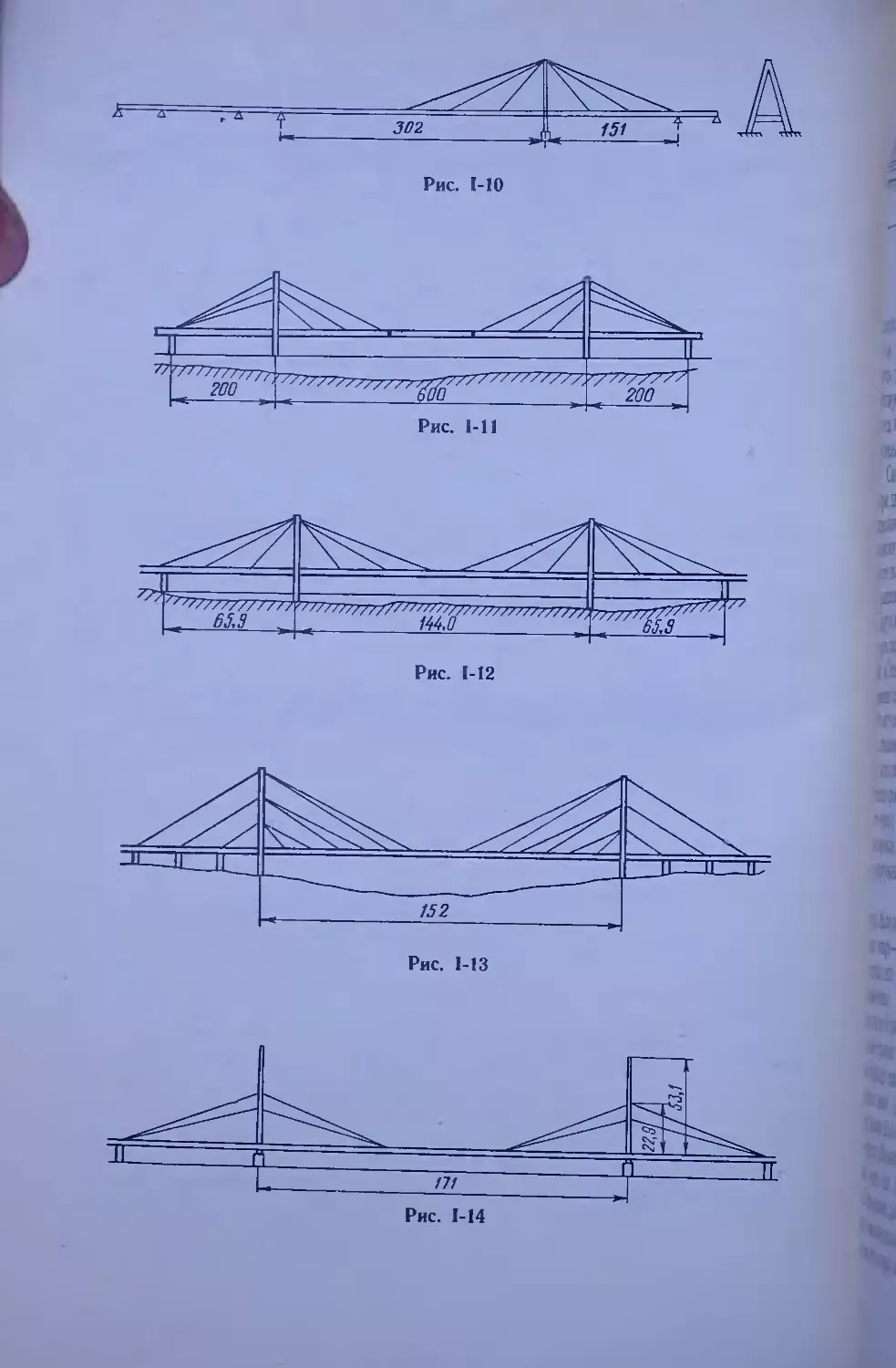
Оригинальный мост построен в 1959 г. через р. Рейн в Кёльне
[19]. Он имеет шесть пролетов, величина которых выбрана в
соответствии с местными условиями (~49 + 89 + 48+302+151+52 м).
Все пролеты перекрыты неразрезной балкой, которая в двух
наибольших пролетах усилена вантами (рис. 1-10).
12
(%fj
Рис. 1-9
Система этого моста оригинальна еще тем, что стойки пилона
установлены наклонно и вершины их соединены (рис. 1-10, справа).
Благодаря этому все ванты верхними концами закреплены на оси
моста, а нижними — по краям проезжей части. Таким образом,
получается, что они веерообразно расположены не только по фасаду,
но и в плане. Это решение можно признать удачным, так как
боковая жесткость моста при таком расположении ванта повышается и
внешний вид сооружения получается оригинальным и интересным.
Для вантовых мостов с балками жесткости предлагают все
новые и новые конструктивные формы. В 1967 г. были опубликованы
результаты конкурса на проекты моста через пролив Большой
Бельт. На конкурс подали 155 проектов. Для пролетов свыше 200 м
предложены в основном мосты с наклонными вантами и
коробчатыми балками жесткости.
Одна из четырех первых премий была присуждена проекту
моста, схема которого показана на рис. 1-11. Проект интересен,
во-первых, тем, что здесь показана возможность и целесообразность
перекрытия вантовой системой с балками жесткости пролетов
величиной в 600 м. Кроме того, мост спроектирован двухъярусным
совмещенным (для автомобилей (наверху) и железной дороги). В
среднем пролете фермы жесткости имеют подвесной пролет.
Подобное решение в мостах рассматриваемого вида применено
впервые.
Не останавливаясь на деталях развития систем вантовых мостов,
отметим мост через р. Днепр в Киеве, построенный в 1963 г.
(рис. 1-12). Этот мост имеет ряд интересных конструктивных
особенностей, из которых основная — применение железобетонных
балок жесткости [19]. Некоторые конструктивные детали будут
показаны ниже.
Мост через р. Аск (рис. 1-13) в Ныопорте (Англия) имеет две
особенности. Во-первых, с каждой стороны главного пролета
13
—J
-в—т
302
■Ж-
151
Рис. 1-10
Рис. 1-11
^^^^^^7^7777777^^^^^^^^^^^^Ж^^^^^^
&£■?
144.0
65,3
Y7
Рис. II2
Рис. 1-13
Рис. 1-14
Рис. 1-15
расположены не один, как обычно, а три боковых пролета (по
16,9 м). Все промежуточные опоры этих участков моста
используются для закрепления оттяжек пары вант. Такое решение
способствует повышению жесткости конструкции. Благодаря этому
балка жесткости в главном пролете поддерживается вантами в 12
промежуточных точках. Это тоже имеет свои преимущества.
Своеобразен мост через р. Эльбу в Гамбурге (рис. 1-14). Здесь
при двух оттяжках в каждом боковом пролете главный пролет
поддерживается вантами всего в двух точках. Другой особенностью
является то, что при необходимой для примененной системы моста
высоте пилонов в 22,9 м они имеют высоту 53,1 м. Очевидно, что
эти решения вызваны стремлением к оригинальности.
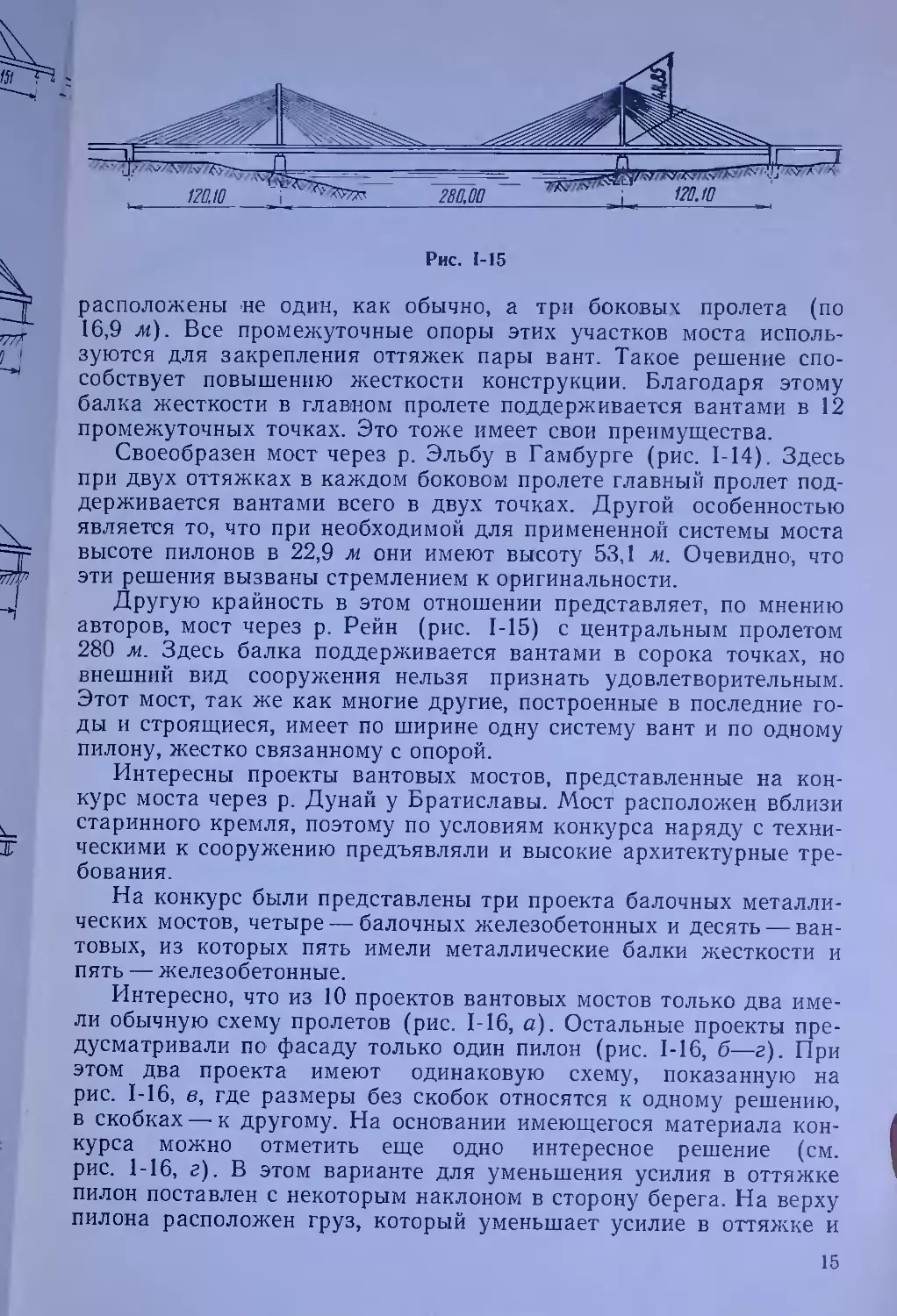
Другую крайность в этом отношении представляет, по мнению
авторов, мост через р. Рейн (рис. 1-15) с центральным пролетом
280 м. Здесь балка поддерживается вантами в сорока точках, но
внешний вид сооружения нельзя признать удовлетворительным.
Этот мост, так же как многие другие, построенные в последние
годы и строящиеся, имеет по ширине одну систему вант и по одному
пилону, жестко связанному с опорой.
Интересны проекты Байтовых мостов, представленные на
конкурс моста через р. Дунай у Братиславы. Мост расположен вблизи
старинного кремля, поэтому по условиям конкурса наряду с
техническими к сооружению предъявляли и высокие архитектурные
требования.
На конкурс были представлены три проекта балочных
металлических мостов, четыре — балочных железобетонных и десять —
Байтовых, из которых пять имели металлические балки жесткости и
пять — железобетонные.
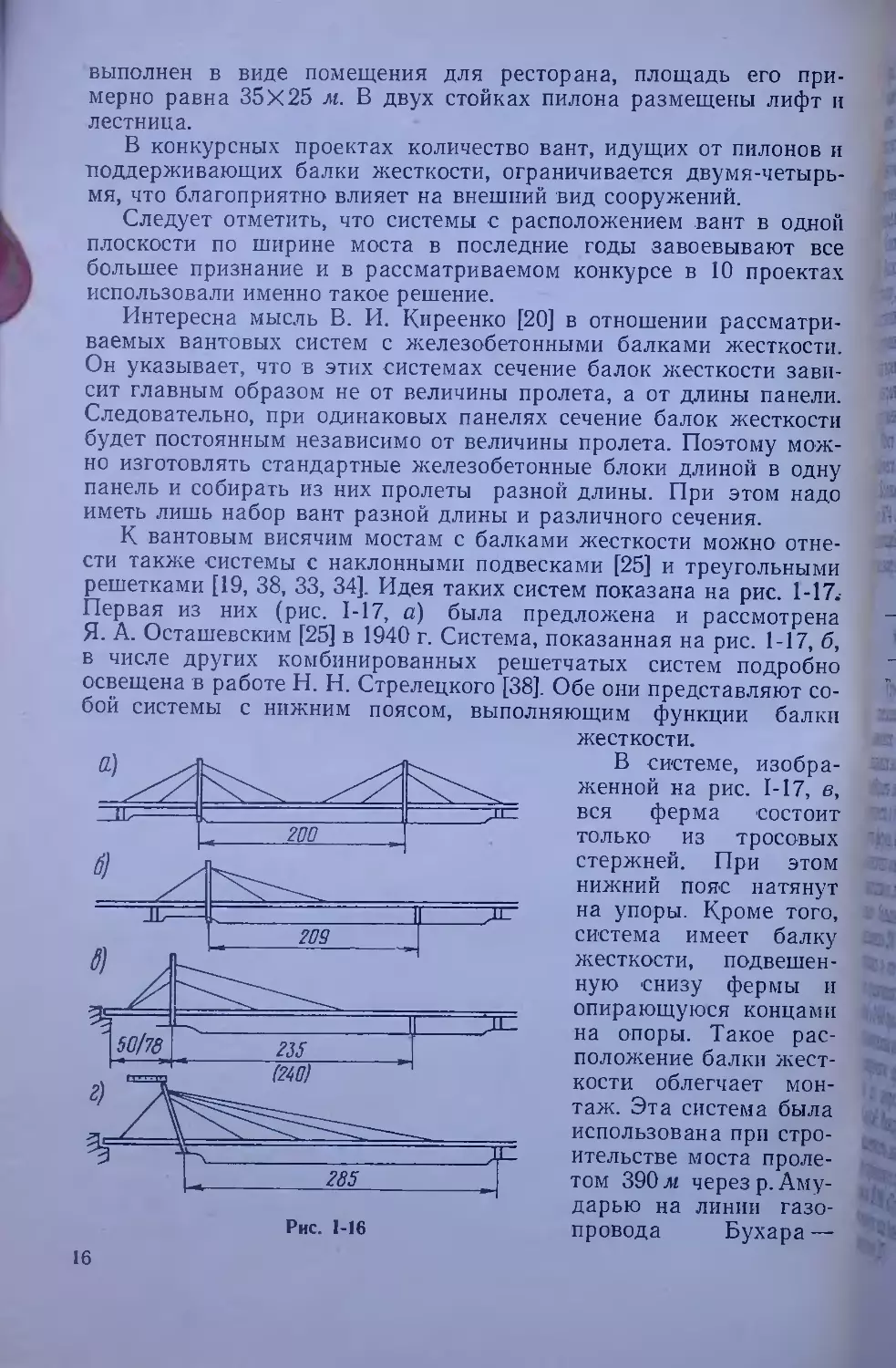
Интересно, что из 10 проектов Байтовых мостов только два
имели обычную схему пролетов (рис. 1-16, а). Остальные проекты
предусматривали по фасаду только один пилон (рис. 1-16, б—г). При
этом два проекта имеют одинаковую схему, показанную на
рис. 1-16, в, где размеры без скобок относятся к одному решению,
в скобках — к другому. На основании имеющегося материала
конкурса можно отметить еще одно интересное решение (см.
рис. 1-16, г). В этом варианте для уменьшения усилия в оттяжке
пилон поставлен с некоторым наклоном в сторону берега. На верху
пилона расположен груз, который уменьшает усилие в оттяжке и
15
выполнен в виде помещения для ресторана, площадь его
примерно равна 35X25 м. В двух стойках пилона размещены лифт и
лестница.
В конкурсных проектах количество вант, идущих от пилонов и
поддерживающих балки жесткости, ограничивается двумя-четырь-
мя, что благоприятно влияет на внешний вид сооружений.
Следует отметить, что системы с расположением вант в одной
плоскости по ширине моста в последние годы завоевывают все
большее признание и в рассматриваемом конкурсе в 10 проектах
использовали именно такое решение.
Интересна мысль В. И. Кнреенко [20] в отношении
рассматриваемых вантовых систем с железобетонными балками жесткости.
Он указывает, что в этих системах сечение балок жесткости
зависит главным образом не от величины пролета, а от длины панели.
Следовательно, при одинаковых панелях сечение балок жесткости
будет постоянным независимо от величины пролета. Поэтому
можно изготовлять стандартные железобетонные блоки длиной в одну
панель и собирать из них пролеты разной длины. При этом надо
иметь лишь набор вант разной длины и различного сечения.
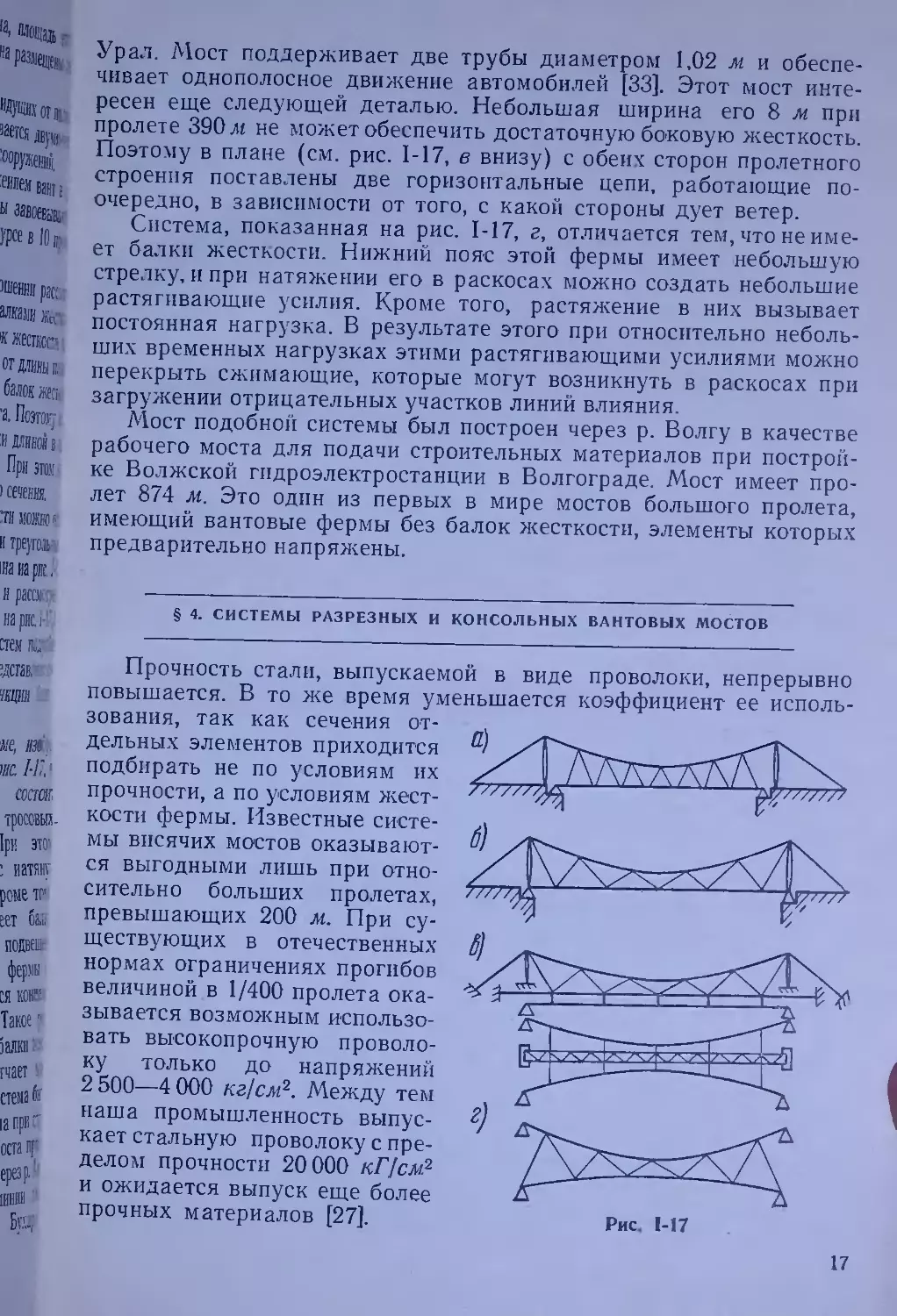
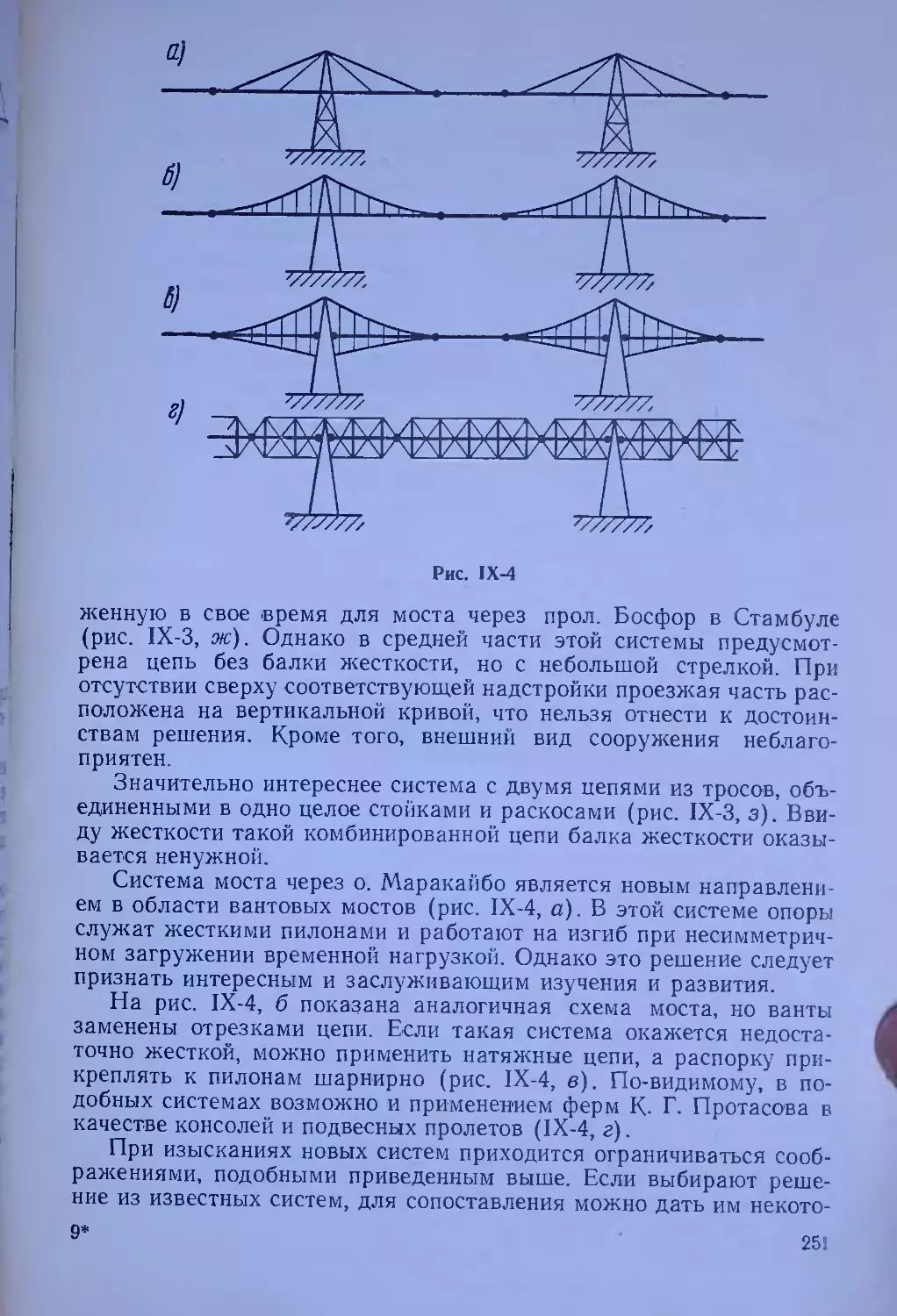
К вантовым висячим мостам с балками жесткости можно
отнести также системы с наклонными подвесками [25] и треугольными
решетками [19, 38, 33, 34]. Идея таких систем показана на рис. 1-17.
Первая из них (рис. 1-17, а) была предложена и рассмотрена
Я. А. Осташевским [25] в 1940 г. Система, показанная на рис. 1-17, б,
в числе других комбинированных решетчатых систем подробно
освещена в работе Н. Н. Стрелецкого [38]. Обе они представляют
собой системы с нижним поясом, выполняющим функции балки
жесткости.
В системе,
изображенной на рис. 1-17, в,
вся ферма состоит
только из тросовых
стержней. При этом
нижний пояс натянут
на упоры. Кроме того,
система имеет балку
жесткости,
подвешенную снизу фермы и
опирающуюся концами
на опоры. Такое
расположение балки
жесткости облегчает
монтаж. Эта система была
использована при
строительстве моста
пролетом 390 м через р. Аму-
дарью на линии газо-
Рис 1-16 провода Бухара —
16
Урал. Мост поддерживает две трубы диаметром 1,02 м и
обеспечивает однополосное движение автомобилей [33]. Этот мост
интересен еще следующей деталью. Небольшая ширина его 8 м при
пролете 390 м не может обеспечить достаточную боковую жесткость.
Поэтому в плане (см. рис. 1-17, в внизу) с обеих сторон пролетного
строения поставлены две горизонтальные цепи, работающие
поочередно, в зависимости от того, с какой стороны дует ветер.
Система, показанная на рис. 1-17, г, отличается тем, что не
имеет балки жесткости. Нижний пояс этой фермы имеет небольшую
стрелку, и при натяжении его в раскосах можно создать небольшие
растягивающие усилия. Кроме того, растяжение в них вызывает
постоянная нагрузка. В результате этого при относительно
небольших временных нагрузках этими растягивающими усилиями можно
перекрыть сжимающие, которые могут возникнуть в раскосах при
загружении отрицательных участков линий влияния.
Мост подобной системы был построен через р. Волгу в качестве
рабочего моста для подачи строительных материалов при
постройке Волжской гидроэлектростанции в Волгограде. Мост имеет
пролет 874 м. Это один из первых в мире мостов большого пролета,
имеющий вантовые фермы без балок жесткости, элементы которых
предварительно напряжены.
§ 4. СИСТЕМЫ РАЗРЕЗНЫХ И КОНСОЛЬНЫХ БАЙТОВЫХ МОСТОВ
Прочность стали, выпускаемой в виде проволоки, непрерывно
повышается. В то же время уменьшается коэффициент ее
использования, так как сечения
отдельных элементов приходится
подбирать не по условиям их
прочности, а по условиям
жесткости фермы. Известные
системы висячих мостов
оказываются выгодными лишь при
относительно больших пролетах,
превышающих 200 м. При
существующих в отечественных
нормах ограничениях прогибов
величиной в 1/400 пролета
оказывается возможным
использовать высокопрочную
проволоку только до напряжений
2 500—4 000 кг/см2. Между тем
наша промышленность
выпускает стальную проволоку с
пределом прочности 20 000 кГ/см2
и ожидается выпуск еще более
прочных материалов [27].
Рис 1-17
17
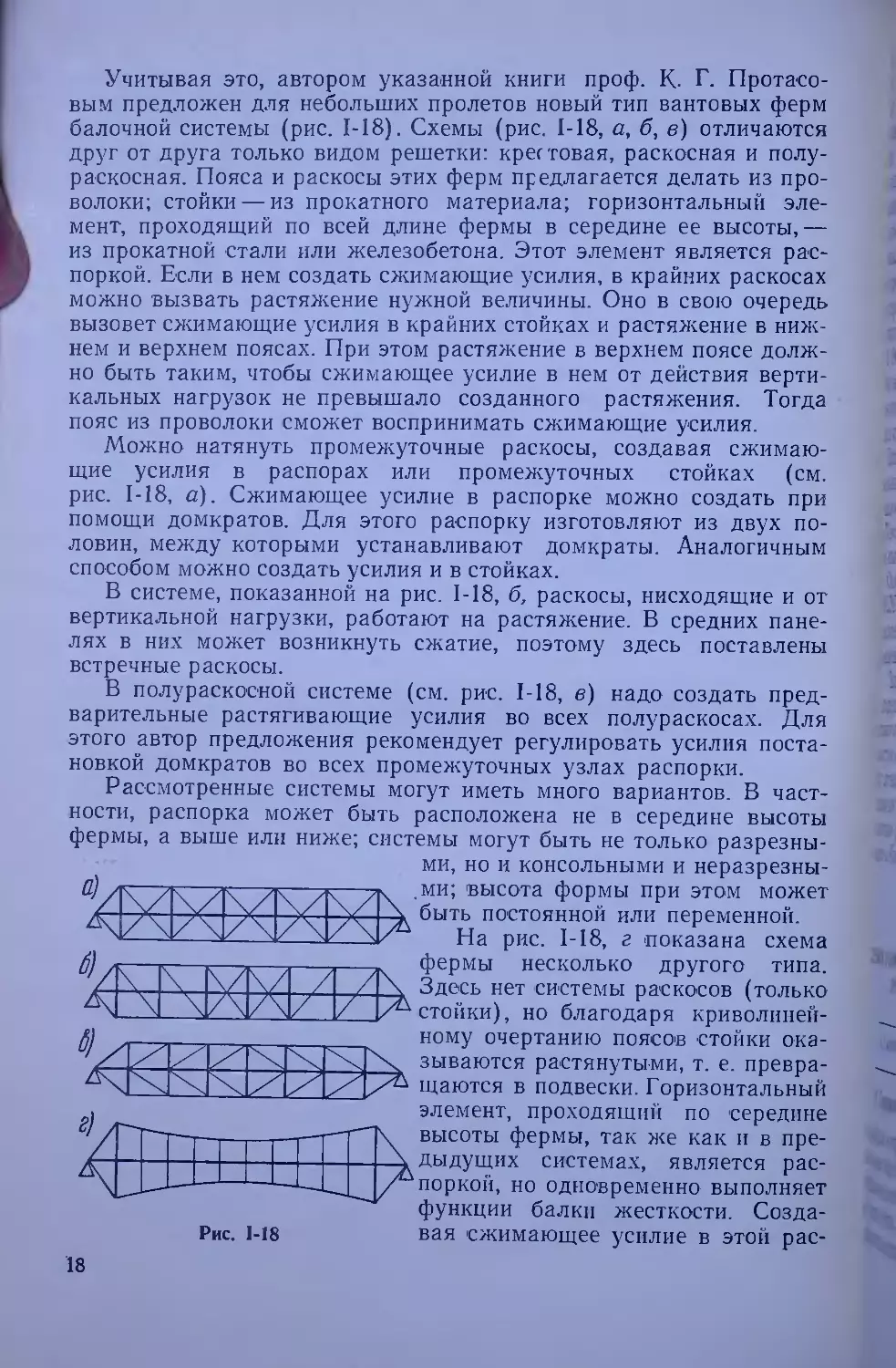
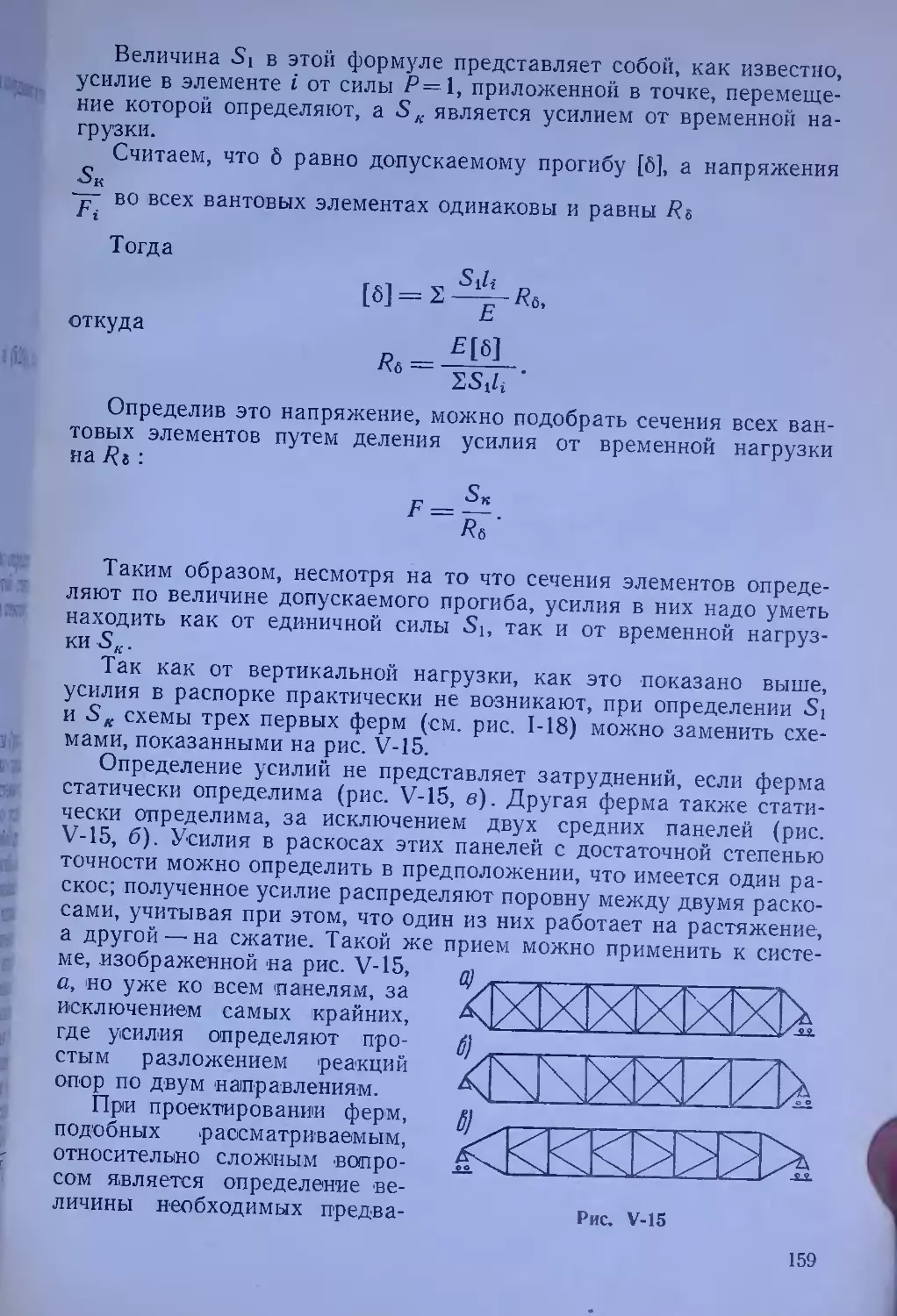
Учитывая это, автором указанной книги проф. К. Г.
Протасовым предложен для небольших пролетов новый тип вантовых ферм
балочной системы (рис. 1-18). Схемы (рис. 1-18, а, б, в) отличаются
друг от друга только видом решетки: крестовая, раскосная и
полураскосная. Пояса и раскосы этих ферм предлагается делать из
проволоки; стойки —из прокатного материала; горизонтальный
элемент, проходящий по всей длине фермы в середине ее высоты,—
из прокатной стали или железобетона. Этот элемент является
распоркой. Если в нем создать сжимающие усилия, в крайних раскосах
можно вызвать растяжение нужной величины. Оно в свою очередь
вызовет сжимающие усилия в крайних стойках и растяжение в
нижнем и верхнем поясах. При этом растяжение в верхнем поясе
должно быть таким, чтобы сжимающее усилие в нем от действия
вертикальных нагрузок не превышало созданного растяжения. Тогда
пояс из проволоки сможет воспринимать сжимающие усилия.
Можно натянуть промежуточные раскосы, создавая
сжимающие усилия в распорах или промежуточных стойках (см.
рис. 1-18, а). Сжимающее усилие в распорке можно создать при
помощи домкратов. Для этого распорку изготовляют из двух
половин, между которыми устанавливают домкраты. Аналогичным
способом можно создать усилия и в стойках.
В системе, показанной на рис. 1-18, б, раскосы, нисходящие и от
вертикальной нагрузки, работают на растяжение. В средних
панелях в них может возникнуть сжатие, поэтому здесь поставлены
встречные раскосы.
В полураскосной системе (см. рис. 1-18, в) надо создать
предварительные растягивающие усилия во всех полураскосах. Для
этого автор предложения рекомендует регулировать усилия
постановкой домкратов во всех промежуточных узлах распорки.
Рассмотренные системы могут иметь много вариантов. В
частности, распорка может быть расположена не в середине высоты
фермы, а выше или ниже; системы могут быть не только
разрезными, но и консольными и неразрезны-
ми; высота формы при этом может
быть постоянной или переменной.
На рис. 1-18, г показана схема
фермы несколько другого типа.
Здесь нет системы раскосов (только
стойки), но благодаря
криволинейному очертанию поясов стойки
оказываются растянутыми, т. е.
превращаются в подвески. Горизонтальный
элемент, проходящий по середине
высоты фермы, так же как и в
предыдущих системах, является рас-
1 поркой, но одновременно выполняет
функции балки жесткости. Созда-
Рис. 1-18 вая сжимающее усилие в этой рас-
й)
4>
Ж
б)
18
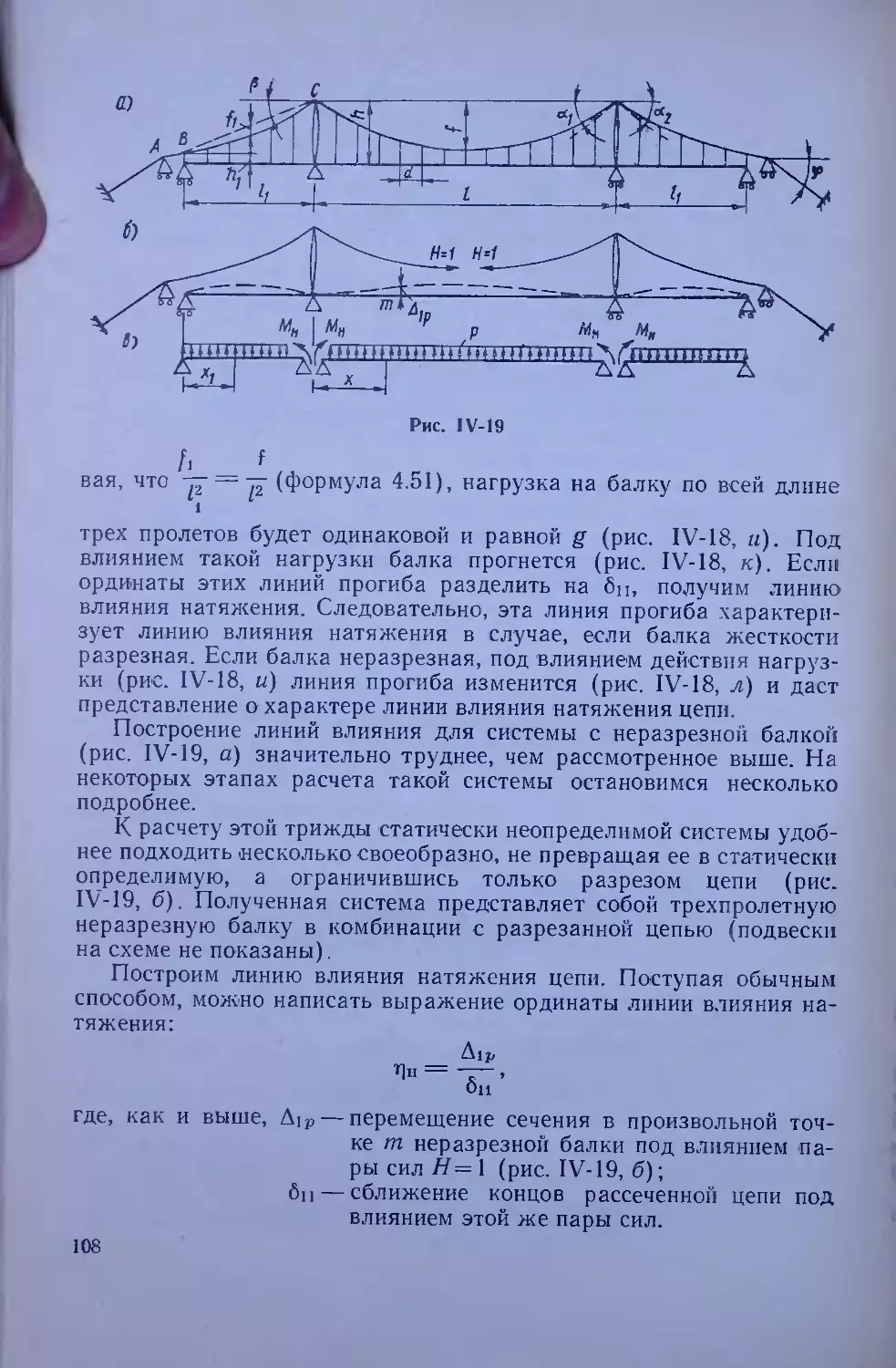
Рис. 1-19
1} порке, можно вызвать
.„ так же, как в
рассмотренных выше фермах,
необходимые растяги-
д вающие усилия в
поясах и подвесках.
jul Сравнение жестко-
стей рассматриваемых
балочных ферм и
Байтовых ферм типа Жискляра при пролете 80 м говорит о
преимуществе первых (например, меньший расход металла при одинаковой
жесткости).
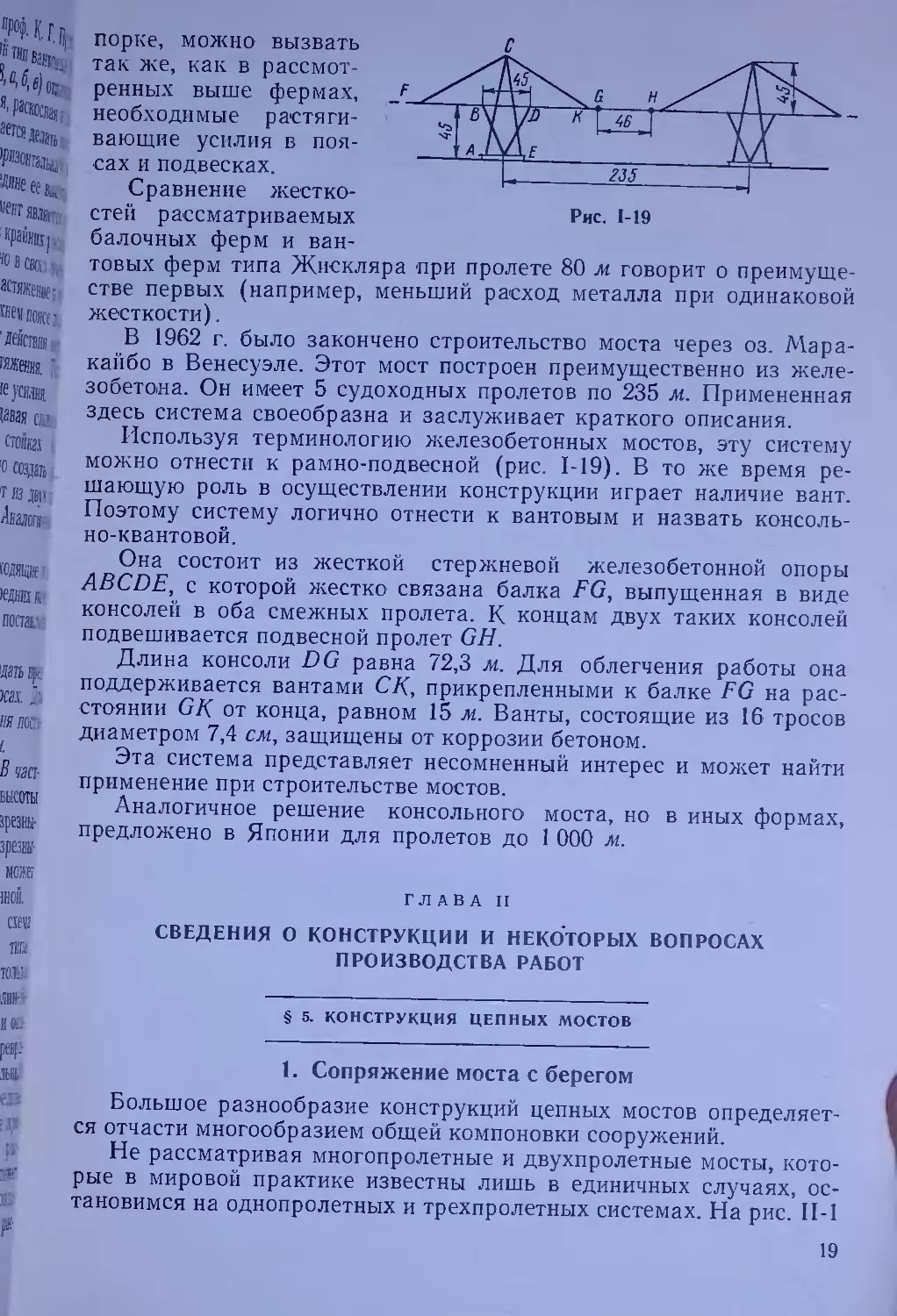
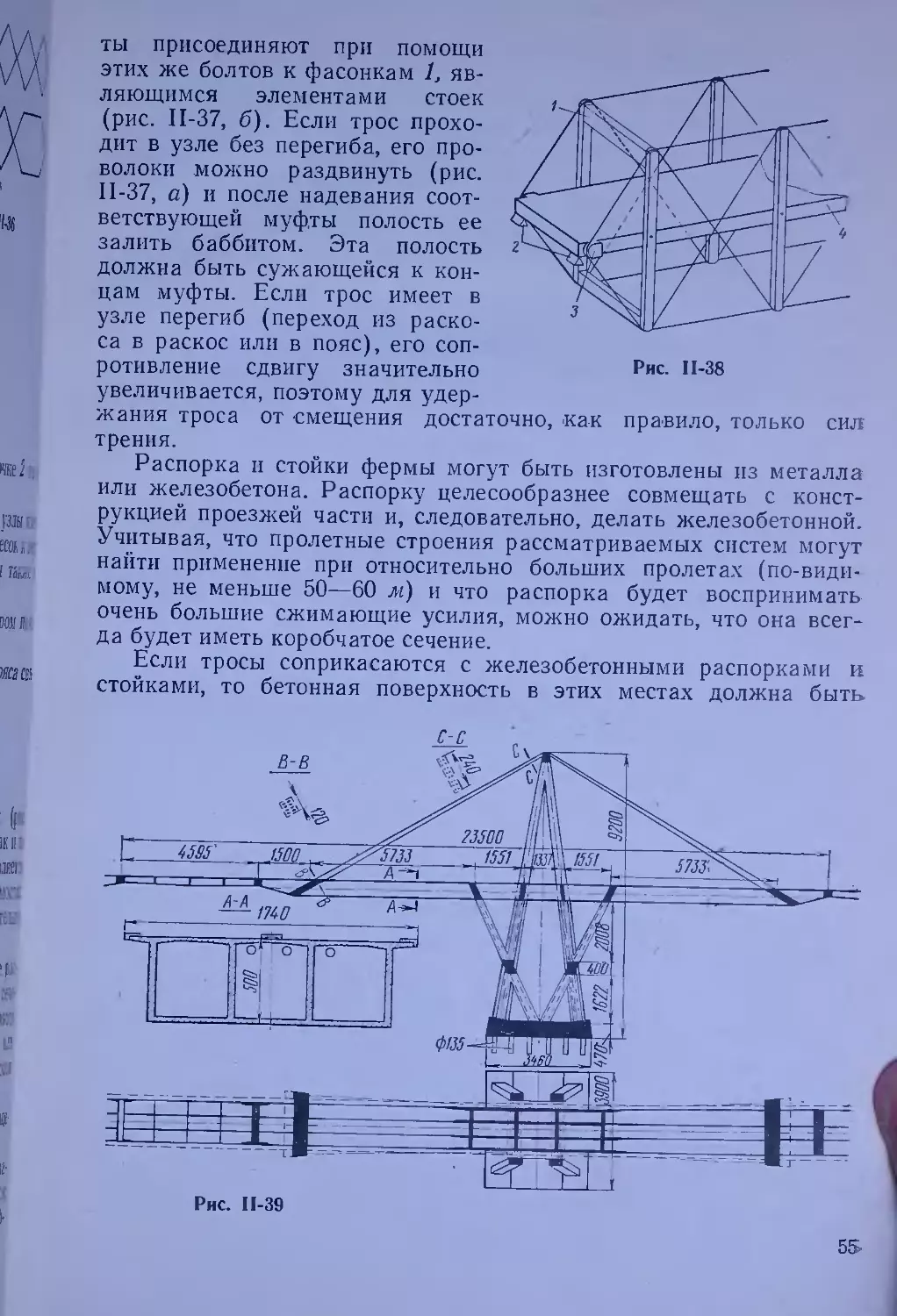
В 1962 г. было закончено строительство моста через оз. Мара-
кайбо в Венесуэле. Этот мост построен преимущественно из
железобетона. Он имеет 5 судоходных пролетов по 235 м. Примененная
здесь система своеобразна и заслуживает краткого описания.
Используя терминологию железобетонных мостов, эту систему
можно отнести к рамно-подвесной (рис. 1-19). В то же время
решающую роль в осуществлении конструкции играет наличие вант.
Поэтому систему логично отнести к вантовым и назвать консоль-
но-квантовой.
Она состоит из жесткой стержневой железобетонной опоры
ABCDE, с которой жестко связана балка FG, выпущенная в виде
консолей в оба смежных пролета. К концам двух таких консолей
подвешивается подвесной пролет GH.
Длина консоли DG равна 72,3 м. Для облегчения работы она
поддерживается вантами СК, прикрепленными к балке FG на рас-
1 стоянии GK от конца, равном 15 м. Ванты, состоящие из 16 тросов
диаметром 7,4 см, защищены от коррозии бетоном.
Эта система представляет несомненный интерес и может найти
применение при строительстве мостов.
Аналогичное решение консольного моста, но в иных формах,
предложено в Японии для пролетов до 1 000 м.
глава п
СВЕДЕНИЯ О КОНСТРУКЦИИ И НЕКОТОРЫХ ВОПРОСАХ
ПРОИЗВОДСТВА РАБОТ
§ 5. КОНСТРУКЦИЯ ЦЕПНЫХ МОСТОВ
1. Сопряжение моста с берегом
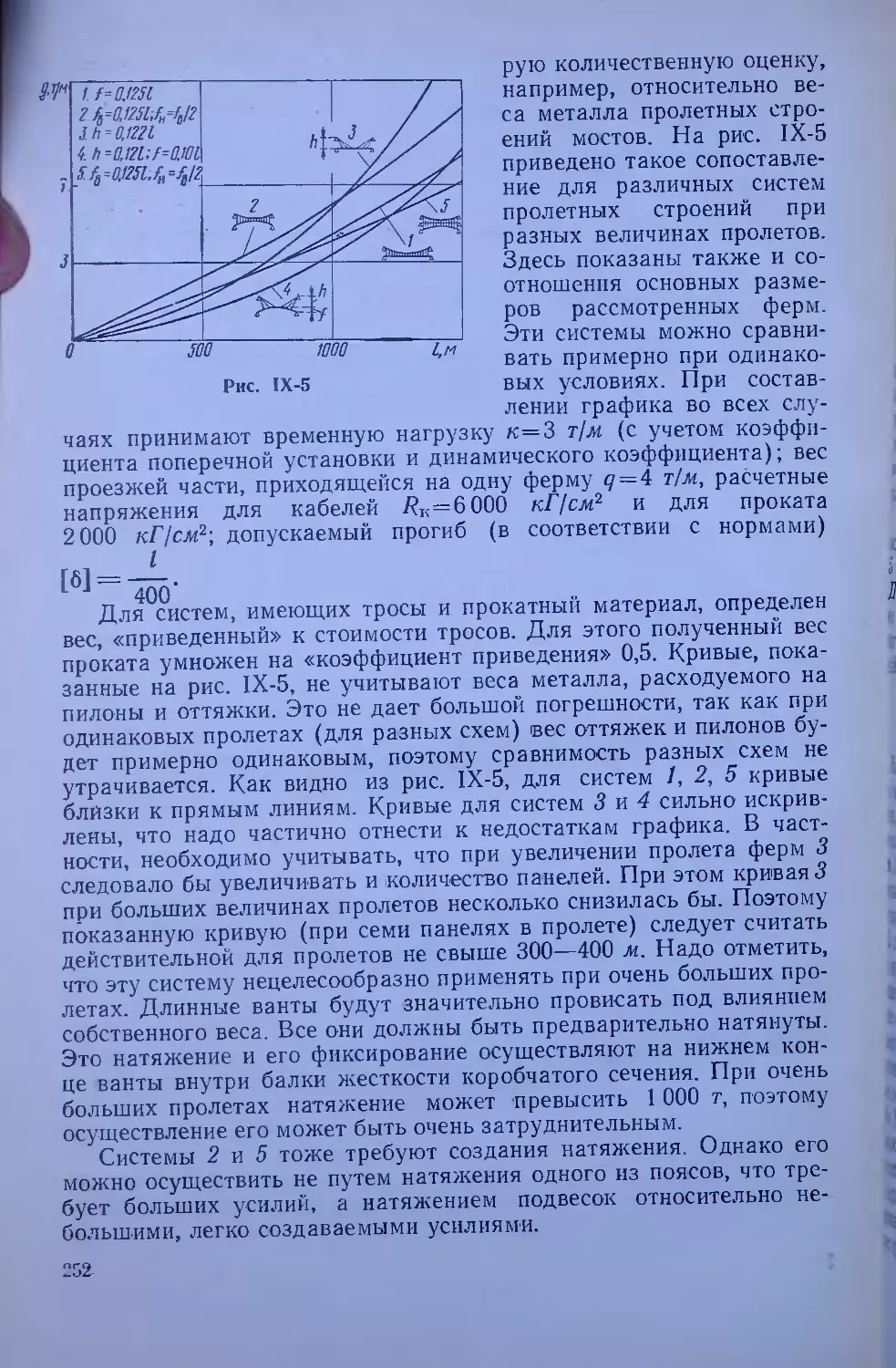
Большое разнообразие конструкций цепных мостов
определяется отчасти многообразием общей компоновки сооружений.
Не рассматривая многопролетные и двухпролетные мосты,
которые в мировой практике известны лишь в единичных случаях,
остановимся на однопролетных и трехпролетных системах. На рис. II-1
19
ч)
во':
И
CS^
J." "a "ijf» ssnt&IEsf
L <
vsf
Ш
m
Рис. 11-1
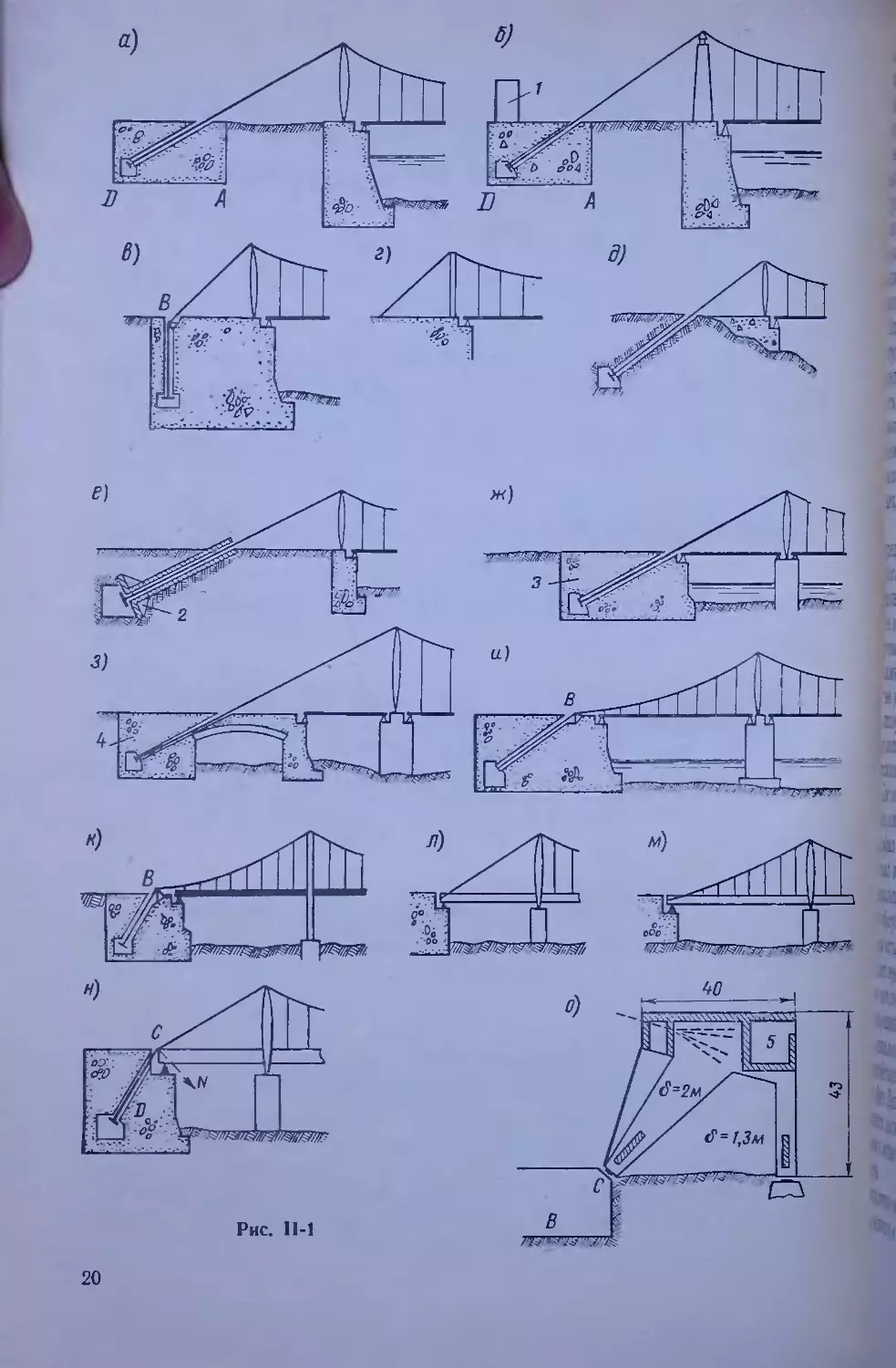
/1У*У№'У"&
20
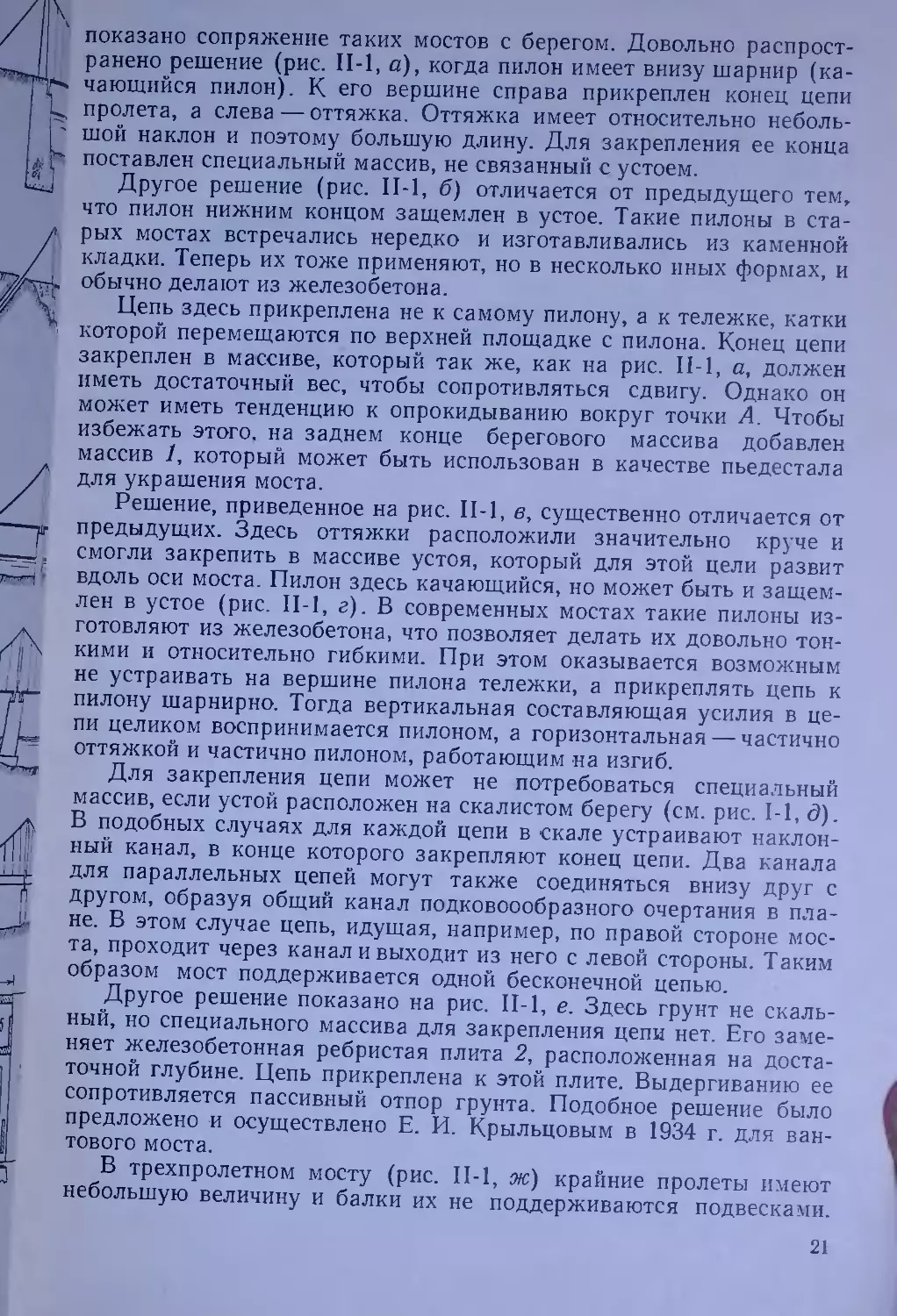
показано сопряжение таких мостов с берегом. Довольно
распространено решение (рис. Н-1, а), когда пилон имеет внизу шарнир
(качающийся пилон). К его вершине справа прикреплен конец цепи
пролета, а слева — оттяжка. Оттяжка имеет относительно
небольшой наклон и поэтому большую длину. Для закрепления ее конца
поставлен специальный массив, не связанный с устоем.
Другое решение (рис. П-1, б) отличается от предыдущего тем,
что пилон нижним концом защемлен в устое. Такие пилоны в
старых мостах встречались нередко и изготавливались из каменной
кладки. Теперь их тоже применяют, но в несколько иных формах, и
обычно делают из железобетона.
Цепь здесь прикреплена не к самому пилону, а к тележке, катки
которой перемещаются по верхней площадке с пилона. Конец цепи
закреплен в массиве, который так же, как на рис. П-1, а, должен
иметь достаточный вес, чтобы сопротивляться сдвигу. Однако он
может иметь тенденцию к опрокидыванию вокруг точки А. Чтобы
избежать этого, на заднем конце берегового массива добавлен
массив 1, который может быть использован в качестве пьедестала
для украшения моста.
Решение, приведенное на рис. П-1, в, существенно отличается от
предыдущих. Здесь оттяжки расположили значительно круче и
смогли закрепить в массиве устоя, который для этой цели развит
вдоль оси моста. Пилон здесь качающийся, но может быть и
защемлен в устое (рис. П-1, г). В современных мостах такие пилоны
изготовляют из железобетона, что позволяет делать их довольно
тонкими и относительно гибкими. При этом оказывается возможным
не устраивать на вершине пилона тележки, а прикреплять цепь к
пилону шарнирно. Тогда вертикальная составляющая усилия в
цепи целиком воспринимается пилоном, а горизонтальная — частично
оттяжкой и частично пилоном, работающим на изгиб.
Для закрепления цепи может не потребоваться специальный
массив, если устой расположен на скалистом берегу (см. рис. 1-1, д).
В подобных случаях для каждой цепи в скале устраивают
наклонный канал, в конце которого закрепляют конец цепи. Два канала
для параллельных цепей могут также соединяться внизу друг с
другом, образуя общий канал подковоообразного очертания в
плане. В этом случае цепь, идущая, например, по правой стороне
моста, проходит через канал и выходит из него с левой стороны. Таким
образом мост поддерживается одной бесконечной цепью.
Другое решение показано на рис. П-1, е. Здесь грунт не
скальный, но специального массива для закрепления цепи нет. Его
заменяет железобетонная ребристая плита 2, расположенная на
достаточной глубине. Цепь прикреплена к этой плите. Выдергиванию ее
сопротивляется пассивный отпор грунта. Подобное решение было
предложено и осуществлено Е. И. Крыльцовым в 1934 г. для
Байтового моста.
В трехпролетном мосту (рис. П-1, ж) крайние пролеты имеют
небольшую величину и балки их не поддерживаются подвесками.
21
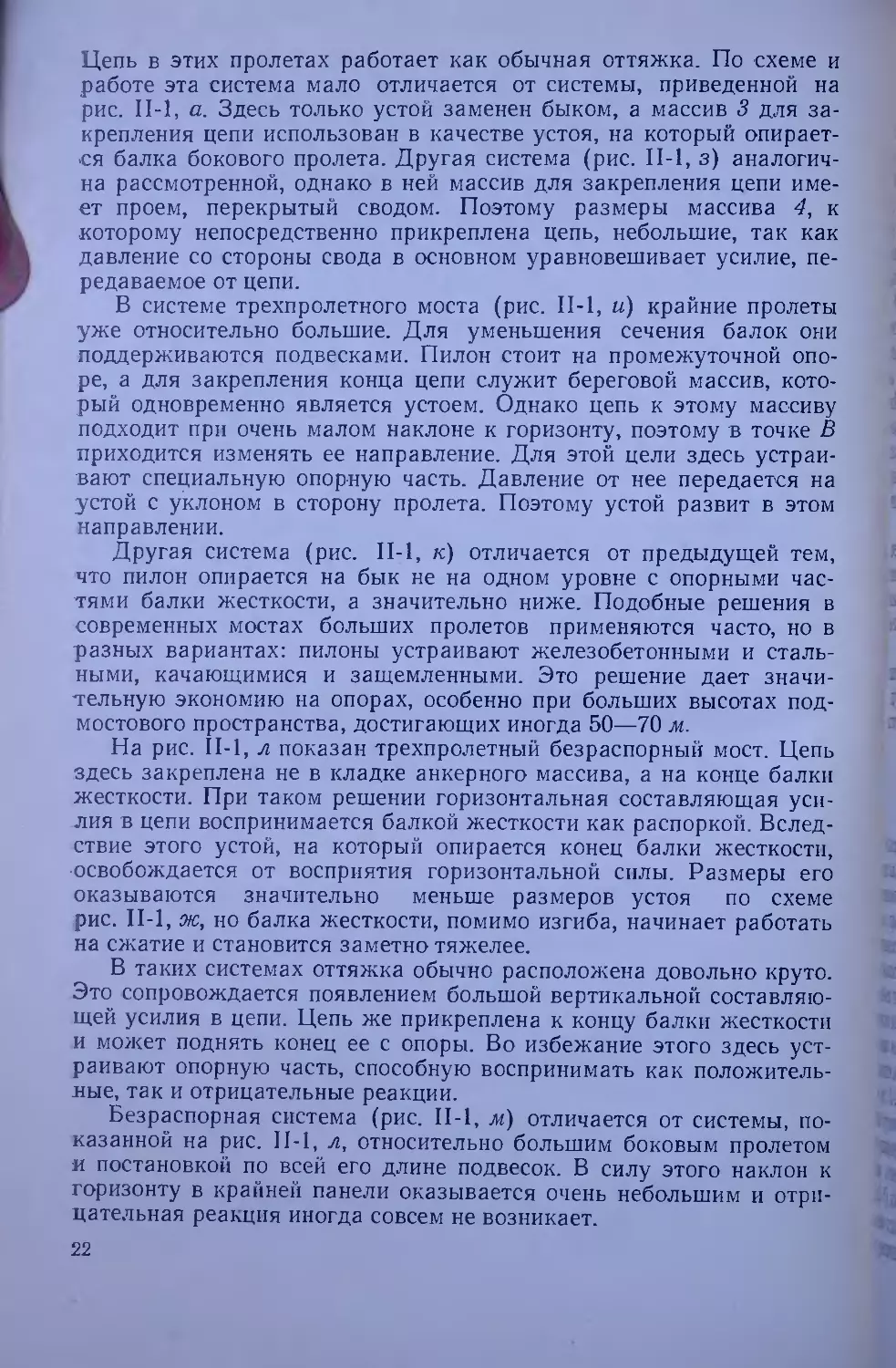
Цепь в этих пролетах работает как обычная оттяжка. По схеме и
работе эта система мало отличается от системы, приведенной на
рис. П-1, а. Здесь только устой заменен быком, а массив 3 для
закрепления цепи использован в качестве устоя, на который
опирается балка бокового пролета. Другая система (рис. П-1, з)
аналогична рассмотренной, однако в ней массив для закрепления цепи
имеет проем, перекрытый сводом. Поэтому размеры массива 4, к
которому непосредственно прикреплена цепь, небольшие, так как
давление со стороны свода в основном уравновешивает усилие,
передаваемое от цепи.
В системе трехпролетного моста (рис. П-1, и) крайние пролеты
уже относительно большие. Для уменьшения сечения балок они
поддерживаются подвесками. Пилон стоит на промежуточной
опоре, а для закрепления конца цепи служит береговой массив,
который одновременно является устоем. Однако цепь к этому массиву
подходит при очень малом наклоне к горизонту, поэтому в точке В
приходится изменять ее направление. Для этой цели здесь
устраивают специальную опорную часть. Давление от нее передается на
устой с уклоном в сторону пролета. Поэтому устой развит в этом
направлении.
Другая система (рис. П-1, к) отличается от предыдущей тем,
что пилон опирается на бык не на одном уровне с опорными
частями балки жесткости, а значительно ниже. Подобные решения в
современных мостах больших пролетов применяются часто, но в
разных вариантах: пилоны устраивают железобетонными и
стальными, качающимися и защемленными. Это решение дает
значительную экономию на опорах, особенно при больших высотах под-
мостового пространства, достигающих иногда 50—70 м.
На рис. П-1, л показан трехпролетный безраспорный мост. Цепь
здесь закреплена не в кладке анкерного массива, а на конце балки
жесткости. При таком решении горизонтальная составляющая
усилия в цепи воспринимается балкой жесткости как распоркой.
Вследствие этого устой, на который опирается конец балки жесткости,
■освобождается от восприятия горизонтальной силы. Размеры его
оказываются значительно меньше размеров устоя по схеме
рис. П-1, ж, но балка жесткости, помимо изгиба, начинает работать
на сжатие и становится заметно тяжелее.
В таких системах оттяжка обычно расположена довольно круто.
Это сопровождается появлением большой вертикальной
составляющей усилия в цепи. Цепь же прикреплена к концу балки жесткости
и может поднять конец ее с опоры. Во избежание этого здесь
устраивают опорную часть, способную воспринимать как
положительные, так и отрицательные реакции.
Безраспорная система (рис. П-1, м) отличается от системы,
показанной на рис. П-1, л, относительно большим боковым пролетом
и постановкой по всей его длине подвесок. В силу этого наклон к
горизонту в крайней панели оказывается очень небольшим и
отрицательная реакция иногда совсем не возникает.
22
На рнс. П-1, н показано своеобразное конструктивное решение.
Оттяжка имеет перелом в точке С. Опорная часть в этом месте
опирается на наклонную площадку торца балки жесткости. Со
стороны цепи на балку передается сила N и ее горизонтальная
составляющая воспринимается балкой жесткости как распоркой. Однако
на участке CD отрезок оттяжки не вертикален, поэтому и на
массив устоя передается горизонтальная составляющая усилия. В
результате в этой системе натяжение цепи частично воспринимается
балкой жесткости как распоркой и частично устоем.
Особого внимания, по мнению авторов, заслуживает
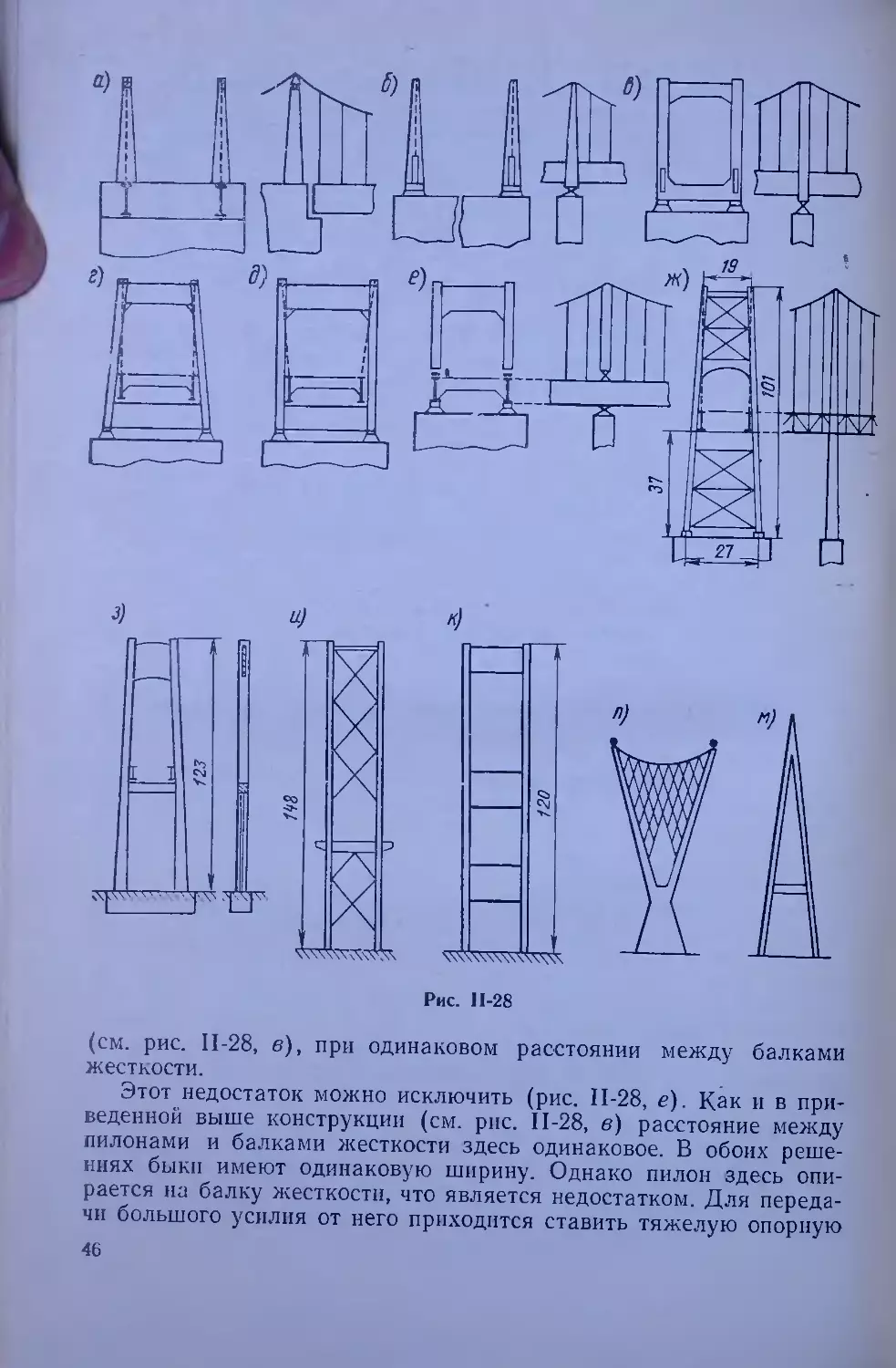
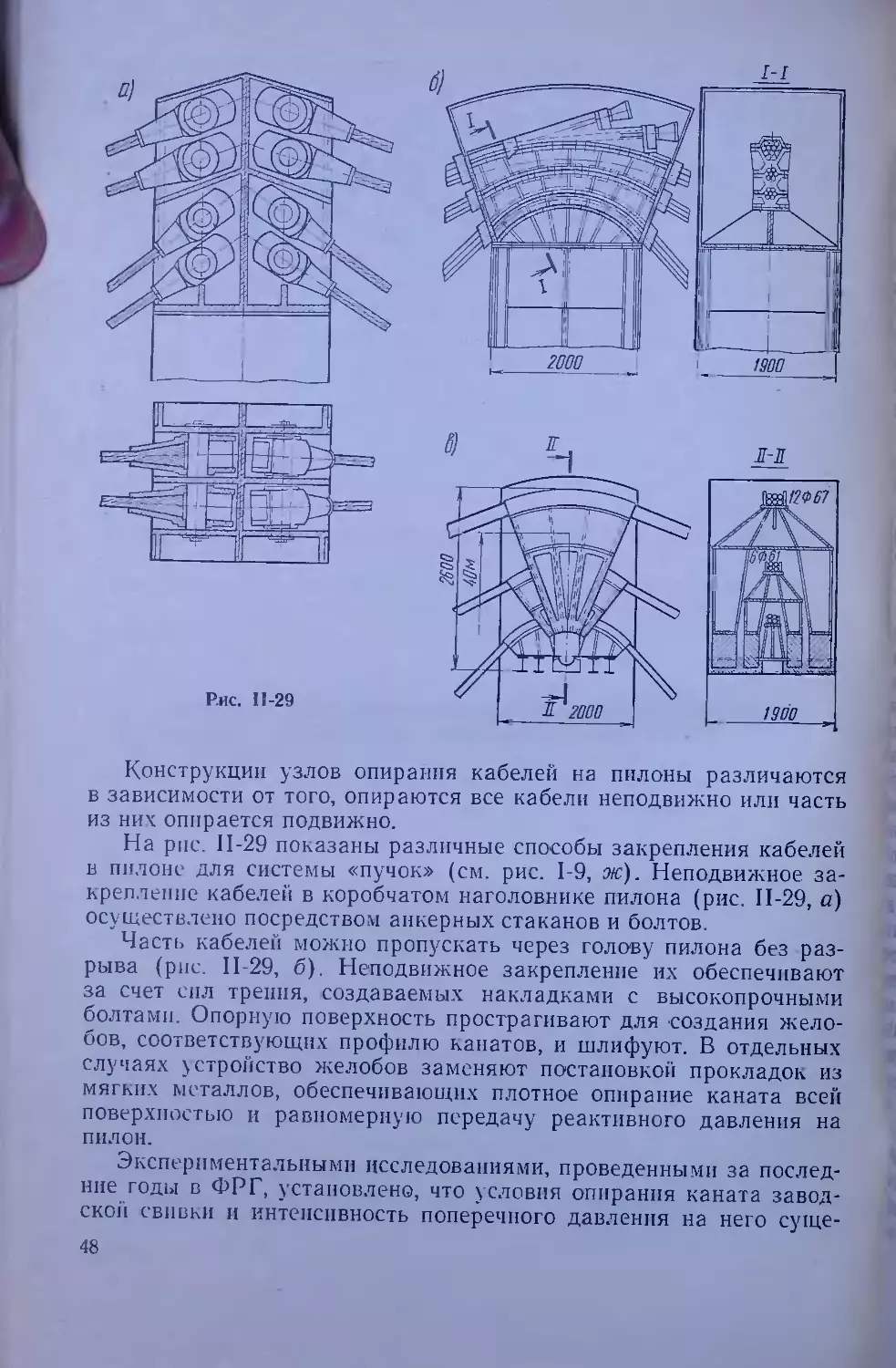
промежуточная железобетонная опора Танкарвильского моста через р. Сену,
отделяющая трехпролетную висячую систему от береговой
эстакады (рис. П-1, о). Справа к ней примыкает эстакада, слева —
крайний пролет висячей части, имеющей схему 176+608+176 ж Система
распорная, конец кабельной цепи разделен на отдельные ветви и
заделан в стенку опоры (см. пунктир на рис. П-1, о). Как видно из
рисунка, опора состоит из двух продольных железобетонных
стенок, соединенных друг с другом стенками-распорками.
Для противодействия моменту, который вызывается усилием в
цепи, прикрепленной в верхней части опоры, последняя в своей
нижней части развита в сторону пролета, а наверху со стороны
примыкающей эстакады имеет коробку 5 для загружения ее
противовесом.
Опора ввиду ее сложной и тяжелой работы имеет весьма
большие размеры. В передней части ее со стороны речного пролета
предусмотрена опорная часть для восприятия реакции балки
жесткости (на рисунке она не показана).
2. Сечение цепи и прикрепление подвесок
к цепи и к балке жесткости
Конструкции висячих мостов очень разнообразны, поэтому не
представляется возможным описать все их разновидности,
рассматривая конструкции отдельных мостов. В связи с этим авторы
отдают предпочтение изучению конструкций по элементам с
рассмотрением каждого из них в различных вариантах и сочетаниях.
Основным элементом в цепных мостах можно считать цепь. Цепь
из звеньев применяют в настоящее время редко, но мосты с
такими цепями встречаются. В отдельных случаях возможно
строительство новых мостов такого типа. Поэтому целесообразно дать
краткие сведения об их конструкции.
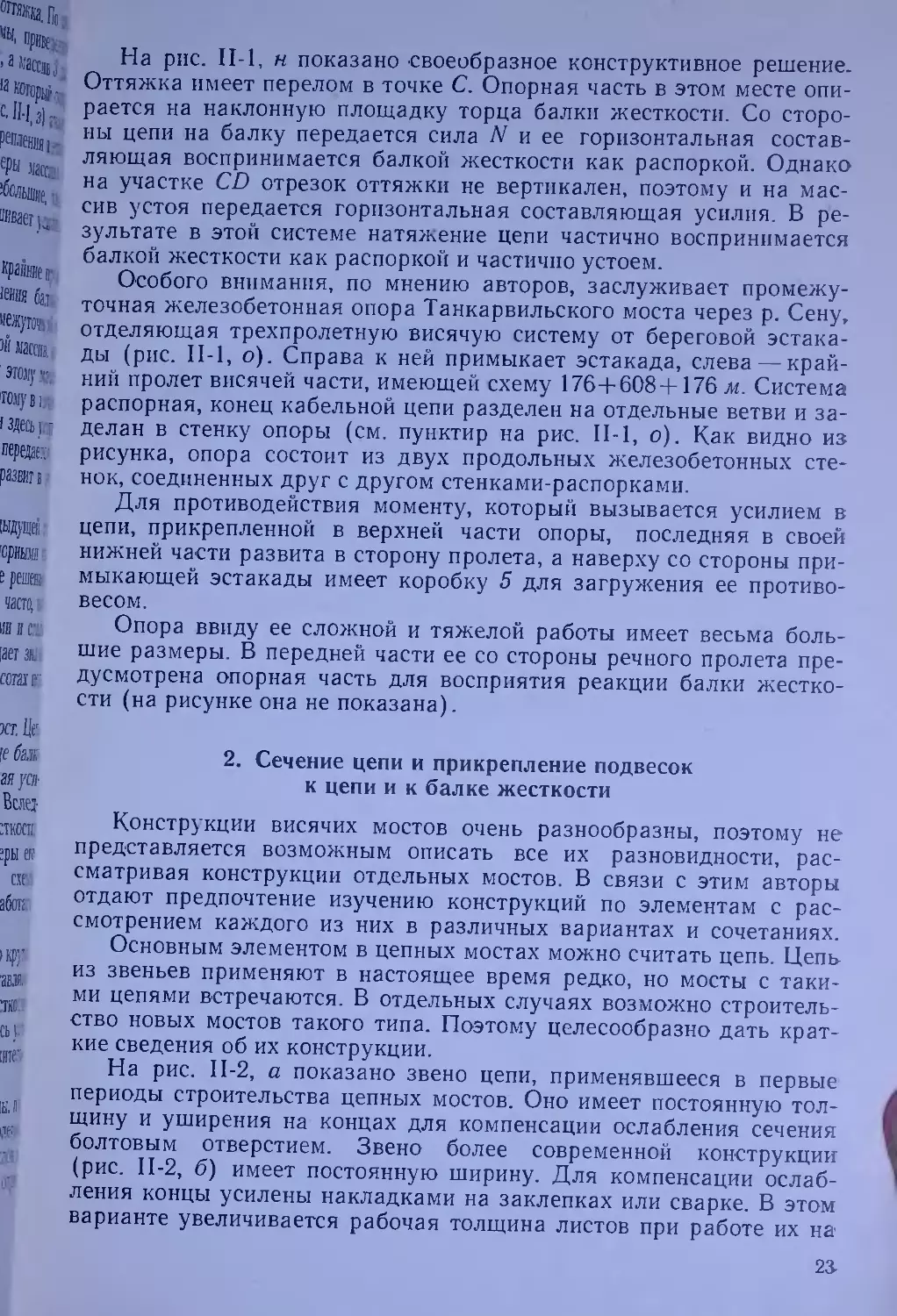
На рис. П-2, а показано звено цепи, применявшееся в первые
периоды строительства цепных мостов. Оно имеет постоянную
толщину и уширения на концах для компенсации ослабления сечения
болтовым отверстием. Звено более современной конструкции
(рис. П-2, б) имеет постоянную ширину. Для компенсации
ослабления концы усилены накладками на заклепках или сварке. В этом
варианте увеличивается рабочая толщина листов при работе их на
23-
I ' ' I I I ~i 1
! I ! i , , 1 i i I
I'll '' ■III
Рис. 11-2
°i j, W 61
Рис. 11-3
«; <#
Рис. 11-4
24
смятие. Из звеньев такого типа
составлены сечения цепей
Крымского моста в Москве,
построенного в 1938 г.
Элемент цепи собирают из
нескольких таких звеньев. Звенья
соседней панели входят в
промежутки между звеньями первой и
соединяются с ними при помощи
многосрезного болта. Этим
достигается гибкость цепи, так как
элементы одной панели соединены с
элементами другой шарнирно.
Звенья цепи работают только на
растяжение. Напряжения изгиба
практически исключаются.
Если лист или листы, из
которых состоит сечение цепи,
расположить не в вертикальной
плоскости, а в горизонтальной, то
такая цепь будет очень гибкой в
вертикальном направлении. В
этом случае нет необходимости
делить цепь на звенья и
устраивать шарниры. Мост с цепями
такой конструкции был построен в
первом десятилетии нашего века
в Бреславле [26]. Не
останавливаясь подробно на устаревшей в
наше время конструкции,
ограничимся схемой сечения цепи этого
моста, имеющего пролет 114 м
(рис. П-3,а).
Как видно из этой схемы, цепь
состоит из четырех ветвей,
каждая из которых склепана из
шести листов сечением 580X17 мм.
Конструкция прикрепления
подвесок к этой цепи сложна:
приходится принимать меры для
равномерного распределения
усилий, передаваемых от подвесок
на все четыре ветви. Это
достигается с помощью рычажных
устройств, показанных схематично
на рис. П-3, б.
Присоединение подвесок к
цепям типа, показанного на рис.
11-2, значительно проще. Они прикрепляются к болту, который
служит для соединения звеньев цепи (рис. П-4, а). Болт 5 не имеет
головок. Концы его в каждую сторону от поверхности наружных
звеньев соединяемых панелей выступают на величину б, равную
толщине фартуков 3, надетых на эти выступающие концы. Чтобы
фартуки не могли соскочить с болта, поставлены шайбы 6,
укрепленные шурупами 4. К спускающимся вниз концам фартуков
болтами 7 прикреплена коробка 5 (рис. П-4, б), а к стенке 2 этой
коробки при помощи болта, входящего в отверстие 1, присоединен
«вилкой» верхний конец подвески круглого сплошного сечения.
Прочность материала листов, из которых составляют сечения
цепей, подобные рассмотренным выше, невелика (6000—
8 000 кГ/см2). В перспективе предполагается выпуск более прочных
сталей, однако в настоящее время приходится ориентироваться на
выпускаемые отечественной промышленностью стали в виде
проволоки с пределом прочности порядка 20 000 кГ/см2 и готовых
витых тросов, составленных из определенного количества проволок
круглого профиля. Между отдельными проволоками остается
некоторое пространство, поэтому такие тросы имеют в сечении 25—
42% пустот. Так как цепи мостов не защищены от атмосферных
осадков, в эти пустоты может проникать вода и трос начнет
ржаветь. Пустоты между проволоками при изготовлении канатов на
заводе заполняют смазкой, но практика показывает, что такие
канаты из неоцинкованной проволоки недолговечны. Оцинковка
целесообразна, однако не гарантирует от проникания влаги в
пустоты и ржавления. В этом отношении значительно надежнее так
называемые закрытые тросы.
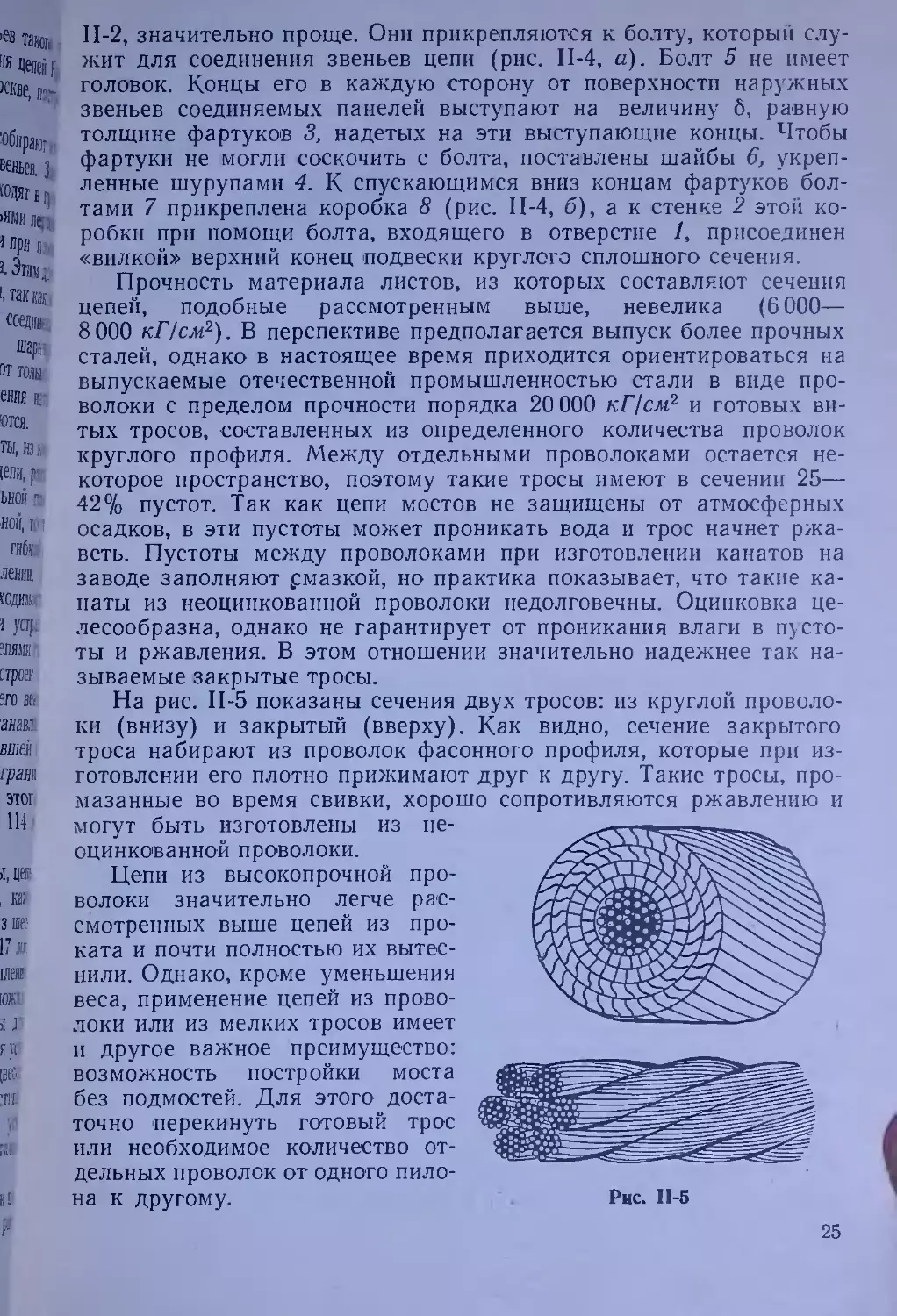
На рис. П-5 показаны сечения двух тросов: из круглой
проволоки (внизу) и закрытый (вверху). Как видно, сечение закрытого
троса набирают из проволок фасонного профиля, которые при
изготовлении его плотно прижимают друг к другу. Такие тросы,
промазанные во время свивки, хорошо сопротивляются ржавлению и
могут быть изготовлены из
неоцинкованной проволоки.
Цепи из высокопрочной
проволоки значительно легче
рассмотренных выше цепей из
проката и почти полностью их
вытеснили. Однако, кроме уменьшения
веса, применение цепей из
проволоки или из мелких тросов имеет
и другое важное преимущество:
возможность постройки моста
без подмостей. Для этого
достаточно 'Перекинуть готовый трос
или необходимое количество
отдельных проволок от одного
пилона к другому. Рис. Н-5
25
Рис. 11-6
К образовавшейся цепи
прикрепляют подвески, а к
ним — балки жесткости и
проезжую часть. Для
мостов, имеющих цепь из
проката, это невозможно,
поэтому строят подмости в
два яруса: один — для
сборки цепей, другой — для
монтажа балок жесткости и
проезжей части.
Цепи из проволоки
довольно разнообразны. При
очень небольших пролетах и
легких пешеходных
нагрузках цепь может состоять из
одного витого троса заводского изготовления. При пролетах
большей величины сечение набирают из нескольких тросов,
расположенных в одном горизонтальном ряду или трех-четырех рядах.
Цепи, перекрывающие большие пролеты, собирают на месте
постройки моста из отдельных проволок. В этих случаях цепь иногда
состоит из очень большого количества проволок. Так, например, мост
через р. Тахо в Лиссабоне имеет цепь из 11 248 проволок
диаметром 5 мм, а в каждой цепи моста Веррацано — Нерроуз их 26108.
Изготовление (или прядение) цепи кабеля из отдельных
проволок осуществляют при помощи прядильного колеса.
Непосредственно под будущей цепью к пилонам подвешивают два легких
троса, на которых по всей длине моста устраивают легкий настил.
Над этим мостиком подвешивают рабочий трос, по которому от
одного конца моста к другому перемещают при помощи тягового
каната прядильное колесо. Колесо на своем ободе имеет желоб для
проволоки.
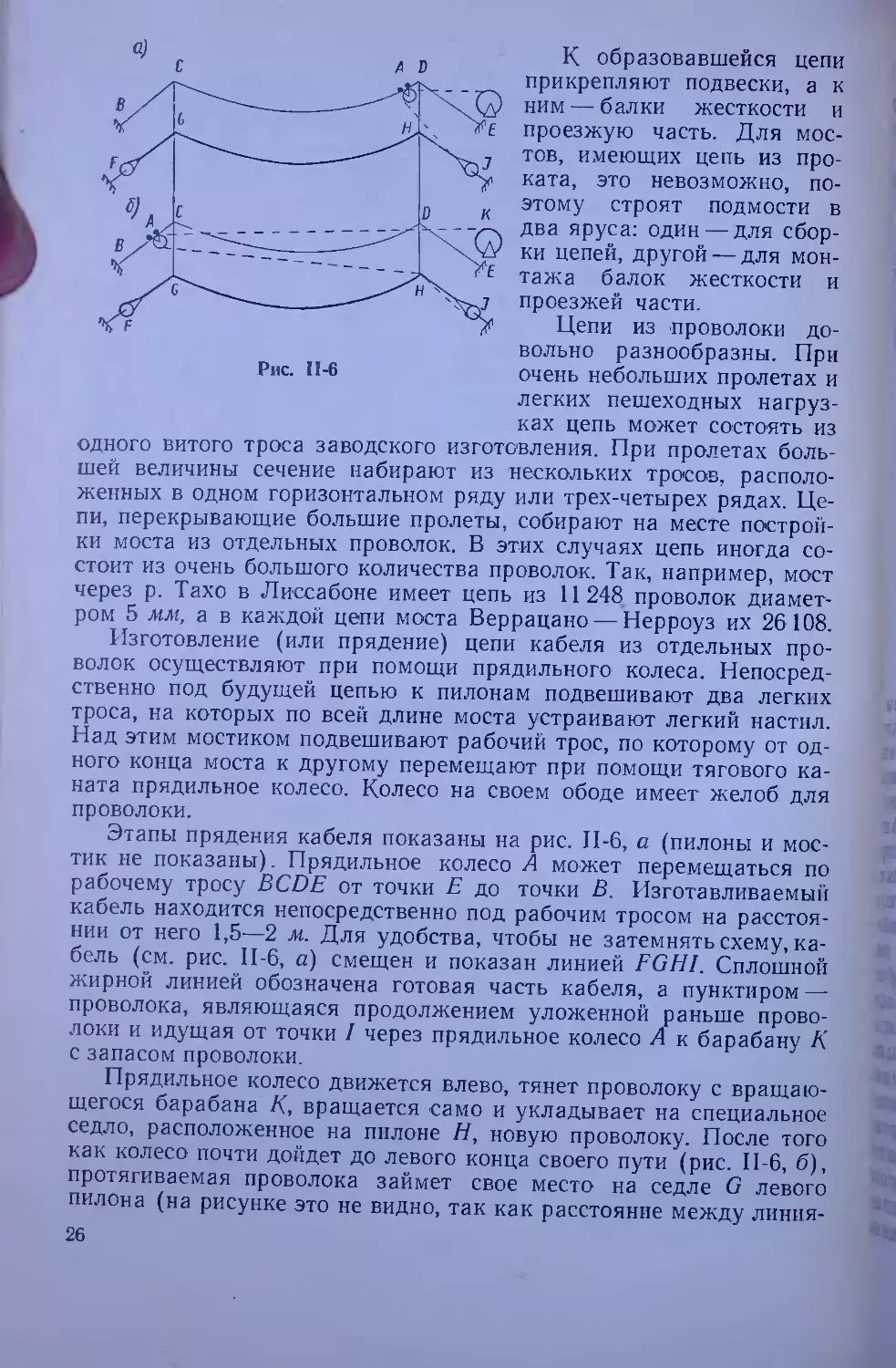
Этапы прядения кабеля показаны на рис. П-6, а (пилоны и
мостик не показаны). Прядильное колесо А может перемещаться по
рабочему тросу BCDE от точки Е до точки В. Изготавливаемый
кабель находится непосредственно под рабочим тросом на
расстоянии от него 1,5—2 м. Для удобства, чтобы не затемнять схему,
кабель (см. рис. П-6, а) смещен и показан линией FGHI. Сплошной
жирной линией обозначена готовая часть кабеля, а пунктиром —
проволока, являющаяся продолжением уложенной раньше
проволоки и идущая от точки / через прядильное колесо А к барабану К
с запасом проволоки.
Прядильное колесо движется влево, тянет проволоку с
вращающегося барабана К, вращается само и укладывает на специальное
седло, расположенное на пилоне Н, новую проволоку. После того
как колесо почти дойдет до левого конца своего пути (рис. П-6, б),
протягиваемая проволока займет свое место на седле G левого
пилона (на рисунке это не видно, так как расстояние между линия-
26
-Ьщ
'г г
"3 Шл
'"«етсоор.
о;
■ ь*?'.'.
:Я-Р:"'
°«-"
•PU- ..*■■.'£''
"^°-- -.у*/
... -•..оо. j .оЛ///
'■:-
6-
Г)'
Нзг*3
ш.х</
О^. .;■'■-
:^v^:-;^....
■.■>-44ifr-.v: ':^---;-;"r;W-"-:.:v-"fii^
.. ■.■ -'J/^ ■*" s*
. •. --■■■ 'fjS^ ^^v -" -'
л :''а:УУ^ <5>^C ^ ^
Sl Г\ S S л V^-fl".':-
-^v sC^c ^^><х-?<*
^§J^^'~1
'^^^<л '
ф:'-' '2
.'■.■й.1?; ■.-:;•"•;. <.o.i- ;... ia.-: .--.'•. -£•£
/
^
;-
-p-
w
■-"-."•"_
■«'■"
'?;%
-■o.-
О:---
?£
' Д
°&-У:
Рис. 11-7
nv-rtf^n °Я Увеличен°)" Когда колесо А дойдет до конца своего
пути, перетягиваемую петлю проволоки снимают с колеса А и
'надевают на специальный упор (башмак) F. Теперь ветвь IHA
проволоки уложена на место. Если несколько ослабить натяжение ветви
лд, то и она ляжет на место.
Таким образом, за одно движение колеса от одного конца
моста до другого укладывают две проволоки. Если в ободе колеса
сделать два желоба, за один ход колеса можно уложить четыре
проволоки, а если на каждую из двух цепей иметь по одному колесу
ЙЕ пТоволГ0 " Д6ЛаЮТ)' Т° 33 °ДИН ПР°Х0Д -жноДуло^ит°ь евСоУ
От левого берега к правому колесо можно перемещать
вхолостую или сделать этот цикл рабочим, если на левом берегу иметь
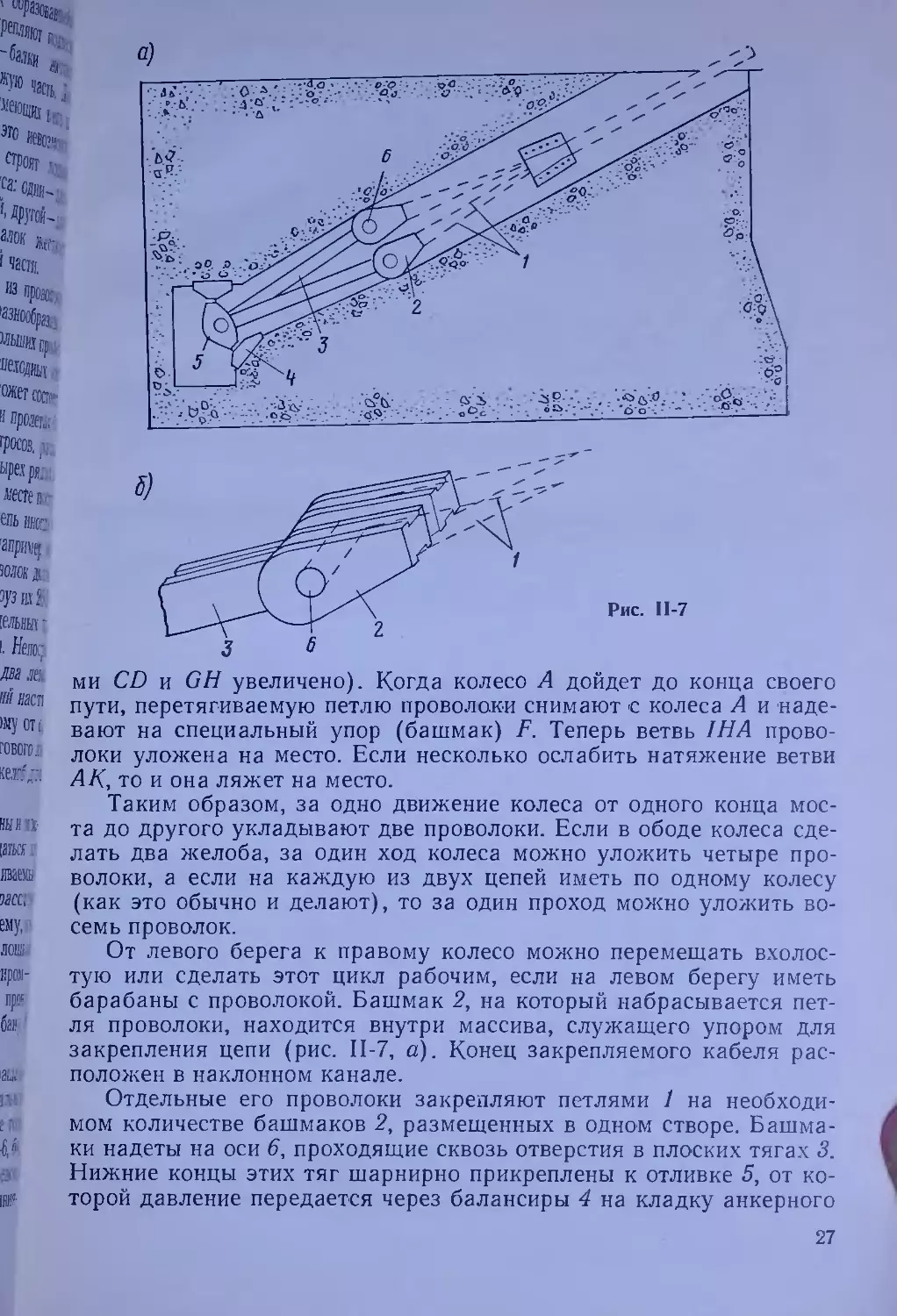
барабаны с проволокой. Башмак 2, на который набрасывается пет
ля проволоки, находится внутри массива, служащего упором для
закрепления цепи (рис. П-7, а). Конец закрепляемого кабеля рас
положен в наклонном канале. рас
м™°ТДеЛЬНЫе eL° ПР°В0Л0КИ закрепляют петлями 1 на необходи-
к ^KnT4eCTBe б"Шмаков 2' Размещенных в одном створе
Батмане™ Н3 °СИ *' пР0Х(™ие скв°зь отверстия в плоских тяга?!
тппП ДЫ ЭТИХ ТЯГ шаРниР«° прикреплены к отливке 5, от V
торой давление передается через балансиры 4 на кладку анкерного
27
массива. Эти операции удобно производить, пока канал не закрыт
сверху кладкой и башмаки 2 доступны.
Схема башмаков 2 с тягами 3 показана на рис. П-7, б. Болтом 6
два башмака присоединяют к пакету тяг 3, состоящему из
необходимого числа звеньев, выбираемых по условию равнопрочности с
проволоками, надеваемыми на два башмака.
Прядение кабеля — очень кропотливая и продолжительная
работа. Так, цепи моста Веррацано — Нерроуз расположены по его
ширине парами и количество проволок превышает 100 000. При
длине каждой проволоки 2 200 м общая длина их составляет около
230 000 км. Прядильные колеса, при помощи которых
изготавливали трос, перемещались со скоростью до 427 м/мин. Следовательно,
если укладывать за 1 раз две проволоки, то только на
перетягивание всех проволок потребуется около 4 000 ч. Если учесть время на
заправку проволок с колеса на башмак и с барабана на колесо, то
при работе в три смены потребуется почти год. Изготовление
кабелей Фортского моста (Англия) с пролетами 405+1 000+405 м
продолжалось восемь месяцев, в том числе на их сборку потребовалось
семь месяцев.
Для экономии времени при постройке моста через бухту
Narragansett близ Нью-Йорка цепь собирали на месте не из
отдельных проволок, а из прядей, изготовленных вне строительной
площадки и доставлявшихся на место в бухтах. Каждая прядь имела
в своем сечении 61 параллельную проволоку диаметром 5 мм, а
цепь состояла из 152 таких прядей. Таким образом, при сборке за
один проход в пролет подавали не одну, а 152 проволоки.
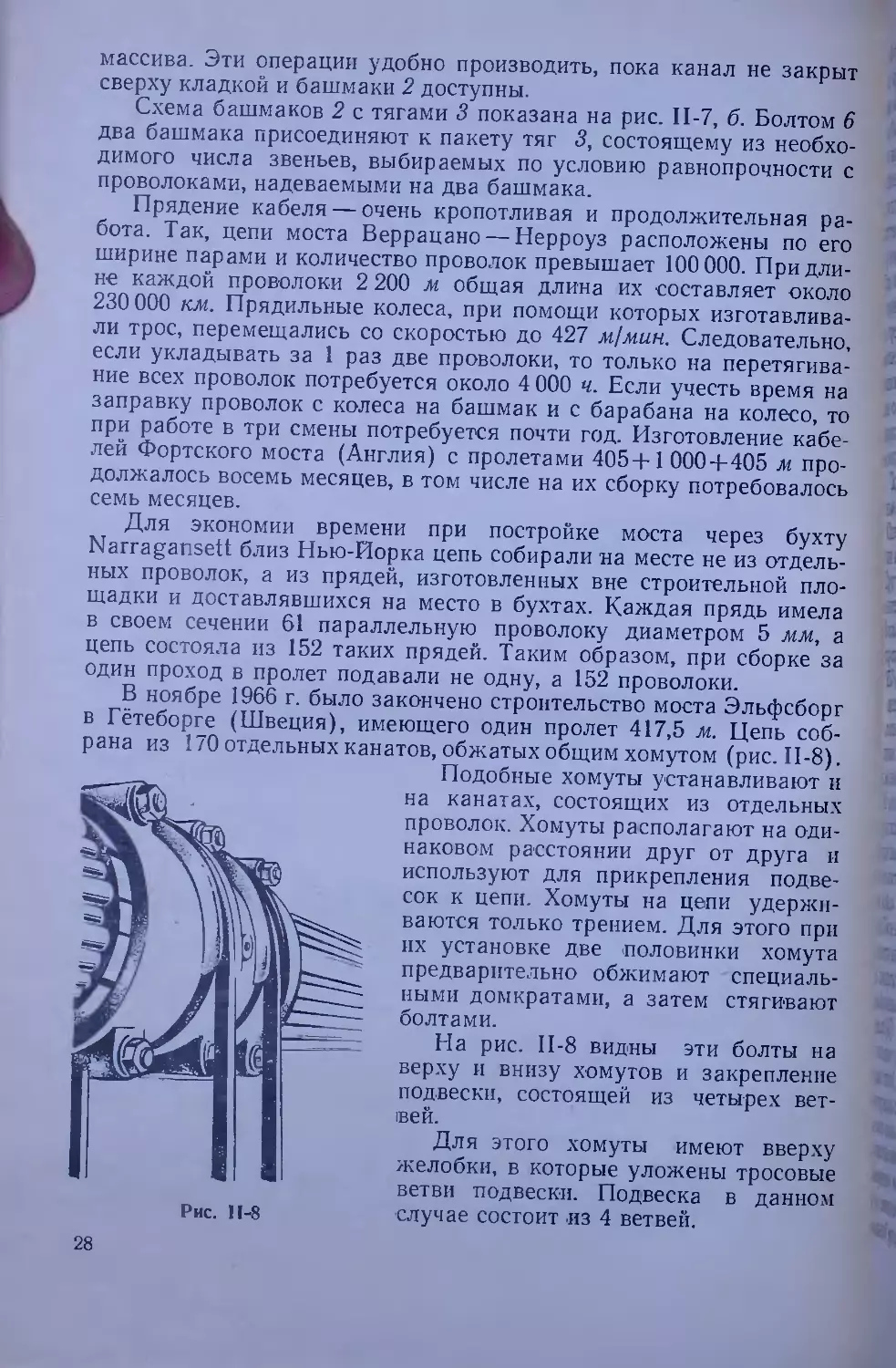
В ноябре 1966 г. было закончено строительство моста Эльфсборг
в Гётеборге (Швеция), имеющего один пролет 417,5 м. Цепь
собрана из 170 отдельных канатов, обжатых общим хомутом (рис. П-8).
Подобные хомуты устанавливают и
на канатах, состоящих из отдельных
проволок. Хомуты располагают на
одинаковом расстоянии друг от друга и
используют для прикрепления
подвесок к цепи. Хомуты на цепи
удерживаются только трением. Для этого при
их установке две половинки хомута
предварительно обжимают
специальными домкратами, а затем стягивают
болтами.
На рис. П-8 видны эти болты на
верху и внизу хомутов и закрепление
подвески, состоящей из четырех
ветвей.
Для этого хомуты имеют вверху
желобки, в которые уложены тросовые
ветви подвески. Подвеска в данном
Рис. us случае состоит из 4 ветвей.
28
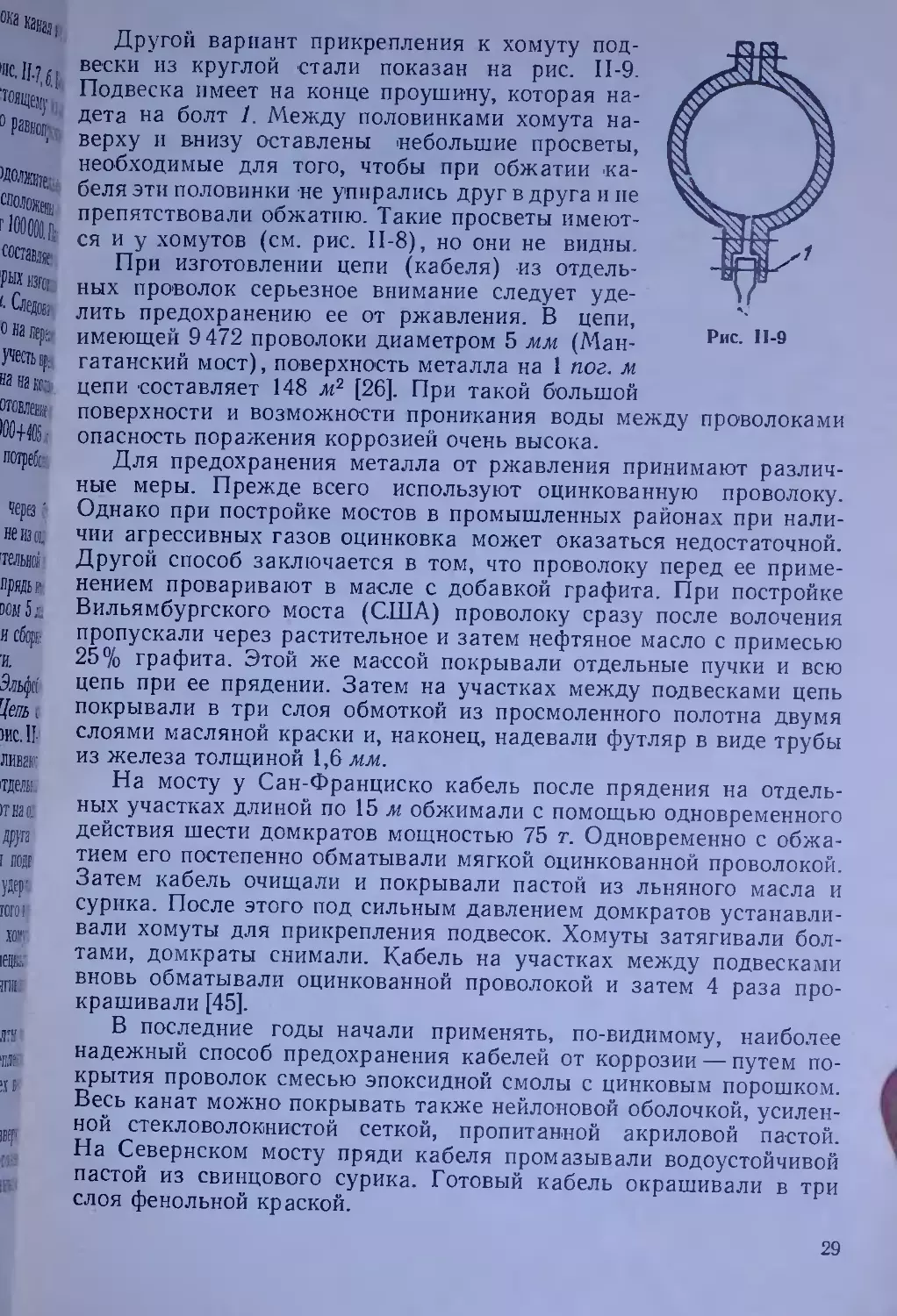
Другой вариант прикрепления к хомуту
подвески из круглой стали показан на рис. П-9.
' Подвеска имеет на конце проушину, которая
надета на болт 1. Между половинками хомута
наверху и внизу оставлены 'небольшие просветы,
необходимые для того, чтобы при обжатии «а-
беля эти половинки не упирались друг в друга и не
препятствовали обжатию. Такие просветы имеют-
■* ся и у хомутов (см. рис. П-8), но они не видны.
При изготовлении цепи (кабеля) из
отдельных проволок серьезное внимание следует
уделить предохранению ее от ржавления. В цепи,
имеющей 9 472 проволоки диаметром 5 мм (Ман-
ц гатанский мост), поверхность металла на 1 пог. м
л цепи составляет 148 м2 [26]. При такой большой
поверхности и возможности проникания воды между проволоками
опасность поражения коррозией очень высока.
Для предохранения металла от ржавления принимают
различные меры. Прежде всего используют оцинкованную проволоку.
Однако при постройке мостов в промышленных районах при
наличии агрессивных газов оцинковка может оказаться недостаточной.
Другой способ заключается в том, что проволоку перед ее
применением проваривают в масле с добавкой графита. При постройке
Вильямбургского моста (США) проволоку сразу после волочения
пропускали через растительное и затем нефтяное масло с примесью
25% графита. Этой же массой покрывали отдельные пучки и всю
цепь при ее прядении. Затем на участках между подвесками цепь
покрывали в три слоя обмоткой из просмоленного полотна двумя
слоями масляной краски и, наконец, надевали футляр в виде трубы
из железа толщиной 1,6 мм.
На мосту у Сан-Франциско кабель после прядения на
отдельных участках длиной по 15 ж обжимали с помощью одновременного
действия шести домкратов мощностью 75 т. Одновременно с
обжатием его постепенно обматывали мягкой оцинкованной проволокой.
Затем кабель очищали и покрывали пастой из льняного масла и
сурика. После этого под сильным давлением домкратов
устанавливали хомуты для прикрепления подвесок. Хомуты затягивали
болтами, домкраты снимали. Кабель на участках между подвесками
вновь обматывали оцинкованной проволокой и затем 4 раза
прокрашивали [45].
В последние годы начали применять, по-видимому, наиболее
надежный способ предохранения кабелей от коррозии — путем
покрытия проволок смесью эпоксидной смолы с цинковым порошком.
Весь канат можно покрывать также нейлоновой оболочкой,
усиленной стекловолокнистой сеткой, пропитанной акриловой пастой.
На Севернском мосту пряди кабеля промазывали водоустойчивой
пастой из свинцового сурика. Готовый кабель окрашивали в три
слоя фенольной краской.
29
Рис. IMO
Очевидно, что
предохранять от
коррозии следует не
только тросы, но и
прокатный металл.
Однако здесь, по-
видимому,
достаточно надежным
является обычное
покрытие масляной
краской.
Внутренние
стенки коробок жесткости не гарантированы от появления коррозии,
если к ним может проникать воздух и влага. Поэтому необходимы
меры по защите от коррозии. На Севернском мосту в полости
коробки заложены водопоглощающие вещества, которые по мере их
использования заменяют.
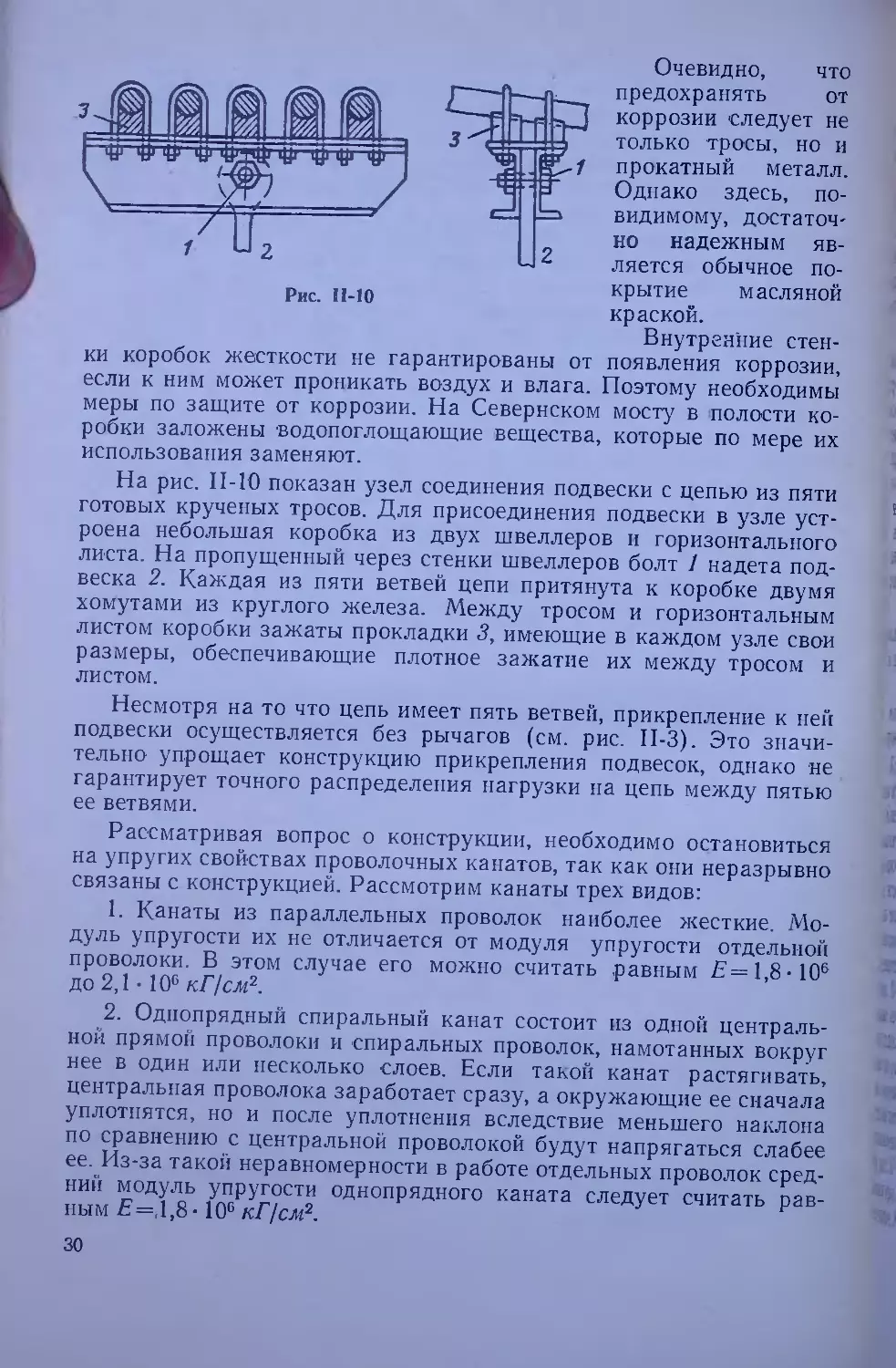
На рис. II-10 показан узел соединения подвески с цепью из пяти
готовых крученых тросов. Для присоединения подвески в узле
устроена небольшая коробка из двух швеллеров и горизонтального
листа. На пропущенный через стенки швеллеров болт У надета
подвеска 2. Каждая из пяти ветвей цепи притянута к коробке двумя
хомутами из круглого железа. Между тросом и горизонтальным
листом коробки зажаты прокладки 3, имеющие в каждом узле свои
размеры, обеспечивающие плотное зажатие их между тросом и
листом.
Несмотря на то что цепь имеет пять ветвей, прикрепление к ней
подвески осуществляется без рычагов (см. рис. П-3). Это
значительно упрощает конструкцию прикрепления подвесок, однако не
гарантирует точного распределения нагрузки на цепь между пятью
ее ветвями.
Рассматривая вопрос о конструкции, необходимо остановиться
на упругих свойствах проволочных канатов, так как они неразрывно
связаны с конструкцией. Рассмотрим канаты трех видов:
1. Канаты из параллельных проволок наиболее жесткие.
Модуль упругости их не отличается от модуля упругости отдельной
проволоки. В этом случае его можно считать равным £=1,8-106
до 2,1 • 106 кГ/см2.
2. Однопрядный спиральный канат состоит из одной
центральной прямой проволоки и спиральных проволок, намотанных вокруг
нее в один или несколько слоев. Если такой канат растягивать,
центральная проволока заработает сразу, а окружающие ее сначала
уплотнятся, но и после уплотнения вследствие меньшего наклона
по сравнению с центральной проволокой будут напрягаться слабее
ее. Из-за такой неравномерности в работе отдельных проволок
средний модуль упругости однопрядного каната следует считать
равным £=,1,8 • 106 кГ/см2.
30
3. Многопрядный канат состоит из одной центральной пряди и
намотанных вокруг нее других прядей. Модуль упругости их
оказывается еще ниже (£=1,5-106 кГ/см2). Однако если такой канат
предварительно растянуть нагрузкой, в 1,5—2 раза превышающей
расчетную, и держать под ней 1,5—2 ч, отдельные проволоки и
пряди уплотнятся и модуль упругости повысится до 1,75 ■ 106н-
4-1,8- Ю6кГ/см2 [45].
Перед изучением отдельных узлов конструкции необходимо
остановиться на вопросах, касающихся подготовки концов тросов
заводского изготовления, устройства стыков тросов и отдельных
проволок.
Последний вопрос имеет непосредственное отношение к
изложенному — прядению кабеля из отдельных проволок. При больших
пролетах приходится укладывать десятки тысяч километров
проволоки. Например, на мосту Веррацано — Нерроуз каждый из
четырех кабелей имеет длину проволок свыше 50000 км. Очевидно,
при прядении необходимо неоднократное наращивание проволоки,
которое осуществляют при помощи муфточек с обратной нарезкой
в левой и правой ее половинках. Один из концов соединяемых
проволок тоже имеет правую, а другой левую нарезку. Стык
получается очень компактным, но благодаря наличию нарезки не совсем
равнопрочным цельной проволоке.
Однако при большом количестве проволок в сечении несколько
ослабленных проволок не могут заметно снизить прочность кабеля
- в целом.
Диаметр муфточек примерно в 1,5 раза больше диаметра
самой проволоки. Поэтому порядок укладки стыкованной проволоки
практически не нарушается.
:_ Концы тросов заводского изготовления обрабатывают следую-
г~ щим образом.
Конец вставляют в конический стакан и на участке, несколько
большем длины стакана, расплетают. Концы проволок -загибают в
виде крючков, и пучок втягивают в коническую полость стакана.
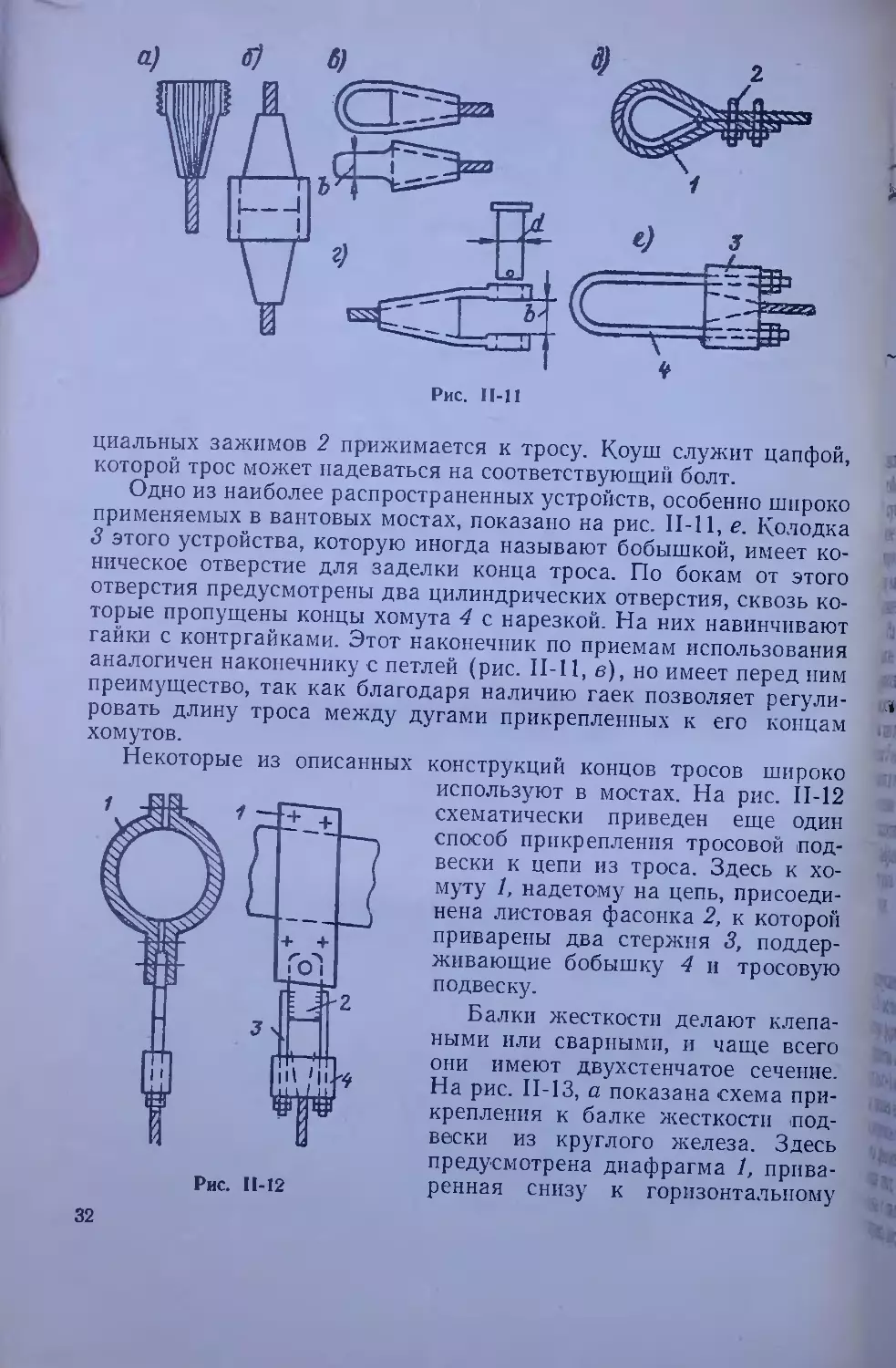
После этого стакан устанавливают вертикально (рис. П-11, а) и
полость его заливают сплавом из олова, сурьмы и свинца [45].
Если иметь снаружи нарезку (см. рис. П-11, а), два каната
можно соединять друг с другом при помощи муфты с внутренней
нарезкой (рис. П-11, б). Наконечники могут иметь и другие формы,
показанные на рис. П-11, в, г. Первый из них имеет петлю, которую
можно надевать на болт, пропущенный через две фасонки,
расположенные на расстоянии Ъ друг от друга. Второй имеет две щеки,
сквозь которые может быть пропущена чека. Наконечник можно
надеть на лист толщиной Ъ, имеющий отверстие диаметром d. Чека
в установленном положении закрепляется шплинтом.
: На рис. П-11, д показана другая конструкция конца троса, изго-
J- товленная при помощи так называемого коуша /, имеющего желоб-
в- чатое сечение. Конец троса огибает этот коуш и при помощи спе-
31
Рис. II-ll
циальных зажимов 2 прижимается к тросу. Коуш служит цапфой,
которой трос может надеваться на соответствующий болт.
Одно из наиболее распространенных устройств, особенно широко
применяемых в вантовых мостах, показано на рис. П-11, е. Колодка
3 этого устройства, которую иногда называют бобышкой, имеет
коническое отверстие для заделки конца троса. По бокам от этого
отверстия предусмотрены два цилиндрических отверстия, сквозь
которые пропущены концы хомута 4 с нарезкой. На них навинчивают
гайки с контргайками. Этот наконечник по приемам использования
аналогичен наконечнику с петлей (рис. П-11, в), но имеет перед ним
преимущество, так как благодаря наличию гаек позволяет
регулировать длину троса между дугами прикрепленных к его концам
хомутов.
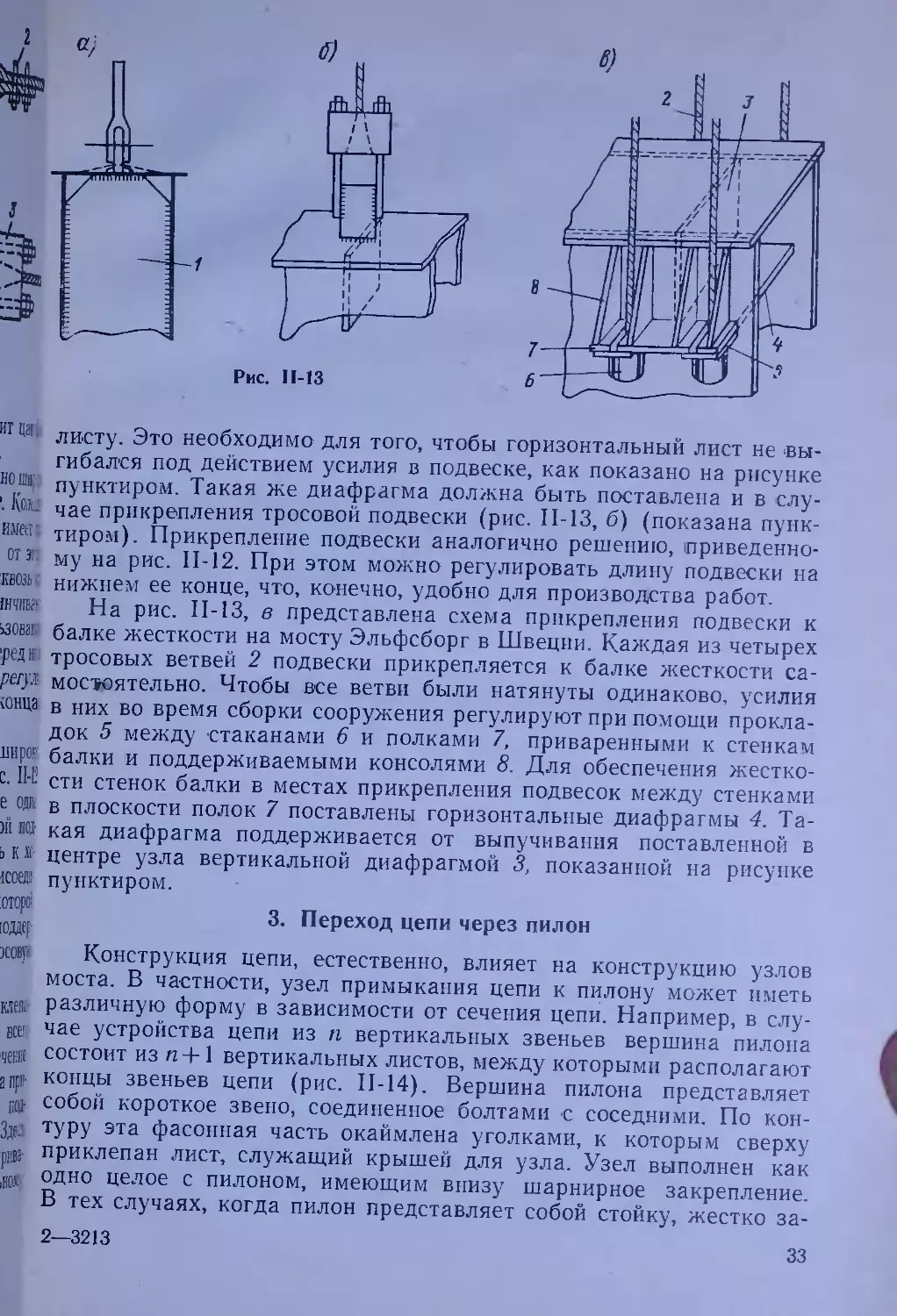
Некоторые из описанных конструкций концов тросов широко
используют в мостах. На рис. П-12
схематически приведен еще один
способ прикрепления тросовой
подвески к цепи из троса. Здесь к
хомуту /, надетому на цепь,
присоединена листовая фасонка 2, к которой
приварены два стержня 3,
поддерживающие бобышку 4 и тросовую
подвеску.
Балки жесткости делают
клепаными или сварными, и чаще всего
они имеют двухстенчатое сечение.
На рис. П-13, а показана схема
прикрепления к балке жесткости
подвески из круглого железа. Здесь
предусмотрена диафрагма /, прнва-
Рис. IM2 ренная снизу к горизонтальному
32
игщ' листу. Это необходимо для того, чтобы горизонтальный лист не
'Выгибался под действием усилия в подвеске, как показано на рисунке
нош пунктиром. Такая же диафрагма должна быть поставлена и в слу-
'. KfflL чае прикрепления тросовой подвески (рис. П-13, б) (показана пунк-
ими тиром). Прикрепление подвески аналогично решению, ориведенно-
отэ' му на рис. II-12. При этом можно регулировать длину подвески на
квоаь нижнем ее конце, что, конечно, удобно для производства работ.
шчпв?'" На рис. П-13, в представлена схема прикрепления подвески к
ьзова! балке жесткости на мосту Эльфсборг в Швеции. Каждая из четырех
'РШ тросовых ветвей 2 подвески прикрепляется к балке жесткости са-
рет моск>ятельно. Чтобы все ветви были натянуты одинаково, усилия
чонца в них во время сборки сооружения регулируют при помощи
прокладок 5 между стаканами 6 и полками 7, приваренными к стенкам
мро." балки и поддерживаемыми консолями 8. Для обеспечения жестко-
с. Н-1! сти стенок балки в местах прикрепления подвесок между стенками
е ода в плоскости полок 7 поставлены горизонтальные диафрагмы 4. Та-
зй под- кая диафрагма поддерживается от выпучивания поставленной в
ькж- центре узла вертикальной диафрагмой 3, показанной на рисунке
«зд; пунктиром.
J 3. Переход цепи через пилон
зсовр Конструкция цепи, естественно, влияет на конструкцию узлов
моста. В частности, узел примыкания цепи к пилону может иметь
Met различную форму в зависимости от сечения цепи. Например, в слу-
Бсег чае устройства цепи из п вертикальных звеньев вершина пилона
дац состоит из п+ 1 вертикальных листов, между которыми располагают
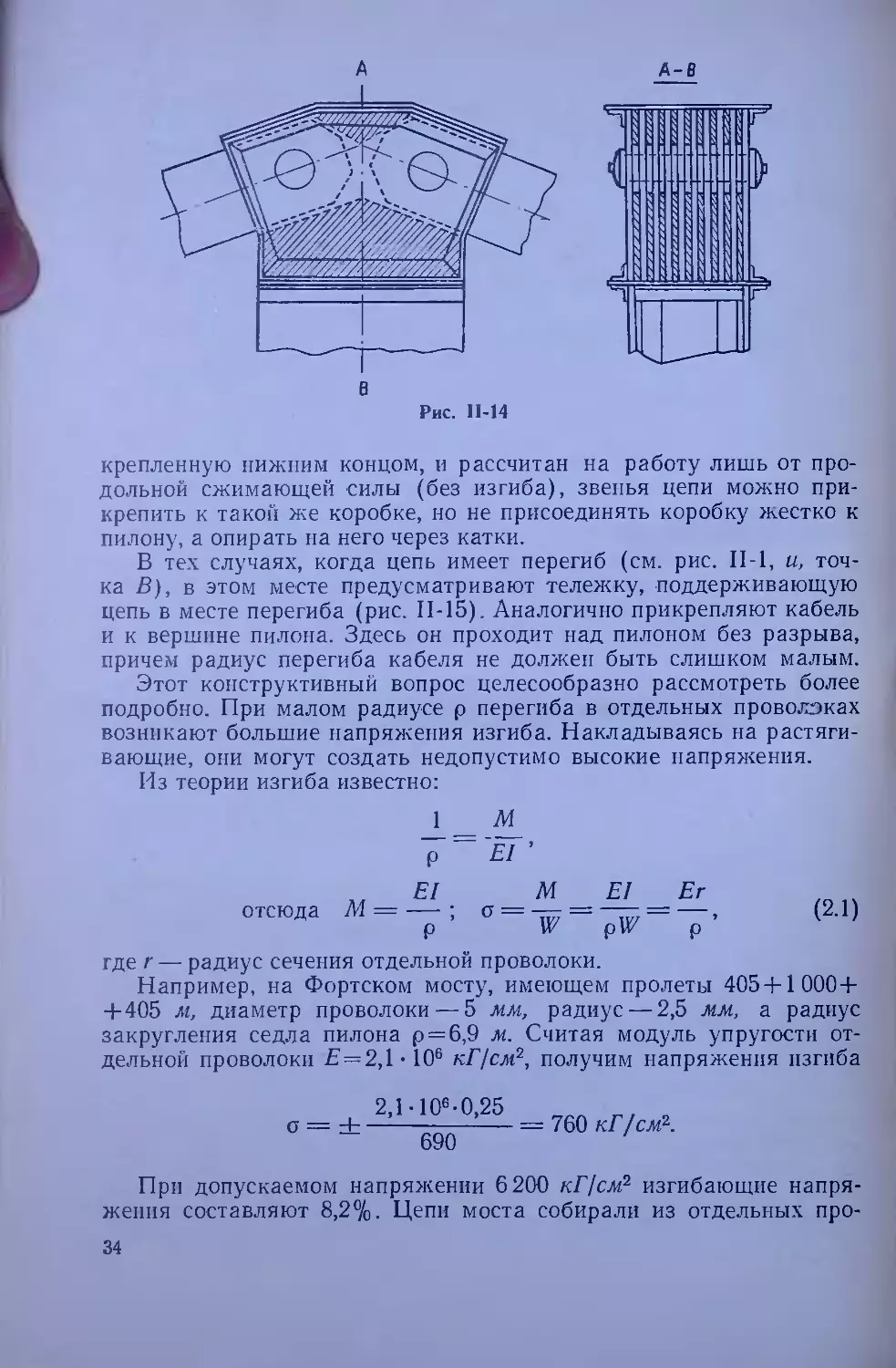
апри- концы звеньев цепи (рис. Н-14). Вершина пилона представляет
под- собой короткое звено, соединенное болтами с соседними. По кон-
Зде." ТУРУ эта фасонная часть окаймлена уголками, к которым сверху
рНва- приклепан лист, служащий крышей для узла. Узел выполнен как
|Н№ одно целое с пилоном, имеющим внизу шарнирное закрепление.
В тех случаях, когда пилон представляет собой стойку, жестко за-
2—3213
33
А-в
Рис. 11-14
крепленную нижним концом, и рассчитан на работу лишь от
продольной сжимающей силы (без изгиба), звенья цепи можно
прикрепить к такой же коробке, но не присоединять коробку жестко к
пилону, а опирать на него через катки.
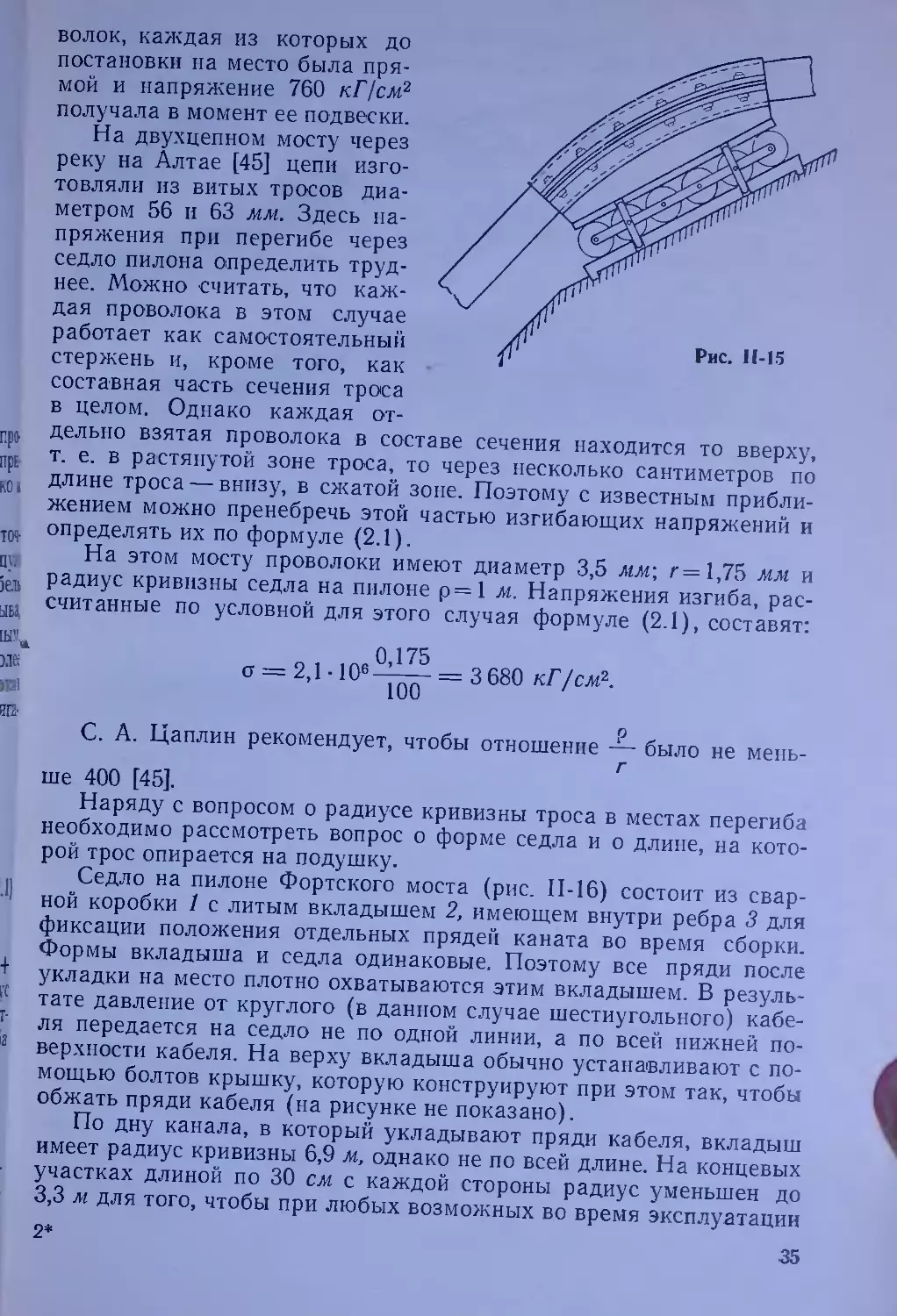
В тех случаях, когда цепь имеет перегиб (см. рис. П-1, и,
точка Б), в этом месте предусматривают тележку, поддерживающую
цепь в месте перегиба (рис. П-15). Аналогично прикрепляют кабель
и к вершине пилона. Здесь он проходит над пилоном без разрыва,
причем радиус перегиба кабеля не должен быть слишком малым.
Этот конструктивный вопрос целесообразно рассмотреть более
подробно. При малом радиусе р перегиба в отдельных проволоках
возникают большие напряжения изгиба. Накладываясь на
растягивающие, они могут создать недопустимо высокие напряжения.
Из теории изгиба известно:
1 _ М
El M El Ег
отсюда М = — ; а = — = —- = —,
р w ри/ р
(2.1)
где г — радиус сечения отдельной проволоки.
Например, на Фортском мосту, имеющем пролеты 405+1000 +
+ 405 м, диаметр проволоки — 5 мм, радиус — 2,5 мм, а радиус
закругления седла пилона р = 6,9 м. Считая модуль упругости
отдельной проволоки £ = 2,1-106 кГ/см2, получим напряжения изгиба
с— ±-
2,1-106-0,25
690
760 кГ/см2.
При допускаемом напряжении 6 200 кГ/см2 изгибающие
напряжения составляют 8,2%. Цепи моста собирали из отдельных про-
34
волок, каждая из которых до
постановки на место была
прямой и напряжение 760 кГ/см2
получала в момент ее подвески.
На двухцепном мосту через
реку на Алтае [45] цепи
изготовляли из витых тросов
диаметром 56 и 63 мм. Здесь
напряжения при перегибе через
седло пилона определить
труднее. Можно считать, что
каждая проволока в этом случае
работает как самостоятельный
стержень и, кроме того, как
составная часть сечения троса
в целом. Однако каждая
отдельно взятая проволока в составе сечения находится то вверху,
т. е. в растянутой зоне троса, то через несколько сантиметров по
длине троса — внизу, в сжатой зоне. Поэтому с известным
приближением можно пренебречь этой частью изгибающих напряжений и
определять их по формуле (2.1).
На этом мосту проволоки имеют диаметр 3,5 мм; г =1,75 мм и
радиус кривизны седла на пилоне р=1 м. Напряжения изгиба,
рассчитанные по условной для этого случая формуле (2.1), составят:
а = 2,1 ■ 106- = 3 680 кГ/см2.
л 100
о
С. А. Цаплин рекомендует, чтобы отношение — было не мень-
г
ше 400 [45].
Наряду с вопросом о радиусе кривизны троса в местах перегиба
необходимо рассмотреть вопрос о форме седла и о длине, на
которой трос опирается на подушку.
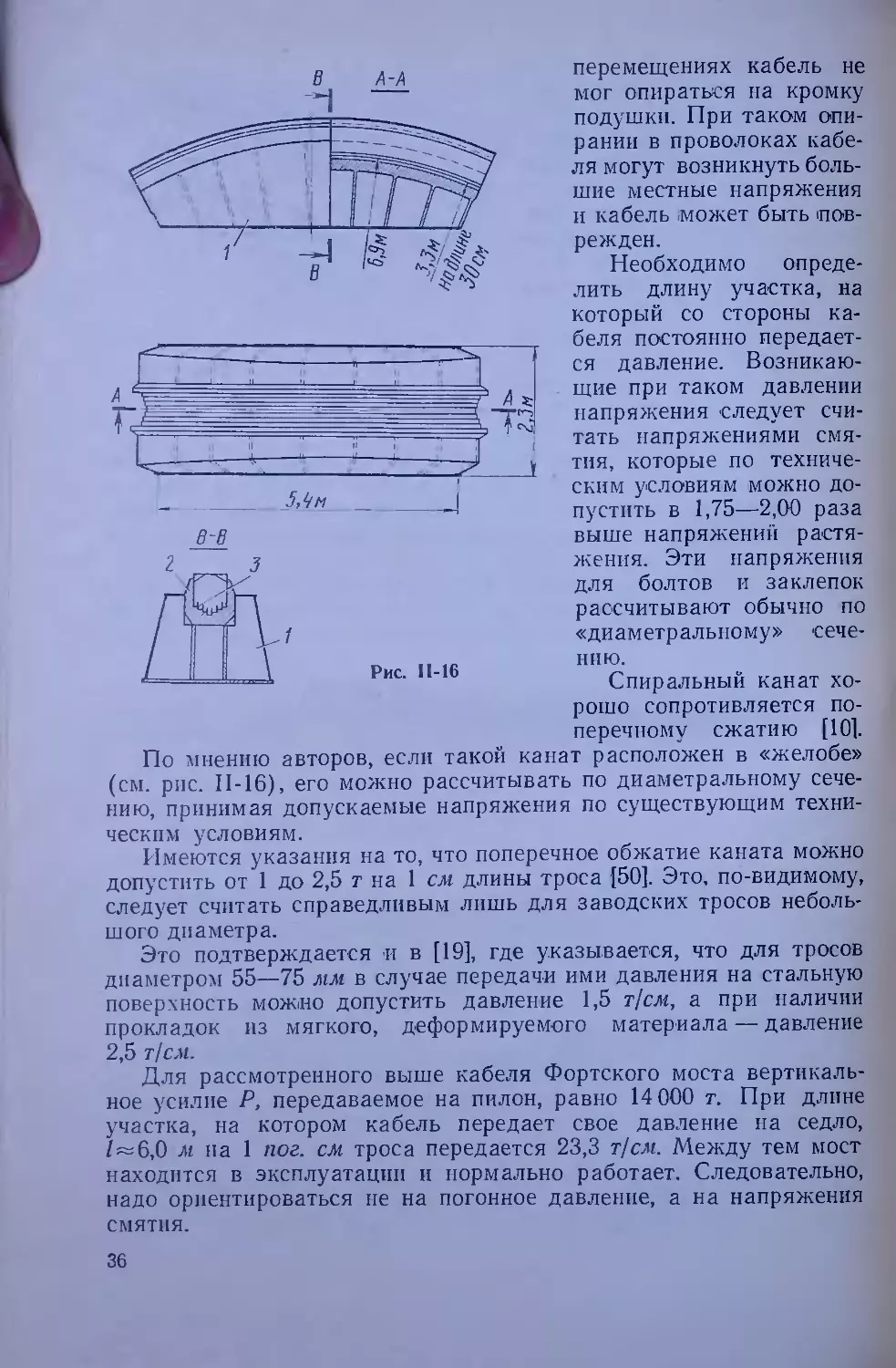
Седло на пилоне Фортского моста (рис. II-16) состоит из
сварной коробки / с литым вкладышем 2, имеющем внутри ребра 3 для
фиксации положения отдельных прядей каната во время сборки.
Формы вкладыша и седла одинаковые. Поэтому все пряди после
укладки на место плотно охватываются этим вкладышем. В
результате давление от круглого (в данном случае шестиугольного)
кабеля передается на седло не по одной линии, а по всей нижней
поверхности кабеля. На верху вкладыша обычно устанавливают с
помощью болтов крышку, которую конструируют при этом так, чтобы
обжать пряди кабеля (на рисунке не показано).
По дну канала, в который укладывают пряди кабеля, вкладыш
имеет радиус кривизны 6,9 м, однако не по всей длине. На концевых
участках длиной по 30 см с каждой стороны радиус уменьшен до
3,3 м для того, чтобы при любых возможных во время эксплуатации
2*
•35
перемещениях кабель не
мог опираться на кромку
подушки. При таком опи-
рании в проволоках
кабеля могут возникнуть
большие местные напряжения
и кабель .может быть
поврежден.
Необходимо
определить длину участка, на
который со стороны
кабеля постоянно
передается давление.
Возникающие при таком давлении
напряжения следует
считать напряжениями
смятия, которые по
техническим условиям можно
допустить в 1,75—2,00 раза
выше напряжении
растяжения. Эти напряжения
для болтов и заклепок
рассчитывают обычно по
«диаметральному»
сечению.
Спиральный канат
хорошо сопротивляется
поперечному сжатию [101.
По мнению авторов, если такой канат расположен в «желобе»
(см. рис. П-16), его можно рассчитывать по диаметральному
сечению, принимая допускаемые напряжения по существующим
техническим условиям.
Имеются указания на то, что поперечное обжатие каната можно
допустить от 1 до 2,5 т на 1 см длины троса [501. Это, по-видимому,
следует считать справедливым лишь для заводских тросов
небольшого диаметра.
Это подтверждается и в [191, где указывается, что для тросов
диаметром 55—75 мм в случае передачи ими давления на стальную
поверхность можио допустить давление 1,5 т/см, а при наличии
прокладок из мягкого, деформируемого материала — давление
2,5 т/см.
Для рассмотренного выше кабеля Фортского моста
вертикальное усилие Р, передаваемое на пилон, равно 14 000 т. При длине
участка, на котором кабель передает свое давление на седло,
/~6,0 м на 1 пог. см троса передается 23,3 т/см. Между тем мост
находится в эксплуатации и нормально работает. Следовательно,
надо ориентироваться не на погонное давление, а на напряжения
смятия.
Рис. П-16
36
Диаметр троса этого моста после его обжатия домкратами
составил d = 59 см. Следовательно, на единицу площади диаметрапь-
ного сечения передается давление
Р 14 000000 „, ,
асм = —, = « 400 кГ/см2.
с Id 600-59 '
Если кабель имеет относительно большое сечение, а форма
подушки пилона не седлообразная, а цилиндрическая, Н. С.
Стрелецкий [37] рекомендует его сечение у пилона развернуть в
горизонтальной плоскости, пропустив через отливку пилона тонким слоем.
Это справедливо, но, видимо, предпочтение следует отдавать
подушкам седлообразной формы.
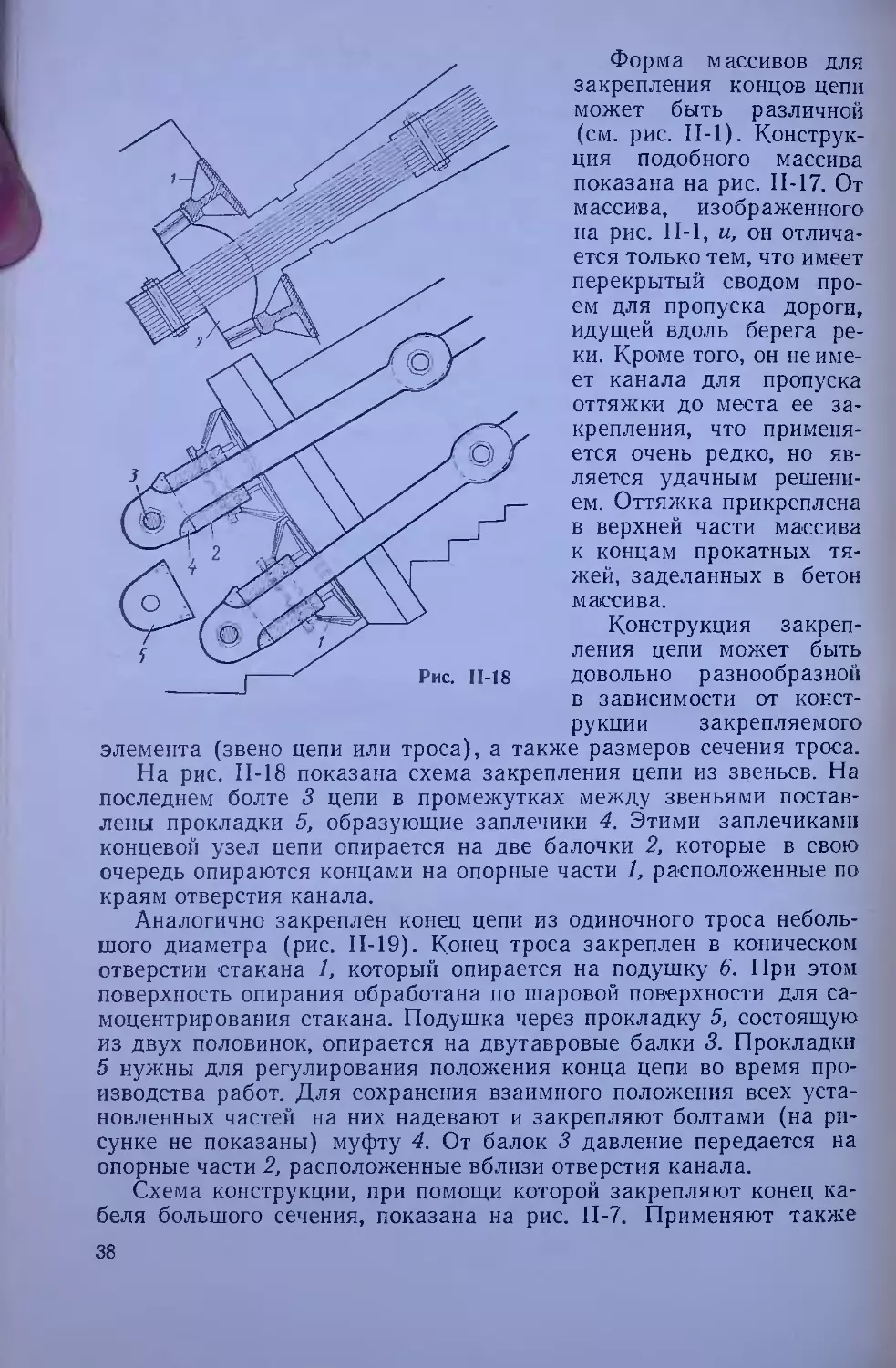
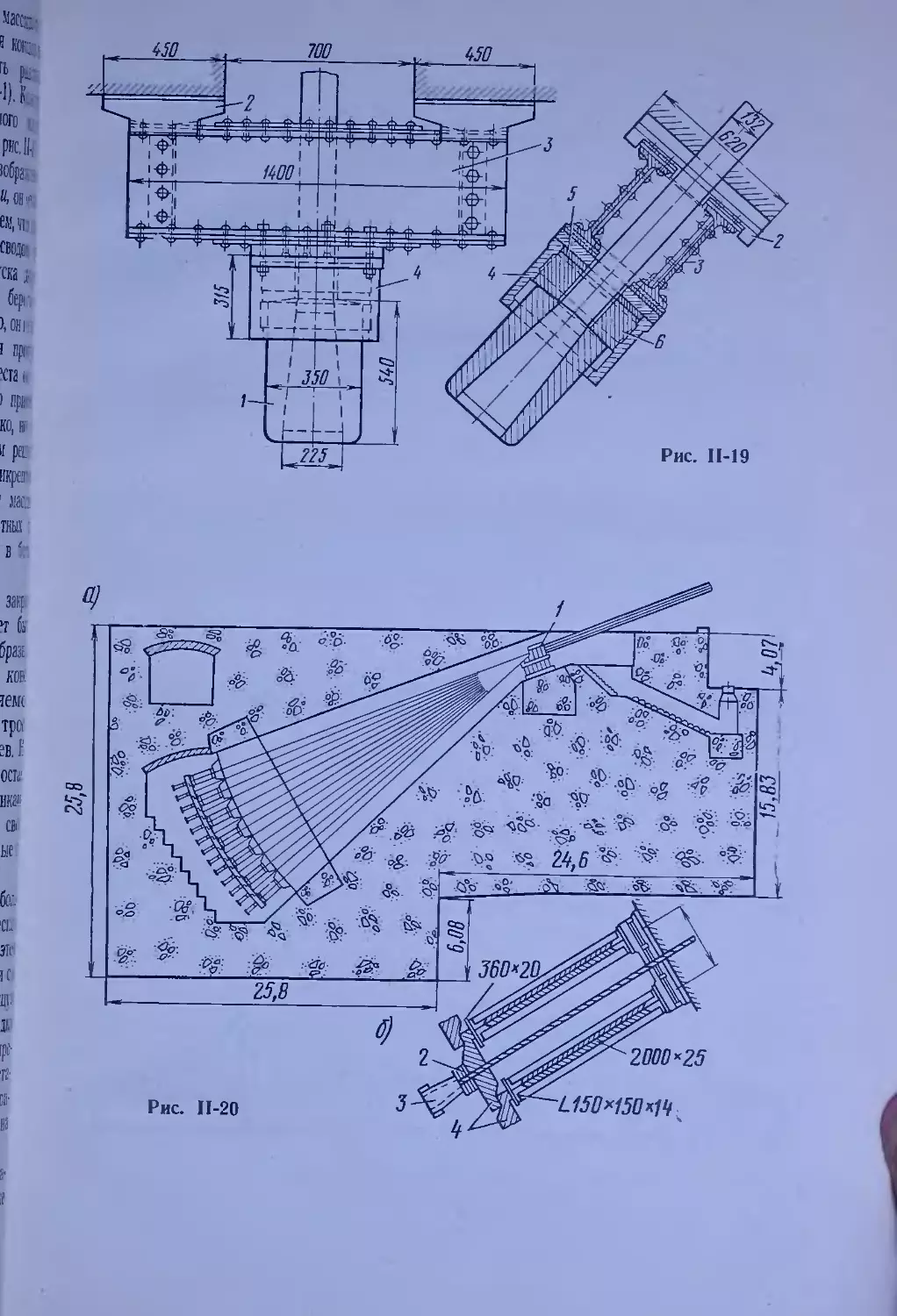
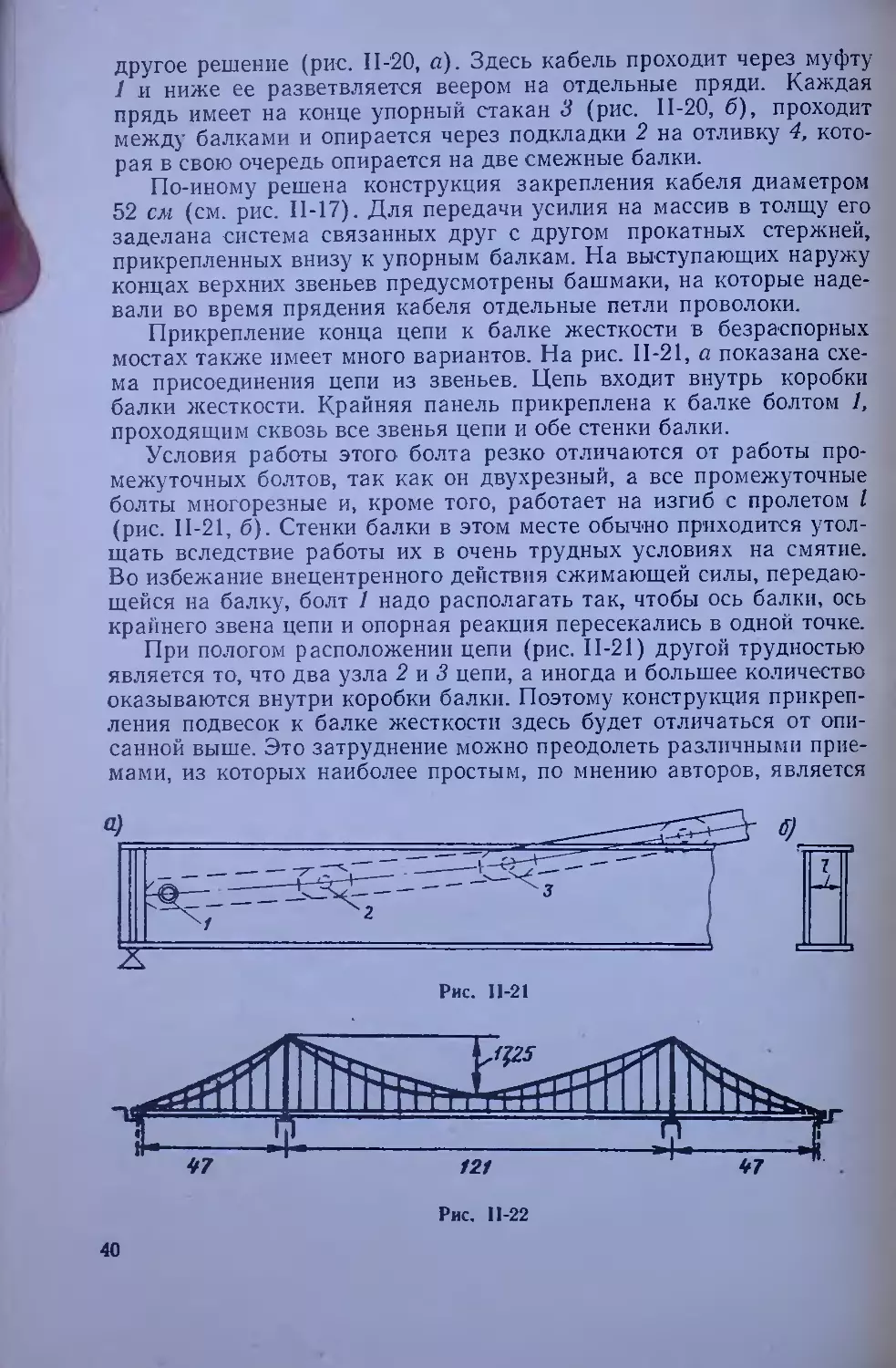
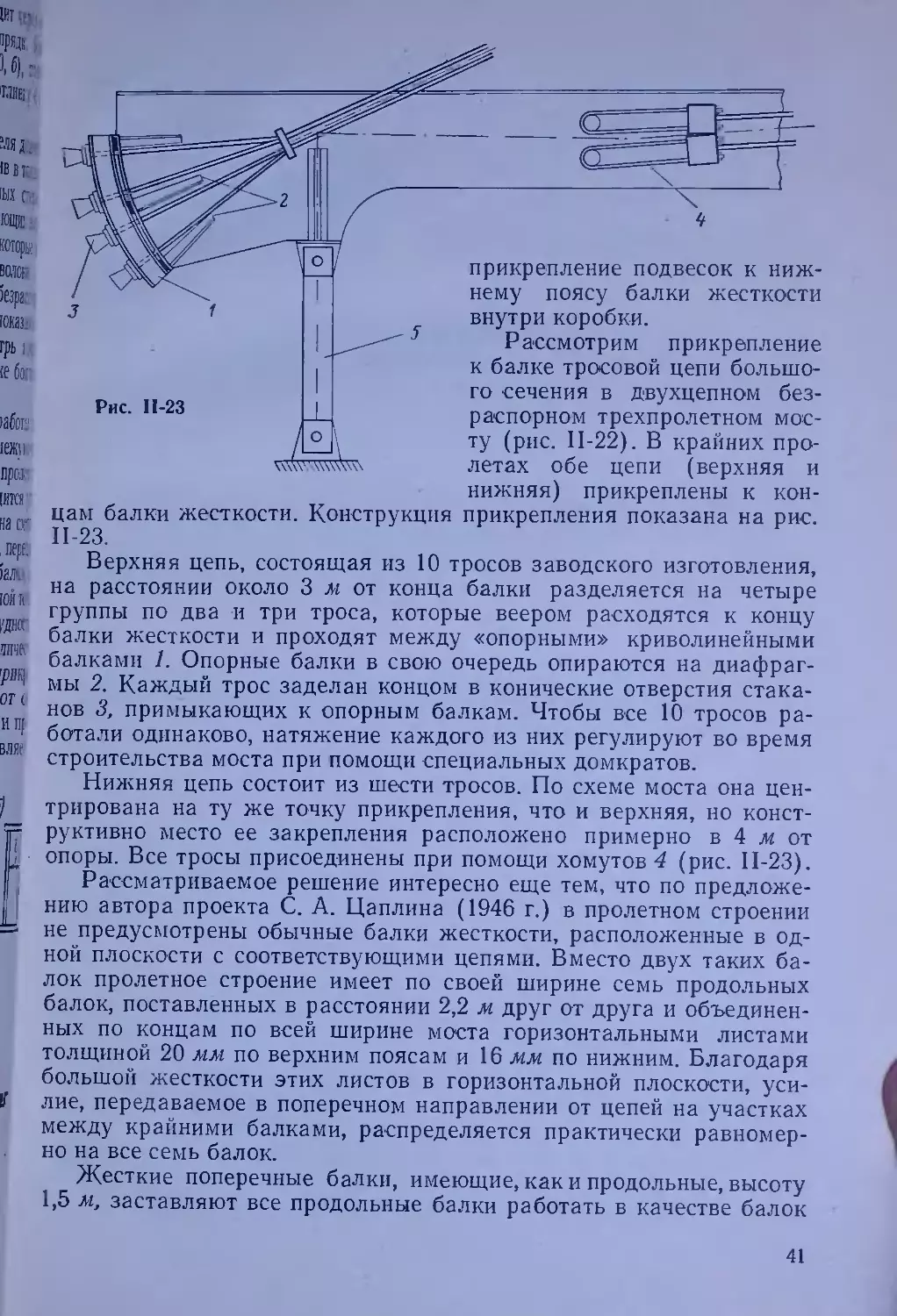
4. Закрепление конца цепи в массиве
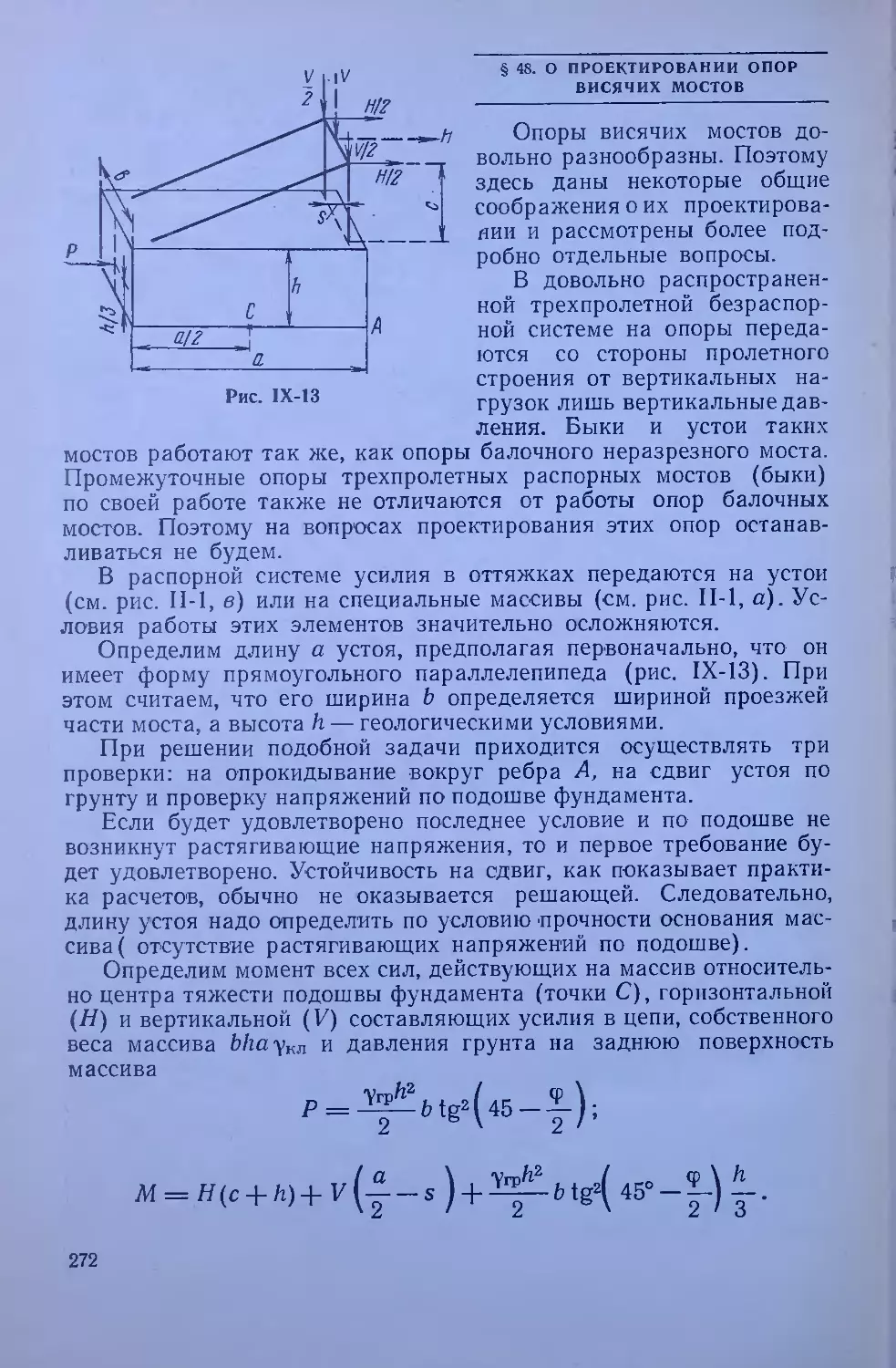
и в балке жесткости. Системы балок жесткости
Одним из наиболее сложных элементов конструкции цепного
моста является закрепление концов цепи. Рассмотрим такие
закрепления в распорных и безраспорных мостах.
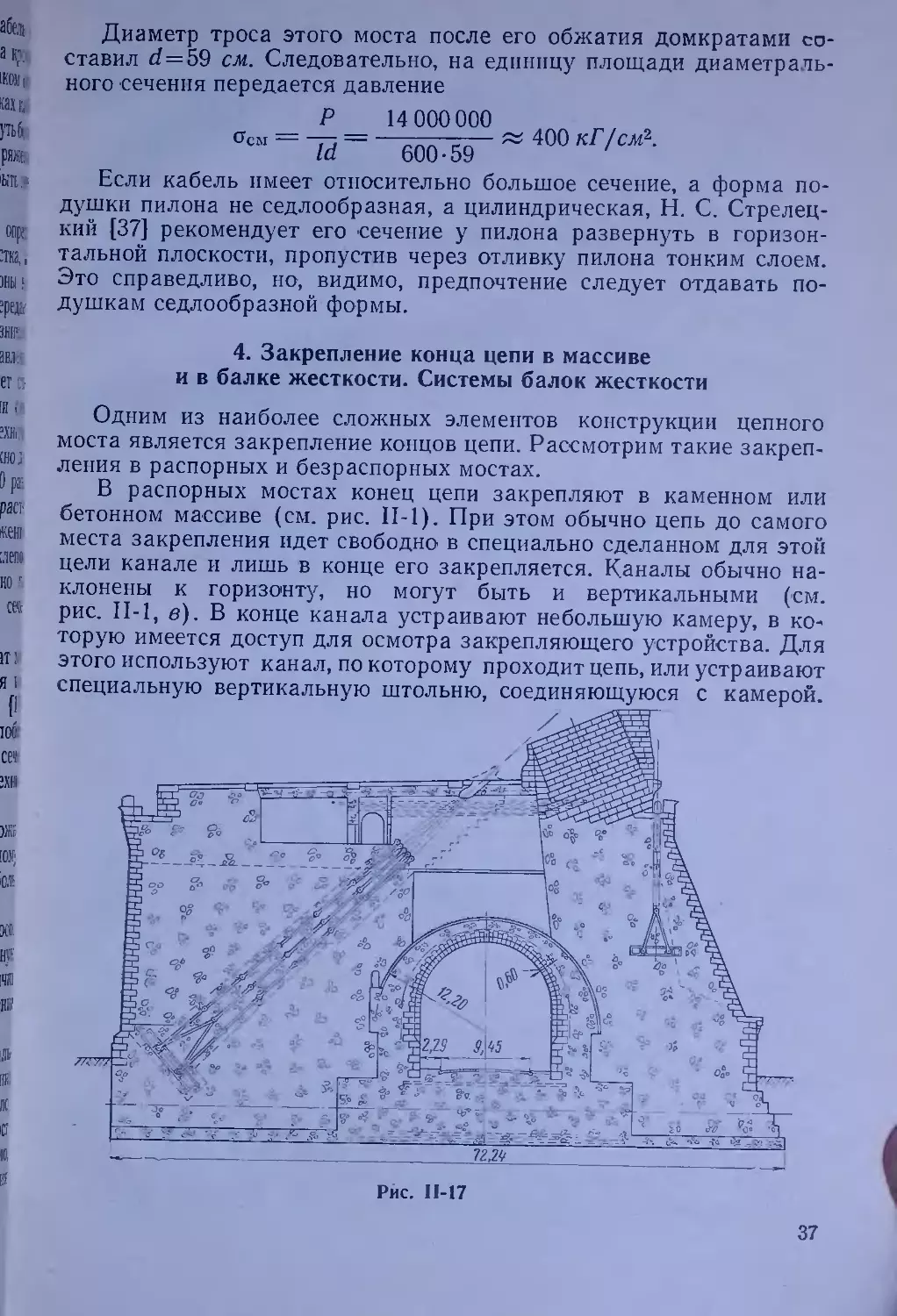
В распорных мостах конец цепи закрепляют в каменном или
бетонном массиве (см. рис. П-1). При этом обычно цепь до самого
места закрепления идет свободно в специально сделанном для этой
цели канале и лишь в конце его закрепляется. Каналы обычно
наклонены к горизонту, но могут быть и вертикальными (см.
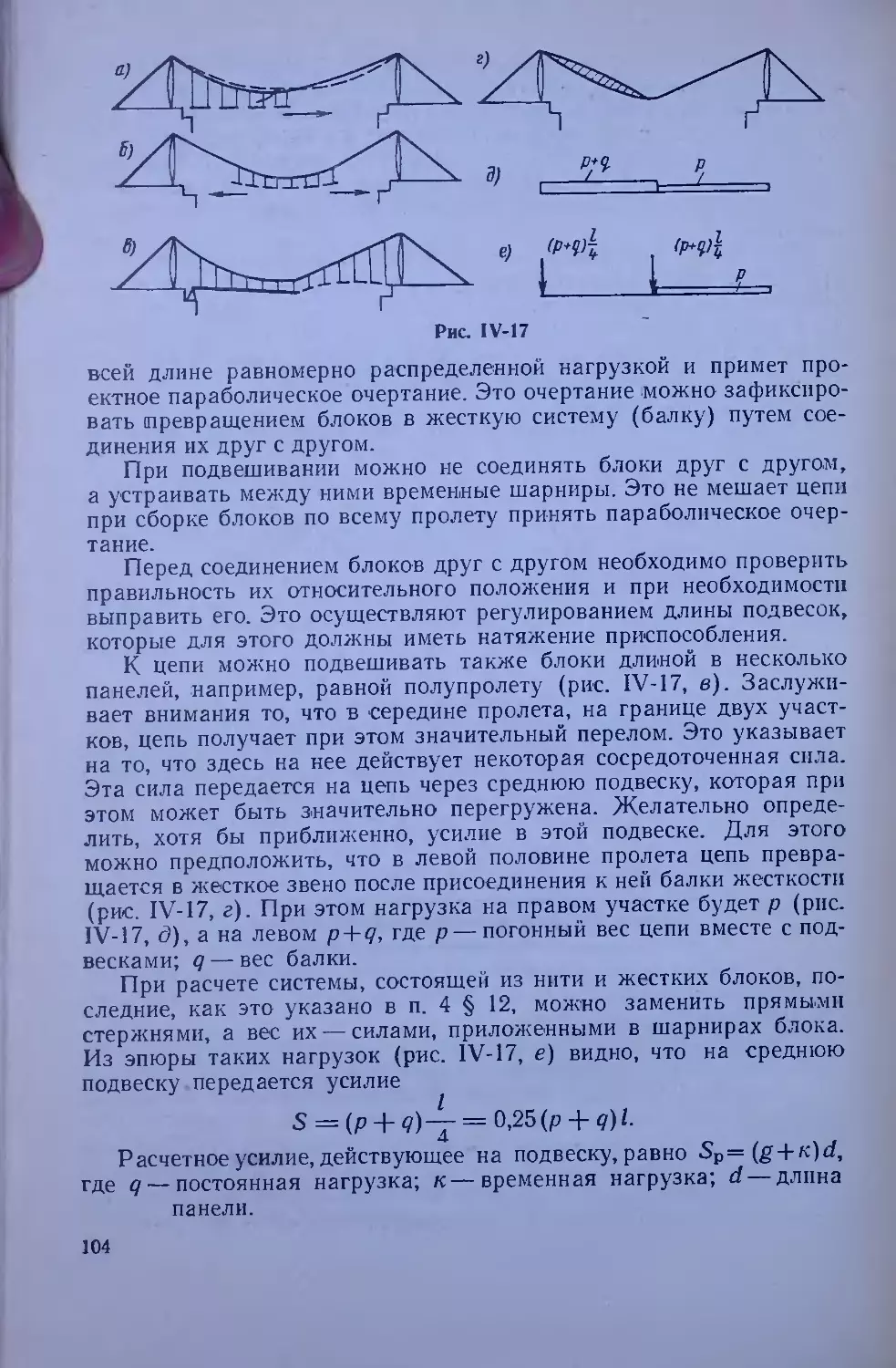
рис. П-1, в). В конце канала устраивают небольшую камеру, в
которую имеется доступ для осмотра закрепляющего устройства. Для
этого используют канал, по которому проходит цепь, или устраивают
специальную вертикальную штольню, соединяющуюся с камерой.
им
* ъ~^М
Рйс. Н-17
37
Форма массивов для
закрепления концов цепи
может быть различной
(см. рис. П-1).
Конструкция подобного массива
показана на рис. П-17. От
массива, изображенного
на рис. П-1, и, он
отличается только тем, что имеет
перекрытый сводом
проем для пропуска дороги,
идущей вдоль берега
реки. Кроме того, он не
имеет канала для пропуска
оттяжки до места ее
закрепления, что
применяется очень редко, но
является удачным
решением. Оттяжка прикреплена
в верхней части массива
к концам прокатных
тяжей, заделанных в бетон
массива.
Конструкция
закрепления цепи может быть
довольно разнообразной
в зависимости от
конструкции закрепляемого
элемента (звено цепи или троса), а также размеров сечения троса.
На рис. П-18 показана схема закрепления цепи из звеньев. На
последнем болте 3 цепи в промежутках между звеньями
поставлены прокладки 5, образующие заплечики 4. Этими заплечиками
концевой узел цепи опирается на две балочки 2, которые в свою
очередь опираются концами на опорные части /, расположенные по
краям отверстия канала.
Аналогично закреплен конец цепи из одиночного троса
небольшого диаметра (рис. II-19). Конец троса закреплен в коническом
отверстии стакана /, который опирается на подушку 6. При этом
поверхность опирания обработана по шаровой поверхности для
самоцентрирования стакана. Подушка через прокладку 5, состоящую
из двух половинок, опирается на двутавровые балки 3. Прокладки
5 нужны для регулирования положения конца цепи во время
производства работ. Для сохранения взаимного положения всех
установленных частей на них надевают и закрепляют болтами (на
рисунке не показаны) муфту 4. От балок 3 давление передается на
опорные части 2, расположенные вблизи отверстия канала.
Схема конструкции, при помощи которой закрепляют конец
кабеля большого сечения, показана на рис. II-7. Применяют также
38
Рис. П-19
Рис. И-20
2000"25
±150*150*14-
другое решение (рис. П-20, а). Здесь кабель проходит через муфту
1 и ниже ее разветвляется веером на отдельные пряди. Каждая
прядь имеет на конце упорный стакан 3 (рис. П-20, б), проходит
между балками и опирается через подкладки 2 на отливку 4,
которая в свою очередь опирается на две смежные балки.
По-иному решена конструкция закрепления кабеля диаметром
52 см (см. рис. 11-17). Для передачи усилия на массив в толщу его
заделана система связанных друг с другом прокатных стержней,
прикрепленных внизу к упорным балкам. На выступающих наружу
концах верхних звеньев предусмотрены башмаки, на которые
надевали во время прядения кабеля отдельные петли проволоки.
Прикрепление конца цепи к балке жесткости в безраспорных
мостах также имеет много вариантов. На рис. П-21, а показана
схема присоединения цепи из звеньев. Цепь входит внутрь коробки
балки жесткости. Крайняя панель прикреплена к балке болтом /,
проходящим сквозь все звенья цепи и обе стенки балки.
Условия работы этого болта резко отличаются от работы
промежуточных болтов, так как он двухрезный, а все промежуточные
болты многорезные и, кроме того, работает на изгиб с пролетом /
(рис. П-21, б). Стенки балки в этом месте обычно приходится
утолщать вследствие работы их в очень трудных условиях на смятие.
Во избежание внецентренного действия сжимающей силы,
передающейся на балку, болт / надо располагать так, чтобы ось балки, ось
крайнего звена цепи и опорная реакция пересекались в одной точке.
При пологом расположении цепи (рис. П-21) другой трудностью
является то, что два узла 2 и 3 цепи, а иногда и большее количество
оказываются внутри коробки балки. Поэтому конструкция
прикрепления подвесок к балке жесткости здесь будет отличаться от
описанной выше. Это затруднение можно преодолеть различными
приемами, из которых наиболее простым, по мнению авторов, является
Рис. П-21
40
Рис. П-22
Рис. 11-23
\
рикрепление подвесок к
нижнему поясу балки жесткости
внутри коробки.
Рассмотрим прикрепление
к балке тросовой цепи
большого сечения в двухцепном
безраспорном трехпролетном
мосту (рис. П-22). В крайних
пролетах обе цепи (верхняя и
нижняя) прикреплены к
концам балки жесткости. Конструкция прикрепления показана на рис.
П-23.
Верхняя цепь, состоящая из 10 тросов заводского изготовления,
на расстоянии около 3 м от конца балки разделяется на четыре
группы по два и три троса, которые веером расходятся к концу
балки жесткости и проходят между «опорными» криволинейными
балками /. Опорные балки в свою очередь опираются на
диафрагмы 2. Каждый трос заделан концом в конические отверстия
стаканов 3, примыкающих к опорным балкам. Чтобы все 10 тросов
работали одинаково, натяжение каждого из них регулируют во время
строительства моста при помощи специальных домкратов.
Нижняя цепь состоит из шести тросов. По схеме моста она
центрирована на ту же точку прикрепления, что и верхняя, но
конструктивно место ее закрепления расположено примерно в 4 ж от
опоры. Все тросы присоединены при помощи хомутов 4 (рис. П-23).
Рассматриваемое решение интересно еще тем, что по
предложению автора проекта С. А. Цаплина (1946 г.) в пролетном строении
не предусмотрены обычные балки жесткости, расположенные в
одной плоскости с соответствующими цепями. Вместо двух таких
балок пролетное строение имеет по своей ширине семь продольных
балок, поставленных в расстоянии 2,2 м друг от друга и
объединенных по концам по всей ширине моста горизонтальными листами
толщиной 20 мм по верхним поясам и 16 мм по нижним. Благодаря
большой жесткости этих листов в горизонтальной плоскости,
усилие, передаваемое в поперечном направлении от цепей на участках
между крайними балками, распределяется практически
равномерно на все семь балок.
Жесткие поперечные балки, имеющие, как и продольные, высоту
1,5 м, заставляют все продольные балки работать в качестве балок
41
Рис. 11-24
жесткости и принимать участие в работе на изгиб. Таким образом,
функции балок жесткости здесь выполняет коробка, состоящая из
продольных и поперечных балок и железобетонной плиты проезжей
части, вовлеченной в совместную работу с металлическими
балками.
Замена двух отдельных балок жесткости «коробкой жесткости»
получила в последующие годы широкое распространение за
рубежом, но в иных конструктивных формах.
На рис. П-24 показано поперечное сечение коробки жесткости по
проекту моста через Малый Бельт (Дания), имеющего пролеты
240 + 600 + 240 м.
Поперечное сечение коробки жесткости замкнутое. Верхний
лист, по которому осуществляется движение транспорта,
поддерживается продольными балочками корытного сечения, а нижний —
ребрами. Верхний и ниж.ний листы соединены заострениями из
листов. Такая форма поперечного сечения обеспечивает лучшую
обтекаемость его ветровым потоком, поэтому коробка жесткости
имеет существенные преимущества перед системами с двумя
балками или фермами жесткости. Другое преимущество заключается в
том, что пояса коробчатой балки имеют листы, ширина которых
равна ширине моста. Благодаря этому коробка жесткости при
прочих равных условиях значительно жестче в горизонтальном и в
вертикальном направлениях, чем две отдельные балки. Это позволяет
принимать высоту коробки меньше высоты балок, составляющей
обычно пролета, в то время как наибольшая высота ко-
60 100
робки моста через Малый Бельт равна 3 м, или 1/200 пролета. Се-
вернский мост в Англии при пролете 985 м имеет коробку высотой
3,04 ж (1/325 пролета).
Пролет Фортского моста в Англии (1000 м) почти равен
пролету Севернского. Фортский мост имеет две фермы жесткости высотой
8,25 м, т. е. в 2,7 раза выше коробок Севернского моста. Однако
вертикальная жесткость обоих мостов одинакова.
Существенным преимуществом коробки жесткости является то,
что она значительно лучше работает на кручение, чем две балки.
Крутильная жесткость ее значительно выше, что позволило разра-
42
ботать новые
конструктивные решения, которые
теперь широко входят в жизнь.
К ним относятся пролетные
строения не с двумя цепями
по ширине моста, а с одной,
расположенной по его оси.
В этом случае загружение
одной стороны проезжей
части (см. рис. 1-8) вызывает
крутящий момент, который
воспринимается коробкой
жесткости значительно
лучше, чем двумя балками.
5. Особенности двухцепных
ферм
Некоторым
преимуществом двухцепных мостов
перед одноцепными является
главным образом их
большая жесткость.
К конструктивным
особенностям двухцепных
мостов относится, прежде всего,
устройство среднего узла
системы, которое можно
выполнять в двух вариантах.
Цепи в этом узле можно не
соединять друг с другом. В
этом случае сечения и
взаимное расположение их
должны обеспечивать
свободное прохождение ветвей
цепи в среднем узле без
соприкосновения с ветвями встреч-
нон цепи.
В другом варианте цепи
в среднем узле соединяют
друг q другом и к узлу
прикрепляют подвеску (рис.
П-25). Верхние ветви цепей
имеют большее сечение, чем
нижние, поэтому в узле
сделаны стыки обеих цепей,
аналогичные показанному
на рис. II-11, б. Цепи соеди-
нены при помощи четырех колодок / и 2, стянутых друг с другом
болтами.
Круглый стержень подвески проходит через отверстия в
колодках и закрепляется наверху при помощи гайки с контргайкой.
Переход цепей через пилон аналогичен переходу в одноцепных
мостах.
Двухцепные мосты существенно отличаются от одноцепных по
конструкции прикрепления подвесок к цепям. Верхние ветви цепей
во избежание раскачивания в вертикальной плоскости делают с
небольшим провесом и положение их фиксируют подвесками.
Поэтому каждую подвеску приходится прикреплять к нижней и
верхней ветвям цепей.
Подвеска моста (см. рис. П-22) прикреплена непосредственно
к узлу нижней цепи, состоящей из шести тросов (рис. П-26). Этот
узел тросиками небольшого сечения соединен с узлом верхней цепи
из 10 тросов.
Между тремя колодками / и 2, стягиваемыми болтами, зажаты
два ряда тросов как верхней, так и нижней цепи. К торцам средних
колодок / при помощи шурупов прикреплены узкие листы, а к ним
уже известными конструктивными приемами — подвески.
6. Опорные части балок жесткости
В отличие от опорных частей балочных пролетных строений
опорные части балок жесткости работают не только на сжатие, но
и на растяжение при определенных положениях временной
нагрузки. Такая опорная часть может представлять собой качающуюся
стойку 5, прикрепленную при помощи болтов к концу балки
жесткости и к опорной отливке (см.
рис. П-23). Последняя
присоединена к устою при помощи
анкерных болтов. Стойка может
работать на сжатие при загру-
жении бокового пролета и на
растяжение при загружешш
среднего.
Аналогично опирается
конец однопролетной фермы
жесткости моста Эльфсборг с
пролетом 417,6 м (рис. П-27).
Однако здесь опорная часть
выполнена в виде качающемся
подвески. Верхним концов
она шарнирно прикреплена к
фасонке, которая приварена к
стальной стойке пилона.
В некоторых случаях для
облегчения работы опорных
Рис. 11-27
44
стоек или подвесок концы балок жесткости загружают под
проезжей частью балластом, для размещения которого устраивают
специальные ящики в крайних панелях проезжей части. Так, на
Крымском мосту в Москве, где цепи прикрепляются к концам балок
жесткости под сравнительно большими углами к горизонту (~27°),
при любых нагрузках возникают только отрицательные реакции,
достигающие при невыгодном загружении 2 000 г. Здесь устроены
балластные ящики. При реконструкции мостов через р. Великую в
г. Острове и замене деревянных балок жесткости на металлические
также были устроены балластные ящики, полностью погашающие
отрицательные реакции.
Помимо качающихся стоек или подвесок, применяют и др\гие
опорные части [26]. Однако они значительно сложнее и в последние
годы вытесняются описанными выше опорными устройствами.
7. Пилоны
Конструкция пилонов довольно разнообразна (рис. П-28). Она
зависит от материала (камень, сталь, железобетон), системы моста
(однопролетный, трехпролетный), архитектурных соображении и
вкуса проектировщика.
Каменные пилоны применяли довольно часто в первые периоды
строительства цепных мостов (рис. П-28, а). Их устраивали в виде
двух массивных столбов, обычно не связанных друг с другом. На
вершине такого пилона устанавливали катковую опорную часть, к
которой прикрепляли цепь пролета и оттяжку. Пилоны имели
большое сечение и занимали довольно большую часть ширины проезда.
В настоящее время подобные пилоны сохранились только на
небольшом числе старых мостов.
Стойки металлических пилонов Крымского моста также не
соединены друг с другом, но имеют внизу цилиндрические шарниры.
Мост трехпролетный, однако балки жесткости не прерываются у
пилонов, а проходят через отверстия в пилонах (рис. П-28, б).
Пилон с аналогичными стойками показан на рис. П-28, в. Здесь
стойки также имеют отверстия для пропуска балок жесткости, но
соединены друг с другом распорками вверху и внизу.
Отверстия для пропуска балок жесткости усложняют
конструкцию пилонов. Избежать их устройства можно разными способами.
Стойки пилона, показанного на рис. П-28, г, имеют наклон и
соединены распорками вверху и внизу. Балки жесткости
установлены через легкие опорные части на нижнюю распорку. При помощи
опорных частей, которые здесь значительно тяжелее, пилоны
опираются непосредственно на бык.
Цепи, изображенные на рисунке пунктиром, расположены в
вертикальных плоскостях. Стойки такого пилона можно устраивать
вертикальными, располагая при этом цепи в наклонных плоскостях
(см. рис. П-28, д). Недостатком обоих решении (рис. П-28, г, д)
является большая ширина быков, чем при пилоне с отверстиями
45
и)
'
х)
wwraw» \Чч\\чччч\\'
х^
Рис. 11-28
(см. рис. Н-28, в), при одинаковом расстоянии между балками
жесткости.
Этот недостаток можно исключить (рис. П-28, ё). Как и в
приведенной выше конструкции (см. рис. П-28, в) расстояние между
пилонами и балками жесткости здесь одинаковое. В обоих
решениях быки имеют одинаковую ширину. Однако пилон здесь
опирается на балку жесткости, что является недостатком. Для
передачи большого усилия от него приходится ставить тяжелую опорную
46
часть, а затем вторично передавать это усилие вместе с реакцией от
балки жесткости на бык. Поэтому приходится вместо одной
тяжелой и одной легкой опорной части ставить две тяжелые и дорогие.
При высоких подмостовых габаритах в последние десятилетия
стали применять новые конструктивные формы пилонов. Мост
Медвежьей горы через Гудзон пролетом 497 м имеет высоту подмосто-
вого пространства около 47 м. При этом оказалось выгодным
максимально уменьшить высоту быка, на который опирается пилон, за
счет увеличения высоты стальной рамы пилона (рис. П-28, ж).
Пилоны моста жестко защемлены нижними концами в кладке быков.
Пилоны Танкарвильского моста через р. Сену, имеющие высоту
123 м, изготовлены из железобетона и жестко защемлены в
фундаментах (рис. П-28, з). Ширина их рамы несколько увеличивается
книзу. Пилоны Фортского (рис. П-28, и) и Севернского
(рис. П-28, к) мостов имеют постоянную ширину по всей высоте.
Оба они металлические, но первый решетчатый, а второй рамный.
Схему, аналогичную пилону Фортского моста, имеют пилоны
моста через р. Тахо в Лиссабоне. Высота этих пилонов 190,5 м при
ширине 23,5 м.
На рис. П-28, л. м показаны два варианта железобетонных
пилонов этого моста, имеющие наклонные стойки, расходящиеся
кверху или книзу. В первом случае пролетное строение имеет две цепи,
расположенные в наклонных плоскостях, а пилон представляет
собой одно целое с быком. В другом варианте вместо быка
предусмотрены только фундаменты под стойками пилона (на рисунке не
показаны). Цепь расположена по оси пролетного строения.
При выборе системы пилона надо руководствоваться
экономическими и архитектурными соображениями. Конструкция отдельных
узлов металлических и железобетонных пилонов не имеет
специфических особенностей, поэтому здесь не приведена.
§ 6. БАЙТОВЫЕ МОСТЫ С БАЛКАМИ ЖЕСТКОСТИ
Байтовая система дает возможность назначать минимальную
высоту балок жесткости, которые из условия размещения анкерных
устройств для закрепления вант удобнее всего устраивать двух-
стенчатыми.
Проезжая часть может быть выполнена в виде балочной клетки
и железобетонной плиты. В современных вантовых мостах с
металлическими балками жесткости проезжая часть обычно состоит из
асфальтобетонного покрытия и стальной ортотропной плиты,
входящей в состав сечения балок. В мостах с воспринятым распором
целесообразно применять железобетонные балки жесткости,
конструктивно связанные для совместной работы с проезжей частью.
Пилоны вантовых мостов могут быть металлическими или
железобетонными. По своим конструктивным схемам и сопряжению с
балками жесткости они аналогичны пилонам цепных мостов (см.
п. 7 §5).
47
Конструкции узлов опирания кабелей на пилоны различаются
в зависимости от того, опираются все кабели неподвижно или часть
из них опирается подвижно.
На рис. П-29 показаны различные способы закрепления кабелей
в пилоне для системы «пучок» (см. рис. 1-9, ж). Неподвижное
закрепление кабелей в коробчатом наголовнике пилона (рис. П-29, а)
осуществлено посредством анкерных стаканов и болтов.
Часть кабелей можно пропускать через голову пилона без
разрыва (рис. П-29, б). Неподвижное закрепление их обеспечивают
за счет сил трепня, создаваемых накладками с высокопрочными
болтами. Опорную поверхность прострагивают для создания
желобов, соответствующих профилю канатов, и шлифуют. В отдельных
случаях устройство желобов заменяют постановкой прокладок из
мягких металлов, обеспечивающих плотное опирание каната всей
поверхностью и равномерную передачу реактивного давления на
пилон.
Экспериментальными исследованиями, проведенными за
последние годы в ФРГ, установлено, что условия опирания каната
заводской свивки и интенсивность поперечного давления на него суще-
48
ственно влияют на
выносливость материала каната.
Поэтому радиус опорной
поверхности назначают из
условий ограничения
интенсивности поперечного
обжатия величиной 1-^2,5 т/см.
Грани опорных частей
делают с плавными пологими
закруглениями, чтобы
обеспечить нормальный переход
от состояния поперечного
сжатия каната к
состоянию свободного
подвешивания.
Нижний кабель можно прикреплять неподвижно, а верхний и
средний — подвижно с помощью балансирных опорных частей (рис.
П-29, в).
При наличии в боковых пролетах одной оттяжки (см.
рис. 1-16, б) узел прикрепления вант обычно выполняют по типу
\зла, показанного на рис. П-29, а.
В системе «арфа» (см. рис. 1-9, з) ванты крепят к пилону в
нескольких точках по высоте без разрывов. Конструкция
неподвижного узла аналогична схеме, изображенной на рис. 11-29, б.
Неподвижное закрепление кабелей уменьшает прогибы системы и изгибающие
моменты в балке жесткости, но вызывает изгибающие моменты в
пилонах. Поэтому иногда нижние и средние кабели опирают на
пилон подвижно, используя балансирные (см. рис. Н-29, в) или кат-
ковые опорные части.
Регулирование натяжения вант осуществляют подъемом или
опусканием каждой опорной части домкратами, установленными на
стойке пилона.
В системе «пучок» для регулирования необходима постановка
натяжных приспособлений в узлах крепления вант к балкам.
Одна из возможных конструкций такого узла при металлических
балках жесткости показана на рис. П-30. Натяжение канатов
регулируется домкратами 2, которые упираются с одной стороны в
поперечную домкратную балку /, прикрепленную к вертикальным
стенкам балки жесткости, а с другой — в подвижную коробчатую
балку 4, к которой крепятся анкерные стаканы 3 канатов.
Полученное натяжение фиксируется с помощью прокладок соответствующей
толщины, устанавливаемых между неподвижной / и подвижной 4
балками.
На рис. 11-31 показана конструкция узла крепления вант к
железобетонным двухстенчатым балкам жесткости 1. Такая
конструкция была применена при строительстве Байтового моста в Киеве.
Канаты 4 вант прикреплены к балке с помощью стальных
хомутов 2 из полос низколегированной стали, охватывающих мощную
49
Рис. 11-31
грушевидную распорку 9
балки. Анкерные стаканы 3
канатов опираются на
приваренные к хомутам упоры
5. Благодаря закругленной
форме сечения распорки
стальные полосы хомутов
работают практически
только на растяжение.
Большие конструктивные
размеры распорки и
примыкание ее к стенкам П-образ-
ного сечения балки на
большой длине позволили удобно армировать ее и обеспечили
свободный доступ для уплотнения бетона вибраторами. Ослабление
сечения балок жесткости в местах окон для пропуска вант
компенсируется местным утолщением их вертикальных стенок.
Натяжение канатов регулируют с помощью гидравлического
домкрата 8 и инвентарного натяжного устройства 7. Для фиксации
натяжения используют закладные вилкообразные шайбы 6.
Величины натяжения канатов контролируют тарировочными
манометрами, включенными в сеть маслопровода домкратов. При
утечке в сети, а также в холодную погоду при застывании масла
показания манометров следует уточнять поправочными
коэффициентами, определяемыми экспериментально.
Более надежным способом является определение натяжения
каната по его собственной частоте колебаний. Частоту колебаний т в
герцах натянутого каната можно определить по известной формуле
для частоты поперечных колебаний струны:
= -!/■
21 "
N
"т'
где п — количество полуволн возбуждаемых колебаний;
/ — длина каната, равная длине между закреплениями
минус 1—2 м для исключения жестких участков у опор;
N— натяжение каната, т;
m = — — погонная масса каната, т • сек2/м2;
g
q — погонный вес каната, т/м;
g — ускорение силы тяжести, м/сек2.
Удобнее всего вести наблюдения при колебании каната всем
пролетом, т. е. при п— 1. Искомое натяжение будет равное = 4т2/2/и.
Колебания в канате легко возбуждаются при его раскачке с
помощью веревки в течение нескольких секунд. После раскачки канату
дают свободно колебаться и по секундомеру отсчитывают время tK
50
для определенного количества полных колебаний к. Обычно
принимают к = 50. Для определения усилия в канате непосредственно по
замеренному времени предыдущая формула может быть
преобразована так:
N = ЮФт,
/2
50
где /50 — замеренное время для 50 колебаний каната, сек.
Необходимо обращать внимание на то, чтобы раскачиваемые
канаты при возбуждении колебаний не ударялись о другие их
нитки в пучке или пучок раскачивался целиком, для чего необходимо
предварительно поставить стяжки.
Указанный метод можно применять и при контроле натяжения
подвесок в цепных мостах.
Натяжение тросов небольшого сечения можно также
контролировать канатными тензометрами.
Армирование балок жесткости (за исключением участка по
длине средней панели) в основном определяется конструктивными
соображениями, поскольку балки обжимаются распором вант и
работают как сжато-изогнутые.
Первый опыт проектирования и строительства моста в Киеве
подтвердил высокую эффективность вантовых систем с
железобетонными балками жесткости.
Опорные части балок жесткости устраивают аналогично
опорным частям цепных систем. Отрицательные опорные реакции на
крайних опорах обычно воспринимаются с помощью вертикальных
тяжей, шарнирно прикрепленных к закладным частям опор, а
положительные— обычными опорными частями.
§ 7. БАЙТОВЫЕ МОСТЫ БЕЗ БАЛОК ЖЕСТКОСТИ
Конструкция рассматриваемых здесь мостов имеет ряд деталей,
схожих с описанными выше. К ним относятся, например,
сопряжения мостов с берегом. В тех случаях, когда пояса вантовой фермы
проходят через пилон без разрыва, голова пилона оказывается
аналогичной применяемым в мостах с цепями из тросов. Если система
имеет ряд лучеобразных вант, сходящихся на голове пилона,
конструкция этого узла мало отличается от аналогичных узлов
вантовых мостов с балками жесткости (см. рис. П-29).
Однако некоторые узлы здесь совершенно своеобразны. К
таким, в частности, относятся промежуточные узлы ферм Жискляра
(см. рис. 1-9, а), имеющие две основные разновидности (рис. П-32).
Если в узле сходятся три-четыре стержня, применяют узлы вида,
показанного на рис. П-32, а (узел D системы, показанной на
рис. 1-9, а).
Четыре сходящихся здесь стержня имеют по несколько ветвей
с наконечниками (см. рис. П-11, е). Один из стержней может иметь
51
Рис. И-34
нечетное количество ветвей, а все остальные — четное. Наконечники
всех этих ветвей надевают на один общий цилиндрический
сердечник так, чтобы расположение их относительно середины длины
сердечника было симметричным. Внутренний диаметр петель всех
наконечников должен быть равен диаметру сердечника. Сечение
тросов и петель принимают по условиям прочности.
Узел, показанный на рис. П-32, б (см. рис. 1-9, а, узел В), имеет
несколько одинакового очертания фасонок 1, расположенных на
некотором расстоянии друг от друга. Каждый из стержней,
сходящихся в узле, состоит из нескольких ветвей с наконечниками,
надеваемыми на цилиндрические вкладыши 2, которые так же, как и ветви
стержней, могут иметь разные сечения в соответствии с условиями
прочности.
На рис. П-33 изображен узел D фермы рис. 1-9, б, которую в
настоящее время почти не применяют.
Жесткая стойка / состоит из шести продольных ветвей,
соединенных решетками. В узле стойка имеет три фасонки 2, через
которые проходит болт 8.
Пояс фермы имеет 12 ветвей 3, расположенных парами в
вертикальных плоскостях. Каждая пара присоединена к болту 8 узла
при помощи двойных листов 4, имеющих продольные канавки, в
которых зажаты тросы 3 при помощи болтов 7.
Встречные тросовые раскосы 6 присоединены к болту 8 при
помощи обычных хомутов 5.
Нижние узлы отличаются от верхних тем, что на болт, подобный
болту 8, кроме хомутов раскосов 5 и листов 4, надеты
вертикальные хомуты подвесок.
Рассмотренную конструкцию едва ли можно считать
совершенной. Если применять подобное решение, необходимо, прежде всего,
отказаться от дробления сечения пояса на большое количество
ветвей, что упростит всю конструкцию.
В вантовой предварительно напряженной ферме (см. рис. 1-9, д)
основным рабочим элементом является ее пояс, к которому
прикреплены подвески, поддерживающие проезжую часть. Чтобы под
влиянием частичного загружения пролета пояс не менял своего
очертания, узлы его прикреплены к низу устоев наклонными
натянутыми оттяжками, расположенными веером. Такая система не
получила практического применения, поэтому конструкция ее не
имеет установившихся форм. В этой системе наиболее
характерными узлами являются промежуточные узлы относительно мощного
пояса, к которому прикрепляются ванты небольшого сечения:
подвеска и оттяжка. Одно из возможных решений узла А показано на
рис. П-34, а.
Пояс / охвачен хомутом, состоящим из двух частей (рис.
П-34, б). Болты, стягивающие их внизу, одновременно держат фа-
сонку 3, к которой при помощи хомутов (см. рис. Ill 1, г), прикреп-
5а
tlXIXIXiXl) ЪОООО
x > го<хх>
лены подвеска 5 и оттяжка 4, центрированные в точке 2 на ось
пояса.
В системе, показанной на рис. 1-7, г [11], почти все узлы имеют
известные конструкции, в частности, прикрепление подвесок к
верхнему и нижнему поясам. Переход поясов через пилон также не
представляет затруднений.
Наиболее необычным узлом является узел С, в котором пояса
сходятся до соприкосновения (рис. П-35).
На остальной длине они соединены хомутами. В узле пояса
связаны друг с другом специальными литыми хомутами.
§ 8. БАЛОЧНЫЕ И КОНСОЛЬНЫЕ БАЙТОВЫЕ СИСТЕМЫ
Байтовые системы, предложенные К. Г. Протасовым (рис.
П-36, а), своеобразны как по схеме (см. рис. 1-1, в, 1-18), так и по
конструкции. Одной из особенностей этой конструкции является
присоединение отдельных вант к узлам. В висячих Байтовых мостах
каждый вант, как правило, присоединяют к узлу самостоятельно
при помощи стальных наконечников.
Здесь же отдельные тросы, из которых составлено сечение
раскоса или пояса, проходят через узел и могут входить в состав
сечений нескольких панелей верхнего и одновременно нижнего поясов
(рис. Н-36, б), в состав сечений всех раскосов (рис. П-36, в) или
части их, могут быть включены в состав как поясов, так и раскосов
(рис. П-36, г).
Преимуществом этого решения является значительное
сокращение количества поковок.
Закрепление тросов в отдельных узлах осуществляют путем
зажатия их в муфтах, состоящих из двух цилиндрических половинок
с фланцами, имеющими отверстия для высокопрочных болтов. Муф-
54
ты присоединяют при помощи
этих же болтов к фасонкам 1,
являющимся элементами стоек
(рис. П-37, б). Если трос
проходит в узле без перегиба, его
проволоки можно раздвинуть (рис.
П-37, а) и после надевания
соответствующей муфты полость ее
залить баббитом. Эта полость
должна быть сужающейся к
концам муфты. Если трос имеет в
узле перегиб (переход из
раскоса в раскос или в пояс), его
сопротивление сдвигу значительно
увеличивается, поэтому для
удержания троса от смещения достаточно, как
трения.
Распорка и стойки фермы могут быть изготовлены из металла
или железобетона. Распорку целесообразнее совмещать с
конструкцией проезжей части и, следовательно, делать железобетонной.
Учитывая, что пролетные строения рассматриваемых систем могут
найти применение при относительно больших пролетах
(по-видимому, не меньше 50—60 м) и что распорка будет воспринимать
очень большие сжимающие усилия, можно ожидать, что она
всегда будет иметь коробчатое сечение.
Если тросы соприкасаются с железобетонными распорками к
стойками, то бетонная поверхность в этих местах должна быть
Рис. П-38
правило, только сил
В-в
ht
4595'
.то,,, ^Ш~
Г
*±то *
о' о
§1
т
Рис. Н-39
5S
покрыта броневой сталью, имеющей канавки в местах прохода
тросов.
Аксонометрическая проекция части пролетного строения
показана на рис. П-38. Железобетонная коробчатая распорка 4 имеет
бронированные выступы 3, на которые опираются тросы
восходящего и нисходящего раскосов, переходящие в верхние и нижние
пояса или в раскосы смежной панели.
Железобетонные стойки прикреплены к коробке при помощи
предварительно напряженных тросов, проходящих по поперечным
каналам в распорке.
Крайние стойки, воспринимающие большие сжимающие усилия,
имеют вверху и внизу портальные распорки /. Остальные стойки
воспринимают значительно меньшие усилия от раскосов, а пояса,
поддерживаемые ими, всегда растянуты. Поэтому соединять эти
стойки поперечными распорками потребуется, по-видимому, лишь в
редких случаях.
Опорные части 2, как и в любой балочной конструкции, на
одном конце пролетного строения должны быть неподвижными, а на
другом — подвижными.
На рис. П-39 представлены опора и элементы пролета величиной
235 м моста через озеро Маракайбо. Интересно, что покрытые
бетоном ванты прикреплены не к балкам, которые они поддерживают,
а к концам железобетонных распорок, плоскость наибольшей
жесткости которых совпадает с плоскостью, в которой расположены
ванты.
РАЗДЕЛ II
РАСЧЕТЫ НА ПРОЧНОСТЬ И ЖЕСТКОСТЬ
ГЛАВА III
ИЗ ТЕОРИИ РАСЧЕТА ГИБКИХ НИТЕЙ
§ 9. РАСЧЕТ НИТИ ПРИ ЗАДАННОМ ЗАГРУЖЕНИИ
1. Натяжение нити и ее уравнение
Основными элементами висячих мостов являются гибкие
стальные стержни (ванты), которые изготавливают чаще всего из витых
тросов, но иногда в виде пучков из прямых проволок. В обоих
случаях отдельные проволоки связывают друг с другом, но не
соединяют в одно целое, поэтому жесткость их очень небольшая.
Учитывая при этом большую длину, которую обычно имеют ванты в
мостах, практически их можно считать абсолютно гибкими. Ниже
приведены основы расчета таких вант, называемых часто гибкими
нитями.
Гибкие нити по своей работе довольно разнообразны. В частности, они
могут быть нагружены только собственным весом, распределенным равномерно
по всей их длине. В мостах подобные нити имеют относительно небольшую
длину при очень сильном натяжении. В этом случае трос натянут почти без провеса,
и его можно рассчитывать как прямой стержень, работающий на растяжение.
На тросы в мостах часто действуют сосредоточенные силы одинаковой
величины, расположенные на одинаковых расстояниях друг от друга. Количество сил
по длине троса обычно очень большое (20 и более), поэтому замена их
равномерно распределимой нагрузкой дает ничтожные ошибки при определении
усилий. В связи с этим будут рассмотрены почти исключительно нити, загружаемые
равномерно распределенной по их пролету нагрузкой, а также равномерно
распределенными нагрузками различной интенсивности на разных участках пролета.
Кроме такой нагрузки, равномерно распределенной по всему пролету или по
его части, на нигь действует собственный вес, распределенный равномерно не по
длине пролета, а по длине самой нити. Под действием собственного веса нить
провисает по цепной линии, а от воздействия нагрузки, равномерно
распределенной по пролету, — по параболе. Если же действуют обе нагрузки, линия
провисания будет промежуточной между параболой и цепной линией. Однако при не-
57
большом провесе нити разница
между нагрузкой,
распределенной равномерно по длине нити
и по длине ее пролета,
оказывается ничтожной. Поэтому
расчет такой нити в
предположении нагрузки, равномерно
распределенной по пролету,
дает практически точные
результаты.
В висячих мостах нить, как
правило, имеет относительно
большой провес, .и вес ее
значителен. При отношении пролета
к стрелке 6,25 ошибки такого
расчета для одиночной нити
достигают 3—4%. Однако в
мостах такие большие стрелки
встречаются редко и, главное,
на нить с таким провесом, кроме
ее собственного веса, всегда
действуют другие нагрузки
значительно большей величины,
распределенные равномерно по
пролету (например, вес
проезжей части). В результате
возможные неточности расчета не
превышают долей процента.
Рассмотрим сначала общий
случай расчета нити (рис.
III-1, а), подверженной
действию произвольной сплошной и
сосредоточенной нагрузок (рис.
III-1, б). Эта нагрузка,
находящаяся в уровне проезжей части, передается на нить через подвески. В качестве
общего случая будем считать ее приложенной непосредственно к нити.
Выясним, какие усилия возникают в сечениях нити. Реакции SA н SB,
передающиеся на нить со стороны опор, должны быть направлены по касательным
к нити на ее концах, так как нить абсолютно гибкая.
Каждую из этих реакций можно разложить на две составляющие
(рис. III-I, е). Определим их из условий равновесия нити. Проектируя все силы
на горизонтальную ось, получим
2 х = — КА cos р + К в cos р = 0,
откуда Ка = Кв = К.
Для определения вертикальной составляющей Va возьмем сумму моментов
всех сил относительно споры В:
Рис. II1-1
J\MB = VAl-J\MB<l^0,
v,Af
откуда
V» = '
Bq
где ~ZMBq — сумма моментов всех внешних сил, загружающих нить, относительно
опоры В.
Если определить реакцию левой опоры балки (рис. Ш-1, г), загруженной
как и нить, получим такое же выражение. Таким образом, вертикальная
составляющая опорной реакции нити равна «балочной» реакции. Это справедливо и для
вертикальной составляющей опорной реакции Sb
58
Для определения сил К возьмем сумму моментов всех сил, действующих
слева от точки С (см. рис. II1-1, е), и приравняем ее нулю, так как нить абсолютно
гибкая и моменты воспринимать не может:
V мСл = VAa - ^ мс™ - КаУ cos р = О,
гдеИЛГслв1—момент всех внешних вертикальных сил, расположенных левее
точки С.
Следовательно, выражение V'да — '^■Мслв равно изгибающему моменту
в точке С балки, показанной на рис. Ш-1, г, — балочному моменту М<>.
Тогда К а у cos р = Ку cos р = М6,
отсюда К cos р = .
У
К cos P представляет собой горизонтальную составляющую усилия Sa (cm.
рис. Ш-1, е), которую обычно называют распором или натяжением и
обозначают буквой Н. Очевидно, что если рассмотреть правую половину нити, получим:
такой же результат. Следовательно, можем написать
н = -#*-. (3.1)
У
Нередко эту формулу используют в другом виде:
Мб
y~-jT- (3-2>
Необходимо отметить, что показанные на рис. Ш-1, в составляющие
опорных реакций Va и Vb не являются полными вертикальными составляющими Ra
и/?в (рис. Ш-1, д).
Для определения Ra и Rb возьмем суммы моментов всех сил относительно
опор В и А:
Ял=Ям + -у—. Rb = Rb6-—j-.
где Ra6 и Rb6 — балочные опорные реакции.
Если к кривой провисания нити провести горизонтальную касательную,
получим точку D, где усилие в нити направлено горизонтально. Если рассмотреть
условие равновесия участка нити AD или DB, можно убедиться, что усилие в
точке D равно Н. Если рассмотреть сечения слева или справа от этой точки, то
условия равновесия покажут, что усилия будут увеличиваться. Наибольшее усилие
будет там, где нить больше всего наклонена к горизонту — в точке А:
-/
т + л?А
Рассмотрим пример, который часто встречается при расчете мостов
(рис. III-2, а). Необходимо найти натяжение нити, уравнение кривой ее
очертания, закон изменения усилия по длине нити при заданных /, /, q. Балочный
момент в середине пролета
и натяжеш.е (3.1)
М nil
(3.3)
59
м6 =
м
н~ f
8
Я*
8/
В расстоянии х от левой опоры
балочный момент равен
*гЯ
q&
ql
Следовательно, уравнение кривой
провеса нити (3.2) будет
М,
бх
ql_
2
qxl
И
или у =
8/
4fx (I — х)
/2
(3.4)
Рис. II1-2
ченную часть, относительно точки К, получим
Х\
qxi —— — Ht/i=0 или, используя формулу (3.3),
Если перенести начало координат
в точку D, а ось у направить вверх,
уравнение нити получит еще более
простой вид.
Это просто показать,
рассматривая условия равновесия половины
нити (рис. II1-2, б). Взяв сумму
моментов сил, действующих на левую отсе-
qx\
qfr
8/
■yi
Отсюда
У\ =
4/*?
/2
(3.5)
Используя формулу (3.5), определим тангенс угла наклона касательной
к нити на расстоянии a"i от начала координат (рис. III-2, в):
tg « = J/i =
8/*i
/2
Рассматривая условия равновесия нити KD на участке длиной хх, получим
= #l/l+tg2a = //]/ 1
S =
н
1 +
64/2*?
COS a - - - г - /4
Наибольшее усилие будет, очевидно, при наибольшем значении Х\, равном //2
5™« = //|/ ! + 167Г
(3.6)
При действии на нить более сложной нагрузки выводы и формулы
усложняются, но общий ход расчета в основном остается тем же.
Если опоры нити расположены на разных уровнях (рис. III-2, г), решение
несколько усложняется. Здесь известны I, f, q и h. Считаем, что нагрузка q
равномерно распределена по горизонтальной проекции нити. Балочный момент в
точке С равен
60
следовательно, натяжение И =
'АЛ2
\±L±
2
Mr. 'AqP-
qi з Кт1; з
Л1б = -*— ■— / — — = all,
0 2 4 2 32 Ч '
f 32/
Балочный момент в расстоянии х от левой опоры
ql qxi
Мбх =—-—х——-—, а ордината нити
/ ЛГ2
о х — а ■
Мох 2 2 Wx(l-x)
Я 3?/2 3/2
32/
Следует обратить внимание на то, что здесь абсциссу х отсчитывают по
горизонтали от точки А, а ординаты у— по вертикали от линии АВ. Если ординаты
отсчитывать от горизонтальной оси AD, получим:
Щх(1-х) х
У\ = 7. +Л . (3.7)
уу 3/2 / у
Производная от этого выражения
. 16/ 32/* А
"i—w—w+т- (3-8)
Если приравнять ее н\лю, получим:
/ 3 Ш
Хп = -4- • .
2 32 /
В этом сечении будет наибольшая ордината нити.
Если, например, /= 100 м, /=8 м, h= 16 м, то
100 3 100-16
*0=—+ —• = 68,7 м.
Подставив это значение в (3.7), получим
16-8-68,7.31,3 68,7
"- ^Ш +16-^=20,15 ж.
Наибольшее усилие будет, очевидно, в точке А, где х=0. Используя (3.8).
определим для этой точки у':
16/ h 16-8 16
У\ — 1ёаА= ~Т— + = —^ + = 0,588.
иг в а 2,1 I 3-100 100
1 Н
Тогда cos ал = =0,862; 5макс = ———- = 1,16Я.
1/1+0,5882 °>862
Запишем (3.1) в другом виде:
уН=Мб. (3.9)
61
Взяв производные от левой и правой частей этой формулы, получим два
выражения, одно из которых необходимо для определения длины нити:
y'H=-^-H = Q6; (ЗЛО)
dx
у"Н=-^И = дх. (3.11)
2. Определение длины нити
Рассмотрим сначала случай, когда нить имеет опоры на одном уровне. Длину
нити можно написать в следующем виде:
i i
Так как в мостах применяют нити с относительно небольшими стрелками, ве-
dy I dy \2
личины и тем более I I всегда значительно меньше 1. Поэтому
dx \ dx )
приближенно можно написать
L
Ч/1+Ш-»Н'+тШ>-=
I
I
о о
dy Q
Из формулы (3.10) имеем ~— — ~ТГ*
dx Н
I
Учитывая, что \dx = l, получим
о
§Q2dx
L==/ + l т • (ЗЛ2)
Используя этот расчет, определим длину нити с опорами на разных уровнях
(рис. III-3, а). Для этого нагрузку, действующую на нить, разложим на две
составляющие: перпендикулярную линии АВ и параллельную ей. Считаем, что
очертание нити, а следовательно, и ее длина определяются только первыми
силами (рис. Ш-3, б). Для нитей с небольшими стрелками это близко к
действительности. На рис. Ш-3, в размеры lu yu dx, показаны в соответствии со схемой
нити, имеющей опоры на одном уровне. Длину нити (рис. III-1) при нагрузке,
показанной на рис. III-1, б, определим по формуле (3.12) как для нити с
опорами на одном уровне. При этом в (3.12) / заменим на
h — о , a Q — на Qi. Но оно будет равно Q, так как нагрузки уменьшились
62
<9]v = ^cosp), а длины увеличились [dxx =-^-j-j. Вместо dx подставим
cos P
Величину Я в обшем виде можно выразить так:
Иу=о.
У\
где а — коэффициент, одинаковый для нитей с опорами на одном и на разных
уровнях.
Величины !/, = £/cos р. Следовательно, вместо И в формулу надо подставить
Я, =а
qx cos 3/'-
— = ///COS'2 |
COS2 p£/ COS P
Подставив все эти величины в формулу (3.12), получим
\ QMx/cos p
I I
L =
I 1 _о
cosp + 2 ' //2/cos^p
I
\Q2dX
или
I =■
+ 777^ cos3 р.
(3.13)
cos р ' 2Я2
В формулах (3.12) и (3.13) некоторые затруднения обычно вызывает
определение интеграла J QUx. В случае действия нагрузки одного типа решение
получается простым. Например, для равномерно распределенной нагрузки
(Р«с Ш-4) д1
Qx = —^ Я**
-Рис. Ш-3
Рис. Ш-4
\
$ г
i
63
и, следовательно,
\iQ2dx=^-^--qxJdx = -
qW
12
Если ннть нагружена двумя или большим числом различных нагрузок,
решение усложняется. Например, для двух видов нагрузки интеграл имеет выражение
J Qidx = J «?! + Q2)"~dx = j Q\dx + 2 j" QxQsdx +j(%dx,
где Qi и Q2 — поперечные силы в данном сечении от одного и другого вида
нагрузки.
ТАБЛИЦА III-1
Схема нагрузки
а)\
\
б)
Q
t
Ка*
i
i A
" L
s
f l
ч
1
Р «
,ч
i '
ь \
1- i :
\
J С'"*
#2/з piab
— + + qPab
12 т I v
5 зз ^/3 j^
192 32 192
о?дЗ ^:й1
3 4/
г;
LJ
^ ч
1
< 1
_^2/3 _ />2дЗ /^4
12
4/
+
+ qpd-
'(т-т)
Схема эпюры Q
jQ2rf,v
4
^ ъ.
а.
fyn
ъ
-я
*л»
i^-""
*3п Ьл
- с ..
^^
<*to
d
+ (<?§„+<?a..<?8,+ <?L)4"+-
64
Каждый из интегралов удоб-
нее'находить перемножением эпюр
(способом Верещагина). Так, в
частности, получена формула для
схемы нагрузки а (табл. III-1),
в которой
Q~dx =
\
12
РШ
.х .i.dx
Рис. 111-5
В табл. III-1 приведены наиболее часто встречающиеся случаи определения
интегралов при заданной комбинации нагрузок (схемы а—г).
В случаях когда эпюра Q имеет очень сложный вид со скачками или без
скачков, ее всегда с достаточной степенью точности можно разбить на трапеции.
В табл. III-1 показаны такая эпюра (схема <Э) и формула для определения
интеграла.
Во всех формулах табл. III-1 любая нагрузка Р, q, p и любая ордината Qi
может быть равна нулю и быть отрицательной. Эти величины надо подставлять
в формулы со своими знаками.
3. Упругое удлинение нити
Рассмотрим подвешенную к опорам нить, на которую действует некоторая
нагрузка. Допустим, что нить обладает бесконечно большой продольной
жесткостью. Если считать, что нить начала упруго деформироваться, то удлинение ее
будет равно:
М
-5
;• Н ds
cos -f EF
EF J
dx
cos- 9
H
EF
J(l + tg* ?)<**,
где H — натяжение нити.
dy Q
Из pi с 111-5 получим tg 9 = tg В + == tg В +
dx H
Тогда XL =
H СI Q 02 \ H
— J (l + tg2p + 2tgp-^r+-^r)urx = -^^ X
EF
H №
EF
С 1 Q Q~ \
X \ + 2tg В -^— + -*— dx
J cos? S T hv H ^ № j
HI 2tgB
EF cos2B+ EF J " ' HEF
I
§Q2dx
Qdx+-
В этом выражении \ Qdx представляет собой полную площадь эпюры
поперечных сил для простой разрезной балки.
3—3213
05
Рис. 111-6
Такая площадь (при отсутствии действия на балку моментов) всегда равна
нулю. Поэтому второе слагаемое исключается. Расчеты показывают, что третье
слагаемое всегда мало по сравнению с первым и редко достигает 6%- Поэтому
примем
HI
Ык, . (3.14)
EF cos2 р ч
§ 10. ОПРЕДЕЛЕНИЕ НАТЯЖЕНИЯ НИТИ ПРИ ИЗМЕНЕНИИ НАГРУЗКИ,
ТЕМПЕРАТУРЫ И ПОЛОЖЕНИЯ ОПОР
1. Общий случай расчета нити
Предположим, что смещения опор по горизонтальному б и вертикальному v
направлениям малы по сравнению с пролетом. Поэтому считаем, что угол |3
наклона к горизонту линии, соединяющей опоры при этих изменениях, остается
постоянным (рис. III-6). Влияние этих смещений, а также повышения
температуры на t° будем рассматривать отдельно. Считаем также, что по вертикали
и горизонтали смещается одна из опор или обе одновременно. Положительными
будем считать смещения опор навстречу друг другу.
Рассмотрим сначала по отдельности влияние смещений о и С на расстояние
между опорами А и В (рис. 111-6, а и б). Как видно из рис. III-6, щ
первоначальное расстояние между точками А и В, равное — , под влиянием сме-
cos р
щения v изменилось на величину AC=v sinfi и стало равным
I
cos р
• vsin 15.
Под влиянием горизонтального смещения 6 (см. рис. III-6, б)
расстояние АВ уменьшится еше на отрезок AD = b cos |3 и составит
AiB =
cosp
— 8 cos p.
Условимся все величины, относящиеся к первоначальному состоянию нити,
обозначать с индексом «0», а к конечному — «1». Тогда формулы (3.13) можем
записать Tah:
66
\Qldx
Ln= -+- ^cos3p;
cos p
2//,
0
L\ =
h p
lQ\dx jQjd/лг
/ i
cos3p = — — v sin § — S ens ,3 4
cosSS,
c°s 3 2H\ cos p " " '" - - ■- • 2H2
От изменения нагрузьи на величину Н\—Н0 нить удлинится (3.14) т
(//, - Но) I
LI:
EF cos2 р
Д£,=
Кроме того, длина ее изменится под влиянием повышения температуры на
lat
cos р
Между величинами L0, LitAL и ALt имеется очевидная связь
Сделав подстановки, получим
!-r+l со5эр+ {Нг-Н0)1+Ы
cosp
.— v sin p —
2Hi
f/7 cos2 p cos p cos 3
— 5 cos p + ' cos3 p.
2H\
После сокращений и преобразований получим основную формулу:
"f^JQouTxcosSp
(3.15)
Щ +
21 Hi
— и -\- lai cos Р + v sin P cos2 P + 5 cos3 p
f/'jO?
//?
d*
2/
. cossp = 0.
(3.16)
Эту формулу можно применять в любых сочетаниях с учетом смещений опор
и изменения температуры или в предположении 6=0; v = 0; t=Q одновременно
или отдельно. При этом начальная нагрузка может быть меньше конечной или
больше ее, а опоры — на разных уровнях или на одном (|3=0). В дальнейшем
эту формулу и ее разновидности будем записывать сокращенно:
где для данного случая
EF J Q^dx coss p
А =
2lHi
Н\ + АН\ — Я=0,
И 4- ^ C0S Р + D sin P cos2 Р + В cos3 Р pp.
I
EF J Qf dx cos5 p
B=—i
2/
(3.17)
(3.18)
3*
07
В случае учета упругого смещения опор нити выражения А и В несколько
изменятся, но формула (3.17) полностью сохранит свой вид.
В мостах очень часто встречается система, показанная схематически
на рис. Ш-7. Чтобы учесть влияние боковых элементов (оттяжек) на работу
системы, в формулу (3.15) надо ввести некоторые поправки. В частности, под
а
влиянием изменения температуры левая оттяжка, имеющая длину
.удлинитесь 7.1,
а .
ся на величин} М. Легко установить, что при этом опора переместится в
cos 7л
а
сторону пролета на величину г— at. Аналогично определяют смещение пра-
COS2 7Л
вой опоры. Следовательно, опоры А и В сблизятся на величину
/ a b \
bt = + at.
\С052 7л COs2 7r, /
Под влиянием температурного удлинения hat пилонов, высоту которых будем
считать одинаковой, точки А и В разойдутся на величину
8*п = — A<rf(fg-b + tgfn).
Кроме того, они еще сблизятся под влиянием упругих удлинений оттяжек
при изменении натяжения нити на величину Н{—Н0. Например, усилие в левой
Н\ ~ Н0 а
оттяжке изменится на и длина ее, равная , увеличится на
cos 7Л cos 7л '
. При этом точка А сместится в пролет на величину
cos2 inEF y r j
(Hi-Н0)а
, а сол 1жение вершин пилонов будет равно
cos3 ^„EF
Hi-H;, / а Ъ_
EF \cos3 7д cos3 7
й\
Упругие деформации пилонов также могут влиять на величину пролета нити.
Однако они настолько малы, что ими можно пренебречь.
Если в формулу (3.16) подставить
в = (—*— + —Ь~—)at ~ ш <*2Тл +tg Тп) +
\ COS2 7л COS27,, /
НХ~Н0 / а + *_
EF V cos3 7'л cos3 7
получим довольно громоздкое выражение:
' EF coss р f Ql dx
н\+-
Ч1Н\
Яп +
Ы cosB+l— + -—) at cossp—/z(tg 7л+4£ 7„)ctf cos3 p+t'sin pros? p
\cos2 7,, cos2 7„ /
+ /
//, - Hn
( + ) cos3 p ) EF coss p \Q\dx
\COS3Tfl COS37,r / ,J „2 J
68
m
После преобразования эта формула примет вид:
a b
1 +
Н\
(■
cos3 7л
■ + ■
cos3 р
EF cos* p J Q^clx
+
-Ни
'♦'(
+
cos3 fn /
a b \
+ ) ms3 p
ens3 ?л cos3 7„ /
2W;
о
Z
+
+
JI cos p + (
a b \
+ 7.— «■ os3 3—h (tg TjI+tg 7n) cos3 p
— 7n /
COS2 7j, COS2
ctf+t/Sin p COS2p
/
-X
EF coss p f Q\dx
X E/1" //f—
2/
= 0.
Если обозначить
fa b \
I + : + : ) cos3 p = /np;
V cos3 7j, cos37n /
1 +
a
cos-^ 7Л
+
cos
hr)
(3.19)
C0S2 p - h (tg Тл + tg 7n) cos2 p = lt
и несколько преобразовать ее, получим выражение, аналогичное формуле (3.16).
Формула (3.16) является частным случаем этой более общей формулы
EF coss 6 \ Q\dx
Н\ +
2/цр/^о
ltat COS Р + V Sin Р COS2 S
— Н0+ ; EF
EF cos5 p J Ql dx
i
■^'np
tut
- =0.
>tf?
(3.20)
Эта формула отличается от (3.16) только тем, что в ней нет величины 6.
Если /Пр = '( = / и 6=7^0, получим снова формулу (3.16).
2. Расчет нити на упругих опорах
Если нить имеет упругое закрепление опор, отличающееся от показанного
на рис. II1-7, горизонтальное сближение опорных точек ее может быть получено
по формуле
В = (//,-//0) ш,
где т — некоторый коэффициент пропорциональности.
Тогда формулу (3.16) можно написать так:
Н\ +
EF cossp \Q%dx
i (rti-/¥0)/72E^cos3 3
■ по + ; +
2im
I
EFv sin p cos2 p EFl
+ : - + ■
Wcosp ,
~l J";
\ Q\dxEF cos5 p
2/
- = 0.
69
Преобразования дадут
Г EF cos5
L 2(l + mEJ
lot cos 3 + t' sin В cos2 В
— H0 + — : — £F
/rafF cos3 p)/y2 ' + m£/=- cos3 p
j Qfdx f/7 cosS В
«?-
2 (/ + /nfF cos» B)
= 0. (3.21)
Эта формула принципиально не отличается от формулы (3.20) и может быть
написана в той же форме. Однако формулы (3.19) изменятся:
/лр = / -f mEF cos3 В; )
(3.22)
// = /■ J
(При этом предполагаем, что упругое закрепление не может реагировать на
изменение температуры). Формулы (3.21) и (3.20) могут быть написаны в форме
(3.17), но коэффициенты А и В примут несколько иной вид
§ 11. ВАРИАНТЫ РАСЧЕТА НИТИ
Одним из недостатков формулы (3.16) является то, что при вычислениях,
как правило, приходится иметь дело с очень большими числами. Поэтому
удобнее пользоваться следующим решением.
Обозначим
Hi=H0n. (3.23)
Тогда формуле (3.16) можно придать вид:
EFcosS$ \Qldx
i В cos В + v sin Bcos2B -f /a/cos В
«3 + 1 " — 1 + 77} EF ]ri± —
11H\ IHq
£Fcos5B \Q\dx
~ 2~Щ =0 <3"24>
или ri? + Crfl — D = Q, (3.25)
£FcosSBfQ2fifj*r
i о cos 8 + v sin В cos2 В + lat ros В
где С = 1 + ! ' — EF; (3.26)
2lHl Wo
EF cosS В j Q\dx
D = [ . (3.27)
2lHl
Формулы (3.20) и (3.21) могут быть написаны так же, как и (3.25), но в них
EFcosS$§Qldx
„ 1 1,п* cos p -I- v sin 3cos2B
С = 1 + -* F P- EF; (3.28)
70
л
EF f Q-rfvros'P
/
(3.29)
Формулу (3.25) можно
представить в виде довольно удобной и
простои номограммы (рис. Ш-8). Для
этого можно задаваться различными
значениями п и определить для
каждого из них величины D, задаваясь
значениями С. С и D связаны
линейной зависимостью, поэтому для
каждого п можно получить прямую
линию.
По этой номограмме легко
определяют п, если известны С и D.
После определения п по формуле
(3.23) легко найти Hi.
В тех случаях, когда при данной
нагрузке #i представляет собой
наибольшее возможное натяжение,
формулы (3.20) и (3.21) можно
преобразовать также следующим, весьма
эффективным способом.
Имея схему нити, можно установить, в каком сечении возникает наибольшее
усилие. В мостах такое усилие чаще всего имеют оттяжки, но иногда и нить в
пролете (см. рис. III-7).
При этом „ _ Н\
^max— t
COS a>
где ф — наибольший нз углов наклона касательной к нити в пролете или наклона
оттяжки.
Предположим, что расчетное напряжение в нити равно R. Тогда Smax = RF,
где F — площадь сечения нити. Получим:
— = RF или F = .
COS <р R COS В
Подставим это значение в формулу (3.20):
//?+'
i ltat cos (5 4- v sin pcos2p EH\
; ~FfQ + -
R cos у21прЩ «пр
Rcos ш
tfi
EHxcos^^^Q\dx
i
R cos у 2/„p
= 0.
Преобразовывая это уравнение, можно получить удобное квадратное
уравнение относительно Ht:
1 +
£cosS|5 \Q\dx
/
Rcos?2lnpHl
+ (ltat cos 8 + v sin p cos* p) -
R cos <p/np
XHl — HoHi-
EcosS$$(%dx
i
2lnpR cos 9
X
(3.30)
71
Формулы (3.21) или (3.20) могут быть преобразованы различными
способами. Например, выразим Hi через балочный момент в некотором произвольно
выбранном сечении:
Нх= j*— , (3.31)
Ус + г
где М\с — балочный момент;
Цс — ордината нити в данном сечении при начальной нагрузке;
г — изменение этой ординаты при изменении нагрузки.
Подставив эти величины в наиболее общее уравнение (3.21) и обозначив,
как и выше:
EFcost $\Qldx
1 „ , v sinpcossp +//*< cosp
; — Щ + : EF = A;
f Q\dxEF cos5 p
2/np
полечим + A — В = 0,
in с + О3 {у с + г)2
где г — единственная неизвестная величина.
После преобразования получим
= В,
(3.32)
. 9 АМ2\ , АМ~ М3,
гз + Зусг2 + (3у2- 1 г + у3. 1 ус - —L = 0. (3.33)
Из этого уравнения можно определить л, а затем по формуле (3.31)
—натяжение. Формула (3.33) интересна тем, что величина г (перемещение выбранного
сечения по вертикали) обычно мала, и по нашим техническим условиям не
превышает "7ZZ- Если предположить, что ордината нити £/~0,1 /, получим
1 „ 1
„з
г=——ус и гЗ = ус. Это позволяет практически всегда пренебрегать
первым слагаемым формулы (3.33). Тогда г можно определить из квадратного
уравнения
\ зУсв)
AM2 \r t у\ АМ\ М\
ЗВ ЗВус
Г2+ Ус- !_л+1£— J-_L_ = 0. (3.34)
Очень часто можно пренебречь и слагаемым, содержащим г2. Тогда
поточим линейное уравнение
3 АМ\ М\
Ус~~ГУс~~Г
г ^ £ £_. (3.35,
ш\ о 2
В формулы (3.33), (3.34) и (3.35) вместо А и В можно подставлять
выражения (3.32), а в случае нити без оттяжек— (3.18).
72
§ 12. СПЕЦИАЛЬНЫЕ ВОПРОСЫ РАСЧЕТА НИТЕЙ
1. Перемещение сечения нити в горизонтальном
направлении
При проектировании комбинированных статически неопределимых систем
из нитей иногда приходится решать некоторые специфические задачи, которые
целесообразно рассмотреть сначала для изолированной нити.
Выше при выводе основной формулы (3.16) определяли величину,
пропорциональную перемещению одного конца нити относительно другого, и приравнивали
ее нулю. Следовательно, расчет в настоящем параграфе должен быть основан на
тех же предпосылках, что и в § 10.
Рассмотрим нить, на которую действует некоторая начальная нагрузка
(рис. Ш-9, а). Исходные параметры ее известны. Следовательно, при загружении
дополнительной нагрузкой можно определить натяжение нити Ht и вертикальную
составляющую перемещения сечения нити в любом месте по длине пролета.
Кроме того, определим горизонтальную составляющую перемещения точки С.
Для этого составим для участка нити АС уравнение, подобное уравнению
(3.15) для нпги в целом. Формулу начальной длины нити на этом участке
можно, как и выше, написать приближенно:
-Ос-
cos р
+
Qldx ross р
При изменении режима работы нити длина участка АС составит:
J Qfcfjr cos3 fi
Lic a —— + 2 — Bc ros p.
cos 3
2H7
где 6c—горизонтальная составляющая перемещения правого конца участка АС
в сторону опоры А.
Учитывая упругие деформации, получим
(И, - Щ) с
Рис. II1-9
Рис. 111-10
73
Подставим сюда определенные выше значения L1C и Lr,c:
J Q?dx cos3 p
откуда
2/yf
j Qldx
occos p —
2Я;
coss 3 = (Я' ~ H°)c
EF cos2 p
f (£dx cos2 p f Q?rfJ*r cos2 p
oJ о (Я, -H0) с
2Hi
2Hi
£Fcos3p
(3.36)
Следует заметить, что Ьс представляет собой перемещение относительно
опоры А (в ее сторону).
Есш опора А смешается в сторону пролета на величину бА, перемещение
точки С в пространстве будет
с с
Г Q?dx cos2 р Г Qldx cos2 3
ri о _ (Я, - //„) с
2tff
2Я
£F сочз ч
(3.37)
2. Обратно симметричное загружение
симметрично нагруженную систему
Рассмотрим симметричную
(рис. Ш-10, а).
В висячих мостах наиболее невыгодным загружением временной нагрузкой
часто оказывается загружение полупролета. При расчете рам такую нагрузку
нередко заменяют двумя схемами загружения.
Одной из них является нагрузка к, расположенная по всему пролету. Расчет
на нее обычно очень прост. В качестве второй схемы принимают загружение
одной половины нагрузкой к, направленной вниз, а другой половины —
направленной вверх. В результате получают загружение одной половины пролета
нагрузкой 2к.
Расчет на эту нагрузку также прост, особенно для таких систем, как
симметричные рамы или арки, так как при втором этапе загружения распор арки
или рамы не меняется. Кроме того, сечение, находящееся на оси симметрии, не
перемещается по вертикали.
Гибкая нить — система изменяемая, поэтому при обратно симметричном
загружения в ней возможно перемещение середины и изменение натяжения.
Однако при небольшой величине временной нагрузки такие изменения
достаточно малы и ими можно пренебречь. Рассмотрим, при каких условиях возможны
такие пренебрежения. На нить действует нагрузка
Я = ?о + к,
где до — первоначальная постоянная нагрузка;
к — временная нагрузка по всему пролету.
Натяжение нити при этом составляет Н0. Добавим обратно симметричную
нагрузку (рис. Ш-10, б) и определим, изменится ли натяжение. Из табл. III-1
получим
*
12
74
192
+
(q + к) (q ■
32
к) is 5 (q
л-)2 I3
192
®'
/з
12
Подставим эти значения в формулу (3.16):
£Ф2+(f)2]/2
н1+
EFqW
На
IWi
и\~
24
= 0.
Разделим это выражение на Я03:
й)
з YEFqW
24Я;
■з
— 1
о
Обозначив
EFqW
24И1
EFHi+(tJ]
24tfg
0.
I
(3.38)
получим
откуда
1.
(3.39)
"i
На рис. III-1I сплошной линией показано отношение ■— как функция
велико
к
чины — • Можно убедиться, что приложение обратно симметричной нагрузки
вызывает изменение натяжения. Однако висячие мосты применяют обычно
только при относительно больших пролетах. При увеличении же пролета постоянная
нагрузка, как известно, возрастает, а временная уменьшается. Кроме того,
к
q—qo+к, поэтому отношение — никогда не будет больше 0,5. Следовательно,
Я
натяжение Н изменится не более чем на 3% (см. рис. Ш-П).
Следует заметить, что сплошная кривая графика (см. рис. Ш-11) построена
для системы, имеющей /=200 м, /о=20 м, EF=200 000 т и 9о=2 т/м. В
результате получились В=0,0936. Однако для контроля построены еще две кривые:
В=0 и £=0,20. Обе они показаны на графике пунктиром и на полученные
выводы практически не влияют. Таким образом, замену несимметричного загружения
симметричной и обратно симметричной нагрузкой можно признать приемлемой
для дальнейших выводов.
ГЛАВА IV
РАСЧЕТ ЦЕПИ С БАЛКОЙ ЖЕСТКОСТИ
§ 13. СТЕПЕНЬ СТАТИЧЕСКОЙ НЕОПРЕДЕЛИМОСТИ И ВЫБОР ОСНОВНОЙ СИСТЕМЫ
Степень статической неопределимости системы проще всего
определять следующим образом. Найдем степень статической
неопределимости системы, показанной на рис. IV-1, а, для чего
проследим порядок ее образования. Поставим, прежде всего, на опоры
балку жесткости — система статически определима. Затем двумя
стержнями прикрепим к земле узел А (рис. IV-1, б) —статическая
определимость не нарушилась. Прикрепим узлы В, С, D, E, F, G
(см. рис. IV-1, а)—система осталась статически определимой.
Если теперь к узлу G и земле присоединить стержень GH, то этот
стержень будет «лишним» и система окажется однажды
статически неопределимой.
Аналогично можно определить степень статической
неопределимости системы, показанной на рис. IV-1, в. Поставим на опоры
неразрезную балку АВ ■—система однажды статически неопределима.
Теперь присоединим к ней по очереди двумя стержнями узлы С,
D, F — система осталась однажды статически неопределимой.
Поставим стержень FG — система станет дважды статически
неопределимой. Таким образом, замечаем, что постановка одной
непрерывной цепи повышает степень статической неопределимости
установленной ранее балки на единицу.
Однако это справедливо только в случае, если пилоны имеют
внизу шарниры, а все подвески — конечную длину. Если длина
самой короткой подвески будет равна нулю, окажется, что цепь
непосредственно прикреплена к балке жесткости. Степень статической
неопределимости повысится на единицу. Это касается и случая,
когда при прежнем шарнирном присоединении цепи к вершине пилона
один из них будет жестко закреплен нижним концом. Закрепление
двух пилонов повысит степень статической неопределимости на два.
Если цепь прикрепить к тележкам, расположенным на вершинах
таких пилонов, степень статической неопределимости не возрастет.
Если в балке жесткости с любым количеством пролетов
поставить шарнир, степень статической неопределимости уменьшится на
единицу.
Трехпролетная неразрезная балка (рис. IV-1, г) дважды
статически неопределима. Цепь (при шарнирно опертых пилонах)
повышает степень статической неопределимости до трех.
Если балку жесткости сделать разрезной, т. е. поставить два
шарнира над промежуточными опорами, степень статической
неопределимости снизится до единицы. Такой же результат дает
постановка двух шарниров в среднем пролете или по одному в
крайних, т. е. балка жесткости становится консольной. Такой прием
иногда применяют, но консоли следует делать очень небольшими,
во избежание резкого снижения жесткости.
76
На рис. IV-1, д показана двухцепная система, предложенная
С. А. Цаплиным. Рассуждая как и выше, предположим, что система
имеет одну цепь (например, ABCDE), тогда она будет однажды
статически неопределимой. Постановка второй цепи повысит
степень статической неопределимости до двух, а соединение в узле С
цепей и установка в нем подвески — до трех.
Таким образом, может встретиться несколько десятков
различных систем и каждая из них имеет свою специфику расчета.
Рассмотреть способы расчета всех этих систем невозможно и не
представляется необходимым. Можно ограничиться подробным
изучением одной-двух из них и дополнить его соображениями о
специфических особенностях расчета других систем.
Наиболее распространенные системы показаны на рис. IV-1, а
и г. Первая из них однажды статически неопределима, а вторая с
неразрезной балкой жесткости — трижды, независимо от того,
прикреплены концы цепи к балке жесткости или к массивам.
Перейдем к выбору основной системы. Степень статической
неопределимости может меняться и доходить до четырех-пяти.
Естественно, что и ход расчета разных систем будет различным. Однако
при выборе основной системы имеются принципы, общие для
различных систем.
Как известно, в качестве основной системы целесообразно
выбирать ту, которая по своим свойствам меньше всего отличается от
заданной. Например, при расчете неразрезной балки в качестве
лишних неизвестных выгоднее принимать опорные моменты
(теорема о трех моментах), чем опорные реакции, ибо в последнем
случае конечные результаты получаются как малые разности больших
величин. Такое решение затруднительно.
Поэтому может показаться, что при расчете цепного моста
систему выгодно превращать в статически определимую путем
введения нужного количества шарниров в балку жесткости. Однако
практика показывает, что это не так. При таком решении усложняются
все расчеты, а преимуществ по сравнению с наиболее
распространенным способом, описанным ниже, нет. Поэтому удобнее, прежде
77
всего, разрезать цепь. В однопролетной системе разрез цепи в
середине пролета дает основную систему.
Если система двух- или трехпролетная с разрезными балками
жесткости, можно ограничиться только разрезом цепи в середине
пролета или любом другом сечении. В неразрезной балке надо,
кроме разреза цепи, поставить шарниры над опорами. В двухцепной
системе (рис. IV-1, д), которая дважды статически неопределима,
необходимо разрезать в любых сечениях обе цепи. Если эта
система имеет соединение цепей в середине пролета и среднюю подвескл,
она трижды статически неопределима и для расчета удобно
разрезать обе нижние ветви цепей и среднюю подвеску. Если система од-
ноцепная, но цепь в середине пролета присоединена к балке
жесткости, необходим уже не один разрез цепи, а два — слева и оправа от
места присоединения цепи к балке. Все приведенные рекомендации
не следует считать обязательными. Они даны лишь для
ориентировки, как наиболее распространенные и простые.
§ 14. ОПРЕДЕЛЕНИЕ УСИЛИЙ
В ЭЛЕМЕНТАХ ОДНОПРОЛЕТНОЙ СИСТЕМЫ
При расчете статически неопределимых систем приходится, как
известно, задаваться сечениями всех элементов. Применяемые при
этом приемы настолько несовершенны, что не дают возможности
более или менее четко задаться законом изменения сечений балки
жесткости по длине пролета. Поэтому при расчете обычно
принимают сечение балки жесткости постоянным.
На первый взгляд кажется, что это очень несовершенное
решение, однако практика расчетов показывает, что переменность
сечения балки жесткости мало влияет на результаты и линии
влияния, полученные в предположении постоянного сечения,
незначительно отличаются от точных. В большинстве случаев по этим
линиям влияния можно определить усилия и подобрать сечения
элементов и при новых сечениях расчет не повторять.
Эти соображения дают основания подробно остановиться на
расчете цепных мостов в предположении балок жесткости
постоянного сечения, а о расчете систем с фермами дать лишь необходимые
> казания.
Рассмотрим однопролетную цепную систему со сплошной балкой
жесткости постоянного сечения. Цепь имеет очертание квадратной
параболы. Система однажды статически неопределимая (рис
IV-2, а). Построим линии влияния усилий в элементах системы. Для
раскрытия статической неопределимости примем в качестве
основной систему, показанную на рис. IV-2, б. Тогда «лишней»
неизвестной будет натяженце (распор) цепи Н.
Напишем каноническое уравнение
Ябц + Д,р = 0, (4.1)
78
Рис. IV-2
где бц — сближение концов цепи в месте разреза под влиянием
действия парной силы Н= 1 (рис. IV-2, б);
Aip — сближение этих же концов под влиянием вертикальной
силы Р=\, направленной вниз и приложенной в
произвольной точке А на уровне проезда.
По теореме о взаимности перемещений можно считать, что AiP
есть перемещение по вертикали точки А при действии парной силы
Н=\.
Условимся считать, как это обычно делают, с очень небольшой
погрешностью, что пролет балки жесткости равен пролету цепи /.
Тогда под влиянием натяжения #=1 равномерно распределенная
нагрузка, заменяющая усилия в подвесках, будет равна (3.3)
8/Я
/2
8/1
где f — стрелка цепи.
Эта нагрузка направлена вверх. Уравнение прогиба балки
жесткости (точки А с абсциссой х):
Aip =
q(l3x — 2/x3 + %4)
24£б/
8f\(l3x — 2/х3 + х4)
24/2£б/
(4.2)
Здесь знак «минус» (—) принят потому, что сила Р = \ направлена
вниз, а перемещение AiP происходит вверх.
Величину бц определяют для той же нагрузки парной спл<ч"«
Я=1 по известной формуле
гМЧх Sifi
EF
(4.3)
Первое слагаемое относится к изгибаемым элементам, в данном
случае к балке жесткости (бц6), второе—ко всем элементам,
работающим на продольные силы, т. е. на цепь (б^), пилоны (ЭД1
оттяжки (6,°jT), (подвески (6"i). Определим все эти величины.
• j
Балка жесткости подвергается действию нагрузки п = —'— _
Изгибающий момент в произвольном сечении
„„ Я1 Я*2 4/1 ,
М = —х — - ^J—(lx — xz).
NP-dx
Интегрируя ' по всему пролету (4.3), получим
b"=-rni\^-*x*+xk)dx=^h- <4-4>
Практика подсчетов показывает, что в выражении (4.3)
полученное слагаемое бц° является наибольшим. Сумма остальных
слагаемых составляет обычно не более 5—10% от 6цб. Поэтому
определять их будем с некоторым приближением. В частности, при опре-
р
делении бцц считаем, что цепь имеет сечение р — 5_ где Fn—
cos a '
сечение в середине пролета, а а — угол наклона касательной к цепи
(параболического очертания) в произвольном сечении. Тогда
ц с S2ds r l2cosa dx г (1 + tgzu)dx
611 = 3 -Б~Г = 3 _*„р f "717- =3
о
E4F4 „ zo5zaEnFn cos a ' EuFn
Используя уравнение цепи
4/(/х-х2) 4/ 8/х
* = р. = ^=tga = T- —,
ц 1 £/ 16/2 64/2;е 64/2;е2 \
получим бц = -^г- 1 + — — + -^- d* -
_ 3/2+ 16/2
См£ц/'ц
Для двух пилонов длиной /,7 получим
,„ „ Sn/n 2(tgp1 + tgp2)2/n
бй = 2
Сп* П СпГп
zt0T
и аналогично для оттяжек би = -
COS2 PifoT^OT
Для подвесок, в которых при параболическом очертании цепи
усилия будут одинаковые, при длине панели, равной d, получим
^ — -г, а> он = г^пд.
80
Можно с достаточной степенью точности считать, что величина
<Й/ПД равна площади, заключенной между кривой очертания цепи
и балкой жесткости:
UZj/пд
Тогда б1? =
Таким образом получаем
3 '
64/Ч*(а—Ь)
' £-пд''пд
бц =
8/2/ , ^3 I 2(tgpt + tgp2)2/n
15£5/
£цГц
2/о
+
СдГп
64/м(л-1/)
(4.5)
COS2 PifoT^OT ' PEnTtFnR
Это выражение в случае балки жесткости постоянного сечения
можно считать практически точным. Так как первое слагаемое
выражения бц значительно больше суммы всех остальных, полученное
выражение удобнее записать так:
би =
8/2/
-, 8>
15£б/
где е — величина, несколько большая единицы:
16 /2
2(tgB1 + tg^2)2/n ,
(4.6)
'=1 +
/ +
3 /
2/„
Е F
Е F
cos^^F,
от
64/2й?
('-и
1ЪЕ F
1 *-пл пд
15Я6/
8/4
(4.7)
Учитывая выражения (4.1), (4.2) и (4.6), можно написать
формулу для ординаты линии влияния натяжения цепи rjH:
Т)н
Aip _ 5(13х — 21х3-\-х^)
8Pfe
Плошадь этой линии влияния
i
йн = \ Цнах = —т- .
„ 8fc
/2
(4.8)
(4.9)
81
Характер линии влияния
показан на рис. IV-3, а.
Так как усилия в
пилонах, оттяжках и подвесках
пропорциональны
натяжению цепи, можно легко
получить уравнения линий
влияния и их ллощадей для
этих элементов:
Т]П = — »]H(tgPi + tgp2);
Т|от
Г]н
COS Pi
8fd
'1п-д = jj- >1«-
Йп = —(tgfo + tgpa);
Йс
/2 1
8/е cos р4
Рис. IV-3
8fd d
£2пд = -;-Йн = — (4.10)
I- E
Выражение для ординаты линии влияния изгибающего момента
в любом сечении балки жесткости может быть написано в общем
виде как сумма двух ординат: Цм^Щмо + Цми- Первую из них г]М0
получают как ординату линии влияния для простой разрезной
балки (рис. IV-3, б), а вторая пропорциональна т]н. Натяжение
вызывает действующую на балку направленную вверх равномерно
распределенную нагрузку^ =
8/Лн
/2
. От этой нагрузки в сечении
балки с аосциссои а возникнет момент (рис. IV-3, е)
1|Л/п = —
q(la — а2)
4fa{l — a)
/2~
■Т)„.
аО
Рис. IV-4
Рис. IV-5 -»•
IF'i2
0,01?
o,m
о
/\^J
у
■Jl/
Я
/
■
■
1JD0 1,0b
Xll
0,50
Ofi€
0,30
0,20
0,10
1,08 e
Таким образом (рис. IV-3, г), для середины пролета
4fa(l-a) 4//2
Цм = т]дго —~ Т]Н = т]дго — — Лн = ^мо — /г]н. (4 11)
/2
4/2
На рис. IV-3, д, е, ж показаны те же кривые для линии влияния
момента в четверти пролета.
Аналогично получим выражение для поперечной силы в том же
сечении (рис. IV-3, з, и, к):
4Q
8f ( I \
(4.12)
Для усилий в пилонах, оттяжках и подвесках оказалось
возможным получить ф'ормулы площадей линий влияния. Для моментов и
поперечных сил в балке жесткости это затруднительно, тем более
что эти линии влияния имеют участки с разными знаками.
Напишем формулу (4.8) в таком виде:
5 I I х х3 , х4\ 1 .. .„,
*>"=итЬ-2т+тП- (4ЛЗ)
Отсюда видно, что очертание линии влияния натяжения не
зависит от длины пролета, а зависит только от соотношения — и
коэффициента е.
Это справедливо и для линии влияния поперечной силы (4.12).
В формуле (4.11) первое слагаемое зависит только от пролета:
чем он больше, тем больше слагаемое.
83
Учитывая, что длина а — известная величина, определяющая
положение сечения, для которого строится линия влияния, можно
считать, что во второе слагаемое величина / входит тоже множителем.
t I
Тогда отношения.!. и , входящие в выражение г]н, сократятся.
/ /
Следовательно, при заданной величине е можно заранее
сосчитать все ординаты линии влияния натяжения Н (формула 4.13), в
которые войдет множителем отношение —-. Аналогично можно
поступить с формулами (4.11) и (4.12). При этом в первую из них
войдет множителем /, а во вторую — единица. Зная очертания
линий влияния, можно определить длины участков разных знаков и
подсчитать площади этих участков, что и будет сделано ниже.
Все эти данные для симметричной однопролетной системы с
балкон жесткости постоянного сечения можно считать практически
точными. Упомянутые подсчеты можно произвести для любого
сечения балки. Ниже они приведены только для двух наиболее
характерных сечений: середины и четверти пролета, где изгибающие
моменты имеют, как правило, наибольшую величину.
На рис. IV-4 показаны линии влияния момента в середине
пролета при значениях множителя е=1,00; 1,05 и 1,10. По горизонтали
отложены абсциссы сечений балки х/l, отсчитываемые от левой
опоры; по вертикали — ординаты линий влияния, деленные на
пролет /. Из этого рисунка видно, что при разных величинах е площади
линии влияния изменяются довольно сильно. Значительно
изменяются и длины отдельных участков. Для удобства вычислении при
первоначальном проектировании на рис. IV-5 показаны в функции е
площади положительных участков Q+ и их длины К. Имея длины за-
гружения, можно найти эквивалентную временную нагрузку, а
умножив ее на Q+, получим наибольший момент от временной
нагрузки. Для определения его при загружении всего пролета
(постоянная нагрузка) следует воспользоваться кривой Q.
Линии влияния для изгибающего момента в четверти пролета
не даются. Характер их виден из рис. IV-3, ж. Приведены площади
положительного участка и полные площади (рис. IV-6). Здесь
обозначения те же, что на рис. IV-5. Даны также длины положительных
участков К. По данным этого рисунка можно определить момент в
четверти пролета от загружения большего по величине
положительного участка. При необходимости можно определить момент и от
загружения отрицательного участка. Его площадь равна Q_=fi—
— Q+, а длина равна 1-Х.
На рис. IV-7 показаны положительные площади линий влияния
моментов для других сечений. Однако, кривые здесь являются
приближенными, так как каждая из них вычерчена всего по пяти точкам
(опоры, четверти пролета и середина). На этом рисунке показаны
также площади положительных участков линий влияния для
поперечной силы, выраженные одной общей кривой для любого значе-
84
Рис. IV-6 Рис. 1V-8
ния е. Величина этого коэффициента сравнительно слабо
отражается на величинах поперечных сил, поэтому кривая (см. рис. IV-7)
определена для среднего значения е=1,06.
На рис. IV-8 приведены характерные очертания линий влияния
поперечных сил для е=1,06. Здесь же приведены площади
положительных участков соответствующих линий влияния.
В случаях когда пилоны имеют внизу не шарнирное, а жесткое
закрепление (рис. IV-9, а), можно полностью использовать
предыдущее решение, заменив во всех выводах защемленный пилон
опертым шарнирно (рис. IV-9, б), а длину оттяжки ^ — «приведенной»
длиной /пр. Такая замена должна быть осуществлена из. условия,
что горизонтальное перемещение г вершины пилона под влиянием
силы Р в двух системах (рис. IV-9, а и б) будет одинаковым.
Усилие Р в первой системе (см. рис. IV-9, а) частично
уравновешивается горизонтальной составляющей Р0 >силия в оттяжке и
частично силой Рп, воспринимаемой жестко закрепленным пилоном
При этом
Ро + Рп = Р. (4.14)
Под влиянием этих сил вершина пилона должна переместиться
на величину горизонтальной составляющей смешения конца
оттяжки:
p6==_fo_Jo 1_
cosp E0F0 'cos p ' (4Л5)
где 6 —величина перемещения вершины свободно стоящего
пилона под влиянием действия силы Р=1 (рис. IV-9, в);
EqFq — жесткость оттяжки.
85
77-гггт?
Рис. IV-9
Приведенная длина оттяжки может быть найдена из условия,
что ее удлинение под действием силы Р будет равно удлинению
фактической оттяжки под действием силы /V
Р1
пр
Poh
или
cos $E0F0 cos $E0Fo
P'lip = Рок-
(4.16)
Уравнения (4.14), (4.15) и (4.16) имеют три неизвестные
величины Р0; Ра и /Пр. Решение дает
1 +
h
I
пр
1Р°-
1от-
k
6E0F0 cos2 р
1 +
k
(4.17)
б£о^о cos2 р
Если пилон имеет постоянное сечение, то g —
П3
При .пере-
менном сечении можно найти это перемещение общими способами
строительной механики.
Все полученные выше формулы для определения бц, е и
последующие справедливы для рассматриваемого случая при условии
замены длины оттяжки /от приведенной ее длиной 1щ>.
Заметим, что пилоны в случае шарнирного их опирания
рассчитывают как простые стержни. При жесткой заделке пилон работает
одновременно на сжатие от силы
yV = Ptgp4 + />0tgP = Ptgpn + —t tgp (4.18)
1 +
/о
bEQFaCOsz p
и на изгиб от силы Рп, приложенной к его вершине:
Р
Рп = Р-Р0 = Р-
1 +
/о
(4.19)
&E0F0 cos2 P
86
В первой из этих формул рц — угол наклона касательной к цепи
у пилона.
Рассмотрим также расчет массивов для закрепления концов
оттяжек. Такие массивы очень разнообразны (см. рис. Н-1), и расчет
каждого из них имеет свою специфику. Некоторые из них (см. рис.
П-1, а и рис. II-1, б) подвергаются только действию оттяжек,
приложенному в точках D, и реакций со стороны окружающей среды.
В качестве давления на заднюю и переднюю стенки следует
принимать активное давление грунта. По нижней поверхности
действуют касательные напряжения, распределенные равномерно по ней
и имеющие равнодействующую, равную сумме горизонтальной
составляющей усилия в оттяжке и давлений земли по передней и
задней граням массива. Кроме того, действует собственный вес
массива. Зная эти силы, необходимо найти коэффициенты запаса
массива на сдвиг по нижней поверхности и на опрокидывание вокруг
точек А. Кроме того, надо определить нормальные напряжения,
передающиеся на грунт от массива по нижней его поверхности.
Массив (см. рис. П-1, в) рассчитывают аналогично, но к силам,
действующим на массивы (см. рис. Н-1, а, б), здесь добавится
давление со стороны пилонов и балок жесткости. Действие
оттяжки в этой схеме можно заменить силой, приложенной в точке В и
направленной вдоль оттяжек.
В системе, показанной на рис. П-1, з, надо рассматривать
отдельно два массива: задний и передний. При расчете заднего
массива, к которому прикреплена оттяжка, следует учесть те же силы,
которые действуют на упомянутые выше массивы (см. рис.
П-1, а, б) и добавить к ним давление свода.
Особенностью расчета других массивов (см. рис. П-1, и. к)
является то, что на них передается давление от опорных частей балок
жесткости ,а усилие в цепи приложено в точках В по направлению
примыкающего крайнего звена цепи.
Своеобразен железобетонный массив (см. рис. П-1, о),
примененный на мосту через р. Сену у Танкарвиля. На этот массив
передается большая реакция со стороны заанкеренной здесь цепи.
Кроме того, с левой стороны действует относительно небольшая
реакция балки жесткости, а с правой — реакция со стороны
подходного пролета. Обе эти реакции (на схеме не показаны) при расчете
необходимо учитывать.
Кроме определения прочности элементов коробки массива,
расчет его включает в себя проверку на опрокидывание вокруг точки С
и проверку на сдвиг массива В.
Для исключения опрокидывания относительно легкой
железобетонной коробки массив имеет сзади камеру 5, которая может
быть дополнительно загружена.
В современных мостовых конструкциях нередко встречаются
системы не с двумя цепями по ширине моста, а с одной (рис. IV-10, а).
Балки жесткости здесь заменены коробкой. В местах опирания
коробки жесткости на опоры поставлены мощные диафрагмы, через
87
ь)
<
h»
JCi.
которые давление со
стороны коробки жесткости
передается 'на опору при помощи
опорных частей / (рис.
IV-10, б). Пилон имеет
опорную часть 2 и для
обеспечения устойчивости в боковом
направлении жестко
соединен с опорной диафрагмой
коробки. Таким образом,
опорные части /
воспринимают давление со стороны
коробки жесткости и
одновременно удерживают пилон
от опрокидывания в
сторону. В пролете коробка висит
на .подвесках (рис. IV-10,
а, в).
При загружении пролетного строения по всей ширине расчет
такой системы не отличается от расчета пролетного строения с двумя
фермами. Различие состоит лишь в том, что вся нагрузка действует
на единственную ферму, а вместо жесткости одной балки надо
принимать жесткость всей коробки в целом.
При расположении нагрузки на одной половине ширины
коробки (рис. IV-10, в) на нее передается внешний погонный крутящий
момент Mq = qc, где q — эквивалентная нагрузка на единицу длины
пролетного строения от всех рядов машин, расположенных по
данной стороне коробки.
Наибольший момент, скручивающий балку, будет у опор при
загружении всего пролета
Мк = ^-. (4.20)
Рис. IV-10
Этот момент вызывает в коробке касательные напряжения.
Величина таких напряжений для тонкостенной коробки равна:
т =
Мк
соб
(4.21)
где о) — площадь внутреннего пространства поперечного сечения
коробки, ограниченного ее оболочкой;
6 — толщина оболочки в данной точке.
Наибольшее напряжение возникает там, где толщина оболочки
наименьшая.
Если в данной точке, помимо касательного напряжения,
возникает и нормальное, следует проверить прочность, пользуясь одной
из теорий прочности.
88
§ 15. ВЛИЯНИЕ ИЗМЕНЕНИЯ ТЕМПЕРАТУРЫ
Предположим, что ферма подверглась равномерному изменению
(повышению) температуры на f. Однопролетный цепной мост
является системой внешне статически неопределимой, поэтому в
элементах фермы возникнут усилия. Чтобы их определить, надо найти
величину лишней неизвестной, в качестве которой, как и выше,
примем натяжение цепи Ht. Как известно, н, = —— где б и—
6ц'
величина, получаемая по формулам (4.6) и (4.7), и Au=2Sij/,-a/,
где Sn — усилие в элементе t от пары сил Н=\, приложенной в
месте разреза цепи.
Величины Аи и бц определим для групп элементов моста.
Для цепи
i i i
±и = f — dsat = at f ^— = at f (1 + tg2 fr)dx; (4.22)
о cos р; 0Jlcos2pj oJ
по аналогии с выводом формул (4.6) и (4.7) получим:
2
Для оттяжек A J = hat.
cosPo
Для пилонов Дн = — 2 (tg |3Ц + tg p0) hat.
Of | Of . 9 \
Для подвесок Д™ = —— йаШпп « —1 h f) at.
I2 I \ 3 /
В этих формулах:
Po — угол наклона оттяжки к горизонту;
/о — длина оттяжки;
рц — угол наклона крайнего звена цепи в пролете;
/п — высота пилона;
d — длина панели;
h — расстояние по вертикали от вершины пилона до уровня
закрепления нижних концов подвесок.
Изменение длины балки не отразится на величине усилия в
цепи, так как от пары сил Н=\ она будет только изгибаться, не
растягиваясь и не сжимаясь.
Следовательно,
f1 (л f 2 /
1 + ^ГТ + 2-7Га 2(tgp4 + tgPo)Zn +
Л L COS Ро
+т(л~т/Яа'- (4-23)
Натяжение (распор) цепи от повышения температуры на f
составит:
и Ди
nt = —- =
Ои
l + ^-t + 2—^_2(tg6n + tg60)/n + -^(/i-^-f) (4.24)
3 / cos Bo I x о ' -
= at.
_8_ _P/
Зная натяжение от температуры, легко найти усилие в любом
элементе, например в оттяжках и пилонах:
5от = '—; Sut = -Ht(tgfa + tgfa). (4.25)
COS |3o
Равномерная нагрузка, передаваемая через подвески на балку
жесткости,
Pt = JpL- (4-26)
Изгибающий момент в сечении на расстоянии с от опоры балки
Ptc(l-0 ^AfHMl-c)
2 I2
Поперечная сила
/ I \ 'V 2 /
Q, = p,(--c) = Ht. (4.28)
Следует отметить, что изменение температуры вызывает
незначительные изменения усилий в цепях, оттяжках, пилонах и
подвесках, поэтому при расчете на прочность этих элементов им можно
было бы пренебречь. В то же время изгибающие моменты в балках
жесткости возрастают значительно и пренебрегать этим нельзя.
Балка жесткости при исходной температуре и отсутствии
временной нагрузки поддерживается подвесками. Опорные реакции
ее, изгибающие моменты и поперечные силы равны нулю. При
повышении температуры все элементы (цепь, оттяжки, подвески)
удлиняются. Балка опускается на опоры, подвески постепенно
перестают ее поддерживать и в ней возникают положительные
моменты. При понижении температуры подвески стремятся оторвать
балку от опор. Возникают реакции, направленные вниз, и
соответствующие этому положению отрицательные моменты.
90
При проектировании и постройке моста надо позаботиться о том,
чтобы наибольшие по абсолютной величине положительные и
отрицательные моменты в балках жесткости, при учете временной
нагрузки и изменений температуры, были равны друг другу. Из
этого условия и надо выбирать температуру, при которой балка
будет полностью висеть на подвесках и не работать на изгиб.
Если пилоны имеют жесткую заделку, можно поступить
аналогично расчетам на временную нагрузку (см. рис. IV-9). Напишем
три уравнения. Первое из них — условие равновесия:
Рп + Р0 = Р. (4.29)
Второе уравнение — условие 'совместимости деформаций,
показывающее, что верхний конец оттяжки под влиянием ее упругих
деформаций и температурных деформаций самой оттяжки (loat) и
пилона (/па/) имеет такую же горизонтальную составляющую
перемещения, как и вершина пилона, при этом пренебрегаем упругим
удлинением пилона, как величиной очень малой:
„ Polo loo.t
Pnb = ° + -?—- - Ш sin p. 4.30)
Eq,Fo COS2 Р COS Р
Третье уравнение — условие эквивалентности горизонтальной
составляющей перемещения вершины пилона при его жесткой
заделке и воображаемом шарнирном опирании и приведенной длине
оттяжки:
Р1щ> lupat Polo , hut
(4.31)
£0^0 cos2 p cosp E0F0 cos2 p cosp"
Из первых двух уравнений можем определить Ро:
P6 + /natsinp —
cos Р
Ро = } ?-, (4.32)
6+ Ь.
E0F0cosz$
а из третьего уравнения получим приведенную длину оттяжки:
, E0Fо cos p
/цр = h -—! . (4.33)
£0^0 cos р
После определения /пр можно по формуле (4.24) получить Н,,
подставив в нее /Пр вместо /0, а затем применить формулы (4.25)
— (4.28).
91
§ 16. ЛИНИИ ВЛИЯНИЯ ПЕРЕМЕЩЕНИЙ
Линия влияния для прогиба пролетного строения в некоторой
точке А может быть получена на основании теоремы о взаимности
перемещений как линия прогиба балки жесткости от действия
единичной вертикальной силы, приложенной в этой точке.
Для построения линии влияния прогиба, например в середине
пролета, приложим силу Р=\ в этом сечении. При этом в цепи
возникнет натяжение, равное ординате соответствующей линии
влияния в середине, т. е. т]н.Ср. В результате этого натяжения цепь
передаст на балку равномерно распределенную по всему пролету
нагрузку, направленную вверх:
Р = ^~. (4.34)
На балку будет действовать нагрузка (рис. IV-11, а), под
влиянием которой она получит прогиб:
v i = — ( 3/2jc - 4jc3) -\ £— (Рх - 2/jc3 + jc4),
Т 48£/ 24Я/ V T
или
v t = 1— (ЗРх—Ах3) -f ^~Wp i Рх - 2/х3 + jc4).
4SEI 3PEJ
2
Величина т]Н.ср равна (см. рис. IV-3 при х = //2):
0,195/ 25 /
■Пн.ср
fe 128 ft '
25 (/2х — 2х3 + — )
следовательно, v = 1 • (4.35)
Чг 48£/ ^ е384£/ V '
х
или, ооозначив —
/
3z — 423 252 — 50z3 -4- 25z
-f
Ff I
'/2 EI ' 48 ' 384e J' (4'36)
На рис. IV-11, б показаны линии влияния прогиба середины
пролета при разных значениях коэффициента е (4.7). Из рисунка
видно, что при значениях е, близких к единице, линии влияния имеют
довольно большие отрицательные участки. При обычно
встречающихся величинах е эти участки не имеют существенного значения.
Аналогично могут быть построены линии влияния прогиба
любого другого сечения пролетного строения. Практика показывает,
что в системах, подобных рассматриваемой, наибольший прогиб
возникает не в середине пролета, а примерно в четверти.
Затруднением является также то, что при разных положениях временной
92
Рис. IV-ll
-СМ.
Рис. IV-I2 -* fffi?f/?
нагрузки и любых значениях е прогиб изменяет не только свою
величину, но и знак. При этом величины отрицательных прогибов
получаются довольно большими.
В этом случае прогиб надо определять для нагрузки (рис.
ПМ2,а),где р = &hm/i .
По аналогии с построением линии влияния прогиба в середине
пролета получим уравнение для правого участка:
Vi =
4
714— 16л'3
128£7
(*- т)3 95(
Щ1Ч — 2х3 +
т)
или, обозначив x/l = z,
/3 Г 7г— 16z3
v = I —
'Л F1 I
6£7
(г-0,25)
128
2048е£7
3 95 (г — 2г3 + г'Л
- + —
2048е
(4.37)
Для левого участка второе слагаемое в скобках последнего
выражения не учитывается.
На рис. IV-12, б показаны линии влияния прогиба в левой
четверти пролета для разных значений е.
Зная очертания линий влияния прогибов для разных значений е,
можно найти площади положительных и отрицательных участков
линий влияния и их длины.
93
W W /,04 Щ Щ f 0
\ 1 \
\л
—
Q
ЮОООЕШ
Рис. IV-13
Кривую отрицательных (прогиб вниз) площадей линий влияния
для прогибов середины пролета можно показать в функции е
(рис. IV-13). Здесь нанесена также кривая К, по которой
определяют длины загружения для нахождения наибольшего прогиба. Как
видно из анализа этой кривой, если е^1,05, невыгоднейшим за-
гружением оказывается загружение всего пролета.
Для четверти пролета график аналогичен (рис. IV-14), но здесь
показаны площади линий влияния, соответствующие прогибам вниз
(знак «минус») и вверх, так как технические условия
регламентируют арифметическую сумму этих прогибов.
На этом графике показаны также кривая полных площадей
линий влияния прогибов Q и кривая длин отрицательных участков Я_.
При необходимости длину положительного участка можно
получить по формуле к+ = 1—%-.
§ 17. ПРИБЛИЖЕННЫЕ СПОСОБЫ И ПУТИ ОКОНЧАТЕЛЬНОГО РАСЧЕТА
Полученные уравнения линий влияния усилий в элементах
системы и перемещений для случая, когда рассматриваемая
конструкция имеет сплошную балку жесткости постоянного сечения, можно
считать практически точными. Если балка жесткости имеет
переменное сечение, ими также можно пользоваться. При этом
желательно предполагать некоторый средний момент инерции балки.
Однако в этом случае решение будет заведомо приближенным, но
ошибки, как показывают расчеты, относительно небольшие.
Однако для приближенных решений задачу можно значительно
упростить. Имея уравнения линий влияния, можно определить их
полные площади, площади отдельных участков разных знаков и
длины этих участков, которые необходимы для определения
соответствующих эквивалентных нагрузок.
В качестве первого приближения площади линий влияния
можно определить по формулам (4.9) и (4.10), принимая е=1:
94
-ю I I 1—№
1000DE1Q
Рис. IV-14
v
/2
для натяжения цепи q .
8/'
для усилий в подвесках 12пд = й
для усилии в оттяжках q0
8/cosp '
для усилии в пилонах с2п = "(lg Pl + tg ^ .
ч
для изгибающего момента в четверти пролета балки жесткости
(см. рис. IV-7) Qc — 0,016/2, или округленно
Йб = —. (4.39)
64
Для определения усилий в цепи, оттяжках, пилонах и
подвесках величины площадей надо умножить на полную нагрузку
(постоянную и временную), а для определения изгибающих моментов
в балке жесткости — только на временную, так как систему при
строительстве обычно регулируют так, чтобы вся постоянная
нагрузка передавалась на цепь через подвески.
Следует учитывать, что кроме вертикальной нагрузки в
элементах цепного моста возникают усилия от изменения температуры.
Однако в цепях, оттяжках, пилонах и подвесках эти усилия
невелики, поэтому в первом приближении можно ими пренебречь и
подбирать сечения только по усилиям от вертикальных нагрузок.
Сложнее определять усилия в балке жесткости. Изменение
температуры может вызвать в ней большие моменты, поэтому
пренебрегать этим нельзя. С другой стороны, величина момента от
изменения температуры зависит от жесткости балки. Таким образом,
для подбора сечения надо знать момент от изменения температуры,
а для определения его надо знать сечение (момент инерции)
балки. Для решения поставленной задачи поступим следующим
образом.
Определим приближенно напряжение at в балке от изменения
температуры. Подбирать сечение будем по расчетному напряжению,
уменьшенному на at.
Рассмотрим симметричную систему (рис. IV-15). Если
температура повысится на t°, то каждая оттяжка удлинится на loat. Под
влиянием такого удлинения вершина каждого пилона сместится в
сторону пролета «а величину ^ == °а а пролет цепи
I at C0S P'
уменьшится на о = 26i = 2 .
cos р
Теперь определим, насколько изменилась величина стрелки f
цепи после изменения температуры. Приближенно будем считать, что
упругие деформации при этом не возникнут, а удлинение пилонов
компенсируется удлинением подвесок.
95
Рис. IV-15
Длина цепи до повышения температуры и после равна
^3/ * 3(/ —6)
/ —6 +
8(/ + Af)2
3/
Следовательно, под влиянием изменения температуры цепь
удлинилась на величину Lt — L0, равную температурному удлинению
цепи
/ Г / Л . 8^ + ^)' I 8^ _(/-4-8 П
или
[(/ + А/)2-Р]^=(' + уу)«Н2
3 /
hat
cos р
а/
Напишем это выражение в другом виде:
8 Р , 2/„
(' +
Обозначая I
(2/ + Д/)Д/ =
8 /2 , 2/„
3 I
cos R
г)
а/
3/.
3 I cos |3
-пр
(4.40)
и приближенно считая 2f+Af^z2f, найдем перемещение по
вертикали среднего сечения нити:
Lnpat-3l
А/ =
16/
(4.41)
На эту величину прогнется балка жесткости в середине пролета.
Предполагая, что при изменении температуры нагрузка на цепь со
стороны подвесок уменьшится на величину qt, получим
Д/ =
bqih qtle 5/б
384£/
8 48£/
Ml
5/б
48£/ '
(4.42)
где Mt — изгибающий момент в середине пролета балки от
изменения температуры.
96
Приравнивая правые части выражений (4.41) и (4.42), можем
найти величину этого изгибающего момента:
At,-"-""". (4.43,
5/?/ V ■
и
Разделив это выражение на момент сопротивления балки W и
учитывая, что.._= (половине высоты балки) 'получим напряжение:
W 2
9Z.np/a^
ot = :—Е. (4.44)
10/2/ ^ '
Изгибающий момент в четверти пролета от изменения темпе-
3
ратуры будет равенMtf/i = Mt. При постоянном по всему про-
4
лету сечении балки наибольшее напряжение в этом сечении:
3 27 LDplath
otl/i = — Ot = Е. (4.45)
' 4 40/2/ V
б
Зная наибольший изгибающий момент Мн в 'Д пролета от
вертикальной нагрузки, можно по нему подобрать сечение балки при
допускаемом напряжении:
о'
Этот момент будет равен (4.39) :
где к — эквивалентная временная нагрузка с коэффициентом
перегрузки, коэффициентом поперечной установки и
динамическим коэффициентом.
Зная наибольший момент и «допустимое» напряжение /? — °tu
можно найти момент сопротивления W, а затем легко подобрать
сечение балки:
W= MV4 = КА . (4.47)
А 64 *—щг~Е
Так как приведенные здесь выводы приближенные, желательно
произвести проверку. Это легко сделать, пользуясь примером,
приведенным в книге Г. П. Передерия [26]: /=75 м; /б =72 м; / = 9 м;
/о=27 м; р = 35°; £ = 2-107 т/м2; / =0,0308 м\ а=0,000012; / = 40°.
4—3213 97
^^~1Z
Рис. IV-16
Определим изгибающий момент от изменения температуры в
середине пролета. Для этого сначала найдем Lnp (>по формуле 4.40):
-пр
8 92 27
75 А г-2
3 75 cos 35°
144 м.
По формуле (4.43) определим Mt:
9-144-0,000012-40-75-2-107-0,0308
Mt =
5-722-9
123,8 тм.
Точное значение момента 124 тм (разница в пределах точности
вычислений).
Учитывая, что переход от Mt (формула 4.43) ко(и и W
(формулы 4.45 и 4.47) осуществлен достаточно строго в соответствии с
-законами строительной механики, можно считать, что точность
определения величин a{li и W такая же.
Следует заметить, что если пролет балки Ц считать равным
пролету цепи (как это нередко делают), ошибка в определении Mt
будет также очень незначительной и в рассматриваемом примере
составит ~8%- В большинстве случаев разница между / и Ц
меньше, чем здесь, поэтому меньше будут и неточности.
Наряду с полученными выше решениями о величинах
наибольших прогибов (формула 4.37 и рис. IV-14), можно найти
приближенное решение для суммы абсолютных величин положительного
и отрицательного прогибов в четвертях пролета.
Существующие технические условия ограничивают не
абсолютную величину перемещения какой-либо точки пролетного строения,
а сумму 26 абсолютных величин перемещений данной точки вверх
и вниз. В рассматриваемом случае наибольшую величину имеют
перемещения примерно в четвертях пролета.
Чтобы ясно представить характер подобных деформаций,
можно построить соответствующую линию влияния для 26. Линия
влияния перемещения данной точки, как показывает теорема о
взаимности перемещений, является линией прогиба балки от действия
единичной силы в этой точке. Мы определяем перемещение не од-
98
ной, а взаимное перемещение двух точек. Поэтому к каждой из них
надо приложить единичную силу (рис. IV-16, а).
Приложенная нагрузка обратно симметрична, а линия влияния
натяжения цепи симметрична. Поэтому можно считать, что
приложенные силы не изменят натяжение цепи и балка жесткости
будет работать как простая разрезная балка (рис. IV-16, б) и
прогибаться так, как это показано пунктиром. Нулевая точка С будет,
очевидно, в середине пролета. В этой точке изгибающий момент
равен нулю (точка перегиба). Точка не перемещается по
вертикали, следовательно, каждую половину балки можно рассматривать
как разрезную балку пролетом 1/2, нагруженную силой Р=\ в
середине пролета.
Можно найти уравнение этой линии прогиба, которая
представляет собой линию влияния взаимного смещения по вертикали двух
точек, расположенных в четвертях пролета, но ввиду
приближенности предлагаемого вывода ограничимся определением площади
участка одного знака этой линии влияния. Такую площадь можно
найти как прогиб полубалки от воздействия погонной нагрузки
<7=1, расположенной на всей длине полубалки:
5-1(//2)4 5/4 „ /4
Q+ = -~— = FT7 = 0.000815 — . (4.48)
384£/ 6 144Я/ EI v '
На графике (см. рис. IV-14) этой величине соответствует сумма
ординат кривых Q+ и £2_, которая, как видно из графика, меняется
в зависимости от величины е примерно
7 б/4 9 4/4 / /4 /4 \
от 1ШШ до Шю (от 0ДЮ76£Г д0 "'«в/ '
Следовательно, ф.ормула (4.48) дает ошибку от + 7 до —13%
главным образом потому, что, используя эту формулу, мы "загружаем
не весь однозначный участок линии влияния прогиба, а полупролет
(см. рис. IV-12).
Теперь уточним особенности расчетов. Все полученные выводы
и формулы касаются балки жесткости постоянного сечения. В
действительности сечения ее обычно несколько изменяются по длине.
Чтобы перейти к балке переменного сечения, проще всего поступить
так: выполнить расчет рассмотренными выше приемами и подобрать
сечения всех элементов и, в частности, балки жесткости на разных
участках; затем повторить расчет с учетом переменности сечений.
Можно воспользоваться также графиком (см. рис. IV-7).
Однако при этом неизвестна первоначальная величина коэффициента 8.
Ею можно задаться как средней величиной (например, е=1,06).
Тогда будут известны приближенные величины положительных
площадей линий влияния моментов. Эквивалентные нагрузки можно
определить в предположении длины загружения, равной 0,4—0,5
пролета (см. рис. IV-6 и IV-5). После введения динамических
коэффициентов, коэффициентов перегрузки и поперечной установки
4*
99
можно получить моменты, а затем подобрать сечения балки на
разных участках.
Сечения цепи, оттяжек, пилонов и подвесок можно подобрать,
пользуясь формулами (4.9) и (4.10). Больших ошибок при этом
не будет. Имея эти сечения, можно перейти к окончательному
расчету. От приведенного выше он отличается только тем, что
величины Aip и бц нужно определять с учетом переменности сечения
балки жесткости.
т* *Б \МЧх
Интеграл бц = \ приходится брать по участкам, на каж-
J El
о
дом из которых жесткость можно считать постоянной. При
определении Aip необходимо находить в ряде точек прогиб балки
жесткости от равномерно распределенной по ее длине нагрузки. Это,
по-видимому, удобнее всего осуществлять графо-аналитическим
способом, разделив эпюру моментов на короткие участки и
принимая линейное изменение моментов на каждом из них. На каждом
участке ординаты эпюры моментов делят на их жесткость. При-
М ■
нимая эти величины I за фиктивные нагрузки, можно вычислить
Eli
фиктивные моменты в разных сечениях, которые представляют
собой величины Aip.
Теперь легко определить ординаты линии влияния натяжения
■пи = iJt. Построение линий влияния других усилий не отличается
бц
от приведенных выше.
После определения расчетных усилий вновь подбирают сечения
всех элементов. Они обычно мало отличаются от исходных, и
'поэтому расчет, как правило, можно этим закончить.
Если предполагают осуществить конструкцию моста не с
балкой, а с фермой жесткости, расчет приходится выполнять также в
два этапа. На первом этапе ферму можно заменить балной, так
как фермы жесткости висячих мостов имеют небольшую и обычно
постоянную высоту (1/40—1/80 пролета и меньше). Расчеты
показывают, что при таких малых высотах деформации раскосов и стоек
очень мало влияют на общие деформации. Этим влиянием можно
пренебречь и заменить ферму балкой с постоянным моментом
инерции
Fh2
/ = -г-
где F — средняя площадь сечения поясов фермы в четверти пролета
(„ = _^±£е):
h — теоретическая высота фермы.
При такой замене можно использовать приемы расчета,
описанные выше для систем с балками жесткости.
100
После определения моментов М и поперечных сил Q в этой
условной балке усилия в поясах фермы 5П и раскосах 5Р можно
получить по формулам:
5П=Д; 5Р = -^-, (449)
h cos a
где h—теоретическая высота фермы;
а — угол наклона раскоса к вертикали.
Для раскрытия статической неопределимости при
окончательном расчете надо найти величины бц и AiP. Теперь (для системы с
фермой жесткости) они будут:
6ii = 2^-; Alp = 2^i-. (4.50)
где Su — усилие в данном элементе от приложенной единичной
силы в месте разреза цепи;
SjP — усилие от единичной внешней силы, приложенной в
данной точке в уровне проезжей части.
Обе суммы должны учитывать все элементы системы, в том
числе и элементы фермы жесткости.
При окончательном расчете цепных мостов, кроме влияния
вертикальных статических нагрузок, учитывают статическое действие
горизонтальных ветровых нагрузок, а также некоторые
динамические факторы, которые будут рассмотрены в гл. VII.
Предположим, что горизонтальные ветровые нагрузки действуют
по направлению, перпендикулярному продольной оси моста.
Давление ветра в пролете моста передается на две цепи (погонная
нагрузка шц), на балку жесткости (ву6) и на подвески. Поверхность
подвесок относительно мала, поэтому последней «агрузкой обычно
пренебрегают. Под влиянием первых двух >нагрузок обе цепи в
середине пролета и система двух соединенных друг с другом связями
балок жесткости переместятся по направлению, перпендикулярному
оси моста соответственно на Дц и До. Если эти перемещения будут
иметь одинаковую величину, то подвески останутся вертикальными.
Если же одно из «их больше другого, подвески займут наклонное
положение, усилия от них будут действовать на балки и на цепи
по наклонным направлениям и горизонтальные составляющие
этих усилий будут алгебраически суммироваться с усилиями
W6 И ВУц.
Большее из перемещений Аб и Ац несколько уменьшится, а
меньшее— увеличится. В результате на цепи и балку, кроме
вертикальных нагрузок, будут передаваться от подвесок горизонтальные
силы, которые приближенно можно заменить равномерно
распределенными по пролету нагрузками +q (на цепи или балку) и —q (на
балку или цепи).
101
По данным Е. Е. Гибшмана [7], величину q рекомендуется
принимать равной:
О.вйУцр гюъР
Рб — Ра 60£/
q~~h~^f } ^
1 6 -Н 1
Рб Рб + рц 60£/
где f — стрелка цепи;
/ — пролет цепи;
h — расстояние по вертикали от верха пилона до уровня
горизонтальных связей между балками жесткости;
EI — жесткость горизонтальной «балки», состоящей из двух
поясов (балок жесткости) и связей между ними;
рц — погонный вес двух цепей;
рб — погонный вес балок жесткости с проезжей частью.
Величина q может быть положительной или отрицательной. Она
будет положительной, если смещение Дц>Дб и, следовательно, на
горизонтальную ферму, состоящую из двух балок и связей между
ними, передается нагрузка Wo + q, а на цепи — горизонтальная
нагрузка wn — q. При отрицательной величине q на цепи передается
нагрузка wn+q и на балки w^ — q. На эти нагрузки следует
рассчитывать связи между фермами (w^ + q или w^ — q) и отклонение
цепей от вертикали (w4—q или wn + q).
§ 18. ИСКУССТВЕННОЕ РЕГУЛИРОВАНИЕ УСИЛИЙ
Цепные распорные мосты с цепями из тросов обычно сооружают
в такой последовательности: монтируют пилоны, подвешивают
цепи, собирают балки жесткости вместе с балочной клеткой. Затем
устраивают плиту (в настоящее время обычно из железобетонных
плит) и полотно проезжей части.
Железобетонная плита вместе с полотном представляет собой
довольно большую нагрузку. Если не принять специальных мер, эта
нагрузка распределится между цепью и балкой жесткости. При
этом на балку жесткости будут передаваться лишь 5—7% этой
нагрузки, которые, однако, вызовут в ней большие изгибающие
моменты и потребуют значительного увеличения сечения.
Поэтому выгоднее вес плиты и полотна целиком передавать
на цепь и сделать ее тяжелее на 5—7%, но освободить от этой
нагрузки балку жесткости и уменьшить этим ее вес на 30—50%.
Таким образом, регулирование усилий в цепных распорных
мостах сводится к тому, чтобы при средней (расчетной) температуре
балка жесткости не работала на изгиб от действия постоянной
нагрузки. Для этого обычно систему собирают сначала как статически
определимую, устраивая в балке жесткости временные шарниры.
Так, в однопролетном мосту, система которого однажды статически
неопределима, устраивают один шарнир в середине пролета. Если
система трехпролетная с .неразрезной балкой, ставят три шарнира.
102
Собранную цепь через подвески соединяют с балкой жесткости.
Длину подвесок выбирают такой, чтобы цепь, прикрепленная ими
к балке, имела очертание квадратной параболы. В этом случае
усилия в подвесках становятся одинаковыми, на балку передается от
подвесок равномерная 'нагрузка, направленная вверх, и балка не
работает на изгиб ни от веса полотна, ни от собственного веса.
Балка оказывается подвешенной к цепи. В этот момент и заглушают
шарниры.
После этого балка вступает в работу и начинает реагировать на
временную вертикальную нагрузку и на повышение или понижение
температуры. Последнее следует учитывать при выборе момента
заглушения временных шарниров. Эту операцию желательно
проводить в соответствии со средней температурой, принятой при
проектировании моста, при которой изгибающий момент от изменения
температуры не возникает.
Однако точно удовлетворить это требование трудно хотя бы
потому, что температура всего пролетного строения, особенно в
солнечный день, не будет одинаковой и равной температуре
воздуха. Но к этому следует стремиться, иначе балка жесткости может
получить переломы в местах заглушённых шарниров и, главное,
изгибающие моменты в ней могут отличаться от расчетных.
Однако последний недостаток можно устранить подтягиванием
или ослаблением подвесок, но эта работа очень кропотливая и
длительная. Указанных трудностей можно частично избежать,
назначая при составлении графика производства работ момент
заглушения шарниров в период благоприятной температуры.
Балку жесткости можно собирать и без шарнира, но при этом
следует устанавливать опорные части после передачи постоянной
нагрузки полностью на подвески. Как и заглушение шарнира,
установка опорных частей также должна производиться при
определенной температуре воздуха. Однако можно осуществлять эту
операцию и при другой температуре, но предварительно необходимо
определить величину реакций опор для этой температуры. Эту
величину должны иметь реакции при установке опорных частей.
§ 19. О ПОРЯДКЕ МОНТАЖА ЦЕПНЫХ МОСТОВ
Рассмотрим некоторые вопросы расчета, связанные с
подвешиванием балки жесткости к изготовленной вместе с подвесками
цепи, выполненной в виде троса.
Существуют различные способы производства работ. Можно,
например, сначала подвешивать к цепи отдельные блоки балки, не
соединяя их друг с другом, пока не будут подвешены все блоки.
Такую сборку можно осуществлять' от одной опоры к другой (рис.
IV-17, а), от середины лролета в обе стороны (рис. IV-17, б) или
от опор к середине пролета. Во всех случаях при подвешивании
отдельных блоков очертание цепи изменяется (см. рис. IV-17, а).
После монтажа блоков по всему пролету цепь будет загружена по
ЮЗ
о)
f
г)
Б)
\
f
h~~■"-"■'—К
3)
Р/9-
(P+V\
\ L
iw\
£
Рис. IV-17
всей длине равномерно распределенной нагрузкой и примет
проектное параболическое очертание. Это очертание можно
зафиксировать (превращением блоков в жесткую систему (балку) путем
соединения их друг с другом.
При подвешивании можно не соединять блоки друг с другом,
а устраивать между ними временные шарниры. Это не мешает цепи
при сборке блоков по всему пролету принять параболическое
очертание.
Перед соединением блоков друг с другом необходимо проверить
правильность их относительного положения и при необходимости
выправить его. Это осуществляют регулированием длины подвесок,
которые для этого должны иметь натяжение приспособления.
К цепи можно подвешивать также блоки длиной в несколько
панелей, например, равной полупролету (рис. IV-17, в).
Заслуживает внимания то, что в середине пролета, на границе двух
участков, цепь получает при этом значительный перелом. Это указывает
на то, что здесь на нее действует некоторая сосредоточенная сила.
Эта сила передается на цепь через среднюю подвеску, которая при
этом может быть значительно перегружена. Желательно
определить, хотя бы приближенно, усилие в этой подвеске. Для этого
можно предположить, что в левой половине пролета цепь
превращается в жесткое звено после присоединения к ней балки жесткости
(рис. IV-17, г). При этом нагрузка на правом участке будет р (рис.
IV-17, д), а на левом p + q, где р — погонный вес цепи вместе с
подвесками; q— вес балки.
При расчете системы, состоящей из нити и жестких блоков,
последние, как это указано в п. 4 § 12, можно заменить прямыми
стержнями, а вес их — силами, приложенными в шарнирах блока.
Из эпюры таких нагрузок (рис. IV-17, е) видно, что на среднюю
подвеску передается усилие
S = {p + g)— = 0,25 (р+ <?)/.
Расчетное усилие, действующее на подвеску, равно Sp= (g + K)d,
где q — постоянная нагрузка; к—временная нагрузка; d — длина
панели.
104
Усилие 5 в подвеске во время сборки может быть значительно
больше, чем расчетное 5Р, чтомадо проверить.
Преимуществом применения при сборке крупных блоков
является небольшое количество монтажных стыков. В то же время,
если мост строят через водоток, подача на плаву крупных блоков
к месту сборки не представляет особых трудностей. Однако у этого
способа есть существенный недостаток.
Если подвешен блок левого полупролета (см. рис. IV-17, в), то
в правом цепь матянется. Стрелка полупролета уменьшится, и
.нижние концы подвесок окажутся не на одной прямой. Следовательно,
когда прямой правый блок поднят в нужное положение, его можно
беспрепятственно присоединить только к двум подвескам, а
остальные придется подтягивать. Это значительно усложнит простой,
казалось бы, способ сборки.
Следует заметить также, что при изготовлении цепи из звеньев,
а не из тросов, описанные выше способы сборки окажутся вообще
неприменимыми. В этом случае обычно устраивают подмости, на
которых собирают балки жесткости с балочной клеткой и связями.
Затем сооружают второй ярус подмостей и на них собирают цепь.
Если цепь состоит из тросов, целесообразнее применять
рассмотренный выше простой и удобный способ — сборку балок из
отдельных блоков и соединение последних друг с другом лосле
подвешивания всех блоков.
В трехпролетном безраспорном мосту чаще всего сначала
собирают все три пролета балки жесткости на подмостях или отдельных
опорах. Затем к пилонам подвешивают цепь (если ее изготовляют
из тросов), закрепляют концы ее на балке, присоединяют подвески
и регулируют их натяжение. Однако известны случаи, когда
применяли другой порядок сборки: изготавливали балки жесткости в
крайних пролетах, навешивали цепи и монтировали навесным
способом средний пролет. При этом необходимо во время сборки
надежно закреплять балки крайних пролетов, чтобы при монтаже
среднего шролета они не сдвинулись с опор.
§ 20. ТРЕХПРОЛЕТНЫЕ СИСТЕМЫ
Расчет трехпролетных одноцепных мостов принципиально не
отличается от расчета однопролетнкгх. Рассмотрим, например,
систему, не имеющую в крайних пролетах подвесок (рис. IV-18, а).
Балка разрезная, но отдельные пролеты сопряжены друг с другом так,
что в целом она способна воспринимать горизонтальную
составляющую усилий в цепи. Для этого балки соединены друг с другом над
опорами шарнирами, которые для упрощения конструкции иногда
несколько^ смещают в средний пролет.
Эта система однажды статически неопределима. В качестве
статически неопределимой величины обычно принимают натяжение
цепи (рис. IV-19, б). Эта система отличается от однопролетной тем,
что в выражение бп вместо деформаций длинных оттяжек, концы
105
которых закрепляются в упорном массиве, приходится учитывать
деформации коротких оттяжек, прикрепленных к концам крайних
балок, и деформации сжатия самих балок во всех трех пролетах.
Выражение AiP такое же, как для однопролетной системы.
Следовательно, и характер линии влияния натяжения цепи (распора) не
отличается от линии влия.ния в однопролетной системе (рис.
IV-18, в).
Если балка жесткости неразрезная (рис. IV-18, г), система
трижды статически неопределима и, следовательно, имеет три
лишних неизвестных.
При расчете можно в качестве этих неизвестных принять
натяжение цепи Хи момент Х2 на левой опоре балки жесткости и
момент Х$ на правой опоре.
Можно применить и другой прием, рассмотренный ниже. Чтобы
выяснить характер линии влияния Хи можно приложить пару сил
X, = 1 в разрезе цепи. Тогда в подвесках возникнут усилия, которые
можно заменить сплошной нагрузкой 0 = _LJ (рис. IV-18, д). Ли-
ния прогиба неразрезной трехпролетной балки (рис. IV-18, е) будет
характеризовать линию влияния натяжения цепи. Как видно' из
этого рисунка, загружение боковых пролетов уменьшает натяжение
цепи.
Линия влияния момента в балке над левой промежуточной
опорой показана на рис. IV-18, ж. При этом в зависимости от
соотношения жесткостей положительный участок в среднем пролете
может исчезнуть и появиться в правом боковом пролете.
106
Линия влияния натяжения цепи (рис. IV-18, е) является и
линией влияния сжатия балки в любом ее сечении. Следовательно,
две линии влияния (см. рис. IV-18, е, ж) дают возможность
определить продольное усилие и момент в сечении над левой
промежуточной опорой и, следовательно, наибольшее возможное
напряжение в этом сечении. Для определения напряжений в произвольном
сечении балки используют линию влияния нормальной силы (см.
рис. IV-18, е) и линию влияния момента в этом сечении, построение
которой будет рассмотрено ниже.
Рассмотрим также систему, показанную на рис. IV-18, з. При
выборе стрелок fi боковых пролетов (при заданной стрелке f
среднего пролета) исходят из следующих соображений.
Как и в однопролетной системе, всю постоянную нагрузку,
включая собственный вес балки, передают через подвески на цепь.
Постоянная нагрузка по всей длине пролетного строения
практически одинакова и равна q. Следовательно, на цепь во' всех трех
пролетах должна передаваться нагрузка q.
Пилоны моста предполагаются качающимися, поэтому они не
могут воспринимать горизонтальную нагрузку, приложенную к
вершинам. Следовательно, горизонтальные составляющие усилий
справа и слева от пилона должны быть равны друг другу. Это
требование можно выразить формулой
qlz
¥
h =
qh
~~&h
/2
f—.
1 р
отсюда
(4.51)
Теперь, когда известны основные размеры конструкции, можно
остановиться на некоторых вопросах расчета.
Если балка жесткости разрезная (см. рис. IV-18, з), система
однажды статически неопределима. За статически неопределимую
величину принимают чаще всего натяжение Н цепи, которое, как и
в однопролетной системе, равно _И . При этом бц отличается от
той же величины для однопролетной системы только тем, что
интегрирование и суммирование распространяют на все три пролета.
Если система безраспорная, надо учитывать деформации сжатия
балки жесткости.
В безраспорной системе оттяжек и их влияния нет. В распорной
они имеются, но значительно короче, чем в однопролетной системе.
При определении Дц> прикладывают пару сил Х{=1 в разрезе
цепи и получают погонную нагрузку на балку со стороны подвесок,
8/il ofi
равную в боковых пролетах gi = -г- и в среднем д — ' . Учиты-
' 1\ ё /2
107
Рис. IV-19
/' f
вая, что ~j[ — -ji (формула 4.51), нагрузка на балку по всей длине
трех пролетов будет одинаковой и равной g (рис. IV-18, и). Под
влиянием такой нагрузки балка прогнется (рис. IV-18, к). Если
ординаты этих линий прогиба разделить на бц, получим линию
влияния натяжения. Следовательно, эта линия прогиба
характеризует линию влияния натяжения в случае, если балка жесткости
разрезная. Если балка неразрезная, под влиянием действия
нагрузки (рис. IV-18, и) линия прогиба изменится (рис. IV-18, л) и даст
представление о характере линии влияния натяжения цепи.
Построение линий влияния для системы с неразрезной балкой
(рис. IV-19, а) значительно труднее, чем рассмотренное выше. На
некоторых этапах расчета такой системы остановимся несколько
подробнее.
К расчету этой трижды статически неопределимой системы
удобнее подходить .несколько своеобразно, не превращая ее в статически
определимую, а ограничившись только разрезом цепи (рис.
IV-19, б). Полученная система представляет собой трехпролетную
неразрезную балку в комбинации с разрезанной цепью (подвески
на схеме не показаны).
Построим линию влияния натяжения цепи. Поступая обычным
способом, можно написать выражение ординаты линии влияния
натяжения:
Aip
■Пн = —-,
бц
перемещение сечения в произвольной
точке т неразрезнон балки под влиянием
пары сил Н=\ (рис. IV-19, б);
сближение концов рассеченной цепи под
влиянием этой же пары сил.
где, как и выше, Д]Р —
б„-
108
Определим бц по формуле
-з
Slh с M2dx
EiFt J EI
Цепь в крайнем пролете на участке ВС нагружена усилиями в
подвесках. На этом участке и будем рассматривать стрелку и
пролет цепи. На участке АВ, свободном от действия подвесок, цепь
представляет собой просто стержень, работающий на растяжение.
Этот стержень всегда имеет относительно небольшую длину.
Влиянием его деформации можно пренебречь, так как по сравнению с
другими элементами оно незначительно. Для определения бц
можно частично использовать выводы для однопролетной системы.
Для цепи среднего пролета, как и в однопролетной системе,
Для цепей двух крайних пролетов приближенно полечим по
формуле (4.52), заменив в ней / na__L_ / — на fi cos p и иатяже-
cos |3'
ние#=1— на •
cos |3'
бц =
х cos В 3 /i /
■Сц^д COS Р * COS Р 3 h
Для оттяжек при угле наклона их к горизонту ф, длине /о и
площади сечения такой же, что цепи в пролете,
о 2tn
С052ф£цГц
Для- подвесок, учитывая, что усилия в них одинаковые, как и в
однопролетной мосту, получим
пд Ш Г А/* 2 р {h + hrf 4 ff 1
611 =Жд^~У7^ + —Ц T13-J- (4"55)
2/
Для пилонов бп = —r^-(tg ax + tg a2)2. (4.56)
■Сш п
И, наконец, определим бц для балки жесткости, которую считаем
постоянного сечения. Выше показано, что' при удовлетворении
условия (4.51) действие силы #=1 вызывает усилия в подвесках,
одинаковые во всех трех пролетах. Эти усилия можно, как и выше,
заменить равномерно распределенной по всей длине балки
нагрузкой п = Ш (см. рис. IV-19.6).
И /2
109
На этом рисунке балка показана разделенной на три отдельных
пролета, на концах каждого из которых показаны моменты Мв
действия на данный пролет соседнего.
Величины этих моментов легко определить с помощью теоремы
о трех моментах или другим способом:
Мв =
Р(П + Р)
24
(4+4)
3 + 2
(4.57)
Изгибающие моменты в произвольных сечениях крайних и
среднего пролетов будут
.. рк Muxi
Mxi = -*Н —
2
pxi
Pl
px,2-
9 ' 9
Возведя эти величины в квадрат, заменив величину р ее значением
_*_ н произведя интегрирование по всем трем пролетам и после-
дующие преобразования, получим
««•-J
и
МЧх
1Г^
4/2/
к
15(з + 2у)£б/
[l+4-f-
l\
I5 l6~l
(4.58)
Для получения би надо просуммировать величины бц; бц; 6м;
бц; бц. Ввиду того что здесь так же, как в однопролетнои
системе, наибольший удельный вес имеет слагаемое бц, выражение для
полного би будет:
4р/
бц =
1б(з + 2-у £0/_
1+4
к 10/t
Я
it
I
I3
+ 12 —+ 3
^ I5 ^ I6
]-
(4.59)
где
e=l +
■
/
X
, 16 P A 32 f\
+ 3 / , 2cos2^3-/;cos2^,
E F ' F F '
^n ц *-ц' ц
"A/2 2 /з (A, + A)/? 4 /si
/3 3 /3 /J 3 /J
64tf
-r-
X
no
41 41
n (tgBx + tga,)-'
Е F ' ~ cos 'ZiE F
X
15J3 + 2|)f6/
X ^ з l ' 5 —. (4.60)
4/2/(i+^--io-A + i2A+3A4
Величина е так же, как в однопролетных системах, мало отличается
от единицы.
Перейдем к определению переменной величины А\Р, которая
представляет собой прогибы сечений балки жесткости под
влиянием нагрузки, показанной на рис. IV-19, в. Эти прогибы можно
определить аналитическим способом, зная р и Мв. Все решение здесь
не приводится. Сообщаются лишь некоторые результаты.
После составления и интегрирования дифференциальных урав-
Xi
нении, определения произвольных постоянных и замены —— = zi
и — = z получим уравнения прогиба:
для крайнего пролета
з
к
/<1 ^1 +
Aip =
"■'(О
(zi — Zi) + у — j (zt-f-zi — 2zi),
(4.61)
для среднего пролета
И«+4)
мР = - — '(z2-z) + ^—(z + z4-2z3). (4.62)
(з + 2у)г0/
3£б/
I h.r,]
Для получения линии влияния натяжения (распора) цепи теперь
достаточно разделить величины А\р на бц. Полученные величины
представляют собой ординаты линии влияния. При этом очертания
линий влияния зависят от отношения пролетов ——. Это видно из
ill
?«
Рис. IV-20
рис. IV-20, где показан характер линий влияния при разных
отношениях —. Чтобы от этих кривых перейти к действительным
ординатам линий влияния т]н, надо величины ординат |лн|, показанных
т
на графике, умножить на ; #
3EcJbn
Расчеты мостов очень облегчаются, если известны плошали
линий влияния. Полученные формулы позволяют определить такие
площади для натяжения цепи интегрированием (рис. IV-21). Здесь
показаны в функции — площади линии влияния при загружении
одного бокового пролета fii, при загружении среднего пролета Q
и при загружении всех трех пролетов 2Q. Величина множителя
Щ
здесь составляет ■ —
«eg/On
Рассмотрим линии влияния изгибающих моментов в балке.
Ординаты этих линии влияния могут быть выражены формулой
т]лг = г] мо + Ст]н, (4.63)
где г] л/о — ордината линий влияния для простой неразрезной балки;
С — некоторый постоянный коэффициент, зависящий от места
расположения сечения и показывающий величину
изгибающего момента в сечении от натяжения цепи Н=\.
112
Рис. IV-21
Я'
0,6
0,2
г — —1
\ V
\ у>
а.
"
■ S3
Ji_
1,0
0,6
'■'¥
Рассмотрим несколько подробнее построение линии влияния
опорного момента на левой промежуточной опоре. Ординаты t^M0
можно определить по таблицам, но легко и вычислить. Основная
система показана на рис. IV-22.
На опоре / приложен момент от пары сил М0=1. Величины г\м0
можно найти как ординаты линии прогиба Aip, деленные на бц,
равное в данном случае взаимному углу поворота концов балок на
опоре /.
Определим момент Mj на опоре 2. Нетрудно доказать, что он
равен Mi = — —. Тогда через момент М0 легко выразить
величины прогибов Aip и угла поворота бцб. Последняя величина равна:
M0li M0l
в£ =
MJ2
ЗЕб1
(4.64)
3£б/ 12(/ + /i)£6/
Для определения прогибов Aip составляем и интегрируем
дифференциальные уравнения на трех участках балки. Получим:
для первого участка
i _ М0 Г х]
для второго
,п Мо Г х\
А1р=ЛЛбГ
1Х2
6 J1
(1-Х2У &(/ —Jfc)
(4.65)
12(/ + /i)
Me'i
fJEUj
12(/ +
\
/l) J'
(4.66)
'f fc^J
1 _J L h.
*iL
2
Рис IV-22
113
для третьего
ш^мл /4— to 1
1Р £бД 12(/ + /i)/t ^ 12(/ + /i) J ^
Воспользуемся этими уравнениями для частного случая /i = 0,5 /_
Применяя формулу (4.64), получим
б M0l M0l M0l U
6ц
б£б/ 3£б/ 18£б/ 9Еб1
Разделив на эту величину перемещения А\р, получим ординаты
линии влияния момента на левой опоре для простой неразрезной
балки.
Для трех участков они равны:
i 3 x'i 3
ii 3 xl 3 (J-*2)3, jl-хг)
1im=-BT-TX2 8^- + —8 ; (4"68)'
з
III Xs X3
4JM=-4P+16-
l
По этим формулам для разных сечений балки можно определить
величины слагаемых г\мо формулы (4.63). Второе слагаемое
формулы может быть найдено следующим образом. При данном
расположении груза Р=\ на балке ордината линии влияния натяжения
цепи равна т]н-
Этому натяжению соответствует направленная вверх по всей
длине балки равномерно распределенная нагрузка р. Выше было
установлено (4.57), что при натяжении Н=\ такая нагрузка
вызывает на олоре момент Мн. В данном случае натяжение равно цн,
следовательно,
2>(>+!-)
М = Мнцн = Цн.
и
Ординаты г\н можно вычислить так, как это было показано
выше, или умножением ординат \цн\ графика (см. рис. IV-20) на
Щ
множитель ' —.
3£б'бц
114
Следовательно, момент
(слагаемое ординаты линии
влияния момента в
рассматриваемом сечении от
действия натяжения цепей) будет:
а)
6)
2/
(ч-4)
У\мн —
X
3 + 2
h
■X
ч
с
Oflb
0,08
и,и
^■~~~~~.
\\
\\
\\
\\
\\
\\
\\
у\
\
/
//
/ /
/ /
/ /
/ /
/ /
/
/
/
/"" """^"^
/ Множитель 1
/2/
ЗЕв16ц
\г\н\
8)
0,№
Подставив сюда 6ц, по
формуле (4.59), получим
-№
\
Множитель 1
Рис. IV-23
*\мн
з
2/(l+A-)^.15(3 + 2^-)£6/
|т)н|.
if (4-69)
Произведя сокращения и подставив_1 _ q 5 получим
Цмн
1,30/|т]н|
(4.70)
На рис. IV-23, а показана схема балки, а на рис. IV-23, б
сплошной линией — кривая, полученная по формулам (4.68), причем вниз
отложены отрицательные ординаты. Пунктирная кривая получена
по формуле (4.70) в предположении e=il (формула 4.60), но вниз
теперь отложены положительные ординаты. Алгебраическая сумма
этих ординат, т. е. искомая линия влияния, показана на рис.
IV-23, е.
Подобным образом могут быть построены линии влияния
изгибающих моментов в других сечениях балки. На рис. IV-24 показаны
линии влияния моментов в середине среднего пролета для разных
h
отношении
/
115
Рис. IV-24
Рис. IV-25 Рис. IV-26
Величина е здесь тоже принята равной единице. В среднем
пролете положительный участок имеет довольно большую площадь.
Для нахождения наибольших моментов в балке в большинстве
случаев приходится загружать именно этот участок. Поэтому для
первоначальных прикидок желательно иметь длины этих участков и их
площади. На рис. IV-25 показаны длины загружения к в частях
пролета /. Эти длины даны в функции отношений —и
коэффициентов е. График представлен в форме, подобной плану в
горизонталях. Каждая «горизонталь» показывает данную длину загружения
при разных комбинациях — и е. Заштрихованный участок
соответствует случаям загружения всего пролета.
Коэффициент е для трехпролетной системы, очевидно, может
изменяться примерно в тех же пределах, что и для однопролетнон.
На рис. IV-25 и некоторых последующих пределы изменения е
приняты с запасом 1,00 до 1,30.
116
1,2
V
—4^1
\ \ I / /
\. \
\Y
\ \ i-
\\r
//
i
0,3
0Л
0,5
Рис. IV-27
Рис. IV-28
На рис. IV-26 даны площади положительных участков при тех
независимых переменных-у- и е и длинах загружения,
соответствующих рис. IV-25.
Для безраспорной системы выводы и формулы несколько
изменятся, и пользоваться полученными результатами при
окончательном расчете таких систем нельзя. Однако для начальных прикидок
они могут быть полезными. При загружении данного участка такой
фермы в балке, помимо изгибающего момента, возникает
сжимающее усилие, равное натяжению цепи. На рис. IV-27 показаны
площади линий влияния сжимающего усилия, соответствующие загру-
жению, принятому при составлении графика на рис. IV-26.
Таким образом, используя рис. IV-25, можно определить длину
загружения и, следовательно, эквивалентную нагрузку. Умножая
эту нагрузку на площадь линии влияния (см. рис. IV-26), получим
изгибающий момент в балке, а умножение на площадь линии
влияния (см. рис. IV-27) дает (для безраспорной системы)
соответствующее сжимающее усилие в том же сечении.
Необычным кажется резкий изгиб кривых в правом верхнем
углу графика на рис. IV-27. Он объясняется тем, что загружение
здесь соответствует полному пролету и с увеличением е длина
загружения не возрастает. Перестает расти и площадь.
Аналогичны рассмотренным и графики
для момента ,в четверти среднего пролета.
На рис. IV-28 показан характер линии
влияния. Как видно, 'при изменении
коэффициента е от 1,0 до 1,3 линии влияния изменяются
не сильно и, следовательно, .кривые при е= 1
для первоначальных расчетов
удовлетворительны.
На рис. IV-29 показаны длины
загружения положительных участков линий
влияния изгибающих моментов; >на рис. IV-30 —
площади положительных участков и на рис. рис. IV-29
U
U
1,0
\\
^
\\\
\ Л
WN
Я
'Л V
\ N \
0,3 0,1,
0,5
I
117
IV-31 —соответствующие площади загружения линий влияния
сжимающего усилия в'балке (если система безраспорная).
Не останавливаясь подробно, заметим, что. построение линий
влияния поперечных сил аналогично построению линии влияния
изгибающих моментов, т. е. в соответствии с формулой
t]q = t]qo + r\QH, (4.71)
где t]qo — ордината линии влияния простой неразрезной балки;
t]qh — величина поперечной силы, возникающей в данном
сечении под влиянием натяжения нити при данном
расположении единичной силы.
§ 21. ДВУХЦЕПНАЯ СИСТЕМА
Двухцепные системы, предложенные С. А. Цаплиным, имеют
довольно много разновидностей. Как и одноцепные, они могут быть
однопролетными и трехпролетными, распорными и безраспорными.
Кроме этого, возможны вариации и внутри пролета: две цепи в
месте их пересечения могут соединиться или не соединиться друг с
другом. Если они соединяются, то в этом месте можно поставить
подвеску.
Расчеты этих вариантов отличаются друг от друга. Однако
различия небольшие, частично они были рассмотрены при расчетах
одноцепных мостов. Поэтому здесь можно ограничиться
рассмотрением одного варианта однопролетной распорной системы с тем,
чтобы показать на нем специфику, которую дает наличие двух
цепей. При этом для упрощения расчетов считают, что балка
жесткости имеет постоянное сечение и цепи в месте пересечения не
соединены. Способы расчета некоторых других двухцепных систем
приведены в работе [45].
На рис. IV-32, а показана схема фермы, а на рис. IV-32, б —
одна из цепей в несколько искаженном масштабе. Верхние ветви
цепей показаны прямыми, что является желательным решением,
однако под влиянием собственного веса такая ветвь будет прови-
118
Рис. IV-32
сать. Провес 'небольшой, «о если
оставить ветвь свободной (см.
рис. IV-32, а, слева), то с
изменением усилия этот провес будет
меняться. Это лишний фактор
возбуждения 'колебаний. Справа
ветвь (поддерживается на всем
своем протяжении элементами,
являющимися 'продолжением
подвесок. Чтобы она была прямой,
эти элементы надо сделать
способными работать на сжатие, т. е.
жесткими. Однако это
'Неблагоприятно отразится иа внешнем виде сооружения, расходе
материалов. Кроме того, сжатые элементы могут выходить из плоскости
фермы.
Учитывая это, автором системы предложено делать верхние
ветви параболического очертания с небольшим провесом. С. А. Цап-
лин предлагает этот провес /г делать равным ./ . и даже и
100 150
фиксировать при этом очертание ветвей верхними легкими
подвесками, расположенными между верхней и нижней ветвями (см. рис.
IV-32, а, справа).
Таким образом, цепь должна иметь очертание, показанное на
рис. IV-32, б. Необходимо выбрать величину стрелок /; /i и /г, из
которых величиной двух можно задаться произвольно, но третью
определить из условия, чтобы в точке А сопряжения двух ветвей не
было перелома. Для решения этой задачи напишем уравнение
цепи, например, для левого участка
tJ = V2Xl
4/i*i(- xtj
2/xi 8/iXt
16/lXi
(1/2)'
Взяв производную, получим
/
/
/2
У = -
В точке А, где xi =
2'
2/ , 8/i 32/4*!
/
«i-f
/
.4.
I
p
8Л
I
Аналогично для правой ветви можно получить
Jx*=T I
2/ 8/2
/
119
В середине пролета
ветви должны иметь
общую касательную, т. е.
I I l^l
поэтому
/l+fc=
j- i«2>
Стрелку f, как и в од-
ноцепных мостах,
принимают в пределах поряд-
/
/
6~
ка '-■
Рис. IV-33
Если,
0,167/
например,
-0,005/ =
f = -L = 0,1671;
6 /
: 0,0785/ = .
12,7
h =
200
0,005/, то fi
Рассматриваемая система (рис. IV-33, а) дважды статически
неопределима. Для превращения ее в статически определимую
разрежем обе цепи (рис. IV-33, б). Лишними .неизвестными считаем
горизонтальные составляющие усилий в цепях .A"] и Х2.
Построим линии влияния этих неизвестных, для чего напишем
канонические уравнения метода сил:
^i6n + vV26i2 + Aip = 0;
*i62i + ^2622 + A2P = 0. (4.73)
В этих уравнениях 611 = 622 ввиду симметрии системы и 621 = 612 (по
теореме о взаимности перемещений).
Решение уравнений (4.73) дает:
6nAip — 612Д2Р
*i =
Х2 =
б2 —б2
12 11
бцДгр — 612Д1Р
б2 —б2
12 11
(4.74)
Определим 'приближенно сначала величины бц; 612, а затем Д|Р
или ДгР, изменения которых по длине пролета симметричны. А\р
представляет собой перемещение концов разрезанной цепи под
влиянием силы Р=\, приложенной в точке В (см. рис. IV-33, б)
или (по теореме о взаимности перемещений) перемещение точки В
под влиянием .пары сил Хх = 1 (см. рис. IV-33, в). При натяжении
цепи силой Х\=\\ на балку действует нагрузка, направленная вверх
(рис. IV-33, г).
120
При этом
8/i.q 32/Л 32/21 <7i /i
Qi = = ; 09 = или — = —г -
(//2)2 /2 ' Ч Р <?2 /2
Натяжение Х\ можно выразить через q\ и «72:
qdz q№ 16/1
Xi = + = 1 или <7i + #2 =
16/ 16/ ' ' /2
Решая совместно два уравнения, связывающие <7i и <?2, получим
16П 16/1
9i = —г- i-r-J ^2 = ; • (4.75)
('+!)'*' ('+£)
/2
Эти величины можно подсчитать заранее, поэтому в дальнейшем
будем считать их известными.
Теперь надо определить величины бц, 612, Sip.
сМЧх Ntli
б11==3^-г+2
Ed EiF{
Первое слагаемое здесь составляет 90—95% от бц. Определим
его возможно точнее. Второе слагаемое можно найти с меньшей
точностью. Из рис. IV-33, г можно получить момент в левой
половине балки, а затем интеграл для этой половины:
Af = -(-!?i/ + j?a/)* + ^y-; (4.76)
'/2 '/2
с п 3 1 Oix2 \2
)МЧх = ]у — — qvlx — — q,lx-\--~-) dx =
00
"' \ 5120 1536 + 3072 / '
Интеграл для правой половины будет:
J * 5120 1536 3072
Интеграл для всего пролета:
г МЧх _ 34 г 2 д^гР __
£ Еб1 15 360£б/ {qi + qz) +256EcJ~~
l7(q"i + qb+30q1qLl5 ^ ^
7680£б/
121
Сумма 2 — распространяется на цепь с оттяжками, пилоны
■С г* г
и подвески.
Усилие в цепи равно 1/cos щ, где аг- — угол наклона к
горизонту данного элемента цепи. Принимая цепь за непрерывную кривую,
dx
можно считать, что бесконечно 'малый элемент имеет длину .
cos a.i
Зная жесткость цепи на растяжение Ецгц, получим для нее
Nik _ Г dx
EnFn I cos3 a,iEnFn
Будет небольшой ошибкой, если вместо переменного угла щ
принять угол а (см. рис. IV-33, а):
Nik , /
2tV- = ' i-p-F- (4-78)
СцГц cos-* асцГц
Две оттяжки дадут:
a; l I a
cos р cos р
2
Ni h a a
2 L_L=9 ■ = (4 79)
EiFi cos3pEn2Fn cos3 рВД," l ' '
Площадь сечения оттяжки принята равной двум площадям сечения
цепи, так как оттяжка воспринимает горизонтальные составляющие
усилий в обеих цепях.
Влиянием деформаций подвесок и пилонов пренебрегаем ввиду
их малости.
Сложив выражения (4.77), (4.78) и (4.79), получим
л * ^.^(ft'+g'l + SOgifls fS , / , а
Он = 022 ~ ^ „„ '^ , I ■
7680£б/ cos3a£4/74 совЗрВД, '
Л я (4-80)
Определим перемещение 612:
г
MiM2dx NiNJi
г Мф'ШХ
Используя формулу (4.76) и рис. IV-33, г, получим величины Mi
и М2 для левой половины балки:
fi = - (—<71/+—<72/)x+
122
мг- i- -. ■ • -.i.. . <^2
878' 2
_ rNhM2dx ^
Следовательно, интеграл \ будет равен;
о
MiM2dx
о Ы
'/2
>5
= 2 . dx^
34^д2+ 15(^2+д22)
7680£б/
Сила Х\ = \ вызывает усилие только в одной цепи, в другой оно
остается равным нулю. Поэтому сумма 2 не распростра-
EiFi
няется на цепь в пролете. Влиянием деформаций пилонов и
подвесок можно пренебречь. Для оттяжек получим выражение бц по
формуле (4.79). Следовательно,
34й1<72+ 15(04 + qz) „ a
6" = 6*=' 7680W ,5+^ЩЛ- (4-81>
Для построения линий влияния остается получить величину Д!р,
которая представляет собой, как показано выше, перемещение по
вертикали произвольной точки балки под влиянием пары сил Xi= 1,
т. е. ординаты линии прогиба балки под действием нагрузок q\ и о2
(см. рис. IV-33, г). Отсчитывая абсциссы х от левого конца балки,
можем написать дифференциальное уравнение:
M-E''-^ = -{y^ + ^"J)X + —2 2
Здесь «/ = Aip. Уравнение для левого участка балки представлено
двумя первыми членами, для правого —©семи тремя.
Интегрируя дважды это выражение, получим
,W q& <*-*>(*-т)4
E6Iy=-(3qi + q2y— + -^ ^ + CX + D.
123
Определение произвольных постоянных дает:
384
Получим
(Sqi + q2)lxs qix*- (9qi + 7q2)l3x
У=—&1р = Г7ГБ-Т \~ ~7^-Б~7 +
48£б/ 24Еб1 384£б/
/
~2
(Qi — q2)(x — —-j
24E6I
(4.82)
Здесь последнее слагаемое относится только к правому участку
балки.
Чтобы более ясно представить ход решения, рассмотрим
пример, не касаясь некоторых подробностей:
Пример: /=200 м, о = 70 м, стрелки / = 0,167/ (полученное выше
значение), /,=0,0785/, /2 = 0,005/, а=18°30', (3 = 30°, жесткость
каждой цепи £ц/7ц= 127400 т, жесткость балки £с/ = 600000 тм2.
По формулам (4.75) получим от натяжения, равного единице:
2,51 0,16
* =—; яг= 1 .
Имея эти величины, по формулам (4.80) и (4.81) получим:
6ц = 6ш = 0,211 — ;
т
м
6i2 = 62i = 0,189 —,
т
а по формуле (4.82) —
— 0,160 v3 + 0,1046^- + 0,061 8/2а- — 0,09791 —
Aip =
600 000
Таким образом, определены все величины, входящие в
формулы (4.74).
Подставив в последнюю формулу значения х, найдем величины
Aip для разных сечений. В табл. IV-1 приведены значения А,Р и
124
Лор для девяти сечений;
величины натяжений цепей г\\
вписаны в графу 4, ординаты
линии влияния для натяжения
второй цепи г]2 — в графу 5.
Теперь построим линии
влияния изгибающего
момента в сечении балкн жесткости,
расположенном на расстоянии
b от левой опоры (рис. IV-34,
а, б).
Ординаты этой линии
влияния складываются из трех
слагаемых. Первое из них —
момент т}1мо от единичной силы,
определяемый как для простой
балки (см. рис. IV-34, б);
второе—момент от нагрузки
(рнс. IV-34, б), вызываемой
натяжением ч\\. Этот момент
равен
3
Цш. = —qii — lb
о
или, учитывая, что при натяжении, равном ц\,
2,51 0,16
<7и = —1—Цй Q2i = —j- Цй
2,51 3 0,16 1 2,51т ,,,
Чш = J-4-jlb T-^Tlb+-^—b-.
ТАБЛИЦА IV-1
X
1
0
25
50
75
100
125
150
175
200
Д1Р
2
0
-0.099
-0,178
—0,226
—0,233
—0.212
-0,157
-0,088
0
*2Р
Г>
0
—0,088
—0,157
-0,212
-0,233
—0,226
—0,178
-0,099
0
та
4
0
0,48
0/91
0,89
0,59
0,23
—0,05
—0,01
0
It
5
0
-0,01
-0,05
0,23
0,59
0,89
0,91
0,48
0
м
6
0
18,8
37,5
31,3
25,0
18,8
12,5
6,3
0
—32,3т;,, ж
7
0
—15,5
-29,4
-28,8
-19,1
-7,4
1,6
0,3
0
—17,5т]г, м
8
0
0,2
0.9
-4,0
—10,3
—15,6
— 15,9
-8,4
0
т'л- ■"
9
0
3,5
9,0
-1.5
■ ,4
-4,2
-1,8
-1.2
0
125
ТЙШвмШ2
"НЧ
Р=1
К- Ч Яп
-*
^1ММИНМл»7пи
Рис. IV-34
1 62
<?2i — lb+qu —,
Аналогичное выражение получим для М2 — третьего слагаемого,
возникающего от натяжения т}2 (рис. IV-34, г). Просуммируем три
слагаемых:
г]м = т1мо - (2,51 -|- + 0,16 у )тц6 - ( 0,1б|- + 2,51 j-) г\гЬ +
+ (т11-2,51+т12-0,16) —.
Принимая 6 = 50 м, после подстановок и преобразований
получим г\м = Цма — 32,3t]i — 17,5г)2.
Величины tim для девяти сечений приведены в графах 6—9
табл. IV-1.
На рис. IV-34, д показан характер линии влияния натяжения
первой цепи, а на рис. IV-34, е — момента на расстоянии b = 50 м от
левой опоры. Линию влияния поперечной силы строят аналогично
построению линии влияния момента. При этом также
рассматривают три слагаемых t]qo, T[q\ и г)р2-
§ 22. ПРИБЛИЖЕННЫЙ
СПОСОБ РАСЧЕТА ПО ДЕФОРМИРОВАННОЙ СХЕМЕ
При изменении действующей на сооружение нагрузки или ее
положения в строительной механике обычно считают, что схема
сооружения при этом не меняется, а при определении внутренних усилий
в элементах системы принимают систему такой же, какой она была
до загружения.
В большинстве случаев это не мешает получить правильные и.
даже точные результаты.
Цепные системы с балками жесткости рассчитывают, как это
видно из предыдущего, подобным образом. Независимо от того,
загружен весь пролет балки или его половина, считают, что цепь
имеет до загружения очертание параболы и сохраняет такое
очертание; поэтому усилия во всех подвесках остаются одинаковыми.
В то же время считают, что при загружении полупролета балка
изгибается по S-образной кривой: в загруженной половине вниз, в
незагруженной — вверх, а длина подвесок не изменяется.
Все эти допущения "приводят к неудовлетворению условий
совместности деформаций: на загруженной половине цепь и балка
должны быть удалены друг от друга, на незагруженной —
сближены, в то же время подвески на обеих половинах удерживают цепь
и балку на постоянных расстояниях друг от друга.
Следовательно, способы расчета по недеформнруемой схеме
дают ошибки. Величину этих ошибок необходимо оценить.
Ниже приведен приближенный способ расчета по
деформированной схеме. Однако этот способ относительно хорошо учитывает
условия совместности деформаций; сравнение результатов с точными
показывает, что ошибки здесь небольшие.
126
Рассмотрим
симметричную систему (рис.
IV-35, а).
Первоначальная постоянная нагрузка
q, равномерно
распределенная по пролету,
полностью передается на
цепь. Балка
.поддерживается подвесками, и ее
вес, являющийся частью
полного веса q, тоже
передается на цепь.
Натяжение цепи Н0.
Загрузим весь пролет
временной нагрузкой к и
будем считать, что часть
этой нагрузки кц передается на цепь, а другая часть ко на балку.
При этом
«ц + «б = к. (4.83)
При таком дополнительном загружении натяжение цепи
возрастет до Нх. Усилие в оттяжках увеличится на {Hi Но) .
Рис. IV-35
Имея в виду, чго длина оттяжки равна
(Ht-H0)a
а
-, можно определить ее
удлинение: Да
cos |3
Это удлинение сопровождается
EF cos2 p
смещением опорной точки цепи (вершины пилона) на
_ Да _ (Hj —Н0) а
cos |3 EF cos3 p
Следовательно, пролет нити уменьшился на
2(Ht-Но)а
26 =
EFcos3fi
Под влиянием изменившегося натяжения цепь удлинилась на ве-
(Ъ-Но)!
личину Л» = г=г= *
Теперь можно получить уравнения деформаций цепи на участке
между опорами (см. § 9):
Li = £0 + Ы или 1 — 26
\}iQ2i dx
2#2
1
= /+'fefe* -+А/.
2#2
о
(4.84)
127
Величины б и Л/ определены выше. Другие величины равны:
8/о Jz 12 8(/0 + г)_
(<7 + Кц)/2
8(/о + г) '
] Qi dx =
(9 + /сц)2(/_2б)3 (<7 + /ец)Ч3
12 12
где г — величина, на которую увеличилась стрелка цепи от
временной нагрузки к. Подстановка всех этих величин в формулу (4.84)
и небольшие преобразования дадут
ы (я,-яа)(/+-|^) 8ft+f), „
ТГ + £f з/ зГИо + з^-')
или / 2а
(^ _ Я0) ( / -f
S^LL^lL.^ + 1-.l. (4.85)
EF 3/^3/ l '
Последнее слагаемое формулы (4.85) составляет не более
1—1,5% от предпоследнего слагаемого, поэтому им можно
пренебречь:
Hi — Ho/ 2а \ 16 for
" I Н )~ —• (4-86)
EF \ cos3p / 3 / V -
Подставив сюда значения Н0 и Н\, после небольших
преобразований получим
Ыо — дг_ 128 /о EF
fl + rk-^TT I 2а \ П
\ cos3p '
Допуская здесь несколько большую неточность, чем выше,
пренебрежем величиной /0/" по сравнению с /о2. Тогда можно получить
простую формулу:
Кц/о
г = . (4.87)
128 f0EF
я + -
3 Mi + -J!L-)
v cos3p /
В этой формуле две неизвестные величины г и /сц. Для их
определения надо составить формулу, связывающую эти величины друг с
другом.
128
На балку жесткости действует нагрузка kq = k — /сц (см. формулу
4.83). Можно получить формулу прогиба балки жесткости в
середине пролета и приравнять ее г:
5 (к — /Сц) Z4
Г ~~ 384£б/
Однако в этом случае условие 'совместности деформаций
удовлетворяется только в середине пролета. Это видно из рис. IV-35, б, где
сплошной линией показана линия прогиба балки (парабола
четвертой степени), а пунктирной — линия перемещения точек цепи
(квадратная парабола). В остальных точках условия совместности
не удовлетворяются. Особенно сильно перемещения расходятся
примерно в четвертях пролета. Можно поступить иначе: исходить из
условия равенства друг другу площадей, ограниченных двумя
линиями прогибов цепи и балки (рис. IV-35, в). В этом случае условия
совместности будут удовлетворены в двух точках и, главное,
расхождения в других точках будут меньше.
Площадь, ограниченная линией прогиба цепи (квадратная
парабола), при величине средней ординаты г будет равна:
2
Уравнение линии прогиба балки:
(К — /Сц) 1Х3 (/С — /Сц) Xi (К — /Сц) 14
У
12£б/ 24£G/ 24£б/
Площадь, ограниченная этой линией,
_ (/с-/сц)/5
6~' 120£б/ •
Приравнивая Оц и Об, получим
, (/с — /сц) /4
г = Г 7 (4.88)
80£б/
Решая совместно уравнения 4.87 и 4.88, получим
к/о
128Jo EF , 80£б//о
(4.89),
3 /3 / 2а \ ' /4
(<+—)
\ cos313 /
В этой формуле первое слагаемое знаменателя, как показывают
расчеты, очень невелико по сравнению с двумя другими. Поэтому
можно пользоваться упрощенным выражением:
5-3213 129
128
~3~
f3
/о
/3
Kfo
EF
('+—)
80£6//o
/4
cos2p
80
[e5i
+ 0,533-
foEFl
(4.90)
I
2a
cos3p
Из формулы (4.88) получим:
/Стт К ■
80Ecfr
Kg — К — Кц —
/4 '
80Еб1г
(4.91)
(4.92)
Зная эти величины, легко найти натяжение цепи и усилия в балке
(см. пример ниже).
Расчет системы при загружении полупролета удобнее проводить
в два этапа. Сначала загружают весь пролет половинной
временной нагрузкой и определяют натяжение Hi и прогиб середины г
(т. е. решают предыдущую задачу). На втором этапе прикладывают
обратно симметричную половинную нагрузку. При этом можно
считать, что полученные величины Hi и г сохраняют свои значения.
Это позволяет относительно легко определить перемещения сечений
в четвертях пролета и распределение временной нагрузки между
балкой и цепью на том и другом полупролете и благодаря этому
найти внутренние усилия в балке жесткости.
Допустим, что первый этап за-
гружения выполнен. Определены
стрелка цепи f{ и натяжение щ ней
Н\. Приложим к системе обратно
симметричную нагрузку,
направленную «а левом полупролете вниз
(нагрузка к) и на правом — вверх.
Рассмотрим левый полупролет как
самостоятельную систему (рис. IV-36,
а). Введем обозначения, показанные
на рисунке:
с = —; di = —.
2 4
ПЧбт/м Из первого этапа расчета
известны нагруз-ки на цепь и балку (соот-
Рис. IV-36 ветственно qnl и q$i)\
б)
,1,890 у„
ннннп
WA
Л
130
При загружении дополнительной обратно симметричной
нагрузкой считаем, что точки А; В; Ах, Вх остаются неподвижными. В
действительности при таком загружении точка В нити несколько
сместится по горизонтали. В некоторых случаях автор учитывал
подобное перемещение, однако это не оказывало большого влияния
на результаты. Поэтому такое перемещение можно не принимать
во внимание.
Итак, при загружении полупролета обратно симметричной
нагрузкой к на цепь передается нагрузка кц2, на балку — кс2. При
этом
/v'62 = К — Кц2. (4.93)
Стрелка цепи полупролета rfi при этом увеличилась и стала
равной d2. Натяжение #i не изменилось, поэтому
Стрелка увеличилась на величину
t = d2 — di. (4.95)
Здесь три неизвестных d2; Кцг и t. Для составления третьего
уравнения примем во внимание, что в середине полупролета прогиб
полубалки также равен t:
5/сб2С4 5 (к — /сц2) ck
t
384£б/ 384£в/
Следовательно, t = d2 — fli = аг =
8#i 384£б/
Здесь одна неизвестная величина кц2. Она равна
5кс4 дтс2
384£б/ + * 8Ht
Кц2 = 5^ * • (4-96>
384£б/ SHi
По формулам (4.93) и (4.95) можно найти нагрузку на левой
половине балки к^2, перемещение в четверти пролета t и внутренние
усилия в балке. Для правой половины решение остается таким же.
Следует иметь в виду, что в правой половине нагрузка к
направлена вверх.
Для выяснения некоторых деталей, а также степени точности
предлагаемого приближенного расчета рассмотрим пример (см.
рис. IV-35): /=100 м; /0=12,5 м; а='36,6 м; р = 20°, жесткость цепи
EF =12-105 т, жесткость балки Еб1 = 2-106 тм2, постоянная
нагрузка р = б т/м, временная нагрузка при загружении всего пролета
к=2 т/м и при загружении полупролета — 2 /с=4 т/м.
5*
131
Сначала рассмотрим загружение всего пролета. При отсутствии
временной нагрузки предположим, как это обычно бывает, что вся
постоянная нагрузка р передается на цепь:
pi2 6-1002
Н0 = — = = 600 т.
8/о 8-12,5
Приложим временную нагрузку к=2 т/м. По формуле (4.89)
получим
г = =-^ > = 0,0452 м.
128 12,53 12-105 80-2-106-12,5
6 + —-
3 1003 2-36,6 1004
100 Ч '—
cos320°
Формулы (4.91) и (4.92) дадут:
80-2-106
Кб = —-0,0452 = 0,0722 т/м;
/Сц = 2,000 — 0,072 = 1,928 т/м.
Следовательно, натяжение цепи
(Р + кц)12 7,928-1002
Hi = „У ц; = ' пг „ = 789 т 789,4 т).
8(/0 + г) 8-12,545 v ;
(в скобках здесь и ниже приведены точные значения, полученные
в работе [35]). Изгибающий момент в середине пролета балки
0,0722-1002
М i = = 90,2 тм (93,2 тм).
1 8
Полученные значения показывают, что точность предлагаемого
решения при загружении всего пролета вполне удовлетворительная.
При загружении полупролета точность несколько ниже. Для этого
случая временная нагрузка предположена 2 к = 4т/м. Это
позволяет рассматривать полученные результаты в качестве первого
этапа расчета. Итак, начальная нагрузка на цепь ^щ = 6+1,928 =
= 7,928 т/м и на балку ^сч =0,0722 т/м, стрелка полупролета
_ /о + г _ 12,545 _010Q
"1— 2 — 7 —3,138 м, начальное натяжение #i =
= 789 т.
Подставив все известные величины в формулу (4.96), получим:
5-2,00-50* 7,928-502
'3,138
384-2-106 8-789
/Сп2 = • = 0,182 т/м.
m 5-504 502
384-2-106 8-789
132
Если рассмотреть условия работы полупролета от нагрузки,
направленной вверх, то и нагрузка кц2 будет направлена вверх, но
абсолютная величина ее останется тон же: кц2=—0,182 т/м.
Временная нагрузка, передающаяся на левую и правую
половины балки, будет:
кл = 2.000 — 0,182 =1,818 т/м, кп = —2,000+0,182 = —1,818 т/м.
Учитывая, что при первом этапе загружения на балку
передавалась направленная вниз нагрузка ко = 0,072 т/м, получим
полную нагрузку слева и справа (рис. IV-36, б):
<7Л = 1,818 + 0,072 = 1,890 т/м; qn = 1,818 — 0,072 = 1,746 т/м.
Изгибающие моменты в четвертях пролетов:
Мп = 637 тм (635 тм); Мп = — 494 тм (— 463 тм).
Момент в загруженной половине пролета, наибольший по
абсолютной величине, получен практически точным. В незагруженной
половине погрешность составляет 6,5%. По формуле (4.94) можно
найти стрелки цепи в левом и в правом полупролете:
(7,928 + 0,182) 502 ,
й = — ~ ' ; d*. = 3,22*; 4а = 3,07 л.
о- /8У
Следовательно, прогибы в четвертях пролетов (с точностью до
1 см) от загружения полупролета будут:
/2л = 3,22 — 3,14 = 0,08 м; /а, = 3,07 — 3,14 = — 0,07 м
и амплитуда прогиба St — 0,08 + 0,07 = 0,15 м.
Преимуществом расчета висячих мостов по деформированной
схеме является, прежде всего, то, что он точнее обычного расчета.
Кроме того, это уточнение позволяет уменьшить расход
материалов и расчетные прогибы. Так, в рассмотренном примере
наибольший изгибающий момент равен 675 тм, а при обычном расчете он
составляет 720 тм (на 7% больше). Наибольшие суммарные
прогибы (вверх и вниз) соответственно равны 15 и 17 см, что также
является преимуществом уточненного решения.
§ 23. ЦЕПЬ С БАЛКОЙ ЖЕСТКОСТИ И НАТЯЖНОЙ ЦЕПЬЮ
В цепной системе (рис. IV-37) натяжением нижней цепи можно
изменять жесткость фермы в целом и регулировать в известной
степени работу балки жесткости, а также влиять на динамические
свойства системы.
Считаем, что при начальной нагрузке балка жесткости не
работает и всю постоянную нагрузку р воспринимает верхняя цепь.
Кроме того, на эту цепь передается дополнительная нагрузка qn,
возникающая при предварительном натяжении нижней цепи.
133
Рис. IV-37
При загружении всего пролета нагрузкой к элементы системы
примут очертания, показанные на рис. IV-37 пунктиром. Определим
прогиб системы г в середине пролета.
По аналогии с расчетом (см. § 22) можно получить для верхней
цепи уравнение, подобное уравнению (4.86):
^-М' + Т^ПГ) Ifi L«r
(4.97)
cos3p
EF„
I
Нижняя цепь не имеет оттяжек, поэтому для нее, считая пролет ее
равным /, получим
(Нщ-НъУЬ ^ 16/0в/-
EFH 31 ' { ' '
В этих двух уравнениях три неизвестных величины: #iB; Нт и г.
Используя уравнение (4.88), получим третье уравнение:
80EJ У '
где <7]Н и <7ib — нагрузки, передающиеся на нижнюю и верхнюю
цепи через подвески после загружения системы временной нагрузкой.
Эти величины также неизвестны, но их легко выразить через
натяжения Н1в и Я1н:
п 8(/0в + /-)Я1в 8(fm-r)HlH
9ib = р ; <7ih = — - . (4.100)
Таким образом .получаем пять уравнений с пятью неизвестными:
#1в, Нш, г, <7iB, qiB. Решая эту систему уравнений, получим
*74
(4.101)
г =
80
£Б/ + 0,5331
f2 EF I
J+
2а
cos3 ri
+Л„^н
Эта формула учитывает и случай, рассмотренный в предыдущем
параграфу. Если принять FH = 0 (система без нижней цепи),
получим формулу (4.90).
134
к
v^
^
\Т
1
1
1
Я ч i
со
1
оо
л
ОО
iS/
-^
'it::: ""! НН
. - ь
*
.|ЖШМЖЖ
Рис. IV-38
В формулах (4.97) и (4.98) величины Я0в и #0н известны:
Пов = 1 ^7 > п»н :
М ' — ЯГ ' (4Л°2)
О/0в О/Он
следовательно, зная г, из них легко определить натяжения HiB
и #iH:
"*.= "* + 1б£/7^ ; Я1н = Я0н- 16/ГГ"/онГ . (4.103)
3/
(' + —)
V cos3 (V
З/2
Из формулы (4.100) можно определить нагрузки на верхнюю и
нижнюю цепи и, следовательно, на балку:
<7б = к + Р + <7ih — <7ib.
Величины стрелок будут:
/ib = /ов + *"; /1н = /Он Л
(4.104)
(4.105)
При загружении временной нагрузкой полупролета расчет по-
прежнему производят в два этапа. Сначала загружают весь пролет
половинной нагрузкой. Если полную временную нагрузку считать
равной 2 к, то для первого этапа загружения окажутся
действительными все полученные в настоящем параграфе формулы.
Следовательно, останется рассмотреть обратно симметричное загружение
(рис. IV-38). При таком загружении, как и выше, считаем, что
стрелки /ib и /ш, полученные при первом этапе расчета, остаются
постоянными и, следовательно, не изменяются и натяжения Н1в и
Я1н. Учитывая последнее допущение, получим для левого
полупролета:
<7лв&2 qiBb2 qjmb2 qnilbz
S(dB + tn)
8dE
8(du — ta) 8dH
135
где b — полупролет;
tn— изменение стрелок полуцепей при загружении обратно
симметричной нагрузкой;
dHndB— (см. рис. IV-38) равны:
«н = —- -, "в =
4 ' " 4
Из этих формул получим
"в + ^л "н — tл . . , _ _ v
9лв = 91в—-, ; Qns—qis—-z . (4.106)
dB йн
Прогиб балки в середине полупролета, равный /л, имеет обычное
выражение:
5(р + 2/с + <7лн — 9лв — р — к — <7ih + <7ib)&4 ., ,М\
*л = 384^7 ' • (4Л07)
Совместное решение уравнений (4.106) и (4.107) дает
** = -штгг ■ (4Л08>
384£б/ <7ih <7ib
564 + du+~cu
Для правого полупролета получим:
"в — чт "н "г* ^п
Япв = qiB ; <7пн = <7ш— (4.109)
dB du
и перемещение такой же величины, нос обратным знаком:
tn= Qg ~К • (4-П°)
384£б/ qm <7iB
При загружении всего пролета перемещение г не зависит от
начального натяжения подвесок 9н(формула 4.101), но зависитотуп-
ругих свойств цепей (.Е^в и EF„). Напротив, при загружении
полупролета .перемещения tn и t„ не зависят от упругих деформаций, но
косвенно (через q\K и <7iB) зависят от начального натяжения qH. Это
объясняется тем, что в первом случае очертание цепей не меняется,
а лишь пропорционально увеличиваются или уменьшаются все их
ординаты благодаря упругим деформациям, во втором случае
внутренние усилия в цепях практически не изменяются, но
изменяется их форма.
После определения tn и tn по формулам (4.106) и (4.109) можно
найти погонные нагрузки на цепи и, следовательно, на балку
жесткости:
<7бл = Р + 2к + <7нл — <7вЛ; <7бп = р + <7нп — <7вП. (4.111)
136
Зная эти нагрузки, легко найти внутренние усилия (моменты) в
балке жесткости.
Пример: /=100л, /0в = 12,5л, о = 36,6л, р = 20°, EF* =
= 12• 105 т, f0H = 6 м, EFH = 4• 105 т, Ес1 = 2-106 тм\ р = 6 т/м,
к = 2 т/м, <7н=2 т/м. При загруженпи всего пролета нагрузкой к =
= 2 т/м получим по (4.101)
2'10°4 =0,0399 ч.
80
,19 R2. 19. 10°. 100
2-106 + 0,533/ >0 ши4-б2-4-10'
100
2-36,6
0.S25
По формулам (4.102) получим:
2-1002 „ (2 + 6)1002
"- = -^- = 417Г: Н°'= 1.12,5 =ШГ-
По формулам (4.103) имеем:
16-12-105-12,5-0,0399
Я1В = 800
Н
1Н
417
3-100-188,7
16-4-105-6-0,0399
3-1002
Используя формулы (4.100), найдем:
8(12,50 + 0,04)969
969 г;
= 366 т.
<7ib
1002
(6,00 — 0,04)366
ШО2
= 9,71 т/м; <7ih =
= 1,74 т/м.
Нагрузка на балку жесткости по формуле (4.104)
<7б = 2 + 6 + 1,74 — 9,71 = 0,03 т/м.
Изгибающий момент в середине пролета балки жесткости
</бР 0,03-ЮО2
Мб = —^~ = -j = 37,5 тм.
о о
Перейдем к загружёнию обратно Симметричной нагрузкой к=2 т/м.
, Стрелки цепей после загружения симметричной нагрузкой:
Лв = /ов + г = 12,54 м; /1н = f0n — r = 5,96 м.
Стрелки полупролетов:
dB =
f
IB
3,14 м; dB
f
1н
= 1,49 ж.
Перемещения в четвертях пролетов по формулам (4.108) и
(4.110)
137
tn = —tn = . ■ = 0,069 м.
384-2-106 9,71 1,74
5-504 + 3,14 1,49
Перемещения в четвертях пролета при первом загружении
3
— /- = 0,032 м,
4
следовательно, полные перемещения составят в левом полупролете
^л = 0,069 + 0,032 = 0,101 м; в правом полупролете tn = — 0,069 +
+ 0,032 = — 0,037 м.
Чтобы найти внутренние усилия в балке жесткости, по формулам
(4.106) и (4.109) определяют нагрузки на цепи:
Ялв = 10,02 т/м; <7лн = 1,70 т/м; qnB = 9,40 т/м; дш = 1,78 т/м,
а затем погонные нагрузки на балку:
<7бл = р + 2/с + <7лн — <7лв = 1,68 т/м;
<7бп = р + qDS — 9пв = — 1,62 т/м.
Зная эти нагрузки, легко определить изгибающие моменты в
четвертях пролета:
Мл = 546 тм; Мп = — 487 тм.
Сравним результаты этого примера с примером расчета одноцеп-
ной системы (§ 22). Рассматриваемая здесь система отличается от
одноцепной только наличием натяжной цепи.
Результаты расчетов показывают, что при наличии натяжной
цепи усилие в верхней цепи увеличилось с 789 до 969 т, но
несколько уменьшились перемещения как в середине, так и в четвертях
пролета. Изгибающий момент уменьшился с 637 до 546 тм.
Увеличением натяжения нижней цепи можно повысить жесткость
системы и уменьшить изгибающие моменты в балке. При этом
вопрос экономичности системы остается неясным, однако
преимущества в отношении динамических свойств бесспорны.
ГЛАВА V
РАСЧЕТ БАЙТОВЫХ ФЕРМ С БАЛКАМИ ЖЕСТКОСТИ,
КОНСОЛЬНЫХ И БАЛОЧНЫХ СИСТЕМ
§ 24. РАБОТА НАТЯНУТОГО ТРОСА ПРИ СТАТИЧЕСКОЙ НАГРУЗКЕ
До сих пор влияние собственного веса троса на его деформации
не учитывалось. Предполагалось, например, что звено цепи при
изменении нагрузки работает как растянутый стержень и
деформируется в соответствии с законом Гука. Однако любой горизонталь-
138
Рис. V-l
ный трос под влиянием
собственного веса 'провисает и
работает как гибкая нить.
Бели рассматриваемый
элемент имеет небольшую
длину (несколько метров) и
сильно натянут, как,
например, з<вено цепи, провес
будет очень небольшим и им
всегда можно пренебречь.
В вантовых мостах с
балками жесткости и без них
бывают длинные элементы (оттяжки или отдельные тросы в
пролете), которые .могут иметь относительно большие провесы. При этом
возможность пренебрежения такими провесами может вызвать
сомнение. Каковы же будут погрешности, если при определении
продольных деформаций троса пренебречь его провесом?
Рассмотрим трос АВ пролетом /, подвергающийся действию сил
N, которые назовем продольными, и собственного веса, проекция
которого на горизонтальную ось равна q (рис. V-1).
Допустим, что при деформации трос удлиняется по своему
первоначальному направлению. Длина нити (троса) при начальном
равномерном загружении (3.13)
и.
I
yQodx
cos |3
2Я2
о
cos3 p.
Выражая ^Qodx через начальную нагрузку, получим
U
q2l3 cos3 р
cosp
24№
При изменении нагрузки на сооружение натяжение троса станет
равным Яь а пролет / увеличится на величину Л (см. рис. V-1).
Используя предыдущую формулу, получим выражение для новой
длины нити
/ + Д ?2/3cos3p
Li = ■
cos р
Следовательно, нить удлинилась на
Д цЧг cos3 p
24Я2
1
AL = Lt — L0
cos р
24
\ я2 Н*1
соз р
Г +
?2/3cos3p Но-Hi
24
Я2 Я2
о 1
139
Учитывая упругие деформации, это удлинение можно записать
и другом виде:
Hi — Н0 I
cos (3 cos 6
AL » —
EF
Приравнивая правые части двух последних уравнений, получим
A <72/3cos3|3 (Яо + Я1)(Я0-Я1) _ (Hi-H0)l
cos|3 24 ' Я2 Я2 _ EF coszfi
п л т »Л 1 , (Я1 + Яо)^Фсо5^1
Отсюда Д = (Hi — #о -== г- Н 0, J, „„ •
L f/7 cos 6 24Я2 Я2 J
1 i о
Если считать ванту прямых стержнем, ее удлинение будет
равно
AL_(H1-H0)i
EF cos2 (3
а перемещение опоры по горизонтали составит
(Hi-H0)l
Ai = AL cos |3 =
f/7 cos p
Следовательно, отношение точного и приближенного значения
перемещений опор по горизонтали
Д _ (Hi + Но) q*P cos5 $EF
Ai 24#2#2
1 О
Этой же величине будет равно отношение точного и приближенного
значений удлинений троса по направлению линии АВ. Если это
отношение выразить через усилия N, получим
Д __ (Ni + N0) <72/2cos2 $EF
Ai 24/V2/V2
i о
Предполагая, что трос работает как простой растянутый
стержень, считаем -г~ = 1- Следовательно, ошибка, выраженная в до-
Рч
лях единицы, определяется дробью, стоящей в правой части
полученного выражения.
Это выражение может быть несколько преобразовано. Если
принять вес единицы объема материала троса равным у, а площадь его
сечения F, формулу можно переписать так:
но
A _ (Nl + N0)y2F42cos2^,E
1 l о
Если считать, что-vr равно расчетному напряжению R, получим
Д _ уЧ2Е cos213 (Ni + Л^0) W,
Ai 24R3 N2q
В этой формуле для стальных тросов можно принять y = ?>85 г/см?
и E=l,7-106 кг/см2. Для оценки возможной ошибки примем с
запасом р = 0°. При очень большом, редко применяемом пролете троса
/ = 200 м получим (все размеры в метрах и тоннах)
Д 7,85-2002-1,7-107 (Ni + N0)N1
Ai 24R3 N2o
22,2-10'" (Ni + M>) ^
Если принять расчетное напряжение относительно очень
небольшим (У? = 3 000 кГ/см2, или 30 000 т/м2), получим
Д , , 22,2-10'° {Ni + NqW , , пппоп№ + ^)К
Д;=1+"27ТЩЙ № =1+0,0082 .
о о
Отношение ту- в мостах со сравнительно большими пролетами, ко-
торые здесь рассматриваются, не превышает обычно' 1,1—1,3. Если
Ni
опять с запасом принять тг=1'5> получим
/Vo
— = 1 + 0,0082 -2,5-1,5 = 1,032.
Ai
При более вероятном расчетном напряжении #=5 000 кГ/см2
имеем
4-= 1.006.
Ai
Если принять во внимание, что угол (3 обычно больше 20°, то даже
Л
при # = 3 000 кГ/см2 — = 1,029,
Ai
а при R = 5000 кГ/см2— = 1,005.
Ai
Таким образом, если рассматривать трос как простой
растянутый стержень даже при очень невыгодных условиях, ошибки не
будут .превышать примерно 3%.
141
§ 25. РАСЧЕТ БАЙТОВЫХ МОСТОВ С БАЛКАМИ ЖЕСТКОСТИ
Байтовые системы с балками жесткости многократно статически
неопределимы. При расчетах считают, что ванты имеют достаточный
запас растяжения, всегда превышающий по величине сжимающие
усилия, которые могут возникнуть в них при некотором
расположении нагрузки. Это позволяет рассматривать ванты как жесткие
стержни, работающие на усилия обоих знаков и обеспечивающие
при любом загружении геометрическую неизменяемость системы.
Степень статической неопределимости вантовой фермы с
радиальным или параллельным расположением вант можно определить
по формуле [19]:
i = к -f In — а — 3,
где к — общее количество вант, включая оттяжки;
п — общее количество опор балки жесткости;
а — количество подвижных опираний или шарниров, включая
подвижные опирания вант на пилонах.
Например, для Байтового моста в Киеве (рис. V-2, а) степень
статической неопределимости вантовой фермы i= 13. Здесь все
четыре опоры балки жесткости подвижные, а горизонтальные
продольные силы передаются через ванты на жестко опертые пилоны.
Расчет вантовой фермы целесообразно производить методом
сил. Для сокращения вычислений весьма важным является
рациональный выбор основной системы. При расчетах «вручную» или на
электрических клавишных машинах за основную систему следует
принимать вантовую ферму с разрезом по оси симметрии и с
шарнирами в балке жесткости над промежуточными опорами и в местах
прикрепления вант (исключая места прикрепления вант, ближайших
142
Рис. V-2
к разрезу). На рис. V-2, б показана основная система, принятая при
расчете вантовой фермы моста в Киеве.
Для расчета ферм с высокой степенью статической
неопределимости необходимо использовать электронные цифровые
вычислительные машины. При количестве неизвестных свыше 20—30 расчет
с применением ЭЦВМ является практически единственно
возможным. Выбор основной системы определяется в этом случае
уменьшением работы по составлению программы расчета и заполнению
таблиц исходных данных для машины. Для вантовой фермы,
изображенной на рис. V-2, а, при расчете на ЭЦВМ основную систему
удобно принять в виде консольных балок, считая лишними
неизвестными не моменты в сечениях балок жесткости, а усилия в
вантах [19].
Для расчета различных систем вантовых мостов можно
использовать универсальную программу, составленную для машины
БЭСМ-2М и приведенную в диссертации Ле Ван Тхыонга *.
Указания по расчету вантовых систем с применением ЭЦВМ
приведены также в работе [19].
§ 26. ПРИБЛИЖЕННЫЕ СПОСОБЫ РАСЧЕТА
1. Общие сведения
Расчет вантовых систем рассматриваемого здесь типа, как видно
из предыдущего, громоздок и трудоемок. Поэтому для
первоначальных расчетов желательно иметь простые и удобные приемы,
позволяющие быстро и просто задаться размерами фермы и сечениями ее
элементов. Для этого автором были рассмотрены четыре фермы
(рис. V-3). Две из них детально рассчитаны. Первые две системы
(рис. V-3, а, б) имеют разрезные балки жесткости, остальные
(рис. V-3, в, г) —неразрезные.
На рис. V-4 и V-5 показаны некоторые линии влияния и их
площади для неразрезных систем. Все линии влияния усилий в
вантах, кроме Sa-з (рис. V-4, a — и), на протяжении среднего
пролета имеют практически ординаты одного знака. Линия влияния
элемента Л-3 имеет слева небольшой отрицательный участок,
площадь которого не превышает 3—4% площади положительного
участка.
Для элемента Л-4 (рис. V-5, а, б) отрицательная площадь
составляет 9% от положительной, а для элемента А-6—10%. Два
других ванта отрицательных участков ,на среднем пролете не имеют.
Следовательно, для приближенного решения можно принять, что
при определении усилий в вантах главного пролета можно с
достаточной степенью точности загружать весь этот пролет временной
нагрузкой. Усилия от постоянной нагрузки в этих вантах будут оп-
* Ле Ван Тхыонг. Расчет вантовых мостов с балками жесткости из
железобетона, с учетом влияния деформаций ползучести и усадки бетона.
Кандидатская диссертация МАДИ. М., 1966 г.
143
Рис. V-3
%^Пы3|,< InT> «
•>*h
Sas
"3
"e-7
ytkfjT.
4Г^У
0,05m
1 "
/7 mi/?; л* л~-тгП
Si ^ 0.00651/.
■" L-UL
Рис. V-4
Рис. V-5
ределены также достаточно точно, если допустить, что эта нагрузка
расположена только в среднем пролете. Это обусловлено тем, что
площади линий влияния на боковых участках или очень малы, или
относительно велики, но имеют разные знаки.
144
»Jd^
' 0,015V
Ofi\lz
0,0051*
0
-0,№1г
-0,011'
0,333 b
0Л001
OMOl
N3
-f^f—ч>—i т
Рис. V-6
Рассмотрим линии влияния
изгибающих моментов. Если
балка имеет постоянное
сечение, то подбирать его надо по
моменту в середине пролета,
так как линия влияния его
имеет наибольшую площадь
(см. рис. V-4, V-5). При этом
линия 1ВЛИЯИИЯ, 'показанная на
рис. V-5, должна быть
загружена на всем среднем 'пролете.
Небольшую ошибку дает такое
загружение и линии влияния,
изображенной на рис. V-4, так
как здесь отрицательные
участки очень малы.
Таким образом, загружение
временной нагрузкой главного
пролета оказывается наиневыгоднейшим почти для всех элементов
рассматриваемых здесь ферм.
Постоянной нагрузкой можно также загружать только главный
пролет. С довольно большой ошибкой (с запасом) при этом будут
получены только усилия в оттяжках фермы (см. рис. V-5). Величина
ошибки составит —35%. Это не трудно учесть.
Следует заметить, что фермы (см. рис. V-4 и V-5) имеют
неразрезные балки жесткости. Но сделанные для них выводы
относительно загружения главного пролета тем более будут справедливы в
случае применения разрезных балок, так как отрицательные
участки линий влияния в крайних пролетах исчезнут.
Рассмотрим разбивку главного пролета .на панели. При
небольших изменениях длины панелей углы наклона отдельных вант и
расход металла на ванты изменяются мало. Наиболее выгодной
является, по-видимому, разбивка, при которой изгибающие моменты
в балке жесткости распределяются наиболее равномерно по ее
пролету. Чтобы найти это распределение, использованы сделанные
выше выводы о загружении всего главного пролета" и построены
при таком загружении эпюры изгибающих моментов для ф.ерм,
показанных на рис. V-3, б, в). Балки жесткости этих ферм
предположены разрезными.
На рис. V-6, а, б и V-7, а, б приведены эпюры изгибающих
моментов в балках от нагрузки q=\, распределенной равномерно по
всему главному пролету (16). Сплошными линиями показаны
эпюры при разбивке на панели одинаковой длины, точечным
пунктиром — когда средняя панель уменьшена, а остальные остаются
одинаковыми. Эпюры, нанесенные штриховым пунктиром, даны для
случая, когда средняя панель больше остальных.
Сопоставление эпюр (рис. V-6) показывает, что при одинаковых
панелях наибольший изгибающий момент будет в середине пролета.
145
0,431
0,451
Рис. V-7
При увеличении средней панели сечение с наибольшим моментом
не смещается, но момент возрастает с М=0,007 ql2 до М = 0,0125 ql2
(на 78%). При уменьшении средней панели момент в середине
пролета уменьшается. Наибольший момент при этом будет в соседней
панели. Величина его (0,0105 ql2) также значительно больше, чем
при панелях одинаковой длины.
Для случая, показанного на рис. V-7, характер распределения
моментов аналогичен. При уменьшении средней панели наибольший
момент даже несколько уменьшится по сравнению с эпюрой для
случая одинаковых панелей, но всего на 4—5%.
В первоначальных расчетах можно принять для фермы с пятью
равными панелями (см. рис. V-6)
Мтахда 0,007<7/2 (5.1)
и для семипанельной (рис. V-7)
Мтах да 0,006<7/2. (5.2)
Если q в этих формулах считать полезной нагрузкой
(постоянная плюс временная), то по формулам (5.1) и (5.2) можно получить
приближенно величину наибольшего изгибающего момента в балке
жесткости от вертикальных нагрузок.
Усилия в вантах зависят от многих факторов (величины
пролета, количества и размера панелей, если они неодинаковые, углов
наклона). Влияние углов наклона можно исключить, если
первоначально определять неполные усилия в вантах, а их вертикальные
составляющие, которые, как показывают расчеты, мало зависят от
углов наклона вант или высоты пилонов. Так, по данным автора,
изменение высоты пилона примерно в 1,5 раза изменяет величину
этих составляющих примерно на 4%.
На рис. V-8 нанесены точки, относящиеся к разным разбивкам
пролета на панели. При этом все панели, кроме средней, имеют
одинаковую длину. По оси абсцисс отложены величины "к (расстояния
146
9l
15 —
1,0 "
0,5 ♦»
^o о
о -J
•
» о
' J *
о t
от пилонов до точек прикрепления
вант к балке жесткости),
выраженные в долях пролета, а по оси
ординат— вертикальные составляющие
усилий в вантах. График составлен
на основании подсчетов, сделанных
по схемам ферм с разбивкой на семь
и пять панелей. Кружками
отмечены точки, относящиеся к семипа-
нельной ферме (п = 7), а жирными точками — к пятипанельной
(п=б). Точки имеют сравнительно небольшой разброс, поэтому по
ним можно провести прямую линию, имеющую уравнение
0,1 0,2 0,3
Рис. V-8
0,4 Л
V =■
1,50?/
(1 — 1,067.).
(5.3)
Зная вертикальные составляющие усилий в вантах, легко
определить эти усилия (см. рис. V-6, V-7):
Si =
Sin (3i
1,500/(1 — 1.06Я)
п sin Pi
(5.4)
Если ферма имеет пять панелей одинаковой длины (см. рис.
V-6), можно определить усилия для каждого ванта:
Si =
0,237?/
S2 =
0,174<7/
sin |3i ' " sin |32
Усилие в оттяжке (см. рис. V-6) будет:
Si cos |3i + S2 cos |32 _/ 0,237 . 0,174
S0 =
— / °>237 0,174 \
~~ ^ tgBi tg62 /
ql
cos |3o x tg Pi ' tg p2 / cos p0
Аналогично для семипанельной фермы (см. рис. V-7):
(5.5)
(5.6)
S»
0,182?/
So
sinPi
■(-
s2 =
0,146?/
182
sinp2
0,146 0,117
S3 =
0,117ql
sinp3
ql
tgPi
(5.7)
tgp2 tgp3 ' cospo
Автор не использовал подобные решения для других разбивок
на панели, но есть основания думать, что при небольшом числе
панелей (по-видимому, при трех — девяти), можно получить
удовлетворительные результаты.
Полученные результаты дают возможность определить в первом
приближении усилия в элементах системы от вертикальных
нагрузок. Если система безраспорная, этого достаточно для
первоначальных расчетов. При этом следует применять искусственное
регулирование усилий, которое может уменьшить изгибающие моменты в
балках жесткости до 2 раз.
147
Если оттяжки
прикреплены не к концам
балки жесткости, а к
специальным неподвижным
массивам (распорная
система), в элементах
/конструкции возникают
температурные 'напряжения,
которые могут быть
достаточно 'большими.
Такие 'напряжения надо
учитывать.
2. Определение усилий
в вантах при загружении
главного пролета
Симметричная одно-
пролетная распорная
ферма, нагруженная
сплошной равномерно
распределенной по всему пролету
нагрузкой (рис. V-9, а), 6 раз статически неопределима. В качестве
лишних неизвестных принимают усилия ib шести'вантах (рис. V-9 б)
В силу симметрии системы и нагрузки считают, что симметрично
расположенные стержни имеют одинаковые усилия. Опорные части
на обоих концах балки при расчете принимают подвижными При
симметричной .нагрузке .положение 'балки изменяться не будет.
Неизвестные усилия в вантах находят методом сил:
A'ifiii -f ^2612 + ^3613 -+- Aip = 0;
^1621 + ^2622 + А'збгз + ДгР = 0;
*i68i + ^2632 + ^3633 + Д3р = 0. |
Величины коэффициентов при неизвестных, например бп
деляют по формуле
бн=!
Mydx
+ 2
с2
Si Si
EFi
(5.8)
опре-
(5.9)
i £0/
Здесь первое слагаемое учитывает деформации изгиба балки
жесткости по всей ее длине, а второе-продольные деформации
вант и пилонов. Практика показывает, что первое слагаемое
значительно больше второго, поэтому приближенно:
бп = f
Mjdx
Еъ1
Rii,
(5.10)
где eu — коэффициент, несколько больший единицы
148
следовательно,
Если сечение балки считают постоянным по ее длине, то интеграл
\Mi2dx находят, используя рис. V-9, в, па котором показаны силы,
изгибающие балку и соответствующую эпюру изгибающих моментов
(рис. V-9, г).
Умножив эпюру саму на себя, получим
f Mfdx = aiQlS'n|31 •—m sin p!-2 + «i sin ftMi sin |3, =
' О
Q
= — «i sin2 Pi + at 61 sin2 p*,
611 = =r-r eii- (5-11)
E6I
По аналогии с формулой (5.10) коэффициент 612=621 будет
равен:
} MiMzdx
1
612 = =-: ей. (5.12)
E6I
Интеграл Г M\M2dx находят перемножением эпюр, показанных
i
на рис. V-9, г и V-9, д:
С ,, ,, . aiOisin Pi 2
] M1M2dx = — - «isinp2-2 +
1 2 3
, Г ay sin p2 + аг sin P2 , . „ . „ , 1
+ — (a2 — a1)2 + fl2sinp2&2jflisinpi.
Учитывая, что b2 = I — 2a2, получим
з
j MiMzdx = [ aiCL2l — -^- — Old J sin pi sin p2. (5.13)'
Следовательно,
г 3 п
^ata2l — -^- — ахаЦ
6i2 = — sin pt sin p2ei2.
Аналогично можно определить остальные коэффициенты
уравнений (5.8):
«i( —«i + 6ij sin2Pi
5xi = =г~? ei1'
Еб1
149
2
( —a2 + &2)
G2l—£2 + M sin2P:
'2
3
622 = =*-; £22l
а-з —аз + Ьз) sin2 |33
633 = p-7 езз; (5.14)
Ed
I 3 \
( CiC2/ a%_a% J sin |3i sin (З2
612 = 62i = ■ ■=— 812;
E6I
1 3 \
I Cia3/ — — О1О31 sin |3i sin p3
613 = 631 = 'r— E13;
E6I
(0-2 г\
a^CLzl — — «2«з ) sin |32 sin |33
623 = 632 = —: £23.
E(jl
Для составления системы уравнений (5.8) необходимо найти
также грузовые члены. Например, AiP можно определить как
изменение расстояния между концами разрезанного стержня А-1 под
действием заданной нагрузки. Для этого сначала находят по одной
из формул сопротивления материалов перемещение узла / (см.
рис. V-9) от изгиба балки сплошной нагрузкой q:
qlcti qai ql3at
У i
12£б/ 24£c/ 24£б/
Составляющая перемещения по направлению ванты А-1 будет
Ух sin Pi. Так как при таких перемещениях работают одновременно
две ванты, получим
Alp = 2i/1sinp1 = I^rsinp1[2(p-)3-(^)4-p-]. (5.15)
Аналогично можно получить:
150
А2р
Лзр =
ТАБЛИЦА V-l
Система
Безраспорная
Распорная
/, м*
0,237
0,368
0,237
0,368
6Il I Е22
1,040
1,061
1,040
1,060
1,045
1,069
1,045
1,068
Е83
1.070
1,110
1,070
1,109
Ei2-=E21
1,006
1,018
1,012
1,019
Eis~Es
1,013
1,022
1,015
1,024
£2 8 =ЕЯ2
1,013
1,023
1,015
1,024
Чтобы определить величины е в формулах (5.14), были
рассчитаны четыре варианта семипанельной системы пролетом 210 м с
разрезной балкой жесткости (распорные и безраспорные системы).
Балку жесткости принимали разных сечений (моменты инерции
/=0,237 ж4 и / = 0,368 ж4). Результаты расчетов приведены в
табл. V-1. Из таблицы видно, что коэффициенты ец, егг и е3з
больше других. Для приближенного решения эти коэффициенты можно
считать одинаковыми, равными примерно их среднему
арифметическому;
ец = 622 = езз = 1,05. (5.18)
Аналогично можно определить другие коэффициенты, имеющие
разные индексы:
812 = 621 = 813 = 831 = 823 = 832 = 1,02. (5.19)
Полученные коэффициенты можно, по-видимому, применять в
приближенных расчетах систем с другим числом панелей (от трех
до девяти).
3. Влияние изменения температуры
При определении усилий в элементах распорной фермы от
изменения температуры используют канонические уравнения:
-Xifiii -f- -^2612 -j- ^3613 -j- Ait = 0;
Xibsi + ^2622 -f- X3623 + A2* = 0; (5.20)
-^1631 + -^2632 -f- Х3Ьз& -f- Аз* = 0.
Коэффициенты при неизвестных здесь те же, что в уравнениях
(5.8), т. е. определяются по формулам (5.14). Свободные члены
уравнений:
Ди = 2 Sisat; Дм = 2 S&at> Аз« = S 53Sa^> <5-21>
где a — коэффициент линейной деформации элемента;
t — повышение температуры, °С.
Пользуясь приведенной системой уравнений, можно получить
усилия в вантах, а зная их, легко найти вертикальные составляющие
усилий. Затем можно определить изгибающие моменты в балке.
151
По данным автора, эти моменты при данной разбивке на панели
мало зависят от высоты пилонов или угла наклона раскосов. Так,
для середины пролета фермы с семью равными панелями в первом
приближении можно считать изгибающий момент в середине
пролета равным:
М±
2
и для пятипанельной фермы
Mi_
2
Знак изгибающего момента определяется знаком изменения
температуры.
Заметим, что при изменении температуры «а 40° С изгибающие
моменты в балке жесткости изменяются на несколько десятков
процентов (~25—40%). Неучет этого изменения повлечет за собой
существенные ошибки, но в то же время такой неучет по отношению
к усилиям в вантах вполне возможен, так как при этом усилия в
вантах изменяются всего на 2—4%. Следовательно, для
первоначального расчета фермы (без учета искусственного регулирования
усилий) полученных данных достаточно в частности для семи- и
пятипанельных ферм.
Формулы (5.1) и (5.2) вместе с формулами (5.22) и (5.23)
позволяют определить наибольший момент в балке, а формулы (5.5),
{5.6) и (5.7) — найти усилия в вантах.
Однако регулирование усилий в рассматриваемой системе
может очень существенно изменить изгибающие моменты в балке
жесткости. Моменты можно уменьшить примерно в 2 раза, а иногда
и больше. Усилия в вантах при этом несколько увеличатся, но
незначительно на (5—10%). Следовательно, такое регулирование
производить целесообразно.
4. Регулирование усилий
Рассмотрим систему, приведенную на рис. V-10, с. Построим
эпюру наибольших моментов, показанную на рис. V-Ю, б (жирная
линия), и эпюру наименьших моментов (тонкая линия). Эпюра
наибольших моментов получена путем загружения положительных
участков соответствующих линий влияния при максимальной
температуре, а эпюра наименьших моментов — загружением
отрицательных участков при минимальной температуре [17].
Анализ полученных эпюр показывает, что наибольший
изгибающий момент возникает в середине пролета. Он равен отрезку аА
на эпюре. В месте прикрепления к балке наиболее длинной ванты
(в точке В) наибольший момент имеет величину ЪВ, а наимень-
152
= 38
Edat
= 30
E^Iat
(5.22)
(5.23)
sseSS
Рис. V-10
ший — bBi. Таким образом, на протяжении средней панели разность
моментов &М = аА—ЪВ\.
Подтягиванием вант создают на протяжении этой панели такой
отрицательный момент, чтобы в одном из сечений момент остался
положительным М+, а в другом стал отрицательным М_ и чтобы
абсолютные величины этих моментов были равны друг другу.
Этому условию соответствует линия В0В0, от которой следует
отсчитывать ординаты эпюр. Ординаты ЬВ0 линии В0В0 равны:
МРВ = ЬБо =
ah + ЬВ^
Такую величину имеет момент на участке ВВ (см. рис. V-10, а),
который надо создать при регулировании усилий.
Аналогично поступаем с панелью BD. Проведем (см. рис.
V-10, б) линию B0D0 таким образом, чтобы вертикальные
расстояния между этой линией и точками С и Dx были одинаковыми. Тогда
на протяжении этой панели (точку В\ отнесем к средней панели)
абсолютная величина момента не превысит отрезка DiD0 (или
С0С), а момент регулирования в сечении D будет равен: MPD = dD0.
Аналогичным построением получим точку Е0, которая (в
пределах точности чертежа) дает МРЕ = 0.
Если от пунктирной линии, как от прямой, отложить расстояния
до эпюр наибольших и наменьших моментов, получим новые эпюры
этих моментов (рис. V-10, в), возникающих после регулирования.
153
Наибольшие по абсолютной величине ординаты линий моментов
этой эпюры в 2 с лишним раза меньше моментов, возникающих при
отсутствии регулирования.
Регулирование усилий можно осуществить в процессе
строительства подтягиванием отдельных вант. Чтобы создать в балке
жесткости моменты необходимой величины, надо подтянуть каждую ванту
определенным усилием, которое необходимо определить. Это
сделать легко. Известны моменты Мв, MD, МЕ, которые должны быть
созданы. Их можно выразить через вертикальные составляющие
усилий в вантах (рис. V-11):
МЕ = — V1O1 — Vzui — V3au
MD= — Vm — V2a2 — V3az; (5.24)
MB — — Vtat — V2a2 — V3a3.
Совместное решение этих уравнений позволит определить Vi,
V2, V3. Зная их, получим величины необходимых при регулировании
усилий в вантах (см. рис. V-10, с):
Vi V2 V3
Si = -r-^r; 52 = ^r-; S3 = ^-. (5.25)'
sin Pi sin p2 sin p3
He останавливаясь более подробно на решении этой задачи,
сделаем некоторые замечания.
При решении вопроса о регулировании исходили из
предположения, что эпюры (см. рис. V-10, б) получены в результате строгого
расчета с построением линий влияния и невыгоднейшим для
каждого сечения загружением этих линий влияния временной
нагрузкой. Такой расчет нельзя отнести к приближенным решениям,
которые здесь рассматриваются.
В качестве приближенного предлагается следующее решение.
Вместо построения кривых (см. рис. V-10, б) по линиям влияния
можно построить верхнюю кривую как эпюру изгибающих моментов
в балке жесткости от полной нагрузки (постоянная плюс
временная) по всему пролету при наибольшем возможном повышении
температуры. Нижнюю кривую строят как эпюру моментов от одной
постоянной нагрузки при наиболее низкой температуре. Эти
кривые будут мало отличаться от кривых наибольших и наименьших
моментов. Следовательно, описан-
V V? V* v3 v2 vj ным выше 'построением (см. рис.
V-10, б, 'пунктирная линия)
можно с достаточной степенью точно-
•1 -2 i J *
t t t I t t
К f о в в в £ & сти построить эпюру целесообраз-
с
и2
ных при регулировании моментов
и после этого эпюру натяжений
вант.
Если балка жесткости имеет
Рис. V-H постоянное сечение, надо точно
154
установить очертание пунктирной эпюры (сы. рис. V-10, б) лишь в
средней части .пролета. Как показывают линии влияния (ом. рис. V-4
и V-5), полное загружение главного пролета дает наибольшие
усилия с довольно хорошей точностью. Следовательно, регулирование
будет осуществлено с достаточной точностью, а подбор сечения
балки — без больших перенапряжений или иедонапряжений.
Кроме того, необходимо отметить следующее. Ординаты эпюр
(см. рис. V-10, б) зависят от того, каким будет задан момент
инерции балки. Следовательно, описанный выше процесс является
процессом последовательных приближений. Надо задаться жесткостью
балки, построить эпюры, линию моментов регулирования (пунктир
на рис. V-10, б), эпюры после регулирования и подобрать сечение
балки. Если оно окажется близким с первоначально заданным,
задачу можно считать решенной. В противном случае цикл операций
надо повторить.
Получается довольно сложный процесс. Однако он необходим
лишь при уточнении решения. На первом же этапе рекомендуется
поступать проще.
По формулам (5.1) или (5.2) можно определить момент в
середине пролета балки от полной нагрузки р+к, а по формулам (5.22)
или (5.23) — от наивысшей температуры. Сложив эти моменты,
получим наибольший момент в середине пролета, т. е. ординату аА
(см. рис. V-10, б):
МА = 0,006 (р + к) /2 + 38 б/"* .
Найдем ординату ЪВ\. Она равна ординате Аха минус отрезок
Md, определяемый как для простой балки пролетом d:
Pdz
Md = -—.
8
Тогда получим:
сЛ! = 0,006р/2-38£б/а/
ЬВ^ = Мт = 0,006р/2 — 38
E^Iat- pd2
I 8 '
Наибольшая ордината эпюры (рис. V-10, в) будет равна:
МА — Мт ппп^ <о 38E6Iat pd2
Mv = г = 0,003кР+ уб + ?—, (5.26)
' /lb
, t+ + t-
где t = ■
При рассмотрении приемов регулирования исходили из
предположения, что на систему действует полная нагрузка (постоянная и
временная). Были найдены усилия в вантах, которые нужно соз-
155
дать, чтобы получить в балке наивыгоднейшие изгибающие
моменты. Но эти усилия являются дополнительными усилиями, которые
вызваны только регулированием. Они накладываются на усилия от
вертикальной нагрузки. Поэтому при полном загружении создавать
их нет необходимости. Напротив, меньшее загружение пролетного
строения благоприятнее, так как натяжные приспособления в
вантах будут воспринимать в момент начала натяжения меньшие
усилия. По-видимому, лучше всего производить регулирование, когда
фермы со связями и балочной клеткой уже собраны, но настил и
полотно еще не уложены.
§ 27. О РАСЧЕТЕ КОНСОЛЬНЫХ СИСТЕМ
Большие пролеты моста через оз. Маракайбо в Венесуэле (см.
рис. 1-19) аналогичны известным железобетонным системам,
которые обычно называют рамно-подвесными Однако опора этого
моста выполнена в виде решетчатой конструкции. Эту систему
можно изобразить в упрощенном виде (рис. V-12, а). Она
интересна, с одной стороны, тем, что специально предназначена для
использования в многопролетных мостах и, с другой стороны,
возможностью придавать ей разнообразные формы. В качестве
примера на рис. V-12, б показана система с вантами, расположенными
пучком, на рис. V-12, в — с консолями, поддерживаемыми цепями,
и на рис. V-1'2, г — та же система, но имеющая для повышения
жесткости натяжные цепи. Можно получить еще ряд систем,
например, с другим числом вант, с параллельными вантами и т. д.
При расчете систем с подвесными пролетами можно
рассматривать каждый раз только одну опору с консолями и подвесными
пролетами по обе стороны от опоры. Тогда при наличии шарниров
в местах прикрепления балок жесткости к опорам (пилонам)
системы, показанные на рис. V-12, а, в, окажутся статически
определимыми, а другие системы (см. рис. V-12, б, г) дважды статически
неопределимыми.
6)
V
-£22
г)
Рис V-12
156
Рис V-13
Если в системах, показанных на
рис. V-12, балки жесткости не имеют
шарниров в местах прикрепления к
пилонам, степень статической
неопределимости повышается в каждой
системе на два.
Рассмотрим систему, 'показанную
на рис. V-12, а, но с балками, жестко
соединенными с итилонами ('pwc. V-13,
а). На рис. V-13, б приведена
основная система, для которой канонические уравнения метода сил
могут быть написаны так:
Xi6n + Xzbiz + Aip = 0;
•^1621 -f- ■А'збгг -f- АгР = 0.
Здесь, в силу симметрии, 611 = 622:
'И 111111111 \в
р
А
JiL
-г 1 4 \
Рис. V-14
Hi.
Suit
~Е~Ё7
+2 J
M2dx
EI
Здесь сумма распространяется на ванты, сжатые участки балок
жесткости и пилон, если он имеет постоянное сечение. Если сечение
переменное, то слагаемое, относящееся к деформации пилона от
л Szdx
сжатия, должно быть выражено в форме интеграла |\ т^,— >распро-
страненного на длину от вершины до сечения А.
Интегралы распространяются на изгибаемые элементы, т. е. на
участки балок АВ и АС, а также на верхний участок пилона.
Равные друг другу величины 612 и 621 можно получить анало-
SiS2/,- , г MiNU-dx
гично: 6)2 = 621=^ —— f- j -
EF<
EI
При этом и сумма, и интеграл распространяются только на один
элемент — верхнюю часть пилона. В остальных элементах усилия
и моменты равны нулю от сил Х{ или Х2. Характер линии влияния
усилия Хх показан на рис. V-13, е.
В одной из систем (см. рис. V-12, е) от подвесной балки на
конец консоли передается сила Р. Кроме того, по всей длине консоли
действует нагрузка q (рис. V-14). Желательно выбрать стрелку
цепи так, чтобы от постоянной нагрузки q балка жесткости не
изгибалась. Для этого надо прикрепить цепь к концу балки так, чтобы
сила Р вызывала в балке только сжатие. Это возможно при
удовлетворении условия
Р г. Я?
tga = —, где Н = -у, (527)
°/
Я'
157
или tg a = ——. (5.28)
ql2
Уравнение цепи при расположении начала координат в точке Л:
ах 4fx (I — х)
у=~т р—•
Первая производная будет
, а 4/ 8fx
а 4/
Прнх = 0 y' = tga = - j-. (5.29)
Приравнивая правые части уравнений (5.28) и (5.29), получим
8fP а 4/
откуда
f =
I I
a
8P
+ 4
ql
Зная величину стрелки по формуле (5.27), можно определить И
и затем угол а. Построение линии влияния для этой статически
определимой системы трудностей не представляет и поэтому здесь
не рассматривается.
§ 28. РАСЧЕТ БАЛОЧНЫХ СИСТЕМ
Если сечения элементов балочной вантовой системы (рис. 1-18)
подбирать по условиям прочности, прогиб может резко превзойти
допускаемую ТУ величину. Поэтому автор этой системы проф.
К. Г. Протасов рекомендует подбирать сечения по условиям
жесткости [27]. Прогиб рассматриваемых ферм, как и любой другой,
зависит от деформаций всех элементов. Однако доля прогиба,
зависящая от деформаций стоек, очень мала, поэтому в дальнейшем ею
можно пренебречь. Распорка почти не работает от вертикальной
нагрузки, и на величину прогиба ее деформации практически не
влияют. В этом легко убедиться при рассмотрении работы опорного
узла. Два раскоса, которые -здесь встречаются, имеют одинаковый
наклон. Усилия в них поэтому считаем одинаковыми по величине,
но обратными по знаку. Следовательно, равнодействующая этих
усилий направлена по вертикали и в распорке вызвать усилия не
может. Остальные раскосы к распорке не прикреплены (см. рис.
11-38), а стойки не имеют горизонтальной составляющей усилия.
Таким образом, прогиб можно выразить формулой б = "
v
EFi
где сумма распространена только на вантовые элементы.
158
Величина Si в этой формуле представляет собой, как известно,
усилие в элементе i от силы Р=\, приложенной в точке,
перемещение которой определяют, a Sк является усилием от временной
нагрузки.
Считаем, что б равно допускаемому прогибу [б], а напряжения
~-рг во всех вантовых элементах одинаковы и равны Hs
* i
Тогда
откуда
[б]
Rt
Е
Определив это напряжение, можно подобрать сечения всех
вантовых элементов путем деления усилия от временной нагрузки
на Ri:
SK
F =
R*
Таким образом, несмотря на то что сечения элементов
определяют по величине допускаемого прогиба, усилия в них надо уметь
находить как от единичной силы 5Ь так и от временной
нагрузки SK.
Так как от вертикальной нагрузки, как это показано выше,
усилия в распорке практически не возникают, при определении Si
и SK схемы трех первых ферм (см. рис. 1-18) можно заменить
схемами, показанными на рис. V-15.
Определение усилий не представляет затруднений, если ферма
статически определима (рис. V-15, в). Другая ферма также
статически определима, за исключением двух средних панелей (рис.
V-15, б). Усилия в раскосах этих панелей с достаточной степенью
точности можно определить в предположении, что имеется один
раскос; полученное усилие распределяют поровну между двумя
раскосами, учитывая при этом, что один из них работает на растяжение,
а другой — на сжатие. Такой же прием можно применить к
системе, изображенной «а рис. V-15, ^
а, «о уже ко всем панелям, за
исключением самых крайних,
где усилия определяют
простым разложением реакций
опор по двум направлениям.
При проектировании ферм,
подобных .рассматриваемым,
относительно сложным
■вопросом является определение
величины необходимых предва- Рис. V-15
£1X1X1X1X1X1X1^
6)
п
159
ригельных усилий в элементах конструкции. Величины этих усилий
должны быть такими, чтобы тросовые элементы, работающие на
сжатие от ■вертикальных нагрузок, всегда оставались растянутыми.
Эти усилия можно вызвать созданием сжимающих усилий в
распорке и стойках. Если распорка 'расположена посередине высоты
фермы (см. рис. 1-18), создаваемое в ней сжимающее усилие
сопровождается появлением одинаковых растягивающих усилий в верхнем и
нижнем поясе.
Усилия в раскосах данной панели (см. рис. 1-18, в) также
вызываются созданием усилий в распорке и тоже будут одинаковыми.
Во всех раскосах (см. рис. 1-18, а) и в раскосах средних панелей
(см. рис. 1-18, б) растяжение создается увеличением длины стоек
и в данной панели в обоих раскосах также будет одинаковым.
Необходимость создания предварительных усилий вызывается
сжатыми тросовыми элементами, от которых и зависит величина
этих искусственно создаваемых усилий.
В сжатом стержне от расчетных вертикальных нагрузок, с
учетом коэффициентов перегрузки, возникает усилие Sq + SK. Такую
величину должно иметь предварительное растягивающее усилие,
которое надо в нем создавать: 5П = 5^ + 5К,
где .Sq — усилие в стержне от постоянной нагрузки;
SK —усилие от временной нагрузки.
В то же время усилие такой же величины возникает и в
соответствующем растянутом элементе.
Если к величине предварительного усилия прибавить
(алгебраически) усилия от постоянной нагрузки, получим усилия:
в сжатом стержне 5n+g = SK,
в растянутом стержне 5n+g = 2Sg + SK,
а от толпой нагрузки Sn+g+K = 0; 5п+д+к = 2Sq + 25к.
Чтобы действительное усилие в сжатом стержне никогда не
равнялось нулю, коэффициент условий работы (т2) для
рассматриваемых систем, по-видимому, следует принимать с некоторым запасом
по сравнению с существующими нормами.
Таким образом, расчетным усилием для сжатых элементов
является начальное усилие SIU а для растянутых 2Sq + 2SK при
невыгоднейшем загружении временной нагрузкой. Определив эти
усилия, следует проверить соответствующие напряжения в элементах
конструкции, учитывая не только тросовые, но и жесткие элементы.
В распорке от вертикальных нагрузок, как показано выше,
усилия не возникают. Поэтому для нее расчетным усилием является
предварительное суммарное усилие верхнего и нижнего поясов.
Что касается стоек, то усилия в них следует определять из рассмот-
160
рения условии равновесия верхнего или нижнего узлов. При этом
не следует забывать, что нижняя половина стоек работает
интенсивнее, чем верхняя, так как на нее непосредственно передается вес
проезжей части вместе с временной нагрузкой.
ГЛАВА VI
РАСЧЕТ БАЙТОВЫХ СИСТЕМ БЕЗ БАЛОК ЖЕСТКОСТИ
§ 29. СТАТИЧЕСКИ ОПРЕДЕЛИМЫЕ БАЙТОВЫЕ СИСТЕМЫ
В настоящее время промышленность выпускает проволок) очень
высокой прочности. Если такую проволоку применять для
статически неопределимой системы, то напряжения от изменения
температуры в ней составят относительно небольшой процент от общей
прочности высокопрочного металла. Конструкция такой системы
упростится по сравнению со статически определимой и жесткость
при прочих равных условиях повысится. В связи с этим статически
определимые Байтовые системы в настоящее время почти не
применяют. В то же время конструкции статически неопределимых систем
совершенствуются. Расчет статически определимых систем прост.
Особенностью фермы, показанной на рис. VI-1, а, является (см.
§ 3) лишь необходимость выбора очертания поясов [26]; [45]. Ферму,
изображенную на рис. VI-1, б, можно считать статически
неопределимой, в связи с тем что в каждой панели расположены встречные
раскосы. Однако рассчитывают подобные фермы как статически
определимые, так как при данном положении временной нагрузки
один из раскосов исключается из работы, аналогично раскосам
фермы Гау — Журавского'.
Система, предложенная Росновским (рис. VI-1, в), меньше
других освещена в литературе, поэтому кратко остановимся на ее
расчете. Такая ферма имеет два жестких стержня 3—3' и 9—9' (рис.
VI-2). Система представляет собой перевернутую трехшарнирную
арку своеобразной формы.
На этом же рисунке по- ц\
казаны линии влияния
для некоторых элементов
фермы. Ферма
изображена в масштабе, поэтому
отдельные ординаты линий
влияния определены
графическим 'способом. Эти
построения показаны справа
от линий влияния. При этом
около каждого графика
указан номер узла фермы, на
который передается в
данный момент нагрузка Р—1. Рис. VI-1
6—3213
161
На рис. VI-2, б, в показаны линии влияния распора и
вертикальной составляющей левой опорной реакции. Линия влияния для
элемента 2—3', работающего на местную нагрузку, изображена на
рис. VI-2, г. При расположении груза за пределами панелей 1—2
и 2—3 этот элемент не работает. Для элементов 3—4 и 2—3 линии
влияния имеют аналогичное очертание (рис. VI-2, д, е). Различие
состоит только в абсолютных величинах ординат, которые
определяются углами наклона этих элементов. Когда груз находится в
узле 3, стойка 3—3' не работает. Поэтому ординаты в обоих
элементах 2—3 и 3—4 определяются из графика, 'показанного справа,
который является общим для обеих линий влияния.
На рис. VI-2, ж представлена линия влияния для элемента З'—б.
Если груз находится в правой половине фермы, в левой работают
только элементы 0—3' и 3'—6. На этом участке линии влияния для
них имеют одинаковое очертание. Интересно, что линия влияния
для элемента 0—3' в левой части имеет отрицательный участок
(рис. VI-2, з). Отрицательная ордината в узле / получена из
рассмотрения условий равновесия узла 0 при действии на него распора
Н и реакции R (см. построение справа). Отрицательный участок
имеет площадь Q-, отношение которой к полной площади Q состав-
ляет "о" = "** Следовательно, сжимающее усилие в элементе не
возникает в случае, когда соотношение между временной нагрузкой
Рис. VI-2 Рис. VI-3
162
к и постоянной <7 подчиняется условию kQ_ ^ qQ или —=^1,89.
Q
В противном случае такую ферму применять не следует; при этом
необходимо найти решение с расположением узлов / и 2 несколько
ниже, т. е. нижний пояс 0—3 выполнить ломаным и выпуклым вниз.
Такое изменение схемы фермы целесообразно, если при этом не
возникают сжимающие усилия в лучевых элементах /—3' и 2—3'.
На рис. VI-2, и показана линия влияния для элемента /—2.
Ордината в узле 2 определена из условий равновесия узла 0 (см.
построение справа), так как при расположении груза Р=\ в узле 2
стержень /—3' не работает.
Линия влияния для стойки 3—3' (рис. VI-2, к) имеет своеобраз-
» ный вид, так как при расположении груза в узле 3 усилия
возникают только в элементах 3—0 и 3—12. В стойке усилие оказывается
равным нулю, но при расположении груза слева или справа от
узла 3 стойка начинает работать на сжатие.
Для определения ординаты линии влияния в узле 2 сначала
рассматривали условие равновесия этого узла, определяли усилие в
элементах 2—3', а затем рассматривали условие равновесия узла 3'
(см. построения справа). Аналогично определена ордината и в
узле 4.
Следует отметить, что показанные на рис. VI-2 величины
получены из чертежей малого масштаба, поэтому не очень точные.
§ 30. РАСЧЕТ ДВУХПОЯСНЫХ И МНОГОПОЯСНЫХ ФЕРМ
Основные разновидности ферм, рассматриваемых в настоящем
параграфе, показаны на рис. VI-3, а — г. Описание и основные
принципы образования подобных систем приведены в гл. I.
Рассматриваемые фермы, с точки зрения строительной механики
стержневых систем, отличаются недостаточным для неизменяемости
количеством стержней. Неизменяемость обеспечивают созданием в
системе предварительных напряжений.
При разработке методики расчета этих предварительно
напряженных вантовых ферм предполагают, что пояса, расположенные
выпуклостью вниз, воспринимают всю действующую на фермы
нагрузку и усилия предварительного натяжения, которое создается
«натяжными» поясами, имеющими выпуклость вверх. Натяжные
пояса рассчитывают только на восприятие усилий
предварительного натяжения. Предполагают также, что эти усилия при любых
загружениях фермы не уменьшаются до нуля.
В большинстве случаев точное решение получается довольно
громоздким ввиду сложной геометрической формы элементов при
наличии комбинированных перемещений: упругих и
кинематических. Поэтому в расчет вводят ряд упрощающих допущений,
которые приведены выше. Здесь лишь следует отметить, что норматив-
6*
163
ная жесткость конструкции моста обеспечивается за счет
соответствующего начального натяжения элементов ферм С помощью
предварительного натяжения обеспечивается также
пространственная и аэродинамическая устойчивость моста.
1. Расчет ферм, пояса
которых не имеют непосредственного соединения в пролете
Статические расчеты ферм, пояса которых в точках пересечения
не соединены друг с другом (см. рис. VI-3, г), аналогичны, поэтому
в дальнейшем все расчеты относятся к фермам типа, 'показанного
на рис. VI-4, а. Исследованиями таких ферм установлено, что
наиболее невыгодно загружение временной равномерно
распределенной нагрузкой всего пролета или одного из полупролетов.
В начальном состоянии на ферму действует постоянная
нагрузка интенсивностью q0 (рис. IV-4, а). Интенсивность начального
натяжения в подвесках составляет /?о- Все величины, относящиеся к
этому состоянию, имеют индекс «О». Индексы «в» и «н» показывают,
что величина относится соответственно к верхнему (рабочему) или
нижнему (натяжному) поясу.
Начальные натяжения в поясах определяются выражениями:
пов = -f ; (6.1)
о/ов
О/Он
1. Расчет фермы при загружении всего пролета временной
нагрузкой. Все величины, относящиеся к «расчетному» состоянию
фермы (рис VI-4, б), выделены индексами «1». «Расчетное» состояние
фермы характеризуется тем, что под влиянием временной нагрузки
интенсивностью к начальное «атяжение в подвесках уменьшается
до величины Р\ и изменяются также начальные ординаты поясов.
Связь между начальными стрелками провеса поясов и стрелками
в «расчетном» состошии определяется выражениями:
Ьв = /ов +''; (6.3)'
Лн = /он — г, (6.4)
где г—перемещение середины 'пролета фермы в вертикальном
направлении.
Натяжения в поясах можно определить, используя рис. VI-4, б
и зависимости (6.3) и (6.4):
(ffo + Pi + кП2 ..«
Я1В= 8<f„. + r) ; (6^
Я1"=8(&- <*6>
164
I
к\ It1111 ITT
ЮШЕШ*
jnunmttuimnjy
,r f^-^rt J
"""innuntltll;
^ I) m л 11 u 11 п п u n*
tiHHinnumtnifd
iiHiiiimiih |ТТТ]Д
1 4 U j |,4 4 4 rl t f t t t Ш
&
7
4»
Рис. VI-4
/
ItHUIIIIMMH!' fK^f
Из формул (6.3) — (6.6) легко заметить, что полное
представление о работе фермы при данном загружении можно получить
после определения двух неизвестных — р\ и г.
Для определения этих неизвестных составляют систему из двух
уравнений, характеризующих перемещения середины пролетов
поясов в вертикальном направлении. При этом используют линейную
форму уравнения из теории гибкой нити (3.33), в котором в
качестве неизвестного принято перемещение заданного сечения нити в
вертикальном направлении.
После несложных преобразований уравнение (3.33) для
верхнего пояса примет вид:
{ %
3 (9о — ро) /4 3/ (6 cos 2р + v sin (3 cos (3 + Ш)
64£/у0в cos5 р
8 cos4 р
3//,
0в
8 cos4 p
(6 cos2 р + v sin р cos |3 + Ш) ■
З/4
6<IEFB cos5 p
X (/с + Pi - Ро) = 0.
(6.7)
Учитывая, что большинство коэффициентов этого уравнения
относится к начальному состоянию, получим выражение
гС—С{ — С2(к + Pi — р0) = 0,
(6.8)
где коэффициенты равны:
165.
С = 2/ов+ 3(?° + Р°>*4 — (6cos2p + aBsinPcosp + lat);
^/ов-г 64jefb/0b Cos5 p 8cos4pv
(6.9)
3tfoB
d = — (6B cos2 |3 + vB sin p cos p + M); (6.10)
8 cos4 p
C2 = . (6.11)
64£FBcos5p v
Аналогично получим уравнение перемещений середины пролета
для нижнего (натяжного) пояса:
[-/]Сз-С4-С5(/71-/7о) = 0. (6.12)
Здесь коэффициенты равны:
г -of2 , 3^4
3;
(6ncos2Y + wHsinvcosY + /ctf); (6.13)
8 cos4 у
3lf
C4 = °^— (6hcos2y + uHsinYCOSY + faf); (6.14)
8 cos4y
64£rn cosJ y
В уравнении (6.12) величина /■ отрицательная, так как от загру-
жения фермы середина пролета натяжного пояса перемещается вниз
при нагрузке на этот пояс ри направленной вверх.
Совместное решение уравнений (6.8) и (6.12) позволяет
определить неизвестные:
КС2С5 -f- CiC5 — С2С4 С3 С4
ССъ -\- С2.С3 Cs С$
2. Расчет двухпоясных ферм (рис. У1-4, а) при загружении
временной нагрузкой одного полупролета. Для упрощения расчетных
зависимостей используем выводы § 12 о возможности разложения
несимметричной нагрузки интенсивностью 2к на две
составляющие— симметричную и обратно симметричную нагрузки
интенсивностью к. Считаем, что при действии обратно симметричной
нагрузки величина .натяжения поясов остается такой же, как при
симметричном загружении. При этом можно считать постоянными и
ординаты fiB и Ьн в середине пролета фермы.
Расчет фермы при действии симметричной временной нагрузки
производят по формулам (6.16).
Характер загружения и деформации фермы при действии
обратно симметричной нагрузки приведены на рис. V1-4, в. Значения
неизвестных на этом этапе расчета выделены индексом «2».
166
Полное представление о деформациях фермы можно получить
после определения двух неизвестных ргп и Ргл — изменившегося
натяжения в подвесках загруженного и незагруженного полупролетов
(см. рис. VI-4, в).
Для определения неизвестных используют уравнения
неизменности длины подвесок при данном загруженин по сравнению с первым
этапом загруженин:
для левой четверти пролета фермы
/гвл — /~1вл = flnn — /2нл; (6-17)
для правой четверти пролета фермы
flBn — /гвп = /гвп — /lBn. (6.18)
Значения ординат в уравнениях (6.17) и (6.18) определяют
выражениями (см. рис. VI-4, б):
/2ВЛ - —тг- (4« + 3<?о + 2р2л + /72п); (6.19)
/ал = -^-Г-(2р2л + Р2п); (6.20)
/2ВП = -^г-№ + 3?о + р2л + 2/72п]; (6.21)
/2нп = -^7Г-[Р2л + 2р2п]. (6.22)
0/.П 1Н
Используя рис. VI-4, б, получим:
_f _3 f
6ЩЛ /1НП "~Г"/1Н,
-f _3 *
^1ВП /1ВЛ "~/1В.
(6.23)
Подставив выражения (6.19) и (6.23) в уравнения (6.17) и
(6.18), после преобразований получим формулы для определения
неизвестных:
8 (/ib + /ш) HibHiH . q0
'z("ib + "ih) #ib
8 (/ib + /ш) HiBHiK q0 -f- 2к
Ргл = ~ТГн~ГТГ^ «—■ <6-25)
1 +
IB
#1н
Для оценки жесткости фермы определяют абсолютные значения
перемещений в четвертях пролета:
''лев = /1нл — /йшь /"пр = /гнп — flHit- (6.26)
167
Учитывая возможность возникновения в пределах одного
пролета вертикальных перемещений разного знака, жесткость фермы
оценивают при помощи выражения
2гг = |/Лев| + |гПр|. (6.27)
Пример (см. рис. VI-4, с):
/ = 200 м; /0в = 20 м; /№ = 10 м; EFB = 200 000 т; EFH = 100000 т;
^0 = 4 т/м; ро — 2 т\м; к = 0,73 т/м; 2к = 1,46 т/м; р = ? = 0; t = 0.
Определим усилия в поясах и перемещения при загружении всего пролета
нагрузкой к (рис. VI-4, б), а затем полупролета нагрузкой 2к (рис. VI-4, е).
По формулам (6.9)—(6.15) определим коэффициенты:
С = 912,5 м?; Ci = 0; С2 = 375,0 "-^- ; С3 = 350,0 л*3; С4 = 0; С5 = 750 — .
По формулам (6.16) найдем: /"= 0,252 лг;/>i = 1,882 /л'.«, следовательно, (рис.
VM,6) /ib = /ов + ' = 20,252 л; /1Н = /о„ - г = 9,748 л.
Теперь легко определить натяжения поясов:
а) в начальном состоянии
„ {qo + Po)i2 и роР 1ПП.
Я0в = — =1500 г: Н0Н = ——=1000 7-;
о/ов о/он
б) в расчетном состоянии (см. рис. VI-4, б)
«ib = r-j—■— = 1630 t; #ш = _— = 967 7-.
8(/ов + г) 8(foH —r)
Рассмотрим загружение полупролета нагрузкой 2к=1,46 г/.и.
При этом считаем (см. § 12), что натяжения поясов в этом сл\чае
будут такими же, как при загружении 'всего пролета нагрузкой к.
Не изменяются и ординаты поясов в середине пролета:
Я2В = 1630 г; Я2н = 967 г; /2в = 20,252 м; /2н = 9,748 м.
По формулам (6.24) и (6.25) находим
р2п = 2,15 т/м; р2л = 1,61 т/м,
а по формулам (6.19) — (6.22)
/гвл = 15,55 м; f2lM = 6,93 м; /2вп = 14,83 м; f2mn = 7,64 м.
При загружении всего пролета нагрузкой к ординаты в
четвертях пролета будут:
3 3
/ют = /гвл = — fiB = 15,20 м; ^цш = fiM = —fin = 7,31 м.
4 4
Следовательно, перемещения в левой четверти пролета (вниз):
^л = Ьвл = flvn = 0,35 М
или Ьнл — Ыл = 0,38 м (в среднем 0,37 м).
168
В правой четверти (вверх):
tu = /1ВП — /2ВП = 0,37 м, или
tu = /аш - Лип = 0,33 м (в среднем 0,35 м).
Некоторое несовпадение перемещения сечений верхнего и
нижнего -поясов объясняется погрешностями подсчетов (на линейке).
Амплитуда перемещений /„ + /„ = 0,72 м или — , что превышает
нормативный прогиб. Уменьшить ее можно увеличением
предварительного натяжения нижнего пояса и, следовательно, величины р0,
или соединением друг с другом поясов в середине пролета.
Последнее решение будет рассмотрено ниже.
На рис. VI-5, а, б, показаны нагрузки на верхний и нижний
пояса до и после загружения полупролета.
Перемещения по горизонтали середин верхнего и нижнего
поясов определяют по формуле 3,36:
Дв = 0,10 м (влево); Дн = 0,04 м (вправо).
Расчет системы (см. рис. VI-4) можно выполнить также
аналогично расчету системы, показанной на рис. IV-37, принимая
жесткость балки равной нулю.
169
2. Двухпоясная ферма с одним узлом соединения
поясов в пролете
Расчет такой фермы (рис. VI-6, а) при действии равномерно
распределенной по всему пролету временной нагрузки не
отличается от расчета фермы бее непосредственного соединения поясов.
Вертикальное перемещение в середине пролета и изменившееся
натяжение в подвесках определяют по формулам (6.16).
Расчет усложняется при действии на ферму нагрузки,
расположенной только на одном полупролете. Особенностью работы фермы
при таком загружении является то, что натяжения в 'поясах
загруженного полупролета не равны соответствующим натяжениям в
поясах незагруженного.
Применяемый здесь способ расчета предложен В. А. Семеновым
[31]. Он основан на совместном рассмотрении работы фермы с
соединением поясов в пролете (см. рис. VI-6, а) и фермы без такого
соединения (рис. VI-6, б, в).
В первой ферме среднее сечение верхнего пояса при загружении
полупролета нагрузкой 2 к перемещается влево на Дв, а такое же
сечение нижнего пояса — на Дн вправо (см. рис. VI-6, б). Этим
перемещениям соответствуют изменения усилий в верхнем поясе на
Hq+2K — Hq, в нижнем на Hq+2K — Hq.
Середина пролета фермы (см. рис. VI-6, а) прп таком
загружении перемещается влево на величину б. Если пояса не соединены
друг с другом, сечение верхнего пояса сместится влево на Дв. При
этом натяжения в левой и правой ветвях пояса останутся
одинаковыми. В схеме на рис. VI-6, а они разные (//* и fl*\ поэтому
сечение перемещается не на Дв, а на б. Следовательно, разнице усилий
в левой и правой половинах пояса //в //в соответствует
перемещение Дв — б.
Сопоставляя изменения усилий и соответствующие перемещения
в фермах с соединенными и несоединенными поясами, можно
получить полуэмпирическую формулу для верхних поясов:
Нд+2к — Hq Нл — Нп
Дв Дв — б
и аналогично для нижних поясов:
Hq — Нд+2к Нп — #л
(6.28)
(6.29)
Дн ДН _|_ §
Усилия Hq+2n, Hq- Н*+2к; Яд и перемещения Дв и Дн можно
определить на основании выводов, сделанных выше.
170
Следовательно, в формулах (6.28) и (6.29) неизвестными будут
пять величин: нпв; Ялв; Япн; Ял' и б и поэтому, кроме двух
приведенных уравнений, необходимо 'получить еще три уравнения.
Для этого В. А, Семенов предлагает использовать условие
равновесия
Ял + Ял = Яп+Я° (6.30)
и два уравнения, составленные из условия, что средняя
арифметическая усилий в двух половинах данного пояса фермы (рис. VI-6, а)
равна усилию в том же поясе другой фермы (см. рис. VI-6, б) от
нагрузки q+к, распределенной по всему пролету:
Щ^ = Н*д+к; * (6.31)
^Ц^ = /&*. (6.32)
Таким образом оказывается необходимым предварительно
рассчитать ферму с несоединенными поясами (см. рис. VI-6, б),
определив для нее ц*+2к] яв; Дв; Я*+2к; Н* и А", * также
натяжения в поясах при загружении нагрузкой к всего пролета, т. е.
"д+к и Я5+к.
Такой расчет показан выше.
После определения всех указанных величин можно составить и
решить уравнения (6.28)—(6.32).
В результате получим
Ял; Ни; Ял; Яп и б.
Следует отметить, что сделанные здесь выводы основаны на
некоторых не вполне строгих «полуэмпирических» положениях,
однако автор приведенного решения показал его достаточную точность
путем проверки выводов на специально построенной модели
фермы [31].
Определив натяжение в поясах фермы при загружении
полупролета, можно определить вертикальные перемещения характерных
сечений полупролетов. Поскольку при рассматриваемом загружении
наибольшие вертикальные перемещения возникают примерно в
четвертях пролета, определим перемещения этих сечений. Для этого
рассмотрим отдельно в полупролетах участки поясов как нить на
двух опорах. Пролет всех нитей считаем равным , пренебрегая
2
горизонтальным перемещением б точки С (см. рис. VI-6, а).
171
Вертикальное перемещение середины верхнего пояса в
загруженном полупролете равно:
(<7о + 2/с + рл)(^-)2
*вл « — с0в; (6.33)
то же, для нижнего пояса
>лЫ~
*вл ~ Сон • (6.34)
л
Здесь Сов и Сон — начальные ординаты поясов в середине
полупролета, отсчитываемые от прямой, соединяющей опору пояса с се-
~ /ов ^он
рединой пролета. Эти величины равны: с0в = ——; с0н = ——,
где /ов и /он — соответствующие начальные стрелки полного пролета
верхнего и нижнего поясов.
Считая подвески недеформируемыми и приравнивая друг другу
^в и tH, получим уравнение, из которого определим
32ЯЖ_. , , {д* + 2к)Н1
Р* = Р(Н* + Н*) (Ѱ + С°н) //» + № • (6-°5)
\ -т ■ -, / тт ■ тт
Аналогично найдем
- с0н; (6.36)
8ЯН
п
32ЯПЯП <7о#п 0_ч
Рп = /2(яв + ян)(Сов +Cte) -/^T7F' (6"37)
v п ■ п' п ' п
После определения /?л и /?п и подстановки их в уравнения (6.34)
и (6.36) можно найти перемещения tHIi (вниз) и /Нп (вверх). Сумма
их абсолютных величин даст величину расчетного прогиба,
ограничиваемого техническими условиями.
Рассмотрим пример расчета при тех же исходных данных, что ч в
приведенном выше примере. Однако здесь опоры расположены на одном уровне пояса
и соединены друг с другом в середине пролета. Из рассмотренного расчета
системы с песоединенными поясами имеем:
Н* = Я0в = 1 500 пг; Нд = Я0н = 1 000 т; Н«+2к = H(q+K)K =//,„ = 1 630 т;
Дв = 0,10 м (влево); Д„ = 0,04 м (вправо).
172
Подставив эти величины в формулы (6.28) и (6.31), получим:
130 Ял— #п 33 Яп— Ял ..в . г.и ив и'л
Пд + tt.-i = пп + п„,
0,10 0,10-6 0,04 6 + 0,04
Я" + Я„ = 1630 т; Я." + Я" = 967 т.
2 2
Совместное решение этих уравнении даст:
5 = 0.046 .«; Н"я = 1 665 m; //£ = 1 595 т; Н"я = 932 я; ЯЦ - 1 002 т.
По формулам (6.35) и (6.37), где
с0в = — = 5 .и; с0„ = -^ = 2,5 м, получим />, - 1 ,ГЗ и .и; />, = 2, l!l '" л.
Подстановка известных величин в формулы (6.36) и (6.34) даст
г1. = 0,31 .«; /„ = 0,19 я.
/,+-„ 0.50 1
Сумма этих величгн ta +/„ = 0,50 л/ составляет —-— = ——- ——
пролета, что удовлетворяет требованиям технических условий
Сопоставление результатов расчета двух ферм (см. приведенные
примеры) показывает преимущества фермы с соединением поясов
в середине пролета в отношении размаха прогиба: 0,50 м против
0,72 м в ферме с несоединенными поясами. Наибольшие усилия и
верхнем поясе оказываются при загружении полупролета нагр\ зкой
2 к и в обоих случаях почти одинаковы (1665 т и 1630 т). Лишь
при загружении полупролета в незагруженной половине нижнего
пояса усилие (1 002 т) несколько больше, чем наибольшее усилие в
ферме с несоединенными поясами (967 т). Расчет фермы
заканчивают определением усилия Т = Ял — Яп = Ип — Ял, на восприятие
которого рассчитывают соединение поясов в пролете.
Теоретически количество поясов и число узлов
непосредственного соединения поясов ферм в пролете не ограничивается. Например,
ферма может иметь три таких узла (рис. VI-7). Расчет подобных
систем значительно сложнее, однако достаточно простых и удобных
способов расчета таких ферм в настоящее время нет.
Приближенный способ расчета фермы (см. рис. VI-7) приведен в работе [11].
Расчет фермы, показанный на рис. V1-8, производят так, как и
расчет приведенной выше фермы (см. рис. VI-4). Для решения
конструктивных задач определяют величины Л] и Ni
_ (д + к)1 HlHa HiBb
rti — 1 —— ; Ni = «lB + /У1н.
Ферму, изображенную на рис. VI-9, а, рассчитывают
аналогично, но при условии, что в точках В и D пояса друг с другом не
соединены. Эта ферма имеет две пары поясов. При загружении левого
173
Рис. VI-7
Рис. VI-8
Рис. VI-9
пслупролета работают только пояса АМВС (рабочий) и ENDF
(натяжной), а при загружении правого полупролета — два других.
Каждую из этих пар поясов можно рассматривать независимо от
другой, пренебрегая перемещениями точек А и С.
Очертание рабочего пояса в «начальном» состоянии на участке
АМВ (рис. VI-9, б) характеризуется уравнением
2XfOB , 8/омЯ 16foM-^Z /с оо\
У = —+— р~- (6-38>^
Легко определяют /ом = /ов/2, а затем г/ом = А». Исследуя
уравнение (6.38) на экстремум, определяем сечение с у=Утах, абсцисса
которого равна
lb х /ом '
На участке ВС пояс считают прямолинейным. Очертание
натяжных поясов на криволинейных участках в начальном состоянии
определяется аналогичными уравнениями.
Натяжения поясов получают из выражений: в начальном
состоянии при постоянной нагрузке q0 и натяжении подвесок р0
(<7о + /?о)/2 „ Pol2
Я,
Ов
16/,
#0н =
Ов
в расчетном состоянии
Hie =
Pil2
16frH '
(<7o + Pi + kH2
16(/ов + г)
16(foi.-r)
(6.39)
(6.40)
174
Здесь значения р\ и перемещения в середине пролета г
определяют (аналогично расчету фермы, показанной на рис. VI-4) по
формулам:
/сС8Сц -|- С7Си — СвСю
г = ;
СцСц -\- СвСс,
Pt = Po — r- —. (6.41)
Ьц С it
Коэффициенты С, в этом случае имеют вид:
Сб = 2/ов + i60£f/OB— ЗУ(б + Ш)' ^42)
Г 3/Кк_ь/м Г 3/4 r 9f* , Зро/4
10 v " 160EFB ' ~'uu ' 160£/yte
3/ 31?ов 3Z4
-(6 +/of); C10 =-7^(6 + Zaf); Cu = -
10v ' " 10 v " 160£FH '
где 6 — сближение вершин пилонов.
Перемещение точки М в четверти пролета (рис. VI-9) также
равно г.
§ 31. РАСЧЕТ ФЕРМ С ТРЕУГОЛЬНЫМИ РЕШЕТКАМИ
Системы с треугольными решетками (см. рис. 1-9, е) по своим
статическим свойствам должны быть отнесены .к однажды
статически неопределимым системам. Однако расчет таких ферм
имеет особенности ввиду того, что все стержни их изготовляют из
тросов, 'которые не способны работать на сжатие. Поэтому все
элементы фермы, которые от вертикальной нагрузки работают на
сжатие, должны быть предварительно натянуты и величина
натяжения должна перекрывать величину ожидаемого сжатия.
Рекомендуется следующий порядок расчета.
Сначала систему рассчитывают как стержневую ферму, в
которой все стержни способны работать и на растяжение, и на сжатие.
При этом определяют, в каких стержнях возникают сжимающие
усилия, и величину этих усилий. Затем находят величину
предварительного усилия, которое нужно создать в каком-либо стержне,
чтобы в сжатых стержнях вызвать растяжение необходимой
величины.
Усилия во всех стержнях, возникающие при таком
регулировании, алгебраически суммируют с усилиями от вертикальных
нагрузок и тем самым определяют расчетные усилия в этих стержнях.
Такой расчет имеет особенности, поэтому рассмотрим пример
расчета фермы с треугольной решеткой (рис. VI-10, а — и). Здесь
постоянная нагрузка, приходящаяся на одну ферму, <7 = 3 т/м (с
коэффициентом перегрузки); временная нагрузка Я-30, коэффициент
175
Т А Б
Элс\ ент
1
0—1
1-2
2-3
3-3'
А—1
А-2
А-3
А-С
'/, -и
2
29,0
28,6
28,6
28,6'2
39,6
62,8
88,8
70,0
FA
1
1
1
1
0,3
0,5
0,75
1,50
*v-l
4
0,75
0,76
0,83
1,00
0,03
0,05
0,17
0,36
, м
г
и
19,6
19,8
24,6
72,0
34,2
50,8
95,0
212,0
й_, Jk
к
— 114,4
— 94,8
— 52,0
0
0
—4,4
0
0
£, м
7
-94,8
—75,0
—27,4
72,0
34,2
46,4
95,0
212,0
поперечной установки
/спу=1,30, 'коэффициент
перегрузки 1,40,
динамический коэффициент
1,30.
В табл. VI-1
приведены основные данные
расчета усилий в
ферме от вертикальных
нагрузок.
Система статически
неопределима, поэтому
необходимо задаться
величинами площадей
сечений элементов или
их соотношениями.
Отношения площадей всех
стержней F, к площади
сечения стержня 3—3'
Fa, приведенные в
графе 3 таблицы,заданы в
первом приближении.
Если получают
неудовлетворительные
результаты, расчет
повторяют.
В качестве лишней
неизвестной принято
усилие IB стержне
3—3' (А). В графе 4
даны усилия во всех
стержнях от силы А'Л =
= 1, которые необходи-
Рис. V1-10
176
Л II Ц Л VI-1
Л' т
Ч
8
-294
-225
-82
2IG
103
131
285
636
s,<. '"
9
78
79
98
288
137
203
380
848
sK . т
10
-457
-379
-208
0
0
— 17
0
0
Smax' '"
ii
—216
—145
16
504
240
342
665
1484
SmW m
12
-751
-704
—290
216
103
122
285
636
V." '"
13
750
760
830
1000
30
50
170
360
S°, m
14
534
614
846
1504
270
392
8.35
1844
мы при раскрытии статической неопределимости и в дальнейшем
при регулировании усилий.
Раскрытие статической неопределимости и построение линий
влияния для усилий в элементах системы, в которой (по первому
этапу расчета) все стержни могут работать как на растяжение, так
и на сжатие, затруднений не представляет и поэтому не приводится.
Линии влияния показаны на рис. VI-10.
Имея эти линии влияния, легко найти площади их
положительных Q+ и отрицательных fi_ участков и полные площади Q (графы
5, 6, 7 табл. VI-1). Перемножая интенсивности постоянной нагрузки
<7==3 т/м на полные площади линий влияния, получим усилия Sq.
Умножение эквивалентных временных нагрузок (с учетом
коэффициентов поперечной установки и перегрузки и динамического
коэффициента) на площади положительного и отрицательного участков
дает наибольшие растягивающие SK+ и сжимающие усилия S,r от
временной нагрузки. Эти усилия даны в графах 9 и 10.
Эквивалентные нагрузки приближенно приняты для всех элементов /с = 4 т/м.
Сложив S(/ и 5К+, найдем наибольшие усилия в элементах Smax,
а сложив Sq и SK~, — наименьшие усилия 5min.
Из полученных значений видно, что в трех элементах (0—/,
1—2 и 2—3) могут возникнуть сжимающие усилия. Эти элементы
надо натянуть путем искусственного регулирования усилий. Такое
регулирование можно осуществить путем натяжения любого
элемента фермы, например, 3—3'. Величину усилия, которое надо в
нем создать, можно определить по табл. VI-1 (графа 4). От силы
Ss-з' = 1 в элементе 0—/ возникает усилие S0i =Ю,75. Следовательно,
чтобы в элементе 0—/ погасить сжимающее усилие, равное 751 т,
надо поделить его на 0,75. Получим 5а=Ю00 т. Для погашения
сжатия в элементах /—2 и 2—3 необходимы усилия соответственно
с 704 290
Sa = = 925 т; SA = - = 349 т. Таким образом, усилием
U, lb 0,oo
в 1 000 т можно погасить сжимающие усилия во всех стержнях.
177
Зная эти усилия, по табл. VII (графа 4) легко определить
усилия регулирования (графа 13) во всех стержнях.
Сложив усилия 5тах и 5рег, получим наибольшие возможные
усилия от вертикальных нагрузок 5В (графа 14).
Для определения расчетных усилий надо учесть такие усилия от
изменения температуры. Это усложняется тем, что площади
поперечных сечений элементов неизвестны. Однако, зная отношения пло-
I'i
щадей отдельных элементов тг~ , можно найти напряжения в них.
Г А
Усилие в «лишнем» стержне (3—3') можно определить по
формуле
XAt = — = FAEat.
Тогда напряжение будет равно:
(УAt
2..bjiti
s2/-
°г1'г
Fi/FA
S2 /
Fi/FA
-Eat.
(6.43)
Определенные по этой формуле напряжения представлены в
табл. VI-2.
Внизу граф 2 и 3 даны суммы, входящие в формулу (6.43). В
расчете принято 2: = 1,7-106 кГ/см2, а = 0,0000125. При этом считаем,
что сборка конструкции и натяжение ее элементов произведены при
ТАБЛИЦА VI-2
Элемент
Sn l;. Ж
JHFA
Of. к Г/см'
/?=9000 кГ1см
к Г/см2
/-", см-
/?-6000 кГ!см-
кГ'см"
/-", см2
0-1
1—2
2-3
3-3
А—1
А—2
А-3
АС
21,4
21,7
23,8
14,3
1,2
3,1
15,1
25,2
125,8
15,9
16,5
19,8
14,3
0,1
0,3
3,4
4,8
76,1
2 090
2 140
2 340
2 820
282
282
639
676
6910
6 860
6 660
6180
8718
8718
8 361
8 324
78
90
129
245
31
45
100
222
3910
3 860
3 660
3180
5718
5718
5 361
5 324
138
162
232
473
47
69
157
346
178
наиболее высокой .в данной местности температуре, а затем она
понизилась на t = 80°C.
По форМуле (6.43) получ.ш температурное напряжение в стерж-
не 3—3' cr^i='2 820 кГ/см2. Зная это напряжение, отношение—t и
Fa
величины усилий в стержнях от силы Sx.\ (табл. VI-1, графы 3 и 4),
легко определить напряжения от температуры в других стержнях:
О И = OAt^A—~ = О At
Ft Fi/FA
Полученные напряжения приведены в табл. VI-2 (графа 4).
Теперь, зная усилия от вертикальных нагрузок 5Б и расчетное
напряжение в материале стержней R, можно подобрать сечения, считая
допускаемое напряжение при вертикальных нагрузках равным
[о]= R — сг(.В графах 5 и 7 таблицы приведены напряжения для
ft = 9 000 кГ/см2 и /? = 6 000 кГ/см2, а в графах 6 и 8 —
соответствующие площади сечений.
Необходимо обратить внимание на то, что отношения Fi/FA
значительно отличаются от заданных первоначально в табл. VI-1.
Поэтому расчет надо повторить, вновь задаваясь полученными при
данном R площадями сечений. Это здесь не приводится.
Практика расчетов показывает, что если для повторного расчета
принять площади сечений, полученные по первому приближению,
обычно получают удовлетворительное соответствие между
принятыми и полученными вновь сечениями. Поэтому данные граф 6 и 8
табл. VI-2 можно считать достаточно точными. Следовательно,
сечения подобраны в соответствии с величинами расчетных
напряжений. Условия прочности удовлетворены.
Определим условия жесткости.
Наибольший прогиб от временной нагрузки к можно ожидать в
середине пролета (при загружении всего пролета). Величину этого
прогиба можно выразить известной формулой
О = 2j ■
EFt
где 5,i — усилие в элементе i от единичной силы, приложенной
в середине пролета;
Si,.. = nQi — усилие в элементе i;
к — величина нагрузки.
Обозначим = —-— = ои
Ft Fi
тогда формула будет иметь вид:
179
где а, — отношение напряжения в элементе i к напряжению в том
элементе, где оно будет наибольшим
а; =
QiK
Q
Т
к =
I max
Qi/Fi
(Q/F) max
Подставляя это выражение в формулу (6.44) и считая, что б —
величина допускаемого прогиба [б], получим
£[6]
СТвр =
ISnli
Qi/Fi
(6.45)
(Q/F),
Подсчеты по этой формуле сведены в табл. YI-3. Величины S;
приняты по линиям влияния (см. рис. VI-10), длины элементов и
плошади линий влияния Qi взяты из табл. VI-1, а площади сечений
элементов F{ — из табл. VI-2 для # = 9 000 кГ/см2 и R =
=6 000 кГ/см2. Величины, приведенные в графах 5 и 8,
пропорциональны напряжениям, возникающим в элементах от временной
нагрузки. Наибольшее растягивающее напряжение возникает в обоих
случаях (# = 9 000 кГ/см2 и # = 6 000 кГ/см2) в элементе Л-1,
поэтому за (fi//7)max приняты соответствующие величины, относящиеся к
этому элементу.
Суммы, приведенные ъ графах 7 и 10, относятся к полупролету.
Двойные величины этих сумм представляют собой знаменатель
формулы (6.45).
ТАБЛИЦА VI-3
m
1
0-1
1—2
2—3
3-3'
А-1
А—2
А—3
отт.
"э
2
-0,65
-0,65
-0,75
0,90
—0,03
-0,13
1,57
2,04
*.
о*
со
.4
— 18,0
-18,6
-21,4
12,9
- 1,2
- 8,1
139,5
142,9
ч
::
4
—94,8
-75,0
-27,4
72,0
34,2
46,4
95,0
212,0
С
С!
5
-122
- 83
- 21
19
ПО
103
95
96
/?=9 000 к Г
•ъ
Ч.
с:
X
Е
^
Г.
-1.11
—0,75
—0,19
0,26
1,00
0,94
0,86
U,87
СЧ-
ч.
-"Г*
й
Е
'—'
—■■"
7
20,0
14,0
4,1
3,4
-1,2
-7,6
120,0
124,2
276
7 м
R=С 000 к Г 1см-
С
-
8
-69
—46
— 12
15
73
67
61
61
Ч.
о
X
Е
и.
9
—0,95
-0.63
—0,16
0,21
1,00
0,92
0,84
0,84
X
о
.=
I
<
с
^
10
17,1
11,7
3.4
2,7
— 1.2
—7.5
117.2
120,0
263
,4 л
180
L 200
Приняв E = 1,7-106 кГ/см-; [б] = = ; = 0,5 и подставив
эти значения б формулу (6.45), получим для случая R = 6000кГ/см2
1,7 -106 - 50
°ВР= 2-26340 = * 612 «Г/С*.
Это напряжение соответствует загружению только временной
нагрузкой, которую в соответствии с техническими условиями
принимают нормативной, т. е. без коэффициента перегрузки (1,4) и без
динамического коэффициента (1,3). Следовательно, она будет равна
Кя=тЬг2*т/м-
Кроме этой нагрузки, действует постоянная q = 3 т/м также по
всему пролету. Следовательно, от вертикальных нагрузок
допускают напряжение
кв + q 2,2 + 3,0
(Тверт = (Твр = — 1612 = 3 810 КГ/СМ2.
кв 2,2
Если приближенно учесть напряжение от изменения
температуры, достигающие максимум 2 820 кГ/см2 (табл. VI-2), получим
наибольшее возможное напряжение
оверт + ot = 3 810 + 2 820 = 6 630 кГ/см2.
Таким образом, оказывается, что по условиям жесткости в
рассмотренном случае можно допустить напряжения более высокие,
чем по условиям прочности. Но если исходить из прочности
материала 9 000 кГ/см2, получим (табл. VI-3 и формула 6.45)
Овр=1540 кГ/см2, Оверт = 3 640 кГ/см2 и аЕерт+« = 6 460 кГ/см2,
т. е. для материала по условиям прочности можно допустить а =
= 9 000 кГ/см2, а по условиям жесткости всего 6 460 кГ/см2. Вслед-
9 000 QQ
ствие этого увеличиваются сечения элементов в =1,39 раза.
6 460
Высокопрочные материалы оказывается невыгодным
использовать в мостах, т. е. в области, где встречаются наибольшие
величины пролетов (до 1300 м), и применение их кажется наиболее
рентабельным.
Между тем за рубежом такие материалы широко и успешно
используют, ибо допускают прогибы до пролета и больше. Если
в рассмотренной системе допустить такой прогиб, можно поднять
напряжения от полной нагрузки с учетом влияния изменения
температуры с 6 460 до 7 400 кГ/см2, или на 14%.
Авторы поддерживают проф. К. Г. Протасова, который считает,
что «для эффективного применения в мостах высокопрочной стали
требуется пересмотр норм допускаемых упругих прогибов от
временной нагрузки» [27].
181
ГЛАВА VII
ОСНОВЫ ДИНАМИЧЕСКОГО И АЭРОДИНАМИЧЕСКОГО РАСЧЕТА
Современные висячие мосты по сравнению с мостами других
типов обладают относительно меньшей жесткостью вследствие
применения высокопрочных материалов, а также особенностей их
систем.
В истории мостостроения известен ряд аварий с висячими
мостами, первопричиной которых были их колебания. Последняя
грандиозная катастрофа произошла в США в 1940 г. Под воздействием
ветра, дувшего со скоростью около 19 м/сек, возникли
интенсивные изгибно-крутильные колебания висячего моста через прол.
Такома. Мост выдерживал эти колебания примерно в течение часа,
после чего обрушилась проезжая часть по 'всей ее длине между
пилонами на протяжении 854 м.
Крушение Такомского моста привлекло к себе внимание
инженеров и ученых многих стран. Появилось большое количество
теоретических и экспериментальных работ, по-разному объяснявших
причину катастрофы. В результате этих исследований удалось
установить существование ряда явлений, которые ранее не были
известны. Однако, несмотря на достигнутые успехи, проблема
динамического и аэродинамического расчета висячих мостов в полной мере
не решена до настоящего времени. Препятствием на пути к этому
являются главным образом математические трудности, связанные с
необходимостью решения сложных нелинейных уравнений
колебаний, некоторые коэффициенты которых, зависящие от формы
конструкции и характера возмущающих сил, известны лишь
приближенно и не поддаются строгому теоретическому обоснованию.
В связи с этим представляют существенную ценность
экспериментальные данные, позволяющие с помощью теории установить
критерии надежности висячих мостов при действии на них
динамических и аэродинамических сил.
В данной главе рассматриваются лишь некоторые основные
вопросы динамического и аэродинамического расчета.
§ 32. ДИНАМИЧЕСКИЕ НАГРУЗКИ НА ВИСЯЧИЕ МОСТЫ
1. Подвижные эксплуатационные нагрузки
При движении нагрузки по мосту наблюдаются различные
явления. Прежде всего вследствие изменения положения нагрузки во
времени возникают вынужденные колебания моста, увеличивающие
его статический прогиб.
Подвижная нагрузка может обладать неуравновешенностью
вращающихся частей, а поэтому она будет не только подвижной, но
и переменной.
182
Кроме того, из-за неровностей проезжей части при движении
временной нагрузки неизбежны толчки, удары, перегрузки и
другие дополнительные динамические воздействия.
Экспериментальным путем установлено, что решающее значение
в динамическом воздействии на автодорожные мосты принадлежит
тем изменениям нагрузок, которые возникают вследствие
колебаний отдельных элементов этих нагрузок. Например, в
автомобильной нагрузке происходят колебания кузовов на рессорах и
пневматических шинах и колебания подрессорных частей на
пневматических шинах.
В гусеничной нагрузке существенное значение имеют
ритмические воздействия от ударов звеньев гусениц. Для городских и
пешеходных мостов важное значение приобретают воздействия от
толпы людей, идущих в ногу.
Эту нагрузку также можно рассматривать как меняющуюся во
времени подвижную нагрузку.
2. Ветровые нагрузки
Ветер может воздействовать на мост порывами с некоторыми
интервалами, вызывая вынужденные колебания моста. Кроме того,
и при равномерном обтекании проезжей части потоком воздуха
образуются чередующиеся вихри, вызывающие вибрацию моста в
плоскости, перпендикулярной ветровому потоку. При определенных
скоростях потока может наступить явление аэродинамической
неустойчивости моста.
3. Динамический коэффициент
Расчет висячих мостов на воздействие движущейся временной
нагрузки принято производить, основываясь на методах статики
сооружений, рассматривая действие на мост неподвижной
статической нагрузки. Дополнительные динамические воздействия при этом
учитывают путем введения так называемого динамического
коэффициента.
Технические условия СН 200-62 устанавливают для основных
элементов висячих мостов независимо от их статической схемы
следующую величину динамического коэффициента.
50
1+ц=Н , (7.1)
^^ ^70 + К у '
где К — пролет моста, м.
Формула эта весьма условна и в ряде случаев может не
соответствовать действительным динамическим воздействиям на
сооружения. Так, например, действие периодических и ритмических усилий,
возникающих при движении по мостам автомобилей, гусеничных
машин, толпы людей, идущих в ногу, конных повозок и др., при
определенных системах и неблагоприятных геометрических разме-
183
Рис. VII-1
pax сооружения может вызвать чрезвычайно большой динамический
эффект, далеко превосходящий значения, которые 'определяют по
формуле (7.1).
Исходя из этого для автодорожных мостов всех систем в
технические условия введено ограничение (СН 200-62 § 8, п. 52),
исключающее их работу в резонансной зоне (расчетный период
свободных вертикальных колебаний автодорожных мостов не должен
находиться в интервале 0,3—0,7 сек).
Интервал 0,3—0,7 сек установлен на основании опытных
данных по динамическим характеристикам подвижных
эксплуатационных нагрузок.
§ 33. СВОБОДНЫЕ КОЛЕБАНИЯ ВИСЯЧИХ МОСТОВ
Частоты или периоды свободных колебании моста являются его
важнейшими динамическими характеристиками. По их величинам
можно в значительной степени судить о пригодности того или иного
сооружения к эксплуатации.
1. Свободные вертикальные колебания цепных
мостов
Рассмотрим наиболее общий случай — висячую предварительно
напряженную систему с балкой жесткости (рис. VII-1).
Примем следующие предпосылки:
1. Верхняя и нижняя цепи очерчены по пологим квадратным
параболам.
2. Жесткость балки EI и погонная масса моста т постоянны по
всему пролету.
3. Подвески нерастяжимы, т. е. относительные вертикальные
перемещения цепей и балки исключаются, а массы цепей и подвесок
приложены распределенными равномерно по оси балки.
4. Отклонением подвесок от вертикального положения, а также
горизонтальными силами инерции цепей и пилонов пренебрегаем.
5. Реакции подвесок на балку принимаем в виде равномерно
распределенной нагрузки.
6. Влияние затухания на частоты свободных колебаний не
учитываем.
184
Выражение для изгибающего момента в балке жесткости при
учете деформации системы имеет вид:
М = Л/о - Яв (у* + г) + Ян (ун - г), (7.2)
где Мо — изгибающий момент в простой балке;
Нъ, Нп, Ув, Ун — статические распоры и начальные ординаты
цепей в сечённи х;
г — статический прогиб балки в сечении х.
d2r d2M
Попользуя приближенные зависимости El-— = М и ——- = qr
dx2 dx2
получим уравнение статического равновесия системы:
Р1ФГ (НЛ-Н\й2Г и d2ljB ■ U ^J* n /7Ч\
£/^-(я"+яв)^-яв-^+//и-а^-=* (7-3)
где q—погонная интенсивность постоянной нагрузки на одну
балку.
При свободных колебаниях системы возникает динамический
прогиб х\ = ц(х, t) и появляются соответствующие инерционные
силы. От этих сил в цепях возникают динамические распоры ДЯВ и
ДЯН. Уравнение статического равновесия по принципу Даламбера
приобретает вид:
Е, »<' + "> -(Я. + АН^'+У - № + А*.)-*" + *"
дх* v ' "'- дх2 v ' ' dv-2
d2t/E d2tiH д2\\
(ЯВ + ДЯВ)—^^ + (Ян + ДЯн)-^ = 9-т- '
dx2 ' ^ " ' "' dx2 n dt2 '
Вычитая из этого уравнения уравнение (7.3) и принимая ось
/ d2r \
балки в невозмущенном состоянии прямолинейной I т. е. -— = О J ,
х dx2 I
■получим:
дх* ' " ' "' дх2 ч " ' "' дх2 " dx2 '
d2vu д2г\
+ ДЬ_£- + 1Я_3_ = 0. (7.4)
В этом уравнении три неизвестных величины: ц, ДЯВ и ДЯН.
Дополнительные два уравнения можно составить исходя из условия
неизменяемости расстояния между заанкеренными концами цепей.
Рассмотрим деформированное состояние элемента верхней цепи,
вырезанного в пределах пролета балки (рис. VI1-2).
До деформации для элемента dS имеем dS2 = dx2 + dy2,
-после деформации (dS -f AdS)2 = (dx + dg)2 + (dy + dr\)2.
185
Из этих двух уравнений,
пренебрегая малыми высшего порядка,
получим:
kdSdS = dxdl -f dydr\, (7.5)
где &dS— удлинение элемента
верхней цепи, равное
AdS
dS =
AHBdS
EFB cos pB
dx
Рис. VI1-2
Из уравнения (7.5) следует
ДЯвс?х
cos pE
dl =
.-^А,.
£FB cos3 pB я"*
Горизонтальная проекция деформации боковых оттяжек
_ 2АЯвс
EFB cos3 Po
Так как между анкерными закреплениями цепи имеем условие
| dg + б = О,
то можно записать:
ДЯВ
/2а г rfx \ =Cd_y_d
W3 Во J cos3 fiB ' ■' dx Ч
(7.6)
Учитывая, что для верхней цепи
4/в .. . , , . 4f„ 8/Ех
У = Ув = -р-х(1 — х); */B = tgpB = —
/2
1
cos
/4
—=lA+tg2pB=l/ 1+-^
/з "J-"
обозначим \-
dx
2a
cos3 pB cos3 Po
U
Подставляя сюда значение и пренебрегая малыми сла-
cos рв
гаемыми после интегрирования, получим
186
\ ^ /2 W cos3 Во /
' cos3 Po
Интеграл \ ——dr\ берут .по частям с учетом того, что —— \ dr\ =
■ ах ах *
о о
= 0 вследствие симметрии системы по отношению к середине
пролета.
Уравнение (7.6) окончательно примет вид:
EFB dx* -1 v
Нижняя цепь в силу предварительного напряжения при
действии вертикальной нагрузки сверху вниз будет работать на сжатие.
Рассматривая деформацию элемента этой цепи, по аналогии с
(7.7) получим
Д#н£н d2yH n
FF = , 9 Л dx, (7.8)
EFH dx- J
где IH«/(l+8^).
Совместное решение уравнений (7.4), (7.7) и (7.8) приводит к
нелинейному интегродифференциальному уравнению колебаний,
решение которого возможно только приближенными методами.
Анализ этого уравнения показывает, что влияние нелинейных
членов проявляется лишь в области сравнительно больших
амплитуд колебаний, превышающих Vioo l- При таких амплитудах,
очевидно, необходимо подвергнуть анализу и погрешности, вносимые
принятыми выше допущениями. При амплитудах менее '/юо /
практически всегда можно ограничиться рассмотрением линейного
уравнения. В этом случае уравнение 7.4 упрощается:
Рассматривая гармонические колебания, положим
г] = г\ (х) ■ cos at, (7.10)
где ц(х) —функция, удовлетворяющая граничным условиям и
определяющая форму главных колебаний системы;
со — соответствующая частота свободных колебаний.
187
После подстановки (7.10) в (7.9), (7./) и (7.8) и учитывая, что
<%в 8/в d2yH 8/н
и —
dx- P dx* /2
получим:
dx* dx- - -
= Д#Н — -АЯВ —,
ДЯВ-1В 8/в р
—ftf— = ~й- ч (*)<**;
ДЯн-Lh 8/нГ , 4J
(7,11)
При точном решении системы (7.11) получается трансцендентное
частотное уравнение, корни которого определяют методом
последовательных приближений. При этом из-за отсутствия наглядности
расчетных формул весьма трудно оценить влияние различных
параметров системы на частоты ее свободных колебаний.
Практически точное решение можно получить, аппроксимируя
форму главных колебаний рядом Фурье:
оо
«-1 „ 1ЯХ
х\(х)= ^dsm—-; (i=l;2;3, .... оо). (7.12)
t=i l
После подстановки (7.12) в (7.11), умножения всех членов урав-
. пкх,
нения на sin—-dx (/г= 1; 2; 3..., оо), интегрирования в пределах
от 0 до / и учитывая, что
С ппх inx | 0 (при п Ф- i)
\sin-— sin dx = \
I I \l/2 (при n = i),
получим
CtP3i + (Яв + HB) d + У. CtAanai - С,-(в2те — = 0, (7.13)
71=1
где Ct — коэффициент разложения;
Pai — Эйлерова критическая сила;
_ Fn*EI
^эг — —-—;
.188
2„n 2
л_123^ vlIEFb \xnEFB\ _/b fH
л* M + 8j.i- + у 1 + 8|л2 ' I I
2a 1 — cos tin 1 — cos ш
-; a,- = . (7.13a)'
cos3|30-/ ti2
Бесконечный ряд в уравнении (7.13) выражает влияние
динамических распоров. При / = 2, 4, 6 ... (кососимметричные колебания)
имеем: а, = 0, ДЯв = ДЯ„ = 0, поэтому можно записать
, Рэг + #в + Ян - со2т -£-) С, = О,
откуда для частоты кососимметричных колебаний получим
2 о
тт-
w. =£/+(ЯВ +Ян)-—.
/4/72 /2т (7.14)
Как видно, частоты кососимметричных колебаний не зависят от
жесткостей цепей. Поскольку коэффициенты щ и ап содержат в
знаменателе квадраты чисел 1, 3, 5, ..., то ряд в (7.13) быстро
сходится и, следовательно, влияние динамических распоров на частоты
симметричных колебаний при i>1, га>1 исчезающе мало. Исходя
из этого, ограничимся при суммировании двумя членами ряда:
\Рл + #в + Я„ + Aaf- co2m —o ) С, + Л<ц• а3С3 = 0;
( Рэз + Яв + Ян + Аа3 - со2т ~) С3 + Лаз-aid = 0.
9л2
Приравнивая определитель ,из членов при С\ и С3 нулю, получим
формулу для частоты первого и третьего тона:
wj, = Я/ -^- (41 + Ш + 283В +
+ )' 1 + 0,01#2 + 50,2£2 + 0,2Я - 11,56 - 1,14# £), (7.16)
где
f$EFB flEFH (Яв + Я„)/2
яв(1+8ц2 +у)Е1 ' л6(1+8ц2)£/ ' л2£/
v ' ^ в ' ' ч ' ^н' (7 17)
Каждой собственной частоте системы соответствует своя особая
форма главных колебаний. В случае кососимметричных колебаний
такая форма состоит из полуволн синусоиды, количество которых
(£ = 2, 4, 6...) определяет и соответствующую частоту (7.14).
Частотам coi и соз соответствуют формы симметричных
колебаний, которые образуются в результате наложения друг на друга
189
Рис. VII-З
синусоид с одной и тремя полуволнами (рис. VI1-3). Соотношения
амплитуд С3 и С\ определяются из (7.15) после вычисления частот
6)1 И ОЭз-
Для первой симметричной формы имеем
^i P,i + Н* + Нп + А а? — wfm —
Сч Л"
С1
1
для третьей
3
Л(Х1(Хз
^эз + Яв + Ян + Лаз — соз/п
9л2
Лаз(Х1
При расчетных напряжениях в кабеле /?„ == 5 000—8 000 кГ/см2
частоте coi соответствует форма колебаний, в которой преобладает
синусоида с одной полуволной, а частоте соз— форма колебаний с
преобладанием синусоиды с тремя полуволнами. -
Обычно влиянием динамического распора на частоты
симметричных колебаний (за исключением частоты coi) можно полностью
пренебречь и пользоваться формулой (7.14) при i=3, 5, 7.
Для частоты coi достаточно точный результат получают [2], если
в (7.14) при i='l принять
Яв + Я „ = 0,556л2 [EFB. jx2B (1 + Y) -I + EFB ■ yL].
(7.18)
В частном случае из формул (7.14) и (7.18) получают
выражения для частот одноцепной гибкой системы (£7 = 0, Я„ = 0, £FH = 0),
одноцепной распорной системы с балкой жесткости (Ян = 0, ££н=0)
и двухпоясной предварительно напряженной фермы (£7=0). Для
одноцепной безраспорной системы (§ 20) при i = 2, 3, 4, 5, ...,оо в
формуле (7.14) следует принять Яв = Ян=0, а в случае первой
симметричной формы колебаний (t=l) выражение для частоты будет:
2 vi п'
0)16 = £^0
/4m
0,556л4 „„ . е
(7.19)
где g — ускорение силы тяжести.
190
Если в системе (см. pnc.VII-1) обе цепи прикрепить к балке
жесткости на ее оси, то приближенная формула для первой и
второй частоты такой системы будет иметь вид [2]:
со ? = £/ -^ + 0,556 ^- [EFBlx\ (1 + Y) -i + EFnl?u], (7.20)
lkm llm
где i=l; 2.
Полагая £FH = 0 или £7 = 0, получим соответствующие частные
случаи.
Висячая система имеет бесконечное множество частот
свободных колебаний. Однако не все эти частоты в равной мере важны
для расчета. Как правило, чем выше частота свободных колебаний,
тем меньше амплитуда колебаний, совершающихся с
соответствующей частотой. Поэтому наибольший практический интерес
представляют низшие частоты свободных колебаний. В соответствии с
теорией динамической и аэродинамической устойчивости висячих
мостов при проектировании необходимо стремиться к повышению
этих величин. Формулы (7.14) и (7.18) при t=l; 2 исходя из
приближенной статической зависимости жесткости балки £/ и цепей
££в и ££н от силовых и геометрических параметров висячих
систем, удобно представить в следующем виде:
для одноцепной системы с балкой жесткости:
—2 g Г h к Ее f £к / к W
- = т('3'1«'Т71+4'93т); (7'22)
для предварительно напряженной системы без балки жесткости:
wf = 4-6,78(l+Y)-4Ml+*- + - + -f(l + Y)]; (7-23)
* I Rkl q q q /в J
= 4-4,93^(1+-^ + -^-^), (7.24)
/ f в \ q q /H '
2
C02
где h — высота балки жесткости;
щ — коэффициент, характеризующий увеличение изгибающего
момента в балке при изменении температуры;
Если максимальный момент от временной нагрузки обозначить
Мвр, а от изменения температуры — Mt, то
Mt
ш = 1 +
М
вр
h 1 1
при T=5o^TooaiwU:
191
b — коэффициент, учитываю-
•щий долю временной нагрузки,
которую 'воспринимает верхняя
цепь в предварительно
напряженной двухпоясной системе.
Величина его определяется
соотношением жесткостей и стрелок цепей а
обычно равна b = 0,5-^-0,7. Еб, Re,
£к, /?к — модули упругости и
расчетные напряжения в балке и
кабеле.
В качестве примера на рис.
,VII-4 представлены кривые
периодов колебаний Ту и Т2 для
рассматриваемых систем. При
подсчетах принято:
h 1 к р
~г =—; — = 0,4; — = 0,6;
/ 60 q q
at = 1,1; Ь = 0,6; (1 + y)-1 = 0,7; R6 = 2-103 кГ/см2;
£б = 2,1-106 кГ/см*;
Ек= 1,7-106 кГ/см2.
Условные обозначения на графике следующие:
Т\\, Т}2 — периоды, соответствующие первой и второй частотам
(второй индекс) одноцепной системы с балкой жесткости;
7*21, ^22—то же, для предварительно напряженной системы без
балки жесткости.
Индексы вверху «3» и «10» означают соответственно расчетные
напряжения в кабеле /?к = 3 000 кГ/см2 и /?к= 10 000 кГ/'см2.
Из графика видно, что для одноцепной системы при Ru =
= 3 000 кГ/см2 7,]2>7~jj, т. е. низшей частотой является too с формой
колебаний по двум полуволнам. С повышением расчетных
напряжений в кабеле до 10 000 кГ/см'2 картина меняется — Тх2<Т\[;
низшей частотой становится «i с формой колебаний по одной
полуволне. В случае предварительно напряженной системы указанная
закономерность проявляется в меньшей степени — период Г™
остается ниже Т2о.
При определенной величине расчетных напряжений в кабеле для
обеих рассмотренных систем возможен случай равенства низших
частот (f»]2 = о)ц или c»2i = (022). Такое положение в висячих мостах
весьма желательно, так как при этом уменьшается возможность
появления резонанса. Очевидно, дальнейшее повышение расчетных
напряжений в кабеле, при котором будет выполнено неравенство
192
100 300 600 960 Ifi
Рис. VH-4
1
1
/н
= н>; 7Г = °'5;
Wi<co2, связано с уменьшением жесткости системы и повышенной
чувствительностью ее к динамическим и аэродинамическим
нагрузкам.
Определим предельную величину расчетных напряжений в
кабеле исходя из равенства низших частот oji и ш2.
Для одноцепной системы из формул (7.21) и (7.22) получим
Вн =
1,37(1 +Y)-i£Kl( 1+1)
Ti к Е6 I
2,5а,- -Б- + -Г
l q Ro f
(7.25)
Для предварительно напряженной системы без балки жесткости
из формул (7.23) и (7.24) имеем1
f
Л,Л-=1,37(1 + т)-1^-77-Х
X
1 + 6-1 + А
q q
Р
1+(1 + T)
/в
1 +
1 +
А
/„
(7.26)
Подставив в формулы (7.25) и (7.26) принятые при составлении
графика (рис. VI1-4) исходные параметры, получим
7?к = 8050 кГ/см* и RK = 13 300 кГ/см\
В современных одноцепных мостах расчетные напряжения в
кабеле назначают в пределах 5 000—8 000 кГ/см2. Если при
сохранении 'прочих данных 'принять
/ /в 1 _
- '— = —, то получим Вк = 10 800 кГ/см* и RK = 20 800 кГ/см-;
I 8
/
при
/н - 1 /в - ] R
31,500 кГ/см2
Как видно, возможности применения высокопрочных
материалов в предварительно напряженной системе значительно шире, чем
в одноцепной.
Это позволяет повышать низшую частоту такой системы путем
увеличения преварительного напряжения с одновременным
'Использованием высокопрочных материалов.
Для трехпролетной одноцепной системы с балкой жесткости
(см. рис. IV-18, з) точное решение в линейной постановке можно
найти в работах [30], [49]. При кососимметричных колебаниях такой
системы средний пролет колеблется независимо от боковых. Соот-
7-3213 193
.о
3l атшгшшв Jk
Рис. VII-5
ветствующие частоты могут быть определены из формулы (7.14)
при i = 2, 4, 6, ..., принимая El и Н равными соответственно
жесткости балки и статическому распору в трехпролетной схеме, а / —
длине среднего пролета. При симметричных колебаниях влияние
боковых висячих пролетов проявляется в снижении
соответствующих частот однопролетной схемы. Имея в виду, что граничные
условия опирания балки жесткости мало влияют на частоты
симметричных колебаний, частоту coi можно приближенно определить по
формулам (7.14) и (7.18) при t=l с умножением ее на понижающий
коэффициент К.
Этот коэффициент определяют как отношение прогибов
средней точки от постоянной нагрузки- в одно- и трехпролетной схемах
при загружениях, соответствующих низшим симметричным формам
колебаний. Предполагают, что длина среднего пролета равна
такой же длине в однопролетной схеме.
На рис. VI1-5 приведена схема линии влияния прогиба средней
точки для трехпролетного моста. Здесь же показана схема загру-
жения, соответствующая частоте соь
Величина А будет равна
I- 5з(Йз + 2Йз)<7з-'
где Si; S3; Q\; Q$; Q3; Q\\ qz — ординаты в середине пролета,
площади линии влияния и постоянные нагрузки в одно- и трехпролет-
ных схемах.
Аналогичным путем можно определить частоты трехпролетной
системы с передачей распора на балку жесткости.
2. Свободные вертикальные колебания вантовых
мостов с балками жесткости
Байтовые системы с балками жесткости довольно
разнообразны (см. § 3). Рассмотрим здесь раднально-вантовые мосты
системы «пучок» (рис. VII-6).
Количество панелей в среднем и боковых пролетах может быть
произвольным.
Примем следующие допущения.
1. Ванты при колебаниях системы остаются растянутыми, т. е.
рассматриваем малые перемещения системы, при которых ванты
не выходят из работы.
194
a)
x(
2
Of .
J J'
-""^
i"
^
/'
?
\
T 2
—*-■« =»h
^
Рис. VI1-6
2. Массами вант пренебрегаем по сравнению с массой балки
жесткости и проезжей части.
3. Жесткость балки El и погонная масса моста т постоянны по
всему пролету.
4. В местах установки пилонов над промежуточными опорами
балка жесткости имеет шарниры.
5. Влиянием затухания колебаний и горизонтальными силами
инерции пилонов пренебрегаем.
При указанных допущениях в качестве расчетной схемы удобно
принять шарнирно опертую по концам балку пролетом / с упругими
вертикальными опорами, расположенными в местах крепления
вант.
Жесткость каждой упругой опоры определяется деформатив-
ностью соответствующей ванты в центральном пролете, углом
наклона этой ванты и горизонтальным смещением вершины пилона
(пренебрегая продольной деформацией самого пилона).
Если система симметрична относительно середины
центрального пролета, то расчет существенно упрощается. При кососимметрич-
ных колебаниях такой системы взаимного горизонтального
смещения пилонов не будет.
Центральный пролет в этом случае колеблется независимо от
боковых и коэффициент жесткости каждой упругой опоры можно
определить по формуле
EFi
(7.27)^
где EFU Sh |3i — жесткость, длина и угол наклона к горизонтали
соответствующей ванты.
7* 195
k+l
V<57
l = lf*n
7?VT,
Рис. VI1-7
При симметричных колебаниях системы влияние боковых
пролетов можно оценить как снижение жесткости упругих опор
центрального пролета.
В общем случае задача определения частот свободных
колебаний балки на упругих опорах (особенно при большом количестве
их) требует громоздких вычислении [43]. Рассматриваемые
Байтовые системы (см. рис. VI1-6) имеют, однако, конструктивные
особенности, позволяющие упростить эту задачу.
Обычно по условиям изготовления сборных элементов, а также
исходя из рационального распределения изгибающих моментов в
балке длины панелей делают равными. При этом различие в
коэффициентах жесткости упругих опор получается относительно
небольшим. Жесткость опор довольно закономерно уменьшается к
середине пролета. Расчеты показывают [2], что в большинстве
случаев низшие частоты вантовой системы (при равных длинах панелей)
с допустимой погрешностью можно определять в предположении
равенства коэффициентов жесткости всех упругих опор. Жесткость
каждой опоры следует принять равной
С—*
где С — средняя арифметическая величина коэффициента
жесткости из величин, определяемых по формуле (7.27);
С,; — коэффициент жесткости опоры, ближайшей к середине
пролета.
Ниже дается кратким вывод частотного уравнения для случая равных
панелей н равных жесткостсй упругих опор.
Обозначим количество панелей п, а длину панели lt. Направление
координатных осей для к и к+\ панелей примем в соответствии с рис. VII-7. Для любой
панели уравнение изогнутой оси балки при колебаниях можно представить Г43]
в виде:
у (6) = Ат (£) + А2у2 (£) + ЛзУз (6) + Ат (£), (7.28)
где \ — безразмерная координата (£= —] ;
определяемые из граничных
А\\ А2\ А.,
постоянные,
АА — произвольные
условий
УЛ1), У2&), 'Ml), iMl) —функции А. Н. Крылова;
196
1
У\ (?) = "Г (ch rS + cos r£);
f/2(0 = — (shrS + sin/-5);
£/3 (?) = "^f (ch rS — cos r£);
М (?) = ^гз" ^Sh Г? ~ Si" r5)' Г = *'
4/~mo>2
У IF'
где со — частота свободных колебаний.
Обозначим прогиб на опоре к через т]к, а величину, пропорциональную
изгибающему моменту, через н- Для смежных панелей к и к+1 имеем следующие
четыре условия:
0*(°)=*«+i(O)=V (7.29)
^(0) = ^+1(0) = [хк; (7.30)
-^(0) = ^+,(0); (7.31)
£/«/;; (0) + Е1у"к+! (0) = - Сг/К (0). (7.32)
Из условий (7.29) и (7.30), учитывая, что для функций А. Н. Крылова имеем:
</2 (0) = уз (0) = у4 (0) = 0; у\ (0) = у°2 (0) = г/4" (0) = 0; У1 (0) = у\ (0) = 1
получим Ах = tjk и Л3 = fiK.
Уравнения (7.28) для /с и /с+1 панелей будут иметь вид:
У к = \:У1 (?) + Л2*0я (Э + <^з (?) + ЛЛм (6); (7.33)
^к+1 + ^кУ1 (?) + Л (A-+l)f 2 (? ) + (^З (?) + А4 (к+1,^4 (?)• (7-34)
Условия (7.31) и (7.32) после подстановки в них значений у(0); у'(0)
и у'"(0), которые определяются из (7.33) и (7.34), дают:
С13
А2к + А2 (к+1) = °-' А*к + А4 (я+1) =~ ~ ^ (7-35)
Кроме условий (7.29)—(7.32), можно записать:
У к 0) = \c-i- У (к+1) С1) = Vn>"
#кО) = PK-v ^кц(1) = {хк+г
Из этих условий с учетом (7.33) и (7.34) получим:
Ъ+i = Vi С1) + А (к+1)#2 (!) + Р*#з (1) + Л (к+1)^4 (!); (7-36)
Ч«_1 = ^f/i О) + Л^2 (1) + V-KVz (1) + Л* </4 (1): (7-37)
V-k+i = ^l С1) + A (*+i)W О) + 1\</з (]) + А4 1к+1)У1 О): (7-38)
tV_i = wl (1) + А.^2 (1) + tVs (!) + А4кУ1 (D- (7-39)
7—3213 197
Суммируя (7.36) и (7.37), (7.38) и (7.39), с учетом (7.35) и принимая во
внимание, что
у\О) = ^з(1); у1 (О = у\ (1); у\ (i) = уг О). .
ci
будем иметь: t\K+l + т)к_1 = 2ij,,#i(l) + 2и-ку3(1) — —L гу^О).'
EI
Ик+1 + t\-_l = 2г4^3(1) + 2,ак(/1(1)-_1 ЧжУ2(1)-
(7.40)
В случае шарнирно опертых концов балки для решения этой системы
уравнений необходимо принять:
IKK iKK
т}к=Лбш ; ^K = Bsm
(7.41)
где i — целое число;
п — количество панелей.
Граничные условия для /с=0 и к=п при таком выборе значений г\к и \ак
удовлетворяются полностью. Подставив (7.41) в (7.40) и учитывая, что
sin
(г/ел ш \ ( шп it \ iKit in
+ —■ ) + sin I — — = 2 sin cos — ,
n n I \ n n J n n
после сокращения обеих частей уравнений на sin получи!
2 [cos fiL-&1(I) ) + ^Lf/4(l)| Л-2у3(1)В=0;
£7
Л+2
rcosi£L-^(i)"|B=o.
Определитель этой системы дает уравнение частоты. После преобразований
этот определитель можно привести к виду:
1
27з"
cos .— (ch r + cos r) —cos2 — — cos r ch r
cos —. (sh r — sin r) + sin r ch r — cos r sh r
Cl\
2ЁГ
(7.42)
Круговую частоту колебаний определяют по формуле
_2
щ
-¥
EJ_
т
(7.43)
Задаваясь значениями i=l, 2, 3, ..., п, получим все низшие частоты системы.
Величина i определяет и количество полуволн изгиба упругой линии, т. е.
соответствующую форму колебаний системы.
19В
CLJ
2fJ
20
Ю
Применительно к вантовым
мостам некоторые значения
корней г, соответствующие низшим,
частотам (t"=l; 2), можно
определить графически (рис. VI1-8).
Величину С определяют
раздельно при кососимметричных (i = 2)
н симметричных (' = !) формах
колебаний. Влияние нормальной
силы в балке жесткости на
низшие частоты системы обычно
незначительное, и им мож'но
пренебречь.
При количестве панелей
nZ^b достаточно точные результаты для низших частот получают
из приближенной формулы [4]
О
i=1
i=2
п>/5 >
•^
/
1
Mi
pi
а
И
и
i
i
!
Ж 1ъ*п=з
У/ г
f i
0.5
U 25
Рис. VII-8
ш,-
l/ ng
2fq
(7.44)
где u
-t
С '
g — ускорение силы тяжести;
Д, — статический прогиб ваптовой системы в
середине пролета от постоянной нагрузки.
При подсчете прогиба /(/ по формуле Мора достаточно
ограничиться лишь учетом деформаций вант:
ь=2
NKNqSK
EFK
(7.45)
Для низшей частоты кососимметричных колебаний (i = 2) знак
2 в (7.45) распространяется только на ванты центрального
пролета. Прогиб вычисляют от равномерно распределенной нагрузки q.
При i"=l прогиб ^ определяют от нагрузки q, приложенной в
соответствии с низшей симметричной ф°Рм°й колебаний
(рис. VII-9, а), а суммирование в (7.45) распространяется на все
ванты и оттяжки.
Аналогичным путем по формуле (7.44) в зависимости от
прогиба в середине пролета fq можно определить частоты,
соответствующие формам колебаний, показанным на рис. VII-9, б, в.
Соотношение низших частот сог и coi зависит от схемы Байтового
моста и от отношения бокового пролета к центральному. Для
систем (рис. VII-6, в) при й//=0,42ч-0,48 обычно co2~l,9toi, а для
систем (см. рис. VII-6, а, б) при а/7=О,22-ь0,24 сог — l,35coi.
Частоту о)ь определяемую по формуле (7.44), удобно выразить
через расчетный прогиб системы от временной нагрузки:
7*
199
Cut
где р
=<*V-£-?.
2/k q
(7.46)
fK — расчетный прогиб системы от временной нагрузки в
середине пролета;
кн—-погонная интенсивность временной нормативной нагрузки-
U — прогиб системы в середине пролета от нагрузки той же
интенсивности, но приложенной так, как показано на
рис. VII-9, а. В зависимости от вида системы обычно R-1
(рис. VII-6, а, б), 0^0,9 (см. рис. VII-6, в).
Для ориентировочных подсчетов низших частот формулу (7 44)
можно выразить через исходные параметры вантовой системы:
(*—д£ Е (Я + к) I n
R q И. . (п-1)2 14 '
I
■■ 1
[• +
4гс2
/2
(7.47)
где Е — модуль упругости тросов;
R — расчетные напряжения в тросах;
к —расчетная временная нагрузка' с учетом коэффициентов
перегрузки и динамического;
h — высота пилона.
При i=l для систем типа, показанного на рис. VII-6, а б
следует принять Л = 0,7. Для трехпролетных систем (см. рис VII-6 в)
А -0,35. При i = 2 для всех систем А = 1,25. Полученные значения
частот следует рассматривать как граничные значения для низшей
группы спектра частот вантовой системы.
пиши гггп
ЬипИпиппнпйи лт1
01
ниннни UmTTTJ
ИМИ
а
а
12
Ю
QS
ЦБ
0.4
0,2
О
'•'
/Tis
/>
' V*
-<?■
<?
s
Jl~
Рис. VI1-9
100 Ж, 300 им
Рис. VII-10
200
На рис. VII-10 представлены кривые периодов свободных
колебаний некоторых вантовых систем, соответствующие частотам coi
и со2- Условные обозначения здесь следующие: Т\ и Т\ — периоды
*"*7 "*~ 7
трехпролетной системы (см. рис. VII-6, в) при п=7,Т± и Г2
—nets 15
риоды семипанельной системы (см. рис. VI1-6, a, 6),Ti и Ti
—периоды трехпролетной системы при п=\Ъ (количество панелей в
боковом пролете 7).
_, Е а -\-к
При подсчетах для всех систем принято — = 360, = 1,5;
/ I * "
— = 8 для семипанельных систем и — = 5 при п= 15. Из
сравнения этого графика с аналогичным графиком для цепных висячих
систем (см. рис. VII-4) видно, что частоты радиально-вантовых
мостов (три равных с цепными мостами 'пролетах) значительно
выше.
В заключение отметим, что формулы (7.44) и (7.46) могут быть
использованы для приближенного определения низшей частоты
Байтового моста системы «арфа» (см. рис. 1-9, з).
Для определения частот вантовых мостов без балки жесткости
применяют тот же метод, что и при расчете ферм [24],
Низшая частота таких мостов довольно точно может быть
вычислена методом эквивалентной балки [5].
В этом случае в формулах (7.44) и (7.46) следует принять а =
= р=1 и« = 2.
3. Свободные горизонтальные и крутильные
колебания
В висячих мостах из-за несовпадения в поперечном сечении
проезжей части (вместе с балками жесткости) центра масс с центром
изгиба горизонтальные колебания связаны с крутильными, т. е.
свободные колебания
происходят .по изгибно-крутильной
форме. В большинстве случаев
связанностью форм колебаний
можно пренебречь, особенно
при использовании
современных коробчатых сечений
проезжей части [30].
В дальнейшем будем
предполагать, что поперечное
сечение проезжей части имеет две
оси симметрии и подвески
(ванты) укреплены на
горизонтальной оси. Горизонтальные и кру- Рис. VH-11
201
тильные формы колебаний таких мостов можно рассматривать
независимо.
Рассмотрим горизонтальные колебания однопролетного ванто-
вого моста.
Каждую элементарную по длине часть моста представим в виде
математического маятника длиной S, груз которого присоединен к
горизонтальной пружине (рис. VI1-11, а).
Масса маятника rri\=q^g равна погонной массе моста, а
жесткость горизонтальной пружины эквивалентна жесткости
горизонтальной фермы. Уравнение колебаний маятника имеет вид [40]
d2w
mtS ——- + ^7i sin ф = 0.
ot2
Отклонение сечения горизонтальной фермы равно
т] = Ssinq).
При малых колебаниях можно считать sin<p~cp Тогда
восстанавливающая сила от растяжения пружины будет
д4п д4<р
EI*-iTL=SEIrir-.>
ох4 ох*
а уравнение горизонтальных колебаний моста
д2а> d4m
mi "а^+ г"а^"г^1ф==а (7'48)
Положим ф= 2 Ф (^) sin —-
тх
После подстановки этого выражения в (7.48). умножения каж-
1-ГГ V
дого члена уравнения на5{п_1!_^х и интегрирования в пределах от
0 до / получим
»«>+(^+§-)ф«) = о,
откуда для частоты горизонтальных колебаний имеем
согг=]/£/г^- + |-; (/=1; 2;..., оо). (7.49)
Вторым слагаемым в формуле (7.49) обычно можно пренебречь
по сравнению с первым.
Частота горизонтальных колебаний трехпролетных мостов с
неразрезной балкой жесткости мож'но вычислять, используя общий
метод решения для поперечных колебаний неразрезных балок
[5], [43].
202
Для одноцепных висячих мостов формула (7.49) справедлива
лишь при относительно небольшом весе кабеля по сравнению с
общим весом моста. При пролетах />300 м необходимо учитывать
горизонтальные перемещения кабеля относительно балки
жесткости. Частоты горизонтальных колебаний в этом случае следует
определять по формуле
ttri = I 2(1-b) -I Wri' ( ]
H-
g
lzmK Kw, , mK mi
ui = ; b = —; m = —;
со2 tn 1
где
mK — погонная масса одного кабеля;
cori — частота свободных горизонтальных колебаний системы
без учета относительных перемещений кабеля,
определяемая по формуле (7.49);
K'/t—длина подвески в четверти пролета.
Величину Ъ можно приближенно определить по формуле
где у — объемный вес материала кабеля.
При малом весе .кабеля (Ь^О) из формулы (7.50) получим
°>Г/~ШЦ-
Рассмотрим теперь горизонтальные колебания предварительно
напряженного висячего моста (см. рис. VII-1).
В качестве расчетной схемы примем систему, изображенную на
рис. VIII1, б.
Погонная масса моста т,\ прикреплена к натянутой
проволоке АВ и горизонтальной пружине, эквивалентной по жесткости
горизонтальной ферме.
Натяжение проволоки АВ равно интенсивности
предварительного напряжения подвесок 1р. __
Восстанавливающая сила проволоки при малых отклонениях х\
будет
„ (SB + SH)
2/7 (sin фв + sin фн) « 2рт] ±—— .
•JB^H
Уравнение горизонтальных колебаний системы
£/,|3 + rai^+2pJ£^)-=0. (7.51)
<5л'4 dt2 SBSB
203
Решая это уравнение по общим правилам, получим следующую
формулу для частоты горизонтальных колебаний:
Мн = 1/Ч£' + ^^±^ ((=.1:2 со,, (7.52,
SB = /в + кв', 5Н = /н + А«;
где
^в, ^н — соответствующие длины подвесок в середине моста.
В формуле (7.52) не учитываются горизонтальные силы инерции
цепей. Если предположить, что обе цепи смещаются относительно
балок жесткости на одинаковую величину, то для более точного
решения можно воспользоваться формулой (7.50), приняв при этом
12Л2
а* =
и тк, равным суммарной погонной массе верхнего и нижнего каое-
ля, а сои- — частоте по формуле (7.52).
Рассмотрим крутильные колебания предварительно
напряженной системы (см. рис. VII-1). Если представить, что обе плоские
фермы колеблются вертикально по одной и той же форме и син-
фазно, то получаются в целом вертикальные изгибные колебания
моста, происходящие (при малых колебаниях) в соответствии с
уравнениями (7.7), (7.8) и (7.9). Если при этом El относится
только к одной из двух балок жесткости, то т — погонная масса,
относящаяся только к одной плоской ферме, т. е. половина погонной
массы всего моста.
Можно также представить, что обе фермы колеблются по одной
и той же форме, но в противофазе, вызывая кручение проезжей
части. Продольная ось моста остается неподвижной. В этом случае
не все массы в сечении проезжей части имеют одинаковое
перемещение. Если z — абсцисса (<в поперечном направлении) какой-либо
точки проезжей части, изменяющаяся от —Ь до Л-Ь (2Ь — ширина
моста), то перемещение этой точки по сравнению с перемещением
края проезжей части уменьшается в отношении z/b и
соответствующая элементарная кинетическая энергия получается в z2/b2 раз
меньше. Иначе говоря, средняя масса участвует в крутильном
движении с коэффициентом r2/b2, где г — радиус инерции сечения
проезжей части относительно продольной оси, тогда как в
вертикальном перемещении эта масса участвует с коэффициентом, равным
единице. Чтобы получить уравнение, применимое к крутильным
колебаниям, нужно в инерционном члене уравнения (7.9) заменить
га величиной r2/b2m. Кроме того, необходимо учесть
восстанавливающий упругий момент от кручения проезжей части.
Таким образом, уравнения свободных крутильных колебании
будут иметь вид:
204
г2 д\
+ //1 г- = 0; (7.53)
^ b2 dt2
ДЯВ1В **».fvdjc. (7.54)
£FB djfl
AHULH d2ya
EFn dx2
f v d*. (7.55)
(J
где m — относится к половине проезжей части;
EI — к одной балке жесткости;
Нв и Нк— к одной ферме;
GIK — крутильная жесткость поперечного сечения
проезжей части (две балки жесткости, связи и плита);
v = v(x, t)—координата того же характера, что и r\(x, t), но
описывающая кручение, т. е. v — вертикальный
подъем одного из краев проезжей части при
условии, что другой перемещается на —v.
Уравнения крутильных колебаний решают тем же методом, что
и уравнения вертикальных колебаний, в частности приближенная
формула для частот крутильных колебаний имеет, по аналогии с
формулами (7.14) и (7.18), следующий вид:
—=£/w+( я"+я»+йг)-**г: (7-56)
(i = 2, 3, 4,...,оо)
при i = 1, Нв + Нв = 0,556я2 [EFB ■ ц2в (1 + Y) -i + EFBlil ].
Формула для частоты одноцепной системы получается из (7.56) как
частный случай при #Н=Ю, EFIX = 0. Прикрепление цепи к балке
жесткости на ее оси дает возможность практически полностью
исключить низшую кососимметричную форму крутильных колебаний.
В этом случае кручение проезжей части должно сопровождаться
деформацией сдвига по всей длине моста. Очевидно, частота,
соответствующая такой форме колебаний, будет очень высокой.
Приближенное уравнение свободных крутильных колебаний
Байтовой системы с балкой жесткости (при количестве панелей п^=5)
можно записать так:
дЧ dzv GIK d*v Cn r2 d2v
EIl*±Nto--2»-d*+TV + m*-dii=0- (757)
205
где N— продольная сила в балке жесткости, которую принимают
постоянной по всему пролету; знаки + и — перед N соот-
;ветствуют безраспорной и распорной системам.
оо
■Sri ... 1ПХ
Полагая v = 2j v(0sin——, получим следующую формулу:
1
М2_ i2n2b2 GIK i2n2 Cnb2
etKp.i = EI——- + N —— + —-— \-——. (7.58)
/V2m l2r2m 2 l2-r2m lr2m
Висячие и вантовые мосты иногда устраивают с одной несущей
фермой, расположенной в плоскости вертикальной оси симметрии
проезжей части. Очевидно, в этом случае висячая или вантовая
ферма не участвует в крутильном движении моста. Принимая за
формы главных колебаний синусоиды, можно получить 'Следующую
формулу для частот крутильных колебаний таких мостов:
2 14Я462 л 12Я2
<•"-' = И1^Г + С'«2^Г- .<7-59)
§ 34. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ ВИСЯЧИХ МОСТОВ
1. Колебания висячих мостов под воздействием
подвижной эксплуатационной нагрузки
Характер и величина динамического эффекта, вызываемого в
конструкции моста движущейся временной нагрузкой, в основном
зависят от двух факторов: 1) динамических характеристик самого
моста и 2) особенностей временной нагрузки, 'вызывающей
вынужденные колебания моста.
В автодорожных мостах основной причиной динамических
воздействий являются неровности ездового полотна. После проезда
автомобилем отдельной неровности возникают колебания кузова на
рессорах и неподрессоренных масс за счет упругости шин.
Особенно сильные колебания появляются в случае совпадения времени
прохода колесом неровности с полупериодом собственных
колебаний кузова или неподрессоренных частей. Эти колебания создают
ритмические силовые воздействия, складывающиеся со
статическими нагрузками и передающиеся мосту. Если одна из частот
свободных колебаний временной нагрузки совпадает с частотой
колебаний моста, то возникает резонанс, в результате чего в течение
некоторого короткого отрезка времени может произойти
значительное нарастание колебаний пролетного строения.
При прохождении по мосту колонны автомашин возможно такое
сочетание скоростей движения и расстояний, при котором
последовательно проходящие через неровности автомашины будут
создавать непрерывное периодическое воздействие на мост, вызываемое
колебаниями кузовов автомашин.
206
По опытным данным периоды свободных колебаний кузовов
отечественных автомашин (в груженом состоянии) находятся в
интервале 0,3—0,4 сек. Периоды свободных колебаний неподрессоренных
частей изменяются в пределах 0,10—0,15 сек. Если висячий мост
проектируют под железную дорогу, то необходимо учитывать
динамические особенности железнодорожной нагрузки [6].
Обычно для исследования вынужденных колебаний висячих
мостов применяют уравнения Лагранжа, представив прогиб моста ъ
виде
г=оо
i=i
где Qt(t) —обобщенные координаты;
Xt(x) —функции, удовлетворяющие граничным условиям.
В случае однопролетного моста можно принять
г=оо
т](*,о=2 ?*sin—■ (7-6°)
г=1
Уравнение Лагранжа для каждой обобщенной координаты
имеет вид [40]:
d /dV\ dV дТ
-тЛ-57)—£- + •*- = Qu (7.61)
dt^dqi' dqt dqt
где V— кинетическая энергия системы;
Т — потенциальная энергия системы;
Q — обобщенная сила, соответствующая обобщенной
координате Qi.
Для предварительно напряженной системы (см. рис. VII-1)
кинетическая энергия будет равна
о
Подставив сюда прогиб по (7.60), получим
i=oo I . , г=оо
1/ m Vi ■ 2 Г • 9 1ЯХ j ml N^ • 2 in со\
V = — 2>qi Jsin2—dx = —2<7г. (7.62)
~ г"=1 0 г=1
Потенциальная энергия системы есть энергия изгиба балки и
деформации цепей:
2 1\д&1 2 *\дх1
о о
207
После подстановки сюда (7.60) будем иметь
S^5irsln2—dx+—2—S^l-p-cosa7-dx =
" i=l 0 г=1 О
£7jl4 !Zr°° 2 . (Яв + Ян)^'"00 2 , „„
= -цг 2 »** + 4/ S '"*■ (7-63)
г'=1 i=l
Члены, содержащие произведения координат, исчезают из
выражений (7.62) и (7.63) в силу свойства ортогональности главных
форм колебаний (см. п. 1, § 33).
При i'=l величину Нв + Нп в формуле (7.63) следует заменить
в соответствии с формулой (7.18).
Вантовую систему с балкой жесткости при количестве панелей
п~^Ь можно рассматривать как балку на условном упругом
основании, сжатую или растянутую силой N. Выражение для
кинетической энергии такой системы сохранится в виде (7.62), а
потенциальная энергия будет
г=1 г=1 г=1
Подставив (7.62) и (7.63) или (7.64) в (7.61), получим для любой
координаты qu
Qt +^iQi =—j-Qi, (7 65)
ml
где o)i—-частота свободных колебаний висячей или вантовой
системы.
Общее решение уравнения (7.65) [40] имеет вид
2 »'
Qi = ^i cos со^ + ^i sin ant H — \ Qi sin ©i (t — M dt\.
tnltoi
о
Первые два члена этого решения представляют собой свободное
колебание, определяемое начальными условиями, тогда как третий —
колебание, вызванное возмущающими силами.
Выражение для прогибов системы от возмущающих сил с
учетом формулы (7.60) будет
i=oo . t
Ч(х, 0 = —г^,— sin—- \ QiSinai(t — ti)dti. (7.66)
ml ^ u>i I •'
г=1 о
Из выражения (7.66) можно получить решение ряда практически
важных задач. При движении по мосту постоянной силы Р со ско-
208
ростыо v для обобщенной силы в формуле (7.66) следует принять
invti
Qi = P sin——. В случае движущейся пульсирующей силы
Qi — Р sin Qti sin ——.
Если пульсирующая сила расположена неподвижно на
расстоянии Х\ от опоры, то
Qi = P sin 0/ sin-
I
При движении по мосту нескольких пульсирующих сил
Qi= ^PiSmQtism-j-yh-—),
i
где /,- — расстояние между силами Pi и Я,- (£= 1, 2,..., /);
/ — число сосредоточенных пульсирующих сил;
6 — частота изменения возмущающих сил Р%.
Величина динамического коэффициента может быть выражена
формулой
, , #ст + Укай . . Удин
1 + [х = = 1 -\ ,
Уст Уст
где уст —статический прогиб моста в определенной точке от
временной нагрузки;
Удин — динамический прогиб в той же точке, определяемый из
формулы (7.66).
В области, близкой к резонансу, при подсчете динамического
прогиба необходимо учитывать силы демпфирования,
ограничивающие амплитуду вынужденных колебаний моста. Обычно силы
демпфирования выражают в виде коэффициента у, который
называется логарифмическим декрементом колебаний. Величина у
зависит от многих факторов и определяется опытным путем. По
некоторым данным для вантовых мостов с балками жесткости у=0,03—
—0,04. _
Для одноцепных мостов величина у в зависимости от пролета
изменяется в пределах 0,005—0,020. Низшие значения у
соответствуют мостам больших пролетов.
Периоды свободных колебаний цепных мостов
(соответствующие низшим частотам i='l,2) значительно превышают интервал
0,3—0,4 сек. Случай резонанса для таких мостов при воздействии
автомобильной нагрузки невозможен даже при относительно
небольших пролетах /='100—200 м. Динамический коэффициент
уменьшается с ростом пролета в соответствии с формулой (7.1).
209
Периоды колебаний вантовых мостов с балками жесткости
практически определяются не длиной пролета (см. формулу 7.47), а
длиной панели. Расчеты показывают-, что при воздействии
автомобильной нагрузки в вантовых системах возможны резонансные
колебания по низшим формам при длинах панелей от 8 до 18 м. В
большинстве случаев динамический коэффициент в резонансной
зоне при учете эффекта виброгашения [42] не превышает величины,
определяемой по формуле (7.1).
Особую опасность для некоторых систем вантовых мостов
представляет случай резонанса, возникающего при проходе группы
людей, идущих в ногу. При частотах обычно возможного шага (85—
120 шагов в минуту) период воздействия будет Г=0,5—0,7 сек.
Если предположить, что весь пролет моста заполнен колонной
людей, идущих в ногу, то величину динамического коэффициента при
резонансе можно определить по следующей формуле:
2я
1 + ц=1+——. (7.67)
а2пу
Приняв а=1,35, п=7, \>=0,035, получим
1 + ц^15.
Такой резонанс, конечно, допустить нельзя. В мостах с малой
жесткостью развитию резонанса обычно препятствует образование
сдвига фазы на XU периода между нагрузкой и прогибом,
вынуждающего идущих по мосту сбить шаг. Однако в вантовых мостах,
обладающих большой жесткостью -и массой, вполне возможно
развитие устойчивого резонанса. Для мостов в сельской местности
важное значение приобретают нагрузки в виде конных повозок и
стада животных. Периоды воздействия таких нагрузок находятся в
интервале 0,3—0,4 сек.
В соответствии с указаниями норм СН 200-62 при
проектировании вантовых мостов с балками жесткости под автодорогу нельзя
допускать величин периодов их свободных колебаний по низшим
формам, лежащих в интервале 0,3—0,7 сек.
Это условие накладывает определенное ограничение на
возможную длину панелей вантовых мостов. По ориентировочным
подсчетам в зависимости от схемы Байтового моста при расчетных
напряжениях в вантах /? = 5000 кГ/см2 длины 'панелей должны быть более
l
30—40 м. Условию /i>40 м соответствует отношение — =5^5.
Л
Периоды колебаний висячих цепных мостов, соответствующие
низшим частотам, как правило, превышают 0,7 сек (см. рис. VI1-4).
Резонанс в таких системах возможен лишь при малых пролетах
(/^100 ж). Формула (7.67) в этом случае приобретает вид:
л
1 + И=1+=-.
У
210
Динамический коэффициент может достигать величин в
несколько десятков единиц. В настоящее время цепные мосты малых
пролетов не строятся.
2. Колебания висячих мостов под воздействием
ветра
Воздействие ветра на висячие мосты может быть различным в
зависимости от характера потока. Обычно рассматривают два
случая: действие потока воздуха с постоянной скоростью и
естественные порывы ветра. Действительный характер ветрового воздействия
в значительной степени зависит от топографической структуры
местности. Скорость ветра беспорядочно изменяется относительно
основной (средней) скорости переноса воздушных масс. В
метеорологии это явление называют порывистостью (пульсацией) ветра.
Пульсации ветра можно рассматривать как некоторый случайный
процесс, для описания которого применимы методы математической
статистики. При длительных промежутках времени ветер — это
нестационарный апериодический процесс. Однако в практических
расчетах иногда ограничиваются определенным отрезком времени,
в течение которого процесс воздействия ветра может
рассматриваться как установившийся периодический.
В настоящее время сведения о величине давления и частоте
повторяемости порывов ветра довольно противоречивы. По некоторым
сведениям, периодические (в определенный промежуток времени)
порывы ветра происходят с интервалами не менее 4—5 сек. В
соответствии с этим, например, в датских нормах указано, что
строительные конструкции должны иметь такие размеры, чтобы период
их колебаний был не больше 2,5 сек. По данным шведского
метеорологического института, периоды порывов ветра могут быть менее
4—5 сек. Установлено, что ветровое давление уменьшается с
уменьшением периода воздействия.
Воздействие на висячие мосты потока воздуха с постоянной
скоростью изучено более полно.
Если в потоке воздуха находится какое-либо препятствие, то за
ним образуется вихревой след, причем вихри сбегают с
определенной периодичностью, зависящей от формы и размеров конструкции,
а также от скорости потока. Так, например, при обтекании
цилиндра образуется вихревая дорожка, называемая дорожкой Кармана
I/ (рис. VII-12). Направление сбегающих с цилиндра вихрей попере-
I менно меняется. Число вихрей, сбегающих за секунду, определяется
выражением
где v — скорость потока, м/сек;
_£> — диаметр цилиндра, м;
sh — число Штроухольса (для цилиндра sh = 0,20).
9*
211
Величина числа Штроухольса зависит от типа обтекаемой
конструкции.
В результате отделения вихрей поочередно с двух сторон
цилиндра на последний действует гармонически изменяющаяся сила,
перпендикулярная направлению потока. Закон изменения во
времени этой силы имеет вид:
P = Cvr — FsmBt, (7.69)
где р — плотность воздуха (6=0,125 кг сек2-м-*);
F— площадь проекции поверхности в направлении потока, м2;
6 — круговая частота возмущающей силы (2ят се/с-1);
Cw — аэродинамический .коэффициент (для цилиндра CV—1).
Такая сила возникает при обтекании любой конструкции, но
коэффициент Cw зависит от ее формы. Чем хуже обтекаемость
конструкции, тем больше 'коэффициент С1у и соответственно амплитуда
силы Р. Коэффициент CV зависит также от угла между
направлением действия потока и конструкцией.
Висячий мост, расположенный в потоке воздуха, испытывает
действие возмущающей силы (7.69) и, следовательно, приходит в
состояние вынужденных колебаний. Поскольку аэродинамические
силы вихрей могут быть приложены несимметрично относительно
продольной оси проезжей части вместе с балками жесткости, то
вполне возможно возбуждение как вертикальных, так и крутильных
форм колебаний. При совпадении частоты 0 с какой-либо из
собственных частот моста (o)i или ыКрг) наступает резонанс. В зоне
интенсивных колебаний процесс вихреобразованпя начинает зависеть
от перемещений моста. С ростом перемещений растут и амплитуды
аэродинамических сил. Полную характеристику поведения моста в
резонансной зоне можно получить с помощью методов нелинейной
механики. Решение этой задачи связано с большими трудностями
и пока отсутствует.
На практике обычно применяют
экспериментально-теоретический метод. Воздействие вихрей на мост рассматривают как
начальную причину возникновения колебаний. При установившихся
колебаниях на проезжую часть, помимо сил вихревого происхождения,
действуют аэродинамические подъемные силы и моменты,
вызванные перемещениями самого моста в потоке воздуха. Эти силы
создают связь между вертикальными и крутильными формами
колебаний. Задача, таким образом, сводится к рассмотрению связанных
изгибно-крутилышх колебаний моста, находящегося под воздейст-
212
P2
Ъ
'b/2
6/2
Ь12
*I2
7I
вием ветра. При определен- ГЦМ
нон скорости потока возмож- —„^
на потеря устойчивости мое- iff
та в форме быстро пара- *- | | |
стающих изгибно-крутнль-
ных колебаний (флаттера).
Расчет критической
скорости флаттера ведется для
жесткой упруго-опертой i 2Ь
пластины с двумя степеня- — Н
ми свободы, соответствую- Рис_ VII.13
щими вертикальным и
крутильным колебаниям моста. „„„„„
Расчетные значения критической скорости сравниваются с экспе-
пимента^нымп, полученными при испытании моделей в аэродана-
мической трубе В результате для различных систем висячих мостов
в Гависи^сЙ от типа" поперечного сечения проезжен части можно
получить уточненную величину критической скорости ветра
На рис VII-13 приведена расчетная схема висячего моста.
Аэродинамические силы в общем случае определяют по следующим фор-
мулам [54]:
Л = 2лр • bvC (к) (t-ф + ц + 6/2ф);
л
iJ/ = —-—Р6202ф,
о
р., = npb2i\; Рз = npb*vy;
где „ _ вертикальное перемещение пластины;
ф-угол поворота пластины вокруг продольной оси,
перпендикулярной к направлению действия потока;
С (к) -комплексная функция, зависящая от частоты колебании
Уравнен^сТя^анных колебаний без учета сил демпфирования
имеют вид:
2 п
тц + т^цу\ — г =
о;}
(7.70)
о
т/-2ф + т/^сОфф — М = 0,
где
р = р1 + Р2 + Р3;
M = M + —(Pl-PsU
т — масса пластины;
г радиус инерции относительно продольной оси;
•о,, о) —частоты свободных вертикальных и крутильных
колебаний пластины на пружинах.
Рассматриваемая модель вполне соответствует колеблющемуся
висячему мосту при условии, что величина 2 b соответствует ширине
проезжен части т — погонной массе моста, г—радиусу инерции
сечения проезжей части, a м, и со,-частотам свободных
вертикальных аа и крутильных ыкР1 колебаний моста.
Решение системы уравнений (7.70) находят в виде
т] = Aieia>t + А2е~ш; <р = Вге^ + В2е~ш, (7.71)
т. е. предполагают, что обе координаты меняются с одинаковой
частотой со.
Здесь Ль Л2, Ви В2 — постоянные;
»= V-U
t — время.
После подстановки выражения (7.71) в выражение (7.70) и
приравнивания определителя системы нулю получают алгебраическое
уравнение относительно со. Корни этого уравнения могут быть в
общем случае числами вещественными, мнимыми и комплексными.
Характер движения системы зависит от характера корней. Если со
окажется вещественным числом, то, используя формулу Эйлера
emt = cos u>t + i sin u>t, выражение (7.71) для т) примет вид
т] =(Л1 + A2)cos(ot-\- t (Л 1 — Л2) sin corf.
Аналогичным будет и выражение для ср. Этому уравнению
соответствует гармоническое колебательное движение с постоянной
амплитудой.
Если со число мнимое, например co = ip, то вместо (7.71) получим
т] =Л1е-Р' + Л2ер*.
Это решение (см. второе слагаемое) будет свидетельствовать
о неограниченном и монотонном росте перемещений. В этом случае
состояние равновесия системы неустойчивое.
Наконец, если со будет комплексным числом, например co=ia+t'p,
то вместо (7.71) получим
т] = Aieiate-w -\- А2е-Ше&.
Каким бы ни было число р (положительным или отрицательным),
одно из слагаемых будет неограниченно возрастать. Из-за
множителей eiat и e~iat движение будет носить колебательный
характер, но с безгранично возрастающей амплитудой (флаттер). Таким
образом, для устойчивости системы необходимо, чтобы со было
вещественным числом. Исходя из условия вещественности со и
определяют критическую скорость ветра иКря-
Величина vVVR зависит от нескольких параметров висячего
моста. Основными из этих параметров являются низшие частоты
свободных вертикальных колебаний системы ьц, соотношение низших
частот крутильных и вертикальных колебаний одного порядка
СОкр г" п ,
, ширина моста 2 о и погонная масса моста т.
(Иг
Критическая скорость ветра увеличивается при возрастании
каждого из указанных параметров системы. Из теоретического
решения, в частности, следует, что uKpR = °° при условии соКрг-<сог.
На практике это условие может быть выполнено лишь в случае,
214
■fy/f
25
20
15
in
J
0
u-
p
=50
p——=30
p = 10
III 1 //
pi ^>
/
/ /
-^^ --
г/ь-i.a /
7/
^- ■"
s^^s ^
-^ -s^1
0,5 ^
■""" 6/
/.0
w
^0 2J
Рис. VI I-14
■*# 'Vt/^"
если в поперечном сечении моста находится нечетное количество
висячих ферм( одна или три). Очевидно, возможность возбуждения
колебаний таких мостов сохраняется непосредственно вихрями
ветра. Расчетную критическую скорость ветра для некоторых систем
висячих мостов можно определить по графику [54], представленному
на рис. VI1-14.
На рис. VII-15 приведены результаты сравнения
экспериментальных величин критических скоростей ветра окрг) с расчетными
для различных типов поперечного сечения проезжей части. Более
подробные сведения по этому вопросу можно найти в работах [54,
63], где приводится и обширная библиография по проблеме
аэродинамического расчета висячих мостов.
Рассмотрим в качестве примера данные висячего моста через
пролив Такома, существовавшего до аварии в 1940 г. Вес 1 пог. м
этого моста <7i = 8,25 т/м, ширина моста 2 6 = 12 ж, частота
свободных вертикальных кососимметричных колебаний со2=0,833 сект1,
215
°Kf.V
0,8
0,6
№
a?
®
® ®
о
о
-
dl2b=0,0S
^-'~~L j
о
X
/ 0,20
й/2Ь=0М
0.J0
—L
~^0,20
0,10
—/• —
4.0 uHpLlb)i
2b--t '
'C5f
X
Рис. VI1-15
соотношение частот —— = 2,3, отношение — = 0,77,высота балки
жесткости со сплошной стенкой — 2,5 м [30]. Поперечное сечение
моста показано на рис. VII-15 (отмечено х).
Погонная масса моста
mi
g
8250
9,81
= 841 кг- сек2 -м~2.
Безразмерная масса, характеризующая отношение массы моста
к массе «присоединенного» воздуха,
'" 841
и = = = 59,4.
* npb2 3,14-0,125-36
По графику (см. рис. VI1-14) имеем
икрн
S* 10,
откуда расчетная критическая скорость ветра
Окр я = 0,833 • 6,0 • 10 = 50 м/сек.
216
По графику (см. рис. VII-15) определяем поправку t>Kpn за счет
£-'ьр и
формы поперечного сечения проезжен части = 0,3.
Укр R
Отсюда действительная критическая скорость ветра Окрг=
= 0,3-50 = 15 м/сек.
Как видно, неблагоприятная форма поперечного сечения
проезжей части существенно снижает критическую скорость ветра.
Скорость ветра в момент аварии моста была и=18,7 м/сек. В данном
случае при подсчете иКрл не учтены силы демпфирования, которые
несколько увеличивают критическую скорость ветра.
Новый мост через пролив Такома при тех же пролетах имеет
ширину проезжей части 2 6 = 18 и. Высота сквозной балки
жесткости— 10 м. Если предположить, что все параметры моста (за
исключением ширины и профиля поперечного сечения) сохранились,
то, принимая для сквозной формы по рис. VII-15 = 0,8, ПОЛу-
^кр R
чим для нового моста
9
укр v = 50 — 0,8 = 60 м/сек,
6
т. е. критическая скорость увеличилась в 4 раза. В действительности
за счет более мощных балок жесткости критическая скорость
возросла еще больше.
Считают, что в самую сильную бурю скорость ветра не
превышает 45 м/сек. Надо отметить, что приведенные на рис. VI1-14 и
VI1-15 результаты теоретических и экспериментальных
исследований относятся главным образом к случаю горизонтального
воздействия потока воздуха на проезжую часть. При этом наблюдается так
называемый классический флаттер, близкий по характеру к
флаттеру крыла самолета. В настоящее время установлено, что висячие
мосты находятся в более опасном состоянии, когда ветер действует
под некоторым углом (углом атаки) к горизонтальной плоскости
проезжей части моста. Колебания в этом случае носят название
флаттера срыва. Основные различия между классическим
флаттером и флаттером срыва потока состоят в следующем.
Критическая скорость флаттера срыва меньше критической
скорости классического. Если частота классического флаттера
устанавливается в пределах между величинами собственных частот моста
о), и (1)кр г, то частота флаттера срыва близка к частоте ы„рг-. Во
флаттере срыва крутильные колебания имеют доминирующее
значение.
Результаты экспериментов на моделях со сквозными фермами
показывают, что критические скорости флаттера срыва при углах
атаки потока ±10с могут быть в 2—3 раза меньше критических
скоростей классического флаттера [63].
Надежной основой для исследования опасности возникновения
срывного флаттера до сих пор являются лишь эксперименты.
8-3213
217
3. Динамическая устойчивость висячих мостов.
Явление перекачки энергии
В предыдущих разделах главы мы исходили из линейных
уравнений движения. Это обстоятельство позволило существенно
упростить задачу определения частот свободных колебаний висячих
мостов и применить к исследованию их вынужденных колебаний
хорошо разработанную методику линейной динамики сооружений.
Линеаризация уравнений приводит, однако, к тому, что ряд
явлений, специфичных для нелинейной системы, выпадает из
рассмотрения, так как в рамках только линейной теории эти явления
не могут быть объяснены.
В 1947 г. проф. И. И. Гольденблатом было установлено, что в
висячих одноцепных мостах наряду с обычным резонансом
возможен и так называемый параметрический резонанс [8, 9]. Его
возникновение связано с нелинейностью деформаций висячей системы.
Рассмотрим предварительно напряженную висячую систему (см.
рис. VII-1). Уравнение статического равновесия такой системы
определяется выражением (7.3). Предположим, что на мост действует
равномерно распределенная по пролету вертикальная нагрузка
интенсивностью Ро cos Qt. Распоры в верхней и нижней цепях от этой
нагрузки можно представить в виде:
Яв = РвЛ, cos Qt;
Ян = — РнЛ, cos Qt, (7.72)
где рв и рп — коэффициенты, имеющие разномерность в метрах;
Ро, Q — амплитуда погонной интенсивности и частота
возмущающей нагрузки. Знак минус перед вторым
выражением означает, что нижняя цепь в силу
предварительного натяжения работает на усилие, противоположное
по знаку усилию верхней цепи.
С учетом внешней нагрузки уравнение статического равновесия
по принципу Даламбера примет вид:
Ы я^ (Яв + Яв) 375 (Ян + #н);
(3X4 V -/ дх2 * " ' "н'. дх2
-(HB+ffB)^ + (HB + ffB)^ = q + P0cosQt-md^.
Вычитая из него уравнение (7.3) и подставляя вместо Яв и Я„
их значения по (7.72), получим (предполагая ось балки в невозму-
„ „ dV
щенном состоянии прямолинейной, т. е. — = Q)уравнение вынуж-
денных колебаний системы
218
Ш -Й - (Яв + Ян) ^ - (Рв - Р-) Л, cos в№+т в2Ц
= (l-pB-^-pH-^)p0cose/. (7.73)
/2 г" /2
Уравнение (7.73) после подстановки т, _ у „. in Gjn tJt*
г=1 '
и преобразований будет иметь вид:
q\ + со? (1 + ^г cos Qt)qi = Ai cos 6f, (7.74)
РоРв(1-рн/рв) .
Ai p~i ' (7-75>
EI— + tfB + tfH
(Hi — частота свободных колебаний системы.
Величину Ai можно принять равной нулю, так как при t = 2, 4,
6 ... Лг- = 0, а при i=l, 3, 5 ... Лг~0. В случае первой симметричной
формы колебаний (i=l) величину Нв + Ня в формуле (7.75) следует
заменить в соответствии с формулой (7.18).
Уравнение (7.74) представляет собой уравнение Матье. Это
уравнение описывает квазигармонические колебания, близкие по
характеру к нелинейным и присущие довольно широкому кругу
механических систем. Основной результат исследования уравнения
(7.74) сводится к тому, что система имеет области динамической
неустойчивости (параметрического резонанса) в области соотноше-
СОг 1 . 3 ^ „
ния частот— = —, 17 —...Особую опасность представляет первая
область неустойчивости. В этом случае внешняя периодическая
нагрузка с частотой 0«2 со* может вызвать резонансные колебания
системы с частотой со*.
Если внешние периодические силы, например вихри ветра,
вызывают кручение проезжей части, то уравнение вынужденных
крутильных колебаний висячего моста также приводится к уравнению
Матье. Коэффициент %г получается несколько меньше за счет роста
знаменателя, куда входит еще член, характеризующий крутильную
жесткость проезжей части. Для одноцепной распорной системы при
действии вертикальных периодических сил [8] коэффициент X,- будет:
U = -—, Л РГ% , (7.76)
q
\ Т /2 HI
I2 Н
где q — погонная интенсивность постоянной нагрузки на одну ферму.
8* 219
Силы демпфирования сужают границы областей неустойчивости
и накладывают определенное ограничение на возможность
возникновения интенсивных параметрических колебаний. С учетом
демпфирования уравнение (7.74) примет вид:
2
<7i + 2e-5i + coi(l -\-hiCOsBt)qi = AiCOsQt,
где е — коэффициент демпфирования (затухания) колебаний.
Для границ низших областей неустойчивости получаются [8]
следующие выражения:
для первой области неустойчивости
для второй области неустойчивости
4б -2 2 -
где v = —; со,- = «г — е •
6
Из этих выражений видно, что возможность возникновения
параметрического резонанса связана с определенными соотношениями
между коэффициентами Я,г- и v.
Для первой области неустойчивости должно выполняться
условие
кг > 4v, (7.77)
а для второй
k>2y2v. (7.78)
Если приближенно принять для первой области неустойчивости
2л y
О = 2сог и для второй 6 = «г, то тогда при он = — и е = —
I i 1 i
условия (7.77) и (7.78) примут вид:
^>4-Ь; X/>4l/i,
тс У it
Декремент колебаний у для цепных мостов имеет величину
порядка 0,005—0,02. Поэтому параметрический резонанс при 6=2 со,
вызвать гораздо легче, чем при 6 = он, так как в первом случае
величина %i, а следовательно, амплитуда нагрузки требуется меньше.
Для одноцепных распорных мостов при слабых балках жесткости
Ро
в случае низших частот (£= 1; 2) можно считать 7,»-»—. При y=0.01
ч
220
Амплитуда,
при частоте u>i
Скорость
мг щ V Ветра,
условие возникновения
параметрического резонанса (0 = 2ы,) в
таких системах будет
р
—°> 0,013.
Q
Это условие вполне
выполнимо, например, при воздействии на
мост людей, заполнивших пролет
и идущих в ногу. Таким образом,
область возможного резонанса Рис. VII-16
0,3—0,7 сек для распорных одно-
цепных систем может расширяться, распространяясь на мосты с
периодами свободных колебании по низшим формам менее
Г=0,7-2=1,4 сек.
При воздействии ветра амплитуды аэродинамических сил
зависят от перемещений моста и, как правило, неизвестны. Проверить
условия (7.77) и (7.78) нельзя. Если обратиться к формулам (7.68)
и (7.69) для цилиндра, то можно видеть, что при увеличении
частоты вихрей (т.е. скорости потока) в 2 раза амплитуды
аэродинамических сил увеличиваются в 4 раза. После аварии Такомского моста
в аэродинамических трубах были испытаны модели висячих мостов
в уменьшенном масштабе. При этом кривые возбуждения колебаний
по всевозможным формам имели общий характер (рис. VII-16) [30].
В диапазоне скоростей Vi^-v2 возбуждались устойчивые колебания
с (Ог при небольших амплитудах. С увеличением скорости ветра до
значения v^2v\ амплитуды колебаний с той же со* 'быстро росли и
скорость приходилось уменьшать во 'избежание поломки моделей.
Параметрические колебания (даже в том случае, если они не
несут прямой угрозы для прочности сооружения) повышают
чувствительность моста к ветру. Повышенная чувствительность к ветру
приводит иногда к недопустимым условиям психологического
воздействия колебаний на людей, находящихся на мосту. С этим
обстоятельством при проектировании висячих мостов также
необходимо считаться. Следует стремиться к уменьшению коэффициента Я,,-,
так как при прочих равных условиях параметрические колебания
возбуждаются тем легче, чем больше величина этого коэффициента.
В случае одноцепной распорной системы уменьшению Я,г-, (см.
7.76), способствует увеличение веса моста и жесткости балки.
Предварительно напряженная двухцепная система (см. рис.
VII-1) обладает важным преимуществом перед одноцепной. Ее
параметры всегда могут быть выбраны так, что коэффициент %и
определяемый по формуле (7.75), даже при отсутствии балки
жесткости будет минимальным или равным нулю. Случаю Я,* = 0 соответ-
ствует условие i- = 1. Отношение-- можно найти как абсолютную
рв рв
221
величину отношения соответствующих динамических распоров Д#н
и ДЯВ, определяемых по формулам (7.8) и (7.7):
рв _ АЯВ I fBLHEFB '
Таким образом, Я,г=0 в случае, если
м^н=1 (779)
При данном выборе параметров уравнение (7.74)
преобразуется к обычному неоднородному уравнению второго порядка и,
следовательно, динамическая устойчивость висячей системы с
натяжной цепью будет обеспечена при любом соотношении частот сог/6
независимо от величины декремента колебаний.
д2ц дЦ]
При Яг = 0 нелинейные члены Д#В и Д#Н—-, входящие в
дх2 дх2
уравнение (7.4) с разными знаками, взаимно уничтожаются. В этом
случае предварительно напряженная система является линейной.
Аналогичным свойством линейности (7^ = 0) обладает одноцепная
висячая система с передачей распора на балку жесткости.
Нелинейностью вантовой системы с балкой жесткости, как правило,
можно пренебречь. В заключение остановимся на явлении
перекачки энергии, которое свойственно всем висячим системам. Это
явление, близкое по характеру к параметрическому возбуждению
колебаний, заключается в том, что если между частотами свободных
вертикальных со,- и горизонтальных tor; колебаний системы одного
порядка существует соотношение.
СО; = 2(0гг, (7.80)
то при возбуждении одного из видов колебаний (вертикального или
горизонтального) в системе происходит взаимный энергообмен.
Амплитуды горизонтальных колебаний, уменьшаясь со временем,
переходят в нарастающие амплитуды вертикальных колебаний. По
истечении некоторого времени (при отсутствии внешнего
воздействия) процесс перекачки энергии происходит в обратном
направлении. Колебания поддерживаются самостоятельно, одна форма как
бы возбуждает другую. Вследствие затухания колебаний амплитуды
со временем уменьшаются. Однако при воздействии на висячие
мосты ветра, который будет поддерживать колебания, возможно
развитие устойчивого резонанса. Для устранения этого явления
параметры висячей системы необходимо подобрать так, чтобы условие
(7.80) для низших частот (i = l; 2) не выполнялось.
Таким образом, для обеспечения надежности висячих мостов
необходимо тщательно подбирать их конструктивные параметры.
Наряду с обеспечением статической прочности задача
проектировщика состоит в том, чтобы свести до минимума эффект от действия
на мост динамических и аэродинамических сил.
[per'-
№
ь;с
"аск
:ся.: РАЗДЕЛ III
ЭСКИЗНОЕ ПРОЕКТИРОВАНИЕ
Задача эскизного проектирования состоит в выборе наиболее
целесообразного в данных условиях решения. Во время эскизного
проектирования рождается основная идея сооружения, и с этой точки
зрения этот этап считается самым ответственным.
При этом нельзя связывать себя рамками известных,
проверенных решений. Именно в процессе эскизного проектирования
находят новые решения, и не следует опасаться того, что они не
проверены ни расчетом, ни пробным конструированием, ни практикой
эксплуатации. В дальнейшем детальное проектирование выявит
достоинства и недостатки нового решения, покажет, как зачастую
избавиться от этих недостатков и сохранить преимущества.
Новые решения при эскизном проектировании их следует искать
и исследовать.
Одними из основных задач эскизного проектирования являются
сравнение вариантов и выбор окончательного решения. При этом
сравнивают показатели, из которых одними из основных являются
расход материалов и связанная с ним стоимость сооружения. При
разработке вариантов важно выбрать рациональные пропорции
сооружения. В частности, составление вариантов начинают с
разбивки на пролеты, которая может определяться, например,
условиями подмостового габарита или, если мост проектируют через
несудоходную реку, условиями наиболее экономичной разбивки.
Если в мостах применяют висячие конструкции, разбивка на
пролеты только по экономическим соображениям маловероятна.
223
Чаще всего здесь приходится решать комплексную задачу, когда
один-два пролета определяются условиями судоходства, а
остальные — условиями экономики. Судоходные пролеты часто делают
висячими, а остальные — самых разнообразных систем из различных
материалов.
В дальнейшем будет рассматриваться только висячий участок
моста.
Основными задачами эскизного проектирования висячей части
моста являются выбор системы и изыскания рациональных
размеров элементов выбранного решения.
Первую задачу решают путем составления вариантов и
сравнения их по экономическим показателям, эксплуатационным,
строительным и архитектурным качествам. При сравнении вариантов
по стоимости определяют размеры массивных элементов: быков,
устоев, массивов для закрепления оттяжек, что сделать
относительно легко.
Кроме того, надо установить стоимость пролетных строений,
для чего необходимо определить количество расходуемого металла
разных сортов (тросы, прокат). Эта задача уже требует
специального изучения.
В настоящей работе рассматриваются сисячие, преимущественно
металлические сооружения, поэтому сначала освещаются вопросы
веса 'пролетных строений.
После выбора варианта (а иногда и до этого) приходится
уточнять основные размеры сооружения. В частности, если принята
цепная система с балкой жесткости, надо определить количество
цепей по ширине моста (две или одна) и решить вопрос, будет ли
эта система однопролетной, трехпролетной или многопролетной,
будет ли она распорной 'или безраспорной.
Надо выбрать соотношение пролетов, величины стрелок цепей,
материал цепей, установить угол наклона оттяжек, высоту балки
или фермы жесткости.
При проектировании Байтового моста с балкой жесткости тоже
приходится решать вопрос о разбивке на пролеты и наклоне
оттяжек и определять количество .вант в пролете, высоту
пилонов и балки жесткости, количество ферм в поперечном сечении
моста.
Если составляют вариант Байтового моста без балки жесткости,
то основным вопросом оказывается уже выбор системы. Если в
двух предыдущих случаях основные идеи системы вполне
определенны, то здесь может быть много вариантов: статически
определимая или неопределимая система, с жесткими стержнями или без
них, двухпоясная, многопоясная или с решеткой, составленной из
треугольников.
Все эти разнообразные вопросы надо решить три эскизном
проектировании, и на них авторы стремятся дать ответ в настоящем
разделе.
224
ГЛАВА VIII
ВЕС ВИСЯЧИХ МОСТОВ
При проектировании пролетного строения моста ставится
задача определения размеров всех элементов конструкции, которою
решают путем расчета элементов на прочность. Расчет на
прочность может быть осуществлен только при условии, когда известны
все нагрузки, в том числе собственный вес сооружения.
Таким образом, чтобы найти размеры сечения элемента, надо
знать вес всех элементов, в том числе и рассчитываемого, т. е. когда
проектировщик ищет размеры элемента, он уже должен знать эти
размеры. Получается замкнутый кр^г, выход из которого можно
найти только путем приближенных расчетов или на основании
опыта проектирования определить ориентировочный вес
сооружения.
Знание веса сооружения позволяет также сопоставить друг с
другом разные варианты по расходу металла и стоимости и тем
самым помогает решить основную задачу эскизного проектирования —
выбор решения.
Существуют различные способы определения веса сооружения.
Н. С. Стрелецкий в 1926 г. предложил универсальный способ
решения задачи, получивший название способа характеристик. Формула
погонного веса имеет вид:
ка -\- qb
где к—временная нагрузка;
q— вес проезжей части;
R — расчетное напряжение;
у — вес единицы объема материала;
/ — пролет;
а и Ъ — характеристики, которые для разных систем имеют
различные значения и приведены, например, в работах [7],
[37] и др.
Все способы предварительного определения веса являются
приближенными. В частности, ни один из них не учитывает влияния
изменения температуры. Между тем этот фактор может отразиться
на весе внешне статически неопределимых систем, однако есть
основания думать, что это влияние не является особенно
существенным.
Искусственное регулирование усилий в элементах конструкций
существенно не влияет на вес ряда систем, но для вантовых
статически неопределимых систем этот фактор является иногда
основным и его необходимо учитывать.
225
§ 35. ВЕС ЦЕПНЫХ МОСТОВ
Вес ферм пролетных строений цепных мостов с балками
жесткости определяют по частям. Самым тяжелым элементом является
балка жесткости. Наибольший изгибающий момент в ней возникает
в четверти пролета при загружении полупролета. Он равен
Ме = — • (4.39)
Соответствующее напряжение равно
Мф/2 к№
I 128/
Сечение балки двутавровое или коробчатое. Приближенно можно
считать, что площадь каждого пояса и стенки (или двух стенок)
F
равна— , где F — полная площадь сечения. Тогда
О
F h2 2 h2 7Fhz
3 12 ^ 3 4 36
Наибольшее напряжение
Mh/2 id2
о = ——
25hF
Если напряжение о равно расчетному Re, получим площадь
сечения и погонный вес балки:
к/2 KlZytyo
Р = ^5Яф'' Яб^25^Г' (8Л)
где -фб — конструктивный коэффициент балки, который можно
принять с небольшим запасом iJ)g= 1,6.
Вес цепи можно определить, предполагая, что усилие в ней
н_ (gO + <Jn4 + gn + K)lz
Тогда погонный вес
Отсюда
где к — временная нагрузка с коэффициентом поперечной
установки перегрузки и динамическим коэффициентом;
226
qm — вес проезжей части, приходящийся на одну цепь;
я^ц — конструктивный коэффициент, который можно принять
равным 1,3.
Вес подвесок составляет обычно 2—3% от веса цепи, поэтому
им можно пренебречь. Вес цепи, если она изготовлена из
высокопрочной проволоки, может ограничиваться величиной прогиба.
По формуле (4.90), пренебрегая в знаменателе жесткостью
бачки Eal по сравнению с жесткостью цепи и считая нагрузку
нормативной, получим
кн/4
/ + 2a/cos3p
Приравняем эту величину допускаемому npoi ибу, например г=г^х »
a Fn выразим через натяжение цепи и расчетное напряжение Rn:
F _ (q + x)l2
Ц 8foRn '
Здесь q — полная постоянная нагрузка на ферму. Получим
kbIrJi-\--^-)
COS3P' I
(<7 + к)5,31/0£ц =400'
Отсюда
= Еп{д + к)1о
ц 75,2/cH(/ + 2a/cos3p) ' К ' '
Чтобы удовлетворить условию жесткости (прогиб в середине
пролета), надо, пользуясь формулой (8.2), принять расчетное
напряжение цепи Яц не выше полученного по формуле (8.3).
Если цепь состоит из звеньев, жесткость пролетного строения
ограничивается жесткостью балки. По формуле (4.48) можем
получить
5/CjJ4 I
6144£б/ = 400' (8'4)
Наибольший изгибающий момент в балке
к/2
М = —.
64
Следовательно, наибольшее напряжение в ней, которое примем
равным расчетному, будет
_ KPh/2
°б — —2Г7Т—•
64/
227
Отсюда
_ tcPh
~ 128#б '
Подставив это выражение в формулу (8.4) и определив из нее /?б,
получим
41,8 ка I
При определении веса балки по формуле (8.1) расчетное
напряжение Re следует принимать не выше тюлученного.
2а г ,
Пример. Определим вес фермы при / = 200 м; 1+ —=340 м; f=lb м\
/г=4 м; £6=2,1-107 г/ж2; £„=1,7-107 т/м2; #„ = 60 000 г 1м2; /?6=20 000 т/м2;
к = 3,0 т/м; кв=1,7 т/м, дпц = 4,0 г//*; -фс = 1,6; фц=1,3.
2.Ы07 3,0 - 4 17йпп , „„
По формуле (8.5) найдем /?б: Я б = ' 7Т " 200
По формуле (8.1) можно определить вес балки, принимая в качестве
расчетного напряжения величину /?с = 17 800 т/м2, полученную по условию жесткости:
3.2002.7,85.1,6 = 0845от/^
25-17 800-4
Используя формулу (8.2), определим вес цепи в первом приближении:
= 0,85 + 4,00 + 3,00 = М4
8-16-60 000 —1
2002-7,85-1,3
Проверим по формуле (8.3) величину расчетного напряжения, которую
можно допустить по условиям жесткости. Если принять полную постоянную нагрузку
q = q ч + g6 + gn = 4,00 -*- 0,8-5 + 0,4-1 = 5,29 m м, то получим
/?„ = ]-7-107 - t5,29 + 3.00)-16 = 5, еоо m м2
75,2 1,7-340
Таким образом, оказывается, что при первоначальном определении веса цепи
величина расчетного напряжения (/?ц = 60 000 т/м2) была несколько завышена.
Поэтому пересчитываем вес цепи по формуле (8.2):
= 0,85 + 4,00+3,00 = „ 52 п1Яш
8-16-51600 —1
2002-7,85-1,3
Полная постоянная нагрузка составит q= 4,00 +^0,85 + 0,52 = 5,37 тп^и.
Вторичный пересчет не нужен, так как эта нагрузка мало отличается от
полученной в первом этапе расчета (5,29 т/м).
§ 3R- ВЕС БАЙТОВЫХ ФЕРМ С БАЛКАМИ ЖЕСТКОСТИ
Вопрос о весе таких ферм освещен в литературе слабо.
Используя приведенные выше расчеты, можно получить, но весьма
приближенно, вес конструкции. Если начинать с определения погонного
теоретического веса балки жесткости, можно применить формулы
228
(5.1) и (5.2) наибольшего изгибающего момента в пяти- и семипа-
нельной системе. Воспользуемся первой формулой, дающей
некоторый запас. Учитывая влияние изменения температуры, надо это
выражение, по данным автора, умножить примерно на 1,5, а
учитывая искусственное регулирование, разделить приблизительно на
2. В результате получим
M = 0,005(il>g + <7 + K)/2f
где g— погонный теоретический вес балки;
■ф — конструктивный коэффициент балки жесткости;
q — погонный вес проезжей части;
к — эквивалентная нагрузка на ферму.
Если поделить момент на расчетное напряжение, получим
момент сопротивления сечения балки
= 0,005 (г^ + <у + к)/2
R
Выразим момент сопротивления балки жесткости через ее
площадь. Если сечение балки двутавровое или коробчатое, но имеет
одинаковые площади верхнего и нижнего поясов (FB), можно
приближенно написать
F Ш
bfr п V 2 / „ h „ ,
1 2 = Fc \- FBh.
6 ^ /г/2 6
Считая, как и в цепных мостах, площадь одного пояса равной
площади стенки, полечим полщю площадь балки F и W:
F = 3FC; W = Fch(\+\r) = \,\7Fch.
4 6 '
Отсюда
W = 1,17 —ft
_. 2,5W 2,5 0,005(^ + 9 +к)/2
и г та = ■ ■.
h h R
Умножив теоретическую площадь сечения балки на вес единицы
объема материала у, получим выражение теоретического погонного
веса балки жесткости
0,0125(^ + 9 +к)/2
ё = кг, Y.
откуда g
Rh
0,0125(9 + к) /2-у
Rh — 0,0125ф/2у
229
или
= д + к
ё~ Rh
0,0125/2v ~
- / 1
Если считать высоту балки жесткости равной я= -—- , получим
шпй /z =
100
теоретический вес
g
или конструктивный вес
q + K
R
1,25/y
■*
g6 = —о • (8-6),
1 ,25/y4>
При выводе этой формулы не учтено продольное усилие в
балке жесткости. Однако в средней панели безраспорных систем, по
которой определяли вес, продольная сила отсутствует. В тех же
сечениях, где возникает большая продольная сила, изгибающие
моменты, как правило, невелики. Поэтому есть основания считать, что
полученной формулой можно пользоваться в качестве
приближенного решения для безраспорных мостов, а для распорных — лишь в
качестве первого приближения.
Для балки со сплошной стенкой можно принять коэффициент
\|j = l,4. Формула (8.6) выведена для пятипанельной фермы. Если
ферма семипанельная, то формула получит вид:
Ш*= 1 + К • (8-7)
—* 1
1,07*уЧ>
Очевидно, чем больше пролет моста, тем на большее количество
панелей выгодно его делить. Следует учитывать, что использование
формул (8.6) и (8.7) может дать удовлетворительные результаты
лишь при относительно небольших пролетах, по-видимому, до
300—400 м. Пролеты большей величины желательно делить на 9,
11 и большее число панелей, чтобы получить относительно легкую
конструкцию.
Однако надо заметить, что внешний вид сооружения при
большом количестве вант становится неблагоприятным (см. рис. 1-15).
Зная вес балки жесткости и, следовательно, практически полную
нагрузку, можно определить и вес вант, но с меньшей точностью,
чем вес балки. Однако вес вант относительно невелик, поэтому
ошибка, даже значительная, почти не отразится на общем весе.
230
В связи с малым весом вант конструктивный коэффициент ниже
не учитывается.
Чем меньше число вант, тем сильнее каждый из них нагружен.
Поэтому есть основания думать, что вес вант мало зависит от их
числа. В связи с этим определен вес для пятипанельной фермы.
В этом случае по формулам (5.5) получим усилия (пренебрегая
собственным весом вант):
0,237(9 +к+ £б)/ с 0,174(9 + * +go)/
Ol = ; , 02 =
sin pt sin p;
2
Длина первого короткого ванта l\= ; второго/2 =
0,4/ г . C0SpPl ^
Считая расчетное напряжение равным RB и объемный вес
cos Р2
Y, получим вес вант:
Sik 0,237(q + K + g6)l-0,2ly
Qi =
RBcosfii sinpicospi^n
= 0,047(9 +к+ g6)*2V .
sin Pi cos Pi RB
0,0696(9 + к + g6)/^y
sin p2 cos p2 RB
Для большей определенности зададимся высотой пилона
/
hu = — = 0,143/.
Тогда tgpi =0,713; tgp2 = 0,357; р!=35°30'; р2=19°40';
sin f>i cos Pi = 0,463; sin p2cos p2=0,312 и
n 0,102(9 + к + g6)Y/2 n 0,223(9 + 'v + g6)^2
vi = ^ ; V2 =
Ав Ав
Распределив вес четырех вант равномерно по пролету, получим
погонный теоретический вес
0,65(9 + к + g6) у/
£в = - • (°-°>
Ав
Усилие в оттяжке равно
_ SiCosPt , 52cosp2 0,237(9 + к + g6)l ,
Оо = 1 == (-
COS Ро COS Ро tg Pi COS Ро
, 0,174(9 + к + g6)l
tg p2 cos Ро
231
Принимая Ро = 30°, получим
So = (0,385 + 0,563) (9 + к + g6) / = 0,948 (q + к + g6) /.
Тогда, считая длину двух оттяжек равной 0,8/, получим их вес
п S0y 0,78(9+ * + g6)/2Y
Q0 = _0,8/ = к
и погонный вес, отнесенный к единице длины пролета
0,78(9 + K + g6)ly
q° = Rl •
Полный погонный вес всех вант
1,43(9+ K + g6)*y ,йсп
Дв
Нагрузка на пилон будет
5П = 5i sin pt + S2 sin p2 + So sin p0 = (0,237 + 0,174 +
+ 0,948 sin 30°) (q + к + g6) I = 0,900 (q + к + g6) /.
Вес двух пилонов, считая длину пилона равной 0,143/, составит
= 0,900(9 + K + g6)/-0,143/y2 ^ 0,257(9 + K + g0)Py
Rn An
и погонный вес
0»Ц,+ , + „.)
Rn/iytyn
где ifn — конструктивный коэффициент
Считая конструктивный коэффициент равным 1,8 с учетом
коэффициента снижения допускаемого напряжения, получим
0,462(9 + K + g6)/Y
gn =
R*
Полный вес прокатного металла
__ , 0,462(9 + * + £б)/у ,.,,.
£пр = £бН ^ • (8.11)
Дп
В данном случае не рассматривался вопрос относительно
величин напряжения, которые можно допустить при удовлетворении
условий жесткости, в связи с тем что прогиб вантовых ферм с балкой
жесткости в основном зависит от деформаций вант. Следовательно,
232
учет допускаемого прогиоа
отразится практически только на весе
вант, а вес вант в этих системах
относительно невелик. Поэтому
снижение расчетных напряжений
по условиям жесткости не
учитывалось.
§ 37. ВЕС БАЙТОВЫХ ФЕРМ
С ТРЕУГОЛЬНЫМИ РЕШЕТКАМИ
Рассматриваемые здесь
системы, в том числе и вопросы
их веса, мало изучены. Ниже
приведены выводы формул веса
ферм лишь некоторых из
рассмотренных выше систем.
В плоских статически
неопределимых вантовых фермах (рис.
VIII-1) для устранения
сжимающих усилий в элементах
приходится создавать предварительные
усилия (см. § 31). Предположим,
что в некоторых стержнях
однажды статически неопределимой
системы возникли сжимающие
усилия (рис. VIII-1, а) от действия вертикальных нагрузок.
Натягивая один из стержней, например АВ, можно в любом стержне
создать растягивающее усилие какой угодно величины. Конечное
усилие должно быть таким, чтобы сжимающие усилия были
перекрыты во всех стержнях. При этом тот стержень, который требует
создания наибольшего усилия в натягиваемом стержне, будем
называть диктующим.
Выражение для усилия в произвольном стержне имеет вид:
St^Q+K + Qtiq + gl+Sri, (8.12)
где Qf~— площадь положительного участка линии влияния;
Q,i — полная площадь;
к — временная нагрузка;
q — вес проезжей части;
g— вес фермы;
Sri — усилие, возникающее в данном стержне от регулирования.
Если отношение усилия 'при регулировании в данном стержне
Sri к усилию в непосредственно натягиваемом 5К обозначить
Рис. VIII-1
= а,-,
(8.13)
233
формула (8.12) примет вид:
St = Qt к + Qi (q + g) + аЛ.
Для диктующего стержня при загружении отрицательного
участка линии влияния Q~ получим
5Д = QUK + QH(<7 -f g) + aHSH = 0.
01с10да SH = j^ + g»(^ + g)l. (8.141
Од
Считая, что для диктующего стержня полная площадь всегда
отрицательная, получим
6i = £2i ^ + ь2г (^ + g) Ч аг-.
Од
При расчетном напряжении в стержне R, объемном весе у, длине
стержня U и строительном коэффициенте ф вес стержня будет
Й*к + Й*(? + гЖ|Йд> + |Йд| (? + £)>—
Q. = _ Y/iVj,.
Сложив вес всех стержней и разделив эту сумму на пролет L,
полечим выражение теоретического погонного веса фермы:
_ K2Q?U + qlQiU + gZQik + {| ^л 1« +1QB| <?} X
X
Од
#L
ад
5Wi
к2Й+/( + <72Й*/,+{|Й„ |к + |Яд|<7>
отсюда г = wj ■ =-7 " -(8-15)
ул¥ ад
Разделим числитель и знаменатель этой формулы на L2:
8 __R ZQili |Йд|2аЛ- ' (8Л6)
234
Такое выражение удобнее предыдущего, так как ряд
множителей и слагаемых в нем не зависит от пролета. Если они вычислены
для определенной системы при данном пролете, то остаются
действительными для этой системы с любыми пролетами, при тех же
соотношениях размеров. Если обозначить:
2Qi h |£2д |2ai/i
2Qj/j |fiH|2(Xi/j
то получим простую формулу
= а:
= Ь,
(8.17)
ак4- bq
yWL
Эта формула аналогична известной формуле характеристик
Н. С. Стрелецкого. Разница состоит только в том, что учет
необходимости искусственного регулирования усилий несколько усложнил
коэффициенты.
По формулам (8.17) определены характеристики а и Ъ для ферм,
схемы которых приведены на рис. VIII-1. Пунктиром на схемах
показан уровень проезжей части, которая поддерживается не
показанными на схеме подвесками (рис. VIII-1, а, б) или стойками
(рис. VIII-1, в, г).
Вес подвесок, стоек и оттяжек приведенными ниже
характеристиками не учитывается.
Из формулы (8.15) видно, что вес фермы слагается из двух
частей. Первая из них соответствует загружению вертикальной
нагрузкой, вторая — регулированию усилий, поэтому в табл. VIII-1
характеристики а и Ь приведены в виде двух слагаемых.
Пример. Определить погонный вес фермы (см. рис. VIII-1, а) при /- = 100 м,
<7=4 т/м, к=3 т/м, у=7,85 г/ж3, Я =,6 000 кГ/см2, -ф= 1,50.
Из табл. VIII-1 получим:
а = ав+ Ар = 0,44+1,60 = 2,04; Ь = Ьъ + Ьр = — 0,05 + 1,60 = 1,55.
Полный погонный вес равен g= аК + bq = 2,°4'3 + *'55'4 =0,250 т/м.
JL — ь 60 000 _ j 55
1<\>1 7,85-1,5-100
Определим отдельно вес, соответствующий действию
вертикальной нагрузки (считая, что все элементы могут работать на сжатие
и растяжение с одинаковым напряжением)
Овк + М 0,44-3-0,05-4
£В = -7J— = ^ = 0.023 т/м;
Ов
yWL
235
^ = avK + bvQ =l,60-3+J,60-4 = o226 т/м_
R
49,5
yWL
Заслуживает внимания то обстоятельство, что здесь
регулирование требует затрат материала в 10 раз больше, чем вертикальная
нагрузка. На это следует обращать внимание при изысканиях
наиболее выгодных систем.
ТАБЛИЦА VIII-1
Схемы ферм
(см. рис. VI1I-1)
а
б
в
г
д
ав+ар=а
0,44+1,60=2,04
0,49+1,71 = 2,20
0,44+1,08=1,52
0,78+0,78=1,56
1,21+0,57=1,78
6В+6Р="
—0,05 + 1,60-1,55
-0,07+1,71 = 1,64
0,05+1,08 = 1,13
0,39+0,64 = 1,03
0,90+0,24 = 1,14
Так, например, для системы, показанной на рис. VIII-1, д,
g'B = 0,165 т/м, gv=0,054 т/м и отношение — = 0,33 (ло сравнению с
10 для системы, изображенной на рис. VIII-1, а) более
благоприятно.
Для определения веса статически определимых вантовых ферм
Жискляра (см. рис. 1-9, а) и предложенных Е. И. Крыльцовым
можно воспользоваться формулой последнего [21]:
{n + q)yLW • 1 \ 1
g = Л 1+7> V- Г • (8-19>
4R
2 cos2 a tg a
где tga=//— (/—ордината среднего узла фермы,
отсчитываемая от уровня вершин пилонов).
В заключение необходимо отметить следующее. Как и в цепных
мостах (см. § 35), здесь может оказаться, что расчетное
напряжение в элементах конструкции определится не условиями прочности,
а условиями жесткости. Поэтому формулу (8.18) следует считать
приближенной и при проектировании соответствующей системы
надо проверить жесткость и на основании этого определить
расчетное напряжение.
§ 38. ВЕС ДВУХПОЯСНЫХ ФЕРМ
В двухпоясной ферме (рис. VIII-2) наибольший вес имеют пояса.
Поэтому вес подвесок, который от полного веса обычно составляет
2—3%, не учитывается.
236
I 11 I 111111111111111 11
i.i.M ri 111 ы 111 гттпгп _
w
Рис. VI11-2
Наибольшие усилия в элементах фермы возникают при загру-
женин временной нагрузкой всего пролета, а наибольшие
перемещения — при загружении полупролета. Для этих двух видов за-
гружения и определяют вес ферм. Обычно при больших пролетах
решающее значение имеет загружение всего пролета. В этом
случае вес определяется прочностью, а при малых пролетах —
жесткостью.
Сначала определим вес фермы (рис. VIII-2) по условиям
прочности исходя из следующих предпосылок. Вся постоянная
нагрузка q полностью воспринимается верхним поясом. При этом натя-
ql2
жение верхнего пояса Яв= и нижнего пояса — Нв = 0.
Временная нагрузка к распределяется между верхним и
нижним поясами. При этом нижний пояс должен работать на сжатие.
Чтобы пояс смог воспринимать сжимающие усилия, его надо
предварительно натянуть. Величину необходимого при этом
растягивающего усилия можно найти исходя из первоначального
предположения, что нижний пояс способен работать на сжатие, и
определив, как распределяется нагрузка к между верхним и нижним
поясами.
Эту задачу можно решить на основании данных, приведенных в
§ 30, но проще всего — содержащихся в § 23.
Для фермы (рис. VIII-2), не имеющей балки жесткости,
считаем, что / = 0. Используя формулу (4.101), найдем перемещение
сечения фермы в середине пролета от нагрузки к (распределенной по
всему пролету):
г= ^ . (8.20)
Нздё+/-№-)
По формуле (4.98) получим (считая #0н=0)
н^ш^а. <8.2„
237
После подстановки сюда г и преобразований получим
Я, - -0Л25МР кР
2с F* б/н Л2. /="„,, 2с
/+-*- "н I /- ^ /4
cos3p ^ ' cos3^
Для приближенного решения считаем, что именно на такую
величину надо предварительно натянуть нижний пояс, чтобы он мог
принимать участие в восприятии нагрузки к.
Учитывая, что наибольшее усилие в нижнем поясе будет при
отсутствии временной нагрузки, получим
Яон= ; ^— - = НТ\ (8.23)
COS3 (г
При загружении фермы нагрузкой к усилие в нижнем поясе
окажется равным нулю, а в верхнем составит
Усилия, определяемые по формулам 8.23 (для нижнего пояса) и
8.24 (для верхнего пояса), будут наибольшими усилиями в поясах.
Пренебрегая в последней формуле перемещением г по сравнению с
величиной стрелки, получим
„max (<7 + к)/2
Я1В = . (8.25)
о/в
Тогда погонный вес верхнего пояса при расчетном напряжении
R можно приближенно считать равным
gB= SfBR yW>
где \р — конструктивный коэффициент;
Y — объемный вес материала;
R — расчетное напряжение.
Если учитывать вес оттяжек, считая распределение его тоже
равномерным по пролету, получим
(<7 + /е)/(н — W
* cosp /у (д + к)//пр
238
Полный вес фермы (двух поясов) будет
g
„шах „max „max
nB yW Пи y*¥ Нв yW
R
R
R
8f*R i- +
[u max -,
' //max J
//max
в
..max
Пи
//max
в
]•
(8.27)
Отношение
нт
..max
пп
//max
в
имеет вид:
к№/в
HI
8/н 1 +
А
I
Z-(-2r/cos3p
\(q+r<P
к
■рЧ?+к)П+-
Z7,
/
л
£ГФЯ =
(?+к)/2тФ
8/BR
F„ / + 2c/cos3p
л:
(8.28)
р
Все величины этой формулы, кроме — , обычно известны. Дан-
*"н
ные о величине этого отношения почти отсутствуют. По-видимому,
оно может колебаться в пределах Ъ—7. Однако, по данным автора,
изменения в этих пределах отношения FJF^ мало влияют на
величину, стоящую в квадратных скобках. При—2 = 1 это изменение
сосун
тавляет 12%, а при —- =2 всего 6%. Поэтому для приближенного
/н
решения, которое здесь приводится, примем FB/Fn=5. Тогда:
(д + к)Р^
Я:
8
г1 +
к
V.R
{,+*>£('+<! Л
(8.29
)
/; z+2C/cos3p
Перейдем к определению веса по условиям жесткости g$s.
При несимметричном загружении рассматриваемая система
деформируется по S-образной кривой. Наиболее невыгодным в отно-
239
шении прогибов является загружение полупролета. При этом
оказывается, что чем больше предварительное натяжение в подвесках,
тем меньше будут абсолютные величины прогибов в четвертях
пролета |^л| и |/п[. Определим необходимое для удовлетворения
условий жесткости предварительное натяжение элементов системы, в
частности натяжение подвесок р\ на единицу длины пролета.
Величины прогибов tn и tn можно определить по формулам
(4.108) и (4.110), принимая Е1 = 0. Эти формулы получены для
случая загружения полупролета нагрузкой 2/с. В данном случае
принимаем нормативную нагрузку /сн, поэтому величины формул
(4.108) и (4.110) разделим на 2.
По аналогии с выводами, приведенными в § 23, получим
величину, ограниченную Техническими условиями:
кн
б = гл + tn ■—
или (см. рис. IV-38)
6 =
<7ih , *7ib
dH dB
к"
4<7ih , 4<7ib
flH f:
IB
где <7iH и <7iB — погонные нагрузки на нижний и верхний пояса при
загружении на первом этапе временной нагрузкой
к"
2
Умножим числитель и знаменатель последней формулы на 8/2:
6 = -
324? h32-V
8fiH 8/:
1в
Ввиду приближенности данного расчета будем считать, что
ординаты поясов в середине пролета f„ и fB при изменении нагрузки
остаются постоянными. Перемещение б принимаем равным
допускаемому [б]. Тогда получим
(8.30)
или
W2
8/Чн
qiJ2 _ н <7ib/2 _ <7ib/2
8/н 8/ib 8/в
— Гл1
32(Я1н + Я1в) L°J
П]я + niB = ——- .
= HiBl
32 [б]
(8.31)
240
Величины Я1н и HiB можно выразить через нагрузки,
передающиеся «а каждый пояс
по всему пролету):
ся «а каждый пояс при первом этапе загружения (нагрузкой —
и—к< "••=—8ь ■ фШ)-
где р\ — нагрузки, передающиеся на пояса от подвесок;
q— полная постоянная погонная нагрузка (неизвестная).
Подставляя эти величины в формулу (8.31), получим
{q+~+Pi)i2
pd2 v ' ' 2 r I kJ2
8/h 8/e 32 [6] '
^(m-^-Vvk- (8-33)
Пренебрегая весом подвесок, получим приближенное выражение
для q
i 2с \
Нву \ + cos3p /* , Яну ,
{я+^+pi)* v Ч
2с
Y cos3p Pil2 y
где ^пч — вес проезжей части.
Из этой формулы можно определить р\.
Л,__^(|+^и1_,, *_(<+_2£_),.
*L 8/УО cos3p'^J ЩЪК \ cos3p /v
Pi. =
8/в R^ cos3B/
8/в /?V cos3p/" 8/нЯ
(».c54)
Обозначая
1 \ rnsSR /
/v /, . 2c \
8fBR ^ ' 16/вЯ v cos3p
ад-'1' Т+7.^Ж]" 2/,'-*' "M7B-mi (a35)
241
и приравнивая правые части формул (8.33) и (8.34), получим
(1 — ai)q — biKil — qn4
= rfiKH — ami.
bi + Ci
Отсюда полный погонный вес будет
(*■■ *'
q = Яв + Яв. + <7пч =
% + Ci
кн
1
bi + ci
tTLi
а погонный вес металла фермы
g<}>6 = <?в + дя = q — qn4 =
bi + Ci
1 — а{
bi + Ci
61 W(
(8.36)
«i
6l + Ci
mtl qn4
1 — at
6i + Ci
m.
(8.37)
Рассмотренное решение довольно громоздкое, но
преимуществом его является возможность определения натяжения подвесок
(8.34) и, следовательно, натяжения поясов (8.32) и их сечения. Если
необходимо найти только погонный вес фермы, следует
воспользоваться формулой (8.31). Предположив, что при загружении
полупролета в обоих поясах возникают одинаковые расчетные
напряжения R, получим
Яш + Я is кн/2\>г|)
£фб ~ ^ -у-ф = onr«in- (8-38)
R
32[8]R'
Пример. Определить вес фермы по условиям прочности и условиям жестко-
ста при /=100 /(;/ + ■——= 178 м, fB = \2 м; /н = 6 м; ?Пч = 4 т/м; к=3 т/м;
кн=1,7 т/м; у=7,85 т/ж3; #=60 000 т/м2; б = //400 = 0,25 м, г|)=1,4.
В первом приближении считаем, что полная постоянная нагрузка д=дач =
= 4 т/м. Тогда, используя формулу (8.29), по условиям прочности получим
^Ф/? —
(3 + 4)1002-7,85-1,4
8,12-60 000
1 +
(3 + 4)-LA+J*..5.i°°\
12 \ 62 178/
Применяя формулы (8.35) н (8.37) по условиям жесткости, имеем:
Д1 = 100-7,85-1,4-178 = 00346; ь а± = 0,0173;
8-12-6000 2
=0,143 /и,' м.
Ci>
1002-7,85-1,4
8-6-60 000
= 0,0382; rfx
_ 12,6
12+6
(—L——J-W3.83;
\4-0.25 2-12/
mi-.
12 + 6
=0,333;
242
£Ф«
^3,83 + 0,01га \lf7 + / одшб _0i333U
I 0,0173 + 0,0382/ ^0.0173 + 0,0382 /
1-0.0346 L0333
Z_ = 0,462 т/м.
0,0173+0,0382
Как видно, условия жесткости оказались решающими (вес по этим условиям
в 3,23 раза больше, чем по условиям прочности).
Уточним вес, принимая q = дач + #фб = 4 + 0,462 = 4.462 т м.
Тогда по условиям прочности получим вес, мало отличающийся от
определенного в первом приближении ^фл=0,152 т/м.
По условиям жесткости вес не изменится, так как в формулы (8.35) и (8.37)
он не входит.
По приближенной формуле (8.38) вес фермы £фб =0,40 т/м (погрешность
15%).
Следует отметить, что в некоторых системах при малых
пролетах решающими оказываются условия жесткости, а при больших
пролетах — условия прочности. В рассматриваемой системе,
например, при пролете 1 000 м вес по условиям жесткости примерно в
2,7 раза выше, чем по условиям прочности. Этот вес и следует
принять.
В этом случае удовлетворены и условие жесткости, и условие
прочности, но ввиду необходимости дополнительного натяжения
поясов появляются излишние запасы в поясах по растяжению. Эти
запасы при заданном расчетном напряжении в поясах можно
устранить путем небольшого изменения системы.
Для этого вместо увеличения сечений поясов (а следовательно,
и их веса) можно добавить в систему балку жесткости и тем самым
получить систему, рассмотренную в § 23. Балка должна иметь
такую жесткость, чтобы при загружении полупролета она получила
весь излишек нормативной нагрузки, который требует увеличения
сечения поясов. Этот излишек можно найти по формуле (8.37),
подставив в нее £фД вместо £фб. Тогда вместо нагрузки кн получим
нагрузку kJj» которую можно допустить на ферму без увеличения
сечения поясов против полученных по условиям прочности:
ёФп (г—;—~ + mi) — ( г—г mi / 9пч
Kb = г ■ (8.39)
di
н
Оставшийся излишек
bi + ci
в
Д/сн = Ka — Kr (8.40)
можно передать на балку жесткости.
При этом сечение балки жесткости надо подобрать такое,
чтобы при загружении фермы нагрузкой к%, а балки нагрузкой Лкн
прогибы их были одинаковыми.
Ограниченный техническими условиями прогиб балки при
загружении полупролета нагрузкой А/сн будет равен (4.48) :
243
[в]=и**_=_|_.
L J 6144£/ 400 v ;
Чтобы найти расход материала на балку, надо определить
теоретическую площадь ее сечения. По формуле (8.41) найдем
Дкн/3
/ = — . (8.42)
3,072£ -v h
Считаем, как и выше, что балка имеет двутавровое или
коробчатое сечение, причем площади каждого пояса и стенки одинаковые
и равные одной трети полной площади балки.
7№
Тогда l-Fc — + 2Fa\-j __Д—+ _j ^ ;
36 / 36 А/с"/3 Дкн/3
Отсюда f = T._ = T.1SJf^=1,64-^. (8.43)
Теоретический погонный вес балки с учетом конструктивного
коэффициента г]) = 1,6 будет
Дкн/3
g6 = 2,62-^-Y. (8.44)
Высотой балки задаются по конструктивным соображениям.
Рассмотрим полученные результаты, используя данные
приведенного выше примера. По формуле (8.39) определим /^.считая
£фй = 0,143г/я:
н
0,143 ( 1-°>Ш + 0,333 ) - ( —^ 0,333) 4,00
' \ 0,017 + 0,038т ' / V 0,017+ 0,038 '
3,83
= 0,32 т/м.
0,017
0,017 + 0,038
По формулам (8.40) и (8.42) получим
1,38-1003
ДКн = 1,70 — 0,32 = 1,38 т/м; I = '—-—— = 0,0214 мК
1 3,072-2,1-Ю7
Как и в цепных мостах с балками жесткости, примем
/
h = — = 2,00 м. Тогда по формуле (8.44) получим
50
„„ 1,38-1003- 7,85
ее, = 2,62 — ■ = 0,336 т/м.
ё 2,Ы07-2,02 '
Изгибающий момент в балке жесткости при загружении
полупролета
Дкн/2 1,38-1002
М да — = -1—- = 214 тм
64 64
244
и напряжения
м±
2 21400 000-100
о = = — = 1000 кГ/см2.
I 2 140 000 '
Таким образом, полный вес фермы будет
£ф = 0,143 + 0,336 = 0,479 т/м,
т. е. практически он тот же, что получен для системы без балки
жесткости (0,462 т/м2). Учитывая, однако, что стоимость проката
в н = 2ч-3 раза ниже стоимости тросов в конструкции оказывается,
что стоимость системы с балкой жесткости ниже. Если принять, что
прокат в 2 раза дешевле тросов. Тогда приведенный к одинаковой
стоимости вес системы с балкой жесткости будет
0,336 Л
gnp = 0,143 + -^— = 0,311 т/м,
т. е. на 32% легче (дешевле) фермы без балки жесткости.
§ 39. ВЕС ПИЛОНОВ И ОТТЯЖЕК ВИСЯЧИХ МОСТОВ
При определении веса пилонов и оттяжек висячих мостов могут
встретиться случаи, когда к пилону со стороны пролетного
строения подходит один трос (одноцепные и двухпоясные вантовые
системы) или несколько тросов.
Рассмотрим первый случай. Наибольшие усилия в верхнем
поясе системы и, следовательно, в пилоне будут при загружении
временной нагрузкой всего пролета. При таком загружении можно
считать, что вся нагрузка пролетного строения (постоянная q и
временная к) передается на цепь или верхний пояс, а от него на пилон.
Вертикальная составляющая усилия, передающегося на пилон со
стороны пролета, будет
V, = ^- (8.45,
и горизонтальная составляющая
(q + K)l2
Я= 8/ • <8-46)
Горизонтальные составляющие усилий в оттяжке и верхнем
поясе равны и, следовательно, усилие в оттяжке будет
cos p 8/ cos p '
где р — угол наклона оттяжки к горизонту.
245
Вертикальная составляющая этого усилия
Уот = Sosin Р = {Q "t *^ tg P-
Таким образом, сжимающее усилие в пилоне будет
Fn = vi+FoT = ii+^i(1+',gP)
и вес пилона Qn =
2 v 4f
Япф
где ф — коэффициент снижения напряжения при сжатии. Для
приближенного решения можно считать ф = 0,7. Вес одного
пилона равен
(9 + K)/(l+^tgp)/nYTl)n
Qn= т» • ^
Эту формулу можно упростить, но за счет снижения точности.
Можно принять— = 8; р = 30°; /п=0,13/, тогда вес одного пилона
Q^0,2(, + K)^ (84g)
Дп
Вес оттяжки будет
Ro 8fcosp R0' y '
где /0 — длина оттяжки;
R0— расчетное сопротивление.
/
Если, как и выше, принять — = 8, р = 30° и !0 = 0,35/, получим
приближенную формулу
АО
Формулами (8.48) и (8.50) рекомендуется пользоваться только
для ориентировочных расчетов. Более точные результаты дают
формулы (8.47) и (8.49).
Величину q (погонную постоянную нагрузку) можно определить
по формулам предыдущих параграфов.
Вес оттяжек и пилонов в системах, рассмотренных в § 36 и 37,
тоже может быть определен по формулам (8.47) и (8.49), так как
для этого надо знать только вертикальную и горизонтальную
составляющие усилий, передаваемых на вершину пилона от
пролетного строения при загружении последнего временной нагрузкой по
всему пролету.
246
Формулы (8.47) и (8.49) непосредственно вытекают из формул
(8.45) и (8.46). При применении к фермам, рассмотренным в § 36 и
37, эти формулы не дадут больших ошибок, так как при загруже-
нии всего пролета временной нагрузкой элементы, расположенные
ниже проезжей части, почти полностью выйдут из работы и ферма
начнет работать подобно свободной гибкой нити. Следовательно,
по формулам (8.47) и (8.49) также можно удовлетворительно
оценить вес пилона и оттяжки. Однако при этом в качестве / следует
принимать расстояние по вертикали от вершин пилона до
горизонтального элемента в середине пролета в фермах без балки
жесткости или расстояние от вершин пилона до середины высоты балкн
жесткости.
ГЛАВА IX
ВЫБОР СИСТЕМЫ И ОСНОВНЫХ РАЗМЕРОВ МОСТА
§ 40. ВЫБОР СИСТЕМЫ МОСТА
Системы висячих мостов чрезвычайно разнообразны, поэтому
выбор системы — очень сложная и в то же время весьма
ответственная задача.
К мосту предъявляют разнообразные требования, которые
должен учитывать проектировщик: экономичность, долговечность,
удобства эксплуатации и строительства, что определяет
техническую целесообразность строительства моста. Кроме того, следует
учитывать местные условия. Так, при проектировании городских
мостов на первый план зачастую выдвигаются архитектурные
требования. При этом любое из перечисленных выше требований хотя
и сохраняется, но отодвигается на второй план. Однако при
выполнении архитектурных требований не следует забывать о
технической целесообразности, что иногда наблюдается в практике.
Примером может служить упоминавшийся выше мост в ФРГ через
р. Эльбу (см. рис. 1-14), в котором довольно удачный вид
сооружения получен за счет снижения технических качеств.
Не следует вдаваться и в другую крайность, т. е. за счет
технической целесообразности строить даже вне городов уродливые
мосты (см. рис. 1-15), тем более, что техническая целесообразность
такого решения (ФРГ) не является бесспорной.
В конкурсном проекте моста через р. Дунай в Братиславе (см.
рис. 1-16, г) приняты все возможные меры, чтобы уменьшить
усилие в оттяжке: предусмотрены и наклонный пилон, противовес
(ресторан) на его вершине и лифт в стойке пилона. Техническая
целесообразность удовлетворена полностью, но внешний вид моста
оставляет желать лучшего. Между тем с эстетической точки зрения
мостовой переход является очень ответственным, ибо на правом
берегу реки расположено сооружение, имеющее историческую и
архитектурную ценность.
В другом конкурсном проекте моста (см. рис. 1-16, б)
технические возможности использованы в меньшей степени, но в условиях
247
i\vy
повышенных архитектурных
требований; по мнению автора, это
решение более целесообразно.
Остановимся на вопросе
технического соответствия системы
местным условиям. Если мосты
пересекают глубокие и широкие реки,
морские проливы или заливы, может
оказаться, что постройка
промежуточных опор невозможна или
нецелесообразна по стоимости. Тогда
приходится строить мост с очень
большими пролетами, которые иногда
достигают нескольких сотен метров и доходят до 1 300 м (мост
Веррацано — Нерроуз в США). В таких случаях в распоряжении
проектировщика очень небольшие возможности в выборе системы.
Учитывая современное состояние мостовой техники, при очень
больших пролетах вне конкуренции стоят -пока только цепные мосты
(см. рис. 1-2, б, ж, з). В других системах висячих мостов, так же
как балочных (консольных) и арочных, пролеты достигли
величины ~500 м. При таких пролетах возможности выбора системы уже
более широкие.
Для решения вопроса о выборе системы составляют варианты,
определяют стоимость, оценивают эксплуатационные и
строительные качества каждого варианта, причем количество вариантов
иногда достигает 10—20. При составлении вариантов не следует
пренебрегать решениями, которые 'не 'применялись.
Рассмотрим некоторые малоизвестные системы, которые можно
применять главным образом в горной местности.
На рис. IX-1, а показано традиционное решение: цепь с балкой
жесткости. Однако в ряде случаев целесообразнее другая схема
Рис IX-2
248
Рис. IX-З
(рис. IX-1, б). При этом получим экономию благодаря замене
пилонов и оттяжек простой анкеровкой. Замена же подвесок
стойками мало повлияет на стоимость сооружения.
Можно применить вантовую ферму без балки жесткости (рис.
IX-2, а). Здесь сначала подвешивают цепь, затем прикрепленные к
ней вертикальные оттяжки заанкеривают в скале и слегка
натягивают. В узлах цепи устанавливают качающиеся (вдоль моста) стойки,
а на них — разрезные балки.
Этой ферме аналогична система, показанная на рис. IX-2, б.
Однако здесь езда понизу, а оттяжки сделаны не вертикальными, а
наклонными. Обе системы должны быть отнесены к чисто
Байтовым. К ним относится и система (рис. IX-2, в), которая является в
сущности перевернутой системой (см. рис. IX-2, б). Но она
экономичнее.
Прототипом фермы, показанной на рис. IX-2, г, является
система известного моста через оз. Маракайбо в Венесуэле (см.
рис. 1-19), жесткие пилоны которого работают на изгиб от
несимметрично расположенной нагрузки и имеют поэтому очень
мощные сечения. В ферме (см. рис. IX-2, г) пилон поддерживает
шарнирно опертую на него балку АВ, концы которой соединены с
Байтовыми напряженными опорами. В результате пилон будет
работать на изгиб лишь под действием тормозных сил. Вертикальные
9—3213
249
Sj vj
//////////ль.
•f
—'
1—L
, r—I
1
1
l—u
p--
—«.
p^
'—-
1
p
\
\
///////////
-г
нагрузки при несимметричном загружении вызывают в опорах
только сжимающие усилия, а в вертикальных оттяжках —
растягивающие.
Схемы этих систем (кроме 'показанной на рис. IX-2, г) изучены
при эскизном проектировании, выполнявшемся студентами
старших курсов и дипломниками. В этой работе принимали участие
студенты, 'ныне инженеры Р. Л. Бабухадия, Б. И. Цветков,
В. Н. Назимов и В. В. Модестов.
Новых систем можно показать еще большое количество. В
состав вантовых статически определимых и неопределимых ферм могут
быть включены жесткие стержни (рис. IX-3, а, б). Можно
применять различные комбинированные системы, в том числе очень
экономичную и жесткую двухцепную систему С. А. Цаплина (рис.
IX-3, в), а также использовать и некоторые старые системы на
новой основе, например систему Лейнекугель Лекока с напряженными
оттяжками (рис. IX-3, г). Представляет интерес упоминавшаяся
выше система в виде цепи с балкой жесткости и натяжной цепью
внизу (рис. IX-3, д). В такой системе можно значительно
сэкономить на балке жесткости. Возможны и безраспорные системы
(рис. IX-3, е), в которых распор воспринимается балкой жесткости.
Благодаря наличию натяжной цепи эта балка может иметь
небольшое сечение. Можно использовать в вариантах и систему, предло-
250
V77777,
W//W,
Рис. IX-4
женную в свое .время для моста через прол. Босфор в Стамбуле
(рис. IX-3, ж). Однако в средней части этой системы
предусмотрена цепь без балки жесткости, но с небольшой стрелкой. При
отсутствии сверху соответствующей надстройки проезжая часть
расположена на вертикальной кривой, что нельзя отнести к
достоинствам решения. Кроме того, внешний вид сооружения
неблагоприятен.
Значительно интереснее система с двумя цепями из тросов,
объединенными в одно целое стойками и раскосами (рис. IX-3, з).
Ввиду жесткости такой комбинированной цепи балка жесткости
оказывается ненужной.
Система моста через о. Маракайбо является новым
направлением в области вантовых мостов (рис. IX-4, а). В этой системе опоры
служат жесткими пилонами и работают на изгиб при
несимметричном загружении временной нагрузкой. Однако это решение следует
признать интересным и заслуживающим изучения и развития.
На рис. IX-4, б показана аналогичная схема моста, но ванты
заменены отрезками цепи. Если такая система окажется
недостаточно жесткой, можно применить натяжные цепи, а распорку
прикреплять к пилонам шарнирно (рис. IX-4, в). По-видимому, в
подобных системах возможно и применением ферм К. Г. Протасова в
качестве консолей и подвесных пролетов (IX-4, г).
При изысканиях новых систем приходится ограничиваться
соображениями, подобными приведенным выше. Если выбирают
решение из известных систем, для сопоставления можно дать им некото-
9*
25!
1_f=0J25L
2 /ц=0,/2Я;Щ/2
JA = 0,1221
4.fi=0M:f=0M
SJt=0,125l.fH=fuH
»!-
2 s.
*>^%
л^лг//
500 1000
Рис. IX-5
Z.A?
рую количественную оценку,
Ям\ Lf=0№i | I 7 I например, относительно
веса металла пролетных
строений мостов. На рис. IX-5
приведено такое
сопоставление для различных систем
пролетных строений при
разных величинах пролетов.
Здесь показаны также и
соотношения основных
размеров рассмотренных ферм.
Эти системы можно
сравнивать примерно при
одинаковых условиях. При
составлении графика во всех
случаях принимают временную нагрузку к = 3 т/м (с учетом
коэффициента поперечной установки и динамического коэффициента); вес
проезжей части, приходящейся на одну ферму q = 4 т/м, расчетные
напряжения для кабелей /?к=6 000 кГ/см2 и для проката
2 000 кГ/см2; допускаемый прогиб (в соответствии с нормами)
Для систем, имеющих тросы и прокатный материал, определен
вес, «приведенный» к стоимости тросов. Для этого полученный вес
проката умножен на «коэффициент приведения» 0,5. Кривые,
показанные на рис. IX-5, не учитывают веса металла, расходуемого на
пилоны и оттяжки. Это не дает большой погрешности, так как при
одинаковых пролетах (для разных схем) вес оттяжек и пилонов
будет примерно одинаковым, поэтому сравнимость разных схем не
утрачивается. Как видно из рис. IX-5, для систем /, 2, 5 кривые
близки к прямым линиям. Кривые для систем 3 и 4 сильно
искривлены, что надо частично отнести к недостаткам графика. В
частности, необходимо учитывать, что при увеличении пролета ферм 3
следовало бы увеличивать и количество панелей. При этом кривая 3
при больших величинах пролетов несколько снизилась бы. Поэтому
показанную кривую (при семи панелях в пролете) следует считать
действительной для пролетов не свыше 300—400 м. Надо отметить,
что эту систему нецелесообразно применять при очень больших
пролетах. Длинные ванты будут значительно провисать под влиянием
собственного веса. Все они должны быть предварительно натянуты.
Это натяжение и его фиксирование осуществляют на нижнем
конце ванты внутри балки жесткости коробчатого сечения. При очень
больших пролетах натяжение может превысить 1 000 т, поэтому
осуществление его может быть очень затруднительным.
Системы 2 и 5 тоже требуют создания натяжения. Однако его
можно осуществить не путем натяжения одного из поясов, что
требует больших усилий, а натяжением подвесок относительно
небольшими, легко создаваемыми усилиями.
252-
Поэтому системы 2 и 5 можно 'применять и для очень больших
пролетов.
Система / не требует предварительного создания больших
усилий и применяется для пролетов ('примерно от 80 м до 1300 м).
По весу она несколько уступает системе 5. Кривая для системы 4
почти на всем протяжении расположена ниже других. Однако эта
кривая менее точная, чем остальные, ибо ее ординаты определены
только по расчетным напряжениям. Можно предполагать, что
требования жесткости повысят вес ферм такого типа, поэтому в
случае применения систем такого типа целесообразно проверять
достаточность ее жесткости.
Применение систем типа 4 для очень больших пролетов едва ли
целесообразно, так как при этом очень затрудняется прикрепление
наклонных тросов (особенно средних) к нижнему поясу. Практика
проектирования показывает, что для пролетов 200—300 м
применение ее целесообразно. Для очень больших пролетов
эффективнее использовать системы /, 2 и, по-видимому, наиболее
целесообразны системы 5.
Для сравнения во всех рассмотренных системах стрелки поясов,
воспринимающих нагрузку, приняты одинаковыми. В системах 2 и
5 нижним поясом задавалась стрелка, равная половине верхней.
Для частного случая /=400 м сделана проверка. При верхней
стрелке /Б = 50 м величину нижней принимали от 50 до 12,5 м. В этом
интервале общий вес фермы изменялся лишь на 5% и
минимальный оказался при стрелке нижнего пояса ^«0,75^.
§ 41. ВОЗМОЖНЫЙ НАИБОЛЬШИЙ ПРОЛЕТ
Наибольший пролет, достигнутый в мостах, — это пролет
цепного моста Веррацаио — Нерроуз в США, равный 1 300 м. Нет
сомнения, что этот пролет будет превзойден. Уже предложены проекты
мостов, пролеты которых превосходят названный, например мосты
через Ламанш, через Мессинский пролив. Нельзя, конечно, назвать
величину следующего рекордного пролета и систему моста,
которая при этом будет применена.
До сих пор наибольшие пролеты принадлежали системам
мостов в виде цепи с балкой жесткости, но при этом не были
известны такие системы, как двухпоясные и многопоясные фермы, двух-
поясные фермы с балками жесткости. Однако эти фермы требуют
предварительного создания усилий в натяжных поясах для
удовлетворения условий жесткости, но чем больше пролет моста, тем
больше постоянная нагрузка и, следовательно, меньше величина
прогиба. Натяжение потребуется небольшое, поэтому появляется
возможность перекрытия пролетов наибольшей величины именно
этими системами. По-видимому, они могут конкурировать с
системой в виде цепи с балкой жесткости, однако еще мало изучены.
Величину возможного пролета в цепных мостах, очевидно,
ограничивает прочность цепи. Чтобы решить вопрос о наибольшей воз-
253
можной величине пролета таких мостов, достаточно знать
соотношение между погонным весом кабеля и весом остальной нагрузки.
Например, в Фортском мосту вес кабеля составляет ~25% от
полной нагрузки. Чем больше пролет, тем больше будет доля веса
кабеля'в общей нагрузке. Ориентировочно примем, что при
предельном пролете она составит 50%.
Величина усилия в цепи зависит от веса проезжей части с
балкой жесткости р, собственного веса цепи yF и временной нагруз-
/
ки к. Предполагая — = 10, можем приближенно написать условие
прочности
iP + K + yF)fi_RF ми (p + K + yF)l =RFi
8-1 °'8
10
где R — расчетное напряжение.
Из этого уравнения получим
_ ода
p + K + yF
Учитывая, как предположено, что p + K = yF, получим
предельный пролет
Если ориентировочно принять # = 60 000 т/м2 и -у = 7,85 т/м3,
величина предельного пролета составит
0,4-60000 „ п
I = ——— « 3000 м.
7,85
В ноябре 1970 г. международное жюри рассмотрело
представленные на конкурс 143 проекта висячего моста через Мессинский
пролив. Первую премию получил проект моста с пролетом 3 000 м,
разработанный в Италии.
§ 42. ОПРЕДЕЛЕНИЕ ВЫСОТЫ БАЛКИ ЖЕСТКОСТИ ЦЕПНОГО МОСТА
Высоту балки жесткости можно определить в зависимости от
расчетных нормальных напряжений R. Наибольший изгибающий
момент возникает в четверти пролета. По формуле (4.39) он
приближенно равен
М.= ('+^. (9.1,
64
Используя формулы (4.27) и (4.24), изгибающий момент в этом
же сечении от повышения температуры на t° будет
254
3 „, 45EIatf, 16 f* 2/o
X/n +
8/
f(*-f')l
Если обозначить
lb P , 2/o
— 2№Рц + 1др0)/п + у-(л-|-/)=/|,
3 / cos Bo
(9.2)
то момент будет
45 E/at,
Изгибающий момент в четверти пролета от вертикальной
нагрузки и повышения температуры составит
(1+ц)лк/2 45 Elat
64 ^ 32 fie
Напряжение примем равным R:
h (l+>i)wc/2 45 Elat
М ~2 64 + 32" Не * h
°=w = — = Г—1 T = R- m)
Здесь две неизвестные величины / и h. Используем также
условие жесткости (4.48):
5к/4
мйй-ГО- <95)
Исключив / из уравнений (9.4) и (9.5), получим
№Rl
Е
~ ., , ч 6144[б] , 90atlt ' (9"6)
(1 +ц)п— 1
5/ fe
Высота балки жесткости h определяется этой формулой по
величине допускаемого перемещения [б] при заданном расчетном
напряжении R. Преимуществом формулы является то, что h не
зависит от временной или другой нагрузки. Поэтому, зная общую
схему фермы и используя технические условия, можно получить
высоту балки.
Рассматривая формулу 9,6, может показаться, что чем выше
расчетное напряжение, тем меньше может быть принята высота
балки жесткости. Но это не так, ибо решающую роль здесь играет
[б], а не R. Допустим, что определили высоту балки при данном R,
255
а затем при той же высоте увеличили R. Прогиб возрастет и
окажется больше допускаемого. Чтобы его уменьшить до
допускаемого, надо увеличить высоту. Таким образом, увеличение R, как и
показывает формула (9.6), приводит к увеличению высоты балки.
Если принять прогиб равным [б] = ——,
«4'
получим h = —. L(9.7)
(l + ^)n + 29,4-
h
Пример. Определить высоту балки при: /=210 м; /0=75 м; f=26,2 м; /п=28 м;
е=1,05; #=16000 т/л*2; £=2,Ь107 т/ж2; *=40°; а=0,0000125; 1 + ц=1,30; п=1,40.
По формулам (9.2) и (9.7), получим
/
h = 5,52 м, или h « —.
8 I
Если при 'сохранении всех прочих условий принять [б] = —— »
получим h = 2,16 м, или —/.
Формула 9.6 выведена для определения высоты сплошной балки
жесткости в однопролетной системе. Можно ожидать, что эта
формула даст удовлетворительные результаты и для фермы. Если мост
трехпролетный (распорный) с неразрезной балкой жесткости и
небольшими боковыми пролетами, не поддерживаемыми подвесками,
высоту балки главного пролета, имеющего упругую заделку по
концам, можно, видимо, несколько уменьшить. Если длина боковых
пролетов равна примерно половине длины среднего, высоту
следует несколько увеличить. В безраспорной системе балка жесткости
наряду с изгибом работает на сжатие, и поэтому при прочих
равных условиях ее высоту тоже необходимо увеличить.
Все эти задачи не имеют в настоящее время готовых решений,
поэтому в каждом частном случае следует составлять и сравнивать
варианты.
§ 43. ВЫБОР СТРЕЛКИ ЦЕПИ
При проектировании цепных мостов одним из основных
вопросов является выбор величины стрелки цепи. Известно, что чем
больше стрелка, тем меньше величина возникающих в цепи усилий и
сечение цепи, но в то же время цепь и подвески становятся
длиннее, а пилоны выше. Следовательно, увеличение стрелки может
сделать конструкцию легче и дешевле, но может дать и обратный
результат. Поэтому необходимо приближенное исследование.
Рассмотрим однопролетную систему в виде цепи и с балкой
жесткости (рис. IX-6). Как показывает практика расчетов и при-
256
'"'""fy
I
fiSJ*
№~1
1 \o
y//////^\
Рис. 1Х-6
ближенные решения, изгибающие моменты в балке жесткости и,
следовательно, расход материалов на нее очень мало зависят от
стрелки цепи. Поэтому для решения вопроса о величине стрелки
надо рассмотреть систему: цепь — подвески — оттяжки — пилоны.
Чтобы получить максимальные усилия в этих элементах, надо
загрузить весь пролет нагрузкой наибольшей интенсивности,
например q, включающую всю постоянную и временную нагрузки.
Считаем, что она приложена в уровне проезда. Эта нагрузка частично
воспринимается балкой жесткости и частично цепью, но на балку
передается, как правило, не больше 2—5% нагрузки. Считаем, что
балка на нагрузку не работает. Тогда натяжение (распор) цепи бу-
ql2
Наибольшее усилие наблюдается у пилона
дет ц =
8/
S =
н
ql2
cos р 8f cos (5
Тогда сечение цепи (из троса) F = — =
Ат
ql2
8/ cos p R?
8 f2
Длина цепи (см. п. 2 § 9)ЬЦ = I -| —,
Если оттяжки имеют угол наклона такой же, как цепь у
пилонов, то напряжение в оттяжках будет равно наибольшему усилию в
цепи, а сечения оттяжек и цепи будут одинаковыми. Предполагая
также, что при изменении величины стрелок уровень анкеровки
остается прежним, получим длину двух оттяжек
2L0=2
sinp
Тогда полная длина цепи (с оттяжками) будет
L = L4 + 2L0 = / + AJL + 2 "
о I sin p
а вес материала цепи
Qn = LF =
qPy
/, 8 /2
V+--V+2-
(9.8)
8/ cos р #И" ' 3 I ■ sin p
Для определения веса подвесок считаем, что подвеска
расположена на единице длины пролета. Тогда усилие в ней приближенно
будет равно q, а площадь сечения FnR = — .
Ат
257
ТАБ
f.M
tg?
p
?
sin p
4
cos p
5
1268
/cosp
6
■ T
0,0765f
cos p
7
T
12,08
CD.
to
О
и
Gl
С
8
20
25
30
35
40
45
50
0,382
0,477
0.572
0.667
0,763
0,858
0,952
2P0'
25°30'
29°50'
33°40'
37°30'
40°40'
43°40'
0,358
0,430
0,497
0,554
0,608
0,651
0,690
0.93
0,90
0,87
0,83
0,79
0,76
0,72
70,0
56,3
48,6
43,6
40,1
37,1
35,2
1,7
2,1
2,6
3,2
3.9
4,5
5.3
36,4
31,4
28,0
26.3
25,2
24,5
24,5
Умножив эту величину на площадь, ограниченную цепью,
балкой жесткости и пилонами (рис. IX-6), т. е. на
If
fi = /c + Y
и на объемный вес у, получим
дт ' 3
Сложив формулы (9.8) и (9.9), получим полный вес тросов
«,= «^(,+f £+2^)+«(fc+f). (9.
8/ cos (Жт v 3 Z sin p ' Rt v 3 '
(9.9)
10)
Усилие, передающееся на пилон, при углах наклона цепи у
пилона и оттяжки р будет
I
Из уравнения цепи (парабола) имеем
Следовательно, усилие в пилоне
5П=— .т=д1.
(9.11)
258
ЛИЦА IX-I
242
СП.
W
О
U
_С
•*-ч
9
0,241 +
+ 0,077/, т
10
V£T,
11
ft,-2.27/. т
12
Фпр.З- т
13
<?пр.2- ?■
14
/?=10 000 кГ\смг
Фпр.З' г
15
<?пр,2' т
16
36,3
25.0
18.6
15,1
12.5
10,9
10.1
1,7
2.1
2,5
2,9
3.3
3,7
4,0
146,1
116,9
100,3
91.1
85.0
80,7
79,4
45.3
56,8
€8,1
79,5
90,8
102,2
113,5
161,2
135,6
122,8
117,6
115,3
114,8
116,9
168,8
145.3
134,4
130.9
130.4
131,8
135,9
85,5
74,5
69,8
68,5
68.8
70,1
72,5
93,1
83,9
81,2
81,8
83,9
87.1
91.4
Вес пилонов, считая расчетное (Напряжение Rn и коэффициент
снижения напряжения на устойчивость ф, составит
Qn
2ql
(pRn
lti\-
Высота пилона 1п несколько превосходит стрелку цепи.
Приближенно считаем /п=1,1/-
Тогда
Qlf
Qn = 2,2-^f-Y-
фАп
(9.12)
Кривые изменения веса в функции стрелки рассмотрим на
примере, принимая / = 210 м; a = f+20 м; с=\ м; q = 7 т/м; Rn=
=*1600 кГ/см2; ф=0,7; у = 7,85 т/м. Расчетные напряжения в тросах
(цепь, оттяжки, подвески) примем в двух вариантах ^т =
= 5000 кГ/см2 и /?т = 10 000 кГ/см2. Определим коэффициенты
формулы (9.10) и (9.12) при RT = 5000 кГ/см2:
8Rv
<7Y
1 1
7-2102-7,85 8 _
8-50 000 -6'04™; ^7= 78>8 м
— ; 2a = 2f + 40;
7-7,85-210,1
R,lC= 50000 =0-231"'
3R-C
2,2qly 2,2-7-210-7,85
qyl _ ;7-7,85-210
_ 50 000-3
= 2,27 т.
= 0,077 т;
Ф#п 0,7-16 000
Тогда получим вес тросов (в тоннах, / — в метрах)
6,04 /_ р 2/ 40
<2т =
-Н (2104 ^ \
f cos p X 78,8 sin p sin p
)+0,
231 + 0,077/ =
259
1268 ■0,0765/.- 12-°8 ■ 242
/ sin 6 sin Bf
= — — + 0,231 + 0,077f; (9.13)
cos В
Qn = 2,27f; (9.14)
4/ f
tgP==^ = ^5- (9Л5)
Подсчеты по этим формулам сведены в табл. IX-1. Величины
tg p определены по формуле (9.15) (см. графу 2). В трех
следующих графах приведены тригонометрические величины, входящие в
формулу (9.13). Теоретический вес тросов (11-я графа) и пилонов
(12-я графа) подсчитаны но формулам (9.13) и (9.14) длявсего
пролета, сложив эти величины (графы И и 12), можно получить
суммарный теоретический вес материалов, расходуемых на ферму.
Однако таким способом нельзя найти наиболее экономичное решение.
Если же известна стоимость тонны металла (в деле) пилонов
(Сп) и тросов (Ст), то можно получить представление об
отношении стоимостей рассмотренных вариантов. Примем это отношение
Ст
раВНЫМ—Is:: 3
Тогда, разделив величины графы 12 на 3 и сложив их с
величинами графы 11, получим расход металла, приведенный 'к стоимости
тросов (графа 13).
В графе 14 приведены аналогичные величины при отношении
Ст_
Графы 15 и 16 дают представление о влиянии на величину
стрелки марки стали тросов. Здесь приведены те же величины, что
и в графах 13 и 14, но в предположении, что расчетное напряжение
тросов увеличено в 2 раза (R= 10000 кГ/см2), а материал пилонов
остался тем же.
Кривые относительных стоимостей показаны на рис. IX-7. Как
видно (цифры на кривых показывают отношение стоимостей тонны
тросов и проката), наименьший расход металла определяется не
только величиной стрелки, но и расчетными напряжениями.
В то время как при расчетом напряжении /?т = 5 000 кГ/см2,
минимальную стоимость можно ожидать при отношении—, равном
5—6, при напряжении Ят=10 000 кГ/см2 это отношение будет 6—7.
Следовательно, определить точную величину выгодного
соотношения l/f не представляется возможным, а для приближенного
определения можно воспользоваться приведенными выше
исследованиями.
260
При использовании современных
материалов в первом приближении,
по-видимому, можно считать
наиболее выгодным отношение —равньш
— — —• Однако, учитывая возмож-
5 7
ность возникновения больших
колебаний, рекомендуется принимать
/ I I
стрелку g — [30] и даже — (для
больших пролетов).
В § 35 получена формула (8.3)
для определения величины
расчетного напряжения, которое может
быть допущено в цепи по условиям
жесткости при заданной стрелке.
Эту формулу можно преобразовать
в неравенство, считая, что величины
R и г заданы и требуется
определить стрелку цепи:
75.2Я (l 4 2а
f> ;
cos3p
g0\20 25 3D 35 40 45 f.M,
Щ5 6,4 ID 6,0 5,3 4,7 llf
Рис. IX-7
KH
q + к
Следовательно, эта формула дает возможность определять
стрелку по условию жесткости. Если принять те же частные
условия, что и выше, считая при этом, что
кн=1,7 т/м; q + K = 8J т/м;
Е = 1,7-106 кГ/см?, R = 5000 кГ/см*,
f 1
получим /^=16,1 м, т. е."7"^ .„/■
Это ограничение, по-видимому, может иметь решающее значение
лишь в редких случаях.
§ 44. ВЫБОР УГЛА НАКЛОНА ОТТЯЖКИ
На угол наклона оттяжки значительно влияют местные условия,
поэтому для выбора его в большинстве случаев составляют
варианты (закрепление цепи в массиве устоя, специальном массиве или
скале). Однако в некоторых случаях угол наклона можно
определить без рассмотрения вариантов, — например, если установлено,
что анкер оттяжки может быть расположен на уровне АВ (рис.
261
Рис. IX-8
IX-8), а угол наклона В желательно выбирать наиболее выгодным,
т. е. таким, чтобы вес оттяжки был наименьшим.
В данном случае длина оттяжки/= ; усилие S = ,
sin В cos В
где Я— натяжение цепи в пролете. Если расчетное напряжение
равно R, то теоретический объем оттяжки будет
Я а _ 2На
~ cosBtf sin 6 ~~ tfsin2B'
Чтобы найти минимальный объем оттяжки, возьмем производную
от объема тю углу В и приравняем ее нулю:
dV Rcos2$-2-2Ha
cfB R2 sin2 26
= 0
или cos2B = 0 и, следовательно, 2p = 90°; p = 45°. При этом усилие в
И
оттяжке будет S0 = —, а наибольшее усилие в цепи (у пилона)
с Н п C0S , / /
5Ц = . При обычных стрелках /, равных -г-^тг-. У'гол а будет
cosn 10 8
22° —27° (tga = —^), т.е. а < 45° и, следовательно, при 6 = 45°
усилие в оттяжке окажется больше, чем наибольшее усилие в цепи.
При таких условиях сечение оттяжки должно быть больше, чем
сечение цепи в пролете. Когда цепи '.висячих мостов делали из
звеньев, это было целесообразно. Сейчас, когда цепь изготавливают
почти исключительно из тросов, увеличение сечения оттяжки по
сравнению с сечением цепи пролета значительно усложняет
конструкцию. Если же сечения их принять одинаковыми, то при 6=45° цепь
в лролете имеет запас 20—30%.
Следовательно, в мостах, имеющих цепь из тросов, угол наклона
оттяжки целесообразно принимать равным углу наклона цепи
пролета в крайней панели, т. е. р = а, как это обычно и делают.
Оттяжки в этом случае будут длиннее, чем при угле 6 = 45°, в
, nft , г„ / sin 45° sin 45° \
1,90—1,56 раза I и — ).
F V sin 22° sin 27° /
При этом усилие в них, а следовательно, и сечение уменьшатся в
(cos 22° cos 27° \
—г- и ——) , а расход материала увеличится в
cos 45 cos 45 '
262
' -- ' т.е. 1,44—1,24 раза. Однако упростится конструкция
1,32 1,26
так как не нужно менять сечение цепи в месте перехода ее через
пилон. Именно поэтому такое решение и получило
преимущественное распространение в цепных мостах с цепями из тросов.
Если в пролете несколько тросов, а в оттяжке — один
(например, двухцепная система), но имеющий сечение, равное суммарному
сечению тросов пролета, угол наклона оттяжки следует выбирать
из условия
FiOi/cos ai + F2O2/00S си + ...'^ (Fi + F2 + ...)Ro/cos сю,
^ {Fl + Fi + ...)Ro
откуда cos а0 ^ — = , (У.1 о)
flOl Г2Р2
cos ai cos аг
где Fi, Fi — площади сечений отдельных тросов в пролете;
«ь о.2 — углы наклона к горизонту тросов в пролете;
Oi, 02-. — напряжения в тросах при невыгоднейшем загруже-
нии пролета;
а0 и Ro — угол наклона к горизонту и расчетное напряжение
материала оттяжки.
Угол наклона оттяжек в висячих мостах с веерным
расположением вант, зависящий от местных условий, определяют так же, как
и в цепных мостах. Небольшая разница заключается в следующем.
В вантовых мостах к пилону со стороны пролета подходят
несколько вант, которые здесь обычно обрывают и прикрепляют к вершинам
пилона. Поэтому оттяжка в таких мостах обычно не переходит из
пролета, а является самостоятельным элементом, и выбор ее
сечения не зависит от сечения вант в пролете. Следовательно, угол
наклона можно выбрать наиболее выгодным либо по расходу
материала на оттяжку (45е), либо по стоимости массива для ее
закрепления.
В системе «арфа» несколько оттяжек. Здесь каждая ванта
пролета переходит через пилон без разрыва и становится одной из
оттяжек (см. рис. 1-9, з). Поэтому целесообразно углы наклона
оттяжек принимать равными углам наклона вант в пролете.
§ 45. ВЫБОР ВЫСОТЫ ПИЛОНОВ
БАЙТОВОГО МОСТА С БАЛКАМИ ЖЕСТКОСТИ
При выборе высоты пилонов можно использовать приближенные
выводы, приведенные в § 26. На основании этих выводов можно
считать, что наибольший изгибающий момент в балке жесткости
практически не зависит от высоты пилонов. Следовательно, высота
пилонов определяется расходом материалов на ванты, оттяжки и
пилоны. Эти величины легко определить по формулам (5.7).
263
ahr—->-
1
б)
А>Ж^»
w
и
yJU-l
Mj i
MLL
ТЩ
8B0
nil
TTT
810
XLL
Й
170
ПШ
inn
i_L
TTTT
880
Рис. IX-9
Автором произведены расчеты для безраспорной фермы (рис.
IX-9, а, б) с разрезной балкой жесткости. Главный пролет имеет
семь панелей по 30 м. Высоту пилонов h принимали от 20 до 45 м,
расчетное напряжение для вант — 3 000; 6 000 и 9 000 кГ/см2; для
пилонов—1400 кГ/см2; постоянная нагрузка 5 т/м, временная
нагрузка 2 т/м. В табл. IX-2 в качестве примера приведены подсчеты
ТАБЛИЦА IX-2
Величины
tgPi
Р/
sin P/
cos Р/
Si, т
Fi, см?
li, м
Vt, мз
Qi, т
Элементы
АЛ
1,50
56°15'
0,83
0,56
322
107
53,5
0,57
4,5
А -2
0,75
37°0'
0,60
0,80
368
123
75,0
0,92
7,2
А-г
0,50
26°40'
0,45
0,89
382
127
101,0
1,28
10,1
А-й
1,125
48°20'
0,75
0,66
1232
411
60,6
2,49
19,6
Пилон
—
—
—
—
1584
1615
45,0
7,27
57,1
для h = 45 м, где р — углы наклона тросов, зависящие от высоты
пилонов и разбивки на пролеты и панели; Si — усилия в тросах в
соответствии с формулами (5.7) (усилия в оттяжке и пилоне определены на
основании условий равновесия узла A); Fi— площади сечений
элементов при расчетном напряжении в тросах RT = 3 000 кГ/см2 (для
сжатого элемента — пилона — условно принят коэффициент
снижения напряжения на устойчивость ф = 0,7); U — длина; Vi — объем
материала; Q,— вес. Сложив веса Qi, получим вес тросов QT =
=41,4 т и вес проката Qn=57,l г для полуфермы.
Результаты расчета сведены в табл. IX-3. Как видно, при
увеличении высоты пилонов вес тросов уменьшается, а вес пилонов
увеличивается. Если сложить эти веса, то общий расход материалов
264
при расчетном напряжении Ri =
= 3000 кГ/см2 будет наименьшим
при высоте пилонов h = 25 м или 7в /.
Стоимость изменяется по
другому закону, так как прокатный
металл (в деле) дешевле тросов.
Поэтому определены «приведенные»
веса исходя из соотношения
стоимостей металла разных видов. В
табл. IX-3 даны приведенные веса
для расчетных напряжений RT,
равных 3 000, 6 000 и 9 000 кГ/см2.
Приведенный вес Qnp2 определен при
стоимости проката, в 2 раза более
низкой, чем стоимость тросов, а
Спрз — в 3 раза. Кривые
приведенного веса показаны на рис. IX-10
(цифры на кривых показывают отношение
стоимостей тонны тросов и проката).
Характер верхних кривых,
полученных для #т = 3 000 кГ/см2, резко
отличается от характера нижних
(Ят = 6 000 и 9000 кГ/см2).
Определяемые наивыгоднейшие высоты
70
60
so
40
J0
?п
■
RT=3000xr/cM^
Ч
3
1 -
Ят=Б000кфм^
<<£
/V
^2
s
R^SOOOKr/b^'
V?
20 25 30 35 40 км
10,5 8.4 7,0 6,0 5,3 L/h
Рис. IX-10
ft, M
20
25
30
35
45
hll
1/10,5
1/8,4
1/7.0
1/6,0
1/4,7
QT. m
при
=3 000 hTICM"
60,0
51,5
47,0
43,8
41,4
ТАБЛИЦА IX-3
Q„. т
25,2
31,4
37,9
44,2
57,1
#т=3000 кГ/сл3|/?т=6000 кПсм*
^пр.2.
г
72,6
67,2
66,0
64,9
70,0
^пр.З.
m
68.4
62,0
59.7
58,6
60,6
'Зпр.г.
m
42,6
41,4
42,5
44,0
49,3
^пр.З!
m
38,4
36,2
36,2
36.7
39,9
Кт-=№ЮкГ1см'
m
32,6
32.9
34,7
35,7
42,5
Спр.З»
m
28,4
27.7
28,4
29.4
33,1
пилонов при разных расчетных напряжениях в тросах оказываются
различными: h ж— и h да— при /?т = 3 000 кГ/см2;
6 5,5
265
h = и h = — при /?т = 6000 кГ/см2; h = и h =
при /?т = 9 000 кГ/см2. В области наивыгоднейшего веса кривые
мало меняют свои ординаты, поэтому нет необходимости точно
определить высоты, соответствующие минимальному .весу.' Важно
только учитывать, что эта выгоднейшая высота зависит от
расчетного напряжения в тросах, или, точнее, от отношения расчетных
напряжений в тросах к расчетному напряжению в прокате, а также
от соотношения стоимостей обоих материалов.
Современные материалы имеют довольно разнообразные
прочностные характеристики, которые с совершенствованием технологии
производства материалов сильно изменяются, поэтому можно
рекомендовать при ответственном проектировании производить
изыскания, подобные приведенным выше.
При предварительном проектировании можно, по-видимому,
принимать — в пределах 1/6—1/7.
Разумеется, приведенные выводы нельзя считать точными для
распорных и тем более для безраспорных систем. С изменением
высоты пилонов меняются усилия в тросах и их горизонтальные
составляющие.
Следовательно, если эти составляющие воспринимаются балкой
жесткости как распоркой, в ней возникают продольные усилия,
меняющиеся с изменением высоты пилонов. Изменение усилий в
определенной степени влияет на сечение балки жесткости, что в
выводах не учитывали.
На рис. IX-9, б показана эпюра продольных усилий в балке
безраспорного моста. Здесь усилия возрастают к опорам. В случае
распорной системы эпюра тоже ступенчатая, но ординаты ее
увеличиваются к середине пролета. В этом отношении безраспорные
системы выгоднее: при увеличении изгибающих моментов к
середине пролета продольные усилия здесь уменьшаются, а в распорной
системе увеличиваются.
На стоимость распорных систем значительно влияет стоимость
массивов, в которых заделывают оттяжки. С изменением высоты
пилонов изменяются горизонтальные составляющие усилий в
оттяжках, а также и размеры массивов. В выводах это также никак не
учитывалось. Однако есть основания считать, что перечисленные
факторы мало влияют на стоимость сооружения ,в целом и
полученные кривые (см. рис. IX-10) серьезных коррективов не требуют.
Пренебрежение указанными факторами как в безраспорных, так
и распорных системах снижает высоту пилонов. Следовательно,
полученная выгодная высота в Чь-^-Ч? пролета, во всяком случае, не
завышена. Таким образом, влияние этих факторов на высоту
пилонов при первоначальных расчетах можно не учитывать. Наши тех-
266
Рис. IX-11
нические условия требуют, чтобы прогиб не превышал 'Доо I-
Поэтому приходится снижать величину напряжений. При этом, как видно
из рис. IX-10, выгодно увеличивать высоту пилонов и соответственно
будет увеличиваться и расход материалов.
Какие же изменения вносят ограничения жесткости в
полученные результаты?
Найдем выражение для наибольшего прогиба системы, который
будет в середине пролета или вблизи нее. При этом временной
нагрузкой надо загрузить весь пролет. Тогда возникнут наибольшие
напряжения в вантах пролета и оттяжках и произойдут наибольшие
деформации. Жесткость балки, как установлено выше, мало влияет
на усилия в вантах, поэтому при выводе приближенной формулы
прогиба ею пренебрегаем. Пренебрегаем также продольными
деформациями балки. Таким образом, будем рассматривать балку
как шарнирную цепь из абсолютно жестких звеньев [9].
В такой системе определим перемещение точки А (рис. IX-11, а),
считая, что при загружении всего пролета временной нагрузкой
напряжения в элементах АВ и ВС будут равны Дк. Тогда оттяжка
Яка/cos 6о
удлинится на величину Да = — (рис. IX-11, б), а перемеще-
Да
RKa
ние вершины пилона .по горизонтали будет Д =
cos Ро Е cos2 Po
Допустим временно, что ванта заняла положение А\В\.
Повернем ее вокруг точки В и Тогда точка Ах будет перемещаться по
линии АхАг и точка А — по 'вертикали на величину АА2, равную
_ Д _ RKa
a_tgpt ~£tgplCos2Po'
267
Теперь допустим, что ванта АВ деформируется (рис. IX-11, в).
Удлинение ее будет АЬ= —, а перемещение точки А по вер-
cos^E
тикали
Ab RKb
8в = — = . =г. (9.18)
sin Pi sin Pi cos pt£
Сложив 6а и 6в, получим полное перемещение точки А под
действием временной нагрузки 6 = 6а + 6В.
Примем эту величину в соответствии с требованиями
технических условий, равной или меньшей — .
Rk I о. b \ I
)-
Е\ tgPiCos2Po sin pt cos Pi /"""400'
откуда получим выражение для напряжения RK в вантах от
одной временной нормативной нагрузки
IE
R*
400
tg Pi cos2 Po sin Pi cos pt
Следовательно, чтобы прогиб от временной нагрузки не
превосходил допускаемой величины, от полной Багрузки (р + к,
постоянной плюс временной) напряжение (которое и будет расчетным) не
должно превышать
D D Р + к 1Е{р + к)
(а Ь \
400Кн( ; 1 : )
\ тег Р>, ргпч2 Rn sin Р., сеч R, /
4Г)Пк:„1 -
tgPiCos2p0 sin Pi cos Pi
(9.17)
По этой формуле для того же частного случая, что и выше (/=
= 210 м, а = 40 м; к = 2 т/м; р = 5 т/м; /сн=|1,7 т/м), получены
значения R для средней ванты (Ь = 90 м) при разных высотах пилонов.
При этом
lElK + p) 210-1,7-107-7 „„ пппп
v н' = - = 36 700 000 т/м,
400/Сн 400-1,7 ' '
а остальные данные сведены в табл. IX-4.
к 1
Величины R для -г=-^г определены ло формуле (9.17). Влоследней
графе приведены возможные расчетные напряжения при
допущении прогиба в 7зоо I-
Результаты расчета представлены графически на рис. IX-12.
Кривая, показанная точечным пунктиром, нанесена по трем точ-
268
ТАБЛИЦА IX-4
ft, м
20
25
30
35
40
45
1
II
со.
.ЕС
0,5
0,63
0,75
0,88
1,00
1,12
РЬ
26"30'
32°10'
37 ЧУ
41°20'
45°0'
48°
cos р0
0,89
0,85
0,80
0,75
0,71
0,67
cos» р0
0,79
0,72
0,64
0,56
0,50
0,45
tgPi
0,22
0,28
0,33
0,39
0,44
0,50
о
о
(П.
8
(П.
230
200
190
184
182
178
■о
со.
sin p, cos
427
361
300
266
243
225
■Si
СО-
(О
О
С»
со.
+
о
о
СО.
V)
с
и
co-
be
657
561
490
450
425
403
R, кПсм2
*„ г
400
5600
6500
7 500
8150
8 640
9100
S 1
1 300
7 490
8 650
10000
10850
11500
12150
кам, координаты которых представляют наивыгоднейшую при
данном расчетном напряжении высоту пилонов (см. рис. IX-10). Они
взяты с кривых, построенных для отношения стоимостей тросов и
проката, равного трем.
Кривая, нанесенная сплошной линией, построена по данным
I
табл. IX-4 для допускаемого прогиба 6 = —-, т. е. в соответствии с
существующими нормами. В точке А пересечения этих двух кривых
получим расчетное напряжение R = 7 100 кГ/см2, при котором
условие жесткости будет удовлетворено, а
наивыгоднейшая при данном
напряжении высота пилонов составит И.т28м.
Следует заметить, что сплошная
кривая 'получена, в сущности, только
для двух тросов — ванты АВ и
оттяжки (сад. рис. IX-11). Остальные
тросы (В—1 и В—2) могут иметь другую
марку стали, но это едва ли
целесообразно. Расход материала на
последние тросы в несколько раз меньше, чем
на оттяжку и трос АВ, поэтому
нежелательно применять для них другую
марку стали. Ввиду этого считаем
расчетное напряжение во всех тросах
одинаковым (7? = 7 100 кГ/см2).
Штриховым пунктиром на рис.
IX-12 показана кривая, построенная
для предельного прогиба
300
Если
ф 6fi 7,0 6.0 5,3 l/h
Рис. IX-12
269
воспользоваться этой кривой, то можно допустить расчетное
напряжение ^ = 8700 кГ/см2, т. е. на 21% выше, чем при
ограничении прогиба по нормам.
§ 46. ВЫБОР БАЙТОВОЙ СИСТЕМЫ С ТРЕУГОЛЬНОЙ РЕШЕТКОЙ
Для ферм с треугольной решеткой (см. рис. VIII-1) определен
вес при следующих исходных данных: /=100 м; q = 4 т/м; /с = 3 т/м\
г)) = 1,50; y = 7,85 r/ж3; R = 6 000 кГ/см2. Результаты подсчетов
приведены в табл. IX-5. При этом для определения факторов, влияю-
ТАБЛИЦА IX-5
(1-
Схема t|
(см. рис
а
б
в
г
д
1=100 м
gB. TIM
0,023
0,024
0,032
0,078
0,145
gp, Т/м
0,226
0,243
0,153
0,098
0,053
g, TlM
0,249
0,267
0,185
0,176
0,198
/=500 м
gB. TlM
0,124
0,131
0,125
0,467
0,896
gp. TIM
1,475
1,588
0,951
0.602
0,321
g. TIM
1,599
1,719
1,076
1.069
1,217
щих на вес ферм, для каждой фермы отдельно подсчитаны
слагаемые gn и gp (см. § 37), а затем полный вес. В таблице даны также
результаты подсчетов при пролете / = 500 м, при тех же исходных
данных, что для пролета 100 м, за исключением веса проезжей
части, который принят q = b т/м.
Схемы двух ферм (см. рис. VIII-1, а, б) в основном одинаковые.
Разница состоит только в том, что первая ферма имеет семь
панелей в пролете, а вторая— 11. Вес первой фермы лишь на 8%
меньше веса второй (для пролетов 100 и 500 м). При сопоставлении
этих ферм следует обратить внимание на то, что вторая имеет
меньшую длину панели и вес балочной клетки у нее будет заметно
меньше, чем у первой. Поэтому, по всей вероятности, следует делать
выбор не по, соображениям полного веса ферм, а по соображениям
веса балочной клетки. Однако несколько усложняется конструкция
и становится кропотливее процесс сборки второй фермы.
Остальные фермы имеют одинаковое число панелей, но
соображения, вытекающие из сравнения двух первых ферм, остаются в
силе.
Отношение весов ферм, соответствующих действию
вертикальных нагрузок рв и действию регулирования pv для пролетов 100 м,
колеблется от 0,097 (см. рис. VIII-1, б) до 2,74 (см. рис. VIII-1, д).
Для пролета 500 м это соотношение составляет 0,083—2,79. Это
объясняется главным образом тем, что в большинстве случаев при
270
регулировании приходится создавать дополнительные усилия во
всех элементах ферм (см. рис. Л/111-1. а — г), в других случаях —
только в некоторых (см. рис. VIII-1. д). Величины необходимых
дополнительных усилий оказываются в некоторых фермах (см.
рис. VIII-1, в) значительно меньше, чем в других (см. рис.
VIII-1, а, б). Интересно, что две фермы (см. рис. VIII-1, а, в) имеют
совершенно одинаковые схемы и размеры, но только одна из них
•по отношению к другой перевернута. При этом вторая ферма при
пролете 100 м на 26% легче первой, а при пролете 500 м — на 33%.
Самой легкой оказалась ферма, показанная на рис. VIII-1, г.
Однако одна из ферм (см. рис. VIII-1, в) тяжелее ее только на 5%
при пролете 100 м и лишь на 0,8% при пролете 500 м.
Полная высота фермы, показанная на рис. VIII-1, д, составляет
0,12 от величины пролета. В других фермах, считая высоту фермы
между верхним и нижним узлами, это отношение имеет величину
0,16—0,22. Очевидно, если высоту фермы (см. рис. VIII-1, д)
увеличить, доля веса gB, соответствующая вертикальной нагрузке,
уменьшится, а вес £ф незначителен и не является здесь решающим.
Есть основания полагать, что вес фермы можно значительно
уменьшить. Однако при этом увеличится высота пилонов и длина
оттяжек. Окончательный выбор решения требует составления и
сравнения вариантов.
§ 47. БАЙТОВЫЕ БАЛОЧНЫЕ ФЕРМЫ
Определение размеров вантовых балочных ферм системы
К. Г. Протасова представляет некоторые трудности. По-видимому,
при пролетах свыше 200 м эти системы едва ли смогут
конкурировать с висячими Байтовыми системами. С другой стороны, при
пролетах 20—30 м, возможно, выгоднее будут более простые и широко
известные балочные металлические или железобетонные системы.
Поэтому можно ожидать, что эти фермы найдут применение в
мостах с пролетами 40—200 м.
Относительно высоты ферм тоже недостаточно данных.
По-видимому, ее следует принимать равной ]Д—7б пролета. При высоте
фермы 7ю—V12 I (пролет 80 м) расход металла на 30 и 55%
больше, чем при высоте 76 / [27].
Длина панели определяется углом наклона раскосов, и ферма
с двухраскосной решеткой наиболее жесткой будет при наклоне
раскосов 45°. Таким образом, выгодная длина панели в этом случае
оказывается равной высоте фермы. Вес вантовых элементов при
такой панели также будет наименьшим. Но расход материала на
стойки, который составляет довольно большую часть в общем
расходе, получим меньшим при большей величине панели. Поэтому,
вероятно, наиболее выгодной длиной панели окажется длина,
несколько большая высота фермы. Таким образом, при
окончательном выборе размеров фермы можно рекомендовать только
составление и сопоставление нескольких вариантов.
271
4—i
Рис. IX-13
§ 48. О ПРОЕКТИРОВАНИИ ОПОР
ВИСЯЧИХ МОСТОВ
Опоры висячих мостов
довольно разнообразны. Поэтому
здесь даны некоторые общие
соображения о их
проектировании и рассмотрены более
подробно отдельные вопросы.
В довольно
распространенной трехпролетной
безраспорной системе на опоры
передаются со стороны пролетного
строения от вертикальных
нагрузок лишь вертикальные
давления. Быки и устои таких
мостов работают так же, как опоры балочного неразрезного моста.
Промежуточные опоры трехпролетных распорных мостов (быки)
по своей работе также не отличаются от работы опор балочных
мостов. Поэтому на вопросах проектирования этих опор
останавливаться не будем.
В распорной системе усилия в оттяжках передаются на устои
(см. рис. П-1, в) или на специальные массивы (см. рис. П-1, а).
Условия работы этих элементов значительно осложняются.
Определим длину а устоя, предполагая первоначально, что он
имеет форму прямоугольного параллелепипеда (рис. IX-13). При
этом считаем, что его ширина b определяется шириной проезжей
части моста, а высота h — геологическими условиями.
При решении подобной задачи приходится осуществлять три
проверки: на опрокидывание вокруг ребра А, на сдвиг устоя по
грунту и проверку напряжений по подошве фундамента.
Если будет удовлетворено последнее условие и по подошве не
возникнут растягивающие напряжения, то и первое требование
будет удовлетворено. Устойчивость на сдвиг, как показывает
практика расчетов, обычно не оказывается решающей. Следовательно,
длину устоя надо определить по условию 'прочности основания
массива ( отсутствие растягивающих напряжений по подошве).
Определим момент всех сил, действующих на массив
относительно центра тяжести подошвы фундамента (точки С), горизонтальной
(Н) и вертикальной (V) составляющих усилия в цепи, собственного
веса массива Ыгаукл и давления грунта на заднюю поверхность
массива
Р =
М
= я<с + А>+у(£-. ) + *£■««< «--|-)*
272
Вертикальная сила, передающаяся на подошву фундамента,
Q = V + y™hab.
Выражение для эксцентриситета е приложения равнодействующей
Q, считая, что сила располагается на границе ядра сечения, будет
а
е==~6
*(. + *>+r(y-.)-b^»W («"-!) а
или е = — — ■ = —-
V + УкпЛ-ао 6
Для а получим квадратное уравнение
2V 6 Г уГр№
УклПО УклПО L 6
X&tg2(45°—1-)] = 0. (9.18)
Рассмотрим пример:
пролет /=100 м; стрелка цепи /=12,5 м; полная нагрузка
пролетного строения q + K = 8 т/м; с=13,5 м; /i = 30■ м; 6=11 м; s=l м; Yrp=
= 1,8 т/м3; укл = 2,2 т/м; Ф=65°.
Получим:
8-1002 8-100
Н = - = 800г; V = —r—= 400г;
8-12,5 2
yK!Ihb = 2,2-30-11 = 726 т/м;
■У^-b tg2 ( 45° %)= 1'8fi3°3l I tg2(45° - 17°30') = 24 100 тм.
Подставим эти величины в уравнение (9.18)
с2 + 0,544а — 486 = 0,
откуда а = + 0,27 + УО/73 + 486 « 23м.
Необходимо убедиться, что напряжения по подошве не
превышают допускаемых нормами
Q М
Здесь:
Q= V-\-yKSlabh = 400 + 2,2-23-11 -30= 17 100т;
*_H(c + *)+v(f-.)+^-w(«p-f) =
= 800-43,5 + 400-10,5 + 24 100 = 63 000 т/м;
273
11•232
F = 23-11 =253 ж2; W = = 979 м3.
6
17100 63 000 „n „„ , ,
Следовательно, а = ± = 68 + 65 т/мг,
253 979
т. е. наибольшие сжимающие напряжения равны +13,3 кГ/см2, а
растягивающих нет (amin= +0,3 кГ/см2).
Установим, как распределяются напряжения под фундаментом
при действии только постоянной нагрузки. Допустим, что в этом
случае # = 500 г; У=250 т. Тогда Q='16 900 т; М = 45 700 т/м.
16900 45 700
a = ± = 67,0 ± 46,8;
253 979 '
Отах = 11,4 КГ/СМ2; Gmin = 2,0 кГ/см2.
Напряжения от постоянной нагрузки распределяются по
основанию очень неравномерно. Если основание сложено из грунтов, в
которых возможны осадки, устой будет оседать неравномерно;
появятся перекосы. Следовательно, надо принимать меры к
выравниванию напряжений.
Для этого устой не должен иметь форму параллелепипеда —
нижнюю часть его следует развить в сторону пролета. Такое
решение показано на рис. П-1, в, и, к, н. Наряду с выравниванием
напряжений оно дает еще и значительную экономию материалов.
На рис. П-1, а, б, з показаны схемы массивов, специально
предназначенных для закрепления оттяжек. Первый из них имеет форму
параллелепипеда. Так как усилие цепи направлено с уклоном вверх,
напряжения по основанию распределяются неравномерно. Другой
массив такой же формы (см. рис. П-1, б) имеет дополнительный
груз, выравнивающий напряжения. Напряжения можно выровнять
и развитием нижней части массива в сторону пролета (см.
рис. П-1, в).
ЛИТЕРАТУРА
1. Беликов В. Г. Анализ работы некоторых систем висячих мостов
с кабелем, закрепленным в балке жесткости. Диссертация, 1968.
2. Бернштейн С. А. Основы динамики сооружений. М., Госстройиздат,
1938. 159 с.
3. Б о н д а р ь Н. Г., К а з е й Н. Н., Л е с о х и н Б. Ф. и др.
Динамика железнодорожных мостов. М., «Транспорт», 1965. 412 с.
4. Б р а г и н А. В. К вопросу определения частот свободных колебаний
висячих предварительно напряженных систем. Доклады на II научной конферен-
1 ции молодых ученых ЛИСИ. Сб. «Строительное производство, строительная
техника». Изд. ЛИСИ, 1967. 13—22 с.
5. Б р а г и н А. В. Оценка нерегулярности динамической расчетной схемы
вантовых мостов с балками жесткости. Доклады к XXVII конференции ЛИСИ.
Сб. «Дороги, мосты, геодезия». Изд. ЛИСИ, 1969. 50—54 с.
6. Б р а г и н А. В. О вертикальных колебаниях вантовых мостов с
балками жесткости. Доклады к XXV конференции ЛИСИ. Сб. «Автомобильные дороги,
мосты и геодезия», Изд. ЛИСИ, 1967. 39—43 с.
7. Г и б ш м а н Е. Е. Металлические мосты на автомобильных дорогах. М.,
Автотрансиздат, 1954. 339 с.
8. Гольденблат И. И. Современные проблемы колебаний и
устойчивости инженерных сооружений. М., Стройиздат, 1947. 133 с.
9. Гольденблат И. И. Динамическая устойчивость сооружений. М.,
Стройиздат, 1948. 56 с.
10. Д у к е л ьс к и й А. И. Подвесные канатные дороги и кабельные краны.
М, Машгиз, 1951. 397 с.
11. Е руно в Б. Г. Предварительно напряженные вантовые фермы мостов.
Диссертация, 1967.
12. Илья сев ич С. А., Грамолин И. С, Крыльцо в Е. И. и др.
VII международный конгресс по мостам и конструкциям. М., «Транспорт», 1965.
113 с.
13. К а чур ин В. К. Теория висячих систем. М., Стройиздат, 1962. 223 с.
14. Качурин В. К. Графо-аналитический способ назначения очертания
вантовых ферм. Сб. Ленинградского автодорожного института № 5. Транспортно-
техническое издательство, 1938. 113—125 с.
15. К ач урин В. К. Выбор очертания поясов вантовых ферм. Научные
труды ЛИСИ. Вып. 11. Изд. ЛИСИ, 1951. 115—124 с.
16. Качурин В. К. Некоторые вопросы проектирования вантовой системы
с балкой жесткости. В кн.: Вопросы проектирования мостов. Изд. ЛИСИ, 1962.
5—29 с. (Труды ЛИСИ).
17. Качурин В. К. Регулирование усилий в вантовой системе с балкой
жесткости. Сб. ЛИСИ. Вопросы проектирования мостов. Изд. ЛИСИ, 1962.
29—34 с.
18. Каширский Ю. А., Л у коя нов Ю. Н. О расчете заделки болтов
с анкерными плитами в бетонные фундаменты. Известия вузов. «Строительство
и архитектура», 1966, № 4. 12—15 с.
19. Киреенко В. И. Вантовые мосты. Киев, Буд1вельник, 1967. 144 с.
20. К и р е е н к о В. И. Вантовые системы в железобетонных мостах боль-
275
ших пролетов. Сб. «Стальные предварительно напряженные и тросовые
конструкции». М., Стройиздат, 1964. 202—218 с.
21. Крыл ьц о в Е. И. Байтовые мосты. М., Трансжелдориздат, 1935. 243 с.
22. Крыльцов Е. И., Попов О. А. Железобетонные мосты за
рубежом. М., Автотрансиздат, 1963, 234 с.
23. М а ц е л и н с к и й Р. Н. Статический расчет гибких висячих
конструкций. М., Стройиздат, 1950, 192 с.
24. Н и к и ф о р о в С. Н. Колебания сквозных металлических конструкций
и вантовых ферм. Сборник по проектированию и конструкциям Труды ВИСУ
(Высшее инженерно-строительное училище). Государственное научно-техническое
издательство. 1931. 46—83 с.
25. О ст а ше в ск ий Я. А. Висячие мосты с косыми подвесками. Труды
ЛИИКС. Вып. VII. М. — Л., Стройиздат, 1940. 116—142 с.
26. Передерни Г. П. Курс мостов. Висячие мосты. Госиздат, 1928. 300 с.
27. П р о т а с о в К- Г. Новые вантовые фермы. М., Трансжелдориздат,
1963. 100 с.
28. Р а б и н о в и ч И. М. К теории вантовых ферм. Сб. «Вантовые фермы
в мостостроении». Транспечать, 1930. 9—50 с.
29. Р а й н у с Г. Э. Расчет многопролетных тросов и многопролетных ферм
из тросов. М., Стройиздат, 1968. 135 с.
30. Р о к а р И. Неустойчивость в механике. Пер. с фр. Изд-во иностр.
литературы, 1959, 287 с.
31. Семенов В. А. Вантовые фермы для покрытия зданий. Диссертация,
1968.
32. С и л ь н и ц к и й Ю. М. Расчет висячих мостов по деформированной
схеме. Изд. ЛИИЖТ 1967. 108 с.
33. С л он им Э. Я. Байтовый переход пролетом 390 м через р. Амударью
на газопроводной магистрали Бухара — Урал. Сб. «Металлические конструкции».
М., Стройиздат, 1966. 244—253 с.
34. С л о н и м Э. Я. Особенности работы висячих однопролетных
решетчатых вантовых ферм. Сб. «Материалы по металлическим конструкциям». М.,
Стройиздат, 1966. 100—142 с.
35. С т е п к и н С. А. К расчету висячих цепных однопролетных мостов
с балкой жесткости с учетом деформации. Сб. трудов ЛИИЖТ. Вып. 142. М.,
Трансжелдориздат, 1950. 70—93 с.
36. Степки н С. А. Деформационный расчет на подвижную нагрузку
висячих мостов больших пролетов. Сб. трудов ЛИИЖТ. Вып. 249, М.,
Трансжелдориздат, 1966. 85—96 с.
37. С т р е л е ц к и й Н. С. Курс мостов. Металлические мосты. М., Гос-
стройиздат, 1931, 385 с.
38. С т р е л е ц к и й Н. Н. Решетчатые комбинированные системы мостов.
Дориздат, 1953. 219 с.
39. Тартаковский Г. А. Строительная механика трубопроводов. М.,
«Недра», 1967. 312 с.
40. Тимошенко С. П. Теория колебаний в инженерном деле. Л. — М.
Государственное технико-теоретическое издательство, 1934. 344 с.
41. Толмачев К. X. Регулирование напряжений в металлических
пролетных строениях мостов. М., Автотрансиздат, 1960. 116 с.
42. Федоров Ю. П. Исследование работы автодорожных мостов под
подвижной нагрузкой. Диссертация, 1954.
43. Филиппов А. П. Колебания механических систем. Киев, «Наукова
думка», 1965. 716 с.
44. X а з а н И. А. Стальные автодорожные мосты за рубежом. М.,
Автотрансиздат, 1961. 152 с.
45. Ц а п л и н С. А. Висячие мосты. М., Дориздат, 1940. 287 с.
46. Шехтерле К. Опоры мостов. М., Трансжелдориздат, 1940. 333 с.
47. A m m а п п О. Н. Die Narrous — Bridge in New. Iork. — «Der Stahlbau»,
1960, N 60, S. 297—301.
48. В e g e г E., T u s s i n g Tr. Nordbrucke Diisseldorf — «Der Stahlbau»,
1955, N 2, 3, S. 25—33 und 63—67; 1958, N 1, S. 1—6.
276
49. Bleich R, Cul lough С. В., Rosecrans R., Vincent С S.
The matematical Theorie of vibration in Suspension Bridges. Waschington, 1950,
S. 316.
50. D a n i e 1 H. Die Bundesautobahnbriicke iiber den Rhein bei Leverkusen —
«Der Stahlbau», 1965, N 2, 3, 4, 5, 12, S. 33—36, 83—86, 115—119, 153—158,
362—368.
51. Homberg H. Einflusslinien von Schragseilbriicken.— «Der Stahlbau»,
1955, N 2, S. 40—44.
52. H e s s H e i n r i с h. Die Severinsbriicke Koln. — «Der Stahlbau», 1960,
N 8, S. 225—261.
53. К li ngenber g W. Ideenwettbewerb fur eine feste Verbindung iiber den
Grossen Belt.— «Der Bauingenieur», 1967, N 11, S. 384—407.
54. К 1 о p p e I K-, T h i e 11 T. Modellversuche in Windkanal zur Bemessung
von Briicken gegen die Gefahr Windderregter Schwingungen. — «Der Stahlbau»,
1967, N 12, S. 353—365.
55. В e r g P. Die Strassenbrucke iiber die Seine bei Tancarville. — «Der
Stahlbau», 1960, N 4, S. 118—122.
56. Mans Chr. Schragseilbriicke, «Bautechnik», 1957, N 10, S. 403.
57. Mehrtens С. "С. Eisenbriickenbau. Leipzig, 1908. S. 813.
58. Gabriel Pall. Die Konstruction des unteren Fahrbahndecks der
Georg — Washington Briicke. — «Der Stahlbau», 1960, N 12. S. 373—380.
59. S с h о 11 g e n I. Ergebniss der Offentlichen Ausschreibung fiir die Stras-
I senbriicke iiber den Rhein bei Speijer. — «Der Stahlbau», 1955, N 5, 6. S. 102—109,
135—140.
60. S i e v e r s H. Der Wettberwerb fiir den Wiederaufbau der Strassenbrucke
fiber der Rhein zwischen Duisburg — Ruhrort und Hamberg. — «Der Stahlbau»,
1953, S. 1—6.
61. Thul. Die Briickenbau an Bundesfernstrassen. — «Strassen und Tiefbau»,
1966, N 1, S. 7—14.
62. V о 1 e 1 Gottfried. Die Montag des Stahliiberbaues des Severinsbriicke
Kola —«Der Stahlbau», 1960, N 9, S. 219—293.
, 63. Ukeguchi Nobuhira, Sakata Hiroshi, Tanaka Hiroki,
Jamamata Hiroshi, Nishitoni Harumitsu. Study on aeroclastic
instability of Suspension bridges.— «Technikal Revuer», 1967, N 2, p. 116—123.
64. Wen k. H. Die Stromsundbriicke. — «Der Stahlbau», 1954, N 4, S. 73—76.
ОГЛАВЛЕНИЕ
Предисловие 3
РАЗДЕЛ I. СИСТЕМЫ И КОНСТРУКЦИИ
Глава I. Системы висячих и вантовых мостов 5
§ 1. Общие сведения 5
§ 2. Системы цепных мостов 6
§ 3. Системы вантовых висячих мостов 12
§ 4. Системы разрезных и консольных вантовых мостов ... .17
Глава II. Сведения о конструкции и некоторых вопросах производства
работ , . Ш
§ 5. Конструкция цепных мостов .19
1. Сопряжение моста с берегом 19
2. Сечение цепи ,и прикрепление подвесок к цепи и к балке
жесткости . 23
3. Преход цепи через пилон 33
4. Закрепление конца цепи в массиве и в балке жесткости.
Системы балок жесткости ... . . 37
5. Особенности двухцепных ферм . . ... 43
6. Опорные части балок жесткости . . . 44
7. Пилоны . .45
§ 6. Байтовые мосты с балками жесткости . .... 47
§ 7. Байтовые мосты без балок жесткости ... . 51
§ 8. Балочные и консольные вантовые системы 54
РАЗДЕЛ II. РАСЧЕТЫ НА ПРОЧНОСТЬ И ЖЕСТКОСТЬ
Глава ш. Из теории расчета гибких нитей . 57
§ 9. Расчет нити при заданном загружении .... 57
1 Натяжение нити и ее уравнение . 57
2. Определение длины нити 62
3. Упругое удлинение нити . 65
§ 10. Определение натяжения нити при изменении нагрузки,
температуры и положения опор 66
1. Общий случай расчета нити 66
2. Расчет нити на упругих опорах 69
§ 11. Варианты расчета нити . 70
§ 12. Специальные вопросы расчета нитей 73
1. Перемещение сечения нити в горизонтальном направлении 73
2. Обратно симметричное загружение . . 74
278
Глава IV. Расчет цепи с балкой жесткости . . 76
§ 13. Степень статической неопределимости и выбор основной
системы . . . . . .76
§ 14. Определение усилий в элементах однопролетнон системы . . 78
§ 15. Влияние изменения температуры . . , .... .89
§ 16. Линии влияния перемещений ■ .92
§ 17. Приближенные способы и пути окончательного расчета . . 94
§ 18. Искусственное регулирование усилий . . 102
§ 19. О порядке монтажа цепных мостов ... . ЮЗ
§ 20. Трехпролетные системы .... . . .105
§ 21. Двухцепная система ., . . . .i . 118
§ 22. Приближенный способ расчета по деформированной схеме . . 126
§ 23. Цепь с балкой жесткости и натяжной цепью .... .133
Глава V. Расчет вантовых ферм с балками жесткости, консольных и ба-
глочных систем . . . . . . . . .138
§ 24. Работа натянутого троса при статической нагрузке . .138
§ 25. Расчет вантовых мостов с балками жесткости . 142
§ 26. Приближенные способы расчета .... . .143
1. Общие сведения . , 143
2. Определение усилий в вантах при загружении главного
пролета ...[..... . 148
3. Влияние изменения температуры 151
4. Регулирование усилий . . . 152
§ 27. О расчете консольных систем . . 156
§ 28. Расчет балочных систем 158
Глава VI.,Расчет вантовых систем без балок жесткости 161
§ 29. Статически определимые вантовые системы . . . 161
§ 30. Расчет двухпоясных и многопоясных ферм 163
1. Расчет ферм, пояса которых не имеют
непосредственного соединения в пролете 164
2. Двухпоясная ферма с одним узлом соединения поясов
в пролете . . ., ... .170
§ 31. Расчет ферм с треугольными решетками . . . 175
Глава VII. Основы динамического и аэродинамического расчета . 1S2
§ 32. Динамические нагрузки на висячие мосты .... 182
1. Подвижные эксплуатационные нагрузки . 182
2. Ветровые нагрузки .... . 183
3. Динамический коэффициент 183
§ 33. Свободные колебания висячих мостов. . . ., 184
1. Свободные вертикальные колебания цепных мостов . . 184
2. Свободные вертикальные колебания вантовых мостов с
балками жесткости 194
3. Свободные горизонтальные и крутильные колебания . 201
§ 34. Вынужденные колебания висячих мостов 206
1. Колебания висячих мостов под воздействием подвижной
эксплуатационной нагрузки . ... 206
2. Колебания висячих мостов под воздействием ветра . . .211
3. Динамическая устойчивость висячих мостов. Явление
перекачки энергии ... .218
РАЗДЕЛ III. ЭСКИЗНОЕ ПРОЕКТИРОВАНИЕ
Глава VIII.Вес висячих мостов 225
§ 35. Вес цепных мостов ... 226
§ 36. Вес вантовых ферм с балками жесткости .,. . • 228
279
§ 37. Вес вантовых ферм -с треугольными решетками 233
§ 38. Вес двухпоясных ферм , 236
§ 39. Вес пилонов и оттяжек висячих мостов 245
Глава IX. Выбор системы и основных размеров моста 247
§ 40. Выбор системы моста 247
§ 41. Возможный наибольший пролет 253
§ 42. Определение высоты балки жесткости цепного моста . . . 254
§ 43. Выбор стрелки цепи . . . . ■ 256
§ 44. Выбор угла наклона оттяжки . . 261
§ 45. Выбор высоты пилонов вантового моста с балками жесткости 263
§ 46. Выбор вантовой системы с треугольной решеткой 270
§ 47. Байтовые балочные фермы 271
§ 48. О проектировании опор висячих мостов 272
Литература . . ... ... - - . 275
Владимир Константинович Качурин,
Анатолий Владимирович Брагин,
Борис Григорьевич Ерунов
ПРОЕКТИРОВАНИЕ ВИСЯЧИХ И ВАНТОВЫХ МОСТОВ
Редактор К. М. Ивановская
Технический редактор Т. М. Плешкова
Корректоры В. Я. Кинареевская, В. Н. Капусткина
Сдано в набор 27/V 1971 г. Подписано в печать 2/XI 1971 г.
Бумага бОХЭО'Ле Печ. л. 17.5 Уч.-изд л. 17.58
Т—16249 Тираж 5 000 экз. Цена 1 р. 90 к. Изд. № 1—4—1/15 № 2011
Издательство «Транспорт», Москва, Басманный туп., 6а.
Московская типография № 8 Главполнграфпрома
Комитета по печати при Совете Министров СССР,
Хохловский пер., 7. Зак. 3213.